/






































































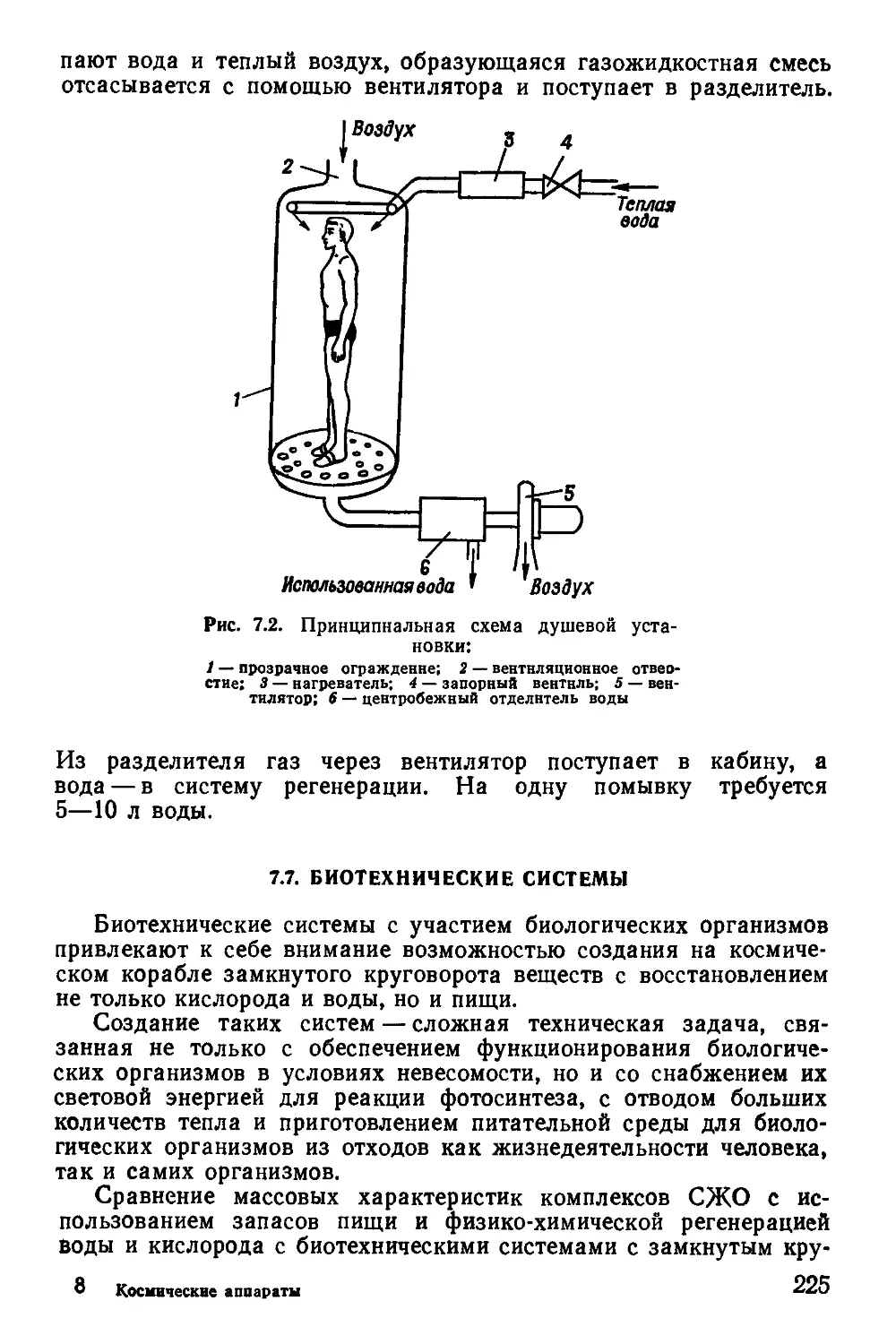



























Text
й
КОСМОДРОМ
РАКЕТЫ-НОСИТЕЛИ
КОСМИЧЕСКИЕ АППАРАТЫ
МОСКВА
ВОЕННОЕ ИЗДАТЕЛЬСТВО
1983
РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС
КОСМИЧЕСКИЕ
АППАРАТЫ
Под общей редакцией проф. К. Л. Феоктистова
МОСКВА
ВОЕННОЕ ИЗДАТЕЛЬСТВО
1983
ББК 39.62
К71
УДК 629.78
АВТОРСКИЙ КОЛЛЕКТИВ
В. Н. Бобков, В. В. Васильев, Э. К. Демченко, Г. В. Лебедев,
В. А. Овсянников, Б. В. Раушенбах, О. В. Сургучев, В. А. Тимченко,
К. П. Феоктистов, Ю. М. Фрумкин, Б. В. Черняев
Рецензент: кандидат технических наук, доцент Л. М. ШИШОВ
Космические аппараты/Под общ. ред. К. П. Феоктистова.
К71 М.: Воениздат, 1983.—319 с., ил.— (Ракетно-космический ком-
плекс).
В пер.: 1 р. 60 к.
В книге даются общие сведения об условиях, целях и задачах космического
полета, основах проектирования автоматических и пилотируемых космических ап-
паратов и их использования. Рассматриваются устройство космических аппаратов
и их систем, логика работы и схемы их полета. Излагаются основные проблемы
проектирования и особенности проектной разработки космических аппаратов, а
также их связи с другими элементами ракетно-космического комплекса.
Книга предназначена для инженерно-технических работников, учащихся выс-
ших учебных заведений и лиц, интересующихся ракетно-космической техникой.
3607000000-183 ББК 39.62
068(02)—83 6Т6
(g) Воениздат, 1983
4
ОТ АВТОРОВ
В предлагаемой читателю третьей книге серии «Ракетно-косми-
ческий комплекс» излагаются особенности устройства, проектиро-
вания и использования автоматических и пилотируемых космичес-
ких аппаратов (КА), а также перспективы их дальнейшего раз-
вития. На построение и содержание книги повлияло то обстоятель-
ство, что космический аппарат в наибольшей степени зависит от
конкретных задач полета и по своему облику и конструкции яв-
ляется самым изменчивым элементом ракетно-космической систе-
мы (РКС) и всего ракетно-космического комплекса (РКК).
Поэтому в книге внимание уделено не только конструкции
и системам КА, но и их использованию, целям, задачам и схемам
полетов, основам проектирования и особенностям разработки КА
различных типов.
При написании книги авторы стремились дать комплексное
представление о космических аппаратах, показать взаимосвязь и
взаимообусловленность отдельных факторов и явлений, лежащих
в основе технических решений при определении их облика.
Книга написана авторским коллективом в составе: В. Н. Боб-
кова (разделы 3.6 и 3.7), В. В. Васильева (глава 1), Э. К. Дем-
ченко (главы 4 и 11), Г. В. Лебедева (глава 10), В. А. Овсянни-
кова (глава 9), Б. В. Раушенбаха (глава 8), О. В. Сургучева
(главы 6 и 7), В. А. Тимченко (введение, разделы 3.1—3.5),
К. П. Феоктистова (глава 4), Ю. М. Фрумкина (глава 2),
Б. В. Черняева (глава 5). Авторы выражают благодарность
товарищам, оказавшим помощь при подготовке рукописи.
Авторы отдают себе отчет в том, что книга не свободна от не-
достатков, и будут благодарны читателям, если они выскажут
свои критические замечания и пожелания.
5
ВВЕДЕНИЕ
Со времени запуска первых искусственных спутников создано
большое количество космических аппаратов*. Главными целями
разработки беспилотных космических аппаратов были исследова-
ние и наблюдение Земли и космического пространства, организа-
ция дальней радиосвязи, проведение технических экспериментов в
космосе, исследование Луны и планет Солнечной системы. В об-
ласти пилотируемых полетов за прошедшие годы разработаны и
реализованы проекты ряда ракетно-космических систем, к числу
которых относятся советские «Восток», «Восход», «Союз»,
«Союз Т», «Салют» и американские «Меркурий», «Джемини»,
«Аполлон», «Скайлэб», «Спейс Шаттл».
О темпах развития космической техники говорит тот факт, что
за один год с момента запуска первого искусственного спутника
на околоземную орбиту было выведено 7 космических аппаратов,
за последующие пять лет—130, а за десять лет — более 600. К
настоящему времени Англия, Франция, ФРГ, Япония, КНР и дру-
гие страны ведут космические исследования и имеют собственные
разработки космических аппаратов. Однако ведущее положение в
космической технике, включая проведение пилотируемых полетов,
занимают Советский Союз и Соединенные Штаты Америки. В по-
следние годы получило развитие международное сотрудничество:
программа «Интеркосмос», советско-французские, советско-индий-
ские и другие совместные космические исследования.
При планировании и реализации дорогостоящих космических
программ большое внимание уделяется эффективности космичес-
ких исследований и полетов, оценке их оправданности и целесо-
образности. Но с этими критериями нельзя подходить к проектам
первых ИСЗ: они осуществлялись прежде всего ради становления
самой космической техники. По мере развития космической тех-
ники к КА предъявлялись все более жесткие требования, совер-
шенствовалась бортовая аппаратура, возрастал круг решаемых
задач, а в некоторых случаях стали использоваться системы спут-
* Здесь и далее под космическими аппаратами (КА) поиимаютси любые
искусственные космические объекты, в том числе беспилотные космические ап-
параты, пилотируемые космические корабли, орбитальные и межпланетные стан-
ции, искусственные спутники Земли и планет.
6
ников, подчиненных единой цели. Практическая отдача, полезность
современных КА или систем из них должна быть достаточно вы-
сокой, чтобы оправдать затраты на их создание.
В настоящее время с помощью автоматических и пилотируе-
мых КА проводятся эффективные исследования в интересах науки
и техники, промышленности и сельского хозяйства (наблюдение
за погодой, изучение геологических структур Земли и поиск по-
лезных ископаемых, обеспечение дальней радиосвязи и телевиде-
ния, обнаружение скоплений рыбы в морях и океанах, наблюде-
ния за посевами, лесами и загрязнением водоемов, получение в
невесомости новых материалов и т. п.). Кроме того, космическая
техника, ставя повышенные требования к изделиям других отрас-
лей и форсируя внедрение новых научных достижений и техноло-
гии, способствует общему повышению уровня разработок и про-
мышленного производства.
Космической технике присуще большое многообразие техничес-
ких задач, необходимость решения в процессе разработки КА
сложных проблем и использования результатов исследований и но-
вейших достижений в самых различных областях знаний и науч-
ных направлений (физика, астрономия, механика, математика,
аэрогазодинамика, автоматическое управление, электроника, ра-
диотехника, оптика, химия, электрооборудование, метеорология,
медицина и др.). Активное развитие космонавтики вызвало широ-
кие публикации на эту тему, которые в большинстве своем посвя-
щены популяризации достижений, описанию проектов и специаль-
ным вопросам. В то же время существует ряд факторов и обстоя-
тельств, которые определяют облик КА, влияют на выбор его
очертаний и характеристик, на его системы и конструкции, т. е.
«делают» его таким, какой он есть. Указанные факторы, а также
существо решаемых научно-технических проблем, сложность за-
дач разработки и связи в технических решениях могут быть по-
казаны при изложении основ проектирования и особенностей раз-
работки систем и конструкции космических аппаратов. Это и
стало одной из основных задач при подготовке предлагаемой чи-
тателю книги.
Если первые две книги серии «Ракетно-космический комплекс»
были посвящены космодрому и ракете-носителю, то третья книга
знакомит читателя с беспилотными и пилотируемыми космичес-
кими аппаратами, т. е. с теми инженерными объектами, ради ко-
торых создаются и ракеты-носители, и космодромы. Настоящая
книга рассказывает об устройстве КА, показывает последователь-
ность и причинные связи в их создании, дает представление о це-
лях разработки и решаемых в полете задачах, о влиянии этих за-
дач на системы и конструкцию КА, о происходящих в полете про-
цессах и проводимых операциях, о составе бортовых систем и дру-
гих аспектах разработки.
Главное внимание в книге уделено технике пилотируемых кос-
мических полетов, в которой в максимальной степени ужесточа-
ются требования к космическому аппарату и усложняется сово-
7
купность используемых инженерных решений и результатов науч-
ных исследований. В книге отражены связи в разработке состав-
ных частей ракетно-космических комплексов (РКК) с точки зре-
ния влияния на них космического аппарата и решения вопросов
взаимных сопряжений, приведены особенности проектирования
КА различных типов и некоторые сведения по организации работ.
Наряду с рассказом о реальных достижениях, о созданных
космических аппаратах, об особенностях их проектирования и ис-
пользования в книге нашли отражение современные тенденции
развития ракетно-космической техники.
8
Глава 1
УСЛОВИЯ КОСМИЧЕСКОГО ПОЛЕТА
1.1. ОБЩАЯ ХАРАКТЕРИСТИКА КОСМИЧЕСКОГО
ПРОСТРАНСТВА
Космос — понятие, используемое с древних времен как сино-
ним Вселенной и означающее мир в целом, бесконечный во вре-
мени и пространстве и безгранично разнообразный по формам,
которые принимает материя в процессе развития.
В связи с космическими полетами слова «космос», «космичес-
кое пространство» в современном понимании обозначают все то,
что находится за пределами Земли и ее атмосферы. Это деление
несколько условно. Резкой верхней границы атмосферы (ее вер-
тикальная протяженность ~20000 км) не существует, она посте-
пенно переходит в межпланетную среду. По решению Междуна-
родной авиационной федерации (ФАИ) принято считать косми-
ческими те полеты, высота которых составляет не менее 100 км.
Обычно рассматривают не космическое пространство в целом,
а те или иные его области: околоземное, межпланетное, меж-
звездное пространство и т. п.
При характеристике космического пространства ограничимся
пределами Солнечной системы, уделив главное внимание тем ее
составляющим, которые представляют интерес в качестве целей
космических полетов, полезных факторов, используемых на борту
космических аппаратов, или источников потенциальной опас-
ности.
Солнечная система состоит из звезды — Солнца, планет со
спутниками, астероидов (малых планет), комет и межпланетной
среды, образуемой метеорами, космической пылью и межпланет-
ным газом, и, как считают, имеет диаметр около 2-1013 км.
Солнце — центральное тело Солнечной системы — имеет мас-
су, составляющую более 99% всей массы тел Солнечной системы.
Его гравитационное поле служит главным фактором, определяю-
щим движение планет, астероидов, комет и метеорных тел, а так-
же и космических аппаратов вне сфер действия полей тяготения
планет. Солнце является источником мощных потоков корпуску-
лярного и электромагнитного излучений.
Физические условия в межпланетном и околоземном простран-
стве существенно зависят от проявлений солнечной активности.
Вариации интенсивности излучений Солнца, связанные с 11-лет-
ним циклом, вызывают сравнительно монотонные и регулярные
9
изменения, которые легко обнаруживаются и поддаются достаточ-
но точному долгосрочному прогнозированию. В то же время про-
явления солнечной активности, называемые солнечными вспыш-
ками, при которых резко (на несколько порядков) увеличивается
интенсивность корпускулярного излучения, оказывают самое не-
посредственное и внезапное влияние на характеристики физичес-
ких условий в космическом пространстве. Влияние других прост-
ранственно-временных вариаций интенсивности излучений Солнца
сравнительно мало.
Девять планет (Меркурий, Венера, Земля, Марс, Юпи-
тер, Сатурн, Уран, Нептун и Плутон) обращаются вокруг Солнца
в прямом направлении, т. е. с запада на восток. Их почти круго-
вые орбиты лежат приблизительно в одной плоскости. Все плане-
ты, как и Земля, вращаются вокруг своей оси в прямом направ-
лении (с запада на восток), лишь Венера имеет обратное враще-
ние (с востока на запад), а ось вращения Урана лежит почти в
плоскости его орбиты.
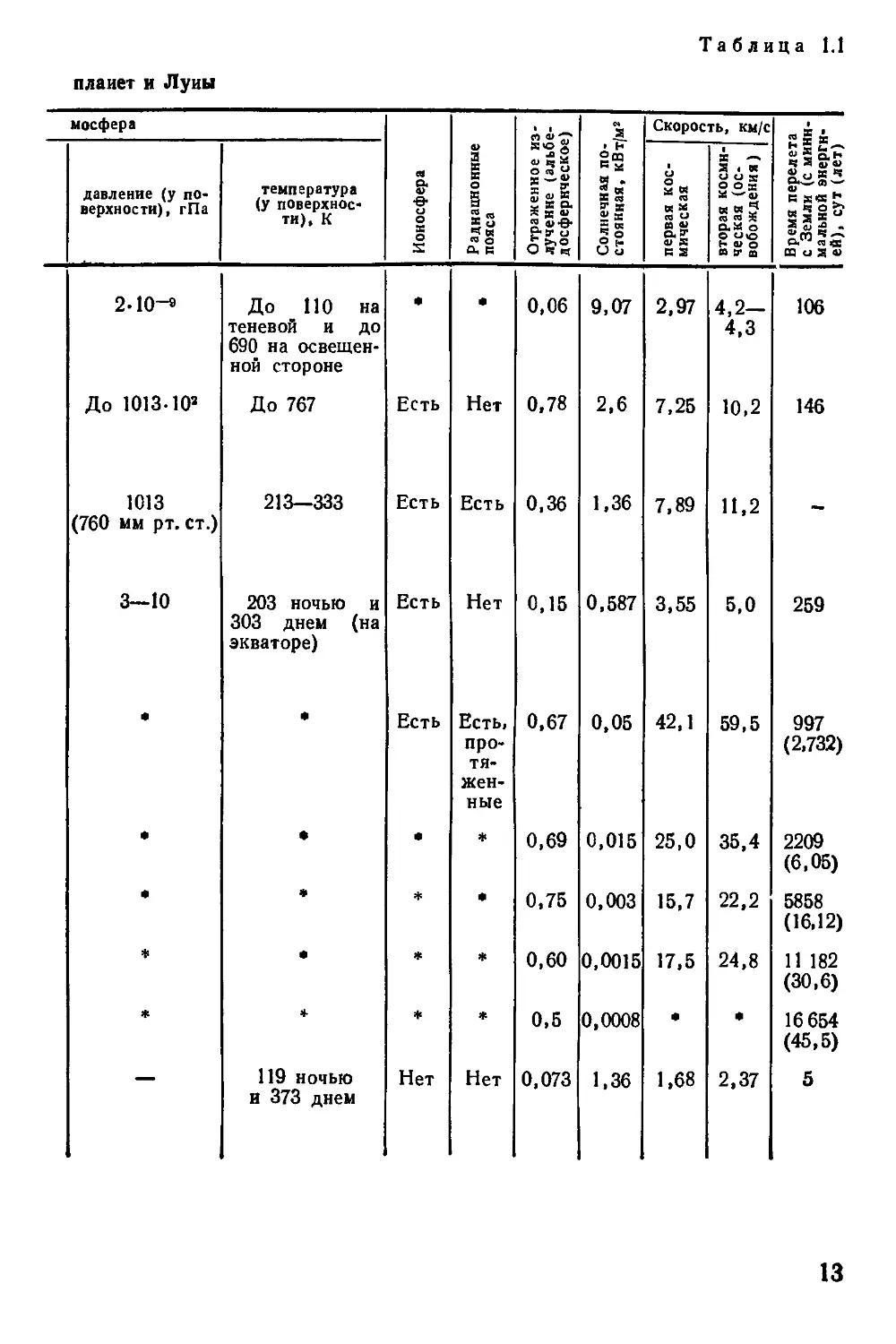
По физическим свойствам все планеты делят на планеты зем-
ной и юпитерианской групп: к первой, кроме Земли, относят Мер-
курий, Венеру, Марс и иногда Плутон, ко второй — планеты-ги-
ганты Юпитер, Сатурн, Уран, Нептун. Данные о физических ха-
рактеристиках планет и Луны, а также некоторые другие данные,
связанные с космическими полетами, приведены в табл. 1.1.
Планеты и другие крупные тела Солнечной системы обладают
полями тяготения. Затраты энергии на преодоление сил тяготения
будут наибольшими из тех, которые необходимы при выведении
КА на орбиту, при изменении величины и направления вектора
скорости в целях коррекции траектории полета, а также при его
торможении для посадки на поверхность небесного тела.
Огромные расстояния между Землей, Луной и планетами
Солнечной системы требуют значительного времени на их преодо-
ление, которое при существующих возможностях ракетно-косми-
ческой техники измеряется при полете к Луне несколькими дня-
ми, к планетам земной группы — месяцами, а к планетам юпите-
рианской группы — годами.
У Земли, Венеры и некоторых других планет имеется атмос-
фера. При движении КА в атмосфере возникают аэродинамичес-
кие силы, вызывающие торможение КА и приводящие к потере
им скорости. При старте с планеты на преодоление аэродинами-
ческого сопротивления требуются дополнительные затраты топли-
ва для достижения КА заданной скорости. При движении КА по
орбите искусственного спутника воздействие аэродинамических
сил определяет время его существования на орбите. Аэродинами-
ческие силы можно использовать для стабилизации КА относи-
тельно вектора скорости, а также для снижения скорости КА без
затрат энергии при посадке на планеты, имеющие атмосферу (при
этом требуется защита КА от аэродинамического нагрева).
Состав атмосферы, изменение давления и температуры по вы-
соте, а также физические условия (давление, температура, иали-
10
чие ветров, механические характеристики поверхностного слоя
грунта, пересеченность местности и т. п.) на поверхности планет
необходимо учитывать при создании КА, предназначенных для
посадки на них. Физические явления в атмосфере, в частности
наличие и состояние ионосферы, будут влиять на распростра-
нение радиоволн и радиосвязь КА с Землей, между КА и при
использовании ИСЗ для радиосвязи и телевидения. Возмуще-
ния ионосферы во время солнечных вспышек могут практи-
чески исключить возможность коротковолновой радиосвязи в этот
период.
Полеты в зоне радиационных поясов — у Земли и Юпитера —
из-за воздействия ионизирующего излучения опасны для человека
и требуют специальной защиты, а также разработки устойчивой к
этому воздействию бортовой аппаратуры.
При движении в магнитном поле Земли и других планет на
КА, обладающий магнитным (постоянным или переменным) мо-
ментом, будет действовать вращающий момент, который можно
использовать для успокоения движения КА относительно центра
масс, для целенаправленной его ориентации и т. п.
Космическое пространство, являясь естественным барьером,
предотвращает перенос форм жизни (если они существуют) с од-
ного небесного тела на другое. Возможность космических полетов
делает этот естественный барьер преодолимым. Поэтому при меж-
планетных полетах необходим комплекс специальных мер, назы-
ваемых планетным карантином, для исключения возможности
переноса форм жизни с одного небесного тела на другое.
Астероиды (малые планеты), обращающиеся вокруг
Солнца, главным образом между орбитами Марса и Юпитера, об-
разуют кольцо (пояс) астероидов шириной более 1 а. е*. Значи-
тельная часть астероидов (примерно 97%) имеет большие полу-
оси орбит в пределах от 2,17 до 3,64 а. е. и образует так назы-
ваемое основное кольцо астероидов, состоящее в свою очередь
из нескольких второстепенных колец, в промежутках (люках) ме-
жду которыми астероиды или отсутствуют, или имеются в незна-
чительном количестве. В настоящее время открыто более 6000
астероидов, диаметр наибольшего из которых — Цереры — прини-
мается равным 768 км. Постоянные столкновения отдельных тел
в кольце астероидов приводят к их постепенному дроблению и об-
разованию в этой зоне Солнечной системы мелко раздробленного
твердого вещества вплоть до мельчайших твердых пылинок.
Для космических полетов пояс астероидов считается наиболее
опасным районом Солнечной системы из-за возможности столк-
новения КА с мелкими астероидами.
Кометы — небесные тела, внешне напоминающие туманную
расплывчатую звезду с одним или несколькими слабо светящи-
мися хвостами. Голова кометы может иметь размеры от несколь-
* 1 а. е. (астрономическая единица) = 149,598 • 10* км.
11
Физические характеристики
Планета Расстояние Масса в массах Земли Экваториальный диаметр в диа- метрах Земли Ускорение силы тяжести» отне- сенное к земному Магнитное поле (магнит- ный момент, отнесенный к земному) Ат
49 л а? X о> о 5*. U 4) 4) . сь Н Q • О-—-Я от Земли» 10е км наличие и состав
Мерку- рий 0,39 82—217 0,054 0,38 0,38 Есть, слабое Следы Не, Н» и др.
Венера 0,72 39—260 0,815 0,95 0,905 Есть (2-10-3). слабое Очень плотная, в основном СО2, при- меси N2, Аг, О2 и др.
Земля 1,00 — 1,000 1,00 1,00 Есть (1,00), сильное Плотная, в ос- новном N2 и О2, примеси Аг, СО2 и др.
Марс 1,52 56—400 0,107 0,53 0,38 Есть (2-Ю-4), слабое Очень разрежен- ная, в основном СО2 и примеси па- ров Н2О, N2, Аг, СО и др.
Юпитер 5,2 591—965 317,88 11,11 2,67 Есть (4- 10s), очень сильное
Сатурн Уран 9,54 19,19 1199— 1653 2586— 3153 95,17 14,54 9,43 3,98 1,17 0,83 Есть, довольно сильное * Очень плотная и протяженная, в основном Н2, Не, примесн метана, аммиака и др.
Нептун 30,07 4309— 4682 17,25 3,82 1,15 *
Плутон 39,52 4249— 7558 <1 <1 >2,0 * •
Луна 1,0 0,3844 (среднее) 0,012 0,272 0,165 Есть (110-в), очень слабое Нет
* Данные прямых измерений отсутствуют.
12
1 * * • • • I О ст о Е — Е о тэ со п о о со ьэ о 1
с*
119 ночью и 373 днем * • « • • 203 ночью и 303 днем (на экваторе) 213—333 До 767 ной стороне теневой и до 690 на освещен- До 110 на
Не’ * * * • п п п Eci •
сг сг сг СГ
Нет i * * • * ные жен- Есть, про- тя- 1 Нет Есть Нет •
О о о о о о о О О о
о со ст ст о ст ст со СТ ст 8? 00 о ст
1,36 о § 00 9100'0 0,003 0,015 1 90'0 0,587 1,36 2,6 9,07
89*1 • 17,5 15,7 25,0 42,1 3,55 7,89 7,25 1 2,97
2,37 • 24,8 22,2 35,4 59,5 5,0 10,2 4,3 4,2—
СП 16654 (45,5) 11 182 (30,6) 5858 (16,12) 2209 (6,05) 997 (2,732) 259 1 146 106
s
к
s
я
|И
Я к
S
Е
Ионосфера
Радиационные
пояса
Отраженное из-
лучение (альбе-
досфернческое)
Солнечная по-
стоянная, кВт/м2
первая кос-
мическая
ж
вторая косми-
ческая (ос-
вобождения)
я
к
Время перелета
с Земли (с мини-
мальной энергн-
; ей), сут (лет)
Таблица 1.1
ких тысяч до (1—2) • 10е км, а хвост, возникающий при прохож-
дении кометы вблизи Солнца, может иметь длину до 200 • 10е км.
Комета имеет твердое ядро, окруженное массой газа — комой, ко-
торая образует внешнюю оболочку и хвост кометы. Ядро кометы
состоит из глыб метеорного вещества, кусков льда из воды, ам-
миака, метана и т. п.
Практический интерес представляет тот факт, что распавшие-
ся кометы дают начало метеорным потокам. При распаде коме-
ты остатки ее ядра в виде обломков твердого вещества, продол-
жая двигаться почти по той же орбите, что и сама комета, обра-
зуют метеорный рой. Этот метеорный рой под действием возму-
щений планет постепенно растягивается по орбите в более или
менее однородный метеорный поток.
Метеоры и космическая пыль — это множество твер-
дых частиц, свободно движущихся в поле тяготения Солнца и,
как правило, физически не связанных с планетами.
Метеорные частицы делят на два класса: метеорные потоки
(рои) и спорадические метеоры.
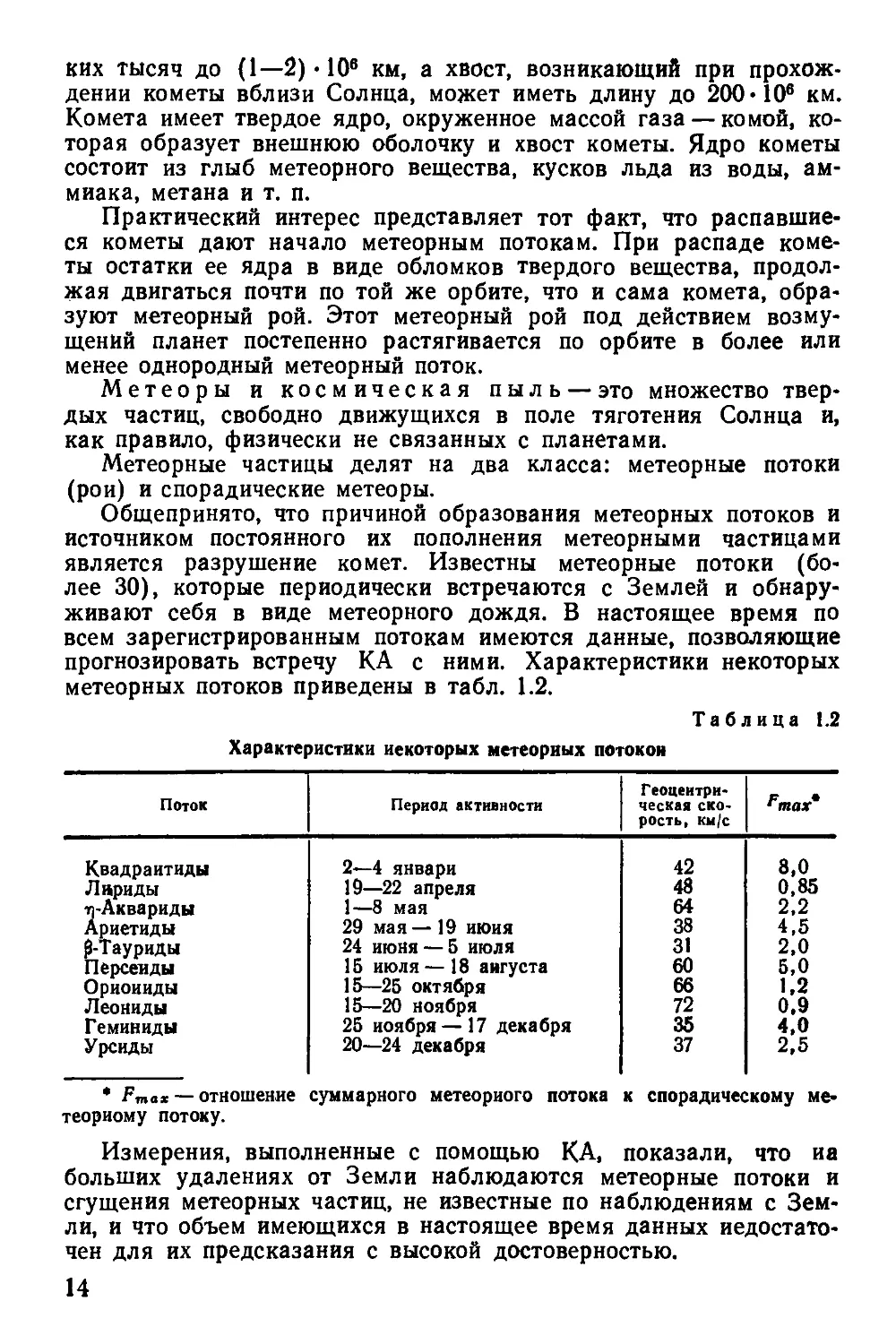
Общепринято, что причиной образования метеорных потоков и
источником постоянного их пополнения метеорными частицами
является разрушение комет. Известны метеорные потоки (бо-
лее 30), которые периодически встречаются с Землей и обнару-
живают себя в виде метеорного дождя. В настоящее время по
всем зарегистрированным потокам имеются данные, позволяющие
прогнозировать встречу КА с ними. Характеристики некоторых
метеорных потоков приведены в табл. 1.2.
Таблица 1.2
Характеристики некоторых метеорных потоком
Поток
Период активности
Геоцентри-
ческая ско-
рость, км/с
Ртах*
Квадраитиды
Л ириды
iq-Аквариды
Ариетиды
(З-Тауриды
Персеиды
Ориоииды
Леониды
Геминиды
Урсиды
2—4 январи
19—22 апреля
1—8 мая
29 мая — 19 июня
24 июня — 5 июля
15 июля —18 аигуста
15—25 октября
15—20 ноября
25 ноября—17 декабря
20—24 декабря
42 8,0
48 0,85
64 2,2
38 4,5
31 2,0
60 5,0
66 1,2
72 0,9
35 4,0
37 2,5
* Ртах — отношение суммарного метеорного потока к спорадическому ме-
теорному потоку.
Измерения, выполненные с помощью КА, показали, что иа
больших удалениях от Земли наблюдаются метеорные потоки и
сгущения метеорных частиц, не известные по наблюдениям с Зем-
ли, и что объем имеющихся в настоящее время данных недостато-
чен для их предсказания с высокой достоверностью.
14
Метеорные частицы, которые не удается причислить к какому-
либо метеорному потоку, называют метеорами фона, или спора-
дическими метеорами (они могут принадлежать и к слабым невы-
явленным метеорным потокам). Согласно одной из гипотез основ-
ным источником спорадических метеорных частиц считают пояс
астероидов, а сами частицы — осколками астероидов, согласно
другой — все метеоры, в том числе и спорадические, имеют комет-
ное происхождение. Кроме первичных частиц, о которых го-
ворилось выше, наблюдаются также вторичные частицы, ко-
торые выбиваются первичными метеорами при попадании
в Луну.
Встречаются каменные и железные метеорные частицы, при-
чем средняя плотность образуемых ими конгломератов состав-
ляет 0,5 г/см3.
Максимальная скорость первичных метеорных частиц относи-
тельно Солнца на расстоянии 1 а. е. равна 42 км/с, а относитель-
но Земли, имеющей орбитальную скорость 30 км/с,—12 км/с, если
частица догоняет Землю, или 72 км/с — если она летит навстречу
Земле. Для расчетов принимают среднюю скорость 30 км/с.
Дробление комет, астероидов, а также крупных планет и их
спутников при столкновении с метеорами приводит к заполнению
всей Солнечной системы мельчайшей твердой пылью.
Корпускулярное излучение (радиация)—потоки
электрически заряженных частиц высокой энергии (ядер атомов
химических элементов, электронов и протонов) солнечного или га-
лактического происхождения. Оно представляет опасность прежде
всего для человека и может влиять на работу электронной аппа-
ратуры и свойства некоторых материалов. В наземных условиях
это влияние отсутствует, так как Земля защищена от потоков час-
тиц, создающих наибольшую опасность, магнитным полем и ат-
мосферой.
В межпланетном и околоземном пространстве корпускуляр-
ное излучение наблюдается в виде солнечного ветра, солнечного
и галактического космического излучений и излучения радиацион-
ного пояса Земли.
Солнечный ветер — непрерывное радиальное истечение
плазмы солнечной короны в межпланетное пространство, содержит
~9О°/о протонов, ~9% ядер гелия и 1% других более тяжелых
ионов. В последнее время под солнечным ветром подразумевают
измеряемый вблизи Земли поток частиц солнечного происхождения
с энергией до 106 эВ.
Солнечный ветер определяет структуру и величину межпланет-
ного магнитного поля, силовые линии которого вытянуты вдоль
линий тока солнечного ветра и имеют форму спирали Архимеда,
закручиваемой вращением Солнца. Это магнитное поле влияет на
распределение интенсивности галактических космических лучей в
Солнечной системе, препятствуя их проникновению в ее внутрен-
ние области.
15
Солнечный ветер благодаря давлению отклоняет хвосты комет,
«выметает» из Солнечной системы газ и мельчайшие частицы кос-
мической пыли, определяет характер геомагнитных возмущений и
связанных с ними других геофизических явлений, является одним
из источников пополнения заряженными частицами радиационного
пояса Земли.
Солнечное космическое излучение (СКИ)—ин-
тенсивные потоки частиц высокой (от 10е до 2 • 1010 эВ) энергии,
генерируемые Солнцем во время сильных вспышек. В состав СКИ
входят в основном протоны, обнаружены также ядра с зарядом
и электроны с энергией ^40 кэВ.
Сильные вспышки сравнительно редки и длятся не более су-
ток, но в это время именно солнечные космические лучи опреде-
ляют радиационную обстановку в межпланетном пространстве.
Галактическое космическое излучение (ГКИ)—
потоки частиц, возникающие вне пределов Солнечной системы и
состоящие из ~94% протонов, ~5,5% ядер гелия и небольшого
количества тяжелых ядер. Средняя энергия частиц ГКИ, наблю-
даемых около Земли, составляет 1010 эВ, причем энергия некоторых
из них может достигать 1020 эВ и выше, т. е. во много раз превос-
ходит максимальную энергию, полученную на Земле с помощью
ускорителей заряженных частиц. Поток частиц движется с реляти-
вистскими (близкими к скорости света) скоростями. Его интенсив-
ность практически одинакова во всех направлениях, увеличивается
по мере удаления от Солнца (что связано с действием межпланет-
ного магнитного поля) и имеет колебания (в 2 раза) в противо-
фазе с изменением периодов солнечной активности.
По своей проникающей способности галактические космические
лучи превосходят все другие виды излучений, кроме нейтрино.
Излучение радиационного пояса Земли — интенсивные
потоки электронов и протонов, захваченных магнитным полем
Земли и заполняющих всю магнитосферу*.
Захваченные частицы под действием магнитного поля совер-
шают колебательное движение по широте (по траектории, пред-
ставляющей собой спираль с переменным шагом, как бы «нави-
вающуюся» на силовую линию) и «дрейф» по долготе (электроны
смещаются на восток, протоны и другие положительные части-
цы— на запад), образуя так называемую радиационную зону
(пояс) в виде торообразного кольца, охватывающего Землю в
плоскости геомагнитного экватора иа высоте от нескольких сотен
до десятков тысяч километров.
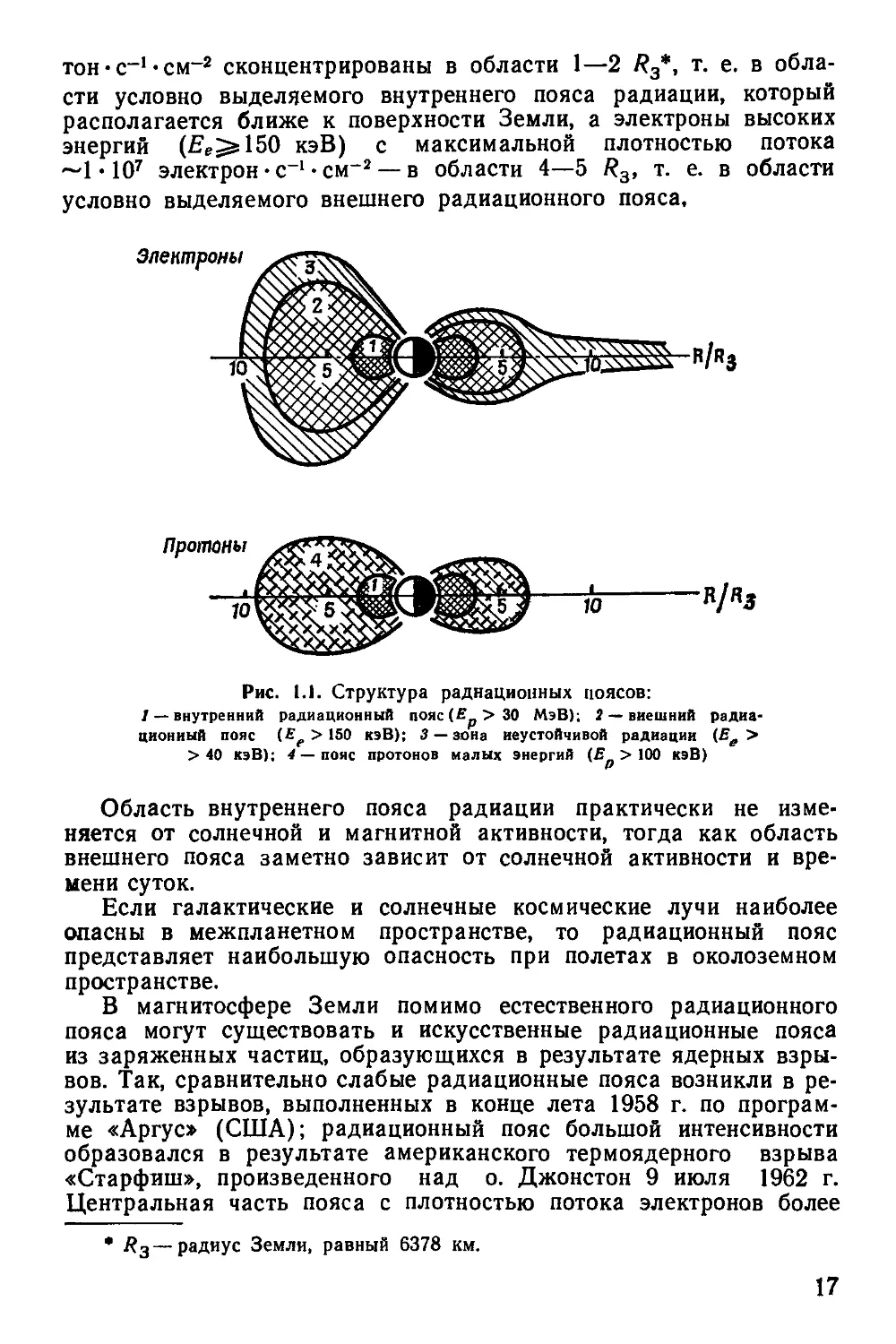
Электроны и протоны различных энергий распределяются в
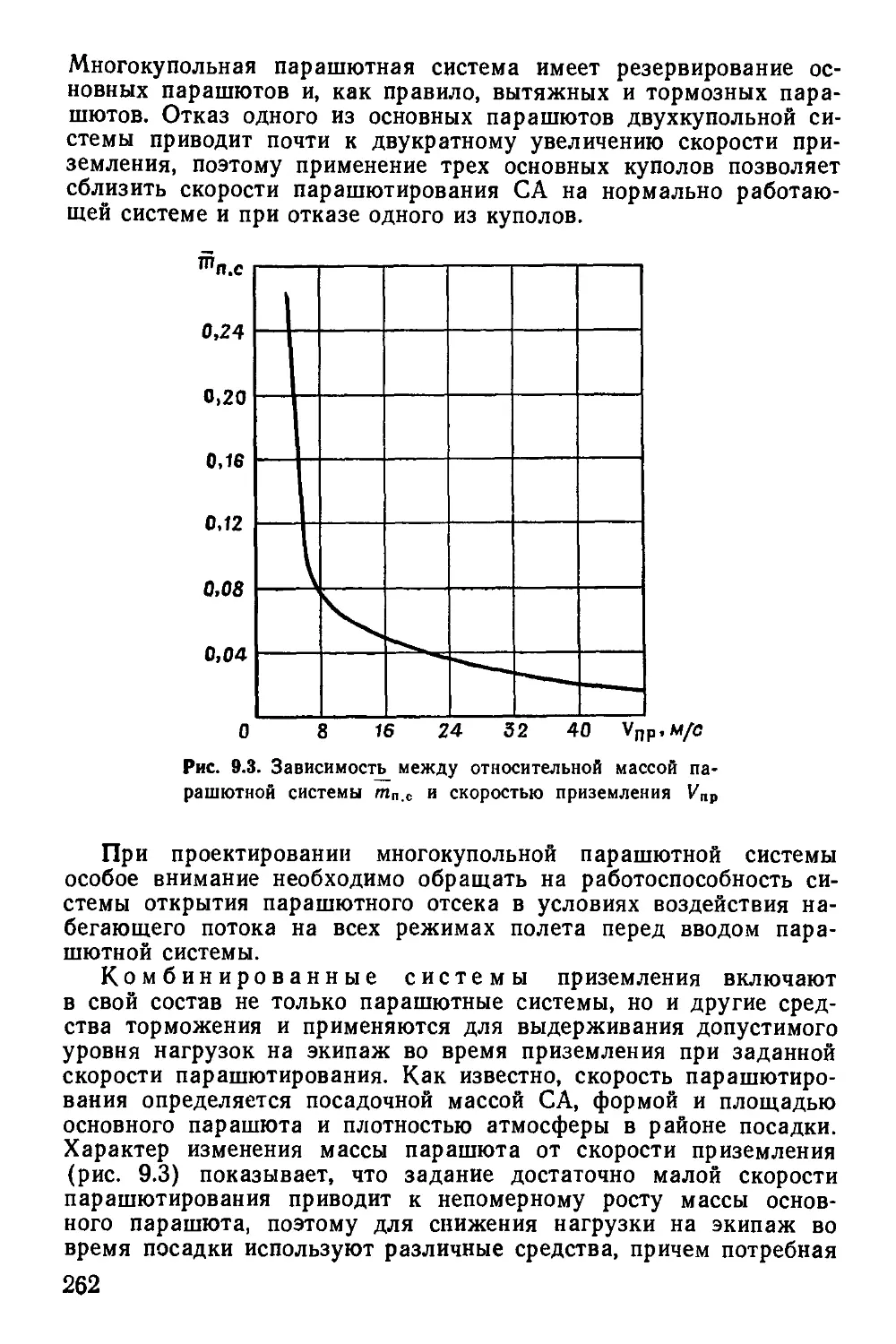
радиационном поясе Земли дифференцированно (рис. 1.1). Элек-
троны и протоны сравнительно низких энергий почти равномерно
заполняют магнитосферу Земли. Протоны высоких энергий
(£р^30 МэВ) с максимальной плотностью потока -~2-104 про-
• Магнитосфера — область околоземного пространства, занимаемая магнит-
ным полем Земли.
16
тон • с-1 • см-2 сконцентрированы в области 1—2 /?3*, т. е. в обла-
сти условно выделяемого внутреннего пояса радиации, который
располагается ближе к поверхности Земли, а электроны высоких
энергий (Ёе>150 кэВ) с максимальной плотностью потока
~1 • 107 электрон • с-1 • см-2 — в области 4—5 /?3, т. е. в области
условно выделяемого внешнего радиационного пояса.
Рис. 1.1. Структура радиационных поясов:
/ — внутренний радиационный пояс(£р>30 МэВ); 2 — внешний радиа-
ционный пояс (Ер > 150 кэВ); 3 — зона неустойчивой радиации (£р >
> 40 кэВ); 4 — пояс протонов малых энергий (£р > 100 кэВ)
Н/Я3
Область внутреннего пояса радиации практически не изме-
няется от солнечной и магнитной активности, тогда как область
внешнего пояса заметно зависит от солнечной активности и вре-
мени суток.
Если галактические и солнечные космические лучи наиболее
опасны в межпланетном пространстве, то радиационный пояс
представляет наибольшую опасность при полетах в околоземном
пространстве.
В магнитосфере Земли помимо естественного радиационного
пояса могут существовать и искусственные радиационные пояса
из заряженных частиц, образующихся в результате ядерных взры-
вов. Так, сравнительно слабые радиационные пояса возникли в ре-
зультате взрывов, выполненных в конце лета 1958 г. по програм-
ме «Аргус» (США); радиационный пояс большой интенсивности
образовался в результате американского термоядерного взрыва
«Старфиш», произведенного над о. Джонстон 9 июля 1962 г.
Центральная часть пояса с плотностью потока электронов более
• /?3—радиус Земли, равный 6378 км.
17
1 • 109 электрон • с-1 • см-2 была расположена на высоте 3000—
6000 км от поверхности Земли в плоскости экватора. Искусствен-
ные радиационные пояса к настоящему времени практически пол-
ностью распались.
Основным источником электромагнитных излучений
в Солнечной системе является Солнце.
Земная атмосфера имеет только два небольших «окна проз-
рачности» для солнечной радиации: «оптическое окно» (длина
волн от 3-10-7 до 4-10~7 м) и «радиоокно» (длина волн от 8-10-3
до 15 м). Радиоизлучение заметно ослабляется ионосферой при
длинах волн от 15 до 40 м и полностью поглощается в остальной
части спектра атмосферой Земли и до ее поверхности не доходит.
В космическом пространстве КА будет испытывать воздействие
излучения Солнца во всем спектре длин волн. Так как интенсив-
ность излучения Солнца в основной части спектра практически не
зависит от солнечной активности, его обычно характеризуют ве-
личиной «солнечной постоянной» — потоком солнечной энергии,
падающим в единицу времени под прямым углом на единичную
площадку, расположенную на определенном расстоянии от Солн-
ца. Применительно к земным условиям (т. е. к удалению от Солн-
ца в 1 а. е.) солнечная постоянная за границей земной атмосферы
Ес = 0,136 Вт/см2.
Для других областей межпланетного пространства солнечная
постоянная
£№=-£' (1Л)
где Ес — солнечная постоянная на расстоянии в 1 а. е.;
R — расстояние от Солнца, а. е.
Излучение Солнца является основным внешним источником
тепла, влияющим на тепловой режим КА.
Излучение видимой части спектра определяет условие осве-
щенности естественных и искусственных небесных тел.
Энергия солнечного излучения может быть преобразована с
помощью фотоэлектрических преобразователей (солнечных бата-
рей) в электрическую энергию и использована длй электропита-
ния бортовых систем КА.
Солнечный свет оказывает давление на освещенные части тел.
Давление солнечного света на площадку, перпендикулярную сол-
нечным лучам, при условии полного поглощения определяется вы-
ражением
/=$-. (1-2)
где ^0=4,547-10-® Н/м2=0,5 мг/м2— давление солнечного света на
расстоянии 1 а. е.
Оно оказывает возмущающее действие на траекторию движе-
ния КА, причем тем больше, чем меньше масса КА и больше по-
18
верхность, на которую давят солнечные лучи. Существует идея
использования давления солнечного света в двигательных систе-
мах «солнечный парус», называемых так по аналогии с обычным
парусом.
Излучение с длиной волны меньше 3-10~7 м, называемое ко-
ротковолновым, является ионизирующим, представляет опасность
для незащищенных живых организмов и может вызывать измене-
ния поверхностных свойств материалов наружных устройств КА.
Радиоизлучение Солнца опасности для человека не представ-
ляет, но может явиться помехой для связи КА с Землей во время
солнечных вспышек.
1.2. ВЛИЯНИЕ ВАКУУМА
Давление среды на высотах 100—200 км от поверхности Земли
порядка 10-2—10-4 Па*, а в межпланетном пространстве —
10~10 Па. Человек, попадая в условия таких низких давлений, по-
гибает из-за недостачи кислорода и кипения имеющихся в его те-
ле жидкостей. Очевидно, что при космическом полете экипаж КА
должен находиться в герметичной кабине или в скафандре, в ко-
торых обеспечиваются определенное давление и состав окружаю-
щей человека газовой среды.
Выбор и обеспечение на борту КА давления и газового состава
атмосферы подробно рассмотрены в главе 7.
В условиях вакуума, особенно при высокой температуре, про-
исходит испарение некоторых материалов, что крайне нежела-
тельно для тех из них, которые имеют целевое назначение, на-
пример покрытия с определенными радиационными характерис-
тиками, смазки трущихся частей и т. п.
В наземной вакуумной практике большинство веществ испа-
ряются настолько медленно, что их потери можно не учитывать
и, кроме того, эти потери не имеют такого значения, как в кос-
мосе, поскольку любая деталь или механизм легко могут быть
заменены.
Скорость испарения вещества (в г/см2 • с) в вакууме описы-
вается формулой Ленгмюра
/ и \°>s
G-l 1,69а, (-£) . (1.3)
где ра — давление насыщенного пара данного вещества, Па;
р, — молярная масса вещества, г/моль;
Т — температура испаряющейся поверхности, К.
Формула (1.3) выведена для абсолютного вакуума, поэтому
реальная скорость испарения в космическом пространстве будет
меньше расчетной. Для некоторых металлов, используемых в ка-
• 1 Па«10“5 кгс/см2; 1 кгс/см2=9,80665• 104 Па (точно)— 105 Па=0,1 МПа.
19
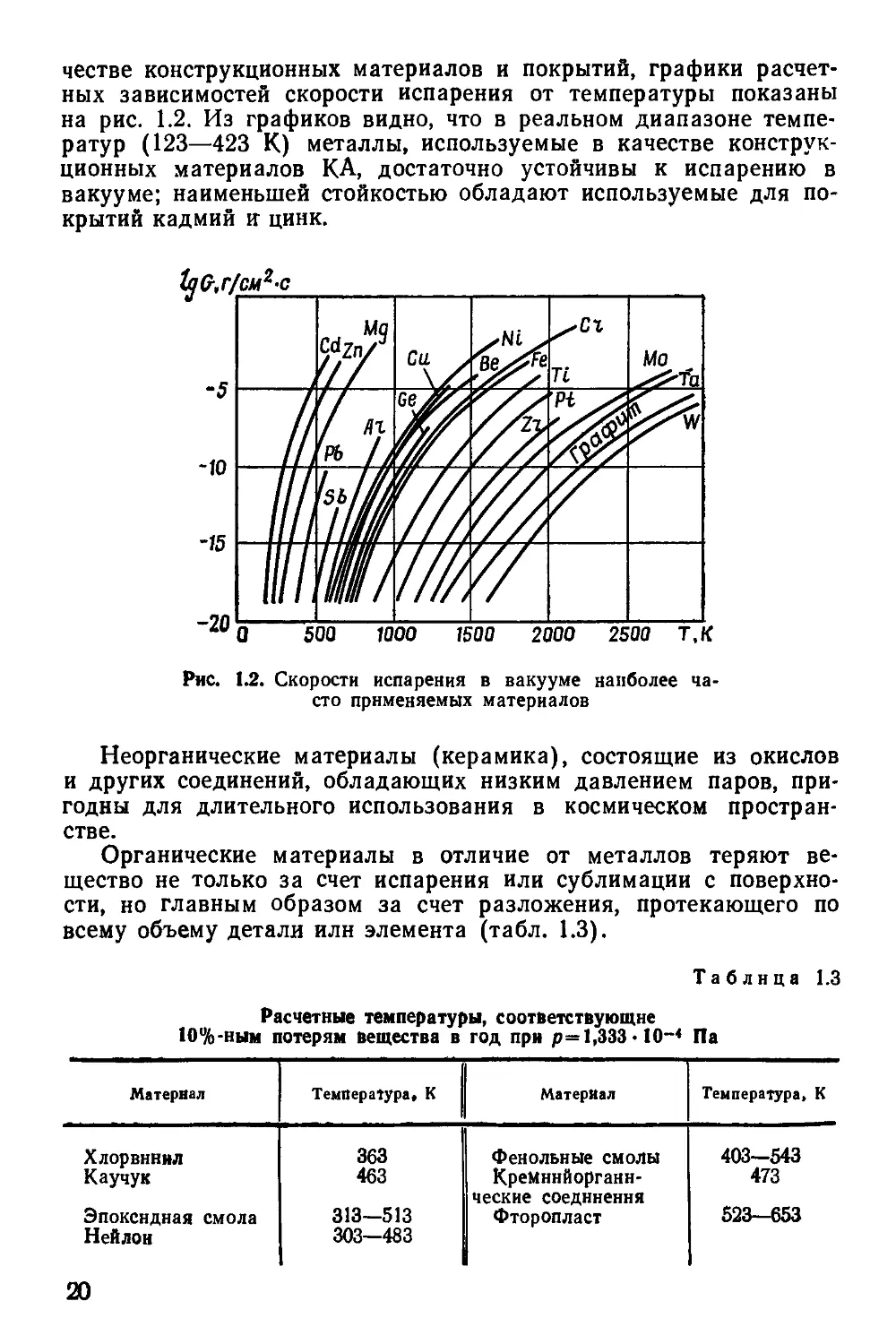
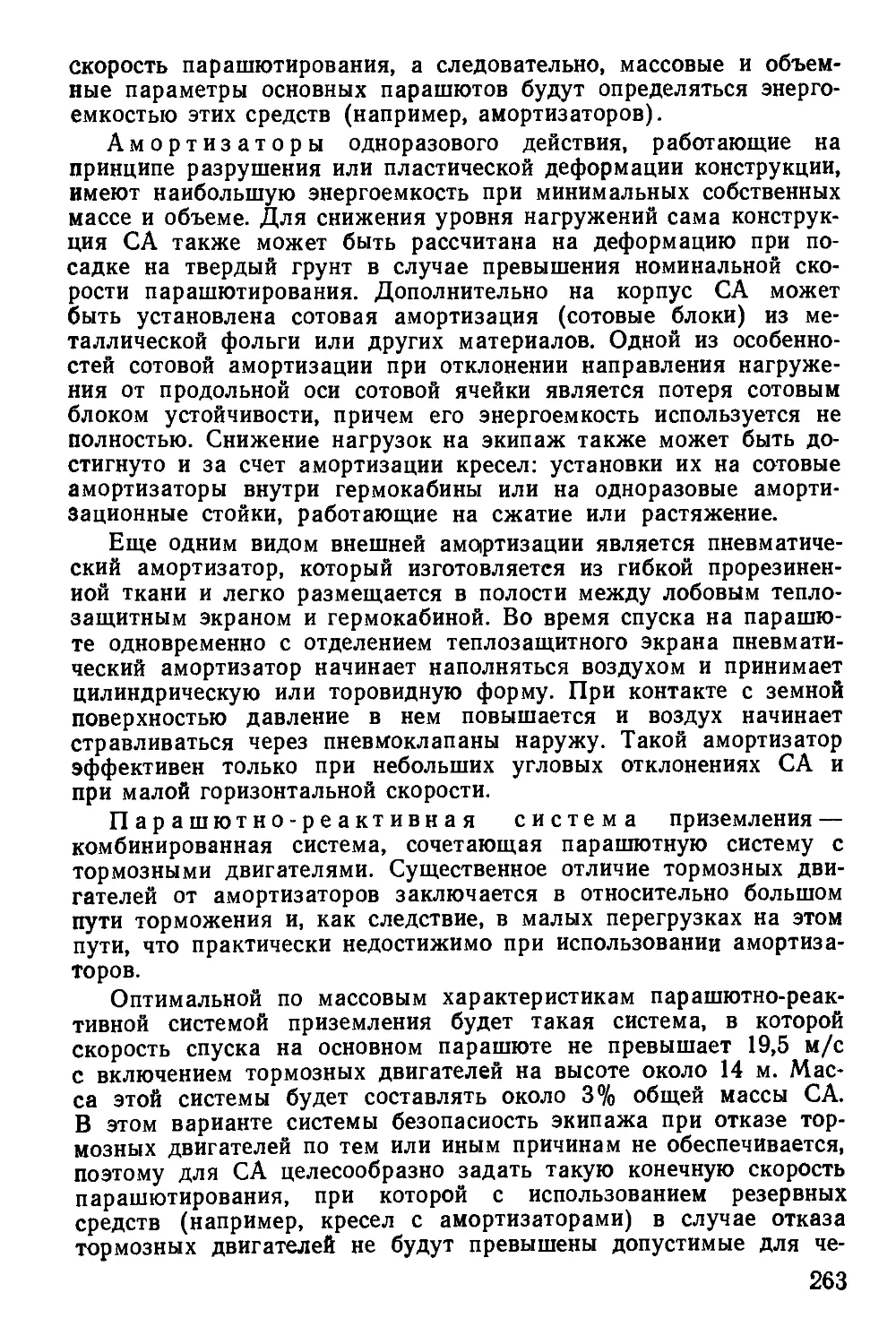
честве конструкционных материалов и покрытий, графики расчет-
ных зависимостей скорости испарения от температуры показаны
на рис. 1.2. Из графиков видно, что в реальном диапазоне темпе-
ратур (123—423 К) металлы, используемые в качестве конструк-
ционных материалов КА, достаточно устойчивы к испарению в
вакууме; наименьшей стойкостью обладают используемые для по-
крытий кадмий и цинк.
Рис. 1.2. Скорости испарения в вакууме наиболее ча-
сто применяемых материалов
Неорганические материалы (керамика), состоящие из окислов
и других соединений, обладающих низким давлением паров, при-
годны для длительного использования в космическом простран-
стве.
Органические материалы в отличие от металлов теряют ве-
щество не только за счет испарения или сублимации с поверхно-
сти, но главным образом за счет разложения, протекающего по
всему объему детали илн элемента (табл. 1.3).
Таблица 1.3
Расчетные температуры, соответствующие
10%-ным потерям вещества в год при р== 1,333 • 10~4 Па
Материал Температура, К Материал Температура, К
Хлорвинил 363 Фенольные смолы 403-543
Каучук 463 Кремннйорганн- ческие соединения 473
Эпоксидная смола Нейлон 313—513 303—483 Фторопласт 523—653
20
Значительный разброс температур (см. табл. 1.3) объясняется
различием мономеров, из которых получены одни и те же поли-
меры, наличием в полимерах примесей и присадок, особенно ка-
тализаторов, используемых при полимеризации.
Сублимацию материалов можно уменьшить нанесением на их
поверхность защитных пленок. Для металлов, например, приме-
няют фосфатирование и оксидирование, в качестве покрытий для
пластмасс — как органические, так и неорганические вещества,
пластмассовые оболочки, как правило, металлизируют — покры-
вают слоем алюминия, иногда золота.
Сложной задачей является обеспечение в вакууме смазки тру-
щихся поверхностей (шарниров, подшипников, выдвигающихся те-
лескопических механизмов, зубчатых передач и т. д.), так как
обычные жидкие смазки непригодны или ограниченно пригодны
из-за высокого давления паров и изменения вязкости от темпера-
туры. Испарение смазки приводит к сухому трению неокисляемых
в вакууме поверхностей. Чистые поверхности при контакте под-
вержены интенсивной диффузии и «холодной сварке». Жидкост-
ная смазка, однако, если исключить ее испарение, будет работать
в космосе так же хорошо, как и в наземных условиях.
Для уменьшения вредного влияния вакуума на работу тоу-
щихся поверхностей используют несколько методов: первый —
герметизация трущихся пар (размещение трущихся пар в герме-
тичных отсеках, применение герметических уплотнений валов при
малых скоростях вращения, использование магнитного привода
через стенку при малых моментах и т. п.); второй — использова-
ние смазочных веществ с низким давлением насыщенных паров,
имеющих наименьшие потери при испарении, в частности твердых
смазочных материалов, а также специальных покрытий (в качест-
ве твердого покрытия и компонента вакуумных смазок эффекти-
вен дисульфид молибдена MoS2, достаточно хорошие результаты
получены при использовании в качестве твердых покрытий се-
ребра, золота и бария); третий — подбор материалов для тру-
щихся пар, которые обеспечили бы хорошую работу в условиях
полета. В последнем случае лучшими достоинствами (несваривае-
мость контактирующих поверхностей в вакууме при повышенных
нагрузках и температурах, хорошее взаимодействие сопрягаемых
деталей не только с использованием смазки, но и при сухом тре-
нии, так как такие трущиеся пары часто являются самосмазыва-
ющимися) обладают неметаллические материалы. Из полимерных
материалов хорошие показатели имеют фторорганические соеди-
нения.
Наличие космического вакуума используется для создания эк-
ранно-вакуумной теплоизоляции (ЭВТИ), применяемой для сни-
жения внешнего теплообмена КА (подробнее см. главу 6), а так-
же в ряде устройств, в которых соответствующие полости вакуу-
мируются за счет сообщения с окружающим КА пространством
(высокотемпературные печи для технологических экспериментов,
конденсаторы, радиолампы и т. п.).
21
В условиях космического полета вокруг КА возникает собст-
венная атмосфера, образующаяся за счет газовыделения и субли-
мации летучих материалов с внешней поверхности КА, неизбеж-
ных утечек газа из его гермоотсеков, выхлопных продуктов реак-
тивных двигателей, различного рода пылевых частиц и т. п.
Собственная атмосфера, вызывая изменения оптических харак-
теристик окружающей среды и внешнее загрязнение элементов
КА, может быть причиной возникновения помех в системах астро-
ориентации, чувствительной оптической аппаратуры, повышения
коэффициента поглощения терморегулирующих покрытий и др.
Ее наличие следует учитывать при выборе аппаратуры КА и раз-
работке методов решения тех или иных научных и технических за-
дач.
1.3. РАДИАЦИОННАЯ ОПАСНОСТЬ
Общие сведения
Радиационная опасность космических полетов связана с воз-
можностью поражения экипажа, повреждения аппаратуры и эле-
ментов конструкции КА при облучении корпускулярным и электро-
магнитным излучением.
Способность излучения оказывать радиационное воздействие на
вещество определяется его свойством взаимодействовать с атомами
среды с потерей части своей первоначальной энергии и передачей
ее облучаемому веществу. В общем случае степень радиационного
воздействия тем выше, чем больше количество поглощенной ве-
ществом энергии излучения. Количество поглощенной энергии из-
лучения, отнесенное к массе вещества, называется поглощенной
дозой (D) и измеряется в радах*. Доза, накопленная в единицу
времени, называется мощностью поглощенной дозы.
При рассмотрении биологического воздействия смешанного из-
лучения используется эквивалент дозы радиации, измеряемый в
бэрах и определяемый как
H==D-KK, (1.4)
где D — поглощенная доза, рад;
КК — коэффициент качества, учитывающий относительную био-
логическую эффективность излучения в сравнении с био-
логической эффективностью стандартного рентгеновского
излучения, которая условно принята равной 1.
Радиациоииая опасность при полетах человека
В настоящее время при полетах человека учитывают три основ-
ных источника корпускулярного излучения: радиационный пояс
Земли (РПЗ), галактическое (ГКИ) и солнечное (СКИ) косми-
ческие излучения.
♦ 1 рад—10“’ Дж/кг—100 эрг/г—6,24 • 107 МэВ/г.
22
Уровни доз, создаваемые излучением радиационного поя-
са Земли (РПЗ), зависят от времени полета КА через пояс,
траектории полета и толщины защиты. Их можно рассчитать за-
ранее с достаточной точностью. Поглощенные дозы от излучения
внутреннего РПЗ в основном обусловлены протонами высоких
энергий. Рекомендуемый коэффициент качества КК= 1,0—1,4. Вели-
чина поглощенной дозы при толщине защиты менее 1 г/см2 сущест-
венно меняется от поверхности тела к глубине. При толщине за-
щиты более 1 г/см2 величина поглощенной дозы по глубине изме-
няется не более чем в три раза, что позволяет считать распределе-
ние дозы равномерным.
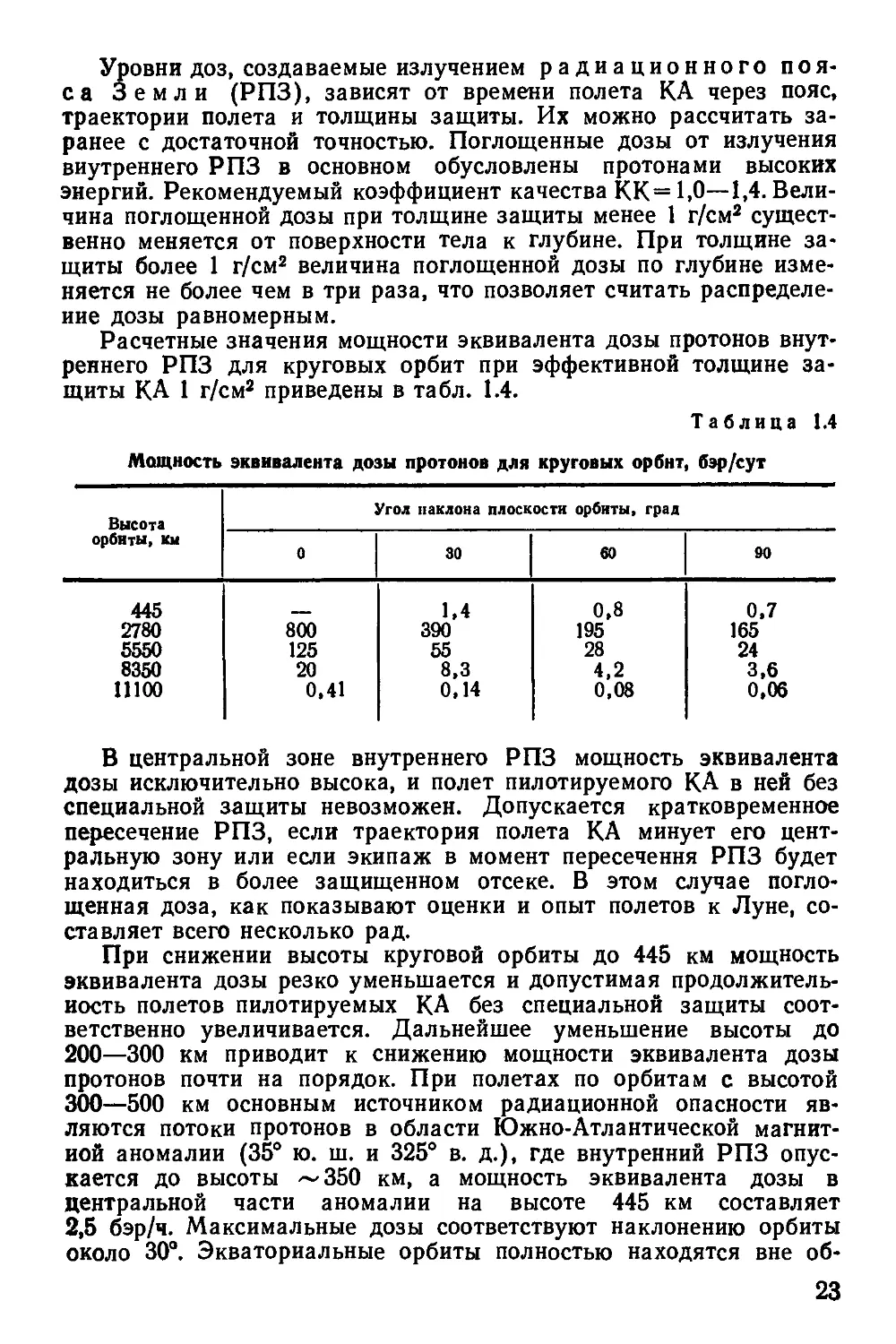
Расчетные значения мощности эквивалента дозы протонов внут-
реннего РПЗ для круговых орбит при эффективной толщине за-
щиты КА 1 г/см2 приведены в табл. 1.4.
Таблица 1.4
Мощность эквивалента дозы протонов для круговых орбит, бэр/сут
Высота орбиты, км Угол наклона плоскости орбиты, град
0 30 60 90
445 1,4 0,8 0,7
2780 800 390 195 165
5550 125 55 28 24
8350 20 8,3 4,2 3,6
11100 0,41 0,14 0,08 0,06
В центральной зоне внутреннего РПЗ мощность эквивалента
дозы исключительно высока, и полет пилотируемого КА в ней без
специальной защиты невозможен. Допускается кратковременное
пересечение РПЗ, если траектория полета КА минует его цент-
ральную зону или если экипаж в момент пересечения РПЗ будет
находиться в более защищенном отсеке. В этом случае погло-
щенная доза, как показывают оценки и опыт полетов к Луне, со-
ставляет всего несколько рад.
При снижении высоты круговой орбиты до 445 км мощность
эквивалента дозы резко уменьшается и допустимая продолжитель-
ность полетов пилотируемых КА без специальной защиты соот-
ветственно увеличивается. Дальнейшее уменьшение высоты до
200—300 км приводит к снижению мощности эквивалента дозы
протонов почти на порядок. При полетах по орбитам с высотой
300—500 км основным источником радиационной опасности яв-
ляются потоки протонов в области Южно-Атлантической магнит-
ной аномалии (35° ю. ш. и 325° в. д.), где внутренний РПЗ опус-
кается до высоты ~350 км, а мощность эквивалента дозы в
центральной части аномалии на высоте 445 км составляет
2,5 бэр/ч. Максимальные дозы соответствуют наклонению орбиты
около 30°. Экваториальные орбиты полностью находятся вне об-
23
ласти аномалии и для таких орбит радиационная опасность не-
значительна до высоты примерно 500 км.
Внешний РПЗ состоит из электронов и низкоэнергетических
протонов. Рекомендуемый коэффициент качества излучения
КК=1. При взаимодействии электронов с веществом защиты воз-
никает тормозное излучение, относительный вклад которого в по-
глощенную дозу возрастает с увеличением толщины защиты. Рас-
пределение поглощенной дозы в теле крайне неравномерно, доза
резко спадает по глубине ткани.
Мощность дозы электронов в центре внешнего РПЗ (на высо-
те около 22000 км) при отсутствии защиты может составлять де-
сятки тысяч рад в сутки для экваториальной орбиты и несколько
тысяч рад в сутки для орбиты с наклонением 60°. За защитой в
1 г/см2 из вещества с небольшим атомным номером мощность
дозы на поверхности тела составит около 40 рад/сут, при этом
среднетканевая мощность дозы, обусловленная тормозным излу-
чением электронов, — 1 рад/сут. Результаты измерений при поле-
тах космического корабля «Аполлон» показали, что при прохож-
дении внешнего РПЗ накопленная доза составила менее 1 рад.
Галактическое космическое излучение (ГК.И)
действует постоянно в течение всего полета и его биологический
эффект определяется максимальной поглощенной дозой. Присут-
ствие тяжелых ядер в составе ГКИ заметно увеличивает относи-
тельную биологическую эффективность этого излучения. Рекомен-
дуемый коэффициент качества излучения КК=4—7. В результате
взаимодействия ядер ГКИ с веществом защиты образуются вто-
ричные частицы, вклад которых в суммарную поглощенную дозу
может достигать 50—100%. Распределение поглощенной дозы
ГКИ в теле принято считать равномерным.
Эквивалент дозы, создаваемой ГКИ в свободном пространстве,
т. е. за пределами магнитосферы Земли, достигает в периоды
максимума и минимума солнечной активности 50 и 100 бэр в год
соответственно. Эти оценки нуждаются в уточнении по мере по-
лучения новых данных о процессах прохождения через веществе
защиты и биологической ткани тяжелых частиц, входящих в ГКИ.
Дозы ГКИ вблизи Земли значительно меньше, чем в свободном
пространстве, что обусловлено влиянием магнитного поля (умень-
шает плотность потока ГКИ в 3—10 раз) и экранирующим влия-
нием («тенью») Земли (уменьшает плотность потока ГКИ при-
мерно в 2 раза). Доза ГКИ на сравнительно небольшой высоте
зависит от наклонения орбиты и при высоте 200—600 км на эква-
ториальной орбите будет примерно в 5 раз ниже, чем на поляр-
ной, причем с увеличением высоты эта разница постепенно умень-
шается. По данным измерений на КА среднесуточная доза
на орбитах высотой до 350 км и наклонением 65° за защитой
~3 г/см2 весьма постоянна и составляет 9 мрад±2 мрад.
Солнечное космическое излучение (СКИ), сопро-
вождающее некоторые солнечные вспышки, может представлять
значительную радиационную опасность при полетах человека в
24
свободном космическом пространстве. Рекомендуемый коэффи-
циент качества излучения КК=1.
Вследствие экранирующего действия самой Земли и ее маг-
нитного поля поглощенные дозы излучения солнечных вспышек
на околоземных орбитах значительно меньше, чем в свободном
пространстве, и зависят от наклонения орбиты и геомагнитной
обстановки: с увеличением наклонения орбиты, а также при воз-
никновении магнитных возмущений экранирующий эффект гео-
магнитного поля уменьшается, что приводит к соответствующему
увеличению доз.
Как известно, наиболее мощной и радиационно опасной
вспышкой из изученных за последние 20 лет является вспышка
4 августа 1972 г., при которой интегральная доза в свободном
пространстве за эффективной защитой 3 г/см2 по данным прямых
измерений составила ~ 123 рад (поверхностная доза) и 10 рад
(на глубине 5 см ткани). При допущении о наиболее неблагопри-
ятной геомагнитной обстановке на околоземной орбите высотой
300 км поверхностная доза за той же защитой по оценкам со-
ставила 2,05 рад при наклонении орбиты 51,5° и 9,1 рад при на-
клонении орбиты 65°, а дозы на глубине 5 см ткани — примерно
в 10 раз меньше. Асимметрия геомагнитного поля может привести
к увеличению указанных значений дозы не более чем в 2 раза.
Приведенные значения доз, по мнению некоторых ученых,
очень близки к предельно возможным от однократной вспышки
на соответствующих околоземных орбитах.
Частота возникновения солнечных вспышек зависит от фазы
солнечного цикла. В период максимальной активности Солнца
обычно происходит большее число протонных вспышек, причем
наиболее часты слабые вспышки. Мощные вспышки, сопровож-
дающиеся излучением большой интенсивности, происходят один-
два раза в пять лет, причем в период подъема или спада солнеч-
ной активности (но не в период ее максимума).
Согласно современным представлениям моменты возникнове-
ния солнечных вспышек, их интенсивность и другие характеристи-
ки описываются статистическими законами. Поэтому при проекти-
ровании КА радиационную опасность излучения вспышек в пла-
нируемый период полета принято оценивать ожидаемой величи-
ной поглощенной дозы излучения и вероятностью (риском) ее
превышения, которую рекомендуется принимать равной 0,01.
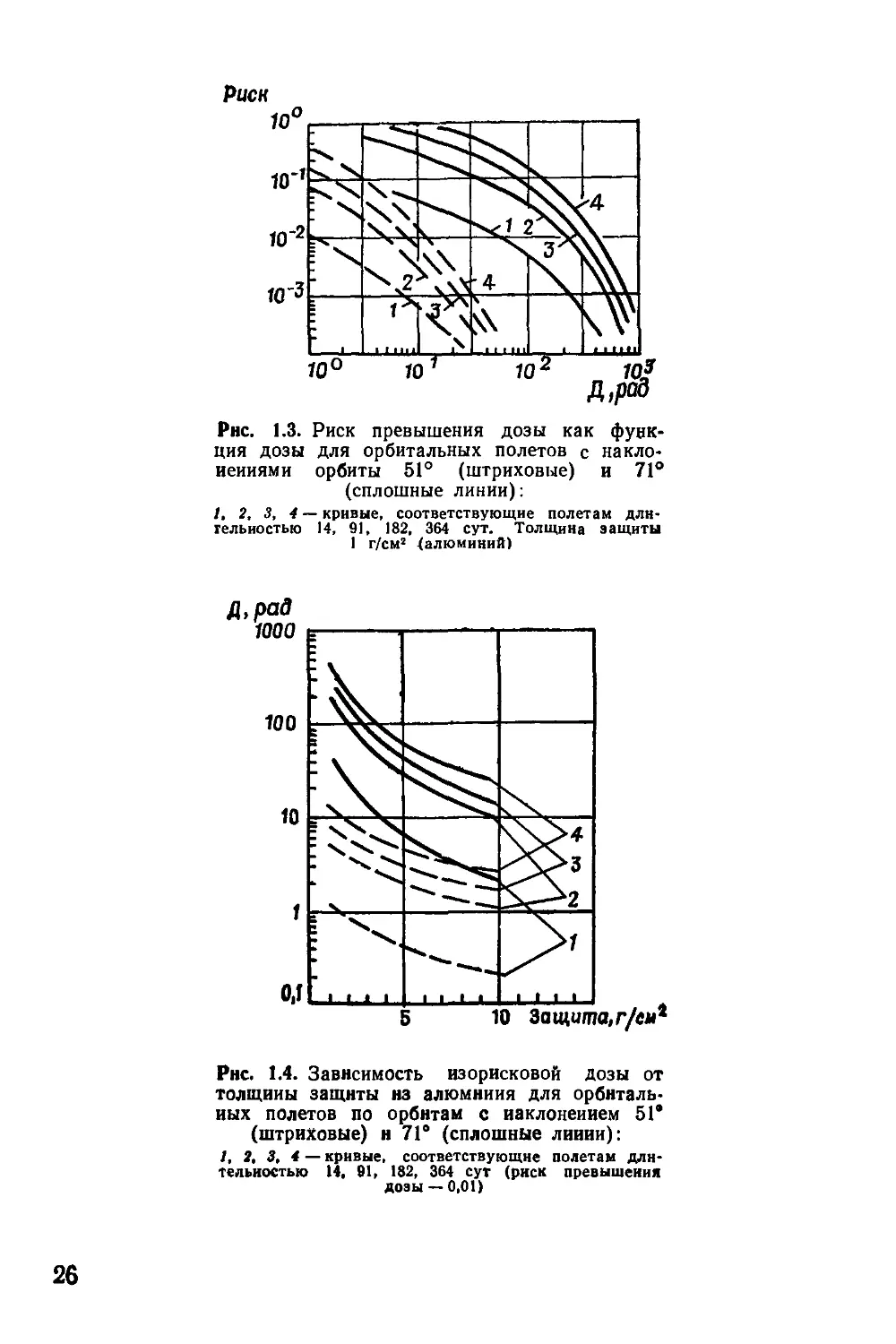
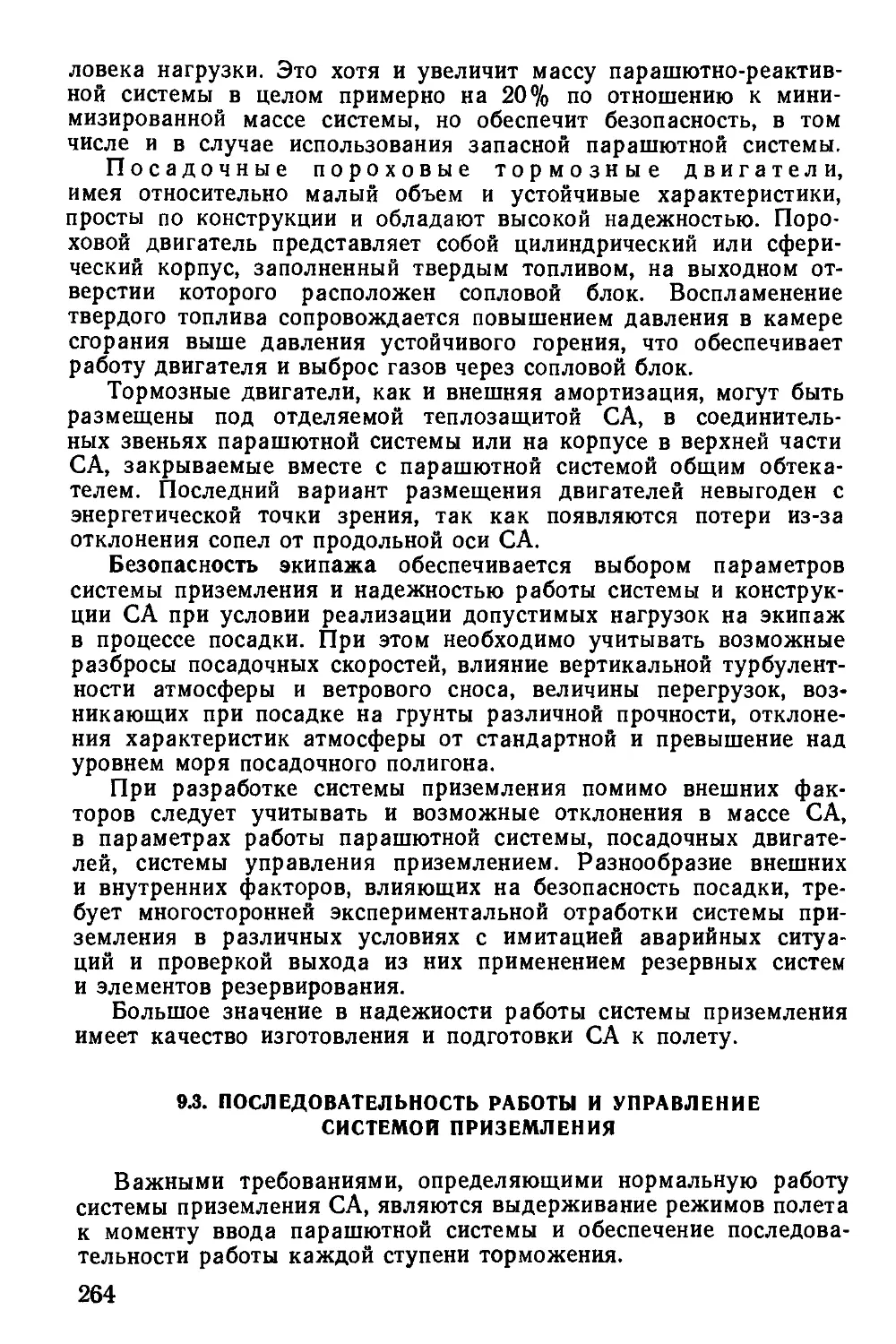
Графики, позволяющие оценить соотношение дозы и риска ее
превышения для полетов в свободном пространстве и по орбитам
ИСЗ при различных наклонениях круговых орбит, эффективной
толщине защиты и длительности полета, показаны на рис. 1.3—
1.5. Они получены с использованием статистической модели радиа-
ционной обстановки на период с 1978 по 1983 гг. (ожидаемый
период максимума 21-го цикла солнечной активности), построен-
ной по данным о солнечных вспышках и геомагнитных возмуще-
ниях, зарегистрированных в течение 19-го и 20-го циклов солнеч-
ной активности. В качестве характеристики радиационной обста-
25
Риск
Рнс. 1.3. Риск превышения дозы как функ-
ция дозы для орбитальных полетов с накло-
нениями орбиты 51° (штриховые) и 71°
(сплошные линии):
1, 2, 3, 4 — кривые, соответствующие полетам дли-
тельностью 14, 91, 182, 364 сут. Толщина защиты
I г/см2 /алюминий)
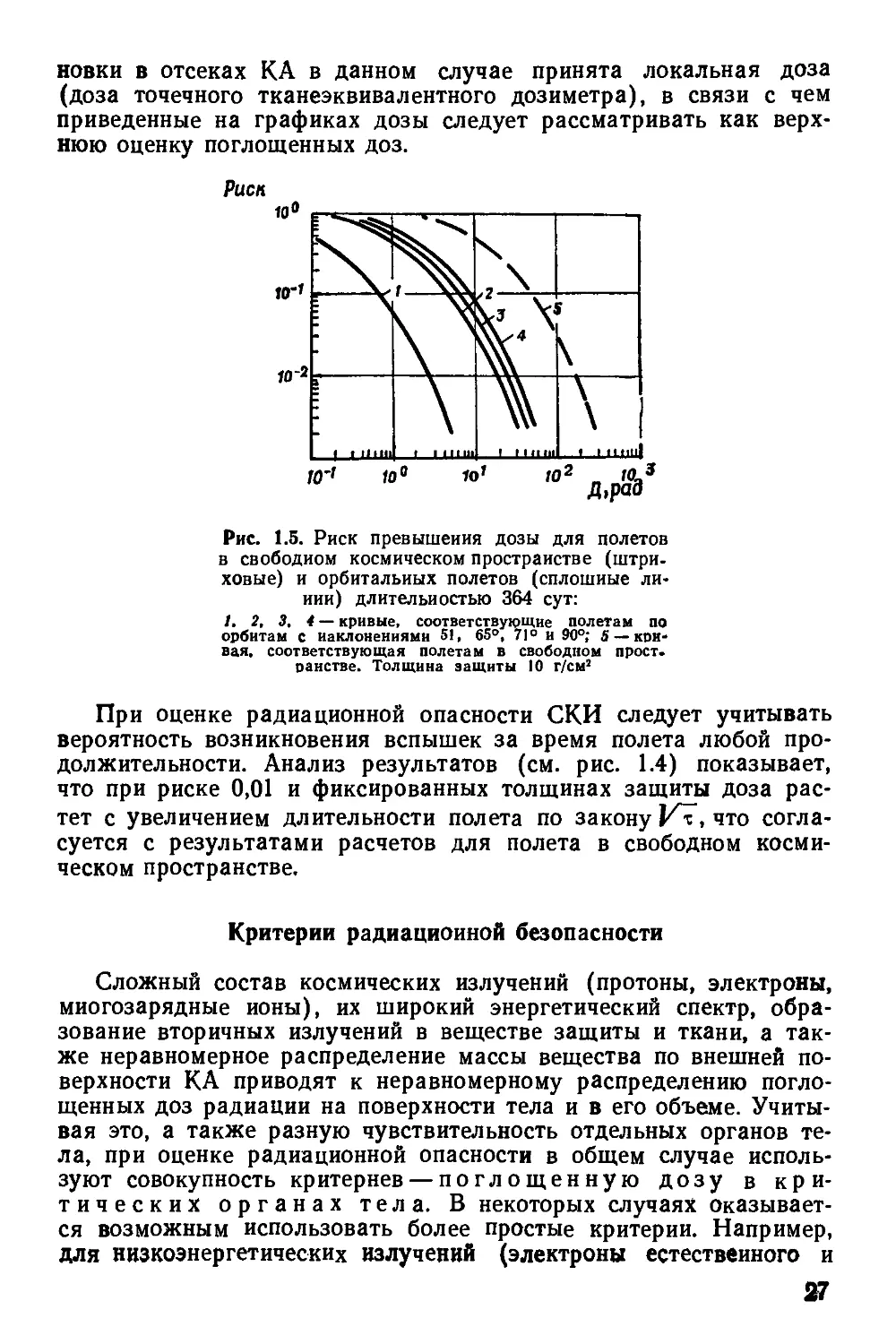
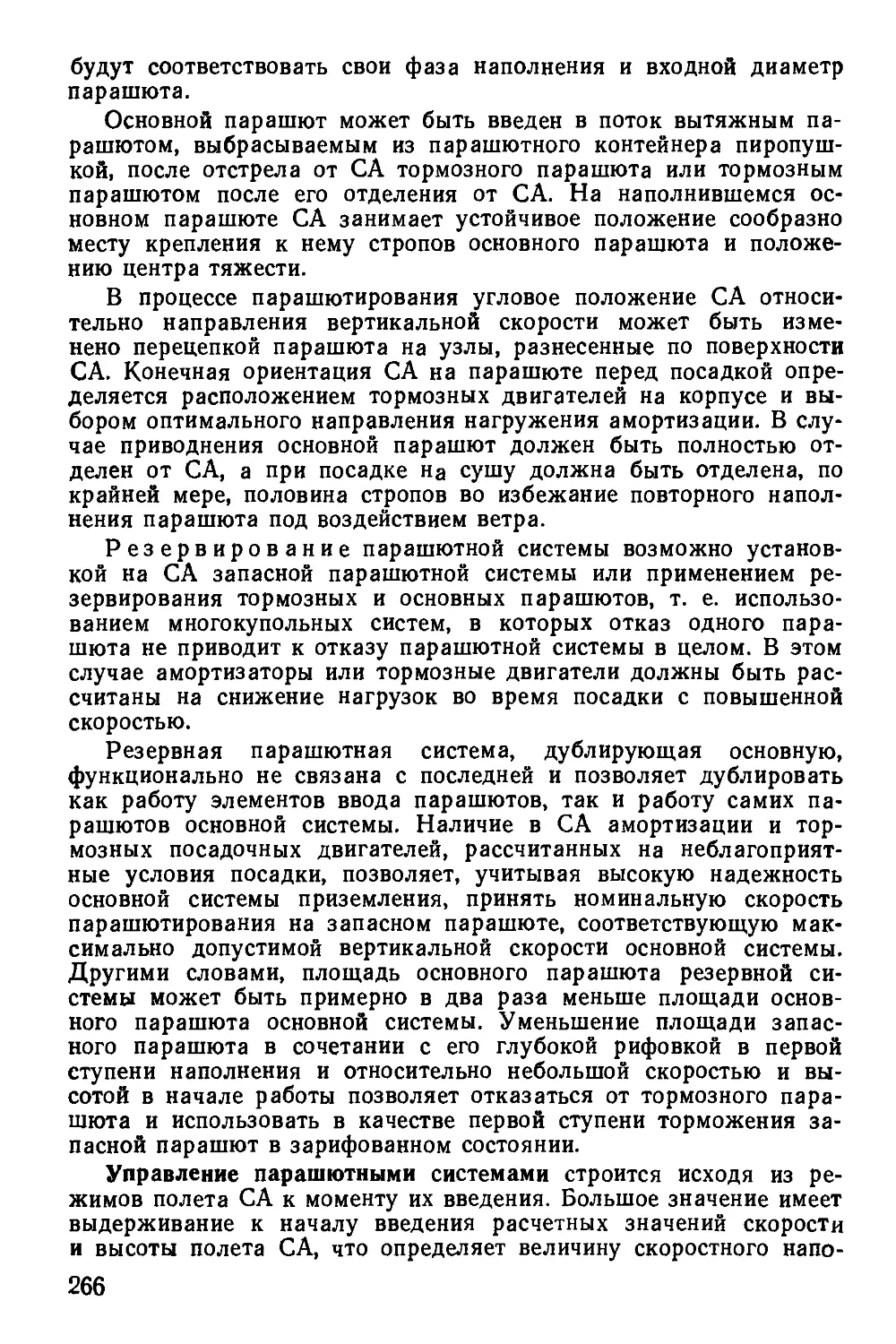
Рнс. 1.4. Зависимость изорисковой дозы от
толщины защиты из алюминия для орбиталь-
ных полетов по орбитам с наклонением 51*
(штриховые) и 71° (сплошные линии):
1, 2, 3, 4 — кривые, соответствующие полетам дли-
тельностью 14, 91, 182, 364 сут (риск превышения
дозы — 0,01)
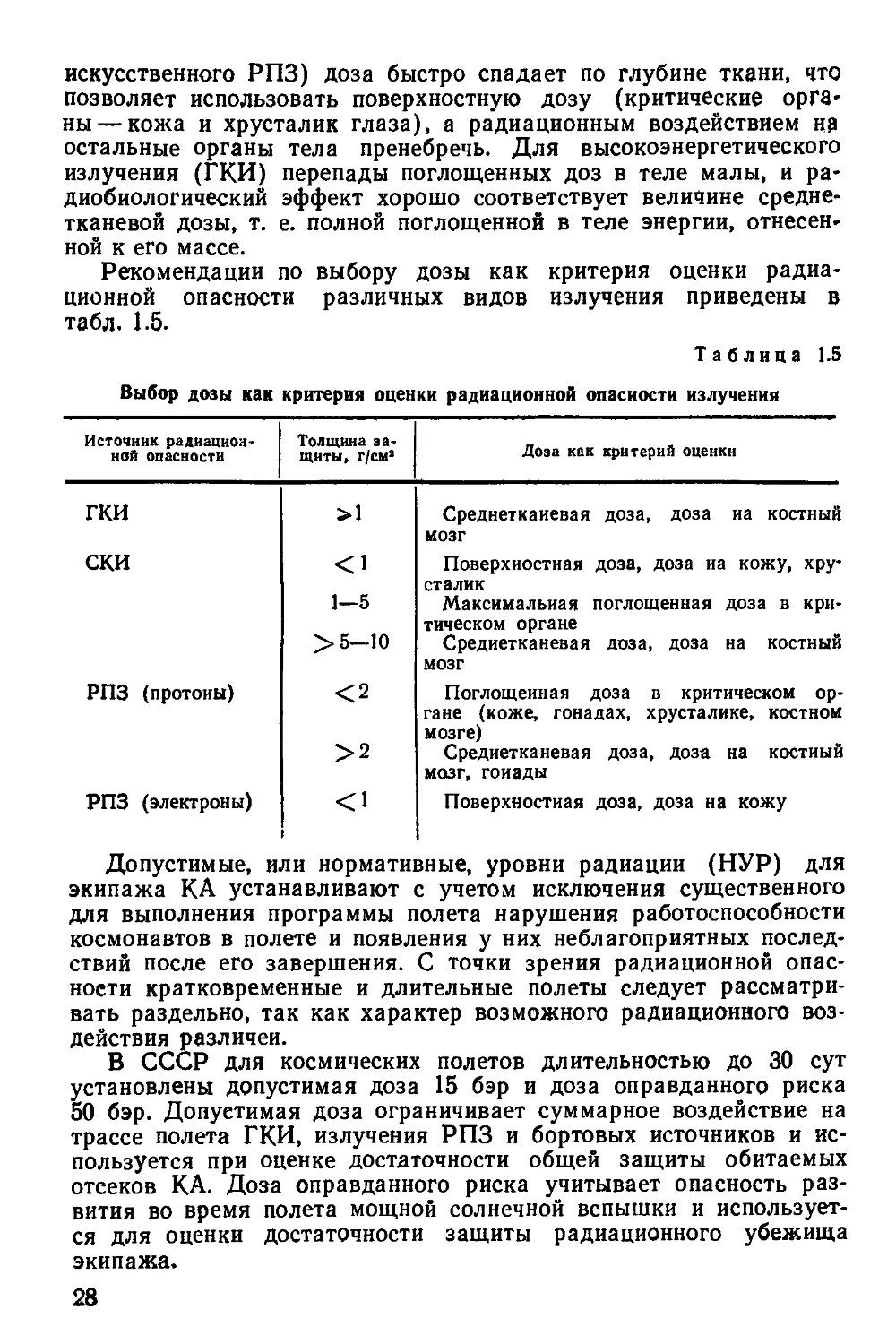
26
новки в отсеках КА в данном случае принята локальная доза
(доза точечного тканеэквивалентного дозиметра), в связи с чем
приведенные на графиках дозы следует рассматривать как верх-
нюю оценку поглощенных доз.
