























































































































































Author: Ванько В.И
Tags: физика дифференциальные, интегральные и другие функциональные уравнения конечные разности вариационное исчисление функциональный анализ математическая физика задачи математической физики вариационные принципы
ISBN: 978-5-7038-3372-8
Year: 2010




» » т.
и
'irnMLfiiufj:,
jjpiJiJifHjjn л -ад^ш
A
r
О
D
! ^s^f
M
""\ P
В X
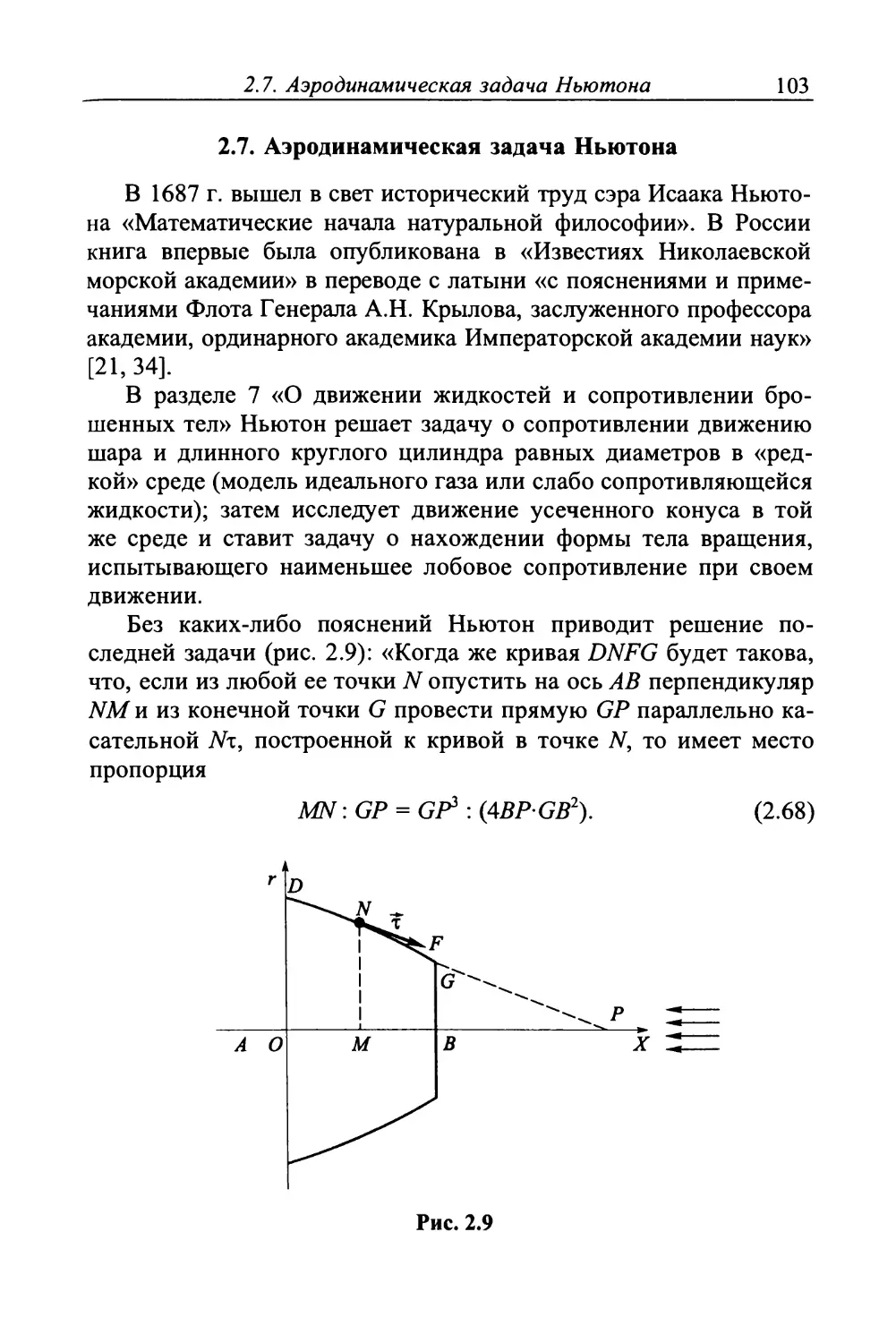
MN: GP = GP3 : (4BP ■
Издательство МГТУ им. Н.Э. Баумана
В.И. Ванько
Вариационные
принципы и задачи
математической
физики
Рекомендовано методической комиссией
Научно-учебного комплекса
«Фундаментальные науки» МГТУим. Н.Э. Баумана
в качестве учебного пособия
для студентов инженерных специальностей
Москва 2010
УДК 530:517.9(075.8)
ББК22.311
В17
Рецензенты:
нач. лаборатории ЦНИИмаш д-р техн. наук, проф. С.Н. Сухинин;
д-р физ.-мат. наук, проф. кафедры «Математическое моделирование»
МГТУ им. Н.Э. Баумана С.А. Агафонов
Ванько В. И.
В17 Вариационные принципы и задачи математической
физики : учеб. пособие / В. И. Ванько. - М. : Изд-во МГТУ им.
Н. Э. Баумана, 2010. - 191, [1] с. : ил.
ISBN 978-5-7038-3372-8
В книге изложены основные вариационные принципы
механики; демонстрируются приложения принципов к решению
многочисленных задач математической физики. Принципы позволяют
поставить задачу в терминах дифференциальных уравнений, т. е. вывести
соответствующее уравнение и естественные краевые условия.
Несмотря на то, что при этом ужесточаются требования к гладкости
искомых решений (повышение порядка дифференцируемости в два
раза), дифференциальные уравнения Эйлера - Лагранжа во многих
случаях позволяют качественно исследовать свойства экстремалей.
Если не удается получить дифференциальное уравнение, которое
имеет решение, в арсенале исследователя остается возможность
использования так называемых прямых методов. В данной работе
продемонстрированы оба подхода.
Для студентов и аспирантов, а также преподавателей и
специалистов.
УДК 530:517.9(075.8)
ББК22.311
© Ванько В.И., 2010
© Оформление. Издательство
ISBN 978-5-7038-3372-8 МГТУ им. Н.Э. Баумана, 2010
ОГЛАВЛЕНИЕ
Предисловие 5
Глава 1. Вариационные принципы 7
1.1. Дифференциальные принципы 8
1.2. Принцип Мопертюи - Лагранжа 16
1.3. Принцип стационарного действия Гамильтона 23
1.4. О характере экстремума действия по Гамильтону 27
1.5. Каноническая форма системы уравнений Эйлера.
Функция Гамильтона 30
1.6. Канонические преобразования. Теорема Нетер 36
1.7. Приложения теоремы Нетер: законы сохранения 44
1.8. Минимальные принципы в теории упругости 48
Глава 2. Вариационное исчисление и задачи
математической физики 61
2.1. Система с конечным числом степеней свободы 61
2.2. Принцип возможных перемещений для деформируемого
тела 66
2.3. Колебания струны 76
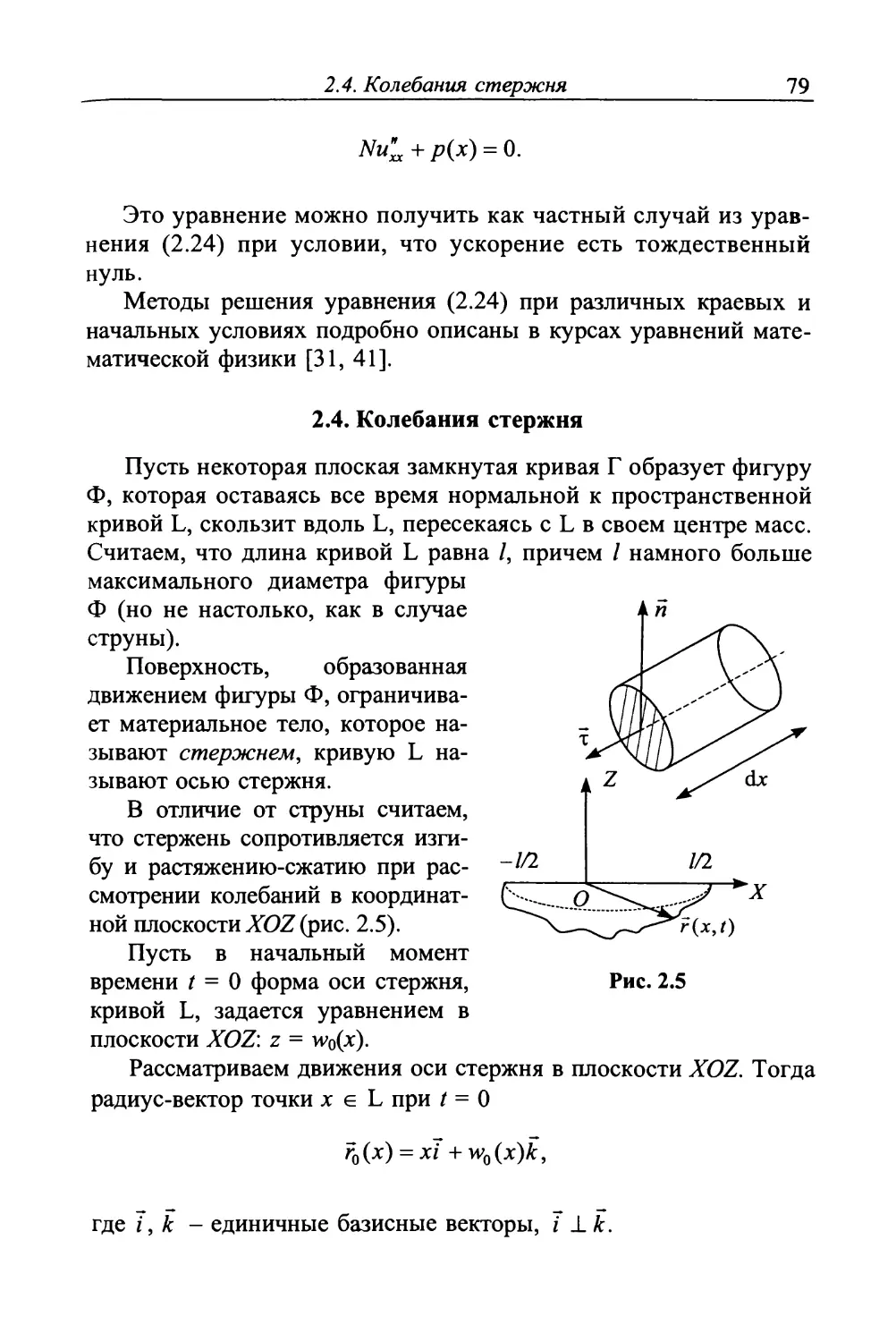
2.4. Колебания стержня 79
2.5. Мембрана под давлением 85
2.6. Движение идеальной жидкости 92
2.7. Аэродинамическая задача Ньютона 103
2.8. Чистый изгиб упругой балки 119
2.9. Эйлерова критическая сила 124
Глава 3. Прямые методы вариационного исчисления 130
3.1. Основные сведения из функционального анализа 131
3.2. Минимизирующие последовательности 149
3.3. Метод Ритца 159
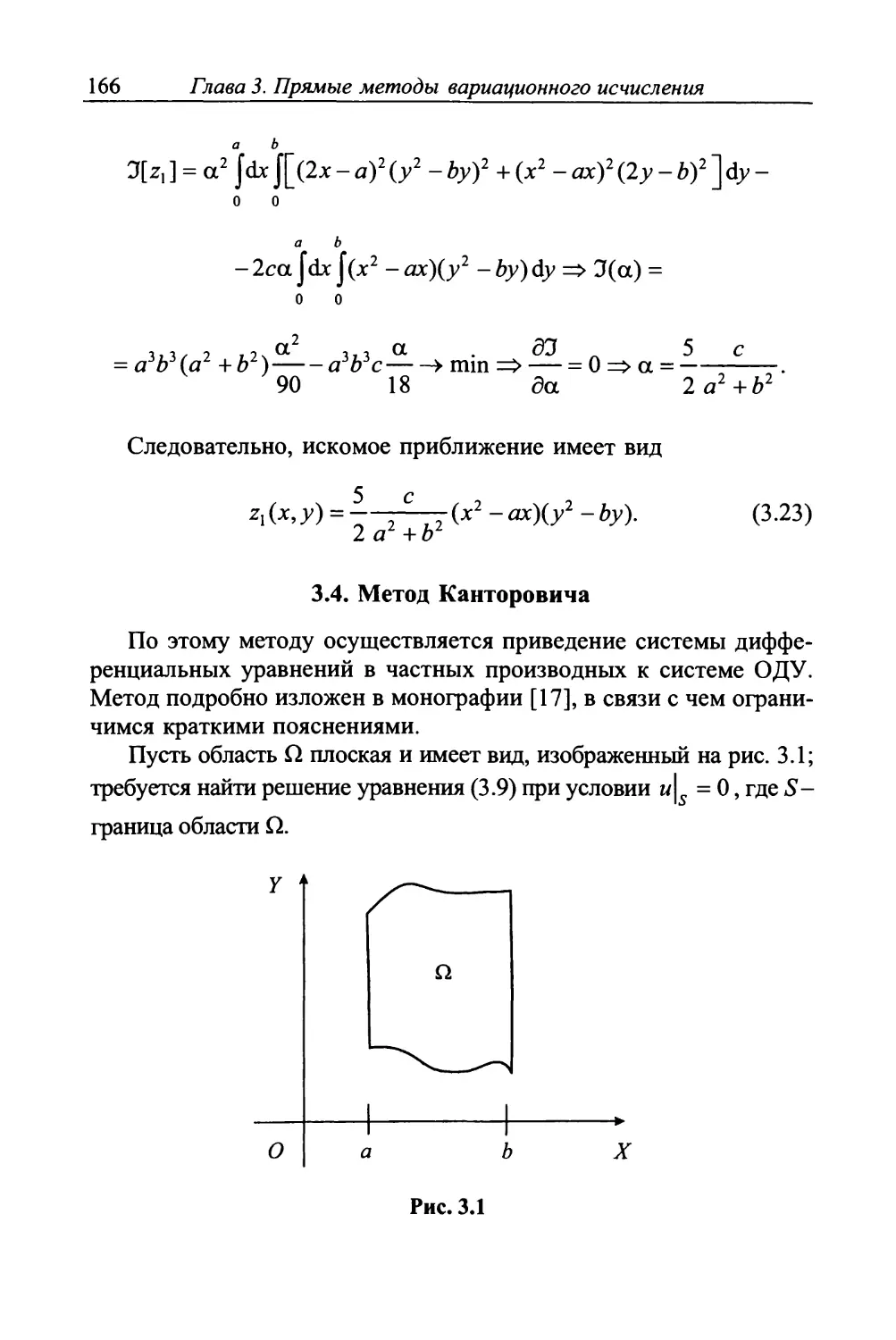
3.4. Метод Канторовича 166
3.5. Метод Эйлера 169
4 Оглавление
3.6. Метод наискорейшего спуска 172
3.7. Метод Бубнова - Галеркина 174
3.8. Метод наименьших квадратов 176
3.9. Метод локальных вариаций 178
3.10. Сравнение результатов 181
Литература 188
Теория, мой друг, суха,
Но зеленеет жизни древо.
И.В. Гёте «Фауст»
ПРЕДИСЛОВИЕ
Предлагаемое вниманию читателей, прежде всего студентов
инженерных специальностей, учебное пособие можно
рассматривать как дополнение к тому XV комплекса учебников
«Математика в техническом университете» [5].
По мнению автора, в курсах теоретической механики для
технических университетов вариационным принципам и их
приложениям уделяется мало внимания, что можно объяснить
недостаточным объемом учебных программ.
В формировании мировоззрения будущего инженера
понимание сути вариационных принципов играет определяющую роль.
Поэтому автор считает своим долгом познакомить читателя с
содержанием основных вариационных принципов и на простых
примерах показать, как они работают: принципы позволяют решить
поставленную задачу «напрямую» (прямые методы) либо получить
соответствующее дифференциальное уравнение и естественные
граничные условия. Второй подход, несмотря на то что при этом
приходится сужать класс решений (увеличение вдвое порядка
дифференцирования искомой функции), часто дает возможность
качественного исследования решения. В работе
продемонстрированы оба подхода.
В первой главе рассмотрены основные вариационные принципы
механики примерно в объеме университетского курса Н.Н. Бухголь-
ца [4]. Особое внимание уделено принципам Даламбера - Лагран-
жа и Гамильтона, популярным в приложениях к задачам
математической физики. Представлены также некоторые минимальные
принципы теории упругости, наиболее полное изложение которых
(с многочисленными приложениями) читатель найдет в книгах
Л.С. Лейбензона и Я.А. Пратусевича [27, 36].
Вторая глава посвящена приложениям идей и методов
вариационного исчисления к задачам математической физики. Наряду с
Пер. с нем. Б. Пастернака. - Прим. ред.
6
Предисловие
изложением задач, которые можно найти в любом учебнике
математической физики (струна и мембрана), обсуждаются задачи о
колебаниях стержня в вертикальной плоскости (две степени
свободы); о бифуркации в смысле Эйлера форм равновесия упругого
стержня при продольном сжатии; на примере задачи об изгибе
балки поперечной нагрузкой показано, как вариационная
постановка позволяет получить естественные краевые условия; краевые
условия можно также получить, используя динамический принцип
Гамильтона - Остроградского, что демонстрируется выводом
уравнений движения идеальной жидкости.
Особое внимание уделено подробному исследованию решения
аэродинамической задачи Ньютона. Здесь подчеркивается
выдающаяся роль А.Н. Крылова, который не только дословно перевел с
латыни на русский язык великую книгу «Математические начала
натуральной философии», но и снабдил своими комментариями и
оригинальными решениями многие утверждения Ньютона.
Подчеркнем, что современное решение классической задачи Ньютона
принадлежит Крылову [21, 34].
Прямые методы решения задач математической физики
представлены в третьей главе. Кроме традиционных в подобных
пособиях методов Ритца, Бубнова - Галеркина и наименьших
квадратов, излагаются методы Эйлера, наискорейшего спуска,
Канторовича и метод локальных вариаций.
В заключительном разделе третьей главы на примере решения
задачи о прогибе мембраны под действием поперечного давления
дано сравнение решений, полученных с помощью методов Ритца,
Канторовича и наименьших квадратов, по величине нормы
невязки.
ГЛАВА 1
ВАРИАЦИОННЫЕ ПРИНЦИПЫ
Под термином «принцип» подразумеваем такое
аксиоматическое утверждение, которое при своей достаточной общности для
данной области науки является основным, т. е. все остальные
положения (например, законы движения) вытекают из
сформулированного принципа как логические следствия [4].
Стремление к поиску принципов помимо требований научной
эстетики имеет целью найти наиболее общие законы природы.
Принцип должен не только удовлетворять общим логическим
требованиям, но и иметь эвристическую ценность: чтобы из него
вытекали не только те факты, следствием которых он является, но и
факты, которые к моменту опубликования принципа еще не были
известны.
Созданные на базе исследований Галилея и Кеплера законы
Ньютона, по существу являющиеся принципами, легли в основу
механики и послужили ее развитию; принцип Даламбера дал
мощный метод решения задач динамики, а принцип виртуальных
перемещений Лагранж считал основным принципом механики.
Принципы вводятся и формулируются аксиоматически как
обобщение широкого круга опытных данных. То, что называется
доказательством вариационных принципов является выводом
принципов из уравнений движения. Такой вывод показывает
только то, что для круга опытных данных, выражаемых уравнениями
движения, тот или иной принцип приводит к правильным
результатам, т. е. описывает рассматриваемое движение механической
системы. «Доказательство» устанавливает, что в данной области
принцип и уравнения движения эквивалентны, т. е. описывают
одни и те же наблюдаемые явления, хотя и в различной
математической форме.
8
Глава 1. Вариационные принципы
Различают невариационные и вариационные принципы. Как
те, так и другие подразделяют на дифференциальные и
интегральные.
Невариационный принцип представляет собой некоторое
общее для всех движений свойство, которое имеет место для данного
момента времени {дифференциальный принцип) либо для
конечного промежутка времени {интегральный принцип).
Следствием вариационного принципа является признак,
отличающий действительное движение системы (т. е. именно то
движение, которое происходит под действием заданной системы сил
при данных наложенных на систему связях) от всех других
движений, которые кинематически возможны, ибо не нарушают
наложенные на систему связи.
Вариационный принцип состоит в том, что некоторый
функционал, характерный для данного принципа, имеет для
действительного движения экстремальное значение по сравнению со
всеми кинематически возможными движениями системы. Таким
образом, прежде нужно сконструировать функционал, для которого
действительная траектория является экстремалью; далее четко
определить класс движений, среди которых находится искомая
экстремаль - действительное движение.
Отсюда следует, что, применяя вариационный принцип к
решению задачи, мы сводим проблемы механики к проблемам
вариационного исчисления при некоторых дополнительных
условиях.
Вариационные принципы так же, как и невариационные,
разделяют на дифференциальные (дающие критерий истинного
движения в данный момент времени) и интегральные (выделяющие
истинное движение на конечном промежутке времени).
1.1. Дифференциальные принципы
1. Принцип возможных (виртуальных) перемещений и принцип
Даламбера - Лагранжа
Положение равновесия системы отличается от всех
кинематически возможных ее положений тем, что только для положения
равновесия сумма элементарных работ активных сил, действующих на
систему, на возможных перемещениях системы равна нулю.
1.1. Дифференциальные принципы
9
Следуя Лагранжу, обозначим возможное перемещение
некоторой /-й точки системы, не нарушающее наложенные на систему
связи, символом brt.
Элементарной работой силы Ft, приложенной к /-й точке, на
ее возможном перемещении называют скалярное произведение
векторов Fi и brt:
6A(Fi) = Frbri.
Тогда сформулированный выше принцип возможных
перемещений Лагранжа для системы п точек запишем в виде
£&4(/*) = 0. (1.1)
Для удобства изложения переобозначим декартовы
координаты п материальных точек системы: координаты (х\,у\, z\) 1-й точки
обозначим через (jci, хг, *з), координаты (х2, уг> z2) 2-й точки - через
(х4, х5, х6), координаты (х„, ут z„) и-й точки - через (x3ft_2, *з*-ь *зя)-
Вариация радиус-вектора /-й точки будет представлена в виде
дп = {dxi, 6>,, &,-} = {5x3l-_2, 8x3M, 8x3l-}.
Аналогично переобозначим и компоненты сил:
Fi =\Fix> Fiy> Fiz) = {^3i-2> ^3i-b ХЪ{\-
Вследствие сказанного выше принцип возможных
перемещений имеет вид
3/7
Z^-Sx^O.
i=\
Несмотря на то что в выражение этого принципа не входит
(в общем случае) вариация некоторого функционала, он имеет
характер вариационного дифференциального принципа, так как под
знаком суммы стоит линейная функция вариаций координат, т. е.
вариационное выражение.
10
Глава 1. Вариационные принципы
Потенциалом сил, действующих на механическую систему,
называют скалярную функцию координат точек системы U(x\, х2,
хз, ..., хзп), такую, что для любой /-й точки с координатами (хц-2,
*з/-ь хз,) координаты действующей на нее силы Ft есть
производные £/(•) по соответствующим координатам точки:
Fix = Хц-2 -
8U
dx3i_2
F -X - dU
Fiz = хм -
dU
dx3i'
Такие системы сил называем потенциальными.
Итак, пусть активные силы имеют потенциал. Тогда
эй з/7 ди
YJXibxi = Y,^rbxi=bU,
i=\ i=\ OXj
и выражение принципа возможных перемещений (1.1)
приобретает вид
5*7=0.
(1.2)
Таким образом, когда система потенциальна, положению
равновесия отвечает стационарное значение потенциала £7().
Соединяя принцип возможных перемещений с принципом Да-
ламбера, получаем принцип Даламбера - Лагранжа,
описывающий отличие истинного движения системы от любого возможного
(виртуального) движения.
В любой момент времени действительное движение системы
отличается от виртуальных ее движений тем, что только для
действительного движения сумма элементарных работ активных сил и
сил инерции на возможных перемещениях системы равна нулю:
х
/=1
Fi-mi^T
J
Ъп
i=\
Xi-щ
V
d2*,
dt2
5jc, = 0,
(1.3)
где, очевидно w3;_2 =w3/_1 =w3/ -mv
1.1. Дифференциальные принципы
И
Здесь так же, как и в (1.1), в выражение принципа входит не
варьируемый функционал, а линейная функция вариаций
координат, которую рассматриваем как результат вариационного
процесса.
Из принципа Даламбера - Лагранжа выводятся уравнения
движения системы, когда на нее наложены голономные или
линейные неголономные связи [4].
2. Принцип Гаусса (принцип наименьшего принуждения)
Преимущество этого принципа перед рассмотренным выше
состоит в том, что он дает возможность
вывода уравнений движения системы
при любых неголономных связях.
Таким образом, принцип Гаусса
есть наиболее общий принцип
механики, обладающий большой
эвристической ценностью. Достаточно сказать,
что механика Г. Герца возникла
главным образом на основании идей
принципа Гаусса [35].
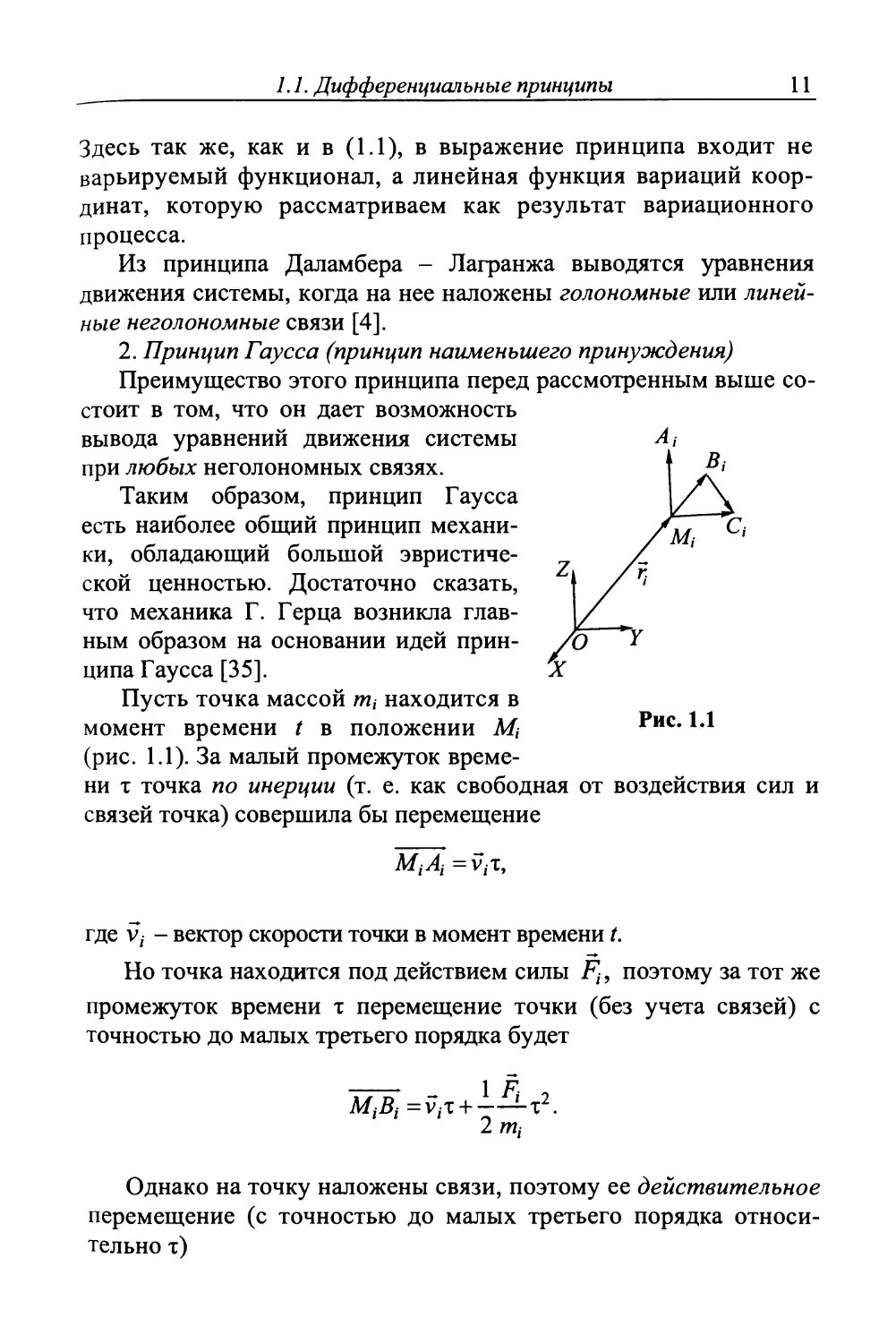
Пусть точка массой mt находится в
момент времени t в положении Мг
(рис. 1.1). За малый промежуток
времени т точка по инерции (т. е. как свободная от воздействия сил и
связей точка) совершила бы перемещение
MtAi =v,-T,
где v, - вектор скорости точки в момент времени t.
Но точка находится под действием силы Fi9 поэтому за тот же
промежуток времени т перемещение точки (без учета связей) с
точностью до малых третьего порядка будет
2 mt
Однако на точку наложены связи, поэтому ее действительное
перемещение (с точностью до малых третьего порядка
относительно т)
Рис. 1.1
12
Глава 1. Вариационные принципы
М,.С,.=у,т + 1#;т2,
где fVj - ускорение точки в ее действительном движении.
Уклонение точки от свободного движения под действием
только силы Fj представляется вектором ДС, с точностью до малых
третьего порядка:
1
BiCi=M&-M,Bi=±%2
Здесь rt = Щ - вторая производная радиус-вектора точки по
времени.
За меру уклонения точки от свободного движения Гаусс
принимает величину, пропорциональную скалярному квадрату
вектора ДС/, которую называет «принуждением» (от нем. Zwang):
Zwi=-mi
Принуждение всей системы п точек
" 1
т,-
~\2
v1 -
i=i 2
т,
(1.4)
Очевидно, что идея выразить принуждение системы в виде
суммы величин, пропорциональных квадратам уклонений точек
системы, подсказана Гауссу им же построенной теорией
ошибок.
Сформулируем принцип Гаусса.
В любой момент времени действительное движение системы
отличается от возможных движений, происходящих из той же на-
1.1. Дифференциальные принципы
13
чальной конфигурации и с теми же начальными скоростями, тем,
что только при действительном движении принуждение системы
принимает минимальное значение:
Zw —> min => b(Zw) = 0.
Из формулировки принципа следует, что вариация
принуждения вычисляется при неизменных координатах и скоростях точек,
т. е. варьируются только ускорения. Такого рода вариацию в
механике называют гауссовой вариацией.
Выполняя варьирование принуждения Zw и приравнивая
найденную вариацию к нулю, получаем
5(Zw) = Z№ -т&)Щ =0. (1.5)
i=\
Пример 1.1. Пусть точка в поле сил тяжести скользит по
гладкой наклонной плоскости; движение начинается из положения М с
начальной скоростью v0 = 0 (рис. 1.2).
Рис. 1.2
Кинематически возможны перемещения из точки М с
различными ускорениями, которые «расположены» на наклонной
плоскости.
По Гауссу, скорость и время не варьируются, поэтому все
возможные перемещения начинаются из точки М с начальной
скоростью v0 = 0 и совершаются за один и тот же промежуток времени т.
Эти перемещения есть
14
Глава 1. Вариационные принципы
2 2
MQ=—WU MC2=—W2, ....
2 2
Действующей на материальную точку активной силой является
сила тяжести mg; свободное перемещение под действием этой
силы направлено по вертикали вниз и за время т при начальной
скорости v0 = 0 вычисляем по формуле
2 5
Принуждение при каждом из рассматриваемых виртуальных
перемещений пропорционально квадратам векторов BQ, ВС2,... .
