/











































































































































































































































































































































































































Text
К.Ланцош
ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
Книг, посвященных основаниям механики, на русском языке не так много,
хотя интерес читателя к этой теме огромен. Книга «Вариационные принципы
механики» Корнелиуса Ланцоша должна привлечь читателей своеобразным
изложением, в котором автор главное внимание уделил не формальной стороне
вопроса, а наглядности, целостности и взаимному проникновению и влиянию
идей и понятий. Некоторые неожиданные интерпретации, предложенные автором,
могут показаться интересными также и специалистам, так как основой для книги
послужили лекции, которые читались автором в университетской аспирантуре.
Книгу с удовольствием прочтут все математически образованные читатели,
интересующиеся основаниями механики и физики.
Содержание
Предисловие редактора перевода 5
Из предисловия автора 11
Предисловие ко второму изданию 14
ВВЕДЕНИЕ
1. Вариационные методы в механике 15
2. Формализм Эйлера и Лагранжа 16
3. Формализм Гамильтона 17
4. Вариационное исчисление 18
5. Сравнение векторного и вариационного методов в механике 18
6. Математическая оценка вариационных принципов 19
7. Философская оценка вариационного подхода в механике 21
ГЛАВА I. ОСНОВНЫЕ ПРИНЦИПЫ АНАЛИТИЧЕСКОЙ
МЕХАНИКИ
1. Характерные черты методов аналитической механики 25
2. Обобщенные координаты 29
3. Пространство конфигураций 34
4. Отображение пространства самого на себя 35
5. Кинетическая энергия и риманова геометрия 39
6. Голономные и неголономные механические системы 46
7. Обобщенная сила и силовая функция 49
8. Склерономные и реономные системы. Закон сохранения энергии 54
ГЛАВА П. ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
1. Общие свойства задач на экстремум 56
2. Стационарное значение функции 60
3. Вторая вариация 62
4. Взаимосвязь стационарных и экстремальных значений 64
5. Дополнительные условия. Метод неопределенных множителей 65
Лагранжа
6. Неголономные дополнительные условия 71
7. Стационарное значение определенного интеграла 72
8. Основные операции вариационного исчисления 76
9. Коммутативные свойства операции варьирования 79
10. Вывод условии стационарности определенного интеграла методами 80
вариационного исчисления
11. Дифференциальные уравнения Эйлера—Лагранжа в случае п степеней 83
свободы
12. Варьирование при наличии дополнительных условии 86
13. Неголономные условия 88
14. Изопериметрические условия 89
15. Вариационное исчисление и граничные условия. Задача об упругом 92
стержне
ГЛАВА Ш. ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ
1. Принцип виртуальных перемещении для обратимых перемещении 97
2. Равновесие твердого тела 101
3. Эквивалентность двух систем сил 103
4. Задачи о равновесии при наличии дополнительных условии 104
5. Физическая интерпретация метода неопределенных множителей 107
Лагранжа
6. Неравенство Фурье 110
ГЛАВА IV. ПРИНЦИП ДАЛАМБЕРА
1. Сила инерции 112
2. Роль принципа Даламбера в механике 116
3. Закон сохранения энергии как следствие принципа Даламбера 118
4. Фиктивные силы при ускоренном движении систем отсчета. Гипотеза 120
Эйнштейна об эквивалентности
5. Фиктивные силы во вращающейся системе отсчета 124
6. Динамика твердого тела. Движение центра масс 127
7. Динамика твердого тела. Уравнения Эйлера 129
8. Принцип наименьшего принуждения Гаусса 130
ГЛАВА V. УРАВНЕНИЯ ДВИЖЕНИЯ ЛАГРАНЖА
1. Принцип Гамильтона 136
2. Уравнения движения Лагранжа и их инвариантность относительно 140
точечных преобразований
3. Теорема о сохранении энергии как следствие принципа Гамильтона 145
4. Циклические (игнорируемые) координаты и их исключение 151
5. Бессиловая механика Герца 157
6. Время как циклическая переменная; принцип Якоби; принцип 159
наименьшего действия
7. Принцип Якоби и риманова геометрия 165
8. Дополнительные условия: физический смысл неопределенных 168
множителей Лагранжа
9. Негол ономные дополнительные условия и полигенные силы 174
10. Малые колебания около положения равновесия 175
ГЛАВА VI. КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ
1. Дуальное преобразование Лежандра 190
2. Преобразование Лежандра в применении к функции Лагранжа 193
3. Преобразование уравнений движения Лагранжа 195
4. Канонический интеграл 197
5. Фазовое пространство и фазовая жидкость 202
6. Теорема сохранения энергии как следствие канонических уравнении 205
7. Теорема Лиувилля 207
8. Интегральные инварианты, теорема Гельмгольца о циркуляции 209
9. Исключение циклических переменных 214
10. Параметрическая форма канонических уравнении 216
ГЛАВА VII. КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
1. Преобразования координат как метод решения задач механики 225
2. Точечные преобразования Лагранжа 227
3. Преобразования Матье и Ли 233
4. Канонические преобразования общего типа 237
5. Билинейная дифференциальная форма 240
6. Скобки Лагранжа и Пуассона 245
7. Бесконечно малые канонические преобразования 250
8. Движение фазовой жидкости как непрерывное выполнение 253
канонических преобразовании
9. Главная функция Гамильтона и движение фазовой жидкости 256
ГЛАВА Vin. ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ В ЧАСТНЫХ
ПРОИЗВОДНЫХ ГАМИЛЬТОНА—ЯКОБИ
1. Важная роль производящей функции в задаче о движении 264
2. Теория преобразований Якоби 266
3. Решение уравнения в частных производных методом разделения 275
переменных
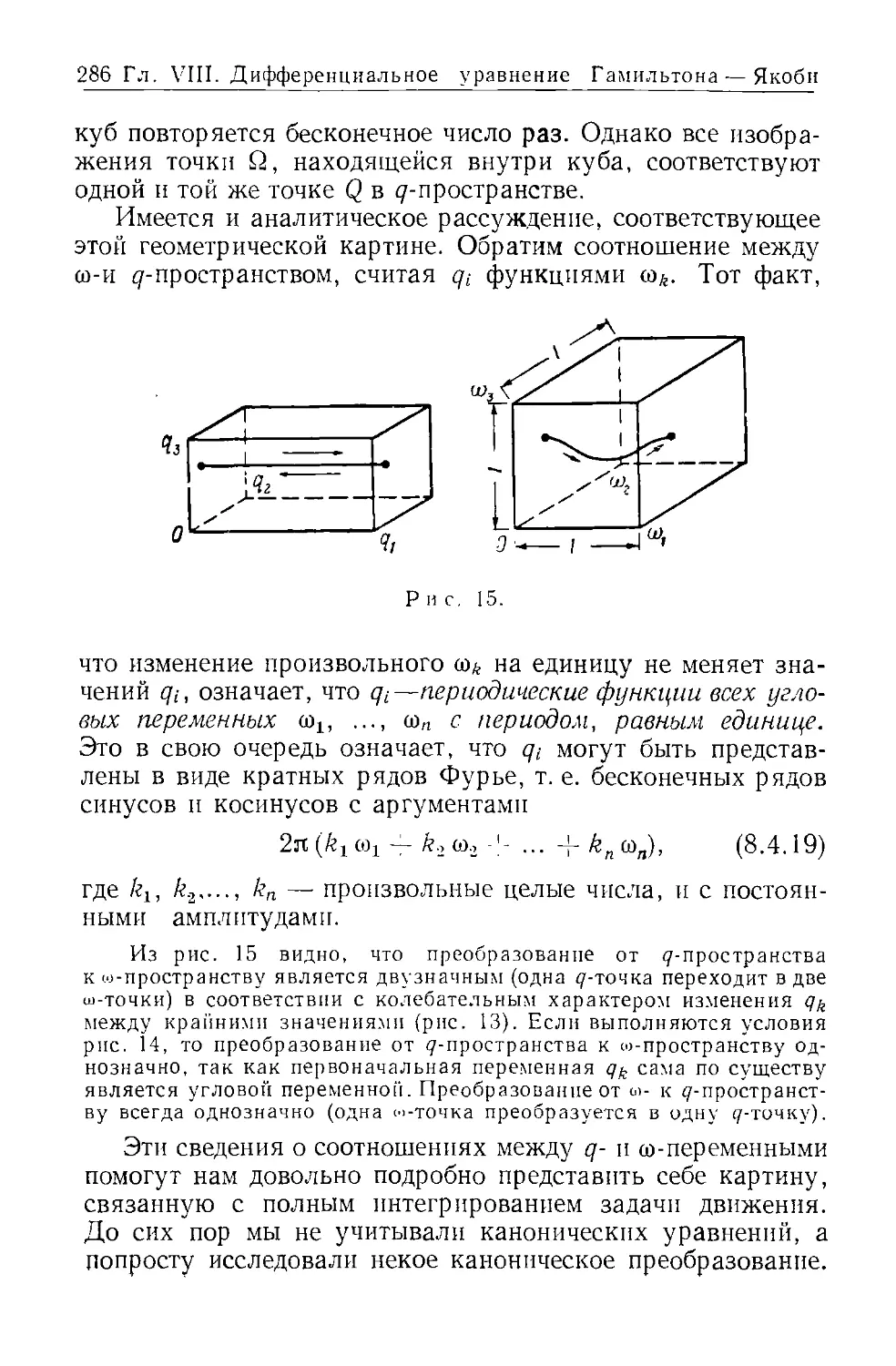
4. Метод Делоне для разделения переменных с периодических системах 279
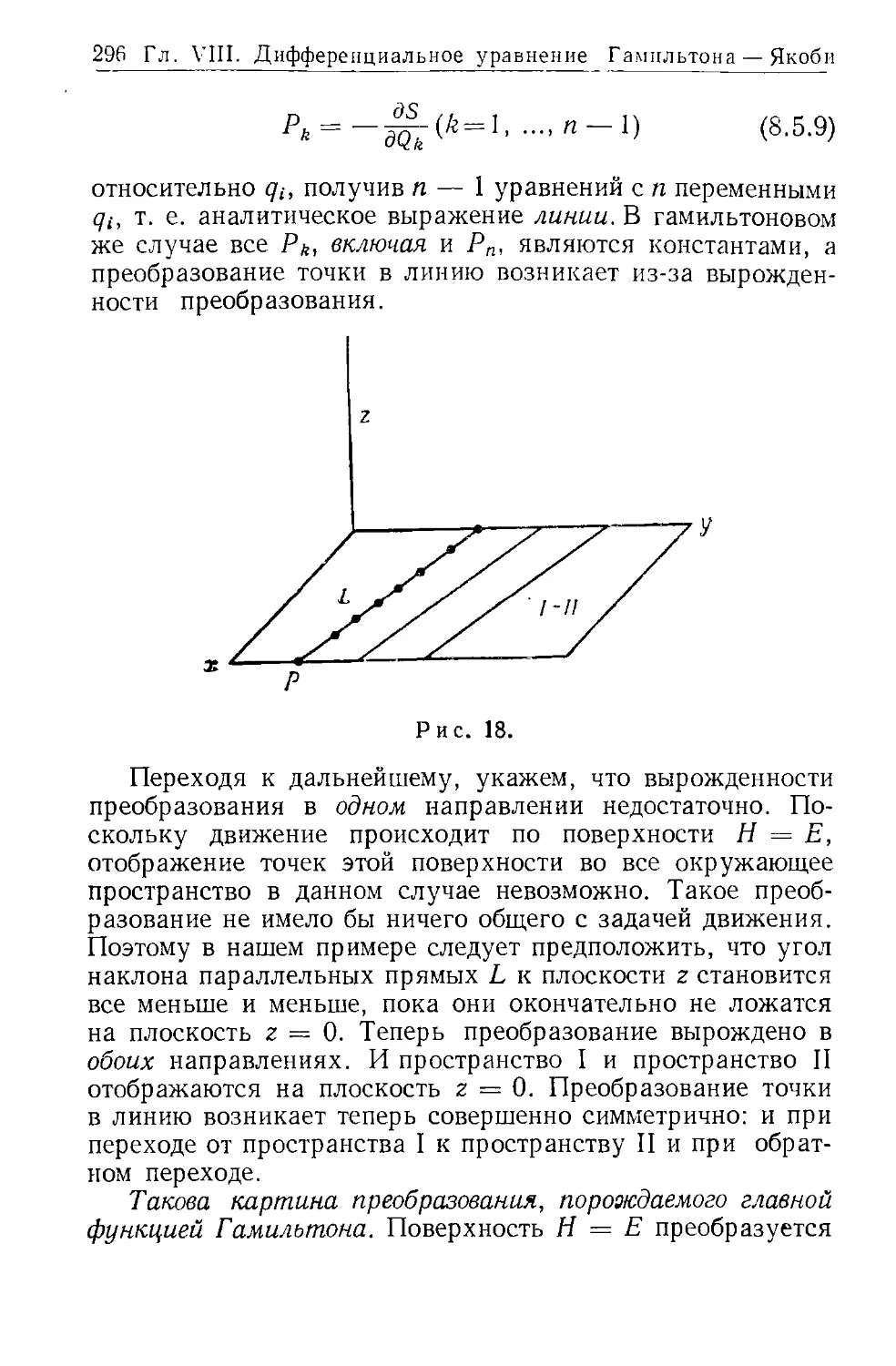
5. Роль дифференциального уравнения в частных производных в теориях 291
Гамильтона и Якоби
6. Построение главной функции Гамильтона при помощи полного 299
интеграла Якоби
7. Геометрическое решение уравнения в частных производных. Оптико- 302
механическая аналогия Гамильтона
8. Значение уравнения в частных производных Гамильтона в теории 315
распространения волн
9. Геометризация динамики. Неримановы геометрии. Метрическая 319
интерпретация уравнения в частных производных Гамильтона
ГЛАВА IX. РЕЛЯТИВИСТСКАЯ МЕХАНИКА
1. Историческое введение 331
2. Релятивистская кинематика 334
3. Четырехмерное пространство Минковского 341
4. Преобразования Лоренца 344
5. Механика одной частицы 356
6. Гамильтонова формулировка динамики частицы 361
7. Потенциальная энергия V
8. Релятивистская формулировка ньютоновой скалярной теории
гравитации
9. Движение заряженной частицы
10. Геодезические линии в четырехмерном мире
11. Орбиты планет в теории тяготения Эйнштейна
12. Гравитационное искривление световых лучей
13. Гравитационное красное смещение спектральных линий
ГЛАВА X. ИСТОРИЧЕСКИЙ ОБЗОР
Приложение
Библиография
Дополнительная библиография
Указатель
Указатель
362
364
365
371
372
378
381
384
396
399
400
401
Аберрация света 338
- хроматическая 312
Амплитудная функция 317
Аналогия оптико-механическая 305
Аппель 394
Аристотель 385
Бернулли 386
Бор 275, 394
Борн 395
деБройль290, 316, 318
Бюргере 279
Вариационное исчисление 18
Вариация 18, 60, 61
- вторая 63, 64
- определенного интеграла 80
- первая 61
- функции 77
Варьирование 77
- коммутативные свойства 78
- при дополнительных условиях 65,
70,85
- - фиксированных граничных
значениях 78, 81
Вектор 41
Величины инвариантные 332
- ковариантные 41, 143, 332
Виртуальное перемещение 61
Время собственное 360
Галилей 385
Гамильтон 391
Гаусс 392
Гельмгольц 393
Геодезические линии 134, 166, 371
Геометрическая интерпретация задач
динамики 330
Геометрия нериманова 320, 322, 328,
329
Геометрия риманова 42
Герц 393
Гессиан 191
Гравитационная теория Эйнштейна
372
Гравитационное искривление
световых лучей 378
- красное смещение 381
Гравитационный радиус Солнца 378
Граничный член 92, 146
Гюйгенс 307
Даламбер 388
Действие 17, 18,27,28
Делоне 281, 393
Дисперсия 312
Допплера эффект 338, 381
Задача вариационная свободная 65
- - с дополнительными условиями 65,
70,85
- динамики 25
- Кеплера 277
- об упругом стержне 92
- равновесия при дополнительных
условиях 104
Закон движения Ньютона основной
25
- третий 19, 25
Зеемана эффект 279, 289
Импульс 18
- обобщенный 146
- сопряженный 199
Инвариантное свойство метрической
геометрии 326
Инвариантность уравнений Лагранжа
141, 142, 143
Инварианты интегральные 209
Интеграл полный 268, 279
Канонические уравнения, см.
уравнения канонические
Канонический интеграл 197, 199, 218
Квантовые условия Зоммерфельда—
Вильсона 290
Кватернионы 345
Кинематика релятивистская 334
Кинематические условия 45
Кинетическая энергия, см. Энергия
кинетическая
Кинетический фокус 310
Кинетическое взаимодействие 156
Колебания малые 175
- нормальные 187, 189
Координаты обобщенные 29, 32, 34
- сферические 40
- циклические (игнорируемые) 151,
214
Лагранж 390
Лейбниц 387
Ли 393
Линейный элемент 40, 44, 166
- - Шварцшильда 373, 377
Линии геодезические 134, 371
Майер 385
Мах 384
Метод неопределенных множителей
Лагранжа 66, 90
интерпретация 107, 168
- разделения переменных 275
Механика аналитическая 16, 19
-векторная 16, 19
-Герца 157, 158
- релятивистская 331
- - одной частицы 356, 361
Минковский 42, 333, 341
Мировая линия 141, 356
Многообразие двумерное 42
- одномерное 42
Мопертюи 388
Неравенство Фурье 110
Ньютон 387
Обобщенные координаты, см.
Координаты обобщенные
- направляющие косинусы 323
Оптико-механическая аналогия 305
Парадокс часов 339
Параметры макроскопические 157
- микроскопические 157
Переменные действия 283, 291
- кинематические 117
- пассивные 193
- угловые 284, 285, 291
Перемещения виртуальные 61
- обратимые 98, 110
Преобразование координат точечное
37, 142
- Лежандра 190, 192, 193
- линейного интеграла в
поверхностный 244
- уравнений Лагранжа 195
Преобразования канонические 225
- - бесконечно малые 251, 253
- - общего типа 237
- контактные 234
- Лоренца 344
- - бесконечно малые 355, 369
- Матье и Ли 233, 237
- реономные 232, 239
- склерономные 231, 239
- точечные Лагранжа 227
Принцип 27
- виртуальных перемещений 98, 99
- Гамильтона 18, 136, 139
- Гюйгенса 307
- Даламбера 114
- инвариантности 143
- наименьшего времени
распространения, см. Принцип
Ферма
Принцип наименьшего действия
(Эйлера—Лагранжа) 17,18, 165
- - принуждения (Гаусса) 130, 132
- общей относительности 333
-Ферма22, 162, 163, 309
-Якоби 162
- - и риманова геометрия 165
Пространство конфигурации 34, 44
- - расширенное 141
- Минковского 341
- состояний 203
- фазовое 202, 205
- - расширенное 217, 231
- функциональное 74
Пуанкаре 393
Пуассон 393
Равновесие нейтральное 188
- неустойчивое 188
- твердого тела 101
- устойчивое 188, 189
Раус 393
Релятивистская кинематика 334
- механика заряженной частицы 365
- - одной частицы 356, 361
- формулировка теории гравитации
364
Риманова геометрия 42, 166
Свойства пространства метрические
35
- - топологические 35
Связь голономная 47, 49
- неголономная 47, 49
- различных принципов 222
- реономная 54
- склерономная 54
Сила 18
- инерции 112
- - Даламбера 124
- фиктивная 121
- Эйлера 127
- Эйнштейна 123
- эффективная 114
Силовая функция 19, 20, 26, 51
Силы консервативные 52
- моногенные 53
- обобщенные 50
- полигенные 53
Система сил 26
- - голономная 47
- - консервативная 19
- - неголономная 47
- - реономная 120, 149
- - склерономная 120, 147
Системы эквивалентные 103
Скобки Лагранжа 246
- Пуассона 248
Скорость 43
Сложение скоростей 337
Сохранение энергии 55, 118, 120,
145, 148, 206, 207, 368
Спектр нормальных колебаний 187
Стационарное значение 59, 60, 62
- - определенного интеграла 72, 80
Степени свободы 32
Тензор 41, 42
- кривизны 43
- метрический 42
Теорема Гельмгольца о циркуляции
209, 213
- Лиувилля 208, 255
Теория относительности общая 23,
333,334
- - специальная 332
- Стокса 244
Томсон 393
Уравнение амплитудное 317
- волновое Френеля 317, 329
- Гамильтона—Якоби 263, 270, 273,
274,291,319
- характеристическое 181
ШредингераЗП
Уравнения канонические 196
- - в параметрической форме 216, 220
- Эйлера 129
- Эйлера—Лагранжа 76, 82
Условия граничные естественные 93
- - наложенные извне 93
- дополнительные 65, 168
- - неголономные 71, 88, 174
- изопериметрические 89
- стационарности определенного
интеграла 80
Фазовая жидкость 202, 205, 206
- - движение 254, 256
Фазовое пространство, см.
Пространство фазовое
Фигуры Лиссажу 187, 189, 287
Физо331
Форма дифференциальная
билинейная 241, 245
- - квадратичная 41
Формализм Гамильтона 18
- Эйлера и Лагранжа 17
Фуко 126,313
Функция амплитудная 317
- Гамильтона 150, 194, 249
Функция Гамильтона главная 256,
301, 322
- - обобщенная 220, 232
- - построение 299, 301
-Лагранжа 138, 193
- производящая 238
- - видоизмененная 239
- характеристическая 257
Фурье 313
Циркуляция 209, 214, 243
Центр масс 127
Частица свободная 19
Черный спутник Сириуса 382
ШредингерЗП
Эйлер 389
Эйнштейн 9, 123, 290, 332
Экстремум 63, 64, 65
Энергии сохранение, см. Сохранение
энергии
Энергия кинетическая 19, 43
-полная 55, 149, 160,358
- потенциальная 52, 55, 362, 388
Якоби 391
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
Вариационные принципы механики всегда вызывали весь-
весьма повышенный интерес, причем характер этого интереса
менялся. В XVIII веке механиков и философов волновало
то обстоятельство, что телеологический финализм, который,
как им казалось, заложен в этих принципах, оказывался
в какой-то мере эквивалентным причинному (ньютонову)
описанию явлений. В XIX веке интерес сосредоточился на
мощном математическом формализме, связанном с этими
принципами, и на их внутреннем родстве с проблемой пре-
преобразований в механике. В последней четверти XIX и первой
половине XX века особое внимание привлекли эвристиче-
эвристические возможности этих принципов (особенно в теории отно-
относительности и квантовой физике) и их место в физической
картине мира.
Исключительная общность вариационных принципов
механики, возможность сравнительно простого их обобще-
обобщения на многочисленные (немеханнческие) области физики,
их связь с законами сохранения и группами Ли ставит эти
принципы в центральное положение при решении многих
фундаментальных проблем физики. Это может показаться
удивительным, ибо классическая (аналитическая) механика,
в которой эти принципы играют основную роль, является,
строго говоря, существенно приближенной физической тео-
теорией. И тем не менее классическая механика остается в на-
настоящее время и сохранится навсегда как эталон ясности
и последовательности идей для всех математических теорий
физических (и не только физических) явлений природы.
Вряд ли будет ошибкой сказать, что классическая меха-
механика в ее гамильтоновой и лагранжевой формах еще долгое
время будет играть важную и вдохновляющую роль в со-
создании новых физических теорий. Не существует правил для
отыскания путей в дебрях природы. Творческий разум руко-
Предисловие редактора перевода
водствуется обобщением результатов эксперимента, анало-
аналогиями и перенесением так или иначе переработанных старых
понятий в новые представления. Именно здесь гибкость и
универсальность математической формы вариационных
принципов механики приходит на помощь исследователю.
Из вариационных принципов в столь общем их понимании
нельзя вывести физическую картину мира, но они могут
служить путеводной нитью для нахождения верных путей
в сложных лабиринтах событий и процессов природы.
Вариационные принципы механики не только выражают
в простой инвариантной форме уравнения движения и урав-
уравнения многих полей, но и заключают в себе синтез контину-
континуального и дискретного аспектов движения и являются вы-
выражением обобщенного принципа причинности в физике.
Они находят применения в широком (и все более расширя-
расширяющемся) круге вопросов самых разнообразных областей
современной земной и космической механики.
Наконец, в науке есть своя эстетика, и красота логиче-
логической стройности вариационных принципов механики не
может не восхищать математиков, физиков, механиков.
Сказанного, вероятно, достаточно для того, чтобы объяс-
объяснить факт выхода в свет очень большого и все еще растущего
числа статей и книг, посвященных вариационным принципам
механики. Различие точек зрения и подходов авторов этих
работ позволяет лучше и глубже понять как математическую
структуру вариационных принципов механики, так и их
место и роль в физике. Поэтому появление в русском пере-
переводе книги известного математика К- Ланцоша, посвященной
этим принципам, является вполне обоснованным. Весьма
любопытен подход автора к проблеме вариационных прин-
принципов (см. его предисловие и введение). Читателю будет
интересно сравнить точку зрения Ланцоша с иными точками
зрения, представленными, например, в работах Синга \
Голдстейна 2 и других авторов.
Читатель, безусловно, найдет много полезного и интерес-
интересного в своеобразной книге Ланцоша. Ее большим достоинст-
1 С и н г Дж. Л., Классическая динамика. Фпзматгиз, М.,
1963.
2 Г о л д с т е й н Г., Классическая механика, ГТТИ, М.,
1957; см. также список дополнительной литературы на русском
языке, помещенный в конце книги.
Предисловие редактора перевода
вом является наглядность и почти скульптурная отчетли-
отчетливость изложения многих вопросов. К сожалению, в книге
отсутствует теорема Э. Нётер, без которой вряд ли возможно
изложение вариационных принципов механики, рассматри-
рассматриваемых не только как некоторый частный раздел аналити-
аналитической механики; естественно,"Учто из сферы внимания ав-
автора, по существу говоря, выпала теория поля.
Переводчик и редактор стремились сохранить особен-
особенности стиля автора даже там, где это оказалось связанным
с сохранением некоторых недостаточно строгих его рассуж-
рассуждений и выводов.
К приложенной в конце книги небольшой библиографии
мною добавлено несколько работ на русском языке, которые
могут оказаться полезными для читателя, интересующегося
вариационными принципами механики.
Л. Uо лак
IVas du ererbt von deinen Vcitern hast,
Erwirb еь, ит es zu besitzen.
GOETHE
Посвящается
Альберту Эйнштейну
ПРЕДИСЛОВИЕ
В течение ряда лет автор читал двухсеместровый курс
лекций по вариационным принципам механики для аспиран-
аспирантов Purdue University и всякий раз, когда ему приходи-
приходилось сталкиваться с основными принципами и методами ана-
аналитической механики, он ощущал .чувство необычайного
подъема. Вряд ли существует еще какая-либо из точных
наук, где абстрактные математические рассуждения и кон-
конкретные физические доводы так прекрасно гармонируют п
дополняют друг друга. Не случайно принципы механики
производили огромное впечатление на многих выдающихся
математиков и физиков. Не случайно также, что в европей-
европейских университетах с давних пор курс теоретической механи-
механики обязательно входит в план обучения любого будущего ма-
математика и физика. Аналитическая механика — это гораздо
большее, чем просто эффективный метод решения динамиче-
динамических задач, с которыми приходится встречаться в физике и
технике. Для того чтобы подчеркнуть важность теоретиче-
теоретической механики, нет необходимости ссылаться на гироскопы,
как бы ни были важны они в физике и технике—само сущест-
существование общих принципов механики служит ее оправданием.
Настоящую книгу о вариационных принципах механики
не следует рассматривать как изложение, конкурирующее
с обычными учебниками. Не сомневаясь в превосходном
качестве методов изложения, принятых в них и носящих
в основном технический и формальный характер, автор
все же считает, что существует потребность в монографиях,
которые показали бы самый остов точных наук в элементар-
элементарном изложении и с некоторым философским уклоном.
Многие современные научные сочинения написаны неким
полумистическим языком как бы специально для того,
чтобы создать у читателя тягостное ощущение постоянного
присутствия какого-то супермена. Данная книга выполнена
в скромном стиле и предназначена для обычных читателей.
Опираясь на свой опыт, автор считает, что одним из сущест-
12 Предисловие
веннейших недостатков современной системы высшего обра-
образования является то, что целый ряд фундаментальных, но
кажущихся простыми, понятий относят к числу«элементар-
числу«элементарных» и излагают их в тот период, когда студенческий ум еще
недостаточно созрел для того, чтобы постичь их истинный
смысл. Плоды этой ошибки можно наблюдать ежедневно.
Студент, знакомый с мельчайшими подробностями устрой-
устройства аппаратуры для расщепления атома, зачастую оказы-
оказывается совершенно смущенным идеями о связи между массой
и весом или между тяготеющей и инертной массой. В меха-
механике, одной из наук, лежащих в фундаменте естествозна-
естествознания, подобная путаница особенно бросается в глаза.
Для философски искушенного ума различие между дейст-
действительным и виртуальным перемещениями кажется совер-
совершенно очевидным и не нуждается в дальнейших пояснениях.
Но современный студент — это что угодно, но только не
философский ум. Для него это различие совсем не очевид-
очевидно, более того, чтобы постичь смысл понятия «виртуальное
перемещение», ему приходится в течение долгого времени
оперировать с ним, применяя его к ряду знакомых ситуа-
ситуаций. Поэтому автор счел наилучшим введением в приложе-
приложения вариационного исчисления самостоятельный вывод
студентом ряда известных результатов векторной механики
из принципа виртуальных перемещений. Попутно студент
замечает, что ранее не связанные и более или менее аксио-
аксиоматически введенные свойства сил и моментов оказываются
вытекающими из одного всеобъемлющего принципа. У него
возникает интерес, побуждающий двигаться дальше, за пре-
пределы статики. Здесь б его поле зрения попадает принцип Да-
ламбера, показывающий, что тот же самый принцип вирту-
виртуальных перемещений может служить для получения уравне-
уравнений движения в сколь угодно сложной динамической задаче.
Автор сознает, что изложение можно было бы значитель-
значительно сократить, если начать непосредственно с уравнений
движения Лагранжа, а затем перейти к теории Гамильтона.
Такая последовательность была бы оправданной, если бы
целью книги было первое ознакомление студента с опре-
определенным формализмом и методом составления дифферен-
дифференциальных уравнений, отвечающих любой заданной динами-
динамической задаче, а также с определенными «рецептами»,
которые могли бы помочь в решении этих уравнений. Но
Предисловие 13
именно этого автор не хотел делать. За великими теориями
Эйлера и Лагранжа, Гамильтона и Якоби скрывается не-
необычайное богатство философского содержания, которое
совершенно исчезает при чисто формальном изложении, но
которое не может не быть источником величайшего интел-
интеллектуального наслаждения для человека, любящего мате-
математику. Дать студенту возможность открыть для себя
скрытую красоту этих теорий — в этом заключалась одна
из главных задач автора. Для этого ему пришлось вести
читателя вдоль всего пути исторического развития с самого
его начала, а также включить задачи, позволяющие студенту
освоить новые понятия и идеи. Эти задачи, сами по себе
простые, были выбраны так, чтобы проиллюстрировать соот-
соответствующие общие принципы.
Как видно из оглавления, в эту книгу не включен важный
раздел — теория возмущений уравнений динамики. Кроме
того, первоначально планировавшуюся главу о релятивист-
релятивистской механике пришлось опустить из-за недостатка'места \
Однако даже имеющийся материал вполне может составить
содержание двухсеместрового аспирантского курса по.
три часа каждую неделю; он достаточен для студента-ма-
студента-математика, физика или инженера, который не собирается
специализироваться в области механики, а хочет лишь со-
составить себе представление о ее основных принципах.
Автор приносит свои извинения за то, что он не везде
ссылается на оригинальные работы. Ему пришлось иметь
дело с этим предметом в течение многих лет, так что зачастую
трудно было указать, откуда он почерпнул тот или иной
материал. В первую очередь он обязан книге Уиттекера
«Аналитическая динамика», статье Нордгейма в Handbuch
der Physik, статье Пранджа в Encyclopaedic der mathemati-
schen Wissenschaf ten — все они включены в библиографию и
рекомендованы для дальнейшего чтения.
Автор глубоко благодарен профессору Дж. Л. Сингу за
ту тщательность, с которой он просмотрел рукопись и указал
автору на многие слабые места в его изложении. В некоторых
случаях различие в точках зрения было лишь кажущимся,
однако в ряде мест оказалось возможным дать более точные
формулировки, что должно существенно облегчить чтение.
1 Эта глава добавлена во втором издании. — Прим. ред.
14 Предисловие
Корни вариационных принципов механики уходят в глубь
эпохи либерализма, начавшейся с Декарта и окончившейся
с французской революцией, эпохи, в которую жили Лейб-
Лейбниц, Спиноза, Гёте и Иоганн Себастьян Бах. Это был единст-
единственный период во всей истории Европы со времен древних
греков, когда люди мыслили в масштабах Вселенной. Если
автор сумел передать хотя бы частицу этого космического
духа, то его усилия вполне вознаграждены.
Лос-Анжелос, май 1949 Корнелиус Ланцош
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Помимо приложения, в котором дается более простой
вывод перехода от лагранжевой к гамильтоновой форме
механики, это издание отличается от предыдущего лишь
добавлением новой главы о релятивистской механике.
Автор благодарен дирекции Университетского издатель-
издательства в Торонто, которая предоставила ему возможность
дополнить свою книгу этим материалом, относящимся к од-
одному из наиболее поразительных открытий человеческого
гения. В этой главе в очень сжатой форме, но последова-
последовательно изложены все основные идеи, принципы и результаты
Эйнштейна, относящиеся к кинематике и динамике одной
частицы. Общая теория преобразований Лоренца изложена
при помощи гамильтоновых кватернионов. Они так удачно
подходят для этой цели, что вряд ли найдется другой мате-
математический аппарат, столь же простой и компактный. Урав-
Уравнения поля общей теории относительности, естественно, не
вошли в эту книгу, однако здесь подробно рассматриваются
динамические аспекты гравитационной теории Эйнштейна,
в том числе три решающих эксперимента по проверке теории,
поскольку они не выходят за рамки лагранжевой и гамильто-
гамильтоновой форм динамики.
Автор надеется, что добавление этой главы увеличит по-
полезность книги и привлечет к ней новых друзей помимо той
большой армии читателей, которые сочли для себя полезным
изучение этого введения в одну из величайших глав естество-
естествознания и нашли в нем источник вдохновения.
К. Л.
Дублин, Ирландия, июль 1962
ВВЕДЕНИЕ
1. Вариационные методы в механике. С тех пор как
Ньютон заложил прочный фундамент динамики, сформули-
сформулировав основные законы движения, механика развивалась
по двум основным направлениям. Одна ветвь, которую мы
будем называть «векторной механикой» \ исходит непосред-
непосредственно из ньютоновых законов движения. Задача заключает-
заключается в выявлении всех сил, действующих на каждую данную
частицу, после чего движение однозначно определяется, если
действующие силы известны в каждый момент времени.
Анализ и синтез сил и моментов составляет, таким образом,
основу векторной механики.
В то время как Ньютон предложил действие силы из-
измерять ее импульсом, великий философ и универсал Лейб-
Лейбниц, современник Ньютона, ратовал за другую величину
vis viva, или живую силу, считая именно ее правильным
мерилом динамического действия силы. Эта vis viva Лейб-
Лейбница совпадает — с точностью до несущественного множи-
множителя 2 — с величиной, которую мы сегодня называем «кине-
«кинетической энергией». В то же время он заменил «силу»
Ньютона «работой силы». Эта «работа силы» была впослед-
впоследствии заменена еще более фундаментальной величиной —
«силовой функцией». Таким образом, Лейбниц является
основателем второй ветви механики, обычно называемой
«аналитической механикой» 2, в которой изучение равно-
равновесия и движения во всех случаях исходит из двух основных
величин, «кинетической энергии» и «силовой функции»,
причем последняя часто заменяется «потенциальной энер-
энергией».
1 Применение этого термина не обязательно означает, что ис-
используются именно векторные методы.
2 См. замечание относительно терминологии в конце п. 1 гл. I.
16 Введение
Поскольку движение по своей природе — явление на-\
правленное, кажется удивительным, что для определения
движения достаточно двух скалярных величин. Теоремг
о сохранении энергии, устанавливающая, что сумма кине-
кинетической и потенциальной энергий остается неизменной
в процессе движения, дает лишь одно уравнение, в то время
как для определения движения одной частицы требуется
три уравнения; в случае механической системы, состоящей
из двух или более частиц, эта разница становится еще болы
шей. И тем не менее эти два фундаментальных скаляра дей-
ствительно содержат в себе полную динамику наиболее
сложных материальных систем, при том, однако, условии
что эти скаляры кладутся в основу некоторого принципа
а не просто уравнения.
2. Формализм Эйлера и Лагранжа. Для того чтобы по-
понять, как это происходит, рассмотрим частицу, находящуюся1
в точке Рг в момент времени tx. Предположим, что нам
известна ее скорость в этот момент. Пусть нам также из-
известно, что через некоторый заданный промежуток времени
частица окажется в некоторой точке Р2. Хотя траектория
частицы нам неизвестна, ее можно найти чисто математи-
математическим путем при условии, что кинетическая и потенциаль-
потенциальная энергии частицы заданы как функции возможных скоро-
скоростей и возможных положений частицы.
Эйлер и Лагранж первые открыли в точном виде прин-
принцип наименьшего действия, заключающийся в следующем
Соединим точки PL и Р2 произвольной пробной траекторией.
По всей вероятности, эта траектория, в качестве которой
может быть выбрана любая непрерывная кривая, не совпада-
совпадает с действительной траекторией, избранной для движения
природой. Однако мы можем постепенно исправлять наше
пробное решение и прийти в конце концов к некоторой
кривой, которую можно считать действительной траекторией
движения.
С этой целью позволим частице двигаться вдоль пробной
траектории в соответствии с законом сохранения энергии.
Сумма кинетической и потенциальной энергий сохраняется
постоянной и равной тому значению энергии Е, которым
обладало действительное движение в момент времени tx.
Введение 17
Это ограничение определяет скорость в каждой точке нашей
траектории и определяет таким образом все движение. Тра-
Траекторию можно выбрать произвольно, но после того, как
выбор сделан, закон сохранения энергии определяет движе-
движение однозначно.
В частности, можно вычислить время, за которое частица
достигнет произвольной заданной точки на нашем фиктивном
пути, и, следовательно, интеграл по времени от vis viva, т.е.
от удвоенной кинетической энергии, распространенный на
весь интервал пути от Pi до Р2. Этот интеграл по времени
называется «действием». Он имеет определенное значение
для нашей пробной траектории, равно как и для любой дру-
другой пробной траектории, соединяющей точки Pi и Рг и про-
проходимой с тем же значением постоянной энергии Е.
Значение «действия» меняется от одной траектории к дру-
другой. Для одних траекторий оно оказывается большим, для
других меньшим. Математически можно себе представить,
что испробованы все возможные траектории. Среди них долж-
должна найтись одна определенная траектория (по крайней мере,
если точки Pi и Рг не слишком далеки друг от друга), для
которой это действие принимает минимальное значение.
Принцип наименьшего действия утверждает, что именно
эта траектория и избирается природой в качестве дейст-
действительной траектории движения.
Мы описали механизм применения принципа для одной
частицы. Его можно обобщить, однако, на любое число ча-
частиц и на сколь угодно сложные механические системы.
3. Формализм Гамильтона. В механике часто приходится
сталкиваться с задачами, в которых силовая функция за-
зависит не только от положения частиц, но и от времени.
Для подобных систем закон сохранения энергии не выпол-
выполняется и принцип Эйлера — Лагранжа не применим, однако
применим принцип Гамильтона.
В подходе Гамильтона мы также исходим из заданных
начальной и конечной точек Pi и Р2, однако в этом случае
пробное движение ничем не ограничивается. Не только
траектория выбирается произвольным образом, лишь бы она
удовлетворяла естественным условиям непрерывности, но
и процесс протекания движения во времени находится
2 Зак. 1646
18 Введение
в нашем распоряжении. Потребуем теперь лишь, чтобы наши
пробные движения начинались и кончались в те же самые
моменты времени ti и /г, что и действительное движение.
(Это условие не выполняется в формализме Эйлера — Ла-
гранжа, потому что теорема о сохранении энергии ограничи-
ограничивает движение, и время, затрачиваемое на переход из Pi
в Рг вдоль пробной траектории, вообще говоря, отличается
от времени при движении вдоль действительной траек-
траектории.)
Характерной величиной, используемой в этом случае
в качестве меры действия и не имеющей, к сожалению,
общепринятого названия, является интеграл по вре-
времени от разности между кинетической и потенциальной
энергиями.
Принцип наименьшего действия в формулировке Гамиль-
Гамильтона утверждает, что действительным движением, реализу-
реализующимся в природе, является то, для которого это действие
принимает наименьшее значение1.
Можно показать, что в случае «консервативных» систем,
т. е. систем, удовлетворяющих закону сохранения энергии,
принцип Эйлера — Лагранжа является следствием прин-
принципа Гамильтона. Вместе с тем последний остается справед-
справедливым и для неконсервативных систем.
4. Вариационное исчисление. Математическая задача
минимизации некоторого интеграла связана с особой ветвью
математики, называемой «вариационным исчислением». Из
математической теории следует, что окончательный резуль-
результат можно получить, не рассматривая бесконечного мно-
множества возможных пробных траекторий. Свой математиче-
математический эксперимент мы можем ограничить такими траектория-
траекториями, которые бесконечно близки к действительной траектории.
Пробная траектория, отличающаяся от действительной
произвольным образом, но на бесконечно малую величину,
называется «вариацией» действительной траектории. Вари-
Вариационное исчисление исследует, изменения значения ин-
интеграла, вызванные подобными бесконечно малыми вариа-
вариациями траектории.
1 Строго говоря, речь идет о стационарном значении.—Прим. ред.
Введение 19
5. Сравнение векторного и вариационного методов в ме-
механике. Векторная и вариационная механики — это два
различных математических описания одной и той же сово-
совокупности явлений природы. Теория Ньютона базируется
на двух основных векторах: на «импульсе» и на «силе»;
вариационная теория, основанная Эйлером и Лагранжем,
базируется на двух скалярных величинах: на «кинетической
энергии» и «силовой функции». Помимо математической
целесообразности возникает вопрос об эквивалентности этих
двух теорий. В случае свободных частиц, движение которых
не ограничено заданными «связями», эти два способа описа-
описания приводят к аналогичным результатам. Однако для си-
систем со связями аналитический подход оказывается более
экономичным и простым. Заданные связи учитываются
здесь естественным путем, так как рассматриваются движе-
движения системы лишь вдоль таких траекторий, которые не
противоречат связям. При векторном подходе нужно учиты-
учитывать силы, поддерживающие связи, а потому приходится
вводить различные гипотезы относительно этих сил. Третий
закон движения Ньютона («действие равно противодейст-
противодействию») не охватывает всех случаев. Он оправдывается лишь
в динамике твердого тела.
С другой стороны, ньютонов подход не ограничивает
природы действующих сил. В вариационном же методе
предполагается, что действующие силы получаются из
скалярной величины — «силовой функции». Силы типа тре-
трения, не имеющие силовой функции, оказываютс» вне об-
облает^ применимости вариационных принципов, в то время
как ньютонова схема охватывает их без каких бы то ни
было затруднений.
Происхождение подобных сил связано с межмолекулярными
процессами, которыми пренебрегают при макроскопическом, описа-
описании движения. Если к макроскопическим параметрам механической
системы добавить еще и микроскопические параметры, то силы, не
имеющие силовой функции, по всей вероятности, не возникли бы.
6. Математическая оценка вариационных принципов.
Множество элементарных задач физики и техники решаются
методами векторной механики и не требуют применения
аналитических методов. Однако во всех более сложных за-
задачах становится заметным превосходство вариационных
2*
20 Введение
методов. Это превосходство связано с полной свободой
в выборе системы координат рассматриваемой задачи. Век-
Векторным методам решения легко поддаются лишь те задачи,
которые могут быть рассмотрены в прямоугольных системах
отсчета, потому что изображение векторов в криволинейных
координатах — затруднительная задача, если только не
пользоваться сложными методами тензорного исчисления.
Хотя необычайная важность инвариантов и ковариантов
во всех явлениях природы была открыта лишь недавно и во
времена Эйлера и Лагранжа была еще неизвестна, оказалось,
что вариационный подход к механике предвосхитил это
направление развития, так как принцип инвариантности
удовлетворяется в нем автоматически. Мы обладаем полной
свободой при выборе координат именно потому, что выклад-
выкладки и результирующие уравнения остаются справедливыми
в произвольной системе координат. Математическая и фило-
философская оценки вариационных методов исходят в основ-
основном из этой свободы выбора и связанной с ней возможностью
произвольных преобразований координат. Это намного об-
облегчает составление дифференциальных уравнений движе-
движения, а также их решение. Если мы попадаем на особый тип
координат, называемых «циклическими» или «игнорируемы-
«игнорируемыми», то сразу же возможно частичное интегрирование ос-
основных дифференциальных уравнений. Если все координаты
циклические, то задача решается полностью. Поэтому всю
задачу решения дифференциальных уравнений движения
можно сформулировать как задачу о преобразовании коор-
координат, т. е. вместо того чтобы пытаться непосредственно
проинтегрировать дифференциальные уравнения движения,
можно стремиться получить как можно больше циклических
координат. В механике Эйлера и Лагранжа мы находим
нужные циклические координаты более или менее случайно,
потому что систематического метода их выделения нет. Од-
Однако дальнейшее развитие теории, проведенное Гамильто-
Гамильтоном и Якоби, чрезвычайно расширило первоначальные
возможности путем введения «канонических уравнений»
с их значительно более широкими возможностями с точки
зрения преобразований. Здесь уже можно получить пол-
полный набор циклических координат путем решения лишь
одного дифференциального уравнения в частных произ-
производных.
Введение 21
Хотя реально решение этого дифференциального урав-
уравнения возможно только для ограниченного класса задач,
оказывается, что многие важные задачи теоретической фи-
физики принадлежат именно к этому классу. Поэтому наиболее
развитая форма аналитической механики остается не только
эстетически и логически наиболее удовлетворительной, но
и практически важной, потому что она дает ключ к решению
многих задач динамики, недоступных элементарным ме-
методам 1.
7. Философская оценка вариационного подхода в меха-
механике. Хотя в наши дни существует молчаливое соглашение
о том, что в научных трактатах следует избегать философ-
философских дискуссий, для вариационных принципов механики
может быть сделано исключение, отчасти потому, что эти
принципы были открыты в век, настроенный в высшей сте-
степени философски, а отчасти из-за того, что вариационный
метод неоднократно оказывался в центре философских спо-
споров и недоразумений.
Действительно, идея о расширении существующей реаль-
реальности путем включения «пробных» возможностей с последу-
последующим выделением одной из них при помощи условия, что она
соответствует минимуму некоторой величины, как-будто
вводит целенаправленность в поток природных явлений.
Это находится в противоречии с обычным причинным опи-
описанием событий. Однако нас не должно удивлять, что для
более универсального подхода, характерного для XVII и
XVIII веков, эти две формы мышления не обязательно
казались противоречивыми. Основным лейтмотивом всего
этого периода была кажущаяся предустановленная гармо-
гармония между «разумом» и «миром». Великие открытия в об-
области высшей математики и их непосредственное примене-
применение к явлениям природы наполняли философов того вре-
времени неколебимой уверенностью в существенно интеллек-
интеллектуальной структуре мироздания. Поэтому deus intellectua-
1 В этой книге не обсуждаются другие методы интегрирова-
интегрирования, которые не основаны на теории преобразований. Читатель,
желающий с ними познакомиться, отсылается к учебникам, указан-
указанным в библиографии.
22 Введение
1 is ' был основной темой философии Лейбница не в меньшей
степени, чем Спинозы. И хотя у Лейбница были сильны теле-
телеологические тенденции, его деятельность оказала не малое
влияние на развитие вариационных методов 2. Это не по-
покажется удивительным, если вспомнить, что чисто эстети-
эстетический и логический интерес к задачам на максимум и ми-
минимум дал самый мощный толчок развитию исчисления бес-
бесконечно малых и что вывод законов геометрической оптики,
сделанный Ферма на основе его «принципа наименьшего
времени распространения», произвел неотразимое впечат-
впечатление на философски настроенных ученых того времени.
И не вина великих философов в том, что дилетантское зло-
злоупотребление этими тенденциями в теологических целях
у Мопертюи и ему подобных привели к дискредитации всего
направления.
Трезвый, практичный, прозаический девятнадцатый век,
наследниками которого мы являемся, счел все спекулятив-
спекулятивные тенденции и интерпретации «метафизическими» и огра-
ограничил свою программу чистым описанием явлений природы.
В его философии математика играет роль стенографии,
экономного, удобного языка для выражения существующих
закономерностей. Поэтому не удивительна и вполне соот-
соответствует «позитивистскому» духу девятнадцатого столетия
следующая оценка аналитической механики, встречающая-
встречающаяся у одного из сторонников этого направления Э. Маха
(«The Science of Mechanics», Open Court, 1893, p. 480):
«Нельзя ждать фундаментальных результатов от этой
ветви механики. Напротив, нужно совершенно покончить
с открытиями различных принципов, прежде чем можно
будет поставить вопрос об основах аналитической механики,
единственной целью которой является совершенство прак-
практического искусства в решении задач. Тот, кто неправильно
оценит эту ситуацию, никогда не сможет постичь сущность
великих работ Лагранжа, дающих здесь по существу тот
же эффект экономии». (Курсив в оригинале.) Согласно такой
философии, вариационные принципы механики — не более,
1 Интеллектуальный дух.
2 См. очень интересную историческую работу А. Кнезера:
К п е z e r A., Das Prinzip der kleinsten Wirkung von Leibniz bis
zur Gegenwart (Leipzig; Teubner, 1928).
Введение 23
чем другая математическая формулировка законов Ньютона,
не содержащая ничего принципиально нового.
Однако философские направления появлялись и ис-
исчезали, а последнее слово в философии, конечно, не сказано.
В наши дни мы явились свидетелями по крайней мере одного
фундаментального открытия, имеющего беспрецедентное
значение, —эйнштейновской общей теории относительности,
открытия, ставшего возможным благодаря глубоким мате-
математическим и философским рассуждениям. Это открытие
базируется на таких доводах, которые позитивист не при-
минул бы назвать «метафизическими», и все же они позволи-
позволили проникнуть в сердце предмета, чего никогда нельзя было
бы сделать простым экспериментированием и сухой регист-
регистрацией фактов. Общая теория относительности снова выз-
вызвала к жизни дух великих космических теоретиков древ-
древней Греции и восемнадцатого столетия.
В свете открытий теории относительности вариационные
основы механики заслуживают большего, чем чисто фор-
формальной оценки. Это далеко не просто другая формули-
формулировка ньютоновых законов движения. Преимущества ва-
вариационного метода можно сформулировать в следующих
пунктах.
1. Принцип относительности требует, чтобы законы
природы формулировались в инвариантной форме, т. е.
чтобы они не зависели от какой-либо специальной системы
отсчета. Методы вариационного исчисления автоматически
удовлетворяют этому требованию, потому что минимум ска-
скалярной величины не зависит от координат, в которых эта
величина измеряется. В то время как ньютоновы уравнения
не удовлетворяют принципу относительности, принцип
наименьшего действия остается справедливым, с тем лишь
дополнением, что основная величина «действия» должна
быть приведена в соответствие с требованием инвариантно-
инвариантности.
2. Общая теория относительности показала, что мате-
материя не может быть отделена от поля и в действительности
порождается полем. Поэтому основные уравнения физики
должны иметь вид уравнений в частных, а не в обыкновен-
обыкновенных производных. В то время как картина ньютоновых ча-
частиц едва ли может быть приведена в согласие с концепцией
поля, вариационные методы не ограничены механикой ча-
24 Введение
стиц и могут быть распространены на механику непрерыв-
непрерывных сред.
3. Если основное «действие» в вариационном принципе
выбрано инвариантным относительно любых координатных
преобразований, то принцип общей относительности удов-
удовлетворяется автоматически. Поскольку риманова диффе-
дифференциальная геометрия доставляет нам подобные инвари-
инварианты, можно без затруднений составить требуемые уравне-
уравнения поля. Современная математика не дает какого-либо
другого метода, при помощи которого можно было бы сфор-
сформулировать ковариантную и в то же время совместную
систему уравнений поля. Следовательно, в свете теории
относительности применение вариационного исчисления
при изучении законов природы не представляется слу-
случайным.
ГЛАВА I
ОСНОВНЫЕ ПРИНЦИПЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1. Характерные черты методов аналитической механики.
Аналитическая форма механики, развитая Эйлером и Ла-
гранжем, существенно отличается по своим методам и прин-
принципам от механики векторной. Основной закон механики,
сформулированный Ньютоном: «произведение массы на
ускорение равно движущей силе»,— непосредственно при-
применим лишь к одной частице. Он был выведен при изучении
движения частиц в поле тяготения Земли, а затем применен
к движению планет под воздействием Солнца. В обоих слу-
случаях движущееся тело могло рассматриваться как «мате-
«материальная точка» или «частица», т. е. можно было считать
массу сосредоточенной в одной точке. Таким образом, за-
задача динамики формулировалась в следующем виде: «Ча-
«Частица, которая может свободно перемещаться в пространстве,
находится под действием заданной силы. Описать движение
в любой момент времени». Из закона Ньютона получалось
дифференциальное уравнение движения, и решение задачи
динамики сводилось к интегрированию этого уравнения.
Если частица не является свободной, а связана с други-
другими частицами, как, например, в твердом теле или в жидкости,
то уравнение Ньютона следует применять осторожно. Не-
Необходимо сначала выделить одну частицу и определить силы,
которые на нее действуют со стороны остальных, окружа-
окружающих ее частиц. Каждая частица является независимым
объектом и подчиняется закону движения свободной частицы.
Этот анализ сил зачастую является затруднительным.
Так как природа сил взаимодействия заранее неизвестна,
приходится вводить дополнительные постулаты. Ньютон
полагал, что принцип «действие равно противодействию»,
известный как его третий закон движения, будет достаточен
для всех проблем динамики. Это, однако, не так. Даже
в динамике твердого тела пришлось ввести дополнительное
предположение о том, что внутренние силы являются цен-
2В. Зак. 1646
26 Гл. I. Основные принципы аналитической механики
тральными. В более сложных случаях ньютонов под-
подход не всегда приводит к однозначному решению задачи.
Аналитический подход к задаче о движении совсем иной.
Частица уже больше не является изолированным объектом,
а представляет собой часть «системы». Под «механической
системой» понимается совокупность частиц, взаимодейству-
взаимодействующих между собой. Отдельная частица не играет роли;
изучается поведение системы как целого. Например, до-
допустим, что в задаче о движении планет нас интересует
движение лишь какой-то одной из них. Однако задачу
нельзя решить в таком ограниченном виде. Источником
силы, действующей на данную планету, в основном является
Солнце. Но в какой-то степени эта сила обусловлена дейст-
действием других планет, и потому она не может быть опре-
определена, если не известно движение остальных частей си-
системы. Поэтому целесообразно рассматривать задачу дина-
динамики системы в целом, не разбивая эту систему на части.
Преимущества такого объединенного изучения еще более
существенны с точки зрения анализа сил. В векторной меха-
механике каждая частица рассматривается отдельно и действу-
действующие силы должны быть определены независимо для каж-
каждой частицы. При аналитическом же подходе достаточно
знать одну-единственную функцию, зависящую от положе-
положения движущихся частиц. Эта «силовая функция» содержит
в неявном виде все силы, действующие на частицы системы;
их можно получить из этой функции простым дифференци-
дифференцированием.
Еще одно существенное различие между двумя методами
связано с понятием «дополнительных условий». Часто
случается, что между частицами движущейся системы имеют-
имеются кинематические соотношения, которые могут быть сфор-
сформулированы a priori. Например, возможности движения
частиц твердого тела ограничены его «жесткостью»; это
означает, что расстояние между любыми двумя точками не
может изменяться. Природа подобных кинематических
условий не ясна a priori, ибо своим возникновением они
обязаны действию каких-то значительных сил. Аналитиче-
Аналитический метод обладает, однако, тем преимуществом, что он
не требует знания этих сил и позволяет обойтись лишь кине-
кинематическими условиями как таковыми. Мы можем написать
уравнения движения для твердого тела, не зная, какие силы
1. Характерные черты методов аналитическом механики 27
обусловливают его жесткость. Аналогично нам не нужно
детально знать силы взаимодействия между частицами жид-
жидкости; достаточно знания того экспериментального факта,
что в жидкости возникают весьма значительные силы, пре-
препятствующие изменению ее объема, в то время как силы,
препятствующие изменению ее формы при сохранении
объема, невелики. Исходя из этого, мы можем заменить не-
неизвестные внутренние силы кинематическими условиями
о том, что в процессе движения объем любой части жидкости
должен сохраняться.
Если учесть, что задание таких априорных кинематиче-
кинематических условий намного проще, чем детальное изучение сил,
необходимых для удовлетворения этих условий, то станет
очевидным громадное преимущество аналитического под-
подхода по сравнению с векторным.
Однако более фундаментальным, чем все эти особенности,
является наличие в аналитической механике объединя-
объединяющего принципа, который является кульминационным
пунктом аналитического подхода. Движение достаточно
сложной механической системы описывается большим чи-
числом — иногда даже бесконечным числом — отдельных диф-
дифференциальных уравнений. Вариационные принципы анали-
аналитической механики образуют единую основу, из которой
следуют все эти уравнения. За всеми этими уравнениями
скрывается общий принцип, заключающий в себе смысл
всей этой совокупности уравнений. Вводится одна фунда-
фундаментальная величина «действие»; принцип, согласно кото-
которому эта величина должна иметь стационарное значение,
приводит к полной системе дифференциальных уравнений,
Более того, установление этого принципа не связано с какой-
либо специальной системой координат. Поэтому и аналити-
аналитические уравнения движения также инвариантны относитель-
относительно любых преобразований координат.
Замечание относительно терминологии. Прилагательное «ана-
«аналитическая» в выражении «аналитическая механика» не имеет ничего
общего с философским процессом анализа; оно происходит от мате-
математического термина «анализ» и указывает на приложение методов
исчисления бесконечно малых к тем или иным проблемам чистой или
прикладной математики. Во французской и немецкой литературе
термин «аналитическая механика» относится лишь к абстрактной ма-
математической трактовке проблем механики методами Эйлера, Лаг-
ранжа и Гамильтона; в английской же, и особенно в американской
2В*
28 Гл. I. Основные принципы аналитической механики
литературе, этим же термином часто называют и элементарные при-
приложения анализа к задачам обычной векторной механики. Термин
«механика» включает в себя «статику» и «динамику», причем первая
имеет дело с равновесием частицы и систем частиц, а вторая изучает
их движение. (Отдельным разделом механики является «механика
сплошной среды», включающая в себя гидромеханику и теорию упру-
упругости. Она основана главным образом на уравнениях в частных
производных, а не на обыкновенных дифференциальных уравне-
уравнениях. Эти вопросы не входят в настоящую книгу.)
Резюме. Сформулируем теперь четыре основных
пункта, по которым имеется различие между вектор-
векторной и аналитической механикой:
1. Векторная механика выделяет отдельную* ча-
частицу и рассматривает ее изолированно от остальных;
аналитическая механика рассматривает систему как
целое.
2. В векторной механике действующая сила вы-
вычисляется отдельно для каждой движущейся частицы;
в аналитической механике рассматривается одна-
единственная функция — силовая функция (или по-
потенциальная энергия). Эта функция содержит в себе
всю необходимую информацию о действующих силах.
3. Если на механическую систему наложены из-
известные эмпирически определяемые кинематические
условия, выполнение которых обеспечивается за счет
действия достаточно больших сил, то векторная меха-
механика должна рассматривать эти силы. Аналитическая
же механика исходит из самих кинематических усло-
условий и не требует знания сил, обеспечивающих выпол-
выполнение этих условий.
4. В аналитическом методе полная система урав-
уравнений движения может быть получена из одного объ-
объединенного принципа, содержащего в неявном виде
все эти уравнения. Этот принцип заключается в на-
нахождении минимума определенной величины, называ-
называемой «действием». Так как принцип минимума не
связан с той или иной системой отсчета, то уравнения
аналитической механики справедливы в любой системе
координат. Это позволяет выбирать координаты в со-
соответствии с особенностями рассматриваемой задачи.
2. Обобщенные координаты 29
2. Обобщенные координаты. При элементарном вектор-
векторном подходе к механике абстрактная концепция «координат»
не является деталью всей картины. Сам метод по существу
является существенно геометрическим.
Векторные методы чрезвычайно полезны в задачах стати-
статики. Однако в динамике число задач, которые могут быть
решены чисто векторными методами, сравнительно невелико.
При решении большинства сложных задач геометриче-
геометрический подход векторной механики оказывается несостоятель-
несостоятельным и вынужден уступать дорогу более абстрактному анали-
аналитическому подходу. При таком аналитическом обосновании
механики понятие координат в наиболее общем смысле за-
занимает центральное место.
Аналитическая механика является чисто математической
наукой. Все производится путем вычислений в абстрактной
сфере математических величин. Физический мир переводит-
переводится на язык математических соотношений, и этот перевод со-
совершается при помощи координат. Координаты устанавли-
устанавливают взаимооднозначное соответствие между точками физи-
физического пространства и числами. После установления этого
соответствия мы можем оперировать с координатами как
с алгебраическими величинами, забывая об их физическом
значении. Конечный результат подобных математических
вычислений затем переводится обратно в мир физических
реальностей.
За столетие, прошедшее от Ферма и Декарта до Эйлера
и Лагранжа, произошло необычайно бурное развитие ме-
методов высшей математики. Одним из наиболее важных из-
изменений было обобщение первоначальной идеи Декарта
о координатах. Ясно, что введение системы из трех взаимно
перпендикулярных осей, с определением длины, ширины и
высоты относительно них, является всего лишь одним из
способов установления взаимооднозначного соответствия
между точками пространства и числами. Другие способы
могут также хорошо служить для этой цели. Например,
вместо прямоугольных координат*, у, z можно взять сфери-
сферические координаты г, 8, <р. Одна из характерных особен-
особенностей аналитических методов механики заключается именно
в том, что мы не накладываем никаких условий на природу
координат, переводящих данное физическое явление в абст-
абстрактную математическую схему.
30 Гл. I. Основные принципы аналитической механики
Рассмотрим сначала механическую систему, состоящую из
N свободных частиц, «свободных» в том смысле, что они не
связаны никакими кинематическими условиями. Прямо-
Прямоугольные координаты этих частиц
*„ ylt z, (t=l,2 N) A.2.1)
характеризуют положение механической системы. Задача
движения, естественно, считается решенной, если x-t, yt,
zt известны как функции времени /.
Эта задача, однако, будет решенной и в том случае, если
хь у,-, z,- выражены через какие-то другие величины
Яи Я2,-->Язк> A.2.2)
a qk в свою очередь определены как функции времени t.
Такой косвенный процесс решения задачи о движении
представляет огромные преимущества, что оказывается на
практике решающим фактором. Эта операция в математике
называется «преобразованием координат». Она является
обобщением перехода от прямоугольных координат одной
точки х, у, z к ее сферическим координатам г, 6, <р. Обобще-
Обобщение соотношений
x=rsin 0cos<p,
t/ = r sin 6 sin ф, A.2.3)
z = r cos 6
заключается в том, что старые переменные могут являться
произвольными функциями новых переменных. Количество
переменных равно уже теперь не 3, a 3N, так как положе-
положение рассматриваемой механической системы определяется
3iV координатами. Таким образом, в общей форме подоб-
подобное преобразование координат выглядит следующим об-
образом:
M)
Мы можем выбрать функции/i, ..., /W любым способом и
свести первоначальную задачу об определении xt, yt, zt как
функций t к новой задаче об определении qlt ..., q3N как
2. Обобщенные координаты 31
функций t. При некотором искусстве можно выбрать си-
систему координат так, чтобы новая задача решалась гораздо
легче старой. Полная свобода в выборе системы от-
отсчета позволяет выбрать координаты так, чтобы они были
особенно удобны для данной задачи. Например, в задаче
о движении планеты, т. е. материальной частицы, враща-
вращающейся вокруг неподвижного притягивающего центра,
сферические координаты гораздо лучше соответствуют усло-
условиям задачи, чем прямоугольные.
Преимущество обобщенных координат становится более
очевидным, если рассматриваются механические системы
с наложенными на них кинематическими условиями. Эти
условия математически выражаются определенными функ-
функциональными соотношениями между координатами. Напри-
Например, расстояние между двумя атомами, образующими моле-
молекулу, определяется равновесием внутримолекулярных сил.
С точки зрения динамики такая система может рассмат-
рассматриваться как состоящая из двух частиц с координатами
хь уъ zx и х2, уг, z2, и частицы находятся на постоянном
расстоянии а одна от другой. Это приводит к условию
(x1-xi)*+(Ui-y2J+(Zi-**J = a*, A.2.5)
вследствие которого 6 координат xlt ..., z2 не могут быть
выбраны независимо. Достаточно задать 5 координат;
шестая определится из условия A.2.5). Очевидно, однако,
что нецелесообразно рассматривать одну из координат как
зависимую переменную, поскольку соотношение A.2.5)
симметрично относительно всех координат. Более естест-
естественно ввести три прямоугольные координаты центра масс
системы и два угла, определяющих направление оси двух-
двухатомной молекулы. 6 прямоугольных координат х1г ..., z2
можно выразить через эти 5 параметров.
В качестве второго примера рассмотрим твердое тело,
которое может состоять из любого числа частиц. Но, неза-
независимо от числа частиц, достаточно задать три координаты
центра масс и три угла, определяющих поворот тела относи-
относительно системы неподвижных осей. Эти 6 параметров пол-
полностью определяют положение тела. Координаты любой
из его частиц могут быть выражены через эти 6 параметров.
В общем случае, когда на механическую систему из Л/ ча-
частиц наложено т независимых кинематических условий,
32 Гл. I. Основные принципы аналитической механики
конфигурация этой системы может быть однозначно задана
с помощью
п=-ЪЫ—т A.2.6)
независимых параметров
<7i. <7«,....<7л. A-2.7)
причем прямоугольные координаты всех частиц могут быть
записаны как функции переменных A.2.7):
'.'.'.'.'.'.'.'. С-2-8)
2^ = /з^((?ь ¦¦¦>Яп)-
Число п не может меняться для данной механической си-
системы и является ее характерной константой. Меньшее коли-
количество параметров недостаточно для описания системы,
большего же количества не требуется. О системе, для одно-
однозначного определения конфигурации которой необходимо и
достаточно задать п параметров, говорят, что она обладает
«я степенями свободы»; сами п параметров qlt ..., qn называ-
называются «обобщенными координатами» системы. Число частиц,
образующих механическую систему, а также их координаты
несущественны при аналитическом методе исследования,
важны лишь обобщенные координаты qlt q2, -.., qn и некото-
некоторые определенные функции от них. Твердое тело может
состоять из бесконечного количества частиц, а с точки зре-
зрения механики — это система, имеющая не более чем 6 не-
независимых координат.
Примеры.
Одна степень свободы. Поршень, двигающийся вверх и
вниз. Твердое тело, вращающееся вокруг неподвижной оси.
Две степени свободы. Частица, перемещающаяся по задан-
заданной поверхности.
Три степени свободы. Частица, перемещающаяся в про-
пространстве. Твердое тело, вращающееся вокруг неподвижной
точки (волчок).
Четыре степени свободы. Двойная звезда, плоскость
вращения которой не поворачивается.
2. Обобщенные координаты 33
Пять степеней свободы. Две частицы, удерживаемые на
определенном расстоянии друг от друга.
Шесть степеней свободы. Две планеты, вращающиеся
вокруг неподвижного Солнца. Твердое тело, свободно пере-
перемещающееся в пространстве.
Обобщенные координаты qu q2,...,qn не обязательно
должны иметь геометрический смысл. Необходимо, однако,
чтобы функции A.2.8) были ограничены, однозначны, не-
непрерывны и дифференцируемы и чтобы якобиан по крайней
мере одной комбинации из п функций был отличен от нуля.
Эти условия могут нарушаться в некоторых особых точках,
которые нужно исключить из исследования. Например,
преобразование A.2.3) от прямоугольных к сферическим
координатам удовлетворяет общим условиям регулярности,
однако следует иметь в виду, что при г = 0 и 6 =0 якобиан
преобразования обращается в нуль.
Кроме этих ограничений «в малом» следует обратить
внимание и на ограничения «в большом». Нужно, чтобы
диапазон непрерывного изменения переменных qlt q2, ¦-.-, qn
допускал изменение первоначальных прямоугольных коор-
координат в достаточно широких пределах, не ограничивая их
более, чем этого требуют наложенные кинематические усло-
условия. (Например, преобразование A.2.3) гарантирует из-
изменение х, у и z от —оо до +оо при г, меняющемся от 0 дооо,
8 — от 0 до л, а ф — от 0 до 2я.) Однако эти условия очень
редко осложняют исследование, так как даже если и нельзя
охватить весь диапазон движения, то все же остается воз-
возможность изучить характерную его часть.
Не всегда имеет смысл исключать все кинематические
условия задачи путем введения соответствующих обобщен-
обобщенных координат. Иногда удобнее исключить только часть
условий, сохранив остальные в виде дополнительных усло-
условий. Поэтому наиболее общая формулировка задачи о меха-
механической системе с наложенными на нее кинематическими
условиями выглядит следующим образом. Имеется система
уравнений A.2.8) и, кроме того, т уравнений вида
<M<7i.<72 0=0, (i=l,...,m); A.2.9)
число степеней свободы при этом равно
п' = п — т.
34 Гл. I. Основные принципы аналитической механики
Резюме. Проблемы изучения движения аналитиче-
аналитическими методами требуют обобщения первоначальной
концепции декартовых координат. В качестве си-
системы координат может быть выбрана любая совокуп-
совокупность параметров, характеризующая положение меха-
механической системы. Эти параметры называются обоб-
обобщенными координатами системы.
3. Пространство конфигураций. Одним из наиболее
важных понятий, используемых при абстрактном аналити-
аналитическом решении задач механики, является понятие о про-
пространстве конфигураций. Подобно тому, как трем величинам
х, у, z ставится в соответствие точка трехмерного простран-
пространства, можно рассматривать п величин qu q2,...,qn как
прямоугольные координаты «точки» Р в n-мерном простран-
пространстве. Аналогично обобщаются понятия «кривой» и движения
точки вдоль кривой. Вместо системы уравнений для обыч-
обычного трехмерного пространства
y=g(t), A.3.1)
теперь пишется система
<7i = <7i(O>
' • ' ' " A.3.2)
Эти уравнения представляют собой решение задачи
динамики. Им соответствует геометрическая картина, в ко-
которой точка Р я-мерного пространства движется по некото-
некоторой кривой в этом пространстве. ¦
Этот геометрический образ очень помогает нашему мыш-
мышлению. Независимо от количества частиц, входящих в дан-
данную механическую систему, и от сложности соотношений
между ними система в целом ^изображается одной точкой
многомерного пространства, называемого «пространством
конфигураций». Например, положение твердого тела, со-
3. Пространство конфигураций 35
стоящего из бесконечного количества материальных точек,
изображается одной точкой в 6-мерном пространстве. Это
6-мерное пространство, конечно, не является физической
реальностью для данного твердого тела. Оно просто скор-
релировано с твердым телом в смысле взаимно однозначного
соответствия: различные положения тела «отображаются»
на различные точки 6-мерного пространства и, наоборот,
разные точки 6-мерного пространства могут быть физически
интерпретированы как разные положения твердого тела.
Для краткости мы будем называть точку пространства кон-
конфигураций, изображающую положение механической си-
системы, «О^точкр-й», а кривую, описываемую этой точкой
в процессе движения системы,—«С-кривой».
Построенная нами картина пространства конфигураций
нуждается в дальнейших уточнениях. Мы основывались
в своих рассуждениях на аналитической геометрии п-мер-
ного евклидова пространства и соответственно считали
п обобщенных координат механической системы прямо-
прямоугольными координатами в этом пространстве. Если же за-
заменить аналитическую геометрию дифференциальной, как
это будет сделано в п. 5 этой главы, то можно получить
картину, гораздо лучше отображающую геометрическую
структуру пространства конфигураций. Однако и наша
первая схема может быть весьма полезной. Продемонстриру-
Продемонстрируем это на следующем примере.
Положение свободной частицы в пространстве можно
определить с помощью сферических координат (г, 0, <р).
Если принять эти величины за прямоугольные координаты
точки, то построенное таким образом пространство будет
сильно отличаться по своим геометрическим свойствам от
реального пространства. Прямые линии перейдут в кривые,
углы и расстояния изменятся. Однако ряд важных характе-
характеристик пространства при этом преобразовании сохранится.
Точка перейдет в точку, окрестность точки преобразуется
в окрестность, кривая останется кривой, смежные кривые
останутся смежными. Непрерывность и дифференцируемость
кривых также сохранятся. Для операций вариационного
исчисления важны именно такие «топологические» свойства
пространства, в то время как «метрические» свойства —
расстояния, углы, площади и т. п. — не играют роли. По-
Поэтому даже упрощенная картина пространства конфигура-
36 Гл. I. Основные принципы аналитической механики
ций, не обладающего соответствующей геометрией, может
быть с успехом использована при исследовании абстракт-
абстрактных аналитических операций.
Резюме. Наглядная картина n-мерного простран-
пространства дает возможность распространить механику одной
материальной точки на сколь угодно сложные механи-
механические системы. Такая система заменяется одной
точкой, движение которой и изучается. Однако про-
пространство, в котором находится эта точка, уже не яв-
является обычным физическим пространством. Это аб-
абстрактное пространство, количество измерений ко-
которого определяется условиями задачи.
4. Отображение пространства самого на себя. От п обоб-
обобщенных координат
Qi, Q2,-,qn A-4.1)
требуется лишь, чтобы они полностью определяли положе-
положение системы. Поэтому в качестве обобщенных координат
можно выбрать, вообще говоря, и другую совокупность
параметров
<7i, <72.-><7n- A-4-2)
Между этими двумя совокупностями координат должны
существовать функциональные соотношения вида
<71=М<71.-.<7„).
Функции Д, /2,..., /„ должны удовлетворять обычным усло-
условиям регулярности. Они должны быть ограниченными,
однозначными, непрерывными и дифференцируемыми функ-
функциями qk с якобианом А, отличным от нуля.
4. Отображение пространства самого на себя
37
Дифференцирование уравнений A.4.3) дает
A.4.4)
Отсюда видно, что независимо от вида функциональных
соотношений между двумя системами координат связь
между их дифференциалами всегда линейна.
q - пространство
q - пространство
Рис. 1.
С этим «преобразованием координат» можно связать
определенную геометрическую картину. Пусть qi так же,
как и qL,— прямоугольные координаты в n-мерном про-
пространстве. Будем рассматривать точки в ^-пространстве и
точки в ^-пространстве. Некоторой точке Р в ^-пространстве
соответствует определенная точка Р^в* ^-пространстве. По-
Поэтому преобразование вида A.4.3) называется «точечным
преобразованием». В некоторой области точки ^-пространст-
^-пространства находятся во взаимно однозначном соответствии с точ-
точками ^-пространства. Мы имеем, таким образом, «отображе-
«отображение» гс-мерного пространства самого на себя. Это отображе-
отображение не только удовлетворяет обычным требованиям взаимно
однозначного соответствия. Сохраняется непрерывность.
Окрестность точки Р отображается в окрестность точки Р
и наоборот. Можно утверждать даже большее. Прямая
линия в ^-пространстве не остается прямой в ^-пространстве.
Однако по мере уменьшения размеров области соотношения
38 Гл. I. Основные принципы аналитической механики
все более и более приближаются к линейным. В бесконечно
малой окрестности точки Р прямые линии переходят в пря-
прямые, а параллельные линии — в параллельные, хотя длины
и углы не сохраняются. Малый параллелепипед в окрест-
окрестности точки Р отображается в малый параллелепипед в ок-
окрестности точки Р. Якобиан А является как раз детерминан-
детерминантом системы линейных уравнений A.4.4). Геометрически
этот детерминант равен отношению объема т нового парал-
параллелепипеда к объему т первоначального. ¦ Отличие А от
нуля эквивалентно требованию, чтобы полная окрестность Р
отображалась в полную окрестность Р, что действительно
необходимо для существования взаимно однозначного соот-
соответствия. Если А равен нулю, то п-мерная область в окрест-
окрестности Р отображается в область меньшего числа измерений
в окрестности Р, в результате для некоторых точек окрест-
окрестности Р нет соответствующих отображений, а для дру-
других точек таких отображений бесконечное множество.
Физической моделью подобного отображения простран-
пространства самого на себя является движение жидкости. Если
пометить частицы жидкости и зафиксировать их положения
в два различных момента времени, то соответствующие по-
положения этих частиц и дадут отображение пространства
самого на себя. Если выделить в жидкости малый парал-
параллелепипед, то, несмотря на искажения его углов и длин при
движении жидкости, он будет оставаться параллелепипедом.
Если к тому же жидкость несжимаема, то объем этого парал-
параллелепипеда будет сохраняться. Аналитически движение
такой жидкости соответствует преобразованию координат
с якобианом, всюду равным единице.
Резюме. Ввиду произвола в выборе координат одна
система обобщенных координат может быть заменена
другой. Это «преобразование координат» может
мыслиться геометрически как отображение п-мерного
пространства самого на себя. Отображение не сохраня-
сохраняет углов и расстояний. Прямые линии преобразуются
в кривые, однако в бесконечно малой области, в окрест-
окрестности некоторой точки, отображение «выпрямляется»:
прямые линии переходят в прямые, параллельные —
в параллельные, и сохраняется отношение объемов.
5. Кинетическая энергия и риманова геометрия 39
5. Кинетическая энергия и риманова геометрия 1. Ис-
Использование произвольных обобщенных координат для
описания движения механической системы является одной .
из существенных черт аналитической механики. Структура
уравнений аналитической механики такова, что они могут
быть записаны в виде, не зависящем от применяемых коор-
координат. Это свойство общих уравнений движения связывает
аналитическую механику с одним из крупнейших дости-
достижений математики девятнадцатого века — теорией инва-
инвариантов и ковариантов. Эта теория окончательно созрела
в наши дни, когда теория относительности Эйнштейна по-
показала, как законы природы связаны с проблемами ин-
инвариантности. В основе теории относительности лежит
требование, чтобы формулировки законов природы не за-
зависели от какой-либо специальной системы координат.
Математическое решение этой проблемы показало, что
между законами, управляющими материей, и римановым
основанием геометрии, существует глубокая внутренняя
связь. Согласно общей теории относительности Эйнштейна,
истинная геометрия природы не евклидова, а более общая—
риманова; эта геометрия связывает пространство и время
в единое четырехмерное многообразие.
Сделанное Декартом открытие, что геометрия допускает
аналитическую трактовку, явилось существенной вехой
в истории развития этой науки. Однако геометрия Декарта
предполагала евклидову структуру пространства. Для
введения прямоугольной системы координат необходимо
принять постулаты конгруентности и постулат о параллель-
параллельных прямых.
Второй вехой в развитии геометрии явилась геометрия
Римана, которая выросла из замечательных работ Гаусса,
касающихся геометрии поверхностей. В основе геометрии
Римана лежит одна-единственная дифференциальная ве-
1 Первым, кто обратил внимание на существование связи между
динамикой и геометрией искривленных пространств, был Якоби
A845) (ср. гл. V, пункт «Принцип Якоби»). Более поздние исследова-
исследования связаны с именами Липке, Бервальда и Франка, Эйзенхарта и
других. Наиболее исчерпывающее исследование этого вопроса, ос-
основанное на последовательном использовании тензорного исчисле-
исчисления, произведено Дж. Л. Сингом в работе «Тензорные методы
в динамике», ИЛ, М., 1947.
40 Гл. I. Основные принципы аналитической механики
личина, называющаяся «линейный элемент» ds1. Эта вели-
величина означает расстояние между двумя соседними точками
пространства, выраженное через координаты и их диффе-
дифференциалы. Рассмотрим для примера бесконечно малое
расстояние ds между двумя точками Р и Рх с координа-
координатами х, у, г и х + dx, у + dy, z + dz. Согласно теореме
Пифагора,
ds2=dx2+dy2+dz2. A..5.1)
Это выражение есть следствие постулатов Евклида и опре-
определения координат х, у, z.
Предположим теперь, что мы ничего не знаем ни о каких
постулатах, и примем A.5.1) без доказательства как опре-
определение линейного элемента. Зная, кроме того, что пере-
переменные х, у, z изменяются в пределах от —оо до + оо,
мы можем отсюда вывести все положения евклидовой гео-
геометрии, включая и интерпретацию х, у, z как прямоуголь-
прямоугольных координат. Аналогично, если квадрат линейного эле-
элемента задать в виде
ds2=dx2 -f x2dy2+x2 sin2 уdz2, A.5.2)
где х меняется2 от 0 до оо, у — от 0 до я, z — от 0 до 2я,
то геометрия, определяемая этим линейным элементом,
будет снова евклидова, но три переменные х, у, z будут уже
иметь смысл сферических координат, ранее обозначавших-
обозначавшихся через г, 0, ср. Все это содержится в одном дифферен-
дифференциальном выражении A.5.2), дополненном граничными ус-
условиями.
В общем случае, если обозначить через хъ х2, х3 (вместо
х, у, г) произвольные «криволинейные» координаты с коор-
1 Чертой над символом мы будем обозначать, как это часто де-
делается, неинтегрируемые дифференциалы, которые нельзя рассма-
рассматривать как бесконечно малое изменение какой-то величины. В то
время как dq^ или dt означает «d от q^ или Ы от Ь, ds следует рас-
рассматривать как бесконечно малое выражение, а не как «d от s».
Действительно, если бы ds был интегрируемый дифференциал, было
бы невозможно найти кратчайшее расстояние между двумя точками,
так как длина всех кривых между этими точками была бы одинакова
и зависела лишь от положения самих точек.
2 Нужно еще добавить граничное условие, что точки (х, у, 0)
и (х, у, 2тс) должны совпадать при всех х и у.
5. Кинетическая энергия и риманова геометрия 4J
динатными линиями, уже не прямыми, как в декартовой
схеме, а в виде произвольных кривых, то квадрат линей-
линейного элемента запишется в следующем общем виде:
ds2=(gn dXi+g12 dx2+gl3 dx3) dxy +
2i dxx+g22 dx2+g23 dx3) dx2->r
A.5.3)
Выражение такого рода называется «квадратичной диффе-
дифференциальной формой» переменных хг, х2, x3. «Коэффициен-
«Коэффициенты» этой суммы gn,---,ga3 — не постоянные величины,
а функции трех переменных х17 х2, х3. Сумма A.5.3) может
быть записана в более компактной форме:
з
^= 2 gikdxtdxk. A.5.4)
Так как члены gik dxt dxk и gki dxt dxk можно собрать
в один член, то число независимых членов квадратичной
формы не 9, а 6. Чтобы форма сохранила симметричный
вид, можно вместо уменьшения числа членов в ней нало-
наложить на коэффициенты следующее условие:
ёы=ён- A-5.5)
В абсолютном исчислении (тензорном), которое система-
систематически развивает коварианты и инварианты римановой
геометрии, величины gik образуют «тензор». Величина ds2
имеет абсолютное значение, потому что расстояние между
двумя точками не зависит от системы координат. Она яв-
является «абсолютной», «инвариантной» величиной, не за-
зависящей от системы отсчета. Тензор определяется компо-
компонентами инвариантной дифференциальной формы. Напри-
Например, инвариантная дифференциальная форма первого
порядка
dw=F1dx1+F2dx2+...-\-Fndxn A.5.6)
определяет вектор. Величины /г1, F2,...,Fn называют
«компонентами» вектора. Они зависят от системы отсчета и
являются поэтому «ковариантными» величинами. Диффе-
Дифференциальная форма в целом, однако, инвариантна. Мы имеем
здесь абстрактное, чисто аналитическое определение век-
42 Гл. I. Основные принципы аналитической механики
тора, которое полностью обходится без традиционной
картинки «стрелы». Дифференциальная форма второго поряд-
порядка определяет тензор второго ранга и т. д.
Тензор gik, лежащий в основе геометрии, называется
«метрическим тензором». Он позволяет строить геометрию
пространства не только трех, но и любого числа измере-
измерений. Геометрия п-мерного пространства определится, если
ввести линейный элемент в виде
~ds*= 2 glkdXidxk A.5.7)
i, k=\
с дополнительным условием
?,*=?*/. A-5.8)
которое делает метрический тензор симметричным. Эйн-
Эйнштейн и Минковский показали, что геометрия реальной
природы включает пространство и время, образуя таким
образом четырехмерный мир с переменными х, у, z и t.
Величины gjj, в общем случае не являются постоянными,
а представляют собой функции переменных хх, х2, ..., хп.
Они оказываются константами только в случае прямоуголь-
прямоугольных и в более общем случае косоугольных координат.
Для криволинейных координат значения меняются от точ-
точки к точке. Они зависят от двух индексов i и k и образуют
двумерное многообразие, в то время как компоненты
вектора, например, образуют одномерное многообразие.
Аналитическое построение геометрии, не зависящее
от какой-либо специальной системы отсчета, является
лишь одним из достоинств римановой геометрии. Более
фундаментальным открытием Римана является то, что
определение A.5.7) линейного элемента образует не толь-
только новый, но и гораздо более общий базис для постро-
построения геометрии, чем старый базис евклидовых постулатов.
Только в том случае, когда g-,k принадлежат к некото-
некоторому определенному классу функций, получается геомет-
геометрия евклидова типа. В общем же случае возникает но-
новый тип геометрии, характеризуемый следующими двумя
фундаментальными свойствами:
1. Свойства пространства меняются от точки к точке,
но только непрерывным образом.
5. Кинетическая энергия и риманова геометрия 43
2. Для бесконечно малых областей справедлива евкли-
евклидова геометрия, хотя она не справедлива для больших
областей.
Риман показал, как при помощи дифференцирования
можно получить характеристическую величину — «тензор
кривизны», определяющий вид геометрии. Если все
компоненты тензора кривизны равны нулю, то геометрия
евклидова, в противном случае — неевклидова.
Когда специальная теория относительности Эйнштейна
и Минковского, объединив время и пространство, пока-
показала, что геометрия природы имеет скорее четыре, а не
три измерения, то это была еще геометрия евклидова
типа. Лишь общая теория относительности Эйнштейна про-
продемонстрировала, что линейный элемент с постоянными
коэффициентами должен быть заменен римановым линей-
линейным элементом, содержащим десять функций gik четырех
координат х, у, z, t.
Таинственная сила всемирного тяготения была ин-
интерпретирована как чисто геометрическое явление — след-
следствие римановой структуры пространственно-временного
континуума.
Абстрактные построения римановой геометрии были
использованы не только в теории относительности, но и
в аналитической механике. Понятие рнмановой геометрии и
методы тензорного исчисления оказались естественным ору-
орудием при операциях по преобразованию координат, встреча-
встречающихся при аналитической трактовке задач динамики.
Геометрия входит в царство механики в связи с инерт-
инертными свойствами массы. Эти свойства отражены в левой
части уравнения Ньютона в форме «массы, умноженной на
ускорение» или «скорости изменения импульса». Аналитиче-
Аналитическая механика показала, что в действительности фундамен-
фундаментальной величиной, характеризующей инерцию массы,
является не импульс, а кинетическая энергия. Кинетиче-
Кинетическая энергия — это скалярная величина, определенная как
mv2l2 для одной частицы и как
Т = 4-2тд>? A.5.9)
для системы частиц; v здесь скорость частицы, определяемая
выражением
44 Гл. I. Основные принципы аналитической механики
Л )а ='*¦ + '%+*'. A.5.10)
dtj dt '
Таким образом, кинетическая энергия частицы явно связа-
связана с линейным элементом ds и поэтому зависит от геометрии
пространства.