Рис. 1.5. Риск превышения дозы для полетов
в свободном космическом пространстве (штри-
ховые) и орбитальных полетов (сплошные ли-
нии) длительностью 364 сут:
/» 2, 3, 4 — кривые, соответствующие полетам по
орбитам с наклонениями 51, 65°, 71° и 90°; 5 — кри-
вая. соответствующая полетам в свободном прост,
раистве. Толщина защиты 10 г/см3
При оценке радиационной опасности СКИ следует учитывать
вероятность возникновения вспышек за время полета любой про-
должительности. Анализ результатов (см. рис. 1.4) показывает,
что при риске 0,01 и фиксированных толщинах защиты доза рас-
тет с увеличением длительности полета по закону Р'Т, что согла-
суется с результатами расчетов для полета в свободном косми-
ческом пространстве.
Критерии радиационной безопасности
Сложный состав космических излучений (протоны, электроны,
миогозарядные ионы), их широкий энергетический спектр, обра-
зование вторичных излучений в веществе защиты и ткани, а так-
же неравномерное распределение массы вещества по внешней по-
верхности КА приводят к неравномерному распределению погло-
щенных доз радиации на поверхности тела и в его объеме. Учиты-
вая это, а также разную чувствительность отдельных органов те-
ла, при оценке радиационной опасности в общем случае исполь-
зуют совокупность критериев — поглощенную дозу в кри-
тических органах тела. В некоторых случаях оказывает-
ся возможным использовать более простые критерии. Например,
для низкоэнергетических излучений (электроны естественного и
27
искусственного РПЗ) доза быстро спадает по глубине ткани, что
позволяет использовать поверхностную дозу (критические орга-
ны — кожа и хрусталик глаза), а радиационным воздействием на
остальные органы тела пренебречь. Для высокоэнергетического
излучения (ГКИ) перепады поглощенных доз в теле малы, и ра-
диобиологический эффект хорошо соответствует величине средне-
тканевой дозы, т. е. полной поглощенной в теле энергии, отнесен-
ной к его массе.
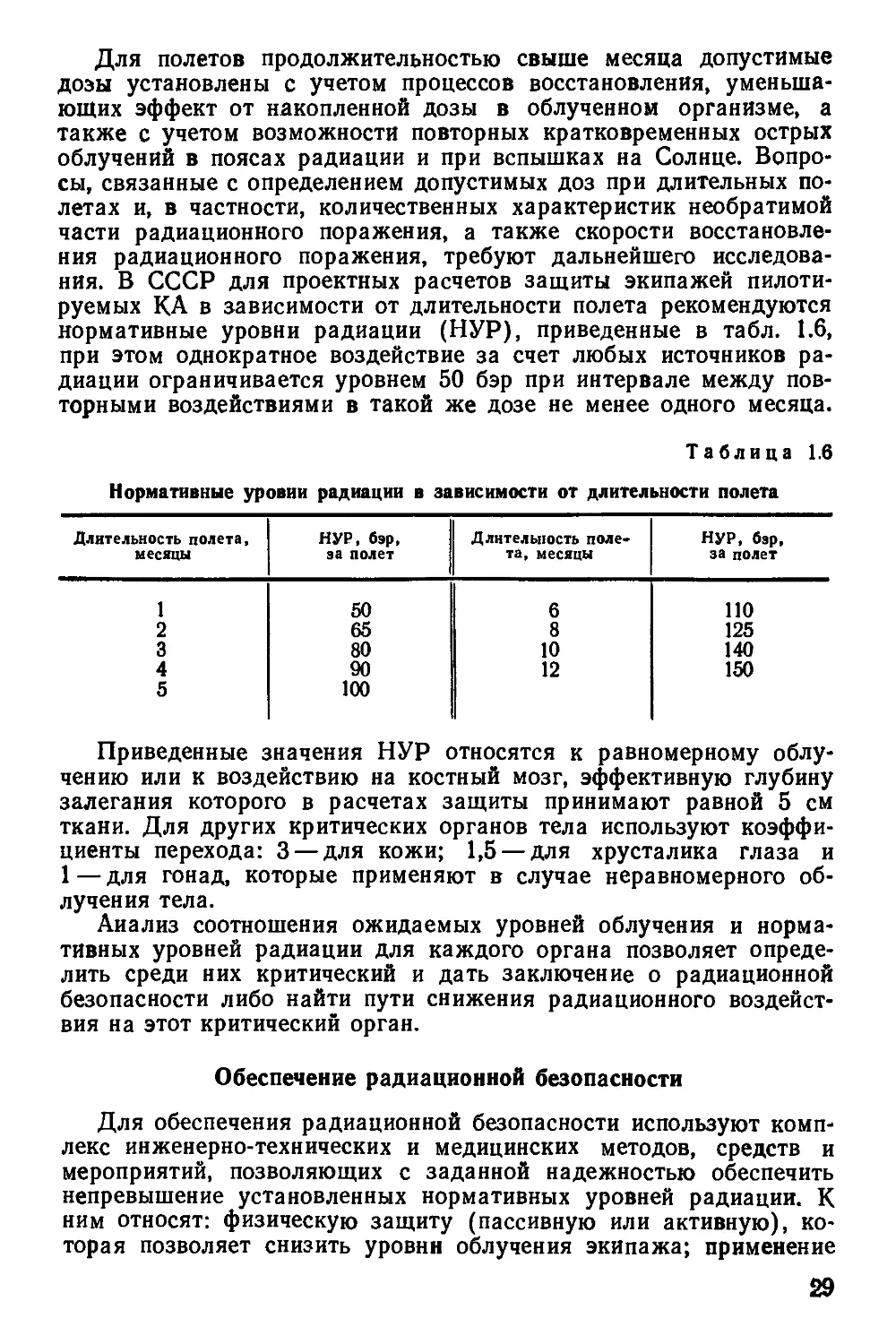
Рекомендации по выбору дозы как критерия оценки радиа-
ционной опасности различных видов излучения приведены в
табл. 1.5.
Таблица 1.5
Выбор дозы как критерия оценки радиационной опасности излучения
Источник радиацион- ной опасности Толщина за- щиты, г/см3 Доза как критерий оценки
ГКИ >1 Среднеткаиевая доза, доза иа костный мозг
СКИ <1 Поверхностная доза, доза иа кожу, хру- сталик
1—5 Максимальная поглощенная доза в кри- тическом органе
>5—10 Среднеткаиевая доза, доза на костный мозг
РПЗ (протоны) <2 Поглощенная доза в критическом ор- гане (коже, гонадах, хрусталике, костном мозге)
>2 Среднеткаиевая доза, доза на костный мозг, гоиады
РПЗ (электроны) <1 Поверхностная доза, доза на кожу
Допустимые, или нормативные, уровни радиации (НУР) для
экипажа КА устанавливают с учетом исключения существенного
для выполнения программы полета нарушения работоспособности
космонавтов в полете и появления у них неблагоприятных послед-
ствий после его завершения. С точки зрения радиационной опас-
ности кратковременные и длительные полеты следует рассматри-
вать раздельно, так как характер возможного радиационного воз-
действия различен.
В СССР для космических полетов длительностью до 30 сут
установлены допустимая доза 15 бэр и доза оправданного риска
50 бэр. Допустимая доза ограничивает суммарное воздействие на
трассе полета ГКИ, излучения РПЗ и бортовых источников и ис-
пользуется при оценке достаточности общей защиты обитаемых
отсеков КА. Доза оправданного риска учитывает опасность раз-
вития во время полета мощной солнечной вспышки и использует-
ся для оценки достаточности защиты радиационного убежища
экипажа.
28
Для полетов продолжительностью свыше месяца допустимые
дозы установлены с учетом процессов восстановления, уменьша-
ющих эффект от накопленной дозы в облученном организме, а
также с учетом возможности повторных кратковременных острых
облучений в поясах радиации и при вспышках на Солнце. Вопро-
сы, связанные с определением допустимых доз при длительных по-
летах и, в частности, количественных характеристик необратимой
части радиационного поражения, а также скорости восстановле-
ния радиационного поражения, требуют дальнейшего исследова-
ния. В СССР для проектных расчетов защиты экипажей пилоти-
руемых КА в зависимости от длительности полета рекомендуются
нормативные уровни радиации (НУР), приведенные в табл. 1.6,
при этом однократное воздействие за счет любых источников ра-
диации ограничивается уровнем 50 бэр при интервале между пов-
торными воздействиями в такой же дозе не менее одного месяца.
Таблица 1.6
Нормативные уровни радиации в зависимости от длительности полета
Длительность полета, месяцы НУР, бэр, за полет Длительность поле* та, месяцы НУР, бэр, за полет
1 50 6 по
2 65 8 125
3 80 10 140
4 90 12 150
5 100
Приведенные значения НУР относятся к равномерному облу-
чению или к воздействию на костный мозг, эффективную глубину
залегания которого в расчетах защиты принимают равной 5 см
ткани. Для других критических органов тела используют коэффи-
циенты перехода: 3 — для кожи; 1,5 —для хрусталика глаза и
1 — для гонад, которые применяют в случае неравномерного об-
лучения тела.
Анализ соотношения ожидаемых уровней облучения и норма-
тивных уровней радиации для каждого органа позволяет опреде-
лить среди них критический и дать заключение о радиационной
безопасности либо найти пути снижения радиационного воздейст-
вия на этот критический орган.
Обеспечение радиационной безопасности
Для обеспечения радиационной безопасности используют комп-
лекс инженерно-технических и медицинских методов, средств и
мероприятий, позволяющих с заданной надежностью обеспечить
непревышение установленных нормативных уровней радиации. К
ним относят: физическую защиту (пассивную или активную), ко-
торая позволяет снизить уровни облучения экипажа; применение
29
фармакохимических препаратов, повышающих радиорезистент-
ность организма; проведение мероприятий, связанных с прогнози-
рованием и контролем уровней облучения во время полета и вы-
дачей рекомендаций по действиям экипажа в случае ухудшения
радиационной обстановки.
Пассивная защита строится на принципе ослабления потока
излучения за счет поглощения его энергии при прохождении через
толщу какого-либо вещества. Необходимая толщина защиты за-
висит от физических характеристик космических излучений, тра-
ектории и длительности полета, компоновки корабля, свойств эк-
ранирующих материалов и выбранных критериев радиационной
безопасности. Известно, что с увеличением толщины обшивки КА
уровень излучения в его отсеках от РПЗ и солнечных вспышек
уменьшается. Защита от ГКИ по имеющимся оценкам нереальна,
так как для снижения его уровня на 50% необходима защита в
несколько десятков граммов на квадратный сантиметр.
Анализ радиационной обстановки и опыт космических полетов
показали, что для околоземных орбитальных полетов с высотой
орбит до 400 км и наклонением до 50° при эффективной толщине
защиты не менее 3 г/см2 специальной радиационной защиты не
требуется. Обитаемые КА, как правило, компонуются так, что
защита, обеспечиваемая веществом, распределенным вокруг зон
обитания экипажа, составляет от нескольких до десятков граммов
на квадратный сантиметр (соответственно в наиболее ослаблен-
ных местах и в местах, экранированных конструкцией, прибора-
ми, оборудованием, запасами топлива, продовольствия и т. п.).
Этого оказывается достаточно для снижения дозы радиации до
установленной нормы. В качестве радиационного убежища в пе-
риод ухудшения радиационной обстановки экипаж может исполь-
зовать один из наиболее защищенных отсеков, например снабжен-
ный тепловой защитой спускаемый аппарат (СА).
Фактические значения индивидуальной дозы радиации в реаль-
ных условиях полета советских и американских пилотируемых
космических кораблей и орбитальных станций в большинстве слу-
чаев были намного ниже допустимого уровня. Так, наибольшая
эквивалентная доза радиации зарегистрирована при полете дли-
тельностью 84 сут последнего экипажа станции «Скайлэб»; она
составила от 14 до 18 бэр на кожу для разных членов экипажа.
В конструкции обитаемых КА, предназначенных для длитель-
ных полетов в радиационном поясе Земли (например, на стацио-
нарной орбите) или в межпланетном пространстве, может потре-
боваться дополнительная радиационная защита обитаемых отсе-
ков. Одним из способов, дающих значительный выигрыш в массе,
является оптимальное размещение приборов, оборудования и раз-
личных запасов (топлива, продовольствия и т. п.), но его недоста-
ток— ослабление защиты по мере расходования запасов. Другой
способ — введение в конструкцию специальных экранов для защи-
ты отдельных отсеков КА, применение локальной защиты крити-
ческих органов тела человека и др. Толщина защиты радиацИон-
30
ного убежища на космическом корабле, предназначенном для дли-
тельных полетов, зависит от программы и длительности полета,
фазы цикла солнечной активности, вклада в суммарную дозу из-
лучения других космических источников.
Например, для космического корабля с ЖРД применительно к
межпланетному полету при значении риска 0,01 для поверхности
радиационного убежища 25 м2 толщина защиты в период макси-
мума солнечной активности должна быть 12 г/см2 при 200 сут и
30 г/см2 при 1000 сут полета, а в период минимума — 5 г/см2 при
200 сут и 30 г/см2 при 650 сут полета. При более длительных по-
летах толщина защиты радиационного убежища резко возрастает,
так как доза ГКИ приближается к дозе оправданного риска, и
требуется или большая кратность ослабления дозы СКИ или за-
щита обитаемых отсеков от ГКИ.
В качестве перспективного направления рассматривают актив-
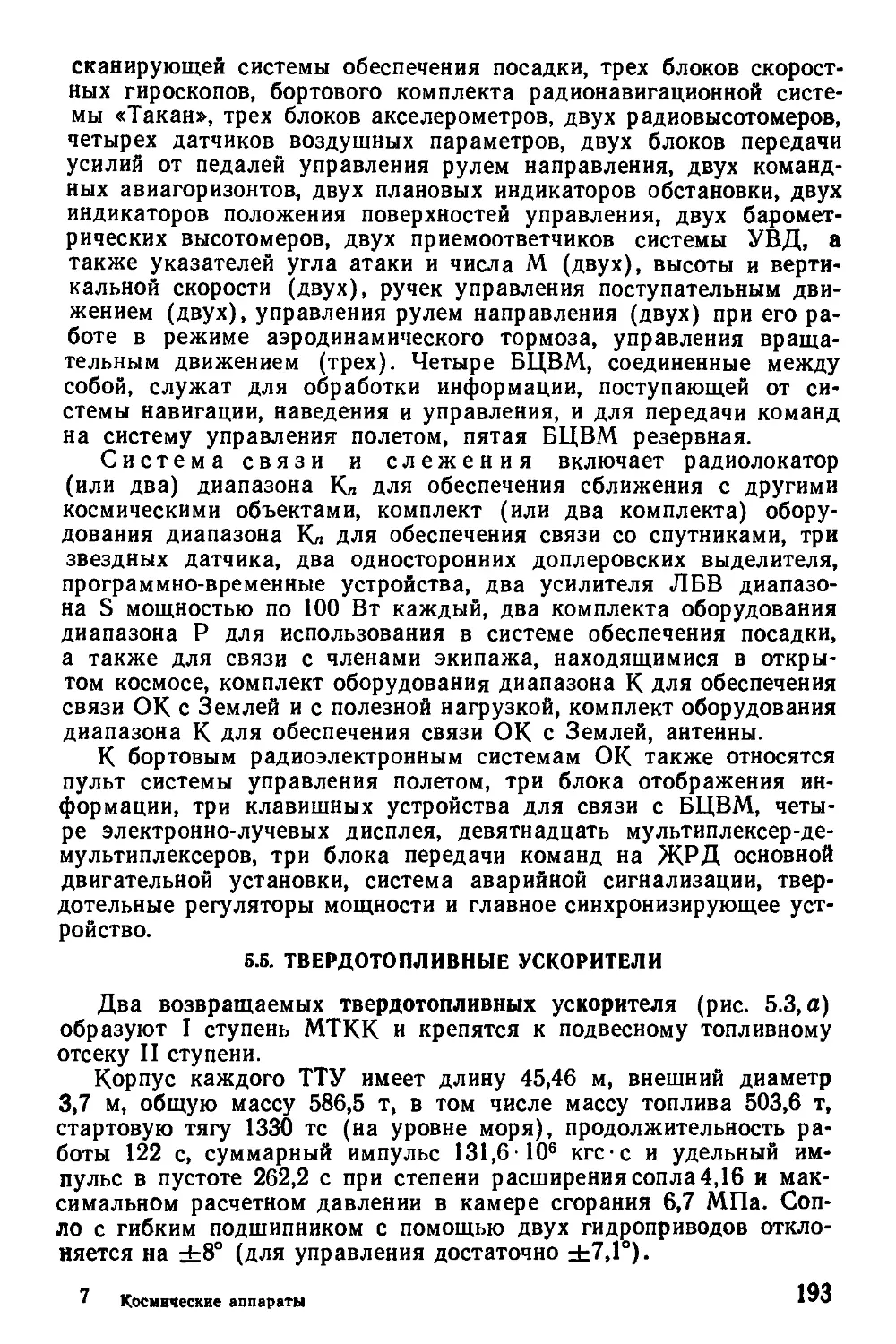
ные виды физической защиты, обеспечивающие отклонение заря-
женных частиц от обитаемого отсека космического корабля с по-
мощью электромагнитного или электростатического поля. Экспе-
рименты иа модели электростатической защиты, установленной
снаружи ИСЗ <Космос-605», позволили определить характеристики
электростатической защиты от электронов радиационного пояса
Земли и сделать вывод, что иа базе современных высоковольтных
средств можно создать эффективную защиту, требующую мини-
мальных массы и энергопотребления. Такая электростатическая
защита может найти применение иа длительно существующих КА
иа стационарной орбите, проходящей иа расстоянии около
36000 км от поверхности Земли, т. е. в пределах внешнего радиа-
ционного пояса.
Воздействие корпускулярной радиации на материалы
Корпускулярная радиация при соответствующей энергии час-
тиц и времени действия вызывает радиационные повреждения
материалов, проявляющиеся в поверхностной эрозии, ионизации
вещества и смещении атомов. Эти повреждения могут привести к
ухудшению рабочих характеристик или выходу из строя элемен-
тов конструкции и систем космического аппарата, размещенных
как снаружи (солнечные батареи, оптические системы, электриче-
ские изоляторы, покрытия и т. д.), так и внутри (электронная и
полупроводниковая аппаратура, фотоматериалы и т. п.).
Поверхностная эрозия — это выбивание атомов или
групп атомов с поверхности металлов протонами. В результате
эрозии возрастает треиие между трущимися поверхностями, изме-
няется поверхностное излучение и уменьшается коэффициент от-
ражения. Наименее устойчивы к поверхностной эрозии медь, се-
ребро и золото, применяемые в качестве покрытий, а устойчи-
вы— алюминий и окислы металлов, в первую очередь — окись
алюминия. Наиесеиие тонких пленок из окислов металлов (А120з,
TiO2, SiO2 и др.) может использоваться для защиты чувствитель-
31
ных к эрозии элементов (например, отражающей поверхности ме-
таллического фокусирующего зеркала телескопа и т. п.).
Ионизация вещества — отрыв электронов от атомов, что
существенно изменяет электрические и некоторые другие характе-
ристики вещества — является основным видом повреждения пласт-
масс, эластомеров, масел и смазок, стекла и керамики.
Смещение атомов — выбивание атома со своего места в
атомной решетке при столкновении с частицей — существенно для
металлов и особенно для полупроводников, а также для таких ма-
териалов, как стекло, керамика.
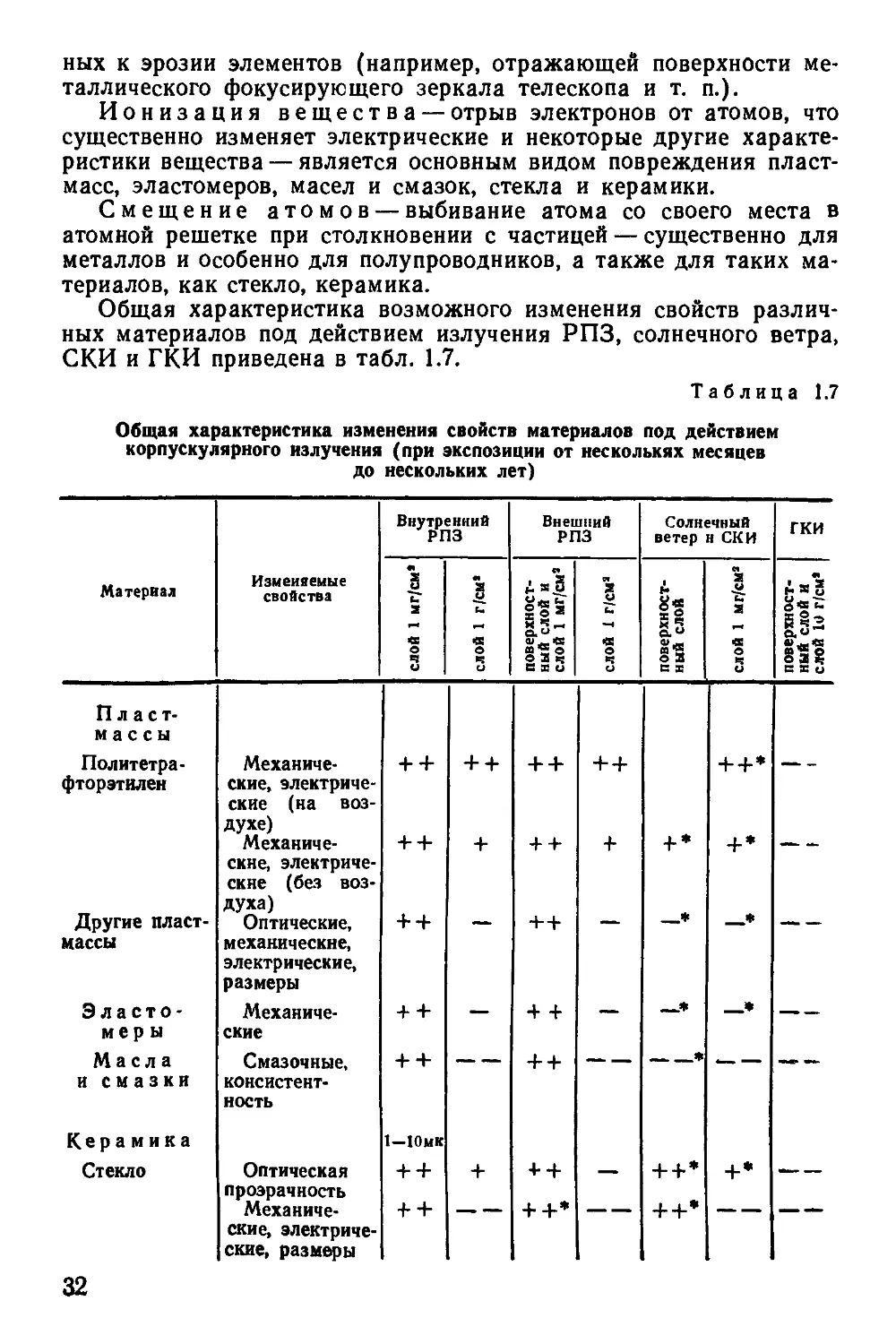
Общая характеристика возможного изменения свойств различ-
ных материалов под действием излучения РПЗ, солнечного ветра,
СКИ и ГКИ приведена в табл. 1.7.
Таблица 1.7
Общая характеристика изменения свойств материалов под действием
корпускулярного излучения (при экспозиции от несколькях месяцев
до нескольких лет)
Материал Изменяемые свойства Внутренний РПЗ Внешний РПЗ Солнечный ветер н СКИ ГКИ
слой 1 мг/см* слой 1 г/см* поверхност- ный слой и слой 1 мг/см* слой 1 г/см* поверхност- ный слой слой 1 мг/см* поверхност- ный слой и СЛОЙ 10 г/см*
Пласт- массы Политетра- Механиче- + + + + + + ++♦
фторэтилен ские, электриче- ские (на воз- духе) Механиче- + + + + + + +* +*
Другие пласт- скне, электриче- ские (без воз- духа) Оптические, + +
массы Эласто- механические, электрические, размеры Механиче- + + + +
меры Масла ские Смазочные, + + ++ _ ♦
и смазки Керамика Стекло консистент- ность Оптическая 1—Юмк + + + + + + + * +•
прозрачность Механиче- + + + +* ++* — _ —
ские, электриче- ские, размеры
32
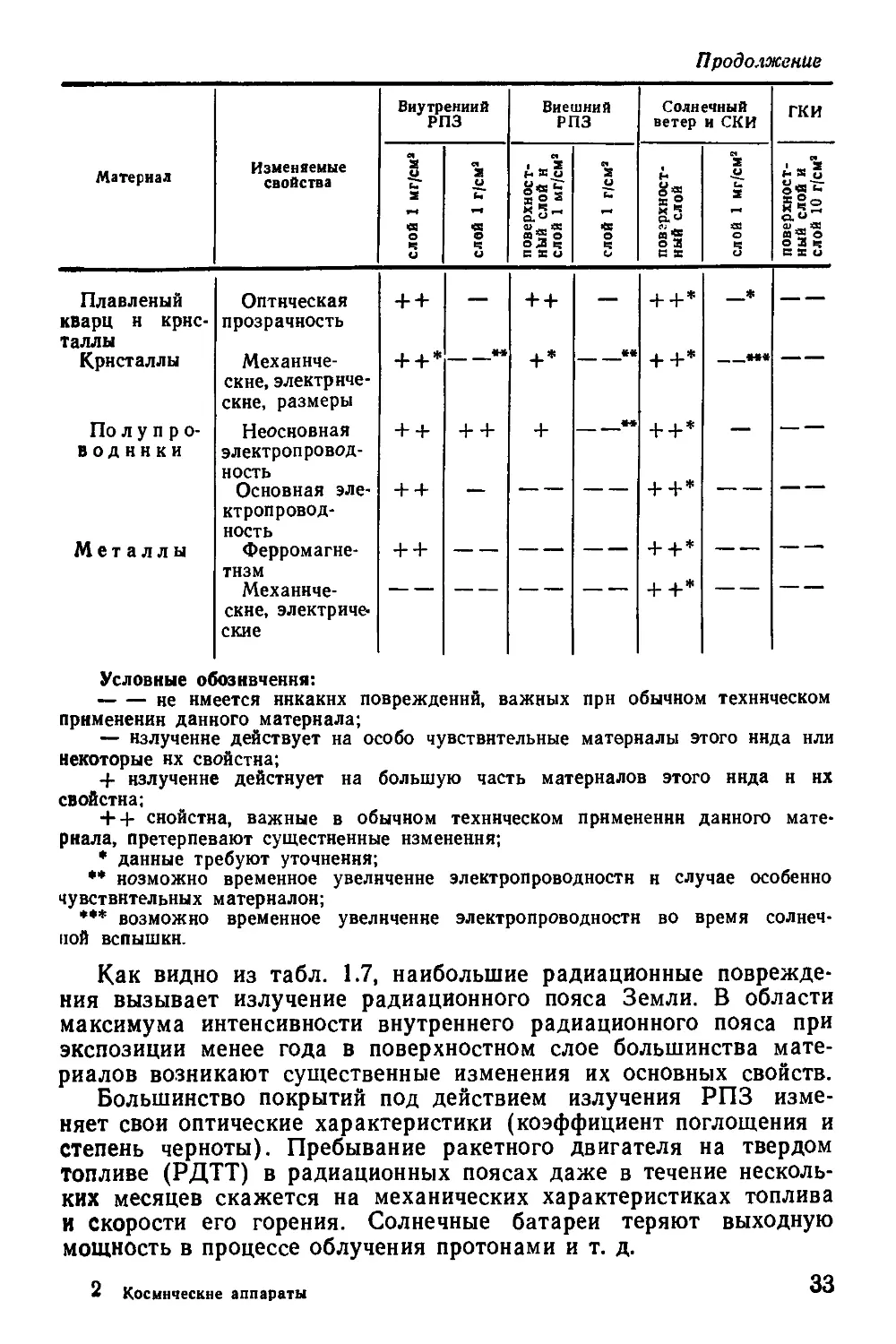
Продолжение
Материал Изменяемые свойства Внутренний РПЗ Внешний РПЗ Солнечный ветер и СКИ ГКИ
слой 1 мг/см2 слой 1 г/см2 поверхност- ный слой н слой 1 мг/см2 слой 1 г/см2 поверхност- ный слой слой 1 мг/см2 поверхност- ный слой и слой 10 г/см2
Плавленый кварц н крис- таллы Оптическая прозрачность ++ — + + — ++* * — —
Кристаллы Механиче- ские, электриче- ские, размеры ++* + * .** + +*
Полупро- водники Неосновная электропровод- ность + + + + + »* ++* — ——
Основная эле- ктропровод- ность + + — + +*
Металлы Ферромагне- тизм + + — — — — — + +* — —
Механиче- ские, электриче- ские + +*
Условные обозначения:
------не имеется никаких повреждений, важных при обычном техническом
применении данного материала;
— излучение действует на особо чувствительные материалы этого ннда нли
некоторые нх свойстна;
+ излучение действует на большую часть материалов этого ннда и нх
свойстна;
+ + снойстна, важные в обычном техническом применении данного мате-
риала, претерпевают существенные изменения;
* данные требуют уточнения;
* * возможно временное увеличение электропроводности и случае особенно
чувствительных материалов;
* ** возможно временное увеличение электропроводности во время солнеч-
ной вспышки.
Как видно из табл. 1.7, наибольшие радиационные поврежде-
ния вызывает излучение радиационного пояса Земли. В области
максимума интенсивности внутреннего радиационного пояса при
экспозиции менее года в поверхностном слое большинства мате-
риалов возникают существенные изменения их основных свойств.
Большинство покрытий под действием излучения РПЗ изме-
няет свои оптические характеристики (коэффициент поглощения и
степень черноты). Пребывание ракетного двигателя на твердом
топливе (РДТТ) в радиационных поясах даже в течение несколь-
ких месяцев скажется на механических характеристиках топлива
и скорости его горения. Солнечные батареи теряют выходную
мощность в процессе облучения протонами и т. д.
2 Космические аппараты
33
Металлы и керамические кристаллические материалы доста-
точно стойки к действию частиц.
При создании радиационно устойчивой аппаратуры и оборудо-
вания необходимо выбирать наиболее стойкие в радиационном
отношении материалы и электрорадиоэлементы, а также паиии-
мать конструктивные решения, обеспечивающие высокую радиа-
ционную стойкость. При этом допустимая доза радиации для си-
стемы определяется по наиболее слабому звену. Для уменьшения
чувствительности солнечных элементов к радиации применяют бо-
лее стойкие к воздействию проникающей радиации полупроводни-
ковые материалы (например, элементы с п—р-переходом), а так-
же оптически прозрачные защитные покрытия (стекло, сапфир).
Оценки показывают, что в результате применения стеклянного по-
крытия с эффективной толщиной 0,3 г/см2 время 25%-ного паде-
ния мощности возрастает примерно в 4 раза. Для устранения то-
ков утечки в электросхемах вследствие ионизации воздуха в це-
лях повышения их стойкости к радиации исключается контакт
поверхностей электросхем с воздухом за счет откачки воздуха или
заливки веществами типа кремнийорганических или эпоксидных
смол. Для длительного хранения фотоматериалов применяют спе-
циальные хранилища с эффективной толщиной защиты более
10 г/см2 и т. д.
Воздействие электромагнитного излучения на материалы
В космических условиях воздействие электромагнитного излу-
чения ограничивается поверхностным слоем материала от 10-4
до 10-7 г/см2 и сказывается в первую очередь на радиационных
и оптических характеристиках поверхности. Фотоны больших энер-
гий могут вызывать радиационные повреждения материалов в ви-
де ионизации и смещения атомов. Электромагнитное излучение в
ближней ультрафиолетовой, видимой и в еще более длинновол-
новых областях спектра уже не может вызывать каких-либо пов-
реждений в материале, даже если оно и возбуждает атомы.
Металлы и сплавы устойчивы к воздействию электромагнит-
ной радиации.
Изменение свойств неорганических материалов может про-
явиться в изменении радиационных характеристик (увеличение
поглощательной способности поверхности) или увеличении по-
верхностной электропроводности. Изменения механических харак-
теристик в тонком поверхностном слое не имеют практического
значения. Особенно сильно электромагнитное излучение влияет на
характеристики оптических приборов и светлых покрытий, нано-
симых на радиационные поверхности. Под воздействием излуче-
ния возможно образование центров потемнения, вызывающих об-
щее потемнение материала, что уменьшает прозрачность многих
видов стекла и изменяет радиационные характеристики светлых
покрытий. Особенно чувствительна к воздействию ультрафиоле-
34
тового излучения двуокись титана, используемая в качестве бело-
го пигмента для высококачественных красителей.
В оптических приборах рекомендуется использовать стойкое к
радиации нетемнеющее стекло, а там где возможно — весьма
чист] ю плавленую двуокись кремния. Для терморегулирующих
поверхностей выбирают светлые красители, устойчивые к образо-
ванию центров потемнения. Черные красители, используемые для
увеличения поглощения света в видимой и ультрафиолетовой об-
ластях спектра, практически не подвержены влиянию электромаг-
нитного излучения.
Электромагнитное излучение существенно влияет на органи-
ческие материалы. Так, при дозах, полученных за год, изменяют-
ся свойства всех известных полимеров, в том числе отражатель-
ная я поглощательная способности, прозрачность, поверхностная
электропроводность, окраска органических материалов и их меха-
нические свойства (прочность, упругость, гибкость).
Для уменьшения воздействия излучения могут применяться
стабилизаторы, которые в 3—10 раз увеличивают время появле-
ния первых признаков повреждения. При использовании полиме-
ров в иных (не оптических) целях их защищают непрозрачными
покрытиями (например, для защиты полиэтилентерефталата на-
носят слой алюминия). Важным условием радиационной стойко-
сти используемых материалов является их химическая чистота.
Перспективным путем повышения радиационной стойкости поли-
меров считается применение различных органических и неоргани-
ческих поглотителей ультрафиолетовой радиации. Хорошим погло-
тителем ультрафиолетового излучения является окись цинка, дав-
но используемая для защиты органических покрытий. Устойчивы к
воздействию УФ-излучения органометаллические соединения, наз-
ванные ферроценами (производные дициклопентадиена железа),
которые могут использоваться как сырье для полимеров или как
стабилизирующие добавки в органические материалы.
Поверхностный заряд
Совместное воздействие корпускулярной и коротковолновой
радиации, а также взаимодействие КА с окружающей его плаз-
мой вызывает появление поверхностного заряда. Распре-
деление потенциала на КА в принципе неравномерно, так как за-
висит от соотношения потока фотоэлектронов, испускаемых по-
верхностью, освещенной Солнцем, приходящего на КА потока эле-
ктронов и ионов плазмы космического пространства и вторичной
электронной эмиссии, вызываемой энергичными электронами, а
также от внешней конфигурации КА и свойств его материалов.
Непроводящие поверхности могут заряжаться относительно
проводящей конструкции (или конструкции КА), а некоторые ди-
электрики способны аккумулировать так называемые разделен-
ные наряды — на поверхности и в объеме материала, Элементы
2* 35
конструкции КА также могут заряжаться до потенциалов большой
величины относительно окружающей плазмы.
Возникновение поверхностного заряда, влияние на работу си-
стем КА и меры его нейтрализации изучены мало. Есть предпо-
ложение, что это явление стало причиной зафиксированных
случаев ложного срабатывания электронных систем, ухудшения
характеристик терморегулирующих поверхностей на ИСЗ, рабо-
тающих на синхронной орбите, где они могут заряжаться до вы-
соких потенциалов. Понимание этого явления необходимо также
для правильной интерпретации научных измерений (например,
данных регистрации электрических полей и концентрации частиц
малых энергий), а также для устранения нежелательных послед-
ствий из-за разницы поверхностных потенциалов при стыковке
космических кораблей (КК), находившихся в длительном авто-
номном полете, возвращении на КК членов экипажа, длительное
время находившихся за его пределами, или при переходе их на
другой корабль и т. п.
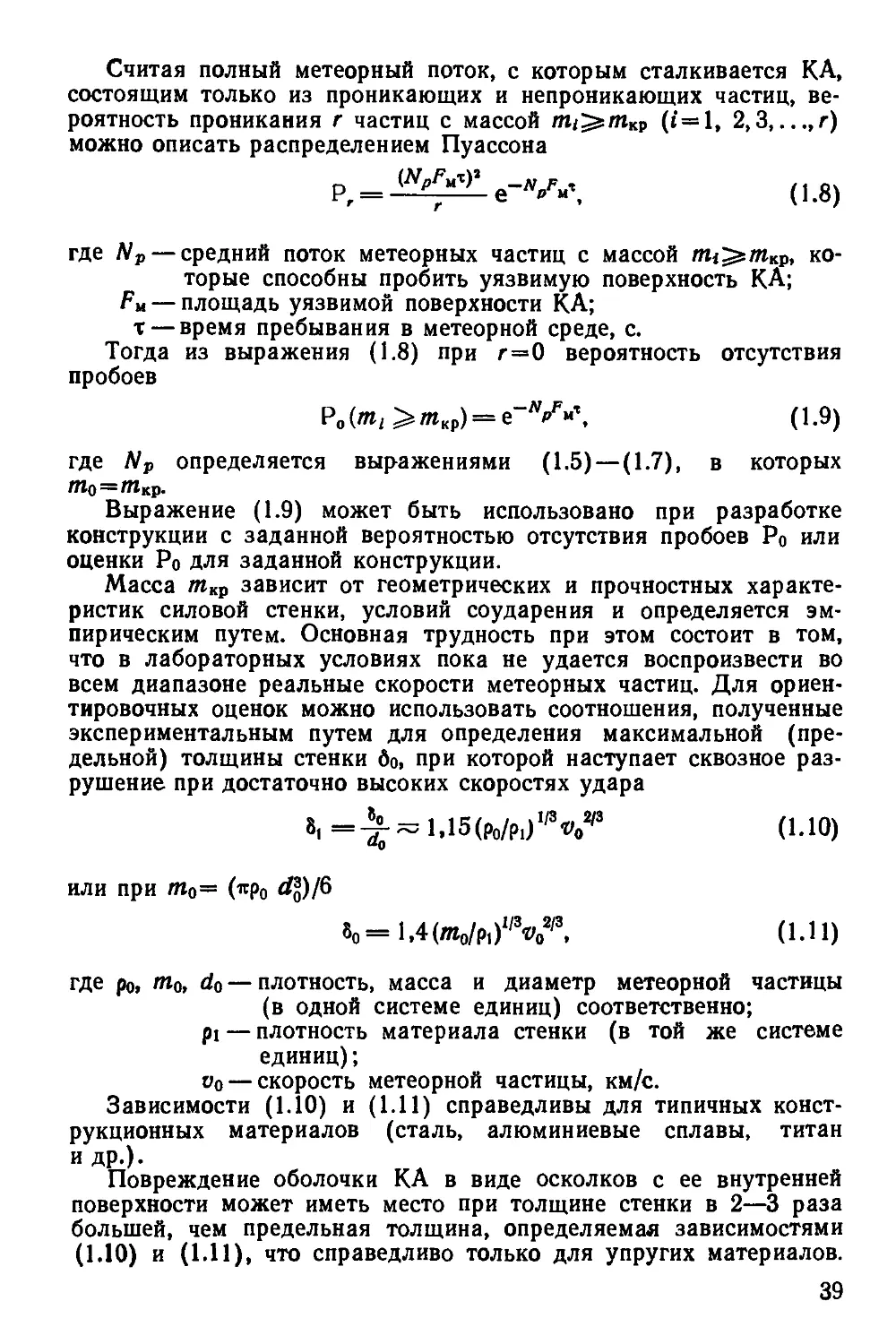
1.4. МЕТЕОРНАЯ ОПАСНОСТЬ
Общие сведения
Столкновения с метеорными частицами в зависимости от их
размеров, количества, скорости и плотности, а также от места
удара способны вызвать следующие повреждения КА:
пробои герметизирующей оболочки корпуса и повреждение от-
дельных элементов конструкции, агрегатов и систем, а также по-
ражение космонавта;
эрозию внешних поверхностей (поверхностей с определенными
радиационными характеристиками, солнечных батарей), оптичес-
ких приборов и других устройств и деталей, размещенных снару-
жи КА, и ухудшение их рабочих характеристик;
откалывание частиц от внутренней поверхности оболочки кор-
пуса, что может быть источником опасности для аппаратуры и
экипажа.
Метеорную среду обычно характеризуют величиной потока ме-
теорных частиц с массой т^то на единицу площади в единицу
времени. В связи с тем что наблюдаются как временные (суточ-
ные, сезонные), так и пространственные вариации в распределе-
нии спорадических метеорных частиц, пользуются осредненными
результатами измерений за большие промежутки времени (напри-
мер, за год) по разным районам наблюдений.
Известно несколько моделей метеорной среды. Данные разных
авторов иногда расходятся иа несколько порядков, что объяс-
няется как систематическими ошибками, заложенными в исполь-
зуемых методах (селективная чувствительность датчиков, отсут-
ствие надежных количественных соотношений между данными
наземных оптических или радиолокационных наблюдений и пря-
36
мых измерений и т. д.), так и различием в значениях некоторых
исходных величин, задаваемых при обработке результатов изме-
рений (скорость метеорных частиц, плотность, характер распре-
деления в пространстве и т. д.).
В литературе часто упоминается модель метеорной среды для
околоземного пространства, предложенная Уипплом и имеющая
вид
lg Л7= - 14,48 + 2,681g(0,44/р0) - 1,34 lg/n0, (1.5)
где N — поток метеорных частиц, частица с-1 • м~2;
ро — плотность частицы, г/см3;
т0 — масса частицы, г.
В этой модели средняя плотность метеорных частиц принята
равной 0,44 г/см3, а скорость — 30 км/с.
Прямые измерения, проведенные на советской автоматической
межпланетной станции (АМС) «Луна-19» в 1971—1972 гг. и на
американских лунных и межпланетных КА в 1966—1974 гг., пока-
зали, что поток микрометеорных частиц у Луны существенно не
отличается по величине от потока в межпланетном пространстве
и для /п=10-13—10~7 г может быть описан выражением
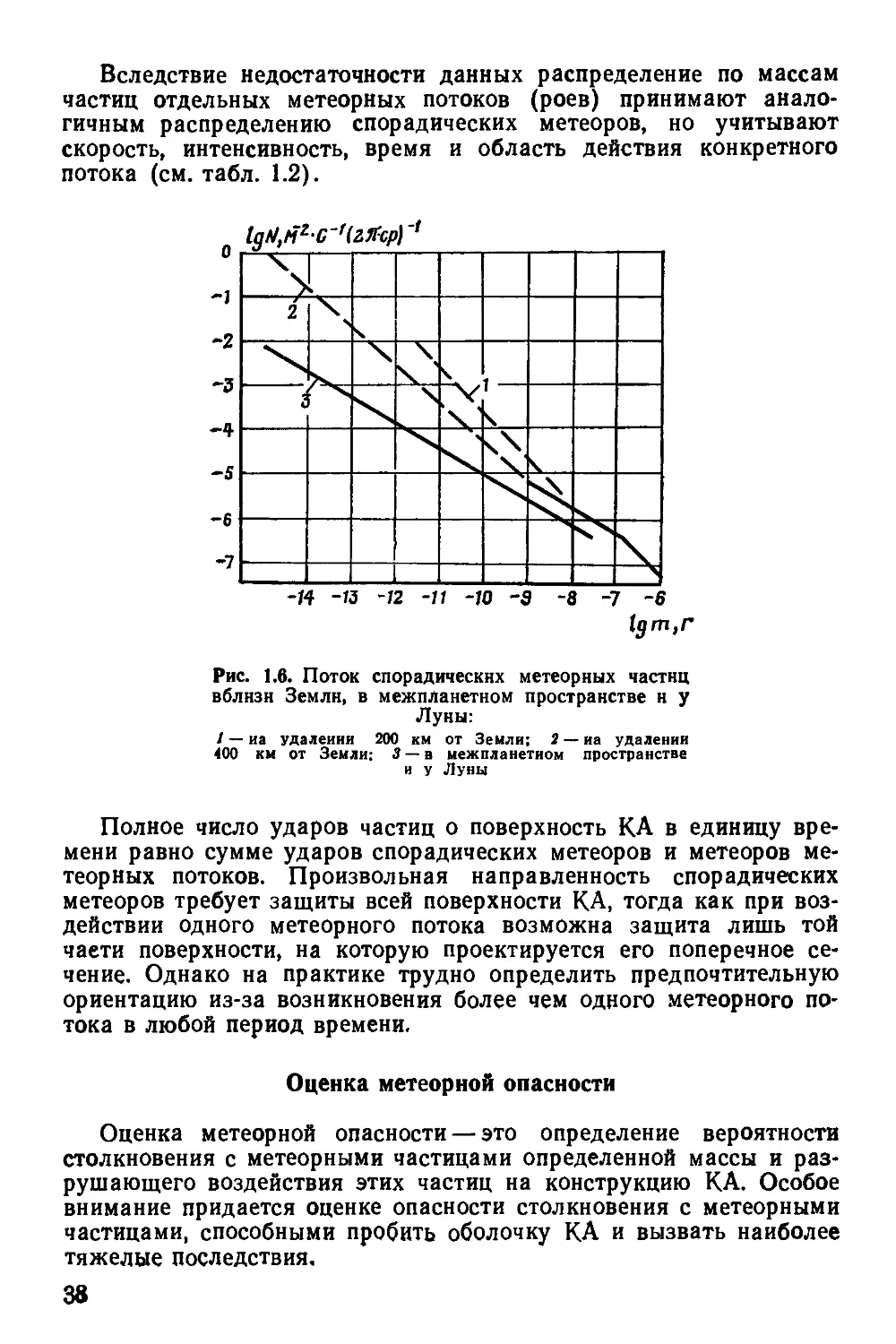
lgJV= - (10,7 + 0,5) - (0,57 ± O,O5)lgzno. (1.6)
Исследования микрометеорных частиц в различных областях
космического пространства вблизи Земли и у Юпитера показали
наличие повышенной плотности метеорного вещества вблизи пла-
нет по сравнению с межпланетной средой. Интегральный поток
частиц с массами /п^З-10-12 г на высоте 200 км от Земли пре-
вышает его величину в межпланетном пространстве примерно на
полтора порядка, а на высотах 350—400 км — почти не отличается
от потока в межпланетном пространстве. Для высот 100—400 км
среднее распределение частиц по массам имеет вид
lgW=- 16,1 — l,31gzn0. (1.7)
Графики зависимостей (1.6) и (1.7) показаны на рис. 1.6.
Вблизи других планет в зависимости от величины их электри-
ческих, магнитных и гравитационных полей, наличия или отсут-
ствия атмосферы и т. п. можно ожидать наличия более или ме-
нее плотных и протяженных пылевых оболочек.
Предварительные результаты измерений на американском КА
«Пионер-10» показали, что в астероидном поясе поток частиц рез-
ко увеличивается, причем основная масса частиц в этой области
имеет размер 0,01—1 мм. Хотя и делается вывод, что опасность
серьезного повреждения КА невелика, количество попаданий час-
тиц в КА «Пионер-10» оказалось большим, чем ожидалось до
запуска.
37
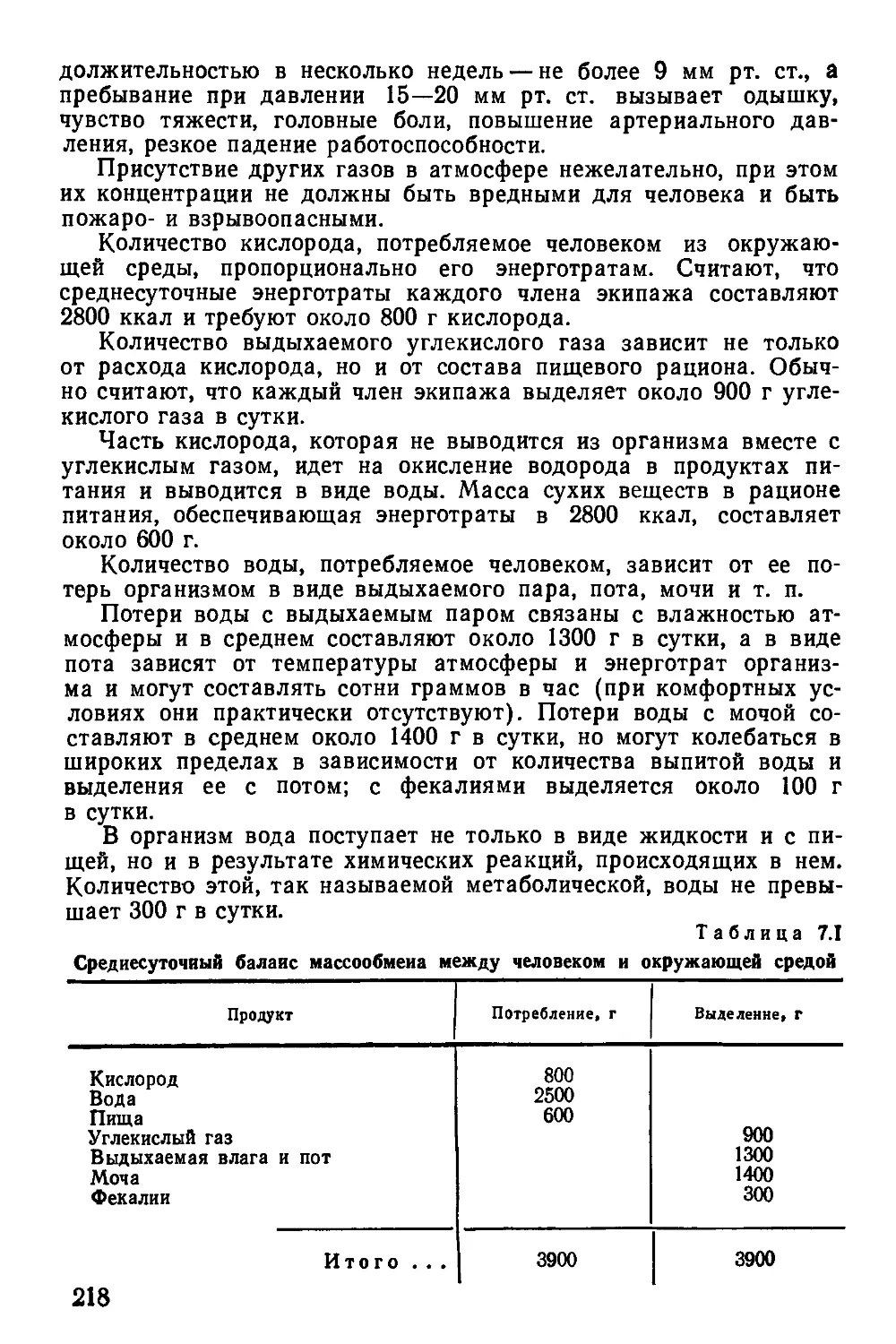
Вследствие недостаточности данных распределение по массам
частиц отдельных метеорных потоков (роев) принимают анало-
гичным распределению спорадических метеоров, но учитывают
скорость, интенсивность, время и область действия конкретного
потока (см. табл. 1.2).
-И -13 -12 -11 -10 -э -8 -7 -6
1дт,г
Рис. 1.6. Поток спорадических метеорных частиц
вблизи Земли, в межпланетном пространстве н у
Луны:
t — иа удалении 200 км от Земли; 2 — иа удалении
400 км от Земли: 3 — в межпланетном пространстве
и у Луны
Полное число ударов частиц о поверхность КА в единицу вре-
мени равно сумме ударов спорадических метеоров и метеоров ме-
теорных потоков. Произвольная направленность спорадических
метеоров требует защиты всей поверхности КА, тогда как при воз-
действии одного метеорного потока возможна защита лишь той
чаети поверхности, на которую проектируется его поперечное се-
чение. Однако на практике трудно определить предпочтительную
ориентацию из-за возникновения более чем одного метеорного по-
тока в любой период времени.
Оценка метеорной опасности
Оценка метеорной опасности — это определение вероятности
столкновения с метеорными частицами определенной массы и раз-
рушающего воздействия этих частиц на конструкцию КА. Особое
внимание придается оценке опасности столкновения с метеорными
частицами, способными пробить оболочку КА и вызвать наиболее
тяжелые последствия.
38
Считая полный метеорный поток, с которым сталкивается КА,
состоящим только из проникающих и непроникающих частиц, ве-
роятность проникания г частиц с массой tni^tnKP (i=l, 2,3, ...,r)
можно описать распределением Пуассона
Рг = _^мТ)2
(1.8)
где Np — средний поток метеорных частиц с массой пц^тКр, ко-
торые способны пробить уязвимую поверхность КА;
FM — площадь уязвимой поверхности КА;
т — время пребывания в метеорной среде, с.
Тогда из выражения (1.8) при г=0 вероятность отсутствия
пробоев
P0(znz >znKP) = e“VM't, (1.9)
где Np определяется выражениями (1.5) — (1.7), в которых
/П0 = /Пкр.
Выражение (1.9) может быть использовано при разработке
конструкции с заданной вероятностью отсутствия пробоев Ро или
оценки Ро для заданной конструкции.
Масса ткр зависит от геометрических и прочностных характе-
ристик силовой стенки, условий соударения и определяется эм-
пирическим путем. Основная трудность при этом состоит в том,
что в лабораторных условиях пока не удается воспроизвести во
всем диапазоне реальные скорости метеорных частиц. Для ориен-
тировочных оценок можно использовать соотношения, полученные
экспериментальным путем для определения максимальной (пре-
дельной) толщины стенки до, при которой наступает сквозное раз-
рушение при достаточно высоких скоростях удара
(i.io)
“О
или при т0= (тср0 rf®)/6
80=1.4(/п0/р1),/Ч2/3. (1.И)
где ро, tn0, do — плотность, масса и диаметр метеорной частицы
(в одной системе единиц) соответственно;
pi — плотность материала стенки (в той же системе
единиц);
ио — скорость метеорной частицы, км/с.
Зависимости (1.10) и (1.11) справедливы для типичных конст-
рукционных материалов (сталь, алюминиевые сплавы, титан
и др.).
Повреждение оболочки КА в виде осколков с ее внутренней
поверхности может иметь место при толщине стенки в 2—3 раза
большей, чем предельная толщина, определяемая зависимостями
(1.10) и (1.11), что справедливо только для упругих материалов.
39
Защита от воздействия метеорных частиц
Защита КА от воздействия метеорных частиц состоит в соз-
дании конструкции, способной противостоять этому воздействию.
В принципе возможны активные способы защиты, позволяющие
уменьшить частоту соударений КА с метеорными частицами. На
практике применяют пассивные (конструктивные) методы за-
щиты: уменьшение поверхностей КА, уязвимых к метеорному воз-
действию; увеличение толщины стенки; применение защитных
Рис. 1.7. Зависимость суммарной
толщины экранированной стенки и
экрана от толщины экрана
Z* _ 8» + 8 . » _ 8 > .
(о2 - d„ • ®з - rf0 ) •
1. 2, 3 — кривые, соответствующие удару
«сталь —Д16» при г>0 = 5,5; 7,5 и 10 км/с;
4, 5 — удару «сталь — титан» и «сталь —
сталь» при т>0 -7,5 км/с (первым назван
материал частицы, вторым — материал
экрана; материал мишени — дюралюминий)
противометеорных экранов и кры-
шек для предохранения установ-
ленных снаружи отдельных агре-
гатов, приборов и уязвимых по-
верхностей КА.
Наиболее эффективным сред-
ством защиты конструкции КА,
позволяющим уменьшить толщи-
ну силовой стенки и общую мас-
су конструкции, являются з а-
щитные противометеор-
ные экраны, которые в равной
мере снижают как вероятность
пробоя силовой стенки, так и
вероятность образования оскол-
ков с ее внутренней поверхно-
сти. Противометеорными экра-
нами могут также служить ко-
жухи, радиаторы СТР, элементы
конструкции и т. п. Пробивая
экран, метеорная частица в ре-
зультате развивающихся в ней
волновых процессов разрушается.
Удар остатков частицы по силовой стенке, расположенной за экра-
ном, распределяется по площади, во много раз превосходящей
площадь сечения частицы, что вместе с потерей импульса частицы
на пробивание и определяет защитное действие экрана.
Максимальный защитный эффект и минимальная масса конст-
рукции обеспечиваются при оптимальных расстоянии (S) между
экраном и стенкой и соотношении толщины экрана (б) и силовой
стенки (до). Экспериментально установлено, что оптимальное
расстояние между экраном и стенкой характеризуется безразмер-
ной величиной Sj = -^-=25—30 (при меньших значениях защит-
ные свойства снижаются, при больших — практически не увеличи-
ваются). Зависимость суммарной предельной толщины экрана и
стенки 82 = ° от толщины экрана 83 = -з- для экранов
UQ UQ
из алюминиевых сплавов, титана, стали и различных скоростей
удара показана на рис. 1.7.
40
При очень тонких экранах 62 стремится к величине предель-
ной толщины для незащищенной стенки. С возрастанием толщины
экрана 62 уменьшается и достигает минимума при некотором оп-
тимальном значении толщины экрана, зависящем от условий со-
ударения. Дальнейший рост толщины экрана вызывает увеличе-
ние 62, продолжающееся до тех пор, пока б2 не становится срав-
нимой с предельной для данной скорости и материала.
Оптимальную экранную защиту можно рассчитывать по фор-
муле
82 = ^!, (1.12)
где = — определяют из соотношения (1.10) или (1.11);
k — эмпирический коэффициент, зависящий от тех же
параметров, что и 62.
Зависимость k от толщины 83 = -^- для экранов из алюминие-
«0
вых сплавов, титана и стали и больших расстояний между стен-
кой и экраном (S]>30) показана на рис. 1.8. Для приближенных
расчетов рекомендуется вы-
бирать толщину экрана из
условия 8з = 0,5—0,6 и при-
нимать & = 0,35 при боль-
ших расстояниях между эк-
раном и стенкой и & = 0,7
при малых расстояниях
(5^51^20—25). Указан-
ные значения коэффициента
k и толщины экрана 83 обес-
печивают определенный за-
пас «непробиваемости» стен-
нов из алюминиевых сплавов, титана и
стали в случае Si >30 (параметры уда-
ра для кривых /—5 те же, что на
рис. 1.7)
ки при изменении плотно-
сти материала экрана в ши-
роком диапазоне.
В ряде работ экспериментально показано, что в диапазоне до-
стижимых скоростей удара 5 км/с12 км/с глубина пораже-
иия стенки при наличии экрана с ростом скорости удара падает,
однако приведенные скорости затрагивают лишь нижний диапазон
метеорных скоростей. При существенном повышении скорости
удара, по мнению многих авторов, поражение стенки при боль-
ших расстояниях Si будет стремиться к нулю вследствие полного
испарения материала ударяющей частицы.
Зависимость толщины одиночной стенки (сплошные линии) и
суммарной толщины экрана и экранированной стенки (штрихо-
вые линии) от заданной вероятности отсутствия пробоя стенки для
различных «экспозиций» Fx показана на рис. 1.9. В расчетах ис-
пользовалась метеорная модель Уиппла (1.5) при ро = 2,7 г/см3,
цо=ЗО км/с и допущении, что Si>30 (при расчете экранирован-
ной стенки).
41
Результаты исследований и накопленный опыт показывают,
что при полетах продолжительностью в несколько дней и недель
в районе Земли и Луны для КА небольших размеров метеорная
Рис. 1.9. Зависимость суммарной толщины экра-
на и экранированной стеикн (штриховые) и тол-
щины одиночной стенки (сплошные линии) от
заданной вероятности отсутствия пробоя Р:
1—5 — кривые, соответствующие «экспозициям»
Ft: 4,5-10’; 1.1.-10’; 6,75-10’; 1,7-10’и 3,4-10'; ч’-ч
космических полетах (около года и более), существенном увели-
чении размеров КА, а также при полетах в малоизученных обла-
стях Солнечной системы (за пределами орбит Марса и Венеры)
метеорной опасностью пренебрегать нельзя.
1.5. ВЛИЯНИЕ НЕВЕСОМОСТИ
Общие сведения
Состояние невесомости возникает, когда к телу, находяще-
муся в пространстве, не приложены никакие внешние силы, кроме
силы притяжения. Если КА находится в центральном поле тяго-
тения и не вращается вокруг своего центра масс, он испытывает
невесомость, характерным признаком которой является то, что
ускорения всех элементов конструкции, деталей приборов и час-
тиц человеческого тела равны ускорению силы тяжести.
Положительное свойство невесомости — возможность примене-
ния в космосе ажурных, тонких н очень легких конструкций (в том
числе надувных) при создании крупномасштабных сооружений на
орбите (например, гигантских антенн радиотелескопов, панелей
солнечных батарей орбитальных электростанций и т. п.). В на-
стоящее время эта возможность в полной мере не используется
из-за силовых факторов, действующих на КА при выведении их
в космос. Большой научный и практический интерес представляет
использование невесомости в различных технологических процес-
42
сах для получения материалов и изделий со свойствами, недо-
ступными в условиях земной силы тяжести (получение металличе-
ских и полупроводниковых материалов, состоящих из элементов
с существенно различными удельными весами, композитных ма-
териалов с заранее заданным распределением компонентов по
объему, выращивание больших полупроводниковых кристаллов
и т. д.).
Невесомость оказывает влияние на физические процессы, про-
текающие в системах и агрегатах КА, вследствие отсутствия кон-
вективного теплообмена и гидростатических сил. При отсутствии
гидростатических сил положение жидкости в емкостях (баках,
баллонах) зависит лишь от сил поверхностного натяжения и сил
сцепления между жидкостью и стенкой емкости, что может при-
вести к отливу жидкости от заборных устройств в баках (балло-
нах) и нарушить работу, в частности, запуск двигательных уста-
новок (ДУ) на жидких, и особенно на криогенных компонентах
топлива, так как пузырьки пара или газа в жидком компоненте
могут привести к кавитационному срыву и поломке насоса или
просто к останову (выключению) двигателя.
Для удержания жидкости в определенном положении в баках
(баллонах) применяют специальные перегородки, сетки и другие
устройства. Разделение жидкой и газовой фаз в баках можно до-
стигнуть либо путем создания начальной перегрузки (с помощью
малых РД, раскрутки всей космической системы вокруг центра
масс и т. п.), либо за счет установки непроницаемой подвижной
перегородки (поршня, эластичной ткани, пластика или металли-
ческой мембраны), либо за счет использования сил поверхност-
ного натяжения (сетчатые заборные устройства в баках). Первый
способ находит применение в системах обеспечения запуска ДУ
космических ракетных блоков, второй и третий — в ДУ орбиталь-
ных станций, КА и КК.
Полет в невесомости требует закрепления на своих местах ап-
паратуры и оборудования, а также оснащения обитаемого КА
средствами фиксации космонавтов, предметов их труда и быта.
Влияние невесомости на организм человека
Первичными эффектами невесомости являются снятие гидро-
статического давления крови и тканевой жидкости, весовой на-
грузки на костно-мышечный аппарат, а также отсутствие грави-
тационных стимулов специфических гравирецепторов афферент-
ных систем. Реакции организма, обусловленные длительным пре-
быванием в невесомости, выражают, по существу, его приспособ-
ление к новым условиям внешней среды и протекают по типу
«неупотребления» или «атрофии от бездействия» (рис. 1.10).
Состояние невесомости в начальный период часто вызывает
нарушения пространственной ориентации, иллюзорные ощущения
и симптомы болезни движения (головокружение, дискомфорт в
желудке, тошнота и рвота), что связывают главным образом с ре-
43
a — звенья патогенеза и связь между ними; б — профилактические средства и направления их
воздействия
акциями вестибулярного аппарата и приливом крови к голове.
Наблюдаются также изменения субъективного восприятия нагру-
зок и некоторые другие изменения, вызываемые реакциями чув-
ствительных органов, которые настроены на земную силу тяжести.
В течение первых десяти дней пребывания в невесомости в зави-
симости от индивидуальной чувствительности человека, как пра-
вило, происходит адаптация к указанным проявлениям невесомо-
сти и самочувствие восстанавливается.
В условиях невесомости происходит перестройка координации
движений, развивается детренированность сердечно-сосудистой си-
стемы.
Невесомость влияет на баланс жидкости в организме, обмен
белков, жиров, углеводов, минеральный обмен, а также на неко-
торые эндокринные функции. Наблюдаются потери воды, электро-
литов (в частности, калия, натрия), хлоридов и другие изменения
в обмене веществ.
Ослабление действия внешних сил на структуры, несущие ве-
совую нагрузку, приводит к потере кальция и других веществ,
важных для поддержания прочности костей. После длительного
воздействия невесомости возможны явления легкой мышечной
атрофии, некоторая слабость мускулатуры конечностей и т. д.
К числу наиболее общих проявлений неблагоприятного влия-
ния невесомости на организм в сочетании с другими особенно-
стями условий жизни на космическом корабле относится астени-
зация, отдельные признаки которой (ухудшение работоспособно-
сти, быстрая утомляемость) обнаруживаются уже в процессе са-
мого полета. Однако наиболее заметно астенизация сказывается
при возвращении на Землю. Снижение массы тела, мышечной мас-
сы, минеральной насыщенности костей, уменьшение силы, вынос-
ливости, физической работоспособности ограничивают переноси-
мость стрессовых воздействий, характерных для этого периода пе-
регрузок, и действия земной силы тяжести.
Нарушения двигательной функции в условиях космического
полета, по-видимому, не являются критическими, так как выра-
ботка навыков координации движений в невесомости протекает
относительно успешно. Значительно более неблагоприятными
представляются нарушения координации движений, которые мо-
гут развиваться в реадаптационный период в зависимости от про-
должительности воздействия гиподинамии и невесомости.
Ортостатическая неустойчивость, характеризующаяся выра-
женным усилением физиологических изменений, появлением голо-
вокружения, слабости, тошноты, и особенно возможностью обмо-
рочного состояния при вертикальной позе, представляет весьма
серьезную проблему, типичную для послеполетного периода, хотя
после кратковременных полетов эти признаки были непродолжи-
тельными и легко обратимыми.
Изменения иммунологических реакций и устойчивости к ин-
фекциям сопровождаются возрастанием восприимчивости к забо-
леваниям, что может привести к возникновению критической си-
45
туации во время полета. В кратковременных полетах значитель-
ных изменений со стороны иммунологической реактивности не от-
мечалось.
Существует определенная вероятность того, что и некоторые
другие сдвиги в функциональном состоянии организма чогут
влиять на продолжительность безопасного пребывания в условиях
длительной невесомости. Одни из них определяются процессами
перестройки механизмов нервной и гормональной регуляция ве-
гетативных и двигательных функций, другие зависят от степени
структурных изменений (например, мышечной и костной ткани),
детренированности сердечно-сосудистой системы и обменных
сдвигов. Разработка и внедрение системы мероприятий по профи-
лактике этих расстройств являются одной из важных задач ме-
дицинского обеспечения длительных космических полетов.
В принципе возможны два способа профилактики влияния не-
весомости. Первый состоит в том, чтобы предотвратить адат ацию
организма к невесомости, создавая на КА искусственную силу
тяжести, эквивалентную земной; это наиболее радикальный, но
сложный и дорогостоящий способ, причем исключающий преци-
зионные наблюдения за внешним пространством и возможности
экспериментов в условиях невесомости. Второй способ допускает
частичную адаптацию организма к невесомости, но вместе с тем
предусматривает и принятие мер по профилактике или умень-
шению неблагоприятных последствий адаптации. Профилактиче-
ское действие защитных средств рассчитано в первую очередь на
поддержание достаточного уровня физической работоспособности,
двигательной координации и ортостатической устойчивости (пере-
носимости перегрузок и вертикальной позы), поскольку по совре-
менным данным изменения этих функций, возникающие в реадап-
тационный период, представляются наиболее критическими.
Естественным и практически осуществимым является профи-
лактическое воздействие на такие первичные пусковые эффекты
невесомости, как снятие гидростатического давления крови я ве-
совой нагрузки на костно-мышечный аппарат, что позволяет
исключить или ослабить длинную цепочку вторично обусловлен-
ных сдвигов, в том числе и вызывающих наибольшую озабочен-
ность в реадаптационном периоде. Значительно более сложно пари-
рование тех изменений, которые возникают в деятельности аффе-
рентных систем в невесомости. Восполнить отсутствие гравитаци-
онных стимулов для специфических гравирецепторов, не прибегая
к созданию искусственной тяжести, невозможно. Профилактиче-
ские и терапевтические воздействия могут быть адресованы не
только к первичным, или пусковым, эффектам невесомости, но
и к более низким уровням патогенетической цепи.
Профилактика реакций, связанных с отсутствием гидростати-
ческого давления крови в невесомости во время полета, может
состоять, во-первых, в использовании средств и методов, искус-
ственно воспроизводящих эффект гидростатического давления:
дыхание под избыточным (выше атмосферного на 15—22 мм
46
рт. ст.) давлением, воздействие отрицательным (ниже атмосфер-
ного на 25—70 мм рт. ст.) давлением на нижнюю половину тела
и др., во-вторых, в профилактическом воздействии на некоторые
промежуточные звенья патогенетической цепи с помощью фарма-
кологических и гормональных препаратов. В послеполетный пе-
риод рекомендуется ношение противоперегрузочных костюмов,
обычно используемых летчиками (при давлении в камерах 35—
50 мы рт. ст.), и установление щадящего режима с постепенным,
дозированным увеличением времени пребывания в вертикальной
позе.
Восполнение дефицита весовой нагрузки на костно-мышечный
аппарат в условиях невесомости относится к числу весьма пер-
спективных направлений в разработке профилактических меро-
приятий и обеспечивается за счет физической тренировки с ис-
пользованием пружинных или резиновых эспандеров, велоэргомет-
ров, тренажеров типа «бегущей дорожки» и нагрузочных костю-
мов, создающих статическую нагрузку на тело и отдельные мы-
шечные группы за счет резиновых тяг.
В системе профилактики сдвигов, преимущественно обуслов-
ленных отсутствием весовой нагрузки на опорно-двигательный
аппарат, могут найти применение и другие методы воздействия,
в частности, электростимуляция мышц, применение гормональных
препаратов, нормализующих белковый и кальциевый обмен, а так-
же различные способы повышения устойчивости организма к ин-
фекциям.
В общей системе защитных мероприятий должна быть учтена
также возможность повышения неспецифической сопротивляемости
организма за счет снижения неблагоприятного воздействия стресс-
факторов космического полета (снижение уровня шумов, опти-
мизация температуры, создание надлежащих гигиенических и бы-
товых удобств), обеспечения достаточного водопотребления, пол-
ноценного и хорошо сбалансированного питания с повышенной
витаминной насыщенностью, обеспечения условий для отдыха, сна
и т. д. Увеличение внутреннего объема космических кораблей и
создание на них улучшенных бытовых удобств заметно способ-
ствуют смягчению неблагоприятных реакций на невесомость.
Следует отметить, что в системе мероприятий по профилактике
неблагоприятного влияния на организм человека длительной не-
весомости самостоятельное значение принадлежит предполетному
отбору и тренировке, а также восстановительной терапии, исполь-
зуемой в послеполетном периоде.
На современном уровне знаний достижение относительно гар-
моничного профилактического эффекта может быть обеспечено
лишь при использовании комплекса профилактических средств,
адресованных различным звеньям патогенетической цепи. Пра-
вильность такого подхода к построению системы профилактиче-
ских мероприятий наглядно продемонстрировали полеты экипажей
орбитальных станций «Салют» (30, 63, 96, 140, 175, 185 и 211 сут)
и «Скайлэб» (28, 59 и.84 сут). Эти полеты подтвердили способ-
47
ность человека существовать и функционировать на современных
КА при использовании соответствующих средств профилактики,
однако необходимо дальнейшее исследование влияния невесомо-
сти на организм человека.
Космическое пространство не является однородной средой
с постоянными (хотя бы в среднем) свойствами в каждой своей
точке, поэтому конкретные условия полета КА будут зависеть от
области пространства, траектории и продолжительности полета.
В общем случае полет КА будет происходить:
вне планеты, когда все необходимое для нормального сущест-
вования КА и его экипажа должно находиться на его борту;
в условиях глубокого вакуума, что вызывает необходимость
подбора и разработки удовлетворяющих этому условию конструк-
ционных материалов и смазок, обеспечения герметичности отсе-
ков КА, разработки особых средств обеспечения теплового ре-
жима КА и т. п.;
в условиях невесомости, что исключает нормальный конвек-
тивный теплообмен и гидростатическое давление жидкостей, вы-
зывает изменение или нарушение жизненно важных функций че-
ловеческого организма;
в условиях метеорной опасности, которая требует разработки
конструкции, устойчивой к воздействию метеорных частиц;
в условиях радиационной опасности, обусловленной электро-
магнитным и корпускулярным излучениями солнечного и галакти-
ческого происхождения, в связи с чем необходимо обеспечение
радиационной защиты экипажа и устойчивых к воздействию ра-
диации материалов и аппаратуры.
Следует отметить, что при увеличении длительности космиче-
ских полетов как в околоземном пространстве, так и при полетах
к другим планетам роль фактора внешних физических условий
существенно возрастает.
Кроме рассмотренных выше условий полета в космическом
пространстве при разработке КА следует учитывать условия по-
лета на участке выведения на орбиту в составе ракетно-косми-
ческой системы, а для аппаратов, возвращаемых на Землю,—
условия полета на участке спуска в атмосфере и приземления.
Условия полета на участке выведения рассмотрены в книге
«Ракеты-носители» — второй книге серии «Ракетно-космический
комплекс» (М., Воениздат, 1981), а особенности спуска в атмо-
сфере и приземления — в главах 3 и 9 данной книги.
Глава 2
АВТОМАТИЧЕСКИЕ КОСМИЧЕСКИЕ АППАРАТЫ
2.1. ОБЩИЕ СВЕДЕНИЯ
Космический аппарат (КА) — аппарат, предназначенный для
полета в космосе или для работы на других небесных телах. От-
личительной особенностью большинства КА является их способ-
ность к длительному самостоятельному функционированию в усло-
виях космического пространства.
В настоящее время прочно утвердилось мнение, что в решении
стоящих перед человечеством глобальных проблем, вызванных
значительным возрастанием активности человеческой деятельно-
сти, в научных исследованиях существенную роль могут сыграть
КА и космические методы изучения Земли и Вселенной.
Космический аппарат по сравнению со всеми использовавши-
мися ранее средствами обладает уникальными возможностями для
проведения исследований и решения задач народного хозяйства.
Его использование позволяет:
перейти от методов дистанционного изучения космического
пространства, Луны и планет к непосредственным измерениям и
исследованиям вплоть до взятия проб атмосферы и грунта пла-
нет;
систематически исследовать Землю и околоземное простран-
ство; отдельные ИСЗ и системы спутников обеспечивают необхо-
димую дискретность обновления информации о Земле, ее облач-
ном покрове, о процессах в атмосфере, околоземном космическом
пространстве и при необходимости — о факторах, связанных
с внешними воздействиями на околоземное пространство и
Землю;
исключить влияние сильных помех Земли (радио-, световых
и т. п.) при проведении исследований, создать за счет глубокого
вакуума и невесомости благоприятные условия для проведения
физических, технических и других экспериментов, которые труд-
но или практически невозможно осуществить на Земле;
создать системы ИСЗ для организации радиосвязи между
удаленными друг от друга районами, для решения задач нави-
гации подвижных средств (судов, самолетов) и т. п.
Научные исследования, проводимые в настоящее время с по-
мощью КА, направлены в основном на изучение:
49
Солнца, Луны и планет (атмосферы и физики планет, космо-
химических процессов, физико-механических свойств неземных
грунтов);
космических лучей;
источников различных электромагнитных излучений в кос-
мосе;
Земли из космоса (природных ресурсов, окружающей среды
идр.);
околоземного пространства (структуры и физики верхней ат-
мосферы, ионосферы и околоземного космоса, радиационных по-
ясов, магнитосферы Земли);
медико-биологических проблем.
По мере развития космической техники все большее значение
приобретают КА, используемые для решения прикладных задач:
организации радиосвязи, навигации, прогноза погоды и т. п.
В Советском Союзе создана система дальней космической свя-
зи на базе спутников связи «Молния», «Радуга», «Экран», «Го-
ризонт». Космическое телевидение, коммерческая междугородная
телефонная, телеграфная и фототелеграфная связь, передача мат-
риц газет в другие города — вот неполный перечень задач, которые
решают сегодня спутники связи. До недавнего времени дальняя
телевизионная, телефонная и телеграфная связь осуществлялась в
основном с использованием кабельных и релейных линий, строи-
тельство которых для отдаленных и особенно труднодоступных
районов требует значительных средств и времени. Спутники связи
в сочетании с наземными магистралями и сетью приемных стан-
ций значительно ускоряют и удешевляют создание единой авто-
матизированной сети.
С середины 60-х годов в СССР для прогноза погоды исполь-
зуются метеоспутники «Метеор». Основа метеорологии — это дан-
ные о состоянии атмосферы и о динамике происходящих в ней
процессов. На Земле имеется более 10 000 метеостанций, которые
регистрируют состояние атмосферы у поверхности Земли, изме-
ряют температуру и плотность воздуха, учитывают осадки, на-
правление воздушных течений и другие параметры. Однако полу-
чаемая ими информация недостаточна для достоверных прогнозов
погоды. Использование спутниковой метеорологии положило на-
чало развитию методов синоптической интерпретации телевизион-
ных и инфракрасных изображений облачного покрова и привело
к разработке метода дистанционного зондирования атмосферы в
целях обеспечения прогноза погоды необходимой количественной
информацией.
За период развития космической техники разработано боль-
шое количество различных космических аппаратов, подразделяе-
мых на два существенно отличающихся друг от друга класса: п и-
лотируемые и автоматические, причем основным кри-
терием этого деления является обитаемость.
Кроме обитаемости КА классифицируют:
по скорости, сообщаемой КА (по траектории полета);
50
по времени активного полета (по продолжительности полета);
по назначению;
по способу ориентации в пространстве;
по наличию и типу двигательных установок (ДУ);
по компоновочным схемам;
по методу управления полетом и др.
По траектории полета КА делят на искусственные спутники
Земли, аппараты для полетов к Луне, к планетам Солнечной си-
стемы и аппараты для полетов с выходом за пределы Солнечной
системы.
Искусственный спутник Земли (ИСЗ) характеризует относи-
тельно небольшое удаление от Земли, периодичность изменения
внешних условий и прохождения над определенными географиче-
скими районами Земли, кратная периоду обращения. ИСЗ совер-
шает полет в поле тяготения и атмосфере Земли, что сказывается
на времени его существования, эволюции орбиты, внешних тепло-
вых потоках и некоторых других факторах. В системах ориен-
тации и управления движением ИСЗ могут использоваться
аэродинамические силы и измерения ионной составляющей атмо-
сферы Земли для обеспечения одноосной длительной ориента-
ции по вектору скорости, гравитационные силы и измерение ин-
фракрасного излучения атмосферы для ориентации на Землю.
Ориентация за счет аэродинамических сил применялась на неко-
торых ИСЗ серии «Космос», гравитационная — как одни из ре-
жимов ориентации орбитальной станции «Салют», инфракрасные
построители вертикали — на многих КА, начиная с КК «Восток»,
ионные датчики — на КК «Союз».
Искусственные спутники Земли по высотам орбит делят на
КА малых, средних и больших высот, причем условными
границами приняты границы зон радиационных поясов Земли,
длительный полет в которых связан с необходимостью решения
проблем обеспечения жизнедеятельности экипажа и работоспособ-
ности аппаратуры.
Высоту полета ИСЗ считают:
малой, если На < Нт1п р. п;
средней, если Нк НтаХ р. п при На Нтт р- п;
большой, если
где Нк и Нл — высоты перигея и апогея * орбиты ИСЗ;
Нт1п р. п и НтаХ?. п — минимальная и максимальная высоты радиа-
ционных поясов Земли.
Практически все используемые пилотируемые ИСЗ относят к
группе аппаратов малых высот, так как длительные полеты на
высотах свыше 400 км требуют значительной по массе радиаци-
онной защиты экипажа.
* Апогей — наиболее удаленная от центра Земли, а перигей — ближайшая
к нему точка орбиты ИСЗ.
51
Автоматические КА представлены всеми тремя группами. Для
решения ряда научных и прикладных задач, в первую очередь для
исследования Земли, структуры и физики атмосферы, ионосферы,
наиболее предпочтительны малые высоты. Автоматические ИСЗ,
относящиеся к КА средних высот, как правило, предназначены
для исследования самих радиационных поясов и космического
пространства в этой области.
Для решения задач, связанных с глобальным обзором Земли,
необходимы высокие орбиты, в том числе и геостационарная, ко-
торая обладает уникальным свойством: спутник, выведенный на
такую орбиту, «висит» над одним и тем же районом земной по-
верхности. Использование ИСЗ, выведенных на геостационарную
орбиту (в сочетании со спутниками, находящимися на других ор-
битах), особенно важно для организации радиосвязи, метеона-
блюдений и т. п.
Космические аппараты для полетов к Луне совершают пере-
лет от Земли до Луны за время около 4 сут, а их система радио-
связи должна обеспечить дальность действия 400—500 тыс. км.
Лунные аппараты в зависимости от характера траектории полета
делят на пролетные, спутники Луны и посадочные.
Наиболее сложными из них являются посадочные аппараты
(т. е. совершающие посадку на Луну), в состав которых входят
устройство, обеспечивающее сохранность и устойчивость КА после
посадки, двигательная установка с двигателями регулируемой
тяги и значительными запасами топлива, а также система обес-
печения теплового режима, рассчитанная на широкий диапазон
изменения внешних тепловых потоков. Аппараты, совершающие
посадку на Луну, могут быть неподвижными и передвигающимися
(луноходы).
Космические аппараты для полетов к планетам Солнечной си-
стемы имеют существенно большие по сравнению с лунными ап-
паратами удаления от Земли и продолжительность полета. Для
обеспечения связи на дальности в сотни миллионов километров
обязательным условием является использование в бортовом ра-
диокомплексе остронаправленной антенны, а в системе управле-
ния— средств наведения антенны на Землю. При больших уда-
лениях от Земли управляющие радиокоманды и информация
о работе систем могут поступать соответственно на борт КА и
в Центр управления полетом с временной задержкой, составляю-
щей десятки минут. В связи с этим бортовая система управления
должна обеспечивать проведение некоторых сложных полетных
операций без непосредственного контроля со стороны Центра
управления полетом за ходом их выполнения.
Как правило, в процессе длительного перелета от Земли к пла-
нете существенно меняются расстояния от КА до Солнца. Это
сказывается на построении системы обеспечения теплового режи-
ма, которая должна быть рассчитана на большие изменения
внешних тепловых потоков.
52
Космические аппараты данного типа классифицируют по пла-
нетам, особенности которых существенно влияют на построение
КА, особенно на КА, совершающие посадку на планету.
2.2. СОСТАВ
Диапазон размеров и массовых характеристик автоматических
КА очень широк: от KA-карликов с массой в единицы или десятки
килограммов до KA-гигантов, имеющих массу, исчисляемую тон-
нами. Разнообразны и их конструктивно-компоновочные схемы.
Однако, несмотря на значительные внешние отличия, в основе
построения автоматических КА лежат определенные общие зако-
номерности. В общем случае автоматический КА свободен от
ряда ограничений, связанных с разработкой пилотируемого КА,
и имеет большее разнообразие форм, размеров и более широкий,
чем у пилотируемых КА, диапазон массовых характеристик. Ав-
томатические КА более просты по составу бортовых систем, агре-
гатов и конструкции, хотя отдельные их системы и элементы кон-
струкции могут быть более сложными, чем у пилотируемых. Так,
для осуществления стыковки в космосе, для забора лунного грун-
та и доставки его на Землю, для решения задач навигации авто-
матические системы имеют более сложное построение, чем сред-
ства, используемые экипажем.
Состав и построение КА определяют такие факторы, как:
особенность условий космического полета (вакуум, невесо-
мость, радиация и т. п.) и условий совместного полета с ракетой-
носителем (перегрузки, вибрации, акустическое воздействие и т. п.);
необходимость использования для управления полетом КА
наряду с бортовыми средствами управления канала связи с Зем-
лей;
особенность динамики орбитального полета, который в основ-
ном происходит под действием сил тяготения и реактивных сил.
Указанные факторы можно считать общими для любого КА
независимо от его назначения. Условия космического полета тре-
буют введения в состав КА средств, обеспечивающих надежную
защиту аппаратуры от воздействия радиации, вакуума, микроме-
теоров, создания системы терморегулирования для поддержания
температуры КА в пределах, допустимых по условиям обеспече-
ния функционирования всех его элементов. Условия полета, как
правило, не накладывают серьезных ограничений на внешние об-
воды КА и не требуют придания им обтекаемой аэродинамической
формы, характерной для атмосферных летательных аппаратов,
что, в основном, и объясняет многообразие конструктивно-компо-
новочных схем КА. Однако в отдельных случаях, не являющихся
типичными для КА как летательного аппарата, его облик может
определяться требованиями обеспечения полета в атмосфере (на-
пример, спускаемые аппараты или капсулы, совершающие посад-
ку на Землю, автоматические межпланетные станции, предна-
значенные для посадки на планеты, имеющие атмосферу, и т. п.).
53
Для управления полетом автоматический КА должен иметь
в своем составе радиотехнический комплекс и комплекс средств
управления, обеспечивающие так называемый автономный
режим полета КА, при котором управление осуществляется
только бортовыми системами, а также режим с использова-
нием радиоуправления с Земли, при котором предус-
мотрен обмен информацией между КА и наземным комплексом
управления (НКУ) полетом.
Особенностью динамики орбитального полета является то, что
для межорбитальных переходов (изменения высоты, наклонения
или других параметров орбиты, перехода с орбиты на траекторию
спуска на Землю или планету и т. п.) и поддержания определен-
ного положения КА в космическом пространстве, т. е. ориентации,
КА должен иметь реактивную двигательную установку.
В общем случае в состав автоматического КА входят полез-
ная нагрузка, служебные системы, конструкция и двигательные
установки.
Полезная нагрузка — это аппаратура или средства, непосред-
ственно реализующие решение задачи, поставленной перед КА.
Служебные системы обеспечивают функционирование КА в
процессе полета (управление, контроль, электроснабжение, радио-
связь, температурный режим и т. д.). К ним относят:
систему ориентации и управления движением
(СОУД), обеспечивающую постоянную или периодическую ориен-
тацию КА в режиме, необходимом для решения целевых задач по-
лета, управление процессами коррекции орбиты, межорбитальными
переходами, выполнение программных разворотов, закрутки ап-
парата, навигационных измерений и других задач управления дви-
жением;
систему электропитания (СЭП), снабжающую потре-
бителей электроэнергией на всех этапах полета;
систему управления бортовым комплексом
(СУБК), реализующую программно-логическое и электросиловое
управление бортовыми системами;
бортовой радиотехнический комплекс (БРТК)
для связи с наземным комплексом управления полетом с целью
решения задач обмена командно-программной информацией, про-
ведения траекторных измерений, передачи телевизионного изобра-
жения и информации от системы бортовых измерений;
систему бортовых измерений (СБИ) для сбора и
передачи на Землю через собственные передатчики или БРТК те-
леметрической информации о функционировании КА, в том
числе о результатах работы научной аппаратуры, систем и средств
полезной нагрузки;
систему обеспечения теплового режима (СОТР)
для поддержания температуры полезной нагрузки, систем, кон-
струкции и ДУ в необходимом для их функционирования диа-
пазоне.
54
Конструкция — это силовая основа КА, объединяющая все его
составные части в единое целое и обеспечивающая их защиту от
неблагоприятных воздействий космических условий и условий
совместного полета с ракетой-носителем, а также механизмы и
средства, участвующие в выполнении задач полета.
Двигательные установки реализуют управление движением
центра масс КА, изменяя скорость его движения.
Состав и построение КА различных классов рассмотрим иа
примере связного ИСЗ «Молиия-1», автоматической лунной стан-
ции «Луиоход-1» и автоматической межпланетной станции (АМС)
«Веиера-9».
Рис. 2.1. Спутник связи «Молния-1»
Связной ИСЗ «Молния-1» (рис. 2.1) предназначен для ретранс-
ляции телевизионных программ и осуществления дальней теле-
фонной и телеграфной связи, действует с 1965 г. и входит в со-
став системы дальней космической связи, работая совместно с
наземными радиостанциями системы «Орбита». «Молиия-1» — это
космический аппарат массой 1500 кг и максимальным размером
в поперечнике 8 м, выводится на сильно вытянутую эллиптиче-
скую орбиту ИСЗ с высотой апогея 40 000 км, расположенного иад
северным полушарием и периодом обращения 12 ч.
Полезной нагрузкой является бортовой ретранслятор с аитеи-
но-фидериой системой, обеспечивающий прием радиосигнала с
Земли, его усиление и передачу иа Землю. Для обеспечения энер-
гетических характеристик передающего радиоканала используется
остронаправлеииая параболическая антенна, ориентируемая иа
Землю.
Система ориентации и управления движением обеспечивает:
длительную ориентацию ИСЗ на Солнце (для системы электро-
питания) и наведения параболической антенны иа Землю;
55
кратковременную ориентацию и проведение коррекции орбиты
(ориентацию продольной оси по или против вектора скорости
в месте включения корректирующей двигательной установки в за-
висимости от необходимости выдачи тормозного или разгонного
корректирующего импульса, управление двигательной установкой,
стабилизацией во время ее работы);
выдачу управляющих сигналов на электроприводы параболи-
ческой остронаправленной антенны для ее наведения на Землю.
В состав СОУД входят:
чувствительные элементы — оптические датчики ориентации на
Солнце, инфракрасные и оптические датчики ориентации на
Землю;
счетно-решающие и коммутирующие устройства;
исполнительные органы, включающие мотор-маховик гироско-
пического типа (используется также в качестве чувствительного
элемента системы) для поддержания длительной ориентации ИСЗ
и реактивную систему, работающую на запасах газообразного ра-
бочего тела, обеспечивающую стабилизацию ИСЗ при работе дви-
гательной установки и периодический сброс кинетического момен-
та, накапливаемого в результате действия внешних возмущающих
моментов на КА.
Система электропитания (СЭП) состоит из генератора элек-
троэнергии — солнечных батарей, буферных батарей — аккумуля-
торов, накапливающих электроэнергию, расходуемую в сеансах
связи и при проведении коррекции орбиты, блоков логики, кон-
троля и управления.
Система управления бортовым комплексом (СУБК) обеспечи-
вает распределение, коммутацию (включение и выключение) элек-
троэнергии, защиту цепей от короткого замыкания, а также про-
граммно-временное управление основными полетными операциями
(сеансами работы ретранслятора, проведением совместно с СОУД
коррекций орбиты, сеансов связи с наземным комплексом управ-
ления) и включает блоки логики, программно-временные устрой-
ства, блоки силовой коммутации и защиты, бортовую кабельную
сеть.
БРТК состоит из приемопередающих средств, антенно-фидер-
ной системы всенаправленного действия, блоков логики, форми-
рования точного бортового времени, дешифрирования и преобра-
зования командно-программной информации.
