/
















































































































































































































































































Text
м
зз
ДЖ. п. ДЕН-ГАРТОГ
МЕХАНИЧЕСКИЕ
КОЛЕБАНИЯ
Пе евод с четвертого
американского издания
А. Н. ОБМОРЩЕВА
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА I960
MECHANICAL
VIBRATIONS
J. P. DEN HARTOG
Professor of Mechanical Engineering
Massachusetts Institute of Technology
FOURTH EDITION
New York Toronto London
Me GRAW-HILL BOOK COMPANY, INC.
19 5 6
Дж. П. Ден Гартог
Механические колебания
Редактор;. С. А. Мейнгаод.
Технический редактор С. С. Гаврилов Корректор: Л. О Сечейко
Сдано в набор 12/1 I960 г Подписано к печати 23/IX I960 г. Бумага 6Оу92х/10
Физ. печ л. 36,25. Услопн. печ. л 36,25. Уч. изд. л. 37,73. Тираж 8500 экз.
Г 08935 Цена книги 20 о 85 к С 1/J 1961 г. цена 2 р. 09 к Заказ 2074
Государственное издательство физико-математической литературы.
Москва, В 71. Ленинский проспект, 15.
liinoi рафии I дстеми, Будапешт
ОГЛАВЛЕНИЕ
Предисловие к русскому изданию ..................................... 6
Hi предисловия автора ........................................... 8
I л и и а I Кинематика колебаний.................................... 11
§ I I Основные определения .................................. Н
У 1.2 Век горний интерпретация колебаний ..................... 13
| I I Ьш пия ................................................ 17
J I I Ко к Л.in ия трубопровода водяной турбины ...... 19
!| Г» Mi н»л комплексных чисел ................................. 22
I о I'jTioiii, от рш н m.ih при гармоническом движении .... 25
17 I h HipMon Н'й ( ног периодическое движение ............ 32
I л и п а II ( in 1ГМ1.1 с одной 11С11СНЫ0 свободы ................. 40
У 2 I (,нп(пи свободы ..................................... 40
У 2.2 (.осииикчнн дифференциального уравнения колебаний .. 42
У 2 I Другие случаи ......................................... 45
У 2.4 Свободные колебания без затухания ........................ 52
У 2,5. Примеры ............................................... 56
§ 2.6 Свободные колебания с затуханием, пропорциональным
скорост и............................................. 60
|| 2 7 Вынужденные колебания без затухания ..................... 67
| 28 Вынужденные колебания с затуханием, пропорциональ-
ным скорости............................................. 74
IV Ч Приборы для измерения частоты............................. 83
2 10 Сейсмические приборы .................................... 86
2 11 Приборы электрического измерения ....................... 93
2 12 Георня виброизоляции ................................. 102
2 Н Приложения к однофазным электрическим машинам .... 105
| 2.14 Применение к автомобилю. Плавающая подвеска........ 111
I л п и и III. Две степени свободы ........................... 115
1J I Свободные колебания. Главные колебания ................... 115
3,2, Динамический поглотитель колебаний без затухания .... 125
У 3 i Поглотитель колебаний с затуханием....................... 134
!1 4 Успокоение качки корабля ............................... 150
15 Поглотители толчков на автомобилях ...................... 159
3,6 Впброизоляция нежестких оснований ....................... 165
I лйнл IV Системы с произвольным числом степеней свободы ..... 171
У 1 I Свободные колебания без затухания ....................... 171
!4,2. Вынужденные колебания без затухания ..................... 176
4 i Свободные и вынужденные колебания с затуханием .... 181
4.4. Струны и органные трубы. Продольные и поперечные коле-
бания однородных балок .......................... 188
У 4.5, Метод Рэлея ......................................... 195
4
ОГЛАВЛЕНИЕ
§ 4.6. Колебания изгиба однородных балок ............... 204
§ 4.7. Балки переменного поперечного сечения ......... 214
§ 4.8. Нормальные функции и их применение .............. 218
§ 4.9. Метод Стодолы для высших типов колебаний ........ 223
§ 4.10. Кольца, мембраны и пластинки..................... 226
Глава V. Многоцилиндровые двигатели ......................... 232
§ 5.1. Неприятные явления, присущие машинам с возвратно-
движущимися частями .................................... 232
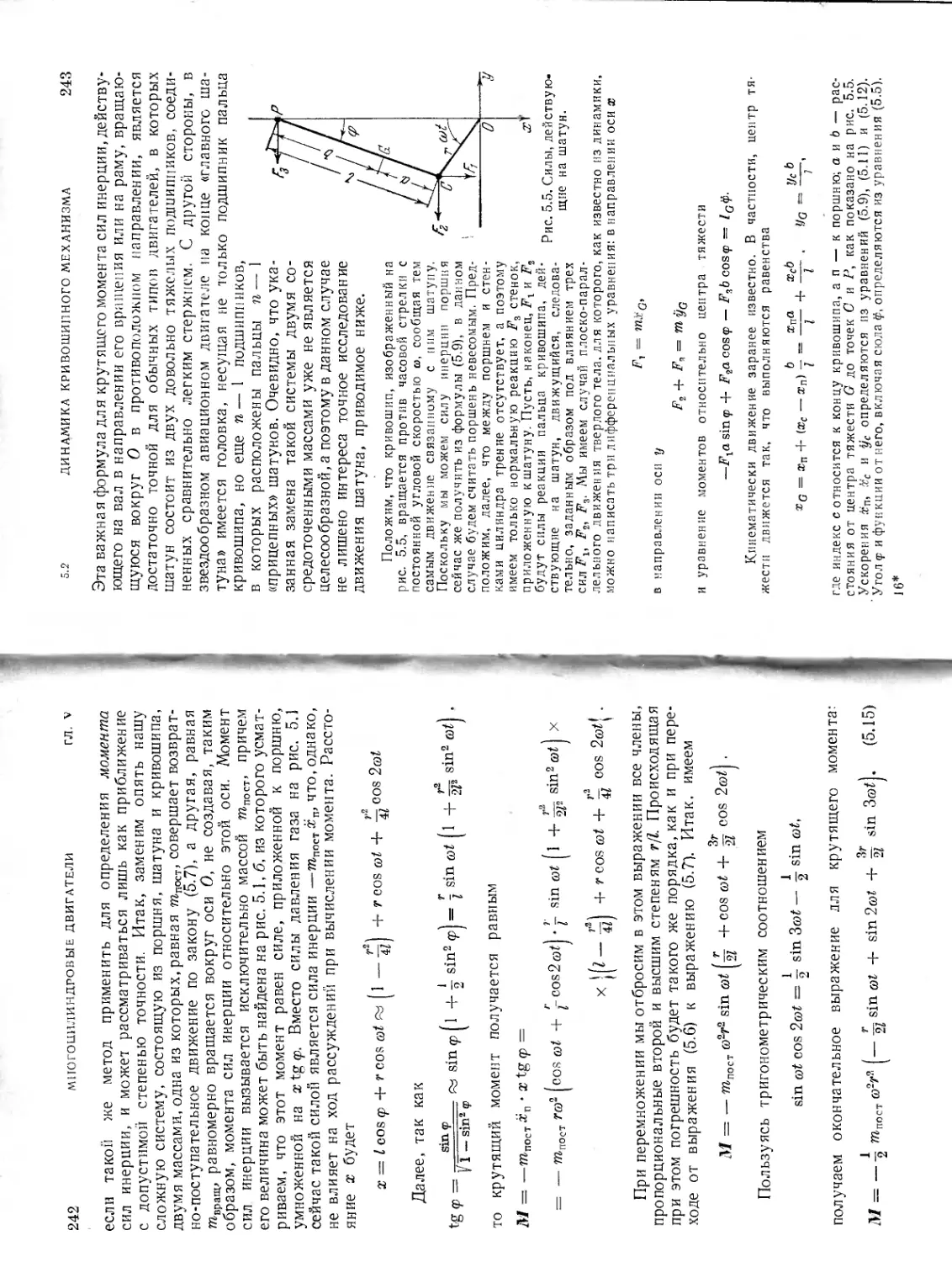
§ 5.2. Динамика кривошипного механизма .................. 237
§ 5.3. Уравновешивание сил инерции многопилиндровых дви-
гателей .................................................... 245
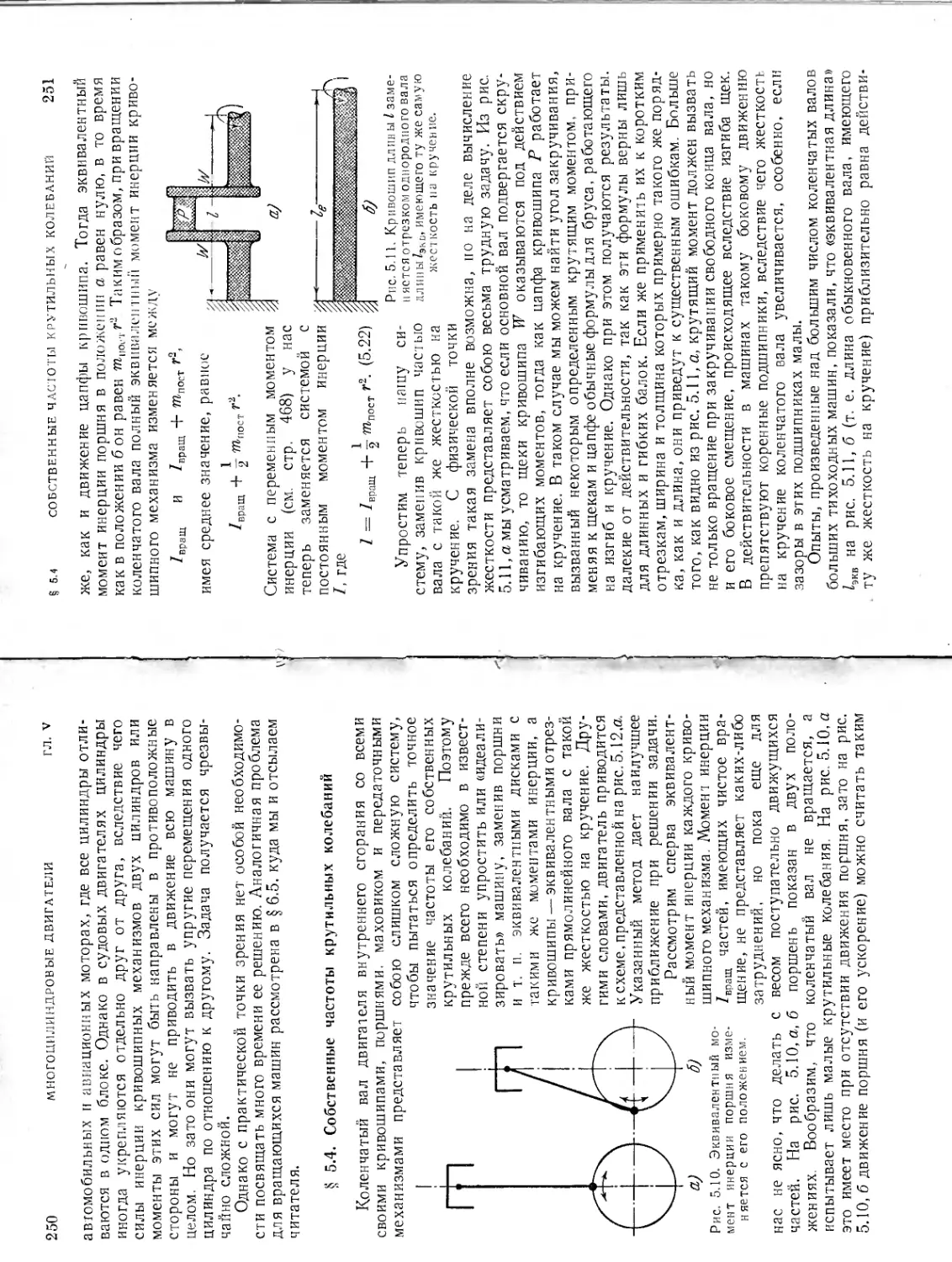
§5.4. Собственные частоты крутильных колебаний ......... 250
§ 5.5. Числовой пример .................................. 254
§ 5.6. Исследование крутящего момента ................. 266
§ 5.7. Работа, совершаемая крутящим моментом при колеба-
ниях коленчатого вала .................................... 271
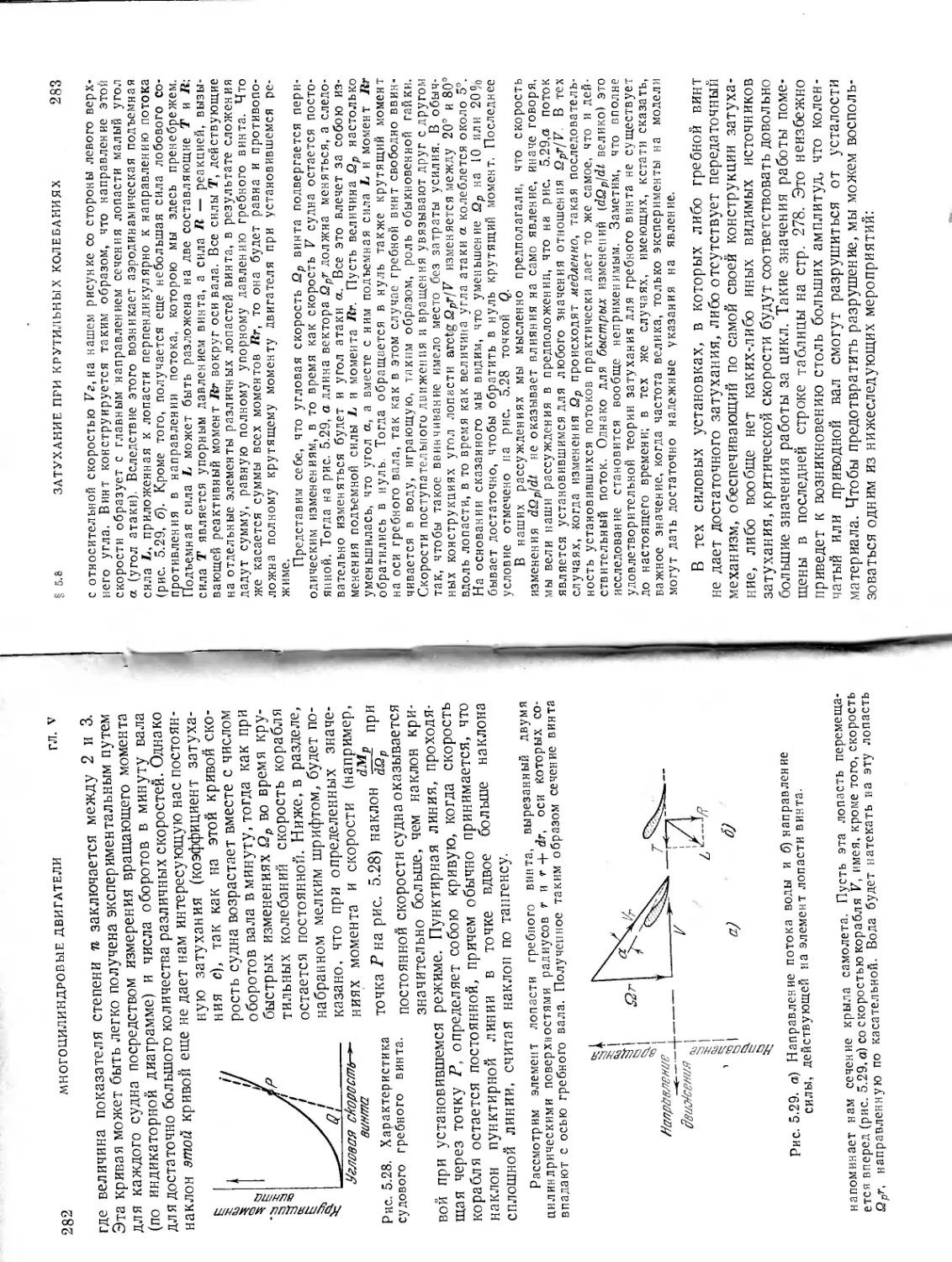
§ 5.8. Затухание при крутильных колебаниях. Затухание коле-
баний гребного винта ..................................... 278
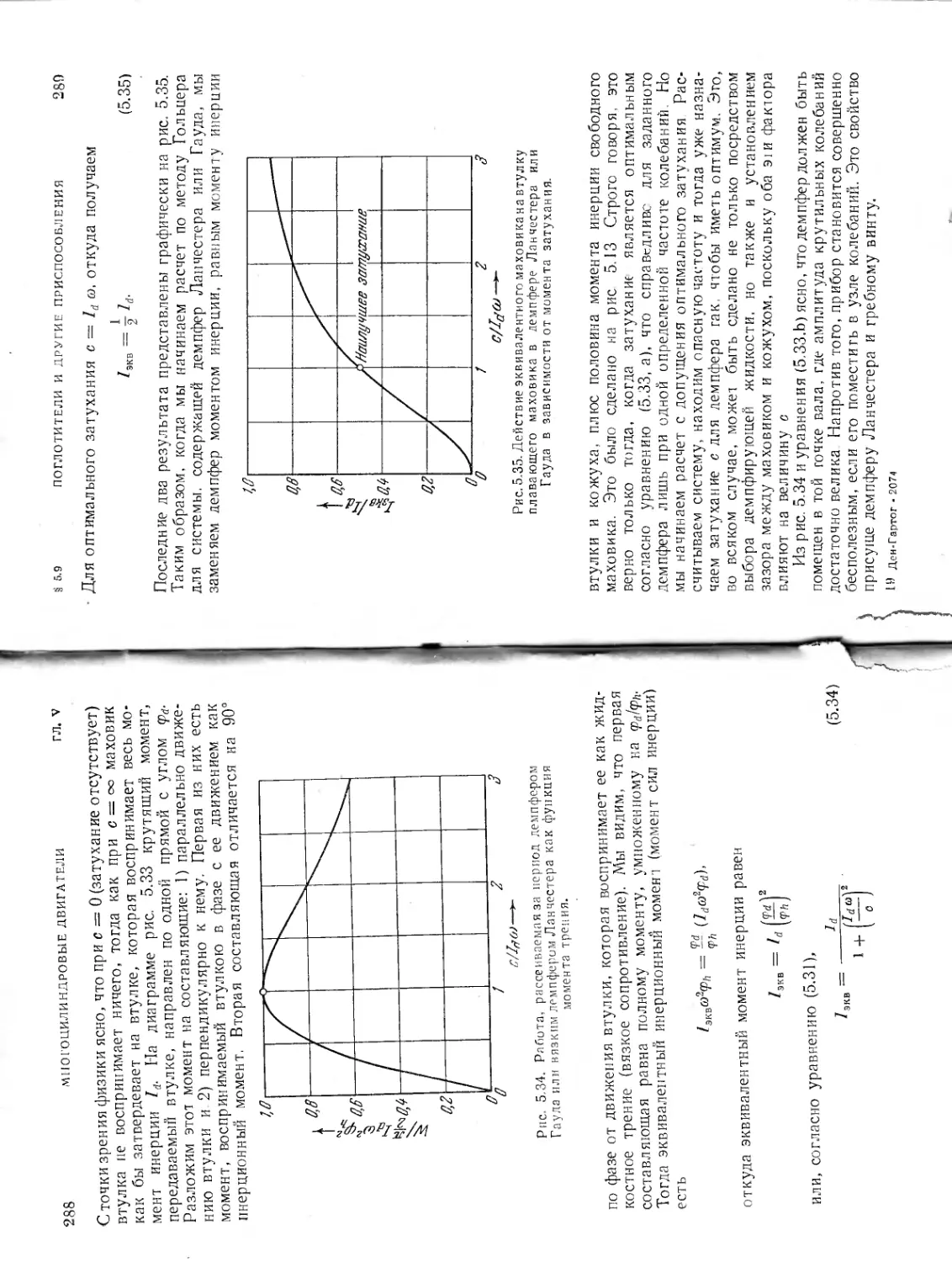
§ 5.9. Поглотители и другие приспособления для успокоения
крутильных колебаний ..................................... 284
Глава VL Вращающиеся части машин ........................303
§ 6.1. Критические скорости .......>..................... 303
§ 6.2. Метод Гольцера для определения критических скоростей
при изгибе ............................................. 309
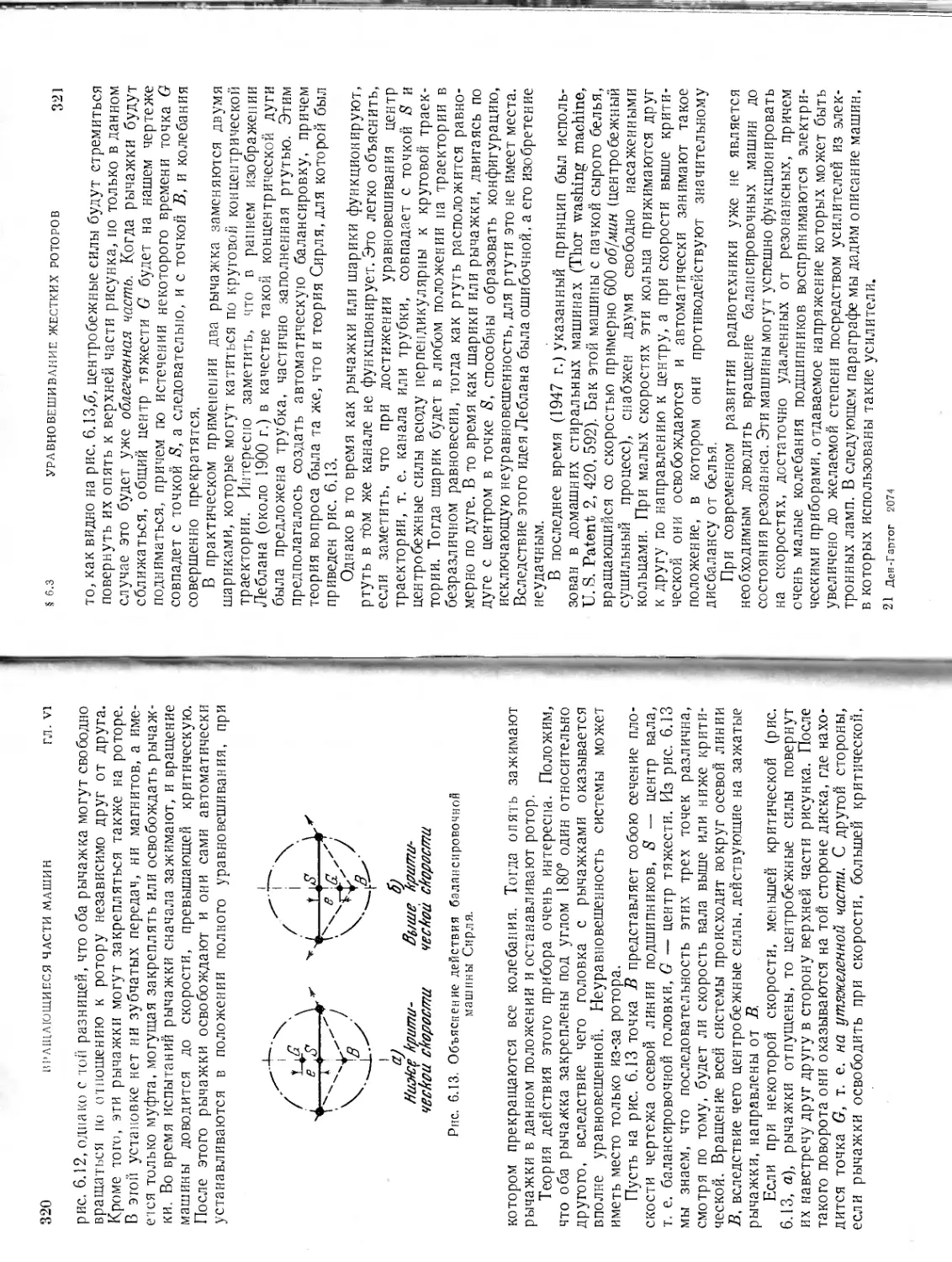
§6.3. Уравновешивание жестких роторов .............. 313
§ 6.4. Одновременное уравновешивание в двух плоскостях .... 322
§ 6.5. Уравновешивание гибких роторов. Уравновешивание на
месте установки ......................,.................. 327
§ 6.6. Критические скорости второго рода ................ 332
§ 6.7. Критические скорости роторов вертолетов........... 335
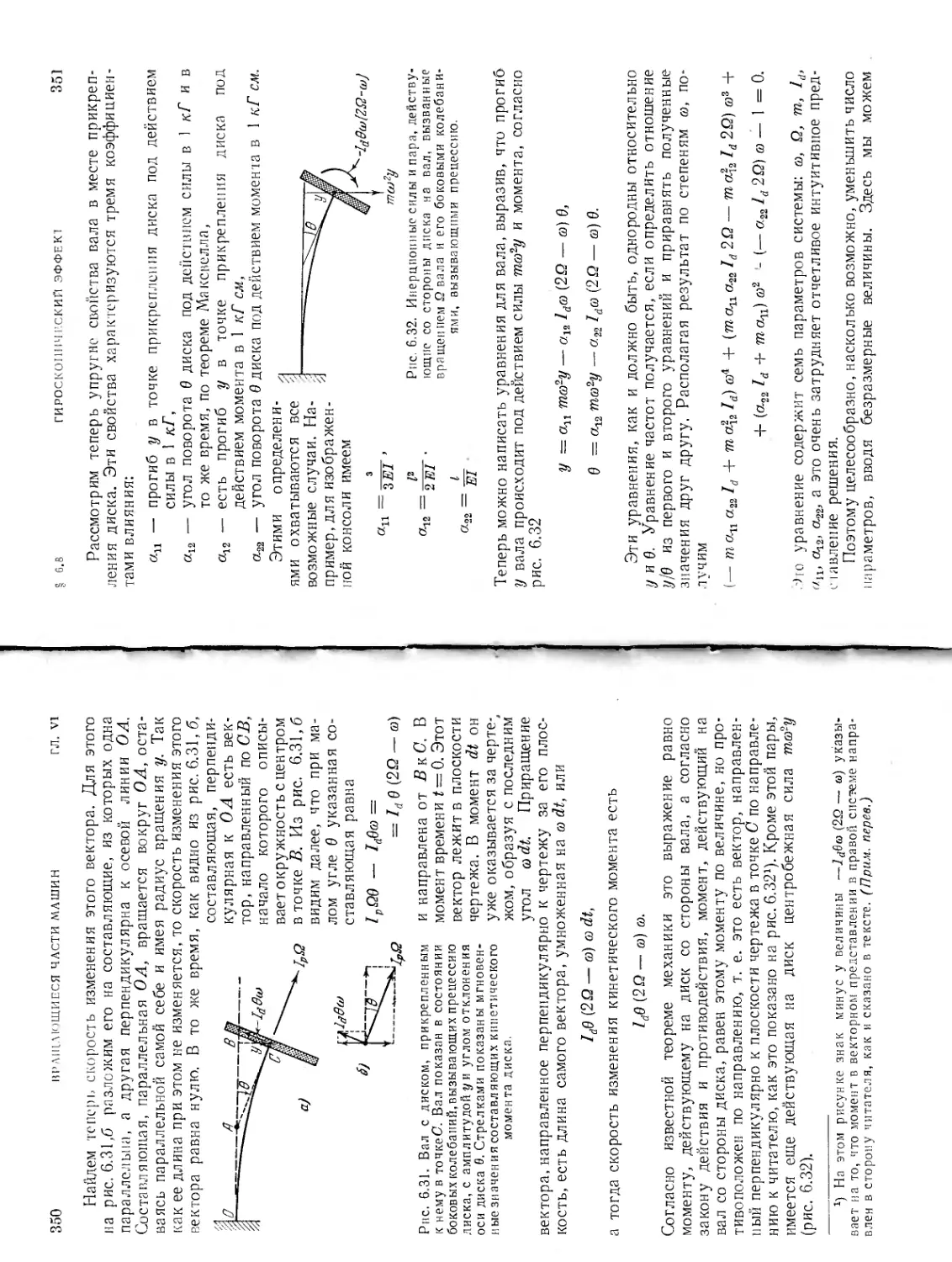
§ 6.8, Гироскопический эффект ........................... 340
§ 6.9. Вибрации рам электрических машин ................. 356
§ 6.10. Вибрация винта самолета ....................... 361
§ 6.11. Вибрации колес и лопаток паровых турбин.......... 370
Глава VEL Автоколебания ................................. 377
§ 7.1. Общие замечания .................................. 377
§ 7.2. Математический критерий устойчивости ............. 381
§ 7.3. Неустойчивость вследствие трения .............. 387
§ 7.4. Внутренний гистерезис валов и масляные пленки от
смазки подшипников как причины неустойчивости............. 394
§ 7.5. Галопирование линий электропередачи .............. 400
§ 7.6. Вихри Кармана ................................ 408
§ 7.7. Колебания регулятора паровой машины .............. 413
§ 7.8. Форсунки двигателей Дизеля ....................... 419
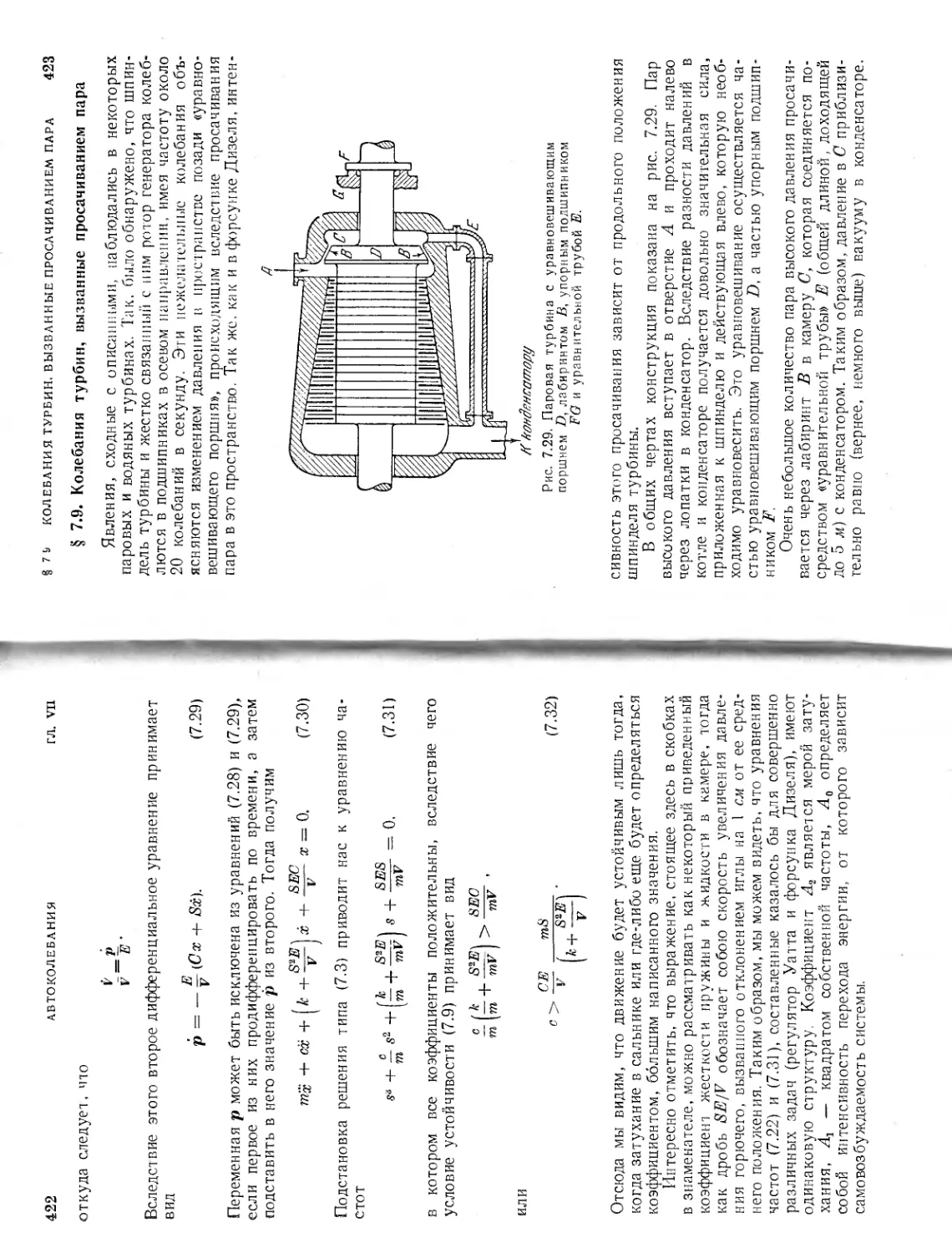
§ 7.9. Колебания турбин, вызванные просачиванием пара .... 423
§ 7.10. Явление флаттера в крыльях самолета ............. 428
§ 7.11. Явление шимми в колесах автомобилей ....,........ 438
Глава V11L Квазигармонические и нелинейные колебания систем 447
§ 8.1. Принцип наложения ................................ 447
§ 8.2. Примеры систем с изменяющейся жесткостью.......... 449
§ 8.3. Решение уравнения ................................ 458
§ 8.4. Интерпретация результата ......................... 463
§ 8.5. Примеры нелинейных систем ........................ 468
ОГЛАВЛЕНИЕ 5
§ 8.6. Свободные колебания систем с нелинейными харак-
теристиками ........................................ 472
§ 8.7. Релаксационные колебания ........................ 485
§ 8.8. Вынужденные колебания при нелинейной восстанавли-
вающей силе .......................................... 494
§ 8.9. Вынужденные колебания при нелинейном затухании .... 500
§ 8.10. Субгармонический резонанс ...................... 504
Задачи .................................................. 509
О гнеты к задачам .......................................... 552
Приложение: формулы и постоянные ........................... 566
Обозначения ................................................ 573
Именной указатель........................................ 576
Предметный указатель ....................................... 577
ПРЕДИСЛОВИЕ К РУССКОМУ ИЗДАНИЮ
Предлагаемая вниманию читателей книга является переводом
с четвертого, значительно переработанного американского изда-
ния, вышедшего в оригинале в 1956 г. Перевод со второго амери-
канского издания, выполненный тем же переводчиком, был
издан в 1942 г. под названием «Теория колебаний». За истекший
период наша отечественная литература обогатилась не только
огромным количеством статей в периодических и непериодических
изданиях, содержащих существенные результаты, но также много-
численными монографиями и книгами учебного характера по
общей теории колебания, среди которых имеются такие фунда-
ментальные труды, как «Колебания» Б. В. Булгакова, составив-
шие эпоху в науке о колебаниях, «Асимптотические методы в
теории нелинейных колебаний» Н. Н. Боголюбова и Ю. А. Митро-
польского, «Теория колебаний» И. М. Бабакова и многие другие.
Несмотря па это, книга Дж. П. Деп-Гартога, особенно в пере-
работанном виде, нисколько не потеряла своего значения. Эта
книга при достаточной элементарности математического аппарата
насыщена инженерными приложениями из самых разнообразных
областей техники, которые охватывают все основные разделы
современной теории колебаний. При этом автор обращает большое
внимание <на физическую сторону явлений и на практические
приемы исследования, что делает книгу особенно ценной для
многочисленных инженеров-производственников. Однако можно
с уверенностью сказать, что эта книга полезна вообще всем,
изучающим теорию колебаний, как пропедевтика к теоретическим
курсам.
11еревод выполнен текстуально, поскольку это допускалось лите-
ратурной формой русского изложения. Числовые данные в иллюс-
тративных примерах и в задачах пересчитаны с английских мер
на метрические, причем во многих случаях, где это не имело прин-
ципиального значения (например, двигатели определенных марок),
для удобства расчета данные введены с округлением. В неко-
торых случаях текст снабжен необходимыми примечаниями.
В то же время переводчик не счел себя в праве делать какие-
либо существенные дополнения, в частности снабдить книгу
ПРЕДИСЛОВИЕ К РУССКОМУ ИЗДАНИЮ
7
онолиографическим указателем, изъятым автором из последнего
издания. Библиографические справки читатель найдет в много-
численной советской литературе, особенно в упомянутой книге
Ь. В. Булгакова.
При переводе были приняты во внимание замечания по преды-
дущему изданию. Переводчик считает своим долгом выразить
благодарность всем лицам, сделавшим замечания, — профессору
К). И. Иоришу, доценту А. Г. Галанову и в особенности доценту
( . Л. Мейнгарду, который взял на себя нелегкий труд подготовки
рукописи к печати.
А. Н. Обмершее
ИЗ ПРЕДИСЛОВИЯ АВТОРА
Настоящая книга возникла из курса лекций, читанных авто-
ром в период 1926—1932 гг. слушателям инженерной школы
(Design School) Компании Вестингауз в Питсбурге. С 1932 г. до
начала войны это был уже систематический курс, читавшийся в
Гарвардской инженерной школе; с целью облегчения изучения
курса в 1934 г. было опубликовано первое издание этой книги,
отразившей личный производственный опыт автора в фирме
Вестингауз. В последующих изданиях были внесены изменения и
дополнения, подсказанные консультационной практикой автора
и его службой в Корабельном Бюро (Bureau of Ships) во время
войны.
В книге поставлена цель дать наиболее простое допустимое
изложение предмета при возможной полноте его охвата. При этом
математический метод не избегается, но во всех случаях избирается
простейшее математическое приближение. Число задач увеличи-
лось с 81 в первом издании до 230 в настоящем — четвертом.
Изменения в тексте были сделаны во всех главах, чтобы привести
дисциплину к современному уровню. Для сохранения объема
книги изменения состояли не только в дополнениях, но и в изъя-
тии некоторых разделов.
За время существования книги — с 1934 г. — наука и техника
инженерного дела росли с поразительной быстротой; одновременно
выросла и наука о колебаниях. За истекшие двадцать лет она
дала начало многим своим ответвлениям, каждое из которых
приобрело самостоятельное значение и обогатилось обширной
литературой. Сюда относятся: 1) электронная измерительная
аппаратура с теорией и практикой ее применения; 2) следящие
системы и системы автоматического регулирования; 3) теория
флаттера или «аэроупругости».
Здесь не было попытки охватить эти три области, так как
даже поверхностное их изложение сделало бы эту книгу в не-
сколько раз толще. Но каждый из перечисленных трех предметов
является ветвью теории колебаний и не может быть изучен без
знания этой теории. В то время, как в 1934 г. инженер-механик
мог считаться хорошо образованным без каких-либо знаний из
ИЗ ПРЕДИСЛОВИЯ АВТОРА 9
области колебаний, теперь эти знания являются необходимыми.
Таким образом, материал, представленный в первом издании,
тогда охватывал более или менее всю дисциплину; с другой
стороны, изложенное в настоящем издании теперь может рассмат-
риваться лишь как необходимый инструмент почти для каждого
инженера-механика.
Как и в предыдущих изданиях, автор выражает благодарность
читателям, приславшим свои отзывы и указавшим на погрешности,
и выражает надежду, что такое же внимание будет проявлено со
стороны читателей и к этому изданию. Автор чувствует себя осо-
бенно обязанным профессору Эриксону за проверку задач и
ответов к ним.
Дж. П. Ден-Гартог
ГЛАВА 1
КИНЕМАТИКА КОЛЕБАНИЙ
§ 1.1. Основные определения
Колебанием мы вообще называем периодическое движение,
т. е. такое движение, которое повторяется по истечений некото-
рого промежутка времени, называемого периодом колебания;
период колебания обыкновенно обозначается буквой Т. График
перемещений х в зависимости
от времени I часто может изо-
бражаться достаточно сложной
кривой. В качестве примера на
рис. 1.1,а изображен график
колебаний станины паровой
турбины1).
Простейшим типом периоди-
ческого движения является гар-
моническое движение-, в этом слу-
чае зависимость между пере-
мещением х и временем t может
быть выражена уравнением
х = ж0 sin G)t (1.1)
Рис. 1.1. Графики периодической и
гармонической функций периода Т
и амплитуды а?0.
Это уравнение имеет место
для малых колебаний математи-
ческого маятника, график ко-
торых представлен на рис. 1.1,5. Наибольшее значение ж0 откло-
нения называется амплитудой колебания.
г) Строго говоря, колебание, во-первых, не обязательно движение
(подразумевается механическое) и, во-вторых, не обязательно является
периодическим процессом. Вообще колебательный процесс, в частности
механическое колебание, характеризуется чередованием возрастания и
убывания некоторой величины, например, отклонения движущейся точки
<и некоторого фиксированного положения. (Прим, перев.)
12
КИНЕМА IИКЛ КОЛЕБАНИИ
ГЛ. I
Период Т обычно измеряется в секундах. Величина, обратная
периоду,
/=т
называется частотой колебания и измеряется числом колебаний
в одну секунду. Для единицы частоты предложено название
герц — в честь Генриха Герца, первого экспериментатора в обла-
сти электрических колебаний и волн.
В уравнение (1.1) входит величина ю, известная под назва-
нием угловой, круговой или циклической частоты, измеряется
она числом радианов в секунду. Такое, может быть несколько
неудачное, название получила эта величина на основании вектор-
ной интерпретации гармонического колебания, о чем будет речь
в следующем параграфе. Установим соотношения между ®, / и Т.
Из уравнения (1.1), а также из рис. 1.1,6 ясно, что полный цикл
колебания завершается при изменении at на 360° или, в радиан-
ной мере, на 2тг, так как после этого синус принимает свое преж-
нее значение. Тогда, если at = 2тг, то промежуток времени t
равен периоду Т:
Т = - сек. (1.2)
(1)
Но величина / обратна величине Т. Поэтому
/ = «г- колеб/сек. (1.3)
Для вращающихся машин частота нередко выражается числом
N колебаний в минуту:
уу колеб _30ы
мин л *
Найдем скорость гармонического движения. Зная, что закон
движения выражается уравнением
х = х0 sin at,
находим, дифференцируя его по времени,
= х = жою cos at. (1.4)
di
Отсюда видно, что скорость является также гармонической
функцией времени и имеет максимум axQ.
Аналогично находим ускорение
— х = — sin at. (1.5)
nt.6 v
I 1Л
ВЕКТОРНАЯ ИНТЕРПРЕТАЦИЯ КОЛЕБАНИЙ
13
>го — также гармоническая функция, принимающая наибольшее
шачение ю2ж0.
Рассмотрим теперь два колебательных движения, определяе-
мых уравнениями
= a sin at,
х2= b sin (at H- <p).
Графики этих колебаний представлены на рис. 1.2, где по оси
абсцисс отложена величина at. Благодаря присутствию величины
Рве. 1.2. Два гармонических движения, имеющих разность фаз <р.
смещения, вызванные соответствующими колебаниями, дости-
гни] своего наибольшего значения не в один и тот же момент
времени, а через <р!а секунд одно после другого. Величина ср
11444 1113 под названием угла сдвига фазы, или разности фаз1).
< oiu pun нно очевидно, что оба колебания имеют одну и ту же
ни нн\ / 1ик как в обоих случаях величина а одна и та же.
liMt him, iiiu cjihhi физы имеет значение лишь в случае двух коле-
си к 'ины двп/Кен nfi рапной частоты; если же частоты различны,
и» ни in личина in с уще с । вс ина.
Пример, h »1<», 1И1Л1К iiiriHioe па пружине, колеблется вверх и вниз в
!<гр| iiioi'ii.ном к ап ра нл( п и и, ишпмая крайние положения на высоте 1 и
1,5 ппл некоторым основанием. Найти Т, j, ы и х0, если известно, что
нло лиснпас! своего верхнею положения 20 раз в течение каждой се-
кунды,
Решение т0 = 0,25 см, 7 = 0,05 сек, 1 = 20 колеб1сек, ы = 2 л/ =
126 padlccK.
§ 1.2. Векторная интерпретация колебаний
Движение колеблющейся частицы может быть представлено
помощью вращающегося вектора. Пусть некоторый вектор а
(рис 1.3) вращается против часовой стрелки с некоторой по- б
б Г.ели рассматривается только одно уравнение колебаний, то назы-
(ин |ч и просто начальной фазой, (Прим, перев.)
14
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. I
стоянкой угловой скоростью а. Если мы будем отсчитывать
время от того момента, когда вектор находился в горизонтальном
положении, то горизонтальная (О А) и вертикальная (О В) про-
екции вращающегося вектора будут соответственно равны
a cos cot и a sin at.
Каждая из этих проекций
Рис. 1.3. Гармоническое движе-
ние, изображаемое горизонталь-
ной проекцией вращающегося
вектора.
может служить для представления
возвратно-поступательного дви-
жения, но в дальнейшем мы будем
пользоваться для этой цели лишь
горизонтальной проекцией.
Приведенная здесь интерпре-
тация колебательного движения
послужила поводом для введения
термина «круговая частота». Вели-
чина ю, являясь угловой ско-
ростью вектора, измеряется в
радианах в секунду, а частота /,
очевидно, в оборотах в секунду.
Отсюда сейчас же следует ра-
венство
а = 2лг/.