Очевидно, что наименьшим из возможных скалярных
квадратов будет квадрат вектора ВСХ, направленного по
перпендикуляру, опущенному из точки В на наклонную плоскость:
min (Щ)2=(Щ)2.
i
Следовательно, движение происходит по вектору MQ,
который соответствует минимальному принуждению:
MCx=—Wl9 Z(MBCx) = a,
поэтому Щ = g sin a.
Это и есть ускорение точки в ее действительном движении.
Применение принципа Гаусса привело к известному из курсов
физики результату: движение материальной точки по наклонной
плоскости происходит по линии наискорейшего ската с
ускорением W = g sin a.
Пример 1.2. Вывод уравнений движения из принципа Гаусса.
Отметим, что если на систему не наложено никаких связей,
то вариации ускорений независимы и, следовательно, из (1.5)
получаем
1.1. Дифференциальные принципы
15
Xi-mixi=0 (i = l,3/i).
В этом случае все точки системы свободны и их движения
описываются системой уравнений Ньютона. Эту же систему
уравнений (для свободной от связей системы) получим также из
принципа Даламбера - Лагранжа, так как вариации 8jc,
независимы.
Вывод уравнений движения из принципа Гаусса при
произвольных голономных и неголономных связях приводится в
университетских курсах теоретической механики (см., например, [4]).
Замечание. Выясним, почему принцип Гаусса дает
возможность вывода уравнений движения при произвольных
неголономных связях (в отличие от принципа Даламбера - Лагранжа,
работающего только для линейных неголономных связей).
Обычно в качестве неголономных связей рассматриваются
соотношения
%(хи...,х3п;хь..., х3п; 0 = 0 (р = 1,г),
в которые входят координаты и скорости точек.
Дифференцируем связи по времени:
Z^4 + yp(*,jc,o = o.
1 dXi
Здесь Vj/p () - слагаемые, в которые ускорения не входят.
Так как, по Гауссу, варьированию подлежат только ускорения, то
из представленного выше уравнения имеем
I^-вх^О (р = 1,г).
1 OXi
Относительно Ъх\ получены линейные выражения, которыми и
воспользуемся (с помощью множителей Лагранжа) для построения
на основе (1.5) уравнений движения неголономной системы.
Если предположить, что существуют некоторые неголономные
связи, зависящие и от ускорений:
16
Глава 1. Вариационные принципы
%(х,х,х) = 0 (р = 1,г),
то принцип Гаусса будет применим только для линейных
относительно ускорений связей
3/7
Z tfp,- О, х, t)xt + ар (х, х, t) = О,
i=l
подобно тому как из принципа Даламбера - Лагранжа
вытекают уравнения движения только при линейных неголономных
связях.
Следовательно, большая общность принципа Гаусса
(сравнительно с принципом Даламбера - Лагранжа) связана с характером
варьирования: бх, = ох, = 0, ох, ф 0.
1.2. Принцип Мопертюи - Лагранжа
Решая задачи вариационного исчисления при условии
фиксированное™ границ интегрирования, мы пользовались понятием
изохронной вариации.
Более внимательно рассмотрим понятие полной вариации [4].
Пусть точка имеет одну степень свободы и положение ее
определяется координатой q =/(/)• Дифференцируем это равенство по
времени:
dq = f(t)dt.
Здесь имеем изменение функции, обусловленное изменением
независимой переменной t - времени; дифференциал
координаты соответствует ее изменению вследствие действительного
движения.
Изменим теперь вид самой функции:
£ = /(0 + 61,(0. (1.6)
Здесь £ - некоторый малый параметр; r|(f) - произвольная
дифференцируемая функция, т. Q.f(t), r\(t) g С на некотором
промежутке времени t.
1.2. Принцип Мопертюи - Лагранжа
17
Очевидно, что в равенстве (1.6) второе слагаемое в правой
части является изохронной вариацией функции q(f)\
bq = £Г|(0,
для bq выполняется свойство коммутативности по отношению к
операции дифференцирования по времени:
М2-*
Отметим, что в случае изохронного варьирования время не
варьируется, т. е. bt = 0.
Определение. Полной вариацией называют изменение функции
как вследствие изменения вида самой функции, так и в силу
изменения аргумента t.
Полную вариацию обозначают символом Aq. Пусть I' = t + e£(f),
где t - измененный аргумент (время), а £(/) - произвольная
дифференцируемая функция. Обозначим изменение аргумента
через At:
A/= f-f = e£(f).
Тогда для полной вариации функции q(f) имеем с точностью до
малых второго порядка
Aq = bq + qAt,
(1.7)
т. е. теперь изменение функции
состоит из двух слагаемых: первое
слагаемое есть изохронная
вариация, второе слагаемое - изменение
функции вследствие изменения
аргумента t на величину А*. На
рис. 1.3 наглядно показано
различие между изохронной и полной
вариациями.
q\
0
bq/
t
Дл_-
^у
t+
~qAt
At
~Ч
~Ч
t
Рис. 1.3
18
Глава 1. Вариационные принципы
Покажем, что операция выполнения полной вариации и
дифференцирование по времени свойством коммутативности не
обладают. Продифференцируем (1.7) по времени:
±bq = Sq + q&t + q^. (1.8)
Для полной вариации функции q с учетом (1.7) имеем
Aq = dq + qAt => qAt = Aq- dq.
Подставляем полученное значение qAt в (1.8):
d . dAt /Л пч
—Aq = Aq + q—. (1.9)
at at
Из (1.9) получаем
±(Aq)*A(q).
at
Упражнение. Покажите, что для случая q(t) = t операция
полного варьирования коммутативна с операцией
дифференцирования.
Пусть материальная точка под действием активной силы F
описывает некоторую траекторию АВ (рис. 1.4), т - единичный
вектор касательной к траектории в текущей точке, v = vx - вектор
скорости точки, dr - приращение радиус-вектора относительно
начала выбранной инерциальной системы координат. С точностью
до малых второго порядка относительно дифференциала дуги 6s
имеем: dr = dsi.
Рассмотрим криволинейный интеграл по дуге АВ от
скалярного произведения векторов v и дг:
3= Jv.dr= jvds. (1.10)
АВ АВ
1.2. Принцип Мопертюи - Лагранжа
19
Рис. 1.4
Очевидно, что vds = vvdt = v2dt > 0.
Наряду с действительной траекторией АВ рассматриваем
возможные (дозволяемые связями, наложенными на точку)
траектории А\В, А2В, ..., АпВ. Сравниваем численные значения
интегралов
J vds, J vds, ..., J vds.
Мопертюи назвал интеграл (1.10) «действием» и в 1744 г.
сформулировал свой принцип.
Действие, вычисленное по действительной траектории точки,
минимально:
[ v ds = min
ЛЯ
J vds
ЛЯ
(1.11)
Мопертюи придавал своему принципу значение всеобщего
закона природы и объявил его «божьим промыслом». На это
научная общественность просвещенной Европы отреагировала
весьма бурно. Разгорелась полемика, в которой приняли активное
участие Эйлер и Даламбер; даже Вольтер посчитал своим долгом
выступить с довольно едкой критикой религиозных взглядов
Мопертюи [35].
20
Глава 1. Вариационные принципы
Эйлер первым понял методологическую важность принципа
Мопертюи и постарался дать ему серьезное обоснование, т. е.
вывести из него уравнения движения точки.
В полной мере обоснование и обобщение принципа
Мопертюи удалось Лагранжу, который показал, что при определенных
ограничениях на класс траекторий движения из обсуждаемого
принципа следуют уравнения движения системы материальных
точек.
Рассмотрим систему материальных точек массами mh i = \,n с
координатами (xt, yi9 zt) в инерциальной декартовой системе с ор-
тонормированным базисом {еь е2, в3}. Предполагаем отсутствие
связей, наложенных на точки системы.
Кинетическая энергия этой системы
Т = ±-1т^=±£т>(х}+у!+21). (1.12)
2 i=\ 2 i=\
Предполагаем потенциальность системы сил:
3U=U(xh y„ Z/) t):Fi={Xh Y„ Z,} = Ц„ U'y>, U'If}. (1.13)
Взятый со знаком минус потенциал называют потенциальной
энергией системы:
V=-U.
Консервативной системой называют систему, для которой
имеет место закон сохранения полной механической энергии (во
времени):
Т+ V= T-U=h = const => Т= U+h. (1.14)
Далее выведем достаточное условие консервативности.
Считаем, что в момент времени t = t0 система находится в некотором
фиксированном состоянии (фиксированы координаты точек, их
скорости и сумма Т+ V- И).
1.2. Принцип Мопертюи - Лагранжа
21
Введем в рассмотрение евклидово 3/7-мерное пространство Е,
в котором будем описывать эволюцию данной консервативной
системы, т. е. изменение положений точек во времени под
действием данной системы сил. Эволюцию системы описываем в
пространстве Е кривой:
Xi = Xi (t), yt = У г (О, Ъ = Zi (0 (/ = 1, П).
Движение начинается из точки M0(xi (to), yt (to), zt (t0)) и при t = t\
заканчивается в точке M\(xt(t\),yt(t\), Zi(t\)), где материальные
точки имеют определенные скорости Xi(tx), yj(tx), zt(tx), т. е. в
момент времени t = t\ система имеет определенную конфигурацию.
Движение по траектории М0МХ, совершаемое под действием
приложенных сил Fi9 называют движением по прямому пути:
М0МХ - прямой путь. Движение М0 —* М\ с той же полной
энергией h = const может происходить и по некоторым другим
(допустимым) траекториям М0\МХ, М02МХ, ... - по окольным
путям. При этом, вообще говоря, на окольные пути нужно будет
затратить различные времена t\ - t0, здесь t\ - момент времени
прихода системы в конфигурацию М\, свой для каждого
окольного пути.
Введем в рассмотрение действие по Лагранжу.
W = )\trnivAdt= )(2T)dt. (1.15)
Этот интеграл, являясь функцией верхнего предела
(переменного, как мы выяснили), положителен и ограничен только снизу.
Принцип Мопертюи - Лагранжа гласит: действие по Лагранжу
имеет экстремум на действительной траектории системы:
QxtrW(M^x,...,M^Mx,) = W(M0Mx). (1.16)
22
Глава 1. Вариационные принципы
Эволюции происходят при фиксированном значении полной
энергии Т + V=h = const.
В силу положительной определенности функционала W
характер экстремума есть минимум (по сравнению со значениями
интеграла на окольных путях), если прямой путь не проходит
через кинетический фокус, сопряженный с начальной точкой (см.
ниже).
Пример 1.3. Траектория луча света. Оптико-механическая
аналогия.
Принцип Мопертюи - Лагранжа позволяет установить
общность между движением материальной точки в потенциальном
поле сил и распространением света в оптически неоднородной среде.
Согласно принципу Ферма, геометрическая форма
монохроматического луча между двумя точками в оптически неоднородной
среде определяется из условия минимума времени движения луча
между этими точками.
Следовательно, имеет место соотношение
Bds
5J—= 0,
А V
где v - скорость света в данной среде; ds - элемент дуги траектории.
Рассмотрим движение свободной точки массой т = 1 в
силовом поле с заданной потенциальной функцией U(x, у, z); скорость
точки по модулю (вследствие закона сохранения энергии)
вычисляется следующим образом (V=- U):
ту2 rr mv2 _. . /————
где h - величина постоянная для каждого движения точки.
В силу принципа Мопертюи - Лагранжа реализуется
траектория, минимизирующая функционал:
в в
jvds=jyj2(U + h)ds.
А А
1.3. Принцип стационарного действия Гамильтона 23^
Сравнивая его с соотношением 8 {— = 0 видим, что действительно
л v
имеется аналогия между движением точки и распространением
света в том смысле, что в обоих случаях речь идет о минимуме
функционала вида
в
3= \F(x,y,z)ds,
А
такого, что если F = y]2(U + h), стационарность функционала оп-
ределяет траекторию материальной точки; если F = —, то - гео-
v
метрическую форму светового луча.
Упомянутая общность проявится сильнее, если сопоставлять
траектории точки и светового луча при условии
- = Jl(U + h)^>v = . Х
v y yl2(U + h)
Установленная таким образом общность представляет собой
оптико-механическую аналогию, с помощью которой можно
объяснить, например, явление продолжения видимости небесных светил
некоторое время после их заката за горизонт: в неоднородном
оптическом поле траектория светового луча близка к параболе, так же,
как и траектория материальной точки в силовом поле [10].
Подчеркнем, что, несмотря на (кажущуюся) простоту
формулировки принципа (1.16), вследствие нефиксированности момента
времени прихода системы в конфигурацию М\ (t\ - переменная
величина) вариации рассматриваемых здесь величин неизохронны.
Поэтому и вывод уравнений движения из принципа Мопертюи -
Лагранжа нетривиален [4]. Познавательный очерк об истории
развития вариационных принципов помещен в книге [35].
1.3. Принцип стационарного действия Гамильтона
Снова обратимся к интерпретации движения системы в
пространстве Е 3/7 измерений. Рассмотрим потенциальную (существу-
24
Глава 1. Вариационные принципы
ет потенциал U), но неконсервативную (Т+Уф const) систему.
Пусть как по прямому пути М0МХ так и по окольным путям
M0iMl система эволюционирует за одно и то лее время: t\ - tQ =
= const.
Функцией Лагранжа потенциальной системы называют сумму
кинетической энергии и потенциала:
L = T+U=T-y (1.17)
Итак, рассматриваем голономную систему под действием
потенциальных сил.
Пусть система имеет т степеней свободы. Тогда функция
Лагранжа будет выражена через обобщенные координаты и
обобщенные скорости [4]:
L = T + U = L(qu ..., qm, qu ..., qm, t).
Уравнения движения системы запишем в виде уравнений
Лагранжа 2-го рода:
dt
dL
~ = 0 (i = l,m). (1.18)
dqt
Действием по Гамильтону называют интеграл
'1
S=\Ldt. (1.19)
'о
Сравниваем значения S, вычисленные за одно и то же время
t\ - to = const при эволюции системы по прямому и окольным
путям.
В силу принципа Гамильтона: среди всех кинематически
возможных путей из конфигурации А/0 в М\, проходимых за время t\ -
- t0 = const, только на действительном пути действие по
Гамильтону имеет стационарное значение
1.3. Принцип стационарного действия Гамильтона 25
'о
(1.20)
Уравнения движения (1.18) есть уравнения Эйлера
вариационной задачи:
3[q]= fZ,df->extr,
'о
{t = tx:q{tx) = qx.
Ввиду общенаучного значения принципа Гамильтона покажем,
как из уравнений Лагранжа (1.18) можно получить выражение
принципа (1.20). Умножая каждое из уравнений (1.18) на
соответствующую вариацию bqt (вариации bqu ..., bqm между собой
независимы, так как система имеет т степеней свободы) и складывая
все полученные выражения, имеем
At
Щ>)
dq-,j
4=0.
(1.21)
Поскольку здесь вариации изохронны:
—Ъа = Ъа,
dt Ч
найдем, что
'ео
.dq,
я дЬя d
dqt At
я,_ ^ (bl.. az,s л
—5tf; \-\—bqi+—bqi
26
Глава 1. Вариационные принципы
Подставляя это выражение в (1.21), получаем
d/T
i ^ a?,
(1.22)
Так как L = b(q, q, A, bt = О, то
ai
= 51.
Поэтому равенство (1.22) принимает вид
dzfe^| = 5L-dr.
(1.23)
Интегрируем равенство (1.23) в пределах от t = t0 до t = t\ (t0 -
момент времени, когда система находилась в фиксированной
конфигурации М0; t\ - момент времени, соответствующий
фиксированной конфигурации М\). Получаем
i ydqt
= \bLdt.
'о 'о
(1.24)
В силу отмеченной фиксированности конфигураций М0 и Ми
а также постоянства пределов интегрирования, 5#, (*0) = 5^, (t\) = 0,
имеем
5jLdf = 0,
(1.25)
т. е. 6S = 0 - это и есть математическое выражение принципа
Гамильтона.
1.4. О характере экстремума действия по Гамильтону 27
Таким образом, показана эквивалентность уравнений
движения (1.18) и принципа (1.20).
1.4. О характере экстремума действия по Гамильтону
В принципе Гамильтона сравниваются движения за один и тот
же промежуток времени t\ - t0 по прямому пути и по окольным
путям, проходящим через фиксированные конфигурации системы
^о(^о) и ^\(Я\)- Для движения по прямому пути действие S
имеет стационарное значение.
Обсуждаем два связанных между собою вопроса: 1) является
ли прямой путь единственным при произвольном выборе точек М0
и Mi; 2) каков характер экстремума (минимум или максимум) при
движении по прямому пути.
Представление о возможных ответах на поставленные вопросы
дает следующий простой пример.
Пример 1.4. Пусть материальная точка движется по гладкой
сфере радиуса R; активные силы отсутствуют, т. е. точка движется
по инерции. Тогда движение будет происходить по геодезической
линии данной поверхности, в нашем случае - по дуге большого
круга (см. [4]). Скорость по модулю постоянна: v = v0.
Очевидно, что
Z, = r = -^- = const, S = S0=-^-(tx-t0).
Если на сфере выбраны две произвольные фиксированные
точки А и В (рис. 1.5), то через них проходят два возможных прямых
пути: Л£[Mi?\<nR\ и АВ0В\\АВ0В\> kR\. Исключение
представляет случай, когда точка В совпадает с точкой В0, диаметрально
противоположной начальной точке А.
В этом случае через точки А и В проходит множество близких
прямых путей - меридианы.
Точки А и В, через которые проходит множество близких
прямых путей, называют сопряженными кинетическими фокусами.
На основании данного рассмотрения можно сделать выводы,
справедливые и в общем случае:
28
Глава 1. Вариационные принципы
1) если прямой путь не проходит через кинетический фокус,
В Ф Во, то действие имеет минимум, так как точка за время t\ - к
пройдет кратчайший путь с постоянной скоростью
v0=-
АВ\
'i-'o
-=>S0=S„
вследствие того, что любой окольный путь длиннее, чем \АВ ;
2) если прямой путь проходит через кинетический фокус, то
действие на этом пути не имеет минимума.
у^^ /
1 -""" ~~~ I
Wcdl.
^v
г^г
г^^
в \
^*~^^ \
Во
Рис. 1.5
В данном примере это следует из того факта, что для прямого
пути АВоВ найдутся окольные пути, дуги которых будут короче
дуги АВ0В Скорость v и действие S для этих путей подчиняются
неравенствам
v < v0 => S < S0.
Таким образом, точки АиВ всегда можно выбрать настолько
близкими, что действие на прямом пути будет минимальным.
1.4. О характере экстремума действия по Гамильтону 29
Для этого достаточно, чтобы путь АВ не достигал
сопряженного фокуса.
Отсюда и часто употребляемый термин «принцип
наименьшего действия».
В заключение приведем пример, поясняющий
принципиальное различие между принципами Мопертюи - Лагранжа и
Гамильтона [4].
Пример 1.5. По гладкой поверхности по инерции движется
материальная точка. Имеем
w т _ т. . Ill V
U = const => T-U = h => = const:
2
=> v = const.
Согласно принципу Гамильтона
<l/mv2 ^
mv
s=\\—+c
„2
dt = —tx + Ctx => 55* = ^5— = 0,
2 l 2
oV 2
так как St = 0.
Отсюда
5(v2) = 0 => v = vmin.
Таким образом, из всех кинематически возможных движений
между точками А и В, происходящих за одно и то же время (но с
различными скоростями), действительным будет то движение,
для которого v = vmin, и, следовательно
/ = |55| = v/1=/min,
поэтому действительное движение осуществляется по
кратчайшему пути, т. е. по геодезической линии поверхности.
Согласно принципу Мопертюи - Лагранжа, для
действительного движения действие по Лагранжу имеет минимальное значе-
30 Глава 1. Вариационные принципы
ние (так как W > 0) по сравнению с возможными движениями,
происходящими с одной и той же полной энергией:
А {(2T)dt = 0 - полная вариация.
'о
Для рассматриваемого движения
h
W = \mv2dt = mv2tx => AW = mv2At = 0
о
mv2
энергия постоянна: = const, и скорости сравниваемых
движений постоянны.
Отсюда At = 0 => t = fmin-
Таким образом, действительное движение А —> В происходит
за минимальное время, а так как скорость при этом постоянна, то
движение осуществляется по геодезической линии поверхности,
т. е. по кратчайшему пути.
1.5. Каноническая форма системы уравнений Эйлера.
Функция Гамильтона
Поставим задачу классического вариационного исчисления:
[ ъ
Р[у] = lf(x,y,y') dx -> extr,
i a (1.26)
[Яа) = Уо> У(Ь) = У\.
Здесь/() - дважды непрерывно дифференцируемая функция своих
переменных; у = {ух(х),у2(х), ...,у„(*)}, уАх)еС2[а,Ь].
Необходимое условие экстремума функционала в задаче (1.26)
приводит к краевой задаче для системы п уравнений II порядка
(уравнения Эйлера):
7.5. Каноническая форма системы уравнений Эйлера 31
6х у*
У\(а) = ухи ...,уп(а) = уХп,
У\Ф) = У2и ^Уп(Ь) = у2п.
(1.27)
Полученная выше система уравнений Эйлера имеет не очень
удобную форму для исследования. Обычно стараются систему
уравнений высших порядков свести к эквивалентной системе
уравнений I порядка. Можно принять УъУг>~->у'п за п новых
неизвестных функций и рассматривать систему 2п обыкновенных
дифференциальных уравнений (ОДУ) I порядка:
дх
= Ъ,
Г —— Г =0
(i = l,n)-
dx
Здесь f(x9yi9...9y„9yi,...9y'„) = f(x9yi,...,y„9zu...z„).
Однако наиболее удобной для исследования формой
представления является нормальная форма Коши [40], в которой можно
представить систему уравнений (1.27), если ввести в рассмотрение
переменные
л=/;.
Выразив величины у[,...,у'„ через х9у\9 ..., уп и р\9 ...,/?„ из
равенств
Pi=f'v' (х,У\>—,Уп>У1>--->У'П) 0= I"),
У х
принимаем новые переменные
х9у\9 ..-,Уп, Ри -,Pn-
32
Глава 1. Вариационные принципы
Вводим в рассмотрение функцию Гамильтона, связанную с ин-
тегрантом функционала следующим соотношением:
H = -f(x,y,y') + ±y\Pi. (1.28)
Здесь у\ - функции переменных х, yh рг после разрешения
уравнений р{ =fyi(x9yi,...9y„, Уи-чУп) относительно у\, что возможно,
если соответствующий якобиан отличен от нуля, получаем
D(fy,,..,/;,)
*0.
Переменные величины х, yi9 /?,-, называют каноническими
переменными, отвечающими данному функционалу
)f(x,y,y')dx.
а
При вычислении дифференциала функции Гамильтона в
представлении (1.28) нет необходимости в слагаемом f(x,y,y')
переходить к переменным рг в силу теоремы об инвариантности формы
представления первого дифференциала [42, 43]:
dH=-df+£pidy'i + £y,idpi =
i=\ /=i
=-/;d*-L(/' dy, +/;ф;)+х(Аф;+>;Ж).
/=1 yi yi /=1
Вследствие наличия равенств /?, = /у получаем
dH = -f'dx- Z Г dyi + ^y\dPi. (1.29)
i=l yi i=l
Для дифференциала функции Н как функции канонических
переменных х, yi9 pi имеем выражение
7.5. Каноническая форма системы уравнений Эйлера 33
dH(x,y,p) = H'xdx+ZH' dK + Itf' ф,, (1.30)
i=i У{ i=i ^''
Далее из (1.27) находим
/' =— /'. = — А- (1.31)
Jy< dx ', dx K '
Сравнивая равенства (1.29) и (1.30), получаем систему 2л
уравнений I порядка, называемую канонической системой уравнений
ъ
Эйлера рассматриваемого функционала lf(x,y,y')dx:
UKJJL, Ф/=_5£ (|. = j^). (1.32)
dx dpi dx дуг
Из равенств (1.29), (1.30) получаем также зависимость между
производными по х функции Гамильтона и интегранта:
af-f- <■•»>
ох ох
Первым интегралом системы ОДУ называют функцию,
сохраняющую постоянное значение вдоль каждой интегральной
кривой этой системы. Другими словами, полная производная
первого интеграла по х тождественно равна нулю. Это есть
необходимое и достаточное условие для существования первого
интеграла [40].
Рассмотрим сначала случай, когда интегрант/() не зависит
явно от х:
Д-)=Ау,У).
При этом и функция Гамильтона явно от х не зависит.
Следовательно, получим
34
Глава 1. Вариационные принципы
^я_ = удв_^+дн_^ (134)
dx /=1 dyt дх dpi дх
Подставив в это равенство частные производные Н'у , Н'
(найденные по формулам (1.32)), запишем
АН
— = 0=>#(p,j>) = const (1.35)
dx
вдоль каждой экстремали.
Таким образом, если интегрант не зависит от х явно, то
функция Гамильтона Н(у,р) есть первый интеграл системы уравнений
Эйлера (1.27).
Отметим, что если Н явно зависит от jc, то имеет место равен-
дН дН
ство = .
dx дх
Выясним, при каких условиях произвольная
дифференцируемая функция
Ф(У\,У2, -,Уп,Р\,Р2,...,Рп)
будет первым интегралом системы уравнений (1.32).
Вычисляем полную производную Ф() по х вдоль некоторой
интегральной кривой системы:
^=1«г>; М+ф; л')=Х(ф; я; - ф; н').
OX /=1 yi yi /=i 7l yi yi 7г
Выражение
[Ф,Щ = Т(Ф'Н' -Ф'Н') (1.36)
1=1 ' ' ' '
называют скобкой Пуассона от функций Ф и Н [4].
Таким образом, чтобы функция Ф(у,р) была первым
интегралом системы уравнений Эйлера, необходимо и достаточно тожде-
7.5. Каноническая форма системы уравнений Эйлера 3^
ственного равенства нулю скобки Пуассона от данной функции
Ф{-) и функции Гамильтона для данного функционала.
Если же и #(•), и Ф() явно зависят отх, то условием
существования первого дифференциала для функции Ф(х,у,р) становится
тождество
<1Ф дФ
— = ^- + [Ф,Д>0. (1.37)
ах дх
Выясним механический смысл функции Гамильтона.
Рассматриваем потенциальную систему п свободных точек: кинетическая
энергия системы есть
потенциал
U = U(xhyhZi)(i = ui).
Уравнения движения данной системы являются следствиями
принципа Гамильтона как необходимое условие экстремума
функционала
S= \(T + U)dt= \L(xh yh z,; xh yh z,)df.
to 'o
Вводим канонические переменные (i - номер точки): р^ =
= —r = mixh pW =ЩУ1, р^ -Щ2\ - это компоненты вектора ко-
дхг
личества движения i-й точки - импульсы.
Имеем функцию Гамильтона для интегранта функционала S:
—,, . dL . dL дЬЛ
Н = И\Х> — + У1 — + Ъ —
OXj Oyt OZj
-L =
-2T-(T + U) = T-U = T + V. (1.38)
36
Глава 1. Вариационные принципы
Таким образом, функция Гамильтона есть полная
механическая энергия системы. Если же функция Лагранжа от времени явно
не зависит, то, как мы видели выше, функция Н(х, у, z; х, у, z)
является первым интегралом уравнений движения - интегралом
энергии.
Замечание. Обсуждаемый принцип был изложен У.Р.
Гамильтоном в работах, написанных в 1834, 1835 гг. для случая
стационарных связей. Независимо от Гамильтона и в более общей форме
(нестационарные связи) принцип был сформулирован М.В.
Остроградским в 1849 г. Поэтому в отечественной литературе принцип
стационарного действия часто называют принципом Гамильтона -
Остроградского [35].
1.6. Канонические преобразования.
Теорема Нетер
Известна инвариантность формы представления уравнения
Эйлера
— f'.-f = О
относительно преобразования переменных
х = х(и, v), у = у(и, v)
с отличным от нуля якобианом [11].
Этим свойством обладают и канонические уравнения.
Симметрия формы канонических уравнений относительно
переменных yh pi дает возможность понять суть замены переменных
в более широком смысле, а именно как переход от (у„ pi) к новым
переменным (У,, />,-):
Yi=Yi(x,yhPilPi = Pi(x,yi,pd- (1-39)
Какие условия нужно наложить на функции Л (•) и У, (•) в (1.39),
чтобы в новых переменных канонические уравнения сохраняли
свою форму:
1.6. Канонические преобразования. Теорема Нетер Ъ1_
^lJJL dfl=_«L? (140)
dx 8R ' dx dY'
Здесь Я = Н(х, Y, Р) - преобразованная функция Гамильтона.
Преобразования (1.39), оставляющие форму канонических
уравнений инвариантной, называют каноническими
преобразованиями.
Выпишем функционал, которому соответствуют уравнения
(1.40):
5[^]=|-Я + £}у^<к. (1.41)
Здесь У,, Pi - функции переменных х, yt, рг, определяемые
равенствами (1.39), Y/ - производная функции У,.
Потребуем, чтобы новая система уравнений (1.40) получалась
из старой
Ф^__ая ф, = ен
dx dpi' dx dyt
невырожденной заменой переменных, т. е. была ей эквивалентна.
Это равносильно эквивалентности вариационных задач со старой
Н и новой Н функциями Гамильтона в качестве интегрантов.
Доказана теорема 1.1 [11]: две вариационные задачи
эквивалентны, т. е. имеют одни и те же экстремали, если
подынтегральные выражения для функционалов этих задач отличаются друг от
друга на некоторый полный дифференциал, т. е. если
£ p, dyi - Них = £ P,dY, -Hdx + d0(x,у,, Pi). (1.42)
Здесь Ф - некоторая дифференцируемая функция.
Итак, если преобразование (х, ух, pi) —* (х, Yi9 Pi) такое, что
существует функция Ф , удовлетворяющая условию (1.42), то
преобразование (1.39) каноническое.
38
Глава 1. Вариационные принципы
Функцию Ф (х, yh pi) называют производящей функцией
данного канонического преобразования.
Покажем, что по заданной производящей функции возможно
найти соответствующее каноническое преобразование, т. е.
название «производящая» оправданно.
< Из (1.42) имеем:
d0 = ftPidyi-ftPiyi^(H-H}dx=>
1 1
дФ дФ _ дФ ~ тт
ду{ У1 дУг дх
=^Я = Я+-. (1.43)
Формулы (1.43) при соответствующем разрешении первых
двух соотношений дают зависимости (1.39), последенее равенство
определяет значение новой функции Гамильтона. ►
Введем понятие инвариантности функционала относительно
некоторой совокупности преобразований.
Пусть дан функционал
3Irt=J/(*,;V,/)dx. (1-44)
Рассматриваем некоторое преобразование точек (п + 1)-
мерного пространства:
\х* =щ(х,уиу2,...,уп) = щ(х,у), —
(i = ln). (1-45)
Это преобразование переводит кривую у: У/ = yt (х) в кривую у :
у* = у* (х), уравнение которой получим, разрешая зависимости
(1.45).
1.6. Канонические преобразования. Теорема Нетер 39
Определение. Функционал 3 [у] называют инвариантным
относительно преобразования (1.45), если
ЭД = 5[/], т.е. )f(x,y,y')dx = )f(x,y',y")dx\
а а'
Пример 1.6. Покажем, что функционал
3[y]=J/2d*
а
инвариантен относительно преобразования
jc* = х + с,у* = у. (1-46)
Если кривая у определена как у = ц(х) (а < х < Ь), то у : у = у ,
следовательно,у* = ц(х) = ц(х* - с) = ц(х*) (а<х* -с< Ъ).
Образуем функционал от кривой у*:
5[/]J)t^)Tdx-=7f^±£lV=
dx
Ш*-**
так как х - с = х, дх = дх.
ь
Упражнение. Убедитесь в том, что функционал 3[у] = |л^,2(к
а
не инвариантен относительно преобразования (1.46).
Выше было показано, что система уравнений Эйлера имеет
первый интеграл, которым является соответствующая функция
Гамильтона, если интегрант явно не зависит от х, т. е. если
£.о.
дх
40
Глава 1. Вариационные принципы
Факт явной независимости интегранта от х равносилен
следующему: если рассмотреть преобразование (1.46) - сдвиг по оси
ОХ, то функционал не изменяет своего значения, инвариантен
относительно этого преобразования (пример 1.6).
Таким образом, прослеживается связь между инвариантностью
данной вариационной задачи относительно некоторой
совокупности преобразований и наличием первых интегралов
соответствующей системы дифференциальных уравнений, что весьма важно при
решении прикладных задач.