Система обеспечения теплового режима обеспечивает поддер-
жание температуры газа в гермоотсеке, температуры ДУ и эле-
ментов, расположенных на внешней поверхности отсека. СОТР
имеет в своем составе радиационные теплообменники холодного
и горячего контуров (установлены снаружи гермоотсека) соответ-
ственно для отвода или подвода тепла к системе, газожидкостные
теплообменники гермоотсека, обеспечивающие температуру газа
отсека, гидравлическую систему (насосы, компенсаторы, трубопро-
воды, жидкость-теплоноситель, арматуру) для переноса тепла
между радиационными и газожидкостными теплообменниками и
56
обеспечения температурного режима элементов внешних устано-
вок, средства управления и контроля (управляющие и телеметри-
ческие датчики, блоки автоматики).
Основой конструкции ИСЗ «Молния-1» является герметичный
цилиндрической формы корпус приборного отсека. К нему с внеш-
ней стороны крепятся панели солнечных батарей СЭП (устанав-
ливаются в рабочее положение после вывода на орбиту), двига-
тельная установка, радиационные теплообменники СОТР, антенны
ретранслятора и БРТК, датчики ориентации на Солнце и Землю,
баллоны с газообразным рабочим телом и микродвигатели испол-
нительных органов СОУД.
Рис. 2.2. «Луноход-1»
Двигательная установка состоит из ЖРД многоразового дей-
ствия, работающего на высококипящих компонентах топлива, ба-
ков для компонентов, системы подачи топлива (вытеснительного
типа) и регулирования работы ЖРД.
«Луноход-1» (рис. 2.2) —подвижная лаборатория массой 750 кг
и максимальным габаритным размером 3 м для изучения Луны
была доставлена на поверхность Луны с помощью автоматической
станции «Луна-17».
Полезной нагрузкой «Лунохода-1» являются системы и сред-
ства для изучения топографических особенностей лунной поверх-
ности и физико-механических свойств грунта: телевизионные си-
стемы (панорамная и малокадровая), спектрометрическая аппара-
тура определения химического состава грунта, аппаратура иссле-
дования радиационной обстановки на поверхности Луны, прибор
для внедрения в грунт штампа, датчики (пути, угла крена, диф-
ферента), уголковый отражатель для лазерной локации и аппа-
ратура исследования рентгеновского космического излучения.
Управление передвижением «Лунохода-1» осуществлялось си-
стемой, включавшей наземную и бортовую части, при этом основ-
57
пая роль в выборе параметров, логики управления и решении на-
вигационной задачи при движении возлагалась на операторов и
наземную аппаратуру. Бортовая часть системы дистанционного
управления обеспечивала реализацию команд операторов и выдачу
на Землю данных об угловом положении «Лунохода-1». СОУД
«Лунохода-1» включала гироскопические датчики курса и верти-
кали, счетно-решающие и коммутирующие блоки.
Функции приема команд управления, передачи на Землю сиг-
налов подтверждения исполнения команд, передачи телевизион-
ного изображения и телеметрической информации выполнял БРТК,
включавший приемопередающие радиоустройства, телевизионную
систему (панорамные камеры для навигации и научных исследо-
ваний и камеры малокадрового телевидения для управления дви-
жением и научных исследований), остронаправленную антенну для
передачи телевизионного изображения и малонаправленную ан-
тенну для обмена с Землей другими видами информации, блоки
преобразования, дешифрирования сигналов, логики и автома-
тики.
Сбор информации, ее хранение и передачу в БРТК обеспечи-
вала СБИ, имевшая датчики, локальные коммутаторы, систему
измерений температур, запоминающее устройство и блоки сопря-
жения.
СОТР должна была обеспечить заданный диапазон темпера-
тур конструкции и приборов как в условиях лунного дня (темпе-
ратура поверхности 400 К), так и в периоды лунной ночи (тем-
пература поверхности 100—120 К). На луноходе использовалась
активная газовая циркуляционная система, включавшая контуры
ндгрева с изотопным источником тепла и охлаждения с радиа-
ционным теплообменником (верхнее днище приборного отсека),
который на время лунной ночи закрывался теплоизолированной
крышкой. Кроме того, в состав СОТР входили средства регулиро-
вания, контроля, управления системой, а также пассивные сред-
ства терморегулирования (тепловые «мосты», изоляция и др.).
Выполняя традиционные для КА функции, СЭП и СУБК со-
стояли из солнечной батареи с механизмом поворота для ориента-
ции на Солнце, буферной батареи для электроснабжения в сеан-
сах связи и в период лунной ночи, средств распределения и ком-
мутации электроэнергии, бортовой кабельной сети, блоков авто-
матики и контроля.
Конструкция лунохода включала приборный отсек в форме
усеченного конуса с выпуклыми верхним и нижним днищами и са-
моходное шасси с 8 колесами, имеющими индивидуальные под-
веску и электрические приводы, и датчиком пройденного пути. На
внешней поверхности отсека располагались антенны БРТК, теле-
визионные камеры, датчики научно-исследовательской аппаратуры,
оптический уголковый отражатель. Компоновочная схема луно-
хода была выбрана с учетом необходимости обеспечения его
устойчивости при перемещении по поверхности сложного
рельефа.
58
Автоматическая межпланетная станция «Венера-9» (рис. 2.3)
предназначалась для изучения поверхности и атмосферы Венеры,
имела массу около 4940 кг и была запущена в июне 1975 г. Она
была выведена на траекторию полета к планете с околоземной
круговой орбиты высотой 170 км. В процессе ее полета к планете
были проведены две коррекции траектории. При подлете к пла-
нете от нее был отделен СА, а сама АМС переведена на орбиту
искусственного спутника Венеры (ИСВ).
Рис. 2.3. АМС «Венера-9»
Полезной нагрузкой станции являлись фотометры для получе-
ния изображения поверхности в оптическом диапазоне и измере-
ния яркости и рассеивающей способности атмосферы, датчики дав-
ления, температуры и перегрузки, анемометр для измерения ско-
рости ветра, спектрометры для измерения химического состава и
содержания радиоактивных элементов, плотномер для определе-
ния плотности грунта.
СОУД станции включала бортовую цифровую вычислительную
машину, блоки логики, гиростабилизированную платформу, опти-
ко-электронные приборы ориентации на Солнце, звезды, Землю,
усилительно-преобразующие устройства и исполнительные органы.
СЭП станции была построена на базе солнечных генераторов элек-
троэнергии и совместно с СУБК обеспечивала электроснабжение
всех потребителей АМС. В состав БРТК входили антенно-фидер-
ные устройства, приемники и передатчики, работающие в различ-
ных диапазонах длин волн, радиоретрансляционная и телеметри-
ческая аппаратура, средства автоматики и контроля. Особенностью
радиотехнического комплекса было использование БРТК станции
(после ее перевода на орбиту ИСВ) в качестве ретранслятора
для передачи на Землю информации от спускаемого аппарата при
его посадке и с поверхности Венеры.
СОТР станции, кроме традиционных задач термостатирования
АМС в процессе космического полета, обеспечивала температур-
59
ный режим СА в процессе его спуска в атмосфере Венеры и при
нахождении на ее поверхности в условиях, когда температура ат-
мосферы и поверхности составляет 730 К. СОТР станции имела
контуры нагревания и охлаждения с радиаторами, многослойную
экранно-вакуумную изоляцию и систему циркуляции газа в гер-
метичном отсеке; кроме того, спускаемый аппарат, имея внешнюю
и внутреннюю теплоизоляцию, был помещен в сферический много-
слойный корпус, предназначенный для его защиты от высокой тем-
пературы ударной волны на начальном участке снижения в атмо-
сфере.
Для коррекции траектории полета от Земли к Венере и для
перевода АМС на орбиту ИСВ предназначалась ДУ с ЖРД и вы-
теснительной системой подачи топлива.
«Венера-9» имела сложную компоновочную схему: собственно
станцию и спускаемый аппарат, способные функционировать после
их разделения как отдельные КА.
Основным силовым элементом станции являлся блок баков ДУ,
имеющий цилиндрическую форму с двумя выпуклыми днищами,
к одному из которых крепился приборный отсек, выполненный в
форме тора, к другому через промежуточный силовой элемент
(переходник) — СА. На внешней поверхности АМС имелись остро-
направленная параболическая антенна, малонаправленные антен-
ны БРТК, оптико-электронные приборы и исполнительные органы
СОУД, радиаторы СОТР, солнечные батареи СЭП, блоки научной
аппаратуры.
Основным силовым элементом СА являлся прочный сферический
корпус, рассчитанный на работу при наружном давлении свыше
10 МПа. На верхней части корпуса находилось жесткое аэроди-
намическое тормозное устройство с цилиндрическим контейнером,
имевшим отсеки для парашютной системы и научной аппаратуры,
а на нижней — посадочное устройство тороидальной формы.
2.3. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ
Проектирование КА начинается с выбора его проектных па-
раметров, исходными данными для которого являются:
технические требования к КА (назначение, область использо-
вания, основные эксплуатационные характеристики и др.);
ограничения, определяющие необходимость использования уже
созданных средств космической техники (ракет-носителей, назем-
ного комплекса управления полетом и др.);
требования по обеспечению технико-экономических и других
показателей.
Проектирование КА имеет три основных этапа:
этап технических предложений позволяет наметить варианты
построения КА и предварительно оценить его проектные пара-
метры;
60
этап эскизного проектирования определяет принципы построе-
ния и основные параметры КА и всех его элементов, при этом
допускает вариантность технических решений по некоторым особо
сложным вопросам;
этап технического проектирования определяет все характери-
стики варианта КА, принятого для реализации, необходимые для
разработки рабочей документации на составные части и на КА
в целом.
Проектирование КА — это проектирование большой системы,
оснащенной сложной и разнообразной по принципам построения
и характеристикам аппаратурой и оборудованием, которые не су-
ществуют как автономные независимо функционирующие средства,
а имеют связи между собой и с другими системами, не входящими
в состав КА.
Основу процесса проектирования КА составляют исследова-
ния, завершающиеся выбором и подтверждением возможности реа-
лизации проектных параметров, обеспечивающих с заданными на-
дежностью и эффективностью решение поставленной перед КА
задачи при условии обеспечения минимальных экономических за-
трат на реализацию проекта, создание и эксплуатацию КА.
Сущность исследований заключается в анализе внутренних
связей в пределах КА и связей КА с другими средствами (внеш-
ние связи).
К внешним относят связи с НКУ, PH, наземным комплексом
подготовки пуска, комплексом средств и космических систем, с ко-
торыми будет взаимодействовать разрабатываемый КА в процессе
полета. Эти связи, как правило, серьезно ограничивают выбор
проектных параметров КА. Так, задачи управления полетом КА
с участием Земли решаются во взаимодействии бортового радио-
технического комплекса и НКУ, при этом, чем лучше приспособ-
лен НКУ вновь разрабатываемого КА к решению конкретных за-
дач, тем проще бортовой радиотехнический комплекс и КА в це-
лом. Однако НКУ является универсальным комплексом и пред-
назначен для управления многими КА различного назначения,
поэтому проектирование нового КА обычно начинают исходя из
использования уже созданного НКУ и лишь в случае, когда его
принцип построения и характеристики препятствуют решению це-
левой задачи, рассматривают возможность изменения его харак-
теристик.
Из этого примера видно, что внешние связи могут серьезно
ограничивать выбор проектных параметров КА, но в некоторых
случаях эти ограничения могут быть сведены к минимуму за счет
одновременной проектной разработки и создания ракеты-носителя,
космического аппарата и средств их обслуживания. Именно таким
путем были разработаны космические программы исследования
планет Солнечной системы с использованием автоматических меж-
планетных станций «Марс», «Венера», программа пилотируемых
полетов космических кораблей «Восток», программа лунных экс-
педиций «Сатурн—Аполлон» и др.
61
Внутренние связи — это связи между элементами КА. В каче-
стве примера рассмотрим СОУД с целью раскрытия характера ее
связей с другими системами, полезной нагрузкой, конструкцией и
двигательными установками. СОУД (рис. 2.4) автоматического
КА имеет, как правило, три главные функциональные составляю-
щие: чувствительные элементы (датчики), бортовой цифровой вы-
числительный комплекс или счетно-решающие блоки и систему
исполнительных органов (в качестве исполнительных органов мо-
гут использоваться
микродвигатели двигательной установки).
Рис. 2.4. Структурная схема СОУД
Кроме того, в состав СОУД входят средства информационно-логи-
ческого и электросилового согласования трех главных составляю-
щих между собой и СОУД в целом с другими системами КА.
Чувствительные элементы (датчики) обеспечивают получение
информации о положении КА в пространстве и о характере угло-
вого движения аппарата. Большую группу датчиков составляют
датчики внешней ориентации — электрооптические приборы, ис-
пользующие в качестве опорных ориентиров Солнце, Землю, Луну
и звезды, а также инфракрасные приборы. Другую значительную
группу представляют гироскопические датчики, функционирование
которых основано на свойствах быстро вращающегося волчка —
гироскопа, способного «запоминать» заданное угловое положение
на длительное время полета. В ряде случаев в качестве датчиков
используют радиотехнические средства (радиовысотомеры, радио-
системы сближения и стыковки, радионавигационное и другое обо-
рудование) .
Сигналы датчиков, преобразованные в бортовом цифровом вы-
числительном комплексе (БЦВК) или блоках логики, поступают
на исполнительные органы, которые создают управляющие мо-
менты за счет использования реактивных сил микродвигателей,
прецессии силовых гироскопов и т. п. В зависимости от решаемой
задачи СОУД должна обеспечивать ориентацию КА с различной
62
точностью: от долей угловых секунд при астроориентации для
научных наблюдений до 10—20° при ориентации солнечных бата-
рей. БЦВК кроме логической обработки сигналов от датчиков
обеспечивает, как правило, управление всеми процессами, свя-
занными с движением относительно центра масс (угловое движе-
ние) и движением центра масс (изменение направления и скоро-
сти движения), включая управление процессами функционирова-
ния двигательной установки.
СОУД имеет тесные и разнообразные связи с БРТК и СБИ.
Через БРТК осуществляются обмен информацией между БЦВК
и наземным вычислительным комплексом, траекторные измерения,
сверка бортового и наземного времени, передача данных о функ-
ционировании СОУД на Землю по радиотелеметрическому каналу
с использованием СБИ.
В свою очередь СОУД обеспечивает выдачу целеуказаний или
непосредственное наведение остронаправленных антенн БРТК,
а иногда и управление другими средствами радиокомплекса.
СОУД, как правило, участвует в синхронизации и управлении
СБИ; в ряде случаев СОУД и СБИ совместно решают задачу
контроля и диагностики функционирования КА в целом. Вообще
БЦВК, как правило, обеспечивает обслуживание всех бортовых
потребителей, нуждающихся в вычислительных средствах. СОУД
тесно связана и с конструкцией. Ее датчики внешнего ориентиро-
вания требуют значительных зон обзора, особой защиты от бли-
ков, не терпят соседства с микродвигателями системы исполни-
тельных органов (СИО) и ДУ, что приводит к затруднению в
размещении на корпусе КА датчиков СОУД и вынуждает приспо-
сабливать конструкцию специально под их установку. Усугубляется
эта задача и проблемами обеспечения точности взаимного поло-
жения оптических и гироскопических датчиков (от угловых минут
до угловых секунд), датчиков и ДУ, датчиков и СИО, иногда дат-
чиков СОУД и датчиков научной аппаратуры. Нередко датчики
«обрастают» блендами, защитными крышками, размещаются на
штаигах.
СОУД предъявляет определенные требования к центровке,
моментам инерции и положению главных осей инерции КА (обес-
печиваются компоновкой и конструкцией КА), определяет пре-
дельно допустимое время полетных операций и характер построе-
ния механизмов, предназначенных для разделения отсеков КА,
стыковки КА в космосе, приведения элементов конструкции и си-
стем в рабочее и транспортное положения и т. п.
При наличии солнечных батарей СОУД обеспечивает их ори-
ентацию на Солнце, а в ряде случаев определяет и режимы за-
крутки или ориентации, необходимые для обеспечения теплового
режима КА. Естественны также связи СОУД с СЭП, СУБК (обес-
печение электропитания), СОТР (обеспечение теплового режима),
ДУ (управление режимами функционирования).
Сложность и многообразие внешних и внутренних связей опре-
деляют в процессе проектирования необходимость одновременного
63
проведения различных исследований, основными из которых яв-
ляются:
исследование возможных принципиальных схем решения целе-
вой задачи;
выбор баллистической схемы полета;
исследование принципов управления полетом, разработка про-
граммы полета;
выбор компоновки и конструктивно-силовой схемы КА;
анализ баланса массовых, электроэнергетических и ресурсных
характеристик КА, определение необходимых запасов компонен-
тов топлива, рабочих тел систем и двигательных установок, рас-
ходуемых в процессе полета;
выбор состава, принципов построения и основных характери-
стик бортовых систем, агрегатов и двигательных установок.
Исследование возможных принципиальных схем решения це-
левой задачи зависит от конкретной поставленной перед КА за-
дачи. Так, задача определения с высокой точностью химического
состава лунного грунта может быть решена либо за счет прове-
дения анализа грунта с помощью средств, доставленных на Луну,
и последующей передачи результатов анализа по радиотелеметри-
ческому каналу на Землю, либо за счет забора грунта и после-
дующей доставки его на Землю. Естественно, что автоматические
КА для реализации этих двух возможных вариантов будут сущест-
венно отличаться по построению, компоновке, массовым и другим
характеристикам, так как первый вариант приведет к развитию
в составе КА средств, обеспечивающих анализ химического состава
грунта, т. е. самой исследовательской аппаратуры, систем ее об-
служивания и радиотехнических средств передачи данных на
Землю, а второй — к оснащению КА средствами забора грунта и
доставки его в возвращаемой на Землю капсуле. В ряде случаев
одновременно с исследованием возможных принципиальных схем
решения целевой задачи необходимы конкретные исследования по
средствам ее реализации. Так, для варианта доставки грунта на
Землю уже на ранней стадии проектирования требовалось прове-
дение комплекса научно-технических исследований, связанных с
выбором принципов построения и характеристик средств забора
грунта, без которых невозможно определить реализуемость дан-
ного варианта и оценить затраты массы, потребную энергетику
СЭП и другие характеристики будущего КА.
Баллистические схемы полета автоматических КА имеют мно-
жество вариантов, каждый из которых приводит КА к цели, но
с различными затратами времени и топлива двигательных уста-
новок. В качестве примера выбора баллистической схемы полета
рассмотрим автоматическую лунную станцию (АЛС), предназна-
ченную для посадки в заданном районе Луны.
Возможны два принципиально отличающиеся варианта балли-
стической схемы полета АЛС: первый — «прямая» посадка, т. е.
посадка непосредственно с траектории перелета Земля—Луна без
выхода на орбиту искусственного спутника Луны (ИСЛ), и вто-
64
рой — посадка с предварительным выведением АЛС на орбиту
ИСЛ. Первый вариант был реализован в программах «Сервейер»,
«Луна» (при мягкой посадке АЛС «Луна-9»), второй — при вы-
садке «Луноходов», в программе «Аполлон» и АЛС для доставки
лунного грунта. При выведении станции на орбиты ИСЛ возмож-
ны также варианты баллистических схем, отличающиеся последо-
вательностью формирования и параметрами орбит ИСЛ. Надеж-
ность и точность посадки в заданный район Луны в баллистиче-
ских схемах второго варианта существенно выше, чем первого,
однако суммарное время полета от старта с Земли до посадки
во втором варианте значительно (в 1,5—2 раза) больше. Балли-
стическая схема полета определяет также требования к системе
ориентации и управления движением (необходимые режимы ори-
ентации, требуемые точности ориентации, точности стабилизации
при работе ДУ и т. д.), к двигательным установкам (тяге, необ-
ходимости и пределам ее регулирования, запасам топлива и т. п.),
к распределению ресурсов топлива по этапам полета, а также
к проведению динамических операций, их последовательности и
т. п., т. е. к программе полета. Как показали комплексные иссле-
дования, проведенные при разработке лунных КА, второй вариант
баллистических схем является более предпочтительным. В связи
с этим с середины 60-х годов в программах, предусматривающих
посадку КА на поверхность Луны, используются баллистические
схемы с предварительным выведением КА на орбиту ИСЛ.
Программа полета определяет последовательность про-
ведения и характеристики полетных операций, их взаимосвязь,
а также взаимодействие бортовых и наземных средств комплекса
управления в процессе всего полета КА. Кроме временных харак-
теристик и увязки функционирования всего комплекса взаимодей-
ствующих в процессе полета средств программа формирует требо-
вания к запасам расходуемых компонентов и является основой
расчета их расхода в полете.
Значительное место при проектировании КА отводится выбору
его компоновки.
Некоторые КА имеют достаточно простые внешние обводы и
простую компоновочную схему. Для простой компоновочной схе-
мы КА, как правило, выполненной в виде одного отсека, харак-
терны обводы, представляющие геометрически правильную или
близкую к ней конфигурацию, обычно симметричного вида
(рис. 2.5), что не исключает наличия выносных элементов типа
антенн, датчиков и т. п., выходящих за пределы конфигурации
основных обводов.
Для сложной компоновки (рис. 2.6) характерны многоотсечные
схемы, представляющие сочетание отсеков, агрегатов и двигатель-
ных установок различной конфигурации. Как правило, такая
компоновка усложнена элементами соединения и отделения от-
секов.
Сложны, и компоновочные схемы, не имеющие ярко выражен-
ных отсеков, объединяющие с помощью силовой конструкции от-
3 Космические аппараты 65
Рис. 2.5. Простые компоновочные схемы КА:
я—АЛС «Луна-1» (СССР); б — научно-исследовательский ИСЗ «Ариабата» (Индия);
в — ИСЛ «Луна-10» (СССР)
Рис. 2.6. Сложные компоновочные схемы КА:
а — АМС «Венера-5» (СССР); б — АМС «Вояджер» (США)
66
дельные агрегаты, блоки приборов и оборудования, причем каж-
дая составляющая такой компоновочной схемы имеет свою, не-
зависимую от других составляющих конфигурацию.
Основные факторы, определяющие специфику построения КА
как летательного аппарата (см. раздел 2.2), в значительной сте-
пени определяют и выбор компоновочной схемы КА. Однако кро-
ме них на облик — компоновку конкретного КА влияют:
специфика целевой задачи и особенности полезного груза;
требования бортовых систем, агрегатов, двигательных уста-
новок к компоновке и конструкции;
условия размещения на ракете-носителе;
необходимость оптимизации характеристик, в первую очередь
массовых.
Для иллюстрации закономерностей, определяющих общую ком-
поновочную схему автоматического КА, рассмотрим автоматиче-
скую лунную станцию «Луна-16».
Автоматическая лунная станция «Луна-16» (рис. 2.7) предна-
значалась для взятия пробы лунного грунта и доставки его на
Землю и состояла из посадочной и взлетной (ракета Луна—Зем-
ля) ступеней. Посадочная ступень обеспечивала участок перелета
от Земли до Луны и мягкую посадку станции на Луну, причем
коррекция орбит, сход с орбиты ИСЛ и гашение скорости для
обеспечения мягкой посадки осуществлялись двигательной уста-
Рис. 2.7. Автоматическая лунная станция «Луна-16»
новкой посадочной ступени. После взятия грунта и переноса его
в возвращаемый аппарат взлетная ступень АЛС обеспечивала
старт с Луны, перелет от Луны к Земле и доставку возвращаемого
аппарата в заданный район Советского Союза.
з*
67
Взлетная ступень состояла из сферического возвращаемого ап-
парата, приборного отсека, топливных баков и двигательной уста-
новки и была смонтирована на посадочной ступени. Посадочная
ступень включала приборный отсек, топливные баки, двигатель и
некоторые другие элементы, объединенные в единую силовую кон-
струкцию, к которой крепилось посадочное устройство. Посадоч-
ное устройство служило для гашения энергии удара станции в мо-
мент ее касания поверхности Луны с ограничением действующих
на станцию перегрузок и для обеспечения ее устойчивости на по-
верхности Луны в целях сохранения после посадки положения,
необходимого для старта взлетной ступени. На внешней поверх-
ности посадочной ступени были установлены штанга с буровым
механизмом, антенны и другие элементы.
Возможны и другие варианты компоновочных схем АЛС
(рис. 2.8). Первая АЛС, совершившая мягкую посадку на Луну
(«Луна-9»), имела сферическую форму и массу 100 кг; ее поса-
дочное устройство было выполнено в виде мягкой надувной сфе-
рической оболочки, защищавшей станцию со всех сторон (поса-
дочное устройство и средства вертикализации составляют при-
мерно 30% массы всей станции). После гашения удара о поверх-
ность и успокоения амортизатор сбрасывался, а станция, раскры-
вая «лепестки», устанавливалась нижней частью к поверхности.
Станция «Луна-16» при ее посадке на Луну имела массу
1900 кг — максимально допустимую при использовании разрабо-
танной PH. Применение старых принципов построения посадочного
устройства не обеспечивало выполнение задачи доставки грунта
с Луны. Необходимы были принципиально новые решения в по-
строении АЛС и ее компоновочной схемы. Таким решением стал
переход от сферического посадочного устройства (как у «Луны-9»)
к устройству с амортизаторами направленного действия, рассчи-
танному на строго определенную ориентацию станции в момент
касания лунной поверхности. Могло быть несколько вариантов ре-
шения этой задачи: кольцевой амортизатор на донной поверхности
посадочной ступени с сохранением отверстия для камеры ЖРД;
многоопорные схемы с разным числом опор и размещением амор-
тизаторов в различных силовых элементах посадочного устрой-
ства и т. д. Остановившись на использовании амортизаторов на-
правленного действия, необходимо было определить основные тре-
бования к посадочному устройству и выявить факторы, от которых
зависят его характеристики.
Учитывая, что рельеф лунной поверхности достаточно сложен,
в качестве расчетной была принята модель поверхности с общим
уклоном, выпуклыми неровностями и кратером, соизмеримым с
размерами посадочного устройства. Исходными данными для рас-
чета посадочного устройства и определения его базы (максималь-
ного расстояния между опорами, касающимися грунта) кроме мо-
дели поверхности Луны стали геометрические и инерционные ха-
рактеристики КА, ограничения по допустимым перегрузкам и дру-
гие данные.
68
Рис. 2.8. Компоновочные схемы автоматических лунных станций (варианты):
а — с отделением КА и сферическим амортизатором; б — г — без отделения КА; 1 — двигательная установка: 2 — КА; 3 — лунное поса-
дочное устройство
В общем виде база посадочного устройства АЛС
В = /7(щАлс: ,l> J'> а> <Г> К “)•
(2.1)
где /пАЛС — масса АЛС;
ЛцТ — высота центра тяжести;
п — допустимая перегрузка;
J — моменты инерции;
а — расчетный уклон посадочной поверхности Луны;
q — удельная плотность лунного грунта;
V и со — линейная и угловая скорости АЛС при соприкоснове-
нии с поверхностью Луны.
Параметры /пАЛС, Нцт, J, п определяют массово-инерционные
и геометрические характеристики АЛС и допустимые нагрузки на
нее; a, q — характеристики поверхности и грунта Луны; V, со —
параметры движения АЛС при ее соприкосновении с лунной по-
верхностью.
Возрастание параметров /пАЛС, Нцт, a, q, V, со приводит к уве-
личению базы В посадочного устройства для обеспечения устой-
чивости АЛС. Расчеты показали, что с ростом базы В существен-
но увеличивается масса посадочного устройства и АЛС в целом,
что одним из основных путей уменьшения массы является разме-
щение тяжелых элементов станции в ее нижней части, т. е. смеще-
ние центра тяжестиАЛС вниз.
Использование посадочных
устройств направленного дей-
ствия позволило существенно
уменьшить их относительную
массу и применительно к АЛС
«Луна-16» обеспечить реше-
ние технически очень слож-
ной задачи — доставки грунта
г Луны при условии исполь-
зования разработанной ранее
р а кеты-носител я.
В ряде случаев проектная
разработка КА приводит к
необходимости «гипертрофиро-
ванного» построения отдель-
ных его составляющих. При-
мерами таких КА могут слу-
жить автоматические «КА-ан-
тенны», облик которых опре-
деляет комплекс бортовых ан-
тенн (рис. 2.9), «КА-телескоп» (рис. 2.10), КА, компоновка кото-
рых базируется на конструкции двигательной установки, имеющей
большие запасы топлива, или КА, габариты которых определя-
ются сильно развитыми поверхностями солнечных батарей системы
70
Рис. 2.9. «KA-антенна» (спутник свя-
зи ATS-VI)
электропитания, и т. д. Появление космических аппаратов типа
«KA-антенна» диктуется физическими закономерностями, и в пер-
вую очередь законами распространения радиоволн. Для иллюстра-
ции рассмотрим упрощенную схему расчета энергетики линии свя-
зи КА—Земля.
Рис. 2.10. «КА-телескоп» (телескоп-спутник-обсерватория ST)
Мощность электромагнитных волн, проходящих через площадку
в 1 м2, перпендикулярную направлению на источник излучения
(всенаправленная диаграмма передающей антенны)
Р = ^-, (2.2)
4itz?3 ’ ' f
где Рпер — мощность передатчика;
D — дальность от передатчика до приемника.
Мощность, поступающая на вход приемника
р _ РпеР5эФ (Л оч
где 5Эф — эффективная площадь приемной антенны.
Мощность сигнала на входе приемника с учетом направлен-
ности передающей антенны и потерь
Р ___ ^пер$эфО’]Пер£ [е) .
с —
где т]пер — коэффициент полезного действия передатчика;
G — коэффициент направленного действия;
L — коэффициент, определяющий, во сколько раз умень-
шается мощность принимаемого сигнала при прохож-
дении через атмосферу и межпланетный газ.
Однако даже мощный сигнал не может быть зарегистрирован
из-за помех, что вызывает необходимость превышения мощности
71
сигнала над мощностью шумов, называемое отношением сигнал/
шум,
Рс PnepS^G^nepL {rt
Рш — 4^РШ •
Таким образом, дальность радиосвязи
D = 1 / Рпер^пер£ , (2 б)
У 4кРш(-^)
\ “ш /мин
/Рс\
где [—£) —реальная чувствительность приемника.
\Рцг /НИН
Анализ выражения (2.6) показывает, что увеличение дально-
сти радиосвязи при неизменной скорости передачи информации
возможно за счет увеличения мощности передатчика, направлен-
ности передающей антенны, эффективной площади наземной ан-
тенны и коэффициента полезного действия передатчика. Кроме
того, увеличения дальности можно достигнуть и за счет выбора
диапазона частот, в котором сокращаются потери в атмосфере, и
некоторых других факторов.
В формуле (2.6) на первом месте стоит мощность передатчика.
Можно ли за счет ее увеличения при всенаправленной
передающей антенне обеспечить связь с межпланетными
автоматическими станциями? Рассмотрим это на примере
передатчика первого спутника Земли, имевшего мощность 1 Вт и
дальность связи 10000 км. Для увеличения дальности связи до
100-106 км необходимо увеличить мощность передатчика в 108 раз,
что составит 100000 кВт и будет соответствовать мощности сред-
ней земной электростанции. Вот почему при больших дальностях
связи борьба идет за все потенциальные возможности увеличения
энергетики линии связи. Наиболее эффективным, как правило,
оказывается увеличение коэффициента направленного действия
бортовой антенны КА, которое приводит к необходимости созда-
ния, как правило, остронаправленной параболической антенны.
В связи с этим автоматические межпланетные станции даже при
обеспечении относительно малых скоростей передачи информации
оснащаются антенной с высоким коэффициентом направленного
действия.
Потребность в остронаправленной антенне значительных раз-
меров может появиться и при небольших удалениях КА от Земли
в случаях, когда радиолиния должна обеспечивать высокую ско-
рость передачи информации.
В конечном счете увеличение скорости передачи информации
вызывает увеличение отношения сигнал/шум
c = wlog2(l + ^), (2.7)
где С — скорость передачи информации;
w — ширина полосы частот.
72
Как правило, наиболее рациональным способом увеличения
скорости передачи информации является повышение коэффициента
направленного действия антенны; поэтому некоторые спутники-ре-
трансляторы, выводимые на сильно вытянутую эллиптическую
или геостационарную орбиту ИСЗ, имеют параболические ан-
тенны, которые иногда существенно превышают размеры от-
секов с аппаратурой, т. е. все остальные, вместе взятые, эле-
менты КА.
Основой проектной разработки любого нового КА является
опыт разработки его предшественников и поиск новых принципов
построения КА.
Комплексная разработка, включающая одновременные иссле-
дования основных характеристик КА, его внутренних и внешних
связей — обязательное условие оптимизации его проектных пара-
метров. Оптимизацию осуществляют, как правило, по комплексу
показателей, основными из которых могут быть: надежность, стои-
мость, массово-энергетические характеристики, сроки разработки
и др.
Так, при оптимизации, например, по стоимости из всех воз-
можных технических решений, приводящих к достижению целевой
задачи КА, должно быть выбрано решение, обеспечивающее ми-
нимальные экономические затраты на разработку и эксплуатацию
данного КА.
Для оптимизации проектных параметров КА строится его м а-
тематическая модель — совокупность математических вы-
ражений, описывающих КА и устанавливающих количественные
связи между заданными условиями проектирования, оптимизируе-
мыми проектными параметрами и критерием эффективности, т. е.
математический эквивалент показателя (или показателей) совер-
шенства КА. Требования к модели противоречивы: с одной сторо-
ны, она должна быть достаточно полной и учитывать все важней-
шие факторы, от которых существенно зависит критерий эффек-
тивности, с другой — достаточно простой, определяющей в удобной
(желательно — аналитической) форме зависимость между входя-
щими в нее параметрами. Построение математической модели —
наиболее важная и ответственная часть исследования, требующая
глубоких знаний не только и не столько в математике, сколько
в существе моделируемых взаимосвязей КА. Методика оптимиза-
ции учитывает этапы проектирования КА и предусматривает ис-
пользование ряда последовательных приближений при выборе его
проектных параметров.
На первом этапе проектирования основное внимание при опти-
мизации уделяют принципам построения КА, требованиям ко всем
его составным элементам и средствам, с которыми он взаимодей-
ствует, а также факторам, наиболее сильно влияющим на надеж-
ность выполнения задачи полета, массовые и энергетические ха-
рактеристики. На этом этапе также определяют вопросы, связан-
ные со спецификой целевой задачи, с которыми ранее космическая
техника не встречалась и по которым необходимы глубокие изы-
73
скания, научные и опытно-конструкторские работы. На последую-
щих этапах оптимизации выбирают характеристики всех элемен-
тов КА, проводят уточнение его проектных параметров.
По мере развития космической техники совершенствуется и
методика проектирования КА, которые постоянно усложняются в
связи с необходимостью решения новых сложных задач.
Сегодня в космических программах роль автоматических КА
значительна, и в будущем космические программы должны
строиться на разумном сочетании запусков пилотируемых и авто-
матических КА. В связи с этим у автоматических КА есть не
только прошлое и настоящее, а и большое будущее.
Главе 3
ПИЛОТИРУЕМЫЕ КОСМИЧЕСКИЕ КОРАБЛИ
3.1. НАЗНАЧЕНИЕ И ОСОБЕННОСТИ
Пилотируемый космический корабль — это космический аппа-
рат, предназначенный для полета людей и имеющий все необходи-
мые средства для работы при выведении на орбиту (с помощью
PH), выполнения задач полета в космосе и возвращения экипажа
на Землю. Обязательными признаками пилотируемого космическо-
го корабля (КК) являются наличие на борту экипажа и способ-
ность осуществлять полет по замкнутому циклу: Земля — космос—
Земля.
Задачи полетов и направления использования
Первые космические корабли — советский «Восток» и амери-
канский «Меркурий» — предназначались для первых полетов че-
ловека в космос и были относительно просты по конструкции и
используемым системам.
Разработка КК «Восход» и «Джемини» позволила провести
серию технических экспериментов, а создание и эксплуатация КК
«Союз» и «Аполлон», включая их совместный полет, положили
начало использованию пилотируемых КК в транспортных полетах
к долговременным орбитальным станциям, в дальних космических
полетах, в операциях по спасению в космосе и т. п. Таким обра-
зом, На первый план вышла практическая направленность косми-
ческих полетов, а решаемые при этом задачи стали определяющим
фактором в разработке пилотируемых КК.
Космическая техника является относительно молодой и бурно
развивающейся отраслью промышленности, а фундаментальные
задачи освоения космоса находятся в стадии становления. Это за-
трудняет четкую классификацию пилотируемых КК, однако одним
нз признаков классификации можно считать уже сложившиеся или
прогнозируемые на будущее основные направления использования
КК: полеты одиночных кораблей; экспериментальные орбитальные
полеты; транспортные полеты пилотируемых КК; дальние полеты
КК; полеты космических кораблей — спасателей; полеты пилоти-
руемых КК для ремонта или сборки на орбите.
Полеты одиночных кораблей (автономные полеты) по орбитам
искусственного спутника Земли начинали освоение космического
75
пространства. КК «Восток» и «Меркурий» были специально раз-
работаны для таких полетов. В настоящее время для автономных
полетов используются КК, созданные в других целях и дорабо-
танные для выполнения конкретной задачи полета. Так, при по-
лете доработанного корабля «Союз-13» (1973 г.) был проведен
ряд исследований, включая астрофизические, а при полете КК
«Союз-22» (1976 г.)—фотографирование территории СССР в ин-
тересах народного хозяйства.
Экспериментальные орбитальные полеты имеют целью прове-
дение технических экспериментов. Например, на КК «Восход» и
«Джемини» отрабатывались средства выхода человека в косми-
ческое пространство (1965 г.), а на КК «Джемини-8» совместно
с ракетной ступенью — методы сближения и стыковки (1966 г.).
Большое значение имел полет КК «Союз-4» и «Союз-5»
(1969 г.), в котором была выполнена их стыковка и переход двух
космонавтов из корабля в корабль через открытый космос.
Транспортные полеты пилотируемых КК к долговременным
станциям предназначены для доставки на борт станций экипажа
и его возвращения на Землю, а также транспортирования неболь-
шого груза. Такими были полеты КК «Союз» к станциям «Салют»
и транспортного варианта КК «Аполлон» к станции «Скайлэб».
Дальние полеты КК проводились по американской программе
«Аполлон», в ходе которой была осуществлена первая посадка
на Луну пилотируемого КА (20 июля 1969 г.). В Советском Союзе
был разработан КК-станция «Зонд», который впервые совершил
после облета Луны вход в атмосферу Земли со второй космиче-
ской скоростью сначала по баллистической траектории с посад-
кой в Индийский океан («Зонд-5», сентябрь 1968 г.) и затем по
траектории управляемого спуска с приземлением на территории
СССР («Зонд-6», ноябрь 1968 г.). Этот экспериментальный ко-
рабль мог быть оборудован и как пилотируемый.
Космические корабли-спасатели предназначены для спасения
экипажей терпящих бедствие пилотируемых КК и станций и пред-
ставляют новое возможное направление использования. В задачи
программы «Союз»—«Аполлон» входила разработка и проверка
в полете экспериментальных совместимых средств сближения и
стыковки, необходимых не только для совместных полетов, но и
для операций по спасению.
Полеты пилотируемых кораблей для ремонта или сборки на
орбите — обязательный компонент будущих программ. Создание
больших конструкций на орбите (например, электростанций или
антенн) может потребовать прямого участия человека в операциях
сборки или ремонта.
Особенности пилотируемых КК
Появление человека на борту существенно изменяет облик кос-
мического аппарата, его характеристики, подход к проектирова-
нию и разработке. Это связано не только с необходимостью обес-
76
печения человека всем необходимым для жизни в необычных для
него условиях космического полета, но и с возможностью орга-
низации ручного управления полетом космического корабля (КК)
и работой его систем. Иные основы лежат в подходе к постановке
и реализации целей полета, так как необходимо учитывать раз-
личные аспекты деятельности экипажа и его безопасность. Особен-
ности пилотируемых КК определяются, в частности, следующими
основными факторами: возвращением на Землю; условиями жиз-
ни и деятельности экипажа; безопасностью полета.
Возвращение на Землю является обязательной операцией для
каждого пилотируемого КК. При выполнении орбитального полета
в этих целях осуществляется торможение КК для перехода на
траекторию спуска. Для дальних полетов необходимы коррекции
траектории возвращения. Это требует наличия у КК силовой уста-
новки для изменения траектории движения и ряда других систем
(например, системы ориентации и управления движением, системы
ее исполнительных органов, системы электропитания).
Для возвращения на Землю пилотируемый КК должен иметь
средства защиты от аэродинамического нагрева и средства посад-
ки. Обычно спуск и приземление экипажа осуществляются в спе-
циализированном отсеке — спускаемом аппарате (СА).
При его разработке должны быть обеспечены устойчивость его
движения, достаточная точность посадки и переносимость экипа-
жем перегрузок (см. раздел 3.5).
Условия жизни экипажа в космическом полете могут быть
обеспечены только внутри герметичной оболочки, для чего каж-
дый пилотируемый КК имеет герметичный отсек с атмосферой,
пригодной для дыхания и постоянно обновляемой. Наилучшими
являются давление и состав газа, естественные для человека и со-
ответствующие земным на уровне моря. Такие условия выдержи-
ваются на КК «Союз» и «Союз Т» и станции «Салют», на КК
«Аполлон» принята чисто кислородная атмосфера с пониженным
давлением.
Объем и размеры жилого отсека должны позволять человеку
делать привычные движения (например, распрямляться в полный
рост) и соответствовать задачам и длительности полетов. Первые
космические корабли «Восток», «Меркурий», «Восход» и «Джеми-
ни» из-за жестких требований по снижению их массы имели тес-
ные кабины, кабины КК «Союз» и «Аполлон» были существенно
увеличены. В жилом отсеке должны поддерживаться нормальные
условия по температуре, что приводит к необходимости разработки
систем терморегулирования.
Жизнь человека связана с питанием, отправлением естествен-
ных нужд, личной гигиеной и сном. Это предопределяет наличие
на борту достаточных запасов пищи и воды, средств санитарно-
гигиенического обеспечения, различных предметов туалета и ги-
гиены, а также соответствующих принадлежностей и приспособ-
лений для сна. Причем все это должно быть рассчитано на ис-
пользование в условиях замкнутого объема и невесомости.
77
В полете экипаж подвергается различным воздействиям, изме-
няющимся по этапам полета. Одной из главных задач при проек-
тирдвании пилотируемого КК является защита экипажа от этих
воздействий и снижение их уровня, т. е. обеспечение переносимо-
сти условий космического полета.
Деятельность экипажа, связанная с управлением полетом КК
и выполнением ручных операций, существенно влияет на конструк-
цию и системы КК. Управление полетом требует наличия рабочих
мест, рационально организованных и позволяющих наблюдать
внешнюю обстановку, получать информацию о работе систем КК,
вести радиосвязь с Землей и другими пилотируемыми КА, поль-
зоваться бортовой документацией, выбирать режимы работы си-
стем КК, включать и выключать их, осуществлять ориентацию и
маневрирование на орбите, сближение и стыковку, а при наличии
на борту вычислительных машин — управлять их работой. Тради-
ционно рабочее место состоит из кресла, пульта и ручек управле-
ния, иллюминаторов и оптических приборов для наблюдения.
В полете экипаж работает со многими элементами бортового
оборудования, расположенными в объеме кабины экипажа (неко-
торые агрегаты системы обеспечения жизнедеятельности, снаря-
жение экипажа, ручные механизмы, научная аппаратура и т. п.).
В транспортных полетах (например, полет КК «Союз» к стан-
ции «Салют») с переходом экипажа необходимы стыковочные аг-
регаты с жестким соединением КК и станции и с герметизацией
образующегося переходного туннеля, люк в стыковочном агрегате
и система контроля герметичности стыка. Эти же особенности при-
сущи КК «Аполлон», где предусмотрен переход из орбитального
корабля в экспедиционный модуль и обратно. В эксперимен-
тальной программе «Союз»—«Аполлон» американской стороной
был разработан специальный стыковочный модуль для перехода
экипажей при несовместимых атмосферах внутри космических
кораблей.
Если предусматривается выход человека в открытый космос,
на борту корабля должны быть скафандры с соответствующей си-
стемой обслуживания, а сам корабль должен иметь шлюзовую
камеру (КК «Восход»). В качестве шлюзовой камеры может ис-
пользоваться один из отсеков корабля или станции (КК «Союз»,
станция «Салют»); выход может осуществляться и непосредст-
венно из кабины экипажа (КК «Джемини»); в этом случае
должна иметься система сброса и восстановления атмосферы
и открываемый в космосе люк.
Безопасность полета имеет принципиальное значение при созда-
нии пилотируемого КК и обеспечении его высокой надежности.
Для любого КА в начале разработки задается и затем подтвер-
ждается вероятность успешного выполнения задачи, или надеж-
ность выполнения программы полета, а для пилотируемых КК
в дополнение к этому — вероятность обеспечения безопасности
экипажа, или степень безопасности полета. Оба критерия опреде-
ляются некоторыми контрольными значениями и обычно задают-
78
ся— первый — на уровне 95—98%, второй — 99% и выше. Эти
значения, не выражая степень действительного риска, являются
расчетной оценкой эффективности комплекса мероприятий, прово-
димого в процессе разработки КК, их экспериментальной отработ-
ки и эксплуатации ради успешного выполнения программы полета
и максимального исключения влияния опасных для жизни чело-
века происшествий и условий.
Требования по безопасности влияют на облик корабля, харак-
теристики его систем, на ракетно-космическую систему в целом
и на схему полета. Помимо обеспечения надежности систем про-
водится их функциональное резервирование, автоматические ре-
жимы работы дополняются ручными, вводятся специальные сред-
ства спасения экипажа при авариях, устанавливаются дублирую-
щие приборы, механизмы и т. д. Так, особенностями КК «Союз»
по сравнению с беспилотными КА являются резервирование пара-
шютной системы, ручные режимы ориентации, комплекс средств
спасения при разгерметизации жилых отсеков и т. п.
При создании пилотируемого КК большое внимание уделяют
анализу нештатных ситуаций (отказы, отклонения от заданных
режимов или аварии) и путей выхода из них. В процессе разра-
ботки такой анализ позволяет обосновать выбор решений по ре-
зервированию и необходимым дополнительным энергетическим
запасам (топливо, электроэнергия), а при подготовке полета —
разработку планов действий в нештатных ситуациях (см. гла-
ву И).
Космический корабль и ракетно-космический комплекс
Пилотируемый КК существенно влияет на весь ракетно-косми-
ческий комплекс (РКК), вызывая определенные изменения в его
структурных элементах по сравнению с беспилотными КА. Эти
изменения связаны с установкой систем, характерных для пило-
тируемого полета, необходимостью работ по обслуживанию эки-
пажа, повышенными требованиями по оперативному контролю и
планированию полета и с обеспечением деятельности и безопас-
ности экипажа на всех этапах полета.
Ракета-носитель пилотируемого КК оснащается специальными
элементами для распознавания отказов и отклонений от нормаль-
ных режимов работы. Для спасения экипажа в случаях, когда не-
обходимо своевременное прекращение полета при возникновении
опасных ситуаций или выведение становится невозможным, уста-
навливается система аварийного спасения (подробнее см. гла-
ву 10). Эти особенности заметно влияют на конструкцию PH и
решение таких вопросов, как расчетные нормы нагружения, проч-
ность, аэродинамические характеристики, параметры траектории
выведения, зоны падения отделяемых элементов и т. д. К PH
предъявляются высокие требования по надежности как в целях
повышения вероятности выведения КК на орбиту, так и по сооб-
79
ражениям безопасности экипажа. Кроме мер технологического ха-
рактера при изготовлении и сборке вводится резервирование си-
стем и агрегатов, например систем управления и электропитания.
На ступенях PH, имеющих несколько двигателей, могут устанав-
ливаться системы диагностики, способные обнаружить отказ дви-
гателя и обеспечить его выключение. Дальнейший полет в этом
случае продолжается на пониженной общей тяге.
Немалое значение имеет вид применяемого на PH топлива.
Известно, что двухкомпонентные высококипящие топлива типа
«азотная кислота — ди мети лги др азин» обладают высокой токсич-
ностью, которая при авариях на старте, а также на участке вы-
ведения в случае посадки СА в районе падения ракетного блока
создает повышенную опасность для экипажа и обслуживающего
персонала. Поэтому для пилотируемых РКС используются «бла-
городные» компоненты топлива: «керосин — кислород» или «водо-
род — кислород», обеспечивающие в то же время высокий удель-
ный импульс двигателей.
Техническая позиция пилотируемых КК оснащена большим ко-
личеством контрольно-испытательной аппаратуры и монтажно-сты-
ковочного оборудования, комплектуемого с учетом особенностей
КК, и отличается повышенными требованиями по чистоте. В мон-
тажно-испытАтельном корпусе или отдельном здании предусмат-
ривается помещение для подготовки экипажей. Для доставки эки-
пажей на стартовую позицию используется специальный авто-
транспорт.
Стартовая позиция так же, как и техническая, оборудуется
с учетом особенностей конструкции и подготовки пилотируемого
КК к пуску. В частности, такими особенностями являются подъем
экипажа на уровень КК с помощью лифтов, его посадка в КК
со специальной площадки, выполнение обслуживающим персона-
лом заключительных операций, включая контроль герметичности,
и подготовка системы аварийного спасения.
Для срочной эвакуации экипажа и персонала с верхних уров-
ней стартового сооружения предусматриваются специальные сред-
ства (подробнее см. книгу «Космодром»).
Для командно-измерительного комплекса во время пилотируе-
мого полета характерно максимальное использование наземных
пунктов, плавучих командно-измерительных средств и связи че-
рез спутники-ретрансляторы. Работу Центра управления полетом
отличает ведение радиосвязи с экипажем, контроль и планирова-
ние его деятельности и отдыха и обязательный круглосуточный по-
сменный режим работы персонала.
Поисково-спасательный комплекс приводится в готовность еще
до старта пилотируемого КК, исходя из необходимости поиска СА
и эвакуации экипажа при возможных авариях PH. Особенностью
работы комплекса по сравнению с обслуживанием беспилотных
КА является резкое увеличение привлекаемых средств (самолеты,
вертолеты, плавсредства и др.), организация радиосвязи с экипа-
жем, его медицинское обеспечение и эвакуация.
80
3.2. ЭТАПЫ И СХЕМА ПОЛЕТА
Этап полета — это характерный участок, который отличает или
определенное состояние КК, или выполняемый режим, или решае-
мая на участке промежуточная задача полета. Деление на этапы
в известной степени условно.
Схема полета — последовательность операций, обеспечивающих
выполнение задачи полета, т. е. укрупненный план полета. Часто
выделяют баллистическую схему полета, как последовательность
динамических операций, формирующих необходимые траектории.
Характерные этапы полета
Выведение на орбиту, или активный участок, представляет со-
бой один из наиболее ответственных и напряженных этапов по-
лета КК. Этап критичен из-за возможных аварий PH, создающих
опасность для жизни экипажа.
На участке выведения работают служебные системы КК (за-
действована система регенерации атмосферы, ведется радиообмен
с экипажем, передается телеметрическая информация, телевизион-
ное изображение кабины КК и др.), а система аварийного спасе-
ния находится в режиме контроля параметров аварийности и го-
това к действию. По ходу полета в соответствии с программой вы-
ведения происходит сброс ДУ САС, а затем головного обтекателя
PH (если он имеется) после выхода РКС из зоны больших ско-
ростных напоров.
Состояние КК резко изменяется при обнаружении аварии PH.
Автоматически или по команде, которая может быть выдана эки-
пажем или с наземных пунктов, САС приводит в действие спе-
циальные средства и штатные системы для спасения экипажа, со-
став которых, темп и последовательность работы зависят от участ-
ка полета, на котором произошла авария.
Начальный участок орбитального полета характеризуется под-
готовкой КК к дальнейшему полету и проверкой его систем. На-
пример, на КК «Союз» после отделения от PH гасятся получен-
ные возмущения, раскрываются солнечные батареи и антенны, си-
стемы включаются в режим орбитального полета и проверяется
состояние бортовых систем и агрегатов.
Автономный орбитальный полет в зависимости от решаемых
КК задач может быть основным или промежуточным этапом; на
нем, как и на других этапах, постоянно работают системы реге-
нерации атмосферы, терморегулирования, электропитания, управ-
ления бортовым комплексом и др., т. е. все то, что составляет де-
журный режим КК; как правило, периодически включаются радио-
системы, системы телеизмерений и телевидения; проводятся ори-
ентация КК (или постоянно поддерживается) н маневры для из-
менения орбиты.
Сближение на орбите разделяется на дальнее и автономное.
81
Дальнее сближение — это процесс, состоящий из серии
маневров (в течение одних или нескольких суток) и в силу доста-
точного запаса времени позволяющий ограничить импульсы и со-
кратить расходы топлива. При дальнем сближении маневры рас-
считываются по параметрам орбит сближающегося КК и цели
(станции) и определяются или по данным наземных измеритель-
ных пунктов, или бортовыми навигационными системами.
Автономное сближение — процесс, проводимый в зоне,
допускающей определение параметров относительного движения
КК и цели, измерение которых ведет сближающийся КК как ак-
тивный объект. На КК «Союз» и «Союз Т» в этих целях исполь-
зуются радиотехнические средства измерений, процесс сближения
происходит автоматически. На КК «Аполлон» в процессе сближе-
ния участвовал экипаж, при этом использовались радиолиния для
измерения дальности и ручные оптические средства (секстан) для
измерения угловых параметров.
Причаливание и стыковка завершают этап сближения. Про-
цесс причаливания начинается при относительном расстоя-
нии в несколько сотен метров и характеризуется использованием
для координатных перемещений двигателей причаливания и ори-
ентации вместо основной двигательной установки, что позволяет
не проводить развороты КК-
На КК «Союз» причаливание, как правило, проходит в авто-
матическом режиме, при этом экипаж контролирует процесс при-
чаливания через оптический прибор—перископ и телевизионную
систему путем наблюдения станции, установленных на ней сиг-
нальных огней и стыковочной мишени; при необходимости эти же
средства позволяют причаливать и в ручном режиме. На КК
«Аполлон» причаливание проходило только в ручном режиме с
наблюдением КА — цели и его стыковочной мишени через иллю-
минаторы и оптические приборы.
Процесс стыковки представляет собой последовательность
механических операций, выполняемых стыковочным агрегатом под
управлением бортовой автоматики и по командам экипажа. Начи-
наясь с касания и механического захвата (сцепки), процесс сты-
ковки переходит в операции гашения энергии относительного дви-
жения, выравнивания осей стыкующихся объектов, стягивания,
жесткой фиксации и герметизации стыка. На КК «Союз» и «Апол-
лон» в национальных программах использовались стыковочные
агрегаты типа «штырь — конус», где конус играл роль приемного
устройства и находился на пассивном КА. В программе «Союз» —
«Аполлон» впервые были применены андрогинные стыковочные
агрегаты, каждый из которых мог играть как пассивную, так и
активную роль, что зависело только от принятого в программе
полета решения.
Полет в пристыкованном положении в схемах обслуживания
орбитальных станций, как правило, не требует от КК активных
операций. В комплексе «Салют»—«Союз» КК «Союз» обычно пе-
реводится в режим консервации: большинство его систем и агре-
82
гатов отключены, и работают лишь системы поддержания необ-
ходимых условий в КК и контроля его состояния. На отдельных
этапах полета возможно использование КК в режимах совместной
его работы со станцией, например ориентации станции или изме-
нения (подъема) орбиты за счет запасов топлива КК-
Возвращение экипажа на Землю — этап с тремя участками:
торможение и сход с орбиты, спуск в атмосфере и приземление.
Спуск в атмосфере проходит в напряженных условиях: тормо-
жение за счет аэродинамических сил со значительными перегруз-
ками и аэродинамическим нагревом (см. раздел 3.5).
Участок приземления критичен в силу неоднозначности и слож-
ности условий посадки, которые определяются состоянием атмо-
сферы (турбулентность и ветер), грунтом и рельефом (или вол-
нением моря), раскачкой на парашюте и другими случайными фак-
торами. Безопасность посадки обеспечивается анализом и норми-
рованием условий приземления, соответствующим выбором пара-
метров систем и контролем соблюдения принятых норм при
оперативном планировании времени и места реальной посадки СА
(более подробно см. главу 9).
Особенности дальних полетов пилотируемых КК определяются
их целями и баллистическими схемами. Для полетов в пределах
Солнечной системы КК, покидая орбиту спутника Земли, должен
выполнить разгонный маневр с приращением скорости в пределах
3—8,4 км/с. Этот маневр аналогичен орбитальному, но резко от-
личается от него по энергетическим характеристикам. При таких
импульсах скорости целесообразно использование специального
разгонного блока, отделяемого после выполнения маневра, или
последней ступени PH.
Скорость возвращения КК к Земле из дальнего полета выше
первой космической, поэтому возможны две принципиально от-
личные схемы спуска КК на ее поверхность: прямой вход в атмо-
сферу или переход на орбиту спутника Земли с последующим
спуском с этой орбиты (см. раздел 3.5).
Целью межпланетных полетов является или выход на орбиту
спутника планеты, или посадка на ее поверхность. Динамические
этапы перехода на орбиту спутника, посадки, взлета и перехода
на траекторию возвращения к Земле требуют очень больших
энергетических затрат; они могут быть несколько уменьшены за
счет использования для торможения при посадке аэродинамиче-
ских сил вместо тяги двигательных установок при наличии у пла-
неты атмосферы.
Важной особенностью дальних полетов является их большая
продолжительность и дальность. Время только одностороннего пере-
лета, например, к Марсу около года, а расстояние между орбита-
ми Марса и Земли (по радиусу) примерно равно 78-Ю6 км. В этих
условиях необходимо проводить не только заранее запланирован-
ные маневры орбитальных переходов, но и коррекции орбит пере-
летов для исправления отклонений, появляющихся в силу накоп-
83
ления ошибок. Такие длительные полеты потребуют специального
медико-биологического обеспечения, высокой надежности КК и
решения многих проблемных вопросов разработки его систем и
конструкции.
Схема полета
В основе схемы полета лежит план проведения динамических
операций, необходимых для достижения целей полета, и план того
его этапа (или этапов), где эти цели решаются. Например, схему
полета КК «Союз» к станции «Салют» определяли маневры сбли-
жения и операция причаливания, а решение транспортной за-
дачи (см. главу 4) завершалось стыковкой и переходом эки-
пажа.
При разработке схемы полета большое значение имеют общее
допустимое время полета КК и необходимые расходы топлива.
Время полета может быть ограничено параметрами системы элек-
тропитания (см. раздел 3.3) и всегда ограничено запасами расхо-
дуемых для обеспечения жизнедеятельности экипажа материалов
(см. главу 7). Потребные расходы топлива определяются планом
маневров и затратами на проведение ориентации. В то же время
топливо играет большую роль в массовом балансе КК- Так, для
КК «Союз» в автономном полете (для ориентации и спуска) потреб-
ная масса топлива составляет примерно 4% массы КК, а в транс-
портной операции — 11—12%. Поэтому план полета должен быть
максимально экономным в отношении затрат топлива, практиче-
ские запасы которого всегда ограничены необходимым для вы-
полнения задач полета количеством с учетом дополнительных
расходов на случай возникновения нештатных ситуаций, например
повторная попытка причаливания или увеличение времени
полета.
План полета также должен учитывать периоды работы и от-
дыха экипажа, характер и условия его деятельности (наблюдения,
требующие ориентации КК, проведение экспериментов и т. д.).
На схему полета влияют как внешние условия (например, рас-
положение терминатора — границы света и тени на поверхности
Земли), так и особенности бортовых систем самого КК. Если на
борту КК используется хотя бы для контроля оптический прибор
ручной ориентации, необходимо, чтобы до начала орбитального
маневра подстилающая поверхность Земли была освещена Солн-
цем, ибо лишь тогда экипаж сможет не только определить верти-
каль, наблюдая горизонт, но и, видя бег предметов, контролиро-
вать курсовой угол КК. В автоматических системах ориентации,
использующих датчик инфракрасной вертикали, в момент проле-
та над терминатором, когда Солнце выходит из-за горизонта и
освещает датчик, возможны отклонения с нарушением ориентации,
что может стать ограничивающим фактором, если в системе не
предусмотрены защитные меры. Во многих случаях выдвигается
84
требование освещенности на орбите, например в целях контроля
стыковки по телевидению или освещения стыковочной мишени,
что также является ограничением.
На схему полета влияют и возможности командно-измеритель-
ного комплекса, его состав и размещение. Станции слежения, рас-
положенные на территории СССР, могут контролировать происхо-
дящее на борту КК только на ‘Л витка, и то не на всех витках.
Поэтому ответственные этапы полета привязываются к «зонам ви-
димости» станций слежения как для передачи на борт командно-
уставочной информации, так и для контроля событий. В целях уве-
личения возможностей планирования и управления полетом исполь-
зуются специально оборудованные суда («Космонавт Юрий Га-
гарин» и др.), позволяющие следить за полетом на «невидимых»
с наземных станций витках, а также связь через спутники-ре-
трансляторы.
Для поисково-спасательной службы важно, чтобы посадка про-
исходила в светлое время суток, что ускоряет визуальное обнару-
жение СА и позволяет своевременно эвакуировать экипаж. Так,
для КК «Союз» по окончании длительных полетов посадка пла-
нировалась не позднее чем за 1 ч до захода Солнца, хотя могла
проводиться и в темноте. Аналогичные по своему характеру тре-
бования существовали и для КК «Аполлон».
Отмеченные выше факторы и ограничения дают представление
о некоторых особенностях в разработке схем полетов. Влияние
этих факторов существенно зависит от того, создается новый КК
или рассматривается вариант полета уже существующего. При
разработке нового КК выбор схемы полета является одним из
элементов проектирования и, как правило, тесно связан с выбо-
ром основных параметров КК и PH, характеристик и состава
бортовых систем, с определением требований к командно-измери-
тельному комплексу и к наземным службам. При разработке но-
вых схем полета уже существующих КК ограничения, вносимые
особенностями РКС и наземных служб, играют, естественно, роль
сдерживающих факторов.
В качестве примеров построения схем полетов ниже приве-
дены три принципиально разных варианта схем, разработанных
для автономного полета по орбите спутника Земли, полета на
Луну и полета со сближением и стыковкой на орбите.
Автономный полет КК «Союз-22» имел целью исследование
поверхности Земли путем фотографической съемки одновременно
в шести областях спектра с помощью многозональной фотокамеры
МКФ-6, разработанной учеными СССР и ГДР н рассчитанной на
эксплуатацию в пилотируемом полете (эксперимент «Радуга»).
Экипаж должен был со специального пульта включать камеру,
устанавливать диафрагму и экспозицию, а также заменять кассеты.
Фотосъемка проводилась в режиме орбитальной ориентации
(продольная ось КК направлена по касательной к орбите, боко-
вая перпендикулярна ее плоскости) в течение ряда последова-
тельных витков. Для размещения фотокамеры был разработан до-
85
полнительный отсек с иллюминатором, обращенным к Земле (в ре-
жиме орбитальной ориентации), установленный вместо стыковоч-
ного агрегата, а наклонение орбиты, учитывая географическое по-
ложение СССР, с традиционного 51,6—51,8° было изменено на
65°. Последнее привело к
Рис. 3.1. Схема полета КК «Союз-22»:
/ — участок выведения; 2 — орбита выведения;
3 — переходная орбита; 4 — первый импульс по
формированию рабочей орбиты; 5— второй им-
пульс по формированию рабочей орбиты; 6 —
рабочая орбита; 7 —импульс торможения;
8 — траектория спуска
цем, а полосы фотографирования
потере примерно 350 кг
массы полезного груза PH,
так как при старте в вос-
точном направлении с увели-
чением наклонения умень-
шается полезное влияние
угловой скорости вращения
Земли, но позволило сфо-
тографировать большинство
районов Советского Союза
вплоть до широты Архан-
гельска.
Баллистическая схема
этого полета была выбрана
на основе изложенных ре-
шении с учетом ряда усло-
вий и требований: старт и
посадка в дневное время
суток, в процессе съемки за-
данных территорий подсти-
лающая поверхность дол-
жна быть освещена Солн-
вдоль трасс с учетом су-
точного смещения последних должны равномерно распределяться
в направлении «восток — запад» по возможности с минимальными
пропусками в низких и перекрытиями в высоких широтах. В ре-
зультате расчетов была принята следующая баллистическая схема:
старт КК в 12 ч 48 мин 30 с по московскому времени 15 сен-
тября 1976 г., т. е. в дневное время для космодрома Байконур
и по трассе выведения;
высота рабочей орбиты в начале полета 280 (максимальная)
и 250 км (минимальная), что с учетом времени старта обеспечи-
вало условия фотографирования;
двухимпульсный переход (рис. 3.1) с орбиты выведения на
рабочую орбиту на пятом витке с сообщением импульсов около
12 и 20 м/с с интервалом между ними примерно 43 мин;
спуск на первом витке девятых суток полета, с оставлением
в резерве еще одних суток на случай появления непредвиденных
ситуаций, которые не позволили бы закончить полет в назначен-
ный срок.
Для выполнения программы фотосъемок, являвшейся основной
рабочей частью полета, КК из состояния закрутки (солнечными
батареями на Солнце), т. е. из режима подзаряда буферных хи-
мических батарей, переводился в режим орбитальной ориентации.
86
С подходом к намеченным территориям начинался сеанс фото-
съемки, при этом в случае зон сплошного облачного покрова эки-
паж, контролируя обстановку, выключал камеру в целях эко-
номии фотопленки. Продолжительность сеанса устанавливалась
около 6 мин и более на каждом рабочем витке при 2—6 рабочих
витках в сутки, кроме первых и восьмых суток, которые исполь-
зовались на формирование орбиты и подготовку к спуску. На не-
рабочих витках КК находился в режиме закрутки на Солнце для
восстановления запасов электроэнергии. На 17-м витке полета
было проведено фотографирование горизонта Земли в предрас-
светное время, для чего КК переводился в режим инерциальной
ориентации с разворотом иллюминатором фотокамеры на горизонт.
Полет КК «Союз-22» был выполнен практически без отклонений
от намеченной программы, при этом камерой МКФ-6 было сде-
лано более 2000 шестизональных снимков.
Полет на Луну в рамках американской космической програм-
мы «Аполлон» (принята в 1961 г.), имевшей целью высадку лю-
дей на Луну и их возвращение на Землю, стал вопросом нацио-
нального престижа США и потребовал около 25 млрд. дол.
При разработке программы «Аполлон» шло параллельное про-
ектирование КК, PH и наземного комплекса. Ракета-носитель «Са-
турн-V» разрабатывалась исходя из выведения на траекторию
полета к Луне КК массой до 40 т (позднее до 47 т) или около
130 т на орбиту спутника Земли. В качестве основы баллистиче-
ской схемы полета была принята схемд с выходом на селеноцен-
трическую орбиту, делением КК на этой орбите на две части и
посадкой на Луну только одной нз них. Такое решение позволяло
уменьшить количество топлива, потребного на посадку и взлет,
и сбалансировать массовые характеристики в рамках полезной
нагрузки одной PH «Сатурн-V». Таким образом, в состав пило-
тируемого комплекса для полета на Луну входили два летатель-
ных аппарата: собственно корабль «Аполлон», или лунный орби-
тальный корабль (основной блок), и лунный экспедиционный мо-
дуль (лунная кабина).
При выборе баллистической схемы полета из соображений
безопасности предпочтение было отдано так называемым пролет-
ным траекториям, с которых предусматривался переход на селено-
центрическую орбиту. Пролетные траектории в отличие от траек-
торий попадания гарантировали исключение падения на Луну в
случае аварий после разгона до второй космической скорости.
Кроме того, пролетная траектория могла быть выбрана и как
траектория возвращения, обеспечивающая, по крайней мере, в но-
минале условия входа в атмосферу Земли. Переход на селено-
центрическую орбиту не только давал энергетический выигрыш,
но и способствовал снижению напряженности в проведении опе-
раций и повышению безопасности полета (резерв времени для
оценки ситуации, планирования дальнейших действий и выбора
места посадки, проведение навигационных измерений, возможность
при необходимости прервать полет и стартовать к Земле).
87
Динамические этапы и операции при
«Аполлон» показаны на рис. 3.2.
полетах по программе
Zff
Рис. 3.2. Схема полета на Луну по программе «Аполлон»:
1 — старт с Земли и выведение иа орбиту; 2 — полет по промежуточной орбите; 3 — уча-
сток разгона к Луие; 4— перестроение комплекса и отделение III ступени; 5 — полет к
Луне; б—коррекция траектории; 7 — торможение и переход иа селеноцентрическую ор-
биту; 5 —отделение лунного модуля; 9 — импульс перехода лунного модуля иа эллипти-
ческую орбиту; 10 — орбита ожидания КК «Аполлон»; // — торможение и посадка лун-
ного модуля; /2 — старт с Луны и выведение на промежуточную орбиту; 13 — переход
на круговую орбиту, сближение и стыковка; 14— переход экипажа в КК «Аполлон», от-
деление лунного модуля и подготовка к старту; 15 — импульс перехода на траекторию
возвращения; 16 — разделение корабля и вход командного модуля в атмосферу; 17 —
спуск и приводнение
После выведения на промежуточную круговую орбиту (накло-
нение 32° и высота около 190 км) и проверки состояния комплек-
са он разгонялся с помощью III ступени PH «Сатурн-V» для пе-
рехода на траекторию полета к Луне (приращение скорости около
3 км/с). Затем происходило перестроение комплекса и отделение
III ступени PH. В процессе полета к Луне выполнялись коррекции
траектории. Переход на селеноцентрическую орбиту высотой 110—•
115 км примерно через 3 сут после старта осуществлялся за счет
торможения с помощью двигателя лунного орбитального корабля
(импульс около 0,8 км/с); на этой орбите проводилась подготовка
систем к посадке и переход двух из трех астронавтов в лунный
экспедиционный модуль.
После отделения от орбитального корабля лунный модуль с
помощью силовой установки посадочной ступени переводился на
переходную эллиптическую орбиту. В районе переселения на вы-
соте 15 км (скорость около 1,7 км/с) вновь включался двигатель
посадочной ступени, и лунный модуль переходил на участок сни-
жения и выполнял посадку с вертикальной скоростью около
1 м/с.
При старте с Луны посадочная ступень лунного модуля оста-
валась на ее поверхности, а сам лунный модуль с помощью взлет-
ной двигательной установки выводился на орбиту, где происхо-
88
дили его сближение и стыковка с орбитальным кораблем. После
перехода экипажа, отделения лунного модуля и проверки систем
орбитального корабля ему сообщался импульс около 1 км/с для
возвращения к Земле, в процессе которого проводились коррекции
Рис. 3.3. Схема стартов по программе «Союз»—«Апол-
лон» с выведением КК «Союз» и «Аполлон» в одну
плоскость:
1 — космический центр
«Союз»: 2 — космодром
«Союз»; 4 — старт КК
им. Кеннеди в момент старта КК
Байконур; 3 — плоскость орбиты КК
«Аполлон» через 7,5 ч после старта
КК «Союз»
с целью обеспечения необходимых условий (ограничений) при
входе в атмосферу Земли со второй космической скоростью. За
15 мин до входа и примерно через 2,5 сут с момента старта с се-
леноцентрической орбиты орбитальный корабль разделялся, и спу-
скаемый аппарат (командный модуль), совершив управляемый
спуск в атмосфере, приводнялся в акватории океана. При длитель-
ности пребывания на Луне 21,5 ч весь полет занимал около 8 сут.
Экспериментальный полет по программе «Союз»— «Аполлон»
проводился в соответствии с заключенным в мае 1972 г. между
СССР и США соглашением о сотрудничестве в исследовании и
использовании космического пространства в мирных целях.
В основе программы лежало создание совместимых средств
сближения и стыковки и их проверка в экспериментальном полете
с использованием пилотируемых КК «Союз» и «Аполлон».
В результате совместных проработок специалистами двух стран
была принята следующая баллистическая схема полета (рис. 3.3):
первым стартует КК «Союз» с космодрома Байконур (СССР) в
северо-восточном направлении с выходом на орбиту наклонением
51,8°, что соответствует традиционному направлению стартов ко-
раблей «Союз», а вторым — корабль «Аполлон» с Космического
центра им. Кеннеди (м. Канаверал, США); при этом КК «Апол-
лон» выводится в плоскость орбиты КК «Союз», для чего время
его старта должно соответствовать моменту, когда Космический
центр им. Кеннеди вследствие вращения Земли войдет в плос-
89
кость орбиты КК «Союз». В процессе проработок вариантов схем
полета было принято, что орбита встречи будет круговой с высо-
той 225 км, а сближение будет осуществлять КК «Аполлон».
Орбита выведения КК «Союз» имела минимальную высоту
188 км и максимальную 228 км; это потребовало для перехода на
орбиту встречи проведения двух маневров (на 4-м и 17-м вит-
ках).
Орбита выведения КК «Аполлон» имела минимальную высоту
150 км и максимальную 167 км, а сближение должно было про-
ходить по шестиимпульсной схеме, как в программе «Скайлэб».
Уникальность первой международной программы требовала
максимальной вероятности встречи двух КК на орбите. Для этого
был разработан план действий на случай, когда старт КК «Апол-
лон» откладывается, а КК «Союз» уже выведен на орбиту. Это
могло произойти из-за капризов погоды во Флориде, где в летнее
время часты грозы, или из-за технических неполадок в процессе
стартовой подготовки. Названные факторы были учтены, й КК
«Аполлон» получил пять стартовых возможностей (пять последо-
вательных дат старта). При неполадках в наземной подготовке
КК «Союз» его запуск и запуск КК «Аполлон» откладывались,
т. е. назначалась новая дата старта.
По штатному плану полета сближение и стыковка намечались
примерно через 2 сут после старта КК «Союз», расчетная дли-
тельность работы которого на орбите 6 сут. При полете космиче-
ских кораблей в состыкованном состоянии (около 2 сут) плани-
ровались взаимные переходы членов экипажа из одного КК в
другой, совместная их деятельность и отдых. После разделения
КК в течение следующих суток в автономном полете должны
были проводиться совместные эксперименты, а затем полет по
своим независимым программам. При использовании КК «Апол-
лон» второй стартовой возможности на сближение отводились уже
только 1 сут, при еще более поздних стартах потерянное время
компенсировалось за счет сокращения сначала автономного,
а потом и совместного полета. Таким образом, общая схема по-
лета (рис. 3.4) выдерживалась при старте КК «Аполлон» в любой
из оговоренных пяти дней.
Сложным вопросом было определение суточного времени стар-
та КК и допустимого его отклонения, т. е. интервала времени
старта, или стартового «окна». Для КК «Союз» существовали
ограничения по времени приземления (не позднее чем за 1 ч до
захода Солнца из условий эвакуации экипажа) и по планированию
точки начала торможения при спуске (в течение 8 мин до вклю-
чения двигателя полет должен проходить над освещенной поверх-
ностью Земли для контроля экипажем правильности ориентации
КК), а для КК «Аполлон» — по времени приземления (не позд-
нее чем за 3 ч до захода Солнца), что связано с поиском СА в
океане в случае аварии на участке выведения. После длительных
проработок было выработано компромиссное решение: для КК
«Аполлон* уменьшен запас светлого времени суток на поиск в
90
Атлантическом океане, а для КК «Союз» снято ограничение по
контролю ориентации на основном посадочном витке (первый су-
точный) с сохранением его на втором резервном. В результате
•Cfiym
Рис. 3.4. Схема полета по программе «Союз» — «Аполлон»:
/, 2 — старты КК «Союз» и «Аполлон»; 3, 4 — выведение иа орбиту; 5 — маневры КК
«Союз»; 6 — маневры КК «Аполлон»; 7 — стыковка и работа в состыкованном состоянии
(2 сут); 8— разделение; 9, 10 — спуск с орбиты КК «Союз» и «Аполлон»; 11— посадка
СА КК «Союз» иа территории СССР; 12 — приводнение СА КК «Аполлон» в Тихом
океане
этого появились «окна» старта, в которых эти ограничения увя-
зывались. Для заранее намеченной основной даты начала полета
(15 июля 1975 г.) старт КК «Союз» должен был состояться в
15 ч 20 мин по московскому времени с задержкой не более 10 мин,
при этом «окна» старта были согласованы для всех дат по 15 июля
1976 г. включительно.
При выборе времени и точки стыковки учитывалось, что для
обеих сторон была желательна связь с КК через свои наземные
станции при наиболее ответственных операциях в процессе сбли-
жения и стыковки, что на этапе причаливания КК должны нахо-
диться на светлой части орбиты, что стыковочная мишень КК
«Союз» должна освещаться Солнцем, а сближение целесообразно
проводить в «спокойном» темпе, т. е. не сжимать по времени.
В итоге было принято решение, что в штатном случае стыковка
произойдет 17 июля 1975 г. в 19 ч 15 мин по московскому вре-
мени в зоне видимости станции «Евпатория» за 10 мин до входа
КК в тень.
Экспериментальный полет «Союз» — «Аполлон» был начат и
развивался точно по намеченному плану. Программа «Союз» —
«Аполлон», включавшая стыковку на орбите, отличалась от нацио-
нальных программ рядом интересных особенностей: схемой по-
лета при стартах из разных географических пунктов, определе-
нием «окон» старта, решением проблемы совместимости КК, пла-
нированием совместных действий и др.
91
3.3. ОСНОВНЫЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
Проектирование КК обычно включает три основных этапа:
предварительные изыскания, проектную разработку КК и разра-
ботку его систем и конструкции. Проектирование КК тесно свя-
зано (см. раздел 3.1) с разработкой PH, технической и стартовой
позиций, с организацией наземных служб, поэтому при создании
нового РКК на всех этапах проводится параллельное проектиро-
вание его составных частей со взаимным согласованием и увязкой
требований к ним.
Предварительные изыскания
Предварительные изыскания служат для формирования целей
разработки, обоснования решения о создании КК и определения
его технического облика.
Технические характеристики КК и его систем зависят прежде
всего от задач полетов, т. е. от назначения КК (основной
цели полета) и совокупности задач промежуточных этапов полета
(см. разделы 3.1 и 3.2). В то же время для принятия решения
о создании нового КК необходимо ясное представление о целях
разработки проекта, от которых также зависят технический
облик КК и подход к его проектированию.
Цели разработки проекта можно определить как совокупность
представлений о задачах полетов нового КК, об уровне прогнози-
руемых технических и научных достижений, получаемых в резуль-
тате его создания, о роли КК в решении экономических проблем
и его эффективности по сравнению с другими космическими сред-
ствами. Цели разработки могут предполагать такие задачи, как
унификация космических средств (например, создание ряда моди-
фикаций КК) или поэтапное развитие РКК с наращиванием его
возможностей.
Решение о создании нового КК (начале его разработки) при-
нимается с учетом и на основании целей разработки, технической
обоснованности проекта, прогнозируемых сроков создания КК, воз-
можностей финансирования проекта, наличия производственной и
экспериментальной базы. Эти вопросы взаимосвязаны. Так, внед-
рение новых технических идей связано с некоторой неопределен-
ностью конечных результатов, с возможным увеличением сроков и
повышением стоимости разработки. Поэтому, стремясь к повыше-
нию технического уровня проекта, в то же время важно исполь-
зовать рациональное сочетание новых и апробированных решений.
С другой стороны, производственные возможности определяют
сроки создания КК так же, как их определяют и возможности по
экспериментальной отработке, а расширение тех и других, напри-
мер, для сокращения сроков или внедрения новых технических
идей приводит к необходимости дополнительного финансирования.
Для принятия решения о начале разработки все указанные аспек-
92
ты должны быть сбалансированы так, чтобы проект был обосно-
ванным, своевременным и реализуемым, а затраты на него —
оправданными.
В процессе технического обоснования разработки пилотируе-
мого КК важно доказать необходимость или эффективность си-
стемы «человек — машина» для выбранных целей и задач полетов,
т. е. показать невозможность или нерациональность их решения с
помощью беспилотных КА.
В процессе предварительных изысканий для их обеспечения
проводятся научно-исследовательские работы по проблемным во-
просам разработки проекта, включая экономический анализ.
При техническом обосновании целесообразности разработки
проекта и выбора основных характеристик КК и его систем в
предварительных изысканиях могут быть выделены три направ-
ления: анализ задач полетов, проектный анализ конструктивно-
компоновочных решений и подготовка исходных данных на про-
ектную разработку.
Под анализом задач полетов в общем смысле подразу-
мевают исследования и разработки, проводимые для выбора пу-
тей решения этих задач (в частности, для определения основ по-
строения плана полета, структурной схемы РКС, требований к КК,
к его конструкции и системам, к эксплуатации КК и управлению
его полетом) и направленные на то, чтобы РКС, КК, наземный
комплекс и средства управления в своей совокупности соот-
ветствовали поставленным задачам и обеспечивали их дости-
жение.
Этот анализ имеет принципиальное значение для этапа пред-
варительных изысканий, на котором должны быть определены
общие контуры проекта, изучены возможности создания КК и рас-
смотрены характеристики всех необходимых средств. На этом
этапе выбирают и разрабатывают наиболее рациональные и прак-
тически пригодные способы и средства реализации проекта, в том
числе общие схемы КК и РКС в целом, схему полета и траек-
тории, потребные энергетические характеристики КК (с одновре-
менным определением массовых характеристик), нужные для вы-
полнения полета операции, условия его проведения и функцио-
нальные особенности КК. Затем, опираясь на эти уже получен-
ные сведения, определяют необходимые бортовые системы, требо-
вания к ним и к конструкции КК, включая ресурсы систем жизне-
обеспечения, требования к двигательным установкам и к точности
систем управления, основы построения систем электропитания
и т. п.
Проектный анализ конструктивно-компоновочных реше-
ний проводится для определения компоновочной схемы КК (или
ее вариантов), массовых характеристик и основ разработки кон-
струкции КК. Он ведется параллельно с анализом задач полета,
причем результаты этих двух анализов в процессе предваритель-
ных изысканий дополняют друг друга и взаимно уточняются. При
выборе, например, структурной схемы РКС и определении схемы
93
полета и потребных энергетических характеристик КК и ракетных
блоков используются материалы проработок по вариантам компо-
новочных схем КК, а при разработке последних учитываются
условия полета, проводимые операции и характеристики бортовых
систем.
Следует отметить, что «обратные связи» между направлениями
разработки вообще характерны для процесса проектирования,
а задачи этапа предварительных изысканий, получив на этом эта-
пе свое принципиальное решение, рассматриваются и решаются
при дальнейшей разработке с постепенным их расширением и раз-
витием, все большей конкретизацией и переходом к детальным
разработкам.
Полученные на этапе предварительных изысканий результаты
позволяют сформулировать исходные данные (основные
требования) для этапа проектной разработки КК, которые содер-
жат постановку задачи проектной разработки, принятые принци-
пы построения РКС, требования к КК и могут включать в себя
варианты технических решений для дальнейшей проработки и вы-
бора.
Исследования и расчеты
С проектированием КК неразрывно связаны баллистические и
аэродинамические исследования, анализ теплообмена между КК и
внешней средой, исследования нагрузок, действующих на КК при
транспортировке и в полете, расчеты его конструкции на прочность
и исследования процессов разделения КК, а также исследования
и расчеты по анализу внешних условий полета (см. главу 1), по
разработке систем КК (см. главы 6—10) и т. п.
Баллистические исследования и расчеты проводятся на всех
этапах создания РКС от выбора общей схемы полета до эксплуа-
тации КК- Главная задача исследований орбитального движе-
ния— это выбор оптимальных траекторий и плана орбитальных
маневров, т. е. проектирование орбит, включая орбиту выведе-
ния, и орбитальных переходов. Основным при этом является по-
иск наиболее экономного по энергетическим затратам пути дости-
жения цели (формирование рабочей орбиты, сближение с орби-
тальной станцией, полет к планете и т. д.). В результате исследо-
ваний создаются баллистическая схема полета (см.
раздел 3.2) и ее варианты для выхода из нештатных ситуаций,
определяются энергетические характеристики РКС и требования
к бортовым системам КК (например, по перечню обязательных
операций и точности работы системы управления). Особую об-
ласть исследований составляют вопросы спуска в атмосфере
(см. раздел 3.5).
На этапе эксплуатации КК осуществляется баллистическое
обеспечение полета, т. е. оперативный расчет траекторий с учетом
текущих измерений параметров орбит и с выдачей информации
для управления полетом (характеристики маневров, прогнозы ор-
94
бит, время входа в зоны видимости станций слежения, периоды
освещенности на орбите и т. д.).
В основе баллистических исследований лежат расчетно-теоре-
тические методы, опирающиеся на использование ЭВМ. Широко
применяются методы статистических испытаний, когда расчеты
проводят многократно, а случайные величины, участвующие в рас-
четах, варьируются в соответствии со своими законами распре-
деления.
Аэродинамические исследования направлены на изучение кар-
тины обтекания КА набегающим потоком и силовых воздействий,
оказываемых им на КА. В эти исследования входит задача опре-
деления аэродинамических сил, моментов и распределения давле-
ния по внешней поверхности, анализ условий обеспечения аэро-
динамической устойчивости, подготовка рекомендаций по аэроди-
намической компоновке КА и др. Важное значение имеют иссле-
дования по обтеканию КА сверхзвуковым потоком и определению
газодинамических параметров между фронтом ударной волны и
его поверхностью, что необходимо для решения проблемы защиты
от аэродинамического нагрева, а также изучение струйных тече-
ний (работа реактивных двигателей) и их влияния на элементы
конструкции КА.
Для спуска в атмосфере характерны широкие диапазоны ско-
рости полета и плотности воздушной среды. Так, при возвращении
с орбиты числа Маха (М — отношение скорости движения к ско-
рости звука) изменяются в пределах от 30 до 0,5, т. е. СА по-
следовательно проходит зоны гипер-, сверх-, транс- и дозвуковых
скоростей. В то же время изменяется характер обтекания СА по-
током: при входе в атмосферу имеет место свободно-молекуляр-
ное течение, когда плотность настолько мала, что частицы воздуха
ударяются о поверхность и отражаются от нее, практически не
взаимодействуя между собой; по мере увеличения плотности все
в большей степени проявляется эффект взаимодействия набе-
гающих и отраженных частиц, газ перед СА уплотняется, появ-
ляется ударная волна и наступает промежуточная область тече-
ний со скольжением, когда еще есть движение частиц воздуха
вдоль поверхности аппарата; затем развивается течение сплош-
ной среды с явно выраженным пограничным слоем, когда голов-
ная ударная волна, или скачок уплотнения, может на порядок
увеличить давление и плотность воздуха, при этом высокая кине-
тическая энергия потока в определенной части преобразуется во
внутреннюю энергию газа, что вызывает процессы его диссоциа-
ции и ионизации.
С практической точки зрения наиболее важны режимы тече-
ний сплошной среды, и выбор параметров СА опирается на ис-
следования в этой области. Аэродинамические характеристики КК,
используемые для прогнозов снижения орбиты из-за его постепен-
ного торможения атмосферой и оценки возмущающих моментов
при низких орбитах, определяются по режимам свободномолеку-
лярного течения.
95
Особенностью полета отделяемого головного блока САС яв-
ляется аэродинамическое влияние струй пороховых двигателей в
процессе увода и скорости полета от нуля (начальная при ава-
рии на старте) до М=4—5.
Решение задач аэродинамики основано на неразрывно связан-
ных между собой теоретических и экспериментальных мето-
дах. Без экспериментов в аэродинамических трубах определе-
ние характеристик КА практически невозможно, кроме того,
необходимо использование летных испытаний на моделях и ма-
кетах.
Анализ теплообмена между КК и внешней средой необходим
для всех участков полета и, в частности, для таких характерных
случаев, как аэродинамический нагрев на участке выведения, теп-
лообмен в орбитальном полете и нагрев на участке спуска в ат-
мосфере.
В первом случае необходима защита всего КК как от нагрева,
так и от воздействия скоростного напора, при этом тепловые по-
токи, как правило, не превышают 30 ккал/м2-с, а скоростные на-
поры— 3000—4000 кгс/м2. В компоновочной схеме с головным
обтекателем, принятой для КК «Союз», тепловые и силовые воз-
действия принимает на себя головной обтекатель, а защита са-
мого КК разрабатывается из условий орбитального полета.
В компоновочных схемах без головного обтекателя, принятых для
КК «Джемини» и «Аполлон», тепловые и силовые воздействия за-
метно влияют на конструкцию КК. например в части максималь-
ного исключения выступающих элементов или установки скрытой
экранно-вакуумной изоляции.
Вопросы теплообмена в орбитальном полете решаются исходя
из регулирования температуры конструкции КК и атмосферы жи-
лых отсеков в необходимых пределах (подробнее см. главу 6).
Задачи теплообмена и тепловой защиты на участке спуска
в атмосфере вытекают из принятого способа торможения при воз-
вращении на Землю, а успех в их решении определяет саму воз-
можность использования такого способа. Торможение в атмосфере
основано на рассеивании кинетической и потенциальной энергии,
которую имеет СА относительно поверхности Земли, путем пре-
образования этой энергии в тепловую энергию воздуха. Однако
определенная ее часть (около 1%) неизбежно поступает к кон-
струкции СА. Поэтому защита от аэродинамического нагрева тре-
бует исследования условий теплообмена между потоком и поверх-
ностью СА и предохранения последнего как от разрушений, так
и от прогрева конструкции.
Движение СА в атмосфере происходит в сложных условиях.
Максимальные удельные тепловые потоки достигают 250 ккал/м2-с
при спуске с орбиты и 2500 ккал/м2-с при входе в атмосферу со
второй космической скоростью, а общий приток тепла—до 20 000
и 150000 ккал/м2 соответственно. Скоростные напоры, как пра-
вило, лежат в пределах от 3000 до 7000 кгс/м2. Нагрев опреде-
ляется конвективной теплопередачей в пограничном слое и теп-
96
ловым излучением слоя воздуха между ударной волной и СА.
Исследования показывают, что затупленные формы более выгодны
с точки зрения снижения конвективного нагрева, а его значитель-
ному уменьшению способствует также отрыв потока от поверхно-
сти и образование застойных зон (донная область). С другой
стороны, приток тепла от излучения воздуха может быть снижен
заострением носовой части аппарата, когда ударная волна при-
двигается к его поверхности и уменьшается слой излучающего
воздуха. Это противоречит задаче снижения конвективного на-
грева и, в целом, оказывается нерациональным. Отсюда следует,
что условия теплообмена влияют на выбор формы СА.
При использовании абляционной тепловой защиты (см. раз-
дел 3.5) газообразные продукты разрушения ее внешнего слоя
оказывают обратное воздействие, трансформируя пограничный
слой, и тем самым влияют на тепловой поток. Поэтому условия
Теплообмена зависят и от выбора материалов тепловой за-
щиты.
Исследования по теплообмену и тепловой защите, опираясь на
решение газодинамических задач, теорию пограничного слоя, теп-
лофизику и изучение физико-химических процессов в воздухе за
ударной волной и в материалах тепловой защиты, требуют экспе-
риментальных исследований в аэродинамических трубах, на га-
зодинамических и тепловых установках по испытаниям моделей,
образцов материалов, фрагментов тепловой защиты и макетов
КА. Заключительные проверки тепловой защиты проводят в про-
цессе летных испытаний.
Исследования нагрузок, действующих на КК в полете, позво-
ляют получить исходные данные для расчета его конструкции на
прочность.
Нагрузки на участке выведения определяются характеристи-
ками PH и условиями ее полета. Для схем с головным обтека-
телем это в основном инерционные силы, а в схемах без него
еще и распределенные нагрузки, вызываемые воздействием набе-
гающего потока. Особую группу расчетных случаев нагруже-
ния создают режимы работы системы аварийного спасения (см.
главу 9).
В автономном полете на КК действуют малые силы (нагрузки
от работы двигателей и бортовых механизмов), которые, как пра-
вило, лежат в пределах других расчетных случаев. Основными
для расчета конструкции являются перепады давлений на оболоч-
ках корпусов отсеков, а также большие нагрузки, возникающие
при стыковке. В совместном полете из-за упругих колебаний си-
стемы «станция—КК» и ее элементов возникают циклические
нагружения (например, колебания, возбуждаемые при работе си-
стемы управления или при перемещениях экипажа).
На участке спуска в атмосфере на СА действуют нагрузки,
определяемые распределенным по его поверхности давлением воз-
духа, результирующая сила которого создает линейные перегруз-
ки (см. раздел 3.5), на участке работы системы приземления они
4 Космические аппараты 97
определяются рывками при вводе парашютов и работой двигате-
лей мягкой посадки.
Общий уровень перегрузок на всех этапах полета ограничен
5—6 ед. (при использовании баллистического спуска как штат-
ного— 9—10 ед.), за исключением нештатных ситуаций. Особым
расчетным случаем является посадка СА на грунт или воду с
ударными перегрузками до 70—100 и 15—20 ед. соответственно;
при посадке на воду опасно давление на днище (около 1,5—
2 МПа), которое может быть причиной потери плавучести.
Для КК характерны динамические нагрузки в виде вибраций,
акустических воздействий и ударных импульсных нагружений, ис-
точником которых являются реактивные двигатели и пиромеханизмы.
Для определения нагрузок используются результаты балли-
стических расчетов, аэродинамических исследований и анализа
внешних условий, характеристики конструкции (геометрия, жест-
кость, распределение масс) и систем управления, результаты ис-
пытаний на моделях и макетах, данные летных испытаний и др.
Во многих случаях нагрузки уточняют в процессе отработки кон-
струкции КК- Нагрузки при транспортировке (статические и дина-
мические) зависят от видов транспорта (железнодорожный, авто-
мобильный, воздушный и др.) и подъемных механизмов и прове-
ряются при транспортировочных испытаниях.
Расчеты на прочность КК необходимы так же, как и для лю-
бой другой машины и подтверждаются статическими и динамиче-
скими испытаниями узлов, агрегатов, отсеков и собранного КК на
макетах или головных образцах.
Исследования процессов разделения отсеков и отделения сбра-
сываемых элементов конструкции имеют две стороны: расчет са-
мого процесса отделения и анализ относительных траекторий.
Разделение КК при спуске подчинено, например, требованиям
как надежности, так и отсутствия соударений в дальнейшем дви-
жении. В связи с этим разделение КК «Союз» происходит за 10—
15 мин до входа в плотные слои атмосферы, с тем чтобы отсеки
уверенно разошлись даже при небольшой (около 1 м/с) относи-
тельной скорости. В задаче штатного сброса ДУ САС расчет ее
отделения и увода специальным пороховым двигателем проводится
с учетом исключения соударений с нормально летящей PH. При
аварии в начале участка выведения должны быть исключены со-
ударения PH с СА после его отделения н с вводимым в поток
некоторое время спустя парашютом.