Скорость движения, происходящего по закону
х = a cos at,
будет
х = — аа sin at
и может быть представлена как
горизонтальная проекция век-
тора длины аа, вращающегося
с той же угловой скоростью а,
что и предыдущий вектор, опре-
деляющий смещение точки,
но повернутого относительно
него на 90° в сторону вра-
щения. Ускорение будет
х = — аа2 cos at
и, подобно скорости, может
быть представлено как горизон-
тальная проекция вектора
длины аю2, вращающегося опять
с такой же угловой скоростью
а, но уже повернутого на 180°
Рис. 1.4. Перемещение, скорость в
ускорение изображаются тремя
взаимно перпендикулярными векто-
рами.
относительно вектора смещения
или на 90° относительно вектора скорости в сторону дви-
§ 1.2
ВЕКТОРНАЯ ИНТЕРПРЕТАЦИЯ КОЛЕБАНИЙ
15
жения (рис. 1.4). В справедливости сказанного легко убедиться,
проследив последовательные положения всех векторов за один
оборот.
Изложенный векторный метод представления возвратно-
поступательного движения чрезвычайно удобен. Пусть, например,
имеем точку, совершающую одновременно два гармонических
движения равной частоты, но имеющих разность фаз ср, о пре де»
Рис. 1.5. Сложение двух колебаний посредством сложе-
ния векторов, изображающих эти колебания.
ляемых именно выражениями acosofl и b cos (cot — р). Сложе-
ние этих выражений по правилам тригонометрии связано с излиш-
ней затратой времени. Однако очень легко построить два соот-
ветствующих вектора, геометрическая сумма которых определит
полное движение, как это видно из верхней части рис. 1.5. Для
этого заставим параллелограмм (а, Ь) вращаться с постоянной
угловой скоростью со против часовой стрелки; тогда горизон-
тальные проекции векторов будут перемещениями в функции
времени. Все это показано на нижней части рис. 1.5, где линия
а а изображает тот момент времени, для которого построена
16
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ.
указанное сложение векторов
Рис. 1.6. Сложение двух колебаний
различной амплитуды, из которых
одно происходит по закону синуса,
а другое — по закону косинуса.
векторная диаграмма. Из чертежа сразу видно, что перемещение
суммы векторов а + Ь равно сумме перемещений векторов а и 6,
и, следовательно, перемещение проекции суммы векторов, пока-
занное на графике пунктиром, действительно равно сумме пере-
мещений проекций векторов а и Ь.
Совершенно очевидно, что
приводит к верному результату. В самом деле, a cos осесть гори-
зонтальная проекция вектора a, a b cos (at — ср) — горизонталь-
ная проекция вектора 6; но гори-
зонтальная проекция суммы
двух векторов равна, как из-
вестно, сумме, горизонтальных
проекций составляющих век-
торов, а это и есть то, что мы
хотели показать.
Такое сложение векторов
допустимо лишь в том случае,
когда оба колебания имеют
одинаковые частоты. Колеба-
тельные движения, определя-
емые выражениями a sin at и
a sin 2at, могут быть пред-
ставлены двумя векторами,
первый из которых вращается с
угловой скоростью о,а второй —
вдвое быстрее, т. е. с угловой скоростью 2а. Так как взаимное
расположение этих векторов на диаграмме непрерывно изменя-
ется, то геометрическое сложение в данном случае не имеет смысла.
В заключение остановимся на одном особом случае векторного
сложения, который довольно часто будет встречаться в после-
дующих главах, а именно, на случае, когда складываемые коле-
бания имеют разные амплитуды и происходят: одно по
синуса, а другое по закону косинуса, т. е. соответственно
a sin at и b cos at.
закону
В этом случае оба вектора взаимно перпендикулярны
легко видеть из рис. 1.6,
a sin at + Ь cos cot = /а2 4- b2 sin (at +q>),
и, ка..
(1.6)
где
Ь
Пример. Найти амплитуду результирующего колебания, если состав-
ляющие определяются уравнениями
#, = 5 sin 25г см,
я2=10 sin (25? + 1) см.
БИЕНИЯ
17
Ь 1.3
Решение. Первое движение изображается с помощью вектора длины
5 см, который проведен, например, вертикально вниз. Так как в этом
положении построенный вектор не имеет горизонтальной проекции, то
можно считать, что указанное положение соответствует началу движения
в момент t ~ 0. В этот момент для второго движем и я получаем = 10 sin 1,
т. е. в данном случае имеем вектор длиной 10 см, повернутый на 1 радиан
(^57°) против часовой стрелки по отношению к первому вектору. Путем
графического сложения полученных векторов находим результирующий
вектор длиной в 13,4 см, что и будет амплитудой суммарного колебатель-
ного движения.
§ 1.3. Биения
’8’E‘D кб?)
Если точка движется взад и вперед по некоторой прямой
таким образом, что ее смещение во всякий момент времени может
быть представлено в виде суммы двух членов
a sin + b sin сэ2£,
где 0j ф й)2, то мы получаем движение, которое называется «на-
ложением» двух колебаний различных частот. Очевидно, что
это движение уже не будет синусоидальным. Здесь интересен тот
особый случай, когда обе частоты 0г и ю2 почти равны друг другу.
Тогда первое составляющее коле-
бание может быть представлено
посредством вектора а, врашающе-
о гося с угловой скоростью 0V в то
время, как вектор Ь, определяющий
второе колебание, вращается с угло-
вой СКОРОСТЬЮ 02. ЕСЛИ 0г почти
равно 02, то оба вектора приблизи-
тельно сохраняют взаимное распо-
ложение в течение одного оборота,
т. е. угол, заключенный между ними,
изменяется очень незначительно.
Вследствие этого мы можем оба
вектора сложить, и тогда резуль-
тирующее движение за время одного
оборота векторов может практически
считаться происходящим по закону
синуса с частотой «2 и ампли-
тудой с (рис. 1.7) Однако вслед-
ствие неполного совпадения величин ол и сэ2 относительное
положение векторов а и Ь по истечении некоторого, доста-
точно значительного, числа оборотов все же изменится, что
повлечет за собой изменение и результирующего вектора с.
Поэтому получаемое движение приближенно может быть
представлено как колебание по закону синуса с частотой 0г
и амплитудой, медленно изменяющейся между ее крайними
2 Ден-Гартог 2047
Рис. 1.7. Векторные диаграммы,
иллюстрирующие биения.
18
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. 1
значениями (Ь + а) и (6 — а), или, если b = а, то между 2а
и 0 (рис. 1.7 и 1.8).
Описанное явление носит название биений. Частота биений
есть число, показывающее, сколько раз в секунду амплитуда
изменяется от одного минимума А до ближайшего следующего
В, проходя при этом через максимум (рис. 1.8). Период одного
биения, очевидно, соответствует времени, необходимому для
полного оборота вектора Ь по отношению к вектору а. Круговая
частота биений, как легко видеть, равна — сэ2-
Рис. 1.8. Биения.
Пример. Тело совершает одновременно два колебания, соответственно
= 3 sin 402 и а?2 — 4 sin 412, где за единицу длины взят сантиметр и за
единицу времени — секунда. Каковы максимум и минимум амплитуды
результирующего движения и чему равна частота биений?
Решение. Максимум амплитуды есть 3 + 4 — / см, мин имум 4 — 3 = 1 см.
Угловая частота биений со/, = 41 — 40 = 1 рад1сек, тогда частота =
= со/,/2эт = 1/2тг колебаний в секунду и период, или продолжительность
одного биения Т/, = 1//& = 6,28 сек.
Явление биений можно наблюдать во многих случаях (см. стр.
122,442). Биение особенно заметно при звуковых колебаниях. Два
тона одинаковой силы, но незначительно отличающиеся по высоте,
вызывают колебания в силе получающегося звука, частота кото-
рых равна разности частот обоих составляющих тонов. Биение
можно слышать, например, на электрических станциях во время
пуска генераторов, Динамомашина обладает «магнитным жуж-
жанием». основной тон которого соответствует удвоенной частоте
электрического тока, обычно 120 колебаниям в секунду. В момент
включения генератора в линию частота электрического тока
генератора несколько отличается от частоты тока в цепи. Вслед-
ствие этого жужжание генератора и жужжание в остальной цепи
(другие генераторы или трансформаторы) имеют различную
высоту тона, что и дает возможность услышать биение.
В существовании биений можно убедиться также с помощью следую-
щих три тонометр ических выкладок. В самом деле, пусть мы имеем два
колебания a sin и b sin где и w2 почти равны друг другу; пусть
далее w2 — «Iе /Aw-
$ 1.4 КОЛЕБАНИЯ ТРУБОПРОВОДА ВОДЯНОЙ ТУРБИНЫ 19
Тогда
a sin 4“ b sin (o2t =
= a sin 4- b (sin cos Awt 4- cos sin Дю£) =
= (a 4- b cos Aut} sin co4 4- b sin Aut cos 0г£.
Применяя формулу (1.6) к результирующему колебанию, имеем
У .(а 4- b cos Awt)2 4- b2 sin2 Awt • sin 4- p),
где (p есть сдвиг фазы, определение которого выполнимо, но в данном случае
не представляет интереса. Что касается амплитуды, определяемой ради-
калом, то она может быть выражена так:
Уа2 4- b2 (cos2 & ut 4- sin2 A to ft 4- 2ab-cos Aut = \a2 4- b2 4- 2ab • cos Avt,
откуда следует, что амплитуда изменяется между а + b и а —- b с часто-
той Ди.
§ 1.4. Колебания трубопровода водяной турбины
Непосредственное применение векторного метода к изучению
колебаний рассмотрим на примере, имеющем большое практи-
ческое значение.
На одной гидростанции обнаружились столь сильные колеба-
ния труб, подводящих воду
даже вопрос об опасности
разрушения турбинного
здания. Частота колебаний
оказалась равной НЗ^з
колебаниям в секунду, что
как раз совпало с произве- >
дением числа оборотов в
секунду (400:60) на число
лопаток (17) вращающейся
части турбины Фрэнсиса.
Трубы издавали такое
громкое жужжание, что
оно было слышно на рас-
стоянии нескольких кило-
метров. Случайно в непо-
к водяным турбинам, что возник
Рис, 1.9. Объяснение колебаний трубопро-
вода турбины Фрэнсиса.
средственуой близости от
трансформаторов электро-
станции были обнару-
жены биения с частотой
62/з колебания в секунду, которые
были вызваны совместным действием шума трубопровода и тран-
сформаторов; эти биения можно было ясно слышать.
На рис. 1.9 изображена в горизонтальной проекции схема
турбины с вертикальным валом. Вода поступает через трубу I
в спиральную камеру или «улитку» ZZ, в которой основной поток
2*
20
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. 1
воды разбивается на 18 отдельных потоков при помощи непо-
движных лопаток направляющего аппарата. Далее вода попадает
на 17 лопаток вращающегося турбинного колеса и, проходя
между лопатками, изменяет направление своего движения
на 90°. Наконец, вода вытекает через вертикальную отводную
трубу III.
На рисунке показаны две из 18 струй, на которые разбивается
главный поток воды. Останавливая свое внимание на одной из
них, мы видим, что за каждый оборот колеса мимо струи проходят
17 лопаток, которые тем самым сообщают ей 17 импульсов. Всего
за 1 секунду проходит ИЗ1^ лопатки, сообщающих через воду
такое же количество импульсов трубопроводу. Все это происходит
не только со струей а, но и с любой другой струей, а следовательно,
подводящая воду труба получает 18 импульсов, имеющих, так
сказать, различные источники, но обладающих одной и той же
частотой, именно, ИЗ1^ колебания в секунду. Если бы все эти
импульсы были одной и той же фазы, то они, складываясь ариф-
метически, разрушающе подействовали бы на турбинную уста-
новку.
Условимся считать, что струя а испытывает наибольшее зна-
чение импульса в тот момент, когда лопатки 1—1 приходятся
одна против другой. Тогда максимальное значение импульса в
струе
ранее
b наступит несколько раньше, чем в струе а (.более точно,
1
17 • 18
на
оборота турбины вследствие того, что возникно-
вение максимального импульса в струе b наступит в момент,
когда лопатки 2—2 расположатся друг против друга).
Импульс от струи а движется к подводящей трубе со скоростью
звука (скорость звука в воде гъ 1400 м/сек)', то же самое относится
и к струе Ъ1). Заметим, однако, что путь, пройденный импульсом
от струи Ъ, во всяком случае длиннее, чем соответствующий путь
от струи а, причем разница здесь составляет примерно длины
осевой линии улитки. Вследствие указанного обстоятельства
импульс от b должен прийти в трубу позднее, чем импульс от а
Оказалось, что в исследуемой турбине упомянутые два явле-
ния погашали друг друга, вследствие чего импульсы от а и от Ь
приходили к сечению А А трубы одновременно, т. е. в одной и
той же фазе. Это обстоятельство имело место, конечно, не только
для струй а и Ь, но и для всех остальных 18 струй. В таком случае,
если воспользоваться векторным методом, то импульсы должны
расположиться так, как указано на рис. 1.10 а, и тогда ре-
зультирующий импульс в сечении АА оказывается очень
большим.
г) Так как общая скорость водяного потока мала по сравнению со ско-
ростью звука, то влиянием последней мы пренебрегаем.
§ 1.4
КОЛЕБАНИЯ ТРУБОПРОВОДА ВОДЯНОЙ ТУРБИНЫ
21
Чтобы избавиться от указанного недостатка, колесо, имеющее
17 лопаток, было из турбины удалено и заменено колесом с 16
лопатками. Такая замена, конечно, не повлияла на величины
разностей времен прихода импульсов в рассматриваемое сечение
А А, получающихся вследствие разностей длин путей а, b и т. д.
Но зато она должна была изменить интервалы времени между
импульсами от каждых двух соседних лопаток направляющего
аппарата1). И вот теперь в тот момент, когда
вращающаяся лопатка 1 посылает свой им- |
пульс, лопатка 9 также посылает свой им- м
пульс, в то время, как в прежней конструк-
ции лопатка 9 находилась в этот момент
посредине между двумя неподвижными ло-
патками (рис. 1.9). 11
Благодаря счастливой случайности по-
ловина длины улитки проходилась звуковой
волной приблизительно в г/2 • секунды,
вследствие чего два импульса от лопаток
1 и 9 приходили в поперечное сечение А А,
имея противоположные фазы (рис. 1.10).
Что касается разности фаз импульсов от
каждых двух соседних струй, то она со-
ставляла, таким образом, одну девятую >> /
от 180°, вследствие чего 18 отдельных им- м
пульсов располагались на векторной диаг-
рамме по окружности и при своем ге- м д
ометрическом сложении давали в результате
нуль.
Произведенный анализ приводит, каза-
лось бы, к выводу, что после описанной
замены колеса колебания должны совер- Рнс. 1.10.18парциаль-
шенно исчезнуть. Однако такого эффекта сечении АА рис. 1.9
ожидать все же не приходится, так как наш
расчет выполнен лишь приближенно и многие
обстоятельства при этом вовсе не были при-
для колеса с 17 ло-
патками (а) и 16 ло-
патками (6).
няты во внимание; (прежде всего спираль-
ная камера была заменена узким каналом, далее, не были
приняты во внимание кривизна поверхности волны, отра-
жение волн от различных препятствий и действие затухания).
В действительности амплитуда колебаний трубы была понижена
до одной трети своего первоначального значения, и это уже можно
рассматривать как достаточно удовлетворительное решение за-
дачи.
х) Обусловленные изменением расстояний по окружности между
лопатками колеса турбины. (Прим, перев.)
22
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. I
§ 1.5» Метод комплексных чисел
В предыдущих параграфах было показано, что гармонические
движения можно представлять посредством вращающихся век-
торов, что сложение двух векторов соответствует сложению двух
гармонических движений одинаковой частоты и, наконец, что
дифференцирование уравнений таких движений по времени можно
понимать как умножение изображающего вектора на со с одновре-
менным поворотом его на 90° по направлению движения. Если
немного напрактиковаться в пользовании этими векторами, то
тем самым мы получаем достаточно наглядный метод изучения
гармонических движений, который является более простым, чем
непосредственное изучение синусоидальных колебаний.
Несмотря на указанную наглядность, все же векторный метод
мало пригоден для числовых расчетов, поскольку приходится рас-
кладывать векторы на вертикальные и горизонтальные состав-
ляющие. Так, например, если нужно сложить два движения, со-
гласно рис. 1.5, то мы пишем
с — а 4- bs
разумея здесь геометрическое сложение. Для вычисления длины
вектора с, т. е. амплитуды результирующего движения, надо
еще написать равенство
а —
которое выражает, что а есть геометрическая сумма своих компо-
нентов, ах и ау соответственно по осям х и у. В таком случае
имеем
с = ах 4- Яу 4- Ьх 4- by = (ах 4- Ъх) 4- (ау 4" Ьу).
Тогда длина вектора с или его модуль будет
с = У(ах 4- \)2 4- (ау 4- 6у)2.
Итак, этот метод оказывается довольно длинным, вследствие
чего в значительной мере теряется то преимущество, которое мы
получаем путем использования векторной интерпретации гармо-
нического движения. ►
Однако существует простой метод числовых расчетов с помо-
щью векторов, а именно метод комплексных чисел. Как известно,
всякое комплексное число может быть представлено графически
точкой на плоскости, где действительные числа 1, 2, 3,... на-
носятся на горизонтальной оси, а мнимые — на вертикальной.
Если ввести обозначение
1 = V— 1»
то эти мнимые числа представятся как /, 2/, 3/. . . В качестве
§ 1.5
МЕТОД КОМПЛЕКСНЫХ ЧИСЕЛ
23
примера на рис. 1.11 изображена точка, соответствующая ком-
плексному числу 3 + 2/. Соединяя эту точку с началом коор-
динат, мы видим, что комплексное число может быть представлено
также посредством вектора. Если буквой а обозначить угол,
образованный вектором с горизонтальной осью, и буквой а —
длину вектора, то комплексное
выражения
a (cos а + j sin ос).
Вспомним теперь, что гар-
моническое движение изобра-
жается посредством вращаю-
щегося вектора. В таком слу-
чае, подставляя в последнее
выражение вместо фиксирован- *
кого значения угла ос перемен-
ную величину cot, мы приведем
выражение для вектора к виду
число можно написать в виде
Рис, 1.11. Изображение вектора точ-
кой в комплексной плоскости.
собою гармоническое движение,
я есть не что иное, как действи-
a (cos cot + j sin cot), (1.7)
представляющему уже враща-
ющийся вектор, горизонтальная
проекция которого определяет
Но эта горизонтальная проекци
тельная часть выражения (1.7). Поэтому если мы говорим, что
«вектор изображает гармоническое движение», то мы подразу-
меваем, что горизонтальная проекция вращающегося вектора
изображает это движение. Подобным же образом, когда мы
утверждаем, что «комплексное число изображает гармоническое
движение», мы имеем в виду, что указанное движение представляет-
ся действительной частью такого числа, написанного в виде выра-
жения (1.7).
Пример, Решить пример, приведенный на стр. 16, пользуясь методом
комплексных чисел.
Решение. Первый вектор изображается числом —5?, а второй числом
— 1О/ cos 57° + 10 sin 57° == —5,4/ + 8,4. Сумма этих чисел равна 8,4 —
— 10,4/, откуда мы находим длину вектора, равную У(8,4)2 + (10,4)2 =
— 13,4 см.
Дифференцируя выражение (1.7) и вспоминая, что, по опреде-
лению, /2 = —1, имеем
а (— со sin cot + /о cos cot) = jco • a (cos cot + / sin cot).
Таким образом, мы видим, что дифференцирование комплексного
выражения (1.7) равносильно его умножению на jco.
24
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ I
Итак, в векторном изображении при дифференцировании вектор
умножается на со и поворачивается в сторону движения па угол
90°. Отсюда мы приходим к заключению, что умножение комплекс-
ного числа на j равносильно повороту соответствующего вектора
в положительную сторону на четверть оборота без изменения
его длины. Последнее утверждение легко может быть проверено
непосредственно. В самом деле,
j (а + jb) = — b + ja.
Указанное действие представлено графически на рис. 1.121).
Производя всевозможные вычисления с упомянутыми комп-
лексными числами, необходимо придерживаться обычных правил •
алгебры, помня лишь на каждом этапе расчета, что дви-
жение представляется только действительной частью этих
чисел. Правда, последнее требование обычно не соблюдается: ал-
Рис. 1.12. Умножение комплексного чис«
ла на j равносильно повороту соответ-
ствующего вектора на прямой угол в
сторону вращения.
гебраические действия вы-
полняются без того, Чтобы
особенно задумываться над
их физическим смыслом, и
лишь окончательный резуль-
тат интерпретируется пу-
тем рассмотрения действи-
тельной части полученного
выражения.
Для разрешения простых
задач навряд ли стоило бы
заниматься изучением комп-
лексного метода, так как и
без него решение получается
достаточно просто. Напротив, при решении многих задач значи-
тельно более сложного характера, подобно задачам § 3.3, об-
легчение, приносимое указанным методом, весьма существенно.
Выражение 1.7 иногда пишут в иной форме, ... именно
a (cos cot -j- j sin == aefo*
или, если для простоты положим а = 1 н tat «= а, то
eJa = cos а + j sin а. (1.8)
Правая часть написанного равенства есть обыкновенное комплексное
1) Здесь имеется в виду вращение в положительном направлении, т. е.
против часовой стрелки. (Прим, перев.)
§ 1.6 РАБОТА, СОВЕРШАЕМАЯ ПРИ ГАРМОНИЧЕСКОМ ДВИЖЕНИИ
25
число; что касается левой части, то она нуждается в пояснении. Разло-
жим ех в ряд Маклорена:
еА= 1 4- х Ч-------1----h . . .
2! 3!
и положим здесь х — /а; тогда находим
а2 а3 а4 а5
eJ(1 = 1 4- ja-------j-----1----I- j---h . . =
2! 3! 4! 5!
Правая часть полученного равенства является комплексным числом,,
которое, как видим, должно быть равно eJa. С другой стороны, всматри-
ваясь в выражения, стоящие в скобках, мы узнаем в них разложения
в ряды Маклорена cos а и sin а, а тогда немедленно приходим к фор-
муле (1.8).
Полученный результат может быть очень просто интерпретирован
графически в комплексной плоскости рис. 1.11 или 1.12. Для этого рас-
смотрим в указанной плоскости окружность единичного радиуса. Каждая
точка этой окружности имеет горизонтальную проекцию cos а и вертикаль-
ную проекцию sin а, представляя таким образом комплексное число cos а 4-
-Ь j sin а = eJ°. Следовательно, число eJ° изображается точкой на единичной
окружности в угловом расстоянии а радианов от точки -Ы Если теперь
а приравнять cot, то легко видеть, что e^i представит собой вращающийся
единичный вектор, горизонтальная проекция которого изобразит гармо-
ническое движение с единичной амплитудой и с круговой частотой w.
Заметим заранее, что на стр. 62 нам представится случай использовать
уравнение (1.8).
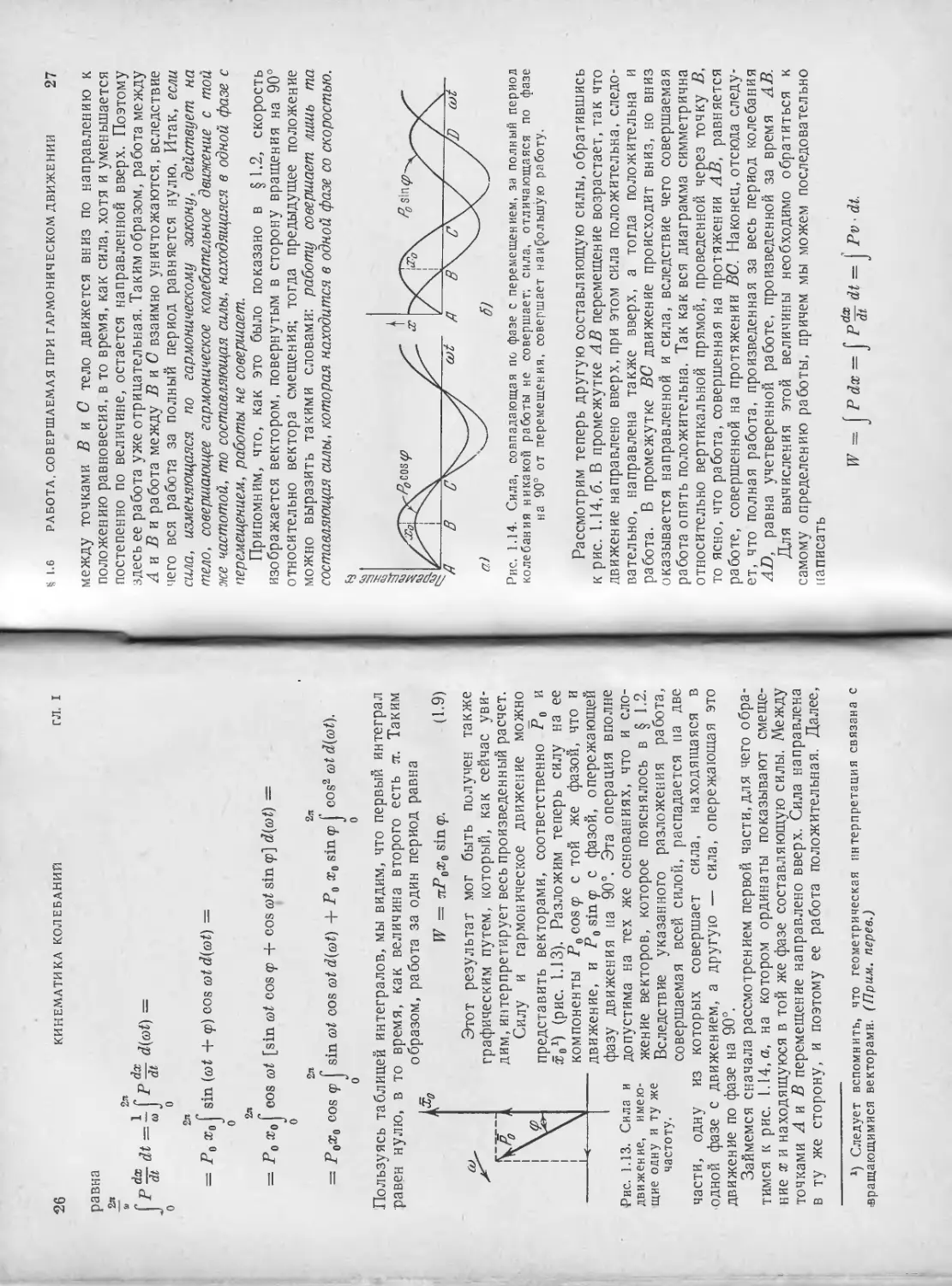
§ 1.6. Работа, совершаемая при гармоническом движении
Во многих приложениях чрезвычайно важным является воп-
рос о работе силы, изменяющейся по гармоническому закону,
которая совершается ею при гармоническом движении, имеющем
ту же частоту, что и сила.
Пусть сила
Р = Ро sin (at + у)
действует на тело, движение которого происходит по закону
х~ ж0 sin cot.
Работа, совершаемая этой силой на малом перемещении dx,.
равна Р dx, что может быть написано также в виде P-^-dt.
Urb
За время одного полного колебания фаза cot изменяется от
О до 2тг, и, следовательно, t изменяется от 0 до 2тг/ю. Работа,
совершаемая за время одного колебания, т. е. за один период,
26
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. I
равна
_2л
w 2л
р>‘г,=Иг£*><)=
о о
2л
= Ро х0 J sin (cot + у) cos ot d(cot) =
о
2л
— Ро rroy cos cot [sin cot cos ср H- cos cot sin cp] d(cot) =
о
2л 2л
= P0x0 cos (p J sin ot cos cot d(ot) + Po xq sin cp J cos2 cot d(ot).
о 0
Пользуясь таблицей интегралов, мы видим, что первый интеграл
равен нулю, в то время, как величина второго есть тг. Таким
образом, работа за один период равна
м W = лРохо sin (р. (1.9)
Рис. 1.13. Сила и
движение, имею-
щие одну и ту же
частоту.
Этот результат мог быть получен также
графическим путем, который, как сейчас уви-
дим, интерпретирует весь произведенный расчет.
Силу и гармоническое движение можно
представить векторами, соответственно PQ и
Ёо1) (рис. 1.13). Разложим теперь силу на ее
компоненты Fo cos ср с той же фазой, что и
движение, и Fosing) с фазой, опережающей
фазу движения па 90°. Эта операция вполне
допустима на тех же основаниях, что и сло-
жение векторов, которое пояснялось в § 1.2.
Вследствие указанного разложения работа,
совершаемая всей силой, распадается па две
части, одну из которых совершает сила, находящаяся в
одной фазе с движением, а другую — сила, опережающая это
движение по фазе на 90°.
Займемся сначала рассмотрением первой части, для чего обра-
тимся к рис. 1.14, а, на котором ординаты показывают смеще-
ние х и находящуюся в той же фазе составляющую силы. Между
точками А и В перемещение направлено вверх. Сила направлена
в ту же сторону, и поэтому ее работа положительная. Далее,
х) Следует вспомнить, что геометрическая интерпретация связана с
вращающимися векторами. (Прим, перев.)
5 1.6
РАБОТА, СОВЕРШАЕМАЯ ПРИ ГАРМОНИЧЕСКОМ ДВИЖЕНИИ
27
между точками В и С тело движется вниз по направлению к
положению равновесия, в то время, как сила, хотя и уменьшается
постепенно по величине, остается направленной вверх. Поэтому
здесь ее работа уже отрицательная. Таким образом, работа между
А и В и работа между В и О взаимно уничтожаются, вследствие
чего вся работа за полный период равняется нулю. Итак, если
сила, изменяющаяся по гармоническому закону, действует на
тело, совершающее гармоническое колебательное движение с той
же частотой, то составляющая силы, находящаяся в одной фазе с
перемещением, работы не совершает.
Припомним, что, как это было показано в § 1.2, скорость
изображается вектором, повернутым в сторону вращения на 90°
относительно вектора смещения; тогда предыдущее положение
можно выразить такими словами: работу совершает лишь та
составляющая силы, которая находится в одной фазе со скоростью.
Рис. 1.14. Сила, совпадающая по фазе с перемещением, за полный период
колебания никакой работы не совершает; сила, отличающаяся по фазе
на 90° от перемещения, совершает наибольшую работу.
Рассмотрим теперь другую составляющую силы, обратившись
к рис. 1.14,6. В промежутке АВ перемещение возрастает, так что
движение направлено вверх, при этом сила положительна, следо-
вательно, направлена также вверх, а тогда положительна и
работа. В промежутке ВС движение происходит вниз, но вниз
оказывается направленной и сила, вследствие чего совершаемая
работа опять положительна. Так как вся диаграмма симметрична
относительно вертикальной прямой, проведенной через точку В,
то ясно, что работа, совершенная на протяжении АВ, равняется
работе, совершенной на протяжении ВС. Наконец, отсюда следу-
ет, что полная работа, произведенная за весь период колебания
AD, равна учетверенной работе, произведенной за время АВ.
Для вычисления этой величины необходимо обратиться к
самому определению работы, причем мы можем последовательно
написать
И7 = J Р dx = J Р J dt = j Pv dt.
28
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. )
Отсюда видно, что работа, совершенная за один полный период
колебания, представляется в виде интеграла по времени от произ-
ведения силы на скорость. Так как (см. рис. 1.14, б) сила и скорость
соответственно имеют вид
Р = Ро gin ф • COS Ot,
V = Х0О COS Ot,
то работа за один период равна
Т 2л
J PQ sin ср • cos ot • хосу cos ot • dt = Fo sin J cos2 cot • d(ot).
о о
Величина определенного интеграла, стоящего справа, может
быть вычислена посредством рис. 1.15, на котором кривая I изоб-
Рис. 1.15. Геометрическое доказательство равенства cos2 a da = п.
ражает cos cot, а кривая II — соответственно cos2 ot. Кривая,
построенная для cos2 ot, представляет собой синусоиду, имею-
щую своей осью пунктирную прямую АА\ частота cos2 ot вдвое
больше частоты cos ot, что легко проверить с помощью тригоно-
метрической формулы
cos2 ос = (1 + cos 2ос).
£
Рассмотрим прямоугольник 7—2—3—4, разделенный пунктир-
ной кривой II на две части, и заметим, что обе полученные части
имеют одинаковую форму и равные площади. Расстояние 1—4
равно единице, а расстояние 3—4 есть тг/2 или соответственно 90°.
Таким образом, площадь всего прямоугольника равна тг/2, а
площадь его части, лежащей ниже кривой ZZ, должна быть равна
половине найденной величины. Следовательно, величина нашего
§1.6 РАБОТА, СОВЕРШАЕМАЯ ПРИ ГАРМОНИЧЕСКОМ ДВИЖЕНИИ 29
определенного интеграла, взятого в пределах от 0 до Т/4, есть
тг/4, а величина этого же интеграла, но взятого в пределах от
О до Т, должна быть равна тг. Итак, работа, совершенная за время
одного полного колебания, будет
W = 7гР0ж0 sin у. (1.9)
В следующем параграфе будет показано, что периодическая
сила а также периодическое движение могут не быть чисто гармо-
ническими, т. е. могут содержать так называемые «гармоники
высших порядков», налагающиеся на «основную гармонику». По
этой причине чрезвычайно важно уметь определить работу гармо-
нической силы на перемещении, подчиняющемся опять-таки гар-
моническому закону, но уже с частотой, отличной от частоты
изменения силы. Пусть сила изменяется с частотой, кратной о,,
например по, и пусть частота колебательного движения есть
другое кратное числу о, например то. Мы сейчас покажем,
что работа указанной силы на таком перемещении за полный
период колебания с частотой о равна нулю.
В самом деле, допустим, что сила изменяется по закону Р =
= Ро sin not, а перемещение есть х = х0 sin (mot + у). Тогда
работа за один период равна
Т 7
Р dx = Р dt = J Fo sin not * xQmo cos (mot + y) dt.
о 0
Пользуясь преобразованием
cos (mot + y) = cos mot cos у — sin mot sin у
и принимая во внимание, что угол у не зависит от времени, а
потому его функция может быть вынесена за знак интеграла,
мы можем разбить определенный интеграл на два интеграла
| а ко го вида
т т
J sin not sin mot dt и f sin not cos mot dt.
о 6
Легко показать, что при п, отличном от т, оба эти интеграла
равны нулю. Для этой цели преобразуем подынтегральные функ-
ции
sin not sin mot = £ cos (n — m) ot — £ cos (n + m) ot,
sin not cos mot = £ sin (n 4- m) ot 4- £ sin (n — m) ot.
Так как промежуток интегрирования есть Т = 2тг/й>, то синус и
30
КИНЕМАТИКА КОЛЕБАНИИ
ГЛ. 1
косинус интегрируются в промежутках, кратных 2тг, вследствие
чего интегралы действительно равны нулю.
Для наглядности рассмотрим хотя бы первый интеграл, поло*
жив в нем, например, п = 4, т = 5. Этот случай представлен на
рис. 1.16, где амплитуды обеих волн отложены по оси ординат в
различных масштабах, чтобы таким образом сделать яснее раз-
личие между ними. Промежуток времени, на который распростра-
няется интегрирование, изображен на нашем рисунке в виде
отрезка АВ. Соответственные ординаты обеих кривых должны
Рис. 1.16. Геометрическое доказательство равенства
2л
J sin па sin та da = 0.
о
перемножаться между собой, после чего уже выполняется интег-
рирование. Рассмотрим две точки, из которых одна взята несколько
правее точки А, а другая — па таком же расстоянии влево от
точки С. Вблизи точки А обе волны положительны, но вблизи
точки С — одна положительна, а другая отрицательна, имея,
однако, ординаты, равные по абсолютной величине соответствен-
ным ординатам вблизи точки А. Следовательно, та часть интеграла,
куда входят элементы, ближайшие к точке А, взаимно уничто-
жаются с той его частью-, в которую входят соответственные
элементы, ближайшие к точке С. Такое приведение имеет место
не только для элементов, расположенных очень близко к точкам
А и С, но и для любых двух элементов, один из которых удален
влево от точки С настолько же, насколько другой удален вправо от
точки А. Вследствие этого интеграл, распространенный на об-
ласть AD, уничтожается с интегралом, распространенным на
область CD. Таким же образом можно показать, что интеграл,
распространенный на область СВ, равен нулю.
Необходимо иметь в виду, что работа равна нулю только
за время одного полного колебания. После отправления от точки А
ординаты обеих кривых (силы и скорости) положительны, так
что совершаемая работа также положительна; эта работа во
всяком случае отдается обратно, но уже позднее, при последующем
движении, а до этого времени она должна накопляться в виде
потенциальной или кинетической энергии.
§ 1.6 РАБОТА, СОВЕРШАЕМАЯ ПРИ ГАРМОНИЧЕСКОМ ДВИЖЕНИИ 31
Эта графическая интерпретация явления может быть повто-
рена и для всякой иной совокупности целых чисел тип, а также
и для интегралов, содержащих косинус в интегрируемой функции.
Когда т делается равным л, мы имеем рассмотренный выше
случай равных частот. В этом случае работа опять равна нулю,
если сила и перемещение находятся в одной фазе. В случае т = п
и разности фаз в 90° работа за одно колебание n-й гармоники
равна, как мы уже знаем, лРохо, и тогда, поскольку в одном
полном колебании основной частоты а> содержится п упомяну-
тых колебаний, работа за время одного основного колебания
равна
Сделаем краткую сводку полученных результатов.
1. Работа, совершаемая гармонической силой при гармони-
ческом движении ее точки приложения с частотой, отличной отг
частоты изменения силы, равна нулю, если промежуток времени,
в течение которого работа измеряется, содержит некоторое
целое число периодов изменения силы и отличное от него целое число
периодов колебания или периодов изменения скорости
2. Работа, совершаемая за один период гармонической силой,
отличающейся по фазе на 90° от гармонической скорости той
же частоты, равна нулю.
3. Работа, совершаемая за один период гармонической силой
с амплитудой PQ и частотой со, находящейся в одной фазе с гармони
ческой скоростью = х0 о той же частоты, равна л Ро =
= тг Fo х&
Пример. Сила, равная 10 sin 2тг *60 t, действует на перемещении, рав-
ном 0,1 sin (2тг • 60 t — тг/4), причем за единицу длины взят метр, за единицу
силы — килограмм и за единицу времени — секунда. Найти pa-боту, совер-
шаемую силой в течение первой секунды, а также работу за одну тысячную
первой секунды, считая от начала движения.
Решение Сила отличается по фазе от перемещения на эт/4, или 45°, и
может быть разложена на две составляющие, амплитуда каждой из которых
равна 10/У2 кГ, но при этом фаза одной из них совпадает с фазой пере-
мещения, а фаза другой отличается от последней на 90° Первая из этих
составляющих работы не совершает, тогда как работа второй за один
период равна
10
7tP0x0 = л — • 0,1 = 2,22 к Гм.
/2
В течение первой секунды происходит 60 полных колебаний, так что
вся работа за это время равна 60 ’2,22 = 1,33 кГм
Переходя к другому вопросу, мы видим, что в продолжение первой
60
тысячной доли первой секунды совершается = 0,06 полного колеба-
ния, а поэтому векторы на диаграмме повернутся за это время только на
0,06 * 360° = 21°, 6. Заметим, что формула (1.9) имеет место лишь для пол-
ного периода. Что касается упомянутой части периода, то для нее придется
32 КИНЕМАТИКА КОЛЕБАНИЙ ГЛ. i
здесь выполнить интегрированне полностью. Итак, имеем
IV — J Р dx — J Ро sin (Dt • x0(D cos ((Dt — (p) dt =
21°,6
= Poxo | sin (w£) cos ((Dt — (p) d((Dt) =
0
21 °,6
= 10 • 0,1 у sin ((Dt) [cos (ot) cos (p 4- sin (wt) sin p] d(wt) =
о
21°,6 21°,6
== cos У sin ((Dt) cos («0 d(o0 4- sin g>y sin2(«0 d(a)t) =
о о
1 . о - I1 1 • n ll21°*6
~ — cost? sin2 (w£) 4- sm (p [— (Dt — — sin 2(Dtj I —
— — cos 45° sin2 21 °,6 4- - • —- sin 45° — — sin 45° • sin 43°,2 ==
2 2 57,3 4
= J- • 0,707 • 0.3 682 4- - • —— • 0,707 - - • 0,707 • 0?685 =
2 2 57,3 4
= 0,048 + 0,133 — 0,121 = 4-0,060 kPm.
Найденная величина значительно меньше тысячной части работы,
совершаемой за всю первую секунду. Это объясняется тем обстоятельством,
что за рассматриваемую тысячную долю секунды сила чрезвычайно мала,
так как здесь она изменяется от 0 до 0,368 Ро.
§ 1.7. Негармоническое периодическое движение
Периодическое движение обладает тем свойством, что оно
полностью воспроизводится по истечении некоторого проме-
Рис. 1.17. Сложение двух гармониче-
ских движений различных частот при-
водит к движению, которое не яв-
ляется гармоническим.
жутка времени, называемого
периодом движения Всякое
гармоническое движение есть
движение периодическое, но
не всякое периодическое дви-
жение является гармони-
ческим. Например,на рис. 1.17
изображено движение
х = a sin cot 4- sin 2cyi,
представляющее собой нало-
жение двух колебаний,совер-
шающихся по закону синуса,
но имеющих различные ча-
стоты.
Это движение является периодическим, но не гармоническим.
§ 1.7 НЕГАРМОНИЧЕСКОЕ ПЕРИОДИЧЕСКОЕ ДВИЖЕНИЕ 33
Из математики известно, что периодическая кривая f(t) с частотой
су может быть разложена на ряд синусоид с частотами со, 2со, Зсо,
4со и т. д., а именно:
/(О = Ао + Д sin (cot + ф) + Д sin (2cot 4- ср2) 4-
4~ Д sin (3cot + <рз) 4~ . . ., (1.10)
где предполагается, что f(t) повторяет свои значения по истечении
каждого промежутка Т = 2 от/со. Амплитуды различных колебаний
Д, Д, ... и их начальные фазы д^, ср2, . . . могут быть определены
аналитически, если вид функции f(t) задан. Написанный ряд
(1.10) известен под названием ряда Фурье1).
Второй член называется основной или первой гармоникой
функции f(t) и вообще (п-\- 1)-й член с частотой псо называется п-й
гармоникой функции f(t).
Так как
sin (ncot + (рп) = sin ncot cos cpn + cos ncot sin cpn,
то написанный ряд можно представить еще так:
/(0 = ах sin cot + а2 sin 2cot + ап sin ncot + . . . 4-
4- 60 &j cos cot 4- b2 cos 2cot 4- . . . 4- bn cos ncot 4- . . . (1.11)
Постоянный член 60 представляет собою «среднюю» высоту кривой
f(t) за время одного колебания. Для кривой, которая на протя-
жении одного периода отклоняется от нулевой линии на одина-
ковое расстояние в ту и другую сторону, член bQ равен нулю.
Амплитуды а1?. . ., ап,. . blf . bn,. . . могут быть определены
с помощью доказанных теорем о работе (см. стр. 31).
Чтобы убедиться в сказанном, предположим, что f(t) есть
сила, и положим далее, что эта сила, не являющаяся, вообще
говоря, гармонической, действует на точку, скорость которой
изменяется по гармоническому закону, будучи равной, например,
sin ncot. Представим теперь силу fit) как сумму всех членов соот-
ветствующего ряда Фурье и определим работу, совершаемую
каждой гармоникой отдельно. Все члены, входящие в разложение
силы, кроме ап sin ncot и bn cos ncot, имеют частоты, отличные
от частоты скорости sin ncot, а поэтому их работа за время одного
полного колебания равна нулю. Кроме того, член bn cos ncot
отличается по фазе от скорости на 90°, вследствие чего и его
работа обращается в нуль. Таким образом, вся работа силы
а) Следует заметить, что не всякая периодическая функция может
Сыть разложена в ряд Фурье, а лишь такая, которая удовлетворяет усло-
виям Дирихле, т. е. которая в рассматриваемом промежутке ограничена,
причем этот промежуток может быть разбит на конечное число частей, в
каждой из которых данная функция непрерывна и монотонна. (Прим,
не рев.)
Ден-Гартог • 2074
34 КИНЕМАТИКА КОЛЕБАНИЙ ГЛ. I
совершается лишь за счет члена ап sin not при скорости движения
sin not и равна пап • l/по за время одного колебания с часто-
той по. Что касается работы за время одного основного коле-
бания (которое в п раз больше предыдущего), то она, очевидно,
равна najo.
На основании сказанного амплитуда ап оказывается в о/п
раз больше работы, совершаемой всей негармонической силой
f(t) за время ее периода изменения при скорости точки приложения
sin not. Сказанное может быть выражено посредством фор-
мулы
2я
а
ап = ~ J f(t) sin notdt. (1.12 а)
о
Предполагая, что скорость изменяется по закону cos not
вместо sin not, и повторяя все приведенные рассуждения, при-
ходим к выражению коэффициента Ьп:
а
bn = J f(t) cos п о t dt. (1.12 b)
о
Соотношения между величинами ап и Ьп, с одной стороны, и вели-
чинами Ап и <рп, входящими в уравнение (1.10) с другой, находятся
на основании уравнений (1.6) (см. стр. 16)
4?, = а* + 1%,
•
Таким образом, работа, совершаемая негармонической силой
f(t) с частотой о на перемещении с гармонической скоростью,
имеющей частоту по, есть просто работа, совершаемая одной
только составляющей n-й гармоники силы, находящейся в одной
фазе со скоростью; работа же всех остальных гармоник силы
за время, равное ее полному периоду изменения, обращается
в нуль
С помощью формул (1.12) мы имеем возможность найти ап
и Ьп для некоторой заданной периодической кривой1). Та отрасль
математического анализа, которая занимается подобными зада-
чами, называется гармоническим анализом.
Пример 1. Рассмотрим «прямоугольную волну» — периодическую
кривую, составленную из неполных прямоугольников с чередующимися
положительными и отрицательными ординатами: f(t) == = const при
0< л- и f(t) = -Fo при л < ot < 2л.