Рассмотрим совокупность обратимых преобразований
переменных с параметром а:
(У =ф0(*, Уи Уг* •••> Уп, а),
0 = 1,"). (1-47)
[у*=<Рё(х,У\>У2>—>Уп>ъ)
Здесь функции ф0, ср, - дифференцируемы; пусть значению
а = 0 соответствует тождественное преобразование
фо(*,.Уь ...,ун)=х, yfa,yu...9yn)=yh
тогда имеет место теорема Нетер.
Теорема 1.2 (теорема Нетер). Каждому преобразованию
ь
(1.47), оставляющему интеграл \/{х,у,у')&к инвариантным,
а
соответствует некоторый первый интеграл системы
уравнений Эйлера.
Доказательства этой теоремы для рассматриваемого
функционала (1.44) изложены в работе [11].
Оригинальное, основанное на физической сущности законов
сохранения, доказательство теоремы Нетер приведено в книге [2].
Построим доказательство теоремы Нетер для частного случая
преобразования (1.47):
г *
х = х
{i=~n). (1.47*)
[у- =<fi(x,yi,...,y„,a)
1.6. Канонические преобразования. Теорема Нетер 41^
< Для доказательства потребуется выражение вариации
функционала
3[у]= \f(x,y,y')dx (1.48)
а
в случае подвижных границ отрезка [а, Ь].
ь
Первая вариация функционала 3[у(х)] = jf(x,y,y')dx в задаче
а
с подвижными границами приводит к естественным краевым
условиям [5]:
53 = (/ - у'Гу- )\х=ь ЬЬ - (f- yf'y )\х=а Ьа +
+ /;L*> - //L*-=°-
Запишем это равенство в более удобной форме:
83 = /;.8^+ (f-yW&cfc=0.
Теперь представим очевидное обобщение этой формулы для
функционала (1.48).
На экстремалях имеем
»=£/;, в* t+(f-iyifM
1 *
= 0. (1.49)
Пусть преобразование (1.47*) оставляет функционал (1.48)
инвариантным:
у->у'^3[у] = 3[у'].
Считаем параметр а малым, тогда
5у, = у* ~Уг= Ф^С*^0)** + о(а) = \\fi(x,y)a + o(a).
42
Глава 1. Вариационные принципы
Принимаем далее, что кривая yt= yt(x) - экстремаль; вычисляем
вариацию функционала, соответствующую переходу yt —> yt +a\|/„
воспользовавшись формулой (1.49).
Рассматриваем случай фиксированных границ отрезка [я, Ь]:
6х(а) = 6х(Ь) = 0.
Тогда вариация функционала примет вид
1 '
Вследствие инвариантности функционала относительно
преобразования у—»у* имеем
53 = 5[у*]-ЗД = 0=>
^i/^eviC=«£/;, viC=о ==>
Интерпретируем полученное равенство следующим образом:
придадим символам аи b смысл переменных величин хх = а, х2 = b -
любые точки отрезка [а, Ь].
Тогда приведенное выше равенство означает, что вдоль
каждой экстремали выполняется условие
п
Z/v>/=const-
1
п
Таким образом, ^/'.у,- есть один из первых интегралов сис-
темы уравнений Эйлера. ►
Пример 1.7. Возвращаемся к случаю явной независимости ин-
тегранта от jc, что равносильно инвариантности функционала
относительно сдвига по оси ОХ:
1.6. Канонические преобразования. Теорема Нетер 43
х = х + а
> дх = а, 5у, = 0.
Действительно, функционал на кривой у имеет вид
После преобразования
3[Y> if(y(xm-a)9y\x*-a))dx\
Обозначив х* - а = z, получим
ь
3[Y*]=f/(>(2),F(z))dz.
Это выражение представляет собой исходный функционал с
точностью до обозначения переменной интегрирования.
По формуле (1.49) вычисляем вариацию функционала,
отвечающую данному преобразованию (Ьх = а, 5у, = 0):
SH/-IM/;, М
= \/-Т,у1Р1 а
:0.
Здесь р/ = /',. Поэтому в круглых скобках имеем функцию
Гамильтона:
дЗ = Н\Ь =0.
\а
Рассуждая так же, как проведено доказательство теоремы
Нетер, приходим к выводу о том, что функция Гамильтона есть
первый интеграл, отвечающий преобразованию сдвига.
44
Глава 1. Вариационные принципы
1.7. Приложения теоремы Нетер: законы сохранения
Продолжая рассматривать потенциальную систему, введем
канонические переменные:
dL dL . dL
Рх; = — = ЩЪ, Ру.= — = ЩУп А,- = — = Щ*г (1-50)
Величины pXj, py, pz. называют импульсами; произведение
массы точки на вектор ее скорости - количество движения точки;
определенные в (1.50) импульсы точек потенциальной системы
являются проекциями количеств движения точек системы на
соответствующие координатные оси.
Вычисляем функцию Гамильтона:
И = £&рХ1+У1РУ1 +ziPzi)-L = 2T-(T-U) = T-U = T + V,
т. е. функция Гамильтона есть полная энергия системы.
Согласно принципу Гамильтона, чтобы определить прямую
траекторию системы, ее действительное движение, необходимо
решить вариационную задачу:
/1
5S = 0=> |Z,df->extr. (1.51)
to
Найдем некоторые первые интегралы системы уравнений
движения.
1. Пусть функция Лагранжа явно от времени не зависит. Как
мы видели выше, функция Гамильтона для интегранта
функционала, не зависящего от времени явно, на экстремалях сохраняет
постоянное значение Н = const.
Это есть закон сохранения полной энергии системы, т. е. в
случае явной независимости функции Лагранжа от времени система
является консервативной.
2. Пусть функция Лагранжа не меняет своего значения при
параллельном переносе осей
1.7. Приложения теоремы Нетер: законы сохранения 45
(х,у, z)-->(x + a,y + b,z + с),
т. е. функционал (1.51) инвариантен относительно этого
преобразования.
Рассмотрим только перенос по оси ОХ:
а = а, Ь = с = 0.
Мы получим преобразование (1.47), для которого в частном
случае была доказана теорема Нетер, если запишем
t* = t, x* = х + а, у* = у, z = z =>
да да да
В силу теоремы Нетер первым интегралом является сумма
^(дЬ дх- ( dL ду- ^ dLdz*A
, ^ dxi да dyt да dzt да )а=0
п dL "
= У — = const => У рх = const.
Аналогично из инвариантности относительно сдвигов по осям
OY, OZ получим
п п
X рУ1 = const, £ pz. = const.
1 1
Полным импульсом системы называют вектор р:
46
Глава 1. Вариационные принципы
Таким образом, если интеграл ]bdt инвариантен
относительно преобразования параллельного переноса, то полный импульс
системы не изменяется во времени.
Получен закон сохранения импульса системы - закон
сохранения количества движения.
3. Рассмотрим векторы:
Pi = Рх^\ + Ру^г + Pz& - полный импульс /-й точки системы;
Ц = Xiex + yie2 + 2{еъ - радиус-вектор этой же точки
относительно начала координат.
Векторное произведение векторов rt х Д называют моментом
импульса точки относительно начала координат - моментом
количества движения точки.
'1
Предположим, что функционал JLdt инвариантен
относило
тельно преобразования поворота вокруг оси OZ на угол а:
х* = х, cos а + уi sin а,
у* = -Xj sin а + yt cos а,
Z* =Z;.
(1.52)
Из (1.52) получим:
дх*\
да
= Уп
1а=0
да
а=0
= -*,, — = 0.
да
По теореме Нетер имеем первый интеграл:
^(dLdx* t dLdy- { dLdz-
! I дх; да dy-t да dzt да
-1£(Px.yi-pXi) = const.
1.7. Приложения теоремы Нетер: законы сохранения 47_
В последней сумме каждая пара слагаемых есть (со знаком
минус) проекция вектора момента количества движения на ось OZ.
Таким образом, проекция на ось OZ вектора количества
движения всей системы сохраняется во времени.
Значит, если действие по Гамильтону инвариантно
относительно вращений вокруг координатных осей, то момент полного
импульса сохраняет свою величину - является одним из первых
интегралов системы уравнений движения.
Пример 1.8. Рассматриваем движение материальной точки под
действием притягивающей центральной силы, которая является
линейной функцией радиус-вектора точки:
F = —сг = -с(хех + уе2 ).
Потенциальная и кинетическая энергии системы имеют вид
V(x,y) = -U(x,y) = c^ + £\
Т = -т{х2+у2\
а функция Лагранжа такова:
L = T + U = L(x, у, х, у).
Как видим, функция Лагранжа явно от времени не зависит,
поэтому полная энергия есть величина постоянная:
Н = T-U = -т(х2 + у2) + -с(х2 + у2) = const.
Действие по Гамильтону
1 '*
S = - \(m(x2 +y2)-c(x2 +y2))dt
'о
48
Глава 1. Вариационные принципы
обладает следующими свойствами:
1) неинвариантно относительно сдвигов по каждой из осей
координат, например:
t =t,x = х + а,у = >>=>
=> L(x\y\x\y*) = -m(x2 + у2) -с((х+ а)2 + у2) * L(x,y,x,y).
Поэтому закон сохранения импульса не имеет места;
2) инвариантно (в силу своей квадратичной структуры)
относительно поворота на угол а вокруг оси OZ:
L(x*,y* ,х*, у* )=—[т(х cos а+у sin а)2 +
+ w(-isina+>'Cosa)2-c((jccosa+^sina)2+(-jcsina+^cosa)2)] =
=-[m(x2+y2)-c(x2+y2)]=L(x,y,x,y)^>
=> JL(x,y,x,y)dt = JL(x\y*,x\y*)dt*.
to 'o
Следовательно, имеет место закон сохранения момента
импульса относительно оси OZ.
1.8. Минимальные принципы в теории упругости
1. Принцип минимума потенциальной энергии
Рассмотрим упругое тело, занимающее область QcR3c
поверхностью Е. Введем обозначения: \ех, е2, ?3} - ортонормиро-
ванный базис системы ОХ\Х2Хъ\ и(хих2,х3) = щех +и2ё2 +щеъ -
вектор перемещений точек М(х\, х2, *з) е Q; Оу (х\, х2, х3) -
компоненты тензора (второго ранга) напряжений QJ =1,2, 3); Еу(хи х2, х3) -
компоненты тензора малых деформаций, связанные с координатами
вектора и формулами Коши [38]:
1.8. Минимальные принципы в теории упругости А9_
ди;
— = "/,, при/= 7,
дщ ди. . .
— + -г1- = "ij + «/,/ при z * j.
дх; дхг J
(1.53)
Пусть рассматриваемое тело линейно упруго и изотропно.
Тогда в силу закона Гука деформации и напряжения связаны
известными соотношениями Ламэ ((0 = ех х + е22 + £зз):
А.0 + 2ц£„ при / = у,
це/у при i * у
(1,7=1,2,3).
(1.54)
Здесь 0 = div(w) = щ \ + м2,2 + и\ъ ~ малое относительное
объемное расширение (относительное изменение объема элемента d£l);
ji и X - постоянные Ламэ, связанные с основными механическими
константами материала модулем Юнга Е (Н/м2) и коэффициентом
Пуассона v (безразмерная величина) формулами, приведенными в
работе [38]:
, vE E
Х = — ———, \х = -
=>£• =
(l + v)(l-2v)
\i(3X + 2ц)
2(1 + v)
X
2(А, + ц)
В терминах деформации упругий потенциал выглядит
следующим образом [24]:
2U = Хв2 + 2ji(6?! + г222 + е323) + ц(е22 + е23 + е323),
и, так как U- есть положительно определенная квадратичная
форма (см. п. 2.2), отсюда следует, что X > 0, \l > 0.
Таким образом, в силу связи между X, \х и Е, v имеем
£>0, l + v>0, l-2v>0=>-Kv<
1
50
Глава 1. Вариационные принципы
Последнее неравенство (как следствие п. 2.2) есть необходимое
и достаточное условие положительной определенности упругого
потенциала.
Пусть F - внешние объемные силы, под действием которых, а
также, возможно, и поверхностных сил Q, тело находится в
равновесии:
1 1
Уравнения равновесия элемента объема любого сплошного
тела имеют вид
t°VJ+Fi=0=>-i°!fj=Fi (* = U,3). (1.55)
В силу связей между напряжениями и деформациями (1.54),
между деформациями и перемещениями (1.53), уравнения (1.55)
будем рассматривать как одно векторное уравнение относительно
вектора и (записанное в операторной форме):
Au=F. (1.56)
В курсах теории упругости показано [33], что оператор А для
упругого изотропного тела имеет вид
X
Аи = цДм+ — grad(divw). (1.57)
v
Пусть упругий потенциал U = Up(Oij) = Uu{Zij)
Г dU,
On =
4 5s,"
; и , и - векторы упругих перемещении, отвечающие
диЛ
объемным и поверхностным силам F", Q' и F", Q"
соответственно.
1.8. Минимальные принципы в теории упругости Ъ\_
По закону взаимности Бетти [28] работа сил первой системы
(обозначенных одним штрихом) на перемещениях и",
обусловленных второй системой сил (два штриха), равна работе сил
второй системы на перемещениях, отвечающих силам F", Q.
Поэтому имеем
I о'уе'у = Z оЪе'9=>и(и'9и') = и(ия,и'). (1-58)
Известны как следствие закона взаимности соотношения [33]:
\и Ай"<Ю. = 2\и(и\ип)<Ю.-6й'-Q"^ (1.59)
\и Au'dn = 2\U(u\u")<Kl-6u" Q'dL. (1.60)
q q z
Отсюда
l(u'-Au"-u*'Au')dn = ^(u'-Q'-u'-Q')dL. (1.61)
« s
Исследуем задачу об интегрировании уравнения теории
упругости (1.56).
Пусть краевые условия, соответствующие уравнению (1.56),
однородны:
а) граница (поверхность) упругого тела закреплена:
«|s=0; (1.62)
б) граница свободна от внешних усилий:
е|2=б; (1.63)
в) граница состоит из двух частей Е = 1Х + Е2 (смешанные
условия):
52
Глава 1. Вариационные принципы
5|,,=0, 42=0- (1-64)
Потенциальную энергию рассматриваемой системы (упругое
тело под действием массовых сил F) можно записать в виде
интеграла
V*= l(U(u)-uF)da (1.65)
Q
Докажем, что краевые задачи (1.56), (1.62); (1.56), (1.63); (1.56),
(1.64) равносильны задаче о минимуме функционала (1.65):
V* —> min.
< Прежде всего сформулируем теорему о минимальном
функционале.
Пусть задача состоит в решении дифференциального
уравнения при некоторых краевых условиях. Считаем, что краевые
условия однородные, само уравнение неоднородное. Левую часть
уравнения рассматриваем как оператор, определенный на
соответствующих функциях, удовлетворяющих краевым условиям:
Au=f(P),
где/(Р) - заданная функция точки Р; эта функция имеет конечную
норму.
Теорема 1.3. Если оператор А положительный, то уравнение
Аи =f(P) не может иметь более одного решения [33].
Приводимые в курсах математической физики теоремы
единственности решения основных краевых задач для эллиптических
уравнений чаще всего есть частные случаи теоремы 1.3. То же
самое относится и к известной теореме Кирхгофа о единственности
решений основных задач статической теории упругости (ниже
увидим, что оператор А системы уравнений теории упругости
положительный).
Скалярным произведением двух функций и(Р), у(Р)
непрерывных в области Q (P е Q) называют интеграл по области Q от
произведения этих функций:
1.8. Минимальные принципы в теории упругости 53^
(u,v)=lu(P)v(P)dn.
Q
Теорема 1.4 (теорема о минимальном функционале). Пусть А -
положительный оператор с областью определения DA. Если
уравнение Ли = f(P) имеет решение, то из всех значений
квадратичного функционала
3[и] = (Аи,и) - 2{uJ) = \[и(Р) • Аи{Р) - 2u(P)f(P)]dQ,
которые 3 [и] принимает на функциях u(P)eDA, наименьшим
является значение 3 [щ], где щ(Р) - решение уравнения Ли =f(P).
Итак, рассмотрим скалярное произведение
(и, Аи)= \й• Ай<К1,
п
из которого в силу (1.59), (1.60) получим
(Аи,и) = 2 lU(u)d£l > 0, (1.66)
Q
так как вследствие краевых условий (1.62) или (1.64)
подынтегральная функция в поверхностном интеграле равна нулю.
Если (Ли,и) = 0, то U(u) = 0, и, так как U есть положительно
определенная квадратичная форма относительно е,у, получим ztj = 0.
При этом вектор и может быть отличным от нуля, если и
является вектором жесткого перемещения тела. Однако в силу (1.62)
или (1.64) жесткое перемещение тела невозможно. Следовательно,
(Аи,и)>0, причем (Ай,и) = 0=> и = Ъ.
Таким образом, оператор А положителен на множестве
функций и(Р) е DA.
По теореме о минимальном функционале отыскание решения
уравнения (1.56) равносильно решению задачи
3[и] = (Аи,и)-2(и, F) = 2l[U-uF]dn^min.
Q
54
Глава 1. Вариационные принципы
Здесь 3[и] - потенциальная энергия упругой системы. Итак,
доказан принцип минимума потенциальной энергии системы
применительно к краевым условиям (1.62) и (1.64). ►
Задача решения уравнения (1.56) при условиях (1.63) в теории
упругости аналогична задаче Неймана в теории гармонических
функций [41].
На линейном пространстве векторов, непрерывных в Й = Q. +1
вместе со своими производными вплоть до второго порядка,
оператор А не является положительным, если не устранить жесткие
смещения тела (см. выше): (Аи, и) > О, (Аи, й) = 0 не только при
и = О - достаточно принять за и вектор малого перемещения
и = const.
Как и в задаче Неймана, сделаем оператор положительным,
рассматривая его на более узком множестве векторов.
Необходимые условия разрешимости задачи (1.56), (1.63) состоят в том, что
система сил, приложенных к упругому телу, должна быть
эквивалентна нулю (необходимое условие равновесия деформируемого
твердого тела), т. е.
jF6D. = 0, \(r0xF)<Kl = 0,
Q Q
так как поверхностные силы отсутствуют; г0 - радиус-вектор
относительно центра О, например, начала координат.
Вектор перемещений и в этом случае (краевые условия
(1.63)) определяется, вообще говоря, неединственным образом:
два вектора упругих (внутренних) перемещений при одной и той
же системе сил F могут отличаться на произвольный вектор и0
малого жесткого перемещения тела. Этот произвольный вектор
можно фиксировать, подчинив искомое упругое решение
условиям «равновесия»:
|й(Ю = б, J(r0xw)dfi = 6. (1.67)
Q Q
Упражнение. Покажите, что вектор жесткого перемещения,
удовлетворяющий условиям «равновесия» (1.67), равен нулю.
1.8. Минимальные принципы в теории упругости 55
Докажем, что на линейном пространстве функций м,
удовлетворяющих условиям (1.63) и (1.67), операторе положительный.
-4 Выше выяснено, что из условия (Ail,и) = О следует
равенство нулю вектора и малого жесткого перемещения, которое в
нашем случае фиксировано в силу (1.67). Но при этом жесткое
перемещение равно нулю (см. упражнение).
Следовательно, и для краевых условий (1.63) оператор А
положительный. ►
Таким образом, принцип минимума потенциальной энергии
системы имеет место при однородных краевых условиях (а - в).
В работе [33] показано, что оператор А, определяющий
уравнения теории упругости изотропного тела на линейных пространствах
векторов, подчиняющихся условиям (1.62), (1.64) или (1.63), (1.67),
не просто положительный, а положительно определенный.
2. Принцип Кастильяно
Внимательно рассматривая связь между понятиями
потенциальной энергии и дополнительной работы, можно утверждать, что
теоремы Лагранжа и Кастильяно взаимны (см. п. 2.2). Поэтому
стационарному (минимальному) значению потенциальной энергии
нелинейно упругого тела должно отвечать также стационарное
(максимальное) значение дополнительной работы, т. е. функции
Гамильтона.
Если рассматривать линейно упругое тело, то V = Н, т. е.
функция Гамильтона есть потенциальная энергия упругого тела и
можно ожидать, что взаимный (двойственный) к принципу Лагранжа
принцип Кастильяно будет формулироваться в терминах
минимальности потенциальной энергии.
В работе [37] принцип Кастильяно выводится с
использованием принципа возможных перемещений, а в работе [22] - с
использованием идеи множителей Лагранжа. Здесь принцип
Кастильяно будет выведен с помощью метода ортогональных
проекций [33].
Рассматриваем множество всех тензоров напряжений о(Оу) (ij =
= 1,2, 3), компоненты которых удовлетворяют уравнениям
равновесия упругого тела Q с гладкой границей Е под действием
произвольных массовых сил F(xx, х2, хъ):
56
Глава 1. Вариационные принципы
Sa^+F, =0(1=1,2,3). (1.68)
7=1
С каждым тензором а свяжем однозначно определенный тензор
деформаций £ = (е,у) (в силу закона Гука):
е« = — iPu ~ v<S>jj + <*«)) 0" * J * к),
\ (1-69)
2(1+ v) ,. Л
I E
Упомянутое множество а с помощью известных из линейной
алгебры процедур превращаем сначала в линейное пространство,
затем, определив скалярное произведение и норму, в гильбертово
Я(о):
(a',a') =
= {Ке11 +^22 +^33 + ^12 +^зеГз +^23 )^К {ХЩ
Q
следовательно, (а', а") = (а", а') согласно закону взаимности
Бетти (1.58),
И|2= 1(аце11+... + а23е2з). (1.71)
Q
Заметим, что если а есть тензор упругих напряжений, то — |а|| -
потенциальная энергия деформации тела Q.
Упражнение. Убедитесь в том, что определения (1.70), (1.71)
удовлетворяют всем аксиомам евклидова и нормированного
пространств.
Далее рассматриваем смешанную задачу теории упругости, т. е.
краевые условия ставим в виде (1.64).
1.8. Минимальные принципы в теории упругости 57_
Пусть Н2(о) множество тензоров напряжений а",
удовлетворяющих однородным уравнениям равновесия
2Х,=0 (1=1,2,3). (1.72)
Это множество образует подпространство Н2(о) с: #(о),
соответствующее нулевому значению вектора F (F = 0).
В качестве подпространства Н\(о) выбираем множество
тензоров а', таких, что соответствующие им (в силу (1.69)) деформации
s'ij связаны с вектором перемещений и' формулами Коши (1.53).
Пусть сам вектор й\ в свою очередь, удовлетворяет краевому
условию й'\ =0.
Замечания. 1. Очевидно, что множества тензоров а е Н(е), так
же как и Н2(о), бесконечны, так как для трех уравнений
относительно шести значений а,у (тензоры оие симметричны) можно
построить сколько угодно дифференцируемых функций <5у{х\, х2, х3),
обращающих эти уравнения в тождества.
2. Множество Н\(а) можно образовать так: строится любая
дважды дифференцируемая функция й(хих2,х3), отвечающая
малым перемещениям точек тела и равная нулю на Еь по
формулам Коши образуем соответствующий вектору и' тензор (ejy), a
затем по закону Гука - тензор (о'у).
Очевидно, что множество Н\(о) также бесконечно.
Убедимся в том, что подпространства Н\(о) и Н2(о)
ортогональны, а в сумме образуют Н(о):
Я ,(о) 1 Я2(о), Я(о) = Я ,(о) + Я2(о).
«^ Пусть на участке поверхности dX с единичной внешней нор-
з _ з
малью й = ^/Д действует поверхностная сила б = ^бД-.
58
Глава 1. Вариационные принципы
По известным формулам Коши [38] компоненты вектора Q
выражаются через значения а,у, вычисленные в точках (х\, jc2, jc3) е Е, в
виде
з
fi=Z<Vy 0" =1.2,3). (1.73)
По определению
(о',с/)= J(e;ia;i+... + e'23^23)dQ =
Q
= j(Wl>r1+...+(W2,3+<2)^23)da.
Q
При интегрировании каждого слагаемого используем формулы
типа
dQ =
= (J(W;ari)/idS-JW;aludQ
и т.д.
Тогда имеем
= <J(«i'K,/i +ay2 +CT13/3) + ...)d2-
dO =
" J(«l'(ofu + CT12,2 + <Тп,з) + • • -)dQ = 0,
n
так как первый интеграл обращается в нуль в силу краевых условий
1.8. Минимальные принципы в теории упругости 59^
второй интеграл равен нулю вследствие того, что компоненты
тензора a]j тождественно удовлетворяют однородным уравнениям
равновесия.
Итак,
Нх(&)±Н2{а').
Далее, если а - произвольный тензор из #(а), то его можно,
очевидно, представить в виде суммы
о = о, + о"(о'еНь о"еН2).
Пусть и' - вектор упругих перемещений, удовлетворяющий
вместе с соответствующим ему тензором а' соотношениям (1.53),
(1.54), уравнениям (1.55) и смешанным краевым условиям (1.64).
За тензор а" достаточно принять разность а - а', так как
компоненты тензора Оу - aj, удовлетворяют однородным уравнениям
равновесия:
i(ara;.)v=0(/=l,2,3).
Следовательно, Я(а) = Нх (а') + Н2 (а"). ►
Пусть а - любой тензор из пространства #(а),
удовлетворяющий условию
б! =6=>ivy| = 0 (/=1,2,3), (1.74)
а тензор a0 = (a{J-) есть решение смешанной задачи теории
упругости в напряжениях. Тогда оо есть проекция тензора а на
подпространство Н\ (в силу его природы). Следовательно,
60
Глава 1. Вариационные принципы
(6-g0)<eH2 и (g0,g-g0) = 0, тогда а0 1(а-а0).
По теореме Пифагора имеем g = g0 + (g-g0)^>
ЧИ2ЧЫ12+|*-«о||2.
Отсюда получаем выражение принципа Кастильяно:
||а|| ^||ао|| - из всех тензоров напряжений, удовлетворяющих
уравнениям равновесия и краевому условию в напряжениях,
наименьшую потенциальную энергию телу сообщает тензор истинных
упругих напряжений, т. е. точное решение задачи упругости в
напряжениях.
Энергетической нормой вектора и, связанной с оператором,
действующим на вектор, называют скалярное произведение
(Ай,й)=\и\.
Пусть и0 — вектор упругих перемещений, соответствующий
точному значению тензора напряжений а0 (точному решению
задачи). Из формулы (1.66) имеем
(Ай,й)=\и\=2У(и0),
где V(u0) - потенциальная энергия упругой деформации,
соответствующей вектору и0. Отсюда ясно, что ||сго| = |"о I-
Таким образом, мы получили возможность строить оценки
приближенных решений, получаемых прямыми методами (см.
гл. 3).
На основе изложенного выше материала сделаем выводы.
Согласно принципу Лагранжа (минимума потенциальной
энергии) потенциальная энергия системы (энергия упругих
деформаций и работа внешних сил) минимальна на истинных упругих
перемещениях точек тела, а в соответствии с принципом Кастильяно
упругая энергия деформированного тела минимальна на
истинных напряжениях, возникших в упругом теле под действием
внешних сил.
ГЛАВА 2
ВАРИАЦИОННОЕ ИСЧИСЛЕНИЕ
И ЗАДАЧИ МАТЕМАТИЧЕСКОЙ ФИЗИКИ
Вариационное исчисление является надежным инструментом
для вывода дифференциальных уравнений математической
физики. Если при этом речь идет о задачах равновесия, то в основу
исследования можно положить вариационный принцип минимума
потенциальной энергии. Уравнения процессов движения проще
всего формулируются с помощью принципа Гамильтона или
принципа Даламбера - Лагранжа.
2.1. Система с конечным числом степеней свободы
Пусть механическая система, имеющая п степеней свободы, связи
которой не зависят от времени (склерономны), находится под
действием потенциальных сил. Кинетическая энергия системы Т
определяется в виде квадратичной формы от обобщенных скоростей:
п
'.7=1
причем коэффициенты щ - заданные функции обобщенных
координат. Потенциальная функция - потенциал обобщенных сил -
известная функция обобщенных координат, не зависящая явно от времени:
U=U(qu q2, ..., qn).
Принцип Гамильтона (см. гл. 1) требует стационарности
действия по Гамильтону на действительной траектории системы (на
прямом пути) по сравнению со всеми возможными путями систе-
62 Глава 2. Вариационное исчисление и задачи математической физики
мы, согласными с наложенными на систему связями и
проходимыми за один и тот же промежуток времени t\- t0 = const:
6S = d\(T + U)dt = 0.
Отсюда в качестве уравнений Эйлера данной вариационной
задачи получаем уравнения Лагранжа 2-го рода:
±(Т+иу41-(т+и)'^=о--
dt
d_
dt
едтЛ
\дъ;
дТ _dU
(2.1)
Пусть значения qt = О обращают в нуль частные производные
потенциала по обобщенным координатам: = 0.
dqt
При этом система ОДУ (2.1) имеет очевидное решение q\-qi-
= ... = q„ = О - положение равновесия системы.
Потенциальная функция определяется с точностью до
аддитивной постоянной, и мы вправе считать, что U= U(0, О, ..., 0) = 0.
Поэтому можно утверждать, что разложение функции U в
окрестности положения равновесия q = 0 начинается с членов второй
степени относительно qf.
Пусть квадратичная форма, образуемая слагаемыми второй
степени отрицательно определена, откуда следует, что U имеет
максимум при q = 0, а потенциальная энергия V = -U
соответственно имеет минимум. При этом положение равновесия будет
устойчивым, и при малых начальных возмущениях система
будет совершать малые колебания в окрестности положения
равновесия [32].
Итак, для рассматриваемой системы кинетическая и
потенциальная энергии являются положительно определенными
квадратичными формами: первая в силу определения есть форма от
обобщенных скоростей, вторая в силу приведенных выше
рассуждений - форма от обобщенных координат.
2.1. Система с конечным числом степеней свободы 63
Пусть V = £ bijqiqj (Ь0 = Ьл).
Преобразуем выражение кинетической энергии. Разлагая
коэффициенты я,у, являющиеся функциями обобщенных координат qh
в ряд Тэйлора в окрестности q = 0, получаем
'да^
^• = K)o+Z т-Ч^ + Е
&1г
{ ач
=lV^r^,J0
0г0,+--
Вследствие малости отклонений и скоростей в положении
устойчивого равновесия в полученном разложении ограничиваемся
только первым слагаемым, так как остальные слагаемые в
произведении с qiqj являются в выражении кинетической энергии
слагаемыми не ниже третьего порядка.
Тогда выражение для кинетической энергии также будет
квадратичной формой с постоянными коэффициентами:
',7=1
В дальнейшем изложении в выражении коэффициентов
квадратичной формы символ «О» опускаем: (я,у)0 = я,,.
Подставляем значения энергий в систему уравнений (2.1),
получаем систему п линейных ОДУ II порядка с постоянными
коэффициентами:
*i \Я\ + а\гЯг +••• + а\п4п + buqx+ bnq2 +... + Ъх nqn = О,
*2i& + a2i4i + • • • + alnqn + b2Xqx + b22q2 +... + b2nqn = 0,
(2.2)
{an\'4\ + an2q2 +... + annqn+ bnXqx + bn2q2 +... + bnnqn = 0.
Решаем систему уравнений (2.2) методом Эйлера [40]:
64 Глава 2. Вариационное исчисление и задачи математической физики
(Ч1,<]2,...,д„У=(А1,А2,...,А„Уек'.
(2.3)
Здесь символ «т» означает операцию транспонирования;
постоянные А\, ..., А„, X подлежат определению.
Подставляем (2.3) в (2.2) и получаем для определения А, и X
алгебраическую систему уравнений
(bu+X2au)Ax+{bn+X2an)A2+... + (bXn+X2aXn)An=^
(Ь2Х+Х2а2Х)Ах + (Ь22+Х2а22)А2+... + (Ь2п+Х2а2п)Ап=0,
(2.4)
№i +*4i)4 HKi +^Ч2)Л +... + №« + ^2OA =0.
Для получения нетривиального решения однородной системы
уравнений (2.4) (А\, А2, ..., А„) * (0, 0, ..., 0) приравняем
определитель системы к нулю:
\(bxx+X2axx)(bX2+X2aX2) ... (bXn+X2aXn)
(b2X+X2a2X)(b22+X2a22) ... (b2n+X2a2n)[
= 0.
(Ьщ+Х2апХ)(Ьп2+Х2ап2) ... (&„„ +A,20|
Раскрыв определитель, получим алгебраическое уравнение
степени 2п:
Х2п + щХ2п~1 + ... + агл-Д + а2п= 0,
(2.5)
представляющее собой характеристическое уравнение системы (2.2).