В некоторых случаях отделяемая часть КК может решать и
дополнительную задачу. Так, на СА космического корабля «Союз»
крышка парашютного контейнера вводит в поток вытяжной пара-
шют, что требует обеспечения достаточной скорости и энергии
относительного движения крышки. При расчете процесса разде-
ления учитываются условия отделения (скоростной напор, угло-
вые возмущения и т. д.), геометрические и массово-инерционные
характеристики разделяемых частей, особенности конструкции КК
и его состояние на момент отделения.
98
В результате расчетов, проводимых с использованием статисти-
ческих методов, задаются требования к системам разделения, ко-
торые в дальнейшем проходят отработку на специальных установ-
ках и макетах КК.
Проектная разработка
При проектировании пилотируемого КК учитывают большое
число разносторонних факторов, требований и ограничений. Мно-
гие из них противоречивы, и выбор общей схемы КК, как правило,
включает элементы технического компромисса. В результате про-
ектной разработки должны быть определены основные проектные
характеристики КК и установлены необходимые требования, обес-
печивающие широкий фронт работ для всех проектных групп, за-
нимающихся как бортовыми, так и наземными системами и кон-
струкциями.
Задачи проектной разработки вытекают из необходимости
иметь сбалансированный во всех отношениях проект КК и вклю-
чают в себя выбор, разработку или определение:
схемы полета (см. раздел 3.2);
состава бортовых систем, их размещения и общей логики их
функционирования;
запасов и балансов по электроэнергии, топливу и расходуемым
материалам СЖО;
компоновочной схемы КК и головного блока PH (см. раз-
дел 3.4);
основных проектных характеристик КК, а также СА (см. раз-
дел 3.5) и ОГБ САС (см. главу 10), как аппаратов, осуществляю-
щих самостоятельный полет;
массово-инерционных и центровочных характеристик;
требований к конструкции;
действующих нагрузок (см. раздел 3.3);
условий эксплуатации бортовых систем и конструкции;
требований по технологии изготовления и подготовки КК к по-
лету, по его надежности и безопасности, включая решения по ре-
зервированию систем и режимов работы (см. разделы 3.1 и 3.2).
Параллельно с решением указанных вопросов происходит увяз-
ка КК, PH и наземного комплекса в части определения и согла-
сования взаимных требований, связей и сопряжений (см. раз-
дел 3.1). Ниже приведено краткое описание задач проектной раз-
работки, кроме тех, по которым даны ссылки.
Состав бортовых систем и общая логика их функционирования
определяются функциональными признаками, в том числе необ-
ходимостью выполнения всех предусмотренных программой поле-
та операций, управления движением КК и работой его бортовых
систем, поддержания внутри КК необходимых условий и т. д. На
4* 99
состав систем существенно влияют требования по надежности и
безопасности полета.
Системы по отсекам КК распределяются с учетом их назначе-
ния, конструкции, особенностей функционирования и способа
управления ими, а также их взаимосвязей между собой и требо-
ваний по расположению центра масс КК. Системы, агрегаты и
оборудование, с которыми непосредственно работает экипаж (ор-
ганы ручного управления и индикации, приборы наблюдения, си-
стема жизнеобеспечения, оборудование рабочих мест и т. п.), раз-
мещают в основном в жилых отсеках, хотя некоторые из них
могут быть вынесены и за его пределы (емкости с кислородом,
сборники жидких отходов и т. п.). Системы, не требующие пря-
мого доступа экипажа или разрабатываемые исходя из этого по-
ложения, могут быть расположены в любых отсеках при соблю-
дении необходимых для их работы условий (температура, давле-
ние и др.) и ограничений по коммуникационным связям.
Солнечные батареи, антенны, датчики ориентации, реактивные
двигатели, радиаторы системы терморегулирования и другое по-
добное оборудование размещают на внешней поверхности КК.
Кроме того, существуют системы, элементы которых размещены
практически во всех отсеках (теплообменники системы терморе-
гулирования и ее арматура, элементы систем электропитания и
управления, датчики и коммутирующие устройства системы теле-
измерений и т. д.), и специальные системы, расположение которых
определяется назначением отсеков (например, системы управле-
ния спуском и приземления СА).
Бортовые системы становятся единым комплексом лишь при
наличии общей логики их функционирования, которая «координи-
рует» их работу и определяет межсистемные связи. Как правило,
такая логика разрабатывается для этапов полета или операций
и реализуется в бортовых автоматических программах, приводи-
мых в действие в соответствии с установленным программой по-
лета порядком (объединяются программой в единое целое). При
ручном управлении последовательность операций определяется
бортовой документацией, также составленной на основе логики
работы систем.
Разработка общей логики функционирования — необходимый
элемент проектирования КК, так как позволяет обеспечить требуе-
мые для полета взаимодействие систем и заданную схему функ-
ционирования КК в целом.
Расчет запасов и балансов по электроэнергии и топливу про-
водится на этапе проектирования для выбора характеристик си-
стем КК и получения его сбалансированной массовой сводки, а на
этапе его эксплуатации — для определения потребных заправок
топлива и контроля обеспеченности электропитанием. Аналогич-
ные расчеты необходимы и по системам жизнеобеспечения (см.
главу 7). Выбор характеристик системы электропитания рассмот-
рим на примерах использования электрохимических источников
энергии (аккумуляторных батарей) и солнечных генераторов в
100
совокупности с буферной батареей. В первом примере (рис. 3.5)
как в процессе проведения КК динамических операций (потреб-
ный ток 50 А), так и в дежурном режиме (ток 5 А) происходит
Рис. 3.5. Запас электроэнергии в аккумуляторных ба-
тареях по времени полета:
1 — в системе без солнечных генераторов; 2 — в системе
«солнечные генераторы — буферная батарея»
ничено емкостью аккумуляторной батареи. Во втором примере
после каждой динамической операции емкость буферной батареи
восстанавливается за счет подзаряда от солнечных генераторов
Рис. 3.6. Изменение массы систем электропитания по
расчетной продолжительности полета:
1 — на электрохимических батареях; 2 — с солнечными генера-
торами
(зарядный ток 8,5 А), причем система сбалансирована и не огра-
ничивает время полета. При больших длительностях полета ва-
риант без солнечных батарей проигрывает и в отношении затрат
массы (рис. 3.6).
101
Потребные запасы топлива зависят прежде всего от балли-
стической схемы полета и определяются заданными орбитальными
маневрами и расходами топлива на ориентацию и стабилизацию
КК (см. раздел 3.2). В расчетах учитывают запасы на нештат-
ные ситуации, гарантийные остатки и незаборы из баков, потери
на выбросах при запуске двигателей и др. Емкости баков выби-
рают с учетом расчетов по максимальному с точки зрения энерге-
тических затрат варианту программы полета.
Проектные характеристики КК задаются на ранних этапах
проектирования. В ходе разработки, как правило, некоторые из
них уточняются в связи с изменениями в конструкции, системах и
схеме полета КК при углублении и расширении проработок, но
в любом случае эти уточнения не должны противоречить постав-
ленным задачам.
Проектные характеристики содержат основные контрольные
данные по КК, отражают его возможности и включают:
состав экипажа;
массу полезного груза (контрольное значение массы КК), вы-
водимую PH;
параметры орбиты выведения (наклонение, высота);
требования к баллистической схеме полета;
общие массово-инерционные, центровочные и геометрические
характеристики КК и его отсеков;
максимальное время полета в зависимости от ресурсов борто-
вых систем, запасов топлива и расходуемых материалов;
энергопотребление бортовых систем;
параметры двигательных установок (тяга, удельный импульс
и т. п.);
точность ориентации на орбите и отклонения точки посадки;
характеристики систем приземления и др.
Массово-инерционные и центровочные характеристики опреде-
ляют массу КК и ее составляющие, распределение масс, моменты
инерции и положение центра масс. В процессе разработки они по-
стоянно уточняются и должны соответствовать возможностям PH,
характеристикам системы управления и ДУ, требованиям по устой-
чивости движения и нормам, принятым в расчете нагрузок. Эти
характеристики задаются раздельно как для КК, так и для само-
стоятельно функционирующих его частей (СА, ОГБ САС), а так
как масса и состав КК в полете изменяются, их расчет проводят
по этапам полета. Контроль массово-инерционных характеристик
в процессе разработки является одним из инструментов контроля
состояния проекта в целом.
Требования к конструкции как к основе КК вытекают из при-
нятой компоновочной схемы, действующих нагрузок, условий экс-
плуатации и во многом зависят от деятельности экипажа и усло-
вий обеспечения работы бортовых систем. Два последних фактора
определяют функциональные особенности конструкции и налагае-
мые на нее ограничения.
102
Для экипажа должны быть обеспечены условия жизни и рабо-
ты (см. раздел 3.1), создан интерьер жилых отсеков, разработаны
необходимые механизмы и устройства (люки, приводы, контей-
неры для укладки предметов и др.), рационально установлены
элементы оборудования и систем, с которыми придется работать
в полете. Для бортовых систем во многих случаях требуется раз-
работка специальных узлов и механизмов (например, внешних
радиаторов системы терморегулирования или механизмов раскры-
тия антенн).
Конструкция КК должна обеспечивать метеорную и радиаци-
онную защиту экипажа и оборудования, причем первой цели мо-
гут служить двойные оболочки, противометеорные экраны или
элементы экранно-вакуумной изоляции, второй — корпус КК и лю-
бые массы, распределенные по его поверхности, например слой
тепловой защиты или рационально размещенное на корпусе обо-
рудование (см. главу 1).
Условия эксплуатации — это совокупность требований, учиты-
вающих как внешние условия полета (давление газа, солнечную
и космическую радиации, метеорные потоки), так и условия,
создаваемые при работе КК (внутренние давления, их перепады,
температуры, перегрузки, вибрации), условия транспортирования,
хранения и подготовки к полету и др. Эти требования задаются
в виде формализованных единых норм, охватывающих диапазоны
реальных условий и выражаемых или некоторыми предельными
значениями, или в форме распределений случайных величин, вклю-
чая спектральные.
Требования по технологии на этапе проектной разработки
имеют вид директивных указаний и направлены на экономное по-
строение технологического процесса и выработку единого под-
хода. Так, для обеспечения фронта сборочных работ задается де-
ление КК на отсеки и агрегаты (схема агрегатирования) с указа-
нием технологических разъемов, определяются особенности сборки
(вертикальная или горизонтальная, на заводе или на космодроме
и т. д.), формулируются требования к электрическим, вакуумным
(проверка герметичности) и другим испытаниям.
3.4. КОМПОНОВКА
В ракетно-космической технике для получения больших конеч-
ных скоростей при минимальной стартовой массе широко исполь-
зуют многоступенчатые PH, а для улучшения массовых характе-
ристик КК — сброс на участке выведения уже не нужного обору-
дования (ДУ САС, ГО и т. п.). При проектировании КК исполь-
зуют схему его построения из изолированных отсеков (модульный
принцип), что позволяет получить выигрыш за счет специализа-
ции отсеков и их отделения на определенном этапе полета. Так,
средствами возвращения обычно оснащается не весь КК, а только
его СА, что уменьшает массу этих средств; отсек, оставляемый на
Луне, снижает массу топлива, требуемого для возвращения к
103
Земле, и т. д. Специализация отсеков во многих случаях позво-
ляет упростить компоновку и конструкцию КК, например отсут-
ствие тепловой защиты на поверхности его орбитальных отсеков
облегчает установку антенн, радиаторов и им подобных элемен-
тов. Вместе с тем, если КК разработан по модульному принципу,
его доработка при изменении целей полетов возможна путем за-
мены или модификации отдельных отсеков.
В компоновочной схеме пилотируемого КК могут быть преду-
смотрены следующие основные отсеки:
спускаемый аппарат (СА) для размещения экипажа при выве-
дении КК на орбиту, при возвращении его на Землю, а также
при выполнении некоторых операций в ходе орбитального полета;
после отделения СА становится самостоятельным атмосферным
летательным аппаратом;
орбитальный отсек для работы экипажа на орбите и установ-
ки необходимого для выполнения программы полета оборудова-
ния и систем, требующих доступа экипажа; это второй (после
СА) обитаемый отсек КК, обеспечивающий увеличение жилого
объема; его внешняя поверхность удобна для размещения наруж-
ных систем и механизмов, в том числе антенн и стыковочного аг-
регата;
приборный отсек для установки не требующих доступа эки-
пажа систем; его объем герметичен и изолирован от жилых
отсеков;
агрегатный отсек (отсек оборудования) для размещения основ-
ных агрегатов КК (маршевого реактивного двигателя, сопло ко-
торого выходит через донный экран, баков с топливом, баллонов
с газом наддува, блоков системы электропитания и агрегатов си-
стемы терморегулирования — внутри отсека; радиаторов системы
терморегулирования, солнечных батарей, блоков микрореактивных
двигателей причаливания и ориентации, антенн и других элемен-
тов— снаружи отсека), как правило, имеет цилиндрическую не-
герметичную оболочку с донным экраном;
приборно-агрегатный отсек, если приборный и агрегатный от-
секи соединены в один;
переходной отсек для перехода от ограниченного числа (обыч-
но 3—6) силовых точек крепления СА к фланцевым соединениям,
типичным для других стыков; имеет вид фермы или обечайки и
создает дополнительный объем для размещения оборудования;
навесной отсек — вводится в состав КК при сбросе части ап-
паратуры на каком-то промежуточном этапе полета;
специализированные отсеки для выполнения определенных опе-
раций; эти отсеки в процессе выполнения операций или после них
могут быть отделены от КК (это, например, капсулы для достав-
ки материалов наблюдений на Землю или зонды для проведения
исследований).
Компоновочные схемы КК, разработанных в СССР и США,
имеют определенные тенденции.
104
В проекте «Меркурий» все бортовое оборудование КК, кроме
тормозных пороховых двигателей, установленных снаружи на ло-
бовом теплозащитном экране (рис. 3.7,г), было сосредоточено
в СА. Разработка пилотируе-
мого КК «Джемини» велась по
линии логического развития
проекта «Меркурий» с учетом
новой постановки задачи орби-
тального полета (маневриро-
вание со сближением, большая
длительность полета, выход
человека в космос), в резуль-
тате чего в составе КК «Дже-
мини» появился отсек обору-
дования (рис. 3.7, д). В проек-
те «Аполлон» компоновочная
схема орбитального корабля
сохранила два отсека, анало-
гичных по назначению отсекам
КК «Джемини» (рис. 3.7, е).
В отечественных проектах
компоновочная схема из одно-
го отсека не использовалась.
Уже на первых КК был при-
менен модульный принцип с
двумя отсеками: спускаемым
аппаратом и приборно-агре-
гатным отсеком (рис. 3.7, а, б).
В компоновочной схеме КК
«Восход» для решения задачи
выхода человека в космос бы-
ла предусмотрена надувная
шлюзовая камера, которая
была сложена на участке вы-
ведения, развертывалась и при-
водилась в рабочее состояние
в орбитальном полете и отде-
лялась перед спуском. На КК
«Союз» использовалась еще
более развитая модульная схе-
ма: кроме двух названных от-
секов был введен третий — ор-
битальный отсек (рис. 3.7,в).
Выбор компоновочной схе-
мы так же, как и разработка
Рис. 3.7. Компоновочные схемы кос-
мических кораблей:
а — «Восток»; б — «Восход»; в — «Союз»;
г — «Меркурий»; д — «Джемини»; е —
«Аполлон»; 1 — СА (возвращаемая кап-
сула, командный модуль): 2 —приборно-
агрегатный отсек (отсек оборудования); 3—
шлюзовая камера; 4 — орбитальный отсек;
S — пороховая тормозная ДУ
конструкции, из-за большого числа различных и во многом про-
тиворечивых требований обычно не имеет однозначного решения
и практически состоит в определении наиболее рационального
105
варианта из многих возможных. Однако и здесь могут быть
отмечены некоторые достаточно очевидные мотивы и тен-
денции.
Если компоновочная схема КК включает в себя спускаемый
аппарат и агрегатный отсек, а другие отсеки не предусматрива-
ются, то из соображений компоновки на PH и организации спасе-
ния экипажа при авариях на участке выведения СА должен за-
нимать верхнее по отношению к агрегатному отсеку положение.
Такая компоновочная схема проста и не имеет внутренних про-
тиворечий.
Для увеличения жилого объема КК возможны два пути: уве-
личение размеров СА с неизбежным возрастанием массы тепловой
защиты или использование СА минимальных размеров с дополни-
тельным обитаемым отсеком. При объемах более 8—9 м3 второй
путь предпочтительнее в отношении снижения затрат массы. С уче-
том целесообразности специализации отсеков и создания ком-
фортных условий экипажу для КК «Союз» была принята схема
с двумя жилыми отсеками (общий объем около 11 м3). Подобная
схема имеет противоречие с точки зрения выбора места отсеков
и их сопряжения: люк переходов между отсеками на СА было бы
рационально разместить на его поверхности, затененной при спуске
в атмосфере, что приводит к установке СА под орбитальным от-
секом, но в то же время СА целесообразно устанавливать в верх-
ней части КК над орбитальным отсеком в интересах организации
спасения экипажа при авариях PH, а люк переходов размещать
на лобовой теплонапряженной поверхности СА (рис. 3.8). Воз-
можна также компромиссная схема с разворотом отсеков.
Окончательно с учетом готовности КК к работе сразу же после
его отделения от PH, исключения размещения люка в наиболее
теплонапряженной части СА, а также преимуществ по размеще-
нию стыковочного агрегата и антенн для КК «Союз» была при-
нята схема с верхним расположением орбитального отсека, хотя
это и привело к некоторому усложнению решений аварийного
спасения, в частности, конструкции головного блока PH.
Головной блок (ГБ) ракеты-носителя — это конструкция, уста-
навливаемая на последнюю ступень PH и состоящая из КК, эле-
ментов его сопряжения с PH и агрегатов САС. ГБ может быть
выполнен по одной из двух основных схем: с головным обтекате-
лем (ГО) и без него. Схема с ГО традиционна для отечественных
проектов, схема без ГО — для американских.
В принятой для головного блока КК «Союз» схеме (рис. 3.9)
сам корабль и ГО устанавливаются на верхнем шпангоуте пере-
ходного отсека, крепящегося к III ступени PH. В нормальном по-
лете опоры САС, охватывая СА, свободно перемещаются относи-
тельно ГО и стопорятся только в момент аварии. Сброс ГО по
штатной схеме происходит в два этапа: сначала сбрасывается дви-
гательная установка, затем, после раскрытия стыков ГО, его
створки с помощью небольших пороховых двигателей разворачи-
ваются вокруг осей разворота и отбрасываются в стороны.
106
Рис. 3.8. Компоновочные схемы КК с двумя жилыми отсе-
ками:
а — с передним расположением орбитального отсека; б — с люком в
теплозащитном экране СА; в — с разворотом орбитального отсека;
1 — СА; 2 — орбитальный отсек; 3 — стыковочный агрегат; 4 — пере-
ходной отсек; 5 — приборный отсек; 6 — агрегатный отсек; 7 — штан-
ги разворота
Рис. 3.9. Головной блок и схема сброса обтекателя:
1 —• ДУ САС; 2 — двигатели сброса створок; 3 — КК; 4 — плавающие опоры САС; 5 — ава-
рийный стык; 6 — узлы разворота створок обтекателя; 7 — переходной отсек PH; 8 —•
сброс ДУ САС; 9 — продольный стык ГО; 10 — решетчатые стабилизаторы САС (сложены);
11 — поперечный стык; 12 — сброс створок
107
Компоновочные схемы КК и ГВ взаимосвязаны через требова-
ния нормального выведения КК на орбиту и обеспечения аварий-
ного спасения экипажа (см. главу 10). Практически компоновоч-
ная схема выбирается параллельно с разработкой ГБ и выбором
схемы функционирования системы аварийного спасения.
3.5. СПУСКАЕМЫЙ АППАРАТ
Разработка СА, сочетающего в себе функции отсека КК и са-
мостоятельного атмосферного летательного аппарата, одна из са-
мых сложных задач создания пилотируемого КК. Особенностью
полета СА является необратимость происходящих событий, так
как начатый спуск прервать практически невозможно, и СА неиз-
бежно пройдет сквозь плотные слои атмосферы и будет прибли-
жаться к Земле. Это существенно ужесточает требования к си-
стемам и конструкции СА в части их надежности, степени резер-
вирования и обеспечения безопасности экипажа.
Задачи спуска и приземления
На этапе возвращения на Землю главные задачи состоят в
торможении СА при полете в атмосфере и в обеспечении его по-
садки. Граница участков спуска и приземления лежит на высотах
5—10 км, ниже которых движение близко к установившемуся и
проходит со скоростями 100—200 м/с при перегрузках, мало от-
личающихся от единицы.
Между задачами спуска и приземления существует прямая
связь, причем способ посадки выбирается с учетом технических
решений по участку спуска. Для КК, форма которых обеспечива-
ет эффективное управление на сверхзвуковых скоростях с выхо-
дом в район посадочной полосы, а на дозвуковых режимах — пла-
нирование с относительно небольшой вертикальной скоростью,
рациональна горизонтальная посадка — самолетный способ посад-
ки, а для СА, имеющих малое аэродинамическое качество (т. е.
слабо выраженные несущие способности корпуса) и движущихся
на предпосадочном участке почти вертикально, — вертикальная
посадка, требующая применения специальных средств торможе-
ния (парашюты, двигатели, роторы и т. п.) и дополнительных си-
стем, амортизирующих удар о грунт (воду), что в совокупности
обеспечивает допустимые дчя экипажа условия приземления (при-
воднения). Вертикальный способ посадки использовался, напри-
мер, на кораблях «Союз» и «Аполлон».
Аэродинамические характеристики
При движении любого тела в воздухе на него действуют силы
давления, зависящие от скорости, плотности воздуха, формы тела
и его положения в потоке. Их результирующая (суммарная) сила
определяется как интеграл от сил давления по поверхности тела
108
и проходит через точку, называемую центром давления. Ин-
теграл от моментов сил давления относительно точки, называемой
центром масс (центром тяжести), дает аэродинамиче-
ский момент, который может быть представлен как произведение
результирующей силы на ее плечо относительно центра масс. При
выделенном моменте аэродинамические силы (или их составляю-
Рис. 3.10. Схема аэродинамических сил при движении
СА на балансировочном угле атаки и размещение
экипажа:
V —скорость полета; /?—результирующая (суммарная) аэро-
динамическая сила; У— подъемная сила; Q — сила лобового
сопротивления; N и Т — нормальная и тангенциальная силы
соответственно (вариант разложения суммарной силы); М —
аэродинамический момент; а^аЛ—балансировочный угол ата-
ки; ? — угол между результирующей силой и линией спины
человека; Ф — угол суммарной силы к оси СА; /т — боковое
смещение центра тяжести; Хт н X — продольные координаты
центров тяжести и давления; ЦТ — центр тяжести; ЦД — центр
давления
щие) рассматриваются как приложение к этому центру. Силы и
моменты (рис. 3.10) выражаются через безразмерные аэродина-
мические коэффициенты:
F = CqS\ (3.1)
M=mqlS, (3.2)
где С и m — безразмерные коэффициенты силы и момента соот-
ветственно;
PV2
q = -----скоростной напор;
р — плотность воздуха; v — скорость полета;
о—характерная площадь (миделя или крыла);
/ — характерный размер (например, длина КА).
109
Одним из главных параметров СА является аэродинамиче-
ское качество — отношение подъемной силы к силе сопротив-
ления
к=су/сх,
(3.3)
где Су и Сх — коэффициенты подъемной силы У и силы сопро-
тивления Q соответственно (см. рис. 3.10).
Типичные аэродинамические характеристики осесимметричногс
СА сегментальной формы показаны на рис. 3.11. В силу влияния
Рис. 3.11. Примерные аэродинамические
характеристики СА на сверхзвуковых ско-
ростях
аэродинамических возму-
щений (например, началь-
ного угла атаки) возникает
движение летательного ап-
парата вокруг центра масс,
что требует решения вопро-
сов статической и динами-
ческой устойчивости.
Статическая устой-
чивость — это свойство
летательного аппарата при-
обретать при выходе из
о положения равновесия та-
кие аэродинамические мо-
менты, которые вновь воз-
вращают его в это положе-
ние. В простейшем случае
это возможно, если центр
давления находится за цен-
тром тяжести (по отноше-
нию к передней точке лета-
тельного аппарата) и аэро-
динамическая сила создает
восстанавливающий момент.
В этом смысле расстояние
между центрами давления и
тяжести, отнесенное к длине аппарата, обычно называют запа-
сом статической устойчивости, а угол атаки, при кото-
ром существует устойчивое равновесие (момент равен нулю, а его
производная по углу отрицательна), — балансировочным.
Чтобы получить на осесимметричном аппарате сегментальной фор-
мы подъемную силу, следует (см. рис. 3.11) придать ему определен-
ный угол атаки, балансировка на котором может быть обеспечена
созданием весового эксцентриситета (см. рис. З.ЮиЗ.П).
Динамическая устойчивость — это способность лета-
тельного аппарата создавать стабилизирующие моменты в про-
цессе его колебаний вокруг центра масс. При наличии угловой
скорости мгновенный угол атаки различен по длине аппарата, что
создает некоторый дополнительный момент. Если производная
этого момента по угловой скорости отрицательна, то момент демп-
110
фирующий, в противном случае — антидемпфирующий. Характери-
стики динамической устойчивости учитываются при проектирова-
нии летательного аппарата и его системы управления.
Траектории спуска и выбор параметров СА
Траектории спуска выбирают с учетом возможностей, созда-
ваемых характеристиками СА, в пределах ограничений по пере-
грузкам и тепловым режимам, а также требований самой траек-
тории спуска (заданный маневр, точность посадки). Указанные
ограничения влияют на характеристики СА и на программы управ-
ления его движением. Рассмотрим эти вопросы применительно к
задаче спуска с низких околоземных орбит (высоты 200—500 км).
Характер траекторий определяется прежде всего параметрами
СА, основными из которых являются аэродинамическое качество К
(см. формулу (3.3) и баллистический параметр
(3-4)
где т — масса СА.
В расчетах часто используют также параметры:
Ру = ^. (3.5) Рм = ^. (3.6)
первый из которых (3.5) является величиной, производной от А
и рх, а второй (3.6) характеризует нагрузку на мидель или
крыло.
Приведенные параметры определяют соотношение между гра-
витационными и аэродинамическими силами и являются мерой эф-
фективности или способности последних создавать в полете уско-
рения, так как
— = (3.7)
mg рх ' >
У _ 1 Л_ К „
mg Ру Рх ‘
Таким образом, возможности формирования траекторий зави-
сят от выбора аэродинамического качества и баллистического па-
раметра, а управление движением—от их изменения в полете.
На траектории влияют и условия входа в атмосферу, под верх-
ней границей которой (высотой входа) понимают высоту начала
заметного влияния аэродинамических сил (100—120 км). К этим
условиям относят скорость входа (для спуска с орбиты около
111
7,6 км/с) и угол наклона траектории, или угол входа, определяе-
мые на указанной высоте.
Маневр на участке спуска может быть осуществлен с помощью
изменения лобового сопротивления аппарата (коэффициента со-
противления или эффективной поверхности), но только в плоско-
сти траектории, т. е. по дальности. Использование подъемных сил
создает возможность маневра как по дальности, так и в боковом
направлении.
В зависимости от аэродинамического качества различают сле-
дующие характерные виды спуска:
баллистический — без использования подъемных сил, как пра-
вило, без управления по дальности и с большим разбросом точек
посадки (около ±300 км);
Рис. 3.12. Влияние аэродинамического качества
и угла входа на максимальные перегрузки при
спуске с орбиты
планирующий — с использованием подъемных сил; обычно под
ним подразумевают спуск с аэродинамическим качеством (боль-
шим 0,7—1), что создает широкие возможности по маневру и
обеспечению точной посадки;
скользящий, или полубаллистический,— это планирующий спуск
с малым аэродинамическим качеством (меньшим 0,3—0,5), позво-
ляющим снизить перегрузки и обеспечить достаточно точную по-
садку, хотя и без широкого маневра; этот вид спуска используется
на КК «Союз» и «Аполлон».
Перегрузки при спуске — один из основных траектор-
ных параметров — зависят в основном от аэродинамического каче-
ства и угла входа. Для снижения перегрузок, как видно из
рис. 3.12, целесообразно увеличение аэродинамического качества
112
до 0,3—0,5 (его дальнейшее повышение влияет слабо), а угол
входа не должен превышать 2—3°.
Тепловые потоки, воздействующие на поверхность СА,
зависят от аэродинамического качества и угла входа в атмосферу
(рис. 3.13). Для улучшения тепловых режимов важно, чтобы тор-
можение происходило в верхних слоях атмосферы для максималь-
ного снижения скорости до наступления пика теплового потока.
Это реализуется при баллистическом спуске за счет увеличения
аэродинамического сопротивления и снижения нагрузки на мидель,
а для СА с большим аэродинамическим качеством — за счет уве-
личения угла атаки (роста коэффициентов сопротивления и подъ-
емной силы) и снижения нагрузки на несущую поверхность. При
Рис. 3.13. Характер влияния аэродинамического качества и
угла входа на тепловые потоки (удельный q и интеграль-
ный Q):
~ — Я max ввх)
ЧтаХ~ Ятах^ = 0: вв,=0)’
О Qs (К, Ввх)
~ QAK = о: ввх = оу
скользящем спуске высокий коэффициент сопротивления обеспе-
чивает тупая форма СА, а угол атаки, несколько снижая этот ко-
эффициент, создает подъемную силу.
Во всех случаях в начальной фазе спуска с точки зрения улуч-
шения тепловых режимов важен не режим максимального каче-
ства, а максимально возможный рост коэффициентов сопротивле-
ния и подъемной силы или снижение нагрузки на характерную
площадь.
Переносимость перегрузок при оптимальной позе че-
ловека обеспечивается вплоть до значений 25—27 ед. (максималь-
ная по траектории спуска величина со временем действия до 5—
10 с), а работоспособность до 15 ед. Для обеспечения относитель-
ного комфорта экипажа и уверенного контроля им полета пере-
грузки не должны превышать 4—6 ед.
ИЗ
Выбор параметров СА определяется прежде всего требо-
ваниями по обеспечению переносимости перегрузок, по маневру и
точности посадки и по разработке тепловой защиты.
Задача надежного возвращения экипажа на Землю наиболее
просто решается путем баллистического спуска с орбиты, при ко-
тором перегрузки не превышают 10 ед., а при спасении на участке
выведения — 25 ед., т. е. лежат в пределах переносимых значений.
Если исходить из обеспечения работоспособности экипажа, аэро-
динамическое качество должно соответствовать 0,15—0,2 при
штатном спуске и 0,3 при аварийном с уровнем перегрузок 4—5
и 15 ед. соответственно. При этом в случае управляемого спуска
с орбиты при располагаемом аэродинамическом качестве 0,3 (с за-
пасом на управление) обеспечивается посадка с достаточной точ-
ностью (отклонение в пределах десятков километров). Из условий
теплообмена в двух названных видах спуска целесообразно сниже-
ние баллистического параметра. Увеличение в этих целях поверх-
ности СА (уменьшение нагрузки на мидель) ведет к неоправдан-
ным затратам массы. Более рационально повышение коэффици-
ента сопротивления, что прослеживается в проектах всех разрабо-
танных кораблей.
В случаях когда задан специальный маневр на участке спуска,
необходимо повышение аэродинамического качества, которое при
требовании межвиткового маневра (боковое отклонение 2000—
2500 км, например, для посадки в одной точке с трех смежных
витков) должно быть около 1,5. В то же время повышение аэро-
динамического качества, способствуя улучшению переносимости
перегрузок и точности посадки, ведет к росту массы тепловой за-
щиты, а при развитых несущих поверхностях и к росту массы
конструкции. Это сдерживает выбор аэродинамического качества
выше значения, необходимого для решения задач спуска.
Способ управления движением определяется приня-
тым методом регулирования подъемной силы в полете. Баланси-
ровочный угол атаки и аэродинамическое качество можно изме-
нять (см. рис. 3.11) поперечным смещением центра тяжести за
счет передвижения больших масс внутри СА (для «Союза» около
150 кг), что нерационально. При использовании в тех же целях
реактивных двигателей непомерно возрастают расходы топлива,
а создание аэродинамических рулей эффективно только для кры-
латых схем.
Широкое распространение получил способ управления путем
разворотов СА по крену при постоянном балансировочном угле
атаки, не требующий больших управляющих моментов. При нуле-
вом угле крена подъемная сила направлена вверх в плоскости
траектории, а при повороте отклоняется в сторону, изменяя верти-
кальную составляющую, что обеспечивает управление по дально-
сти. Изменение горизонтальной составляющей, включая перевод
аппарата с правого на левый крен и наоборот, используется для
управления в боковом направлении. Этот способ применяется и в
нештатных ситуациях. Так, при отказе системы управления подъ-
114
емная сила может оказаться направленной вниз, что приведет к
недопустимому возрастанию перегрузок, исключить которое можно
вращением аппарата по крену (режим закрутки). В этом случае
среднее значение подъемной силы равно нулю, т. е. идет балли-
стический спуск.
Управление при с п у с к е необходимо для того, чтобы
движение шло по принятой траектории с заданной точностью.
Источниками отклонения траектории от расчетной могут быть
ошибки в условиях входа (угол, скорость, координаты), случай-
ные изменения плотности атмосферы и ветровые воздействия,
ошибки в определении аэродинамических характеристик и другие
факторы. Система управления опирается на измерения текущих
траекторных параметров и определяет по ним управляющие воз-
действия, реализуемые через принятый способ управления (раз-
вороты по крену); на точность ее работы влияют инструменталь-
ные и методические погрешности.
Схема спуска с малым аэродинамическим качеством, ис-
пользуемая на КК «Союз», который всегда приземляется на тер-
ритории СССР, начинается с ориентации КК для торможения. В
расчетной точке над Атлантическим океаном двигательная уста-
новка сообщает КК тормозной импульс 100—120 м/с, после чего
дальнейшее движение происходит по переходному эллипсу с уг-
лом входа около 1,5° с сохранением ориентации. После разделе-
ния КК его СА разворачивается так, чтобы в прогнозируемой точ-
ке входа в атмосферу угол атаки соответствовал балансировоч-
ному, а угол крена (около 45°) обеспечивал бы расчетное эффек-
тивное качество. При появлении аэродинамических сил (перегрузка
около 0,04 ед.) начинается управление движением, при этом раз-
вороты по крену и демпфирование колебаний по тангажу и рыс-
канью осуществляются с помощью микрореактивных двигателей.
Максимальные перегрузки при спуске лежат в диапазоне 3—4 ед.,
а время полета от входа до высоты 9,5 км (ввод парашюта) со-
ставляет около 10 мин.
В нештатных ситуациях предусмотрен переход на баллистиче-
ский спуск (перегрузки до 9 ед.) путем закрутки СА по крену с
угловой скоростью 12,5 град/с. Спускаемый аппарат статически
устойчив в круговом смысле и способен прийти к расчетному углу
атаки даже при нарушении начальной ориентации.
Спуск при входе в атмосферу со второй
космической скоростью
Скорость подлета к Земле при возвращении от Луны близка
ко второй космической, а в межпланетных полетах превышает
ее. При этих условиях возможен переход на низкую околоземную
орбиту с последующим спуском, что невыгодно в энергетическом
смысле, поэтому более практична схема прямого входа в атмо-
115
^ятпах
^min
5
Рис. 3.14. Схема коридора входа
в атмосферу:
1 — предельные орбиты (границы ко-
ридора); 2 — граница плотной атмо-
сферы; 3 — Земля; 4 — траектории спу-
ска; S — условные орбиты без учета
влияния атмосферы
сферу со второй космической скоростью. Такая схема была при-
нята для КК-станций «Зонд» и КК «Аполлон».
Коридор входа (рис. 3.14) представляет собой зону между
двумя предельно допустимыми траекториями входа, из которых
верхняя определяется по условию захвата СА атмосферой с ис-
ключением полета по промежуточной орбите (первое погружение
должно привести к скорости, меньшей первой космической), а
нижняя — по перегрузкам, принятым как предельно допустимые.
Границы коридора входа выражаются через высоты условного
перигея или углы входа.
Аэродинамическое качество при управляемом спуске позволяет
расширить коридор входа и повысить точность посадки. Схема
движения строится так, что при верхних отклонениях по высоте
подъемная сила прижимает СА к Земле, вводя его в нужный ко-
ридор траекторий, а в случае крутого входа поднимает траекто-
рию вверх, предотвращая чрезмер-
ный рост перегрузок. Кроме того,
аэродинамическое качество может
быть направлено на выполнение
маневров по дальности и в боко-
вом направлении. Так, при разра-
ботке КК-станций «Зонд» задача
посадки на территорию СССР при
трассах, проходящих через Индий-
ский океан с юга на север, реша-
лась практически только с исполь-
зованием аэродинамического каче-
ства для достижения нужной даль-
ности полета и приемлемой точно-
сти посадки.
При входе в атмосферу со вто-
рой космической скоростью доста-
точно аэродинамическое качество в
пределах 0,3—0,5; для СА КК-стан-
ции «Зонд» оно было принято рав-
ным 0,3, а коридор входа—рав-
ным 20 км по высоте условного
перигея (средняя высота 45 км)
с учетом ограничений по резервно-
му баллистическому спуску.
Траектории спуска при входе в атмосферу в пределах приня-
того коридора входа имеют два характерных участка: первое по-
гружение, когда скорость снижается до значения, меньшего чем
первая космическая, и второе погружение, мало отличающееся от
спуска с орбиты, причем при крутых траекториях участки слива-
ются. Кривые перегрузок по времени имеют два пика, соотноше-
ние между которыми изменяется в зависимости от начальных ус-
ловий. Средний уровень перегрузок 5—7 ед., а при резервном бал-
листическом спуске — 15—16 ед. При управлении дальностью no-
lle
лета принципиальное значение имеет формирование траектории
при выходе из первого погружения (или на этапе снижения ско-
рости до первой космической); например, для СА станции «Зонд»
повышение угла выхода на Г давало увеличение дальности на
2500 км. Управление на втором погружении малоэффективно, и
при К=0,3 обеспечивается в пределах ±350 км.
Тепловая защита работает в существенно более напряженных
условиях, чем при спуске с орбиты (см. раздел 3.3), что вызывает
повышение к ней требований и увеличение ее массы на 20—30%.
При разработке тепловой защиты необходимо учитывать нали-
чие двух пиков нагрева и фактор частичного охлаждения конст-
рукции в интервале времени между ними.
Форма СА
Для КК «Восток» были приняты сферическая форма и балли-
стический спуск. Особенностью сферической формы является то,
что суммарная аэродинамическая сила всегда проходит через гео-
метрический центр, и на всех режимах полета уверенно обеспе-
чивается статическая устойчивость СА. Для КК «Меркурий», так-
же снижавшихся по баллистической траектории, была принята
форма с передним сферическим сегментом, боковой конической
поверхностью (полуугол конуса 20°) и цилиндром в хвостовой
части (см. рис. 3.7,г). Аналогичную форму имела и возвращае-
мая капсула КК «Джемини», но путем смещения центра тяжестп
она была сбалансирована на угле атаки, соответствовавшем аэро-
динамическому качеству около 0,2.
В процессе подготовки к работам по кораблю «Союз» в нашей
стране были проведены проектно-теоретические исследования СА
различных форм и их возможностей, направленные на поиск наи-
более рациональных методов спуска и приземления. Рассматри-
вались СА баллистического спуска и с аэродинамическим качест-
вом в широком диапазоне, включая крылатые схемы, а также изу-
чались особенности вертикального и горизонтального (самолет-
ного) способов посадки. Исследования показали необходимость
управления движением в атмосфере, достаточность аэродинамиче-
ского качества около 0,3 как для спуска с орбиты, так и для вхо-
да в атмосферу со второй космической скоростью, нерациональ-
ность использования в целях возвращения экипажа на Землю кры-
латых схем в силу больших потерь масс на их реализацию. В ре-
зультате исследований для КК «Союз» был принят управляемый
спуск с малым аэродинамическим качеством и вертикальный спо-
соб посадки. Анализ вариантов аэродинамической компоновки за-
вершился выбором формы спускаемого аппарата типа «фара»
(рис. 3.15, а), передняя поверхность которой представляла собой
сферический сегмент, а коническая боковая плавно переходила в
донную полусферу. При этом было решено балансировочный угол
атаки обеспечивать весовым эксцентриситетом, а управление
117
движением — разворотами по крену. Одновременно был раз-
работан способ перехода в баллистический спуск путем за-
крутки СА.
Аналогичные принципы были независимо разработаны амери-
канскими специалистами и положены в основу решений по спус-
ку КК «Аполлон». Форма его командного отсека (рис. 3.15,6)
также имела переднюю сегментальную поверхность и боковой ко-
нус, но с увеличенным углом полураствора, и обеспечивала аэро-
динамическое качество около 0,45. Спускаемые аппараты КК
«Союз» и «Аполлон» относятся к аппаратам малого аэродинами-
ческого качества.
Рис. 3.15. Форма спускаемых аппаратов КК «Союз» (а)
и КК «Аполлон» (б)
Осесимметричные формы с передним сферическим сегментом
получили название сегментальных. Наиболее характерным
примером их применения является СА кораблей «Союз» и «Апол-
лон». У них радиус кривизны переднего сегмента (см. рис. 3.15)
примерно равен диаметру миделя, что обеспечивает при сверх-
звуковых скоростях высокий коэффициент сопротивления и хоро-
шую статическую устойчивость при балансировочных углах ата-
ки, но существенно отличаются формы боковой и донной поверх-
ности. Малый угол полураствора конуса СА корабля «Союз» в
сочетании с развитой верхней сферической поверхностью дает вы-
сокий коэффициент объемного заполнения (отношение объема в
степени 2/3 к площади миделя) и позволяет получить круговую
статическую устойчивость. Форма СА корабля «Аполлон», проиг-
рывая в этом плане, имеет затененную боковую поверхность, что
повышает аэродинамическое качество и улучшает условия защиты
от нагрева. Обе формы СА проверены при спусках с первой и
второй космическими скоростями и подтвердили рациональность
их применения.
Основные варианты аппаратов для спуска в атмосфере, типы
их форм и особенности приведены в табл. 3.1.
118
Основные варианты аппаратов для спуска в атмосфере
Таблица 3.1
Аппарат Баллистический Малого качества Среднего качества Большого качества
Форма Сферическая Ct ^менталь- ная Сегм витальная Несущий корпус Крылатая
Где использована «восток» «Восход» «Меркурий» «Союз»,«Зонд » «Джемини» «Аполлон» «СоюзТ » «Спейс Шаттл»
Аэродинамическое качество при скоростях: гиперзвуковых дозвуковых о 0,2+ 0,5 eq to о о •"Л ^to
Вид спуска с орбиты ИСЗ Баллистический Скользящий Планирующий
Способ посадки Вертикаль н ы и Вертикальный или самолетный Самолетный
Тепловая защита
Для защиты СА от аэродинамического нагрева применяются
твердые материалы, достаточно стойкие к тепловому и механичес-
кому воздействию потока и образующие вместе с тепловой изо-
ляцией внешний слой конструкции СА; этот слой называют теп-
ловой защитой, а материалы — теплозащитными.
Среди возможных вариантов тепловой защиты следует назвать
излучательные системы, системы с теплопоглощением и абляцион-
ные системы. Излучательные системы основаны на применении
внешней тонкой оболочки из высокотемпературного материала,
которая, будучи нагретой, излучает в пространство тепло, урав-
новешивающее поток тепла от аэродинамического нагрева. Мак-
симальная допустимая рабочая температура материала оболочки
ограничивает условия применения тепловой защиты по поступаю-
щему потоку тепла. Защита такого типа была использована на
КК «Меркурий», боковая коническая поверхность которого была
покрыта черепицей из никель-кобальтового сплава толщиной 0,4—
0,8 мм со слоем теплоизоляции под ней.
Системы с теплопоглощением не только излучают тепло, но и
накапливают его в материале, теплоемкость которого должна
быть высокой, а слой толстым. Такая система применялась на КК
«Меркурий» в более теплонапряженной зоне на боковой цилинд-
рической поверхности с использованием пластин из бериллия тол-
щиной около 5,5 мм.
Абляционные системы (абляция — потеря массы при нагреве)
допускают разрушение внешнего слоя и частичный унос массы
тепловой защиты. Происходящие при этом процессы сложны и за-
висят от применяемого материала. При использовании органичес-
кого пластика его внешний слой под воздействием тепла подвер-
гается пиролизу, в результате чего появляется коксовый остаток и
выделяются газообразные продукты. С течением времени коксо-
вый слой увеличивается и зона разложения опускается в глубину
материала. При разложении пластика поглощается значительная
часть поступающего тепла, образующиеся газы вдуваются через
пористый остаток в пограничный слой, деформируя его и снижая
конвективный поток, а высокотемпературный коксовый слой, кро-
ме того, излучает тепло. Процесс сопровождается уносом части
коксового слоя из-за механического воздействия со стороны пото-
ка и догоранием газообразных продуктов. Теплоизоляция кор-
пуса СА обеспечивается непрококсованным слоем абляционного
материала и слоем легкого теплоизолятора, если он установлен
под первым.
Применяют комбинированные и сублимирующие абляционные
материалы. В первом случае в материал вводится наполнитель
(например, стеклянный), который усиливает коксовый слой, а на
поверхности плавится и частично испаряется. Материалы такого
рода имеют повышенную плотность и прочность. Сублимирующие
материалы (например, типа фторопласта) не образуют коксового
120
остатка, при нагреве переходят из твердой фазы в газообразную
и имеют относительно низкую температуру сублимации и малый
теплоотвод излучением.
Абляционные материалы применялись для лобовых теплоза-
щитных экранов всех СА, а также на боковой поверхности СА
всех отечественных КК и американского КК «Аполлон». В част-
ности, на спускаемом аппарате КК «Союз» лобовой щит выпол-
нен из абляционного материала с наполнителем в виде асбесто-
вой ткани, а боковая теплозащита представляет собой трехслой-
ный пакет из сублимирующего материала типа фторопласта, плот-
ного абляционного материала типа стеклотекстолита, создающего
прочную оболочку, и теплоизолятора в виде волокнистого мате-
риала с легкой связующей пропиткой. При этом поперечные срезы
теплозащиты (люки, стыки и т. д.) закрыты окантовками из плот-
ного абляционного материала. Такая теплозащита проста по кон-
струкции и технологична.
На КК «Аполлон» использовался абляционный материал, ко-
торым заполнялась сотовая конструкция на основе стеклоткани,
приклеенная к корпусу СА.
Толщина тепловой защиты по поверхности СА, как правило,
неравномерна и выбирается с учетом распределения тепловых по-
токов и заданной температуры корпуса СА. Так, на КК «Апол-
лон» толщина защиты лежит в диапазоне от 8 до 44 мм.
В конструкции теплозащиты должны учитываться свойства ма-
териалов в части линейных расширений при нагреве.
Компоновочная схема
Целью разработки компоновочной схемы является рациональ-
ное размещение экипажа, оборудования и основных элементов
конструкции в рамках выбранной для СА формы при условии
выполнения требований по его центровке и минимизации массы,
функциональных требований и ограничений, а также решения во-
просов технологичности и эксплуатации (агрегатирование, доступ
к оборудованию и т. п.). В процессе поиска компоновочной схемы
определяются или уточняются геометрические размеры СА и де-
тали его аэродинамической компоновки.
В качестве примера рассмотрим основы построения компоно-
вочной схемы спускаемого аппарата КК «Союз». Как известно,
наилучшая переносимость перегрузок обеспечивается при их воз-
действии в направлении «грудь — спина» при угле 78° между ли-
нией спины и вектором силы. Поэтому с учетом отклонения сум-
марной аэродинамической силы (см. рис. 3.10) кресла по линии
спины установлены под углом 70° к оси СА. Они имеют индиви-
дуальные ложементы, привязную систему и амортизатор, снижа-
ющий перегрузки при приземлении, движение вдоль которого (ра-
бочий ход 250 мм) сопровождается поворотом кресла вокруг
шарнира, расположенного в районе ног космонавта (рис. 3.16).
Перед посадкой амортизатор «взводится» (поднимая кресло в
121
28 29 30
Рис. 3.16. Компоновочная схема спускаемого аппарата КК «Союз>:
1 — корпус с тепловой защитой; 2 — двигатели управления по рысканью; 3 — дви-
гатели управления по таигажу; 4 — командно-снгнальиое устройство; 5 — прибор*
иая доска; 6 — иллюминатор оптического прибора (визир-ориеитатор); 7 — ручки
управления КК; 8 — шарнир кресла; 9 — отрывная плата; 10 — сбрасываемый ло*
бовой щит; 11 — двигатели управления по крену; 12 — пороховые двигатели мяг*
кой посадки; /3 —рама с баллоном и арматурой для подачи газа в скафандры;
14 — кабинная часть оптического прибора (внешняя сбрасываемая перед спуском
часть не показана); 15 — кресло космонавта; 16 — люк для доступа к бакам с
топливом; 17 — контейнеры с пищей, водой и носимым аварийным запасом (НАЗ);
18 — запасная парашютная система; 19 — инша для установки баков; 20 — амор-
тизатор кресла; 21 — основная парашютная система; 22 — приборная рама; 23 —
баки с топливом (условно смещены); 24 — контейнер запасной парашютной систе-
мы (условно смещен); 25 — контейнер основной парашютной системы; 26 — кры-
шка парашютного контейнера (условно смещена); 27 — узел крепления стренг
парашюта (условно смещен); 28 — донный шпангоут; 29 — иллюминатор; 30 — кры-
шка люка-лаза со щелевой антенной
122
верхнее положение), чем подготавливается к работе. При вы-
бранной позе космонавта обеспечивается переносимость и всех
других перегрузок в полете (работа PH, ввод в поток парашютов
и т. д.).
При наличии двух обитаемых отсеков СА должен иметь мини-
мальные размеры (см. раздел 3.4), причем определяющим в этом
отношении является диаметр корпуса в зоне установки кресел.
КК «Союз» проектировался как трехместный, и наиболее компакт-
ной оказалась схема размещения кресел «веером» (см. рис. 3.16).
Между креслами вдоль образующей конической поверхности по
соображениям центровки были установлены два контейнера пара-
шютных систем; при высокой плотности укладки (0,5—0,6 кг/л) и
большой массе они способствуют созданию нужного бокового сме-
щения центра тяжести СА. На основе такой схемы и с учетом воз-
можностей размещения оборудования в подкресельной зоне и на
стенках кабины был определен (как минимально допустимый) и
принят диаметр металлического корпуса СА, равный 2 м.
В спускаемом аппарате КК «Союз» перед космонавтами, на-
ходящимися в креслах, установлена центральная приборная дос-
ка (см. рис. 3.16), по краям которой размещены командно-сиг-
нальные устройства, ниже приборной доски — оптический прибор
для наблюдения при стыковке и для ручной ориентации КК, а
справа и слева от кресел — обзорные иллюминаторы; ручки управ-
ления установлены на центральном кресле. Основная часть обо-
рудования размещена на приборных рамах переднего днища, на
котором также установлены двигатели мягкой посадки, закрытые
при спуске лобовым щитом, сбрасываемым на участке парашюти-
рования. Парашютные системы уложены в герметичных контей-
нерах и вводятся в поток при сбросе их крышек. Спускаемый ап-
парат имеет быстрооткрывающийся люк, в тепловой защите
которого смонтирована щелевая антенна. Реактивные двигатели
малых тяг и питающие их баки с однокомпонентным топливом
установлены снаружи гермоконтура.
В двухместном КК «Союз» на месте левого кресла устанавли-
вается рама с баллонами и арматурой для подачи воздуха в
скафандры в случае разгерметизации КК.
В орбитальном полете СА и орбитальный отсек соединены ме-
жду собой, а их стык уплотнен так, что образуется единый гер-
моконтур. Перед спуском они разделяются с помощью пироуст-
ройств. С переходным отсеком (см. рис. 3.8) СА связан металли-
ческими стяжками, проходящими через лобовой щит, внешние
концы которых при разделении КК освобождаются пирозамками
переходного отсека.
Выбор компоновочной схемы и размеров СА космического ко-
рабля «Союз» был подчинен требованию максимальной компакт-
ности, что делало инженерный поиск особенно сложным. Опыт
эксплуатации КК подтвердил рациональность принятых реше-
ний и соответствие технических характеристик СА задачам
полетов.
123
3.6. СОВЕТСКИЕ ПИЛОТИРУЕМЫЕ КК
Космический корабль «Восток» — первый в мире пилотируе-
мый орбитальный КК, на котором был осуществлен полет чело-
века в космическое пространство. Созданная на базе двухступен-
чатой PH «Спутник» ее трехступенчатая модификация, впоследст-
вии названная PH «Восток», позволила вывести на геоцентриче-
скую орбиту корабль-спутник массой более 4,7 т.
Рис. 3.17. Космический корабль «Восток»
Космический корабль «Восток» (рис. 3.17) состоял из спус-
каемого аппарата и приборного отсека с тормозной двигательной
установкой. Его основные технические характеристики приведены
в табл. 3.2.
Таблица 3.2
Технические характеристики космического корабля «Восток»
Параметр Величина
Стартовая масса, т, в том числе: 4,725
СА приборного отсека с двигательной установкой Габариты, м: длина (по корпусу) диаметр максимальный (по корпусу) диаметр СА Свободный объем герметичной кабины, м’ Перегрузка на траектории баллистического спуска, ед. Продолжительность полета, сут 2,46 2,265 4,41 2,43 2,3 1,6 9—10 До 10
Работа над проектом космического корабля (КК) началась
в 1958 г.
124
15 мая 1960 г. был запущен первый КК-спутник в беспилотном
варианте без теплозащиты, 19 августа 1960 г. — второй с двумя
собаками на борту, который благополучно возвратился на Землю,
а затем еще три КК, причем в двух последних (март 1961 г.) бы-
ла полностью проверена программа будущего пилотируемого по-
лета.
12 апреля 1961 г. в 9 ч 07 мин по московскому времени PH
«Восток» вывела на орбиту с перигеем 181 км, апогеем 327 км
и наклонением 65° КК «Восток» массой 4725 кг с летчиком-кос-
монавтом СССР Ю. А. Гагариным. Через 108 мин, совершив один
виток вокруг Земли, КК «Восток» и летчик-космонавт Ю. А. Га-
гарин благополучно приземлились иа территории Советского
Союза.
6 августа 1961 г. был выведен на орбиту КК «Восток-2», на
котором летчик-космонавт СССР Г. С. Титов впервые выполнил
суточный орбитальный полет.
В августе 1962 г. состоялся первый групповой полет двух КК
«Восток-3» (летчик-космонавт А. Г. Николаев) и «Восток-4» (лет-
чик-космонавт П. Р. Попович).
В июне 1963 г. был выполнен новый групповой полет двух КК
«Восток-5» (летчик-космонавт В. Ф. Быковский) и «Восток-6»
(летчик-космонавт В. В. Терешкова). Максимальная продолжи-
тельность полета КК «Восток-5» составила 5 сут. Успешное вы-
полнение полетов по программе «Восток» послужило основой для
дальнейшего развития советской космической техники.
Космический корабль «Восток» имел следующие бортовые си-
стемы:
управления движением и стабилизации, обеспечивающую ав-
тономную и ручную ориентацию и стабилизацию КК при выпол-
нении программы полета; в этом случае для ручной ориентации
использовалось оптическое устройство «Взор», а для автоматичес-
кой ориентации — датчик автономной солнечной ориентации; для
контроля работы систем и ручной выдачи команд имелся пульт
космонавта;
газовых сопел ориентации, состоящую из двух автономных си-
стем реактивных сопел (по 8 шт. в каждой), работающих на сжа-
том азоте, поступающем из шар-баллонов, размещенных на при-
борном отсеке;
управления бортовой аппаратурой и электропитания, включав-
шую командно-логические и электрокоммутационные устройства и
блоки аккумуляторных батарей (в приборном отсеке), автоном-
ную аккумуляторную батарею (в СА), а также преобразователи
тока;
жизнеобеспечения и терморегулирования, поддерживающие в
кабине КК нормальную атмосферу давлением 755—775 мм рт. ст.
с содержанием кислорода 21—25% по объему и температуру
17—26°С и состоящие из регенерационной установки, холодильно-
сушильного агрегата, поглотителей влаги, фильтра для поглоще-
ния вредных примесей, контролирующей и регулирующей аппара-
125
туры, а также из резервной системы испарительного охлаждения
в СА; тепло от холодильно-сушильного агрегата отводилось хлад-
агентом, подаваемым из приборного отсека, на котором были
установлены радиатор-излучатель и жалюзи; система терморегу-
лирования обеспечивала заданный температурный режим аппара-
туры и в приборном отсеке КК;
радиосвязи в составе УКВ-радиолинии, двух КВ-радиолиний
для обеспечения двусторонней телефонной связи, КВ-передатчика
системы «Сигнал» для передачи данных о самочувствии космо-
навта, дублированного комплекта радиоаппаратуры, обеспечиваю-
щего траекторные измерения, ТВ-передатчика и широковеща-
тельного приемника, двух комплектов приемных и дешифрирую-
щих устройств аппаратуры командной радиолинии, двух комплек-
тов радиотелеметрической аппаратуры с соответствующей аппара-
турой коммутации; в момент введения основных парашютов
космонавта и СА предусматривалась работа пеленгационных
KB-передатчиков, а после приземления — УКВ-передатчиков;
программно-временного устройства, обеспечивающего задан-
ную циклограмму работы бортовой аппаратуры;
двигательную установку для торможения при сходе с орбиты
(сухой массой 396 кг), включавшую жидкостной реактивный дви-
гатель с тягой 1,6 тс, топливные баки, систему подачи топлива
и запас (280 кг) двухкомпонентного топлива; стабилизация КК
при работе двигателя осуществлялась автоматически по сигналам
от гироскопов с помощью рулевых сопел двигательной установки;
приземления в составе парашютной системы посадки спускае-
мого аппарата, катапультируемого кресла космонавта с пара-
шютными системами и блоком НАЗ и автоматикой управления ра-
ботой системы;
аварийного спасения космонавта, построенную с учетом того,
что при аварии PH на старте или в начале полета космонавт ка-
тапультируется из спускаемого аппарата, а при аварии на осталь-
ных участках полета СА отделяется от приборного отсека КК и
PH для последующего спуска на Землю.
Вся наружная поверхность СА была покрыта теплозащитой
(массой до 800 кг), защищавшей конструкцию из алюминиевого
сплава от нагрева при полете в атмосфере на участке спуска.
Снаружи теплозащиты были наложены маты из экранно-вакуум-
ной теплоизоляции.
Стартовая масса всей РКС «Восток» составляла 287 т при
тяге двигателей I и II ступеней 408 тс на Земле, запускаемых
одновременно, а общая длина PH с КК «Восток» (от вершины го-
ловного обтекателя до среза сопел рулевых камер)—38,4 м. Бо-
лее подробные сведения о PH «Восток» приведены в книге «Раке-
ты-носители» (М„ Воениздат, 1981).
Космический корабль «Восход» — первый многоместный орби-
тальный КК — имел две модификации и состоял из двух отсе-
ков — спускаемого аппарата и приборного отсека с тормозной
двигательной установкой (КК «Восход»), и двух указанных отсе-
126
ков и шлюзовой камеры (КК «Восход-2»). Основные технические
характеристики КК «Восход» приведены в табл. 3.3.
Таблица 3.3
Технические характеристики космического корабля <Восход>
Параметр Величина
Стартовая масса, т, в том числе СА 5,32—5,68 2,8-3,1
Габариты, м: длина (по корпусу) диаметр: 5,0
максимальный (по корпусу) СА Перегрузка на траектории баллистического спуска, ед. Продолжительность полета, сут 2,43 2,3 8-10 До 3
Первый многоместный КК «Восход» (летчики-космонавты
В. М. Комаров, К- П. Феоктистов, Б. Б. Егоров) был выведен
12 октября 1964 г. на орбиту с перигеем 177,5 км, апогеем 408 км
и наклонением 65°; 13 октября 1964 г. он совершил мягкую по-
садку на территории СССР.
18 марта 1965 г. был запущен КК «Восход-2» (летчики-космо-
навты П. И. Беляев и А. А. Леонов) на орбиту с перигеем 173 км,
апогеем 498 км и наклонением 65°. Используя надувной шлю-
зовой отсек и специальное оборудование, летчик-космонавт
А. А. Леонов впервые в мире вышел в открытое космическое про-
странство, пробыв вне КК 12 мин.
Бортовые системы КК «Восход» по сравнению с бортовыми
системами КК «Восток» имели следующие отличия:
двигательная установка для торможения при сходе с орбиты
имела дублирующий резервный тормозной пороховой реактивный
двигатель массой 145 кг, установленный в верхней части КК;
система ориентации была дополнена аппаратурой ориентации
с использованием ионных датчиков;
система приземления имела два основных парашюта и двига-
тель мягкой посадки в стренгах их подвески, а в СА вместо ка-
тапультируемого кресла были установлены два (или три) амор-
тизационных кресла с индивидуальными ложементами для чле-
нов экипажа;
в состав системы жизнеобеспечения был введен специальный
скафандр с автономным ранцем, а также надувная шлюзовая ка-
мера массой 250 кг, обеспечивающие выход человека в открытое
пространство (КК «Восход-2»).
Ракетой-носителем КК «Восход» была ракета-носитель, раз-
работанная на базе PH «Восток», но с более мощной III сту-
пенью, что позволило увеличить стартовую массу КК-
127
Космический корабль «Союз» — многоцелевой орбитальный КК
второго поколения. КК «Союз» (рис. 3.18) состоит из трех отсе-
ков: орбитального (бытового) отсека с агрегатом стыковки (или
специальным отсеком), спу-
скаемого аппарата и прибор-
но-агрегатного отсека. Его ос-
новные технические характе-
ристики приведены в табл. 3.4.
В 1962 г. была начата раз-
работка КК «Союз», а уже
в 1964 г. — экспериментальная
отработка его бортовых си-
стем и конструкции.
Летная отработка бортовых
систем и конструкции была
начата на ИСЗ «Космос-133»
28 ноября 1966 г.
Первый испытательный пи-
лотируемый полет КК «Союз-1»
состоялся 23 апреля 1967 г.
(летчик-космонавт В. М. Ко-
маров). Корабль был выведен
на орбиту с перигеем 180 км,
апогеем 228 км и наклонением
51,6°. После проведения до-
полнительной эксперименталь-
ной отработки началась дли-
тельная эксплуатация КК «Со-
юз» в пилотируемом вариан-
Рис. 3.18. Космический корабль «Союз-8» те, начиная с КК «Союз-3»
во иремя сборки (летчик-космонавт Г. Т. Бере-
говой) , запущенного 28 октября
1968 г. к беспилотному ко-
раблю «Союз-2». При стыковке на орбите 16 января 1969 г. двух
пилотируемых КК «Союз-4» (летчик-космонавт В. А. Шаталов)
и КК «Союз-5» (летчики-космонавты Б. В. Волынов, А. С. Ели-
сеев, Е. Н. Хрунов) была образована первая экспериментальная
станция массой 12 924 кг и осуществлен переход через открытое
космическое пространство двух членов экипажа из одного КК
в другой. Впоследствии на КК «Союз-6», «Союз-7» и «Союз-8»
был выполнен групповой полет с маневрированием и сближением
на орбите. В июне 1970 г. КК «Союз-9» (летчики-космонавты
А. Г. Николаев и В. И. Севастьянов) совершил полет продолжи-
тельностью 17,7 сут. В 1971 г. КК «Союз» был модернизирован
в транспортный корабль (ТК) для доставки экипажа на орби-
тальную станцию «Салют» и в этом качестве использовался по
1981 г. включительно, обеспечивая длительную эксплуатацию
станций «Салют» и выполнение программы «Интеркосмос».
128
Таблица 3.4
Технические характеристики космического корабля «Союз»
Параметр Величина
Стартовая масса (без учета ГО и САС), т, в том числе: СА: при старте после приземления приборно-агрегатного отсека орбитального отсека Габариты, м; длина (по корпусу) диаметр: максимальный (по корпусу) СА орбитального отсека размах солнечных батарей (при наличии) Свободный объем, м’: СА орбитального отсека Перегрузка на траектории спуска с использо- ванием аэродинамического качества СА Продолжительность полета, сут: автономного в составе орбитального комплекса 6,5-6,8 2,8 2,0—2,2 2,5-2,8 1,2-1,3 6,98-7,13 2,72 2,2 2,2 8,37 2,5 4,0 3-4 3-20 120
В 1974 г. КК «Союз» был доработан для экспериментального по-
лета по программе «Союз» — «Аполлон». В полете КК «Союз-16»
(летчики-космонавты А. В. Филипченко и Н. Н. Рукавишников)
была проведена проверка нового варианта корабля, а совместный
полет был осуществлен 15—20 июля 1975 г. при участии совет-
ского КК «Союз-19» (летчики-космонавты А. А. Леонов и
В. Н. Кубасов) и американского КК «Аполлон» (астронавты
Т. Стаффорд, Д. Слейтон, В. Бранд). КК «Союз-19» в полете
(снимок сделан из КК «Аполлон») показан на рис. 3.19.
На корабле «Союз-22», запущенном 15 сентября 1976 г. (лет-
чики-космонавты В. Ф. Быковский и В. В. Аксенов), была осуще-
ствлена программа фотографирования земной поверхности с по-
мощью многозонального космического фотоаппарата МКФ-6, раз-
работанного совместно специалистами СССР и ГДР и изготов-
ленного в ГДР на народном предприятии «Карл Цейс Йена».
Бортовые системы КК «Союз» включают:
систему ориентации и управления движением;
систему реактивных двигателей причаливания и ориентации;
сближающе-корректирующую двигательную установку;
систему электропитания;
комплекс систем жизнеобеспечения экипажа;
системы радиосвязи;
систему стыковки;
систему приземления спускаемого аппарата;
5 Космические аппараты
129
Рис. 3.19. Космический корабль
«Союз-19» в полете
систему управления бортовым комплексом аппаратуры и обо-
рудования;
систему аварийного спасения.
Система ориентации и управления движением работает как в
автоматическом, так и в ручном режиме и оснащена командными
приборами: гирокомплексом, датчиками ориентации, интегратором
ускорений, датчиками угловых скоростей, а также приборами-пре-
образователями, коммутацион-
но-логическими приборами и
приборами визуального кон-
троля ориентации корабля.
Часть этой системы, разме-
щенная в СА, обеспечивает
управление его движением на
участке спуска; ее исполни-
тельными органами являются
шесть реактивных двигателей
ориентации, в том числе че-
тыре двигателя по тангажу и
рысканью номинальной тягой
по 7,5 кгс и два двигателя по
крену номинальной тягой по
15 кгс, которые работают на
однокомпонентном топливе
(запас перекиси водорода —
30 кг), размещенном в двух
баках и подаваемом вытес-
нительной системой подачи.
Для ручного управления
КК используются пульт космо-
навтов с информационно-сиг-
нальными приборами, два ко-
мандно-сигнальных устройства
и две ручки управления.
Система реактивных двигателей причаливания и ориентации
предназначена для выполнения разворотов КК относительно его
центра масс вокруг трех осей и обеспечения координатных малых
перемещений центра масс вдоль каждой из этих осей. В состав
системы входят четырнадцать реактивных двигателей причалива-
ния и ориентации с номинальной тягой 10 кгс и восемь двигателей
ориентации с номинальной тягой 1—1,5 кгс, а также топливные
баки с однокомпонентным топливом (запас перекиси водорода —
140 кг), трубопроводы, система вытеснения и подачи топлива и
автоматика системы. Из четырнадцати двигателей причаливания
и ориентации десять расположены на раме переходной секции
приборно-агрегатного отсека рядом с топливными баками (в рай-
оне центра масс), а остальные четыре двигателя причаливания и
ориентации, а также восемь двигателей ориентации — у нижнего
шпангоута агрегатной секции приборно-агрегатного отсека.
130
Сближающе-корректирующая двигательная установка пред-
назначена для изменения скорости КК в направлении его про-
дольной оси (при проведении коррекций орбиты и при торможе-
нии для схода с орбиты) и состоит из основного сближающе-кор-
ректирующего однокамерного двигателя многократного запуска
с номинальной тягой 417 кгс, дублирующего двухкамерного
двигателя с номинальной тягой 411 кгс, четырех топливных ба-
ков, системы подачи топлива в двигатели и автоматики двига-
тельной установки. При работе основного двигателя КК стабили-
зируется с помощью двигателей причаливания и ориентации, а
при работе дублирующего двигателя — с помощью рулевых сопел,
работающих на газе одного из турбонасосных агрегатов двига-
тельной установки. Основной и дублирующий двигатели работают
на двухкомпонентном топливе: окислитель — азотная кислота и
горючее — типа гидразина (запас топлива в зависимости от про-
граммы полета КК — 0,5—0,9 т).
Система электропитания обеспечивает аппаратуру КК по-
стоянным током с номинальным напряжением 27 В и включает
основную химическую батарею, резервную батарею, а также ста-
тические преобразователи тока, счетчики ампер-часов и комму-
тационные щитки. Емкость основной батареи достаточна для про-
ведения автономного полета КК до его стыковки и последующего
автономного полета перед спуском на Землю. Для увеличения вре-
мени автономного полета на КК могут устанавливаться солнеч-
ные батареи площадью ~ 11 м2. Автономная батарея СА обеспе-
чивает электропитанием его системы на участке спуска и после
приземления или приводнения.
Комплекс систем жизнеобеспечения включает комплект ска-
фандров, системы обеспечения газового состава атмосферы жилых
отсеков, терморегулирования, питания и водообеспечения, ассени-
зационно-санитарное устройство, средства гигиенического и ме-
дицинского обеспечения. В жилых отсеках КК «Союз» с помощью
регенерационных агрегатов поддерживается обычная кислород-
но-азотная атмосфера с давлением около 760 мм рт. ст. с возмож-
ным увеличением процентного содержания кислорода по объему
до 40% и понижением давления до 520 мм рт. ст.
Скафандры используются экипажем при разгерметизации КК,
на участке выведения КК на орбиту, при проведении стыковки,
а также на участке спуска и возвращения на Землю. Система
терморегулирования обеспечивает сброс избыточного тепла
в космическое пространство путем прокачивания теплоносителя
через специальные радиаторы-излучатели, установленные сна-
ружи основного корпуса приборно-агрегатного отсека. Кроме то-
го, для исключения притока тепла от Солнца и неконтролируемо-
го сброса тепла конструкцией все отсеки КК закрыты многослой-
ной экранно-вакуумной теплоизоляцией. Системы питания и водо-
обеспечения включают в себя специальные рационы и запасы во-
ды в емкостях с устройствами подачи воды; эти системы
Ъ*
131
размещены как в орбитальном отсеке, так и в спускаемом аппа-
рате, ассенизационно-санитарное устройство в полном комплек-
те— только в орбитальном отсеке.
Системы радиосвязи КК состоят из командной радиолинии, си-
стем радиотелефонной и радиотелеграфной связи, радиотелемет-
рии, телевидения и радиотехнической системы сближения.
Командная радиолиния позволяет передавать на борт КК
команды с выдачей на Землю квитанции о приеме, а также обес-
печивает траекторные измерения. Она работает в дециметровом
диапазоне радиоволн через многовибраторную антенну с круговой
диаграммой обзора.
Система радиотелефонной и радиотелеграфной связи работает
в КВ и УКВ диапазонах, обеспечивает внутренние переговоры эки-
пажа, связь экипажа с Землей и между КК на орбите, а также
передает сигналы оперативной телеметрической связи через антен-
ны, установленные на корпусе приборно-агрегатного отсека (или
солнечных батареях) в виде штырей различной длины. Эта же си-
стема обеспечивает связь при спуске через щелевую антенну СА,
связь и пеленг на участке парашютирования и после посадки с
помощью антенны в стропах парашюта и антенн, раскрывающих-
ся на спускаемом аппарате (после посадки).
Радиотелеметрическая система позволяет вести передачу теле-
метрической информации о состоянии бортовых систем и агрега-
тов КК и данных о самочувствии членов экипажа как в режиме
непосредственной передачи, так и в режиме воспроизведения с за-
поминающих устройств, используя автономные передатчики и ан-
тенны.
Телевизионная система предназначена для контроля за про-
цессом причаливания и стыковки и для проведения телерепорта-
жей из жилых отсеков КК, причем телевизионное изображение в
первом случае поступает на бортовое видеоконтрольное устройст-
во, а во втором — передается на Землю по автономной радиоли-
нии или через командную радиолинию. Система имеет наружные
телекамеры на орбитальном отсеке и телекамеру в СА.
Радиотехническая система сближения предназначена для ав-
томатического сближения и стыковки КК и станции с взаимным
поиском, обнаружением и последующими измерениями углового
положения и угловой скорости линии визирования относительно
связанной с корпусом КК системы координат, расстояния между
КК или КК и станцией, радиальной составляющей относитель-
ной скорости КК и угла взаимного крена между стыкующимися
КК и станцией. Система начинает работать с расстояния около
20 км между КК или КК и станцией при относительной скорости
до 40—60 м/с без предварительного целеуказания об их взаимном
угловом положении. На «активных» и «пассивных» КК и станциях
установлены идентичные антенны обзора и пеленга. Кроме того,
на «пассивном» КК или станции имеются две антенны маяка, ан-
тенна ретранслятора и антенна крена, а на «активном» — гиро-
стабилизированная антенна головки наведения (в кардановом
132
подвесе), работающая с антенной ретранслятора, и антенна за-
проса, работающая в режиме причаливания на антенну обзора и
пеленга «пассивного» КК или станции. Электронная аппаратура
системы радионаведения установлена в орбитальном отсеке КК
«Союз» и в рабочем отсеке станции «Салют».
Система стыковки КК «Союз» состоит из стыковочного агрега-
та и приборов автоматики стыковки, задающей необходимые ре-
жимы работы при стыковке. Стыковочный агрегат установлен
в верхней части орбитального отсека КК и имеет люк диаметром
800 мм.
Система приземления спускаемого аппарата обеспечивает его
посадку вместе с экипажем и включает основную и запасную
парашютные системы, четыре твердотопливных двигателя мягкой
посадки (на корпусе СА), срабатывающих по команде от высото-
мера, амортизационные кресла и автоматику системы.
Система управления бортовым комплексом аппаратуры и обо-
рудования состоит из коммутационно-логических приборов, раз-
мещенных во всех отсеках КК.
Система аварийного спасения предназначена для обеспечения
безопасности экипажа в случае аварии PH на старте и на участ-
ке выведения КК на орбиту и построена по принципу использо-
вания как специальных средств (двигательная установка, авто-
матика и др.), так и штатных систем КК (см. главу 10).
Спускаемый аппарат, изготовленный в основном из алюминие-
вого сплава, имеет сбрасываемый перед посадкой лобовой тепло-
защитный экран, а также боковую теплозащиту и внутреннюю
теплоизоляцию.
Приборно-агрегатный отсек выполнен из алюминиевого, а ор-
битальный отсек — из магниевых сплавов.
Для выведения КК «Союз» на орбиту ИСЗ используется трех-
ступенчатая ракета-носитель «Союз», имеющая стартовую массу
Рис. 3.20. Ракетно-космическая система «Союз» во
время транспортирования на стартовую позицию кос-
модрома
до 310 т, общую длину (с КК «Союз») до 49,3 м и максимальный
размер по воздушным рулям на боковых ракетных блоках —
10,3 м (рис. 3.20)
133
Рис. 3.21. Автоматическая межпла-
нетная станция «Зонд» (общий вид)
I ступень (как и PH «Восток») имеет четыре боковых ракет-
ных блока длиной 19,8 м и диаметром 2,68 м каждый, оснащен-
ных четырехкамерными (с двумя дополнительными рулевыми ка-
мерами) двигателями РД-107.
II ступень включает центральный ракетный блок длиной
27,76 м (у PH «Восток» — 28,75 м) с максимальным диаметром
2,95 м, оснащенный четырехкамерным (с четырьмя дополнитель-
ными рулевыми камерами) дви-
гателем РД-108.
III ступень состоит из ракет-
ного блока длиной 8,1 м и диа-
метром 2,66 м (у PH «Восток» —
2,98 м и 2,58 м соответственно),
оснащенного четырехкамерным
двигателем (с рулевыми соп-
лами) тягой в пустоте 29,5 тс
(у PH «Восток»—однокамер-
ный тягой 5,6 тс).
Двигатели всех ступеней ра-
ботают на керосине и жидком
кислороде. При старте двигатели
I и II ступеней запускаются од-
новременно, развивая тягу 418 тс
на Земле.
Двигатель II ступени продолжает работу после сброса боко-
вых ракетных блоков. Через определенное время сбрасывается
головной обтекатель КК. Двигатель III ступени включается в
конце работы двигателя II ступени перед ее отделением, после че-
го сбрасывается хвостовой отсек III ступени. Продолжительность
активного участка работы двигателей всех ступеней PH около
9 мин.
Космический корабль или автоматическая межпланетная стан-
ция (АМС) «Зонд» — КК для отработки техники полета к Луне
с возвращением на Землю. АМС «Зонд» (рис. 3.21) состояла из
СА и приборно-агрегатного отсека, а также сбрасываемого перед
стартом к Луне опорного конуса массой 150 кг, установленного в
носовой части.
Основные технические характеристики АМС «Зонд» приведены
в табл. 3.5.
Старт к Луне выполнялся с промежуточной орбиты с перигеем
187 км и апогеем 219 км.
Первый полет АМС «Зонд-5» к Луне был выполнен 15 сентяб-
ря 1968 г. Облетев Луну, АМС вошла в атмосферу Земли со вто-
рой космической скоростью и выполнила спуск по баллистической
траектории в акваторию Индийского океана (рис. 3.22). На АМС,
запущенных 10 ноября 1968 г. («Зонд-6») и 8 августа 1969 г.
(«Зонд-7»), были отработаны облет Луны и возвращение на Зем-
лю с управляемым спуском в атмосфере в заданный район терри-
тории СССР. При полете АМС, запущенной 20 октября 1970 г.
134
Таблица 3.5
Технические характеристики автоматической межпланетной
станции «Зонд»
Параметр Величина
Стартовая масса (без ГО и САС), т, в том числе: 5,3-5,5
СА 2,9-3,1
приборно-агрегатного отсека 2,25
опорного конуса Габариты, м: длина: 0,15
по корпусу на орбите ИСЗ 5,0
при полете к Луне диаметр: 4,5
максимальный (по корпусу) 2,72
СА 2,2
размах солнечных батарей 9,0
Перегрузка на траектории спуска с использо- ванием аэродинамического качества СА 4-7
Расчетная продолжительность полета, сут 7-8
Рис. 3.22. Спускаемый аппарат АМС «Зоид-5» в Индийском
океане
(«Зонд-8»), был отработан вариант возвращения на Землю со
стороны северного полушария.
В проведенных полетах был получен ценный материал, вклю-
чая фотографии Земли и Луны с различных расстояний, причем на
борту АМС «Зонд-5» находились живые существа — черепахи.
135
Бортовые системы АМС «Зонд» имели следующие особен-
ности:
система ориентации и управления движением новой разработ-
ки имела гироплатформу, датчики солнечной и звездной ориента-
ции и специальный вычислитель;
было увеличено количество реактивных двигателей, управляю-
щих движением СА на участке спуска в целях их дублирования
по каналу крена;
система реактивных двигателей ориентации с номинальной
тягой 1—1,5 кгс имела дублирующий комплект из восьми двига-
телей;
корректирующая двигательная установка была оснащена одно-
камерным реактивным двигателем номинальной тягой 410 кгс,
снабженным рулевыми соплами, с массой топлива 0,4 т;
система электропитания имела солнечные батареи площадью
11 м2 для подзаряда буферной химической батареи;
система дальней радиосвязи была оснащена остронаправлен-
ной антенной, работающей в дециметровом диапазоне волн для
обеспечения надежной связи на больших расстояниях;
тепловая защита СА была модернизирована с учетом ее на-
грева при входе СА в атмосферу со второй космической скоростью;
система приземления имела одну парашютную систему с ос-
новным парашютом площадью 1000 м2, двигатели мягкой посадки
и автоматику управления системой;
двигательная установка системы аварийного спасения была бо-
лее мощной с учетом особенностей PH.
Рис. 3.23. Космический корабль «Союз Т»
Ракетно-космическая система включала PH типа «Протон»
с дополнительной разгонной ступенью для старта АМС к Луне.
Космический корабль «Союз Т» (рис. 3.23)—усовершенство-
ванный трехместный орбитальный КК, созданный с учетом опыта
разработки и эксплуатации КК «Союз» — состоит из орбитально-
го (бытового) отсека с агрегатом стыковки, спускаемого аппарата
и приборно-агрегатного отсека новой конструкции.
136
Основные технические характеристики КК «Союз Т» приве-
дены в табл. 3.6.
Таблица 3.6
Технические характеристики космического корабли <Союз Т»
Параметр Величина
Стартовая масса (без ГО и САС), т, в том числе: 6,85
СА орбитального отсека приборно-агрегатного отсека Габариты, м: 3,0 1,1 2,75
длина (по корпусу) диаметр: 6,98
максимальный (по корпусу) СА орбитального отсека размах солнечных батарей Свободный объем жилых отсеков, м3 Перегрузка на участке спуска, ед. Расчетная продолжительность полета, сут: 2,72 2,2 2,2 10,6 6,5 3-4
автономного в составе орбитального комплекса 4 120
16 декабря 1979 г. для отработки операций сближения и сты-
ковки со станцией «Салют-6» и выполнения 100-суточного полета
в составе орбитального комплекса был запущен корабль «Союз Т»
в беспилотном варианте. Первый испытательный пилотируемый
полет КК «Союз Т-2» (летчики-космонавты Ю. В. Малышев и
В. В. Аксенов) со стыковкой к станции «Салют-6» состоялся
5 июня 1980 г. 27 ноября 1980 г. стартовал КК «Союз Т-3» (лет-
чики-космонавты Л. Д. Кизим, О. Г. Макаров, Г. М. Стрекалов).
Основной задачей полета была отработка транспортного корабля
при полном составе экипажа.
12 марта 1981 г. был запущен КК «Союз Т-4» (летчики-космо-
навты В. В. Ковалевой и В. П. Савиных), полет которого поло-
жил начало регулярной эксплуатации КК «Союз Т».
Космические корабли «Союз Т» выводятся на орбиту PH
«Союз».
Бортовые системы КК «Союз Т» по сравнению с КК «Союз»
имеют следующие особенности:
система управления движением построена на принципах бес-
платформенной (отсутствуют гироскопы или гироплатформы)
инерциальной системы на базе бортового цифрового вычислитель-
ного комплекса; все режимы ориентации, в том числе на Землю
137
и Солнце, выполняются как автоматически, так и при участии
экипажа, а режимы сближения — на основе расчетов с помощью
БЦВК траекторий относительного движения и оптимальных ма-
невров при использовании информации от радиотехнической си-
стемы сближения; система автоматически контролирует динами-
ческие операции, расход топлива, состояние ряда приборов и аг-
регатов и может принимать решения об изменении режима ра-
боты или о переключении на резервные комплекты аппаратуры;
система управляется по командной радиолинии с Земли или эки-
пажем с использованием бортовых устройств ввода и отображе-
ния информации, включая дисплей, обеспечивает возможность пе-
рехода к ручному управлению на любом этапе полета и спуска;
сближающе-корректирующая двигательная установка с марше-
вым двигателем тягой 315 кгс в кардановом подвесе объединена
по питанию с системой двигателей причаливания и ориентации,
использует единые компоненты топлива в общих баках; примене-
ние такой комбинированной двигательной установки (КДУ) по-
зволяет перераспределять топливо между разными двигателями,
что обеспечивает оптимальное его использование и гибкость при
выполнении программы полета, особенно в нештатных ситуациях;
комбинированная двигательная установка имеет четырнадцать
двигателей причаливания и ориентации номинальной тягой до
14 кгс каждый и двенадцать двигателей номинальной тягой
2,5 кгс каждый;
система электропитания оснащена солнечными батареями,
исключающими зависимость (в части электропитания) вре-
мени автономного полета от емкости химических источников
тока;
комплекс систем жизнеобеспечения рассчитан на экипаж до
трех человек с использованием запасов газообразного кислорода
и поглотителей углекислого газа, скафандры имеют усовершенст-
вованную конструкцию;
система терморегулирования оснащена новыми гидроагрегата-
ми, радиатором-излучателем и автоматикой;
системы радиосвязи имеют телевизионную систему с лучшим
качеством передачи изображения, усовершенствованные командно-
программную радиолинию и радиотелеметрическую систему, при
этом кроме обычных используются антенны типа «антенной ре-
шетки»;
система управления бортовым комплексом новой разработки
имеет повышенную надежность, усовершенствован пульт космо-
навтов;
система приземления СА снабжена новыми парашютными си-
стемами и автоматикой, двигателями мягкой посадки с повышен-
ной энергетикой и высотомером для их запуска;
система аварийного спасения оснащена новыми твердотоплив-
ными двигателями и обладает улучшенными характеристиками, в
частности по уводу СА из опасной зоны,
138
3.7. АМЕРИКАНСКИЕ ПИЛОТИРУЕМЫЕ КК
Космический корабль «Меркурий» — первый орбитальный КК,
с помощью которого США начали освоение космического прост-
ранства КК «Меркурий» (рис. 3.24) состоял
из отсека экипажа, парашютной и антенной
секций. ,* - ;
Отсек экипажа имел свободный объем
1,1 м3, теплозащиту массой 380 кг, восем-
надцать двигателей ориентации номинальной
тягой 0,45, 2,7 и 11 кгс; три пороховых дви-
гателя отделения тягой 182 кгс каждый и три
пороховых двигателя торможения общей тя-
гой 1,35 тс.
Парашютная система обеспечивала ско-
рость приводнения КК 9 м/с при использова-
нии основного парашюта диаметром 19,2 м.
Основные технические характеристики КК
«Меркурий» приведены в табл. 3.7.
Для выведения КК «Меркурий» на орбиту
с перигеем 160 км, апогеем 260 км и накло-
нением 32° использовалась PH «Атлас-Д»,
имевшая с КК стартовую массу ИЗ т при
тяге двигателей I ступени 163 тс и общую
длину 26,8 м.
Работы над КК «Меркурий» были начаты
в 1958 г. 13 сентября 1961 г. был выполнен
первый орбитальный полет в беспилотном
варианте (КК «Меркурий МА-4»), а 5 мая
(астронавт А. Шепард) и 21 июня (астро-
навт В. Гриссом) 1961 г. — два пилотируе-
Рис. 3.24. Космиче-
ский корабль «Мер-
курий» иа ракете-ио-
сителе
мых полета по баллистической траектории высотой 190 км.
Первый пилотируемый орбитальный трехвитковый полет КК
«Меркурий МА-6» (астронавт Д. Гленн) состоялся 20 февраля
Таблица 3.7
Технические характеристики космического корабля «Меркурий»
Параметр Величина
Стартовая масса (с САС), т, в том числе: 1,935
после выхода иа орбиту после приводнения Габариты, м: 1,35 1,13
длина (по корпусу) диаметр максимальный (по корпусу) Перегрузка иа траектории баллистического спуска, ед. Продолжительность полета, сут 2,98 1,89 7,7—8,0 1,5
139
1962 г. Впоследствии было выполнено еще три полета, в послед-
нем из которых (астронавт Г. Купер) была достигнута про-
Рис. 3.25. Космический корабль
«Джемини» в полете
должительность полета 34 ч
20 мин.
Космический корабль «Дже-
мини» — двухместный орби-
тальный корабль — был разра-
ботан для проведения различ-
ных экспериментов в инте-
ресах развития космической
техники. КК «Джемини»
(рис. 3.25) состоял из отсе-
ка экипажа, секций радиоло-
катора и ориентации и агре-
гатного отсека. Секция радио-
локатора включала РЛС с
дальностью захвата 460 км
и БЦВМ.
Секция ориентации имела
шестнадцать двигателей ори-
ентации и управления спус-
ком с номинальной тягой по
11,3 кгс каждый и массу топ-
лива до 100 кг.
Отсек экипажа имел сво-
бодный объем 1,6 м2 и был
оснащен двумя катапульти-
руемыми креслами, основным
парашютом диаметром 25,6 м3
и имел аэродинамическое ка-
чество К = 0,17.
Агрегатный отсек включал четыре корректирующих двигателя:
два тягой по 38,5 кгс и два тягой по 45 кгс, четыре управляющих
двигателя тягой по 45 кгс, восемь двигателей ориентации тягой
по 11,3 кгс и четыре пороховых двигателя торможения общей тя-
гой 4,6 тс. Запас топлива составлял 180—427 кг.
Основные технические характеристики КК «Джемини» приве-
дены в табл. 3.8.
Для выведения КК «Джемини» использовалась ракета-носи-
тель «Титан-II», имевшая с КК стартовую массу 148,5 т при тяге
двигателей I ступени 195 тс и общую длину 33,2 м.
Работы над КК «Джемини» начались в 1961 г. 8 апреля
1964 г. состоялся первый запуск КК «Джемини-1» в беспилотном
варианте, а 23 марта 1965 г. — первый трехвитковый орбитальный
полет КК «Джемини-3» (астронавты В. Гриссом и Д. Янг). 3 июня
1965 г. на КК «Джемиии-4» был выполнен первый выход в кос-
мическое пространство (астронавт Э. Уайт). 15 декабря 1965 г.
через 5 ч 50 мин после старта КК «Джемини-6» (астронавты
У. Ширра и Т. Стаффорд) сблизился до расстояния 0,3 м с КК
140
Таблица 3.8
Технические характеристики космического корабля «Джемини»
Параметр Величина
Стартовая масса, т, в том числе отсека экипажа после приводнения Габариты, м: длина (по корпусу) диаметр максимальный (по корпусу) Перегрузка на траектории с использованием аэродинамического качества СА, ед. Продолжительность полета (ресурс бортовых систем), сут 3,13 1.8-2,15 5,79 3,05 4-5 15
«Джемини-7» (астронавты Ф. Борман и Д. Ловелл), после чего
был выполнен групповой полет. Общая продолжительность полета
КК «Джемини-7» составила 330 ч 35 мин 17 с. 16 марта 1966 г.
экипаж КК «Джемини-8» (астронавты Н. Армстронг и Д. Скотт)
осуществили стыковку пилоти-
руемого КК с беспилотным объ-
ектом-мишенью (ракетой «Адже-
на-Д»).
На КК «Джемини-11» (астро-
навты Ч. Конрад и Р. Гордон)
были проведены четыре стыков-
ки с объектом-мишенью, достиг-
нута высота полета 1370 км,осу-
ществлен выход в космическое
пространство и проведен экспе-
римент по стабилизации в поле-
те двух объектов, соединенных
тросом. 11 ноября 1966 г. стартом
КК «Джемини-12» была закон-
чена серия из десяти пилотируе-
мых полетов по этой программе.
Космический корабль «Апол-
лон» — пилотируемый КК для
полета человека на Луну —
состоял из основного блока
(рис. 3.26), включавшего команд-
ный и служебный модули, и лун-
ной кабины (рис. 3.27), в состав
которой входили посадочная и
Рис. 3.26. Основной блок космиче-
ского корабля «Аполлон-11» над
поверхностью Луны
взлетная ступени.
Командный модуль основного блока (отсек экипажа) имел
двенадцать двигателей, управляющих спуском, тягой 42,2 кгс каж-
дый, три основных парашюта диаметром 26,7 м и аэродинамиче-
ское качество К=0,28—0,4.
141
Служебный модуль основного блока включал шестнадцать
управляющих двигателей тягой 45 кгс каждый и один маршевый
двигатель тягой 9,3 тс.
Посадочная ступень лунной кабины имела один посадочный
двигатель с регулируемой тягой от 0,47 до 4,76 тс, а взлетная сту-
пень— шестнадцать управляющих двигателей тягой 45 кгс каж-
дый и один взлетный двигатель тягой 1,59 тс.
Рис. 3.27. Лунная кабина космического корабля
«Аполлон-11» на Луне
Основной блок (ОБ) и лунная кабина (ЛК) КК «Аполлон»
при полете к Луне в состыкованном состоянии имели начальную
массу около 43,8 т при суммарной длине 17,7 м, свободный объем
для экипажа — 6,1 и 4,5 м3.
Основные технические характеристики КК «Аполлон» приве-
дены в табл. 3.9.
Для полета к Луне использовалась РКС «Сатурн-V—Аполлон»,
имевшая стартовую массу 2905 т при тяге двигателей I ступени
3450 тс и общую длину 110,7 м, причем полезная нагрузка трех-
ступенчатой PH «Сатурн-V» — КК «Аполлон-11» (КК, САС, пе-
реходник, защищающий ЛК) составила 49,762 т.
Разработка проекта КК «Аполлон» была начата в 1961 г.
26 февраля 1966 г. двухступенчатой PH «Сатурн-IB» был запу-
щен первый КК «Аполлон» (основной блок) в беспилотном ва-
рианте.
142
Таблица 3.9
Технические характеристики космического корабля «Аполлон»
Параметр Величина
Стартовая масса (с САС),Т, в том числе: командного модуля при приводнении служебного модуля посадочной ступени взлетной ступени Габариты, м: командного модуля: длина диаметр служебного модуля: длина диаметр посадочной ступени: высота размер по опорам взлетной ступени: высота размер поперечный Расчетная продолжительность полета, сут 47,9 5,56 (0,111 топлива) 5,31 23,26 (19,1 топлива) 10,2 (8,22 топлива) 4,8 (2,64 топлива) 3,48 3,85 7,49 3,91 3,2 9,4 3,76 4,3 До 12
11 октября 1968 г. состоялся первый десятисуточный пилоти-
руемый полет КК «Аполлон-7» (астронавты У. Ширра, Д. Эйзел
и У. Каннингем) по геоцентрической орбите. 21 декабря 1968 г.
КК «Аполлон-8» (астронавты Ф. Борман, Д. Ловелл, У. Андерс),
запущенный PH «Сатурн-V», впервые освоил трассу «Земля —
Луна — Земля». Запуск 3 марта 1969 г. КК «Аполлон-9» позво-
лил провести его испытания на геоцентрической орбите в полном
составе.
