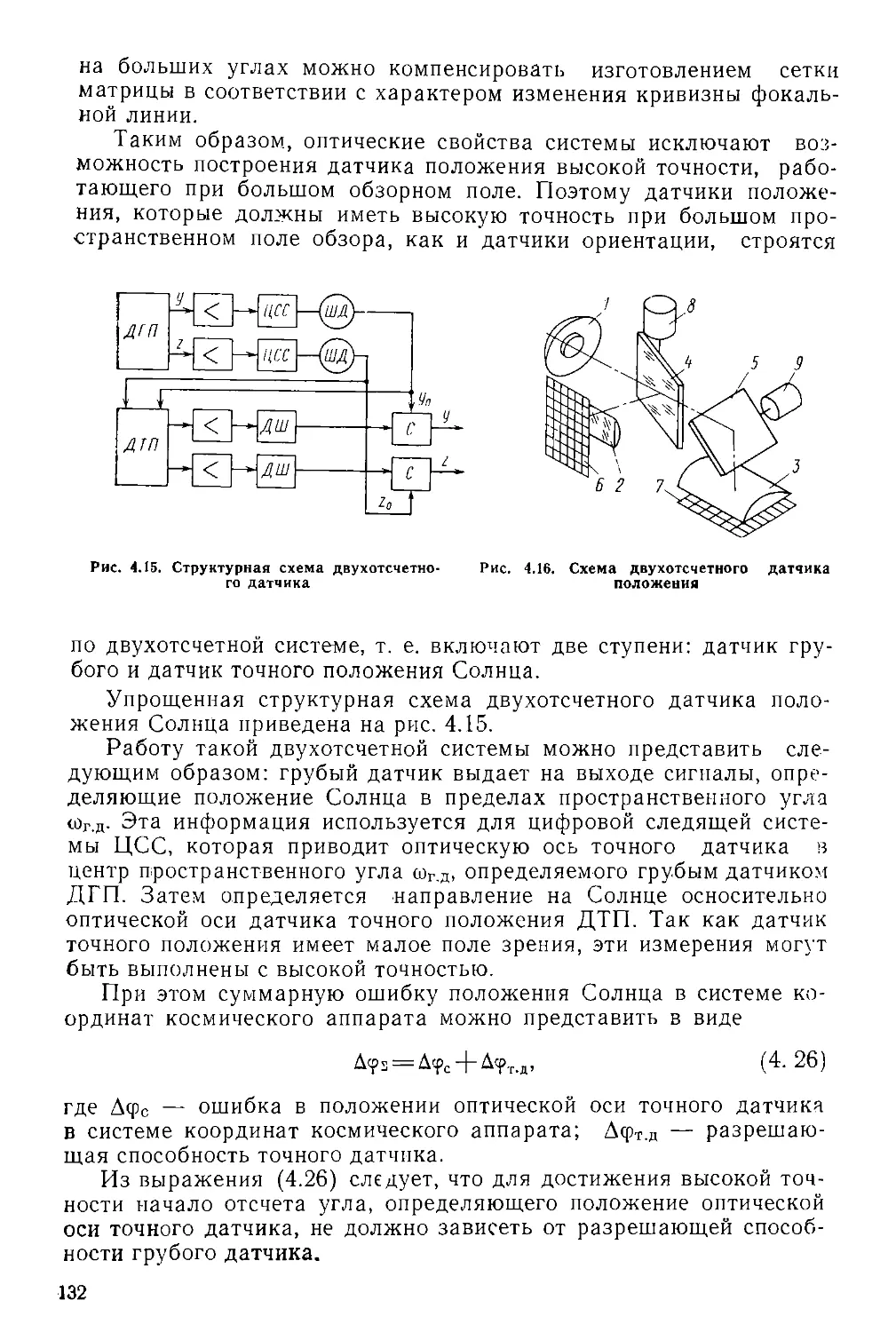
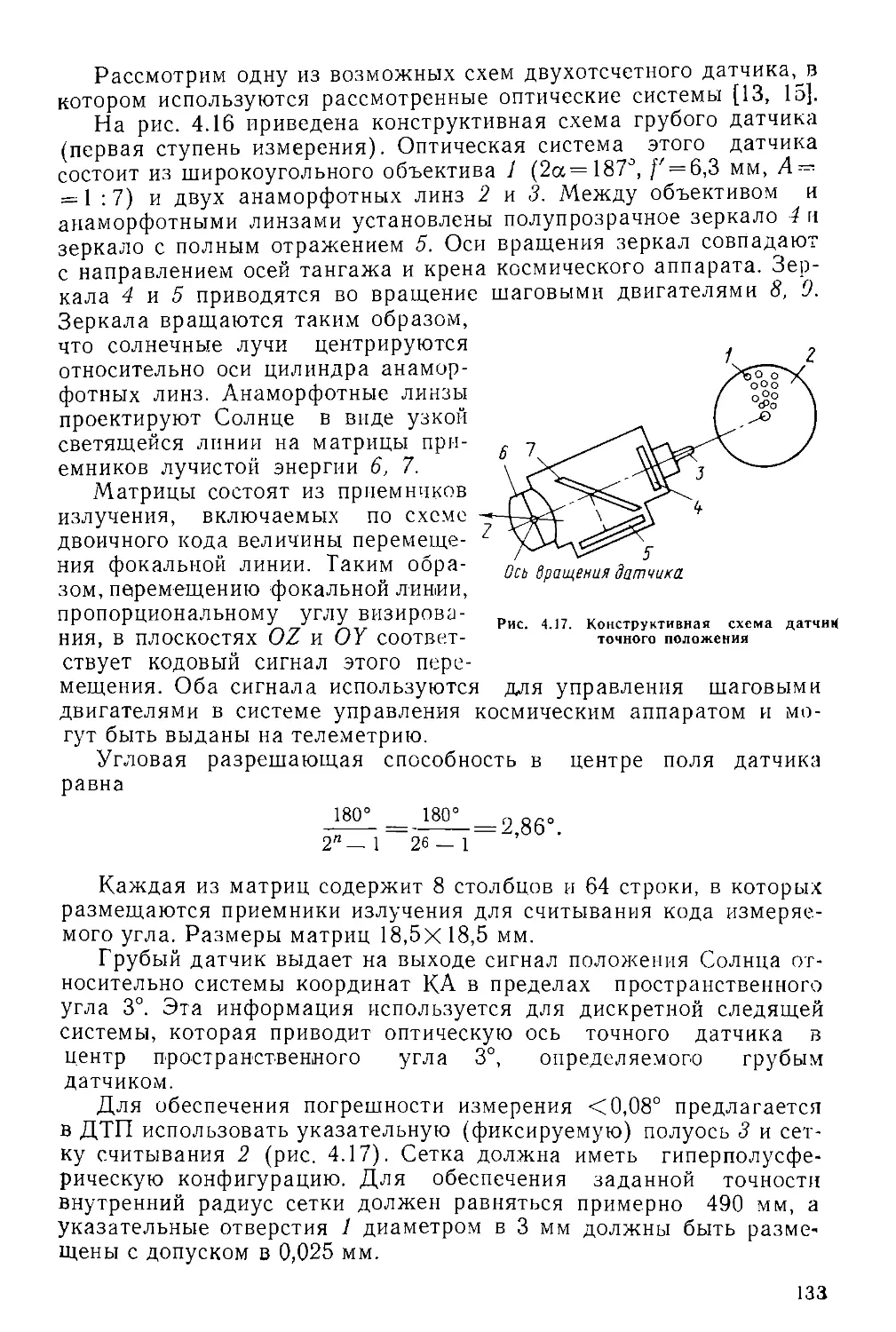
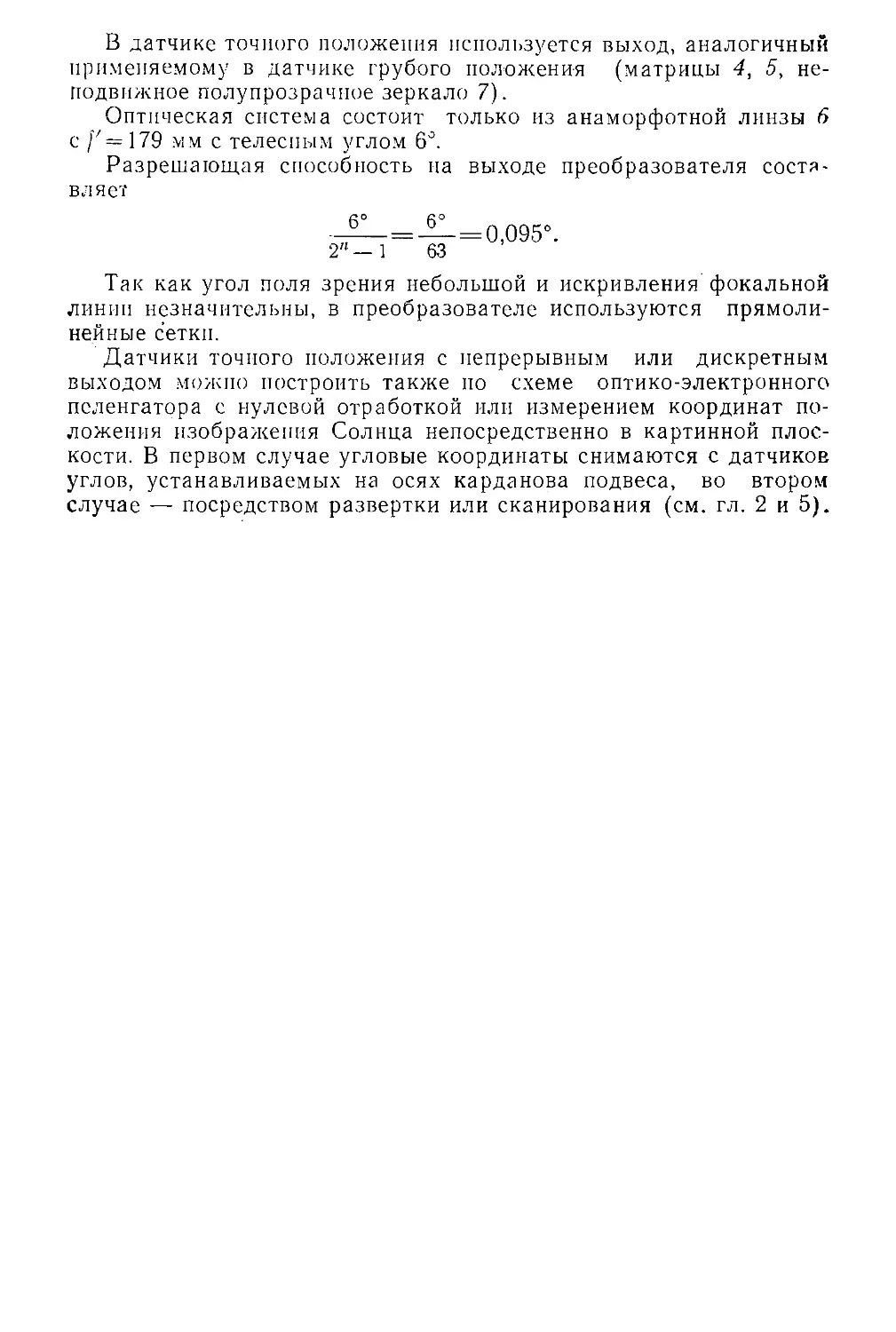
/













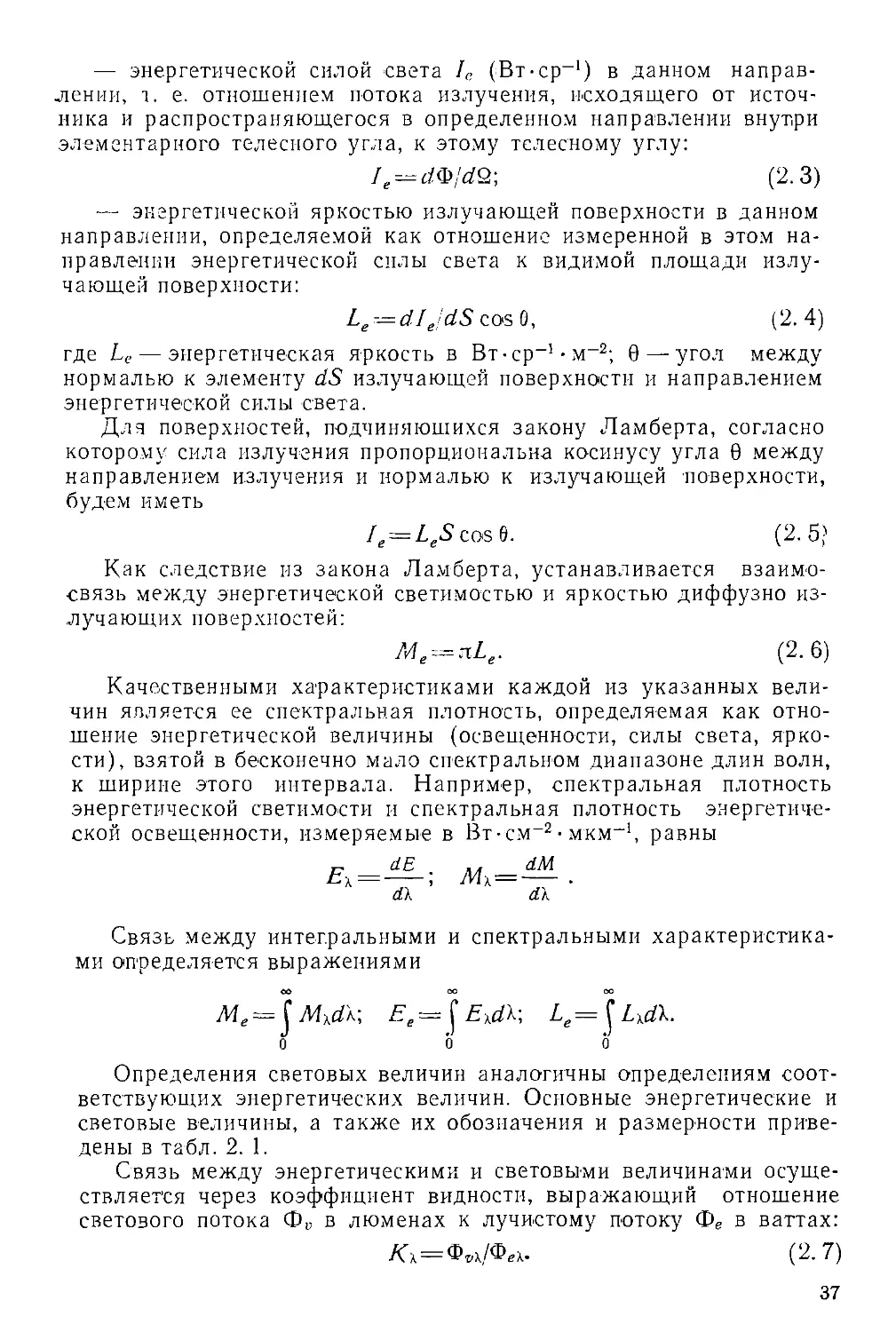
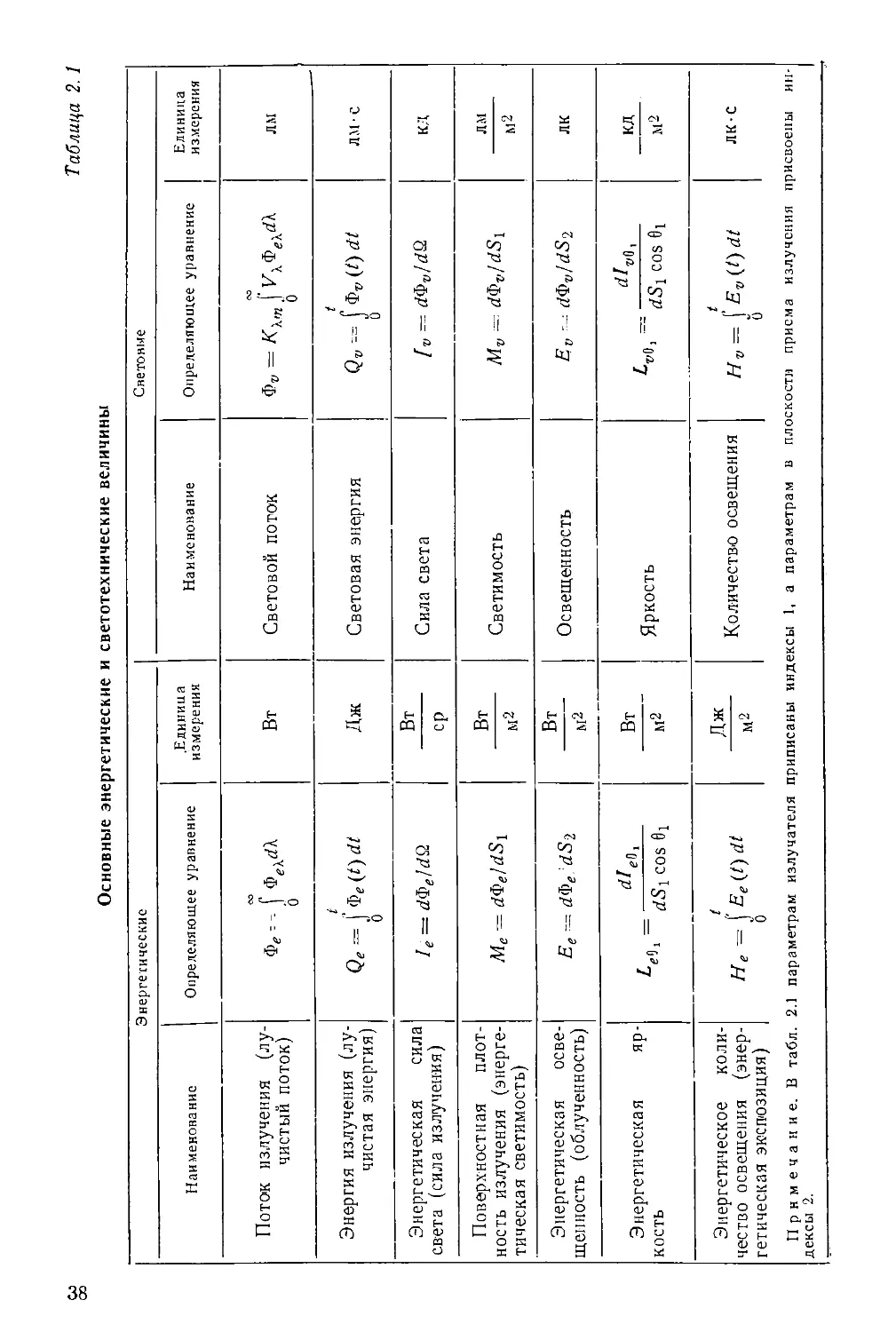













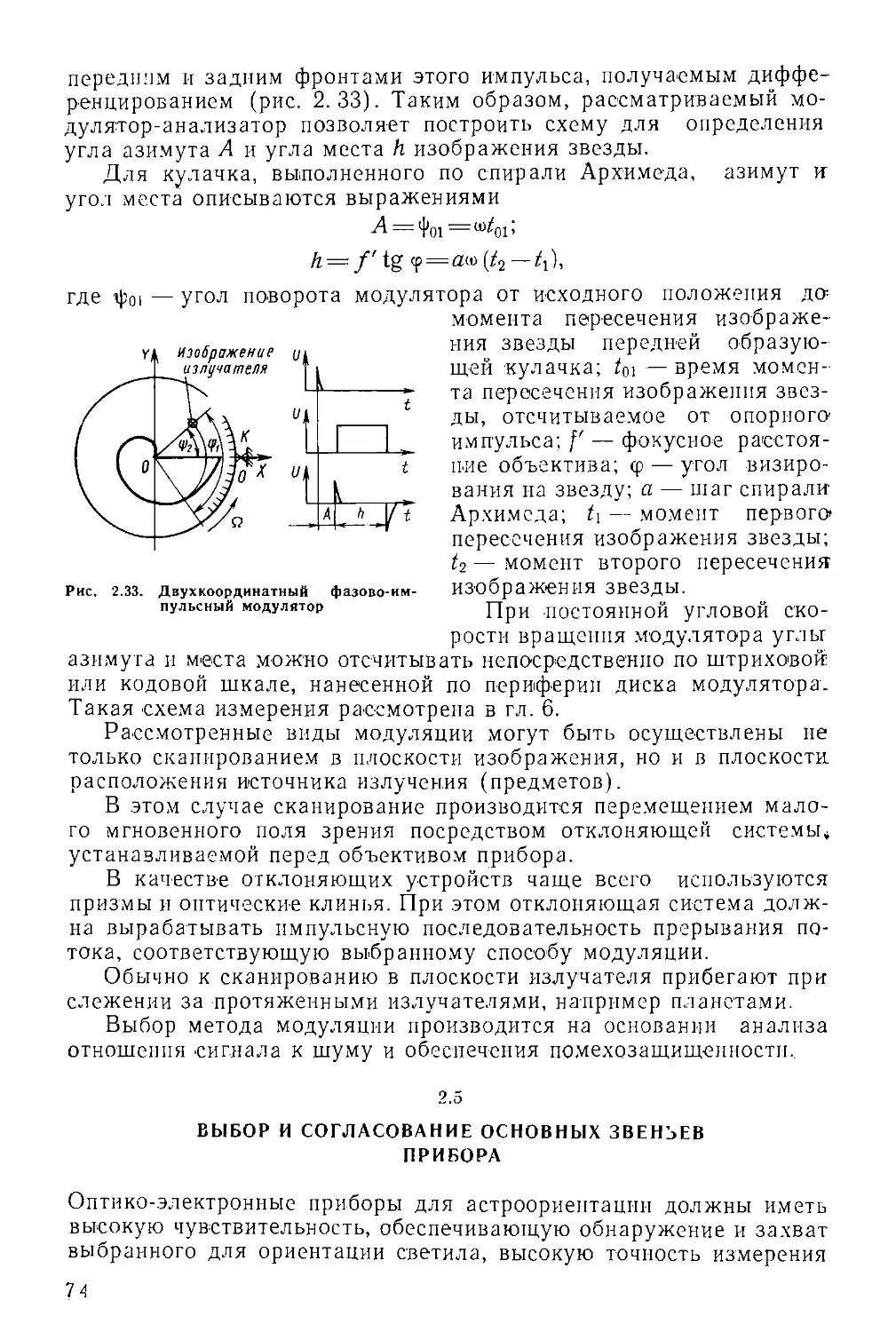





























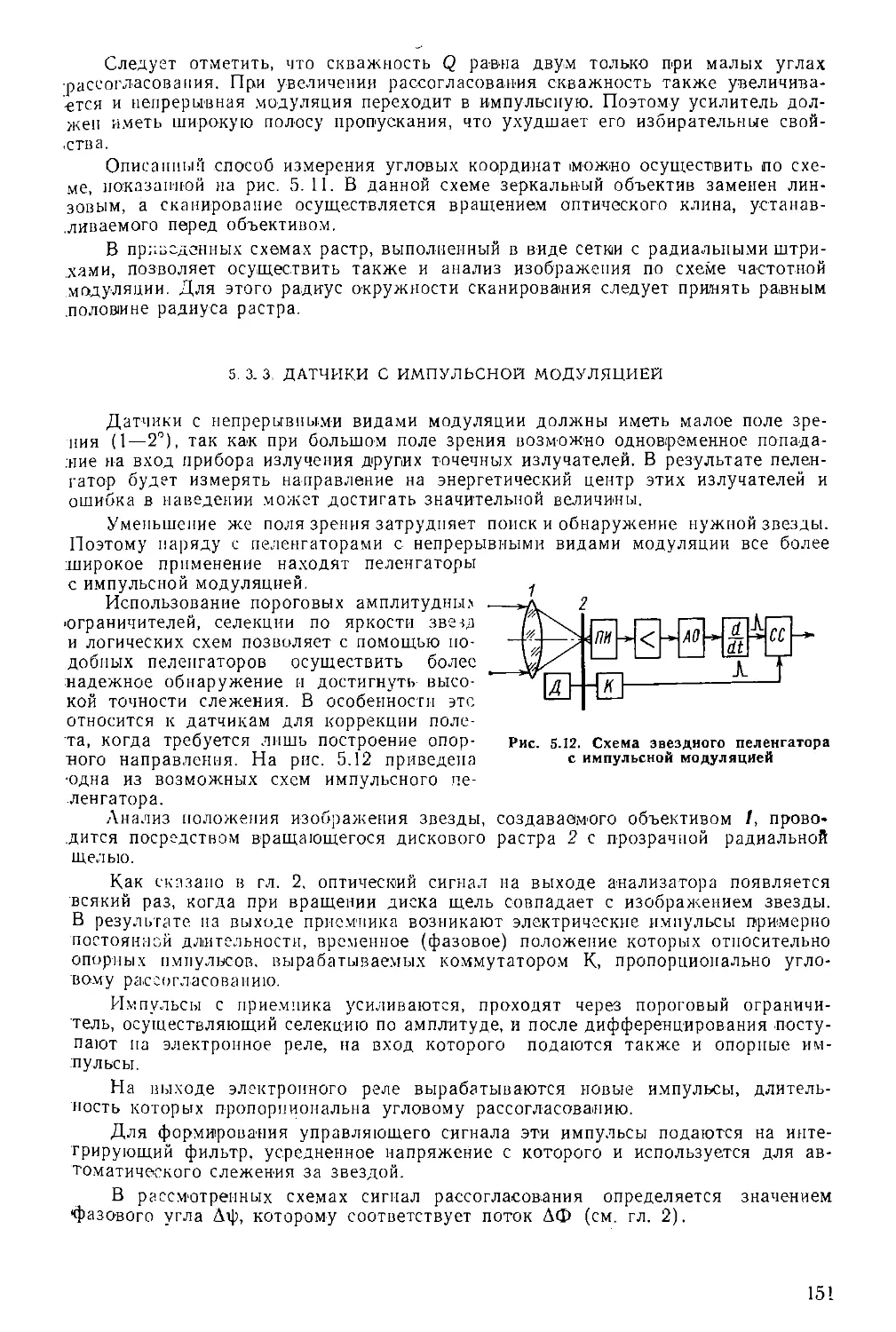


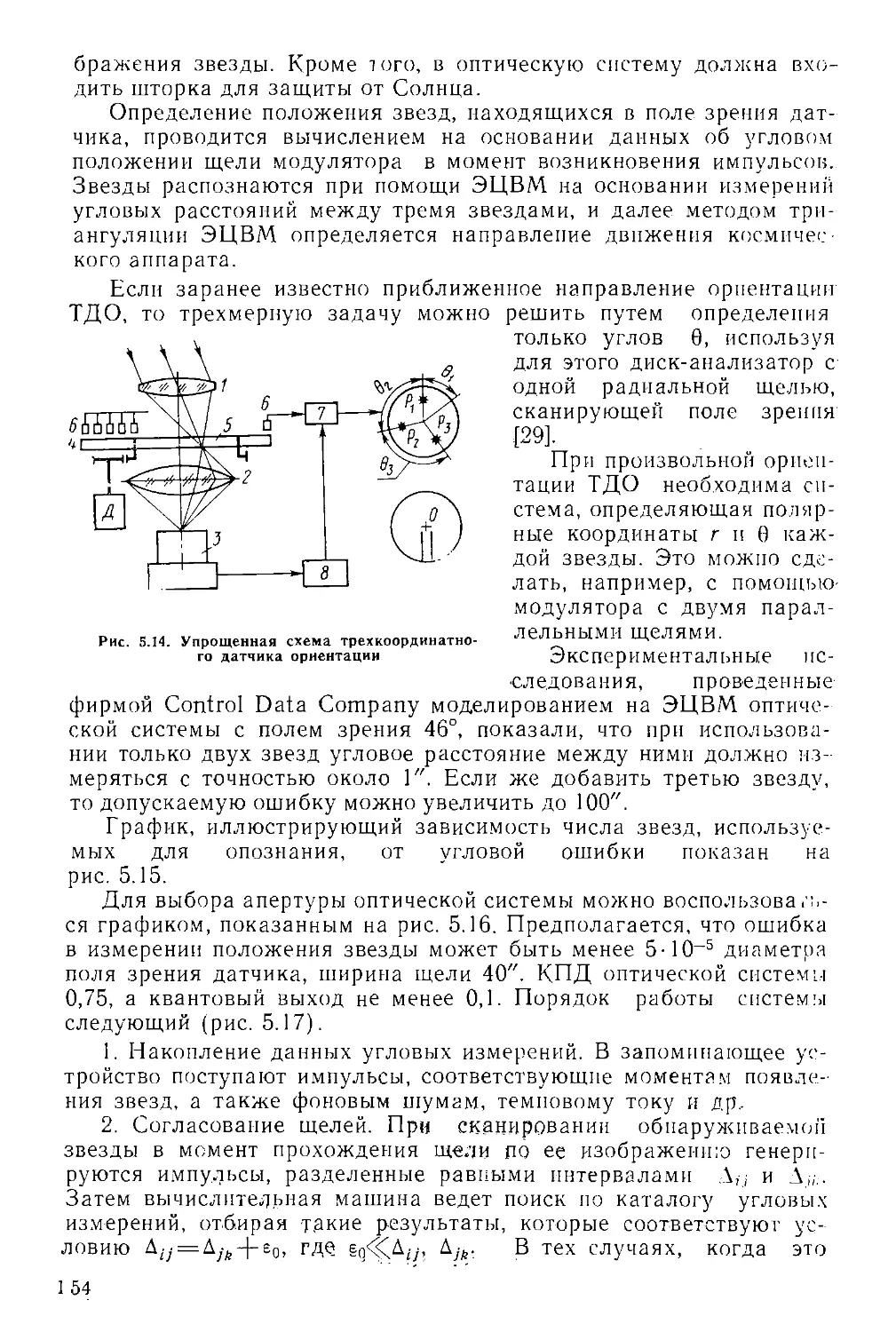

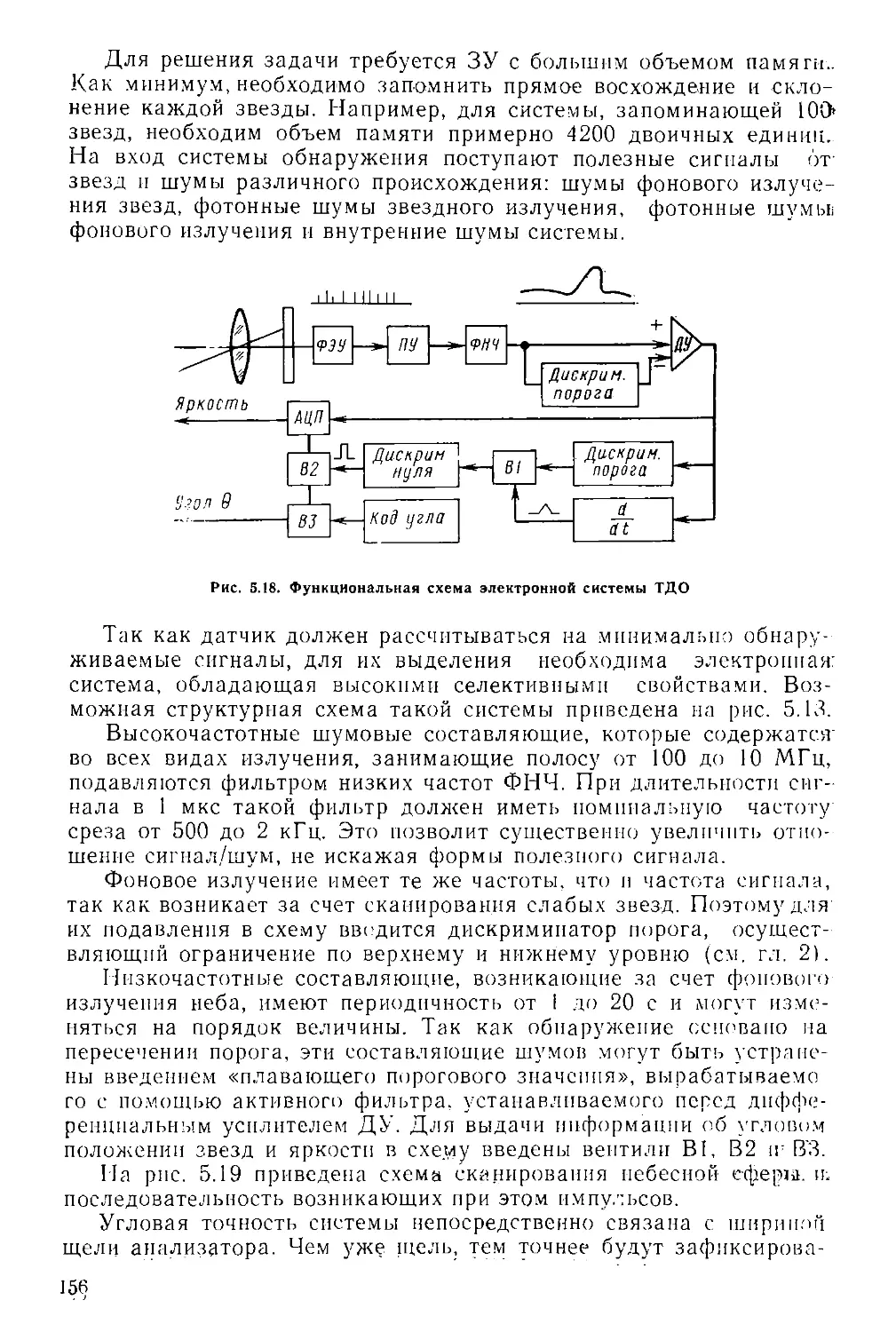
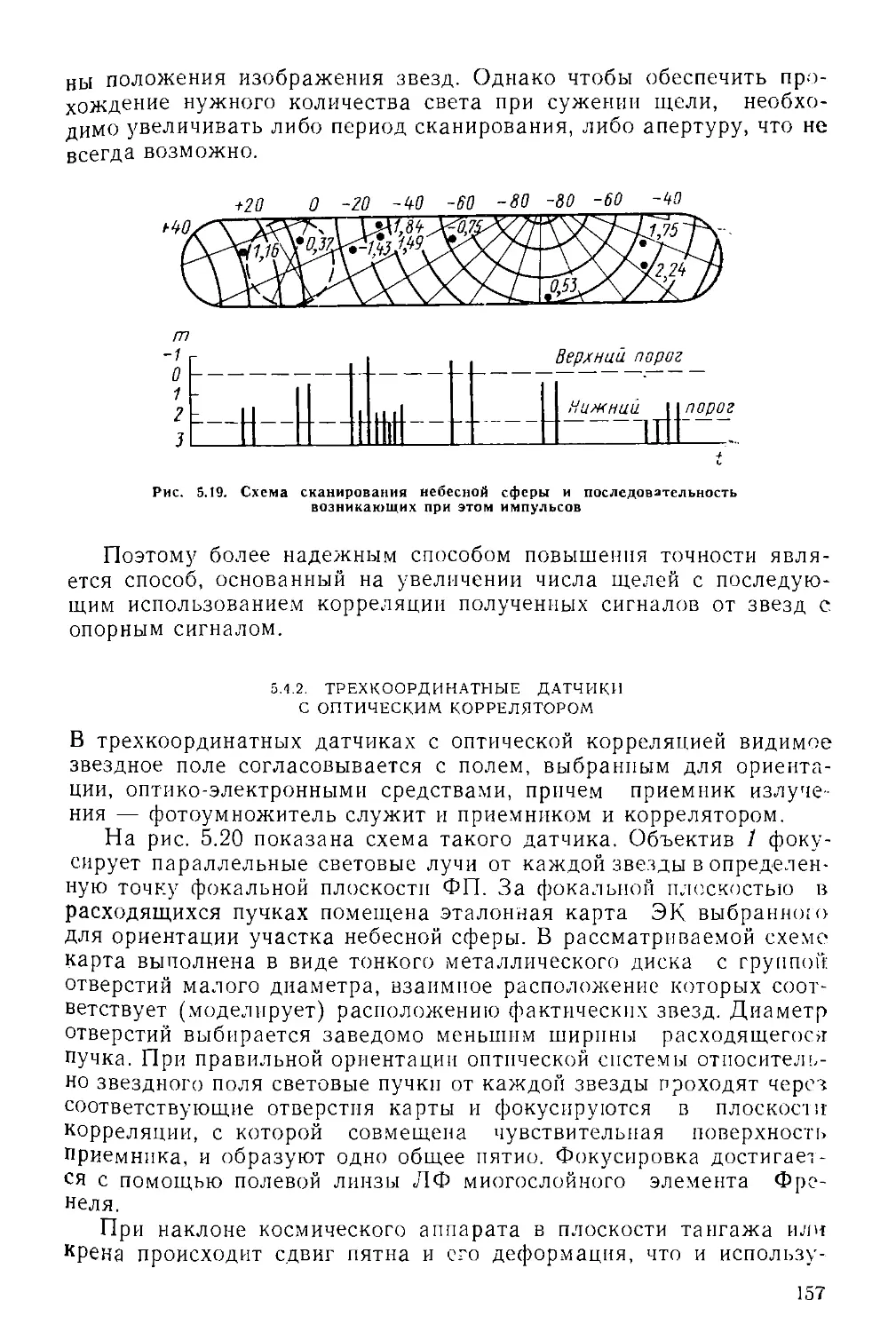










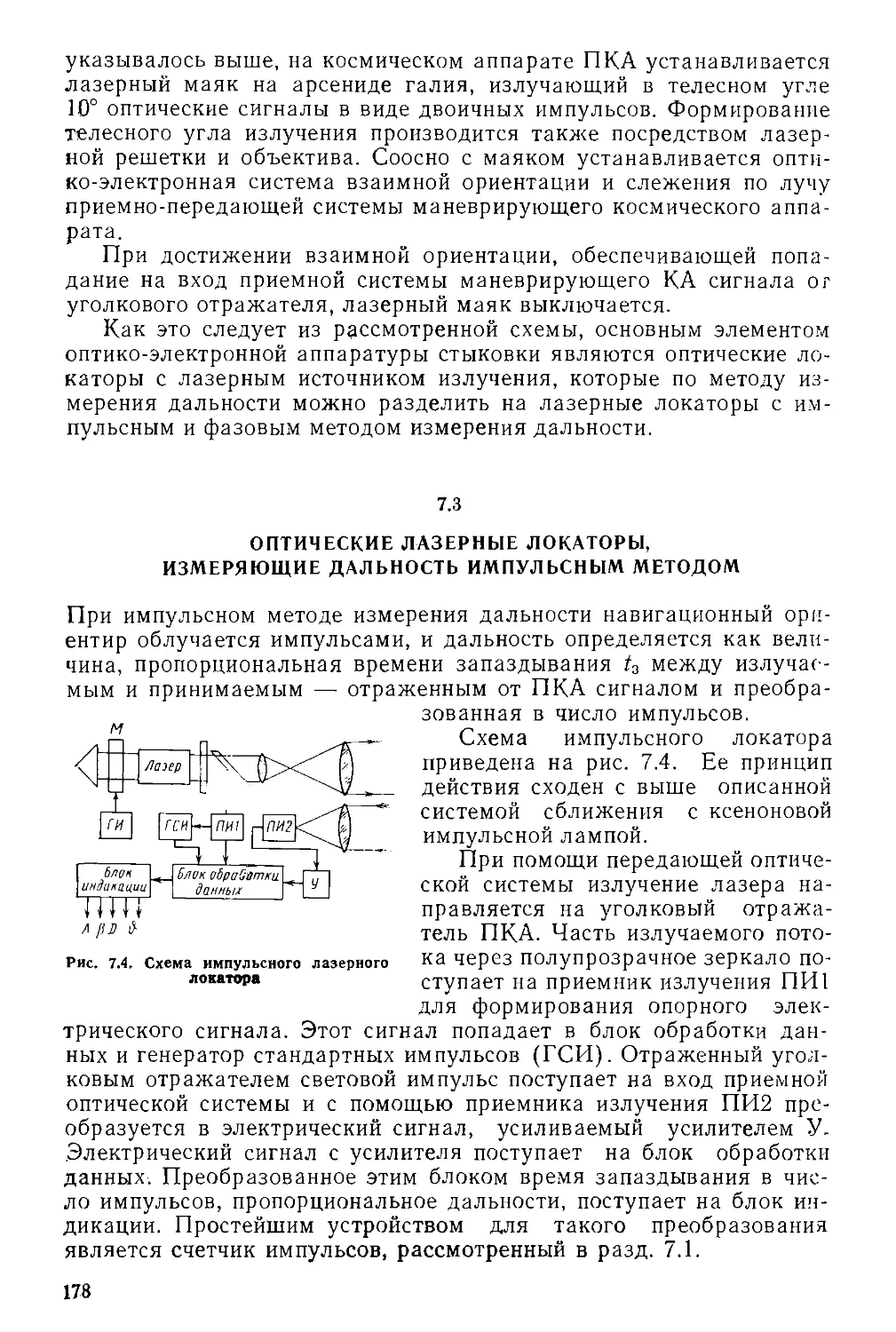

















Text
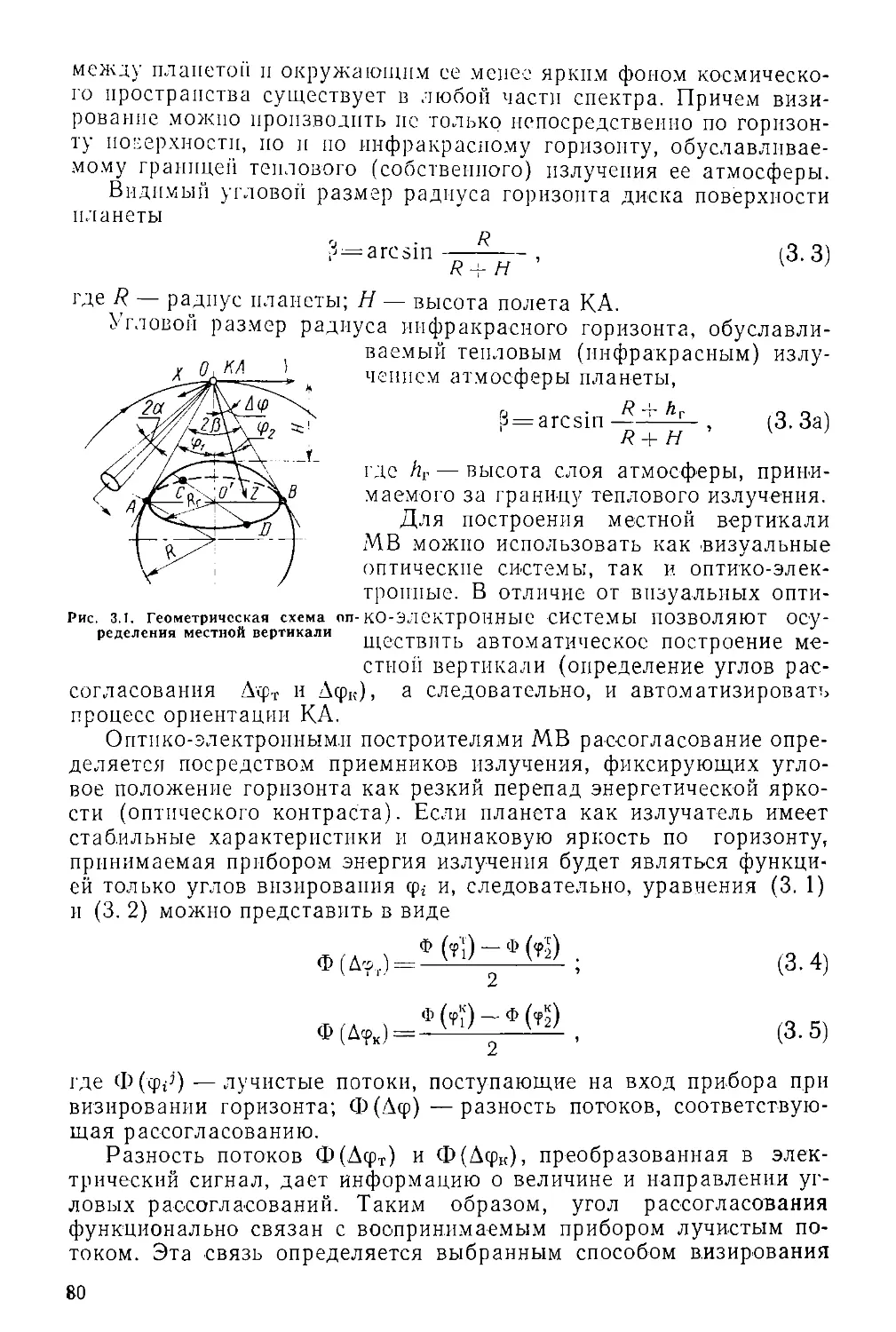
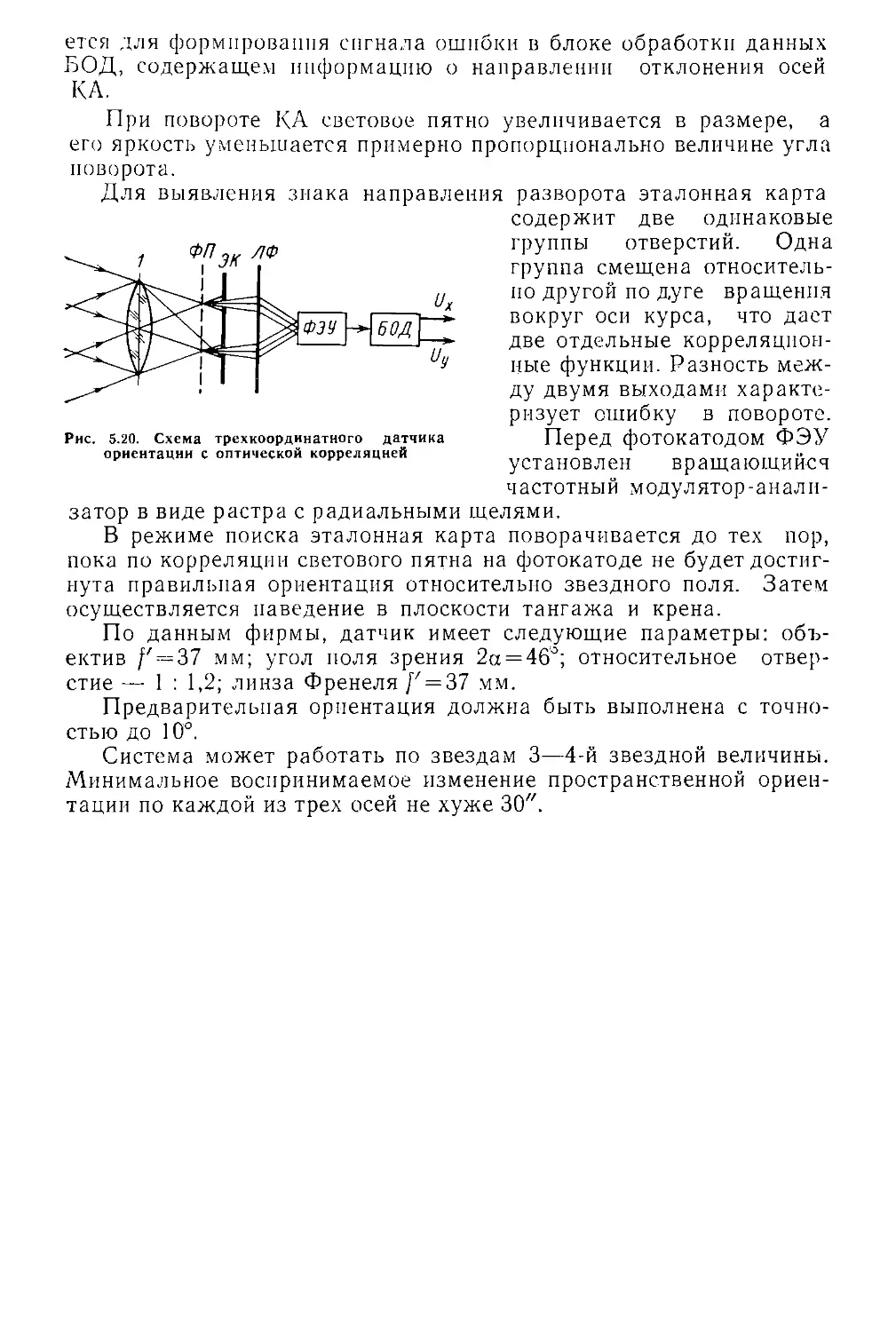
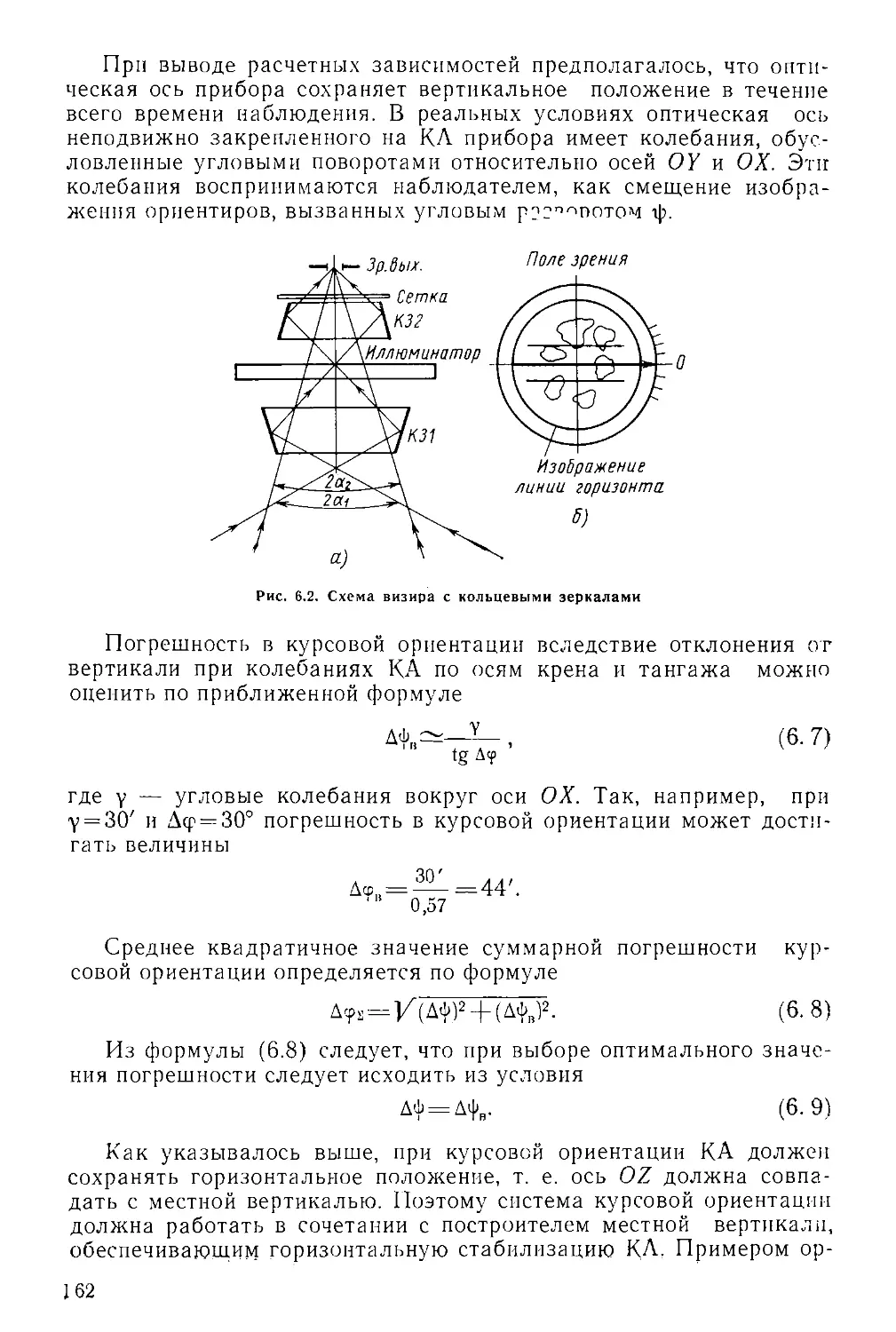
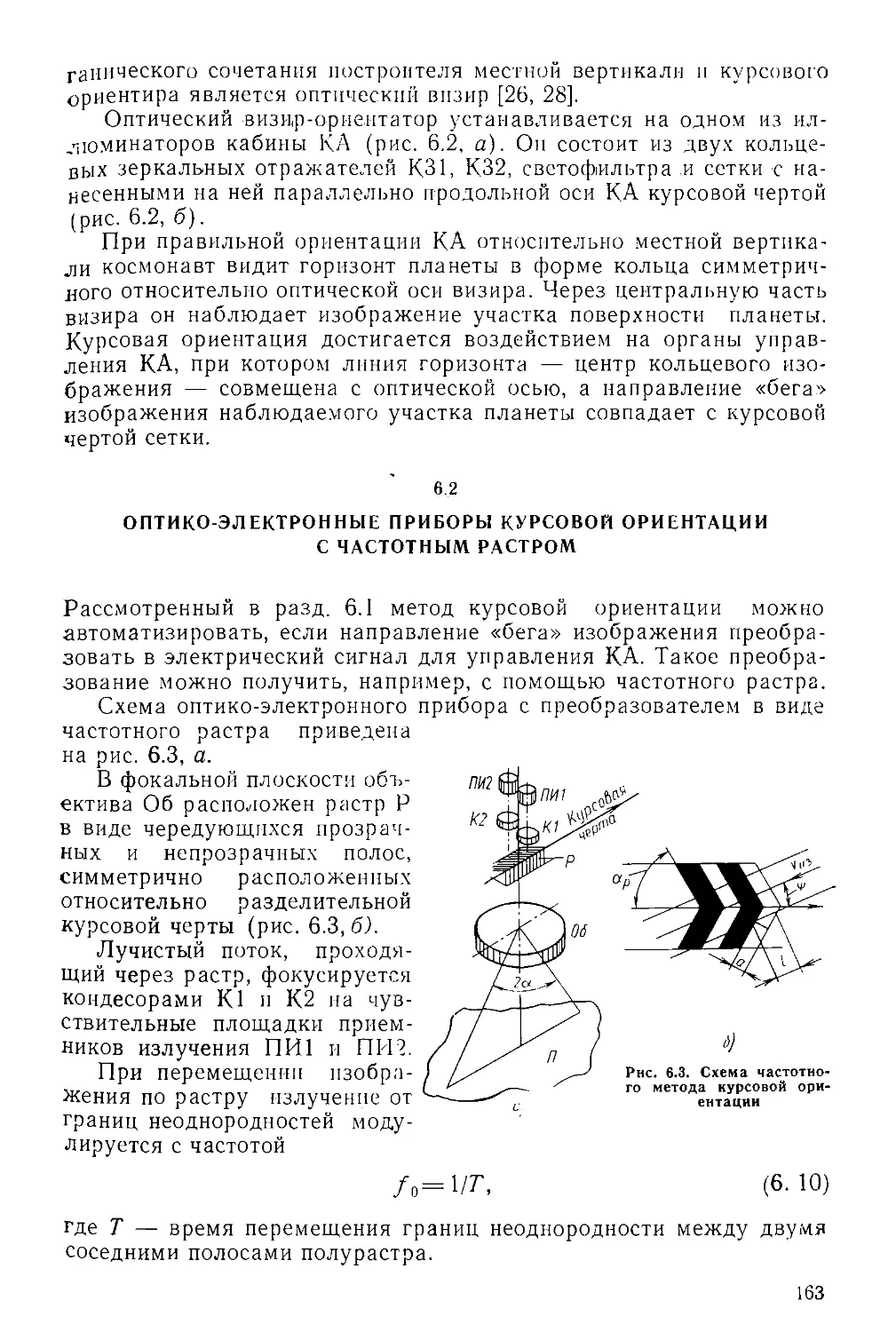
ОПТИЧЕСКИЕ ПРИБОРЫ
НАВЕДЕНИЯ
И ОРИЕНТАЦИИ
КОСМИЧЕСКИХ
АППАРАТОВ
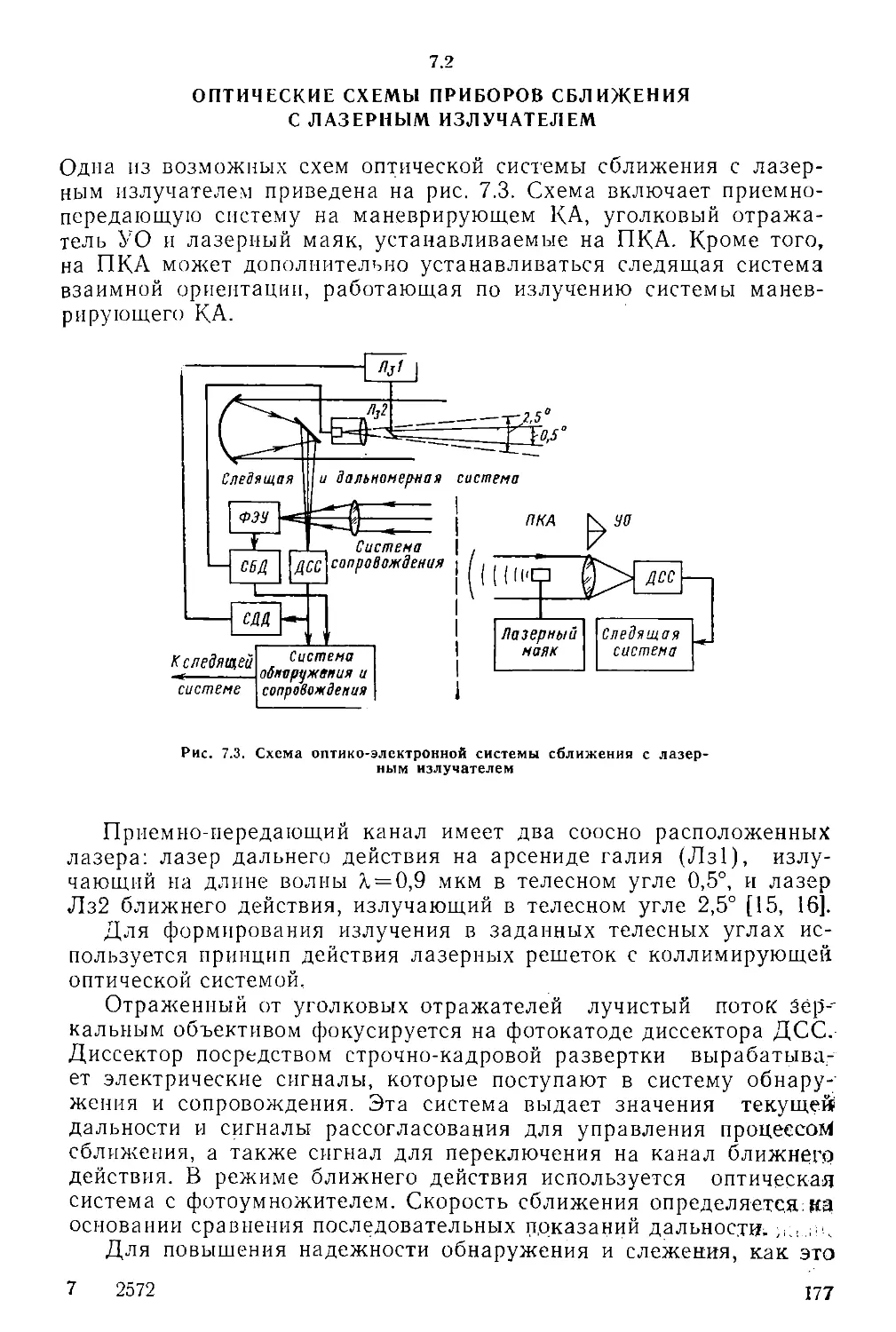
Я. М. ИВАНДИКОВ
ОПТИЧЕСКИЕ ПРИБОРЫ
НАВЕДЕНИЯ
И ОРИЕНТАЦИИ
КОСМИЧЕСКИХ
АППАРАТОВ
Москва МАШИНОСТРОЕНИЕ 1979
ББК 39.56
И18
УДК 629.7.054.001
Рецензент канд. техн. наук В. Н. Дикарев
Ивандиков Я. М.
И18 Оптические приборы наведения и ориентации косми¬
ческих аппаратов.— М.: Машиностроение, 1979. 208 с.,
ил.
75 к.
В книге изложены теоретические основы проектирования оптических и оп¬
тико-электронных приборов ориентации и навигации, наведения перед стар¬
том и при стыковке КА.
Рассмотрены типовые схемы приборов и их принципы действия. Приведены
методы расчета характеристик естественных и искусственных излучателей —
навигационных ориентиров и параметров оптических приборов.
Книга рассчитана на широкий круг инженеров и может быть также полез¬
на для студентов вузов.
31904-331 ББК 39.56
И 331-79. 3607000000
038(01 )-79 6П5.8
ИБ № 1732
Яков Моисеевич Ивандиков
ОПТИЧЕСКИЕ ПРИБОРЫ НАВЕДЕНИЯ И ОРИЕНТАЦИИ
КОСМИЧЕСКИХ АППАРАТОВ
Редактор И. А. Суворова
Технический редактор JI. Т. Зубко
Корректор В. Е. Блохина
Обложка художника Г. А. Жегина
Сдано в набор 18.06.79. Подписано в печать 14.09.79. Т-13272.
Формат бОХЭО'Лб Бумага типографская № 2. Гарнитура литературная.
Печать высокая. Уел. цеч. л. 13,0 Уч.-изд. л. 14,7
Тираж 1800 экз. Заказ 2572. Цена 75 к.
Издательство «Машиностроение» 107885,
Москва, ГСП-6, 1-й Басманный пер., 3
Московская типография № 8 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, голиграфии и книжной торговли,
Хохловский пер., 7.
© Издательство «Машиностроение», 1979 г.
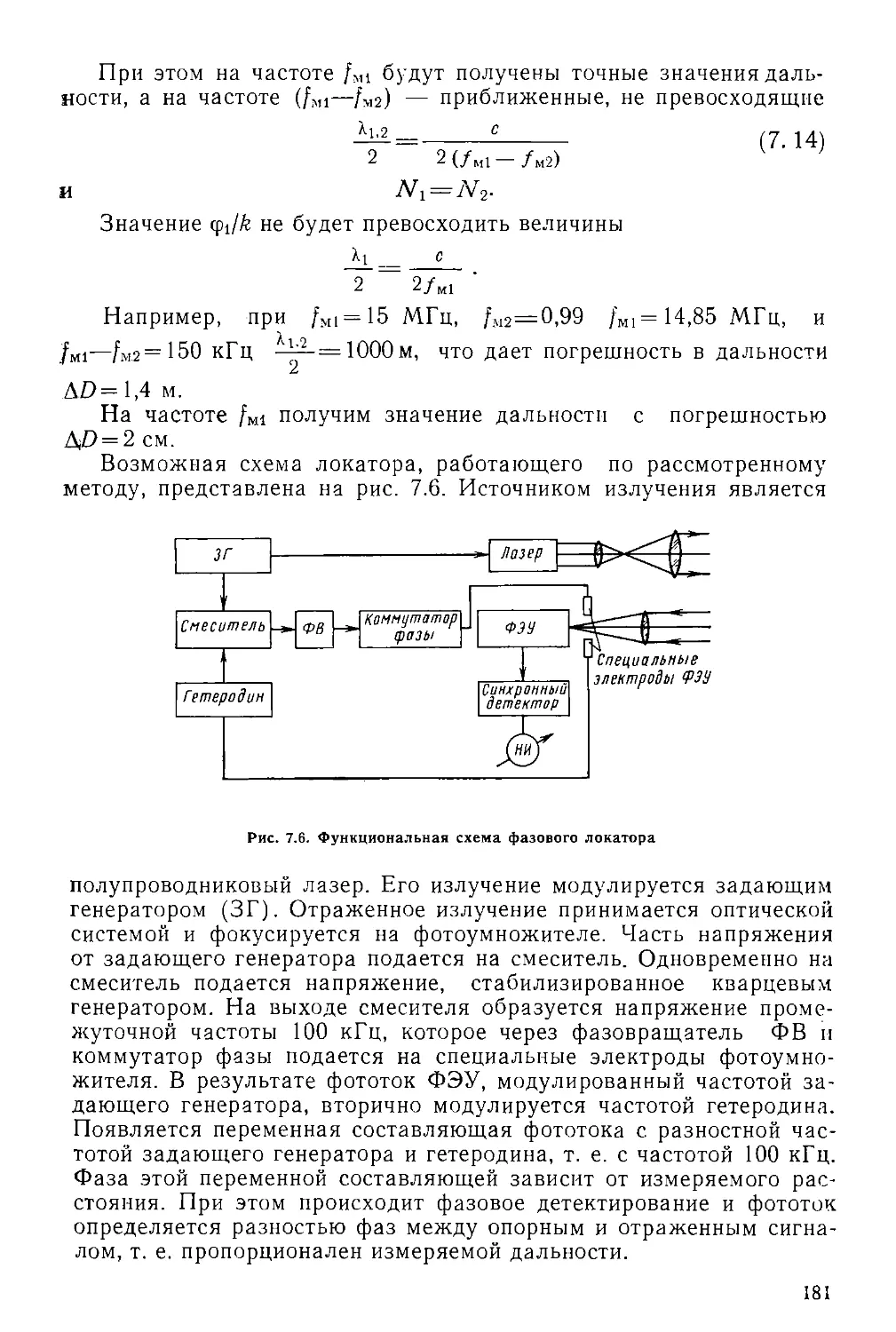
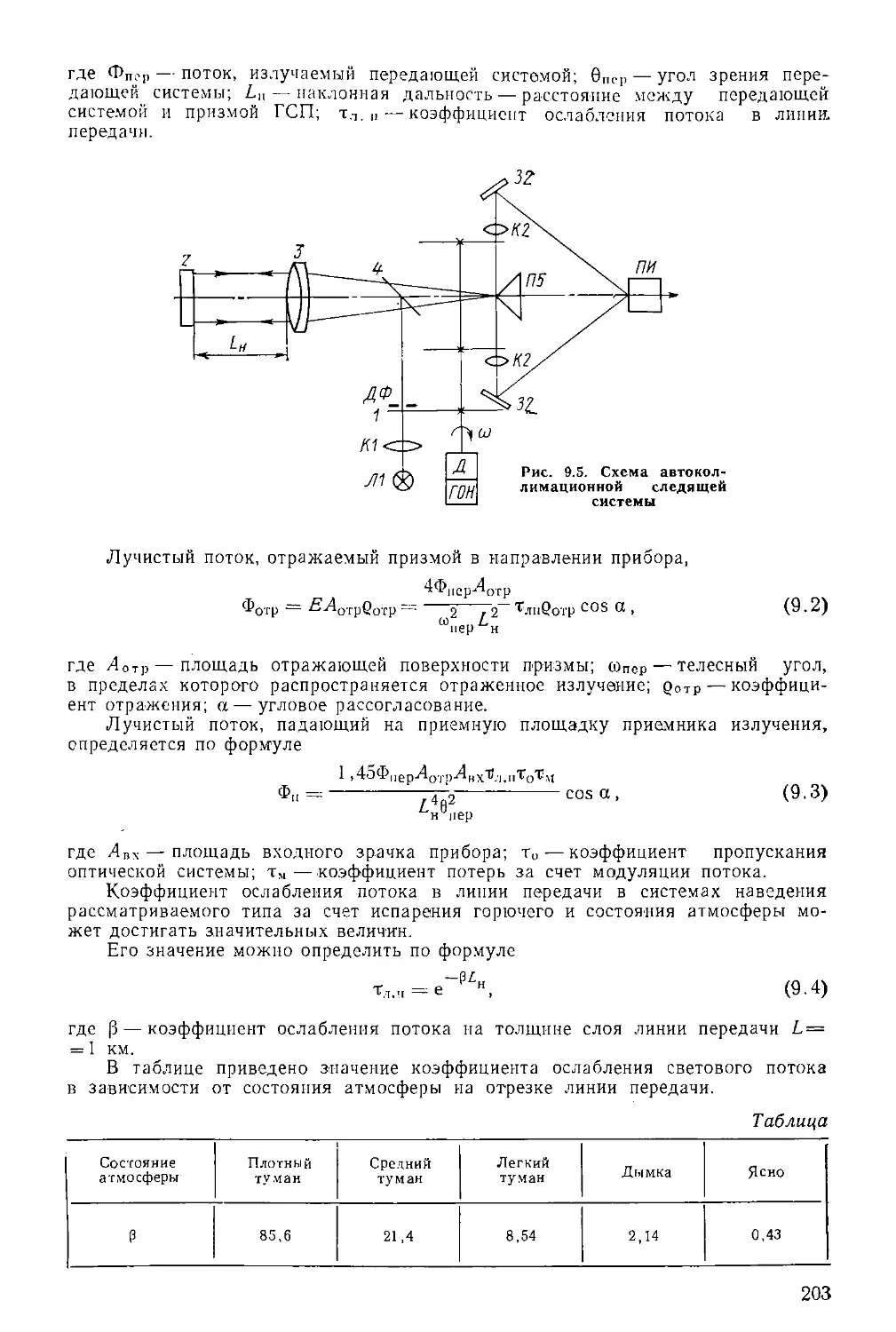
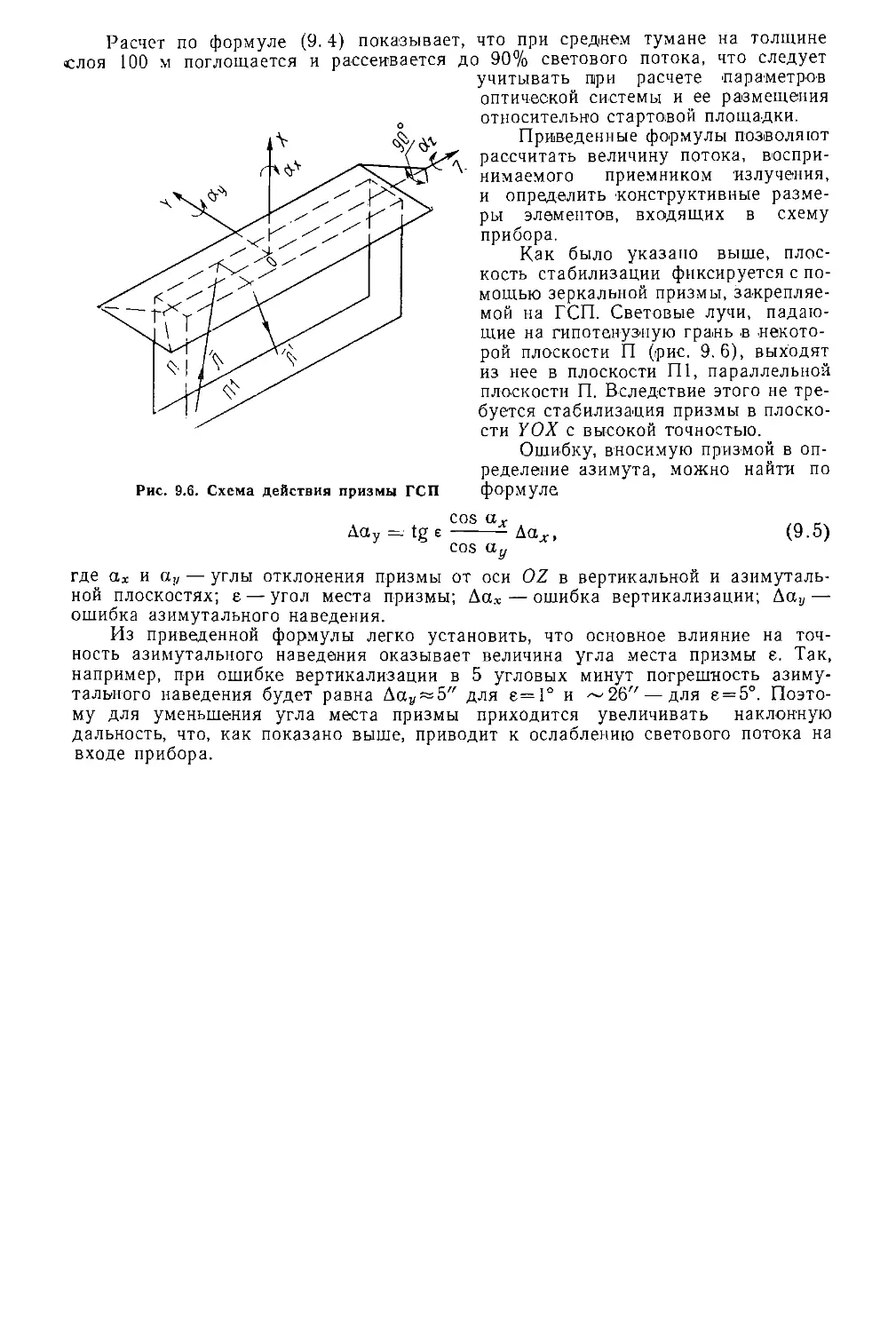
ПРЕДИСЛОВИЕ
В ходе исследования космического пространства возникает необ¬
ходимость в решении все более сложных и разнообразных науч¬
ных и технических проблем, к числу которых принадлежит, в ча¬
стности, получение и обработка первичной информации для наве¬
дения, ориентации и навигации космических аппаратов на всех
этапах полета.