Взяв некоторый корень характеристического уравнения,
подставив в систему алгебраических уравнений (2.4) и решив систему, по-
2.1. Система с конечным числом степеней свободы 65
лучим один или несколько собственных векторов (А\, А2, ..., А„)
в зависимости от кратности корня X уравнения (2.5).
Подробности исследования характера малых колебаний
рассмотрены в [4].
В общей теории квадратичных форм доказывается, что если
при рассмотрении двух квадратичных форм одна из них
оказывается положительно определенной (в нашем случае обе
квадратичные формы Т и V положительно определены), то существует
такое линейное преобразование координат
п п _
4/ = X Y/A > Чх= Z УiAj 0' = !> ")>
,•=1 у=1
что Т и V одновременно преобразуются к каноническому виду:
T = tati> v = £bti, (2.6)
l 1=1
где ап Ь1 - коэффициенты, полученные в результате
преобразования.
Уравнения Лагранжа для новых координат £,- примут вид
Интегрируя эти уравнения, найдем
^ = С, cos(oo/ i) + Д sin((0/1), (2.7)
где со. =у]^/а^
Координаты £/ называют главными или нормальными. Из
полученных для £/ выражений следует, что каждая нормальная
координата совершает гармоническое колебание со своей собственной
частотой. Другие координаты, которые могут быть получены из
66 Глава 2. Вариационное исчисление и задачи математической физики
нормальных координат с помощью невырожденного линейного
преобразования, имеют сложные колебания как результат
суперпозиции п гармонических (нормальных) колебаний.
2.2. Принцип возможных перемещений
для деформируемого тела
Упругое тело, будучи деформированным, является
аккумулятором энергии, т. е. работы, затраченной на его деформирование.
При устранении действующих на тело сил накопленная энергия
отдается упругим телом. Использование упругого аккумулятора
энергии широко распространено в технике и находит применение,
например, в конструкции заводного механизма, в некоторых
самопишущих приборах и т. д.
В общем случае внешние силы, прикладываемые к упругому
телу, совершают работу, которая, с одной стороны затрачивается
на сообщение скорости частицам тела, т. е. переходит в
кинетическую энергию Г, а с другой стороны, накапливается в виде
потенциальной энергии деформации. Уравнение баланса энергии для
упругого тела есть
A = T+V. (2.8)
Величина V представляет ту часть работы А внешних сил,
которая затрачивается на деформирование тела и, если тело упругое,
остается в нем до тех пор, пока внешние силы не будут устранены.
Для вычисления потенциальной энергии V предположим, что
внешняя сила прикладывается таким образом, что кинетическая
энергия равна нулю. При этом внешнюю силу Р необходимо
прикладывать так, чтобы ее модуль возрастал от нуля до своего
максимального значения столь медленно, что скорость деформации
можно было бы считать практически равной нулю (такие процессы
нагружения называют квазистатическими); пренебрегаем также и
силами инерции. Только лишь в этом случае внутренние силы
упругости уравновешиваются внешними силами, и поэтому
уравнение баланса (2.8) запишем в виде
A = V.
2.2. Принцип возможных перемещений для деформируемого тела 67
Пример 2.1. Вычислим энергию деформации в случае
деформирования линейно упругого цилиндрического стержня, длина которого
/, площадь поперечного сечения F; модуль Юнга материала стержня
Е Н/м2. Стержень растягивается продольной силой Р.
Процесс деформирования представим как последовательность
малых приращений удлинения d(A/), вызываемых увеличением
силы Р, которая при растяжении-сжатии связана с удлинением А/
законом Гука (г = А/// - деформация в точках произвольного
поперечного сечения):
Р = (Ee)F = EF(Al/t), (2.9)
где Ее - напряжение в точках поперечного сечения.
Приращению d(A/) соответствует положительная элементарная
работа
ЬА = Pd(Al).
Поэтому в силу (2.9)
А£ А£ EF EF А/2 1
V = A= j>d(A/) = J A/d(A/) = = -PM. (2.10)
0 0 ' ILL
Обратите внимание, что при деформировании стержня работа
деформации равна половине работы внешней силы в ее конечном
значении на произведенном ею перемещении А/.
Если деформируемое твердое тело под действием внешних сил
Pi9 приложенных в точках с радиус-векторами гп находится в
состоянии равновесия, то можно воспользоваться принципом
возможных перемещений Лагранжа, имея в виду, что на возможных
перемещениях будут работать не только внешние, но и внутренние
силы системы. Внешние силы вызовут в теле ответную реакцию в
виде напряжений (упругих, упругопластических, либо тех и
других одновременно).
Если тело упругое, то затраченная внешними силами работа
полностью перейдет в энергию упругой деформации:
£ргЬп=ЬУ, (2.11)
68 Глава 2. Вариационное исчисление и задачи математической физики
где bV - изменение упругой энергии, соответствующее данной
системе возможных перемещений.
Величину bV можно представить следующим образом:
bV=\budn. (2.12)
Q
Здесь Ьи - элементарная работа внутренних сил в единице объема -
плотность энергии деформации; Q - область, занимаемая упругим
телом.
Рассмотрим элемент объема в виде параллелепипеда, ребра
которого а, Ь, с направлены по главным осям тензора напряжений
[38]. Пусть действующие на грань напряжения (главные
напряжения) суть Gi, g2, G3; приращения деформаций соответствующих
ребер есть 5гь 5г2, 5г3. Напряжение, действующее на грань с
площадью (Ь х с) обозначим как Gb следовательно, сила, действующая
на эту грань, есть (Ьс)о\\ эта сила произведет работу на
элементарном перемещении, равном удлинению ребра а, т. е. на
перемещении а Ы\. Рассчитывая работу сил, действующих на все грани, и
относя работу к единице объема, получаем
bu = Gj5ei + G25e2 + G35e3. (2.13)
В общем случае деформируемого твердого тела величина Ьи не
является полным дифференциалом, т. е. не существует функции
w(eb г2, г3), такой, что
ди
Однако для упругого тела такая функция существует, и
называют ее упругим потенциалом (вспомните определение потенциала
сил механической системы материальных точек). Упругий
потенциал есть не что иное, как энергия упругих деформаций в
единице объема.
Если гь г2, г3 в (2.13) выражены через Gb g2, g3 по закону
Гука [28], т. е.
2.2. Принцип возможных перемещений для деформируемого тела 69
гх =—(^-уСаг+аз)), ...
Е
(где многоточие означает, что г2, ез получаются круговой
заменой индексов 1 —» 2 —» 3 —» 1), то правая часть уравнения (2.13)
интегрируется и мы получим выражение упругого потенциала
через напряжения:
и = (a2 +G2 + a2 -2v(a!a2 + о2аз + а1аз))> (2-14)
2Е
где v - коэффициент Пуассона.
Известно, что коэффициент Пуассона удовлетворяет
ограничениям
-К v < 1/2.
Покажем, что квадратичная форма (2.14)
Доь а2, а3) = и
положительно определена.
< Действительно, матрица квадратичной формы (2.14) без
учета общего для всех слагаемых коэффициента (\/2)Е > 0 имеет вид
А =
( 1 -v-v
-V 1 -V
-V -V \ )
Вычисляем главные диагональные миноры матрицы А:
Ai = 1, А2 = 1 - v2, А3 = 1 - v2(3 + 2v).
Первые два минора положительны в силу ограничений -1 < v < 1/2.
Рассмотрим кубический полином
70 Глава 2. Вариационное исчисление и задачи математической физики
А3 ее Р(у) = -2v3 - 3v2 + 1 ее - (v - l/2)(v + l)2,
примерное поведение которого показано на рис. 2.1.
Рис. 2.1
Следовательно, на интервале (-1, 1/2) А3 > 0.
Таким образом, все главные диагональные миноры матрицы
квадратичной формы /(аь а2, а3) больше нуля, поэтому в силу
критерия Сильвестра квадратичная форма (2.14) положительно
определена. ►
Существование потенциала положено в основу определения и
нелинейно упругого тела, для которого выражение (2.13) также
представляет полный дифференциал.
Формула (2.13) показывает, что энергия упругого
деформирования однозначно определяется заданием деформации. Так
как деформированное состояние упругого тела однозначно
определяется заданием внешних сил, то V можно рассматривать
как функцию этих сил или функцию перемещений точек их
приложения.
Итак, пусть на тело действуют обобщенные силы Р\,Рг, ..., Р„,
соответствующие обобщенные перемещения есть qi,qi,...,q„.
Тогда можно считать, что
V = Vq(qu q2, ..., qn) = Vp(Pu Р2, ..., Рп).
2.2. Принцип возможных перемещений для деформируемого тела 71
Сообщим обобщенным перемещениям возможные изменения
5д„ согласные со связями. При этом элементарная работа обоб-
п
щенных сил есть ^/^5д,, и
" 8V
l dq,
Уравнение (2.11) приводим к виду
f Я1/ Л
6*f.=0. (2.15)
\ dai J
Отсюда вследствие независимости вариаций bq{ получаем
важные соотношения:
dqt
Соотношения (2.16) выражают одну из самых общих теорем
механики упругого тела, а именно - теорему Лагранжа.
Теорема 2.1 (теорема Лагранжа). Производная от упругой
энергии по обобщенному перемещению равна соответствующей
обобщенной силе.
Пример 2,2 [38]. Рассмотрим систему двух упругих стержней,
соединенных шарниром и образующих в исходном положении
угол к между собой (рис. 2.2). К шарниру О приложена сила Р,
которая вызывает малое вертикальное перемещение q.
Перемещение шарнира вызовет удлинения обоих стержней:
д/, =д/2=/|— 1 | = д/,
V cos a
при этом само перемещение шарнира О вычисляется как q =
= /sina « /а.
В нашем случае имеем
72 Глава 2. Вариационное исчисление и задачи математической физики
Д/ = /
cos a
1 =/
1 — а2+...
V 2
--1
2 2
2/
Следовательно, полная энергия растяжения двух стержней -
потенциальная энергия деформирования системы (см. пример 2.1):
I 4/3
По теореме Лагранжа
dq /3 \EF
Как видим, получена существенно нелинейная зависимость
между приложенной силой и вызванным ею перемещением,
несмотря на малость последнего.
Рис. 2.2
Объясняется это тем, что мы рассматривали равновесие
системы в ее деформированном состоянии.
2.2. Принцип возможных перемещений для деформируемого тела 1Ъ
Пусть потенциальная энергия деформации выражена через
внешние силы:
V=Vp(Pl,P2,...,Pn) (Vp=Vq).
Образуем функцию Гамильтона
п п п fly
1 1 1 dqt
>67/ = 2>,5i>,
так как в силу теоремы Лагранжа = Pt.
Предположим, что функция Гамильтона выражена только
через внешние силы:
П fljLT
н = #(/>,/>,..., рп)^т = 1—5^,
1 dPt
т. е.
±^-Щь,.
Отсюда получаем формулу
?,= —-. (2.17)
дР
Функцию Н для упругой системы называют дополнительной
работой.
Формула (2.17) выражает теорему Кастильяно.
74 Глава 2. Вариационное исчисление и задачи математической физики
Рис. 2.3
Теорема 2.2 (теорема Кас-
тильяно). Производная
дополнительной работы по обобщенной
силе равна соответствующему
обобщенному перемещению.
Термин «дополнительная
работа» легко понять, если обратиться
к рис. 2.3.
При нелинейной зависимости
между Рид имеем V = \Pdq,
поэтому V есть площадь заштрихованной фигуры, а величина Н
представляет собою площадь, дополняющую V до площади всего
прямоугольника, т. е.
H+V = Pq. (2.18)
Применение общих теорем Лагранжа и Кастильяно к
исследованию систем, для которых связь между внешними силами и
перемещениями точек их приложения нелинейна (либо вследствие
нелинейности связи между деформациями и напряжениями, либо в
результате того, что уравнения статики должны составляться для
деформированного состояния, как в примере 2.2), связано с
преодолением значительных трудностей.
Поэтому рассматриваем только линейные системы, в которых
напряжения выражаются линейно через внешние силы, а так как
удельная энергия и есть квадратичная форма от напряжений
(см. (2.14)), то Vp есть квадратичная форма от сил Pl9 ..., Рп,
a Vq является квадратичной формой от перемещений.
Отсюда согласно теореме Эйлера для однородных функций
имеем
" 8V
l dqt
1 "
^ l
(2.19)
Равенство (2.19) выражает теорему Клапейрона.
Теорема 2.3 (теорема Клапейрона). Работа деформации
составляет половину работы внешних сил на произведенных ими
упругих перемещениях точек приложения (сил).
2.2. Принцип возможных перемещений для деформируемого тела 75
Замечание. В отличие от теорем Лагранжа и Кастильяно,
которые доказаны для любых упругих систем, теорема Клапейрона
верна только для линейных систем.
Теорема Клапейрона позволяет вычислять удельную энергию
деформации через напряжения: во многих случаях это удобно
делать, переводя внутренние силы во внешние, действующие на
элемент объема рассматриваемого линейно-упругого тела.
Пример 2.3 [38]. 1. Кручение круглоцилиндрического упругого
стержня длиной / (рис. 2.4).
Рис. 2.4
Приложим к сечениям выделенного (по длине) элемента
стержня размером dz два равных противоположно направленных
(так как элемент находится в равновесии) крутящих момента М2.
Обобщенное перемещение для такой группы обобщенных сил есть
угол относительного поворота сечений, т. е. 0dz (0 - крутка,
относительное кручение - погонный угол закручивания, рад/м).
Согласно теореме Клапейрона
1 1 '
dK=-Mz0dz=> K=- fMOdz.
2 20J
М
Так как для линейно-упругих круглых стержней 0 = —— (G -
GJ
модуль сдвига материала стержня; J - полярный момент инерции
поперечного сечения), то получим
76 Глава 2. Вариационное исчисление и задачи математической физики
1 ' М2
V = -\^b. (2.20)
2. Рассмотрим изгиб стержня в плоскости XOY моментом М2,
которому соответствует приращение кривизны ае, при этом угол
взаимного поворота концевых сечений элемента &с есть dcp = aedx
(рис. 2.4). Изгибающий момент работает на взаимном угле
поворота упомянутых сечений, поэтому
dV=-M2&dx,
и, так как, по Бернулли, ае = —— (Е - модуль Юнга, / - момент
El
инерции поперечного сечения относительно нейтральной оси
поперечного сечения), получим
1 1 АА2
v = L\2i-dz. (2.21)
2 0J EI
2.3. Колебания струны
Простейшим примером движения механической системы с
непрерывно распределенными массами является процесс колебаний
струны.
Струной (нитью) называют «одномерное» тело (максимальный
диаметр поперечного сечения намного меньше длины), которое
сопротивляется только растяжению. Струна однородна, если
плотность (линейная плотность, кг/м) материала, из которого она
изготовлена, постоянна по длине (струны).
Пусть в начальный момент времени струна под действием
натяжения N приобрела длину / и располагается вдоль оси ОХ,
х g (0, /), концы закреплены и струна совершает малые
колебания и(х, /): u(x,t)<t: /, |w^(jt,f)| <£ 1.
Следовательно, имеем краевые условия
и(0, 0 = и(1, 0 = 0.
2.3. Колебания струны
11
Кинетическая энергия элемента длины струны равна А Г =
= — pw,'2cbc, поэтому кинетическую энергию колеблющейся струны
2
запишем в виде интеграла:
T = -\pu'2(x,t)dx.
^ о
Очевидно, что при колебаниях изменяется длина струны:
Д/ = \j\ + u'2dx-l = {( \ + -и'2+... jdx-/«- \u'2dx.
о <А 2 J i 0
Показано, что при малых колебаниях струны натяжение N
можно считать постоянным [41].
Сила натяжения совершает работу на приращении длины А/,
поэтому вклад в потенциальную энергию внешней по отношению к
каждому элементу длины силы N вычисляем (в силу теоремы 2.3)
с помощью формулы
1 /
V=-N\u'2dx.
2 J
Согласно принципу Гамильтона
\{T-V)dt = - J\(pu'2 -Nu'2)dxdt -> extr. (2.22)
'о 'о 0
В качестве функций сравнения рассматриваются все функции
и(х, /), имеющие кусочно-непрерывные производные и
обращающиеся в нуль при х = 0, /, совпадающие при / = t0, tx с функциями
w(x, to), u(x, t\), изображающими форму струны в начале и в конце
рассматриваемого промежутка времени t\ - to = const.
Уравнение свободных колебаний получаем в качестве
уравнения Эйлера - Остроградского вариационной задачи (2.22):
78 Глава 2. Вариационное исчисление и задачи математической физики
|-/.;0 + -f Л;О-/.*) = ?Щ -М£ =0. (2.23)
ot ox
Пусть на струну действует поперечная нагрузка
интенсивности р(х, t), Н/м, работа которой на поперечных перемещениях
точек струны
А= jp(x,t)u(x,t)dx.
Струна, распрямляясь, совершит работу, противоположную по
знаку вычисленной выше работе внешней нагрузки.
Следовательно, дополнительная потенциальная энергия равна
-\pudx.
Теперь действие по Гамильтону имеет вид
S= \(T-V)dt= J П — pw/2—Nux2 + pu \dxdt,
t0 'о (Л 2 2 /
поэтому уравнение Эйлера - Остроградского запишем в виде
^(T-V)'u; +-f (Г-КУи; -(T-Vya =0=>pitf-M£ =p(x,t). (2.24)
dt ox
Получаем уравнение вынужденных колебаний струны.
Положение устойчивого равновесия под действием
стационарной нагрузки найдем, решая вариационную задачу:
V = J — Nu'x2 - р(х)и dx -> min,
и уравнение равновесия запишем в виде
2.4. Колебания стержня
79
Nu"xx+p(x) = 0.
Это уравнение можно получить как частный случай из
уравнения (2.24) при условии, что ускорение есть тождественный
нуль.
Методы решения уравнения (2.24) при различных краевых и
начальных условиях подробно описаны в курсах уравнений
математической физики [31, 41].
2.4. Колебания стержня
Пусть некоторая плоская замкнутая кривая Г образует фигуру
Ф, которая оставаясь все время нормальной к пространственной
кривой L, скользит вдоль L, пересекаясь с L в своем центре масс.
Считаем, что длина кривой L равна /, причем / намного больше
максимального диаметра фигуры
Ф (но не настолько, как в случае
струны).
Поверхность, образованная
движением фигуры Ф,
ограничивает материальное тело, которое
называют стержнем, кривую L
называют осью стержня.
В отличие от струны считаем,
что стержень сопротивляется
изгибу и растяжению-сжатию при
рассмотрении колебаний в
координатной плоскости XOZ (рис. 2.5).
Пусть в начальный момент
времени / = 0 форма оси стержня,
кривой L, задается уравнением в
плоскости XOZ: z = w0(x).
Рассматриваем движения оси стержня в плоскости XOZ. Тогда
радиус-вектор точки х е L при / = О
Рис. 2.5
r0(x) = xT + w0(x)k,
где 1, к - единичные базисные векторы, Г _1_ к.
80 Глава 2. Вариационное исчисление и задачи математической физики
При / > 0
r(x, t) = г0 (х) + §(х, t) = г0 (х) + и(х, t)J + w(x, t)k.
Находим дифференциальный элемент длины оси стержня в
начальном (As0) и текущем (As) положениях:
As0 =\r0(x + Ax)-r0(x)\ = \(x + Ax)7 + w0(x + Ax)k-r0(x)\ =
= |АсГ + w0(x)Axk + ...| « y]\ + w'02 Ax.
Аналогично
As = д/l + Щ2 [ 1 + - (2их + и2 + 2w» w2) ] Ах.
Деформацию оси определяем как
As- Asn
Тогда
1
s=^+u?+2^+^. (2.25)
Для вариации величины г имеем выражение
5г = Ъих + ихЪих + w03wx + wx3wx.
Приращение кривизны оси стержня в случае изучаемых здесь
малых колебаний имеет вид
Дае = и£ => 5(Аае) = 5и£. (2.26)
Для вывода уравнений движения оси стержня (малых
колебаний в плоскости ХОТ) воспользуемся принципом Даламбера - Ла-
2.4. Колебания стержня 81
гранжа, который для непрерывно распределенных масс
формулируется аналогично тому, как и для системы материальных точек
(см. гл. 1). Отличие состоит лишь в том, что в данном случае при
вычислении суммы элементарных работ всех сил, действующих на
дифференциальные элементы стержня, включая и силы инерции,
используется процедура интегрирования по пространственной
координате X G
Рассмотрим бесконечно малый элемент стержня длиной &с с
площадью поперечного сечения F. Свяжем с осью стержня базис
натуральных осей (т, Я, Р), начало которого поместим в центр
масс сечения: т - касательный вектор, п - главная нормаль, р -
бинормаль (в данном случае р - перпендикуляр к плоскости
чертежа). Система внутренних усилий в поперечном сечении
сводится к главному вектору Т, изгибающему моменту М в
плоскости XOZ. Пренебрегаем перерезывающими силами, поэтому
получаем
f = тт, Л/ = Л/р.
Модуль вектора Т есть функция деформации оси стержня,
начального усилия растяжения или сжатия Г0. В простейшем
случае линейно-упругого материала имеем
Т = Т0 + E&F (Т0 = const).
Здесь Е - модуль Юнга материала стержня. Модуль изгибающего
момента вычисляем по формуле Бернулли:
М=Е1Аэе,
где / - момент инерции поперечного сечения относительно оси Ср,
вокруг которой и происходит поворот сечения на угол ср; Аае -
приращение кривизны оси стержня,
Аф = Дае-сЬс.
1_ 1_
"2' 2
82 Глава 2. Вариационное исчисление и задачи математической физики
Если в некоторый момент времени положение точки оси
стержня определяется радиус-вектором
r(x,0 = /b (*) + §(*, О,
то возможное перемещение из этого положения есть вариация
Ъг = 8&
Вариация радиус-вектора в силу кинематических
соотношений (2.25), (2.26) приведет к вариации деформированного
состояния:
5§->(5г-т,5(Дэе)р).
Каждое внутреннее усилие работает на соответствующем
возможном перемещении: осевое усилие - на осевом перемещении
5е dx, момент - на угловом перемещении 8(Дае)сЬс.
В силу третьего закона динамики [4] векторы Т и 5е, М и
5(Аае) разнонаправленные. Поэтому элементарные работы
внутренних сил вычисляем в виде
дА(Т) = Тде<Ьс = -ТЬг<1х,
(2.27)
ЬА(М) = М • 5(Aae)dx = -Af5(Aae)dx.
Элементарные работы сил тяжести Р и инерции I
дифференциального элемента стержня Fdx вычисляем по формулам
ЗА(Р) = РЬг = pgFdx • 5w,
(2.28)
ЬА(1) = pFdx(-rt") • 3r = -pF(w*5w + w,"5w)dx.
Считаем, что концы стержня х = ±1/2 неподвижны: шарнирно
оперты либо жестко заделаны.
В первом случае
и(±//2, 0 = w(±//2, t) = 0; (2.29)
2.4. Колебания стержня
83
во втором случае:
и(±//2, 0 = w(±//2, 0 = w'(±//2, t) = 0. (2.30)
Отметим, что (2.29), (2.30) - предварительные краевые
условия.
Сумму всех элементарных работ сил, действующих на систему
элементов стержня, запишем в виде
'/2
А= J {-(Г0 + EFe)be - Я/Дае • 5( Дэе) -
-1/2 (2.31)
-pF(w*8w + w"ttbw) + gpF5w} dx.
Здесь р - плотность материала стержня; g - ускорение
свободного падения.
В силу принципа Даламбера - Лагранжа получим, что
А = 0. (2.32)
Методика вывода уравнений движения и краевых условий в
силу принципа Даламбера - Лагранжа состоит в следующем.
В данной задаче каждая точка оси стержня имеет две степени
свободы - компоненты вектора перемещения и и w. Следовательно,
вариации Ьи и bw независимы. В подьштегральное вьфажение (2.31)
наряду с Ьи и 5w входят и производные этих вариаций различных
порядков.
Интегрированием по частям добиваемся того, чтобы в
подынтегральное выражение входили только Ьи и 5w. Приравнивая затем
множители при ди и bw к нулю, получаем систему уравнений
движения; внеинтегральные слагаемые с учетом предварительных
краевых условий дадут естественные краевые условия.
Интегрируем по частям выражение (2.31) с учетом
кинематических соотношений (2.25), (2.26) и выражений (2.27), (2.28) для
элементарных работ. При этом учитываем, что для обоих видов
краевых закреплений имеем
5w(±//2) = 5w(±//2) = 0.
84 Глава 2. Вариационное исчисление и задачи математической физики
При раскрытии скобок под интегралом пренебрегаем
слагаемыми, в которые компоненты и(х, t) и w(x, t) и их производные
входят в степенях выше первой.
Тогда получим
А= \{((T0+EF)u°„+EF{w'Qw'x)x-9Fu:)bu +
-1/2
+ (7оwo + P2F) " PFw," )5w} ^ +
Из этого равенства получаем систему уравнений движения
(Т0 + £F)*4 + EF(w'0wx)'x - pFu"tt = О, (2.33)
Ehd ~ТУ- ~FF(W02wfx + н/оМ;); + pFn£ = О. (2.34)
При написании уравнения (2.34) учтено, что равенство
T0Wq + pgF = О удовлетворяется тождественно, являясь
уравнением равновесия стержня, нагруженного силой тяжести (своим
весом).
Из системы уравнений (2.33), (2.34) ясна роль начального
прогиба стержня w0(x): если w0(x) = О, то малые колебания в
направлениях по осям ОХ и OZ происходят независимо, так как система
распадается на два уравнения:
(Г0+£РК-рРи;=0, (2.35)
EIwZs-T^+pFw^O, (2.36)
из которых первое есть уравнение продольных колебаний
растянутого (Г0 > 0) или сжатого (Г0 < 0) стержня; второе - уравнение
поперечных колебаний растянутого или сжатого стержня.
2.5. Мембрана под давлением
85
Из уравнения (2.35) при EF = О получим уравнение колебаний
растянутой струны (см. п. 2.3).
Проанализируем обращение в нуль внеинтегральных
слагаемых:
£/vOwg2 - Elw'^wf^ = 0. (2.37)
Первое слагаемое, как отмечено выше, равно нулю в силу
предварительных условий, так как 5w(±//2) = 0.
Получаем
EIw"xxbwx)(,_2l/l=Q.
Если стержень шарнирно оперт, то bW - неизвестная неравная
нулю величина и обращение в нуль рассматриваемого слагаемого
возможно только при
w"xx(±l/2,t) = 0,
т. е. изгибающий момент в этих сечениях равен нулю.
Интегрирование системы уравнений (2.33), (2.34) методом
Канторовича - Галеркина [17] и исследование влияния начального
прогиба на собственные частоты проведено в работе [6].
2.5. Мембрана под давлением
Мембраной называют материальную поверхность (пленку),
которая не сопротивляется изгибу и сдвигу, т. е. работает только на
растяжение. Пусть мембрана натянута на жесткий контур Г,
охватывающий плоскую область D a XOY. Нагружаем мембрану
медленно возрастающим давлением (чтобы избежать динамических
эффектов), перпендикулярным плоскости XOY.
Каждая точка мембраны (х, у) е D испытывает нормальное к
плоскости XOY перемещение и(х, у), которое считаем малым:
\и(х, у)\ намного меньше диаметра области Z);
К1>К|«1 "х2«К1> <«К1-
86 Глава 2. Вариационное исчисление и задачи математической физики
Пусть 6.1 - элемент некоторого контура на мембране. На этот
элемент действует усилие Tdl, где вектор Т вследствие
отсутствия сопротивления изгибу и сдвигу (в касательной к
деформированной поверхности плоскости) лежит в касательной плоскости и
перпендикулярен к d/. Натяжение Г во всех точках мембраны
считаем постоянной величиной, материал мембраны линейно-упругий
(закон Гука).
Тогда потенциальная энергия мембраны пропорциональна
приращению площади ее поверхности с коэффициентом
пропорциональности, равным модулю натяжения. Это можно показать,
выделив дифференциальный элемент площади и рассчитав
элементарную работу сил натяжения, затраченную на его
деформацию [41].
Площадь поверхности z = и(х, у) вычисляем по формуле
Z=llyll + u'x2+u'y2dxdy.
D
Значит, приращение площади мембраны
AZ= Я(д/1 + и;2+и;2-1)<Ьй1у*
D
^ D
Вычисляем потенциальную энергию деформированной
мембраны:
/7, =ГДЕ= JJ-(«i2 + u'y2)dxdy.
D ^
Элементарная работа, затраченная на перемещение элемента
площади dxdy, есть
dA =р(х, у) и(х, у) dxdy.
Следовательно, полная работа
2.5. Мембрана под давлением
87
А= \\p(x,y)u(x,y)dxdy.
Потенциальная энергия есть работа внешних сил, взятая с
обратным знаком:
П2 =-\\pudxdy.
Получаем энергию всей системы (мембрана и внешняя
нагрузка) в виде функционала
П = \(^(их1+и1у1)-ри^6хАу.
Для равновесия консервативной системы потребуем минимума
потенциальной энергии [32].
Отсюда вытекает постановка вариационной задачи:
П[и]= JJI — (и2 + и'2) - ри\ dxdy -* extr,
[и(*,>0|г=0.
Здесь и(х, y)GCi[D]; очевидно, что интегрант дважды непрерывно
дифференцируемая функция своих аргументов.
Краевая задача в силу уравнения Пуассона [5] имеет вид
{Т(цв„+ивуу) + р(х9у) = 09
\и(х,у)\г=0.
д2 д2
Используя символ оператора Лапласа As + , получим
дх2 ду2
запись краевой задачи:
88 Глава 2. Вариационное исчисление и задачи математической физики
\Аи(х,у) = р(х,у),
[и(х,у)\г=0.
Это известная в теории уравнений математической физики
задача Дирихле для уравнения Пуассона [41].
Сохраним основные допущения (малость прогибов,
постоянство направления вектора усилия в каждой точке - коллинеарность
относительно оси 07), считаем давление произвольной функцией
времени: р = р(х, у, t); по-прежнему обозначаем деформированную
поверхность мембраны через z = и(х, у, t).
Пусть на мембрану действует поперечное давление р(х, у, i),
Н/м2; перед нагружением мембрана занимала область D на
плоскости XOY, ограниченную замкнутой кривой Г. Жесткий контур
Г мембраны удерживается непрерывно расположенными по
длине контура линейно-упругими пружинами с упругим
модулем с, Н/м2 - так как жесткость заделки отнесена к единице
длины. Тогда на контур при колебаниях мембраны действует
внешняя распределенная нагрузка стремящаяся удержать контур в
положении равновесия
где к - единичный вектор оси 07.
Работа пружин, распределенных по элементу контура d/ на
перемещении этого элемента на величину ик, а также суммарная
работа есть
5Апр = -\cu4l => Аар = -ЦсиЧ1. (2.38)
2 2 г
Пусть внешнее давление действует также и на жесткий контур
мембраны, который, например, является кольцом шириной h = 1.
Тогда
ЗАК(р) = -р • uhdl => Ак = -cj pudl. (2.39)
2.5. Мембрана под давлением
89
Кроме перечисленных внешних сил, на контур воздействуют
силы натяжения f d/ (касательные к поверхности мембраны и
перпендикулярные к элементу контура), составляющие которых
Т. по оси OZ совершают работу на перемещениях точек контура
(рис. 2.6).
neXOY;
f = fz+fxy',
7; Z(n,f) = Za
Рис. 2.6
Вычисляем составляющие Т2 и совершенную ими работу:
, ди
Т. =Tcos a =rsina«Ttga = r-
Л ) дп
ди
A(f2) = -dT—udl.
р дп
(2.40)
Здесь п - единичная внешняя нормаль к контуру Г, п е XOY.
Таким образом, потенциальная энергия упругой системы
мембрана - нагрузка - контурные пружины находится по
формуле
V=ll\j(u'x2+u'y2)-pujdxdy +
+ <jl p(l)u + -cu2(l) + T—u)dl.
(2.41)
90 Глава 2. Вариационное исчисление и задачи математической физики
Пренебрегаем массой контура и контурных пружин, тогда
кинетическую энергию всей мембраны вычисляем в виде
K = ^l\pu;2dxdy.
^ г»
Здесь р(х, у) = ро = const - поверхностная плотность пленки, кг/м2.