Полет 18—26 мая 1969 г. КК «Аполлон-10» (астронавты
Т. Стаффорд, Д. Янг, Ю. Сернан) к Луне стал генеральной ре-
петицией перед высадкой на нее человека. 16 июля 1969 г. к Луне
стартовал КК «Аполлон-11» (астронавты Н. Армстронг, М. Ко-
линз, Э. Олдрин). Лунная кабина «Игл» с астронавтами Н. Арм-
стронгом и Э. Олдрином, отделившись от основного блока «Ко-
лумбия», 20 июля 1969 г. через 102 ч 45 мин 40,2 с после старта
с Земли совершила посадку на Луну в море Спокойствия. В те-
чение 21 ч 36 мин 21 с пребывания на Луне астронавты соверши-
ли выход на ее поверхность (Н. Армстронг — 2 ч 31 мин 40 с,
Э. Олдрин — 2 ч 15 мин), собрали 25 кг образцов лунного грунта
и вернулись на Землю.
Впоследствии к Луне было запущено еще шесть КК «Апол-
лон», пять из которых совершили посадку на ее поверхности.
Программу полетов к Луне завершил КК «Аполлон-17» в де-
кабре 1972 г,
143
Основной блок КК «Аполлон» был впоследствии использован
в качестве транспортного корабля для доставки астронавтов и
грузов на орбитальную станцию «Скайлэб».
В 1975 г. после модификации КК «Аполлон» принял участие
в первом международном космическом полете по программе
«Союз» — «Аполлон» совместно с советским КК «Союз-19»
(см. раздел 3.6).
Кроме командного и служебного модулей в состав КК «Апол-
лон» входил специально разработанный стыковочный модуль,
имевший массу 2 т, длину 3,15 м, диаметр 1,42 м и свободный
объем 3,65 м3.
При стартовой массе 18,85 т масса корабля на орбите соста-
вила 14,7 т (масса командного 5,9 и служебного 6,8 т модулей)
при суммарной длине 13,03 м.
При полете по программе «Союз» — «Аполлон» стартовая мас-
са РКС «Сатурн-1В — Аполлон» составила 589,7 т при тяге дви-
гателей I ступени 725 тс, а общая длина — 68,26 м.
Стыковка КК «Союз» и «Аполлон» состоялась 17 июля 1975 г.
в 19 ч 09 мин по московскому времени. Двое суток космические
корабли общей массой около 21 т летали в состыкованном состоя-
нии. После расстыковки были выполнены повторная стыковка и
ряд экспериментов в групповом полете.
Глава 4
ОРБИТАЛЬНЫЕ СТАНЦИИ
4.1. ПИЛОТИРУЕМЫЕ ОРБИТАЛЬНЫЕ СТАНЦИИ
Актуальность и широта задач, решаемых пилотируемыми ор-
битальными станциями, объясняют развитие этого направления
космической техники, а успехи, которые уже имеются в этой об-
ласти (полеты орбитальных станций «Салют» и «Скайлэб», в том
числе «Салют-6» и «Салют-7»), позволяют надеяться в недалеком
будущем на их постоянную эксплуатацию.
Современные орбитальные станции служат для проведения
исследований и экспериментов, освоения длительных полетов че-
ловека в условиях невесомости, отработки технических средств
космической техники, подготавливая ее дальнейшее развитие.
4.2. СТАНЦИЯ КАК ОРБИТАЛЬНЫЙ КОМПЛЕКС
Орбитальная станция или орбитальный комплекс — это сово-
купность состыкованных (соединенных) друг с другом элементов
собственно станции и комплекса ее средств, которые и определяют
ее конфигурацию.
Конфигурация станции является функцией времени, так как
количественный и качественный состав элементов, составляющих
станцию, может многократно меняться в течение полета.
Собственно станция может состоять из одного или нескольких
состыкованных друг с другом блоков, обеспечивающих функцио-
нирование станции как в автономном полете, так и во взаимодей-
ствии с комплексом средств станции.
Комплекс средств станции
В зависимости от задач, решаемых орбитальной станцией, и
способов их решения могут использоваться различные средства, в
том числе отдельные КА, которые, будучи самостоятельными, в
составе комплекса средств станции подчинены общим требованиям
выполнения ее задач.
Средства доставки экипажа иа станцию и возвращения его иа
Землю — пилотируемые КК, имеющие, помимо систем, обеспечи-
вающих выполнение автономного полета, системы сближения и
стыковки со станцией, а также средства, позволяющие последую-
щее достаточно длительное пребывание их в составе станции (КК
145
«Союз» для станции «Салют» и КК «Аполлон» для станции «Скай-
лэб»).
Количество пилотируемых кораблей, используемых для данной
станции, определяется числом экипажей, посещающих станцию
в соответствии с программой полета.
Средства материально-технического снабжения предназначены
для регулярного снабжения станции научными материалами и ин-
струментами, расходуемыми элементами служебных систем и т. п.
Ими могут быть грузовые корабли («Прогресс») или транспорт-
ные корабли, способные доставлять одновременно экипаж и груз
(«Союз» и «Аполлон»), а также грузы в виде блоков, которые
после выведения на орбиту транспортируются к станции с помощью
буксира. Количество грузовых кораблей определяется величиной
грузопотока, необходимого для поддержания запланированных
режимов функционирования и этапов полета станции.
Средства доставки на Землю результатов работ зависят от
массы, объема и габаритов последних. Результаты работ (точнее,
их материальные носители) — это экспонированные материалы
(пленки, образцы) и материалы, полученные в технологической
аппаратуре, различные пробы, агрегаты и приборы, требующие
доставки на Землю для продолжения исследований, и т. п.
Вначале, когда масса и габариты этих материалов были неве-
лики, они доставлялись на Землю пилотируемыми кораблями од-
новременно с экипажами. Так было на первых станциях «Салют»,
когда материалы возвращались одновременно с экипажем на КК
«Союз», так же было и на станции «Скайлэб», где для этого ис-
пользовались пилотируемые КК «Аполлон».
В дальнейшем, с увеличением массы и габаритов возвращае-
мых материалов и оборудования, задачу их возвращения можно
будет решить путем создания грузовозвращающих кораблей, спе-
циальных беспилотных кораблей или универсальных многоразовых
транспортных систем. Так, в процессе полета третьей основной
экспедиции станции «Салют-6» для возвращения грузов был ис-
пользован беспилотный корабль «Союз-32».
Средства перемещения грузов с орбиты на орбиту (буксиры)—
это средства будущего. В ряде случаев будет выгоднее возложить
выполнение задачи перехода КА с орбиты на орбиту и их сбли-
жение на специальный многократно используемый KA-буксир в
целях доставки к станции грузов, выведенных на низкую орбиту
ракетой-носителем, или каких-либо автоматических спутников для
проведения профилактических, регламентных и ремонтных работ,
изменения орбиты станции и т. п.
Пилотируемые орбитальные станции и их особенности
Так как общепринятая классификация орбитальных станций
пока отсутствует, рассмотрим возможные типы пилотируемых ор-
битальных станций по параметрам, существенно влияющим на их
облик:
146
время нахождения экипажа на станции;
способ создания конструкции станции на орбите;
решаемые задачи;
высота рабочей орбиты.
По времени нахождения экипажа станции можно разделить на
обитаемые (с практически постоянным пребыванием экипажа) и
посещаемые.
На обитаемых станциях «Салют» и «Скайлэб» основ-
ные задачи решают в период нахождения экипажа на ее борту,
т. е. выполнение основной программы во время пилотируемых эта-
пов полета станции.
Основу таких станций составляют системы, обеспечивающие
жизнедеятельность экипажей и профилактику длительного воздей-
ствия невесомости, средства предупреждения и обеспечения безо-
пасности, средства обеспечения комфорта и т. п. Кроме того, та-
кие станции должны иметь значительный объем жилых отсеков.
На посещаемых станциях основные задачи решают на
беспилотных этапах полета. Основная программа работы таких
станций выполняется в автоматическом режиме или при управле-
нии с Земли по командной радиолинии. На борту таких станций
экипаж находится сравнительно короткое время только для про-
ведения ремонтных, профилактических, регламентных, наладоч-
ных и т. п. работ или уникальных экспериментов с помощью ис-
следовательских инструментов станции, которые невозможно вы-
полнить автоматически.
Посещаемые станции могут иметь небольшие объемы жилых
отсеков и упрощенные системы обеспечения жизнедеятельности по
сравнению со станциями с постоянным пребыванием экипажей,
что позволяет увеличить массу научных инструментов и автома-
тических систем управления и существенно уменьшить грузопо-
ток.
По способу создания конструкции на орбите станции могут
быть моноблочными, многоблочными (или модульными) и сбор-
ными.
Моноблочные станции («Салют» и «Скайлэб») достав-
ляются на орбиту одной ракетой-носителем (PH); после неболь-
шого объема подготовительных работ на орбите (раскрытие эле-
ментов конструкции, расконсервация систем и проверка функцио-
нирования) станция готова к работе.
Преимуществом таких станций является их вывод на орбиту
практически в готовом, законченном, предварительно испытанном
на земле виде и небольшое (несколько суток) время подготовки
к работе. Однако габариты и масса таких станций ограничены
возможностями одной PH.
Многоблочные, или модульные, станции создаются
за счет стыковки на орбите двух и более блоков (модулей), каж-
дый из которых доставляется на орбиту отдельной PH. Каждый
блок такой станции конструктивно завершен и оснащен агрегата-
ми и системами, а после стыковки между собой их механических,
147
электрических, гидравлических, пневматических и других связей
станция готова к работе.
Модульные станции могут быть постоянной или пере-
менной конфигурации. Станции постоянной конфигурации после
их создания (стыковки модулей) сохраняют неизменными количе-
ство модулей (блоков) и общую конфигурацию. Станции пере-
менной конфигурации в период функционирования могут менять
как количество состыкованных модулей, так и общую конфигу-
рацию. Такие станции удобны при необходимости периодической
замены (например, по ресурсным соображениям) части модулей
(блоков) или обновления состава научных инструментов в процес-
се выполнения программы полета.
Сборные станции монтируют на орбите из отдельных эле-
ментов конструкции и агрегатов, выведенных на монтажную ор-
биту одной или несколькими PH. Такие станции не зависят по
своим габаритам и массе от PH. Считают, что станции будущего
будут создаваться только путем сборки на орбите (радиотелеско-
пы с диаметром в несколько сотен метров или орбитальные сол-
нечные электростанции), причем трудоемкость сборочных работ
таких станций очень велика. Так, по оценкам американских спе-
циалистов, для сборки солнечной электростанции промышленной
мощностью 5000 МВт необходима работа бригады монтажников
в количестве 500 человек в течение шести месяцев. Создание та-
кой станции на орбите следует рассматривать как самостоятель-
ную, автономную задачу.
По профилю решаемых задач станции могут быть универсаль-
ными и специализированными.
Универсальные станции («Салют», «Скайлэб») исполь-
зуются для решения широкого круга задач и оснащаются боль-
шим набором экспериментального оборудования и научных ин-
струментов.
С углублением исследований, а также с возможным появлением
промышленного производства на орбите могут создаваться и
специализированные станции, предназначенные для ре-
шения какой-либо одной задачи и оснащенные специализирован-
ным оборудованием и инструментами. Такими станциями могут
быть технологическая станция для производства уникальных ма-
териалов, астрофизическая лаборатория, монтажная станция
и т. д.
Уход от торможения в верхних слоях атмосферы Земли (при
увеличении размеров станции) или решение некоторых научных
задач (создание радиотелескопа-интерферометра) потребует в бу-
дущем создания высокоорбитальных станций. С увеличением вы-
соты орбиты резко возрастет потребная энергетика на выведение
как самой станции, так и комплекса средств, используемых стан-
цией (пилотируемых и грузовых космических кораблей), что в свою
очередь вызовет необходимость увеличения энергетики PH, созда-
ния специальных разгонных блоков, использования буксиров
и т. п.
148
Экипаж станции
Экипаж станции необходим для выполнения наблюдений, про-
ведения научных исследований, управления работой аппаратуры
для прикладных и экономических задач, технических эксперимен-
тов, монтажно-демонтажных работ, освоения длительных полетов
в условиях невесомости и т. д., т. е. для выполнения задач, кото-
рые невозможно решить с помощью автоматики или которые тре-
буют создания слишком сложной и дорогостоящей аппаратуры.
Наличие экипажа требует создания средств его доставки на стан-
цию и возвращения на Землю, жилых отсеков достаточных объ-
емов; установку системы жизнеобеспечения (СЖО) и безопасно-
сти, пополнения расходуемых материалов (пища, вода, кислород
и др.); установку бытового оборудования и средств комфорта
и т. п.
Однако несмотря на эти сложности и учитывая, что процесс
освоения человеком условий жизни и работы на орбите еще да-
леко не закончен, перед экипажем ставят более широкие задачи,
в том числе и те, которые можно решить автоматическими сред-
ствами.
Количество членов экипажа (одновременно находящихся на
станции) зависит от многих факторов. В настоящее время счи-
тают, что по соображениям безопасности в длительном полете
(подстраховка друг друга, психологическая поддержка) количе-
ство членов экипажа должно быть не менее двух человек, а опти-
мальным количеством членов экипажа (длительное время нахо-
дящихся на борту станции)—два-три человека. Это количество
может увеличиваться за счет экспедиций посещения до предель-
ных возможностей кораблей и станции (для станции типа «Са-
лют»— до четырех—шести человек). При этом учитывают по-
требности в управлении научной и служебной аппаратурой, воз-
можности пилотируемого корабля, оптимизацию по балансу
расходуемых элементов СЖО, которые необходимо пополнять
с помощью грузовых кораблей, и др.
Для современных станций количество членов экипажа посеще-
ния также не будет превышать двух-трех человек, что позволит
при создании таких станций затратить минимальные массы на
жилые отсеки и систему жизнеобеспечения.
Для больших станций (например, база для строительства сол-
нечной электростанции на орбите) количество членов экипажа
будет определяться потребностями выполнения задачи в заданный
срок и может составлять несколько десятков человек.
Специализация экипажа зависит от количества его членов. При
двух членах основного экипажа специализация их практически от-
сутствует, оба члена экипажа взаимозаменяемы по основным опе-
рациям полета (по соображениям безопасности и надежности).
Члены экспедиции посещения могут специализироваться только на
решении задач, характерных для данной экспедиции (например,
149
международный экипаж со своей аппаратурой и экспери-
ментами).
Введение в состав экипажа третьего (и более) члена позволит
снизить или исключить совсем требования по знанию им (ими)
служебных систем станции и кораблей, которые обеспечивают
безопасность работы и возвращение экипажа в любых ситуациях
(эта задача возложена на первых двух членов экипажа), и в ко-
роткий срок подготовить к полету любого специалиста высокой
квалификации (астрофизика, геофизика, наладчика аппаратуры и
инструментов, врача и т. п.) для выполнения им узкой, специаль-
ной задачи.
При создании больших станций, на которых количество членов
экипажа может достигать нескольких десятков человек, необходи-
ма большая дифференциация и специализация между ними, при-
чем состав специалистов может зависеть от работ, выполняемых
на станции (например, на этапе сборки станции из элементов кон-
струкции будут преобладать монтажники, на этапе настройки
научной аппаратуры — специалисты-наладчики и т. д.).
Режим работы членов экипажа станции может быть либо н е-
прерывным (с передаваемыми «вахтами — сменами»), либо
синхронным, как на станции «Салют-6», где сон и бодрствова-
ние всех членов экипажа происходит в одно и то же время. Такой
режим имеет много положительных моментов, удобен с точки зре-
ния взаимодействия с Землей.
Однако для выполнения некоторых служебных (прибытие и
стыковка к станции другого корабля) или научных (наблюдение
заданного природного явления) операций возможно нарушение
режима работы экипажа из-за несовпадения проводимых опера-
ций с принятым режимом. Поэтому при выполнении операций,
требующих постоянного участия экипажа, более целесообразным
может быть непрерывный режим работы.
Длительность полета одного экипажа (одной смены) необхо-
димо рассматривать исходя из выбора оптимальной длительности
смены экипажа (частоты смены экипажей) и дальнейшего изуче-
ния возможностей увеличения длительности полета человека в
космосе.
Оптимальную длительность полета одного экипажа обычно вы-
бирают с учетом:
достигнутой длительности безопасного непрерывного нахожде-
ния на станции (с использованием имеющихся средств профилак-
тики невесомости и психологической поддержки);
поддержания достаточно высокой работоспособности и качества
работы;
возможностей (ограничений) и стоимости замены экипажей
(различной для низко- и высокоорбитальной станций).
Изучение возможностей дальнейшего увеличения длительности
полета человека в космосе — это задел на будущее (экспедиции
к другим планетам, работа на орбитальных промышленных стан-
150
циях, сборка сооружений, организация поселений около Земли
и т. п.). С точки зрения разработки пилотируемой космической тех-
ники важно знать предельные возможности человека и средств
профилактики невесомости и определить границу целесообразно-
сти перехода к созданию искусственной тяжести. Эти задачи пред-
стоит решать на пилотируемых орбитальных станциях.
Этапы полета
Основными и наиболее характерными участками полета стан-
ции считают этапы создания станции на орбите, доставки и воз-
вращения экипажей (смена экипажей), материально-технического
снабжения, исследований или решения хозяйственных задач
(рис. 4.1).
Этап создания на орбите моноблочной станции может состав-
лять всего несколько дней, модульной станции в зависимости от
количества стыкуемых модулей и объема монтажных работ — от
нескольких недель до нескольких месяцев, а сборной станции —
несколько лет. На этап создания могут накладываться этапы
смены экипажей и материально-технического снабжения.
В процессе раскрытия (разворачивания) элементов конструк-
ции возможен выход экипажа в открытый космос с применением
средств передвижения вне гермоотсеков и монтажных манипуля-
торов, а при создании протяженных пространственных конструк-
ций— применение специальных сборочных агрегатов и технологи-
ческой оснастки.
Станция может собираться как на рабочей, так и на промежу-
точной орбите, с выходом на рабочую орбиту с помощью своей
двигательной установки или грузового корабля, или буксира, или
разгонного модуля и т. п.
Этап доставки и возвращения экипажа (смена экипажа)
может продолжаться от нескольких часов до нескольких
суток.
В существующих схемах полета (это, очевидно, сохранится и
в будущем) пилотируемые корабли при сближении являются ак-
тивными, т. е. сближение и стыковка идут за счет маневрирова-
ния (изменения орбиты) самого корабля.
Этап материально-технического снабжения может быть от не-
скольких суток до нескольких недель и зависит от объема погру-
зочно-разгрузочных и монтажно-демонтажных работ, которые не-
обходимо выполнить по прибытии корабля с грузом.
Этап исследований или решения хозяйственных задач является
основной выходной характеристикой станции, суммарная длитель-
ность которого закладывается при разработке станции, исходя из
поставленных перед ней задач. На этот этап могут накладываться
(или прерываться) этапы смены экипажа и материально-техниче-
ского снабжения.
151
Рис. 4.1. Возможные этапы создания орбитальных
станций
Данные операции могут периодически повторяться в
процессе создания или функционирования станции
4.3. ОРГАНИЗАЦИЯ МАТЕРИАЛЬНО-ТЕХНИЧЕСКОГО
СНАБЖЕНИЯ
Задачей материально-технического снабжения станции явля-
ются:
доставка научных материалов и инструментов;
доставка сырья, полуфабрикатов, элементов конструкции, агре-
гатов и т. п. для работы в космосе;
пополнение запасов и доставка блоков для обеспечения ре-
сурса служебных систем (средств обеспечения жизнедеятельно-
сти, топлива и т. п.).
Структура и соотношение масс и объемов доставляемых грузов
зависят от типа станции, принципов построения и характеристик
служебных систем, этапа полета и т. п.
Для примера рассмотрим грузопоток станции «Салют-6». В те-
чение первых трех основных экспедиций на станцию «Салют-6»
было доставлено около 12 т грузов, из них сухих* — 75%, жидко-
стей и газов — 25%.
Масса доставленного оборудования по принадлежности к си-
стемам распределялась в таком отношении: СУБК, освещение
0,39%; СОУД, СИО, ДУ, система стыковки 0,57%; РТК, СТИ
1,37%; СЭП 1,97%; СТР, СЖО, медицинская аппаратура и быто-
вые принадлежности 95,7%.
В числе научных материалов доставлено около 170 кг фото- и
кинопленки, что составило 20% массы доставленного научного
оборудования.
Масса и объем сухих грузов значительно превышали массу и
объем жидкостей и газов, причем в будущем эта разница, по-ви-
димому, будет увеличиваться. Поэтому грузовые корабли должны
иметь достаточно большие объемы для сухих грузов, а их габа-
риты и суммарные объемы для сухих грузов в свою очередь на-
кладывают существенные ограничения на системы и конфигура-
цию станции.
В целях экономии объемов в ряде случаев целесообразно идти
на доставку жидкостей и газов в специальных емкостях вне гер-
моотсеков грузовых кораблей с перекачкой их затем в емкости
станции, даже если это вызовет увеличение массы станции и гру-
зового корабля.
Размещение и крепление грузов в отсеке грузового корабля
должны обеспечивать:
универсальность конструкции размещения и крепления, позво-
ляющую в широком диапазоне варьировать номенклатурой и ко-
личеством доставляемых грузов;
возможность крепления в грузовом корабле отработанного обо-
рудования в процессе или после разгрузки корабля;
* Под сухим грузом понимают груз, который доставляется в гермоотсеке
грузового корабля, а затем переносится в отсеки станции, а под жидкостями
и газами — грузы, размещенные в специальных баках и баллонах, из которых
они перекачиваются в емкости станции.
153
минимальную трудоемкость погрузочно-разгрузочных работ.
В грузовых кораблях желательно иметь холодильные или мо-
розильные установки для хранения доставляемых скоропортящих-
ся продуктов и фотопленок.
В ряде случаев целесообразно проводить эксперименты на на-
учной аппаратуре, размещаемой на грузовом корабле, без пере-
носа ее на станцию.
4.4. КОНСТРУКЦИЯ
Создание пилотируемых орбитальных станций связано с реше-
нием ряда проблем как в части проектирования и выбора пара-
метров бортовых систем, так и в части разработки конструкций
самой станции.
Особенности бортовых систем
Все бортовые системы станции можно разделить на две груп-
пы: первая — научная аппаратура и инструменты, выполняющие
основную целевую задачу станции, и вторая — служебная аппа-
ратура, обеспечивающая ее функционирование.
Научная аппаратура станции определяется задачами, решае-
мыми ею, и в то же время диктует требования к характеристикам
и режимам функционирования служебных систем.
Обычно в состав служебных систем станции входят:
система управления бортовым комплексом (СУБК);
система ориентации и управления движением (СОУД);
двигательные установки (ДУ) и система исполнительных орга-
нов (СИО);
бортовой радиотехнический комплекс (БРТК);
система бортовых измерений (СБИ);
система электропитания (СЭП);
система обеспечения теплового режима (СОТР);
система жизнеобеспечения (СЖО);
медицинская аппаратура и средства профилактики;
система освещения (СО);
система стыковки;
запасной инструмент и приспособления (ЗИП).
Особенностью СУБК долговременных станций является управ-
ление большим количеством приборов (например, на станции «Са-
лют-6» — около 1500) и обеспечение взаимодействия с СУБК кос-
мических кораблей и модулей, подстыкованных к станции. С раз-
витием станций СУБК, сохраняя возможность ручного управле-
ния основными режимами, должна в будущем обеспечивать все
большую автономность полета за счет максимальной автоматиза-
ции управления и диагностики состояния бортовых систем, что
позволит разгрузить экипаж станции и наземный персонал управ-
ления. Решение таких задач возможно только с использованием
154
в СУБК электронно-вычислительных машин (ЭВМ) и разработки
сложного и объемного математического обеспечения.
Система ориентации и управления движением (СОУД) обычно
кроме управления движением центра масс и около центра масс
станции обеспечивает решение навигационных задач, измерение
параметров относительного движения и управление процессом
сближения с кораблем или модулем, наведение элементов станции
на заданную точку в пространстве (например, антенны — на спут-
ник-ретранслятор), при этом наряду с автоматическими режимами
могут применяться и ручные режимы с использованием визуаль-
ных приборов и индикаторов.
Отличительной особенностью СОУД станций переменной кон-
фигурации является обеспечение режимов СОУД при изменении
конфигурации станции (при этом меняются моменты инерции, по-
требные управляющие моменты и другие характеристики), а так-
же использование чувствительных элементов органов управления
и запасов топлива, размещенных на корабле или модуле.
Решение навигационных задач (определение местоположения
станции в пространстве) позволяет существенно увеличить авто-
номность станции при выполнении экспериментов и управлении
бортовой аппаратурой.
Двигательные установки (ДУ) и система исполнительных орга-
нов (СИО) служат для управления движением станции относи-
тельно центра масс и изменения скорости движения центра масс
станции.
Использование двигательных установок на долговременных
станциях связано с расходом запаса рабочего тела, требующего
регулярного пополнения. Так, на станции «Салют-б» предусмотре-
на объединенная двигательная установка с многоразовой систе-
мой дозаправки топливом, доставляемым грузовым кораблем
«Прогресс».
В целях экономии рабочего тела и, как следствие, сокращения
грузопотока для управления станцией относительно ее центра масс
могут применяться силовые гироскопы, использование которых
возможно и в тех случаях, когда по условиям проведения экспе-
риментов недопустимо загрязнение пространства, окружающего
станцию, выбросами, образующимися в результате сгорания ра-
бочего тела в двигателях ориентации.
В ряде случаев целесообразно не размещать на станции дви-
гательную установку, а использовать для изменения скорости дви-
жения центра масс, а также для ориентации и стабилизации дви-
гательные установки подстыкованных к станции КК, модулей или
буксиров. Так, для коррекции орбиты станций «Салют-б» и «Скай-
лэб» неоднократно использовались двигательные установки под-
стыкованных к ним КК.
Бортовой радиотехнический комплекс (БРТК) предназначен для
обеспечения связи и обмена информацией с Землей.
Одной из главных проблем является обеспечение максимально
длительной (в пределе — непрерывной) связи станции с Центром
155
управления, что необходимо, во-первых, для проведения исследо-
ваний, требующих непосредственной передачи на Землю результа-
тов измерений, и, во-вторых, для существенного повышения безо-
пасности полета и оперативности управления. Радикальное реше-
ние этой проблемы — использование для связи спутников-ретранс-
ляторов, что в свою очередь требует размещения на станции до-
статочно громоздких остронаправленных антенн, а также системы
наведения и слежения за спутником-ретранслятором.
Другой достаточно сложной проблемой является распределе-
ние частот между радиосредствами самой станции и кораблями,
модулями и другими КА, входящими в комплекс средств станции.
Телефонно-телеграфная система связи (ТТС)
обеспечивает связь экипажа станции с Землей и с экипажами
взаимодействующих с ней КК, связь космонавтов в скафандрах,
находящихся снаружи станции, с космонавтами, находящимися
внутри станции, и с Землей; внутреннюю связь между отсеками
станции, КК и модулями, запись речи на магнитофон и воспро-
изведение.
Телевизионная система (ТС) позволяет вести передачи
изображения на Землю с внутренних репортажных или стационар-
ных телекамер (показ интересующих Землю рабочих моментов,
элементов конструкции, состояния приборов, визуальной научной
информации и т. п.) и внешних камер (контроль сближения, об-
зор поверхности станции, наблюдение за «выходом» экипажа
и т. п.) и с Земли на борт станции (техническая информация,
информация в рамках психологической поддержки — связь с
семьями, показ кинофильмов и т. п.), а также обеспечивает внут-
реннюю телевизионную связь, видеозапись и воспроизведение.
Аппаратура радиоконтроля орбиты (РКО) обес-
печивает с помощью приемоответчика замер параметров траекто-
рии движения станции наземными средствами. В будущем с раз-
витием собственной навигационной системы станции или с введе-
нием в строй спутниковой навигационной системы можно будет
избавить Землю от этой достаточно трудоемкой и регулярной
функции, исключив из состава станции аппаратуру РКО и пере-
дав эту задачу бортовой навигационной системе.
Система бортовых измерений (СБИ) предназначена для сбора
информации со служебных систем и научной аппаратуры и пере-
дачи ее на Землю по телеметрической радиолинии как в режиме
непосредственной передачи на Землю, так и в режиме записи
с последующим воспроизведением. Эффективность использования
телеметрической радиолинии повышается за счет способности си-
стемы телеизмерений уплотнять собранную информацию перед
передачей на Землю.
Характеристики системы телеизмерений (информативность, ско-
рость записи и др.) определяются в первую очередь требованиями
научной аппаратуры.
Классической и оптимальной системой электропитания (СЭП)
для станций сегодняшнего и большинства станций завтрашнего
156
дня является система, включающая солнечные и буферные ба-
тареи.
Хотя мощность СЭП существующих станций достаточно велика
(4 кВт), мощность СЭП последующих станций может быть боль-
шей, во-первых, из-за роста потребления служебных систем,
главным образом СЖО (ее потребляемая мощность возрастает
с увеличением степени замкнутости системы и может достигнуть
нескольких киловатт на каждого члена экипажа), и, во-вторых,
из-за увеличения потребностей научной и технологической аппа-
ратуры. Так, организация полупромышленного технологического
производства материалов может потребовать уже десятки кило-
ватт электроэнергии. Для СЭП кораблей и станций принято на-
пряжение постоянного тока 25—30 В с преобразованием его, при
необходимости, в переменный в СЭП или в самой потребляющей
системе.
Одной из проблем СЭП станции являются помехи, которые
создаются в цепях питания большим количеством потребителей и
для устранения которых необходимо введение специальных филь-
тров, разделения шин, источников питания и т. п.
Другой проблемой является эрозия и старение элементов сол-
нечных батарей, которая ведет к снижению мощности, снимаемой
с единицы их поверхности, что требует либо установки заведомо
больших площадей солнечных батарей, либо замены панелей
с элементами по мере их старения. По мере старения требуют
замены и буферные батареи.
Система обеспечения теплового режима (СОТР) помимо под-
держания заданного теплового режима жилых отсеков, приборов,
агрегатов, конструкции, пристыкованных кораблей и модулей обес-
печивает заданный уровень влажности в жилых и приборных зо-
нах, поддержание низких температур в холодильных и морозиль-
ных шкафах с пищей, фотопленкой, биообъектами и другими ма-
териалами.
Потребная тепловая мощность СОТР (мощность сбрасываемого
тепла) определяется мощностью СЭП, количеством членов экипа-
жа и мощностью независимых источников тепла (например, изо-
топных подогревателей).
Потребной тепловой мощности должна соответствовать площадь
радиаторов-излучателей (на станции «Салют-1» около 21 м2).
Одним из способов уменьшения площади радиаторов является
использование холодильных машин, что в свою очередь требует
увеличения мощности СЭП, а следовательно, и мощности тепло-
съема. Поэтому целесообразность такого способа может быть оце-
нена в результате балансных расчетов тепловой и электрической
мощности, а также массы систем обоих вариантов.
Большие радиаторы уязвимы с точки зрения пробоя магистра-
лей с хладагентом метеорами, поэтому необходимо предусматри-
вать секционирование их панелей с обеспечением возможности
последующего ремонта.
Хладагент, используемый в контурах СОТР, расположенных
157
в жилых отсеках, должен быть нетоксичным и пожаробезопас-
ным.
СОТР обеспечивает температуры от 20 до 30°С в жилых отсе-
ках, от 0 до +40°С в приборной зоне, от +3 до +8°С в холо-
дильных и до —20°С в морозильных шкафах.
Дополнительно СОТР может охлаждать чувствительные эле-
менты научной аппаратуры до уровня «азотных» или «гелиевых»
температур (на станции «Салют-6» — приемника большого субмил-
лиметрового телескопа с использованием машинного замкнутого
цикла).
Принцип построения системы жизнеобеспечения (СЖО) зави-
сит от типа станции: посещаемая или с постоянным пребыванием
экипажа. СЖО посещаемых станций может быть построена на
простейших принципах, в основном с использованием запасов,
а СЖО станций с постоянным пребыванием экипажа — по воз-
можности на замкнутых циклах.
Медицинская аппаратура и средства профилактики предназна-
чены для оперативного и детального медицинского контроля, ме-
дицинских исследований, а также для оказания первой медицин-
ской помощи.
Для длительных полетов существенными становятся пропорции
и концентрация отрицательных и положительных ионов в воздухе
и дозы ультрафиолетового облучения, получаемые человеком, по-
этому в составе станции целесообразно предусматривать иониза-
торы воздуха и средства ультрафиолетового облучения.
В качестве средств профилактики невесомости используются
беговая дорожка (тредбан), велоэргометр, вакуумная емкость,
создающая пониженное давление на нижнюю часть тела, трениро-
вочно-нагрузочные костюмы (ТНК).
Средства измерения радиации позволяют измерять интенсив-
ность облучения, интегральные дозы и т. п. В качестве профилак-
тики и защиты от повышенной радиации могут применяться ме-
дикоментозные средства, индивидуальные защитные средства, от-
секи с большой массой на единицу поверхности, специальные убе-
жища.
Система освещения (СО) включает:
рабочее и дежурное освещение жилых отсеков, постов управ-
ления, рабочих мест;
освещение для кинофотосъемок и телевизионных передач (цвет-
ной спектр);
наружное освещение (для «выхода»);
габаритные и опознавательные огни, используемые при стыков-
ках КК и модулей.
Система освещения определяет количество и расположение
внутренних светильников с учетом уровней освещенности в раз-
личных точках отсека. Светильники должны иметь раздельное
(группами или по одному) включение и регулирование яркости.
На станции «Салют-6» используются экономичные и безопас-
ные в эксплуатации люминесцентные светильники.
158
Система стыковки обеспечивает:
механический захват на заключительном этапе причаливания;
взаимное выравнивание станции и КК;
механическую стыковку к станции КК или модуля;
стыковку и герметизацию герметичных отсеков станции и КК
с обеспечением возможности внутреннего перехода экипажа;
стыковку электро-, гидро- и пневматических коммуникаций.
Одним из факторов, влияющих на габариты и массу стыковоч-
ного узла, является величина линейного и углового промаха си-
стемы сближения на конечном участке и скорость подхода КК к
станции. Поэтому при выборе параметров системы сближения и
стыковочного узла необходимы балансные расчеты для выявления
их оптимальных значений. Другим фактором, влияющим на раз-
меры стыковочного узла, является размер его люка для перехода
экипажа и переноса груза.
К настоящему времени разработаны и опробованы в полете
два типа стыковочных узлов: «штырь—конус» и андрогинный.
Стыковочные узлы «штырь—конус» использовались на станциях
«Салют» и «Скайлэб», а андрогинный — в совместном проекте
«Союз» — «Аполлон».
Целесообразность использования того или иного стыковочного
узла определяется задачами, поставленными перед станцией.
Однако перед космической техникой стоят задачи, которые тре-
буют возможности стыковки друг с другом любых КА, имеющих
стыковочные узлы (например, для спасательных операций в кос-
мосе). Такой подход был положен в основу программы «Союз» —
«Аполлон».
Запасной инструмент и приспособления (ЗИП) используют для
проведения ремонтных, регламентных и профилактических работ,
а также для монтажных работ при создании станции. В состав
ЗИП входит как универсальный, так и специальный инструмент
для проведения механических работ (резка, сверление и т. п.) и
работ с электромеханическим и электронным оборудованием (пай-
ка, измерения тестером и др.).
К космическому инструменту предъявляют такие требования,
как удобство работы одной рукой, фиксация инструмента (напри-
мер, к руке), безынерционность и др. Соответственно крепежные
элементы в конструкциях станции разрабатывают с учетом при-
меняемого инструмента.
Особенности компоновки. Конструктивно-
компоновочные проблемы
Конструкция и компоновка орбитальных станций достаточно
разнообразны, хотя и имеются общие черты, присущие всем стан-
циям. Орбитальная станция состоит из герметичных и негер-
метичных отсеков. Первые из них предназначены для жилых
и рабочих помещений экипажа, а также для размещения обору-
дования и аппаратуры, вторые—для научных инструментов и
159
аппаратуры, используемой в открытом космосе. Кроме того, в не-
герметичных отсеках с целью экономии массы конструкции или
из соображений безопасности могут размещаться баки с топливом
и агрегаты двигательных установок, баллоны с газами, баки с
жидкостью и др.
Характерными наружными элементами станции являются па-
нели солнечных батарей и радиаторов СОТР, стыковочные узлы,
иллюминаторы, люки для выхода наружу станции, внешние огни
и телекамеры, различные чувствительные элементы систем, антен-
ны и штанги с антеннами и т. п.
При компоновке и конструкции станции учитывают ограниче-
ния, связанные с размещением на PH и условиями выведения, тре-
бования, предъявляемые к станции в полете, а также условия
создания, испытаний и подготовки к старту станции на Земле.
В соответствии с условиями размещения служебных блоков и
научных инструментов определяют необходимость и количество
негерметичных отсеков с учетом достижения минимальной массы
конструкции.
При размещении станции (или блока станции, если станция
многоблочная) на PH одной из самых сложных проблем является
выдерживание заданных лимитов массы и габаритов головной части
(ГЧ).
После распределения лимитов массы на системы, агрегаты и
конструкцию станции проводится непрерывный контроль баланса
массы, заканчивающийся перед самым стартом после окончатель-
ного взвешивания станции. Этот контроль необходим для опре-
деления центровки и своевременной компенсации возрастания
массы отдельных систем и агрегатов, причинами которого могут
быть:
уточнение массы систем и агрегатов при разработке, изготов-
лении и испытаниях;
уточнение массы конструкции при разработке чертежно-техни-
ческой документации и компоновке станции, проведении прочност-
ных и жесткостных расчетов по результатам динамических, ста-
тических, конструктивно-доводочных и других испытаний;
доработки конструкции и систем, связанные с результатами
комплексных испытаний на заводе-изготовителе и технической по-
зиции.
Возросшая масса компенсируется за счет существующего ре-
зерва массы, закладываемого в процессе проектирования, пере-
распределения массы с учетом доставляемого оборудования
(уменьшение начального запаса, доставка транспортными кораб-
лями некоторых блоков и т. п.) и снятия с систем второстепенных
функций и задач с соответствующим уменьшением лимита массы
систем.
Габариты станции определяются габаритами ее корпуса (гер-
метичные и негерметичные отсеки) и размерами внешних элемен-
тов, выходящих за габариты корпуса (для обеспечения поля зре-
ния, освещенности и т. п.). К таким элементам относят панели
160
солнечных батарей, антенны, датчики, чувствительные элементы и
научные инструменты.
Для выдерживания заданных габаритов ГЧ, а также во избе-
жание больших аэродинамических и тепловых нагрузок на участ-
ке выведения используют складываемые панели солнечных бата-
рей, антенны, штанги с чувствительными элементами и т. п.
Потребные объемы герметичных отсеков (гермоотсеков) стан-
ции, особенно жилых, возрастают с увеличением длительности по-
лета экипажа, что приводит к необходимости использования транс-
формируемых конструкций гермоотсеков, способных разворачи-
ваться после выведения на орбиту, или к использованию объемов
последних ступеней ракет-носителей.
В гермоотсеке обычно выделяют жилую и приборную зоны.
В жилой зоне располагают посты управления и рабочие
места, места приема пищи, сна, отдыха, проведения физических
упражнений и ассенизационно-санитарное устройство.
С увеличением длительности полета возрастают требования к
обеспечению удобства работы и бытовым удобствам экипажа.
По своей структуре и организации жилые отсеки должны прибли-
жаться к аналогичным земным помещениям (пультовая, индиви-
дуальные каюты, бытовые каюты и т. п.). Их интерьер (окраска,
украшения, текстура отделочного материала) выполняют с услов-
ным обозначением верха (потолка) и низа (пола). Интерьер дол-
жен легко очищаться от загрязнений, быть удобным для биоло-
гической обработки, легко заменяться. Во избежание случайных
травм членов экипажа при перемещениях следует избегать обра-
зования острых кромок и выступающих элементов, наличия острых
углов.
Во всех рабочих и бытовых зонах необходимо предусматривать
удобные и быстрые средства фиксации, а также поручни для пе-
ремещения, на свободных поверхностях — средства фиксации раз-
личных мелких предметов, с которыми работает экипаж (книги,
фото- и киноаппараты, различный инструмент, приборы и др.),
а также защиту пультов управления от случайного соприкоснове-
ния с перемещающимися членами экипажа и предметами.
Серьезной проблемой является борьба с пылью, для чего весь
объем воздуха в течение суток должен многократно очищаться
в специальных противопыльных фильтрах.
Другой проблемой служит шум, который может существенно
снизить работоспособность экипажа и отразиться на его само-
чувствии. Основными источниками шумов являются вентиляторы,
электроприводы, силовые гироскопы и другие вращающиеся мас-
сы. Борьба с шумом ведется по двум направлениям: предъявле-
нием жестких требований к агрегатам — источникам шума и
применением амортизаторов, шумопоглощающих перегородок
и т. п.
Средства физических упражнений (тредбан, велоэргометр и др.)
являются одним из основных источников механических возмуще-
ний, приводящих к циклическим нагружениям элементов конструк-
6 Космические аппараты 161
ции станции, а также созданию перегрузок, мешающих проведе-
нию некоторых экспериментов. Их уменьшению способствует
выбор места и положения этих средств с учетом координат
центра масс станции и ее жесткостных характеристик, что
для многоблочной станции переменной конфигурации достаточно
сложно.
Особенностью компоновки приборной зоны является обес-
печение возможности замены в полете любого блока (прибора),
свободного доступа к ним, унифицированного легкосъемного креп-
ления блоков и электроразъемов, а также введение ограничений
на габариты и массу блоков.
Приборы могут быть размещены как в центре отсека, так и
вдоль оболочки отсека. Размещение приборов в центре обеспечи-
вает доступ не только к ним, но и к самой оболочке отсека, что
ценно при организации системы контроля герметичности отсека,
поиска н ремонта в случае пробоя метеоритом. Размещение при-
боров вдоль оболочки отсека обеспечивает лучший доступ к при-
борам, но затрудняет доступ к самой оболочке.
Приборы, как правило, термостатируют принудительным обду-
вом воздуха, а приборы, требующие теплоотвода большой мощ-
ности, устанавливают на термостатируемых кронштейнах.
Одной из проблем является статическое электричество, которое
может накапливаться до больших потенциалов, что требует тща-
тельного заземления приборов на корпус станции и металлизации
конструкции (т. е. соединение металлическими перемычками эле-
ментов конструкции). В полете применяют специальные приспо-
собления для выравнивания электрических потенциалов перед
установкой приборов на борту и стыковкой электроразъемов.
Имеющиеся на станции иллюминаторы служат для установки
стационарных, съемных и ручных приборов и для визуальных
наблюдений.
Большое внимание при компоновке уделяют защите иллюми-
наторов станции от запотевания и пыли. Эта проблема решается
за счет установки пыленепроницаемых чехлов, соединенных с об-
щей атмосферой отверстиями с фильтрами, и интенсивного обдува
иллюминаторов вентиляторами или ручной очисткой их стекол.
Компоновка внешних элементов заключается в целесообразном
размещении их на корпусе станции.
Размещение стыковочных узлов связано с определением зон,
занимаемых стыкуемым КК или модулем с учетом максимальных
линейных и угловых взаимных отклонений в процессе стыковки и
увязки выступающих элементов станции и КК в зонах соприкос-
новения. В ряде случаев во избежание соударения некоторых эле-
ментов в процессе стыковки используют привод для их склады-
вания (уборки). Кроме того, учитывают силовое и тепловое воз-
действия струй ЖРД в процессе причаливания.
Размещение панелей солнечных батарей (СБ) затруднено из-за
их большой площади (у «Скайлэб» — ПО м2, у «Салют-6» —
60 м2), которая имеет тенденцию к дальнейшему увеличению и
162
в будущем может достигать нескольких сотен квадратных метров.
В целях повышения эффективности солнечных батарей их панели
ориентируют на Солнце путем вращения вокруг одной или даже
двух осей, что требует освобождения от выступающих элементов
занимаемого при вращении панелей СБ пространства. Обычно
принимают компромиссное решение, заключающееся в отводе па-
нелей СБ в определенное фиксированное положение на время про-
ведения некоторых операций или режимов. При размещении па-
нелей СБ желательно их минимальное затенение от пристыкован-
ных КК и модулей, а также от собственного корпуса станции.
На станции обычно приходится размещать достаточно боль-
шое количество всенаправленных, малонаправленных, острона-
правленных и т. п. антенн, служащих для обеспечения надежной
связи во всех используемых диапазонах волн. Диаграммы на-
правленности антенн оказываются настолько изрезанными высту-
пающими элементами (панелями СБ, КК, модулями и т. п.), что
требуется введение группы коммутируемых антенн или использо-
вание так называемых «фазированных решеток». Особую слож-
ность представляет размещение остронаправленных антенн доста-
точно больших размеров (до нескольких метров) для связи со
спутником-ретранслятором. Нередко практически невозможно с
помощью одной антенны обеспечить непрерывную связь со спут-
ником-ретранслятором при произвольной ориентации станции, что
требует установки нескольких остронаправленных антенн.
Большая протяженность тракта антенно-фидерных устройств
(АФУ) вызывает дополнительные потери, уменьшение которых
возможно за счет расположения оконечных устройств передаю-
щего и входных устройств приемного трактов как можно ближе
к антеннам (иногда на самих антеннах), что, в свою очередь, вы-
зывает осложнения в обеспечении их теплового режима, увеличе-
ние массы на штангах антенн и т. д.
Размещение датчиков ориентации, визуальных приборов, теле-
камер, иллюминаторов с учетом их полей зрения настолько слож-
но, что при его решении приходится идти по пути увеличения
числа датчиков и допущения некоторого затенения полей зрения
приборов, приняв меры по исключению засветки (ослепления,
бликов).
Размещение маршевых двигателей и двигателей ориентации
должно учитывать тепловое и силовое воздействия струй на эле-
менты конструкции и приборы, необходимость обеспечения мак-
симальных управляющих моментов и диапазон изменения поло-
жения центра масс станции, эксцентриситет между вектором тяги
маршевых двигателей и центром масс станции.
Для размещения радиаторов СОТР, площадь которых состав-
ляет десятки квадратных метров, можно использовать свободные
части поверхности корпуса станции, а также обратную сторону
панелей СБ, хотя при этом придется вводить подвижные соедине-
ния трубопроводов с хладагентом, что увеличит массу конструк-
ции панелей СБ, потребную мощность их приводов и т. п.
6*
163
Внешняя конфигурация станции должна вызывать минималь-
ные аэродинамические возмущения, что связано с расходами рабо-
чего тела на ориентацию, потребными величинами управляющих
и накоплением кинетических моментов.
Для защиты гермоотсеков от пробоя микрометеорами приме-
няют наружные экраны. Оптику приборов и иллюминаторы защи-
щают от эрозии и загрязнений крышками с приводами (это при-
менимо только для периодически работающих приборов) и приме-
нением специальных мер борьбы с загрязнением и эрозией (для
постоянно работающих приборов).
Для перемещения в скафандрах снаружи станции на ее по-
верхности предусматривают элементы фиксации космонавта и ин-
струмента (приборов), при этом особое внимание обращают на
отсутствие острых кромок и углов, за которые можно зацепиться
и повредить скафандр.
Помимо требований к конструкции станции, обусловленных
условиями полета, следует учитывать также наземные условия ее
подготовки:
технологичность сборки на заводе (деление на отсеки, техно-
логические стыки, выбор вертикального или горизонтального спо-
соба сборки и т. п.);
обеспечение электро-, «вакуумных и других испытаний (техно-
логические электроплаты с разъемами, гермовводы и др.);
обслуживание на технической (ТП) и стартовой (СП) позициях
(вентиляция, освещение, технологические проходы, размещение
обслуживающего персонала внутри станции, люки обслуживания
на СП; колодки для подстыковки на СП магистралей СОТР
и др.);
работу на заправочной станции (заправочные лючки и колодки
для подстыковки заправочного оборудования) и т. д.
Орбитальная станция «Салют-6»
Примером орбитальной станции с пребыванием на ней экипажа
является станция «Салют-6», предназначенная для проведения на-
учных исследований и экспериментов на околоземной орбите в пи-
лотируемом и беспилотном режимах работы (рис. 4.2). В комп-
лекс средств станции входят пилотируемые транспортные корабли
«Союз» (см. рис. 3.18) и автоматические грузовые корабли «Про-
гресс» (рис. 4.3).
Станция состоит из пяти отсеков (рабочего, переходного, про-
межуточной камеры, отсека научной аппаратуры и негерметич-
ного агрегатного отсека).
На активном участке выведения внешние элементы переход-
ного и часть рабочего отсека станции, в котором размещены сло-
женные панели солнечных батарей, а также основная часть чув-
ствительных элементов и оптических приборов ориентации, защи-
164
a
Рис. 4.2. Орбитальный комплекс «Салют-6» — «Союз»:
7 — КК «Союз*; 2— переходной отсек; 3 — орбитальная станция «Салют*6>; 4 — промежуточная камера; 5 — агрегатный отсек
6— отсек научной аппаратуры; 7 — рабочий отсек
щены от воздействия аэродинамического потока при выведении на
орбиту сбрасываемым головным обтекателем, а наружная часть
отсека научной аппаратуры — сбрасываемой крышкой.
Длина станции 15 м, с двумя КК около 29 м, максимальный
поперечный размер по раскрытым панелям солнечных батарей —
около 17 м.
Рис. 4.3. Грузовой корабль «Прогресс»:
1 — стыковочный агрегат; 2 — грузовой отсек; 3 — отсек компонентов топлива:
4 — приборно-агрегатный отсек
Рабочий отсек предназначен для размещения в нем экипажа
и основной массы оборудования и образован двумя цилиндриче-
скими оболочками (диаметром 2,9 и 4,1 м и длиной 3,5 и 2,7 м
соответственно), соединенными между собой конической оболоч-
кой длиной 1,2 м, со сферическими днищами.
Компоновка отсека выполнена с размещением приборов и обо-
рудования вдоль стен в приборной зоне. Жилая зона отделена от
приборной панелями интерьера.
В отсеке меньшего диаметра (2,9 м) размещен центральный
пост управления станцией (пост № 1), на котором сосре-
доточено управление основными системами. Левый и правый
борта, потолки и пол определяют условно относительно рабочего
положения экипажа на посту № 1 при его фиксации в креслах
лицом к центральному пульту. Пост № 1 имеет два рабочих места,
оборудованных средствами ведения связи, пультами управления,
приборами для визуальной ориентации, обзорными иллюминато-
рами и ручкой управления угловым положением станции в про-
странстве.
166
Слева и справа от поста № 1 установлены регенерационные
патроны, обеспечивающие поддержание требуемого газового со-
става станции, а также холодильно-сушильные агрегаты системы
терморегулирования, а за пультами поста № 1 на жесткой раме —
гироскопические приборы ориентации.
Сзади поста № 1 расположен пост № 2, с которого прово-
дится ручная астроориентация станции. Пост № 2 оборудован
средствами ведения связи, пультом управления режимом ориента-
ции и астроприборами, устанавливаемыми на двух иллюминаторах.
Между постами № 1 и 2 расположена зона отдыха, приема
пищи и занятий делами, не связанными с управлением на постах.
Здесь установлены раскладной столик и устройства подогрева
пищи. На столике может крепиться емкость с водой для питья.
Кресла поста № 1 после разворота их на 180° располагаются
около столика. На столике можно провести мелкий ремонт или
профилактическое обслуживание оборудования, используя укладку
с бортовым инструментом, расположенную на левом борту. На
правом борту установлена система регенерации воды из конден-
сата атмосферной влаги, которая обеспечивает экипаж горячей и
холодной водой. В этой же зоне на левом борту расположена бор-
товая вычислительная машина.
Пост № 3 размещен около отсека научной аппаратуры со
стороны заднего днища рабочего отсека и предназначен для
управления аппаратурой, расположенной в этом отсеке. На пос-
ту № 3 установлены пульты управления, средства ведения связи
и фиксации космонавта, оптический визир и ручки управления
станцией и телескопом.
Далее в районе конической части рабочего отсека расположен
пост № 4, который предназначен главным образом для проведе-
ния медико-биологических исследований и фотографирования.
Справа расположены медицинское оборудование и французская
аппаратура «Цитос», предназначенная для проведения совместных
советско-французских биологических экспериментов, слева — био-
логические блоки и кинофотооборудование. Пост № 4 оборудован
средствами ведения связи и фиксации космонавтов. В том же
районе установлены душевая установка, беговая дорожка со
средствами выполнения физических упражнений пневмовакуум-
ный костюм «Чибис» для создания пониженного давления на ниж-
нюю часть тела космонавта, на потолке — велоэргометр и изме-
ритель массы тела. Здесь же, на самом большом иллюминаторе
станции, имеющем снаружи крышку с приводом, установлена фо-
тоаппаратура многозональной съемки МКФ-6М производства На-
родного предприятия ГДР «Карл Цейс Йена», рядом с ней пуль-
ты управления и блок электроники МКФ-6М.
В приборной зоне рабочего отсека, имеющего диаметр
4,1 м, по правому и левому бортам размещены газожидкостные
теплообменные агрегаты терморегулирования, аппаратура борто-
вого радиокомплекса, блоки электроники и автоматики системы
ориентации, приборы радиотелеметрической системы и системы
167
электропитания, а также приборы системы управления бортовым
комплексом. Ближе к заднему днищу находятся контейнеры с за-
пасами пищи и емкости с водой для питья. На интерьере преду-
смотрены спальные места экипажа. На потолке установлены две
шлюзовые камеры для выброса контейнеров с отходами и прове-
дения экспериментов. Рядом с правой шлюзовой камерой распо-
ложена аппаратура «Сплав» для проведения технологических экс-
периментов. На заднем днище рабочего отсека размещены сред-
ства санитарно-гигиенического обеспечения, отделенные от осталь-
ной части отсека и имеющие принудительную вентиляцию.
В районе заднего днища размещены пылесос, воздушные фильтры
очистки атмосферы, запасы сменного белья и другие расходуемые
материалы обеспечения жизнедеятельности экипажа.
Рабочий отсек имеет два люка: для перехода из рабочего от-
сека в переходной на переднем днище и для перехода из рабочего
отсека в промежуточную камеру на заднем днище.
Переходной отсек предназначен для соединения с помощью сты-
ковочного узла станции с КК, шлюзования при выходе наружу
станции и для проведения астроориентации и оптических наблю-
дений. Отсек образован цилиндрической (диаметром 2 м) и кони-
ческой оболочками общей длиной ~3 м. На конической части
отсека установлен пассивный стыковочный агрегат типа «конус»,
а цилиндрическая часть пристыкована к рабочему отсеку. В от-
секе имеется люк для выхода наружу, а также для обслуживания
во время наземной подготовки станции.
В переходном отсеке размещены скафандры, пульты обеспе-
чения выхода, оборудование и средства фиксации, используемые
при выходе, а также два поста управления: пост № 5 (на по-
толке) и пост № 6 (на левом борту), оснащенные астроориен-
таторами, визуальными приборами, приборами «Спектр» и «Дуга»
для геофизических исследований, устанавливаемыми на иллюми-
наторах, пультами управления режимами ориентации, ручками
ориентации станции, средствами ведения связи и фиксации кос-
монавтов.
Промежуточная камера предназначена для соединения станции
с КК с помощью стыковочного узла, размещения в ней сменного
оборудования, доставляемого грузовыми кораблями, и проведения
технологических экспериментов на установке «Кристалл». Камера
длиной около 1,3 м аналогична переходному отсеку. На ее кони-
ческой части установлен второй стыковочный узел станции, а ци-
линдрическая часть стыкуется к заднему днищу рабочего от-
сека.
Все жилые отсеки оборудованы средствами громкоговорящей
связи, светильниками и электрическими розетками для включения
переносной аппаратуры. При проведении кино- и фотосъемок и
телерепортажей имеются дополнительные переносные светильники
дневного света.
Отсек научной аппаратуры предназначен для размещения в
нем крупных научных инструментов, работающих в вакууме; в нем
168
установлен большой субмиллиметровый телескоп БСТ-1 с системой
низкотемпературного термостатирования (4 К) чувствительных
элементов телескопа и специальная защитная крышка (открыва-
ется только на время работы телескопа), предохраняющая теле-
скоп от попадания солнечных лучей. Электронные блоки и блоки
автоматики телескопа и системы охлаждения расположены внутри
гермообъема рабочего отсека, на ферме, которая крепится вверху
отсека научной аппаратуры.
Агрегатный отсек цилиндрической формы диаметром 4,1 м и
длиной 2,2 м служит для размещения двигательной установки и
соединения с ракетой-носителем и стыкуется к заднему днищу
рабочего отсека. В нем расположены шесть топливных баков, два
корректирующих двигателя, 32 двигателя малой тяги для созда-
ния управляющих моментов при ориентации станции, блок ком-
прессоров системы дозаправки топливом, арматура и агрегаты
объединенной двигательной установки. Отсек термостатируется в
полете и имеет наружную теплоизоляцию.
Снаружи станции, на внешней поверхности переходного отсека,
установлены антенны радиоаппаратуры сближения, средства руч-
ного причаливания (огни и мишень), внешние телекамеры, панели
с агрегатами системы терморегулирования, баллоны с запасами
газа, датчики ориентации, поручни и элементы фиксации космонав-
тов в скафандрах, съемные блоки с образцами для экспонирова-
ния их в открытом пространстве.
На передней наружной части рабочего отсека диаметром 2,9 м
размещены датчики системы ориентации солнечных батарей, опре-
деляющие положение Солнца в передней полусфере станции, и ра-
диаторы системы терморегулирования. Вверху и по бокам уста-
новлены три панели солнечных батарей с приводами, разворачи-
вающими панели в сторону Солнца, внизу — приборы ручной и
автоматической ориентации станции.
Часть наружной поверхности рабочего отсека диаметром 4,1 м
и вся цилиндрическая часть агрегатного отсека покрыты пласти-
ковым кожухом.
На внешней торцевой поверхности агрегатного отсека установ-
лены антенны радиоаппаратуры сближения, средства ручного при-
чаливания (огни и мишени) со стороны агрегатного отсека, дат-
чики ориентации панелей солнечных батарей, определяющие по-
ложение Солнца в задней полусфере, и телевизионная камера.
4.5. НАПРАВЛЕНИЯ РАЗВИТИЯ ОРБИТАЛЬНЫХ СТАНЦИЙ
Многоблочные станции
Примером многоблочной космической станции является разра-
ботанный в США проект станции, собираемой из блоков (моду-
лей), доставляемых многоразовым транспортным космическим ко-
раблем (М.ТКК), и обеспечивающей ее автономное функциониро-
вание, что исключает необходимость в сложном комплексе назем-
ного обеспечения.
169
Основа многоблочной станции — начальная космическая стан-
ция, доставляемая на орбиту с помощью трех МТКК и рассчитан-
ная на экипаж из шести человек. Блоки станции — энергетиче-
ский модуль, командный модуль и лаборатория общего назначе-
ния— собирает и проверяет экипаж. Присоединение к начальной
космической станции по одному энергетическому и командному
модулю определяет создание развитой космической станции, рас-
считанной на 12 человек.
Транспортирование грузов производится с помощью модулей
обеспечения, доставляемых МТКК и служащих в качестве храни-
лища грузов в космосе, один из которых должен постоянно нахо-
диться на орбите.
В системе обеспечения станции также предусмотрен грузопас-
сажирский модуль, рассчитанный на перевозку 6 членов экипажей.
На начальном этапе к станции будет присоединено пять моду-
лей для научно-прикладных исследований, три из которых впо-
следствии будут возвращены на Землю. На дальнейшем этапе
к оставшимся двум модулям будет доставлено еще 12, нз них три
будут автономными.
При выборе орбиты станции необходимо учитывать такие фак-
торы, как обзор поверхности Земли, повторяемость траектории,
разрешающая способность научно-прикладной аппаратуры, затра-
ты на поддержание рабочей орбиты.
С учетом этих факторов за рабочую принята круговая орбита
высотой 456 км и наклонением 55° (двухсуточной кратности).
Особенности крупногабаритных космических
конструкций
Ряд перспективных проектов по освоению и использованию кос-
мического пространства основан на применении крупногабаритных
конструкций, собираемых в космосе на монтажной орбите из от-
дельных элементов и узлов. К таким проектам можно отнести:
космическую солнечную электростанцию;
космический радиотелескоп (КРТ);
большие орбитальные платформы;
орбитальные базы-станции.
Учитывая, что габариты выводимого полезного груза ограни-
чены (полезный груз в виде крупногабаритных блоков, как пра-
вило, ведет к неполной загрузке по массе PH), считают более
целесообразным собирать крупногабаритные конструкции в кос-
мосе из относительно малогабаритных элементов (например, фер-
менных конструкций, имеющих форму равносторонней четырех-
гранной призмы, каждое ребро которой представляет собой гра-
фитоэпоксидный стержень круглого сечения). Такие элементы эф-
фективны для формирования конструкций больших размеров и
малой массы и имеют достаточно большую жесткость во всех
направлениях. Разрабатываются и другие конструктивные реше-
ния, позволяющие достичь большой степени автоматизации сбо-
170
рочно-св арочных работ на орбите, более плотной укладки кон-
структивных элементов при выведении на сборочную орбиту и т. п.
При создании таких конструкций следует:
обеспечить простоту, модульность и преемственность конструк-
ций;
конструировать по критерию, наиболее рациональному для
каждого конкретного элемента;
создавать сборные конструкции без последующих регулиро-
вок, а элементы — с возможностью отработки в наземных усло-
виях;
добиваться эффективности работы конструкции подбором необ-
ходимых материалов и их конфигурации, а не усложнением кон-
структорских решений;
обеспечить возможность изготовления и частичной сборки кон-
струкции перед запуском.
Большую роль в конструкторском решении играет взаимосвязь
между нагрузками и критерием совершенства конструкции. В не-
далеком прошлом основным критерием совершенства космических
конструкций считалась наименьшая масса конструкции, рассчи-
танной на нагрузки, воздействующие на космический аппарат в
ходе активного участка выведения на орбиту. Поэтому многие
разработанные ранее космические аппараты имели конструкции,
рассчитанные не на режим основной эксплуатации, а на нагруз-
ки выведения. Подход к разработке космических конструкций,
собираемых на орбите (солнечная электростанция, КРТ и др.),
нормирование нагрузок и запасов прочности, а также выбор под-
ходящего критерия должны быть согласованы с условиями основ-
ного режима эксплуатации.
Один из важнейших вопросов проектирования — учет жестко-
сти конструкции с точки зрения ее воздействия на работоспособ-
ность системы управления.
Усложнение вновь проектируемых систем управления крупно-
габаритных объектов будет вызываться значительными амплиту-
дами деформации от нежесткости конструкций при малой собст-
венной частоте колебаний. Разработка систем управления будет
наиболее сложной для объектов, требующих высокоточной ориен-
тации и стабилизации, в первую очередь для антенн.
В настоящее время взаимовлияние колебательных процессов в
нежесткой конструкции и в контуре системы управления гаран-
тированно парируется большим разнесением их основных частот
и перекрытием диапазонов их изменения за счет либо увеличения
жесткости конструкции для поднятия частоты ее собственных ко-
лебаний, либо сужения диапазона рабочих частот системы управ-
ления, причем первый метод увеличивает массу конструкции, а вто-
рой ухудшает чувствительность системы управления. Для перспек-
тивных крупногабаритных конструкций оба эти метода непри-
емлемы, поэтому возможно применение новых принципов управ-
ления на основной частоте, использующих как сравнительно про-
стые схемы демпфирования, так и сложнейшие схемы управления
171
формой поверхности крупногабаритного объекта. Работа таких
систем управления основывается на наличии информации о теку-
щих деформациях во всех узловых точках конструкции.
Модульная конструкция, уменьшая стоимость, может привести
к некоторому увеличению массы. Преемственность конструктив-
ных разработок, выражающаяся в повторяемости узлов и подси-
стем в целом, резко увеличивает надежность конструкции за счет
детальной отработки унифицированного узла. Дальнейшее усо-
вершенствование возможно за счет создания конструкций, не тре-
бующих регулировок при сборке. Экономия достигается как на
самих сборочных узлах, так и на наземном стендовом оборудо-
вании для отладки и настройки регулировочных устройств.
Отдельные элементы станции будут собираться в космосе с ис-
пользованием сварочно-сборочного оборудования, размещаемого
на автономно функционирующей в космосе специализированной
платформе для сборки крупногабаритных конструкций. Предпола-
гают, что конечным этапом развития такой платформы будет спе-
циализированная сборочная пилотируемая космическая станция.
В состав штатного оборудования такой платформы будут вхо-
дить манипуляторы и устройства для перемещения собираемых
элементов, оборудование для подвески, кантования и натяжения
отдельных элементов, сварочные агрегаты, внешнее освещение и
затенители солнечного света, оборудование для взаимоувязки, про-
верки и контрольных испытаний собранных элементов, наборы
шаблонов, кондукторов и сборочных стапелей. Часть оборудования
должна быть универсальной, часть — специализированной, обес-
печивающей наряду с преемственностью автоматизацию процес-
сов сборки — сварки в космосе.
Одним из важнейших элементов оснащения монтажных стан-
ций будут пилотируемые космические аппараты с открытой или
герметичной кабиной, предназначенные для выполнения работ по
сборке в космосе крупногабаритных конструкций различного на-
значения, ремонтно-восстановительных операций, регламентных ра-
бот и т. д.
Космическая солнечная электростанция
В соответствии с прогнозами энергетических потребностей и
анализом возможных основных источников энергии выявлено, что
наряду с использованием угля и ядерных источников может ока-
заться экономически выгодным получение энергии от космических
солнечных электростанций (СЭС), размещаемых на геостационар-
ной орбите.
В качестве примера рассмотрим проект спутника — космиче-
ской СЭС мощностью 10000 МВт, массой 100000 т и габаритами
21x5 км, выведенного на стационарную орбиту. Конструкцию
спутника целесообразно изготовлять из композиционного материа-
ла с использованием для преобразования солнечной энергии в
электрическую кремниевых элементов. Электрическую энергию со
спутника на Землю предполагается передавать в виде радиоизлу
172
чения через бортовую передающую антенну диаметром 1 км и
наземную приемную антенну размерами 13x9,5 км, при этом
плотность мощности в ее центре будет составлять 23 МВт/см2,
а на краях — 1 МВт/см2.
Для доставки элементов спутника на низкую орбиту целесо-
образно создание многоразовой ракеты-носителя, а на стационар-
ную орбиту — межорбитального буксира с солнечно-электрической
двигательной установкой.
Предполагают, что масса монтажного комплекса на низкой ор-
бите составит 8500 т, а количество персонала — несколько сотен
человек, масса монтажного комплекса на стационарной орбите —
1500 т, а количество персонала — несколько десятков человек.
При ежедневных пусках PH с грузом порядка 300 т на низкую
орбиту спутник-СЭС мощностью 10 000 МВт может быть создан
в течение 1 года.
Большие орбитальные платформы
По оценкам советских и зарубежных специалистов, в будущем
будет целесообразно иметь на стационарной орбите ограниченное
число больших орбитальных платформ, выполняющих функции
множества малых ИСЗ.
В состав бортового оборудования больших орбитальных плат-
форм войдут разнообразные ретрансляторы и вспомогательные
средства (системы энергопитания, терморегулирования, командно-
телеметрические, ориентации и стабилизации, коррекции парамет-
ров орбиты, слежения и т. п.). С помощью таких платформ можно
будет обеспечить межконтинентальную, региональную и внутри-
государственную связь, обслуживать морские суда, самолеты и
наземные подвижные объекты, получать навигационную и ме-
теорологическую информацию и многое другое.
Для расширения возможностей больших орбитальных плат-
форм могут быть организованы каналы связи между несколькими
платформами, а также между платформами и специализирован-
ными ИСЗ на низких околоземных орбитах, объектами на поверх-
ности Луны и космическими аппаратами в Дальнем космосе.
Использование больших орбитальных платформ позволит устра-
нить взаимные помехи, вызываемые большим скоплением ИСЗ на
стационарной орбите; достигнуть существенной экономии за счет
использования общего вспомогательного оборудования; применять
крупногабаритные антенные системы при значительных общих
размерах орбитальных сооружений и довести их эксплуатацию до
нескольких десятилетий.
Орбитальные платформы могут обслуживаться с помощью пи-
лотируемых и беспилотных КА, предназначенных для проведения
операций ремонта и замены модулей. В процессе эксплуатации
больших орбитальных платформ предполагается их постоянное
расширение для выполнения ими дополнительных функций.
Рассматривается вопрос и о целесообразности создания на
стационарной орбите пилотируемых орбитальных платформ, от-
173
личающихся более высокими возможностями в отношении прове-
дения операций по ремонту и реконфигурации. Однако они по-
требуют значительно больших расходов, связанных с созданием
систем жизнеобеспечения, радиационной защитой и необходи-
мостью проведения полетов для доставки продуктов питания, за-
мены членов экипажа и т. п.
Орбитальная обсерватория
Примером такой обсерватории может служить большой кос-
мический телескоп-спутник-обсерватория ST, проект которого раз-
работан в США (см. рис. 2.10). Обсерватория будет выводиться
на орбиту высотой 600 км с помощью МТКК. Оптический теле-
скоп обсерватории рассчитан на эксплуатацию в течение трех
пятилетних периодов, в середине каждого из которых на обсер-
ваторию в МТКК будет доставляться экипаж для замены научных
приборов и блоков служебного оборудования. Предполагают, что
таким образом может быть заменено все оборудование обсерва-
тории, за исключением первичного и вторичного зеркал телескопа
и его каркаса. В конце каждого пятилетнего периода телескоп-
спутник-обсерватория ST будет доставляться на Землю для вос-
становительного ремонта.
Телескоп-спутник-обсерватория ST по сравнению с наземными
телескопами имеет ряд преимуществ:
отсутствие искажений, обусловленных атмосферными неодно-
родностями, не позволяющими постоянно использовать оптические
характеристики наземных телескопов;
возможность слежения за объектами (квазары, галактики, га-
зовые туманности и др.) с интенсивностью свечения в 50 раз мень-
шей, чем у самых слабых объектов, наблюдаемых земными теле-
скопами;
возможность наблюдения явлений в атмосфере и на поверхно-
сти планет Солнечной системы, а также связанных с происхожде-
нием Вселенной;
возможность поиска планет, обращающихся вокруг соседних
звезд. Предполагается, что при общей массе спутника 4,6 т, диа-
метре 3 м и длине 13 м масса научных приборов в фокальной
плоскости телескопа составит 1,5 т, диаметры — первичного зер-
кала 2,4 м, вторичного зеркала 0,3 м, а угловое разрешение теле-
скопа — 0,1".
Система ориентации спутника должна будет обеспечить наве-
дение телескопа на выбранный астрономический объект с точ-
ностью до 0,01" и сопровождение этого объекта с точностью
0,007". Информация от приборов спутника ST будет передаваться
через спутник-ретранслятор при среднем ее объеме 2,8-10® бит/сут.
Приборы спутника будут работать в широком диапазоне (от
1000 А до 1 мкм) длин волн.
Система электропитания должна иметь мощность не менее
4 кВт (с учетом ремонта и восстановления).
174
Предусмотрено использование силовых гироскопов и магнит-
ных стержней, а также мер, исключающих влияние вибрации от
силовых гироскопов на точность ориентации.
Несущую конструкцию телескопа предполагается изготавли-
вать из эпоксидной смолы, армированной графитовым волокном
(такой композиционный материал имеет очень низкий коэффициент
теплового расширения), а зеркало — из стекла, также имеющего
чрезвычайно низкий коэффициент расширения.
4.6. ОРБИТАЛЬНЫЕ СТАНЦИИ, СОЗДАННЫЕ В СССР И США
Первая экспериментальная космическая станция была создана
16 января 1969 г. в результате стыковки КК «Союз-4» (космонавт
В. Шаталов) и КК «Союз-5» (экипаж Б. Волынов, Е. Хрунов и
А. Елисеев).
19 апреля 1971 г. была выведена на орбиту ИСЗ первая дол-
говременная пилотируемая орбитальная станция «Салют-1», имев-
шая массу (совместно с КК) 25,6 т, в том числе массу научной
аппаратуры 1,2 т, и объем жилых отсеков — 90 м3. Стыковочный
узел станции позволял переходить из КК в станцию непосредст-
венно, без выхода наружу. В состав станции были введены сред-
ства профилактики воздействия невесомости на человека. Макси-
мальная длительность пилотируемого полета составила 24 сут.
В 1973—1976 гг. запущены орбитальные станции «Салют-2»
(в беспилотном режиме), «Салют-3», «Салют-4» и «Салют-5»; на
трех последних работали шесть экспедиций (по два экипажа на
каждой станции). В 1973 г. была запущена первая пилотируемая
орбитальная станция США «Скайлэб», имевшая массу (совместно
с КК) 90,6 т. На станции были выполнены полеты трех экипажей
по три человека в каждом. Максимальная длительность полета
(третий экипаж Д. Карр, Э. Гибсон, У. Поуг) —84 сут.
29 сентября 1977 г. с запуском станции «Салют-6» начался но-
вый этап развития работ по долговременным пилотируемым орби-
тальным станциям. Масса станции (совместно с двумя КК) —32 т.
Впервые созданные и использованные в комплексе средств
станции грузовые корабли «Прогресс» позволили доставлять на
станцию научные материалы и аппаратуру, а также пополнять рас-
ходуемые запасы бортовых систем. Впервые были разработаны и
отработаны средства многократной дозаправки двигательной
установки станции топливом, доставляемым грузовым кораблем.
Осуществлены полеты на станцию международных экипажей
в рамках программы космических исследований стран — участниц
программы «Интеркосмос». На станции в течение 1977—1981 гг.
выполняли работу шестнадцать экипажей. Максимальная длитель-
ность полета —185 сут.
19 апреля 1982 г. на орбиту была запущена станция «Салют-7»,
подобная станции «Салют-6», но модернизированная с учетом
опыта ее эксплуатации.
Некоторые данные по орбитальным станциям, запущенным в
СССР и США, приведены в табл. 4.1.
175
Таблица 4.1
Орбитальные станция, запущенные СССР США (по состоянию на 1 января 1983 г.)
Орбитальная станция Государство Дата запуска (спуска) Максималь- ная масса*, т Время полета, сут Экспедиции на станцию Примечание
общее суммарное пилотируе- мого полета дата старта (посадки) длительность полета, сут транспортный корабль экипаж
.Салют-1 СССР 19.4.71 (11.10.71) 25 175 24 23.4.71 (25.4.71) 6.6.71 (30.6.71) 24 «Союз-10“ .Союз-11‘ Шаталов Владимир Александрович Елисеев Алексей Ста- ниславович Рукавишников Нико- лай Николаевич Добровольский Геор- гий Тимофеевич Волков Владислав Ни- колаевич Пацаев Виктор Ива- нович
.Скайлэб' США 14.5.73 (11.7.79) 90 2249 171 25.5.73 (22.6.73) 28.7.73 (25.9.73) 16.11.73 (8.2.74) 28 59 84 .Аполлон' .Аполлон' .Аполлон' Чарльз Конрад Джозеф Кервнн Поль Вейц Алан Бин Джек Дуема Оуэн Гэрриот Джеральд Карр Эдвард Гибсон Вильям Поуг
* С учетом массы пристыкованных КК.
Орбитальная станция Г осударство Дата запуска (спуска) Максимальная 1 масса, т Время полета, сут
общее суммарное пилотируе- мого полета дата старта (посадки)
.Салют-3* СССР 25.6.74 (24.1.75) 25 213 16 3.7.74 (19.7.74)
,Салют-4* СССР 26.12.74 (3.2.77) 25 774 92 11.1.75 (9.2.75)
24.5.75 (26.7.75)
.Салют-5* СССР 22.6.76 (8.8.77) 25 441 67 17.11.75 (18.2.76) 6.7.76 (24.8.76)
7.2.77 (25.2.77)
.Салют-6* СССР 29.9.77 (29.7.82) 32 1764 684 10.12.77 (16.3.78)
Продолжение
Экспедиции на станцию Примечание
длительность полета, сут транспортный корабль экипаж
16 «Союз-14» Попович Павел Рома- нович Артюхин Юрнй Петро- вич
29 «Союз-17» Губарев Алексей Александрович Гречко Георгий Ми- хайлович
63 «Союз-18» Клнмук Петр Ильич Севастьянов Виталий Иванович
93 «Союз-20» Без экипажа
49 «Союз-21» Волынов Борис Ва- лентинович Жолобов Виталий Михайлович
18 «Союз-24» Горбатко Виктор Ва- сильевич Глазков Юрий Нико- лаевич
96 «Союз-26» Романенко Юрнй Вик- Проведена
«Союз-27» торовнч Гречко Георгий Ми- хайлович (1-я основная экспе- диция) операция снабжения «Прогресс-1>
00 Орбитальная станция Государство Дата запуска (спуска) Максимальная масса, т Времв полета, сут
общее суммарно: пилотируе- мого полета дата старта (посадки)
,Салют-6* СССР 29.9.77 (29.7.82) 32 1764 684 10.1.78 (16.1 .78)
2.3.78 (10.3./8)
15.6.78 (2.11.78)
27.6.78 (5.7.78)
26.8.78 (3.9.78)
Продолжение
Эксаедипнн на станцию Примечание
длительность полета» сут транспортный корабль экипаж
6 «Союз-27» «Союз-26» Джанибеков Влади- мир Александрович Макаров Олег Гри- горьевич (1-я экспедиции по- сещения)
8 «Союз-28» Губарев Алексей Александрович Ремек Владимир (ЧССР) (2-я экспедиция посе- щения) Коваленок Владимир
140 «Союз-29» «Прогресс-2»
«Союз-31» Васильевич Иванченков Александр Сергеевич (2-я основная экспе- диция) Клнмук Петр Ильич Гермашевский Миро- слав (ПНР) (3-я экспедиция посе- щения) «Прогресс-3» «Прогресс-4»
8 «Союз-30»
8 «Союз-31» «Союз-29» Быковский Валерий Федорович Иен Зигмунд (ГДР) (4-я экспедиция посе- щения)
Орбнтадьная станция Время полета, сут
г осударство Дата запуска (спуска) Максимальная масса, т общее суммарное пилотируе- мого полета дата старта (посадки)
«Салют-6» СССР 29.9 .77 (29.7.82) 32 1764 684 25.2.79 (19.8.79) 16.12.79 (25.3.80) 9.4.80 (11.10.80) 26.5.80 (3.6.80) 5.6.80 (9.6.80)
Продолжение
Экспедиции на станцию Примечание
длительность полета, сут транспортный кораоль экипаж
175 «Союз-32» Ляхов Владимир Афа- «Прогресс-5»
<Союз-34» «Союз Т-1» иасьевич Рюмин Валерий Вик- торович (3-и основная экспе- диция) Без экипажа «Прогресс-6» «Прогресс-7»
185 «Союз-35» «Союз-37» Попов Леонид Ива- нович Рюмин Валерий Вик- торович (4-я основная экспе- диция) «Прогресс-8» «Прогресс-9» «Прогресс-10»
8 «Союз-36» «Союз-35» Кубасов Валерий Ни- колаевич Фаркаш Берталаи (ВНР) (5-я экспедиция посе- щении) «Прогресс-11»
4 «Союз Т-2» Малышев Юрий Ва- сильевич Аксенов Владимир Викторович (6-я экспедиция посе- щения)
8
Орбитальная станция Государство Дата запуска (спуска) Максимальная масса, т Время полета, сут
общее суммарное пилотируе- мого полета дата старта (посадки)
«Салют-6> СССР 29.9.77 (29.7.82) 32 1764 684 23.7.80 (31.7.80)
18.9.80 (26.9.80)
27.11.80 (10.12.80)
12.3.81 (26.5.81)
22.3.81 (30.3.81)
Продолжение
Экспедиции на станцию Примечание
длительность полета, сут транспортный корабль экипаж
8 «Союз-37» «Союз-36» Горбатко Виктор Ва- сильевич Фам Туаи (СРВ) (7-я экспедиция посе- щения)
8 «Союз-38» Романенко Юрий Вик- торович Арнальдо Тамайо Мендес (РК) (8-я экспедиция посе- щения) Кизим Леонид Дени- сович Макаров Олег Гри- горьевич Стрекалов Геннадий Михайлович
13 «Союз Т-3» Испытатель- ный полет и ремонтно- восстанови- тельные ра- боты
75 «Союз Т-4» Ковалевой Владимир Васильевич Савиных Виктор Пет- рович (5-я основная экспеди- ция) «Прогресс-12»
8 «Союз-39» Джанибеков Влади- мир Александрович Жугдэрдемидийн Гур- рагча (МНР) (9-я экспедиция посе- щения)
Орбитальная станция Г осударство Дата запуска (спуска) Максимальная масса, т Время полета, сут
общее суммарное пилотируе- мого полета дата старта (посадки)
«Салют-6> СССР 29.9.77 (29.7.82) 32 1764 684 14.5.81 (22.5.81)
«Салют-7» СССР 19.4.82 32 256 211 13.5.82 (10.12.82)
24.6.82 (2.7.82)
19.8.82 (27.8.82)
00
Продолжение
Экспедиции на станцию Примечание
длительность полета, сут транспортный корабль экипаж
8 «Союз-40» Попов Леонид Ивано- вич Прунариу Думитру (СРР) (10-я экспедиция по- сещения)
211 «Союз Т-5» «Союз T-7j Березовой Анатолий Николаевич Лебедев Валентин Ви- тальевич (1-я основная экспе- диция) «Прогресс-13» «Прогресс-14» «Прогресс-15»
8 «Союз Т-6» Джанибеков Влади- мир Александрович Иванченков Александр Сергеевич Жан Лу Кретьеи (Франция) (1-я экспедиция посе- щения) «Прогресс-16»
8 «Союз Т-7» «Союз Т-5» Попов Леонид Ивано- вич Серебров Александр Александрович Савицкая Светлана Евгеньевна (2-я экспедиция посе- щения)
Главе 5
МНОГОРАЗОВЫЕ ТРАНСПОРТНЫЕ КОСМИЧЕСКИЕ СИСТЕМЫ
5.1. ПРЕДПОСЫЛКИ СОЗДАНИЯ
Для того чтобы полезный груз (космический аппарат или пило-
тируемый космический корабль) мог выполнить свою задачу, его
необходимо доставить с Земли на рабочую орбиту и в некоторых
случаях после выполнения программы полета вернуть на Землю.
Кроме того, в последнее время в связи с созданием долговремен-
ных орбитальных станций, разработкой перспективных космичес-
ких программ по созданию в космосе больших развертываемых
конструкций (радиотелескопы, солнечные электростанции, орби-
тальные исследовательские платформы) и уникальных оптических
космических телескопов возникли требования по обслуживанию
выводимых полезных грузов (ПГ) в целях выполнения монтаж-
ных, отладочных и регламентных работ. Для этого и предназна-
чены транспортные космические системы (ТКС) как одноразо-
вого, так и многоразового применения.
В настоящее время в основном используются ТКС одноразо-
вого применения, состоящие из одноразовой PH для выведения
ПГ на низкую околоземную орбиту, или PH и космического раз-
гонного блока для выведения ПГ на высокие околоземные орбиты
или траектории полета к планетам Солнечной системы.
Для возврата ПГ из космического пространства на Землю
используются специальные СА, входящие в состав ПГ, оборудо-
ванные одноразовой тепловой защитой и средствами приземления
парашютного или парашютно-реактивного типа.
При этом функциональные задачи ТКС по выведению ПГ на
орбиту, как правило, возлагаются на PH и разгонные блоки, а по
возврату — непосредственно на сам полезный груз. Такое построе-
ние современных ТКС определилось возможностями однора-
зовых PH.
На сегодняшний день потребность в решении задачи обслужи-
вания применительна только к пилотируемым долговременным
станциям. Эксплуатация в Советском Союзе долговременной ор-
битальной станции «Салют» с помощью КК «Союз» и «Прогресс»
является примером успешного решения этой задачи.
Вполне естественно стремление к созданию ТКС, которые бы
решили все функциональные транспортные задачи, а полезный
груз мог бы создаваться исходя из требований выполнения основ-
ных целевых задач. Для сокращения стоимости и сроков создания
182
полезных грузов, которые всегда стоили дороже средств выведе-
ния, желательно послабление требований по массе, габаритам и
уровню наземной экспериментальной отработки, причем снижение
первоначального уровня надежности в этом случае может быть
компенсировано за счет обеспечения обслуживания и замены вы-
шедших из строя функциональных частей непосредственно на орбите.
Быстрое развитие космической техники требует постоянного
увеличения мощностей ракетно-космической промышленности для
производства полезных грузов, что может быть достигнуто за
счет сокращения производства средств выведения. Одним из ре-
альных путей достижения этого является использование принципа
многоразовости в их применении, скажем, по примеру современ-
ной транспортной авиации. Ведь сегодня никому не придет в го-
лову предложить одноразовые транспортные самолеты для до-
ставки грузов или пассажиров, какими бы совершенными и ско-
ростными они не были.
При росте грузопотока материальные затраты и производствен-
ные мощности, необходимые для изготовления таких самолетов,
нарастали бы пропорционально его росту.
Поэтому рост грузопотока Земля — космическое пространст-
во— Земля ставит на повестку дня вопрос создания новой косми-
ческой транспортной системы, обеспечивающей регулярные рейсы
по перевозке грузов и экипажей.
В качестве примера рассмотрим многоразовую транспортную
космическую систему (МТКС) «Спейс Шаттл» («Космический
челнок»), практическая разработка которой началась в США
с начала 70-х годов, а первый полет состоялся 12 апреля 1981 г.
(экипаж Д. Янг и Р. Криппен) продолжительностью 54 ч 20 мин
52 с. Не все бесспорно и совершенно в этой системе с точки зре-
ния желаемой идеальной МТКС. Это своеобразный полиатив ме-
жду традиционными одноразовыми баллистическими ракетами и
многоразовой системой, использующей авиационные принципы,
являющейся этапом в создании МТКС, которая базируется на оп-
ределенном уровне развития ракетно-космической техники США и
использует исключительно благоприятные географические условия
США с точки зрения обеспечения всеазимутального запуска и реа-
лизации спасения I ступени.
Конструктивно МТКС «Спейс Шаттл» (рис. 5.1) состоит из
двух спасаемых твердотопливных ускорителей, являющихся фак-
тически I ступенью, и орбитального корабля с тремя маршевыми
кислородно-водородными двигателями и подвесным топливным от-
секом, образующими II ступень, при этом топливный отсек являет-
ся единственным одноразовым элементом всей системы. Преду-
сматривается двадцатикратное использование твердотопливных
ускорителей, стократное — орбитального корабля, а кислородно-
водородные двигатели рассчитываются на 55 полетов.
Предполагается, что такая МТКС при стартовой массе 1995—
2050 т сможет выводить на орбиту с наклонением 28,5° полезный
груз массой 29,5 т, на солнечно-синхронную орбиту— 14,5 т и воз-
183
вращать на Землю с орбиты полезный груз массой 14,5 т. Предпо-
лагается также, что количество запусков МТКС может быть дове-
дено .до 55—60 в год. В первом полете стартовая масса МТКС
«Спейс Шаттл» составляла 2022 т, масса пилотируемого орби-
тального корабля при выведении на орбиту — 94,8 т, при посад-
ке—89,1 т.
Рис. 5.1. МТКС «Спейс Шаттл» (общий вид)
Разработка такой системы — весьма сложная и трудоемкая
проблема, о чем говорит тот факт, что на сегодня оказались не
выполненными заложенные в начале разработки показатели по
общим затратам на создание системы, стоимости ее запуска и
сроки создания. Так, стоимость возросла с 5,2 млрд. дол. (в ценах
1971 г.) до 10,1 млрд. дол. (в ценах 1982 г.), стоимость пуска —
с 10,5 млн. дол.до 24 млн. дол. Не удалось выдержать срок и на-
мечавшегося на 1979 г. первого экспериментального полета.
Министерство обороны США, в частности ВВС, является глав-
ным заказчиком МТКС «Спейс Шаттл»,
184
5.2. СОСТАВ
Многоразовая транспортная космическая система состоит из
многоразового транспортного космического корабля (МТКК), раз-
гонного космического блока — космического буксира (КБ) и ком-
плекса наземных, воздушных и морских средств, обеспечивающих
транспортирование, ремонтно-восстановительные работы, подго-
товку МТКК к старту, а также операции управления, контроля и
связи в ходе полета МТКК.
Многоразовый транспортный космический корабль (МТКК) со-
стоит из пилотируемого орбитального корабля (ОК), подвесного
топливного отсека (ПТО) и двух твердотопливных ускорителей
(ТТУ).
Для обслуживания космических аппаратов вне зоны доступно-
сти бортовых манипуляторов орбитального корабля (от несколь-
ких десятков метров до нескольких десятков километров) и до-
ставки их непосредственно к ОК предполагается использование
специально создаваемого для этих целей дистанционно управ-
ляемого экипажем ОК (или с Земли) телеоператора — бло-
ка ТМТ.
Для увеличения продолжительности эксплуатации ОК на орби-
те или снабжения электроэнергией полезных грузов, выводимых с
помощью МТКК, разрабатывается энергетическая установка SPM
мощностью 25 кВт и предполагается разработка энергетической
установки мощностью 200—500 кВт. Для изготовления на орбите
элементов больших конструкций разрабатываются несколько ви-
дов установок производства ферменных конструкций в космосе и
герметизированный обитаемый блок для их сборки. В качестве
космического буксира разрабатываются два вида однора-
зовых твердотопливных многоступенчатых буксиров JUS и SSUS
(разработки ВВС США и NASA). Такой выбор сделан на пер-
вом этапе из-за низкой стоимости, простоты и высокой надежно-
сти РДТТ. В дальнейшем предполагается разработка и ввод в
эксплуатацию к 1986 г. многоразового буксира второго поко-
ления OTV с ЖРД, работающим на жидких кислороде и во-
дороде.
Буксиры JUS и SSUS должны обеспечить запуск полезных гру-
зов массой 2,3 т на геостационарную орбиту, 2,72 т на 12-часовую
орбиту и более 5 т на межпланетную траекторию, а буксир OTV
предназначается для доставки полезных грузов с низкой орбиты
на более высокую (в основном на геостационарную) с последую-
щим возвращением на низкую орбиту или на Землю, а также для
обеспечения операций на низких или геостационарной орбитах.
Рассматриваются автоматические и пилотируемые буксиры OTV,
рассчитанные на однократное и многократное (с заправкой топ-
лива на орбите) применение. Типовым будет полет на геостацио-
нарную орбиту с пилотируемым КА массой 6,4 т (два члена эки-
пажа) и пребыванием на геостационарной орбите 1—2 нед (по
другим данным с четырьмя космонавтами 30 сут).
185
5.3. СХЕМА ФУНКЦИОНИРОВАНИЯ МТКК
В процессе выведения МТКК выполняет как бы роль ракеты-
носителя в одноразовых транспортных космических системах. В
орбитальном корабле размещаются экипаж и полезный груз. В
подвесной топливный отсек заправляется все кислородно-водород-
ное топливо, расходуемое в процессе выведения на орбиту. Два
твердотопливных ускорителя обеспечивают дополнительную тягу
на начальном участке траектории полета и гарантированную для
спасения ОК скорость в случае аварии на начальном участке вы-
ведения. В момент старта МТКК одновременно работают двига-
тельные установки I и II ступеней, при этом управление полетом
осуществляется отклонением вектора тяги их двигателей, а на ат-
мосферном участке полета дополнительно отклонением руля на-
правления ОК. На 125 с полета при достижении скорости 1390 м/с
и высоты полета ~50 км твердотопливные ускорители
(ТТУ) отделяются с помощью восьми ракетных двигателей на
твердом топливе (РДТТ). Дальнейший неуправляемый полет ТТУ
происходит по баллистической траектории, причем на высоте
7,6 км раскрываются тормозной парашют, а на высоте 4,8 км —
основные парашюты. Приводнение ТТУ происходит на 463 с с мо-
мента старта и на расстоянии 256 км от него. Затем ТТУ букси-
руют к берегу для проведения восстановительных работ и повтор-
ного использования их в составе МТКК.
Три основных двигателя ОК продолжают работать, используя
топливо ПТО, и обеспечивают скорость, близкую к орбитальной.
После выработки топлива на 480 с полета подвесной топливный
отсек отделяется и по баллистической траектории падает в Тихий
или Индийский океан, разрушаясь в плотных слоях атмосферы;
его спасение не предусмотрено.
С помощью двигателей системы орбитального маневрирования
ОК создается дополнительный импульс по приращению скорости,
необходимой для его вывода на опорную орбиту. Эти же двига-
тели используются для маневрирования при аварийном прекра-
щении штатного полета на участке выведения, для межорбиталь-
ных переходов, сближения и выдачи тормозного импульса при
сходе с орбиты для посадки. Имея запас энергии, путем торможе-
ния и маневрирования на атмосферном участке спуска ОК дости-
гает заданной боковой и продольной дальности для обеспечения
безмоторной посадки на посадочную полосу стартово-посадочного
комплекса или запасного аэродрома посадки.
С момента старта до посадки весь полет МТКК состоит из сле-
дующих этапов: набор высоты и скорости, отделение ПТО и вы-
ход ОК на орбиту, орбитальный полет, сход с орбиты, полет в
атмосфере при спуске и посадка.
Отличительной особенностью МТКК «Спейс Шаттл» при воз-
никновении аварийной ситуации на участке выведения и посадки
является обязательное спасение и возврат на Землю всего ОК
вместе с экипажем (который остается в кабине ОК во время ава-
186
рийного спасения) и полезным грузом, так как традиционные
способы аварийного спасения одноразовых кораблей для ОК
МТКК принципиально непригодны. Для повышения живучести
всей системы использованы резервирование бортовых систем; твер-
дотопливные ускорители, надежность которых близка к единице;
эффективная система диагностики, позволяющая выключать неис-
правный двигатель без его разрушения; 9% запас по форсирова-
нию тяги основных двигателей, что позволяет частично компенси-
ровать потери тяги одного выключенного двигателя, для чего в
подвесном топливном отсеке имеется резервное топливо. Все это
в зависимости от того, в какой момент произошла авария, долж-
но способствовать реализации различных вариантов спасения ОК:
прекращение разгона и выведения с возвратом на посадочную
полосу (ПП), расположенную на полигоне запуска;
полет с выходом на одновитковую траекторию с последующей
посадкой на ПП стартового комплекса после выполнения нор-
мального входа в атмосферу и маневров перед посадкой;
выход на орбиту с последующим возвратом (после нескольких
витков ожидания) на ПП стартового комплекса или запасной
аэродром, или проведением спасательных операций на орбите.