Оптические и оптико-электронные приборы, как одно из средств
получения такой информации, вырабатывают требуемую инфор¬
мацию посредством визирования естественных (Солнце, планеты,
Луна и звезды) и искусственных излучателей — навигационных
ориентиров.
С помощью оптических приборов определяются угловые коор¬
динаты положения навигационных ориентиров относительно осей
инерциальной платформы или осей космического аппарата, даль¬
ность и относительная скорость при сближении и стыковке косми¬
ческих аппаратов и решается ряд других задач космического
полета.
К важнейшим свойствам, присущим оптическим приборам, от¬
носятся автономность получения информации, высокая точность
измерения, а также возможность построения замкнутых автомати¬
ческих и полуавтоматических систем управления с использовани¬
ем как аналоговых, так и цифровых вычислительных устройств.
Так, па пилотируемых космических кораблях визуальные прибо¬
ры — это основная часть биооптико-механической системы управ¬
ления, в которой замыкающим звеном является космонавт, и, сле¬
довательно, ее качественные показатели существенно зависят от
динамических характеристик прибора и психофизиологических
свойств оператора-космонавта.
Совершенствование оптических средств послужило стимулом
к возникновению и развитию нового типа приборов — оптических
имитаторов небесных светил и оптических тренажеров, воспроизво¬
дящих навигационную обстановку для наземной тренировки кос¬
монавтов.
Цель настоящей книги — изложение теоретических основ по¬
строения широкого класса приборов рассматриваемого типа на
основе обобщения их схем и конструкций, описанных в отечествен¬
ной и зарубежной печати.
Предполагается, что физические основы оптических приборов,
а также основы теории оптических систем известны читателю.
В основных разделах книги рассматриваются методика и рас¬
чет энергетических и спектральных характеристик излучения небес¬
ных светил—ориентиров, сканирование и растровая модуляция
излучения, преобразование оптического сигнала в электрический
для системы управления космическим аппаратом, измерение угло¬
вых координат изображения излучателя, принципы построения
структурных и принципиальных схем оптических и оптико-элек¬
тронных приборов различного назначения. Основное внимание уде¬
лено проектированию и расчету важнейших элементов этих при¬
боров.
Автор выражает благодарность д-ру техн. наук В. А. Хруста-
леву, рецензенту канд. техн. наук В. Н. Дикареву и канд. техн.
наук Л. Т. Немытовой за ценные замечания, сделанные ими при
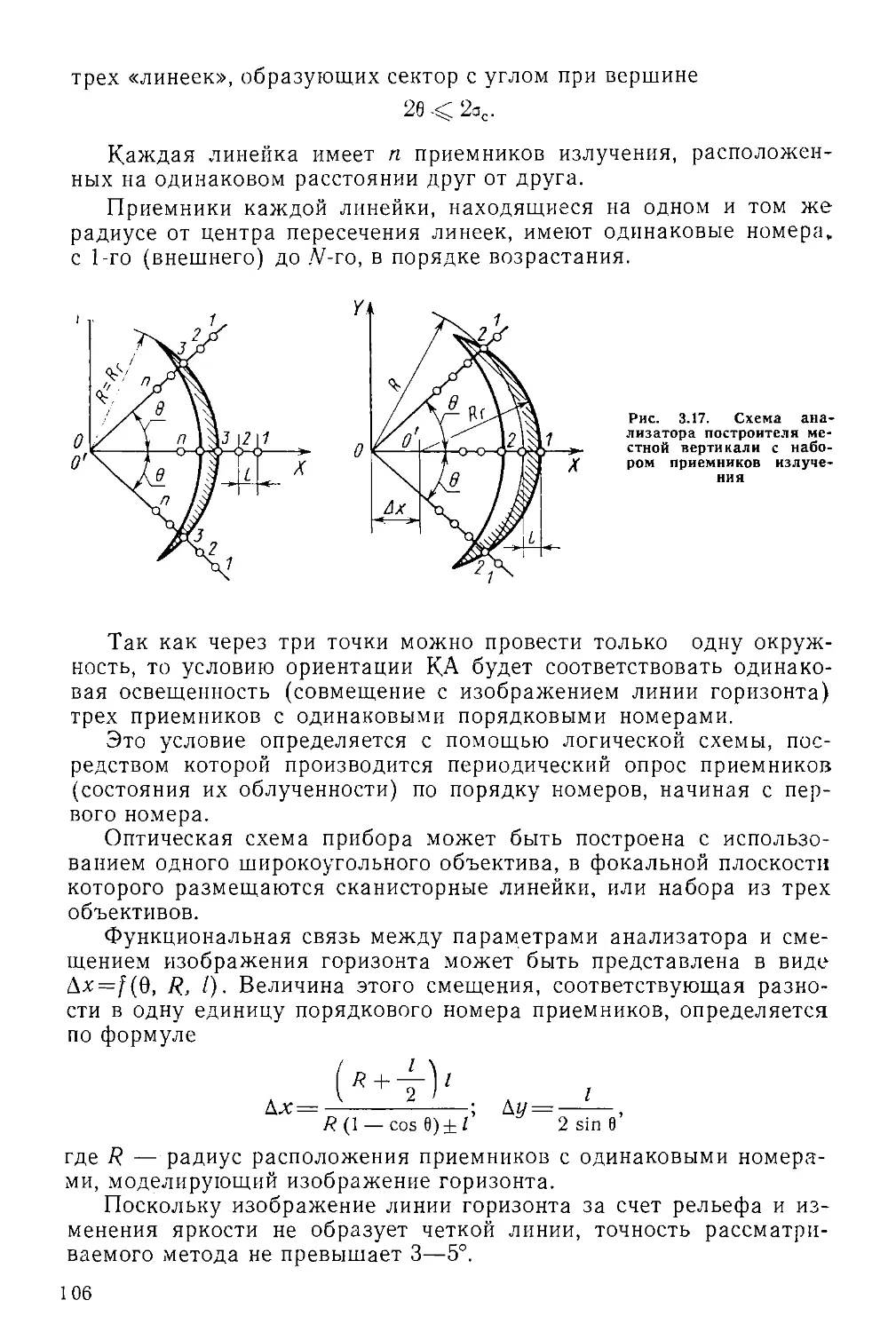
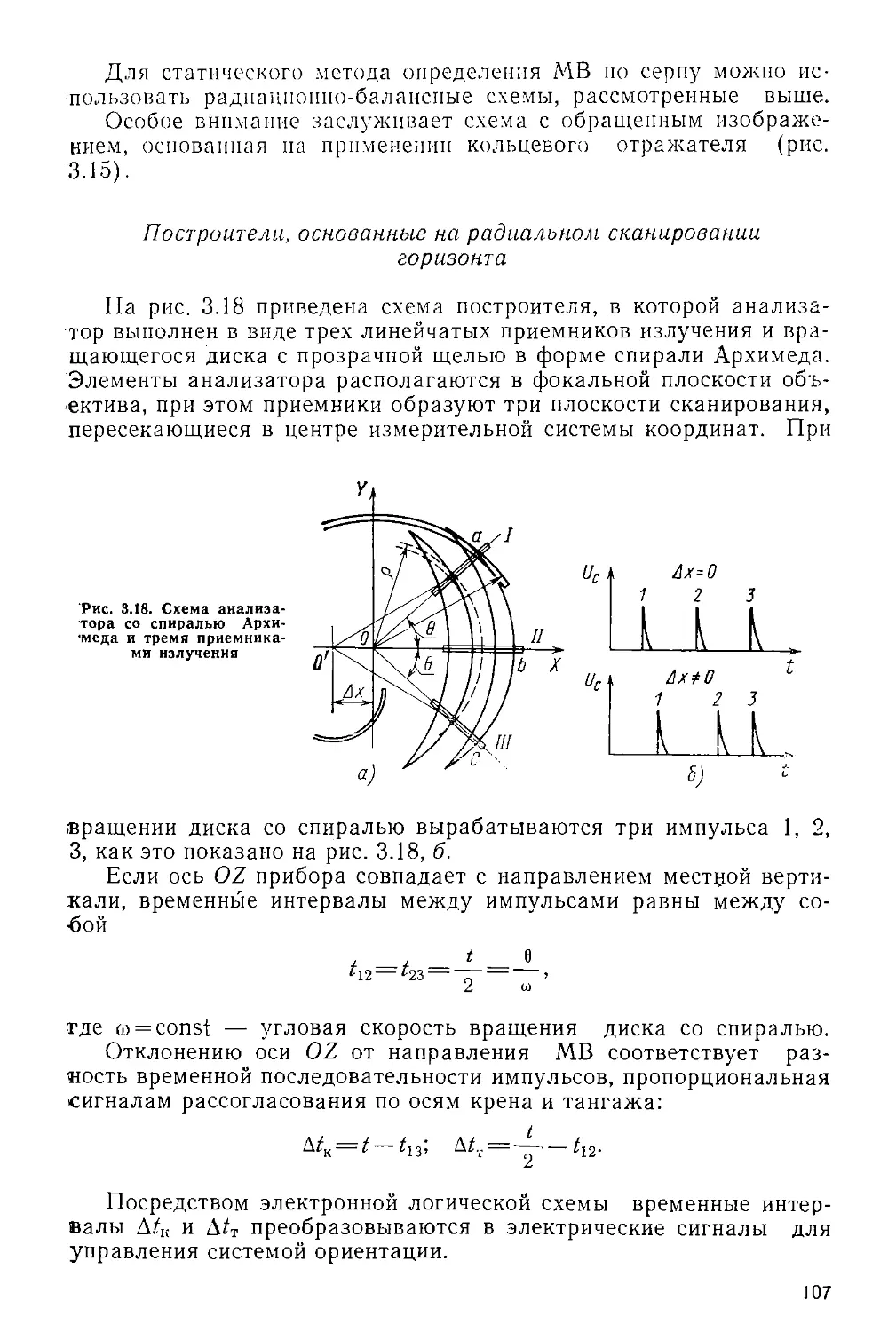
просмотре рукописи.
Автор просит читателей присылать свои отзывы и критические
замечания по адресу: Москва, ГСП-6, 1-й Басманный пер., 3,
изд-во «Машиностроение».
ГЛАВА 1
ОБЩИЕ СВЕДЕНИЯ ОБ ОРИЕНТАЦИИ
И НАВИГАЦИИ КОСМИЧЕСКИХ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
Космическими летательными аппаратами (КА) называются искус¬
ственные спутники Земли (ИСЗ), межпланетные космические ко¬
рабли (МКК) и межпланетные автоматические станции (MAC).
Полет искусственного спутника Земли происходит в гравитаци¬
онном поле Земли, тогда как на движение межпланетной космиче¬
ской станции и космического корабля воздействует не только гра¬
витационное поле Земли, но и поля других планет и Солнца. Этим
обуславливается основное различие между ними, так как воздейст¬
вие гравитационных полей является одним из важнейших факто¬
ров, определяющих траекторию полета.
Динамика движения центра масс летательного аппарата опи¬
сывается уравнениями равновесия всех действующих внешних и
уравновешивающих инерционных сил по трем осям координат. Ре¬
шение этих уравнений с учетом начальной скорости и координат
места вылета позволяет найти скорость и координаты центра масс
КА в любой момент времени.
Непосредственное решение этой задачи сопряжено с большими
трудностями, и на практике используются приближенные методы.
Вначале рассматривается невозмущенное движение КА в централь¬
ном поле тяготения Земли, а затем определяют параметры движе¬
ния под воздействием возмущающих сил, являющихся некоторыми
функциями координат КА и его скорости [9, 26].
Невозмущенное движение космического летательного аппарата
в прямоугольной системе координат с началом в центре небесного
тела и неподвижной относительно звезд описывается дифференци¬
альными уравнениями
1.1
ОБЩИЕ СВЕДЕНИЯ
у dti
kM ;
kM — ,
гз
О
где Jx, Jv, Jz — проекции ускорения на оси координат, сообщаемого
КА силами тяготения; k — гравитационная постоянная; М — масса
небесного тела; г — радиус-вектор, определяющий положение цент¬
ра масс КА.
Решение этих уравнений приводится в курсе небесной механи¬
ки и имеет вид
CiX-\- С2у ~г C$z — 0;
0 affl п
■ — ь3;
1.1)
dt
1 4- е cos Ь
(1.2)
(1.3)
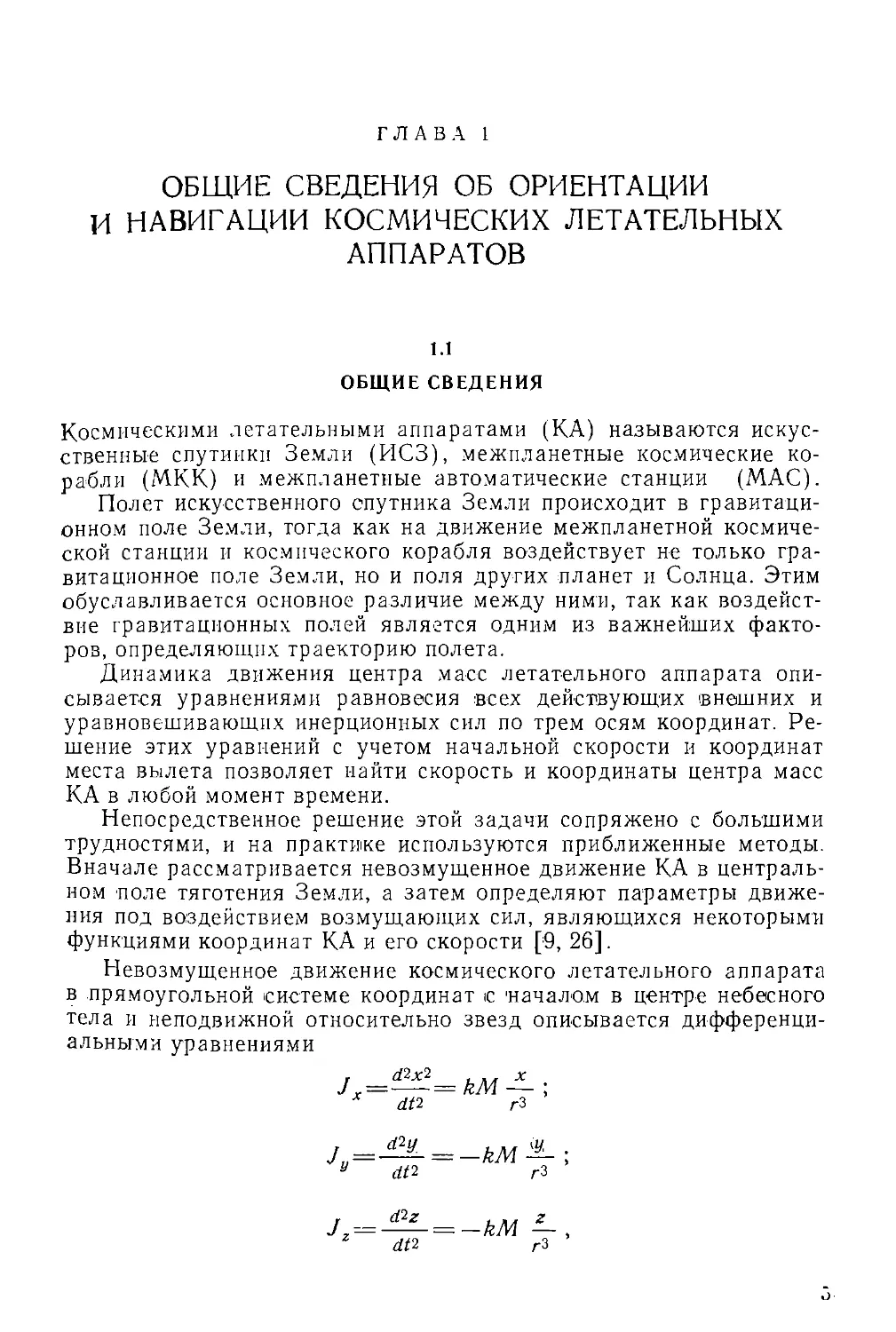
Рис.
1.1. Орбитальная система коорди¬
нат космического аппарата
где С|, С2, Сз, р, е — постоянные ве¬
личины.
Из уравнения 01.1) следует, что
орбита корабля при невозмущенном
движении лежит в плоскости, прохо¬
дящей через центр небесного тела и
неподвижной относительно звезд. Из
уравнения (1.2) следует закон пло¬
щадей в полярной системе коорди¬
нат: r20 = const (0 —текущая координата), согласно которому пло¬
щадь, ометаемая радиус-вектором траектории в единицу времени
(секториальпая скорость), есть величина постоянная (второй закон
Кеплера). Уравнение (1.3) представляет собой уравнение кривой
второго порядка, или уравнение конического сечения в полярной си¬
стеме координат с фокусом в центре небесного тела и поляр¬
ной осью, направленной от фокуса к ближайшей вершине кривой.
Сз
Параметры этой кривой: р = — параметр конического сече¬
ния; е =
V
С4С;
лярныи угол;
(k М) 2
Г -кМ
Ь4 — —
а
эксцентриситет орбиты; 0=0 — 0о
по¬
ст — боль-
■ постоянная интегрирования;
шая полуось орбиты (эллипса).
При движении по круговой орбите r=p=const, е — 0; по эл¬
липсу р=а{ 1 — е2), 0<е<1; по параболе р = р, е=1; по гипербо¬
ле р = а(е2 — 1), е> 1.
Положение орбиты при невозмущенном движении определяется
следующими параметрами (рис. 1.1): наклонением орбиты i —
угол между плоскостью орбиты и плоскостью экватора; прямым
восхождением восходящего узла Q — угол между направлением
на точку весеннего равноденствия Y и линией пересечения пло¬
скости орбиты и экватора; угловым расстоянием перигея со; боль¬
шой полуосью орбиты а; моментом прохождения космического
аппарата через перигей t.
6
Форма орбиты движения космического аппарата определяется
его скоростью в перигее vn, а ориентация плоскости орбиты в
„ 2 Jl kM
пространстве — направлением этой скорости. Вели vu <С , то дви¬
жение КА будет происходить по эллиптической орбите. При
ч?= движение будет происходить по параболической, а при
Гп
о . 2/г ЬА
'Vn.
ГI,
по гиперболической орбитам [1, 9, 26].
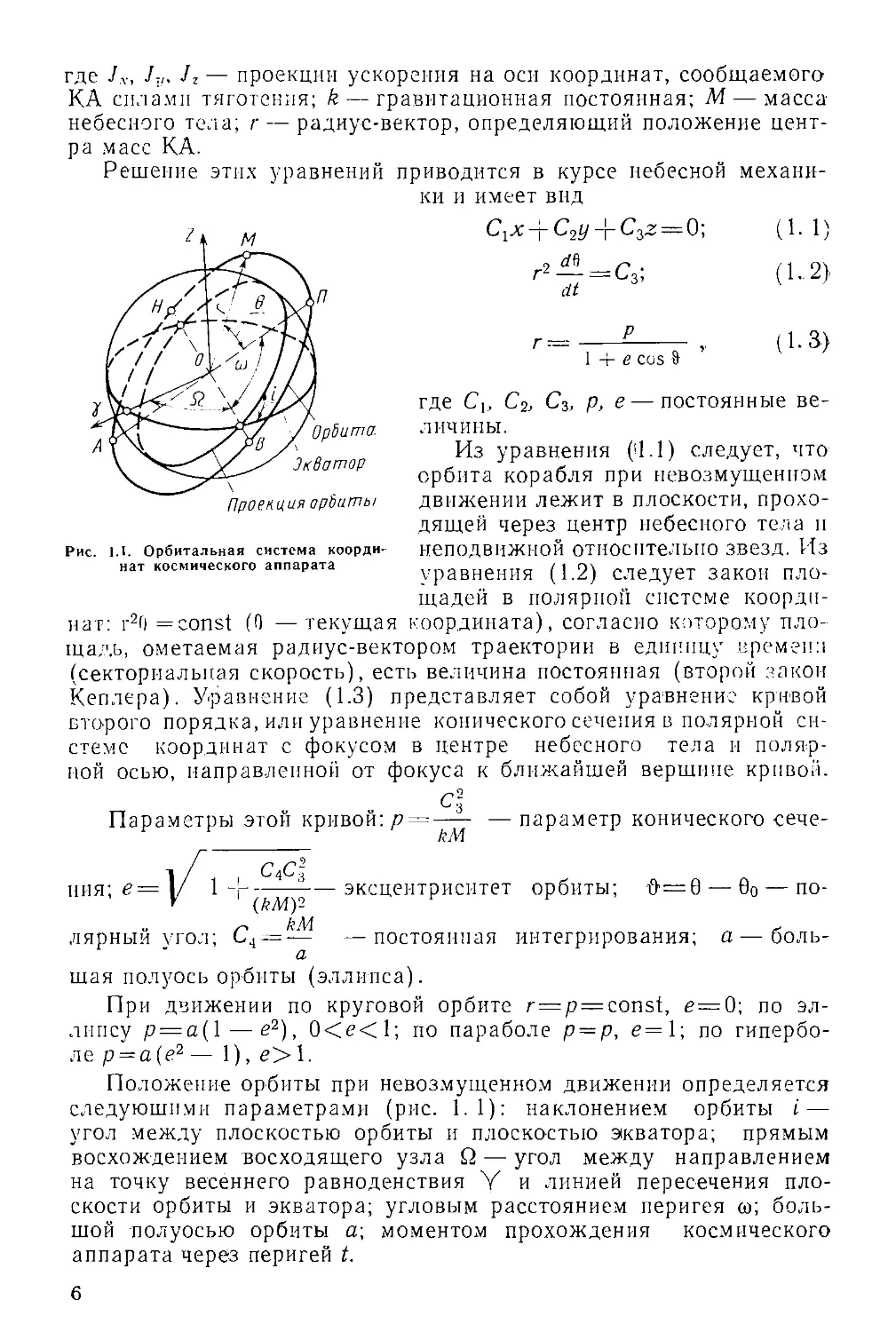
Рис. 1.2. Участки траектории межпланетно¬
го полета
Из приведенных неравенств следует, что при полетах по пара-
болической и гиперболической орбитам требуются большие выход¬
ные скорости, чем при полете по эллиптической орбите, следова¬
тельно, с энергетической точки
зрения последняя более экономич¬
на. Поэтому космические кораб¬
ли, использующие химическое
топливо, выполняют полеты по
эллиптическим орбитам. В даль¬
нейшем с появлением мощных
атомных и ионных двигателей
космические корабли будут ле¬
тать и по более коротким траекто¬
риям — по параболическим п ги¬
перболическим орбитам.
Искусственные спутники и
космические корабли при полете
к Луне движутся по эллиптической орбите, один из фокусов кото¬
рой совпадает с центром Земли.
Движение межпланетных космических кораблей в большей ча¬
сти также происходит по эллиптической орбите с фокусом в цент¬
ре Солнца.
При облете какой-либо планеты корабль двигается по эллип¬
тической орбите с фокусом в центре планеты. Для случая попада¬
ния в планету начальный и конечный участки траектории полета
выполняются по гиперболе.
В общем случае траектория полета межпланетного корабля мо¬
жет быть разделена на следующие участки (рис. 1.2): выведение
на орбиту искусственного спутника планеты — отправителя (АВ),
полет по круговой или эллиптической орбите вокруг этой планеты
(ВС), полет по эллиптической орбите относительно Солнца (CD),
выход на орбиту спутника относительно планеты назначения (DE),
и, наконец, участок снижения на поверхность планеты назначе¬
ния (EF).
Во всех точках перехода с одной орбиты на другую требуется
определенная затрата энергии, так как эти переходы связаны с из¬
менением величины и направления скорости космического аппара¬
та. А это значит, что в момент старта корабль должен быть соот¬
ветствующим образом ориентирован относительно некоторой си¬
стемы координат, в начале каждого участка и в течение времени
7
работы двигателей также требуется ориентация, стабилизация и
управление полетом корабля.
Для решения этих задач необходим комплекс измерительных
устройств, вырабатывающих первичную информацию для системы
наведения и управления. Кроме того, при огромных расстояниях
и длительности, характеризующих космический полет, неизбежно
возникает необходимость в дополнительной коррекции траектории,
как это показана на рис. 1. 2 точками К\ и Кг-
.'йита корабля
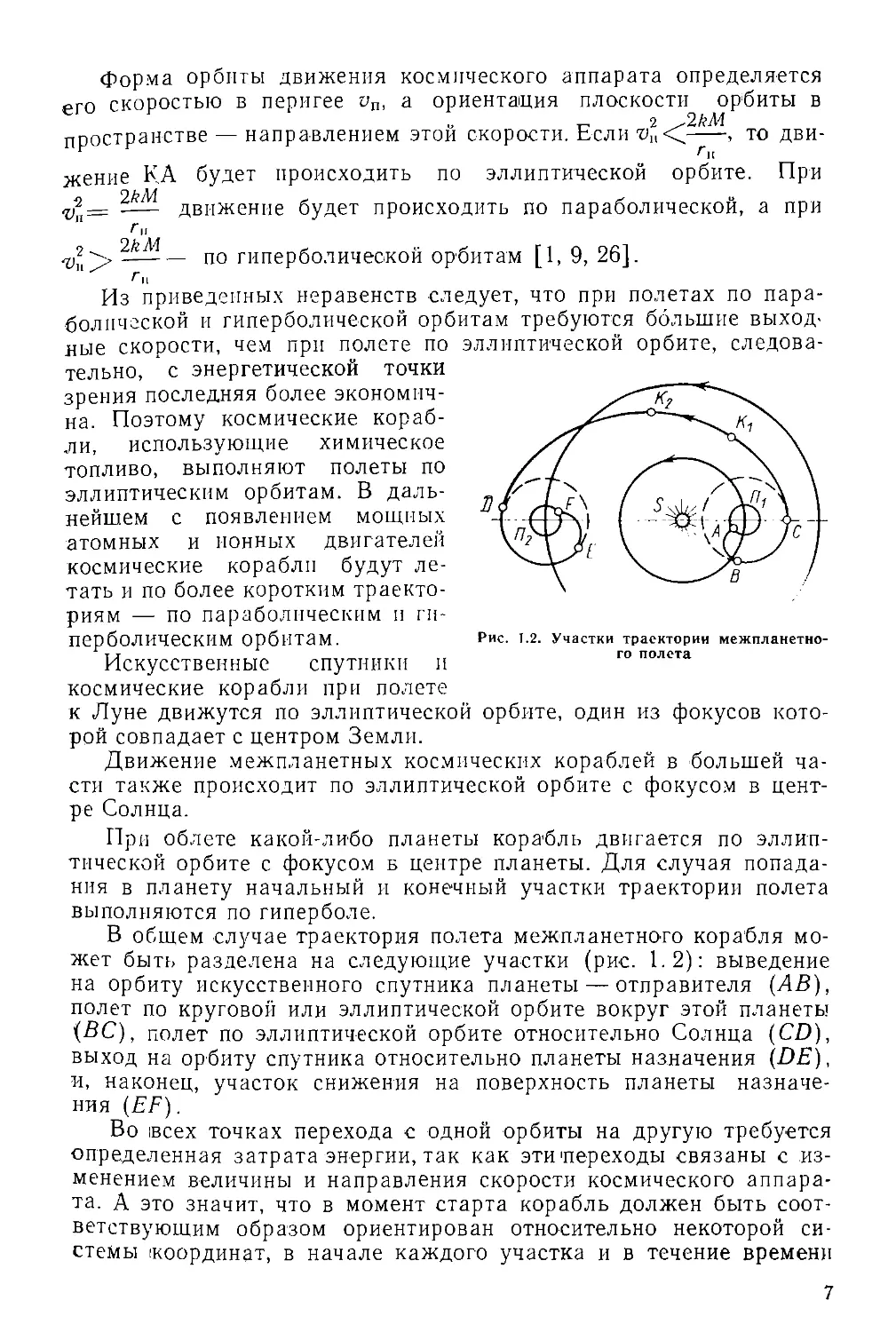
Полет по эллипсу минимальной энергии требует, чтобы Земля (планета от¬
правления) в момент старта космического корабля и планета назначения в мо¬
мент, соответствующий подлету к ней, располагались па прямой, проходящей че¬
рез центр Солнца, т. е. на линии апсид гелиоцентрической орбиты корабля.
Причем, для полета к внешним планетам (Марс, Юпитер и др.) перигелий
(П) орбиты должен быть расположен на орбите Земли, а афелий (А) — на ор¬
бите внешней планеты назначения, например, па орбите Марса (рис. 1.3, а). Дли
полета к внутренним планетам (Меркурий, Велера) афелий орбиты должен быть
расположен на орбите Земли (внешней планеты), а перигелий — на орбите «внут¬
ренней» планеты назначения (рис. 1.3,6).
Эти требования ограничивают время и последовательность запуска космиче¬
ских кораблей. Например, для полета к Марсу благоприятные условия следуют
друг за другом через 2,14 года.
Для наблюдения за космическими кораблями, определения их экваториаль¬
ных координат, района приземления и решения ряда других задач необходимо
знать закон движения космического корабля относительно поверхности Земли
и звезд.
Траектория искусственного спутника относительно поверхности Земли опре¬
деляется соотношением
tg<p^ sin (w'<-f ДА.) tg/ (1.4)
где ф — текущее значение широты географического места спутника; оь' — сум¬
марная угловая скорость вращения Земли и средней скорости прецессии орбиты;
t — время полета спутника от восходящего узла орбиты до данной точки земной
поверхности; АК — разность долгот точки местоположения спутника и восходяще¬
го узла орбиты.
Максимальная широта, равная наклонению орбиты ф = /, будет иметь место
при sin(o>:1f+ ДА.) = 1. Следовательно, проекция траектории движения спутника
располагается на поверхности шарового пояса Земли, ограниченного параллеля¬
ми с широтой ф=±1.
8
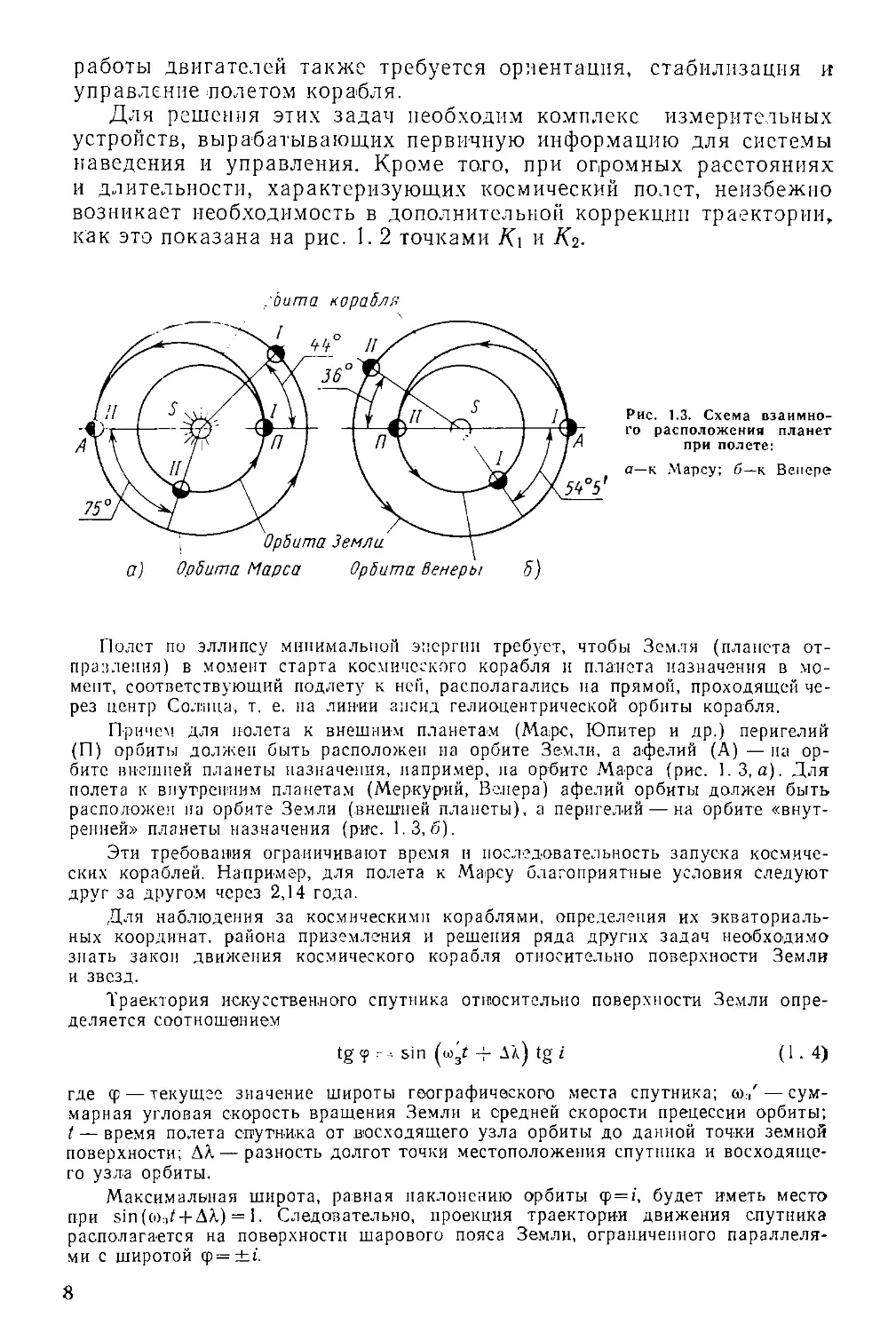
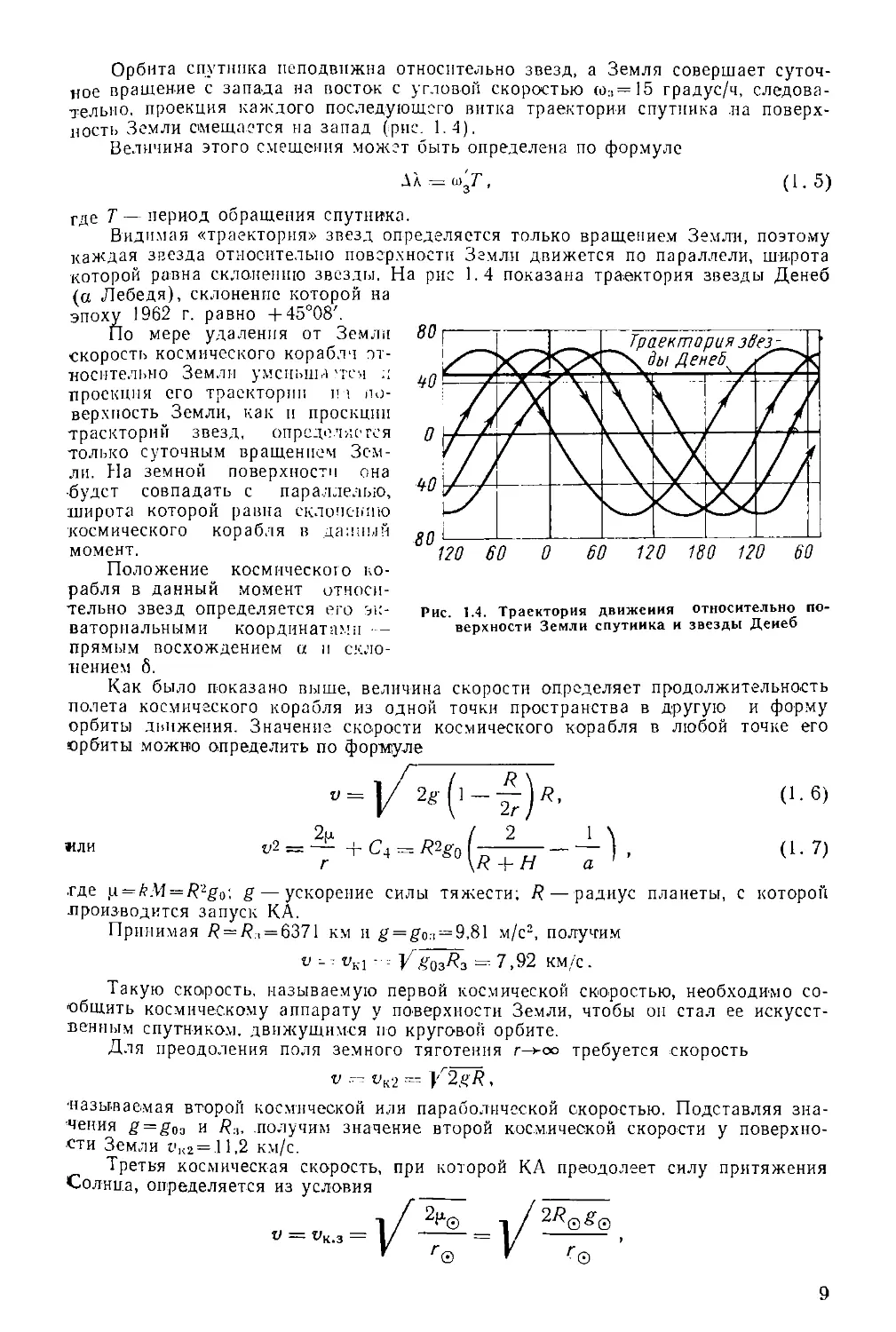
Орбита спутника неподвижна относительно звезд, а Земля совершает суточ¬
ное вращение с запада на восток с угловой скоростью w:l=15 градус/ч, следова¬
тельно, проекция каждого последующего витка траектории спутника на поверх¬
ность Земли смещается на запад (рис. 1.4).
Величина этого смещения может быть определена по формуле
Лл = ш Т,
(1.5)
где Т — период обращения спутника.
Видимая «траектория» звезд определяется только вращением Земли, поэтому
каждая звезда относительно поверхности Земля движется по параллели, широта
которой равна склонению звезды. На рис 1.4 показана траектория звезды Денеб
(а Лебедя), склонение которой на
эпоху 1962 г. равно +45°08'.
По мере удаления от Земли
скорость космического корабля от¬
носительно Земли уменьши дел л
проекция его траектории ич по¬
верхность Земли, как н проекции
траекторий звезд, определяется
только суточным вращением Зем¬
ли. На земной поверхности она
будет совпадать с параллелью,
широта которой равна склонению
космического корабля в данный
момент.
Положение космического ко¬
рабля в данный момент относи¬
тельно звезд определяется его эк¬
ваториальными координатами -
прямым восхождением а и скло¬
нением б.
Как было показано выше, величина скорости определяет продолжительность
полета космического корабля из одной точки пространства в другую и форму
орбиты движения. Значение скорости космического корабля в любой точке его
орбиты можно определить по формуле
Рис. 1.4. Траектория движения относительно по¬
верхности Земли спутника и звезды Деиеб
«-|А
2_ 2р.
г
■■ R2go
1
а
1.
(1.6)
(1. 7)
радиус планеты, с которой
\R + H
■где [i — kM=:R2g0; g— ускорение силы тяжести; R
.производится запуск КА.
Принимая /? = /?., = 6371 км и g = go;: = 9,81 м/с2, получим
v tV. V gaaR* = 7,92 км/с.
Такую скорость, называемую первой космической скоростью, необходимо со¬
общить космическому аппарату у поверхности Земли, чтобы он стал ее искусст¬
венным спутником, движущимся по круговой орбите.
Для преодоления поля земного тяготения г—>оо требуется скорость
v ^ цк2 - Y^gR,
■называемая второй космической или параболической скоростью. Подставляя зна¬
чения g = g0а и R:t, получим значение второй космической скорости у поверхно¬
сти Земли г.’,;2 = 11,2 км/с.
Третья космическая скорость, при которой КА преодолеет силу
Солнца, определяется из условия
притяжения
9
где [i©— постоянная тяготения Солнца; Tq—радиус-вектор, определяющий по¬
ложение КА относительно центра Солнца.
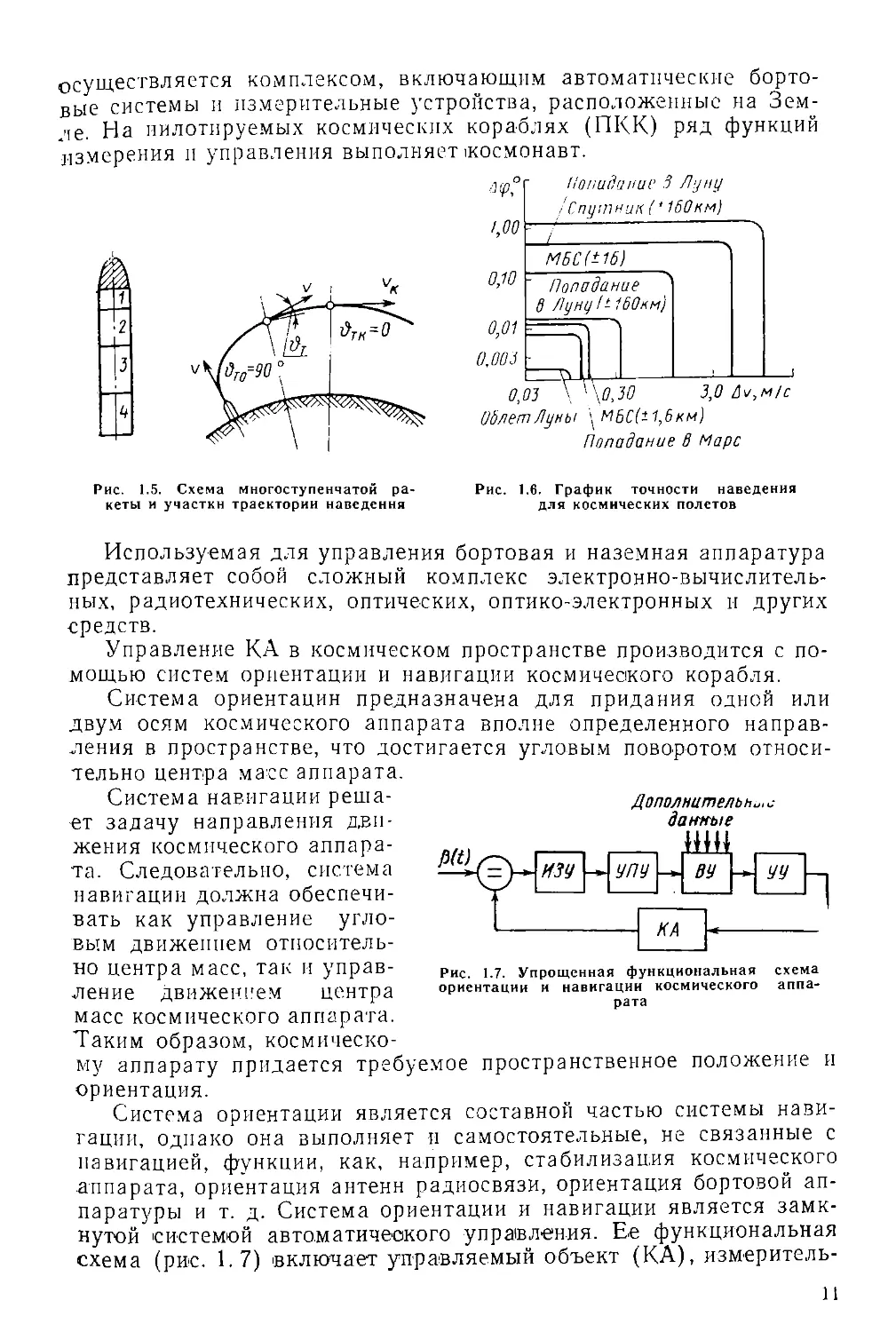
Запуск и выведение космического корабля па заданную орбиту производит¬
ся с помощью многоступенчатых ракет-носителей (рис. 1.5).
В результате последовательного сброса ступеней (4, 3, 2, 1), после оконча¬
ния работы двигателя данной ступени, масса ракеты уменьшается и, следователь¬
но, прирост скорости увеличивается. Поэтому многоступенчатая ракета, идея со¬
здания которой впервые была предложена К. Э. Циолковским, позволяет достиг¬
нуть больших скоростей, обеспечивающих полет в космическом пространстве.
Ракетоноситель управляется на активном участке, т. е. при работающем дви¬
гателе. Схема траектории выведения на орбиту приведена на рис. 1.5, где угол
наклона вектора скорости к горизонту в данной точке траектории обозначен
через От. Старт носителя осуществляется вертикально. После небольшого участ¬
ка вертикального подъема ракетоноситель постепенно поворачивается относитель¬
но поперечной оси по заданной программе, в результате чего траектория его дви¬
жения искривляется. Выбирая соответствующую программу разворота по време¬
ни, можно получить требуемое значение высоты и угла От. к в конце участка
выведения при конечной скорости
т <к <к
vK — ^ Ci In ^ ^ sin **dt'
l o o
где Сi — скорость истечения горючего; G,0 — начальная масса отделяемых сту¬
пеней; Gi — конечная масса отделяемых ступеней; х — проекция силы аэроди¬
намического сопротивления на ось ОХ\ G —текущее значение массы ракеты; т —
число ступеней.
Первый член уравнения (1.8) соответствует формуле Циолковского и опреде¬
ляет скорость ракеты при отсутствии воздействия внешних сил.
Второй член уравнения определяет потери скорости на преодоление сил аэро¬
динамического сопротивления, а третий — потери скорости, связанные с влиянием
сил тяготения.
При запуске спутника в восточном направлении скорость, сообщаемая ему
ракетоносителем, складывается со скоростью суточного вращения Земли. Увели¬
чение скорости вследствие вращения Земли можно выразить формулой
Динр ш3 (#3 + Н) cos i, (1. 9)
где Н — высота точки выведения.
Одной из важных задач осуществления космического полета является уп¬
равление космическим летательным аппаратом в полете и наведение его на за¬
данный навигационный ориентир (НО).
Эта задача охватывает широкий круг вопросов: выбор оптимальной траек¬
тории полета, вывод на выбранную орбиту, стабилизация положения КЛА на
орбите и его ориентация в необходимом направлении, навигация корабля на
всех этапах полета, посадка на планету, возвращение на Землю, осуществление
маневров в космосе с целью встречи или стыковки с другими КЛА и др.
Высокие скорости и точность, с которой должно осуществляться управле¬
ние, и ограниченное время для решения навигационных задач требуют макси¬
мальной автоматизации средств навигации и управления.
Некоторые представления о требованиях, предъявляемых к точности наве¬
дения и управления, дает график, представленный на рис. 1.6, где по оси абсцисс
отложена величина ошибки по скорости, а по оси ординат — ошибка ориентации
вектора скорости, допустимые при выполнении поставленной задачи [27].
Любое сочетание ошибок по абсолютной величине и угловой ориентации век-
гора скорости в пределах области, ограниченной той или иной кривой, обеспечи¬
вает выполнение задачи наведения и управления, которую представляет данная
кривая.
Задача управления может быть полностью решена с помощью
автономного управления автоматическими устройствами, находя¬
щимися на борту космического аппарата. В основном управление
П
осуществляется комплексом, включающим автоматические борто¬
вые системы и измерительные устройства, расположенные на Зем¬
ле. На пилотируемых космических кораблях (ПКК) ряд функций
измерения и управления выполняет космонавт.
т
1
г
3
у
'Щ
1,00
0,10
0,01
0.000
Попидиние 3 Луну
i
\
MSCfi 16)
Попадание
в Луну /ti60км)
•
■
0,00 \ ' \0,00 3,0 Av,m/c
Облет Луны \ М6С(И,6км)
Попадание в Марс
Рис. 1.5. Схема многоступенчатой ра¬
кеты и участки траектории наведения
Рис. 1.6. График точности наведения
для космических полетов
Используемая для управления бортовая и наземная аппаратура
представляет собой сложный комплекс электронно-вычислитель¬
ных, радиотехнических, оптических, оптико-электронных и других
средств.
Управление КА в космическом пространстве производится с по¬
мощью систем ориентации и навигации космического корабля.
Система ориентации предназначена для придания одной или
двум осям космического аппарата вполне определенного направ¬
ления в пространстве, что достигается угловым поворотом относи¬
тельно центра масс аппарата.
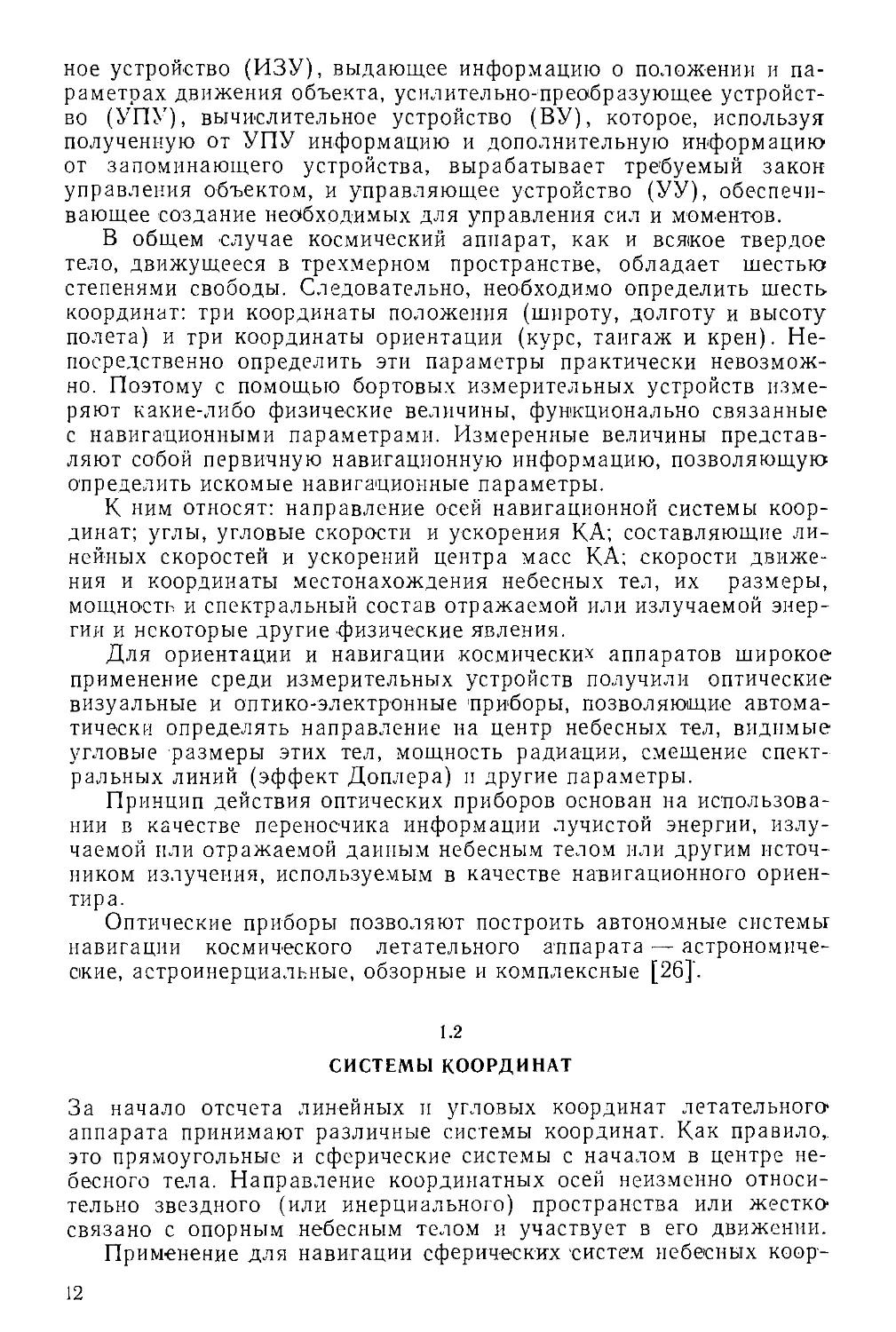
Дополнительна, с
данные
ПЗУ
УПУ
-
ВУ
УУ
КА
п
Рис. 1.7. Упрощенная функциональная схема
ориентации и навигации космического аппа¬
рата
Система навигации реша¬
ет задачу направления дви¬
жения космического аппара¬
та. Следовательно, система
навигации должна обеспечи¬
вать как управление угло¬
вым движением относитель¬
но центра масс, так и управ¬
ление движением центра
масс космического аппарата.
Таким образом, космическо¬
му аппарату придается требуемое пространственное положение и
ориентация.
Система ориентации является составной частью системы нави¬
гации, однако она выполняет н самостоятельные, не связанные с
навигацией, функции, как, например, стабилизация космического
аппарата, ориентация антенн радиосвязи, ориентация бортовой ап¬
паратуры и т. д. Система ориентации и навигации является замк¬
нутой системой автоматического управления. Ее функциональная
схема (рис. 1.7) включает управляемый объект (КА), измеритель-
11
ное устройство (ИЗУ), выдающее информацию о положении и па¬
раметрах движения объекта, усилигельно-преобразующее устройст¬
во (УПУ), вычислительное устройство (ВУ), которое, используя
полученную от УПУ информацию и дополнительную информацию
от запоминающего устройства, вырабатывает требуемый закон
управления объектом, и управляющее устройство (УУ), обеспечи¬
вающее создание необходимых для управления сил и моментов.
В общем случае космический аппарат, как и всякое твердое
тело, движущееся в трехмерном пространстве, обладает шестью
степенями свободы. Следовательно, необходимо определить шесть
координат: три координаты положения (широту, долготу и высоту
полета) и три координаты ориентации (курс, таигаж и крен). Не¬
посредственно определить эти параметры практически невозмож¬
но. Поэтому с помощью бортовых измерительных устройств изме¬
ряют какие-либо физические величины, функционально связанные
с навигационными параметрами. Измеренные величины представ¬
ляют собой первичную навигационную информацию, позволяющую
определить искомые навигационные параметры.
К ним относят: направление осей навигационной системы коор¬
динат; углы, угловые скорости и ускорения КА; составляющие ли¬
нейных скоростей и ускорений центра масс КА; скорости движе¬
ния и координаты местонахождения небесных тел, их размеры,
мощность и спектральный состав отражаемой или излучаемой энер¬
гии и некоторые другие физические явления.
Для ориентации и навигации космических аппаратов широкое
применение среди измерительных устройств получили оптические
визуальные и оптико-электронные приборы, позволяющие автома¬
тически определять направление на центр небесных тел, видимые
угловые размеры этих тел, мощность радиации, смещение спект¬
ральных линий (эффект Доплера) и другие параметры.
Принцип действия оптических приборов основан на использова¬
нии в качестве переносчика информации лучистой энергии, излу¬
чаемой пли отражаемой данным небесным телом или другим источ¬
ником излучения, используемым в качестве навигационного ориен¬
тира.
Оптические приборы позволяют построить автономные системы
навигации космического летательного аппарата — астрономиче¬
ские, астроинерциальные, обзорные и комплексные [26]'.
1.2
СИСТЕМЫ КООРДИНАТ
За начало отсчета линейных и угловых координат летательного
аппарата принимают различные системы координат. Как правило,,
это прямоугольные и сферические системы с началом в центре не¬
бесного тела. Направление координатных осей неизменно относи¬
тельно звездного (или инерциального) пространства или жестко
связано с опорным небесным телом и участвует в его движении.
Применение для навигации сферических систем небесных коор¬
12
динат связано с представлением о некоторой вспомогательной сфе¬
ре, на которую проектируются светила, а при необходимости и ле¬
тательный аппарат. Такая вспомогательная воображаемая сфера
произвольного радиуса называется небесной сферой. В зависимо¬
сти от предназначения небесной сферы ее центр может совпадать
с глазом наблюдателя, с центром Земли, центром Луны, Солнца и
Рис. 1.8. Системы коор¬
динат:
а—небесная сфера; б—ге¬
ографическая и геоцент¬
рическая; в—экватори¬
альные сферическая и
прямоугольная; г—эк¬
липтическая (гелиоцент¬
рическая)
других планет. Сферические координаты светил на небесной сфе¬
ре, центр которой совпадает с центром глаза наблюдателя, назы¬
ваются топоцентрическими, а с центром, совпадающим с центром
Земли, — геоцентрическими. Если центр сферы совпадает с цент¬
ром Солнца или Луны, то сферические координаты светил называ¬
ют соответственно гелиоцентрическими или селеноцентрическими.
Прямая, проходящая через центр сферы параллельно оси Зем¬
ли или совпадающая с ней, называется осью мира. Две диамет¬
рально противоположные точки Р и Р' пересечения этой прямой со
сферой (рис. 1.8, а) называются соответственно северным и юж¬
ным полюсами мира. Вокруг оси мира происходит видимое суточ¬
ное вращение небесной сферы, являющееся отражением действи¬
тельного суточного вращения Земли вокруг своей оси. Вращение
небесной сферы вместе со всеми светилами происходит в противо¬
положном относительно вращения Земли направлении, т. е. с во¬
стока на запад, и с угловой скоростью, равной угловой скорости
вращения Земли вокруг своей оси ш3=7,29-10-5 с-1 (т 15 град/ч).
Две диаметрально противоположные точки пересечения прямой,
проходящей через центр сферы параллельно направлению силы тя¬
13
жести в точке наблюдения, называются соответственно зенитом —
Z и надиром Z'. Плоскость NESW, перпендикулярная к линии ZZ'
и проходящая через центр сферы, называется 'плоскостью истин¬
ного или астрономического горизонта. Большой круг небесной сфе¬
ры, проходящий через полюсы мира, зенит и надир PZP'Z', назы¬
вают небесным меридианом или меридианом наблюдателя. Боль¬
шой круг, по которому происходят пересечения плоскости, перпен¬
дикулярной оси мира, с небесной сферой QEQ'W, называют небес¬
ным экватором. Точки N и S называют соответственно точками се¬
вера и юга, а точки Е и W — точками востока и запада истинного
горизонта. Линия NS называется полуденной линией. В полдень
по местному солнечному времени Солнце находится над этой лини¬
ей. Большой круг небесной сферы РСР', проходящий через полю¬
сы мира и светило, называется кругом склонения или часовым
кругом светила, а большой круг ZCZ', проходящий через зенит,
светило и надир, — вертикалом светила. Суточное движение светил
происходит по малым кругам небесной сферы, плоскости которых
qq' параллельны плоскости небесного экватора. Эти малые круги
называются суточными параллелями.
Рассмотрим некоторые из навигационных систем координат,
применяемых на различных этапах полета космического аппарата.
Географическая и геоцентрическая системы
координат. Географическая и геоцентрическая системы коорди¬
нат используются при старте ракеты с Земли. В этих системах на¬
чало системы совмещают с центром земного эллипсоида, а за ос¬
новную плоскость принимают плоскость экватора. Положение КА
(точка М на рис. 1.8,6) определяется сферическими координата¬
ми — географической широтой ф, отсчитываемой от направления
линии ствеса до плоскости экватора, долготой %, отсчитываемой от
гринвичского меридиана, и высотой Н относительно поверхности
эллипсоида.
В геоцентрической системе координат Земля принимается за
шар и отсчет широт ведется от плоскости экватора до направления
радиус-вектора g, долгота определяется так же, как и в географи¬
ческой системе.
Экваториальная система координат. Экватори¬
альная система координат (рис. 1.8, в) используется для опреде¬
ления текущих координат местоположения КА, планет, Солнца и
других небесных тел. За основную плоскость системы принимает¬
ся плоскость экватора. Положение КА определяется сферическими
координатами — склонением 6, прямым восхождением а и длиной
радиус-вектора д. Склонение является угловым 'расстоянием ради¬
ус-вектора q относительно плоскости экватора. Положительный
угол отсчитывается в сторону северного полюса, отрицательный —
в сторону южного полюса. Прямое восхождение отсчитывается от
направления на точку весеннего равноденствия в сторону враще¬
ния Земли.
Для определения координат светила и КА вместо прямого вос¬
хождения а можно воспользоваться часовым углом t (угол при
14
полюсе или соответственно дуга экватора) между меридианом на¬
блюдателя и кругом склонения светила. Часовой угол отсчитыва¬
ется в направлении суточного движения небесной сферы.
Долгота, измеряемая относительно гринвичского меридиана, на¬
зывается гринвичским часовым углом tTP:
Арt.
Гринвичский меридиан вследствие вращения Земли поворачи¬
вается относительно точки весеннего равноденствия на угол, назы¬
ваемый гринвичским звездным временем 5гр. Меридиан наблюда¬
теля, где находится КА, поворачивается относительно точки весен¬
него равноденствия на угол, называемый звездным временем 5.
Если учесть, что угол между гринвичским меридианом и мери¬
дианом наблюдателя соответствует долготе X, так что S = Srp 4-А,,
а угол между направлением на точку весеннего равноденствия и
меридианом наблюдателя является прямым восхождением с, то из
гео'метрпческих построений можно получить
a — S + / = SVp-|-a.-f-Е или t = a — X — Sr
Приведенные соотношения углов позволяют осуществить пере¬
ход от географической системы координат к экваториальной,
не участвующей во вращении Земли. Вследствие вращения Земли
угол Srp непрерывно изменяется со скоростью 7,28-10~5 рад/с.
Переход от сферических геоцентрических координат X, <p, q к
координатам х, у, z в геоцентрической декартовой системе коорди¬
нат можно осуществить по формулам
x = R cos ср cos X, q = Yx2-\-y2-\-z2,
У = о cos о sin X, cp = arctg—-r 2 ,
y 1 Y S у x2 + y'l
j. и
z = q sin cp, A=arctg— .
X
Орбитальная система координат (ем. рис. 1. 1). За
основную плоскость отсчета принимается плоскость орбиты КА,
проходящая через центр Земли. Положение плоскости орбиты опре¬
деляется ее наклонением i и прямым восхождением восходящего
узла й. Положение КА в плоскости орбиты определяется углом 0
и радиус-вектором г, соединяющим летательный аппарат с цент¬
ром Земли.
Орбитальная и экваториальная системы координат могут быть
построены не только относительно Земли, но и относительно Лу¬
ны, Марса, Венеры и других небесных тел.
Гелиоцентрическая — эклиптическая система
координат (ем. рис. 1.8, г). За основную плоскость гелиоцент¬
рической системы координат принимается плоскость эклиптики.
Начало координат совмещается с центром Солнца.
Положение летательного аппарата (точка М) в этой системе
координат определяется сферическими координатами — астрономи¬
ческой долготой а, астрономической широтой р и длиной радиус-
15
вектора р. Долгота к отсчитывается от направления на точку весен¬
него равноденствия у в сторону движения Земли по орбите. Ши¬
рота р отсчитывается от 0 до ±90° в сторону северного к южного
полюсов эклиптики. Вследствие вращения эклиптики относительно
постоянной плоскости небесная широта звезд изменяется с угловой
скоростью около 0,07 микрорадиан в год.
Астрономическая долгота меняется вследствие перемещения
точки у с угловой скоростью 250 микрорадиан в год. Поэтому за
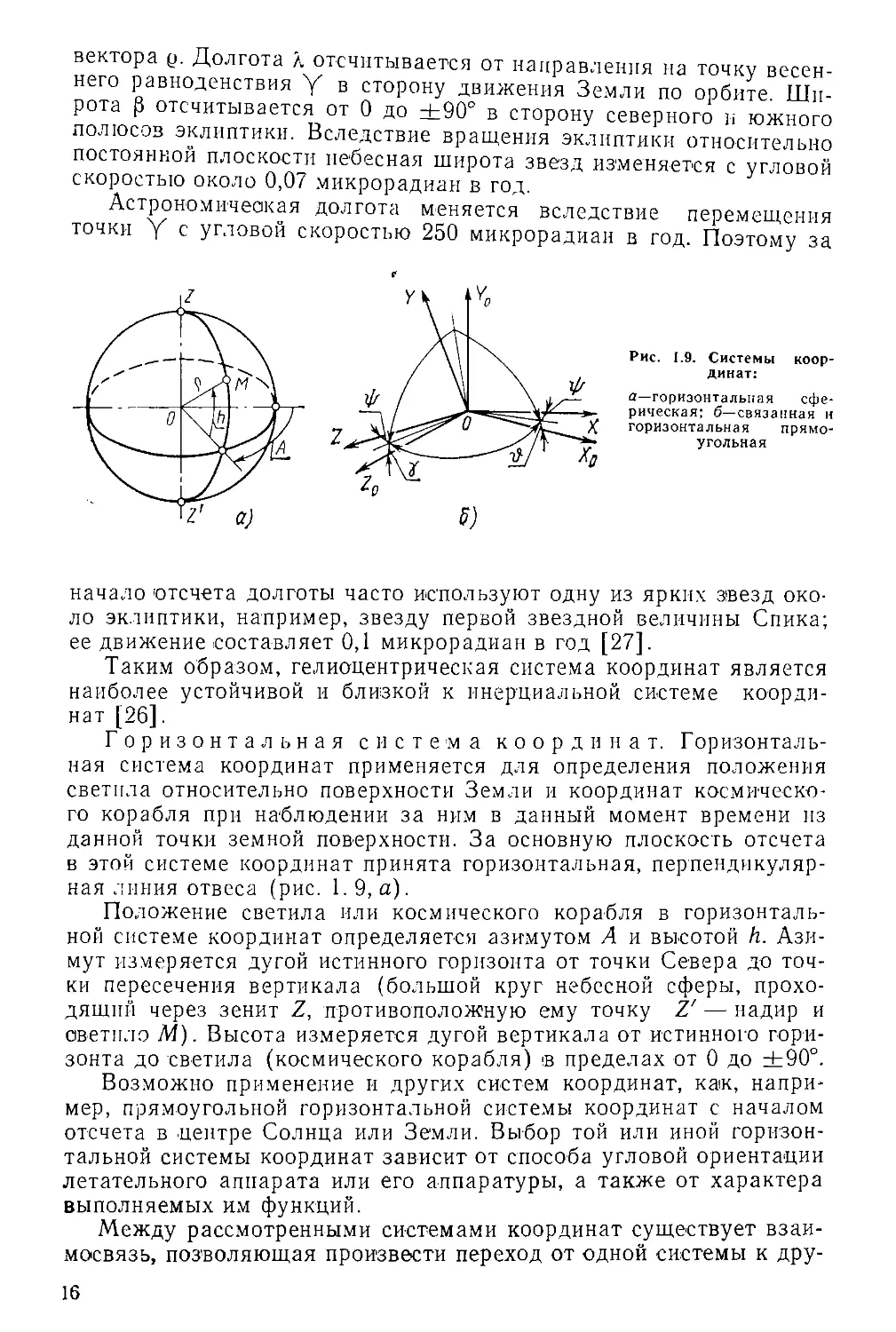
Рис. 1.9
Системы
динат:
коор-
а—горизонтальная сфе¬
рическая; б—связанная и
горизонтальная прямо¬
угольная
начало отсчета долготы часто используют одну из ярких звезд око*
ло эклиптики, например, звезду первой звездной величины Спика;
ее движение составляет 0,1 микрорадиан в год [27].
Таким образом, гелиоцентрическая система координат является
наиболее устойчивой и близкой к инерциальной системе коорди¬
нат [26].
Горизонтальная система координат. Горизонталь¬
ная система координат применяется для определения положения
светила относительно поверхности Земли и координат космическо¬
го корабля при наблюдении за ним в данный момент времени из
данной точки земной поверхности. За основную плоскость отсчета
в этой системе координат принята горизонтальная, перпендикуляр¬
ная линия отвеса (рис. 1. 9, а).
Положение светила или космического корабля в горизонталь¬
ной системе координат определяется азимутом А и высотой h. Ази¬
мут измеряется дугой истинного горизонта от точки Севера до точ¬
ки пересечения вертикала (большой круг небесной сферы, прохо¬
дящий через зенит Z, противоположную ему точку Z' — надир и
светило М). Высота измеряется дугой вертикала от истинного гори¬
зонта до светила (космического корабля) в пределах от 0 до ±90°.
Возможно применение и других систем координат, как, напри¬
мер, прямоугольной горизонтальной системы координат с началом
отсчета в центре Солнца или Земли. Выбор той или иной горизон¬
тальной системы координат зависит от способа угловой ориентации
летательного аппарата или его аппаратуры, а также от характера
выполняемых им функций.
Между рассмотренными системами координат существует взаи¬
мосвязь, позволяющая произвести переход от одной системы к дру-
16
гой. Этот переход достаточно просто осуществляется по формулам
сферической тригонометрии [9, 26].
Связанная система координат. Навигационные си¬
стемы координат воспроизводятся (моделируются) на космическом
аппарате с помощью измерительных приборов и устройств. При
этом центр моделирующей системы совмещают с центром масс
КА, а направление ее осей устанавливают параллельно осям вос¬
производимой навигационной системы координат. Например, гори¬
зонтальную систему координат можно воспроизвести с помощью
построителя местной вертикали и астрокомпаса или гироскопа.
Принципы действия и устройства приборов для реализации различ¬
ных систем координат рассматриваются в последующих разделах.
Для ориентации КА применяют систему координат, жестко свя¬
занную с его корпусом. Оси связанной системы координат OXY
совмещают с осями симметрии КА: ось ОХ направлена вперед по
продольной оси, ось OY — по нормали вверх, а ось OZ — по попе¬
речной оси вправо.