1) См. оговорки в примечании на стр. 33. (Прим, перев.)
§ 1.7
НЕГАРМОНИЧЕСКОЕ ПЕРИОДИЧЕСКОЕ ДВИЖЕНИЕ
35
Коэффициенты Фурье находим на основании уравнений (1.12), а именно:
£2
пл
cos not -Ь
cos not
= — (— cos пэт 4- cos 0 4- cos 2пэт — cos пэт)
пэт
Для четных порядков п = 0, 2, 4, . . . все углы являются кратными 360°
или 2эт, а тогда четыре члена в скобках взаимно уничтожаются. Для нечет-
ных порядков п = 1, 3, 5, . . . мы имеем созпэт = —1, тогда как cos 0 =*
= cos 2пэт =4-1, вследствие чего величина выражения в скобках равна 4,
и поэтому ап = 4Р0/пэт (п — нечетное).
п 2л
tv fii
[ cos dt — Fo J cos dfj =
0 л
6)
ПЭТ
sin not
Fo
— (0 — 0 — 0 4- 0) == 0.
ПЭТ
Таким образом, разложение «прямоугольной волны» высотой Fo имеет
вид:
/(О = ~~ (sin ot 4- sin 3ot 4- g sin 5ot 4- . . . j.
Пример 2. На рис. 8.17 (стр. 470) кривая с показывает приближенно
силу сопротивления воздуха, испытываемую телом при гармоническом
движении Если на этом чертеже начало координат сместить влево на
четверть периода, то уравнение кривой сопротивления выразится так:
/(со/) = sin2 ot
при 0 < ot < эт, и
/(со/) = —sin2 со/
при эт < w t < 2эт Требуется найти амплитуды различных гармоник этой
кривой.
Решение. Анализируемая кривая изображает нечетную функцию,
которую и предстоит нам разложить на гармоники. Под нечетной функцией
понимают такую функцию, относительно которой выполняется условие
/( — со/) = —/(со/).
Поскольку синус является нечетной, косинус — четной функцией, разло-
жение нашей функции не может содержать косинусов. Вследствие этого
нее коэффициенты Ьп равны нулю. Это утверждение может быть проверено
3*
36 КИНЕМАТИКА КОЛЕБАНИЙ ГЛ.
также графическим путем с помощью формул (1.12), для которых выпол-
няется построение, аналогичное рис. 1.16, откуда становится ясным взаим-
ное уничтожение слагаемых. Так как ось кривой совпадает с осью времен
(средняя высота равна нулю), то имеем, кроме того, Ьо =* 0.
Для коэффициентов при синусах находим:
2л
<ъ
w г
ап = — I /(«О sinnw/oto =
п J
о
л 2л
= — s*n2 w* • sin nat ’ d(at) — j" sin2 at • sin nat • d(w£)j.
О я
Подынтегральные функции преобразуем по формулам на стр. 29:
sin2 at • sin nat = I---- cos 2ы/| sinnat —
12 2 )
i i л i , '
= — sin nat — — sm (n 4- 2) at —- — sin (n — 2) at.
2 4 4
Неопределенный интеграл от этого выражения имеет вид
F =---------L cos nat 4- ------ cos (n 4- 2) at 4-
2n 4 (n 4“ 2)
j-----!--- cos (n — 2) at.
4 (n - 2)
Вспоминая, что коэффициент an равен соответствующему определен-
ному интегралу, деленному на л-, и замечая, что F(2ar) = Z^(0), имеем
i 2
ап « - [Z(or) - F(0) — P(2or) 4- F(TT)] « -[F(") - Л0)] =
ЭТ ЗГ
2 |1 1 114 cos nit — 1
ar (cos nit 1) | 2n 4 (n 4- 2) 4 (n — 2) 1 n n (n2 — 4)
Легко видеть, что для четных значений п все ап равны нулю, вследствие
чего существуют лишь гармоники, соответствующие нечетным п. В частно-
сти, полагая п «= 1, находим для основной гармоники
8
аА = — = 0,85.,
3 аг
т. е. амплитуда основной гармоники составляет 85% от наибольшей орди-
наты самой кривой.
Ряд Фурье для исследуемой кривой имеет вид
1(at} -= 7Д [sin at — sin Zat — ~ sin 5at — -J- sin lat —
3or \ 5 35 63 )
Вычисление интегралов (1.12) может быть выполнено в точ-
ном виде лишь для очень немногочисленных видов функции f(t\
§ 1.7
НЕГАРМОНИЧЕСКОЕ ПЕРИОДИЧЕСКОЕ ДВИЖЕНИЕ
37
Когда /(0 является кривой, полученной путем записи действи-
тельного колебания или же взятой с индикаторной диаграммы,
мы не в состоянии даже указать для нее аналитическую форму.
Однако все же, располагая кривой, полученной таким образом,
мы можем найти значения соответствующих интегралов либо
графически, либо путем численного интегрирования, либо, на-
конец, с помощью прибора, называемого гармоническим анали-
затором.
Действие такого гармонического анализатора основано на
том же принципе, что и действие индикатора Уатта для паровой
Рис. 1.18. Гармонический анализатор —прибор,
работающий по тому же принципу, что и инди-
катор Уатта для паровой машины.
машины. Индикатор вычерчивает замкнутую кривую, ордината
каждой точки которой представляет собой давление пара (или
силу, приложенную к поршню), а абсцисса — перемещение поршня.
Площадь полученной замкнутой кривой выражает работу, совер-
шаемую силой, приложенной к поршню, за один оборот машины.
Но ведь формулы (1.12) показывают, что коэффициенты ап или
Ьп являются величинами, в о/п раз большими работы, совершае-
мой силой /(0 за один период на определенном перемещении, ско-
рость которого равняется sin not. Чтобы получить полное
соответствие между обоими случаями, заметим, что sin not
1
есть скорость перемещения-------cos not, вследствие чего ра-
венство (1.12 а) может быть написано в несколько измененном
виде, а именно:
ап = — J М d(cos not) = — ~ ф/Ш.
1десь символ ф указывает, что интегрирование производится
по всей замкнутой кривой, описываемой силой f(t) за один период.
Прибор схематически показан на рис. 1.18.
Выходом прибора является точка D, где укреплено перо,
описывающее кривую на куске бумаги, укрепленной на столике Е.
38
КИНЕМАТИКА КОЛЕБАНИЙ
ГЛ. I
По аналогии с индикатором Уатта вертикальное движение пера D
должно следовать за изменением силы /(£), тогда как горизон-
тальное движение — за скоростью cos ncot. Вертикальное движение
пера D достигается показанной связью с лекалом, изображающим
анализируемую кривую/(£)заодин период. Лекало А прикрепляется
к рейке, сцепленной с шестеренкой В, приводимой во вращение
посредством электромотора. Стержень С так установлен в направ-
ляющем приспособлении, что он может перемещаться лишь в
продольном направлении, прижимаясь слегка к лекалу посред-
ством пружины. Таким образом, вертикальное движение пера Z),
прикрепленного к стержню С, выражается функцией /(£). Столик Е
перемещается горизонтально и приводится в движение кулисой
Вольфа и зубчатым колесом, связанным соответственным пере-
даточным механизмом с колесом В таким образом, что столик Е
совершает п гармонических колебаний в то время, как лекало А
перемещается на полную длину диаграммы. К прибору прила-
гается ящик с набором запасных колес, чтобы можно было
получать, путем их замены, различные передаточные числа п
от 1 до 30.
Горизонтальное движение столика Е выражается функцией
sin ncot или cos ncot, в зависимости от того, как сцеплены зуб-
чатые колеса. Точка D описывает тогда на столике замкнутую
кривую, площадь которой равна ап или Ьп (по умножении, конечно,
на постоянный множитель 1/птт). Вместо того, чтобы в действи-
тельности вычерчивать указанную кривую, инструмент дает
возможность непосредственно находить ее площадь с помощью
присоединенного к нему планиметра, точка вращения которого
прикреплена к Е, а обводный штифт к D\ на этом планиметре,
которым снабжен анализатор, площадь может быть считана
непосредственно, без изображения самой кривой.
Гармонические анализаторы конструируются также и на
основе других принципов. Интересный оптический метод, основан-
ный на использовании звуковой записи кинофильмов, был изобре-
тен Уэнтом и конструктивно осуществлен Монтгомери в Теле-
фонной лаборатории Белла (Bell Telephone Laboratories).
Для практических целей вполне приемлемы имеющиеся элек-
трические гармонические анализаторы, дающие чрезвычайно бы-
стро значение полной амплитуды гармоники Ап = + Ъ2п [урав-
нения (1.10) и (1.11)], но не дающие никаких указаний на фазовые
углы <рп (или на отношения ап/Ьп в тех же уравнениях).
Они разработаны Западной электрической компанией (Western
Electric Company) для анализа звука или шума. Эти анализа-
торы требуют существования исходной кривой в виде закона из-
менения электрического напряжения, подобно тому, как это
имеет место в электрическом датчике при исследовании колеба-
ний (стр. 93) или в микрофоне. Это напряжение, после соответ-
§ 1.7 НЕГАРМОНИЧЕСКОЕ ПЕРИОДИЧЕСКОЕ ДВИЖЕНИЕ 30
ствующего усиления, поступает в электрическую цепь, известную
под названием «полосового фильтра частот». Фильтр гасит вУсе
частоты, за исключением тех, которые лежат в узкой полосе шири-
ною в пять колебаний в секунду. Полоса пропускания частот
б?“ТЬ назначенд где угодно в диапазоне от 10 до 10 000
ФупьрС1Н прпВ Секунду' Дл.я того чтобы проанализировать по методу
ФуР“ периодическое (установившееся) колебание или шум,
имеется небольшой мотор, который автоматически перемещает
"°” У "Р°ПУТ""Я теря мсь спектР' ПР" результат з™"
Штифтом на полоске провощенной бумаги. Это дает
°зм°жность в несколько минут получить амплитуды гармони-
ческих колебаний для частот, лежащих в интервале от Ю до
Ю 000 колебании в секунду. Запись сейчас же может быть считана
.ЛРУГ°И эле^РИческий анализатор, работающий почти на том
<^бтРйИН1ГИПе’ Н° ^графической регистрации, выпускается Все-
MaS ) Компанией Радио (General Radio Company, Cambridge
Задачи к главе I № 1—11.
ГЛАВА П
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
§ 2.1. Степени свободы
Механическая система обладает одной степенью свободы, если
ее геометрическое положение в какой-либо момент времени
вполне определяется только одним числом. Возьмем, например,
поршень, движущийся в цилиндре. Так как его положение во
всякий момент времени вполне определяется заданием расстояния
от дна цилиндра, то здесь мы имеем случай системы с одной сте-
пеньюсвободы. Другим примером может послужить коленчатый вал
в неподвижных подшипниках; в этом случае положение системы
вполне определяется углом между каким-нибудь кривошипом
и вертикальной плоскостью. Груз, подвешенный на пружине
таким образом, что направляющие позволяют ему перемещаться
лишь вверх и вниз по вертикали, представляет собою классиче-
ский пример колебательной системы с одной степенью свободы
(см. рис. 2.3 на стр. 43).
Вообще, если для определения положения механической систе-
мы требуется задать п чисел, то о такой системе говорят, что
она имеет п степеней свободы. Так, диск, свободно движущийся
в своей плоскости, имеет три степени свободы, характеризую-
щиеся перемещениями х и у центра тяжести диска и углом пово-
рота диска вокруг его центра тяжести. Цилиндр, катящийся
вниз по наклонной плоскости, имеет одну степень свободы.
Если же этот цилиндр может спускаться частью вследствие
качения, а частью вследствие скольжения, то он имеет две сте-
пени свободы, определяемые поступательным перемещением и
вращением.
Твердое тело, могущее свободно двигаться в пространстве,
имеет шесть степеней свободы: три, определяемых тремя поступа-
тельными перемещениями, и три, определяемых тремя враща-
тельными перемещениями. Следовательно, для определения его
положения требуется задать шесть чисел или шесть обобщенных
координат, которые в этом случае обычно обозначаются через
§ 2.1
СТЕПЕНИ СВОБОДЫ
41
х, у, z и <р, х1). Система, состоящая из двух твердых тел, соеди-
ненных между собою пружинами или какими-либо другими связя-
ми, причем так, что каждое тело может двигаться только вдоль
прямой, не имея при этом возможности вращаться, обладает
двумя степенями свободы (рис. 2.1), Заметим, что два числа,
определяющие положение такой системы, могут быть выбраны
достаточно произвольно. Например, мы можем обозначить
хх расстояние от первого тела до неподвижной точки О, а
х2 — расстояние от этой точки до второго тела. Тогда хг и х2
ются обобщенными координатами.
Можно выбрать в качестве одной
обобщенной координаты — назовем
ее ух — расстояние от точки О до
общего центра тяжести обоих тел,
а за другую координату — расстояние
между обоими телами: у2 = х2— хг.
Два числа х^ и х2 вполне определяют
положение системы, но ее положе-
ние могут определить и два числа ух
и у2. Надо заметить, что последний
выбор имеет в данном случае неко-
торое практическое преимущество,
так как обыкновенно нам не столь
интересно общее положение всей
через
через
явля-
системы в целом, как напряженное Рис. 2.1. Система с двумя сте-
состояние внутри этой системы. На- пенями свободы.
пряжение в пружине (рис. 2.1) вполне
определяется величиной y2i так что для вычисления напряжения
вовсе не требуется знать величину ух. Удачным выбором обобщен-
ных координат системы со многими степенями свободы можно
в значительной мере упростить расчеты.
Не следует думать, что система с одной степенью свободы
всегда очень проста. Так, например, двенадцатицилиндровый
двигатель внутреннего сгорания с жестким коленчатым валом
и жестко укрепленным блоком цилиндров имеет вместе со всеми
своими поршнями, шатунами, клапанами, кулачковым валом и
г. п. только одну степень свободы. Это объясняется тем обстоя-
тельством, что положение любой движущейся части двигателя
определяется всего лишь одним числом (выражающим, например,
угол поворота коленчатого вала). Однако, если блок цилиндров
подвешен на гибких рессорах и притом так, что он может сво-
бодно перемещаться в любом направлении (подобные случаи мы
г) Первые три из них определяют положение точки, фиксированной в
тимом теле, например центра тяжести: последние три являются углами
'Ойлера. (Прим, перев.)
42 ИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ ГЛ. II
имеем в большинстве современных автомобилей), то система
имеет семь степеней свободы, из которых шесть относятся к самому
блоку, как свободному твердому телу в пространстве, и одна —
к коленчатому валу, угол поворота которого является седьмой
обобщенной координатой.
В общем случае упругая система имеет бесконечное число
степеней свободы. Рассмотрим для примера упругую балку на
двух опорах. Подбирая соответствующую нагрузку, можно эту
балку изогнуть таким образом, что ее упругая линия будет иметь
любую заданную форму (рис. 2.2).Описание подобной кривой тре-
................ ,, ,..бует задания фукции 2/=/(я),
а? что равносильно заданию бес-
I......................х--конечного множества число-
У вых значений. В самом деле,
Рис. 2.2. Балка имеет бесконечное число ДДЯ каждой ТОЧКИ с абсцис-
степеней,свободы. сой х балки можно задать
величину прогиба у совер-
шенно независимо от положения остальных частиц балки
(конечно, в пределах прочности), вследствие чего определение
положения всей балки требует задания стольких значений у,
сколько точек расположено вдоль балки. Как и в случае, пред-
ставленном на рис. 2.1, функция у = f(x) не есть единственная
совокупность чисел, могущих быть взятыми для определения
положения. Другой возможный путь для определения изогнутой
оси балки заключается в установлении значений коэффициентов
Фурье ап и Ьп [уравнение (1.11), стр. 33], которых опять-таки
бесчисленное множество.
§ 2.2. Составление дифференциального уравнения колебаний
Положим, что некоторая масса т подвешена посредством
пружины, как это указано на рис. 2.3. Жесткость пружины
характеризуется числом k, являющимся «постоянной пружины»,
и называемым коэффициентом жесткости1). Последний определя-
ется выраженной в килограммах растягивающей силой, которую
надо приложить к пружине, чтобы удлинить ее на 1 см. Положим
х) К сожалению, в литературе до настоящего времени еще иет строго
установившегося наименования этого коэффициента, который называется
также восстанавливающим коэффициентом, коэффициентом упругости, а
в самом общем случае—квазиупругим коэффициентом. Не следует только
называть его просто «жесткостью», так как в сопротивлении материалов
понятие «жесткости» получило вполне определенный смысл, несколько
отличный от смысла коэффициента жесткости. Так, например, для случая
удлинения стержня длины I с площадью поперечного сечения 8 и модулем
упругости Е жесткость равна Е S, а коэффициент жесткости равен Е 8/1.
В связи с этим, заметим, что коэффициентом упругости называют также
обратную величину модуля упругости. (Прим, перев.)
§2.2 СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ КОЛЕБАНИЙ 43
с называется
Рис. 2.3. Основной тип си-
стемы с одной степенью
свободы.
далее, что между массой и жесткими стенками имеется масляное
или воздушное тормозящее приспособление (демпфер или аморти-
затор). Предполагается, что, пока груз находится в покое, на
него не действует никакая сила, но как скоро он приходит в
движение, сейчас же возникает сила сопротивления амортиза-
тора или «сила затухания», которая пропорциональна скорости
движения, т. е. равна сх или но направлена в сторону,
противоположную движению. Величина
фициентом вязкого сопротивления или
коэффициентом затухания1).
Сила затухания, действующая на ме-
ханическую систему, в действительности
далеко не всегда может быть пред-
ставлена столь просто, как это у нас
сейчас было, т. е. в виде выражения сх\
напротив того, зачастую встречаются
случаи значительно более сложные. Но
в таких случаях и математическая тео-
рия явления весьма усложняется (см., на-
пример, главу VIII на стр. 483 и 500), в то
время,как анализ вязкого сопротивления
сравнительно прост.
Пусть переменная внешняя сила
Fosin<Df, называемая возмущающей силой
и вызываемая каким-либо приспособле-
нием, в детали которого нам нет надобности входить, дейст-
вует на массу. Для наглядности мы можем вообразить, что
кто-нибудь то тянет за эту массу рукой, то отталкивает ее, дей-
ствуя попеременно в обоих направлениях.
Задача заключается в том, чтобы найти движение массы ш,
вызванное возмущающей силой. Иначе говоря, если обозначить
через х расстояние между каким-либо мгновенным положением
массы при ее движении и положением равновесия, мы должны
выразить х в функции времени. В сущности говоря, уравнение
движения, которое нам предстоит составить, есть не что иное,
как математическое выражение второго закона Ньютона, а
именно:
сила = масса X ускорение.
При этом мы условимся считать положительными
те силы,
1) Обычно за коэффициент затухания принимают величину cj2in. Но
гак как в дальнейшем эта величина cfcm не встречается, то мы сохраним
•Ц‘рминологию автора, т. е. коэффициентом затухания будем называть
величину, указанную в тексте. (Прим, перев.)
44
СИСТЕМЫ с ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. п
которые направлены вниз, и, наоборот, отрицательными —
силы, направленные вверх.
Полагая, что пружина подчиняется закону Гука, мы можем
выразить упругую силу пружины в виде кх, где х — удлинение,
к — величина упругой силы при растяжении пружины на единицу
длины. Если х выражено в сантиметрах, кх — в килограммах,
то к будет выражено в кГ/см. Если растяжение х равно нулю,
то сила кх тоже равна нулю.
Знак силы упругости пружины должен быть отрицательным,
потому что пружина тянет подвешенную массу вверх при смещении
массы вниз, т. е. эта сила отрицательна при положительном х.
Поэтому сила пружины напишется в виде —кх.
Сила сопротивления, действующая на массу, также отрица-
тельна и равна — сх, поскольку она направлена против скорости
х, действуя, следовательно, вверх (в отрицательном направлении)
при х, направленном вниз (в положительном направлении).
Таким образом, в результате совокупного действия на массу трех
указанных сил мы получаем силу, направленную вниз и равную
— кх — сх 4- Ро sin ot.
Тогда по закону Ньютона имеем
т dt? = т$ = — — сх + PQ sin cot,
или
тх + сх + кх = Р$ sin ot. (2.1
Мы получили очень важное уравнение1), которое называется
дифференциальным уравнением движения системы с одной степенью
свободы. Четыре члена уравнения (2.1) выражают собой: силу
инерции, силу затухания, силу упругости пружины и внешнюю
возмущающую силу.
Прежде чем приступать к определению х из уравнения (2.1),
т. е. прежде чем интегрировать это дифференциальное уравне-
ние, полезно обратиться к рассмотрению некоторых других
задач, которые приводят к такому же уравнению.
1) При выводе не принималось во внимание действие силы тяжести.
Но ведь отклонение х отсчитывалось от «положения равновесия», т. е.
от того положения, в котором сила mg, направленная вниз, уравновеши-
вается силой пружины /сб, направленной вверх (где 6 — статическое удли-
нение пружины под действием груза). Конечно, можно отсчитывать ху
также от положения груза при нерастянутой пружине, так что хг = х + 6.
Тогда в уравнении (2.1) надо заменить х через х^ и прибавить справа сил7
mg, а это приведет нас опять к тому же уравнению (2.1).
§ 2.3
ДРУГИЕ СЛУЧАИ
45
§ 2.3. Другие случаи
Рис 2.4. Крутиль-
ные колебания си-
стемы с одной сте-
пенью свободы.
На рис. 2.4 изображен диск с моментом инерции 2, прикреп-
ленный к стержню с коэффициентом жесткости к, под которым
мы подразумеваем величину крутящего момента, выраженного
в килограмма-сантиметрах, необходимого для закручивания диска
на угол в один радиан1}. Рассмотрим крутильные колебания
диска под действием приложенного извне крутящего момента
То sin ot. Прежде всего мы видим, что в нашей задаче мы опять
имеем дело с системой с одной степенью свободы, так как смещение
диска из его положения равновесия при кру-
чении может быть выражено посредством
только одной величины, а именно угла <р.
На основании известного закона Ньютона мы
можем утверждать, что для вращающегося
твердого тела
крутящий момент =
= моменту инерции х угловое ускорение =
Аналогично предыдущей задаче здесь имеют
место 'Три крутящих момента, действующих
на диск: момент сил упругости, момент сил
сопротивления, вызывающий затухание, и воз-
мущающий момент, приложенный извне. Мо-
мент сил упругости равен —кер, где <р измеряется в радианах.
Отрицательный знак здесь очевиден по той же причине, что
и в предыдущем случае для силы упругости пружины, где мы
имели —кх. Момент сил сопротивления или сил затухания,
вызываемый не показанным на чертеже приспособлением,
равен —с<р. В данной задаче «коэффициент затухания»
с есть величина крутящего момента, действующего на диск, при
угловой скорости последнего в один радиан в секунду. Наконец,
внешний крутящий момент равен TQ sin ot. Следовательно,
на основании закона Ньютона, мы приходим к дифференциальному
уравнению
/ф 4- сер 4- k(p = То sin ot, (2.2)
имеющему тот же вид, что и уравнение (2.1).
2) У автора эта величина названа жесткостью на кручение (torsional
stiffness), но обычно жесткостью на кручение называют величину Glp, где
G есть модуль сдвига, 1р — полярный момент инерции стержня. Из формулы
для угла закручивания <р = MyGIp, где М есть крутящий момент, I —
длина стержня, видно, что k = Glpll. Сравнить с примечанием на стр. 42.
(Прим, перев.)
46
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
В качестве третьего примера рассмотрим электрический
контур с генератором переменного тока, конденсатором О,сопро-
тивлением Ли индуктивностью Z, которые включены все последо-
вательно. Вместо закона Ньютона мы воспользуемся здесь соот-
ношением, выражающим, что во всякий момент времени электро-
двужущая сила генератора е = Е0 sin cot равна сумме трех
напряжений на концах С, R и L. Пусть г есть мгновенное значение
силы тока в цепи, направление которого указано на рис. 2.5.
Согласно закону Ома напряжение на концах проводника с сопро-
тивлением равно
F3 - V4 = Ri.
Напряжение на концах про-
водника с индуктивностью
равно
е2-г3 = л£.
П- II ? ----
'с d Ъ
tz
Рис. 2.5. Колебания в электрическом
контуре с одной степенью свободы.
Что касается конденсатора, то для него имеет место соотношение
где ^есть величина заряда,О — электроемкость и V — потенциал.
Заряд Сможет быть выражен через г следующим образом. Если ток
силы г протекает в течение элемента времени dt, то он переносит
за это время через поперечное сечение контура количество электри-
чества, равное idt. Но так как через конденсатор ток не те-
чет, то должен увеличиться заряд конденсатора и притом на
величину
dQ = idt 1)>
откуда
или
Чтобы показать, что такой электрический ток ведет себя
подобно колеблющейся массе, изображенной на рис. 2.3, удобнее
оперировать не с силой тока г, хотя эта величина и является
1) К несчастью, буква г у же сама по себе имеет точку сверху. Во избежа-
ние нед°Разумений принято считать, что i обозначает силу тока, и для
произвоДной от i по времени принято пользоваться обозначением Лейб-
di
ница
§ 2.3
ДРУГИЕ СЛУЧАИ
47
более привычной для нас, а с величиной заряда Q. Падение потен-
циала на отдельных участках контура представится так:
Г,-Г, = £g
Р„- Г4 = Ri = R^ =RQ.
ClL
Так как сумма этих трех падений потенциала должна быть равна
электродвижущей силе генератора, то отсюда следует дифферен-
циальное уравнение
LQ 4- RQ + pQ = sin cot, (2.3)
и
имеющее опять такой же точно вид, как и уравнение (2.1).
Таким образом, все рассмотренные до сих пор случаи коле-
баний продольных, крутильных и электрических приводят к
одному и тому же дифференциальному уравнению. Переход от
одного случая к другому можно осуществить непосредственно^
воспользовавшись приведенной ниже таблицей.
Сравнение эквивалентных величии
Продольные колебания Крутильные колебания Электрические колебания
Масса т Коэффици- ент жест- кости ... к Коэффици- ент зату- хай ия ... с Возмущаю- щая сила. Pq sin w Перемеще- ние х Скорость .. X = V Момен т^инер- ции 1 Коэффици- ент жест- кости при кручеиии к Коэффици- ент зату- хания при кручении с Возмуща ю- щий мо- мент Tq sin at Угловое пе- ремещен ие у Угловая ско- рость .... ф = W Индуктив- ность ... L 1 : электро- . емкость — С Омическое сопротив- ление ... R Электродви- жущая сила .... Ео sin at Заряд кон- денсатора Q Сила тока Q ==
Все утверждения из области механики имеют здесь свои
аналоги из области электричества и обратно. Например, уста-
новлено, что «напряжение на концах проводника с самоиндук-
48
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. П
цией L равно На языке механики это будет гласить: «сила,
действующая на массу т, равна m-j-». Возьмем положение из
Рис. 2.6. Крутильные колебания
двух дисков на упругом валу.
механики: «энергия, накопляющаяся в массе, равна 1/2 тЛ.
Аналогом из учения об электричестве будет положение: «энергия,
накопляющаяся в проводнике с самоиндукцией, равна 1/2 Li2».
Посредством уравнения (2.1) решаются задачи, относящиеся
не только к рассмотренным трем случаям. Любая система, обла-
дающая инерцией, упругостью и затуханием, пропорциональным
скорости, перемещение которой может быть вполне охарактери-
зовано только одной величиной, относится к этому же классу.
Так, например, рассмотрим два
диска с моментами инерции и
/2, соединенных между собой стер-
жнем с коэффициентом жесткости
при кручении, равным ккГсм!рад
(рис. 2.6). Пусть на первый диск
действует возмущающи'й момент
Tosin&)Z, причем имеет место
затухание,пропорциональное угло-
вой скорости закручивания стер-
жня с коэффициентом пропор-
циональности с. Спрашивается,
каково будет движение.
В нашу систему входят два диска, положение каждого из
которых, определяемое углом поворота, не зависит от положения
другого вследствие возможности закручивания стержня. Казалось
бы, что здесь мы имеем систему с двумя степенями свободы. Одна-
ко, что здесь наиболее может интересовать инженера, так это
угол закручивания стержня, и движение можно описать посред-
ством только одной этой величины. Пусть будут и <р2 — угловые
перемещения каждого из двух дисков; тогда разность — <р2
определит угол закручивания стержня, к — <р2) есть крутящий
момент стержня и с (ф2 — ф2) — момент сил затухания. Применяя
закон Ньютона к первому диску, имеем:
То sin cot = Zj <рг 4- к (<рг — <р2) 4- с (<Pi — Фз)«
Аналогично для второго диска получим
О = /2ф2 + к (<р2 — д^) 4- с (ф2 — (ft).
Разделим первое уравнение на llf а второе — на Z2 и вычтем одно
из другого
Тц sin cot = (pj — ф2) 4- I ~ 4- -~j (д?! — ср2) + 4- (Ф1 — Фг)-
§ 2.3
ДРУГИЕ СЛУЧАИ
49
Введем, наконец, угол закручивания
— <Р2 = у
и умножим написанное сейчас уравнение на дробь 1Т Z2/(A + Z2);
тогда мы придем к уравнению
гр + су + ку = т2^т- Sin cot, (2.4)
•*1 Т 1 2 21 т 7 2
имеющему опять такой же вид, как и уравнение (2.1). Конечно,
Рис. 2.7. Зубчатая передача, при-
водимая к системе, изображенной
на рис. 2.6.
решение этого уравнения укажет нам лишь на закручивание
стержня или на относительное
движение обоих дисков относи-
тельно друг друга, но при этом
мы совершенно не будем знать,
как движется каждый диск,
взятый в отдельности.
Видоизменение схемы на
рис. 2.6 представляет собой
схема на рис. 2.7, на которой
изображена зубчатая передача.
Положим, что моменты инерции
дисков соответственно равны
и Z2, а зубчатые колеса G и Р
инерцией не обладают вовсе.
Положим далее, что зубцы колес
жестки, так что гибкость си-
стемы, работающей на кру-
чение, имеет место лишь вследствие гибкости валов, коэф-
фициенты жесткости которых обозначим через кх и fc2. Переда-
точное число пусть будет п.
Дифференциальное уравнение для системы, изображенной на
рис. 2.7? может быть получено непосредственно из закона Нью-
тона, но мы предположим, что эту систему мы привели к системе на
рис. 2.6 путем отбрасывания зубчатых колес и замены fc2, Z2 и у
другими, «эквивалентными величинами», после чего уже можно
применить уравнение (2.4).
На рис. 2.6 коэффициент к может быть определен экспери-
ментально, для чего диск Z2 надо зажать, а к диску Ц приложить
постоянный крутящий момент То. Этот последний вызовет пово-
рот диска 1г на некоторый угол и тогда
Фо
Мы можем повторить этот опыт и для системы на рис. 2.7,
зажав диск Z2 и приложив крутящий момент То к диску Zv Благо-
даря зубчатой передаче крутящий момент на валу к2 равен
4 Ден-Гартог • 2047
50
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ II
вследствие чего угол закручивания этого вала равен Т^/пк*
Так как Z2 зажато, то этот угол будет углом поворота также
шестерни Р, а угол поворота колеса Одолжен быть в п раз меньше,
а именно Т^пгк2. Прибавляя сюда еще угол закручивания T0/fcj
вала кг, мы получим полное угловое перемещение диска /Р Таким
образом, мы приходим к уравнению, определяющему эквивалент-
ное значение к\
1 = *- = 1 + 1
к То кг п2 к2 '
Рассмотрим теперь моменты инерции.. Момент инерции Z2
на рис. 2.6 может быть определен посредством следующего опыта.
Сообщим диску (или всему валу к) постоянное угловое ускорение
а. Тогда в сечении А на вал будет действовать справа крутящий
момент То = a Z2. Следовательно, обратно, 12 = Т^а. Повторим
этот же опыт и с механизмом, изображенным на рис. 2.7. Угловое
ускорение а вала кг и колеса G определяет ускорение па вала к2.
Отсюда крутящий момент для к2 получается равным- па12. Но
это есть также крутящий момент для шестерни Р. Для колеса G
он будет уже в п раз больше, вследствие чего крутящий момент
в сечении А оказывается равным n2aZ2, а тогда эквивалентом
величины 12 в системе без зубчатой передачи будет величина n2Z2.
Таким образом, вообще система, включающая в себя зубчатые
передачи, подобно показанной на рис. 2.7, может быть приведена
к эквивалентной системе без зубчатых передач (рис. 2.6). если
воспользоваться следующим правилом.
Всю систему расчленить па отдельные части, каждая из кото-
рых имеет определенную угловую скорость, общую для всех своих
деталей (на рис. 2.7 таких частей две, но вообще их может быть
и больше). Принять одну из этих частей за основную и установить
передаточные числа п для всех прочих частей, где п представляет
собою отношение угловой скорости взятой части к угловой ско-
рости основной части (n > 1 для скоростей, больших основной
скорости; для основной системы п равно единице). После этого
удалить все зубчатые передачи и умножить на п2 все коэффициенты
жесткости к и все моменты инерции Z. Тогда дифференциальное
уравнение для полученной упрощенной системы без передач
будет такое же, как и для первоначальной системы с передачами.
Рассмотрим, наконец, последний пример, который во многих
отношениях напоминает собою первый, но в то же время от него
и отличается. Именно, предположим, что вместо силы Z% sin art,
действующей на массу на рис. 2.3, мы имеем дело с подвижным
верхним концом пружины или с подвижным местом прикрепления
А, которое вынуждено двигаться вверх и вниз с амплитудой а,
причем движение точки А определяется выражением a0 sin cot.
Покажем, что такое движение верхнего конца пружины вполне
$ 2.3
ДРУГИЕ СЛУЧАИ
51
эквивалентно действию возмущающей силы на подвешенную
массу.
Обозначим, как и прежде, буквой х вертикальное перемеще-
ние массы по направлению вниз; тогда вследствие перемещения
верхнего конца пружины на величину aosin at удлинение пружи-
ны в какой-либо момент времени будет х — aosinctf. Сила упру-
гости пружины должна быть равна —к (х— aosincoi), и анало-
гично сила затухания будет —с (х — а0 a cos cot). По закону
Ньютона имеем
тх + к (х — а0 sin at) + с (х — аоа cos at) = О,
или
тх + сх + кх = kaQ sin at + са0 a cos at.
Согласно уравнению. (1.6) (стр. 16) сумма двух отклонений при
колебаниях по законам синуса и косинуса одинаковой частоты
является опять гармонической функцией, вследствие чего мы
можем написать
тх + сх + кх = У(£а0)2 + (са0аъ)2 sin (at + <р). (2.5)
Следовательно, движение верхнего конца пружины с ампли-
тудой эквивалентно действию на массу переменной силы с ампли-
тудой, равной |/(fca0)2 + (са0а)2. •
Здесь выражения ка0 и caQa представляют собой наиболь-
шие значения силы упругости и силы затухания, тогда как весь
радикал есть наибольшее значение полной силы при зажатой
массе, когда движение, определяемое изменением координаты ж,
предотвращено.
Пример. Найти относительное движение у массы относительно места
закрепления пружины А на рис. 2.3, если PQ = 0 и если место прикрепле-
ния совершает гармоническое движение вверх и вниз, т. е.
у = х — а0 sin cot.
Решение. Дифференцированием находим
х — у + а0 sin al,
х = у аоы cos cot.
№ = у — а0ю2 sin
Подставляя найденные значения в уравнение (2.5), имеем
m?/ — ma0<o2 sin wZ + су + caow cos cot 4- ky + kab sin ut =
= ka0 sin cot •+ caow cos cot,
или
my + СУ + ky = ?na0 w2 sin wi. (2.6)
Таким образом, движение массы относительно перемещающейся точки
подвеса происходит так же, как и абсолютное движение массы при неподвиж-
ном месте закрепления пружины, когда на массу, действует гармоническая
4*
52
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. 11
сила с амплитудой Правая часть уравнения (2.6) представляет
собою силу инерции массы в предположении, что эта масса колеблется с
амплитудой а0, следовательно, на этот член мы можем смотреть так же,
как на силу, приложенную к верхнему концу пружины, если бы последняя
была вполне жесткой, т. е. не допускались бы перемощения, определяемые
величиной г/.
§ 2.4, Свободные колебания без затухания
Прежде чем искать решение уравнения (2.1), написанного
в общем виде, полезно рассмотреть некоторые частные случаи,
имеющие важное значение. Так, например, если отсутствует
возмущающая сила Fosin0tf, а также нет затухания (с = 0),
то уравнение (2.1) приводится к виду
тх 4- кх = 0 (2.7)
или
Этот результат можно выразить словами: перемещение х
есть такая функция времени, которая после двукратного дифферен-
цирования по времени превращается опять в ту же функцию,
умноженную на постоянную отрицательную величину. Даже не
зная теории дифференциальных уравнений, мы можем припом-
нить, что подобные функции существуют, именно таковыми
оказываются синус и косинус. Простым подбором мы убеждаемся,
что как sin ^k/mt, так и cos f к/m t действительно являются реше-
ниями уравнения (2.7). Наиболее же общий вид, в котором может
быть написано решение этого уравнения, есть
х = Сл sin ]/— t + С2 cos ][t, (2.8)
1 t т й f т
где Cj и С2 - произвольные постоянные. Что выражение (2.8)
является решением уравнения (2.7), легко может быть проверено
путем двукратного дифференцирования этого выражения по
ypaRv-d и подстановки его в уравнение (2.7); то, что уравнение
(2.7) не имеет других решений, кроме (2.8), здесь нет надобности
доказывать, и это положение мы можем просто принять как
справедливое.
Постараемся теперь дать выражению (2.8) физическую интер-
претацию. Прежде всего мы видим, что результат в таком виде
является крайне неопределенным, так как постоянные Сг и С2
могул принимать любые значения, какие только нам будет
желательно им дать. Однако так задача никогда не ставится.
Дело в том, что уравнение (2.8) выражает собою все движения,
которые способна совершать система, состоящая из груза и пру-
§ 2.4 СВОБОДНЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ 53
жины. Среди прочих отметим случай, когда = С2 = 0. Тогда
х = 0, и это означает, что подвешенный груз неизменно остается
в покое.
Теперь более конкретизируем нашу задачу, положив, что
груз выведен из положения равновесия в положение х — х0
и отпущен без начальной скорости. Отсчитывая время от того
момента, когда мы предоставили груз самому себе, мы имеем
два условия:
если t = 0, то х = х0, и х = 0.
Подставляя первое условие в уравнение (2.8), получаем
= Ci • 0 + О2 • 1,
или
= Xq.
Для того чтобы воспользоваться вторым условием, мы долж-
ны продифференцировать один раз уравнение (2.8), после чего
находим
о=с’ 1 -^-0,о-
г тг \ т
или
Сг = 0.
Подстановка обоих результатов в уравнение (2.8) приводит
нас к окончательному решению для данного частного случая в
виде
У Тс
— I- (2.8а)
Написанное уравнение выражает незатухающие колебания,
причем одно полное колебание совершается в течение такого
промежутка времени, когда величина \k/mt изменяется на 360°,
или, в радианах, на 2л (рис. 2.8). Обозначая время одного
колебания или период буквой Т, мы имеем
I/- Т =
у m
ИЛИ
Т = 2 л . (2.9)
Величину Ук/т принято обозначать через 0С и называть
круговой, или угловой, или циклической частотой собственных
колебаний. Эта величина
][ к
/ — =
\ т с
54
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. п
представляет собою угловую скорость вращающегося вектора,
изображающего колебательное движение (см. стр. 14).
Величина /с, обратная Т, т. е.
1 1 ][ к wc
Т 2л \ m 2л ’
(2.10)
называется частотой собственных колебаний и измеряется числом
колебаний в секунду. Отсюда, между прочим, следует, что если
массу т заменить, например, массой, в два раза большей, чем
предыдущая, то колебания будут совершаться в /2 раз медленнее,
чем прежде. Подобным же образом мы получим колебания в У 2
Рис. 2.8. Незатухающие колебания, начинающиеся от не-
которого начального отклонения.
раз более медленные при замене данной пружины другой пружи-
ной, более слабой, чем предыдущая, в два раза. Заметим, наконец,
что по причине отсутствия возмущающей силы Fosin cot рассмот-
ренные колебания носят название свободных колебаний.
Если мы будем исходить из предположения, что колебания
происходят по гармоническому закону, то частоту колебаний
очень легко вычислить на основании рассмотрения энергии систе-
мы. В середине полного размаха масса обладает значительной
кинетической энергией, в то время как в каждом из крайних
положений эта масса па один момент останавливается, совершенно
лишаясь вследствие этого кинетической энергии. Но в этих же
положениях пружина оказывается соответственно наиболее рас-
тянутой или наиболее сжатой, накопляя в себе упругую энер-
гию, или энергию деформации. В произвольном промежуточном
положении, между средним и крайним, мы имеем дело как с энер-
гией деформации, так и с кинетической энергией, сумма которых
остается постоянной, поскольку внешние силы в нашей системе
работы не совершают. Следовательно, кинетическая энергия в
среднем положении груза должна быть равна энергии дефор-
мации в крайнем положении.
§ 2.4 СВОБОДНЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ 55
Обратимся теперь к вычислению той и другой энергии. Так
как сила упругости пружины есть кх, то работа, совершаемая
этой силой на элементарном перемещении dx, равна kxdx. Потен-
циальная энергия или энергия деформации пружины при ее растя-
жении на величину х должна быть равна
J кх dx — g кх-.
о
Кинетическая энергия есть V2 mv2. Предполагая, что движение
происходит по закону
X = х0 sin G)t,
мы имеем
V = XgG) cos cot.
Потенциальная энергия в крайнем положении равна 1/2 кх%,
в то время как кинетическая энергия в нейтральном, т. е. среднем
положении, где скорость наибольшая, равна
2 ^Wmax = 2
Тогда
1 кх2 = 2
откуда следует, что величина со2 = к/т не зависит от амплитуды
Яо’ Этот «энергетический метод» вычисления частоты имеет
очень большое значение. В главах IV и VI нам придется иметь
дело с более сложными системами, и там мы увидим, что определе-
ние- частоты из дифференциального уравнения зачастую бывает
столь сложным, что практически оно оказывается просто невы-
полнимым. Вот в таких-то случаях нас и ведет к цели обобщенный
энергетический метод, известный под названием метода Рэлея
(см. стр. 195—214).
Формула (oc^klm может быть написана также и в несколько
ином виде. Мы знаем, что масса т имеет вес, равный тд, и что
удлинение пружины под действием этого веса равно тд/к. По-
следняя величина называется статическим удлинением пружины;
обозначая ее буквой 6СТ, имеем
УСТ к ’
откуда
к _ д
772 ^СТ
56
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
или
(2.11)
Если 6СТ выражено в см, д = 981 см!сек\ то для
имеем выражение
, /9811ГТ с 17Т 4
/с = Ч— / z- = 5 /«- колеб/сек
^71 у ^ст I орт
ИЛИ
частоты /с
/с = 300 1/ колеб/мин.
I' ОС7
(2.11 а)
Это соотношение, весьма полезное для быстрого определения
Рис. 2.9. Кривая, представляющая урав-
нение (2.11а) для собственной частоты
незатухающей системы с одной сте-
пенью свободы.
частот или критических ско-
ростей, представлено графи-
чески на рис. 2.9.
§ 2.5. Примеры
Рассмотрим несколько чис-
ловых примеров на прило-
жение основной формулы
(2.10).
1. Пусть имеем стальную
балку поперечного сечения
4X2 см2, защемленную одним
концом и несущую груз 30 кГ
на другом (рис. 2.10). Требу-
ется определить:
а) частоту колебаний балки при расстоянии между грузом
и местом заделки, равным 100 см\
б) процентное изменение частоты при укорочении балки на 2 см.
Решение, а) Находим собственный вес балки: 4x2x100x0,00785^
ра 6,28 кГ. Можно считать, что частицы балки, лежащие вблизи
груза в 30 кГ, колеблются с той же
самой амплитудой, что и груз, тогда
как частицы, находящиеся около за-
деланного конца, почти не совершают
колебаний. Это обстоятельство учиты-
вается путем прибавления к весу коле-
блющегося груза некоторой части веса
самой балки. На стр. 214 показыва-
ется, что такая прибавка прибли-
зительно равняется одной четверти
Рис. 2.10. Балка, заделанная
одним концом в стену и несу-
щая груз на другом конце.
масса т в уравнении (2.10) оказывается равной
веса балки. Таким образом,
31,57
Q
31,57
981
кГсм~1сек2.
§ 2.5
ПРИМЕРЫ
57
Сила Р на конце балки вызывает прогиб
л - р/3
0 “ SEI *
Постоянная fc, согласно определению, будет
Р __ SEI
Момент инерции поперечного сечения в нашем случае равен
1 = 1 №3 = = 10,67 см*
LZ о
(или же он равен = 2,67 см*, что зависит от того, происходят
о
ли колебания балки в плоскости ее наибольшей или наимень-
шей жесткости). Круговая частота получается
равной
1/Т
= / —
с у т
3 • 2 • 10<5 • 32.981 ... ,
---------------— 44 4 сек~ .
3-1003 ‘31,57 ’ ’
откуда частота
f —
с ~ 2л
= 7,05 7 колеб/сек.
В случае колебаний в плоскости наимень-
шей жесткости I = 2,67 см*, и частота /с де-
лается равной половине своего предыдущего
значения, т. е. 3,5 колеб/сек.
б) На вопрос, касающийся изменения ча-
стоты вследствие изменения длины балки,
можно ответить следующим образом. По-
стоянная к обратно пропорциональна величине
1?\ следовательно, частота прямо пропорцио-
нальна величине Z-8/*. Отсюда видно, что при
укорочении балки на 1% ее длины частота
возрастает на 1,5°/0. Тогда, укорачивая балку
лучим увеличение частоты на 3%.
Рис 2.11. Колеба-
ния столба жид-
кости в U-образ-
ной трубке.