Определим теперь линейный элемент ЗЛ/-мерного про-
пространства уравнением
N N
ds2=--2Tdt2= 2 т,и?Л2 = 2 m^dxf+dyj+dzj). A.5.11)
После этого кинетическая энергия может быть записана
в виде
7 = 1„г(^Д A.5.12)
где
т=1. A.5.13)
Это означает, что вместо кинетической энергии всей системы
можно рассматривать кинетическую энергию одной частицы
с массой 1. Эта воображаемая частица является точкой
ЗЛ/-мерного пространства конфигураций, символизирующей
состояние механической системы. Вся система в целом
изображается в этом пространстве в виде одной точки.
Поэтому мы сможем применить к любой механической си-
системе механику свободной частицы, поместив эту частицу
в пространство с соответствующим числом измерений и со-
соответствующей геометрией.
Форма записи линейного элемента A.5.11) показывает,
что ЗЛ^-мерное пространство конфигураций N свободных
частиц имеет евклидову структуру, а величины
Ymxt, Y~fnyi> Y~tnZi A.5.14)
следует считать прямоугольными координатами этого про-
пространства. При замене прямоугольных координат A.5.14)
произвольными криволинейными координатами в соответст-
соответствии с уравнениями A.2.4) геометрия остается евклидовой,
хотя линейный элемент и задается уже в более общей ри-
мановой форме A.5.7) (с п = 3N).
5. Кинетическая энергия и риманова геометрия 45
Рассмотрим теперь механическую систему, на коорди-
координаты которой наложены данные кинематические условия.
Можно поступить двумя способами. Во-первых, можно ис-
использовать прежнее пространство конфигураций 3N изме-
измерений, ограничив возможности свободного перемещения
С-точки имеющимися кинематическими условиями, записан-
записанными в виде
fi(xi,...,zN) = О,
A.5.15)
Геометрически каждое из этих уравнений представляет
собой гиперповерхность в пространстве 3N измерений.
С-точка должна находиться в области пересечения всех
этих гиперповерхностей, т. е. в подпространстве с числом
измерений, равным п = 3N — т. Это подпространство
является уже не плоским евклидовым, а искривленным
римановым пространством.
Второй способ решения той же самой задачи заключается
в том, что мы с самого начала выражаем прямоугольные
координаты частиц через п параметров qu...,qn, подобно
тому как это сделано в A.2.8). Эти параметры являются
теперь криволинейными координатами л-мерного простран-
пространства. Чтобы построить линейный элемент получившегося
пространства, нужно взять дифференциалы от обеих частей
каждого из уравнений A.2.8) и подставить их в выраже-
выражение A.5.11). В результате получим линейный элемент вида
п
~ds2= S aikdqLdqk, A.5.16)
i, ft=l
где aib — известные функции от qL. Линейный элемент
A.5.16) уже является существенно римановым не только
потому, что qt — криволинейные координаты, но и потому,
что геометрия пространства конфигураций сохранила евкли-
евклидову структуру первоначального ЗЛ/-мерного пространства
только в бесконечно малых областях. Например, движение
идеально сбалансированного волчка (т. е. волчка, враща-
вращающегося вокруг своего центра тяжести) можно рассматри-
рассматривать как перемещение С-точки в некотором римановом про-
46 Гл. I. Основные принципы аналитической механики
странстве трех измерений, происходящее по кратчайшему пу-
пути. Аналогично, изучение движения двухатомной молекулы
сводится к задаче о нахождении кратчайшего пути в соот-
соответствующем пятимерном римановом пространстве и т. д.
Механическая задача сводится к задаче дифференциальной
геометрии.
Отметим, что при первом способе рассуждении л-мерное про-
пространство конфигураций рассматривается как часть ЗМ-мерного ев-
евклидова пространства. При втором же способе пространство конфи-
конфигураций рассматривается само по себе, а не как часть пространства
большего числа измерений.
Резюме. Возможность введения произвольных ко-
координатных систем и инвариантность уравнений ме-
механики относительно преобразований координат тесно
связывают аналитическую механику с идеями и ме-
методами римановой геометрии. Движение произвольной
механической системы может рассматриваться как
движение свободной частицы в соответствующем п-
мерном пространстве с определенной римановой струк-
структурой. Кинетическая энергия системы определяет ри-
манов линейный элемент пространства конфигураций.
6. Голономные и неголономные механические системы.
Кинематические связи не всегда имеют вид соотношений
между координатами частиц. Случается, что имеют место
условия более общей природы, которые можно записать
лишь в дифференциальной форме. Характерным примером
является шар, катящийся по столу. Шар, свободно пере-
перемещающийся в пространстве, имеет шесть степеней свободы.
Если же он движется по плоскости, то высота центра тяже-
тяжести остается постоянной, что уменьшает число степеней
свободы до пяти. Мы можем описать положение шара двумя
прямоугольными координатами х и у точки контакта шара
с плоскостью и тремя углами а, Р и у, которые фиксируют
положение шара относительно системы неподвижных осей.
Если шар может двигаться с проскальзыванием, то он дейст-
действительно имеет все пять степеней свободы. Однако если он
вынужден катиться без скольжения, то мгновенная скорость
6. Голономные и неголономные механические системы 47
в точке касания должна равняться нулю и мгновенная ось
вращения должна проходить через точку касания. Если
мгновенная ось вращения все время находится в плоскости
стола, то мы имеем «чистое качение», в противном случае —
«качение» с «верчением». В случае чистого качения число
степеней свободы уменьшается до двух. Если путь точки
контакта определен заданием хну как функций времени t,
то положение шара этим самым однозначно определено
в любой момент времени. Может показаться, что углы а,
Р, у могут быть заданы как функции х и у. Это, однако, не-
невозможно. Дифференциалы a, р\ у выражаются через диф-
дифференциалы х я у, но эти соотношения неинтегрируемы.
Их нельзя заменить эквивалентными конечными соотноше-
соотношениями между координатами. Действительно, представим
себе, что качение шара начинается с какого-то определен-
определенного положения и заканчивается при некотором фиксиро-
фиксированном значении х и у. Если шар двигался двумя различ-
различными путями, то и конечные положения его окажутся повер-
повернутыми относительно друг друга; а если бы а, р1, уможно
было задать в виде функций х и у, то конечные положения
шара в обоих случаях совпадали бы.
Подобные кинематические связи, которые могут быть
заданы только в виде соотношений между дифференциалами
координат, были названы Герцем «неголономными», в от-
отличие от обычных «голономных» связей. Кинематическая
связь вида
f(qi,...,qn)=O A.6.1)
является голономной, хотя из A.6.1) и следует при помощи
дифференцирования, что
Hf-dq1+... + p-dqtt = O. A.6.2)
dqx 4l dqn Чп х '
Если же мы начнем с дифференциального соотношения вида
Axdqi+...+Andqn = Q A.6.3)
(Ак — заданные функции величин qk), то его можно пере-
перевести в соотношение A.6.1) лишь при выполнении определен-
определенных условий интегрируемости. Единственным исключением
является случаи п = 2, потому что дифференциальные соот-
соотношения между двумя переменными всегда интегрируемы.
48 Гл. 1. Основные принципы аналитической механики
При помощи одних дифференцирований и исключений пере-
переменных всегда можно определить, является ли данная совокупность
дифференциальных условий голономной или нет. Покажем, как
это делается, на простейшем примере одного соотношения меж-
между тремя переменными; обобщение на случай большего количества
уравнений и переменных следует автоматически. Сначала запишем
заданное условие в виде:
dq3 = B\dqi -\- B2dq2. A.6.4)
Если эта связь допускает конечное соотношение между qt, q2, q3,
то должно иметь место равенство
Jqt=Wi A'6-5)
или, точнее, поскольку В± и В2 могут зависеть неявно от q3,
дВг dBi dqs _ dfij ( dBj dcfo
dq2 dq3 dq% dq\ vq3 dq\ ' ' '
Величины dq-j/dqx и dqsldq2 известны из A.6.4); поэтому
—~ ~f" 1 B2 = —¦ 4- —- Si A 6 7)
Это равенство должно выполняться при любых qr и q2, т. е. оно
должно быть тождеством. Если это имеет место, то выражение
A.6.4) интегрируемо, в противном случае — нет. Может случиться,
однако, что q3 не выпадает из результирующего уравнения A.6.7),
а выражается через qx и q2. Тогда следует проверить, будут ли
частные производные от q3 по <72 и q2 равны Sj и В2, как это должно
быть согласно A.6.4). Если будут, то мы тем самым доказали, что
данная связь голономна, и заменили ее дифференциальное выражение
конечным. В случае более чем двух независимых переменных все
условия интегрируемости
= A.6.8)
dqk dqt K '
должны быть исследованы подобным же образом. Если задана целая
система независимых дифференциальных соотношений, то следует
сначала их разрешить относительно некоторых зависимых дифферен-
дифференциалов, а затем аналогично предыдущему проверить условия интег-
интегрируемости.
Задача. Исследовать интегрируемость следующего дифферен-
дифференциального соотношения
xdz + (г/2 — х"- -z)dx + (z-y3 — xy) dy = 0. A.6.9)
(Это условие голономно и может быть заменено конечным соотно-
соотношением
г = х2—ху+ у2.) A.6.10)
7. Обобщенная сила и силовая функция 49
Голономные кинематические связи можно использовать
двумя путями. Во-первых, при наличии т уравнений с п
переменными можно исключить часть переменных и свести
задачу к п — т независимым переменным. Во-вторых,
можно оперировать с полным числом переменных, сохраняя
заданные соотношения в качестве дополнительных условий.
Неголономные связи допускают лишь второй способ
решения. Уменьшение числа переменных здесь невозможно
и приходится оперировать с большим количеством перемен-
переменных, чем того требует число степеней свободы системы. Про-
Пространство конфигураций в этом случае является частью про-
пространства большего числа измерений, но не образует в нем
определенного подпространства, потому что кинематичес-
ские условия в каждой точке порождают пучок направле-
направлений, но эти пучки не имеют огибающей поверхности.
С точки зрения вариационных принципов механики голономные
и неголономные связи различаются очень сильно. Хотя уравнения
механики и могут быть написаны в случае неголономных связей, но
эти уравнения нельзя получить из общего принципа, приравнивая
нулю вариацию от определенной величины (гл. II, п. 13).
Резюме. Кинематические условия не всегда имеют
вид конечных соотношений между координатами, иначе
говоря, не всегда являются «голономными». Может
случиться, что связи представимы лишь в виде соот-
соотношений между дифференциалами от координат. Та-
Такие связи называют «неголономными». Подобные связи
возникают, например, при качении твердого тела
без скольжения по некоторой поверхности.
7. Обобщенная сила и силовая функция. Левая и правая
части уравнения движения Ньютона отражают соответст-
соответственно два принципиально различных аспекта задач меха-
механики. В левой части отражены инертные свойства мас-
массы. В аналитической механике эти свойства находят свое
выражение в понятии кинетической энергии. Правая часть
уравнения — «движущая сила» — описывает динамическое
поведение внешнего поля в его воздействии на частицу.
Хотя мы склонны считать силу за некую первичную и не-
3 Зак. 1646
50 Гл. I. Основные принципы аналитической механики
сводимую величину, аналитические методы механики при-
приводят к выводу, что на самом деле основную роль играет
не сила, а производимая ею работа, в то время как сама
сила есть вторичная величина, получаемая из работы.
Предположим, что на каждую частицу системы с массой
т1 и прямоугольными координатами xL, yit z-t действует
сила Fi, имеющая компоненты
Х„ Yt, Ъ, A.7.1)
Эти силы появляются либо за счет внешнего поля, либо в ре-
результате взаимодействия частиц. Сюда, однако, не включа-
включаются силы, которые обеспечивают выполнение кинематиче-
кинематических связей; аналитические методы механики не требуют
знания этих сил.
Изменим координаты каждой частицы на бесконечно
малую величину dxt, dyi, dzt. Полная работа всех рассматри-
рассматриваемых сил равна
_ N
dw = 2 (X^+r^+Zjdz,). A.7.2)
i
Если теперь заменить прямоугольные координаты обобщен-
обобщенными в соответствии с уравнениями A.2.8), то дифференци-
дифференциалы dxi, dyit dzi выразятся через dqi, а бесконечно малая
работа dw запишется в виде линейной дифференциальной
формы от переменных qc.
dw = Fldq1 + Ftdqa+... + Fndqn. A.7.3)
Эта дифференциальная форма играет первостепенную роль
в образовании понятия силы в аналитической механике.
Исходные силы, действующие на частицы, несущественны;
важны лишь коэффициенты
FltFs,...,Fa A.7.4)
дифференциальной формы A.7.3). Величины A.7.4) полно-
полностью определяют динамическое действие всех сил; они яв-
являются компонентами вектора, причем вектора в я-мерном
пространстве конфигураций. Мы будем называть этот вектор
«обобщенной силой», а величины Ft — «компонентами обоб-
обобщенной силы».
7. Обобщенная сила и силовая функция 51
Подобно тому как движение механической системы
можно заменить движением одной частицы в некотором
я-мерном римановом пространстве, причем инерция всей
системы входит в кинетическую энергию этой воображаемой
частицы, так и динамическое действие всех сил может быть
представлено с помощью одного вектора, действующего на
эту частицу. Этот вектор имеет п компонент в соответствии
с числом измерений пространства конфигураций. Компо-
Компоненты вектора определяются аналитически как коэффици-
коэффициенты инвариантной дифференциальной формы первого
порядка, которая выражает полную работу всех действу-
действующих сил при произвольном бесконечно малом изменении
положения системы.
Теперь силы, действующие на механическую систему,
автоматически распадаются на две категории. В общем
случае мы ничего не сможем сказать о величине dw, кроме
того, что она является дифференциальной формой первого
порядка. Однако возможно также, что dw окажется полным
дифференциалом некоторой функции. В большинстве за-
задач осуществляется именно эта возможность.
Предположим, что бесконечно малая работа dw являет-
является полным дифференциалом некоторой функции, так что
черта над dw может быть опущена. Эта функция называется
«силовой» и обычно обозначается буквой U. Поэтому по-
положим
~dw = dU, A.7.5)
где
U = U(qi,q9,...,qJ. A.7.6)
Отсюда имеем
откуда
На практике обычно пользуются величиной, которая от-
отличается от силовой функции знаком. Эту величину обо-
обозначают через V:
52 Гл. I. Основные принципы аналитической механики
V = —U. A.7.9)
Смысл замены знака состоит в том, что с точки зрения закона
сохранения энергии V может быть интерпретирована как
«потенциальная энергия» системы. Уравнения A.7.8) можно
теперь переписать в виде:
где V — функция координат
V = V(qi,q2,...,qn). A.7.11)
Силы, имеющие потенциал, замечательны с двух точек
зрения. Во-первых, они удовлетворяют закону сохранения
энергии; по этой причине они называются «консерватив-
«консервативными силами». Во-вторых, несмотря на то что обобщенная
сила имеет п компонент, все эти компоненты могут быть
вычислены из одной скалярной функции U. Для применения
к механике вариационных методов важно только послед-
последнее свойство, а то, что при этом сохраняется энергия си-
системы, несущественно.
Определение силовой функции на основе выражения
A.7.5) слишком ограничено. В природе имеются силы, опре-
определяемые силовой функцией, зависящей от времени: U =
= V(ql, q2, ..., qn, t). Уравнение A.7.5) при этом остается
справедливым, только если при нахождении дифференциала
dU время t считать константой. Уравнения A.7.7) и A.7.8)
остаются справедливыми, но свойство сохранения энергии
системы уже теряется. Обобщенная сила, не будучи консер-
консервативной, имеет силовую функцию. Электрически заряжен-
заряженные частицы, вращаясь в циклотроне, возвращаются в ту же
точку с возросшей кинетической энергией, так что энергия
не сохраняется. Это происходит не из-за того, что в этом
случае силовая функция отсутствует, а потому, что она за-
зависит от времени. С другой стороны, обобщенная сила может
не иметь силовой функции и все же удовлетворять условию
сохранения энергии системы, как, например, сила, обеспе-
обеспечивающая качение.
Желательно иметь особое название для сил, порожда-
порождаемых одной скалярной величиной, независимо от того, кон-
консервативны они пли нет. В данной книге для этой категории
7. Обобщенная сила и силовая функция 53
сил предлагается название «моногенные» (что означает «про-
«произведенные от одного»), в то время как остальные силы,
например трение, можно называть «полигенными».
Силовая функция, связанная с моногенной силой,
в наиболее общем случае зависит от координат и от скоро-
скоростей
U = U{qlt...,qn; qlt .... qn, t). A.7.12)
Например, электромагнитная сила Лоренца, действующая
на частицу при наличии электрического и магнитного полей,
порождается именно подобной силовой функцией. Из диф-
дифференциальных уравнений Эйлера — Лагранжа (см. ниже,
гл. II, п. 10) следует, что связь между силой и силовой функ-
функцией при этом задается уравнением
' <Э<7< dt dq. v >
которое является обобщением более простого выражения
A.7.8).
Резюме. При аналитическом подходе существенной
величиной в механике является не сила, а работа,
совершаемая действующими силами на произвольном
бесконечно малом перемещении. Вариационные ме-
методы дают особенно полезные результаты в случае
сил, определяемых одной скалярной величиной, сило-
силовой функцией U. Такие силы можно назвать «моноген-
«моногенными». Если силовая функция не зависит от вре-
времени, мы получаем класс сил, называемых «консерва-
«консервативными», поскольку они удовлетворяют закону со-
сохранения энергии. В распространенном случае, когда
силовая функция не зависит ни от времени, ни от
скоростей, эта функция, взятая с обратным знаком,
может быть интерпретирована как потенциальная
энергия; сила при этом является градиентом потен-
потенциальной энергии, взятым с обратным знаком. Силы,
не имеющие силовой функции, тоже могут быть охарак-
охарактеризованы работой, совершенной на бесконечно малом
перемещении, но к ним не применима общая про-
процедура нахождения минимума, характерная для ана-
аналитической механики.
54 Гл. I. Основные принципы аналитической механики
8. Склерономные и реономные системы. Закон сохране-
сохранения энергии. Во всех наших предыдущих рассуждениях
мы не принимали во внимание наиболее характерную пере-
переменную всех задач динамики — время t. Приемы аналити-
аналитической механики существенно зависят от того, присутствует
время или нет в явном виде в основных скалярных величи-
величинах механики. Все величины в механике являются, ко-
конечно, функциями времени; речь идет о том, входит ли
время в явном виде в выражения для кинетической энергии
или силовой функции.
Раньше (см. 1.6) мы предполагали, что голономные кине-
кинематические связи имеют вид некоторых соотношений между
координатами механической системы. Может случиться,
однако, что подобное соотношение непрерывно меняется
во времени, так что уравнение, выражающее такую связь,
имеет вид
f(qi,...,qn, 0=0. A.8.1)
Это, например, происходит, когда некоторая точечная масса
движется по поверхности, которая в свою очередь пере-
перемещается по заданному закону. Уравнение такой поверх-
поверхности записывается в виде
f(x,y,z,t) = O. A.8.2)
В качестве другого примера укажем на маятник, длина кото-
которого непрерывно меняется посредством выбирания нити;
в этом случае опять возникают дополнительные условия,
явно зависящие от времени.
Для того чтобы различать кинематические связи, за-
зависящие и не зависящие явно от времени, Больцман ввел
для них термины «реономные» и «склерономные». Наличие
среди кинематических связей реономных связей приводит
к тому, что при исключении их путем выбора соответству-
соответствующих криволинейных координат в уравнения A.2.8) войдет
явно время:
A.8.3)
8. Склерономные и реономные системы 55
Подобная же ситуация возникает и при отсутствии связей,
зависящих от времени, если выбранные координаты от-
относятся к движущейся системе отсчета.
Реономные системы поддаются изучению аналитически-
аналитическими методами, но при этом пропадает ряд характерных след-
следствий, имеющих место для склерономных систем. Это связа-
связано в первую очередь с тем, что дифференцирование уравне-
уравнений A.8.3) по времени приводит к выражениям
¦ _дк ¦ , , §к ¦ , ?L
Х1 — dq1 ?i + ¦•• ~г dqn Яп -г dt '
A.8.4)
Если подставить эти выражения в определение кинетиче-
кинетической энергии A.5.9), то мы не получим чисто квадратичной
формы обобщенных скоростей qc дополнительно возникнут
новые члены, линейные относительно скоростей, а также
члены, не зависящие от скоростей. В этом случае уже не
могут быть в той же мере использованы соотношения рима-
новой геометрии.
Возвращаясь несколько назад, заметим, что время t
может входить в явном виде в силовую функцию U. Аналити-
Аналитически совершенно безразлично, содержится ли время явно
в коэффициентах кинетической энергии или силовой функ-
функции или не содержится; система реономна в обоих случаях.
Как будет показано ниже, существенное различие между
реономной и склерономной системами заключается в следу-
следующем: для склерономной системы имеется фундаментальная
величина, интерпретируемая как «полная энергия» системы,
которая сохраняется при движении. Полная энергия равна
сумме кинетической и потенциальной энергий, при условии
что потенциальная энергия механической системы опреде-
определяется следующим образом:
В распространенном случае, когда силовая функция не
зависит от скоростей, потенциальная энергия становится
56 Гл. I. Основные принципы аналитической механики
равной силовой функции,взятой с обратным знаком; при
этом можно вообще обойтись без понятия силовой функ-
функции, считая кинетическую энергию Т и потенциальную
энергию V двумя основными скалярами механики.
В общем случае A.8.5), однако, приходится возвратиться
к силовой функции U; более того, если U зависит от време-
времени, то пропадает самый смысл определения «потенциальной
энергии» как другой формы энергии, компенсирующей
потерю или рост энергии кинетической.
Действительно, фундаментальной величиной аналитиче-
аналитической механики является не потенциальная энергия, а сило-
силовая функция, хотя физикам и инженерам более знакомо
первое понятие. Во всех случаях, когда мы будем говорить
о потенциальной энергии, молчаливо предполагается, что
силовая функция имеет вид A.7.6) и выполняется соотно-
соотношение V = —U.
Для реономных систем не выполняются никакие законы
сохранения, в то время как; для склерономных систем они
имеют место. Поэтому склерономные системы часто относят
к «консервативным системам».
Резюме. Может случиться, что две основные вели-
величины механики, кинетическая энергия и силовая функ-
функция, содержат время в явном виде. Это происходит,
когда некоторые из имеющихся кинематических связей
зависят от времени, а также когда силовая функция
есть явная функция времени (или, быть может, скоро-
скоростей). Если и кинетическая энергия, и силовая функ-
функция склерономны, т. е. не зависят от времени, то из
уравнений движения вытекает фундаментальная тео-
теорема, называемая законом сохранения энергии. Если
хотя бы одна из основных величин реономна, т. е. за-
зависит от времени, то такой закон сохранения не может
быть получен.
ГЛАВА II
ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
1. Общие свойства задач на экстремум. Задачи на на-
нахождение экстремума всегда привлекали к себе внимание.
Даже наша ходьба по прямой линии есть инстинктивное
решение задачи на экстремум: мы хотим достичь конечной
точки нашего пути с возможно меньшими усилиями. Извест-
Известное выражение «по пути наименьшего сопротивления» есть
еще одно признание нашего инстинктивного стремления
к нахождению минимума. Это же стремление проявляется
в общем интересе к рекордным достижениям, к чему-то
такому, что «нельзя превзойти».
Математически мы говорим о «задаче на экстремум»
всякий раз, когда фигурирует наибольшее или наименьшее
значение какой-либо величины. Например, мы можем
искать наивысшую точку горы или наинизшую точку доли-
долины, или кратчайший путь между двумя точками, или наи-
наибольший объем контейнера, который можно сделать из дан-
данного куска металла, или наименьшие возможные затраты на
освещение либо на обогрев и т. д. Для решения подобных
задач возникла отдельная ветвь математики, называемая
«вариационным исчислением».
С формальной точки зрения задача нахождения минимума опре-
определенного интеграла является собственно задачей вариационного
исчисления, в то время как задача нахождения минимума функции
принадлежит к обычному анализу. Исторически эти две проблемы
возникли одновременно и четкого разграничения между ними не
было вплоть до Лагранжа, развившего технику вариационного ис-
исчисления. Знаменитая задача Дидоны, хорошо известная геометрам
древности, была вариационной задачей, требовавшей нахождения
минимума некоторого интеграла. Герон Александрийский вывел
закон отражения, исходя из того, что луч света, выходящий из
точки Л и приходящий в точку В после отражения от зеркала, дости-
достигает цели в кратчайшее время. Ферма применил этот принцип для
получения законов преломления. Все эти задачи решались геоме-
геометрическими методами. Задача о брахистохроне (кривой быстрей-
быстрейшего спуска) была предложена Иоганном Бернулли и решена неза-
независимо им самим, Ньютоном и Лейбницем. Основные дифферен-
ЗВ. Зак. 164G
58 Гл. II. Вариационное исчисление
циальные уравнения для вариационных задач были найдены Эйле-
Эйлером и Лагранжем. Общий метод решения вариационных задач был
предложен Лагранжем в его Mecanique Analytique A788I.
Перед тем как приступить к изложению формального
аппарата вариационного исчисления, рассмотрим один
простой, но типичный пример, который поможет уяснить
общие черты задач на экстремум. Предположим, что мы
желаем определить высшую точку юры. Высота местности
может быть аналитически записана уравнением
z=f{x,y) B.1.1)
и пусть f(x, у) -- непрерывная и дифференцируемая функ-
функция х и у.
Вопрос о максимуме или минимуме по самой своей при-
природе требует какого-то сравнения. Если мы утверждаем, что
находимся на вершине горы, то мы должны показать, что
все соседние точки расположены ниже нас. Здесь мы сталки-
сталкиваемся с первым характерным ограничением задач на экст-
экстремум. В удаленных от нас частях горы могут существо-
существовать и более высокие пики. Нам достаточно, чтобы достиг-
достигнутая нами высота была максимальна в непосредственной
окрестности, даже если и не установлено, что она макси-
максимальна в более широкой окрестности. Мы говорим, таким
образом, о локальном максимуме (или минимуме) в отличие
от абсолютного максимума (или минимума).
Однако даже программа поисков этого относительного
экстремума может быть еще больше ограничена исследова-
исследованием в первую очередь бесконечно малой (т. е. произвольно
малой) окрестности нашего местоположения. Ясно, что
возле вершины горы все точки бесконечно малой окрестно-
окрестности должны иметь в первом приближении одинаковую
высоту. Это означает, что скорость изменения высоты долж-
должна быть равна нулю при движении в любом направлении.
Действительно, наличие положительной скорости движения
в каком-либо направлении означало бы, что в ближайшей
окрестности нашей точки имеются другие точки, с большей
высотой. С другой стороны, если скорость изменения отри-
отрицательна в некотором направлении, то, двигаясь в противо-
противоположном направлении, мы можем сделать скорость измене-
1 Точнее, в 1760—1762 гг. См. сб. Вариационные принципы ме-
механики, под ред. Л. С. Полака, Физматгиз, М., 1959.—Прим. ред.
Общие свойства задач на экстремум 59
ния положительной. При этом предполагается, и это очень
существенно, что имеется возможность двигаться в любом
направлении.
Таким образом, в точке, где имеется относительный мак-
максимум функции, не должно быть ни положительного, ни
отрицательного значения скорости ее изменения. Отсюда
следует весьма важное утверждение, что для наличия мак-
максимума данной функции в некоторой точке требуется, чтобы
скорость изменения функции при движении в любом направ-
направлении от этой точки была равна нулю.
Однако это условие само по себе не гарантирует наличие
максимума. Мы можем находиться на седловой точке, что
приводит к наличию минимума по отношению к одним на-
направлениям и максимума по отношению к другим. Поэтому
равенство нулю скорости изменения функции во всех воз-
возможных направлениях является необходимым, но отнюдь
не достаточным условием наличия экстремума. Требуется
провести дополнительное исследование, чтобы установить,
что в действительности реализуется: максимум, минимум или
седловая точка без какого-либо экстремального значения.
Однако тот факт, что мы находимся в точке, где скорость
изменения функции в любом направлении равна нулю, ин-
интересен сам по себе. Подобные точки являются особыми, не-
независимо от того, выполняются в них или нет более силь-
сильные условия наличия максимума или минимума. Поэтому
эти точки имеют специальное название. Если скорость из-
изменения функции в любом направлении в некоторой точке
равна нулю, то мы говорим, что функция имеет в этой
точке ^.стационарное значение-».
Как оказалось, в задачах о движении существенны лишь
стационарные значения некоторых определенных интегра-
интегралов. Поэтому имеется заметное различие между вариацион-
вариационным исчислением — ветвью чистой математики, с одной
стороны, и его приложением к задачам механики—с другой.
С точки зрения чистой математики задача о нахождении
стационарных значений не представляет большого интереса.
После установления критерия для стационарных точек
идут дальше и ищут дополнительные критерии для истинных
экстремумов. Для вариационных принципов механики,
однако, эти последние исследования представляют интерес
только при решении задач устойчивости, когда ищется дей-
ЗВ*
60 Гл. II. Вариационное исчисление
ствительный минимум потенциальной энергии. Задачи же
по определению движения не связаны со специальными ус-
условиями существования таких минимумов.
Резюме. Задача о нахождении точки, в которой не-
некоторая функция имеет относительный максимум или
минимум, приводит к необходимости исследования
бесконечно малой окрестности этой точки. Это иссле-
исследование должно показать, что функция обладает ста-
стационарным значением в рассматриваемой точке. Хотя
это утверждение само по себе без дополнительных усло-
условий и не может гарантировать наличия экстремума,
для общих задач динамики его достаточно: задачи
движения требуют лишь нахождения стационарных
значений, а не обязательно минимумов некоторого
определенного интеграла.
2. Стационарное значение функции. Рассмотрим функ-
функцию произвольного числа переменных
F=F(ultu, ы„). B.2.1)
Эти переменные могут рассматриваться как прямоугольные
координаты точки Р в пространстве п измерений. Если мы
нанесем значения самой функции вдоль еще одного измере-
измерения, то получим некоторую поверхность в пространстве
п + 1 измерений. Мы будем предполагать, что F — не-
непрерывная и дифференцируемая функция переменных uk.
Переведем теперь выражение: «исследование бесконечно
малой окрестности некоторой точки» на точный математиче-
математический язык. При этом нам понадобится понятие «вариации»,
которое означает бесконечно малое изменение, подобное
дифференциалу в обычном анализе. В отличие от обычного
дифференцирования это бесконечно малое изменение не
связано с действительным изменением независимой пере-
переменной; это своего рода математический эксперимент,
который мы проделываем над совокупностью переменных.
Рассмотрим для примера шарик, покоящийся в нижней
точке чаши. Действительное перемещение шарика равно
2. Стационарное значение функции 61
нулю. Нам, однако,желательно перевести его в какое-нибудь
соседнее положение, чтобы посмотреть, как изменится его
потенциальная энергия. Подобная операция называется
«виртуальным перемещением». Термин «виртуальное» озна-
означает, что перемещение производится преднамеренно в любом
кинематически допустимом направлении. Такое виртуаль-
виртуальное бесконечно малое изменение положения кратко называ-
называется «вариацией положения». Эта вариация вызывает соот-
соответствующее изменение исследуемой функции F (в нашем
примере потенциальной энергии шарика). Мы производим
варьирование переменных по своему усмотрению, после
чего соответствующее изменение функции, называемое «ва-
«вариацией функции», происходит уже независимо от нас.
Лагранжу принадлежит замечательная идея ввести для
вариации специальный символ б, чтобы подчеркнуть ее
виртуальный характер. Сходство с обозначением дифферен-
дифференциала d напоминает, что оба символа означают бесконечно
малое изменение. Однако d относится к действительным,
а б — к виртуальным изменениям. Так как в задачах,
связанных с вариациями определенных интегралов, встре-
встречаются одновременно оба типа изменений, это различие
в обозначениях оказывается весьма существенным.
В соответствии с введенными обозначениями запишем
бесконечно малые виртуальные изменения наших коорди-
координат в виде
Ьиъ Ьий,...,Ьип. B.2.2)
Соответствующее изменение функции F находится по прави-
правилам элементарного анализа
Это выражение называется «первой вариацией» функции F.
Для того чтобы оперировать с конечными, а не с беско-
бесконечно малыми величинами, положим
бы1 = еа1, бы2 = еа2,..., бы„=еа„, B.2.4)
где щ, а2, ..., ап — направляющие косинусы выбранного
нами виртуального направления, а е — параметр, стремя-
стремящийся к нулю.
62 Гл. II. Вариационное исчисление
Скорость изменения функции в выделенном направлении
5F dF , dF . dF /о о сч
-=v-a! + r а8 + -+г- °V B.2.5)
Для того чтобы F приняло стационарное значение, эта
скорость должна обратиться в нуль:
«Виртуальность» нашего перемещения означает, что мы
можем выбрать любое направление; поэтому ak произвольны
и, следовательно,
Обратно, если условия B.2.7) выполняются, то величина
B.2.5) обращается в нуль и F имеет стационарное значение.
Следовательно, условия B.2.7) являются необходимыми и
достаточными для стационарности функции.
Заметим, что уравнения B.2.7) определяют лишь положение
стационарного значения, а не само значение. Найдя, однако, из п
уравнений B.2.7) п величин их, и2, ¦¦¦, и„, мы можем подставить их
в выражение для F и определить таким образом стационарное значе-
значение нашей функции.
Резюме. Необходимым и достаточным условием
наличия стационарного значения функции F п пере-
переменных в некоторой точке Р является обращение
в нуль в этой точке всех ее п частных производных.
3. Вторая вариация. Вернемся к бесконечно малому
изменению функции, связанному с виртуальной вариацией
координат. Записав вариации координат снова в форме
B.2.4), мы должны оценить величину
-F(ultut,...,un). B.3.1)
3. Вторая вариация 63
Рассматривая эту величину как функцию параметра е и
разлагая ее в ряд по е, получаем
AF=e 2j -5— ak + -о- е 2j а я сс,«ь + •¦¦¦ B.3.2)
Если в некоторой точке функция F имеет стационарное
значение, то первая сумма обращается в нуль и разложение
AF начинается с членов второго порядка. При достаточно
малом е можно пренебречь членами высших порядков и на-
написать
AF = ~d*F, 'B.3.3)
где
ба/^е2 V d2f B.3.4)
Это выражение называется «второй вариацией» F. Пусть
62F оказывается положительной при любом выборе косину-
косинусов а,- (любом, но, конечно, при условии, что сумма их квад-
квадратов равна 1). Это означает, что F возрастает во всех на-
направлениях от Р, и мы имеем в этой точке действительный
минимум. Если же 62F отрицательна при любых выбран-
выбранных значениях а,-, то F уменьшается во всех направлениях
от Р и осуществляется максимум. Если 62F положительна
для одних направлений и отрицательна для других, то в дан-
данной точке нет экстремума. Таким образом, знак второй ва-
вариации позволяет установить наличие экстремума. Запишем
уравнение
S2F=0 B.3.5)
и попытаемся найти удовлетворяющие ему действительные
значения а/. Если это возможно, то 62F может изменить знак
и экстремума не существует. Если же, наоборот не сущест-
существует действительных решений уравнения B.3.5) для а,-,
то S2F не может изменить знак и потому имеется экстремум.
(Чтобы определить, максимум это или минимум, следует
вычислить 82F при каких-нибудь произвольных значениях а,-
и определить таким образом ее знак.)
64 Гл. II. Вариационное исчисление
Вторую вариацию функции мы рассмотрим более подробно при
обсуждении вопросов малых колебаний вблизи положения равнове-
равновесия (см. гл. V, п. 10). Там мы найдем более точные критерии для раз-
различения максимума и минимума. Здесь следует, однако, отметить,
что иногда исследование второй вариации является излишним,
потому что наличие, скажем, минимума может быть известно зара-
заранее из самого характера задачи. Пусть, например, мы ищем минимум
функции, состоящей только из положительных членов. Тогда заранее
ясно, что эта функция должна иметь где-то наименьшее значение.
Поэтому если условия существования стационарного значения вы-
выполняются лишь в одной точке, то эта точка и будет точкой мини-
минимума (см. гл. IV, п. 8).
'Резюме. При выполнении условия существования
стационарного значения дальнейшие критерии на-
наличия экстремума связаны со знаком второй вариации.
Для существования экстремума достаточно, чтобы
знак второй вариации сохранялся при всех возможных
бесконечно малых виртуальных перемещениях; по-
положительный знак при этом соответствует минимуму,
а отрицательный — максимуму. Если вторая вариация
положительна для одних перемещений и отрицательна
для других, то в стационарной точке функция не
имеет экстремума.
4. Взаимосвязь стационарных и экстремальных значе-
значений. Следует хорошо усвоить разницу между стационарным
значением и экстремумом, а также взаимосвязь между
этими двумя понятиями. Для стационарного значения тре-
требуется лишь обращение в нуль первой вариации, без каких
бы то ни было ограничений на вторую вариацию. Для экст-
экстремума требуется, помимо обращения в нуль первой вари-
вариации, выполнение некоторых условий для второй вариации.
До сих пор мы рассматривали вопрос об экстремумах для
внутренних точек заданной области пространства конфигу-
конфигураций. Функция, не допускающая экстремумов внутри не-
некоторой области, может иметь их на границе области, где
направления перемещений уже не обратимы. Поэтому наше
утверждение, что первая вариация должна обратиться
в нуль, так как в противном случае ее можно сделать и по-
положительной и отрицательной, больше не имеет места.
5. Дополнительные условия, л — метод Лагранжа 65
При необратимых перемещениях функция может иметь
экстремум и не в стационарных точках. В этих случаях
экстремум существует без обращения в нуль первой вариа-
вариации. Шар, катящийся по желобу, приходит в состояние
равновесия в наинизшей точке желоба, где касательная
к его траектории горизонтальна. Но шар можно остановить
и раньше при помощи колышка, который не даст ему ска-
скатиться донизу. Шар при этом находится в своем наинизшем
из всех возможных положений, хотя тангенс угла наклона
желоба не равен нулю и высота не имеет стационарного
значения. Последнее и не требуется, так как шар находится
на границе области пространства конфигураций и вариации
его положения не обратимы по направлению.
Резюме. Экстремум функции требует стационарного
значения лишь в случае перемещений, обратимых по
направлению. На границах области пространства
конфигураций, где обратимость не имеет места, экст-
экстремум может достигаться и не в стационарных точках.
5. Дополнительные условия. Метод неопределенных
множителей Лагранжа. Задача нахождения минимума функ-
функции не всегда задается в той форме, о которой говорилось
выше. Число измерений пространства конфигураций, в ко-
котором движется точка Р, может оказаться меньшим, чем п,
из-за наличия каких-то определенных кинематических со-
соотношений между координатами. Подобные кинематические
условия называются «дополнительными условиями» соответ-
соответствующей вариационной задачи. Если такие условия не
наложены и переменные ыь и2, ••-, ип могут меняться без
ограничений, то мы имеем «свободную» вариационную за-
задачу, которая рассматривалась выше (пп. 1—3).
Исследуем теперь вариации функции
tut un) B.5.1)
с дополнительным условием
,ия) = 0. B.5.2)
66 Гл. II. Вариационное исчисление
Естественно сначала исключить одну из переменных —
например, ип — при помощи дополнительного условия,
выразив ее через остальные uk. Тогда мы получим функцию
п — 1 переменных иь ..., ип-\, которую можно уже ис-
исследовать методами свободной вариационной задачи. Этот
способ вполне оправдывает себя, а иногда оказывается и
наиболее простым. Однако очень часто исключение пере-
переменных является чрезвычайно обременительной задачей.
Кроме того, условие B.5.2) может быть симметричным от-
относительно переменных ult ..., ип\ тогда, вообще говоря,
нет никаких оснований искусственно выделять одну из
переменных в качестве зависимой, выражая ее через
остальные как через независимые переменные.
Лагранж предложил прекрасный метод решения задач
с дополнительными условиями, так называемый «метод
неопределенных множителей», который, не прибегая к ис-
исключению некоторых переменных, сохраняет их симметрию
и тем не менее сводит задачу к задаче о свободной вариа-
вариации. Этот метод очень общий. Он применим при любом
количестве дополнительных условий и даже в случае не-
голономных условий, заданных в виде неинтегр-ируемых
соотношений между дифференциалами переменных.
Чтобы уяснить смысл метода множителей Лагранжа,
начнем с единственного дополнительного условия, заданно-
заданного в виде B.5.2). Варьируя это уравнение, мы получаем
следующее соотношение между бИд,:
V = ^e«*+- + Jr/«--0. B.5.3)
в то время как обращение в нуль вариации функции F
в стационарной точке дает
Из п. 3 нам известно, что в случае, когда всебц^ независимы,
условие B.5.4) должно приводить к обращению в нуль всех
dF/duk. Здесь, однако, этот случай не имеет места из-за
условия B.5.3). Нам придется выразить Ьип через другие
вариации [dfldun в точке Р предполагается отличной от
нуля), а затем рассматривать остальные 8uk как свободные
5. Дополнительные условия. /.—метод Лагранжа 67
вариации. Однако предварительно преобразуем B.5.4).
Умножим левую часть B.5.3) на некоторый неопределен-
неопределенный множитель к, являющийся функцией «ь ..., ип, и при-
прибавим полученное произведение к 8F. При этом, естествен-
естественно, величина 8F не изменится, так как мы прибавили нуль.
Поэтому справедливо равенство
Эта операция не тривиальна, так как хотя мы и прибавили
нуль, но мы в действительности прибавили сумму; нулю
равна вся сумма, но не отдельные ее члены.
Запишем B.5.5) в виде
V /J^+я/Мб о. B.5.6)
j^d \duk ' duJ к v '
Теперь вместо исключения 8ип мы можем выбрать к таким
образом, чтобы обратился в нуль множитель при 8ип:
!^+Я#- = 0. B.5.7)
ди„ дип v '
После этого в нашей сумме осталось всего п — 1 членов
A? ^>
Так как остались только те 8uk, которые могут быть выбраны
произвольно, то теперь применимы условия свободной ва-
вариационной задачи. Поэтому коэффициенты при всех 8u/t
должны равняться нулю:
2-? + *!г().(* = 1.2,...,Я-1). B-5.9)
Из формул B.5.7) и B.5.9) видно, что все коэффициенты
в сумме B.5.6) обращаются в нуль, как если бы все вариации
8ик были свободными. В результате идея «метода неопределен-
неопределенных множителей» Лагранжа может быть сформулирована
следующим образом: вместо изучения условий обращения
в нуль вариации 6F можно рассматривать обращение в нуль
выражения
bF + W B.5.10)
68 Гл. II. Вариационное исчисление
и опустить дополнительное условие, оперируя со всеми ик
как со свободными, независимыми переменными.
Так как произведение /6Я обращается в нуль из-за до-
дополнительного условия / = 0, справедливо равенство
6F + %bf = b(F + Xf). B.5.11)
Поэтому результат наших рассуждений можно выразить
в еще более компактной форме: вместо того, чтобы прирав-
приравнивать нулю первую вариацию F, заменяем функцию F на
F = F + Xf B.5.12)
и приравниваем нулю первую вариацию F при произволь-
произвольных вариациях uk.
Обобщим этот метод на случай произвольного числа
дополнительных условий. Пусть надо определить стацио-
стационарное значение функции F при т независимых ограничи-
ограничивающих условиях
/l(«l, «2> ¦". «л) =0,
(т<л) B.5.13)
/m("l> «2. •••> «„) = 0.
Эти дополнительные условия приводят к следующим соот-
соотношениям между вариациями 8ик:
B.5.14)
Из-за этих условий т. вариаций 8uk могут рассматриваться
как зависимые и быть выражены через остальные вариации.
Мы будем считать зависимыми последние т из вариаций дик,
а первые п — т — соответственно независимыми.
Рассматриваемая вариационная задача требует обраще-
обращения в нуль вариации
^ dF
а^Ч B-5.15)
5. Дополнительные условия.).—метод Лагранжа 69
при всех возможных вариациях 6ик, удовлетворяющих за-
заданным дополнительным условиям. Мы должны были бы
выразить последние т вариаций 8uk через остальные вари-
вариации. Однако сначала преобразуем выражение B.5.15),
добавив левые части каждого из уравнений B.5.14), умно-
умноженные предварительно на некоторые неопределенные мно-
множители %i. В результате получим
Теперь исключение последних т вариаций 8uk может быть
произведено путем подбора множителей К так, чтобы
? ?? д?
B.5.17)
Тогда от равенства B.5.16) остается
k^l
Все оставшиеся в B.5.18) вариации—свободные, и коэф-
коэффициенты при них должны обратиться в нуль. В конечном
счете мы получаем систему уравнений
^-+^^+... + ^^«0, (*=!.....»). B.5.19)
которые можно рассматривать как следствие вариацион-
вариационного условия
6F + X1bf1+... +KVm = 0 B.5.20)
в предположении, что все вариации независимы. Таким
образом, в конечном счете разница между зависимыми и
независимыми переменными исчезла.
Уравнение B.5.20) можно записать даже в более заме-
замечательном виде
^(F + hh + ... + KfJ = 0 B.5.21)
и интерпретировать его следующим образом: вместо того,
чтобы отыскивать стационарное значение функций F, мы
можем искать стационарное значение другой функции
70 Гл. II- Вариационное исчисление
x+ ...+Kfm> B-5.22)
опуская дополнительные условия и оперируя по правилам
свободной вариационной задачи. Это дает п уравнений. Кроме
того, мы должны удовлетворить т дополнительным' усло-
условиям B.5.13). Всего получается п -f m уравнений сл + т
неизвестными
иъ иг, ..., ип; Хи К2, ..., Кт. B.5.23)
Этот замечательный метод множителей Лагранжа за-
заменяет задачу с п — т степенями свободы задачей с п 4~ т
степенями свободы. Если к п переменным uk добавить еще
т величин Я,- в качестве дополнительных переменных и после
этого искать стационарное значение функции F, то коэф-
коэффициенты при вариациях uk дадут те же самые п уравнений,
которые мы имели раньше, а коэффициенты при вариациях Я,-
дадут дополнительно т уравнений
/1 = 0, ..., /т = 0. B.5.24)
Эти уравнения представляют собой не что иное, как задан-
заданные ранее дополнительные условия. Теперь мы их получили
a posteriori из решения вариационной задачи.
Метод Лагранжа позволяет использовать дополнитель-
дополнительные координаты, что очень часто по многим соображениям
механики оказывается удобным. Он сохраняет полную сим-
симметрию всех координат, так как делает ненужным деление
переменных на зависимые и независимые.
Резюме. Метод неопределенных множителей Ла-
Лагранжа сводит вариационную задачу с дополнитель-
дополнительными условиями к свободной вариационной задаче.
Функция F, для которой ищется стационарное значе-
значение, преобразуется путем прибавления левых частей
дополнительных условий, каждая из которых умно-
умножается предварительно на некоторый неопределен-
неопределенный множитель Я. Вариационная задача для преобра-
преобразованной функции решается как свободная. Получа-
Получающиеся условия стационарности вместе с имеющимися
дополнительными условиями определяют искомые
значения переменных и множители X.
6. Неголономные дополнительные условия 71
6. Неголономные дополнительные условия. Как было
показано в гл. I, п. 6, ограничения на координаты механиче-
механической задачи могут быть наложены в дифференциальной, а не
в конечной форме. Отсюда возникает вариационная задача
с неголономными дополнительными условиями. Уравнения
B.5.13) в этом случае отсутствуют, но имеются соотношения,
аналогичные дифференциальным формам B.5.14) для конеч-
конечных дополнительных условий. Единственное различие за-
заключается в том, что в левых частях уравнений стоят теперь
не полные дифференциалы, а просто бесконечно малые ве-
величины. Неголономные условия можно записать в следу-
следующем виде:
o/i = Ап 6«х + Л12 бы2 + ••• + Аи Ьип =-- О,
B.6.1)
Здесь Aik — заданные функции щ, которые не могут рас-
рассматриваться как частные производные функции Д-.
Задачу с неголономными условиями нельзя решать
методом исключения переменных, потому что нет уравнений,
с помощью которых можно бы выразить одни переменные
через другие. Метод множителей Лагранжа тем не менее
применим. При помощи операций, в точности подобных
описанным ранее, можно получить уравнение, аналогичное
B.5.20), а именно
6F+K, 6?! + ... + Хт 6fm = 0; B.6.2)
в этом уравнении снова все быА можно считать свободными
вариациями. Единственная разница заключается в том, что
мы не можем перейти к уравнению B.5.21) и должны удов-
удовлетвориться дифференциальной формулировкой метода.
Таким образом, мы еще в одном случае произвели сведение
вариационной задачи на условный экстремум к свободной
вариационной задаче.
72
Гл. II. Вариационное исчисление
Резюме. Метод Лагранжа применим также и при
неголономных условиях. Левые части этих условий
умножаются на некоторые неопределенные множи-
множители X и прибавляются к вариации исследуемой функ-
функции F. Все это выражение приравнивается нулю, при-
причем все вариации Ьик считаются здесь свободными.
7. Стационарное значение определенного интеграла.
Изучение движения аналитическими методами приводит
к частному виду задачи на экстремум: нахождению стацио-
Рис. 2.
нарных значений определенного интеграла. Ветвь математи-
математики, занимающаяся подобными проблемами, называется
вариационным исчислением. В качестве типичного примера
рассмотрим задачу о брахистохроне (кривой быстрейшего
спуска), впервые сформулированную и решенную Иоганном
Бернулли A696); это одна из первых вариационных задач.
Требуется найти плоскую кривую, двигаясь вдоль которой
(под действием силы тяжести) частица спустится от точ-
точки А до точки В за кратчайшее время. Пусть искомая
кривая аналитически выражается уравнением
У = !(х). B.7.1)
7. Стационарное значение определенного интеграла 73
Тогда время, минимум которого нас интересует, будет пред-
представлено в виде следующего определенного интеграла:
Vi±gL^ B72)
а
Здесь у — неизвестная функция х, которую нужно найти.
Среди всех возможных у = f(x) мы должны найти такую
f{x), которая даст наименьшее возможное значение t. Функ-
Функция у должна быть непрерывна, дифференцируема и иметь
непрерывную производную. Кроме того, поскольку оба
конца неизвестной кривой заданы, функция у должна удов-
удовлетворять следующим граничным условиям:
f(a) = a, /(ft) = p. B.7.3)
Имеется одна и только одна функция, удовлетворяющая
этим условиям.
Задача, с которой мы здесь столкнулись, может быть
сформулирована в более общем виде следующим образом.
Задана функция трех переменных
F=F(y,y',x) B.7 А)
(в приведенном выше примере F не зависит от х, но это огра-
ограничение несущественно); задан определенный интеграл
ь
у', x)dx\ B.7.5)
заданы, наконец, граничные условия
f(a) = a, f(b) = p. B.7.6)
Требуется найти функцию
y = f(x), B.7.7)
удовлетворяющую обычным условиям регулярности, для
которой интеграл принимает экстремальное или, по край-
крайней мере, стационарное значение.
На первый взгляд эта задача совершенно отлична от пре-
предыдущих задач, где мы имели дело с экстремумом или со
стационарным значением функции F(ult ..., ип) от несколь-
нескольких переменных. Здесь должна быть минимизирована
не функция, а определенный интеграл; вместо системы пере-
переменных их, ..., ип мы имеем неизвестную функцию у =f(x).
Более детальное изучение, однако, показывает, что по своей
74 Гл. II. Вариационное исчисление
математической природе эта новая задача несущественно
отличается от предыдущей.
Используем понятие «функционального пространства», предло-
предложенное Гильбертом. Произвольная функция у = f(x), удовлетворяю-
удовлетворяющая некоторым общим условиям непрерывности, может быть раз-
разложена в бесконечный ряд Фурье в заданном интервале от а до 6:
1
/ (а:) = -^ а0 + пх cos ? + а2 cos 2s + ... +
+ bx sin ? + 62sin2? -f- ... , B.7.8)
2n I a\-b
где ?=fe^-(*-—2~
Коэффициенты этого разложения определяются однозначно. Тогда
любой функции у = f(x) можно поставить в соответствие определен-
определенную совокупность коэффициентов а0, alt ..., ап; blt ..., Ьп, при усло-
условии что п выбрано достаточно большим, так чтобы остаток разложе-
разложения был достаточно малым. Примем эти коэффициенты за прямоуголь-
прямоугольные координаты точки Р в Bn -f- 1)-мерном пространстве. При этом
произвольная функция изобразится некоторой точкой этого много-
многомерного пространства; значение интеграла /, соответствующее
функции f(x), можно отложить на перпендикуляре к прежнему про-
пространству, увеличив на единицу число измерений. Мы, таким обра-
образом, вновь приходим к картине поверхности в многомерном простран-
пространстве. Малому изменению функции f{x) отвечает малое перемещение
точки Р. Задача нахождения функции f(x), которая минимизирует
определенный интеграл /, сводится к задаче нахождения наинизшей
точки на некоторой поверхности в пространстве 2га + 2 измерений.
Это в точности та же задача, которую мы рассматривали в предыду-
предыдущих пунктах данной главы.
Эйлер показал, что эту задачу можно решить элемен-
элементарными средствами, не прибегая к специальным методам.
Мы используем тот факт, что определенный интеграл
можно заменить суммой с возрастающим числом членов.
Кроме того, производную можно заменить отношением
приращений функции и аргумента. Получающаяся при
этих операциях ошибка может быть сделана сколь угод-
угодно малой.
В соответствии с обычной схемой разделим интервал
от х=а до х=Ь на большое число малых равных интер-
интервалов; мы получим некоторое множество значений абсцисс
хо=а, х1г х2, ..., хп, xn+i = b B.7.9)
и соответствующее множество ординат
Уо = ос, у\, у2, ..., Уп, Уп+\ =Р, B.7.10)
7. Стационарное значение определенного интеграла 75
где
ijk = f(xk). B.7.11)
После этого заменим производную /' (xk) отношением при-
приращении
а интеграл B.7.5) — суммой
% гк, xk) {xk+1 —xk). B.7.13)
k=0
Ошибка, возникающая в результате таких замен, стре-
стремится к нулю, когда все интервалы Ахк = Xk+\ — xk стре-
стремятся к нулю.
Мы заменяем первоначальный интеграл суммой B.7.13)
и ищем стационарное значение этой суммы. Это уже задача
обычного типа: задана функция S п переменных tji, ..., уп
(вместо фигурировавших раньше переменных ult ..., ип).
Мы знаем, что задача решается приравниванием нулю част-
частных производных S по ук. В заключение придется лишь ис-
исследовать переход Дхй -> 0.
Перед тем как приступить к выполнению этой программы,
изменим несколько выражение B.7.13); при предельном
переходе это изменение, конечно, не должно отразиться на
значении предела. Так как уь+i и ук различаются сколь
угодно мало, можно заменить F(yk, zk, xk) на F(yk+\, гк, xk).
Теперь интересующая нас функция будет выглядеть следу-
следующим образом:
| *,,*,)(*,+ ,-*,). B.7.14)
При образовании частной производной S' по одной из
переменных, например, ум+\, следует иметь в виду, что ук+\
появляется в сумме S' в двух соседних членах при у = к
и / = k + 1. Это видно из определения zk-\-\ в B.7.12). Част-
Частная производная S' по yk+i будет поэтому иметь вид
76 Гл. II. Вариационное исчисление
После деления на Ахк = хk+\ — xkсоответствующее урав-
уравнение можно записать в виде
r0{k=0' u 2'-' п~1)-B7Л6)
Здесь записаны необходимые и достаточные условия стацио-
стационарности суммы S'. Важно отметить, что две крайние ор-
ординаты г/о и Уп+[ заданы и не варьируются. Если бы и они
были неизвестны, то нам бы потребовалось в дополнение
к уравнениям B.7.16) еще два граничных условия.
В пределе, при Дх, стремящемся к нулю, разностное
уравнение B.7.16) переходит в дифференциальное уравнение.
Так как точки xk могут быть выбраны сколь угодно близ-
близкими к любой точке интервала (а, Ь), наше дифференциаль-
дифференциальное уравнение будет справедливо во всем интервале
f-fg)=0 (а<х<Ь). B.7.17)
ду dx \ду' J v ; v '
Это фундаментальное уравнение было открыто независимо
Эйлером и Лагранжем и обычно называется дифференци-
дифференциальным уравнением Эйлера — Лагранжа. Заметим, что оно
было выведено элементарными средствами из условия ста-
стационарности суммы, заменяющей данный определенный
интеграл.
Этот метод вывода основного дифференциального уравнения
вариационного исчисления, предложенный Эйлером, не совсем строг,
так как он использует двойной предельный переход в не вполне до-
допустимой форме. Прямой вывод Лагранжа, который мы изложим
ниже, свободен от этого недостатка.
Резюме. Задача минимизации определенного ин-
интеграла, содержащего неизвестную функцию и ее
производную, может быть сведена к элементарной за-
задаче минимизации функции многих переменных. Для
этого интеграл заменяется суммой, а производная —
отношением приращений. Условия, при выполнении
которых первая вариация обращается в нуль, при-
принимают форму разностного уравнения, которое в пре-
пределе переходит в дифференциальное уравнение Эй-
Эйлера — Лагранжа.
8. Основные операции вариационного исчисления 77
8. Основные операции вариационного исчисления. Ла-
гранж понимал, что задача нахождения минимума опре-
определенного интеграла требует особых методов, отличных от
методов обычного анализа. С помощью таких методов задача
могла бы решаться непосредственно без обращения к пре-
предельному переходу, как это сделал Эйлер.
Рассмотрим функцию у = f(x), которая, по предположе-
предположению, дает стационарное значение определенному интегралу
B.7.5). Чтобы доказать, что мы действительно имеем стацио-
стационарное значение, нужно вычислить подобный же интеграл
для слегка измененной функции у = f(x) и показать, что
скорость изменения интеграла при изменении функции
становится равной нулю.
Измененную функцию f(x), очевидно, можно записать
в виде
Цх) = f(x) + еф(х), B.8.1)
где ф(л:) — некоторая произвольная функция, удовлетворя-
удовлетворяющая тем же общим условиям непрерывности, что и функ-
функция f(x): ф(лг) должна быть непрерывной и дифференциру-
дифференцируемой.
Очевидно, что выбор искомой функции f(x), которая решает ва-
вариационную задачу, должен быть сделан в классе непрерывных
функций, дифференцируемых по крайней мере один раз; иначе инте-
интеграл от F{y, у', х) не будет иметь смысла. Мы, однако, ограничим
f(x) более сильным, требованием, чтобы и f"(x) существовала во всем
интервале. (Подобного предположения для о (х) не требуется.)
При помощи переменного параметра 8 мы можем делать
изменение функции f(x) произвольно малым; для этого
нужно лишь устремить е к нулю.
Теперь сравним значения измененной функции f(x) со
значениями первоначальной функции f(x) при некотором
определенном значении независимой переменной х. Для этого
образуем разность между f(x) и f(x); она называется «вариа-
«вариацией» функции f(x) и обозначается через 8у:
&У = НХ)~ fix) = еф(х). B.8.2)
Вариация функции, по аналогии с вариацией положения
точки, рассматривавшейся ранее, характеризуется двумя
основными свойствами. Во-первых, это бесконечно малое
78
Гл. II. Вариационное исчисление
изменение, так как параметр е стремится к нулю. Во-вто-
Во-вторых, это виртуальное изменение, так что его можно осущест-
осуществить произвольным образом. Следовательно, <р(х) — со-
совершенно произвольно выбранная функция, удовлетворя-
удовлетворяющая условиям непрерывности.
Отметим существенное различие между 8у и dy. Обе
величины являются бесконечно малыми изменениями функ-
Рис. 3.
ции у. Однако dy порождается бесконечно малым измене-
изменением dx независимой переменной, в то время как 8у своим
возникновением обязано новой функции у + Ьу.
Природа процесса варьирования такова, что варьирует-
варьируется лишь функция у, а варьирование независимой перемен-
переменной х является излишним. Поэтому мы будем всегда считать
6* = 0.
B.8.3)
Кроме того, две граничные ординаты /(а) и f{b) функции f(x)
заданы и не могут варьироваться. Это означает, что
B.8.4)
Мы говорим в этом случае о «варьировании при фиксирован-
фиксированных граничных'значениях».
9. Коммутативные свойства операции варьирования 79
Резюме. Вариационное исчисление рассматривает
виртуальное бесконечно малое изменение функции
у =f(x). Вариация 8у означает произвольное бес-
бесконечно малое изменение значения у при фиксиро-
фиксированном значении х. Независимая переменная х не
принимает участия в процессе варьирования.
9. Коммутативные свойства операции варьирования.
Вариация функции f(x) приводит к совершенно новой функ-
функции 8ф(л:). Можно взять производную от этой функции.
С другой стороны, можни взять также производные функ-
функции f(x) и f(x). Их разность естественно назвать вариацией
производной f'{x). В одном случае мы имеем «производную
от вариации»
В другом — «вариацию от производной»
Из B.9.1) и B.9.2) следует, что
и х dx
т. е. производная от вариации равна вариации от производ-
производной.
Подобным же образом можно ввести вариацию определен-
определенного интеграла. Это означает, что берется разность между
определенными интегралами, вычисленными при изменен-
измененном и при первоначальном значениях подинтегрального
выражения
ь ь ь
b[F{x)dx= [F (x) dx— [F (x) dx =
а а а
Ь Ь
= f \F (х) — F (х)} dx = Г Щх) dx. B.9.4)
80 Пь II. Вариационное исчисление
Следовательно,
ь ь
b\F(x)dx=\bF{x)dx, B.9.5)
а а
т.е. вариация от определенного интеграла равна определен-
определенному интегралу от вариации.
Резюме. Операция
варьирования обладает
характерными свойствами.
а) варьирование
менять местами;
б) варьирование и
местами.
и дифференцирование
интегрирование можно
двумя
можно
менять
10. Вывод условий стационарности определенного ин-
интеграла методами вариационного исчисления. Рассмотрим
еще раз задачу из п. 7, но на этот раз непосредственно ме-
методом вариационного исчисления. Пусть требуется найти
стационарное значение некоторого определенного интеграла
B.7.5) с граничными условиями B.7.6).
Для решения этой задачи рассмотрим скорость измене-
изменения данного интеграла при варьировании функции у = f(x).
Начнем с варьирования самой подинтегральной функции
F(y, у', х), происходящего при варьировании у (напомним,
что F — заданная функция трех переменных у, у' и х, кото-
которая не меняется в процессе варьирования)
bF{y,y', x)=F(y+&<?, г/'+е<р', x) — F(y, у', х) =
-(?*+#¦*')• BЛ0Л)
Высшими членами разложения Тейлора можно пренебречь,
так как е стремится к нулю.
Теперь можно вычислить вариацию определенного ин-
интеграла B.7.5)
ь ь
^ ^~(p+~q>')dx. B.10.2)
10. Вывод условий стационарности интеграла 81
Чтобы получить «скорость изменения» нашего интеграла,
нужно разделить B.10.2) на бесконечно малый параметр е
подобно тому, как мы это делали в п. 2, когда искали стацио-
стационарное значение обычной функции F(ult ..., ип). Следова-
Следовательно, величиной, которая должна обратиться в нуль при
стационарном значении интеграла /, является выражение
Выражение в такой форме не годится для дальнейшего
анализа, потому что <р(х) и <р'(х) взаимосвязаны и в то же
время эту взаимосвязь нельзя записать в алгебраической
форме. Эту трудность можно обойти путем искусного при-
применения интегрирования по частям. Вторая часть подин-
тегрального выражения B.10.3) преобразуется следующим
образом:
ь ь
. [dF -\Ь г a (dF \ , /о ,п ..
dx= ЬпФ — I j— [it-, ) ydx. B.10.4)
[ду /TJa )dx\dy')V K >
Первый член выпадает, так как мы варьируем при фиксиро-
фиксированных граничных значениях и у(х) обращается в нуль в точ-
точках а и Ь. В результате B.10.3) приобретает вид
ь
Ы С /dF d dF\ , ,. ,» ,.
)-dFW)(fdx- BЛ0'5)
Введем для краткости следующее обозначение:
^х> ~~ ду dx д~у~' У ¦ • )
и запишем условие стационарности / в виде
ь
^ E(x)y(x)dx = 0. B.10.7)
а
Теперь нетрудно видеть, что этот интеграл может обра-
обратиться в нуль при произвольной функции ф(лг) только в том
случае, если Е(х) тождественно равна нулю в интервале
4 Зак. 1646
82 Гл. II. Вариационное исчисление
(а, Ь). Действительно, мы можем выбрать функцию <р(х)
таким образом, чтобы она обращалась в нуль везде, кроме
произвольно малой окрестности точки х = ?. Внутри этого
интервала Е(х) практически равна константе и может быть
вынесена из-под знака интеграла х
B.10.8)
Совершаемая при этом ошибка стремится к нулю при р,
стремящемся к нулю. Так как интеграл в B.10.8) находится
в нашем распоряжении и может быть сделан отличным от
нуля, для обращения в нуль бII& требуется, чтобы был равен
нулю первый множитель. Точка х = \ может быть выбрана
в любом месте интервала (а, Ь). Следовательно, во всем ин-
интервале справедливо уравнение
^_/-_|^ = 0. B.10.9)
ду dx ду' к '
Это условие необходимо для обращения в нуль 81. С другой
стороны, оно является и достаточным, так как если подин-
тегральное выражение в B.10.5) обращается в нуль, то и ин-
интеграл обращается в нуль. Таким образом, дифференциаль-
дифференциальное уравнение B.10.9) является необходимьш и достаточным
условием стационарности интеграла I при граничных ус-
условиях B.7.6).
Задача. Пусть задан определенный интеграл
Ь
/= \ F(y, у', у", x)dx, B.10.10)
содержащий первую к вторую производные (/. Найти для него усло-
условие стационарности, образуя вариации интеграла и двукратно при-
применяя интегрирование по частям. Должно получиться дифферен-
дифференциальное уравнение
dF d dF d* dF
+ 0 BЖП)
1 Предполагается, что функция Е(х) непрерывна.
11. Дифференциальные уравнения Эйлера — Лагранжа 83
Член, получающийся при интегрировании
KdF d dF \ dF ~\b
1Г-Г — -1 —]Ц + -]Г*-ЬЧ'\ , B.10.12)
ду' dx ay" J у ' ду" у ]а' v
обращается в нуль, если значения у и у' фиксированы в конечных
точках интервала.
Резюме. Необходимым и достаточным условием ста-
стационарности интеграла
ь
|"f (у, у', х) dx
а
с граничными условиями
у (а) = а, у{Ь) -=0
является выполнение дифференциального уравнения
Эйлера — Лагранжа
д?^ d_ j)F_ _ n
ду dx dtf "
11. Дифференциальные уравнения Эйлера — Лагранжа
в случае п степеней свободы. В механике приходится иметь
дело с вариационными задачами следующего вида. Тре-
Требуется найти стационарное значение определенного ин-
интеграла
г.,
(?!,..., qn; ?,,..., qn\ t)dt B.11.1)
с граничными условиями
[в?*@]/=/, = 0, [6qk(t)\l=l,=0 B.11.2)
(qk заданы на концах интервала в точках 11 и /3, так что
их вариации в этих точках равны пулю). Здесь qL,..., qn—
неизвестные функции /; их требуется определить, исходя
из того условия, что при искомом движении интеграл /
принимает стационарное значение
Ы = 0 B.11.3)
для произвольных независимых вариаций qk, удовлетво-
удовлетворяющих граничным условиям B.11.2).
84 Гл. II. Вариационное исчисление
Выделим одну из переменных qk и будем варьировать
только по ней, оставляя остальные qi неизменными. При
этом мы сможем использовать уравнение B.10.9), пред-
предварительно лишь заменив в обозначениях у на qk, у' на qk,
а независимую переменную х на время t. Функция F теперь
обозначена через L, а пределы интегрирования — через ti
и to. В результате имеем
^-^¦|r==0(/i<'</i)- BЛ1-4)
Эти уравнения справедливы для каждого отдельного qk,
где k пробегает все значения от 1 до п.
Примененные до сих пор вариации были частными ва-
вариациями. Естественно возникает вопрос, не появятся ли
какие-либо дополнительные условия при одновременном
варьировании по всем qk. Этого, однако, не случится, вслед-
вследствие принципа суперпозиции операций с бесконечно малыми
величинами. Обозначим через 8к1 вариацию /, получающую-
получающуюся при варьировании только по одному qh. Тогда при одно-
одновременном варьировании по всем qk результирующая ва-
вариация б/ запишется следующим образом:
6/=61/+62/ + ... + 6„/. B.11.5)
Из дифференциального уравнения B.11.4) следует обраще-
обращение в нуль 8к/. Поскольку оно справедливо для всех qk,
сумма B.11.5) обращается в нуль, т. е. 6/ = 0 при произ-
произвольных вариациях цк.
Таким образом, задача нахождения стационарного значе-
значения интеграла / при произвольных вариациях по qk при
фиксированных граничных значениях решена. Условия
стационарности получаются в виде следующей системы
дифференциальных уравнений:
wit-?k = 0{k = l-2'"'n)- BЛ1-6)
Они называются «дифференциальными уравнениями Эй-
Эйлера — Лагранжа», а также, когда они встречаются в при-
приложениях к механике, «уравнениями движения Лагранжа».
За исключением того единственного случая, когда L
зависит от части либо от всех qh линейно, все частные произ-
12. Варьирование при наличии дополнительных условии 85
водные dLldqk будут содержать соответствующие qk. По-
Поэтому дифференцирование по t приведет везде к появлению
вторых производных qk. Полученные уравнения можно ал-
алгебраически разрешить относительно qk и записать систему
дифференциальных уравнений B.11.6) в следующем виде:
¦¦•' <7«: </i> ¦¦•• Qn> 0- B.11.7)
В результате решения такой системы дифференциальных
уравнений второго порядка появится 2п констант интегри-
интегрирования, так что полное решение B.11.7) может быть записа-
записано следующим образом:
qk = qk{Alt ..., Ап, Ви .... Вп, t). B.11.8)
Константы интегрирования Ak и Вк выбираются в соответст-
соответствии с граничными условиями. Наша вариационная задача
требует варьирования при фиксированных граничных значе-
значениях. Следовательно, координаты qk заданы при t = ti
и t =ti. Это и есть In граничных условий, которым можно
удовлетворить соответствующим выбором констант Ак и Вк.
Однако природа задач механики такова, что обычно вместо
граничных условий задаются начальные условия. Наличие
2п констант интегрирования позволяет задать произвольным
образом все начальные значения координат и скоростей.
Резюме. Если из условия стационарности опре-
определенного интеграла, содержащего не одну, а несколь-
несколько неизвестных функций, требуется найти эти функции,
то можно варьировать эти функции независимо друг
от друга. Поэтому для каждой функции в отдельности
можно написать дифференциальное уравнение Эй-
Эйлера — Лагранжа. В результате получается система
п дифференциальных уравнений второго порядка.
Решение этой системы уравнений определяет п иско-
искомых функций, которые оказываются выраженными
через независимую переменную (время t) и 2п констант
интегрирования.
12. Варьирование при наличии дополнительных усло-
условий. Рассмотрим снова задачу предыдущего пункта с тем,
Я6 Гл. П. Вариационное исчисление
однако, отличием, что на переменные qlt ..., qtl будут на-
наложены дополнительные условия. Пусть эти условия имеют
вид некоторых функциональных соотношений между qk:
/i (<7i- ••..</„, 0 = 0,
B.12.1)
fmtiu -.</«. 0 = 0.
Можно исключить какие-то т переменных qk, выразив их
через остальные переменные, и уменьшить тем самым число
степеней свободы до п — т\ после этого становятся
применимыми дифференциальные уравнения Эйлера — Ла-
Лагранжа. Однако исключение переменных может оказаться
практически трудно выполнимым; кроме того, связи между
переменными могут быть даны в таком виде, который за-
затрудняет разделение переменных на зависимые и независи-
независимые. В этих случаях хорошие результаты дает метод не-
неопределенных множителей Лагранжа, описанный выше
в п. 5.
Варьирование уравнений B.12.1) дает
B.12.2)
Эти уравнения справедливы в любой момент времени t.
В соответствии с методом Лагранжа умножим каждое из
этих уравнений на неопределенный множитель Я,,-. Так как
дополнительные условия выполняются при всех значениях
независимой переменной t, множители к, тоже используются
при всех значениях t, что делает их функциями от t. Кроме
того, после суммирования по всем дополнительным услови-
условиям, каждое из которых умножено на свое Я,,-, получившееся
выражение подставляется под знак интеграла по t. В резуль-
результате метод множителей Лагранжа принимает такую форму:
вместо того, чтобы приравнять нулю вариацию заданного
интеграла, преобразовываем ее следующим образом:
12. Варьирование при наличии дополнительных условий 87
б/' = б j Ldt + J (M/i -f ... + К в/J dt = 0. B.12.3)
Сделать это можно, так как в действительности мы при-
прибавили нуль к вариации интеграла /. Первый член пре-
преобразуем обычным интегрированием по частям к виду
б j Ldt= j [Et (t) bqi + ... + En @ bqn\ dt. B.12.4)
ti ti
Объединим теперь подинтегральные выражения в B.12.3)
и соберем члены, содержащие одинаковые б^. Мы дол-
должны были бы исключить последние (п—т) вариаций bqk
при помощи уравнений B.12.2), но этого можно избежать,
выбрав Xi таким образом, чтобы коэффициенты при этих
б^ обратились в нуль. Оставшиеся вариации могут вы-
выбираться произвольно, а потому и при них коэффициенты
должны быть равны нулю во всем интервале. В итоге
получается, что коэффициенты при всех bqk обращаются
в нуль, безотносительно к тому, является ли данная ва-
вариация зависимой или нет.
Окончательная система уравнений имеет вид
K+ b U (ZAZb)
0Як dt dqk "Як oqk
(*=! n)
Она совпадает с системой уравнений для следующей ва-
вариационной задачи: вместо вариации определенного ин-
интеграла
/= \ Ldt B.12.6)
t,
с дополнительными условиями B.12.1) рассматривается
вариация другого, видоизмененного, интеграла
'*.
Г = ( V dt, B.12.7)
где
но уже без дополнительных условий.
Гл. II. Вариационное исчисление
В этом случае, как и всегда, Kt должны рассматриваться
как константы в процессе варьирования. Можно, однако,
включить их в вариационную задачу в качестве дополни-
дополнительных неизвестных функций от t. Варьирование по Я,*
приведет тогда снова к дополнительным условиям B.12.1).
Решение системы B.12.5) должно удовлетворять допол-
дополнительным условиям B.12.1), что и определяет А.; как функ-
функции от t. Из имеющихся начальных условий мы можем вы-
выбрать произвольно лишь п — т координат и п — т скоро-
скоростей, а остальные qL и qt определятся из дополнительных
условий. Это согласуется с тем фактом, что соответствующая
механическая система имеет лишь п— т степеней свободы.
Поэтому использование дополнительных координат являет-
является лишь удобным математическим приемом.
Резюме. Метод неопределенных множителей Ла-
гранжа позволяет избежать исключения лишних пе-
переменных при наличии дополнительных условий и
учитывает дополнительные условия без уменьшения
числа переменных. Подинтегральное выражение L
заданной вариационной задачи преобразуется пу-
путем прибавления левых частей имеющихся допол-
дополнительных условий, каждое из которых умножается
предварительно на множитель К. Полученная новая
задача рассматривается как свободная вариационная
задача. Множители X определяются затем как функции .
t путем удовлетворения имеющихся дополнительных
условий.
13. Неголономные условия. Метод неопределенных мно-
множителей Лагранжа применим и в том случае, когда допол-
дополнительные условия вариационной задачи заданы в виде не
алгебраических, а дифференциальных соотношений (ср. гл. I,
п. 6, и гл. II, п. 6). Мы снова получаем уравнения B.12.5)
с той только разницей, что df!dqk заменены коэффициен-
коэффициентами Aik неголономных условий B.6.1). Различие имеется
лишь в вопросе о начальных условиях. Координаты qt
теперь не связаны какими бы то ни было условиями, связи
наложены только на их дифференциалы. Поэтому начальные
14. Изопериметрические условия
значения всех qi можно задать произвольно. Скорости,
однако, связаны некоторыми условиями в соответствии
с уравнениями
n
+ ... + A(nqn=0, (« = 1, .... т). B.13.1)
Мы можем поэтому произвольно задать п начальных коор-
координат и п — т начальных скоростей.
Имеющиеся т уравнений B.13.1) служат не только для
исключения т начальных скоростей. С их помощью опре-
определяются коэффициенты^ К, которые входят в "уравнения
движения как неопределенные множители.
Особого внимания требуют неголономные дополнительные усло-
условия, которые являются одновременно реономными, т. е. зависящими
от времени. Необходимо выяснить, какие соотношения будут сущест-
существовать между bqk, если варьирование осуществляется не мгновенно,
а за бесконечно малое время Ы. Дополнительные условия при этом
имеют вид
An*qx + ... + Ainbqn + В fit = О, B.13.2)
где коэффициенты А^ и В; — некоторые функции от qt и t. Вели-
Величины Bi не входят в уравнения движения, так как виртуальные
перемещения происходят без варьирования времени; они, однако,
входят в соотношения между скоростями
Ап Яг + ¦¦¦ + Ли,Яп + Bi -•- 0. B.13.3)
Резюме. Вариационную задачу с неголономными
дополнительными условиями нельзя привести к такому
.виду, чтобы решение получилось путем приравнива-
приравнивания к нулю вариации какой-то определенной величины.
Однако уравнения движения можно получить при
помощи метода неопределенных множителей так же,
как и в случае голономных условий.
14. Изопериметрические условия. Дополнительные ус-
условия могут быть заданы не в виде алгебраического соот-
соотношения между qk, а в форме определенного интеграла,
равного некоторой заданной величине С
4В. Зак. 1646
90 Гл. II. Вариационное исчисление
$f(qlt...,qB,t)dt=C. B.14.1)
U
Дополнительные условия такого вида называются"«изопери-
метрическими условиями», так как исторически они впервые
встретились в задаче о нахождении максимальной площади
фигуры, ограниченной кривой с данным периметром (за-
(задача Дидоны).
Вообще говоря, может быть произвольное число допол-
дополнительных условий вида B.14.1), но мы ограничимся изуче-
изучением случая, когда имеется лишь одно такое условие; обоб-
обобщение на случай т условий очевидно.
Условие B.14.1) должно выполняться не только для
тех функций <7i, ..., qn, которые приводятйк стационарно-
стационарности интеграла B.11.1), но и для варьированных функций
q1 qn; поэтому можно проварьировать B.14.1), что
приводит к следующему интегральному соотношению между
bqx, ..., bqn:
(^ ^) = 0. B.14.2)
Поэтому наша задача заключается в том, чтобы удовлет-
удовлетворить уравнению
61= j[?1@fi<7i+ ...+En(tNqn]dt=0 B.14.3)
при дополнительном условии B.14.2). Как и раньше,
можно умножить левую часть уравнения B.14.2) на не-
некоторый неопределенный множитель К и прибавить к б/.
В результате получим
(-+^)ЧЛв0- BЛ4-4)
Заменим теперь dt на At, а определенный интеграл сум-
суммой, и устремим сумму к интегралу, делая Д^ все мень-
меньшим и меньшим. При этом X можно все время выбирать
таким образом, чтобы в результате интеграл B.14.4) об-
14. Изопериметрические условия 91
ращался в нуль при произвольных вариациях bqk. Так
как это выполняется независимо от интервалов At, то
будет выполнено и после перехода к пределу. Следова-
Следовательно, при соответствующем выборе X получим при про-
произвольных вариациях bqk
= 0. B.14.5)
Это означает, что мы снова сумели перевести вариацион-
вариационную задачу с условиями в свободную вариационную за-
задачу, заменив первоначальную функцию L на
L' = L + Kf, B.14.6)
где % — неизвестная константа.
Из сказанного можно сделать те же выводы, что и
в п. 12. Мы снова пришли к уравнениям типа B.12.5)
с той лишь разницей, что ki — константы, а не функции t.
Эти константы можно определить путем удовлетворения
заданным интегральным условиям.
Этот же метод неопределенных множителей применим и тогда,
когда изопериметрическое условие B.14.1) зависит не только от q/,,
но и от производных по времени t:
t,
J7(<7i <7„; <7i> ..., qn\t)dt = C. B.14.7)
fi
Подобная задача — задача о гибкой цепи — рассматривается в
в гл. III, п. 4.
Резюме. Метод множителей Лагранжа можно обоб-
обобщить на случай дополнительных условий, заданных
в виде некоторого определенного интеграла, значение
которого не должно меняться при варьировании.
Результирующие уравнения имеют тот же вид, что и
при алгебраических дополнительных условиях. Един-
Единственное различие состоит в том, что в этом случае
коэффициенты К — не функции времени, а константы.
4В*
92 Гл. II. Вариационное исчисление
15. Вариационное исчисление и граничные условия.
Задача об упругом стержне 1. Во всех наших предыдущих
рассуждениях мы интересовались в основном дифференци-
дифференциальными уравнениями, которые получались как решение
задачи о стационарном значении заданного определенного
интеграла. Вывод этих уравнений при помощи интегрирова-
интегрирования по частям показывает, что вариация определенного ин-
интеграла состоит из двух частей: из интеграла,распространен-
интеграла,распространенного на данный интервал, и граничного члена. Мы не рас-
рассматривали до сих пор этот член, так как задача решалась
при граничных условиях, обращавших его в нуль. Однако
имеются случаи, когда граничный член играет более актив-
активную роль. Ниже, при изучении работ Гамильтона по реше-
решению дифференциальных уравнений динамики при помощи
уравнения в частных производных, мы увидим, что в мате-
математически более сложных вопросах механики этот ранее
отброшенный член окажется существенным. Здесь, однако,
мы хотим обсудить другой аспект вопроса о гранич-
граничном члене, имеющий более непосредственный физический
смысл.
Как известно, любая задача, приводящая к решению
дифференциальных уравнений, требует определенного числа
граничных условий для того, чтобы решение было единствен-
единственным. Эти условия формулируются на основе - имеющихся
физических соображений. Может, однако, случиться, что
физические соображения не приводят к граничным условиям
либо дают их в количестве, недостаточном для получения
однозначного решения.
В качестве иллюстрирующего примера возьмем задачу
из механики сплошной среды. Рассмотрим закрепленный
на концах горизонтальный гибкий стержень, находящийся
под действием вертикальных сил, например, сил веса.
Прогиб стержня определяется дифференциальным уравне-
1 Материал, изложенный в этом разделе, основан на ряде крат-
кратких, но существенных замечаний по этому вопросу, имеющихся
в книге Куранта и Гильберта «Методы математической физики»
(см., в частности, стр. 183—185, т. I, изд. 3-е, Гостехиздат, 1951).
Связь между вариационным исчислением и граничными условиями
не только интересна сама по себе, но и является чрезвычайно сущест-
существенной во многих приложениях, в частности, при изучении вопросов
устойчивости в теории упругости.
15. Вариационное исчисление и граничные условия 93
нием четвертого порядка, которое требует задания четырех
граничных условий. Если защемить оба конца стержня, то
и сами прогибы и первые производные от прогибов на кон-
концах стержня будут равны нулю; это даст как раз четыре
граничных условия.
Однако можно не защемлять стержень, а лишь под-
подпереть его с обоих концов. В этом случае из физических
соображений следуют лишь два граничных условия — обра-
обращение в нуль прогибов на обоих концах, в то время как про-
производные остаются неопределенными. Откуда же взять два
дополнительных граничных условия?
Замечательное свойство вариационных задач заключает-
заключается в том, что в них всегда автоматически возникает нужное
число граничных условий. Эти граничные условия, не обус-
обусловливаемые имеющимися внешними обстоятельствами,
следуют из сути вариационной задачи. Для наличия стацио-
стационарного значения эти дополнительные граничные условия
существенны в такой же степени, как и выполнение диф-
дифференциальных уравнений Эйлера — Лагранжа. Появление
этих дополнительных условий связано с граничным членом
в б/. «Наложенные извне» (внешние) и «естественные»
граничные условия, вместе взятые, обеспечивают единствен-
единственность решения.
Проиллюстрируем этот принцип на упоминавшейся выше
задаче о нагруженном гибком стержне. Равновесие стержня
определяется из условия минимальности его потенциальной
энергии. Мы не будем останавливаться на выводе выраже-
выражения для упругой энергии стержня, который можно найти
в любом учебнике по теории упругости. Обозначим через /
длину стержня, а через х — независимую переменную, из-
изменяющуюся от 0 до / и определяющую положение любой
точки стержня. Малое вертикальное перемещение (прогиб)
под действием нагрузки обозначим через у(х), а величину
нагрузки на единицу длины — через р(х). Предположим
также, что стержень имеет постоянное сечение. Тогда по-
потенциальная энергия, обусловленная силами упругости,
определится формулой
B-15.1)
94 Гл. II Вариационное исчисление
где k — константа, а потенциальная энергия силы тяжести
имеет вид
i
V2 = —$pydx. B.15.2)
о
Следовательно, интеграл, минимум которого нас интере-
интересует, будет иметь вид
1
о
Дифференциальное уравнение Эйлера — Лагранжа
в этом случае запишется, согласно B.10.11), следующим
образом:
ky""(x) = P(x). B.15.4)
Если удовлетворить этому уравнению, то вариация 6/
сводится к граничному члену, который в нашей задаче
имеет вид [см. B.10.12)]
+ //"(/) 6г/'(/)-г/"@)оУ@)]. B.15.5)
1. Защемленные концы. Граничные условия, наложен-
наложенные на стержень, имеют вид
</(О)=о, ,(/но,
ущ=о, «/'(9=0.
Так как вариации фиксированных величин равны нулю,
то все члены в B.15.5) обращаются в нуль, и единствен-
единственным условием обращения в [нуль 6/ остается дифферен-
дифференциальное уравнение B.15.4). Все граничные условия здесь
наложены извне и никакие естественные условия не до-
добавляются.
2. Опертые концы. Внешних условий всего два
t/@) = 0, у (/) = 0. B.15.7)
Следовательно, вариации 6у'@) и ду'A) произвольны и для
обращения в нуль выражения B.15.5) необходимо выполне-
выполнение добавочных граничных условий:
г/"@) = 0, //"(9 = 0, B.15.8)
которые дополняют внешние условия B.15.7).
15. Вариационное исчисление и граничные условия 95
3. Один конец защемлен, другой свободен. Пусть стержень
защемлен в точке х = 0 и свободен на другом конце. Внеш-
Внешние граничные условия при этом
г/@) = 0, у'@) = 0, B.15.9)
в то время как у{1) и у'(/) не заданы. Следовательно,
вариации этих величин произвольны и для обращения
в нуль B.15.5) требуется выполнение условий
у"A)=0, у'"A) = 0. B.15.10)
Эти условия возникают как следствие вариационной задачи
и дополняют внешние условия B.15.9).
4. Оба конца свободны. Естественные граничные условия
B.15.10) выполняются теперь на обоих концах
у"@)=0, г/''@) = 0, B.15.11)
Заметим, что здесь уже все граничные условия вытекают из
вариационной задачи. «Наложенных извне» условий нет,
но естественные условия имеются в нужном количестве.
Легко видеть тем не менее, что в последней задаче воз-
возникают свои специфические трудности, так как стержень не
может находиться в равновесии при отсутствии соответству-
соответствующей поддержки со стороны двух сил, направленных вверх.
Мы будем рассматривать эти силы как предельный случай
сил, непрерывно распределенных вдоль стержня; поэтому
их можно включить в нагрузку р(я), приписав силам, на-
направленным вверх, отрицательный знак. В общей теории
дифференциальных уравнений показывается, что правая
часть уравнения B.15.4) может быть задана произвольным
обра'зом лишь в том случае, если соответствующее однород-
однородное дифференциальное уравнение, т. е. дифференциальное
уравнение с р(х) = 0, не имеет решений, кроме как у = 0.
Во всех предыдущих случаях граничные условия были
таковы, что дифференциальное уравнение
у""{х) = 0 B.15.12)
не имело нетривиальных решений. Здесь же существуют два
таких независимых решения, а именно
У=\ B.15.13)
у = х. B.15.14)
96 Гл. II. Вариационное исчисление
В подобных случаях задача имеет решение только при усло-
условии, что р(х) «ортогонально» к решениям B.15.13) и B.15.14)
однородного уравнения, т. е.
\P(x)dx=0 B.15.15)
p(x)xdx=0. B.15.16)
о
Физический смысл этих условий заключается в том, что
сумма сил и сумма моментов сил, действующих на стер-
стержень, равны нулю. Эти условия определяют две поддер-
поддерживающие силы, необходимые для равновесия стержня. Эти
силы получаются, таким образом, из условий интегрируемо-
интегрируемости краевой задачи; граничные же условия задачи целиком
определяются с помощью вариационного исчисления.
Задача 1. Исследовать случай, когда конец х = О поддержи-
поддерживается (но не защемлен), а конец х = / свободен. Показать, что
имеется лишь одно условие интегрируемости: «сумма всех моментов
равна нулю».
Задача 2. Рассмотреть случай двух стержней различного сече-
сечения, жестко скрепленных друг с другом. Здесь константа k в диффе-
дифференциальном уравнении B.15.4) испытывает скачок в точке х = %
соединения стержней. Показать, что граничный член B.15.5) приво-
приводит к двум условиям непрерывности в точке х = ?, а именно
к требованию, чтобы ky" и ky'" были непрерывны в точке х = ?.