Для вывода уравнения движения воспользуемся принципом
Гамильтона:
L = K-V^>S= jLd/=>5S = 0:
^JUJlftt'2"f(tt*2+<)+^H^
-j(pu + ±u
2+T—u\dl\dt = 0.
(2.42)
Из (2.42), преобразуя |T(...)djtdy по правилам вариационного
исчисления, получим уравнение колебаний мембраны:
^д2и д2и^
+ p(x,y,t) = p—.
or
(2.43)
кдх2 ду2
Вычисляя вариацию c[(...)d/, запишем естественные краевые
условия:
5(^(...)d/ = (J[ p(u + 6и) + -(и + Ъи)2 +Т — (и + Ьи)(и + 5м) Id/
а«
-cff ри + -и2 +Т—1/ |d/ = cff о + см + Г—\budl
2.5. Мембрана под давлением
91
с точностью до величин первого порядка малости относительно
перемещения и его производных; кроме того, имеем —(8м) = О
дп
в силу фиксированности области D с XOY.
Отсюда вытекает естественное краевое условие:
Ъб(...)d/ = 0 => Т— + р + си = О, (2.44)
* дп
так как Ьи ф О на контуре.
Если речь идет о закрепленной неподвижно по контуру
мембране, то контурный интеграл в (2.42) тождественно равен нулю и
естественное краевое условие (2.44) заменяется предварительным
условием и\т = 0.
При использовании принципа Гамильтона мы считаем, что
допустимые функции сравнения имеют заранее заданные значения в
моменты времени /0 и /j. Однако в задачах о движении обычно
задают помимо предварительных краевых условий только начальное
состояние, т. е для функций и(х, у, t) и и\ (х, у, t) задают их
значения в момент времени / = 0.
Таким образом, задачи о движении деформируемых тел
приводят к задачам теории дифференциальных уравнений смешанного
типа, когда задаются как краевые, так и начальные условия.
Поставим, исходя из изложенного выше, задачу о статическом
нагружении «подпружиненной» по контуру мембраны. Из (2.43),
(2.44) при щ = 0 получаем
2
Аи = --р(х,у) (x,y)eD, (2.45)
ди с 1
— + ~" = -~Р (*,>0еГ\ (2.46)
дп Т Т
Уравнения (2.45), (2.46) представляют собой задачу для
уравнения Пуассона с краевым условием третьего рода [41].
Из (2.46) можно получить простейшее краевое условие и\г = 0,
если считать, что с —> оо, как бы увеличивая жесткость пружин,
пока не получим абсолютно жесткую заделку.
92 Глава 2. Вариационное исчисление и задачи математической физики
Если с = О, граница становится свободной от удерживающих
связей и можно заранее предполагать, что мембрана, свободно
подвижная над областью Д под действием произвольных сил не
имеет в общем случае равновесных положений. Для равновесия
необходимо, чтобы главный вектор внешних сил был равен
нулю:
\lp(x9y)dxdy + <$p(l)h.dl = 0.
г
Упражнение. Сохраним введенное выше предположение о
«подпружиненной» границе мембраны над областью D. Пусть
первоначально мембранная поверхность натянута на массивную
рамку Г с линейным распределением т{1), кг/м.
Из принципа Гамильтона получите естественное краевое
условие.
2.6. Движение идеальной жидкости
1. Вывод уравнений движения методом Ньютона
Пусть некоторая сплошная среда (жидкость) протекает через
фиксированную область Q с IR3, ограничивающую поверхность
которой обозначим через Z- Следуя Эйлеру, будем выражать
скорости частиц жидкости, попадающих в выделенный объем, как
функции координат точки М(х\, х2, *з), в которой в момент времени
/ находится частица жидкости [29]:
v = v(xl,x2,x3,t) = vlel +v2e2 + v3e3. (2.47)
Здесь {ёх,ё2,ёъ} ортонормированный базис декартовой системы
координат Ох\Х2хъ.
Можно сказать, что наблюдатель, находясь в точке М(х\, х2, *з),
измеряет скорость частиц, протекающих через эту точку (рис. 2.7).
Кроме скорости, величинами, характеризующими движение
(состояние) жидкости, являются плотность p(*i, х2, хз, t), кг/м3;
давление р(х\, х2, х3, t), создающее усилие на грань элементарного
2.6. Движение идеальной жидкости
93
объемного элемента, отнесенное к площади грани элемента, Н/м2;
объемные силы (например, силы тяжести) K(xux2,x3,t), Н/м3.
Рис. 2.7
Считаем, что рассматриваемая жидкость идеальная, т. е. на
любой элементарной площадке выделенного элемента объема
отсутствуют силы трения со стороны протекающих мимо частиц,
соприкасающихся с гранями. Таким образом, в идеальной
жидкости на любой элементарный объем со стороны окружающей объем
жидкости действуют только нормальные усилия - нормальное
давление, которое называют гидростатическим:
Ар = £(-/>)*№ => р = -Цр(х19х29Хз)п&. (2.48)
Здесь при вычислении элементарного усилия Ар на выделенный
шестигранный элементарный объем суммирование
осуществляется по всем граням; nt - вектор внешней единичной нормали к /-й
грани.
Интеграл (2.48) по формуле Гаусса - Остроградского легко
сводится к объемному интегралу:
94 Глава 2. Вариационное исчисление и задачи математической физики
- ]рп dz=- \(р\1\ёх + pi2e2 + pi3e3)dz =
i n i dxt
=-&[—Р^бп=-1^Р<1п. (249)
Здесь 11, /2, h - направляющие косинусы нормалей, f=<ff; J= ПТ;
i i n n
при дифференцировании под знаком интеграла учтено, что
в, = const.
Запишем главный вектор объемных сил:
К. = \k(xux2,x^t)dQ.. (25°)
При вычислении ускорения частицы, протекающей через точку
М(х\, х2, хз), учитываем собственное движение частицы: для
частицы, движущейся по траектории х\ = X\(t), х2 = x2(t), х3 = х3(А точка
М является точкой ее траектории в момент времени /. Поэтому
скорость v необходимо рассматривать как сложную функцию
времени:
v=v{xx{t\x2{t),x,{t\t\ (2.51)
и полная производная по времени находится по правилу
дифференцирования сложной функции многих переменных:
dv dv dv dxx dv dx2 dv djc3
dt dt dxx dt dx2 dt dx3 dt
dv Л dv
=¥+^v" (2-52)
2.6. Движение идеальной жидкости
95
Здесь v,: v = vxex + v2e2 + v3e3.
Выражение (2.52) называют субстанциональной производной
скорости, так как операция дифференцирования выполнена с
учетом движения самой частицы, т. е. изменения ее положения.
В силу второго закона Ньютона
Jp — dQ = -JgradpdQ+ Jp^dQ. (2.53)
Из (2.53) с учетом произвольности объема Q получаем
уравнение движения идеальной жидкости в форме Эйлера [29]:
^+i^Vt=-^P + K. (2.54)
ot j oxt p
Важным фактом при изучении движения жидкости (сплошной
среды) является ее неразрывность (непрерывность, сплошность).
Если внутри объема Q нет никаких источников и стоков (т. е.
внутри объема Q жидкость не вырабатывается и никуда не
стекает), то изменение в единицу времени количества жидкости в
объеме Q по формуле Гаусса - Остроградского равно потоку
жидкости через поверхность I:
— Jp«/Q = -(j(pv)-w/2:=> Jf — p + div(pv)]jQ = 0. (2.55)
at Q L Q v dt )
Замечание. Объясним происхождение знака минус в правой
части формулы (2.55).
Потоком вектора а через элемент поверхности dZ называют
скалярную величину
dn = (5-«)dZ.
Здесь п - единичная нормаль к элементу dZ-
Будем рассматривать поток жидкости (в обычном понимании)
через поверхность Z, ограничивающую фиксированный объем Q.
Нас интересует, каково приращение массы жидкости в этом объеме
за время d/ (рис. 2.8).
96 Глава 2. Вариационное исчисление и задачи математической физики
Рис. 2.8
Пусть п - переменный единичный вектор внешней нормали к
поверхности.
Если частица втекает в объем Q, то v • п < О, при вытекании
частицы из объема v • п > 0. При этом приход жидкости в объем Q и
расход ее из объема Q за время dt равны элементарной массе
столбика жидкости высотой |v dt • п\ с площадью основания dZ:
Am = p|v„|d/dl = p|v • n\ d/dl,
так как частицы, имеющие скорость vT (касательная составляющая
скорости v ), остаются на поверхности и масса жидкости в объеме
Q не изменяется.
Если частица втекает в объем Q, то масса жидкости в объеме
увеличивается, т. е. dm > 0; при вытекании частицы из объема Q
масса жидкости в объеме уменьшается, т. е. dm < 0. Поэтому в
каждом из этих случаев необходимо найти приращение массы
d
dm = -(pv) • «Aid/ => —m = -(pv)mil.
dt
Отсюда и следует (2.55).
Так как объем Q произволен, мы вправе написать уравнение
неразрывности:
d
— p + div(pv) = 0. (2.56)
dt
2.6. Движение идеальной жидкости
97
К уравнениям (2.54), (2.56) присоединяем уравнение
состояния, характеризующее связь между давлением и плотностью:
Р =/(Р)- (2-57)
Таким образом, получаем замкнутую систему уравнений
движения идеальной жидкости: пять уравнений для пяти искомых
величин vi, v2, v3, p и р (в скалярном виде):
dt j„x dxj p dXj
\dp ' д , ч n (2.58)
^+Z—(рп) = о,
dt j.t dxj
P = /(P).
Для постановки задачи необходимо знать начальные (при / = 0)
значения составляющей скорости, плотности и давления, а также
краевые условия на поверхности Z-
Например, если часть поверхности Zi с Z соприкасается с
твердой стенкой, сквозь которую жидкость не протекает, то
нормальная к Zi составляющая скорости (характеризующая
просачивание сквозь эту стенку) равна нулю:
v„|Li =v-nZi =0.
2. Вывод уравнений движения из принципа Гамильтона
Рассмотренный ранее принцип Гамильтона может быть
обобщен на случай неконсервативной и неголономной системы.
Для динамической системы, т. е. системы, для которой
функция Лагранжа определяется равенством (в соответствии с
обозначениями, введенными в главе 1)
L = T+U,
98 Глава 2. Вариационное исчисление и задачи математической физики
принцип Гамильтона записываем в виде
'i
(2.59)
Введем вместо слагаемого 6U (элементарная работа
потенциальных сил, в данном случае - вариация) величину
представляющую собой элементарную работу непотенциальных
сил, выраженную через обобщенные силы (символ «5'» уже не
обозначает вариацию какой-либо функции).
Запишем вместо (2.59) соотношение
Л
Л 1 )
d/ = 0 =
■?£*♦?
dq, dq,
dt = 0-
m
r dT\
дТ Л
+—+a
\u4iJ
it) dqt
bqtdt = 0.
(2.60)
AT
Так как —5/ = 0 (8/ = 0), то
dt
\дТ„. Л дТ г
—8?,d/=— Sq,
и d<li dq,
Г _"fAf—1
&Л =
- 'fdfar
S^d/ (8?((r0) = 8?,0i)=0).
2.6. Движение идеальной жидкости
99
Из (2.60) следуют уравнения движения неконсервативной
системы с п степенями свободы, так как промежуток интегрирования
произволен, а вариации 5д, независимы:
гдТ\
Ч
-— = -& 0'=1,«). (2.60*)
dq,
Доказывается, что в форме (2.60) принцип Гамильтона
справедлив и для систем с неголономными (линейными) связями [4].
В силу сказанного выше появляется возможность
использования принципа Гамильтона для вывода уравнений движения
произвольной жидкости, на поверхности объема которой поставлены
линейные краевые условия. При этом, как мы увидим, особое
преимущество вариационного принципа обнаруживается в том, что
принцип позволяет получить не только уравнения движения, но
и краевые условия, которым должны удовлетворять искомые
функции.
Пусть поле плотности стационарно и жидкость несжимаема
(др
- = 0, р = const . Тогда уравнение неразрывности (см. (2.58))
{dt J
переходит в уравнение несжимаемости [29]:
(p = div(v) = X-^ = 0.
i dxf
Подвергнем точки выделенного объема малым
перемещениям 3. При этом приведенное выше условие не нарушается, так
как объемное расширение есть дивергенция поля малых
перемещений (см. [28, 37]).
Так как в оговоренных условиях
ф = div(v) = div(§),
получим (в силу изохронности вариаций)
5ф = 8(div(§)) = div(8§). (2.61)
100 Глава 2. Вариационное исчисление и задачи математической физики
Рассматриваем идеальную несжимаемую жидкость, на
которую действуют неконсервативные силы. Принцип Гамильтона
запишем в виде
Jd/J(8r + 8'>4)dn = 0. (2.62)
Так как работа внутренних сил в любом объеме жидкости
равна нулю (вследствие ее идеальности), то д'А есть
элементарная работа только внешних сил, например массовых сил.
Таким образом, ставится задача о стационарности действия
по Гамильтону при дополнительном условии (2.61).
Используя метод множителей Лагранжа, имеем
'i
Jdf J(5r + Ъ'А + А,5ср) сЮ = 0. (2.63)
Здесь все подынтегральные величины отнесены к единице объема,
r = -pvv=>5r = p(5vv), b'A = Kbr.
2
Действительная скорость есть полная производная вектора F,
поэтому
dr d
5v = 8— = —5F,
d/ d/
так как вариация изохронна.
Имеем
Jp(v-8v)d/= fp[v-—5F ]d/ =
= p(v.5F)|;:-Jp^.6FJdr = -Jp^.6F]dr,
(2.64)
'о
2.6. Движение идеальной жидкости
101
так как в силу определенности состояний в моменты времени to и t\
5г(/0) = 5г(/1) = 0.
Далее, обозначив & через 5F, имеем
А,8ф = A,(div br) = div(A,8F) - grad X • 8F
по известной формуле векторного анализа [29]
div (ab) = a div 6 + (grad a) • Ъ.
Согласно теореме Гаусса - Остроградского
JXdiv(5F)dQ = J(div (Xbr)-^rad X • br)dQ =
= - Jgrad X • 5F dQ + (J Ц5Р • л) dl.
Здесь d... - поверхностный интеграл по замкнутой поверхности Z;
Я - единичная внешняя нормаль к Z.
Используя приведенные выше выкладки, получим
Jd/ J(5r + 5',4 + A,5(p)dQ =
/0 Q
= Jd/ Jf-P— + £-gradA,WdQ + Jd/^A.8r-wdZ = 0.
(2.65)
Для выполнения равенства (2.65) достаточно обратить в нуль
каждое слагаемое.
Учтем при этом, что смысл множителей Лагранжа при
изучении движений механических систем состоит в том, что эти
дополнительные неизвестные, устраняя связи, наложенные на
102 Глава 2. Вариационное исчисление и задачи математической физики
точки системы, являются ответными воздействиями связей на
систему, т. е. это есть реакции связей (силы, моменты, давления
и т. д.).
При выделении объема идеальной жидкости из всей
сплошной среды связи осуществляются в виде воздействия «остальной»
среды на выделенный объем. А это есть нормальные давления на
поверхность выделенного объема, т. е. X = р. Поэтому
приравненное к нулю первое слагаемое представляет собой уравнение
движения в векторной форме:
\dt J -p — + K-gradp WdQ = 0=>
dv •
=> p — + gradp = K. (2.66)
dt
Выражение (2.66) есть выведенное ранее методом Ньютона
уравнение движения.
Второе слагаемое (поверхностный интеграл) порождает
краевые условия в терминах давления и перемещений точек границы:
pbr\z = 0. (2.67)
Например, если часть границы поверхности Zi cz Z
соприкасается с неподвижной стенкой (жидкость течет по каналу), то из (2.67)
получим 5r|z =0 - факт отсутствия перемещений на Zi-
Если часть границы Z2 cz Z - свободная поверхность, а Ъг -
произвольны, то давление на свободной поверхности равно нулю:
Упражнение. При сохранении условия несжимаемости
жидкости считаем, что касательные напряжения между элементарными
слоями жидкости описываются законом Ньютона: т = -r\v -
линейные функции скорости частиц [29].
Воспользовавшись обобщенным выражением принципа
Гамильтона, выведите уравнение движения.
2.7. Аэродинамическая задача Ньютона
103
2.7. Аэродинамическая задача Ньютона
В 1687 г. вышел в свет исторический труд сэра Исаака
Ньютона «Математические начала натуральной философии». В России
книга впервые была опубликована в «Известиях Николаевской
морской академии» в переводе с латыни «с пояснениями и
примечаниями Флота Генерала А.Н. Крылова, заслуженного профессора
академии, ординарного академика Императорской академии наук»
[21,34].
В разделе 7 «О движении жидкостей и сопротивлении
брошенных тел» Ньютон решает задачу о сопротивлении движению
шара и длинного круглого цилиндра равных диаметров в
«редкой» среде (модель идеального газа или слабо сопротивляющейся
жидкости); затем исследует движение усеченного конуса в той
же среде и ставит задачу о нахождении формы тела вращения,
испытывающего наименьшее лобовое сопротивление при своем
движении.
Без каких-либо пояснений Ньютон приводит решение
последней задачи (рис. 2.9): «Когда же кривая DNFG будет такова,
что, если из любой ее точки ТУ опустить на ось АВ перпендикуляр
NM и из конечной точки G провести прямую GP параллельно
касательной Nt, построенной к кривой в точке N, то имеет место
пропорция
MN:GP = GP*: (4BPGB2). (2.68)
Рис. 2.9
104 Глава 2. Вариационное исчисление и задачи математической физики
Постановка задачи о теле вращения наименьшего
сопротивления зависит от закона сопротивления среды. Ньютон представлял
себе «редкую» среду состоящей из неподвижных равномерно
распределенных в ней абсолютно упругих шариков массой т
(поэтому и назвал среду «редкой»).
Пусть тело вращения (вокруг оси ОХ) движется со скоростью
v (|v| = const) в ньютоновской среде и сталкивается с
расположенными в среде шариками (рис. 2.10).
Y *
Рис. 2.10
Дифференциальный элемент dr на оси Or при вращении вокруг
оси ОХ «заметет» площадь
da = 2nrdr.
Этому кольцу, принадлежащему плоскости rOY, на
поверхности движущегося тела соответствует поясок площадью dZ. За
время dt поясок dZ «вытеснит» объем
dV=2nrdr(vdt).
(2.69)
Пусть р - плотность среды. Тогда количество частиц,
встретившихся на пути пояска dZ
V
N=pd—.
т
(2.70)
2.7. Аэродинамическая задача Ньютона 105
Вычисляем импульс, действующий на dZ (за время dt). Пусть
элемент ds дуги меридиана поверхности вращения наклонен к оси
Or под углом ф. Отражаясь от точек пояска dZ (при этом угол
падения равен углу отражения), каждая частица получит приращение
количества движения
m(v2 ~ Vj) = 2mvcos фЯ, (2.71)
где 1^1 = |v2|; ф = arctg угол ds с осью Or; n - единичная
нормаль к элементу поверхности. В уравнении (2.71) столкновения
абсолютно упругие.
В силу третьего закона Ньютона, от столкновения с одной
частицей тело подвергнется действию импульса
d5 = -2тУС08фй;
за время dt таких импульсов будет N, причем за счет осевой
симметрии компонента суммарного импульса Зг (по оси Or) равна
нулю, а Зх вычисляется (в силу (2.69) и (2.70)) как
\3Х | = (Nm2v cos ф) cos ф = 4p7tv2 cos2 ф rdrdt.
Отсюда получаем составляющую по оси (Ж силы
противодействия движению тела:
dFd/ = Зх => dF = — =>
х At
=> dF = (47ipv2)cos2 qrdr => (2.72)
=> F = 4p*/fcos2 <prdr = k)-^— = к]—&-
\dr
Необходимо определить уравнение такой кривой х = х(г),
чтобы сила сопротивления F была минимальной.
106 Глава 2. Вариационное исчисление и задачи математической физики
Прежде чем решить проблему минимизации функционала
(2.72), рассмотрим вспомогательную задачу: среди всех усеченных
конусов, построенных на данном основании радиуса R и на данной
высоте h, найти конус (т. е. определить радиус меньшего
основания) с наименьшим сопротивлением движению (рис. 2.11).
S
Рис. 2.11
Иными словами: построить прямой конус (т. е. при заданном
радиусе основания R найти высоту AS = Н), усечением которого на
высоте h получим конус с наименьшим сопротивлением.
Ньютон (без объяснений) дает способ построения искомого
конуса: поделим отрезок АВ пополам точкой О, найдем
гипотенузу ААСО
CO = ylR2+(h/2)2
и отрезок СО отложим от точки О вдоль оси АВ:
AS = H = - + y]R2+(h/2)2.
Таким образом, построим конус ACS, который необходимо
«усечь» на высоте h.
Приводим решение А.Н. Крылова, данное в его комментариях
к «Математическим началам» [21].
2.7. Аэродинамическая задача Ньютона 107
Введем вспомогательный параметр Ъ;. Н = h + ^. Тогда
tgcp=^, rQ = BG=J*-.
6V R {h + Q
Сила сопротивления среды, действующая на усеченный конус,
есть сумма сопротивления Fx носовой части GH и сопротивления
F2 боковой поверхности:
А
F = F,+F2 =4rcpv2
:27ipV2
'0 Л
Jrdr+J
2 Л
rdr
l + tg2cp
R2
( %R1
(й + $)Ч R2+{h + Q2
R2+(h + Q2
=2npv2R2
%+R2
= F(&.
R2+{h + Z)2
Находим стационарную точку:
F'(£) = 0=>^2+/^-£2=0
Л,2 =
(-h±ylh2+4R2)
Берем положительный корень:
h
S = -^ + jR2+(h/2)2,
получаем высоту конуса ACS, предложенную Ньютоном
108 Глава 2. Вариационное исчисление и задачи математической физики
Рассмотрим малую секцию усеченного конуса:
/*->0=>#->Д:
Н Л
■ tgq> = —->1,
К
т. е. образующая усеченного конуса пересекает меньшее
основание под углом 135°.
Отсюда Ньютон делает важный вывод (рис. 2.12): «Если тело
образуется обращением эллипса или овала ADBE около оси АВ и
к производящей кривой проводятся касательные FG, GH, Ш в
точках F, В, 3 так, что GH J_ АВ в точке касания, другие же
касательные FG и Ш составляют с GH углы FGB и ЗНВ, равные 135°,
то тело, образуемое обращением фигуры ADFGH3E около той же
оси АВ, будет испытывать меньшее сопротивление, нежели
первоначальное (т. е. тело, образованное вращением овала), при
движении вдоль оси точкою В вперед.
Я считаю, что это предложение может быть небесполезно при
построении судов».
Рис. 2.12
Пример 2,4, Спроектируем носовую секцию некоторого
аппарата, головная часть которого должна быть получена вращением
параболы х = г" вокруг оси ВХ (рис. 2.13).
На каждой полуветви производящей кривой находим точки F,
3, проведенные касательные из которых под углом 45° пересекают
ось Вг. Тогда координаты точек F, 3 равны
(
(\\~
\п)
п Л
-1 П
п)
^>BG = r,=-
1Г1V1
2.7. Аэродинамическая задача Ньютона 109^
Вычисляем силы сопротивления и объемы тел, образованных
вращением параболы FB3 (F{ и Qx соответственно) и вращением
ломаной FGBH3 (F2 и Q2).
Н В G г
Рис. 2.13
Сравнительные значения величин приведены в табл. 2.1 -
силы сопротивления даны в условных силовых единицах, объемы в
некоторых кубических единицах длины.
Таблица 2.1
Парабола
х = г2
х = \г\3
Fi
0,0866
0,1309
Q\
0,0982
0,1209
F2
0,0781
0,1204
Qi
0,1145
0,1418
(F,-F2)/F,x
x 100%
9,81
8
(Qi-QiVQi *
x 100%
16,4
17,28
Отмечаем в обоих случаях уменьшение силы сопротивления и
увеличение полезного объема носовых секций.
Из (2.72) получаем экстремальную задачу:
3Mr)]=J- ^->min,
ге[0,г0]=>х = 0, x(R) = h,
кроме того, в силу замечания Ньютона имеем х'(>о) = 1.
(2.73)
110 Глава 2. Вариационное исчисление и задачи математической физики
В формуле (2.73) интегрант функционала явно зависит от
независимой переменной г, поэтому интегрировать соответствующее
уравнение Эйлера весьма затруднительно.
Получим более удобную форму функционала.
Считая функцию х = х(г) монотонно возрастающей, обратим
зависимость
= х(г) => г = r(x) =>dr = r'dx.
Тогда
", rdr = *f rdr = *J dxj rdr = \ /Vdx
(dr/dc)2 1 + UJ 1 + U
Следовательно, задача ставится так:
„г , чл *fr'3rdx
3[*(r)]= J- ^-->min,
о1 + г (2.73*)
г(0) = г0, r(h) = R, г'(0) = 1.
В (2.73*) штрихом обозначаем производную по х; далее
покажем, что г(0) = г0 * 0, т. е. тело вращения с минимальным
сопротивлением имеет площадку в носовой части. Это соответствует
чертежу Ньютона (рис. 2.9).
Замечание. В комментариях А.Н. Крылова к задаче Ньютона
показано, что геометрическое условие (2.68) фактически
эквивалентно уравнению Эйлера вариационной задачи (2.73*).
Решаем задачу (2.73*). Интегрант преобразованного
функционала явно не содержит независимой переменной, в данном случае х.
Поэтому сразу выписываем первый интеграл (обозначив интегрант
через/(•)):
г#-/ = <?, =>
2.7. Аэродинамическая задача Ньютона 1П_
Г ггп
1 + г1 ) , 1 + г
'2 *
(2.74)
2г'гг
(1 + /2)
= С,.
Полученное ОДУ I порядка интегрируем методом введения
параметра [40]:
=>г = С,
<У + Р2?
(1+р2)2
2рг
Далее имеем
dr /^0 + P2)2>,
'*-f(7-27-37l*:
=>* = -
1 3 1
Р 4Р .
+ Сг
Итак, выведены параметрические уравнения искомых
экстремалей (образующих поверхности вращения):
С, (1 + р2)2
Г 2 р3 '
(2.75)
112 Глава 2. Вариационное исчисление и задачи математической физики
Замечание. Параметрическое представление экстремалей
задачи (2.73*) впервые получено А.Н. Крыловым, причем С, = — [21].
2
В работе [25] уравнения экстремалей получены также в
параметрической форме. Параметр обозначенный q в работе [25]
есть обратная величина введенного параметра q = \1р.
В работе [1] задача Ньютона решалась как задача
оптимального управления (в введенных обозначениях, см. (2.72)):
"crdr
J- ^ inf.
ol + к
dbc
Tr=U'
x(0) = 0,Вс(Д) = h,
ueIR+.
Решение получено также в параметрической форме через
параметр и = -\/р(р- использованный в данной работе параметр).
Отметим, что представления решений в виде (2.75) и в
цитированных работах совпадают с точностью до обозначения
параметров и постоянных.
Пусть начальное значение параметра р = р0 > 0. Тогда из
второго соотношения (2.75) получим г(р0) Ф 0. В противном случае
г(ро) = 0 => С\ = 0, и из первого соотношения (2.75) получим х =
= С2, т. е. кривая х = х(г) вырождается в отрезок прямой,
параллельной оси Or, и при этом нарушается условие взаимной
однозначности зависимости х ~ г.
Исследуем кривые семейства кривых (2.75). Рассмотрим
кривую при С\ = 2, С2 = 0; остальные кривые семейства при любых Сь
С2 * 0 получаются из этой кривой (С\ = 2, С2 = 0) подобным
преобразованием с центром в точке принятой за начало координат, с
коэффициентом подобия С\ и перемещением на расстояние С2.
Получили кривую Ньютона:
2.7. Аэродинамическая задача Ньютона П_3^
1 3 1
х = 1п/? + — + -
Р
2 4р4
(2.76)
1 2
г = — + - + р.
Р Р
Исследуем поведение кривой (2.76) на плоскости ХОг. При
р -> +0: г -> +оо, х -> +оо; при р -> +оо: г -> +оо, х —» +оо.
Поэтому при некотором значении параметра р = р функции
х(р) и г(р) достигают своих минимальных значений. Найдем
стационарные точки (р > 0):
dx p4-2p2-3
др~ р5
= 0^>р4-2р2-3 = 0;
dr _рл-2р2-Ъ
= 0=>/?4-2р2-3 = 0.
В обоих случаях получили одно и
то же биквадратное уравнение,
единственный корень которого,
удовлетворяющий условию/? > 0, есть р* = л/3.
Для кривой (2.76), двумя ветвями х(р")\
уходящей в бесконечность, точка с
координатами (г(р*), х(р*)) есть точка
возврата (рис. 2.14) [39].
Итак, при р -> л/3 функции г(р),
х(р) стремятся к своим минимальным
значениям:
О
rip)
Рис. 2.14
г(р*), х->х(р*) - по 1-й ветви;
р g л/3, +оо I: р -> +оо => г, х -> +оо - по 2-й ветви.
114 Глава 2. Вариационное исчисление и задачи математической физики
Покажем, что минимальное значение функционала обеспечивается
1-й ветвью кривой Ньютона: ре 0,V3 . Проверяем выполнение
усиленного условия Лежандра:
f(x,r,r') =
1 + г'
_„ ,-2г'4+4г'2 + 6^_
=> frv = rr > 0 =>
(1 + г'2)4
=>-г'4 + 2г'2+3>0, (2.77)
так как г, г* > 0.
Из неравенства (2.77) получаем ограничения на изменение
параметра р = г': 0 < р < л/3.
Тангенс угла наклона касательной кривой (2.76) к оси Or
выражается в виде
dx 1
tg<P = — = — •
or р
Отметим, что в точке возврата для обеих ветвей
tg(p = -r=xp = 30°.
V3
Так как при р -> 0 => tg ф -> оо, на 1-й ветви существует
точка (r,ic), где tg ф = 1, т. е. ф = 45°: (г,х)= 4,— , ибо здесь
р = \.
Теперь приведем слова Ньютона: «...из конечной точки G
проведем прямую GP... то имеет место пропорция ...», см. (2.68).
Точка G на оси Or должна быть задана при постановке задачи:
г = г{х) => г(0) = г0, что будет показано далее.
2.7. Аэродинамическая задача Ньютона 115
Поэтому, на наш взгляд, задача Ньютона изначально ставилась
следующим образом: на оси Or задавался отрезок BG = го и кривая
(х(р), г{р)) строилась так, чтобы точка G была бы точкой кривой,
где касательная образует с осью Or угол 45° (см. вспомогательную
задачу о конусе наименьшего сопротивления).
Итак, пусть г(ро) = г(1) = г0, х(1) = 0. Тогда из
параметрических соотношений (2.75) получаем значения постоянных
интегрирования:
С -^ С --—г
'~2' 2~ 16 °'
Следовательно, решение задачи имеет вид
r0 Q + P2)
4 р
х = —
4
1 1 3 И 7
v р2 4P4J 16
(2.78)
Рассмотрим различные конструктивные требования.
Прежде всего отметим, что задавать произвольно габариты R,
h, го, вообще говоря, нельзя.
Например, пусть R = 50, г0 = 16, h = 57 некоторых единиц
длины. Из первого уравнения системы (2.78) прямой подстановкой
убеждаемся в том, что р = — есть одно из его решений. Второе
уравнение системы (2.78) после подстановки значений х = h = 57,
г0= \6ир= — приведет к противоречию: In— =0.
Покажем, что задание габаритов R и h (совместно с условием
х'(го) =1) определяет единственное решение задачи (2.73*). Из
уравнений (2.78) исключаем г0 и, вводя параметр со = h/R,
получаем уравнение
p4\np = l-p*-p2-?- + co(p5+2pi+p) (0<р<1). (2.79)
4 4
116 Глава 2. Вариационное исчисление и задачи математической физики
Обозначив через <Р\(р) и <рг(р) левую и правую части уравнения
(2.79), имеем (р\(р) = фг(р).
Решения уравнения (2.79) есть абсциссы точек пересечения
графиков функций у = q>\(p) и у = фгО?) на плоскости pOY.
Функция у=р4\пр на интервале (0,1) корней не имеет:
у < 0, р -> 0 => у -> -0, ф,(1) = 0.
Исследование многочлена пятой степени фгО?) в силу теоремы
Бюдана - Фурье (построением таблицы перемен знаков функции
ф2(р) и ее производных до пятого порядка в точках р = 0 и р = 1)
показывает, что многочлен имеет на интервале (0,1) три корня или
один корень [23].