на 2 см, мы по-
2. В качестве второго примера рассмотрим U-образную труб-
ку, наполненную водой (рис. 2.11). Пусть вся длина водяного
столба равна I, поперечное сечение трубки равно S и масса,
приходящаяся на 1 см3 (т. е. плотность), равна Если
вода совершает колебательные движения, то в указанном дви-
жении принимает участие масса, равная m^Sl. В этой задаче
«пружина» в прямом смысле этого слова отсутствует, но зато
роль восстанавливающей силы играет сила тяжести, которая
58
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
всегда стремится возвратить уровень воды в положение
равновесия. Таким образом, действие пружины заменяется
действием веса воды, причем квазиупругим коэффициентом1),
согласно определению, должна быть сила, отнесенная к
единице отклонения. Пусть уровень воды в одном колене
трубки поднялся на 1 см, тогда уровень в другом колене должен
опуститься на 1 см. Это приводит к появлению неуравновешенного
веса водяного столбика в 2 см высотою, а тогда соответственная
сила 2тх8д и будет квазиупругой постоянной. Таким образом,
Рис. 2.12. Три системы, включаю-
щие в себя различные комбинации
пружин, эквивалентные системе
на рис. 2.8. В системах (а) и (б)
пружины включены «параллель-
но», в системе (в) — «последова-
тельно».
мы приходим к круговой частоте
][ к ][2д
Ос = / — = \ -Г .
с у т у I
3. Рассмотрим теперь системы,
изображенные на рис. 2.12, где
масса т подвешена посредством
двух пружин кх и к2 тремя раз-
личными способами. Случаи, изо-
браженные на рис. 2.12,а и
2.12,6 с динамической точки
зрения идентичны, поскольку от-
клонение груза на 1 см вниз в
обоих случаях влечет за собою
появление одной и той же силы,
равной + к^кГ и направленной
вверх. Следовательно, круговая
или циклическая частота соб-
ственных колебаний для таких систем есть
1/ fci +
у т
Что касается рис. 2.12, в, то здесь мы имеем дело с системой,
принципиально отличной от двух предыдущих. В самом деле,
потянем подвешенную массу вниз с силой в 1 кГ. Эта сила пере-
дастся вся обеим пружинам, соответственные удлинения которых
будут 1/йхи \/к2, вследствие чего полное удлинение их окажется
равным l/&i 4- 1/&2- Но ведь по определению это есть не что иное,
как \/к, т. е. обратная величина приведенного коэффициента же-
сткости обеих пружин. Отсюда
*) Здесь название «коэффициент жесткости» следует признать уже
неудачным, если только не понимать его условно. (Прим, перев.)
§ 2.5
ПРИМЕРЫ
59
Таким образом мы приходим к следующему правилу: приведен-
ный коэффициент жесткости нескольких пружин при их «парал-
лельном» включении равен
к = 2 kn.
Если же п пружин включены «последовательно», то приведенный
коэффициент жесткости находится из соотношения
к — кп '
Например, если данную нам винтовую пружину с коэффици-
ентом жесткости к разрежем на две равные части, то жесткость
каждой из них будет характеризоваться коэффициентом жестко-
сти 2к (т. е. потребуется вдвое большая нагрузка для удлинения
половины пружины на такую
же вел ич ину, на ка кую
удлиняется целая пружина).
Располагая эти две полу-
пружины последовательно,
мы'получим
Рис. 2.13. Пружина к эквивалентна не-
которой фиктивной пружине жесткости
к
, помещенной в месте прикреп-
что и следовало ожидать.
Интересно отметить, что
выведенное правило дляопре- ления массы т.
деления квазиупругих коэф-
фициентов сложных систем такое же, как и то, которым поль-
зуются в электротехнике при определении полного сопротивления
проводников, включенных в цепь последовательно или параллельно.
4. Рассмотрим, наконец, последний пример, для которого
имеем схему, изображенную на рис. 2.13. Пусть невесомый и
несгибаемый брус шарнирно укреплен одним концом, а на другом
несет груз массы т. На расстоянии а от шарнира имеется пружина,
жесткость которой характеризуется коэффициентом жесткости
к. Требуется определить частоту собственных колебаний этой
системы.
Допустим, что рассматриваемые колебания столь малы, что
движение груза с достаточной степенью точности можно считать
происходящим лишь по вертикали вверх и вниз. При составлении
дифференциального уравнения движения (стр. 44) мы прирав-
нивали силу упругости пружины, действующую на массу, вели-
чине тх. В нашем случае естественно задать вопрос: какую
силу надо приложить к массе, чтобы отклонить ее на 1 см? Пусть
F будет искомая сила. Согласно условию статического равновесия
сила упругости пружины должна быть в этом случае равна (l/a) F.
60
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. П
Далее, так как отклонение массы равно 1 см, то изменение длины
пружины будет уже a/Z см, а отсюда следует, что сила упругости
пружины должна равняться у к. Таким образом, приходим
к уравнению
- F= у к,
а I
откуда
* = (тр-
Итак, действительный коэффициент жесткости для подвешен-
ного груза оказывается равным fc(a/Z)2. Отсюда видно, что дей-
ствие жесткости пружины очень быстро убывает при перемещении
ее влево. Круговая частота будет
.С помощью энергетического метода (стр. 55) расчет может
быть произведен следующим образом. Пусть движение массы
представляется уравнением
X = Хо sin CDct,
где ос есть пока неизвестная величина. Амплитуда колебаний
конца пружины тогда равна х^а/1, а потенциальная энергия
пружины l/2 кд2 = V2 fc(^oa/Z)2. Кинетическая энергия массы
равна х/2 m/v2 = х/2 тсо2х%. Приравнивая эти величины друг
другу и сокращая на амплитуду х0, находим
Некоторые задачи в конце книги, относящиеся к этой главе,
могут быть решены значительно проще с помощью энергетиче-
ского метода, чем путем непосредственного применения формулы,
заключающей в себе величину ^к/пь.
§ 2.6. Свободные колебания с затуханием, пропорциональным
скорости
Из предыдущего мы могли видеть, что свободные незатухающие
колебания должны продолжаться сколь угодно долго [см., напри-
мер, уравнения (2.7) и (2.8а)]. Однако совершенно очевидно, что
это никогда не может иметь места в действительности; все свобод-
ные колебания в конце концов прекращаются. Поэтому рассмот-
рим теперь уравнение (2.1) уже с членом сх, входящим в него
вследствие затухания, т. е.
т£ + сх + кх = 0. (2.12)
§ 2.6
СВОБОДНЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ
61
Член, определяющий силу затухания, обычно представляется
в виде выражения сх, поскольку оно достаточно хорошо отобра-
жает условия затухания вследствие вязкости масла в амортиза-
торе. Правда, существуют и другие случаи затухания, но они
будут рассмотрены ниже (стр. 484). Теперь уже решение урав-
нения (2.12) не может быть найдено столь же просто, как это
имело место для уравнения (2.7). Однако, если мы рассмотрим
функцию х = est, где t есть время, as - неизвестная пока постоян-
ная величина, то легко видеть, что после дифференцирования мы
получим опять ту же функцию, но только умноженную на эту
постоянную величину. Если эту функцию подставить в уравнение
(2.12), то мы можем последнее разделить на esi, придя, таким
образом, к алгебраическому уравнению вместо уравнения диффе-
ренциального, а это уже есть большое упрощение. Итак, мы поло-
жим, что est есть решение уравнения (2.12), которое теперь примет
вид
(ms2 + cs + k) est = 0. (2.13)
Если уравнение (2.13) может удовлетворяться, то предпо-
ложение, что х = est есть решение, является правильным. Но
уравнение (2.13) — квадратное относительно s, и поэтому суще-
ствуют два значения и s2> обращающие в нуль его левую часть,
а именно:
(2.14)
Вследствие этого выражения eSit и е5*1 оба являются решениями
уравнения (2.12). Что касается его наиболее общего решения, то
оно имеет вид
х = 4- С2
(2.15)
где Су и С2 — произвольные постоянные.
При изучении физического значения этого уравнения нужно
различать два случая в зависимости от того, будут ли выражения
для s, получаемые из равенства (2.14), действительными или
комплексными. Совершенно ясно, что при (с/2т)2> /с/т выра-
жение под знаком радикала положительно, а тогда оба значения
s действительны. Больше того, мы можем сразу сказать, что
они оба отрицательны, так как квадратный корень меньше, чем
с/2т. Таким образом, выражение (2.15) представляет собою
решение, изображающееся суммою ординат двух показательных
кривых, приближающихся к оси абсцисс, как указано на
рис. 2.14. В качестве примера на нем взят конкретный случай,
когда Су = \,С2 = —2, причем график, соответствующий сумме,
изображен пунктирной линией.
62
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
Без анализа частных случаев, для чего следовало бы опре-
делять соответственные значения постоянных (\ и С2, из рассмот-
рения графика видно, что, в сущности говоря, здесь нет никакого
колебания, а имеет место лишь медленное движение к положению
равновесия. Это происходит вследствие того, что при (с/2т)2 > к/т
Рис. 2.14. Движение системы с одной
степенью свободы при затухании,
большем критического ск.
затухание с очень велико. При
меньшихзначениях с, что именно
и встречается в большинстве
практических случаев, из урав-
нения (2.14) получаются для s
уже комплексные значения, а
тогда решение,написанное в виде
уравнения (2.15), становится
лишенным смысла. Затухание,
определяемое коэффициентом с,
при котором наступает указан-
ный переход, называется кри-
тическим затуханием, и соот-
ветствующий коэффициент обо-
значается тогда через ск:
ск = 2?п ]/ — =
к \ т
= 2 т к = 2 т сэс. (2.16)
В случае меньшего затухания формулу (2.14) лучше перепи-
сать в таком виде:
С ."]/"& ( С 1 “ С । . /П 1
= — — ? / — о 14’ (2.17)
1,12 2т — ’ у т \2т) 2т ~ f
где j = у—1. Хотя радикал здесь и действительный, но зато
оба значения s содержат /, а потому решение (2.15) уравнения
(2.12) содержит члены вида ejat, которые мы интерпретировали
посредством уравнения (1.8) на стр. 24.
С помощью равенств (2.17) и (1.8) решение уравнения (2.15)
примет вид
_________с
х = е ~т [Cj (cos qt + j sin qt) 4- Ca (cos qt — j sin qt)] =
e
[(C\ 4- C2) cos qt 4- 1 (CT — C2) sin qt].
(2.18)
Так как (\ и C2 были произвольными постоянными, то произ-
вольны также Сг + С2 и /(Ci —О2), которые мы для краткости
обозначим через С{ и С2. Таким образом, имеем
с
— -— I
х = е [GJ cos qt 4- С2 sin qt],
(2.19а)
S 2.6
СВОБОДНЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ
63
где
к с2
у т 4m2
(2.19b)
Это есть решение уравнения для случая, когда затухание
меньше критического, т. е. когда с < сК. Оно представляет собою
произведение двух сомножителей, первый из которых изобра-
жается нисходящей показательной кривой (рис. 2.14), а второй —
синусоидой. В окончательном результате мы получаем затуха-
ющую синусоиду, которая лежит между показательной кривой и
Рис. 2.15. Свободные колебания системы при затухании,
меньшем критического, определяемого уравнением (2.16).
ее зеркальным изображением (рис. 2.15). Чем меньше коэффици-
ент затухания с, тем более пологой будет показательная кривая
и тем большее число полных колебаний произойдет до их прек-
ращения.
Здесь представляет интерес быстрота такого затухания,
которая может быть достаточно просто определена на основании
рассмотрения двух последовательных максимумов кривой:
А и В, В и С и т. д. В течение промежутка времени между двумя
такими максимумами, т. е. в течение 2n/qceK, амплитуда колебания
(которая в моменты этих максимумов практически совпадает с
величиной e~(c/2m}t) уменьшается от e~(c/2m)t до e~(cl2m}(t+2nlq) Ч.
Как видим, последнее из этих двух выражений равно первому,
умноженному на постоянную величину e~nc/mq, которая, очевидно,
меньше единицы. Легко убедится, что этот множитель будет
одним и тем же для каждых двух последовательных максимумов,
независимо от амплитуды колебания и времени. Таким образом,
отношение двух последовательных наибольших отклонений
Ь Строго говоря, при этих выражениях должен быть еще постоянный
коэффициент, но так как в дальнейшем отыскивается их отношение, где
этот коэффициент сокращается, то в данном случае величина его не суще-
ственна и может быть положена равной единице. (Прим, перев.)
64
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
постоянно, или, иными словами, амплитуды убывают в геомет-
рической прогрессии.
Если хп есть п-е наибольшее отклонение тела при колебании, а хп+1 —
следующее наибольшее отклонение, то из предыдущего видно, что жп+1 =
== хп или
. хп
In------=
Я'п-н
ле
— = 6.
тд
Эта величина 6 называется логарифмическим декрементом затухания.
Для малого затухания мы имеем
ПС
тд
и, следовательно,
а поэтому
(2.20)
Частота колебаний, как легко видеть из равенства (2.19b),
с увеличением сопротивления уменьшается. С помощью соотно-
шения (2.16) мы можем упомянутое равенство переписать в такой
безразмерной форме:
Рис. 2.16. Собственная частота
системы с затуханием, имею-
щей одну степень свободы, как
функция коэффициента зату-
хания График соответствует
уравнению (2.19b).
Эта зависимость изображена гра-
фически на рис. 2.16, где ординаты
представляют собою отношение ча-
стот затухающего и незатухаю-
щего колебаний, а абсциссы — отно-
шен недействительно го и критического
коэффициентов затухания. График
представляет собою окружность.
Очевидно, что для критического
затухания (с = ск) циклическая ча-
стота q собственных колебаний равна
нулю. Построенная диаграмма заходит также в область отрица-
тельных значений с, для которых она сохраняет свою силу. Смысл
этих значений будет выяснен в дальнейшем в главе VII (стр: 379).
Вследствие горизонтального положения касательной к окруж-
ности при с = 0 циклическая частота здесь может считаться
§ 2.6
СВОБОДНЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ
65
постоянной и равной /й/тпдля всех случаев затухания, встреча-
ющихся обычно в технике (при с/ск < 0,2).
Свободное незатухающее колебание, являясь движением гар-
моническим, может быть изображено посредством вращающегося
вектора, конец которого описывает окружность. В случае зату-
хающего колебания подобная графическая интерпретация тоже
имеет место, с тем лишь исключением, что амплитуда умень-
шается с течением времени. Так,если вращающийся вектор укора-
чивается со скоростью, пропорциональной его длине, то ряд по-
следовательных его длин
образует убывающую гео-
метрическую прогрессию.
Конец вектора описывает
при этом логарифмическую
спираль (рис. 2.17). От-
клонения точки, даваемые
диаграммой, изображен-
ной, например, на рис. 2.15,
могут быть получены из
рис. 2.17, если взять го-
р изонтальную проекцию
переменного вектора, ко-
торый вращается с посто-
янной угловой скоростью
q и конец которого все
время остается на упомя-
нутой спирали [см. урав-
нение (2.19)]. Особым слу-
чаем предыдущей задачи
Рис. 2.17. Векторная диаграмма свободных
затухающих колебаний.
является тот, когда масса
или инерция системы настолько мала, что ею можно пренебречь,
такчтоостается лишь пружина и амортизатор. Постараемся найти
движение такого невесомого поршня с амортизатором, совер-
шаемое им после первоначального отклонения на величину ж0.
Дифференциальное уравнение движения здесь примет вид
dx
С dt
+ kx = 0,
или
с dx
к х
— — dt,
откуда находим
. с С dx с Z1 . ,ч
t = — & I “ = — (ш ж + const).
5 Ден-Гартог • 2074
66
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
Так как при t — 0отклонение х = х0, то постоянная равна —In По-
следовательно,
, С , X
t = — г In — ,
к х0
а отсюда
-Ъ
х = х0 е с . (2.21)
Написанное уравнение изображается графически одной из
сплошных кривых рис. 2.14. Очевидно, что показатель степени
является безразмерной величиной, вследствие чего дробь с/к
должна иметь размерность времени. Эта дробь называется вре-
менем релаксации, которое определяется как время, необходимое
для уменьшения отклонения х0 системы до величины, составляю-
щей 1/е часть первоначального его значения. На стр. 490 нам
представится случай воспользоваться этим понятием.
Пример. Пусть в системе, изображенной на рис. 2.13, стр. 59, подвешен-
ный груз весит 20 Г, жесткость пружины такова, что эта пружина уд-
линяется на 1 см при нагрузке 1,6 кГ\ I — 10 см, а = b — 5 см. Пусть, далее,
амортизирующий механизм скреплен с серединой балки, т. е. с той же точ-
кой, где прикреплена пружина. Сила сопротивления амортизатора равна
0,2 Г при скорости 1 см/сек. Найти:
а) быстроту затухания свободных колебаний,
Ь) величину критического затухания амортизатора.
Решение. Ответим сначала на вопрос Ь) с помощью уравнения (2.16).
Круговая частота свободных незатухающих колебаний есть ы0 = У&/т.
На стр. 60 было найдено, что приведенный коэффициент жесткости пру-
жины на рис. 2.13 равен
а2 к
к ~ = - — 0,4 кПсм.
I2 4
Тогда
Коэффициент критического затухания системы (т. е, критического зату-
хания для воображаемого амортизатора, связанного с массой), согласно
уравнению (2.16) равен
0,02
2 • —— • 140 = 0,0057 кГсек/см.
981
Так как амортизатор в действительности помещен в середине балки, то
нам надо увеличить найденное значение в четыре раза; это следует из тех
же соображений, на основании которых мы должны брать здесь более
жесткую пружину, а именно с учетверенным коэффициентом жесткости
по сравнению с «эквивалентной» пружиной (см. стр. 60). Таким образом,
мы находим ответ на вопрос (Ь):
ск = 4 • 0,0057 = 0,0228 к Г сек/см.
§ 2.7 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ
67
Ответ на вопрос (а). Быстрота затухания определяется на основании урав-
нения (2.20):
Лх п с 0,0002
— = 6 = 2 л — — 2л------------— 0,055.
х ск 0,0228
Тогда
5111 = 1 _ 0,055 = 0,945.
§ 2.7. Вынужденные колебания без затухания
Исследуем другой важный частный случай уравнения (2.1),
когда член сх, выражающий затухание, равен нулю, а все прочие
члены остаются:
тх + kx — /%sin cot. . (2.22)
/Мы можем предположить, что функция
х = х0 sin cot
удовлетворяет этому уравнению. В самом деле, если указанную
функцию подставить в уравнение (2.22), то оно примет вид
— тсо2 xQ sin cat + kxQ sin at = Po sin at.
Это уравнение может быть почленно разделено на sin cot, а тогда
имеем
х0 (к — тсо2) — Ро,
или
£о £о
т ___ Л _______ ___ __ к
0 к — mw2 to2 / ю \2 '
1-тп- 1- -|
к \(й0)
откуда
что и будет решением уравнения (2.22). Выражение Р^к, стоящее
в числителе, имеет простое физическое значение, а именно: это
есть статическая деформация пружины под действием постоянной
нагрузки Pq. Поэтому мы можем написать
Л/СТ,
б*
68
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
вследствие чего решение примет вид
=-----sin “г- (2.24)
Lfi)CJ
Хотя и верно то, что выражение (2.23) есть решение, однако
оно не может быть общим решением, которое должно содержать
две постоянные интегрирования. Подстановкой легко убедиться,
что выражение
х = С\ sin й?с t + С2 cos coct Ч-^т-2 sin cot (2.25)
1©CJ
удовлетворяет уравнению (2.23). Здесь первые два члена справа
определяют свободные или собственные незатухающие колебания,
а третий член — незатухающие вынужденные колебаниях). Эта
форма решения определяется общим свойством дифференциальных
уравнений такого вида, которое может быть выражено в виде
следующей теоремы.
Теорема. Общее решение (2.25) дифференциального уравнения
(2.22) с правой частью есть сумма общего решения (2.8) уравнения
(2.7) без правой части и частного решения (2.23) данного урав-
нения (2.22).
Мы видим, что первые два члена выражения для х (2.25) (сво-
бодные колебания) определяют колебательное движение по закону
синуса с частотой свободных или собственных колебаний сос,
тогда как вынужденные колебания (третий член) являются также
колебательным движением по закону синуса, по уже с частотой,
равной частоте со изменения возмущающей силы. Поскольку у
нас имеется свобода в выборе величины со, то ясно, что со и сос
совершенно не зависят друг от друга. Решение (2.25), представляю-
щее собою сумму синусоидальных колебаний различных частот,
само не является, вообще говоря, гармоническим движением
(см. рис. 2.25, в, стр. 82).
Интересно ближе изучить результат, выражаемый формулой
(2.24). Очевидно, что х/хСТ представляет собою синусоиду с ампли-
тудой 1 : [1—(о/юс)2], зависящей от отношения частот со/сос.
На рис. 2.18 эта зависимость изображена графически.
Из формулы (2.24) следует, что при со/сос < 1 амплитуды, или,
что то же, ординаты положительны, тогда как при со/сос > 1
они отрицательны. Чтобы уяснить смысл отрицательных ампли-
туд, возвратимся к уравнению (2.22) и к предположению, что
х) Величина ----- называется коэффициентом динамичности или
-а
коэффициентом нарастания колебаний. (Прим, перев.)
§ 2.7
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ
69
ж0 sin at есть его решение. Тогда становится ясным, что’в области
а/а)с > 1 значения х0 должны быть отрицательны. Но мьГможем
написать
— х0 sin cot = + х0 sin (cot + п),
откуда видно, что «отрицательная амплитуда» эквивалентна
положительной амплитуде колебания, отличающегося по фазе
на л: от рассматриваемого колебания. С физической точки зрения
которой подвергается действию силы постоянной амплитуды и изменяю-
щейся частоты [уравнение (2.23)]. Эта диаграмма отлична от диаграммы
рис. 2.20.
это значит, что в случае со/<ос < 1 сила и движение находятся в
одной фазе, а в случае gd/g)c > 1 они находятся в противоположных
фазах. Таким образом, если при ю/юс < 1 груз находится ниже поло-
жения равновесия, когда сила действует вниз, то при со/юс > 1 груз
находится выше этого положения,если сила опять направлена вниз.
Обычно эта зависимость между фазами не представляет боль-
шого интереса, тогда как амплитуды имеют исключительно боль-
шое значение. По этой причине мы можем не обращать внимания
на знак, и тогда приходим к кривой, обозначенной на рис. 2.18
пунктиром. На этом графике имеются три замечательные точки,
а именно А, В и С, ординаты которых легко определить из сооб-
ражений чисто физического характера. Рассмотрим прежде всего
70
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. п
точку А в непосредственной близости к а = 0. Здесь частота
изменения силы чрезвычайно мала, и груз будет отклоняться
силой лишь до достижения упругой системой положения стати-
ческого равновесия в деформированном состоянии. С физической
точки зрения это совершенно ясно, и, таким образом, ординаты
кривой вблизи точки А должны быть приблизительно равны
единице. С другой стороны, для очень больших частот, когда
а>/шс^> 1, сила изменяет свое направление то в одну, то в другую
сторону столь быстро, что масса не успевает следовать за ней, а
тогда соответственные амплитуды будут очень малы (точка В).
Рис. 2.19. Неуравновешенный мотор, дающий силу
ты?а0 и приводящий к резонансной диаграмме"
рис. 2.20. *
Однако наибольший интерес представляет точка С, где ампли-
туда становится бесконечно большой. Этот факт может быть так-
же интерпретирован физически. Дело в том, что при o>/&)c = 1 час-
тота вынужденных колебаний, а следовательно, и частота изме-
нения возмущающей силы совпадает с частотой собственных коле-
баний. Поэтому возмущающая сила действует на массу в такт с ее
движением, вследствие чего амплитуда может расти безгранично.
Таков, например, случай маятника, которому при каждом раз-
махе сообщается легкий толчок в направлении его движения;
тогда с помощью незначительной силы можно получить колебания
сочень большой амплитудой. Описанное явление, имеющее исклю-
чительно важное значение, носит название резонанса, а частота
собственных колебаний называется тогда резонансной частотой.
До сих пор мы имели дело с возмущающей силой, амплитуда
которой Р$ не зависит от частоты а>. Другой важный случай,
имеющий в технике большое значение, это тот, когда Р$ пропор-
ционально ш2. Например, на рис. 2.19 представлена балка, лежа-
щая на двух опорах и несущая посредине неуравновешенный
мотор. Во время вращения ось мотора испытывает действие цент-
робежной силы т^т, где есть масса неуравновешенного гру-
за, а г — его расстояние от оси вала. Эта сила, вращающаяся
вместе с валом мотора, может быть разложена на вертикальную
составляющую sin cot и горизонтальную составляющую
m^r cos at. Предположим, что балка является очень жесткой
в горизонтальной плоскости, но имеет значительно меньшую
жесткость в вертикальной, допуская, следовательно, перемещения
только в последней. В таком случае мы имеем систему с одной
§ 2.7
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ
71
степенью свободы, состоящую из массы т (мотор) и пружины
(балка) с коэффициентом жесткости к = 48-E7Z/Z3. Эта система
подвергается действию вертикальной возмущающей силы с ампли-
тудой зависящей от частоты.
Другой пример такого же типа был рассмотрен на стр. 51.
Там мы видели, что определяемое ординатой у «относительное дви-
жение массы по отношению к подставке на рис. 2.3, где под-
ставка движется по закону а0 sin art, а сила Ро отсутствует,
происходит таким же образом, как если бы на массу действовала
переменная сила с амплитудой ma0a)2. Оказывается, что и этот
последний случай имеет очень большое практическое значение,
так как на таком же принципе построены приборы, регистриру-
ющие колебания (вибрографы), о чем будет идти речь дальше (см.
стр. 86).
Кривая резонанса для обоих только что рассмотренных слу-
чаев может быть найдена непосредственно из уравнения (2.23)
подстановкой в него ma»2a0 вместо Ро. Таким образом, имеем
тю2а0 Гы"|2
ПЛИ
Вспомним» что а0 есть амплитуда движения верхнего конца
пружины, а у выражает движение подвешенного груза относитель-
но верхнего конца пружины, иначе говоря, у есть удлинение
пружины. Здесь ординаты трех точек А, В и С (рис. 2.20) также
допускают простую физическую интерпретацию. Так, в точке
А частота о почти равна нулю. Тогда верхний конец пружины
перемещается вверх и вниз очень медленно, а потому движение
груза будет следовать указанному движению, и пружина оста-
нется нерастянутой: у0 = 0. В точке В верхний конец пружины
движется очень быстро, вследствие чего груз не будет успевать
следовать за этим движением и останется вообще в покое. Тогда
относительное движение будет такое же, как движение верхнего
конца, и поэтому z/0/a0=l. В точке С имеет место резонанс,
аналогично предыдущему случаю, и удлинения пружины теорети-
чески должны сделаться бесконечно большими.
Последний результат находится в очевидном противоречии
с фактами, наблюдаемыми в действительности, а поэтому
72 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ гл. п
необходимо принять во внимание также затухание, что и будет
сделано в § 2,8.
Пример. Умформер состоит из электромотора переменного тока в 25
периодов, соединенного с генератором постоянного тока. Мощность уста-
новки равна 200 л. с. при 725 об}мин. Соединительный вал имеет диаметр
10 см и длину 60 см. Момент инерции ротора мотора равен 200 кГ см сек2,
а генератора — 800 кГ см сек2. Вращающий момент мотора не постоянен
(см. стр. 106), а изменяется от нуля до удвоенного значения момента при
Рис. 2.20. Резонансная диаграмма, соответствующая уравнению (2.26),
показывает относительное движение системы, в которой один конец пружи-
ны подвергается колебаниям с постоянной амплитудой а0 и абсолютное
движение системы,масса которой испытывает действие переменной силы
амплитуды mw2a0,
полной нагрузке. Он изменяется с частотой, вдвое большей частоты тока,
т. е. с частотой 50 периодов в секунду, и равен
То 4- То sin (2 л • 500.
В то же самое время противодействующий момент генератора постоянного
тока с течением времени не меняется. Требуется найти наибольшее напря-
жение вала при полной нагрузке, полагая вал стальным.
Решение. Прежде всего найдем коэффициент жесткости вала:
„ G—d*
крутящий момент G1 р 32
угол I I
8,4 • 105 • л 104
32 • 60
13,7 • 106кГ см.
§ 2.7 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ 73
Наша система схематически изображена на рис. 2.6 (стр. 48), и ее
дифференциальное уравнение есть (2.4). Круговая частота собственных
колебаний определится по формуле
13,7 • 10е • 1000
—----------------= 291 сек-1.
200 • 800
Частота изменения возмущающей силы, а следовательно, и вынужденных
колебаний, равна 50 колебаниям в секунду, или
ы = 2л/ == 314 сек-1.
Это, очевидно, составляет = 1,08 резонансной частоты системы,
вследствие чего, согласно рис. 2.18 или уравнению (2.23), крутящий момент
увеличивается в число раз, равное так называемому коэффициенту нара-
стания колебаний или коэффициенту динамичности1)'
1 — (1,08)2
Из
момент
уравнения (2.4)
800
равен -----Тп,
1000 °
видно, что встречающийся в расчетах крутящий
4
или — переменной составляющей действительного
о
крутящего момента. Как мы уже установили, вращающий (он же крутя-
щий) момент состоит из постоянной части То и переменной части с такой
же самой амплитудой То. Таким образом, наибольшее значение интере-
сующего нас крутящего момента равно
То 4- 6,0 -~Т0 - 5,80 То.
5
Постоянный момент То можно найти, зная угловую скорость ы (или число п
оборотов в минуту) и мощность ДО, выраженную в лошадиных силах, по
формуле
75 ДО 75 • 30 ДО
----------------------------
Ы 71 П
75 • 30 • 200
------725— == 197 кГ м = 19,7 • 103 кГ см.
Касательное напряжение на окружности вала при статическом дей-
ствии крутящего момента То равно
Tod
То
7i d* d3
5 • 19,7 • 103
To3
= 98.5 кПсм2,
т
32
Вследствие близости к резонансу это напряжение необходимо умно-
жить еще на 5,80, и тогда полное наибольшее касательное напряжение
окажется равным 570 кГ(см2.
Усталостная прочность стенки определяется испытанием иа растяже-
ние, причем нормальное напряжение в этом случае вдвое больше касатель-
*) См. подстрочное примечание на стр. 68. Для нас здесь интересно
лишь абсолютное значение этой величины, а потому мы не обращаем вни-
мания на знак. (Прим, перев.)
гл. п
валов ниже
может быть
74 СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
«ого. Так как предел усталости обычных сталей для
1140 кПсм\ то возможно разрушение вала. Конструкция
улучшена путем уменьшения диаметра вала до 8 см. Тогда круговая частота
собственных колебаний получается равной 185 сек~1 и соответствующий
коэффициент динамичности равен 0,53 Новое значение наибольшего нор-
мального напряжения теперь будет равно 466 кПсм2. что уже допустимо в
смысле безопасности.
§ 2.8 Вынужденные колебания с затуханием, пропорциональным
скорости
Рассмотрим, наконец, уравнение (2.1) в его полном виде:
тх 4- сх 4- kx = Р 0 sin (tit (2.1)
Можно показать, что теорема, приведенная на стр. 69, здесь
также сохраняет силу. Согласно этой теореме, полное решение
уравнения (2.1) состоит из суммы общего решения уравнения
(2.12), которое представляет собою уравнение (2.1)/ где правая
часть равна нулю, и частного решения данного уравнения (2.1).
Но решение уравнения без правой части нами было уже получено
[см. уравнение (2.19)], а тогда
с
х = е 2™ ((\ sin qt 4- С2 cos qt) 4- частное решение. (2.27)
Таким образом, нам остается только найти частное решение.
Аналогично случаю, рассмотренному в § 2.7, здесь, казалось бы,
можно тоже принять х = tfosintt>£. Но так как при подстановке
производной от этого выражения в уравнение (2.1) вместо х полу-
чится член, содержащий cos то высказанное предположение
несправедливо. Однако мы можем положить
х — A sin at + В cos (ti 1
и подставить это выражение в уравнение (2.1). После такой под-
становки получится уравнение, в котором будут члены, содержа-
щие sin (tit и cos (tit. Поскольку в нашем уравнении имеются две
постоянные А и В, то после группировки членов приравниваем
нулю коэффициенты при sin (tit и cos (tit и получаем два алгебраи-
ческих уравнения, решая которые относительно А и В, находим
частное решение. Темне менее при отыскании решения мы пойдем
иным путем, чтобы лучше уяснить явление с физической точки
зрения.
Допустим, что искомое решение представляет собою колебание
по закону синуса с частотой вынужденных колебаний (о. Тогда
все четыре силы, входящие в уравнение (2.1), должны также изме-
няться по закону синуса с той же частотой, причем эти силы
Й 2.8
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ
75
мы можем изобразить соответствующими векторами на векторной
диаграмме Как было изложено на стр. 14, дифференцирование в
этом случае эквивалентно умножению длины вектора на со
с одновременным поворотом его на прямой угол в сторону
вращения.
Пусть перемещение точки выражается уравнением
х = х0 sin (cot — ср),
где х0 и ср — пока неизвестные постоянные величины. Отложим
это перемещение в виде вектора, направ-
ленного вертикально вверх. На векторной
диаграмме (рис. 2.21) он изображен пункти-
ром. Восстанавливающая сила — кх имеет
амплитуду кх$ и направлена на диаграмме
вертикально вниз Сила затухания — сх
имеет амплитуду сох^ и повернута на
прямой угол в положительном направлении
по отношению к восстанавливающей силе.
Сила инерции — тх повернута на 90° в сто-
рону вращения по отношению к силе зату-
хания и имеет амплитуду тги&х Возмуща-
ющая сила Fo sin cot расположена под углом
ср к перемещению xQ sin {cot — ср) и тоже в
сторону вращения Таким образом, мы полу-
чаем полную диаграмму на рис. 2.21. где
я0 и ср остаются неизвестными
Закон Ньютона [или же уравнение (2.1)]
требует, чтобы сумма всех четырех сил была
равна нулю во всякий момент времени Но
ЭТО значит, что геометрическая сумма четы- Рис. 2.21. Векторная
рех векторов на рис. 2.21 должна быть равна
нулю, откуда, в свою очередь, следует, что
должна равняться нулю не только сумма
вертикальных проекций всех этих векторов,
диаграмма, на основа-
нии которой может
быть построен
рис. 2.22.
но также сумма их горизонтальных проекций. Все это может
быть выражено математически:
по вертикали
кх0 — то2х0 — /%cos ср = 0:
по горизонтали
— Рп sin ср = 0.
Из этих двух уравнений могут быть найдены х0 и р, и мы
76
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. В
получаем:
V(cw)2 + ты2)2
(2.28а)
. cw
Ф Ь _ т(а2
(2.28b)
Пользуясь механико-электрической аналогией (стр. 47), мы можем
полученный результат перевести на язык электротехники и получить
или
(2.29)
Гак как ? — и Q ® Qo sin w с то сила тока будет г — Qom cos cot
Левая часть уравнения (2.29) есть наибольшее значение силы тока.
Квадратный корень в знаменателе правой части известен под названием
«импеданса». Эта величина играет большую роль в электротехнике.
Формулы (2.28а) и (2 28b) для амплитуды х0 и угла сдвига
фазы ср выражены через «безразмерные величины», т е. только
через отношения Так, сюда входят отношение частот gj/o)c и
отношение коэффициентов затухания с/ск, где ск есть коэффициент
«критического затухания», определяемый формулой (2.16). PQ/k
можно истолковать как удлинение пружины под действием на-
грузки Ро, эта величина иногда называется «статическим удли-
нением» жст
Указанные соотношения представлены на рис. 2.22,а и 2.22,6
График амплитуд содержит семейство кривых, каждая из которых
соответствует одному определенному значению коэффициента
затухания с Все эти кривые лежат ниже одной кривой, соответ-
ствующей отсутствию затухания, которая, очевидно, является
гой же кривой, что и изображенная на рис. 2.18 Всматриваясь в
эти кривые, мы видим, что амплитуды вынужденных колебаний
уменьшаются вследствие затухания. Другое интересное свойство
данной диаграммы состоит в том, что максимумы отдельных кри-
вых имеют место уже не при а>/а>с = 1. а вообще при меньших
частотах. В сущности говоря, в случае затухающих колебаний
Рис 2.22. а) Амплитуды вынужденных колебаний систем, представленных н а
рис' 2.3— 2.7 при различных значениях затухания. 6} Разность фаз между
силой и перемещением для различных значений затухания.
78
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. п
необходимо различать три разные частоты, которые все совпадают
между собою при с — 0, а именно:
1) £>с = — частота незатухающих собственных колеба-
ний;
2) 0. [з^г]2 ““ част°та затухающих собственных коле-
баний;
3) частота, соответствующая максимуму амплитуды вынуж-
денных колебаний или «резонансная часто га».
Для малых величин затухания все эти три частоты по своим
числовым значениям очень близки друг к другу. Большой инте-
рес представляет также диаграмма угла сдвига фазы, данная на
рис 2.22,6. Мы уже видели выше, что при отсутствии затухания
сила и перемещение находятся в одной фазе (<р = 0) до наступле-
ния резонанса и в противоположной (ср = тг) после. Таким обра-
зом, кривая сдвига фазы имеет разрыв в точке, соответствующей
резонансу, где она делает скачок. Это можно видеть также из
уравнения (2.286), считая в нем коэффициент затухания с очень
малым. Ниже резонанса знаменатель положителен, вследствие
чего tg ср должен быть очень малым положительным числом.
Выше резонанса tg ср уже оказывается очень малым отрицательным
числом. Что же касается самого угла ср, то он должен быть поэтому
либо очень близким к 0,либо немногим меньше тг. Если положить
затухание равным нулю, то ср делается в точности равным либо 0,
либо тг
Для затуханий, отличных от нуля, мы имеем на рис. 2.22,6
ряд других кривых, дающих значения сдвига фазы. Можно ви-
деть, что затухание вообще стремится сгладить резкие переходы в
кривых, построенных для незатухающих колебаний, причем это
относится как к диаграмме амплитуд, так и к диаграмме углов
сдвига фазы
Здесь было бы поучительно вернуться к векторной диаграмме
на рис. 2.21 и проследить за ней, как изменяются в зависи-
мости от изменения частоты амплитуда и сдвиг фазы. Для очень
медленных колебаний (со 0) затуханием и силой инерции можно
пренебречь, а тогда Ро = кх0 и ср = 0. С возрастанием частоты
вектор, изображающий силу затухания, растет, но зато сила
инерции растет еще быстрее. Сдвиг фазы уже не может больше
оставаться равным нулю, поскольку Ро должно иметь горизон-
тальную составляющую слева, чтобы уравновесить ссохо. Вектор
силы инерции будет увеличиваться до тех пор, пока он по своей
длине не сделается равным восстанавливающей силе или силе
упругости пружины. Тогда будет ср = тг/2 и Ро = co)xQ, а это
имеет место при резонансе, так как ?по>2е0 = кх0 или со2 = к/т.
Итак, при резонансе сдвиг фазы равен л/2 независимо от затухания.
§ 2.8 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ 79
За пределом этой частоты увеличивается интенсивнее,,
чем кх0, вследствие чего Ро получит наклон вниз, и ср будет
больше, чем тг/2. Для очень высоких частот кх0 незначительно
по сравнению с так что Р^ будет уравновешивать силу-
инерции, и тогда <р = %.
При малых скоростях возмущающая сила преодолевает силу
упругости пружины; при больших скоростях эта возмущающая
сила идет на преодоление инерции, а при резонансе она уравно-
вешивает силу затухания.
Привлечение энергетических соотношений к описываемым коле-
баниям также помогает лучшему уяснению физической стороны
явления Для очень медленных движений <р = 0 и, как это было
показано на стр. 27, за полный период колебания никакая работа
не совершается. Иными словами, за это время механическая энер-
гия в тепловую не преобразуется. Исходя от положения равнове-
сия, возмущающая сила перемещается на некоторое расстояние,
прежде чем достигнуть крайнего положения, и следовательно,
совершает при этом некоторую работу Однако эта работа просто
переходит в потенциальную или упругую энергию, накопляю-
щуюся в пружине. В продолжение следующей четверти периода
движение происходит против приложенной силы, и пружина
отдает поглощенную ею энергию Итак, при малых скоростях
работа возмущающей силы переходит в упругую энергию, и ника-
кая ее часть не превращается в тепло. При резонансной частоте
ср = тг/2 величина рассеянной энергии за один период равна
%Р0 х0 (стр. 31). В таком случае возмущающая сила численно
равна и противоположно направлена силе затухания, так что
затухание происходит как раз вследствие рассеяния энергии.
Сила упругости пружины равна тогда силе инерции, но противо-
положна ей по фазе, а следовательно, она находится в одной
фазе с перемещением. Каждая из этих сил совершает работу за
четверть периода, вследствие чего накапливается энергия. В
течение следующей четверти периода эта энергия отдается обрат-
но. Таким образом,за счет совершаемой работы происходит перио-
дическое накопление упругой энергии пружины и кинетической
энергии движущейся массы
Между прочим, эти энергетические соотношения могут быть
использованы для вычисления «резонансной амплитуды». Сила
затухания имеет амплитуду e(rr)max = cg>x0 и отличается по
фазе на %/2от перемещения х0. Следовательно,энергия,рассеянная
за один период вследствие затухания, равна тгсбхг?. Работа же,
совершенная возмущающей силой за один период, есть лР0 xQ,
и эта величина должна равняться количеству энергии, рассеиваю-
щейся в связи с затуханием, т. е
= пссйх^. (2.30)
80
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. И
Это соотношение представлено на рис. 2.23, где по оси абсцисс
отложены амплитуды а по оси ординат — величины работы
за один период, причем одна кривая соответствует работе силы
Ро, а другая — работе силы затухания. В точке пересечения кривых
мы имеем энергетическое равновесие, и соответствующая амплиту-
да ж0 есть та амплитуда, которая устанавливается сама собой.
В самом деле, если в некоторый момент времени амплитуда
сделается больше, то рассеяние энергии будет больше, чем ее
приток, что повлечет за собою постепенное уменьшение кинети-
ческой энергии системы до тех
пор, пока не будет достигнута
амплитуда, соответствующая
указанному равновесию.
Разрешая уравнение (2,30)
относительно я0, мы имеем
(^о)ред = • (2.31)
Строго говоря, это есть не
что иное, как амплитуда при
той частоте, когда сдвиг фазы
равен тт/2, но эта частота в точ-
ности не соответствует наиболь-
шему значению амплитуды.
Однако эти частоты настолько
близки друг к другу по вели-
Рнс.2.23. Величина работы, сорершае
мой за один период гармонической
силой и вязким сопротивлением при
разных амплитудах.
чине, что очень хорошее при-
ближенное значение наибольшей амплитуды можно полу-
чить, приравнивая работу возмущающей силы энергии, рас-
сеившейся при затухании. Для систем с одной степенью свободы
этот метод вычисления резонансной амплитуды не представляет
большого интереса, но в дальнейшем мы рассмотрим более слож-
ные случаи, где точное вычисление чрезвычайно затруднительно
и где приближенный метод, для которого имеет место уравнение
(2.30) и рис. 2.23,дает вполне приемлемые результаты (см. стр. 272).
Уравнения (2.28а) и (2.28b) являются наиболее важными в
этой книге. Представляет интерес получение коэффициента дина-
мичности в случае резонанса w — сос из уравнения (2.28а). Этот
коэффициент оказывается тогда равным простому выражению
1:2с/ск. С другой стороны, на стр. 64 [см. уравнение (2.20)] мы виде-
ли, что относительное уменьшение амплитуды свободных колеба-
ний за один период есть Дх/х = 2т/ск. Сопоставляя написанные
два выражения, получим:
коэффициент динамичности =
относительное уменьшение амплитуды
§ 2.8
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ
81
Для процентного изменения амплитуды указанное соотноше-
ние представлено в виде графика на рис. 2.24.
Возвратимся, наконец, к выражению (2.27) на стр. 74 и вспом-
ним, что все изложенное'\на предыдущих страницах относится
лишь к «частному решению» или к «вынужденным колебаниям».
Общее решение состоит из двух частей, представляющих собою
в своей совокупности свободные затухающие колебания, наложен-
ные на вынужденные колебания. По истечении короткого про-
межутка времени затухающие
колебания исчезают и оста-
ются лишь одни вынужден-
ные колебания. Поэтому вы-
нужденные колебания назы-
ваются также «установив-
шимися колебаниями», в то
время как свободные коле-
бания могут быть названы
«колебаниями в переходном
процессе». Значения посто-
янных С, и С2 зависят от
условий в начальный момент
движения и могут быть
определены аналитически из
этих условий подобно тому,
как это было сделано на
стр. 53. Однако вполне воз-
можно построить полную
Рис.. 2.24. Коэффициент динамичности
при резонансе, как функция процент-
ного уменьшения амплитуды свободных
колебаний за один период.
картину суммарного движения даже только на основании
соображений чисто физического характера В качестве примера
рассмотрим следующую задачу.
На груз, подвешенный к пружине, действует извне гармони-
ческая возмущающая сила, частота которой в восемь раз меньше
частоты собственных колебаний системы. Вначале груз удержи-
вается в неподвижном состоянии при помощи зажима, в то время
как возмущающая сила уже действует. В некоторый момент
зажим мгновенно удаляют. Каково в результате будет движение,
если затухание в системе уменьшает колебания на 10% в течение
каждого периода?
Первое, на что надо обратить внимание при решении этой
задачи, это неопределенность ее постановки, поскольку ничего
не было сказано о том, в какой момент полного цикла изменения
силы груз освобождается. Чтобы сделать задачу определенной,
допустим, что освобождение груза происходит в тот момент,
когда тело вследствие вынужденных колебаний должно было бы
иметь наибольшее отклонение от положения равновесия. Из на-
чальных условий задачи следует, что в момент освобождения
б Ден-Гартог 2047
82
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. D
груз не имеет ни отклонения от этого положения, ни скорости.