Резюме. Решение дифференциального уравнения
или системы дифференциальных уравнений не единст-
единственно, если не добавлено нужное количество граничных
условий. Задачи, связанные с нахождением стационар-
стационарного значения определенного интеграла, всегда имеют
нужное число граничных условий. Если условия за-
задачи не дают достаточного количества граничных ус-
условий, то недостающие условия получаются из самой
вариационной задачи, потому что граничный член
в вариации б/ добавляет некоторые «естественные»
условия к имеющимся условиям, «наложенным извне».
Задача об упругом стержне с различными способами
закрепления концов прекрасно иллюстрирует это
положение.
Г Л ABA HI
ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ
1. Принцип виртуальных перемещений для обратимых
перемещений. Первый вариационный принцип, с которым
мы встречаемся в механике, это принцип виртуальных пере-
перемещений. Он определяет равновесие механической системы.
Принцип имел фундаментальное значение для последую-
последующего развития аналитической механики.
Согласно ньютоновой механике, частица находится
в равновесии, если результирующая сила, действующая на
эту частицу, равна нулю. При этом частица изолируется и
все ее связи заменяются силами. Неудобство подобного под-
подхода станет очевидным, даже если обратиться, например,
к столь простой задаче, как равновесие рычага. Рычаг со-
состоит из бесконечного числа частиц и число внутренних сил
взаимодействия между этими частицами бесконечно. При
аналитическом подходе можно не интересоваться всеми
этими силами, а рассматривать лишь внешние в данном
случае силы тяжести. Это достигается путем учета лишь
тех виртуальных перемещений, которые допускаются на-
наложенными связями. В случае рычага, например, мы рас-
рассматриваем лишь вращение всего рычага как твердого тела
вокруг точки опоры. Поэтому сохраняются неизменными
расстояния между любыми двумя точками рычага. При та-
таком подходе надобность в учете внутренних сил, порожда-
порождаемых связями, отпадает.
С точки зрения механики поведение твердого тела сильно
отличается от поведения кучи песка. Существуют значитель-
значительные внутренние силы, действующие между частицами твердо-
твердого тела, которые удерживают эти частицы на своих местах
внутри тела; такие силы не возникают между песчинками..
Как доказать наличие этих сил? Это можно сделать, по-
попытавшись разрушить твердое тело, т. е. сдвинуть одни
частицы относительно других таким способом, который не
допускается данными связями. Если мы осторожно пере-
98 Гл. III. Принцип виртуальных перемещений
мещаем кучу песка, вращая либо передвигая ее парал-
параллельно самой себе, то разница между ней и твердым телом
как механическими системами пропадает, так как значитель-
значительные по величине внутренние силы, отличающие твердое
тело от кучи песка, при таком движении не действуют. Вот
почему в вариационных методах механики «силами связи»,
обеспечивающими выполнение некоторых определенных ки-
кинематических условий, пренебрегают, принимая во внима-
внимание лишь работу «приложенных (активных) сил». Исключить
действие внутренних сил удается благодаря тому, что вирту-
виртуальные перемещения системы не нарушают имеющихся кине-
кинематических связей. Число уравнений, получаемых при таком
подходе, меньше числа частиц, но оно в точности равно числу
степеней свободы системы.
Воспользуемся сначала языком векторной механики.
Предположим, что некоторые заданные внешние силы Flt
F2, ..., Fn действуют на систему в точках"* Р1г Pz, ..., Рп.
Виртуальные перемещения этих точек обозначим через
6Rb 6R2, ..., 6Rn. C.1.1)
Эти виртуальные перемещения не должны нарушать име-
имеющихся кинематических связей; мы будем предполагать,
что все эти перемещения обратимы, т. е. что заданные связи
не мешают нам заменить любое перемещение 6R(- на —6R;.
Принцип виртуальных перемещений утверждает, что
данная механическая система будет находиться в равновесии
в том и только том случае, когда полная виртуальная ра-
работа всех приложенных сил обращается в нуль
to = F1-6R1+F2-6R2+ ... +FB-eRn=0. C.1.2)
Переведем это уравнение на аналитический язык. С этой
целью выразим прямоугольные координаты xlt yit z,- как
функции обобщенных координат qx, q2, ..., qn, подобно тому
как это было сделано в гл. I, п. 7. Дифференциальная фор-
форма C.1.2) преобразуется в новую дифференциальную форму
6w = F1t>q1 + F2&qs+ ... +Fnbqn, C.1.3)
где Flt F2 Fn — компоненты обобщенной силы, образу-
образующие вектор в гс-мерном пространстве конфигураций.
Принцип виртуальных перемещений требует, чтобы
1. Принцип для обратимых перемещений 99
.. + Fabqa=O. C.1.4)
Можно предложить поразительную геометрическую интер-
интерпретацию этого уравнения. В левой его части записано, по
сути дела, «скалярное произведение» силы и виртуального
перемещения. Обращение в нуль этого скалярного произ-
произведения означает, что сила Fi ортогональна всем возможным
виртуальным перемещениям.
Предположим сначала, что на координаты qu q2 qn
не наложено никаких связей. В этом случае С-точка в про-
пространстве конфигураций может перемещаться в любом на-
направлении. Тогда принцип C.1.4) требует, чтобы сила Ft
обратилась в нуль, потому что не существует вектора, кото-
который был бы перпендикулярен ко всем направлениям в про-
пространстве.
Пусть теперь С-точка под действием заданных кинема-
кинематических связей вынуждена оставаться в некотором (п—т)-
мерном подпространстве пространства конфигураций.
Тогда условие C.1.4) требует уже не обращения в нуль силы
Fi, а лишь ее ортогональности этому подпространству.
Это дает п — т уравнений, что соответствует п — m степе-
степеням свободы механической системы.
Мы можем теперь дать физическую интерпретацию прин-
принципа виртуальных перемещений. Согласно механике Ньюто-
Ньютона, состояние равновесия требует, чтобы результирующая
сила, действующая на любую частицу системы, была равна
нулю. Эта результирующая сила есть сумма приложенных
сил и сил, обеспечивающих выполнение наложенных связей.
Последние обычно называются «силами реакции». Так как
условие равновесия требует, чтобы «сумма приложенной
силы и результирующей сил реакции равнялась нулю»,
то виртуальная работа приложенных сил равна виртуальной
работе сил реакции, взятой с обратным знаком. Следова-
Следовательно, принцип виртуальных перемещений можно сфор-
сформулировать в несколько другом виде, который мы будем
называть постулатом А:
«Виртуальная работа сил реакции всегда равна
нулю на любом виртуальном перемещении, не
нарушающем заданных кинематических связей».
100 Гл. III. Принцип виртуальных перемещений
Действие этого постулата не ограничивается областью ста-
статики. Он приложим также и к динамике, где принцип вир-
виртуальных перемещений соответствующим образом обобщает-
обобщается принципом Даламбера. Так как все основные вариацион--
ные принципы механики — принципы Эйлера, Лагранжа,
Якоби, Гамильтона — являются всего лишь другими мате-
математическими формулировками принципа Даламбера, посту-
постулат А есть в сущности единственный постулат аналитиче-
аналитической механики и поэтому играет фундаментальную роль г.
Принцип виртуальных перемещений приобретает особое
значение в важном частном случае, когда приложенная
сила Fi моногенная, т. е. когда она получается из одной
скалярной функции — силовой. В этом случае виртуальная
работа равна вариации силовой функции U(qlt ..., qn).
Так как силовая функция равна потенциальной энергии,
взятой с обратным знаком, то можно сказать, что состояние
равновесия механической системы характеризуется стацио-
стационарностью потенциальной энергии, т. е. условием
6V=0. . C.1.5)
Если равновесие устойчиво, то потенциальная энергия долж-
должна иметь минимум, точнее относительный минимум, в то
время как в общем случае для равновесия требуется не
минимальность, а лишь стационарность V.
Резюме. Принцип виртуальных перемещений тре-
требует, чтобы в состоянии равновесия равнялась нулю
работа приложенных сил при любой бесконечно малой
вариации конфигурации системы, при которой не нару-
нарушаются наложенные кинематические связи. Для моно-
моногенных сил это приводит к следующему условию: в со-
состоянии равновесия потенциальная энергия должна
иметь стационарное значение по отношению ко всем
кинематически возможным вариациям.
1 Те ученые, которые утверждают, что аналитическая механика
есть не что иное, как математически отличная формулировка за-
законов Ньютона, должно быть, полагают, что постулат А можно
вывести из законов движения Ньютона. Автор не видит, как это
можно сделать. Третий закон Ньютона — «действие равно противо-
противодействию», конечно, не достаточно универсален, чтобы заменить по-
постулат А.
2. Равновесие твердого тела 101
Следующие два пункта будут посвящены приложению принципа
виртуальных перемещений к статике твердого тела. Эти результаты
хорошо известны из элементарной векторной механики, однако по-
получение их из одного общего принципа является полезным уп-
упражнением.
2. Равновесие твердого тела. Твердое тело, свободно
перемещающееся в пространстве, имеет шесть степеней сво-
свободы: три, связанные с поступательным движением, и три,
связанные с вращением. Используя принцип суперпозиции
бесконечно малых величин, можно рассмотреть эти два типа
перемещений независимо друг от друга.
(А) Поступательное движение. Бесконечно малый парал-
параллельный перенос приводит к одинаковому перемещению
всех точек твердого тела. Обозначим через е величину пере-
перемещения, а через В — вектор единичной длины. Тогда для
виртуального перемещения 6Rft частицы Pk можно написать
6Rft=eB, C.2.1)
и выражение для суммарной работы принимает вид
C.2.2)
Так как вектор В может принимать любое направление, для
обращения в нуль C.2.2) требуется, чтобы выполнялось ра-
равенство
F=2F*=0; C.2.3)
это означает, что равнодействующая F всех приложенных
сил обращается в нуль.
Рассмотрим поршень, имеющий возможность двигаться внутри
цилиндра. Вектор В имеет в этом случае определенное направление.
Поэтому для обращения в нуль C.2.3) необходимо, чтобы равнялась
нулю лишь компонента вектора F в направлении движения.
(Б) Вращение. Пусть 8 — угол бесконечно малого по-
поворота, аО — вектор единичной длины вдоль оси вращения.
Перемещение точки Pk, обусловленное поворотом, можно
1(|2 Гл. III. Принцип виртуальных перемещении
записать следующим образом:
6Rft = eQxR*, C.2.4)
где вектор R^ определяет положение точки Р& относительно
начала координат на оси вращения. Работа силы F* равна
6^=Fft-eSxRft=eQ.(R4xFft) = eQ-MA, C.2.5)
где мы ввели вектор
Mfe=RAxFft C.2.6)
для обозначения «момента силы» относительно начала коор-
координат.
Следовательно, полная работа всех действующих сил
to=2e2-Mft=eQ-2Mft. C.2.7)
Отметим полную аналогию между C.2.7) и C.2.2): вектор Q
заменяет вектор параллельного переноса В, а момент М —
силу F.
Так как свободное тело может вращаться вокруг любой
оси и направление ?2 произвольно, для обращения в нуль
C.2.7) требуется выполнение равенства
М=2МЛ = 0. C.2.8)
Результирующий момент всех приложенных сил обращается
в нуль.
Мы получили таким образом второе условие равновесия
твердого тела. Так как произвольное виртуальное перемеще-
перемещение твердого тела всегда можно представить в виде супер-
суперпозиции бесконечно малых параллельного переноса и по-
поворота, условия C.2.3) и C.2.8) совместно определяют равно-
равновесие тела.
Замечание 1. Тело может быть закреплено в одной точке,
принятой за начало координат. При этом оно теряет степени сво-
свободы поступательного движения. Первое условие: «сумма всех сил
равна нулю» — отпадает, однако второе условие, обращение в нуль
результирующего момента, остается. Радиусы-векторы R^ теперь
откладываются от закрепленной точки. Поэтому должен обращаться
в нуль результирующий момент относительно этой точки.
Замечание 2. Можно закрепить не только одну точку тела, но и
целую ось. В этом случае Й — уже не произвольный вектор, а имеет
Эквивалентность двух систем сил 103
направление вдоль данной осн. Для обращения в нуль C.2.7) доста-
достаточно условия
й-М=0. C.2.9)
Это означает, что должна обращаться в нуль лишь проекция результи-
результирующего момента на ось вращения.
Резюме. Произвольное движение твердого тела
складывается из поступательного движения и враще-
вращения. При равновесии для исключения возможности
поступательного движения требуется равенство нулю
суммы всех сил, а для исключения возможности
вращения — равенство нулю суммы всех моментов.
3. Эквивалентность двух систем сил. Как мы увидим
ниже, виртуальная работа приложенных сил характеризует
не только равновесие, но и динамическое поведение механи-
механической системы. Две системы сил, производящие одну и ту
же виртуальную работу, динамически эквивалентны.
Так как виртуальная работа произвольной системы сил,
действующих на данное твердое тело, зависит лишь от двух
величин: равнодействующей силы F и результирующего мо-
момента М, то мы сразу получаем важную теорему: две системы
сил с равной равнодействующей и равным результиру-
результирующим моментом механически эквивалентны.
Задача 1. Показать, что любая система сил, действующая на
твердое тело, может быть сведена к одной силе в том и только том
случае, если результирующий момент М и равнодействующая сила
F взаимно ортогональны
F-M=0. C.3.1)
Задача 2. Показать, что две силы могут быть заменены одной
в том и только том случае, если они компланарны и не образуют
пары.
Задача 3. Показать, что произвольную систему параллельных
сил
Fl = m,G C.3.2)
всегда можно заменить одной силой
F = mG, C.3.3)
104 Гл. III. Принцип виртуальных перемещений
приложенной в точке
Ко ~ V т »
при условии, что т = ?т не равно нулю.
Задана 4. Показать, что произвольную систему- сил можно
заменить одной силой F = ^F и одной парой с осью, параллельной F .
4. Задачи о равновесии при наличии дополнительных
условий. Часто встречаются задачи о нахождении равно-
весия^системы, на которую наложены одно или несколько
дополнительных условий. В соответствии с общим методом,
обсуждавшимся в гл. II, п. 5 и 12, в подобных задачах к бес-
бесконечно малой виртуальной работе bw следует прибавить
вариации дополнительных условий, умноженные на неопре-
неопределенные множители Лагранжа X, и лишь затем получен-
полученную сумму^приравнять нулю. Для иллюстрации этого об-
общего метода мы рассмотрим здесь две задачи статики. В од-
одной требуется минимизировать обычную функцию, а в дру-
другой — определенный интеграл.
1. Задача о соединенных стержнях. Рассмотрим систему однород-
однородных твердых стержней постоянного сечения, шарнирно соединенных
друг с другом. Два свободных конца цепи подвешены. Найти поло-
положение равновесия системы.
В этой задаче приложенной силой является сила тяжести,
имеющая потенциал. Запишем для нашей системы потенциальную
энергию V, минимум которой нужно найти. Направим ось х гори-
горизонтально, а ось у — вертикально вниз и обозначим через х^ и </#
прямоугольные координаты концов стержней, а через lk — длину
А-го стержня
1\ = (*й+, - Ч)г + (Vk+1 - У кJ =
= (Д**)» + (ДЫ* (* = 0, 1, .... я- 1). C.4.1)
Для потенциальной энергии получаем следующее выражение:
п-1
где а — масса единицы длины. Требуется найти минимум функции V,
рассматривая C.4.1) с заданными константами 1^ как п дополни-
дополнительных условий.
В соответствии с общим методом Лагранжа составим видоизме-
видоизмененную потенциальную энергию вида
4. Задачи о равновесии при дополнительных условиях 105
л—1 п—1
V=Y ^ (Уь + 'Л+\) '*+ 2 М(д**J + (%&J] C-4.3)
(несущественный постоянный множитель ag опущен). Требуется
найти минимум этой новой функции. Варьируемыми величинами за-
задачи являются Xfc и уь (k = 1, 2 re—1), в то время как х0, у0 и
хп, уп фиксированы как координаты двух точек подвеса.
Варьирование по х^ дает
h^xk~h-i^xk-\=0' C.4.4)
откуда следует, что
Варьирование по у^ дает
= 0. C.4.6)
Подставив вместо Xfr их выражения из C.4.5), получим решение
нашей задачи о равновесии в виде следующего разностного уравне-
уравнения
= Т С*+ '*-.)¦ (З-4-7)
2. Задача об однородной цепи (цепная линия). Если увеличи-
увеличивать число стержней, одновременно уменьшая их длину, то (не-
(независимо от того, равны длины стержней между собой или нет)
цепь по форме будет приближаться к гладкой, непрерывной и диффе-
дифференцируемой кривой. В предельном случае мы получим задачу об
однородной цепи. Легко видеть, что разностное уравнение C.4.7)
в пределе перейдет в дифференциальное уравнение
где через ds обозначен дифференциал дуги кривой. Зададим кривую
уравнением вида у = f(x); тогда уравнение C.4.8) запишется в форме
./—-=- = ». C-4.9)
где a = 1/с. Это уравнение можно проинтегрировать, и мы получим
хорошо известное уравнение цепной линии
J/ = 2^(e"+e~")- C.4.10)
106 Гл. III. Принцип виртуальных перемещений
Вместо того чтобы использовать предельный переход, решим задачу
прямыми методами вариационного исчисления. Предположим, что
искомая кривая задана в параметрической форме
x = x(z),
C.4.11)
у = и (")¦
Определенный интеграл, который нужно минимизировать, имеет
вид
V = f y/x'2 + y'2d-.. C.4.12)
Что касается дополнительных условий, то можно действовать дву-
двумя способами. Если исходить из предыдущей задачи, то следует
в процессе варьирования сохранять постоянной длину любого,
сколь угодно малого участка цепи. Это даст дополнительное условие
;г2+ j/'2 = 1, C.4.13)
если за параметр т мы примем длину дуги s искомой кривой. В этом
случае метод Лагранжа требует нахождения минимума видоизме-
видоизмененного интеграла
V= \\y + l{x'2+ y'2)\d-. C.4.14)
•с i
Ввиду того что наша цепь абсолютно гибкая, мы можем производить
варьирование другим способом. Мы можем допустить любые вариа-
вариации кривой C.4.11), которые не меняют ее полной длины. Это озна-
означает, что следует минимизировать интеграл C.4.12) с дополнитель-
дополнительным условием
J ]A-/2+ y'2d- = const. C.4.15)
Ti
Эта задача изопериметрического типа (см. гл. II, п. 14). Видоизме-
Видоизмененный интеграл имеет вид
У=\ V х'2 + у'2 (у 4- X) dz. C.4.16)
~ 1
Отметим существенную разницу между указанными двумя способа-
способами решения задачи. В первом случае, когда используется дополни-
дополнительное условие локального типа, коэффициент X является функцией
¦z, во втором, — когда дополнительное условие, определенный ин-
интеграл, взятый по всей области, — А будет константой.
Задача 1. Применить дифференциальные уравнения Эйлера —
Лагранжа к интегралу C.4.14). Первое уравнение (связанное
с переменной х) непосредственно интегрируется. Выразив из него X
5. Физическая интерпретация неопределенных множителей 107
и подставив ее во второе дифференциальное уравнение, можно прий-
прийти к уравнению C.4.8). Проверить, что /. оказывается функцией -..
Задача 2. Применить дифференциальные уравнения Эйлера —
Лагранжа к интегралу C.4.16). Если отождествить •: с у, то диф-
дифференциальное уравнение для х можно непосредственно проинтегри-
проинтегрировать. Показать, что результат в обеих задачах совпадает. Во второй
задаче л — константа и совершенно отличается от /. из первой зада-
задачи.
5. Физическая интерпретация метода неопределенных
множителей Лагранжа. Пусть мы имеем механическую
систему с п степенями свободы, определяемую обобщен-
обобщенными координатами qlt ..., qn, на которую наложено кине-
кинематическое условие вида
f(qlt ..., <7„)-0. C.5.1)
Метод Лагранжа требует, чтобы
W+W = 0. C.5.2)
Напомним, что это выражение можно записать в виде
617=0, C.5.3)
где
V=V+bf. C.5.4)
Мы снова получаем задачу о нахождении стационарного
значения функции, но эта функция — уже не первоначаль-
первоначальная потенциальная энергия V, а видоизмененная потенци-
потенциальная энергия V. Физически это вполне понятно. По-
Поскольку мы не ограничиваем вариации положения системы
условием C.5.1), а допускаем произвольные вариации qi7
постольку будут действовать не только приложенные силы,
но и силы, обеспечивающие выполнение заданной связи.
Они тоже имеют свою потенциальную энергию, которую
следует добавить к потенциальной энергии внешних сил.
Поэтому преобразование потенциальной энергии путем
добавления члена Xf — это не просто математический прием,
а операция, имеющая реальный физический смысл. Преоб-
Преобразование потенциальной энергии в соответствии с методом
множителей Лагранжа отражает наличие потенциальной
энергии у сил, обеспечивающих выполнение заданных кинема-
кинематических условий.
108 Гл. III. Принцип виртуальных перемещений
Естественно, что мы не можем ожидать большого коли-
количества сведений о механизме, обеспечивающем выполнение
заданного кинематического условия, поскольку нам, по
сути дела, ничего не известно, кроме самого условия. Член Xf
содержит множитель к, который может быть вычислен только
для реальных конфигураций механической системы. Иначе
говоря, Я, известно только для тех точек С пространства
конфигураций, которые лежат на поверхности C.5.1).Тем не
менее этих скудных сведений о силовой функции для сил,
обеспечивающих связь, вполне достаточно для определения
самих этих сил. Дело в том, что, взяв градиент дополнитель-
дополнительной потенциальной энергии
Vx = Xf, C.5.5)
мы получим
В точке С второй член выпадает, так как в него входит
множитель /, обращающийся в точке С в нуль; в результате
«сила реакции» Fn сводится к
F» = -*wr <3-5-7>
Таким образом, член с множителем Лагранжа обладает
следующим интересным свойством: из него можно получить
силу реакции, связанную с соответствующей кинематиче-
кинематической связью. Ниже мы увидим, что это справедливо не
только в состоянии равновесия, но и при движении (см.
гл. V, п. 8).
Задача 1. Пусть силовая функция совокупности свободных час-
частиц, связанная с силами взаимодействия между ними, зависит лишь
от «относительных координат»
?;* = *; — xk, \ik=--\)i—\)k, 4k = Zi — zk C.5.8)
любой пары частиц Я,- и Рк
и = и$1к.Чк.Ьи)- C-5.9)
Варьируя по Xj, получаем ^-компоненту силы, действующей на Рг
Показать, что величину
Xik=}jrr. C-5.10)
5. Физическая интерпретация неопределенных множителей 109
можно интерпретировать, как ^-компоненту силы, «действующей
на Pi со стороны Pp. Непосредственно видно, что
Х,к = -Хы. C.5.11)
Следовательно, для этих сил выполняется закон Ньютона «действие
равно противодействию». Силы появляются попарно, равные по ве-
величине и противоположные по знаку.
Задача 2. Сделаем более жесткое предположение, что U за-
зависит только от комбинации
'?* = & ИМ?* + &, C.5.12)
т. е. от расстояния между любыми двумя частицами. Показать, что
внутренние силы в этом случае являются центральными, т. е. направ-
направлены вдоль прямой, соединяющей Pt н Pk. Такие силы не дают ре-
результирующего момента.
Задача 3. Рассмотрим твердое тело как совокупность свобод-
свободных частиц, ограниченных дополнительными условиями
(*i ~xkJ + (У1 ~ У кJ + (г1 -z*J = Ак- (З-5-13>
Показать с помощью метода множителей Лагранжа и результа-
результатов предыдущих двух задач, что силы, удерживающие части-
частицы твердого тела, не дают результирующей силы F и результи-
результирующего момента М.
Если имеющиеся кинематические связи неголономны, то
уже нельзя записать видоизмененную функцию, которая
должна быть минимизирована. Но в условиях равновесия
все же появляются члены с X. Это опять-таки имеет прямой
физический смысл. Члены с X добавляют к приложенным
силам силы, обеспечивающие удовлетворение кинематиче-
кинематических связей. Хотя в этом случае и не существует силовой
функции, силы реакции возникают, как и раньше.
Таким образом, замечательный метод неопределенных
множителей Лагранжа проясняет природу голономных
и неголономных кинематических связей, показывая, что
голономные связи механически эквивалентны моногенным
силам; с другой стороны, неголономные связи механи-
механически эквивалентны полигенным силам. Голономная
связь поддерживается при помощи моногенных сил; не-
голономная связь поддерживается при помощи полигенных
сил.
110 Гл. III. Принцип виртуальных перемещений
Резюме. Физический смысл метода неопределенных
множителей Лагранжа заключается в том, что этот
метод позволяет получить силы реакции, возникающие
вследствие наличия кинематических связей. В случае
голономных связей эти силы можно получить из неко-
некоторой силовой функции; в случае неголономной связи
такой функции не существует, однако силы реакции
можно получить и в этом случае.
6. Неравенство Фурье. Все наши предыдущие рассуж-
рассуждения проводились при молчаливом предположении, что вир-
виртуальные перемещения обратимы. Фактически рассматри-
рассматривался случай, когда мы находились где-то внутри простран-
пространства конфигураций, так что движение могло осуществляться
в любом направлении. Однако ситуация совершенно меняет-
меняется, когда мы достигаем границ пространства конфигураций.
Здесь виртуальные перемещения должны быть направлены
внутрь, а противоположно направленные перемещения не-
невозможны, так как они выводят за пределы пространства.
Рассмотрим шар, висящий на гибкой нити. Этот шар может
двигаться вверх, и при этом он будет лишь ослаблять натя-
натяжение нити. Но он не может двигаться вниз, потому что нить
этого не допускает. Другой пример: шар может двигаться
по поверхности стола, а также в любом направлении вверх;
но он не может двигаться вниз. Виртуальные перемещения
обратимы при движении в горизонтальном направлении и
необратимы во всех других направлениях.
Как указал Фурье, обычная формулировка принципа
виртуальных перемещений
6У=0 C.6.1)
относится к обратимым перемещениям; в случае необрати-
необратимых перемещений ее следует заменить неравенством
бУ>0. C.6.2)
Действительно, наша конечная цель—минимизировать по-
потенциальную энергию. Это значит, что при малых, но ко-
конечных перемещениях функция V должна всегда увеличи-
увеличиваться
6. Неравенство Фурье 111
AV>0. C.6.3)
Для бесконечно малых перемещений следует еще добавить
знак равенства
ДУ>0. C.6.4)
Теперь у нас уже нет возражений против знака «больше».
Единственный довод, на основании которого мы отбрасывали
его раньше, заключался в том, что из-за обратимости пере-
перемещений знак «больше» предполагает одновременное наличие
и знака «меньше», а последний противоречит предположению
о минимуме. При необратимых перемещениях, однако, этот
аргумент уже не справедлив, и нам приходится согласиться
с неравенством C.6.4), потому что других возражений против
положительного изменения потенциальной энергии нет.
Так как изменение потенциальной энергии равно работе
приложенных сил, взятой с обратным знаком, то нера-
неравенство C.6.4) можно записать в виде
Ш < 0. C.6.5)
В такой форме неравенство Фурье справедливо и для поли-
полигенных сил, не имеющих потенциальной энергии. Если
работа сил на любом виртуальном перемещении равна нулю
или отрицательна, то система находится в равновесии.
Когда шар, подвешенный на нити, движется вверх, работа
силы тяжести отрицательна. При горизонтальном (и обратимом)
перемещении шара она равна нулю. Аналогично, при движении шара
вдоль по горизонтальному столу (обратимое перемещение) работа
силы тяжести равна нулю, а при движении шара вверх она ста-
становится отрицательной. Механическая система, которая не может
прийти в равновесие внутри некоторой области пространства конфи-
конфигураций, будет двигаться к границе области и найдет свое равновесие
там. Удовлетворить неравенству C.6.4) на границе области легче,
чем равенству C.6.1) внутри области. Напомним, что на границе
области для равновесия не требуется стационарности потенциальной
энергии.
Резюме. Обычная формулировка принципа вирту-
виртуальных перемещений: «сумма всех виртуальных работ
равна нулю» справедлива только для обратимых пере-
перемещений. Для необратимых перемещений на границе
пространства конфигураций условие «равна нулю»
следует заменить — «меньше или равна нулю».
ГЛАВА IV
ПРИНЦИП ДАЛАМБЕРА
Введение. Приступая к принципу Даламбера, мы покидаем
область статики и попадаем в область динамики. Здесь задачи
гораздо более сложны и их решение требует более совершенных ме-
методов. В то время как задачи статики для систем с конечным числом
степеней свободы приводят к алгебраическим уравнениям, которые
могут быть решены при помощи исключения переменных и подстано-
подстановок, задачи динамики приводят к дифференциальным уравнениям.
Настоящая книга посвящена главным образом формулировке и ин-
интерпретации основных дифференциальных уравнений движения,
а не их окончательному интегрированию. Принцип Даламбера, ко-
который мы обсудим в настоящей главе, непосредственно ничего не
дает для целей интегрирования. Однако он является важной вехой
в истории теоретической механики, так как он дает интерпретацию
силе инерции, а это существенно для дальнейшего развития вариа-
вариационных методов.
1. Сила инерции. Выдающийся французский математик
и философ Даламбер A717—1783) сумел совершить гени-
гениальный шаг, распространив на динамику применимость
принципа виртуальных перемещений. Простая, но далеко
идущая идея Даламбера может быть изложена следующим
образом. Мы исходим из основного закона движения
Ньютона: «произведение массы на ускорение равно движу-
движущей силе»:
mA = F D.1.1)
и переписываем его в виде
F —mA = 0. D.1.2)
Введем вектор I следующим образом:
1 = — т\. D.1.3)
Этот вектор можно рассматривать как силу, создаваемую
движением. Назовем ее силой инерции. Теперь уравнение
Ньютона можно записать в следующем виде:
F+I = 0. D.1.4)
1. Сила инерции 113
На первый взгляд ничего не изменилось, так как промежу-
промежуточная ступень D.1.3) дает лишь новое название произведе-
произведению массы на ускорение, взятому с обратным знаком. Имен-
Именно эта кажущаяся тривиальность делает принцип Даламбера
гениальным открытием и в то же время постоянным источ-
источником неверных толкований и недоразумений.
Важность уравнения D.1.4) связана с тем, что в нем со-
содержится нечто большее, чем просто измененная формули-
формулировка закона Ньютона. Это уравнение является выражением
некоторого принципа. Мы знаем, что в ньютоновой меха-
механике обращение силы в нуль означает равновесие. Следова-
Следовательно, уравнение D.1.4) утверждает, что добавление силы
инерции к остальным действующим силам приводит к равно-
равновесию. Это означает, что, имея какой-либо критерий равно-
равновесия механической системы, мы можем сразу же распро-
распространить его на систему, находящуюся в движении. Единст-
Единственно, что для этого требуется, это добавить к имеющимся
силам новую «силу инерции». В результате динамика
сводится к статике.
Это не означает, что мы можем на практике решать за-
задачи динамики методами статики. Окончательные уравне-
уравнения являются дифференциальными уравнениями, которые
приходится потом решать. Мы просто выводим эти уравне-
уравнения, пользуясь соображениями статики. Добавление силы
инерции I к действующей силе F заменяет задачу о движении
задачей о равновесии.
Нам могут возразить, что поскольку масса m на самом
деле движется, то, казалось бы, нет оснований рассматри-
рассматривать ее так же, как если бы она покоилась. На это возраже-
возражение можно дать два ответа. Во-первых, движение есть явле-
явление относительное. Мы можем ввести систему отсчета, движу-
движущуюся вместе с телом, и наблюдать за телом из этой системы.
Тогда тело будет действительно покоиться. Во-вторых,
принцип Даламбера акцентирует внимание на силах, а не
на движущемся теле, и равновесие данной системы сил
можно рассматривать безотносительно к состоянию движе-
движения тела, на которое эти силы действуют. Согласно крите-
критерию равновесия для произвольной системы сил, должна
обратиться в нуль полная виртуальная работа всех сил. Этот
критерий использует виртуальные, а не реальные переме-
перемещения, и потому он равно применим и к покоящимся, и
5 Зак. 1646
114 Гл. IV. Принцип Дяламбера
к движущимся массам. Так как виртуальные перемещения
представляют собой хотя и возможный, но все же чисто ма-
математический эксперимент, то их можно произвести в не-
некоторый определенный момент времени (даже если бы по-
подобные перемещения и потребовали физически бесконечных
скоростей). В такой фиксированный момент времени реаль-
реальное движение тела не играет роли.
Даламбер обобщил свои рассуждения о равновесии одной
частицы на произвольную механическую систему. Принцип
Даламбер а утверждает, что любая система сил находится
в равновесии, если мы добавляем к приложенным (активным)
силам силы инерции. Это означает, что полная виртуальная
работа всех приложенных сил и сил инерции равна нулю на
обратимых перемещениях. Представляется удобным дать
особое название силе, получающейся в результате сложения
силы инерции lk и заданной силы F*, действующей на ча-
частицу. Мы назовем эту суммарную силу «эффективной
силой» J и обозначим ее через F*:
F! = F*+I*. D.1.5)
Принцип Даламбера можно теперь сформулировать следу-
следующим образом: полная виртуальная работа эффективных
сил равна нулю для всех обратимых виртуальных перемеще-
перемещений, совместимых с заданными кинематическими условиями
2 F*-6R*= 2 (Fk-mkAk)-6Rk=0. D.1.6)
t<= i *= i
Заметим, что приложенные силы могут действовать лишь на часть
точек системы, в то время как эффективные силы FJ существуют
везде, где только имеются массы, участвующие в ускоренном дви-
движении.
Заданная система приложенных сил в общем случае не
находится в равновесии, так как для этого требуется выпол-
выполнение специальных условий. Полная виртуальная работа
этих сил обычно отлична от нуля. Однако само движение
системы восполняет этот недостаток. Тело движется таким
х Синг и Гриффит в своей книге The Principles of Mechanics
(см. библиографию), а также некоторые другие авторы используют
название «эффективная сила» для произведения массы на ускоре-
ускорение, т, е. для силы инерции, взятой с обратным знаком.
I. Сила инерции 115
образом, чтобы дополнительные инерционные силы, по-
порождаемые движением, привели баланс работы к нулю.
Таким путем из принципа Даламбера следуют уравнения
движения произвольной механической системы.
В отличие от приложенных (активных) сил, которые
обычно получаются путем дифференцирования одной сило-
силовой функции (моногенные силы), силы инерции имеют поли-
генный характер. В то время как виртуальная работа ак-
активных сил может быть записана в виде полной вариации
силовой функции
6w=6U, D.1.7)
виртуальная работа сил инерции
6^ = -2mAA*-6Rft. D.1.8)
Это просто дифференциальная форма, не сводимая к вариа-
вариации скалярной функции. (Ниже мы увидим, как этот не-
недостаток может быть возмещен при помощи интегрирования
по времени.)
Уравнение Ньютона D.1.1) справедливо только в случае, когда
масса постоянна. Если масса меняется во время движения, то основ-
основной закон движения должен быть записан в виде
^(mv) = F, D.1.9)
т. е. «скорость изменения импульса равна движущей силе». Соответ-
Соответственно сила инерции I должна быть определена как скорость изме-
изменения импульса, взятая с обратным знаком
I = -^(mv). D.1.10)
В обычном случае постоянной массы это общее определение совпа-
совпадает с D.1.3).
Определение силы инерции требует наличия «абсолютной си-
системы отсчета», в которой измеряется ускорение. Это внутренний
недостаток ньютоновой механики, который остро ощущался самим
Ньютоном и его современниками. Разрешение этой трудности появи-
появилось лишь недавно, в связи с величайшим достижением Эйнштейна,
общей теорией относительности.
Можно спросить, в чем же физический смысл принципа
Даламбера. Из определения «эффективной силы» D.1.5)
следует, что эта сила равна нулю для свободной частицы и
равна силе реакции, взятой с обратным знаком, для частицы,
на которую наложена некоторая связь. Следовательно,
5*
1_16 Гл. IV. Принцип Даламбера
применение принципа виртуальных перемещений к эффек-
эффективной силе Р эквивалентно предположению, что «виртуаль-
«виртуальная работа сил реакции равна нулю на любых виртуальных
перемещениях, совместимых со связями». Мы таким образом
вновь приходим к тому же «постулату А», который мы
сформулировали раньше в гл.III, п. 1. Принцип Даламбера
распространяет действие этого постулата из области ста-
статики на область динамики, не производя в нем никаких
изменений.
Резюме. Принцип Даламбера вводит новую силу,
силу инерции, определенную как произведение массы
на ускорение, взятое с обратным знаком. Добавив
эту силу к активным силам, получим равновесие,
означающее выполнение условия принципа виртуаль-
виртуальных перемещений. Действие последнего распростра-
распространяется таким образом из области статики па область
динамики.
2. Роль принципа Даламбера в механике. Принцип
Даламбера дает полное решение задачи механики. Все
остальные принципы механики — это просто математически
другие формулировки принципа Даламбера. Наиболее
развитый вариационный принцип механики, принцип Га-
Гамильтона, может быть получен из принципа Даламбера
путем некоторого математического преобразования. В тех
случаях, когда оба принципа применимы, они эквивалентны.
Однако принцип Гамильтона относится лишь к голономным
системам, в то время как принцип Даламбера равно приме-
применим и к голономным и к неголономным системам.
Принцип Даламбера более элементарен по сравнению
с остальными вариационными принципами, так как он не
требует интегрирования по времени. Недостатком принципа
является то, что виртуальная работа сил инерции есть поли-
полигенная величина, не сводимая к одной скалярной функции.
Это делает его неудобным при использовании криволиней-
криволинейных координат. Однако во многих простых задачах дина-
динамики, которые могут быть рассмотрены при помощи прямо-
прямоугольных координат или векторными методами вообще без
всяких координат, принцип Даламбера очень полезен.
2. Роль принципа Даламбера в механике И7
В некоторых задачах принцип Даламбера оказывается
даже более гибким, чем более развитый принцип наимень-
наименьшего действия. Дифференциальные уравнения движения,
определяющие ускорения движущейся системы, являются
уравнениями второго порядка. Ускорение qt — это вторые
производные координат qi или первые производные скоро-
скоростей qt. Может, однако, оказаться более удобным — и такая
ситуация встречается, в частности, в динамике твердого
тела —¦ характеризовать движение при помощи некоторых
скоростей, не являющихся производными действительных
координат. Такие величины называют «кинематическими
переменными». Хорошим примером является вращение
волчка вокруг оси симметрии. Его можно охарактеризо-
охарактеризовать угловой скоростью вращения со = dyldt, где dcp —
просто бесконечно малый угол поворота, а не дифференциал
от какого-либо угла <р, так как такой угол <р существует
лишь в случае, если ось симметрии закреплена. Тем не
менее и при незакрепленной оси удобно использовать dyldt
как величину, характеризующую движение волчка. В прин-
принципе наименьшего действия нельзя использовать кинемати-
кинематические переменные, а в принципе Даламбера можно.
Принцип Даламбера важен еще в другом отношении.
Делая возможным использование движущихся систем от-
отсчета, этот принцип -предвосхищает революционную идею
Эйнштейна об относительности движения. Он объясняет
также, оставаясь в пределах ньютоновой физики, проис-
происхождение тех «фиктивных сил», которые появляются
в движущихся системах координат.
Резюме. Принцип Даламбера требует введения
полигенной величины для составления виртуальной
работы сил инерции; поэтому он, в отличие от прин-
принципа наименьшего действия, не дает возможности ис-
использовать преимущества криволинейных координат.
Однако этот принцип чрезвычайно полезен в задачах,
где возможно использование кинематических перемен-
переменных (неголономные скорости) и движущихся систем
отсчета.
118 Гл. IV. Принцип Даламбера
В следующих пунктах мы остановимся на применении принципа
Даламбера к ряду типичных задач, в частности, задач, связанных
с использованием движущихся систем отсчета. Первое приложение
касается вывода закона сохранения энергии, хорошо известного из
элементарной механики. Этот вывод, однако, представляет интерес,
так как он показывает пределы применимости закона.
3. Закон сохранения энергии как следствие принципа
Даламбера. Хотя принцип Даламбера применим, вообще
говоря, к полигенным силам, имеется один частный случай,
когда для моногенных сил он допускает интегрирование.
Этот особый случай приводит к одному из наиболее фунда-
фундаментальных законов механики, закону сохранения энергии.
Рассмотрим общую формулировку принципа Даламбера,
данную в уравнении D.1.6). Пусть активные силы — моно-
моногенные, получаемые из функции потенциальной энергии.
Тогда работа активных сил равна вариации потенциальной
энергии, взятой с обратным знаком, и принцип Даламбера
можно записать в виде
6V+2mAA*-eR* = 0. D.3.1)
Второй член, работа сил инерции со знаком минус, не
может быть записан в общем случае как вариация какой-
либо величины. Однако распорядимся вариацией 6RA,
являющейся произвольной пробной вариацией радиуса-
вектора Rb, особым образом. Выберем в качестве пробных
перемещений действительные перемещения, происходящие
за время dt. Это означает, что мы заменяем 6R& на dRk и
имеем дело с частным случаем вариационного выражения
D.3.1).
Для этой выбранной особым образом вариации вирту-
виртуальное изменение &V потенциальной энергии совпадает
с действительным изменением dV, происходящим за вре-
время dt. Более того, второй член в D.3.1) также становится
дифференциалом некоторой величины, что можно увидеть,
если заменить ускорение hk второй производной радиуса-
вектора Rk
D-3-2)
3, Закон сохранения энергии 119
где Т — кинетическая энергия механической системы
Т = \^тку\^\у,тЛ1 D.3.3)
Уравнение D.3.1) теперь принимает вид
dV+dT=d<y+T) = 0 D.3.4)
и может быть проинтегрировано, что дает
?. D.3.5)
Сумма кинетической и потенциальной энергии остается при
движении постоянной. Эта фундаментальная теорема назы-
называется «законом сохранения энергии». Мы получили скаляр-
скалярное уравнение, являющееся лишь одним из интегралов урав-
уравнений движения. Хотя его одного и недостаточно для пол-
полного решения задачи о движении системы (исключая случай
одной степени свободы), это тем не менее один из наиболее
фундаментальных и универсальных законов природы, кото-
который при соответствующих модификациях выполняется не
только в механических, но и во всех физических процессах.
Постоянная Е называется «постоянной энергии».
На первый взгляд может показаться, что отождествле-
отождествление 6RA с dRk возможно всегда, потому что среди кинемати-
кинематически возможных перемещений обязательно должно быть и
действительное перемещение. Однако этот почти очевидный
аргумент не всегда безупречен. Он справедлив для свобод-
свободных частиц, но не всегда правилен в случае механической
системы со связями. Конечно, положение С-точки в про-
пространстве конфигураций можно изменять произвольно, и мы
всегда можем отождествить 6q,• с dqL. Это, однако, не всегда
означает, что вариации 6R,- положений частиц совпадают
с действительными перемещениями dRi. Следует иметь
в виду, что вариации накладываются мгновенно, в определен-
определенный момент времени, что означает возникновение бесконеч-
бесконечных скоростей, в то время как реальное движение проис-
происходит с конечными скоростями. Сравнив уравнения A.2.8)
суравнениями A.8.3), мы увидим, чтов первом случае отож-
отождествление bqi с dqL приводит к равенству 6Rj = dRi,
а во втором случае — нет. Уравнения первого типа выпол-
120 Гл. IV. Принцип Даламбера
няются для «склерономных» систем, когда заданные кине-
кинематические связи не содержат явно времени. Уравнения
же второго типа выполняются для «реономных» систем,
когда кинематические связи зависят явно от времени.
Подобные соображения справедливы и относительно
потенциальной энергии V. Если V — функция одних
только qL, то выбор bqL = dqi приводит к 6V = dV, если
же V зависит явно от времени, то этого не происходит. Так
как V определена как —U, то наш результат означает, что
для сохранения энергии силовая функция U не должна за-
зависеть явно от времени.
Таким образом, применение закона сохранения энергии
следует ограничить системами, склерономными как в от-
отношении силовой функции, так и в отношении кинемати-
кинематических условий. Кроме того, наш вывод неявно предполагает,
что массы mit — константы.
Резюме. Если в принципе Даламбера отождествить
вариации с действительными перемещениями, проис-
происходящими за время dt, то полученное уравнение можно
проинтегрировать. Это приводит к закону сохранения
энергии, который утверждает, что в процессе движения
сумма кинетической и потенциальной энергий остается
постоянной. Для справедливости этого вывода необ-
необходимо, чтобы в процессе движения массы чаетиц были
постоянными, а силовая функция и заданные связи
системы были склерономными, т. е. не зависели от
времени.
4. Фиктивные силы при ускоренном движении систем от-
отсчета. Гипотеза Эйнштейна об эквивалентности. Глубокая
справедливость принципа Даламбера может быть проверена
при помощи совершенно точных физических экспериментов,
и выводы из этого принципа подтверждаются наблюдениями.
Принцип Даламбера предполагает, что сила инерции —
это просто еще одна дополнительная сила, действующая
подобно всем остальным силам. Для определения силы инер-
инерции нам приходится использовать «абсолютную систему
4. Фиктивные силы при ускоренном движении систем отсчета 121
отсчета». Если система отсчета, в которой измеряются уско-
ускорения, движется относительно абсолютной системы, то сила
инерции в движущейся системе отсчета — это уже не истин-
истинная сила инерции: к ней следует добавить дополнительные
члены. Согласно принципу Даламбера, корректирующие
члены, входящие в силу инерции из-за движения системы
отсчета, могут также рассматриваться как приложенные
силы, порождаемые внешним полем сил. Таким образом,
возникает понятие «фиктивных сил» в движущихся системах
отсчета.
В дальнейшем нам понадобится сравнение между двумя
системами отсчета, одна из которых «находится в абсолютном
покое», а другая движется. Мы будем называть их «системой
5» и «системой 5'» и условимся обозначать соответствующие
величины в обеих- системах одинаковыми буквами, отмечая
величины из системы S' штрихами. Особенно интересно
сравнить измерения в системах S и S' трех основных кине-
кинематических величин: радиуса-вектора R, скорости v и уско-
ускорения. А движущейся частицы.
Пусть сначала система отсчета движется чисто поступа-
поступательно, подобно лифту, который может двигаться вверх и
вниз с произвольными ускорениями.
Такое поступательное движение системы отсчета можно
охарактеризовать следующим образом. Начало координат
О' подвижной системы движется по заданной кривой С,
описываемой вектором С, который является функцией вре-
времени t. Радиусы-векторы R и R' связаны между собой
соотношением (рис. 4)
5В. Зак. 1648
122 Гл. IV. Принцип Даламбера
'. D.4.1)
Дважды дифференцируя по времени это соотношение,
получаем
R=C-j-R'. D.4.2)
Это уравнение можно записать в виде
А = С-гА' D.4.3)
или, умножив на —т,
1=—тС + Г. D.4.4)
Отсюда видно, что сила инерции, которую, согласно прин-
принципу Даламбера, нужно добавить к приложенным силам F,
состоит из двух частей. Величина — тС— это часть истин-
истинной силы инерции; появление этого члена связано с тем, что
использованная система отсчета движется относительно
абсолютной системы. Этот дополнительный член, порожда-
порождаемый движением системы отсчета и добавляемый к относи-
относительной силе инерции Г в этой системе, называется «фиктив-
«фиктивной силой». Это название очень точно указывает на тот факт,
что этой силы не существует в абсолютной системе отсчета
и что она возникает лишь из-за движения нашей системы
отсчета относительно абсолютной. Это название в то же
время будет дезориентирующим, если, исходя из него,
считать, что эта сила не столь «реальна», как остальные си-
силы. При движении системы отсчета фиктивная сила яв-
является совершенно реальной и не отличается от других при-
приложенных сил. Предположим, что наблюдатель не знает, что
его система отсчета движется равноускоренно. Тогда из
чисто механических наблюдений он не сможет установить
этого факта. Согласно принципу Даламбера, физический
процесс определяется суммой приложенной силы F и силы
инерции I. Способа разделить эти силы не существует. Если
физик, не знающий о своем движении, будет считать фиктив-
фиктивную силу —тС приложенной силой, то он не придет к про-
противоречию с фактами.
Таково логическое следствие принципа Даламбера. Пред-
Предположим, что истинная сила инерции I и сила инерции Г,
измеренная в движущейся системе, связаны следующим со-
соотношением:
4. Фиктивные силы при ускоренном Движении систем отсчета 123
I = J + I . D.4.5)
Эффективная сила, действующая в движущейся системе,
есть
I'. D.4.6)
Поскольку механическое действие определяется лишь эф-
эффективной силой, постольку можно с равным основанием
считать Fe суммой F и J + Г либо суммой F + J и Г.
В первом случае мы отмечаем тот факт, что наша система
отсчета движется и что это движение создает силу J как
часть силы инерции. Во втором случае мы забываем о движе-
движении нашей системы отсчета и интерпретируем силу J как
дополнительную приложенную силу, действующую на ча-
частицу.
Предположим, что мы находимся в закрытой лаборато-
лаборатории; пусть в некоторый момент времени поле тяжести вне-
внезапно исчезло, и лаборатория в этот же момент начинает
двигаться вверх с постоянным ускорением G («опыт в ящике»
Эйнштейна). Тогда принцип Даламбера утверждает, что
никакой механический эксперимент не сможет указать на
происшедшее изменение, потому что невозможно выбрать
между следующими двумя гипотезами:
1. Наша система отсчета движется вверх с постоянным
ускорением G; поля гравитации не существует.
2. Наша система отсчета находится в покое, но имеется
поле гравитации, которое действует вниз на каждую массу
т с силой mG.
Эта «гипотеза об эквивалентности» была предложена Эйн-
Эйнштейном при его ранних попытках раскрыть загадку грави-
гравитации, до создания общей теории относительности. С точки
зрения чистой механики гипотеза об эквивалентности есть
прямое следствие принципа Даламбера. Эйнштейн возвел
его в общий принцип природы. Было бы заслуженно назы-
называть фиктивную силу
Е=— гпС, D.4.7)
которая, согласно принципу Даламбера, действует в посту-
поступательно ускоряющейся системе координат, «силой Эйн-
Эйнштейна». Отметим, что все фиктивные силы, поскольку они
порождены силой инерции —тА, пропорциональны инерт-
5В*
124 Гл. IV. Принцип Даламбера
ной массе т. Тот опытный факт, что гравитационная
масса всегда пропорциональна инертной массе, был путе-
путеводной нитью, приведшей Эйнштейна к утверждению, что
сила гравитации есть фиктивная сила.
а) Парашютист, прыгающий с самолета, переживает в первый
момент своего падения особое ощущение, вызванное тем, что он ста-
становится абсолютно невесомым. Фиктивная сила, возникающая при
падении, компенсирует силу гравитации. По мере раскрытая пара-
парашюта вес постепенно восстанавливается, б) Подобное ощущение
уменьшения веса возникает, хотя и в меньшей степени, в первый
момент после начала движения лифта вниз. Наоборот, при замед-
замедлении движения лифта перед остановкой наш кажущийся вес
возрастает, в) Когда автобус трогается с места, нас толкает назад,
когда он останавливается — вперед, г) Ускорение и замедление
поезда можно измерить при помощи чувствительных пружинных
весов, укрепленных на стене, перпендикулярной направлению дви-
движения. Все эти явления иллюстрируют принцип Даламбера.
Резюме. Ускоренное движение системы отсчета
вызывает эффект, эквивалентный появлению некото-
некоторых дополнительных внешних сил. Эти силы называют-
называются «силами Даламбера» или «фиктивными силами»,
потому что они образуются вследствие движения си-
системы отсчета и отсутствуют в абсолютной системе.
Фиктивная сила, возникающая при движении си-
системы отсчета с постоянным ускорением, аналогична
однородному гравитационному полю.
5. Фиктивные силы во вращающейся системе отсчета.
Любое движение жесткой системы отсчета можно рассмат-
рассматривать как поступательное движение плюс вращение. После
изучения чисто поступательного движения системы перей-
перейдем к случаю чистого вращения. Общая задача представля-
представляет собой суперпозицию этих двух задач.
Если начала координат обеих систем совмещены, то ра-
радиусы-векторы R и R' в абсолютной системе 5 и движущейся
системе S' одинаковы
R = R'. D.5.1)
Тем не менее скорости и ускорения, измеренные в обеих
системах, различаются, так как скорость изменения положе-
5. Фиктивные силы во вращающейся системе отсчета 125
ния точки различна в обеих системах. Если некоторый век-
вектор В вращается вместе с системой S' и потому постоянен
в этой системе, то, наблюдаемый из системы S, он совершает
за время dt бесконечно малый поворот
dK = (QxB)dt D.5.2)
[см. C.2.4)], где 2 — угловая скорость вращения системы
S' относительно 5. Следовательно,
^ = ЙХВ, D.5.3)
в то время как
Введенное здесь обозначение d'/dt относится к операции
наблюдения скорости изменения какой-либо величины
в движущейся системе 5'.
Для вектора В, не постоянного в S', так что d'Bldt=f=O,
мы найдем, используя принцип суперпозиции бесконечно
малых величин,
^ = ^ + ЙХВ- D.5.5)
Применив это уравнение к рад и ус у-вектор у R = R', по-
получим
f = ^ + QxK'- D.5.6)
Отсюда следует соотношение между скоростями v и v'
v=v' + QxR'. D.5.7)
Далее, чтобы получить соотношение между абсолютным
и относительным ускорениями А и А', продифференцируем
уравнение D.5.7)
S=^ + axR' + ax^. D.5.8)
Правую часть выражения D.5.8) можно преобразовать
с тем, чтобы выразить все через величины, принадлежа-
принадлежащие системе S'. В результате получим
126 Гл. IV. Принцип Даламбера
~ = ^ -f- 2Q X v' + U х B X R') + Й х R'. D.5.9)
Умножив на —т, придем к соотношению между силами
инерции I и Г
1 = Г —2mQxv' —mQx(QxR') —mQxR'. D.5.10)
В дальнейшем мы больше не будем проводить сравнения
между абсолютной и вращающейся системами, оставаясь
все время во вращающейся системе S'. Поэтому мы опустим
штрих, подразумевая, что все величины относятся к S'.
Из D.5.10) видно, что вращение системы отсчета приводит
к появлению трех фиктивных сил различного характера.
Третий член в D.5.10) может быть преобразован в
C = mQ2R±, D.5.11)
где R L означает компоненту радиуса-вектора R, перпенди-
перпендикулярную вектору Q. Это сила моногенной природы, так
как ее можно получить из потенциальной энергии
Ф = -| Q2RZ±. D.5.12)
Она называется «центробежной силой». На Земле, враща-
вращающейся вокруг своей оси, линия отвеса указывает направле-
направление равнодействующей силы гравитации и центробежной
силы. Из принципа Даламбера следует, что их нельзя раз-
разделить ни в одном эксперименте.
Совершенно другую природу имеет второй член
В = —2mQxv = 2mvxQ, D.5.13)
зависящий от скорости движущейся частицы. Он всегда
перпендикулярен скорости и поэтому не совершает работы.
Эта сила называется «силой Кориолиса». Ее горизонтальная
компонента может быть обнаружена с помощью знаменитого
опыта Фуко с прецессирующим маятником — первой меха-
механической демонстрацией вращения Земли.
Наличие вертикальной компоненты можно продемонстрировать
с помощью замечательного эксперимента венгерского физика
Этвеша, который взял химические весы и заставил их вращаться
вокруг вертикальной оси, с постоянной угловой скоростью пред-
предварительно сняв с них обе чашки. Коромысло весов вращалось в го-
горизонтальной плоскости, причем точка на правой части коромысла
6. Динамика твердого тела. Движение центра масс 127
и симметрично расположенная точка на левой части коромысла
имели скорости, равные по величине и противоположные по направ-
направлению. Сила Кориолиса, действуя то вверх, то вниз, приводила
к появлению периодического вращающего момента, действовавшего
на коромысло и вызывавшего вынужденные колебания весов (мак-
(максимум момента достигается, когда коромысло расположено по мери-
меридиану; при прохождении направления запад — восток вращающий
момент обращается в пуль). Хотя эффект получался очень малень-
маленьким, его можно было наблюдать в условиях резонанса, выбрав часто-
частоту вращения так, чтобы она совпадала с собственной частотой коле-
колебаний весов.
Последний член в D.5.10) имеется лишь в том случае,
когда вектор угловой скорости изменяется либо по направ-
направлению, либо по величине. Эта третья фиктивная сила не
имеет общепринятого названия. Мы будем называть ее
«силой Эйлера» в знак признания выдающегося значения
исследований Эйлера в этой области механики. Положив
D.5.14)
окончательно получим эффективную силу Fe, действующую
во вращающейся системе, в виде
I D.5.15)
(приложенная сила + центробежная сила + кориолисова
сила -\- сила Эйлера + сила инерции).
Резюме. Во вращающейся системе координат появ-
появляются фиктивные силы: центробежная и кориолисова.
Если к тому же скорость вращения непостоянна, то
появляется третья фиктивная сила, «сила Эйлера».
6. Динамика твердого тела. Движение центра масс.
В качестве последней иллюстрации действия фиктивных сил
и принципа Даламбера рассмотрим динамику твердого тела,
которое может свободно перемещаться в пространстве. Пред-
Предположим, что наблюдатель, производящий измерения, на-
находится в системе отсчета, связанной с телом. В этой системе
отсчета тело покоится и потому находится в равновесии.
Как было показано в гл. III, п. 2, для равновесия твердо-
твердого тела требуется выполнение двух векторных условий:
128 Гл. IV. Принцип Даламбера
сумма всех сил и сумма всех моментов должны обратиться
в нуль. В настоящем пункте мы рассмотрим лишь первое
условие.
При вычислении равнодействующей силы Fe следует
иметь в виду, что кроме приложенной силы F имеются еще
фиктивные силы, действующие на тело. Это, во-первых,
«сила Эйнштейна» D.4.7), появляющаяся вследствие посту-
поступательного движения твердого тела, и, во-вторых, «центро-
«центробежная сила» D.5.11) и «сила Эйлера» D.5.14), связанные
с вращением тела (кориолисова сила В и сила инерции I
выпадают, так как в нашей системе отсчета точки тела не
имеют ни скоростей, ни ускорений). Пусть начало координат
нашей системы отсчета О' совпадает с центром масс. Это
означает, что
2mR=0. D.6.1)
Задача 1. Показать, что в нашей системе отсчета равнодейст'
вующая центробежных сил обращается в нуль.
Задача 2. Показать, что в нашей система отсчгта равнэдаисгвую-
щая сил Эйлера обращается в нуль.
Так как в выбранной системе отсчета равнодействующие
центробежных сил и сил Эйлера обращаются в нуль, долж-
должно выполняться условие равновесия между приложенными
силами и силами Эйнштейна. Это приводит к условию
F —2>С = 0 D-6.2)
или
mC=F, D.6.3)
где
m = ?m. D.6.4)
Ввиду того что С — ускорение центра масс, уравнение D.6.3)
выражает хорошо знакомую теорему о движении центра
масс: центр масс твердого тела движется, как частица
с массой, равной полной массе тела, на которую действует
равнодействующая всех сил, приложенных к твердому телу.
Резюме. Закон, по которому движется центр масс
твердого тела, может быть получен из того факта, что
приложенные силы и силы Эйнштейна, действующие
в системе отсчета, жестко связанной с телом, на-
находятся в равновесии.
7. Динамика твердого тела. Уравнения Эйлера 129
7. Динамика твердого тела. Уравнения Эйлера. Пере-
Переходим ко второму условию равновесия твердого тела, сво-
свободно движущегося в пространстве: сумма всех моментов
должна обратиться в нуль.
Задача 1. Показать, что в нашей системе отсчета результи-
результирующий момент сил Эйнштейна обращается в нуль.
Так как силы Эйнштейна не имеют результирующего
момента, то должна обратиться в нуль сумма моментов
следующих трех категорий сил: приложенных сил, центро-
центробежных сил и сил Эйлера.
Введем прямоугольную систему координат с осями х, у,
г и началом в центре масс. Пусть оси этой системы жестко
связаны с телом и совпадают с «главными осями инерции».
Это означает, что в нашей системе координат равны нулю
«произведения инерции»
= 0. D.7.1)
Кроме того, введем общепринятые обозначения
2т(г/2 + г2) = Л,
Цт(хЧ г/2) = С. D.7.2)
Задача 2. Показать, что компоненты результирующего момента
центробежных сил D.5.11) равны
(В—С)о> ш (С — А)ь>гаК; (А — В) <oi- <о„. D.7.3)
У У
Задача 3. Показать, что компоненты результирующего момента
сил Эйлера D.5.14) равны
— А'а>х, —Воуу, ~Cuz. D.7.4)
Обозначим компоненты результирующего момента
М = 2 (R X F) приложенных сил через
Мх, Мв, М2. D.7.5)
Условие обращения в нуль суммы моментов D.7.3), D.7.4)
и D.7.5) приводит к уравнениям Эйлера
Awx — (В — С) а у еог = Мх,
В(лу — (С — А) оог а>х = Ми, D.7.6)
Со>г — (А —В) олх Ыу = Мг,
130 Гл. IV. Принцип Даламбера
Эти знаменитые уравнения описывают изменение со временем
положения мгновенной угловой скорости вращения П относительно
системы координат, связанной с телом. Они решают лишь часть ди-
динамической задачи о свободном вращении твердого тела и должны
быть дополнены описанием движения системы координат, связан-
связанной с телом относительно системы неподвижных осей. Эта задача,
как и ряд других задач динамики твердого тела, выходит за рамки
данной книги, посвященной основным принципам механики и обра-
обращающейся к приложениям лишь для иллюстрации применения этих
основных принципов. Для дальнейшего изучения этой темы чита-
читатель отсылается к учебникам, указанным в библиографии.
Резюме. Уравнения Эйлера, описывающие величину
изменения вектора угловой скорости вращения твердо-
твердого тела относительно осей координат, жестко связан-
связанных с телом и направленных вдоль его главных осей
инерции, могут быть интерпретированы как условия
обращения в нуль результирующего момента сил
следующих трех категорий: сил Эйлера, центробеж-
центробежных сил и внешних сил.
8. Принцип наименьшего принуждения Гаусса. Принцип
Даламбера не связан с понятием минимальности. В нем
фигурирует бесконечно малая величина — виртуальная
работа приложенных сил, к которой прибавлена виртуаль-
виртуальная работа сил инерции, причем последняя величина не
есть вариация какой-либо функции. Гаусс A777—1855)
предложил замечательную интерпретацию принципа Далам-
Даламбера, вводящую в этот принцип понятие минимальности.
Идею Гаусса можно изложить следующим образом.
Дифференциальные уравнения движения определяют
ускорения qi. Предположим, что мы встретились с такой
задачей: в некоторый момент времени t заданы положения
и скорости всех частиц механической системы; ускорениями
же мы можем распоряжаться по своему усмотрению, не
нарушая, однако, заданных связей. Замена действительного
ускорения частицы A(t) в момент времени t величиной
А + 6А приводит к следующему. Положение частицы в мо-
момент времени t + т определяется рядом Тэйлора
R (t + т) = R (/) + v @ т -|- i- А (/) т2 + ... . D.8.1)
8. Принцип наименьшего принуждения Гаусса 131
Вариация ускорения приведет к изменению пути частицы.
Вследствие того, что мы договорились не менять начальных
значений координат и скоростей системы, вариации первых
двух членов в правой части D.8.1) равны нулю. Следова-
Следовательно, считая т достаточно малым и пренебрегая членами
высшего порядка по т, получаем
6R(/ + t) = ±-6A(/)-t2. D.8.2)
Это рассуждение совершенно не зависит от каких бы то
ни было связей.; связи учитываются лишь при выборе
вариаций bA(t).
Далее, согласно принципу Даламбера,
2 (F, —m;A«)-6R:- = 0, D.8.3)
где в качестве 6R,- можно взять любое виртуальное пере-
перемещение, совместимое со связями. Применим этот принцип
в момент времени t -\-х, выбрав 6R,- (/ + т) в соответствии
с D.8.2). В результате получим
2 (Fz-m/A^-fiA, =0. D.8.4)
Поскольку приложенные силы F,- заданы и не могут
варьироваться, условие D.8.4) можно переписать следую-
следующим образом:
N
У (Fi—miAi)-6(Fi~mii) = 0, D.8.5)
1 = 1 х '
откуда
Гаусс ввел величину
N
/ = 1
1_32 Гл. IV. Принцип Даламбера
назвав ее «мерой принуждения» движения, и сформулировал
содержание уравнения D.8.6) в виде «принципа наимень-
наименьшего принуждения»: движение, осуществляющееся в дейст-
действительности, таково, что величина Z принимает наименьшее
возможное значение из всех значений, совместимых с дан-
данными кинематическими связями. Если частицы свободны
от связей, то Z достигает своего абсолютного минимума,
равного нулю. Мы получим тогда
mi At =--Fi, D.8.8)
т. е. закон движения Ньютона. Если связи ограничивают
свободу выбора А,-, то мы можем тем не менее минимизиро-
минимизировать Z при данных дополнительных условиях. Решение
вариационной задачи определит нам движение системы,
реализующееся в действительности.
Пример. Частица, вынужденная оставаться на поверхности
z = f(x,y), D.8.9)
находится под действием силы F. Найти уравнения движения.
Из уравнения связи D.8.9) имеем
z = f.vi + V»+/,-ri» + ... • D-8Л0>
Требуется минимизировать величину
(F, - тхУ + (F, - ту)* + (F, - тг)\ D.8.11)
где г задана уравнением D.8.10). Независимыми переменными яв-
являются х и у. Окончательно получаем
F1 — mx + (F3 — mz)fx = 0,
F2-my+(F3-mz)fy = 0. D.8.12)
Это и есть искомые уравнения движения.
Гаусс высоко ценил сформулированный им принцип,
потому что этот принцип представляет собой полную физи-
физическую аналогию «методу наименьших квадратов» теории
ошибок (открытому самим Гауссом и независимо Лежанд-
ром). Пусть задано некоторое функциональное соотноше-
соотношение, содержащее ряд параметров, которые должны быть
определены экспериментально. Если число наблюдений
равно числу неизвестных параметров, то вычисления произ-
производятся непосредственно. Однако при числе наблюдений,
превышающем число параметров, уравнения становятся
противоречивыми вследствие наличия ошибок наблюдений.
8. Принцип наименьшего принуждения Гаусса 133
Под «ошибкой» понимается разность между предполага-
предполагаемым значением функции и значением, наблюдаемым на
опыте. В этом случае составляется сумма квадратов всех
отдельных ошибок и параметры задачи определяются из
того условия, чтобы эта сумма была минимальной.
Принцип нахождения минимума величины Z полностью
аналогичен только что сделанному наброску. 3N членам
суммы D.8.7) соответствует 3N наблюдений. Это число пре-
превышает количество неизвестных qt вследствие наличия т ки-
кинематических связей. «Ошибка» заменена разностью между
приложенной силой и силой инерции — «массой, умножен-
умноженной на ускорение». Даже множитель 1/т,- в выражении для Z
может быть интерпретирован как «весовой коэффициент»,
по аналогии со случаем наблюдения нескольких различ-
различных величин, которые входят в уравнения с весами, соот-
соответствующими надежности полученных значений.
Хотя условие D.8.6) требует лишь стационарности Z,
можно легко доказать, что в данном случае стационарность
всегда, без каких-либо дополнительных условий, означает
наличие минимума. Это следует из того факта, что функ-
функция Z, будучи суммой существенно положительных членов,
должна иметь где-то минимум. Следовательно, если условие
стационарности имеет единственное решение, то это реше-
решение должно давать минимум величины Z. Единственность
решения показывается следующим образом. В приведен-
приведенном выше примере z получилась в виде линейной функции х
и у. В общем случае, независимо от конкретного характера
заданных кинематических условий, их двукратное диффе-
дифференцирование всегда приводит к линейным соотношениям
между ускорениями. После исключения при помощи этих
условий лишних ускорений результирующее выражение
для Z останется квадратичной формой от остальных ускоре-
ускорений, которые уже варьируются свободно. Следовательно,
мы приходим к системе линейных уравнений, которая имеет
единственное решение.
Гауссов принцип наименьшего принуждения является,
таким образом, истинно минимальным принципом, подобно
принципу наименьшего действия; притом гауссов принцип
проще, так как он не требует интегрирования по времени.
Это преимущество, однако, далеко не искупает того недо-
134 Гл. IV. Принцип Даламбера
статка, что в принцип Гаусса входят ускорения, в то время
как в принцип наименьшего действия — одни лишь скоро-
скорости. Вследствие этого принцип Гаусса имеет меньшее значе-
значение. С другой стороны, он с одинаковым успехом может ис-
использоваться как при голономных связях, так и при неголо-
номных, не теряя свойства минимальности; забегая вперед,
укажем, что принцип наименьшего действия не может быть
сформулирован в виде минимального принципа при неголо-
номных связях или непотенциальных силах.
Герц г предложил замечательную геометрическую интер-
интерпретацию принципа Гаусса в частном случае, когда прило-
приложенные силы равны нулю. Он показал, что в этом случае
мера принуждения Z может быть интерпретирована как
«геодезическая кривизна» траектории С-точки, изобража-
изображающей положение механической системы в ЗЛ^-мерном евкли-
евклидовом пространстве с прямоугольными координатами
\/~niiXi, У'ntit/i, У miZi (см. гл. I, пп. 4 и 5). Из-за наличия
связей наша точка должна оставаться внутри определен-
определенного подпространства этого Замерного пространства.
Утверждение, что 2 принимает минимальное значение,
можно теперь сформулировать следующим образом: С-точка
при движении стремится уменьшить кривизну своей траек-
траектории в каждой ее точке до минимального значения, до-
допускаемого связями. Это означает, что траектория С-точки
стремится стать возможно более прямой. Интерпретация
Герца с помощью «прямейшего пути» роднит принцип Гаус-
Гаусса с принципом Якоби, который достигает той же самой цели
гораздо более непосредственно, путем минимизации длины
дуги в пространстве конфигураций. Герцовы «пути наимень-
наименьшей кривизны» могут быть интерпретированы как геодези-
геодезические линии в искривленном, пространстве конфигураций,
которое погружено в евклидово ЗЫ-мерное пространство
Герца (см. гл. I, п. 5).
Аппель 2 предложил другую формулировку принципа
1 См. Hertz H., Principles of Mechanics (London, Macmillan,
1900). Имеется русский перевод: Г е р ц Г., Принципы механики, из-
изложенные в новой связи, М., 1959.
2 А р р е 1 1 P. E., Sur une forme generate des equations de la
dynamique (Memorial des sciences mathem., fasc. 1, Paris,Gauthier—
Villars, 1925). См. также: АппельП, Теоретическая механика,
т. II, Физматгиз, М., 1960, стр. 420—426.
8. Принцип наименьшего принуждения Гаусса 135
Гаусса, сделавшую его более удобным для вывода уравнений
движения в случае неголономных связей и в случае, когда
желательно использовать кинематические переменные, о ко-
которых говорилось в п. 2.
Резюме. При помощи вариаций особого вида Гауссу
удалось преобразовать принцип Даламбера в подлинно
минимальный принцип, в котором отыскивается ми-
минимум некоторой скалярной величины, названной
Гауссом «мерой принуждения»; при этом ускорения
рассматриваются как переменные вариационной за-
задачи. Будучи принципом минимума, принцип наимень-
наименьшего принуждения аналогичен принципу наименьшего
действия. Он проще, чем этот последний, так как не
требует вариационного исчисления, поскольку отыски-
отыскивается не минимум определенного интеграла, а минимум
обычной функции. Большим недостатком принципа
наименьшего принуждения является то, что он требу-
требует вычисления ускорений. Это, вообще говоря, при-
приводит к гораздо более громоздким и трудоемким вы-
вычислениям. В то же время в принципе наименьшего
действия все выводится- из скалярной функции, не
содержащей производных выше первого порядка.
ГЛАВА V
УРАВНЕНИЯ ДВИЖЕНИЯЛАГРАНЖА
Введение. Мы подошли, наконец, к типичным «вариационным
принципам», в которых рассматривается минимум или, точнее, ста-
стационарное значение некоторого определенного интеграла. Полиген-
Полигенный характер силы инерции можно обойти при помощи интегриро-
интегрирования по времени. В результате такого подхода задача динамики сво-
сводится к исследованию некоторого скалярного интеграла. Из усло-
условия стационарности этого интеграла получаются все уравнения дви-
движения.
Несмотря на то, что имеется целый ряд вариационных принци-
принципов, связанных с именами Эйлера, Лагранжа, Якоби, Гамильтона,
все эти принципы взаимосвязаны, и к ним ко всем подходит название
«принцип наименьшего действия», если понимать этот термин в ши-
широком смысле слова.
При изложении вариационных принципов мы не будем придер-
придерживаться исторической последовательности, а начнем с «принципа
Гамильтона», который является наиболее прямым и наиболее естест-
естественным преобразованием принципа Даламбера в минимальный
принцип. Из него при некоторых ограничениях мы сможем получить
более старые формы принципа, применявшиеся Эйлером и Лагран-
жем, а также принцип Якоби.
1. Принцип Гамильтона. В принципе Даламбера опери-
оперируют с неинтегрируемыми дифференциалами. Приравнива-
Приравнивается нулю некоторая бесконечно малая величина 8we —
полная виртуальная работа приложенных и инерционных
сил. Две составные части совершаемой работы, связанные
с этими двумя категориями сил, резко различаются по
своему характеру. Виртуальная работа приложенных сил —
моногенный дифференциал, получаемый из силовой функ-
функции; виртуальную работу сил инерции нельзя получить из
какой-либо одной функции — ее приходится выписывать
для каждой частицы в отдельности. Это ставит силы инер-
инерции в очень невыгодное положение по сравнению с прило-
приложенными силами. Большое теоретическое и практическое
значение имеет тот факт, что это положение может быть
исправлено путем преобразования, которое придает прин-
принципу Даламбера моногенный характер. Хотя в неявном
виде это использовалось еще Эйлером и Лагранжем, Га-
1. Принцип Гамильтона 137
мильтон первый произвел преобразование принципа Далам-
бера, показав, что интегрированием по времени можно
придать работе сил инерции моногенную форму.
Умножим величину ~5we на dt и проинтегрируем в интер-
интервале от t = tx до t = t2
?«l[F'-*(m'v')
¦fiR,-d/. E.1.1)
Представим правую часть E.1.1) в виде суммы двух слага-
слагаемых. Первое из них может быть записано в виде
Г 2F< • fiRi dt = — Г bVdt = — б Г Vdt. E.1.2)
(Мы предполагаем, что силовая функция не зависит от
скоростей, и полагаем V = —U.) Во второй части можно
выполнить интегрирование по частям
t2 t,
- j | {пи у,) ¦ 6R,- dt = - j ^ {mi уi ¦ 6R«) Л +
/. E.1.3)
Первый интеграл в E.1.3) после интегрирования дает гранич-
граничный член
— [m,vrfiR,-]J;, E.1.4)
Второй интеграл, с учетом коммутативности операций варь-
варьирования и дифференцирования [см. уравнение B.9.3I,
преобразуется следующим образом:
I misi"di^idt= [ гщ v,- • 6v,- d/ =
,t-fd/. E.1.5)
Л
1 '
Далее, просуммировав по всем частицам, окончательно
получим
= б fi-
138 Гл. V. Уравнения движения Лагранжа
i v]dt-b Г Vrf/ —
— [S^iVf-eR,-]';. E.1.6)
Вводя затем кинетическую энергию Т механической си-
системы, согласно определению A.5.9), построим с ее помощью
функцию
L = T — V. E.1.7)
Функция L, определенная как избыток кинетической энер-
энергии по сравнению с потенциальной, является наиболее
важной величиной при математическом анализе задач меха-
механики. Эту функцию обычно называют «функцией Лагранжа».
С помощью функции Лагранжа выражение E.1.6) можно
записать в форме
U и
-[2m/vreRi]{;. E.1.8)
До сих пор вариации SR,- являлись произвольными вирту-
виртуальными изменениями радиусов-векторов R,. Потребуем
теперь, чтобы 6R,- обязательно обращались в нуль на концах
интервала t1 и t2:
6R, (/х) = О,
6R,(/2) = 0. E.1.9)
Это означает, что при t = tl и t = t% положение механиче-
механической системы считается заданным, и при этих граничных
значениях t не допускаются никакие вариации. Мы говорим,
что мы варьируем «при фиксированных граничных значе-
значениях», потому что начальное и конечное положения системы
заданы. В этом случае граничный член в правой части
E.1.8) обращается в нуль и интеграл по времени от вирту-
виртуальной работы, совершенной эффективными силами, пере-
переходит в вариацию некоторого определенного интегра/.а
E.1.10)
1. Принцип Гамильтона 139
где
t,
А = [Ldt. E.1.11)
и
Так как принцип Даламбера требует, чтобы величина bwe
равнялась нулю в любой момент времени, левая часть
E.1.10) также должна быть равна нулю. Следовательно,
принцип Даламбера можно сформулировать в виде
6Л = 0. E.1.12)
Это и есть «принцип Гамильтона». Он утверждает, что дви-
движение произвольной механической системы происходит
таким образом, что определенный интеграл А приобретает
стационарное значение по отношению к любым возможным
вариациям положения системы, при которых начальное и
конечное положения остаются фиксированными.
Гамильтон, по существу, дал улучшенную математическую фор-
формулировку принципа, который был установлен еще в фундаменталь-
фундаментальных исследованиях Эйлера и Лагранжа; предложенная им операция
интегрирования по времени также была известна уже Лагранжу.
Поэтому название «принцип Гамильтона», данное Якоби, не приви-
привилось среди ученых прошлого столетня. Оно вошло в употребление,
однако, благодаря ряду учебников, появившихся в более позднее
время.
Рассуждения, которые привели нас к принципу Гамиль-
Гамильтона, могут быть проведены и в обратном порядке. Мы можем
сначала постулировать, что 8А обращается в нуль для про-
произвольных вариаций положения системы, а затем преобра-
преобразовать 8А в левую часть E.1.10) и прийти к обращению
в нуль величины 8we, т. е. к принципу Даламбера. Отсюда
видно, что принцип Гамильтона и принцип Даламбера ма-
математически эквивалентны и их возможности одинаковы до
тех пор, пока приложенные силы, действующие на механи-
механическую систему, являются моногенными. В случае полиген-
полигенных сил преобразование принципа Даламбера в минималь-
минимальный принцип, или, точнее говоря, в принцип стационарного
значения, становится невозможным. Так как голономные
кинематические связи механически эквивалентны моно-
моногенным силам, а неголономные связи — полигенным силам,
то мы можем сказать, что принцип Гамильтона при-
применим к произвольной механической системе, характеризу-
140 • Гл. V. Уравнения движения Лагранжа
емой моногенными силами и го.юномными связями. Кон-
Консервативности же сил и стационарности связей (т. е. их не-
независимости от времени) не требуется.
В то время как в принципе Даламбера высказываются
независимые суждения для каждого отдельного момента
времени в процессе движения, принцип Гамильтона содер-
содержит лишь одно утверждение, охватывающее весь проме-
промежуток времени. В этом принципе движение рассматривается
как нечто целое.
Это унифицирующее свойство вариационного принципа
поистине замечательно. Хотя современная физика сущест-
существенно отошла в своем развитии от старого курса вследствие
появления теории относительности и квантовой теории, тем
не менее идея о получении основных уравнений природы из
вариационных принципов сохранилась. И уравнения те-
теории относительности, и уравнения волновой механики полу-
получаются, подобно более старым уравнениям физики, из «прин-
«принципа наименьшего действия». Только функцию Лагранжа L
определяют по-разному.
Резюме. При помощи интегрирования по времени
виртуальная работа сил инерции может быть преобра-
преобразована в истинную вариацию. Таким образом, принцип
Даламбера может быть математически переформули-
переформулирован в принцип Гамильтона; последний требует стаци-
стационарности определенного интеграла, взятого по вре-
времени, от функции Лагранжа L, где L — разность
между кинетической и потенциальной энергиями.
Варьирование должно производиться при фиксиро-
фиксированных граничных положениях системы (и фиксиро-
фиксированном интервале времени).
2. Уравнения движения Лагранжа и их инвариантность
относительно точечных преобразований. При выводе прин-
принципа наименьшего действия были использованы прямоуголь-
прямоугольные координаты. Однако на механическую систему могут
быть наложены связи; если эти связи голономны, то 3N
прямоугольных координат системы могут быть выражены
2. Уравнения движения Лагранжа и их инвариантность 141
через п обобщенных координат qx, ..., qn, подобно тому как
это было сделано в A.2.8) и A.8.3) Тогда и потенциальная,
и кинетическая энергии становятся функциями обобщенных
координат и обобщенных скоростей дг, ..., qn- Движение
системы может быть теперь изображено при помощи одной
С-точки в л-мерном пространстве конфигураций qL. Можно,
однако, сделать еще один шаг по пути геометризации дина-
динамики, приняв время t за дополнительное измерение и опери-
оперируя с (п + 1)-мерным «расширенным пространством конфигу-
конфигураций», содержащим обобщенные координаты и время t
в качестве независимых переменных х. В этом пространстве
последовательные фазы движения изображаются последо-
последовательными точками кривой. Эта кривая, «мировая линия»
С-точки, содержит в геометрической форме всю физическую
историю данной механической системы.
Теперь варьирование положения системы в произволь-
произвольный момент времени между tx и t2 выглядит как варьирова-
варьирование С-кривой, т. е. мировой линии механической системы.
Так как положения системы в моменты времени tx и t2
заданы (так же, как и сами моменты времени. t1 и t2), варьи-
варьирование производится при фиксированных граничных значе-
значениях. Это означает, что варьированная кривая С имеет те
же самые концевые точки А и В. Время t не играет какой-
либо особой роли в этом представлении и даже не обязатель-
обязательно должно рассматриваться как аргумент. Можно с равным
успехом записать кривую С в параметрической форме, задав
все qi и время t как функции некоторого параметра т.
Необходимые и достаточные условия стационарности ин-
интеграла действия E.1.11) имеют вид (см. гл. II)
Ld±. — *L=. О (i == 1 л). E.2.1)
dtdqt dqt V ' ;
Следует особо отметить тот замечательный факт, что за-
задача минимизации определенного интеграла совершенно не
зависит от какой-либо особой системы отсчета. Пусть перво-
первоначальная система координат qi при помощи точечного пре-
преобразования A.4.3) заменена другой системой координат.
1 Идея о введении времени t в качестве дополнительного измере-
измерения была впервые предложена Лагранжем в его Mecanique Analy-
tique A788).
142
Гл. V. Уравнения движения Лагранжа
Это точечное преобразование можно представить как отобра-
отображение /г-мерного ^-пространства самого на себя (см. гл. I,
п. 4). Кривая С (q, /^пространства переходит в некоторую
новую кривую С. Варьированная кривая С" переходит
в соответствующую вариацию С" кривой С.|Если при этом
t t
I/
V
Чг
Рис. 5.
вариация в (q, ^-пространстве производится при фиксиро-
фиксированных граничных значениях, то и в (q, ^-пространстве
получится вариация с фиксированными граничными зна-
значениями (рис. 5). Обращение в нуль вариации интеграла А
требует обращения в нуль вариации и в том случае, когда
она записана в новых координатах. Следовательно, диф-
дифференциальные уравнения Эйлера — Лагранжа остаются
справедливыми и в новой системе отсчета. Функция Лагран-
Лагранжа L и интеграл действия А являются инвариантами преоб-
преобразования. Мы просто подставляем в них вместо коорди-
координат qi их выражения через новые переменные qL. Вид
функции L в результате замены переменных, возможно,
изменится, но ее численное значение останется прежним.
Аналогично остаются неизменными значения интеграла
действия А, взятого вдоль кривой С и затем вдоль кривой С.
Каждое отдельное уравнение Лагранжа, с каким-либо опре-
2. Уравнения движения Лагранжа и их инвариантность 143
деленным значением индекса г, не переходит в соответст-
соответствующее уравнение в новых переменных. Однако полная
система уравнений переходит в соответствующую систему
в новых переменных \ потому что полная система уравне-
уравнений Лагранжа отражает факт обращения в нуль вариации
интеграла действия А, а этот факт не зависит от какой-либо
конкретной системы координат.
Поскольку t является просто еще одной переменной, наши рас-
рассуждения остаются в силе и в том случае, когда соотношения между
старыми и новыми #; зависят от времени t (см. гл. I, п. 8). Это имеет
место, когда механические явления описываются в движущейся си-
системе отсчета. Уравнения движения Лагранжа остаются справедли-
справедливыми и в произвольным образом движущейся системе отсчета.
Инвариантность уравнений Лагранжа относительно
произвольных точечных преобразований обусловила выда-
выдающуюся роль этих уравнений в развитии математической
мысли. Эти уравнения оказались первым примером того
«принципа инвариантности», который являлся одной из
ведущих идей математики XIX столетия и который при-
приобрел значение первостепенной важности в современной
физике.
Инвариантность уравнений движения Лагранжа явля-
является одним из наиболее важных их свойств. Она позволяет
использовать координаты, соответствующие особенностям
задачи. Поскольку не существует общего метода решения
уравнений Лагранжа, то лучшее, что можно сделать, это
выбрать такую систему координат, в которой эти уравнения
были бы, хотя бы частично, интегрируемы.
Вторым большим преимуществом принципа наименьшего
действия по сравнению с принципом Даламбера является
использование одной скалярной функции L. Теперь уже не
нужно находить ускорения для каждой частицы и виртуаль-
виртуальную работу, совершаемую всеми силами инерции. Скалярная
функция L = Т — V определяет собой всю динамику задан-
заданной системы.
Задача 1. Пусть положение физического маятника определяется
углом 0 между плоскостью, проходящей через ось подвеса и центр
масс, и вертикалью. Показать, что
1 Поэтому, говоря о полной системе уравнений, мы употребляем
термин «ковариантная», а не «инвариантная».
144 Гл. V. Уравнения движения Лагранжа
Т = g /93,
где / — момент инерции относительно оси подвеса, и что
V = Mgl (I —cos 8),
где М — масса маятника, а / — расстояние от центра масс до оси
подвеса.
Записать уравнение движения Лагранжа и проинтегрировать
его в предположении, что угол 0 мал.
Задача 2. Опишем положение планеты с помощью полярных
координат г, 6. Показать, что
v _ _ fmM
в предположении, что Солнце неподвижно и находится в начале
координат. Составить уравнения движения Лагранжа.
Задача 3. Записав положение сферического маятника длины /
в сферических координатах г, 0, tp, показать, что
V = mgl(\ — cos6).
Составить уравнения движения Лагранжа.
Две основные функции Т и V соответствуют двум вели-
величинам, которые приравниваются друг другу в уравнении
Ньютона: «Произведение массы на ускорение равно силе».
Это уравнение может быть интерпретировано как баланс
между силой инерции и движущей силой. Подобный баланс
может быть установлен и при аналитическом подходе путем
разделения членов с двумя основными скалярами аналити-
аналитической механики: кинетической энергией Т и силовой функ-
функцией U. Уравнения Лагранжа можно записать в виде
Теперь
d дТ
dt dqi
п величин
dT _
dqt
d дТ _
dt dqi
d dU
dT
E
E
.2.2)
.2.3)
3. Теорема о сохранении энергии 145
представляют собой п компонент силы инерции в простран-
пространстве конфигураций, а п величин
_ddU_ ди_ E24)
dt dqi ^ дщ
— соответственно п компонент движущей силы.
Обычно первый член в E.2.4) выпадает из-за того, что
U является функцией только от координат qL. Более того,
U заменяется на —V. Однако нет никаких внутренних
причин для того, чтобы исключить возможность зависимо-
зависимости силовой функции от скоростей qt. В релятивистской
механике такая возможность осуществляется: электромаг-
электромагнитная сила, действующая на заряженную частицу, может
быть получена из силовой функции, зависящей от скорости.
Резюме. Принцип Гамильтона приводит к системе
дифференциальных уравнений второго порядка —
уравнениям движения Лагранжа. Эти уравнения об-
обладают замечательным свойством инвариантности от-
относительно произвольных преобразований координат.
3. Теорема о сохранении энергии как следствие принципа
Гамильтона. Закон сохранения энергии, полученный рань-
раньше как следствие принципа Даламбера (см. гл. IV, п. 3),
может быть теперь выведен из принципа Гамильтона. По-
Попутно при этом выводе выясняются общие соотношения,
существующие между полной энергией механической си-
системы и функцией Лагранжа L.
Используем снова тот частный способ варьирования,
который мы применили раньше при выводе теоремы о со-
сохранении энергии из принципа Даламбера. Пусть вирту-
виртуальные перемещения bqi в каждый момент времени совпада-
совпадают с действительными перемещениями dqit происходящими
за бесконечно малый промежуток времени dt = e. Другими
словами, положим
б?/ = dqt = щи E.3.1)
6 Зак. 1646
146 Гл. V. Уравнения движения Лагранжа
Задача 1. Изобразить эту вариацию графически в плоскости
(<7, t), направив ось q вертикально вверх, и показать, что она сво-
сводится к горизонтальному сдвигу влево истинной кривой на величину
е. При этом следует иметь в виду, что время t в соответствии с обыч-
обычными правилами не варьируется (см. гл. II, п. 8).