На первых полетах как мера дополнительной безопасности для
экипажа предусматривается установка катапультируемых кресел.
5.4. ОРБИТАЛЬНЫЙ КОРАБЛЬ
Орбитальный корабль (рис. 5.2) представляет собой гиперзву-
ковой летательный аппарат с дельтовидным крылом, является но-
сителем полезного груза со средствами его развертывания и об-
служивания на орбите и обеспечивает необходимые условия для
жизнедеятельности и работы экипажа из четырех человек (коман-
дир, пилот, специалист по программе полета и специалист по по-
лезной нагрузке). В отдельных полетах при выполнении спаса-
тельных операций на борту ОК может находиться до десяти че-
ловек.
По своим массовым и габаритным характеристикам ОК срав-
ним с современными транспортными самолетами и имеет длину
37,26 м, размах крыльев 23,8 м, высоту по килю 17,27 м, старто-
вую массу с полезной нагрузкой 85—114 т, сухую массу 68 т, по-
садочную массу с полезной нагрузкой 84,8 т.
Аэродинамическая схема ОК выбрана с расчетом обеспечения
компромисса между большими углами атаки при гиперзвуковой
скорости и достаточно высоким аэродинамическим качеством при
дозвуковом полете. Крыло с двойной стреловидностью (углы стре-
ловидности 81 и 45° по передней кромке) обеспечивает при гипер-
звуковой скорости аэродинамическое качество 1,3 при угле ата-
ки 34°, сравнительно низкие тепловые нагрузки и коэффициент
подъемной силы 0,8, при дозвуковой скорости — аэродинамическое
качество 4,4 при угле атаки 18° и коэффициент подъемной силы
187
0,9; в крыле размещены главные стойки шасси, в передней части
фюзеляжа — носовое шасси.
Фюзеляж ОК состоит из носовой, средней и хвостовой час-
тей. В носовой части расположены герметичная кабина экипажа
и носовой блок системы реактивного управления, в средней час-
ти — негерметичный отсек полезного груза, в хвостовой — три
основных двигателя и киль, а в двух внешних гондолах — двига-
тельные установки орбитального маневрирования и системы реак-
тивного управления.
Рис. 5.2. Орбитальный корабль:
1 — блоки двигателей реактивного управления; 2 — маршевые ЖРД; 3 — двигатели
системы орбитального маневрирования; 4 — топливные баки двигателей орбиталь-
ного маневрирования; 5 — силовая рама крепления маршевых ЖРД; 6 — панели
радиаторов; 7 — манипулятор; 8 — крышка люка для доступа в отсек полезного
груза; 9 — иллюминаторы; 10 — кабина экипажа; 11 — носовой отсек ОК; 12 — топ-
ливные элементы системы электропитания; 13— теплоизоляция планера ОК; 14—
баки топливных элементов; 15 — планер ОК; 16 — створки отсека полезного груза
Кабина экипажа состоит из верхней, средней и нижней
секций. Верхняя и средняя секции (где находится экипаж) имеют
общий герметизированный объем 75 м3, при этом номинальный
свободный объем 30,6 м3 при размещении шлюзовой камеры в
средней секции и 34,1 м3 при ее размещении в отсеке полезной
нагрузки. Для обеспечения термической изоляции кабина экипа-
жа крепится к конструкции носовой части фюзеляжа только в че-
тырех точках. Все окна, кроме окон задней стенки, состоят из
трех панелей: внутренней герметизирующей, средней противо-
ударной и внешней теплозащитной.
Шлюзовая камера диаметром 1,6 м и высотой 2,1 м слу-
жит для перехода из кабины экипажа в отсек полезной нагрузки
188
без ее разгерметизации и рассчитана на одновременное пребыва-
ние в ней двух полностью экипированных членов экипажа в ска-
фандрах.
Отсек полезной нагрузки (ОПН) расположен в сред-
ней части фюзеляжа, имеет длину 18,3 м, диаметр 4,6 м, объем
339,8 м3, а также двухстворчатую крышку, внутри которой уста-
новлены створки радиационной поверхности системы терморегули-
рования. Полезная нагрузка, располагаемая в ОПН, подвержена
сравнительно низким перегрузкам: 3,3 ед. по продольной, 0,2 ед.
по поперечной и 0,75 ед. по вертикальной осям при выведении
на орбиту; максимальные перегрузки 2,5 ед. по вертикальной оси,
около 1 ед. по продольной оси при возвращении с орбиты и 2,8 ед.
при посадке.
Терморегулирование ОПН для поддержания постоянной темпе-
ратуры 23,8°С обеспечивается теплоизоляцией, а до старта — про-
дувкой газом с помощью наземного оборудования.
В нижней части ОПН (под полом) находится система электро-
питания.
На левом борту ОПН установлен манипулятор дистанционно
управляемый из кабины экипажа; при необходимости предусмот-
рена установка второго манипулятора с правого борта ОПН. В
сложенном положении манипулятор массой 450 кг имеет форму
цилиндра диаметром 203 мм и длиной 15,3 м.
Прожекторы, закрепленные внутри ОПН на шпангоутах, соз-
ют достаточные уровни освещенности для выполнения любых опе-
раций в грузовом отсеке.
Для обеспечения операции стыковки орбитального корабля с
другими космическими аппаратами предусмотрена установка внут-
ри грузового отсека у задней стенки отсека экипажа специаль-
ного стыковочного модуля.
В ОПН имеются элементы, обеспечивающие полезные нагруз-
ки электроэнергией, рабочими жидкостями и газами, а также ме-
ханизмы удержания для гарантированного сохранения полезной
нагрузки на всех стадиях полета.
Для предохранения орбитального корабля, каркас н обшивка
фюзеляжа которого выполнены из алюминиевого сплава (исключе-
ние составляет рама ЖРД основной двигательной установки в
хвостовой части, изготовленная из титанового сплава, армирован-
ного бор-эпоксидной смолой), от аэродинамического нагрева на
участке выведения и при входе в атмосферу используется тепло-
защита.
Теплозащита предназначена для поддержания температур
обшивки не выше 450 К, стенок кабины экипажа — не выше 322 К,
внутри ОПН — не выше 366 К, а в отсеках, где размещаются
двигатели и шасси, — 450 К, хотя при входе в атмосферу отдель-
ные участки наружной поверхности нагреваются до 1755 К-
На различных участках корпуса в зависимости от степени на-
грева при входе в атмосферу теплозащита выполнена из различ-
ных материалов.
189
Нос фюзеляжа и передние кромки крыльев, нагревающиеся до
1755 К, защищают теплозащитой RCC («углерод — углерод»),
представляющей собой многослойную конструкцию из углерод-
ной ткани, пропитанной фенольной смолой. Участки, нагревающие-
ся до 820—1500 К, защищают теплозащитой HRSJ на основе квар-
цевого волокна, которая изготавливается в основном в виде квад-
ратных плиток (общее количество 2000 шт.) размером
15,2Х 15,2 см при толщине от 19 до 63,6 мм в зависимости от на-
грева участка.
Участки, нагревающиеся до 680—820 К, защищают теплозащи-
той LRSJ на основе кварцевого волокна, также изготавливаемой
в виде квадратных плиток (общее количество 7000 шт.) размером
20,3x20,3 см при толщине 5,1—25,4 мм в зависимости от нагрева
участка. Теплозащита LRSJ почти аналогична теплозащите HRSJ
и отличается от нее только покрытием и пигментом, которые обе-
спечивают ей низкий коэффициент поглощения и высокий коэффи-
циент излучения солнечной радиации. Плитки теплозащиты HRSJ
и LRSJ на внешней поверхности имеют покрытие из боросиликат-
ного стекла, обеспечивающее влагонепроницаемость и требуемые
оптические свойства, приклеиваются к изолирующей войлочной
подложке из волокна «гпопех», компенсирующей неравномерную
деформацию обшивки и теплозащиты, а вместе с подложкой —
к обшивке ОК.
Участки, нагревающиеся до 645 К при входе в атмосферу и
до 672 К на участке выведения, защищены теплозащитой FRSJ,
представляющей собой войлок толщиной 4,1—10,2 мм с нанесен-
ной белой силиконовой резиной.
Теплозащиты RCC, HRSJ, LRSJ и FRSJ занимают 3,5%
(38 м2), 43,2% (475 м2), 25,6% (281 м2) и 27,7% (304 м2) общей
площади защищаемой поверхности, а их массовые доли равны
21,5%, 59,7%, 13,2% и 5,6% соответственно, при общей массе те-
плозащиты 7,164 т.
Основная двигательная установка ОК состоит
из трех ЖРД, работающих на жидких водороде и кислороде. Каж-
дый ЖРД имеет номинальную тягу 170 тс на уровне моря и
213 тс в пустоте с изменением ее от 50 до 109% с учетом регули-
рования перегрузок на участке выведения и при аварийном пре-
кращении полета, а также шарнирную подвеску, обеспечивающую
отклонение на ±11° по тангажу и ±9° для управления по
рысканью и крену.
Двигательная установка маневрирования и
ориентации включает два ЖРД маневрирования и 44 ЖРД
ориентации (реактивного управления); из них 38 основных и 6
вспомогательных, которые работают на монометилгидразине и
четырехокиси азота. Конструктивно двигатели объединены в три
двигательные установки: носовую и две кормовые, размещенные
в двух боковых гондолах по обе стороны от киля.
В носовой двигательной установке (сухая масса 492,6 кг) раз-
мещены 14 основных и 2 вспомогательных ЖРД ориентации и
190
1112 кг топлива. В каждой кормовой двигательной установке (су-
хая масса 1793 кг в гондоле) расположено по одному ЖРД ма-
неврирования, 12 основных и 2 вспомогательных ЖРД ориента-
ции, а также 5650 кг топлива ЖРД маневрирования, 1097 кг то-
плива ЖРД орнентацин, 44 кг топлива в трубопроводах и 25 кг
газа в баллонах. Запаса топлива маневрирования достаточно для
сообщения ОК с полезной нагрузкой 29,5 т скорости 350 м/с. Кро-
ме того, в ОПН предусматривается размещение до трех комплек-
тов топливных баков, объединенных в один блок массой 19051 кг
(16 556 кг топлива), занимающих 15% объема ОПН и обеспечи-
вающих дополнительное приращение скорости по 150 м/с каж-
дый. ЖРД ориентации обеспечивают заданную ориентацию ОК
относительно центра масс по трем осям и поступательные пере-
мещения в трех взаимно перпендикулярных плоскостях, причем
основные ЖРД ориентации служат для быстрых разворотов, а
вспомогательные — для управления в режиме точной ориентации.
Для всех элементов ЖРД ориентации предусмотрено резерви-
рование, обеспечивающее их нормальное функционирование при
отказе любых двух элементов.
Основные характеристики ДУ приведены в табл. 5.1.
Система жизнеобеспечения и терморегулиро-
вания включает герметичный объем экипажа с двухгазовой
(21% кислорода н 79% азота) искусственной атмосферой при дав-
лении 760 мм рт. ст. и температуре 18,3—26,6°С. Кислород О2
(51 кг) хранится в жидком виде в двух баках кислородно-водо-
родных топливных элементов, азот N2 — в газообразном виде
(78 кг) в четырех баллонах. Для удаления углекислого газа СО2
и дезодорации служат патроны с гидроокисью лития. Из патронов
газовая смесь поступает в теплообменник для обеспечения задан-
ных параметров по температуре и влажности. Запас сжатых га-
зов (25 кг кислорода), хранится в баллоне ОПН и рассчитан на
наполнение герметизированного объема кабины экипажа после
одной его полной разгерметизации или на поддержание в этом
объеме давления 42,5 мм рт. ст. в течение 165 мин при появлении
небольшого отверстия в корпусе при старте или вскоре после него.
Полезный запас расходуемых материалов (75,2 кг пищевых про-
дуктов, 150 кг воды в трех переносных бачках, два из которых
заполняются при старте, а также 1311 кг воды из водородно-
кислородных топливных элементов) рассчитан на экипаж из че-
тырех человек, совершающих орбитальный полет в течение 7 сут
с учетом аварийного запаса на 4 сут.
Поддержание необходимого температурного режима всех внут-
ренних отсеков ОК обеспечивается пассивными и активными эле-
ментами системы терморегулирования, включающими теплоизо-
ляцию, термонагреватели, аммиачный испаритель и радиационные
экраны.
Комплексная система навигации, наведения
и управления ОК состоит из трех инерциальных измеритель-
ных блоков, бортового комплекта строированной микроволновой
191
Таблица 5.1
Основные характеристики двигательных установок орбитальвого корабля
ЖРД Тяга, тс Удельный нмпульс, с Давление в камере сгорания, МПа Компоненты топлива Система подачн Масса, кг Ресурс работы, ч (число включений) Макси- мальная продолжи- тельность работы, с Срок годности, лет (число полетов)
Основной 170,1* 213,2 363,2 455,2 21 Жидкие водо- род и ки- слород ТНА 3000 8 (55) 825 55 включе- ний
Маневрирования 2,7 313,2 8,6 Четырех- окнсь азота — монометил- гндразнн Вытес- нитель- ная 118 15 (1000, но не более 10 в каждом полете) 1250 10 (100)
Ориентации: 5,5 (50 000) 150
основной 0.395 255** 200 1,06 То же То же 6,1 10 (100)
вспомогательн ый 0,0113 272** 240 7,3 » > 3,5 (50 000) 1500 10 (100)
* В знаменателе — на Земле, в числителе — в пустоте.
** В знаменателе — при непрерывном режиме, в числителе — при импульсном режиме.
сканирующей системы обеспечения посадки, трех блоков скорост-
ных гироскопов, бортового комплекта радионавигационной систе-
мы «Такая», трех блоков акселерометров, двух радиовысотомеров,
четырех датчиков воздушных параметров, двух блоков передачи
усилий от педалей управления рулем направления, двух команд-
ных авиагоризонтов, двух плановых индикаторов обстановки, двух
индикаторов положения поверхностей управления, двух баромет-
рических высотомеров, двух приемоответчиков системы УВД, а
также указателей угла атаки и числа М (двух), высоты и верти-
кальной скорости (двух), ручек управления поступательным дви-
жением (двух), управления рулем направления (двух) при его ра-
боте в режиме аэродинамического тормоза, управления враща-
тельным движением (трех). Четыре БЦВМ, соединенные между
собой, служат для обработки информации, поступающей от си-
стемы навигации, наведения и управления, и для передачи команд
на систему управления полетом, пятая БЦВМ резервная.
Система связи и слежения включает радиолокатор
(или два) диапазона Кл для обеспечения сближения с другими
космическими объектами, комплект (или два комплекта) обору-
дования диапазона Кл для обеспечения связи со спутниками, три
звездных датчика, два односторонних доплеровских выделителя,
программно-временные устройства, два усилителя ЛБВ диапазо-
на S мощностью по 100 Вт каждый, два комплекта оборудования
диапазона Р для использования в системе обеспечения посадки,
а также для связи с членами экипажа, находящимися в откры-
том космосе, комплект оборудования диапазона К для обеспечения
связи ОК с Землей и с полезной нагрузкой, комплект оборудования
диапазона К для обеспечения связи ОК с Землей, антенны.
К бортовым радиоэлектронным системам ОК также относятся
пульт системы управления полетом, три блока отображения ин-
формации, три клавишных устройства для связи с БЦВМ, четы-
ре электронно-лучевых дисплея, девятнадцать мультиплексор-де-
мультиплексеров, три блока передачи команд на ЖРД основной
двигательной установки, система аварийной сигнализации, твер-
дотельные регуляторы мощности и главное синхронизирующее уст-
ройство.
S.S. ТВЕРДОТОПЛИВНЫЕ УСКОРИТЕЛИ
Два возвращаемых твердотопливных ускорителя (рис. 5.3, а)
образуют I ступень МТКК и крепятся к подвесному топливному
отсеку II ступени.
Корпус каждого ТТУ имеет длину 45,46 м, внешний диаметр
3,7 м, общую массу 586,5 т, в том числе массу топлива 503,6 т,
стартовую тягу 1330 тс (на уровне моря), продолжительность ра-
боты 122 с, суммарный импульс 131,6- 10е кгс с и удельный им-
пульс в пустоте 262,2 с при степени расширения сопла 4,16 и мак-
симальном расчетном давлении в камере сгорания 6,7 МПа. Соп-
ло с гибким подшипником с помощью двух гидроприводов откло-
няется на ±8° (для управления достаточно ±7,1°).
7
Космические аппараты
193
Конструктивно каждый твердотопливный ускоритель состоит
из 11 секций пяти типов, изготовленных из стали толщиной 12 мм,
габариты которых выбраны так, чтобы при их изготовлении и
ремонтно-восстановительных работах для повторного использова-
ния исключить сварку и использовать существующие способы рас-
катки, термической и механической обработки.
Рис. 6.3. Твердотопливный ускоритель (в) и подвес-
ной топливный отсек (<5):
1,3- РДТТ отделения ТТУ от ПТО; 2 — основной парашют;
4 — сопло ТТУ; 5 — нижняя юбка; б — нижний узел крепления
ТТУ к ПТО; 7 — верхний узел крепления ТТУ к ПТО; 8 — ап-
паратура подсистемы разделения и спасения ТТУ; 9 — верх-
няя юбка; 10 — головной обтекатель; 11 — вытяжной парашют;
12 — обтекатель; 13 — перегородки для демпфирования колеба-
ний окислителя; 14 — передний узел крепления ТТУ; 15 —
стрингеры; 16 — передний узел крепления орбитального ко-
рабля (ОК); /7 — задний узел крепления ОК; /8 — магистрали
систем подачи топлива и наддува; 19 — бак горючего (жид-
кий водород); 20 — межбаковый отсек; 21 — плата разъемов;
22 — бак окислителя (жидкий кислород)
Для защиты От воздействия морской воды внешняя поверх-
ность корпуса имеет покрытие на эпоксидно-полиамидной основе,
внутренняя — изоляцию из бутадиенового каучука с асбестоквар-
цевым наполнителем.
К последней секции крепится верхняя юбка, обеспечивающая
плавучесть приводнившегося блока и служащая для установки го-
ловного Обтекателя (ГО) с тремя основными (диаметр купола
81,7 м) и одним тормозным (диаметр купола 16,5 м) ленточными
194
парашютами и программного устройства, работающего от баро-
датчика и используемого после отделения ускорителя. На ГО рас-
положены четыре двигателя отделения твердотопливного ускори-
теля от ПТО.
Твердотопливные ускорители снаряжаются смесевым топливом
продолжительностью хранения не менее 10 лет.
Многократное использование твердотопливных ускорителей
обеспечивает существенную экономию: стоимость изготовления
нового ускорителя составляет 4,1 млн. дол., стоимость его спасе-
ния и восстановления —1,6 млн. дол. (в ценах 1975 г. из расчета
445 полетов МТКС).
S.6. ПОДВЕСНОЙ ТОПЛИВНЫЙ ОТСЕК
Подвесной топливный отсек (рис. 5.3,6) служит для размеще-
ния компонентов топлива основной двигательной установки II сту-
пени (ОК), имеет длину 47 м, диаметр 8,38 м, сухую массу 33,5 т и
массу с топливом 743 т. ПТО состоит из бака окислителя, бака го-
рючего и промежуточного межбакового отсека.
Бак окислителя (сухая масса 5,647 т) монококковой кон-
струкции оживальной формы с эллипсоидальным нижним днищем
имеет внутренний полезный объем 552 м3 и вмещает 604,2 т жид-
кого кислорода при номинальном давлении наддува 0,14—
0,155 МПа.
Бак горючего (сухая масса 14,45 т) сварной (сварка
плавлением) полумонококковой конструкции из алюминиевого
сплава состоит из эллипсоидального верхнего днища, цилиндриче-
ской обечайки и эллипсоидального нижнего днища, имеет внутрен-
ний полезный объем 1573,2 м3 и вмещает 101,6 т жидкого водо-
рода при давлении наддува 0,22—0,234 МПа.
Промежуточный межбаковый отсек длиной 6,87 м
и диаметром 8,4 м имеет форму цилиндра и состоит из двух си-
ловых панелей, воспринимающих тягу двух твердотопливных ус-
корителей, шести панелей обшивки, главного и четырех промежу-
точных шпангоутов, четырех лонжеронов и поперечной силовой
балки.
Теплозащита ПТО состоит из теплозащиты CPR-448 (фто-
роуглеродный пенопласт малой вязкости и полиизолциануратный
пенопласт) и теплозащиты SLA-561 (кремнийорганический пено-
каучук с добавкой обугливающихся и армирующих веществ),
должна обеспечивать заданную температуру компонентов топли-
ва (скорость их выкипания не должна превышать расчетную),
предотвращение намерзания льда на внешней поверхности и сжи-
жения воздуха на баке горючего. Теплозащита наносится так,
чтобы при входе в атмосферу ПТО мог разрушиться без боль-
шого разлета его элементов, поскольку все они должны падать в
заданном районе.
7*
195
6.7. ПЕРСПЕКТИВЫ РАЗВИТИЯ
Ожидаемое в ближайшем будущем значительное увеличение
объема транспортных перевозок в околоземном космическом про-
странстве, включая геостационарные орбиты, не может быть в
полной мере удовлетворено МТКС типа «Спейс Шаттл». Эта в
достаточной мере дорогая система имеет к тому же существенные
ограничения по массе и объему выводимой полезной нагрузки. В
середине 1980-х годов будут предприняты усилия по разработке
нового поколения МТКС, которые позволят снизить стоимость
выведения 1 кг полезного груза на порядок и более (на МТКС
«Спейс Шаттл» стоимость выведения 1 кг — 800 дол.) и сущест-
венно повысить грузоподъемность (более 100 т на низкую орбиту
и более 25 т на геосинхронную). Направление разработок пойдет
по двум путям: создание одно- или двухступенчатых МТКС,
использующих авиационные принципы взлета и посадки для
оперативной доставки на низкую околоземную орбиту экипажа
и небольших полезных нагрузок, и МТКС, использующих балли-
стические принципы взлета, разгона и спуска с орбиты для вы-
ведения полезных нагрузок с большой массой и габаритами.
До создания этих средств будут предприняты попытки даль-
нейшего совершенствования МТКС «Спейс Шаттл» как по повы-
шению его энергетических возможностей с использованием ОК,
так и по созданию на его основе грузового варианта с выведе-
нием на низкую орбиту грузов массой 65—90 т.
Глава 6
ОБЕСПЕЧЕНИЕ ТЕПЛОВОГО РЕЖИМА
КОСМИЧЕСКИХ АППАРАТОВ
6.1. ОБЩИЕ СВЕДЕНИЯ
Тепловой режим космического аппарата, находящегося в меж-
планетном пространстве, определяется условиями внешнего те-
плообмена и структурой самого КА. В состав любого КА входят
средства, обеспечивающие внешний и внутренний теплообмен, на-
зываемые системой обеспечения теплового режима (СОТР). Ко-
нечно, тепловой режим КА должен быть обеспечен и на других
участках эксплуатации.
При нахождении КА на космодроме тепловой режим обычно
обеспечивается с помощью наземных средств.
От аэродинамического нагрева при прохождении плотных
слоев атмосферы на участке выведения КА обычно защищается
средствами ракеты-носителя (сбрасываемый головной обтекатель,
защитные щитки и т. д.), а также применением на внешней по-
верхности материалов, способных выдерживать нагрев в несколь-
ко сотен градусов.
Космический аппарат, совершающий посадку на поверхность
планеты, имеющей атмосферу, должен быть защищен от аэроди-
намического нагрева при торможении, а также обеспечивать
требуемые температуры работающей аппаратуре после посадки.
В данной главе будут рассмотрены вопросы обеспечения теп-
лового режима в основном на участке орбитального полета.
6.2. ВНЕШНИЙ ТЕПЛООБМЕН
В космическом пространстве вне пределов атмосферы планет
единственным видом теплообмена КА с окружающим его прост-
ранством (если исключить процессы, связанные с выбросом
масс) является теплообмен излучением. Поверхность КА погло-
щает падающую на нее лучистую энергию и в свою очередь из-
лучает в окружающее пространство энергию, равную сумме по-
глощенной и подведенной изнутри. Для КА, находящихся в окре-
стностях планет, имеющих атмосферу, внешним источником на-
грева может стать тепловая энергия, выделяющаяся как при
столкновении его поверхности с молекулами газа, так и за счет
рекомбинации на его поверхности диссоциированных молекул.
197
Для Земли эта энергия существенна на высотах менее 200 км, а
на высотах более 250 км она настолько мала, что практически
не влияет на температуру поверхности КА.
Обычно при расчете теплообмена между телами, имеющими
близкие температуры, считают, что степень черноты поверхности е
равна коэффициенту поглощения падающего теплового потока А.
Особенность процессов теплообмена в космическом простран-
стве состоит в том, что они происходят между телами, имеющими
существенно различные температуры: Солнце — основной источ-
ник тепловой энергии имеет эффективную температуру поверхно-
сти около 5800 К, поверхности КА и планет — температуру по-
рядка сотен кельвинов, «черное» космическое пространство — тем-
пературу, близкую к 4 К.
Основная доля энергии солнечного излучения (~92%) при-
ходится на диапазон длин волн от 0,3 до 3 мкм, а основная доля
энергии излучения планет и поверхностей КА — на диапазон длин
волн свыше 4 мкм.
Для селективно излучающих материалов коэффициент погло-
щения падающего теплового потока существенно зависит от диа-
пазона длин волн, в котором переносится этот тепловой поток.
Поэтому для таких материалов в общем случае коэффициент по-
глощения солнечной радиации Ад не равен степени черноты е.
Коэффициенты Ад и в обычно называют тепловыми радиационны-
ми характеристиками поверхности. Подбирая материалы с одной
и той же степенью черноты, но с различными коэффициентами по-
глощения солнечной радиации, можно, при прочих равных усло-
виях, получать различные температуры поверхности, освещаемой
Солнцем.
Тепловой поток, идущий от планеты, состоит из собственного
излучения и отраженной от планеты солнечной радиации. Коэф-
фициент поглощения отраженной от планеты солнечной радиации
в силу своей природы близок к коэффициенту поглощения сол-
нечной радиации Ад, а коэффициент поглощения собственного из-
лучения планеты может быть принят равным степени черноты в
поверхности КА, так как излучение обоих тел приходится в об-
щем на один и тот же диапазон длин волн.
Учитывая, что тепловой поток, излучаемый поверхностью, в
соответствии с законом Стефана — Больцмана пропорционален
температуре в четвертой степени и степени черноты поверхности,
для элемента поверхности КА уравнение теплового баланса будет
иметь вид
mfii = ®c<nihjASj + Фотр^Ajj + ФСО6Л + ®bhj (6-1)
где mlt Cp Tt — масса единицы поверхности элемента КА,
его теплоемкость и температура соответ-
ственно;
198
Фсолнр Фот₽р ®собг —солнечный тепловой поток, тепловой по-
ток, отраженный от планеты, и собствен-
ное излучение планеты, падающие на эту
поверхность;
Фвн/ — тепло, подведенное от смежных элемен-
тов;
-с — время;
а — постоянная закона Стефана—Больцмана.
Из уравнения (6.1) следует, что при освещении Солнцем при
прочих равных условиях температура поверхности зависит от ее
радиационных характеристик, а при отсутствии тепловых пото-
ков от смежных элементов и от планеты—только от отноше-
ния As/e.
Поверхности, имеющие заданные радиационные характерис-
тики и предназначенные для организации внешнего теплообмена,
называют радиационными поверхностями.
Придание поверхности определенных радиационных характе-
ристик возможно самыми различными способами: напылением на
нее различных металлов или их окислов, гальванической обра-
боткой, нанесением терморегулирующих покрытий и т. д.
Современное развитие техники позволяет получать значения
радиационных характеристик в пределах е = 0,02—0,99, As=0,l—
—0,99 и As/e=0,15—8.
Спектральные характеристики материалов, как правило, не ме-
няются при изменении температур поверхности в весьма широком
диапазоне (при отсутствии фазовых изменений в структуре по-
верхности).
Если основным тепловым потоком, поступающим на поверх-
ность КА, является собственное излучение планеты, при любых
покрытиях при отсутствии внутреннего теплоподвода поверхность
принимает температуру, соответствующую этому тепловому по-
току. Это создает немало трудностей при разработке СОТР КА
для посадки на поверхности планет или их спутников, не имею-
щих атмосферы (Меркурий, Луна), так как в этом случае тепло-
обмен с окружающим пространством, как и при нахождении на
орбите, в основном происходит за счет излучения.
При отсутствии внешних тепловых потоков, падающих на по-
верхность КА, ее температура определяется степенью черноты
поверхности и количеством тепла, подведенного от смежных эле-
ментов КА.
Во всех случаях полностью решить проблему обеспечения те-
плового режима нанесением покрытий с определенными радиа-
ционными характеристиками невозможно. При изменении внеш-
него теплового потока и внутреннего тепловыделения в таких пре-
делах, когда обеспечить сохранение заданного диапазона темпе-
ратур подбором As и е нельзя или когда внешний тепловой поток
имеет характеристики, исключающие возможность получения
требуемых температур, используют другие способы регулирования
Внешнего теплообмена (рис. 6.1,а).
199
Эффективным способом регулирования температуры поверхно-
сти КА является изменение его ориентации в пространстве отно-
сительно падающего теплового потока. Но так как в этом слу-
Рис. 6.1. Основные способы регулирования внешнего теплообмена:
а — подбор покрытий с определенными радиационными характеристиками; б — створчатые
жалюзи; в — жалюзи в виде экранов, перемещающихся параллельно поверхности; г — эк-
ранирование поверхности; д — изолированная радиационная поверхность; е — экранно-
вакуумная теплоизоляция; ж — испарительная система; 1 — поверхность КК; 2 — створ-
ки; 3 — жалюзи; 4 — экран; 5 —радиационная поверхность; S — изоляция; 7 —трубопро-
вод с теплоносителем; 8 — датчик температуры, управляющий перепускным клапаном;
9 — перепускной клапан; 10 — внешний слой с определенными радиационными характери.
стиками; 11 — металлизированная пленка; 12— стеклосетка; 13— емкость в рабочим те-
лом; 14 — испаритель; 15 — сопло, сбрасывающее пары в вакуум
чае ориентация КА будет подчинена обеспечению теплового ре-
жима, могут создаться определенные трудности для выполнения
его основных задач полета, что практически исключает использо-
вание этого способа.
200
Другим способом регулирования лучистого теплообмена явля-
ются жалюзи (рис. 6.1,6, в)—подвижные экраны, которые, пе-
ремещаясь, открывают или закрывают участки поверхности с раз-
личными радиационными характеристиками.
Жалюзи перемещаются с помощью исполнительного механиз-
ма, реагирующего непосредственно на температуру поверхности,
или специальных приводов, работающих по командам чувстви-
тельного элемента, реагирующего на изменение температуры газа
или жидкости, циркулирующих вдоль поверхности. Хотя жалюзи
и эффективны при регулировании лучистого теплообмена, одна-
ко их возможности ограничены радиационными характеристиками
покрытий при данном поле внешних тепловых потоков.
Более эффективным способом регулирования внешнего тепло-
обмена является создание специальных радиационных по-
верхностей, отделенных от корпуса КА (рис. 6.1,6). В та-
ких системах внешний теплообмен регулируется за счет измене-
ния тепловых связей между радиационной поверхностью и внут-
ренними объемами. Естественно, что температура такой поверх-
ности меняется в зависимости от количества тепла, излучае-
мого ею.
Поверхности, предназначенные для сброса тепла, располагают
по возможности так, чтобы они получали минимальное количест-
во внешних тепловых потоков, и наносят на них покрытия, имею-
щие степень черноты s-»-l и коэффициент поглощения солнечной
радиации As->-0.
Системы с изолированными радиационными поверхностями
способны сбрасывать тепло и в тех случаях, когда внутренние те-
пловые нагрузки и поле внешних тепловых потоков таковы, что
не позволяют получить заданные температуры с помощью термо-
регулирующих покрытий. Для этого в системе передачи тепла изо-
лированной радиационной поверхности должна быть установлена
холодильная машина.
Средствами регулирования внешнего теплообмена являются и
мероприятия, сводящие к минимуму теплообмен поверхности с
окружающим пространством: нанесение покрытий с минимальны-
ми значениями коэффициентов As и е, экранирование по-
верхности или защиту ее изоляцией (рис. 6.1,г, ж).
При установке над поверхностью нескольких экранов с одинако-
вой степенью черноты тепловой поток, излучаемый поверхностью
в космическое пространство (при отсутствии внешнего теплового
потока), уменьшается в п+1 раз, где п — число экранов.
Стремление к созданию конструкции с максимальным числом
экранов при их минимальной массе привело к появлению экран-
но-вакуумной теплоизоляции (ЭВТИ)—пакета экра-
нов, выполненных из фольги или металлизированной пленки тол-
щиной 5—10 мкм, переложенных для уменьшения контактов ме-
жду ними стекловуалью или стеклосеткой. Возможно применение
пакетов экранов и без прокладок между ними, но в этом случае
экраны имеют рифление, обеспечивающее точечные контакты ме-
201
жду ними. Свойства ЭВТИ существенно зависят от температуры,
так как основной теплообмен в ней осуществляется излучением;
ее достоинством по сравнению с другими видами изоляции явля-
ются малые массовые затраты в вакууме на единицу термическо-
го сопротивления (в 5—10 раз меньше, чем у пористых изоля-
ционных материалов).
К средствам, регулирующим внешний теплообмен, относят и
испарительные системы, использующие теплоту фазовых
превращений веществ для поглощения энергии, выделяющейся в
КА или получаемой им в результате внешнего теплообмена
(рис. 6.1,ж). Обычно в таких системах в качестве рабочего тела
используют воду как вещество, имеющее максимальную скрытую
теплоту испарения, а ее пары сбрасывают в окружающий КА ва-
куум. Подобные испарительные системы применяют в случаях,
когда почему-либо невозможно обеспечить требуемый теплооб-
мен с окружающим пространством средствами, описанными выше,
или когда масса испарительной системы вместе с запасами воды
в силу кратковременности сброса энергии меньше, чем масса ра-
диационных поверхностей, необходимых для этого.
6.3. внутренний теплообмен
Внутренний теплообмен должен обеспечить отвод тепла от те-
пловыделяющих приборов и перенос его к радиационным поверх-
ностям КА, а также перераспределение тепла между различными
элементами КА, в частности между оболочками, находящимися в
теплообмене с окружающим пространством.
При отсутствии в КА специальных средств переноса тепла ме-
жду его элементами теплообмен осуществляется излучением между
поверхностями и теплопроводностью по элементам конструкции
или среды, заполняющей герметичный объем (при отсутствии
средств, обеспечивающих принудительную циркуляцию, практи-
ческое отсутствие свободной конвекции при полете по орбите про-
сто превращает газ или жидкость в среду, обладающую только
теплопроводностью).
Для интенсификации теплообмена излучением внутренние по-
верхности КА обычно имеют степень черноты s->-l. Излучением на
1 К перепада между двумя «черными» параллельными пласти-
нами при температуре около 300 К можно передать около
5,5 Вт/м2 тепловой энергии. Лучистый теплообмен мало пригоден
при передаче тепла в «загроможденном» объеме или при охлаж-
дении элементов (например, радиоэлектронной аппаратуры),
имеющих плотности тепловыделения порядка нескольких ватт на
квадратный сантиметр.
Передача тепла через специальные металлические
теплопроводы позволяет существенно увеличить интенсив-
ность тепловых потоков, но требует значительных затрат массы.
Часто в качестве теплопроводов используют элементы конструк-
202
ции, а специальные теплопроводы — как правило, при передаче
тепла на небольшие расстояния. Это заставляет искать пути при-
нудительного переноса тепла; наиболее простым из них является
перенос тепла газом, совершающим движение с помощью венти-
ляторов в герметичных контейнерах.
Однако коэффициент теплоотдачи от газа к стенке при его
движении с небольшими скоростями сравнительно невелик (в
плоской щели шириной 10 мм он составляет всего около 8 Вт/м2).
Поэтому для интенсификации теплообмена необходимо делать
щели более узкими или устанавливать ребра, что ведет к увели-
чению массы конструкции и мощности вентиляторов, обеспечива-
ющих движение газа.
Увеличить коэффициент теплоотдачи от газа к стенке в 5—
6 раз можно за счет заправки герметичных контейнеров гелием,
однако многие электронные приборы в атмосфере гелия работать
не могут.
В КА с тепловыделяющей аппаратурой, расположенной в не-
герметичных отсеках, для передачи больших количеств тепла на
изолированную радиационную поверхность или отвода (подвода)
тепла от источников большой мощности с большой удельной
плотностью тепловыделения используют жидкие теплоносители,
циркулирующие в трубопроводах жидкостных контуров.
При поддержании температур циркулирующего теплоносителя
в заданных пределах теплоноситель кроме переноса тепла будет
стабилизировать и температуру элементов, имеющих непосредст-
венный тепловой контакт с ним. Так, нуждающиеся в охлаждении
приборы устанавливают на термостатируемые платы, через кото-
рые циркулирует теплоноситель, или подают теплоноситель не-
посредственно в приборы для охлаждения теплонапряженных эле-
ментов.
В качестве теплоносителей используют углеводороды, кремний-
органические жидкости, фреоны, водные растворы этиленгликоля,
воду и т. п.
Для передачи тепла на небольшие расстояния и отвода его от
источников с большой плотностью тепловыделения могут быть ис-
пользованы тепловые трубы — устройства в виде замкнутого
герметичного объема, заполненного рабочим телом и покрытого
изнутри смачиваемой капиллярно-пористой структурой. Часть ра-
бочего тела, заполняющего объем, находится в паровой фазе,
часть — в жидкой, причем последняя должна заполнять всю ка-
пиллярно-пористую структуру. Если в таком объеме имеются зо-
ны с различными температурами, то в зоне повышенной темпера-
туры рабочее тело будет испаряться, а в зоне пониженной темпе-
ратуры— конденсироваться. При этом за счет разности давлений,
вызванной конденсацией, пар из зоны испарения будет переме-
щаться в зону конденсации, а жидкость по капиллярно-пористой
структуре за счет капиллярных сил из зоны конденсации будет
поступать в зону испарения. В тепловых трубах в качестве рабо-
чего тела используют воду (для температур 300—400 К), ацетон,
203
фреоны, аммиак (для температур 200—350 К) и т. п. Плотность
теплового потока может составлять десятки ватт на квадратный
сантиметр поперечного сечения тепловой трубы.
6.4. ВЫБОР СРЕДСТВ ОБЕСПЕЧЕНИЯ
ТЕПЛОВОГО РЕЖИМА
Как правило, СОТР представляет собой совокупность различ-
ных средств и устройств, регулирующих внешний и внутренний
теплообмен КА. Обычно в состав СОТР входят комплекс средств
активного регулирования тепловых процессов, называемый систе-
мой терморегулирования (СТР), и средства пассивного терморе-
гулирования (СПТР). СТР включает вентиляционные устройства,
жидкостной контур с теплообменными устройствами и средствами
регулирования тепловых потоков, активные средства регулиро-
вания лучистого теплообмена и т. д., а СПТР — конструктивные
элементы, обеспечивающие заданные параметры теплообмена из-
лучением и теплопроводностью (терморегулирующие покрытия,
различного рода тепловая изоляция и теплозащита, термомосты
и термосопротивления).
Необходимо отметить, что в ряде случаев могут быть пост-
роены системы обеспечения теплового режима, состоящие только
из СПТР.
Основными факторами, определяющими выбор СОТР, явля-
ются:
область космического пространства, в которой предполагается
эксплуатация КА;
требования к тепловому режиму;
внутренние тепловыделения;
программа ориентации;
конструктивные особенности КА.
Область космического пространства, в которой предполагается
эксплуатация КА, определяет поле тепловых потоков, их спект-
ральный состав и интенсивность.
Околосолнечное пространство можно разделить на межпла-
нетное пространство, в котором преимущественным источником
тепла является Солнце, околопланетное пространство, в котором,
помимо солнечного излучения, приходится считаться с излучением
планеты, а также поверхности планет и их спутников, не имею-
щих атмосферы (Меркурий, Луна).
Тепловой режим — последовательность температурных со-
стояний элементов КА. КА состоит из большого числа элементов
(приборов, узлов конструкции и т. п.), каждый из которых имеет
свою собственную температуру. Описать температуры абсолютно
всех элементов довольно сложно. Поэтому при разработке системы
обеспечения теплового режима в КА выделяют ограниченное чис-
ло термостатируемых элементов, которые при организации соот-
ветствующих тепловых связей с ними и будут определять темпе-
204
ратуры всех остальных элементов КА. Такими термостатируемыми
элементами могут быть газ или оболочка герметичного отсека,
оболочка негерметичного отсека, теплоноситель жидкостного кои-
тура СТР и т. п. Именно температура термостатируемых элемен-
тов и условия тепловой связи с ними остальных элементов и опре-
деляют тепловой режим КА.
Например, в герметичных отсеках задаются температура, ско-
рость движения газа (последняя определяет теплообмен каждого
элемента с газом), в негерметичных отсеках — температуры и сте-
пень черноты поверхностей, обращенных к агрегатам и приборам;
для приборов, устанавливаемых на внешней стороне оболочки и
имеющих теплообмен с космическим пространством, — температу-
ры оболочки и термическое сопротивление между посадочной
плоскостью прибора и оболочкой.
Выбор термостатируемых элементов и их температурного диа-
пазона определяется совокупностью требований к поддержанию
теплового режима каждого из элементов КА, количеством тепла,
отводимого от них, а также конструктивными особенностями КА.
Внутренние тепловыделения — временная последова-
тельность выделения тепла различными элементами КА — сущест-
венно влияет на выбор СОТР, прежде всего на площадь радиа-
ционных поверхностей и принцип регулирования внешнего тепло-
обмена, так как все тепло, выделившееся внутри КА, должно быть
сброшено в окружающее пространство.
Программа ориентации — последовательность положе-
ния осей КА в пространстве относительно звезд, планет, Солнца.
Ориентация КА в пространстве определяет количество тепловых
потоков, получаемых различными участками поверхности КА.
Конструктивные особенности КА (число и форма
отсеков, компоновка и размещение в них оборудования, наличие
головного обтекателя, защищающего КА от аэродинамических пе-
регрузок и нагрева на активном участке и т. п.) непосредственно
влияют на состав СОТР и ее массовые и энергетические характе-
ристики. Поэтому сам КА должен быть спроектирован с учетом
минимальных массовых и энергетических затрат, а используемые
конструктивные решения, дающие выигрыш в массе элементов, но
увеличивающие массу СОТР в сумме, должны давать выигрыш в
массе КА в целом.
Рассмотрим особенности построения СОТР в околоземном про-
странстве. Интенсивность солнечного теплового потока при сред-
нем расстоянии Земли от Солнца 149,5 Ю6 км составляет около
1400 Вт/м2 и изменяется в течение года на ±3%. Вращаясь во-
круг Земли, КА может периодически попадать в область простран-
ства, экранируемого от солнечного излучения Землей, в так назы-
ваемую «тень Земли», в которой КА совершенно не получает сол-
нечного тепла и в которой единственным источником тепловых
потоков будет только собственное излучение Земли.
Орбиты, которые не проходят через «тень Земли», называют
«солнечными». Время пребывания КА в «тени Земли» для круго-
205
вых орбит зависит от угла ys между плоскостью орбиты и на-
правлением на Солнце, высоты орбиты и периода обращения
(рис. 6.2), а для эллиптических орбит, кроме того, и от положе-
ния в пространстве большой оси орбиты. Начальный угол fs за-
висит от угла наклонения орбиты к экватору и времени запуска
КА. Из-за вращения Земли вокруг Солнца и прецессии орбиты
S
Рис. 6.2. Отношение времени пребывания КА
в тени планеты тт к его периоду обращения т
в завнснмости от угла между плоскостью
орбиты и направлением на Солнце н отношения
высоты орбиты Н над поверхностью планеты
к радиусу планеты R
угол -fs периодически меняется от минимального до максималь-
ного значения. Соответственно этому изменяется и время пребы-
вания КА в «тени Земли».
Таким образом, в общем случае поверхность КА подвергает-
ся переменному по времени воздействию внешних тепловых пото-
ков, причем осредненный тепловой поток, получаемый поверхно-
стью за один оборот, зависит от параметров орбиты, положения
последней в пространстве и ориентации КА.
Для КА, имеющих большую массу на единицу площади по-
верхности, колебания температур конструкции, связанные с за-
ходом в «тень Земли», невелики. Поэтому оценку возможности под-
держания теплового режима подбором терморегулирующих по-
крытий часто проводят по равновесной температуре, т. е. темпе-
206
ратуре, определенной по средним за виток тепловым потокам.
Предполагается, что средства внутреннего теплообмена обеспечи-
вают одинаковую температуру всем элементам КА. Зависимость
изменения равновесной температуры КА сферической формы, на-
Рис. 6.3. Изменение равновесной температуры
сферического тела, вращающегося по круговой
орбите вокруг планеты, в зависимости от отно-
шения высоты орбиты Н к радиусу планеты R и
угла у» между плоскостью орбиты и направле-
нием на Солнце (на большом расстоянии от пла-
неты покрытие обеспечивает температуру 20°С)
холящегося на круговой орбите около Земли, при отсутствии
внутреннего тепловыделения от высоты орбиты Н и угла наклона
орбиты к направлению на Солнце -fs при Aste, обеспечивающем
на бесконечном удалении от планеты температуру +20°С (293 К),
показана на рис. 6.3. Как видно из рисунка, равновесные темпе-
ратуры укладываются в диапазон от 10 до 36°С.
Если КА будет иметь определенное постоянное тепловыделе-
ние, позволяющее подобрать при //->оо отношение коэффициеи-
207
тов As/e, обеспечивающее заданную температуру, то диапазон ее
изменения при разных Н и ys будет еще меньше.
Поэтому подбор терморегулирующих покрытий в ряде случаев
может быть достаточным для обеспечения теплового режима КА
сферической формы, находящегося на околоземных орбитах.
Если КА представляет собой несколько необъединенных в те-
пловом отношении элементов или имеет отличную от сферичес-
кой форму, то, придавая ему вращение относительно оси, распо-
ложенной в плоскости, перпендикулярной направлению на Солнце,
можно обеспечить относительно равномерное распределение внеш-
них тепловых потоков по его поверхности и, следовательно, при-
емлемые температуры за счет подбора терморегулирующих по-
крытий.
Системы, в которых основным элементом, поддерживающим
тепловой режим, являются терморегулирующие покрытия, широко
применялись и применяются для простых ИСЗ небольшого раз-
мера.
В тех случаях, когда тепловыделение в КА меняется в широ-
ких пределах или необходимо обеспечить температуру в узком
диапазоне, применяют активное регулирование внешнего теплооб-
мена. На небольших КА используют жалюзи, например на ИСЗ
«Электрон-1» и «Электрон-2» (рис. 6.4). Жалюзи были также ис-
пользованы в СОТР первого пилотируемого космического корабля
«Восток».
Жалюзи работают в тяжелых условиях (большие перепады
температур на их элементах, вакуум), поэтому при наличии в со-
ставе СОТР жидкостного контура для регулирования внешнего
теплообмена, как правило, применяют изолированные радиацион-
ные поверхности, более предпочтительные, с точки зрения надеж-
ности, чем жалюзи.
Система с изолированными радиационными поверхностями
предполагает защиту изоляцией всей поверхности КА, сводящей
к минимуму нерегулируемый теплообмен с окружающим прост-
ранством, при выполнении условия, что сумма максимального дли-
тельного внутреннего тепловыделения и максимальной величины
нерегулируемых теплопритоков должна быть меньше хладопроиз-
водительности радиационной поверхности. Учитывая, что величина
нерегулируемых теплопритоков может быть как положительной,
так и отрицательной (что помимо радиационных характеристик
внешней поверхности определяется и полем внешних тепловых по-
токов по поверхности КА, т. е. его ориентацией и формой), сумма
минимального внутреннего тепловыделения и минимальной вели-
чины нерегулируемого теплопритока должна быть положительной,
ибо при невыполнении этого условия КА при минимальном тепло-
выделении будет охлаждаться. Для КА, имеющих источники
электроэнергии, мощность которых мало зависит от времени экс-
плуатации (например, солнечные батареи), целесообразно при ра-
боте аппаратуры в дежурном режиме излишек мощности исполь-
зовать на подогрев КА.
208
Рис. 6.4. Принципиальная тепловая схема КА «Электронз:
1 — жорпус; г — жалюзи; 3 — воздуховод; < — чувствительный элемент, управляющий жалюзи; 5 — вентилятор
№
О
Системы с изолированными радиационными поверхностями
имеют все современные пилотируемые космические корабли и
станции, а также крупные автоматические КА.
Тепловой режим элементов, находящихся вне (снаружи) КА
(антенны, приборы, вынесенные на штангах, и т. д.), определяет-
ся полем тепловых потоков, ориентацией в нем того или иного
элемента и радиационными характеристиками его поверхности. В
связи с малой теплоемкостью таких элементов температура их
может существенно понижаться при заходе в «тень Земли». Не-
обходимо также учитывать, что КА для своих внешних элемен-
тов с точки зрения тепловых потоков является как бы «планетой»,
и они могут находиться в его «тени» и не получать солнечной
энергии. На высотах, не превышающих 500 км, из-за особенностей
поля теплового излучения Земли температура внешних элементов
вряд ли будет ниже 150 К при любой ориентации КА, так как
практически вся его поверхность получает энергию собственного
излучения Земли.
Для обеспечения узкого диапазона температур внешним при-
борам, не имеющим теплового контакта с корпусом, на их по-
верхность наносят терморегулирующие покрытия, обеспечивающие
заданные температуры при максимальных внешних тепловых по-
токах, а для обеспечения нижней границы температурного диапа-
зона в приборы устанавливают электронагреватели, включающие-
ся по команде чувствительного элемента при достижении мини-
мально допустимых температур.
В межпланетном пространстве интенсивность солнечного теп-
лового потока меняется обратно пропорционально квадрату рас-
стояния от Солнца (см. главу 1). Соответственно температура по-
верхности, получающей только солнечную энергию, меняется об-
ратно пропорционально корню квадратному из отношения рас-
стояний от Солнца. Так, температура такой поверхности около
Венеры будет в 1,18 раза больше, чем у Земли, а у Марса — в
1,23 раза меньше.
Как правило, КА, летящие к Марсу или Венере, в качестве
источников тока используют солнечные батареи, жестко прикре-
пленные к корпусу, и постоянно ориентированные на Солнце. По-
этому распределение внешних тепловых потоков по поверхности
таких КА постоянно, что позволит разместить устройства, регу-
лирующие их тепловой режим, оптимальным образом.
Постоянная ориентация на Солнце — обязательное условие
для КА, приближающегося к нему, — позволяет размещать радиа-
ционные поверхности для сброса тепла таким образом, чтобы на
иих не падали потоки солнечной радиации, а поверхности, осве-
щенные им, защищать изоляцией. Для КА, движущихся к краю
Солнечной системы, уже при достижении орбиты Юпитера сол-
нечный тепловой поток столь слаб, что не играет существенной
роли в обеспечении теплового режима. В таких случаях для ста-
билизации температуры наиболее целесообразно использовать изо-
топные источники тепла.
210
Обеспечение теплового режима КА, находящегося иа поверх-
ности Луны, связано с интенсивным собственным излучением
участков ее поверхности, над которыми Солнце находится в зе-
ните (температура такой поверхности ~390 К), и практическим
отсутствием внешних тепловых потоков лунной ночью (темпера-
тура поверхности ~ 120 К).
II II I I1 I I III I
Рис. 6.6. Температуры, которые примут изолированные
участки поверхности нетеплопроводной полусферы,
расположенной на поверхности Луны в подсолнечной
точке, в зависимости от отношения As/s и угла а между
нормалью к участку поверхности полусферы и направ-
лением иа Солнце
Так как продолжительность лунного дня и лунной ночи состав-
ляет 29 земных суток, нельзя рассчитывать на осреднение темпе-
ратуры в КА за счет его теплоемкости в течение лунных суток.
Распределение температур по поверхности нетеплопроводной полу-
сферы, находящейся на Луне в подсолнечной точке при различ-
ных отношениях As/e, показано на рис. 6.5, из которого видно,
211
что для сброса тепла радиационную поверхность следует распо-
лагать параллельно лунной. Очевидно, что хладопроизводитель-
ность радиатора при температурах, близких к 273 К, необходи-
мых для обеспечения теплового режима пилотируемых КА, чув-
ствительна к радиационным характеристикам поверхности и к
точности ее установки (рис. 6.6).
Рис. 6.6. Хладопроизводительность идеальной радиацион-
ной поверхности, расположенной перпендикулярно солнеч-
ным лучам, в зависимости от отношения As/e прв е=0,9
и температуре t
Таким образом, для КА, совершивших посадку вблизи лунного
экватора, основные сложности обеспечения теплового режима свя-
заны с пребыванием на освещенной стороне Луны (лунным днем).
Обеспечение теплового режима на затененной стороне Луны (лун-
ной ночью), очевидно, не вызывает больших трудностей, если в со-
ставе КА имеется постоянный источник тепла (например, изотоп-
ный), компенсирующий теплопотери.
Для пилотируемых КА, предназначенных для пребывания на
поверхности Луны длительное время и имеющих мощные энер-
гетические установки, целесообразно вводить в состав СОТР хо-
лодильные машины, которые обеспечат более высокие темпера-
туры на радиационной поверхности и, следовательно, меньшую
зависимость от точности ее установки и величины коэффициен-
та As.
Для КА, находящихся на поверхности Луны малое время,
обеспечение теплового режима в течение лунного дня целесооб-
212
разно за счет использования испарительных систем. Подобные си-
стемы имели первая АЛС «Луна-9», совершившая мягкую посад-
ку на поверхность Луны, и пилотируемая лунная кабина КК
«Аполлон».
Обеспечение теплового режима КА, находящегося на поверх-
ности Меркурия, освещенной Солнцем, еще более сложно, чем на
Луне из-за большей плотности солнечного теплового потока
(6450—14 800 Вт/м2) и, следовательно, большей интенсивности по-
тока собственного излучения планеты. Радиационные поверхности,
расположенные параллельно поверхности Меркурия, в подсолнеч-
ной точке при As/e = 0,15 и нулевой хладопроизводительности име-
ли бы температуру 369—461 К, поэтому длительное существова-
ние КА в таких условиях возможно только с использованием хо-
лодильных машин.
6.5. ОСОБЕННОСТИ СОТР ПИЛОТИРУЕМЫХ КА
Принято считать, что для нормального существования челове-
ка в замкнутом объеме обитаемого отсека КА газовая среда долж-
на иметь температуру 18—26°С при относительной влажности 30—
70%, а поверхности, окружающие человека, — температуру, отли-
чающуюся от температуры газа не более чем на 3—4°С (при боль-
шей разности температур человек ощущает дискомфорт).
В объеме, где находится экипаж, скорость движения газа
должна быть 0,1—0,3 м/с с возможностью ее изменения непосред-
ственно членами экипажа по субъективным ощущениям.
Наличие влаги в атмосфере обитаемого отсека требует, чтобы
температуры всех элементов, за исключением специально пред-
назначенных для сбора влаги, были выше точки росы во избежа-
ние конденсации на них влаги. Поэтому наружные поверхности
обитаемых отсеков тщательно изолируют для сведения к мини-
муму нерегулируемого теплообмена с космическим пространством,
который может привести к нежелательному понижению темпера-
туры.
Выделяющееся в отсеках тепло через газожидкостный тепло-
обменник принудительно передается в теплоноситель жидкостного
контура. Обычно газожидкостные теплообменники обитаемых от-
секов одновременно конденсируют и собирают влагу из атмосфе-
ры отсека, являясь, таким образом, теплообменниками-конденса-
торами.
Сконденсировавшаяся влага собирается фитилями, проложен-
ными вдоль холодной поверхности, и за счет капиллярных сил
поступает во влагосборник, заполненный гигроскопичным мате-
риалом. Из влагосборника конденсат по мере наполнения откачи-
вается в емкости его хранения или в систему регенерации воды с
помощью поршня, выжимающего гигроскопичный материал, как
губку, либо с помощью насоса, создающего разрежение в отсасы-
вающей трубе.
213
Рис. 6.7. Принципиальная схема СОТР КК «Союз»:
АО — агрегатный отсек; БО — бытовой отсек; ПО — приборный отсек; СА — спускаемый аппарат; 1 — ЭВТИ; 2 —двигатели ори-
ентации; 3 — радиационные поверхности; 4 — контур КЖО; 5 — насос контура КЖО; 6 — жидкостно-жидкостный теплообменник;
7, И —датчики температуры; 8 — теплозащитная обмазка СА; 9 — теплообменник-конденсатор; 10 — комфортный вентилятор: 11 —
асос контура КНР; 12 — контур КНР; 13 — регулятор расхода жидкости: 15 — газожидкостный теплообменник; 16 — змеевик аг-
регатного отсека; 17. — подвижная крышка сопла двигателя
Исходя из требований максимальной безопасности экипажа и
учитывая, что теплообменные устройства — тонкостенные конст-
рукции, в качестве теплоносителей жидкостных контуров обитае-
мых отсеков обычно используют негорючие водные растворы эти-
ленгликоля, пары которых малотоксичны, а температура замерза-
ния (253—233 К) зависит от относительного содержания в них
этиленгликоля.
Так как температура изолированной радиационной поверхно-
сти может быть значительно ниже 233 К, для вывода на нее теп-
ла, как правило, используют наружный контур с теплоносителем,
имеющим температуру замерзания ниже 173 К. Оба контура об-
мениваются теплом через специальный жидкостно-жидкостный те-
плообменник.
Для примера рассмотрим схему СОТР космического корабля
«Союз» (рис. 6.7). Тепло из спускаемого аппарата (СА) и бытового
отсека (БО), выделяемое приборами и экипажем, через теплооб-
менники-конденсаторы поступает в жидкостный контур жилых от-
секов (КЖО), трубопровод которого обогревает элементы двига-
телей ориентации. Контур жилых отсеков через жидкостно-жид-
костный теплообменник связан с контуром наружных радиаторов
(КНР), которому отдает тепло, полученное от СА и БО. КНР за-
бирает также тепло из приборного отсека, обогревает корпус не-
герметичного агрегатного отсека и регулирует сброс тепла в ок-
ружающее пространство через изолированные радиационные по-
верхности.
Количество тепла, передаваемого радиационной поверхности,
регулируется регулятором расхода, перепускающим жидкость иа
радиационную поверхность и поддерживающим температуру
жидкости на входе в жидкостно-жидкостный теплообменник свя-
зи с КЖО в пределах 278—280 К, что обеспечивает в зависимо-
сти от уровня тепловыделения в СА и БО температуру теплоноси-
теля перед теплообменниками-конденсаторами в пределах 280—
284 К.
Температура газа в жилых объемах в свою очередь регулирует-
ся расходом газа через теплообменную решетку в теплообменни-
ке-конденсаторе, вентиляторы которого одновременно обеспечи-
вают циркуляцию газа по объемам отсеков. Кроме того, в жилой
зоне установлены комфортные вентиляторы, включаемые экипа-
жем. Все поверхности отсеков для уменьшения нерегулируемого
теплообмена с окружающим пространством закрыты ЭВТИ.
Поверхность СА имеет теплозащиту, предохраняющую его от
аэродинамического нагрева при торможении в атмосфере Земли
во время спуска, при этом тепловой режим его внутренних элемен-
тов обеспечивается за счет их теплоемкости.
Глава 7
СИСТЕМЫ ЖИЗНЕОБЕСПЕЧЕНИЯ ЭКИПАЖА
7.1. ОБЩИЕ СВЕДЕНИЯ
Комплекс систем жизнеобеспечения (СЖО) экипажа включает:
системы и средства, обеспечивающие газовый состав и давле-
ние атмосферы обитаемого отсека (подачу кислорода по мере его
расходования, удаление углекислоты, водяных паров, а также
вредных газообразных примесей, появляющихся в атмосфере как
в результате деятельности человека, так и из других источников,
вакуумирование или наддув отсеков), в состав которых входят
устройства, вырабатывающие кислород, собирающие, складирую-
щие или перерабатывающие углекислый газ, собирающие влагу и
доставляющие ее во влагосборники или систему регенерации воды,
а также аппаратура, контролирующая состав атмосферы отсека;
средства, обеспечивающие комфортные температурные усло-
вия в среде обитаемого отсека и теплообмен с ней (обычно эта
задача решается с помощью СОТР; с этой точки зрения СОТР —
одна из систем, входящих в комплекс СЖО);
запасы воды и пищи, средства, обеспечивающие их приготов-
ление и прием, а также системы, регенерирующие воду;
средства санитарно-гигиенического обеспечения, в которые вхо-
дят ассенизационно-санитарное устройство (АСУ) для приема
твердых и жидких выделений человека и доставки их в изолиро-
ванные емкости или в системы, перерабатывающие отходы, умы-
вальники, души, пылесосы, сборники пищевых отбросов и исполь-
зованных предметов личной гигиены;
индивидуальное снаряжение, включающее скафандры для
кратковременного пребывания человека в вакууме, в том числе в
открытом космическом пространстве, защитные маски, противо-
газы, используемые при нарушении газового состава атмосферы
(например, вследствие пожара), а также средства, обеспечиваю-
щие существование экипажа при посадке СА на воду или в не-
расчетные районы поверхности Земли.
Конкретный выбор комплексов СЖО определяется задачами,
решаемыми КА, и обеспечением максимальной безопасности эки-
пажа при минимальной массе СЖО.
В данной главе в основном рассмотрены принципы построения
систем, обеспечивающих массообмен человека с окружающей сре-
дой в космическом корабле.
216
7.2. УСЛОВИЯ НОРМАЛЬНОГО СУЩЕСТВОВАНИЯ
Условия нормального существования экипажа — это состав,
давление и температура среды, окружающей человека, а также
обеспечение его водой и пищей.
Очевидно, что наиболее благоприятной средой пребывания
экипажа при длительном полете его в космическом пространстве
является естественная земная атмосфера, имеющая давление
760 мм рт. ст. и состоящая из ~78°/о азота, ~21% кислорода,
~1% аргона, ~ 0,01 % прочих газов. Кроме того, в составе ат-
мосферы Земли всегда присутствуют углекислый газ (0,02—0,4%)
и водяные пары (0—4%).
Специально тренированный человек может существовать в га-
зовой среде, существенно отличающейся от земной как по давле-
нию, так и по составу, при этом для его нормальной жизнедея-
тельности парциальное давление кислорода должно быть не ме-
нее 120 мм рт. ст., а общее давление — не менее 190 мм рт. ст.
Такой человек без вредных последствий способен находиться в те-
чение двух недель и в чисто кислородной атмосфере при давлении
190—260 мм рт. ст., хотя пребывание в чисто кислородной атмос-
фере при давлении 450 мм рт. ст. более одних суток может вы-
звать патологические изменения в легких.
Поддержание атмосферы, соответствующей земной, трудное, а
иногда и невыгодное дело. Так, при выходе человека в космичес-
кое пространство целесообразно иметь в скафандре возможно
меньшее давление, так как уменьшение перепада давления на ра-
бочей оболочке скафандра ведет к уменьшению необходимых фи-
зических усилий для движения в нем, но быстрый переход от
давления 760 мм рт. ст. к давлению 190—260 мм рт. ст., необхо-
димому для работы в скафандре, может вызвать декомпрессион-
ные расстройства (боли в суставах, головокружение, кожный
зуд, потерю сознания), обусловленные увеличением объемов сво-
бодных газов, содержащихся в полостях тела, а также переходом
азота, растворенного в тканях тела человека, в газообразное со-
стояние.
Без декомпрессионных расстройств возможен переход к давле-
нию 190 мм рт. ст. из атмосферы, состоящей из 50% азота и 50%
кислорода, при давлении 360 мм рт. ст., однако при понижении
давления ухудшаются процессы теплообмена в герметичных отсе-
ках КК.
Чисто кислородная атмосфера использовалась в американских
космических кораблях «Меркурий», «Джемини» и «Аполлон»; ее
недостатком является крайняя пожароопасность.
В советских КК «Восток», «Восход», «Союз» и на станциях
«Салют» используется азотно-кислородная атмосфера при давле-
нии 600—940 мм рт. ст. и содержании кислорода до 40% исходя из
соображений пожаробезопасности.
При длительных полетах давление углекислого-газа СОг в ат-
мосфере КК должно быть не более 5 мм рт, ст., при полетах про-
217
должительностью в несколько недель — не более 9 мм рт. ст., а
пребывание при давлении 15—20 мм рт. ст. вызывает одышку,
чувство тяжести, головные боли, повышение артериального дав-
ления, резкое падение работоспособности.
Присутствие других газов в атмосфере нежелательно, при этом
их концентрации не должны быть вредными для человека и быть
пожаро- и взрывоопасными.
Количество кислорода, потребляемое человеком из окружаю-
щей среды, пропорционально его энерготратам. Считают, что
среднесуточные энерготраты каждого члена экипажа составляют
2800 ккал и требуют около 800 г кислорода.
Количество выдыхаемого углекислого газа зависит не только
от расхода кислорода, но и от состава пищевого рациона. Обыч-
но считают, что каждый член экипажа выделяет около 900 г угле-
кислого газа в сутки.
Часть кислорода, которая не выводится из организма вместе с
углекислым газом, идет на окисление водорода в продуктах пи-
тания и выводится в виде воды. Масса сухих веществ в рационе
питания, обеспечивающая энерготраты в 2800 ккал, составляет
около 600 г.
Количество воды, потребляемое человеком, зависит от ее по-
терь организмом в виде выдыхаемого пара, пота, мочи и т. п.
Потери воды с выдыхаемым паром связаны с влажностью ат-
мосферы и в среднем составляют около 1300 г в сутки, а в виде
пота зависят от температуры атмосферы и энерготрат организ-
ма и могут составлять сотни граммов в час (при комфортных ус-
ловиях они практически отсутствуют). Потери воды с мочой со-
ставляют в среднем около 1400 г в сутки, но могут колебаться в
широких пределах в зависимости от количества выпитой воды и
выделения ее с потом; с фекалиями выделяется около 100 г
в сутки.
В организм вода поступает не только в виде жидкости и с пи-
щей, но и в результате химических реакций, происходящих в нем.
Количество этой, так называемой метаболической, воды не превы-
шает 300 г в сутки.
Таблица 7.1
Среднесуточный баланс массообмеиа между человеком и окружающей средой
Продукт Потребление, г Выделение, г
Кислород Вода Пища Углекислый газ Выдыхаемая влага и пот Моча Фекалии 800 2500 600 900 1300 1400 300
Итого ... 3900 3900
218
С учетом 300 г фекалий, выделяемых человеком, среднесуточ-
ный баланс массообмена между человеком и окружающей средой
приведен в табл. 7.1.
В приведенном балансе указаны средние стабильные значе-
ния потребления кислорода и пищи, но минимально необходимое
количество воды, которое может существенно увеличиваться при
дискомфортных условиях в результате покрытия затрат, вызван-
ных повышенным потовыделением.
7.3. СРЕДСТВА ОБЕСПЕЧЕНИЯ ГАЗОВОГО СОСТАВА
Кислород в обитаемый объем может поступать как из имею-
щихся запасов, так и в результате его регенерации из продуктов
жизнедеятельности.
Запасы кислорода могут быть в виде газа, хранящегося в бал-
лонах при высоком давлении (самый простой способ хранения),
в виде жидкости при криогенных температурах и относительно
небольшом давлении, в связанном виде и т. п.
До давлений ~20 МПа изменение объема газа обратно про-
порционально повышению давления и масса баллона остается
практически неизменной.
Отношение массы запасов т3 того или иного вещества к массе
конструкции тк, которая обеспечивает их хранение, называют
коэффициентом массы конструкции
«к = >. (7.1)
Для современных стальных баллонов ак=1,5—2,5, т. е. на 1 кг
массы хранимого газообразного кислорода приходится 1,5—
2,5 кг массы баллонов.
Меньшая масса (ак = 0,5) может быть получена при хранении
кислорода в жидком состоянии при криогенных температурах и
давлениях, близких к атмосферному. Так как получение в около-
земном пространстве в результате внешнего теплообмена крио-
генных температур связано с определенными трудностями (см.
раздел 6.3), баки с жидким кислородом тщательно теплоизоли-
руют.
При отсутствии расхода тепло, прошедшее через изоляцию,
увеличивает внутреннюю энергию хранимого кислорода, что при-
водит к повышению его температуры и давления. Если кислород
из бака будет постоянно расходоваться, тепло пойдет на испаре-
ние уходящего в газообразном виде кислорода. Отбор газообраз-
ного кислорода из парожидкостной смеси в условиях невесомости
требует довольно сложных устройств в баках хранения. На аме-
риканских КК «Джемини» и «Аполлон» кислород хранился в од-
нофазном надкритическом состоянии при температуре в начале
полета 155 К и давлении 5 МПа. В процессе полета за счет те-
плопритоков температура увеличивалась, а давление при постоян-
ном расходе кислорода оставалось примерно постоянным. Кисло-
219
род использовался как для дыхания, так и для питания электро-
химического генератора (ЭХГ). Такая система имеет ак = 1.
Кислород входит в состав многих химических соединений, но
в качестве его источников пригодны только достаточно стабиль-
ные, легко его выделяющие (без посторонних примесей) соедине-
ния. Некоторые из них, содержащие кислород в достаточно боль-
ших количествах, используемые или предполагаемые для исполь-
зования на борту КК, приведены в табл. 7.2.
Таблица 7.2
Некоторые соединения, содержащие кислород
Соединение Химическая формула Количес- тво высво- бождаю- щегося Of на 1 кг продукта, кг Минималь- ная погло- щаемость СО1 иа 1 кг про- дукта, кг Теплота реакции при выделе- нии 1 кг Оц ккал Конечный продукт
Надперекись натрия NaOa 0,436 0,40 + 1090 N а2СО3 N аНСО3
Надперекись калия КОа 0,338 0,31 +955 К2СО3 КНСОз
Перекись лития LIqOj 0,348 0,96 +935 Ы2СО3
Перекись водорода Н2Оа 0,471 0,96 + 1460 нао
Вода нао 0,889 — —4275* Нз
Перхлорат лития LiG104 0,601 — —133* Lid
Хлорат натрия NaC103 0,451 — —880* NaCl
* Эндотермическая реакция.
Достоинством перекисных и надперекисных соединений щелоч-
ных металлов является то, что, будучи достаточно стойкими, они
легко отдают кислород, а продукты реакции поглощают углекис-
лый газ. Из этих соединений кислород выделяется в результате
реакции вещества с парами воды, находящимися в атмосфере от-
сека:
2КО2 + Н2О 2КОН + 8/2О2;
2NaO2 + Н2О -> 2NaOH + 8/2О2;
2Li О + Н2О 2Li ОН + i/2O2.
Получившиеся гидроокиси металлов реагируют с углекислым
газом. Натрий и калий образуют в зависимости от условий реак-
ции карбонаты и бикарбонаты:
2КОН + СО2 К2СО3 + Н2О;
2КОН + 2СО2 2КНСО3;
2Na ОН + СО2 -> 2Na2CO3 + Н2О;
2Na ОН + 2СО2 2Na НСО3;
2L1 ОН + СО2 Li2CO3 + Н2О.
220
Надперекиси и перекиси щелочных металлов использовались
на КК «Восток», «Союз» и станциях «Салют».
Из хлората натрия кислород получают разложением его на
хлористый натрий и кислород при температуре 973—1073 К:
2NaCl О3 —2NaCl + ЗО2,
причем тепло для поддержания этой эндотермической реакции по-
ступает за счет окисления небольшого количества порошка метал-
ла, смешанного с хлоратом, что приводит к некоторому уменьше-
нию выхода кислорода.
Высококонцентрированная перекись водорода (99%) достаточ-
но стабильное вещество при температуре 298—303 К, но при про-
пускании ее через катализатор разлагается на кислород и воду
2НА -> 2Н2О + О2,
причем полученная в результате разложения вода пригодна для
питья.
Перекись водорода используется полностью, а коэффициент
массы конструкции для ее запасов ак = 0,2.
Кислород из воды можно получить и в результате ее электро-
лиза
2Н2О —* 2Н2 -1- О2.
Так как для разложения 1 кг воды теоретически требуется
4,38 кВт-ч электроэнергии, а коэффициент массы конструкции
ак^0,2, этот метод перспективен для КА, имеющих мощные
энергетические установки.
Кислород может быть получен и в результате регенерации его
из углекислого газа с помощью реакции с водородом. Например,
в зависимости от катализатора и условий, в которых происходит
реакция, образуются или углерод и вода (реакция Боша при тем-
пературе 873—973 К) или метан и вода (реакция Сабатье при
температуре 523—573 К). Метан после реакции Сабатье, подвер-
гаясь пиролизу, разлагается на углерод и водород (реакция, на-
чинаясь при 953 К, заканчивается при 1373 К).
Кислород выделяется в результате электролиза воды, а во-
дород, полученный при разложении метана и воды, вновь взаи-
модействует с углекислым газом.
Теоретическое количество энергии, необходимое для получения
1 кг кислорода из углекислого газа, составляет 3,43 кВт ч, хотя
действительные затраты энергии, вероятно, будут составлять 10—
15 кВт-ч, что связано с тепловыми потерями при проведении ре-
акции при больших температурах и неоднократным разогревом и
охлаждением веществ, участвующих в ней.
Необходимо подчеркнуть, что любые способы получения кисло-
рода из углекислого газа достаточно сложны, ибо процессы про-
ходят при высоких температурах и связаны с необходимостью от-
деления твердой фазы, что в условиях невесомости требует спе-
циальных сложных устройств.
221
Для очистки атмосферы обитаемых отсеков от углекислого га-
за применяют или связывание углекислого газа химическйми ве-
ществами, или поглощение углекислого газа регенерируемыми по-
глотителями.
Поглощение углекислого газа надперекисными и перекисными
соединениями щелочных металлов рассмотрено выше. Помимо
них практически использовалась гидроокись лития, 1 кг которой
способен поглотить 920 г углекислого газа:
2Li ОН + СО2 -> Li2 СО3 + Н2О.
Гидроокись лития применялась в качестве поглотителя угле-
кислого газа на американских КК «Меркурий», «Джемини» и
«Аполлон».
При длительных полетах, когда источником кислорода служат
вещества, неспособные поглощать углекислый газ после освобож-
дения кислорода, целесообразно использовать системы поглоще-
ния углекислого газа на основе регенерируемых поглотителей (на-
пример, синтетических цеолитов). Поглощая углекислый газ при
нормальных температуре и давлении, синтетические цеолиты спо-
собны восстанавливаться — отдавать углекислый газ в вакууме
при нормальной температуре или при нагреве до 443—473 К при
нормальном давлении.
Способность цеолитов отдавать углекислый газ при нагреве
позволяет использовать их в качестве концентраторов углекислого
газа с последующим его разложением в специальных аппаратах.
Помимо углекислого газа в атмосфере обитаемого объема все-
гда присутствуют вредные микропримеси, выделяемые как чело-
веком, так и аппаратурой и материалами, особенно органически-
ми. Основная масса микропримесей поглощается в фильтрах вред-
ных примесей, основой которых, как правило, служит активиро-
ванный уголь. Растворимые микропримеси частично поглощаются
вместе с конденсатом атмосферной влаги в теплообменниках-кон-
денсаторах. Основным средством борьбы с вредными примесями в
атмосфере обитаемых отсеков является подбор материалов, не
выделяющих вредные примеси.
7.4. ВОДООБЕСПЕЧЕНИЕ
Вода составляет не менее 65% массы веществ, поглощаемых
организмом человека в процессе массообмена с окружающей сре-
дой. Она поступает в организм вместе с пищей, в виде напитков
и просто в чистом виде. Определенное ее количество используется
и для санитарно-гигиенических нужд.
Источниками воды на борту КК являются запасы воды, взя-
тые в начале полета или доставляемые с помощью транспортных
кораблей в виде чистой воды, соков, пищи, а также вода, получае-
мая как в результате регенерации влаговыделений человека и
отработанной воды в средствах санитарно-гигиенического обес-
222
печения, так и в качестве побочного продукта химических реак-
ций в кислородно-водородных топливных элементах.
Вода в виде запасов хранится в емкостях с разделительными
мембранами, с одной стороны которых находится воздух, позво-
ляющий в условиях невесомости выдавливать воду. Коэффициент
массы конструкции емкостей ак^0,2.
Из влаговыделений человека наиболее просто регенерируется
атмосферный конденсат, собранный в теплообменниках-конденса-
торах системы терморегулирования и содержащий незначительное
количество летучих веществ, находящихся в атмосфере отсека и
растворяющихся в воде. Для очистки конденсат пропускают че-
рез колонки с ионообменными смолами и через колонки, придаю-
щие воде вкусовые качества.
В связи с возможным микробиологическим загрязнением воду
перед употреблением стерилизуют ультрафиолетовым облучением
или нагревом до температуры 353—363 К.
Более сложной проблемой является регенерация воды из мочи,
содержащей ~4,7% (по массе) твердых веществ, в состав кото-
рых входят ~30% неорганических солей, ~50% мочевины и
~20% органических соединений.
Наиболее целесообразным способом регенерации воды из
мочи является способ вакуумной дистилляции, при котором в
процессе испарения влаги из мочи при температуре не выше 309—
310 К не происходит разложение мочевины, а полученный после
конденсации дистиллят практически не содержит аммиака и дру-
гих примесей. После дополнительной очистки фильтрами и сте-
рилизации получают пригодную для питья воду.
Регенерация воды, использованной для гигиенических нужд,
содержащей не более 1% твердых веществ, аналогична регенера-
ции мочи.
7.5. ПИЩА
Экипаж КК питается пищей, запасенной на борту КК или
доставляемой в процессе полета транспортными кораблями.
Пища должна иметь не только определенную калорийность,
обеспечивающую покрытие энерготрат организма, но и содержать
в необходимом соотношении все вещества, требующиеся для нор-
мальной жизнедеятельности (белки, жиры, углеводы, минераль-
ные вещества, витамины).
На космическом корабле пища хранится в виде туб с пюре-
образными продуктами, соками и т. д., консервов, свежих продук-
тов в специальной упаковке из дублированной целлофанполиэти-
леновой пленки, натуральных продуктов в замороженном виде,
обезвоженных сублимацией продуктов (мяса, овощей, фруктов,
соков, высушенных в замороженном виде в вакууме).
Продукты в тубах и консервах при нормальной температуре
могут храниться на борту КК до полугода и более, а для их
подогрева используют специальные подогреватели, Свежие про-
223
дукты в упаковке из пленки хранятся при нормальной темпера-
туре 7—10 сут. Замороженная пища хранится при температуре
—20°С, хорошо защищена от бактериологического или химиче-
ского воздействия, после приготовления практически не отлича-
ется от своего первоначального вида, но требует наличия на бор-
ту КК специального морозильника с температурой —20°С и
устройств ее приготовления.
Обезвоженные сублимацией продукты хранятся при нормаль-
ной температуре до года, при пониженной температуре — значи-
тельно больше. Перед приемом сублимированных продуктов па-
кет с пищей заполняется водой, после чего она приобретает вкус,
цвет и запах натурального продукта.
Масса нормального суточного рациона питания из обычных
продуктов составляет 2000—2500 г, обезвоженных продуктов —
600 г. Однако обезвоженная пища дает выигрыш в массе запасов
только при наличии на борту КК установки, регенерирующей во-
ду, или установки с химическими процессами, в которых получае-
мая вода является побочным продуктом (например, ЭХГ). В про-
тивном случае отсутствие в пище воды должно быть компенси-
ровано увеличением ее запасов.
7.6. СРЕДСТВА САНИТАРНО-ГИГИЕНИЧЕСКОГО
ОБЕСПЕЧЕНИЯ
Наиболее сложными средствами санитарно-гигиенического
обеспечения являются ассенизационно-санитарное устройство и
Рис. 7.1. Принципиальная схема
АСУ:
/ — центробежный разделитель фаз;
2 — сборник каловых масс; 3 — при-
емник мочи; 4 — ручка; 5 — вентиля-
тор; 6 — фильтр очистки воздуха
душевая установка.
Ассенизационно-санитарное уст-
ройство (рис. 7.1) служит для прие-
ма твердых и жидких выделений
человека — мочи и фекалиев. Во
время пользования АСУ включает-
ся вентилятор, воздушный поток
которого переносит жидкие выделе-
ния либо в сборник мочи с пори-
стыми гранулами, поглощающими
мочу, либо в центробежный газо-
жидкостный разделитель, из которо-
го моча поступает в систему реге-
нерации воды. Воздух, проходя
через фильтр, очищается от пахучих
веществ и снова поступает в жилой
отсек.
Сборник фекалиев имеет смен-
ные вкладыши, после употребления
убираемые в отдельную емкость.
Душевая установка (рис. 7.2) представляет собой изолиро-
ванный объем, в который через разбрызгивающие насадки посту-
224
пают вода и теплый воздух, образующаяся газожидкостная смесь
отсасывается с помощью вентилятора и поступает в разделитель.
Рис. 7.2. Принципиальная схема душевой уста-
новки:
1 — прозрачное ограждение; 2 — вентиляционное отвео-
стие; 3 — нагреватель; 4 — запорный вентиль; 5 — вен-
тилятор; 6 — центробежный отделитель воды
Из разделителя газ через вентилятор поступает в кабину, а
вода — в систему регенерации. На одну помывку требуется
5—10 л воды.
7.7. БИОТЕХНИЧЕСКИЕ СИСТЕМЫ
Биотехнические системы с участием биологических организмов
привлекают к себе внимание возможностью создания на космиче-
ском корабле замкнутого круговорота веществ с восстановлением
не только кислорода и воды, но и пищи.
Создание таких систем — сложная техническая задача, свя-
занная не только с обеспечением функционирования биологиче-
ских организмов в условиях невесомости, но и со снабжением их
световой энергией для реакции фотосинтеза, с отводом больших
количеств тепла и приготовлением питательной среды для биоло-
гических организмов из отходов как жизнедеятельности человека,
так и самих организмов.
Сравнение массовых характеристик комплексов СЖО с ис-
пользованием запасов пищи и физико-химической регенерацией
воды и кислорода с биотехническими системами с замкнутым кру-
8 Космические аппараты 225
говоротом веществ, в состав которых входят высшие растения,
обеспечивающие человека пищей, показало, что последние конку-
рентоспособны при внеземном времени существования КК не ме-
нее 20 лет.
Более простыми, легкими и потому более привлекательными
являются биотехнические системы с использованием одноклеточ-
ных водорослей (хлореллы, сине-зеленых), биомасса которых со-
держит около 50% белков, 30% жиров и 20% углеводов и все
незаменимые аминокислоты. Однако биомасса водорослей в не-
обработанном виде практически не усваивается организмом чело-
века. В настоящее время не существует методов переработки
биомассы, позволяющих приготовить из нее пищу, которая могла
бы стать основой рациона питания.
7.8. ОБЛАСТИ ПРИМЕНЕНИЯ РАЗЛИЧНЫХ КОМПЛЕКСОВ СЖО
Конкретный комплекс СЖО выбирают с учетом продолжи-
тельности полета КК и его задач, источников энергии на борту,
возможных аварийных ситуаций, требований к работе в откры-
том космосе, ожидаемых энерготрат экипажа, количества его чле-
нов, массовых лимитов, располагаемых КК, и ожидаемой степени
отработанности систем к моменту полета.
В полетах небольшой продолжительности комплекс СЖО це-
лесообразно строить на основе запасов.
Для американских КК «Джемини» и «Аполлон», имевших в ка-
честве источников электроэнергии ЭХГ на основе водорода и кисло-
рода, комплексы СЖО были созданы на основе единых запасов
кислорода в криогенном состоянии для экипажа и для энергетиче-
ской установки и использования для питья воды, полученной в ре-
зультате реакции. В качестве поглотителей углекислого газа исполь-
зовалась гидроокись лития. Для советских КК «Восток» и «Союз»,
имевших в качестве источников тока солнечные батареи или ак-
кумуляторы, комплексы СЖО были созданы на основе исполь-
зования в качестве источника кислорода и поглотителя углекис-
лого газа надперекиси калия и запасов воды и пищи.
Системы регенерации воды и кислорода целесообразно исполь-
зовать при значительном увеличении продолжительности полета,
когда массы регенерирующих установок будут меньше масс не-
обходимых для полета запасов.
Системы с регенерацией конденсата выгодны при продолжи-
тельности полетов более двух недель. Подобные системы впервые
появились на советской станции «Салют-3» в 1974 г.
Создание электролизеров и систем регенерации воды из мочи
позволит перейти к комплексам СЖО, имеющим в качестве за-
пасов только воду и обезвоженную пищу, при этом масса запасов
вместе с массой конструкции будет составлять не более 2 кг на
одного человека в сутки. Создание систем регенерации кислорода
из углекислого газа позволит сократить величину массы до 1 кг
226
на одного человека в сутки, но такие комплексы будут целесо-
образными только при продолжительности полета не менее 2—
3 лет.
7.9. СКАФАНДРЫ
Скафандр — индивидуальное снаряжение космонавта, состоит
из герметичной оболочки, систем и устройств, обеспечивающих
необходимые условия для его существования и работоспособ-
ности при нахождении в вакууме.
По своему назначению скафандры делят на аварийно-спаса-
тельные, для выхода в открытый космос и для выхода на поверх-
ность Луны.
Аварийно-спасательный скафандр предназначен
для спасения членов экипажа в случае разгерметизации обитае-
мых отсеков КК и должен быть постоянно готовым к немедлен-
ному использованию. Экипаж, находясь в скафандрах в разгерме-
тизированном отсеке, должен иметь возможность управлять КК.
Длительность пребывания в загерметизированном скафандре опре-
деляется временем спуска КК на Землю, перехода в другой отсек
или другой КК.
Обычно такой скафандр надевают не только после возникно-
вения аварийной ситуации, но и перед операциями, выполнение
которых связано с большей вероятностью их возникновения (на-
пример, во время прохождения активного участка, при динами-
ческих операциях, стыковке и т. п.).
Скафандр для выхода в открытый космос слу-
жит для защиты при выходе из КК в окружающее космическое
пространство с целью ремонта устройств и систем, находящихся
снаружи КК, проведения сборочных работ, монтажа или демон-
тажа различного оборудования, научных наблюдений. Скафандр
должен быть подвижным, позволять выполнять запланированную
работу и обеспечивать необходимые тепловые условия как при
нахождении его на освещенной, так и на теневой стороне КК.
Скафандр для выхода на поверхность Луны
предназначен для передвижения по различным грунтам поверх-
ности Луны и должен позволять подниматься после падения, вы-
полнять запланированные работы с оборудованием и обеспечивать
требуемые условия обитания при внешних тепловых условиях на
поверхности Луны.
Основным элементом любого скафандра является герметичная
оболочка, в зависимости от типа которой скафандры делят на
мягкие, жесткие и полужесткие.
Мягкий скафандр имеет герметичную оболочку в виде
комбинезона, изготовленного из резины или прорезиненной ткани,
поверх которой расположена силовая система из тросов, прочных
шнуров или лент, удерживающих герметичную оболочку в опре-
деленном объеме для подачи в нее избыточного давления. Шлем,
ботинки, перчатки могут быть выполнены как заодно с комбине-
8* 227
зоном, так и съемными с герметичными соединениями. Подвиж-
ность такого скафандра существенно зависит от избыточного дав-
ления в нем. Мягкий скафандр хорошо сочетается с оборудова-
нием КК и, в частности, с креслом космонавта в СА, а в ненадду-
том состоянии может длительное время служить и одеждой.
Жесткий скафандр состоит из стеклопластиковых или
металлических элементов, соединенных между собой шарнирами
на герметичных подшипниках. Преимуществом жесткого скафан-
дра является возможность создания в нем большего избыточного
давления и большая пожаробезопасность, так как его корпус из-
готавливается из негорючих материалов, а недостатками —
большая масса и плохая сочетаемость с оборудованием КК.
Рис. 7.3. Схема питания регенерационного ска-
фандра:
1 — баллон с запасами кислорода; 2 — редуктор; 3 —
фильтр; 4 — поглотитель влаги; 5 — поглотитель угле*
кислого газа; 6 — вентилятор; 7 — теплообменник; 8 —
трубки вентилирующей системы
Полужесткий скафандр имеет жесткий корпус и мяг-
кие «руки» и «ноги», соединенные с корпусом шарнирами на гер-
метичных подшипниках.
Под герметичной оболочкой любого скафандра расположена
система вентиляции, которая по трубкам подводит воздух (газ)
к различным частям тела. Двигаясь вдоль поверхности тела
к выходу, воздух поглощает пот, тепло и газообразные выделения
организма. Система вентиляции может обеспечить относительно
длительное пребывание человека в скафандре при энерготратах,
не превышающих 120—150 Вт, что характерно для аварийно-спа-
сательных скафандров.
В скафандрах, предназначенных для проведения работ с боль-
шими энерготратами (выход на поверхность Луны), предусмотрен
костюм с водяным охлаждением — легкий комбинезон, пронизан-
ный трубками диаметром 1,5—3 мм, по которым циркулирует
вода.
228
По типу газоснабжения скафандры могут быть вентиляцион-
ными и регенерационными. В вентиляционных скафандрах газ
поступает из источников газоснабжения и, пройдя скафандр, вы-
брасывается в окружающее пространство, а в регенерационных—
поступает в систему, где очищается от углекислого газа, водяных
паров, охлаждается и вновь направляется в скафандр. Затраты
массы на систему регенерации окупаются уже при продолжитель-
ности нахождения в скафандре более 4 ч.
Источники кислорода и система регенерации могут находиться
как на борту КК, так и в ранце скафандра (рис. 7.3), причем
в качестве источников автономного газоснабжения обычно ис-
пользуют баллоны с кислородом.
Скафандр, предназначенный для длительного (более 3 ч) пре-
бывания, снабжается мочеприемником.
В зависимости от назначения скафандра поверх его герметич-
ной оболочки надевают различного рода защитные оболочки:
на аварийно-спасательный скафандр — одежду для защиты
оболочки от механических повреждений при нахождении в ка-
бине или после приземления;
на скафандры для выхода в открытый космос — одежду, пре-
дохраняющую от механических повреждений и обладающую не-
обходимыми радиационными характеристиками, обеспечивающи-
ми на поверхности скафандра на обращенной к Солнцу стороне
определенную температуру, под одеждой помещают экранно-ва-
куумную теплоизоляцию и защиту от микрометеоритов (пористая
резина, фетр);
на скафандр для выхода на поверхность Луны — одежду, ана-
логичную скафандру для выхода в космос, а его ботинки должны
иметь изоляцию, предохраняющую ноги космонавта от перегрева
или переохлаждения при нахождении на поверхности Луны.
Остекление шлема любого скафандра имеет светофильтры, за-
щищающие глаза от слепящего воздействия Солнца.
Глава 8
УПРАВЛЕНИЕ ДВИЖЕНИЕМ
8.1. ОБЩИЕ СВЕДЕНИЯ
Управление движением КА включает управление движением
центра масс и управление движением вокруг центра масс (управ-
ление ориентацией). Задачей первого является целенаправленное
изменение траектории движения КА (его орбиты), а второго —
удержание осей, жестко связанных с корпусом КА, в требуемом
положении относительно некоторых внешних ориентиров или со-
общение корпусу КА целенаправленного вращения. Эти движения
практически не зависят друг от друга, и, следовательно, их
можно изучать раздельно.
Управление движением КА во время работы реактивного дви-
гателя (РД) по сути ничем не отличается от управления PH и
поэтому рассматриваться не будет. Учитывая, что длительность,
включений корректирующих РД невелика (сравнительно со вре-
менем, характерным для траекторий КА, например периодом об-
ращения вокруг Земли), допустимо пренебречь ею и считать кор-
рекцию траектории КА (или иной аналогичный маневр) как
мгновенное изменение вектора скорости движения КА на некото-
рую сравнительно малую с исходной величину.
Таким образом, теоретическую схему управления движением
КА можно свести к двум указанным выше независимым движе-
ниям: управлению ориентацией и управлению движением центра
масс путем дискретных, мгновенных изменений его вектора ско-
рости на малые величины.
В зависимости от решаемых задач конкретные виды управле-
ний можно классифицировать следующим образом:
а) управление ориентацией в зависимости от типа
управления по положению осей ориентации (во всех случаях
начало осей находится в центре масс КА) можно разде-
лить:
на ориентацию в инерциальных осях, сохраняющих свои на-
правления относительно неподвижных звезд, которая характерна
при астрономических наблюдениях далеких небесных объектов,
перед коррекциями в межпланетном полете (на участках тра-
ектории, далеких от планет) и в других аналогичных за-
дачах;
230
на ориентацию в орбитальных осях, когда одна ось направ-
лена через центр планеты, другая в плоскости орбиты, а третья
перпендикулярно ей, что характерно при движении по орбите
искусственного спутника планеты и при маневрах КА, осущест-
вляемых относительно планеты (подъем апоцентра или перицен-
тра, посадочный маневр и т. п.); направление одной из осей по-
стоянно через центр планеты упрощает изучение последней (фо-
тографирование ее поверхности и т. п.);
на ориентацию в осях специальных видов, которые могут
оказаться целесообразными при решении конкретной задачи
управления, например, ориентация на Солнце для подзарядки
солнечных батарей;
б) управление движением центра масс, в которое
входят:
коррекция межпланетных траекторий;
маневрирование в околопланетном пространстве в целях из-
менения орбиты;
дальние маневры сближения с другим КА;
маневр посадки на планету с атмосферой, связанной со срав-
нительно незначительным изменением скорости, которое, однако,
приводит к такому изменению орбиты, что часть ее оказывается
лежащей внутри слоя плотной атмосферы;
в) управление сближением двух КА в зоне непосред-
ственной видимости одного КА с другого с использованием соот-
ветствующей аппаратуры.
Управление движением КА, связанное со значительным изме-
нением скорости полета (разгон от первой до второй космических
скоростей, перевод со стартовой орбиты на орбиту стационарного
спутника Земли, посадка на без атмосферную планету и т. п.),
нередко совершается с помощью так называемых разгонных
или посадочных блоков, являющихся специализированными сту-
пенями PH. Такое управление близко к режиму выведения PH
и в данной главе рассматриваться не будет.