Таким образом, мы предписываем вынужденным колебаниям
момент их начала при х = ж0 и х = 0. Эти два условия могут
быть выполнены лишь в том случае, если свободные колебания
будут начинаться при ж =— xQ и х =• 0. Тогда суммарное или
полное движение начнется от нулевого положения при скорости,
равной нулю. Рис. 2.25,а показывает свободные колебания, рис.
2.25,6 — вынужденные колебания и, наконец, рис. 2.25,в — сум-
марное движение.
Легко видеть, что свободные колебания в переходном процессе
очень скоро исчезают и что наибольшее отклонение в начале
2.9
ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ
83
движения примерно в два раза больше конечной амплитуды
установившегося колебания. Если разность частот свободных и
вынужденных колебаний мала и если затухание также мало,
то на графике мы получим биения от этих двух колебаний (см.
стр. 17). Вследствие затухания такие биения исчезают по истече-
нии некоторого промежутка времени. Для того чтобы иметь
установившиеся биения, обязательно должны быть или два уста-
новившихся, или два вынужденных колебания.
Пример. Автомобиль имеет надрессорную часть, весящую 1360 кГ,
которая покоится иа четырех одинаковых рессорах, имеющих просадку
в 22,8 см под действием веса надрессорной части. Каждый из четырех амор-
тизаторов имеет коэффициент затухания, равный 1,25 кГ сек/см (т. е.
сила сопротивления равна 1,25 кГ при скорости в 1 см/сек). Этот автомобиль
установлен всеми своими четырьмя колесами на испытательной платформе,
двигающейся вверх и вниз с резонансной скоростью и амплитудой в 2,54 см.
Найти амплитуду колебаний на рессорах надрессорной части автомобиля,
полагая, что центр тяжести его находится в центре колесной базы.
Решение. На основании уравнения (2.11) частота собственных колеба-
ний равна
1ГТ Юл
Гшс == 2 л/с = Юл I/ —= — = 6,6 сек"1.
F бст V22.8
Затухание системы (для четырех амортизаторов) определяется коэф-
фициентом
с = 4 • 1,25 = 5 кГ сек/см.
Движение определится из дифференциального уравнения (2.5) на
стр. 51. При резонансе возмущающая сила равна
У(£а0)2 4- (ca0w)2.
Здесь
1360
к == ----= 59,6 кПсм, а0 — 2,54 см,
22,8
с — 5 кГ сек!см, ы = 6,6 сек~ Ч J
Тогда
У(kae)a + (саош)2 = VfSF’+S?2 = 173 кГ.
Наконец, из уравнения (2.31) находим искомую амплитуду колебаний
автомобиля:
§ 2.9. Приборы для измерения частоты
Рис. 2.20 дает ключ к пониманию действия большинства вибро-
измерительных приборов. Колебание иногда представляет собою
волну достаточно .сложной формы. Если эта волна нанесена на
бумагу, то все параметры, касающиеся колебания, вполне воз-
6*
84
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
можно определить, но во многих случаях это даже и не требуется.
Нас может интересовать либо частота, либо амплитуда движения,
либо ускорение. Приборы, удовлетворяющие только этим ча-
стным требованиям, могут быть изготовлены проще и дешевле,
чем в случае, когда потребовалась бы полная запись колеба-
тельного движения.
Прежде всего рассмотрим методы измерения только частоты.
Во многих случаях колебание бывает достаточно чистым, т.е. осно-
вная гармоника имеет значительно большую амплитуду, нежели
гармоники высших порядков. В таких случаях измерение частоты
выполняется легко, и по результату измерения бывает возможно
судить о причине колебаний. Устройство измерителей частот
почти всегда основывается на принципе резонанса. Для частот
низших, чем примерно 100 колебаний в секунду, обычно употреб-
ляются язычковые тахометры Таковых существует два типа:
с одним язычком и с большим числом язычков.
Измеритель частоты с одним язычком состоит из балочки,
представляющей собою пластинку из рессорной стали, плотно
зажатую одним концом и имеющую другой конец свободным.
Длина свободной части пластинки может изменяться посред-
ством вращения ручки установочного винта, соединенного с
зажимом. Таким образом, частота собственных колебаний пла-
стинки может регулироваться по произволу, и на язычке или
балочке нанесены значения частот в числах колебаний в секунду,
соответствующие каждой длине балочки (см. рис. 4.28 на стр.
211). Во время измерения зажатый конец пластинки плотно
прижимают к колеблющемуся предмету, вследствие чего основа-
ние этой пластинки принимает участие в измеряемом колебании.
После этого начинают слегка вращать установочный винт, изменяя
тем самым свободную длину язычка до тех пор, пока, при некоторой
определенной длине, не наступит состояние резонанса с пере-
даваемыми колебаниями, на что укажет значительный рост
амплитуд свободного конца. В этот момент на язычке читается
соответствующая частота. Прибор подобного типа выпускается
фирмой Вестингауз.
Пример. Язычковый частотомер с одним язычком переменной длины
состоит из полоски рессорной стали поперечного сечения 5x0,5 мм\ несу-
щей на конце грузик весом 7 г. Какова должна быть наибольшая длина
свободной части язычка этого прибора, если он предназначается для изме-
рения частот от 6 до 60 периодов в секунду?
Решение Коэффициент жесткости язычка, представляющего собой
балочку, заделанную одним концом, равен ЗЕ1№. Момент инерции попереч-
ного сечения
1 « — Ь№ • 0,5 • 0,053 = 5,2 • 10“«сл<4.
12
Тогда, полагая Е ** 2,10 - 106 кПсм\ имеем жесткость на изгиб, равную
EI = 2,1 • 106.5,2 • 10“6 = 10,9 кГ см\
§ 2.9
ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ
85
и тогда
ЗЕ1 32,7
Масса груза на конце равна
0,007
т =--------
981
= 71,4 • 10“7 кГ сек*!сМ' и
масса балочки на единицу длины (т. е. на 1 см)
0,5 • 0,05 • 0,0078 л л л п
= 2.0 • 10“07
к Г сек* 1см.
981
Так как нам надо при расчете взять одну четверть этой массы (так назы-
ваемую приведенную массу груза, см. стр. 214), то в общей сложности мы
получим массу
т 4- = (71,4 + 0.5/) • 10“7 кГ сек*/см.
4
При наибольшей длине частота должна быть равна 6 колебаниям в
секунду, откуда
ш2 = (2 л • 6)2 = 1420 сек-*.
Пользуясь уравнением (2.10), находим
_ 32,7-10’
1420 = -- _________
I* (71,4 + 0,5/)’
или
/з (1 + 0,007/) = 3,225 • 103.
Это уравнение может быть разрешено путем последовательных прибли-
жений. Вследствие малости второго члена в скобках (учитывающего массу
балочки), по сравнению с первым членом (учитывающим массу грузика),
мы в первом приближении пренебрежем вторым членом, и тогда получим
/з = 3225, откуда I = 14,8 см.
Если теперь это значение для / подставить в скобки предыдущего урав-
нения, то двучлен в скобках будет равен 1 + 0,007 • 14,8 = 1,104: следова-
тельно
„ 8225
/3 = ----- — 2992 см* и I — 14,3 см.
1,104
что уже является достаточно хорошим приближением.
Частотомер другого типа, известный под названием тахо-
метра Фрама, имеет большое количество язычков. Этот прибор
состоит из легкого ящика 6, содержащего в себе очень много
стальных пружинных полосок а. расположенных в один или
несколько рядов. Каждый такой язычок имеет частоту собствен-
ных колебаний, немного более высокую, чем соседний слева от
него, благодаря чему покрывается целый ряд частот. При упо-
треблении ящик помещается на вибрирующую машину, причем
86
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
большинство язычков вообще не будет двигаться. Однако один
или два из них, частоты собственных колебаний которых очень
близки к частоте колебаний, воспринимаемых от машины, будут
колебаться со значительной амплитудой. Это будет особенно
Ъ
lllllllll
Рис. 2.26. Тахометр Фрама.
хорошо видно, если ящик выкрасить внутри в сплошной черный
цвет, а наконечники на свободных концах язычков сделать бе-
лыми (рис. 2.26). Тахометры такого типа имеют широкое при-
менение.
Совершенно такие же приборы употребляются для определения
частоты переменного электрического тока. Механическое возбуждение от
возмущающей силы здесь заменяется электрическим возбуждением. Для
этой цели один или несколько витков проволоки помещается в ящик под
язычки. Ток, протекающий по этим виткам, образует переменное маг-
нитное поле, которое соответствующим образом действует на язычки.
§ 2.10. Сейсмические приборы1)
Для измерения амплитуды ко’лебаний обычно применяются
так называемые сейсмические инструменты, основная часть
которых состоит из массивного тела, подвешенного на пружинах
внутри коробки. Такой прибор помещается на вибрирующую
машину, и тогда амплитуда относительного движения коробки
и массы при различных частотах, регистрируемого колебания
будет следовать диаграмме, изображенной на рис. 2.20. Легко
видеть, что если частота изменения возмущающей силы велика по
сравнению с частотой собственных колебаний прибора, то заре-
гистрированная амплитуда г/0 практически оказывается такой
же самой, как и амплитуда а0 действительного движения. Таким
образом, чтобы получить прибор для измерения перемещений,
или «виброметр», необходимо, чтобы этот прибор имел частоту
собственных колебаний, по крайней мере вдвое меныиую, чем наи-
более низкая частота регистрируемых колебаний. В том случае,
когда исследуемое движение не является чистым, а, например,
содержит высшие гармоники, мы, в сущности говоря, никаких
х) Называемые также инерционными приборами. (Прим, перев.)
§2.10
СЕЙСМИЧЕСКИЕ ПРИБОРЫ
87
трудностей не встречаем, поскольку гармоники высших порядков
имеют более высокие частоты, чем основное колебание, вследствие
чего они будут записаны еще точнее.
Сейсмическая масса на пружинах может дать также запись
ускорений. Заметим, что если движение определяется выражением
aosinGji, то соответствующее ускорение есть — а0 о2 sin at с
амплитудой а0 а2. На рис. 2.20 левая ветвь кривой (от а/ас = 0
до а/ас = 1/2) практически идет по закону а0о2. В самом деле,
уравнение кривой, изображенной на рис. 2.20 (стр. 72), есть
(2.26)
Так как для небольших значений а/ас знаменатель мало отли-
чается от единины, то уравнение приближенно может быть выра-
жено так:
?/о = [ Ц1
ап | wc I
2
или
1 2
Уо = $ «о «2-
Здесь l/сэ2 есть постоянная прибора, не зависящая от частоты
внешних колебаний. Отсюда следует, что крайняя левая часть
рис. 2.20 изображает ускорения при различных частотах.
Акселерометр, или прибор для записи ускорений, есть сейсми-
ческий инструмент с частотой собственных колебаний, по край-
ней мере вдвое более высокой, чем наибольшая частота регистри-
руемых ускорений. Отсюда сейчас же возникает возможность появ-
ления принципиальных трудностей в конструировании такого
прибора, так как движение, не являющееся чисто гармоническим,
содержит гармоники высших частот по сравнению с основной
гармоникой, причем частота одной из них может оказаться очень
близкой к частоте собственных колебаний прибора. Указанное
затруднение свойственно лишь акселерометру. В отношении
виброметра упомянутые осложнения отпадают, поскольку все
гармоники колебания имеют частоты, высшие* по сравнению с
частотой главного или основного колебания, и, таким образом,
опасность резонанса возникает лишь в том случае, когда частота
регистрируемого главного колебания ниже, чем частота собствен-
ных колебаний прибора. Чтобы обойти это специфическое затруд-
нение, необходимо ввести в акселерометр затухание.
88
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. П
На рис. 2.27 представлены четыре кривые: парабола, соответ-
ствующая идеальному акселерометру, и три резонансные кривые,
соответствующие различной степени затухания. Кривые для слу-
чаев, когда затухание равно 0,5 или 0,7 его критического зна-
чения. лежат ближе к параболе, которую нам было бы жела-
тельно получить, чем к кривой без затухания. Больше того,
теперь уже нечего бояться резонанса. Если коэффициент зату-
хания заключен между половиной и 0,7 его критического зна-
чения, то акселерометр запишет ускорения без заметной по-
Рис. 2.27. Сравнен не резонансных кривых для различных значений за-
тухания с парабол и чес кой кривой для идеального акселерометра.
грешности для колебаний, частота которых доходит до трех чет-
вертей частоты собственных колебаний прибора, в то время, как
влияние на ускорение высших гармоник уменьшится, или, если их
частоты достаточно велики, то практически совсем уничтожится.
Расчет кривых на рис. 2.27 производится путем применения дифферен-
циального уравнения (2.1) (стр. 44). Его решение [выражение (2.28а) на
стр. 75] можно сейчас же применить здесь, заменив Ро через тю8а3. Таким
образом.
является уравнением кривых на рис. 2.27. Читателю будет полезно про-
верить правильность формулы для нескольких точек кривой.
Формула (2.28b) для сдвига фазы и соответствующий рис. 2.28,6 могут
быть использованы в нашем случае без всяких изменений. Интересно отме-
§ 2.10
СЕЙСМИЧЕСКИЕ ПРИБОРЫ
80
тить, что в области частот ниже резонансной и при затухании между 0,5-
и 0,7 критического значения кривая сдвига фаз очень мало отличается от
прямой, проходящей по диагонали’ прямоугольника. Это обстоятельство
способствует избавлению от ошибки, известной под названием «искажения
фазы». Для каждой гармоники сложного колебания прибор дает свой
особый сдвиг фазы между действительным движением и записанным.
Если всякий раз этот сдвиг пропорционален соответствующей частоте,
то записанные кривые колебаний будут иметь такую же форму, что и>
кривые действительных движений.
Исторически наиболее старыми сейсмическими инструментами
являются сейсмографы, служащие для записи колебаний при зем-
летрясениях. В этих приборах упруго подвешенная масса бывает
иногда очень велика, ее вес достигает 1m и больше. Что же касает-
ся частоты собственных колебаний,
то она очень низка, порядка одного
колебания за десять секунд.
Для технических применений
имеется большое разнообразие пере-
носных инструментов, весящих при-
близительно от 10 кГ для обычно-
го употребления и до 30 Г и даже
меньше для установки на самолетах.
Главное различие между разнообраз-
ными приборами заключается в спо-
собе регистрации. В наиболее про-
стых из них имеется циферблатный
Рир. 2.28. Виброметр для го-
ризонтальных и вертикальных
колебаний.
индикатор, прикрепленный к раме
прибора и связанный, кроме того, с сейсмической массой.
На рис. 2.28 представлена схема подобного прибора с одним ука-
зателем для горизонтальных и одним для вертикальных колеба-
ний. Обыкновенно колебательное движение бывает столь бы-
стрым, что наблюдателю циферблатная стрелка представляется
в виде двух стрелок с затемненной областью между ними; тогда
удвоенная амплитуда колебаний определится расстоянием между
двумя крайними положениями стрелки.
Приведенная здесь схема видоизменяется еще таким образом>
что циферблат со стрелкой заменяется маленьким зеркальцем,
которое качается при колебаниях Луч света от небольшого про-
жектора, ввиде автомобильной фары, проходит через щель и
затем отражается от качающегося зеркальца на шлифованную
стеклянную пластинку. Пока зеркальце находится в покое, изоб-
ражение получается в виде тонкой линии, но как только начи-
наются колебания, эта линия расширяется в полоску. Приборы
подобного рода, не снабженные приспособлением для непрерывной
записи, называются виброметрами Более совершенные вибро-
графы имеют регистрирующий механизм, который по своим раз-
мерам обычно превосходит сейсмическую часть прибора. Не ко то-
90
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. П
рые из них имею! перо, производящее запись на бумажной ленте;
в других эта запись совершается посредством иглы, наносящей
царапину на целлулоиде или стекле, которая затем исследуется
под микроскопом; наконец, есть приборы, в которых запись про-
изводится световым лучом на движущейся фотографической
пленке.
Вибрографы иногда изготовляются без специальных гасителей.
Эти приспособления должны ставиться в акселерометрах, где они
изготовляются в виде воздушного или масляного демпфера, либо
магнитного амортизатора, сущность которого состоит в том, что
сейсмическая масса снабжается еще придатком, представляющим
собою тонкую медную пластинку, перемещающуюся параллельно
своей плоскости в узкой щели между двумя полюсами сильного
электромагнита. При движении пластинки в ней возбуждаются
токи Фуко, которые вызывают тормозящую силу, пропорциональ-
ную скорости движения.
Пример !. Иногда употребляется виброграф, вовсе лишенный сейсми-
ческой части, т. е. являющийся просто регистрирующим приспособлением.
В этом случае прибор устанавливается на месте, свободном от колебаний,
например он может быть поставлен на тяжелом предмете, который
подвешен к крану заводского помещения Единственным соединением при-
бора с вибрирующей деталью является нгла, которая прижимается к этой
детали посредством пружины, другой конец нглы приводит в действие
записывающий механизм. Требуется найти давление пружины на иглу,
которое необходимо для удержания ее на детали, колеблющейся по закону
sin и« Масса иглы и соединительных движущихся частей пишущего
приспособления равна т.
Решение. Если бы пружины не было, то соприкасание между колеблю-
щейся деталью и концом иглы должно немедленно нарушиться, как только
эта деталь начнет двигаться в обратную сторону. При отсутствии соприка-
сания ускорение иглы по направлению к детали должно равняться Pjm,
где Р есть давление пружины. Это ускорение должно быть, по крайней
мере, равно наибольшему ускорению при возвратном движении колеблю-
щейся детали, т. е.
Р
— = anw2,
т
«ли
Р = юга0ю2.
Для записи крутильных колебаний употребляется сейсми-
ческий прибор, являющийся некоторым видоизменением вибро-
графа и называемый торсиографом. Вместо массы, подвешенной
на пружинах, работающих на растяжение или сжатие, здесь
имеется маховичок, связанный с пружиной, работающей на кру-
чение. Очень легкий алюминиевый шкив а (рис. 2.29) заклинен
на валу Ь. Тяжелый маховичок с может свободно вращаться на
валу, но между ним и валом осуществляется связь при помощи
мягкой спиральной пружины d. Пока шкив находится в покое,
маховичок может совершать вокруг вала свободные крутильные
§ 2.10
СЕЙСМИЧЕСКИЕ ПРИБОРЫ
91
колебания, собственная частота которых достаточно низка. Но
как только валу будут сообщены крутильные колебания, и, следо-
вательно. шкив начнет колебаться, то движение маховичка отно-
сительно шкива будет происходить в этом случае по тому же за-
кону, который изображен графически на рис. 2.20 (вследствие
эквивалентности рисунков 2.3 и 2.4).
Торсиографы этого типа широко распространены в применении
к измерению крутильных колебаний коленчатых валов тихоход-
Рис. 2.29. Сейсмическая часть торсиографа.
ных, а также работающих на средних скоростях двигателей внут-
реннего сгорания.
Конечно, помимо измеряемых колебаний, валы обладают также
равномерным вращением. При производстве измерений шкив а
приводится в движение от коленчатого вала посредством узкого
хлопчатобумажного приводного ремня. Пока коленчатый вал
вращается равномерно, маховичок в точности следует этому дви-
жению, и между а и с никакого относительного движения нет.
Когда же вал начинает вращаться неравномерно, т. е. на его
вращение налагаются крутильные колебания, то шкив а будет
опять точно следовать движению вала, но зато уже маховичок с,
вследствие большой инерции, будет вращаться опять с постоянной
скоростью. Таким образом, возникают колебания в относительном
движении между а и с, которые передаются посредством системы
маленьких коленчатых рычажков тонкому стержню, расположен-
ному по осевой линии полого вала Ъ. В свою очередь, стержень
приводит в действие перо, которое производит запись на бумаж-
ной ленте, приводимой в движение часовым механизмом. Опи-
санный прибор, известный под названием вибро-торсиографа
Гейгера, появился в 1916 г. и выпускается фирмой Commercial
Engineering Laboratories, Detroit, Mich. Он пригоден лишь в при-
менении к тихоходным машинам, каковы, например, судовые
двигатели. В то же время в случае современных быстроходных
двигателей Дизеля регистрирующая система с пером попадает
92
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
в местный резонанс и, сверх того, достижимое увеличение записи
(до 24) оказывается недостаточным. В этих случаях предпоч-
тительнее пользоваться механическим торсиографом Саммера
(Summer), изготовляемым фирмой General Motors Research Labo-
ratories, Detroit, Mich.
Этот прибор вполне пригоден для частот до 10 000 колебании
в минуту и делает запись в виде полярной диаграммы.
Пример 2. Пусть маховик с торсиографа на рис. 2.29 может быть,
приближенно представлен в виде сплошного стального диска диаметром.
11 см и толщиной 5 см. Внешний диаметр шкива равен 12 см. При неподвиж-
но зажатом маховике груз в 300 Г, подвешенный к веревке, навернутой на-
шкив, поворачивает внешнюю окружность шкива на 1,2 см, т. е. при этом'
груз спускается также на 1,2 см.
Какова погрешность записи колебаний с помощью такого инструмента,
если записываемые колебания обладают частотой в 3 периода в секунду?
Кроме того, какова погрешность в записанной амплитуде третьей гармоники
кривой?
Решение. Найдем прежде всего частоту собственных колебаний при-
бора. Коэффициент жесткости k при кручении, выраженный в килограм-
мосантиметрах на радиан, определяется из тех соображений, что момент,
равный 0,3*6= 1,8 кГ см, вызывает угловое перемещение, равное 1,2 : 6 ==
— 0,2 радиана. В таком случае
. 1,8 n г
k = — — 9 к Г см.
0,2
Найдем теперь вес маховика. Получим
- • II2 • 5 • 0,0078 = 3,71 кГ.
4
Далее находим его момент инерции
1 1 3, 7
I — — тг2 = — •----- 5,52 = 0,0572 к Г см сек2.
2 2 981
Частота собственных колебаний получается равной
9 ___
—— = /157 - 12,5 сек-\
0,0572
12,5
fc — — = -— = 2,0 колебания в секунду.
2 л 2л
Итак, частота
Следовательно, по
истинной равно
записываемых колебаний оказывается на 50% выше
уравнению 2.26 отношение записанной амплитуды к
1,52 2,25
Т1 - 1.5s I ~ Ё25 “ 11 1
Гак как третья гармоника имеет частоту, в 4 - раза большую частоты
собственных колебаний прибора, то коэффициент динамичности равен
4,5 20,25
______ _ _ — _ . — — I иг
| 1 - 4.52 | 19,25 ’ ’
^2.11
ПРИБОРЫ ЭЛЕКТРИЧЕСКОГО ИЗМЕРЕНИЯ
93
§ 2.11. Приборы электрического измерения
Быстрое развитие радиотехники за последнее десятилетие
Рис. 2.30. Сейсмоэлектрический датчик,
являющийся в существенных чертах
элементом громкоговорителя.
обмотками,
механиче-
в электри-
сделало возможным создание многих измерительных приборов,
имеющих вообще значительно меньшие размеры и в то же время
гораздо большую чувствительность, чем прежние механические
приборы, описанные в предыдущем параграфе. Большинство из
таких электрических «датчиков» — это опять сейсмические ин-
струменты для прямолинейных или крутильных колебаний,
работающие на том же принципе, что и приборы, рассмотренные
выше. Но они снабжены еще
электрическими
превращающими
ские колебания
ческий ток, который может
быть усилен и затем записан
посредством осциллографа.
На рис. 2.30 изображен схе-
матически датчик для прямо-
линейных колебаний, раз-
работанный Дрейпером и
Бентли (Draper and Bentley)
и выпускаемый под назва-
нием «Сперри-МИТ» фирмами
Sperry Gyroscope Company,
Brooklyn, N. Y. и Consolidated Engineering Corporation,
Pasadena Calif.
Электрическая часть этого прибора, габаритные размеры
которого, кстати сказать, не превосходят 2,5 см, а вес 60 Г, в
общих чертах напоминает собою электромагнит электродинами-
ческого громкоговорителя. Прибор имеет форму тела вращения
вокруг вертикальной осевой линии. Стальная часть а сейсмиче-
ски подвешивается посредством пружин с к корпусу d прибора.
Весьма важной деталью является не показанное на чертеже
направляющее приспособление для массы а. ограничивающее
ее движение только вертикальным направлением и не позволя-
ющее смещаться в стороны. В полости стальной части а помещается
катушка Ь, намотанная на центральный цилиндрический сердеч-
ник. Возбуждение производится проходящим через витки катушки
постоянным током, который намагничивает тело а
Для упрощения в некоторых конструкциях катушка не ста-
вится, и деталь а изготовляется в виде постоянного магнита из
специальной стали. Магнит а, являющийся телом вращения,
имеет кольцевой воздушный зазор с радиальным магнитным полем,
в который вставлен тонкий бумажный цилиндр е, несущий на
себе обмотку из чрезвычайно тонкой проволоки и прикрепленный
94
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
к крышке корпуса d. Весь прибор прикрепляется к тому объекту,
колебания которого желательно измерить. Всякое движение
магнита а в вертикальном направлении создает относительное
перемещение его по отношению к «звуковой катушке» е, приводя
таким образом к возникновению переменного напражения в
этой катушке. Это напряжение, пропорциональное скорости
относительного движения, поступает в усилитель, а затем после
достаточного увеличения записывается на ленте осциллографа.
Пригодные для этой цели осциллографы получили значительное
развитие за последние десятилетия прежде всего в связи с их
применением к практическим вопросам нефтеразведки, завоевав
себе в настоящее время достаточно
прочное положение.
Датчик торсиографа подобного
же типа показан на рис. 2.31, где
а есть вращающаяся сейсмическая
часть, аналогичная части с на
рис. 2.29. Эта часть здесь пред-
ставляет собою постоянный магнит,
северный и южный полюсы которого
обозначены на чертеже. Магнит мо-
жет свободно поворачиваться на мяг-
кой пружине, работающей па кру-
чение, вокруг сердечника d, жестко
Рис. 2.31. Сейсмоэлектрический связанного с валом, крутильные ко-
датчик торсиографа. лебапия которого желательно изме-
рить. Этот сердечник d несет на себе
звуковую катушку е. Силовые линии магнитного поля проходят от
северного полюса к южному через сердечник d, вследствие чего
всякое относительное вращательное движение магнита а по
отношению к сердечнику d вызывает изменение напряжения в
звуковой катушке е, величина которого пропорциональна угловой
скорости относительного движения.
Поэтому запись, полученная на осциллографе (осциллограмма)
от каждого из вышеописанных двух приборов, дает непосредствен-
но скорость, а не амплитуду колебаний. Этот факт сам по себе
не является отрицательным, однако во многих случаях удобнее
иметь сразу же запись амплитуды, а не получать ее путем числен-
ного или графического интегрирования кривой скорости. Это
может быть выполнено электрическим путем посредством так
называемого интегрирующего контура», показанного на рис. 2.32.
На этом рисунке буквой е опять обозначена звуковая катушка,
напряжение в которой пропорционально скорости. Ток, возбуж-
даемый в этой катушке, питает контур с последовательно включен-
ными емкостью С и сопротивлением R. Этот контур рассчиты-
вается так, что напряжение на сопротивлении в несколько раз,
§2.11
ПРИБОРЫ ЭЛЕКТРИЧЕСКОГО ИЗМЕРЕНИЯ
95
например в 10, больше, чем на конденсаторе. Напряжение на
сопротивлении равно iR, а на конденсаторе Так как пер-
вое из них значительно больше второго, то вполне допустимо
считать напряжение iR равным полному напряжению V зву-
ковой катушки. Вследствие этого сила тока г оказывается
пропорциональной напряжению 7, которое, в свою очередь,
пропорционально скорости сейсмической массы, и напряже-
ние на обкладках конденсатора, пропорциональное Jidt, оказы-
вается, таким образом, пропорциональным интегралу от скорости,
т. е. амплитуде колебаний, а это и имелось в виду. Справа на рис.
Рис. 2.32. Интегрирующий электрический кон-
тур, преобразующий запись скорости в запись
амплитуды.
2.32 изображен векторная диаграмма падений напряжения при
изменениях этих величин по гармоническому закону. Упомя-
нутое выше «интегральное» напряжение попадает на вход первого
каскада усилителя. Так как напряжение на конденсаторе равно
примерно одной десятой полного напряжения, то чувствительность
установки понижается в 10 раз, вследствие чего оказывается необ-
ходимым добавочное усиление.
Конструирование усилителей чувствительности, не подвер-
женных влиянию частоты, легко осуществляется для частот от
10 герц и выше. Однако выполнены усилители также для более
низких частот до 3/4 герц и для более высоких до 15 000 герц;
таким образом, оказывается перекрытым весь диапазон частот,
имеющий практическое значение в машиностроении.
Для регистрации очень медленных колебаний применяется
другой электрический принцип, известный под названием «вари-
ации магнитного сопротивления» и поясненный на схемах рисун-
ков 2.33—2.35.
На рис. 2.33 изображены два электромагнита а, жестко свя-
занных один с другим, через обмотки с которых пропускается
нерешенный ток. Частота его значительно выше частоты измеряемых
колебаний, а амплитуда напряжения имеет постоянную вели-
чину. Обычный ток в 60 периодов в большинстве случаев вполне
96
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ, п
подходит для изучения колебания с частотой ниже 15 периодов
в секунду; при регистрации колебаний, значительно более бы-
стрых, для возбуждения катушек с применяется специальный
-альтернатор с частотой порядка 500 периодов. Ток из альтерна-
тора проходит через две катушки с, включенные последовательно.
Сердечник Ь, изготовленный из стальных пластинок, как и
С7-образные части а, установлен между этими частями таким обра-
зом, чтобы воздушный зазор между ними получился возможно
более малым. Средняя часть Ь совершает колебательное движение
Рис. 2.33. Прибор, работающий на прин-
ципе вариации магнитного сопротив-
ления, в котором применяется несущий
ток значительно более высокой частоты,
чем частота измеряемых колебаний.
между неподвижными частя-
ми а, изменяя, таким обра-
зом, воздушный зазор с ча-
стотой, равной частоте коле-
баний. Если при колебании
части Ь зазоры по обе сто-
роны от этой части в некото-
рый момент времени в точ-
ности равны др^г другу, то
напряжение от альтернатора
распределяется поровну меж-
ду обмотками с; однако, если
зазор со стороны одной части
а делается больше, чем со
в катушках с уже отли-
стороны другой, то напряжения
чаются одно от другого.
Описанный прибор соединяется с цепью мостика Уитстона
по схеме, показанной на рис. 2.34, где катушки с уравновешиваются
двумя равными полными сопротивлениями d. При равных воз-
душных зазорах и, следовательно, равных напряжениях на
катушках с указатель на мостике Уитстона покажет нуль, а
вообще его показания будут пропорциональны разности между
обоими зазорами. Как легко видеть, прибор находится под дей-
ствием тока, частота которого равна частоте возбуждающего
источника. Если вместо указателя включить в цепь осциллограф,
то последний сделает запись, характер которой представлен на
верхней части рис. 2.35. На этой осциллограмме быстрые колеба-
ния обусловлены переменным током от альтернатора, а медлен-
ные изгибы обертывающей кривой представляют собою интере-
сующие нас колебания установки. Для большего удобства чте-
ния записи в измерительную ветвь мостика Уитстона включают
выпрямитель, который преобразует верхнюю запись на рис.
2.35 в нижнюю.
Прибор, изображенный на рис. 2.33, может применяться в
качестве сейсмического прибора, если части а имеют сейсми-
ческую подвеску, а часть b непосредственно соединена с колеблю-
щейся деталью, движение которой желательно изучить. Однако
§2.11
ПРИБОРЫ ЭЛЕКТРИЧЕСКОГО ИЗМЕРЕНИЯ
97
Рис.2.34. Цепь мостика Уит-
стона для прибора, пока-
занного на рис. 3.33.
этот же прибор может быть использован в качестве тензометра,
т. е. прибора для определения удлинений в стержнях конструк-
ций; тогда две части а прикрепляются к одному месту исследуе-
мой конструкции, а средняя часть Ъ к другому.
Прибор, известный под названием электрического торсиометра
Сименса — Мак-Наба (Siem ens-McNab Electric Torsion Meter),
вошел в употребление для измерения
мощности, передаваемой валом гребного
винта у судов, находящихся в пути.
Часть а прибора по схеме на рис. 2.33
прикрепляется к муфте, связанной с
одним сечением вала гребного винта,
тогда как часть b прикрепляется к дру-
гой муфте, связанной с сечением вала,
находящимся примерно на расстоянии
90 см от первого. Если вал на этом
участке подвергается скручиванию,
дающему деформированное состояние,
то в процессе вращения вала части а
и Ъ изменяют относительное располо-
жение. Обратимся теперь к рис. 2.34.
Здесь части с, с вращаются вместе
с валом, и ток протекает через три
скользящих кольца. В то же время неврашающийся прибор
содержит не только омические сопротивления й, но также
и весь комплекс, подобный изображенному на рис. 2.33. Взаимное
расположение (невращающихся)частей а и Ь изменяется прецизион-
ным микрометрическим винтом до тех пор, пока амперметр не
покажет нуль. Тогда воздушные зазоры, вращающийся и не вра-
Рис. 2.35. Запись, полученная с помощью мостика Уитстона.
шлющийся, должны быть одинаковы; их положение, а следова-
к'лыю, и крутящий момент на валу, прочитывается по невращаю-
щемуся микрометрическому винту.
Прибором, имеющим чрезвычайно большое значение, является
।сизометрический датчик проволочного сопротивления, впервые
7 Двп-Гартог - 2074
98
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
4
ГЛ. II
Рис. 2.36. Проволочный
тензометрический зажим.
введенный в употребление Симмонсом и Дэтвейлером (Simmons
and Datwyler), усовершенствованный Раджем и де-Форестом
(Ruge and De Forest) и выпускаемый под маркой «SR-4gage» фир- *
мой Болдуин (Baldwin Southwark Со, Philadelphia, Ра); этот при-
бор получил всеобщее применение, особенно в авиационной
промышленности. Прибор изготовляется из очень тонкой прово-
локи (0,025 мм) с большим электри-
ческим сопротивлением (нихром), рас-
положенной, как показано на рис. 2.36,
и помещенной между двумя тонкими
листами бумаги. Вся длина прибора
около 2,5 см\ полное электрическое ь
сопротивление около 500 ом. Прибор
приклеивается к испытуемому метал-
лическому предмету; если этот предмет (а следовательно, и нихро-
мовая проволока) деформируется, то электрическое сопротив-
ление проволоки изменяется. Коэффициент чувствительности,
являющийся отношением относительного изменения' сопротив-
ления к относительному изменению длины, примерно равен 3. )
Это значит, что, например, для напряжения в стали, равного
2,1 • 10® кГ/см2 и дающего относительное удлинение 0,001,
электрическое сопротивление получает относительное изме-
нение 0,003, так что в приборе с сопротивлением 500 ом
абсолютное изменение сопротивления будет 1,5 ом. Рис. 2.37
показывает включение описанного прибора в цепь. Электри-
ческое напряжение батареи делится между прибором а и постоян-
ным сопротивлением Ъ. Если деформация, и, следовательно, ।
Рис. 2.37. Цепь для электри-
ческого тензометрического
датчика.
Рис. 2.38 Два тензометрических дат-
чика, укрепленных под углом 45° к
оси вала, образующие чувствитель-
ный элемент для исследования кру-
чения вала.
сопротивление прибора ас течением времени изменяется, то меня-
ется как напряжение на его концах, так и напряжение на сетке
лампы первого каскада усилителя, связанного с осциллографом.
На рис. 2.38 показано применение этого метода к измерению
кручения вала. Известно, что для вала, работающего на кручение,
§2.11 ПРИБОРЫ ЭЛЕКТРИЧЕСКОГО ИЗМЕРЕНИЯ 99
.пинии наибольших деформаций направлены под углом 45° к
его оси. Поэтому, если приклеить два тензометрических датчика
к валу, как показано на рисунке, то при его скручивании один из
них будет удлиняться, а другой укорачиваться. Вследствие этого
напряжение постоянного тока от батареи непоровну распреде-
лится между обоими датчиками, и изменения напряжения будут
следовать за изменениями вала, т. е. за изменениями крутящего
момента.
Практическое преимущество тензометров только что описан-
ного типа заключается прежде всего в их чрезвычайной легкости.
Так, для измерения напряжений в винтах самолетов или в лопат-
ках турбин, где напряжение поля центробежных сил достигает
9000 д, пригодны только чувствительные элементы, почти лишен-
ные веса. Применение датчиков омического сопротивления впер-
вые сделало возможными достаточно надежные измерения ви-
брационных давлений в винтах самолетов.
При очень медленных вариациях замеряемых величин обыч-
ный усилитель не сможет работать, и в этих случаях приборы
возбуждаются высокочастотным током, подобно тому, как пока-
зано на рис. 2.34. Фирма Фоксборо (Foxboro Со., Foxboro, Mass.}
выпускает прибор под маркой «Диналог» (Dynalog) с несущим
током 1000 периодов, генерируемым ламповым осциллятором,
вмонтированным в прибор. Схема его контура приблизительно
такая же, как на рис. 2.34, где с, с — два датчика» один в состоя-
нии растяжения, другой — в состоянии сжатия, й, d — конден-
саторы, один постоянной емкости,'другой — переменной. Ток от
неуравновешенного мостика вместо того, чтобы проходить через
амперметр (рис. 2.34), проходит через маленький моторчик, вра-
щающий вал. Последний изменяет переменную емкость конден-
сатора d до тех пор, пока не будет снова достигнуто равновесие,
и ток через мотор прекратится. Положение вала конденсатора
показывает деформацию, значение которой может быть легко
отсчитано по шкале с точностью до 1% всей шкалы, которая
обычно соответствует относительной деформации в 0,001.
В соединении с этим диналогом возможно употребление мно-
ючисленных датчиков для измерения самых разнообразных
величин, как, например, деформации, напряжения, давления.
Датчики для измерения давления имеют вид и размеры запальной
свечи и могут ввинчиваться в трубопровод. Они содержат в
п Си элемент, который деформируется пропорционально давле-
нию жидкости или газа и с которым связан описанный выше датчик
SJI = 4. Эти приборы имеют различную чувствительность;
наиболее чувствительные из них имеют шкалу для диапазона
давлений от Одо 42 кГ/см2, в то время как наименее чувствитель-
ны! — от Одо 1400 кГ)см2. Существуют также дифференциальные
приборы подобного типа, наиболее чувствительные из которых
100
СИСТЕМЫ с ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. I)
регистрируют давления в диапазоне шкалы от 0 до 250 см водя-
ного столба, налагающиеся на основное давление 35 кГ/см2
или выше1).
Стробоскоп есть прибор для производства прерывающихся
вспышек света, посредством которых тело, совершающее быстрые
колебательные движения, может казаться находящимся в покое
или движущимся очень медленно. В хорошем стробоскопе вспышки
света имеют исключительно короткую продолжительность. Вооб-
разим, что колеблющийся предмет освещен источником света
подобного рода, который отрегулирован так, что имеет ту же
самую частоту, что и колебания. Предмет будет видимым в не-
котором определенном положении, после чего он сделается тем-
ным и будет оставаться невидимым при дальнейшем своем пере-
мещении в течение одного периода колебания. Затем, когда по
истечении периода он возвратится к своему первоначальному
положению, на него опять попадает свет при следующей вспышке.
Таким образом, предмет будет казаться стоящим на месте. Если
частота вспышек слегка отличается от частоты колебательного
движения, то создается впечатление, что колебания происходят
очень медленно. Для создания хорошей иллюзии покоя, без мерца-
ния, необходимо, чтобы в течение одной секунды происходило не
менее 15 вспышек, подобно тому, как это имеет место в кинопроек-
торе. Отчетливость получаемой картины обусловливается требо-
ванием, чтобы за время одной вспышки предмет перемещался
очень мало. Вспышки значительной продолжительности при-
водят к расплывчатому изображению. Новейшие усовершенство-
вания вакуумных и газонаполненных трубок сделали возмож-
ным изготовление стробоскопов, дающих вспышки большой силы
и очень малой продолжительности. Частота вспышек может
непосредственно отсчитываться на калиброванном циферблате
подобно тому, как это делается в радиоприемнике. Для достаточно
больших амплитуд прибор может служить одновременно как
измерителем частоты, так и измерителем амплитуд.
Для меньших амплитуд употребляется стробоскоп в соеди-
нении с сейсмически подвешенным микроскопом. Для этого надо
взять сейсмическую массу с очень малой частотой собственных
колебаний, несущую на себе микроскоп. Микроскоп наводится на
маленький кусочек наждачной бумаги, наклеенный на колеб-
лющийся предмет и освещенный стробоскопом. Тогда отдельные
частички наждака представятся наблюдателю в виде резких
точек, описывающих по причине стробоскопической установки
1) В оригинале приводится калибровка приборов в английских мерах.
Указанные здесь значения давления представляют собой соответствен-
но слегка округленные величины 600 фунт1дюйм2, 20 000 фунт1дюйм2.
100 дюйм, 500 фунт/дюйм2. (Прим, перев.)
§2.11
ПРИБОРЫ ЭЛЕКТРИЧЕСКОГО ИЗМЕРЕНИЯ
101
замкнутые кривые. Таким образом, можно определить частоту
и амплитуду колебаний.
Некоторые стробоскопы имеют две или больше ламп, действу-
ющих от одной и той же цепи, которые вследствие этого вспыхи-
вают одновременно. Это чрезвычайно удобно для нахождения
отношения фаз. Пусть мы имеем две части машины, колеблющиеся
с одной и той же частотой, и нам нужно знать, находятся ли эти
части водной фазе или в противоположных.Для этого каждый из
двух наблюдателей берет по лампе, причем частота вспышек
регулируется так, чтобы колебания казались очень медленными.
После этого они обращают свое внимание на две отметки, и пер-
вый наблюдатель подает сигнал каждый раз, как рассматриваемая
им колеблющаяся часть занимает одно из двух крайних положе-
ний.,Тогда другой наблюдатель может легко проверить, находится
ли изучаемое им движение в той же фазе или в противоположной.
Очень удобный прибор такого рода, разработанный Эджер-
тоном (Edgerton), выпускается Всеобщей Компанией Радио (Gene-
ral Radio Company, Cambridge, Mass.) под маркой «Строботак»
(Strobotak).
Пример. Положим, что мы хотим наблюдать точку, расположенную
в 10 см от оси машины, вращающейся со скоростью 10 000 об/мин. Какова
должна быть продолжительность одной вспышки света, если нам желатель-
но получить расплывчатость изображения не более чем в 0,7 мм?
Решение. Точка, о которой идет речь, перемешается в одну секунду
на расстояние
• 2л • 10 = 10 500 см = 150 000 • 0,07.
60
1
Таким образом, вспышка должна длиться — А—- - сек или меньше.
150 000
Интересный торсиограф, основанный на совершенно ином
принципе, был разработан фирмой General Motors Research
Laboratories. Он назван «торсиографом со сдвигом фазы» (phase-
shift torsiograph) и состоит из насаженного на вал тонкого колеса
(толщины около 1,5 мм) с большим числом равноотстоящих друг
от друга зубцов (например, около 300). Два небольших электро-
магнита с обмотками подведены почти вплотную к зубчатому
колесу, которое действует наподобие обращенного электриче-
ского звонка. Проходящие зубцы вызывают в обеих катушках
переменное напряжение с частотой прохождения этих зубцов.
>ia частота постоянна лишь в случае равномерного вращения
нала; если же вал испытывает крутильные колебания, то запись
юка покажет синусоидальные волны то тесно сдвинутые, ю-
раздвинутые.
Получаемый на выходе ток переменной частоты поступает в
смеситель, где он смешивается с током постоянной средней ча-
ст гы, который вырабатывается ламповым генератором.
102
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. II
Таким образом, два тока будут составлять между собой непре-
рывно изменяющийся фазовый угол, и соответственным приемом
можно достигнуть того, что на осциллографе сразу получится
запись амплитуд крутильных колебаний в зависимости от вре-
мени. Преимущества этого метода состоят в отсутствии скользя-
щих колец и в возможности установить прибор на машинах так
компактно, как это невозможно для какого-либо иного прибора,
а также в получении записи, которая не зависит от степени усиле-
ния электронных устройств, а определяется только фазовыми
углами. Интересно отметить, что в этом методе «сейсмическим»
элементом является уже не механическая деталь — маховик,
вращающийся с постоянной скоростью, а вакуумная трубка
генератора, производящего ток постоянной частоты.
По вопросу электрических гармонических анализаторов см.
стр. 38 (раздел о рядах Фурье).
§ 2.12. Теория виброизоляции
Положим, что неуравновешенная машина должна быть уста-
новлена в сооружении, колебания которого нежелательны. Подоб-
ное требование встречается довольно часто. Примером может
служить мотор переменного тока лифта в больнице или гостинице,
а также двигатель на автомобиле. Задача заключается в уста-
новке машины таким образом, чтобы в том сооружении, с которым
она связана, колебания не
появлялись.
Общее решение этой
задачи состоит в пружин-
ном подвешивании ма-
шины, а тогда рисунки 2.18
и 2.20 опять дают указа-
ния к правильному выпол-
нению подобной установ-
ки. На рис. 2.39 машина
изображена в виде массы
т с силой Р sin cot, дей-
Рис. 2.39. Опора на очень гибких пружинах
предупреждает передачу колебаний фун-
даменту.
ствующей на нее. На
рис. 2.39, а эта масса прикреплена жестко к фундаменту,
в то время как на рис. 2.39,6 она установлена на пружинах
с коэффициентом жесткости к (на рис. 2.39, а это к бесконечно
велико). Для простоты фундамент предполагается абсолютно
жестким; более сложный случай подвижного основания будет
рассмотрен ниже на стр. 165.