Выбранная нами вариация изменяет значения координат
qi(t) и на концах интервала tx и t2; поэтому здесь нельзя
говорить о «вариации при фиксированных граничных значе-
значениях». Мы уже знаем, что уравнения движения получаются
из принципа
^ 0 E.3.2)
при условии, что qt не варьируются в граничных точках.
Посмотрим, однако, как будет себя вести вариация интегра-
интеграла действия, если мы не выполним, условия варьирования
при фиксированных граничных значениях, а проварьируем
также и граничные значения координат. Из интегрирова-
интегрирования по частям при преобразованиях вариации определен-
определенного интеграла [см. B.10.4)] видно, что варьирование на
концах интервала вызывает появление граничного члена.
В результате получим
dqi k
Перед тем как продолжить наши рассуждения, введем
одно очень важное обозначение. Частные производные функ-
функции Лагранжа по скоростям играют столь существенную
роль во всех выводах аналитической механики, что они
имеют особое название и обозначение. Положим
р, = дЛ E.3.4)
dqt
и назовем эти р,- компонентами «обобщенного импульса»,
потому что в случае одной свободной частицы при прямо-
прямоугольной системе координат величины р1( р2, р3 совпадают
с соответствующими компонентами импульса mv. В общем
случае компоненты pi не имеют ничего общего с элементар-
элементарным определением импульса и должны рассматриваться как
компоненты некоторого вектора в пространстве конфигура-
конфигураций. На фундаментальную важность величин р,- как некой
3. Теорема о сохранении энергии 147
новой системы независимых переменных обратил внимание
Гамильтон; он построил всю свою теорию, исходя из того
факта, что с импульсами можно оперировать, как с новой
совокупностью механических переменных. Однако даже и
уравнения Лагранжа будут выглядеть значительно проще,
если мы используем pi в качестве промежуточных перемен-
переменных и запишем уравнения движения в виде
Уравнение E.3.3) при использовании обобщенных импуль-
импульсов принимает вид
^^^\ E.3.6)
Для случая выбранной нами частной вариации E.3.1)
можно установить определенные соотношения между вари-
вариацией функции L и истинным бесконечно малым изменением
L за время dt. Предположим, что наша система склерономна,
т. е. что L не содержит явно времени (см. гл. I, п. 8)
L = L(qlt ..., qn, qx, ..., qn). E.3.7)
Тогда сразу видно, что из условия E.3.1) следует соответ-
соответствующее уравнение для вариации функции L
6L = dL = eL, E.3.8)
откуда следует, что
'•. ** '*
б j Ldt = j bLdt = j eLdt = e [Ц\ E.3.9)
'i 'i U
в то время как правая часть E.3.6) принимает вид
2 Pi я]''- E-3.10)
Окончательно уравнение E.3.6) записывается следующим
образом:
Г ]'' E.3.11)
Это означает, что величина 2/?,<?,•—L имеет одно и то же зна-
значение в моменты времени t= ti и t=tz. Поскольку границы
6*
148 Гл. V. Уравнения движения Лагранжа
интервала t1 и t2 не входят явно в уравнения движения и
могут быть выбраны произвольно, мы получаем
V piCji — L^ const. E.3.12)
Эта фундаментальная теорема не предполагает каких-
либо ограничений вида функции L, кроме требования ее
независимости от времени t. Вместе с тем в приложениях
вариационного исчисления в механике функция L обычно
встречается в форме Т — V, где и Г и V — функции опре-
определенного вида: Т представляет собой квадратичную форму
скоростей qh [см. A.5.16)]
Т =--п- ^ ctiktfiQiii E.3.13)
(. к = 1
где aik — функции qi, a V обычно вообще не зависит от
скоростей. При этих условиях мы имеем
Pi=--d^- = j?aikqk, E.3.14)
откуда
%Pi'qi= V aikqiqk=2T. E.3.15)
/= l i, k= i
В результате уравнение E.3.12) принимает вид
2Т — (Г — V) = Т + V-= const = E. E.3.16)
Это хорошо известный закон сохранения энергии.
Наш вывод показывает, что обычная формулировка тео-
рзмы о сохранении энергии: «сумма кинетической и потенци-
потенциальной энергий в процессе движения остается постоянной»
справедлива лишь при определенных ограничивающих
условиях. Недостаточно, чтобы система была склерономной.
Необходимо, помимо этого, чтобы кинетическая энергия
была квадратичной формой скоростей, а потенциальная
энергия не содержала скоростей вообще. Встречаются, од-
однако, механические системы с «гироскопическими членами»,
линейными относительно скоростей. Более того, в реляти-
релятивистской механике кинетическая часть функции Лагранжа
зависит от скоростей более сложным образом, чем в ньюто-
3. Теорема о сохранении энергии 149
новой механике. Подобные системы, если они склерономны,
тоже удовлетворяют закону сохранения. Но этот закон при-
принимает более общую форму E. 3.12), которая имеет место
при любом виде функции Лагранжа.
Заметим, что в случае механической системы с одной
степенью свободы теорема E.3.12) приводит к полному ин-
интегрированию задачи. Уравнение E.3.12) имеет при этом
форму
/(?¦ </) = ?, E.3.17)
откуда можно выразить q
q=<p(E,q). E.3.18)
После интегрирования получаем
^y + т, E.3.19)
чго дает нам t как функцию q. Обратная функция определя-
определяет q через t с двумя константами интегрирования Е и т.
Задача 2. Решить задачу о линейном осцилляторе
1 . 1
Т = 2~ tnx', V = к" kx2
при помощи теоремы о сохранении энергии.
Задача 3. Решить задачу о физическом маятнике, приведенную
в п. 2, задача 1. (Здесь квадратура приводит к эллиптическому ин-
интегралу.)
Величину
A=21p,^-L E.3.20)
можно интерпретировать как «полную энергию» механиче-
механической системы. Наряду с функцией Лагранжа она является
наиболее важным скаляром, характеризующим механиче-
механическую систему. Как мы увидим ниже, в гамильтоновой форме
механики эта функция А отбирает первенство у функции
Лагранжа L и, выраженная в соответствующих переменных,
превращается в «функцию Гамильтона» Я, которая полно-
полностью заменяет первоначальную функцию L.
Интересно выяснить, что происходит с полной энергией
Л в случае, когда система реономна, т. е. L зависит явно
150 Гл. V. Уравнения движения Лагранжа
от времени t
L = L(qlt...,qn,qlt...,qn,t). E.3.21)
В этом случае SL и dL уже не равны между собой, потому
что вариация 6L производится в определенный момент вре-
времени, а изменение dL происходит за интервал времени dt.
Вместо E.3.8) получается более общее соотношение
E.3.22)
а уравнение E.3.11) обобщается следующим образом:
t,
Отсюда видно, что полная энергия Л теперь не является
константой, а изменяется по закону
АА = -'§§ dt. E.3.24)
Задача 4. Математический маятник свисает с неподвижного
блока. Другой конец нити находится в руках наблюдателя, ко-
который ее медленно выбирает, укорачивая таким образом длину
маятника с постоянной скоростью (маятник Эренфеста). Пренебрегая
трением, показать, что амплитуда колебаний увеличивается таким
образом, что изменение полной энергии от одного положения Й = 0
до следующего положения 6 = 0 задается выражением
где Е — постоянная энергии невозмущенного маятника.
Резюме. Для склерономных систем уравнения дви-
движения Лагранжа дают первый интеграл в форме
"Zpiqi — L = Е. Это уравнение можно интерпрети-
интерпретировать как закон сохранения энергии, если определить
левую часть уравнения как полную энергию системы.
Для обычных задач классической механики сумма
2р,-<7,- равна удвоенной кинетической энергии; в этом
случае теорема о сохранении энергии принимает
форму Т + V = Е.
4. Циклические координаты и их исключение 151
4. Циклические (игнорируемые) координаты и их ис-
исключение. Выше уже упоминалось о том, что общего метода
интегрирования уравнений Лагранжа не существует. Од-
Однако иногда оказывается возможным произвести частич-
частичное их интегрирование. Особенно важным примером такого
положения является случай «циклических» или «игнориру-
«игнорируемых» переменных.
Функция Лагранжа L, вообще говоря, зависит от всех
координат qi и скоростей q-L. Однако может случиться, что
некоторые qk не входят в функцию Лагранжа, хотя соответ-
соответствующие qk в ней имеются. На особую важность подобных
переменных для интегрирования уравнений Лагранжа
впервые обратил внимание Раус \ а затем несколько позже
Гельмгольц 2. Раус назвал эти переменные «отсутствующи-
«отсутствующими координатами», а Дж. Дж. Томсон употреблял названия
«киностенические» или «скоростные координаты». Гельм-
Гельмгольц те же самые координаты называл «циклическими пере-
переменными», а в курсе Уиттекера (см. библиографию) исполь-
используется название «игнорируемые координаты» 3.
Как указывалось выше, после введения «импульсов» рк
в соответствии с определением E.3.4) уравнения Лагранжа
могут быть записаны в следующей форме:
Р* = ^. E-4.1)
Если qk — циклическая координата, то
и E.4.1) может быть сразу же проинтегрировано
рк = const = ck. E.4.3)
1 R о u t h E. J., Dynamics of Rigid Bodies (Macmillan, 1877).
2 He 1 m h о 1 t z H. V., Journal of Math., 97 A884), 111.
3 Автор пользуется терминами «игнорируемые» и «киностени-
«киностенические координаты»; однако в соответствии со сложившейся в рус-
русской литературе терминологией мы в дальнейшем в большинстве
случаев будем употреблять термин «циклические координаты». —
Прим. перев.
152 Гл. V. Уравнения движения Лагранжа
Импульс, соответствующий циклической координате, оста-
остается постоянным в процессе движения. Эта важная теорема
имеет много физических приложений.
Задача 1. Рассмотреть задачу о движении планет, сформули-
сформулированную раньше в задаче 2, п. 2. Показать, что постоянство цикли-
циклического импульса Рд есть не что иное, как закон Кеплера о площадях.
Задача 2. Рассмотреть подобным же образом задачу о сфериче-
сферическом маятнике (п. 2, задача 3); дать интерпретацию постоянству
циклического импульса.
Поскольку qk отсутствует в частной производной pk =
= dL'dqk, a qk в ней присутствует, из E.4.3) можно выразить
qk через нециклические координаты и скорости. Для упро-
упрощения изложения ограничимся случаем одной циклической
координаты; обобщение на случай любого их количества
является очевидным.
Поставим индексы при координатах с таким расчетом,
чтобы циклической оказалась последняя координата qn,
так что
д± = сп; E.4.4)
dq,i
отсюда
qn = / {qlt ..., qn-\, ?i qn~i,cn, /). E.4.5)
Теперь в уравнениях Лагранжа можно qn везде заменить
выражением E.4.5); само же qn в уравнениях отсутствует.
Таким образом, задача интегрирования уравнений Лагран-
Лагранжа может быть сведена к задаче с одними лишь нецикличе-
нециклическими координатами. После решения этой последней, когда
<7< и <7< — уже известные функции t, их можно подставить
в E.4.5) и с помощью интегрирования определить qn.
Поскольку циклические переменные столь легко исклю-
исключаются после написания уравнений движения Лагранжа, то
возникает естественный вопрос, нельзя ли произвести их
исключение до написания уравнений еще при постановке
самой вариационной задачи. Как известно, первая вариация
интеграла
'i
А =-- ^ L(qu ...,qn_i,qu ..., q'n_u qn,t)dt E.4.6)
4. Циклические координаты и их исключение 153
обращается в нуль для произвольных вариаций qk при
фиксированных граничных значениях. Исключив qn с по-
помощью E.4.5), мы с самого начала сведем задачу от п к п — 1
степеням свободы и тем самым сразу существенно упростим
имеющуюся вариационную задачу. Следует, однако, иметь
в виду, что соотношение E.4.5) выражает qn как функцию
нециклических переменных лишь в том случае, если мы
считаем соотношение E.4.4) выполняющимся не только для
действительного, но и для варьированного движения. Во-
Вообще говоря, это ограничение возможностей варьирования qn
мало существенно, потому что вариация А обращается
в нуль при произвольных вариациях всех qk. Однако усло-
условие, что вариация qn должна обращаться в нуль на концах
интервала, теперь нарушается, потому что qn получается
из E.4.5) при помощи однократного интегрирования. По-
Поэтому из уравнения E.3.3) мы имеем
^[РпЬЯп\'{\ E.4.7)
Напомним, что циклический импульс рп постоянен вдоль
всей С-кривой. Поэтому можно написать
[Рп *яХ\ = Рп б J Яп dt = б j pnqn dt, E.4.8)
в результате чего E.4.7) переходит в равенство
$nqn)dt = O. E.4.9)
и
Положим
L-cnqn = L E.4.10)
и назовем L «видоизмененной функцией Лагранжа». Ре-
Результат наших рассуждений может быть теперь сформули-
сформулирован следующим образом: задача минимизации интеграла
действия А, содержащего циклическую координату qn,
может быть сведена к минимизации видоизменного интеграла
действия
E.4.11)
h
6В Зак. 1646
154 Гл. V. Уравнения движения Лагранжа
не содержащего циклической координаты qn, путем исклю-
исключения qn при помощи первого интеграла рп = сп.
Процесс исключения циклической переменной может
быть разбит на три стадии.
1. Выписывается уравнение для циклического импульса
2. Данная функция Лагранжа преобразуется к виду
L = L~cn'qn. (P)
3. Путем решения уравнения (а) относительно qn и
подстановки в ф) циклическая скорость qn исключается
из L. Новая функция Лагранжа уже не зависит от цикличе-
циклической переменной и первоначальная вариационная задача
с п степенями свободы сводится к новой вариационной
задаче ел — 1 степенями свободы.
Подобным же образом следует действовать и в том случае,
когда рассматриваемая задача содержит более чем одну
циклическую координату. Видоизмененная функция Ла-
Лагранжа тогда записывается в виде
^=L-^ckqk, E.4.12)
где суммирование распространяется на все циклические
координаты.
Задача 3. Применить общий метод уменьшения числа степеней
свободы к рассматривавшейся ранее задаче о движении планет (см.
п. 2, задача 2), исключив 6. В результате получается задача с одной
степенью свободы, которая может быть решена при помощи теоремы
о сохранении энергии.
Задача 4. Рассмотреть таким же образом задачу о сферическом
маятнике (см. п. 2, задача 3).
Задача 5. Рассмотреть случай, когда сами координаты входят
в функцию Лагранжа, а скорости — нет. Показать, что такие пере-
переменные могут быть исключены алгебраически при помощи уравне-
уравнения
без видоизменения функции Лагранжа L.
4. Циклические координаты и их исключение 155
Исключение циклической переменной имеет интерес-
интересные следствия для полученной в результате этого исключе-
исключения задачи. Кинетическая энергия Т первоначальной си-
системы может быть записана следующим образом [см. E.3.13)]:
п— 1 л—1
Т = ~ 2 «/А?<?* +2 fl<«?/?«+T«««?"¦ EА13)
(. *=1 1 = 1
где мы выделили циклическую скорость из остальных скоро-
скоростей. Циклический импульс запишем теперь в виде
дТ "~1
Рп = 7" = 2 а1пЯ1 + аппЯп= сп' E.4.14)
а для видоизмененной функции Лагранжа получим
""'
а1кЙ1Як — -2аппЯ2п — У. E.4.15)
Процесс пока не закончен, так как нужно еще исключить qn
с помощью E.4.14). Проделав это, мы получаем, во-первых,
член в L
"IP E-4.16)
вообще не зависящий от скоростей. Во-вторых, получаем
п — 1 членов, линейных относительно нециклических скоро-
скоростей.
Член E.4.16) ведет себя подобно некой фиктивной по-
потенциальной энергии и может быть объединен с V
V = V + ±?n. E.4.17)
Остальные члены имеют необычную природу. Их можно,
вообще говоря, считать частью кинетической энергии Т,
но вместо того, чтобы быть квадратичными, они линейны
по скоростям. Такие члены в функции Лагранжа называются
6В*
156 Гл. V. Уравнения движения Лагранжа
«гироскопическими», потому что именно они обусловлива-
обусловливают парадоксальное поведение гироскопа. Сила Кориолиса
во вращающейся системе координат и магнитная сила,
связанная с электрическими токами, дают нам другие при-
примеры гироскопических членов в функции Лагранжа.
Появление или отсутствие гироскопических членов за-
зависит от коэффициентов a-tn (i =f= n), связывающих цикличе-
циклические и нециклические скорости. Если не все а1П обращаются
в нуль, то говорят, что существует «кинетическое взаимо-
взаимодействие» между циклическими и недиклическими скоро-
скоростями. Если же все а1П обращаются в нуль, то взаимодейст-
взаимодействия нет и получающаяся задача свободна от гироскопиче-
гироскопических членов.
Пример. В задаче Кеплера исключение (J приводит к появле-
появлению фиктивной потенциальной энергии вида с'2/г2. Это означает на-
наличие фиктивной отталкивающей силы, пропорциональной Mr3,
в то время как сила притяжения пропорциональна 1/л2. Эти две силы
уравновешивают друг друга в некоторой точке, являющейся точкой
устойчивого равновесия. Осцилляциямн г вблизи этой точки объ-
объясняются пульсации радиуса-вектора между перигелием и афелием.
Если бы сила притяжения уменьшалась как 1 /г3 или быстрее, то ус-
устойчивого равновесия между этими двумя силами не существовало
бы и радиус-вектор не мог бы колебаться между конечными преде-
пределами. Траектории движения планет были бы либо гиперболического
типа, либо типа спиралей, приближающихся к Солнцу — в зависи-
зависимости от величины константы углового момента. (Кинетическое взаи-
взаимодействие здесь равно нулю.)
Резюме. Если некоторые координаты не входят
в функцию Лагранжа, в то время как соответствующие
скорости в нее входят, то такие координаты называют-
называются циклическими. Импульс, соответствующий цикличе-
циклической координате, остается постоянным в процессе
движения. Циклические координаты могут быть ис-
исключены из функции Лагранжа путем ее соответству-
соответствующего видоизменения. Исключение приводит к по-
появлению фиктивной потенциальной энергии. Кроме
того, может появиться фиктивная кинетическая энер-
энергия, не квадратичная, а линейная относительно скоро-
скоростей.
5. Бессиловая механика Герца 157
5. Бессиловая механика Герца. Свойства циклических
координат легли в основу интересной теории Герца, создан-
созданной с целью вскрыть более глубокий смысл потенциальной
энергии. Механическая система характеризуется определен-
определенным количеством координат, но некоторые из них могут быть
скрытыми. Система может обладать «микроскопическими
параметрами», которые непосредственно не наблюдаемы.
Из-за этих «микроскопических параметров» число степеней
свободы системы может показаться меньшим, чем оно есть
на самом деле. Например, твердое тело является в первом
приближении жестким, однако в действительности молекулы
твердого тела осциллируют вокруг некоторых средних по-
положений. Шесть степеней свободы твердого тела описывают
механическое поведение тела только макроскопически.
Микроскопические движения внутри механической си-
системы могут быть разделены на две категории: движения,
выражающиеся через циклические, и движения, выража-
выражающиеся через нециклические переменные. Микроскопиче-
Микроскопические движения, связанные с нециклическими переменными,
приводят, очевидно, к полигенным силам в макроскопиче-
макроскопическом движении. Хорошим примером является сила трения,
которая действует макроскопически как полигенная сила,
а в действительности является лишь проявлением ненаблю-
ненаблюдаемого микроскопического движения молекул.
Совсем другую природу имеют микроскопические движе-
движения, связанные с циклическими переменными. Они поддают-
поддаются исключению, и можно иметь механическую систему с та-
таким скрытым движением, которое не проявляется в виде не-
голономного поведения системы. Приведенная система пол-
полностью голономна и удовлетворяет принципу наименьшего
действия; наличие скрытых движений никак не может быть
обнаружено.
При наличии кинетического взаимодействия между мак-
макроскопическими и скрытыми циклическими координатами
функция Лагранжа макроскопической системы будет со-
содержать гироскопические члены, линейные относительно
наблюдаемых скоростей. При отсутствии же подобного вза-
взаимодействия скрытые движения проявляются лишь в виде
дополнительной фиктивной потенциальной энергии, за-
записанной в макроскопических переменных.
158 Гл. V. Уравнения движения Лагранжа
Эти соображения привели Герца г к мысли о том, что,
возможно, вся потенциальная энергия приложенных сил
порождается скрытыми движениями, выражаемыми при
помощи циклических переменных. Дуализм кинетической
и потенциальной энергий представляет собой достойную
задачу для философских размышлений. Мы имеем инерт-
инертное свойство материи, с одной стороны, и силу — с другой.
Инертное свойство материи есть нечто, вытекающее из
самого факта существования массы. Обычная инерция за-
заставляет материю двигаться по прямой линии; то же самое
происходит и в римановом пространстве, при помощи кото-
которого движение даже самых сложных механических систем
изображается как движение одной точки. Создается впе-
впечатление, что инерция есть первичное свойство материи,
которое вряд ли может быть сведено к чему-либо еще более
простому. Поэтому с философской точки зрения можно
согласиться с тем, что при помощи кинетической энергии
выражаются инертные свойства материи. Однако подобного
объяснения для «силы» предложить нельзя. Если кинетиче-
кинетическая энергия является главной движущей силой в механике,
то нельзя ли как-нибудь обойтись без потенциальной энер-
энергии и тем самым устранить необъяснимый дуализм, проник-
проникший в механику вместе с понятием о двух глубоко различ-
различных формах энергии, кинетической и потенциальной. Герц
хотел показать, что потенциальная энергия имеет кинетиче-
кинетическое происхождение, что она возникает в результате скрытых
движений с циклическими координатами. Место сил в бес-
бессиловой механике Герца занимают кинематические условия,
налагаемые на движение с микроскопическими параметрами.
Хотя эта любопытная гипотеза так и осталась в виде
эскизных набросков, она тем не менее имела пророческое
значение. Теория относительности, исходившая из со-
совершенно других предпосылок и развивавшаяся совершен-
совершенно иными путями, дала эффективный пример бессиловой
механики Герца. Движение планет вокруг Солнца было объ-
объяснено на основе одной инерции, без привлечения каких бы
то ни было сил. Планеты описывают кратчайшие траектории
1 Г е р ц Г., Принципы механики, М., Изд-во АН СССР, 1959;
см. также Thomson .I. J., Application of dynamics to Physics
and Chemistry (Macmjllan, 1888), стр. 11.
6. Время как циклическая переменная; принцип Якоби 159
в римановом пространстве как раз таким образом, как пред-
представлял себе это Герц для механических систем, свободных
от потенциальной энергии. Единственная разница заключа-
заключается в том, что в системе Герца риманова кривизна про-
пространства конфигураций создается кинематическими усло-
условиями, наложенными на скрытые движения системы, а в тео-
теории Эйнштейна риманова структура физического простран-
пространственно-временного континуума является внутренним свой-
свойством геометрии мира.
Резюме. Скрытые микроскопические движения
внутри механической системы, выражаемые цикличе-
циклическими переменными, не нарушают ни голономного
характера макроскопической системы, ни справедли-
справедливости принципа Гамильтона. Они «игнорируемые»,
потому что их можно исключить. Они вызывают появ-
появление фиктивной потенциальной энергии, которую
можно интерпретировать как потенциальную энергию
приложенных сил. Это явление привело Герца к мысли
о том, что, возможно, происхождение потенциальной
энергии любой механической системы связано со скры-
скрытыми движениями циклической природы.
6. Время как циклическая переменная; принцип Якоби;
принцип наименьшего действия. Рассмотрим склерономную
или «консервативную» систему с функцией Лагранжа, не
зависящей явно от времени. Представим себе, что мы не
используем время t как независимую переменную и что все
п + 1 переменных qx, ..., qn и ^заданы как функции некото-
некоторого параметра т. Система имеет теперь п -|- 1 степеней
свободы. Обозначив штрихом производные по т, получим
интеграл действия в следующем виде:
'dr. E.6.1)
Время здесь является циклической координатой, поскольку
в подинтегральное выражение входит только f, а само t
не входит.
160 Гл. V. Уравнения движения Лагранжа
Воспользуемся теоремой о том, что импульс, соответст-
соответствующий циклической координате, остается при движении
постоянным. Вначале рассмотрим pt — импульс, соответст-
соответствующий временной переменной
., a an _ г
Выражение в последних круглых скобках в точности сов-
совпадает с тем выражением, которое встречалось уже раньше
при обсуждении закона сохранения энергии. Мы назвали
это выражение полной энергией и обозначили через Л.
Для обычных механических систем Л есть просто сумма
кинетической и потенциальной энергий Т + V. Мы получа-
получаем таким образом важную теорему, которая справедлива
независимо от того, консервативна система или нет: импульс,
соответствующий временной переменной t, является полной
энергией, взятой с обратным знаком. Если t — циклическая
координата, т. е. если наша система консервативна, то мы
сразу получаем
pt = — А = const == — Е, E.6.3)
что является новым выводом теоремы о сохранении энер-
энергии.
Можно, однако, сделать нечто большее. Мы знаем, что
циклическую переменную можно исключить, уменьшив на
единицу число степеней свободы исходной вариационной
задачи. В данном случае мы можем исключить из вариацион-
вариационной задачи t и получить новую вариационную задачу, опре-
определяющую траекторию движения в пространстве, но ничего
не говорящую о том, как это движение протекает во времени.
Согласно общему методу, сначала видоизменим функцию
Лагранжа. В данном случае мы должны написать
L = U'-ptt' = (L-pt)f = 2 Piki*', E.6.4)
i = i
что приводит к новому интегралу действия
6. Время как циклическая переменная; принцип Якоб и 161
it'dx. E.6.5)
Учитывая E.3.15), можно переписать А в виде
t'dx. E.6.6)
В литературе восемнадцатого века этот интеграл часто появ-
появлялся в форме
J E.6.7)
но Якоб и указал на то, что эта форма неудовлетворительна,
потому что время t не может рассматриваться как аргумент
в данной вариационной задаче. Действительно, наш про-
процесс уменьшения числа степеней свободы еще не закончен.
Мы должны исключить циклическую переменную / при по-
помощи уравнения для импульса E.6.3), а это делает / за-
зависимой переменной. До этого исключения вариационный
принцип не может быть применен к E.6.6) или E.6.7).
Используем теперь символическое понятие С-точки,
изображающей механическую систему в пространстве кон-
конфигураций. Мы уже знаем, что кинетическую энергию си-
системы можно рассматривать как кинетическую энергию
одной частицы с единичной массой
E.6.8)
где ds — линейный элемент пространства конфигураций
(см. гл. I. п. 5). Поскольку аргументом теперь является не
t, а т, мы должны написать
1@7 Г. E.6.9)
Выражая отсюда V с учетом теоремы о сохранении энергии
E.6.3), получаем
V = -. ^ ~ . E.6.10)
V2(E-V) d~ '
162 Гл. V. Уравнения движения Лагранжа
Более того, в подинтегралъном выражении в E.6.6) можно
положить
Г = ?— V, E.6.11)
в результате чего E.6.6) будет иметь вид
= ^ ]/2 (Е — V)f_dx = | Y2 (Е — V) Is. E.6.12)
Мы закончили таким образом исключение переменной t и
получили интеграл действия для приведенной системы.
Время t не входит в интеграл Л, и, кроме того, А не зависит
также от параметра т. Однако ds не есть полный диффе-
дифференциал, и было бы совершенно неверно считать, что
V2(E — V) — это подинтегральное выражение в A, a ds со-
соответствует дифференциалу независимой переменной.
Чтобы избежать этого недоразумения, мы и поставили черту
над ds. В качестве аргумента нужно выбрать какой-либо
параметр т. В частности, в качестве такого параметра можно
взять одно из qi, например qn, считая все остальные qt
функциями qn.3m сразу сведет вариационную задачу от п
к п — 1 степеням свободы.
Принцип минимизации, примененный к интегралу
E.6.12) с целью нахождения пути механической системы,
называется «принципом Якоби». Время не входит в его фор-
формулировку. Он определяет траекторию С-точки в простран-
пространстве конфигураций, а не движение во времени. Однако это
последнее легко найти путем интегрирования уравнения
E.6.10), что дает t как функцию параметра т. Уравнение
E.6.10) не является частью вариационной задачи, а есть
выражение теоремы о сохранении энергии. Однако оно до-
дополняет вариационную задачу, определяя, как происходит
движение во времени.
Принцип Якоби является фундаментальным принципом
механики. Если ограничиться случаем одной частицы, то
линейный элемент ds совпадает с линейным элементом обыч-
обычного трехмерного пространства в произвольных криволи-
криволинейных координатах. Принцип Якоби в этом случае оказы-
оказывается механическим аналогом принципа Ферма наимень-
наименьшего времени в оптике, согласно которому оптический путь
светового луча определяется минимизацией интеграла
6. Время как циклическая переменная; принцип Якоби 163
E.6.13)
где п — коэффициент преломления, который, подобно ве-
величине \ 2{Е—V), может изменяться от точки к точке.
Мопертюи утверждал, что законы природы могут быть полу-
получены путем минимизации некоторой величины, которую он
назвал «действием» и которая при соответствующей формули-
формулировке совпадает с интегралом Якоби E.6.12); он пытался
показать, что закон преломления света получается из прин-
принципа наименьшего действия с таким же успехом, как и из
принципа наименьшего времени. Он обратил внимание,
таким образом, на ту же самую примечательную аналогию
между оптическими и механическими явлениями, которая
была известна еще Иоганну Бернулли, и которая впослед-
впоследствии нашла свое полное развитие в замечательной оптико-
механической теории Гамильтона. Эта аналогия сыграла
важную роль в развитии современной волновой механики.
Аналогия между принципом Якоби, с одной стороны, и
принципом Ферма — с другой, касается лишь пути, описыва-
описываемого движущейся точкой в механике и лучом света в оптике.
Протекание процесса во времени в механическом и в оптиче-
оптическом случаях совершенно различно (см. гл. VIII, п. 7).
Якоби раскритиковал рассуждения Лагранжа, каса-
касающиеся «принципа наименьшего действия», указав на важ-
важность того обстоятельства, что варьирование происходит
при определенных граничных значениях; последнее не-
невозможно, если в качестве аргумента выбрано время.
В этом случае верхний предел интеграла действия должен
варьироваться определенным образом с тем, чтобы обес-
обеспечить сохранение энергии вдоль истинного и варьирован-
варьированного путей. Тем не менее если соответствующим образом
понять формулировку принципа наименьшего действия,
данную Эйлером и Лагранжем, то окажется, что их выклад-
выкладки совершенно правильны, а их принцип отличается
от принципа Якоби лишь формально. Как мы видели,
принцип Якоби представляет собой результат следующих
операций.
1. В кинетической энергии дифференцирование по вре-
времени t заменяется дифференцированием по параметру t
164 Гл. V. Уравнения движения Лагранжа
qk=Tr. E.6.14)
2. После исключения f при помощи соотношения для
энергий
~+V=E E.6.15)
минимизируется интеграл действия
-dx. E-6.16)
В качестве «действия» Эйлер и Лагранж использовали тот
же самый интеграл, который является основой принципа
Якоби — разница заключалась только в параметре т. Более
того, Эйлер и Лагранж использовали соотношение E.6.15)
в качестве дополнительного условия, что эквивалентно исклю-
исключению^'из этого выражения. Как известно, дополнительные
условия можно учитывать либо путем исключения перемен-
переменных, либо при помощи метода неопределенных множите-
множителей. Первый способ соответствует методу Яксби, а второй —
методу Лагранжа. При этом второй способ приводит к по-
появлению новой формы интеграла действия
1= j' [2 Tv + \ (р + vj\ dr. E.6.17)
В данной конкретной задаче неопределенный множитель
Лагранжа можно легко вычислить. Так как f — одна из
переменных, то минимум по f дает соотношение
97" 9'/ Т"
-^"-^ = 0, E.6.18)
откуда
К = —Г. E.6.19)
В результате интеграл принимает вид
Х- \ \ji—V)t'dx= J (T-V)t'dx. E.6.20)
7. Принцип Якоби и риманова геометрия 165
Поскольку новая вариационная задача является сво-
свободной, без каких бы то ни было дополнительных условий,
нет причин, препятствующих использованию t в качестве
аргумента. В результате получаем интеграл действия
7 — V)dt =-- А, E.6.21)
возвращающий нас к принципу Гамильтона. Этот вывод
объясняет, как Лагранж получил свои уравнения движе-
движения, являющиеся прямым следствием принципа Гамильтона,
исходя из совершенно иного принципа, «принципа наи-
наименьшего действия».
Резюме. При параметрическом задании движения
время является дополнительной координатой, которая
может принять участие в процессе варьирования.
Импульс, соответствующий временной координате,
является полной энергией, взятой с обратным знаком.
Для склерономных систем время становится цикличе-
циклической координатой, а соответствующий импульс —
константой. Это приводит к теореме сохранения энер-
энергии для консервативных систем. Исключение времени
как циклической координаты позволяет сформули-
сформулировать новый принцип, определяющий лишь путь ме-
механической системы, а не ее движение во времени.
Это — принцип Якоби, аналогичный принципу Ферма
в оптике. Этот же принцип может быть сформулирован
как «принцип наименьшего действия». В последнем
случае интеграл по времени от удвоенной кинетиче-
кинетической энергии минимизируется с дополнительным усло-
условием, что при движении и вдоль истинного, и вдоль
проварьированного пути должна выполняться теорема
о сохранении энергии. Если этот принцип рассматри-
рассматривать с помощью метода неопределенных множителей,
то в качестве результирующих уравнений получаются
уравнения движения Лагранжа.
7. Принцип Якоби и риманова геометрия. Как было
выяснено в гл. I, п. 5, геометрическая структура простран-
166 Гл. V. Уравнения Движения Лагранжа
ства конфигураций в общем случае не евклидова, а риманова.
Пространство конфигураций механической системы, со-
содержащей N свободных частиц, является евклидовым и
имеет 3jV измерений. Однако при наличии связей между
частицами пространство конфигураций становится искрив-
искривленным подпространством с числом измерений, меньшим
чем 3N. Геометрия этого подпространства характеризуется
римановым линейным элементом. Этот линейный элемент
определяется кинетической энергией механической системы,
записанной в криволинейных координатах ць
Принцип Якоби наглядно поясняет внутренние соотно-
соотношения, существующие между движением консервативной
голономной системы и геометрией пространств, обладающих
кривизной. Введем в дополнение к линейному элементу ds
пространства конфигураций еще один риманов линейный
элемент da, определяемый равенством
do~2 = (E — V)Ts\ E.7.2)
Согласно E.6.12), принцип Якоби требует минимизации оп-
определенного интеграла
Т! 1а~, E.7.3)
а это совпадает с нахождением кратчайшего пути между
двумя определенными точками в некотором римановом про-
пространстве. Движению механической системы под действием
потенциальной энергии V можно сопоставить движение
точки вдоль некоторой геодезической линии в данном римано-
римановом пространстве. Решение данной динамической задачи
математически эквивалентно решению задачи о нахождении
этих геодезических линий.
Рассмотрим частный случай, когда потенциальная энер-
энергия V обращается в нуль, т. е. когда движение происходит
при отсутствии каких бы то ни было приложенных сил.
В этом случае мы можем, не вводя дополнительного линей-
линейного элемента da, оперировать непосредственно с линейным
7. Принцип Якоби и риманова геометрия 167
элементом пространства конфигураций ds. Поскольку V --= О,
принцип Якобн требует, чтобы
J0. E.7.4)
Это означает, что С-точка механической системы движется
вдоль кратчайшего пути (геодезической линии) простран-
пространства конфигураций. Более того, теорема о сохранении энер-
энергии дает
откуда видно, что С-точка движется с постоянной скоростью.
Мы имеем здесь замечательное обобщение закона инер-
инерции, открытого Леонардо да Винчи и Галилеем: «Под дейст-
действием собственной инерции частица движется по прямой ли-
линии с постоянной скоростью». Оказывается, что этот закон
справедлив для сколь угодно сложных механических си-
систем с произвольными голономными связями! Однако «ча-
«частица», представляющая такую систему, движется не в обыч-
обычном трехмерном, а в n-мерном римановом пространстве.
Пример. Частица вынуждена оставаться на некоторой поверх-
поверхности; к ней не приложены силы. Риманово пространство теперь
имеет два измерения, а его геометрия идентична внутренней геоме-
геометрии заданной поверхности. Движение частицы по поверхности про-
происходит по одной из геодезических линий этой поверхности.
Задача. Показать то же самое при помощи принципа Гамиль-
Гамильтона.
Отметим тесную связь между этим геодезическим прин-
принципом и динамическим принципом теории Эйнштейна. Там
также задача о движении эквивалентна нахождению геоде-
геодезической линии риманова пространства. Это риманово про-
пространство имеет четыре измерения, так как пространство и
время вместе образуют единый четырехмерный континуум.
Из закона инерции получается решение задачи о движении
планет без введения каких бы то ни было сил гравитации.
Принцип Якоби применим в релятивистской механике ча-
частицы. Единственная разница заключается в том, что рима-
риманова структура четырехмерного континуума является вну-
внутренним свойством вселенной, а не следствием наличия ки-
кинематических связей.
168 Гл. V. Уравнения движения Лагранжа
Резюме. Принцип Якоби связывает движение голо-
номных консервативных систем и риманову геометрию.
В частности, если система движется под действием
собственной инерции в отсутствии приложенных сил,
то изображающая эту систему С-точка описывает гео-
геодезическую (кратчайшую) линию в пространстве кон-
конфигураций, которое является n-мерным римановым
пространством. Из теоремы о сохранении энергии
следует к тому же, что движение происходит с по-
стояннной скоростью. Все это является естественным
обобщением обычного закона инерции, который ут-
утверждает, что при наличии лишь собственной инерции
частица движется по прямой линии с постоянной
скоростью.
8. Дополнительные условия; физический смысл неопре-
неопределенных множителей Лагранжа. При изучении общих воп-
вопросов вариационного исчисления мы подробно обсуждали,
как следует оперировать с механическими системами, на
которые наложены кинематические связи (см. гл. II, п. 12).
При голономных связях, заданных в форме аналитических
соотношений между переменными
/,.(<?!. ....9„, 0 = 0 (t = l,...,m), E.8.1)
можно поступить двумя различными способами. Во-первых,
можно, с помощью дополнительных условий E.8.1) исклю-
исключить т координат qi, сведя тем самым заданную систему
к свободной системе без связей. Во-вторых, можно обойтись
без исключений, применив метод неопределенных множи-
множителей Лагранжа. Для этого подинтегральное выражение L
в вариационной задаче преобразуется в L путем добавления
левых частей уравнений E.8.1), каждая из которых пред-
предварительно умножена на некоторый неопределенный множи-
множитель Xi(t) 1. После этого с задачей можно оперировать как
1 Метод неопределенных л-множителей остается справедливым
даже и при дополнительных условиях, содержащих не только
qL, но и q-r Мы встретились с такой ситуацией в п. 6, где уравнение,
содержащее требование постоянства энергии, было дополнительным
условием при варьировании.
8. Дополнительные условия; смысл множителей Лагранжа 169
со свободной, несмотря на имеющиеся дополнительные
условия.
Поскольку Ki — неопределенные множители, можно
с равным успехом использовать —А,-, записав L в форме
L = L-(k1fl+...+kmfJ. E.8.2)
В обычных задачах классической механики L представляет-
представляется в виде разности Т — V. Модификацию функции L можно
приписать изменению потенциальной энергии V, считая,
что V преобразуется в V
V=V+k1f1+...+Xmfm. E.8.3)
Этот изящный математический прием имеет неожиданную
и вместе с тем поучительную физическую интерпретацию.
То обстоятельство, что после изменения функции Лагранжа
L вариационная задача становится свободной, означает,
что мы опускаем имеющиеся кинематические связи и рас-
рассматриваем механическую систему так, как если бы связей
не было. При этом, однако, замена функции V на V означает,
что мы добавляем к потенциальной энергии приложенных сил
потенциальную энергию сил, обеспечивающих удовлетворе-
удовлетворение заданных связей. Эти силы задаются выражениями
Таким образом, те условия, с которыми мы встречались
раньше в статике (ср. гл. III, п. 5), появляются теперь в том
же самом виде в динамике. Снова метод Х-множителей
Лагранжа определяет силы реакции имеющихся связей.
Имеется, однако, один аспект задачи, требующий особого
внимания. Пусть заданные кинематические условия E.8.1)
и потенциальная энергия V не зависят явно от времени t.
Тогда система является консервативной; в этом можно сразу
же убедиться, если при учете дополнительных условий
применить метод исключения лишних переменных. Следова-
Следовательно, силы реакции также должны быть консервативными;
это означает, что их потенциальная энергия не должна за-
зависеть от /. С другой стороны, k-i являются функциями t,
170 Гл. V. Уравнения движения Лагранжа
что создает впечатление, будто бы потенциальная энергия
сил реакции
Vo = bJi+ ... + *„,/„ E-8.5)
является также функцией t.
Это кажущееся противоречие проистекает из того факта,
что потенциальная энергия сил реакции известна только
вдоль С-кривэй. Более детальный анализ снимает это проти-
противоречие и приводит к интересной физической интерпретации
множителей А,,-.
Достаточно рассмотреть одно дополнительное условие
0 = 0. E-8.6)
так как результаты легко обобщаются на случай произволь-
произвольного числа подобных условий. Предположим, что потенци-
потенциальная энергия Vi сил реакции связи E.8.6) имеет вид
Vi = <P(/). E.8.7)
[Это предположение нуждается в уточнении. Очевидно, что
E.8.6) не определяет однозначно функцию /, потому что
это самое условие можно задать и в более общей форме
gf = O, E.8.8)
где g(qi, ..-, qn) —любая другая функция координат, кото-
которая не обращается в нуль на поверхности / = 0. Поэтому
аргумент функции ср в E.8.7) должен быть фактически за-
заменен на gf, где g — некоторая функция qt. Более общий
случай рассматривается в задаче 4 в конце этого пункта.]
Естественно, что удовлетворение связи E.8.6) обеспечи-
обеспечивается за счет появления значительных сил, поэтому урав-
уравнение E.8.6) не может сильно нарушаться. Ввиду этого
потенциал Vi будет интересовать нас лишь для малых
значений /. Следовательно, функцию ср можно разложить
в ряд Тейлора в окрестности / = 0. Поскольку постоянные
слагаемые в потенциальной энергии не существенны, можно
написать
| E.8.9)
При этом мы пренебрегаем членами выше второго порядка.
8. Дополнительные условия; смысл множителей Лагранжа 171
Известно, что силы реакции не проявляются до тех пор,
пока условие E.8.6) выполняется точно. Это означает, что
/ = 0 должно соответствовать состоянию равновесия сил
реакции; более того, можно также утверждать, что заданная
связь не могла бы поддержаться, если бы состояние равно-
равновесия не было устойчивым. Следовательно, функция Vi
должна иметь минимум при / = 0. Это означает, что
Ф'@)=0, E.8.10)
а ф"@) должна быть положительной.
Пусть
Ф"(О) = |, E.8.11)
где е — малая постоянная положительная величина. Ма-
Малость е отражает тот факт, что связь E.8.6) поддерживается
большими по величине силами. Строгое выполнение условия
E.8.6) в течение длительного времени потребовало бы бес-
бесконечно больших сил, т. е. е = 0.
Поскольку в действительности е хотя и малая, но все же
конечная величина, условие E.8.6) не может точно удовлет-
удовлетворяться в процессе движения. Истинное движение проис-
происходит в соответствии с уравнением
/(<?!, ...,<7п) = еР(/), E.8.12)
где p(t) — некоторая функция времени. Имея в виду ма-
малость е, можно сказать, что условие / = 0 выполняется
лишь макроскопически. Правую часть уравнения E.8.12)
можно назвать «микроскопической ошибкой» данной связи
/ = 0. Эта ошибка меняется со временем t.
Потенциальная энергия
Vi = 5-tf* E-8.13)
приводит к появлению силы
wr E-8Л4)
в то время как, согласно методу неопределенных множителей
Лагранжа,
Kt = -b.Wr E-8-15)
172 Гл. V. Уравнения движения Лагранжа
4. E.8.16)
Сравнение E.8.14) и E.8.15) приводит к равенству
А
или, учитывая E.8.12),
Я-р(/). E.8.17)
Это соотношение показывает, что лагранжевы к-множители
являются мерой макроскопического нарушения уравнения
связи f = 0. Правая часть этого уравнения в действитель-
действительности не нуль, а произведение е-X, где в — малая положи-
положительная величина, стремящаяся к нулю, когда силы, под-
поддерживающие связь, стремятся к бесконечности.
Мы получили, таким образом, объяснение того, почему
потенциальная энергия \\ сил реакции на первый взгляд
зависит от времени t, хотя в действительности силы кон-
консервативны.
Мы еще раз установили результат — как это уже было
сделано для систем, находящихся в равновесии,— согласно
которому голономные дополнительные условия механически
эквивалентны моногенным силам. Можно добасить, что
склерономные голономные условия эквивалентны консерватив-
консервативным моногенным силам.
Задача 1. Рассмотреть двухатомную молекулу со следующей
структурой: потенциальная энергия внутренних сил имеет вид
где г — расстояние между атомами, а А — большая постоянная
величина. Показать, что движение системы под действием приложен-
приложенных сил с потенциальной энергией V макроскопически эквивалентно
движению двухатомной молекулы без какого бы то ни было Vlt но
с дополнительным условием г = 1.
Задача 2. Показать, что в предыдущей задаче множитель Лаг-
ранжа /. равен микроскопическому нарушению условия г = 1,
умноженному на 4А.
Задача 3. Рассмотреть тяжелую материальную точку массы
т, движущуюся по сфере
Показать, что множитель /. в этой задаче пропорционален микроско-
микроскопическому упругому проникновению в глубь сферы, вызываемому
давлением точки на поверхность сферы. Множитель X, а вместе с ним
8. Дополнительные условия; смысл множителей Лагранжа 173
и сила реакции обращаются в нуль в точке, где масса покидает
сферу, продолжая свое движение в свободном падении.
Задача 4. Рассмотреть более общую задачу, возникающую
в связи с тем, что функция / определяется уравнением / = 0 неод-
неоднозначно; вследствие этого простое выражение E.8.7) следует заме-
заменить более общим предположением
Vx = ?(te), E-8.18)
где g — неизвестная функция координат. Для исключения этой
неизвестной функции нужна дополнительная информация, не содер-
содержащаяся в уравнении связи / = 0. Известно, что поверхность / = 0
является эквипотенциальной для сил реакции. Предположим, что
нам известна в пространстве конфигурации вторая, близкая эквипо-
эквипотенциальная поверхность. Ее можно охарактеризовать, задав в каж-
каждой точке поверхности / -- 0 бесконечно малое расстояние ч между
двумя эквипотенциальными поверхностями у = 0 и г = р, где р —
положительная бесконечно малая величина. В этом случае можно
установить следующее соотношение для ).:
-tf. E.8.19)
grad f i-
Снова ). оказалось пропорциональным /, т. е. микроскопическому на-
нарушению связи / = 0; однако множитель пропорциональности уже
не является константой, хотя и остается существенно положительной
величиной.
Эта дополнительная информация потребовалась только для
интерпретации множителя X. Сила реакции не зависит от неизвест-
неизвестной функции g и всегда полностью определяется методом неопре-
неопределенных множителей Лагранжа1.
Резюме. Физический смысл метода неопределенных
множителей Лагранжа при решении задач с дополни-
дополнительными условиями заключается в том, что имеющие-
имеющиеся кинематические связи заменяются силами, поддер-
поддерживающими эти связи. Этот метод позволяет опреде-
определить силы реакции, обусловленные данными связями.
Силы реакции возникают вследствие микроскопиче-
микроскопических отклонений от связей, а ^-множители могут быть
интерпретированы как мера этих отклонений. От-
Отклонения меняются в процессе движения, что делает
А,,- функциями t, несмотря на консервативную природу
сил, поддерживающих заданные связи.
1 Автору неизвестно подобное обсуждение в литературе физи-
физического смысла неопределенных множителей Лагранжа.
174 Гл. V. Уравнения движения Лагранжа
9. Неголономные дополнительные условия и полиген-
полигенные силы. Если кинематические условия не имеют формы
аналитических соотношений между координатами, а пред-
представляют собой неинтегрируемые дифференциальные соот-
соотношения типа B.6.1), то уже нельзя уменьшить число степе-
степеней свободы путем исключения лишних переменных. Метод
неопределенных множителей Лагранжа, однако, по-преж-
по-прежнему применим. В самом деле, из B.6.1) мы получаем для
уравнений Лагранжа
4 j^j^ .+ЬпАтк), E.9.1)
где Atk — заданные функции qi. Они заняли место произ-
производных dfildxk, которые входили в уравнение в случае голо-
номных условий.
Для физической интерпретации неголономного случая
следует заметить, что у сил реакции неголономных связей
силовой функции не существует, однако сами силы по-преж-
по-прежнему могут быть определены с помощью метода неопределен-
неопределенных множителей. Положим
Ki = -(hAii + ... + 'kmAml). E.9.2)
Эти Ki можно физически интепретировать как компоненты
силы, действующей на механическую систему с целью обес-
обеспечить выполнение заданных неголономных условий. Эта
сила имеет теперь полигенную природу. Мы убеждаемся
еще раз, что неголономные дополнительные условия механи-
механически эквивалентны полигенным силам.
Исходя из этой эквивалентности, естественно предполо-
предположить, что соответствующим образом преобразованные урав-
уравнения Лагранжа применимы и в случае полигенных сил.
Это действительно так. Полигенную систему сил можно
охарактеризовать с помощью их виртуальной работы. Пусть
эта работа имеет вид
6^ = Pl6<7i + р2б<72 + ... + р„бGп.. E.9.3)
Единственное отличие от случая моногенной силы за-
заключается в том, что работа бw не может быть представлена
в виде вариации какой-либо скалярной функции. Предпо-
Предположим, что все моногенные приложенные силы учтены
10. Малые колебания около положения равновесия 175
обычным образом в функции Лагранжа L, а для полиген-
полигенных сил задана их виртуальная работа E.9.3). Тогда урав-
уравнения движения получаются в форме
d д!^_Ы= E94)
dt dcJi dq. ?' v ;
Снова, как и в E.9.1), полигенные силы приводят к появле-
появлению «правой части» в уравнениях Лагранжа.
Резюме. Метод множителей Лагранжа остается
справедливым и в случае неголономных дополнитель-
дополнительных условий. Силы, возникающие в связи с этими усло-
условиями по-прежнему могут быть найдены. Эти силы
имеют полигенную природу. Неголономные допол-
дополнительные условия и полигенные силы одинако-
одинаково влияют на уравнения движения Лагранжа: они при-
приводят к появлению в этих уравнениях «правых частей».
10. Малые колебания около положения равновесия.
Одним из наиболее замечательных примеров эффектив-
эффективности аналитических методов является приложение урав-
уравнений Лагранжа к теории малых колебаний вблизи положе-
положения устойчивого равновесия. Эта теория чрезвычайно важна
при изучении упругих свойств твердых тел, колебаний мо-
молекулярных структур, теории теплоемкости и других фун-
фундаментальных проблем. Наиболее замечательной чертой
теории является ее общность. Независимо от степени слож-
сложности механической системы ее движение вблизи положе-
положения равновесия описывается всегда одинаковым образом.
Конкретные вычисления усложняются по мере увеличения
числа степеней свободы, однако теоретические аспекты за-
задачи остаются неизменными.
Упрощения, возникающие при решении этой задачи,
связаны с фактом малости колебаний. Как известно, про-
пространство конфигураций имеет не евклидову, а риманову
геометрию. Известно также, что искривленное риманово
пространство по мере уменьшения размеров области все
более приближается к плоскому. Это свойство риманова
17G Гл. V. Уравнения движения Лагранжа
пространства находит свое аналитическое выражение в том,
что линейный элемент
ds~2- 2 aikdqidqk, E.10.1)
в котором aik являются функциями <7ь в непосредственной
окрестности точки Р может быть заменен локальным линей-
линейным элементом с постоянными коэффициентами. Коэффици-
Коэффициенты аи меняются в этой окрестности столь незначительно,
что они могут быть заменены их значениями в точке Р.
Пусть точка Р, являющаяся одновременно С-точкой,
изображающей положение механической системы в про-
пространстве конфигураций, соответствует положению равно-
равновесия. Поместим ее для простоты в начале координат, за-
записав ее координаты в виде qL = 0. Будем теперь считать
линейный элемент E.10.1) с постоянными а/А, соответству-
соответствующими точке Р, справедливым во всем пространстве. Про-
Пространство, получившееся в результате этой операции, яв-
является евклидовым, а допущенная нами ошибка стремится
к нулю по мере приближения к точке Р.
В новом пространстве qL являются уже не криволиней-
криволинейными, а прямолинейными координатами. Нам понадобятся
несколько основных фактов, касающихся аналитической
природы таких координат. Начнем с того, что в нашем не-
искривленном пространстве не только дифференциальная
форма E.10.1), но и конечная форма
E.10.2)
ft= 1
имеет простой геометрический смысл. Она задает расстоянье
sot начала координат Р — @, ..., 0) до точки Q=-. (qx, ..., qn).
Пусть мы находимся в «-мерном евклидовом простран-
пространстве с п линейно независимыми базисными векторами ;,
Uj, u2, ..., и„ E.10.3)
произвольной длины и ориентации; независимость этих
лекторов означает, что ни один из и^ не представляет собой
винейной комбинации остальных базисных векторов.
10. Малые колебания около положения равновесия 177
Радиус-вектор R точки этого пространства можно теперь
записать в виде
R = <7iU1 + <72ii2+ ... +qnnn. E.10.4)
Образовав скалярное произведение вектора R самого
на себя, получим
R2 = S2= 2 (ui-\xk) qi qk. E.10.5)
i, k=l
Сравнение с E.10.2) показывает, что коэффициенты щн ли-
линейного элемента равны
aik = aki = uruk. E.10.6)
В частном случае прямоугольных координат в качестве
и,- выбираются взаимно перпендикулярные векторы еди-
единичной длины. Тогда
uruk = 0 Aф1г), u?=l E.10.7)
и квадрат расстояния s принимает обычную пифагорову
форму
s»=92+92 + ... + 92. E.10.8)
Мы намеренно не накладываем каких-либо специальных
условий на базисные векторы, чтобы оперировать с произ-
произвольной прямолинейной системой координат. Однако мы
должны потребовать, чтобы евклидово пространство было
«реальным», т. е. чтобы расстояние между несовпадающими
точками Р и Q в нем не могло равняться нулю. Для этого
нужно, чтобы квадратичная форма E.10.2) была «положи-
«положительно определенной», т. е. принимала положительные
значения s2 при произвольных значениях qi, кроме триви-
тривиального случая qi = 0, когда s = 0.
В пространстве конфигураций это условие действи-
действительно выполняется, потому что кинетическая энергия,
определяющая линейный элемент E.10.1), а с ним и рас-
расстояние E.10.2), никогда не может стать отрицательной.
Даже значение нуль для нее возможно лишь в случае,
когда все qt обращаются в нуль. Это гарантирует поло-
положительную определенность выражения E.10.2).
Рассмотрим теперь две различные точки Q и Q' а
с ними и два вектора
7 Зак. 1646
178 Гл. V. Уравнения движения Лагранжа
PQ = R = qlu1 + ... + qnun E.10.9)
PQ'= R'= <7i u, +... + </„ un. E.10.10)
Образуем скалярное произведение этих двух векторов
п п
R R' = 2 (Ui-Uk)qi q'k= 2 aikqiq'k. E.10.11)
i, k=\ i, k=i
Заметим, что обращение в нуль суммы E.10.11) означает
взаимную ортогональность векторов R и R'.
Сделав эти общие замечания, касающиеся аналитической
геометрии «-мерного евклидова пространства, перейдем
теперь к изучению потенциальной энергии V(qlt ..., qn)
механической системы. Разложим эту функцию в ряд Тей-
Тейлора в окрестности начала координат qt = 0
**+•••¦ <5лол2)
)
1=1 I. k=\
Предположим теперь, что начало координат Р нашей
системы отсчета является положением равновесия. Следова-
Следовательно, функция V должна иметь в этой точке стационарное
значение (см. гл. II, п. 2 и гл. III, п. 1). Поэтому линейные
члены разложения E.10.12) выпадают. Поскольку аддитив-
аддитивная постоянная в потенциальной энергии несущественна,
то можно считать, что разложение начинается с членов вто-
второго порядка. Дальнейшие члены не нужны, потому что
уже членами третьего порядка можно пренебречь при до-
достаточно малых qt. Следовательно, можно написать
F = ji bikqiqk, E.10.13)
i, k=\
где
(SV <5Л0Л4>
Рассмотрим теперь уравнение V^y, г. е.
^bikqiqk=\. E.10.15)
10. Малые колебания около положения равновесия 179
Геометрически это уравнение определяет поверхность
в л-мерном пространстве. Можно сказать более определен-
определенно, что оно определяет какую-то поверхность второго по-
порядка; для наглядности можно представить себе эллипсоид
или гиперболоид в обычном трехмерном пространстве, но не
следует забывать при этом о разнице в числе измерений.
Следует отметить, что аналитическую геометрию поверхно-
поверхностей второго порядка можно строить с равным успехом при
любом числе измерений. Теория таких поверхностей очень
важна почти во всех разделах математической физики. Стро-
Строгое математическое обоснование теории упругости, акустики
и волновой механики может быть сформулировано при по-
помощи аналитической геометрии таких поверхностей в про-
пространстве с бесконечно большим числом измерений.
В механике мы сталкиваемся с этой теорией в связи с ко-
колебаниями механических систем около положения равно-
равновесия. Из обычной аналитической геометрии известно, что
изучение поверхностей второго порядка сильно облегчается,
если оси системы координат совпадают с определенными
осями симметрии, например с тремя взаимно перпендику-
перпендикулярными «главными осями» эллипсоида или гиперболоида.
Если уравнение задано относительно других осей, то
следует найти главные оси и повернуть систему отсчета
в новое положение. В физике это «приведение к главным
осям» онень важно, потому что большая часть аналитиче-
аналитических задач обычно решается лишь после выполнения этого
преобразования.
Покажем теперь, как тесно связана задача о малых коле-
колебаниях механических систем около положения равновесия
с определением главных осей для потенциальной энергии V'.
Главные оси поверхности второго порядка обладают опре-
определенными экстремальными свойствами. Их можно найти,
отыскивая на поверхности те точки, для которых расстоя-
расстояния от начала координат имеют стационарные значения.
Поэтому задача состоит в нахождении стационарного значе-
значения квадратичной формы
alkqlqk E.10.16)
<¦, *= i
при дополнительном условии, что мы движемся по поверх-
поверхности
180 Гл. V. Уравнения движения Лагранжа
2 bikqiqk=\. E.10.17)
i, *=¦!
Это обычная алгебраическая экстремальная задача с до-
дополнительным условием, и решается она методом Х-множи-
телей. Оставим в стороне дополнительное условие E.10.17)
и минимизируем функцию
Здесь мы заменили неопределенный множитель X на
— 1Д, что более удобно для наших целей.
Легко видеть, что вместо минимизации функции
E.10.18) можно с равным успехом минимизировать функ-
функцию
F (Я» .~,q,d = Ilbtkqlqk — lk2lalkq,qll. E.10.19)
Это приводит к следующей формулировке нашей экстре-
экстремальной задачи. Найти стационарное значение функции
2V = 2W7* E.10.20)
при дополнительном условии
Ita,kq,qk=l. E.10.21)
Условие E.10.21) означает, что мы находимся на сфере
радиуса 1. В каждой точке этой сферы потенциальная
энергия V имеет определенное значение. Требуется най-
найти те особые точки Qi на поверхности сферы единич-
единичного радиуса, для которых потенциальная энергия V
имеет стационарное значение.
Условие стационарности функции F дается следую-
следующими линейными уравнениями:
Ьп <7х+ ... +blnqn=X(anql+ ... + auqn),
E.10.22)
Ьп\ qx-V ¦¦¦ + bnnqn=X(ani QrJr ¦•• + am,qn).
Эти однородные линейные уравнения относительно qi
имеют ненулевые решения лишь при условии, что детер-
10. Малые колебания около положения равновесия 181
минант системы равен нулю. Мы получаем таким образом
фундаментальное детерминантное условие, называемое
«характеристическим уравнением», из которого можно
определить «характеристические значения» ki
Ьи —Хап, ..., Ь1П — ка1п
bnl—Xanl, ..., bim —
= 0. E.10.23)
Это алгебраическое уравнение л-й степени относительно К
должно иметь п корней, среди которых возможны и ком-
комплексные. Обозначим эти л корней через
К1г Х2, .... Х„. E.10.24)
Среди корней могут оказаться кратные. Мы считаем такой
случай вырожденным и будем устранять вырождение путем
сколь угодно малого изменения коэффициентов а-л и bik-
При этом кратные корни разделяются, а затем, уже после
исследования, можно выполнить предельный переход. По-
Поэтому можно исключить случай кратных корней и считать,
что все %i различны.
Для каждого %t можно найти соответствующее решение
системы линейных уравнений E.10.22). Решение находится
с точностью до произвольного множителя, общего для всех
qi\ этот множитель, однако, однозначно определяется
(с точностью до знака) из дополнительного условия E.10.21).
Значения <7i> ¦¦¦> Яп, соответствующие некоторому Я,-,
могут рассматриваться как компоненты вектора р,- единич-
единичной длины. Назовем этот вектор г-й «главной осью» поверх-
поверхности E.10.17). Существует п таких главных осей
Pi, p2, ...,р„, E.10.25)
соответствующих п характеристическим значениям E.10.24).
Эти главные оси обладают рядом характерных свойств,
которые мы сейчас кратко перечислим.
1. Корни характеристического уравнения инвариантны
относительно произвольных линейных преобразований коор-
координат qt. Умножив уравнения E.10.22) соответственно
на qlt ..., qn и затем сложив их все, получим справа произ-
182 Гл. V. Уравнения движения Лагранжа
ведение Я-1 ввиду дополнительного условия E.10.21),
а слева величину 2V. Это приводит к соотношению
Я = 2У. E.10.26)
Следовательно, произвольное линейное преобразование
координат qt, не изменяющее значений потенциальной энер-
энергии V, оставляет неизменным также и значения Я,-. В то
время как п главных осей Р, определяют направления,
в которых потенциальная энергия достигает своих стацио-
стационарных значений, корни Я,- определяют сами эти значе-
значения Vi, согласно равенству
Vi='±. E.10.27)
2. Все корни являются действительными, и потому
главные оси — это п действительных векторов в п-мер ном
евклидовом пространстве. Корни Я,- алгебраического урав-
уравнения п-й степени являются, вообще говоря, комплексными;
то обстоятельство, что они оказываются действительными
для характеристического уравнения E.10.23), обусловлено
симметрией элементов детермината aik и Ьцг
aik = aki, bik = bkl. E.10.28)
Для доказательства этой важной теоремы поступим
следующим образом. Предположим, что некоторый корень Я,-
является комплексным, и решим линейные уравнения
E.10.22) при этом значении Я. В качестве qt получаются не-
некоторые комплексные числа. Как известно, любое алгебраи-
алгебраическое соотношение между комплексными числами остается
справедливым при замене i на —/. Следовательно, мы можем
выписать уравнения E.10.22), заменив qi на q{*, а Я на Я:",
где звездочкой обозначены комплексно-сопряженные ве-
величины. Умножим первую систему уравнений последова-
последовательно на <7*, ..., <7л, а вторую—на qlt ..., q,, и составим в каж-
каждом из этих случаев сумму уравнений. В левых частях урав-
уравнений мы получим в обоих случаях одинаковые суммы,
а сравнение правых частей приведет к соотношению
(Я-Я*) 2 aikqiq2 = 0- E.10.29)
i. k=\
10. Малые колебания около положения равновесия 183
После замены qt на ak + фь, где ак и $k — действительные
числа, и при учете E.10.28) равенство E.10.29) переходите
(X — ^*)(s^ + s^) = 0, ¦ E.10.30)
где Si и s2 — действительные расстояния в я-мерном евклидо-
евклидовом пространстве, не равные одновременно нулю. Следова-
Следовательно,
к = Ь*. E.10.31)
т. е. X должны быть действительными.
3. Главные оси р» взаимно перпендикулярны и потому
образуют ортогональную систему координат в п-мерном
пространстве. Это фундаментальное свойство главных осей
поверхности второго порядка может быть доказано при по-
помощи того же соотношения E.10.29), которое мы раньше
использовали для доказательства действительности корней
Xi. Теперь его следует лишь по-иному интерпретировать.
Предположим, что X и X* — два различных характеристиче-
характеристических корня, a qi и qi определяют соответственно две глав-
главные оси, соответствующие этим двум Xt. В этом случае
первый сомножитель в E.10.29) не может обратиться в нуль,
потому что Хи X* различны. Следовательно, в нуль должен
обратиться второй сомножитель. Это дает
2 aikqtqt=O. E.10.32)
i, A=l
В соответствии с E.10.11) это уравнение в векторной форме
выглядит следующим образом:
р-р*=О. E.10.33)
Это означает, что две главные оси р и р*, а значит, и любые
pi и рд. ортогональны между собой.
Из упомянутых основных свойств векторов р, видно,
что п главных осей могут быть выбраны в качестве осей
новой прямоугольной системы координат. Аналитически это
преобразование выполняется следующим образом. Обозначим
решение qx, ..., qn, полученное в задаче о главных осях при
определенном Xt, через
aw, a2,-, ..., ani. E.10.34)
184 Гл. V. Уравнения движения Лагранжа
Расположим эти решения в последовательных столбцах
в соответствии с такой схемой
Pi. Рг> ••• . Рп
а,Л' ап2' ••¦> апп
Теперь произведем линейное преобразование
Я\ = «и «1 + ••• + а1п ип,
E.10.35)
Здесь «!, ..., ип — прямоугольные координаты некоторой
точки Q, которая в старой системе имела прямолинейные
координаты <7ь •••> Яп-
Упрощение, возникающее в результате такого преобра-
преобразования, довольно очевидно. Расстояние s2 от начала коор-
координат до точки Q имеет теперь пифагорову форму
52 = Ц2+Ц2+ ... _|_ и*п, E.10.36)
потому что мы оперируем с обычными прямоугольными де-
декартовыми координатами. Следовательно, квадратичная
форма общего вида E.10.2) переходит в чисто диагональную
форму.
Посмотрим, что произойдет с потенциальной энергией
V в результате такого преобразования. На первых порах
можно только сказать, что она должна стать некоторой квад-
квадратичной формой новых переменных Uk с новыми коэффи-
коэффициентами bik
1 "
V^y V biktiiuk. E.10.37)
i, A=l
Теперь, однако, следует решить задачу о главных осях еще
раз, уже в новой системе отсчета. При этом получаются
уравнения
10. Малые колебания около положения равновесия 185
п
2>'/«и„=Л,и, E.10.38)
с дополнительным условием
u\ + ...+ u2n=\. E.10.39)
В качестве X в уравнении E.10.38) могут быть последо-
последовательно взяты п прежних значений Хи ..., Хп, поскольку
Xi инвариантны относительно произведенного преобразова-
преобразования. Более того, решение задачи о главных осях в новой си-
системе отсчета тривиально, поскольку главные оси совпадают
с координатными осями. Решение, соответствующее Xi,
имеет вид
ы,- = 1, все остальные Uk — 0. E.10.40)
Подставив эти значения в уравнения E.10.38), получим
"~~ '• E.10.41)
Отсюда следует, что потенциальная энергия V в новой си-
системе отсчета имеет вид
V = \iXxu] +Х2и22 + ... +Хпи2п). E.10.42)
Мы получили замечательный результат: в новой системе от-
отсчета диагональную форму принимает не только квадрат
расстояния s2, но и потенциальная энергия V. Одним ли-
линейным преобразованием координат можно одновременно
привести к диагональному виду две квадратичные формы,
из которых одна положительно определенная (в остальном
эти формы произвольны).
В задачах механики подобное преобразование приводит
к значительному упрощению выражений для потенциальной
и кинетической энергий. Выражение для кинетической энер-
энергии в новой системе принимает вид
в то время как потенциальная энергия равна
7В Зак. 1646
186 Гл. У. Уравнения движения Лагранжа
V = ^-{kiu2l + ...+Xnul). E.10.44)
Уравнения движения Лагранжа выглядят теперь следую-
следующим образом:
«! -f lx иг ---=0,
E.10.45)
Un + К «„ ¦¦= 0.
Переменные в этих дифференциальных уравнениях полно-
полностью разделены, и уравнения легко интегрируются. Это диф-
дифференциальные уравнения простого гармонического колеба-
колебания, и они имеют решения
ui = Аг cos Ykit + Bt sin yxlt, E.10.46)
где Ai и Bi — произвольные константы интегрирования.
Задача. Дан двойной маятник, состоящий из двух математи-
математических маятников одинаковой длины и массы, второй из которых
подвешен к грузу первого. В качестве координат взяты два беско-
бесконечно малых угла iI и 02 между нитями и вертикалью.
1. Записать выражения для кинетической и потенциальной
энергий системы.
2. Записав линейный элемент, показать, что две оси Qx и Q2
косоугольной системы координат расположены под углом 45° друг
к другу.
3. Показать, что главные оси р1 и р2 направлены по биссектри-
биссектрисам угла между Qt и Q2 и дополнительного угла.
4. Показать, что частоты, связанные с двумя главными осями,
равны
где v — собственная частота каждого из математических маятников.
Следует рассмотреть две принципиально различные воз-
возможности. Мы уже знаем, что Xi всегда действительны.
Однако мы не можем гарантировать, что они всегда поло-
положительны. В общем случае часть из них может быть поло-
положительна, а часть •— отрицательна. Предположим, что
все %i положительны. В этом случае из решения E.10.46)
видно, что С-точка колеблется вблизи положения
10. Малые колебания около положения равновесия 187
равновесия Р. Движение состоит из суперпозиции монохро-
монохроматических колебаний с частотами
yt = YU E.10.47)
и с малыми, но постоянными амплитудами и произвольными
начальными фазами. Эти колебания происходят в направле-
направлениях взаимно перпендикулярных главных осей р;. Супер-
Суперпозиция всех этих колебаний образует «фигуры Лиссажу»
в n-мерном пространстве конфигураций. Из-за взаимной
ортогональности эти колебания называются «нормальными
колебаниями». Их число всегда равно числу степеней сво-
свободы механической системы. Частоты v; меняются при пере-
переходе от одной главной оси к другой, что дает основание гово-
говорить о «спектре» нормальных колебаний.
Замечательным примером колебаний механической системы
вблизи положения равновесия является случай твердого тела,
молекулы которого расположены вблизи положения равновесия,
но находятся в состоянии непрерывных беспорядочных колебаний
в связи с тепловым движением. Все эти колебания могут быть
аналитически изображены одной С-точкой, помещенной в ЗЛ^-мер-
ном евклидовом пространстве, где N — число молекул, составляю-
составляющих твердое тело. Движение С-точки можно представить в виде
гармонических колебаний определенных частот вдоль взаимно пер-
перпендикулярных осей. Каждой степени свободы отвечает одна ось.
Спектр этих колебаний простирается от очень низких упругих
и акустических частот вплоть до очень высоких инфракрасных час-
частот. Распределение амплитуд и фаз определяется статистическими
законами и является функцией абсолютной температуры Т.
Предположим теперь, что по крайней мере один из харак-
характеристических корней %i — например, корень %.п — отри-
отрицателен. Положив в этом случае
l^=Tn=vn, E.10.48)
получим решение последнего из уравнений Лагранжа в виде
ип^Апе"п1 + Впе-*"'. E.10.49)
Это решение уже не периодическое, а экспоненциальное.
Достаточно малейшего толчка вдоль оси р„ для того, чтобы
привести С-точку в состояние движения, которое, не яв-
являясь уже колебательным, начнет уводить ее все дальше
и дальше от положения равновесия.
Таким образом, изучение малых колебаний вблизи по-
положения равновесия приводит нас к заключению, что сле-
7В*
188 Гл. V. Уравнения движения Лагранжа
дует различать два типа равновесия, физически глубоко
различных. Первый случай реализуется, когда все корни
характеристического уравнения положительны. Равновесие
тогда называется «устойчивым», так как малые возмущения
не выводят систему из положения равновесия, а лишь вызы-
вызывают колебания вблизи этого положения. Второй случай
реализуется, когда по крайней мере один из характеристиче-
характеристических корней отрицателен. Тогда достаточно малейшего воз-
возмущения, чтобы вывести систему из первоначального поло-
положения равновесия. Это означает, что равновесие, даже если
оно и достигается в какой-то момент, не может поддерживать-
поддерживаться в течение длительного времени. Равновесие такого типа
называется неустойчивым. В промежуточном случае, ког-
когда среди корней Xi нет отрицательных, но один из корней
равен нулю, говорят о «нейтральном» равновесии.
Обсудим связь между материалом, изложенным в данном пункте,
где речь шла об описании механических явлений вблизи положения
равновесия, и макроскопической картиной пространства конфигура-
конфигураций. Мы оперировали с координатами, имевшими значение локаль-
локальных координат. Они отражали малые локальные вариации bqt
координат <7° вблизи положения равновесия Р. Потенциальная
энергия V вследствие разложения в ряд Тейлора также отражала
локальные вариации потенциальной энергии V в окрестности точ-
точки Р. Линейные члены выпадали, поскольку мы разлагали функцию
вблизи точки равновесия. Разложение начиналось с членов второго
порядка и давало то, что в общем случае называется «второй вариа-
вариацией» функции (см. гл. II, п. 3). Теперь мы видим, что та же самая
вторая вариация, которая была существенна при определении экстре-
экстремальных свойств стационарной точки, существенна и в вопросе об ус-
устойчивости либо неустойчивости состояния равновесия. Если все
X,- положительны, то вторая вариация является положительно опре-
определенной формой; это означает, что потенциальная энергия увеличи-
увеличивается в любом направлении от Р. Следовательно, потенциальная
энергия имеет локальный минимум в точке Р. Утверждения о наличии
минимума потенциальной энергии и существовании устойчивого по-
положения равновесия эквивалентны. Если по крайней мере один из
корней /.; отрицателен, то вторая вариация меняет знак и стационар-
стационарное значение потенциальной энергии не является уже истинным
экстремумом. В то же время соответствующее положение равновесия
неустойчиво.
Вопросы устойчивости необычайно важны в некоторых задачах
теории упругости. Тонкие оболочки при слишком большой нагрузке
внезапно выгибаются. Выгибание происходит не путем постепенного
преодоления сил упругости, а «хлопком». Явление «хлопка» означа-
означает, что при определенной нагрузке устойчивое равновесие оболочки
сменяется неустойчивым. Решение задачи о «хлопке» автоматически
10. Малые колебания около положения равновесия 189
приводит к исследованию второй вариации VV потенциальной энер-
энергии в точке, где ZV равно нулю. Если можно найти характеристиче-
характеристические значения /.; <rV, то знаки этих Л/ сразу же решают вопрос об
устойчивости равновесия. Пока наименьшее из ~kt положительно,
оболочка устойчива; если же наименьшее )-i отрицательно, то обо-
оболочка неустойчива. Критическая нагрузка соответствует случаю,
когда наименьшее из Хг обращается в нуль.
Часто бывает очень сложно найти характеристический спектр
второй вариации, и более приемлемым оказывается другой путь
решения задачи. Вторая вариация минимизируется и определяется
ее знак в минимуме. При положительном знаке равновесие устойчиво,
в противном случае — неустойчиво. Условие «хлопка» получается
приравниванием минимального значения 8'2V к нулю.
Резюме. Движение произвольной механической
системы вблизи положения устойчивого равновесия
удобно изучать с помощью пространства конфигура-
конфигураций. В этом случае пространство евклидово, а пере-
переменные qt служат в нем прямолинейными координата-
координатами. Главные оси квадратичной формы потенциальной
энергии определяют п взаимно ортогональных напр-ав-
лений в пространстве конфигураций, которые могут
быть выбраны в качестве осей естественной системы
координат. С-точка совершает гармонические колеба-
колебания вдоль этих направлений с частотами, меняющимися
от одной оси к другой. Амплитуды и фазы этих коле-
колебаний, называемых «нормальными», произвольны и
зависят от начальных условий. Произвольное движе-
движение системы является суперпозицией нормальных ко-
колебаний. В результате такого движения С-точка опи-
описывает фигуры Лиссажу в пространстве конфигура-
конфигураций. Для устойчивости равновесия требуется, чтобы
корни характеристического уравнения были положи-
положительны, так как в противном случае нарушается ко-
колебательный характер движения.
ГЛАВА VI
КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ
Кто из богов придумал этот знак?
Какое исцеленье от уныния
Дает мне сочетанье этих линий!
Расходится томивший душу мрак.
Все проясняется, как на картине.
И вот мне кажется, что сам я—бог
И вижу, символ мира разбирая,
Вселенную от края и до края.
(Фауст, разглядывающий
знак макрокосма), Гёте,
«Фауст», часть I, сцена I1
Введение. Принцип наименьшего действия и его обобщение,
произведенное Гамильтоном, переводят задачу механики в область
вариационного исчисления. Уравнения движения Лагранжа, выте-
вытекающие из стационарности некоторого определенного интеграла,
являются основными дифференциальными уравнениями теоретиче-
теоретической механики. И тем не менее мы еще не достигли конца пути.
Функция Лагранжа квадратична по скоростям. Гамильтон обнару-
обнаружил замечательное преобразование, делающее функцию Лагранжа
линейной по скоростям при одновременном удвоении числа меха-
механических переменных. Это преобразование применимо не только
к специальному виду функции Лагранжа, встречающемуся в меха-
механике. Преобразование Гамильтона сводит все лагранжевы задачи
к особенно простой форме, названной Якоби «канонической» формой.
Первоначальные п дифференциальных лаграижевых уравнений вто-
второго порядка заменяются при этом In дифференциальными урав-
уравнениями первого порядка, так называемыми «каноническими уравне-
уравнениями», которые замечательны своей простой и симметричной
структурой. Открытие этих дифференциальных уравнений ознаме-
ознаменовало собой начало новой эры в развитии теоретической механики.
1. Дуальное преобразование Лежандра. Французский
математик Лежандр A752—1833) в своих работах по изуче-
изучению дифференциальных уравнений обнаружил одно важное
преобразование, которое обладает замечательными свойства-
свойствами, обусловившими его применение во многих проблемах
анализа. В механике оно приводит к новой форме уравнений
1 Перевод Б. Пастернака.
1. Дуальное преобразование Лежандра 191
Лагранжа, которая будет очень удобна для дальнейших
математических исследований. Перед тем как применить
это преобразование к уравнениям Лагранжа, обсудим его
общие математические свойства.
Пусть задана функция п переменных иь ..., ип
F = F(u1 и„). F.1.1)
Введем новую совокупность переменных v1, ..., vnc помощью
преобразования
v, = ?. F.1.2)
Предположим, что так называемый «гессиан», т. е. детерми-
детерминант, образованный из вторых частных производных F,
отличен от нуля. Этим гарантируется независимость п пе-
переменных V[, и из уравнений F.1.2) можно выразить ы,-,
представив их как функции у,-.
Определим новую функцию G следующим образом:
га
G =2,UiVi—F. F.1.3)
/1
Выразим щ через у,- и подставим в F.1.3). Функция G
окажется выраженной только через новые переменные у,-
G = G(u1( ...,о„). F.1.4)
Рассмотрим теперь бесконечно малую вариацию функ-
функции G, вызванную произвольными бесконечно малыми ва-
вариациями у,-. Из.F.1.3) и F.1.4) получим
дв
i -\-vi.biii) — 6F = F.1.5)
i=r
192 Гл. VI. Канонические уравнения движения
Поскольку G — функция одних только vit мы должны были
бы выразить и,- через и,- и, следовательно, вариации щ
через вариации vt. Однако из F.1.5) видно, что эта опера-
операция излишня, так как коэффициенты при 8«,- автоматиче-
автоматически равны нулю в соответствии с определением переменных
Vi, данным в F.1.2). Поэтому из F.1.5) сразу получаем
Этот результат выражает замечательный дуализм преобра-
преобразования Лежандра, который можно пояснить следующей
схемой:
Старая система Новая система
Переменные
Функции:
_ dF
G^^utVi
G = G(vlt.
: «!, ...
F=F(u
-F,
- vn).
i.-. "„);
Преобра зован и е
(a) i
(P)
(Y)
dv' F.1.7)
= 2,utv, — G,
= F(uu ...,«„).
Го есть так же, как новые переменные представляют собой
частные производные старой функции по старым переменным,
старые переменные являются частными производными новых
функций по новым переменным.
Преобразование, определяемое F.1.7), полностью сим-
симметрично. Название «старая система» и «новая система»
связаны с тем, начинаем ли мы справа или слева. Но ведь
в действительности можно с равным успехом начинать
и справа и слева. В преобразовании Лежандра «старая»
и «новая» системы полностью эквивалентны.
Область применимости преобразования Лежандра можно
несколько расширить. Предположим, что функция F зави-
зависит от двух систем переменных их, ..., ип и wlt ..., wm:
F = F(wv ...,wm, ult ...,«„). F.1.8)
Переменные wi не зависят от переменных «,-. Они входят
в F просто как параметры и не участвуют в преобразова-
2. Преобразование Лежандра функции Лагранжа 193
нии, которое выполняется точно так же, как и раньше.
Новая функция G также будет содержать wi. Мы будем назы-
называть щ активными, a wi—пассивными переменными преоб-
преобразования.
Возвращаясь к уравнению F.1.5), найдем полную вариа-
вариацию G при произвольных вариациях всех v? и Wi. Наличие
переменных wi приводит к появлению соотношений, кото-
которых не было раньше. Соотношения F.1.2) остаются неизмен-
неизменными; однако в дополнение к ним появляются равенства
3F 3G .„ , „
Резюме. Преобразование Лежандра заменяет дан-
данную функцию заданной системы переменных новой
функцией новой системы переменных. Старые и новые
переменные связаны между собой точечным преобра-
преобразованием. Замечательным свойством преобразования
Лежандра является его симметрия относительно обе-
обеих систем. То преобразование, которое переводит ста-
старую систему в новую, приводит также от новой систе-
системы к старой.
2. Преобразование Лежандра в применении к функции
Лагранжа. Функция Лагранжа L, появляющаяся в вариа-
вариационной задаче, зависит в общем случае от п позиционных
координат qh n скоростей qt и времени t
L = L{qi qn, Ql q'n,t). F.2.1)
Для нас сейчас неважно, что qt — скорости действитель-
действительного движения, в своих рассуждениях мы будем их считать
просто переменными, независящими от qt.
Применим преобразование Лежандра, считая qlt ..., qn
активными переменными, а остальные переменные пассивны-
пассивными. Другими словами, qt соответствуют щ, a qL и t соот-
соответствуют Wi в общей схеме. Поэтому в данной задаче чис-
число т пассивных переменных равно п + 1.
194 Гл. VI. Канонические уравнения движения
Следуя общей схеме преобразования Лежандра, произве-
произведем последовательно следующие три операции.
1. Введем «новые переменные», которые теперь называ-
называются импульсами и обозначаются через pi
. Pi = ^- F-2.2)
d
2. Введем новую функцию, назвав ее «полной энергией»
и обозначив ее через Н,
H=J2ipiqi-L. F.2.3)
3. Выразим новую функцию Н через новые переменные
pi, разрешив уравнения F.2.2) относительно qt и подставив
их в F.2.3). В результате получим
H = H(q1,...,qn,p1,...,pn,t), F.2.4)
где Н теперь называется «функцией Гамильтона». Общая
схема преобразования выглядит таким образом:
Старая система Новая система
Функция: Лагранжа L, Гамильтона Н.
Переменные: Скорости, Импульсы.
Пассивные переменные: позиционные координаты, время.
Дуальная природа преобразования отражается в сле-
следующих уравнениях:
6L ¦ дН
P 1
H = H(q1,...,qn,p1 pn,t),L=L{q1,...,qn,q\,...,qn,t).
Мы исходили из функции Лагранжа i и с помощью трех
последовательных операций построили функцию Гамиль-
Гамильтона Н. Точно так же можно начать с функции Гамильтона
Н и построить тремя последовательными операциями функ-
функцию Лагранжа L.
3. Преобразование уравнений движения Лагранжа 195
Уравнения F.1.9) общей схемы теперь принимают вид
dqt
dL
at ~~
dqi'
dH
at •
Резюме. Преобразование Лежандра можно приме-
применить к функции Лагранжа L, считая скорости q: ак-
активными переменными преобразования, а позиционные
координаты qt и время t — пассивными. Скорости пре-
преобразуются в импульсы; функция Лагранжа преобра-
преобразуется в функцию Гамильтона.
3. Преобразование уравнений движения Лагранжа.
Уравнения движения Лагранжа являются дифференциаль-
дифференциальными уравнениями второго порядка относительно позици-
позиционных координат qi. Однако, введя в качестве промежуточ-
промежуточных величин импульсы
Pi = % F.3.1)
dq
эти уравнения можно записать в виде дифференциальных
уравнений первого порядка
P' = Wf F-3-2)
Мы попросту назвали некоторую совокупность величин
«импульсами» с целью упростить форму записи уравнений
Лагранжа. Однако введение р,- привело к замене первона-
первоначальной системы из п дифференциальных уравнений второго
порядка системой из 2« дифференциальных уравнений пер-
первого порядка, а именно из уравнений F.3.1) и F.3.2).
Введение pt привело к тому, что для записи уравнений не
требуются производные выше первого порядка. Эта процеду-
процедура аналогична тому, как в векторной механике, определив
импульс как «произведение массы на скорость», мы заменя-
заменяем «произведение массы на ускорение» на «скорость измене-
изменения импульса».
196 Гл. VI. Канонические уравнения движения
Применим теперь преобразование Лежандра, подобно
тому как мы это сделали в предыдущем пункте. Вследствие
дуализма преобразования вместо уравнений F.3.1) можно
написать
q\ = Щ F.3.3)
Уравнения F.3.1) и F.3.3) эквивалентны друг другу. Сле-
Следует отметить, что эти уравнения не отражают какого-либо
физического закона. Уравнения F.3.1) являются просто
определением импульса, а в уравнениях F.3.3) это опреде-
определение переписано таким образом, чтобы скорости были вы-
выражены через импульсы, а не импульсы через скорости.
Уравнения движения Лагранжа содержатся в уравне-
уравнениях F.3.2). Применив преобразование Лежандра, их
можно записать в виде [см. F.2.6I
Р, = ~Щ, F-3.4)
Теперь, наконец, уравнения движения Лагранжа пол-
полностью заменены новой системой дифференциальных урав-
уравнений, которые называются «каноническими уравнениями
Гамильтона»,
дН ¦ дН ,с о _.
?<=эр? Pi = -^ F-3'5)
Эти уравнения полностью эквивалентны первоначальным
лагранжевым уравнениям, являясь лишь их новой матема-
математической формулировкой. Однако новые уравнения обла-
обладают огромным преимуществом по сравнению с первоначаль-
первоначальными: производные по времени в них появляются лишь
в левых частях уравнений, потому что функция Гамильтона
не содержит производных qt или pt по времени t.
Эта замечательная система уравнений впервые появилась
в одной из статей Лагранжа A809), в которой шла речь о теории воз-
возмущений для механических систем. Лагранж не заметил глубокой
связи между этими уравнениями и уравнениями движения. Первый
указал на истинное значение этих уравнений Коши(в неопубликован-
неопубликованном мемуаре в 1831 г.). Гамильтон положил эти уравнения в основу
своих выдающихся исследований в области механики. Поэтому на-
название «канонические уравнения Гамильтона» вполне оправдано,
хотя работа Гамильтона появилась лишь в 1835 г.
4. Канонический интеграл 197
Резюме. Уравнения движения Лагранжа являются
дифференциальными уравнениями второго порядка.
Применение преобразования Лежандра замечательным
образом отделяет дифференцирование по времени
от аналитических операций над переменными. Новые
уравнения образуют систему In дифференциальных
уравнений первого порядка. Они называются «кано-
«каноническими уравнениями».
4. Канонический интеграл. Уравнения системы F.3.5)
происходят из двух источников. Первая группа уравнений
возникает в силу преобразования Лежандра и может рас-
рассматриваться как определение импульсов pt. Вторая группа
уравнений является следствием вариационного принципа.
Вместе с тем явная симметрия полной системы уравнений
заставляет предположить, что все они могут быть получены
из какого-то единого принципа. Это действительно так.
Исходя из функции Гамильтона Н и опираясь на дуа-
дуализм преобразования Лежандра, можно построить функцию
Лагранжа L. Функция L будет определяться выражением
L=%PlqL-H. F.4.1)
Из этого выражения предстоит исключить pi, выразив их
через qi и qt. Однако более детальное исследование показы-
показывает, что этого исключения производить не нужно.