Таким образом, уравнение (2.79) на интервале р е (0,1) может
иметь от одного до трех корней (один корень заведомо существу-
3
ет, так как ф2(0) = —, ф2(1) = 4со > 0).
4
Покажем, что любому значению параметра со = h/R > 0
соответствует единственное значение р е (0,1).
Разрешив (2.79) относительно со, получим
р4\пр + р2--р4+-
со = —--^ ±, (2.80)
р5+2ръ + р
со = со(/?): р -> +0 => со(/?) -> оо, со(1) = 0.
Анализ значений производной функции со(р) на полуинтервале
(0, 1] показывает, что со'(р) < 0, т. е. функция со(р) на этом отрезке
монотонно убывает (рис. 2.15).
Пусть дано отношение габаритов h/R = со0. На кривой со = со(р)
находим соответствующее значение р = ро. Чтобы определить
значение го, необходимо задать в некоторых единицах длины,
например, габарит R. Тогда h = со0Л и значение г0 (в тех же единицах)
определяется из любого из уравнений (2.79).
Замечания. 1. Рассуждения, изложенные выше, можно
рассматривать как доказательство существования поля экстремалей в
области х > 0, г > 0.
2.7. Аэродинамическая задача Ньютона
117
<*(Р)к
2. С помощью анализа теоремы Бюдана - Фурье доказывается
единственность решения задачи (2.73*) при задании габаритов го,
R или го, h.
Последние утверждения очевидны, если встать на
геометрическую точку зрения: задание габарита го определяет единственную
кривую (2.78); на этой кривой габарит г = R определяет
единственное значение х = h (и наоборот) (рис. 2.16).
118 Глава 2. Вариационное исчисление и задачи математической физики
3. В работе [20] дано решение задачи Ньютона в упрощенной
постановке.
Ставится задача (см. (2.73*)):
3 = f-^-dx -> min, r(0) = 0, гЩ =R.
nl + r'2
Считая, что — «1 (т. е. рассматриваются пологие обра-
1 + г
зующие поверхности вращения), получим
А
3 = jV'V dx -> min, r(0) = 0, r(h) = R.
о
Уравнение Эйлера имеет вид
г'3 - 3(гг'2)' = 0, (2.81)
следовательно, частное решение г = 0 неприемлемо в силу
поставленных краевых условий.
Уравнение (2.81) приводится к виду
г'3 + Ъгг'г" = 0. (2.82)
Умножив (2.82) на г', заметим, что полученное выражение есть
полная производная:
гV3 + Згг г") = — (г'3г) = 0 => г'ъг = С, =>
dx
Г V^3 (4^А з/4
7\1 ^Г(Х)=Ь) №xX+Cl) • (2-83)
> г' =
V
В силу граничных условий: С2 = 0, С, = Л.
,4 /z
3/Г3
2.8. Чистый изгиб упругой балки
119
зУ/4Г^3/4
Таким образом, г = — — R, т. е. поверхность
минимального сопротивления в рассматриваемой постановке есть
парабола степени 3/4.
Обратим внимание на то, что
hm— = оо,
х->о dx
т. е. соответствующая поверхность вращения в носовой части
имеет затупление.
Очевидно, что экстремали (2.80) образуют поле и выполняется
усиленное условие Лежандра.
4. Задача Ньютона получила значительное развитие в работах
отечественных исследователей в связи с проектированием
головных частей космических аппаратов [12, 13, 19, 46, 47].
2.8. Чистый изгиб упругой балки
Упругая балка, находящаяся под действием распределенной
нагрузки постоянного направления интенсивностью q(x),
представляет консервативную систему, для положения равновесия
которой имеет место принцип минимума потенциальной энергии
77-> min.
Пусть балка постоянной площади поперечного сечения
находится в состоянии чистого изгиба, т. е. в любом поперечном
сечении система внутренних усилий (напряжений) приводится только
к главному моменту. Тогда потенциальная энергия изгибаемой
балки [37] вычисляется по формуле
1'
Ц =-JEIx26x,
где Е - модуль Юнга материала балки; 7 - геометрический момент
инерции поперечного сечения балки относительно нейтральной
120 Глава 2. Вариационное исчисление и задачи математической физики
линии поперечного сечения; ае - приращение кривизны,
происшедшее под действием нагрузки; /-длина балки (рис. 2.17).
0U I + I ГТ; Mil*
у*
Рис. 2.17
Работа внешних распределенных усилий
А= \я(хЫх)дх,
поэтому потенциальную энергию внешних сил запишем в виде
n2=-A = -lq(x)y(x)dx,
где у(х) - прогиб балки под действием нагрузки.
Считаем прогибы балки малыми (|у'|<£ 1), поэтому можно
использовать приближенное выражение для приращения кривизны:
ае^
(1 + У2)3/2
*у.
Принцип минимума потенциальной энергии приводит к
вариационной задаче:
3[у] = 17 = Ц +Л2 = J -Ely1 -qy dx->min.
2.8. Чистый изгиб упругой балки
121
Вычисляем вариацию функционала:
8ЗД = J(/;-5v" + /» dx = j(EIy" ■ by - qby) Ax.
0 0
Считаем (для упрощения выкладок) Е и I постоянными
величинами, обозначим El = К и дважды проинтегрируем первое
слагаемое подынтегрального выражения:
/ /
ре/8/<1с = Ку Ъу\ - \КутЬудх =
о о
= Ky'by^-Ky-byl + 1Ку"5удх.
О
Следовательно,
Щу]= j(KyW -qybydx + Ky'Sy'l-Ky'Sy^O.
Отсюда получим дифференциальное уравнение упругой линии
изгибаемой балки
Ely1 v - q = О,
представляющее собой ОДУ IV порядка, для определения частного
решения которого необходимы четыре краевых условия, которые
получим, используя равенство нулю вариации функционала:
Ю = Ку(1)Ъу\1) - Ку\0)Ьу'(О) + Кут(1)Ьу(1) - Кут(0)Ьу(0) = 0.
Рассмотрим различные условия закрепления концов балки х = 0,
x=L
1. Шарнирное опирание концов (рис. 2.18).
Предполагаем, что трение в шарнирах отсутствует, поэтому
имеем два предварительных (кинематических) условия:
ЯО)=Х1) = о^б>(0) = б>(/) = о.
122 Глава 2. Вариационное исчисление и задачи математической физики
Рис. 2.18
Вариация функционала теперь выглядит так:
Ю = Ky\l)by'(l) - £/(0)8/(0) = 0.
Углы поворота в точках опирания не равны нулю и независимы:
6>'(/),бу(0)*0.
Из условия равенства нулю вариации функционала получили
два естественных краевых условия:
У(/) = 8у"(0) = 0.
Предварительных и естественных условий достаточно для
определения экстремали.
В теории упругости показано, что внутренний изгибающий
момент в сечении балки есть величина
M=Ete*EIy".
Таким образом, смысл естественных условий очевиден -
равенство нулю изгибающих моментов в шарнирно опертых сечениях.
2. Концевые сечения жестко заделаны (рис. 2.19).
Оба концевых сечения неподвижны:
у(0)=ЛО = о.
Упругая линия балки такова, что касательные к прогибу
у = у(х) в точках х = 0 и х = I горизонтальны в силу сопротивления
изгибу в этих точках:
2.8. Чистый изгиб упругой балки
123
У(0)=У(/) = о.
Вследствие соотношений у(0) = у(1) = О, у'(0) = у'(Г) = О
равенство Ю = О выполняется тождественно, а все краевые условия
предварител ъные.
о|ДДШШД%,
Рис. 2.19
3. Левое сечение х = О жестко заделано, правый конец свободен.
В силу предположенной малости перемещений упругой линии
балки считаем, что правый конец при перемещении под действием
нагрузки скользит по прямой х = I (рис. 2.20).
0:3
/
Li-
Рис. 2.20
В точке х = О условия предварительные: у(0) = О, у'(0) = 0;
значит, 5у(0) = 0, 5у'(0) = 0 и равенство Ю = О запишем в виде
Ку\1)Ьу\1) + Ку\1)Ьу(1) = 0.
Вариации 5у'(0 и §у(0 не равны нулю и независимы, поэтому
У(0=/"(0 = о.
124 Глава 2. Вариационное исчисление и задачи математической физики
Четырех условий ^(0) = у'(0) = у"(1) = у'"(1) = 0 достаточно для
определения четырех произвольных постоянных общего решения
уравнения равновесия.
В литературе по сопротивлению материалов показано, что
величины Ely" и Ely'" являются соответственно изгибающим
моментом и перерезывающей силой в поперечном сечении балки.
Следовательно, полученные выше естественные краевые
условия в сечении х = I выражают равенство нулю изгибающего
момента и перерезывающей силы в свободном поперечном сечении.
2.9. Эйлерова критическая сила
В 1742 г. в письме от 22 октября Д. Бернулли сообщает Л.
Эйлеру, что задача об изгибе упругого стержня может быть решена
методом максимумов и минимумов: «Среди кривых постоянной
длины, которые проходят через две фиксированные точки...
определить ту, для которой
/
Jae2dy->min». (2.84)
о
Это была первая в истории теории упругости постановка
вариационной задачи, [48].
Действительно, ае - приращение кривизны упругой оси
изгибаемого стержня, £Уэе согласно формуле Бернулли есть
внутренний момент сопротивления стержня изгибу; (l/2)jE7ae2ds -
потенциальная энергия деформации элемента ds. Поэтому
требование минимальности функционала (2.84) - выражение
минимума потенциальной энергии деформируемого упругого тела
(см. гл. 1).
Решая задачу (2.84), Эйлер получил девять эластик - форм
изгиба идеально упругого стержня, подверженного действию двух
(равных по модулю и противоположно направленных) продольных
сил, приложенных к его концам [24, 38, 48].
Отметим, что Эйлер получил свои эластики, рассматривая
геометрически нелинейную постановку задачи, т. е. принимая для
кривизны ее истинное значение:
2.9. Эйлерова критическая сила
125
эе =
(1 + У2)3/2"
Рассмотрим вертикальный цилиндрический стержень, оба
конца которого жестко заделаны, при этом верхний конец может
скользить по вертикальной направляющей (рис. 2.21). Под
действием медленно возрастающей силы Р неизменного направления
верхний конец стержня перемещается на величину
А = /- Icoscpd?,
о
где / - первоначальная координата
верхней точки стержня; ф - угол
между касательной к упругой оси стержня и
вертикальной осью.
Следовательно, работа, совершаемая
силой Р, есть
А(Р) = Р\ I- Jcoscpds-
П(Р) = -Pl + P Jcos ф ds,
Рис. 2.21
где П(Р)- потенциальная энергия внешней нагрузки.
Не будем учитывать сжатие оси упругого стержня, поэтому
потенциальную энергию деформации рассчитываем как энергию
чистого изгиба [37]:
I i
Яизг=-|я/Ж2^,
где Е - модуль Юнга материала стержня; / - момент инерции
поперечного (постоянного по длине) сечения стержня; ае = при-
ds
ращение кривизны упругой оси.
126 Глава 2. Вариационное исчисление и задачи математической физики
Следовательно, полная потенциальная энгергия
рассматриваемой консервативной системы есть
77= М—(—J +Pcosyids-Pl. (2.85)
Постоянное слагаемое в этом выражении можно отбросить,
выбрав соответствующий уровень отсчета потенциальной энергии.
Итак,
»-Ш"-'~'Ь
Для того чтобы консервативная система находилась в
состоянии устойчивого равновесия, необходимо и достаточно
потребовать минимума потенциальной энергии [32].
Вследствие этого получаем вариационную задачу
П -> min,
ф(0) = 0,Ф(/) = 0.
Из (2.85) следует краевая задача
f£7<p*-P(-sin<p) = 0,
(2.86)
1<р(0) = ф(/) = 0.
Очевидно, что ф = 0 есть одна из экстремалей задачи.
Вопрос об устойчивости прямолинейной формы равновесия
(ф = 0) в смысле Эйлера ставится так: при каких значениях силы Р
наряду с формой ф = 0 возможно равновесие при ф(я) ф 0 ?
Считаем, что рассматриваются формы равновесия изогнутого
стержня, весьма близкие к прямолинейной. Тогда уравнение (2.86)
линеаризуется (sin ф « ф):
2.9. Эйлерова критическая сила
127
* Р
ф +— Ф = 0,
EI (2.87)
1ф(0) = ф(/) = 0.
Р
При каких значениях параметра — имеется нетривиальное
решение?
Таким образом, поставлена задача Штурма - Лиувилля [18,
31,40].
Запишем решение уравнения (2.87) в виде
[7 [7
<p(s) = С, cos 4 /— s + С, sin 41— s,
\Е1 \Е1
ф(0) = 0 => С, = 0.
Имеем однопараметрическое семейство экстремалей:
Ф = С, sin ч /— s.
\Е1
Если . I— / < я, то строится поле экстремалей, в которое
включается экстремаль ф = 0. Имеется только одна форма
равновесия и при этом
-I2 <я2=>Р<-
EI I2
Е1п2
При Р > на отрезке [0, /] имеется сопряженная точка
к
I = — ; существует нетривиальное решение задачи (2.87) [5].
Я/л2
Силу Рэ = —-— называют эйлеровой критической силой.
128 Глава 2. Вариационное исчисление и задачи математической физики
Обозначив интегрант функционала (2.85) через /(•), проверим
выполнение усиленного условия Лежандра:
EI „
/(•)= ф +PC0S(p:
2
fii=EI>0.
• т
У/////Л
sss/s/
Рис. 2.22
Таким образом, при значениях нагрузки Р<Рэ решение
(p(s) = 0, т. е. прямолинейная форма равновесия, обеспечивает
сильный минимум функционалу энергии.
Замечание. Для того, чтобы понять,
что такое бифуркация, М.А. Лаврентьев
предложил и в свое время
демонстрировал студентам следующий эксперимент
[26] (рис. 2.22).
Пусть стержень (тонкая упругая
полоса, в эксперименте - длинная стальная
линейка) расположен вертикально, его
нижний конец закреплен в массивном
"основании; к верхнему концу стержня
крепится точечная масса, создающая
своей тяжестью сжимающую силу, которая в
начале опыта намного меньше
соответствующей эйлеровой силы Рэ.
Если стержень слегка отклонить от вертикального положения,
а затем отпустить, то он, совершив затухающие колебания в
окрестности положения равновесия, вернется в первоначальное
положение.
Имеем устойчивое равновесие вертикали, прямолинейной
формы равновесия. Увеличиваем массу т. При этом уменьшается
частота колебаний стальной линейки. При некотором
критическом значении массы ткр частота колебаний обращается в нуль -
стержень при отклонении верхнего конца в вертикальное
положение не возвращается. Наступает состояние безразличного
равновесия, причем это состояние может быть как вертикальным,
так и отклоненным (от вертикального) с любой (в некоторых
пределах) амплитудой.
При тщательной постановке эксперимента значение критической
массы соответствует значению критической силы. В данном случае
2.9. Эйлерова критическая сила
129
я2 EI
Замечание. В течение почти 200 лет бифуркационный подход
Эйлера к задачам устойчивости не подвергался сомнению. При
решении некоторых задач была выявлена парадоксальная
ситуация: при последовательном проведении процедуры Эйлера,
например, в задаче об устойчивости стержня под действием
«следящей» силы (направление сжимающей силы, приложенной к
свободному концу стержня (см. рис. 2.22) совпадает с касательной
к изогнутой оси в точке х = I) оказалось, что критической силы
не существует.
Выходом из этого положения является динамический подход к
решению задачи: рассматривается уравнение малых колебаний в
окресности начального положения конструкции и выявляются те
значения приложенных внешних сил, при которых возможно
«расходящееся» решение. Таким образом, задача ставится в терминах
теории устойчивости A.M. Ляпунова.
Первым эту ситуацию разрешил Е.Л. Николаи.
В дальнейшем было выяснено, что подход Эйлера корректен,
если задача об устойчивости является консервативной:
конструкция упругая и к ней прикладываются потенциальные нагрузки.
При этом оператор задачи является самосопряженным.
В противном случае, конструкция упругопластическая либо
нагрузки неконсервативные, оператор задачи не самосопряженный
и подход Эйлера может оказаться некорректным.
Глубокое исследование неконсервативных задач упругой
устойчивости и ссылки на работы Николаи читатель найдет в книге
В.В. Болотина [3].
ГЛАВА 3
ПРЯМЫЕ МЕТОДЫ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ
Как известно, основной вопрос в связи с постановкой
вариационной задачи - вопрос о существовании решения задачи.
Методы классического вариационного исчисления приводят к
краевым задачам для обыкновенных дифференциальных уравнений
(либо - к уравнениям в частных производных). При этом
решение строится не локально (как в известной задаче Коши), а во
всей области. Теория ОДУ дает ответ на вопрос о существовании
решения краевой задачи в редких случаях. Кроме того, уравнения
Эйлера и исходная вариационная задача в общем случае не
эквивалентны [22].
Отмеченные обстоятельства заставили искать иные подходы к
решению вариационных задач, что привело к созданию так
называемых прямых методов.
По определению С.Л. Соболева, прямыми называют такие
методы решения задач теории дифференциальных и интегральных
уравнений, которые сводят эти задачи к конечным системам
алгебраических уравнений [33].
Среди известных из литературы определений данное выше
определение является наиболее общим и полным, хотя некоторые
методы, рассматриваемые ниже и называемые прямыми, трудно
подвести под данное определение. Таков, например, метод
Канторовича [17].
Обзор прямых методов и основные сведения из
функционального анализа, необходимые для четкого понимания
сущности обсуждаемых ниже вопросов, представлены в книгах [14,
15,22,33].
3.1. Основные сведения из функционального анализа 131
3.1. Основные сведения из функционального анализа
В этом разделе приводим определения основных понятий и
даем формулировки основных теорем, которые используются при
построении прямых методов решения вариационных задач.
Доказательства приводимых теорем можно найти в упомянутых далее
источниках.
Считаем, что читателю знакомы следующие понятия:
линейное пространство элементов произвольной природы; евклидово
пространство как линейное пространство, в котором определено
скалярное произведение любых двух его элементов;
нормированное пространство как линейное пространство, в котором
определена норма любого элемента, в том числе и норма разности
элементов, которую можно рассматривать в качестве расстояния
между двумя элементами. В связи с этим вспомним о том, что
любое евклидово пространство можно нормировать, если норму
элемента определить в виде арифметического корня из
скалярного квадрата элемента.
Читателю должны быть также известны и основные элементы
теории линейных операторов в действительных линейных
пространствах: сопряженные, самосопряженные, ортогональные
операторы. В линейной алгебре все эти понятия относились к
конечномерным векторным пространствам [16].
Линейное пространство, элементами которого являются
функции, называют функциональным пространством. Будем
иметь дело только с действительными функциональными
пространствами: сами элементы пространства и числа, на которые
умножаются элементы пространства, действительны.
Функциональное пространство, в котором определено скалярное
произведение двух любых его элементов, называют гильбертовым
пространством - в честь великого математика XX столетия Д.
Гильберта [8, 30].
Приведем примеры гильбертовых пространств.
Пример ЗА. Пространство L2(0), элементами которого
являются интегрируемые со своими квадратами функции,
определенные на некотором измеримом множестве евклидова
пространства размерности п (в приложениях обычно п = 1, 2, 3).
Пусть, например, О. - ограниченная область, переменную точку
132 Глава 3. Прямые методы вариационного исчисления
которой обозначим буквой Р, элемент меры (длины, площади,
объема) - (Ю.
Определим скалярное произведение и норму следующими
соотношениями:
(ф, \\f) = J q>(P)\\f(P) dQ - скалярное произведение,
о
||ф|| = / |ф2(Р) dQ - норма элемента.
Пример 3.2. Пространство L2(Q, т(Р)). Элементы этого
пространства - функции, для которых существует интеграл
Jx(P)92(P)dQ,
где х(Р) - некоторая неотрицательная в Q функция, одна и та же
для всех элементов <p(P)eL2(Q, т(Р)).
Скалярное произведение и норму задаем в виде
(9,v|/)=Jx(/>)9(/>M/>)dQ, (3.1)
о
||ср||= \x(P)<p2(P)da (3.2)
В пространствах L2(Q) и L2(Q, т) элементы называют
равными, если расстояния между ними (равные норме разности)
равны нулю:
Ф,(Р) = Ф2(/>) ^ ||Ф, -Ф2|2 = /(Ф, -Ф2)2(Ю = 0 (в L2(Q)),
Ф,(Р) = ф2(Р) »||ф, -ф2||2 = |х(Р)(Ф, - ф2)2(Ю = 0 (в Z,2(Q,т)).
3.1. Основные сведения из функционального анализа 133
Пример 3.3. Векторное пространство 1(^}(0).
Рассмотрим линейное пространство вектор-функций, каждая из
которых есть упорядоченная совокупность функций:
ф(Р) = (ф1(Р),Ф2(Р),...,Ф/и(/>)),
причем ф, (Р) (i = 1, т) принадлежат гильбертову пространству
Скалярное произведение вводим по формуле
(ф,Ч>) = J(p-vj)dQ= П ]Гф*\р* dQ.
Норму определяем по формуле
||(p||2 = J(p(P)(p(P)dQ.
Элементы фЬ ф2, ..., фт гильбертова пространства L(2w)(Q)
называют линейно зависимыми, если
/ /я Л /и
За,,^,...,^ а^М^а^О :Еа,Ф,-(/>) = 0 (^Q).
Элементы q>\(P), ..., ф™ (Р) линейно независимы, если
/и
X а,Ф,- (Р) = О => а, = а2 = ... = ат = 0.
Теорема 3.1. Для линейной зависимости элементов ($>\(Р),
ф2(Р), ..., фт(Р) гильбертова пространства необходимо и
достаточно, чтобы был равен нулю определитель матрицы Грома
134 Глава 3. Прямые методы вариационного исчисления
det[(9f.,9y)] =
(Ф1.Ф1) (Ф1.ф2) -■■ (ФмФ«)
(Ф2.Ф1) (ф2>Ф2) •••(Ф2>Ф™)
(ф^фО (Фт.ФгЬ-СФт.Ф*)
= 0
(3.3)
в области Q, здесь (i,j = \,т) [16].
Если речь идет о произвольном гильбертовом пространстве, в
качестве обозначения пространства употребляем букву Н.
Пусть фь ф2, ..., ф„, ... = {ф„(Р)} - функциональная
последовательность элементов фДТ^е//.
Говорят, что последовательность {(р„(Р)} сходится к функции
ф(Р) (ф(Р) называют пределом последовательности), если
Ve > 0 Эя0(б) eN:«> я0(е) => ||Ф„ -Ф|| < 8, (3.4)
т. е.
Нт||Фя-ф|| = 0.
л->оо
Будем использовать символику:
Ф„ —> ф, если lim ф„ = ф.
л->оо
Пример 3.4. а) В пространстве L2(£2) сходимость ф„ —> ф
означает, что
lim |(ф„-ф)2(Ю = 0.
При этом говорят, что ф„(Р) сходится к ф(Р) в среднем в
области Q.
б) В L2(Q, т) сходимость ф„ —> ф означает сходимость в среднем
с весом т(Р):
3.1. Основные сведения из функционального анализа 135
lim фя (Р) = ф о lim fт(Р)(ф„ - ф)2 (Ю = 0.
л->оо л->оо
Q
Теорема 3.2. Если ф„ —> ф и у„ —> у, то (ф„, у„) —> (ф, у).
Отсюда следствия:
1) если ф„ —> ф, то (ф„, у) —> (ф, у), здесь у(Р) -
фиксированная функция;
2) если ф„ -> ф, то ||ф„|| -> ||ф|| [33].
Пусть в Я дана сходящаяся к ф(Р) последовательность {%(Р)},
т. е. в силу определения (3.4) по заданному положительному числу 8
можно найти натуральное число п0, зависящее от выбора 8 и такое,
что при п > я0(е) для всех «оставшихся» членов
последовательности выполняется неравенство ||ф„ - ф|| < 8.
Тогда для числа е/2 ожно найти такое натуральное число
л0(е/2), что
(к > «0(е/2) л п > п0(г/2)) => (||Ф, - ф|| < е/2 л ||Ф„ - Ф|| < е/2).
Оценим норму разности ф^ - ф„. Согласно неравенству
треугольника (неравенство Минковского) имеем
||ф* " Фп Is ||(Ф* " Ф)" (Фп " Ф)|| ^ ||ф* " ф|| + ||ф„ " ф|| < е-
Значит, норма разности меньше любого наперед заданного
положительного числа, т. е.
lim ||Ф*-Ф„|| = 0- (3.5)
k,n-wo
Пример 5.5. Множество непрерывных функций ф(д:), у(д:), на
отрезке [-1, 1] образует линейное пространство М. Сделаем это
пространство гильбертовым, если определим скалярное
произведение его элементов, например, формулой
1
(Ф,у)= |ф(*)у(*)ск.
136 Глава 3. Прямые методы вариационного исчисления
В качестве элементов М рассматриваем функции
Г-1 при -\<х<-\/п,
Фл(х) = <пх при -\/п<х<\/п,
[ 1 при \/п<х<\.
Очевидно, что
Г-1 при -1 < д: < О,
[ 1 при 0<*<1,
причем стремление к пределу равномерное в каждом из отрезков
[-1, -е] и [е, 1], где 0 < 8 < 1.
Отсюда следует, что
lim |(ф„(*)-ф0(*))2(к = 0,
т. е. в среднем ф„(х) —> ф0(*).
Функция фо(*) разрывна, более того, ее нельзя сделать
непрерывной, изменяя ее значения на множестве меры нуль. Так как
предел в смысле сходимости в среднем единственный, то в
пространстве Мне существует элемента, предельного для {ф„(*)},
хотя эта последовательность удовлетворяет условию (3.5) (убедитесь
в этом!).
В силу теоремы Риса - Фишера [33] в пространстве L2(Q) =
= L2[—1, 1] равенство (3.5) влечет за собой существование
предельного элемента. В нашем примере этим предельным элементом
является функция ф0(х) е L2(-\, 1).
Присоединим к множеству функций М (гильбертову
пространству непрерывных функций) предельный элемент фо(*),
получим гильбертово пространство L2(-\, 1), т. е. пополним
пространство М.
3.1. Основные сведения из функционального анализа 137
Таким образом, если ф„ —> ф, то выполняется равенство (3.5).
Однако можно ли утверждать, что предел последовательности
существует, если выполняется (3.5)?
В общем случае ответ на поставленный вопрос отрицателен (в
противоположность известному критерию Коши для числовых
последовательностей), т. е. при выполнении (3.5) последовательность
может иметь пределом некоторую функцию ф(Р), не
принадлежащую пространству Н.
Последовательность называют фундаментальной, если она
такова, что выполняется равенство (3.5). Гильбертово
пространство полное, если любая последовательность его элементов,
удовлетворяющая (3.5), имеет предел, принадлежащий
пространству Н. В противном случае пространство Н называют
неполным.
Итак, в полном гильбертовом пространстве всякая
фундаментальная последовательность сходится.
Назовем элементы ф, у предельными (или идеальными), если
в Н найдутся последовательности {ф„}, {у„}, такие, что ф„ —> ф,
у„-> у.
Примем, что ф = у, если выполняется равенство
11т||ф„-1|/„|| = 0.
л->оо
Если Н - неполное гильбертово пространство, а любая
последовательность {ф„} е Н имеет предел ф е Н, то, присоединяя к Н
все предельные элементы, образуем полное гильбертово
пространство [33].
Далее рассматриваем только полные гильбертовы
пространства.
Множество МаН называют плотным в Н, если любой
элемент ф е Н может быть получен как предел последовательности
{ф„} е Н. Множество Ма Н замкнуто, если оно содержит все свои
предельные элементы (все свои предельные точки):
(ф„ е МЛ ф„ —> ф) => ф е М.
138 Глава 3. Прямые методы вариационного исчисления
Элементы ф, у е Н взаимно ортогональны, если (ф, у) = 0.
Если все элементы некоторой системы попарно ортогональны, то эту
систему называют ортогональной. Система фь фг, ..., ф„, ... орто-
нормированная, если
[1 при i = j,
(Ф,".фу) = 1
[0 при i*j.
На множестве М гильбертова пространства определен
функционал, если каэюдому элементу феМпо некоторому правилу (закону)
поставлено в соответствие определенное число 3[ф]. Множество М
при этом есть область определения функционала 3.
В качестве примеров функционалов можно привести
определения нормы элементов и скалярного произведения 3 [ф] = (ф, а), где
о(Р) - фиксированный элемент гильбертова пространства; можно
вспомнить любой из интегралов, рассмотренных ранее.
Линейный функционал на множестве М а Н ограничен, если
3N= const > 0: |3[q>]| < tf |q>|| (Уф е М). (3.6)
Наименьшее из чисел 7V, удовлетворяющих (3.6), называют
нормой ограниченного функционала и обозначают |р||.
Таким образом,
|3[<р]|фЦ-||ф| (V9ejW).
Будем называть функционал непрерывным, если ф„, ф е H и
фя->Ф=>ИтЗ[фя] = 3[ф].
л->оо
Например, норма элемента есть непрерывный функционал,
так как
фя->ф=>||фя|->1ф|
в силу теоремы 3.2.
3.1. Основные сведения из функционального анализа 139
Теорема 3.3 (теорема Риса) [33]. Всякий линейный
ограниченный функционал, определенный в гильбертовом пространстве,
имеет вид скалярного произведения
3[ф] = (ф,ч0,
где у - фиксированный элемент пространства Н, единственный
для каждого функционала 3.
Важную роль играют билинейные и квадратичные
функционалы, определенные на плотных множествах гильбертова
пространства. Если 3[ф, у] - билинейный функционал, то 3[ф, ф] называют
квадратичным функционалом или квадратичной формой.
Квадратичная форма удовлетворяет тождеству
5[ф + у ] = 5[ф] + 25[ф, у] + 5[у ]
(аналогично известной формуле (а + bf = а2 + 2ab + Ь2).
Пусть на множестве элементов гильбертова пространства
DAaHкаждому элементу феД< по определенному закону
(правилу) ставится в соответствие один элемент у е Н:
у=ЛФ. (3.7)
Тогда говорят, что на DA определен оператор А.
Множество элементов ф, на котором определен оператор А,
называют областью определения оператора, а множество RA
элементов у (образов элементов ф) - областью значений оператора А:
A:DA->RA.
Отметим, что в понятие оператора существенно входит
область его определения.
Два оператора А и В полагают равными, если совпадают их
области определения DA = DB и для каждого элемента феД<
выполняется равенство
Ау = £ф.
140 Глава 3. Прямые методы вариационного исчисления
Если DAaDBu для любого среД* выполняется равенство А<р =
= By, то оператор В называют расширением оператора А.
Оператор А линейный, если область его определения есть
линейное пространство и выполняется равенство
А(а^(Р) + а2у2(Р)) = а, Лф, + а2Ау2
(Vq>i,q>2 GDA;aua2G R).
Очевидно, что для линейного оператора выполняется
равенство AQ = 0, где 0 - нулевой элемент множества DA, 9 - нулевой
элемент множества RA.
Оператор непрерывен, если
Ф„ -> Ч> => Ит Лф„ = Ау;
л->оо
ограничен, если
3N = const > 0: ||Лкр|| < N ||ф||.
Наименьшее из чисел N, удовлетворяющих представленному
выше условию, называют нормой оператора:
min Л^ = ||л|| => ||Лф|| < ||Л|| |ф||.
Вспомним знакомые из курса линейной алгебры определения:
тождественный оператор переводит каждый элемент в себя:
£ф = ф;
сумму и произведение операторов определяют равенствами
{А + В) ф = Ay + By, (AB)y = А(Ву),
причем в общем случае АВ Ф ВА, Ап = АА...А.
Если операторы А иВ линейны, то линейными операторами
являются их сумма и произведение.
Пусть А и В - ограниченные операторы, тогда
3.1. Основные сведения из функционального анализа 14J_
\\(А + Я)ср|| => ||л<р + Я<р|| < ||Лср| + \\В<р\\ <
Ф1Н+М№(И+1*1)М-
Отсюда получаем неравенство треугольника для нормы
суммы операторов:
1И+*1ФН14
Пусть A: Da—>Ra', оператор А устанавливает взаимно
однозначное соответствие между DA и RA, вследствие чего определен
оператор
В: RA->DA.