Если теперь Ро удерживается постоянным, а частота из-
меняется, то амплитуда колебаний массы т изменяется согласно
диаграмме, изображенной на рис. 2.18.
§ 2.12
ТЕОРИЯ ВИБРОИЗОЛЯНИИ
103
Наша задача заключается в нахождении величины силы,
передаваемой машиной фундаменту. Так как в соприкосновении
с основанием находятся лишь пружины к, то единственной пере-
даваемой силой может быть только сила упругости пружины,
которая имеет величину кх (предполагается, что затухание
отсутствует). Ординаты на рис. 2.18 представляют собою отно-
шение наибольшего перемещения xQ массы к статическому пере-
мещению:
Поэтому
хп хп ка0 сила пружин
ордината =—- = = ----------------
г жст Ро Ро возмущающая сила
к
= —°-----------— = «коэффициент передачи» (transmissibility),
возмущающая сила
) В идеальном случае это отношение должно быть равно нулю;
практически наша цель заключается в том, чтобы сделать указан-
ное отношение достаточно малым. На рис. 2.39, а коэффициент
жесткости к = ©о, и поэтому частота собственных колебаний
или резонансная частота равна бесконечности. Таким образом,
действующая частота со возмущающей силы очень мала по срав-
нению с частотой собственных колебаний, т. е. мы находимся в
точке А рис. 2.18, вследствие чего передающая сила равняется
возмущающей силе. С физической точки зрения это очевидно, так
как основание предположено нами жестким, а поэтому масса т
не может двигаться: следовательно, основанию передается вся
сила Ро. Диаграмма на рис. 2.18 показывает, что поддерживающие
пружины необходимо рассчитать таким образом, чтобы часто-
та собственных колебаний всей машины была очень мала в сравне-
нии с частотой изменения возмущающей силы; иными словами,
пружины должны быть очень мягкими.
Рассмотрение этой диаграммы и соответствующей формулы
(2.24) показывает, что если со меньше, чем сос ]/2 = У^к/т, то пру-
жины в действительности только ухудшают положение, так
как коэффициент передачи оказывается больше единицы. Когда
1
частота собственных колебаний равна- частоты изменения возму-
о
тающей силы, коэффициент передачи равен Это достаточно
хорошо, но во многих случаях предпочитают делать пружины
еще мягче. До сих пор мы предполагали, что колебание машины
происходит без затухания. Практически это можно считать
104
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. П
выполненным при применении стальных пружин. Однако иногда
с целью амортизации употребляется каучуковая или пробко-
вая набивка, и тогда уже [пренебрегать явлением затухания
нельзя. Соответствующая система символически представлена
на рис. 2.40; амплитуда движения массы т определяется одной
Рис. 2.40. Рессорная
опора с затуханием.
из кривых на рис. 2.22. В этом случае
ординаты кривой перемещений уже не
являются прямо пропорциональными ор-
динатам кривой коэффициентов передачи.
Теперь передаваемая сила возникает не
только вследствие силы упругости пружины
kxQ, но также вследствие силы затухания
сых0. На стр. 75 было показано, что эти
две силы, находящиеся соответственно вод-
ной фазе с перемещением и со скоростью,
отличаются по фазе друг от друга на 90°,
или на тг/2. Следовательно, их сумма, ко-
торая является полной передаваемой силой, согласно уравнению
(1.6, стр. 16), равна
х0У№ + (са>)2.
(2.32)
Амплитуда ^определяется формулой (2.28 а) на стр. 16,
ствие чего из формулы (2.32) получаем:
вслед-
передаваемая сила =
или, поскольку PQ является возмущающей силой, то
(2.33)
В случае отсутствия амортизатора, т. е. при с/ск = 0, мы получаем
формулу (2.24) на стр. 68. Это соотношение графически представ-
лено на рис. 2.41. Как видно, затухание выгодно лишь в области,
где й)/юс < 1,41 (где рессорное подвешивание нецелесообразно);
для всех же значений о/с»с, при которых рессорное подвешивание
оказывается благоприятным, затухание ухудшает значение коэф-
фициента передачи.
Это довольно парадоксальное утверждение в действительности
не имеет столь принципиального значения. В самом деле, прежд
всего неблагоприятное действие затухания уже не так велико и
105
§ 2,13 ПРИЛОЖЕНИЯ К ОДНОФАЗНЫМ ЭЛЕКТРИЧЕСКИМ МАШИНАМ
может быть легко избегнуто, если сделать пружины несколько
менее жесткими, что соответствует на рис. 2.41 некоторому
перемещению вправо. С другой стороны, хотя мы и не желаем
попадать в резонанс, когда cd/cdc = 1, но это, к сожалению, иногда
может случаться, и тогда-то присутствие амортизатора является
Рис.2.41. Диаграмма, показывающая желательность зату-
хания в рессорном подвешивании при &> < о>с У2 и не-
желательность при w > ь>сУ2.
в высшей степени желательным. Таким образом, вопреки указа-
нию диаграммы, изображенной на рис. 2.41, некоторое затухание
в пружинах вообще выгодно.
§ 2.13. Приложения к однофазным электрическим машинам
На практике случаи виброизоляции посредством пружин
встречаются во многих машинах. Надо, однако, отметить, что
главная область применений относится к тем машинам, которые
являются неуравновешенными по самой своей конструкции или
воспринимают непостоянный вращающий момент, обусловленный
особенностью машины. Среди последних наиболее важны одно-
фазные динамомашины и электромоторы, а также двигатели
внутреннего сгорания.
Рассмотрим прежде всего однофазные электрические машины.
Как известно, крутящий момент в электромоторе вызывается
действием электромагнитного поля на якорь, по которому
106
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. 11
течет ток, но в свою очередь и само магнитное поле вызвано тече-
нием тока через катушки поля. Пусть мотор приводится в дей-
ствие однофазным переменным током, имеющим, например, 60
периодов в секунду; тогда ясно, что ток, протекающий через мотор
(и через катушки электромагнитов поля), должен обращаться в
нуль 120 раз в секунду. Но при силе тока, равной нулю, исчезает
и магнитное поле, а следовательно, и крутящий момент. Даже
не зная подробностей устройства такой машины, мы можем
предполагать, что вращающий момент должен быть некоторой
периодической функцией времени, имеющей 120 периодов в
секунду.
Более точный анализ может быть произведен следующим образом.
Мощность всякой электрической машины в данный момент времени, выра-
женная в ваттах (произведенная работа за одну секунду), равняется произ-
ведению напряжения (в вольтах) на силу тока (в амперах), или:
число ватт = е • i.
Если напряжение равно
б = emax ‘ sin tot,
где ю = 60 • 2леек-1 и если сила тока
« = «max ’ Sin (tot — <р),5
то имеем:
мощность = етах • ?тах • sin tot • sin (ьИ — tp) =
— етах «max sin tot (sin cot coSep — cos tot sin tp) =
= emax «max (sin2 tot COS tp — sill tot COS tot sin tp) =
emax «max . ,, n
= ---------[cos«p(l — cos 2wf) — smtp sin 2 tot] =
emax «max r ,o . ,
« ---------[cos tp — cos (2cot — tp) J.
Таким образом, мы видим, что выражение для мощности состоит из двух
частей, из которых одна не зависит от времени в представляет собою
установившуюся мощность (это есть та мощность, которая имелась в
виду при конструировании машины); другая же часть изменяется по гар-
моническому закону с частотой 2со. За продолжительный промежуток
времени последняя часть не даст работы, так как положительные и отрица-
тельные члены будут взаимно уничтожаться. Крутящий момент найдется
из мощности так:
работа момент X угол
мощность = --------- ------------------- момент х угловая скорость,
секунда секунда
Таким образом, все заключения, сделанные относительно мощности,
сохраняют свою силу и для момента, если, конечно, угловая скорость
постоянна, что обычно при установившемся ходе машин практически можно
считать выполненным.
§ 2,13 ПРИЛОЖЕНИЯ К ОДНОФАЗНЫМ ЭЛЕКТРИЧЕСКИМ МАШИНАМ
107
Соотношение между крутящим моментом и временем дано
на рис. 2.42, который показывает, что амплитуда а изменения
момента примерно на 30% больше номинального значения Ь
этого момента для данной машины. Однако такое соотношение
создает плохие условия для работы машины; самый лучший
случай, который только может представиться — это тот, когда
а = Ь. Тогда крутящий момент никогда не делается отрицатель-
ным, а только обращается в нуль, причем 125 раз в секунду.
Рис. 2.42. Крутящий момент однофазного электромотора перемен-
ного тока есть периодическая фун кция времени, частота которой
равна удвоенной частоте напряжения.
Электрическая машина состоит из двух частей: ротора и
статора. Хотя в назначение машины входит сообщение крутящего
момента ротору, однако по закону Ньютона о равенстве действия
и противодействия неизбежным является тот факт, что момент,
такой же по величине, но противоположный по направлению,
действует на статор. Если статор наглухо прикреплен болтами к
фундаменту, то мы имеем случай, аналогичный изображенному
на рис. 2.39, а. Реактивный момент весь передается фундаменту
машины, и оттуда его действие может дальше распространяться
r различных направлениях. Хотя распространяющееся таким
образом колебательное движение обычно очень мало, однако может
случиться, что на достаточно большом расстоянии от источника
колебаний окажется балка или вообще какое-либо сооружение,
имеющее частоту собственных колебаний тоже 120 периодов
в секунду. Подобная конструкция воспримет движение и увеличит
его благодаря резонансу. Известен случай, относящийся к неко-
торому числу больших однофазных генераторов, установленных
па фундаменте в Нью-Йорк Сити. От жильцов квартир, располо-
женных в доме за несколько кварталов от места установки гене-
108
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. П
раторов, поступали жалобы на неприятное жужжание в их
квартирах, тогда как со стороны соседей, живущих значительно
ближе к источнику колебаний, подобных жалоб совершенно не
было. Очевидно, объяснение описанного факта таково: лица,
которые жаловались, имели несчастье жить в квартирах, где
пол или потолок звучали именно с частотой 120 колебаний в
секунду. Помочь этому оказалось возможным путем установки
генераторов на пружинах, как указано на рис. 2.43.
Рис. 2.43. Рессорное подвешивание больших однофазных
генераторов для восприятия реактивных моментов.
Так как возмущающим фактором является лишь крутящий
момент, а не сила, действующая попеременно вверх и вниз, то
пружины должны быть расположены таким образом, чтобы
статор мог поворачиваться, совершая крутильные колебания,
т. е. уступать действию крутящего момента. Жесткость пружин
должна быть подобрана так, чтобы частота собственных кру-
тильных колебаний статора на пружинах была примерно равна
одной седьмой от 120 колебаний в секунду.
В установках для больших машин, имеющих место в действи-
тельности, пружины, показанные на рис. 2.43, бывают обычно
не винтовые, как изображено на рисунке, а чаще в виде брусьев
из рессорной стали, работающих на изгиб и расположенных своей
длиной параллельно оси вращения генератора. На рис. 2.44 дан
эскиз подобной установки (поперечное сечение АА на рис. 2.43);
а обозначает статор, Ь — опору и с — плоскую рессору, воспри-
нимающую нагрузку в четырех точках.
Малые однофазные моторы широко применяются в машинах
для домашнего хозяйства, как то: в холодильниках, в машинах
для стирки белья и т. п. Иногда такие моторы имеют шестерню
§2.13 ПРИЛОЖЕНИЯ К ОДНОФАЗНЫМ ЭЛЕКТРИЧЕСКИМ МАШИНАМ
109
на валу, приводящую в движение зубчатое колесо, так что в этом
случае оказывается необходимым устанавливать подшипники
ротора таким образом, чтобы они обладали большой жесткостью
либо при вертикальных, либо при горизонтальных перемещениях,
благодаря чему было бы обеспечено хорошее действие зубчатой
Рис. 2.44. Деталь листовой рессоры генератора рис. 2.43.
передачи. Сдругой стороны, статор должен быть установлен весьма
гибко для возможности совершать вращательные движения.
В продаже существует несколько конструкций, удовлетворя-
ющих обоим поставленным требованиям. Две из них мы здесь опи-
шем. Их общая особенность та, что подшипники ротора непо-
Рис.2.45. Укрепление малого однофазного мо-
тора в резиновом кольце а, являющемся гиб-
ким на скручивание и жестким на верти-
кальное и боковое перемещения.
движно скреплены со статором, чем эти конструкции и отличаются
от изображенной на рис. 2.43, где подшипники прикреплены не-
подвижно к полу, так что пружины оказываются между подшип-
никами ротора и статором. Такой жесткий агрегат (ротор-
счатор) установлен на пружинах или на основании, или на полу.
Способы, которыми все это выполняется, во всяком случае доста-
точно разнообразны.
no
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
гл. п
В первой конструкции (рис. 2.45) каждый конец статора уста-
новлен в толстом резиновом кольце а, которое удерживается в
опоре Ь, прикрепленной к полу. Резина является материалом,
могущим подвергаться весьма значительному растяжению до
достижения предела упругости, но в то же время она исключи-
тельно сильно сопротивляется изменению ее объема: если рези-
новую полоску удлинить вдвое, то среднее значение ее поперечного
сечения при этом становится также в два раза меньше (иным
способом это можно выразить, указав, что для резины пуассоново
Рис. 2.46. Укрепление малого мотора на рессоре, со-
стоящей из двух участков, наклоненных под углом 45°
к горизонту и проходящих через ось мотора.
отношение равно половине). Благодаря такому свойству подшип-
ник внутри резинового кольца навряд ли сможет передвигаться в
сторону по отношению к основанию, так как это значило бы
утоньшение кольца с одной стороны, что могло бы иметь место
лишь тогда, когда резина утолщалась бы в вертикальном направ-
лении. Это, однако, предотвращено трением, вследствие чего
кольцо образует жесткое звено между подшипником и опорой,
поскольку речь идет о боковых (или вертикальных) перемещениях.
Что же касается вращения подшипника в опоре, то ему резина
противодействует лишь реакцией, действующей на сдвиг, который
может иметь место без изменения объема, и, таким образом,
кольцо проявляет гибкость по отношению к этому движению.
Обратимся теперь к другому способу, также достаточно
остроумному и ведущему к той же цели; соответствующая схема
представлена на рис. 2.46.
Здесь подшипник поддерживается стальной полоской, изог-
нутой так, что два ее участка образуют с горизонтом углы по 45°,
а три участка горизонтальны (эта полоска является одновременно
и пружиной и опорой). Таким образом, мы получаем между полом
и подшипником две наклоненные под углом 45° балки, заделанные
обоими концами. Конструкция осуществляется так, что осевые
линии обеих балок проходят через центр подшипника. Всякое
вертикальное и горизонтальное перемещение сопряжено либо с
растяжением, либо со сжатием этих балок, в то время как поворот
§ 2.14
ПРИМЕНЕНИЕ К АВТОМОБИЛЮ. ПЛАВАЮЩАЯ ПОДВЕСКА
111
подшипника вызывает изгиб балок. Так как полоска легко под-
дается изгибу, но является несравненно более жесткой на чистое
растяжение или сжатие, то тем самым мы достигаем желаемого
результата.
§ 2.14. Применение к автомобилю. Плавающая подвеска
Двигатели внутреннего сгорания имеют диаграмму враща-
ющего момента в зависимости от времени, немногим отличающуюся
от диаграммы, представленной на рис. 2.42. Для четырехтактного
двигателя соответствующая частота в периодах в минуту равна
п п
2 X число оборотов в минуту, где п есть число цилиндров. Все
это подробно будет разъяснено на стр. 266, здесь же важно знать
Рис. 2.47. Схема плавающей подвески автомобильного двигателя.
лишь, что существует вращающий момент. Если мотор жестко
установлен на раме, то изменения этого момента вызовут появле-
ние соответственных реакций со стороны самого экипажа (авто-
мобиля, вагона и т. д.), которые будут восприниматься как крайне
неприятное явление. Очевидное средство против указанного
явления заключается в установке двигателя таким образом,
чтобы его свободные вращательные колебания вокруг оси вра-
щающего момента были очень медленными; точнее говоря, частота
1нких свободных колебаний должна быть меньше угловой скоро-
< hi вращения вала примерно в п/2 раза.
Это может быть выполнено помещением блока мотора на две
напфы — одна спереди и одна сзади, — входящие в подшипники,
прикрепленные к шасси, благодаря чему блок получает возмож-
ность поворачиваться вокруг оси, практически параллельной
о< II момента и проходящей через центр тяжести мотора (ось А А
и.। рис. 2.47). Если конструкцию осуществить именно в таком виде,
г* । каких-либо добавлений, то блок мог бы свободно вращаться
uoKpyj оси А А. Эта возможность, однако, предупреждается
112
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ГЛ. 11
введением полоски листовой пружины В между блоком и рамой,
жесткость которой подбирается таким образом, чтобы сделать
частоту собственных колебаний достаточно низкой.
Кроме действия неуравновешенного момента, четырехцилинд-
ровый двигатель испытывает еще действие горизонтальных и
вертикальных сил инерции (см. стр. 241), которые естественно
вызывают реакции в А и В. По этой причине как подшипники А,
так и конец пружины В заделываются в резину.
В конструкциях, имеющих место в действительности, ось АА
не строго параллельна оси момента. Это делается вследствие того,
что ось момента не является главной осью инерции и, следователь-
но, не совпадает с соответственной осью вращения.
Рис. 2.48. Вращение вокруг оси, отличной от главной
оси инерции, приводит к возникновению реактивных
сил в подшипниках.
Всякое твердое тело имеет три «главные оси инерции». Рассмотрим,
например, прямоугольный брусок стали (рис. 2.48), который прикреплен к
невесомому валу, проходящему через его центр тяжести, но не совпадающему
ни с одной из его главных осей инерции (»лесь это будут оси симметрии).
Брусок и ось вала лежат в плоскости чертежа. Теперь приложим мгновенно
вращающий момент к валу и рассмотрим вызванные им ускорения. Точки
верхней части бруска получают ускорения, направленные за чертеж, в то
время как ускорения точек, принадлежащих нижней части, направлены со
стороны чертежа на нас (все это указано на фигуре точками и крестиками).
Умножая эти ускорения на массу соответственных элементов, мы получим
силы инерции. Из чертежа ясно, что произведения сил инерции на расстоя-
ния их от оси вала образуют в результате крутящий момент, который равен
по величине, но противоположен по направлению, приложенному вра-
щающему моменту. Больше того, эти силы, будучи умножены на их рас-
стояния от вертикальной пунктирной линии, дают крутящий момент
относительно этой линии, как оси. Отсюда получаются соответствующие
реакции в подшипниках; тогда на правый подшипник будет действовать
сила, толкающая его со стороны чертежа по направлению к читателю, в то
время как левый подшипник будет испытывать действие силы, толкающей
его за плоскость чертежа. Очевидно, что если бы мы удалили подшипники,
то тело под действием вращающего момента стало бы вращаться уже не
вокруг оси момента (силы в подшипниках соответствовали именно такому
вращению)1). Итак, вообще тело, находящееся под действием вращающего
момента, вращается вокруг оси, не совпадающей с осью момента (если
только эта ось не является главной осью инерции).
г) А вокруг какой-то иной оси. (Прим, перев.)
Й 2.14
ПРИМЕНЕНИЕ К АВТОМОБИЛЮ. ПЛАВАЮЩАЯ ПОДВЕСКА
ИЗ
Таким образом, ось, к которой должен быть амортизирующе
подвешен мотор («плавающая подвеска»), не должна быть
осью момента. Она должна быть осью вращения, соответствую-
щей заданной оси момента. Только в том случае, когда ось
момента является главной осью инерции, обе указанные оси
совпала ют.
Существует еще несколько иных конструкций рессорного
подвешивания в автомобилях; однако большинство из них в
принципе сходны с конструкцией, схематически представленной
на рис. 2.47. Некоторые из этих конструкций имеют одну рези-
новую опору в задней части двигателя и две, рядом расположен-
ные, в передней части на той же высоте. Эти передние опоры
по своему назначению заменяют подшипник А и восстанавли-
вающую пружину В на рис. 2.47.
Пример. Четырехцилиндровый автомобильный двигатель, весящий
182 кГ, подвешен так, как указано на рис. 2.47. Радиус инерции мотора
относительно оси АА равен 15,2 см, расстояние а = 45,8 см и длина пло-
ской пружины / = 10,2 см. Диаметр задних колес равняется 76,2 см,
причем на высшей передаче мотор делает три оборота за один оборот задних
колес. Желательно, чтобы двигатель был в состоянии резонанса при
скорости, соответствующей скорости автомобиля 5,6 км/час на высшей
передаче.
а) Чему должна быть равна постоянная плоской пружины (коэффициент
жесткости)?
б) На какой скорости следует ожидать наступление резонанса при
порче зажигания в одном цилиндре?
Решение, а) Скорость 5,6 км/час = 155 см/сек. Окружность колеса
115
76,2л = 239 см. При критической скорости колесо делает = 0,65 оборо-
тов в секунду, и тогда мотор вращается со скоростью 3 • 0,65 = 1,95 оборотов
в секунду. Полный цикл изменения кривой вращающего момента соответ-
ствует промежутку времени между каждыми двумя вспышками. Так как
в четырехтактном четырехцилиндровом двигателе за каждый оборот вала
происходят две вспышки, то в данном случае мы имеем 3,9 вспышки в
секунду.
Таким образом, желаемая частота собственных колебаний двига-
теля /с == 3,9 колебания в секунду или
k
w2 = 4л2 • (3,9)2 = 600 сек~2 = — ,
где к есть крутящий момент, действующий со стороны пружины при закру-
чивании вала на один радиан.
Отклонение конца пружины при закручивании на угол ср радианов
равно 45,8ср см. Если кх есть коэффициент жесткости пружины, выраженный
в кГ/см и характеризующий ее жесткость на отклонение, то сила упруго-
сти пружины равна 45,8 кгср кГ и действует на плече 45,8 см, вследствие
к го момент равен
45,8 • 45,8 krcp = 2,1 • 1 О3
вида к = 2100 кх.
Н Ден Гартог - 2974
114
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
гл. н
Далее, I = — • 15.22 = 42,7 кГ см сек2-. 981
следовательно, 0 _ 2100 fc, со. = 600 = —. 42,7
откуда , 42,7 • 600 k' ~ 2100 " *2'2 КПСМ-
б) Если зажигание в одном цилиндре нарушится, то кривая моментов
будет иметь уже другую периодичность, а именно: цикл ее изменения будет
соответствовать двум оборотам вала двигателя. Так как периодически
возмущающее действие сил теперь оказывается происходящим в четыре
раза медленнее против предыдущего, то резонанс с собственными колеба-
ниями двигателя должен наступить при скорости автомобиля, равной
4 • 5,6 из 22,4 км/час.
Задачи к главе II № 12—63.
ГЛАВА Ш
ДВЕ СТЕПЕНИ СВОБОДЫ
§ 3.1. Свободные колебания. Главные колебания
В предыдущей главе была изложена теория колебаний системы
с одной степенью свободы при затухании, обусловленном сопро-
тивлением вязкостих). Хотя та идеализированная система, о
которой говорит теория, встречается в точном виде редко, тем
не менее мы видели, что в действительности существует достаточно
случаев, столь близких к идеализированным, что для них можно
сделать несколько практически важных выводов. Теория, изло-
женная для системы с одной степенью свободы, позволяет нам
объяснять явление резонанса во многих машинах, находить
частоты собственных колебаний для большого количества соору-
жений, разъяснять действие большинства виброизмерительных
приборов и решать вопросы рессорного подвешивания и виброизо-
ляции.
Этим почти полностью исчерпываются возможности практиче-
ского применения изложенной теории, а для того, чтобы уметь
объяснять явления наложения колебаний, необходимо развить
теорию более сложных систем. Сделаем первый шаг в этой обла-
сти и рассмотрим систему с двумя степенями свободы, что позво-
лит дать объяснение действия большинства поглотителей колеба-
ний, или вибро гасителей, различных приспособлений для успоко-
ения качки корабля на волнах, а также амортизаторов или погло-
тителей толчков на автомобилях.
В самом общем виде система с двумя степенями свободы без
затухания может быть приведена к системе, изображенной на
рис. 3.1, которая состоит из двух масс и т2, подвешенных
на пружинах кА и к2и связанных между собою посредством соеди-
нительной пружины к3. Предполагая, что массы могут иметь
пниь вертикальные перемещения, мы имеем, очевидно, две степени
свободы, поскольку обе массы могут двигаться независимо друг
г) Когда тормозящая сила пропорциональна первой степени скорости.
(Прим, перев.)
116
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. Ш
от друга. Если задать их положения на вертикали величинами хг
и ж2, то тем самым положение системы вполне определяется.
Как и в случае системы с одной степенью свободы, здесь
мы сможем привести большое количество примеров систем с двумя
степенями свободы из области крутильных колебании, электро-
техники и т. п., которые вполне эквивалентны системе, представ-
ленной на рис. 3.1.
Приступая к нахождению свободных колебаний, мы заме-
различные силы, действующие на массу
а именно: сила упругости главной пру-
жины йги сила упругости соединительной
пружины &3. Первая из них равна
—кгхг и действует вниз (в направлении
положительных значений х1} если пред-
положить, что первая пружина сжата).
Укорочение соединительной пружины
равно хх — ^2>BCJleACTBHe чего соответству-
ющая сила упругости будет- к3 (х1 — х2).
Эта пружина, будучи сжата, толкает
массу вверх, а поэтому указанная сила
должна быть взята тоже со знаком минус.
Фактически мы имеем дело только с двумя
силами, действующими на массу тпи и
тогда дифференциальное уравнение ее дви-
жения напишется в таком виде:
чаем, что имеются две
Рис. 3.1. Незатухающая
система с двумя степе-
нями свободы с пружи-
т-^Ху = — кгхг — к3 (жг — х2),
ил и
mA + А + &з) ” ^2 = 0. (3.1)
Уравнение движения второй массы может быть получено
совершенно таким же путем. Но мы можем для этой цели перевер-
нуть рис. 3.1, изменив при этом направления хг и ж2; тогда т2
и к2 станут на место тг и к19 вследствие чего получим
т2х2 + (к2 4- к3) х2 — к3хх — 0. (3.2)
Допустим теперь, что массы тг и т2 совершают гармони-
ческие движения одной и той же частоты о (пока неизвестной),
но с различными амплитудами ал и а2 (также неизвестными),
т. е.
хг — аг sin cot,
Х2 —а2 sm cot.
Это — лишь предположение; мы даже не знаем, возможно ли
такое движение в действительности. Подставляя написанные
(3.3)
g 3.1 СВОБОДНЫЕ КОЛЕБАНИЯ. ГЛАВНЫЕ КОЛЕБАНИЯ 117
выражения в наши дифференциальные уравнения, мы сможем
быстро разрешить этот вопрос. Итак, имеем
[— т^о2 + (&i + k3) — fc3a2] sin ot = О,
[— т2а2о2 + (к2 + *3) а2 — к3ах] sin ot = 0.
Полученные уравнения должны удовлетворяться тождественно
в любой момент времени, но выражения, стоящие в левой части
каждого написанного уравнения, представляют собой гармони-
ческие движения, и для того, чтобы они обращались в нуль при
всех значениях времени, должны быть равны нулю амплитуды,
стоящие в скобках, т. е.
а) а, (— тхо2 + кх + к.) — к3а2 = 0, I
б) — к3а{ Ч-Ъ2 (— т2о2 + к2 + к3) = 0. |
Если предположение, что колебания выражены уравнениями
(3.3), правильно, то необходимо должны быть удовлетворены
уравнения (3.4). Вообще это, конечно, не имеет места, но мы
должны вспомнить, что в уравнениях (3.3) как на амплитуды
ах и а2, так и на частоту о не было наложено никаких ограничи-
тельных условий. Поэтому вполне возможно выбрать величины
aja2 и о так, чтобы уравнения (3.4) удовлетворялись, а при таких
значениях ах/а2 и о уравнения (3.3) становятся решением1). Для
нахождения значений ах/а2 и о нам надо разрешить относительно
этих величин уравнения (3.4). Так, из уравнения (3.4 а) имеем
°1 _ _____________ /о ГА
а2 ” mjw2 - кл к3 ’
в то время как из второго уравнения получаем
к2 — к3 ,q
— к3
Для совместности должно выполняться равенство
-к3 __ т2ы2 ~ к2 — к3
тгы2 — k-L — к3 — к5 *
ИЛИ
^4___^2 ~Ь к3 Ч~ к3) кхк2 к2к3 + кхк3 __ q (3 7)
) т2 1 ту т2 - х • )
Это уравнение, называемое «уравнением частот», приводит
к двум значениям о2. Каждое из них, будучи подставлено в равен-
сгва (3.5) или (3.6), дает соответствующее значение для aja2.
Эю значит, во-первых, что функции (3.3) могут являться реше-
нием задачи, а во-вторых, что таких решений существует два.
J) Подразумевается: уравнений (3.1) и (3.2). (Прим, перее.)
118
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. гп
Для читателей, знакомых с кругом Мора в плоской задаче теории
упругости, не лишено интереса следующее построение. Пусть на рис. 3.1
2 К + &з 2 -Нз &з
mi тч ^тхтп2
Величины wQ и являются частотами системы, когда одна нз масс
удерживается в неподвижном состоянии, в то время как &>а& характеризует
жесткость соединения. В таких обозначениях уравнение (3.7) примет
Рис. 3.2. Круг Мора для определе-
ния собственных частот системы
рис. 3.1.
вид
"4 - "2 + "Р + (w“ = о.
Обратимся теперь к рис. 3.2, на котором
отложим такие расстояния:
ОА = ОБ = ВС =
После этого опишем около сере-
дины расстояния между А и В, как
около центра, окружность, проходя-
щую через точку С. Полученные при
таком построении новыг точки D и Е
определят собою частоты собствен-
ных колебаний системы, а именно:
wf =s OD и = ОЕ,
что может быть легко подтверждено уравнением. В частном случае, при
отсутствии связи между грузами (ВС = 0), точки D и Е совпадают соот-
ветственно с Л и В, и тогда и оказываются частотами собственных
колебаний.
Для дальнейших рассуждений упростим пашу систему, сделав
ее симметричной, для чего положим
кх = к2 = к и = т2 = ттг.
Уравнение частот примет тогда вид
_ 2Ы2 + к(^+^кз) = 0
т т1
с решениями
02 _ к. + । Uр+ &з|2 + 2&з)
т — / J т J т2
ИЛИ
(3.8)
определяющими две частоты собственных колебаний системы,
которые мы будем для краткости называть просто собственными
частотами. Подставляя эти частоты в уравнения (3.5) или (3.6),
имеем
и
5 3.1 СВОБОДНЫЕ КОЛЕБАНИЯ. ГЛАВНЫЕ КОЛЕБАНИЯ 119
Физическое значение такого результата очевидно. Равенство
ах/а>2~ 1 означает [см. уравнение (3.3)], что обе массы переме-
щаются в одном и том же направлении на одно и то же расстоя-
ние. Соединительная пружина при этом не растянута и не сжата.
Тогда вполне естественно, что частота колебаний определяется
равенством ю2 = fc/лг, поскольку система приводится к двум
независимым системам, каждая из которых имеет одну степень
свободы. Что касается равенства = —1, то оно означает,
что обе массы перемещаются на одно и то же расстояние, но дви-
гаются в противоположных направлениях. Последнее движение
вполне симметрично, так что средняя точка соединительной
пружины k3 совершенно не перемещается. Если бы эта средняя
точка была закреплена неподвижно, то не произошло бы никакого
изменения в характере движения. Таким образом, и в этом случае
система распадается на две независимые системы с одной степенью
свободы каждая. Однако теперь каждая масса оказывается
связанной с неподвижной частью уже двумя пружинами, одна из
которых имеет коэффициент жесткости 1с, а другая — 2fc3 (см.
стр., 59), вследствие чего частота определится равенством
о2 = к .
т
Итак, мы имеем здесь два «главных колебания», каждому из
которых соответствует определенная собственная частота. Реше-
ние показывает, что если системе дать начальное отклонение,
определяемое координатами хг = + 1 и х2 = + 1 (рис. 3.1) и
затем ее отпустить, то полученное движение будет чисто сину-
соидальным с частотой
причем мы имеем здесь первое главное колебание. С другой сто-
роны, если начальное отклонение определяется координатами
it’j = + 1 и х2 = — 1, то, хотя движение будет опять чисто сину-
соидальное, частота будет уже
]Гк 4- 2&3
^2 — / ~ •
у т
Л о есть второе главное колебание.
Пусть теперь начальное отклонение, из которого система
свободно отпускается, определяется координатами xt = 1 и
in = 0. Для такого случая мы пока еще решения не имели. Но
указанное начальное отклонение может рассматриваться как
состоящее из двух частей: первая определяется координатами
11 11
= 2 и х2 = , а вторая — координатами и х2 = — g ’
< шрння для каждого из этих отклонений мы знаем.
12)
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. III
Предположим, что получаемое в результате этого движение
является «наложением» двух таких частных решений, а именно:
1 / 1 1 . \
— к COS G)At + К COS 6)2t, i
& & I
i 1 (3'9)
X2 = COS G)At — Tj- COS 0)2t. \
Чю это есть действительно решение, можно убедиться подста-
новкой написанных выражений в уравнения (3.1) и (3.2), которые
при этом удовлетворяются. Кроме того, легко видеть, что началь-
нье условия при t = 0 также удовлетворяются.
Уравнения (3.9) показывают, что полученное движение будет
пеэвым главным колебанием с амплитудой 1/2 и частотой
наложенным на второе главное колебание с амплитудой 1/2 и
частотой W21). Легко видеть, что, пока имеется соединительная
пружина fc3, частоты и сэ2 отличны друг от друга.. Таким обра-
зов, сложное движение каждой массы уже не может быть вообще
си-тусоидальным, а должно состоять из двух колебаний с различ-
ньми частотами. Очевидно, что если частоты мало отличаются
одта от другой, то возникнут биения (см. рис. 1.8).
Это случится, когда ^значительно меньше, чем к (к2<^ к}» или,
иными словами, когда соединительная пружина значительно
мягче главных пружин. При начальном отклонении хг = 1, х2 = О
правая масса т1 будет колебаться с амплитудой, равной 1, тогда
как масса т2 будет почти неподвижной. Однако по истечении
некоторого времени разница обеих частот изменит разность фаз
обэих колебаний на 180°, или л (см. рис. 1.7). Тогда вместо
значений
1 1 / - ч
Ж1 = з-, #2 = ат (первое главное колебание)
л
и
1 1 ( -
= —к (второе главное колебание)
мн имеем
^1 = 2" ^2 = 2 (первое главное колебание)
и
х-1 — — у, х2 — + з- (второе главное колебание).
Zi Z
х) Алгебраическое значение отношения отклонений масс в каком-либо
главном колебании в любой момент времени определяет собою форму
кшебания. (Прим, перев.)
В 3.1
СВОБОДНЫЕ КОЛЕБАНИЯ. ГЛАВНЫЕ КОЛЕБАНИЯ
121
Итак, теперь уже первая масса остается в покое, а вторая совер-
шает колебания с амплитудой, равной 1. Это явление должно
быть периодическим» так что движение будет непрерывно переда-
ваться от одной массы к другой.
Изложение может быть проиллюстрировано на многих разно-
образных опытах, о которых дает представление рис. 3.3. В пер-
вом случае мы имеем Два маятника, которые могут качаться в
Рис. 3.3. Пять опытов, в которых можно наблюдать периодическое переме-
щение энергии из одной части системы в другую.
плоскости чертежа. Роль основных пружин здесь играет вес,
но соединительная пружина оставлена; она представляет собою
очень мягкую винтовую пружину. Для малых колебаний (с
амплитудой, примерно меньшей 30°) тяжелый маятник может
быть уподоблен нашей основной системе с пружиной и массой.
Квазиупругий коэффициент пружины Ж1), являющийся восста-
навливающей силой при единичном отклонении, здесь равен
mgfl, вследствие чего для простого маятника
При сравнении рис. 3.3, а и 3.1 мы видим, что квазиупругий коэф-
г) См. подстрочное примечание на стр. 42.
122
ДВЕ СТЕПЕНИ СВОБОДЫ
гл. in
фициент V) соединительной пружины, изображенной на рис. 3.1,
в данном случае есть сила, действующая на массы со стороны
соединительной пружины, при увеличении расстояния между
массами на единицу длины. Применяя такую интерпретацию к
рис. 3.3, а, мы находим, что при отсутствии веса сила, равная
7 а2
и приложенная к одной массе, отодвигает одну массу от
другой на 1 см (см. также стр. 60). Итак, величиной, эквивалентной
1 г а?
к3, здесь является величина к^ .
£
Теперь уже легко найти оба главных колебания. Маятники
должны качаться либо один вместе с другим, либо противополож-
но друг другу, причем соответственные частоты равны
_ ][д ,, _ । п к а*
Отведя левый маятник на 1 см влево и удерживая правый
на своем месте, мы имеем полное отклонение системы, эквивалент-
ное сумме двух отклонений, показанных на рис. 3.4,6 и 3.4, в.
Рис. 3.4. Всякое колебательное движение системы с двумя степе-
нями свободы может быть разложено на два главных колеба-
ния, имеющих две различные собственные частоты и ы2.
Если теперь отпустить левый маятник, то он будет совершать
колебания, указанные на рис. 3.4, а (правый маятник остается в
покое). Полученное движение может рассматриваться как сум-
марное, происходящее в результате наложения двух других дви-
жений с частотами и ®2, как указано на схеме. В течение несколь-
ких первых периодов будет иметь место движение только одного
маятника, так как частоты достаточно близки друг к другу,
чтобы сохранить общую картину на некоторое короткое время.
Однако второе главное колебание происходит несколько быстрее,
чем первое, и опережает его, так как По прошествии до-
статочного промежутка времени, например 20 периодов, второе
главное колебание окажется по фазе на 180° впереди первого, что
1) Который в данном случае может быть назван и коэффициентом
жесткости. (Прим, перев,)
§ 3.1
СВОБОДНЫЕ КОЛЕБАНИЯ. ГЛАВНЫЕ КОЛЕБАНИЯ
123
показано на рисунках 3.4, г и 3.4, д. Выполнив сложение, указанное
на схеме, мы видим, что левый маятник теперь оказывается в
покое, тогда как правый будет качаться с полной амплитудой.
Указанное явление будет повторяться, причем амплитуда будет
непрерывно передаваться от одного маятника к другому до тех
пор, пока вследствие неизбежного трения вся система не придет
в состояние покоя.
На рис. 3.3, б маятники качаются перпендикулярно к плоско-
сти чертежа. Здесь возможны следующие два главных движения:
1) маятники качаются вместе, 2) маятники качаются навстречу
друг другу, скручивая при этом очень слабый соединительный
вал, который вызывает некоторое увеличение частоты колебаний.
Отклоняя один из маятников и удерживая другой на месте (тем
самым скручивая слегка соединительный вал), а затем отпуская
всю систему, мы приходим опять к тому же случаю непрерывной
передачи движения одним маятником другому.
На рис. 3.3, в представлена система, напоминающая шасси
автомобиля на рессорах. Здесь для массы возможны два главных
движения: 1) подпрыгивание по вертикали без вращения с частотой
l/2fc
“ I/ ,
1 у т
2) продольная качка, или галопирование, т. е. вращение вокруг
центра тяжести G в плоскости чертежа с частотой
— у 21 *
Вывод этих формул для частот предоставляем читателю. Предполо-
жим теперь, что левый конец шасси приподнят на 1 см> в то время
как правый удерживается на месте, после чего система предостав-
Рис. 3.5. Иллюстрация передачи энергии в опыте рис. 3.3, в.
ляется самой себе. В этом случае движение опять распадается на
две части (см. рис. 3.5, а, слева направо).
Если величины я I, ки I таковы, что и почти равны друг
другу, то движение, показаное на рис. 3.5, а, будет сохраняться
без заметных изменений в продолжение нескольких периодов.
Однако по истечении достаточно большого числа периодов одно
из главных движений, например галопирование, опередит другое
124
ДВЕ СТЕПЕНИ СВОБОДЫ
гл. in
по фазе на 180°. Рассматривая теперь рис. 3.5 справа налево, мы
видим, что тело колеблется так, что остается неподвижным его
левый конец. Конечно, по прошествии опять такого же промежутка
времени будет иметь место первое движение и т. д. до тех пор,
пока движение окончательно не прекратится вследствие зату-
хания.
В то время как соединительная пружина видна в том или ином
виде на рис. 3.3, а и 3.3, б, где она изображена как отдельная
часть системы, ее не видно на рис. 3.3, в. Однако сейчас наиболее
существенным требованием является у нас то, чтобы система
имела две степени свободы с отличающимися друг от друга соб-
ственными частотами и совершенно неважно, можно ли указать
соединительную пружину или нет.
Замечательный опыт можно проделать с так называемой пру-
жиной Вильберфорса, изображенной на рис. 3.3, г. Масса, под-
вешенная на винтовой пружине, имеет два выступающих винта с
насаженными на них гайками. Две степени свободы обусловли-
ваются здесь движением вверх и вниз и затем скручиванием.
«Соединение» выражается в данном случае своеобразно, а именно:
в виде того факта, что оба движения связаны друг с другом, и
оттягивание груза на пружине влечет за собою некоторое ее
скручивание и обратно, закручивая пружину, мы видим, что она
слегка изменяет свою длину. При изменении положения гаек
момент инерции I изменяется, в то время как масса m остается
постоянной. Таким образом, соответственной установкой гаек
можно добиться того, что обе частоты будут приблизительно
равны друг другу. Тогда, если оттянуть груз вниз и отпустить
его, то вначале возникнут вертикальные колебания массы без
закручивания. Однако по истечении некоторого времени будут
иметь место только крутильные колебания без вертикальных ит.д.
Последний случай, проиллюстрированный на рис. 3.3, д, это —
электрическая аналогия изучаемого нами явления (см. стр. 46, 47).
Две равные массы (индуктивности) L, присоединенные к одинако-
вым главным или основным пружинам (конденсаторам) С, связаны
между собой слабой соединительной пружиной (промежуточным
конденсатором С большой емкости, так как к эквивалентно 1/С).
Электрический ток, начавшись в одной петле контура, по истече-
нии некоторого времени весь перейдет в другую петлю и т. д.
Читатель, знакомый с теорией электричества, может продумать
до конца вопрос о том, как течет ток в каждом из своих «главных
колебаний», каковы частоты, а также построить для данного
случая схему, аналогичную схемам на рис. 3.4 или 3.5.
Пример. Однородная балка массы т и длины 2Z своими концами опи-
рается на две пружины (рис. 3.3, в) неодинаковой жесткости, определяемой
соответственно коэффициентами к (слева) и 2к (справа). Найти две соб-
ственные частоты и вид соответствующих главных колебаний.
§3.2 ДИНАМИЧЕСКИЙ ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ БЕЗ ЗАТУХАНИЯ 125
Решение. Пусть х обозначает вертикальное перемещение центра тяже-
сти балки иф—ее угол поворота, отсчитываемый по часовой стрелке. Тогда
перемещение левого конца равно ж 4-/ф. а правого х— 1$. Силы упру-
гости пружин будут соответственно равны
1с (х 4- 1$) и 2к (х — !<р).
Таким образом, приходим к двум дифференциальным уравнениям.
чпх 4- к (х + + 2& (х — 1<р) = О,
Ф + kl (х 4- /ф) — 2&Z (х — 1ср) = 0.
Предполагая, что решение выражается формулами (3.3), в нашем случае
имеем:
(— + 3&) х0 — kly0 = 0,
—“ klxQ ~|~
—з 4- 3&/2
откуда получаем уравнение частот
(—тлю2 4- ЗА:) [---?nc)2Z24-3&Z2] — к2Р = 0,
«ли
(к\2
w4 _ 12 — ш2 4- 24 — == 0,
тп. [т J
решения которого таковы:
к к
= 2,54 — , = 9,46 — .
т т
Виды колебаний, соответствующие этим частотам, определятся из второго
дифференциального уравнения, которое может быть написано так:
Подставляя сюда только что найденные значения для ю2, получим
= 4-2,16 и [Д] - -0,15.
*фОУ]
Эти выражения показывают, что мы имеем дело с вращательными колеба-
ниями балки, с одной стороны, вокруг точки, лежащей на расстоянии
2,16 I справа от ее центра, с частотой wt, с другой стороны, — около точки,
лежащей на расстоянии 0,15/ слева от центра, с частотой ш2-
§ 3.2. Динамический поглотитель колебаний без затухания
Машина или какая-либо ее часть, находящаяся непрерывно
под действием переменной силы постоянной частоты изменения,
может испытывать вредные колебания, особенно вблизи резо-
нанса. Чтобы устранить таковые, мы можем попытаться прежде
126
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. Ш
Рис. 3.6. Добавление
малой системы
к—т к большой ма-
шине К — М преду-
преждает колеба-
ния последней, не-
смотря на действие
переменной силы
Ро sin at.
нулю. В нашем
всего освободиться от этой силы, что, однако, очень часто с прак-
тической стороны бывает неудобно или даже невозможно. В
таком случае, стремясь удалиться от условий резонанса, можно
изменить в нашей системе массу или упругую постоянную. Но
бывают случаи, когда и это также оказывается непрактичным, и
тогда в качестве третьей возможности остается прибегнуть к
помощи динамического поглотителя колебаний1), изобретенного
Фрамом в 1909 г.
Пусть совокупность К, М на рис. 3.6 схематически представ-
ляет собою рассматриваемую часть машины, на которую действует
возмущающая сила Ро sin art, Поглотитель
колебаний состоит из малой, по сравнению
с первой, колеблющейся системы к, т, свя-
занной с главной массой М. Собственная ча-
стота ^к/т присоединенного поглотителя под-
бирается так, чтобы она равнялась частоте
о изменения возмущающей силы. Покажем, что
в таком случае главная масса М вовсе не будет
колебаться и что малая система к, т будет
колебаться так, что упругая сила ее пружины
во всякий момент времени будет равна и про-
тивоположно направлена силе PQ sin cot. По-
скольку на массу М не будет действовать ни-
какая результирующая сила, то ясно, что
масса не должна колебаться.