Посмотрим, как варьирование pi влияет на вариацию
интеграла действия. Варьирование выражения F.4.1) по
Pi дает
(i)*- F-4-2)
но коэффициенты при bpi равны нулю в силу преобразова-
преобразования Лежандра. Отсюда видно, что произвольное варьирова-
варьирование pi не влияет на вариацию L. Следовательно, оно также
не влияет и на интеграл от 8L по времени. Это приводит
к следующему важному- результату. Раньше мы требовали
обращения в нуль первой вариации интеграла действия
198 Гл. VI. Канонические уравнения движения
А при условии, что pi не являются независимыми перемен-
переменными, а суть некоторые заданные функции qL и qt. Вариации
pi, таким образом, определялись вариациями qt. Однако,
поскольку вариации р,- не влияют на вариацию интеграла
действия, можно расширить формулировку первоначаль-
первоначального вариационного принципа и утверждать, что интеграл
действия принимает стационарное значение даже и при про-
произвольных вариациях pi, когда pi рассматриваются как
вторая система независимых переменных.
Поэтому нет необходимости что-либо менять в форме
записи функции Лагранжа F.4.1). Можно образовать ин-
интеграл действия
§'2ipljl-H(ql,...,qa, Pl,...,pn,t)]dt F.4.3)
и потребовать его стационарности при произвольных вари-
вариациях qi и pi. Эта новая вариационная задача содержит
2л переменных и дифференциальные уравнения Эйлера—
Лагранжа могут быть записаны относительно всех qi и р,-.
Сделав это, получим 2/г дифференциальных уравнений
dt d'qt dqt dt dqt ' F 4 4)
dt dpt dpL др^
Это не что иное, как канонические уравнения F.3.5), пред-
представляющие собой единую систему из 2п дифференциальных
уравнений, полученных из интеграла действия F.4.3).
Мы больше не нуждаемся ни в первоначальной функции
Лагранжа, ни в преобразовании Лежандра, при помощи ко-
которого была получена функция Н. У нас есть теперь новый
вариационный принцип, эквивалентный первоначальному,
но имеющий перед ним некоторое преимущество вследствие
более простой структуры получающихся дифференциальных
уравнений — они уже не второго, а первого порядка.
В уравнениях все производные выделены, а не скрыты ка-
какими-либо алгебраическими операциями.
Это замечательное упрощение получено за счет простоты
формы нового интеграла действия F.4.3), который мы будем
4. Канонический интеграл 199
называть «каноническим интегралом». Подинтегральное
выражение снова имеет вид «кинетическая энергия минус
потенциальная ^энергия». Действительно, роль прежних
позиционных координат qi теперь играют переменные qt
и pi, и второй член подинтегрального выражения является
функцией только этих позиционных координат, первый же
член зависит от скоростей. Замечательные свойства кано-
канонического интеграла связаны именно с кинетической частью
подинтегрального выражения. Эта «кинетическая энергия»
представляет собой теперь простую линейную функцию
скоростей qtl, а именно
Pi <7i + р2 ц\ + •¦• + Рп Чп- F.4.5)
Нетрудно видеть, что каждому qk соответствует определен-
определенное pk- Поэтому pk называется «сопряженными импульсами»
и переменные вариационной задачи могут быть разбиты
на пары
\Pi/ \Рг/ \Р„
Замечательное преобразование уравнений Лагранжа,
произведенное Гамильтоном, фактически означает, что про-
произвольная сколь угодно сложная вариационная задача
может быть преобразована в эквивалентную задачу с удвоен-
удвоенным количеством переменных и с кинетической частью, при-
приведенной к простой форме. Это преобразование осуществля-
осуществляется без какого бы то ни было интегрирования, лишь при
помощи дифференцирований и исключения переменных.
Обычные задачи механики приводят к функциям Лагран-
Лагранжа, не содержащим производных выше первого порядка.
В общем же случае в вариационных задачах могут встре-
встретиться в подинтегральном выражении производные вплоть
до m-го порядка. Эти задачи также могут быть преобразова-
преобразованы к нормальному виду при помощи канонического инте-
интеграла. Поэтому канонические уравнения Гамильтона могут
считаться нормальным видом, к которому приводится любая
1 В классической механике кинетическая энергия обычно бывает
квадратичной функцией скоростей. Это, однако, отнюдь не обяза-
обязательно. Преобразование к канонической форме может быть выпол-
выполнено для произвольных сколь угодно сложных функций Лагранжа.
200 Гл. VI. Канонические уравнения движения
система дифференциальных уравнений, возникающих в вариа-
вариационных задачах. В §бщем случае для приведения к нормаль-
нормальному виду также не требуется ничего, кроме дифференциро-
дифференцирований и исключения переменных1.
Задача. Рассмотреть задачу о нагруженном упругом стержне,
приведенную в гл. II, п. 15, в частности интеграл B.15.3). Ввести
вспомогательный «импульс»
3L
" = ^'
и преобразовать этот интеграл методом Гамильтона в
j [иу —<р(у,у,и)] dx.
о
Интегрирование по частям интеграла B.15.3) преобразует первый
член подинтегрального выражения в —иу. Теперь мы имеем обычную
лагранжеву задачу с переменными у к и, которая может быть пре-
преобразована в гамильтонову форму, что даст две пары канонических
уравнений для четырех переменных </, и, plt р2; они заменяют собой
одно первоначальное дифференциальное уравнение четвертого по-
порядка для у. Показать эквивалентность канонической системы
и первоначального дифференциального уравнения. Очевидно, что
этот метод перехода от вторых производных к первым производным
применим при любом количестве переменных. В общем случае при
наличии производных m-го порядка следует начать с выших произ-
производных, сводя их к производным (т — 1)-го порядка; затем про-
процесс повторяется до тех пор, пока в подинтегральном выражении
останутся одни лишь первые производные. Это и означает, что под-
интегральное выражение приведено при помощи преобразования
Гамильтона к каноническому виду.
Отметим, что произвольную систему дифференциальных
уравнений можно путем введения соответствующей системы
независимых переменных qlt ..., qn привести к виду
qt = ft(qi>.:.4n>t)- F-4.7.)
Однако дифференциальные уравнения, вытекающие из ва-
вариационного принципа, обладают тем отличительным свой-
1 Впервые на это обратил внимание русский математик М. Ос-
Остроградский: Memoire sur les equations differentielles relative au
probleme des Isoperimetres, Mem. de I'Acad. de St. Petersb., VI
A850), 385 (см. также сб. Вариационные принципы механики
под ред. Л. С. Полака, Физматгиз, М., 1959, стр. 315.—Прим.ред.).
Ссылка взята из первого обзора Кейли (Cayley, первый обзор,
стр. 186, см. библиографию).
Канонический интеграл 201
ством, что их правые части сразу получаются в таком виде
из одной-единственной функции Н путем дифференциро-
дифференцирования. Функция Н определяет собой всю систему уравнений.
Особым свойством канонических уравнений является то, что
они разбиваются на пары. При замене сопряженных переменных <7*,
Pf, комплексными переменными
F.4.8)
двойная система канонических уравнений F.3.5) заменяется одной
системой комплексных уравнений, а именно
dub дН
—* = .. F.4.9)
idt duk '
Вследствие дуализма преобразования Лежандра каж-
каждой гамильтоновой задаче можно поставить в соответствие
лагранжеву задачу. Для этого р,- выражаются через qi и qi
при помощи уравнений
« = '?• <6'4-10)
а затем подставляются в подинтегральное выражение. Это
дает функцию Лагранжа L, зависящую только от qt и qL.
Резюме. Канонические уравнения Гамильтона мо-
могут рассматриваться как решение задачи Лагранжа
с подинте'гральным выражением особо простой струк-
структуры. Переменными в этой вариационной задаче явля-
являются варьируемые независимо друг от друга qi и pt.
Подинтегральное выражение вариационной задачи
приводится к нормальной форме
i ki — Н (qx,..., qn, pt р„, t) К
1 См. приложение, стр. 396.
202 Гл. VI. Канонические уравнения движения
5. Фазовое пространство и фазовая жидкость. Пере-
Переменными в каноническом интеграле являются qt и pi.
Следовательно, новая вариационная задача касается 2/г
степеней свободы. Если мы желаем изобразить эту новую
ситуацию геометрически, то нам придется использовать
пространство 2я измерений. «Положение» механической
системы теперь определяется наряду с прежними позици-
позиционными координатами лагранжевой механики также и им-
импульсами. Великий американский ученый Гиббс назвал
это q — р пространство, в котором одна точка С определяет
обобщенное «положение» механической системы «фазовым
пространством». В лагранжевой механике мы говорили
о «пространстве конфигураций», в которое включались
только переменные qt. В гамильтоновой механике мы гово-
говорим о «фазовом пространстве», использующем qt и р,-, как
совокупность 2/г переменных.
В пространстве конфигураций имело смысл введение оп-
определенного вида геометрии, причем эта геометрия оказа-
оказалась римановой. В фазовом пространстве ситуация иная:
оно не имеет определенной метрики, и мы для удобства бу-
будем считать, что qt и pt являются прямоугольными коорди-
координатами 2я-мерного евклидова пространства. Поскольку
нет особых оснований для введения метрики в фазовом про-
пространстве, евклидова геометрия столь же хороша, как
и всякая другая.
Удвоение числа измерений, произведенное при введении
фазового пространства, на первый взгляд кажется ненуж-
ненужным усложнением. Однако при теоретических исследованиях
задач движения использование фазового пространства ведет
к ряду существенных преимуществ. Одно из наиболее важ-
важных преимуществ станет наглядным, если рассмотреть
множество траекторий С-точки, сначала в лагранжевом
пространстве конфигураций, а затем в гамильтоновом фазо-
фазовом пространстве. Пока речь идет об одной траектории, то
движущаяся С-точка в обоих случаях описывает некоторую
кривую. Однако выделение одной конкретной траектории
из множества всех возможных траекторий часто сильно за-
затрудняет теоретические исследования. На многие вопросы
механики нельзя дать удовлетворительный ответ, выделяя
одно частное решение уравнений движения, соответствую-
соответствующее какому-то конкретному выбору начальных условий.
5. Фазовое пространство и фазовая жидкость 203
Необходимо получить общее решение, удовлетворяющее
произвольным начальным условиям.
Попытавшись изобразить все множество траекторий
в лагранжевом пространстве конфигураций, мы получим
безнадежно запутанное переплетение линий. Движение
может начинаться из любой точки пространства конфигура-
конфигураций в произвольном направлении и с произвольной началь-
начальной скоростью. Невозможно получить какое-либо упорядо-
упорядоченное представление всех этих линий. Обратимся теперь
к фазовому пространству уравнений Гамильтона — урав-
уравнений не второго, а первого порядка. При заданном положе-
положении С-точки эти уравнения определяют значение ее скоро-
скорости. Движение может начаться в любой точке фазового про-
пространства, но задание одной точки Р однозначно определяет
всю траекторию. Выражаясь аналитическим языком, можно
сказать, что для полного решения канонических уравнений
F.3.5) нужно знать qL и pi, как функции времени t и 2я
констант интегрирования, которые можно интерпретировать
как значения 2/г координат фазового пространства в момент
времени t = 0
pi = gt(q°' •••,<7°.p?> ...,pn,t).
Это полное решение канонических уравнений можно
изобразить в упорядоченном виде, без каких бы то ни было
пересечений, если 2п координат q-L, р,- рассматривать как
различные измерения фазового пространства. Геометриче-
Геометрическая картина получается еще более полной, если добавить
еще одно измерение, вводя время t в качестве Bл + 1)-й
координаты. Картан1 назвал это Bл -+- 1)-мерное простран-
пространство «пространством состояний» (espace des etats). В про-
пространстве состояний задача о движении системы полностью
геометризуется и полное решение канонических уравне-
уравнений изображается в виде бесконечного множества кривых,
заполняющих B/г + 1)-мерное пространство. Эти кривые
нигде не пересекаются. Действительно, пересечение двух
кривых означало бы, что в одной и той же точке пространст-
пространства состояний возможны две касательные, что исключается,
1 С а г t а п, Invariants integraux, p. 4, см. библиографию.
20 4 Гл. VI. Канонические уравнения движения
так как канонические уравнения в каждой точке этого про-
пространства определяют единственную касательную.
Полученная геометрическая и аналитическая картина
находится в полной аналогии с движением жидкости. Пред-
Представим себе трехмерное движение обычной жидкости, с ко-
которой оперирует гидродинамика. Это движение можно опи-
описать двумя способами: «с помощью частиц» и «с помощью
поля».
При первом способе рассматривается отдельная частица
жидкости и прослеживается изменение ее положения со
временем t, начиная с некоторого начального положения
хо > У о> 2о
х = f{xo,yo,zo,t),
У = g(xo,yo<Zo,t)> F.5.2)
2 = h(xo,yo,zo,t).
С другой стороны, можно рассмотреть «поле скоростей»,
существующее в некоторый момент времени t и заданное
уравнениями
df ¦ dg dh ,с г О\
Разрешим уравнения F.5.2) относительно х0, у0, z0, выра-
выразив их в виде функций х, у, z, t. Подставив затем полученные
выражения в F.5.3), получим х, у, z как функции х, у, zn t
х = и(х, y,z, t),
у = v(x,y, г, t), F.5.4)
2 = w(x,y,Z,t).
Это и есть описание движения жидкости с помощью поля,
которое определяет вектор скорости в любой точке простран-
пространства в любой момент времени. Из заданного описания с по-
помощью частиц можно получить описание с помощью поля
путем дифференцирований и исключения переменных.
С другой стороны, для получения описания второго типа из
первого нужно проинтегрировать уравнения F.5.4). Оба
способа описания эквивалентны.
Эта гидродинамическая картина полностью переносится
на фазовое пространство. Единственная разница заключает-
заключается в том, что вместо трех координат х, у, z имеются 2л ко-
6. Теорема о сохранении энергии 205
ординат qlt ..., qn, pi рп- Описание с помощью частиц
получается в результате интегрирования канонических
уравнений. Поведение 2/г-мерной фазовой жидкости подоб-
подобно поведению обычной жидкости.
Резюме. Пространство конфигураций канонических
уравнений имеет 2я измерений, а именно п позицион-
позиционных координат qt и п импульсов pi, и все они являются
независимыми переменными вариационной задачи.
Это 2я-мерное пространство называется «фазовым
пространством». Вводя время в качестве дополнитель-
дополнительной переменной, получим B/г + 1)-мерное пространст-
пространство, которое называется «пространством состояний».
Геометрически движение можно представить в виде
движения 2/г-мерной жидкости, называемой «фазовой
жидкостью». Каждая отдельная линия тока движу-
движущейся жидкости определяет собой движение меха-
механической системы при соответствующих начальных
условиях; движение жидкости в целом определяет
общее решение при произвольных начальных условиях.
6. Теорема сохранения энергии как следствие канони-
канонических уравнений. Канонические уравнения
дН
получают новый смысл, если их интерпретировать гидродина-
гидродинамически, имея в виду движение фазовой жидкости. Они опре-
определяют скорость частиц жидкости в определенной точке фа-
фазового пространства в определенный момент времени. Ока-
Оказывается, что особые типы движения жидкости, представля-
представляющие интерес в обычной гидродинамике, интересны также
и при движении фазовой жидкости.
Одним из таких типов является стационарное движение
жидкости. В нем поле скоростей не зависит от времени t.
Хотя жидкость движется и частицы все время изменяют
206 Гл. VI. Канонические уравнения движения
свое положение, скорость в определенной точке простран-
пространства постоянна. Это означает, что в описании с помощью
поля правые части уравнений F.5.4) явно не зависят от вре-
времени I.
Такая же ситуация возникает в потоке фазовой жидкости
в случае консервативных (склерономных) систем. Здесь
функция Лагранжа, а следовательно, и функция Гамильто-
Гамильтона, не зависят от t
H = H(qi,...,qn,Pl,...,pJ. F.6.2)
Поэтому правые части уравнений F.6.1) не зависят от време-
времени, откуда сразу следует, что фазовая жидкость в случае
консервативных систем находится в состоянии стационар-
стационарного движения.
Второй фундаментальной теоремой, которая может быть
получена для таких систем, является теорема о сохранении
энергии. Дифференцирование уравнений F.6.2) дает
dfi -чгл /дН • . дН • \ in r ^
ггг = 7 h- 1/ + з—Pi- (о.6.3)
dt *шш \dg,- dpi I
Из канонических уравнений F.6.1) сразу видно, что
^Т = ° F-6.4)
и, следовательно,
И = const = Е. F.6.5)
Эта теорема придает функции Н физический смысл «полной
энергии». Если L= Т — V, и Т — квадратичная функция скоростей,
в то время как V от скоростей не зависит, то
H=T-\-V. F.6.6)
В релятивистской механике ни одно iu этих условий но выпол-
выполняется. Тем не менее теорема о сохранении энергии F.6.5) остается
справедливой, но функция Н определяется в соответствии с общей
формулой F.2.3)
_V EL •
i= 1
7. Теорема Лиувилля 207
Теорема о сохранении энергии F.6.5) имеет интересную
геометрическую интерпретацию в связи с движением фазо-
фазовой жидкости. Уравнение
H(q1,...,qn,p1,...,pn) = E F.6.8)
определяет некоторую поверхность в 2/г-мерном простран-
пространстве. Если константа Е может принимать произвольные зна-
значения, то мы получаем бесконечное семейство поверхностей,
заполняющих все фазовое пространство. Теорема о сохране-
сохранении энергии утверждает, что частица жидкости, начавшая
свое движение на некоторой изоэнергетической поверхности,
остается на этой поверхности в течение всего движения,
независимо от его продолжительности.
Резюме. Если функция Гамильтона Я не зависит от
времени t, то механическая система консервативна.
Такие системы характеризуются двумя особыми свой-
свойствами фазовой жидкости:
1. Движение фазовой жидкости является стацио-
стационарным.
2. Каждая частица жидкости остается все время на
«изоэнергетической поверхности» Н=Е.
7. Теорема Лиувилля. Физическая жидкость иногда под
действием достаточно больших сил испытывает изменение
объема. Если же в процессе движения произвольный объем
жидкости остается неизменным, то мы говорим о «несжима-
«несжимаемой жидкости». Аналитически несжимаемость жидкости
можно описать двумя способами. В описании с помощью
частиц F.5.2) условием несжимаемости является тождест-
тождественное равенство единице «функционального детерминанта»
от х, у, z по х0, уо, Zq. В описании с помощью поля F.5.4)
условие несжимаемости выглядит так:
divv =-r- -f -з- + я~ = 0. F.7.1)
дх ' ду dz v '
Фазовая жидкость, связанная с каноническими уравнения-
уравнениями, обладает тем интересным свойством, что она имитирует
208 Гл. VI. Канонические уравнения движения
поведение несжимаемой жидкости. Поскольку жидкость
имеет 2л измерений, то естественным обобщением уравне-
уравнения F.7.1) является
Щ F.7.2)
? Qi dp.j "¦ '
Из канонических уравнений F.6.1) непосредственно сле-
следует, что это соотношение выполняется, причем не только
для консервативных, но и для произвольных систем. На-
Напомним теперь, что теорема Грина, переводящая объемный
интеграл от дивергенции в интеграл, определяющий поток
через поверхность, применима в случае л измерений в та-
такой же степени, как и в случае трех измерений. Ввиду на-
наличия такого преобразования уравнение для дивергенции
F.7.2) равносильно утверждению, что полный поток фазо-
фазовой жидкости через любую замкнутую поверхность в фазовом
пространстве всегда равен нулю. Это в свою очередь означает,
что фазовая жидкость движется подобно несжимаемой жид-
жидкости. Эта теорема была впервые сформулирована Лиувил-
лем A838) и поэтому называется «теоремой Лиувилля».
Теорема Лиувилля позволяет добавить к закону сохране-
сохранения энергии еще один закон сохранения. Выделим произ-
произвольную 2л-мерную область фазового пространства с объе-
объемом
а = \idqx...dqndpx...dpn F.7.3)
и посмотрим, что происходит с точками этого объема при
движении фазовой жидкости. Хотя форма области может
искажаться, ее объем в процессе движения остается неизмен-
неизменным
о = const. F.7.4)
Пример. Для механической системы лишь с одной степенью
свободы фазовое пространство становится двумерным, а простран-
пространство состояний —трехмерным. Поэтому в этом простом случае по-
поведение фазовой жидкости можно изобразить особенно наглядно при
помощи нашего обычного пространства. «Энергетические поверх-
поверхности» в этом случае сводятся к кривым, причем эти кривые опреде-
определяют непосредственно линии тока двумерной фазовой жидкости.
Более того, хотя картина линии тока является статической и не со-
содержит скоростей, с которыми частицы жидкости движутся вдоль
линий тока, эти скорости можно получить из расстояний между со-
8. Интегральные инварианты, теорема Гельмгольца 209
седними линиями тока, воспользовавшись несжимаемостью фазовой
жидкости.
Задача. Два следующих рисунка соответствуют таким двум за-
задачам.
1. Линейный осциллятор
L = jmq*-lfk*q*. F.7.5)
2. Движение частицы между двумя твердыми стенками с упру-
упругими отражениями от стенок.
Дать анализ рис. 6 и 7. Линиями тока в первой задаче являются
эллипсы, а во второй — прямоугольники.
Пусть потенциальная энергия задается выражением
у = ^к*ч™, F.7.6)
где т меняется от 1 до со . Показать, что по мере увеличения т
эллипсы осциллятора становятся все более выпуклыми, прибли-
приближаясь к прямоугольникам. Для т — оо получается распределение
линий тока, соответствующее упругому отражению. Винтовая ли-
линия рис. 6, б деформируется в ломаную, изображенную на
рис. 7, б. «Стенки» при этом расположены в точках q = ± 1.
Резюме. Фазовая жидкость в 2я-мерном простран-
пространстве ведет себя подобно несжимаемой жидкости. Про-
Произвольная область, вырезанная из жидкости и движу-
движущаяся вместе с ней, меняет в процессе движения свою
форму, но сохраняет свой объем.
8. Интегральные инварианты, теорема Гельмгольца о
циркуляции. Французский математик Пуанкаре A859—
1912) предложил для любых интегралов, связанных с фазо-
фазовой жидкостью и сохраняющих свою величину при движе-
движении фазовой жидкости, название «интегральные инвариан-
инварианты». Объем а фазовой жидкости, рассматривавшийся в пре-
предыдущем пункте, является одним из примеров подобных
интегральных инвариантов. Другим важным примером яв-
является величина, введенная Гельмгольцем и называемая
«циркуляцией».
Вернемся к теореме, сформулированной в гл. V, п. 3
[см. там E,3.3I, в которой определяется вариация интегра-
8 Зак. 1646
Рис. 6. Линейный осциллятор
а. Фазовое пространство, б. Пространство состояний.
/ 1
1
1
Я
/
Рис. 7. Упругое отражение.
Фазовор пространство, б. Пространство состояний.
8. Интегральные инварианты, теорема Гельмгольца 211
ла действия при произвольных вариациях qit которые могут
даже и не обращаться в нуль в двух граничных точках
- F-8.1)
Эта важная теорема может применяться в гамильтоновой
форме механики без каких бы то ни было изменений, по-
поскольку вариации pt не влияют на ЬА. Следовательно,
F.8.1) имеет место при произвольных вариациях q-t и pt.
Используем эту теорему следующим образом. Проведем
произвольную замкнутую кривую L в фазовом простран-
пространстве в некоторый момент времени tx. Предположим, что это
«материальная линия», т. е. что она жестко связана с части-
частицами жидкости и движется вместе с ними. Поэтому в какой-
либо другой момент времени t2 кривая L будет находиться
уже в другом месте фазового пространства. Она по-прежнему
будет замкнутой кривой. Пусть в момент времени tt кривая
L задана в параметрической форме
I'-f'W' F.8.2)
Pi --= gi (*)•
Напишем следующий криволинейный интеграл, взяв его
вдоль замкнутой кривой L
Г = ? 2 Р/ dq, = ф |р« q\ dr. F.8.3)
J 1=1 i=\
Эта величина инвариантна при движении,
r=const. F.8.4)
Сказанное иллюстрируется рис. 8. Фазовое простран-
пространство в моменты времени tt и t2 изображено в виде двух сече-
сечений B/г + 1)-мерного пространства состояний. Точка М1
переносится движущейся жидкостью в точку Мг, а соседняя
точка N-l — в точку N2. Линии М±М2 и NLN2 являются
мировыми линиями частиц жидкости. Интеграл действия
между точками Мх и М2 имеет значение А, а между точка-
точками NiH N2 — значение А + ЬА. Так как линия NxNo может
8*
212
Гл. VI. Канонические уравнения движения
рассматриваться как вариация линии MiM2, применив
теорему F.8.1), получим
= I 2 ipibqT .
F.8.5)
Рис. 8.
Интегрируя это равенство между точками хх и т2 кривой L,
получаем
II' п Л'г
J 2 р/ 6^7/ . F.8.6)
Если полностью обойти всю кривую L, так чтобы конечная
и начальная точки совпали, то АЛ обратится в нуль. Следо-
Следовательно,
F.8.7)
Так как ^ и t2 произвольны, отсюда следует теорема F.8.4).
>' Гельмгольц интересным образом использовал эту «тео-
«теорему о циркуляции». Рассмотрим движение частицы в поле
силы с потенциальной энергией V. Связанное с этой зада-
задачей фазовое пространство имеет шесть измерений. Однако
8. Интегральные инварианты, теорема Гельмгольца 213
для того чтобы наглядно изобразить содержание теоремы
F.8.4), отнюдь не нужно шести измерений. Вместо того
чтобы рассматривать рх, р2, р3 как три дополнительные ко-
координаты, можно ввести вектор с компонентами р1; р2, р3
в точке qu q2, q3 пространства конфигураций. Выберем
в качестве ^-координат обычные прямоугольные координаты
х, у, г. Мы получим тогда замкнутую кривую в обычном трех-
трехмерном пространстве, а вдоль этой кривой непрерывное
векторное поле с компонентами рх, р2, р3. Так как вектор
импульса ресть попросту mv, где v—скорость, то циркуля-
циркуляция принимает вид
Т=т (f \-ds, F.8.8)
где ds — векторный элемент длины замкнутой кривой. Это
представление обходится без шестимерного фазового про-
пространства, которое заменяется трехмерным пространством
конфигураций.
В общем случае пространство конфигураций не имеет
ничего общего с реальным физическим пространством. Од-
Однако пространство конфигураций одной частицы совпадает
с физическим пространством. Различные траектории в про-
пространстве конфигураций представляют собой траектории
самой частицы, относящиеся к разным начальным услови-
условиям. Эти траектории могут также рассматриваться как ли-
линии тока так называемой «идеальной жидкости», т. е. физиче-
физической жидкости (необязательно несжимаемой), которая не
обладает вязкостью и имеет постоянную температуру. На
частицы такой жидкости действуют, конечно, силы со сторо-
стороны окружающих частиц, но из гидродинамических урав-
уравнений Эйлера видно, что эти силы имеют потенциал и экви-
эквивалентны некоторой внешней моногенной силе. Следова-
Следовательно, выполняются условия применимости принципа
Гамильтона, и линии тока движущейся жидкости совпадают
с линиями тока в пространстве конфигураций, к которым
применима теорема о циркуляции. Мы получаем таким об-
образом теорему Гельмгольца о циркуляции, которая утверж-
утверждает, что
(fi\-ds=const, F.8.9)
где интеграл берется вдоль любой замкнутой кривой в иде-
идеальной жидкости, причем кривая движется вместе с жидко-
214 Гл. VI. Канонические уравнения движения
стью. Отсюда следует, что если циркуляция вдоль любой
замкнутой кривой равна нулю в момент времени t = О,
то это свойство сохраняется и в дальнейшем. Это значит, что
жидкость, в которой вихри сначала отсутствуют, будет
оставаться безвихревой сколь угодно долго. Другими сло-
словами, вихри не могут возникать или исчезать.
Резюме. «Циркуляция» является инвариантом дви-
движения фазовой жидкости. Она представляет собой
величину 2ipidqit проинтегрированную вдоль произ-
произвольной замкнутой кривой фазового пространства.
Инвариантность циркуляции имеет для фазовой жид-
жидкости тот же смысл, что и теорема Гельмгольца для
идеальной физической жидкости: обе они утверждают
сохраняемость вихрей.
9. Исключение циклических переменных. Хотя канони-
канонические уравнения имеют гораздо более простую структуру,
чем исходные уравнения Лагранжа, у нас нет общего мето-
метода интегрирования этих уравнений. Поэтому при интегри-
интегрировании уравнений движения по-прежнему необычайно
важную роль играют циклические переменные. Как только
появляются циклические переменные, становится возмож-
возможным частичное интегрирование данной механической задачи
и сведение ее к более простой. Сам процесс сведения, однако,
в гамильтоновой форме механики выглядит гораздо проще,
чем в лагранжевой форме.
Если функция Лагранжа L не содержит какой-либо опре-
определенной координаты qt, скажем цп, то и функция Га-
Гамильтона Н тоже ее не содержит. Последнее из канонических
уравнений тогда имеет вид
Рп=0, F.9.1)
откуда
pn=const=Cn. F.9.2)
Таким образом, при помощи канонических уравнений
еще раз установлено постоянство циклических импульсов.
9. Исключение циклических переменных 2JJ5
Так как р,- — независимые переменные, не может быть
возражений против того, чтобы в процессе варьирования
использовать условие F.9.2). Само правило варьирования —
при фиксированных граничных значениях — не нарушается,
поскольку р„ не варьируется вовсе.
Так как рп — постоянная величина, в функции Гамиль-
Гамильтона ее можно заменить на Сп. Более того, кинетическая
часть интеграла действия принимает вид
ndt=Cn[qX\. F.9.3)
Полученное выражение представляет собой граничный член,
который не изменяется при варьировании и потому может
быть опущен. Следовательно, интеграл действия сводится к
А= \ ("ZPtqi-fAdt. F.9.4)
Этот метод применим при любом количестве цикличе-
циклических переменных.
Задача. Для каждой гамильтоновой задачи существует соответ-
соответствующая лагранжева задача. Показать, что исключение цикличе-
циклических переменных при гамильтоновом подходе соответствует при лаг-
ранжевом подходе процессу сведения Рауса, обсуждавшемуся ранее
в гл. V, п. 4.
После решения сведенной механической задачи цикличе-
циклические переменные получаются в виде функций / прямым
интегрированием, так как правые части соответствующих
канонических уравнений
in = т^" F-9.5)
являются явными функциями t.
Резюме. Исключение циклических переменных в га-
гамильтоновой форме механики является очень простой
операцией. Вклад от циклических переменных в кине-
кинетической части канонического интеграла опускается,
а циклические импульсы в функции Гамильтона заме-
заменяются константами.
216 Гл. VI. Канонические уравнения движения
10. Параметрическая форма канонических уравнений.
Раньше было показано, что введение понятия «пространства
состояний» полностью геометризует задачу о движении, свя-
связанную с каноническими уравнениями. Множество всех ре-
решений системы канонических уравнений можно изобразить
с помощью некоторого бесконечного семейства непересека-
непересекающихся кривых, заполняющих пространство состояний.
Характерной чертой пространства состояний является
то, что оно имеет нечетное число измерений. Всем позици-
позиционным координатам qL соответствуют их импульсы pit
а время t выделено как обособленная переменная, не свя-
связанная ни с каким импульсом. Причина заключается в том,
что время t не является механической переменной, а игра-
играет роль независимой переменной.
Иногда оказывается чрезвычайно выгодным превратить
время t в механическую переменную. Вместо того чтобы счи-
считать позиционные координаты qt функциями времени t,
координаты qi и время t рассматриваются как функции не-
некоторого произвольного параметра т. Лагранж в подобных
случаях считал, что пространство конфигураций для одной
частицы превращается из пространства трех в простран-
пространство четырех измерений. В релятивистской механике этот
переход абсолютно необходим, так как пространство и вре-
время объединяются там в один четырехмерный континуум
Эйнштейна—Минковского.
Теперь встает вопрос о том, как в этом случае сформули-
сформулировать канонические уравнения движения Гамильтона.
Первоначальная задача Лагранжа превращается в задачу
о нахождении qx, ..., qnn t как функций аргумента т. Поэ-
Поэтому пространство конфигураций Лагранжа имеет теперь
п + 1 измерение, и t можно включить в число позиционных
координат, положив
t = qn+l. F.10.1)
Однако соответствующее фазовое пространство должно те-
теперь иметь 2л + 2 измерений, поскольку имеется л -|- 1
пара канонических переменных.
41) iqz) (qn) и
piI W' ¦"' \pJ' \pJ'
10. Параметрическая форма канонических уравнений 217
где t и pt— просто другие обозначения переменных qn+i
и рл+ь Импульс pt, соответствующий времени t [таким
«импульсом» является полная энергия, взятая с обратным
знаком,—см. гл. V, п. 6 E.6.2)], добавляется к другим пере-
переменным в качестве еще одной независимой переменной, сно-
снова увеличивая число измерений уже по сравнению с «про-
«пространством состояний». Это новое пространство мы будем
называть «расширенным фазовым пространством». Прежний
интеграл Лагранжа в параметрической форме [см. гл. V,
п. 6 E.6.1)] переходит в
Г
Г 1
к, .... qn, <?„+,.^' -."тН й'^х. F.10.2)
Можно заранее сказать, что обычный стандартный метод
не подходит для параметрического случая, потому что кано-
канонические 5уравнения определяют переменные qi и pi как
некоторые конкретные функции независимой переменной —
в данном случае т,— в то время как в действительности т—¦
произвольная переменная и свобода ее выбора должна как-то
отразиться в решении.
И действительно, функция Гамильтона Нх расширенной
задачи тождественно обращается в нуль. Это можно уви-
увидеть, рассмотрев функцию Лагранжа
qn, qn+l, 4^ »i-W F.10.3)
Чп+1 <7+1/
Функция Li является линейной формой относительно п + 1
переменных q\, ..., q'n+\¦ Следовательно, согласно теореме
Эйлера об однородных функциях,
откуда видно, что
#!=!>, ?;-?,=<). F.10.5)
8В Зак. 1646
218 Гл. VI. Канонические уравнения движения
Итак, канонический интеграл сводится к совершенно
симметричной форме
Л- j Д/^.Л F.10.6)
без какой бы то ни было функции Гамильтона. Ясно, однако,
что место функции Нх должно занять что-то другое, так
как при полном отсутствии гамильтоновой функции все qi
и pi обратились бы в константы, что невозможно.
Действительно, существует нечто, заменяющее функцию
Гамильтона. Этим заменителем оказывается дополнительное
условие, связывающее q-t и pi, которое обязательно должно
существовать. Нетрудно видеть, что уравнения
Pi = j? FЛ0.7)
не могут быть разрешены относительно q{. В противном слу:
чае мы получили бы определенную совокупность qt, отве-
отвечающую совокупности pi, тогда как в действительности pi
не изменяются при умножении всех qt на один и тот же
множитель а. Из того, что уравнения F.10.7) неразрешимы
относительно qi, следует, что они не являются взаимно
независимыми. Отсюда в свою очередь следует, что должно
существовать какое-то тождественное соотношение меж-
между pi (это тождество содержит qi в качестве параметров и по-
поэтому оно фактически является соотношением между qi
и р^.
Действительно, выделив последнюю переменную qn+i —
= t, получим для связанного с ней импульса
Рп+х = ~Н{Яг ¦¦¦' ?„+,-Р,. -. /U F.10.8)
В результате наша вариационная задача принимает следу-
следующий вид: интеграл
А= J (/>,<?;+ ... +pn+lq'n+i)dr F.10.9)
10. Параметрическая форма канонических уравнений 219
должен принять стационарное значение при дополнительном
условии
р„+1+Я = 0. F.10.10)
Подставив в интеграл F.10.9) вместо рп+\ его значение
—Я, получим обычную форму канонического интеграла
Pnqn~H)dt F.10.11)
при условии, что вместо параметра т мы вновь в качестве
независимой переменной возьмем qn+i=t.
Однако нет необходимости выделять переменную qn+\\
лучше записать тождество, которое должно существовать
между <7« и Р*. в более общей форме
K{qv .... qn+r pr ...; Pn+l)=0. F.10.12)
В этой форме сохраняется симметрия 2л + 2 канонических
переменных и ни одной из них не отдается предпочтение.
Задача 1. Пусть дан интеграл действия из принципа Якоби
Показать, что р;, связанные с этим подинтегральным выражением,
удовлетворяют следующему тождеству:
ЪЬ jk Pi Pk
2(E — V) ~ ''
где bik — коэффициенты матрицы, обратной исходной матрице aih.
Задача Гамильтона, отвечающая параметрической форме
задачи Лагранжа, принимает, наконец, следующий вид.
Отыскивается условие стационарности интеграла F.10.9)
при дополнительном условии F.10.12). Условие F.10.12)
можно учесть методом неопределенных множителей
8В*
220
Гл. VI. Канонические уравнения движения
Лагранжа, видоизменив заданный интеграл следующим об-
образом:
F.10.13)
Здесь X —¦ некоторая произвольная функция т в полном
соответствии с произвольностью самого т. В настоящей
задаче «неопределенный множитель Лагранжа» действи-
действительно остается неопределенным. При желании мы можем
положить К = 1 за счет соответствующего выбора перемен-
переменной т. Тогда получим вариационный интеграл
A =
I' /n+l
F.10.14)
имеющий в точности каноническую форму, за тем лишь ис-
исключением, что наша «расширенная» задача имеет 2/г + 2
вместо In канонических переменных. Функция К — левая
часть дополнительного условия F.10.12)—-заняла место
функции Гамильтона Я; поэтому мы будем называть К
«обобщенной функцией Гамильтона».
Таким образом, в параметрической форме канонические
уравнения имеют вид
В частном случае, когда
получим
{k=\ Л+1). F.10.15)
F.10.16)
(k=l, ..., Л),
п
dH
F.10.17)
F.10.18)
F.10.19)
10. Параметрическая форма канонических уравнений 221
Уравнение F.10.18) показывает, что нормированный таким
образом параметр т совпадает с qn+i, т. е. со временем t.
Уравнения F.10.17) при этом являются обычными канони-
каноническими уравнениями. Последнее из уравнений системы
[уравнение F.10.19I определяет закон, по которому из-
изменяется со временем t полная энергия pn+i (см. гл. V, п. 3).
Оно включено теперь в параметрическую систему уравнений
в качестве независимого уравнения, поскольку рп+\ — одна
из независимых переменных.
Общая параметрическая формулировка канонических
уравнений в форме F.10.15) с теоретической точки зрения
обладает серьезными преимуществами по сравнению с дру-
другими формулировками. Ее можно считать наиболее вырази-
выразительной формой канонических уравнений. Она совсем
по-новому освещает роль консервативных систем. За-
Заметим, что после преобразования времени / в одну из меха-
механических переменных любая система становится консерва-
консервативной. «Обобщенная функция Гамильтона» К не зависит
явно от независимой переменной т, и поэтому наша система
в расширенном фазовом пространстве становится кон-
консервативной. Движение фазовой жидкости является уста-
установившимся, и каждая частица жидкости все время нахо-
находится на какой-то определенной поверхности
/C=const. F.10.20)
Поэтому если начальные значения qi и р,- при значении т,
равном тх, выбраны в соответствии с условием /С = 0,
то это условие выполняется в течение всего времени движе-
движения.
В свете всего сказанного о параметрических системах
формулировка принципа наименьшего действия для консер-
консервативных систем, данная Эйлером и Лагранжем, получает
новый смысл. Напомним, что этот принцип требует мини-
минимизации интеграла по времени от величины 2Г при условии,
что для движущейся точки выполняется энергетическое
уравнение Т + V = Е. При переходе от пространства кон-
конфигураций к фазовому пространству принцип Эйлера —
Лагранжа принимает следующую форму. Требуется найти
условия стационарности интеграла
222 Гл. VI. Канонические уравнения движения
?i + - +Pni'n)dx F.10.21)
при дополнительном условии
Я —? = 0. F.10.22)
Согласно принципу, выраженному каноническими уравне-
уравнениями в параметрической форме, требуется стационар-
стационарность интеграла
А = J М',+ - +Pn4'n+Pn+l4'^l)dx F.10.23)
при дополнительном условии
/С = 0. F.10.24)
Заметим, что этот принцип сразу же переходит в принцип
Эйлера — Лагранжа, когда система консервативна и когда
К, задается в виде Н + рп+\. Поскольку последняя перемен-
переменная t = <7„_|_1 является теперь циклической, импульс рп+\
может быть заменен на — Ей последний член в подинтеграль-
ном выражении в F.10.23) можно опустить.
Параметрическая форма канонических уравнений поз-
позволяет также глубже понять внутренние соотношения,
связывающие различные принципы минимума в механике.
Если канонический интеграл приведен к нормальной форме
А=
F.10.25)
то разница между различными принципами соответствует
различным интерпретациям дополнительного условия
/С=0. F.10.26)
Как было установлено в задаче 1 настоящего пункта,
дополнительное условие принципа Якоби принимает вид
F.10.27)
10. Параметрическая форма канонических уравнений 223
То же самое условие можно, очевидно, задать в форме
\^blkplPk + V = E, F.10.28)
что соответствует дополнительному условию принципа Эй-
Эйлера — Лагранжа. Таким образом, непосредственно уста-
установлена эквивалентность этих двух принципов. Более того,
если учесть дополнительное условие F.10.28) с помощью
метода неопределенных множителей Лагранжа, вернувшись
при этом от фазового пространства к пространству кон-
конфигураций, то мы получим принцип Гамильтона. Отсюда
видна эквивалентность всех трех принципов для консерва-
консервативных систем. Время t, играющее роль параметра, интер-
интерпретируется как частный вид переменной т, при котором
неопределенный множитель к превращается в 1.
Интересно посмотреть, что произойдет, если применить
метод неопределенных множителей, оставив дополнительное
условие в форме F.10.27). Вернувшись снова от фазового
пространства к пространству конфигураций, получим прин-
принцип, в котором стационарное значение принимает интеграл
-2 п
А= J (E-V) 2 alkq'iq'kdx. F.10.29)
-, i,k=\
Это есть принцип Якоби, хотя и без обычного квадратного
корня. Траектории, получаемые из интеграла F.10.29), тем
не менее те же самые, что и из принципа Якоби. Разница
заключается лишь в выборе независимой переменной т.
В обычной формулировке принципа Якоби т — произволь-
произвольный параметр; в принципе же F.10.29) т выбрано определен-
определенным образом.
Задача 2. Принцип F.10.29) приводит к следующей интересной
теореме эквивалентности. Рассмотрим движение частицы с массой in,
меняющейся по закону
т = тл A — t-V),
где а — константа. Эта частица переменной массы, двигаясь под
действием собственной инерции, без какого бы то ни было внешнего
поля сил, описывает ту же самую траекторию, что и частица постоян-
постоянной массы т0 в потенциальном поле V, при условии что масса т0
начинает свое движение в том же направлении, что и масса т, и что
ее полная энергия Е = \h. Доказать справедливость этой теоремы,
написав уравнения движения Лагранжа. Эквивалентность сохра-
сохраняется лишь для траекторий, но не для движения во времени.
224 Гл. VI. Канонические уравнения движения
Резюме. Путем добавления времени / к другим
механическим переменным в качестве (п + 1)-й по-
позиционной координаты достигается замечательная
симметризация канонического интеграла. Канониче-
Канонический интеграл принимает вид
и ищется его стационарное значение при дополни-
дополнительном условии
При этом фазовое пространство имеет 2п + 2 измере-
измерений, движение фазовой жидкости является всегда
установившимся, а механическая система всегда кон-
консервативна. Особые свойства консервативных систем
распространяются таким образом на произвольные
системы. Эта параметрическая формулировка канони-
канонических уравнений с теоретической точки зрения обла-
обладает рядом преимуществ.
Г Л А В А VII
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
Введение. Мы привели дифференциальные уравнения движения
к особенно удобному «каноническому» виду. Однако наша конечная
цель будет достигнута только тогда, когда мы сможем решить эти
уравнения. Поскольку нам неизвестен метод непосрественного ин-
интегрирования этих уравнений, то приходится идти косвенными пу-
путями. Одним из таких путей является метод преобразований коор-
координат. Мы пытаемся отыскать такую систему координат в фазовом
пространстве, в которой входящая в канонические уравнения функ-
функция Гамильтона имела бы настолько простой вид, чтобы уравнения
движения могли быть непосредственно проинтегрированы. Естест-
Естественно, что с этой точки зрения желательно исследовать всю группу
преобразований координат, связанных с каноническими уравнения-
уравнениями. Изучение этих «канонических преобразований» оказывает ценную
помощь при интегрировании уравнений механики. Теория канониче-
канонических преобразований в основном связана с именем Якоби. Хотя он,
возможно, и не обладал воображением, присущим Гамильтону, и
его усилия были в основном направлены на решение задачи интегри-
интегрирования уравнений, однако открытие канонических преобразований
явилось все же огромным достижением. Получившаяся в результате
теория интегрирования сыграла важную роль в развитии современ-
современной атомной физики. В далеко идущих исследованиях Гамильтона
проблема интегрирования являлась второстепенной задачей.
1. Преобразования координат как метод решения задач
механики. Как мы уже видели при изучении лагранжевой
формы механики, правильный выбор координат может су-
существенно облегчить задачу решения дифференциальных
уравнений движения. Если среди наших координат имелась
циклическая, то мы сразу находили первый интеграл урав-
уравнений Лагранжа. Поэтому мы пытались получить цикличе-
циклические координаты путем преобразования первоначальной
системы координат.
Совершенно аналогичная ситуация возникает и в га-
мильтоновой форме механики. Мы снова не имеем прямого
метода интегрирования канонических уравнений, и наиболее
эффективными оказываются координатные преобразования
фазового пространства. При этом выясняется, что уравнения
Гамильтона обладают рядом преимуществ по сравнению
226 Гл. VII. Канонические преобрагогания
с уравнениями Лагранжа. В лагранжевои механике су-
существенной является функция L, представляющая собой
разность между кинетической и потенциальной энергией.
При попытке упростить выражение для потенциальной
энергии кинетическая энергия может приобрести слишком
сложный вид, и наоборот. Одновременное упрощение выра-
выражений и для потенциальной и для кинетической энергий яв-
является довольно трудной задачей. В гамильтоновой меха-
механике положение более благоприятное, потому что основная
функция, функция Гамильтона Я, зависит лишь от самих
переменных и не содержит каких бы то ни было производ-
производных. Поэтому ее можно сравнить с потенциальной энергией
в лагранжевои задаче. Кинетическая же энергия приводится
к нормальному виду 2р;<7< и не участвует в задаче преобра-
преобразования. Ею определяется общий класс преобразований,
которые могут применяться. Оставаясь внутри этого класса,
мы можем полностью сконцентрировать свое внимание на
функции Гамильтона Н.
Еще одно преимущество уравнений Гамильтона при ко-
координатных преобразованиях по сравнению с уравнениями
Лагранжа связано с удвоенным количеством переменных.
Хотя на первый взгляд это является скорее недостатком,
чем преимуществом, сам процесс преобразования координат
переводит этот пассив в актив. Увеличение числа перемен-
переменных, имеющихся в нашем распоряжении, расширяет об-
область возможных преобразований, что очень существенно.
Наконец, в лагранжевои механике не существует какого-
либо общего метода упрощения функции Лагранжа. Не
существует никакого систематического приема для получе-
получения циклических переменных и их можно получить лишь
путем удачной догадки. В гамильтоновой механике может
быть предложен определенный метод получения цикличе-
циклических переменных и упрощения функции Гамильтона. Этот
метод сводит всю задачу интегрирования к нахождению
одной фундаментальной функции, являющейся производя-
производящей функцией некоторого преобразования. Он играет цен-
центральную роль в теории канонических уравнений и, как
будет показано в следующей главе, предоставляет широкие
возможности для различных обобщений.
Метод преобразований координат требует совершенно
иного подхода по сравнению с задачей прямого интегриро-
2. Точечные преобразования Лагранжа 227
вания. Теперь qi и р,- уже не рассматриваются как функции
времени t. Нужно совершенно забыть об уравнениях движе-
движения и считать qi и р,- просто переменными величинами. Они
являются теперь только координатами точки в фазовом про-
пространстве и ничем больше. Специфическая задача о движе-
движении полностью предается забвению. Важно лишь, чтобы
при преобразовании сохранялись канонические уравне-
уравнения. Это требование приводит к появлению дифференци-
дифференциальной формы, которая фигурирует в каноническом инте-
интеграле. При сохранении этой дифференциальной формы со-
сохраняется и вся система дифференциальных уравнений.
Следовательно, мы имеем задачу о преобразовании коор-
координат, которая характеризуется инвариантностью опреде-
определенной дифференциальной формы.
Преобразования, сохраняющие канонические уравнения,
называются «каноническими преобразованиями». Общая
теория этих преобразований принадлежит Якоби.
Резюме. Наиболее эффективным инструментом для
исследования и решения канонических уравнений
являются преобразования координат фазового про-
пространства. Вместо того чтобы пытаться непосредст-
непосредственно интегрировать уравнения, ищется некоторая
новая система координат, которая больше подходит
для решения задачи, чем первоначальная система.
Для этого процесса в нашем распоряжении имеется
широкий класс преобразований. Они называются
«каноническими преобразованиями».
2. Точечные преобразования Лагранжа. В лагранжевой
механике позиционными координатами являются величины
qi. Уравнения движения Лагранжа остаются инвариант-
инвариантными по отношению к произвольным точечным преобразова-
преобразованиям этих координат. В гамильтоновой механике мы снова
встречаемся с задачей Лагранжа, но уже при наличии 2/г
переменных q-t и р,-. Пространством конфигураций гамильто-
гамильтоновой механики является 2я-мерное фазовое пространство.
На первый взгляд может показаться, что в нашем распоря-
228 Гл. VII. Канонические преобразования
жении имеются теперь произвольные точечные преобразо-
преобразования фазового пространства. Это означало бы, что 2п ко-
координат qt и pi могут преобразовываться в какие-либо
новые <7< и Pi при помощи любых функциональных соотно-
соотношений. Дело обстоит, однако, не так. Канонические урав-
уравнения
dfL
G.2.1)
порождаются некой весьма специальной лагранжевой зада-
задачей, а именно задачей с функцией Лагранжа, приведенной
к каноническому виду
^Pii-n. G.2.2)
Произвольное точечное преобразование, переводящее qt и
Pi в qt и ph могло бы нарушить нормальную форму канониче-
канонического интеграла, а вместе с ней и канонические уравнения.
Мы должны ограничиться, таким образом, преобразова-
преобразованиями, которые сохраняют каноническую форму этих урав-
уравнений. Последнее гарантируется в том случае, если варьиру-
варьируемое подинтегральное выражение имеет вид G.2.2). Любое
преобразование, оставляющее инвариантным каноническое
подинтегральное выражение G.2.2), оставляет инвариант-
инвариантными также и канонические уравнения G.2.1).
Перед тем как исследовать полную группу канониче-
канонических преобразований, изучим некоторые частные случаи.
Лагранжевы точечные преобразования являются весьма
частным случаем гораздо более широкой группы канониче-
канонических преобразований.
В дальнейшем везде при обсуждении преобразований
мы будем придерживаться удобных обозначений, введен-
введенных Уиттекером в книге «Аналитическая динамика» (см. би-
библиографию). Преобразованные переменные будем обозна-
обозначать соответствующими большими буквами Qt, Pi1.
1 Если время t также подвергается преобразованию, то преобра.
зованную переменную мы будем обозначать через /, а не через Т,
с тем чтобы избежать путаницу с кинетической энергией Т.
2. Точечные преобразова ия Лагранжа 229
Поскольку переменными в лагранжевой механике яв-
являются одни qi, произвольное точечное преобразование
лагранжевой механики имеет вид
qi = fi(Qi Qn).
;;;;;;;;;; G.2.3)
9» = /»(Qi. ••- Qn)-
Из вида подинтегрального выражения G.2.2) ясно, что ка-
канонические уравнения заведомо сохранятся, если, преобра-
преобразуя рг, одновременно потребовать инвариантности дифферен-
дифференциальной формы ^b
?pibqt= ?P;6Q(.. G.2.4)
(=1 i=l
Если этот принцип справедлив в случае произвольных
бесконечно малых изменений qt, мы можем заменить кано-
канонический интеграл
= J
li
G.2.5)
соответствующим интегралом
Vs/ "
А= \'2lPidQl~H'dt). G.2.6)
Отсюда видно, что канонические уравнения сохраняются и
что функция Гамильтона И' в новой системе координат,
после того как qi,pt выразятся через новые переменные Q,-,
Pi, будет иметь тот же вид, что и функция Н в старой систе-
системе. Можно сказать, что функция Гамильтона Н инвариант-
инвариантна относительно точечного преобразования G.2.3).
Ниже мы увидим, что инвариантность дифференциальной
формы G.2.4) не является обязательным свойством, при-
присущим каждому каноническому преобразованию. Преобразо-
Преобразования, удовлетворяющие этому условию, образуют лишь
подгруппу в полной группе канонических преобразований.
Даже внутри этой подгруппы формулы G.2.3) выделяют
весьма узкую группу преобразований, отличающуюся тем
230 Гл. VII. Канонические преобразования
свойством, что в соотношения между ць и Q, совсем не входят
ни pi, ни Pi. Соответствующие преобразования для величин
Pi следуют из принципа инвариантности G.2.4). Из формул
G.2.3) имеем
6?< = !r6Qi+ - +Wn^- G-27)
Вводя эти выражения в G.2.4) и приравнивая коэффициенты
при 8Qi в левой и правой частях уравнения G.2.4), получаем
выражения для преобразования р,- в явном виде — в форме п
линейных уравнений. Эти уравнения могут быть разрешены
относительно р,- при условии, что якобиан преобразования
G.2.3) отличен от нуля.
Нужно, однако, показать, что введенное преобразование
величин qi и р,- действительно эквивалентно точечному пре-
преобразованию Лагранжа. Формулы G.2.3) устанавливают эту
эквивалентность в части, касающейся переменных q; следует
также доказать, что преобразование импульсов, основанное
на принципе инвариантности G.2.4), согласуется с соответ-
соответствующим преобразованием в механике Лагранжа.
Как известно, импульсы р4- вводятся в гамильтоновой
механике с помощью определения
р; = |. G.2.8)
Соответственно, после введения новых переменных Q,-
в функцию Лагранжа мы должны аналогично определить и
новые импульсы Р,-,
р <72^
Функция Лагранжа L есть инвариант этого преобразо-
преобразования, но pi и Pi являются «ковариантными» величинами,
связанными между собой по определенному правилу. Будем
считать L функцией одних только qi, забыв на некоторое
время о наличии переменных qt и t, которые как бы останут-
останутся постоянными. Тогда принцип инвариантности дает для
произвольных вариаций qt и соответствующих вариаций Q,-:
2. Точечные преобразования Лагранжа 231
Отсюда следует
iiptf>q,= IlPMl. G.2.11)
i = 1 »= 1
Теперь из дифференцирования уравнений G.2.3) по време-
мени t
видно, что преобразование от qt в Qi является линейным,
причем в точности таким же, как и преобразование G.2.7),
связывающее 6д,- с 6Q,-. По этой причине принцип инвариант-
инвариантности G.2.11) остается справедливым и при замене 6<7» и
SQ; на б^( и 6Q;
G.2.13)
Это и есть, однако, тот самый принцип инвариантности
G.2.4), с которого мы начинали. Мы установили таким
образом, что преобразование импульсов, связанное с лаг-
ранжевым точечным преобразованием, может быть получе-
получено из принципа инвариантности G.2.4).
Задача 1. Записать кинетическую энергию произвольной части-
частицы в прямоугольных координатах х, у, г и в сферических координа-
координатах г, 6, rf. Ввести соответствующие импульсы рх, ptJ, pz и рг, рц, р?
на основе правил лагранжевой механики и определить связывающие
их соотношения. Показать, что эти же самые соотношения могут быть
получены из принципа инвариантности
Рх Ъх + Ру Т'У + Рг Ьг = Рг Ьг + Pa?jQ + Р-= *'<?•
Точечное преобразование G.2.3) было «склерономным»,
так как оно не включало время /. Для того чтобы об-
обобщить наши рассуждения на реономный случай, наиболее
естественно добавить время t к остальным механическим
переменным и рассматривать задачу в B/г + 2)-мерном «рас-
«расширенном фазовом пространстве», которое связано с пара-
параметрической формой канонических уравнений (см. гл. VI,
п. 10). В этом случае точечное преобразование G.2.3)
автоматически включает в себя время /, поскольку мы
232 Гл. VII. Канонические преобразования
теперь имеем точечное преобразование от старых перемен-
переменных qlt ..., qn, t к новым переменным Qx Qn, t. Принцип
инвариантности G.2.4) принимает вид
2 pi 6qt + pt Ы = % Pi 8Qi + pj 6t. G.2.14)
Более того, инвариантом преобразования является теперь
не функция Гамильтона Н, а обобщенная функция Га-
Гамильтона К. Как было показано в гл. VI, п. 10, эта
функция находится в следующем соотношении с обычной
функцией Гамильтона Н:
G.2.15)
поэтому инвариантность /С приводит к соотношению
Pt+H=pT+H', G.2.16)
где через Н' обозначена функция Гамильтона, получив-
получившаяся после преобразования. Следовательно,
H'=H+pt~pr, G.2.17)
откуда следует, что в общем случае реономного преобразо-
преобразования функция Гамильтона уже не является инвариантом.
Наиболее часто встречаются реономные преобразования,
вводящие движущиеся системы отсчета, но не преобразую-
преобразующие при этом самого времени. Преобразования такого типа
характеризуются уравнениями
<7i=/i(Qi
qn=fn(Qi Qn, Ц,
t=T.
G.2.18)
Введем эти соотношения в принцип инвариантности G.2.14)
варьируя только время /. В результате получим
|§. G-2.19)
3. Преобразования Матье и Ли 233
откуда
п
Н' = Я — V Pii~l ¦ G.2.20)
Поскольку Н' должна быть выражена через новые пере-
переменные Q,- и Р;, из второго члена в правой части G.2.20)
следует исключить pt, записав их как функции Pt. Отметим,
что этот член линеен относительно импульсов и является
источником появления «гироскопических членов» в Н'.
Задача 2. Рассмотреть движение одной частицы, переходя
от прямоугольных координат х, у, г во вращающуюся систему от-
отсчета
х = х' cos ш/ — у' sin wt,
у = х' sin wt -\- у' cos u>t,
Показать, что преобразование функции Гамильтона приводит
к появлению во вращающейся системе отсчета фиктивных силы Ко-
риолиса и центробежной силы.
Резюме. Канонические уравнения инвариантны
относительно точечного преобразования Лагранжа.
Преобразование импульсов происходит с учетом ин-
инвариантности дифференциальной формы^Pibqi. Функ-
Функция Гамильтона является инвариантом преобразо-
преобразования, если новая система координат покоится отно-
относительно старой. В противном случае функция
Гамильтона изменяется за счет гироскопических
членов.
3. Преобразования Матье и Ли. В предыдущем пункте
было показано, что инвариантность дифференциальной фор-
формы G.2.4) приводит к инвариантности канонических уравне-
уравнений. Инвариантность дифференциальной формы G.2.4) мо-
может быть получена, однако, и в том случае, если не требо-
требовать выполнения G.2.3). Эти более общие преобразования,
известные уже Якоби, были изучены французским матема-
математиком Матье (в 1874 г.). Поэтому их иногда называют
234 Гл. VII. Канонические преобразования
«преобразованиями Матье»1. Софус Ли широко использовал
эти же самые преобразования в своих работах, касающихся
геометрических методов решения дифференциальных урав-
уравнений. Он назвал их «контактными преобразованиями».
Ли определял контактное преобразование из того требования,
чтобы дифференциальная форма
п
dz-^Pidq, G.3.1)
1= 1
была пропорциональна преобразованной дифференциальной форме
rfZ-j} PLdQL. G.3.2)
i= i
Если считать 2 просто (п -f- 1)-й переменной qn . ,, то это условие
можно записать в однородной форме
л+1 л+1
2 Ptdqi-= S pidQi' G-3.3)
1=1 1=1
при этом оно становится эквивалентным преобразованию Матье
в пространстве п + 1 измерений.
Вместо точечного преобразования, связывавшего qt и
Qi без помощи pit мы имеем более общее функциональное
соотношение между координатами за счет того, что импульсы
могут теперь входить в соотношения между позиционными
координатами. Единственным условием является принцип
инвариантности
2 Plb4l= tPiHQ,. G-3.4)
Внимательное изучение этого условия показывает, что
qi и Qi не могут быть совершенно независимыми. Иначе
бы получился абсурдный результат, что все pL и Pi должны
обратиться в нуль. Поэтому существует по крайней мере
одно функциональное соотношение
/foi qn, Qi,...,QJ = 0 G.3.5)
1 См., например, У и т т е к е р, Аналитическая динамика,
стр. 333.
3. Преобразования Матье и Ли 235
между qt и Q,-, в которое не должны входить ни /?,-, ни Р,-.
В случае точечного преобразования имеются п таких соот-
соотношений. Можно классифицировать преобразования Матье
по числу т независимых соотношений, существующих
между ^-переменными без участия р-переменных. Наимень-
Наименьшее число — 1, наибольшее п. Эти соотношения могут быть
заданы произвольно. Таким образом, преобразования Матье
характеризуются следующей системой дополнительных
условий, которые нужно добавить к принципу G.3.4):
Здесь т</г. Если т достигает своего наибольшего значе-
значения т = п, то получается наиболее ограниченная форма
преобразований Матье. Мы возвращаемся тогда к рассмо-
рассмотренному ранее случаю точечного преобразования, потому
что мы можем исключить все qt, выразив их через Qit и по-
получить таким образом соотношения G.2.3).
Для того чтобы практически произвести преобразования
от старых координат к новым, нужно т из qt представить
как функции остальных qk и Q,-, а затем представить ва-
вариации этих qi в условие G.3.4). Однако, не желая нарушать
симметрии соотношений G.3.6), применяют метод неопре-
неопределенных множителей Лагранжа, рассматривая уравнения
G.3.6) как заданные дополнительные условия при варьиро-
варьировании. Это приводит к выражению.
Si(p>tyi^,) MQ1+... + A,m6Qm> G-3.7)
где теперь уже все qt и Q,- могут варьироваться произволь-
произвольным образом. В результате получаем общие формулы для
произвольного преобразования Матье в следующем виде:
G.3.8)
236 Гл. VII. Канонические преобразования
где I = 1, 2, ..., п. Эти уравнения вместе с данными допол-
дополнительными условиями G.3.6) полностью определяют пре-
преобразования, хотя и в неявном виде. Можно исключить
^,- из уравнений G.3.8), получив 2п — т соотношений меж-
между старыми и новыми переменными. Вместе с т дополнитель-
дополнительными условиями G.3.6) они и задают преобразование. Путем
соответствующих алгебраических операций старые q-L, p,-
могут быть выражены через новые Qb Pi, и наоборот.
Все дальнейшие рассуждения будут аналогичны рассуж-
рассуждениям предыдущего пункта. Инвариантность дифферен-
дифференциальной формы ^pibqi гарантирует инвариантность кано-
канонических уравнений и снова функция Гамильтона Я оказы-
оказывается инвариантом преобразования. Более того, мы снова
можем включить время t в число позиционных координат
<7i, ¦••, qn в качестве дополнительной переменной, перейдя
к параметрической форме канонических уравнений. В ре-
результате получим реономную форму преобразований Матье,
характеризуемую инвариантностью дифференциальной
формы
п п
2 р,bqi+ p,bt= 2 Р, Щ + РТU G.3.9)
с дополнительными условиями
Qk(qi, ...,qa,Q1 Qn, 0 = О,
(k = l, ...,m), t =7. G.3.10)
К уравнениям G.3.8) добавляется сейчас еще одно урав-
уравнение
Мы снова имеем дело с расширенным фазовым пространст-
пространством, в котором обобщенная функция Гамильтона /С инва-
инвариантна относительно преобразования. Это приводит
к соотношению
pt+H=pT+H', G.3.12)
откуда
l*j± + ... + \md-2f. G.3.13)
4. Канонические преобразования общего типа 237
Здесь мы опять сталкиваемся с тем фактом, что функция
Гамильтона инвариантна лишь относительно склерономных
преобразований, в то время как в реономном случае появ-
появляются дополнительные корректирующие члены.
Задача. Предположим, что т = п и что дополнительные усло-
условия G.3.6) заданы в явном виде G.2.18). Показать, что преобразова-
преобразование функции Гамильтона в соответствии с G.3.13) приводит к тому
же результату, что и формула G.2.20) предыдущего пункта.
Резюме. Преобразования Матье определяются тре-
требованием инвариантности дифференциальной формы
2Р^<7»- Для выполнения этого требования должно су-
существовать по крайней мере одно соотношение между
qi и Qi, не содержащее p-t. Преобразования Матье
могут быть классифицированы по числу соотношений,
существующих между q-t и Q», которые могут быть
заданы заранее. Минимальное число соотношений
равно 1, а максимальное п. Последний случай соответ-
соответствует рассматривавшимся ранее точечным преобра-
преобразованиям, которые составляют, таким образом, особую
подгруппу преобразований Матье.
4. Канонические преобразования общего типа. Инва-
Инвариантность дифференциальной формы G.2.13) не является
абсолютно необходимой для сохранения вида канонических
уравнений. Существует более широкая группа преобразова-
преобразований, которые оставляют инвариантными канонические урав-
уравнения. Предположим, что дифференциальная форма G.2.13)
преобразуется по следующему закону:
где SS — полный дифференциал некоторой величины S, яв-
являющейся функцией qi и Q;- Канонический интеграл при-
принимает вид
= 1 ( 2 Л dQi~ Hdt) + j dS, G.4,2)
238 Гл. VII. Канонические преобразования
Последний интеграл является граничным членом, не зави-
зависящим от способа варьирования, поскольку варьирование
производится при фиксированных граничных значениях.
Следовательно, хотя мы и изменили канонический интеграл,
это изменение свелось лишь к добавлению некоторой кон-
константы. Поэтому обращение в нуль вариации канонического
интеграла, записанного в первоначальных переменных,
гарантирует обращение в нуль вариации канонического
интеграла в новых переменных. Это означает, что канони-
канонические уравнения движения остаются инвариантными от-
относительно преобразования G.4.1).
Мы получили наиболее общее условие для канонического
преобразования. Требование инвариантности дифферен-
дифференциальной формы ^Pi&qi мы заменили условием
2(p№Q) bS, G.4.3)
где S —• некоторая заданная функция qi и Q<
S = S(qi qn,Qi,...,Qn). G.4.4)
Функция S называется «производящей функцией»
канонического преобразования. Вариация S имеет вид
1 = 1
Подставим это выражение в G.4.3), предполагая при этом,
что не существует дополнительных условий, связывающих
qi и Qi, так что все bqt и 6Qt —свободные вариации.
Тогда получим
ds
P
ds
G.4.6)
Уравнения G.4.6) являются уравнениями произвольного
канонического преобразования, свободного от каких бы то
ни было априорных условий. В самой природе канонических
преобразований заключено то свойство, что мы не можем
получить в явном виде выражения старых переменных через
новые переменные, и наоборот, не сделав предварительно
4. Канонические преобразования общего типа 239
некоторых исключений. Мы имеем смешанное представление,
в котором старые и новые импульсы записаны в виде функ-
функций и старых и новых позиционных координат. Для полу-
получения явного представления требуется разрешить относи-
относительно позиционных координат либо первую, либо вторую
систему уравнений G.4.6).
Наиболее общая форма канонического преобразования
возникает в том случае, когда преобразование обладает про-
производящей функцией S и, кроме того, существуют дополни-
дополнительные соотношения между qt и Qi, как в случае преобра-
преобразований Матье. Применение метода неопределенных множи-
множителей Лагранжа показывает, что уравнения преобразования
имеют вид
dQt'
G.4.7)
где «видоизмененная производящая функция» S определяет-
определяется следующим образом:
S = S+k1Q1+...+XmQm. G.4.8)
До сих пор мы рассматривали только склерономные пре-
преобразования. Для обобщения на реономный случай следует
снова обратиться к расширенному фазовому пространству,
в котором время является дополнительной позиционной
координатой. Производящая функция S тогда имеет вид
S=S(q1,...,qll,Q1,...,Qn,t) G.4.9)
с дополнительным условием
t = t. G.4.10)
Из определения функции S при помощи обобщенной диффе-
дифференциальной формы
t Plbqt+ P,6/-(ipi6Q;+P767) = 65. G.4.11)
сразу следуют снова уравнения G.4.6), характеризующие
каноническое преобразование; к ним добавляется, однако,
еще одно уравнение
240 Гл. VII. Канонические преобразования
Наконец, инвариантность обобщенной функции Гамиль-
Гамильтона К = Pt + Н приводит к следующему закону преобра-
преобразования обычной функции Гамильтона Н:
H'=H+pt-pj = H+^. G.4.13)
Задача. Доказать справедливость соотношения G.4.13) другим
способом. Оставив время t в качестве независимой переменной, рас-
рассмотреть каноническое преобразование, в котором время входит как
параметр. После этого получить выражение G.4.13), различая ве-
величины dS в каноническом интеграле и 55 в определении кано-
канонического преобразования. В первом случае время варьируется,
а во втором нет.
Резюме. Общая форма произвольного канонического
преобразования связана с производящей функцией,
которая определяет собой это преобразование. Любая
функция переменных qL и Q,- может быть выбрана
в качестве производящей функции для соответствую-
соответствующего канонического преобразования. В"дополнение
к этой функции a priori может быть задан ряд опреде-
определенных соотношений между qt и Q,-. В этом случае мы
получаем «обусловленное» каноническое преобразо-
преобразование. Число заданных заранее условий может ме-
меняться от одного до п. Формулы канонического пре-
преобразования имеют ту особенность, что они не за-
задают преобразование в явном виде. Вместо выра-
выражений для новых переменных через старые либо
наоборот — старых через новые мы имеем некото-
некоторое смешанное представление. Старые и новые
импульсы выражаются через старые и новые пози-
позиционные координаты.
5. Билинейная дифференциальная форма. В любой тео-
теории преобразований имеются основные величины, которые
при преобразовании не меняются. Они являются основными
инвариантами, которые определяют собой природу преоб-
преобразования. Начав изучать канонические преобразования,
мы установили инвариантность дифференциальной формы
~^\pibqi, откуда следовала инвариантность канонических
уравнений. Однако затем выяснилось, что' канонические
уравнения остаются инвариантными и при более общих
условиях. Необходимое и достаточное условие каноничности
5. Билинейная дифференциальная форма 241
преобразования было сформулировано в такой форме: раз-
разность двух дифференциальных форм должна быть полным
дифференциалом 65 некоторой функции S. При этом возни-
возникает вопрос, что же в действительности является основным
инвариантом канонических преобразований.
Эта задача тесно связана с вопросом о геометриче-
геометрической структуре фазового пространства. Мы уже видели, как
помогло динамической теории введение определенной геоме-
геометрической структуры лагранжевого пространства конфигу-
конфигураций. Там был введен рнманов линейный элемент ds,
квадрат которого задавался в виде некоторой квадратичной
дифференциальной формы переменных qt. Величина ds2
была одновременно основным инвариантом лагранжевого
точечного преобразования и тем бесконечно малым расстоя-
расстоянием, которое — при соответствующем выборе граничных
условий — определяло геометрическую структуру про-
пространства конфигураций.
Можно ли ввести что-нибудь подобное в гамильтоновом
фазовом пространстве? Имеются ли какие-либо инвариант-
инвариантные дифференциальные формы, которые могли бы в нем иг-
играть роль формы ds2, как в лагранжевом пространстве конфи-
конфигураций? Такая дифференциальная форма, связанная с кано-
каноническими преобразованиями и инвариантная при этих
преобразованиях, действительно существует, хотя она и
отличается принципиально от римановой формы ds2. Она
также квадратична относительно дифференциалов, но свя-
связана при этом с двумя перемещениями и не имеет ничего
общего с расстоянием. Геометрия фазового пространства
имеет, таким образом, необычную метрику. Она похожа ско-
скорее на некую геометрию, в которой могут измеряться не
расстояния, а площади. Поскольку основной дифференциаль-
дифференциальный инвариант канонических преобразований линеен по
каждому из двух бесконечно малых перемещений, мы будем
называть его «билинейной дифференциальной формой».
На основе этой инвариантной дифференциальной формы
может быть построена полная теория канонических пре-
преобразований.
Дифференциальная величина
п п
2 Pidq,— У\ PidQ, == dS G.5.Ь
i=i /=i '
9 Зак. 1646
242 Гл. VII. Канонические преобразования
напоминает работу моногенной силы. Такая работа яв-
является полным дифференциалом некоторой функции, из
которой может быть получена и сама сила. Желая проверить,
является ли данная сила моногенной, мы прилагали ее
к какой-нибудь частице, перемещающейся по произвольной
замкнутой траектории. Равенство нулю полной работы силы
вдоль любой замкнутой траектории означало моногенность
силы, противное свидетельствовало о ее полигенности.
Рис. 9.
Подобный критерий может быть применен и к дифферен-
дифференциальной форме G.5.1). Проинтегрируем G.5.1) вдоль лю-
любой замкнутой кривой L в фазовом пространстве. Тогда
в левой части мы получим два криволинейных интеграла,
поскольку каждая (р, <7)-точка связана преобразованием
с соответствующей (Р, (З)-точкой. Интеграл в правой части
обращается в нуль. Следовательно, мы получаем принцип
инвариантности, в котором уже отсутствует неопределенная
функция S,
Г = § ? Pl dqt = § Д Р,. dQt. G.5.2)
Для любой замкнутой кривой в фазовом пространстве .мож-
.можно записать «циркуляцию» Г, и эта циркуляция инвариант-
инвариантна при произвольном каноническом преобразовании.
Вместо того чтобы проводить исследование 2п-мерного
фазового пространства, можно сделать определение цирку-
циркуляции наглядным, перейдя в пространство ^-переменных и
введя в каждой точке qt величины pt- в виде компонент векто-
вектора. Произвольная замкнутая кривая L в фазовом простран-
5. Билинейная дифференциальная форма 243
стве переходит в таком представлении в какую-то замкну-
замкнутую кривую L в ^-пространстве, в каждой точке которой
задан вектор, непрерывно меняющийся при движении вдоль
кривой (см. рис. 9).
Уравнение G.5.2) характеризует каноническое преобра-
преобразование с помощью интегрального инварианта. Покажем
теперь, как этот интегральный инвариант может быть пре-
преобразован в дифференциальный инвариант. С этой целью
будем считать заданную замкнутую кривую L границей
какой-то двумерной области К- Предположим, что в каждой
точке этой области задан вектор р,- и что каждую точку
мы аналитически характеризуем при помощи двух «гауссо-
«гауссовых криволинейных координат» и и v
а, = а, (и, v),
4l 4l\ G.5.3)
Pt = p,(u,v).
Параметрические линии и — const и v = const образуют
плотную сетку линии. Вместо того чтобы двигаться вдоль
гладкого контура L, будем перемещаться вдоль зигзаго-
зигзагообразной линии L', образованной из бесконечно малых
участков параметрических линий (см. рис. 10). В пределе,
когда сетка параметрических линий становится сколь угод-
угодно плотной, циркуляция Г вдоль зигзагообразной линии V
как угодно близко приближается к циркуляции, взятой
вдоль гладкого контура L.
Заметим, что циркуляцию Г можно вычислять двумя
способами. Можно двигаться вдоль самого контура, как мы
это делали раньше. Однако можно также двигаться и вдоль
всех многочисленных маленьких параллелограммов, обра-
образованных двумя семействами параметрических линий и --=
= const и v = const. Конечный результат будет тем же са-
самым, поскольку вклады от внутренних участков выпадают,
потому что каждый из таких участков проходится дважды
в противоположных направлениях. Вклад от внешних
участков остается прежним. Это приводит к переходу от
линейного интеграла к поверхностному интегралу.
Пусть f(u, v) — произвольная функция, заданная в об-
области К- Обозначим через d'f изменение f, связанное с изме-
изменением одного лишь v, при постоянном и
d'f = ^dv. G.5.4)
244 Гл. VII. Канонические преобразования
k U- const
Рис. 10.
Аналогично через d"f обозначим изменение /, связанное
с изменением одного лишь и, при постоянном v
d"f = ^du. G.5.5)
Для циркуляции вдоль бесконечно малого параллелограм-
параллелограмма, образованного параметрическими линиями, можно на-
написать
2 Ы' (Р« d'qd - d"(Pi d'q,)] = 2 id' Pl d" 4l - d" Pl d' qt) =
" /dtJi dPi dpi dqt\
= .^ \'Ш'д^~'дЦ ^) du dv- G-5-6)
Мы получили следующее важное преобразование линейного
интеграла в поверхностный интеграл:
$ 1 Pi d4l = J 2 (t f -t Щ ^ dv. G.5.7)
I i = l К i=1
Задача. Применив теорему G.5.7) к трехмерному случаю п =
= 3, показать, что она сводится к интегральному преобразованию,
известному под названием «теорема Стокса». Интегральное преобра-
преобразование G.5.7) обобщает теорему Стокса на любое число измерений.
Отметим, что эта теорема не зависит от каких-либо специальных ме-
метрических свойств пространства.
С помощью этого преобразования инвариантность цир-
циркуляции Г может быть представлена в другом виде. Цир-
Циркуляция может быть записана в виде поверхностного инте-
интеграла, распространенного на область К- Поскольку эта
область совершенно произвольна, из инвариантности Г
следует инвариантность подинтегрального выражения
6. Скобки Лагранжа и Пуассона 245
дЖ ^i_ д1± дЛ.\ п с сп
ди dv dv да ) ' (,/.Э.«)
Это в свою очередь эквивалентно инвариантности дифферен-
дифференциальной формы
S (d'p^-d'Pid'q,), G.5.9)
которую можно связать с любыми двумя независимыми бес-
бесконечно малыми перемещениями d'qi, d'pt и d"'q-t, d"pi
в фазовом пространстве. Это и есть «.билинейная дифферен-
дифференциальная форма», инвариантность которой является необ-
необходимым и достаточным условием канонического преобразова-
преобразования. Производящая функция S исключена из этого условия.
В действительности определение канонического преобразо-
преобразования при помощи S-функции может рассматриваться как
интегральная форма того утверждения, что билинейная
дифференциальная форма является определяющим инва-
инвариантом канонического преобразования.
Резюме. Условие того, что преобразование являет-
является каноническим, может быть сфомулировано без по-
помощи производящей функции S. Характерным свойст-
свойством канонических преобразований является инвариант-
инвариантность циркуляции вдоль любой замкнутой кривой
в фазовом пространстве. Это же самое свойство может
быть представлено в дифференциальной форме. Мы по-
получаем определенное дифференциальное выражение,
«билинейную дифференциальную форму», инвариант-
инвариантную относительно канонических преобразований. Эта
билинейная дифференциальная форма аналогична ве-
величине ds2 в метрической геометрии. Однако в то вре-
время, как линейный элемент соответствует одному бес-
бесконечно малому перемещению, билинейный дифферен-
дифференциал соответствует двум бесконечно малым переме-
перемещениям. Поэтому он скорее подобен элементу площади,
а не элементу расстояния.
6. Скобки Лагранжа и Пуассона. Лагранж предвосхитил
целый ряд результатов, которые являются по существу
естественными следствиями теории канонических преобра-
246 Гл. VII. Канонические преобразования
зованнй1. Он заметил, что в теории возмущений оказывается
чрезвычайно важным одно выражение. Рассмотрим две
системы переменных, qt и pi, которые заданы как функции
двух параметров и и v. Образуем «скобки Лагранжа».
н clo dv ди
Они, очевидно, антисимметричны относительно перестанов-
перестановки переменных и и v
[u,v] = — [v, и]. G.6.2)
Эти скобки тесно связаны с теорией канонических преобра-
преобразований.
Заметим, что выражение G.6.1) в точности равно той
величине, с которой мы встретились в предыдущем пункте
при преобразовании в поверхностный интеграл циркуляции,
записанной в виде криволинейного интеграла. В новых обо-
обозначениях можно написать
2 Pidq,= ) [и, v]du dv. G.6.3)
Поскольку инвариантность циркуляции, взятой вдоль лю-
любой замкнутой кривой L, является характерным свойством
канонических преобразований, это же свойство может быть
выражено как инвариантность скобок Лагранжа [и, v]\
каноническими являются те преобразования от переменных
qi, pi к Qi, Pi, которые оставляют инвариантными скобки
Лагранжа, независимо от того, как qi, pi зависят от и и
v. Смысл этой инвариантности состоит в том, что, заменив
координаты qit р,- в результате канонического преобразова-
преобразования координатами Q,-, Pt и образовав затем скобки Лагран-
Лагранжа в новой системе координат, мы получим то же самое
значение, что и раньше.
Уже было показано, что, характеризуя каноническое
преобразование при помощи производящей S-функцпи,
мы не получаем сразу явных уравнений преобразования.
Преобразование получается в неявном виде и окончательные
1 Lagrange, Oeuvres, vol. VI, p. 713. Оригинальная статья
вышла в 1808 г.
6. Скобки Лагранжа и Пуассона 247
уравнения получаются лишь путем исключения (разреше-
(разрешения относительно одной из систем переменных). В связи
с этим возникает интересный вопрос: как узнать, является
ли некоторое заданное в явном виде преобразование кано-
каноническим или нет? У нас нет возможности получать в явном
виде канонические преобразования, однако мы можем
проверить, является ли данное преобразование канониче-
каноническим. Каноническое преобразование может быть охаракте-
охарактеризовано системой дифференциальных соотношений. Если
эти соотношения выполняются, то преобразование кано-
каноническое, и наоборот, если преобразование каноническое,
то эти соотношения должны выполняться.
Эти дифференциальные соотношения сразу следуют
из того факта, что произвольные скобки Лагранжа не ме-
меняются при канонических преобразованиях. Предположим,
что нам задано в явном виде некоторое преобразование от
старых переменных к новым
7/ = //(Qi. ...,Q«,Pi, ...,Р„),
P, = ^(Q1,...,Qn,Pi,...,PB). ( j
Тогда можно выбрать любую пару переменных: Q,- и Qk,
либо Qi и Pk, либо Pi яРк — и рассматривать их как два
параметра и и v, для которых образуются скобки Лагранжа;
при этом остальные переменные следует считать постоянны-
постоянными. Затем проделывается то же самое в новой системе коор-
координат. В новой системе координат все QL и Р,- взаимно
независимы. Поэтому из определения скобки Лагранжа
сразу получаем
[Q/,Q*] = 0, ]Pl,Pk] = 0, [Q,,Pft] = a,ft, G.6.5)
где «символ Кронекера» bik = 1 при i = k, 6,-j = 0 при
к
Задача 1. Используя правила дифференцирования неявной
функции, показать, что для любого преобразования координат от
4i> Pi K Qb Pi, удовлетворяющего условию G.6.5), оказываются
инвариантными произвольные скобки Лагранжа [и, и]. Отсюда вид-
видно, что условия G.6.5) являются не только необходимыми, но и доста-
достаточными для определения канонической природы преобразования.
248 Гл. VII. Канонические преобразования
Задача 2. Показать, что при выполнении условия G.6.5) били-
билинейная дифференциальная форма
п
2 (dlpld'qi-dtp,d'qi)
также является инвариантом преобразования.
Вскоре после исследований Лагранжа Пуассон
(в 1809 г.) ввел другой тип скобок, который является естест-
естественным дополнением к скобкам Лагранжа. Вместо того что-
чтобы считать qt и pi функциями Q,- и Pit рассмотрим пару
переменных и и v как заданные функции координат qi, p,,
и = u(<7i, ..., qn, Pi, ..., р„), ^ б6^
V= v(qlt .... qn, pj, ...,р„).
«Скобками Пуассона» называется следующая величина:
(и, 0)= V (*i g- _ |Е. |!L\ . G.6.7)
Эти скобки также обладают свойствами антисимметрии
(u,v) = -(v,u). G.6.8)
Они тесно связаны со скобками Лагранжа. Предположим,
что у нас имеются 2л переменных и1у ..., и2П, которые яв-
являются заданными функциями qit pt. Можно, конечно,
и наоборот, рассматривать qit p,- как функции ult ..., игп.
Для соотношений первого типа образуются скобки Пуассо-
Пуассона, для соотношений второго типа — скобки Лагранжа.
Один тип скобок определяет другой. Следовательно, раз
скобки Лагранжа инвариантны относительно канонических
преобразований, то этим свойством обладают и скобки Пуас-
Пуассона. Отсюда получается другая-формулировка условий и
каноничности преобразования. Каноническими являются те
преобразования, которые оставляют инвариантными скоб-
скобки Пуассона {и, v) независимо от того, как функции и и v
зависят от координат qit pt.
6. Скобки Лагранжа и Пуассона 249
Применим теперь этот принцип инвариантности к обрат-
обратному каноническому преобразованию G.6.4), которое пе-
переводит новые координаты в старые
Qi = Qi Oh. •¦•> <7л> Pi> ¦¦¦' Рп)' rj 6 g)
Pi = Pi(qi> .... qn,Pi, -,р„).
Отождествим и и v с любыми двумя переменными из Q,-,
Pi и запишем скобки Пуассона в новой и старой координат-
координатных системах. Для старой системы они могут быть, как и
раньше, непосредственно вычислены. Следовательно, из
свойства инвариантности получаем
(Q,,Qft)=0, (Pt,Pk)=0, (Q,,P*)=V G.6.10)
Эти условия эквивалентны первоначальным условиям G.6.5).
Задача 3. Считая иъ ..., игп заданными функциями qit pt и
разрешая затем заданные соотношения относительно qt, p,-, устано-
установить следующие формулы, связывающие скобки Лагранжа и Пуассо-
Пуассона,
in
2 [«;. «J(«ft, и.) = 8«. G.6.11)
При использовании этих соотношений условия G.6.10) оказываются
прямым следствием условий G.6.5).
Резюме. Заданная производящая функция опре-
определяет каноническое преобразование в неявной
форме. Хотя и не существует формул, которые бы
задавали каноническое преобразование в явном виде,
однако относительно любого конкретного преобразо-
преобразования можно выяснить, является ли оно канони-
каноническим. Для этой цели могут быть использованы
скобки Лагранжа или Пуассона. Эти скобки тесно
связаны с каноническими преобразованиями. Ка-
Каноническими являются те преобразования сопряжен-
сопряженных переменных, которые оставляют инвариантными
любые скобки Лагранжа или Пуассона.
9В Зак. 1646
250 Гл. VII. Канонические преобразования
7. Бесконечно малые канонические преобразования.
Произведем некоторое произвольное каноническое преобра-
преобразование, определяемое условием
Д (p;6^-P(.6Q,.) = 65. G.7.1)
Пусть теперь переменные Q,-, Р; преобразуются в другие
переменные qi, p-t при помощи второго канонического пре-
преобразования
Ъ(Р№1-~РМ1) = №. G-7.2)
Суммируя, получаем
Y>{pMi-~plb~qi) = b(S-\-S% G.7.3)
откуда видно, что прямой переход от переменных qi, pt
к переменным qlt pi также является каноническим преоб-
преобразованием. Это означает, что произведение двух канониче-
канонических преобразований снова является каноническим преобра-
преобразованием. Мы говорим, что канонические преобразования
«обладают групповыми свойствами». Это играет важную
роль в теории дифференциальных уравнений Ли. Там
полное решение системы дифференциальных уравнений сво-
сводится к изучению некоторой непрерывной группы преоб-
преобразований. Как будет видно из дальнейшего, канонические
уравнения движения находятся в теснейшей связи с подоб-
подобными непрерывными преобразованиями.
Рассмотрим производящую функцию S, содержащую
параметр t
S=S(q1,...,qtl,Q1,...,Qll,t). G.7.4)
В дальнейшем t будет отождествлено со временем; пока же
это просто переменный параметр.
Производящая функция вида G.7.4) порождает беско-
бесконечное множество канонических преобразований, потому
что каждому значению t соответствует свое определенное
каноническое преобразование. Рассмотрим теперь пре-
преобразование, соответствующее какому-то определенному
7. Бесконечно малые канонические преобразования 251
значению /, а также близкое преобразование, относящееся
к значению t-\-S.t. Каждое преобразование можно рассмат-
рассматривать, как отображение пространства самого на себя. Пре-
Преобразование I отображает точку Р фазового пространства
в некоторую точку Q, а преобразование II отображает ту
же точку Р в какую-то другую точку Q'. Поскольку S —
непрерывная функция t, две точки Q и Q' находятся близко
одна к другой. Ввиду групповых свойств канонических
преобразований переход из Q в Q' тоже есть каноническое
преобразование. Мы встречаемся здесь с особым типом пре-
преобразований, когда каждая точка фазового пространства
переходит в соседнюю близкую точку. Таким образом, мож-
можно положить
Q* = ?*+А**. G J
где Aqk и Ар,, — малые величины, произведениями и квад-
квадратами которых можно пренебречь.
Подобное преобразование называется «бесконечно ма-
малым каноническим преобразованием». Оно обладает одним
замечательным свойством: в то время как произвольное
каноническое преобразование не допускает представления
в явном виде, бесконечно малое каноническое преобра-
преобразование может быть получено в явном виде.