Система управления движением, в частности управления ори-
ентацией, состоит, как правило, из следующих функционально от-
личающихся групп приборов:
датчиков, позволяющих судить о положении КА в простран-
стве и о характере его движения;
логических устройств, анализирующих информацию, поступаю-
щую с датчиков и других систем КА, и вырабатывающих коман-
ды управления движением, соответствующие возникшей ситуа-
ции;
исполнительных органов, изменяющих движение КА в соот-
ветствии с командами логических устройств;
ручек управления, индикаторов, оптических устройств и т. п.
(при наличии ручного управления), при этом сигналы с ручек
управления поступают в логические устройства, а не на испол-
нительные органы.
231
8.2. ДАТЧИКИ СИСТЕМЫ ОРИЕНТАЦИИ
Управление ориентацией немыслимо без получения информа-
ции о движении жестко связанного с корпусом КА триэдра осей *
относительно других аналогичных осей ориентации, которые, имея
начало в той же точке, что и первые, не зависимы от корпуса
КА. Оси ориентации представляют триэдр направлений *, относи-
тельно которого легко сформулировать требования к получению
нужной ориентации КА, и которые изменяются с изменением
задач, стоящих перед КА.
Так, если на КА установлен телескоп, который требуется на-
править в нужную точку небесной сферы, то в качестве осей
ориентации следует избрать поступательно движущийся триэдр
осей, не изменяющих своего углового положения относительно
звезд, но если на КА установлен фотоаппарат для изучения при-
родных ресурсов Земли, то в качестве осей ориентации следует
выбрать триэдр, соответствующий системе орбитальных осей.
Для упрощения дальнейшего изложения будем считать, что
задачей системы ориентации является удержание равными или
близкими к нулю углов ориентации — углов между одноименными
осями двух триэдров, из которых один жестко связан с корпусом
КА, а другой определяет оси ориентации.
Углы ориентации измеряются так называемыми позицион-
ными датчиками, которые по принципу действия можно раз-
бить на три группы: датчики внешней информации, инерциальные
датчики и датчики памяти. Каждые из них имеют свои положи-
тельные и отрицательные стороны и требуют для своего функцио-
нирования выполнения вполне определенных условий, заметно
влияющих на конструкцию КА.
Основными считают датчики внешней информации, ко-
торые получают информацию из внешнего (по отношению к кор-
пусу КА) пространства. К ним относят все оптические датчики,
использующие для своей работы оптическое излучение внешних
по отношению КА тел (Солнца, Луны, звезд, инфракрасное излу-
чение Земли), а также датчики, измеряющие магнитное поле
Земли, движение КА относительно окружающей Землю среды
и т. п.
Среди датчиков внешней информации наиболее разнообразны
и распространены оптические датчики, простейшим из которых
является так называемый солнечный датчик, позволяющий судить
об отклонении его оптической оси от направления на центр
Солнца. Конструкция такого датчика основана на том, что Солнце,
являясь мощным источником излучения, который невозможно
спутать с другими, позволяет использовать достаточно простые
фотоприемники. При этом возможно применение широкоугольных
датчиков, одновременно «осматривающих» большие доли небес-
* Триэдр осей (направлений) — три взаимно перпендикулярные оси (на-
правления), пересекающиеся в одной точке (начале).
232
ной сферы, так как свет попадающих в его поле звезд не служит
помехой для реагирования иа солнечное излучение.
Наиболее сложным из датчиков внешней информации является
звездный датчик, фиксирующий отклонения своей оптической оси
от направления на далекую звезду. Слабость излучения даже са-
мых ярких звезд требует сильное уменьшение поля зрения дат-
чика и использование в качестве фотоприемников наиболее чув-
ствительных приборов, например фотоумножителей.
Солнечные и звездные датчики, одновременно фиксируя на-
правление на Солнце и звезду, полностью определяют положение
КА в пространстве и в связи с этим широко применяются в виде
солнечно-звездной пары датчиков.
Установка солнечного датчика связана с требованием не за-
тенения его широкоугольного поля зрения никакими элементами
конструкции корпуса КА, что накладывает определенные условия
на компоновку корпуса КА, размещение на нем таких элементов
конструкции, как солнечные батареи, антенны и т. п., на выбор
наиболее подходящего места для установки самого солнечного
датчика. Установка звездного датчика, имеющего узкое поле зре-
ния, казалось бы, не имеет столь жестких условий, но, учитывая,
что в некоторых случаях оптическая ось звездного датчика по-
движна, в его суммарно достаточно большое поле зрения также
не должны попадать элементы конструкции КА, а чрезвычайно
высокая чувствительность самого датчика вызывает необходи-
мость его защиты от возможного воздействия паразитных засве-
ток (за счет освещения КА Солнцем), которые в сумме могут
оказаться более мощными, чем свет далекой звезды, а также
установки весьма совершенных бленд на объективы звездных
датчиков и защиты этих бленд от солнечного света, ограничения
допустимых значений углов «Солнце—объект—звезда» и т. п.
Указанные проблемы определяли компоновку таких КА, как
«Марс», «Венера» и «Зонд».
Установка радиотехнических датчиков сложна из-за проблемы
размещения их антенн, а применение ионных датчиков требует
их установки в таких местах корпуса КА, где они «находили»
бы невозмущенный элементами конструкции КА поток частиц
внешней среды и т. д. Таким образом, использование датчиков
внешней информации связано с определенными конструктивными
трудностями.
Поэтому совершенно естественно использование таких датчи-
ков, которые можно было бы устанавливать внутри корпуса КА
и которые, не будучи связанными с внешней информацией, не
требовали бы каких-либо внешних устройств, затрудняющих ком-
поновку КА.
Такими датчиками являются инерциальные датчики
ориентации, которые могут функционировать только при вра-
щении осей ориентации в абсолютном пространстве вокруг непо-
движного направления с достаточно большой угловой скоростью.
Поэтому датчики такого рода находят широкое применение на
233
искусственных спутниках планет и бесполезны на межпланетных
космических трассах. Кроме того, они могут измерять лишь одну
угловую координату, определяющую движение корпуса КА отно-
сительно осей ориентации, и то только при условии, что две дру-
гие угловые координаты измеряются датчиками иного рода, т. е.
датчиками внешней информации. Так, если на ИСЗ установлен
инфракрасный построитель вертикали, определяющий углы кре-
на и тангажа, то угол рысканья можно измерить датчиком инер-
циального типа.
Приведенные свойства инерциальных датчиков ориентации по-
казывают, что они способны работать лишь в комбинации с дат-
чиками внешней информации, а их применение ограничено.
В настоящее время в качестве инерциальных датчиков обычно
используют гироорбиты — гироскопические приборы, напоминаю-
щие наземные гирокомпасы.
Датчики памяти — это гироскопические приборы, также
работающие без непосредственного использования внешней ин-
формации, в которых, однако, используются свойства свободного
гироскопа. Как известно, свободный гироскоп (находящийся в
кардановом подвесе) стремится сохранить свое положение отно-
сительно далеких звезд (относительно ньютоновского абсолютного
пространства) неизменным, независимо от поворотов того осно-
вания, на котором он установлен в своем подвесе.
Так как один свободный гироскоп позволяет определить толь-
ко два угла (повороты КА относительно оси, параллельной оси
вращения ротора гироскопа, отсчитать невозможно), для опреде-
ления всех трех углов ориентации необходима система из двух
свободных гироскопов, оси вращения роторов которых не парал-
лельны.
Такая система гироскопов обладает двумя принципиальными
недостатками: во-первых, для функционирования ее необходимо
предварительно «выставить», т. е. расположить оси роторов ги-
роскопов в определенном положении относительно внешних ори-
ентиров, а во-вторых, ось ротора гироскопа сохраняет свое поло-
жение в пространстве неизменным лишь сравнительно малое вре-
мя. Первый недостаток приводит к использованию датчиков внеш-
ней информации, а второй, связанный с «уходом» гироскопов,
ограничивает время пользования такой системой. Хотя в совре-
менных гироскопических приборах скорость ухода оси ротора
гироскопа не превышает одной десятой углового градуса в час,
что с точки зрения обычной человеческой практики очень мало,
в большинстве задач управления ориентацией КА они недопу-
стимо велики, так как обычно длительность одного сеанса ориен-
тации измеряется сутками, неделями, а иногда и большими от-
резками времени.
Применение системы свободных гироскопов в качестве изме-
рителей углового положения корпуса КА вполне уместно при ста-
билизации во время работы корректирующего двигателя, т. е.
в сравнительно кратковременных режимах, которые уже не отно-
234
сятся к управлению ориентацией. Если на борту КА будет уста-
новлена такая гиросистема, вполне допустимо ее использование
как вспомогательного устройства для кратковременного управле-
ния ориентацией, например при осуществлении «программных
поворотов» корпуса КА, т. е. поворотов на заданные углы от
некоторого исходного положения, реализованного системой управ-
ления ориентацией.
Если требуется увеличение времени эффективной работы си-
стемы свободных гироскопов до произвольно большого времени,
необходимо периодически ее корректировать, используя информа-
цию, снимаемую с датчиков внешней информации. Такой способ-
ностью обладают так называемые корректируемые гиросистемы.
Сказанное выше справедливо и для использования вместо
системы свободных гироскопов некорректируемых или корректи-
руемых гироплатформ.
Помимо позиционных датчиков при управлении ориентацией
применяются и датчики угловой скорости (ДУС) — приборы, не-
подвижно установленные на корпусе КА и позволяющие измерять
составляющую его вектора угловой скорости, параллельную оси
чувствительности соответствующего ДУС. Для получения полного
представления о векторе угловой скорости КА необходим комп-
лект из трех ДУС, оси чувствительности которых взаимно перпен-
дикулярны и согласуются с осями чувствительности позиционных
датчиков.
В настоящее время практическое применение нашли только
гироскопические ДУС, которые не нуждаются во внешней инфор-
мации и могут быть установлены в любой точке КА.
8.3. СИСТЕМА ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ
Управление угловым положением КА требует не только до-
статочно полной информации о таковом и о скорости его измене-
ния, но и возможности целенаправленных изменений углового
движения КА. Нужные для этой цели управляющие моменты
создаются системой исполнительных органов.
По принципу действия исполнительные органы можно разбить
на два типа: использующие для создания управляющих моментов
внешние по отношению к КА силы и основанные на реактивных
принципах.
К первому типу относят такие исполнительные органы, кото-
рые создают управляющие моменты в результате взаимодействия
КА с магнитным полем Земли, например, за счет расположения
на КА токонесущих контуров или поворачиваемых постоянных
магнитов так, чтобы изменялся магнитный момент КА и в резуль-
тате целенаправленного взаимодействия с магнитным полем Земли
создавались нужные управляющие моменты, приложенные к кор-
пусу КА. Преимуществом подобных моментных магнитоприводов
является то, что для их функционирования потребна лишь элек-
235
троэнергия, в принципе восполняемая от солнечных батарей, а не-
достатком — существование одного направления, вокруг которого
принципиально невозможно создание управляющего момента,
т. е. направление, параллельное вектору магнитной индукции
Земли в данной точке орбиты.
Ко второму типу исполнительных органов относят реактивные
двигатели ориентации (ДО), создающие реактивные силы и ги-
роскопические силовые стабилизаторы (ГСС), создающие реак-
тивные моменты.
Рис. 8.1. Расположение двигателей ориентации относи-
тельно главных центральных осей ннерцни КА прн уп-
равлении ориентацией с помощью снл
Для обеспечения полного управления ориентацией, т. е. управ-
ления по трем осям КА, необходимо, чтобы расположение осей
КА и ДО было согласовано с эллипсоидом инерции КА (рис. 8.1),
оси КА совпадали с главными центральными осями инерции КА,
а включение одного ДО давало бы момент только вокруг одной
из таких осей. Пусть триэдр жестко связанных с корпусом КА
осей OXYZ совпадает с главными центральными осями инерции,
а показанные на рис. 8.1 плоскости являются плоскостями сим-
метрии эллипсоида инерции. Оси сопел ДО А, В, С лежат в плос-
костях, проходящих через центр масс О и перпендикулярных осям
инерции, относительно которых происходит управление; ДО уда-
лены от соответствующей оси на расстояние I и, кроме того, пер-
пендикулярны прямой, соединяющей точку их установки и ось,
вращение вокруг которой они обеспечивают. Поэтому включение
любого ДО создает момент только относительно одной главной
оси инерции.
236
Преимуществом такой схемы является наличие минимального
количества ДО (шесть), а недостатком — приложение к корпусу
КА при включении одного ДО не только момента, но и силы, что
малосущественно, но на длительных межпланетных трассах неже-
лательно. Чисто моментное управление можно обеспечить за счет
удвоения количества ДО, включаемых попарно. Как известно из
механики, место приложения пары сил несущественно. Это поло-
жение предоставляет определенную свободу при компоновке КА.
Z
Рис. 8.2. Расположение двигателей ориентации относительно
главных центральных осей инерции КА при управлении ори-
ентацией парами снл
Схема такого расположения ДО показана на рис. 8.2, причем
двигатели, обеспечивающие вращение вокруг одной главной цен-
тральной оси инерции, обозначены одинаковыми буквами.
Иногда размещение ДО диктуется их расположением на одном
агрегатном отсеке (рис. 8.3), когда все они сосредоточены в од-
ной плоскости и управление вокруг осей OY и OZ происходит
за счет управления силами, а по оси ОХ — пар сил.
Техническое решение реактивных двигателей ориентации мо-
жет быть различным. Чаще всего используют два типа таких
ДО: работающие на сжатом газе и на одно- или двухкомпонент-
ном топливе. В ДО, работающем на сжатом газе (рис. 8.4),
в баллоне хранится сжатый до большого давления газ (обычно
азот), давление которого в редукторе снижается до нужного зна-
чения. Через коллектор газ поступает к ДО (по сути это элек-
тропневмоклапаны с соплами Лаваля), которые открываются и
закрываются по командам, поступающим из блоков логики. Для
полного отключения системы служит запорный клапан.
237
В ДО, использующих двухкомпонентное топливо (рис. 8.5),
газ (служащий теперь не рабочим телом, а средством подачи
топлива) из редукторов поступает в емкости, вытесняет из них
горючее и окислитель и через коллекторы подает их в двигатели.
Рис. 8.4. Система двигателей ориентации, работающих иа
сжатом газе:
1 — баллов со сжатым газом; 2 — запорный клапан; 3 — редуктор;
4 — коллектор; 5 — двигатели ориентации
Преимуществами ДО на сжатом газе являются крайняя про-
стота конструкции и отсутствие загрязнения окружающего КА
пространства, что может быть весьма существенно при прове-
дении некоторых научных экспериментов. Такие ДО использова-
лись на КК «Восток», «Восход», на межпланетных КА, на спут-
никах связи «Молния-1» и др.
238
Преимуществами ДО на одно- или двухкомпонентном топливе
являются более высокая экономичность (более высокие удельные
импульсы) и меньшая масса всей ДУ: сжатый газ не играет
здесь роли рабочего тела, и тяжелые емкости могут быть сде-
ланы относительно малыми. Подобные ДО используются на КК
«Союз», орбитальных станциях «Салют» и др.
Рис. 8.5. Система двигателей ориентации, работающих иа двухкомпо-
нентном топливе:
/ — баллоны со сжатым газом; 2 —запорные клапаны; 3 — редукторы; 4 — бак
горючего; 5 — бак окислителя; 6, 7 — коллекторы; 8 — двигатели ориентации
Общим недостатком рассмотренных ДО является необходи-
мость расхода массы рабочего тела при каждом включении, за-
пас которого всегда ограничен.
Возможность сравнительно простого способа пополнения бор-
товых запасов электроэнергии с помощью солнечных батарей де-
лает весьма перспективным применение гироскопических силовых
стабилизаторов (ГСС) — исполнительных органов, способных
ограничиться потреблением только электроэнергии. Поскольку
ГСС создают реактивные моменты (а не силы), не существует
проблемы размещения их в корпусе КА в согласии с положением
его центра масс, так как их можно устанавливать в любом месте,
учитывая только удобство компоновки и направление главных
центральных осей инерции.
Существует три типа ГСС: одно-, двух- и трехстепенные.
Одностепенные ГСС — маховики (рис. 8.6) имеют оси ро-
торов, параллельные осям КА; изменение оборотов ротора А’
(изменение его кинетического момента Гд) приводит к вращению
корпуса КА вокруг оси ОХ в противоположном направлении, при
239
этом момент, приложенный к корпусу КА, будет численно равен
и противоположен по знаку моменту, приложенному к ротору
Г
Рис. 8.6. Расположение одностепенных гироскопических
силовых стабилизаторов (маховиков) относительно
главных центральных осей инерции КА
Двухстепенные ГСС (рис. 8.7) обладают двумя степеня-
ми свободы, из которых одна связана с вращением ротора (кине-
Рис. 8.7. Схема двухстепенного гироскопи-
ческого силового стабилизатора:
1 — корпус КА; 2 —гироузел; Г — вектор кинети-
ческого момента ротора гироузла; т — момент,
приложенный к гироузлу; Мд — результирующий
тический момент ротора Г),
а другая — с поворотом ги-
роузла, несущего ротор,
установленного на корпусе
КА и способного вращать-
ся вместе с установленным
в нем ротором вокруг оси g.
Развиваемый таким ГСС
управляющий момент
Л1А = Г.е, (8.1)
где е — угол поворота гиро-
узла.
Из выражения (8.1) вид-
но, что кинетический мо-
мент ротора должен быть
возможно большим, а сле-
довательно, ротор должен
вращаться с постоянной,
момент, приложенный к корпусу КА ВОЗМОЖНО большей уГЛОВОЙ
скоростью. Поворот гиро-
узла вокруг оси $ потребует приложения некоторого малого мо-
мента т. Следовательно, двухстепенный ГСС обладает свой-
240
ством «усиления» моментов: малый момент т, приложенный
к гироузлу, вызывает большой момент ЛГд, приложенный к кор-
пусу КА.
Трехстепенные ГСС (рис. 8.8) представляют собой сило-
вой ротор с кинетическим моментом Г, установленный в карда-
новом подвесе. Моментные устройства, создающие моменты тх
и ту, вызывают прецессию гироскопа, при которой численно рав-
ные им, но противоположные моменты будут прикладываться
к корпусу КА.
Рис. 8.8. Схема трехстепенного гироскопического сило-
вого стабилизатора:
1 — внешняя рама карданова подвеса; Г — кинетический мо-
мент ротора; и Шу — моментные датчики, вызывающие
прецессию ротора
Таким образом, минимальное количество ГСС, позволяющее
управлять по всем осям, равно трем для одно- и двухстепенных
ГСС и двум для трехстепенных, хотя и это количество не является
наилучшим. Вполне оправдано только применение трех односте-
пенных ГСС, так как они в процессе функционирования не изме-
няют положения осей роторов относительно корпуса КА. Двух-
степенные или трехстепенные ГСС в процессе функционирования
изменяют положение осей силовых роторов вследствие прецессии
гироскопов относительно корпуса КА, что в конечном итоге может
привести к тому, что в некоторый момент времени управление по
какой-то связанной с корпусом КА оси станет невозможным до
изменения расположения осей роторов. Это неприятное свойство
можно избежать установкой на КА избыточного количества ГСС.
Общим недостатком всех ГСС является их неспособность к
длительному противодействию внешнему возмущающему моменту
одного знака. В реальных полетных условиях внешние возмущаю-
щие моменты практически всегда имеют постоянную составляю-
щую, которая и «выводит из строя» ГСС. Суть этого явления за-
ключается в том, что ГСС лишь перераспределяют кинетический
момент между корпусом КА и ГСС и если этот суммарный кине-
тический момент под действием внешних возмущений будет воз-
растать, а кинетический момент корпуса КА исходя из требований
241
к ориентации оставаться постоянным, то наступит момент, когда
ГСС окажутся уже не в состоянии «всасывать» вращательный
импульс, создаваемый внешним возмущающим моментом. Это
связано с тем, что одностепенные ГСС не способны к беспредель-
ному увеличению угловой скорости вращения ротора, а двух- и
трехстепенные ГСС не могут сохранять положение осей своих ро-
торов близким к исходному.
Для обеспечения длительной работы ГСС требуется система-
тическая «разгрузка» их от накопленного кинетического момента.
Это возможно выполнить несколькими методами:
допустимо использование того же внешнего момента, изменив
его знак на обратный путем резкого изменения ориентации КА;
недостатком такого метода является довольно частое изменение
ориентации, что не всегда допустимо;
можно компенсировать воздействие внешнего возмущающего
момента, действующего на КА, включением второго контура ис-
полнительных органов, что не требует частых переориентаций;
если во втором контуре применить ДО, то включение их в на-
правлении, противоположном постоянной составляющей внешнего
момента на нужное время, приведет ГСС в исходное состояние.
Казалось бы, что наличие ДО и необходимость их включений де-
лают бессмысленным использование ГСС, но это не так: работая
во втором контуре исполнительных органов, ДО будут компенси-
ровать лишь постоянную составляющую внешних моментов, ко-
торая обычно мала по сравнению с их периодической составляю-
щей; недостатком такого метода является необходимость расхода
массы;
наконец, можно применять во втором контуре магнитопривод,
взаимодействующий с магнитным полем Земли. В этом случае,
хотя и отсутствует расход массы рабочего тела, увеличивается
расход энергии и появляется необходимость установки относи-
тельно массивных магнитоприводов. Этот метод использован на
КА «Метеор».
8.4. ЛОГИЧЕСКИЕ УСТРОЙСТВА
Конструктивно блоки логических устройств могут быть са-
мыми различными — от простейших аналоговых устройств до вы-
сокопроизводительных бортовых цифровых вычислительных машин
(БЦВМ) с соответствующими внешними устройствами, служа-
щими для связи БЦВМ с датчиками, исполнительными органами
и другими бортовыми системами. Количество таких блоков может
быть различным.
Основные задачи, выполняемые логически-преобразующими
устройствами, сводятся:
к приему сигналов датчиков, их обработке и сопоставлению;
к выработке решения о характере работы системы ориента-
ции в данной обстановке;
к осуществлению логики ориентации;
242
к выработке сигналов для управления системой исполнитель-
ных органов и преобразованию их к должному виду.
Применение вместо аналоговых устройств в качестве логиче-
ски-преобразующей аппаратуры БЦВМ с соответствующими внеш-
ними устройствами расширяет возможности управления и позво-
ляет основываться на более сложных и совершенных законах
управления движением. Сигналы, снимаемые с датчиков, могут
предварительно подвергаться достаточно сложной обработке, сво-
дящейся, в частности, к подавлению шумов, сглаживанию этих
сигналов до использования их в целях управления. Вместо реаги-
рования системы управления на несколько наиболее серьезных
отказов появляется возможность непрерывного автоматического
контроля состояния всей аппаратуры, выбора наилучшего запас-
ного режима ориентации при отказе какого-то элемента аппара-
туры, анализа возникших отказов и соответствующей перестройки
логики управления, что заметно повышает общую надежность си-
стемы.
Наличие БЦВМ позволяет осуществить так называемую бес-
карданную систему управления. Многие режимы управления дви-
жением требуют, чтобы при любых поворотах корпуса КА в про-
странстве на его борту постоянно существовал некоторый триэдр
осей, параллельный выбранным осям ориентации. Как правило,
для получения такого базисного триэдра осей применяют гироста-
билизированные платформы, недостатком которых (как и других
гироприборов аналогичного назначения) является наличие кар-
данового подвеса платформы, на которой расположены гироскопы.
Карданов подвес (в силу конструктивных причин) обусловливает
ограниченность углов поворота платформы относительно корпуса
КА, что в свою очередь ограничивает угловое маневрирование КА
и связано с рядом других аналогичных трудностей, заметно услож-
няющих управление ориентацией.
Радикальное решение этого вопроса — переход к созданию ба-
зовых систем отсчета углов ориентации по бескарданной схеме.
Использование БЦВМ делает возможным непрерывное интегри-
рование уровней движения КА при сколь угодно сложном его
характере, опираясь на показания таких же датчиков, что и уста-
навливаемые на гироплатформе, но неподвижно скрепленных с
корпусом КА. В бескарданных системах громоздкие и неудобные
при управлении ориентацией КА устройства подвеса гироплат-
формы со следящими приводами «заменяются» интегрированием
уравнений движения.
8.5. РАСХОДЫ РАБОЧЕГО ТЕЛА И ЭНЕРГИИ
Для работы двигателей ориентации или ГСС необходима за-
трата рабочего тела и энергии. В отличие от земных транспорт-
ных средств, у которых топливо или подводимая энергия тратится
главным образом на преодоление сопротивления среды, а доля,
243
идущая на управление движением, мала, в космосе именно рас-
ходы на управление являются нередко определяющими. Если го-
ворить об управлении ориентацией, то обычно основной расход
рабочего тела и энергии ДО и ГСС связан с режимами длитель-
ного поддержания ориентации.
При использовании ДО возможны два предельных случая:
полное отсутствие внешних возмущающих моментов и наличие
«большого» возмущающего момента.
Первый случай приводит к так называемым «двусторонним»
колебаниям корпуса КА, а второй — к «односторонним» колеба-
ниям; в первом случае попеременно включаются ДО, создающие
моменты, противоположные по знаку, включаются попеременно
так, чтобы постоянно удерживать угол ориентации в допустимых
пределах, а во втором внешний возмущающий момент все время
«прижимает» КА к одному из допустимых пределов углов ориен-
тации, а ДО, создающий момент, противоположный внешнему, все
время «отталкивает» корпус КА от него в сторону другого допу-
стимого значения углов ориентации.
В первом случае оценка средневременного расхода массы ра-
бочего тела
О = <8-2>
где I — момент инерции корпуса КА;
W — скорость истечения газов из ДО;
I — расстояние от линии действия силы тяги до центра масс
КА;
Д<р— приращение угловой скорости КА, сообщаемой ему при
однократном включении ДО;
фо — амплитуда колебаний угла ориентации КА^_
Из формулы (8.2) видно, что уменьшение G возможно за
счет увеличения скорости истечения W и плеча силы тяги, а так-
же уменьшения приращения угловой скорости Аф и увеличения
амплитуды колебаний угла ориентации ф0, или, что то же, полу-
чение импульсного включения ДО, дающего минимально возмож-
ное Аф при одном включении и снижение потребной точности
ориентации (система управления ориентацией не должна иметь
точность выше, чем это необходимо для решения заданной за-
дачи).
Из формулы (8-^2) также следует, что нет пределов снижения
среднего расхода G за счет уменьшения Аф или использования
ДО очень малой тяги. Однако этому мешает требование совер-
шения (например, при поиске ориентира) достаточно быстрых
поворотов, требующих ДО большой тяги. Компромиссное реше-
ние сводится к выбору тяги ДО исходя из требований быстроты
поворотов КА при непрерывном включении ДО и получении мини-
мального значения Аф путем использования технически дости-
жимых минимальных по времени импульсных включений ДО.
244
Во втором случае, когда колебания оказываются односторон-
ними, средневременный массовый расход рабочего тела
0=1^1, (8.3)
где Мв — внешний возмущающий момент.
Физическая сущность этого равенства очевидна — расход про-
порционален внешнему возмущающему моменту Мв и не зависит
ни от точности ориентации, ни от величины единичного враща-
тельного импульса Дф.
В общем случае теоретическое рассмотрение задачи и мето-
дика расчетов сильно усложняются. Для предварительной про-
ектной оценки расхода рабочего тела можно предложить про-
стое суммирование обоих видов расхода
Для ГСС — одностепенных гиростабилизаторов, работающих
в импульсных режимах, значения средневременного расхода энер-
гии Е аналогичны формулам (8.2) и (8.3), в которых произведе-
ние WI — эффективность используемых ДО — следует заменить
величиной а — эффективностью использования энергии ГСС, рав-
ной
° = (8.5)
где Мв — развиваемый момент;
N — потребляемая мощность.
При пренебрежимо малом значении внешнего возмущающего
момента следует учитывать, что между статором (корпусом КА)
и ротором ГСС действует момент сопротивления Мс, который фор-
мально будет играть роль внешнего момента Мв в равенстве (8.3).
Что касается двух- и трехстепенных ГСС, характеризующихся
постоянством кинетических моментов роторов при большой угло-
вой скорости их вращения, то средневременной расход энергии
определяется главным образом затратами на поддержание этой
угловой скорости постоянной и не зависит от особенностей про-
цесса ориентации.
Основным внешним моментом, с которым приходится иметь
дело при создании ИСЗ, является гравитационный момент, тогда
как аэродинамический момент проявляется только на очень низ-
ких высотах, а момент от солнечного давления — лишь на меж-
планетных трассах, где первые два практически исчезают.
Гравитационный момент стремится повернуть КА в положе-
ние, при котором его наиболее протяженная главная центральная
ось инерции стала бы параллельной местной вертикали. На рис. 8.9
показано протяженное тело S, движущееся по плоской орбите
вокруг центра Земли С. Триэдр осей OXQYoZ0 — триэдр орбиталь-
ных осей ориентации, а триэдр OXYZ составлен главными цен-
245
тральными осями инерции тела S. Рассмотрим случай, когда оси
Z и Zo совпадают и поворот тела относительно местной вертикали
определяется углом <pz, т. е. имеет место поворот только по тан-
гажу. В этом случае гравитационный момент
Яр, = -5”Т<5“Л)81112^ <8-6>
£ го
где (Я — ускорение силы земного тяготения на поверх-
ности Земли, a R3 — радиус Земли);
А и В — главные центральные моменты инерции тела относи-
тельно осей ОХ и ОУ;
Го — расстояние центра масс КА от центра Земли.
Рис. 8.9. Жестко связанный с телом S триэдр осей
OXKZ, повернутый на угол <fz относительно триэдра
орбитальных осей OXaYaZa (С — центр Земли)
Из формулы (8.6) видно, что при <pz = 0 и <р=тс/2 гравитаци-
онный момент равен нулю, т. е. горизонтальное и вертикальное
положение большой оси тела S соответствует положению равно-
весия. Однако между этими двумя положениями равновесия
имеется существенное отличие. Нетрудно убедиться, что устой-
чивым является вертикальное, а не горизонтальное положение
вытянутой оси тела S.
Гравитационный момент может проявиться и при орбитальной
ориентации КА, так как жестко связанный с корпусом КА триэдр
главных центральных осей инерции OXYZ практически всегда по-
246
вернут относительно триэдра OX'Y'Z', определяемого конструк-
цией КА (конструктивных осей КА). Поскольку датчики системы
ориентации и научная аппаратура юстируются в КА относительно
его конструктивных осей, в реальном полете ориентируют именно
конструктивные оси КА, что делает КА гравитационно неуравно-
вешенным. Величина момента, вызванного несовпадением кон-
структивных осей и осей инерции, будет возрастать вместе с раз-
мерами КА, поскольку гравитационный момент пропорционален
моментам инерции, которые, в свою очередь, возрастают пропор-
ционально пятой степени линейных размеров КА. Поэтому для
очень больших КА более предпочтителен полет в несколько «по-
вернутом» положении, при котором в гравитационном поле Земли
нужное положение заняли бы оси инерции, а не конструктивные
оси КА, что может вызвать усложнение логики системы ориен-
тации. Особенно большие повороты эллипсоида инерции относи-
тельно конструктивных осей возможны при резком изменении
геометрии масс КА (функционировании разного рода массивных
поворотных устройств, пристыковке и отстыковке других КА и
т. п.).
Другим источником появления больших гравитационных мо-
ментов может стать требование удержания корпуса КА неподвиж-
ным относительно поступательно движущихся осей ориентации
(относительно далеких звезд), например, при астрономических
исследованиях, когда угол тангажа может изменяться за один
оборот вокруг Земли на величину 2л. Как следует из форму-
лы (8.6), изменение угла тангажа на л/2 является наибольшим
возможным интервалом значений <р, внутри которого гравитаци-
онный момент Afrp не изменяет своего знака.
Так, при полете вокруг Земли по круговой орбите в начальный
момент времени кинетический момент КА равен нулю, угол <pz=0
и, следовательно, Afrp = O. Тогда кинетический момент, накоплен-
ный КА при полете по */4 дуги его круговой орбиты,
т
4
H—^MTVdt, (8.7)
о
где Т — период обращения ИСЗ вокруг Земли.
Интегрируя выражение (8.7), получим
H = (8.8)
Таким образом, можно избежать включения второго контура
исполнительных органов, если система гиростабилизаторов будет
в состоянии «поглотить» кинетический момент, имеющий порядок
произведения момента инерции ИСЗ на угловую скорость его
вращения вокруг Земли. Другим методом радикального умень-
шения всех затрат, связанных с возмущающим действием грави-
247
тационного момента, является приближение эллипсоида инерции
КА к сфере, т. е. приближение разности моментов инерции в фор-
муле (8.6) к нулю.
Гравитационный момент не всегда является помехой и может
быть использован для получения нужной ориентации. Если, на-
пример, нужна ориентация в орбитальных осях, при которой про-
дольная ось КА была бы все время вертикальной, достаточно
привести КА в такое вертикальное положение и придать ему в
нужном направлении угловую скорость, равную угловой скорости
орбитального движения, после чего гравитационный момент будет
удерживать КА в этом положении сколь угодно долго. Такой
метод ориентации иногда применялся на орбитальном комплек-
се «Салют»—«Союз». Возможность полезного использования гра-
витационного момента привела к возникновению целого направ-
ления в космической технике — созданию ИСЗ с пассивными (без
затраты рабочего тела и энергии) и полупассивными (без за-
траты рабочего тела) системами гравитационной стабилизации.
Эти системы, позволяя удерживать только постоянную ориента-
цию ИСЗ в орбитальных осях, имеют ограниченное примене-
ние.
Роль гравитационного момента резко возрастает с увеличе-
нием массы КА, так как момент инерции КА чрезвычайно быстро
растет с увеличением его размеров. При естественных предполо-
жениях о зависимости характеристик КА и его агрегатов от ли-
нейных размеров КА с ростом последних прямо пропорционально
возрастают и относительные запасы рабочего тела. Это приводит
к тому, что с увеличением размеров КА использование ДО для
управления ориентацией все более и более затруднительно. По-
этому, начиная с некоторой величины КА, особенно при длитель-
ных полетах, необходимо применение ГСС. Правда, при даль-
нейшем увеличении КА относительная масса агрегатов ГСС так-
же возрастает и для очень больших орбитальных станций (значи-
тельно превышающих размеры современных) их применение ста-
новится малоэффективным. Для очень больших сооружений в
космосе будет необходим переход к пассивным методам под-
держания ориентации или к поддержанию нужной ориентации пу-
тем придания КА вращения (стабилизация вращением). Все это
сделает такие станции «неповоротливыми» и заставит вести ис-
следования, требующие многих и разных ориентаций с малых
КА, лишь базирующихся на такой станции и выполняющих свою
основную работу в свободном полете.
8.6. СБЛИЖЕНИЕ И СТЫКОВКА
Стыковка КА — совершенно необходимый элемент космическо-
го полета — предназначена для доставки экипажей и различных
материалов на орбитальные станции, отделения и последующего
присоединения к основному КА специализированных модулей.
248
Как уже говорилось выше, один из КА является «активным»,
т. е. совершает маневр сближения, а другой — «пассивным», т. е.
не изменяет движения своего центра масс. Пассивный КА, в даль-
нейшем именуемый станцией, может в процессе сближения со-
вершать повороты вокруг центра масс в целях облегчения задачи
активному КА (например, станция может разворачиваться так,
чтобы быть постоянно обращенной к активному КА своим стыко-
вочным узлом).
При сближении КА работают две подсистемы системы управ-
ления сближением: подсистема наведения (управляющая
движением центра масс) и подсистема управления ори-
ентацией; очевидно, что на станции допустима работа только
второй подсистемы.
Участок наведения делится на участки дальнего и ближ-
него наведения. Дальнее наведение служит для выведения ак-
тивного КА в зону, где возможно автономное ближнее наведение,
т. е. в зону, в которой станция и активный КА находятся в усло-
виях взаимной «видимости» (с учетом дальности действия уста-
новленной на обоих КА аппаратуры). Методы дальнего наведения
ничем не отличаются от других маневров изменения орбиты КА
и будут рассмотрены в следующем разделе. Ближнее наведение
имеет целью сближение КА на некоторое малое расстояние и при-
ведение их относительной скорости сближения в строго заданные
пределы, ограниченные сверху прочностью КА, а снизу — надеж-
ной работой стыковочного узла. Нередко последний участок ближ-
него наведения выделяют в так называемый участок причалива-
ния, в котором резко изменяется характер управления движением
КА.
На основном участке ближнего наведения движение центра
масс КА изменяется включением сравнительно мощного РД,
установленного вдоль продольной оси активного КА (обычно этот
же РД используется и для маневров коррекции траектории КА),
причем для придания его импульсу нужного направления его за-
пуску предшествует ориентация продольной оси КА. Таким обра-
зом, процесс сближения связан с целой серией переориентаций,
что недопустимо на участке причаливания, где управление дви-
жением центра масс активного КА и управление ориентацией
обоих КА должны все время поддерживать оси стыковочных узлов
на одной прямой, а сами узлы в направлении друг к другу, что
определяет нормальную работу этих узлов после их касания. По-
этому на участке причаливания управление ведется так, чтобы
при постоянной ориентации (т. е. без каких-либо поворотов) име-
лась возможность разгона и торможения активного КА, а также
бокового смещения его продольной оси в любом направлении.
Это возможно только при установке на КА нужного количества
сравнительно малых двигателей, способных сообщать КА ускоре-
ния в продольном и двух боковых направлениях.
Первый способ управления, связанный с включением одного
РД, иногда называют полярным, а второй, при котором ра-
249
ботает группа малых РД, — декартовым (по аналогии с со-
ответствующими системами координат). Теоретически для декар-
тового управления вектором суммарной тяги достаточно шести
РД (по два на ось, так как тяга РД не изменяет знака), однако
их количество рационально удваивать, чем решаются сразу две за-
дачи: во-первых, эти РД можно использовать и для управления
ориентацией продольной оси КА, а во-вторых, не требуется точ-
ной установки оси такого бокового РД относительно центра масс
КА; последнее трудно потому, что положение центра масс не
всегда известно с нужной точностью, оно смещается при переме-
щениях членов экипажа, расходовании топлива и т. п. Кроме
того, возможность «разнесения» РД упрощает компоновку КА,
так как установке их точно по оси КА (для торможений и раз-
гонов) мешает маршевый РД большой тяги и наличие стыковоч-
ного узла.
При управлении наведением КА на ближнем участке возмож-
ны два метода: первый, основанный на использовании законов
орбитального движения (метод свободных траекторий), и вто-
рой— метод сближения по линии визирования (метод параллель-
ного сближения); первый из них использует свойства орбиталь-
ного движения. Сообщая активному КА кратковременные и ма-
лые импульсы, можно так изменить траекторию его полета, что
в некоторый момент времени он окажется в непосредственной
близости от станции, причем их относительные скорости будут ле-
жать в пределах, обеспечивающих переход к процессу причалива-
ния. Теоретически минимальное количество импульсов сближения
сводится к двум, хотя практически их требуется несколько больше.
Особенностью рассматриваемого метода является необходимость
«привязки» его к орбитальной системе координат. Как известно,
свойства измененного импульсом РД орбитального движения су-
щественным образом зависят от направления импульса скорости
относительно притягивающего центра (в данном случае центра
Земли) и плоскости орбиты. Поэтому при целенаправленном ис-
пользовании свойств орбитального движения система управления
сближением должна располагать не только сведениями о взаим-
ном положении активного КА и станции и их орбит, но и знать
(с высокой точностью) положение активного КА относительно
орбитальных осей. Следовательно, приборный состав аппаратуры
сближения будет включать не только средства измерения даль-
ности до станции, направления на станцию (линии визирования),
относительных скоростей двух сближаемых КА, но и приборы,
дающие направление местной вертикали и положение плоскости
орбиты.
Метод сближения по линии визирования основан на сближе-
нии, происходящем по прямой, соединяющей два сближаемых КА.
В этом случае угловая скорость поворота линии визирования в
абсолютном пространстве все время остается равной нулю
(в практической реализации — близкой к нулю) и сближаемые
КА не испытывают боковых (относительно линии визирования)
250
смещений в процессе сближения. Для реализации этого метода
необходимо знание положения и характера движения КА друг
относительно друга; их положения относительно центра Земли и
плоскости орбиты несущественны.
Простота описанного метода сближения требует, однако, за-
метного увеличения запасов топлива, так как движение по пря-
мой не является естественным свободным движением КА, поэтому
естественную траекторию КА необходимо постоянно «спрямлять»
путем включения РД. Избыточный сравнительно с методом сво-
бодных траекторий расход топлива будет тем больше, чем силь-
нее естественная траектория отличается от прямой. Из этого сле-
дует, что при сравнительно малых начальных дистанциях сбли-
жения, когда искривление свободной траектории мало, расходы
топлива, потребные для сближения по обоим методам наведения,
будут отличаться мало.
При разработке КА, предназначенного для активного сбли-
жения, необходим выбор метода сближения с полным учетом
его преимуществ и недостатков. Обычно в основе такого выбора
лежит учет сложности аппаратуры и потребных для сближения
суммарных масс аппаратуры и топлива. Недостаток метода сво-
бодных траекторий заключается в относительно большой массе и
сложности аппаратуры, которая будет окупаться лишь в случае
заметного уменьшения массы потребного топлива, что, как уже
говорилось, возможно только при достаточно больших началь-
ных дистанциях автономного сближения.
Для грубых оценок можно считать, что расход топлива на
сближение прямо пропорционален начальной дальности, при этом
запас потребной характеристической скорости может быть оценен
по формуле
?пт = к1, (8.9)
где тт — масса топлива;
I — начальная дальность сближения;
к — коэффициент, принимаемый равным 2 (м/с) /км для ме-
тода свободных траекторий и 5 (м/с)/км для метода
параллельного наведения.
Помимо затрат топлива на спрямление траектории активного
КА следует учитывать и его затраты на разгон и торможения
вдоль линии визирования, причем разгон необходим в начале
сближения, а «ступенчатое» торможение по мере сближения — из
соображений безопасности.
Схема подсистемы автономного сближения КА представлена
на рис. 8.10. Приборы измерения параметров относительного дви-
жения (обычно это какая-либо радиолокационная система) изме-
ряют текущие значения расстояния между КА, компоненту их
относительной скорости (вдоль линии визирования), угловые
координаты станции и компоненты вектора угловой скорости ли-
нии визирования (они позволяют найти боковые составляющие
относительной линейной скорости КА). Эта информация посту-
251
пает в вычислительное устройство, в которое, кроме того, посту-
пают данные о векторе собственной угловой скорости активного
КА из блока датчиков угловых скоростей, информация об орби-
тальном движении КА (направление местной вертикали, положе-
ние плоскости орбиты и др.) от приборов ориентации. Все дан-
ные, поступающие в вычислительное устройство, выбираются так,
Рис. 8.10. Схема подсистемы автономного сближения КА:
1 — приборы измерения относительного взаимного движения сближа-
ющихся КА; 2 — блок датчиков угловых скоростей КА; 3 — вычисли-
тельное устройство; 4 — приборы для определения орбитального дви-
жения КА; 5 — подсистема управления маршевым двигателем: 6 —
маршевый двигатель; 7 — двигатели причаливания и ориентации
чтобы решение задачи о потребном характере движения актив-
ного КА было бы обеспечено. Сигналы управления, выработанные
в вычислительном устройстве, поступают на исполнительные ор-
ганы— сближающий РД со своей подсистемой стабилизации и на
РД причаливания и ориентации. В том случае, если реализуется
относительно простой метод сближения по линии визирования,
приборы ориентации могут отсутствовать, а вычислительное
устройство может быть достаточно простым в отличие от БЦВМ
для метода свободных траекторий.
В заключение следует добавить, что возможно и комбиниро-
ванное использование методов сближения, например, метода сво-
бодных траекторий для автономного сближения КА со значитель-
ных начальных расстояний и метода параллельного сближения
на достаточно малых расстояниях между КА.
8.7. МАНЕВРИРОВАНИЕ
Маневрирование — преднамеренное изменение орбиты КА пу-
тем сообщения ему импульсов скорости.
Практически наиболее часто используются одноимпульсные
маневры, которые удобно разбить на две группы: маневры с по-
252
воротом плоскости орбиты и маневры без изменения плоскости
орбиты. Для рассмотрения свойств таких маневров предположим,
что исходная орбита является круговой; это позволяет получить
простые зависимости, в основном правильно описывающие и свой-
ства эллиптических орбит, тем более, что обычные орбиты, как
правило, являются слабоэллиптическими.
Положение плоскости орбиты будем определять долготой вос-
ходящего узла Q и наклонением плоскости орбиты к плоскости
экватора i, а импульс, сообщенный КА, разложим на три взаим-
но перпендикулярные составляющие AVr, A Vs и AV,?, из которых
составляющая AVr направлена параллельно вектору скорости КА,
A Vs — вдоль радиуса-вектора, связывающего центр масс КА с
центром Земли, a AVr— перпендикулярно плоскости орбиты.
Тогда изменения Q и i за один виток определятся формулами:
(8.10)
дп__ 1 sin I] ...
4В~^ТЕГ^:
Д: = cos U
V кр
где Vkp — круговая скорость движения КА;
U — аргумент широты (угловое расстояние мгновенного по-
ложения КА от узла).
Из зависимостей (8.10) видно, что эффективность приложения
к КА некоторого корректирующего импульса зависит от точки
траектории, где этот импульс скорости сообщается КА (от коор-
динаты U).
Что касается порядков потребных значений импульсов ско-
рости AVr, то, поскольку наибольшее возможное значение функ-
ций sin U и cos U равно единице, AQ и Ai будут иметь порядок
AVif/Vkp, т. е. для поворота плоскости орбиты на один радиан
(57°,3) потребуется AVr порядка VKp. Поворот плоскости орбиты
всего на один угловой градус потребует приложения импульса
AVr=140 м/с, что указывает на крайнюю трудность поворота
плоскости орбиты.
Рассмотрим теперь изменение наиболее существенных пара-
метров движения КА, определяющих вид его траектории в плос-
кости орбиты. Ограничимся двумя величинами — параметром р,
характеризующим линейные размеры орбиты, и эксцентрисите-
том е, характеризующим форму орбиты. При сделанных выше
предположениях
Д/> = 4ДУГ;
Ае = -pj— (sin v ДVs + 2 cos v ДУГ),
V кр
(8.П)
где Т — период обращения спутника вокруг Земли;
v — истинная аномалия (угловое расстояние от перигея до
253
При Т—90 мин Др=1700ДУт, т. е. изменение скорости движе-
ния на 1 м/с дает изменение размеров орбиты на 1,7 км. Это
весьма эффективное приращение, так как обычные маневры (на-
пример, поддержания высоты полета) имеют порядок 100—200 км
и требуют для этого сообщения КА скорости всего в 60—120 м/с.
Что касается величины Де, ее оценка по формулам (8.11) не
имеет такой наглядности и более удобна при рассмотрении ма-
невра, связанного с переходом на траекторию снижения в атмо-
сфере, т. е. при рассмотрении посадочных импульсов.
Направление посадочного импульса может варьироваться в
самых широких пределах. Рассмотрим свойства двух основных
посадочных импульсов — импульса торможения и импульса «при-
жатия». Первый направлен против скорости орбитального движе-
ния и приводит к снижению скорости полета, второй направлен
к центру Земли и приводит к повороту вектора скорости по-
лета.
В качестве идеализированной схемы посадки примем такую,
при которой в результате приложения к КА посадочного импуль-
са первоначально круговая орбита деформируется и на некото-
ром ее участке, соответствующем точке условного перигея
(т. е. перигея, который образовался бы при отсутствии атмо-
сферы), КА достигнет области, лежащей уже в достаточно плот-
ных слоях атмосферы, сопротивление которой движению КА и
приведет к посадке. Поэтому будем считать точку условного пе-
ригея точкой конца космического полета и судить о маневре по-
садки по этой точке.
Как известно, в точке перигея истинная аномалия о=0 и рас-
стояние КА от центра Земли г=р/(1+е), тогда изменение высо-
ты полета ДЯ, соответствующее этой точке,
АЯ= Ьр — р Де, (8.12)
где Др и Де определяются по уравнениям (8.11), a v берется для
точки сообщения КА посадочного импульса, а не для точки пе-
ригея.
Определение значения угла истинной аномалии v для точки,
в которой КА сообщается посадочный импульс, затруднено тем,
что у исходной круговой орбиты не существует перигея, от ко-
торого ведется отсчет v, но можно считать, что перигей образуется
с первого же мгновения включения РД для маневра. В случае
если КА сообщается импульс торможения, перигей образуется
в противолежащей точке орбиты и, следовательно, точке место-
нахождения КА будет соответствовать v = a, а в случае сообще-
ния КА импульса «прижатия» перигей образуется на угловом
расстоянии iv/2 в направлении движения от точки приложения
импульса, т. е. о = 3/2л. Подставляя эти значения в уравнения
(8.11) с учетом равенства (8.12) и принимая за параметр орби-
ты р сумму радиуса Земли и обычной высоты полета, найдем,
что на импульс в 1 м/с Д//=3,2 км для импульса торможения
и Д//=0,8 км для импульса «прижатия». Следовательно, импульс
254
торможения в 4 раза более экономичен, чем импульс «прижатия»,
однако последний имеет примерно вдвое меньшее время полета
до посадки вследствие вдвое меньшего пути до точки условного
перигея.
Таким образом, в околопланетном пространстве надо всяче-
ски избегать или сводить к минимуму маневры поворота плоско-
сти орбиты, предпочитая им маневры в плоскости орбиты. Для
примера рассмотрим маневр изменения периода обращения ИСЗ.
Вследствие вращения Земли вокруг своей оси изменение периода
обращения приведет к тому, что после такого изменения ИСЗ
будет пролетать не над пунктами «исходной» орбиты, а над
другими, новыми. Несложные выкладки для исходной круговой
орбиты дадут
ДГобр = ^ДУг, (8.13)
где Тобр — период обращения «исходной» орбиты.
Подстановка численных данных даст для обычных орбит ИСЗ
изменение ДТОбр — 2 с на импульс 1 м/с. Этой эффективности
вполне достаточно для «подправки» орбиты так, чтобы снять не-
точности выведения КА или неточности, вызванные естественной
эволюцией орбиты, и при необходимости пройти строго над за-
данным пунктом поверхности Земли без совершения маневра
поворота плоскости орбиты.
8.8. АВТОНОМНАЯ НАВИГАЦИЯ
Космические полеты невозможны без развитой системы нави-
гационного обеспечения. Необходимо всегда и с требуемой сте-
пенью точности знать орбиту КА, т. е. знать, где КА находится
в данный момент и какой будет его траектория на ближайшее
время. Понятие «ближайшее время» зависит от задач полета и
скорости эволюции орбиты и может составлять часы и недели.
Как правило, навигационное обеспечение осуществляется
сетью наземных пунктов, оборудованных соответствующими ра-
диолокационными средствами, средствами передачи и обработки
получаемой измерительной информации в наземных координаци-
онно-вычислительных центрах. Обработанная информация в виде
прогноза движения КА, «расписания» сеансов связи с назем-
ными пунктами, времени восхода и захода Солнца на каждом
витке и т. п. передается на борт КА с использованием каналов
связи «Земля—борт».
Эти задачи могут быть решены и без связи с наземными пунк-
тами, если на борту КА имеется система автономной навигации,
которая способна определять орбиту КА (а не его мгновенное
положение, как часто думают), давать прогноз его движения,
уметь вычислять и передавать экипажу служебную информацию,
связанную с движением КА по орбите. Для решения таких задач
255
необходимо использование БЦВМ, опирающейся в своих расче-
тах на информацию, снимаемую с датчиков автономной навига-
ционной системы. Эта информация может поступать в резуль-
тате работы экипажа (например, регистрацией времени заходов
навигационных звезд за горизонт или измерением угловых рас-
стояний между соответствующими небесными ориентирами) или
автоматически (путем регистрации времени захода и восхода
Солнца, определения расстояний до известных пунктов земной
поверхности, в которых расположены соответствующие «радио-
маяки», и т. п.). Информация после обработки в БЦВМ сооб-
щается экипажу КА в виде сводок служебной информации (т. е.
в форме, используемой непосредственно) с помощью специаль-
ных индикаторов путем «вызова» нужной информации с пульта
системы автономной навигации, высвечивания на цифровых ин-
дикаторах или печатания на бумажной ленте.
Наличие системы автономной навигации на борту КА позво-
ляет экипажу получать нужные сведения в любой момент полета
без связи с наземными пунктами, заметно уменьшает объем ин-
формации, передаваемой по линии «Земля—борт», и служит по-
лезным источником оперативной информации для экипажа КА.
Недостатком такой системы является установка дополнительной
аппаратуры, что затрудняет применение системы автономной на-
вигации. Совершенно естественно, что подобная аппаратура не
устанавливается на транспортных кораблях, полет которых быс-
тротечен, но находит эффективное применение на орбитальных
станциях, где проблема установки дополнительной аппаратуры
не столь остра.
Глава 9
СИСТЕМЫ ПРИЗЕМЛЕНИЯ ПИЛОТИРУЕМЫХ
КОСМИЧЕСКИХ КОРАБЛЕЙ
9.1. ОСОБЕННОСТИ И УСЛОВИЯ ПОСАДКИ
Завершающим этапом полета пилотируемого космического ко-
рабля при возвращении на Землю является его посадка, осущест-
вляемая с помощью системы приземления. КК или его СА, пройдя
атмосферу Земли, будет иметь на высотах ниже 10 км скорость
порядка 100—200 м/с.
Основной задачей системы приземления и является последо-
вательное снижение этой скорости до величин, обеспечивающих
требования безопасности посадки, выдерживание допустимых
уровней нагружений и других воздействий на СА и его экипаж.
У современных КК торможение осуществляется средствами, вхо-
дящими в состав системы приземления: парашютами и тормоз-
ными двигателями, для которых характерны относительно не-
большие горизонтальные скорости движения, появляющиеся в про-
цессе работы системы приземления и в результате ветрового
сноса.
Особенности посадки КК связаны с обеспечением его тормо-
жения минимальными средствами до достаточно малых посадоч-
ных скоростей и выдерживания допустимого для человека уровня
нагрузок.
Одной из особенностей заключительного этапа полета явля-
ется невозможность прекращения начавшегося процесса спуска
с орбиты. Поэтому к системе приземления предъявляют гысокие
требования по ее надежности: резервирование основных средств
торможения, распознавание отказов и введение в действие резерв-
ных средств.
Другой особенностью системы приземления является ограни-
чение возможностей управления выходом КК в намеченный район
посадки и воздействием ветрового сноса, что прямо влияет на
точность посадки относительно расчетной точки. Возможна сроч-
ная посадка КК в широком диапазоне географических условий,
т. е. посадка возможна в Северном или Южном полушарии, на
воду или на сушу с различным рельефом местности, в различных
погодных условиях. Это обусловливает еще одну особенность
системы приземления — будучи приведена в действие, она должна
быть приспособлена к автономной работе без обратной связи с
наземными пунктами управления.
9 Космические аппараты 257
С учетом перечисленных особенностей КК и его система при-
земления должны быть пригодными для посадки как на сушу,
так и на воду. Если учитывать конкретные условия эксплуатации
КК и место расположения стартового комплекса космодрома, его
близость или удаленность от больших водных акваторий, веро-
ятность возникновения аварии на участке выведения на орбиту,
допустимость посадки на сушу на нескольких витках в течение
одних суток с учетом предельно возможных отклонений от рас-
четной точки и т. д., целесообразно ограничить условия посадки,
отдав предпочтение посадке на сушу или на воду и подчинив
выбранному виду поверхности задание основных параметров си-
стемы приземления и конструкции КК. Определяющими характе-
ристиками суши, влияющими на нагружения, сопровождающие
посадку КК, являются упругие и пластические свойства грунта и
силы трения, возникающие между КК и грунтом. При этом из-за
различий в составе грунта и выходов на поверхность коренных
пород, распределения разных видов грунтов по посадочному по-
лигону, сезонных и суточных изменений температуры на полигоне
эти свойства могут меняться в широких пределах.
Величина и направление нагрузки на КК зависят от поса-
дочной скорости, свойств грунта, направления ветрового сноса и
рельефа местности. Исходя из прочности СА, амортизационных
возможностей его конструкции и допустимого уровня нагрузок
на экипаж, могут быть определены возможные сочетания условий
во время посадки и проведены испытания в этих условиях.
Приводнение СА отличается от посадки на сушу при одина-
ковых вертикальных скоростях посадки меньшими нагрузками,
к тому же вода в отличие от суши имеет стабильные характери-
стики, хотя средний уровень скорости ветра над открытой водной
поверхностью выше, чем на суше. С другой стороны, волнение
водной поверхности в зависимости от относительного движения
воды и СА в момент его контакта с водой могут привести к уве-
личению фактической скорости посадки.
Как известно, в СССР пилотируемые КК выводятся на орбиту
с космодрома Байконур и совершают посадку в том же районе.
Выведение КК на орбиту проходит над восточной частью страны,
имеющей сложный рельеф, что учитывается при разработке КК
и их средств посадки, в частности обеспечение возможности по-
садки в районах, имеющих существенное превышение высоты
местности над уровнем моря.
Выведение на орбиту американских КК проходит большей
частью над океаном и только в случае аварии на старте или
после прекращения выведения на первых секундах полета КК
может совершить посадку на сушу. Это обстоятельство и стрем-
ление максимально снизить массовые затраты на средства по-
садки, по-видимому, и повлияли на выбор водной акватории как
основного посадочного полигона.
Невозможность выполнения всех требований, предъявляемых
к посадке КК в любой точке земного шара, заставляет ограничи-
258
вать диапазоны условий, на которые рассчитывается система при-
земления, и одновременно доказывать расчетами и эксперимен-
тами правомочность ограничений с точки зрения безопасности
экипажа.
9.2. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ ПРИЗЕМЛЕНИЯ
При разработке средств приземления и методов обеспечения
безопасности экипажа помимо нормальной схемы возвращения
рассматривают также вопросы спасения и приземления экипажа
в случаях аварийных ситуаций на стартовой позиции, на участ-
ке выведения или в случае необратимого отказа в штатной систе-
ме приземления во время возвращения на Землю. Эти вопросы
оказывают влияние на общие принципы построения систем при-
земления.
Возвращение из космического полета, как отмечалось выше,
сопровождается аэродинамическим торможением СА в атмосфере:
на высоте 20 км он движется уже с дозвуковой скоростью, на
высоте 10 км — со скоростью около 200 м/с, мало меняющейся
в дальнейшем. Поэтому на таких СА для снижения скорости
спуска применяют парашютные системы.
Использование для торможения СА атмосферы в сочетании
с парашютами позволяет решить проблемы посадки при мини-
мальных затратах массы и внутренних объемов СА, при этом
в полной мере используется конструктивная особенность парашю-
тов — размещение больших куполообразных поверхностей в ма-
лых объемах.
Парашютные системы СА, как правило, имеют тормозные и
основные парашюты. Площади основного парашюта или связки
из двух-трех основных парашютов определяются заданной вели-
чиной скорости парашютирования СА определенной массы вблизи
земной поверхности.
Парашютная система с одним основным купо-
лом в большей степени отвечает этим условиям, может быть ми-
нимизирована по массе и объему применением тормозного пара-
шюта, уменьшающего скорость полета СА перед вводом основ-
ного и создающего нагрузки, действующие на конструкцию СА
и экипаж в заданных пределах. Зная режимы ввода парашютной
системы, прочностные и массовые характеристики материалов,
применяемых в конструкциях тормозных и основных парашютов,
можно, опираясь на такой параметр, как площадь тормозного
парашюта, определить массу парашютной системы минималь-
ной величины (рис. 9.1). Интересно, что суммарная масса тор-
мозного и основного парашютов может быть минимальной при
такой площади тормозного парашюта, когда нагрузки, сопро-
вождающие ввод тормозного и основного парашютов, стано-
вятся близкими по значениям (рис. 9.2). Это упрощает про-
ектирование конструкции СА, в том числе узлов крепления па-
рашютов.
9*
259
m
5
Рис. 9.1. Зависимость массы парашютной системы тп.с>
основного /По.п и тормозного /ит.п парашютов от пло-
щади тормозного парашюта FT.n
Рис. 9.2._3ависимость нагрузок на основной R0.n и тор-
мозной Цтл парашюты от площади тормозного пара-
шюта FT.n
260
Парашютная система с одним основным куполом хорошо изу-
чена, применяется на различных режимах полета, включая спа-
сение на малых высотах в случае аварии PH. Размещение ее
в СА не вызывает больших затруднений, так как ей может быть
придана любая форма, соответствующая форме отсека, в кото-
ром она размещается.
Многокупольная парашютная система состоит из
связки основных куполов одного типа, которые после наполнения
могут располагаться на одном уровне, несколько отклоняясь друг
от друга. Такие системы имеют большую устойчивость при сни-
жении, но вследствие интерференции между куполами меньший
на 5—10% коэффициент сопротивления, чем у одиночного купола
той же площади. Исходя из опыта отработки и эксплуатации од-
нокупольных и многокупольных систем следует, что нормальное
функционирование парашютной системы с одним основным ку-
полом практически надежно на всех режимах, тогда как примерно
тот же уровень надежности многокупольной системы достигается
усложнением процесса ввода системы и применением дополни-
тельных устройств, не всегда обеспечивающих одновременность
ввода и наполнения основных куполов, входящих в систему.
Минимальная масса многокупольной системы, как и одного
основного парашюта достигается уменьшением скорости полета
до 60—80 м/с с помощью тормозного парашюта. В состав мно-
гокупольной системы, как правило, входят два тормозных пара-
шюта, чем достигается резервирование в обоих каскадах системы.
Тормозные парашюты вводятся в поток одновременно или, если
второй тормозной парашют — запасной, его вводят в случае от-
каза первого.
Резервирование парашютной системы на СА, совершаю-
щих посадку с экипажем на борту, вводится ввиду необрати-
мости процесса посадки. Поэтому в состав системы приземления
одновременно с парашютной системой с одним основным куполом
включается запасная парашютная система, функционально не свя-
занная с основной. Применение запасной парашютной системы,
размещаемой в отдельном контейнере, позволяет полностью дуб-
лировать основную систему, включая устройства открытия пара-
шютного отсека, вытяжной, тормозной и основной парашюты си-
стемы, пиротехнические узлы их крепления и т. д. В то же время
идентичность многих конструктивных решений, связанных с ра-
ботой основной и запасной парашютных систем, позволяет суще-
ственно сокращать сроки и стоимость экспериментальной отработ-
ки системы приземления.
В отличие от многорежимной основной парашютной системы
запасная система может быть работоспособна только на одном-
двух режимах, что позволяет сузить требования к запасной си-
стеме.
По скорости приземления посадка на запасной системе соот-
ветствует случаю приземления СА на многокупольной парашют-
ной системе с вышедшим из строя одним основным парашютом.
261
Многокупольная парашютная система имеет резервирование ос-
новных парашютов и, как правило, вытяжных и тормозных пара-
шютов. Отказ одного из основных парашютов двухкупольной си-
стемы приводит почти к двукратному увеличению скорости при-
земления, поэтому применение трех основных куполов позволяет
сблизить скорости парашютирования СА на нормально работаю-
щей системе и при отказе одного из куполов.
При проектировании многокупольной парашютной системы
особое внимание необходимо обращать на работоспособность си-
стемы открытия парашютного отсека в условиях воздействия на-
бегающего потока на всех режимах полета перед вводом пара-
шютной системы.
Комбинированные системы приземления включают
в свой состав не только парашютные системы, но и другие сред-
ства торможения и применяются для выдерживания допустимого
уровня нагрузок на экипаж во время приземления при заданной
скорости парашютирования. Как известно, скорость парашютиро-
вания определяется посадочной массой СА, формой и площадью
основного парашюта и плотностью атмосферы в районе посадки.
Характер изменения массы парашюта от скорости приземления
(рис. 9.3) показывает, что задание достаточно малой скорости
парашютирования приводит к непомерному росту массы основ-
ного парашюта, поэтому для снижения нагрузки на экипаж во
время посадки используют различные средства, причем потребная
262
скорость парашютирования, а следовательно, массовые и объем-
ные параметры основных парашютов будут определяться энерго-
емкостью этих средств (например, амортизаторов).
Амортизаторы одноразового действия, работающие на
принципе разрушения или пластической деформации конструкции,
имеют наибольшую энергоемкость при минимальных собственных
массе и объеме. Для снижения уровня нагружений сама конструк-
ция СА также может быть рассчитана на деформацию при по-
садке на твердый грунт в случае превышения номинальной ско-
рости парашютирования. Дополнительно на корпус СА может
быть установлена сотовая амортизация (сотовые блоки) из ме-
таллической фольги или других материалов. Одной из особенно-
стей сотовой амортизации при отклонении направления нагруже-
ния от продольной оси сотовой ячейки является потеря сотовым
блоком устойчивости, причем его энергоемкость используется не
полностью. Снижение нагрузок на экипаж также может быть до-
стигнуто и за счет амортизации кресел: установки их на сотовые
амортизаторы внутри гермокабины или на одноразовые аморти-
зационные стойки, работающие на сжатие или растяжение.
Еще одним видом внешней амортизации является пневматиче-
ский амортизатор, который изготовляется из гибкой прорезинен-
ной ткани и легко размещается в полости между лобовым тепло-
защитным экраном и гермокабиной. Во время спуска на парашю-
те одновременно с отделением теплозащитного экрана пневмати-
ческий амортизатор начинает наполняться воздухом и принимает
цилиндрическую или торовидную форму. При контакте с земной
поверхностью давление в нем повышается и воздух начинает
стравливаться через пневмоклапаны наружу. Такой амортизатор
эффективен только при небольших угловых отклонениях СА и
при малой горизонтальной скорости.
Парашютно-реактивная система приземления —
комбинированная система, сочетающая парашютную систему с
тормозными двигателями. Существенное отличие тормозных дви-
гателей от амортизаторов заключается в относительно большом
пути торможения и, как следствие, в малых перегрузках на этом
пути, что практически недостижимо при использовании амортиза-
торов.
Оптимальной по массовым характеристикам парашютно-реак-
тивной системой приземления будет такая система, в которой
скорость спуска на основном парашюте не превышает 19,5 м/с
с включением тормозных двигателей на высоте около 14 м. Мас-
са этой системы будет составлять около 3% общей массы СА.
В этом варианте системы безопасность экипажа при отказе тор-
мозных двигателей по тем или иным причинам не обеспечивается,
поэтому для СА целесообразно задать такую конечную скорость
парашютирования, при которой с использованием резервных
средств (например, кресел с амортизаторами) в случае отказа
тормозных двигателей не будут превышены допустимые для че-
263
ловека нагрузки. Это хотя и увеличит массу парашютно-реактив-
ной системы в целом примерно на 20% по отношению к мини-
мизированной массе системы, но обеспечит безопасность, в том
числе и в случае использования запасной парашютной системы.
Посадочные пороховые тормозные двигатели,
имея относительно малый объем и устойчивые характеристики,
просты по конструкции и обладают высокой надежностью. Поро-
ховой двигатель представляет собой цилиндрический или сфери-
ческий корпус, заполненный твердым топливом, на выходном от-
верстии которого расположен сопловой блок. Воспламенение
твердого топлива сопровождается повышением давления в камере
сгорания выше давления устойчивого горения, что обеспечивает
работу двигателя и выброс газов через сопловой блок.
Тормозные двигатели, как и внешняя амортизация, могут быть
размещены под отделяемой теплозащитой СА, в соединитель-
ных звеньях парашютной системы или на корпусе в верхней части
СА, закрываемые вместе с парашютной системой общим обтека-
телем. Последний вариант размещения двигателей невыгоден с
энергетической точки зрения, так как появляются потери из-за
отклонения сопел от продольной оси СА.
Безопасность экипажа обеспечивается выбором параметров
системы приземления и надежностью работы системы и конструк-
ции СА при условии реализации допустимых нагрузок на экипаж
в процессе посадки. При этом необходимо учитывать возможные
разбросы посадочных скоростей, влияние вертикальной турбулент-
ности атмосферы и ветрового сноса, величины перегрузок, воз-
никающих при посадке на грунты различной прочности, отклоне-
ния характеристик атмосферы от стандартной и превышение над
уровнем моря посадочного полигона.
При разработке системы приземления помимо внешних фак-
торов следует учитывать и возможные отклонения в массе СА,
в параметрах работы парашютной системы, посадочных двигате-
лей, системы управления приземлением. Разнообразие внешних
и внутренних факторов, влияющих на безопасность посадки, тре-
бует многосторонней экспериментальной отработки системы при-
земления в различных условиях с имитацией аварийных ситуа-
ций и проверкой выхода из них применением резервных систем
и элементов резервирования.
Большое значение в надежности работы системы приземления
имеет качество изготовления и подготовки СА к полету.
9.3. ПОСЛЕДОВАТЕЛЬНОСТЬ РАБОТЫ И УПРАВЛЕНИЕ
СИСТЕМОЙ ПРИЗЕМЛЕНИЯ
Важными требованиями, определяющими нормальную работу
системы приземления СА, являются выдерживание режимов полета
к моменту ввода парашютной системы и обеспечение последова-
тельности работы каждой ступени торможения.
264
Ввод парашютной системы начинается с отделения крышки
парашютного контейнера и введения вытяжного парашюта. Кон-
струкция крышки парашютного контейнера и система ее отделе-
ния зависят от формы и размеров контейнера, места его разме-
щения в СА и направления отстрела крышки относительно набе-
гающего потока. Введение вытяжных парашютов возможно как
крышкой парашютного контейнера, так и с помощью метатель-
ных пиропушек, устанавливаемых в парашютном отсеке. Первый
способ предпочтителен для относительно небольших парашютных
систем с одним тормозным и одним основным куполами, второй—
для многокупольных систем в целях повышения надежности вве-
дения нескольких парашютов одновременно.
Вытяжной парашют, используемый для извлечения
(ввода) тормозных или основных парашютов, должен обеспечи-
вать тягу от 20 до 200 кгс в широком диапазоне скоростей ввода.
Обычно применяют вытяжной блок, состоящий из двух вытяжных
парашютов меньшей и большей площади, из которых парашют
меньшей площади работает при больших скоростях во время
спуска с орбиты, а большей площади — при малых скоростях в слу-
чае работы системы аварийного спасения. Работе тормозного
парашюта может предшествовать введение так называемого ста-
билизирующего парашюта, изменяющего динамические
характеристики СА на малых сверхзвуковых и трансзвуковых
скоростях полета. Стабилизирующий парашют при небольшой
площади должен иметь высокие прочность, термостойкость и ра-
ботоспособность на скоростях, соответствующих числам М^2,5.
Тормозной парашют размещается в парашютном кон-
тейнере и связан своей камерой с вытяжным парашютом, а стро-
пами— с узлом крепления СА и камерой основного парашюта;
имеет площадь от 10 до 30 м2. С увеличением площади парашюта
возрастают нагрузки в процессе торможения, которые могут быть
снижены увеличением пути и времени торможения СА за счет
ступенчатого раскрытия купола. Обычно применяются две ступе-
ни раскрытия: первая, когда входное отверстие парашюта стя-
нуто кольцевым рифовочным шнуром по периметру полотнища
и после наполнения купола торможение происходит на уменьшен-
ной площади купола в плане, и вторая — полное раскрытие пара-
шюта после рассечения на части рифовочного шнура специаль-
ными резаками, размещенными на силовом наборе купола.
Основные парашюты также работают со ступенчатым
раскрытием купола, не отличающимся от применяемого в тор-
мозных. Помимо снижения величины максимального нагружения
во время наполнения на первой и второй ступенях рифование
основного парашюта упорядочивает процесс наполнения пара-
шюта большой площади.
В принципе как в тормозных, так и в основных парашютах
в зависимости от начальных режимов ввода куполов может быть
реализовано несколько ступеней торможения, каждой из которых
265
будут соответствовать свои фаза наполнения и входной диаметр
парашюта.
Основной парашют может быть введен в поток вытяжным па-
рашютом, выбрасываемым из парашютного контейнера пиропуш-
кой, после отстрела от СА тормозного парашюта или тормозным
парашютом после его отделения от СА. На наполнившемся ос-
новном парашюте СА занимает устойчивое положение сообразно
месту крепления к нему стропов основного парашюта и положе-
нию центра тяжести.
В процессе парашютирования угловое положение СА относи-
тельно направления вертикальной скорости может быть изме-
нено перецепкой парашюта на узлы, разнесенные по поверхности
СА. Конечная ориентация СА на парашюте перед посадкой опре-
деляется расположением тормозных двигателей на корпусе и вы-
бором оптимального направления нагружения амортизации. В слу-
чае приводнения основной парашют должен быть полностью от-
делен от СА, а при посадке на сушу должна быть отделена, по
крайней мере, половина стропов во избежание повторного напол-
нения парашюта под воздействием ветра.
Резервирование парашютной системы возможно установ-
кой на СА запасной парашютной системы или применением ре-
зервирования тормозных и основных парашютов, т. е. использо-
ванием многокупольных систем, в которых отказ одного пара-
шюта не приводит к отказу парашютной системы в целом. В этом
случае амортизаторы или тормозные двигатели должны быть рас-
считаны на снижение нагрузок во время посадки с повышенной
скоростью.
Резервная парашютная система, дублирующая основную,
функционально не связана с последней и позволяет дублировать
как работу элементов ввода парашютов, так и работу самих па-
рашютов основной системы. Наличие в СА амортизации и тор-
мозных посадочных двигателей, рассчитанных на неблагоприят-
ные условия посадки, позволяет, учитывая высокую надежность
основной системы приземления, принять номинальную скорость
парашютирования на запасном парашюте, соответствующую мак-
симально допустимой вертикальной скорости основной системы.
Другими словами, площадь основного парашюта резервной си-
стемы может быть примерно в два раза меньше площади основ-
ного парашюта основной системы. Уменьшение площади запас-
ного парашюта в сочетании с его глубокой рифовкой в первой
ступени наполнения и относительно небольшой скоростью и вы-
сотой в начале работы позволяет отказаться от тормозного пара-
шюта и использовать в качестве первой ступени торможения за-
пасной парашют в зарифованном состоянии.
Управление парашютными системами строится исходя из ре-
жимов полета СА к моменту их введения. Большое значение имеет
выдерживание к началу введения расчетных значений скорости
и высоты полета СА, что определяет величину скоростного напо-
266
ра, действующего на СА и вводимые парашюты. Если чувстви-
тельные элементы автоматики управления системой приземления
выдадут команды на заданных значениях плотности воздуха или
атмосферного давления, парашюты будут вводиться на заданной
барометрической высоте в довольно узком диапазоне скоростных
напоров. В отличие от барометрического определения высоты при-
менение высотомеров, измеряющих фактическую высоту нахожде-
ния СА над поверхностью Земли, не позволяет отслеживать се-
зонные и суточные изменения плотности атмосферы по высоте,
что расширяет диапазон возможных скоростных напоров и по-
вышает требования к парашютной системе. Если же высота мест-
ности в районе посадки будет значительно выше уровня моря, для
выдерживания допустимых условий нагружения парашютов при
вводе необходимо учитывать и эту разницу в высотах.
С помощью барометрических датчиков могут быть получены
команды для начальных операций ввода парашютной системы и
включения программных устройств, вырабатывающих команды по
заранее заданной программе на отстрел тормозного и ввод ос-
новного парашютов, отстрел отделяемых частей конструкции СА
и автоматическое включение или выключение бортовых систем.
Дублирование основных команд управления средствами по-
садки может выполняться и членами экипажа с пультов вручную.
С этой целью на СА должна быть специальная сигнализация и
индикация, а экипаж должен ориентироватся в обстановке полета
по времени и иметь возможность наблюдать за состоянием пара-
шютов и других элементов средств посадки.
В управлении посадочными двигателями требуется высокая
точность в определении высоты их включения из-за малого вре-
мени их работы. Поэтому команда на включение двигателей по-
дается автоматически при достижении заданной высоты и опре-
деленном значении вертикальной скорости. В случае отклонения
скорости парашютирования от номинальной автоматически может
изменяться высота включения или выбираться количество вклю-
чаемых двигателей.
Управление амортизацией состоит в заблаговременном приве-
дении ее в исходное положение, если она находится не в рабо-
чем состоянии. Внешняя амортизация СА (например, сотовая
амортизация под теплозащитным экраном) может быть расправ-
лена и подготовлена к посадке сразу после отделения тепло-
защиты.
В отличие от внешней внутренняя амортизация может нахо-
диться в рабочем состоянии с момента ее установки на борт. Для
ее нормальной работы необходимо свободное пространство, по-
этому для создания дополнительного свободного объема внутри
СА кресла в процессе всего полета могут быть смещены вниз на
величину хода амортизатора и устанавливаться в рабочее поло-
жение только на участке парашютирования с помощью пиротех-
нического или пневматического взведения.
267
9.4. БОРТОВЫЕ СРЕДСТВА ПОИСКА
Космический корабль для нормального завершения полета
должен совершить посадку в заданном районе, где его появление
ожидается специальными командами технического и медицинского
обслуживания, располагающими средствами доставки экипажа и
СА на основную или промежуточные базы.
После разделения КК с СА ведутся радиосвязь в УКВ диа-
пазоне и прием телеметрической информации. На участке аэро-
динамического торможения СА в атмосфере, когда высокая тем-
пература торможения вызывает ионизацию воздуха в набегающем
потоке, при определенной концентрации свободных электронов
вокруг СА они экранируют егр антенны, что временно нарушает
радиосвязь. Перерыв в радиосвязи зависит от характера траек-
тории спуска и от рабочих частот передатчиков и для СА с ма-
лым аэродинамическим качеством составляет 5—6 мин.
С вводом парашютной системы развертываются антенны КВ
диапазона и с этого момента бортовые радиопередатчики подают
сигналы в обоих диапазонах для определения местонахождения
СА. После посадки автоматически или по команде экипажа.рас-
крываются антенны КВ и УКВ диапазонов на корпусе СА, причем
передатчики продолжают работать в режиме радиомаяков. Пе-
ленгование радиомаяков может вестись центрами связи, поиско-
выми самолетами и вертолетами, судами и другими транспорт-
ными средствами, оборудованными пеленгующей аппаратурой.
Экипаж во время работы радиомаяков может выходить на
связь в КВ и УКВ диапазонах и вести радиопереговоры с по-
исковыми группами и центрами связи.
Помимо радиотехнических средств хорошим ориентиром для
визуального обнаружения СА в светлое время суток является па-
рашют, а в ночное время — светоимпульсные маяки, работающие
как во время парашютирования, так и после посадки.
Поиск приводнившегося СА может быть облегчен примене-
нием окрашивающего воду вещества, ультразвуковой гидроаку-
стической бомбы и других средств.
После приземления экипаж проходит медицинское обследо-
вание и доставляется на ближайший аэродром, а СА после осмот-
ра его состояния подготавливается командой технического об-
служивания к эвакуации на вертолете или транспортировочном
автомобиле.
Приводнившийся СА может быть эвакуирован на вертолете
или на эвакуационном судне. При большом волнении возможна
эвакуация СА вместе с экипажем.
9.5. ОСОБЕННОСТИ СИСТЕМ ПОСАДКИ МЕЖПЛАНЕТНЫХ КК
Приземление межпланетных КК совершается с помощью тех
же средств, что и СА после полета по орбите искусственного
спутника Земли. СА таких КК входит в атмосферу Земли со
268
второй космической скоростью и к моменту ввода парашютной
системы иа высотах от 7 до 10 км имеет скорость полета и ско-
ростной напор, действующий на него, несколько выше, чем при
спуске с орбиты ИСЗ. Эту особенность следует учитывать при
разработке тормозного парашюта и расчете его на прочность.
Основные парашюты и другие посадочные средства могут быть
аналогичны КК — спутникам Земли с учетом требований, предъ-
являемых к посадочным условиям.
Различия в атмосферах Земли и других планет предопреде-
ляют необходимость специальной разработки средств посадки на
Марс и Венеру.
Характерной особенностью атмосферы Марса по сравнению
с земной является меньшая (почти на два порядка) плотность,
которая у поверхности Марса соответствует плотности атмосферы
Земли на высоте 35 км. Поэтому для длительного торможения
в атмосфере Марса, движение в которой начинается с большой
(от 3,5 до 10 км/с) сверхзвуковой скоростью, необходимо при-
менение теплозащитного экрана максимального диаметра для
торможения и восприятия большого теплового потока. На малых
(до 2,5 М) сверхзвуковых скоростях вводится парашютная систе-
ма— еще одна большая тормозящая поверхность, а окончатель-
ное торможение осуществляется твердотопливными или жидкост-
ными РД.
Атмосфера Венеры в отличие от атмосферы Земли и Марса
имеет температуру до 770 К, плотноеть в 60 раз большую зем-
ной и давление у поверхности около 10 МПа. Для спуска в такой
атмосфере КК проектируется как глубоководный аппарат с пара-
шютом относительно малой площади или другим тормозным
устройством для реализации оптимального режима торможения.
9.6. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И ОСОБЕННОСТИ
СИСТЕМ ПРИЗЕМЛЕНИЯ
Космический корабль «Восток» имел катапультируемое кресло,
в котором космонавт находился в скафандре и которое служило
ему постоянным рабочим местом, причем угловое положение ка-
тапультируемого кресла было выбрано из условия придания кос-
монавту наиболее благоприятной позы для восприятия нагрузок
во время выведения на орбиту и при спуске в атмосфере.
Парашютная система, применявшаяся для посадки СА, имела
вытяжной парашют площадью 1,5 м2, вводимый в поток крышкой
парашютного контейнера по команде барометрических датчиков;
за вытяжным парашютом последовательно вводились тормозной
площадью 18 м2 и основной площадью 574 м2 парашюты и СА
совершал посадку на основном парашюте.
Катапультируемое кресло служило средством посадки космо-
навта при завершении полета, а также средством аварийного
покидания КК в случае аварии PH. Катапультируемое кресло
располагалось на направляющих в СА под углом 64° к его про-
269
дольной оси при угле между плоскостью спинки кресла и плос-
костью сиденья 110°. Стреляющий механизм придавал креслу с
космонавтом скорость на выходе его из СА до 20 м/с за 0,1—
0,2 с.
Для спасения космонавта в случае аварии PH на старте или
в зоне максимальных скоростных напоров во время выведения
были предусмотрены в дополнение к стреляющему механизму два
пороховых ракетных ускорителя, с помощью которых катапуль-
тируемому креслу придавалась скорость до 48 м/с, кроме того,
используя эксцентриситет тяги ускорителей относительно центра
тяжести катапультируемого кресла в сочетании с моментом,
создаваемым аэродинамическими силами, можно было развернуть
кресло заголовником по потоку и тем самым создать благоприят-
ные условия для ввода тормозного парашюта.
В состав катапультируемого кресла входило два парашюта:
основной и запасной. Вводу основного парашюта предшествовал
ввод тормозного площадью 2 м2 для создания благоприятных
условий при вводе основного. Основной парашют площадью
83,5 м2 размещался в верхней части кресла в парашютном кон-
тейнере, запасной парашют площадью 56 м2 — на специальной
отделяемой спинке кресла и вводился в случае отказа основного.
В составе отделяемой спинки катапультируемого кресла помимо
запасного парашюта имелись механизмы подтяга плечевых рем-
ней, пиротехнические замки аварийного отделения космонавта от
кресла, баровременные автоматы для управления вводом запас-
ного парашюта и заголовник. Под отделяемой спинкой в нижней
части кресла имелся отсек для размещения носимого аварийного
запаса (НАЗ).
По команде автоматики системы приземления (рис. 9.4) про-
исходило отделение крышки входного люка и через 2 с — ката-
пультирование. За 2 с крышка уходила на безопасное расстоя-
ние от СА, происходили автоматическое закрытие остекления
шлема скафандра, подтяг плечевых ремней и включение кисло-
родного прибора. Через 0,5 с после начала движения кресла по
направляющим, после его выхода из СА, вводился тормозной
парашют, а через 3 с одновременно с отделением от кресла кос-
монавта вместе с отделяемой спинкой, запасным парашютом и
НАЗ от кресла отделялся тормозной парашют и вводил основной.
Спустя 10 с после отделения космонавта от кресла отделялся
НАЗ и зависал на фале длиной 15 м. В случае катапультирова-
ния в аварийных условиях космонавт отделялся от кресла без
НАЗ. При неотделении космонавта по какой-либо причине от
кресла во время работы основного парашюта предусматривалось
его принудительное отделение от кресла вместе с запасным пара-
шютом и НАЗ. В этом случае с задержкой в 5 с должен был
вводиться запасной парашют с последующим отделением НАЗ.
Катапультирование космонавта из СА в случае аварии на
больших высотах или при спуске с орбиты происходило без вклю-
чения пороховых ускорителей и при пониженной энергетике стре-
270
12
Рис. 9.4. Схема работы системы приземления СА КК сВостокэ:
/ — начало спуска: 2 —отстрел крышки люка (открытие кабины космонавта); 3 —
катапультирование космонавта; 4 — отстрел крышки парашютного контейнера; 5 —
ввод вытяжным парашютом тормозного; 6 — отделение тормозного парашюта к
ввод основного; 7 — посадка спускаемого аппарата; 8~ ввод тормозного пара-
шюта катапультируемого кресла; 9—ввод основного парашюта катапультируемого
кресла; 10— отделение космонавта на парашюте от кресла и отделение НАЗ;
И — спуск космонавта на парашюте; 12 — приземление космонавта
ляющего механизма, снижение которой достигалось дренирова-
нием стреляющего механизма.
После катапультирования и спуска на парашюте космонавт
совершал приземление на ноги. Снаряжение космонавта предус-
матривало и средства, необходимые
0 / для пребывания на воде.
Космический корабль «Восход»
имел парашютио-реактивную систему
Рис. 9.5. Схема работы систе-
мы приземления СА КК «Вос-
ход»:
1 — начало спуска; 2 — отстрел
крышки парашютного контейнера:
3 — ввод вытяжным парашютом
тормозного; 4 — спуск на тормоз*
ном парашюте; 5 — отделение тор-
мозного парашюта; 6 — ввод основ-
ных парашютов н тормозного дви-
гателя; 7 — посадка после работы
тормозного двигателя
приземления с тормозным пороховым
двигателем, размещенным в подвесной
системе основного блока парашютов.
Экипаж (три космонавта) размещал-
ся в креслах, имевших амортизаторы
и профилированные ложементы. Па-
рашютная система и пороховой дви-
гатель находились в парашютном кон-
тейнере. В состав парашютной систе-
мы входили вытяжной и тормозной
парашюты, аналогичные парашютам
КК «Восток», и основной блок пара-
шютов, состоявший из двух парашю-
тов площадью по 574 м2. Примене-
ние тормозного порохового двигате-
ля существенно снизило конечную ско-
рость посадки СА. В случае отказа
одного из основных парашютов посад-
ка могла происходить на одном пара-
шюте с использованием тормозного
двигателя и амортизаторов кресел
космонавтов.
Тормозной двигатель включался
на заданной высоте с помощью щупа
с контактным устройством. Схема ра-
боты системы приземления СА КК
«Восход» показана на рис. 9.5.
Космический корабль «Союз» име-
ет парашютно-реактивную систему
вертикальной посадки с основной и
запасной парашютными системами,
тормозными посадочными двнгателя-
ми, креслами с амортизаторами и про-
филированными ложементами. Основ-
ная и запасная парашютные системы
размещены в отдельных контейнерах
с отстреливаемыми крышками.
Основная парашютная система
имеет блок вытяжных парашютов из
двух куполов разных размеров, пред-
назначенный для извлечения из
272
контейнера тормозного парашюта площадью 14 м2. При ма-
лых скоростях полета (случай работы системы аварийного
спасения на старте или на небольших высотах) в вводе тормоз-
ного парашюта участвуют оба вытяжных купола; на номиналь-
ных скоростях спуска больший из них обрывает тарированный
по прочности фал и отделяется, а тормозной парашют вводится
меньшим вытяжным куполом на высоте 9,5 км, снижает скорость
спуска до 90 м/с и вытягивает основной парашют площадью
1000 м2 из контейнера. Основной парашют имеет рифление в пер-
вой стадии наполнения и до снятия рифовки (на 4 с после вытя-
гивания основного парашюта) снижает скорость до 35 м/с. Во
второй стадии — после снятия рифовки — основной парашют на-
полняется полностью и гасит скорость до 13—17 м/с с последую-
щим ее снижением до 6—7 м/с по мере увеличения плотности
воздуха.
В случае неотделения крышки контейнера с основной пара-
шютной системой или повреждения и выхода из строя одного из
элементов системы вводится запасная парашютная система по
команде автоматики системы приземления, если скорость сниже-
ния СА на высотах работы основной парашютной системы пре-
вышает заданную. Превышение скорости может быть вызвано
разрушением тормозного или основного парашюта, при этом по-
врежденный парашют автоматически отделяется от соответствую-
щего узла крепления СА и с некоторой задержкой вводится за-
пасная парашютная система на высоте около 4,5 км.
Запасная парашютная система состоит из вытяжного блока
и основного парашюта площадью 574 м2 с глубокой рифовкой,
что позволяет ему выполнять функцию тормозного парашюта.
Через 4 с после ввода основного парашюта рифовка снимается
и к моменту включения посадочных двигателей скорость спуска
СА составляет около 9 м/с.
В процессе установившегося спуска происходит подготовка
СА к посадке: отделяется лобовой теплозащитный экран и от-
крываются тормозные посадочные двигатели, а СА, продолжая
парашютирование, занимает положение, при котором его про-
дольная ось совпадает с направлением вертикальной скорости.
Такой переход (перецепка) необходим для занятия СА опти-
мального положения при работе высотомера, тормозных двигате-
лей и амортизаторов. Вводятся амортизаторы кресел, выравни-
вается давление между кабиной СА и атмосферой.
По команде высотомера тормозные двигатели включаются на
высоте около 1 м при спуске на основной парашютной системе
и около 1,5 м при спуске на запасной парашютной системе. Прак-
тически одновременно с окончанием работы тормозных двигате-
лей совершается посадка СА.
Схема работы основной системы приземления СА КК «Союз»
показана на рис. 9.6.
273
2
Рис. 9.6. Схема работы системы приземления СА
КК «Союз»:
/ — начало спуска; 1 — отстрел крышки парашютного
контейнера; 3 — ввод вытяжными парашютами тормоз-
ного; 4 — спуск на тормозном парашюте; 5 — отделе-
ние тормозного парашюта и ваод основного; '6 — спуск
на основном парашюте и отделение лобовой теплоаа-
щиты: 7 — перецепка на симметричную подвеску; 8 —
включение тормозных двигателей; Я — посадка
Глава 10
СПАСЕНИЕ ЭКИПАЖА ПРИ АВАРИЯХ НА УЧАСТКЕ ВЫВЕДЕНИЯ
10.1. ОБЩИЕ СВЕДЕНИЯ
На участке выведения пилотируемого КА на орбиту ИСЗ воз-
можны аварии PH или КК, которые могут привести к одной из
трех наиболее характерных ситуаций:
дальнейший полет возможен с использованием резервных
средств и режимов;
выведение КК на орбиту невозможно;
дальнейший полет невозможен.
В первом случае (например, при отказе одного двигателя PH)
проводится отключение отказавшего РД, а полет продолжается
с использованием исправных. Второй случай возможен при появ-
лении неисправностей, которые делают энергетику PH недоста-
точной для выведения КК на расчетную орбиту (например, отказ
при сбросе головного обтекателя). В третьем случае полет дол-
жен быть прекращен из-за возможности критических ситуаций
(разрушения или взрыв). В двух последних случаях обстановка
наиболее типична для аварий на участке выведения: прекращается
работа PH, сформирована баллистическая траектория, неизбеж-
но падение РКС на Землю; кроме того, возможны быстротечные
процессы, приводящие к катастрофе. В таких ситуациях очевидна
необходимость спасения экипажа.
10.2. БЕЗОПАСНОСТЬ ПОЛЕТА И СРЕДСТВА
АВАРИЙНОГО СПАСЕНИЯ
Безопасность космического полета является одной из основных
проблем при разработке пилотируемых РКС. Решению этой проб-
лемы уделяется постоянное внимание на всех уровнях и этапах
разработки РКС, включая экспериментальную отработку и реа-
лизацию полета, причем основное значение имеют правильность
и достаточность технических решений, принятых в ходе разработ-
ки и создания РКС. Эти решения дополняются организационными
или эксплуатационными мероприятиями, хотя последние не могут
в полной мере компенсировать технических просчетов, если они
были допущены, или недостаточность в резервировании техниче-
ских средств и режимов.
275
При исследовании проблемы безопасности проводят:
анализ возможных аварийных ситуаций, выбор и разработку
средств их предотвращения, прогнозирования и определения;
анализ и определение резервных возможностей составных
частей РКС для обеспечения нештатных и аварийных режимов
полета;
анализ баллистических схем нештатных и аварийных режи-
мов и разработку соответствующих программ полета;
разработку методов и средств проведения аварийно-восстано-
вительных и аварийно-спасательных операций.
Безопасность экипажа в процессе подготовки и проведения
космического полета определяется таким состоянием РКС в целом
и его составных частей, при котором обеспечиваются условия жиз-
недеятельности и благополучного возвращения экипажа на
Землю. Изменение состояния РКС, при котором возникает угроза
потери работоспособности или гибели экипажа, означает появ-
ление аварийной ситуации. Причинами аварийной ситуации мо-
гут быть отказы бортовых и наземных систем, ошибки при раз-
работке и изготовлении РКС и ее составных частей, воздействие
нерасчетных неблагоприятных внешних факторов, а также ошиб-
ки в действиях экипажа и наземного персонала.
Появление аварийной ситуации (рис. 10.1) приводит к нештат-
ным (чрезвычайным) условиям функционирования РКС и в даль-
нейшем к двум возможным исходам: ликвидация (или локали-
зация) аварийной ситуации или возникновение летно-космиче-
ского происшествия.
Ликвидация — это прекращение развития и устранение причи-
ны возникновения аварийной ситуации, в результате чего восста-
навливается работоспособность РКС. При локализации снимается
угроза появления летно-космического происшествия без устране-
ния причины возникновения аварийной ситуации, при этом час-
тично восстанавливается работоспособность РКС, обеспечивается
продолжение полета по штатной программе или по программе,
сокращенной по числу целевых задач и времени.