Положение летательного аппарата относительно горизонтальной
системы координат OXTYTZT определяется тремя углами: истинным
курсом ф, углом тангажа г1} и углом крена у. Переход от одной си¬
стемы к другой достигается е помощью направляющих косинусов
по формулам:
х у z
xr cos*cos ft; — cos y sin ft-f cos у sin *cosft-f-
-f- sin у sin ф cos ft ; -j- sin y sin ft;
Ут cos* sin ft; сое у cos ft + cos у sin ф sin ft —
-j- sin у sin * sin ft ; — sin у cos ft;
zr — sin *; sin * cos *; cos у cos *.
Нужную систему координат выбирают исходя из конкретных за¬
дач, поставленных перед космическим полетом, технических воз¬
можностей ее реализации и применяемой системы управления уг¬
ловыми движениями. Например, для космических кораблей-спут¬
ников, предназначенных для изучения Земли (или любой другой
планеты), используются орбитальные системы координат, у кото¬
рых одна из осей совпадает с направлением вертикали моста, дру¬
гая расположена в плоскости орбиты в направлении движения ко¬
рабля.
1.3
АСТРОНАВИГАЦИЯ В КОСМИЧЕСКОМ
ПРОСТРАНСТВЕ
Астрономические методы навигации в межпланетном пространстве
основываются на математической обработке поверхностей положе¬
ния, получаемых в результате измерений некоторых физических
параметров с помощью оптических приборов [9, 26]. Например,
17
с помощью оптического прибора можно измерить угловой размер
Солнца (3© (рис. 1. 10, а) и получить поверхность положения в ви¬
де сферы с радиусом
£>©
6© = — = const,
2 sin —
где Я©— диаметр солнца; (3©—видимый с КА угловой размер
Солнца, измеряемый с помощью ОЭГ1; р© — расстояние от Солнца
до КА.
Измеряя угол а между направлением на центр небесного тела
и звезды, получают поверхность положения, представляющую со¬
бой конус с вершиной в центре небесного тела. Уравнение этой
поверхности имеет вид (рис. 1. 10, б).
сов а= sin сpj sin ср2 -|- cos <ог cos ср2 cos (Х2 — ^),
Рис. 1.10. Поверхности положения летательного аппарата
где фь л, и фг, Х2 —соответственно широта и долгота летательно¬
го аппарата и звезды в системе координат, начало которой совме¬
щено с центром небесного тела.
Посредством измерения угла а между направлениями на цент¬
ры двух небесных сел, расстояние между которыми известно, по¬
лучают поверхность положения, представляющую собой циклиду
(рис. 1. 10, в). Уравнение этой поверхности записывается в виде
/2 = Z,i —Z,? — ‘2LlL2 cos а,
где /—расстояние между центрами небесных тел (пла-нет); Я и
L2 — расстояния от летательного аппарата до центра небесных тел
Я] и П2 соответственно.
С помощью ОЭП можно получить и другие поверхности поло¬
жения.
Каждая из поверхностей представляет собой геометрическое
место точек возможного положения КА. Пересечение двух поверх¬
ностей положения (например, конических, рис. 1.11, а) дает две
линии положения (ЛП), по которым можно определить угловые
координаты летательного аппарата.
Построение третьей поверхности положения, например сферы,
позволяет получить две точки, в одной из которых и находится ле¬
18
тательный аппарат. Возникающая при этом двухзначность положе¬
ния КА может быть устранена с помощью данных о приближен¬
ном (расчетном) значении его местоположения или дополнитель¬
ным измерением азимута светила.
Таким образом, для астронавигации необходимо иметь не менее
трех различных поверхностей положения.
Рассмотрим некоторые способы и схемы определения коорди¬
нат КА, основанные на использовании поверхностей положения.
Рис. 1.11. Схема опреде¬
ления координат место¬
положения КА
На рис. 1.11,6 приведена схема определения координат про¬
странственного положения КА по расстоянию до Солнца и направ¬
лениям на две звезды — Sfi и St2.
Из полярных треугольников PMSti и PMSt2 получаем уравне¬
ния поверхностей положения:
cos Zj = sin р sin 3[ -|-cos ? cos ^ cos (Xj — K); 1
cos z2 = sin p sin fi2 + cos ? cos % cos (X2 — X) ’ j
D | (1-10)
6 Pc ’
2 sin
2
где q, |3, К—сферические координаты летательного аппарата;
pi, Рг и ?ч, А-2 — сферические координаты звезд; D — диаметр не¬
бесного тела; z\ и z2— измеряемые зенитные расстояния звезд;
Вс — измеренное значение видимого углового размера Солнца или
любого другого небесного тела.
Функциональная схема астроориентатора для реализации урав¬
нения (1.10), заимствованная из работы [26], представлена на
рис. 1.12. Оптико-электронные следящие системы Т1 и Т2, уста¬
новленные на гироплатформе, осуществляют пеленгацию звезд
Sti и Sf2. Сигналы, пропорциональные измеренным зенитным рас¬
стояниям z 1 и z2, подаются на косинусные преобразователи и затем
сравниваются со значениями coszi и cos z2, вычисленными счетно¬
решающими устройствами В1 и В2. Полученные сигналы рассогла¬
19
сования поступают на вход усилителей У1 и У2, которые управля¬
ют двигателями Др и Дх, отрабатывающими искомые координа¬
ты р и Я.
Измеренный с помощью оптико-электронного прибора ТЗ угол
Рс используется в счетно-решающем устройстве для определения
радиальной координаты q.
С помощью дополнительного счетно-решающего устройства сфе¬
рические координаты р, Я, q могут быть пересчитаны в прямо¬
угольные координаты х, у, г.
В приведенной схеме погрешность в определении положения
космического аппарата пропорциональна квадрату расстояния от
Солнца и составляет — 15 ООО км при измерении угла рс с точно¬
стью в 1 мкрад. Точность определения радиальной координаты о
повышается при использовании схемы, включающей измерение уг¬
лов планета — звезда. В этом случае радиальное расстояние зави¬
сит от расстояния до планеты и угла пересечения конической
поверхности с линией положения, образующейся при двух визиро¬
ваниях Солнце — звезда. Так как расстояние до Солнца опреде¬
ляется посредством визирования планета — звезда, погрешность
этого расстояния будет примерно равна погрешности в определе¬
нии линии положения, получаемой при визировании пары Солнце —
звезда, когда планета и Солнце находятся на одинаковом расстоя¬
нии от корабля [27].
Определим местоположение космического корабля, измеряя уг¬
лы между центрами трех небесных тел (Солнца, Земли, Марса)
(рис. 1. 13).
Измеренные с помощью оптико-электронных следящих систем
астроориентатора углы щ, а2, а3 позволяют получить три поверх¬
ности положения., описываемые уравнениями [9, 26]
/12 — -М “Т2 — 2Z.jZ.2 cos оц \
/23 —|- Дз — 2/.2Т3 COS С&25
/.it = L\ -|- Z-з — cos а3.
1. 11)
20
Из уравнений (1. 11) определяются расстояния Lь L2, L3, свя¬
занные с координатами космического корабля выражением
(х — У[)2 -\-{z — гг)2 = /,; (1. 12)
(/=1,2,3),
где Xi, Уг, 2, — координаты небесных тел; х, у, z— искомые коор¬
динаты летательного аппарата.
Для построения астроориентатора, реализующего уравнения
(1.11), (1. 1'2), может быть использована функциональная схема,
аналогичная приведенной на рис. 1. 12.
Определив координаты космического корабля в двух последова¬
тельных положениях, можно найти вектор скорости его движения
_ S Дл:2 + Ау,2 + Дг2 _
(1.13)
cos Ь =-^~ = — Дг ——. , (1-14)
S / Ax2 + Ay2 + Az2
где С и t2 — время, соответствующее моменту измерения коорди¬
нат в первом и втором положении корабля; 5 — путь, пройденный
за время t2 — гг, Ах, А у, A z — соответствующее приращение коор¬
динат за время t2 — t\\ #т— направление вектора скорости.
Очевидно, приведенный метод позволяет определить среднее
значение параметров вектора скорости на прямолинейном участке
орбиты и поэтому пригоден только на больших удалениях космиче¬
ского корабля от центра тяготения.
Текущие прямоугольные координаты космического корабля яв¬
ляются функцией шести элементов его орбиты (t, й, со, а, е, Т) и
времени I. Поэтому, измерив координаты для двух последователь¬
ных положений корабля, соответствующих некоторым моментам
времени С и t2, можно рассчитать элементы орбиты, решив систе¬
му уравнений [8]
xi:=z fi (tt, i, u>. a, e, T)\
!/; = /2((,/,2,«),а,г,Г); (П 15)
zi = i, S, №, a, e, T)
(/= 1, 2).
Приведенные способы решения являются не единственными,
возможны и другие комбинации.
Наиболее приемлемыми в настоящее время считаются три спо¬
соба измерения [28]:
1) Солнце — звезда, Солнце — звезда и измерение углового
диаметра Солнца;
2) Солнце — звезда, Солнце — звезда, планета — звезда (с ис¬
пользованием сведений о времени и эфемеридах);
3) Солнце — звезда, Солнце — звезда, планета — звезда (с ис¬
пользованием только эфемерид).
21
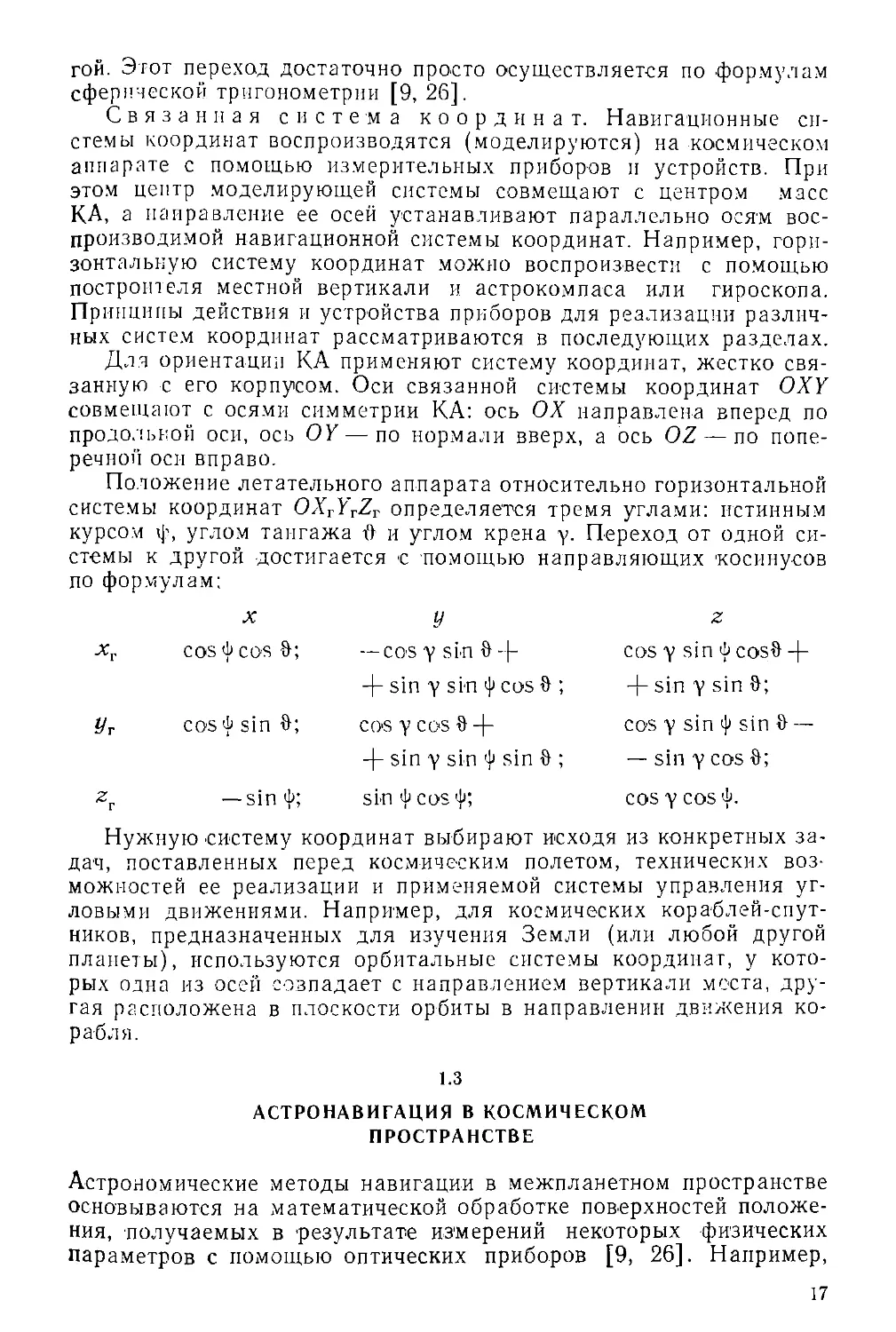
Астроинерциальная система навигации состоит из трех основ¬
ных подсистем: гиростабилизированной платформы с акселеромет¬
рами, системы астрокоррекции и вычислительного устройства
(рис. 1. 14).
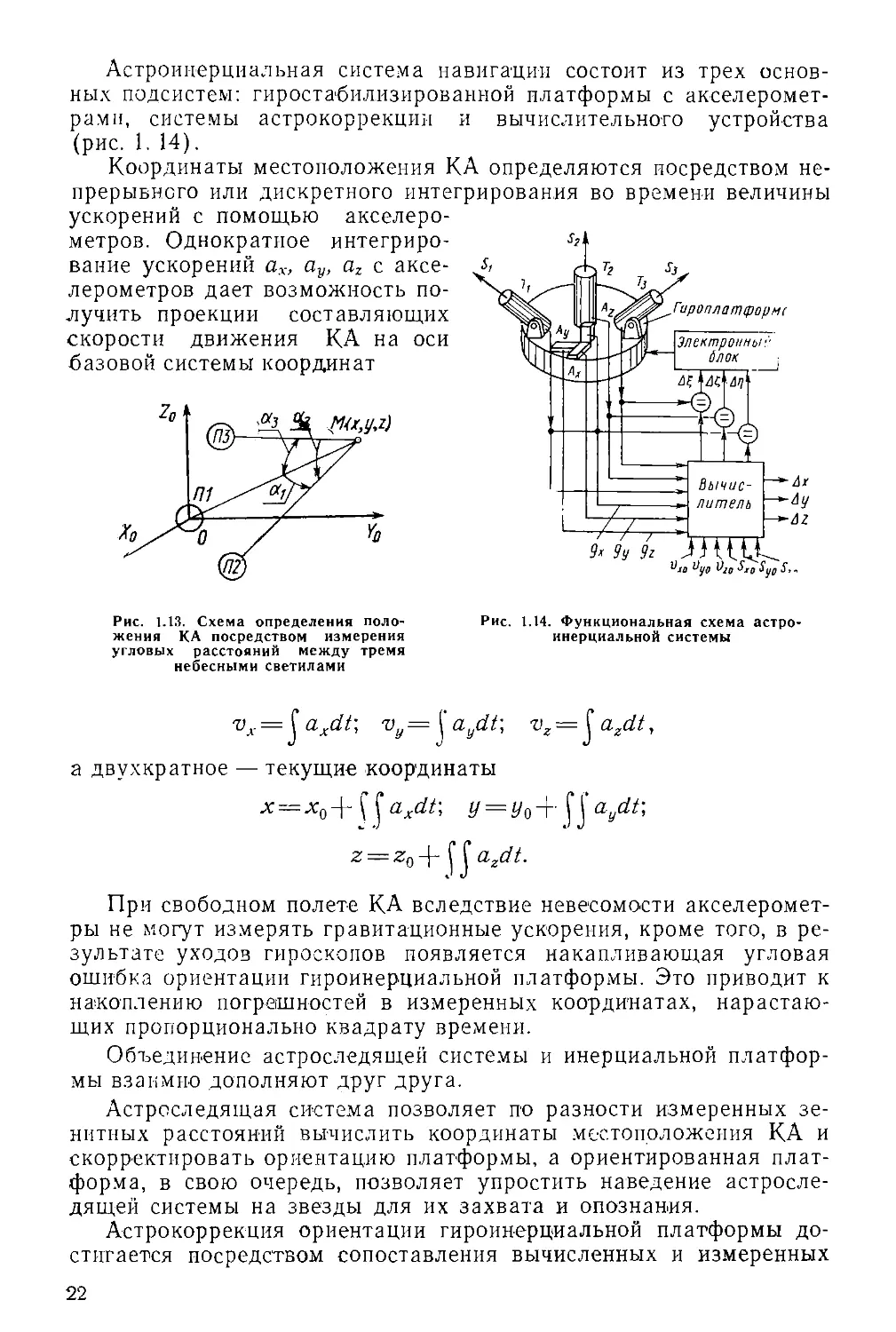
Координаты местоположения КА определяются посредством не¬
прерывного или дискретного интегрирования во времени величины
ускорении с помощью акселеро¬
метров. Однократное интегриро¬
вание ускорений ах, ау, аг с аксе¬
лерометров дает возможность по¬
лучить проекции составляющих
скорости движения КА на оси
базовой системы координат
Рис. 1.13. Схема определения поло- Рис. 1.14. Функциональная схема астро-
ження КА посредством измерения инерциальной системы
угловых расстояний между тремя
небесными светилами
axdt; vy = ^aydt; vz = ^azdt,
а двухкратное — текущие координаты
х = х0+ [^axdt; y = y0+^aydt;
z = zo+ \^azdt-
При свободном полете КА вследствие невесомости акселеромет¬
ры не могут измерять гравитационные ускорения, кроме того, в ре¬
зультате уходоз гироскопов появляется накапливающая угловая
ошибка ориентации гироинерциальной платформы. Это приводит к
накоплению погрешностей в измеренных координатах, нарастаю¬
щих пропорционально квадрату времени.
Объединение астроследящей системы и инерциальной платфор¬
мы взаимно дополняют друг друга.
Астроследящая система позволяет по разности измеренных зе¬
нитных расстояний вычислить координаты местоположения КА и
скорректировать ориентацию платформы, а ориентированная плат¬
форма, в свою очередь, позволяет упростить наведение астросле¬
дящей системы на звезды для их захвата и опознания.
Астрокоррекция ориентации гироинерциальной платформы до¬
стигается посредством сопоставления вычисленных и измеренных
22
положений звезд относительно инерциальной системы координат.
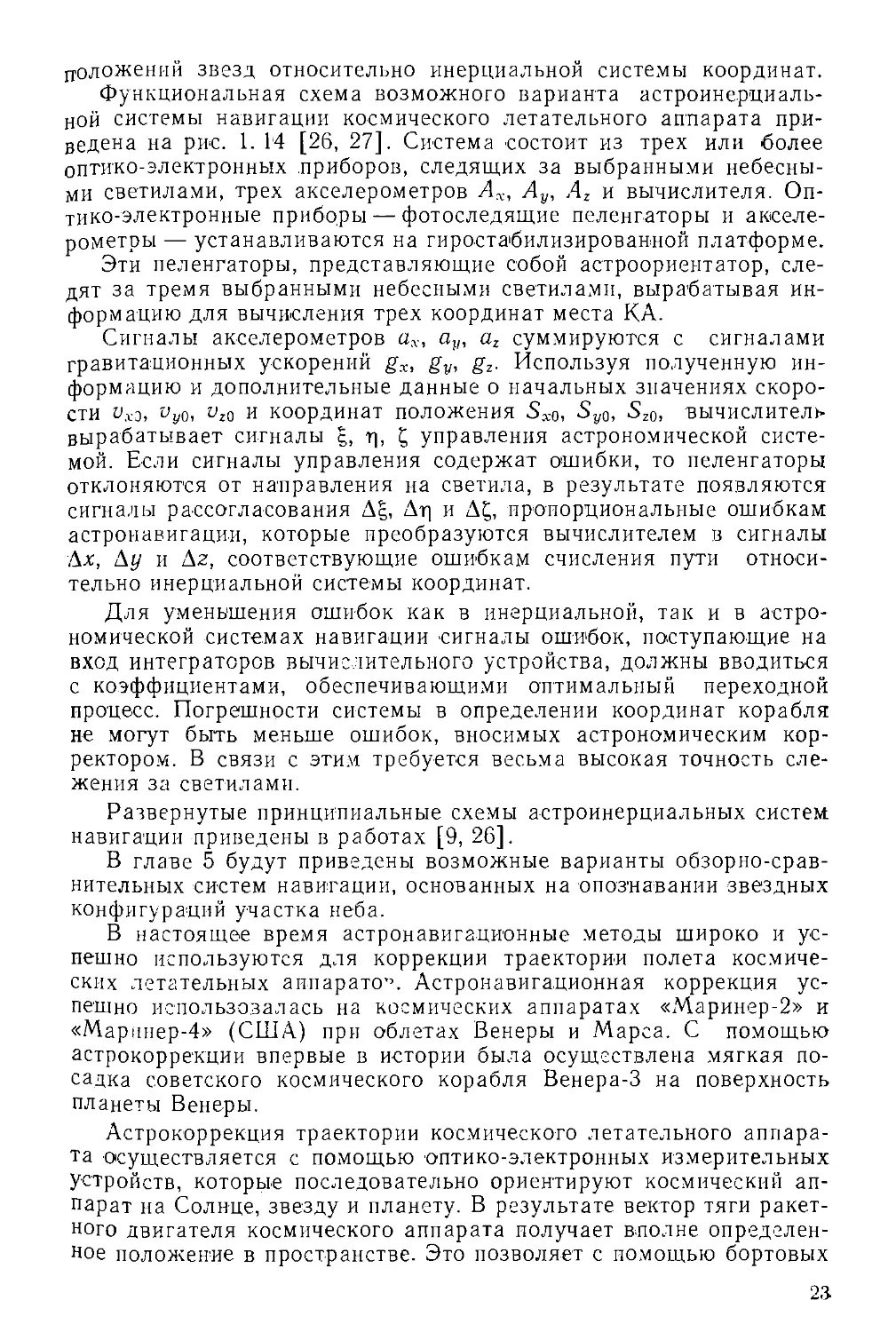
Функциональная схема возможного варианта астроинерциаль-
ной системы навигации космического летательного аппарата при¬
ведена на рис. 1. 14 [26, 27]. Система состоит из трех или более
оптико-злектронных .приборов, следящих за выбранными небесны¬
ми светилами, трех акселерометров Ах, Ау, Аг и вычислителя. Оп¬
тико-электронные приборы — фотоследящие пеленгаторы и акселе¬
рометры — устанавливаются на гиростабилизированной платформе.
Эти пеленгаторы, представляющие собой астроориентатор, сле¬
дят за тремя выбранными небесными светилами, вырабатывая ин¬
формацию для вычисления трех координат места КА.
Сигналы акселерометров ах, ау, аг суммируются с сигналами
гравитационных ускорений gx, gv, gz. Используя полученную ин¬
формацию и дополнительные данные о начальных значениях скоро¬
сти Щэ, с'го и координат положения S^o, Sy0, Sz0, вычислитель
вырабатывает сигналы g, т|, £ управления астрономической систе¬
мой. Если сигналы управления содержат ошибки, то пеленгаторы
отклоняются от направления на светила, в результате появляются
сигналы рассогласования Д§, Дт) и Д£, пропорциональные ошибкам
астронавигации, которые преобразуются вычислителем в сигналы
Ах, А у и Аг, соответствующие ошибкам счисления пути относи¬
тельно инерциальной системы координат.
Для уменьшения ошибок как в инерциальной, так и в астро¬
номической системах навигации сигналы ошибок, поступающие на
вход интеграторов вычислительного устройства, должны вводиться
с коэффициентами, обеспечивающими оптимальный переходной
процесс. Погрешности системы в определении координат корабля
не могут быть меньше ошибок, вносимых астрономическим кор¬
ректором. В связи с этим требуется весьма высокая точность сле¬
жения за светилами.
Развернутые принципиальные схемы астроинерциальных систем
навигации приведены в работах [9, 26].
В главе 5 будут приведены возможные варианты обзорно-срав¬
нительных систем навигации, основанных на опознавании звездных
конфигураций участка неба.
В настоящее время астронавигационные методы широко и ус¬
пешно используются для коррекции траектории полета космиче¬
ских летательных аппаратов Астронавигационная коррекция ус¬
пешно использовалась на космических аппаратах «Маринер-2» и
«Марпнер-4» (США) при облетах Венеры и Марса. С помощью
астрокоррекции впервые в истории была осуществлена мягкая по¬
садка советского космического корабля Венера-3 на поверхность
планеты Венеры.
Астрокоррекция траектории космического летательного аппара¬
та осуществляется с помощью оптико-электронных измерительных
устройств, которые последовательно ориентируют космический ап¬
парат на Солнце, звезду и планету. В результате вектор тяги ракет¬
ного двигателя космического аппарата получает вполне определен¬
ное положение в пространстве. Это позволяет с помощью бортовых
23
и наземных радиолокационных средств слежения за аппаратом
определить момент времени и задать необходимый импульс тяги
двигателя, при котором достигается требуемое изменение траекто¬
рии движения (направление вектора скорости) космического аппа¬
рата, обеспечивающее решение задачи облета или попадания в
планету.
В качестве примера рассмотрим схему полета и посадки на
.Луну космического аппарата «Сервейр» (США) [7]. Продолжи¬
тельность полета аппарата с момента старта на Земле до момен¬
та мягкой посадки на Луну со¬
ставляет 66 ч.
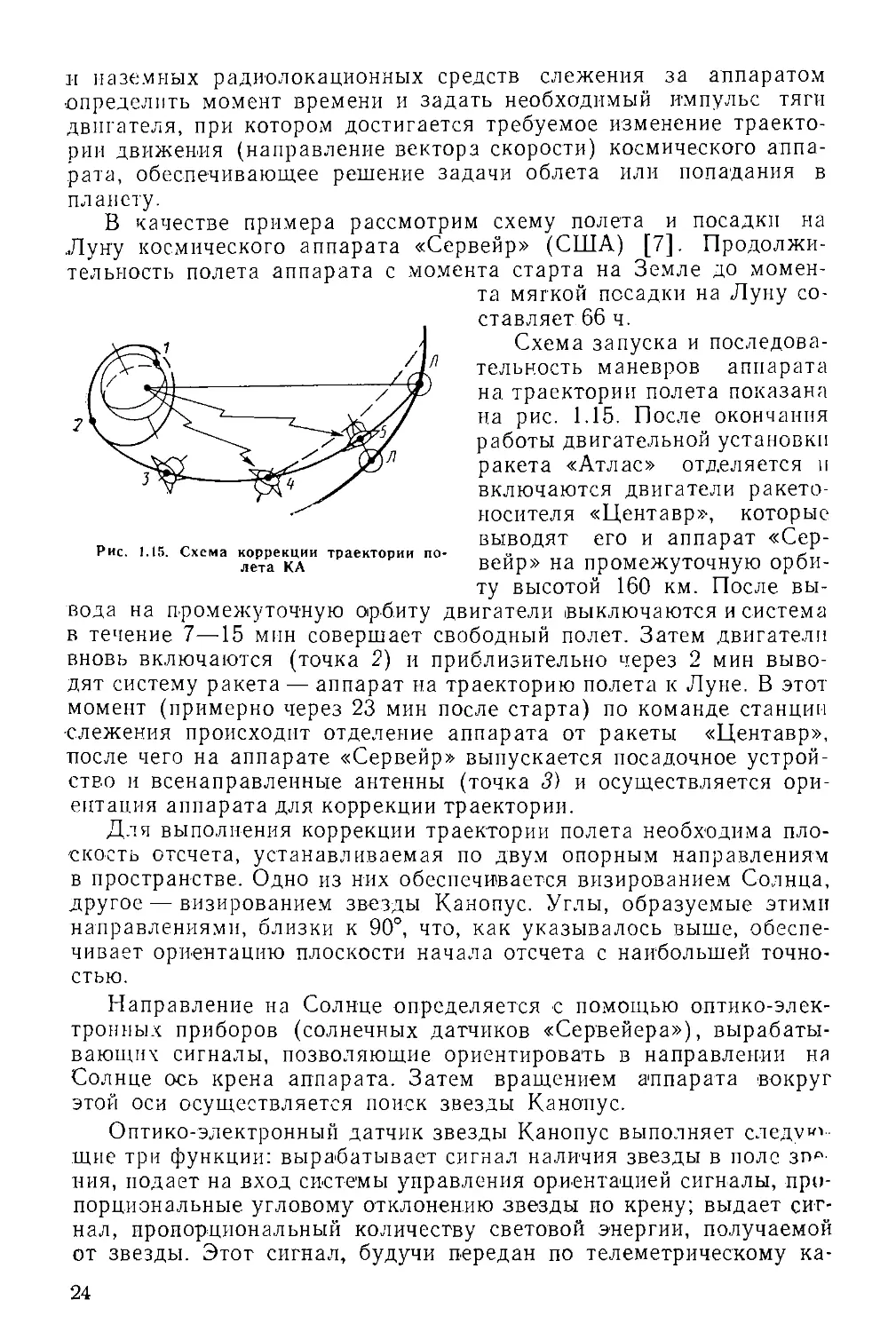
Схема запуска и последова¬
тельность маневров аппарата
на. траектории полета показана
на рис. 1.15. После окончания
работы двигательной установки
ракета «Атлас» отделяется п
включаются двигатели ракето¬
носителя «Центавр», которые
выводят его и аппарат «Сер¬
вейр» на промежуточную орби¬
ту высотой 160 км. После вы¬
вода на промежуточную орбиту двигатели выключаются и система
в течение 7—15 мин совершает свободный полет. Затем двигатели
вновь включаются (точка 2) и приблизительно через 2 мин выво¬
дят систему ракета — аппарат на траекторию полета к Луне. В этот
момент (примерно через 23 мин после старта) по команде станции
•слежения происходит отделение аппарата от ракеты «Центавр»,
после чего на аппарате «Сервейр» выпускается посадочное устрой¬
ство и всенаправленные антенны (точка 3) и осуществляется ори¬
ентация аппарата для коррекции траектории.
Для выполнения коррекции траектории полета необходима пло¬
скость отсчета, устанавливаемая по двум опорным направлениям
в пространстве. Одно из них обеспечивается визированием Солнца,
другое — визированием звезды Канопус. Углы, образуемые этими
направлениями, близки к 90°, что, как указывалось выше, обеспе¬
чивает ориентацию плоскости начала отсчета с наибольшей точно¬
стью.
Направление на Солнце определяется с помощью оптико-элек¬
тронных приборов (солнечных датчиков «Сервейера»), вырабаты¬
вающих сигналы, позволяющие ориентировать в направлении на
Солнце ось крена аппарата. Затем вращением аппарата вокруг
этой оси осуществляется поиск звезды Канопус.
Оптико-электронный датчик звезды Канопус выполняет следую¬
щие три функции: вырабатывает сигнал наличия звезды в поле зп^
ния, подает на вход системы управления ориентацией сигналы, про¬
порциональные угловому отклонению звезды по крену; выдает сиг¬
нал, пропорциональный количеству световой энергии, получаемой
от звезды. Этот сигнал, будучи передан по телеметрическому ка¬
Рис. 1.15. Схема коррекции траектории по¬
лета КА
24
налу, может быть использован для обнаружения звезды в случае
отказа основной системы ориентации.
Коррекция вектора скорости производится примерно через 20 ч
после старта (точка 4) с помощью верньерных двигателей аппара¬
та, включаемых по сигналу станции слежения.
После завершения требуемой коррекции верньерные двигатели
выключаются. Посадке предшествует маневр, ориентирующий ап¬
парат таким образом, чтобы вектор тяги тормозного двигателя ле¬
жал на одной линии с вектором скорости.
Аналогичная схема ориентации использовалась при коррекции
траектории полета «Маринер-2» и «Маринер-4», «Луна-7» и др.
Последовательная ориентация для коррекции траектории может
быть осуществлена не только по Солнцу и звезде, но и по Солнцу
и планете. Например, при запусках аппарата «Рейнджер» исполь¬
зовалась ориентация по Солнцу и Земле. Однако при запуске аппа¬
рата в полнолуние угол между направлением на Солнце и Землю
будет слишком мал для обеспечения надежной ориентации, что
ограничивает применяемость этого способа.
Таким образом, алгоритм навигации представляет собой сово¬
купность взаимосвязанных измерений первичных навигационных
параметров и вычислительных операций по определению местопо¬
ложения КА и его скорости относительно выбранной системы коор¬
динат.
Для автономной ориентации и навигации КА с помощью опти¬
ческих систем измеряемыми астрономическими параметрами в по¬
лете могут быть:
— направления на центр небесных светил (Солнца, планет и
звезд);
— зенитные расстояния светил;
— видимые угловые диаметры Солнца и планет;
— углы между направлениями на звезды и линию горизонта,
центр планеты или характерные ориентиры на ее поверхности;
— углы между направлением на звезду и осями ориентирован¬
ного в пространстве КА;
— моменты захода звезд за видимый горизонт;
— эффект Доплера в излучении Солнца и др.
Измерение того или иного параметра имеет свои присущие ему
особенности, которые приводят к различию в методах решения дан¬
ной задачи, технических средств реализации, расчета и конструи¬
рования прибора.
С учетом этих особенностей используемые в настоящее время
оптические приборы, исходя из характеристик навигационных све¬
тил, можно разделить на три основные группы:
— приборы для ориентации по Солнцу, которые называют так¬
же датчиками солнечной ориентации;
— приборы для ориентации по планетам, называемые построи¬
телями местной вертикали;
— приборы для ориентации по звездам, называемые звездными
датчиками.
25
На базе этих приборов строятся простые и сложные (комплекс¬
ные) навигационные системы астронавигации: оптические визиры,
астроориентаторы, электронно-оптические приборы наблюдения,
астрогиды, ручные неавтоматические секстанты, автоматические
секстанты, астроизмерители и др.
1.4
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К ОПТИЧЕСКИМ ПРИБОРАМ
Оптические приборы, устанавливаемые на борту космического ап¬
парата, должны удовлетворять требованиям, характеризующим
условия работы в космическом пространстве: надежность в эксплу¬
атации, требуемую точность измерения навигационных параметров.
Точность. В общем виде аналитическая зависимость между
измеряемыми параметрами а, координатами xit yiy zt центра не¬
бесного тела, относительно которого измеряется параметр а, и ко¬
ординатами х, у, z космического корабля может быть представле¬
на в виде
a = f{x,y,z,xl,yi,z^. (1-16)
В этом выражении имеются три неизвестные координаты КА,
следовательно, для их определения необходимо измерить три ка¬
ких-либо параметра или один параметр из трех различных точек
земной поверхности. Тогда получим три уравнения, совместное ре¬
шение которых позволит найти три неизвестные координаты КА.
Геометрический смысл решения, как это указывалось выше, заклю¬
чается в отыскании точек пересечения трех поверхностей положе¬
ния [9, 26].
Приведенные рассуждения основаны на предположении, что с
помощью измеренных параметров определяется соответствующая
поверхность положения с абсолютной точностью. В действительно¬
сти, любой параметр измеряется с некоторой погрешностью. Эта
погрешность приводит к ошибке в решении поставленной задачи.
Источниками погрешностей при пеленгации небесных светил яв¬
ляются аберрация света, собственное движение звезд и планет, ко¬
нечная величина скорости света и другие параметры, а также инст¬
рументальные погрешности пеленгатора. Аберрационное смещение
направления на звезду определяется по формуле
tg<p0 = —si'n<b0, (1.17)
с
где с—скорость света; — угол между направлением вектора
скорости v и направлением на звезду.
При пеленгации звезд аберрационное смещение повлечет за
собой погрешность в измерении угла, вследствие чего угловой рас¬
твор конуса будет отличаться от того, который получился бы при
отсутствии этой ошибки. Поэтому при измерениях с точностью в
1 мкрад составляющая скорости полета, перпендикулярная к на¬
правлению на звезду, должна учитываться с точностью до 0,3 км/с.
Собственное движение звезд при измерении угла между ними к
26
планетой вызывает смещение оси конической поверхности, так как
в счетно-решающее устройство будут введены координаты звезд,
соответствующие некоторому моменту (эпохе), на который состав¬
лены используемые таблицы координат звезд. Время пеленгации
будет отличаться от этого момента. Чем больше разность в момен¬
тах измерения и чем больше скорость собственного движения, тем
больше будут ошибки (смещение оси конуса).
Линейное смещение х полученной конической поверхности, воз¬
никающее из-за того, что не было учтено собственное движение
звезд, можно определить из выражения
* = Д<р/8, (1.18)
где Д(р — изменение положения звезды в радианах; 13 — расстояние
до Земли в км.
При определении направления на центр планеты погрешность
может возникнуть вследствие того, что центр яркости не совпада¬
ет с геометрическим центром планеты. Эта ошибка может дости¬
гать при небольших расстояниях значительной величины (от еди¬
ницы до десятков минут).
Абсолютное расстояние между небесными телами известно с
точностью до 0,01%. Если расстояние между планетами в момент
измерения будет большим, то эта ошибка может привести к зна¬
чительным погрешностям в определении поверхности положения.
Конечная скорость распространения света также может вызвать
погрешность в измерении, так как за время прохождения света от
планеты к кораблю планета переместится по орбите и ес коорди¬
наты значительно изменятся. Так, на удалении от Марса 143 млн.
км (луч света проходит это расстояние за 480 с) за время про¬
хождения света до КА Марс переместится по своей орбите более
чем на 11 ООО км. Для устранения этой ошибки в счетно-решающее
устройство необходимо вводить координаты планеты, соответству¬
ющие моменту пеленгации. Однако это требование на практике
трудно выполнимо, так как точное положение КА в момент изме¬
рения неизвестно.
Погрешность в определении положения КА зависит от погреш¬
ностей определения поверхностей положения и от угла их пере¬
сечения. Чем ближе этот угол к прямому, тем меньше погрешность.
Следовательно, необходимо выбирать методы, позволяющие опре¬
делять поверхности положения с более высокой точностью, и сле¬
дует использовать те методы и такие небесные светила, которые
обеспечивают наиболее благоприятные углы пересечения поверхно¬
стей положения.
В табл. 1. 1 и 1. 2 приведены данные о планетах и величины ли¬
нейных погрешностей в определении широты и долготы положения
и расстояния планет от Солнца, получаемых при заданной точно¬
сти измерения [27].
Требования, предъявляемые к инструментальной точности опти¬
ко-электронных измерительных приборов, определяются исходя из
целевого назначения полета, метода навигации и технических воз-
27
Данные о планетах
Таблица I. 1
Планета
Среднее р
от Сс
в астроном,
единицах
асстоиние
лнца
10е км
Период
обращения,
год
Эксцен¬
триситет
Наклонные
плоскости
орбиты,
градус
Звезд¬
ная
величи¬
на т
Средняя
скорость
движения
по орбите,
км/с
Меркурий
0,387
57,9
0,2
0,206
7
-1,2
47,83
Венера
0,723
108,2
0,7
0,007
3,24
—4,4
34,99
Земля
1,000
149,5
1
0,017
0
—4,7
29,76
Марс
1,524
227,8
1,9
0,093
1,51
—2,8
24,11
Юпитер
5,203
777,8
11,9
0,048
1,18
—2,5
13,05
Сатурн
9,539
1426,6
29,5
0,056
2,29
—0,4
9,64
Уран
19,182
2869,1
84
0,047
0,46
+5,7
6,80
Нептун
30,058
4495,7
164,8
0,009
1,46
+8,8
5,43
Плутон
39,518
5899,1
248,4
0,249
17,09
+ 15
4,73
Таблица I. 2
Линейные погрешности в определении широты и долготы положения
и радиальной координаты между Солнцем и планетами
Планета
Погрешность определения
широты и долготы положения,
км
Погрешность в определении радиальной
координаты, км
Да=1 мкрад
при
Да— 1 мкрад
при
Да=2 мкрад.
при измерении
диаметра Солнца
при измерении
планета-звезда
(угол пересеч. 60°)
Меркурий
58
116
2400
201
Венера
108
216
11000
375
Земля
150
300
16000
520
Марс
228
456
37000
790
Юпитер
779
1558
430000
2700
Сатурн
1428
2856
1450000
4950
можностей комплекса системы управления, а также целевого назна¬
чения самих приборов (навигация, стабилизация, привязка резуль¬
татов наблюдения и др.)- Так как целевое назначение измерений
весьма разнообразно, то и требования к инструментальной точно¬
сти различны. Эти требования по данным работы [27] можно оха¬
рактеризовать средней квадратичной точностью солнечных датчиков
(0,5—0,001°), построителей местной вертикали (1—0,1°) и датчиков
звездной ориентации (0,1—0,0001°).
Первые цифры примерно соответствуют точности, получаемой в
настоящее время, вторые отражают перспективные требования.
Надежность. Надежность — это способность устройства со¬
хранять параметры в заданных пределах при определенных усло¬
виях эксплуатации.
Мерой надежности являются различные ее характеристики: ве¬
роятность исправной работы, вероятность отказа, средняя нара¬
ботка на отказ и др.
28
Вероятность исправной (безотказной) работы p(t) есть вероят¬
ность того, что при заданном интервале времени t не произойдет
ни одного отказа (отказ — потеря работоспособности устройства
из-за выхода из строя отдельных элементов или ухода их парамет¬
ров).
Вероятность отказа q(t) — вероятность того, что в заданном ин¬
тервале времени произойдет хотя бы один отказ.
Вероятность отказа и вероятность безотказной работы аппара¬
туры связаны соотношением
<7(0 = ! — ДО-
Средняя наработка на отказ Т0 — среднее время исправной
работы между соседними отказами, полученное при испытании или
эксплуатации аппаратуры. Для однотипных элементов значение
Т0 может быть определено по формуле
N
1
т»=х
i А
где ti — время исправной работы /-го элемента; N — число эле¬
ментов.
Опасность отказов X(i) определяется отношением числа отка¬
завших изделий в единицу времени к среднему числу изделий, ис¬
правно работающих в данный отрезок времени, по формуле
Л (О
Ш-
N (/) Д/
где n(t) —число отказавших изделий за промежуток времени
от Д° ^ — интервал времени (обычно Д/=1 ч);
7V’(/) = ~(jVi + A/'2), причем N\, N2 — число исправно работающих
изделий в начале и конце интервала At.
Основные характеристики надежности связаны между собой сле¬
дующими зависимостями:
t
-(мош
Р {t) = е 0 ;
~ Mt)dt
Г = | p(t)dt=^e 6 dt.
о о
При %=const эти зависимости принимают вид
р(^) = е-М; Т0=\/к.
Время полета КА при современных скоростях велико, и поэто¬
му приборы должны обладать высокой надежностью.
29
На рис. 1. 16 приведены данные, характеризующие время и тре¬
бования к надежности устройств для некоторых типичных космиче¬
ских полетов, для получения вероятности безотказной работы
устройства в 1% на протяжении всего космического 'полета. Сред¬
нее время работы (средняя наработка на отказ) между двумя по¬
следовательными вероятными отказами должно быть таким, как это
показано столбцами графика [27]. Даже для полета на Марс в
один конец требование получения вероятности отказа в 1% озна¬
чает, что среднее время безотказной работы между двумя последо-
Время
100
•О1
Время для выпол¬
нения задачи
г Годы
10:
ю2
10
1,0
г
-г
сз
СХ
I
§
С5
5» «о
^ S3
И
*з
* 5:
£ §1
I
Требуемая величина
среднего срока службы
между двумя
последовательными
отказами при
вероятности отказа 1%
И
Рис. 1.16. График требований к надежности аппаратуры
нательными вероятностями отказа составит 68 лет. Задача несколь¬
ко облегчается, если принять во внимание, что система управления,
а следовательно, и измерительные устройства будут работать не
все время полета, а периодически включаться на продолжительный
отрезок времени. Однако и такой способ работы проблему надеж¬
ности полностью не решает. Поэтому проблема повышения надеж¬
ности и безотказности работы требует дальнейшего изыскания про¬
стейших схемных и конструктивных способов решения задачи изме¬
рения и управления, повышения всех входящих в систему управ¬
ления элементов и узлов, а также резервирования и дублирования
узлов, блоков и систем в целом.
Предположим, что система (прибор) двукратно или даже трех¬
кратно дублируется. Если надежность каждого из двух приборов
равна, например, P(t)— 0,9, то при дублировании она составит
Я=1 — [1 —/7(Л]2 = 1 — 0,12 = 0,99.
Для уменьшения вероятности одновременного выхода из строя
обоих приборов желательно, чтобы физический принцип их дейст¬
вия был различен. Автоматические приборы на пилотируемых кос¬
мических кораблях дублируют неавтоматическими.
Для выполнения предварительного расчета необходимо знать
типы и число используемых элементов; величину средней опасно¬
сти отказов элементов А,(/).
Расчет выполняется при следующих допущениях: однотипные
элементы имеют одинаковые опасности отказов, не зависящие от
времени; все элементы работают в номинальных режимах, преду¬
30
смотренных техническими условиями на них; отказ любого из эле¬
ментов приводит к отказу всего устройства; отказ элементов яв¬
ляется событием случайным и независимым.
Основной задачей предварительного расчета является определе¬
ние отказа по известным опасностям отказа используемых элемен¬
тов. Опасность отказа прибора определяется суммой опасностей
отказа всех используемых элементов.
На основании известных значений опасности отказов K(t) и чис¬
ла элементов N=^N1 определяют среднее время безотказной ра¬
боты устройства Т0 и величину конструктивной надежности, ис¬
пользуя для этого соотношения
7’о=—; p{t) = e~n.
л
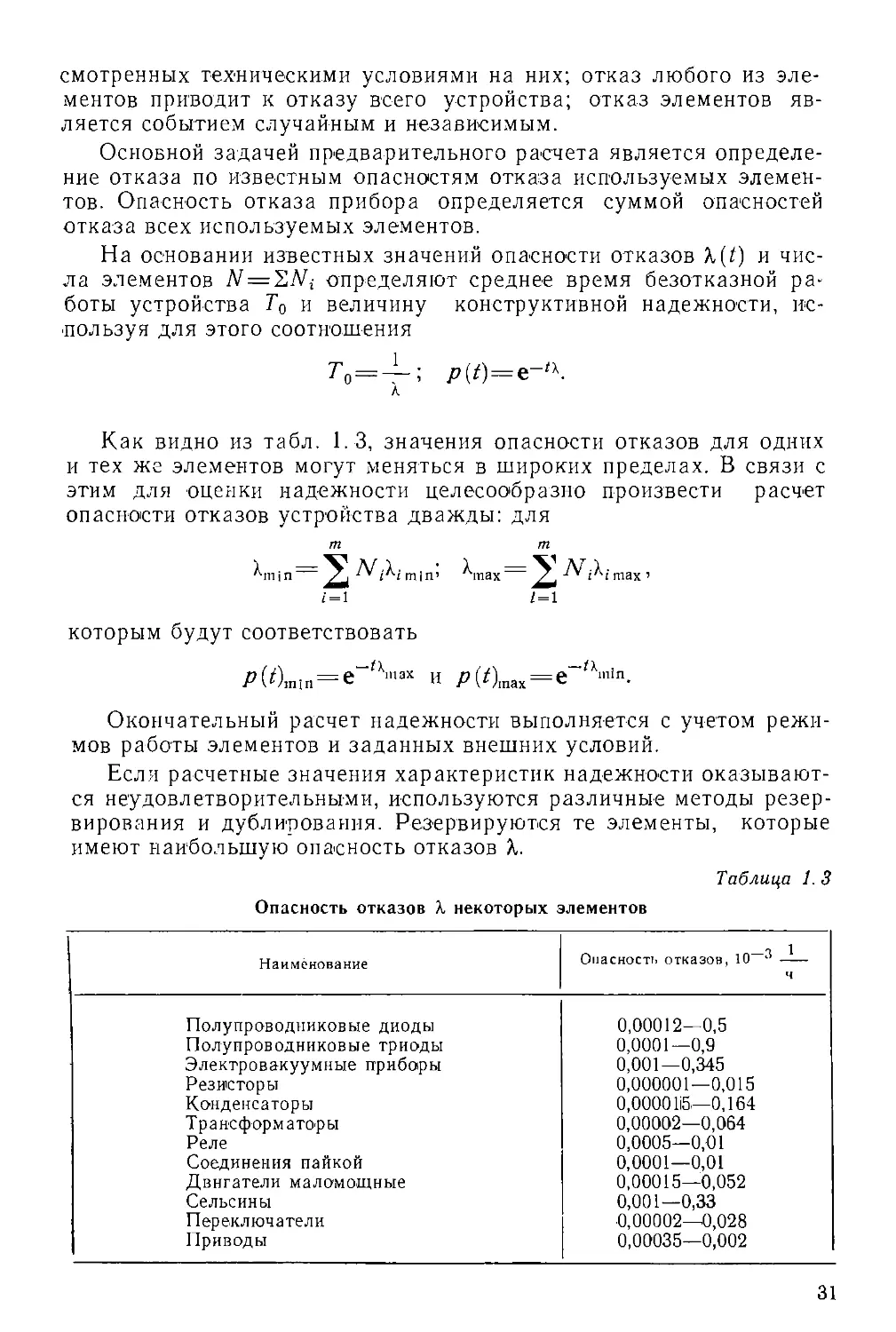
Как видно из табл. 1.3, значения опасности отказов для одних
и тех же элементов могут меняться в широких пределах. В связи с
этим для оценки надежности целесообразно произвести расчет
опасности отказов устройства дважды: для
m m
^min ^А/ min’ \nax ^ i^i max ’
г=1 1 = 1
которым будут соответствовать
^(Omln = e“a‘nax И p{t\ пах = е-Д‘"'п.
Окончательный расчет надежности выполняется с учетом режи¬
мов работы элементов и заданных внешних условий.
Если расчетные значения характеристик надежности оказывают¬
ся неудовлетворительными, используются различные методы резер¬
вирования и дублирования. Резервируются те элементы, которые
имеют наибольшую опасность отказов X.
Таблица 1. 3
Опасность отказов X некоторых элементов
Наименование
а 1
Опасность отказов, 10 °
ч
Полупроводниковые диоды
0,00012—0,5
Полупроводниковые триоды
0,0001—0,9
Электровакуумные приборы
0,001—0,345
Резисторы
0,000001—0,015
Конденсаторы
0,0000 li5—0,164
Т р а не фор м а тор ы
0,00002—0,064
Реле
0,0005—0,01
Соединения пайкой
0,0001—0,01
Двигатели маломощные
0,00015—0,052
Сельсины
0,001—0,33
Переключатели
0,00002—0,028
Приводы
0,00035—0,002
31
Условия работы. Для обеспечения нормальной работы ап¬
паратуры и возможности пребывания живых существ на космиче¬
ском аппарате должны поддерживаться определенные стабильные
температура и давление. В тепловом отношении космический аппа¬
рат по существу является самостоятельным небесным телом, нахо¬
дящимся в лучистом теплообмене с окружающим его простран¬
ством.
Главным источником лучистой энергии, поступающей извне к
космическому аппарату, является Солнце. Поток солнечной энер¬
гии характеризуется значением солнечной постоянной Qs — коли¬
чеством тепла, поступающего в единицу времени на поверхность,
равную 1 м2 и перпендикулярную направлению солнечных лучей.
За пределами атмосферы солнечная постоянная Qs=1200 ккал/м2ч.
Космический аппарат нагревается Солнцем, когда находится
над освещенной стороной планеты. Для ИСЗ с небольшой высотой
орбиты продолжительность этих периодов в большинстве случаев
составляет 65—75% от периода обращения по орбите. Количество
тепла, поступающего к КА от Солнца, зависит от площади миделя
и степени черноты поверхности КА в области максимума энергии
солнечного излучения и определяется коэффициентом поглощения
солнечной радиации Ая.
Вторым основным источником лучистой энергии, поступающей
к КА, является отражаемая планетой, вблизи которой аппарат
пролетает, солнечная радиация. Это увеличивает общее количест¬
во лучистой энергии Солнца, падающей на аппарат. Кроме того,
на аппарат воздействует собственное излучение планеты, сущест¬
вующее как на освещенной, так и на теневой ее сторонах. Энергия
солнечных лучей, отраженных планетой, характеризуется альбедо
планеты и зависит от положения орбиты по отношению к освещен¬
ной части поверхности планеты и от положения аппарата на ор¬
бите.
Например, энергия, поступающая на ИСЗ за счет отраженной
от поверхности Земли солнечной радиации, может достигать 35—
45% от Q,.
Собственное излучение Земли лежит в инфракрасной области,
соответствующей длинам волн около 10 мкм. Эта энергия харак¬
теризуется величинами порядка 15% от Qs.
Кроме того, в тепловом обмене участвует тепловая энергия, вы¬
деляемая приборами самого КА. Наряду с поглощением тепла ап¬
паратом происходит теплоотдача с его внешней поверхности за
счет излучения в окружающее пространство. Собственное излуче¬
ние аппарата как и всякого тела, обладающего сравнительно низ¬
кой температурой, лежит в инфракрасной области спектра (X —
— 10 мкм). Количество излучаемого тепла определяется величиной
поверхности аппарата, а также ее излучагельной способностью, ха¬
рактеризуемой коэффициентом собственного излучения в инфра¬
красной области спектра в.
Значение равновесной температуры определяется из уравнения
теплового баланса
32
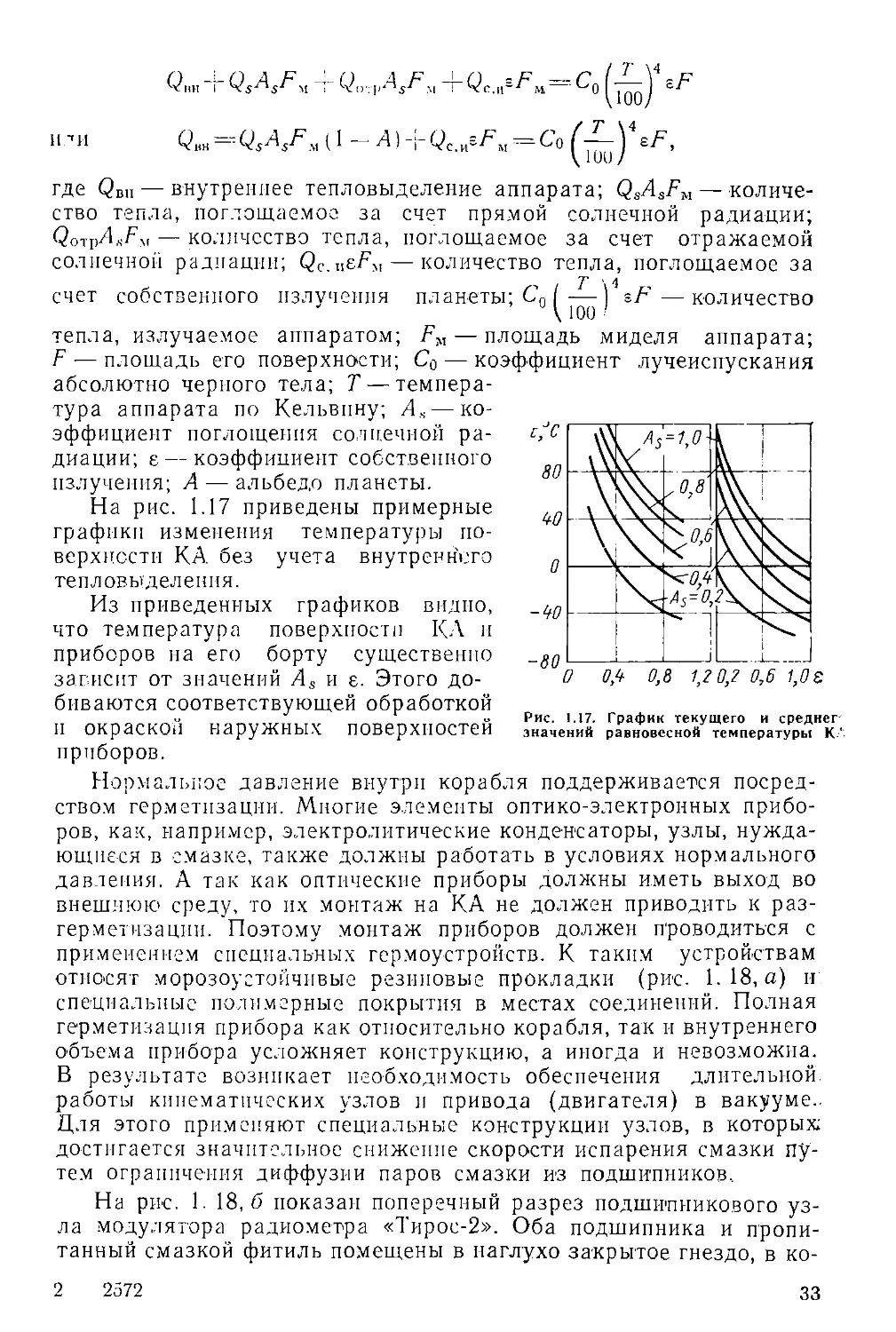
Qm-\-Qs^sf,l -f -rQc.Hs/\,t=C0 г F
ИЛИ Q„h = Q5^5JC'm(1 -^)-|-Ус.иг/;'м = Со^)4в/;',
где Qdii — внутреннее тепловыделение аппарата; QA-^m — количе¬
ство тепла, поглощаемое за счет прямой солнечной радиации;
Qot,AFm — количество тепла, поглощаемое за счет отражаемой
солнечной радиации; Qc. неА— количество тепла, поглощаемое за
счет собственного излучения планеты; Сп /— ]4 — количество
V ЮО '
тепла, излучаемое аппаратом; FN— площадь миделя аппарата;
F — площадь его поверхности; С0 — коэффициент лучеиспускания
абсолютно черного тела; Т — темпера¬
тура аппарата по Кельвину; А,ч— ко¬
эффициент поглощения со т печной ра¬
диации; е — коэффициент собственного
излучения; А — альбедо планеты.
На рис. 1.17 приведены примерные
графики изменения температуры по¬
верхности КА без учета внутреннего
тепловыделения.
Из приведенных графиков видно,
что температура поверхности КА и
приборов на его борту существенно
зависит от значений As и е. Этого до¬
биваются соответствующей обработкой
и окраской наружных поверхностей
приборов.
Нормальное давление внутри корабля поддерживается посред¬
ством герметизации. Многие элементы оптико-электронных прибо¬
ров, как, например, электролитические конденсаторы, узлы, нужда¬
ющиеся в смазке, также должны работать в условиях нормального
давления. А так как оптические приборы должны иметь выход во
внешнюю среду, то их монтаж на КА не должен приводить к раз¬
герметизации. Поэтому монтаж приборов должен проводиться с
применением специальных гермоустройств. К таким устройствам
относят морозоустойчивые резиновые прокладки (рис. 1.18,а) и
специальные полимерные покрытия в местах соединений. Полная
герметизация прибора как относительно корабля, так и внутреннего
объема прибора усложняет конструкцию, а иногда и невозможна.
В результате возникает необходимость обеспечения длительной,
работы кинематических узлов и привода (двигателя) в вакууме..
Для этого применяют специальные конструкции узлов, в которых;
достигается значительное снижение скорости испарения смазки пу¬
тем ограничения диффузии паров смазки из подшипников.
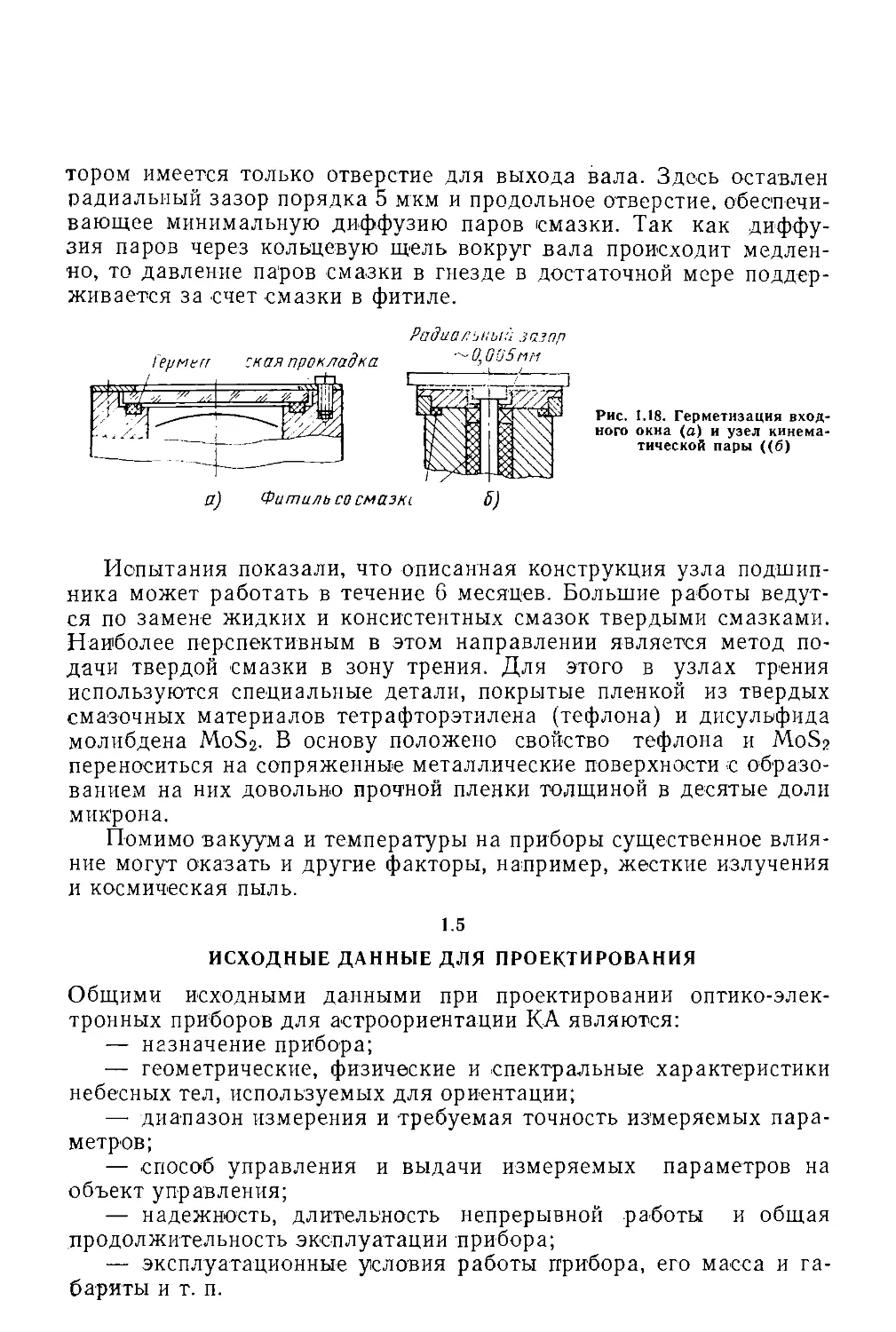
На рис. 1. 18,6 показан поперечный разрез подшипникового уз¬
ла модулятора радиометра «Тирос-2». Оба подшипника и пропи¬
танный смазкой фитиль помещены в наглухо закрытое гнездо, в ко¬
Рис. 1.17. График текущего и среднег
значений равновесной температуры К'
2 2572
33
тором имеется только отверстие для выхода вала. Здесь оставлен
радиальный зазор порядка 5 мкм и продольное отверстие, обеспечи¬
вающее минимальную диффузию паров смазки. Так как диффу¬
зия паров через кольцевую щель вокруг вала происходит медлен¬
но, то давление паров смазки в гнезде в достаточной мере поддер¬
живается за счет смазки в фитиле.
Гермегг :кая прокладка
Радиальный зазор
•'-й 005мм
а) Фитиль со смаэк1
Рис. 1.18. Герметизация вход-
ного окна (а) и узел кинема*
тической пары ((б)
Испытания показали, что описанная конструкция узла подшип¬
ника может работать в течение 6 месяцев. Большие работы ведут¬
ся по замене жидких и консистентных смазок твердыми смазками.
Наиболее перспективным в этом направлении является метод по¬
дачи твердой смазки в зону трения. Для этого в узлах трения
используются специальные детали, покрытые пленкой из твердых
смазочных материалов тетрафторэтилена (тефлона) и дисульфида
молибдена MoS2. В основу положено свойство тефлона и MoS2
переноситься на сопряженные металлические поверхности с образо¬
ванием на них довольно прочной пленки толщиной в десятые доли
микрона.
Помимо вакуума и температуры на приборы существенное влия¬
ние могут оказать и другие факторы, например, жесткие излучения
и космическая пыль.
1.5
ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ
Общими исходными данными при проектировании оптико-элек¬
тронных приборов для астроориентации КА являются:
— назначение прибора;
■— геометрические, физические и спектральные характеристики
небесных тел, используемых для ориентации;
— диапазон измерения и требуемая точность измеряемых пара¬
метров;
— способ управления и выдачи измеряемых параметров на
объект управления;
— надежность, длительность непрерывной работы и общая
продолжительность эксплуатации прибора;
— эксплуатационные условия работы прибора, его масса и га¬
бариты и т. п.
ГЛАВА 2
ПРИНЦИПЫ ПОСТРОЕНИЯ ОПТИЧЕСКИХ
И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ
В системах управления космическими аппаратами применяются
разнообразные оптические визуальные и оптико-электронные при¬
боры, принцип действия которых базируется на использовании в
качестве источника информации потока лучистой энергии, излучае¬
мой и отражаемой небесными телами и другими объектами. При
этом оптический 'прибор, среда, в которой распространяется излу¬
чение, и Есе объекты, находящиеся в поле зрения прибора, обра¬
зуют оптический канал связи.
Лучистая энергия, воспринимаемая прибором от визируемого
объекта, создает «сигнал», последующее преобразование и обра¬
ботка которого и позволяет получить необходимые данные для си¬
стемы управления КА.
На рис. 2. 1 ,а приведена обобщенная структурная схема визу¬
альной системы. Структурная схема оптико-электронной системы
лучистый
пи тик
Световой
(зрительный)
5
Ав
7
сигнал
илектрическии
сигнал
10
5) '
Рис. 2.1. Обобщенная схема визуальной (а) и оптико-электронной (б) следящих систем:
/—защитный элемент; .2—отклоняющий элемент; 3—объектив; 4—оборачивающая система; 5—
анализатор; 5—фильтр; 7—окуляр или экран; 8—конденсор; 9—приемник излучения; 10—
электронное устройство
показана на рис. 2. 1,6. Обе схемы содержат примерно одинаковые
по 'назначению и принципу действия оптические элементы. В визу¬
альных системах оценка обстановки и процесс измерения выполня¬
ется оператором, при этом анализирующее устройство (сетка с
2* 35
марками) имеет вспомогательное назначение — определяет направ¬
ление линии визирования. В оптико-электронных приборах посред¬
ством анализатора, приемника излучения и электронного уеили-
тельно-преобразующего устройства производится непосредственное
измерение и формирование электрического управляющего сигнала.
Поэтому оптико-электронная система позволяет построить замк¬
нутую автоматическую систему управления КА без участия опера¬
тор а-космонавта .
Проектирование оптических систем для наведения и ориентации
КА представляет собой чрезвычайно сложную техническую задачу
и требует координированной проработки большого круга взаимо¬
связанных вопросов из области астрономии, оптики, светотехники,
точной механики, фотоэлектроники и целого ряда других областей
современной науки и техники. В настоящей главе рассматриваются
общие для всех типов оптических приборов вопросы проектиро¬
вания.
ЭНЕРГЕТИЧЕСКИЕ И ФОТОМЕТРИЧЕСКИЕ ВЕЛИЧИНЫ
ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ
Основной величиной, позволяющей судить о количестве энергии из¬
лучения, является поток излучения (лучистый поток) Фе, измеряе¬
мый в ваттах, — количество излучаемой, поглощаемой или перено¬
симой в единицу времени энергии:
где W — энергия излучения в Дж.
Поток излучения, сосредоточенный в малом диапазоне длин
волн от X до Я+АА,, называют спектральным (монохроматическим)
потоком йф или Ф(л), а величину потока излучения, приходящую¬
ся на единичный интервал длин волн внутри диапазона dX, —
спектральной плотностью потока излучения
Пространственное распределение потока излучения описывает¬
ся следующими величинами:
— поверхностной плотностью потока излучения (энергетиче¬
ской светимостью) Ме (Вт-м~2), определяемой как отношение по¬
тока излучения Фе, испускаемого элементом поверхности в полу¬
сферу, к площади этого элемента dS:
— энергетической освещенностью (облученностью) Ее (Вт-м-2),
отношением потока излучения, падающего на элемент поверхности,
к площади этого элемента:
2.1
Фx=dФ/dk.
Ме = йФеШ8-,
(2. 1)
Ee = dФ|dS]
(2. 2)
36
— энергетической силой света 1С (Вт-ср-1) в данном направ¬
лении, 1. е. отношением потока излучения, исходящего от источ¬
ника и распространяющегося в определенном направлении внутри
элементарного телесного угла, к этому телесному углу:
Ie = d<&ldQ; (2.3)
— энергетической яркостью излучающей поверхности в данном
направлении, определяемой как отношение измеренной в этом на¬
правлении энергетической силы света к видимой площади излу¬
чающей поверхности:
Le — d IJd S с os б, (2.. 4)
где Le — энергетическая яркость в Вт-ср-1 ■ м-2; 0 — угол между
нормалью к элементу dS излучающей поверхности и направлением
энергетической силы света.
Для поверхностей, подчиняющихся закону Ламберта, согласно
которому сила излучения пропорциональна косинусу угла 0 между
направлением излучения и нормалью к излучающей поверхности,
будем иметь
/e = Z.e5cos0. (2.5)
Как следствие из закона Ламберта, устанавливается взаимо¬
связь между энергетической светимостью и яркостью диффузно из¬
лучающих поверхностей:
Me = nLe. (2.6)
Качественными характеристиками каждой из указанных вели¬
чин является ее спектральная плотность, определяемая как отно¬
шение энергетической величины (освещенности, силы света, ярко¬
сти), взятой в бесконечно мало спектральном диапазоне длин волн,
к ширине этого интервала. Например, спектральная плотность
энергетической светимости и спектральная плотность энергетиче¬
ской освещенности, измеряемые в Вт-см-2-мкм-1, равны
- dE - Afx = -^.
dX dl
Связь между интегральными и спектральными характеристика¬
ми определяется выражениями
во во во
Ме = j MkdX; Ее = f Exdk- Le = f Lxd\.
0 0 0
Определения световых величин аналогичны определениям соот¬
ветствующих энергетических величин. Основные энергетические и
световые величины, а также их обозначения и размерности приве¬
дены в табл. 2. 1.
Связь между энергетическими и световыми величинами осуще¬
ствляется через коэффициент видности, выражающий отношение
светового потока Ф„ в люменах к лучистому потоку Фе в ваттах:
/Сх = Фы,/фг*. (2-7)
37
Основные энергетические и светотехнические величины
CN
а
з
'О
<3
Цч
е
и
CQ
е
O'
а
*
О
^ Л
^ Е-
СО о
к к
СП
а
4з
ft
о
43
п
к
а
CQ
а
43
е
43
0J
« I
s S
Я Л
® я
£ 5
cS '
со
.a f”1
СП <u
а
о
СО
43
ft
е
43
и
со
>. о
п К
н К СО
СИ си
о У
еч
аэ
СО
-
СО
43
£>
О
•“-ч
о
ft
6*
43
со
■|
43
1
&
!
ft
<t>
Я
CQ
fM
СО
СО
43
43
Ф
43
43
II
1!