Оператор В называют обратным к оператору А и
употребляют обозначение В = А~\
В работе [33] доказаны следующие теоремы.
Теорема 3.4. Оператор А имеет обратный оператор А~1 тогда и
только тогда, когда уравнение
имеет единственное решение ф = 0.
Замечание. Вспомните в связи с теоремой 3.4
соответствующий факт из теории линейных алгебраических уравнений:
квадратная матрица А имеет обратную матрицу тогда и только тогда,
когда однородная система АХ= 0 имеет единственное тривиальное
решение Х= 0.
Теорема 3.5. Для ограниченности обратного оператора
необходимо и достаточно, чтобы
3k = const > 0 : Уф g D^ => |Лф|| > £||ф||.
Оператор А в функциональном пространстве называют
симметрическим, если DA - плотное множество и выполняется
условие
142 Глава 3. Прямые методы вариационного исчисления
Уф, у е D^ => (Лф, v|/) = (ф, Лу).
Пример 3.6. 1. Рассмотрим оператор двукратного
дифференцирования функции м(х) и умножения второй производной на (-1):
d2u
Ли =
dx2
В качестве элементов DA рассматриваем все дважды
дифференцируемые на отрезке [0,1] функции.
Покажем, что определенный таким образом оператор А не
симметрический:
Vm(jc), v(jc) g^=> (Au, v) - (и, Л v) =
l l
= - J (vw" - wv") dx = \{uv - vu')' dx = (uv - vu')\ .
о о
Если на поведение функций и, v e DA не наложить некоторые
дополнительные требования, то результат интегрирования, вообще
говоря, не обращается в нуль и
(Au, v) - (и, Av) Ф 0.
2. Пусть оператор В:
d2u
Ви = (0<jc<1);
dx2
Vu(x)eDB => w(0) = w(l) = 0 - дополнительные требования к
выбору функций из области определения оператора.
Теперь в результате интегрирования получаем
(Ви, v) - (и, Bv) = 0,
т. е. оператор В симметрический.
3. Рассмотрим оператор С:
3.1. Основные сведения из функционального анализа 143
d2u
Си = (0 < л: < 1);
dx2
x = 0=>w'(0) + aw(0) = 0,
* = 1 =>w'(l) + pw(l) = 0.
Аналогично изложенному выше запишем
(Си, v) - (и, Cv) = (uv - vw')|0 =
= («(l)v'(D - v(l)«'(1)) - («(0)v'(0) - v(0)M'(0)).
Покажем, что каждая из этих скобок равна нулю:
Vw, v eDc =^> w'(l) + МО = 0, v'(l) + pv(l) = 0.
Первое из этих равенств умножим на v(l), второе - на м(1);
тогда, очевидно, что разность полученных выражений, имеющая
вид
v(1M1)-W(1)v'(1),
равна нулю.
Аналогично убеждаемся в том, что
m(0)v'(0)-v(0)m'(0) = 0.
Следовательно, оператор С симметрический.
Симметрическими операторами являются сумма и
произведение (при условии АВ = ВА) симметрических операторов:
(АВи, v) = (Bu, Av) = (и, BAv) = (и, ABv).
Симметрический оператор А называют положительным, если
для любой функции u(P)gDa (и X 0) справедливо неравенство
(Аи, и) > 0.
144 Глава 3. Прямые методы вариационного исчисления
Если и(Р) = О, то (Аи, и) = О, поэтому данное выше определение
можно расширить:
\/и(Р) eft=> (Аи, и) > 0.
Пример 3.7. Рассмотрим оператор В:
Ви = -^- (0<х< 1); и(0) = и(1) = 0.
dx
Интегрируя по частям, получим
(Ви,и)=\(и')26х-(ии%.
о
В силу краевых условий последнее слагаемое равно нулю,
поэтому
1
(Ви,и)= jV)2dx>0.
о
Допустим, что (Ви, и) = 0, тогда получим
dw
— = 0 => и(х) = const.
dx
Так как функции из DB на концах отрезка [0, 1 ] равны нулю, то
и(х) = const => и(х) = const = 0.
Итак, (Ви, и) = 0 только при и(х) = 0.
Следовательно, оператор В положительный.
Пример 3.8. Рассмотрим оператор Лапласа в области Q e R3:
Л ( 82 .. 82 X д' ] ' 4. ' 4. '
Аи = + + —- \и = ихх + их , +ихх ,
[дх? дх\ дх\) XiXi чч зд
S - граница области Q.
3.1. Основные сведения из функционального анализа 145
Дважды дифференцируемые функции и(Р) подчинены
краевому условию
и(Р) = О (PeS).
Покажем, что оператор (-А) с краевым условием,
представленным выше, является положительным.
Действительно, в силу одной из формул Грина [41] имеем
(
(-Aw,w) = -JwAwdQ= J X
ди_
Л
dQ- \u-dS.
s дп
Здесь во втором (поверхностном) интеграле осуществляется
дифференцирование по внешней нормали п к границе области Q.
Вследствие условия и(Р) = 0 получаем
'"г.^
^-Ш
dQ>0.
При этом
(-Аи,и) = 0:
ди_
8Х:
= 0 (i=l,2,3).
Из условия и(Р) = 0 имеем и = const = 0 в замкнутой области
Таким образом, оператор (-А) с краевым условием и(Р) = 0
есть положительный оператор.
Коснемся механического смысла факта положительности
оператора.
Рассмотрим, например, закрепленную по контуру и
нагружаемую поперечным давлением q, Н/м2, мембрану, которая в ненагру-
женном состоянии занимала плоскую область Q(x, у); и = и (х, у) -
поперечное перемещение точки мембраны Р е Q; S - граница
области О..
146 Глава 3. Прямые методы вариационного исчисления
Пусть Т = const, Н/м - сила натяжения мембраны.
Стационарный прогиб мембраны удовлетворяет дифференциальному
уравнению (см. гл. 2):
-Аи(Р)=^ (PgQ), u\s=0.
Скалярно умножим данное уравнение на и(Р):
ди
(-^.«) = (р«)=Ч1
V^/У
dxdy -
= \^»U\f,u\>0.
Скалярное произведение действующей нагрузки и
перемещения есть работа внешней силы, затраченная на изменение
состояния механической системы.
Следовательно, в силу равенства представленного выше
скалярное произведение (-Aw, w) есть накопленная потенциальная
энергия рассматриваемой механической системы (мембраны).
Многочисленные примеры убеждают в следующем. Пусть
некоторая механическая система под действием нагрузки f(P)
испытывает перемещение и(Р), что описывается уравнением
Au=f,
где А - положительный оператор.
В этом случае скалярное произведение (Аи, и)
пропорционально работе, которую необходимо совершить, чтобы сообщить
системе перемещение и(Р).
Положительность оператора означает, что внешние силы при
этом совершают положительную работу, которая необходима для
преодоления сопротивления внутренних упругих сил
(напряжений), возникающих в механической системе при ее
деформировании.
3.1. Основные сведения из функционального анализа 147
Имея в виду изложенное выше, будем называть скалярное
произведение (Аи, и) энергией функции и(Р) е DA.
Симметрический оператор А называют положительно
определенным, если
Зу = const > 0: \/и(Р) е Д< => (Аи, и) >y2\\uf.
Из этого определения ясно, что положительно определенный
оператор является также и положительным.
Пусть А - положительно определенный оператор, и, v e DA\
на множестве DA введем энергетическое скалярное произведение
по формуле
[и, v] = (Аи, v)
и энергетическую норму функции и(Р) в виде
\и\ = [и,и] = (Аи,и)=>
^\u\2=(Au,u)>X2\\uf^\\u\\<-\u\. (38)
Введением понятий энергетических скалярного произведения и
нормы превращаем DA в энергетическое гильбертово
пространство. Энергетическое гильбертово пространство оператора А
обозначаем символом НА.
Теорема 3.6. Все элементы пространства НА принадлежат
также и пространству Н:
и(Р)еНА^>и(Р)еН.
Сходимость в энергетическом пространстве называют
сходимостью по энергии, а сам факт
\ип-и\ >0
1 " ' п-юо
символически записывают в виде
148 Глава 3. Прямые методы вариационного исчисления
ип(Р)-^>и(Р).
Отметим, что понятия энергии и сходимости по энергии имеют
смысл только в связи с заданием соответствующего
положительного оператора.
Теорема 3.7. Если А - положительно определенный оператор и
ип—>и в НА, то одновременно и ип—>и в метрике исходного
пространства Н, т. е.
ип(Р)——>и(Р) =>ип -> w (сходится в среднем).
< Имеем |w„ — w| —>0 по условию теоремы. В силу
неравенства (3.8)
\\ип-и\\<-\ип-и\^\\ип-и\\^0. ►
Пример 3.9. Рассмотрим оператор В:
Ви = - — (0<*<1); и(0) = и(1) = 0.
dx2
Как мы видели ранее, оператор В положительный. Покажем,
что В - положительно определенный оператор.
< Очевидно, что при м(0) = О
fx Л2 /, V
и(х)= ji/'(0d/=>M2(jc) = \u{t)dt\ =\ \\u(t)dt
Vo J
Vo
В силу неравенства Коши - Буняковского имеем
Vo
X X
Jl • u{t) dt\ < Jl d/ • \u2 (t) dt = x \u2 (t) dt.
3.2. Минимизирующие последовательности 149
Поэтому
х 1
и2(х) < х \и2(0 d/ < х \и2(0 d/ = х(Ви, и) (см. пример 3.7).
Следовательно, х(Ви, и) > и2(х).
Проинтегрируем это неравенство:
1 1
1
(Ви,и)- \xdt> Jw2(jc)d/ => — (^w,w) > ||w(x)||2.
0 0 ^
Отсюда получаем (Вы, и) > 2||м(л:)|| (у = V2 I, т. е. оператор В
положительно определен. ►
Сходимость по энергии, ип ——>и, в данном случае
означает, что
1
| ип - и | = (В(ип - и), (ип - и)) = \(и'п (х) - и'(х))2 dt.
Первая производная ип(х) сходится к первой производной и(х) в
среднем: ип -> и .
Таким образом, в пространстве Нв (энергетическое
пространство оператора В) сходимость по энергии есть сходимость в
среднем для первых производных.
3.2. Минимизирующие последовательности
Рассматривая здесь некоторое дифференциальное уравнение
(или систему уравнений), предполагаем, что поставлены
однородные краевые условия. Поэтому, чтобы речь шла о нахождении
нетривиального решения, считаем, что само дифференциальное
уравнение неоднородно:
Аи =f(P).
(3.9)
150 Глава 3. Прямые методы вариационного исчисления
Здесь u(P)eH,f(P) имеет конечную норму.
То обстоятельство, что и(Р) е DA, означает, что и(Р)
удовлетворяет поставленным краевым условиям. Предполагаем, что
оператор положительный.
Теорема 3.8. Если оператор А положительный, то уравнение
(3.9) не может иметь более одного решения (т. е. если решение
существует, то оно единственное).
-< Пусть имеются два решения их(Р), и2(Р):
Аих=/{Р) иАи2=/[П
Рассмотрим функцию и = их-и2. В силу линейности
оператора А имеем
Аих - Аи2 = 0 => А(их -и2) = Ай = 0.
Вследствие положительности оператора А
{Ай, и) = 0 => и = их - и2 = 0 => их - и2. ►
Формулировку следующей теоремы мы уже приводили в главе
1 при рассмотрении минимальных принципов в теории упругости.
Докажем эту теорему.
Теорема 3.9 (теорема о минимальном функционале). Если А -
положительный оператор и уравнение (3.9) имеет решение и*(Р)
(единственное в силу теоремы (3.8)), то из всех значений
функционала
3[u] = (Au,u)-2(u,f)= \(uAu-2uf)dQ. (3.10)
наименьшее значение достигается на функции и*(Р):
min3[u] = 3[u*].
Верно обратное утверждение:
3.2. Минимизирующие последовательности 151
Зи* (Р) е DA : 3[и* ] = min 3[и] => А и* = f(P).
< Пусть и*(Р): Au=f{P\ тогда
3[м] = (А и, и) - 2(м, /) = (A w, w) - 2(w, А и*) = [м, и] - 2[и*, w] =
= [и,и]-2[и* ,и] + [и* ,и*]-[и* ,и*] =
= ((и-и*),(и-и*))-[и\и*]^>3[и] = [и-и*]2-\и*\2 .
Из последнего равенства следует, что 3[и] достигает своего
минимального значения при и = и :
и = и* =>min3[w] = -| и* | =-(Аи*,и*).
ueDA
Итак, доказано прямое утверждение теоремы. Доказательство
обратного утверждения, значительно более сложное, приведено,
например, в работе [33]. ►
Изложенное выше позволяет утверждать, что задача о решении
дифференциального уравнения
Au=f(P),
где А - положительный оператор, эквивалентна вариационной задаче:
3[и] = (Аи, и) - 2(u,f) -> min
при соответствующих краевых условиях.
Это утверждение предполагает существование элемента
u*(P)eDAciH, удовлетворяющего уравнению (3.9) либо
минимизирующего функционал 3[и].
В ряде важных задач механики значение функционала 3[и]
пропорционально потенциальной энергии механической системы.
152 Глава 3. Прямые методы вариационного исчисления
В этих случаях теорема 3.9 утверждает справедливость принципа
минимума потенциальной энергии (см. гл. 1).
Метод решения задач математической физики, состоящий в
том, что решение дифференциального уравнения сводится к
вариационной задаче минимизации соответствующего функционала,
называют энергетическим методом.
Пример 3.10. Поставим краевую задачу:
= 2(0<*<1),
_tfu_
dx2
и(0) = и(1) = 0.
Эта задача имеет решение
и(х)=х(\-х),
которое единственно в силу теоремы 3.8, так как оператор задачи
положителен (см. примеры 3.7 и 3.8).
Образуем функционал (/= 2):
3[u] = (Au,u)-2(u,f)=l\
-и —- - 4м
dx2
dx.
По теореме 3.9 краевая задача эквивалентна вариационной задаче
{3[и] -> min,
И(0) = и(1) = 0,
а функция и*(х) = х(\ -х) минимизирует функционал 3[и].
Пусть Ф[и] - некоторый функционал, множество значений
которого ограничено снизу. Тогда существует нижняя грань этого
множества:
d = inf Ф[и].
3.2. Минимизирующие последовательности 153
Назовем последовательность функций {ип(Р)}
минимизирующей для данного функционала, если
lim Ф [ип ] = d.
Л->00
Пусть А - положительный оператор. Если уравнение Аи = f
имеет решение и*(Р), то функционал
3[и] = \(uAu-2uf)dQ.
п
имеет минимум:
min3[u] = 3[u*] = -\u*\2.
Очевидно, что inf 3[и] = - \ и* \ .
Большое значение для приложений энергетического метода
имеет следующая теорема.
Теорема ЗЛО. Если уравнение (3.9) имеет решение м*, то
всякая минимизирующая последовательность для функционала (3.10)
сходится к функции и (Р).
-4 Пусть {ип} - минимизирующая последовательность.
Поэтому имеем
3[и„]=\ип-и\2-\и'\2^^-\и'\2.
Отсюда
\ип-и*\2-+0, т.е. ип(Р)—?-+и\
Если оператор А к тому же положительно определен, то
согласно теореме 3.7
154 Глава 3. Прямые методы вариационного исчисления
ип ——»м* => ип —» и* (сходится в среднем). ►
Итак, если оператор А положительный, имеем сходимость по
энергии, если А положительно определен, минимизирующая
последовательность сходится в среднем.
Теорема 3.10 является основанием многих прямых методов:
чтобы решить уравнение (3.9), достаточно построить для
функционала (3.10) минимизирующую последовательность. Любой
член минимизирующей последовательности есть приблиэюенное
решение уравнения (3.9).
Замечания. 1. Рассуждения, приведенные выше, строились в
предположении существования решения задачи (3.9). Само
существование решения невозмоэюно доказать, предполагая только
лишь положительность оператора А.
В дальнейшем считаем А положительно определенным
оператором.
2. Если оператор А определен на недостаточно обширном
линейном множестве DA, то задача 3[и] —> min может и не иметь
решения на DA- Однако можно попытаться расширить DA, а вместе с
этим - и оператор А.
Пример 3.11. Защемленная (жестко заделанная) по концам
упругая балка нагружена распределенной поперечной нагрузкой
интенсивности q(x), Н/м.
Если обозначить поперечный прогиб через и(х), то задачу об
изгибе балки можно поставить так (см. п. 2.8):
fd4w q{x) ,л
Уш (0<х<0'
[и(0) = и'(0) = и(/) = и'(/) = 0.
Элементарно доказывается, что дифференциальный оператор
поставленной выше задачи положительный (интегрирование по
частям с учетом краевых условий). Сложнее доказать
положительную определенность рассматриваемого оператора [33].
3.2. Минимизирующие последовательности 155
Для решения данной задачи достаточно найти элемент
гильбертова пространства, реализующий минимум соответствующего
функционала. При этом, если нагрузка q(x) - разрывная функция,
необходимо расширить область определения дифференциального оператора
на функции, имеющие разрывную четвертую производную.
Итак, решая дифференциальное уравнение (3.9), рассматриваем
u(P)eDA, тогда (Аи, и) = [и, и]А.
Если f{P) - фиксированный элемент множества Я, а и(Р) -
произвольный элемент соответствующего энергетического
пространства НА, то скалярное произведение (и, /) есть функционал
Ф[и], линейный и ограниченный в НА\
|(м,/)| < II/H • ||и|| - по неравенству Коши - Буняковского;
1И| < — | и \А - в силу положительной определенности операто-
Y
раЛ.
Следовательно, \(u,f)\ < ||/|| • -\и\А.
У
Линейность Ф[и] = (и, f) очевидна.
Согласно теореме Риса (см. теорему 3.3), существует
единственный элемент щеНА, удовлетворяющий условию
(u,f) = [u0,ul (3.11)
Теперь функционал (3.10) можно представить в виде
3[и] = [и,и]А -2[щ,и]А.
Пользуясь этой формулой, расширим действие функционала
3[и] на все пространство НА (DA а НА). Для этого преобразуем
тождественно равенство для функционала 3[и]:
3[и] = [и,и]А -2[и,щ]А + [щ,щ]А-[щ,щ]А =
= [(и-щ),(и-щ)А]-[и0,и0]А =\и-и0 \2А -\и0 \2А
156 Глава 3. Прямые методы вариационного исчисления
Отсюда ясно, что существует элемент и = и0, на котором
достигается минимум функционала 3[и]:
гтпЗ[и] = 3[и0] = -\щ \2А .
В силу эквивалентности задач (3.9) и (3.10) элемент щ(Р)
является решением задачи (3.9), причем единственным.
Функцию и<£Р) называют обобщенным решением уравнения (3.9).
Рассмотрим функции, входящие в область определения DA
некоторого положительного оператора А.
Назовем функции ф(Р), у(Р) ортогональными по энергии, если
их энергетическое скалярное произведение равно нулю:
[ф, у] = (Лф, у) = (ф, Ац) = |(Лф)ч/ dQ = 0.
п
Функцию, энергетическая норма которой равна единице,
назовем нормированной по энергии. Соответственно система функций
{yn(P)}eDA является ортонормированной по энергии, если
1 при 1 = у,
0 при i Ф j.
Пусть в системе {§к}к=—п функции попарно ортогональны:
Ф, 1фу, тогда
ф = ф! + ф2 + ... + фл => |ф|2 = |ф1|2 + ... + |ф„|2,
что является аналогом теоремы Пифагора; если
00
ф = Еа*Ф*> (ЗЛ2)
1
то
|ф*|2=1Х, (3-13)
[<р,.<р,] = -
3.2. Минимизирующие последовательности 157
т. е. если функции {ср*} ортонормированы по энергии, а ряд
(3.12) сходится к ф, то необходимо сходится и числовой ряд
(3.13).
Если дана некоторая ортонормированная по энергии система
функций {ук }к=— и функция и(Р) ограничена по энергии, то
можно поставить задачу об определении таких постоянных сц, а2, ... а„,
чтобы энергетическая норма
п
1"-Еа*ф* I
1
была минимальной.
Эта задача аналогична задаче теории рядов Фурье [8] и имеет
аналогичное же решение: минимизация энергетической нормы
достигается, если коэффициенты а* есть коэффициенты Фурье
функции и(Р) по системе ортогональных функций фДР). Остается
в силе и неравенство Бесселя
Za?=f>,cp4f<|t,|2. (3.14)
1 1
оо
Ряд ^[и,ук]ук будем называть рядом Фурье функции и(Р).
1
Систему функций {ф„}„=]^ называют полной по энергии по
отношению к данному множеству функций и(Р)еМ, если
"о
Ve>0 3«0(£)eN; a^c^,...,^ eR: Iw-Za^, |<e .
1
Имеет место следующая теорема
Теорема 3.11. Если ортонормированная система {ф*} полна
по энергии по отношению к некоторому множеству М функций,
то ряд Фурье любой функции и(Р)еМ сходится по энергии к
функции и(Р); при этом выполняется условие замкнутости
158 Глава 3. Прямые методы вариационного исчисления
1
Доказательство этой теоремы дословно повторяет
доказательство соответствующей теоремы теории рядов Фурье.
Замечания. 1. Если оператор А положительно определенный, то
упомянутый выше ряд Фурье сходится также и в среднем к
функции и(Р).
2. «Обычная» ортогональность есть частный случай
ортогональности по энергии, когда оператор А - тождественный
оператор.
3. Существенную роль в теории ортогональных по энергии
рядов играет процедура процесса ортогонализации, позволяющая
преобразовать любую линейно независимую систему функций в
ортонормированную по энергии. Процедура ортонормирования в
данном случае аналогична процедуре Грама - Шмидта в теории
конечномерных евклидовых пространств.
Разложим найденное выше решение и(Р) задачи (3.9) в ряд
Фурье по некоторой ортонормированной системе {wk}:
u0(P) = f,[u,wk]wk. (3.15)
i
Положив в равенстве (3.11) и = wk, получим
["О, ™к]л = if, Wft).
Рассмотренные выше равенства приводят к представлению
обобщенного решения в виде ортогонального (в энергетическом
пространстве) ряда
Щ(Р) = i(f(PlMP))MP)- (3.16)
1
Пусть А - положительно определенный оператор, щ(Р) -
обобщенное решение уравнения (3.9). Функционал энергии (3.10)
запишем в виде
3.3. Метод Ритца
159
3[w] = |w-w0|2-K|2.
Для этого функционала минимизирующая последовательность
характеризуется равенством
lim3[w„] = -|w0 |2.
л->оо
Итак, если А - положительно определенный оператор, то чтобы
найти решение уравнения (3.9), которое существует, и причем
единственно, достаточно построить минимизирующую для 3[и]
последовательность; любой член этой последовательности есть
приближенное решение уравнения (3.9).
Членами последовательности можно считать частичные суммы
ряда (3.16):
щ(Р) = (f(P), Wi(P))wi(P), и2(Р) = (f, wi)wx + (f, w2)w2,...
i
Рассмотренный выше метод построения минимизирующей
последовательности имеет существенный недостаток,
обусловленный трудоемкостью процесса ортогонализации системы
линейно независимых функций {wk}eDA и вычисления
коэффициентов Фурье.
Далее рассмотрим методы, наиболее популярные в прикладных
задачах.
3.3. Метод Ритца
Выберем последовательность функций (pi, (р2, ..., (р„, —,
удовлетворяющую следующим условиям:
1) все элементы последовательности {уп(Р)} еНА;
2) при любом числе п, функции (pi, (р2, ..., (р„ линейно
независимы;
3) последовательность {(р*} полна в НА.
160 Глава 3. Прямые методы вариационного исчисления
Элементы последовательности {ср*} называем координатными
функциями. Совокупность координатных функций есть
координатная система в НА.
Построим линейную комбинацию первых п координатных
функций
п
с произвольными числовыми коэффициентами а,.
Подставим ип вместо и в функционал 3[и]; эта подстановка
превращает 3[и] в функцию п независимых переменных оц, а2,..., а„:
3kJ =
ЕМФ/>Еа*Ф*
"2 5>/Фм/
= Z Z [ф/> ф* к-*** - 2Ё (ф* > /)а* •
i=l *=1 *=1
Выберем коэффициенты а, так, чтобы полученная функция п
переменных приняла минимальное значение, в силу чего
необходимо приравнять к нулю ее первые частные производные по а,:
да,
= 0 а = 1,л).
Отсюда имеем
аз[ц,]
= 2Х[ф*.Фу]а*-2(/.Фу) О'= Ь«)-
Приравняв производные к нулю, получим систему Ритца:
п
Е[ф*>фу]а* =(/>Фу) и = ъп)>
3.3. Метод Ритца
161
или в более подробной записи
|г[ф1,Ф1]а1+[ф1,ф2]а2+... + [ф1,фя]ая=(/,ф1),
[ф2,ф1]а1+[ф2,ф2]а2+... + [ф2,ф„]а„=(/,ф2),
1[фп.Ф1]а1+[фп.Ф2]а2+... + [фп.ФпК=(/.Фп).
Определитель этой системы есть определитель Грама для
системы линейно независимых функций, и поэтому система Ритца
разрешима, если оператор А положительный. Определив коэффи-
п
циенты ау и подставив их в выражение ^ ауфу, получим элемент
1
гильбертова пространства, который будем называть
приближенным решением уравнения (3.9) по Ритцу.
Предположим, что А - положительно определенный оператор,
и выясним связь между частичной суммой «точного» (под этим
термином подразумеваем обобщенное решение и0(Р)) решения и
решения по Ритцу.
Подвергнем координатную систему {фу} ортонормированию по
энергии и обозначим новые элементы через со*:
1 при к = у,
О при к Ф j.
Тогда система Ритца принимает особенно простой
(диагональный) вид:
п
Z [Ф* > Фу ]<** = (/> Фу ) => ау= (/> фу ) U = 1, И)-
к=\
п
В этом случае ип = ^ (/, со* )соЛ, т. е. приближенное решение
1
по Ритцу задачи о минимуме функционала энергии совпадает с
[(ok,(Oj] = b^ =-
162 Глава 3. Прямые методы вариационного исчисления
частичной суммой ряда, представляющего «точное» решение
задачи (3.9).
Пример 3.12 [5,9]. Запишем уравнение изогнутой оси балки,
нагруженной распределенной по ее оси поперечной нагрузкой q(x):
d2 f ^d2u(x)
dx
EI-
d*2 j
= q(x),xe[0,\]. (3.17)
Здесь Е - модуль Юнга материала балки; / - момент инерции
поперечного сечения балки, в общем случае переменный по длине.
Произведение El характеризует жесткость балки на изгиб.
Пусть EI = const, q(x) = q = const; концы балки шарнирно
оперты поэтому краевые условия имеют вид
и(0) = и{1) = и"(0) = и"(1) = 0. (3.18)
Функцию и(х) найдем, последовательно интегрируя уравнение
(3.17), учитывая краевые условия:
IV Я -
(3.19)
=>w(J) = ^-(Jc4-2Jc3+Jc), Jc=-e[0,l].
24 /
Вследствие симметрии условий закрепления и нагружения
балки делаем заключение о том, что максимальный прогиб wmax
осуществляется при Зс=1/2, т. е. в середине балки.
Это хорошо известный из курса сопротивления материалов
результат:
"тах=— ^4= — •— *0,013021?/4.
тах 384 384 EI
Располагая точным решением задачи (3.17), (3.18), решим ее
методом Ритца.
3.3. Метод Ритца
163
Последовательным интегрированием убеждаемся в том, что
оператор А = при данных граничных условиях на линейном
(к4
множестве м(3с) еС4[0,1] является симметрическим и
положительным (пусть ~х = х):
1
и, w е С4[0,1] => (Аи, w) = JwIV (jc)w(x)dx =
о
1 1
= w(x)um (x)\Q - \w • umdx = ... = J wIV (л:) • u(x) dx = (Aw, u);
(Au9u) = \u(x)ulv (x)dx =
0
1 1
= и(x)um (x)\[ - \u • umdx = ... = {(w'W)2^ > 0.
Из равенства (Аи, и) = 0 следует:
м"(д:) = 0=>«(д:) = С1д: + С2.
В силу граничных условий С\ = С2 = 0.
Следовательно,
(Аи, и) > 0 и (Лw, w) = 0 => m(jc) = 0,
т. е. оператор А - положительный.
Поэтому квадратичный функционал
3[u] = (Au,u)-2(q9u)
на решении задачи (3.17), (3.18) достигает своего наименьшего
значения.
Приближенное решение задачи представим в виде
164 Глава 3. Прямые методы вариационного исчисления
un(x) = Y^aksmknx, *е[0,1]. (3.20)
к=\
Любая из функций ип(х) удовлетворяет условиям (3.18).
Подставляя (3.20) в функционал 3[и], получаем функцию п
переменных я 1, а2,..., ап:
3[u„(x)] = (Au„,un)-2(ql\un) =
п п
1 п 1
= X ак X ат J (S^n т я*)1У ' sin кпх dx - 2^ ат \qlA sin mnx dx =
k=\ m=\ о ,я=1 О
" " ' 7т74 " 1— (—Wm
= YtakY>(m*yam fsin»!7LK-sin*7LK(k-2 £ <V
*=1 m=\ о Я ™=1 W (3-21)
Выражение (3.21) - многочлен второй степени относительно
неизвестных а\, а2, ..., ап.
Система функций {sin кпх} на отрезке [0,1] ортогональная:
1 f 1/2 при т = к,
J sin кпх ■ sin т их dx = <
о [О при тФк.
Поэтому необходимое условие минимума функции от
неизвестных ак (3.21) приводит к системе линейных алгебраических
уравнений с диагональной матрицей. Это позволяет записать явное
выражение для каждого коэффициента:
(*я)5
Если в (3.20) ограничиться лишь первым слагаемым, то
получим
Л /4
w, = я, sin7tr = —о"/4 sin тгЗс"« 0,013071 sin —.
я5 El I
3.3. Метод Ритца
165
Это приближенное решение (по Ритцу) для максимального
прогиба балки при х = 112 дает значение
щ «0,013071 — ,
EI
которое отличается от точного решения wmax менее чем на 0,5 %.
Характерно, что формы прогиба балки с четными номерами не
участвуют в формировании и^х), так как балка нагружается
симметричной (по отношению к х = 112) нагрузкой и краевые условия
«симметричны».
В случае, когда нужно найти экстремум функционала,
зависящего от функции нескольких переменных, выбирается система
линейно независимых координатных функций {ф, (xi, ..., *„)} и
приближенное решение представляется в виде
т
1=1
Функции ф, (•) удовлетворяют поставленным граничным условиям;
а, = const.
Пример 3.13. Найти приближенное решение задачи
3[z(x, у)] = \\{z2 + z'y2 - 2cz) dxdy -> min.
D
Область D - прямоугольник: 0 < x < a; 0 < у < b; на границе
области z(x, у) = 0; в интегранте функционала при третьем
слагаемом присутствует множитель с, размерность которого [с] = м-1.
Найдем первое приближение:
zx{x, у) = а(х2 - ах)(у2 - by) =>
=> z'x = a(2x - а)(у2 - by), z'y = a(x2 - ах)(2у - Ь), (3.22)
размерность а: [а] = м-3.
Вычислим 3[z{]:
166 Глава 3. Прямые методы вариационного исчисления
3[z, ] = a2 Jdx J[(2* - а)2 (у2 - by)2 + (х2 - ах)2(2у - Ъ)2 ]dy-
0 О
а Ь
- 2са Jdx |(д:2 - ах)(у2 - by) dy => 3(a) =
о о
v.2
= аъЪъ(а2 + б2) я363с > mm => — = 0=>а = .
90 18 да 2а2+Ъ2
Следовательно, искомое приближение имеет вид
5 с
z\ (х> У) = ~ 2 ъ2 (х2 - ах)(у2 ~ by).
2 а2 +Ъ2
3.4. Метод Канторовича
(3.23)
По этому методу осуществляется приведение системы
дифференциальных уравнений в частных производных к системе ОДУ.
Метод подробно изложен в монографии [17], в связи с чем
ограничимся краткими пояснениями.
Пусть область Q. плоская и имеет вид, изображенный на рис. 3.1;
требуется найти решение уравнения (3.9) при условии u\s = 0, где S-
граница области Q.
а
О
Рис. 3.1
3.4. Метод Канторовича
167
Предполагаем положительность оператора А на множестве
функций и(Р). Тогда задача сводится к минимизации
функционала (ЗЛО).