Для наших целей будет более удобно обозначить пер-
первоначальные переменные, с которых мы начинаем, боль-
большими буквами Qt,Pi. Новые переменные при значении
параметра, равном /, обозначим через qt, pp а при значении
параметра, равном t-\-At, через qt -\- Aqn pt + Ар;. Тогда
имеем *
п
'"' ' ' G.7.6)
п
2 [(Р(+Ар,) б (<?; + Л<7/) — Pi&Qi\ = $S',
1=1
1 Из формул G.7.6) видно, что S — производящая функция ка-
канонического преобразования, переводящего точку qt, pi в точку
Qi, Pi- Для обратного же преобразования производящей функцией
будет —S.— Прим. ред.
9В*
252 Гл. VII. Канонические преобразования
где
S' = S (qi+ Aqlt ..., qn+Aqn, Qi, .... Qn, t+Af) =
1=1 »=i
Записав разность двух уравнений G.7.6), получим
следующее замечательное соотношение:
п
2 Лр; bQi - Aqi bPi = б |f At. G.7.8)
Для дальнейших рассуждений нам нужно построить
новую функцию. Первоначальная функция 5 имеет вид
G.7.4) и такой же вид имеет ее частная производная по t.
Введем теперь pL с помощью уравнений, определяющих
каноническое преобразование
Из этих уравнений можно получить Q, как функции qL
и pi. Подставим теперь полученные значения Q( в dS/dt
и обозначим получившуюся функцию через — В
|f =— В(дг qn,px, .... рл',0. G.7.10)
Это и есть та функция, которую нужно было построить.
Использовав эту новую функцию в правой части G.7.8),
получим
п
2 (Aptbqi—Aqibpi) =
п
= — Л |-т-6<7г + д— бр(-) АЛ G.7.11)
Сравнение двух частей этого уравнения дает
G.7.12)
8. Движение фазовой жидкости 253
Это и есть уравнения в явном виде для бесконечно малого
канонического преобразования. Вместо «абсолютных коор-
координат» <7« + Д<7ь Pi + Api в новой системе отсчета могут
быть использованы «относительные координаты» Д^,-, Ар,-.
Эти координаты выражены в явном виде при помощи одной
функции В, характеризующей преобразование. В качестве
этой функции может быть выбрана произвольная функция
переменных qit p-t.
Резюме. При бесконечно малом каноническом пре-
преобразовании точки фазового пространства получают
бесконечно малые смещения. Формулы такого преоб-
преобразования могут быть записаны в явном виде. Преоб-
Преобразование определяется заданием произвольным об-
образом выбранной функции переменных qi, p-t.
8. Движение фазовой жидкости как непрерывное вы-
выполнение канонических преобразований. Результаты пре-
предыдущего пункта пролили новый свет на природу уравне-
уравнений динамики. Если разделить левые и правые части урав-
уравнений G.7.12) на At, а затем устремить At к нулю, то в пре-
пределе мы получим дифференциальные уравнения
dqt дВ
dt = др^
G.8.1)
с1р± -_ ЕЁ
dt ~ dqi'
Это — не что иное, как канонические уравнения движения,
если переменный параметр i отождествить со временем, а
функцию В с функцией Гамильтона Н. Чтобы лучше понять
получившийся результат, представим себе, что мы следим
за движением фазовой жидкости в течение некоторого ин-
интервала времени Д?. Предположим, что частицы жидкости
помечены, так что можно определять положение каждой из
них. В какой-то момент времени t сделаем моментальный
снимок движущейся жидкости; затем в момент t -\- At —
второй моментальный снимок. Все частицы жидкости сдви-
сдвинулись со своих прежних мест, но их перемещения бесконеч-
254 Гл. VII. Канонические преобразования
но малы. Эти бесконечно малые перемещения определяют
некоторое каноническое преобразование в фазовом простран-
пространстве. Процесс может быть повторен много раз. Все движение
фазовой жидкости есть не что иное, как непрерывное вы-
выполнение канонических преобразований.
Этот поразительный результат был впервые получен Га-
Гамильтоном, хотя и в несколько другой интерпретации.
Он по-новому освещает роль канонических преобразований
при изучении движения. Все движение механической системы
может рассматриваться как задача о преобразованиях.
Последовательные положения фазовой жидкости представ-
представляют собой непрерывно меняющееся отображение простран-
пространства самого на себя. Это отображение все время канони-
каноническое.
Можно сказать даже нечто большее. Последовательные
преобразования фазовой жидкости связаны друг с другом.
В конце предыдущего пункта мы пришли к функции Гамиль-
Гамильтона В = Н, начав с произвольной производящей функ-
функции S, содержащей параметр t. Однако теперь можно про-
проделать обратный путь. Имеющаяся задача о движении дает
нам функцию Гамильтона Я, зависящую от qi, pi и, воз-
возможно, t. Заменим р,- на dSldqi и попытаемся найти первона-
первоначальную функцию S, из которой возникло уравнение
А это уже задача интегрирования. Первая задача была
проще, потому что она не требовала ничего, кроме дифферен-
дифференцирования и исключения переменных. Новая задача гораздо
более трудная, и она будет подробно рассматриваться в
следующей главе. Можно показать, что для каждой задан-
заданной функции Я может быть найдена соответствующая функ-
функция S; более того, существует бесконечное множество воз-
возможных функций S. Построенная таким образом S-функция
S = S(q1,...tqll,Ql,...,Qn,t) G.8.3)
порождает бесконечное семейство канонических преоб-
преобразований. Точка Qi, Pi преобразуется в точку qt, pit по-
положение которой непрерывно меняется со временем t, при-
причем для выбранных Q,-, Pi при изменении / это движение
8. Движение фазовой жидкости 255
в точности отражает движение механической системы.
Движение же всей фазовой жидкости есть не что иное, как
постепенная эволюция зависящего от времени канонического
преобразования.
Эта новая точка зрения отражает в новом свете также
и смысл инвариантов движения. Эти инварианты являются
в действительности инвариантами произвольного канони-
канонического преобразования. Инвариантность циркуляции, об-
обсуждавшаяся в гл. VI, п. 8, является характерным свой-
свойством канонических преобразований. Более того, она
даже определяет эти преобразования. Теорема Лиувилля
(см. гл. VI, п. 7) доказывает инвариантность объема, осно-
основанную на несжимаемости фазовой жидкости. Эту теорему
можно сформулировать в таком виде: значение якобиана
(функционального детерминанта) преобразования, которое
связывает два состояния движения, соответствующие двум
произвольным моментам времени, всегда равно 1. Это тоже
является общим свойством канонических преобразований.
Значение якобиана произвольного канонического преобра-
преобразования равно 1.
Задача. Записать якобиан Д некоторого канонического пре-
преобразования и умножить его самого на себя. Показать, что Д2 = 1.
Для исключения возможности Д = —1 требуются дальнейшие рас-
рассуждения, однако для движения фазовой жидкости выбор + 1
следует из непрерывности движения.
Резюме. Произвольная функция, зависящая от вре-
времени, порождает бесконечное семейство канонических
преобразований. Последовательные стадии этого пре-
преобразования могут рассматриваться как непрерывно
меняющееся отображение пространства самого на себя,
что в свою очередь может быть интерпретировано как
движение некоторой жидкости. Это движение удов-
удовлетворяет каноническим уравнениям, что приводит,
таким образом, к совершенно новой интерпретации
этих уравнений. Движение фазовой жидкости можно
представить как последовательные стадии бесконеч-
бесконечного семейства непрерывных канонических преобра-
преобразований.
256 Гл. VII. Канонические преобразования
9. Главная функция Гамильтона и движение фазовой
жидкости. Результаты нашего обсуждения, естественно,
имеют отношение к задаче интегрирования уравнений дина-
динамики. Нам уже известно соотношение между производящей
функцией S и функцией Гамильтона Н [см. уравнение
G.8.2)]
¦|? + Я = 0. G.9.1)
При этом следует помнить, что р,- в функции Гамильтона Н
заменены на dSldqi. Предположим, что мы можем найти
производящую функцию S, удовлетворяющую этому урав-
уравнению в частных производных. Тогда мы сможем получить
движение фазовой жидкости в виде последовательных фаз
зависящего от времени канонического преобразования с
заданной производящей функцией S. После соответствую-
соответствующих'дифференцирований и исключений это преобразование
может быть найдено в явном виде. Уравнения преобразо-
преобразования записываются в такой форме
qi=ft(Qi, ...,Qn,Pi, -.Л,,*). G92)
Pi=gi(Qi Qn,Plt...,Ptl,t).
Получение этих формул равносильно полному интегриро-
интегрированию динамической задачи, потому что все механические
переменные записаны в виде явных функций времени t
и 2п постоянных Qlt ..., Qn, Pi,..., Pn, которые могут быть
выбраны в соответствии с произвольными начальными ус-
условиями. В действительности эти «постоянные» являются
координатами той фиксированной точки Q,-, Pt, которая
преобразуется в движущуюся точку qt, pt; движение по-
последней обусловлено тем, что наше преобразование зависит
от времени. В результате оказывается, что в явной форме
описано все движение фазовой жидкости. При этом коор-
координаты QiPi играют роль произвольных постоянных инте-
интегрирования.
Следовательно, задача интегрирования сводится к за-
задаче нахождения производящей функции для данной непре-
непрерывной последовательности бесконечно малых канонических
преобразовании. Если эту задачу решить, то остальное
получается при помощи дифференцирований и разрешения
конечных уравнений.
9. Главная функция Гамильтона, фазовая жидкость 257
Идея о нахождении фундаментальной функции, из ко-
которой при помощи дифференцирования и конечных преоб-
преобразований без всякого интегрирования могли бы быть полу-
получены все решения уравнений движения, принадлежит Га-
Гамильтону. Он первый доказал существование такой функции
в геометрической оптике, назвав ее там «характеристической
функцией»; эта функция оказалась необычайно полезной
в целом ряде задач. Позднее, в своих исследованиях по
динамике, Гамильтон снова столкнулся с той же самой функ-
функцией, назвав ее на этот раз «главной функцией». Ввиду об-
общей вариационной основы у оптики и механики, эти две
концепции эквивалентны и открытие Гамильтона относится
по существу к вариационному исчислению, а специальная
форма вариационного интеграла несущественна. (Этот ин-
интеграл определяет время в оптическом принципе Ферма
и действие в механическом принципе Лагранжа.)
В распоряжении Гамильтона не было теории канони-
канонических преобразований, и он сделал свое открытие, исходя
из совершенно иных предпосылок. Главная функция Га-
Гамильтона не является абстрактным математическим поня-
понятием, которое используется только для получения преоб-
преобразований специального вида; она имеет определенный
физический смысл. Для того чтобы пояснить ход рассуж-
рассуждений Гамильтона, начнем с консервативной системы, у ко-
которой функция Лагранжа L и функция Гамильтона Н не
зависят явно от времени. Именно такие функции встреча-
встречаются в оптике, и это явилось для Гамильтона исходным
пунктом как для оптики, так и для механики. Обобщение
на случай неконсервативных систем может быть сделано
очень просто: задача сводится к случаю консервативных
систем путем включения времени t в число механических
переменных.
Вернемся к принципу наименьшего действия в форму-
формулировке Лагранжа, перейдя, однако, от л-мерного про-
пространства конфигураций к 2п-мерному фазовому простран-
пространству (см. гл. V, п. 6). Требуется найти стационарное зна-
значение «действия»
; 'Л " i n
А = 2 \ Tdl =^ ) 2 Pi q'i 'dt = j >] pi dqi G.9.3)
258 Гл. VII. Канонические преобразования
при том дополнительном условии, что С-точка в фазовом
пространстве остается на поверхности постоянной энергии
H{q1,...,qn,p1 Рп)-Е = 0. G.9.4)
Как мы знаем, тот же самый принцип можно выразить
в форме Якоби. Требуется минимизировать интеграл
А = у 2 )у Е~ V ds G.9.5)
без каких бы то ни было дополнительных условий. Мы
видели, что можно ввести риманов линейный элемент
Лт = У 2(Е — V) ds, G.9.6)
с помощью которого принципу Якоби можно придать про-
простой геометрический смысл: требуется определить кратчай-
кратчайшие (геодезические) линии в некотором римановом про-
пространстве. Предположим, что мы нашли эти геодезические
линии и вычислили вдоль них интеграл G.9.5). При этом
мы фактически получили длину дуги геодезической линии
между двумя точками М и N, или, проще говоря, «расстоя-
«расстояние» между точками М и N. Это расстояние, очевидно, яв-
является функцией координат qt двух крайних точек М и N.
Таким образом, выраженное через координаты двух крайних
точек это расстояние и есть главная функция Гамильтона.
Очевидно, что любые две точки q±,..., qn и qlt ..., qn про-
пространства конфигураций (по крайней мере в достаточно ма-
малой области) могут быть соединены геодезической линией.
Поэтому главная функция Гамильтона может быть записана
для любой пары точек q. и q.. Обозначив главную функ-
функцию Гамильтона через W, получим
W = W(q1,...,qn,ql,...,q,l). G.9.7)
Из предыдущего известно, что вариация интеграла А
равна нулю при варьировании с фиксированными гранич-
граничными значениями, и содержит только граничный член, если
граничные значения варьируются (см. гл. VI, п. 8)
6А = [2л &Ч1У: = S р, bqt~ 2 ^ 6qt. G.9.8)
"' 1=1 / = !
9. Главная функция Гамильтона, фазовая жидкость 259
С другой стороны, функция W, по определению, есть не
что иное, как определенный интеграл А, записанный в виде
функции точек q( и qit между которыми этот интеграл бе-
берется. Отсюда следует
G-9.9)
Сравнение последних двух уравнений приводит к следую-
следующим соотношениям:
__ dW_
Pi'dqi' G.9.10)
Эти уравнения снова показывают, что два положения движу-
движущейся фазовой жидкости связаны друг с другом при помощи
канонического преобразования. Теперь, однако, можно ска-
сказать больше: роль W в уравнениях G.9.10) показывает, что
главная функция Гамильтона является производящей функ-
функцией того канонического преобразования, которое переводит
движущуюся фазовую жидкость из одного состояния в
другое, более позднее1.
Заметим, что производящая функция S зависящего от времени
канонического преобразования есть нечто более общее, чем HP-
функция Гамильтона, потому что зависящее от времени каноническое
преобразование переводит произвольную точку Q;, Р,- фазового
пространства в движущуюся точку qt, р-, в то время как преобра-
преобразование Гамильтона переводит начальное положение q-t, pi движу-
движущейся частицы жидкости в какое-то более позднее положение q4-, р1ш
Во всех наших построениях координаты qit pi все вре-
время оставались на изоэнергетической поверхности Н=Е.
Наши переменные, по сути дела, составляют Bя — ^-мер-
^-мерное многообразие, для которого не существует фазового
1 Точнее, производящей функцией этого преобразования будет
— W.— Прим. ред.
260 Гл. VII. Канонические преобразования
пространства вне изоэнергетической поверхности. [Напом-
[Напомним, что уравнение F.10.27), связанное с принципом Яко-
би, имело смысл тождества, которому должны удовлет-
удовлетворять переменные qit pi.] Поэтому функция W автома-
автоматически удовлетворяет уравнению в частных производ-
производных
A!)-? = 0- G-9Л1)
То же самое можно сказать и о координатах начальной точ-
точки qt, pi, принадлежащей тому же самому многообразию.
Следовательно, функция W удовлетворяет также и второму
уравнению в частных производных, полученному заменой
pi на —dW/dqi,
^-'-. —7T)~E==Q- G-9-12)
Главная функция Гамильтона связана таким образом с
двумя уравнениями в частных производных.
При заданной производящей функции уравнения кано-
канонического преобразования могут быть получены с помощью
дифференцирований и исключений, что дает возможность
выразить в явном виде координаты qit pi через qit pt. Это
означает, что мы получаем в явном виде траекторию
С-точки, с началом в заданной точке пространства конфигу-
конфигураций. В этом и заключается выдающееся открытие Га-
Гамильтона. При заданной главной функции W вся динами-
динамическая задача сводится к дифференцированиям и разрешению
конечных уравнений.
Перейдем теперь к случаю наличия зависимости от вре-
времени, имея в виду как консервативные, так и неконсерва-
неконсервативные системы. Процедура при этом в точности та же са-
самая, что и в случае консервативных систем. Лишь время t
добавляется к позиционным координатам и рассматривается
таким образом «обобщенное действие»
= j(J]
ptq'i+p,t'jdx = K^Pidqi + Ptdt} G.9.13)
9. Главная функция Гамильтона, фазовая жидкость 261
при дополнительном условии
K(qlt...,qn.t,Pi,...,Pn'Pt)=O- G-9-14)
Введем еще раз линейный элемент da, на этот раз для
расширенного пространства конфигураций qu ..., qn, t
do = Ldt= Lt'dx, G.9.15)
но геометрия, введенная этим линейным элементом, уже
не будет римановой. Соединим две точки qlt ...,qn,t и
qlt...,qn,t в (п-|-1)-мерном пространстве кратчайшей ли-
линией и измерим длину дуги
А = \d~o = I Lt'dx G.9.16)
этой линии. Таким образом, мы получаем какое-то опре-
определенное «расстояние» между двумя точками пространства,
причем это расстояние снова оказывается функцией коор-
координат этих двух точек
W = W(qlt...,qa,t,ql,...,qa,t). G.9.17)
Следовательно, мы построим тем самым главную функ-
функцию Гамильтона. Варьируя интеграл действия при про-
произвольных граничных значениях, получаем соотношения
dW - 3W
41 dqi G.9.18)
_ dW_ dW_
Pt~ dt' Pi" df
из которых видна каноническая природа преобразования.
Уравнение в частных производных принимает вид
или, если выразить К через функцию Гамильтона К. =
262 Гл. VII. Канонические преобразования
Л + н(^ qn,S,..., -dS,l)=0. "
dt ^ \41 >4n> d4l' dqn' )
Функция W должна удовлетворять этим двум уравнениям
в частных производных.
Заметим, что ввиду наличия этих двух условий для
W последние два уравнения преобразования G.9.18) сле-
следуют из предыдущих уравнений и могут быть опущены.
В оставшихся уравнениях мы выражаем qt из второй
группы уравнений и подставляем их в первую группу.
Это дает уравнения преобразования
которые в явном виде решают задачу движения, опре-
определяя координаты qi, pi движущейся точки в любой мо-
момент времени t, если задано начальное положение в мо-
момент 1,
Эта схема интегрирования Гамильтона была упрощена
и улучшена Якоби. Главная функция Гамильтона должна
удовлетворять сразу двум уравнениям в частных произ-
производных. Решение этой задачи практически невозможно
без более широкой схемы интегрирования, предложенной
Якоби. Производящая функция S зависящего от времени
канонического преобразования определяет все движение
фазовой жидкости, удовлетворяя лишь одному уравнению
в частных производных
<? + Н(п q,,^-, ..., Р-, Л =0. G.9.22)
dt ' у11' ' Чп dqt dq,i J ч '
Второе дифференциальное уравнение больше не нужно,
поскольку точка Qx Qn не должна лежать на обоб-
обобщенной изоэнергетической поверхности К = 0. Более
того, S является функцией только qlt ..., qn, Qlt ..., Qn, t
в то время, как главная функция Гамильтона зависит,
кроме того, еще и от переменной 1.
9. Главная функция Гамильтона, фазовая жидкость 263
В литературе дифференциальное уравнение G.9.22) часто назы-
называют «дифференциальным уравнением в частных производных Га-
Гамильтона — Якоби». Это название совершенно справедливо. Не-
Несмотря на фундаментальную важность функции расстояния Гамиль-
Гамильтона, его первоначальная схема была неприемлема для целей практи-
практического интегрирования. Замечательное открытие Гамильтона дало
Якоби ключ к каноническим преобразованиям, что в свою очередь
расширило рамки применимости метода самого Гамильтона. С по-
помощью функции Якоби S, на которую наложено гораздо меньше усло-
условий, можно найти и гамильтонову lF-функцию. Но было бы практи-
практически невозможно найти W-функцию непосредственно путем решения
двух совместных уравнений в частных производных. Связь между
этими двумя теориями будет обсуждаться более подробно в следую-
следующей главе.
Резюме. В то время как производящая функция
канонического преобразования является чисто мате-
математическим понятием, Гамильтон ввел «главную функ-
функцию», тесно связанную с интегралом действия. В его
геометрической интерпретации эта функция имеет
ясный смысл. Она задает расстояние между двумя
точками в соответствующим образом определенном
метрическом пространстве, являясь при этом функ-
функцией координат этих двух точек. Главная функция
Гамильтона является производящей функцией того
частного канонического преобразования, которое свя-
связывает два состояния фазовой жидкости, принадлежа-
принадлежащие двум различным моментам времени, причем свя-
связывает их непосредственно, без помощи какой-либо
промежуточной внешней точки.
ГЛАВА VIII
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ В ЧАСТНЫХ
ПРОИЗВОДНЫХ ГАМИЛЬТОНА —ЯКОБИ
Сними обувь твою с ног твоих,
ибо место, на котором ты стоишь,
есть земля святая.
Исход, 111,5
Введение. В своем восхождении мы поднялись уже довольно
высоко и теперь находимся в разреженной атмосфере теорий необык-
необыкновенной красоты и приближаемся к высокому плато, на котором
встречаются и находят общую почву геометрия, оптика, механика и
волновая механика. Только путем глубоких размышлений, прини-
принимающих зачастую творческий характер, можно постичь всю кра-
красоту предмета нашего исследования, в котором последнее слово еще
отнюдь не сказано. Мы начнем с теории интегрирования, принадле-
принадлежащей Якоби, а затем перейдем к исследованиям Гамильтона в об-
области геометрической оптики и механики. Объединение этих двух
подходов ведет к великим открытиям де Бройля и Шредингера, ле-
лежащим в конце нашего пути.
1. Важная роль производящей функции в задаче о дви-
движении. В теории канонических преобразований нет более
важной теоремы, чем та, которая утверждает, что произ-
произвольное каноническое преобразование полностью харак-
характеризуется заданием одной-единственной функции S —
производящей функции этого преобразования. Подобным
же образом и канонические уравнения характеризуются
одной функцией — функцией Гамильтона Н. Эти две фун-
фундаментальные функции можно связать между собой опре-
определенными соотношениями. Для решения задачи о движе-
движении достаточно рассмотреть функцию Гамильтона и попы-
попытаться упростить ее с тем, чтобы канонические уравнения
стали непосредственно интегрируемыми. С этой целью можно
применить подходящее каноническое преобразование, при-
причем это преобразование зависит от одной функции S. По-
Поэтому вместо решения целой системы канонических урав-
уравнений можно свести задачу к решению одного уравнения,
дифференциального уравнения в частных производных.
С практической точки зрения мы выиграли немного. Ре-
Решение уравнения в частных производных — даже одного
I. Важная роль производящей функции 263
уравнения — нелегкая задача. Она в большинстве случаев
не легче, чем первоначальная задача интегрирования. Те
задачи, которые могут быть решены с помощью уравнения
в частных производных, обычно могут быть решены и дру-
другими методами. Поэтому в течение длительного времени
считалось, что методы Гамильтона имеют чисто математи-
математический интерес и их практическое значение невелико. Фило-
Философское же значение этих методов и то, что они позволяют
по-новому осмыслить наиболее глубокие проблемы меха-
механики, оставалось незамеченным всеми, за исключением не-
нескольких ученых, на которых произвела большое впечат-
впечатление необыкновенная красота исследований Гамильтона.
Среди них следует особо отметить Якоби; позднее это были
Гельмгольц, Ли, Пуанкаре и уже в наши дни де Бройль
и Шредингер. В современной физике методы Гамильтона
завоевали признание благодаря оптико-механической ана-
аналогии, которая была выяснена с помощью уравнения в ча-
частных производных Гамильтона. С рождением шрединге-
ровской волновой механики, существенно опирающейся
на работы Гамильтона, основные идеи гамильтоновой ме-
механики нашли свое место в учебниках теоретической фи-
физики. При этом, однако, на первый план выдвигается обычно
техническая сторона этой теории, а ее принципиальная фи-
философская сторона остается в тени. С нашей точки зрения,
чисто техническая сторона этого вопроса менее важна.
Основной интерес представляет осмысление основ этой
теории и взаимосвязи между ее различными аспектами.
Мы обсудим последовательно теории Якоби и Гамильтона
и выявим ту централь:.ую роль, которую в них играет
уравнение в частных производных Гамильтона — Якоби.
Резюме. Канонические преобразования характе-
характеризуются одной-единственной функцией, производя-
производящей функцией. Поэтому задача нахождения некоторого
канонического преобразования, которое бы упро-
упрощало функцию Гамильтона и делало бы уравнения
непосредственно интегрируемыми, эквивалентна за-
задаче о нахождении только одной функции. Эта функ-
функция определяется одним уравнением в частных про-
производных. Задача решения системы канонических урав-
уравнений заменяется задачей решения этого уравнения.
266 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
2. Теория преобразований Якоби. Рассмотрим консер-
консервативную механическую систему с заданной функцией
Гамильтона Я, не зависящей от времени /. Преобразуем
механические переменные qlt ..., qn, р1г..., рп в новую со-
совокупность переменных Qt,..., Qn, P1} ..., Рп с помогцью
некоторого канонического преобразования. При этом на-
наложим лишь одно условие, а именно чтобы в качестве одной
из переменных, например Qn, была взята функция Н.
Qll = H(q1,...,qH,pl рп). (8.2.1)
Остальные 2п — 1 уравнений преобразования произволь-
произвольны, с тем лишь ограничением, что преобразование должно
быть каноническим.
Предположим, что мы сумели найти такое преобразо-
преобразование. Тогда канонические уравнения в новой системе ко-
координат легко проинтегрировать. Поскольку функция Га-
Гамильтона Н инвариантна относительно канонического пре-
преобразования, в новой системе функция Гамильтона Н'
равна Qn- Это означает, что в новой системе координат все
переменные циклические1 и можно произвести полное инте-
интегрирование уравнений движения.
Первая группа уравнений
6
4l - dPt
сразу же дает
Q(- = const = a,, (/=1, 2, ..., п— 1). (8.2.2)
Последний индекс п мы выделили, потому что константа,
связанная с Qn, имеет особый смысл; она представляет
собой постоянную энергии Е
E. . (8.2.3)
Из второй группы уравнений
Р _ т>
1 Строго говоря, циклическими являются координаты Qlt ...,
2ге— 1. — Прим. р-ед.
2. Теория преобразований Якоби
267
получаем
Р»= const = — p, (i = 1, .... л — 1), (8.2.4)
в то время как последнее уравнение дает
Pn = x-t. (8.2.5)
Геометрически это решение канонических уравнений можно
интерпретировать следующим образом. Первоначальные
мировые линии движущейся фазовой жидкости образуют
бесконечное семейство кривых и заполняют все фазовое
пространство. Интересующее нас каноническое преобразо-
преобразование производит такое отображение пространства самого
на себя, которое выпрямляет эти мировые линии, прев-
превращая их в бесконечное множество параллельных прямых
линий, наклоненных под углом 45° к оси времени t.
Замечательным свойством этого преобразования яв-
является тот факт, что выпрямление искривленных мировых
линий фазовой жидкости и превращение их в прямые па-
параллельные линии происходит автоматически при переходе
цилиндрических поверхностей Н=Е в параллельные пло-
плоскости Qn = Е.
<68 Гл. VIII. Дифференциальное уравнение Гамильтона—Якоби
Таким образом, первоначальная задача интегрирования
свелась к нахождению канонического преобразования,
удовлетворяющего единственному условию (8.2.1). Это ус-
условие требует, чтобы в новых переменных Qi: Pi функция
Гамильтона была равна Qn.
Сразу решить эту задачу в явном виде невозможно, по-
потому что мы не умеем получать каноническое преобразо-
преобразование, выражающее д(, pt через Q,-, Pt. Поэтому введем про-
промежуточную ступень. Вместо того чтобы сразу ввести новые
переменные Qt и Р,-, сначала введем лишь Q,-, сохранив ста-
старые q-t и исключив pt. Потом мы исключим также и qt.
Первый шаг может быть выполнен в явном виде, потому
что имеется формула
выражающая pt через qt и Q,-. Подставив эти выражения в Н,
получим функцию Гамильтона, зависящую от qt н Q,-.
Предположим теперь, что в результате этой операции
функция Гамильтона Н стала равной Qn
С„. (8.2.7)
Здесь qt вообще отсутствуют. Поэтому второй шаг, исклю-
исключение qt, может быть опущен, так как наша задача выпол-
выполнена.
Уравнение (8.2.7) является дифференциальным урав-
уравнением в частных производных с неизвестной функцией S.
Недостаточно найти какое-нибудь решение этого диффе-
дифференциального уравнения. Для того чтобы S могла быть
производящей функцией, она должна иметь вид
S = S(q1,...,qn,Q1,...,Qn). (8.2.8)
Однако все Q,-, кроме Qn, в дифференциальное уравнение
не входят. Они являются просто параметрами. С точки зре-
зрения интегрирования (8.2.7) первые п — 1 переменных Q,-
играют роль постоянных интегрирования.
Согласно общей теории, решение, содержащее произ-
произвольные константы в количестве, равном количеству пере-
переменных, называется «полным интегралом». В данном слу-
2. Теория преобразований Якоби 269
чае число переменных п и полное решение должно содер-
содержать п констант интегрирования. Однако в действитель-
действительности одна из констант выпадает.
Поскольку сама функция S не входит в дифференциаль-
дифференциальное уравнение, а входят только ее частные производные,
решение определяется с точностью до аддитивной постоян-
постоянной. Эта постоянная, однако, не входит в каноническое пре-
преобразование и поэтому она с самого начала может быть опу-
опущена. Оставшиеся п — 1 константы можно отождествить
с Qi, ..., Qn_t.
В результате процесс определения функции S проте-
протекает следующим образом. Находится какой-либо полный
интеграл уравнений (8.2.1) с п — 1 существенными по-
постоянными интегрирования щ,..., an_i
S = S(qlt...,qn,a1,...,an-l,QJ. (8.2.9)
Эти постоянные заменяются переменными Qx, ..., Qn—i-
Проделав это, мы тем самым определяем общее реше-
решение канонических уравнений движения. Уравнения
_ dS
(8.2.10)
определяют в явном виде переход от qi, pi к Qi, Р,-. После
разрешения этих уравнений относительно переменных qi, pt
последние могут быть записаны как функции Q,-, Pt
P/=^(Qi.-.Qn, -Pi,.-, -Л,). * ¦ • '
Все значения новых координат известны: они записаны
в решении (8.2.2—8.2.5). Подставив их в выражения
(8.2.11), получим <?; и pi в виде явных функций времени t
и 2п констант интегрирования alt ..., an_i. Е, рь ..., р„_1,т
qi= /«(ai. ¦••• «л-ь Е, рх< ..., р„_ь t — x), 2
Pi=gi (ai. ¦•-. ctn-i, Е, рь ..., Р„_ь t —т).
270 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Задача. В случае одной степени свободы уравнение в частных
производных (8.2.7) сводится к обыкновенному дифференциальному
уравнению и решается в квадратурах. Рассмотреть задачу о ли-
линейном осцилляторе
V = -^
(8.2.13)
Решив дифференциальное уравнение Гамильтона — Якоби, получить
следующее каноническое преобразование:
х = —
k
р=
/2Q
cos kP,
sinkP.
Эллипсы Н=Е первоначальной системы координат преобразуются
в новой системе в прямые линии Q = Е. Как известно, при канони-
каноническом преобразовании пары переменных сохраняется площадь. Как
же может эллипс, ограничивающий определенную площадь, преоб-
преобразовываться в прямую линию? Разрешение этого кажущегося про-
противоречия заключается в неоднозначности преобразования. Для
того чтобы сделать преобразование однозначным, ограничим Р об-
областью от 0 до 2n/k и разрежем плоскость х, р вдоль оси х. Тогда
эллипс нельзя замкнуть способом, отличным от показанного на
рис. 12. Соответствующей фигурой в преобразованной системе от-
отсчета является заштрихованный прямоугольник, который дейст-
действительно имеет ту же площадь, что и первоначальный эллипс.
Рис. 12.
Подытоживая сказанное с точки зрения решения ка-
канонических уравнений, заметим, что нет необходимости
сначала заменять константы интегрирования переменны-
переменными Qi, а затем Q; снова константами. Аналогично, пере-
переменная Qn может быть сразу отождествлена с постоянной
энергии Е. Вся формальная сторона решения может быть
сформулирована в виде следующего рецепта.
2. Теория преобразований Якоби 271
1. Записать уравнение энергии
H(qlt ..., qn, ръ .... Р„)=Е. (а)
2. Заменить pi частными производными некоторой
функции S по переменным qi
И
3. Найти какой-либо полный интеграл с п — 1 сущест-
существенными постоянными интегрирования
S = S(qlt ..., qn, аъ ..., ап_ь Е). (у)
4. Записать уравнения
ds -fi
5. Решить эти уравнения относительно qh получив
qi = fi (ось ..., cz/i-i, ¦?. Рь ¦¦•, Р«-ь ^ —т), (е)
что и является искомым решением.
Перейдем теперь к общему случаю реономной системы,
не ¦ удовлетворяющей закону сохранения энергии. В соот-
соответствии с изложенным раньше методом результаты, по-
полученные для консервативных систем, всегда могут быть
обобщены, если включить время t в число позиционных
координат qt и рассматривать задачу как консервативную,
но в расширенном фазовом пространстве.. Имеется кано-
канонический интеграл
(8.2.14)
для которого требуется найти условия стационарности при
следующем дополнительном условии:
tffai, .... <7„, t, plt...,pn, p,) = 0. (8.2.15)
272 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Предположим, что мы применили какое-то канониче-
каноническое преобразование, удовлетворяющее всего лишь одно-
одному условию, а именно: одно из уравнений преобразования
имеет форму
T=K(ql,...,qn, t, Pl, ...,pn, pt). (8.2.16)
Тогда в новой системе координат дополнительное усло-
условие принимает вид
7=0 (8.2.17)
и канонический интеграл сводится к интегралу
PtQtdx (8.2.18)
без каких бы то ни было дополнительных условий. Это
приводит к тому, что все Q,- и Р? оказываются констан-
константами
Qi==att (8.2.19)
Pi = Р/.
Опять канонические уравнения в новой системе коорди-
координат получаются чрезвычайно легко, причем результат ока-
оказывается даже более симметричным, чем раньше, потому
что все переменные находятся теперь в равном положе-
положении.
Условие (8.2.16) эквивалентно решению уравнения
в частных производных
|И ^Н (8-2-20)
Поэтому снова ищется какой-либо «полный интеграл»,
содержащий п констант интегрирования alt ..., а„, которые
отождествляются с п переменными Qi,..., Qn. Более того,
ввиду дополнительного условия (8.2.17) переменная t
при движении, осуществляющемся в действительности,
тождественно равна нулю, и мы можем подставить это ее
значение заранее. Вспомнить, что связь между К и обычной
2. Теория преобразования Якоби 273
функцией Гамильтона Н имеет вид К = Н -\- pt, получим
уравнение в частных производных
ж+
Это и есть дифференциальное уравнение в частных произ-
производных Гамильтона — Якоби, полученное теперь для про-
произвольных реономных систем.
Замечательная особенность этого метода заключается
в том, что каноническое преобразование, выпрямляющее
«изоэнергетическую поверхность» К = 0 в плоскость t = О,
преобразует также все линии тока движущейся фазовой
жидкости в параллельные прямые линии.
Цепь наших рассуждений, приведшая к распространению
свойств консервативных систем на произвольные реоном-.
ны? системы, основывалась на добавлении к фазовому про-
пространству Двух новых измерений: t и pt. Можно действовать
и другим методом, оставляя время t независимой перемен-
переменной и сохраняя обычное фазовое пространство. Можно рас-
рассмотреть каноническое преобразование qi, pL в Qt, Pt, не
вводя время t в число активных переменных преобразова-
преобразования. Время t входит в -такое преобразование только как
параметр, т. е. уравнения преобразования, связывающие
старые и новые переменные, непрерывно меняются. При
таком зависящем от времени каноническом преобразовании
функция Гамильтона Н не является инвариантной. Как
видно • из уравнения G.4.13), функция Гамильтона Н'
для новой системы координат равна
Н' =- Ц- + И. (8.2.22)
Теперь можно потребовать, чтобы
Я' = 0. (8.2.23)
Это дает в точности условие (8.2.21), т. е. дифференциаль-
дифференциальное уравнение в частных производных Гамильтона — Якоби.
Оно интерпретируется теперь как условие того, что функ-
функция Гамильтона переродится в нуль при помощи зависящего
10 Зак. 1646
274 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
от времени канонического преобразования. Если функция
Гамильтона в новых переменных равна нулю, то из кано-
канонических уравнений сразу следует, что в процессе движения
все Qi и Pi постоянны. Мы возвратились таким образом к
прежнему методу интегрирования, хотя и пришли к нему
несколько иным путем.
Еще раз сформулируем результаты теории преобразо-
преобразований в виде «рецепта», излагающего формализм интегри-
интегрирования (но пусть те, кто понял лишь этот рецепт, не
думают, что они постигли всю теорию Гамильтона —
Якоби.)
1. Получить произвольный полный интеграл уравнения
в частных производных (8.2.21), т. е. решение, содержащее п
существенных постоянных интегрирования аь ..., ая
S = S(qlt...,qn,t,a1,...,all). (8.2.24)
2. Приравнять частные производные S по этим констан-
константам интегрирования п новым константам
-1?-=Р,. (8.2.25)
3. Разрешив эти уравнения относительно п позицион-
позиционных координат qt, записать их в форме
<7i=//(a,,...,an, p,, .... р„, /). (8.2.26)
Этот процесс приводит к полному решению задачи инте-
интегрирования, так как в результате механические переменные
оказываются полученными в виде явных функций времени
t и 2л констант интегрирования, которые могут быть вы-
выбраны в соответствии с произвольными начальными ус-
условиями.
Задача. Предположим,что Н не зависит от t и положим
S = — Et + S1(q1, ..., qn, a,, ..., а„_ь Е).
Показать, что общий процесс, примененный к функции S, взятой
втакой форме, приводит снова к обсуждавшемуся ранее методу ин-
интегрирования, который справедлив для консервативных систем.
3. Решение уравнения в частных производных 275
Резюме. Вместо того чтобы пытаться непосредст-
непосредственно интегрировать канонические уравнения, мы
можем применить процесс преобразования. При этом
для консервативной системы отыскивается канони-
каноническое преобразование, переводящее функцию Га-
Гамильтона Я в одну из новых переменных. Для реоном-
ной системы ищется зависящее от времени канони-
каноническое преобразование, преобразующее Н в нуль.
В обоих случаях найденное преобразование решает
задачу о движении, так как в новой системе координат
канонические уравнения могут быть непосредственно
проинтегрированы. Для нахождения искомого преоб-
преобразования и его выполнения нужно найти какое-либо
полное решение уравнения в частных производных
Гамильтона — Якоби.
3. Решение уравнения в частных производных методом
разделения переменных. У нас нет какого-либо общего ме-
метода решения уравнений в частных производных. Однако
при некоторых особых условиях оказывается возможным
найти полный интеграл уравнения Гамильтона — Якоби.
Этот специальный класс задач сыграл важную роль в раз-
развитии, теоретической физики, так как оказалось, что ряд
основных задач теории атома Бора принадлежит к этому
классу. В таких задачах одно уравнение в частных произ-
производных с п переменными может быть заменено п обыкно-
обыкновенными дифференциальными уравнениями с одной незави-
независимой переменной, которые полностью интегрируются.
Такие задачи называются «задачами с разделяющимися
переменными».
Метод «разделения переменных» заключается в следую-
следующем. Мы пытаемся решить данное дифференциальное урав-
уравнение путем представления функции S в виде суммы*« функ-
функций, каждая из которых зависит только от одной из пере-
переменных
S = S1fa1) + S3(<72)+ ... +Sn(qn). (8-3.1)
Приведет ли такое весьма специальное предположение к
нужному результату, заранее сказать нельзя. Просто из
10*
276 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
алгебраического вида функции Гамильтона нельзя усмот-
усмотреть, будет ли уравнение с разделяющимися переменными
или нет. Леви - Чивита1 показал, как можно исследовать
разделяемость заданной функции Гамильтона, однако в
данном случае проще предположить, что S имеет форму
(8.3.1), и проверить это предположение, непосредственно
подставив функцию S такого вида в уравнение в частных
производных.
Характерным для решения в форме (8.3.1) являет-
является то, что импульс
р j^=dS*M (8.з.2)
и" dqk dqk v ;
оказывается функцией только qk. Запишем уравнение
H(qlt...,qn, Pl,...,pn)-E = 0 (8.3.3)
и разрешим его относительно pk. При этом импульс pk
получится, вообще говоря, функцией всех qi и pi, а, со-
согласно (8.3.2), он должен был бы зависеть от одной qk-
Это противоречие может быть устранено только, если
приравнять константам некоторые определенные комби-
комбинации остальных переменных. Поэтому можно заранее ска-
сказать, что разделение возможно только в случае, когда урав-
уравнение (8.3.3) может рассматриваться как следствие п соот-
соотношений вида
Рк=\ЛЯк, а\, ..., an-i, E), (8.3.4)
где а1,..., an_i — произвольные константы, полученные
в процессе разделения. Обычно в отдельные уравнения
(8.3.4) входят не все а,-. Часто выделение первой переменной,
выбранной соответствующим образом, приводит к введе-
введению одной константы, потом при выделении второй перемен-
переменной появляется вторая константа и т. д., пока мы, наконец,
не получим п констант разделения alt...,an. Постоянная
энергии Е является функцией этих констант
Е = Ф («!,...,«„). ' (8.3.5)
Из этого соотношения можно исключить константу ап>
выразив ее через alt ..., u,,_i и Е. Уравнения (8.3.4) ока-
1 L e v i-C i v i t а Т., Mathematische Annalen, LIX A904),
383.
3. Решение уравнения в частных производных 27?
зываются поэтому достаточно общими, чтобы охватить все
системы с разделяющимися переменными; с другой стороны,
если переменные разделяются, то должны выполняться п
уравнений вида (8.3.4).
Заменив pk, согласно (8.3.2), на dSk/dqk, получим не-
непосредственным интегр ированием
Sk = j /* (<7*. a i ,...,«„_ i, E)dqk + Ck. (8.3.6)
Аддитивная константа Ck входит слагаемым в аддитивную
константу функции S и потому не представляет интереса.
Истинные «константы интегрирования» появляются в про-
процессе разделения переменных; само же интегрирование не
приводит к появлению новых констант.
В качестве типичного примера рассмотрим задачу Ке-
Кеплера о движении планет. Используя сферические коор-
координаты г, 0, ф, получаем линейный элемент
ds2=-dr2-[rr2 dG2 + r2 sin2 0 d^ (8.3.7)
и функцию Гамильтона
я !Lr2+ 4 -:- ^Й—)--. (8.3.8)
2т \ ri /--sin2 О/ г х '
В уравнении Н=Е переменные можно разделить следую-
следующим образом:
p.f = const = a,
1
2т
Итак, процесс разделения переменных автоматически
приводит к нужному числу констант. При настоящем
интегрировании дополнительные константы уже не появ-
появляются.
Задача 1. Произвести разделение переменных в задаче о движе-
движении в однородном поле тяжести V = mgz в прямоугольной системе
координат.
Задача 2. Произвести разделение переменных в задаче об «ани-
«анизотропном осцилляторе»
278 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
V = у т (к2 х2 + k\ у2 + k\ г2)
в прямоугольной системе координат.
Задача 3. Произвести разделение переменных в задаче об эффек
те Штарка
V +E
(Е — напряженность электрического поля, действующего вдоль оси
г) в параболических координатах (Эпштейн, 1916)
х = Yuv costf,
у = У uv sin у,
Иногда разделение переменных возможно не только в одной, а в не-
нескольких системах координат. Старая квантовая теория называла
такие системы «вырожденными системами». Например, в задаче
Кеплера разделение переменных возможно не только в сферических,
но и в параболических координатах.
Из уравнений (8.3.6) видно, что для систем с разделяю-
разделяющими переменными полный интеграл уравнения в частных
производных Гамильтона — Якоби можно получить в квад-
квадратурах. Возникает такая необычная ситуация, что сопря-
сопряженные переменные qk,Pk в каждой паре связаны непосред-
непосредственно друг с другом без участия остальных переменных.
Механическая система с п степенями свободы может рассмат-
рассматриваться как суперпозиция п систем с одной степенью сво-
свободы. Однако истинные уравнения движения такие:
dS о
dS_ . (8.3.10)
дЕ =t—x,
и в этих уравнениях переменные не разделены, потому что,
вообще говоря, каждое конкретное щ, а также Е будут
входить более чем в одну из St.
Задача 4. Получить функцию S и полное решение задачи Кеп-
Кеплера (см. пример выше).
Задача 5. Сделать то же самое для задачи об однородном поле
тяжести, сформулированной в задаче 1.
Разделяемость переменных в тех или иных задачах не
свидетельствует об особенностях физических свойств соот-
4. Метод Делоне для разделения переменных 279
ветствующнх механических систем, а является результатом
только правильного выбора системы координат. Если в дан-
данной задаче при одной системе координат переменные не раз-
разделяются, то они вполне могут разделиться после соответ-
соответствующего точечного преобразования. К сожалению, выбор
правильной системы координат является в каком-то смысле
делом случая, так как никакого систематического метода
для выполнения этой операции не существует.
Бюргере1 показал, что задача о комбинированном эффекте
Штарка и Зеемана (движение электрона вокруг ядра, возмущенное
внешним электрическим и магнитным полями) не допускает разделе-
разделения переменных ни при каких системах координат, и вместе с тем
разделение переменных возможно после соответствующего канони-
канонического преобразования.
Резюме. При благоприятных обстоятельствах
дифференциальное уравнение Гамильтона — Якоби
непосредственно интегрируется в квадратурах. Это
происходит в том случае, когда уравнение для энер-
энергии распадается на п уравнений, каждое из которых
содержит лишь одну пару сопряженных переменных
qk, Pk- При этом функция S может быть записана
в виде суммы п функций, каждая из которых зави-
зависит лишь от одной из переменных q^. Константы ин-
интегрирования появляются в процессе разделения пе-
переменных.
4. Метод Делоне для разделения переменных в периоди-
периодических системах. Метод разделения переменных, если он
применим, приводит к получению полного интеграла урав-
уравнения Гамильтона — Якоби, необходимого в теории инте-
интегрирования Якоби. «Полный интеграл» уравнения в частных
производных первого порядка может принимать множество
различных форм. Предположим, что мы имеем какой-то
полный интеграл
S = S(qu ..., qn, a,, ..., а„_ь Е). (8.4.1)
1 Burgers J. M., Het Atoommodel van Rutherford—Bohr
(Leyden, 1918).
280 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобн
Применим к постоянным интегрирования произвольное
точечное преобразование
«1 =- fl (Vl. •••> Тя).
(8.4.2)
?¦ = /„ (Yi. -. Vn).
Вводя эти соотношения в функцию (8.4.1), получаем S
в виде
S = S(qi,...,qn, Ti, ..-,?„). (8.4.3)
Эта функция S тоже является полным интегралом урав-
уравнения Гамильтона — Якоби, при условии, что мы добавим
к этому решению уравнение
? = /„(?!• -.Т„) (8-4.4)
в качестве дополнительного условия.
С константами Yi> ¦••> У п. можно поступить так же, как
мы поступили раньше с константами alt ...,a,,_i, E, а именно
принять их за преобразованные координаты Qi, ..., Qn.
Тогда мы получим каноническое преобразование от q-t,
Pi к Q,-, Pi, которое переводит функцию Гамильтона Н в
tf' = /n(Qi.-.Qn)- (8.4.5)
Хотя эта формула функции Гамильтона более сложна по
сравнению с Н' = Qn, тем не менее и в этих координатах
канонические уравнения интегрируются в явном виде. Дей-
Действительно, функция Н' зависит лишь от одной совокупности
переменных, а Pi в нее не входят. Поэтому переменные
и здесь являются как бы циклическими. Получим
&=ж = 0> (8А6)
откуда
Q, = const = yt. (8.4.7)
Вторая группа канонических уравнений даст при этом
— Pi= д-щ: = const = v,. (8.4.8)
4. Метод Делоне для разделения переменных 281
Постоянство правых частей в (8.4.8) следует из того, что все
Qi — константы, так что
— Pi = Vlt + 6i (8.4.9)
и канонические уравнения таким образом оказываются
полностью проинтегрированными.
Преимущество такой более общей формы решения для
систем с разделяющимися переменными заключается в сле-
следующем. Может оказаться, что первоначальные константы
alt ..., an_i, появившиеся в процессе разделения перемен-
переменных, не имеют определенного физического смысла, в то
время как новые константы Ух,..., уп могут быть увязаны
с физической сущностью задачи; тогда новая совокупность
констант будет более удобна для обсуждения теорети-
теоретических выводов, чем старая.
Такова основная идея замечательного метода, предло-
предложенного французским астрономом Делоне1 A816—1872)
для решения определенного класса задач с разделяющими-
разделяющимися переменными. На первый взгляд теория Делоне кажется
весьма специальной и чисто методической. Однако именно
этот метод, первоначально разработанный для чисто астро-
астрономических целей, раскрыл глаза физикам на силу идей
Гамильтона.
Как мы уже знаем, при разделении переменных сопря-
сопряженные переменные в каждой паре оказываются связан-
связанными друг с другом без участия остальных переменных.
Поэтому, исходя из уравнений (8.3.4) и считая aL констан-
константами, мы можем нарисовать в плоскости qk, рь линии тока
фазовой жидкости. В классических задачах механики Н —
квадратичная функция pk и поэтому решение уравнения
Н = Е должно обязательно приводить к решению неко-
некоторого квадратного уравнения. Это дает, вообще говоря,
два решения, так что могут быть найдены два значения рь
соответствующие одному и тому же qk. Предположим, что
дискриминант квадратного уравнения положителен только
в определенном конечном интервале изменения qk. В этом
случае qk колеблется между двумя фиксированными предель-
предельными значениями ak и bk, а линии тока соответствующей
двумерной фазовой жидкости должны быть замкнутыми.
1 Delaunay Ch. E., Sur une nouvelle theorie analytique
du mouvement de la lune A846).
10B Зак. 1646
282 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Линии тока могут быть замкнутыми не только при дву-
двузначности соотношений между pk и qk, но н еще в одном
случае. Может случиться, что одна из переменных q^
Рис. 13.
м
\
А
А
Рис. 14.
\
М
¦ч„
меняется в некотором диапазоне от ak до Ь* вследствие гео-
геометрической связности фазового пространства. Например,
если координатой является угол ср, меняющийся в интервале
от 0 до 2 я, то линия тока на самом деле не открытая, как
это может показаться из рис. 14, а замкнутая, потому что
конечные точки ak и bk совпадают. Это можно было бы про-
проиллюстрировать, согнув плоскость рисунка в цилиндр и
совместив граничные ординаты. Движущаяся С-точка пере-
4. Метод Делоне для разделения переменных 283
прыгивает обратно из М" М' и продолжает свое движение
вдоль той же самой линии тока.
Предположим, что по первой или по второй причине
линии тока во всех плоскостях фе, р/г—замкнутые. Тогда
движущаяся частица жидкости возвращается в ту же самую
точку, а затем движение повторяется. Мы имеем тогда пе-
периодическое движение. Это касается, однако, только траек-
траектории движущейся точки, спроектированной на плоскости
qk, Pk\ в отношении же движения во времени периодичность
не имеет места. Скорость, с которой точка начинает свой
второй виток, не совпадает с первоначальной скоростью,
потому что qk и рк в общем случае зависят от всех qt, p,-
и поэтому возвращения одной пары переменных к началь-
начальным значениям недостаточно для того, чтобы движение было
периодическим. Однако движение содержит в себе п неза-
независимых периодов, и они охватывают неразделяющимся
образом все переменные. Метод Делоне показывает, как
путем изучения свойств двух основных функций — функ-
функции Гамильтона Н и производящей функции S — можно
получить все частоты движения. В этом заключается суть
метода. Соответствующее преобразование обнаруживает
многопериодическую структуру данной системы с разделя-
разделяющимися переменными и определяет частоты системы в
явном виде. Этот процесс не требует ничего, кроме квадра-
квадратур и разрешения уравнений относительно определенных
переменных.
Мы знаем, что константы а; и постоянная энергии Е
являются новыми позиционными координатами Q,- в соот-
соответствующем каноническом преобразовании. Заменим эти
переменные новыми переменными Jit называемыми «пере-
«переменными действия», потому что они имеют размерность
«действия», т. е. произведения р на q.
Начнем с уравнений (8.3.4), которые, согласно нашему
предположению, дают замкнутые линии в плоскостях qk,
Pk- Вычислим следующие определенные интегралы, взятые
вдоль всей линии тока:
•^ = § Pkdclk=~- §'/*(?*> av •••> ап-\' E)dQk- (8-4-10)
Этот криволинейный интеграл равен площади, охватывае-
охватываемой линией тока. Эта площадь является функцией а,- и Е,
10В*
284 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобн
которые входят в подинтегральные выражения в качестве
параметров
Jk = Jk(a,, ..., ап_,,?). (8.4.11)
При помощи этих уравнений можно выразить а,- и Е как
функции Jк
ai = a,(Jlt ...,./„), (8.4.12)
E = E(Jlt...,Jn). (8.4.13)
Исходя из этих соотношений, можно ввести «переменные
действия» в производящую функцию S и получить S в виде
функции qi и /,-.
S = S(qu...,qn, Л, ...,./„). (8.4.14)
Нужное преобразование теперь определено. Двумя основ-
основными функциями в новой системе переменных являются
функции Е и S. Функция Е является в действительности
функцией Гамильтона Н в новой системе.
Переменные действия Jt являются позиционными коор-
координатами Qi новой системы отсчета. Сопряженные импульсы
Pi называются угловыми переменными. Они являются без-
безразмерными величинами. Мы будем пользоваться не самими
Pi, а величинами, отличающимися от них знаком, которые
обозначим через соь ..., т„. Согласно общей схеме преобразо-
преобразования,
_/>/ = Ш| = -!?-. (8.4.15)
Исследуем эти уравнения несколько более подробно.
Рассмотрим функциональные соотношения между первона-
первоначальными qi и новыми со,- при условии постоянства Ji.
При этом мы сможем говорить об отображении д-мерного
g-пространства на n-мерное со-пространство, и наоборот.
Соотношения (8.4.15), выражающие сог- через Jit не одно-
однозначны. Отметим сначала, что пространство конфигураций
qi, в котором происходит движение, является ограниченной
областью гс-мерного пространства. Координаты qk меняются
между определенными минимальными и максимальными
значениями. Поэтому, если нанести qi в качестве координат
на прямоугольные оси л-мерного пространства, то ввиду
4. Метод Делоне для разделения неременных 285
разделения переменных все движение окажется ограничен-
ограниченным некоторым «прямоугольным ящиком» в этом прост-
пространстве. Например, в случае задачи Кеплера из уравнений
(8.3.9) видно, что ср меняется от 0 до 2л, 6 — между каким-
то минимальным значением 80 и максимальным я — 90,
а г — между некоторым минимумом гг (перигелием) и мак-
максимумом г3 (афелием). С точки зрения физического прост-
пространства это означает, что движение происходит внутри
области, ограниченной двойным конусом и двумя кон-
концентрическими сферами.
Нанесем теперь одну линию тока на плоскость qk, Pk
и совершим вдоль нее один полный виток; q^ изменится от
минимального до максимального, а затем снова до минималь-
минимального значения, в то время как остальные qi останутся не-
неизменными. Посмотрим, что произойдет при этом с со,-.
Из уравнений (8.4.15) следует
Лео,- = § d\ui = § ddj"tgqk dqlr (8.4.16)
Теперь Ji при интегрировании являются параметрами. По-
Поэтому операцию дифференцирования по /,- можно вынести
из-под знака интеграла, пользуясь правилом дифференциро-
дифференцирования по параметру
^ (8А17)
Последний интеграл по определению равен J\. Поэтому
Дш; = ^ = 6,-ь (8.4.18)
где 6,-? — символ. Кронекера.
Таким образом, полный цикл изменения переменной qu
приводит к изменению со^ на единицу, в то время как осталь-
остальные со,- не-меняются. Этот результат дает ключ для понима-
понимания взаимосвязи между со- и ^-переменными. Можно сказать,
что со-пространство носит характер «зеркальной комнаты».
Представим себе единичный куб в n-мерном пространстве,
стенками которого являются отражающие зеркала. Возь-
Возьмем произвольную точку внутри куба. В каждом направле-
направлении, перпендикулярном к отражающим стенкам, появляет-
появляется бесконечное число мнимых изображений. Единичный
286 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
куб повторяется бесконечное число раз. Однако все изобра-
изображения точки Q, находящейся внутри куба, соответствуют
одной и той же точке Q в q-пространстве.
Имеется и аналитическое рассуждение, соответствующее
этой геометрической картине. Обратим соотношение между
со-и {/-пространством, считая qt функциями a>k. Тот факт,
Рис. 15.
что изменение произвольного «^ на единицу не меняет зна-
значений qi, означает, что qL—периодические функции всех угло-
угловых переменных со1; ..., «„ с периодом, равным единице.
Это в свою очередь означает, что q-t могут быть представ-
представлены в виде кратных рядов Фурье, т. е. бесконечных рядов
синусов и косинусов с аргументами
2л (/?! cOl -/г, ох, -!- ... -\-knan), (8.4.19)
где k1, k2,..., kn — произвольные целые числа, и с постоян-
постоянными амплитудами.
Из рис. 15 видно, что преобразование от ^-пространства
к w-пространству является двузначным (одна ^-точка переходит в две
ш-точки) в соответствии с колебательным характером изменения q^
между крайними значениями (рис. 13). Если выполняются условия
рис. 14, то преобразование от ^-пространства к «-пространству од-
однозначно, так как первоначальная переменная q/, сама по существу
является угловой переменной. Преобразование от «- к ^-пространст-
ву всегда однозначно (одна со-точка преобразуется в одну д-точку).
Эти сведения о соотношениях между q- и «-переменными
помогут нам довольно подробно представить себе картину,
связанную с полным интегрированием задачи движения.
До сих пор мы не учитывали канонических уравнений, а
попросту исследовали некое каноническое преобразование.
4. Метод Делоне для разделения переменных 287
Теперь решим канонические уравнения в новой системе
координат с переменными Jt, со,-. Напомним, что /,- соответ-
соответствуют Qi, a —со,- соответствуют Р,-. Функцией Гамиль-
Гамильтона является E(J\,..., Jn). Первая группа канонических
уравнений дает [см. (8.4.6)]
Л = -|^- = 0, (8.4.20)
откуда
Л = const. (8.4.21)
Постоянство J'i уже предполагалось в наших предыдущих
рассуждениях.
Вторая группа уравнений [см. (8.4.7)] дает
со,- = ~ = const ^ v(- (8.4.22)
и, следовательно,
m = vit + ui. (8.4.23)
Подставив эти значения со,- в аргументы (8.4.19) членов
разложения в кратный ряд Фурье, получим, что все дви-
движение аналитически представляется в виде суперпозиции
простых гармонических колебаний с основными частотами v,-.
Таким образом, частоты движения получаются из полной
энергии, выраженной через переменные действия. Частные
производные Е по /,- дают непосредственно частоты системы.
Задача. Вернемся к задаче об ангармоническом осцилляторе, уже
рассматривавшейся в задаче 2, п. 3. Применяя метод Делоне, пока-
показать, что
Е =¦ Г- (&i J\ + h h + h J3),
что дает три частоты v^ = k^2K.
Можно, однако, продолжить наш анализ. Исследуем
траекторию точки, движущейся в со-пространстве. Урав-
Уравнения (8.4.23) показывают, что траектория является прямой
линией, которая проходится с постоянной скоростью. Со-
Соответствующая кривая в ^-пространстве может быть очень
сложной фигурой Лиссажу.
Используем тот факт, что со-пространство сводится к
единичному кубу. Дойдя до правой стенки куба, прямая
2S8 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
линия перескакивает в соответствующую точку левой стен-
стенки и продолжается в прежнем направлении. Такие перескоки
совершаются многократно, как это показано на рис. 16 для
двумерной проекции. Случайно линия может замкнуться,
но может случиться и так, что она никогда не вернется
Рис 16.
в исходную точку. Критерием замыкания могут служить
линейные соотношения вида
k1v1 + kzv2 + ... + knvn--=0 (8.4.24)
с целыми значениями ?,-. Если существует п — 1 соотно-
соотношений подобного типа, то через какое-то конечное время
линия снова пройдет через начальную точку, так что дви-
движение строго периодично. Если не существует ни одного
такого соотношения, то линия заполняет собой весь единич-
единичный куб, время от времени подходя сколь угодно близко
к любой точке внутри куба. Если же, наконец, существует т
соотношений типа (8.4.24), то движущаяся точка будет оста-
оставаться на определенной (п — т)-мерной плоскости внутри
куба, подходя сколь угодно близко к каждой точке этого
подпространства. Эти результаты могут быть сразу же пере-
перенесены и на первоначальное пространство конфигураций
переменных qt, хотя прямые линии и заменяются кривыми,
а плоское подпространство — искривленным подпростран-
подпространством с тем же числом измерений.
Метод Делоне проливает новый свет на понятие «вы-
«вырожденные системы» старой квантовой теории. Если траек-
траектории полностью заполняют разрешенную область простран-
пространства конфигураций, то система не вырождена и разделение
переменных возможно только в координатах одного вида.
4. Метод Делоне для разделения переменных 289
Это соответствует тому случаю, когда отсутствуют цело-
целочисленные соотношения между частотами. Если существуют
одно или больше соотношений типа (8.4.24), то движение
заполняет лишь отдельные части пространства конфигу-
конфигураций. Система в этом случае является однократно либо
многократно вырожденной.
Например, в случае эллипсов Кеплера, Е принимает
вид
(л + j% + Ji)
Здесь
vx = v2 = v8 (8.4.26)
и движение происходит вдоль одного и того же эллипса.
Введение слабого магнитного поля (эффект Зеемана) сни-
снимает однократное вырождение, заставляя плоскость эллип-
эллипса медленно прецессировать вокруг полярной оси. Остав-
Оставшееся вырождение может быть снято, если предположить,
что сила притяжения меняется как некоторая степень рас-
расстояния, хотя бы немного отличная от 2. На самом деле это
вырождение снимается в связи с тем, что движение проис-
происходит в соответствии с законами релятивистской, а не клас-
классической механики. Это заставляет перигелий эллипса
медленно прецессировать в плоскости самого эллипса.
Вместе оба эти эффекта определяют движение, полностью
заполняющее допустимую область пространства конфигу-
конфигураций.
Метод Делоне возник из астрономических задач теории
возмущений. Однако он был замечательным образом при-
применен к задачам молодой квантовой теории. Квантовая тео-
теория Бора предполагала, что для вращающегося электрона
разрешены лишь определенные орбиты. При движении по
этим орбитам полностью отсутствуют потери энергии, так
что движение происходит в соответствии с обычными зако-
законами механики. Таким образом, квантовая теория воспри-
восприняла принципы механики, а следовательно, и канонические
уравнения без каких бы то ни было модификаций. Она про-
просто добавила определенные дополнительные ограничения
на начальные условия. Теперь 2п констант интегрирования
стали уже не произвольными величинами, а величинами
290 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
«квантованными» в соответствии с определенными прави-
правилами. Для этих «квантовых условий» метод Делоне изуче-
изучения многопер йодных систем был чрезвычайно удобен.
Вторая группа констант—«фазовые углы» б,-, которые
появляются при интегрировании второй группы канони-
канонических уравнений в представлении Делоне [см. (8.4.23)],
оставлялись при этом произвольными; первая же группа
констант, переменные действия, квантовалась. Квантовые
условия требовали, чтобы переменные действия были равны
целым кратным фундаментальной величины — постоянной
Планка h
Jk = nkh. (8.4.27)
(Целые числа П/е называются «квантовыми числами».) Таким
образом, метод Делоне, первоначально развитый для пла-
планетарных задач теории возмущений, нашел свои наиболее
важные применения в области атомной физики.
Условия (8.4.27) называются «квантовыми условиями Зоммер-
фельда — Вильсона» A915). Они не отвечают на вопрос о том, что
происходит в случае систем с неразделяющимися переменными. Более
того, квантование зависело от использованной системы координат;
изменение системы координат приводило к совершенно другим ме-
механическим траекториям. В 1917 г. Эйнштейн предложил удиви-
удивительно эффектную новую интерпретацию квантовых условий Зоммер-
фельда — Вильсона, оперируя не с линиями тока в плоскостях цк,
pk, а с самой S-функцией. Заметим, что ввиду (8.3.2) «фазовые инте-
интегралы» (8.4.10) могут быть заменены на ASA, т. е. на изменение Sk
за один полный виток. Следовательно, в квантовых условиях содер-
содержится нечто, связанное с многозначностью функций S^. Эйнштейн
ввел сумму всех квантовых условий
ZJk = I.±Sk = \S = nh, (8.4.28)
где п = 2п/е — снова целое число. Это одно уравнение, конечно,
не может заменить первоначальную систему уравнений. Однако
Эйнштейн рассматривал его скорее не как уравнение, а как принцип,
потребовав, чтобы многозначность была такова, чтобы для любой
замкнутой кривой пространства конфигураций изменение S на одном
полном витке было кратно h. В случае систем с разделяющимися
переменными следует выбрать кривые с qk = const; тогда принцип
Эйнштейна сразу приведет к квантовым условиям (8.4.27). Инва-
Инвариантная формулировка квантовых условий, данная Эйнштейном,
привела де Бройля в 1924 г. к его фундаментальному открытию
волн материи.
5. Роль уравнения в частных производных 291
Резюме. Делоне предложил замечательный метод
изучения систем с разделяющимися переменными,
удовлетворяющих дополнительному условию, со-
согласно которому линии тока на разделившихся фа-
фазовых плоскостях (qk, pk) — замкнутые кривые. Он
ввел каноническое преобразование, позиционными
координатами которого являются «переменные дей-
действия» Jk, определенные как площади, ограниченные
линиями тока. Для движения, осуществляющегося в
действительности, J k являются константами, а сопря-
сопряженные импульсы, взятые с обратным знаком,— «уг-
«угловые переменные» со* — линейно меняются со вре-
временем t. Частные производные Е по J',- дают п новых
констант, являющихся частотами движения v<. Каж-
Каждое qk может быть записано в виде кратного ряда Фу-
Фурье, содержащего все частоты v,- и все их гармоники.
Поэтому такие системы называются многопериод-
ными.
5. Роль дифференциального уравнения в частных про-
производных в теориях Гамильтона и Якоби. В предыдущей
главе (гл. VII, п. 9) отмечалось, что впервые в аналитиче-
аналитической механике фундаментальное уравнение в частных про-
производных открыл Гамильтон. Он также первый выдвинул
идею о фундаментальной функции, из которой можно было
бы получить при помощи простых дифференцирований и
исключения переменных все механические траектории.
Однако первоначальная схема Гамильтона была практи-
практически неприменима. Более того, главная функция Гамиль-
Гамильтона удовлетворяла двум уравнениям в частных производ-
производных. Второе уравнение с точки зрения теории интегриро-
интегрирования является ненужным усложнением. С другой сторо-
стороны, в теории Якоби требуется найти лишь один полный ин-
интеграл основного дифференциального уравнения. В случае
систем с разделяющимися переменными такой интеграл
может быть найден. Поэтому при поверхностном подходе
создается впечатление, что Якоби освободил теорию Га-
Гамильтона от ненужного усложнения, приведя ее к схеме,
применимой на практике.
292 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Это действительно так, если считать, что основная за-
задача механики состоит лишь в интегрировании уравнений
движения. Но такая ограниченная точка зрения была бы
несправедливостью по отношению к далеко идущим иссле-
исследованиям Гамильтона. Пользоваться непосредственно глав-
главной функцией Гамильтона действительно нельзя, и прихо-
приходится прибегать к методу Якоби, но тем не менее главная
функция Гамильтона остается важной и интересной функ-
функцией и служит гораздо более глубоким целям, чем про-
простое интегрирование канонических уравнений. Поэтому
сравнение W-функции Гамильтона с S-функцией Якоби
заслуживает того, чтобы на нем остановиться. Постигнув
все тонкости теории Гамильтона, мы придем к заключению,
что в теории Гамильтона два уравнения в частных произ-
производных столь же необходимы и естественны, как одно
уравнение в теории Якоби.
Остановимся сначала на задаче о консервативной меха-
механической системе. Это в действительности общий случай,
так как путем добавления времени t к числу позиционных
переменных и введения в пространство конфигураций до-
дополнительной оси t, а также замены слов «независящая от
времени t» словами «независящая от параметра т» любая
механическая система может быть сделана консервативной.
Соединим точки qx,..., qn и qlt..., ^траекторией, которая
приводит к стационарному значению интеграл
Л= f %Pkq'kdr = ] j^Pkdqk (8.5.1)
при том дополнительном условии, что эта траектория ле-
лежит на изоэнергетической поверхности
H(qlt...,qn, Pl,...,pJ-E = 0. (8.5.2)
Представив затем значение интеграла А, взятого для ста-
стационарной траектории, в виде функции координат qL и qt,
получим главную функцию Гамильтона W,
W = W{qlt ...,qn, ?!,...,?„). (8.5.3)
Гамильтон показал,что эта функция удовлетворяет урав-
уравнению в частных производных
5. Роль уравнения в частных производных 293
с л /о с л\
? = 0- (8'5'4)
До сих пор аналогия cS-функцией Якоби, удовлетворяю-
удовлетворяющей тому же самому дифференциальному уравнению, ка-
кажется совершенно полной. Обе функции зависят от 2л
переменных и каждая из них может рассматриваться как
производящая функция некоторого канонического преоб-
преобразования. После интегрирования уравнения (8.5.4) обе
функции будут содержать п констант интегрирования.
Тем не менее для того, чтобы обнаружить существенное
различие между этими двумя функциями, не нужно даже
прибегать к помощи второго уравнения в частных произ-
производных. В теории Якоби энергетическая постоянная Е была
одной из новых переменных Qn. Кроме энергетической по-
постоянной Е, в решении содержалось лишь п — 1 констант
интегрирования. В теории Гамильтона все переменные на-
находятся в равном положении и энергетическая постоянная
играет роль заданной константы, а не переменной. Гамиль-
тоново решение уравнения в частных производных являет-
является не полным, а «.сверхполным», так как оно содержит на
одну константу больше, чем полное решение. Однородность
по всем переменным является характерным свойством, от-
отличающим гамильтонову W-функцию от S-функции Якоби.
Эта однородность приводит к тому, что преобразование,
определяемое функцией W, в корне отличается от S-преоб-
разования.
При помощи S-функции Якоби производится преобразо-
преобразование изоэнергетических поверхностей Н = Е в плоскости
Qn = Е. Смысл уравнения в частных производных заклю-
заключается здесь в том, что в одну из новых переменных Qn пре-
преобразуется функция Гамильтона. В гамильтоновом случае
ситуация совершенно иная. Построение Гамильтона вовсе
не преобразует изоэнергетические поверхности в плоско-
плоскости; оно целиком развертывается на изоэнергетическои по-
поверхности Я = Е, не выходя за ее пределы. В случае Якоби
мы имеем регулярное преобразование, разрешимое как от-
относительно qu, Pk, так и относительно Qk, Pk. Здесь нет тож-
тождества, которому бы удовлетворяли координаты, так как
уравнение в частных производных устанавливает некоторое
соотношение не между одними qk, pk, а между qk, pk и Qn.
294 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
В гамильтоновом случае преобразование не может быть
регулярным, так как пространство qk, pk отображается
на поверхность. Уравнения
Р^-д^ ^.5.5)
неразрешимы относительно qit потому что каноническое
преобразование, переводящее qt, р,- в qh р,-, существует
лишь в том случае, если точка q;, pi фазового простран-
пространства выбрана на поверхности Н = Е. Это показывает, что
функциональный детерминант для уравнений (8.5.5), состав-
составленный относительно q,-, должен быть равен нулю. Отсюда
получается следующее детерминантное условие для функ-
функции W:
| d'W^ | --= 0. (8.5.6)
Это характерное свойство W-функций не имеет аналога в
теории Якоби. Уравнение Гамильтона в частных произ-
производных приводит к некоторому тождеству, связывающему qk,
pk, которое заставляет точку оставаться на определенной
поверхности в фазовом пространстве.
Проиллюстрируем это положение на примере линейного
преобразования, отображающего само на себя обычное трех-
трехмерное пространство. Пусть, например, координаты х,
у, z принадлежат пространству I, а координаты X, Y, Z —
пространству II. При отличном от нуля детерминанте мы
имеем обычное взаимно однозначное преобразование. Од-
Однако предположим, что детерминант преобразования об-
обращается в нуль. Тогда координаты х, у, г, являющиеся
линейными функциями X, Y, Z, удовлетворяют тождеству
вида
Ах + By -f Cz = 0, (8.5.7)
означающему, что все точки х, у, г принадлежат одной
плоскости. Повернем оси координат так, чтобы уравнение
этой плоскости превратилось в г = 0. Тогда наше вырож-
вырожденное (сингулярное) преобразование примет вид
х = X + aZ,
г/^Г + pZ, (8.5.8)
2=0.
5. Роль уравнения в частных производных
295
В результате преобразования (8.5.8) пространство II ото-
отобразилось на плоскость z = 0 пространства I. Следователь-
Следовательно, это преобразование не может давать взаимно одно-
однозначного соответствия. При переходе от пространства II
к пространству I соответствие однозначно; однако при об-
обратном переходе происходит преобразование точки в ли-
линию. (На рис. 17 точка р, лежащая в основании прямой L,
преобразуется в целую прямую.)
Рис. 17.
Преобразование линии в точку характерно для вырож-
вырожденного преобразования. Теперь понятно, почему преобра-
преобразование, порождаемое главной функцией, должно быть вы-
вырожденным. Ведь каким-то образом должно войти движение,
т. е. преобразование точки qk, pk во все последующие поло-
положения Ци, Pk, а это как раз и означает преобразование
точки в линию.
В теории Якоби преобразование точки в линию возни-
возникает совершенно иным путем. Здесь переменная Qn выделена
среди других переменных. Все координаты точки Qit Pi
фиксированы, за исключением координаты Рп, которая ме-
меняется. Следовательно, требуется разрешить п — 1 урав-
уравнений
296 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
(8.5.9)
относительно qit получив п — 1 уравнений с п переменными
qi, т. е. аналитическое выражение линии. В гамильтоновом
же случае все Рк, включая и Рп, являются константами, а
преобразование точки в линию возникает из-за вырожден-
вырожденности преобразования.
Рис. 18.
Переходя к дальнейшему, укажем, что вырожденности
преобразования в одном направлении недостаточно. По-
Поскольку движение происходит по поверхности Я = Е,
отображение точек этой поверхности во все окружающее
пространство в данном случае невозможно. Такое преоб-
преобразование не имело бы ничего общего с задачей движения.
Поэтому в нашем примере следует предположить, что угол
наклона параллельных прямых L к плоскости z становится
все меньше и меньше, пока они окончательно не ложатся
на плоскость z = 0. Теперь преобразование вырождено в
обоих направлениях. И пространство I и пространство II
отображаются на плоскость z = 0. Преобразование точки
в линию возникает теперь совершенно симметрично: и при
переходе от пространства I к пространству II и при обрат-
обратном переходе.
Такова картина преобразования, порождаемого главной
функцией Гамильтона. Поверхность Я = Е преобразуется
5. Роль уравнения в частных производных 29?
сама в себя, так как точки qk, pk преобразуются в линии,
лежащие на этой же поверхности. Таким образом, не толь-
только точка qk, piit но и точка qk, pk лежит на поверхности
Н = Е — это есть в точности то утверждение, которое со-
содержится во втором уравнении Гамильтона в частных про-
производных. Подобно тому как уравнения (8.5.5) не могут быть
разрешены относительно qt из-за обращения функциональ-
функционального детерминанта в нуль, так и уравнения
Р, = -?- (8.5.10)
не могут быть разрешены относительно qi, потому что и
здесь функциональный детерминант обращается в нуль.
Действительно, последний идентичен функциональному де-
детерминанту (8.5.6) вследствие его симметрии относительно
qi и qt. Таким образом, мы видим, что вырожденность пре-
преобразования в одном направлении приводит к вырожден-
вырожденности преобразования и в противоположном направлении.
Одно уравнение в частных производных не может существо-
существовать без другого, причем общая связь между ними выражает-
выражается детерминантным условием (8.5.6).
Перейдем теперь к общему случаю реономных систем.
Ввиду того что этот переход уже встречался ранее, ограни-
ограничимся здесь лишь кратким изложением. Добавим время t
к числу механических переменных и потребуем стационар-
стационарности «обобщенного действия»
т? п+1 , '¦' / п \
А=\ S^m qt dx = \ B Pi dqi + pt dt (8.5.11)
Tt '=> i V'=i /
при том дополнительном условии, чтоС-точка расширенного
фазового пространства остается на «обобщенной изоэнерге-
тической поверхности»
pl+H(q1,.:.,qn,t, plt...Pn) = 0. (8.5.12)
Опять нужно вычислить интеграл (8.5.11), взятый между
двумя точками qx, ..., qn, t и qlt..., qn, t расширенного про-
пространства конфигураций, записав его в виде функции этих
двух совокупностей координат
W*=W(qlt ..., <7„, t, qlt...,qaj). (8.5.13)
298 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Задача 1. Показать, что это определение главной функции
Гамильтона эквивалентно следующей схеме:
з. Получаем полное решение уравнений Лагранжа в форме
Qi = fiD Нп, О-
р. Вычисляем для этого решения определенный интеграл
t
А = |' Ldt,
i
получив А в виде функции t, t и 2га констант интегрирования а/.
~{. Вычисляем константы интегрирования, разрешая 2га уравне-
уравнений
Ш= fl(*l «2И> 0.
Ql = fi («1. ¦¦¦. а2л, 0
относительно з(..
5. Подставляем эти выражения для а( в Л. Сконструированная
таким образом функция является главной функцией Гамильтона W.
Задача 2. Рассмотреть задачу о движении в однородном грави-
гравитационном поле V = mgz, используя прямоугольную систему коор-
координат. Здесь уравнения Лагранжа интегрируются элементарными
средствами. Пользуясь описанной выше схемой, вычислить гамиль-
тонову W-функцию, которая должна иметь вид
т
- 8 [г +7) (/ -7) - ~ g* (t -7)s
Далее при изучении реономного случая вновь выписы-
выписываются уравнения преобразования
dW - dW
dQl dq^ (8.5.14)
dW r dW
Дополнительное условие (8.5.12), записанное для обеих то-
точек (qit t, pi, pt) и (qi, t, pi, pt), приводит к двум уравнениям
в частных производных, которым удовлетворяет W-функ-
ция [см. G.9.20)].
6. Построение главной функции Гамильтона 299
Здесь опять функциональный детерминант преобразо-
преобразования обращается в нуль, что делает преобразование вы-
вырожденным. Нельзя выразить qi, t, pit pt через qit t, piy
pt, и наоборот. Если, однако, выбирать и первую и вторую
совокупности координат в соответствии с условием (8.5.12),
то в обеих группах уравнений (8.5.14) можно опустить по
одному последнему уравнению, потому что они в этом слу-
случае являются следствиями предыдущих уравнений. Остав-
Оставшиеся уравнения
3W - dW ,о г. . сч
разрешимы относительно qt и p-t и преобразование полу-
получается в следующей форме:
Qi = fi{t< q [,..-, qn\ Pi, •••> Pn> t), ,„ r .,,,
Pi=gi{{> Я\,---,Яп, р\, ..., pn,~t).
Это дает исчерпывающее решение задачи о движении, удов-
удовлетворяющее произвольным начальным условиям. По срав-
сравнению с решением Якоби, число констант интегрирования
не 2 я, а 2 я + 1 в соответствии со «сверхполнотой» W-функ-
ции.
Резюме. В то время как преобразование Якоби
переводит изоэнергетические поверхности в плоско-
плоскости, а линии движения — в прямые, преобразование,
порождаемое главной функцией Гамильтона, имеет со-
совершенно другую природу. Оно осуществляется в пре-
пределах изоэнергетической поверхности Н=Е и носит
вырожденный характер. Движение здесь проявляется
как следствие того, что преобразование переводит
точку в линию, а это в свою очередь вызывается об-
обращением в нуль функционального детерминанта.
6. Построение главной функции Гамильтона при помощи
полного интеграла Якоби. Несмотря на различие подходов,
характеризующих теории Гамильтона и Якоби, между
W-функцией и 5-функцией имеется определенная связь. Тео-
300 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобй
рия интегрирования Якоби косвенным образом включает
в себя W-функцию. Зная 5-функцию Якоби, можно при
помощи дифференцирования и разрешения конечных урав-
уравнений построить главную функцию Гамильтона.
Для того чтобы показать это, вернемся к развитой ранее
теории бесконечно малых преобразований (см. гл. VII,
п. 7). Будем считать 5-функцию Якоби производящей функ-
функцией бесконечной последовательности непрерывно изменя-
7, Р,
Рис. 19.
ющихся канонических преобразований. Физически такая
последовательность реализуется в виде движения фазовой
жидкости. Произвольная фиксированная точка Q,-, Pi
фазового пространства преобразуется в движущуюся точку
qlt pi. Эта точка в момент времени t оказывается в поло-
положении qi, pi, а в момент времени t — в положении qt, pi.
С другой стороны, функция Гамильтона W может быть
представлена как производящая функция канонического
преобразования, переводящего точку qi, pi непосредственно
в qit pi, минуя точку Qit Pi.
Воспользуемся теперь групповыми свойствами канони-
канонических преобразований (см. гл. VII, п. 7). Оба преобразо-
преобразования, как qi, pi, к Qi, Pi, так и Q,-, Р,- к qi, pt являются ка-
каноническими. Следовательно, результирующее преобразо-
преобразование от qi, pi в qt, pi тоже каноническое. Производящая
функция результирующего преобразования равна разности
двух производящих функций отдельных преобразований
[см. G.7.3)]. Отсюда получается следующее замечательное
соотношение:
W = AS = S (ft, „., qn, Qlt ...,Qn, t) ~
— S[qu .... <7n, Qi,...,Qn.t). (8.6.1)
6. Построение главной функции Гамильтона 301
Однако наше построение еще не закончено, поскольку мы
должны рассматривать уравнения
р = dS(g, Q, I) p ^ as (~q~, Q, Т) g g
' dQi ' ' dQi \ • ¦ )
как дополнительные условия. Подставив эти два уравне-
уравнения, получим п условий
Щ- = 0. (8.6.3)
Эти п условий могут быть использованы для исключения Q,-,
так что окончательно W оказывается функцией одних толь-
только qL, t и qi, t.
Таким образом, мы пришли к следующей схеме, позво-
позволяющей получить главную функцию Гамильтона из пол-
полного интеграла 5 (qly ..., qn, t,ax , ап) уравнения в част-
частных производных Гамильтона — Якоби.
1. Берется разность
2. Уравнения
^ = 0
разрешаются относительно aL.
3. Полученные выражения для at подставляются в AS.
В результате получается функция W = AS, зависящая от
qlt..., qn, t и qx,..., qn, t. Это и есть главная функция
Гамильтона W.
Задача 1. Решить уравнение в частных производных Гамильто-
Гамильтона — Якоби методом разделения переменных для случая однород-
однородного гравитационного поля (см. задачу 2, п. 5). Из этого решения по-
получить U^-функцию Гамильтона и показать, что результат совпадает
с прежним результатом, когда ^-функция строилась на основе полу-
полученного предварительно полного решения уравнений движения.
Задача 2. Пусть задана консервативная система, для которой
известна независящая от времени U^-функция, связывающая две
точки фазового пространства
Показать, что зависящая от времени Н7-функция может быть полу-
получена в следующем виде:
302 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
при условии, что мы исключим константу энергии Е с помощью урав-
уравнения
дЕ
Резюме. Хотя главная функция Гамильтона со-
содержит лишнюю константу, она может быть получена
из полного решения уравнения теории Якоби с по-
помощью дифференцирования и необходимых исклю-
исключений.
7. Геометрическое решение уравнения в частных произ-
производных. Оптико-механическая аналогия Гамильтона. В на-
наших предыдущих рассуждениях предполагалось, что у нас
есть полное решение дифференциального уравнения в част-
частных производных Гамильтона — Якоби. Предположим те-
теперь гораздо меньшее, а именно что мы знаем лишь не-
некоторое частное решение заданного уравнения в частных
производных
/ dS dS \ С /о,,,
E (8.7.1)
без каких бы то ни было констант интегрирования.
Аналитически такое частное решение может быть использовано
для интегрирования половины полной системы канонических урав-
уравнений. При помощи уравнений
»=ж (8-7-2)
можно pi выразить через qt. После введения этих pi в первую груп-
группу канонических уравнений
<873)
наша задача сводится к решению этих п дифференциальных уравне-
уравнений первого порядка вместо первоначальной системы In уравнений.
Однако в дальнейшем мы будем интересоваться геометрическими, а
не аналитическими методами решения.
7. Оптико-механическая аналогия Гамильтона 303
Частное решение уравнения в частных производных
(8.7.1) можно построить геометрически. Физическая интер-
интерпретация такого метода решения проливает новый свет на
природу механических задач и разъясняет одно из самых
значительных открытий Гамильтона — аналогию между
оптическими лучами и механическими траекториями. В
связи с развитием современных квантовомеханических тео-
теорий эта аналогия превратилась в одну из ведущих идей
в современных атомных исследованиях.
В дальнейшем мы будем предполагать, что имеем дело
с движением частицы в поле с потенциальной энергией V.
В качестве координат выберем обычные прямоугольные ко-
координаты х, у, z. В следующем пункте будет показано, что
все наши выводы применимы и к движению произвольных
механических систем.
Уравнение для энергии в нашей задаче имеет вид
i (р? + Pi + Pi) -'г V (х, у, z) = Е. (8.7.4)
Это приводит к следующему уравнению в частных производ-
производных для функции S
?)'+(?)'+(&)'-*¦ <*-«• <8'75>
Предположим, что 5 — функция только х, у, z, без каких
бы то ни было констант интегрирования
S = S(x, у, z). (8.7.6)
Это означает, что мы имеем частное решение дифференциаль-
дифференциального уравнения (8.7.5) вместо полного интеграла, который
должен содержать две произвольные константы интегри-
интегрирования а± и ос2. Такое частное решение уравнения (8.7.5)
допускает простую геометрическую интерпретацию.
Как известно, градиент функции 5 имеет направление
нормали к поверхности
S(x, у, z) = const. (8.7.7)
Рассмотрим две близкие поверхности S=CHS=C + e.
В произвольной точке Р первой поверхности построим нор-
нормаль, которая пересечет вторую поверхность в точке Р'.
304 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Абсолютное значение grad 5 может быть определено как
частная производная S, взятая в направлении нормали,
Igrad S
В соответствии с рис. 20 можно написать
|gradS|=f.
(8.7.8)
(8.7.9)
Рис. 20.
Тогда уравнение (8.7.5) можно переписать в следующем
виде:
а =
V 2т (Е — V)
(8.7.10)
Из этого уравнения следует метод построения поверхности
5 = С + е по известной поверхности S = С. От каждой
точки поверхности 5 = С перпендикулярно к ней откла-
откладывается бесконечно малое расстояние а, вычисленное по
(8.7.10).
Из такого построения следует возможность получения
частного решения уравнения в частных производных Га-
Гамильтона — Якоби при помощи последовательности беско-
бесконечно малых операций. Мы начинаем с любой заданной ба-
базисной поверхности в трехмерном пространстве и ставим ей
в соответствие значение S = 0. Затем строим близкую по-
поверхность 5 = е, потом поверхности 5 = 2е, S = Зе
и т. д. В конце концов некоторая ограниченная область
трехмерного пространства окажется заполненной поверх-
7. Оптико-механическая аналогия Гамильтона 305
ностями 5 = const, так что через каждую точку простран-
пространства будет проходить одна такая поверхность. Это означает,
что в некоторой области мы имеем функцию 5, удовлетво-
удовлетворяющую уравнению в частных производных (8.7.5).
Поверхности 5 = const замечательным образом свя-
связаны с задачей движения. С помощью этой «частной» про-
производящей функции 5 невозможно решить канонические
уравнения в стиле теории интегрирования Якоби, так как
мы не знаем, каким образом функция 5 зависит от перемен-
переменных Qi. Однако вместо того, чтобы использовать вторую
группу уравнений преобразования, можно обратиться
к первой группе
»=-%;¦ (8-7.11)
Эти соотношения можно записать в виде векторного урав-
уравнения
P = gradS. (8.7.12)
Поскольку импульс Р = т\ имеет направление касатель-
касательной к траектории, мы получаем следующую теорему: ме-
механическая траектория движущейся точки перпендикуляр-
перпендикулярна поверхностям S — const. При помощи этой теоремы,
строя ортогональные траектории к поверхностямS = const,
получаем семейство возможных механических траекторий.
Эта теорема имеет следующий смысл. Представим себе
семейство механических траекторий, каждая из которых
соответствует одной и той же полной энергии Е и все они
начинаются на некоторой заданной поверхности 5 = 0.