Летно-космическое происшествие — следствие тяжелого разви-
тия аварийной ситуации, когда исключается возможность наме-
ченного полета и возникает необходимость вынужденного его пре-
кращения и срочного возвращения КК на Землю. Различают два
вида летно-космических происшествий: авария — разрушение
РКС и преждевременное прекращение полета, при которых со-
храняется жизнь членов экипажа, и катастрофа — происшест-
вие, связанное с пропажей без вести или гибелью членов эки-
пажа.
Условия космического полета на разных его этапах настолько
различны, что создать на современном уровне развития космиче-
ской техники единый универсальный метод решения проблемы
безопасности не представляется возможным. Поэтому каждый
этап полета характеризуют свои специфичные методы и прин-
ципы обеспечения безопасности. Кроме того, различия сущест-
276
вуют даже на одних и тех же этапах полета для РКС разного
типа, так как создание каждого пилотируемого КК все еще яв-
ляется уникальной задачей, при решении которой необходим по-
стоянный поиск принципиально новых путей и возможностей.
Рис. 10.1. Схема событий в случае появления аварийной ситуации
Из истории авиации известно, что взлет и посадка самолетов
были и по-прежнему остаются самыми ответственными и опас-
ными этапами полета. Аналогичное положение наблюдается и при
осуществлении пилотируемых космических полетов, так как на
этапах выведения на орбиту и при спуске на Землю полет быстро-
течен, связан с большим выделением энергии и носит необрати-
мый характер. Вследствие этого обеспечение безопасности на
участке выведения стало самостоятельной задачей при создании
пилотируемого КК. Основным источником аварийных ситуаций
на этом этапе полета является PH. Так как ракетная техника
почти на два десятилетия старше пилотируемой космической тех-
ники, то по функционированию PH (в том числе и по их авариям)
накоплен достаточно обширный статистический материал, который
позволяет провести полный и достоверный анализ аварийных си-
туаций.
По статистическим данным и прогнозам надежность PH на со-
временном этапе их развития все еще уступает надежности авиа-
277
ционной техники и пока недостаточна для проведения пилоти-
руемых полетов без применения дополнительных мер. Характер
протекания аварийных ситуаций на участке выведения в силу
быстротечности развития и многообразия условий полета доста-
точно опасен и предъявляет жесткие требования к обеспечению
безопасности.
Обеспечение безопасности на этапах подготовки к старту и
выведения КК на орбиту обычно состоит из трех взаимосвязанных
задач:
анализа аварийных ситуаций;
выбора критериев аварийности, разработки методов и средств
прогнозирования, предотвращения и установления аварийного со-
стояния;
разработки средств аварийного спасения, методов и средств
локализации и ликвидации аварийных ситуаций.
10.3. АВАРИЙНЫЕ СИТУАЦИИ НА УЧАСТКЕ ВЫВЕДЕНИЯ
Анализ аварийных ситуаций является исходным моментом
всех работ по безопасности, а его результаты во многом опреде-
ляют последующие технические решения при разработке аварий-
но-восстановительных и аварийно-спасательных средств. При ана-
лизе аварийных ситуаций рассматривают их распределение по
месту возникновения (по бортовым и наземным системам) и по
времени появления, определяют причины и вероятность их появ-
ления, характер развития по времени, последствия и значимость
для последующего полета.
Среди аварийных ситуаций, вероятность появления которых
наиболее высока, следует выделить ситуации, вызванные отказами
бортовых систем PH и КК, а также наземных систем стартовой
позиции. Подобные аварийные ситуации, как правило, подлежат
наиболее тщательному анализу. Как показывают результаты лет-
ных испытаний ракетно-космической техники, отказы распреде-
ляются по системам неравномерно: наибольшая вероятность по-
явления отказов — в бортовых системах PH, меньшая — в систе-
мах КК, еще меньшая — в наземных системах. Это объясняется
тем, что на участке выведения бортовые системы КК работают
в основном в дежурном (менее напряженном по сравнению с ра-
бочим) режиме, а в наземных системах значительно легче обес-
печить высокую надежность и своевременный контроль.
При исследовании аварийных ситуаций на PH в основном ис-
пользуют результаты анализа экспериментальных данных по ава-
риям, имевшим место в процессе испытаний и проведения пусков
аналогов и прототипов, при этом анализируют также отказы и
ошибки, которые в иных условиях могли бы привести к аварии
(т. е. потенциально опасные отказы).
При анализе аварийного запуска его классифицируют по ряду
характерных признаков, позволяющих выявить основные особен-
278
ности возникновения и развития аварийной ситуаций. Рассмотрим
некоторые особенности аварийных ситуаций PH, определенные по
экспериментальным данным.
Наиболее высока вероятность возникновения аварий в ранний
период эксплуатации, когда еще не устранены полностью раз-
личного рода недочеты в разработке, изготовлении и эксплуата-
ции данной PH. Обычно этот период совпадает с летно-конструк-
торскими испытаниями, по завершению которых PH должна до-
стигнуть запроектированного уровня надежности.
Так как состав работающих систем, характер их работы и усло-
вия полета различны по времени полета, распределение аварий
по времени подготовки и прохождения участка выведения до-
вольно неравномерно. Для PH аварийные ситуации, как правило,
наиболее вероятны на участках старта, разделения ступеней, за-
пуска ДУ и полета в плотных слоях атмосферы, т. е. на участках
работы бортовых систем в переходных режимах и действия боль-
ших внешних нагрузок.
На основе анализа распределения аварийных ситуаций по си-
стемам PH и по причинам их возникновения определяют те состав-
ные элементы PH, которые должны наиболее тщательно контро-
лироваться во время подготовки и полета. Так, высокая сложность
ДУ и систем управления приводит к большей вероятности воз-
никновения отказов в них для многих типов PH.
Наиболее вероятными причинами отказов могут быть следую-
щие:
ненормальная работа автоматики (клапанов) ДУ;
прогары и разрушения основных и рулевых камер сгорания и
камер сгорания газогенераторов ДУ;
отказы и поломки турбонасосных агрегатов ДУ;
отказы в системах опорожнения баков, негерметичность топ-
ливных и газовых магистралей;
ложные команды или отсутствие заданных команд системы
управления;
отказы основных приборов системы управления (гироскопов,
БЦВМ, программно-временных устройств и т. д.);
ошибки заправки, настройки ДУ и системы управления;
повышенные вибрации конструкции и приборов.
Для определения требований к быстродействию средств ава-
рийного спасения проводят анализ аварий по характеру протека-
ния, при этом выделяют следующие типы аварийных ситуаций:
внезапный отказ, аварийная ситуация протекает быстро и
катастрофично (разрушение, взрыв, пожар);
внезапный отказ, аварийная ситуация протекает хотя и быстро,
но некатастрофично;
внезапный отказ, аварийная ситуация протекает медленно и
без опасных последствий;
постепенный отказ, аварийная ситуация протекает медленно и
без опасных последствий,
279
Анализ по всей совокупности признаков позволяет выявить
некоторые типичные особенности аварийных ситуаций PH:
аварии, возникающие в процессе запуска ДУ I ступени, при
которых возможен невыход PH из стартовой системы, приводят
к взрывам и пожарам (катастрофическое развитие);
аварийные ситуации, связанные с серьезными отказами ДУ,
сопровождаются, как правило, разрушениями конструкции (про-
текают катастрофично);
аварийные ситуации на атмосферном участке полета, особенно
в зоне высоких скоростных напоров, часто развиваются быстро
и катастрофично;
аварийные ситуации на внеатмосферном участке даже при
быстром развитии не имеют катастрофических последствий.
Остановимся на некоторых явлениях, сопровождающих ката-
строфическое развитие аварийной ситуации на PH. При разруше-
ниях ее конструкции происходит утечка компонентов жидкого
топлива, их смешение, а затем взрыв. При взрыве компонентов
жидкого топлива безопасное расстояние определяется с учетом
давления во фронте ударной волны, теплового излучения огнен-
ного шара и поражения разлетающимися осколками.
При определении характеристик взрыва компонентов жидкого
топлива наибольшее распространение имеет метод тринитротолуо-
лового (ТНТ) эквивалента, при котором воздействие взрыва оце-
нивается по воздействию взрыва заряда ТНТ, эквивалентного по
массе части общего количества топлива, участвующего в детона-
ции. Недостатком использования этого метода является различие
процессов детонации и импульсов ударных волн при взрывах ТНТ
и жидкого топлива, поскольку начальная скорость детонации,
а следовательно, и начальная скорость расширения огненного
шара при взрыве ТНТ выше, чем при взрыве жидких топлив.
Однако особенности, присущие процессу взрыва жидких топлив,
характерны только для начального участка расширения огненного
шара и исчезают после прохождения ударной волной некоторого
расстояния. Поэтому при расчетах на больших расстояниях от
эпицентра метод ТНТ эквивалента можно применять с достаточ-
ной точностью. При расчете взрыва PH необходимо определить
долю топлива, участвующую в детонации, которая зависит от об-
щего количества топлива, конструктивных особенностей РКС и
характера разрушения, приводящего к взрыву. Достаточно точ-
ный учет всех этих факторов практически невозможен, поэтому
коэффициент, определяющий эту долю, задается приближенно на
основании данных по экспериментальным взрывам и по взрывам
PH-аналогов. Однако, учитывая, что величина безопасного рас-
стояния зависит от суммарной энергии взрыва в степени */з, ме-
тод ТНТ эквивалента достаточно надежен при определении безо-
пасного расстояния.
При определении безопасного расстояния, используя методику
расчета точечного сферического взрыва, находят такое расстоя-
ние от места взрыва, где избыточное давление во фронте ударной
280
волны оказывается меньше давления, выдерживаемого конструк-
цией спасаемого отсека, его средствами спасения или человеком
(в случае применения катапультируемых кресел). При взрыве
жидких топлив образуется огненный шар и выделяется большое
количество тепловой энергии, которое также необходимо учиты-
вать при определении безопасного расстояния.
При определении безопасного расстояния от огненного шара
проводят расчет нагрева спасаемых элементов от излучения,
при этом тепловое воздействие могут испытывать элементы кон-
струкции спасаемого КК, отсека или катапультируемого кресла
(особое внимание обращается на нагрев пиромеханизмов и двига-
телей), парашютная система на участке спуска и космонавт в
скафандре или в защитном костюме (в случае катапультирова-
ния).
Разлетающиеся обломки при взрыве из всех трех факторов
имеют наибольшее расстояние опасного поражения. Данные по
разлету обломков при взрывах PH свидетельствуют, что отдель-
ные обломки массой в несколько сотен килограммов находили на
расстоянии 2—3 км, что противоречит расчетам по ТНТ экви-
валенту. Это объясняется тем, что из-за пульсаций давления при
взрыве жидких топлив отдельные обломки могут получить срав-
нительно большую начальную скорость и улететь на большие
расстояния. Однако вероятность поражения подобными немного-
численными обломками мала, поэтому при выборе безопасного
расстояния поражение осколками и обломками обычно не учиты-
вают.
Сравнительный анализ воздействия каждого из трех основных
факторов, характеризующих взрыв жидких топлив, показывает,
что при выборе безопасного расстояния от места взрыва опре-
деляющим является допустимое давление во фронте ударной
волны.
10.4. ВЫБОР КРИТЕРИЕВ АВАРИЙНОСТИ И СРЕДСТВ КОНТРОЛЯ
Прогнозирование и своевременное предотвращение аварийных
ситуаций возможно при оснащении РКС разветвленной системой
контроля, позволяющей на всех этапах подготовки и функциони-
рования постоянно оценивать работоспособность РКС на уровне
любых отдельных агрегатов и подсистем, исключать из работы
отказавшие и включать взамен резервные агрегаты и подсистемы.
Применение такого принципа контроля и обеспечения безопасно
сти приводит к чрезмерному усложнению РКС и увеличению ее
стоимости.
Более рационально в случае появления критичных отказов
в основных системах РКС не полное, а частичное восстановление
ее работоспособности, позволяющее обеспечить безопасность по-
лета, хотя и без возможности выполнения его задачи. Например,
при отказе одного двигателя из группы, обеспечивающей полет
ступени PH, выполняются условия возвращения экипажа на Зем-
281
лю, хотя задача выведения на орбиту может быть и не решена.
Этот подход, с одной стороны, ограничивает пределы усложнения
и увеличения стоимости РКС, с другой — значительно упрощает
контроль его аварийного состояния. В этом случае решение сво-
дится в основном к своевременному определению момента появ-
ления отказа и в меньшей степени к обеспечению резервных воз-
можностей РКС в этот же момент. Именно поэтому наибольшее
распространение получили системы контроля с функциями, огра-
ниченными только своевременным определением момента появле-
ния аварийной ситуации.
Контроль аварийности любой системы РКС происходит по до-
стижении одним из основных параметров или совокупности не-
скольких параметров системы предельно допустимого значения,
качественную или количественную меру которого называют пара-
метром аварийности. Анализ причин отказов бортовых си-
стем РКС и характера их протекания позволяет составить пере-
чень таких параметров (табл. 10.1), с помощью которых контро-
лируется максимальное число теоретически возможных аварий-
ных ситуаций.
Таблица 10.1
Параметры аварийности ракетно-космической системы
Система Параметр аварийности
Двигательная установка PH Система управления PH Конструкция и системы разделении PH Космический корабль РКС в целом Критические давление н температура в основ- ной и рулевой камерах сгорания, в камере газо- генератора. Критическое число оборотов ТНА. Не- срабатывание элементов автоматики (клапанов) Критическое падение напряжения питании си- стемы управления. Отсутствие работоспособности основных приборов (БЦВМ, гироскопов, времен- ных механизмов и т. д.) Предельные напряжении в основных силовых элементах конструкции. Неразделенне ступеней, несброс обтекателей и других отделяемых эле- ментов в заданные моменты времени. Неотделе- нне КК. Предельное отклонение в работе системы опорожнении баков, потери герметичности баков и трубопроводов Пожар в жилых отсеках и их разгерметиза- ция. Критическое падение давления в системе над- дува баков ДУ, потери герметичности баков, утеч- ка топлива. Критическое падение давления в ба- ках системы исполнительных органов стабилиза- ции и управленвя Критический недобор скорости при работе лю- бой из ступеней PH, потеря устойчивости и управляемости при движении PH (отклонение на предельные углы или поивление предельной угловой скорости по тангажу, рысканью н кре- ну). Падение осевых перегрузок при работе сту- пеней PH ниже допустимых пределов, поивление предельных боковых перегрузок
282
Создание системы контроля с использованием всех перечис-
ленных выше параметров не только сложно, но и нецелесообразно.
Обычно нз общего числа выбирают ограниченное количество оп-
тимальных параметров, обеспечивающих достаточную уверенность
в своевременном обнаружении аварии, причем задачу оптимиза-
ции решают по таким критериям, как полнота охвата возможных
аварийных ситуаций, быстродействие, отсутствие ложного сраба-
тывания, простота аппаратурного решения. Следует также отме-
тить, что каждая РКС имеет специфические конструктивные и
технологические особенности, которые в значительной степени
влияют на состав параметров аварийности. Так, PH «Союз» до
начала пилотируемых полетов широко использовалась для запус-
ков автоматических КА и поэтому имела достаточно высокий
уровень отработанности и надежности и не требовала сложной
и разветвленной системы контроля. Поэтому для контроля ава-
рийности РКС «Союз» используют сравнительно небольшое число
параметров, приведенных в табл. 10.2.
Таблица 10.2
Параметры аварийности РКС «Союз»
Параметр аварийности
Контролируемые этапы полета
Потеря устойчивости и управляемости при дви-
жении PH (отклонение иа предельные углы по
каналам тангажа, рысканья и крена)
Критический недобор скорости к концу работы
I и II ступеней PH
Преждевременное отделение 1 ступени (боко-
вых блоков)
Падение давлении в камере сгорания ДУ
Критическое снижение осевой перегрузки при
работе ДУ
От старта до выключения
III ступени PH (блокиров-
ки на периоды разделения)
Работа I и II ступеней
PH
Работа I ступени PH
Работа Ill ступени PH
От старта до выключения
III ступени
По достижении предельного значения по любому из приведен-
ных параметров автоматически вырабатывается сигнал «Авария»,
по которому выключается ДУ, прекращается полет и включаются
средства аварийного спасения. Кроме того, в период предстар-
товой подготовки и на всем участке выведения предусмотрена
подача сигнала «Авария» руководителем запуска с наземного
пункта управления по командной радиолинии.
Не затрагивая принципов и методов разработки, назовем толь-
ко основные особенности и характеристики систем контроля, ко-
торые включают:
степень автоматизации, определяющую возможность и целесо
образность участия экипажа в контроле аварийности;
степень централизации, характеризующую структурное построе-
ние системы;
283
наличие элементов прогнозирования, определяющее возможно-
сти системы по предотвращению катастрофического развития ава-
рийных ситуаций;
аппаратурное решение, определяющее место системы в струк-
туре комплекса (автономное, в составе системы управления PH
или системы управления КК).
В настоящее время наметились следующие тенденции развития
систем контроля:
автоматизация и высокое быстродействие при участии экипа-
жа в выработке решения по прекращению полета в ряде аварий-
ных ситуаций;
внедрение бортовых ЦВМ, что значительно повысило степень
централизации систем контроля и позволило ввести в их работу
элементы прогнозирования (т. е. предсказывать развитие аварий-
ных ситуаций и с учетом их изменять программу работы контро-
лируемой системы, не доводя ее до полного отказа).
10.5. ПРИНЦИПЫ РАЗРАБОТКИ КОМПЛЕКСА СРЕДСТВ
АВАРИЙНОГО СПАСЕНИЯ
При своевременном обнаружении аварийной ситуации задачи
средств аварийного спасения достаточно очевидны и заключаются
в прекращении штатного полета РКС, в проведении автономного
полета КК и его спуска в атмосфере, в осуществлении посадки.
Первым и необходимым условием выполнения этих операций
является обеспечение жизнедеятельности экипажа, т. е. поддер-
жание газового состава атмосферы, давления и температуры
внутри жилого отсека, режимов статических, ударных и вибраци-
онных перегрузок, ускорений и акустического воздействия в пре-
делах переносимости человека.
Вторым условием служит максимальное использование штат-
ных систем PH и КК в процессе аварийного спасения.
Анализ условий полета, при которых должны быть решены
основные задачи процесса спасения, показывает, что аварийные
режимы по многим параметрам значительно тяжелее, чем штат-
ные:
аварийные режимы отделения КК от PH отличаются от штат-
ных повышенными аэродинамическими нагрузками (скоростной
напор ^ав^ЗООО—5000 кгс/м2 по сравнению с <7шт = 0), наличие
перегрузок при отделении (случай отсутствия аварийного выклю-
чения ДУ PH), высокими требованиями к быстродействию (время
аварийного разделения отсеков менее 0,1 с);
аварийные режимы автономного полета КК на участке спуска
в атмосфере вследствие увеличения угла входа в атмосферу (ко-
торый, в свою очередь, определяется углом наклона траектории
выведения в момент аварии) отличаются от штатных значительным
увеличением перегрузок;
при аварийном режиме посадка возможна в любой точке вдоль
трассы траектории выведения и может происходить в неблаго-
284
приятных условиях (горные районы, пересеченная местность, тай-
га и т. д.).
Даже из приведенных отличий видно, что обеспечение аварий-
ных режимов при использовании только штатных систем на всех
этапах полета—задача достаточно сложная, решение которой прак-
тически невозможно без комплексного подхода.
Комплексное решение задачи аварийного спасения возможно
по двум путям:
первый — КК и его системы проектируют из условия приме-
нения в более тяжелых аварийный режимах, что приводит к
усложнению и перетяжелению его конструкции и бортовых систем,
к появлению в его составе специальных дополнительных систем,
работающих в тех ситуациях, когда применение штатных систем
нецелесообразно (рис. 10.2, а);
Рис. 10.2. Схемы аварийного спасения:
а — при экстренном прекращении полета PH; б— при полете PH по нештатной
программе
второй — PH и ее системы проектируют с учетом необходимо-
сти работы по нештатным программам, обеспечивающим в случае
аварии достижение режимов полета, близких к штатным при
выполнении основных операций по возвращении КК или его СА
на Землю, что вызывает усложнение PH и ее систем (рис. 10.2,6).
Выбор того или иного пути во многом определяется схемой
РКС и программой ее штатного полета. Практика показывает, что
первый путь более приемлем при создании РКС одноразового ис-
пользования (РКС «Восток», «Меркурий», «Джемини», «Союз»,
«Аполлон»), второй применен на РКС многоразового использова-
ния МТКС «Спейс Шаттл».
Во время подготовки РКС на стартовой позиции и при полете
на участке выведения условия в момент аварии могут быть столь
различны, что разработать единую схему аварийного спасения,
применяемую во всех аварийных ситуациях, невозможно. Более
рационально разбить всю траекторию выведения на несколько
участков, на которых условия полета и развития аварийных си-
285
туаций будут находиться в определенных пределах, позволяющих
применить какую-либо одну из схем спасения. Для различных
РКС из-за характерных особенностей траектории и конструктив-
ной схемы число таких участков и расположение их границ может
быть различным. Так, для РКС одноразового использования учи-
тывают три наиболее характерных участка:
а) первый — атмосферный — от момента приведения в готов-
ность средств спасения РКС на стартовой позиции до выхода
РКС за пределы плотных слоев атмосферы в процессе полета;
верхняя граница участка, как правило, соответствует моменту по-
лета, когда скоростные напоры становятся достаточно малы (q=
=0—50 кгс/м2); характерными особенностями аварийных ситуаций
на этом участке являются:
быстротечность аварийных ситуаций, высокая вероятность их
катастрофического протекания;
наиболее сильное проявление воздействия опасных факторов
при взрыве PH;
необходимость при аварии на старте и в первые секунды по-
лета обеспечения подъема КК или его спасаемой части на высоту,
достаточную для работы системы приземления;
воздействие при авариях в зоне максимальных скоростных на-
поров (время полета от 40 до 90 с) на отделяемую часть КК
значительных аэродинамических сил, препятствующих ее отделе-
нию, так как ее баллистический коэффициент значительно выше,
чем для PH;
б) второй — от момента выхода РКС за пределы плотных
слоев атмосферы до момента, когда в случае прекращения рабо-
ты PH с помощью ДУ КК возможно его выведение на нерасчет-
ную орбиту ИСЗ; особенностями этого участка являются:
некатастрофичность аварийных ситуаций;
возможность отделения КК или его спасаемой части после
аварийного выключения ДУ PH с помощью штатных систем раз-
деления;
сравнительно большие значения углов входа и скоростей по-
лета при аварийном входе в атмосферу КК или его спасаемой
части, что значительно увеличивает перегрузки на участке спуска
(до 20—23 ед. при баллистическом спуске);
в) третий участок характерен тем, что после аварийного пре-
кращения полета PH возможно выведение КК на орбиту с ис-
пользованием собственной энергетики, однако в этом случае из-за
ограниченных запасов топлива КК будет функционировать по
сокращенной программе.
На каждом из рассмотренных участков имеются наиболее
трудные для реализации звенья процесса аварийного спасения:
на первом — отделение и увод КК или его спасаемой части;
иа втором — автономный спуск в атмосфере;
на третьем — оперативная коррекция траектории КК.
286
10.6. СПАСЕНИЕ ЭКИПАЖА ПРИ АВАРИЯХ
В ПЛОТНЫХ СЛОЯХ АТМОСФЕРЫ
Разработка средств аварийного спасения, применяемых на ат-
мосферном участке траектории выведения, возможна только после
качественного анализа всех теоретически возможных схем и ме-
тодов с учетом их обобщенных характеристик и признаков:
типа спасаемой в аварийной ситуации части РКС;
конструктивно-компоновочных особенностей отделяемой при
аварии части РКС;
типа средств отделения и увода отделяемой части РКС;
способа приземления экипажа (или спасаемой части РК.С).
Схемы аварийного спасения по первому признаку делятся на
три основных типа: спасение экипажа в катапультируемых крес-
лах, спасение отсека экипажа и спасение К К-
Катапультируемое кресло как средство спасения многие годы
является наиболее распространенным и надежным средством ава-
рийного покидания самолетов и обеспечивает спасение летчиков
практически во всем диапазоне высот и скоростей полета совре-
менных самолетов, включая взлет и посадку. Сравнительная про-
стота и высокая отработанность катапультируемых кресел явля-
ются очевидным преимуществом этого метода аварийного спасе-
ния, однако для его эффективного применения в аварийных си-
туациях на участке выведения требуется решение ряда сложных
задач, в том числе:
осуществление увода катапультируемого кресла на большое
расстояние от РКС при авариях вблизи старта из-за наличия зоны
высокого избыточного давления и больших тепловых потоков при
взрыве и пожаре PH;
обеспечение защиты экипажа от теплового и акустического
воздействия струй ДУ PH при катапультировании в зоне высоких
аэродинамических нагрузок (время полета от 40 до 80 с);
обеспечение характеристик катапультируемых кресел по пре-
дельной максимальной высоте и скорости применения, превышаю-
щих аналогичные параметры авиационных кресел.
Катапультируемые кресла в качестве средства спасения при-
менялись на КК «Восток» и «Джемини», на ОК «Колумбия» МТКС
«Спейс Шаттл» во время первых полетов.
Схемы «спасение отсека экипажа» и «спасение КК» предусмат-
ривают в случае появления аварийных ситуаций отделение отсека
КК или всего КК с обеспечением их последующего автономного
полета и возвращения на Землю. В частности, для схемы «спасе-
ние отсека экипажа» аварийное спасение заключается в том, что
в аварийных ситуациях на участке выведения от РКС отделяется
и уводится на безопасное расстояние вначале его отделяемый го-
ловной блок (ОГБ), затем от него — спасаемая часть РКС (СА,
носовая часть КК или отсек экипажа), которая совершает авто-
номный баллистический полет, управляемый спуск и приземле-
ние. По этой схеме разработаны средства аварийного спасения
экипажей КК «Меркурий», «Союз» и «Аполлон».
287
Исходя из особенностей развития аварийных ситуаций на ат-
мосферном участке полета (см. раздел 10.3) для аварийного от-
деления и увода ОГБ на атмосферном участке полета необходимы
специальные двигатели с тягой, достаточной для быстрого вы-
хода ОГБ из опасной зоны и преодоления аэродинамического
сопротивления в случае аварии в зоне максимальных скоростных
напоров.
После выхода ОГБ за пределы опасной зоны от него отделя-
ется СА, после чего начинается этап автономного полета СА, для
осуществления которого необходимо обеспечить:
увод СА в условиях аварии на старте на высоту, большую,
чем потери высоты во время введения парашютной системы и под-
готовки к посадке;
возможность разворота СА и последующей стабилизации;
функционирование бортовых систем СА и, в частности, комп-
лекса средств посадки при авариях на малых высотах по одной
или нескольким специальным, сжатым по времени аварийным
программам, а при авариях на больших высотах — по основной
(штатной) программе.
Таким образом, схема «спасение отсека экипажа» кроме при-
менения специальных средств отделения и увода ОГБ, обеспече-
ния автономного полета ОГБ требует и создания специальных
программ функционирования бортовых систем КК (системы управ-
ления спуском, комплекса средств посадки, системы разделения
и т. д.), обеспечивающих автономный полет и посадку СА в ава-
рийных условиях.
Компоновка и состав ОГБ определяются компоновочной схе-
мой КК, расположением СА в его составе, наличием ГО и т. д.
При верхнем расположении СА и отсутствии головного обте-
кателя ОГБ включает только СА и ДУ аварийного увода. Подоб-
ная схема была использована на КК «Меркурий» и «Аполлон».
Рис. 10.3. Отделяемый головной блок КК «Аполлон»:
/ — балансировочный груз; 2 — дестабилизаторы; 3 — ферма; 4 — СА;
5 — теплозащитный экран; 6 — двигательная установка аварийного
увода; 7 — приборы автоматики средств аварийного спасения
Отделяемый головной блок КК «Аполлон» (рис. 10.3) состоит
из СА и отсека ДУ аварийного увода, соединенных фермой. Для
защиты СА от воздействия струй ДУ предусмотрен теплозащит-
288
ный экран. В отсеке ДУ размещены три твердотопливных двига-
теля (основной, разделительный и управляющий), приборы авто-
матики САС, раскрывающиеся дестабилизаторы и балансировоч-
ный груз, обеспечивающие необходимые аэродинамические харак-
теристики ОГБ, После отделения от РКС ОГБ аэродинамически
статически устойчив при работе двигателей и в автономном по-
лете во всем диапазоне скоростей применения. После раскрытия
дестабилизаторов обеспечивается разворот ОГБ на 180°, при этом
СА разворачивается лобовым щитом вперед.
Рис. 10.4. Отделяемый головной блок КК «Союз»:
1 — ДУ САС: 2 — ГО; 3 — орбитальный отсек; 4 — СА; 5 — ложемент;
6 — пиромеханизмы аварийного стыка ГО; 7 — решетчатые Стаби-
лизаторы; 8 — приборы автоматики средств САС
Компоновочная схема ОГБ усложняется, когда выше СА рас-
положены другие отсеки КК, а сам КК защищен ГО. Такая ком-
поновочная схема применена на КК «Союз» и «Союз Т».
Отделяемый головной блок КК «Союз» (рис. 10.4) включает
СА, орбитальный отсек, часть ГО и ДУ САС. ГО является несу-
щим корпусом ОГБ и служит для размещения основных агрегатов
средств аварийного спасения. Силовая связь между ГО и отсека-
ми КК обеспечивается с помощью трех ложементов, опорные пло-
щадки которых размещены в двух поясах: верхний расположен
в районе стыка между СА и орбитальным отсеком и передает
осевые и боковые усилия, нижний находится в районе лобового
щита СА и передает только боковые усилия. Конструкция опор-
ных площадок обеспечивает возможность сброса створок ГО
после нормального прохождения атмосферного участка траекто-
рии или отделения СА от ОГБ в процессе аварийного спасения.
На верхнем конусе ГО размещены приборы автоматики средств
аварийного спасения, а на нижнем торцевом шпангоуте — четыре
раскрываемых решетчатых стабилизатора, уложенные при нор-
мальном полете вдоль образующей ГО (в случае аварии они рас-
10 Космические аппараты 289
крываются и фиксируются в раскрытом положении). Уводимая
часть ГО связана с нижней (остающейся в случае аварии на
PH) частью обтекателя с помощью пиромеханизмов.
Двигательная установка системы аварийного спасения КК
«Союз» (рис. 10.5) состоит из основного двигателя отделения и
увода ОГБ, разделительного двигателя сброса ДУ после нор-
мального прохождения атмосферного участка или отделения СА
от ОГБ в процессе аварийного спасения и управляющих двига-
телей формирования заданной траектории движения ОГБ.
4180
Рис. 10.5. Двигательная установка системы аварийного спасения
КК «Союз»
На современных РКС параметры двигателей, входящих в со-
став ДУ САС, в основном зависят от массовых характеристик
ОГБ и составляют:
для основного двигателя — Р = 50—150 тс, т=2—6 с;
для разделительного двигателя — Р=6—18 тс, т^1 с;
для управляющего двигателя — Р = 0,5—2 тс, т=0,5—1 с.
Отделяемый головной блок — это своеобразный летательный
аппарат, рассчитанный на использование в широком диапазоне
скоростей (от дозвуковых до гиперзвуковых), поэтому сущест-
вуют вполне определенные требования к его аэродинамической
схеме, в том числе:
обеспечение аэродинамической статической устойчивости для
ограничения боковых перегрузок при полете и уменьшения по-
требной энергетики для увода ОГБ;
уменьшение коэффициента аэродинамического сопротивления
для снижения энергетических потерь при уводе ОГБ;
сохранение аэродинамических характеристик PH при сопряже-
нии с ней ОГБ за счет его оптимальной формы.
При выборе аэродинамической схемы ОГБ требуется увязка
аэродинамических характеристик СА (основного элемента ОГБ)
и ОГБ в целом. Эта задача имеет два решения: первое — при
выборе обводов СА принимают компромиссное решение, в равной
степени удовлетворяющее как требованиям автономного полета
СА, так и полета СА в составе ОГБ; по этому пути пошли аме-
риканские специалисты при разработке РКС «Меркурий» и
290
«Аполлон», приняв относительно большое значение угла обрат-
ного конуса СА, которое хотя и ухудшает соотношение поверх-
ности и объема СА (что приводит к росту массы конструкции и
теплозащиты), но, с другой стороны, улучшает положение центра
давления ОГБ и позволяет без применения специальных стаби-
лизаторов обеспечить его аэродинамическую статическую устой-
чивость; второе — оптимизация аэродинамических характеристик
ОГБ за счет соответствующего выбора обводов ГО, используемого
в качестве корпуса ОГБ, с применением аэродинамических ста-
билизаторов; этот путь, использованный в РКС «Союз», позволяет
практически независимо друг от друга выбирать обводы СА и
ОГБ.
Конфигурация отделяемого головного блока РКС «Союз» пред-
ставляет собой сочетание цилиндрических и конических отсеков
ГО и ДУ. При выборе аэродинамической компоновки были рас-
смотрены различные сочетания геометрических характеристик ци-
линдрических и конических отсеков и разные варианты сопряже-
ния ГО с отсеком ДУ, а также различные виды аэродинамических
стабилизаторов. Было установлено, что наиболее рационально
применить в составе ОГБ раскрываемые решетчатые стабилизато-
ры, которые достаточно эффективно обеспечивают нужное смеще-
ние центра давления в раскрытом положении при незначительном
увеличении лобового сопротивления, а в закрытом положении не
оказывают заметного влияния на аэродинамические характеристи-
ки PH.
Проектно-баллистические расчеты — один из основных методов
исследования — предполагают анализ и выбор параметров средств
спасения, в частности, тяги и импульса ДУ, характеристик средств
стабилизации, алгоритмов работы системы управления и т. д.
На участке выведения основные параметры движения РКС
(высота, скорость, скоростной напор, угловые отклонения, угло-
вые скорости и т. д.) изменяются в широком диапазоне, что при-
водит к большому многообразию аварийных ситуаций. Полный
анализ всех аварийных ситуаций баллистическими расчетами,
даже при условии использования ЭВМ, практически невозможен,
поэтому выбирают несколько предельных расчетных случаев, кото-
рые в совокупности полностью определяли бы работу средств
аварийного спасения. Число расчетных случаев и их параметры
зависят не только от условий полета на участке выведения, но и от
программы работы и характеристик средств спасения. Рассмотрим
некоторые из этих случаев, которые являются основными при раз-
работке средств спасения:
авария на старте; она характерна необходимостью увода ОГБ
на высоту, достаточную для срабатывания средств приземления,
и на безопасное расстояние по дальности от места аварии;
авария при максимальном скоростном напоре на участке вы-
ведения; она вызывает наибольшие трудности отделения и увода
ОГБ на безопасное расстояние от PH вследствие больших аэро-
динамических сил; в процессе аварийного увода в этом случае
10* 291
на ОГБ воздействуют максимальные боковые (пУ, пх) и продоль-
ная отрицательная (—пх) перегрузки;
авария на границе плотных слоев атмосферы перед сбросом
ДУ САС; она характерна максимальной продольной положитель-
ной перегрузкой (пх).
Для каждого из рассмотренных случаев разрабатывают рас-
четную модель аварийной ситуации, учитывающую параметры
движения РКС в момент аварии, внешние условия полета (плот-
ность воздуха, параметры ветра, факторы взрыва PH и т. д.),
а также методику расчета траекторий движения ОГБ
или С А.
Осуществление процесса аварийного спасения можно предста-
вить в виде последовательного решения комплекса баллистиче-
ских задач, в каждой из которых проверяется выполнение одного
из условий реализации программы спасения, т. е. весь процесс
разделяется на ряд участков, характерных своей расчетной мо-
делью и методикой расчета. Среди условий успешного выполнения
процесса спасения, одновременно являющихся основными расчет-
ными баллистическими критериями для определенного участка
полета, могут быть:
отсутствие соударений и зацеплений элементов конструкции
ОГБ и PH в процессе отделения;
увод ОГБ на безопасное расстояние от места аварии и высо-
ту, достаточную для срабатывания системы приземления;
достаточное относительное расстояние между ОГБ и PH;
выполнение ограничений по величинам продольных и боковых
перегрузок исходя из переносимости экипажем и сохранения не-
сущей способности конструкции;
обеспечение условий ввода системы приземления;
приземление отсека экипажа вне пределов опасной зоны.
Как правило, баллистические расчеты выполняют в два этапа:
на первом, проектном, анализируют и выбирают основные про-
ектные параметры средств спасения, на втором, поверочном, опре-
деляют с использованием точных массово-инерционных и энерге-
тических характеристик параметры движения отделяемых и уво-
димых частей РКС в процессе аварийного спасения, а также ра-
бочие алгоритмы автоматики.
На проектном этапе выбирают энергетику ДУ САС, схему
управления движением ОГБ и средства его стабилизации, увязы-
вают средства аварийного спасения с системой приземления, за-
дают временную программу работы средств спасения и разраба-
тывают требования к чувствительным элементам автоматики (ги-
роскопическим, барометрическим датчикам и т. д.).
Баллистические исследования позволяют сформулировать не-
сколько основных положений, определяющих выбор энергетики
средств спасения:
суммарный импульс основного двигателя ДУ САС определя-
ется потребной высотой и дальностью увода отсека экипажа при
292
аварии на старте (авария при максимальном скоростном напоре
не является определяющей при выборе этого параметра), а его
тяга — в основном условиями спасения в случае аварии при мак-
симальных скоростных напорах и в меньшей степени условиями
спасения при аварии на старте;
тяговооруженность (отношение тяги ДУ САС к весу ОГБ) для
получения максимальных относительных расстояний между ОГБ
и PH должна не менее чем в два раза превышать значение на-
чальной максимальной аэродинамической перегрузки (тем боль-
ше, чем больше суммарный импульс ДУ САС) и при этом во
всех случаях быть не менее 6—8 ед.
При тяговооруженности 6—8 ед. высота и дальность увода
ОГБ при аварии на старте практически не зависят от тяговоору-
женности; увеличение тяговооруженности нерационально, так как
приводит к неоправданному возрастанию продольных и попереч-
ных перегрузок и, следовательно, к увеличению массы конструк-
ции; при тяговооруженности до 10 ед. возможно вполне допу-
стимое снижение быстродействия системы спасения (в отношении
скорости отхода ОГБ от места аварии).
Управление ОГБ заключается в обеспечении определенного со-
отношения между высотой и дальностью увода ОГБ, а в некото-
рых случаях и определенного направления увода и формирования
траектории увода с ограничениями по величине поперечной пере-
грузки. Различают несколько путей обеспечения бокового увода
и управления ОГБ:
перекос вектора тяги основного двигателя (КК «Меркурий»);
использование одного управляющего двигателя (КК «Апол-
лон»);
использование нескольких управляющих двигателей (КК
«Союз», «Союз Т»).
Наиболее рационален способ бокового увода с помощью управ-
ляющих двигателей, так как он требует наименьших энергетиче-
ских затрат. Кроме того, введение нескольких управляющих дви-
гателей позволяет учесть при выборе направления бокового увода
направление и скорость ветра (определяющего направление и ве-
личину ветрового сноса приземляющего отсека экипажа) и, сле-
довательно, значительно увеличить дальность точки посадки от-
сека экипажа от места аварии.
На проектном этапе баллистических расчетов в связи с боль-
шим объемом вычислительных работ (из-за большого числа опти-
мизируемых параметров) целесообразно использование некоторых
допущений и упрощенных расчетных моделей.
На поверочном этапе, как правило, решают полную систему
уравнений пространственного движения ОГБ и отсека экипажа с
учетом всех воздействующих факторов. Наиболее точные резуль-
таты получают в случае применения метода Монте-Карло, при
котором все величины (массово-инерционные и аэродинамические
характеристики, параметры двигателей, системы управления
293
и т. д.), влияющие иа параметры движения, задают в виде случай-
ных чисел, распределенных в пределах допусков по определен-
ным законам.
между PH и ОГБ в случае аварии при максимальном скоростном напоре
Характер изменения основных параметров движения ОГБ КК
«Союз» в случае аварии на старте показан на рис. 10.6, в слу-
чае аварии при максимальном скоростном напоре — на рис. 10.7.
294
10.7. СПАСЕНИЕ ЭКИПАЖА ПРИ АВАРИЯХ
НА ВНЕАТМОСФЕРНОМ УЧАСТКЕ ТРАЕКТОРИИ ВЫВЕДЕНИЯ
Нижняя граница этого участка достаточно условна и зависит
от конструктивных особенностей КК и PH. Обычно за нее прини-
мают момент выхода РКС из плотных слоев атмосферы, когда
исчезают аэродинамические нагрузки (скоростной напор состав-
ляет несколько единиц), что происходит на высоте 70—90 км при
скорости полета около 2500—3000 м/с.
Верхняя граница участка — это окончание активного участка
траектории выведения и выход КК на орбиту ИСЗ.
В связи с малой плотностью воздуха на внеатмосферном уча-
стке полета воздействие ударной волны и огненного шара даже
при опасном течении аварии проявляется очень слабо. Поэтому
из трех поражающих факторов, характерных для атмосферного
участка, остается только один — поражение разлетающимися при
взрыве осколками. Кроме того, вероятность катастрофического и
быстротечного развития аварии на внеатмосферном участке до-
статочно мала из-за отсутствия аэродинамических нагрузок, кото-
рые, как правило, способствуют разрушению РКС.
Эти особенности протекания аварийных ситуаций на внеатмо-
сферном участке полета позволяют использовать для аварийного
отделения КК или СА штатные средства разделения, необходи-
мыми условиями применения которых являются аварийное выклю-
чение ДУ PH и устранение влияния импульса последействия оста-
точной тяги при выключении ДУ, что достигается либо включе-
нием сравнительно небольших активных средств (тормозных твер-
дотопливных двигателей на PH или двигателей увода на КК),
либо введением определенной временной задержки на срабаты-
вание средств разделения. Средства отделения КК от PH пред-
ставляют собой механические или пиротехнические замки, обес-
печивающие разделение стыковочных шпангоутов, и толкатели,
срабатывание которых приводит к расхождению разделившихся
частей.
После отделения от PH КК (или СА) совершает автономный
полет вне пределов атмосферы по баллистической траектории,
в процессе которого осуществляются ориентация и программные
развороты в целях обеспечения входа в атмосферу с малыми рас-
четными углами атаки. При необходимости для обеспечения по-
садки в заданном районе возможно включение ДУ КК для про-
ведения коррекции траектории, хотя с учетом довольно ограни-
ченных запасов топлива влияние этой коррекции на параметры
траектории относительно мало.
Углы входа КК или СА в атмосферу при аварийном спуске
определяются углом наклона траектории в момент аварии (воз-
можности коррекции, как уже было сказано, ограничены) и вслед-
ствие этого имеют довольно большую величину. В случае сочета-
ния больших значений углов входа с большими скоростями входа
295
в атмосферу при спуске возникают большие перегрузки, намного
превышающие перегрузки при спуске с орбиты ИСЗ.
Значения максимальной перегрузки при аварийном спуске СА
КК «Союз» для различных моментов аварии на участке выведе-
ния показаны на рис. 10.8.
Рис. 10.8. Характер изменения максимальной перегрузки при спу-
ске СА на участке выведении по времени аварии
Другая характерная особенность аварийного спасения на вне-
атмосферном участке заключается в том, что удаление точки
приземления СА значительно зависит от момента аварии и нахо-
дится в диапазоне от сотен до десятков тысяч километров; это
сильно затрудняет поиск и эвакуацию экипажа, СА или КК, со-
вершившего аварийную посадку.
В конце участка выведения наступает момент полета, когда
запасы топлива ДУ КК становятся достаточными для выведения
его на орбиту ИСЗ в случае прекращения работы PH, при этом
орбита КК может быть нерасчетной с малым временем существо-
вания, обеспечивающим кратковременный полет и посадку в штат-
ном посадочном районе.
К настоящему времени известен единственный случай приме-
нения средств аварийного спасения при выведении пилотируемого
КК на орбиту, который относится к внеатмосферному участку
296
траектории выведения. При запуске КК «Союз» произошла ава-
рия PH в момент разделения II и III ступеней на высоте около
165 км. Система аварийного спасения совместно со штатными
бортовыми системами КК обеспечила благополучное возвращение
экипажа на Землю.
10.8. СРЕДСТВА АВАРИЙНОГО СПАСЕНИЯ КК «СОЮЗ»
Аварийное спасение экипажа КК «Союз» обеспечивается комп-
лексом бортовых систем КК и PH, который включает штатные си-
стемы КК и PH, а также специальные подсистемы (автоматика,
твердотопливная ДУ, средства аэродинамической стабилизации,
механизмы силовой связи уводимых отсеков КК и ГО и т. д.),
предназначенные для работы только в условиях аварии и состав-
ляющие в совокупности систему аварийного спасения (САС).
В зависимости от момента аварии спасение экипажа возмож-
но по одной из трех программ:
а) первая — применяется от момента включения САС в де-
журный режим на стартовой позиции (за 10—15 мин до стар-
та PH) до момента сброса ГО, вместе с которым (или несколько
ранее) сбрасывается твердотопливная ДУ; по этой программе в
момент возникновения аварии включается сигнализация на пуль-
те космонавтов, аварийно выключается ДУ PH (только при ава-
риях после 20 с полета), КК разделяется по стыку между СА и
приборно-агрегатным отсеком, фиксируются силовые связи, удер-
живающие СА и орбитальный отсек внутри ГО; разделяется попе-
речный стык в средней части ГО и раскрываются решетчатые ста-
билизаторы, одновременно запускается основной твердотопливный
двигатель; в процессе работы основного двигателя включаются
управляющие двигатели, формирующие траекторию увода ОГБ;
в районе вершины траектории увода происходит отделение СА от
орбитального отсека, включается твердотопливный двигатель раз-
деления, обеспечивающий увод ГО вместе с орбитальным отсеком
на безопасное расстояние от СА; после отделения СА включается
система управления спуском, которая демпфирует угловые воз-
мущения СА, полученные при разделении; затем по команде про-
граммно-временного устройства (при аварии на малых высотах)
или по команде барометрического датчика (при аварии на боль-
ших высотах) начинается ввод парашютной системы; в процессе
спуска на парашюте бортовые системы СА подготавливаются к
посадке;
б) вторая программа применяется в случае аварии в период
от момента сброса ГО до момента достижения скорости полета,
достаточной для выхода КК на нерасчетную орбиту; по этой про-
грамме в момент аварии включается сигнализация на пульте
космонавтов, аварийно выключается ДУ PH, бортовые системы
СА переводятся в аварийный режим работы; по истечении опре-
деленной временной задержки отделяется орбитальный отсек,
а затем разделяются СА и приборно-агрегатный отсек; после чего
297
система управления спуском разворачивает СА в плоскости тан-
гажа и при входе в атмосферу обеспечивает его спуск в режиме
«максимального аэродинамического качества»; при дальнейшем
снижении СА система приземления работает по штатной про-
грамме;
в) третья программа применяется в случае аварии на конеч-
ном участке траектории выведения, на котором возможен выход
КК на нерасчетные орбиты; по этой программе от аварийной РКС
отделяется весь КК.
При проведении пилотируемых космических полетов в 60—70-е
годы задача безопасности на участке выведения сводилась к тому,
чтобы при любом неблагоприятном развитии полета обеспечить
безопасность экипажа и предусмотреть простые меры по безопас-
ности стартовой позиции. Решение этой задачи было успешно
выполнено за счет достаточно высокой надежности PH и создания
специальных средств аварийного спасения и нештатных программ
функционирования КК.
Дальнейшее развитие пилотируемых транспортных космиче-
ских кораблей возможно в направлении создания мощных транс-
портных систем «Земля — орбита ИСЗ» при возрастании их слож-
ности и стоимости. При оценке эффективности подобных систем
на первый план выдвинутся экономические мотивы, что приведет
к несколько иной постановке проблемы безопасности. Несомненно,
по-прежнему, главным будет безопасность экипажа, но помимо
этого возникнут еще две задачи: обеспечение безопасности стар-
тового комплекса и спасение в аварийных ситуациях всего КК как
наиболее ценного элемента РКС. Такой подход к проблеме безо-
пасности потребует и новых методов ее решения, при этом особое
внимание, по-видимому, будет уделяться совершенствованию
средств контроля аварийного состояния, использованию элементов
прогнозирования в построении этих средств для раннего обнару-
жения отказов, увеличению и рациональному использованию ре-
зервных возможностей РКК*
Глава 11
УПРАВЛЕНИЕ ПОЛЕТОМ КОСМИЧЕСКИХ АППАРАТОВ
11.1. ОРГАНИЗАЦИЯ УПРАВЛЕНИЯ
Полет — это завершающая стадия создания КА. Различные за-
дачи полета существенно влияют на организацию управления по-
летом. Как правило, в испытательном полете участвует большое
количество специалистов — создателей систем и конструкции КА,
в процессе такого полета происходит отладка и проверка назем-
ных средств математического обеспечения и организационной
структуры наземных служб. Полет отработанного, серийного КА
обеспечивается специализированными службами управления с
привлечением специалистов по КА только на самых ответственных
участках полета.
С рабочей орбитой КА связана длительность наблюдения его
из одного наземного пункта. Низкоорбитальные КА находятся в
зоне прямой видимости наземного пункта всего несколько минут
(например, станция «Салют-6» 5—8 мин), поэтому для обеспече-
ния достаточного времени связи с КА необходима целая сеть
наземных пунктов или связь через спутники-ретрансляторы.
Высокоорбитальные КА, а также КА, летящие к другим пла-
нетам, находятся в зоне прямой видимости наземного пункта в
течение нескольких часов, однако для связи с межпланетными
КА нужны более мощные наземные средства (большие диаметры
антенн, передатчики большей мощности и т. п.) по сравнению со
средствами связи низкоорбитальных КА.
Управление космическим комплексом усложняется с увеличе-
нием числа входящих в него КА с точки зрения координирования
работы наземных средств с программой работы каждого КА. Наи-
более сложным и ответственным является управление полетом
пилотируемого космического комплекса в связи с дополнительными
задачами взаимодействия Земли и экипажей и обеспечения безо-
пасности полета.
Программа полета — это план работы КА, экипажей (если
полет пилотируемый) и наземных средств, взаимодействующих
с КА.
Общий план полета разбивают на участки, характерные вы-
полнением определенных промежуточных задач полета. Напри-
мер, весь полет орбитальной станции «Салют» разбит иа участки
выведения и орбитального полета, а последний, в свою очередь,—
299
на экспедиции, причем каждая экспедиция, решая свою задачу,
имеет вполне определенную последовательность полетных опера-
ций:
выведение транспортного корабля (ТК) с экипажем;
сближение и стыковка ТК со станцией;
переход экипажа из ТК в станцию;
проведение заданной программы исследований и эксперимен-
тов в процессе полета экспедиции на станции;
расстыковка ТК и станции;
спуск и посадка спускаемого аппарата ТК с экипажем и воз-
вращаемыми грузами.
Программа реализации полетной операции — это временная
циклограмма работы систем КА, экипажа и основных средств,
участвующих в управлении полетом, с указанием информацион-
ного обмена между КА и Землей. Программа реализации полет-
ной операции служит основой для разработки программы управ-
ления бортовыми системами и наземными средствами, участвую-
щими в управлении полетом.
Для пилотируемого КА программу реализации разрабатывают
с учетом суточного расписания деятельности экипажа.
При разработке программы полета рассчитывают не только
основные (штатные) варианты программы реализации, но и ва-
рианты изменения полета при отклонениях в режимах работы КА
или отдельных отказах приборов и агрегатов.
На основании программы полета уточняют состав средств,
привлекаемых к управлению полетом, составляют планы их ра-
боты, которые увязывают с программами полета других КА.
Службы и средства, обеспечивающие управление полетом КА,
решают такие основные задачи, как:
реализация программы полета КА для достижения целей по-
лета;
обеспечение безопасности экипажа и сохранности (живучести)
КА;
выход из нештатных ситуаций и нейтрализация их послед-
ствий.
Управление полетом — это непрерывный процесс, в котором
можно выделить следующие его составляющие:
долгосрочное планирование — долгосрочный план текущего
участка полета;
текущее планирование — разработка программы на сутки или
несколько ближайших суток;
реализация текущей полетной операции — собственно управле-
ние полетом;
контроль выполнения полетной операции и состояния КА;
обработка научной информации, поступающей с КА, и пере-
дача ее потребителям;
корректирование программы с учетом достигнутых результа-
тов.
300
Реализация полетных операций — это отработка системами КА
заданной последовательности управляющих воздействий, в соот-
ветствии с которыми КА выполняет маневры, изменяет свою ори-
ентацию в пространстве, включает и выключает служебную и ис-
следовательскую аппаратуру и т. п.
Различают три способа реализации полетных операций:
программный, когда программа выполнения операции, со-
держащая последовательность управляющих воздействий, заранее
закладывается в бортовые цифровые вычислительные машины
(БЦВМ) или формируется ими и отрабатывается без вмешатель-
ства с Земли;
дистанционный, при котором все управляющие воздейст-
вия передаются на борт КА с Земли;
смешанный, когда часть управляющих воздействий переда-
ется с Земли, а часть формируется бортовыми системами и эки-
пажем.
Последний способ получил наибольшее применение.
Контроль и анализ выполнения полетных операций и функцио-
нирования КА включает контроль прохождения управляющих воз-
действий, хода типовых режимов работы, энергетических, ресурс-
ных и других характеристик КА, запасов расходуемых веществ
и материалов, анализ функционирования систем и диагностику
отказов в системах, прогнозирование работоспособности систем
КА.
Контроль КА проводится Землей в основном по данным теле-
метрической информации, поступающей с КА в процессе выпол-
нения полетных операций, а также по информации экипажа.
Основной метод контроля — сравнение фактических значений
параметров с их ожидаемыми значениями, получаемыми расчет-
ным путем или моделированием.
Анализ функционирования систем направлен на определение
причин, вызвавших ненормальное выполнение заданных режимов
и локализацию отказавшего элемента или блока. На основе ста-
тистической обработки уточняются динамические характеристики КА
(моменты инерции, масса, углы перекоса эллипсоида инерции и
др.) и ресурсные характеристики всех систем КА, используемые
для прогноза их работоспособности и выдачи рекомендаций по
переключению или замене блоков. Результаты анализа и прогноза
работоспособности используют при разработке программы полета
для следующих суток полета.
Предварительная обработка и анализ результатов научных ис-
следований требуются для оперативной корректировки программы
полета с учетом фактического функционирования исследователь-
ской аппаратуры, достаточности и достоверности результатов ис-
следований и экспериментов.
Работа научной аппаратуры оценивается методом сравнения
текущих параметров (в том числе и измерительной информации)
с расчетными или предварительно полученными на модели.
301
В настоящее время процесс управления полетом имеет высо-
кую степень автоматизации, причем сохраняется тенденция к ее
дальнейшему увеличению.
Автоматизация планирования позволяет оптимизировать про-
грамму полета КА на каждом этапе ее разработки, повысить
оперативность планирования и сократить численность персонала
управления, занятого планированием.
Автоматизация процесса реализации полетных операций по-
вышает надежность их выполнения за счет алгоритмического и
аппаратурного резервирования с автоматическим переходом на
резерв.
Автоматизация контроля и анализа работы систем КА увели-
чивает надежность КА за счет расширения числа оперативно кон-
тролируемых параметров, сокращает время анализа и время вы-
хода из нештатных ситуаций.
Автоматизация обработки и анализа научной информации
ускоряет выработку оптимальных рекомендаций по изменению
программы исследований и программы полета, что улучшает по-
казатели эффективности КА.
В дальнейшем предполагается, что все функции управления
будут переданы комплексу ЭВМ, а за персоналом управления
будут оставлены определение целей и задач и принятие решений
в случае нештатных ситуаций, а также контроль за работой ЭВМ.
11.2. КОНТУР УПРАВЛЕНИЯ ПОЛЕТОМ
Задачи управления полетом решает комплекс бортовых и на-
земных средств и служб, образующих контур управления поле-
том — динамичную структуру, изменяющуюся в ходе полета, в
состав которой как основные звенья входят бортовой (БКУ) и
наземный (НКУ) комплексы управления, объединен-
ные информационными связями в единый контур. Исторически
между БКУ и НКУ сложилось такое распределение функций
управления, при котором большую их часть выполнял наземный
комплекс. Развитие бортовых вычислительных машин и передача
большей части функций управления БКУ позволяют расширить
возможности КА за счет автоматизации управления полетными
операциями, снизить затраты на управление за счет сокращения
наземных средств управления и наземного персонала управления,
повысить надежность КА за счет введения бортовой диагностики
и алгоритмического и функционального дублирования в систе-
мах КА.
Распределение функций управления между БКУ и НКУ зави-
сит от типа и назначения КА, длительности и сложности его по-
лета, от многих других причин и включает:
а) для БКУ:
сбор, обработку и хранение информации о работе систем КА;
обмен информацией с НКУ;
302
логическое управление и координацию работы всех систем КА;
контроль состояния и функционирования отдельных систем КА,
а также их диагностику;
отображение информации для экипажа;
реализацию программ управления бортовыми системами, за-
ложенных в память БКУ;
б) для НКУ:
планирование и реализацию программы полета;
сбор, обработку и хранение информации о работе комплексов
КА, отдельных КА и их бортовых систем;
обмен информацией с БКУ КА и выдачу управляющих воздей-
ствий на КА;
контроль, анализ и диагностику систем КА;
отображение, документирование и представление информации
потребителям;
координацию работы отдельных КА и комплексов КА;
управление средствами связи;
обеспечение заключительных наземных испытаний КА;
обеспечение информации от системы единого времени (СЕВ).
Как видно, большинство функций НКУ и БКУ дублируют друг
друга, что не случайно, так как большие затраты на космические
полеты, участие в полетах экипажей требуют очень высокой на-
дежности управления, обеспечение которой возможно только дуб-
лированием функций управления.
Контур управления полетом строится как автоматизированная
(а не полностью автоматическая) система управления, так как
управление в условиях неопределенности, в частности принятие
решений, более эффективно, чем ЭВМ, выполняет персонал управ-
ления. Контур управления обеспечивает выполнение заданной
программы полета в пределах ряда решений, зависящих от ре-
ального функционирования объекта управления.
В процессе разработки контура управления полетом проводят
оценку эффективности управления — степени реализации требо-
ваний, предъявляемых к управлению данным КА. В качестве
критерия эффективности используют стоимость затрат на управ-
ление, а также надежность (задается вероятностью безотказного
управления за заданный промежуток времени) и оперативность
управления (среднее время реакции контура управления на из-
менение условий или режима полета).
Основные параметры контура управления полетом, существен-
но влияющие на структуру и распределение функций в контуре,
оценивают на этапе предварительного проектирования, на кото-
ром выбирают основные принципы управления, строят структур-
ную схему контура управления и определяют перечень средств,
входящих в НКУ.
Большое значение придают обеспечению преемственности вы-
бираемых средств НКУ, так как средства и сооружения НКУ
имеют большую стоимость и предназначаются для длительной
эксплуатации, намного превышающей время полета отдельных
303
КА. Поэтому обычно принимают компромиссное решение, учиты-
вающее предъявляемые требования к разрабатываемому контуру
управления и уже существующие средства НКУ; иногда проще
передать БКУ ту часть функций, которая требует модернизации
существующих средств НКУ.
На этапе эскизного проектирования определяют задачи всех
служб и средств, входящих в контур управления полетом, опре-
деляют требования к каналам связи, разрабатывают план обмена
информацией между звеньями контура и внутри НКУ, распре-
деляют общую надежность управления между отдельными сред-
ствами и службами, определяют необходимое функциональное
дублирование. Важнейшим требованием к общей конфигурации
контура управления является сохранение полной работоспособ-
ности контура при одном отказе и обеспечение безопасности по-
лета при втором отказе.
11.3. БОРТОВОЙ КОМПЛЕКС управления
Бортовой комплекс управления — это совокупность систем КА,
обеспечивающих управление функционированием КА как единого
целого, бортовые системы которого связаны между собой инфор-
мационными каналами.
При построении БКУ учитывают помимо функциональных и
эксплуатационных требований, предъявляемых к КА, такие спе-
цифические требования, как:
степень его автономности при выполнении полетных опера-
ций;
возможность оперативного вмешательства в процессы управле-
ния БКУ со стороны НКУ.
Бортовой комплекс управления обычно имеет четыре режима
работы:
управление от НКУ;
автономное управление, т. е. управление всеми системами по
внутренним программам БКУ;
смешанный режим, при котором часть управляющих воздей-
ствий формирует и передает на борт НКУ, а часть формирует
и исполняет БКУ;
управление с участием экипажа.
Первый режим применяется при проведении особо ответствен-
ных полетных операций и при первых включениях режимов в по-
лете, второй — вне зоны видимости станций слежения НКУ и в
том случае, когда полетная операция уже отработана, третий —
чаще первых двух, так как обладает наибольшей гибкостью.
В процессе полета БКУ взаимодействует с НКУ через каналы
связи, по которым передаются необходимая для функционирова-
ния контура управления полетом командная, уставочная и про-
граммная, телефонная, телеграфная, телевизионная и телеметри-
ческая информации, сигналы радиоконтроля орбиты и сверки вре-
мени.
304
11.4. наземный комплекс управления
Наземный комплекс управления представляет собой систему
(рис. 11.1) служб и средств, обладающую наиболее сложной в
мире системой связи, включающей кабельные, радиорелейные н
спутниковые каналы, большая часть которых арендуется у госу-
Рис. 11.1. Функциональная схема НКУ:
] — спутник-ретранслятор для связи с КА; 2 — каналы связи «спутник-ретрансля-
тор — КА»; 3 — каналы связи «спутннк-ретраислятор — станция спутниковой связи»; 4—
обслуживаемый КА; 5 — каналы связи «КА — наземная станция слежения»; 6 — спут-
ник-ретранслятор для связи ЦУП со станциями слежения; 7 —каналы связи «стан-
ции слежения — спутник-ретранслятор»; 8—пункт спутниковой связи для управле-
ния КА; 9 — наземные станции слежения; 10— наземные каналы связи НКУ: 11—
корабельная станция слежения; 12— пункт спутниковой связи для связи с назем-
ными и корабельными станциями слежения; 13— космодром запуска КА; 14 —
центр управления полетом (ЦУП); 15 — комплексный моделирующий стенд; 16 —
электрический аналог КА (комплексный стенд); 17 — центры обработки научной
информации; /8 — вспомогательные службы управления полетом
дарственных и коммерческих организаций. Средства НКУ обслу-
живает персонал, численностью до тысячи человек, К НКУ как
к системе предъявляют чрезвычайно высокие требования по
быстродействию и надежности, что обусловливает введение авто-
305
матизации ее управления иа всех уровнях. Поступление с совре-
менных КА больших потоков информации (10—100 Мбит/с) тре-
бует включения в состав НКУ широкополосных каналов связи и
быстродействующих ЭВМ для обработки этих потоков информа-
ции и объединения всех ЭВМ в единую вычислительную сеть
с обеспечением межмашинного обмена.
Центр управления полетом
Центр управления полетом (ЦУП) предназначен для опера-
тивного управления полетом отдельных КА или их комплексов,
сбора, обработки, хранения и документирования информации
о функционировании КА, координирования всех средств НКУ и
обмена информацией с ними, а также для обеспечения работы
персонала управления.
Центр управления полетом — центральное звено НКУ, осна-
щенное различными средствами автоматизированного управления
полетом КА и работой НКУ, в состав которых входят информа-
ционно-вычислительный комплекс (ИВК), средства внешней и
внутренней связи ЦУП, средства отображения и документиро-
вания.
Информационно-вычислительный комплекс (ИВК) выполняет:
автоматизированное планирование оперативной программы по-
лета КА;
автоматическую (в реальном времени) обработку ТМ инфор-
мации и ее автоматизированный анализ;
хранение и документирование информации о полете;
выдачу информации персоналу управления на индивидуаль-
ные и коллективные средства отображения;
предварительную обработку и распределение между Центрами
обработки научной информации (ЦОНИ) научной информации,
поступающей с КА;
решение задач управления средствами НКУ;
управление средствами связи НКУ (если в составе НКУ нет
отдельного центра управления связью).
Информационно-вычислительный комплекс строится на базе
однотипных быстродействующих универсальных ЭВМ, осущест-
вляющих основные вычислительные функции, и мини-ЭВМ, вы-
полняющих вспомогательные функции предварительной обработ-
ки данных и связывающих универсальные ЭВМ с устройствами
ввода—вывода. Такое построение обеспечивает высокую эффек-
тивность и высокую надежность ИВК за счет дублирования од-
нотипных ЭВМ. Для связи персонала управления с ИВК широко
используются дисплеи отображения оперативной информации.
В ИВК вычислительные процессы и обработка информации
организуются таким образом, чтобы при любых отказах в ЭВМ
или периферийной аппаратуре процесс управления КА не преры-
вался и обеспечивалась сохранность информации.
306
Информационно-вычислительный комплекс используют при со-
ставлении планов полета и при формировании последовательности
управляющих воздействий. Для проверки правильности и непро-
тиворечивости сформированных воздействий и проверки реакции
систем КА на эти воздействия служат моделирующие стенды и
комплексный стенд КА.
Моделирующие стенды состоят из ЭВМ с набором про-
грамм, имитирующих работу КА, а также отдельных реальных
приборов, работу которых сложно или невыгодно моделировать
на ЭВМ. Моделирующие стенды имитируют работу систем КА
с некоторым отличием от реальности и используются в основном
для предварительной отработки методик полетных операций,
а также тренировок экипажей и персонала управления.
Для более точной имитации работы КА служит комплекс-
ный стенд — электрический аналог КА, на который подаются
управляющие воздействия, причем реакции комплексного стенда
на аналогичные управляющие воздействия адекватны реакции КА
в полете. Кроме управляющих воздействий на тренажных сред-
ствах отрабатываются операции по обслуживанию и ремонту.
Центр управления полетом имеет свой узел связи, объединяю-
щий внешние и внутреннюю сети связи ЦУП. Внешние связи
ЦУП обеспечивают телефонную связь, прием и передачу цифро-
вой информации, телетайпную и фототелеграфную связь, прием и
передачу телевизионной информации. Специальные широкополос-
ные линии связи соединяют ЦУП с предприятиями-разработчика-
ми КА, где установлены моделирующие стенды и тренажеры.
Внутренняя связь ЦУП обеспечивает оперативное взаимо-
действие персонала управления между собой и с обслуживающим
персоналом других служб ЦУП и имеет несколько обособленных
сетей (оперативную громкоговорящую связь, циркуляры групп
поддержки и прямые некоммутируемые служебные связи). Все
рабочие места специалистов оснащены переговорными устройст-
вами, дающими возможность подключения к любой из обособлен-
ных сетей внутренней связи.
Средства отображения ЦУП служат для наглядного отображе-
ния всей необходимой для управления полетом информации и
включают:
оконечные устройства отображения коллективного пользования
(просветные и проекционные экраны, проекторы, проекционные
черно-белые и цветные телевизоры, алфавитно-цифровые табло,
блоки индикации времени и т. п.);
устройства отображения индивидуального пользования (теле-
визионные видеоконтрольные устройства, дисплеи ИВК, устрой-
ства выбора информации);
аппаратуру преобразования, коммутации и управления сред-
ствами отображения,
Проекторы предназначены для отображения карт, таблиц, ри-
сунков, мнемосхем, графиков и позволяют высвечивать статиче-
скую и динамическую информацию в виде движущихся точек,
307
стрелок и символов, проекционные телевизоры позволяют выво-
дить информацию на экраны площадью в десятки квадратных
метров, а световые табло — выводить на них любую алфавитно-
цифровую информацию.
В состав оборудования ЦУП входит аппаратура формирования
единого времени, предназначенная для формирования и хра-
нения местной шкалы времени, привязки ее к центральному эта-
лону частоты и времени, формирования и выдачи на ЭВМ шкал,
кодов и сигналов времени, а также для привязки бортового вре-
мени КА.
Средства документирования ЦУП используются для получения
необходимого количества документов по оперативной программе
и о ходе полета и состоят из различных алфавитно-цифровых пе-
чатающих устройств, графопостроителей и множительных аппа-
ратов.
Для оперативного управления полетом в ЦУП оборудованы
главный и несколько вспомогательных залов управления, причем
из главного зала ведется управление комплексами КА, а из вспо-
могательных залов — управление отдельными КА на участках их
автономного полета.
Главный зал управления имеет большое количество различ-
ных коллективных средств отображения и пультов руководителей
полета, ведущих специалистов по отдельным системам КА, спе-
циалистов по управлению НКУ и операторов связи с экипажем.
Все пульты имеют средства внутренней и внешней связи ЦУП,
цветные телевизионные экраны, дисплеи ИВК и телевизионные
экраны с повышенным разрешением для отображения полетной
документации.
Вспомогательные залы оборудованы аналогичным образом, но
имеют меньшие размеры и меньшее количество средств коллек-
тивного отображения. Кроме залов управления в ЦУП имеются
специально оборудованные помещения для групп поддержки, ко-
торые с помощью установленных пультов взаимодействуют с ИВК
и персоналом управления главного и вспомогательных залов.
Персонал управления — это оперативная группа специалистов
по управлению полетом, системам КА и научным исследова-
ниям.
Персонал управления состоит из главной группы управления
в ЦУП и региональных групп на станциях слежения.
Главная группа управления включает несколько специализи-
рованных по функциональному назначению групп (планирования,
реализации программы, анализа функционирования КА, балли-
стическую, обеспечения научных исследований, связи с экипажем,
медицинского контроля, управления средствами НКУ и т. д.),
разделенных для круглосуточного управления полетом на смены,
работающие с некоторым перекрытием.
В настоящее время наблюдается тенденция сокращения чис-
ленности персонала управления и передачи большей части его
функций вычислительным средствам ЦУП и КА.
308
Наряду с ЦУП одним из основных элементов НКУ является
сеть стационарных и подвижных станций слежения, которая долж-
на обеспечивать:
наиболее возможное перекрытие зонами видимости станций
слежения трассы полета КА или максимально возможное время
связи с КА у других планет Солнечной системы;
возможность использования методов триангуляции и интерфе-
рометрии для контроля орбиты КА;
удаленность от больших населенных пунктов для снижения
помех приему и неблагоприятного воздействия мощных радиопе-
редатчиков на население;
хороший обзор антенн станций слежения.
Станции слежения (СС) предназначены для передачи команд-
ной, телефонной (ТЛФ), телевизионной (ТВ), уставочной и про-
граммной информации на КА; приема с КА ТМ, ТЛФ, ТВ и дру-
гой информации, передаваемой по радио- и оптическим каналам
связи; предварительной обработки информации, поступившей с КА,
и ее передачи в ЦУП; измерения параметров движения КА (тра-
екторные измерения) и проведения операций сверки времени.
По назначению станции слежения делят на станции связи с
околоземными и межпланетными КА. Вторые отличаются от пер-
вых большей мощностью передающих устройств, более узкона-
правленными антеннами и более чувствительной приемной аппа-
ратурой.
В состав НКУ входят две-три станции слежения связи с меж-
планетными КА, максимально разнесенные по долготе с целью
обеспечения большего времени связи и обычно совмещаемые со
станциями связи с околоземными КА. Объединение средств связи
и измерений в пределах одной станции слежения позволяет полу-
чить значительную экономию средств на строительство и обслу-
живание.
В состав средств станции слежения входят:
комплекс антенн с устройствами наведения и автосопровожде-
ния;
приемопередающая аппаратура ТВ и ТЛФ радиолиний;
средства радиоконтроля орбиты;
вычислительный центр для расчета параметров орбиты КА,
ведения прогноза сеансов связи с КА, расчета целеуказаний для
наведения антенн и предварительной обработки поступающей с
КА информации;
оборудование системы единого времени;
средства связи с ЦУП и другими станциями слежения (ТЛФ,
ТВ и широкополосные каналы).
Большинство станций слежения оборудовано аппаратурой свя-
зи через спутники-ретрансляторы и специальными антеннами спут-
никовой связи.
Радиоконтроль орбиты КА проводится путем измерения даль-
ности (Д) по времени прохождения запросного сигнала до КА и
обратно с помощью тональных частот или фазовым методом, ско-
309
рости изменения дальности с помощью эффекта Доплера, угло-
вого положения КА по углам поворота остронаправленных антенн,
а также положения КА триангуляционным или интерферометри-
ческим методом.
Два последних метода требуют участия в радиоконтроле ор-
биты КА двух или трех станций слежения, разнесенных на сотни
и тысячи километров для создания приемлемой базы измерений.
Для снижения ошибок в определении положения КА антенны
станций слежения привязываются к геодезической сети с ошибкой
не больше нескольких метров.
Для расширения возможностей слежения в НКУ входят по-
движные станции слежения на кораблях, автомобильных и же-
лезнодорожных платформах и самолетах, используемые в период
сложных и ответственных полетных операций, как, например,
совместный полет космических кораблей «Союз» и «Аполлон», при
котором в дополнение к сети стационарных станций слежения
были задействованы три корабельные станции слежения НКУ —
«Авангард» (США), «Академик Сергей Королев» и «Космонавт
Юрий Гагарин» (СССР), три самолетные станции слежения — две
в Южной Африке, одна в Австралии и одна передвижная станция
в Ньюфаундленде.
Средства связи НКУ предназначены для объединения всех
элементов НКУ в единую информационную сеть и обеспечивают
ретрансляцию командной, программной и уставочной инфор-
мации, а также ТЛФ и ТВ сигналов из ЦУП на станции слеже-
ния; ТЛФ, ТВ, ТЛМ информации, получаемой с КА, со станций
слежения в ЦУП; информации между ЦУП, моделирующими
стендами и центрами обработки научной информации; служебной
информации НКУ, необходимой для нормального функциониро-
вания контура управления.
Сеть связи НКУ включает управляющий центр, оборудованный
специальными ЭВМ, различающими специфические типы инфор-
мации и автоматически направляющими или переключающими
нужную информацию по месту назначения и, кроме того, управ-
ляющими резервами сети связи так, чтобы при отказе отдельных
каналов потери или задержки информации были минималь-
ными.
Основным требованием к средствам связи является высокая
достоверность передачи информации между элементами НКУ, для
чего в процессе передачи командной, программной и уставочной
информации из ЦУП на станции слежения происходят ее пораз-
рядное квитирование, проверка контрольной суммы массивов и
специальное кодирование.
Высокая надежность передачи информации обеспечивается го-
рячим резервированием каналов связи. Использование спутников-
ретрансляторов в составе НКУ позволяет:
снизить эксплуатационные расходы НКУ за счет уменьшения
количества наземных, корабельных и самолетных станций сле-
жения;
310
расширить зоны связи (вместо 10—20% на витке до 80—85%
для околоземных КА), полосы каналов связи и обеспечить много-
канальную связь;
обеспечить высокую достоверность передачи сообщений;
существенно упростить процесс управления средствами НКУ.
Центры обработки научной информации (ЦОНИ) предназна-
чены для оперативной обработки научной информации, поступаю-
щей с КА, принадлежат научным и промышленным организациям,
проводящим научные исследования и эксперименты на КА, спе-
циализированы по направлениям этих исследований и выпол-
няют:
прием научной информации из ЦУП или непосредственно со
станций слежения;
оперативную обработку научной информации и представление
ее потребителям;
анализ функционирования научной аппаратуры КА по резуль-
татам обработки и выдачу рекомендаций по изменению программы
полета КА;
запись научной информации для хранения и последующей об-
работки.
Центры обработки научной информации — это вычислительные
центры, оборудованные универсальными и специализированными
ЭВМ, имеющие математическое обеспечение для обработки ин-
формации и связанные широкополосными каналами связи с ЦУП
и станциями слежения.
Кроме вычислительных средств в состав ЦОНИ входят специа-
лизированное оборудование для обработки и интерпретации на-
учной информации (например, интерпретаторы и синтезаторы мно-
гозональных космических фотоснимков и телевизионных изобра-
жений), а также технологические образцы научной аппаратуры,
работающей на КА, для моделирования ее работы на борту, рас-
познавания отказов или сопровождающих экспериментов.
Поисково-спасательный комплекс (ПСК) служит для поиска,
обнаружения и доставки космического корабля и экипажа, при-
землившихся в запланированном районе (штатный полигон по-
садки), или после аварийного спуска (резервные или аварийные
полигоны посадки).
В состав средств ПСК входят авиационные (самолеты и вер-
толеты с десантным оборудованием на борту), морские (верто-
летоносцы, морские суда, катера и др.) и сухопутные (вездеходы,
амфибии и др.) транспортные средства, а также командный
пункт, с которого с помощью телевизионных, телефонных, теле-
графных средств связи (в том числе с использованием спутников-
ретрансляторов) организуется работа групп ПСК и координи-
руются действия с ЦУП.
Во время пилотируемых полетов средства ПСК развернуты на
штатном полигоне посадки и в местах оперативной дислокации и
находятся в постоянной готовности.
311
Вспомогательные службы НКУ
К вспомогательным службам относят: службу радиационной
безопасности, метеослужбу и службу Солнца.
Служба радиационной безопасности следит за радиационной
обстановкой в районе полета КА, оценивает воздействие радиа-
ции на экипаж, приборы и конструкцию КА и выдает рекомен-
дации по дальнейшему полету с учетом прогноза радиационной
обстановки.
Метеослужба определяет метеообстановку в районе старта КА
и по трассе полета, на участках проведения фотосъемки или дру-
гих исследований Земли, а также выдает прогноз метеообстановки
в районах посадки КА на ближайшие несколько суток.
Служба Солнца прогнозирует активность Солнца, от которой
зависят условия прохождения радиоволн, радиационная обстанов-
ка на орбите и плотность атмосферы на высотах полета КА.
ВМЕСТО ЗАКЛЮЧЕНИЯ
Приведенные в книге материалы, имея достаточно общий харак-
тер, рассказывают о практической разработке и создании косми-
ческих аппаратов, используемых в мирных целях для научных
исследований, проведения прикладных экспериментов и работ
в интересах народного хозяйства. Созданный к началу 80-х годов
потенциал космической техники позволяет существенно расширить
исследования и работы в этом направлении.
Однако существует и другая возможная сфера использования
космической техники — военная. И если мирные исследования
обогащают науку и содействуют развитию экономики, то разра-
ботка космических средств в военных целях усиливает гонку
вооружений. В этой связи для судеб человечества важное значе-
ние имеет направленность усилий, действий и инициатив ведущих
космических держав.
С начала практического освоения космического пространства —
запуска в нашей стране первого в мире ИСЗ — Советский Союз
выступает за мирное использование космоса. Уже в 1958 г. СССР
внес в ООН предложение о разработке соглашений, предусматри-
вающих запрещение использования космического пространства в
военных целях, но в связи с позицией США и их союзников это
предложение тогда не было принято. В 1963 г. благодаря усилиям
Советского Союза и других социалистических государств был за-
ключен Международный Договор о запрещении испытаний ядер-
ного оружия в атмосфере, космическом пространстве и под во-
дой, явившийся важным шагом в борьбе за мирный космос.
В 1967 г. по инициативе СССР состоялось подписание До-
говора о принципах деятельности государств по исследованию и
использованию космического пространства, включая Луну и дру-
гие небесные тела. Этот Договор предусматривает обязательство
не выводить на орбиту вокруг Земли любые объекты с ядерным
оружием или другими видами оружия массового уничтожения,
не устанавливать оружие подобного типа на небесных телах и
не размещать его в космосе другим путем. В 1972 г. между СССР
и США был подписан Договор об ограничении систем противора-
кетной обороны, по которому стороны обязались, в частности, не
создавать, не испытывать и не развертывать подобных систем
313
в космосе. Постепенно складывалась система международных со-
глашений, способствующая развитию космических исследований в
мирных целях и препятствовавшая милитаризации космоса.
Этим же целям служили соглашения между Академией наук
СССР и НАСА США о мирном изучении космоса (1962 г.) и о сов-
местной деятельности в области космической физики, метеороло-
гии, биологии и медицины и изучения природной среды (1971 г.).
Важное значение имели соглашение между СССР и США о со-
трудничестве в исследовании и использовании космического про-
странства в мирных целях (1972 г.) и реализованная в соответ-
ствии с ним программа «Союз» — «Аполлон» (1975 г.).
В дальнейшем США, не ратифицировав Договор ОСВ-2, встали
на путь развития гонки вооружений, в том числе в космосе. От-
мечается резкая милитаризация космической программы США
80-х годов. При этом, кроме развертывания средств обеспечения
действий армии, авиации и флота (спутники связи, разведки, на-
вигации и др.), планируется доставка в космос новых видов и
систем оружия, которые позволят вести, военные действия в
околоземном космическом пространстве и наносить оттуда удары
по объектам в воздухе, на земле и на море. Стремясь обеспечить
«постоянное лидирующее положение в космосе», США рассмат-
ривают космическое пространство как потенциальный театр воен-
ных действий.
По сообщениям американской печати, в Пентагоне создан спе-
циальный отдел планирования военной политики США в космо-
се, предполагается создание постоянного орбитального командного
пункта, а в вооруженных силах — организация особой службы
«космического командования», призванного объединить усилия
ВВС, ВМС и армии в области военных космических операций.
Особое место в планах Пентагона отводится использованию ор-
битального корабля МТКС «Спейс Шаттл», в регулярных поле-
тах которого планируется выведение на орбиту систем военного
назначения. Разрабатывается программа использования лазеров
на космических орбитальных станциях, пучкового и других видов
вооружений, обсуждается создание «настоящей армады боевых
станций в космосе». По материалам американского журнала
«Форчун», стоимость каждой такой станции составит около
1 млрд, дол., а вся программа, рассчитанная на 20 лет, потре-
бует по крайней мере 100 млрд. дол.
По сведениям американской печати, главная цель разрабаты-
ваемых Пентагоном космических программ — обеспечение военно-
стратегического превосходства над Советским Союзом. Это мо-
жет привести лишь к дальнейшей эскалации гонки во-
оружений, так как СССР в интересах укрепления своей оборо-
носпособности вынужден будет принять соответствующие ответ-
ные меры.
Вынашиваемые в США планы милитаризации космоса — это
несомненная угроза миру и безопасности, способная повысить
314
уровень существующего военного противостояния, увеличить не-
доверие между государствами.
Для предотвращения опасных планов превращения космиче-
ского пространства в арену новой войны, для обеспечения мир-
ного неба над Землей необходимы желание и добрая воля всех го-
сударств и народов нашей планеты.
СПИСОК ЛИТЕРАТУРЫ
Андреевский В. В. Динамика спуска космических аппаратов на Зем-
лю. М.: Машиностроение, 1970, 232 с.
Белью Л., Стулингер Э. Орбитальная станция «Скайлэб». Пер. С
англ. / Под общ. ред. Г. Л. Гродзовского. М., Машиностроение, 1977, 232 С.
Бронштэн В. А. Планеты и их наблюдения. Изд. 2-е. М.: Наука,
1979, 240 с.
Васильев А. А., Сибиряков Г. С. «Спейс Шаттл» готовится к по-
лету. — «США: Экономика, политика, идеология», 1979, № 3, с. 85—95.
Виноградов А. П. Передвижная лаборатория на Луне «Луноход-1».
М.: Наука, 1971, 128 с.
Воронин Г. И., Поливода А. И. Жизнеобеспечение экипажей косми-
ческих кораблей. М., Машиностроение, 1967, 211 с.
Временные нормы радиационной безопасности при космических полетах
(ВНРБ-75). М.: Издание М3 СССР, 1976, 8 с.
Григорьев Ю. Г. Радиационнан безопасность космических полетов. М.:
Атомиздат, 1975, 255 с.
Дело о научно-технических достижениях и рекордах, установленных авто-
матической межпланетной станцией «Зонд-5» 14—21 сентября 1968 г. Федера-
ция авиационного спорта СССР. М., 1973.
Ермилов Ю. А., Иванова Е. Е., ПантюшинС. В. Управление
сближением космических аппаратов. М., Наука, 1977, 448 с.
Залетаев В. М., К а п и н о с Ю. В., Сургучев О. В. Расчеты тепло-
обмена космического аппарата. М.: Машиностроение, 1979, 2С8 с.
Инженерный справочник по космической технике. Изд. 2-е / Под ред.
А. В. Солодова. М., Воениздат, 1977, 430 с.
Ковалев Е. Е. Радиационный риск на Земле и в космосе. М.: Атомиз-
дат, 1976, 256 с.
Коваль А. Ф., Успенский Г. Р. Космос — человеку. М.: Машинострое-
ние, 1974, 200 с.
Космодром (Ракетно-космический комплекс) / Под общ. ред. проф.
А. П. Вольского. М.: Воениздат, 1977, 309 с.
Космонавтика: Маленькая энциклопедия. Изд. 2-е, доп. М.: Советская эн-
циклопедия, 1970, 591 с.
Крошкин Н. Г. Физико-технические основы космических исследований.
М.: Машиностроение, 1969, 288 с.
Левантовский В. И. Механика космического полета в элементарном
изложении. М.: Наука, 1974, 488 с.
Лобанов Н. А. Основы расчета и конструирования парашютов. М.: Ма-
шиностроение, 1965, 363 с.
Мер ж невский Л. А., Титов В. М. Защитные свойства тонкого эк-
рана при высокоскоростном ударе. — «Прикладная механика и техническая
физика», 1977, № 2. Новосибирск, Наука, СО, с. 134—139.
Механика оптимального пространственного движения летательных аппара-
тов в атмосфере / Л. М. Шкадов, Р. С. Туханов, В. Ф. Илларионов, В. П. Пло-
хих. М.: Машиностроение, 1972, 240 с.
316
Назарова Т. Н. и др. Метеорное вещество по измерениям с космических
аппаратов. — «Космические исследования», 1976, т. XIV, вып. 3, с. 435—444.
Новая транспортная космическая система США, ч. I н II. М., Институт
проблем управления, 1978.
Основы космической биологии и медицины. Совместное советско-американ-
ское издание в 3-х томах / Под общ. ред. О. Г. Газенко (СССР) и М. Каль-
вина (США). М.: Наука, 1975.
Основы теории полета космических аппаратов / Под ред. Г. С. Нарима-
нова и М. К. Тихонравова. М.: Машиностроение, 1972, 608 с.
Петров В. М„ Коломенский А. В., Зиль М. В. Радиационная
опасность солнечных вспышек в околоземном космическом пространстве. —
«Космические исследования», 1979, т. XVII, вып. 1, с. 122—126.
Пилотируемые космические корабли: Сб. статей. Пер. с англ. М.: Машино-
строение, 1968, 476 с.
Ракеты-носители (Ракетно-космический комплекс) / Под общ. ред. проф.
С. О. Осипова. М.: Воениздат, 1981, 315 с.
Раушенбах Б. В., Токарь Е. Н. Управление ориентацией космиче-
ских аппаратов. М.: Наука, 1974, 600 с.
Сарычев В. А. Вопросы ориентации искусственных спутников: Серия
«Исследование космического пространства», т. 11, ВИНИТИ, 1978.
«Союз» и «Аполлон»: Сб. статей / Под ред. К. Д. Бушуева. М.: Политиздат,
1976, 271 с.
Средства спасения экипажа самолета / С. М. Алексеев, Я. В. Балкинд,
А. М. Гершкович и др. М.: Машиностроение, 1975, 432 с.
Страницы советской космонавтики / В. П. Денисов, В. И. Алимов,
А. А. Журенко, В. А. Мишарин. М.: Машиностроение, 1975, 350 с.
Творческое наследие академика С. П. Королева: Избранные труды и до-
кументы / Под ред. академика М. В. Келдыша. М.: Наука, 1980, 522 с.
Уманский С. П. Человек на космической орбите. М.: Машиностроенве,
1974, 139 с.
Успехи Советского Союза в исследовании космического пространства: Сб.
статей / Под ред. академика А. А. Благонравова. М.: Наука, 1978, 751 с.
Феоктистов К. П. Научный орбитальный комплекс. М.: Знание, 1980,
64 с.
Фертрегт М. Основы космонавтики. Пер. с англ. М.: Просвещение,
1969, 301 с.
Физика космоса: Маленькая энциклопедия. М.: Советская энциклопедии,
1976, 655 с.
Физические и радиобиологические исследования на искусственных спутни-
ках Земли / Под ред. Ю. Г. Григорьева и Е. Е. Ковалева. М.: Атомиздат,
1971, 200 с.
Журналы «Авиация и космонавтика» за 1971—1979 гг.
Журналы «Космические исследования» за 1972—1980 гг.
Журналы «Вопросы ракетной техники» за 1972—1980 гг.
Экспресс-информация ВИНИТИ за 1973—1980 гг.
Экспресс-информация ЦАГИ за 1977—1980 гг.
Иностранные журналы по вопросам ракетной техники и космонавтики за
1971—1981 гг.
Стр.
ОГЛАВЛЕНИЕ
От авторов ..........................................................
Введение ............................................................
Глава 1. Условия космического полета.................................
1.1. Общая характеристика космического пространства ... —
1.2. Влияние вакуума......................................... 19
1.3. Радиационная опасность ................................. 22
1.4. Метеорная опасность..................................... 36
1.5. Влияние невесомости..................................... 42
Глава 2. Автоматические космические аппараты.......................... 49
2.1. Общие сведения .......................................... ~
2.2. Состав ................................................. 53
2.3. Особенности проектирования ............................. °®
Глава 3. Пилотируемые космические корабли ............................ 75
3.1. Назначение и особенности ............................... —
3.2. Этапы и схема полета................................... 81
3.3. Основные вопросы проектирования........................ 92
3.4. Компоновка............................................ 103
3.5. Спускаемый аппарат.................................... 108
3.6. Советские пилотируемые КК ............................ 124
3.7. Американские пилотируемые КК.......................... 139
Глава 4. Орбитальные станции ....................................... 145
4.1. Пилотируемые орбитальные станции ....................... —
4.2. Станция как орбитальный комплекс........................ —
4.3. Организация материально-технического снабжения . . . 153
4.4. Конструкция .......................................... 154
4.5. Направления развития орбитальных станций.............. 169
4.6. Орбитальные станции, созданные в СССР и США . . . 175
Глава 5. Многоразовые транспортные космические системы............. 182
5.1. Предпосылки создания ................................... —
5.2. Состав................................................ 185
5.3. Схема функционирования МТКК........................... 186
5.4. Орбитальный корабль................................... 187
5.5. Твердотопливные ускорители............................ 193
5.6. Подвесной топливный отсек............................. 195
5.7. Перспективы развития.................................. 196
Глава 6. Обеспечение теплового режима космических аппаратов ... 197
6.1. Общие сведения ......................................... —
318
Стр.
6.2. Внешний теплообмен..................................... 197
6.3. Внутренний теплообмен ................................. 202
6.4. Выбор средств обеспечения теплового режима............ 204
6.5. Особенности СОТР пилотируемых КА................... 213
Глава 7. Системы жизнеобеспечения экипажа......................... 216
7.1. Общие сведения........................................... —
7.2. Условия нормального существования...................... 217
7.3. Средства обеспечения газового состава.................. 219
7.4. Водообеспечение........................................ 222
7.5. Пища.................................................. 223
7.6. Средства санитарно-гигиенического обеспечения.......... 224
7.7. Биотехнические системы................................. 225
7.8. Области применения различных комплексов СЖО .... 226
7.9. Скафандры.............................................. 227
Глава 8. Управление движением..................................... 230
8.1. Общие сведения........................................... —
8.2. Датчики системы ориентации............................. 232
8.3. Система исполнительных органов .................... 235
8.4. Логические устройства.................................. 242
8.5. Расходы рабочего тела и энергии........................ 243
8.6. Сближение и стыковка................................... 248
8.7. Маневрирование ........................................ 252
8.8. Автономная навигация................................... 255
Глава 9. Системы приземления пилотируемых космических кораблей 257
9.1. Особенности и условия посадки........................... —
9.2. Общие принципы построения систем приземления .... 259
9.3. Последовательность работы и управление системой при-
земления ................................................... 264
9.4. Бортовые средства поиска ............................ 268
9.5. Особенности систем посадки межпланетных КК........... —
9.6. Технические характеристики и особенности систем при-
земления ................................................... 269
Глава 10. Спасение экипажа при авариях иа участке выведения . . . 275
10.1. Общие сведения.......................................... —
10.2. Безопасность полета и средства аварийного спасения . . —
10.3. Аварийные ситуации на участке выведения............... 278
10.4. Выбор критериев аварийности и средств контроля . . . 281
10.5. Принципы разработки комплекса средств аварийного
спасения ................................................... 284
10.6. Спасение экипажа при авариях в плотных слоях атмосферы 287
10.7. Спасение экипажа при авариях на внеатмосферном уча-
стке траектории выведения................................... 295
10.8. Средства аварийного спасения КК «Союз»............ 297
Глава 11. Управление полетом космических аппаратов............... 299
11.1. Организация управления.................................. —
11.2. Контур управления полетом............................ 302
11.3. Бортовой комплекс управления......................... £04
11.4. Наземный комплекс управления........................ 305
Вместо заключения.................................................... 313
Список литературы.................................................... 318
Валентин Николаевич Бобков, Вячеслав Васильевич Васильев,
Эрнст Клавдиевич Демченко, Геннадий Васильевич Лебедев,
Валентин Александрович Овсянников, Борис Викторович Раушенбах,
Олег Владимирович Сургучев, Владимир Александрович Тимченко,
Константин Петрович Феоктистов, Юрий Михайлович Фрумкин,
Борис Васильевич Черняев
КОСМИЧЕСКИЕ АППАРАТЫ
Ракетно-космический комплекс
Редактор Б. Ф. Кузьмин
Переплет и титул художника Б. С. Иванова
Редактор (литературный) Л. А. Сафошкина
Художественный редактор И. Б. Попова
Технический редактор Л. С. Афанасьева
Корректор А. И. Беляева
ИВ № 1300
Сдано в набор 21.09.82. Подписано в печать 18.02.83. Г-62643.
Формат 60х90/ц. Бумага типографская № 1. Гарнитура литературная. Печать высокая.
Печ. л. 20. Усл. печ. л. 20. Усл. кр.-отт. 20,90. Уч.-изд. л. 21,39
Изд. № 6/5126. Тираж 10 000 экз. Зак. 150. Цена 1 р. 60 к.
Воениздат, 103160, Москва, К-160
2-я типография Воеииздата
191065, Ленинград, Д-65. Дворцовая пл., д. 10