у
5
1Ц
СП
CQ
СП О
Cl,
<V ,—ч
Ж к
JH s
СП
a
а
S
го
о
0)
с
ГГ
_
м
—
СТ)
со
к
S'
со
г
о
0)
х«
У
CL 3
н
С *
0)
и.
*
38
Отношение коэффициента видности для длины волны X к макси¬
мальному значению К\т называется спектральной световой эффек¬
тивностью:
Ух = К/Кш- (2.8)
Числовое значение коэффициент К\т, который называют также
■световым эквивалентом лучистого потока, равно
Кхт= 683 лм-Вт-1,
Если лучистый поток выражается функцией Ф(Я,), то полный
световой поток, воспринимаемый глазом, определяется интегриро¬
ванием произведения Ф(А,)Кх для всех длин волн в пределах
0,4<Я<0,7 мкм:
0,7
Фг=683 1 ®v(X)Vxdl=
0,4 0
Аналогичным образом может быть оценена эффективность лучи¬
стого потока и для любого другого селективного приемника излу¬
чения, при этом вместо спектральной кривой чувствительности
глаза V х следует принять спектральную характеристику Sx при¬
емника.
Рассмотрим некоторые соотношения между приведенными фо¬
тометрическими величинами, наиболее часто встречающимися на
практике.
Решая равенство (2. 3) относительно йФ с учетом того, что те¬
лесный угол dQ~dScos 0//2 будем иметь
йФе = IedQ = IedS cos 9//2. (2. 9)
Подставляя значение dфe из выражения (2.9) в (2.2), получим
выражение для энергетической освещенности, создаваемой точеч¬
ным излучателем:
dEe = d®JdS = dlе cos 0//2, (2. 10)
где / — расстояние между источником излучения и облучаемым
элементом поверхности dS, расположенной под углом 0 к направ¬
лению облучения.
Решая уравнение (2. 10) относительно dle и подставляя его в
(2. 4), получим выражение для энергетической яркости:
Le0 = dEeO/dQ. (2.11)
Для малых углов dQ, при Les =Le=const
Ee = LebQ. (2. 12)
Если известно распределение силы света Iv в пределах телес¬
ного угла й, то поток
®v=^/v(Q)dQ. (2.13)
а
При проектировании оптических приборов для наведения и
ориентации КА конструктор должен учитывать два вида источни¬
39
(' KifiexdX.
ков теплового излучения: естественные источники излучения —
Солнце, 'планеты, звезды, 'небесный фон и др. — н искусствен¬
ные лампы накаливания, газоразрядные лампы, лазеры и др. Вто¬
рой вид излучателей используется в активных системах наведения
и имитаторах.
Рассмотрим основные законы теплового излучения. В соответ¬
ствии с законом Стефана — Больцмана энергетическая светимость
черного тела пропорциональна четвертой степени абсолютной тем¬
пературы
Ме = аТ*, (2.14)
где а=5,6697 • 10~8 Вт-м~2-К_4— постоянная Стефана — Больц¬
мана.
Напомним, что под черным телом подразумевается тепловой из¬
лучатель, имеющий при заданной температуре максимально воз¬
можную спектральную плотность энергетической светимости для'
всех длин воли, т. е. черное тело полностью поглощает все падаю¬
щие на него излучения независимо от длины волны, поляризации'
и направления падения.
Закон Кирхгофа выражает соотношение между излучением и
поглощением теплового излучателя
M\\jaw = М\2,лш = ... = Minla\n = Мхч.,, (2. 15)
где М>ч.т — спектральная плотность поверхностной плотности из¬
лучения черного тела; ах — спектральный коэффициент погло¬
щения.
Из выражения (2. 15) следует, что чем больше тело поглощает
энергию, тем больше оно ее излучает.
В соответствии с законом сохранения энергии для любого тела
ал + ех-Ьто= 1, (2.16)
где qx и т^ — коэффициенты отражения и пропускания соответ¬
ственно.
Распределение спектральной плотности энергетической светимо¬
сти излучения по спектру для черного тела определяется законом
Планка
М (XT’) = Сг)~5 [ехр (С2;ХТ) — 1]-', (2. 17}
где С^З.7415-10-16 Вт-м2; С2= 1,43879 • КН м • К; Г —абсолют¬
ная температура тела в градусах Кельвина.
Распределение плотности светимости по спектру для реальных
тел принято характеризовать коэффициентом спектральной излу-
чательной способности ех излучения, под которым понимается от¬
ношение спектральной плотности энергетической яркости излуче¬
ния реального тела к спектральной плотности энергетической ярко¬
сти черного тела при той же температуре, т. е.
s , = /.(дЛ//.(ХЛ„,г. (2. 18)'
40
В соответствии с законом Вина длина волны на которую
приходится максимум излучения, определяется по формуле
2897 / q\
= 19)
Более подробное изложение физических основ построения оп¬
тических приборов изложено в работах [19, 20].
2.2
ОПТИЧЕСКИЕ СИСТЕМЫ
Оптическая система предназначена для приема, передачи и пере¬
распределения лучистого потока с целью более эффективного его
использования для обнаружения и измерения угловых и линейных
координат КА относительно базовых объектов — небесных светил
и искусственных излучателей.
Применительно к условиям работы в космосе важное значение
имеют такие характеристики оптической системы, как качество
изображения в картинной плоскости, равномерность освещенности
по полю зрения, спектральные характеристики пропускания и на¬
дежность работы.
Принцип определения угловых координат в оптической части
.прибора состоит в том, что угловое отклонение оптической оси от
направления линии визирования на объект в пределах поля зрения
системы всегда сопровождается смещением изображения этого объ¬
екта относительно центра фокальной плоскости на величину, опре¬
деляемую вектором q (рис. 2.2). Модуль вектора смещения изо¬
бражения Q
g = /'tg Дер, (2.20)
где Дф — угловое отклонение, которое в дальнейшем будем назы¬
вать углом рассогласования.
Проекции вектора q в прямоугольной системе координат OXY,
начало которой совмещено с центром картинной плоскости, выра¬
жается соотношениями
Q^. = QSine; Qy = Q COS £, (2-21)
где e — аргумент вектора q, называемый углом фазирования.
Измерение угловых и линейных координат является наиболее
сложной технической задачей, с которой проектировщик встречает¬
ся при создании оптических измерительных систем. Для решения
этой задачи применяются два принципиально различных способа.
Первый способ — измерение углового положения визируемого
объекта посредством непрерывного слежения за ним. В этом случае
оптическая система наведения состоит из телескопической головки,
смонтированной в двухстепенном кардановом подвесе с устройст¬
вом для слежения по каждой из осей подвеса. В процессе слеже¬
ния оптическая ось телескопа непрерывно совмещается с направ¬
41
лением на объект, а углы поворота рамок карданова подвеса1
(рис. 2. 3) измеряются посредством цифровых или аналоговых дат¬
чиков углов. Такой метод измерения называют нулевым методом.
Нулевой метод также можно Осуществить, изменяя направление-
линии визирования с помощью отклоняющего элемента — призм1
или зеркал, устанавливаемых перед объективом телескопа.
Измерение углового положения объекта нулевым методом осу¬
ществляется с весьма высокой точностью, которая практически оп-
Рис. 2.2. Схема определения координат в оптиче- Рис. 2.3. Схема слежения с иу-
ской системе левой отработкой:
Т—телескоп; КП—карданов под¬
вес; ДУ1, ДУ2—датчики углов;
ЭУ—электронное устройство; Д1,
Д2—двигатели следящей си¬
стемы
ределяется лишь динамическими ошибками слежения и ошибками1
измерения углов датчиками. Дисторсионные искажения и полевые1
аберрации оптической системы и ряд других факторов на точность,
измерения практически не влияют.
При втором способе положение объекта определяется измере¬
нием координат его изображения непосредственно в фокальной
плоскости телескопа.
Оба способа могут быть реализованы как в оптической — визу¬
альной системе, так и в оптико-электронной автоматической.
В визуальной системе процесс слежения за объектом сводится1
к совмещению его изображения с перекрестием сетки, помещаемой
в фокальной плоскости объектива, которое выполняется опера¬
тором.
Точность визирования в основном определяется параметрами1
телескопа, условиями наблюдения и психофизиологическими свой¬
ствами оператора.
Для высококачественной оптической системы погрешность визи¬
рования можно оценить по формуле
Д<Р„ = Л-^’ (2-22>
J-T
120
где фг = = 60" —разрешающая способность глаза; Гт — види-
^з.г
мое увеличение телескопа; т] — коэффициент, учитывающий условия;
наблюдения; d3, г — диаметр зрачка глаза (d3.T='2 мм).
Точность слежения при визуальном наблюдении можно опреде¬
лить средней квадратичной погрешностью
'«в.с = К(Д(Рв)2 + (Д'Ри)2 + (Д'?л.у)2 + (ДсРд). (2l 23:>
42
где Лф„ — инструментальная погрешность системы; Лсрд. у— по¬
грешность датчика углов; Дсрд — динамическая погрешность, обу¬
славливаемая психофизиологическими свойствами оператора.
Приближенное значение динамической ошибки можно опреде¬
лить по формуле
Д?д=«пг, (2.24)
где со — угловая скорость линии визирования; т — инерционная по¬
стоянная оператора.
В оптико-электронных приборах оптическая система произво¬
дит первичную обработку информации, выполняя те же функции,
что и в визуальных системах. Вторичная обработка этой инфор¬
мации, связанная с преобразованием оптического сигнала в элек¬
трический управляющий сигнал, позволяет осуществить автомати¬
ческое слежение и измерение координат. Иначе говоря, оптико¬
электронная система слежения и измерения строится по схеме
.замкнутой системы автоматического регулирования.
Системы автоматического регулирования достаточно хорошо
изучены. Устойчивость и основные показатели качества их работы
определяются соотношением параметров элементов и схемой их
соединения. Достаточно хорошо изучены и методы коррекции та¬
ких систем. Это диет возможность проектировщику производить
сравнительный анализ возможных схем решения данной задачи и
выбирать оптимальный вариант.
Фактически визуальная система в режиме слежения представ¬
ляет собой частный случай системы автоматического регулирова¬
ния, в которой замыкающим звеном является оператор. При таком
подходе характеристики визуальной системы в режиме слежения
можно оценить теми же методами, что и обычных автоматических
систем регулирования, т. е. используя передаточные функции.
Следящую визуальную систему будем называть биооптико-ме-
.ханической системой. Обобщенная схема биооптико-механической
системы регулирования показана на рис. 2. 4.
В биооптикомеханической системе регулирование и управление
процессом осуществляет оператор; устойчивость и основные харак¬
теристики ее работы зависят от ряда факторов: динамических ха¬
рактеристик входящих элементов, реализуемого закона регулиро¬
вания, способов кодирования информации, внешних условий и пси¬
хофизиологического состояния оператора [10].
Деятельность оператора можно характеризовать тремя функ¬
циями:
— получением и восприятием информации от индикаторов-при¬
боров (сенсорная реакция);
— обработкой полученной информации и выработкой решений
•о необходимости управляющих воздействий (вычислительно-логи¬
ческая функция);
— физическим управляющим воздействием на органы управле¬
ния объекта или прибора (моторная функция).
43
Сенсорная функция оператора описывается передаточной функ¬
цией звена с запаздыванием
Wc(p) = e-p'\
вычислительно-логическая функция — реально воспроизводимым:
форсирующим звеном первого порядка
Ул./? -J- 1
-£тг!
моторная функция воспроизводится передаточной функцией инер-
циального звена
WAP)=-~"
Рис. 2.4. Структурная схема биооптико-ме-
ханической следящей системы:
ОС—оптическая система; И—индикатор;
ОП—оператор (космонавт); УУ—управляю¬
щее устройство; ОР—объект регулирова¬
ния
Таким образом, передаточная функция оператора может быть
представлена в виде
U^on (P) = Wс (Р) и^ф (р) Wм (.Р), (2. 25)
где т—постоянная времени сенсорной реакции; Тр — постоянная
времени, характеризующая инерционность выработки решения;
Тф — постоянная времени, характеризующая форсирующие усилия
оператора для компенсации инерционности выработки решения;
Гм —постоянная времени моторной реакции; Кф, Км — коэффици¬
енты передачи.
Приведенная передаточная функция оператора, при всей своей
приближенности, достаточно сложна.
При достаточной тренировке, отсутствии возмущающих воздей¬
ствий и минимальной психофизиологической напряженности опера¬
тор в состоянии сформировать форсирующее звено, которое бы
компенсировало влияние инерционности. В этом случае ГФ=ГР и
второе звено превращается в обычное усилительное звено
Ц7ф(р) =А'0П. Передаточная функция оператора при этом имеет вид
WOB(P)=Kon-TTT— •
1 + тыр
Структурная схема визуальной следящей системы как биооп-
тико-механической системы регулирования показана на рис. 2. 5.
В большинстве случаев инерционностью оптической системы
можно пренебречь и ее передаточную функцию W0.c(p) предста¬
вить коэффициентом передачи Ко. с-
В космических приборах используются следующие типы опти¬
ческих систем:
44
— линзовые, в которых лучистый поток перераспределяется в
результате прохождения через преломляющие среды;
— отражательные, в которых лучистый поток перераспределяет¬
ся в результате отражения от одного или нескольких зеркальных
поверхностей;
— смешанные зеркально-линзовые, совмещающие в себе свой¬
ства линзовых и отражатель-
Угловое от¬
клонение
ных систем;
— специальные, включаю¬
щие зеркальный конус с пря¬
молинейной или криволинейной
поверхностью, тороидальный
зеркальный объектив и тому
подобные элементы.
В зависимости от назначе¬
ния прибора (ориентация, на¬
ведение, измерение линейных и
угловых координат и дщ), гео¬
метрических, энергетических и спектральных характеристик объек¬
та в космических приборах используются разнообразные оптичес¬
кие схемы и входящие в них элементы.
На рис. 2. 6 приведены простейшие схемы оптико-электронного
прибора. В первой схеме (рис. 2.6, а) параллельный пучок лучей
Рис. 2.5. Структурная схема биооптико-механи-
ческоЙ системы управления:
Wо с (р)—передаточная функция оптической
системы; ^0П(Р)—передаточная функция опе¬
ратора; WQp(p)—передаточная функция объ¬
екта регулирования
Рис. 2.6. Схемы оптических координаторов
от объекта ориентации (Солнце, планеты, звезды или искусствен¬
ного источника излучения) фокусируется объективом 1 в плоско¬
сти анализатора 2, за которым раополагается чувствительная пло¬
щадка приемника излучения 3.
Во второй схеме (рис. 2. 6, б) между анализатором 2 и прием¬
ником излучения 3 располагается конденсор 4. Применение в
схеме конденсора .позволяет использовать приемник излучения с
меньшей чувствительной площадкой и устранить влияние на точ¬
ность измерения неравномерности чувствительности по площадке
приемника.
Объектив является важнейшим элементом оптической системы,
его параметры и характеристики в конечном счете предопределя¬
ют энергетические, точностные и конструктивные характеристики
прибора в целом.
45
К основным характеристикам оптической системы относят:
— диаметр входного зрачка DBX или величину относительного
отверстия Л=/?вх///;
— фокусное расстояние объектива /';
— угол поля зрения 2а;
— разрешающую способность;
— интегральный и спектральный коэффициент пропускания.
При проектировании оптико-электронных приборов для наведе¬
ния и ориентации следует учитывать три особенности:
1. Излучатель точечный и его изображение представляет собой
аберрационный кружок рассеяния (случай ориентации по искусст¬
венным излучателям-ориентирам и ориентация по звездам).
2. Излучатель имеет конечные размеры, меньшие поля зрения
оптической системы, — случай ориентации по Солнцу и удаленным
планетам.
3. Размер излучателя перекрывает тюле зрения оптической си¬
стемы —случай, встречающийся при проектировании построителей
местной вертикали.
Для точечного излучателя (кроме звезды) за основную харак¬
теристику принимается сила света /. При этом, если система рабо¬
тает в пределах небольшого телесного угла Д£2, значение силы све¬
та берут постоянным или определяют по этому углу.
Величина потока, попадающего на входной зрачок приемной
оптической системы, определяется по формуле
освещенность (облученность) на входном зрачке соответственно
равна
где Топ — прозрачность среды на пути от излучателя до приемной
системы (для космоса можно принимать топ='1); I — длина пути
луча от излучателя до приемной системы; SBX — площадь входно¬
го зрачка системы; / — сила излучения (света) в направлении к
центру входного зрачка.
Диаметр входного зрачка DBX системы можно определить из со¬
отношения
где Uо min = (хt/ш — минимальный сигнал (напряжение) с выхода
приемника излучения, в ц раз превосходящий шумовой сигнал £/ш;
ц — требуемое отношение сигнала к шуму, обеспечивающее надеж¬
ное обнаружение излучателя и слежение за ним на фоне помех;
5И — вольтовая чувствительность приемника излучения.
(2. 26)
(2. 27)
46
Для второго случая величина потока, поступающего на вход¬
ной зрачок от излучающего элемента AS, расположенного на опти¬
ческой оси, определяется по формуле
2к и
дф=тсш j dty j" L sin a cos ahSda, (2.28)
ф = 0 a = 0
где L — яркость элемента AS при наблюдении под углом а; ф —
азимутальная координата.
В случае косинусного излучателя, подчиняющегося закону Лам¬
берта, из выражения (2. 28) получим
A<p=TonjtZ,AS sin2£/,
где U — апертурный угол оптической системы в пространстве
объектов.
Освещенность на приемнике излучения при яркости источни¬
ка L
Е = хтх0ЛпЬ sin2 U' = ^nL- , (2. 29)
где U' — апертурный угол в пространстве изображений; т0. с — ко¬
эффициент пропускания оптической системы.
При расположении излучателя с площадью SH3 на оптической
оси и при малых апертурных углах
ДФ = TonZ.-^f^. (2.30)
Для расчета диаметра входного зрачка можно воспользоваться
выражением
£>„>2/1/ = 2*1/ — • (2-31)
л:ДТопТ0<с5и5из |/ Я ДТопТо.с^из
В третьем случае площадь излучателя, которую необходимо
учитывать при энергетическом расчете, определяется площадью
диафрагмы поля зрения Sa и расположением излучателя относи¬
тельно входного зрачка системы. Для круглой диафрагмы при зна¬
чительном удалении излучателя его излучающая площадь может
быть определена по формуле
s»=-rk- (2'32)
«Ьд/ Z
Подставляя значение 5ИЗл в формулу (2.30), будем иметь
ДФ = г0.с^-/.5д(-^-)2. (2-33)
Для выбора фокусного расстояния можно воспользоваться не¬
равенством ,
/'>/;. п=~-, (2.34)
Дер
47
где k — относительная величина смещения изображения, при кото¬
рой в зависимости от применяемого способа анализа амплитуда
разности потоков либо глубина модуляции превосходят шумовой
сигнал; d—диаметр изображения излучателя.
При использовании второй схемы (рис. 2. 6, б) диаметр входно¬
го зрачка и фокусное расстояние объектива определяются так же,
как и для схемы без конденсора (рис. 2. 6, а), т. е. исходя из энер¬
гетических и конструктивных соображений. Зная размер чувстви¬
тельной площадки приемника /пр, определяют фокусное расстояние
конденсора
/к =/'-^ (2.35)
Дв-х
где ?3p = -^i!^—увеличение в зрачках; dBых — диаметр зрачка вы-
М)Х
хода.
Для систем, находящихся в воздухе, угол поля зрения конден¬
сора
tg aK = tgcz-^— .
/к
Если входной зрачок совпадает с главной плоскостью объекти¬
ва или расположен вблизи от нее, то расстояние I' от конденсора
до приемника определяется по формуле
Важной характеристикой объектива и всех оптических деталей
системы является коэффициент пропускания и отражения. С це¬
лью повышения коэффициента пропускания и уменьшения коэффи¬
циента отражения применяют просветляющие покрытия.
Для исключения пли значительного уменьшения помех и более
рационального использования чувствительности приемника излу¬
чения (согласования его спектральной чувствительности со спект¬
ральным диапазоном излучателя) в оптическую схему включают
нейтральные и спектральные фильтры.
Оптические детали должны изготовляться из радиационно стой¬
ких материалов, имеющих максимум пропускания в спектральном
диапазоне работы прибора.
Специальные оптические системы и принципиальные схемы для
приборов наведения и ориентации будут рассмотрены в последу¬
ющих главах.
2.3
ПРИЕМНИКИ ИЗЛУЧЕНИЯ
Приемники излучения предназначены для преобразования оптиче¬
ского сигнала в электрический. В оптико-электронных приборах
для наведения и ориентации КА применяют фотоэлектрические (фо¬
тонные) и тепловые приемники. В фотоэлектрических приемниках
48
поглощаемые кванты энергии излучения вызывают эмиссию элек¬
тронов с поверхности фотокатода пли образование свободных элек¬
тронов пли дырок в полупроводнике. Действие тепловых приемни¬
ков основано на преобразовании потока излучения в тепловую энер¬
гию атомов с последующим преобразованием тепловой энергии в
электрический сигнал.
Преобразование оптического сигнала в электрический посред¬
ством фото-или термоэффекта в общем случае можно записать
в виде
Osorio; г'с—-Ф5,г|о1 (2.36)
где Ф — лучистый поток, поступающий на вход прибора от излу¬
чателя; Uc—сигнал (напряжение) на выходе приемника; s(j, s; —
чувствительность приемника по напряжению и току соответственно;
т]о — коэффициент полезного действия оптической системы.
Приведенная формула (2. 36) отражает качественную сторону
преобразования оптического сигнала, так как не учитывает целый
ряд факторов, связанных с характеристиками излучения и самого
приемника, а также влияния канала связи и других, элементов схе¬
мы на формирование электрического сигнала. Основными характе¬
ристиками приемника излучения являются его интегральная чувст¬
вительность по напряжению и току, пороговая чувствительность
Фп, постоянная времени т, спектральная sx. и частотная Sf харак¬
теристики.
Интегральная (вольтовая) чувствительность определяется отно¬
шением амплитуды эффективного напряжения, снимаемого с при¬
емника при оптимальном режиме его включения, к амплитуде сину-
соидально-модулированного эффективного лучистого потока
S(J = д£//ДФе; su = MJI№0. (2.37)
Аналогично для чувствительности по току будем иметь
5; = Дг/ДФе; Si = MjL<S>v. (2.38)
Пороговая чувствительность определяется минимальным лучи¬
стым потоком, который вызывает на выходе приемника сигнал, на¬
ходящийся в заданном отношении к сигналу от шумов:
Ф„ = р ——-2Д- или Ф„ = р ^( (2.39)
su Si
где иш2, tin2 — среднее квадратичное значение шума; р— коэффи¬
циент пропорциональности, определяющий требуемое отношение
сигнал/шум.
Значение коэффициента р выбирается с учетом качества при¬
емника и схемы его включения. Для космических приборов значе¬
ние р должно быть не менее 5—10. Более детальный расчет р мож¬
но произвести, используя теорию оптимального приема сигнала,
задавшись вероятностью правильного обнаружения.
Так как среднее квадратичное значение шума зависит от раз¬
меров чувствительной площадки и полосы пропускания частот си¬
49
стемой, для объективного сравнения различных приемников порог
чувствительности выражают в виде
где qn — плотцадь чувствительной площадки приемника; Af — по¬
лоса пропускания .прибора.
Постоянной времени приемника т называют время, в течение
которого на его выходе при облучении сигнал достигает заданной
величины (обычно принимают величину, составляющую 63% от
максимального значения).
Для выбора максимальной частоты модуляции можно восполь¬
зоваться условием
Частотная характеристика выражает зависимость чувствитель¬
ности приемника от частоты модуляции потока. Например, для
синусоидально-модулированного потока частотная характеристика
может быть определена по формуле
где s0 — чувствительность приемника при облучении немодулиро-
ванным потоком.
Спектральная характеристика приемника sx выражает зависи¬
мость его чувствительности от длины волны воспринимаемого из¬
лучения.
Для селективных приемников (фотосопротивлений, фотодиодов
и др.) спектральные характеристики в большинстве случаев пред¬
ставляют собой плавные кривые с одним максимумом.
В общем случае связь между интегральной и спектральной чув¬
ствительностью приемника можно представить выражением
где Фх —функция, описывающая спектральное распределение по¬
тока в диапазоне длин волн; тх —спектральный коэффициент про¬
пускания среды; s£ — относительная спектральная чувствитель¬
ность приемника; sx м — абсолютная спектральная чувствитель¬
ность в максимуме спектральной характеристики приемника.
Рассмотрим некоторые из приемников, используемых в косми¬
ческих приборах.
К типичным тепловым приемникам, работающим в инфра¬
красном диапазоне спектра излучения, относят полупроводниковые
и металлические болометры. Схемы включения лолулроводниково-
ИЛИ ФП = [Х
(2. 40)
si Y qnb f
/max < 1/ЗТ.
(2.41)
V1 + (2я/т)2 ’
X
п
X
'т
50
го болометра из окислов кобальта и марганца (БКМ) представле¬
ны на рис. 2. 7.
Отличительной особенностью болометров является большая по¬
стоянная времени, что ограничивает частоту модуляции или скани¬
рования несколькими десятками герц (/=10... 50 Гц). При ис¬
пользовании металлических болометров вследствие их малого со¬
противления в схему вводится согласовывающий трансформатор.
Разновидностью теплового приемника является пироэлектриче¬
ский приемник излучения (рис. 2.8), действие которого основано
V,-
\t,7
V.
t ■
Е/2
а)
Рис. 2.7. Схемы включения
полупроводникового боломет¬
ра
Рис. 2.8. Схема включения
пироэлектрического прием¬
ника
на зависимости диэлектрической постоянной вещества от темпе-
ратуры. Чувствительным элементом приемника является конденса¬
тор, роль которого выполняет сегнетоэлектрик. Неравномерное
нагревание конденсатора с сегнетоэлектриком под действием пада¬
ющего лучистого потока приводит к деформациям, которые вызы¬
вают появление зарядов на обкладках. Это позволяет включать
приемник без дополнительного источника питания.
По сравнению с болометром пироэлектрический приемник име¬
ет меньшую постоянную времени при высокой пороговой чувстви¬
тельности и не требует дополнительного источника питания и др.
Из селективных приемников, основанных на фотоэффекте, рас¬
смотрим фоторезисторы, фотодиоды и фотоумножители.
Действие фоторезисторов основано на использовании внутрен¬
него фотоэффекта. Под действием падающего лучистого потока в
фоторезисторе происходит изменение энергетического состояния
электронов без эмиссии их за пределы вещества — полупроводни¬
ков или диэлектриков. Это приводит к изменению фотопроводи¬
мости полупроводника. Напряжение сигнала при облучении при¬
емника можно представить выражением
£/c = W£*maxS\ Щ dl, (2.42)
\ р А>
Хтах Хтах
где Sx шх — чувствительность фоторезистора к излучению с дли¬
ной волны, соответствующей максимуму его спектральной чувст¬
вительности; Ех тах — освещенность по длине волны, соответствую¬
щей максимуму излучения источника; 5 — площадь чувствитель¬
ной площадки приемника.
Фотодиодами называют полупроводниковые приборы, в которых
при воздействии лучистой энергии возникают электронно-дыроч¬
ные пары, разделяемые п — р-переходом и образующие фэтоток.
51
При отсутствии освещения в цепи протекает только темновой ток
(обратный ток запертого диода). Фотодиоды могут включаться па
схеме с внешним источником питания (рис. 2.9, а) —фотодиодный
режим, или по схеме без источника питания (рис. 2.9,6) —фото-
вольтаический (вентильный) режим. В основном применяются гер¬
маниевые и кремниевые фотодиоды. Большой интерес представля¬
ют фотодиоды из арсенида галлия, особенно для слежения за
звездами.
Фотоэлектронный умножитель (ФЭУ) относится к наиболее
высокочувствительным эмиссионным приемникам излучения. Прин¬
цип работы ФЭУ заключается в использовании явления вторичной
а) 5)
Рис. 2.9. Схемы включения фото- Рис. 2.10. Схема фотоэлектронного ум-
диода ножителя
эмиссии, возникающей при последовательной бомбардировке элек¬
тронами ряда эмиттеров, каждый из которых находится под боль¬
шим потенциалом, чем предыдущий (рис. 2. 10). Коэффициент уси¬
ления ФЭУ, зависящий от количества эмиттеров, может дости¬
гать 107.
Анодный ток ФЭУ в стационарном режиме можно определить
по формуле
Ia = SK Е\maximax3rt ^ — * dX, (2.43)
ь 5лтах Хтах
где SK — эффективная площадь фотокатода; о — коэффициент вто¬
ричной эмиссии; п — число каскадов.
Отношение сигнал/шум можно определить по формуле [17]
р.= 1,76-109 ^ ,
Г\ I С и pH •
где Ик~- ; — —отношение катодных токов; iCp — сред-
*сигн + *ср +
няя величина немодулированной составляющей катодного тока,
обусловленная фоновой засветкой; гт — средняя величина темно-
вого тока катода; Дf — полоса пропускания системы.
Большой интерес для построения космических приборов заслу¬
живают координатно-чувствительные приемники, у которых выход¬
ной сигнал зависит не только от поступающего на чувствительную
площадку потока, но и от положения на ней изображения излуча¬
теля. Это позволяет получить электрический сигнал, несущий ин¬
формацию о координатах изображения излучателя, без дополни¬
тельных анализирующих устройств, т. е. координатно-чувствитель¬
52
ный приемник, кроме преобразования, сам выполняет функции
анализатора.
Простейшим координатно-чувствительным приемником являет¬
ся разрезной фотодиод (рис. 2. 11, а). Приемник состоит из четы¬
рех площадок (1, 2, 3, 4), выходные сигналы -с которых при пока¬
занном расположении координатных осей определяются выраже¬
ниями
Ux~suE 2 ^>4)! Uy = su^(Si—S3),
где Si — эффективная площадь изображения излучателя на чув¬
ствительной площадке 'каждого из секторов .приемника.
Поскольку площадь S, является функцией угла рассогласова¬
ния, выходные сигналы Ux и Uv в пределах смещения изображе¬
ния, равного половине диаметра изображения, пропорциональны
Рис. 2.11. Схемы и пеленгационные характеристики четырехсекторного разрезного (а) и
инверсионного (б) приемников излучения
величине и знаку рассогласования. При больших смещениях изо¬
бражения приемник вырабатывает электрические сигналы, знак ко¬
торых соответствует знаку сигнала рассогласования.
Инверсионные фотодиоды — приемники с продольным эффек¬
том в р — л-1переходе, так же как и рассмотренные выше разрез¬
ные, позволяют получить координаты изображения излучателя без
дополнительного устройства в виде анализатора. Сущность про¬
дольного, или бокового, фотоэффекта заключается в том, что при
отклонении светового изображения от центра чувствительной пло¬
щадки фотодиода возникает дополнительная э. д. с., величина ко¬
торой пропорциональна отклонению, а знак соответствует знаку
рассогласования (направлению отклонения).
На рис. 2. 11,6 приведена схема работы инверсионного прием¬
ника и его пеленгационная характеристика.
Разность потенциалов с двух противоположных выводов, на¬
пример 1, 2, определяется по формуле
их = и{ — Uo = ki In d—JS = £' ф in fLLl , (2.44)
d — л: d — x
где t — полный ток, протекающий через приемник; d — половина
расстояния между выводами; х—смещение изображения относи¬
тельно электрической середины приемника; k — коэффициент, ха¬
рактеризующий омическое сопротивление приемника; k' — коэф-
55
фициепт, учитывающий величину k и КПД преобразования лучи¬
стой энергии в электрическую.
При малых отклонениях логарифмическую зависимость можно
заменить линейной:
Ux = k' Ф^±--. (2.45)
d — х
Координатно-чувствительный ФЭУ.
Фотокатод умножителя разделен на четыре сектора-квадранта,
как и у фотодиода, поэтому и линейная зона измерения также
определяется примерно половиной диаметра светового изобра¬
жения.
К.'дГдидЯ \ КиП'ЩШЫ
СтГй'ЧК^Я )
Диафрагма.
Ускоряющие электроды
Мишень
Отклоняющая | к шш
' Фокусирующая I
1 — ^ Управляющий электрод
и анод
к Тормозящий I 3 д
Ускоряющий \
'Электронный
умножитель
"Электронная пушка
Рис. 2.12. Схема диссектора
Рис. 2.13. Схема суперортикона
В отличие от разрезного фотодиода четырехсекторный фотоум¬
ножитель имеет значительно большую чувствительность и мень¬
шую постоянную времени, характерные для ФЭУ.
Большие возможности для измерения угловых координат излу¬
чателя посредством измерения координат его изображения непо¬
средственно в фокальной плоскости представляют приемники
излучения с поэлементным разложением изо¬
бражения. К таким приемникам относят диссектор, суперор-
тикон, видикон, сканистор. Для повышения чувствительности перед
приемником может быть установлен электронно-оптический усили¬
тель (преобразователь) света (ЭОП).
Диссектор (рис. 2. 12). Оптическое изображение наблюдаемого
пространства фокусируется на фотокатод диссектора. Под дейст¬
вием падающего света фотокатод испускает электроны, местная
плотность которых пропорциональна освещенности. Приложенное
к диссектору напряжение ускоряет движение электронов и направ¬
ляет их в сторону фотоумножителя, перед которым установлена
диафрагма диссектора. В плоскости диафрагмы с помощью фоку¬
сирующей катушки создается электронное изображение. Кадровая
и строчная катушки создают магнитные поля, перемещающие элек¬
тронное изображение в плоскости диафрагмы в двух взаимно пер¬
пендикулярных направлениях.
Так как электронный поток попадает на умножитель только при
прохождении через диафрагму, то на нагрузочном сопротивлении
■RH, соединенном с коллектором умножителя, возникают импульсы
.54
напряжения, длительность которых определяется временем пере¬
сечения электронных потоков отверстия диафрагмы.
Выходные импульсы могут быть поданы на видеоусилитель,
а затем на переключающее устройство, которое поочередно и син¬
хронно с разверткой подает сформированные импульсы на усили¬
тели следящей системы для отработки угла азимута и места.
Зависимости для определения отношения сигнала к шуму для
диссектора имеют тот же вид, что и для ФЭУ. Однако следует до¬
полнительно учитывать размер элемента разложения и время про¬
смотра. Размер элемента раз¬
ложения определяется увеличе- / ( фокусирующие
НИе.М ЭЛеКТрОННОЙ ОПТИКИ И Be- ! Катушки-j-
пткппиатшио
личиной отверстия диафрагмы
диссектора.
Телесный угол, стягиваю¬
щий один элемент разложения,
d
где ka — электронно-оптическое
увеличение; d — площадь от¬
верстия диафрагмы диссек¬
тора.
Количество элементов разложения определяется общей пло¬
щадью катода А и электронно-оптическим увеличением Aks/a.
Суперортикон (рис. 2. 13). В суперортиконе, как и в диссекторе,,
применяется электронная развертка изображения, однако протека¬
ющие при этом в них процессы существенно различны. Потенци¬
альный рельеф, соответствующий распределению освещенности на
фотокатоде, накапливается за время развертки всего кадра. Поэто¬
му время накопления заряда будет во много раз больше, чем время
считывания, а следовательно, порог чувствительности суперортико-
на будет больше, чем порог чувствительности диссектора.
Видикон (рис. 2. 14). Видикон представляет собой малогаба¬
ритную телевизионную передающую трубку, действие которой ос¬
новано на явлении фотопроводимости. На внутренней поверхности
входного окна видикона нанесен полупрозрачный электропроводя¬
щий слой, на котором имеется тонкий слой фотопроводника (ми¬
шень). Электронный луч, обегая мишень, заряжает ее до потенци¬
ала катода. При попадании на мишень изображения наблюдаемого-
пространства возникают местные различия в сопротивлении слоя,
обуславливаемые характером освещенности. Скорость разряда в от¬
дельных точках мишени обратно пропорциональна величине сопро¬
тивления в этих точках. При последующем сканировании электрон¬
ный луч подзаряжает мишень, компенсируя утечку. Зарядный ток,,
протекающий через нагрузочное сопротивление, создает на нем
напряжение сигнала, по которому можно судить о координатах на¬
вигационного светила. При соответствующем подборе фотопровод-
ника и охлаждении можно получить видикон для работы в инфра¬
Фотокатод
Hh
Сигнал С R
у. Третий электрод
J
Электроды,
. Второй
первый
Катод
Рис. 2.14. Схема видикона
55*
красном диапазоне. Необходимый минимум освещенности пример¬
но 1—0,1 лк. Ток сигнала порядка 1 мкА.
2.4
СЛЕЖЕНИЕ И ОПРЕДЕЛЕНИЕ КООРДИНАТ ПОЛОЖЕНИЯ
НАВИЕАЦИОННЫХ ОРИЕНТИРОВ (НО)
Слежению и определению координат положения НО предшест¬
вует обнаружение и выделение его на фоне различного рода помех.
При использовании оптических приборов космонавт решает эти
задачи, анализируя визуальную обстановку (изображение в картин¬
ной плоскости) на основании личного опыта. В случае же приме¬
нения оптико-электронного прибора его схема должна самостоя¬
тельно подвергнуть анализу принятое оптическое излучение, опре¬
делить наличие полезного сигнала-излучения НО и сформировать
электрические сигналы для системы управления КА.
Для этого в систему должны быть заложены определенные пра¬
вила методики обработки сигнала, обуславливающие построение
принципиальной схемы прибора и выбор его основных элементов
и устройств.
Анализ оптического сигнала и определение положения НО в по¬
ле зрения оптической системы достигается посредством различного
рода анализирующих устройств. Рассмотрим некоторые из спосо¬
бов и схем анализа оптического сигнала.
2.4. 1. АНАЛИЗАТОРЫ. ОСНОВАННЫЕ НА ЭЛЕКТРОННОМ
СКАНИРОВАНИИ ИЗОБРАЖЕНИЯ
При использовании в качестве приемника излучения телевизион¬
ной передающей трубки (диссектора, видикона или суперортико-
на) положение НО в поле зрения оптической системы определя¬
ется посредством сканирования электронным лучом изображения
в фокальной плоскости объектива, с которой совмещается фотока¬
тод трубки (рис. 2. 15).
Поток фотоэлектронов с -фотокатода, представляющий собой
электронное изображение НО и помехи, ускоряется в направлении
диафрагмы диссектора и попадает на фотоэлектронный умножи¬
тель.
С помощью отклоняющих катушек, питаемых током треуголь¬
ной формы частотой 400 Гц, электронное изображение разверты¬
вается поочередно по осям ОХ и OY, как это показано на
рис. 2. 15, б.
Так как электронный поток в процессе развертки попадает на
умножитель только при прохождении через диафрагму с малым от¬
верстием, то на нагрузочном сопротивлении, соединенном с коллек¬
тором умножителя, возникают импульсы напряжения, длитель¬
ность которых определяется временем пересечения электронных
потоков отверстия диафрагмы, а амплитуда — потоком от НО.
Выходные импульсы подаются на видеоусилитель, а затем на
переключающую схему, которая поочередно и синхронно с разверт¬
56
кой подает соответствующие импульсы к усилителям УССЛ. и УСС„
следящих систем для отработки сигналов рассогласования по осям
наведения и слежения. Если НО находится па оптической оси объ¬
ектива, то выходные импульсы одинаковой длительности следуют
попарно с частотой 800 Гц и сигнал рассогласования отсутствует.
При смещении изображения НО относительно оптической оси
парные импульсы имеют различную длительность (рис. 2.15,6).
.."ШКОЛЬНЫХ
плключапгль
-4о‘с
i s на-s'
Усилитель ОС
L
Видео¬
усилитель
в®
Переключающая
Генератор
схема
развертки
Горизоитальное отклонение
YL а)
Усилитель ОС
- 400Г,
Рис. 2.15. Схема следящей системы с телевизионным приемником
Вследствие этого в выходном сигнале возникает составляющая
основной частоты развертки 400 Гц, которая является сигналом
рассогласования, вызывающим вращение соответствующих двига¬
телей СДЛ. и СДУ следящих систем.
Возможны и другие схемы измерения положения НО в поле
зрения оптической системы с телевизионным приемником излуче¬
ния. Например, положение НО можно определить, фиксируя вели¬
чины отклоняющих напряжений либо токов строчной и кадровой
развертки в момент увеличения тока луча, так как и те и другие
являются электрическими аналогами координат НО по строке и
кадру соответственно.
С помощью телевизионных систем можно измерять координаты
нескольких НО, одновременно попадающих в поле зрения. Посред¬
ством амплитудного селектора можно осуществить выборку нуж¬
ного НО.
57
2. 4. 2. АМПЛИТУДНЫЕ АНАЛИЗАТОРЫ
Принцип действия амплитудных анализаторов основан на разделе¬
нии воспринимаемого потока излучения на составляющие так, что¬
бы их разность в плоскости наведения оказалась пропорциональ¬
ной угловому отклонению оптической оси прибора от направления
на центр излучателя. На рис. 2. 16 дана упрощенная конструктив¬
ная схема, поясняющая этот принцип.
Устройство состоит из объектива 1, светоделительного блока-
призмы 2 и двух приемников излучения 3 я 4, которые вместе с
делителями Ri и и нагрузочным сопротивлением RH образуют
дифференциальную измерительную схему. Излучение от пеленгуе¬
мого объекта фокусируется объективом 1 на ребро призмы 2.
Если оптическая ось совпадает с направлением на центр ориен¬
тира излучателя, то призма делит общий поток на два равных по¬
тока d>i и Ф2, каждый из которых направляется на соответствую¬
щий приемник излучения.
При идентичности характеристик приемников 3 и 4 и равенстве
потоков Ф[ и Ф2 в измерительной цепи через сопротивление на¬
грузки RH, как это показано на рис. 2. 16 стрелками, протекают
равные по величине, но противоположные по знаку токи А и i2.
В .результате падение напряжения на сопротивлении Ra равно
нулю
и, следовательно, AUH=Ui—U2 = 0.
Отклонению оптической оси от направления на ориентир сопут¬
ствует смещение его изображения с ребра призмы, при этом на
приемники 3 и 4 будут падать не равные по величине потоки
(ф^Фг). В результате напряжения на выходах приемников U\
и U2 так же не будут равны между собой и, следовательно,
Таким образом, в схемах с амплитудным анализатором угло¬
вые координаты положения излучателя измеряются электрическим
сигналом (напряжением или током), величина и знак которого оп-
Рис. 2.16. Схема ампли¬
тудного анализатора с
светоделительным блоком
^71 = T1®1st/ = Ti-| s„;
t/2 = Tl®2Sy = Tl-|-sc;;
At/H = T|SU(®1 —Ф2) = Г|5уДФ.
58
ределяется величиной и направлением смещения изображения’
навигационного ориентира относительно оптической оси.
В пределах линейной зоны характеристики приемника н при
равномерном распределении облученности
IJ = r\SuESзф,
где Е — облученность, создаваемая на чувствительной площадке
приемника; 5Эф — эффективная (облученная) площадь чувстви¬
тельной площадки приемника.
Положим, что изображение излучателя, проектируемого на реб¬
ро разделительной призмы, имеет прямоугольную форму. Такое
допущение, не нарушая общности принципа преобразования, су¬
щественно упрощает его математическое описание. Разность на¬
пряжений, снимаемых с приемников, в данном случае можно пред¬
ставить в виде
Д£/н = т1%£№-52), (2.46)
где Si и S2 — эффективные (облученные) площади чувствитель¬
ных площадок соответствующих приемников излучения.
Из рис. 2. 16, б следует:
S\ = a~--\-af tg Д=р; S2 = a~ — af tg Д?,
откуда kS = S1 — S2 = ‘2af' tg Дер. (2.47)
Подставляя значение AS в выражение (2.46), будем иметь
MJK = 2r]suEaf'tg (2.48)
Выходной сигнал в k раз должен превосходить шумовой
сигнал:
MJH = kVul. (2.49)
Решая уравнение (2.48) с учетом уравнения (2.49) относитель¬
но рассогласования Дер, получим формулу для определения порого¬
вой чувствительности схемы при малых отклонениях визирного лу¬
ча от направления на центр НО
k I ' Д и
Д?=-2щгг ' (2-5С)
Рассмотренная схема позволяет определить угловое рассогла¬
сование Аф в одной плоскости наведения. Для измерения рассогла¬
сования в двух плоскостях, т. е. построения двухкоординатной си¬
стемы, необходимо ввести дополнительно два приемника излучения,
расположенных в плоскости, развернутой на угол 90° относитель¬
но первой, и разделительную четырехгранную призму. Возможны
и другие схемы амплитудного анализа, о которых будет сказано
в последующих разделах.
При использовании координатно-чувствительных приемников
излучения (разрезных фотодиодов, четырехсекторных фотоумножи¬
59
телей и инверсионных приемников) роль анализатора выполняет
сам приемник. Это дает возможность существенно упростить кон¬
струкцию прибора. Однако следует учитывать ряд факторов, при¬
сущих амплитудным анализаторам.
Как указывалось выше, приемники излучения должны иметь
идентичные характеристики (крутизну преобразования).
У реальных приемников крутизна характеристики не одинаково
изменяется с течением времени и при изменении температуры окру¬
жающей среды. В результате при Ф1 = Ф2=1/2Ф на выходе ана¬
лизатора появляется электрический сигнал, величина которого
равна
Д£/д= 1/2Ф(5у1 — su2) или Дгд= 1/2Ф (sn — si2).
Напряжение Д£/д (или ток Д/д) создает дрейф начала отсчета,
что может привести к значительной погрешности в измерении угла
рассогласования.
К изменению начала отсчета приводит также и нестабильность
характеристик усилителя постоянного тока, т. е. дрейфа нуля уси¬
лителя. Способы устранения этих явлений показаны в разд. 4. 6.
В случае применения инверсионных приемников к смещению
начала отсчета приводит также изменение облученности на входе
системы.
Амплитудный анализатор вырабатывает сигнал, пропорциональ¬
ный воспринимаемому потоку, не различая, от какого источника
этот поток поступает на входной зрачок системы, что существенно
затрудняет выделение полезного сигнала на фоне внешней помехи.
Поэтому простейшие схемы с амплитудными анализаторами следу¬
ет использовать только в тех случаях, когда мощность, излучаемая
НО, значительно превосходит мощность излучения фоновой поме¬
хи. Эго условие почти всегда выполняется для оптико-электронных
приборов ориентации по Солнцу.
В случае же, когда амплитудная селекция не обеспечивает по¬
строения помехоустойчивой системы, необходимо вводить устрой¬
ство, осуществляющее пространственную угловую селекцию посред¬
ством модуляции лучистого потока модулятором с размером ячей¬
ки растра, соизмеримым с размерами изображения НО. В резуль¬
тате на выходе приемника излучения полезный сигнал будет пред¬
ставлять собой импульсную последовательность напряжения, по¬
зволяющую использовать бездрейфовый усилитель переменного
тока.
2. 4. 3. АНАЛИЗАТОРЫ-МОДУЛЯТОРЫ
Принцип действия анализаторов-модуляторов основан на разверт¬
ке поля зрения прибора в плоскости изображения или плоскости
предметов по заранее заданной программе. В процессе развертки
происходит модуляция (прерывание) лучистого потока, вследствие
чего оптический сигнал имеет вид последовательности импульсов.
Информация об угловых координатах воспроизводится за счет
функционального изменения какого-либо из параметров получае¬
60
мой импульсной последовательности, присущей применяемому ви¬
ду модуляции. При скважности импульсов
q — T% = 2, (^-51)
где т—длительность импульса; Т—периодичность следования
(период) импульсов.
Получаемая импульсная последовательность рассматривается
как непрерывная модуляция, первая синусоидальная гармоника ко¬
торой и используется для выделения координат НО. Это достига¬
ется посредством последующего синхронного детектирования элек¬
трического сигнала, вырабатываемого приемником излучения. При
скважности импульсов q>2 получаемая периодичность рассматри¬
вается как импульсная модуляция.
Для измерения угловых координат и преобразования их в элек¬
трические величины (ток или напряжение) приемник излучения
должен преобразовывать оптический сигнал в аналогичную после¬
довательность электрических импульсов с минимальными искаже¬
ниями.
С помощью анализаторов-модуляторов осуществляются различ¬
ные виды непрерывной модуляции потока: амплитудная (AM), фа¬
зовая (ФМ), частотная (ЧМ) и амплитудно-частотная (АЧМ).
Из импульсных видов модуляции наиболее часто используется
фазоимпулвсная — ФИМ, время-импульсная — ВИМ и кодовая —
КИМ.
Конструктивно анализаторы-модуляторы выполняются в виде
растров-обтюраторов и сканирующих устройств. Фактически любой
анализатор-модулятор осуществляет более сложную модуляцию по¬
тока излучения, чем это необходимо для решения основной задачи.
Причем основная модуляция является полезной для выделения сиг¬
нала, а дополнительная —паразиткой, затрудняющей эту задачу.
Поэтому выбор вида модуляции имеет большое значение для
создания высококачественной системы наведения и ориентации, ее
помехозащищенности и точности определения координат НО.
Рассмотрим некоторые из конструктивных схем модулирующих
анализаторов, используемых в космических приборах.
Анализаторы с одночастотной
амплитудной модуляцией
Простейшим видом амплитудной модуляции является модуляция,
выполненная по схеме, представленной на рис. 2. 17. Модуляция
потока производится растром Р в виде дискового обтюратора, од¬
на половина которого в рабочем диапазоне длин волн излучения
НО прозрачна, а другая — непрозрачна. Растр вращается с посто¬
янной угловой скоростью П, причем центр его вращения совпада¬
ет с осью оптической системы и чувствительной площадки прием¬
ника. Если направление на НО совпадает с направлением оптиче¬
ской оси, то центр изображения НО также совпадает с осью вра¬
щения растра и приемник облучается половиной потока, лучистая
энергия которого не модулируется.
61
П.рп отклонении НО от оптической оси центр его изображения
смещается на величину q, определяемую угловым рассогласовани¬
ем Лер, в результате чего происходит модуляция потока, падающе¬
го на приемник.
Модулированный поток представляет собой периодическую по¬
следовательность импульсов со скважностью Q — 2. При этом с до¬
статочной для практики эффективностью .модулированный поток
может быть представлен первой синусоидальной гармоникой, фаза
которой определяется положением изображения НО относительно
некоторого положения диска, принятого за начало отсчета. Анало-
Рис. 2.17. Схема анализатора с одно¬
частотной амплитудной модуляцией
ос
АИ
А
ПИ -<</
й
гон
ФД1
УМ
Ох
Wj-Q-Л.
Рис. 2.18. Схема пеленгатора с одно¬
частотной амплитудной модуляцией.
гичным образом изменяется и фаза первой гармоники электриче¬
ского сигнала (тока и напряжения) на выходе ПИ. Полученный
с выхода приемника электрический сигнал усиливается резонанс¬
ным усилителем У (рис. 2. 18).
Напряжение на выходе усилителя можно представить в виде
U {t) = ~ sin (^-ЬФ)> (2.52)
где ф— фаза первой гармоники; £2 = пл/30— угловая частота;
п — число оборотов диска-обтюратора в минуту.
Таким образом, фаза первой синусоидальной гармоники, выде¬
ляемой с помощью резонансного усилителя, определяется положе¬
нием НО относительно оптической оси пеленгатора.
Для разделения электрического сигнала на две составляющие,
соответствующие рассогласованиям по осям ОХ и О У, напряжение
усилителя подается на коммутатор, представляющий собой сдво¬
енный фазовый детектор, на который подается опорное напряже¬
ние. Это напряжение вырабатывается генератором (ГОН), кине¬
матически связанным с анализатором. Фаза опорного напряжения,
подаваемого на один из фазовых детекторов (например, ФД1),
сдвинута относительно фазы напряжения, подаваемого на детек¬
тор ФД2 на 90°, а частоты обоих опорных напряжений равны ча¬
стоте модуляции (частоте первой гармоники) сигнала. В резуль¬
тате корреляции средние (выпрямленные) напряжения на выходе
фазовых детекторов представляют собой угловую величину откло¬
нения НО (его изображения в фокальной плоскости) относительно
соответствующих осей ОХ и OY, а знак выходных напряжений по¬
62
казывает направление этих отклонений 1
Uх = CU sin s; Uy = CU cos s,
где С — коэффициент передачи; U — амплитуда напряжения, сни¬
маемого с ПИ.
На рис. 2. 19 представлены графики работы рассматриваемой
системы для трех значений угла
рассогласования Дер, которым соот¬
ветствуют углы фазирования ф = 0;
90 и 45°.
На рис. 2. 20 дана схема анали¬
затора с одночастотной амплитуд-
ной модуляцией, получаемой скани¬
рованием изображения. Сканирова¬
ние осуществляется контррефлекто¬
ром 1, нормаль которого N отклоне¬
на от оптической оси зеркального
объектива 3 на некоторый постоян¬
ный угол.
В картинной плоскости объекти¬
ва установлен растр в виде круговой
диафрагмы 2, ограничивающий раз¬
меры чувствительной площадки при¬
емника, установленного непосредст¬
венно за растром. При вращении
контррефлектора 1 с угловой скоро¬
стью Q нормаль описывает в кар¬
тинной плоскости окружность с диа¬
метром, равным половине диаметра
отверстия растра 2. Изображение
точечного излучателя, находящегося
на оптической оси объектива, пере¬
мещается по окружности края от¬
верстия растра симметрично относи¬
тельно края диафрагмы. В резуль¬
тате, как и в предыдущей схеме,
.приемник облучается постоянным потоком, примерно равным по¬
ловине потока излучателя. При его смещении с оптической оси на
угол рассогласования Д<р изображение НО перемещается по кру¬
говой траектории, центр которой смещен относительно центра диа¬
фрагмы-растра, и приемник облучается только при прохождении
изображения по дуге абв. В результате на выходе приемника по¬
является периодическая последовательность электрических импуль¬
сов. Эта последовательность при малых углах рассогласования
имеет скважность, равную 2, и следовательно, выходное напряже¬
ние, как и в .первой схеме, характеризуется напряжением первой
1 Выходное напряжение пропорционально углу рассогласования только в
пределах смещения, равного половине величины изображения НО, и при усло¬
вии постоянства облученности зрачка входа системы.
X 2Х ЗХ
f)
Рис. 2.19. Диаграмма формирования сиг-
нала рассогласования
63
синусоидальной гармоники. Управляющие сигналы по двум осям
координат выделяются фазовым детектированием. С увеличением
угла рассогласования уменьшается длительность импульса т, а сле¬
довательно, увеличивается скважность q, и непрерывная модуляция
переходит в импульсную.
Рис. 2.20. Схема анализатора со сканированием в плоскости изображения
Поэтому в пеленгаторах со сканированием, в отличие от пелен¬
гаторов с вращающимся растром, требуются резонансные усили¬
тели с более широкой полосой пропускания, что несколько ухуд¬
шает фильтрацию помех.
На рис. 2. 21 приведена схема анализатора с одночастотной мо¬
дуляцией, получаемой посредством сканирования в плоскости объ¬
ектов, которая может быть использована для определения направ-
метов
ления на энергетический центр протяженного источника излучения.
При отсутствии рассогласования мгновенное поле зрения объекти¬
ва посредством вращения зеркала 1 описывает круговую траекто¬
рию, сканируя край источника излучения, и на вход прибора по¬
ступает половина нсмодулированного потока, величина которого
определяется телесным углом мгновенного поля зрения 2а.
При малых рассогласованиях лучистый поток, поступающий на
вход прибора, будет модулироваться со скважностью, равной двум.
Следовательно, для выявления рассогласования можно воспользо¬
ваться ранее рассмотренной схемой для одночастотной амплитуд¬
64
ной модуляции (см. рис. 2.18). Если зеркалу одновременно при¬
дать вместе с круговым вращением колебательное движение, то
получим двухчастотную амплитудную модуляцию.
Анализаторы с двухчастотной
амплитудной модуляцией
Двухчастотная модуляция достигается посредством двойной обтю¬
рации (прерывания) лучистого потока, в результате чего на выхо¬
де приемника возникает последовательная совокупность двух ря¬
дов импульсов (рис. 2. 22, а).
Частота повторений импульсов делается максимально возмож¬
ной и ограничивается только инерционностью приемника и конст-
Рис. 2.22. Схема анализа¬
тора изображения с двух-
ч астотной ампл итудной
модуляцией
рукцией модулирующего устройства. Эта частота, по аналогии с
радиолокационными методами, называется несущей.
Частота повторения последовательности рядов импульсов назы¬
вается частотой управления. Частота управления выбирается из
соображений получения достаточного объема информации и обес¬
печения требуемого для управления объектом быстродействия си¬
стемы в целом.
Наличие несущей частоты повышает помехоустойчивую работу
пеленгатора при наличии неравномерного фона с размерами излу¬
чателя, существенно превышающими угловые размеры НО. Кроме
того, наличие несущей частоты с амплитудой сигналов, не завися¬
щей от величины угла рассогласования и зависящей только от
облученности на входе системы, дает дополнительную информацию,
которая может быть использована для введения автоматического
регулирования усиления системы.
Конструктивно двойная модуляция может быть получена с по¬
мощью анализатора с вращающимся растром при неподвижном
изображении излучателя или перемещением его изображения по
неподвижному растру.
Если выполнить модулирующее устройство таким образом, что¬
бы скважность импульсов и рядов импульсов была равна двум, то
модуляцию как по несущей частоте, так и по частоте управления
можно считать непрерывной. Иначе говоря, получаемый сложный
сигнал можно рассматривать как синусоидальный сигнал несущей
частоты, модулированный синусоидальным же сигналом частоты
И.ЮО/ЫЖГ/П/С If
цели
3 2572
65
управления. Вид этого сигнала на выходе узкополосного усилителя
можно описать уравнением
U [1 -j-т cos (Йг? + Ф)] cois W, (2. 53)
где т = Д£У/£/ц— глубина модуляции, т. е. степень воздействия сиг¬
нала управления на амплитуду несущей частоты; U (t) —-мгновен¬
ное значение амплитуды сложного сигнала; U„ — амплитуда несу¬
щей частоты; AU — амплитуда частоты управления; £2 — угловая
частота управления; со — угловая частота несущей; ф— фаза сиг¬
нала частоты управления.
Раскрыв скобки, выражение (2. 53) можно привести к виду
U (t) = UH cos -|—^— co-s [(со — £2) / -{-ф] -)- cos [(“>-)-2) ^ + Ф]•
(2. 54)
Из выражения (2.54) следует, что спектр рассматриваемого
сигнала’ состоит из трех
спектральных линий (рис.
2.22, б): спектральной линии
несущей частоты со и двух
баковых спектральных ли¬
ний с частотами со — £2 и
со + £2.
Как видно из рисунка,
спектр сложного сигнала,
Рис. 2.23. Схема амплитудного детектора получаемого ДВОЙНОЙ ЭМПЛИ-
тудной модуляцией, не со¬
держит спектральных линий частоты управления.
Информация о положении излучателя содержится в двух боко¬
вых линиях-спутниках, имеющих частоты со — £2 и со + £2. Следова¬
тельно, для определения полярных координат НО необходимо по¬
давить несущую, не содержащую информации частоту, и выделить
управляющую частоту £2. Эта задача сводится к преобразованию
высокочастотного спектра (несущая с двумя спутниками) в низко¬
частотные колебания управляющей частоты. Такое преобразование
достигается посредством детектирования.
Амплитудпо-модулированное напряжение подается на вход цепи
с нелинейным элементом — детектором, обладающим ломаной ха¬
рактеристикой (рис. 2.23). Ток в цепи детектора представляет со¬
бой импульсы высокой частоты с огибающей, воспроизводящей
форму модулированных колебаний управляющей частоты.
На выходе детектора имеются импульсы несущей частоты и ее
гармоник. Кроме того, имеется постоянная составляющая и появля¬
ются низкочастотные составляющие. Для выделения низкочастот¬
ной составляющей нужно отфильтоовать высокие частоты и посто¬
янную составляющую. Постоянная составляющая не проходит че¬
рез разделительные емкости и, следовательно, не попадает в по¬
следующие усилительные каскады. Напряжение управляющей
частоты выделяется с помощью фильтрующего звена RC, вклю¬
чаемого в цепь детектора. Для этого необходимо, чтобы сопротив¬
ление R было много больше емкостного сопротивления для высо¬
кой (несущей) частоты и много меньше емкостного сопротивления
для низкой частоты. Это условие можно записать в виде нера¬
венства
или Т ш <Д тф <<( 7’2,
(2. 55)
(2.56)
Рис. 2.24. Схема пеленгатора
с двухчастотной амплитудной
модуляцией
где 7’ш=2я/со— период несущей частоты; 7’2 = 2я/Q — период
управляющей частоты; Тф = RC— постоянная времени фильтрую¬
щего звена. Получаемое на выходе фильтра детектора напряже¬
ние описывается выражением
U{t) = UQ sin (S^-j-ф), (2.57)
где Uа—амплитуда управляющего сигнала; ф— фаза его пер¬
вой гармоники.
Таким образом, как и в случае одночастотной амплитудной
модуляции, на выходе детектора получаем напряжение, фаза кото¬
рого будет определяться положением НО (углом фазирования изо¬
бражения) относительно оптической оси пеленгатора. Следователь¬
но, дальнейшее преобразование напряжения для выделения состав¬
ляющих угла рассогласования по осям ОХ и OY можно осущест¬
вить по ранее рассмотренной схеме фазового детектирования.
Структурная схема пеленгатора с двухчастотной амплитудной
модуляцией, представленная на рис. 2. 24, включает дополнитель¬
ные элементы: усилитель несущей частоты УНЧ, амплитудный де¬
тектор АД н усилитель управляющей частоты УУЧ.
Анализаторы изображения
с частотной модуляцией
Как и в ранее рассмотренных схемах, результатом воздействия
анализатора на лучистый поток является последовательность им¬
пульсов, распределение и длительность которых функционально
зависят от угловых координат излучателя.
При определенных соотношениях параметров такой сигнал
можно рассматривать как непрерывную частотную модуляцию не¬
сущей частоты модулирующей функцией вида
2MW = A2sin(a^ + JiH), (2.58)
3*
67
где AQ — девиация частоты, выражающая изменение потока под
воздействием (модуляцией) управляющей функции; фн — началь¬
ная фаза управляющих колебаний; QM — угловая частота модули¬
рующей функции.
Для обеспечения линейного закона управления космическим
аппаратом при ориентации девиация управляющей частоты долж¬
на быть пропорциональна углу рассогласования
Д2 = сД<р,
где с — коэффициент пропорциональности.
Текущая модулированная частота равна
ш(^) = со0-|-Д2 sin (2м^ + ф). (2.59)
Уравнение полных колебаний лучистого потока, модулирован¬
ных переменной управляющей частотой, выражается формулой
®W='y{1 + sin (^+-^[со5ф-со5(2мг+ф)]]}, (2.60)
где AQ/£2M = /n_f — коэффициент частотной модуляции, являющийся
основной частотной характеристикой управляющей функции.
Для обеспечения фильтрации частот в усилительном устройстве
несущая частота м0 должна быть на порядок выше величины управ¬
ляющей частоты QM-
При частотной модуляции лучистого потока электрический сиг¬
нал, поступающий на вход усилители несущей частоты с приемни¬
ка лучистой энергии, имеет вид
U4N[ = U0cos [u>J-\-mf sin (2Д-|~6)], (2. 61)
где Uо — амплитуда напряжения несущей частоты.
Спектр частотио-модулированных колебаний содержит одну ли¬
нию несущей частоты мо и большое число симметрично располо¬
женных относительно нее боковых линий. При изменении ампли¬
туды и частоты модулирующей функции меняется tnf и соответст¬
венно видоизменяется спектр частотного сигнала. Чем больше т.),
тем больше составляющих содержит спектр, причем изменяются
как амплитуды боковых составляющих, так и несущей. Ширина
спектра ЧМ в inf раз 'больше, чем ширина спектра AM.
При отношении сигнал/шум, равном двум, оптимальный индекс
модулирования т/=1,8.
На рис. 2. 25, а показан один из применяемых анализаторов для
частотной модуляции.
Анализатор представляет собой растр в виде диска с череду¬
ющимися прозрачными и непрозрачными секторами, устанавливае¬
мый непосредственно перед приемником лучистой энергии. Если
излучатель находится на оптической оси (угол рассогласования
равен пулю), то его изображение описывает окружность, центр ко¬
торой совпадает с центром растра, а радиус равен половине радиу¬
са растра. В этом случае лучистый поток модулируется в виде
импульсов постоянной длительности и периодичности, т. е. оптиче¬
ский сигнал представляет собой импульсы несущей частоты,
68
не модулированные частотой управления (рис. 2.25,6). При нали¬
чии угла рассогласования (например, по оси OY центр окружности,
описываемой изображением излучателя, сместится относительно
центра растра и распределение импульсов по времени и их дли¬
тельность будут переменными величинами (рис. 2. 25, в). Для ма-
ИзоЬражсн..,
, излучателя
н /
Ль
п п п п п п
6)
пппп
Рис. 2.25. Частотный анализатор-модулятор
лых углов рассогласования полученный сигнал можно рассматри-
вать как частотно-модулнрованные колебания, мгновенная частота
которых определяется выражением
со (/) = -ДД т
30
1 — cos (йг!-)-ф) , (2.62)
г
я п
где т = ш — угловая частота несущих немодулированных коле-
30
баний; п — число оборотов изображения излучателя (контррефлек¬
тора) в минуту; т — число прозрачных секторов; Q—f' tgA<p —
смещение окружности сканирования, соответствующее сигналу рас-
е
согласования; г — радиус окружности сканирования;——девиа¬
ция частоты, соответствующая данному угловому рассогласованию.
Для формирования управляющих сигналов по осям ОХ и OY
применяется структурная схема, представленная на рис. 2. 26. Ча-
стотно-модулированные импульсы лучистого, потока преобразовы¬
ваются приемником излучения в электрический частотно-модули-
рованный сигнал, который усиливается резонансным усилителем
и затем поступает на вход дискриминатора Д.
Дискриминатор (рис. 2.27), основой которого является резо¬
нансный контур, расстроенный относительно несущей частоты, и
амплитудный детектор преобразовывают чаототно-модулированный
69
сигнал в амплитудно-модулированпое напряжение. Это напряже¬
ние после усиления усилителем УУЧ подается на вход фазовых де¬
текторов, с которых, как и в ранее рассмотренных схемах, получа¬
ют напряжения постоянного тока, пропорциональные рассогласо¬
ванию по осям ОХ и OY соответственно.
Импульсная оптическая модуляция в анализаторах характеризует¬
ся повышенной скважностью (Q^>2) импульсов. Промежуток вре¬
мени между импульсом от излучателя и опорным импульсом (на¬
чало отсчета) пропорционален измеряемой координате НО. Иначе
говоря, объектом модуляции является временное положение им¬
пульсов от излучателя относительно опорных импульсов немоду-
лированной последовательности. Как и непрерывные виды модуля¬
ции, импульсная модуляция может быть получена с помощью ана¬
лизаторов изображения с вращающимся растром или сканиро¬
ванием.
В качестве примера рассмотрим импульсную модуляцию, полу¬
чаемую с помощью анализатора, выполненного в виде вращающе¬
гося диска с прозрачными щелями (рис. 2.28).
Оптический сигнал появляется всякий раз, когда при вращении
диска щель совпадает с. изображением излучателя. В результате
на выходе анализатора появляется периодическая последователь¬
ность импульсов примерно постоянной длительности. Такую же пе¬
риодическую последовательность имеют и импульсы напряжения
в цепи приемника лучистой энергии. Импульсы напряжения с при¬
емника усиливаются импульсным усилителем УФ. С модулирую¬
щим диском кинематически связывают генератор опорных импуль¬
сов, например, кулачок, управляющий контактным прерывателем
К. Импульсы усилителя и генератора подаются в блок сравнения,,
где происходит сравнение их и вырабатывается новый импульс,,
продолжительность которого пропорциональна разности фаз (вре¬
менного положения) между импульсом от излучателя и опорным
импульсом. На рис. 2. 28, б приведены временные диаграммы, пояс¬
няющие описанный способ измерения углового рассогла¬
сования.
На точность измерения координат при импульсных способах
модуляции существенное влияние оказывает не только временное
Рис. 2.27. Схема фазового дискриминатора
Рис. 2.28. Схема импульсного анализа¬
тора
Импульсная модуляция
70
положение, но и форма импульсов. Особенно важное значение име-
•ет крутизна переднего фронта.
На рис. 2. 29 приведена упрощенная структурная схема пелен¬
гатора с импульсной модуляцией. Более подробные схемы будут
.приведены при рассмотрении ориентации по центру планет и по
.звездам (гл. 4 и 5).
Рис. 2.29. Структурная схема импульсного пе¬
ленгатора
Помехоустойчивость при импульсной модуляции достигается в
.основном за счет селекции электрического импульса. Наиболее ши¬
роко используется селекция импульсов по амплитуде и по длитель¬
ности. В общем случае селекция по амплитуде позволяет выделить
импульсы, амплитуда которых лежит в заданных пределах. Такая
селекция осуществляется с помо¬
щью двухстороннего порогового
ограничителя, схема и временные
диаграммы которого представле¬
ны на рис. 2. 30.
Входные импульсы U с усили¬
теля формирователя УФ подают¬
ся на логическую схему Л С —
(два двухсторонних ограничителя
1 и 2). При этом уровень ограни¬
чителя первого выбирается рав¬
ным U,, 1 и U0, а второго—U0 и Un2- Уровень U0 выбирается по¬
средине между заданными пределами Un\ и Un2. При этом напря¬
жения Ui и U2 на выходе ограничителей оказываются в противо¬
положной полярности друг относительно друга. Если амплитуда
входного импульса превышает уровень UnU то импульсы И\ и U2
имеют равные амплитуды и суммарное напряжение равно нулю.
На рис. 2. 30, б этому случаю соответствует импульс 1. Если же
амплитуда входных импульсов оказывается меньше Un\, но боль¬
шей Ufl2 (импульсы 2 и 3), то амплитуды импульсов U2 оказыва¬
ются больше, чем импульсов Uu а суммарные импульсы Ивых име¬
ют амплитуду, отличную от нуля. Таким образом, на выходе появ¬
ляются лишь импульсы (2 и 3), а амплитуда которых лежит между
JJ п\ и U г. 2.
Рассмотренный способ селекции может быть использован для
селекции НО по яркости, например, при астроориентации по звез¬
дам. Селекция по длительности позволяет выделить из серии им-
Unl
Vo
Un,
П П П п
Jti
(ТТТГ
а)
| u U
5}
Рис. 2.30. Схема двухстороннего порогового
ограничителя по амплитуде
71
пульсов, поступающих от излучателя и помех, импульс, длитель¬
ность которого равна заданной величине.