Для этих траекторий можно найти бесконечное семей-
семейство поверхностей S = const, к которым траектории
будут перпендикулярны. Мы говорим, что механические
траектории «обладают свойством лучей», потому что они
ведут себя точно так же, как лучи света в оптике. Свето-
Световые лучи характеризуются тем, что они везде перпенди-
перпендикулярны волновым поверхностям (фронту волны). То же
самое справедливо для механических траекторий консерва-
консервативной системы: их можно рассматривать как ортогональ-
ортогональные траектории семейства поверхностей S=const.
Ортогональность световых лучей волновому фронту не имеет
места в кристаллооптике. Подобно этому, и механические траектории
11 Зак. 1646
306 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
не всегда перпендикулярны поверхностям 5 = const. Электрон,
движущийся в магнитном поле, не пересекает поверхности S = const
под прямым углом. Однако, как будет показано в п. 9 настоящей
главы, ортогональность сохранится, если рассуждать не в образах
евклидовой геометрии, а той геометрии, которая внутренне присуща
динамической структуре пространства конфигураций.8 Мы увидим,
что в тех случаях, когда линейный элемент взят в форме Якоби
da = у Е — V ds, это различие не проявляется, потому что «внутрен-
«внутренняя ортогональность» ведет к ортогональности в обычном смысле.
В остальных случаях, однако, специальная «внутренняя ортого-
ортогональность» лучей и волновых фронтов не приводит к ортогональ-
ортогональности в обычном евклидовом смысле.
«Лучевые свойства» некоторого выделенного семейства
механических траекторий ни в коем случае не являются
тривиальными. Произвольное непрерывное семейство кри-
кривых в пространстве более чем двух измерений не может, во-
вообще говоря, рассматриваться как семейство ортогональных
траекторий по отношению к какому-нибудь семейству по-
поверхностей. Аналитически лучевые свойства механических
траекторий появляются лишь благодаря тому, что они под-
подчиняются вариационным принципам. Без принципа наи-
наименьшего действия лучевые свойства механических траекто-
траекторий не могли бы быть установлены.
Следует выделить условие, которое приводит к возникновению
лучевых свойств механических траекторий, потому что мы фактиче-
фактически произвели определенный отбор среди всех возможных механиче-
механических траекторий. Световые лучи в заданном оптическом поле обра-
образуют двумерное многообразие, в то время как совокупность всех
механических траекторий в потенциальном поле образует пятимерное
многообразие. С заданной базисной поверхности траектории могли бы
начинаться с произвольными скоростями. Мы отбираем те траекто-
траектории, которые имеют одну и ту же полную энергию и перпендикуляр-
перпендикулярны заданной поверхности. Лучевые свойства устанавливаются имен-
именно для них. Механические траектории являются изолированными
линиями, не пересекающимися друг с другом. Если при помощи ка-
какого-нибудь условия искусственно выделить некоторое семейство
траекторий, то, вообще говоря, ничто не мешает добавить к ним не-
некую «случайную» траекторию, не принадлежащую к этому семейству.
В противоположность этому оптические лучи не могут существовать
в изолированном виде, а всегда являются частью какого-то поля.
В «электронном микроскопе» оптическое изображение образует-
образуется при помощи движущихся электронов. Все электроны покидают
нагретый катод практически с одинаковой полной энергией, потому
что температура катода везде одинакова. Более того, ввиду наличия
сильного электрического поля электроны покидают катод практи-
практически перпендикулярно его поверхности. Степень размытия полу-
получающегося оптического изображения определяется степенью нару-
7. Оптико-механическая аналогия Гкмильтона 307
шения этих двух условий. Как мы покажем ниже, нарушение энерге-
энергетического условия аналогично«хроматической аберрации» в оптике.
Лучевые свойства механических траекторий являются
лишь частью глубокой аналогии, существующей между
оптикой и механикой. Построение волнового фронта на
основе принципа Гюйгенса также имеет механическую ана-
аналогию. Действительно, дифференциальная формулировка
принципа Гюйгенса совпадает с уравнением в частных про-
производных Гамильтона для оптики.
Принцип Гюйгенса в применении к бесконечно малым рас-
расстояниям может быть сформулирован следующим образом.
Мы начинаем с некоторой произвольной поверхности, на
которой имеется световое возбуждение в момент времени
t = 0. Затем строим близкую поверхность для момента вре-
времени t = e, используя значение скорости света в каждой
точке базисной поверхности t = 0. Построение полностью
подобно приведенному на рис. 20. Если v — скорость све-
света в точке Р, то
a = ve. (8.7.13)
Предположим, что среда оптически неоднородна, так что
скорость света меняется от точки к точке. Тогда
f = —г^ г. (8.7.14)
п (х, у, г) v '
где п — «коэффициент преломления» среды, ас — скорость
света в вакууме. Если л задано во всех точках, то бесконеч-
бесконечно малое расстояние
а =~г (8.7.15)
можно отложить от всех точек базисной поверхности, а за-
затем многократно повторить это же бесконечно малое по-
построение. Наконец, некоторая часть пространства запол-
заполнится поверхностями, определяемыми формулой
Ф(а-, у, z) = С. (8.7.16)
Эта ср-функция соответствует прежней 5-функции. Смысл
ее таков: она равна времени, необходимому свету для того,
чтобы пройти от базисной поверхности ср =. 0 до заданной
точки х, у, z. Ввиду соотношения, существующего между
И*
308 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
бесконечно малым расстоянием а, разделяющим две близкие
поверхности cp = const, и градиентом функции ср [см. уравне-
уравнение (8.7.9)], для ф получается следующее уравнение в част-
частных производных:
"'"="'. (8.7.17)
\дх
дх)
ду
дг
Это основное уравнение геометрической оптики, выражаю-
выражающее в дифференциальной форме принцип Гюйгенса, было
открыто Гамильтоном в его фундаментальных исследо-
исследованиях в области геометрической оптики.
М
Р не. 21.
В механических задачах мы встречались с уравнением
в частных производных (8.7.17) в форме (8.7.5). Это диффе-
дифференциальное уравнение может теперь рассматриваться
как аналог принципа Гюйгенса. Сравнивая правые части
уравнений (8.7.17) и (8.7.5), можно для каждой данной
механической задачи сформулировать соответствующую
оптическую задачу, определив коэффициент преломления
воображаемой оптической среды по формуле
(E — V), (8.7.18)
где а — произвольная константа.
Отметим один поразительный исторический факт: еще на заре
развития физических наук, когда методы высшей математики только
7. Оптико-механическая аналогия Гамильтона 309
начинали разрабатываться, Иоганн Бернулли рассмотрел движение
частицы в поле тяжести как оптическую задачу, введя фиктивный
коэффициент преломления, пропорциональный у Е — V.
В своих рассуждениях мы исходили из волновых поверх-
поверхностей (фронта) как в оптике, так и в механике, а оптические
или механические пути рассматривали как траектории, ор-
ортогональные этим поверхностям. Теперь мы покажем, как
из уравнения в частных производных, задающего волно-
волновые поверхности, может быть получен принцип минимума,
определяющий эти траектории.
Рис. 22.
На рис. 21 изображен луч света, идущий вдоль ортого-
ортогональной траектории Т, которая начинается в точке М на
волновой поверхности ср = 0 и заканчивается в точке jV на
поверхности ср = пе. Вместе с ним рассмотрим другой
луч С, с теми же самыми конечными точками М и N, кото-
который не является ортогональной траекторией. Из геометри-
геометрического построения поверхностей cp=const следует, что путь
от М до jV вдоль ортогональной траектории Т займет время
t = lim(e + e + e -f ...), (8.7.19)
а для пути вдоль траектории С потребовалось бы время
+ —?-jr+ ...), (8.7.20)
COS(J /
где 9 — угол между касательной к траектории и нормалью.
Поскольку сумма (8.7.19) составлена только из положитель-
положительных величин, а все члены в (8.7.20) больше или равны соот-
соответствующим членам (8.7.19), получим
t'>t. (8.7.21)
Это неравенство выражает «принцип наименьшего времени
распространения» Ферма: путь луча света отличается тем
310 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
свойством, что из заданной точки М свет приходит в другую
заданную точку N за минимально возможное время.
Казалось бы, из наших рассуждений следует, что принцип
Ферма является истинным минимальным принципом, а не принципом
стационарного значения, если сравнение происходит в «локальном»
смысле, т. е. если истинные траектории сравниваются с траектория-
траекториями, находящимися поблизости. Однако для справедливости нашего
вывода требуется, чтобы вдоль всей траектории Т волновые поверх-
поверхности были хорошо определенными, однозначными поверхностями
с определенными нормалями. Между тем может возникнуть и дру-
другая ситуация (рис. 22). Рассмотрим пучок лучей, исходящий из точ-
точки М. Эти лучи вначале расходятся, но затем они могут снова начать
сходиться, так что соседние траектории Т и Т могут пересечься в ка-
какой-то точке М'. В этом случае волновая поверхность, которой
принадлежит точка М', вырождается в точку. (В оптических ин-
инструментах каждому точечному источнику световых волн М дол-
должно соответствовать «изображение» ЛГ, где волновые поверх-
поверхности вырождаются в точку.) Наше заключение о настоящем
относительном минимуме справедливо лишь до точки М', но не мо-
может быть распространено на область за точку /И', так как в этом
случае близкие траектории проходят через область, где они не
пересекают никаких волновых поверхностей. Тогда величина 0 пе-
перестает быть действительной, а неравенство t'> t становится иллю-
иллюзорным. При соответствующей ситуации в механике точка М' на-
называется «кинетическим фокусом», сопряженным с точкой М на
траектории Т. После того как мы проходим через кинетический фо-
фокус, принцип наименьшего действия перестает быть минимальным
принципом.
Задача 1. Рассмотреть движение частицы по сфере в отсутствие
внешних сил. Показать, что действие перестает быть минимальным,
когда движущаяся точка проходит через «кинетический фокус»,
находящийся в «антиполюсе» по отношению к точке М.
Задача 2. Найти кинетический фокус в поле тяжести Земли для
частиц, вылетающих из определенной точки М в различных направ-
направлениях, но с одной и той же энергией Е. Исследовать свойство «ми-
«минимальности» в принципе наименьшего действия в связи с этим кине-
кинетическим фокусом.
Минимизация времени t означает минимизацию инте-
интеграла
Следовательно, имеется два принципа, с помощью которых
можно описать оптические явления. Можно использовать
принцип волнового фронта, определив из уравнения в част-
частных производных (8.7.17) функцию ср, а затем строя траек-
Оптико-механическая аналогия Гамильтона 311
тории, ортогональные к поверхностям cp=const.C другой
стороны, можно использовать принцип Ферма, минимизи-
минимизирующий интеграл (8.7.22). Эти два принципа полностью
эквивалентны.
Подобный же дуализм проявляется в механических за-
задачах. Можно определить механические пути как ортого-
ортогональные траектории к волновым поверхностям 5=const,
определив 5 из решения уравнения в частных производных
(8.7.5). Можно также использовать принцип минимума, ана-
аналогичный принципу Ферма (8.7.22). Ввиду соотношения
(8.7.18) этот принцип должен.сводиться к минимизации оп-
определенного интеграла
А = J У2т (Е — V) ds. (8.7.23)
А это не что иное, как принцип Якоби (см. гл. V, п. 6),
который снова оказался эквивалентным принципу наимень-
наименьшего действия. Параллелизм между механическими и оптиче-
оптическими явлениями можно усмотреть уже из сравнения прин-
принципа Якоби с принципом Ферма. Принцип Якоби допускает
оптическую интерпретацию, если консервативной механи-
механической системе поставить в соответствие оптическую среду с
коэффициентом преломления, меняющимся пропорциональ-
пропорционально \Е — V. Эта аналогия может быть использована обеими
науками. С одной стороны, канонические уравнения Гамиль-
Гамильтона становятся применимыми в оптических задачах. С дру-
другой стороны, из оптики в область механики могут быть
перенесены методы построения волновых фронтов Гюйген-
Гюйгенса.
Все. сказанное придает новый смысл функции S, опреде-
определенной как произвольное частное решение уравнения Га-
Гамильтона — Якоби. Полный интеграл этого уравнения был
интерпретирован с помощью абстрактных математических
понятий: он представлял собой производящую функцию
определенного канонического преобразования. Однако
5-функция в виде частного решения имеет гораздо более не-
непосредственный физический смысл. Оптическим эквивален-
эквивалентом функции 5 является функция ср, определяющая время,
необходимое свету для прохождения от одного волнового
фронта до другого. Это время может быть определено с по-
312 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
мощью интеграла (8.7.22), взятого вдоль траекторий, ортого-
ортогональных к волновому фронту. Соответствующим интегралом
в механике является действие (8.7.23). Интеграл (8.7.23) бе-
берется, начиная от заданной базисной поверхности, вдоль
истинных механических траекторий с одной и той же полной
энергией Е, которые идут перпендикулярно к этой поверхно-
поверхности. Записав это действие в виде функции координат х, у, z
конечной точки траектории, получим функцию 5. Поверх-
Поверхности 5 = const будут, таким образом, поверхностями
равного действия, а действие измеряется, начиная от про-
произвольной базисной поверхности, для которой принято,
что 5 = 0.
Такая интерпретация 5-функции сильно напоминает
главную функцию Гамильтона W. Единственное различие
заключается в том, что в случае W-функции мы начинаем
от некоторой точки, а не от поверхности. Действие вычис-
вычисляется вдоль произвольной механической траектории, ис-
исходящей из точки х, у, z, вплоть до точки х, у, z. В рас-
рассмотренном же выше случае 5-функции можно начать
с произвольной базисной поверхности, двигаясь затем
от этой поверхности вдоль произвольной ортогональной
траектории.
Заслуживает внимания еще один аспект оптико-механической
аналогии. В заданной области пространства могут распростра-
распространяться световые колебания различных частот. Может случиться
так, что коэффициент преломления я зависит от частоты. Это явле-
явление называется «дисперсией». При наличии дисперсии первоначаль-
первоначальный волновой фронт ср = 0 распространяется различным образом
для разных частот. В оптических приборах это явление называется
«хроматической аберрацией». Явлению дисперсии в оптике тоже
может быть предложена соответствующая механическая аналогия.
Механические траектории, начинающиеся перпендикулярно базис-
базисной поверхности S = 0, могут несколько различаться по своей пол-
полной энергии Е. Это происходит, например, в электронном микроско-
микроскопе, где тепловое движение электронов вызывает небольшой разброс
значений их полной начальной энергии Е. Это приводит к дисперсии
и к небольшой хроматической аберрации в картине, получаемой
с помощью электронного микроскопа.
В оптико-механической аналогии время распростране-
распространения света и действие являются соответственными величи-
величинами. Исходя из заданной начальной поверхности, можно
определить бесконечное семейство поверхностей, до которых
за последовательно малые интервалы времени доходят све-
7. Оптико-механическая аналогия Гамильтона 313
товые импульсы. Соответствующими поверхностями в меха-
механике являются поверхности равного действия. Очень важно,
что оптико-механическая аналогия касается только механи-
механических траекторий и световых лучей. Движение же во времени
происходит по совершенно различным законам. Частицы,
начинающие двигаться с одинаковой полной энергией в на-
направлениях, нормальных к некоторой базисной поверхно-
поверхности, не остаются в процессе движения на поверхностях рав-
равного действия. Они оставались бы в том случае, если бы
для соседних волновых фронтов выполнялось соотношение
(8.7.13). На самом же деле величина ]/2т(Е — V) равна
импульсу mv; поэтому, исходя из уравнения в частных про-
производных Гамильтона—Якоби, соотношение (8.7.13) в случае
механики должно быть записано в виде
a = — . (8.7.24)
mv v '
Бесконечно малое расстояние между двумя соседними вол-
волновыми фронтами оказывается не прямо, а обратно про-
пропорциональным скорости. Поэтому поверхности, на которых
движущиеся частицы находятся в фиксированные моменты
времени, совершенно отличны от поверхностей равного
действия.
Выбор между корпускулярной теорией и волновой теорией све-
света не может быть сделан на основании изучения одних только траек-
траекторий световых лучей. Законы отражения и преломления могут быть
получены и из чисто механических соображений. Однако в корпус-
корпускулярной теории закон преломления получается в виде
sin i v2
Ж7 = const = ТГ ' (8-7-25)
а из волновой теории следует обратное соотношение
sin i v,
^ = const = ^L. (8.7.26)
Выбор между этими двумя теориями.был сделан на основании зна-
знаменитого эксперимента Фуко A850 г.), показавшего, что свет рас-
распространяется в воде медленнее, чем в воздухе. Этот результат
противоречил корпускулярной теории света.
Задача 3. Пронормируем массу движущейся частицы и скорость
света таким образом, чтобы они стали равны 1. Тогда из уравнения
оптико-механической аналогии (8.7.18) получим п = v. Скачко-
Скачкообразному изменению коэффициента преломления на границе двух
ПВ Зак. 1646
314 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобн
оптических сред соответствует скачкообразное поведение соответст-
соответствующего потенциала V. Заменив этот скачок крутым, но непрерыв-
непрерывным изменением потенциала V в пограничном слое, объяснить
механический смысл законов отражения и преломления.
Задача 4. Пусть задан непрерывно изменяющийся от точки
к точке коэффициент преломления п, соответствующий непрерывному
полю сил с потенциальной энергией.V(x, у, г). Дать интерпретацию
дифференциальной формулировке закона преломления
пг sin i = /г2 sin r
и показать, что она определяет искривление светового луча в соот-
соответствии с законом механики
Р -
где F,, — компонента силы вдоль главной нормали, ар — радиус
кривизны траектории.
Резюме. Механические траектории консерватив-
консервативных систем могут быть получены из частнр.го решения
уравнения в частных производных Гамильтона — Яко-
бн с помощью построения ортогональных траекторий
к поверхностям 5 = const. Это построение аналогично
построению волнового фронта и световых лучей в гео-
геометрической оптике. Поверхности равного времени
в оптике соответствуют поверхностям равного дейст-
действия в механике, а принцип наименьшего времени Фер-
Ферма — принципу наименьшего действия или принципу
Якоби. И оптические и механические явления могут
быть описаны как с помощью волн, так и с помощью
частиц. При описании с помощью волн мы оперируем '
с бесконечным семейством поверхностей, которое опре-
определяется уравнением в частных производных Гамильто-
Гамильтона. При описании же с помощью частиц мы оперируем
с ортогональными траекториями к этим поверхностям,
и они определяются принципами. Ферма и Якоби.
Аналогия распространяется только на траектории ме-
механических частиц, не касаясь того, как движение
происходит во времени. Кроме того, при этой аналогии
среди всех возможных механических траекторий вы-
выделяются те, по которым движение начинается перпен-
перпендикулярно к заданной. поверхности.
8. Значение уравнения Гамильтона 315
8. Значение уравнения в частных производных Гамиль-
Гамильтона в теории распространения волн. Выше было выяснено,
что уравнение в частных производных Гамильтона (8.7.17)
в оптике выражает принцип Гюйгенса в дифференциальной
форме. Хотя принцип Гюйгенса основан на предположении
о волновом характере движения, построение с помощью это-
этого принципа последовательности волновых фронтов являет-
является методом геометрической, а не физической оптики. Для
того чтобы более глубоко изучить связь между уравнением
в частных производных Гамильтона и принципами физиче-
физической оптики, мы несколько преобразуем определение вол-
волнового фронта. До сих пор мы рассматривали волновые по-
поверхности в связи с распространением элементарных све-
световых возбуждений в геометрической оптике, однако они
имеют не меньшее значение и в физической оптике при изу-
изучении распространения световой волны определенной час-
частоты. При этом волновые поверхности могут быть определе-
определены как поверхности равной фазы. Скорость распространения
света является в то же время скоростью распространения
фазового угла, например ф, в направлении, перпендику-
перпендикулярном волновым поверхностям.
Распространение волны определенной частоты может
быть описано уравнением
и = Ае^'{-? <*• у- г>], (8.8.1)
где и — распространяющееся возбуждение, А — амплитуда,
v—частота, а ф—фазовый угол. При этом волновые
поверхности характеризуются уравнением
Ф~(х, у, z) = const. (8.8.2)
При распространении определенной фазы должно выпол-
выполняться соотношение
\dt — dq> = 0, . (8.8.3)
или
dq> = vdt. (8.8.4)
Из этого соотношения видно, что время, нужное свету для
того, чтобы пройти расстояние между соседними поверхнос-
поверхностями (p=const, равно dq>/v, а соответствующее время для
11В*
316 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобн
поверхностей ср = const в соответствии с результатом пре-
предыдущего пункта равно <icp [см. (8.7.16)]. Следовательно,
дифференциальное уравнение для ср получается из (8.7.17)
путем замены
cp=-vcp (8.8.5)
и уравнение в частных производных Гамильтона прини-
принимает вид
— | ,B „2 [
grad ф |2 = —— = р- , (8.8.6)
где через к обозначена длина волны.
Интерпретация величины ср как некоторой фазы послужила де
Бройлю исходным пунктом в его фундаментальном открытии волн ма-
материи. Допустим, что в оптико-механической аналогии заключен
какой-то физический смысл, несмотря на очевидное различие между
движением материи и распространением световых волн. Забудем
о том, что электрон — частица, п рассмотрим лишь путь дви-
движущегося электрона как своего рода световой луч. Этот путь пред-
представляет собой некоторую замкнутую орбиту вокруг ядра. Пред-
Предположим, что вдоль замкнутой орбиты имеется какое-то колебание.
Тогда каждый раз при повторных возвращениях в данную точку это
колебание будет вносить вклад в результирующую амплитуду. Эта
амплитуда равна нулю, если фазовый угол возвращающегося ко-
колебания находится не в резонансе с первоначальным фазовым углом.
С другой стороны, амплитуда может стать сколь угодно большой,
если новый фазовый угол отличается от первоначального на 2z либо
на целое кратное 2it. Ввиду того что фазовый угол равен 2~з, мы
получаем следующее правило отбора для траекторий, не уничтожае-
уничтожаемых интерференцией:
Л?=л, (8.8.7)
где п — целое число. С другой стороны, инвариантная формулировка
квантовых условий, предложенная Эйнштейном [см. (8.4.28)], дает
AS = nh. (8.8.8)
В оптико-механической аналогии фазовый угол з и действие S —
соответственные величины. Резонансное условие (8.8.7) пока-
показывает, что можно получить естественную адекватную интер-
интерпретацию квантовых условий Эйнштейна, если под функцией дей-
действия S понимать фазовую функцию ср, удовлетворив соотношению
?= § • (88.9)
8. Значение уравнения Гамильтона 317
Сравнив уравнения в частных производных (8.7.5) и (8.8.6), которые
определяют соответственно функции S и •:, получим, что с движу-
движущимся электроном связана определенная длина волны, согласно
закону
1 1т (Е — V) т- и*-
h- h2
(8.8.10)
Отсюда получается знаменитая «де-бройлева длина волны»
>. = — (8.8.11)
mv ' к '
открытие которой столь сильно повлияло на развитие современной
атомной физики.
Уравнение в частных производных Гамильтона в оптике
эквивалентно дифференциальной формулировке принципа
Гюйгенса. Однако принцип Гюйгенса — всего лишь при-
приближенное следствие истинных принципов физической оп-
оптики. Адекватное описание оптических явлений произво-
производится с помощью уравнений Максвелла для электромаг-
электромагнитного поля, являющихся векторными уравнениями.
Вместе с тем ряд оптических явлений можно объяснить
с помощью более простой скалярной теории Френеля.
Рассмотрим функцию поля ф(х, у, z, t), удовлетворяю-
удовлетворяющую волновому уравнению Френеля
Т^ + ^-Н^—4^ = 0. (8.8.12)
дх1 ' ду1 ' дг- с1 dt2 v '
Это линейное дифференциальное уравнение второго порядка
в отличие от уравнения в частных производных Гамильтона
(8.8.6), которое является уравнением первого порядка, но
второй степени. Связь между этими двумя фундаменталь-
фундаментальными уравнениями может быть установлена следующим
образом.
Предположим, что оптические колебания происходят
с определенной частотой v. Тогда становится возможным
разделение переменных (выделение времени) п ф записы-
записывается в виде
ф = е^1'1^(х, у, z). (8.8.13)
Здесь г|; называется «амплитудной функцией», а определяю-
определяющее ее дифференциальное уравнение — «амплитудным
уравнением»
318 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Из сравнения (8.8.13) с (8.8.1) следует, что имеется' следую-
следующая связь между волновой функцией г|? и фазовой функ-
функцией ф:
i|> = e-2='> (8.8.15)
Подставив выражение (8.8.15) в амплитудное уравнение
(8.8.14), получим следующее дифференциальное уравнение
для ф:
При Я, стремящемся к нулю, последним членом в этом урав-
уравнении можно пренебречь. Отсюда следует интересный вывод:
уравнение в частных производных Гамильтона в оптике эк-
эквивалентно волновому уравнению Френеля для случая бес-
бесконечно малых длин волн, т. е. бесконечно больших частот.
Для малых, но конечных длин волн уравнение в частных
производных Гамильтона является лишь приближенным
и должно было бы быть заменено точным уравнением
(8.8.16) или, что еще лучше, амплитудным уравнением для
функции г|?.
В 1927 г. Шредингер предложил оригинальную идею: углубить
аналогию между геометрической оптикой и механикой, установлен-
установленную уравнением в частных производных Гамильтона и перейти от
фазовой функции (р к волновой функции А/. Так, вводя де-бройлеву
длину волны (8.8.10) в амплитудное уравнение (8.8.14), полу-
получим знаменитое дифференциальное уравнение Шредингера
F ф сГ- ^ д- ± 8г.* т
+++(EV)*0 (88Л7)
которое является основой современной волновой механики. Таким
образом, великий переход от классической к волновой механике
отмечен следующими вехами: теория Делоне для многопер йодных
механических систем с разделяющимися переменными; квантовые
условия Зоммерфельда —¦ Вильсона; инвариантная формулировка
Эйнштейна для квантовых условий; резонансная интерпретация де
Бройля квантовых условий Эйнштейна; логарифмическое преобра-
преобразование Шредингера от фазовой функции ^ к полиопой функции i.
9. Геометризация динамики. Неримановы геометрии 319
Резюме. Волновые поверхности распространения
света могут быть определены как поверхности равной
фазы. Уравнение в частных производных Гамильтона
определяет в оптике распределение в пространстве фа-
фазового угла стационарного оптического поля. Это диф-.
ференциальное уравнение тесно связано с волновым
уравнением Френеля и является его приближенным
следствием. Это приближение переходит в точное
уравнение в случае бесконечно малых длин волн, т. е.
бесконечно больших частот.
9. Геометризация динамики. Неримановы геометрии.
Метрическая интерпретация уравнения в частных производ-
производных Гамильтона. Снова и снова мы убеждаемся в том, сколь
успешно наглядный язык геометрии помогает более глубо-
глубокому пониманию проблем механики. Пространство конфи-
конфигураций с его римановой метрикой дало возможность
изобразить сколь угодно сложную механическую систему
в виде одной точки в соответствующим образом опре-
определенном многомерном пространстве. Благодаря этому за-
законы, определявшие движение одной частицы, удалось
обобщить на произвольные механические системы.
Преимущества геометрического языка особенно заметны
тогда, когда механическая система не подвержена действию
внешних сил. В этом.случае траектория механической си-
системы может рассматриваться как геодезическая линия
в простр-анстве конфигураций (принцип «прямейшего пути»
Герца), Более того, при потенциальной энергии, не завися-
зависящей от времени t, можно ввести вспомогательный линей-
линейный элемент
V,ds, (8.9.1)
где ds — линейный элемент.исходного пространства конфи-
конфигураций. Тогда мы снова получим все механические траек-
траекторий с одной и той же полной энергией Е в виде геодези-
геодезических линий нового пространства.
Однако не все механические системы консервативны.
Силовая функция внешних сил также не всегда зависит от
320 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
одних только координат. Например, в случае сил, дейст-
действующих на электрон при наличии внешнего электромаг-
электромагнитного поля, силовая функция зависит от скоростей qt
и может зависеть и от времени t. Следовательно, обыч-
обычные условия независимости силовой функции от времени
и скорости здесь не выполняются. Более того, при пере-
переходе от классической к релятивистской механике изме-
изменяется обычная форма кинетической энергии, определяю-
определяющая риманову структуру линейного элемента.
Тесная связь между динамикой и геометрией сохраняется
и при более общих предположениях. Риманова геометрия—
не единственно возможная форма метрической геометрии.
Для римановой геометрии характерным свойством является
«выпрямление» пространства в окрестности произвольной
точки, так что обычная евклидова геометрия остается спра-
справедливой по крайней мере в бесконечно малых областях.
Но для построения геометрии, использующей прямые линии
и углы, такого ограничения, вообще говоря, не требуется.
В применении к общим задачам динамики заслуживает
внимания более общая форма геометрии, линейный элемент
которой ds определяется более общим способом по сравне-
сравнению с римановым линейным элементом.
Для последующих рассуждений нужно лишить время t
того положения, которое оно занимает в обычных задачах
механики. Добавим время / к числу позиционных коорди-
координат <7;, положив
(8.9.2
и будем считать все qL равноправными. Индекс i во всех
случаях, когда это особо не оговаривается, будет теперь
пробегать значения от 1 до п -f 1. Пространство конфигу-
конфигураций имеет, таким образом, не п, а п + 1 измерений. Вве-
Введем линейный элемент ds этого пространства с помощью
следующего определения:
ds = F(qr...,qn+i, dqv...,dqn+x). (8.9.3)
Здесь F — произвольная функция 2д + 2 переменных
qi и dqt с тем лишь естественным ограничением, что она
предполагается однородной дифференциальной формой пер-
9. Геометрнзацин динамики. Неримановы геометрии 321
вой степени относительно дифференциалов dqi. Это озна-
означает, что
F[qv ..., qn+i, adqv ..., adqn+l) =
= аР(Чг -. <7n+1. dqv..., dqn+l). (8.9.4)
Рассмотрим произвольную кривую на этом многообра-
многообразии, заданную в параметрической форме
<7/ = /,-(т). (8.9.5)
Благодаря условию (8.9.4) линейный элемент этой кривой
может быть записан в виде
Js =F(<7t, ..., qn+\, q'\, ¦••- q'n+i) dr. (8.9.E)
Следовательно, задача о геодезической линии, т. е. задача
о минимизации длины кривой, соединяющей две точки
t1 и та, приводит к вариационной задаче о минимизации оп-
определенного интеграла
~2
A=\F{ii, -' Чп+v «7i.-.<+1)dT. (8.9.7)
Эта же самая задача может быть сформулирована в не-
несколько иной форме, если выбрать в качестве параметра т
последнюю переменную ^и-и = t- Тогда уравнения геоде-
геодезической линии примут вид
qi=fi(t), ' (8.9.8)
где функции /;(/) находятся из минимизации интеграла
t,
(ih, .... qn, t, qi qn, \)dt. (8.9.9)
Мы сталкиваемся здесь с задачей, аналогичной стандарт-
стандартной задаче лагранжевой механики, а именно с определением
движения механической системы с помощью минимизации
зависящего от времени интеграла от функции Лагранжа L.
Функция F может быть, таким образом, интерпретиро-
интерпретирована с механической точки зрения как функция Лагранжа L
аналитической механики.
322 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
Наоборот, исходя из механической задачи с заданной
функцией Лагранжа L,
L = L{qlt...,qn, t, qx, .... q\\ (8.9.10)
можно определить линейный элемент ds в (п -j- ^-мер-
^-мерном пространстве, написав
~=F{4v -' Яп+1, dqr...,dqn+]). (8.9.11)
Тогда задача о движении перейдет в задачу о нахождении
геодезической линии на этом (п + 1)-мерном многообразии.
' Таким образом, мы видим, что задача решения уравнений ди-
динамики и задача нахождения геодезической линии на опреде-
определенном — вообще говоря, неримановом — многообразии эк-
эквивалентны.
В этой геометрической интерпретации динамики особенно
существенна «главная функция» Гамильтона. Поскольку
«действие» теперь геометрически интерпретируется как
«длина дуги», а «наименьшее действие» — как «наименьшая
дуга», постольку W-функция Гамильтона попросту опреде-
определяет расстояние между двумя точками qlt ..., qn+i, и qlt ...,
, qn+i этого многообразия1.
В свете этой интерпретации сразу видно, почему главная
функция Гамильтона должна быть обусловлена каким-то
дифференциальным уравнением. Трудно было бы ожидать,
чтобы произвольной функции координат двух точек мно-
многообразия можно было бы приписать смысл «расстояния»
между этими точками. Под «расстоянием» на самом деле под-
подразумевается «наименьшее расстояние», а слово «наимень-
«наименьшее» не могло бы относиться к произвольному определению
расстояния.
1 В связи с этой интерпретацией обозначение S, предложенное
Гамильтоном для его главной функции, приобретает пророческий
смысл. В данной книге мы не придерживаемся этого обозначения.
Дело в том, что в современной литературе S-функция интерпрети-
интерпретируется в духе теории интегрирования Якоби, т. е. как производящая
функция некоторого общего канонического преобразования. Ввиду
глубокого различия, существующего между теориями Гамильтона
н Якоби (см. п. 5), нам показалось целесообразным ввести для глав-
главной функции Гамильтона специальное обозначение.
9. Геометризация динамики. Неримановы геометрии 323
При изучении проблемы под геометрическим углом зре-
зрения естественно ожидать, что уравнению в частных произ-
производных Гамильтона может быть придан глубокий геометри-
геометрический смысл. Для получения такой новой интерпретации
начнем с преобразования вариационной задачи (8.9.7)
к каноническому виду. Введем импульсы
Pi-^^t • (8.9.12)
и построим функцию Гамильтона Н. Однако поскольку F —
однородная функция первой степени относительно пере-
переменных qt, получим
" "+1 3F
H = 2wl<r'~F=0- (8-9ЛЗ)
Мы знаем уже, что обращение в нуль функции Гамильтона
всегда компенсируется наличием тождества, связывающего
qt и Pi
. K(qv,..,qn+X, Pl,...,pn+l) = 0. (8.9.14)
Это тождество следует рассматривать как дополнительное
условие вариационной задачи, в которой ищется стационар-
стационарное значение интеграла
т2 л+1
|2/л^<. (8.9.15)
Задача 1. Показать, что в случае евклидова линейного эле-
элемента
. ds = | dx- -\- dif- ~'г dz2
импульсы pi являются «направляющилГи косинусами» iL некоторого
направления. Тождество (8.9.14) в этом случае принимает форму
Следовательно, «импульсы» р;, связанные с произвольным метризо-
метризованным многообразием, являются «обобщенными направляющими
косинусами» этого многообразия. Эти направляющие косинусы не
являются взаимно независимыми— они связаны тождеством (8.9.14).
324 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобн
Рассмотрим теперь произвольную поверхность
/(?1>-.^+.)=° (8-9.16)
на нашем многообразии и найдем нормаль к этой поверх-
поверхности. Для этой цели опустим на поверхность перпендикуляр
из произвольной точки <7i, ¦¦•, <7л-н вне поверхности. Тогда
получим задачу о нахождении расстояния от точки qt до
поверхности. Другими словами, требуется минимизировать
функцию W{qt, qi) при дополнительном условии (8.9.16).
Решение этой задачи на минимум определяется уравнениями
|^_Х/ = О. (8.9.17)
dqt dqi к '
С учетом основных свойств главной функции Гамильтона
получим
/" = *¦!;• (8-9Л8)
Эти уравнения выражают направляющие косинусы нормали
через градиент функции f. Множитель К имеет следующий
смысл. Уравнение (8.9.13) можно написать в форме
^Pidqi = ds, (8.9.19)
и-ли
(8.9.20)
откуда следует
у = =- = i grad / |. (8.9.21)
Следовательно, величина 1А равна производной по на-
направлению нормали от функции f, т. е. равна наибольшей
скорости изменения функции f в данной точке. Уравнение
нормали (8.9.18) принимает вид
9. Геометризация динамики. Неримановы геометрии 325
Для того чтобы вычислить л, подставим выражения
(8.9.18) для pi в тождество (8.9.14). В результате получим
Из этого условия может быть найден неопределенный мно-
множитель 'к.
Задача 2. Для риманова линейного элемента
ds = [' 2 alk dxi dxk
получить наибольшую скорость изменения функции f(xf) в виде
— dxL дхк
где b-lk — элементы матрицы, обратной матрице aik.
Заметим, что этот путь определения множителя X, а
вместе с ним и наибольшей скорости изменения функции /,
напоминает вывод уравнения в частных производных Га-
Гамильтона. Там мы заменили /?,• на dW/dqi и получили
условие для функции W. Здесь же функция / может быть
произвольной функцией, а условие (8.9.23) служит для полу-
получения наибольшей скорости изменения /. Уравнение в част-
частных производных Гамильтона эквивалентно условию
1=1, (8.9.24)
что означает
= ffi=l. (8.9.25)
Это свойство главной функции имеет наглядный геоме-
геометрический смысл. Поверхности W = const являются по оп-
определению концентрическими сферами с общим центром
в точке qi. Радиус-вектор R везде перпендикулярен по-
поверхности сферы. Следовательно, направление радиуса-век-
радиуса-вектора совпадает с направлением нормали и вследствие опре-
определения W как длины радиуса-вектора R имеем
ds /max dr
(8.9.26)
Заметим, что перпендикулярность радиуса-вектора к по-
поверхности сферы не является характерным свойством
326 Гл. VIII. Дифференциальное уравнение Гамильтона — Якобн
только евклидовой геометрии. Это инвариантное свойство
присуще метрической геометрии любого вида.
Условие (8.9.26) эквивалентно уравнению в частных про-
производных Гамильтона . .
Этого дифференциального уравнения достаточно для опре-
определения главной функции Гамильтона W, если только доба-
добавить соответствующие граничные условия. Граничные усло-
условия следуют из определения W как расстояния между дву-
двумя точками q-t и qit принадлежащими нашему многообра-
многообразию. Предположим, что расстояние между этими двумя
точками сколь угодно мало, т. е. что
qi=ji + dqi. .. (8.9.28)
Расстояние между двумя соседними точками является по-
попросту, линейным элементом ds, заданным в форме (8.9.3).
Поэтому имеем условие
( + ++
-ЧЬ Яп+х- dqr...,dqa+l). (8.9.29)
Дифференциальное уравнение (8.9.27) вместе с граничным
условием (8.9.29) однозначно определяет главную функцию
Гамильтона.
Граничное условие (8.9.29) позволяет получить явное выраже-
выражение для функции расстояния W в виде
W=F(gi...,qn + u qi-gu .... <7n+1-7n+1) (8.9.30)
при условии, что точка qt находится достаточно близко к точке q^
Полное интегрирование становится возможным в частном случае,
когда F зависит только от dqi и не зависит от самих qi:
' Ts = F(dqi dqn + l). (8.9.31)
Задача о геодезической линии становится тогда полностью интегри-
интегрируемой, потому что все q\ оказываются циклическими переменными.
В результате получим
^=F(«7l-9i, ...,qn+l-^n+i)di, (8.9.32)
9. Геометризация динамики. Неримановы геометрии 327
откуда расстояние между любыми двумя точками многообразия
получаете;; простой подстановкой без какого бы то ни было интегри-
интегрирования. В этой геометрии пространство однородно, т. е. свойства
пространства вблизи всех точек одинаковы. В то же время простран-
пространство неизотропно, т. е. свойства пространства зависят От направле-
направления. Фигуры в этом пространстве могут подвергаться параллельно-
параллельному переносу, но их, вообще говоря, нельзя поворачивать.
Задача 3. Получить выражение для расстояния между двумя
точками евклидова пространства из линейного элемента ds= /
на основе принципа (8.9.32). . .
Задача 4. Получить таким же способом' главную функцию для
свободной частицы массы т, движущейся в отсутствие внешних
сил. Показать, что результат совпадает с.выражением, полученным
в задаче.2, п. 5, если положить там g = 0.
Задача.5. Показать,, что детерминантное условие (8.5.6) удов-
удовлетворяет, этой геометрии.
В п. 7 мы рассматривали замечательную аналогию
между .оптическими и механическими явлениями. Мы., по-
построили волновые noBepxHbcTHS=const, (p = const и. показа-
показали, что ортогональные траектории к этим волновым поверх-
поверхностямявляются траекториями.соответственно.механических
систем и оптических лучей. Наши рассуждения ограничива-
ограничивались случаем одной частицы, находящейся, под действием
консервативной внешней силы, независящей от скорости
частицы. Отбросим теперь это ограничение и покажем, "что
наши результаты остаются справедливыми,для любых меха-^
нических систем при условии, что каждой системе ставится
в соответствие ее собственная естественная геометрия.
Основное дифференциальное уравнение, которому долж-
должна удовлетворять функция S, может быть сформулировано
геометрически благодаря (8.9.24) и (8.9.25) следующим
образом:
|gradS| = l. (8.9.33)
Это уравнение имеет ясный геометрический смысл.
Все точки поверхности S = const находятся на одном и том
же расстоянии от базисной поверхности S=0. Следователь-
Следовательно, уравнение S = const определяет семейство параллельных
поверхностей. Волновые поверхности, которые раньше были
«поверхностями равного действия», теперь превращаются
в «поверхности равного расстояния», т. е. в параллельные
поверхности.
Теперь можно еще раз установить ортогональность меха-
механических (или оптических) траекторий по отношению к вол-
328 Гл. VIII. Дифференциальное уравнение Гамильтона — Якоби
новым поверхностям S=const. В п. 7 этой главы мы полу-
получили механические траектории из волновых поверхностей
путем решения первой группы уравнений преобразования
Pi = f: ¦ (8-9.34)
Воспользовавшись (8.9.33), запишем эти уравнения в форме
Отсюда видно, что мы имеем дело с уравнениями норма-
нормалей к поверхностям S = const. Таким образом, мы снова
получили результат, согласно которому траектории меха-
механических систем являются ортогональными траекториями
к волновым поверхностям.
Эта теорема стала теперь гораздо более общей. Раньше
ортогональность траекторий и волновых поверхностей рас-
рассматривалась лишь в обычной евклидовой геометрии. На
самом же деле эта теорема справедлива для той неевклидовой
и даже неримановой геометрии, которая внутренним образом
связана с данной механической задачей. Поэтому наши
прежние рассуждения были справедливы благодаря тому
в какой-то мере случайному обстоятельству, что линейный
элемент внутренней геометрии был пропорционален евкли-
евклидову линейному элементу [см. (8.9.1)].
Задача^. Показать, что уравнения нормали инвариантны отно-
относительно умножения элемента ds на произвольный множитель
@
В более общих случаях — таких, как движение элек-
электрона в магнитном поле, неконсервативные системы, реляти-
релятивистская механика, распространение света в кристаллах —
уже нет пропорциональности элемента ds внутренней гео-
геометрии и обычного элемента ds. Ортогональность траекторий
и волновых поверхностей сохраняется поэтому лишь в осо-
особом внутреннем смысле.
Соотношения между волновыми поверхностями и меха-
механическими траекториями более важны, когда задача рас-
рассматривается с точки зрения ее собственной внутренней гео-
геометрии. Тогда в совершенно общем случае мы встречаемся
9. Геометризация динамики. Неримановы геометрии 329
с Toii же самой ситуацией, которая существует в оптике при
изучении распространения света в оптически однородной
среде. Оптические лучи являются прямыми линиями, т. е.
кратчайшими линиями. Элементарные волны в построе-
построении Гюйгенса представляют собой сферы, причем не только
в бесконечно малых, но и в конечных областях. Огибающие
этих сфер, т. е. волновые поверхности, являются парал-
параллельными поверхностями, а оптические лучи—либо траек-
траектории механической системы — ортогональными траекто-
траекториями для этого семейства параллельных поверхностей.
Все это остается справедливым для произвольных оптиче-
оптических или механических систем при условии, что мы опери-
оперируем соответствующим образом определенным метрическим
пространством.
Гаусс в своих бессмертных «Общих исследованиях
поверхностей с кривизной» (Disquisitiones generales circa
superficies curvas, 1827) первый обнаружил, что ортого-
ортогональные траектории произвольного семейства параллельных
поверхностей являются геодезическими линиями. Его иссле-
исследования ограничивались той формой метрики, которая
впоследствии была названа римановой. Однако в действи-
действительности эта теорема в полной мере справедлива для
любой метрической геометрии.
Удивительная форма неримановой геометрии реализуется в
в природе в оптических явлениях, связанных с кристаллами. В этой
геометрии линейный элемент определяется следующим образом:
ai = ±^?!±^+^i> (8.9.36)
где скорость света v получается из решения «уравнения Френеля»
dx- , (\ц" , dz1
~-> 2+-~2-'~+-2 2=°- (8.9.37)
V — V | V — и ? V — V з ч '
Константы vi, vi, 'оз называются «главными скоростями». Поскольку
это уравнение приводит к квадратному уравнению для v, то получает-
получается двузначная метрика, т. е. в одной задаче сосуществуют два различ-
различных типа геометрии. В результате световая волна, падающая на
кристалл, разделяется на две (различно поляризованные) волны и
мы получаем явление «двойного лучепреломления». Элементарные
волновые поверхности теории Гюйгенса образуют двойное семейст-
семейство сложных поверхностей четвертого порядка, хотя они и остаются
сферами при соответствующих геометриях.
330 Гл. VIII. Дифференциальное уравнение Гамильтона—Якоби
Задача 7. Положим в уравнении Френеля и = с>2. Тогда воз-
возникнет осевая симметрия вокруг оси г и кристалл из «двухосного»
превратится в «одноосный». Показать, что при этом одна из метрик
вырождается в метрику евклидова типа, так что одна группа вол-
волновых поверхностей превращается в сферы в евклидовом смысле
(«обыкновенный луч»). Выражение для расстояния во втором типе
геометрии (связанном с «необыкновенным лучом») имеет вид
(*_-*J + (У - г/J + (г -7J
\ o23[(x-j;JT(j-j)!l + »?(-7-zJ
Резюме. Задачи динамики могут быть целиком сфор-
сформулированы в геометрических образах. Для этого
каждой заданной механической задаче нужно поста-
поставить в соответствие нужную форму метрической гео-
геометрии. В общем случае такая геометрия будет нери-
манова типа. Пространство конфигураций при этом
включает в себя время наравнес другими переменными.
Механические траектории являются кратчайшими, т. е.
геодезическими, линиями этого многообразия, а вол-
волновые поверхности превращаются в параллельные по-
поверхности. Геодезические линии могут быть получены
как ортогональные траектории волновых поверхно-
поверхностей. Механическая задача соответствует задаче о рас-
распространении света в оптически однородной среде.
ГЛАВА IX
РЕЛЯТИВИСТСКАЯ МЕХАНИКА
Тому, кто единым взглядом смог бы окинуть
Вселенную, все мироздание показалось бы
единственно правильным и необходимым.
Даламбер, Энциклопедия A751)
1. Историческое введение. Еще со времен появления
фарадеевой концепции «силовых линий» обсуждался такой
вопрос: что происходит с силовыми линиями, когда тела при-
приведены в движение? Перемещается ли электрическое поле,
создаваемое материальными телами, жестким образом при
перемещении этих тел? Г. Герц, первый демонстратор элек-
электромагнитных волн, отвечал на этот вопрос утвердительно.
Однако эксперименты Физо с движущейся водой показали,
что скорость распространения света в воде равна не с -[- v,
а лишь с + A—\ln*)v, где п — коэффициент преломления
воды. Лоренц объяснил «коэффициент увлечения» 1—1/п2
на основе гипотезы о «неподвижном эфире», не увлекаемом
движущимися сквозь него электрическими зарядами. С дру-
другой стороны, из гипотезы о неподвижном эфире следовало,
что на Земле (движущейся относительно неподвижного
эфира вследствие своего вращения вокруг Солнца с перио-
периодом в год) должны были бы наблюдаться определенные оп-
оптические эффекты порядка и2/с2, где v — линейная скорость
вращения Земли вокруг Солнца, ас — скорость света.
Экспериментальное доказательство отсутствия этих эффек-
эффектов поставило теоретическую физику в тупик, выход из ко-
которого был указан в 1905 г. в статье Эйнштейна «Об элек-
электродинамике движущихся тел».
И Г. Лоренц и А. Пуанкаре еще до Эйнштейна пони-
понимали, что нужна теория, которая должна объяснить экспе-
экспериментально обнаруженную невозможность измерения аб-
абсолютной скорости, но они не нашли удовлетворительного
332 Гл. IX. Релятивистская механика
решения этой проблемы. Только Эйнштейн понял, что в ос-
основу наших рассуждений в виде универсального постулата,
принимаемого без доказательства, должна быть положена
эквивалентность всех систем отсчета, движущихся одна
относительно другой с постоянной скоростью. К этому по-
постулату он добавил еще один постулат, утверждавший, что
скорость света во всех эквивалентных системах отсчета и
во всех направлениях равна одной и той же постоянной
величине с. Содержание этого постулата иллюстрируется
отрицательным результатом опыта Майкельсона — Морли
и множеством других экспериментов.
Если исходить из наших обычных кинематических пред-
представлений, то эти два постулата противоречат один другому.
Однако Эйнштейн показал, что их можно примирить, если
отказаться от нашего обычного представления о сущест-
существовании «абсолютного времени». Он нашел соотношение,
которое должно связывать результаты измерения расстоя-
расстояния и времени, производимые двумя наблюдателями в си-
системах отсчета, одна из которых движется относительно
другой с постоянной скоростью. Получившиеся уравнения
показывают, что время t утрачивает свой абсолютный
характер и должно быть теперь добавлено к трем простран-
пространственным координатам. Время I превратилось из инвариант-
инвариантной величины в ковариантную, тогда как скорость света с,
наоборот, из коварнантной величины в z/нвариантную.
Эйнштейну удалось показать, что уравнения такого пре-
преобразования прекрасно согласуются со всеми известными
эффектами первого и второго порядка и дают полное объяс-
объяснение всех явлений, происходящих при движении источника
света относительно наблюдателя, либо, наоборот,—наблюда-
наоборот,—наблюдателя относительно источника. Более того, эти два основных
постулата потребовали модификации уравнений движения
Ньютона, что привело к появлению нового закона динамики.
Однако наиболее сильный результат новой теории состоял
в том, что два ранее независимых понятия массы и энергии
оказались объединенными при помощи знаменитого урав-
уравнения Е = тс2. Эйнштейн открыл это соотношение сначала
в неполном виде в 1905 г., а позже, в 1907 г., придал ему
окончательную форму.
То возражение, что Эйнштейн, мол, не дал истинного фи-
физического объяснения релятивистских эффектов, а лишь за-
1. Историческое введение 333
путал задачу при помощи массы физически неинтерпрети-
руемых математических формул, отпало несколькими го-
годами позже (в 1908—1909 гг.), когда Минковский показал
глубокий смысл обоих постулатов Эйнштейна. Он обнару-
обнаружил, что эти постулаты отражают новую геометрическую
структуру, реализующуюся во Вселенной, где время добав-
добавлено к пространству так, что образуется расширенное много-
многообразие четырех измерений: пространственно-временной кон-
континуум. Поэтому релятивистские эффекты являются прямым
следствием геометрии, реализующейся в природе, независи-
независимо от каких-бы то ни было физических предположений.
Несметное количество доказательств правильности всех
следствий релятивистских постулатов, полученное в резуль-
результате самых тщательных экспериментов, привело через не-
несколько лет к всеобщему признанию теории относитель-
относительности и сделало ее одной из наиболее аргументированных
глав математической физики. Единственный протестующий
голос принадлежал самому Эйнштейну, который чувство-
чувствовал, что первый постулат относительности был недостаточ-
недостаточно общим. Он ограничивал круг рассматриваемых систем
отсчета системами, движущимися с постоянной скоростью,
вместо того чтобы включать все возможные системы. Систе-
Системы отсчета по своей природе являются вспомогательными
построениями, которые не должны были бы иметь абсолют-
абсолютного значения, а понятие законности выбора данной систе-
системы отсчета должно было бы полностью исчезнуть из мате-
математической физики. Постулат об эквивалентности всех
систем отсчета называется «принципом общей относитель-
относительности» в противоположность «специальной относитель-
относительности», ограничивающейся эквивалентностью систем отсче-
отсчета, движущихся с постоянной скоростью.
Еще более серьезным обстоятельством была мысль Эйн-
Эйнштейна о том, что при наличии гравитации не может со-
соблюдаться принцип постоянства скорости света. Вследствие
этого геометрическая структура Вселенной не могла бы быть
типа пространства Минковского. Ее следовало обобщить
таким образом, чтобы эта структура была пространством
Минковского лишь в малом, а при конечных размерах про-
пространство приобретало бы «кривизну». Это бы означало, что
геометрия мира, оставаясь метрической, приобрела вместо
четырехмерной евклидовой четырехмерную риманову струк-
334 Гл. IX. Релятивистская механика
туру. Новая теория дала полное описание всех гравитацион-
гравитационных эффектов, а вместе с тем и новую интерпретацию физи-
физической «материи» при помощи чисто геометрических поня-
понятий. В то время как специальная теория относительности
объединила в одном понятии пространство и время, общая
теория относительности объединила пространство, время
и материю в один геометрический образ — метрическую
геометрию риманова типа в четырехмерном мире.
Общая теория относительности не может быть последо-
последовательно изложена без использования понятия поля, при-
принадлежащего механике сплошной среды. Поэтому в после-
последующем изложении мы ограничимся кинематикой и динами-
динамикой спецальной теории относительности. Однако закон ди-
динамики общей теории относительности попадает в сферу
идей динамики Лагранжа и Гамильтона, а потому он будет
фигурировать в нашем дальнейшем обсуждении.
2. Релятивистская кинематика. В своей основной статье
Эйнштейн1 ввел два следующих постулата:
а) Все системы отсчета, движущиеся с постоянной ско-
скоростью одна относительно другой, одинаково приемлемы
для описания природы, так что ни одной из них нельзя от-
отдать предпочтение.
б) Скорость света с во всех этих системах остается одной
и той же универсальной постоянной.
Второй постулат приводит к следующему кажущемуся
противоречию. Пусть наблюдатель В движется относитель-
относительно А со скоростью света с. Он дает световой сигнал в направ-
направлении своего движения, и этот сигнал движется относитель-
относительно него со скоростью с. Тогда, в соответствии с нашими
обычными представлениями, скорость сигнала относительно
А должна была бы быть 2с, в то время как второй постулат
требует, чтобы она была равна с. Получается абсурдное
равенство с = 2с. Противоречие, однако, устранится, если
мы расстанемся с нашим представлением о том, что время t
одно и то же для наблюдателей А и В.
Согласно Эйнштейну, мы ничего не должны предрешать
заранее в уравнениях преобразования, связывающего коор-
1 Ann. der Physik, 17 A905), 891 (см. также Сб. Принцип отно-
относительности, под ред. В. К. Фридерикса и Д. Д. Иваненко,
0НТИ, М. —Л., 1935, стр. 133. —Прим. ред.).
2. Релятивистская кинематика 335
динаты системы А и системы В. Предполагая, что движе-
движение В относительно Л происходит в направлении X, положим
x ax'+W
где а, C, у, б — константы, поскольку мы хотим сохранить
линейность преобразования. Отказавшись от уравнения
t = f (что соответствовало бы выбору у — 0, б = 1), мы
получили новые возможности в связи с появлением двух до-
дополнительных констант.
Все формулы специальной теории относительности
сильно упростятся, если мы договоримся измерять время
в таких единицах, чтобы скорость света была равна единице
(для этого нужно обычное время t заменить на tic). Для
того чтобы вернуться к формулам, в которые входит наше
обычное время t, мы должны просто заменить везде t на
ct, a v — на vie. Мы будем часто пользоваться этим упро-
упрощением, а потому условимся, что инвариантное значение
скорости света имеет численное значение с =- 1.
Пусть (х, t) — координаты системы, связанной с наблю-
наблюдателем А, а (х', t') — координаты, связанные с наблюдате-
наблюдателем В. Точки системы В измеряемые из А, движутся со
скоростью и(<1). При фиксированном х' это означает, что
dt = bdt',
и потому
dx p
Согласно второму постулату, если х — t, то ,v' = Г. Дейст-
Действительно, если Л обнаруживает, что сигнал распространяет-
распространяется относительно него со скоростью света (равной едини-
единице), то В должен обнаружить это же соотношение в своей
системе. Это приводит к соотношению
а+р=т-;-а. (9.2.3)
Однако свет может распространяться и в противополож-
противоположном направлении: х = —t, что должно соответствовать
336 Гл. IX. Релятивистская .механика
равенству х' = —V. Отсюда получается новое соотно-
соотношение
ос — р = б — у. (9.2.4)
Как результат этих соотношений можно положить
t = k(vx'+t'),
где константа k еще не определена.
Можно, однако, обратить это преобразование, выразив
координаты (xr, t') через (х, t)
, _ 1 x — vt
х ~~Т Т^"'
, !-^ (9-2-6)
к 1 — v2 ¦
Теперь можно использовать факт равноправия систем
А и В. Естественно, следует заменить v на —и, потому что
если система В движется относительно А со скоростью и,
то система А движется относительно В со скоростью —и.
Однако никакие другие замены не допустимы, поскольку
системы А я В должны быть полностью эквивалентными.
Это дает
откуда определяется константа k:
k = ^=L^ . (9.2.8)
у 1 — v2
Таким образом, мы получили соотношения между коор-
координатами двух систем
У I — и2
, vx' + t' ,, __ — ух
К этим уравнениям следует добавить
y = t/, z=z, (9.2.10)
2. Релятивистская кинематика 337
поскольку нет оснований предполагать, что движение вдоль
направления х окажет влияние на координаты у и z.
Сложение скоростей. Рассмотрим сигнал, распространяю-
распространяющийся со скоростью и в системе В, так что
x' = ut'. (9.2.11)
Тогда
и скорость сигнала, измеренная наблюдателем А, оказы-
оказывается равной
vpl (9.2.13)
в отличие от ньютонова уравнения, согласно которому
w = v + и. Это и есть знаменитая теорема Эйнштейна
о сложении скоростей.
Если сигнал распространяется в системе В перпендику-
перпендикулярно оси л;','то
Х'=0' (9.2.14)
y'=ut',
откуда
x==vt> (9.2.15)
Это не означает, что сложение векторов по обычному
правилу параллелограмма более не справедливо. Правило
параллелограмма не применимо только тогда, когда мы хо-
хотим сложить два вектора, измеренные в двух различных си-
системах отсчета.
В опыте Физо свет распространялся в воде со скоростью
и = 1 (9.2.16)
(п — коэффициент преломления), в то время как скорость
воды равнялась v. Результирующая скорость света, изме-
измеренная в лабораторной системе координат, становится
равной
12 Зак. 164G
338 Гл. IX. Релятивистская механика
W = l + U!±. (9.2.17)
Ввиду малости v можно положить (l-\-v/n)~] = \—v/n, и,
пренебрегая величинами второго порядка малости отно-
относительно v, получим
Этот результат полностью согласуется с эксперименталь-
экспериментальными фактами и совпадает с «коэффициентом увлечения»
Френеля.
Аберрация света. Рассмотрим луч света, испускаемый
в системе В в направлении, образующем угол 6' с осью х.
Для него
xWcosG',
y' = t'sinQ'.
Подставив в (9.2.9), получим
х_у v -f cos9'
Vl-v* ' (9.2.20)
i/=/' sinO',
откуда
X »lne' |/]ТГ^Г. (9.2.21)
В обычных астрономических задачах последний множи-
множитель близок к единице; поэтому .можно считать, что
tg6= V' . (9.2.22)
s v + cose v ;
Поэтому направление, под которым видна звезда, из-за
движения Земли изменяется практически так же, как это
получается из элементарного сложения векторов v и с
(для длины результирующего вектора это не справедливо:
она остается равной с, а не |v+c| ).
Эффект Допплера. Рассмотрим плоскую волну, рас-
распространяющуюся в системе В под углом б' к оси X.
Представим ее с помощью волновой функции
Воспользовавшись формулами преобразования (9.2.9), по-
получим ту же самую волну, но измеренную в системе А
где
2. Релятивистская кинематика 339
Tih'(f — х- cos 9' — у' sin 9') /g 2 23)
ования (9.2
ную в систе
(/ — .tcosG — у sin 9) ] (9.2.24)
v= 1—^A+a cos 8'), (9.2.25)
sin 0 = ,sin9' /Г^г",
1 + t» COS в '
(9.2.26)
Л tl+COS0 ч '
cos 9 = т-г1 х-. .
1 -+- v cos 6
Поэтому
" """" (9.2.27)
и, подставляя в (9.2.25), получаем
v = v',1/1~4-. (9.2.28)
1 — о cos 6 v ;
что с точностью до величин первого порядка совпадает
с обычным выражением
v=v'(l + ocos6). (9.2.29)
Однако релятивистская формула (9.2.28) показывает, что
даже световой луч, приходящий от источника, движуще-
движущегося перпендикулярно направлению луча (cos6=0), испы-
испытывает небольшое красное смещение. Этот так называемый
«поперечный эффект Допплера» был исследован эксперимен-
экспериментально, и было показано полное совпадение результатов
измерений с предсказаниями теории *.
Парадокс часов. Одним из парадоксов теории отно-
относительности, породившим поток статей в полунаучных
журналах (вышедших из-под пера менее чем пол у компетент-
компетентных авторов), был так называемый «парадокс часов». На
него впервые обратили внимание около 1918 г., и он был
1 Ives H. E. and Stilwell G. R., J. Opt. Soc. Amer., 28
A938), 215 и 31 A941), 369.
12*
340 Гл. IX. Релятивистская механика
полиостью проанализирован и разъяснен Эйнштейном1.
Из уравнений преобразования (9.2.9) следует, что наблюда-
наблюдатель из системы В, сравнивая показания своих часов с по-
показаниями часов из системы Л, обнаружит, что часы в си-
системе А идут быстрее. (Это не вызывается реальным изме-
изменением скорости работы часов, о чем свидетельствует тот
факт, что наблюдатель из системы А обнаружил бы то же
самое, если бы сравнил свои часы с часами из системы В.)
При относительной скорости v, близкой к скорости света,
может случиться так, что собственные часы наблюдателя В
регистрируют интервал времени, скажем, в 1 сек, а часы из
системы А регистрируют интервал времени в 1 год. Это
же можно пояснить в другой форме. Предположим, что че-
человек находится в снаряде, которым выстрелили из пушки,
так что он движется по направлению к звезде Сириус со
скоростью, близкой к скорости света, а затем с такой же
скоростью движется обратно к Земле. Пусть он вернулся
на место старта, скажем, через 16 сек по своим часам — ко-
конечно, совсем не постарев,— между тем как жители Земли
успели постареть на 16 лет. Хотя этот результат и кажется
в высшей степени парадоксальным, если исходить из сообра-
соображений «здравого смысла» — кстати, основанных на невер-
неверном предположении об абсолютном времени, — в нем еще
не содержится никаких внутренних противоречий. Чело-
Человек, летящий к Сириусу и обратно, движется по совершен-
совершенно иным участкам пространственно-временного континуума,
чем жители Земли, так что нет никаких причин, по которым
они должны были бы постареть одинаково.. Предполагаемый
же «парадокс» становится ясным из следующей кинемати-
кинематической формулировки этого предполагаемого эксперимента.
А говорит: «Я вижу В, движущегося направо со скоро-
скоростью v и возвращающегося с той скоростью обратно». На-
Наблюдения В за движением А будут точно теми же самыми,
с той лишь разницей, что «право» заменится на «лево». По-
Почему же возникает асимметрия в старении Л и В? В дей-
действительности при таком чисто кинематическом описании
событий теряется одно существенное обстоятельство, так
что это описание физически неполно. Если оба наблюдате-
наблюдателя Л и В будут иметь при себе акселерометры, то у Л аксе-
1 Die Naturwissenschaften, 6 A918), 697.
3. Четырехмерное пространство Минковского 341
лерометр все время будет стоять на нуле, а у В он покажет
очень большой сигнал в тот момент, когда В достигнет Си-
Сириуса и повернет обратно. Следовательно, физические со-
состояния у А и В совершенно различны, так что принцип
симметрии нарушен в самом условии задачи.
Экспериментальное доказательство парадокса часов ста-
стало возможным в опытах с коротко живущими частицами,
так называемыми [х-мезонами, возникающими в космических
ливнях на очень больших высотах. Время жизни этих ча-
частиц известно из лабораторных измерений. Оно таково, что
эти частицы, движущиеся со скоростью, составляющей
99,5% скорости света, не должны были бы успеть до рас-
распада проникнуть в атмосферу глубже, чем на 600 м, если бы
не релятивистское удлинение времени. Это удлинение де-
делает возможным их проникновение на глубину 6000 м и бо-
более и их появление на уровне моря. Этот факт никак нель-
нельзя было бы объяснить без формул преобразования теории
относительности. Таким образом, эффект, на котором ос-
основан так называемый «парадокс часов», полностью под-
подтвержден экспериментально1.
3. Четырехмерное пространство Минковского. Форму-
Формулы преобразования (9.2.9—9.2.10) обладают тем свойством,
что они оставляют инвариантным выражение
С(х*+у*+г* — t*)=C(x'2+y'2+z'2 — t'2) . (9.3.1)
Две системы отсчета, к которым они относятся, являются
частными случаями более общего класса систем отсчета,
которые равноправны с точки зрения описания событий
природы. Такие системы отсчета допускают произвольный
перенос начала координат C параметра), произвольный
перенос начала отсчета времени A параметр), произволь-
произвольный поворот пространственных осей C параметра) и посту-
поступательное движение с произвольной скоростью и«1) C па-
параметра) — в общей сложности класс систем отсчета, до-
допускающий свободный выбор 10 параметров. Это полное
семейство допустимых систем отсчета может быть оха-
охарактеризовано одним утверждением, а именно координаты
системы отсчета должны быть такими, чтобы оставалась
1 См. Swann W. F. G., Report on Progress in Physics, 10,
A946), 1, особенно стр. 16.
342 Гл, IX. Релятивистская механика
инвариантной следующая алгебраическая величина:
C[(x-xf + (y-yf + (z ~~zY ~(t-lY] (9.3.2)
(если бы время не было нормировано, то последний член
следовало бы умножить на с). Сюда следует добавить усло-
условие линейности соотношений между двумя системами от-
отсчета. В ньютоновой физике эквивалентность систем от-
отсчета ограничена инвариантностью величины
s*={x-IY + (!,-y)* + {z-I)*, (9.3.3)
являющейся квадратом расстояния между точками (х, у, z)
и (х, у, z). В этом случае эквивалентность систем отсчета
обусловлена тем, что физическое пространство считается
евклидовым пространством трех измерений, в котором эк-
эквивалентны все точки (возможность поступательного пере-
перемещения начала координат) и все направления (возмож-
(возможность поворота координатных осей).
Новая точка зрения, согласно которой эквивалентность
систем отсчета требует инвариантности квадратичной фор-
формы
s2 ^
x~lcJ + (y-yy + (z -гJ-с2(/—FJ], (9.3.4)
показывает, что физическому миру отвечает метрическая
геометрия, в которой расстояние между двумя точками оп-
определяется выражением (9.3.4), а не (9.3.3). Это означает,
что время t присоединяется к пространственным координа-
координатам х, у, z, образовывая евклидово пространство четырех
измерений. Это пространство не совсем евклидово из-за
знака минус перед последним членом. Но его можно сделать
формально евклидовым, вводя совокупность четырех мате-
математических координат с помощью следующих формул:
x±=ix, x2 = iy, x3 = iz, xt=ct. (9.3.5)
В этом случае выражение для расстояния между точками
Ху, х2, х3, хА и xlt хг, х3, xi принимает вид
s2 = ~C [fo -х,J + {хг - х2J_ +
+ (х3-х3J + (х,-х,У]. (9.3.6)
«Абсолютное пространство» и «абсолютное время» Ньютона
больше не могут существовать как независимые категории
3. Четырехмерное пространство Минковского 343
и сливаются в одно целое: «абсолютный пространственно-
временной мир» теории относительности1. В такой интер-
интерпретации все релятивистские эффекты предыдущего пунк-
пункта следует рассматривать как геометрические эффекты,
порождаемые тем обстоятельством, что явления природы
разыгрываются в геометрическом пространстве четырех
измерений с квазиевклидовой структурой.
Константа С может быть опущена, так как мы исходим
из того, что величина расстояния между двумя точками за-
зависит от единиц, в которых это расстояние измеряется. Од-
Однако небезразлично, нормировано ли С на +1 или —1.
Если мы хотим, чтобы расстояния между любыми двумя
физическими соединимыми точками выражались действи-
действительными числами, то следует выбрать —1. Поэтому по-
положим
s2 = c2(,_7J_(*_xJ-(y-yJ,-(Z-IJ, (9.3.7)
или, в дифференциальной форме,
ds2 = c2dt2 — dx2 — dtj2 — dz2. (9.3.8)
Наличие различных знаков (+, —, —,—) в этой квадра-
квадратичной форме приводит к глубоким отличиям от истинного
четырехмерного евклидова пространства, имеющего квадра-
квадратичную форму со знаками (+, +, +, +). «Нулевое расстоя-
расстояние» между двумя точками в евклидовом смысле означает,
что эти точки совпадают. «Нулевое расстояние» в про-
пространстве Минковского означает, что
с2 (/ _ Jf _ (х _ хJ -{у- уJ - {г -7? = 0. (9.3.9)
Геометрическим местом точек, удовлетворяющих этому урав-
уравнению, является сфера с центром в точке (х, у, г), которая
расширяется со скоростью света, начиная с некоторого мо-
момента времени I. Сюда следует добавить сферу, которая
раньше стягивалась в точку (х, у, z) и достигла нулевого
радиуса в момент времени t. Из инвариантности расстояния
относительно прямоугольных преобразований координат
сразу следует, что если расстояние s = 0 в одной из допу
1 Minkowski H., Phys. Zeiischr., 10 A909), 104.
344 Гл. IX. Релятивистская механика
стимых систем координат, то оно равно нулю и во всех
остальных допустимых системах координат. Это означает,
что распространение света есть явление абсолютное, оди-
одинаковое во всех допустимых системах отсчета. Постулат
Эйнштейна об инвариантности скорости света включен та-
таким образом в более исчерпывающий принцип инвариант-
инвариантности линейного элемента (9.3.8).
Тот факт, что в природе невозможна скорость, превы-
превышающая скорость света, оказывается теперь естественным
геометрическим следствием того, что такие скорости приво-
приводят к мнимым расстояниям, квадрат которых отрицателен.
Произвольная точка (х, у, г, i) физического многообразия
может быть физически связана лишь с такими точками
(х, у, z, t), для которых
c2(t-lJ~(x~xf-{y~yJ-{z~lJ>0. (9.3.10)
Уравнение
с2A-1Г~(х~хУ-(у-у-J-(г--гУ = 0 (9.3.11)
называется уравнением «светового конуса», связанного
с точкой (х, у, z, 1). О точках, для которых в неравенстве
(9.3.10) выполняется знак «больше», говорят, что они «ле-
«лежат внутри светового конуса» с центром (х, у, z, t).
4. Преобразования Лоренца. Преобразование (9.2.9)
является частным случаем более широкой группы преобра-
преобразований, которые исторически не очень заслуженно назы-
называются «преобразованиями Лоренца». Они характеризуют-
характеризуются произвольными четырехмерными поворотами евклидова
пространства четырех измерений с координатами хх = ix,
х2 = iy, xa — iz, Xi = ct. Можно обойтись и без мнимых
величин. Для этого следует определить преобразования
Лоренца как группу линейных преобразований четырех
действительных величин, (х, у, z, t), оставляющих инвари-
инвариантной квадратичную форму
с2I* — х2 — г/2 — г2. (9.4.1)
Хотя в то время, когда Гамильтон создавал свою тео-
теорию кватернионов, идея о четырехмерной вселенной была
еще не известна, его кватернионы исключительно удобны
4. Преобразования Лоренца 345
для изучения общих свойств произвольного преобразования
Лоренца. Кватернион Гамильтона определяется как гипер-
гиперкомплексное число вида
(9-4.2)
в котором четвертая компонента («временная часть» ква-
кватерниона) алгебраически ведет себя как простое число
(скаляр), а гиперкомплексные единицы i, j, k подчиняются
следующим правилам:
jk = — kj = i,
ы—ii-j. <9-43)
i2 = j2 = ka = — 1.
Умножение в общем случае не коммутативно (АВфВА), но
обладает свойством ассоциативности. За исключением ком-
коммутативного свойства умножения, все остальные правила
обычной алгебры сохраняются, в том числе и невозможность
деления на нуль. Введем «сопряженный» кватернион
Тогда сумма Q + Q, а также и
I Q I2 = QQ = QQ = q\ + ql + ql + ql (9.4.5)
являются простыми скалярами, коммутирующими с любым
кватернионом. Имеет место также следующее соотношение:
(АВ)~ - ВА. (9.4.6)
Отсюда
| АВ \2=(АВ) {АВ)~=АВВА = {АА) {ВВ)=\А f \ В |2. (9.4.7)
Кватернион может быть интерпретирован как вектор
в пространстве четырех измерений D-вектор). На языке
кватернионов может быть записан ряд свойств электромаг-
электромагнитного поля (например, уравнения МаксвеллаI. Однако
1 См. S i I ber st ein L., Theory ol Relativity (Macmillan,
1924), p. 46.
12В Зак. 1646
346 Гл. IX. Релятивистская механика
исчисление кватернионов особенно удобно для изучения
преобразований Лоренца.
Положим
(9.4.8)
и возьмем некоторый кватернион
А=а11+ал}+а3к+ал, (9.4.9)
удовлетворяющий условию
АА = а21 + а1+а1 + а1 = 1. (9.4.10)
Тогда уравнение
R' = AR (9.4.11)
выражает собой некоторое линейное преобразование коор-
координат, которое, согласно (9.4.7), удовлетворяет условию
R'R' = RR. (9.4.12)
Это означает, что длина вектора R не меняется. Следова-
Следовательно, преобразование (9.4.11) является некоторым по-
поворотом четырехмерного евклидова пространства. То же
самое справедливо для преобразования
R' = RB, (9.4.13)
если кватернион В тоже удовлетворяет условию
ВВ=1. (9.4.14)
Ввиду наличия у поворотов групповых свойств произве-
произведение кватернионов
R'=ARB (9.4.15)
снова является поворотом в пространстве четырех измере-
измерений. Выбор двух кватернионов единичной длины А к В
допускает шесть степеней свободы в соответствии с шестью
степенями свободы произвольного поворота (без отражения)
в пространстве четырех измерений. Следовательно, (9.4.15)
можно рассматривать как общее выражение для произволь-
произвольного поворота в пространстве четырех измерений.
Предположим теперь, что кватернионы А и В имеют
комплексные коэффициенты. «Комплексно сопряженную»
4. Преобразования Лоренца 347
величину мы будем обозначать при помощи звездочки. В про-
пространстве Минковского вектор R имеет действительную вре-
временную часть и мнимую пространственную часть. Это одно-
однозначным образом характеризуется свойством
# = #*. (9.4.16)
Для того чтобы получить поворот четырехмерного прост-
пространства, имеющий физический смысл [т. е. такой, кото-
который бы оставлял инвариантной действительную величину
(9.4.1)], необходимо и достаточно, чтобы условие (9.4.16)
выполнялось и в новой системе отсчета
#' = #'*. (9.4.17)
Это означает, что
BRA = A*R*B*,
или
BR*A=A* R* В*. (9.4.18)
Это условие будет выполнено, если мы выберем
В=А*. (9.4.19)
Тогда и
А=В*. (9.4.20)
Следовательно, произвольное (собственное) преобразование
Лоренца, имеющее физический смысл, можно охарактери-
охарактеризовать произведением кватернионов
R'=ARA*, (9.4.21)
где восемь компонент комплексного кватерниона
A=A'+iA'
удовлетворяют двум скалярным условиям
А'А'—А"А" = 1,
А'А" + А"А'=0.
При А действительном А*=А и
АА*=АА=1.
12В*
348 Гл. IX. Релятивистская механика
Следовательно, R=xt преобразуется в
R'=xit
т. е. временная ось при таком преобразовании остается
неизменной. Преобразование Лоренца в этом случае сво-
сводится к простому повороту обычного пространства. Такое
представление произвольного поворота трехмерного про-
пространства с помощью действительного кватерниона единич-
единичной длины было известно и использовалось еще Эйлером.
При обычном трехмерном повороте особый интерес пред-
представляет ось вращения, т. е. прямая линия, преобразующая-
преобразующаяся сама в себя. Аналогично можно поставить вопрос
о «главной оси» нашего преобразования, характеризующей-
характеризующейся условием
#' = *,#, (9.4.22)
где Я — просто число (необязательно действительное), на-
называемое «главным значением» матрицы, связанной с ли-
линейным преобразованием (9.4.21). Поскольку наше преоб-
преобразование обладает тем свойством, что для всех значений
радиуса-вектора
\R'\2 = \R\2, (9.4.23)
условие (9.4.22) для главной оси дает
(к2—1)|/?|« = 0, (9.4.24)
откуда видно, что либо
Я. = ±1, (9.4.25)
либо
\R\2 = 0. (9.4.26)
Условие (9.4.26) означает, что соответствующая главная
ось лежит на нуль-конусе
X*-\-y* + Zi — (flf = 0. (9.4.27)
Таким образом, главная ось лоренцова преобразования мо-
может существовать в реальном пространстве, несмотря на
то что К отлично от ±1. В евклидовом пространстве этого
не может быть. Действительно, в евклидовом пространстве
с четным числом измерений не может существовать прямой
линии, которая бы при повороте переходила сама в себя
4. Преобразования Лоренца 349
в отличие от пространства с нечетным числом измерений,
где должна существовать по крайней мере одна действитель-
действительная ось вращения. Однако преобразование Лоренца всегда
имеет две главные оси, принадлежащие действительному
нуль-конусу (9.4.27I, хотя величины % практически всегда
отличны от единицы. В пределе эти две оси сливаются в одну.
Остальные главные оси тоже находятся на нуль-конусе
(9.4.27), но они соответствуют комплексным значениям
координат.
Произвольное преобразование Лоренца мы будем вы-
выражать через его две действительные главные оси, которые
будем для краткости называть «нуль-осями», поскольку
они лежат на действительном нуль-конусе. Рассмотрим их
как кватернионы и обозначим через Р и Q. Из того, что они
лежат на нуль-конусе, следует, что их длина равна нулю
PP=qq=0. (9.4.28)
Для того чтобы эти оси были действительными, требуется
выполнение условия (9.4.16). Положим
P=pi[l+i(p1\+p2)+p3k)]=pi(l+iP),
где Р и Q можно рассматривать как обычные трехмерные
векторы либо как кватернионы со скалярной частью, рав-
равной нулю.
Из условия (9.4.28) следует
РР=р? + Р2 + Рз=1 (9.4.30)
и аналогично
г\г\ 2 2 I 2 1
vtQ=^ a i -р о 2 ~т~ Qz == 1 •
Пронормируем длины векторов Р и Q так, чтобы
Р4=?4=Р (9.4.31)
1 Подробней о свойствах нуль-конуса см. Synge J. L.,
Relativity, the Special Theory (North-Holland, Amsterdam, 1956),
стр. 89 и далее.
350 Гл. IX. Релятивистская механика
QP=-Pi(l+iP)qi(l-iQ) +
4(l-tP) = 2p2(l-cos6) = l, (9.4.32)
где через б обозначен угол между векторами Р и Q
(мы временно исключили возможность совпадения этих
двух векторов).
Введем теперь кватернион А преобразования (9.4.21)
следующим образом:
1 (9.4.33)
А* = a* QP + ± PQ.
[Во втором уравнении использовано условие (9.4.16).]
Сначала покажем, что независимо от того, какие (во-
(вообще говоря, комплексные) значения принимает а, условие
(9.4.10) выполняется
АА = (aPQ+^QP^ (aQP + ^
= 1. (9.4.34)
Поскольку длины векторов Р и Q нормализованы усло-
условиями (9.4.30—9.4.32), при выборе этих векторов имеется
четыре степени свободы, которые добавляются к двум
степеням свободы, связанным с комплексной константой а.
Методом дополнения, подобным тому, который был ис-
использован при доказательстве (9.4.34), покажем, что Р и
Q — действительно главные оси нашего преобразования
Р' = (aPQ + 1-Qp) Р (a*
= аа* PQPQP =¦¦
= аа* {PQ + QP) P {QP + PQ) = «a* P. (9.4.35)
Следовательно,
Р' = аа*Р, К1=аа*. (9.4.36)
4. Преобразования Лоренца 351
Аналогично
Q' = -LrQ, A,2 = _L. (9.4.37)
Точно так же можно показать, что кватернионы PQ и QP
также имеют характер главных осей
(aPQ + I QP^j PQ (a* QP + 1 PQ j =
= ~pqpWq =
= ~(pq + qp) pq (pq + qp) = ^ pq. (9.4.38)
Следовательно,
13 = ^, (9.4.39)
Л4 = - . (9.4.40)
Мы получили таким образом четыре главные оси
произвольного преобразования Лоренца. Первая пара
(9.4.36—9.4.37) имеет действительные взаимно обратные
собственные значения; они лежат на действительном нуль-
конусе. Вторая пара (9.4.39—9.4.40) лежит на комплексном
нуль-конусе. Их собственные значения являются комплекс-
комплексно-сопряженными и опять-таки взаимно обратными вели-
величинами.
Предельные случаи. В общем случае преобразование Ло-
Лоренца имеет четыре различных главных значения. Поэтому
не может случиться так, что преобразование оставляет неиз-
неизменными более чем четыре прямые линии. Однако мы встре-
встречались с частным случаем преобразования Лоренца (9.2.9—
9.2.10), когда неподвижной может остаться целая плоскость.
Это происходит только тогда, когда совпадают два собст-
собственных значения. Из проведенной выше классификации
видно, что совпадение собственных значений может произой-
произойти лишь одним из путей:
(а) Если а выбрано действительным. Тогда
Л,=Я,4=1. (9.4.41)
352 Гл. IX. Релятивистская механика
(б) Если а выбрано комплексным, но равным единице по
абсолютной величине. Тогда
X1=Kt=l. (9.4.42)
(При а = 1 осуществляются оба условия. Тогда мы имеем
тождественное преобразование #' = jR и неизменным остает-
остается все пространство. Кроме этого предельного случая, ни-
никогда не может случиться так, что неподвижной окажется
более чем одна плоскость.)
1. Обратимся сначала к случаю (а). Мы сталкиваемся
здесь с 5-параметрическим семейством преобразований, по-
поскольку а ограничено лишь одним условием. Этот класс
преобразований отличается тем свойством, что все четыре
собственных значения, а потому и все четыре главные оси,
действительны. Этого не видно из выражений (9.4.39) и
(9.4.40), так как и PQ, и QP являются комплексными ве-
величинами. Однако ввиду совпадения собственных значений
Я3 и %i можно взять любую линейную комбинацию этих
двух осей. Тогда из (9.4.16) следует, что должны быть дей-
действительными следующие два 4-вектора:
C^PQ+QP, C2 = i(PQ-QP). (9.4.43)
Вычислим для этих двух векторов скаляр (9.4.5)
(PQ ± QP)(QP± PQ) = ± (PQPQ + QPQP).
Учитывая множитель i в С2, получаем, что |С1|2 = |С2|2.
Записав Р и Q в форме (9.4.29), получим
| d |2 = | С2|2 = — 2р2 sin2 б = — A + cos б). (9.4.44)
Следовательно, обе главные оси лежат вне нуль-конуса и вне
физического пространства, преобразующегося по лорен-
цову преобразованию. То же самое справедливо и по отно-
отношению к инвариантной плоскости, проходящей через эти
два 4-вектора. Плоскость Y — Z в частном случае преоб-
преобразования (9.2.9—9.2.10) лежит вне нуль-конуса и потому
преобразование (9.2.9.—9.2.10) принадлежит к этому
классу. В частности, в этом случае имеем
cos6 =
4. Преобразования Лоренца 353
Q = !
-_ 1 yT=-~o+/l + o | 1 y'l—о —/l + t> ¦•
j/l-o1 у 1 — ii2
2. Перейдем теперь к случаю (б). Здесь тоже имеется
5-параметрическое семейство преобразований Лоренца, по-
поскольку а должно иметь вид e'i. Инвариантная плоскость
характеризуется линейной комбинацией двух главных
осей Р и Q
C=aP + bQ, (9.4.45)
так что получаем
ab. (9.4.46)
Те точки инвариантной плоскости, для которых множители а
и b имеют одинаковые знаки, лежат внутри нуль-конуса
(действительное пространство), а те, для которых знаки
разные, лежат вне нуль-конуса (мнимое пространство).
Случаи (а) и (б) взаимно исключают друг друга.
3. Имеется одна точка соприкосновения между этими
двумя классами преобразований, приводящая к 4-парамет-
рическому классу преобразований Лоренца1. Преобразо-
Преобразования этого класса получаются в том случае, когда два
вектора Р и Q непрерывным образом приближаются друг
к другу при одновременном стремлении ct к 1. Положим
а = 1+е, (9.4.47)
где е — бесконечно малый параметр. Тогда кватернион
(9.4.33) принимает вид
A=1+b{PQ—QP). (9.4.48)
Положив
P=p(l+tP0+i>Pi).
Q=p(l+iP0-i|iPx),
I Po 1 = 1 Pi 1 = 1. Po-LPi, (9.4.49)
1 Автор благодарен профессору Дж. Л. Сингу, обратившему
внимание автора на этот класс преобразований.
354 Гл. IX. Релятивистская механика
получим, пренебрегая величинами второго порядка мало-
малости относительно [х,
(9.4
(9.4
(9.4
(9.4.
.50)
.51)
.52)
.53)
PQ- QP = 4p21> (P1+ i Ро Р,),
cos 8 = 1 — рЛ
Учитывая условие (9.4.32), имеем
и потому
е {PQ -QP) = | i (Рх + t Ро Рх).
Отношение 2е/\х двух бесконечно малых параметров может
стремиться к любому конечному значению р. Поэтому ре-
результат наших вычислений можно представить в следующем
виде. Комплексный кватернион А, который, согласно
(9.4.21), производит преобразование Лоренца, превращает-
превращается в
i4=l+ip(P1 + tPs), (9.4.54)
где
|Р1| = |Р2| = 1, РхХРз-
Главными осями этого преобразования становятся Р2
и 1 + /Ро, где
РО = Р1ХР2. (9.4.55)
Хотя действительное собственное значение К = 1 является
четырехкратно вырожденным, мы получаем всего две глав-
главные оси, так как две нуль-оси Р и Q совпадают; более того,
первая ось Сх'из пары (9.4.43) также совпадает с Р, так как
Р2 = 2рР. Поэтому нуль-ось Сг становится трехкратно
вырожденной'осью, в то время как С2 в пределе стремится
к 3-вектор у'Р2.
Инвариантная плоскость, определяемая двумя векторами
Р2 и 1 + гР0> полностью лежит вне нуль-конуса. Однако
она касается его по линии а A + 'Ро)-
В качестве примера такого преобразования выберем
4. Преобразования Лоренца 355
Тогда
или, после расписывания по координатам,
х\ = A — 2р2) *! + 2р х2 + 2ф2 х4,
*з= — 2Р Jfi+ хг +2ф jc4,
*'з = ха,
х\ = 2Р2 txx — 2pt х2 + A + 2р2) *4.
Одна из главных осей Р2 = к видна сразу. Можно также
показать, что значения хх = i, хг — х3 = 0, х4 = г дают
вторую главную ось.
Бесконечно малые преобразования Лоренца. Выбор а =
= 1 приводит к тождественному преобразованию. Выбрав
а очень близким к единице, получим «бесконечно малое
преобразование», соответствующее бесконечно малому пово-
повороту осей. Любой конечный поворот может рассматривать-
рассматриваться как последовательность бесконечно малых поворотов.
Мы снова приходим к соотношению (9.4.48). Посколь-
Поскольку PQ — QP есть просто пространственный кватернион
(с временной скалярной частью, равной нулю), можно по-
положить
А = l + i-et(b-fta), (9.4.56)
где два 3-вектора а и b произвольны, а е — действитель-
действительный бесконечно малый параметр. Тогда
R' =ARA* =
= [l + ! Bi (b + /a)] R [l + 1 8t (b - ia) 1 =
= /? — ye(a/?—/?a) + ^-ei(b/?+/?b), (9.4.57)
или, в координатной форме,
х\ = хг + еа3 х2 — еа2 х3 + feuj д;4,
х2 = — еа3 хг+ х2 + eat х3 + ieb2 xt,
Хз = га2х1—еахх2+ x3-\-iebaxit
Х4 = — hb1xl—1гЬ%х2
356 Гл. IX. Релятивистская механика
5. Механика одной частицы. Вариационные принципы
механики позволяют написать уравнения движения про-
произвольной механической системы, если только задана од-
одна фундаментальная величина — «функция Лагранжа» L.
В ньютоновой механике пространство и время существуют
обособленно, и время t служит при этом независимой пере-
переменной. В теории относительности это уже не так. Время
теперь не более чем одна из координат, равноценная трем
пространственным координатам. Физические события про-
происходят в четырехмерном мире, который имеет определен-
определенную метрику. Согласно требованиям, вытекающим из этой
метрики, в четырехмерном мире не должно существовать
предпочтительного направления. Уравнения, приводящие
к такому привилегированному направлению, противоречат
принципу относительности и должны быть отброшены либо
исправлены таким образом, чтобы в конечном счете они от-
отразили надлежащую метрическую структуру физического
мира.