Для доказательства высказанного утвер-
ждения напишем уравнения движения. Это
сделать очень легко, поскольку рис. 3.6 есть
частный случай рис. 3.1, где к2 равняется
случае надо добавить только внешнюю силу
Posin®f, действующую на первую массу М. Уравнения (3.1) и
(3.2) при этом несколько изменят свой вид, а именно вместо них
получим:
Мхг 4- (К 4- к) — кх2 = Ро sin cot,
тх2 4- к(х2 — хг) = 0.
(3.10)
Вынужденные колебания системы определятся, очевидно, сле-
дующими выражениями:
х. = a, sin cot, i
. , (3.11)
х2 = а2 sin cot. )
Это очевидно, поскольку уравнения (3.10) содержат только xt,
1) Называемого также антивибратором или виброгасителем. (Прим,
перев.)
§ 3.2 ДИНАМИЧЕСКИЙ ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ БЕЗ ЗАТУХАНИЯ 127
хг и х2, х2, но не содержат первых производных хг и х2. После
двукратного дифференцирования синуса получается опять синус,
а следовательно, если принять выражения (3.11) в качестве ре-
шений, то все члены в уравнениях (3.10) оказываются пропор-
циональными величине sin cot. Посредством деления на sin®$
мы преобразуем наши дифференциальные уравнения в уравнения
алгебраические, подобно тому, как мы поступали с уравнениями
(3.1) и (3.2) при получении уравнений (3.4). Итак, имеем:
ах (— 71/й)2 + К + к) — Ы2 = Ро, I
— каг 4- а2 (— та2 + к) — 0. ( (3.12)
Для упрощения приведем эти уравнения к безразмерному
виду, введя для этой цели следующие обозначения:
жст == ~ — статическая деформация главной системы;
1/ &
= /-----собственная частота поглотителя;
а у т
Qc = — собственная частота главной системы;
~ — отношение масс (массы поглотителя к главной
массе).
Тогда уравнения (3.12) примут вид
(3.13)
или, если разрешить их относительно и а2, то
(3.14)
Первое из написанных уравнений сейчас же подтверждает
с праведливость наших соображений. В самом деле, амплитуда
колебаний главной массы равняется нулю, если только числи-
гель 1—(о2/о2) равен нулю, а это имеет место в том случае, когда
частота возмущающей силы равна частоте собственных колебаний
поглотителя.
128
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. III
Рассмотрим теперь второе из уравнений (3.14) для случая
со = соа. Поскольку первый множитель в знаменателе обращается
в нуль, уравнение приводится к виду
К Ро
^2 - £ %СТ fa •
При спокойном состоянии главной массы и при движении массы
поглотителя по закону —(PQ/k) sin cot сила упругости пружины
поглотителя изменяется по закону —Posin это и есть сила,
равная возмущающей силе и направленная противоположно ей.
Наши выводы остаются справедливыми для любого значения
отношения g>IQc. Однако мы видели, что присоединение поглоти-
теля не имеет особого смысла, если основная система не находится
в состоянии резонанса, или по крайней мере не близка к нему.
Поэтому сейчас мы рассмотрим случай, когда
или
или же
Отношение
«а =
m М 9
k _m
К " M *
m
~ м
определит в таком случае размеры поглотителя по сравнению с
размерами главной системы. Для этого особого случая уравнения
(3.14) могут быть написаны в таком виде:
------ sin (Dt,
— м
(3.15а)
(3.15b)
Как в полученном результате, так и в уравнениях (3.14) нам
сразу бросается в глаза то обстоятельство, что оба знаменателя
оказываются равными между собою. Это является далеко не
случайностью, а имеет определенный физический смысл. В самом
деле, выполняя перемножение в знаменателе, мы видим, что
5.2 ДИНАМИЧЕСКИЙ ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ БЕЗ ЗАТУХАНИЯ 129
знаменатель содержит члены, пропорциональные величинам
(®2/«1)2 и (с»2/®!), а также член, не зависящий от этого отношения.
Таким образом, приравнивая знаменатель нулю, мы получаем
квадратное уравнение относительно которое должно иметь
два корня. Следовательно, для двух этих значений частоты зна-
менатели уравнений (3.15) обращаются в нуль, а тогда хг и х2
делаются бесконечно большими. Найденные таким образом две
частоты являются резонансными, или собственными, частотами
нашей системы. Если бы оба знаменателя в уравнениях (3.15)
Рис. 3.7. Две собственные или резонансные частоты
системы рис. 3.6, представленные в фун кпиональной
т
зависимости от отношения масс —, согласно урав-
М
нению (3.16).
не были равны между собой, то могло бы случиться, что при
некотором определенном значении о один из них равнялся бы
нулю, в то время как другой был бы отличен от нуля. Это означало
бы, что, например, ху обращается в бесконечность, тогда как
х2 сохраняет конечное значение. Но если бы хг равнялось беско-
нечности, то удлинения и сжатия пружины поглотителя к ста-
новились бы бесконечно большими, что неизбежно приводит
к такому же заключению и относительно силы упругости пружины.
Таким образом, мы приходим к невероятному выводу, а именно:
размахи х2 массы тп поглотителя были бы конечными при действии
на нее бесконечно большой силы к(ху— х2). Итак, становится
совершенно ясным, что если одна из амплитуд делается беско-
нечной, то такое же заключение необходимо сделать и ‘относи-
гельно другой амплитуды; следовательно, оба знаменателя в
уравнениях (3.15) должны быть одинаковыми.
9 Ден-Гартог • 2074
130
ДВЕ СТЕПЕНИ СВОБОДЫ
гл. m
Собственные частоты мы можем определить, приравнивая
знаменатель нулю, а именно*.
(' - я) (1 + * - 5) -*=»• (51‘ -15)’ <2++1 = °--
решая это уравнение, находим:
(3.16)
Это соотношение графически изображено на рис. 3.7, из кото-
рого мы находим, например, что поглотитель с массой, равной
одной десятой массы главной системы, вызывает две собственные
частоты всей системы в целом, соответственно равные 1,17 и
0,85 частоты собственных колебаний первоначальной системы.
Рис. 3.8. а) Амплитуда главной массы и б) амплитуда ж2 поглотителя
(рис. 3.6) для различных возмущающих частот ы. В данном случае масса
поглотителя составляет одну пятую часть главной массы.
Основной результат, выражаемый уравнениями (3.15), представлен
на рис. 3.8, а и 3.8, б для случая /л = т. е. при массе поглотителя,
равной одной пятой массы главной системы.
3.2 ДИНАМИЧЕСКИЙ ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ БЕЗ ЗАТУХАНИЯ 131
Проследим ход кривой на рис. 3.8, а для возрастающего отно-
шения частот a/Qc = о/оа. Легко видеть, что x-Jxzr — 1 при <у =
О, тогда как для значений о, несколько больших нуля, хг долж-
но быть обязательно положительным, поскольку в уравнениях
(3.15а) как числитель, так и знаменатель положительны. При
наступлении первого резонанса знаменатель проходит через
нуль от положительных значений к отрицательным, вследствие
чего отношение xjx^ становится отрицательным. Далее, при
to = Qc = 0а становится отрицательным также и знаменатель,
а поэтому дробь .хг/хст получает опять положительные значения
(числитель и знаменатель отрицательны, т. е. одного знака).
В момент второго резонанса знаменатель еще раз меняет знак,
вследствие чего хг делается вновь отрицательным.
Подобные, но не идентичные изменения претерпевает также
кривая для отношения ®2/жст; однако здесь числитель остается
все время положительным, так что изменение знака происходит
лишь в моменты резонанса. Но прежде, при изучении рис. 2.18,
мы видели, что такая перемена знака означает просто изменение
фазы на 180°, что в данном случае для нас не существенно. По
ной причине на рис. 3.8, а и 3.8,6 нанесены соответственные
пунктирные линии, и мы можем в дальнейших рассуждениях
смотреть на эти линии как на кривые, определяющие амплитуду,
«ибросив при этом нижние части диаграммы.
Полученные результаты могут быть интерпретированы еще
иным образом, что оказывается полезным в некоторых приложе-
ниях. Пусть изображенный на рис.3.6 поглотитель Фрама с массой
ш и пружиной й заменен некоторой массой ш9КВ, жестко связанной
с главной массой М, и пусть эта эквивалентная масса подобрана
1лк, что движение хг главной массы получается такое же, как и
при поглотителе. Вследствие того, что поглотитель представляет
собою систему, более сложную, чем просто масса (добавлена пру-
жина), то ясно, что эквивалентная масса тпэкв не может быть по-
( гоянной, а должна быть различной для различных возмущающих
частот о. Сила, действующая со стороны поглотителя на главную
массу М системы, есть сила упругости пружины к(х2 — хг),
которая на основании второго уравнения (3.10) равна — тх2.
11о если бы масса т9КВ была жестко связана с массой М, то соот-
ы 1ственная сила, действующая на М, была бы не чем иным,
как силой инерции — ^Экв®1- Для эквивалентности обеих систем
ап две силы должны быть равны друг другу, а тогда на основа-
нии уравнений (3.11) и второго уравнения (3.13) мы имеем
^ЭКВ _ &2 _ «^2 _ ^2 _ 1
т afj x-i «и [ ы2 *
"а
II*
132
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. III
Мы получим уже знакомое нам отношение, для которого была
построена на рис. 2.18 (стр. 68) резонансная кривая. Итак, мы
видим, что система динамического поглотителя Фрама может
быть заменена эквивалентной массой, жестко связанной с главной
массой, причем эквивалентная масса должна быть положительной
для медленных возмущений, бесконечно большой при равенстве
частот возмущающей силы и поглотителя и отрицательной для
быстрых возмущений. Такая точка зрения на действие поглоти-
теля нам понадобится в дальнейшем (см. стр. 297).
Из рассмотрения рис. 3.8, а, который представляет колебания
главной массы, становится ясным, что динамический поглотитель
Рис. 3.9. Электрическая машин ка для стрижки волос с по-
глотителем: а—электромагнит, b — якорь, с — ось вра-
щения якоря, d — нож, е — направляющая ножа, / — по-
глотитель колебаний.
колебаний без затухания оказывается полезным лишь тогда,
когда частота изменения возмущающей силы приблизительно
постоянна. В этих случаях нам представляется возможность
при б9/сэа = o/Qc = 1 иметь дело с очень незначительной (почти
равной нулю) амплитудой. Таково положение, например, во всех
машинах, непосредственно соединенных с синхронными электро-
моторами или генераторами. Однако в машинах, работающих
при переменном скоростном режиме, как, например, в двигателях
внутреннего сгорания, применяемых в автомобильной технике и
авиации, применение подобных поглотителей бесполезно, так как,
в сущности, мы заменяем нашу основную систему с одной резонанс-
ной скоростью (при o/Qc = 1) другой системой с двумя резонанс-
ными скоростями. В этих случаях бывает все же выгодно восполь-
зоваться поглотителем, снабдив его пружину определенным
затуханием, о чем будет идти речь в следующем параграфе.
Интересное применение поглотителя колебаний -сделано в
недавно появившихся электрических машинках для стрижки
волос. Такая машинка, изображенная на рис. 3.9, состоит из
электромагнита а, питаемого переменным током в 60 периодов.
Электромагнит действует переменной силой в 120 периодов на
колеблющуюся систему Ь. Система Ь настроена на частоту, отли-
I J.2 ДИНАМИЧЕСКИЙ ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ БЕЗ ЗАТУХАНИЯ
133
чающуюся примерно на 20% от частоты в 120 периодов, с тем,
чюбы сохранить в определенных границах амплитуду стригущего
юзвия d, которое колеблется с достаточно малым затуханием.
Таким образом, лезвие d должно колебаться примерно с одной
и той же амплитудой, независимо от того, снимает ли машинка
много волос или волос нет совершенно.
Весь механизм, рассматриваемый как свободное тело в про-
странстве, лишенное действия внешних сил, должен иметь непо-
движными центр тяжести и главные оси инерции. Так как части
b и d прибора находятся в движении, то должен двигаться самый
кожух и притом в противоположные стороны, чтобы удовлетво-
рились указанные два условия. Однако колебания кожуха дей-
ствуют на руки парикмахера, создавая крайне неприятное ощу-
щение. Это нежелательное явление в значительной мере преодоле-
вается динамическим поглотителем колебаний /, настроенным в
точности на 120 периодов в секунду и предотвращающим таким
образом всякое движение кожуха в месте расположения массы /.
Наблюдая массы d и / в стробоскопическом освещении, мы дей-
ствительно отчетливо видим их колеблющимися в противополож-
ных фазах.
Необходимо заметить, что описанный прибор в таком именно
осуществлении не является совершенным по причине неправиль-
ного расположения массы /. В самом деле, в некоторый момент
времени колеблющееся лезвие d имеет большую силу инерции,
направленную вверх, в то время как расположенный на весу
конец рычага Ъ имеет малую силу инерции, направленную вниз.
Поэтому равнодействующей сил инерции движущихся частей Ь и
d будет переменная сила, расположенная слева от стригущей
части d на рис. 3.9.
Эффектом поглотителя является полное снятие 120-периодного коле-
бания точки кожуха непосредственно в месте установки массы / погло-
। ягеля; однако поглотитель не может предотвратить вращения кожуха
вокруг этой неподвижной точки. Полное исключение 120-периодного движе-
ния кожуха может быть осуществлено установкой в приборе двух поглоти-
|слсй / на некотором расстоянии друг от друга, причем так, чтобы прямая,
соединяющая их центры тяжести, была перпендикулярна к направлению
движения лезвия. Тогда эти же массы будут автоматически колебаться с
глкнми амплитудами, чтобы их силы инерции противодействовали силе
и моменту сил инерции системы d, Ъ, иными словами, указанные две массы
приведут к неподвижному состоянию две точки кожуха машинки.
Для гашения крутильных колебаний вращающихся систем,
как, например, коленчатого вала двигателя внутреннего сгорания,
динамический поглотитель Фрама принимает форму маховичка Д
м< пущего свободно вращаться на шейке В вала, с которым он
( вязан пружинами &(рис. 3.10, а). Так как вращательные импульсы
в шком двигателе имеют периодичность вспышек в цилиндрах,
е. действуют с частотой, пропорциональной угловой скорости
134
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. Ill
машины, то прибор может работать только на одном скоростном
режиме, в то время как для такой системы имеют место две близ-
лежащие скорости, при которых наступает состояние резонанса
(рис. 3.8, а). Чтобы преодолеть это затруднение, недавно было
предложено заменить пружинный поглотитель, изображенный
на рис. 3.10, а, центробежным маятниковым поглотителем, пред-
ставленным на рис. 3.10,6. Здесь маятник в центробежном сило-
вом поле действует так же, как и обычный маятник в
гравитационном поле, но в котором вместо напряжения поля
тяжести д надо взять напряжение поля центробежных сил гю2.
Рис. 3.10. Поглотители крутильных колебаний:
а) пружинный, б) центробежный.
Так как частота гравитационного маятника равна Уgjl, то частота
центробежного маятника получается равной о^тЦ, т. е. она
пропорциональна угловой скорости машины. Благодаря этому,
центробежный маятник действует как динамический поглотитель
Фрама, настраивающийся в точности на все скорости. Дальней-
шие подробности, касающиеся этого прибора, излагаются на
стр. 296.
§ 3.3. Поглотитель колебаний с затуханием
Рассмотрим систему, представленную на рис. 3.6, в которую
между массами М и т включен параллельно пружине поглоти-
теля к амортизатор. Главная пружина К остается без аморти-
затора.
Применяя закон Ньютона к массе М, имеем
+ Кхг 4- к (хг — х2) + с ($! — х2) = PQ sin ot (3.17)
и аналогично для массы т
тх2 4- к (х2 — жг) + с(х2 — #i) = 0. (3.18)
(3.19)
3.3 ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ 135
Читателю рекомендуется вывести самостоятельно эти урав-
нения и убедиться в правильности знаков у отдельных членов,
{десь вывод подобен тому, который был изложен на стр. 43 и 116.
Четыре члена в левой части уравнения (3.17) обозначают соот-
ветственно силу инерции массы М, силу упругости главной
пружины, силу упругости пружины поглотителя и силу сопротив-
ления амортизатора. Нас интересует лишь решение, соответствую-
щее вынужденным колебаниям; что же касается затухающих
собственных колебаний в переходном процессе, то рассматривать
их мы не будем. Тогда обе величины ху и я2 представляют гармони-
ческие движения с частотой о и могут быть изображены посред-
ством векторов. Каждый член в уравнениях (3.17) и (3.18) может
быть представлен с помощью такого вектора, вращающегося с
угловой скоростью со. Простейший способ решения этих уравне-
ний — это применение комплексных чисел для изображения
векторов. В этом случае наши уравнения примут вид
— Мо2 + Кху + к (Ху — я2) + foe (Ху — х2) = Ро,
— тар х2 4- к (х2 — Ху) 4- jcoc (х2 — = О,
где Ху и х2 — неизвестные пока комплексные числа; остальные
же величины действительные.
Группируя члены с х, и х2, имеем
(— Мео2 4- К 4- к + /<ус) Ху — (к 4- /ос) х2 = Ро
— (к 4- /ос) Ху 4- (— то? 4-^4- /ос) х2 = 0.
41 и уравнения могут быть разрешены относительно Ху и х2.
Мы интересуемся прежде всего движением главной массы, а чтобы
г го найти, выразим х через хл посредством второго уравнения
(3.19) и подставим в первое. Тогда получим:
р____________________(к — ты2) 4- _______________
11______________________________________________________0 [( — Мы2 4- К) (— ты2 4- к) — ты2 4- дыс (— Мы2 4~ ~ ты2)
(3.20)
Для читателей, немного знакомых с переменным электрическим током,
• ют результат может быть получен посредством рассмотрения эквивалент-
ной схемы электрического контура, показанной на рис. 3.11. Эта эквива-
11-п гность может быть установлена путем написания уравнений для напря-
жения тока и сравнения их с уравнениями (3 17) и (3.18) или же непосред-
i । вон но из рассмотрения схемы следующим образом. Растяжение (или ско-
рость) пружины К, смещение (или скорость) груза М и перемещение (или
скорость) точки приложения силы Ро — все равны Ху (или х[). Следова-
тельно, соответствующие элементы электрического контура I/O, L и Еь
юлжны пропускать ток одной и той же силы а поэтому они должны
f>n и» включены последовательно. Скорости (йу —х2) в пружине к и в амор-
I и шторе также равны между собой, вследствие чего соответствующие
|гктрические эквиваленты 1/с и г должны быть в последовательном соеди-
iiriiiin, но в то же время они должны пропускать ток, уже отличный от
136
ДВЕ СТЕПЕНИ СВОБОДЫ
гл. ш
тока в главных элементах L, С и Ео. Скорость массы tn равна разности
скорости массы М и скорости —-#2) пружины амортизатора. Отсюда
следует, что сила тока г2 в I должна быть равна разности i и — г2). Таким
образом, эквивалентность электрического контура и механической системы
можно считать установленной.
Мы интересуемся главным током г. Кажущееся сопротивление спи-
рали, или, как говорят, ее импеданс, равно j&L, а конденсатора — l/jwC',
омическое сопротивление равно R Сопротивления, включенные последова-
тельно при их комплексном представлении, складываются непосредственно;
если же сопротивления включены параллельно, то складываются их обрат-
ные величины. Импеданс в ветви с, т равен г 4- (1/?«с) и соответственно в
ветви I он равен Поэтому для полного
импеданса
раллельно
жение
Рис. 3.11. Эквивалентный
электрический контур. Ма-
лый контур I — с — т соот-
ветствует поглотителю.
кажущегося сопротивления
включенных ветвях имеем
1
’1
1
Эту величину нам надо
дансу других элементов
в па-,
выра-
прибавить к
цепи, и мы получим
1 Е
импе-
г.
Z ~ н—т*— н-
Выполняя здесь алгебраические преобразования
к механической схеме, получим уравнение (3.20).
Комплексное выражение (3.20) может быть
— Р о (^1 + 7 ДО»
и переходя обратно
приведено к виду
(3.21)
где Д и Bi — величины действительные, не содержащие j = У—1.
Смысл комплексного выражения (3.20) такой, что в векторном
представлении хг состоит из двух составляющих, одна из которых
находится в той же фазе, что и сила PQ, а другая соответствует
повороту на прямой угол в сторону вращения (сравнить рис.
2.21 на стр. 75). Складывая геометрически эти векторы, находим
для числового значения х2 выражение
Ъ = PQ / 4? 4-Д2.
Однако пока еще уравнение (3.20) не имеет формы уравнения
(3.21), а имеет форму:
т — Р л +
1 ~ гоо + jD •
S з.з
ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ
137
что можно преобразовать еще так:
р (4 + 1В) (С - jP) __ р (AC + BD) + j(BOl-'AD)
х~~ 0 (С 4- jP) (С - )Р) ~ 0 С2 4- Р2
Отсюда можно получить длину хг вектора таким образом:
о
। AO+BDf , [ ВС - АР |2
[ С2 4- Р2 J 1 [ С2 4- Р2 /
42С2 4- B2D24- В2С2 + Л2Л2
(С2 4- D2)2
1/(4* 4- B2)(C24-D2) _ ]/424- В2
F (С2 4- Р2)2 Г С2 4- Р2 ’
Применяя этот вывод к уравнению (3.20), мы можем написать
х2 ___ ________________ (к — ты2)2 4- о)2с2
/,2 Г( — Mw2 4- В) (— ты2 4- &) — то)2 к2]2 4- ю2с2 (— Мы2 4- К — то2)2
(3.22)
Эю уравнение определяет амплитуду колебаний главной массы М.
Очень полезно проверить полученный результат для несколь-
ких частных случаев и убедиться, что он приводит к уже изве-
стным результатам, полученным выше. Читателю рекомендуется
проделать это для нескольких случаев из числа следующих:
1, k — ОО.
2. к = 0; с = 0.
3. С — оо.
4. с =0; © = i2c = 1/5 = ]/-.
с \ М \ т
5. т = 0.
Таким образом, теперь мы можем вычислять амплитуду во
всех случаях. В уравнении (3.22) ж, есть функция семи пере-
менных: Р& со, с, К, к, М и т. Однако, как‘сейчас будет показано,
число переменных может быть понижено. Пусть, например, Fo
получает удвоенное значение, в то время как все остальные вели-
чины остаются теми же самыми. Тогда очевидно, что хг также
удваивается. Кроме указанного, мы можем установить еще целый
ряд аналогичных соотношений. Чтобы вскрыть их, полезно
138
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. III
написать уравнение (3.22) в безразмерной форме, для чего вводятся
следующие обозначения:
т масса поглотителя
а = = отношение масс = - — ---—
М главная масса
' к
— = собственная частота поглотителя;
т
= собственная частота главной системы;
= ~ = отношение частот (собственных);
«с
(3.23)
д = ~ = отношение частоты вынужденных колеба-
с ний к собственной частоте главной системы;
А .
яст = ~ = статическая деформация системы;
сК = 2m Qc = коэффициент «критического» затухания
(см. стр. 62).
После выполнения некоторых алгебраических преобразований
уравнение (3.22) примет вид:
^ст
2 — д
ск
2
(д2 - Г2)2
+ Lm/2 f/2 — (sr2 — 1) (g2-/*2)]2
(3.24)
Таким образом, мы видим, что отношение отклонений xJxCT
главной массы есть функция четырех переменных величин: /х,
с/ск, f и 9 На рис. 3.12 дана диаграмма отношения x-Jx^, как
функции отношения частот д для некоторой определенной системы
при / = 1, (jl = 1/20, но для различных значений отношения зату-
ханий с/ск. Иначе говоря, диаграмма показывает поведение систе-
мы, когда главная масса в 20 раз больше массы поглотителя, в
то время как частота колебаний поглотителя равна частоте коле-
баний главной системы (/=1).
Интересно проследить за тем, что получается при возрастании
затухания. При с = 0 мы имеем тот же самый случай, что и на
рис. 3.8, а т. е. уже известный результат. Когда коэффициент
затухания становится равным бесконечности, обе массы факти-
чески оказываются жестко связанными между собой, и поэтому
мы имеем случай системы с одной степенью свободы, причем
21
масса системы равна М. Две другие кривые, построенные на
рис. 3.12, соответствуют значениям с/сК, равным 0,10 и 0,32.
§ 3.3 ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ 139
Присоединением к системе поглотителя мы достигаем того,
что наибольшая величина амплитуды при резонансе приводится
к ее наименьшему возможному значению. При с = 0 амплитуда
бесконечна; аналогичный случай мы имеем и при с = ©о. Тогда
где-то между этими предельными значениями затухания с должно
быть такое его значение, при котором резонансная амплитуда
имеет минимум.
Указанное обстоятельство может быть истолковано также
и физически. Мы уже знаем, как это было показано на стр. 80,
Рис.3.12. Амплитуды колебаний главной массы системы на рис.З.бдля раз-
личных значений затухания в поглотителе. Масса поглотителя в 20 раз
меньше главной массы и настроена на ту же частоту, что и основная
система (машина). Все кривые проходят через постоянные точки Р и Q.
что резонансная амплитуда системы с одной степенью свободы
ограничивается только сопротивлением, вызывающим затухание.
Мы видели также, что энергия затухания рассеивается, обра-
щаясь в теплоту. Если погашающая сила совершает значительную
работу, то амплитуда при резонансе остается малой. Эти сообра-
жения сохраняют свою силу и в случае более сложных систем.
Работа, совершаемая погашающей силой, равна этой силе, умно-
женной на перемещение, на котором она действует. В нашем
случае перемещение определяется относительным движением
обеих масс или изменением длины пружины поглотителя. При
с = 0 погашающая сило равна нулю, поэтому никакой работы
нет, а следовательно, резонансная амплитуда делается бесконечно
большой. Когда же с = ©о, обе массы так связаны друг с другом,
что их относительное перемещение равно нулю, а поэтому работа
опять-таки отсутствует. Где-нибудь между 0 и ©© имеет место
140
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. Ill
такое затухание, при котором произведение силы затухания на
ее перемещение делается наибольшим, а тогда резонансная ампли-
туда должна приобрести наименьшее значение.
Прежде чем приступать к вычислению такого оптимального
затухания, мы обратим внимание на одно замечательное свойство
кривых, изображенных на рис. 3.12, а именно, что все четыре
кривые пересекаются в двух точках Р и Q (см. рис. 2.41 на стр. 105).
То, что нам сейчас предстоит установить, ни в какой мере не
является случайностью и вообще все кривые проходят через эти
Рис. 3.13. Резонансные кривые для движения главной массы при наиболее
благоприятной настройке поглотителя колебаний, масса которого состав-
ляет одну четверть главной массы.
две точки, независимо от затухания. Если бы мы смогли определить
их положение, то наша задача была бы решена, так как наиболее
благоприятная кривая есть та, которая имеет горизонтальную
касательную в наивысшей из двух точек Р и Q. Тогда наилучшей
возможной резонансной амплитудой (при наилучшем затухании)
будет ордината этой точки.
Однако это еше не все, что мы можем сделать. При изменении от-
носительной настройки,т.е. отношения/ = g>JQcчастот поглотителя
и главной системы, две отмеченные нами точки Р и Q будут пере-
мещаться вверх и вниз по кривой, соответствующей с = 0. При
изменении / одна из точек пойдет вверх, а другая вниз. Очевидно,
что наиболее желательным является тот случай, когда, во-первых,
путем соответствующего выбора отношения / точки Р и Q будут
установлены на одной высоте и, во-вторых, когда благодаря
соответствующему подбору отношения с/ск кривая будет иметь
горизонтальную касательную в одной из этих точек. Оказывается
практически безразличным, в какой именно из этих точек
* 3.3
ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ
141
(рис. 3.13) кривая будет обладать горизонтальной касательной, что
будет показано ниже.
Возвратимся опять к уравнению (3.24) и посмотрим, нет ли
таких значений д, при которых отношение делается независи-
мым от отношения с/ск. Упомянутое уравнение может быть напи-
сано в таком виде;
Жет
Очевидно, подкоренное выражение не будет зависеть от затухания,
если положить
А В
О “ D 9
или, в развернутом виде
( 1 )2 _ [ 9*-f* V
(92 - 1 + М - [^f2 92 - (92 - 1) (92-П\ '
Здесь мы можем отбросить показатели степени при больших скоб-
ках в обеих частях равенства, приписав, однако, двойной знак
± правой его части. Возьмем сперва знак минус; тогда, пере-
множая крест-накрест, имеем
mJ202 — (ff2 — 1) (#2 —/2) = — (ST2 —/2) (<72 ~ 1 + ^.72)- (3.25)
Легко видеть, что после соответствующих преобразований
получаем
^2д2 = -/*д2(д2-П
или
Г = -д2+Л
откуда
д2 = о-
Мы пришли к тривиальному (однако, верному) решению. При
g = О (т. е. о = 0) отклонение равно яст, и оно не зависит от ве-
личины затухания; этот факт имеет очень простое объяснение.
В этом случае тело движется столь медленно, что нет причины
для возникновения силы сопротивления (мы предполагаем, что
)га сила пропорциональна скорости).
Возьмем теперь перед правой частью уравнения (3.25) знак
/иное. После простых преобразований уравнение примет вид
М 1 + /‘2 + ^/‘2 . 2/2 _ л /о orv
У ~ ---2 + il~ + 2Т7 = °* (3>26)
Мы получили квадратное уравнение относительно д2, имеющее
два корня, которые определяют собою искомые «постоянные
142 ДВЕ СТЕПЕНИ СВОБОДЫ ГЛ. Ill
точки». Пусть эти корни будут соответственно д{ и Легко
видеть, что дг и <у2 (абсциссы точек Р и Q) должны быть функциями
от и /'.
Нашей ближайшей задачей будет построить систему (а именно,
подобрать /) так, чтобы ординаты х/хС1 точек Р и Q сделались
одинаковыми. Решать уравнение (3.26) для определения дг и д2,
подставлять эти величины в равенство (3.24), затем приравнивать
одно к другому полученные выражения — все это представляет
собою весьма длительную операцию. К счастью для нас, это и не
является необходимым. В самом деле, прежде всего вспомним,
что отношение x/xQT как в точке Р, так и в точке Q не зависит от
величины затухания, а поэтому мы можем подобрать такое отно-
шение с/ск, чтобы уравнение (3.24) приняло наиболее простой
вид. Это имеет место при с = ©о, когда уравнение (3.24) обра-
щается в следующее:
Подставляя сюда д} и д2 и приравнивая выражения, имеем
1 - g? (1 +^Г = l-gl(l + /x) • (3‘28)
Однако написанное уравнение не вполне справедливо по следую-
щей причине. Уравнение (3.27) в действительности изображается
на рис. 3.12 не кривой с = ©©, а кривой, имеющей отрицательные
ординаты для значений д, больших, чем 1//1 4-/л (см. также
рис.2.18). Так как точки Рн Q лежат по разные стороны от этого
значения д, то ордината точки Р положительна, а ордината точки Q
отрицательна; следовательно, уравнение (3.28) должно быть ис-
правлено посредством изменения знака перед одной из его частей.
Сделав такое исправление и выполнив простые алгебраические
преобразования, мы приведем это уравнение к следующему виду:
$ + (3-29)
Теперь даже не потребуется решать уравнение (3.26) для полу-
чения дг и д2, если мы вспомним, что коэффициент в среднем члене
квадратного уравнения, взятый с обратным знаком, равен сумме
корней этого уравнения. В уравнении (3.26) эта сумма есть
_ 2(14-/24-ц/2)
З2 ~ 2 + М '
Подставляя это в уравнение (3.29), мы приходим к следующему
результату:
/ = ьЬ • (3-30)
« 3 3 ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ 143
Полученная очень простая формула дает правильное значение
«настройки» для любой величины поглотителя. В случае очень
малого поглотителя (^с^О) настройка определяется величиной.
( 1, т. е. собственная частота поглотителя должна быть такая
же, как и собственная частота главной или основной системы.
При массе поглотителя, составляющей одну пятую часть главной
массы / = т. е. поглотитель должен быть изготовлен так, чтобы
его частота была на 17% меньше частоты основной системы.
Итак, теперь мы знаем, как надо настроить нашу систему, но
Ч1то мы еще не знаем, какую амплитуду ж/жст мы получим. На рис.
3.13 представлен случай такой настройки для /л = 1/4. Здесь
построены две кривые, из которых одна имеет горизонтальную
касательную в точке F, но не горизонтальную в точке Q, а другая,
напротив, горизонтальную в точке Q и не горизонтальную в точке Р.
Легко видеть из чертежа, что без большой практической ошибки
амплитуду в какой-либо из этих точек можно считать за наиболь-
шую амплитуду кривой. Эту амплитуду легко вычислить, для
чего следует только подставить корень уравнения (3.26) в выра-
жение для хг/хСТ, причем, так как в данной точке (Р или Q) отно-
шение хг/хСТ не зависит от величины затухания, то для этого
отношения можно взять выражение (3.27). Выполнив указанную
подстановку, приходим к такому результату:
^- = ]ГГ+~. (3,31}
®ст г М'
Таково решение задачи, если собственная частота поглоти-
теля отличается от собственной частоты главной системы в соот-
ветствии с формулой (3.30).
Интересно теперь сравнить результат, выражаемый уравне-
нием (3.31), с другими случаями, с которыми приходится иногда
встречаться на практике в машиностроении (рис. 3.14),
Прежде всего рассмотрим поглотитель колебаний с постоянной
настройкой при /=1, когда небольшой поглотитель настроен
на такую же частоту, что и главная система, независимо от раз-
меров такового. Тогда уравнение (3.26), служащее для определения
положения обеих постоянных точек Р и Q, примет вид
о
д^ — 2д2+^~ = 0,
2+ ц
о।куда
= 1 ±
Г/2
Для обычных размеров
при меныиих значениях д
][
I 2+ /л
поглотителя максимальная амплитуда
больше, чем при больших значениях
144
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. П1
ft 3.3
ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ
145
<7 (см. рис. 3.12; проверить также положение постоянных точек
но формуле). Возьмем поэтому
g2 = 1 -
][
г 2+ ц
и подставим это значение
в уравнение (3.27). Получим
*1
Я?СТ
________1________
-^ + (1 + ц) 1/-Д-
г 2 + /Л
(3.32)
Далее, рассмотрим прибор, известный под названием «демпфера
Лаичестера» (см. стр. 285), с вязким сопротивлением. Он представ-
ляет собою систему, изображенную на рис. 3.6, в которой пружина
поглотителя заменена амор-
тизатором с линейным сопро-
i ивлением. Следовательно,
к = 0 и, кроме того, как видно
из уравнения (3.23), ол и /
также равны нулю. Поэтому
уравнение (3.26) для опреде-
ления точек Р и Q примет вид
д4-2г/2^- = О,
2+ ц
откуда следует, что одна из
этих точек всегда остается
в точке дР = 0, а положение
другой определяется урав-
нением
й . (3.33)
Рис. 3.15. Резонансные кривые простой
системы, снабженной демпфером Лан-
честера с вязким сопротивлением для
случаев нулевого затухания, беско-
нечного затухания и наилучшего за-
тухания. Все кривые проходят через
постоянные точки Р и Q.
Приборы без затухания
и с бесконечно большим за-
туханием приводятся к сис-
темам с одной степенью сво-
боды, так как в первом слу-
чае масса поглотителя осво-
бождается,а во втором случае
она оказывается жестко связанной с главной массой. Все это ясно
видно из рис. 3.15, на основании которого мы также заключаем,
что наилучшая резонансная амплитуда получается в точке Q.
Подставляя значение (3.33) в уравнение (3.27), мы найдем это
наилучшее значение амплитуды, а именно:
-^ = 1 +-.
яст ц
(3.34)
Ю Ден-Гартог -2074
146
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. 111
В некоторых конструкциях демпфера Ланчестера вязкое со-
противление заменено сухим, т. е. кулоновым трением. Исследова-
ние этого случая достаточно сложно и здесь не приводится.
Расчет показывает, что для наилучшего значения резонансной
амплитуды в таком поглотителе мы имеем следующее приближен-
ное значение:
?! = М6. (з.з5)
Яст 4/л д
Четыре только что рассмотренных случая показаны на рис.
3.14, а. Наиболее выгодные размеры поглотителя определяются
значениями + — или Мы видим из диаграммы, что беспру-
жинный поглотитель, или демпфер Ланчестера, является менее
эффективным, чем пружинные или динамические поглотители
с затуханием. Однако проектирование пружины динамического
поглотителя бывает часто очень затруднительно, так как малые
амплитуды главной массы получаются за счет больших дефор-
маций, а следовательно, и больших напряжений пружины пог-
лотителя.
Прежде чем вычислять напряжение в пружине поглотителя,
необходимо найти оптимальное значение затухания (с/ск)опт.
Оптимальное значение амплитуды было найдено просто посред-
ством установления того положения, что должно быть такое
значение отношения с/ск, при котором кривая в точке Р или Q
обладает горизонтальной касательной, как это изображено на
рис. 3.13. Правда, величина затухания до сего времени еще не была
определена, и вот здесь-то мы впервые встречаемся с трудностями.
Отправляясь от уравнения (3.24), воспользуемся формулой (3.30) для
получения случая «оптимальной настройки» (с/ск)0Пт- Продифференцируем
полученное видоизмененное уравнение (3.24) по д, найдя тем самым наклон
кривой, который приравняем нулю для точки Р, Из полученного таким
образом уравнения можно определить с/ск.
Этот трудоемкий расчет, как показал Брок х), приводит к результату
8(1+ ц)3
С другой стороны, если -— приравнять нулю не в точке Р, а в точке Q и
dg
полученное уравнение разрешить относительно с/ск, то получим:
1 John Е. В г о с k, A Noto on the Damping Vibration Absorber, Trans.
A. S. M. E., 1946, A 284.
Ч 3.3
ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ
147
< реднее из полученных значений дает оптимальное затухание для случаев
оптимальной настройки соответственно уравнению
( с \2 Зрь
Ы = 8(1 + А1)3- (3'36)
Такой же расчет в применении к поглотителю с постоянной настройкой
f = 1 при нулевом наклоне в точке Р дает
+ 3)
8 (1 + /-0
(3.37)
Аналогично для демпфера Ланчестера (рис. 3.15) при / = О нулевое
затухание в точке Q имеет место при
с \2 1
cj = 2 (2 + /X) (1 + р.)' (3'38)
Эти результаты представлены на рис. 3.14, в.
Теперь мы уже можем приступить к нахождению относительного
движения двух масс М и т, определяющего напряжение в пружине погло-
тителя. Точный расчет здесь очень сложен, так как пришлось бы вернуться
к исходным дифференциальным уравнениям. Поэтому мы удовлетворимся
приближенным решением задачи, использовав результат, полученный на
стр. 78; там мы нашли, что вблизи наибольшей или резонансной ампли-
туды разность фаз между силой и перемещением составляет 90° или л/2.
На основании указанных соображений работа, совершаемая силой
/’0 за один период [см. уравнение (1.9) на стр. 29], равна
W = ттР0 х1 sin 90° = пРцХг.
Это есть приближение, но приближение довольно хорошее, так как, если
даже у отличается более или менее значительно от тт/2, то sin отличается
от единицы достаточно мало.
С другой стороны, работа, рассеявшаяся за один период вследствие
затухания, согласно той же формуле равна произведению тт на силу сопро-
тивления и на относительную амплитуду хг, так как эта сила, будучи в
одной фазе со скоростью, отличается по фазе от смещения точно на зг/2.
Итак, для рассеившейся работы имеем
17дИС = П (С(0Хг) • хг = ттсюо#.
1 [риравнивая эти два выражения, находим
ъРцХу = ЗГС0О$,
ИЛИ
. Р°Х1
х? — -----.
Cto
11 безразмерной форме это равенство принимает вид
Xr 'j2 хх 1
Хет J а?ст п е
—
сс
(3.39)
10*
148
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ, III
Написанная формула определяет относительное движение, а следова-
тельно, и напряжение в пружине поглотителя, После подстановки соот-
ветствующих значений д, д и т. д. она может применяться как к вязкому
поглотителю Ланчестера так к « двум типам динамического поглотителя.
Кривые, изображенные на рис. 3.14, б, показывают результаты
указанных вычислений. Мы видим, что относительные движения,
т. е. растяжения пружины, достаточно велики, а именно: их ампли-
туды в три или четыре раза больше амплитуды движения главной
системы. Если пружины могут быть рассчитаны так, что они
противостоят усталости при таких повторяющихся напряжениях,
то все обстоит хорошо, но часто выполнить это весьма трудно,
а иной раз и невозможно из-за отсутствия места для соответствую-
щих пружин. В этом-то и заключается причина того, что поглоти-
тель Ланчестера, несмотря на его меньшую эффективность по
сравнению с пружинными поглотителями, получил большое
распространение.
Пример. Требуется рассчитать поглотитель колебаний для системы,
изображенной на рис. 3.6, который должен действовать при всех частотах
возмущающей силы (принять Мд = 4,5 кГ\ тд = 0,45 кГ\ Ро == 0,45 кГ\
К = 18 кПсм)
Предполагая вначале, что пружина поглотителя характеризуется
коэффициентом к = 1,8 кПсм,. найти:
а) Наилучшее значение коэффициента затухания в поглотителе.
Ь) Наибольшую амплитуду главной массы.
с) Наибольшее напряжение в пружине поглотителя.
Далее, отбрасывая требование к}К = mfM, найти:
d) При каком значении к достигается наиболее полный эффект?
е) Такой же вопрос, что и в а), но для нового значения к.
f) Такой же вопрос, что и в Ь), но для нового значения к.
g) Такой же вопрос, что и в о), но опять для нового значения к.
Решение. Ответы на все вопросы содержатся на рис. 3.14, а, б, в.
а) Рассматривая рис. 3.14 в, мы находим
или
0,45
с = 0,41 т Qn = 0,41 •------- 20 л = 0,0118 кГ • сек}см.
980
Ь) Рис. 3.14, а или уравнение (3.32) дает
а?
— = 7,2;
а?ст
тогда
а?ст = — «== ’. - = 0,025 см,
следовательно,
х = 7,2 • 0,025 = 0,18 см.
К 3.3
ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ЗАТУХАНИЕМ
149
с) Рис. 3.14,6 дает для относительного движения, связанного с
изменением длины пружины
— = 12,8,
*ГСт
о!куда
хг = 12,8 • 0,025 = 0,32 см,
и сила, действующая в пружине, равна
кхг = 1,8 • 0,32 = 0,576 кГ.
d) Наиболее благоприятная настройка определяется из уравнения
(3.30):
«а 1 10
Х?с 1 4" М 11
о г куда
©а V ЮО
Oj ” 121’
Так как величины т, М и К здесь те же, что и в предыдущих вопросах,
то (wa/£c)2 пропорционально к. Поэтому новая пружина поглотителя долж-
на определиться постоянной
к =
е) На рис. 3.14, в имеем
ЮО
—- • 1,8 = 1,5 кПсм.
1^1
с
-------= 0,166.
2т Qc
Так как величина 2т Qc в нашем случае та же самая, что и в вопросе а),
го имеем
0,166
с = —-— • 0,0118 = 0,0096 кГ сек/см.
0,205
f) Рассматривая рис. 3.14, а или уравнение (3.13), находим
£ЕСТ
'Гак как в вопросе Ь) мы уже нашли, что яст = 0,025 см, то наибольшая
амплитуда оказывается равной
х = 4,6 • 0,025 = 0,115 см.
g) Из рис. 3.14,6 имеем
— = 19,5.
®СТ
Тогда
хг — 19,5 • 0,025 = 0,49 см.
При к = 1,5 кГ)см находим, что наибольшая сила в пружине равна
1,5 • 0,49 = 0,735 кГ,
Рис. 3.16.Зубча-
тое колесо с
звукопоглоти-
тельными коль-
цами. Эти коль-
ца либо загоня-
ются в нагретое
колесо, которое
их обжимает
при своем со-
кращении, ли-
бо прикрепля-
ются к нему
в нескольких
местах так,что-
бы могло про-
исходить отно-
сительное пере-
мещение, сопро-
вождаемое тре-
нием во время
колебаний.
150 ДВЕ СТЕПЕНИ СВОБОДЫ ГЛ. III
Демпферы и поглотители описанного типа нашли себе при-
менение, главным образом, на линиях электропередачи (стр. 410,
рис. 7.23), в двигателях внутреннего сгорания (см. стр. 285) и на
кораблях, о чем будет идти речь в следующем параграфе. Заметим,
что в сооружении или в машине «поглотитель»
может оказаться осуществленным таким обра-
зом, что его очень трудно распознать.
Пример упомянутого сейчас устройства мы
имеем в зубчатой передаче, которая, если не
принять соо тветству ющих п редосто ро жно стей,
издавала бы звон наподобие колокольного. Было
установлено экспериментально, что этот шум
может быть в значительной мере устранен по-
средством прижатия двух чугунных колец а, а
(рис. 3.16) к внутренней стороне обода колеса. Но
если кольца прижаты слишком слабо или, на-
оборот, слишком туго, то они не производят
никакого амортизирующего действия; однако
есть какое-то среднее значение давления колец,
при котором эффект получается наиболее полный.
Для опыта можно взять два одинаковых зуб-
чатых колеса, из которых одно снабжено упомя-
нутыми кольцами, а другие без них, поставить их
вертикально и по ободу каждого из них уда-
рить молотком. Тогда первое колесо издаст очень
короткий звук, причем звук этот будет подобен
звуку удара о кусок свинца, а второе колесо бу-
дет звучать в течение примерно десяти секунд
или даже дольше. Очевидно, что чугунные встав-
ки действуют подобно амортизатору Ланчестера.