Например, используя растр в виде узкой щели, ширина кото¬
рой соизмерима с размером изображения излучателя, длительность
импульсов можно определить по формуле
где С—коэффициент пропорциональности; h — ширина щели; d —
диаметр изображения цели; q — радиус окружности сканирования
в плоскости анализа изображения.
Из формулы (2.63) следует, что длительность импульса про¬
порциональна угловому размеру изображения излучателя. Следо¬
вательно, неравномерности фоновых помех будут создавать им¬
пульсы, имеющие большую или меньшую длительность, чем излу¬
чатель.
Принципиальная схема селекции по длительности и график, по¬
ясняющий ее работу, приведены на рис. 2. 31.
Схема селекции включает два каскада Л1 и Л2 и короткозамк¬
нутую линию задержки Л3. Селектируемые импульсы напряже¬
ния U имеют положительную полярность. На аноде £/аi эти им¬
пульсы воспроизводятся с отрицательной полярностью, после от¬
ражения от конца линии лЗ полярность импульсов вновь становится
положительной, поскольку линия на конце замкнута накоротко.
Время двойного пробега t-t должно быть равно заданной длитель¬
ности в рассматриваемом примере длительности 2-го импульса.
Следовательно, если длительность селектируемого импульса т=
=Т2<^з, то между соседними положительными перепадами анод¬
ного напряжения Uа1 имеется интервал времени t3— хг.
При т=Т2=^3 фронт отраженного импульса совпадает в нача¬
ле линии со срезом основного импульса. Если же т=Тз>^з, то еще
до окончания прямого появляется отраженный импульс. Оба им¬
пульса в течение времени т3 — t3 компенсируют друг друга, после
чего остается только отраженный импульс. С помощью цепочки
RcCс осуществляется дифференцирование получаемых импульсов.
Амплитуда любого остроконечного импульса, снимаемого с Rc н
(2. 63),
Рис. 2.31. Схема селекции по длительности импульса
72
подводимого к сетке Л2, недостаточна для отпирания лампы, если
.дифференцированию подвергается либо только прямой, либо толь¬
ко отраженный импульс. Когда же т=тг=Лз п перепад напряже¬
ния Uц] удваивается, происходит удвоение амплитуды продиффе¬
ренцированного импульса и лампа Л2 открывается. На выходе се¬
лектора появляется импульс напряжения U2.
Очевидно, описываемая селекция электрического импульса по
длительности сходна с пространственной угловой селекцией, выпол¬
няемой в оптической части пеленгатора с непрерывной модуляцией.
Возможны и другие способы селекции, как, например, кодирование
.по времени, стробирование и т. п.
Импульсно-кодовая модуляция
Такая модуляция для наведения и слежения в одной плоскости
может быть выполнена с помощью jV-гранной призмы (или зерка¬
ла), вращающейся перед объективом прибора. При этом точечное
.изображение звезды перемещает¬
ся относительно кодовой маски,
помещаемой в фокальной плоско¬
сти объектива (рис. 2.32). Пере¬
мещаясь по маске, поток от звез¬
ды кодируется двоичным кодом
или кодом Грея, этот код и харак¬
теризует угловое положение звез¬
ды. Система выдает информацию
в виде серии импульсов.
Для слежения и измерения в двух плоскостях требуется вторая
аналогичная система. Система не позволяет осуществлять селек¬
цию нескольких близких по яркости звезд, попадающих в поле зре¬
ния, и осуществлять слежение за световым центром тяжести излу¬
чателей.
Двухкоординатный фазово-импульсный
модулятор
Модулятор помещается в фокальной плоскости объектива и мо¬
жет быть выполнен в виде диска, на поверхность которого наносит¬
ся маска. Маска представляет собой прозрачный кулачок, профиль
которого описывается спиралью Архимеда (рис. 2. 33).
При вращении диска с постоянной угловой скоростью Q, в мо¬
мент прохождения изображения звезды по прозрачной части ку¬
лачка, на выходе приемника излучения появляются электрические
импульсы. Длительность этих импульсов пропорциональна ради¬
альному смещению изображения звезды.
Если зафиксировать начальное положение кулачка (радиальной
образующей), то можно определить угол между исходным поло¬
жением кулачка и изображением звезды. Начальное положение
жулачка-модулятора фиксируется опорным импульсом. Длитель¬
ность импульса от звезды измеряется угловым расстоянием между
3 OS
К
-—тп— г
—г—-н
V/
Кододая маска
Рис. 2.32. Схема пеленгатора с импульсно¬
кодовой модуляцией
73
передним и задним фронтами этого импульса, получаемым диффе¬
ренцированием (рис. 2.33). Таким образом, рассматриваемый мо¬
дулятор-анализатор позволяет построить схему для определения
угла азимута А и угла места h изображения звезды.
Для кулачка, выполненного по спирали Архимеда, азимут гг
угол места описываются выражениями
А = Фо1 =(0^oi>
h = f tg <р=аш (^ —^),
где ф0| — угол поворота модулятора от исходного положения да
момента пересечения изображе¬
ния звезды передней образую¬
щей кулачка; /01 — время момен¬
та пересечения изображения звез¬
ды, отсчитываемое от опорного
импульса; /' — фокусное расстоя¬
ние объектива; ср — угол визиро¬
вания на звезду; а — шаг спирали
Архимеда; t\ — момент первого
пересечения изображения звезды;
t2— момент второго пересечения
изображения звезды.
При постоянной угловой ско¬
рости вращения модулятора углы
азимута и места можно отсчитывать непосредственно по штриховой
или кодовой шкале, нанесенной по периферии диска модулятора.
Такая схема измерения рассмотрена в гл. 6.
Рассмотренные виды модуляции могут быть осуществлены не
только сканированием в плоскости изображения, но и в плоскости
расположения источника излучения (предметов).
В этом случае сканирование производится перемещением мало¬
го мгновенного поля зрения посредством отклоняющей системы*
устанавливаемой перед объективом прибора.
В качестве отклоняющих устройств чаще всего используются
призмы и оптические клинья. При этом отклоняющая система долж¬
на вырабатывать импульсную последовательность прерывания по¬
тока, соответствующую выбранному способу модуляции.
Обычно к сканированию в плоскости излучателя прибегают при
слежении за протяженными излучателями, например планетами.
Выбор метода модуляции производится на основании анализа
отношения сигнала к шуму и обеспечения помехозащищенности,
2.5
ВЫБОР И СОГЛАСОВАНИЕ ОСНОВНЫХ ЗВЕНЬЕВ
ПРИБОРА
Оптико-электронные приборы для астроориентации должны иметь
высокую чувствительность, обеспечивающую обнаружение и захват
выбранного для ориентации светила, высокую точность измерения
Рис. 2.33. Двухкоординатный фазово-им¬
пульсный модулятор
7 А
и выдачи угловых координат в систему управления, а также обес¬
печивать надежность и работоспособность в условиях наличия
помех.
Требования к точности этих приборов можно характеризовать
следующими вели ч и н а м и:
— средней квадратичной точностью:
— солнечных датчиков .... не менее 0,1—0,001°
— построителей местной вертикали . . 0,2—0,01°
— датчиков ориентации по планетам . . 0,2—0,01°
— датчиков звездной ориентации . . . 0,001—0,0001°
Первые цифры примерно соответствуют получаемым в настоя¬
щее время, вторые отражают перспективные требования, предъяв¬
ляемые к вновь разрабатываемым приборам [27].
Приведенные значения точностных характеристик могут быть
достигнуты только при условии оптимального приема и обработки
первичной и вторичной информации.
Рассмотрим общие соображения по оптимальному приему сиг¬
нала в оптической части системы. Пороговая чувствительность оп¬
тико-электронного прибора, которая в конечном счете определяет
точность измерения при оптимальной обработке сигнала в элек¬
тронном устройстве, может быть представлена выражением
где Ф0 — удельная пороговая чувствительность приемника; цо —
интегральный коэффициент пропускания оптической системы; А =
— — относительное отверстие; Цм — интегральный коэффи¬
циент пропускания модулятора; р0(со) —частотная характеристика
оптимального фильтра; gb(co) — нормированная спектральная
плотность шума; р0 — угловая величина кружка рассеяния; k — от¬
ношение сигнал/шум на выходе оптимального фильтра, выбираемое
из условий заданной вероятности обнаружения.
Из выражения (2. 64) следует, что величина пороговой чувст¬
вительности при заданных характеристиках обнаружения и опти¬
мальной обработки зависит от характеристик оптической системы
-Dbx', f'\ г)0; т]м; Ро, удельной пороговой чувствительности Фо прием¬
ника, применяемого метода анализа изображения и метода селек¬
ции помех. В общем случае эти характеристики и параметры опре¬
деляются посредством геометрических расчетов и спектральных и
частотных методов анализа работы системы в целом.
В инженерной практике проектирование и расчет прибора начи¬
наются с выбора приемника лучистой энергии, параметры и харак¬
теристики которого принимаются в качестве исходных для выбора
характеристик оптической системы и электронного усилительно-
лреобразующего устройства.
113, 30]
оЧ (2.64)
75
Спектральная и интегральная чувствительность, пороговая чув¬
ствительность приемника и геометрические размеры чувствительной
площадки должны быть согласованы с характеристиками излучате¬
ля и параметрами оптической системы.
Постоянная времени, внутреннее сопротивление и шумы прием¬
ника, а также применяемый метод анализа изображения, опреде¬
ляют схему и основные параметры электронного усилителъно-пре-
образующего устройства: входное сопротивление, максимальную-
частоту модуляции, полосу пропускания и другие характеристики.
Светоэнергетические и оптические расчеты будут наиболее про¬
стыми, если оптические среды, через которые проходит лучистый
поток, не изменяют его спектрального состава, а чувствительность
приемника определяется по источнику этого излучения, или же,
если коэффициент пропускания сред и чувствительность приемника
заранее определены для данного спектрального состава излуча¬
теля.
Для космических приборов, за исключением приборов, опреде¬
ляющих момент затемнения звезды, коэффициент пропускания сре¬
ды до входного зрачка можно принимать равным единице.
Рассмотрим одну из возможных методик расчета.
Необходимая освещенность может быть представлена выраже¬
нием
4Ф'
E = L (о = — ,
Я°вхтс
где L — яркость излучателя; со — телесный угол системы; тс — ин¬
тегральный коэффициент пропускания оптической среды; Фп/ =
= й,/г2А!3/г4Г|мФо — приведенная ко входу чувствительность прибора;
k\kzk$kt — коэффициенты, характеризующие согласование прием¬
ника.
Коэффициент k\ определяет соответствие спектральной характе¬
ристики чувствительности приемника s\ спектру излучения и
спектральному пропусканию оптических элементов и определяется:
из выражения
I MXisxd\ (
Xj лх
где \ —спектральная интенсивность плотности излучения источ¬
ника, для которого дана величина паспортной чувствительности
ПЛЭ; М\2 — спектральная интенсивность плотности излучения.
Пределы интегрирования определяются спектральными характе¬
ристиками приемника. Величина k2 учитывает влияние на порого¬
вую чувствительность полосы пропускания системы. Например, для.
белого шума эта величина может быть определена по формуле.
ь _ . / д/
I/ д f
I -*Уизм
76
где А/ — полоса пропускания усилителя; Л/изм—'полоса, при кото¬
рой производились измерения паспортной чувствительности ПЛЭ.
Интегральная чувствительность пропорциональна корню квад¬
ратному ,из площади чувствительного слоя приемника 1 ■ qn, а шум
изменяется пропорционально этой площади. Следовательно, порог
чувствительности Фп' при изменении q„ в п раз изменяется в
Величина /г4 учитывает требуемое соотношение сигнал/шум,
обеспечивающее надежное обнаружение и выделение сигнала на
фоне помехи.
Анализатор изображения представляет собой пространствен¬
ный фильтр, позволяющий выделить полезный сигнал на фоне по¬
мех и определить координаты излучателя. Следовательно, отноше¬
ние спгнал/шум зависит от свойств анализатора. Качество анализа¬
тора изображения оценивается его коэффициентом полезного дейст¬
вия г)м, показывающим, как изменяется величина полезного пото¬
ка на его выходе.
Величину КПД анализатора изображения можно представить
выражением
где rii — величина, характеризующая степень уменьшения потока
излучения, упавшего на анализатор, в процессе формирования сиг¬
нала несущих колебаний методом прерывания потока; ti2 — вели¬
чина эффективного потока, который можно использовать для фор¬
мирования усиленных несущих колебаний в электронном канале.
При равенстве площадей прозрачных и непрозрачных элементов
модулятора, что необходимо для обеспечения полной глубины мо¬
дуляции, величина г)i = 0,5. Величина цг обычно не превышает 0,7
от максимальной амплитуды.
В большинстве случаев для формирования управляющих сиг¬
налов используются только колебания управляющей частоты, не¬
сущие информацию о координатах излучателя, а напряжение, соот¬
ветствующее несущим колебаниям, подавляется детектором. Поэто¬
му в КПД анализатора входит коэффициент ti3, зависящий от вида
модуляции. Например, для двухчастотной амплитудной модуляции
Т1з=0,35, для частотной модуляции г|3=0,82. Следовательно, для
двухчастотной амплитудной и частотной модуляции величина
соответственно равна 0,1225 и 0,287.
Диаметр входного зрачка системы можно определить по фор¬
муле
Фокусное расстояние оптической системы в плоскости анализа
можно определить по формуле
где k — коэффициент, определяющий величину смещения изобра¬
жения, при котором, в зависимости от применяемого способа ана-
п = у qKJqu раза.
f' = kd'j Д<р,
77
лиза изображения, амплитуда разности потоков либо глубина мо¬
дуляции превосходит шумовой сигнал; d — диаметр изображения
излучателя; Дф— угловая чувствительность в радианах.
Величина коэффициента k должна выбираться с учетом инст¬
рументальных погрешностей, аберрационных характеристик опти¬
ческой системы и распределения энергии в кружке, .изображающем
излучатель.
Для амплитудных анализаторов в случае малых рассогласо¬
ваний
. ДФ я г..
Дер = !L
т Ф 4/'
где ги — радиус кружка, изображающего излучатель.
Для анализаторов-модуляторов при малых значениях Дф и при
Q>r„
Д ф ~ ф 2QA1 t
я ги
где Дф — фазовый угол, соответствующий рассогласованию; q —
расстояние от центра модулятора до центра изображения излуча¬
теля.
Сопротивление приемника должно быть согласовано с входным
сопротивлением усилителя. Причем шумы, порождаемые усилите¬
лем, должны быть не более шумов приемника. Например, для фо¬
тодиода оптимальное нагрузочное сопротивление
^н.онт — 0,88 ,
ф
rr kT . ‘ф I 1 \
где ихх = In ; 1-1 ;
q V Д /
k — постоянная Больцмана; q—1,6-10-19 — заряд электронов: Т —
температура чувствительной площадки ПИ; Iф — фототок коротко¬
го замыкания, пропорциональный облученности приемника; /т —
тепловой ток ПИ.
Для фотосопротивления и полупроводниковых болометров со¬
противление нагрузки
где Re — сопротивление фотослоя для заданной облученности.
Оптимальную полосу пропускания можно определить по фор¬
муле
ДДШ1Т=1,37ДВХ,
где tux — длительность входного импульса.
Для обнаружения излучателя желательная полоса пропускания
Д^обн----Д^1 опт, для слежения Д/дл---- (2 . . . 5) Д/щпт*
При выполнении условий согласования дальнейший расчет элек¬
тронной схемы производится по известной методике [17, 30] с уче¬
том специфических требований, предъявляемых к электронному ка¬
налу конкретного оптико-электронного прибора.
ГЛАВА 3
ПОСТРОИТЕЛИ МЕСТНОЙ ВЕРТИКАЛИ
3.1
НАЗНАЧЕНИЕ И ПРИНЦИП ДЕЙСТВИЯ
Оптические приборы, предназначенные для автономного определе¬
ния местной вертикали относительно планет, вблизи которых про¬
исходит полет КА, получили название построителей местной вер¬
тикали— ПМВ (местная вертикаль — направление, по которому
проходит линия, соединяющая центр масс летательного аппарата
с центром масс небесного тела).
Ориентация относительно местной вертикали позволяет стаби¬
лизировать летательный аппарат по крену и тангажу, построить
орбитальную систему координат и решить ряд других задач, свя¬
занных с использованием и управлением космических аппаратов и
бортовой аппаратуры.
Общие принципы определения местной вертикали базируются
на измерении угла между направлением на край диска планеты —
горизонт, определяемый как граница космос —планета, и осями
аппарата в различных точках горизонта. Для планеты, имеющей
правильную сферическую форму, направление местной вертикали
будет биссектрисой двухгранных углов визирования двух пар диа¬
метрально противоположных точек горизонта А — В и С — D
(рис. 3. 1).
Отклонение оси рыскания Z связанной системы координат КА
OXYZ от направления местной вертикали, которое будем называть
углом рассогласования Аф, можно определить по формулам
ч»! — 4*2 . ,0 П
ДсРт= 2 ’ { '
cPi' —
Д?К=А^-, (3.2)
где Афт и Афк — углы рассогласования в плоскости тангажа и кре¬
на; ф!т, ф2т и ф!к, ф2к — углы визирования горизонта в плоскости
тангажа и крена соответственно.
Визирование горизонта можно производить, используя различ¬
ные части оптического спектра излучения планеты (ультрафиоле¬
товую, видимую или инфракрасную), так как оптический контраст
79
между планетой и окружающим се менее ярким фоном космическо¬
го пространства существует в любой части спектра. Причем визи¬
рование можно производить пс только непосредственно по горизон¬
ту поверхности, по п по инфракрасному горизонту, обуславливае¬
мому границей теплового (собственного) излучения ее атмосферы.
Видимый угловой размер радиуса горизонта диска поверхности
планеты
? = arcsin Т+7Г ’ (3,3)
где R — радиус планеты; Н — высота полета КА.
Угловой размер радиуса инфракрасного горизонта, обуславли¬
ваемый тепловым (инфракрасным) излу¬
чением атмосферы планеты,
3 = arcsin — т hv , (3.3а)
R + H v ’
где Лг — высота слоя атмосферы, прини¬
маемого за границу теплового излучения.
Для построения местной вертикали
MB можно использовать как визуальные
оптические системы, так и оптико-элек¬
тронные. В отличие от визуальных опти-
Рис. 3.1. Геометрическая схема оп- КО-ЭЛеКТрОННЫС СИСТвМЫ ПОЗВОЛЯЮТ ОСу-
ределения местной вертикали ществить автоматическое ПОСТроеНИе М€-
стнон вертикали (определение углов рас¬
согласования Дфт и Дфк), а следовательно, и автоматизировать
процесс ориентации КА.
Оптпко-злектронным.п построителями MB рассогласование опре¬
деляется посредством приемников излучения, фиксирующих угло¬
вое положение горизонта как резкий перепад энергетической ярко¬
сти (оптического контраста). Если планета как излучатель имеет
стабильные характеристики и одинаковую яркость по горизонту,
принимаемая прибором энергия излучения будет являться функци¬
ей только углов визирования фг и, следовательно, уравнения (3. 1)
и (3. 2) можно представить в виде
Ф(Д?Т) =
Ф (Дсрк)
ф (?1) - Ф (?г)
2
Ф (9'<) __ Ф (?«)
(3.4)
(3.5)
где Ф('фЕ) — лучистые потоки, поступающие на вход прибора при
визировании горизонта; Ф(Дф)-—разность потоков, соответствую¬
щая рассогласованию.
Разность потоков Ф(Дфт) и Ф(Дфк), преобразованная в элек¬
трический сигнал, дает информацию о величине и направлении уг¬
ловых рассогласований. Таким образом, угол рассогласования
функционально связан с воспринимаемым прибором лучистым по¬
током. Эта -связь определяется выбранным способом визирования
80
горизонта и последующим преобразованием оптического сигнала
в электрический, т. е. схемой оптического координатора и электрон¬
ного усиллтельно-преобразующего устройства.
Выбор для визирования спектрального диапазона излучения су¬
щественно влияет на конструкцию построителя, его элементы и
эксплуатационные характеристики.
Например, при использовании видимого спектрального диапазо¬
на (отраженной планетой солнечной радиации) ночью, когда пла¬
нета заслоняет Солнце, отряженного потока нет п постооитель не
работает. В другие периоды, когда планета находится в фазах,
подобных фазам Луны, усложняются расчеты, связанные с опреде¬
лением интенсивности излучения горизонта через альбедо (отноше¬
ния отраженного планетой потока к падающему). Кроме того, гра¬
ница перехода от освещенной поверхности к неосвещенной — ли¬
ния терминатора—может быть при визировании воспринята за
ложный горизонт и направление вертикали будет определено с
большой погрешностью.
Указанных недостатков нет в построителях, работающих в ин¬
фракрасном спектральном диапазоне собственного излучения пла¬
неты. В этом случае горизонт определяется по резкому градиенту
интенсивности инфракрасного излучения, существующего при пере¬
ходе от края планеты или ее атмосферы к космическому простран¬
ству. Так как планета имеет примерно постоянную температуру,
этот градиент может быть использован независимо от того, освещен
ли диск планеты в данный момент Солнцем или нет.
Иначе говоря, построитель ИК горизонта может работать как
в дневное, так и в ночное время и не зависит от метеорологических
условий.
Однако, как это будет показано далее, в ряде случаев исполь¬
зование видимого спектрального диапазона позволяет получить вы¬
сокую угловую чувствительность построителя. Поэтому для по¬
строения местной вертикали используются излучения как инфра¬
красного, так и видимого спектрального диапазона.
Поток радиации при визировании под углом ф определяется вы¬
ражением [4, 13] _
2тс а
Ф (cp) = ri5BX| j’ L (cp+ sin ш sin Ф) sin ® cos od®, (3. 6)
o o
где a — половина угла поля зрения прибора; ф и ф —сферические
координаты (ф — угол падения радиации на приемную площадку,
ф— азимут); SKX--- —^вх —площадь входного зрачка прибора;
г) — коэффициент использования прибором лучистого потока, опре¬
деляемый из соотношения
Очевидно, поле зрения прибора 2а, диаметр входного зрачка
£>вх, спектральная чувствительность прибора и рабочий угол визи¬
рования должны быть выбраны таким образом, чтобы величина по¬
тока радиации, принимаемой прибором, по крайней мере в несколь¬
ко раз превосходила порог чувствительности приемника излучения.
При попадании в прибор потока радиации Ф на выходе прием¬
ника излучения возникает электрический сигнал
£/=Ф®и,
где sH — интегральная чувствительность ПИ (В/Вт).
Возникающее на выходе приемника напряжение усиливается"
электронным усилителем и в зависимости от используемого метода
анализа и схемы преобразовывается в выходной электрический сиг¬
нал, пропорциональный угловому рассогласованию по тангажу и
крену.
Различают три способа визирования:
а) визируется малый участок горизонта, такой, что изменения¬
ми яркости излучения вдоль горизонта в пределах участка можно
пренебречь;
б) визируется протяженный участок горизонта длиной Lг вдоль,
горизонта;
в) визируется весь видимый диск планеты.
В первом случае направление визирования определяется усло¬
вием
Ф(ср, /) = Ф0, (3.8)
где Ф0 — пороговая чувствительность прибора.
Во втором случае направление визирования определяется урав¬
нением
ф (ср) = —!— ^ Ф (ср, 1) dl = Ф0. (3. 9)
Lr
О
В третьем случае направление визирования выявляется посред¬
ством сравнения (радиационного баланса) излучения противолежа¬
щих участков излучающей поверхности видимого диска планеты
(Дср) = Ф1 —Ф2, (3.10)
где Фь Ф2 — лучистые потоки, поступающие на вход прибора от
противоположных участков диска.
Таким образом, способ визирования определяет интегрирующие
свойства построителя. Очевидно, при втором способе визирования
на вход прибора поступают усредненные потоки радиации и вариа¬
ции яркости в меньшей степени влияют на точность построе¬
ния MB.
Третий способ визирования обеспечивает существенное усред¬
нение вариаций излучения, но на вырабатываемый сигнал рассо¬
гласования значительное влияние оказывает несовпадение энерге¬
тического центра излучения с геометрическим центром планеты.
82
3.2
ИЗЛУЧЕНИЕ ПЛАНЕТ
Непрерывный спектр излучения планет определяется наложением
двух приблизительно планковских кривых. Суммарное распределе¬
ние энергии излучения имеет два максимума (рис. 3.2). Коротко¬
волновая часть представляет собой спектр солнечного излучения,
отражаемого планетой, длинноволновая — спектр собственного теп¬
лового излучения. Как это следует из графика, имеется некоторая
оптическая длина волны Хк, такая, что в области длин волн, боль-
рис. 3.2. График распре¬
деления спектральной
плотности энергетической
светимости излучения
планет
М,Вт/см2мкм
.Венера, А=0,75
10'
10'
10'
Марс,А=0,15
''vK-Меркурий, А=0,06
/ С- ЛГ >\Nx Юпит'°р> ^ = 0,73
/ \ Венера,270В
Меркурий,BOOK
0,1
03 0,5
Сатурн, А=0,76
Мар с, 2ВО К
Юпитер,130К.
Сатурн, 90К
30Х,мкм
ших критических (область II), интенсивность теплового излучения
больше, чем отраженного; в области длин волн, меньших критиче¬
ских (область I), наоборот, преобладает отраженное излучение.
Чем холоднее планета, тем больше Хк [21]. Например, для
Меркурия на освещенной стороне Як«2 мкм, для Марса Хкяз4 мкм,
для Юпитера Хк~9 мкм.
Таким образом, для индикации направления потока излучения
можно использовать каждый из двух максимумов энергии излуче¬
ния (области I и II) и область, лежащую в зоне критических зна¬
чений длин волн.
В настоящее время, как указывалось выше, проектирование
ПМВ ведется в направлении, использующем области I и II. В свя¬
зи с этим построители MB делятся на два основных класса:
построители, работающие в области собственного (длинновол¬
нового) диапазона излучения, называемые инфракрасными по¬
строителями местной вертикали — ИКПМВ;
построители, основанные на использовании коротковолнового из¬
лучения (отраженная радиация Солнца), — КПМВ.
Приближенное значение интегральной яркости отражающей по¬
верхности планеты можно рассчитать по формуле
Lv = -^~, (3.11)
It
где Q — солнечная постоянная; А — альбедо планеты.
83
Используя уравнение теплового баланса, можно найти инте¬
гральную лучистость планеты
n£2Q(l-Л)-4л/?2Жгух = 0, (3.12)
откуда MeyyL = ~ Q(1 — А)
и LeJ~ , (3. 13)
е Л
где R — радиус планеты; Меух — поверхностная плотность уходя¬
щего в космос излучения.
Приведем сравнительный анализ статистических характеристик
собственного и отраженного излучения для планеты Земля.
Солнечная постоянная Земли Q3=0,1374 Вт/см2; среднее значе¬
ние альбедо Лп=0,34.
Подставляя эти значения в выражения (3. 11), (3. 12) и (3. 13),
получим L,;,= 15,2 • 10~3 Вт/см2ст; Ln=7,2 ПО-3 Вт/см2ст.
Таким образом, интенсивность отраженного излучения пример¬
но в два раза превосходит интенсивность собственного излучения
Земли.
При чувствительности селективных приемников, большей инте¬
гральных, полученное отношение достигает четырехкратного зна¬
чения.
В табл. 3.1 приведены данные облучения планет солнечной си¬
стемы, которыми можно воспользоваться для предварительных рас¬
четов излучающих характеристик планет при проектировании по¬
строителей MB [21].
Таблица 3. t
Назпание
планеты
Среднее расстоя¬
ние от Солнца
Угло¬
вой
радиус
солнеч¬
ною)
диска,
с
Облучение Солнца
т, °с
10г' км
а.е.
Относи¬
тельно
Земли
Тепловое,
г-кал
СМа/\1ИН
Свето¬
вое,
103 лк
Звездная
величина
Солнца
Меркурий
58
0,387
2480
6,68
12,7
901
-28,8
+ 172
Венера
108
0,723
1327
1,91
3,64
258
—27,4
+54
Земля
149
1,000
960
1.00
1,90
135
—26,7
+4
Марс
228
1,524
630
0,431
0,81
28,2
—25,8
—51
Юпитер
778
5,23
184
0,037
0,0702
4,99
—23,1
—151
Сатурн
1426
9,539
101
0,0110
0,0208
1,48
—21,8
—183
Уран
2868
19,191
50
0,0027
0,0052
0,366
—20,3
—210
Нептун
4494
30,071
32
0,0011
0,0021
0,149
— 19,3
—222
Плутон
4897
39,52
24
0,0003
0,0012
0,087
— 18,7
—229
Благодаря большому разнообразию естественных поверхностей,
изменчивости оптических характеристик атмосферы и содержанию'
веществ, поглощающих радиацию, а также изменяющимся услови¬
ям освещения поле отражаемой коротковолновой и излучаемой
длинноволновой радиации будет довольно изменчиво во времени и
пространстве. Даже в условиях горизонтально-однородных отража¬
ющих поверхностей и атмосферы (т. е. таких поверхностей и атмо¬
48
сферы, оптические свойства которых не меняются при перемещении
в горизонтальном направлении) уходящая радиация будет обла¬
дать сильной анизотропией — зависимостью от углов падения и ви¬
зирования. Наличие неоднородностей отражающих и рассеивающих
объектов будет усиливать анизотропию. Поэтому определение излу-
чательных характеристик планет довольно сложная задача, решае¬
мая посредством теоретических расчетов и экспериментальных ис¬
следований и измерения.
3.3
ХАРАКТЕРИСТИКИ ИЗЛУЧЕНИЯ ЗЕМЛИ
Первые экспериментальные исследования яркостной структуры
планеты Земля проведены с помощью космических аппаратов «Во¬
сток-6» и «Восход» путем фотографирования края Земли. Анало¬
гичные работы выполнены с помощью спектрорадиометрических
измерений на спутниках «Тирос-2», «Тирос-4» и др.
Исследованию статистических характеристик излучения Земли
посвящены работы известных советских ученых: А. И. Лебединско¬
го, В. И. Тулупова, К. Я. Кондратьева, Г. В. Розенберга, А. Б. Сан-
домирского и зарубежных ученых Д. К. Уарка и Г. Ямамото и др..
[18, 22, 23, 24].
3.3. 1. ИЗЛУЧЕНИЕ ЗЕМЛИ В ИНФРАКРАСНОМ
СПЕКТРАЛЬНОМ ДИАПАЗОНЕ
Инфракрасное излучение Земли и атмосферы в пространство из¬
меняется по спектру и зенитному углу в соответствии с распределе¬
нием температуры и поглощениями атмосферными газами. Отсюда
следует, что датчик горизонта (ИКПМВ) должен быть чувствитель¬
ным в спектральном диапазоне, имеющем по возможности наимень¬
ший контраст между отдельными излучающими поверхностями.
Вариации излучения при сканировании по диску Земли могут
быть рассчитаны исходя из рассмотренных моделей атмосферы,
каждая из которых определяет возможное состояние атмосферы для
различных широт, сезонов и метеорологических условий. Эти вариа¬
ции ('потемнение или посветление диска) зависят от спектрального
диапазона и модели атмосферы. Очевидно, для работы построителя
наиболее пригодны спектральные диапазоны с наиболее устойчи¬
выми характеристиками.
В работах [18, 22] приведены данные углового распределения:
уходящей радиации, полученные для среднеширотной и среднесе¬
зонной стратификации атмосферы. Эти данные характеризуют из¬
лучение в различных областях спектра: излучения «окна» прозрач¬
ности 10,55—11,1 мкм, полосы поглощения водяного пара 4,88—-
8,7 мкм, полосы поглощения углекислого газа 12—18 мкм, полосы
поглощения озона 9,01 —10,29 мкм, двух узких спектральных уча¬
стков поглощения водяного пара 6,49—6,6 мкм и 41,67—45,45 мкм,
а также двух узких спектральных областей слабого поглощения
водяного пара 5,0—5,05 и 17,86—18,52 мкм.
Из названных спектральных областей наиболее приемлемы:
область полосы поглощения углекислого газа 14,8—15,4 мкм и вра¬
щательной полосы поглощения водяного пара 30,8—33,5 мкм. Од¬
нако использование этих спектральных диапазонов сопряжено с
трудностями приборной реализации. Так как сужение спектраль¬
ного диапазона приводит к уменьшению общего количества энер¬
гии, поступающей на вход прибора (средняя энергетическая яр¬
кость излучения С02 0,4-10-3 Вт/см2ст), для ИКПМВ используется
интегральное излучение в диапазоне 3—12 и 7—30 мкм.
Эффективная яркость (лучистость) воспринимаемого прибором
излучения (излучение планеты подчиняется закону Ламберта) мо¬
жет быть представлена выражением
х3
4ф= — \ м (X) s (X) Л, (3.14)
Я ,J
>‘1
где М (А) —нестационарная случайная функция A; s(A) —прибор¬
ный спектральный коэффициент пропускания, неслучайная функция
Л; Я] и Аг —граница спектрального диапазона работы прибора.
Для практических расчетов ввиду отсутствия аналитических
выражений для получения математического ожидания М (к) и кор¬
реляционной функции К (к, к') эффективное значение эффективной
яркости определяется как сумма энергетических яркостей в отдель¬
ных спектральных интервалах:
П П
Хэф= ХэфД).( Л1дх.5дх;.Д,„ (3. 15)
/=1 /=1
где — спектральная плотность энергетической светимости
уходящего излучения в данном спектральном диапазоне ДАг-
в Вт/см2мкм.
Спектральный интервал Дki выбирается по интервалам, для ко¬
торых получены статистические характеристики [22].
3. 3. 2. ХАРАКТЕРИСТИКИ ОТРАЖЕННОЙ ПЛАНЕТОЙ
СОЛНЕЧНОЙ РАДИАЦИИ
Основной характеристикой для разработки КПМВ является рас¬
пределение яркости по видимому диску планеты при изменении ее
фаз и, в первую очередь, яркость профиля освещенного Солнцем
края планеты (горизонта), по которому обычно и осуществляется
слежение.
Как уже указывалось, образование яркостной структуры осве¬
щенной Солнцем части планеты обуславливается рассеянием сол¬
нечного света в атмосфере и отражением его от поверхности пла¬
неты и атмосферы. Поэтому определение световых характеристик
■сопряжено с большими трудностями и все еще недостаточно изу¬
чено.
Наиболее надежные результаты дают прямые измерения. Тео¬
ретические расчеты базируются на решении уравнений переноса ра-
S6
диацни для различных моделей атмосферы и окружающих поверх¬
ностей.
Наиболее удобной для расчетов ПМВВ фотометрической харак¬
теристикой планеты является ее звездная величина, которая может
быть получена посредством фотографических и фотоэлектрических
измерений.
Интегральная звездная величина планеты изменяется во време¬
ни вследствие изменения фазового угла, расстояния от Солнца и
Земли, вращения планеты и явлений, протекающих на ее поверх¬
ности и в атмосфере.
Пренебрегая последними двумя явлениями, звездную величину
планеты можно представить выражением
таи = отп(1,0) + 51grr/-f Lm{if), (3. 16)
где т„ (1,0) —з :ездная величина планеты при r=d= 1 а. е. и фа¬
зовом угле ф = 0; г — расстояние от планеты до Солнца; d — рас¬
стояние от планеты до Земли; ф — угол фазы Солнце — планета —
Земля; Ати(ф) —изменение звездной величины в зависимости от
угла фазы (фазовая поправка).
Фазовая поправка Дт(ф) характеризует два важных явления;-
во-первых, от фазы зависит, какая часть диска освещена, во-вто¬
рых, зависимость диффузного отражения света поверхность пла¬
неты от угла падения и отражения.
В табл. 3. 2 приведены альбедо планет и звездные величины
при угле фазы ф = 0 [21].
Таблица 3. 2
Планета
Альбедо
планеты
Звездная
величина
Планеча
Альбедо
планеты
Звездная
величина
Меркурий
Венера
Земля
Маре
Юпитер
0,069
0,59
0,5—0,8
0,156
0,56
-1,2
—4,4
—4,57
-2,8
-2,5
Сатурн
Уран
Нептун
Луна
0,50
0,66
0,62
0,7—0,1
0,8
+5,8
+7,7
— 12,7
По спектральному значению солнечной постоянной Q\ можно
определить спектральное излучение планет, например, спектраль¬
ную плотность энергетической светимости:
М(П = ЛхОх,
где Дх —спектральное альбедо планеты [21]; Q\ — спектральнаяг
солнечная постоянная планеты.
Основными исходными данными для проектирования построите¬
лей местной вертикали являются:
— геометрические и физические характеристики планеты, отно¬
сительно которой будет определяться MB;
— диапазон работы построителя, на основании которого опре¬
деляются видимые угловые размеры планеты;
— требуемая точность построения MB;
87
— энергетические и спектральные характеристики планеты как
.излучателя;
— возможные внешние помехи, влияющие на работу построи¬
теля;
— характеристика требуемого выходного сигнала для системы
ориентации;
— весовые и конструктивные габариты, а также потребляемая
.мощность и род питания.
3.4
КЛАССИФИКАЦИЯ ПОСТРОИТЕЛЕЙ
МЕСТНОЙ ВЕРТИКАЛИ (MB)
На рис. 3. 3 приведена примерная классификация известных в на¬
стоящее время ПМВ.
В основу классификации положены:
— спектральный диапазон работы;
— методы индикации направления лучистого потока;
Рис. 3.3. Классификация построителей местной вертикали
— способы анализа, применяемые для определения сигнала
рассогласования.
Как следует из приведенной далеко неполной классификации,
за короткое время создано большое количество типов приборов,
отличающихся как по способу решения задачи, так и по их техни¬
ческой реализации.
Это объясняется, во-первых, широким и многообразным приме¬
нением приборов ориентации, стабилизации, навигации КА и бор
товых устройств различного назначения, широким диапазоном ра-
■боты и разнообразием физических, энергетических и спектральных
характеристик используемых планет, во-вторых все еще недоста¬
точной изученностью вопросов, относящихся к получению и обра¬
ботке первичной информации, особенно в части спектральных и
энергетических характеристик планет.
88
В соответствии с приведенной классификацией рассмотрим неко¬
торые из применяемых схем построителей местной вертикали.
3.1 1. ОПТИКО-МЕХАНИЧЕСКИЙ ПОСТРОИТЕЛИ .MB
Принцип действия оптико-механическпх построителей MB базиру¬
ется на моделировании горизонта планеты в виде его изображения
з картинной плоскости оптической системы.
Получаемое изображение горизонта наблюдается оператором
непосредственно или через окуляр. Для выявления сигнала рассог¬
ласования в картинной плоскости помещается сетка с концентриче¬
скими кольцами, радиус каждого из которых соответствует радиусу
изображения горизонта в заданном диапазоне высот полета КА.
Нулевому рассогласованию — построению MB соответствует
совмещение (или концентрическое расположение) изображения
горизонта с кольцом, нанесенным на сетке.
Радиус кольца определяется по формуле
^K=/«tg3,
где fn—фокусное расстояние оптической системы;
D
B=arcsin ; гк—видимый угловой радиус изображения гори-
R + Н
зонта планеты; R — радиус планеты; Н — высота полета над по¬
верхность планеты.
Для малых высот полета видимый угловой радиус базовой пла¬
неты может достигать больших величин (|3^85р). Поэтому постро¬
ители должны иметь большое поле зрения (сто пятьдесят и более
градусов).
Такое поле зрения можно получить с помощью широкоугольных
объективов или составных оптических систем, а также с помощью
кольцевых зеркал *, проектирующих изображение горизонта на ма¬
товый экран или на сетку.
Схема построителя с составной (комбинированной) оптической
системой строится следующим образом (рис. 3.4).
Окружность горизонта разбивается на п дискретных участков,
каждый из которых проектируется собственной оптической систе¬
мой. Оптические оси всех систем располагаются параллельно гео¬
метрической оси прибора, параллельной ориентируемой оси КА.
При этом проекции осей оптических систем располагаются на об¬
щей окружности, концентричной геометрической оси прибора. Ра¬
диус этой окружности и представляет собой расчетное значение
моделируемой линии горизонта, соответствующее среднему значе¬
нию фактического радиуса горизонта.
Его величина определяется средним значением видимого угло¬
вого размера радиуса горизонта:
о . R
<p = pcp = arcsin
R +И,
ср
1 Схема построения с двумя, кольцевыми зеркалами приведена в гл. 6 на
рис. 6. 2.
89
Угловой размер радиуса горизонта устанавливается посредст¬
вом неподвижной призмы 1 и поворотной призмы-куба 2.
Совмещению оси OZ с местной вертикалью (угол рассогласова¬
ния Дф = 0) соответствует совмещение изображения участков линии
горизонта с кольцевой окружностью, нанесенной на сетке-экране,
в фокальной плоскости оборачивающей системы.
тикали
а—оптическая схема; б—вид поля зрения
Поле зрения оптических систем выбирается из условия обеспе¬
чения ориентации в заданном диапазоне изменения высоты полета.
Свободное (центральное) пространство между оптическими сис¬
темами может быть использовано для построения оптической сис¬
темы курсовой ориентации по «бегу» изображения (см. гл. 6) или
для размещения оптической системы телескопа.
Возможны и другие схемы визуального построения местной вер¬
тикали. Например, используя электронно-оптический преобразова¬
тель, можно создать визир для построения MB по неосвещенной
стороне Земли.
3. 4. 2. ПОСТРОИТЕЛИ МЕСТНОЙ ВЕРТИКАЛИ, РАБОТАЮЩИЕ
В ИНФРАКРАСНОМ СПЕКТРАЛЬНОМ ДИАПАЗОНЕ
При проектировании ИКПМВ в качестве математической модели
планеты-излучателя принимается сфера, яркость поверхности кото¬
рой постоянна, а следовательно, линия ИК-горизонта представля¬
ет собой окружность. Элементы оптической системы выбираются
из условия максимального пропускания излучения в выбранном
спектральном диапазоне. В этом же спектральном диапазоне дол¬
жен работать и приемник излучения. Обычно в качестве приемника
излучения используются неселективные приемники: полупроводни¬
ковые или металлические болометры или пироэлектрические при¬
емники.
90
Для индикации горизонта используются различные способы ска¬
нирования. Рассмотрим наиболее широко используемые способы.
Построители с линейным сканированием
горизонта
Принцип действия построителей с линейным сканированием осно¬
ван на перемещении мгновенного поля зрения оптической системы
в двух взаимно перпендикулярных плоскостях. При этом в процес¬
се сканирования вырабатываются сигналы, изменяющиеся в соот¬
ветствии с интенсивностью излучения, поступающего на вход опти¬
ческой системы.
Всякий раз, когда оптическая ось системы «касается» края ви¬
димого диска планеты (пересекает горизонт) и сканирует поверх¬
ность планеты, ток в приемнике резко возрастает относительно
тока, соответствующего сканированию космического пространства.
Это возрастание тока и используется как сигнал, из которого фор¬
мируется команда для управления угловой стабилизацией космиче¬
ского корабля по оси тангажа и крена.
Линейное сканирование можно получить -круговым вращением
или возвратно-поступательным (колебательным) движением мгно¬
венного поля зрения оптической системы.
Построитель с круговым сканированием. Скани¬
рование осуществляется двумя оптическими системами с малым
полем зрения, равным
2а = 2—-— 57.3,
2/'
где/ — линейный размер чувствительной площадки приемника;
f' — фокусное расстояние объектива.
Поле зрения одной из систем вращается в плоскости тангажа, а
другой — в плоскости крена с одинаковыми и постоянными угловы¬
ми скоростями.
Схема определения местной вертикали в одной плоскости ска¬
нирования приведена на рис. 3.5, а.
Рабочий угол сканирования ограничивается мертвой зоной сп.г,
фиксируемой контактами 1,2, симметрично установленными отно¬
сительно оси Z. Отклонение оси Z относительно направления мест¬
ной вертикали Дер определяется из условия
fS = cpi Дер; 3 = ср2 — Дер,
откуда Аср = ?1~ <е'2 ,
где р — угловой радиус диска планеты, видимый с данной высоты
полета; дц, ср2 — углы визирования края диска, измеряемые относи¬
тельно оси Z.
При постоянстве угловой скорости сканирования со имеет место
равенство
cot! -|— cpj = ср2 -)- 0)Т2,
откуда cpi — ср2 = С0(Т2 — Т[),
91
где ri промежуток времени, в течение которого оптическая ось
проходит угол, определяемый положением контакта 1 и моментом
«касания» горизонта (точка а на рис. 3.5); т2 •—то же для движе¬
ния от точки б до контакта 2.
Подставляя значение г|ц—ф2 в уравнение (3.2), имеем
2
Для определения угла рассогласования Д<р в виде электрическо¬
го сигнала используется схема время-импульсного анализа изобра¬
жения, в результате действия которой вырабатывается серия пря¬
моугольных импульсов с постоянной амплитудой, длительность ко¬
торых пропорциональна ti и т2.
На рис. 3.5, б показана периодичность сигналов, формирующих
подобные импульсы и сигнал управления, вырабатываемые в элект¬
ронном канале построителя, возможная функциональная схема ко¬
торого приведена на рис. 3.6, а.
В момент прохождения визир¬
ным лучом мертвой зоны с кон¬
такта 1 подается импульс, вклю¬
чающий электронное реле — триг¬
гер Т1. При пересечении визир¬
ным лучом края диска (точки а
и б, см. рис. 3.5) па выходе при¬
емника излучения ПИ возникает
электрический сигнал, который
усиливается электронным усили¬
телем У1 и поступает на вход
г пс. о.о. функциональная схема определения сиг- i л\7 л
нала рассогласования (а) н высоты полета КА (б) фОрМИрОЗатвЛЯ ФУ. ФорМИрОВа-
Риг. Я fi (bvUUIIUnUQ ПШОП
92
тель вырабатывает два коротких импульса с крутыми фронтами,
соответствующими переднему и заднему фронтам электрического
сигнала, поступающего с ПИ.
Положительный импульс поступает на триггер Т1 и переводит
его в исходное состояние. Отрицательный импульс включает триг¬
гер Т2, который через промежуток времени т2 импульсом, снимае¬
мым с контакта 5, переводится в исходное состояние.
При п циклах сканирования на выходах Т1 и Т2 будет сформи¬
рована периодическая последовательность импульсов, характери¬
зуемая длительностью Ti и т2 соответственно.
Усредненные напряжения на выходах интегрирующих фильтров
ИФ1 и ИФ2 можно представить в виде
Ui = -^y-x1=kxi\ U2 = -^-х2 = Ь.х2, (3. 17)
где Uо — амплитуда импульса; Т — период сканирования.
Очевидно, разность этих напряжений, получаемая с выхода
дифференциального усилителя ДУ, AUi = Ui—U2 = k(%l—т2) опре¬
деляет величину и знак углового рассогласования в рассматрива¬
емой плоскости сканирования.
Аналогичным образом определяется угол рассогласования в
другой плоскости сканирования.
На рис. 3.7 приведена конструктивная схема описываемого
построителя. По данным [1, 23] подобный построитель использует¬
ся на спутниках «Меркурий» и «Нимбус».
Построитель имеет две головки 1, 2, которые вращаются с пос¬
тоянной угловой скоростью, равной 200 об/с. В каждой из головок
закреплены зеркало 3 и объектив 4. При вращении головок поле
зрения сканирует пространство в двух взаимно перпендикулярных
плоскостях. Объективы проектируют изображение пространства на
два приемника лучистой энергии 5 и 6. Мгновенное поле зрения
сканирующих головок 2а = 2°. Оно определяется фокусным рассто¬
янием объектива, равным 38 мм, и размером чувствительной пло¬
щадки сурьмянисто-индиевого приемника. Диаметр входного окна
системы 25,4 мм.
Прибор рассчитан для работы в спектральном диапазоне от 3
до 12 мкм. Прямая солнеч¬
ная радиация и отраженная
коротковолновая (до 3 мкм)
задерживается поглощаю¬
щим фильтром.
Если обеъктив изготовить
в виде линзы из германия с
просветляющим покрытием,
он может одновременно слу¬
жить и фильтром, обеспечи¬
вая 94% пропускания длин
волн свыше 4 мкм. На каж¬
Рис. 3.7. Конструктивная схема построителя секу¬
щего типа
93
дой из головок установлены магнитные датчики, вырабатывающие
импульсы 1 и 2 начала и конца мертвой зоны.
Построитель дает возможность проводить стабилизацию и ори*
ентацию космического аппарата в широких пределах изменения
высоты полета.. Кроме того, выходные сигналы с построителя мо¬
гут быть использованы для определения текущей высоты полета.
При достижении стабилизации КА по крену и тангажу высоту по¬
лета можно получить, решая уравнения (3.3) относительно R:
/? = (// + /?) sin?. (3.18)
Функциональная схема определения высоты полета приведена
на рис. 3.6, б.
Усиленные сигналы с ПИ1 и Г1И2 подаются на амплитудно-им¬
пульсные преобразователи АИП; напряжение на их выходе пропор¬
ционально углу 2р, в который вписывается планета в каждой из
плоскостей сканирования.
Это напряжение с выхода схемы совпадения И поступает на¬
дводный преобразователь ДП, который аппроксимирует его в нап¬
ряжение, пропорциональное sin р, и подается на потенциометр П.
Напряжение, снимаемое с движка потенциометра П, сравнивается
с напряжением UR, пропорциональным R. Серводвигатель СД пе¬
ремещает движок потенциометра П до положения, при котором
разность Un—UR равна нулю. При этом угол поворота движка про¬
порционален величине H + R. На дифференциальный сельсин ДС,
который кинематически связан с валом двигателя СД, вводится ве¬
личина, пропорциональная R. В результате выходное напряжение
сельсина будет пропорционально высоте полета Н.
Схему можно несколько упростить, если вместо диодного преоб¬
разователя использовать синусный потенциометр или СКВТ.
В схеме построителя визирование горизонта проводится малым
полем зрения (первый тип визирования).
Как следует из углового распределения уходящей радиации, а
также экспериментальных данных, полученных с помощью спутни¬
ка «Тир-ос-2» [30], в спектральном диапазоне 4—12 мкм наблюда¬
ется значительный разброс интенсивности излучения.
Падение интенсивности (провалы) на трассе сканирования, как
видно из приведенных на рис. 3.8 осциллограмм, достигает 60% и
более относительно максимального значения. Это явление может
привести к значительным ошибкам в определении местной верти¬
кали. Поэтому выходкой сигнал с усилителя должен быть ограни¬
чен на уровне, соответствующем потоку, приходящему на вход при¬
бора при минимальном значении интенсивности излучения. Это ус¬
ловие требует применения приемников с очень высокой чувстви¬
тельностью и стабильными характеристиками.
Экспериментальные данные показывают, что точность ориента¬
ции с описанным видом сканирования лежит в пределах 1—2°. По-
видимому, точность построителя можно повысить, если работать в
узком спектральном диапазоне полосы поглощения углекислого га-
94
за 12—18 мкм или вращательной полосы поглощения паров воды
29,2—38,8 мкм.
Построители с колеблющимися зеркалами. На
Рис. 3.8. Эксперименталь-|
ные данные спектральной
плотности энергетической!
светимости уходящего
излучения Земли
''/*>,5от/са.г ,
jlj __ л ~ 6...Ь,5мкм
50
25
О
Ме>Вт/см2 л = /. JOmkm
Ф
рис. 3.9 представлена схема построителя, в котором линейное ска¬
нирование достигается за счет колебаний зеркал. Такое движение
можно получить с помощью кулачковых механизмов или электро¬
магнитного привода.
Рис. 3.9. Схема построе¬
ния MB посредством ко¬
леблющихся зеркал
Колебательное устройство приводят в движение четыре неболь¬
ших зеркала, при помощи которых осуществляется обзор простран¬
ства в двух взаимно перпендикулярных плоскостях (в плоскости
тангажа и крена). Схема, приведенная на. рис. 3.9, а отражает
сканирование в одной плоскости. При помощи объектива 1 и син¬
хронно колеблющихся зеркал 4, 5 на приемники лучистой энергии
95
2 и 3 проектируются небольшие участки противоположных краев
Земли. При этом в процессе сканирования на выходах приемников
вырабатываются электрические сигналы, изменяющиеся в соответ¬
ствии с интенсивностью излучения проектируемого края Земли.
При отклонении оси системы от на фавления на центр планеты дли¬
тельность импульсов на выходах приемников, визирующих проти¬
воположные края планеты, неодинакова. Это и есть информация о
наличии погрешности в ориентации.
Функциональная схема формирования управляющего сигнала
для одной плоскости стабилизации приведена на рис. 3.9, б. Им¬
пульсы с выходов ПИ1 и ПИ2 усиливаются усилителями У1, У2 по
амплитуде и поступают на вход амплитудного ограничителя АО.
На выходе амплитудных ограничителей импульсы имеют постоян¬
ный уровень независимо от яркости объекта, чувствительности при¬
емников и коэффициента усиления разных каналов.
После выпрямления и фильтрации с выхода ВФ постоянное нап¬
ряжение, пропорциональное длительности импульсов, подается на
вход дифференциального усилителя ДУ. Напряжение ка его выхо¬
де пропорционально сигналу рассогласования Дср0.
Генератор Г и усилитель мощности УМ вырабатывают перемен¬
ное напряжение, требуемое для сканирующего устройства.
Блок автоматической регулировки усиления АРУ предназнача¬
ется для создания оптимального режима колебания зеркал.
В режиме поиска сканирование выполняется с максимальной
амплитудой. С момента захвата объекта амплитуда колебаний
постепенно уменьшается и достигает оптимальной величины при
некотором сигнале рассогласования Дг|:0. Принципиально такой ре¬
жим работы позволяет повысить точность ориентации. Для повы¬
шения интегрирующих свойств системы целесообразно проводить
сканирование полем зрения в виде щели с угловыми размерами
1X10°, используя приемники с прямоугольной формой чувствитель¬
ной площадки соответствующих размеров.
Построители с нелинейным сканированием
В отличие от ранее рассмотренных в построителях с нелиней¬
ным сканированием используется только один приемник лучистой
энергии. Поле зрения по-прежнему мало н определяется фокусным
расстоянием и размером чувствительной площадки приемника.
При сканировании мгновенное поле зрения прибора осуществ¬
ляет развертку линии горизонта. Обычно развертка проводится
по синусоиде, гипоциклоиде или в виде четырехлепестковой диа¬
граммы.
На рис. 3.10 приведена принципиальная схема построителя ти¬
па «Маринер-2», в котором используется четырехлепестковая ди¬
аграмма сканирования.
Оптическая система построителя состоит из объектива 3 и двух
оптических клиньев /, 2. Двигатель Дгк через зубчатый редуктор
вращает клинья в противоположных направлениях. Причем ско¬
96
рость вращения одного клина в три раза больше скорости другого:
«1 = 300 об/мин; «2=100 об/мин.
Вследствие этого мгновенное поле зрения приемника описыва¬
ет в пространстве траекторию в виде четырехлепестковой диаграм¬
мы, последовательно сканируя космическое пространство и поверх¬
ность планеты.
В момент сканирования по поверхности .планеты на выходе при¬
емника вырабатываются импульсы напряжения, соответствующие
интенсивности излучения в инфракрасном спектральном диапазоне
3—12 мкм. Измеряя их дли¬
тельность и распределение
во времени, электронная схе¬
ма вырабатывает сигналы
рассогласования относитель¬
но каждого из лепестков ди¬
аграммы сканирования. Ра¬
венство сигналов рассогла¬
сования, достигаемое за счет
соответствующего измене¬
ния углового положения кос¬
мического аппарата, пока¬
зывает, что центр планеты
находится на оси системы.
Прибор рассчитан для ориентации КА по направлению местной
вертикали с расстояния от 160000 до 10000 км. При этом видимые
угловые размеры планет Марс и Венера изменяются примерно от
2 до 52°. Раствор диаграммы поля обзора равен 70°.
Первоначальный поиск планет осуществляется вращением диа¬
граммы вокруг оптической оси со скоростью 5 об/мин с помощью
двигателя ДП. В момент обнаружения на выходе приемника появ¬
ляются сигналы, используемые для прекращения вращения двига¬
теля поиска и перевода системы в режим ориентации.
Рассмотрим принципы построения траекторий сканирования с двумя оптиче¬
скими клиньями.
При малых углах клина отклонение луча визирования можно определить по
формуле
if = (п — 1) V, (3. 19),
где п — коэффициент преломления клина; v — угол при вершине клина.
При вращении двух клиньев в противоположных направлениях угол ф будет'
изменяться, а следовательно, будет изменяться и положение мгновенного поля;
зрения в пространстве.
Как следует из рис. 3. 11, координаты центра мгновенного поля зрения мож^-
но определить из уравнений
■*’ = 61 cos [м + р2 cos (х2; (3. 20)
•У — Si sin Ш — 62 sin (х2, (3.21)
где 6i = rtgcPl = tg[(n—l)vi]r;
62 = г tg <р2 = tg [(« — 1) v2] г;
1*ь 1*2 — углы поворота соответствующих клиньев; г — расстояние от прибора до
Рис. ЗЛО. Схема построителя с криволинейным
(розеточным) сканированием в плоскости предме¬
тов
4 2572
97
плоскости сканирования; V1V2 — углы при вершине клиньев 1 я 2 соответственно.
При pi = W(^, Ц2 = ю2^ Vi=v2, Qi = Qz = Q будем иметь
х = q (cos 1 + cos о)21);
У = Q (Sin 0)j< — Sin 0)2 t),
Рис. 3.11. Построение траек¬
тории сканирования
(3.22)
(3. 23)
где со 1, о>2 — угловые скорости вращения клиньев.
Для построения диаграммы сканирования с N лепестками отношение угло¬
вых скоростей должно удовлетворять условию
“2/“i — N — 1, (3. 24)
откуда следует, что для четырехлепестковой диаграм¬
мы jV = 4 0)2 = 30)! и уравнения (3.22) и (3.23) за¬
писываются в виде
х = q (cos мф + cos За)! t); (3. 25)
у = Q (sin u>if— sin ЗщО- (3. 26)
Угловой раствор диаграммы определяется из
выражения
fmax = 2v (п — 1). (3.27)
С точки зрения теории информации число лепест¬
ков диаграммы сканирования должно быть макси¬
мально возможным, так как при этом поле зрения
датчика большую часть времени будет направлено непосредственно на горизонт
планеты и вариации интенсивности излучения будут оказывать меньшее влияние.
Возможная схема построителя, удовлетворяющего указанным
условиям, может быть выполнена в виде сканирующего устройства
с синусоидальной разверткой горизонта. Сканирующее устройство
для такой развертки состоит из зеркала 1, оптического клина 2 и
объектива 3 (рис. 3.12, а). Зеркало устанавливается под углом ср0,
соответствующим направлению оси мгновенного поля зрения на
линию горизонта при средней высоте полета, и вращается относи¬
тельно вертикальной оси прибора с угловой скоростью coj. Одно¬
временно с угловой скоростью fecoi вращается клин 2. В результате
проекция мгновенного поля зрения прибора описывает траекторию,
показанную на' рис. 3.12, б.
При отклонении вертикальной оси прибора от направления
местной вертикали на выходе приемника 4 будут вырабатываться
импульсы с частотой fecob модулированные по амплитуде управля¬
ющей частотой (oi.
При малых углах рассогласования получаемая периодичность
импульсов имеет скважность, близкую к двум {q = 2), и выходное
напряжение рассматривается как синусоидальный сигнал несущей
частоты fecoi, модулированный по амплитуде управляющей часто¬
той шь Следовательно, для определения сигнала рассогласования
по осям OY, OZ можно воспользоваться описанной в гл. 2 схемой
фазового детектирования.
Построители, принцип действия которых основан
на сравнении освещенностей—• радиационном балансе
Принцип действия подобных построителей основан на сравне¬
нии освещенностей, создаваемых противоположными участками ви-
98
зирусмого горизонта. Эта информация и служит для определения
местной вертикали.
Прибор может быть выполнен без подвижных частей, что пред¬
ставляет возможность упростить его конструкцию и повысить на¬
дежность работы. Простейшая схема подобного прибора состоит
из двух пар датчиков, визирующих противоположные участки го¬
ризонта в двух взаимно перпендикулярных направлениях, т. е. в
плоскостях крена и тангажа
(рис. 3.13, а). Каждый датчик
содержит объектив и приемник
лучистой энергии.
Приемники пары датчиков
включены по дифференциаль¬
ной схеме и образуют ампли¬
тудные анализаторы, выявля¬
ющие угловое рассогласование
по разности потоков, приходя¬
щих с противоположных участ¬
ков горизонта. Угол установки
датчиков относительно общей
оси прибора определяется по
формуле
Рис. 3.12. Схема построения MB посредством
синусоидальной развертки линии горизонта
cf>0 = arcsin
R + hT
R + H
(3. 28)
ср
где Яср — средняя высота полета; hr — высота атмосферы, прини¬
маемая за границу горизонта.
Для выбора поля зрения датчика можно воспользоваться выра¬
жением
2а = 2arcsin Г -
R
R
■ Н, р
ш
2 (R + HQр)
(3. 29)
где АН — диапазон изменения высоты полета космического аппа¬
рата.
На рис. 3.13, б показана схема с изображением совмещенных
полей зрения двух датчиков: при отсутствии сигнала рассогласова¬
ния (II) для средней (I), минимальной (IV) и максимальной (III),
высот полета космического аппарата.
Отклонение оси прибора от направления местной вертикали
сопровождается смещением и неодинаковым изменением величины
изображения участков, а следовательно, будут неодинаковыми по
величине и облучаемые площади приемников лучистой
энергии.
При одинаковых характеристиках приемников и малых рассог¬
ласованиях получим два напряжения, величина которых, как это
показано в разд. 2.3, может быть определена по формулам
4*
99
Д L/, = y\Estl(S1-S2):
И/к=1\Езя(33 — 34),
Рис. 3.13. Схема построения местной вертикали
посредством сравнения освещенностей (радиаци¬
онного баланса)
где Д£/т и Д£/к— разность напряжений, снимаемых с датчиков
тангажа и крена, пропорциональная угловому рассогласованию
при (St—52)=&Дф.
Освещенности можно
сравнить, используя различ¬
ные схемы.
Представляют особый ин¬
терес появившиеся в послед¬
нее время схемы, в которых
используются так называе¬
мые системы с «обращенным
изображением» [7].
Под «обращенным изо¬
бражением» в данном слу¬
чае подразумевается изо¬
бражение видимого диска
планеты в виде кольца,
внутренний диаметр которого (горизонт) замыкает космическое
пространство.
Таким образом, в схемах с «обращенным изображением» одно-
времено проектируется весь горизонт. Поэтому подобные схемы
представляют возможность интегрирования интенсивности излуче¬
ния горизонта по всей его протяженности, что позволяет сущест¬
венно снизить влияние вариации излучения на точность.
На рис. 3.14, а приведена принципиальная схема построителя, в
котором «обращенное изображение» строится с помощью зеркаль¬
ного конуса 1, установ¬
ленного перед линзовым
объективом 2. Лучи, при¬
ходящие от противопо¬
ложных точек края диска
планеты А и В, после от¬
ражения от поверхности
зеркального конуса на¬
правляются на объектив.
Точки пересечения лучей
с фокальной плоскостью
объектива можно опреде¬
лить, проводя через центр
объектива вспомогатель¬
ные линии, параллельные направлению отраженных лучей до пере¬
сечения их с фокальной плоскостью. Точки пересечения вспомога¬
тельных линий с фокальной плоскостью (точки а и Ь) и являются
изображениями точек А и В. Аналогичное построение для точек С
и D, взятых на поверхности диска, дает их изображение в виде то¬
чек end.
Рис. 3.14. Схема построителя местной вертикали с зер¬
кальным конусом
100
Приведенное на рис. 3.14 построение показывает, что точки а и
b оказываются внутрилежащими относительно точек с и б. Следо¬
вательно, из соображений симметрии можно утверждать, что изо¬
бражение всех точек окружности диска будет лежать в фокальной
плоскости на окружности с диаметром ab, а диск планеты будет
изображен в виде кольца, наружный диаметр которого определя¬
ется проекцией основания конуса с углом при вершине, равным
углу зеркального конуса (рис. 3.14, б).
Параметры системы можно рассчитать по формуле
где 2у — угол при вершине зеркального конуса.
Исходными данными для расчета являются угол поля зрения
прибора ф и угол поля зрения объектива 2а.
Поле зрения прибора определяется по формулам
где Иmin и Нщах — максимальная и минимальная высота полета
космического аппарата.
Поле зрения объектива выбирается исходя из оптимальных
размеров чувствительных площадок приемников излучения.
Определение угла рассогласования базируется на тех же прин¬
ципах, что и в построителе с двумя парами датчиков. При откло¬
нении оси прибора от направления местной вертикали кольцевое
изображение перемещается относительно площадок приемников
(рис. 3.14, б), в результате чего разность напряжения, снимаемая
с выходов пары приемников, оказывается пропорциональной углу
рассогласования в данной плоскости. Для устранения дрейфа нуля
усилителя перед приемниками устанавливается германиевый моду¬
лятор излучения.
Зеркальный конус существенно ухудшает качество изображе¬
ния и поэтому построители с рассмотренной схемой имеют точ¬
ность порядка 2—3°.
Значительно лучшее качество изображения, а следовательно, и
точность можно получить, если для построения обращенного изо¬
бражения использовать кольцевой отражатель.
На рис. 3.15 показана оптическая схема подобного построителя,
входящего в двухрежимную систему ориентации [7]. Система вы¬
полнена по коаксиальной схеме и позволяет с помощью одного и
того же телевизионного оптического преобразователя визировать
цели либо в узком, либо в широком поле зрения.
Кольцевой отражатель (рис. 3.15, а), выполненный в виде се¬
чения тора, воспринимает лучн, приходящие под большими угла¬
ср = 2у —а,
(3.30)
ИпЦП’
101
ми к оптической оси, при наблюдении с малых и средних расстоя¬
ний.
Для построения изображения планеты в картинной плоскости
тора можно воспользоваться известным в геометрической оптике
способом построения изображения в зеркальных системах.
Проведем лучи, проходящие от противоположных точек края-
планеты А и В. Затем построим через центр радиуса отражающей
поверхности тора вспомогательные линии, параллельные направ¬
лению лучей А и В. Полученные точки а и b пересечения вспомо¬
гательными линями фокальной плоскости тора и будут изображе¬
ниями противоположных точек края планеты. Аналогичное постро¬
ение для точек С и D, взятых на поверхности диска, дает-их изо¬
бражение в виде точек с и d.
Приведенное на рисунке построение показывает, что, как и в
случае с зеркальным конусом, точки а и Ь оказываются внутриле-
жащими относительно точек end. Следовательно, из соображений
симметрии можно утверждать, что изображение всех точек окруж¬
ности диска планеты будет лежать в фокальной плоскости на ок¬
ружности с диаметром ab, а диск планеты будет изображен в виде
кольца. При больших углах визирования кольцевое зеркало не
дает резкого изображения, что требуется при точных измерениях.
Поэтому в оптическую схему построителя с кольцевым зеркалом-
необходимо вводить оптические элементы для коррекции.
Широкоугольная система (рис. 3.15, в) состоит из кольцевого
зеркала 1, плоского зеркала 2 и двух линз 3 и 4. Кольцевое зер¬
кало воспринимает лучи, приходящие под большими углами к оп¬
тической оси при наблюдении горизонта с малых и средних высот
полета, и направляет их на плоское зеркало. Плоское зеркало
направляет эти лучи через линзу 3 и объектив 4 на вход оптичес¬
кого преобразователя (фотокатод телевизионной трубки). При этом
кольцевое зеркало создает обращенное изображение планеты, по¬
казанное на рис. 3.15, б.
102
Диск получается в виде кольца, внутренняя окружность которо¬
го изображает наружный диск планеты (горизонт). Внутренний
темный круг изображает окружающее планету пространство. По¬
путно отметим, что описываемый эффект имеет место и в случае
■слежения за частично освещенной планетой.
В узкопольной системе (рис. 3.15, в) используются два отража¬
тельных элемента 5 и 6 и корректирующий элемент системы Шмид¬
та — Кассегрена, что обеспечивает поле зрения порядка 1—2°. Свет
от звезды воспринимается первичным зеркалом 5 и отражается
вторичным, имеющимся на обратной стороне кольцевого отража¬
теля широкоугольной системы. Эффективное фокусное расстояние
равно примерно 50—75 см.
Выбор режима работы осуществляется перемещением затвора
при неподвижных оптических элементах.
В системе могут быть использованы различные типы преобра¬
зователей: электростатический видикон, ортикон и диссектор.
При использовании широкоугольной системы как самостоятель¬
ного построителя в качестве преобразователя можно использовать
секторные приемники лучистой энергии с выделением сигнала рас¬
согласования типовым амплитудным анализатором изображения.
По данным [1, 7], описанная двухрежимная система может иметь
следующие характеристики:
Для определения местной вертикали по отраженной солнечной ра¬
диации, когда космический аппарат находится над освещенной по¬
верхностью планеты, принципиально пригодна любая из рассмот¬
ренных систем построителя. На теневой стороне (когда диск пла¬
неты виден частично освещенным) эти построители не пригодны.
Построители местной вертикали по частично освещенному (ви¬
димому) диску планеты при различных ее фазах обычно использу¬
ются совместно с датчиками солнечной ориентации.
Вначале проводится поиск и грубая ориентация космического
аппарата по Солнцу, затем точная ориентация по Солнцу, после
чего поворотом вокруг оси КА, направленной на центр Солнца, осу¬
ществляется поиск планеты и ориентация относительно направле¬
ния на ее центр (местной вертикали). Ориентация достигается
посредством автоматического слежения за краем диска планеты,
освещаемым Солнцем.
широкое поле зрения
угол поля зрения
примерная высота над поверхностью Земли
точность слежения
155—80°
150—3500 км
до 0,05°
узкое поле зрения
угол поля зрения . .
точность слежения . .
1—2°
2—5"
3. ). 3. ПОСТРОИТЕЛИ МЕСТНОЙ ВЕРТИКАЛИ,
ОСНОВАННЫЕ НА ИНДИКАЦИИ ГОРИЗОНТА
ПО ОТРАЖЕННОЙ СОЛНЕЧНОЙ РАДИАЦИИ
103
Профиль освещаемого Солнцем края планеты — фазовый вид
ее диска, видимого с космического аппарата, зависит от взаимного
расположения Солнца, аппарата и планеты.
Исходными данными для проектирования построителя КПМВ
являются геометрические параметры серпа и распределение ярко¬
сти по профилю серпа. Из геометрических построений (рис. 3.16)
линейная величина радиуса
горизонта равна
Rr = R si п (90° — J3) = R cos 3,
(3.31)
где rp = arc sin — ви-
\R + H
димый угловой радиус гори¬
зонта.
Угловая величина стрелы
серпа ДС='Р—рт,
где tg3r: *c
R f~f — .у с
cos v
Рис. 3.16. Схема определения параметров серпа
1/sin Э — sin V
(3. 32)
угол, под которым видна вершина терминатора Т с КА. Координа¬
ты вершины линии терминатора хс и ус определяются по фор¬
мулам
xc=R cosv;
yc=A)sinv,
где v — навигационный фазовый угол Солнце — космический ап¬
парат — планета.