Пусть
п
1
Здесь %к(у) - известные функции, удовлетворяющие краевому
условию, т. е. равные нулю всюду на границе за исключением
прямых х = а, х = Ь.
Выражение ип(х, у) подставляем в функционал (ЗЛО) и
интегрируем по координате у:
У\(х)<у<у2(х).
После процедуры интегрирования получаем функционал
относительно неизвестных функций fi(x), ...,fn(x), a<x<b:
3M(x),...,/,(*)]->min.
Обычными методами вариационного исчисления получаем
систему ОДУ для определения неизвестных /*(х). К полученным
уравнениям добавляем условия при х = а и х = Ь, вытекающие из
краевых условий поставленной задачи (3.9):
Л («) = /*(&) = 0 (к=й)-
Пример 3.14. Поставим задачу Дирихле для прямоугольной
области: 0<х<а; 0<у<Ь:
-Az = c. (3.24)
Пусть z(x, у) имеет смысл прогиба мембраны, размерность г.
[z] = м (см. гл. 2), тогда постоянная в правой части имеет
размерность м-1: [с] = м-1.
Ранее было показано, что оператор Лапласа с отрицательным
знаком (-А) при условии обращения искомой функции на границе
области интегрирования в нуль положительно определен.
168 Глава 3. Прямые методы вариационного исчисления
Поэтому задача (3.24) эквивалентна (в силу теоремы о
минимальном функционале) задаче
3 [z(x, у)] = JJ(—Az • z - 2cz) dxdy -> min,
D
[z(x,y)\r=0.
Интегрант функционала преобразуем по формуле Грина:
[3[z(x,y)] = jj(z'x2 + z'y2 -2cz)dxdy -> min,
(3.25)
4=0.
Задача (3.25) есть решенная методом Ритца задача примера 3.13.
Решаем (приближенно) (3.25) методом Канторовича.
Первое приближение z\(x, у) = а(х)(у2 - by), [а] = м-1; при
этом удовлетворяем краевому условию на сторонах
прямоугольника у = 0, у = Ь.
Имеем
z'x=a\y2-by), z'y=a(2y-b)^
а Ь
=> 3[z] = J J[cc'2 {у2 -by)2+ a2 (2y - b)2 - 2са(у2 - by)] dxdy =>
о о
I 5[a(jc)] = Д — b5a2 +-Ьъа2 +-сЬъа jdx
a(0) = a(a) = 0.
min,
Получаем уравнение Эйлера:
1-Ь5а'--Ь3а--сЬ3=0--
15 3 3
=>a"-10—a = 5c—.
b2 b2
3.5. Метод Эйлера
169
Общее решение этого уравнения имеет следующий вид:
a(*) = CIshVm- + C2cWlO-—с.
Ь Ь 2
Произвольные постоянные С\ и С2 определим из граничных
условий и получим решение задачи:
Г Л
Z\(x,y) = -c
(у2-by). (3.26)
1-chVlO-
^sWio- + chVf(J--l
b
3.5. Метод Эйлера
Излагаем основную идею вывода необходимого условия
экстремума функционала, предложенную самим Эйлером [25].
Пусть функция y(x)eCl[a, b] доставляет экстремальное
значение функционалу
ь
1[У] = \f(x,y,y')dx; y(a) =ya,y{b) =yb.
Разбиваем [а, Ь] на п частей, например равных Ах = (Ь - а)/п.
Рассматриваем семейство ломаных П„ с вершинами (х„ у{)
х0 = а, Xi = a+ iAx, y0=ya, Уп = Уы
причем yj (j = 1, п -1) различны для различных ломаных
семейства П„.
На множестве П„ определим функцию переменныхy\,yi,.. .,jvi:
п-\
/=0
п-\, уп-\, уп_\ )Ах. (3.27)
170 Глава 3. Прямые методы вариационного исчисления
Здесь для производных у\ берем разностные выражения:
rj СУ«ч1-У«). , (У\-Уо). . _(Уп~Уп-у)
Ах Ах Ах
Если^(х)еС1 [а, Ь], то lim3„(-) = 3[у] в силу теоремы о суще-
п—юо
ствовании определенного интеграла.
В интегральной сумме (3.27) Ах = const, поэтому
3 =
Ахо*Уо,Уо) + Ах19у19у[) + ... + /\ ^-i^/-i/,'A^M l +
+/l Wi'^^f1- l+-+/('-i^-i^:-i)
Дх,
от у, зависят только (i— l)-e и i-e слагаемые.
Имеем экстремум функционала 3„:
Зя(Уь ...,yw_i)->extr=>
Ах
-Л|х„Л,^^и = о=*
Ах УДх
_1_
Ах
/у!^.^2^!-/;
**-l.:v/-l.
у.--.Ум
Ах
-//1ад.^и
(|=1,Я-1).
(3.28)
3.5. Метод Эйлера
171
Система (3.28) - есть система (п - 1) алгебраических
уравнений, в общем случае нелинейная относительно (п - 1)
неизвестных:^,^, ...,Уп-1-
Если функционал 3[у] квадратичный, что характерно для
функционалов потенциальной энергии в линейной теории
упругости (см. гл. 1), то (3.28) есть система линейных алгебраических
уравнений.
Пример 3.15. Составим систему разрешающих уравнений (3.28)
для задачи
1
ЗМ= /(а,У2 + 2а2зу' + а3/)ёх->ех1г,
о
у(0)=у(\) = 0.
Пусть а, = const.
Делим отрезок [0,1] на шесть равных частей, т. е.
неизвестными в функции 3„() являются ух, ..., у5; у0 =у6 = 0 - в силу краевых
условий.
Итак,
/у = 2аУ + 2а2У> fy = 2а2/ + 2а3у.
Поэтому система (3.28) имеет вид
-\а2^^ + а3у]Ах = 0 (i = 15). (3.29)
Так как у0 = у(0) = 0, у6 = у(\) = 0, система уравнений (3.29) -
однородная СЛАУ.
В уравнениях системы (3.29) приводим подобные:
172 Глава 3. Прямые методы вариационного исчисления
\У1-\(а\ -а2Ад:) + у,(-2а, + а2Длг-а3Лх2) +
+у/Ч1(а, -а2Ах) s Ау,_х + Byt + Аум =0 (i = 1,5). (3.30)
Вычисляем определитель системы уравнений (3.30):
\ВА000
\abaoo
0АВА0
00АВА
I 000АВ
Следовательно, система имеет единственное тривиальное
решение.
Нетрудно показать (определитель системы легко вычисляется),
что при любом разбиении отрезка [0,1] система уравнений (3.30)
имеет единственное тривиальное решение.
Значит, экстремалью задачи является у(х) = 0, *е[0,1].
3.6. Метод наискорейшего спуска
Этот метод применим только к таким симметрическим
операторам А, которые удовлетворяют условию [33]:
т\\и\\2<(Аи,и)<М\\и\\\ (3.31)
где т и М - положительные постоянные, т < М.
Такие операторы являются положительно определенными и
ограниченными. Поэтому задачу (3.9) заменяем эквивалентной
задачей
3[и] = (Аи, и) - 2(/, и) -> min.
Возьмем произвольную функцию и\(Р)еНА, удовлетворяющую
краевым условиям. Может оказаться, что Аих =/, тогда задача
= В{В2-А2)(В2-ЪА2)фО.
решена.
3.6. Метод наискорейшего спуска
173
Если Ащ Ф/9 то принимаем и\(Р) как первое приближение к
искомому решению.
Для построения второго приближения вычислим функцию
vl(F) = Aul-f
и выберем число щеШ так, чтобы минимизировать функционал
3[щ - a,v, ] = 3[и, - а, (Ащ - /)].
Раскрывая это выражение, получаем:
3[щ -а^] = (А(щ -a,v,),(w, -a,v,))-2(/,(w, -a,v,)) =
= (i4i/I-aIi4vI,MI-aIvI)-2(/,MI) + 2aI(/,vI) =
= (Лм,,и,)-2(/,и,)-а,(Ли,,у,)-
-a,(w,,^v,) + a?(^v,,v,)-2a, (/>,) =
= 3[щ ] - 2a, ((,41/,, v,) - (/, v,)) + a? (A v,, v,).
Это выражение можно упростить, так как
(^1,v1)-(/,v1) = (^1-/,v1) = (v1,v1) = ||v,f.
Следовательно, относительно неизвестного параметра ai
получаем следующую задачу:
3[и1 - a,v, ] = 3[щ ] - 2a, ||v, || + af (Лу,, v,) -> min,
5a, (^vj.v,)
В качестве второго приближения принимаем функцию
174 Глава 3. Прямые методы вариационного исчисления
и2 = щ -a\V\.
Имеем
Au2tf^v2(P) = Au2-f,
находим параметр а2еМ:
3[и2 -cc2v2] —> min,
и т.д.
Скорость сходимости данного метода оценивается
неравенством
i i i i(М-тХ
K+i-«oL^I«i-«oU—— >
\М + т)
где щ - точное решение уравнения (3.9) [33].
3.7. Метод Бубнова - Галеркина
Этот метод можно рассматривать как обобщение метода Ритца
для задачи
Аи =/ (3.32)
с некоторыми, вообще говоря, неоднородными условиями на
границе области интегрирования [33]. Оператор А необязательно
положительный.
Рассматриваем последовательность линейно независимых
координатных функций {ф„(Р)}, непрерывных и достаточное число
раз дифференцируемых, удовлетворяющих всем условиям на
границе области интегрирования.
Считаем оператор А линейным, тогда любая линейная
комбинация
"n(P) = £wk(Pl (3.33)
к=\
где ап - неизвестные постоянные, также удовлетворяет краевым
условиям.
3.7. Метод Бубнова - Галеркина
175
Запишем (3.32) в виде
Au-f=0 (3.32*)
и предположим, что найдено точное решение задачи и = щ\
Au0-f=0.
Тогда скалярное произведение по области интегрирования
левой части (3.32*) и любой координатной функции равно нулю:
(Ащ-f, ((>*(/>)) = 0 (Vcp,(/>)).
Из этого простого рассуждения вытекает идея метода
Бубнова - Галеркина: будем определять неизвестные ак из требования,
чтобы левая часть (3.32*) после подстановки в нее ип(Р) вместо и(Р)
была ортогональна к координатным функциям ($>т(Р):
(Аип -/, фДР)) = 0 (ш = й). (3.34)
Тогда (3.34) есть система линейных (для линейного оператора А)
алгебраических уравнений
Z^(^,9J = (/,(pJ. (3-35)
к=\
Система (3.34) по виду совпадает с системой Ритца (см. п. 3.3).
Отсюда понятно, что методы Ритца и Бубнова - Галеркина
тождественны, если оператор А положительно определенный.
В общем же случае {А не является положительно
определенным оператором) метод Ритца, в отличие от метода Бубнова -
Галеркина, неприменим.
Пример 3.16. Для решения методом Бубнова - Галеркина задачи
f-Az = с,
|z|r=0, 0<x<a, 0<у<Ь
176 Глава 3. Прямые методы вариационного исчисления
вспомним, что оператор (-А) при данных краевых условиях
является положительно определенным. Поэтому поставленная
задача эквивалентна задаче о минимизации функционала (см.
пример 3.13), где методом Ритца было найдено решение первого
приближения.
Полагая решение задачи в виде
zi(x, у) = а(х2 - ах)(у2 - by),
найдем (в силу сделанного выше замечания)
5 с
сс = —
2а2+Ь2
3.8. Метод наименьших квадратов
Для решения уже неоднократно рассмотренной задачи
\Аи=ДР),
\ , (3.36)
{и(Р)\Г=0
выбираем последовательность координатных функций {(р„(Р)},
Ф„ е DA, и приближенное решение задаем в виде
"„(/>) = 2>*Ф*(П (3-37)
1
Постоянные ак находим из требования, чтобы величина
5 = |K-/f (3.38)
приняла наименьшее значение.
Если оператор А линейный, то из условия
5 —> min
получаем систему линейных алгебраических уравнений
относительно неизвестных а\,..., ап\
3.8. Метод наименьших квадратов
111
\\Aun-ff=(£akAyk-f,£amA<pm-f) =
=ЕЕ«л(^ф*^ф».)-2Е«*(^ф*»/)+(/>л. (з.з9)
*=1 m=l *=1
Отсюда
— = Ё^фт,Лф,)-2(Лф,,/) = 0 (* = 1,и).
oak m=i
Тогда
fdam(A<?m,A<?k) = 2(Aq>k,f) (k = u). (3.40)
m=\
Система (3.39) в силу коммутативности скалярного
произведения (А(рт, Аук) является системой линейных алгебраических
уравнений с симметрической матрицей. Определитель системы (3.39)
есть определитель Грама элементов А<$>\, Ау2, ••-, Ауп. Если
указанные элементы (функции) линейно независимы, то определитель
Грама отличен от нуля и система (3.39) имеет единственное
решение.
Достаточное условие единственности решения системы (3.39)
дается следующей леммой [33]
Лемма. Если однородная задача Аи = 0 имеет только
тривиальное решение, то приближенные решения по методу
наименьших квадратов могут быть построены единственным образом при
любом значении п.
Отметим, что в работе [33] формулируются и достаточные
условия сходимости приближенных решений по методу
наименьших квадратов.
Пример 3.17. Решим методом наименьших квадратов задачу
178 Глава 3. Прямые методы вариационного исчисления
\-Az = c ([с] = м"1),
[z\r = О, 0<х<а, 0 < у<Ъ.
Пусть z\ = а(х2 - ах)(у2 - by), [с] = м~1, [а] = м-3.
Образуем невязку у = -Az - с и вычислим ее норму:
|Н|2 = ) \(Az + c)2dxdy = JJ(z^ + z'„ + c)2dxdy =>
(3.41)
•3(a)= — Ua2+b2)2--a2b2 \aba2 -
—cabia2 +b2)a + c2ab.
3
(3.42)
Если 3(a)-»min, то получаем
— = 0^ — \{a2+b2)2--a2b2 \a=-c(a2+b2)--
da 15 V 3 J 3
z(x,y) = -
2
5 c(a2+b2)
(a2+b2)2--a2b2
(x2-ax)(y2-byl (3.43)
3.9. Метод локальных вариаций
Изложим основную идею метода локальных вариаций, впервые
предложенного в работе [45].
Решается задача
3[у] = lf(x,y9y')dx -> min,
а
[у(<*) = Уа> УФ) = УЪ>
3.9. Метод локальных вариаций
179
где у(х)ёС1[а, &],/() - непрерывная дифференцируемая функция
своих аргументов.
Разбиваем интервал [а, Ь] на я, например, равных частей:
х, = а + iAx, Ах = , i = О, п,
хо = а, хп = Ь,
Строим (задаем) на отрезке [а, Ь] в качестве нулевого
приближения ломаную П°, состоящую из п звеньев с вершинами (хо, уа),
(хиу{),..., (xhy,)9..., (х„,уь) (рис. 3.2).
Действуем так же, как ив Yk
методе Эйлера (см. п. 3.5),
заменяя функционал (3.43) его
приближенным значением (у\■, = (>v+i -
-И)/Дх):
Уь
Уа
зд*Е/(^,юд*^0(п°).
о
а хх х2 хг
Рис. 3.2
t*x
Вычисляем 3°(П°) по
заданным значениям ординат yh
Выбираем некоторый шаг возмущения заданных в нулевом
приближении ординат ломаной П° 5у = h и проделываем
следующую процедуру, начиная с точки (х\, у{):
- строим ломаные
nj;: (a,ya), (xuyi + И), (хъу2), (*3,3>з),..., (*„, Ъ\
П„7: (я, уа\ (xuyi - И), (х2, у2),..., (хт Ь);
- вычисляем 3[nJ!i"] и 3[П°п1 ] и в силу требования 3|>]-»min из
чисел 3[П2П и 2Г[П2Г] выбираем наименьшее, например 3[П°, ].
Фиксируем ломаную П°7.
180 Глава 3. Прямые методы вариационного исчисления
Возмущаем ординату точки (х2, у2) :y2±h, следовательно
П^ • (я, УаХ (*i, У\ - h\ (х2, уг + h\ ..., (хп, Ъ\
П^ • (в, Уа\ (*i, ух - h\ (хъуг - И),..., (хп, Ъ).
Сравниваем числа 3[П°+] и 3[П^]:
3[П0п2]<3[П°п-21
следовательно, фиксируем ломаную
П^ : (<*,уа), (xuyi - И), (х2,у2 + h), (x3,y3),..., (*„, Ъ).
И так далее, пока не протестируем точку (x„_i, y„-i).
Далее можно уменьшать шаги разбиения Ах и варьирования
ординат h (согласно описанной процедуре), пока не будет
достигнута заданная погрешность:
|э[п<">]-э[пг»]|<е.
Промежуточные значения искомой экстремали у(х) (между
точками Xi и xi+i) можно получить на основе вычисленных
значений вершин ломаной П^ с помощью той или иной
интерполяционной формулы.
В монографии [44] и в последующих работах авторов подробно
изучаются вопросы реализации и сходимости метода локальных
вариаций на примерах решения самого широкого круга задач
механики и теории управления.
Метод локальных вариаций, как и метод Эйлера, является
алгоритмическим методом решения: дается процедура поиска
ординат экстремали. В работе [45] отмечается, что скорость
сходимости метода и качество решения напрямую зависят от удачного
выбора нулевого приближения. В качестве такового можно исполь-
3.10. Сравнение результатов
181
зовать некоторые механические или физические соображения,
вытекающие из предварительного анализа поставленной задачи.
Либо можно использовать первые приближения на основе одного из
описанных выше аналитических методов: Ритца, Канторовича,
наименьших квадратов и т. д.
3.10. Сравнение результатов
В предыдущих параграфах этой главы задача о малых
прогибах прямоугольной мембраны под действием нагрузки с
краевыми условиями
-Az = с,
, (3.44)
z(x,y)\r=0
в первом приближении решалась методами Ритца, Бубнова - Га-
леркина, Канторовича и наименьших квадратов (см. примеры
3.13, 3.14, 3.16, 3.17). Каждый из этих методов имеет свои
достоинства и недостатки (такова диалектика!), поэтому тот
сравнительный анализ, который будет дан в этом параграфе, носит
условный характер.
При реализации каждого метода исходя из условий на границе
области выбирались координатные функции, и уравнение
Au=f(P),
вообще говоря, не могло быть тождественно удовлетворено.
Рассматривая приближения и ~ ип, назовем невязкой разность
у=Аип-/фО
и оценкой качества рассматриваемого решения будем считать
величину нормы невязки
|Н|2 = (У, Y) = (Аи„ - f, Au„ - f). (3.45)
Вычисляем ||у|| по результатам рассмотренных выше примеров.
182 Глава 3. Прямые методы вариационного исчисления
Методы Ритца и Бубнова - Галеркина (см. примеры 3.13, 3.16):
z<*'^ ^"ГТГ**2 -пХУ2 -ЪуУ (3.46)
Метод наименьших квадратов:
_5 с(а2+Ь2)
2
г(*,У) = Т "v~ "Y (*2 -<кУУ2 ~Ъу). (3.47)
(a2+b2)2--a2b2
Оба результата различаются только постоянными множителями.
Запишем (3.46) и (3.47) в виде
z(x,y) = a(x2-ax)(y2-by).
(3.48)
Выражение нормы невязки для представлений решения (3.46) и
(3.47) через коэффициент а уже найдено - это формула (3.42):
2 2 I , 2 jL242_I 2A2 Li,.rt2
№ = иГ+^ з |fl*'a
— ся&(я2 + 62)а + я&с2.
3
Итак:
1) по методам Ритца и Бубнова - Галеркина:
. (a2+b2)2--a2b2
- — abc2 +abc2 =
3
Aa2+b2)2--a2b2
5 3
4 (a2+Z>2)2
(3.49)
лбе
,2.
3.10. Сравнение результатов
183
2) по методу наименьших квадратов:
*...=bf^f(»'+»'>'-Hff l**"f*
(a2+b2)2--a2b2
3
—abc(a2+b2)-
3
5 c(a2+b2)
(a2+b2)2--a2b2
3
- + abc2 =
( \
x 5 (a2+b2)2
6(a2+b2)2--a2b2
3
abc2.
(3.50)
В выражениях (3.49), (3.50), зависящих от двух размерных
параметров (длины сторон контурного прямоугольника) а и Ь,
перейдем к одному безразмерному параметру к: alb = к. Тогда в
каждом выражении множители при (abc2) рассматриваем как функции
параметра к:
из формулы (3.49) => 5 = —
1
5(\ + к2У--к*
4 (\ + к2)2
--1
V
abc2, (3.49*)
из формулы (3.50) => 5М нк =
1-
5 (1 + £2)2
6(1 + *2)2-!*2
3 J
abc2. (3.50*)
В таком представлении соответствующие множители легко
анализируются. Обозначим
184 Глава 3. Прямые методы вариационного исчисления
(\ + к2)2--к2
3
р(*), *>0,0<Р(*)<1,
(\+к2)2
Р(0)=1, limp(*) = l.
Следовательно, р(&) принимает минимальное значение при
к>0:
Р'(*) =
3 3V '
(i+*»y
■ = 0=> £1=0Д2,з=±1.
Значение A:i = 0 соответствует max р(&) = 1; значение &2 = 1
minp(A:) = —.
12
Очевидны свойства функции
Р(*) =
С**')'
(i+je)2-!*»
И*)
P(it)>l, p(0) = l = minp(it), maxp(it) = p(l):
'if
Примерные графики этих функций представлены на рис. 3.3.
Поэтому получаем оценки качества первых приближений
методов Ритца и наименьших квадратов:
1) по методам Ритца и Бубнова - Галеркина:
-abc2 >5D > — abc2*0,0912(abc2);
6 72
(3.51)
3.10. Сравнение результатов
185
2) по методу наименьших квадратов:
-abc2 >5МНК >— аЪс1 «0,0909(я6с2).
6 11
(3.52)
Как видим, значения нижних границ отличаются только в
третьем знаке.
А«*>
кШ
к О
Рис. 3.3
Оценим качество первого приближения по методу Канторовича.
Получено решение (см. пример 3.14):
z(x, у) = а
1-chptf
shpjc + chpx-l
(У2 -by):
shpa
z^ = ap2(coshpx + chpx)(>;2 -by),
z"yy =2a(coshp;c + chp;c-l).
1 VlO l-chpa
Здесь a = —с, Р =
2 fc
-, a> = -
-, W = m-'.
shpa
|yf = JJ(z;+z;+c)2d«iy =
D
= JJ(*« + 42+c2+2z~4+2cz~+2cz;)<k^ =
186 Глава 3. Прямые методы вариационного исчисления
b2c2 b2c2
= (l + co2)shPtf-chPtf ' 'л-и2р
r + oosh2pa-
+ (1-со2)
i2>/io"wo11 к"б>Яо
Учитывая значения параметров а, р, со получим:
5 =
Ъ2с2 chpa-1
shptf
1 а 1
л/Го fcshptf
6 а shPa VvlO 6 sh0a,
abc2
12
(3.53)
Вводя параметр к = alb, как и выше, получим
ich(Vio*)-i, . , L 2
о„ = ;=— —р= + р=— Хаос
6 Jbsh(VlO£) vVlO sh(VUJ*)
(3.53*)
Обозначим множитель при (abc ) через 5:
Таким образом,
lim5 = —, lim5 = 0.
А:—>0 6 *->»
—лбе2 >5K >0.
6
(3.54)
Для сравнения качества решений, полученных различными
методами, приводим значения множителей при (abc2), вычисленных
по формулам (3.49*), (3.50*) и (3.54).
Из табл. 3.1 следует, что результаты по методам Ритца и
наименьших квадратов разнятся только в третьем десятичном знаке.
При этом д(к) = 5(Ш), что естественно в силу симметрии формул
(3.49*) и (3.50*) относительно параметров а и Ь.
3.10. Сравнение результатов
187
Таблица 3.1
Ы(аЬс2)
Метод
Ритца
Метод
наименьших
квадратов
Метод
1 Канторовича
к |
1/3
0,1417
0,1309
0,1402
1/2
0,1222
0,1197
0,1166
1
0,0972
0,0909
0,0614
2
0,1222
0,1197
0,0268
3
0,1417
0,1409
0,0175
Метод Канторовича дает несколько лучшие результаты при
А:< 1, и Ь(к)фЬ(\1к) в силу несимметричности формулы (3.53*)
относительно а и Ь.
Многочисленные примеры приложений энергетических
методов к решению краевых задач для обыкновенных и в частных
производных уравнений математической физики см., например, в
работах [7, 15, 17,22,27,36,44].
ЛИТЕРАТУРА
1. Алексеев В.М., Тихомиров В.М., Фомин СВ. Оптимальное
управление. - М.: Наука, 1979. - 429 с.
2. Боголюбов Н.Н., Ширков Д.В. Введение в теорию квантованных
полей. - М: ГТТИ, 1984. - 597 с.
3. Болотин В.В. Неконсервативные задачи упругой устойчивости. - М.:
ГИФМЛ, 1961.-339 с.
4. Бухгольц Н.Н. Основной курс теоретической механики. Ч. П. - М.:
Наука. - 332 с.
5. Ванько В.И., Ермошина О.В., Кувыркин Г.Н. Вариационное
исчисление и оптимальное управление. - М.: Изд-во МГТУ им. Н.Э. Баумана. -
2006. - 487 с.
6. Ванько В.И. О собственных частотах колебаний проводов
воздушных ЛЭП // Изв. ВУЗов. Энергетика, 1987. - № 8. - С. 7-12.
7. Власова Е.А., Зарубин B.C., Кувыркин Г.Н. Приближенные методы
математической физики. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2001. -
699 с.
8. Власова Е.А. Ряды. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. -
611с.
9. Вольмир А.С Устойчивость упругих систем. - М.: ГИФМЛ, 1961. -
879 с.
10. Галиуллин А.С. Аналитическая динамика. - М.: Высшая школа,
1984.-264 с.
11. Гельфанд ИМ., Фомин СВ. Вариационное исчисление. - М.:
ГИФМЛ, 1961.-228 с.
12. Гонор А.Л. О пространственных телах наименьшего
сопротивление // Прикладная математика и механика (ПММ). - 1963. - Т. 27.
Вып. 1.-С. 185-189.
13. Ефремов Н.Л., Крайко А.Н., Пьянков К.С, Таковицкий С.А.
Построение в рамках уравнений Эйлера головной части минимального
сопротивления при заданных габаритах и объеме // ПММ. - 2006. - Т. 70.
Вып. 6.-С. 1017-1030.
14. Зарубин B.C., Кувыркин Г.Н. Математические модели механики и
электродинамики сплошной среды. - М.: Изд-во МГТУ им. Н.Э. Баумана,
2008.-511 с.
Литература
189
15. Зарубин B.C., Селиванов В.В. Вариационные методы механики
сплошной среды. - М.: Изд-во МГТУ им. Н.Э. Баумана, 1993. - 357 с.
16. Канатников А.Н., Крищенко А.П. Линейная алгебра. - М: Изд-во
МГТУ им. Н.Э. Баумана, 1998. - 335 с.
17. Канторович Л.В., Крылов В.И. Приближенные методы высшего
анализа. - М.: ГИТТЛ, 1952.-695 с.
18. Коллатц Л. Задачи на собственные значения. - М: Наука, 1968. -
503 с.
19. Крайко А.Н. Об определении тел минимального сопротивления
при использовании законов сопротивления Ньютона и Буземана // ПММ. -
1963. - Т. 27. Вып. 3. - С. 484 - 495.
20. Краснов М.Л., Макаренко Г.И., Киселев А.Н. Вариационное
исчисление. Задачи. - М.: УРСС, 2002. - 166 с.
21. Крылов А.Н. Собрание трудов. Т. 7: Ньютон И. Математические
начала натуральной философии // Пер. с лат. с примечаниями А.Н.
Крылова. - М.-Л.: Изд-во АН СССР, 1936. - 696 с.
22. Курант Р., Гильберт Д. Методы математической физики. Т. 1. -
М.-Л.:ГТТИ, 1933.-532 с.
23. Курош AT. Курс высшей алгебры. - М.: ГИТТЛ, 1953. - 335 с.
24. Лав А.Э.Х. Математическая теория упругости. - М.-Л.: ОНТИ,
1935.-674 с.
25. Лаврентьев М.А., Люстерник Л.А. Основы вариационного
исчисления. Т. I, ч. II. - М.-Л.: ОНТИ НКТП, 1935. - 400 с.
26. Лаврентьев М.А., Шабат Б.В. Проблемы гидродинамики и их
математические модели. - М.: Наука, 1977. - 407 с.
27. Лейбензон Л.С. Вариационные методы решения задач теории
упругости. - М.: ГИТТЛ, 1943. - 287 с.
28. Лейбензон Л.С Курс теории упругости. - М.: ГИТТЛ, 1947. - 464 с.
29. Лойцянский Л.Г. Механика жидкости и газа. - М.: Наука, 1970. -
904 с.
30. Люстерник Л.А., Соболев В.И. Краткий курс функционального
анализа. - М.: Высшая школа, 1992. - 271 с.
31. Мартинсон Л.К, Малое Ю.А. Дифференциальные уравнения
математической физики. - М.: Изд-во МГТУ им. Н.Э. Баумана, 1996. - 367 с.
32. Меркин Д.Р. Введение в теорию устойчивости движения. - М.:
Наука, 1987.-304 с.
33. Мишин СГ. Вариационные методы в математической физике. -
М.:ГТТИ, 1957.-476 с.
34. Ньютон И. Математические начала натуральной философии //
Изв. Николаевской морской академии. - Петроград. - 1915, вып. IV. -
С. 1-276; 1916, вып. V. - С. 1-344.
35. Полак Л.С Вариационные принципы механики. - М.: ГИФМЛ,
1960.-599 с.
190
Литература
36. Пратусевич Я.А. Вариационные методы в строительной
механике. - М.-Л.: ГИТТЛ, 1948. - 400 с.
37. Работное Ю.Н. Механика деформируемого твердого тела. - М:
Наука, 1979.-744 с.
38. Работное Ю.Н. Сопротивление материалов. - М: ГИФМЛ, 1962. -
445 с.
39. Рашевский П.К. Курс дифференциальной геометрии. - М.-Л.:
ГТИ, 1950.-428 с.
40. Степанов В.В. Курс дифференциальных уравнений. - М.: ГИТТЛ,
1953.-468 с.
41. Тихонов А.Н., Самарский А.А. Уравнения математической
физики. - М.: Наука, 1966. - 724 с.
42. Фихтенголъц Г.М. Курс дифференциального и интегрального
исчисления. Т. I. - М.-Л.: Физматгиз, 1958. - 607 с.
43. Фихтенголъц Г.М. Курс дифференциального и интегрального
исчисления. Т. И. - М.-Л.: Физматгиз, 1959. - 807 с.
44. Черноусько Ф.Л., Баничук Н.В. Вариационные задачи механики
и управления. - М.: Наука, 1973. - 238 с.
45. Черноусько Ф.Л. Метод локальных вариаций для численного
решения вариационных задач // Ж-л вычислит, математики и матем.
физики. - 1965. - Т. 5, № 4. - С. 749-754.
46. Черный ГГ. Течения газа с большой сверхзвуковой скоростью. -
М.: Физматгиз, 1959. - 220 с.
47. Шидловский В.П. Введение в динамику разреженного газа. - М.:
Наука, 1965.-218 с.
48. Эйлер Л. Метод нахождения кривых линий, обладающих
свойствами максимума либо минимума. - М.-Л.: ГТТИ, 1934. - 600 с.
Учебное издание
Ванько Вячеслав Иванович
Вариационные принципы
и задачи математической физики
Издается в авторской редакции
Технический редактор Э.А. Кулакова
Художник Н.Г. Столярова
Корректоры Е.В. Авалова,Д.В. Солдатова
Компьютерная верстка А.Ю. Ураловой
Подписано в печать 01.03.10. Формат 60x90 1/16.
Бумага офсетная №1. Печать офсетная. Усл. печ. л. 12,0.
Тираж 500 экз. Заказ 4480.
Оригинал-макет подготовлен
в Издательстве МГТУ им. Н.Э. Баумана.
Санитарно-эпидемиологическое заключение
№ 77.99.60.953.Д.003961.04.08 от 22.04.08 г.
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5.
E-mail: press@bmstu.ru
http://www.baumanpress.ru
Отпечатано в ФГУП
«Производственно-издательский комбинат ВИНИТИ»,
140010, г. Люберцы Московской обл.,
Октябрьский пр., 403.