Существование функции Лагранжа сильно облегчает
эту задачу. Если функция Лагранжа L является истинным
скаляром четырехмерного мира (т. е. величиной, инвариант-
инвариантной относительно произвольного преобразования Лоренца,
или, иначе говоря, «лоренц-инвариантом»), то и полученные
из этой функции уравнения будут корректными с реляти-
релятивистской точки зрения—тоже будут «лоренц-инвариантами».
. Мы уже знаем, как решаются динамические задачи в
ньютоновой механике с помощью функции Лагранжа L =
= Т — V [см. E.1.7)], где Т — кинетическая, а V —по-
—потенциальная энергия системы. Ограничимся изучением
одной частицы, характеризуемой массой и положением.
Кинетическая энергия
T = ~mv\ (9.5.1)
ответственная за инерцию частицы, могла рассматриваться
как истинный скаляр ньютонова мира. Однако в объединен-
объединенном пространственно-временном мире она уже не является
скаляром. Здесь движение частицы может быть изображено
при помощи линии в четырехмерном пространстве, называ-
называемой «мировой линией». Ее линейный элемент задается
выражением
5. Механика одной частицы 357
dl? = — dx2 — dy- — dz2 + с2 dt2 =
= dx\ + dx\ + dx\ + dx\. (9.5.2)
В этом представлении скорость частицы определяется ка-
касательной к мировой линии. Эта касательная является век-
вектором с четырьмя компонентами
dxx dx2 dx3 dxt. ,Q - „.
U' ~Ц' ds' W &•*•*>
Связь этого вектора с нашими обычными представлениями
станет ясной, если учесть необычайно большую величину
скорости света по сравнению с обычными скоростями в нью-
ньютоновой механике. Линейный элемент (9.5.2) может быть
записан в форме
ds = V&dP — dx2 — dy2 — dz2 = с ]/l — [^dt. (9.5.4)
Следовательно, замена ds на cdt приводит лишь к очень ма-
малой ошибке. В частности, с чрезвычайно высокой степенью
точности можно положить
(\p)t, (9.5.5)
откуда
'• *•. *:
mcds = j' тс2 dt — f Tdt. (9.5.6)
Тот факт, что первый член в правой части выражения
(9.5.6) не проявляется при обычных обстоятельствах (не-
(несмотря на огромную константу с2), объясняется необычай-
необычайно высокой стабильностью массы т. Если m—константа,
то вариация первого члена равна нулю и может быть опу-
опущена.
Мы приходим, таким образом, к выводу, что для полу-
получения релятивистски инвариантного интеграла действия
кинетическую часть интеграла
t,
I (9.5.7)
358 Гл. IX. Релятивистская механика
следует заменить на
— c^mds. (9.5.8)
Из такой формы инертного члена в интеграле действия
вытекает ряд важных следствий. Выберем время t в каче-
качестве независимой переменной, тогда функция Лагранжа L
в интеграле действия (9.5.8) принимает вид
1 =-Cm j/l--^(<7?+<J!+<?!); (9-5.9)
при этом координаты х, у, г рассматриваются как дина-
динамические переменные <7,-. Из общих принципов ва-
вариационного метода в механике [см. E.3.4)] известно,
что «импульсы» механической системы могут быть опре-
определены как частные производные L по qt. Следовательно,
0 (9-5.10)
или, в векторной форме,
mv
1-?
Таким образом, поправка к ньютонову определению им-
импульса оказывается очень небольшой для малых скоро-
скоростей. Вместе с тем она приобретает решающее значение
при скоростях, близких к скорости света.
Следующей важной величиной является энергия си-
системы. В соответствии с E.3.12) она может быть опреде-
определена при помощи функции Лагранжа Ь
з
?=2 Piqt — L. (9.5.12)
В рассматриваемом случае имеем
"^. (9.5.13)
5. Механика одной частицы 359
Этот знаменитый результат Эйнштейна представляет собой
одно из наиболее важных открытий теоретической физики.
В ньютоновой физике кинетическая энергия частицы фигу-
фигурировала в виде mv2l2; это означало, что масса приобретает
энергию только при движении. Новое уравнение (9.5.13)
ставит рядом с ньютоновым членом огромную величину
тс2, демонстрируя тем самым, что масса является носи-
носителем громадного количества энергии, связанной лишь
с фактом самого существования этой массы. По сравнению
с ней обычная кинетическая энергия в большинстве случаев
пренебрежимо мала. В связи с тем что различные формы
энергии могут довольно легко переходить одна в другую,
на горизонтах науки появилась возможность перевода и
этой новой формы энергии в другие формы. Успех в деле
создания атомной бомбы трагически подтвердил этот вы-
вывод теории относительности.
Поскольку с«3 ¦ 1010 см/сек, переход 1 г вещества
в энергию приводит к выделению приближенно 9 • 1020 эрг
энергии или 9 • 1013 дж, или 25 млн. квт-ч, или
21500 млн. ккал.
Еще один важный вывод можно сделать с помощью ка-
канонического подинтегрального выражения [см. F.4.3)],
переписанного в математических координатах
Рх dx + p2dy -f- р3 dz — Hdt =
dx rfjc
4 _
= 2 pidxi. (9.5.14)
«=i
Четыре компоненты 4-импульса должны иметь инвариант-
инвариантный характер, являясь компонентами некоторого 4-век-
тора. Действительно, из (9.5.11) и (9.5.13) получаем
_ (9.5.15)
откуда видно, что pi — четырехмерный вектор (9.5.3),
касательный к мировой линии частицы, но умноженный на
постоянную —тс.
360 Гл. IX. Релятивистская механика
Мы видим, что два ньютоновых понятия: импульса
и энергии, существовавшие в ньютоновой физике совершенно
порознь, в релятивистской физике оказываются неразде-
неразделимыми; компоненты импульса (деленные на /) вместе с
энергией (деленной на с) являются компонентами 4-вектора
в пространственно-временном мире Минковского.
В литературе по теории относительности часто урав-
уравнение (9.5.11) пишут в виде
и интерпретируют величину
1Ц- (9.5.17)
как «релятивистскую массу» частицы, изменяющуюся со
скоростью и растущую до бесконечности при стремлении v
к скорости света. Это полезно для демонстрации того факта,
что конечная сила не может ускорить материальное тело до
скорости света, потому что инертность тела бесконечно воз-
возрастает при приближении у к с. Однако в действительности
наличие множителя в знаменателе связано с dt, потому что
нам приходится дифференцировать по длине дуги s, имею-
имеющей инвариантный смысл, а не по переменной времени t,
которая теперь не более чем одна из координат. Вместо
длины дуги s можно ввести более физическую величину,
определив понятие «собственного времени» частицы. Под
этим подразумевается время, измеряемое часами, движу-
движущимися вместе с частицей, а потому связанными с ее миро-
мировой линией. Обозначив это собственное время через а,
имеем
ds = cdo, (9.5.18)
так как часы находятся в системе отсчета, в которой ча-
частица покоится. Отсюда получаем
cdx __ dx dx /n r , ^
ds da
/i-S
dt
6. Гамильтонова формулировка динамики частицы 361
Условимся определять скорость как быстроту изменения
положения частицы, измеряемую с помощью собственного
времени частицы. Тогда определение импульса (9.5.11)
превратится в
р = тх, (9.5.20)
снова приняв вид ньютонова определения.
6. Гамильтонова формулировка динамики частицы.
В предыдущем пункте мы использовали время t в качестве
независимой переменной. Такой подход не в духе теории
относительности, потому что время должно было бы входить
на равных условиях по отношению к другим координатам.
Это можно сделать, введя параметр т и рассматривая четыре
математические координаты q-t = Xi (i = 1, 2, 3, 4) как
функции т. Мы следовали такому методу при изучении урав-
уравнений движения методом Гамильтона (см. гл. VI, п. 10).
В гамильтоновой форме динамики основной является
уже не функция Лагранжа L, а функция Гамильтона
H=^ptqt—L (9.6.1)
[см. F.2.3)], записанная через qt и р,-. В рассматриваемой
сейчас задаче
1 = ~mclR = ~тс l/ 2 qf ¦ <9-6-2)
Г 1=1
Следовательно,
Д_. =~mcd-3i (9.6.3)
V 2.4t ds
-^- + mc^i = o. (9.6.4)
i=1 1=1
Таким образом, мы столкнулись с той же самой ситуацией,
какая встретилась раньше в F.10.5). Хотя в каноническую
функцию Лагранжа входит Н
4
L= Hpiq'i—H, (9.6.5)
i 1
362 Гл. IX. Релятивистская механика
а Н обращается в нашем случае в нуль, это не должно нас
смущать, так как роль функции Гамильтона берет на себя
тождество, которое должно существовать между р,-. Дей-
Действительно, из выражения (9.6.3) видно, что q-t нельзя вы-
выразить через pi ввиду тождества
4
2 р\— /п«ся = 0, (9.6.6)
г =i
которое следует рассматривать как дополнительное условие
в нашей вариационной задаче. Мы должны, таким образом,
минимизировать канонический интеграл
V «!
А = \ liPiqidx ¦ (9.6.7)
при дополнительном условии (9.6.6). Это означает, что ре-
результирующей функцией L становится
4 /4 \
L' = 2 р, qt — г. 2 Р«? — тЧЧ. (9.6.8)
i=i \/ = 1 /
Появление неопределенного множителя К связано со свобо-
свободой выбора параметра т. Можно нормировать к на 1, что
естественно приведет параметр т к какой-то определенной
величине. Существенное отличие от обычной формы дина-
динамики имеется лишь в том, что суммирование идет по че-
четырем, а не по трем координатам.
7. Потенциальная энергия. Вернемся к функции
Лагранжа ньютоновой физики: L = Т— V. Мы уже знаем,
как нужно модифицировать кинетическую энергию Т,
чтобы привести ее в соответствие с принципами теории от-
относительности. Рассмотрим теперь вариационный инте-
интеграл, связанный с потенциальной энергией V.
$ (9.7.1)
Считая V заданным скаляром четырехмерного мира
V = V(xlt...,xJ, (9.7.2)
7. Потенциальная энергия 363
нужно модифицировать интеграл (9.7.1), придав ему четы-
четырехмерный характер. Это можно сделать, заменив dt диф-
дифференциалом «собственного времени» do. Тогда получим
модифицированный интеграл действия в форме
' ds
—. (9.7.3)
а полный интеграл действия, включающий и кинетическую,
и потенциальную энергию, примет вид
ti t,
Л = — f (тс+ ~\ds = — с (' ( т + -^Л ds. (9.7.4)
Отсюда видно, что наличие скаляра потенциальной энер-
энергии эквивалентно увеличению массы частицы на величину
Vic2. Заводя свои часы и увеличивая тем самым их потен-
потенциальную энергию, мы изменяем массу часов. Когда ка-
какие-нибудь химические вещества изменяют свою конфигу-
конфигурацию, переходя в состояние с меньшей потенциальной энер-
энергией иТвыделяя при этом определенное количество хими-
химической энергии в виде тепла, масса нового вещества меньше,
чем масса, которая была раньше. Однако из-за стоящего
в знаменателе множителя с2 эти изменения массы столь
малы, что их невозможно наблюдать.
Совсем иная ситуация в ядерной физике, где процессы
деления и рекомбинации могут привести к весьма эффек-
эффективным событиям ввиду огромного числа участвующих ато-
атомов. Масса ядра атома водорода (протона) равна 1,008146
атомных единиц, если масса атома кислорода принимается
равной 16. Масса нейтрона — 1,00897, а масса атома ге-
гелия — 4,003879. При крайне высоких температурах в при-
присутствии нейтронов (и углерода) водород может превращать-
превращаться в гелий, потому что ядро атома гелия представляет собой
комбинацию двух протонов и двух нейтронов. Однако масса
образующегося ядра на 0,03136 меньше массы исходных
частиц, что составляет примерно 1% массы. Соответствую-
Соответствующая энергия выделяется в виде тепла, что и лежит в основе
разрушительного эффекта водородной бомбы.
Гл. IX. Релятивистская механика
8. Релятивистская формулировка ньютоновой скаляр-
скалярной теории гравитации. Выпишем лагранжевы уравнения,
связанные с принципом действия (9.7.4). Сделаем все
четыре переменные qt = х- равноправными, вводя в каче-
качестве независимой переменной параметр т и рассматривая
qi как функции т. Тогда
(9.8.1)
и из уравнений Лагранжа E.2.1) получим
что может быть записано в виде
или
-^-\(т+К)Щ=^- (9.8.4)
da П с2 I ch oqi v '
Помимо перехода от операции dldt ньютоновой физики к
инвариантной операции dido имеется лишь небольшая
поправка, заключающаяся в замене т на т + Vic1. Правда,
в ньютоновой физике правая часть уравнения имеет отри-
отрицательный знак, поскольку L = Т — V. Однако это раз-
различие объясняется тем, что мы в качестве координат qlt
q2, q3 используем не ньютоновы х, у, z, a ix, iy, iz. Если
ввести обычные координаты, то правая часть окажется ум-
умноженной на —1.
Дав индексу i значение 4, мы получим одно дополнитель-
дополнительное уравнение, выражающее закон сохранения энергии.
Предположим, что V не зависит от t (а следовательно, и
отх4; другими словами, мы предполагаем, что внешнее поле
статическое). Тогда четвертое уравнение дает
У
¦ = const. (9.8.5)
1 — —
9. Движение заряженной частицы 365
что с точностью до величин второго порядка относительно
vie совпадает с законом сохранения энергии в ньютоновой
механике
у тс2 + V = const. (9.8.6)
Эту же задачу можно решить методом Гамильтона. Для
этого используем наш прежний результат, связанный с
принципом Якоби (см. гл. 6, п. 10). Формально принцип
эквивалентен принципу действия (9.7.4), следует лишь за-
заменить }/Г2(Е — V) на т + V 1с2. Отсюда получаем функцию
Лагранжа в каноническом виде
4
= 2.x PiQi—"> (У.о./)
где дифференцирование подразумевается по параметру т,
а функция Гамильтона Я задана в виде
iPi
Н = ,'- кчо (9.8.8)
с добавочным условием, что для реального движения энер-
энергетическая постоянная в выран*ении Н = const должна
быть выбрана равной единице.
Ньютон объяснил орбиты планет при помощи скаляр-
скалярной функции поля, «гравитационного потенциала». В ран-
ранних работах по теории относительности Пуанкаре A905),
а позже Минковский A908) попытались модифицировать
теорию Ньютона, приведя ее в соответствие с четырехмер-
четырехмерной структурой мира. В результате они заменили ньюто-
ньютоновы уравнения движения системой (9.8.4). Эти попытки
оказались ненужными в связи с появлением в 1916 г. общей
теории относительности Эйнштейна, с необычайной убеди-
убедительностью показавшей, что задача о гравитации требует
гораздо более радикальной ревизии наших традиционных
представлений (см. ниже, п. 11).
9. Движение заряженной частицы. Предположим, что
скалярная функция V заменена векторной функцией At,
называемой «векторным потенциалом». В соответствии
366 Гл. IX. Релятивистская механика
с требованиями теории относительности следует предполо-
предположить, что вектор Ai имеет четыре компоненты (при исполь-
использовании математических координат пространственные ком-
компоненты должны быть чисто мнимыми). Он является, таким
образом, 4-вектором пространственно-временного мира. Рас-
Рассмотрим этот вектор как некое поле, заданное в виде функ-
функции четырех координат qt = Xi. Образовав скалярное про-
произведение этого вектора на 4-вектор скорости, получим
истинный скаляр в пространстве Минковского. Соответ-
Соответственно заменим потенциальную энергию инвариантом
% (9.9.1)
где константа е — электрический заряд частицы. Запишем
теперь инвариантный интеграл действия (опустив из сооб-
соображений удобства знак минус)
>§) (9.9.2)
При этом мы, как и раньше, желая сохранить равноправие
координат qt, пользуемся в качестве независимой перемен-
переменной некоторым параметром т. В результате функция Лаг-
ранжа принимает вид •
L = mc]/ 2#+-г2
( = 1 i =
Записывая четыре компоненты импульса
Л|<7/. (9.9.3)
( = 1 i = 1
получаем уравнения движения в следующем виде:
где две константы е и т—соответственно заряд и масса
частицы. Умножив обе части уравнения на dx/da, полу-
получим равноценную форму записи
9. Движение заряженной частицы 367
дАа dqa
Перенесем второй член из левой в правую часть и, вос-
воспользовавшись соотношением
а = 1
объединим правую часть в один член
где
-^_^' = ,F . (9.9.9)
dxt dxk lk'
Шесть величин Fik = — Fk! являются компонентами неко-
некоторого антисимметричного «тензора».
Следует помнить, что компоненты Аъ А2, А3 являются
чисто мнимыми, как и координаты qt = xt (i = 1,2,3).
Поэтому все Fik с i, k=\,2, 3 — действительные, а три
компоненты Рц (г = 1, 2, 3) — чисто мнимые. Соотношения
между Fik и обычными величинами электромагнитного
поля оказываются следующими:
Fu=iElt F2i = iE2, F3i=iE3, g]
где Е и H—обычные векторы напряженности электриче-
электрического и магнитного полей.
Для того чтобы придать уравнениям (9.9.6) обычный
вид, снова выберем время t в качестве независимой пере-
переменной. Для этого.умножим обе части уравнений uada/dt
а. =1
368 Гл. IX. Релятивистская механика
Левая часть может быть выражена с помощью понятий нью-
ньютоновой физики. Если ограничиться первыми тремя урав-
уравнениями (t —1,2,3), причем разделить обе части каждого из
них на i, то левые части превратятся в «скорость изменения
импульса» частицы, где «импульс» определяется согласно
(9.5.11). Тогда правые части оказываются «движущей си-
силой», потому что уравнение Ньютона, из которого мы исхо-
исходим, гласит, что «скорость изменения импульса равна
движущей силе»
% = ?. (9.9.12)
Здесь F — 3-вектор, записываемый в привычных символах
обычного векторного исчисления
V (9.9.13)
Эта сила, называемая «силой Лоренца», действует на заря-
заряженную частицу. Последнее уравнение (I = 4) снова вы-
выражает закон сохранения энергии в форме: «скорость из-
изменения кинетической энергии равна работе движущей
силы» [кинетическая энергия при этом подразумевается в
релятивистской форме (9.5.13)].
При последовательном релятивистском изложении мы
должны были бы оперировать лишь с величинами, имею-
имеющими четырехмерный характер. Поэтому умножим обе части
уравнений (9.9.11) на dtlds и запишем
где четыре компоненты 4-скорости связаны соотношением
2 (g)'=l. (9.9.15)
Совместность этого условия с уравнениями движения
(9.9.14) легко усмотреть, если умножить эти уравнения на
dxi/ds и составить сумму. Справа получится нуль из-за
антисимметричности Fik = — Fki. Слева же будем иметь
9. Движение заряженной частицы 369
тг тс -j- , I ,
2 ds -^ [ els
Это и означает, что величина (9.9.15) остается при движении
постоянной.
Уравнения (9.9.14) допускают интересную геометриче-
геометрическую интерпретацию. В гл. VII, п. 8, показано, что движение
фазовой жидкости можно рассматривать как непрерывное
выполнение бесконечно малых канонических поеобразеваний-
Сосредоточим внимание на векторе скорости
^-ы, (9.9.16)
US
и запишем уравнения (9.9.14) в виде
4
|im ut(b + z)-ut(s) = ±_ у f u (9.9.17)
-1
е ^
тс'1 ят
Fia(s)u,(s). (9.9.18)
Расписав подробно эти четыре уравнения, мы увидим, что
они полностью совпадают с уравнениями (9.4.58), задаю-
задающими бесконечно малое преобразование Лоренца. При этом
электрический вектор Е играет роль а, а магнитный вектор
Н — роль Ь. Следовательно, движение вектора скорости
электрона во внешнем электромагнитном поле можно рас-
рассматривать как непрерывную последовательность бесконечно
малых преобразеваний Лоренца, причем компоненты этого
преобразования задаются электромагнитным тензором Т7,*.
Интересным предельным случаем является движение
электрона в поле плоской волны. Здесь Е=Н и Е±Н. Мы
имеем здесь физическую реализацию того частного четырех-
параметрического класса преобразований Лоренца, ко-
который разбирался раньше [см. (9.4.47—9.4.55)], когда все
четыре собственных значения совпадали и три главные оси
сливались в одну, лежащую на нуль-конусе.
Эта трехкратная ось задается выражением
13 Зак. 1646
370 Гл. IX. Релятивистская механика
в то время как другая ось (лежащая вне конуса) совпадает
с направлением вектора напряженности магнитного поля Н.
Рассмотрим теперь ту же самую задачу о движении ме-
методом Гамильтона. Поскольку функция Лагранжа (9.9.3) —
снова однородная форма первого порядка относительно qi,
из теоремы Эйлера F.10.4) следует, что Н = 0. Таким об-
образом, pi должны быть связаны тождеством, которое исполь-
используется в качестве дополнительного условия и занимает
место функции Гамильтона.
Четыре уравнения (9.9.4) сразу дают
4
y(Pi — е-А^\ =т2с\ (9.9.19)
«= i
и совершенно аналогично (9.6.8) получим
U = V р, q, - У (Pi - е- А,J. (9.9.20)
7
Здесь А, выбрано равным 1, что попросту означает нормиров-
нормировку переменной т, по которой берутся производные. Послед-
Последний член эквивалентен функции Гамильтона
{c) (9'9-21)
Кажется удивительным, что при этом никуда вообще
не вошла масса частицы т. Канонические уравнения Га-
Гамильтона имеют вид
(9.9.22)
и можно проверить, что они эквивалентны (9.9.14), если
только в последних заменить множитель тс в левой части
на 1/2, a dx заменить на ds.
Умножим теперь обе части уравнений (9.9.14) на qt
и образуем сумму. Правые части дадут нуль вследствие
антисимметричности тензора Z7,^. Следовательно,
!0. Геодезические линии в четырехмерном мире 371
2] Qi'ii = °- (9.9.23)
!= I
Это означает, что
2 q'f = const. (9.9.24)
<= i
Из дополнительного условия (9.9.19) следует, что
Т
Я? =
в то время как
(9.9.26)
Из сравнения двух последних тождеств видно, что наш —
прежде неопределенный — параметр т теперь оказывается
равным
так что прежние уравнения (9.9.14) восстановлены теперь
полностью.
10 Геодезические линии в четырехмерном мире. Дви-
Движение частицы, свободной от действия внешних сил, можно
описать с помощью принципа действия
d[ds = O. (9.10.1)
Этот принцип сходен с принципом Якоби E.6.12), если толь-
только в последнем опустить член с потенциальной энергией V.
Кроме того, ds —это уже не линейный элемент трехмерного
пространства, а элемент (9.3.8) четырехмерного простран-
пространства Минковского. Предположим, что с помощью некоторого
точечного преобразования мы переходим от прямоугольных
к произвольным криволинейным координатам. Тогда тот же
самый линейный элемент ds примет форму A.5.16), с сум-
суммированием от 1 до 4
13*
372 Гл. IX. Релятивистская механика
ds= Л/ У, gudq.dq,, . (9.10.2)
Л/ У, gudq.dq,, .
Если интересоваться тем, как свободная частица будет дви-
двигаться в криволинейной системе отсчета, то приходится
решать вариационную задачу с функцией Лагранжа
2 Si" Я, 4k, (9.I0.3)
l,k=\
где дифференцирование производится по некоторому пара-
параметру т.
Снова перейдем к задаче Гамильтона, как это было уже
сделано раньше в гл. VI, п. 10. Функция Гамильтона об-
обращается в нуль, потому что опять L — однородная форма
первого порядка относительно q,. Кроме того, р, удовлет-
удовлетворяет тождеству [см. F.10.27I
2 sikPip. = 1, - (9.10.4)
где обозначение gll> относится к элементам матрицы, обрат-
обратной первоначальной матрице с элементами gn, Следователь-
Следовательно, практически функцией Гамильтона нашей задачи яв-
является выражение
#= 2 ГАР*. (9.Ю.5)
1.Т~\
где g — в общем случае какие-то заданные функции пере-
переменных дх <74, а значение постоянной в равенстве Н =
= const следует приравнять 1.
Уравнения движения, имеющие также смысл уравнений
прямых линий в пространстве Мпнковского, принимают вид
?, = 2 2 g" р.,
11. Орбиты планет в теории тяготения Эйнштейна.
Обдумывая тот удивительный и вместе с тем, по-видимому.
II. Орбиты планет в теории тяготения Эйнштейна 373
основополагающий факт, что всякая инертная масса являет-
является одновременно и тяжелой массой, а потому источником
гравитационной силы, Эйнштейн пришел к выводу, что ско-
скорость света не может быть постоянной при наличии гра-
гравитационного поля. Поскольку линейный элемент Мин-
ковского непосредственно приводит к инвариантности све-
светового конуса (9.3.11), вывод Эйнштейна требует замены
этого линейного элемента более общим линейным элемен-
элементом, учитывающим наличие гравитации. С беспрецедент-
беспрецедентной дерзостью математического воображения, имевшей тем
не менее глубокие корни в среде наблюдаемых физических
явлений, Эйнштейн ввел в физику мира геометрию Римана.
Исходя из геометрии пространств с кривизной, он показал,
что не только пространство и время объединяются в одно
целое (что было уже показано Минковским на основе ква-
квазиевклидова четырехмерного линейного элемента), но что
одним геометрическим целым становятся пространство,
время и материя, причем «материя» в этой картине связы-
связывается с кривизной четырехмерного мира.
Изучение идей общей теории относительности выходит
за рамки динамики частицы, однако мы обсудим фундамен-
фундаментальный результат Эйнштейна, отказавшегося от понятия
о «силе тяжести» как о какой-то отдельной силе, и объяс-
объяснившего движение планет как чисто геодезическое явление,
т. е. как движение частицы, на которую не действуют ника-
никакие силы, в четырехмерном пространстве с римановой
структурой.
Теория Эйнштейна обобщает гравитационный потенциал
Ньютона, заменяя его системой десяти величин, определя-
определяющих поле и являющихся компонентами gik = gki четырех-
четырехмерного риманова линейного элемента. Обобщением ска-
скалярного потенциального уравнения Ньютона явились «Эйн-
«Эйнштейновы уравнения поля», позволяющие получить, напри-
например, гравитационное поле Солнца в предположении, что это
поле сферически симметрично. Результат вычисления по-
получается в форме «линейного элемента Шварцшильда»,
который в сферических координатах имеет вид
= (\-j\dx2, ^ г2 (^62 -Ь si n2 б^ф2). (9.11.1)
13В Зак. 164G
374 Гл. IX. Релятивистская механика
Случай а = О соответствует «плоскому» линейному элемен-
элементу Минковского (9.5.2), записанному в сферических коор-
координатах.
Таким образом, задача о движении планет под действием
притяжения центрального тела становится эквивалентной
вычислению геодезической линии в римановом простран-
пространстве с линейным элементом (9.11.1). Это снова предполагает
решение задачи динамики с функцией Гамильтона (9.10.5),
которая в этом случае имеет вид
В действительности мы заранее знаем, что вследствие сфери-
сферической симметрии эта задача сводится к движению в пло-
плоскости ф = я/2. Поэтому достаточно рассмотреть задачу
Гамильтона лишь для трех пар канонических переменных
с функцией Гамильтона
Л = ^-A-=-)/>?-? (9.11.3)
Далее используем то, что 9 и х4 не входят в функцию Га-
Гамильтона явно. Следовательно, они являются циклическими
координатами и заранее смогут быть исключены
ра = const = ->1,
Pi = const = В А. (У. п.4)
Это сводит Н к
f^{-)A-?. ФА,.Б)
Для нас наиболее интересным является не процесс про-
протекания движения во времени, а геометрические орбиты,
по которым планеты вращаются вокруг Солнца; другими
словами, нас интересует связь между гиб. Имеем
(9.11.6)
др2 ~~ г2
11. Орбиты планет в теории тяготения Эйнштейна
и потому
Вместе с теоремой о сохранении энергии,
Н=\, (9.11.8)
это сразу позволяет выразить р± в виде функции г. Опре-
Определение орбит свелось таким образом к одной xeidpamype
d% = т= = 1—= (9-11 -9)
(знак перед квадратным корнем при вычислении рх выбран
так, чтобы увеличение значений г приводило к увеличению
значений 9); или, после введения в качестве переменной
величины, обратной радиусу г'1 = р, имеем
d? =-. (9.11.10)
)
Поскольку знаменатель оказывается квадратным корнем
из кубического многочлена по р, интегрирование приводит
к эллиптическому интегралу. Однако истинное значение а
в солнечной системе столь мало, что A —ар)^1 можно
разложить в ряд по степеням ар и пренебречь членами
третьего порядка, которые очень малы. Поэтому послед-
последний член в знаменателе заменяется на
fap + a2p2), (9.11.11)
а A—ар)~'/2—соответственно на 1 -f- ^ ар, поскольку
следующий член дает уже совершенно ненаблюдаемый
вклад. В результате получаем интеграл
v ' (9.11.12)
/- (А~2 - В2) + *В2 р - A - В3 a"-) f
который интегрируется в элементарных функциях. Квад-
Квадратичную функцию в знаменателе можно разложить на
множители
13В*
376 Гл. IX. Релятивистская механика
-A-В*а-)(р-Р1)(р-р2), (9.11.13)
где р! и р2 определяются \гсловиями
Y^p-=-Px-|-P2. (9-11.14)
(9.11.15)
Если ввести обозначения
2 (Pi-r Ра) = Ро. ^ (Pi — Pi) = b (9.11.16
и положить
р=Р() + /, (9.11.17)
то знаменатель превращается в
Vх 1 — В2 а2 1 й2 —/2, (9.11.18)
а числитель - в
1 -;-2-aPo-fia/. (9.11.19)
Окончательно получаем подинтегральпую функцию
=-. (9.11.20)
У 1 — Вй оB )' й2 — ^ 2 , Г—В2 а^ т'й2—
Это выражение интегрируется в элементарных функциях.
Величина аВ~, согласно (9.11.14), практически равна
Pi + p2. так что
(9.11.21)
Поэтому постоянный множитель перед первым членом
в (9.11.20) можно заменить на 1 -J- ^ р0 а. Интегрирова-
Интегрирование этого члена дает
~p0a4)arccosf . (9.11.22)
Возвращаясь к исходному переменному г, получаем
(9.11.23)
11. Орбиты планет в теории тяготения Эйнштейна 377
а это — фокальное уравнение эллипса с небольшой поправ-
поправкой, приводящей к медленной прецессии эллипса в его соб-
собственной плоскости. Изменение угла от одного минимума г
перигелия) до следующего равно не 2я, а
2л + 3лроа. (9.11.24)
Интегрирование второго члена в (9.11.20) дает малое пе-
периодическое возмущение орбиты (слишком малое для того,
чтобы его можно было наблюдать). Оно не накапливается,
в то время как смещение перигелия происходит на каждом
обороте, так что после сотен витков оно достигает измеримой
величины.
Для получения численной величины а следует восполь-
воспользоваться феноменологической теорией Пуанкаре — Мнн-
ковского, упоминавшейся ранее в п. 8. Эта теория основана
на специальной теории относительности. Она приспособила
ньютоновы уравнения движения планет к требованиям этой
теории с тем условием, чтобы в предельном случае малых
скоростей получить старые результаты. Функция Гамиль-
Гамильтона в этой теории имеет вид (9.8.8). В сферических коор-
координатах для ф -= const =2- л имеем
(9.11.25)
где V—потенциальная энергия гравитационного поля
Солнца (см. задачу 2 в гл. V, п. 2). Из сравнения гамиль-
гамильтониана (9.11.25) с функцией Гамильтона (9.11.3) теории
Эйнштейна видно, что согласие для малых скоростей полу-
получается при выборе т — 1. Если при этом пренебречь ве-
величинами второго порядка, то знаменатель первого члена
принимает вид
1— Щ^ , (9.11.26)
где / — гравитационная постоянная, а М — масса Солнца.
Следовательно, в качестве постоянной интегрирования
в линейном элементе Шварцшпльда (9.11.1) следует взять
величину
ъ-2[:". (9.11.27)
378 Гл. IX. Релятивистская механика
Численное значение отношения 2/Ус2 очень мало
?|= 1,48Ы0-28сл1/г. (9.11.28)
Умножив эту величину на массу Солнца, получим расстоя-
расстояние, называемое «гравитационным радиусом» Солнца и рав-
равное
а = 2,94-105 см. (9.11.29)
Эта величина очень мала по сравнению с расстояниями до
планет. Поэтому разложение в ряд по air было вполне за-
законным.
Для Меркурия, ближайшей к Солнцу планеты, вековой
эффект движения перигелия уже ясно выражен. Если а —
большая полуось орбиты, а е — ее эксцентриситет, то
Ро^-тг—- (9-11.30)
и смещение перигелия на каждом витке равно в соответ-
соответствии с (9.11.24)
Эгот знаменитый результат Эйнштейна оказался в полном
согласии с величиной наблюдавшейся прецессии пери-
перигелия Меркурия (смещение за столетие: вычисленное —
43,03±0,03 сек, измеренное — 42,56±0,94 секI.
Следует заметить, что эффект прецессии дает возмож-
возможность проверить правильность теоретического выражения
для g,n в первом и во втором приближении, а выражения
для ?и—в первом приближении.
12. Гравитационное искривление световых лучей. Рас-
Распространение световых лучен тоже можно рассматривать
как задачу динамики, так как их следует представлять себе
в виде прямых линий, лежащих на нуль-конусе. Они яв-
являются, таким образом, геодезическими линиями нулевой
длины. Ясно, что в формулировке принципа о геодезической
линии функцию Лагранжа (9.10.3) можно умножить на
константу т. При этом в правой части (9.10.4) вместо 1 бу-
будет стоять пг. По мере уменьшения т частицы будут вес
1 С, I е щ с и с с О. М.. Revs. Mod. Phi/s., 19 A947), .4G|.
12. Гравитационное искривление световых лучей 379
сильнее приближаться к световому конусу и в пределе
при т = 0 будут двигаться непосредственно по световому
конусу. В этом случае постоянная функция Гамильтона
обращается в нуль.
Для того чтобы применить наши предыдущие рассужде-
рассуждения к случаю нулевых геодезических линий, тождество Н =
= 1 следует заменить на Н = 0. На формуле (9.11.10) это
скажется лишь в том, что из знаменателя исчезнет постоян-
постоянная —А~2. В результате получим
ар — (9.12.1)
| 1 —ао у-' В21{\ —ар) — f
Пренебрежем сначала членами с а. Тогда интегрирование
даст
= arc cos :ъ
о
или
что означает
rcose = ^. (9.12.2)
Получилось уравнение прямой линии в полярных координа-
координатах, где В —величина, обратная наименьшему расстоянию
г0, на котором луч света проходит мимо Солнца,
В = -. (9.12.3)
Если теперь знаменатель выражения (9.12.1) разложить
в ряд по степеням ар, то члены второго порядка окажутся
пренебрежимо малыми, так что достаточно проинтегриро-
проинтегрировать простое выражение
— dp. (9.12.4)
I V D ~v~ Ot ?3 p -J
fj f ' i 1
Положим теперь
p-l-aB"- = t. ¦ (9.12.5)
380 Гл. IX. Релятивистская механика
В новых переменных, пренебрегая членами второго порядка
по а, получаем
пткуда
0 = arc cos| + ^-a /?2 —р2". (9.12.7)
Устремим теперь г к пределу г = ос. Тогда р обратится
в нуль и, следовательно,
Нам нужно найти угол, косинус которого немного меньше
нуля, а потому угол несколько больше я/2. С достаточной
точностью имеем
е = ^-ь-270- <9-12-9)
Отклонение направлено в сторону Солнца и соответствует
движению по очень крутой гиперболе. Угол отклонения
равен
4 = = (912Л0>
Это соответствует отклонению светового луча под действием
силы тяжести в элементарной ньютоновой схеме. Отклоне-
Отклонение светового луча было предсказано Эйнштейном на основе
«принципа эквивалентности». Этот принцип, бывший руко-
руководящей идеей ранних работ Эйнштейна, помог ему осо-
осознать, что линейный элемент Минковского не может со-
сохраниться при наличии гравитации. Как видно из наших
выкладок, отклонение порождается членом линейного эле-
элемента, содержащим dx\, т. е. компонентой^.
Из второго члена в правой части (9.12.7) видно, что
компонента gn вызывает добавочное отклонение луча, ве-
величина которого тоже равна а/2/'о. Поэтому результирующее
отклонение оказывается вдвое больше полученного раньше
13. Гравитационное красное смещение спектральных линий 381
Ц = ^ = 2Ж. (9.12.11)
Таким образом, временная часть линейного элемента и часть,
обусловленная неевклндовостью пространства, вносят оди-
одинаковый вклад в величину отклонения луча света, проходя-
проходящего вблизи солнечного диска. Полное отклонение видимого
положения звезды вдвое больше полученной величины, так
как отклонение осуществляется симметричным образом по
обе стороны от Солнца. Полное отклонение луча
6--=2ii--^. (9.12.12)
Для светового луча, проходящего мимо солнечного диска,
6 = 1,75". (9.12.13)
Астрономические наблюдения, производимые при более пли
менее благоприятных условиях во время довольно редко
бывающих полных солнечных затмений, ясно показывают
существование отклонения световых лучен на приблизи-
приблизительно правильную величину. Согласие теории с эксперимен-
экспериментом не хуже, чем можно было бы в этих условиях ожидать.
13. Гравитационное красное смещение спектральных
линий. В п. 2 мы обсуждали теорию эффекта Допплера. Этот
эффект появляется из-за того, что два наблюдателя, движу-
движущиеся один относительно другого и измеряющие каждый
своими собственными часами время между двумя световыми
сигналами, получают различные результаты. Если время,
измеренное наблюдателями, равно t и /', то эффект Доппле-
Допплера, выраженный в частотах, составляет
J = p. (9.13.1)
Рассмотрим теперь два световых сигнала, посланных
с Солнца и принятых на Земле. Ввиду статического харак-
характера солнечного гравитационного поля (gik не зависит
от д-j) определенное A.v4, зафиксированное на Солнце, сохра-
сохранится и при приходе сигналов на Землю. Однако соб-
собственное время, измеренное часами на Солнце и на Земле,
окажется разным
382 Гл. IX. Релятивистская механика
* = 1?„Дл-4. r = Vgitbxit (9.13.2)
а потому
^ ^. (9.13.3)
^ g<u
Ввиду малости а с достаточной точностью имеем
8Л1 = L^i2^ _ Wl_l^ (9.13.4)
gu 1 - ij2r 2 \r r'j ¦
Положив
v' - v t Av (9.13.5)
и учитывая малость эффекта, получим
А; = — ? = — Щ- = —2,12-Ю-6 (9.13.6)
(величина Mr' по сравнению с Mr пренебрежимо мала).
Следовательно, спектральные линии, излучаемые Солнцем,
приходят на Землю несколько смещенными в сторону мень-
меньших частот, т. е. больших длин волн, вследствие гравита-
гравитационного воздействия со стороны материн. Этот важный
результат Эйнштейна был сначала получен из «принципа
эквивалентности». В окончательной теории этот же самый
результат оказался геометрическим следствием четырех-
четырехмерной рнмановой структуры пространственно-временно-
пространственно-временного мира.
Обычно бывает трудно отличить гравитационный доп-
плеровскнй сдвиг от кинематического. Грав.итационный
сдвиг для Солнца, пересчитанный в кинематический эк-
эквивалент, по превышает 0,64 кмIсек, что трудно выделить
среди других возмущений. Однако блестящее эксперимен-
экспериментальное подтверждение существования такого эффекта было
получено из спектральных наблюдении за «черным спут-
спутником» звезды Сириус. Массы обеих звезд известны из ор-
орбитальных измерений. Из светимости черного спутника оп-
определяется его радиус, а следовательно, и гравитационный
потенциал на его поверхности. Эта звезда относится к ка-
категории «белых карликов». Она имеет размеры Земли, а
массу Солнца. Этим определяется ее фантастическая илот-
13. Гравитационное красное смещение спектральных линий 383
ность, в 50 000 раз большая плотности воды. Гравитационное
красное смещение оказывается в 40 раз большим, чем
у Солнца, и поэтому оно легко измеряется. Тщательные
измерения В. С. Адамса1 в обсерватории на горе Вильсон
блестяще подтвердили теоретическое предсказание (теоре-
(теоретическое значение, выраженное при помощи кинематическо-
кинематического эквивалента, 26 км/сек, экспериментальное 23 км/сек).
1 См. Astrophysical Journal, 67 A928), 195.
ГЛАВ А X
ИСТОРИЧЕСКИЙ ОБЗОР1
По-настоящему хорошей и адекватной истории развития
аналитических принципов механики еще не написано.
Книга Дюринга2, претендующая на изложение этого вопро-
вопроса, содержит мало истории по существу. Классическая кни-
книга Маха о развитии механики3 в первую очередь посвящена
ее физическим принципам и в меньшей мере ее аналитиче-
аналитическому аспекту. Мах столь мало симпатизировал всему, что
хоть сколько-нибудь напоминало априорное рационали-
рационалистическое мышление, что он так и не смог подняться
до правильной оценки аналитических методов и их роли
в физических науках. Тот факт, что развитие вариационных
принципов — этой великолепной главы эволюции челове-
человеческого мышления — никогда не вызывало энтузиазма на-
научных кругов и считалось лишь эффективным методом опи-
описания механических явлений, является результатом преоб-
преобладающего влияния позитивистского типа философии в на-
научном мышлении в течение последних пятидесяти лет.
Этим объясняется отсутствие систематического историческо-
исторического описания этой ветви математической физики, в котором
развитие ее прослеживалось бы вплоть до наших дней4.
1 Исторический обзор носит фрагментарный характер и в от-
отдельных местах не совсем точно излагает исторические факты. Не-
Необходимый материал по этому вопросу читатель найдет в книге:
Вариационные принципы механики, сб. статей под ред. Л. С. По-
лака, Физматгпз, М., 1959. — Прим. ред.
- D u h г i п g Е. Е., Kritische Geschichte cler allgemeinen
Principien der Mechanik (Leipzig, 1877).
3 Mach E., The Science of Mechanics (Chicago, Open Court
Publishing Company, 1919).
4 В настоящее время это утверждение уже устарело в связи
с появлением выдающегося фундаментального исторического тру-
труда Р. Дюга [D u ga s, R., Histoire de la Mecanique (Editions de
Griffon. Neuchatel, 1950) |, я котором развитие механических идей
и принципов прослеживается со времен древних греков до наших
дней. Продолжение этой работы [La Ak'canique an XVII Siecle
A954)] посвящено преимущественно великому периоду деятель-
деятельности Кеплера, Декарта, Гюйгенса, Ньютона н Лейбница,
Гл. X. Исторический обзор 385
Короткий очерк А. Манера1 освещает лишь эпизод Монер-
тюи — Эйлер—Лагранж и совершенно опускает развитие
теории Гамильтона — Якоби. При описании этой стадии
развития теории, являющейся в основном продуктом девят-
девятнадцатого столетия, автор использовал отдельные приме-
примечания из математической энциклопедии2. Полезными были
также прекрасные статьи физической энциклопедии3 под
редакцией Гейгера и Шила. Настоящий исторический об-
обзор представляет собой лишь набросок главных направле-
направлений работы мысли. Поэтому нам показалось целесообразным
сгруппировать материал вокруг имен ряда ведущих ученых,
внесших наиболее существенный вклад в эти исследо-
исследования.
Аристотель C84—322 до н. э.). В «Физике» Аристотеля
содержалась первая завуалированная формулировка прин-
принципа виртуальных перемещений. Он вывел закон рычага
из принципа: «силы уравновешивают друг друга, если они
обратно пропорциональны скоростям». Поскольку рассмат-
рассматривается равновесие рычага, а аргументация основана на
скоростях, здесь уже явно присутствует идея «виртуальных
перемещений», обусловленных какой-нибудь малой воз-
возмущающей силой. Термин «виртуальные скорости» вместо
«виртуальные перемещения», широко употреблявшийся
в XIX столетии, восходит к формулировке принципа, дан-
данной Аристотелем. Тот же самый принцип, но в новой фор-
формулировке: «то, что проигрывается в силе, выигрывается
в скорости» — был использован Стевином A548—1620) при
выводе законов равновесия блоков.
Галилей A564—1642). Всемирно известен огромный вклад
в механику, внесенный Галилеем. Однако, отдавая щедрую
дань заслугам Галилея —эмпирика, отца эксперименталь-
экспериментальных методов, — часто забывают о его великих заслугах
как физика-теоретика. Его существенный вклад в теоре-
теоретическую механику заключается в исправлении формулн-
1 Mayer A., Geschichte cles Princips der kleinsten Aktion
(Leipzig, 1877)._
2 Encyklopadie der mathematischen Wissenschaften, IV, Mecha-
nik (Leipzig, 1904—1935), статьи 12 и 13, написанные Г. Пранджем.
3 Handbuch der Physik (Berlin, 1927). V, Mechanics of Points
and Rigid Bodies: гл. 1 «Аксиомы механики» Г. Хамеля и гл. 2
«Принципы механики» Л. Нордгенма.
386 Гл. X. Исторический обзор
ровки принципа Аристотеля. Галилей понял то важное об-
обстоятельство, что в формулировке принципа виртуальных
скоростей должны подразумеваться не скорости вообще,
а лишь скорости в направлении действия силы. Его метод
приводит к понятию «работы» как «произведения силы на
перемещение в направлении действия силы». Применив
принцип виртуальных перемещений к равновесию тела на
наклонной плоскости, Галилей показал, что этот принцип
приводит к тому же самому результату, который был полу-
получен Стевином из энергетических соображений. Галилей пока-
показал также применимость этого принципа в гидростатике,
где он вывел с его помощью законы гидростатического
давления, установленные ранее Архимедом на основе по-
понятия о центре масс.
Иоганн Бернулли A667—1748). Во всех предыдущих
формулировках принципа всегда фигурировали две силы:
«движущая сила» и «нагрузка». При этом закон формулиро-
формулировался с помощью некоторой пропорции. Иоганн Бернулли
первый увидел в принципе виртуальных перемещений общий
принцип статики, с помощью которого могут быть решены
все задачи о равновесии. Он отказывается от использования
пропорций и вводит произвгдение силы и виртуальной ско-
скорости в направлении действия силы, взятое с положитель-
положительным или отрицательным знаком, в зависимости от того,
является ли угол между силой и скоростью острым или ту-
тупым. В письме, написанном Вариньону в 1717 г. Бернулли
сформулировал общий принцип, согласно которому при рав-
равновесии сил сумма всех таких произведений обращается
в нуль на всех возможных бесконечно малых перемещениях.
Теперь уже принцип виртуальных перемещений мог при-
применяться для любых сил и любых механических усло-
условий.
Довольно любопытна также и другая работа Бернулли.
Сравнивая движение частицы в поле заданной силы с распро-
распространением света в оптически неоднородной среде, он по-
попытался создать на этой основе механическую теорию коэф-
коэффициента преломления. Этим Бернулли предвосхитил вели-
великую теорию Гамильтона, в которой было показано, что
принцип наименьшего действия в механике и принцип
минимального времени распространения, носящий имя
Ферма, аналогичны в своих выводах, что позволяет
Гл. X. Исторический обзор 387
интерпретировать оптические явления при помощи понятий
механики и наоборот.
Ньютон A642—1727). На основе более ранних иссле-
исследований Леонардо да Винчи и Галилея Ньютоном были
сформулированы основные уравнения движения. Были вве-
введены такие фундаментальные понятия, как импульс и дей-
действующая сила. Ньютонов закон движения решил задачу
о движении изолированной частицы. Он мог также рассмат-
рассматриваться как общее решение задачи о движении, если толь-
только согласиться разбивать любую совокупность масс на изо-
изолированные частицы. Возникла, однако, трудность, связан-
связанная с тем, что не всегда были известны действующие силы.
Эта трудность была частично преодолена с помощью треть-
третьего закона Ньютона, провозгласившего принцип равенства
действия и противодействия. Это исключило неизвестные
силы в случае движения твердого тела, однако движение
механических систем с более сложными кинематическими
условиями не всегда поддавалось ньютонову анализу.
Последователи Ньютона считали законы Ньютона абсолют-
абсолютными и универсальными законами природы, интерпретируя
их с таким догматизмом, к которому их создатель никогда
бы не присоединился. Это догматическое почитание ньюто-
ньютоновой механики частиц помешало физикам отнестись без
предубеждения к аналитическим принципам, появившимся
в течение XVIII века благодаря работам ведущих француз-
французских математиков этого периода. Даже великий вклад
Гамильтона в механику не был оценен современниками
из-за преобладающего влияния ньютоновой формы меха-
механики.
Лейбниц A646—1716). В то время как Ньютон предла-
предлагал измерять движение скоростью изменения импульса,
Лейбниц отстаивал другую величину — «живую силу»
(«vis viva»), которая с точностью до множителя -^ совпадает
с нашим понятием кинетической энергии. Лейбниц заменил
уравнение Ньютона уравнением, утверждавшим, что «изме-
«изменение кинетической энергии равно работе, произведенной
силой». Идеи Лейбница близки к развившемуся позднее ана-
аналитическому направлению. И понятие кинетической энергии,
и понятие работы, совершаемой действующей силой, легко
можно было обобщить, переходя от одной частицы к произ-
Гл. X. Исторический обзор
вольным системам частиц, без необходимости выделения
отдельных частиц. Работу сил можно было заменить другой,
более фундаментальной величиной: «потенциальной энер-
энергией», взятой с обратным знаком. Этот термин был введен
Ренкином в середине XIX века. Как кинетическая, так и
потенциальная энергии были величинами, характеризую-
характеризующими систему в целом. В этом состояло одно из их сущест-
существенных преимуществ при построении динамики систем взаи-
взаимосвязанных частиц. Второе преимущество заключалось
в том, что, несмотря на свою скалярную природу, эти ве-
величины смогли отразить в себе все силы, действовавшие на
систему, независимо от их численности и степени сложности.
Это стало возможным благодаря применению операции
варьирования к кинетической и потенциальной энергиям.
Таким образом, спор между Ньютоном и Лейбницем о по-
понятии силы был в какой-то мере спором о методе. В то время
как ньютоново определение было, пожалуй, более удобно
в векторной механике, идеи Лейбница явились краеуголь-
краеугольным камнем аналитических методов.
Даламбер A717—1783). Важный толчок развитию анали-
аналитических методов изучения механических систем был дан
Даламбером, который свел произвольную задачу о движении
к задаче о равновесии путем добавления к заданной систе-
системе внешних сил некоторой новой силы, порождаемой движе-
движением. Эта новая сила, сила инерции, совместно с остальными
силами приводит к равновесию. Поэтому принцип виртуаль-
виртуальных перемещений оказывается применимым к любым движу-
движущимся системам. Все уравнения движения произвольной
механической системы охватываются, таким образом,
одним вариационным принципом.
Мопертюи A698—1759). Мопертюп предложил некую
универсальную гипотезу, согласно которой любые события
в природе описываются при помощи определенной величины,
называемой «действием», которое принимает минимальное
значение. Смелый универсализм этого предположения
восхитителен, он вполне в духе религиозного мистицизма
XVIII века. Однако математические возможности Мопер-
Мопертюи были гораздо ниже уровня его времени. Мопертюи
не смог четко определить величину, которая должна быть
минимизирована. Он применил свой принцип при выводе
закона упругих столкновений. При применении вариацион-
Гл. X. Исторический обзор 389
ных методов в этой задаче имеется ряд тонкостей, так что
это требует большого искусства. Мопертюи получил правиль-
правильный результат при совершенно неверном решении. Более
удовлетворительна его работа о законе преломления, в ко-
которой он показал, как принцип минимального времени рас-
распространения Ферма может быть заменен принципом наи-
наименьшего действия. Этот результат был еще раньше полу-
получен Иоганном Бернулли.
Очень интересен эпизод Мопертюи — Эйлер, описанный
Майером в упоминавшейся выше статье. Приоритет Мопер-
Мопертюи оспаривался Кёнигом, утверждавшим, что еще Лейб
ниц высказывал те же самые идеи в частном письме. Само
это письмо никогда не предъявлялось. В возникшей полеми-
полемике Эйлер самым решительным образом встал на защиту при-
приоритета Мопертюи. Вместе с тем, он сам открыл этот прин
цип по крайней мере на год раньше Мопертюи. причем
в совершенно корректной форме. В частности, Эйлер знал
что закону сохранения энергии должны удовлетворять и
действительное, и варьированное движения. Без этого
дополнительного условия «действие» Мопертюи — даже
после замены применявшейся им суммы на интеграл —теряет
всякий смысл. Хотя Эйлер несомненно должен был заметить
слабость аргументации Мопертюи, он воздержался от какой
бы то ни было критики и воздержался даже от упоминания
о своих собственных результатах в этой области, употребив
весь свой авторитет на то, чтобы добиться признания Мопер-
гюи автором принципа наименьшего действия. Даже зная
необычайную щедрость и благородсгво характера Эйлера
поражаешься его самоотверженной скромности, которая не
имеет себе подобной в истории науки, изобилующей проти
воположными примерами.
Эйлер A707—1783). Эйлер внес очень существенный вклад
в развитие теоретической механики. При изучении враще-
вращения твердого тела он впервые использовал кинематические
переменные, введя в качестве вспомогательных переменных
три компоненты угловой скорости. Замечательны его пио
нерские работы в области вариационной механики. Эйлер
начал систематическое изучение вариационных задач
иногда называемых «изопериметрическими». Эти задачи на
максимум-минимум привлекали к себе внимание лучших
умов — таких, как Ньютон. Лейбниц. Яков и Иоганн
ЗРО Гл. X. Исторический обзор
Бернулли — с момента появления дифференциального
исчисления. Эйлер нашел дифференциальное уравнение,
дававшее в явном виде решение для широкого класса таких
задач. Хотя Эйлер и не сформулировал четко принцип
наименьшего действия, что было впервые сделано Лагран-
жем, его применения этого принципа к механическим зада-
задачам, по сути дела, эквивалентны лагранжевой явной форму-
формулировке.
Лагранж A736—1813). Достижения Лагранжа, этого
величайшего математика XVIII века, во многих отношениях
параллельны работам Эйлера. Лагранж вполне независи-
независимо от Эйлера получил решение изопериметрических задач,
сделав это совершенно новыми методами. Он разработал для
этой цели новое, вариационное исчисление. Он также понял
преимущество вариационных принципов в связи с той сво-
свободой, которую мы получаем, описывая положение механи-
механической системы при помощи выбираемой по нашему усмотре-
усмотрению совокупности параметров («обобщенные координаты»).
Если принцип виртуальных перемещений и принцип Далам-
бера позволили рассматривать механическую систему как
нечто целое, не разбивая ее на изолированные частицы, то
уравнения Лагранжа добавили еще одно, чрезвычайно важ-
важное свойство — инвариантность относительно произвольных
преобразований координат Это позволило выбирать системы
координат, удобные для данной конкретной задачи. В своей
«Аналитической механике» A788) Лагранж создал новое,
необычайно мощное оружие для решения любых механиче-
механических задач при помощи чистых вычислений, без каких бы
то ни было физических или геометрических соображений,
при условии, что кинетическая и потенциальная энергии
заданы в абстрактной аналитической форме. Относясь
к этому выдающемуся результату со своей обычной скром-
скромностью. Лагранж писал в предисловии к своей книге: «Чи-
«Читатель не найдет в этой книге рисунков. Развитые мною ме-
методы не требуют ни каких бы то ни было построений, ни гео-
геометрических или механических аргументов — одни только
алгебраические операции в соответствии с последователь-
последовательными едиными правилами». Лагранж таким образом создал
программу и основания аналитической механики.
Метод использования дополнительных условий при
помощи неопределенных множителей — еще одно бессмерт-
Гл. X. Исторический обзор 391
ное открытие Лагранжа, играющее жизненно важную
роль в теоретической механике. Гамильтон, сам один из
выдающихся деятелей в области аналитической механики,
назвал Лагранжа «Шекспиром математики», имея в виду
необычайную красоту, элегантность и глубину его методов.
Гамильтон A805—1865). Совершенно новый мир, скры-
скрывавшийся за достижениями Лагранжа, открылся в иссле-
исследованиях сэра Уильяма Роуана Гамильтона. Уравнения
Лагранжа были довольно сложными дифференциальными
уравнениями второго порядка. Гамильтон сумел преобразо-
преобразовать их в систему дифференциальных уравнений первого
порядка с удвоенным числом переменных; позиционные
координаты и импульсы рассматривались при этом как не-
независимые переменные. Дифференциальные уравнения Га-
Гамильтона линейны и разрешены относительно производных.
Это простейшая и наиболее удобная форма, к которой могут
быть приведены уравнения вариационной задачи. Отсюда
название «канонические уравнения», данное им Якоби.
Именно Гамильтон, преобразовав принцип Даламбера,
впервые дал точную формулировку принципа наименьшего
действия. Форма, в которой применяли этот принцип Эйлер
и Лагранж, справедлива лишь для консервативных (скле-
(склерономных) систем.
Одно из наиболее значительных открытий Гамильтона за-
заключается в осознании и реализации того факта, что задачи
механики и геометрической оптики могут рассматриваться
с единой точки зрения. Он оперировал с «характеристиче-
«характеристической» пли «главной» функцией и в оптике, и в механике.
Эта функция обладает тем свойством, что при помощи
лишь дифференцирования из нее можно определить как
траекторию движущейся частицы, так и траекторию свето-
светового луча. Более того, и в оптике, и в механике характерис-
характеристическая функция удовлетворяет одному и тому же диф-
дифференциальному уравнению. Решение этого уравнения
в частных производных при соответствующих граничных
условиях эквивалентно решению уравнений движения.
Якоби A804—1851). Якоби был одним из немногих мате-
математиков, которые сразу поняли необычайную важность и
красоту методов Гамильтона. Якоби развил теорию преоб-
преобразований канонических уравнений, называемую теорией
«канонических преобразований». Он интепретировал на ос-
392 Гл. X. Исторический обзор
нове этой теории характеристическую функцию, показав,
что функция, использованная Гамильтоном, является лишь
одним частным случаем функции, производящей нужное
каноническое преобразование. Он значительно расширил
применимость уравнения в частных производных Гамиль-
гона доказав, что для полного решения задачи о движении
достаточно любого полного интеграла этого уравнения, без
специальных граничных условий, требовавшихся Гамиль-
гоном.
Якоби дал также новую формулировку принципа наи-
наименьшего действия для случая независимости от времени,
который рассматривали Эйлер и Лагранж. Он критиковал
их формулировку на том основании, что область интегриро-
интегрирования у них не удовлетворяет условию варьирования при
фиксированных граничных значениях. Хотя в действитель-
действительности Эйлер и Лагранж применяли свой принцип вполне
корректно, исключение времени из вариационного интегра-
интеграла, произведенное Якоби, привело к новому принципу, оп-
определяющему траекторию движущейся точки без всякого
указания на то, как движение происходит во времени.
Сходство этого принципа с принципом Ферма о наимень-
наименьшем времени распространения света, из которого может быть
определена траектория светового луча, непосредственно
устанавливало аналогию между оптическими и механиче-
механическими явлениями.
Гаусс A777—1855). Несколько в стороне от главного
направления лежит «принцип наименьшего принуждения»,
установленный выдающимся математиком Гауссом. В этом
принципе не используется в качестве минимизируемой функ-
функции интеграл по времени. Гаусс вводит для произвольного
момента времени определенную положительную величину,
называемую «принуждением», и минимизацией этой ве-
величины получает ускорения, считая скорости и координаты
в этот момент заданными. Принцип Гаусса является истин-
истинным минимальным принципом, а не просто принципом ста-
стационарного значения. Однако он не обладает аналитически-
аналитическими преимуществами других принципов, поскольку «принуж-
«принуждение» включает в себя, помимо позиционных координат
и скоростей, еще и ускорения. Герц дал геометрическую
интерпретацию «принуждения» Гаусса, представив его как
геодезическую кривизну в «пространстве конфигураций»
Гл. X. Исторический обзор 393
3N измерений. В этом пространстве принцип Гаусса может
быть сформулирован как «принцип прямейшего пути». Та-
Такая интерпретация устанавливает тесную связь между
принципом Гаусса и принципом Якоби.
Позднейшее развитие аналитической механики. Мы про-
проследили историческое развитие вариационных принципов
механики. Таким образом, наша задача в части, касающей-
касающейся основного предмета настоящей книги, завершена. Од-
Однако в сооружение величественного здания этой науки вне-
внесли свой вклад и многие другие ученые, разрабатывавшие
аналитические методы и добавившие к основной теории цен-
ценные детали, не говоря уже о решении частных задач. Крат-
Кратко отметим наиболее яркие из них.
Пуассон вместе с Лагранжем ввел в теорию возмущений
выражения, обозначаемые при помощи скобок, и подошел
вплотную к теории канонических преобразований.
Делоне разработал аналитическую теорию многоперио-
многопериодических систем с разделяющимися переменными — метод,
который приобрел необычайную важность в теории атома
Бора.
Э. Дж. Раус и независимо Г. Гельмгольц обнаружили
важность «скоростных» или «циклических переменных»
и разработали общие методы их исключения.
Дж. Дж. Томсон размышлял о возможности построения
бессиловой механики в предположении, что существуют цик-
циклические координаты, т. е. «игнорируемые», потому что
они могут быть исключены.
Г. Герц развил эти идеи более последовательно, пред-
представляя себе потенциальную энергию как кинетическую
энергию скрытых движений. Герц также развил геометри-
геометрические аспекты механики, изображая движение произволь-
произвольной механической системы как движение одной частицы
в пространстве многих измерений в «пространстве конфи-
конфигураций».
С. Ли ввел груиповые представления в теорию канони-
канонических преобразований, уделив особое внимание группе
бесконечно малых преобразований.
А. Пуанкаре изучал «интегральные инварианты» кано-
канонических уравнений. Он внес ценный вклад в теорию воз-
возмущений в применении к астрономии и особенно в исследо-
исследование задачи трех тел. Его интересовали также вопросы
14 Зак. 1646
394 Гл. X. Исторический обзор
геометрии пространства конфигураций «в большом», ко-
которые привели его к фундаментальным топологическим
исследованиям.
77. Аппель изучал аналитические свойства неголономных
систем.
Вклад многих современных ученых в различные новей-
новейшие главы аналитической механики выходит за рамки этой
книги, посвященной лишь основным принципам.
Связь аналитической механики и современной физики.
Два великих достижения современной физики: теория отно-
относительности и квантовая механика — теснейшим образом
связаны с аналитической механикой. Теория относительно-
относительности Эйнштейна революционизировала все области физики.
Было показано, что ньютонова механика справедлива лишь
приближенно для скоростей, малых по сравнению со скоро-
скоростью света. Однако аналитический метод, основанный на
использовании принципа наименьшего действия, остался
неизменным. Модифицирована была лишь функция Лаг-
ранжа; получение же дифференциальных уравнений дви-
движения из принципа минимума осталось. Действительно,
полная независимость вариационного принципа от какой-
либо специальной системы отсчета делала его особенно цен-
ценным для построения уравнений, удовлетворяющих прин-
принципу общей относительности. Этот принцип требует, чтобы
основные уравнения природы оставались инвариантными
при произвольных преобразованиях координат.
Другая революция в современной теоретической физи-
физике — квантовая теория — также тесно связана с аналити-
аналитической механикой, особенно с ее гамильтоновой формой.
Теория электронных орбит Бора великолепно использовала
гамильтоновы методы, когда выяснилась важность систем
с разделяющимися переменными при формулировке кван-
квантовых условий. Если раньше методы Гамильтона изучались
лишь астрономами, то формулировка квантовых условий
Зоммерфельдом и Вильсоном в 1916 г. и расчет эффекта
Штарка, сделанный в том же году Эпштейном, убедительно
продемонстрировали важность гамильтоновых идей при
изучении структуры атома.
Новая интерпретация законов природы при помощи поня-
понятий волновой механики в теориях Шредингера, Гейзенберга
и Дирака также выросла из методов Гамильтона. Сопря-
Гл. X. Исторический обзор 395
женные переменные и канонические преобразования состав-
составляют часть фундамента новой теории. Как новая черта,
в теорию Гейзенберга, Борна и Иордана добавлен матрич-
матричный характер q- и р-переменных; дираковская же теория
рассматривает сопряженные переменные как не коммути-
коммутирующие величины. С другой стороны, Шредингер, исходя
из операционной точки зрения, интерпретировал дифферен-
дифференциальное уравнение в частных производных Гамильтона —
Якоби как волновое уравнение. Исходным пунктом Шре-
дингера была оптико-механическая аналогия Гамильтона.
Несмотря на радикальное отличие новых идей от концеп-
концепций старой физики, основной чертой дифференциальных
уравнений волновой механики является их самосопряжен-
самосопряженность. Это означает, что они получаются из вариационного
принципа. Поэтому, несмотря на все различия в интерпре-
интерпретациях, вариационные принципы механики продолжают
играть важную роль в описании всех явлений природы.
14s
ПРИЛОЖЕНИЕ
(к гл. IV, п. 4, стр. 197—201)
Важный переход от лагранжевой к гамильтоновой форме
динамики можно совершить более непосредственным об-
образом, без использования преобразования Лежандра, ос-
основываясь исключительно на методе неопределенных мно-
множителей Лагранжа. Рассмотрим заданную функцию Лаг-
ранжа L = L(q1,..., qn, <7i>---, <7л. 0- Будем рассматривать
qt как некоторую вторую группу независимых переменных
Wi, т. е. напишем
L = L(<7i,...,<7n, Wi, ...,wn, I). (I)
Это можно сделать, если в качестве дополнительных усло-
условий нашей задачи взять уравнения
g',—wi = 0. B)
Естественно, что новая формулировка идентична перво-
первоначальной, так как исключение wt при помощи дополни-
дополнительных условий приводит обратно к первоначальной за-
задаче.
Однако новую задачу уже можно решать при помощи
метода неопределенных множителей Лагранжа, заменив
первоначальную функцию L на
L' = L+ ^ptiv-wt), C)
i = 1
где через р,- обозначены лагранжевы множители. Новая
задача имеет утроенное количество переменных, а именно
qi, pi и Wi. Заметим, однако, что Wt входят только как
алгебраические переменные, без производных. Такие
динамические переменные могут быть в дальнейшем исклю-
исключены (см. стр. 154, задача 3). Исключение какой-либо пере-
переменной означает, что соотношение, имеющее место для истин-
истинного движения, предполагается выполняющимся также и
для варьированного движения. Это в общем случае недо-
Приложение 397
пустимо, так как может нарушиться условие обращения
вариации в нуль в граничных точках области. Однако в
случае алгебраической переменной интегрирование по ча-
частям отсутствует, так что ограничивающее условие: «вариа-
«вариация должна обращаться в нуль в граничных точках» —
может быть опущено. Следовательно, исключение алгебра-
алгебраических переменных всегда допустимо.
Исключение и\ при помощи уравнений
f— = 0 D)
ow •
означает, что мы должны решить уравнения
-5 pi —¦ 0 E)
OW
I
относительно о>,-. Однако это означает, что нам нужно раз-
разрешить уравнения
—:- — Pi (Ь)
(с первоначальным L) относительно qit записав их в виде
функций pi и qi. Если положить
н= 2 pi™-' — 1 (q*,w«,t), G)
»¦= i
то функция L' имеет вид
L'= 2 Piq'i—H(qa,pa,t). (8)
Поскольку Wi будет в дальнейшем везде исключено, с таким
же успехом можно определить
п
1= 1
с добавочным условием, что qt должны быть исключены
при помощи уравнений F). Это в точности та самая про-
программа, по которой задача Лагранжа преобразуется в за-
задачу Гамильтона.
398 Приложение
Возможность обратного перехода от формулировки Га-
Гамильтона к формулировке Лагранжа следует из того, что
гамильтоново подинтегральное выражение (8) является
чисто алгебраическим относительно р,-, поэтому р, могут быть
исключены. Это означает, что нам следовало бы решить
уравнения
dLr ' дИ ~
q0
выразив pi через qt и qt. Подстановка этих р{ в L' дает
некоторую функцию qi и qit которая есть не что иное, как
первоначальная функция Лагранжа L. Таким образом,
обратимость преобразования установлена. При получении
этих результатов мы пользовались только методом неопре-
неопределенных множителей Лагранжа и исключением алгебраи-
алгебраических переменных.
Еще одно преимущество этого формализма заключается
в том, что мы сразу же получаем преобразование вариа-
вариационной задачи с производными высших порядков к кано-
канонической форме, не прибегая к процессу последовательного
исключения производных, описанному на стр. 200. Пред-
Предположим, например, что задана функция Лагранжа
L = L(y,y,'y,...,y™,t). A1)
Положим
У = <7ъ 9i = ?2. <?2 = <7з, ¦••, <7„ = <7и-ь A2)
V = L(<7i, q2,...,qn+i,t) + pi (q± — q2) +
+ P2 (qz — qs) + ¦¦¦ + Рп(Яп~Яп+\)- A3)
Это означает, что
*•'= 2 Piqi—H, A4)
где
H = PiQz + РгЯз + ¦¦¦ + Pnqn+i —L(qi, ...,qn+i,t). A5)
Единственная алгебраическая переменная, которая должна
быть исключена, это qn+\- Здесь используется уравнение
dL!dqn+i=pn. A6)
В результате получается каноническая система первого
порядка с п парами переменных qlt q2, ...,qn, plt p2,..., pn.
БИБЛИОГРАФИЯ
По аналитической механике существует много учебников и, по
мнению автора, для первого чтения по этому вопросу могут быть
полезны следующие книги:
Ames J. S., Murnaghan F. D., Theoretical Mechanics
(Ginn & Co., 1929).
Сое С. J., Theoretical Mechanics: A Vectorial Treatment (Macmil-
lan, 1938).
С о u r a n t R., H i 1 b e r t D., Methoden der mathematischen
Physik (Springer, v. 1, 1931, v. II, 1937); русский перевод:
Курант Р., Гильберт Д., Методы математической фи-
физики, Физматгиз, М., 1951.
Курант Р., Уравнения с частными производными, «Мир»,
М., 1964.
М а с М i I I a n W. D., Statics and Dynamics of a Particle
(McGraw-Hill, 1927).
Phillips H. В., Vector Analysis (Wiley, 1933).
Synge J. L., Griffith B. A., Principles of Mechanics
(McGraw-Hill, 1942).
Wint ner A., The Analytical Foundations of Celestial Mecha-
Mechanics (Princeton, 1941).
Для подготовленных читателей:
A p p e 1 1 P. E., Traite de mecanique rationelle, vv. I and II
(Gauthier-Villars, 1909); русский перевод: A n п е л ь П.,
Теоретическая механика, т. I и II, Физматгиз, М., 1960.
В i г k h о f f G. D., Dynamical Systems (American Math.
Soc, 1927); русский перевод: Биркгофф Г., Динами-
Динамические системы, Гостехиздат, М. — Л., 1941.
С а г t a n E., Lecons sur les invariants integraux (Hermann, 1922);
русский перевод: К а р т а н Э., Интегральные инварианты,
Гостехиздат, М., 1940.
N о г d h e i m L., Die Prinzipe der Dynamik (Handbuch der
Physik, v. V, pp. 43—90).
Nordheim L., Fues E., Die Hamilton — Jacobische Theo-
rie der Dynamik (Handbuch der Physik, v. V, pp. 91—130).
P г а п g e G., Die allgemeinen Integrationsmethoden der analy-
tischen Mechanik (Encyklopadie der mathematischen Wis-
senschaften, v. IV, № 2, issue 4).
W h i t t a k e г Е. Т., A Treatise on the Analytical Dynamics of
Particles and Rigid Bodies (Cambridge, 1917); русский перевод:
Уиттекер Е. Т., Аналитическая динамика, ОНТИ
М., 1937.
400 Библиография
Превосходный исторический обзор старой литературы по теорети-
теоретической динамике вплоть до 1860 года можно найти в работе
Cayley A., Collected Mathematical Papers (Cambridge, 1890).
Report on the Recent Progress of Theoretical Dynamics, v.
Ill, pp. 156—204, and a second report on special problems,
v. IV, pp. 513—593.
Следующий список литературы по релятивистской механике
является не более чем выборкой из чрезвычайно обширной библио-
библиографии по этому вопросу:
Aharoni J., The Special Theory of Relativity (Clarendon Press,
1959).
В e r g m a n n P. Q., Introduction to the Theory of Relativity (Pren-
(Prentice-Hall, 1947); русский перевод: Бергман П., Введение
в теорию относительности, ИЛ, М., 1947.
М о 1 1 е г. С, The Theory of Relativity (Clarendon Press, 1952).
P a u 1 i W., Theory of Relativity (Pergamon Press, 1958); русский
перевод: Паули В., Теория относительности, Гостехиздат,
М., 1947.
R a i n i с h Q. Y., Mathematics of Relativity (Wiley, 1950).
R i n d 1 e r W., Special Relativity (Oliver and Boyd, 1960).
StephensonG., KilmisterC. W., Special Relativity for
Physicists (Longmans, Green, 1958).
Synge J. L., Relativity: The Special Theory (North-Holland,
1956).
Synge J. L., The General Theory (North-Holland, 1960); русский
перевод: С и н г Дж., Общая теория относительности, ИЛ,
М., 1962.
ДОПОЛНИТЕЛЬНАЯ БИБЛИОГРАФИЯ
Вариационные принципы механики, сб. статей под ред. Л. С. Пола-
ка, Физматгиз, М., 1959.
Г а н т м а х е р Ф. Р., Лекции по аналитической механике, 2 изд.,
изд-во «Наука», М., (в печати).
Голдстейн Г., Классическая механика, Гостехиздат, М., 1957.
Л а н д а у Л. Д., Лившиц Е. М., Теоретическая физика, т. 1,
Механика, Физматгиз, М., 1958.
Лев и-Ч и в и т а Т., А м а л ь д и У., Курс теоретической меха-
механики, т. 2. ч. 2, ИЛ, М., 1951.
Л и ч Дж. У., Классическая механика, ИЛ, М., 1961.
Лурье А. И., Аналитическая механика, Физматгиз, М., 1961.
П о л а к Л. С, Вариационные принципы механики, их развитие и
применение в физике, Физматгиз, М., 1960.
Розе Н. В., Лекции по аналитической механике, ч. 1, Л., 1938.
С и н г Дж. Л., Классическая динамика, Физматгиз, М., 1963.
Суслов Г. К-, Теоретическая механика, Гостехиздат, М., 1946.
Френкель Я. И., Аналитическая механика, КУБУЧ, Л., 1935.
У КАЗАТЕЛЬ
Аберрация света 338
— хроматическая 312
Амплитудная функция 317
Аналогия оптико-механиче-
оптико-механическая 305
Аппель 394
Аристотель 385
Бернулли 386
Бор 275, 394
Борн 395
де Бройль 290, 316, 318
Бюргере 279
Вариационное исчисление 18
Вариация 18, 60, 61
— вторая 63, 64
— определенного интеграла 80
— первая 61
— функции 77
Варьирование 77
— коммутативные свойства 78
— при дополнительных усло-
условиях 65, 70, 85
— — фиксированных гра-
граничных значениях 78, 81
Вектор 41
Величины инвариантные 332
— ковариантные 41, 143, 332
Виртуальное перемещение 61
Время собственное 360
Галилей 385
Гамильтон 391
Гаусс 392
Гельмгольц 393
Геодезические линии 134, 166,
371
Геометрическая интерпретация
задач динамики 330
Геометрия нериманова 320,
322, 328, 329
Геометрия риманова 42
Герц 393
Гессиан 191
Гравитационная теория Эйн-
Эйнштейна 372
Гравитационное искривление
световых лучей 378
— красное смещение 381
Гравитационный радиус Солн-
Солнца 378
Граничный член 92, 146
Гюйгенс 307
Даламбер 388
Действие 17, 18, 27, 28
Делоне 281, 393
Дисперсия 312
Допплера эффект 338, 381
Задача вариационная свобод-
свободная 65
— — с дополнительными ус-
условиями 65, 70, 85
— динамики 25
— Кеплера 277
— об упругом стержне 92
— равновесия при дополни-
дополнительных условиях 104
Закон движения Ньютона ос-
основной 25
— — — третий 19, 25
Зеемана эффект 279, 289
Импульс 18
—• обобщенный 146
— сопряженный 199
Инвариантное свойство метри-
метрической геометрии 326
Инвариантность уравнений Ла-
гранжа 141, 142, 143
402
Указатель
Инварианты интегральные 209
Интеграл полный 268, 279
Канонические уравнения, см.
уравнения канонические
Канонический интеграл 197,
199, 218
Квантовые условия Зоммер-
фельда — Вильсона 290
Кватернионы 345
Кинематика релятивистская
334
Кинематические условия 45
Кинетическая энергия, см.
Энергия кинетическая
Кинетический фокус 310
Кинетическое взаимодействие
156
Колебания малые 175
— нормальные 187, 189
Координаты обобщенные 29,
32, 34
— сферические 40
— циклические (игнорируе-
(игнорируемые) 151, 214
Лагранж 390
Лейбниц 387
Ли 393
Линейный элемент 40, 44, 166
— — Шварцшильда 373, 377
Линии геодезические 134, 371
Майер 385
Мах 384
Метод неопределенных мно-
множителей Лагранжа 66, 90
интерпретация 107,
168
— разделения переменных 275
Механика аналитическая 16, 19
— векторная 16, 19
— Герца 157, 158
— релятивистская 331
— — одной частицы 356, 361
Минковский 42, 333, 341
Мировая линия 141, 356
Многообразие двумерное 42
— одномерное 42
Мопертюи 388
Неравенство Фурье 110
Ньютон 387
Обобщенные координаты, см.
Координаты обобщенные
•— направляющие косинусы
323
Оптико-механическая анало-
аналогия 305
Парадокс часов 339
Параметры макроскопические
157
— микроскопические 157
Переменные действия 283, 291
— кинематические 117
— пассивные 193
— угловые 284, 285, 291
Перемещения виртуальные 61
— обратимые 98, ПО
Преобразование координат то-
точечное 37, 142
— Лежандра 190, 192, 193
— линейного интеграла в по-
поверхностный 244
— уравнений Лагранжа 195
Преобразования канонические
225
— — бесконечно малые 251,
253
— — общего типа 237
— контактные 234
— Лоренца 344
— — бесконечно малые 355,
369
— Матье и Ли 233, 237
— реономные 232, 239
— склерономные 231, 239
— точечные Лагранжа 227
Принцип 27
— виртуальных перемещений
98, 99
— Гамильтона 18, 136,
139
— Гюйгенса 307
— Даламбера 114
— инвариантности 143
— наименьшего времени рас-
распространения, см. Принцип
Ферма
Указатель
403
Принцип наименьшего действия
(Эйлера—Лагранжа) 17, 18,
165
— — принуждения (Гаусса)
130, 132
— общей относительности 333
— Ферма 22, 162, 163, 309
— Якоби 162
— — и риманова геометрия
165
Пространство конфигураций
34, 44
— — расширенное 141
— Мпнковского 341
— состояний 203
— фазовое 202, 205
— — расширенное 217, 231
— функциональное 74
Пуанкаре 393
Пуассон 393
Равновесие нейтральное 188
— неустойчивое 188
— твердого тела 101
— устойчивое 188, 189
Раус 393
Релятивистская кинематика
334
— механика заряженной ча-
частицы 365
— — одной частицы 356, 361
— формулировка теории гра-
гравитации 364
Риманова геометрия 42, 166
Свойства пространства метри-
метрические 35
— — топологические 35
Связь голономная 47, 49
— неголономная 47, 49
— различных принципов 222
— реономная 54
— склерономная 54
Сила 18
— инерции 112
— — Даламбера 124
— фиктивная 121
— Эйлера 127
— Эйнштейна 123
— эффективная 114
Силовая функция 19 20, 26,
51
Силы консервативные 52
— моногенные 53
— обобщенные 50
— полигенные 53
Система сил 26
— — голономная 47
— — консервативная 19
— — неголономная 47
— — реономная 120, 149
— — склерономная 120, 147
Системы эквивалентные 103
Скобки Лагранжа 246
— Пуассона 248
Скорость 43
Сложение скоростей 337
Сохранение энергии 55, 118,
120, 145, 148, 206, 207, 368
Спектр нормальных колебаний
187
Стационарное значение 59,
60, 62
— — определенного интегра-
интеграла 72, 80
Степени свободы 32
Тензор 41, 42
— кривизны 43
— метрический 42
Теорема Гельмгольца о цирку-
циркуляции 209, 213
— Лиувилля 208, 255
Теория относительности об-
общая 23, 333, 334
— — специальная 332
— Стокса 244
Томсон 393
Уравнение амплитудное 317
— волновое Френеля 317, 329
— Гамильтона — Якоби 263,
270, 273, 274, 291, 319
— характеристическое 181
Шредингера 317
Уравнения канонические 196
— — в параметрической форме
216, 220
— Эйлера 129
— Эйлера — Лагранжа 76, 82
404
Указатель
Условия граничные естествен-
естественные 93
— — наложенные извне 93
— дополнительные 65, 168
— — неголономные 71, 88,
174
— изопериметрические 89
— стационарности определен-
определенного интеграла 80
Фазовая жидкость 202, 205,
206
— — движение 254, 256
Фазовое пространство, см.
Пространство фазовое
Фигуры Лиссажу 187, 189,
287
Физо 331
Форма дифференциальная би-
билинейная 241, 245
— — квадратичная 41
Формализм Гамильтона 18
— Эйлера и Лагранжа 17
Фуко 126, 313
Функция амплитудная 317
— Гамильтона 150, 194,
2Р9
Функция Гамильтона главная
256, 301, 322
обобщенная 220, 232
— — построение 299, 301
— Лагранжа 138, 193
— производящая 238
— — видоизмененная 239
— характеристическая 257
Фурье 313
Циркуляция 209, 214, 243
Центр масс 127
Частица свободная 19
Черный спутник Сириуса 382
Шредингер 317
Эйлер 389
Эйнштейн 9, 123, 290, 332
Экстремум 63, 64, 65
Энергии сохранение, см. Со-
Сохранение энергии
Энергия кинетическая 19, 43
— полная 55, 149, 160, 358
— потенциальная 52, 55, 362,
388.
Я коби 391
ОГЛАВЛЕНИЕ
Предисловие редактора перевода 5
Из предисловия автора 11
Предисловие ко второму изданию 14
ВВЕДЕНИЕ
1. Вариационные методы в механике '5
2. Формализм Эйлера и Лагранжа 16
3. Формализм Гамильтона 17
4. Вариационное исчисление 18
5. Сравнение векторного и вариационного методов в механике 18
6. Математическая оценка вариационных принципов ... 19
7. Философская оценка вариационного подхода в механике 21
ГЛАВА I
ОСНОВНЫЕ ПРИНЦИПЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
1. Характерные черты методов аналитической механики . 25
2. Обобщенные координаты '. . 29
3. Пространство конфигураций 34
4. Отображение пространства самого на себя 35
5. Кинетическая энергия и риманова геометрия 39
6. Голономные и неголономные механические системы ... 46
7. Обобщенная сила и силовая функция 49
S. Склерономные и реономные системы. Закон сохранения
энергии 54
ГЛАВА II
ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
1. Общие свойства задач на экстремум 56
2. Стационарное значение функции 60
3. Вторая вариация 62
4. Взаимосвязь стационарных и экстремальных значений 64
5. Дополнительные условия. Метод неопределенных множите-
множителей Лагранжа 65
6. Неголономные дополнительные условия 71
7. Стационарное значение определенного интеграла .... 72
8. Основные операции вариационного исчисления 76
9. Коммутативные свойства операции варьирования .... 79
10. Вывод условий стационарности определенного интег-
интеграла методами вариационного исчисления 80
406 Оглавление
11. Дифференциальные уравнения Эйлера —Лагранжа в
случае п степеней свободы 83
12. Варьирование прн наличии дополнительных условий 86
13. Неголономные условия 88
14. Изопериметрические условия 89
15. Вариационное исчисление и граничные условия. Задача
об упругом стержне 92
ГЛАВА III
ПРИНЦИП ВИРТУАЛЬНЫХ ПЕРЕМЕЩЕНИЙ
1. Принцип виртуальных перемещений для обратимых пе-
перемещений 97
2. Равновесие твердого тела 101
3. Эквивалентность двух систем сил 103
4. Задачи о равновесии при наличии дополнительных усло-
условий 104
5. Физическая интерпретация метода неопределенных мно-
множителей Лагранжа 107
6. Неравенство Фурье ПО
ГЛАВА IV
ПРИНЦИП ДАЛАМБЕРА
1. Сила инерции 112
2. Роль принципа Даламбера в механике 116
3. Закон сохранения энергии как следствие принципа Да-
Даламбера 118
4. Фиктивные силы при ускоренном движении систем отсчета.
Гипотеза Эйнштейна об эквивалентности 120
5. Фиктивные силы во вращающейся системе отсчета . . . 124
6. Динамика твердого тела. Движение центра масс . . ' . 127
7. Динамика твердого тела. Уравнения Эйлера 129
8. Принцип наименьшего принуждения Гаусса 130
Г Л ABA V
УРАВНЕНИЯ ДВИЖЕНИЯ ЛАГРАНЖА
1. Принцип Гамильтона 136
2. Уравнения движения Лагранжа и их инвариантность от-
относительно точечных преобразований 140
3. Теорема о сохранении энергии как следствие принципа
Гамильтона М5
4. Циклические (игнорируемые) координаты и их исклю-
исключение 151
5. Бессиловая механика Герца 157
6. Время как циклическая переменная: принцип Яке би;
принцип наименьшего действия 159
7. Принцип Якоби и риманова геометрия 165
Оглавление 407
8. Дополнительные условия: физический смысл неопреде-
неопределенных множителей Лагранжа 168
9. Неголономные дополнительные условия и полигенные
силы 174
10. Малые колебания около положения равновесия .... 175
ГЛАВА VI
КАНОНИЧЕСКИЕ УРАВНЕНИЯ ДВИЖЕНИЯ
1. Дуальное преобразование Лежандра 190
2. Преобразование Лежандра в применении к функции Ла-
Лагранжа 193
3. Преобразование уравнений движения Лагранжа .... 195
4. Канонический интеграл 197
5. Фазовое пространство и фазовая жидкость 202
6. Теорема сохранения энергии как следствие канониче-
канонических уравнений ' . . 205
7. Теорема Лиувилля 207
8. Интегральные инварианты, теорема Гельмгольца о цир-
циркуляции 209
9. Исключение циклических переменных 214
10. Параметрическая форма канонических уравнений . . . 216
ГЛАВА VII
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ
1 Преобразования координат как метод решения задач ме-
механики 225
2. Точечные преобразования Лагранжа 227
3. Преобразования Матье и Ли 233
4. Канонические преобразования общего типа 237
5. Билинейная дифференциальная форма 240
6. Скобки Лагранжа и Пуассона 245
7. Бесконечно малые канонические преобразования .... 250
8. Движение фазовой жидкости как непрерывное выпол-
выполнение канонических преобразований 253
9. Главная функция Гамильтона и движение фазовой жид-
жидкости 256
ГЛАВА VIII
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ В ЧАСТНЫХ
ПРОИЗВОДНЫХ ГАМИЛЬТОНА —ЯКОБИ
1. Важная роль производящей функции в задаче о движении 264
2. Теория преобразований Якоби 266
3. Решение уравнения в частных производных методом раз-
разделения переменных 275
4 Метод Делоне для разделения переменных в периодических
системах 279
5. Роль дифференциального уравнения в частных проитсед
ных в теориях Гамильтона и Якоби 29i
408 Оглавление
6. Построение главной функции Гамильтона при помощи
полного интеграла Якоби 299
7. Геометрическое решение уравнения в частных производ-
производных. Оптико-механическая аналогия Гамильтона . . . 302
8. Значение уравнения в частных производных Гамильтона
в теории распространения волн 315
9. Геометризация динамики. Неримановы геометрии. Мет-
Метрическая интерпретация уравнения в частных производных
Гамильтона 319
ГЛАВА IX
РЕЛЯТИВИСТСКАЯ МЕХАНИКА
1. Историческое введение 331
2. Релятивистская кинематика 334
3. Четырехмерное пространство Минковского 341
4. Преобразования Лоренца 344
5. Механика одной частицы 356
6. Гамильтонова формулировка динамики частицы .... 361
7. Потенциальная энергия V 362
8. Релятивистская формулировка ньютоновой скалярной
теории гравитации 364
9. Движение заряженной частицы 365
10. Геодезические линии в четырехмерном мире 371
11. Орбиты планет в теории тяготения Эйнштейна .... 372
12. Гравитационное искривление световых лучей 378
13. Гравитационное красное смещение спектральных линий 381
ГЛАВА X
ИСТОРИЧЕСКИЙ ОБЗОР 384
Приложение 396
Библиография 399
Дополнительная библиография 400
Указатель 401