Угол охвата рогов серпа 20с определяется по формуле
2oc = 2arccos (tgPctgv). (3.33)
Уравнение линии терминатора можно представить выражением-
?2
р2 cos2 V
- 1 .
(3.34)
Для предварительных энергетических расчетов можно восполь¬
зоваться приведенным ниже способом.
Лучистый поток, приходящий от Солнца на планету,
Ф1.Р = £®
SqSi,
1^
(3-. 35)
где Ls — яркость фотосферы Солнца; S@ — площадь излучающей’
поверхности Солнца; 5ПЛ — площадь поверхности планеты, осве^
щаемой Солнцем; I — расстояние между планетой и Солнцем.
104
Поток, отражаемый планетой,
Ф,,-Ф„РА = А10^-, (3.36)
где А — альбедо планеты.
Так как яркость поверхности планеты постоянна, то поток отра¬
женной планетой радиации равен
Ф<-=Ф„л^, (3.37)
11Л
где Sc — площадь серпа..
Освещенность на входном зрачке прибора
Е = Фс/кН2. (3.38)
Для более точных расчетов следует использовать звездную ве¬
личину, определяемую по формуле (3.16):
тп = та (1,0) Д- 5 lg rd Дт (v).
Зная звездную величину планеты, с учетом навигационного фа¬
зового угла v определяем освещенность на входе прибора:
Д = Д0-2,512“т"-^- = 2,68-Ю-6-2,512_т'> (3.39)
где £о = 2,68 • 10_6 — освещенность от звезды с нулевой звездной
величиной.
Интегральную яркость серпа определяем по формуле
Lc = —— = 3283-'-—, (3.40)
О) .104 Sc-104
Для расчета спектральных характеристик излучения можно
воспользоваться цветовой температурой планеты, определяемой
по формуле
г-=с^Ж' <3-41>
а также спектральным значением альбедо и спектральной постоян¬
ной Солнца. Здесь С = /ПфХ—твш — показатель цвета.
Для построения MB используются статические методы, осно¬
ванные на сравнении освещенностей, и методы сканирования гори¬
зонта. В обоих случаях информация об ориентации КА относитель¬
но MB достигается индикацией излучения горизонта в двух, трех
и более точках края серпа.
Рассмотрим некоторые из известных способов.
Статические способы построения MB
по излучению серпа
На рис. 3.17 приведена схема анализатора построителя MB, в ко¬
торой для горизонта используется анализатор изображения в виде
105
трех «линеек», образующих сектор с углом при вершине
20 < 2ас.
Каждая линейка имеет п приемников излучения, расположен¬
ных на одинаковом расстоянии друг от друга.
Приемники каждой линейки, находящиеся на одном и том же
радиусе от центра пересечения линеек, имеют одинаковые номера,
с 1-го (внешнего) до N-го, в порядке возрастания.
Так как через три точки можно провести только одну окруж¬
ность, то условию ориентации КА будет соответствовать одинако¬
вая освещенность (совмещение с изображением линии горизонта)
трех приемников с одинаковыми порядковыми номерами.
Это условие определяется с помощью логической схемы, пос¬
редством которой производится периодический опрос приемников
(состояния их облученности) по порядку номеров, начиная с пер¬
вого номера.
Оптическая схема прибора может быть построена с использо¬
ванием одного широкоугольного объектива, в фокальной плоскости
которого размещаются сканисторные линейки, или набора из трех
объективов.
Функциональная связь между параметрами анализатора и сме¬
щением изображения горизонта может быть представлена в виде
Дx=f(Q, R, /). Величина этого смещения, соответствующая разно¬
сти в одну единицу порядкового номера приемников, определяется
по формуле
где R — радиус расположения приемников с одинаковыми номера¬
ми, моделирующий изображение горизонта.
Поскольку изображение линии горизонта за счет рельефа и из¬
менения яркости не образует четкой линии, точность рассматри¬
ваемого метода не превышает 3—5°.
106
Для статического метода определения MB по серпу можно ис¬
пользовать радиационно-балансные схемы, рассмотренные выше.
Особое внимание заслуживает схема с обращенным изображе¬
нием, основанная на применении кольцевого отражателя (рис.
Построители, основанные на радиальном сканировании
горизонта
На рис. 3.18 приведена схема построителя, в которой анализа¬
тор выполнен в виде трех линейчатых приемников излучения и вра¬
щающегося диска с прозрачной щелью в форме спирали Архимеда.
Элементы анализатора располагаются в фокальной плоскости объ¬
ектива, при этом приемники образуют три плоскости сканирования,
пересекающиеся в центре измерительной системы координат. При
вращении диска со спиралью вырабатываются три импульса 1, 2,
3, как это показано на рис. 3.18, б.
Если ось OZ прибора совпадает с направлением местуой верти¬
кали, временные интервалы между импульсами равны между со¬
бой
где оз = const — угловая скорость вращения диска со спиралью.
Отклонению оси OZ от направления MB соответствует раз¬
ность временной последовательности импульсов, пропорциональная
сигналам рассогласования по осям крена и тангажа:
Посредством электронной логической схемы временные интер¬
валы AtK и Д/т преобразовываются в электрические сигналы для
управления системой ориентации.
3.15).
Дх=0
1 2 3
Дх*0
1 2 3
107
Радиальное сканирование можно производить как в плоскости
изображения, так п в пространстве предметов. Для повышения точ¬
ности мгновенное поле сканирования должно иметь форму прямо¬
угольной щели, причем раствор плоскостей сканирования следует
брать максимально возможным. Для обеспечения больших полей
обзора (при малых высотах полета) оптимальной оптической схе¬
мой является комбинированная схема из трех и более веерообразно
расположенных оптических датчиков. На рис. 3.19, а приведена
схема оптического датчика,
сканирующего горизонт серпа
в одной плоскости. Три подоб¬
ных датчика образуют скани¬
рующую систему в трех ради¬
альных плоскостях.
Сканирование можно про-
Y изводить тремя синхронно ко¬
леблющимися зеркалами или
диафрагмами.
Условию ориентации, как и
для рассмотренных схем, со¬
ответствует единовременное
пересечение в трех точках ли¬
нии горизонта мгновенными
полями зрения датчиков. При
отсутствии ориентации это ус¬
ловие нарушается.
Функциональную связь
сигналов рассогласования с
можно представить выражением
Ау = / 1 /3, (3.42)
Рис. 3.19. Оптическая схема (а) и схема ана¬
лизатора (б) построителя MB
измеряемыми
параметрами
А.х = 212 — (/j +/3);
где 1Ь 12, 1г — радиальные координаты точек пересечения линии го
ризонта для плоскостей сканирования I, II, III (рис. 3.19, б) ;
/i = /?r — zcos(0 — ^);
l2=Rr — kx\ h=RT-\-г cos (0—rt);| (3.43)
rcos^=Ax; rsin^ = Ay,
где r — модуль радиус-вектора смещения направления
планеты относительно измерительной системы координат.
На основании (3.42) с учетом (3.43) будем иметь
2/2-(*1 + *з) .
кх~-
2(1 — cos 0)
А У =
h-h
2 sin 0
на центр'
(3.44)
(3. 45)
Полученные зависимости (3.44) и (3.45) позволяют определить
величину сигналов рассогласования для любой схемы радиального
сканирования.
108
Переход от линейных величин рассогласования к угловым, на¬
пример, для сканирования в плоскости изображения, можно про¬
извести по формулам
ДХ = — Д^1,2,3 = ^1^1,2,3> (3’ 46)
2/об <4— cos е)
Ду — —— Д^1,з = ^2Д^1,з» 4^)
2/o6sin 6
где vc — скорость сканирования (перемещения щели); Ati,j,h —
разность в моментах пересечения линии горизонта (изображения)
для соответствующих
плоскостей сканирования.
Из выражений (3.46) и
(3.47) следует, что сов¬
мещение оси прибора с
направлением на центр
планеты (построению
MB) соответствует одно¬
временное выполнение
условия
Д/l ,2,3 == Д^1'3 = 0.
Техническая реализа¬
ция выражений (3.46) к
(3.47) может быть осу¬
ществлена посредством
известных время-импульс-
ных схем формирования команд управления в виде электрических
сигналов, пропорциональных сигналам рассогласования. На рис.
3.20 приведена одна из возможных упрощенных схем такой реали¬
зации.
Сигналы, возникающие на выходах приемников излучения 1,2,
3 в моменты пересечения горизонта щелью, усиленные и сформиро¬
ванные блоками УФ1, УФ2, УФЗ переключают триггеры Т1, Т2, ТЗ,
Т4 в единичные положения. Напряжения с триггеров поступают на
входы дифференциальных усилителей ДУ1 и ДУ2. При этом напря¬
жения на выходах усилителей пропорциональны рассогласованиям
по осям тангажа и крена
Д^/т = £/т1 — ^ — (^1“Мз)];
Д £/к = £/т3 С/,4=С (/?! /?3),
где С — коэффициент пропорциональности.
Диапазон работы построителя можно рассчитать по формуле
Дер = др= arctg , (3.48)
где Др = Ртах—Pmtn — диапазон изменения видимого углового ра¬
диуса планеты; da — коэффициент, учитывающий эффективную
Рис. 3.20. Функциональная схема построителя с
тремя приемниками излучения
109
ширину диафрагмы, при которой сигнал с приемника излучения со¬
ответствует заданному порогу срабатывания прибора; /с — ампли¬
туда сканирования.
3.5
ТОЧНОСТЬ ПОСТРОЕНИЯ МЕСТНОЙ ВЕРТИКАЛИ
Точность определения MB оптическими построителями зависит от
многих факторов и может быть представлена некоторой суммарной
погрешностью Atps. Полагаем, что эта погрешность обуславливается
лишь изменчивостью физических явлений, положенных в основу
метода определения MB, тогда как приборные — инструменталь¬
ные — погрешности при рациональном проектировании прибора
могут быть сведены до весьма малых величин.
В общем случае суммарную ошибку можно представить выра¬
жением
ДсР2 = /(Д?1. Д?2. д?з, •••. Д?л),
где Лер г — составляющая погрешности, обуславливаемая данным
физическим явлением.
К основным составляющим погрешностей в построении MB от¬
носятся:
Дф1 — погрешность, обуславливаемая несферичностью планет;
Дф2 — погрешность, возникающая за счет изменения рельефа
поверхности;
Дфз — погрешность, возникающая за счет изменения высоты из¬
лучающего горизонта;
Дф4 — погрешность, возникающая за счет высотного изменения
облачного покрова на трассе сканирования;
Дф5 — погрешность за счет широтного изменения интенсивнос¬
ти излучения;
Дфб — погрешность, обуславливаемая флюктуацией интенсивно¬
сти излучения.
Предельную погрешность каждой из составляющих, полагая,
что они случайны и независимы, можно рассчитать по формуле
Д{Р»пр==^if 0/)>
где С, — коэффициент пропорциональности, получаемый при вы¬
числении функции f{Pi)\ Pi — доверительная вероятность появле¬
ния погрешности Дф;.
Погрешность, обуславливаемая несферичностью планеты. Как указывалось вы¬
ше, при проектировании ПМВ принимается сферическая модель геометрической
формы планеты и интенсивности ее излучения.
Поверхности большинства планет существенно отличаются от сферических и
лучше аппроксимируются эллипсоидом вращения. В этом случае линия горизон¬
та представляет собой эллипс, а не окружность. Ориентирование по центру ви-
110
димого горизонта планеты приводит к систематической ошибке Дф1 в построе¬
нии местной вертикали, определяемой по формуле
e2R2 1
Д<»1 = sin 2<рг = — е2 sin В sin 2<fr, (3. 49)
Y 2{R + H)2 2 v ’
где e — эксцентриситет планеты; срг — географическая широта местоположе¬
ния КА.
Так, например, при #=500 м и фг = 45° эта погрешность составляет 10' для
планеты Земля и 3° — для Юпитера и возрастает с уменьшением высоты полета.
При построении MB по ИК-излучению атмосферы за горизонт принимается
верхняя граница тропопаузы. Результаты исследований [17, 18, 22] позволяют
сделать заключение, что верхняя граница тропопаузы представляет собой эллип¬
соид вращения, софокусный с эллипсоидом поверхности планеты.
При этом параметры эллипсоида, совпадающие с верхней границей тропопау¬
зы, зависят главным образом от времени года.
Средний эксцентриситет эллипсоида тропопаузы можно определить по фор¬
муле
2 (а + Аэ)2 + (Ь + /гп)2
' <а50)
где а и b — большая и малая полуось эллипсоида поверхности; ha и Ап — высо¬
та границы тропопаузы на экваторе и полюсе соответственно.
Так как эксцентриситет ет больше эксцентриситета е, погрешность вследствие
несферичности при определении MB по ИК-горизонту излучения атмосферы бу¬
дет большей, чем при визировании горизонта поверхности атмосферы.
Погрешность за счет рельефа можно определить по формуле
ДАр
Д?2 = ПГ7 ~ ’ (3.51)
2 у 12 _ #2
где Mp = fti—hi—разность высот неровностей рельефа; l=R+N — высота полета
КА относительно центра планеты.
Для планеты Земля предельную погрешность Дф2 можно определить по фор¬
муле
4940 4940
Д?2.,Р = yl2_R2 = 2 ун (Dп + Н)
Погрешность за счет изменения высоты ИК-горизонта определяется из вы¬
ражения
ДАГ12 ДАГ12
Ъ ~ 2 //2_ R2 ~ 2/Н (£>„ + Н)
где ДЛГ12 — разность высот визируемых диаметрально противолежащих участ¬
ков ИК-горизонта.
Погершность за счет высотного изменения облачного покрова определяется
по формуле
ац- (а53)
где ДАоо—разность высот облачного покрова для сравниваемых углов визиро¬
вания.
111
Погрешность за счет широтного изменения плотности изучения можно пред¬
ставить выражением
ДМ (Д?,-)
AfOp г2) +Af(<Prl)
(3. 54)
где М(фг) и М(фгг)—плотность излучения участков горизонта, соответствую¬
щая визируемым широтам фГ1 и фГ2.
Погрешность за счет вариаций яркости излучения зависит от принятой мо¬
дели излучения и способа сканирования. Например, для вертикалей секущего
типа дисперсию ошибки в построении MB можно представить в виде
4
<эф
df
(3. 55)
<Р=<Ро
где Оф =0ь2/2(ф — фк) —дисперсия потока излучения; air — дисперсия ярко¬
сти; /(ф — фк) ■—функция, определяющая часть телесного угла поля зрения, при
котором сигнал с приемника не менее порога срабатывания прибора; ф„ — угол
визирования, соответствующий положению линии горизонта.
ГЛАВА 4
ОПТИКО-ЭЛЕКТРОННЫЕ ПРИБОРЫ
ДЛЯ ОРИЕНТАЦИИ И НАВИГАЦИИ ПО СОЛНЦУ
'Солнце является центральным телом нашей планетной системы и
имеет массу, значительно превосходящую не только массу любой
отдельной планеты, но и суммарную массу всех планет вместе взя¬
тых. Поэтому движение всех тел в солнечной системе в первую
очередь и главным образом определяется Солнцем. С другой сто¬
роны, Солнце является одним из наиболее удобных объектов для
ориентации и навигации, так как, во-первых, гелиоцентрическая
система координат наиболее приближается к инерциальной систе¬
ме и, во-вторых, Солнце является самым мощным источником
излучения, что позволяет создать наиболее простые оптико-элект¬
ронные приборы для получения информации о пространственном
положении космических аппаратов и бортовых научных и техни¬
ческих приборов и устройств. Поэтому оптико-электронные прибо¬
ры для ориентации и навигации по Солнцу занимают весьма важ¬
ное место в общем комплексе устройств для управления космичес¬
ким аппаратом и устройств, устанавливаемых на его борту.
В соответствии с целевым назначением оптико-электронные при¬
боры можно разделить на две основные группы: приборы для ори¬
ентации и стабилизации космических аппаратов и бортовых уст¬
ройств, получившие название датчиков солнечной ориентации, и
приборы для определения пространственного положения, которые
иногда называют датчиками положения Солнца.
4.1
ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ
СОЛНЦА
При расчетах Солнце можно принимать за правильный шар, диа¬
метр которого D0=1390000 км. Средний угловой размер Солнца,
соответствующий среднему расстоянию между Землей и Солнцем
(астрономической единице), равен ЗГ59,26". Яркость поверхности
Солнца Lq, видимой с Земли, равна 165 000 стб или 165-107 нт.
Яркость Солнца в видимых звездных величинах т = —26,72+0,04.
113
Абсолютная звездная величина Солнца М = 4,73. Освещенность,,
создаваемая за пределами земной атмосферы, равна 135■103 лк.
Основной источник излучения Солнца — фотосфера — характери¬
зуется средней энергетической яркостью 2,1 -107 Вт/м2ср и цвето¬
вой температурой от 5700 до 6000 К-
При практических расчетах излучение фотосферы Солнца при¬
равнивается к радиации идеального излучения (АУТ) с температу¬
рой 6000 К- Следовательно, согласно закону Голицина — Вина
максимум излучения фотосферы Солнца соответствует длине вол¬
ны, примерно равной 0,5 мкм.
Распределение энергии, излучаемой Солнцем, охватывает ши¬
рокий спектральный диапазон. Это позволяет при создании оптико¬
электронных приборов, основанных на использовании солнечной
радиации, применять приемники лучистой энергии с максимумом
чувствительности в ультрафиолетовой, видимой или инфракрасной
спектральных областях.
Для оптико-электронных приборов ориентации наиболее целе¬
сообразно использование приемников, имеющих максимум чувст¬
вительности в видимом спектральном диапазоне, так как в этом'
случае селекция по мощности излучения дает наилучший эффект^
Величину потока, падающего от Солнца на чувствительную
площадку приемника, можно найти по формуле
где а — постоянная Стефана — Больцмана; L© — яркость Солн¬
ца; 5,э — излучающая поверхность Солнца; Г© — температура
поверхности Солнца в градусах К; I — расстояние от аппарата до
Солнца.
Если приемное устройство прибора обладает селективной чув¬
ствительностью, величина потока рассчитывается по формуле
где М\ — спектральная плотность энергетической светимости излу¬
чения; DBX — диаметр входного зрачка прибора.
Зависимость М\ от % при постоянной температуре графически
изображается изотермой Планка. Зная ее, можно легко и просто
графическим методом определить М\ в пределах диапазона —А-2-
Методы такого расчета приведены в работах [19, 20].
Как указывалось выше, в пределах солнечной системы Солнце яв¬
ляется наиболее мощным источником лучистой энергии. Кроме то¬
го, вследствие своего значительного удаления от планет Солнце
всегда будет иметь относительно небольшие угловые размеры.
4.2
ДАТЧИКИ ОРИЕНТАЦИИ ПО СОЛНЦУ
114
Учитывая эти особенности Солнца как источника информации,
при создании датчиков солнечной ориентации представляется воз¬
можным использовать относительно простые схемы и устройства.
Например, в ряде случаев можно построить измерительное устрой¬
ство без оптического усиления.
Задачу обнаружения, захвата и автоматического сопровожде¬
ния можно решить, используя амплитудные методы селекции и
анализа, что существенно упрощает конструкцию прибора. Систе¬
мы ориентации по Солнцу строятся по двухотсчетной схеме, кото¬
рая включает датчики «грубой» и датчики «точной» ориентации.
Датчик грубой ориентации (ДГО) предназначен для обеспечения
первоначального поиска, захвата и приведения изображения Солн¬
ца в поле зрения датчика точной ориентации. Поэтому датчик гру¬
бой ориентации должен иметь большое поле зрения и относитель¬
но невысокую точность.
Датчик точной ориентации (ДТО) предназначен для точного
наведения и автоматического слежения.
Величина и форма поля зрения этих датчиков определяется ха¬
рактером поиска. Поиск может осуществляться без воздействия на
.движение КА, и тогда датчик грубой ориентации должен иметь
поле зрения, обеспечивающее обзор в пределах всей небесной сфе¬
ры, т. е. в пределах телесного угла, равного 4п ср.
Поиск может осуществляться сканированием пространств за
счет программного движения (поворота КА) относительно одной из
осей аппарата. В этом случае поле зрения должно иметь такую
величину и форму, при которой обнаружение Солнца достигается
в кратчайшее время. Этому требованию удовлетворяет поле зрения
датчика, выполненное в виде прямоугольной щели с широким полем
зрения в плоскости, перпендикулярной плоскости вращения.
Поле зрения датчиков точной ориентации рассчитывается из
условия обеспечения предварительно заданной точности наведе¬
ния, динамических характеристик системы управления, с учетом за¬
щиты датчика от фоновой помехи. Такой помехой для датчиков
ивляется излучение планет, находящихся на небольшом удалении
от космического аппарата.
Датчики грубой и точной ориентации могут выполняться в виде
■отдельных приборов и работать последовательно или совместно.
В первом случае датчики грубой ориентации вырабатывают
сигналы, воздействующие на систему управления, осуществляющую
угловой поворот аппарата до положения, при котором Солнце ока¬
зывается в пределах поля зрения датчика точной ориентации. За¬
тем первые отключаются и дальнейшее управление проводится
только по сигналам датчика точной ориентации.
Во втором случае сигналы от датчиков грубой и точной ориен¬
тации суммируются и вырабатывают единый управляющий сигнал,
при этом датчики грубой ориентации не отключаются. Выбор той
или другой схемы работы определяется конкретными задачами
■ориентации и свойствами технических средств управления объек¬
том.
115
В качестве приемников лучистой энергии для датчиков грубой'
и точной ориентации принципиально пригодны все виды приемни¬
ков, имеющие достаточную чувствительность в видимой области
солнечной радиации.
В общем случае датчик солнечной ориентации должен удовлет¬
ворять следующим требованиям:
— иметь высокую чувствительность в зоне, близкой к нулю, что
позволит использовать усилитель следящей системы с малым ко¬
эффициентом усиления;
— иметь в зоне, близкой к нулю, линейную характеристику,
обеспечивающую возможность использования простых компенсаци¬
онных схем для достижения стабильности и демпфирования;
— иметь широкие угловые характеристики, обеспечивающие по¬
иск и захват Солнца;
— для уменьшения запаздывания на частотах возмущающего1
воздействия иметь малую постоянную времени;
— для уменьшения ошибок, связанных с долгопериодическими'
колебаниями, иметь низкий дрейф нуля:
— максимальная чувствительность должна находиться в спект
ральном участке, соответствующем минимуму атмосферного погло¬
щения Земли, т. е. соответствовать определенному окну прозрач¬
ности атмосферы.
Последнее требование позволяет при испытаниях аппаратуры
в наземных условиях получать выходные сигналы, близкие к сиг¬
налам, ожидаемым в реальных условиях эксплуатации прибора.
Датчики, удовлетворяющие перечисленным требованиям, могут
быть построены с германиевыми или кремниевыми фотодиодами,,
а также с использованием фотосопротивлений. Например, на кос¬
мических аппаратах США получили применение селенисто-кадми¬
евые фотосопротивления [29].
Эти приемники используются после 28-часового старения на
свету при освещенности 100 лк и температуре 85° С.
Существенное упрощение конструкции датчиков дает примене¬
ние координирующих разрезных и инверсионных приемников..
4.3
ДАТЧИКИ ГРУБОЙ ОРИЕНТАЦИИ
Датчики грубой ориентации (ДГО) в большинстве случаев строят¬
ся без оптического усиления. По принципу действия эти датчики
можно разделить на два основных типа: датчики с рассеивающим
элементом, или косинусные, и датчики с теневым полем.
Косинусные датчики. В конструктивную схему датчика
входят следующие элементы (рис. 4.1, а): нейтральный фильтр /,
молочное стекло 2, темно-красный фильтр 3, приемник излучения
(ПИ) 4 и усилитель 5.
Молочное стекло рассеивает падающее на него излучение и
создает на чувствительной площадке ПИ освещенность, изменяю¬
щуюся приблизительно пропорционально косинусу угла падения.
116
Темно-красный и нейтральный фильтры предназначены для согла¬
сования спектрального диапазона и нормализации (ослабления)
потока от Солнца, падающего на приемник излучения. На рис. 4.1,6
приведен график угловой характеристики датчика. По оси ординат
отложена относительная величина выходного напряжения с прием¬
ника, а по оси абсцисс отложены значения углов падения светово¬
го потока. Для определения направления в одной плоскости наве¬
дения требуется не менее двух датчиков, устанавливаемых пс»
схеме, приведенной на рис. 4.2.
Рис. 4.1. Датчики грубой
ориентации по Солнцу с рас¬
сеивающим элементом
Конструктивная схема (а) и
его пеленгацнонная характе¬
ристика (б)
Дифференциальная схема включения приемников позволяет
получить координатор Солнца, имеющий угловую (пеленгацион-
ную) характеристику (рис. 4.2, б), состоящую из двух ветвей, ко¬
торая и дает однозначную информацию о величине и знаке угла
рассогласования. Две пары датчиков, устанавливаемых в двух
взаимно перпендикулярных плоскостях, позволяют построить двух¬
координатную систему измерения. Для устранения мертвой зоны
оси датчиков разворачиваются на некоторый угол схождения стс,
обеспечивающий перекрытие угловых характеристик каждой пары
на уровне, соответствующем пороговому сигналу.
Выходное напряжение пары датчиков, приемники которых вклю¬
чены в дифференциальную измерительную схему, можно опреде¬
лить по формуле
^Bb,x = Tl^st/(cos(cp0-fA9) —coscpo], (4. 1)
где -р — КПД системы; ф0 — угол падения солнечных лучей отно¬
сительно оптической оси датчика.
В зоне малых углов рассогласования уравнение (4.1) приводит¬
ся к виду
UBblx = r)£suS sin ср0Дср. (4. 2)
Решая уравнение (4.2) относительно Дф, при заданном значении
отношения сигнал/'шум {UBblx = k \/~Uh ) получим угловую чувст¬
вительность датчика
kV^l
ДсР = —^ : > (4- 3)
■t[ESsu s'n То
V^ril 11-1 у 1*1 , 1"^
суммарное среднее квадратичное значение шума
где k — коэффициент, выражающий отношение сигнал/шум; иш-
117
В соответствии с рис. 4.2, а поле зрения координатора (пары
датчиков) в плоскости наведения
2а — 2аг -f- 2а2 = 4®0 зс. (4. 4)
Датчик с теневым полем. Конструктивная схема
датчика приведена на рпс. 4.3, а и включает следующие основные
элементы: нейтральный фильтр 1, темно-красный фильтр 2, прием¬
ник лучистой энергии 3, усилитель 4 и диафрагму 5.
Рис. 4.2. Схема установки
датчиков для ориентации в
одной плоскости и ее пелен-
гационная характеристика
Нейтральный и темно-красный фильтры, как и в ранее рассмот¬
ренной схеме, предназначены для нормализации освещенности и
согласования спектральных характеристик воспринимаемого пото¬
ка и приемника излучения. Приемник лучистой энергии устанав¬
ливается таким образом, что при совмещении линии .визирования
па Солнце с осью визирования датчика лучи от Солнца не по¬
падают на чувствительную площадку приемника. Чувствительная
площадка приемника затеняется диафрагмой 5. Электрический
■сигнал с приемника появляется только при наличии угла рассогла¬
сования. Угловая характеристика теневого датчика приведена на
рис. 4.3, б.
Как и в ранее рассмотренных схемах, для построения двухко¬
ординатной системы ориентации требуется не менее двух пар дат¬
чиков с размещением, аналогичным показанному на рис. 4.2, а.
В соответствии с рис. 4.4, а для малых углов рассогласования
Дф выходной сигнал датчика можно определить по формуле
^вых = т1 SVE sin ср06/Дср, (4. 5)
где Ь — размер эффективной площадки приемника в поперечном
направлении; I — расстояние от диафрагмы до чувствительной пло¬
щадки приемника.
Угловая пороговая чувствительность при заданном значении от¬
ношения сигнал/шум может быть получена .по формуле
k]/K
Дсрт = - , (4.6)
sin %Ы
где Дфт — угловая чувствительность, соответствующая теневому
методу измерения.
Произведем сравнительную оценку рассмотренных схем с точки
зрения угловой чувствительности. При работе датчиков в одинако¬
118
вых условиях с приемниками, имеющими идентичные характерис¬
тики, из выражений (4.3) и (4.6) будем иметь
Af Ы Ы /
Д<рт s ab а
или Дсрт = -у- Дер, (4.7)
где а — размер чувствительной площадки в продольном направ¬
лении.
Рис. 4.3. Схема датчика грубой ориента¬
ции по Солнцу (а) и его пелеигационная
характеристика (б)
Рис. 4.4. Схема установки теневого датчика
(а) и пелеигационная характеристика пары
датчиков (б)
Из уравнения (4.7) следует, что датчик с теневым полем в ajt
раз чувствительнее датчика с рассеивающим элементом и имеет
более высокую крутизну преобразования.
Выделение полезного сигнала на фоне помехи достигается с по¬
мощью амплитудной селекции. Фоновой помехой для датчиков гру¬
бой ориентации является отраженный планетой поток солнечной
радиации. Яркость фона зависит от положения КА относительно
планеты, высоты Солнца и характеристик атмосферы. Считая фон
идеальным и не селективным по спектру рассеяния, амплитудную
селекцию можно получить, рассчитав поле зрения датчика по
формуле
2a = arcsin (4-8)
где k' — коэффициент, выражающий отношение полезного сигнала
к сигналу, создаваемому фоновой помехой: А — альбедо планеты,,
создающей фоновую помеху.
4.4
ФОРМИРОВАНИЕ ПОЛЯ ЗРЕНИЯ ДАТЧИКА
ГРУБОЙ ОРИЕНТАЦИИ
В общем случае система грубой ориентации должна обеспечивать
обнаружение Солнца из любой точки пространства, в которой
может находиться космический аппарат. Задачу грубой ориентации
можно привести к задаче рассмотрения сферической поверхности
119'
(небесной сферы), описанной произвольным радиусом вокруг цент¬
ра масс КА, любая из точек на которой как бы представляет со¬
бой возможное положение Солнца. Следовательно, задача обнару¬
жения Солнца, как указывалось выше, сводится к обзору всей ука¬
занной сферической поверхности, т. е. просмотру телесного угла в
в 4л ср.
Так как системы грубой ориентации строятся без применения
подвижных частей, то решение задачи обзора всей сферической по¬
верхности достигается подбором датчиков, каждый из которых
проектирует на чувствительную площадку приемника часть сфери¬
ческой поверхности.
При этом, если Солнце оказывается в пределах поля зрения
любого из датчиков, с приемника лучистой энергии этого датчика
поступает сигнал, соответствующий угловому положению Солнца
относительно оптической оси этого датчика.
Выходные сигналы с датчиков поступают на логическую схему,
которая и вырабатывает сигналы, воздействующие на систему уп¬
равления угловым поворотом КА, осуществляя требуемую ориента¬
цию последнего.
Система грубой ориентации должна быть выполнена и установ¬
лена на борту космического аппарата таким образом, чтобы, во-
первых, при минимальном количестве датчиков сфера была спро¬
ектирована без разрывов (мертвых зон) и, во-вторых, обеспечива¬
лась надежная помехозащищенность и требуемая точность ориен¬
тации.
В соответствии с формулой (4.8) датчик будет иметь достаточ¬
ную помехозащищенность, если его поле обзора лежит в пределах
J ,5—2 ср.
Рассмотрим два способа трансформирования сферы, удовлетво¬
ряющие поставленным условиям.
На рис. 4.5, а показана полусфера, в которую вписана правиль¬
ная четырехгранная призма ABCDE. Основание призмы представ¬
ляет собой квадрат со стороной ДЦ2, где R — радиус
сферы.
Призма разделяется на четыре правильных тетраэдра DABE
и др. Внешняя грань каждого тетраэдра является диафрагмой поля
зрения датчика, фотоприемник которого должен быть помещен в
точке О. Очевидно, телесный угол каждого датчика будет равен
J ,57 ср, а четыре датчика будут трансформировать полусферу без
мертвых зон.
Следовательно, при использовании данной схемы развертка
всей сферы достигается с помощью четырех пар датчиков. Датчики
могут монтироваться на борту аппарата по отдельности или в виде
двух приборов, каждый из которых включает две пары датчиков,
устанавливаемых в передней и задней полусфере космического ап-
ларата.
В сферу единичного радиуса R вписывается куб со стороной
2Л?/}/3 (рис. 4.5, б). При этом сфера будет трансформирована на
плоскость, поверхность которой равна поверхности, получаемой
120
разверткой граней куба. Проведем плоскости, проходящие черед
ребра куба и центр сферы, совпадающий с центром куба. Эти плос¬
кости разделят сферу на шесть равных шаровых секторов, опира¬
ющихся на грани куба. Телесный угол каждого сектора, выделен¬
ного гранью куба, будет иметь величину, равную 90X90°. Следо¬
вательно, обзор в пределах всей сферы можно осуществить с по¬
мощью шести датчиков, поле зрения каждого из которых опреде¬
ляется диафрагмой, представляющей собой грань, вписанную в сфе¬
ру куба.
4.5
ДАТЧИКИ С АКТИВНЫМ СКАНИРОВАНИЕМ
При использовании для обнаружения Солнца сканирования про¬
странства посредством разворота КА вокруг одной из осей, напри¬
мер, оси OZ [27], датчик грубой ориентации по Солнцу должен
иметь поле зрения, обеспечивающее просмотр всей сферы в крат¬
чайшее время. Этим требованиям удовлетворяет датчик с полем
зрения, формируемым диафрагмой в виде прямоугольной щели
(рис. 4.6). Для исключения при сканировании пропуска угол поля
зрения вдоль оси сканирования должен быть не менее 180°, при
, , 360° — а,
этом время просмотра сферы t — —
рость КА вокруг оси сканирова¬
ния.
Для формирования сигнала
управления в одной плоскости
наведения можно воспользо¬
ваться теневой схемой с двумя
приемниками излучения ПИ,
как это показано на рис. 4.6,
включенными по дифференци¬
альной схеме.
Максимальная ширина ще¬
ли, определяющая угол поля
зрения в плоскости ОХ, выби¬
рается из условия помехозащи¬
» * АЧ'-' U
Рис. 4.6. Схема датчика сканирующего типа
121
щенности датчика, т. е. обеспечения требуемого отношения сигнала
к шуму фона.
Как указывалось ранее, помехой для датчиков солнечной ори¬
ентации является отраженная близлежащей планетой солнечная
радиация.
Следовательно, отношение сигнала к шуму можно представить
в виде
где Фтщ— минимальное значение потока от Солнца, определяе¬
мое по формуле
Фтах— максимальное значение потока от планеты (помехи)
г) — коэффициент полезного действия системы; £ — коэффици¬
ент использования приемника излучения; 5 — площадь чувстви¬
тельной площадки приемника.
Подставляя значения Фщщ и Ф,пах в формулу отношения
сигнал/шум, получим выражение, позволяющее рассчитать макси¬
мальную ширину щели диафрагмы, удовлетворяющей требованиям
помехозащищенности:
Формирование поля зрения датчика описанной конфигурации
можно осуществить, используя набор датчиков, суммарное поле
зрения которых выбирается
Фс,
с —= ю,
Л»
к
ах
п cos cos
2 2
из условия
где Овд — поле зрения от¬
дельного датчика по оси ска¬
нирования.
О
Для построения таких
датчиков можно воспользо¬
ваться схемой, представлен¬
ной на рис. 4.7, а.
Рис. 4.7. Оптическая схема (а) и пеленгацион-
ная характеристика для составного поля обзо¬
ра (б) ориентации по Солнцу
Схема включает зеркало
1, задающее направление
линии визирования, объек¬
тив 2, в фокальной плоско¬
сти которого помещена ди-
122
афрагма, формирующая поле зрения, и конденсатор или окуляр 3,
в зрачке выхода которого расположена чувствительная площадка
приемника излучения ПИ.
При отклонении визирной оси датчика от направления па Солн¬
це диафрагма виньетирует пучок лучей, что приводит к изменению
освещенности в плоскости выходного зрачка, а следовательно, и к
изменению выходного сигнала с ПИ. Пелеигационная характерис¬
тика датчика приведена на рис. 4.7, б.
Освещенность в плоскости выходного зрачка можно рассчитать
по формуле
Еы= у2 j |* |* (®лгд> а) ^ (Л) d(3.XIId^dX,
“*УХ
где V — линейное увеличение в зрачках; ахд, <р — углы визирова¬
ния в поперечной и продольной плоскостях диафрагмы соответст¬
венно; т(л) — коэффициент пропускания оптической системы.
Очевидно, датчик с составным полем зрения будет обладать
большей помехозащищенностью и большей линейной зоной пелеп-
гационной характеристики.
4.6
ДАТЧИКИ ТОЧНОЙ ОРИЕНТАЦИИ
Для построения датчиков точной ориентации по Солнцу может
быть использован любой вид анализа изображения с непрерывной
модуляцией. Однако в настоящее время наибольшее распростране¬
ние имеют датчики с амплитудными анализаторами. Это объясня¬
ется тем, что при амплитудном анализе изображения измерение уг¬
ловых координат достигается без применения подвижных частей,
а следовательно, конструкция датчика существенно упрощается.
Простейшая схема подобного датчика приведена на рис. 4.8. Дат¬
чик состоит из следующих основных элементов: нейтрального филь¬
тра 1, темно-красного фильтра 2, объектива 3, ножевой диафрагмы
4, полевой диафрагмы 5, приемника лучистой энергии 6 и усили¬
теля 7. Нейтральный и темно-красный фильтры имеют то же наз¬
начение, что и в датчике грубой ориентации. Полевая диафрагма
служит для ограничения поля зрения, а ножевая — для создания
требуемой пеленгационной характеристики датчика.
Двухкоординатная система управления образуется двумя пара¬
ми датчиков, приемники каждой пары включаются в дифференци¬
альную измерительную схему. При такой схеме включения прием¬
ников поле зрения пары датчиков в плоскости анализа изображе¬
ния будет иметь вид, показанный на рис. 4.8.
Рассогласованию Ах (смещение изображения Солнца относи¬
тельно ножевой диафрагмы) соответствует разность потоков ДФ =
= ф4—ф2, облучающих приемники лучистой энергии. При малых
рассогласованиях п идентичных характеристиках приемников на-
123
пряжение на выходе системы можно представить в виде
2
'^Л,2 —
2г©Дл;
)-(■
= r\sb,EAr^x (4.9)
2 / \ 2
или UXi2 = x\suEArQf'^. (4. 10)
где Ui:2 — разность напряжений, снимаемых с двух приемников;
г© — радиус изображения Солнца; /' — фокусное расстояние объ¬
ектива; Дф — угловое рассогласование в плоскости наведения, на¬
пример, в плоскости тангажа.
1 2 3
Рис. 4.8. Схема датчика точной ориентации
Решая уравнение (4.10) относительно Дф, получим чувствитель¬
ность системы по углу рассогласования при заданном значении от¬
ношения сигнал/шум
Дер:
k-/ ul
(4.11)
VuAEr^f
Пеленгационную характеристику системы можно построить, вос¬
пользовавшись величиной относительной чувствительности.
Для малых рассогласований относительная чувствительность
схемы
4Дх
(4. 12)
Относительную чувствительность при любых значениях Ах (в
пределах кружка, изображающего Солнце) можно определить по
формуле
arc sin •
--М. (4.13)
'0 '0
Более выгодна в конструктивном отношении схема с амплитуд¬
ным анализатором, выполненным в виде разделительной призмы.
Принцип действия такой схемы рассмотрен в разд. 2.5.
4.7
ДАТЧИКИ С КООРДИНАТНО-ЧУВСТВИТЕЛЬНЫМИ
приемниками
Датчик с инверсионным фотодиодом. В двухко¬
ординатном инверсионном приемнике выходной сигнал функцио-
124
нально зависит от положения изображения источника излучения
на чувствительной площадке приемника. Это дает возможность по¬
строить датчик с одним приемником для ориентации по Солнцу в
двух взаимно перпендикулярных плоскостях без дополнительного
анализирующего устройства.
Как следует из выражений (2.44), (2.45), на точность измерения
fнаведения) существенное влияние может оказать изменение вели¬
чины потока излучения на входе прибора, что приводит к измене¬
нию усиления сигнала, а следовательно, к погрешности наведения.
Для устранения этой погрешности вводится логический электрон-
Рис. 4.9. Схема датчика с инверсионным приемником
ный блок автоматического регулирования усилия, схема которого
строится таким образом, что напряжение Ь\ создает управляющее
напряжение для усилителей U2, а напряжение U2 — управляющее
напряжение для усилителей 1)х. Математически работу блока мож¬
но выразить в виде
Uxx _d + х . U%x ^d—x^ (4.14)
U 2Х d—л: U\X d + х
Вычитая из первого выражения второе, после детектирования
получим сигнал ошибки наведения:
Ьх=^ ,Ых.-. (4. 15)
u2 Ux rf2_;c2
Для малых по сравнению с величиной d изменений величины х
уравнение (4.15) приводится к виду
bx=4x/d; by = 4y/d.
Схема датчика (рис. 4.9) включает нейтральный 1 и темно¬
красный 2 фильтры, имеющие то же назначение, что и в рассмот¬
ренных схемах, объектив или диафрагму 3, инверсионный прием¬
ник 4, предусилители У, логический блок автоматического регули¬
рования ЛБ АРУ, положительные ПВ и отрицательные ОВ выпря¬
мители п два суммирующих усилителя 7S, на выходах которых вы¬
рабатываются сигналы рассогласования для слежения за Солн¬
цем.
Поле зрения датчика определяется по формуле
2<x = 2arctg^L, (4.16)
125
где I — расстояние между диафрагмой и чувствительной площад¬
кой приемника или фокусное расстояние объектива.
Для грубых датчиков схему можно существенно упростить, т. е.
исключить коммутатор и логические блоки, а сигнал рассогласова¬
ния снимать непосредственно с противоположных выводов прием¬
ника.
В этом случае погрешность наведения можно оценить по фор¬
муле
ох=/Дф = /д/, (4. 17)
где /д — линейная величина дрейфа нуля приемника.
Датчик с разрезным (секторным) приемни¬
ком излучения. Для создания датчиков ориентации по Солн-
Рис. 4.10. Схема датчика грубой и точной ориентации
цу с большим успехом могут быть использованы схемы с разрезным
четырехплощадочным (четырехсекторным) приемником излучения.
На рис. 4.10, а приведены конструктивная схема одного из по¬
добных датчиков для грубой и точной ориентации [1]. Датчик гру¬
бой ориентации, работающий по теневому полю, состоит из коль¬
цевой диафрагмы 1 и четырех секторных 2 приемников А, В, С, D-
(см. рис. 4.10, б). Датчик точной ориентации включает следующие
основные элементы: зеркальный объектив 3, вторичное зеркало 4
и разрезной координатный приемник 6. Кроме того, датчик имеет1
калибровочный излучатель-лампу 7 и зеркало 5. Разрезной прием¬
ник 6 имеет четыре площадки Sb S2, S3 и S4.
Рассмотрим принцип действия датчика точной ориентации. Сиг¬
нал рассогласования вырабатывается как разность токов, снимае¬
мых с площадок приемников: Sb S2, S3:
— A’ 2~h-
Если оптическая ось датчика направлена на центр Солнца, то
его изображение совпадает с центром приемника и облучаемые пло¬
щадки Si, S2, S3 равны по величине. Вырабатываемые точки при
одинаковых характеристиках приемников также равны между со¬
бой, а следовательно, их разность равна пулю.
При отклонении оси датчика от направления на центр Солнца
происходит смещение изображения солнечного диска относительно.
126
центра приемника. В результате облучаемые площадки секторов не
равны п появляются разности выходных токов
Д fJC = slE(Sl-S2y,
^у — SiE ($2 — $3)1
(4. 18)
(4. 19)
Рис. 4.11. Функциональная схема датчика с
компенсацией дрейфа нуля
пропорциональные угловому отклонению оси датчика от направле¬
ния на центр Солнца.
Как известно, создать приемники с одинаковыми характеристи¬
ками (крутизной преобразования) практически невозможно. Кро¬
ме того, характеристики площадок приемников неодинаково изме¬
няются во времени и при измене¬
нии температуры, что может при- ®эм
вести к погрешности измерения
угла рассогласования. Для устра¬
нения погрешности введена пери¬
одическая калибровка (рис. 4.11).
На площадки приемника излуче¬
ния 1, 2, 3 одновременно поступа¬
ют немодулированный поток от
Солнца и модулированный поток
от калибровочной лампы ЭМ. Модулированный поток создает раз¬
ностные сигналы переменного тока, которые можно записать в
виде
л/,к=Фк(*п —(4.20)
Д/ук = Фк(^2 —s/3), (4-21)
где Фк — световой поток, падающий на приемник от калибровоч¬
ной лампы; эц — токовая чувствительность соответствующих пло¬
щадок приемника (/= 1, 2, 3).
В предусилителях 4 происходит усиление и разделение сигна¬
лов переменного и постоянного токов, после чего сигналы пере¬
менного тока поступают на сравнивающее, устройство 5, вырабаты¬
вающее разности токов Д/хк и А1ук, которые используются для ре¬
гулировки крутизны характеристик площадок и S3 относительно
площадки приемника S2, принимаемого за эталонный. Сигналы по¬
стоянного тока, несущие информацию об угловом рассогласовании,
поступают на схему сравнения 6, вырабатывающую управляющий
сигнал для ориентации.
В основу работы амплитудного анализатора изображения поло¬
жено изменение облучаемой площади чувствительной площадки
приемника излучения, которое возникает при смещении изображе¬
ния излучателя. Поэтому схемная чувствительность анализатора,
при прочих равных условиях, будет тем выше, чем большее изме¬
нение облучаемой площади будет сопутствовать рассогласованию.
Следовательно, схемную чувствительность амплитудного анализа¬
тора можно увеличить, если подобрать соответствующую геометри¬
ческую конфигурацию чувствительной площадки приемника.
127
На рис. 4.12 приведена схема датчика точной ориентации с ана¬
морфотным объективом, выполненным в виде цилиндрической лин¬
зы, и приемниками излучения различной конфигурации. Датчик
предназначен для ориентации в одной плоскости. Для ориентации
в двух взаимно перпендикулярных плоскостях используются два
таких датчика.
Рассмотрим принцип действия датчика в одной плоскости на¬
ведения. Изображение Солнца цилиндрической линзой 1 посредст¬
вом зеркала 2 с полупрозрачным покрытием проектируется в виде
светящейся щели на два приемника 3 и 4. Приемник 3 имеет пря¬
моугольную чувствительную площадку, а приемник 4 выполнен в
виде треугольника.
Приемники включены в дифференциальную измерительную схе¬
му. Выходной сигнал описывается уравнением вида
Если ось датчика направлена на центр Солнца, то облучаемые
площадки приемников одинаковы (S3 = S4) и выходное напряжение
равно нулю. Причем S3 = ab\ S4 = 2l0atg а. Следовательно, ab —
= 2l0a tga.
При наличии углового рассогласования Дф облучаемая площадь
приемника 3 остается неизменной, а облученная площадь приемни¬
ка 4 равна
пропорциональное угловому рассогласованию.
Особенность этой схемы — возможность построения датчика
с большой линейной зоной преобразования, что в ряде случаев име¬
ет существенное значение.
Описанные схемы используются для разработки датчиков, име¬
ющих следующие основные характеристики
Рис. 4.12. Схема датчика
с фигурными приемника¬
ми
дU — x\ES(j (53 — £4).
S4=2a(70 + /'A?) tga.
В результате на выходе датчика появляется напряжение
Ш — y\Esu2af' tg аДср,
Датчики с разрезным приемником
Поле зрения точного датчика .
Расчетная точность
Диаметр первичного зеркала .
2а= 1°
др=з"
12,2 мм (Л = 1 : 6)
128
Фокусное расстояние объектива
Площадь чувствительной площадки .
Спектральный диапазон .
54 мм
5 мм2
0,4—1,15 мкм
Датчики с фигурными приемниками
Поле зрения
Расчетная погрешность
Размер цилиндрической линзы
Фс:;ус::ос расстояние ,
Габаритные размеры:
2а = 30°
Дф= 15'
10X20 мм
50 мм
длина ....
Масса ....
Потребная мощность
диаметр
50,8 мм
101,6 мм
226 г
400 Вт
4.8
ДАТЧИКИ ПОЛОЖЕНИЯ СОЛНЦА
Датчики положения предназначены для определения положения
Солнца в системе координат летательного аппарата. С помощью
датчиков положения можно измерить угол рыскания, угловую ско¬
рость и решить другие задачи, связанные с пространственной ори¬
ентацией. Кроме того, непрерывное измерение положения Солнца
(солнечного вектора) позволяет осуществить привязку, а следова¬
тельно, и расшифровку обширной информации, получаемой с по¬
мощью приборов, устанавливаемых на борту космического аппа¬
рата.
Как и датчики грубой ориентации, датчики положения долж¬
ны иметь полный угол обзора в 4я ср.
Датчики с дискретным выходом. Простейший дат¬
чик с дискретным выходом можно построить по схеме куба, впи¬
санного в сферу единичного радиуса. При этом датчик, работаю¬
щий в телесном угле, равном 4я ср, будет состоять из шести измери¬
тельных головок, каждая из которых имеет телесный угол сот =
= 90X90°. Разделим телесный угол каждой головки на п секторов,
в каждом из которых установим приемник лучистой энергии. В ре¬
зультате получим измерительную систему, включающую в себя 6п
Рис. 4.13. Схема датчика положения
5 2572
129
элементарных датчиков положения с телесным углом соа = сог/гг
(рис. 4.13).
Поля зрения элементарных датчиков формируются с помощью
диафрагм, располагаемых на сфере радиуса R;i. Приемники лучис¬
той энергии устанавливаются на оси диафрагмы элементарного
поля зрения датчика по сфере радиуса Rc. Величины Rr и Rc вы¬
бираются из конструктивных соображений, связанных с размеще¬
нием приемников.
Принцип действия прибора осно¬
вывается на том, что направлению’
линии визирования на Солнце
в каждый данный момент времени
соответствует облучение приемника-
вполне определенного элементарно¬
го датчика, а так как направляющие
Рис. 4.14. Схема датчика по- КОСИНуСЫ ЭЛвМеНТарНЫХ ДЭТЧИКОВ
ложентИнЯчеСской системой® °" заранее известны, то, следовательно,
становится известным и положение
Солнца в связанной системе координат космического аппарата.
Очевидно, разрешающая способность подобного датчика будет
равна
. - О, 1
Дел — = 0)э .
2 п 2 9
Для передачи информации выходы датчиков кодируются в дво¬
ичной системе счисления.
Описанный способ позволяет построить простой и надежный
датчик положения, если требуемая точность измерения невелика,
т. е. разрешающая способность лежит в пределах 10—15°. Повыше¬
ние разрешающей способности приводит к усложнению конструк¬
ции, так как при увеличении разрешающей способности в N раз-
количество элементарных датчиков увеличивается в N2 раза. На¬
пример, уже при разрешающей способности в 6° прибор должен
иметь измерительную головку, включающую 64 элементарных дат¬
чика.
Возможные направления в преодолении указанных труднос¬
тей — это создание датчиков с использованием многоэлементных
(мозаичных) приемников или использование датчиков с анамор¬
фотной оптической системой (рис. 4.14). Такой датчик состоит из
следующих основных элементов: полупрозрачного зеркала 1, раз¬
деляющего поток на две составляющие ф^Фг, цилиндрических,
линз 2 и 3 и двух матриц с приемниками лучистой энергии 4 и 5.
Линзы 2 и 3 устанавливаются таким образом, что ось цилиндра од¬
ной линзы перпендикулярна оси OY, а другой линзы — оси ОХ
связанной системы координат космического аппарата.
При указанном расположении линз отклонению визирного лу¬
ча на центр Солнца от оптической оси прибора будет сопутство¬
вать смещение фокальной линии его изображения, пропорциональ¬
130
ное углу рассогласования в направлении осей OY и ОХ системы
координат.
Матрицы должны состоять из приемников излучения, распола¬
гаемых таким образом, чтобы снимаемые с их выходов сигналы
соответствовали двоичному коду измеренной величины отклоне¬
ния.
Угловая разрешающая способность в центре поля датчика
равна
где фу — угловое отклонение линии визирования относительно оп¬
тической оси датчика в плоскости OY; ф* — то же в плоскости OZ.
Матрица может быть выполнена в виде сетки с п вертикальны¬
ми и 2 и горизонтальными секциями. В полученные при пересече¬
нии секции ячейки монтируются фотоэлементы, кодирующие изме¬
ряемую величину. На рис. 4.14, б показана сетка для кодирования
восьми дискретных измеряемых величин, т. е. датчика с разрешаю¬
щей способностью
Положение центральной линии каждой секции можно рассчи¬
тать по формуле
где /' — фокусное расстояние объектива; ф* — дискретное значе¬
ние измеряемых углов.
Фокусное расстояние объектива выбирается из условия
где 6ф.л — ширина фокальной линии (изображение Солнца, созда¬
ваемое цилиндрической линзой); dnv — диаметр чувствительной
площадки приемника излучения; 1С — расстояние между секциями
(строками) матрицы, соответствующее дискретному значению фик¬
сируемого угла.
Приведенные формулы справедливы при условии, что фокаль¬
ная линия прямая и не изменяется по ширине с увеличением угла
визирования. Фактически же фокальная линия при отклонении от
центра системы искривляется и сильно расширяется от центра к
концам и только в пределах небольших углов визирования (:10—
15°) этими искажениями можно пренебречь. Частично искажения
(4. 22)
(4. 23)
23 — 1 7
£/; = /'tg<P«
(i=l, 2, 3...),
(4. 24)
(4. 25)
5*
131
на больших углах можно компенсировать изготовлением сетки
матрицы в соответствии с характером изменения кривизны фокаль¬
ной линии.
Таким образом, оптические свойства системы исключают воз¬
можность построения датчика положения высокой точности, рабо¬
тающего при большом обзорном поле. Поэтому датчики положе¬
ния, которые должны иметь высокую точность при большом про¬
странственном поле обзора, как и датчики ориентации, строятся
Рис. 4.15. Структурная схема двухотсчетно*
го датчика
положения
по двухотсчетной системе, т. е. включают две ступени: датчик гру-
бого и датчик точного положения Солнца.
Упрощенная структурная схема двухотсчетного датчика поло¬
жения Солнца приведена на рис. 4.15.
Работу такой двухотсчетной системы можно представить сле¬
дующим образом: грубый датчик выдает на выходе сигналы, опре¬
деляющие положение Солнца в пределах пространственного угла
сог.д. Эта информация используется для цифровой следящей систе¬
мы ЦСС, которая приводит оптическую ось точного датчика в
центр пространственного угла сог.д, определяемого грубым датчиком
ДГП. Затем определяется направление на Солнце осносительно
оптической оси датчика точного положения ДТП. Так как датчик
точного положения имеет малое поле зрения, эти измерения могут
быть выполнены с высокой точностью.
При этом суммарную ошибку положения Солнца в системе ко¬
ординат космического аппарата можно представить в виде
Acps = Д?с + Д?т.д. (4- 26)
где Дфс — ошибка в положении оптической оси точного датчика
в системе координат космического аппарата; Дсрт.д — разрешаю¬
щая способность точного датчика.
Из выражения (4.26) следует, что для достижения высокой точ¬
ности начало отсчета угла, определяющего положение оптической
оси точного датчика, не должно зависеть от разрешающей способ¬
ности грубого датчика.
132
Ось вращения датчика
Рассмотрим одну из возможных схем двухотсчетного датчиками
котором используются рассмотренные оптические системы [13, 15].
На рис. 4.16 приведена конструктивная схема грубого датчика
(первая ступень измерения). Оптическая система этого датчика
состоит из широкоугольного объектива У (2ос=187°, /' = 6,3 мм, А —
= 1:7) и двух анаморфотных линз У и 3. Между объективом и
анаморфотными линзами установлены полупрозрачное зеркало 4 и
зеркало с полным отражением 5. Оси вращения зеркал совпадают
с направлением осей тангажа и крена космического аппарата. Зер¬
кала 4 и 5 приводятся во вращение шаговыми двигателями 8, 9.
Зеркала вращаются таким образом,
что солнечные лучи центрируются
относительно оси цилиндра анамор¬
фотных линз. Анаморфотные линзы
проектируют Солнце в виде узкой
светящейся линии на матрицы при¬
емников лучистой энергии 6, 7.
Матрицы состоят из приемников
излучения, включаемых по схеме
двоичного кода величины перемеще¬
ния фокальной линии. Таким обра¬
зом, перемещению фокальной линии,
пропорциональному углу визирова¬
ния, в плоскостях OZ и OY соответ¬
ствует кодовый сигнал этого пере¬
мещения. Оба сигнала используются
двигателями в системе управления космическим аппаратом и мо¬
гут быть выданы на телеметрию.
Угловая разрешающая способность в центре поля датчика
равна
180° _ 180° _0 gg0
2" — 1 26 — 1 ’
Каждая из матриц содержит 8 столбцов и 64 строки, в которых
размещаются приемники излучения для считывания кода измеряе¬
мого угла. Размеры матриц 18,5х 18,5 мм.
Грубый датчик выдает на выходе сигнал положения Солнца от¬
носительно системы координат КА в пределах пространственного
угла 3°. Эта информация используется для дискретной следящей
системы, которая приводит оптическую ось точного датчика в
центр пространственного угла 3°, определяемого грубым
датчиком.
Для обеспечения погрешности измерения <0,08° предлагается
в ДТП использовать указательную (фиксируемую) полуось 3 и сет¬
ку считывания 2 (рис. 4.17). Сетка должна иметь гиперполусфе-
рическую конфигурацию. Для обеспечения заданной точности
внутренний радиус сетки должен равняться примерно 490 мм, а
указательные отверстия 1 диаметром в 3 мм должны быть разме¬
щены с допуском в 0,025 мм.
Рис. 4.17. Конструктивная схема датчиН
точного положения
для управления шаговыми
133
В датчике точного положения используется выход, аналогичный
применяемому в датчике грубого положения (матрицы 4, 5, не¬
подвижное полупрозрачное зеркало 7).
Оптическая система состоит только из анаморфотной линзы в
с /' = 179 мм с телесным углом 6°.
Разрешающая способность на выходе преобразователя соста¬
вляет
Так как угол поля зрения небольшой и искривления фокальной
линии незначительны, в преобразователе используются прямоли¬
нейные сетки.
Датчики точного положения с непрерывным или дискретным
выходом можно построить также по схеме оптико-электронного
пеленгатора с нулевой отработкой или измерением координат по¬
ложения изображения Солнца непосредственно в картинной плос¬
кости. В первом случае угловые координаты снимаются с датчиков
углов, устанавливаемых на осях карданова подвеса, во втором
случае — посредством развертки или сканирования (см. гл. 2 и 5).
ГЛАВА 5
ОПТИКО-ЭЛЕКТРОННЫЕ ПРИБОРЫ
ДЛЯ ОРИЕНТАЦИИ И НАВИГАЦИИ ПО ЗВЕЗДАМ
Для ориентации и навигации космических летательных аппаратов
широко используются измеряемые с помощью оптических приборов
направления на звезды.
Астронавигация по Солнцу и звездам позволяет определить ко¬
ординаты положения и ориентации корабля в пространстве, осуще¬
ствить коррекцию траектории полета, реализовать на борту КА
инерциальную систему координат, стабилизировать его и решить
ряд других задач.
Поэтому развитие и совершенствование оптических визуальных
и оптико-электронных приборов для астроориентации по звездам
относится к важнейшим проблемам дальнейшего развития и совер¬
шенствования систем управления космическими аппаратами в це¬
лом.
Проектирование оптических приборов для астроориентации по
звездам развивается в направлениях:
— создания приборов для ориентации по одиночным звездам;
— создания приборов для ориентации по звездному участку.
В настоящее время наибольшее применение получили опти¬
ко-электронные приборы для ориентации по одиночным звездам.
5.1
ОБЩИЕ СВЕДЕНИЯ
Для удобства ориентации на звездном небе еще астрономы древ¬
ности разделили его на отдельные участки — созвездия, каждое из
которых можно узнать по характерному расположению его ярких
звезд. Все небо в настоящее время разделено на 88 созвездий.
С начала XVII в. яркие звезды каждого созвездия обозначают¬
ся буквами греческого алфавита приблизительно в порядке умень¬
шения их блеска. Около 130 звезд имеют собственные названия.
Слабые звезды обозначаются номерами звездных каталогов, в ко¬
торые они занесены, либо их экваториальными координатами.
Пользуясь звездным атласом, можно ознакомиться со звездным
небом, изучить созвездия и расположение отдельных звезд
<рис. 5.1).
135
Звезды отличаются друг от друга прежде всего по своему види¬
мому блеску, который характеризуется видимой звездной величи¬
ной т. С древних времен все звезды, видимые невооруженным гла¬
зом в ясную безлунную ночь, были разбиты на шесть групп. Самые
яркие звезды отнесли к звездам первой величины, самые слабые—
к шестой. Блеск звезды последующей звездной величины пример¬
но в 2,5 раза слабее блеска предыдущей звезды.
Фомальгаут
ал аир
Денеб
\ е
\
р бега
'щДАлыререи,
\
V
Антарес
пи у с нстралия
Г
/
/
Пикок/ I
Фомальгаут —
/
/
Спика
'П
Алт
I
f Арктур
I
Спика
I —. Ригель
I '•
I Капелла / \
г I Сириус
\ /
Регул \ _/
# Роллукс
Процион
\ \ РгКреста.
\ Южный •
ч. полюс J
# ч мира I
А х ер нар "\ / Эль Сухейль
Канопус • '*
V
Сириус
Рис. 5.1. Схема расположения навигационных звезд:
а—южное полушарие; 5—северное полушарие
В 1850 г., по предложению Погасона, отношение блеска звезд
при разности в пять звездных величин было принято равным 100;
при этих условиях логарифм отношения блеска при разности в
1 звездную величину равен 0,4, а само отношение 2,512.
Шкала звездных величин была распространена и на звезды сла¬
бее шестой величины, видимые только в телескоп, а также на не¬
бесные светила, более яркие, чем звезды первой величины.
Таким образом, система фотометрических единиц, принятая в
астрономии, основана на понятии звездной величины т, которая
связывает субъективное восприятие изменения блеска звезды с
объективным изменением количества света, попадающего в глаз.
Последнее пропорционально освещенности, создаваемой звез¬
дой на земной поверхности. На основании закона Вебера — Фех-
нера, который устанавливает логарифмическую зависимость ощу¬
щения глаза от раздражения его светом, соотношение между звезд¬
ными величинами принято определять как
тх — ггц,= — 2,512lg(5. Г)
Б-,
где rrii -— звездные величины; Et — освещенность, создаваемая;
звездой с звездной величиной т{.
136
Блеск звезд можно оценить не только визуально, но и фотогра¬
фически, с помощью фотометра или другого типа приемника излу¬
чения.
В современной электрофотометрии используется фотометриче¬
ская система, введенная Джонсоном и Морганом и обозначаемая
буквами U, В, V (по начальным буквам английских слов ультра¬
фиолетовые, синие и визуальные лучи). Система U, В, V определя¬
ет звездные величины, измеренные в эффективных длинах волн око¬
ло 350, 435 и 550 нм. Нуль системы показателей цвета установлен
так, что несколько звезд спектрального класса, достаточно близ¬
ких к Солнцу и практически свободных от влияния межзвездного
поглощения света, имеют показатели цвета U—В и В—V, равные
нулю, т. е. их звездные величины в фиолетовых, синих и желтых
лучах совпадают (U = В = С).
Эффективная освещенность глаза или любого другого прием¬
ника излучения, создаваемая звездой, равна
£=f£\SS!dX, (5.2)
о
где Е\ — спектральная освещенность в Вт/см2-мкм; 5® — отно¬
сительная спектральная чувствительность приемника.
Так как эффективную освещенность можно определить для при¬
емника с любой спектральной характеристикой, то для каждого из
них можно установить и свою шкалу звездных величин. В литера¬
туре используются для определения блеска (яркости) визуальная
т, фотографическая ЩфТ и фотовизуальная тф звездные величи¬
ны. Для определения интегрального потока излучения от звезды,
проходящего через границу атмосферы, используется болометриче¬
ская звездная величина тб.
Переход от одной шкалы к другой осуществляется с помощью
соотношений
Шф—тъ = Атб — болометрическая поправка,
тфт—т.ф = С — цветовой показатель.
Для расчета энергетических и световых характеристик приемни¬
ков различной спектральной чувствительности необходимо иметь
эталонную звезду т0.
В системе V за нулевую (эталонную) звездную величину при¬
нимается звезда, создающая на границе атмосферы освещенность
£0 = 2,58- 10~б лк = 2,58-10-10 лм/см2.
Величина стандартной энергетической освещенности для mQ = О
принимается равной
Е0е — 3,9‘2-10-13 Вт/см2
или Д0е = 3,57-10“13 Вт/см2.
Разница в приведенных значениях обусловливается величиной
коэффициента, принимаемого при переходе от люмена к ватту:
1 лм = 0,00161 Вт и 1 лм = 0,00147 Вт [17].
137
Интегральную освещенность, создаваемую звездой звездной
величины т, можно рассчитать по формуле
Ev = E0v-2,b\2~m= 2,58• 10_6-2,512~m лк (5.3)
или Ее = Е0е • 2,512“"' = 3,92-10-13- 2,512~ш Вт/см2, (5.4)
По спектру излучения звезды делятся на спектральные классы,
характеризующие звезду как нагретое до определенной температу-
Рис. 5.2. Карта распределения усредненных плотностей звездного фона
ры тело. В табл. 5.1 приведены цветовая и эффективная темпера¬
туры звезд главной последовательности, объединяющей 99% изве¬
стных звезд.
Таблица 5. 1 Таблица, 5. 2
Спектраль¬
ные
классы
Цветовая
темпера¬
тура, К
Эффектив¬
ная
темпера -
тура, К
Процент
от общего
количества
звезд
Видимая
звездная
величина
т
Число
звезд
Видимая
звездная
величина
т
Число
звезд
во
38 ООО
22 000
10,5
1.0
13
6,0
4 800
АО
15 400
10 700
22,3
2,0
40
7,0
15 000
F0
9 000
7 400
18,6
3,0
100
8,0
42 000
Q0
6 700
5 900
14,3
4,0
500
9,0
135 000
КО
5 400
4 900
31,9
5,0
1600
10,0
350 000
МО
3 800
3 600
2.7
Шесть спектральных классов (В, A, F, G, К, М) главной после¬
довательности делятся на 10 подклассов, например АО, Al, А2, . . .,
. . ., А9, причем температура звезды АО выше температуры звезд
Al, А2, . . ., А9.
Число обнаруживаемых звезд возрастает по мере увеличения
видимой звездной величины. В табл. 5.2 дано число звезд ярче дан¬
ной видимой звездной величины [17].
138
Распределение звезд, туманностей и галактик на небе характе¬
ризуется яркостью отдельных источников и угловым расстоянием
между ними.
Для оценки звездного фона можно воспользоваться плотностью
распределения звезд на небесной сфере. Па рис. 5.2 приведена кар¬
та звездного фона, составленная Рочем п Меджилом [17]. На ней
представлено распределение на небе усредненных плотностей звезд¬
ного фона в галактической системе координат.
Изолинии равной плотности обозначены числами, соответствую¬
щими эквивалентному количеству звезд десятой звездной величи¬
ны, суммарная освещенность от которых равна освещенности, соз¬
даваемой 1 кв. градусом прилегающего к данной изолинии участка
неба. Сто звезд 10-й звездной визуальной величины создают осве¬
щенность, эквивалентную по яркости 5-й звездной величине.
Излучение звездного фона затрудняет поиск, обнаружение и
слежение за выбранной для навигации звездой. Поэтому разработ¬
ка астроследящей системы производится по заранее выбранным
конкретным навигационным звездам, что позволяет произвести бо¬
лее точную оценку звездного фона посредством обследования обла¬
сти неба, окружающего навигационную звезду.
В табл. 5.3 приведены характеристики звездного фона для наи¬
более ярких звезд, используемых для навигации.
Из приведенной карты (рис. 5.2) следует, что наибольшая кон¬
центрация звезд имеет место вблизи галактического экватора; к
северному и южному полюсам количество звезд резко уменьшается.
Для навигационных звезд со средним значением звездной вели¬
чины 0,т6 среднее значение звезд фона определяется звездной ве¬
личиной 6,т6. На удалении в 1° от навигационной звезды средняя
звездная величина фоновой звезды равна 5,т4 при плотности рас¬
пределения 1,27 звезды на один квадратный градус.
Суммарный поток излучения от всех звезд небесной сферы при¬
близительно равен потоку от 490 звезд нулевой визуальной звезд¬
ной величины. При этом освещенность, создаваемая одним квад¬
ратным градусом небесной сферы [17],
E — AJ-10~14 Вт/(см2-град2) (5.5)
Спектральные характеристики фона н навигационных звезд при¬
мерно одинаковы, поэтому спектральная селекция в данном случае
мало эффективна.
Поверхностная плотность излучения звезды как абсолютно чер¬
ного тела при температуре Т К
оо
Ме = J MeXd\=5,669- 10“12Г4 Вт/см2.
При этом Ме\тах= 1,290-10" 15Г5 Вт/(см2• мкм).
Используя соотношение
^*Хтах ^еХтах .г-
139
Таблица 5. 'S
Навигационные звезды
Прямое
восхожде¬
ние о,
градус
Склонение 5,
градус
Сс
угловое
расстояние,
градус
>седние звез
позицион¬
ный угол,
градус
ды
звездная
величина
Ахернар (а Эридаиа)
24
—57
0,84
15
7,5
т = 0,28 СК В5
0,93
195
6,0
0,51
295
7,5
Албдебаран (а Тельца)
68
+ 16
0,72
130
6,6
m = 0,55 СК К5
0,67
165
6,5
0,34
200
7,5
0,62
245
6,5
0,56
335
7,5
0,76
343
7,0
Ригель (Р Ориона) т —
78
—8
0,25
285
5,5
= 0,14 СК В8
Бетельгейзе (а Орио¬
88
+7
0,89
50
7,5
на) т = 0,13 СК М2
0,76
340
7,5
Капелла (а-Возничего)
78
+46
0,50
330
7,0
т = 0,14 СК С1
0,42
355
7,5
Капопус (а-Киля) т =
96
—53
0,13
145
6,0
= —0,77 СК ГО
0,67
200
7,0
0,89
270
6,0
0,34
280
7,0
0,81
325
7,0
0,51
350
6,0
Сириус (а-Болыпого
101
— 17
0,84
40
7,5
Пса) т = —1,41 СК А1
0,89
120
6,5
0,99
140
7,0
0,42
160
6,5
0,72
335
7,5
Порцион (а-Малого
114
+5
0,25
80
5,5
Пса) т = 0,35 СК Р5
0,88
100
5,0
4,01
275
7,5
0,51
290
7,5
0,93
315
5,5
Регул (а-Льва) т =
152
+ 12
0,08
300
7,5
= 1,31 СК В8
0,95
325
7,5
Спика (а Девы) т =
201
— 11
нет
= 1,03 СК В1
Агена (|3 Центавра)
210
—60
0,76
15
6,5
т = 0,69 СК В1
0,67
25
7,5
0,34
290
7,5
140
Продолжение табл. 5. 3
Пря мое
Соседние звезды
восхожде¬
Склонение 5,
Навигационные звезды
ние а,
градус
угловое
позицион¬
звездная
градус
расстояние
ный угол,
величина
градус
градус
Арктур (а Центавра)
219
—61
0,98
10
6,5
/л = — 0,27 СК G2—КЗ
0,84
100
7,0
0,25
170
5,5
Вег,а (а Лиры) т=
279
+39
0,98
10
5,5-7,5
=0,05 СК АО
0,67
125
6,5
0,89
150
7,5
0,98
180
7,0
0,72
190
7,5
0,84
240
7,5
0,67
280
7,0
Алтаир (а Орла) т=
297
+9
0,76
10
5,0
= 0,78 СК А7
0,98
115
6,5
0,84
160
7,5
1,01
185
6,5
0,67
310
7,5
Денеб (а Лебедя) т =
310
+45
0,84
10
7,5
= 1,23 СК А2
0,96
70
6,5
0,51
325
6,5
Фомальгаут (а Южной
344
—30
0,47
75
5,5
Рыбы) т=1,19 СК АЗ
0,98
295
7,5
а Центавра т = —0,27
219
—61
1,00
125
7,5
0,89
140
7,5
0,50
290
7,5
1,00
325
7,5
1,20
275
7,0
Пол луке (Р Близне¬
116
+28
0,84
30
7,0
цов) т=1,12
0,93
40
7,5
0,84
75
6,5
1,01
335
3,5
можно выразить максимум освещенности через интегральную осве¬
щенность и температуру:
£х,пх=£0%^=2,28.1О-4£07\ (5.7)
м
Фон ночного неба состоит из света звезд, галактического свече¬
ния (света Млечного Пути) и зодиакального света. Яркость ночно¬
го неба в видимой части спектра равна -~8,5-10_11 Вт/(см2 ср).
В практике эксплуатации звездные датчики подразделяют на
141
автоматические — звездные пеленгаторы (астрогиды), и космиче¬
ские секстанты, и неавтоматические — астровизнры, астроориента-
торы и визуальные секстанты.
5.2
КОСМИЧЕСКИЕ СЕКСТАНТЫ
Космические секстанты служат для измерения углового расстоя¬
ния между некоторым опорным направлением и направлением на
небесное светило. Опорное направление может быть задано визи¬
рованием базового светила, например Солнца, горизонтом планеты,.
Луны или с помощью искусственного устройства — гирогоризонта.
Принцип построения п оптические схемы космических секстан¬
тов сходны с принципами построения и схемами авиационных сек¬
стантов.
Рис. 5.3. Упрощенная схема секстанта (а)] виды поля зрения при.
измерении и отсчете углов (б) и после проведения ориентации (в)
На рис. 5.3 приведена упрощенная схема визуального космиче¬
ского секстанта, представляющего собой двухканальную систему,
в которой изображение двух визируемых светил проектируется з
общую картинную плоскость F, в которой расположено анализиру¬
ющее устройство (сетка).
Световой пучок лучей от светила С/ (звезды) проходит через-
светоделительную призму 2 и защитное стекло 1 и объективом 3
фокусируется в фокальной плоскости F. Посредством поворотного»
зеркала 5 световые лучи от второго — опорного светила С2— на¬
правляются на разделительную грань призмы и затем объективом^
3 его изображение также строится в фокальной плоскости F. Эти:
изображения рассматриваются космонавтом через окуляр 4. С осью»
вращения зеркала связан датчик углов, в рассматриваемой схеме-
лимб 6 с нониусом 7. Отсчет углов производится с помощью отсчет-
ного микроскопа 8, проектирующего шкалу лимба и нониуса в
фокальную плоскость F посредством откидного зеркала 10. Враще¬
ние зеркала 5 производится с помощью маховичка 9.
142
Секстант используется в режиме измерений при определении
навигационных параметров и в режиме ориентации.
В режиме измерений космонавт вращением зеркала 5 совмеща¬
ет изображение горизонта светила, например, Луны, с изображе¬
нием звезды. Очевидно, удвоенный угол поворота зеркала, соот¬
ветствующий моменту совмещения изображений светил, будет ра¬
вен угловому расстоянию — высоте h светила (звезды) над гори¬
зонтом Луны. Этот угол космонавт отсчитывает, наблюдая
изображение штрихов лимба и нониуса через окуляр при включен¬
ном зеркале 10 (рис. 5.3, б).
Для определения местоположения КА необходимо произвести
не менее двух разнесенных по времени измерений высоты одного
и того же светила или выполнить измерение по двум светилам.
В режиме точной ориентации космонавт вращением зеркала 2
устанавливает угловое расстояние (высоту светила), а затем раз¬
воротом КА добивается, чтобы плоскость пеленгации (двойная ли¬
ния) проходила через оба светила и центр базового светила сов¬
падал с центром фокальной плоскости, как это показано на
рис. 5.3, в.
Точность измерения и ориентации зависит от погрешности сов¬
мещения изображений, погрешности отсчетного устройства и датчи¬
ка углов, а также от внешних условий, в которых производится
измерение, например, от неровности линии горизонта и влияния
посторонней засветки.
Среднюю квадратичную погрешность секстанта можно предста¬
вить выражением
= 1/(ДТв)2 + (ДТу)2 + (Д?0.у)2 + (ДТл)2,
где Дфв — погрешность совмещения изображений при измерении
угла; Д-фу — погрешность датчика углов; Дф0.у — погрешность от¬
счета угла; Дфд — динамическая погрешность, которая в первом
приближении может быть определена по формуле Дфд = сот; ш —
угловая скорость слежения; т — постоянная времени (инерцион¬
ность) зрительного восприятия. Точность совмещения Дф„ и отсче¬
та Дфо.у можно определить по формулам
Д9в=^ = &6-^-М; ДТо.у = 0,0шА
/ ок м
где k — коэффициент, учитывающий условия наблюдения (величи¬
на всегда большая единицы); ф — нониальная острота зрения
60 "D
(разрешающая способность глаза), равная 60"; Г= -=0,5В —
полезное увеличение объектива измерительной системы; D — диа¬
метр объектива; Гм — полезное увеличение микроскопа, выбирает¬
ся из условия 500А<ГМ< 1000А, где А — числовая апертура объ¬
ектива (Л = 0,1 ... 0,2).
Из приведенных формул следует, что космический секстант
для обеспечения высокой точности измерений должен иметь боль¬
143
шое увеличение, а следовательно, малое поле зрения. При малом
же поле зрения существенно затрудняется поиск и обнаружение
навигационных светил. Поэтому космические секстанты делают со
сменным увеличением — с большим полем (20—30°) при увеличе¬
нии 4—2х и меньшим полем (6—3°) — при 10—30х.
Изменение поля зрения и увеличения обычно достигается по¬
средством сменных окуляров.
С целью автоматизации и ускорения процесса обработки ре¬
зультатов измерений в конструкцию секстанта целесообразно вво¬
дить угломерное устройство для автоматического считывания и
ввода кода измеряемого угла в бортовую цифровую машину. Для
повышения удобства работы, а следовательно, и точности измере¬
ний необходимо иметь устройства
для точной и грубой наводок и от¬
счета углов.
Структурная схема космического
секстанта, отражающая эти требо¬
вания, приведена на рис. 5.4. Здесь
цифрами 2, 3, 4, 5, 6, 8 обозначены
те же элементы, что и на рис. 5.3.
Дополнительными устройствами яв¬
ляются устройство точного совмеще¬
ния изображений 9, датчик точного
угла 7 и рукоятки точного и грубого
совмещения и отсчета 10, 11.
С погрешностью в 20" измеренный угол можно преобразовать
в двоичный код для ввода в БЦВМ с помощью 16-раэрядного ко¬
дового преобразователя. Такой преобразователь может быть изго¬
товлен в виде стеклянного диска с нанесенной на его поверхности
кодовой маской. Против разрядных колец маски устанавливают ще¬
левую диафрагму и считывающие приемники излучения, с которых
и получают электрические импульсы кода угла. Диск кодового пре¬
образователя соединяют с осью вращения устройства совмещения
изображения (зеркалом) непосредственно или через безлюфтовый
редуктор, если диапазон измеряемых углов менее 90°.
Для достижения более высокой точности (единицы секунд и ме¬
нее) применяют двухступенчатые отсчетные системы с компенса¬
цией погрешности измерения, возникающей за счет эксцентрисите¬
та осевой системы и шкалы лимба.
В настоящее время разработаны способы и схемы двухотсчет-
ных систем [1, 7, 15].
Для определения координат местоположения КА воспользуемся измерением
углов Солнце — звезда (Регул), планета — звезда. Полагаем, что базовая плане¬
та и орбита КА находятся в плоскости эклиптики (рис. 5. 5).
Из Астрономического альманаха для времени наблюдения находим гелио¬
центрическую долготу планеты Хг и расстояние планеты от Солнца г сп-
Из рис. 5. 5, а видно, что
Рис. 5.4. Структурная схема прецизион-
ного секстанта с выдачей кода угла в
БЦВМ
144
где Л,/ — долгота Солнца, измеряемая космическим секстантом; Х2'— долгота
планеты, измеряемая космическим секстантом.
По теореме синусов находим
гкс sin a s'n (/"2
г sin 3 sin (Xj — ^2)
sin (X2— X2)
или гкс' ‘ rcn sin (x; —Xj)’
где гкс — расстояние между Солнцем и КА.
(5.8)
Но X = 180° — Х2—Э = 180° — Х2 — X' + Х2 ^ 18.1° — Х2> или )Х—300°—у = 360°—
— 180°+ Xj = 180° = до¬
полученные значения А и /'ко есть координаты космического аппарата.
Аналогичным образом, выполнив с помощью космического секстанта изме¬
рения для трех последовательных положений КА, можно рассчитать параметры
его орбиты (рис. 5.5,6), где п, г2, г3—последовательные расстояния КА —
Солнце; Аь Аг, Аз — соответствующие долготы; р — параметр, эллиптической ор¬
биты; е — эксцентриситет орбиты; (р— угловое расстояние перигелия.
Для трех последовательных положений КА имеем
(5. 9)
1 + е cos (X,- — я)
d = 1, 2, 3),
где л — угловое положение радиус-вектора с линией Солнце — Регул.
По данным наблюдений находим
р ^ г.у 4- r2e cos (Х2 — я) г3 + r3e cos (Х3 — л); (5. 10)
Г-Л — г 2
г2 cos (Х2 — я) — г3
Выполнив несложные преобразования, получим
(5. 11)
A cos Xi — В cos Хо + С cos Х3
tg л = — , (5. 12)
A sin Xt — В sin Х2 + С sin Х3
гДе А (г3 — г?) гВ (г3 — гх) г2\
С (Г2— Гг)ГЯ.
Получив значение я и используя выражения (5.9), (5.10), (5.11), вычислим
ей р.
6 2572
145
По формуле
р = а (1 — е2)
получим значение большой полуоси а.
Для ориентации по звездному участку (взаимному расположе¬
нию нескольких звезд) используются астроориентаторы. Принци¬
пиальная схема такого астроориентатора, построенная по схеме
коллиматорного визира, представлена на рис. 5.6.
Схема включает полупосеребренный отражатель 1, объектив 2 и
сетку 3, освещаемую лампочкой Л. На сетке нанесены прозрачные
кольца, взаимное расположение которых имитирует угловое рас-
Рис. 5.6. Астроориентатор для ориентации Рис. 5.7. Схема компоновки оптико-инерциаль*
по взаимному расположению звезд: ной системы навигации:
а—оптическая схема; 6—вид в поле зрения /—двухрежимный визир; 2, 3—гиромаятники;
4, 5—электростатические гироскопы; 6—сек¬
ста пт
положение выбранных для ориентации звезд. Сетка расположена
в фокальной плоскости объектива, и поэтому при визировании че¬
рез отражатель космонавт будет одновременно видеть звезды п
светящиеся кольца.
Принцип ориентации с помощью такого прибора основан на
совмещении искусственных ориентиров — светящихся колец с наб¬
людаемыми звездами. Этого совмещения космонавт добивается
воздействием на органы управления ориентации осей космического
аппарата. На рис. 5.6, б показан вид в поле зрения в момент до¬
стижения ориентации по созвездию Скорпиона.
Для визуальной ориентации используются также оптические
визиры в виде перископов со сканирующей призмой и измеритель¬
ной сеткой.
На рис. 5.7 приведена одна из схем компоновки оптико-инерци-
альной системы навигации с автоматическим секстантом [7, 291.
Автоматический секстант 6 представляет собой двухрежимный оп¬
тико-электронный прибор, схема п принцип действия которого рас¬
смотрены в гл. 3.
Действие секстанта сводится к следующему. Вручную или авто¬
матически линия визирования узкопольной системы удерживается
наведенной на выбранную звезду, при этом автоматически произ¬
водится отсчет углов наведения и их значение вводится в память
146
ЦВМ. Затем производится наведение на второе светило (визиро¬
вание широкопольной системой) п значение углов визирования по
второму светилу также вводится в ЦВМ.
Очевидно, разность зафиксированных углов и будет определять
угловое расстояние между этими светилами. Серия подобных по¬
следовательных измерений позволяет рассчитать координаты КА.
Космический секстант и гироскопы 2, 3, 4, 5 смонтированы в
единый блок, при этом отсчетные шкалы и устройство связаны не¬
посредственно с гироскопами. Для такой конструкции характерно
отсутствие подвижных частей и большая надежность.
5.3
ОПТИКО-ЭЛЕКТРОННЫЕ ПЕЛЕНГАТОРЫ — АСТРОГИДЫ
Автоматизация процесса измерения и ориентации по звездам до¬
стигается с помощью астроследящих систем, представляющих со¬
бой оптико-электронные пеленгаторы.
В общем случае схемную чувствительность пеленгатора при
малых угловых рассогласованиях можно представить выражением
где d — диаметр изображения звезды (кружок рассеяния); f —
фокусное расстояние объектива; к — относительная величина сме¬
щения изображения, при котором, в зависимости от применяемого
способа анализа, амплитуда разности потоков либо глубина моду¬
ляции потока превосходят шумовой сигнал.
При получении изображения высокого качества [/е = (0,1 0,01)]
и направление на звезду может быть измерено с погрешностью до
долей секунды.
Световой поток на входе прибора определяется по формуле
Ф m = EmSm = Em^. (5.13)
Для предварительного определения диаметра объектива можно
воспользоваться выражением
m=2,l+lg/Jo6, (5.14)
где т — звездная величина звезды, используемой для ориентации..
Освещенность на входе прибора должна удовлетворять усло¬
вию
Е -С Е
^ п ^ ^ т'
где £„ — приведенная ко входу пороговая чувствительность при¬
бора, определяемая по формуле (5.3) или (5.4).
Звезды из-за большого удаления создают минимально обнару¬
живаемый сигнал. Для его выделения на фоне помех оптико-эле¬
ктронный пеленгатор должен обладать высокими селективными
свойствами. Помехами при ориентации по звездам являются шумы
фонового излучения звезд, фотонные шумы звездного излучения,
6*
147
фотонные шумы фонового излучения, свечение частиц, попадающих
в поле зрения, боковые засветки и внутренние шумы самого при¬
бора, например, шумы темнового тока приемника излучения. Во
всех видах излучения, а также в тепловых шумах приемника со¬
держатся высокочастотные шумовые составляющие со спектром,
занимающим полосу от 100 до 10 мГц.
Эти составляющие могут быть устранены введением фильтра
нижних частот с номинальным срезом от 500 до 2 Гц. Низкочастот¬
ные составляющие, возникающие за счет фонового излучения и из¬
лучения слабых звезд, могут быть существенно снижены посредст¬
вом угловой селекции и порогового ограничения сигнала, т. е. ра¬
ционального выбора способа модуляции и анализа изображения, а
также селекции в электронном канале прибора, как это изложено
в гл. 2. Для уменьшения влияния боковых засветок используются
бленды. Применение селективных спектральных фильтров также
помогает селекции при слежении за звездой, выбранной для нави¬
гации.
Отношение светового потока от звезды к световому потоку от
равномерного фона неба прямо пропорционально квадрату фокус¬
ного расстояния объектива н обратно пропорционально площади
полевой диафрагмы:
= f'\\q-*=JL. J_. io-i,
Фф ^ф 03
где Sд — площадь полевой диафрагмы.
Из формулы следует, что для уменьшения влияния фона неба
пеленгатор должен иметь малый телесный угол поля зрения (по¬
рядка 1°).
Рассмотрим некоторые из схем оптико-электронных пеленга¬
торов.
5. 3. 1. ЗВЕЗДНЫЕ ДАТЧИКИ
С АМПЛИТУДНЫМ АНАЛИЗАТОРОМ
Одна из возможных схем датчика с амплитудным анализатором показана на
рис. 5.8. Схема поясняет принцип действия в одной плоскости наведения, напри¬
мер, в плоскости тангажа. В схему входят объектив 1, разделительная призма-
анализатор 2, конденсаторы 3, 4 и два приемника лучистой энергии 5 и 6. Пе¬
ред приемниками установлен вращающийся обтюратор со щелями 7, модулиру¬
ющий лучистый поток. Сигнал рассогласования, соответствующий величине сме¬
щения изображения х, создается за счет разности потоков Ф] и Пг, образован¬
ных при делении ребром разделительной призмы изображения звезды — в дан¬
ном случае кружка радиусом г (см. рис. 5.8,6). При малых рассогласованиях
величина разности потоков ДФ определяется как
4;Х
ДФ = Ф, _ Ф2 = Ф , (5. 15)
яг
(5. 16)
причем Ф = Ф1+Ф2. Следовательно,
ДФ яг
Х ~ Ф 4
Сигнал с выхода приемников анализатора можно представить в виде
Ui == i\Esv4rx = i\ESy4r /'Д<р, (5. 17)
148
где Аф — угловая величина рассогласования; /' — фокусное расстояние объектива.
Таким образом, для малых отклонений визирного луча от направления на
звезду угловая пороговая чувствительность схемы равна
Д<р = •
кУ U2
MESyff
(5. 18)
Обтюратор 7 со щелями, ширина которых выбирается приблизительно рав¬
ной размеру кружка рассеяния, позволяет осуществить модуляцию потока и уг¬
ловую Cc..wvu.hio звезды от звездного фона.
Усиленное напряжение (Л, пропорциональное угловому рассогласованию, пос¬
ле выпрямления или корреляции с опорным напряжением, частота которого
должна быть равна частоте модуляции потока, используется для автоматическо¬
го слежения за звездой.
’Рис. 5.8. Схема звездного датчика с ам- Рис. 5.9. Схема датчика определения сигнала
плнтудным анализатором рассогласования фазовым способом
Основные погрешности в рассмотренной схеме возникают вследствие неиден-
тичности и неодинакового изменения характеристик приемника, лучистой энергии.
.Этих недостатков не имеет комбинированная схема датчика, включающая ампли¬
тудный анализатор и анализатор-модулятор (рис. 5.9).
В этой схеме измерение угла рассогласования в двух взаимно перпендику¬
лярных плоскостях (двухкоординатное) достигается с помощью только одного
приемника лучистой энергии. Для этого лучистый поток, поступающий с раздели¬
тельного блока (четырехгранной призмы), периодически прерывается колеблю¬
щимися щелями или растровым диском 2. а затем направляется на чувствитель¬
ную площадку приемника лучистой энергии 1. В результате на выходе прием¬
ника появляется периодическая последовательность импульсов напряжения ча¬
стотой /1, модулированных по амплитуде частотой управления /2. На рис. 5.9,6
показана периодическая последовательность импульсов в плоскости анализа.
Так как скважность импульсов <7 = 2, получаемую последовательность можно
рассматривать как непрерывную амплитудную модуляцию, первая синусоидаль¬
ная гармоника которой содержит информацию о сигнале рассогласования. Сигнал
управления можно сформировать, используя обычные способы синхронного детек¬
тирования (см. разд. 2.5).
Применение конденсатора в датчике, приемник которого расположен в вы¬
ходном зрачке, исключает перемещение изображения. Это позволяет снизить
шумы, возникающие из-за неравномерности чувствительного слоя приемника,
а следовательно, повысить пороговую чувствительность системы.
Выбор и расчет конденсатора изложены в работах [3, 19, 20].
Используя амплитудные анализаторы или комбинированные схемы анали¬
за, можно существенно упростить конструкцию датчика, обладающего высокой
точностью при относительно небольших габаритных размерах.
Однако при проектировании датчиков только с использованием амплитудно¬
го анализатора, например, с четырьмя приемниками, необходимо вводить в схему
систему компенсации (калибровку) изменения крутизны характеристики прием¬
ников.
149
В некоторых схемах для этой цели вводится периодически включаемая не¬
прозрачная заслонка с радиолюминесцентным слоем, обращенным в сторону вер¬
шины разделительного блока.
5. 3.2. ЗВЕЗДНЫЕ ДАТЧИКИ
С АНАЛИЗАТОРАМИ-МОДУЛЯТОРАМИ
Простейший по конструкции пеленгатор для ориентации по звездам можно
создать по схеме одночастотпой амплитудной модуляции потока, осуществляе¬
мой анализатором, выполненным в виде вращающегося полудискового оотюрато-
ра, или посредством сканирования изображения, принцип действия которых опи¬
сан в разд. 2. 5.
Однако такой пеленгатор не может обеспечить вышкой помехозащищенно¬
сти при наличии фоновых помех и имеет пеленгационную характеристику с ма¬
лой линейной зоной зависимости выходного сигнала от угла рассогласования.
Значительно лучшие результаты как по точности, так и помехозащищенности
можно получить, используя для анализа изображения анализаторы с двухча¬
стотной амплитудной или частотной модуляцией.
На рис. 5. 10 приведена схема пеленгатора, разработанного фирмой Raytheon
(США), с двухчастотной амплитудной модуляцией. В пеленгаторе используется
зеркальный объектив кассегреновской схемы с диаметром первичного зеркала
152,4 м,м и полем зрения 1°.
Точность выдачи угловых координат при работе в средней зоне обзора со¬
ставляет 0.005° (-— 18"). Система отличается высокой чувствительностью, позво¬
ляющей осуществлять захват и слежение за объектами, соответствующими по
яркости звездам третьей звездной величины.
Лучистая энергия, воспринимая первичным зеркалом 2, направляется на
контррефлектор 1 и, отражаясь от последнего, фокусируется в картинной плоско¬
сти на чувствительную поверхность катода фотоумножителя 3. Контррефлектор
вращается двигателем Д1 со скоростью 50 об/с. При этом центр изображения
звезды описывает окружность, радиус которой равен радиусу диафрагмы растра.
Растр выполнен в виде сетки с радиальными штрихами.
При отсутствии рассогласования приемник облучается немодулированным
потоком, равным 1/2 Ф0. При появлении рассогласования окружность сканиро¬
вания смещается на величину, пропорциональную угловому отклонению линии
визирования относительно оптической оси датчика. В результате происходит
модуляция потока.
Напряжение первой синусоидальной гармоники па нагрузке фотоумножите¬
ля представляет собой синусоидальный сигнал несущей частоты /„ = 1000 Гц. мо¬
дулированный по амплитуде синусоидальным сигналом частоты управления /у =
= 50 Гц. Это напряжение проходит через амплитудный ограничитель АО на ди¬
скриминатор ДС, воспроизводящий сигнал частоты управления:
где Q — угловая частота управления; ф— фазовый угол.
Напряжение управляющей частоты Uy(t) поступает на фазовый детектор-
ФД, где срав'нивается с опорным напряжением, вырабатываемым ГОН.
Сигнал ошибки подается с фазового детектора на серводвигатели, осущест¬
вляющие совмещение оптической оси датчика с линией визирования на звезду..
Рис. 5.10. Схема звездного датчика со ска¬
нированием изображения
Рис. 5.11. Схема датчика со сканировани¬
ем изображения оптическим клином
U у (О =.-.[/с os (Qt + ф),
150
Следует отметить, что скважность Q равна двум только при малых углах
рассогласования. При увеличении рассогласования скважность также увеличива¬
ется и непрерывная модуляция переходит в импульсную. Поэтому усилитель дол¬
жен иметь широкую полосу пропускания, что ухудшает его избирательные свой¬
ства.
Описанный способ измерения угловых координат можно осуществить по схе¬
ме, показанной на рис. 5. 11. В данной схеме зеркальный объектив заменен лин¬
зовым, а сканирование осуществляется вращением оптического клина, устанав-
.ливаемого перед объективом.
В приведенных схемах растр, выполненный в виде сетки с радиальными штри¬
хами, позволяет осуществить также и анализ изображения по схеме частотной
модуляции. Для этого радиус окружности сканирования следует принять равным
.половине радиуса растра.
5. 3. 3. ДАТЧИКИ С ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Рис. 5.12. Схема звездного пеленгатора
с импульсной модуляцией
Датчики с непрерывными видами модуляции должны иметь малое поле зре¬
ния (1—2°), так как при большом поле зрения возможно одновременное попада¬
ние на вход прибора излучения других точечных излучателей. В результате пелен¬
гатор будет измерять направление на энергетический центр этих излучателей и
ошибка в наведении может достигать значительной величины.
Уменьшение же поля зрения затрудняет поиск и обнаружение нужной звезды.
Поэтому наряду с пеленгаторами с непрерывными видами модуляции все более
широкое применение находят пеленгаторы
с импульсной модуляцией.
Использование пороговых амплитудных
■ограничителей, селекции по яркости звещ
и логических схем позволяет с помощью по¬
добных пеленгаторов осуществить более
надежное обнаружение и достигнуть высо¬
кой точности слежения. В особенности это
относится к датчикам для коррекции поле¬
та, когда требуется лишь построение опор¬
ного направления. На рис. 5.12 приведена
•одна из возможных схем импульсного пе¬
ленгатора.
Анализ положения изображения звезды, создаваемого объективом /, прово¬
дится посредством вращающегося дискового растра 2 с прозрачной радиальной
щелыо.
Как сказано в гл. 2, оптический сигнал на выходе анализатора появляется
всякий раз, когда при вращении диска щель совпадает с изображением звезды.
В результате па выходе приемника возникают электрические импульсы примерно
постоянной длительности, временное (фазовое) положение которых относительно
опорных импульсов, вырабатываемых коммутатором К, пропорционально угло¬
вому рассогласованию.
Импульсы с приемника усиливаются, проходят через пороговый ограничи¬
тель, осуществляющий селекцию по амплитуде, и после дифференцирования посту¬
пают па электронное реле, на вход которого подаются также и опорные им¬
пульсы.
На выходе электронного реле вырабатываются новые импульсы, длитель¬
ность которых пропорциональна угловому рассогласованию.
Для формирования управляющего сигнала эти импульсы подаются на инте¬
грирующий фильтр, усредненное напряжение с которого и используется для ав¬
томатического слежения за звездой.
В рассмотренных схемах сигнал рассогласования определяется значением
‘фазового угла Дф, которому соответствует поток ДФ (см. гл. 2).
151
5.4
ОПТИКО-ЭЛЕКТРОННЫЕ ПРИБОРЫ ДЛЯ ОРИЕНТАЦИИ
ПО ЗВЕЗДНОМУ ПОЛЮ
Оптико-электронные приборы, осуществляющие слежение по одной
звезде, должны иметь малое поле зрения, и поэтому во избежание
ошибочного «захвата» другой звезды требуется довольно точное
(до 1°) предварительное наведение на выбранную для ориентации
звезду.
Существенно увеличить поле зрения, а следовательно, получить,
возможность самостоятельного поиска без предварительного наве¬
дения можно, если ориентацию проводить не по одной звезде, а па
звездному полю.
Принцип использования звездного поля в качестве источника:
информации в астронавигационных устройствах не нов (см. разд..
5.2). Однако его практическая реализация в автоматических следя¬
щих системах сопряжена с решением сложных проблем. Основной
из них является придание системе способности самостоятельно
опознавать заданное звездное поле независимо от его угловой ори¬
ентации относительно космического аппарата.
Известны работы, проводимые с использованием суперортико-
нов. В этих системах суперортикон, укрепленный на инерциальной
платформе, грубо наводится на выбранное светило. При этом по¬
ложение звезды можно определить с помощью разомкнутой систе¬
мы. Однако разрешающая способность суперортикона позволяет по¬
лучить точность не более 0,001 от поля зрения и, следовательно, для
реализации точности измерения не менее 10" поле зрения системы
не может быть большим 3,6°.
Комбинация передающей телевизионной трубки с широкоуголь¬
ной оптикой позволяет создать систему обнаружения, чувствитель¬
ную к достаточно большому числу звезд, что дает возможность ре¬
шить задачу автоматического распознавания звезд при произволь¬
ном направлении ориентации. Система такого типа, предложенная
Розенфельдом [29], имела поле зрения 10°, обеспечивала точность
не хуже нескольких угловых минут и обнаруживала звезды до
шестой звездной величины.
Система, описанная Поттером [29], имела угол поля зрения
около 30°, обеспечивала точность порядка 1' и обнаруживала звез¬
ды до третьей звездной величины.
Предпринимаются также попытки разработать мозаичные или
сеточные фотоприемники, заменяющие телевизионные передающие
трубки. Однако пока такие системы также не обеспечивают разре¬
шающей способности, сравнимой с достигнутой в системах слеже¬
ния за одной звездой.
Принципиально опознание звезд можно осуществить по трем ха¬
рактеристикам: относительному взаимному положению на небесной
сфере, яркости и наблюдаемому цвету свечения.
Исследователи фирмы Control Data Company рассмотрели все
три возможности и установили, что наиболее приемлемым для
152
астроориентации является способ, основанный на распознавании
.звезд по характерному рисунку звездного неба, т. е. по их взаим¬
ному расположению [29].
Использование второй характеристики требует измерения абсо¬
лютной яркости звезд с точностью порядка 1%, что связано с боль¬
шими трудностями; требуется периодическое повторение калибро¬
вок и более сложная электронная схема
обнаружения, включающая аналого-циф¬
ровой вычислитель. Поэтому яркостную
характеристику более целесообразно ис¬
пользовать как информацию, придающую
первой характеристике дополнительные
селективные свойства. Для опознания
применяются два способа корреляции.
При первом способе корреляция про¬
водится с помощью цифровой вычисли¬
тельной машины, сравнивающей наблю¬
даемую картину с данными карты звездного участка, хранящими¬
ся в ЗУ ЭЦВМ.
При втором способе видимое звездное поле сравнивается с за¬
данными оптико-электронными средствами, причем приемник лучи¬
стой энергии одновременно является н коррелятором.
Оптико-электронные приборы ориентации но звездному полю
позволяют осуществить трехосную ориентацию и стабилизацию
космического аппарата, поэтому такие приборы в США получили
название трехкоординатных датчиков ориентации — ТДО.
На рис. 5.13 приведена одна нз возможных функциональных
схем астроориентации с ТДО.
Предполагается, что система астронавигации с помощью трех-
координатпых датчиков ориентации проще обычной звездной, так
как неподвижно закрепленный на борту летательного аппарата
ТДО в ряде случаев позволяет отказаться от движущихся узлов и
деталей. В то время как в обычной астроинерциальной системе ис¬
пользуются звездный датчик, вычислительное устройство, три ак¬
селерометра, три гироскопа, пять подвесок и платформа, в ТДО
имеется одно вычислительное устройство и звездный датчик.
3.4. 1. ТРЕХКООРДИНЛТНЫИ ДАТЧИК
С МАШИННОЙ КОРРЕЛЯЦИЕЙ
На рис. 5.14 приведена упрощенная принципиальная схема трех-
координатного датчика ориентации, разрабатываемого фирмой
Control Data Company. Наблюдение звезд осуществляется при
помощи единой оптической системы, вырабатывающей данные для
ориентации по трем осям.
Система состоит из объектива 1, конденсора 2, фотоэлектрон¬
ного умножителя 3, кодового диска 4, модулирующего диска-ана¬
лизатора 5, датчиков угла 6, сканирующего двигателя Д, усилите¬
ля с устройством управления порогом чувствительности 8 и логиче¬
ского устройства, определяющего момент пересечения щелью 7 изо-
тдо
м\ \зцвм\
“
Рис. 5.13. Функциональная схе¬
ма ориентации посредством
трехкоординатного датчика
153
бражения звезды. Кроме того, в оптическую систему должна вхо¬
дить шторка для защиты от Солнца.
Определение положения звезд, находящихся в поле зрения дат¬
чика, проводится вычислением на основании данных об угловом
положении щели модулятора в момент возникновения импульсов.
Звезды распознаются при помощи ЭЦВМ на основании измерений
угловых расстояний между тремя звездами, и далее методом три¬
ангуляции ЭЦВМ определяется направление движения космичес¬
кого аппарата.
Если заранее известно приближенное направление ориентации
ТДО, то трехмерную задачу можно решить путем определения
только углов 0, используя
для этого диск-анализатор с
одной радиальной щелью,
сканирующей поле зрения
[29].
При произвольной ориен¬
тации ТДО необходима си¬
стема, определяющая поляр¬
ные координаты г п 0 каж¬
дой звезды. Это можно сде¬
лать, например, с помощью-
модулятора с двумя парал¬
лельными щелями.
Экспериментальные ис¬
следования, проведенные
фирмой Control Data Company моделированием на ЭЦВМ оптиче¬
ской системы с полем зрения 46°, показали, что при использова¬
нии только двух звезд угловое расстояние между ними должно из¬
меряться с точностью около 1". Если же добавить третью звезду,
то допускаемую ошибку можно увеличить до 100".
График, иллюстрирующий зависимость числа звезд, используе¬
мых для опознания, от угловой ошибки показан на
рис. 5.15.
Для выбора апертуры оптической системы можно воспользовать¬
ся графиком, показанным на рис. 5.16. Предполагается, что ошибка
в измерении положения звезды может быть менее 5-10^5 диаметра
поля зрения датчика, ширина щели 40". КПД оптической системы
0,75, а квантовый выход не менее 0,1. Порядок работы системы
следующий (рис. 5.17).
1. Накопление данных угловых измерений. В запоминающее ус¬
тройство поступают импульсы, соответствующие моментам появле¬
ния звезд, а также фоновым шумам, темповому току и др..
2. Согласование щелей. При сканировании обнаруживаемой
звезды в момент прохождения щели по ее изображению генери¬
руются импульсы, разделенные равными интервалами Л,-; и Л,,-..
Затем вычислительная машина ведет поиск по каталогу угловых
измерений, отбирая такие результаты, которые соответствуют ус¬
ловию Д;/- = Д;-А-(-е0, где ?•. 'ГД..j, Ljk. В тех случаях, когда это
1 54
Рис. 5.14. Упрощенная схема трехкоординатно¬
го датчика ориентации
условие выполнено, машина запоминает три соответствующих уг¬
ла: 01, 02, 03-
3. Для каждого набора из трех углов ЭЦВМ определяет коор¬
динаты предполагаемой звезды.
0Вх,дюйи
20
10
1,0
0,1
w'1i ю1 w2 wh.c
Рис. 5.15. График зависимости угловой
ошибки ориентации от числа визируемых
звезд
Рис. 5.16. График для выбора диаметра
входного зрачка
4. Вычисление угловых расстояний между звездами. Машина
рассчитывает и хранит в ЗУ угловые расстояния между всеми
звездами, выбранными для навигации. Число таких расстояний вы¬
ражается формулой
п
(л —2)! 2! ’
где п — число звезд.
Процесс обработки угловых расстояний начинается при 3.
5. Согласование данных угловых расстояний. Машина в ЗУ
отыскивает информацию о тех звездах, угловые расстояния между
которыми с точностью до +Ео совпадают с угловыми расстояния¬
ми, рассчитанными в п. 4. Этому может удовлетворить более чем
одна пара звезд.
6. Устанавливается связь
внутри звездных пар. Номе¬
ра пар образуют последова¬
тельность, обладающую
свойством цикличности: пер¬
вая пара 5ь S2, вторая S*,
53, третья S3, S,. Это и по¬
зволяет устранить неодно¬
значность.
7. Вычисление направле¬
ния линии визирования ТДО
Когда звезды идентифициро¬
ваны по их координатам,
хранящимся в ЗУ, определя¬
ется направление линии ви¬
зирования и положение всех трех осей ориентации: прямого восхо¬
ждения а, склонения б и азимута А.
Если картина звезд не опознана ЭЦВМ, то проводится повтор¬
ный поиск и опознание.
Рис. 5.17. Схема последовательности анализа
изображения
155
Для решения задачи требуется ЗУ с большим объемом памяти..
Как минимум, необходимо запомнить прямое восхождение и скло¬
нение каждой звезды. Например, для системы, запоминающей 1 СО
звезд, необходим объем памяти примерно 4200 двоичных единиц.
На вход системы обнаружения поступают полезные сигналы от'
звезд и шумы различного происхождения: шумы фонового излуче¬
ния звезд, фотонные шумы звездного излучения, фотонные шумы,
фонового излучения и внутренние шумы системы.
Рис. 5.18. Функциональная схема электронной системы ТДО
Так как датчик должен рассчитываться на минимально обнару¬
живаемые сигналы, для их выделения необходима электронная:
система, обладающая высокими селективными свойствами. Воз¬
можная структурная схема такой системы приведена на рис. 5.13.
Высокочастотные шумовые составляющие, которые содержатся'
во всех видах излучения, занимающие полосу от 100 до 10 МГц,
подавляются фильтром низких частот ФНЧ. При длительности сиг¬
нала в 1 мкс такой фильтр должен иметь номинальную частоту
среза от 500 до 2 кГц. Это позволит существенно увеличить отно¬
шение сигнал/шум, не искажая формы полезного сигнала.
Фоновое излучение имеет те же частоты, что и частота сигнала,
так как возникает за счет сканирования слабых звезд. Поэтому для'
их подавления в схему вводится дискриминатор порога, осущест¬
вляющий ограничение по верхнему и нижнему уровню (см. гл. 2).
Низкочастотные составляющие, возникающие за счет фонового
излучения неба, имеют периодичность от 1 до 20 с и могут изме¬
няться на порядок величины. Гак как обнаружение основано на
пересечении порога, эти составляющие шумов могут быть устране¬
ны введением «плавающего порогового значения», вырабатываемо
го с помощью активного фильтра, устанавливаемого перед диффе¬
ренциальным усилителем ДУ. Для выдачи информации об угловом
положении звезд и яркости в схему введены вентили BI, В2 ir В’З.
На рис. 5.19 приведена схема сканирования небесной сферы. н«
последовательность возникающих при этом импульсов.
Угловая точность системы непосредственно связана с шириной
щели анализатора. Чем уже щель, тем точнее будут зафнксирова-
156
ны положения изображения звезд. Однако чтобы обеспечить про¬
хождение нужного количества света при сужении щели, необхо¬
димо увеличивать либо период сканирования, либо апертуру, что не
всегда возможно.
Рис. 5.19. Схема сканирования небесной сферы и последовательность
возникающих при этом импульсов
Поэтому более надежным способом повышения точности явля¬
ется способ, основанный на увеличении числа щелей с последую¬
щим использованием корреляции полученных сигналов от звезд с
опорным сигналом.
5.4.2. ТРЕХКООРДИНАТНЫЕ ДАТЧИКИ
С ОПТИЧЕСКИМ КОРРЕЛЯТОРОМ
В трехкоординатных датчиках с оптической корреляцией видимое
звездное поле согласовывается с полем, выбранным для ориента¬
ции, оптико-электронными средствами, причем приемник излуче¬
ния — фотоумножитель служит и приемником и коррелятором.
На рис. 5.20 показана схема такого датчика. Объектив 1 фоку¬
сирует параллельные световые лучи от каждой звезды в определен¬
ную точку фокальной плоскости ФП. За фокальной плоскостью в
расходящихся пучках помещена эталонная карта ЭК выбранною
для ориентации участка небесной сферы. В рассматриваемой схеме
карта выполнена в виде тонкого металлического диска с группой
отверстий малого диаметра, взаимное расположение которых соот¬
ветствует (моделирует) расположению фактических звезд. Диаметр
отверстий выбирается заведомо меньшим ширины расходящегося
пучка. При правильной ориентации оптической системы относитель¬
но звездного поля световые пучки от каждой звезды проходят через
соответствующие отверстия карты и фокусируются в плоскости
корреляции, с которой совмещена чувствительная поверхности»
приемника, и образуют одно общее пятно. Фокусировка достигает¬
ся с помощью полевой линзы ЛФ многослойного элемента Фре¬
неля.
При наклоне космического аппарата в плоскости тангажа или
крена происходит сдвиг пятна и его деформация, что и использу¬
ется для формирования сигнала ошибки в блоке обработки данных
БОД, содержащем информацию о направлении отклонения осей
КА.
При повороте КА световое пятно увеличивается в размере, а
его яркость уменьшается примерно пропорционально величине угла
поворота.
Для выявления знака направления разворота эталонная карта
содержит две одинаковые
группы отверстий. Одна
группа смещена относитель¬
но другой по дуге вращения
вокруг оси курса, что даст
две отдельные корреляцион¬
ные функции. Разность меж¬
ду двумя выходами характе¬
ризует ошибку в повороте.
Перед фотокатодом ФЭУ
установлен вращающийся
частотный модулятор-анали¬
затор в виде растра с радиальными щелями.
В режиме поиска эталонная карта поворачивается до тех пор,
пока по корреляции светового пятна на фотокатоде не будет достиг¬
нута правильная ориентация относительно звездного поля. Затем
осуществляется наведение в плоскости тангажа и крена.
По данным фирмы, датчик имеет следующие параметры: объ¬
ектив f' — 37 мм; угол ноля зрения 2а = 46°; относительное отвер¬
стие — 1 : 1,2; линза Френеля }' = 37 мм.
Предварительная ориентация должна быть выполнена с точно¬
стью до 10°.
Система может работать по звездам 3—4-й звездной величины.
Минимальное воспринимаемое изменение пространственной ориен¬
тации по каждой из трех осей не хуже 30".
Рис. 5.20. Схема трехкоординатного датчика
ориентации с оптической корреляцией
ГЛАВА 6
ОПТИЧЕСКИЕ ПРИБОРЫ
ДЛЯ КУРСОВОЙ ОРИЕНТАЦИИ
КОСМИЧЕСКИХ АППАРАТОВ
Под курсовой ориентацией подразумевается определение углового
отклонения вертикальной плоскости, проходящей через продольную
ось ОХ космического аппарата, относительно плоскости орбиты.
Конечной задачей системы управления курсовой ориентацией явля¬
ется совмещение продольной оси ОХ с вектором скорости КА
(плоскостью орбиты) посредством углового разворота вокруг оси
рыскания OZ, совмещенной с местной вертикалью (рис. 6.1).
В настоящее время применяют три основных метода построения
систем курсовой ориентации:
— метод курсовой ориентации посредством измерения угла рыс¬
кания с помощью оптических приборов;
— метод курсовой ориентации, основанной на использовании
гироскопических приборов, работающих в сочетании с построителя¬
ми местной вертикали;
159
— метод курсовой ориентации, основанной на слежении за
опорным светилом н сравнении измеренных углов с расчетными.
Рассмотрим наиболее характерные схемы приборной реализа¬
ции этих методов.
6.1
КУРСОВАЯ ОРИЕНТАЦИЯ, ОСНОВАННАЯ НА ОПРЕДЕЛЕНИИ
НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ ИЗОБРАЖЕНИЯ
Метод курсовой ориентации КА, основанный на определении на¬
правления перемещения (бега) изображения наблюдаемых ориен¬
тиров, аналогичен известному в авиации методу определения угла
сноса.
В обоих случаях процесс курсовой ориентации сводится к сов¬
мещению направления перемещения изображения ориентиров с
курсовой чертой, фиксирующей продольную ось аппарата, посред¬
ством разворота вокруг оси рыскания. Для реализации данного
метода могут быть использованы как визуальные, так и автомати¬
ческие оптико-электронные приборы.
На рис. 6.1 приведена схема, поясняющая принцип действия
при визуальном способе курсовой ориентации. Объектив Об опти¬
ческого прибора, устанавливаемого на КА, проектирует в фокаль¬
ной плоскости изображение участка поверхности планеты, ограни¬
чиваемого углом поля зрения. В фокальной плоскости помещена
сетка с курсовой чертой, параллельной продольной оси ОХ кос¬
мического аппарата, а оптическая ось прибора, направленная по
вертикали места, совпадает или параллельна оси OZ. При движе¬
нии КА ориентиры, находящиеся на поверхности планеты, переме¬
щаются с относительной скоростью, .равной и противоположно
направленной вектору скорости аппарата V.
Положим, что на поверхности планеты имеется ориентир (точ¬
ка /1), видимый под углом ф в момент времени 1и а его изображе¬
ние (точка а) проектируется на курсовую черту.
При движении КА изображение ориентира — точка а — переме¬
щается, «бежит», со скоростью vm. Если вектор скорости КА совпа¬
дает с направлением оси ОХ — курсовой чертой, направление «бе¬
га» происходит по курсовой черте.
При отклонении продольной оси ОХ от направления вектора
скорости на угол рыскания ф перемещение изображения ориенти¬
ра также происходит под углом ф относительно курсовой черты и
за время наблюдения /„ оказывается смещенным по оси OY на
величину А у. Следовательно, величина смещения А у может быть
использована как мера угла ф рыскания, т. е. курсовой стабилиза¬
ции и ориентации КА.
Связь между минимальным значением угла рыскания Дф, обус¬
ловливающим погрешность курсовой ориентации, и смещением
изображения можно представить в виде
АФ=-^-= ьущн + R) с> (6Л)
^из^н VKRfobtH
160
где Дф — минимальное значение смещения изображения, которое
можно обнаружить в течение времени наблюдения /„ = /1—12\
v -v —*—^1, (6.2)
"3 R + Н Н К
Оцз — скорость перемещения изображения; ок — круговая ско¬
рость КА; Н — высота полета; R — радиус планеты; /0б— фокус¬
ное расстояние объектива.
Величина Ду определяется по формуле
, k - 2э0 п\
Д у=——, (6.3)
Гр
где k — разрешающая способность глаза наблюдателя с расстоя¬
ния наилучшего видения 250 мм; Г — увеличение оптической сис¬
темы прибора.
Подставляя в выражение (6.1) значение Ду из (6.3), получаем
k.2oO.H{H + R)
Угловую погрешность курсовой ориентации для рассматривае¬
мого метода можно представить также формулой
At V /ь 2о0 ,а, г-,
Дф = — = ; , (6.5)
v„3А Г/об fg Дс?
где Дф — изменение угла визирования за время наблюдения /,,.
При этом величина изменения угла визирования выбирается из
условия
Дер О 2а, (6.6)
где 2а — поле зрения прибора.
Ориентирами для курсовой ориентации КА являются границы
оптического контраста между отдельными излучающими неодно¬
родностями. Для ИСЗ такими границами служат разрывы в облач¬
ном покрове, граница между сушей и водной поверхностью, круп¬
ные объекты и т. п.
Приведенные формулы (6.2), (6.4), (6.5) и (6.6) позволяют рас¬
считать основные параметры оптического прибора и погрешность
курсовой ориентации. Расчет ведется методом последовательных
приближений, результатом которого должно быть обеспечение за¬
данной точности ориентации с учетом возможности технической
реализации прибора.
Так, например, для ИСЗ, движущегося на высоте Я = 300 км,
при /об=Ю0 мм, поле зрения 2а = 30°, Г = 0,5, по формуле (6.5)
находим
k-250 2,5-250 ос,
ДФ = ; —- —’■ = 25 .
r/o6tgA<p 0,5-100-0,57
Приведенный пример показывает, что рассмотренный метод
курсовой ориентации обладает достаточно высокой точностью.
161
При выводе расчетных зависимостей предполагалось, что опти¬
ческая ось прибора сохраняет вертикальное положение в течение
всего времени наблюдения. В реальных условиях оптическая ось
неподвижно закрепленного на КА прибора имеет колебания, обус¬
ловленные угловыми поворотами относительно осей OY и ОХ. Эти
колебания воспринимаются наблюдателем, как смещение изобра¬
жения ориентиров, вызванных угловым рзз^поточ ф.
Погрешность в курсовой ориентации вследствие отклонения от
вертикали при колебаниях КА по осям крена и тангажа можно
оценить по приближенной формуле
’ (6-7)
tg А?
где у — угловые колебания вокруг оси ОХ. Так, например, при
у = 30' и Дф = 30° погрешность в курсовой ориентации может дости¬
гать величины
Д®„ = —=44'.
‘ 0,57
Среднее квадратичное значение суммарной погрешности кур¬
совой ориентации определяется по формуле
Д<Р5 = ]/’(Дф)2 + (Дф„)2. (6.8)
Из формулы (6.8) следует, что при выборе оптимального значе¬
ния погрешности следует исходить из условия
Д6 = дфн. (6.9)
Как указывалось выше, при курсовой ориентации КА должен
сохранять горизонтальное положение, т. е. ось OZ должна совпа¬
дать с местной вертикалью. Поэтому система курсовой ориентации
должна работать в сочетании с построителем местной вертикали,
обеспечивающим горизонтальную стабилизацию КА. Примером ор-
1 62
ганнческого сочетания построителя местной вертикали и курсового
ориентира является оптический визир [26, 28].
Оптический визир-ориептатор устанавливается на одном из ил¬
люминаторов кабины 1\А (рис. 6.2, а). Он состоит из двух кольце¬
вых зеркальных отражателей КЗ 1, К32, светофильтра и сетки с на¬
несенными на ней параллельно продольной оси КА курсовой чертой
(рис. 6.2, б).
При правильной ориентации КА относительно местной вертика¬
ли космонавт видит горизонт планеты в форме кольца симметрич¬
ного относительно оптической оси визира. Через центральную часть
визира он наблюдает изображение участка поверхности планеты.
Курсовая ориентация достигается воздействием на органы управ¬
ления КА, при котором линия горизонта — центр кольцевого изо¬
бражения — совмещена с оптической осью, а направление «бега'>
изображения наблюдаемого участка планеты совпадает с курсовой
чертой сетки.
6,2
ОПТИКО-ЭЛЕКТРОННЫЕ ПРИБОРЫ КУРСОВОЙ ОРИЕНТАЦИИ
С ЧАСТОТНЫМ РАСТРОМ
Рассмотренный в разд. 6.1 метод курсовой ориентации можно
автоматизировать, если направление «бега» изображения преобра¬
зовать в электрический сигнал для управления КА. Такое преобра¬
зование можно получить, например, с помощью частотного растра.
Схема оптико-электронного прибора с преобразователем в виде
частотного растра приведена
на рис. 6.3, а.
В фокальной плоскости объ¬
ектива Об расположен растр Р
в виде чередующихся прозрач¬
ных и непрозрачных полос,
симметрично расположенных
относительно разделительной
курсовой черты (рис. 6.3, б).
Лучистый поток, проходя¬
щий через растр, фокусируется
кондесорами К1 и К2 на чув¬
ствительные площадки прием¬
ников излучения ПИ1 и ПИ2.
При перемещении изобра¬
жения по растру излучение от
границ неоднородностей моду¬
лируется с частотой
Рнс. 6.3. Схема частотно¬
го метода курсовой ори¬
ентации
(6. 10)
где Т — время перемещения границ неоднородности между двумя
соседними полосами полурастра.
163
Период Т связан с параметрами растра и скоростью изображе¬
ния зависимостью
т_21 2IH(H + R) ^
v*Rf'o6
Положим, что растр выполнен в виде наклоненных под углом ар,
к курсовой черте полос. Тогда величина перемещения в пределах
одной полосы
/=—— , (6.12)
Sin Up
где а — ширина полосы растра.
Подставляя Т и / из выражений (6.11) и (6.12) в (6.11), полу¬
чаем
.г v«f об^ * /С 1 о\
/о = sin ар. (6. 13)
J ° 2аН (Н + R) Р V
Такую частоту модуляция потока будет иметь, когда направле¬
ние «бега» изображения параллельно курсовой черте, т. е. при уг¬
ле рыскания ф = 0.
Если продольная ось КА отклонена на угол рыскания ф от
направления вектора скорости, то вследствие того, что величина
перемещения изображения различна, частоты на левой и правой
половинах растра будут не равны:
j. *(к/обЯ sJn а
J 2 aH(H^R) 1 ’
, vKf'o6R .
/„ — sin а„— ф).
J 2 aH{H + R) p
При малых значениях углового отклонения, определяющих по¬
грешность курсовой ориентации, разность частот
д ^/обД 2 cos а„Д'К (6.14)
у 2аН (Н R) 1 v
Из (6.14) следует, что погрешность курсовой ориентации прямо
пропорциональна разности частот.
С помощью электронного усилителя вырабатываемую разность
частот Af можно преобразовать в управляющее напряжение ЕЛ,
пропорциональное величине и знаку угла рыскания т|э.
Вследствие малой скорости изображения vm частоты /л и (п-
будут малы, поэтому для формирования электрического сигнала
используются схемы с резонансными усилителями и частотным
дискриминатором. Возможная функциональная схема для форми¬
рования управляющего электрического сигнала представлена на
рис. 6.4.
164
Рис. 6. 4. Структурная схема частотного метода’
Схема включает приемную оптическую систему ПОС с двумя
приемниками излучения ПИ1 и ПИ2, резонансные усилители РУ1
и рУ2, частотный детектор ЧД
;и усилитель У.
Наибольшая разность час¬
тот А/, как это следует из
(6.14), будет при ар = 0. Одна¬
ко при этом частоты /0, [ь U
также будут наименьшими. По¬
этому при выборе ар (наклона
полос растра) следует исходить из возможности усиления низко¬
частотного сигнала резонансным усилителем (порядка 14—15 Гц).
Полагая, что разность частот должна составлять не менее
75—85% от максимального значения, и принимая /0 = 15 Гц, при
cos dp = 0,8, sin ар = 0,6 получим значение /тах = 25 Гц, позволяющее
оценит!> ожидаемую погрешность метода. Так, например, при
у/,6 = 250 мм, а = 0,25 мм, Я = 300 км и и1; = 8 км/с получим
А/ = /,-/„ = ^ • 25,5 cos арДа = 25,5 • 0,8 = 20Д%
дф=®£=1,50.
20
и следовательно, Дф=-^г= 1,0”. Здесь различимое значение раз¬
ности частот Д/ принято равным 0,5 Гц.
6.3
КУРСОВЫЕ ОРИЕНТАТОРЫ, ОСНОВАННЫЕ
НА КОРРЕЛЯЦИОННЫХ МЕТОДАХ
Положим, что на КА установлен оптико-электронный прибор с
двумя оптическими головками, визирующими поверхность планеты
под углами ф и —ф, относительно местной вертикали. Причем
плоскости визирования совмещены с вертикальной плоскостью,
проходящей через продольную ось ОХ КА. В фокальной плоскости
объектива датчиков установлены приемники излучения ПИ1 и
ПИ2 (рис. 6.5, а).
При движении КА над неоднородной излучающей поверхностью
с выходов приемников будут поступать фотоэлектрические сигна¬
лы, представляющие собой некоторые случайные функции времени
Ui(t) и U2(t).
Если плоскость визирования П! совпадает с направлением век¬
тора скорости v, то поле зрения обоих приборов будет последова¬
тельно проходить над одними п теми же участками местности, и на
выходе приемников будет воспроизведена одна и та же реализа¬
ция случайной функции, но со сдвигом т, определяемым угловым
Положением поля зрения датчиков и скоростью движения.
Следовательно, при идентичных характеристиках визирующих
систем совмещению оси ОХ с направлением вектора скорости будет
соответствовать одинаковая величина сигналов
U-i (t —f-тг),
165
где Ui(t + x) — сигнал от первой головки, задержанной на время т.
Однако даже при полном совмещении полей зрения в предела*
одной и той же полосы фона нельзя добиться точного совпадения
сигналов Ui(t + x) и U2 (t) в силу случайного характера интенсив¬
ности излучателя. Поэтому наиболее эффективно сравнение сигна¬
лов не по алгебраической разности, а при использовании корреля¬
ционных методов.
Рис. 6.5. Схема определения угла рыскания корреляционным
методом
В основу корреляционного метода положено различие статис¬
тических свойств фона как полезного сигнала и шума. При этом
сигнал и шум принимаются за случайные процессы, одной из ха¬
рактеристик которых является корреляционная функция.
Полезный сигнал — периодический процесс, т. е. если известно
его значение в момент /(, то можно определить его значение в мо¬
мент /2-
Для шумов связь имеет другой характер. Если в течение неко¬
торого времени Т выбрать парные значения шума, отличающиеся
одно от другого по времени на интервале т, т. е. и U(il + x),
U(t2) и U(t2 + x) и т. д., а затем составить их парные произведения
и взять средние значения за время Т, то получим корреляционную
функцию процесса
т
#(T)=-i- \ U{f)U (t\x)d.t.
o’
Корреляционная функция шумов имеет максимум при т = 0, а
такая же функция полезного сигнала тем больше, чем больше зна¬
чение т. Поэтому, используя приведенную выше схему, возможно
выделить очень слабый сигнал, если время наблюдения взять до¬
статочно большим.
166
функциональная схема формирования сигнала для курсовой
ориентации, основанная на корреляционном методе, приведена на
^Как это следует из схемы, при корреляционном методе прибор
должен иметь два приемника и коррелятор.
Детектированные выходные сигналы приемников усиливаются и
додаются иа коррелятор. Выходные напряжения коррелятора моле¬
но представить в виде
U{t) = kU2{t) их (* + 'С),
где /г — коэффициент усиления: U\(t + x) — смесь сигнала и шума
1-го канала; U2{t) — смесь
сигнала и шума 2-го канала.
На выходе коррелятора
будут составляющие посто¬
янного тока при наличии по¬
лезного сигнала и флюктуа-
ционная составляющая шу¬
мов. Выходной сигнал с кор¬
релятора интегрируется с
помощью фильтра низких
частот для выделения по¬
лезной составляющей постоянного тока, которая затем поступает
на индикаторное устройство для управляющего воздействия. Таким
образом, корреляционный прибор должен выполнять последова¬
тельно и непрерывно следующие операции: измерять парные зна¬
чения смеси полезного сигнала и шума U2(t) и LJ, разделен¬
ные по времени на интервалы т, вычислять последовательные про¬
изведения U2(i) и Ui(t-]-x), вычислять средние значения этих
произведений за время 7.
Статистическая погрешность зависит от спектральных характе¬
ристик сигнала, интервала времени Т и измеряемого значения авто¬
корреляционной функции.
В частном случае ограниченного по частоте нормального белого
шума с полосой частот AF статистическая погрешность измерения
значения автокорреляционной функции выражается в виде норми¬
рованной средней квадратичной ошибки е согласно формуле
g= CKO [R (/)] _ 1 J , R2(0) I1'2
S R(t) 2VWf L /?2(т)
где T — эквивалентное время истинного осреднения в с.
Время осреднения можно определить по формуле
Т_1 + R (0)/У?2 (т)
справедливой при е^0,2.
- Так как корреляционная функция является четной функцией.
Для выделения знака измеряемой величины необходимо иметь три
измерительных прибора (см. рис. 6.5, б). При измерении получим
Рис. 6.6. Схема определения сигнала рассогласо¬
вания корреляционных методом
167
две корреляционные функции £?(t)i,2 и R(t)i,3 между сигналами
£Л(т) ,1)2(1+%) и U\(т), £/3(/ + т).
Если R(t)i'2 = R(x) i,z, то это свидетельствует о том, что направ¬
ление вектора скорости совпадает с направлением отсчетной оси
прибора. Если Я (т) i,2># (t)i,3, то это значит, что вектор скорости
развернут влево по отношению к оси, если Д (t)1,2</?(t)i,3, то век¬
тор скорости развернут вправо.
Возможны и другие схемы построения приборов курсовой ори¬
ентации, основанные на обработке сигнала с фотоприемника, воз¬
никающего при движении изображения как случайного процесса.
Так, например, если в схеме на рис. 6.3 частотный растр заме¬
нить диафрагмой в виде прямоугольной щели, ориентированной
относительно продольной оси КА, о курсовой ориентации можно
судить по максимуму автокорреляционной функции Rray
Сущность принципа действия такой системы заключается в сле¬
дующем. При ориентированном положении КА (продольная ось ще¬
ли совпадает с направлением вектора скорости (ф = 0) случайные
сигналы на выходе приемника излучения представляют собой неко¬
торую плавно изменяющуюся кривую, в которой преобладающее
значение имеют гармоники низкой частоты. Наоборот, при попереч¬
ном перемещении изображения относительно щели (угол ф=И=0) в
состав случайного сигнала войдут гармоники более высоких час¬
тот, возникающие при наличии излучающих неоднородностей малой
протяженности. Как известно, чем плавнее кривая случайного про¬
цесса, тем более пологой является случайная функция ДГщ). Если
ввести время задержки ть то значение функции Ru (x.i для самой
плавной кривой будет наибольшим.
С увеличением частоты модуляции сигнала, возникающей при
отклонении щели от направления вектора скорости КА, значение
функции будет уменьшаться. Таким образом, курсовую
ориентацию можно осуществить, разворачивая КА до получения
максимального значения RutXl).
Заслуживает внимания принцип построения курсовых ориента-
торов, основанный на использовании взаимных корреляционных
функций. Источником первичной информации в данном случае яв¬
ляется случайное распределение лучистости поверхности планеты
или случайное распределение лучистости небосвода, обусловлен¬
ное нерегулярностью расположения звезд или излучающих одно¬
родностей поверхности планеты.
Для технической реализации метода требуется четыре прибора
с оптической системой, аналогичной представленной на рис. 6.3, а.
В фокальной плоскости объектива каждого из четырех приборов
помещается растр с двумя парами прозрачных полос, развернутых
относительно направления продольной оси КА на угол ар (рис.
6.3, б).
При полете ориентированного относительно местной вертикали
КА изображение отдельных звезд (границ контраста излучающих
неоднородностей), проходя через прозрачные полосы (щели), соз¬
дает на выходах фотоприемников случайные сигналы.
168
Если продольная ось КА совпадает с направлением вектора
скорости, время прохождения изображения излучающих объектов
между парами щелей одинаково. При отклонении продольной осп
ОХ от направления вектора скорости время прохождения изобра¬
жения через одну пару щелей будет большим, а через другую —
меньшим.
Эти временные интервалы, характеризующие отклонение про¬
дольной оси от направления вектора скорости, определяются на
основе измерения корреляционной связи между случайными сигна¬
лами на выходах приемников.
Все рассмотренные схемы и методы пригодны для разработки
курсовых ориентаторов с использованием как в видимом, так и в.
спектральном диапазоне излучения.
6.4
КУРСОВАЯ ОРИЕНТАЦИЯ, ВЫПОЛНЯЕМАЯ
ПРИ ПОМОЩИ ГИРОСКОПА И ПОСТРОИТЕЛЯ
МЕСТНОЙ ВЕРТИКАЛИ
С помощью построителя местной вертикали на КА можно получит!»
стабилизированную в горизонтальной плоскости платформу. Если
в такую платформу (рис. 6.7) установить двухстепенный гироскоп
с осью подвеса по местной вертикали, то орбитальная угловая
скорость платформы в инерциальном прост¬
ранстве вызовет появление момента Мг на опо¬
рах подвеса гироскопа
Mr=Hv sin
где Н — кинетический момент гироскопа.
При условии начальной выставки оси гиро¬
скопа по вектору v орбитальной скорости КА
гироскоп будет следить за изменением угла ры¬
скания гр. Следовательно, рассматриваемая
система позволяет осуществить курсовую ори¬
ентацию — отработку угла рыскания на пуль.
6.5
АСТРОСЛЕДЯЩИЕ СИСТЕМЫ КУРСОВОЙ ОРИЕНТАЦИИ
В астрономических системах курсовой ориентации с помощью
оптической системы строится плоскость пеленгации, проходящая
через центр навигационного светила, и измеряется угол разворота
этой плоскости относительно продольной оси КА в плоскости гори¬
зонта.
При этом, как это показано на рис. 6.8, истинный курс опреде¬
ляется выражением
ф=А —3,
Рис. 6.7. Схема связи
двухстепенного гироскопа
с местной вертикалью
№
где А — азимут светила; р — курсовой угол светила, измеренный
прибором. Азимут светила А вычисляется на основе введенных в
вычислительное устройство координат местоположения КА и све¬
тила решением параллактического треугольника. Для решения мо¬
гут быть использованы аналоговые или цифровые вычислительные
устройства.
В качестве оптических датчиков для курсовых систем в ряде
случаев используются датчики, применяемые в авиации.
Рассмотрим приведенную на рис. 6.9 схему оптического датчи¬
ка типа ДАК-И и др. [26]. В этом датчике плоскость пеленгации
задается двумя кольцевыми щелями, параллельно которым рас¬
положены приемники излучения 1, 2, включенные по дифференци¬
альной схеме. Для увеличения освещенности чувствительных пл>>-
Рис. 6.9. Схема оптического
датчика горизонтального аст¬
рокомпаса (а); функциональ¬
ная схема определения кур¬
сового угла (б)
а) 1
щадок приемников над ними установлены оптические конусы А
Датчик служит для измерения курсового угла по Солнцу.
При отклонении плоскости пеленгации от направления на центр
Солнца на выходе датчика появляется разностный сигнал, посред¬
ством которого осуществляется слежение за Солнцем. Курсовой \
170
угол Солнца считывается со шкалы или кодового устройства, за¬
крепляемых на вертикальной оси датчика.
По данным работы [26], курсовая система с рассматриваемым
датчиком обеспечивает определение истинного курса с погрешно¬
стью ±3°. Аналогичную точность можно получить, используя дат¬
чик с объективом типа «рыбий глаз», схема которого приведена на
рис. 6.10.
В фокальной плоскости объектива 1 расположен вращающийся
анализатор 2, выполненный по спирали Архимеда, на периферии
которого нанесены прозрачные штрихи. За анализатором распо¬
ложен конденсатор 3, в зрачке выхода которого помещена чувст¬
вительная площадка приемника излучения 4.
При вертикальном положении оптической системы координат
изображение Солнца определяется углом места р и азимута .4
(рис. 6.10, б):
|л = у' tgcp = Q = /z28ca; А = пг8ср,
где ср — угол визирования на центр Солнца; бср — цена деления
шкалы; пи п2 — число штрихов, фиксируемых счетчиками угла ме¬
ста и курсового угла Солнца.
Рис. 6.11. Схема измере¬
ния углов (а); формиро¬
вание электрических сиг¬
налов (б)
LOt
ь;
На рис. 6.11, б приведена возможная схема получения значе¬
ний р и А.
Объектив типа «рыбий глаз» представлен на рис. 6. 12. Он представляет со¬
бою две склеенные плоско-выпуклые линзы. Причем вторая линза выполнена в
виде полусферы. На плоской поверхности первой лиизы нанесена прозрачная
Диафрагма малого диаметра, являющаяся входным зрачком объектива. Объек¬
тив позволяет получить прибор с полем зрения 180° и более.
171
Для предварительного расчета параметров объектива можно воспользоваться
формулами, вытекающими из геометрического построения прохождения луча:
sin i' — — sin W.' = k sin Wr',
r 1
sin i — n sin
W = W' + I' — i.
Рис. 6.12. Схема широкопольного
qобъектива
По приведенным формулам, задавшись значениями
методом
последовательных приближений находим величину k — —q'jr 1 (величина k выби¬
рается меньше единицы), при которой удовлетворяются требуемые значения
W'max и Wmax, Затем по формулам геометрической оптики определяем параметры
объектива — радиус, толщину линз и фокусное расстояние.
Окончательные параметры и характеристики объектива получаем посредством
аберрационного расчета.
ГЛАВА 7
ОПТИЧЕСКИЕ СИСТЕМЫ
ДЛЯ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ И СТЫКОВКОЙ
КОСМИЧЕСКИХ АППАРАТОВ
Стыковка космических аппаратов необходима дли выполнения та¬
ких важных операций, как:
— ремонтные работы в космосе и спуск на Землю аварийных
КА или их экипажей и аппаратуры;
— заправка и дозаправка космических аппаратов, выведенных
на орбиту для полета к планетам;
— доставка и смена экипажей на орбитальной космической
станции;
— сборка космических объектов в космическом пространстве.
Для обеспечения процесса стыковки система управления сбли¬
жением должна иметь средства для решения таких задач, как вза¬
имное обнаружение, наведение, измерение дальности и относитель¬
ной скорости стыкуемых космических аппаратов. Эти задачи могут
быть решены с помощью автономных автоматических и (или) полу¬
автоматических оптических приборов.
Космический аппарат, выполняющий в процессе стыковки ак¬
тивную роль (поиск и наведение), будем называть маневрирую¬
щим космическим аппаратом (МКА), а космический аппарат, с ко¬
торым производится стыковка, — пассивным (ПКА).
По способу обнаружения и наведения оптические приборы для
сближения и стыковки можно разделить на:
— пассивные, в которых ПКА обнаруживается по собственному
или отраженному солнечному излучению:
— активные с пассивным ответом, в которых маневрирующий
КА имеет излучатель, излучение которого отражается ПКА и ис¬
пользуется для наведения. При этом для увеличения дальности
действия на ПКА устанавливают уголковые отражатели;
— активные с активным ответом, когда Г1КА также имеет излу¬
чатель, излучение которого направляется на МПК.
На рис. 7.1 показан участок сближения и примерная схема оп¬
тической системы сближения.
Как это следует из рис. 7.1, б, оптическая система сближения со¬
держит три подсистемы: систему ближнего действия СБД, систему
дальнего действия СДД и устройства пассивного ПС и активного
АС ответов.
173
Примерный диапазон работы бортовы
к систем сближения
Для системы дальнего действия:
диапазон изменения дальности .
от 150 до 5 км
погрешность измерения .
10 м
погрешность угловой ориентации
10'
Для системы ближнего действия:
диапазон изменения дальности
от 5 км до 0
погрешность измерения
0,1 м
погрешность измерения относительной ско¬
рости
0,01 м/с
погрешность угловой ориентации . .
10"
При неавтоматическом процессе стыковки управление маневри¬
рующим космическим аппаратом осуществляет космонавт, исполь¬
зуя для поиска и наведения оптические приборы, в качестве кото¬
рых могут служить визуальные средства ориентации и навигации.
По такому способу выполнялась совместная программа полета
кораблей «Союз — Аполлон» [28].
На маневрирующем ПКК «Аполлон» в качестве системы даль¬
него действия для поиска и наведения использовался космический
секстант, смонтированный на общей раме с ннерциальной системой
навигации. Навигационные данные, получаемые с помощью секс¬
танта с расстояния примерно 400 км, обрабатывались в БЦВМ. Во
МКА
S)
стыковка космических ап~
паратов:
а—участок сближения;
б—схема системы сбли¬
жения
гремя полета по освещенной части орбиты ППК «Союз» наблю¬
дался в отраженном солнечном свете, во время полета по неосве¬
щенной части орбиты наблюдение и измерение велось по вспыш¬
кам света бортовых огней «Союза». Угловое положение ППК
«Союз» стабилизировалось относительно местной вертикали. При
сближении (расстояние 35 км) наведение выполнялось с помощью
перископа со сканирующей призмой, который использовался на
Лунном модуле для стыковки с орбитальным модулем. При дости¬
жении расстояния между космическими кораблями в 2 км скорость
перемещения линии визирования сводилась к нулю и это нулевое
значение сохранялось до окончания сближения кораблей.
На ПКК «Союз» для ручной стыковки предполагалось исполь¬
зовать оптический визир, периферийная оптическая система кото¬
рого служит для ориентации по местной вертикали, а центральная
174
перископическая система со сканирующей призмой — для навига¬
ционных измерений при сближении [28].
Рассмотрим некоторые из оптических схем и способов для по¬
строения автономных автоматических систем сближения при сты¬
ковке.
7.1
СИСТЕМА СБЛИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА
С ИСТОЧНИКОМ ИЗЛУЧЕНИЯ
В ШИРОКОМ СПЕКТРАЛЬНОМ ДИАПАЗОНЕ
На рис. 7.2 приведена функциональная схема системы сближения с
источником излучения в широком спектральном диапазоне. Так,
например, аналогичная система сближения с ксеноновой лампой-
вспышкой была предложена фирмой «Мартин» [15]. Эта система
позволяет получить информацию о дальности, относительной ско¬
рости, угловых координатах и скорости их изменения при расстоя¬
нии между КА от 50 до 7 км.
Рис. 7.2. Схема оптико-электронной системы сближения
Передающая система выполнена в виде параболического зер¬
кала 1 диаметром 180 мм, в фокальной плоскости которого уста¬
новлена ксеноновая лампа-вспышка.
Интервалы и длительность вспышки задаются тактовым гене¬
ратором (ГИ), управляющим спусковым устройством — емкост¬
ным переключателем СУ.
На ПКА устанавливается блок уголковых отражателей. Отра¬
женный этим блоком импульсный световой сигнал передающей
системы попадает на приемную систему маневрирующего КА, кото¬
рая выполнена в виде зеркально-линзового объектива 2. Сфокуси¬
рованный световой поток посредством светоделительного блока 3
разделяется на две части. Одна часть потока поступает на коорди¬
натно-чувствительный приемник ПИ1, другая — на одноплощад-
ный приемник ПИ2.
175
Сигналы с координатно-чувствительного приемника ПИ1 усили¬
ваются и поступают на серводвигатели СД[ и СД2 для слежения за
угловым положением ПКА. Слежение осуществляется разворотом
приемно-передающей системы по азимуту (строчная развертка) и
по углу места (кадровая развертка).
Углы поворота СД, и СД2 посредством тахогенераторов ТГ1 и
ТГ2 и потенциометров Г11, FI2 преобразовываются в электрические
сигналы, пропорциональные угловым скоростям и углам по азиму¬
ту и месту соответственно.
Дальность определяется импульсным методом по формуле
= (7.1;
2
где с — скорость света; t3—интервал времени между посылкой им¬
пульса и приемом отраженного сигнала (время запаздывания).
Интервал времени можно представить в виде
4=«/о. (7-2^
где п — число импульсов, укладывающихся в интервале времени
4; /о — частота импульсов, вырабатываемых генератором стандарт¬
ных импульсов ГСИ.
Подставляя (7.2) в (7.1), получаем
D = — , (7.3)
2/о
где б’/2/о = ДД — дискретность отсчета дальности. Дальность выра¬
жается числом импульсов п, (фиксируемых счетчиком Сч. Для это¬
го тактовый импульс от ГИ, фиксирующий момент излучения свето¬
вого импульса передающим устройством, одновременно поступает
на управляющий триггер УТ, который открывает вентиль В и на
вход счетчика начинают проходить импульсы от генератора ГСИ.
Импульс, приходящий от уголкового отражателя ПКА, преобра¬
зовывается приемником излучения ПИ2 в электрический сигнал,
усиливаемый усилителем УЗ. Сигнал с усилителя переводит триг¬
гер в первоначальное положение, закрывающее вентиль В.
Таким образом, вентиль находится в положении «открыт» в те¬
чение интервала времени /., = 2£>/с. За время С на вход счетчика
через вентиль В от генератора ГСИ поступает число импульсов п,
пропорциональное дальности. Одновременно информация о даль¬
ности со счетчика подается в вычислительное устройство ВУ, кото¬
рое посредством сравнения последующего и предыдущего числа
импульсов вырабатывает данные о скорости.
Недостатком рассмотренной оптической системы слежения яв¬
ляется относительно небольшая дальность действия из-за невысо¬
кой плотности энергетической светимости излучения и влияния фо¬
на, снижающего отношения между сигналом и шумом.
В значительной степени эти недостатки могут быть устранены
при использовании в качестве излучателя оптического лазера.
176
7.2
ОПТИЧЕСКИЕ СХЕМЫ ПРИБОРОВ СБЛИЖЕНИЯ
С ЛАЗЕРНЫМ ИЗЛУЧАТЕЛЕМ
Одна нз возможных схем оптической системы сближения с лазер¬
ным излучателем приведена на рис. 7.3. Схема включает приемно¬
передающую систему на маневрирующем КА, уголковый отража¬
тель УО и лазерный маяк, устанавливаемые на ПКА. Кроме того,
на ПКА может дополнительно устанавливаться следящая система
взаимной ориентации, работающая по излучению системы манев¬
рирующего КА.
Рис. 7.3. Схема оптико-электронной системы сближения с лазер¬
ным излучателем
Приемно-передающий канал имеет два соосно расположенных
лазера: лазер дальнего действия на арсениде галия (Лз1), излу¬
чающий на длине волны А. = 0,9 мкм в телесном угле 0,5°, и лазер
Лз2 ближнего действия, излучающий в телесном угле 2,5° [15, 16].
Для формирования излучения в заданных телесных углах ис¬
пользуется принцип действия лазерных решеток с коллимирующей
оптической системой.
Отраженный от уголковых отражателей лучистый поток зер-'
кальным объективом фокусируется на фотокатоде диссектора ДСС.
Диссектор посредством строчно-кадровой развертки вырабатыва¬
ет электрические сигналы, которые поступают в систему обнару¬
жения и сопровождения. Эта система выдает значения текущей
дальности и сигналы рассогласования для управления процессом
сближения, а также сигнал для переключения на канал ближнего
действия. В режиме ближнего действия используется оптическая
система с фотоумножителем. Скорость сближения определяется:ка
основании сравнения последовательных показаний дальности.
Для повышения надежности обнаружения и слежения, как это
7 2572
177
указывалось выше, на космическом аппарате ПКА устанавливается
лазерный маяк на арсениде галия, излучающий в телесном угле
10° оптические сигналы в виде двоичных импульсов. Формирование
телесного угла излучения производится также посредством лазер¬
ной решетки и объектива. Соосно с маяком устанавливается опти¬
ко-электронная система взаимной ориентации и слежения по лучу
приемно-передающей системы маневрирующего космического аппа¬
рата.
При достижении взаимной ориентации, обеспечивающей попа¬
дание на вход приемной системы маневрирующего КА сигнала ог
уголкового отражателя, лазерный маяк выключается.
Как это следует из рассмотренной схемы, основным элементом
оптико-электронной аппаратуры стыковки являются оптические ло¬
каторы с лазерным источником излучения, которые по методу из¬
мерения дальности можно разделить на лазерные локаторы с им¬
пульсным и фазовым методом измерения дальности.
7.3
ОПТИЧЕСКИЕ ЛАЗЕРНЫЕ ЛОКАТОРЫ,
ИЗМЕРЯЮЩИЕ ДАЛЬНОСТЬ ИМПУЛЬСНЫМ МЕТОДОМ
При импульсном методе измерения дальности навигационный ори¬
ентир облучается импульсами, и дальность определяется как вели¬
чина, пропорциональная времени запаздывания ta между излучае¬
мым и принимаемым — отраженным от ПКА сигналом и преобра¬
зованная в число импульсов.
Схема импульсного локатора
приведена на рис. 7.4. Ее принцип
действия сходен с выше описанной
системой сближения с ксеноновой
импульсной лампой.
При помощи передающей оптиче¬
ской системы излучение лазера на¬
правляется на уголковый отража¬
тель ПКА. Часть излучаемого пото¬
ка через полупрозрачное зеркало по¬
ступает на приемник излучения ПИ1
для формирования опорного элек¬
трического сигнала. Этот сигнал попадает в блок обработки дан¬
ных и генератор стандартных импульсов (ГСП). Отраженный угол¬
ковым отражателем световой импульс поступает на вход приемной
оптической системы и с помощью приемника излучения ПИ2 пре¬
образуется в электрический сигнал, усиливаемый усилителем У.
Электрический сигнал с усилителя поступает на блок обработки
данных. Преобразованное этим блоком время запаздывания в чис¬
ло импульсов, пропорциональное дальности, поступает на блок ин¬
дикации. Простейшим устройством для такого преобразования
является счетчик импульсов, рассмотренный в разд. 7.1.
м
/I рл 1>
Рис. 7.4. Схема импульсного лазерного
локатора
178
Возможно применение и других схем индикации, например, на
электронно-лучевых трубках, используемых в импульсных радиоло¬
каторах.
Лазерный импульсный локатор вследствие монохроматичности
излучения позволяет увеличить дальность действия и отношение
сигнала к шуму.
7.4
ЛАЗЕРНЫЙ ЛОКАТОР, ОСНОВАННЫЙ
НА ФАЗОВОМ МЕТОДЕ ИЗМЕРЕНИЯ ДАЛЬНОСТИ
м
Сущность фазового метода измерения дальности поясним на при¬
мере упрощенной схемы, представленной на рис. 7.5.
Излучение лазера модулируется генератором масштабной час¬
тоты (ГМ). Полагая, что фазовые искажения отсутствуют, напря¬
жение на модуляторе можно представить в виде
= sin <oMt, (7.4)
где сом — масштабная частота.
По такому же закону будет изменяться и излучаемый лазером
лучистый поток, посылаемый передающей системой в направлении
отражателя:
ф,. = Фт sino)M/'. (7.5)
Отразившись от уголкового от¬
ражателя, излучение попадает на
объектив приемного устройства, в
фокальной плоскости которого по¬
мещен приемник излучения ФЗУ.
Приемник излучения преобразует
лучистый поток в электрический
сигнал
^с = 5иФи0 sin [со(/ —13)\, (7.6)
где s„ — вольтовая чувствительность приемника излучения; t3
время задержки.
Напряжения Нм и Uc, усиленные усилителем, поступают на фа¬
зовращатель ФВ, который выдает электрический сигнал, соответст¬
вующий разности фаз:
Рис. 7.5. Схема фазового локатора
2D 0 , 2D
Рр— шм — 4jT/m >
с с
где — частота модуляции.
Решая уравнение (7.7) относительно D, будем иметь
D--
2“м
4 я/,
■ЧУ
(7.7)!
(7.8)
Распространение непрерывного гармонически изменяющегося
Излучения можно оценить в длинах волн У=с//М. Часть длины вол-
179
ны может быть выражена через период 360°—ф. Тогда расстояние
2D легко выразить через N, К, ф:
2D=NX-\~ — X. (7.9)
360
Оценим погрешность измерения. Полагая, что фаза может быть
легко измерена с погрешностью в 1°, получим
AD= — . (7.10)
720
Тогда при /м = 100 мГц (Я = 30 м) погрешность измеряемой даль¬
ности
А г, 30 .
AD = — = 4 см.
720
Следует отметить, что вполне достижимой погрешностью в из¬
мерении фазы является величина в 0,1° и менее.
Из выражения (7.9) следует, что однозначность измерения раз¬
ности фаз возможна только в пределах угла 2я рад, т. е. при вы¬
полнении условия
?шах-?ш,п=-- (Цнах-ДпшКЗя. (7. 11)
С
При Dmin = 0 это условие принимает вид
2 —-Dmax 2jt,
с
CJX,
отсюда = .
Таким образом, для повышения точности измерения дальности
необходимо увеличивать масштабную частоту, а для выполнения
однозначности измерений ее необходимо уменьшать. Выход из это¬
го положения состоит в использовании двух, трех и более фиксиро¬
ванных частот. Первая служит для грубого определения дальности,
вторая — для более точного, а третья — для еще более точного
измерения дальности. Эта задача может быть решена также по¬
средством плавно меняющихся частот.
Применение нескольких, близких между собой фиксированных
частот, приводит к разностному (дифференциальному) способу
определения дальности:
D=it(N'+т); D-i£-(*+f) ■т- *•
Преобразование этих выражений дает
С Г /АТ <Р1—?2
D= —2— [(TV, - N2!
(7. 12)
2 (/м1 — /м2) L ^
Разность фаз ф1—ф2 относится к разностной частоте. Если вы-
брать /м2 = 0,99/м1, то
D = —?—\{N1 - N2)+n~n 1. (7.13)
2.0,01 L k '
180
При этом на частоте /м) будут получены точные значения даль¬
ности, а на частоте (f„i—/м2) — приближенные, не превосходящие
*■1,2 с
2 2 (/м1 - /м2)
и Ni = N2-
Значение (pjk не будет превосходить величины
Ч С
2/м1 '
Например, при /мi = 15 МГц, /м2=0,99 /м1= 14,85 МГц,
(7. 14)
*1.2
1000 м, что дает погрешность в дальности
/mi—/м2= 150 кГц
£
AD= 1,4 м.
На частоте fMi получим значение дальности с погрешностью
Д£> = 2 см.
Возможная схема локатора, работающего по рассмотренному
методу, представлена на рис. 7.6. Источником излучения является
Рис. 7.6. Функциональная схема фазового локатора
полупроводниковый лазер. Его излучение модулируется задающим
генератором (ЗГ). Отраженное излучение принимается оптической
системой и фокусируется на фотоумножителе. Часть напряжения
от задающего генератора подается на смеситель. Одновременно на
смеситель подается напряжение, стабилизированное кварцевым
генератором. На выходе смесителя образуется напряжение проме¬
жуточной частоты 100 кГц, которое через фазовращатель ФВ и
коммутатор фазы подается на специальные электроды фотоумно¬
жителя. В результате фототок ФЭУ, модулированный частотой за¬
дающего генератора, вторично модулируется частотой гетеродина.
Появляется переменная составляющая фототока с разностной час¬
тотой задающего генератора и гетеродина, т. е. с частотой 100 кГц.
Фаза этой переменной составляющей зависит от измеряемого рас¬
стояния. При этом происходит фазовое детектирование и фототок
определяется разностью фаз между опорным и отраженным сигна¬
лом, т. е. пропорционален измеряемой дальности.
181
Для более точного определения рассогласования фаз фаза
опорного сигнала модулируется фазовым модулятором (коммута¬
тором фазы), меняющим фазу опорного напряжения на 2я рад с
частотой 1 кГц. При этом в фотоумножителе появляется состав¬
ляющая частотой 1 кГц с амплитудой, зависящей от разности фаз
между опорным и отраженным сигналами. Ее величина имеет рез¬
ко выраженные максимумы при разности фаз в я и Зя рад, что
увеличивает точность сравнения фазы. Для дальнейшего повыше¬
ния точности и помехозащищенности
сигнал с нагрузки ФЭУ подается на
синхронный детектор и затем на нуль-
индикатор (НИ). Для устранения не¬
однозначности измерений дальности
используются три частоты модуляции
в 30; 29,9 и 27 МГц.
Требования к приемной оптической
системе определяются способом наблю¬
дения и индикации. При визуальном
наблюдении приемная система должна
иметь высокую разрешающую способ¬
ность. Наблюдение может производиться через окуляр или по изо¬
бражению на экране. При фотоэлектроавтоматическом приеме тре¬
бования к коррекции оптической приемной системы определяются
качеством светового пятна.
С равным успехом могут применяться зеркальные, зеркально-
линзовые и линзовые оптические системы. Выбор той или иной сис¬
темы и ее параметров производится с учетом получения наимень¬
ших габаритов и требуемого соотношения между полезным сигна.-
лом и шумом, порождаемым внешними и внутренними помехами.
Решение этой задачи сводится к вычислению пороговой чувстви¬
тельности и дальности действия при заданных параметрах или к
нахождению значения этих параметров по заданной дальности
действия и пороговой чувствительности.
Световой поток излучаемый передающей частью системы, на¬
правляется в приемную часть посредством отражателей. При этом
световой поток должен отражаться с минимальными потерями.
Поэтому наибольший интерес в данном случае предста;вляют отра¬
жатели, не требующие точной ориентировки (рис. 7.7).
7.5
РАСЧЕТ ДАЛЬНОСТИ ДЕЙСТВИЯ СИСТЕМ
С ЛАЗЕРНЫМ ИСТОЧНИКОМ ИЗЛУЧЕНИЯ
Энергетическая освещенность, создаваемая на объекте лазером,
определяется по формуле ![ 15]
^ = 77 = ^77^ cos?, (7.15)
Z,2 (on L2
где /п — интенсивность излучения передатчика; Фл.з — лучистый
Рис. 7.7. Схема отражателей:
а—уголковый; б—прямоугольная
призма
182
поток, излучаемый лазером; тп — коэффициент пропускания опти¬
ческой системы передатчика; соп — телесный угол расходимости
луча передающего устройства; тс — коэффициент пропускания
излучения лазера по линии связи; |3 — угол между направлением
луча и нормалью к облучаемой поверхности.
Сила отраженного излучения в направлении принимающей сис¬
темы от диффузно отражающей поверхности с коэффициентом дд
определяется по формуле
10б = ^- Ло6дд cos р= Ло6тсд сое* р. (7. 16)
It Яш nUl
В приемную систему локатора поступает только та часть отра¬
женного излучения, которая попадает на входной зрачок приемной
системы, и, следовательно, поток излучения можно рассчитать по
формуле
Ф'-р=-^5»Л = Ф-—ТпТ2 (7. 17)
£>2 я£Мш„
где Л0б=Л0ббд cos2 (3 — эффективная площадь отражающей по¬
верхности; то, Тф — коэффициенты пропускания приемного устрой¬
ства и фильтра соответственно.
В частном случае, когда угол расходимости не превышает угло¬
вых размеров поверхности,
Фпр=Флз|§^тфдд. (7.18)
Для выделения полезного сигнала необходимо, чтобы
ФпР>^Фх„£(Д/), (7-19)
где р — требуемое отношение сигнал/шум; Ф(п монохромати¬
ческий пороговый поток приемника при полосе пропускания А/=1;
k(A}) — коэффициент, учитывающий влияние полосы пропускания
в 1 Гц.
Для фотоумножителя £(Д/) = ]/Д/,
kt{ 1 + тп) 0д6
где Дf = l —5-Л*’ ; (7.20)
2 к0„
Д/ — требуемая полоса пропускания; Тк — время просмотра
(длительность импульса); — угол расходимости передающей
системы; 60бз — угол обзора; kf — коэффициент, учитывающий
форму импульса; тп — коэффициент перекрытия при
обзоре.
183
Дальность действия локатора без учета фоновой засветки мож¬
но определить по формуле (15]
/•» 1 f 4Флз^об^вхТ„Т^ф УТК п
V тФХ11я26,10обз/й/(1+т1,)
При использовании уголковых отражателей
ф 16Ф.1зЛОТ|,Лвхротр,ТоТфТсТ1|
,р / 1 ПГ (/.22)
/54я26^ ( + 0,05/г)
п V d cos р /
Q I ,IJ--Ull<--BASUI-p -II -С -и^Ф C0S 108 ^
/ШФтз-Лотр-^вхОотр^пД Т0т,
тФХип22иоб, ( ~ Г + О,
■ \d cos р
ГЛАВА 8
ИМИТАТОРЫ КОСМИЧЕСКОГО ПОЛЕТА
8.1
ОБЩИЕ СВЕДЕНИЯ
Успешное осуществление космических полетов требует тщательно¬
го изучения и отработки системы оператор — машина и всех под¬
систем и устройств КА. Этим в значительной степени объясняется,
что наземная подготовка к запуску КА составляет 60—70% общего
объема работ по их созданию и выводу на орбиту. Существенное
место в этих работах занимает создание имитаторов, позволяющих
отработать навыки в управлении КА в наземных условиях, макси¬
мально приближающихся к условиям полета в космосе, а также
создание имитаторов для отработки и проверки навигационных
систем и приборов.
В общем случае система оператор — машина представляет со¬
бой сложный комплекс устройств, включающий стенд, космический
аппарат или его кабину управления, вычислительную машину и
устройства, воспроизводящие внешнюю панораму полета (вид
звездного неба, Солнца, Луны, Земли и других небесных светил).
Один из вариантов имитационной лаборатории [30] представля¬
ет собой сферическое помещение диаметром 12 м, примыкающее
к двухэтажному зданию площадью 12X12 м. В центре сферы на
подвижном основании стенда установлена герметизированная гон¬
дола, сходная по внутреннему устройству с кабиной экипажа кос¬
мического корабля. В кабине смонтированы приборы и органы уп¬
равления, а внутренний вид соответствует внутреннему виду ими¬
тируемого космического корабля. Условия полета, нагрев, шум
ракетных двигателей, вибрация и другие условия имитируются соот¬
ветствующими устройствами. Внешняя панорама полета воспроиз¬
водится на внутренней поверхности сферы.
Весь имитатор приводится в действие при помощи аналого-циф¬
рового вычислительного комплекса, приспособленного для вычис¬
ления в натуральном масштабе времени уравнений механики дви¬
жения корабля с шестью степенями свободы, навигационных урав¬
нений, уравнений вращения Земли, программ работы, генерирую¬
щих условия окружающей среды, и таких функций, которые
требуются для работы членов экипажа в космической кабине.
В центре лаборатории установлен большой пульт управления,
на котором имеются все органы управления и индикаторные уст¬
185
ройства (в том числе замкнутая телевизионная система), требую¬
щиеся для управления имитируемым полетом. Аппараты типа «Ва-
риплотер», самописцы и устройства записи на магнитную ленту
регистрируют все существенные параметры для контроля работы
экипажа на основе непрерывно получаемых сведений.
Наряду с имитаторами, моделирующими полные условия поле¬
та, большое значение имеют имитаторы, моделирующие частные
задачи. Нацример, имитаторы, моделирующие процесс управления
КА при стыковке, имитаторы для отработки навыков в определе¬
нии навигационной информации, имитаторы для проверки и отлад¬
ки астронавигационных приборов, имитаторы для проверки тепло¬
вого баланса КА и др. Эта группа имитаторов базируется на опти¬
ческих методах моделирования и измерения. Техническая реализа¬
ция таких имитаторов несколько проще, чем имитаторов, модели¬
рующих полные условия полета.
Ниже рассматриваются принципы построения и действия ими¬
таторов Солица, планет и звезд.
8.2
ИМИТАТОРЫ СОЛНЦА
Имитаторы Солнца по функциональному назначению можно раз*-
делить иа два основных класса: имитаторы для юстировки и про¬
верки оптических навигационных приборов — СИ; имитаторы для
исследования теплового баланса космического аппарата и его эле¬
ментов и устройств — ТСИ.
Для термических испытаний требуются имитаторы больших
размеров, это и предопределяет различие между двумя указанны¬
ми классами имитаторов Солнца. Основные требования к энергии
и спектру излучения СИ для обоих классов имитаторов примерно
одинаковы.
Интенсивность солнечного излучения изменяется обратно про¬
порционально квадрату расстояния от Солнца и на орбите Земли
равна ~ 1400 Вт/м2. Сезонные изменения солнечной постоянной
Земли составляют около 3,5%- В связи с удаленностью Солнце рас¬
сматривается как точечный источник излучения с постоянной ин¬
тенсивностью и цветом.
Радиационная температура Солнца, если полагать, что Солнце
излучает как абсолютно черное тело (АЧТ), имеющее видимый
угловой размер Солнца и создающее в вакууме на поверхности,
перпендикулярной к падающим лучам, энергетическую освещен¬
ность, равную солнечной, составляет 5785°. Излучательиая способ¬
ность Солнца 0,99. Средняя энергетическая яркость Солнца Le —
= 2100 Вт-см-2• ср-1. Распределение яркости солнечного диска не¬
однородно, и в центре визуальная яркость в 1,22 раза больше сред¬
ней. Цветовая температура в центре диска выше, чем по краям,
что проявляется как покраснение диска к краю.
Практически вся электромагнитная энергия излучения Солнца
лежит в оптическом спектральном диапазоне 0,1—3 мкм.
186
Мощность излучения в области 0,2—0,3 мкм составляет при¬
мерно 1,22% от общей. Однако излучение в этом спектральном диа¬
пазоне оказывает значительное влияние на поверхностные свойст¬
ва материалов и, в частности, на оптические характеристики по¬
крытий, а следовательно, и на тепловой баланс КА. Основной
вклад в тепловой баланс КА вносит излучение в спектральном диа¬
пазоне 0,3—3 мкм, в котором сосредоточено 97% всей энергии из¬
лучения.
Спектральное распределение энергии солнечного излучения в
вакууме было получено Джансоном и считается общепринятым
(рис. 8.1).
Идеальный имитатор Солн¬
ца должен точно воспроизво¬
дить солнечное излучение по
интенсивности, равномерности,
параллельности лучей и спект¬
ральному распределению энер¬
гии.
Реальный имитатор состоит
из источника излучения и опти¬
ческой системы с присущими
им ограничениями и удовлетво¬
ряет назначению, если отклоне¬
ние его характериттик от ха¬
рактеристик идеального имитатора лежит в пределах, указанных в
табл. 8.1.
Таблица 8.1
Характеристики
Допустимое отклонение
Точность воспроизведения спект¬
рального состава
Энергетическая светимость
Коллимация
Равномерность
Рассеяние
±8% в диапазоне К = 0,1 ... 1,0 мкм
±10 ... 15% при А,>1,0 мкм
±2%
порядка ±2%
±2% на малой и ±5% на большой
площади
Не более 3%
Одна из наиболее сложных задач при создании имитатора —
это выбор источника излучения.
Применительно к имитаторам Солнца важнейшими характерис¬
тиками источника излучения являются:
— яркость светящегося тела и степень равномерности яркости
ло его площади и в различных направлениях пространства;
— световая отдача, т. е. величина светового потока на каждый
J Вт потребляемой электрической мощности;
— спектральный состав излучения;
Рис. 8.1. График стандартной кривой спект¬
рального распределения солнечного излучения
187
— степень сосредоточения излучаемого светового потока в
пределах угла охвата осветительной оптической системы;
— форма и размер светящегося тела;
— стабильность перечисленных характеристик в течение вре¬
мени работы;
— срок службы;
— простота и безопасность обслуживания.
По яркости, спектру и достижимой мощности излучения к иде¬
альному источнику наиболее приближаются источники в виде эле¬
ктрической дуги на угольных электродах и ртутно-ксеноновые и
ксеноновые лампы высокого давления.
(
Ксеноновые лампы сверхвысокого давления СВДШ представля¬
ют собой электрическую дугу закрытого типа в среде ксенона меж¬
ду двумя близко расположенными электродами из вольфрама. Эле¬
ктроды впаиваются в баллон сферической формы из плавленого
кварца (рис. 8.2).
Спектральный состав излучения ксеноиовой лампы соответству¬
ет цветовой температуре 5600°, весьма близок к спектру излучения
Солнца в видимой области (рис. 8.3).
Яркость и световой поток быстро возрастают с увеличением си¬
лы тока. Возможно изготовление ламп мощностью до 150—
200 кВт с яркостью 1500—2000 мкд-м~2.
Ксеноновые лампы могут работать как на постоянном, так и на
переменном токе на частотах до 1000 Гц и выше.
На рис. 8.4 приведены кривые распределения яркости разряда
у ламп постоянного (рис. 8.4, а) и переменного (рис. 8.4, б) тока.
Световая отдача лампы 30—35 лм/Вт.
Мощным искусственным источником излучения является также
угольная дуга высокой интенсивности (ВИ). Эта дуга отличается
от плазменной дуги большой плотностью гока, достигающей на
аноде 150 А/см2, и повышенным содержанием в фитиле анода фто¬
ристых соединений редких земель — от 30 до 60%.
Основной особенностью дуги ВИ как источника света является
весьма высокая яркость сравнительно глубокого кратера, образую¬
188
щегося на рабочем торце анода, большая светоотдача и хороший
спектральный состав излучения. Спектр излучения характеризует¬
ся цветовой температурой 5600°. Около 30—40% всего излучения
дуги ВИ приходится на видимую область спектра. Яркость крате¬
ра дуги ВИ достигает 1500 мкд и более.
L,kc5
-2-1 0 12-2-1 0 11,мм
а) В)
80
ВО
ВО
20
О
15°
I
60
2 3 0 5
Рис. 8.4. Графики распределения яркости раз- Рис. 8.5. График яркостиой ха-
ряда у ксеионовых ламп: рактеристики дуги с углем 9-90
а—лампы постоянного тока; б—лампы пере¬
менного тока
Существенное влияние на работу дуги ВИ оказывают конструк¬
тивные элементы. Для получения правильной формы краев кра¬
тера анод обычно делают вращающимся. На рис. 8.5 приведены
яркостные характеристики дуги ВИ с углем 9-90.
8.2.1. ИМИТАТОРЫ СОЛНЕЧНОГО ИЗЛУЧЕНИЯ
ДЛЯ ИССЛЕДОВАНИЯ ТЕПЛОВОГО БАЛАНСА
Как уже указывалось выше, для испытаний и исследования воздей¬
ствия солнечной радиации на КА, на материалы покрытий, оптиче¬
ские элементы аппаратуры, солнечные элементы используются
различные имитаторы Солнца, создающие термические условия,
близкие к условиям полета в космическом пространстве, — ТСИ.
Имитаторы подобного типа различаются как по габаритам, так и
по техническим характеристикам. Так, например, для испытаний
КА на функционирование и тепловой баланс требуются вакуумные
имитаторы больших размеров. Малые имитаторы требуются при
исследовании конструкций и образцов материалов, а также неболь¬
ших спутников Земли.
Основным требованием к ТСИ является создание в рабочей зо¬
не необходимой освещенности, соответствующей освещенности, соз¬
даваемой Солнцем.
Для солнечных имитаторов с малым углом коллимации и сим¬
метричным расположением источника излучения уравнени i осве¬
щенности можно представить в виде
Е= nt\L sin2 (JH, (8.1)
где т] — коэффициент полезного действия системы; L — яркость
189
источника излучения; U„ — половина угла коллимации (непарал¬
лельное™) .
Яркость имитатора не может быть увеличена посредством уве¬
личения числа источников и, следовательно, ограничивается наи¬
большей яркостью единичного источника. Увеличение числа ис¬
точников позволяет лишь увеличить рабочую зону облучения.
оптические
системы
Преломляющая
система
многомодульные
оптические системы
■) Лампа
Асимметричная
ртрожающая система
Асимметричная
отражающая система
Рис. 8.6. Оптические схемы термического имитатора
Однородность излучения определяется распределением яркости
источника и оптической системой. Наилучшую однородность мож¬
но получить, поместив источник излучения в бесконечность.
Спектральный состав излучения также зависит в основном от
спектрального распределения энергии источника излучения. Для
того, чтобы элементы оптической системы не вносили существен¬
ного изменения в спектральный состав, оптическая система должна
быть хорошо корригирована на хроматические аберрации.
Коллимированность светового потока определяется оптической
системой. С целью получения потока с заданной расходимостью
источник излучения помещают в фокальной плоскости объектива.
В этом случае угол непараллельности будет определяться соотно¬
шением между размерами источника излучения и фокусным рас¬
стоянием коллимирующего объектива. Для выравнивания распре¬
деления интенсивности на выходе системы устанавливаются свето¬
фильтры, которые должны иметь хорошее пропускание по краям и
меньшее в центре.
Общая эффективность системы в этом случае определяется по
формуле
Чс=ЛгЛф, (8.2)
190
где г)г — геометрическая эффективность, определяемая отношени¬
ем энергии, захваченной оптической системой, к энергии, излучае¬
мой источником; т|ф — эффективность фильтра.
Имитаторы для термических исследований ТСИ должны быть
спроектированы так, чтобы энергия, излученная или отраженная
исследуемым объектом, не отражалась обратно на объект.
На рис. 8.6 приведены возможные оптические схемы для пост¬
роения ТСИ [30].
Из отражающих оптических си¬
стем наибольший интерес с точки зре¬
ния коллимации представляет отража¬
ющая система в виде асимметричного
параболоида, так как в осесимметрич¬
ных системах часть коллимированного
пучка искажается источником излуче¬
ния или затенена. Кроме того, в осе¬
симметричных системах энергия, от¬
раженная или излучаемая объектом,
вновь отражается от коллиматора к
объекту и искажает результаты изме¬
рения.
Для небольших имитаторов доста¬
точно одного коллиматора. Однако в
этом случае система может оказаться
более протяженной и поэтому менее
эффективной.
Для небольших имитаторов (ТСГО
оптимальной является система из нес¬
кольких коллиматоров с асимметрич¬
ными отражателями. В этом случае смежные зеркала должны быть
расположены так, чтобы не происходило затенения или наложения
световых пучков и была скомпенсирована неравномерность пучков
в местах стыка зеркал.
На рис. 8. 7 приведена возможная схема асимметричного коллиматора отра¬
жательного типа, которая может быть выполнена с единичной или многосекцион¬
ной системой зеркальных объективов. Источником излучения служит группа
высокоинтеиснвпых дуговых ламп, каждая с индивидуальным отражателем [30].
Отражатели фокусируют излучение каждой лампы на всю площадь проектиру¬
ющей системы, осредняя и сглаживая отклонения интенсивности отдельных ламп.
На рис. 8. 8 приведена упрощенная схема ТСИ многомодульного типа ин¬
тенсивностью от 0,5 до 10 солнечных постоянных. Предусмотрена возможность
увеличения интенсивности до 15 солнечных постоянных, т. е. до 21 700 Вт/м2 с
точностью до ±2%.
Имитатор служит для исследования влияния радиации на различные мате¬
риалы, установившегося и неустанавившегося тепловых режимов и преобразова¬
ния солнечной энергии.
Имитатор состоит из четырех главных частей или подсистем: источников из¬
лучения, оптической системы, системы управления и системы контроля. Источни¬
ком излучения является система, состоящая из 13 «сеноновых ламп фирмы
Osram, мощностью до 2,5 кВт каждая. Предусмотрено увеличение количества
ламп до 19 штук. Оптическая система построена таким образом, чтобы каждый
источник облучал всю испытуемую площадь.
Рис. 8.7. Схема имитатора с асим-
метричной отражательной систе¬
мой:
ОО'—ось параболоида; 1—освети¬
тельная система; 2—коллектив; 3—
коллимирующее параболоидное
зеркало; 4—область равномерной ос¬
вещенности
191
Беспереоойпая работа и регулирование всех источников излучения обеспечи¬
вается системой управления.
Зеркала коллиматоров изготовлены из никеля с использованием электрохи¬
мического процесса полирования. На оптическую поверхность зеркала методом
испарения нанесена пленка алюминия.
Пучок света от каждого источника излучения через два наклонных зеркала
направляется в зону, имитирующую космическое пространство. Система проек¬
ционных линз увеличивает изображение источника до размера коллимирующей
линзы, которая одновременно служит в качестве вакуумного уплотнения окна
камеры и действует как псевдоисточник излучения по отношению к коллима¬
тору.
Рис. 8.8. Упрощенная конструктивная схема термического ими¬
татора
Главное поворотное зеркало, изготовленное из тугоплавкого борного стек¬
ла, смонтировано на теплообменнике, охлаждаемом водой. Второе поворотное
зеркало, работающее при больших уровнях интенсивности, имеет алюминиевое по¬
крытие. Полевая линза изготавливается из кварца.
Для достижения требуемой спектральной характеристики на оптических эле¬
ментах нанесены избирательные покрытия, а также используется набор спект¬
ральных фильтров. Для контроля характеристик на периферии коллимирующей
линзы установлены четыре тарированных фотоэлектрических элемента. Система
контроля также охлаждается водой.
Характеристики имитатора
Интенсивность .
Коллимация
Диаметр светового потока
Неоднородность
Спектральный диапазон .
Стабильность ....
562—14 440 Вт/м2 (0,5—10 солнечных по¬
стоянных)
2° при интенсивности, равной одной сол¬
нечной постоянной, и менее 5° — при
10 солнечных постоянных
279 мм около коллиматора, 152 мм на
расстоянии 1066 мм от коллиматора для
10 солнечных постоянных
±5%
0,22—2,7 мкм
±2%
Для лучшего использования излучаемой энергии применяют
различные оптические формирующие устройства: рефлекторы, кон¬
денсоры, зеркальные конусы, оптические смесители и т. п.
192
4
На рис. 8.9 приведена одна из возможных схем формирующего
оптического устройства для большого имитатора.
Световой поток от лампы ДКСШ (1) рефлектором направля¬
ется на зеркальный конус 2 с углом
раствора в 60°, смеситель 3 и далее на
коллектив 4. Лучистый поток разбива¬
ется смесителем на ряд элементарных
потоков с расходимостью, определяе¬
мой геометрией элемента смесителя.
Смеситель представляет собой набор
кварцевых световодов прямоугольно¬
го или шестиугольного сечения со сфе¬
рическими торцами.
Рис. 8.9. Схема формирования
оптического устройства:
/—осветитель; 2—зеркальный ко¬
нус; 3—смеситель; 4—коллектив-
иллюминатор
8.3
СОЛНЕЧНЫЕ ИМИТАТОРЫ ДЛЯ НАСТРОЙКИ
И ПРОВЕРКИ ПРИБОРОВ
Основное назначение солнечных имитаторов (СИ) состоит в опре¬
делении и проверке точностных и энергетических характеристик
приборов ориентации по Солнцу: поля зрения, порогов срабаты¬
вания, пеленгационных характеристик, помехозащищенности и др.
Обычно имитаторы подобного типа называют контрольно-юстиро-
вочными (КЮ).
Охлаждающая система
Источник
излучения
Отклоняющая
система
Координ.
стол
Рис. 8.10. Схема имитатора
В общем случае движения КА по траектории изменяется рас¬
стояние между КА и Солнцем и его угловые координаты. Схема
имитатора (рис. 8.10) включает коллиматор с источником излуче¬
ния, имитирующим энергетические и спектральные характеристики
излучения Солнца и изменение его видимых угловых размеров;
координатный стол для установки проверяемого прибора; конт¬
рольно-измерительные устройства для проверки характеристик
■имитатора и прибора; пульт управления, блок питания и устрой¬
ства для охлаждения элементов имитатора.
193
Как и для имитаторов типа ТСИ, облученность, которую ими¬
татор СИ должен создавать на входном зрачке исследуемого при¬
бора, определяется по формуле
£ = (8.3}
■^кс
где £д = r]Lsin2t/H — освещенность, соответствующая расстоянию,
равному одной а. е.; DKC — расстояние КА—С.
Рис. 8.11. Оптическая схема имитатора
Видимый угловой диаметр Солнца определяется по формуле
где 2(3© — видимый угловой диаметр Солнца при расстоянии в од¬
ну астрономическую единицу (а. е.).
Имитация видимого углового диаметра Солнца достигается по¬
средством набора диафрагм, помещаемых в фокальной плоскости
объектива коллиматора.
Для расчета диаметра диафрагм можно воспользоваться фор¬
мулой
яГд = 2р0/о6р. (8.5)
На рис. 8.11 приведена одна из возможных схем имитатора СИ.
Источником излучения является ксеноновая лампа высокой интен¬
сивности ДКСШРБ 150А-2.
Характеристика имитатора
Угловые размеры источника излучения (диафрагм)
Фокусное расстояние объектива
Фокусное расстояние конденсора
Размер светового пучка на выходе коллиматора
Уровень освещенности на выходе при угловом диа¬
метре полевой диафрагмы 2р = 2°
Длина дуги (расстояние между электродами) .
8.4
ИМИТАТОРЫ ЗВЕЗДНОГО НЕБА
Имитаторы звездного неба предназначены для тренировки космо¬
навтов в работе с приборами при ориентации и навигационных нз-
15, 20, 32, 45, 53 и 2°
203 мм
35 мм
90 мм
не менее 350 ООО лк
2,4 мм
194
мерениях, а также для проверки характеристик автоматических и
неавтоматических оптических навигационных приборов.
Идеальный имитатор должен воспроизводить реальные харак¬
теристики звездного неба (звезд, планет, фона).
К таким характеристикам относятся:
— энергетические (яркость звезд, яркость планет и звездного
фона);
— геометрические (угловые размеры звезд и планет, фазы пла¬
нет, взаимное расположение звезд и планет);
— кинематические (собственное перемещение планет, переме¬
щение планет относительно звезд из-за движения КА, перемещение
всей визуальной обстановки из-за вращения КА);
— спектральные характеристики звезд и планет.
Точная имитация внешней визуальной обстановки космического
•полета практически трудно осуществима, необходимая же степень
приближения характеристик имитатора к реальным характеристи¬
кам звездного неба определяется исходя из конкретного назначе¬
ния имитатора. Так, например, имитатор для проверки приборов
должен с высокой степенью точности воспроизводить яркость звез¬
ды, спектральные характеристики ее излучения, угловые размеры
и яркость фона. Для моделирования навигационных задач, кроме
указанных характеристик, имитатор должен с высокой точностью
.воспроизводить взаимное расположение звезд и планет.
8. 4. 1. ИМИТАТОРЫ ИЗЛУЧЕНИЯ ЗВЕЗДЫ
'Основное назначение имитатора излучения звезды — проверка
характеристик навигационных оптических приборов — звездных
датчиков.
Принципы построения таких имитаторов поясним на примере
датчика излучения звезды ДИЗ-451, предназначенного для провер¬
ки астрогидов [31].
В фокальной плоскости объектива 1 (рис. 8.12) установлена
диафрагма 4, угловой размер которой несколько меньше углового
размера диффракционного кружка рассеяния объектива, определяе¬
мого по формуле
d" = 2,44 — 206 268;
D
d мм = йГ/к sin 1" = 0,000119Х — ,
J D
где D — диаметр объектива коллиматора; fK' — его фокусное рас¬
стояние.
В сходящихся пучках лучей коллиматора помещены два ахро¬
матизированных клина 2, 3. Лампа накаливания 8, матовое стек¬
ло/и конденсор 6 составляют осветительную систему, обеспечи¬
вающую постоянство светового потока, выходящего из имитатора,
:в пределах ±10%- Набор нейтральных светофильтров 5 позволяет
изменять звездную величину имитируемой звезды.
195
Рис. 8.12. Оптическая схе-
ма имитатора звезды
Для проверки точности наведения астрогида на звезду в колли¬
маторе предусмотрено угловое перемещение имитируемой звезды.
Задание малых углов перемещения осуществляется перемещением,
клиньев 2, 3 с помощью микрометрических винтов.
Перемещение клина вдоль оптической оси создает угловое от¬
клонение визирного луча (звезды), определяемое по формуле
ДсР = -д-8>
* К
где Д— линейное перемещение клина; 6 — угол отклонения клина..
Так, при 6 = 50", /,/=1600 мм и смещении Д = 0,1 угловое откло¬
нение равно 0,25".
Для создания больших угловых отклонений до ±2° использу¬
ется. перемещение диафрагмы 4 с помощью микрометра 9.
Угловое отклонение определяется по формуле
Дс?=7т-е.
* К
где Дд — смещение диафрагмы.
8. 4. 2. ПРИНЦИПЫ ПОСТРОЕНИЯ ИМИТАТОРОВ
ЗВЕЗДНОГО НЕБА
Возможны следующие схемы построения оптических систем ими¬
таторов:
а) проекционные системы с небольшими калиброванными от¬
верстиями, создающие светящиеся изображения звезд на сфериче¬
ском куполе;
б) коллиматорные системы, имитирующие участок звездного не¬
ба в полях зрения астронавигационных приборов.
Большие имитаторы с проецированием звездного неба на внут¬
ренней поверхности полусферического экрана могут быть спроекти¬
рованы по схеме, широко используемой для планетариев.
В коллиматорных системах, имитирующих участки звездного
неба в поле зрения астронавигационного прибора, точечные источ¬
ники света, имитирующие звезды, могут быть созданы с помощью
подсвечиваемых шариков малых диаметров, волоконных светово¬
дов или малых отверстий на сетке, помещаемой в фокальной плос¬
кости объектива. Шарики или световоды размещаются на сфериче¬
ской оболочке, расположенной в фокальной плоскости объектива.
196
f=R
Замкнутая вращаю¬
щаяся модель звездного
неба и планет в фокаль¬
ной плоскости объектива
может быть получена
подвеской сферической
оболочки в трехосном
кардановом подвесе с со¬
ответствующими привода¬
ми по трем осям или в
трехосном подвесе на ро¬
ликах.
Упрощенная схема оп¬
тической системы рас¬
сматриваемого типа при¬
ведена на рис. 8.13.
Освещенность, созда¬
ваемая имитируемой
звездой в выходном зрачке коллиматора, определяется по фор¬
муле [6]
Рис.
.13. К определению параметров имитатора
звезд и фона
Е = -
11 Ldcr VqQuiF О , у)
(8.6).
16/^ У"5 — 4 cos 2р У(5— 4 cos y)3
где Е(р, у)=[4—2cos 2^i-f cos(2S —у) —2 сов у] cos(3 —у);
/,< — фокусное расстояние объектива имитатора — сферического-
зеркала; гш — радиус зеркального шарика; dc, L — диаметр и яр¬
кость источника света, подсвечивающего шарик; то — коэффици¬
ент пропускания оптической системы имитатора; рш — коэффици¬
ент отражения шарика; 2(3 — угол поля зрения имитатора; у ■—
угол между направлением из центра звездной сферы на источник
света и на его изображение, образованное поверхностью шарика.
Для определения яркости имитируемого небеснго фона в поле
зрения имитатора можно воспользоваться формулой
£Ф=с,
Ф
где
C* = L
F (р, у) (2 cos у — 1)
(5 — 4 cos у)2
^сДо (?ф
(8.7)
4/к/5 —4 cos 2?
РФ — коэффициент отражения поверхности, имитирующей не¬
бесный фон.
Подставляя значение Ьф (8.7) в формулу
Шф= 12т,4 — 2,5 Ig Ьф,
получим выражения, связывающие яркость имитируемого небесного
фона в звездных величинах с конструктивными параметрами опти¬
ческой системы имитатора.
Яркость подсвечивающего шарики источника света, необходи¬
мая для имитации блеска звезд, определяется по формуле
197
4,24-10-6/4 ( (5 -4 cos 2?) (5 -4 cos ?)3
L = t, , (о-о)
гг(1с (4 — 2 cos 23 — cos 3) tflSm
где r4 — радиус шарика для имитации звезды гп= + 1,0.
Для расчета угловых размеров имитируемых звезд можно вос¬
пользоваться выражением
СШ^С ! \ - // (8 9)
2 ^/j. /о — 4 cos у 4/^
где йвых — диаметр выходного зрачка коллиматора.
Имитатор со световодами можно построить по аналогичной схе¬
ме, при этом освещенность, создаваемая имитируемой звездой во
входном зрачке прибора, определяется выражением
(8.10)
■' К
где Тпх — яркость площадного источника света, подсвечивающего
световоды; dCB — диаметр входного торца световода; тс — коэффи¬
циент пропускания световода; ф — полевой угол имитируемом
звезды; /Г((3С) — функция, учитывающая смещение центра входно¬
го зрачка прибора относительно оси коллиматора и центра кри¬
визны зеркального объектива. При совмещении центра входного
зрачка прибора с центром кривизны зеркального объектива функ-
дия /ДРс) = 1.
Яркость подсвечивающего световоды источника света, необходи¬
мая для имитации звезд с реальным блеском, определяется по
формуле
1,06-10-6/2
L = —
*-н.с ,9 ’
с1^0^с
где dci — диаметр световода для имитации звезды с т=\.
Угловой размер имитируемой звезды вычисляется по формуле
л
^СВ I ^ВЫХ | 1 /ЧыЛ
/: 8/? V + 16/2 ]
/к «/к V 16/J
Соотношение, связывающее величины имитируемых звезд
параметрами соответствующих им световодов имеет вид
5 lg^L + 2,95/(-^ -MlgQc,
del \ dсв del /
■где I — длина световода; qcb — коэффициент внутреннего отраже¬
ния световода.
При создании тренажеров заслуживает внимания использова¬
ние для имитации звездного неба и других объектов телевизионных
методов и средств.
На рис. 8.14 приведена функциональная схема тренажера [30].
Тренажер позволяет моделировать разнообразные космические
задачи и управление полетом ПКК. Он состоит из нескольких бло¬
ков, которые могут быть объединены в схему установки для моде¬
1398
лирования дайной задачи, например, моделирования дистанцион¬
ного управления маневрирующим КА, процесса наведения и сты¬
ковки, опознавания неизвестных спутников и др.
Схема тренажера связывает в единую систему цифро-аналого¬
вую вычислительную машину, генератор электронного изображе¬
ния, подвижную модель КА, изображаемую телевизионной каме¬
рой, телевизионный звездный планетарий, три проектора, два из
которых являются стереопроекторами для трехмерного изображе¬
ния, и модель ПКК.
Местоположение В системе координат /,Yy Z и
геоцентрические ойреродские у{лы
Аналого-вычис-
лительная
машина
Местоположение 6 системе координат X, V
(угловое положение)
Рис. 8.14. Функциональная схема тренажера
Звездный планетарий выполнен в виде светонепроницаемой пла¬
стиковой сферы диаметром 48 дюймов, на поверхности имеется 460
отверстий различных размеров, имитирующих звезды от 1 до 4-й
звездной величины, освещаемых внешним источником света. Внут¬
ри сферы на кардановом подвесе укреплена телевизионная камера
так, что она может непрерывно поворачиваться в пределах 360° по
углу рыскания и на ±80° по углу тангажа.
Проходящий через отверстия сферы (звездного глобуса) свет
попадает на объектив телекамеры и имитирует звезду как беско¬
нечно удаленный точечный источник излучения.
Аналогичным образом могут быть смоделированы и другие све¬
тила (Солнце, Луна, Земля, земная поверхность и др.).
Электронное изображение с телекамеры может быть передано-
на вчдеоконтрольное устройство и рассматриваться непосредствен¬
но на его экране или спроектировано проектором на большой ки¬
ноэкран.
Используя несколько телевизионных систем, можно построить-
комбинированное изображение нескольких объектов, как это по¬
казано на рис. 8.14.
ГЛАВА 9
ОПТИЧЕСКИЕ СИСТЕМЫ
ДЛЯ НАВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА
ПЕРЕД СТАРТОМ
9.1
ОБЩИЕ СВЕДЕНИЯ
Запуск и выведение КА на заданную траекторию полета производится посредст¬
вом многоступенчатых ракет-носителей (см. рис. 1.5,6).
Для того чтобы движение КА происходило по заданной (расчетной) траек¬
тории, необходимо перед запуском выполнить точную ориентацию корпуса носи¬
теля и датчиков системы управления по вертикали и азимуту.
Совокупность операций по пространственной ориентации корпуса носителя
и датчиков системы управления называют наведением (прицеливанием)
ракеты.
Ориентирование при наведении осуществляется относительно стартовой си¬
стемы координат OcXcY0Zc (рис. 9. 1). Ее начало совпадает с центром масс ра¬
кеты, установленной на пусковом столе; ось ОсУс направлена вертикально вверх,
а оси ОСХС и OcZc лежат в горизонтальной плоскости (ось ОсУс должна лежать
в плоскости расчетной траектории).
Угловая стабилизация и управление ракеты в полете осуществляется астро-
инерциальной системой, датчики которой располагаются на гиростабилизирован-
ной платформе ГСП, фиксируемой относительно инерциальной системы коорди¬
нат 0,ДиУи2„ (рис. 9.2). Плоскость УиОиХа этой системы является основной
плоскостью стабилизации ракеты.
Ориентация гироплатформы относительно корпуса ракеты производится с
помощью трехканальной системы азимутального и горизонтального приведения,
обеспечивающего удержание ГСП в требуемом положении после ее разаррети-
рования [12].
Плоскость, проходящую через продольную ось ракеты и рулевые органы I—
III, называют основной плоскостью связанной системы координат.
В процессе наведения оси связанной и инерциальной систем координат долж¬
ны быть определенным образом ориентированы относительно стартовой системы
координат. При этом основные плоскости стабилизации и симметрии ракеты долж¬
ны быть совмещены с плоскостью расчетной траектории (плоскость запуска —
наведения), а продольная ось ракеты и ось 0„ У и должны быть вертикальны.
Такая ориентация осей системы координат достигается; вертикализацией раке¬
ты; горизонтированием и юстировкой гироплатформы; азимутальным наведени¬
ем ракеты.
Горнзонтирование гироплатформы производится следящими системами при¬
ведения, датчиками которых являются акселерометры. В результате выполнения
этой операции ось 0„У„ инерциальной системы координат совмещается с верти¬
кальной осью ОсУс стартовой системы координат.
Вертикализация ракеты производится с помощью теодолитов, устанавливае¬
мых под углом 90° друг относительно друга, посредством визирования репер¬
ных точек, нанесенных на корпусе ракеты на линии, параллельной оси ракеты.
Азимутальное наведение включает:
— определение ориентирных направлений и их фиксирование на местности;
— совмещение основной плоскости стабилизации с плоскостью запуска —
плоскостью траектории полета.
200
Для решения этих задач используются оптические и оптико-электронные
приборы наведения.
Ориеитириые направления могут быть получены привязкой к пунктам гео¬
дезической сети посредством астрономических наблюдений или с помощью гиро-
теодолитных наблюдений. Полученные ориентирные направления фиксируются
оптическими хранителями этих направлений или двумя удаленными вехами.
В качестве оптических хранителей направлений используются коллиматоры и от¬
ражательные элементы.
Совмещение основной плоскости стабилизации с плоскостью наведения произво¬
дится с помощью угломерного оптико-электронного прибора.
Основная плоскость стабилизации фиксируется посредством зеркала или
прямоугольной призмы 5 (рис. 9.2), укрепленной на гпростабилизировапной плат¬
форме (ГСП). Плоскость наведения задается ориентирным направлением, фик¬
сируемым хранителем направления.
Таким образом, процесс наведения заключается в привязке вертикальной
плоскости визирования угломера к хранителю направления, измерении угло¬
вого отклонения контрольной призмы ГСП и преобразовании этого отклонения в
электрический сигнал для управляющей системы разворота гиростабинизирован-
ной платформы.
Моменту наведения соответствует нулевое значение сигнала рассогласования.
Обычно угломер выполняется по схеме автоколлиматора, позволяющей про¬
изводить измерения угловых рассогласований с высокой точностью. В качестве
примера рассмотрим схему наведения по азимуту с автоколлимационным тео¬
долитом (рис. 9. 3).
Угломер 1 установлен на расстоянии LT, измеряемом в плоскости горизон¬
та. Вначале теодолит привязывают к опорной линии 2, по лимбу теодолита
устанавливают расчетное направление плоскости наведения и затем трубу тео¬
долита наклоняют на угол е для установки контрольной призмы 3.
/—двигатели стабилизации; 2—дат¬
чики угла; 3—гироскопы; 4—акселе¬
рометры; 5—призма ГСП
Рис. 9.2. Инерциальная система ко¬
ординат:
9.2
ОПТИКО-ЭЛЕКТРОННЫЕ СИСТЕМЫ НАВЕДЕНИЯ
201
Рис. 9.3. Схема системы наведения по ази¬
муту:
1—угломер (автоколлимационный теодолит);
2—опорная линия азимута; 3—призма ГСП;
4—ось азимута
На рис. 9.4 приведена оптическая схема автоколлимационного теодолита.
Световые лучи от ламп 2 конденсором 6 направляются на зеркальные гра¬
ни призмы 3. Отраженные призмой лучи телеобъективом 1 направляются на кон¬
трольную призму (зеркало) 5. Если нормаль к поверхности зеркала параллель¬
на оси визирования угломера, то отраженные зеркалом лучи возвращаются к
объективу по прежнему направле¬
нию, т. е. к источникам излучения.
Если же зеркало, а следователь¬
но, и стабилизированная платформа
развернуты на некоторый угол, то от¬
раженные лучи попадают на вершину
призмы 3, проходят через имеющуюся
на ней прозрачную щель 7 и попада¬
ют на фотоумножитель 4. Сигнал с
фотоумножителя усиливается усили¬
телем фотоследящей системы и воз¬
действует на серводвигатели, которые
разворачивают призму (зеркало) в
плоскость визирования, т. е. обнуля¬
ют систему ГСП.
Поскольку плоскость визирования
совпадает с азимутом плоскости на¬
ведения, что достигается привязкой к
хранителю направления, полученное
в результате разворота положение
ГСП будет соответствовать совмеще¬
нию плоскости стабилизации с плоско¬
стью наведения.
Для удобства наведения и повышения надежности аппаратуры автоколли¬
матор устанавливают неподвижно перпендикулярно линии визирования на приз¬
му ГСП, а для привязки к хранителю направления и призме используют устрой¬
ство поворота визирного луча в два положения, соответствующих визированию
на хранитель направления и призму 5. Для отклонения визирного луча исполь¬
зуется переключающаяся пентапризма.
На рис. 9.5 приведена схема автоколлиматора, неподвижно устанавливае¬
мого перед стартовой площадкой. Привязка коллиматора к опорному направ¬
лению осуществляется посредством
откидного зеркала. Излучение источ¬
ника Л1 фокусируется конденсором
К1 на диафрагму ДФ, перед которой
установлен диск модулятора света 1.
Проходящие через диафрагму лучи
отражаются от полупрозрачного зер¬
кала 4 и объективом 3 в виде парал¬
лельного пучка направляются на
призму 2 ГСП или на хранитель на¬
правления. Отраженные призмой лучи
возвращаются к объективу и направ¬
ляются последним на анализирующее
устройство, светоделительную призму
П5 и далее конденсорами К2
и зеркалами 32 — на приемник излучения ПИ.
Сигнал рассогласования формируется по способу, описанному в гл. 2.
Таким образом, угломер для наведения строится по схеме активного пелен¬
гатора. Некоторые из таких схем приведены в работе [12].
Рассмотрим некоторые особенности расчета подобных приборов.
Освещенность, создаваемая передающей системой прибора на входе отра¬
жающей призмы ГСП (рис. 9.6), определяется формулой
Рис. 9.4. Оптическая схема автоколлимацион¬
ного теодолита:
1—телеобъектив; 2—лампы подсветки; 3—приз¬
ма; 4—фотоумножитель; 5—зеркало ГСП; 6—
конденсоры; 7—прозрачная щель
4Ф,
Е = ■
пер
^Л.П
(9.1)
202
где Фпгр — поток, излучаемый передающей системой; 0„ср — угол зрения пере¬
дающей системы; L„ — наклонная дальность — расстояние между передающей
системой и призмой ГСП; тл. „— коэффициент ослабления потока в линии,
передачи.
Лучистый поток, отражаемый призмой в направлении прибора,
4Фцер-4отр
Фотр “ ^^orpQoTpг- 2 Т"2— ПнЛотр eos а, (9.2)
^пер н
где Л отр — площадь отражающей поверхности призмы; соПср — телесный угол,
в пределах которого распространяется отраженное излучение; Q0Tp — коэффици¬
ент отражения; а — угловое рассогласование.
Лучистый поток, падающий на приемную площадку приемника излучения,
определяется по формуле
1 ,4оФмерЛохрЛ„х-0:,.1|То'С:,,
Ф.. = 74Г2 cos а, (9.3)
н пер
где — площадь входного зрачка прибора; т0 — коэффициент пропускания
оптической системы; т„—коэффициент потерь за счет модуляции потока.
Коэффициент ослабления потока в линии передачи в системах наведения
рассматриваемого типа за счет испарения горючего и состояния атмосферы мо¬
жет достигать значительных величин.
Его значение можно определить по формуле
Тл.., = е~-РЧ (9.4)
где |3 — коэффициент ослабления потока на толщине слоя линии передачи L =
= 1 км.
В таблице приведено значение коэффициента ослабления светового потока
в зависимости от состояния атмосферы на отрезке линии передачи.
Таблица
Состояние
атмосферы
Плотный
туман
Средний
ту м ан
Легкий
туман
Дымка
Ясно
Р
85,6
21,4
8,54
2,14
0,43
203
Расчет по формуле (9. 4) показывает, что при среднем тумане на толщине
слоя 100 м поглощается и рассеивается до 90% светового потока, что следует
учитывать при расчете параметров
оптической системы и ее размещения
относительно стартовой площадки.
Приведенные формулы позволяют
рассчитать величину потока, воспри¬
нимаемого приемником излучения,
и определить конструктивные разме¬
ры элементов, входящих в схему
прибора.
Как было указано выше, плос¬
кость стабилизации фиксируется с по¬
мощью зеркальной призмы, закрепляе¬
мой на ГСП. Световые лучи, падаю¬
щие на гипотенузную грань в некото¬
рой плоскости П (рис. 9.6), выходят
из нее в плоскости П1, параллельной
плоскости П. Вследствие этого не тре¬
буется стабилизация призмы в плоско¬
сти YOX с высокой точностью.
Ошибку, вносимую призмой в оп¬
ределение азимута, можно найти по
формуле
Рис. 9.6. Схема действия призмы ГСП
cos ах
Дау =.■ tg е ДаЛ
(9.5)
где ах и а„ — углы отклонения призмы от оси OZ в вертикальной и азимуталь¬
ной плоскостях; в — угол места призмы; Дах — ошибка вертикализации; Да,, —
ошибка азимутального наведения.
Из приведенной формулы легко установить, что основное влияние на точ¬
ность азимутального наведения оказывает величина угла места призмы е. Так,
например, при ошибке вертикализации в 5 угловых минут погрешность азиму¬
тального наведения будет равна Да„«5" для е=1° и ~26" — для е = 5°. Поэто¬
му для уменьшения угла места призмы приходится увеличивать наклонную
дальность, что, как показано выше, приводит к ослаблению светового потока на
входе прибора.
СПИСОК ЛИТЕРАТУРЫ
1. Алексеев К. Б., Бебенин Г. Г. Управление космическими летательными ап¬
паратами. — М.: Машиностроение, 1964, с. 9—65, 176—208.
2. Ален К. У. Астрофизические величины. — М.: Мир, 1977, с. 316—391.
3. Большаков В. Д. Теория ошибок наблюдения с основами теории вероят¬
ностей. — М.: Недра, 1965.—184 с.
4. Бранец В. Н. О точности определения вертикали при визировании гори¬
зонта в ИК области спектра. — Космические исследования, т. 4, 1965, с. 568—
582.
5. Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. — М.:
Мир, 1971, с. 139—244.
6. Бирулин А. И. Энергетический расчет имитатора звездного неба. — Изв.
вузов. Геодезия и аэрофотосъемка, вып. 3, 1971, с. 61—63.
7. Боно С., Хатчинсон С. Система астроинерциальиой навигации. — Вопро¬
сы ракетной техники, № 10, 1966, с. 50—65.
8. Волосов Д. С., Цивкин М. В. Теория и расчет светооптических систем. --
М.: Искусство, 1969, с. 22—56, 268—290.
9. Воробьев J1. М. Астрономическая навигация летательных аппаратов. -
М.: Машиностроение, 1968, с. 131—215.
10. Денисов В. Г., Онищенко В. Ф. Инженерная психология в авиации и кос¬
монавтике. — М.: Машиностроение, 1972, с. 15—75.
11. Елисеев С. В. Геодезические инструменты и приборы. М.: Недра, 1973,
с. 289—325.
12. Ефимов М. В. Прицеливание баллистических ракет. — М.: Недра, 1968,
с. 7—35.
13. Ивандиков Я. М. Оптико-электронные приборы для ориентации и нази-
гации космических аппаратов. — М.: Машиностроение, 1971.— 170 с.
14. Ивандиков Я. М., Константинович К. М. О точности определения верти¬
кали при визировании горизонта с космического аппарата. — Изв. вузов. Геоде¬
зия и аэрофотосъемка, 1974, № 6, с. 113—118.
15. Изнар А. Н., Павлов А. В., Федоров Б. Ф. Оптико-электронные прибо¬
ры космических аппаратов. — М.: Машиностроение, 1971.— 362 с.
16. Инженерный справочник по космической технике/Под ред. А. В. Солодо¬
ва.—М.: Воениздат, 1977, с. 316—391.
17. Квазиус Г., Мекенлесс Ф. Проектирование систем астронавигации./Пер. с
англ. — М.: Мир. 1970, с. 15—51, 190.
18. Кондратьев К. Я., Якушевская Я. Е. Угловое распределение уходящего
теплового излучения в различных областях спектра. — Искусственные спутники
Земли — нзд. АН СССР, 1962, вып. 14. с. 13—30.
19. Лазарев Л. П. Инфракрасные и световые приборы самонаведения и па-
ведения летательных аппаратов. — М.: Машиностроение, 1976, с. 5—104, 353—410.
20. Мирошников М. М. Теоретические основы оитико-электронных прибо¬
ров — М.: Машиностроение, 1977, с. 133—240, 241—316.
21. Мороз В. И. Физика планет. М.: Наука, 1967, с. 34—51.
205
22. Лебединский А. И., Тулупов В. И. и др. Статистические характеристики
излучения Земли в космос.— Геомагнетизм и аэрономия, 1967, № 3, с. 65—77.
23. Проблемы ориентации искусственных спутников Земли/Под ред.
В. А. Боднера. Пер. с англ.— М.: Наука, 1966, с. 398—431.
24. Розенберг Г. В., Сандомирский А. Б. и др. Яркостпый профиль дневного
горизоитва Земли. — Физика атмосферы н океана, 1965, вып. 12, с. 41—75.
25. Романтеев Н. Ф., Хрунов Е. В. Астрономическая навигация пилотируемых
космических аппаратов. — М.: Машиностроение, 1976, с. 7—70, 179—190.
26. Селезнев В. П., Крист М. Л. Системы навигации космических летательных
аппаратов. — М.: Восниздат, 1965, с, 5—70.
27. Управление полетом космических аппаратов/Под ред. П. Ж. Криса,
Л. И. Кузнецова. Пер. с англ. — М.: ИЛ, 1957, с. 170—183, 230—237, 319—333.
28. Управление в пространстве — М.: Наука, том 1, 1976, с. 5—43.
29. Форрел, Лиллестренд. Навигационная система для космических летатель¬
ных аппаратов. — Электроника, 1966, № 6, 7 с. 33—43, 15—27.
30. Имитаторы космического полета — прелюдия к полету человека в кос¬
мос. — Вопросы ракетной техники. 1963, № 1, с. 54—76.
31. Система автономного управления движением космического корабля
«Аполлон». — Вопросы ракетной техники, 1966, № 3, с. 62—83.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . 3
Глава 1. Общие сведения об ориентации и навигации космических ле¬
тательных аппаратов 5
1.1. Общие сведения ....... .... 5
1.2. Системы координат ...... ... 12
1.3.' Астронавигация в космическом пространстве . ... 17
1.4. Требования, предъявляемые к оптическим приборам ... 26
1.5. Исходные данные для проектирования 34
Глава 2. Принципы построения оптических и оптико-электронных при¬
боров . . .35
2.1. Энергетические и фотометрические величины оптического излуче¬
ния 36
2.2. Оптические системы . . . . 41
2.3. Приемники излучения 48
2.4. Слежение и определение координат положения навигационных
ориентиров . . . . . 56
2.4.1. Анализаторы, основанные на электронном сканировании
изображения . . . . . 56
2.4.2. Амплитудные анализаторы . . 58
2.4.3. Анализаторы-модуляторы 60
2.5. Выбор и согласование основных звеньев прибора 74
Глава 3. Построители местной вертикали . . . .... 79
3.1. Назначение и принцип действия 79
3.2. Излучение планет .... 83
3.3. Характеристики излучения Земли 85
3.3.1. Излучение Земли в инфракрасном спектральном диапазоне 85
3.3.2. Характеристики отраженной планетой солнечной радиации . 86
3.4. Классификация построителей местной вертикали (MB) ... 88
3.4.1. Оптико-механические построители MB 89
3.4.2. Построители местной вертикали, работающие в инфракрас¬
ном спектральном диапазоне 90
3.4.3. Построители местной вертикали, основанные на индикация
горизонта по отраженной солнечной радиации ... 103
3.5. Точность построения местной вертикали 110
Глава 4. Оптико-электронные приборы для ориентации и навигации по
Солнцу . . . . . 113
4.1. Основные параметры и характеристики Солнца . 113
4.2. Датчики ориентации по Солнцу ... . 114
207
Ct/j.
4.3. Датчики грубой ориентации 116
4.4. Формирование поля зрения датчика грубой ориентации 119
4.5. Датчики с активным сканированием .... 121
4.6. Датчики точной ориентации ...... 123
4.7. Датчики с координатно-чувствительными приемниками 124
4.8. Датчики положения Солнца . . ... 129
Глава 5. Оптико-электронные приборы для ориентации и навигации по
звездам . . 135
5.1. Общие сведения ... . . . . 135
5.2. Космические секстанты . . 142
5.3. Оптико-эдектроипыс пслепгаторы-астрогнды . . . 147
5.3.1. Звездные датчики с амплитудным анализатором 148
5.3.2. Звездные датчики с анализаторами-модуляторами . 150
5.3.3. Датчики с импульсной модуляцией 151
5.4. Оптико-электронные приборы для ориентации по звездному полю 152
5.4.1. Трехкоординатный датчик с машинной корреляцией . . 153
5.4.2. Трс.хкоордииатный датчик с оптическим коррелятором . . 157
Глава 6. Оптические приборы для курсовой ориентации космических
аппаратов 159
6.1. Курсовая ориентация, основанная на определении направления пе¬
ремещения изображения . 160
6.2. Оптико-электронные приборы курсовой ориентации с частотным
растром . . . . . . 163
6.3. Курсовые ориеитаторы, основанные на корреляционных методах 165
6.4. Курсовая ориентация, выполняемая при помощи гироскопа и по¬
строителя местной вертикали . . . .... 169
6.5. Астроследящие системы курсовой ориентации . .... 169
Глава 7. Оптические системы для управления сближением и стыковкой
космических аппаратов . . . . ..... 173
7.1. Система сближения космического аппарата с источником излучения
в широком спектральном диапазоне 175
7.2. Оптические схемы приборов сближения с лазерным излучателем 177
7.3. Оптические лазерные локаторы, измеряющие дальность импульс¬
ным методом 178
7.4. Лазерный локатор, основанный па фазовом методе измерения
дальности 179
7.5. Расчет дальности действия систем с лазерным источником излу¬
чения .... 182
Глава 8. Имитаторы космического полета . . 185
8.1. Общие сведения . 185
8.2. Имитаторы Солнца . . . . 186
8.2.1. Имитаторы солнечного излучения для исследования теплово¬
го баланса . . 189
8.3. Солнечные имитаторы для настройки и проверки приборов . 193
8.4. Имитаторы звездного неба ... 194
8.4.1. Имитаторы излучения звезды 195
8.4.2. Принципы построения имитаторов звездного неба . . 196
Глава 9. Оптические системы для наведения космического аппарата пе¬
ред стартом . . . 201
9.1. Общие сведения 201
9.2. Оптико-электронные системы наведения 202
Список литературы . 205