§ 3.4. Успокоение качки корабля
Одно из наиболее интересных применений
теории, изложенной в предыдущем параграфе,
это — предупреждение качки корабля в неспо-
койном море посредством специальных приспо-
соблений, установленных на борту корабля.
Прежде всего рассмотрим боковую качку самого корабля,
снабженного амортизирующим устройством. Пусть корабль пла-
вает на спокойной воде (рис. 3.17, а), тогда его вес W и полное
давление воды (поддерживающая сила) В являются двумя рав
ными и противоположно направленными силами, проходящими
через центр тяжести G. Положим теперь, что корабль слегка
отклонен от своего первоначального положения посредством
некоторой внешней пары (рис. 3.17,6). Сила тяжести IV опять
3.4
УСПОКОЕНИЕ КАЧКИ КОРАБЛЯ
151
проходит через точку G, но равнодействующая всех давлений
уже оказывается несколько смещенной влево. Линия действия
пой силы пересекает осевую линию сечения корабля в некоторой
ючке М, которая известна в технике под названием метацентра.
(совершенно очевидно, что положение этой точки определяется
Ц'ометрической формой корпуса корабля. Расстояние h между
ючками М и G называется метацентрической высотой.
Определение этой величины по чертежу корабля является
весьма важной обязанностью конструктора, так как от нее зави-
Рис. 3.17. Подъемная сила и сила веса, действующие на
корабль. Для устойчивости метацентр М должен быть
расположен выше центра тяжести О. Расстояние МО
есть метацентрическая высота h.
сит устойчивость корабля против боковой качки, называемая
в кораблестроительной технике остойчивостью. На рис. 3.17, б
мы видим, что силы W и В образуют пару, стремящуюся воз-
вратить корабль в его вертикальное положение. Это имеет место
всегда, если только метацентр лежит выше центра тяжести или
сели метацентрическая высота h положительна. В случае же
о |рицательного значения h пара W, В (рис. 3.17, б) будет
увеличивать наклон корабля, и равновесие будет уже не-
ус юйчивым.
Пример. Пусть корабль имеет прямоугольное поперечное сечение, а
ипдводпая часть его имеет квадратное сечение со стороной 2а. Пусть, далее,
1нц||) тяжести лежит на вертикальной оси симметрии на высоте х
мил дном корабля Для малых значений х корабль устойчив, тогда как для
Гияыпих значений этой величины статическое равновесие уже не будет
устойчивым. Найти то значение ж, при котором равновесие безразлично.
Решение. Рассмотрим погруженную часть корабля величиною 2а • 2а • 1.
1н |»я такую пластинку единицы толщины, мы получаем то удобство, что
И"1 ружспные объемы становятся численно равными площадям соответ-
152
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ, Ш
ственных поперечных сечений. При наклонении на угол ср форма попереч-
ного сечения погруженной части преобразуется, переходя из полного
квадрата в квадрат, из которого справа отнимается малый треугольник,
но зато такой же треугольник прикладывается слева. Площадь этого
треугольника равна (а/2) • ау = а2у/2. Так как центр тяжести каждого
из упомянутых треугольников расположен на одной трети высоты, если
считать от основания, то перемещение треугольника из правой части в
левую вызывает перемещение центра тяжести площади а2 у/2 на расстояние
(2/3) • 2а. Произведение этих величин должно равняться площади квадрата
4а2, умноженной на горизонтальное смещение у центра тяжести всей
•фигуры. Таким образом.'
или
ау
Итак, центр тяжести погруженной фигуры перемещается на это расстоя-
ние влево от первоначальной вертикальной оси симметрии. Вертикальная
линия, проходящая через этот новый центр тяжести, пересекает ось сим-
метрии в точке, находящейся на расстоянии а/6 над первоначальным поло-
жением центра тяжести. Так как эта точка и есть метацентр Л4, то мы
находим, что метацентр М лежит на расстоянии а + а/6 = (7/6) а над
дном корабля. Таково должно быть и желаемое положение центра тяжести
всего корабля при условии его безразличного равновесия.
Корабль представляет собою колеблющуюся систему, так
как, если его вывести из своего положения равновесия, то он
стремится вернуться обратно. Для малых углов (р положение
точки М не зависит от ср. Момент восстанавливающей пары равен
—Wh sin <р или, для достаточно малых значений угла <р,—Why.
Под действием этой пары корабль будет поворачиваться обратно,
качаясь вокруг некоторой горизонтальной оси. Пусть момент
инерции корабля относительно этой оси равен Is\ тогда диффе-
ренциальное уравнение вращательного движения будет
или
Isy = — Why,
(3.40)
у 4- -f— у = 0,
а это уравнение такого же типа, что и уравнение (2.7) (стр. 52)
для незатухающих колебаний системы с одной степенью свободы.
Следовательно, качка корабля представляет собою гармоническое
колебание с собственной частотой
0С =
(3.41)
Представим себе теперь, что корабль находится в волную-
щемся море. Волны ударяют по корпусу корабля более или менее
периодически, вызывая при этом переменную пару, действующую
S 3.4
УСПОКОЕНИЕ КАЧКИ КОРАБЛЯ
153
на корабль. Хотя это действие и не отличается правильной
закономерностью в смысле его периодичности, все же приближенно
мы можем считать, что имеем дело с гармоническим возмущающим
моментом Т0 sin cot, который и должен быть написан в правой
части уравнения (3.40). В том случае, когда частота волны близка
к собственной частоте сос колебаний корабля при боковой
кач^е, вынужденные колебания могут получиться весьма зна-
чительными.
Как показали наблюдения, значения угла ср при волнении
достигают 20°.
Уравнения (3.40) и (3.41) показывают нам, что поскольку
речь идет о колебательных свойствах, то система, представленная
на рис. 3.17, эквивалентна системе, изображенной на рис. 2.4,.
Рис. 3.18. Стабилизирующие цис-
терны Фрама старого типа.
Рис. 3.19. Современная конструкция
стабилизирующей установки Фрама.
или же верхней части системы на рис. 3.6. Отсюда мы можем
сделать заключение, что делу можно помочь введением поглоти-
теля аналогично показанному на рис. 3.6. Это и было сделано в
1902 г. Фрамом, который сконструировал внутри корабля систему,
состоящую из двух цистерн (рис. 3.18), наполовину наполненных
водой и соединенных между собою водяным трубопроводом внизу
и воздушным трубопроводом с вентилем V наверху. Вторичная
или поглощающая система, полученная таким образом, приблизи-
тельно соответствует системе, представленной на рис. 2.11 (стр. 57).
В других конструкциях нижний соединительный трубопровод
упразднен, а его роль непосредственно играет океан, как это
показано на рис. 3.19. Воздушные цистерны занимают примерно
две трети длины судна и разделяются вертикальными перегород-
ками на три или большее число отсеков. Эти конструкции в действи-
тельности значительно сложнее по сравнению с системой, изо-
браженной на рис. 3.10, хотя старая конструкция (рис. 3.18),
подходит к ней достаточно близко.
Успокоители Фрама были установлены на больших герман-
( них лайнерах «Бремен» и «Европа».
Существует другой метод успокоения качки корабля, который
выглядит совершенно отличным от метода Фрама, хотя и имеет в
154
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. III
основе своего действия тот же самый принцип; речь идет о гиро-
скопе Шлика (рис. 3.20). Прибор состоит из тяжелого ротора,,
вращающегося с большой скоростью вокруг вертикальной оси.
Подшипники А А ротора укреплены на раме, подвешенной на
подшипниках ВБ таким образом чтобы рама могла вращаться
около оси, расположенной поперек корабля. Ось ВВ лежит
выше центра тяжести ротора и его рамы. Для того чтобы гасить
Рис. 3.20. Схема гироскопического стабилизатора Шлика, действующего
вследствие рассеяния энергии в тормозном барабане С.
колебательные движения рамы гироскопа, на ось ВВ насажен
тормозной барабан С. Вес ротора гироскопа рассчитывается так,
чтобы он составлял примерно 1% веса корабля. Ротор вращается
посредством электроэнергии, причем скорость вращения дово-
дится до наивысшей, при которой напряжения в материале,
вызванные центробежными силами, не превосходят допускаемых.
Для уяснения действия этого прибора необходимо вспомнить
основное свойство гироскопа, а именно, что вектор, изображаю-
щий главный момент сил, действующих на гироскоп, геометри-
чески равен скорости конца главного момента количеств движе-
ния, или, как его еще называют, кинетического момента.
Пусть вращение ротора направлено против часовой стрелки,
если смотреть на него сверху; тогда вектор L, изображающий
кинетический момент, должен быть направлен вверх. Пусть,
далее, корабль поворачивается вокруг продольной оси по часовой
стрелке (если смотреть с кормы) с угловой скоростью в таком
Й 3.4
УСПОКОЕНИЕ КАЧКИ КОРАБЛЯ
155
случае скорость изменения вектора L, т. е. скорость его конца,
представляет собою вектор длины Ьф, направленный поперек
корабля вправо. Этот вектор и будет главным моментом всех
с пл, действующих на ротор со стороны рамы. Что же касается
главного момента сил действия ротора на раму, то вектор, его
изображающий, равен предыдущему по величине, но направлен
противоположно, вследствие чего рама получит угловое ускорение
в направлении возрастания угла тр (таким образом, нижняя
часть рамы будет стремиться двигаться к корме корабля).
С другой стороны, если рама ротора при своем качании вра-
щается в данный момент времени с положительной угловой ско-
ростью ф, то вектор-момент L возрастает в каждую секунду на
величину Lip в сторону носа корабля. Этот вектор, определяю-
щий возрастание предыдущего, есть момент, стремящийся , вра-
щать ротор по часовой стрелке, а самый корабль против часовой
стрелки, если смотреть с кормы на нос.
Таким образом, корабль оказывается связанным с гироскопом
в том же смысле, как он бывает связан с успокоителем Фрама,
хотя действия той и другой установки носят совершенно различ-
ный характер.
Если не вводить затухание в колебательное движение рамы
ротора, то действие гироскопа скажется лишь в том, что вместо
одной собственной частоты корабля при его качке у него появляют-
ся две, уже другие, собственные частоты. Резонанс с морской
волной приведет к безграничному увеличению амплитуды ср коле-
баний корабля. Если же, напротив того, ввести бесконечно
большое затухание, то рама ротора фактически оказывается
жестко связанной с кораблем. Поэтому боковая качка корабля
приводит к возникновению момента, стремящегося дать наклон
килю корабля, и, наоборот, связанный с кораблем гироскоп
превращает такое вращение вокруг поперечной оси корабля во
вращение вокруг его продольной оси. При резонансе морской
волны с одной из собственных частот корабля при боковой качке
в результате мы опять получаем беспредельное увеличение амп-
л in уды при этой качке. Однако есть какое-то промежуточное
значение затухания, когда обе резонансные амплитуды суще-
ственно уменьшаются.
Активные стабилизаторы корабля. Движение воды в резер-
вуаре Фрама, так же, как и прецессия гироскопа Шлика, вызы-
ваемся самой качкой корабля и в обоих случаях задерживается
юрмозящим устройством. Таким образом, здесь мы не имеем
совершенного решения задачи, поскольку регулировка наилуч-
1НПХ тормозов различна для различных частот и прочих условий.
Подобные системы называются «пассивными системами» в отли-
чие' от более современных «активных систем», когда в системе
‘Ирама вода перекачивается из одного резервуара в другой, а в
156
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. Ш
системе Шлика прецессия гироскопа вынуждается. Здесь уже нет
тормоза, но зато имеется регулятор или прибор, который чувст-
вует качку корабля и который дает соответствующие сигналы,
управляющие насосом в системе Фрама или прецессией гироскопа
Сзади
б) Зад сзади
в) Сид справа
Рис. 3.21. Гироскопическая установка Сперри для успокоения качки ко-
рабля. Прецессия гироскопа вызывается электромотором который управ-
ляется направляющим гироскопом, показанным на схемах (б) и (в).
в системе Шлика, причем так, что фаза реактивного момента
всегда оказывается правильной.
Первым из таких активныху стройств,достигших практического
совершенства, явился гироскопический судовой стабилизатор
Сперри, схематически показанный на рис. 3.21. Он состоит из
главного гироскопа, отличающегося от гироскопа Шлика лишь
тем, что его ось 55 проходит через центр тяжести и что тор-
мозной барабан С заменен зубчатой дугой, сцепленной с шестер-
ней, насаженной на вал сервомотора постоянного тока D. Помимо
главного гироскопа, здесь имеется еще малый направляющий
й 3.4
УСПОКОЕНИЕ КАЧКИ КОРАБЛЯ
157
гироскоп (рис. 3.21, б, в), который имеет габаритные размеры поряд-
ка 13 см и представляет собою почти точную копию главного
1 ирископа. Единственное отличие заключается в том, что этот
i ироскоп не имеет зубчатки С, а вместо нее он снабжен двумя
электрическими контактами dx и d2f один из которых расположен
впереди, а другой позади рамки ротора.
Действие стабилизатора происходит следующим образом.
Когда корабль имеет угловую скорость качки р, направленную
по часовой стрелке (если смотреть с кормы), верхняя часть ротора
направляющего гироскопа начинает перемещаться в сторону носа
корабля и замыкает контакт й2. Это замыкание включает специ-
альное электрическое реле, которое приводит в действие серво-
мотор D, вращающий раму главного гироскопа вокруг оси ВБ
в таком же направлении, в котором вращается рамка малого
шроскопа. Иначе говоря, верхняя часть главной рамы переме-
щается в сторону носа корабля. Вследствие этого в главном роторе
возникает момент, изменяющий угол ср и направленный по часо-
вой стрелке. Он вызывает, в свою очередь, появление реактивного
момента, действующего на раму главного ротора, а, следовательно,
н на корабль. Таким образом, главный гироскоп создает вра-
щающий момент, действующий на корабль в направлении, про-
швоположном угловой скорости качки, и тем самым наиболее
)ффективно противодействующий этой качке. Как только ско-
рость качки корабля обращается в нуль, момент в направляю-
щем гироскопе исчезает, а его ротор возвращается назад к ней-
тральному положению посредством двух пружин е, показанных
па рис. 3.21, в. Но лишь только скорость качки получает противо-
положное направление, малый гироскоп опять выводится из
своего равновесного положения и замыкает уже контакт dlt
благодаря чему сервомотор начинает вращаться в противополож-
ном направлении. Таким образом, всегда возникает момент,
действующий на корабль противоположно мгновенному враще-
нию его при качке. Так как этот момент направлен против угловой
скорости корабля, то тем самым для корабля пропадает наиболь-
шее количество энергии качки (см. три правила на стр. 31).
Направление желаемого прецессионного движения у главного
гироскопа, как это видно из предыдущего, таково же, что и для
свободного вспомогательного гироскопа. Это означает, что мотор
/) вращает раму главного гироскопа в ту же сторону, в какую
опа сама стала бы вращаться, если бы она получила возможность
свободного вращения в подшипниках Б. Однако легко показать,
'Но при такой возможности прецессия главного гироскопа про-
in кодила бы весьма быстро и притом ускоренным образом: за
ничтожную долю периода качки угол у достиг бы 90°, а из этого
положения гироскоп не может быть выведен качкой. Отсюда
< подует, что мотор D не должен толкать главный гироскоп (за
158 ДВЕ СТЕПЕНИ СВОБОДЫ ГЛ. Ill
исключением самого начала прецессии), а должен оказывать
тормозящее воздействие, понижая скорость прецессии до должной
величины. Были даже предложения совсем отказаться от мотора
D и возвратиться к старей системе Шлика с тормозным бараба-
ном, с той лишь разницей, что нажатие тормоза должно уп-
равляться опять вспомогательным гироскопом посредством
электричества.
В конструкциях, имеющих место в действительности, ось
ЛА направляющего гироскопа горизонтальна и расположена
поперек корабля, тогда как ось его рамы ВВ вертикальна. Пря-
мая, соединяющая контакты dy и d2, остается, как и прежде,
параллельной продольной оси корабля. Читателю предлагается
убедиться, что при указанном расположении действие стабили-
затора получается такое же, как и в случае, изображенном на
рис. 3.21.
Гироскопические стабилизаторы Сперри установлены и успеш-
но действуют на многих яхтах. Их применение на итальянском
трансатлантическом пароходе «Conte di Savoia» показало, что
они весьма эффективно погашают даже сильную качку. Однако
во время больших штормов на Атлантическом океане отдельные
волны бывают таковы, что они способны раскачивать судно до
17°. В то же время мощность гироскопической установки доста-
точна для раскачивания корабля лишь на 2° за каждый размах.
Отсюда следует, что наибольшие углы отклонения при такой
качке мало зависят от того, установлен ли гироскопический стаби-
лизатор или нет. Гироскоп, который в состоянии успокаивать
корабль даже при наиболее бурной погоде, должен был бы иметь
недопустимо большие размеры и обладать весом около 5% веса
всего корабля.
Подобный недостаток присущ также активным цистернам
Фрама, в которых вода подается насосом с одного борта судна
к другому, причем насос управляется направляющим гироскопом.
Испытания, произведенные с этой системой на истребителе,
показали, что она может быть эффективна в широких пределах.
Третье стабилизирующее устройство основано на использова-
нии принципа подъемной силы крыла самолета. Представим себе
такое крыло размахом примерно 6 м при выросшем фюзеляже
самолета до размеров океанского парохода. Эти крылья располо-
жены ниже ватерлинии. При движении корабля в воде возникает
подъемная сила этих крыльев или боковых рулей. Они могут
поворачиваться на малый угол вокруг их продольной оси (попе-
речной по отношению к кораблю), и таким образом может изме-
ниться угол атаки, а следовательно, и гидродинамическая подъем-
ная сила. Пусть, например, левый боковой руль имеет большой
положительный угол атаки и подъемную силу, направленную
вверх, в то время как правый боковой руль имеет отрицательный
Й 3.5
ПОГЛОТИТЕЛИ ТОЛЧКОВ НА АВТОМОБИЛЯХ
159
угол атаки и силу, направленную вниз;- тогда возникает гидро-
динамический вращающий момент, направленный по часовой
стрелке, если смотреть сзади. Если теперь углы атаки непрерывно
изменяются сервомотором (под влиянием направляющего гиро-
скопа) таким образом, что упомянутый момент, действующий на
корабль, противоположен угловой скорости боковой качки, то
ла качка гасится. Подобная система была в действии на некоторых
британских истребителях во время последней войны. Вес ее мал
по сравнению с весом судна, но она имеет тот недостаток, что
несколько увеличивает сопротивление движению, а следовательно,
требует большего расхода топлива за рейс корабля, что является
отрицательным фактором. Указанный недостаток в последнее
время устраняется тем, что боковые м
рули делаются выдвижными, так что
они вводятся в действие только в бур-
пую погоду. А в таком случае в на-
i юящее время это есть наилучшее ” ----
решение вопроса. Необходимо заметить, рис. 3.22 Боковые кили,
ч ю цистерны и гироскопические ста- простирающиеся более чем
билизаторы действуют и при стоящем наполовинудлины корабля,
корабле, что не имеет места для бо-
ковых рулей, действие которых зависит от скорости судна.
Пассивный вариант системы боковых рулей, применявшийся
в течение нескольких лет, это — боковые кили, представляющие
собою примитивную форму боковых рулей, неизбежно связанных
i бортами судна (рис. 3.22). При движении корабля вперед никакой
подъемной силы в этих килях не возникает, поскольку угол
тики равен нулю. Однако, как только корабль попадает в боко-
вую качку, его вращательное движение создает кажущийся
угол атаки, вызывающий подъемные силы, которые образуют
момент, направленный против угловой скорости качки. Боковые
। или совершенно. неэффективны в смысле прекращения качки
1ирабля, стоящего на месте, но становятся эффективными при
но движении, причем эта эффективность, грубо говоря, пропор-
циональна квадрату скорости поступательного движения корабля.
§ 3.5. Поглотители толчков на автомобилях
Автомобиль обычного типа на рессорах и пневматиках пред-
• । л вл ист собою чрезвычайно сложную колебательную систему.
Ьк<|> мы имеем три различные «массы», а именно: надрессорное
11|юепие автомобиля, переднюю ось и заднюю ось; кроме того,
• в еь имеются восемь различных «пружин»: четыре рессоры и
"•ii.ipe пневматика (рис. 3.23). Свободное тело в пространстве
ими । шесть степеней свободы. Так, оно может подпрыгивать,
in ргмсщаясь при этом вверх и вниз, раскачиваться в одну и в
160
ЛВГ СТЕПЕНИ СВОБОДЫ
ГЛ. Ill
Надрессорное строение
Рис. 3.23. Идеализированная схема
обычного автомобиля с передней и
задней осями и поглотителями толч-
ков (амортизаторами).
другую сторону, затем двигаться 'вперед и назад; это — три
поступательных перемещения. Кроме того, могут иметь место
три вращательных перемещения, которые в технике известны под
следующими названиями:
1) боковая качка, т. е. колебания вокруг продольной оси;
2) галопирование или продольная качка, т. е. колебания вокруг
поперечной оси;
3) виляние, т. е. колебания вокруг вертикальной оси.
Так как автомобиль представляет собою совокупность
трех твердых тел, то в действительности он должен иметь 18
степеней свободы. Однако значи-
тельная часть таких переме-
щений не имеет почти никакого
значения. Наиболее важными
перемещениями являются следу-
ющие:
1) подпрыгивание надрессор-
ного строения или корпуса
автомобиля при достаточно
устойчивом положении осей;
2) продольная качка кор-
пуса при почти устойчивом
положении осей;
3) подпрыгивание каждой
оси, вследствие упругости пнев-
матикой, при практически невоз-
мущенном состоянии остова;
4) боковая качка осей, сопровождающаяся незначительным
движением корпуса.
Первые два движения были рассмотрены на стр. 123. Для
вполне симметричного автомобиля (которого в действительности
нет) двумя главными колебаниями должны быть, во-первых, вер-
тикальное поступательное движение, во-вторых, галопирование,
или продольная качка около оси, проходящей через центр тяже-
сти; в действительности же при отсутствии такой симметрии
каждое колебательное движение является совокупностью двух
главных колебаний. На практике собственные частоты двух
первых главных колебаний очень близки друг к другу, оказы-
ваясь в современных машинах иногда даже меньше одного коле-
бания в секунду. Колебания третьего и четвертого типов имеют
частоты, приблизительно равные между собою, но более высокие,
чем предыдущие, относящиеся к надрессорному строению. В
старых моделях собственные частоты для осей были более высо-
кими, доходя до 6 или 8 колебаний в секунду. В современных
же автомобилях, снабженных баллонами и более тяжелыми
осями, по причине установки тормозных барабанов на передних
§ 3.5 ПОГЛОТИТЕЛИ ТОЛЧКОВ НА АВТОМОБИЛЯХ 161
осях, эти частоты уже ниже. Вследствие того, что частота коле-
баний корпуса и частота колебаний осей столь далеки друг от
друга, одно движение (первое или второе) может существовать
независимо от другого (третьего или четвертого). Так, если над-
рессорное строение перемещается вверх и вниз, совершая одно
колебание в секунду, то изменение возмущающей силы в рессорах
будет примерно в шесть раз медленнее собственных колебаний
массы оси на пневматиках, и, таким образом, ось не будет реаги-
ровать на переменную силу.
Подобно этому, когда ось колеблемся со скоростью шесть
периодов в секунду, рессоры должны испытывать действие пере-
менной силы с такой же самой частотой ее изменения, которая,
однако, слишком высока, чтобы оказать заметное действие на
корпус автомобиля (см. рис. 2.18 на стр. 68).
Резонанс с колебаниями каждой из упомянутых частот
возникает довольно часто и может быть легко наблюдаем не
только в машинах старых моделей, но также и в новейших авто-
мобилях, если у них удалить поглотители толчков (амортизаторы).
Явление резонанса при галопировании надрессорной части авто-
мобиля наблюдается при езде со средней скоростью по неровной
дороге с волнистым профилем. Так, например, в автомобилях с
недостаточно мощными амортизаторами наблюдается обычно
сильное галопирование при движении со скоростью около 48 клг в
час по бетонированной дороге старого типа с плитами, стыки
которых чередуются через каждые 12 м. Колебания с другой
собственной частотой оказываются в состоянии резонанса на
достаточно низких скоростях при движении по дороге, вымощен-
ной булыжником. В этом случае оси могут испытывать столь
сильные колебания, что шины отделяются от дороги при каждом
полном колебании.
Наихудшие из описанных явлений могут быть устранены
посредством установки на рессорах поглотителей толчков, кото-
рые служат для гашения колебаний так же, как и успокоители
колебаний. Прежде чем приступать к изучению их действия,
обратимся сейчас к рассмотрению влияния самих рессор и пнев-
матиков на «качество езды» или «комфортабельность езды».
Пусть автомобиль движется вперед с постоянной скоростью.
Спрашивается, какой величиной надо измерять степень комфорта-
бельности? Такой величиной может быть хотя бы вертикальное
перемещение кузова или какая-нибудь производная от этого
перемещения. Такой характеристикой не должна быть величина
амплитуды перемещения, так как переезд через гору, представ-
ая ющий собою тоже своего рода «колебание» с амплитудой, поло-
жим, в 1000 м и частотой в одно колебание в час, может быть
весьма приятным. То же самое следует сказать и о вертикальной
скорости, поскольку нет никаких препятствий к езде с большой
И Дсв-Гартог • 2074
162
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. ш
Рис. 3.24. Движение автомобиля
по волнистой дороге.
скоростью по круто поднимающейся дороге. Аналогично обстоит
и с вертикальным ускорением, гак как установившееся уск рение
ощущается в виде непрерывно действующей силы, создающей
лишь кажущееся изменение величины д, что может быть даже
нечувствительно. Однако внезапные толчки производят чрезвы-
чайно неприятное ощущение. Вот по этой причине критерием
комфортабельности является производная ускорения , что
мы и будем считать мерою толчка.
На рис. 3.24 представлено схематически колесо или ось на
пружинящем пневматике. Пусть колесо катится по дороге с
синусоидальным профилем. Если
автомобиль движется с постоян-
ной скоростью, то точка касания
пневматика с дорогой совершает
колебания
Рассмотрим
одинаковой массы т,
с одинаковой скоростью по одной
и той же дороге aosin^, причем
предположим, что эти колеса
отличаются друг от друга только величиной к, характеризующей
упругие свойства пневматиков, т. е. коэффициентом жесткости.
Сила F, передающаяся посредством пневматика о г дороги на
колесо (ось), должна быть тогда в к раз больше относительного
перемещения. По уравнению (2.26, стр. 71) получается
__ ть)2 «о
hl/o —
по закону aosin®t
различные колеса
катящиеся
F =
w2
1-------
со?
или, в безразмерной форме,
к V
F
тсо2а0
тсо2J
]Гк~\2
(3.42)
1 —
ты2
отложить по ординатам,
Если безразмерную силу
имея абсциссами безразмерный квадратный корень из числа,
характеризующего упругость пневматика, т. е. У к/тср, то урав-
нение (3.42) показывает нам, что мы получим диаграмму, изобра-
женную на рис. 2.20 (стр. 72).
Легко видеть, что жесткие пружины (большие значения к,
например, для колес, снабженных стальными ободьями) отобра-
жаются точками в правой части диаграммы, которые означают
передачу больших сил. Передача малых сил имеет место в слабых
§ 3.5
ПОГЛОТИТЕЛИ ТОЛЧКОВ НА АВТОМОБИЛЯХ
163
пружинах (в нашем случае это относится к баллонам), соответст-
венно чему получаем точки около начала координат (рис. 2.20).
К этим выводам можно прийти также из других соображений.
Рассмотрим данную нам «синусоидальную» дорогу или же ровную
дорогу с одним единственным холмиком на ней и положим, что
мы имеем абсолютно жесткие
колеса со стальными ободьями. у
В таком случае вертикальные |
ускорен ия колеса увеличиваются ---— -------------
пропорционально квадрату СКО- Рис. 3.25. Препятствия (холмик) па
расти, что может быть показано дороге.
следующим образом. Пусть се-
чение холмика на дороге представляется уравнением у = /(ж)
(см. рис. 3.25). Для всякой повозки, движущейся с постоянной
скоростью v, мы имеем х = vt.Тогда вертикальная скорость буде
—
dt d(vt)
vd/
dx
и соответственно вертикальное ускорение
dt \dt J d(vt) \dt J dx ( dx] dx2 ’
Так как вторая производная определяется лишь формой
холмика и не зависит от скорости, то легко видеть, что верти-
кальные ускорения действительно возрастают пропорционально
квадрату скорости. Если колесо вполне жестко (без пневматика),
то силы, действующие как на колесо, так и на дорогу, представ-
ляют собою произведение массы колеса на указанное ускорение.
Поэтому сила, действующая на дорогу, также увеличивается
вместе с квадратом скорости, делая, таким образом, применение
резиновых шин абсолютно неизбежным даже для умеренных
скоростей, о которых обычно идет речь.
Пневматики предназначены прежде всего для предохранения
дороги и колес, тогда как рессоры служат для создания «ком-
(|юр та бел ьности».
Итак, теперь мы можем задаться вопросом: как рассчитать
рессоры, чтобы при заданном движении осей получить наиболь-
шую комфортабельность, т. е. наименьшие толчки, определяемые
третьей производной
Из уравнения (2.26) мы имеем
w2а0 . ,
У = -----8Ш
1 - —
w?
11*
164
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. ш
откуда дифференцированием находим
-4- = —Ц cos cot. (3.43)
ы3а0 и2 ' '
Здесь опять мы получили величину, показанную на рис. 2.20.
Итак, рессоры должны обладать наименьшей возможной жестко-
стью в вертикальном направлении. Толчки на дороге в большин-
стве случаев будут происходить быстрее, чем это соответствовало
бы собственной частоте колебаний надрессорного строения, и
поэтому они не дадут более или менее заметного вертикального
ускорения. Введение затухания на таких больших частотах
дорожных толчков не является желательным. Однако, если
случай резонанса не исключен, то тогда затухание очень жела-
тельно. <
В этом вопросе есть еще иная точка зрения. ’Дело в том, что
рис. 2.20 относится к установившимся вынужденным колеба-
ниям, т. е. к колебаниям в предположении правильного чередо-
вания дорожных толчков. В действительности, однако, это встре-
чается далеко не часто, так как неровности дороги, вообще говоря,
распределяются неравномерно. Вследствие этого движение ока-
жется состоящим из какой-то комбинации вынужденных и свобод-
ных колебаний, и вот тогда-то затухание весьма желательно,
чтобы возможно скорее свести на-нет свободные колебания после
прекращения действия соответственной силы, а именно, когда
дорога станет опять гладкой.
Поглотители толчков в большинстве автомобилей делаются
гидравлическими и действуют по принципу амортизаторов. Каждое
относительное движение между осью и корпусом автомобиля
приводит в действие поршень, перемещающийся в цилиндре,
наполненном маслом. Это масло должно протекать сквозь малень-
кие отверстия или же проходить через клапан, установленный на
пружине так, что он может открываться лишь в том случае, когда
имеется разность давлений по обеим сторонам поршня. Таким
образом, упомянутому относительному движению, связанному с
просадкой рессор, противодействует значительная сила, которая,
грубо говоря, пропорциональна скорости относительного движе-
ния на рессорах.
Наиболее желательная величина затухания в таких поглоти-
телях зависит, вообще говоря, от условий дороги. Так, при езде
по гладкой дороге с пологими выступами и чередующимися с
ними впадинами, когда, например, встречается один выступ в
секунду, наиболее желательным является, очевидно, критическое
затухание. Напротив того, если по дороге встречаются короткие
резкие неровности, желательно уже малое затухание.
§ З.Г ВИБРОИЗОЛЯЦИЯ НЕЖЕСТКИХ ОСНОВАНИЙ 165
Некоторые поглотители толчков имеют односторонние кла-
паны, благодаря чему имеет место различное сопротивление при
взаимном удалении и сближении надрессорного строения и
осей. Это сопротивление вызывается путем нагнетания масла
через различные системы отверстий посредством контрольных
клапанов. Обычно при удалении корпуса автомобиля от оси
затухание мало, тогда как при сближении возникают большие
силы сопротивления, действующие со стороны поглотителей.
Нужно, однако, заметить, что предлагаемые теории и доводы
в качестве оправдания таких конструкций далеко не всегда
убедительны.
§ 3.6. Виброизоляция
нежестких оснований
На стр. 102 мы рассмотрели задачу о защите основания от
вибраций, вызванных помещенной на нем неуравновешенной
машиной; установлено,что подходящим средством защиты является
введение мягких пружин между
машиной и основанием. Пру-
жины должны быть рассчитаны
так, чтобы собственная частота
колебаний подвешенной на них
машины была в несколько раз,
например в три раза, меньше
частоты возмущающих коле-
баний. При получении этого
результата предполагалось, что
основание жесткое. Это вполне
оправдано для многочисленных
случаев, когдамашина монтиру-
ется на основании, непосред-
ственно связанном с грунтом.
Однако когда мы имеем дело с
Ро smart
Возмущающая
сила
Рис. 3.26. Виброизоляция на основа-
нии, которое не является бесконечно
большим, как, например, в случае
двигателя, установленного на кор-
пусе корабля .
большими двигателями Дизеля,
установленными в корпусе судна, или с мощным авиационным
двигателем, монтированным на крыле, то указанное допущение
уже несправедливо, поскольку вес прилегающих частей «основа-
ния» значительно меньше веса самой машины.
Для изучения таких случаев в первом приближении мы пред-
ставим себе основание в виде только массы ттг2 (рис. 3.26), обозначив
при этом массу машины через mv
Дифференциальные уравнения движения имеют вид
m-i хг + к (ж, — х2) = Pq sin cot,
т2 х2 + к (х2 — хг) = 0.
166 ДВЕ СТЕПЕНИ СВОБОДЫ ГЛ. Ш
Задаваясь решен нем
хг = xlrn sin cot,
•2/2 ““ Х2т ®ГП otj
подстановкой находим
%! (— т^со2 4- к) 4- х2 (— к) =
xi (— &) + х2 (— т2а>2 + = 0.
Состояние самой машины нас не интересует, а потому мы не
заботимся о величине xlt мы интересуемся движением х2 основа-
ния. Из второго уравнения получаем
и подставляем в первое уравнение, после чего имеем
_ ________PJc________t
2 т1 т2 w4 — к (m] + т2) со2
Это выражение может быть написано также в других фермах.
Подходящая форма для нашего случая такова:
(3.44)
очень
осно-
(3.45)
(тг 4- m2) w2 — - 1
где собственная частота сос системы определяется формулой
9 к
~— •
с т1 т2
т1 4- т2
Сила, передаваемая основанию, может быть найдена
просто, если заметить, что это есть сила инерции самого
вания т2со2х2, иначе говоря,
т2 Ра
передаваемая сила =---------Н1— .
н 4- т2 со2 1
W2
Сопоставляя этот результат с уравнением (2.33) и с рисунком
2.41, относящимися к старой теории жесткого основания, мы
видим, что эта теория (при отсутствии затухания) сохраняет
свою силу. Иначе говоря, уравнение (3.45) опять может быть
представлено простой резонансной диаграммой. Однако есть и
различие, заключающееся в том, что собственная частота по
прежней теории определялась формулой
§ 3.6 ВИБРОИЗОЛЯНИЯ НЕЖЕСТКИХ ОСНОВАНИЙ 167
тогда как теперь она определяется из уравнения (3.44). Для
всякого рода оснований защитные пружины должны быть рас-
считаны так, чтобы сделать собственную частоту равной примерно
одной трети возмущающей частоты. Согласно этому утверждению
пет как будто разницы между легким и тяжелым основанием,
что может ввести в заблуждение.
Возьмем тот случай, когда машина в 10 раз тяжелее основания.
Тогда из уравнения (3.44) имеем:
о k k 77?! + кх 10 4- 1 .. к
69 о 1 1-1 “ * 1 —... 1 1 - а
v т1 т2 ту т2 тх 1
т1 + т2
^Собственная частота при легком основании оказывается в
11 раз больше, чем при очень тяжелом, а поэтому для получения
той же степени защиты необходимо соответствующие пружины
сделать в 11 раз мягче.
Допустим, что возмущающая частота машины примерно равна
1200 колеб/мин. Тогда для массивного основания следует взять
защитные пружины с собственной частотой около 400 колеб/мин,
что равносильно статической осадке порядка 6 мм (рис. 2.9,
стр. 59). Если ту же машину установить на корабле с легким
основанием при = 0,1, то статическая осадка пружин
должна быть в И раз больше, т.е. должна равняться приблизи-
тельно 6,5 см.
Прежде всего, это вообще очень трудно сделать, и, кроме
того, такая машина на корабле, подвергающемся бортовой и
килевой качке, была бы совершенно невозможна. Отсюда видно,
что защита корпуса судна от вибраций, обусловленных действием
машин, есть очень трудная задача. Вибрации корпуса излучают
подводный шум, который нарушает спокойствие рыб, а иногда
бывает нежелательным и по другим причинам.
Идеализация основания или корпуса посредством массы
юстаточно груба. То место корпуса, где прикреплена машина,
действует отчасти, как пружина, отчасти, как масса, и отчасти,
как амортизатор, поскольку радиация вибрации оказывает демп-
фирующее воздействие. Пытаться определить по чертежу соот-
ветствующие значения жесткости пружины, массы и демпфиро-
вания1) является безнадежной задачей; но в то же время для по-
строенного корабля или самолета можно все это найти экспери-
ментально без особых трудностей. Для этой цели мы связываем
с интересующим нас местом вибратор, создающий гармоническую
возмущающую силу, частоту которой мы можем постепенно менять.
Затем измеряем силу, амплитуду колебаний и фазовый угол для
г) Точнее: количественные характеристики упругости, инерции и зату-
хания. (Прим, перев.)
168
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ III
каждой частоты. Результат может быть представлен в виде
отношения Z — механического импеданса, являющегося функ-
цией циклической частоты
= амплитуда сил^ ^ . (3.46)
' амплитуда смещения
В качестве примера рассмотрим простую пружину, нижний
конец которой закреплен неподвижно, а верхний конец возбуж-
дается вибратором. Пусть перемещение верхнего конца есть
asm cot. Тогда сила равна tosinotf, и, следовательно, для пру-
жины механический импеданс Z = к независимо от частоты.
В качестве второго примера возьмем массу как таковую. Если
вибратор действует на нее, то движение определяется выраже-
нием asinw^, и сила равна тасо2 sin cot, вследствие чего Z =
= — тсо2.
Третий пример — демпфер, цилиндр «которого прикреплен
к неподвижному основанию, а поршень приводится в действие.
Если движение поршня происходит по закону asintutf, то сила
действует по закону сасо cos cot, отличаясь по фазе на 90° от
перемещения. Обращаясь к комплексной интерпретации, мы можем
сказать, что перемещение есть а, а сила — jcaco. Тогда Z = jcoc,
т. е. мнимая величина. Другие случаи более или менее простого
вычисления импеданса приведены в задачах 84—90. Если мы
знаем систему, то мы можем вычислитьее импеданс, но все же мы не
знаем свойств интересующей нас точки корабля. Тем не менее
мы можем измерить импеданс в этой точке.
Рассмотрим теперь систему, состоящую из машины т19 к
которой приложена возмущающая сила Ро sin cot и которая
связана через посредство пружины к с основанием, имеющим
импеданс Z(co). Таким образом, масса иг2 на рис. 3.26 заменена более
общим видом основания, характеризуемым функцией Z(co), являю-
щейся вообще комплексной величиной. Дифференциальные урав-
нения имеют вид:
+ к (хг — х2) = Ро sin cot,
к (хх — х2) = х2 Z.
Предполагая, что движение есть гармоническое колебание
с частотой со, мы должны иметь для перемещений хг и х2 комплек-
сные значения, если Z есть комплексная или чисто мнимая
величина. Итак,
— т1со2х1 + к (хг — х2) = Ро,
к (жх — х2) = х2 Z,
3.6
ВИБРОИЗОЛЯЦИЯ НЕЖЕСТКИХ ОСНОВАНИЙ
169
или после преобразования
(— т^2 + к) + х2 (— &) = PQ,
хг (— к) + х2 (к + Z) = 0.
Разрешаем второе уравнение относительно хг\
хг — х2 1
Подставляем найденное значение
разрешаем относительно х2:
Сила, передаваемая грунту,
есть Z х2, в то время как возму-
щающая сила, действующая на ма-
шину,определяется амплитудой Ро.
Таким образом, отношение этих
сил есть
коэффициент передачи =
в первое уравнение, которое
Рис. 3.27. Двигатель, установлен-
ный на основан ии с импедансом Z
посредством пружины и демпфе-
ра. Коэффициент передачи дается
формулой (3.49).
Эта обща'я формула содержит все возможные характеристики
основания. В качестве первого примера возьмем рис. 3.26, где
Z = — т2(п2. Подстановка этой величины в уравнение (3.48)
приводит к результату, уже полученному ранее для этого случая.
Во втором примере пусть основание состоит из простой пружины
К, так что машина опирается на основание через посредство
пружин к и К, включенных последовательно или же через посред-
ство эквивалентной пружины с коэффициентом жесткости
к К /(к + К). Подставляя Z = К в равенство (3.48), имеем:
коэффициент передачи =
тг(к+ К) w2 ’
I — --- 1------
кК
как и должно быть на основании уравнения (2.33).
Для случая демпфера с, включенного вместе с пружиной к
(рис. 3.27), расчет производится аналогично и выполнение его
170
ДВЕ СТЕПЕНИ СВОБОДЫ
ГЛ. Ill
предоставляется читателю в качестве задачи № 88. Результат
получается такой:
2*
коэффициент передачи = . (3.49)
Z \1 —~— I — т1 со2
V к 4- j
В реальных случаях, когда величина Z, характеризующая
основание, известна из эксперимента, эта формула может быть
использована для изучения поведения системы с различными
защитными элементами А? и с и, таким образом, может быть
найдено наилучшее компромиссное решение.
Задачи № 64—98.
ГЛАВА IV
СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ
СВОБОДЫ
§4.1. Свободные колебания без затухания
Когда число степеней свободы системы становится больше
двух, ничего принципиально нового в задаче мы не имеем. Мы
при этом получаем лишь столько типов колебательных движений,
сколько в системе имеется степеней свободы. Общее изучение
метода мы дадим в нескольких ближайших параграфах для систем
с тремя степенями свободы; для четырех и большего числа сте-
пеней свободы рассуждения совершенно аналогичны.
Рассмотрим, например, рис. 4.1, представляющий невесомую
балку на двух жестких опорах, несущую массы тпр тп2 и т3.
Если вертикальные про-
гибы балки в точках при-
крепления масс, направ-
ленные вверх, обозначить
соответственно через
Рис.4.1. Круглый вал с тремя дисками, уста-
новленный на жестких подшипниках,
представляет собою систему с тремя сте-
пенями свободы (в смысле изгиба).
я2, я3, то первое из диффе-
ренциальных уравнений
движения может быть по-
лучено, если приравнять
произведение вели-
чине силы упругости, действующей на первую массу. Эта сила пред-
ставляет собою разность двух перерезывающих сил, действующих
па балку слева и справа от массы mlt и является величиной, за-
висящей от всех трех прогибов xv х2, х2, а потому сложной по своей
структуре и весьма неудобной для вычисления.
В данном частном случае задачи более естественным является
описание упругого состояния при помощи так называемых коэф-
фициентов влияния. Коэффициент влияния а12 определяется как
«прогиб под грузом вызванный силой, равной 1 кГ, приложен-
ной в том месте, где помещен груз т2». Мы имеем, таким образом,
<ри коэффициента прямого влияния ац, а22, соответствующих
172
СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
единичным силам и прогибам, измеряемым в точках приложения
этих же сил, и шесть коэффициентов сопряженного влияния «12,
а21, «13л «з1л «23л «32л соответствующих различным точкам приложе-
ния единичных сил и измеряемых прогибов. По теореме Максвелла
о взаимности перемещений
«12 — «21*
Это можно выразить словами: деформация упругой системы в
какой-либо точке, вызванная единичной нагрузкой, помещенной
в другой ее точке, равна деформации во второй точке под действием
единичной нагрузки, помещенной в первой точке. Коэффициенты
влияния для какой-либо упругой системы вычисляются по мето-
дам, излагаемым в курсах сопротивления материалов.
Обратимся к составлению уравнений движения. В точках
с абсциссами ж2, (рис. 4.1) массы имеют ускорения х13 х2,
и, следовательно, испытывают действие сил тхХ19 т2х2> т3х3.
Эти силы представляют собою действие балки на массы. По закону
равенства действия и противодействия массы действуют на балку
с силами —тп^Хх, —т2ж2, —т3х3, являющимися силами инер-
ции. Прогиб под действием этих сил в месте прикрепления первой
массы равен
Хг ~~~ — «11 X} — «12 ^2 *^2 — «13 т3 •^'3*
Аналогично имеем для второй и третьей массы:
Х2 = «21 ^'1 Хх «22 ^2 &2 «23 ^3 *^'з*
^3 = «31 ^'1 ^1 «32 ^2 ^2 «“33 ^3 Х3,
Хотя эти уравнения и не являются простым следствием второго
закона Ньютона для каждой массы, тем не менее взятые вместе
они определяют неизвестное движение системы посредством
координат х1} х2, х3.
Подобно тому, как было сделано на стр. 116, мы можем реше-
ние написанных дифференциальных уравнений свести к решению
алгебраических уравнений, для чего следует только положить
Хх = sin cot, \
Х2 = «2 sin /
= а3 sin cot. )
После подстановки получим:
(У-и Ctj2^'2^ «2 4” «13^'3^'^«3’
«2 = «2i^i02«i + a22m202«2 + «гз^з^^з»
а3 о^3хТПхО}^а>х ~{— «з2^^/2^^«2 ~Ь* а33тп3й)^а3.
(4.1а)
(4.1b, с)
(4.2)
(4.3)
§ 4.1
СВОБОДНЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ
173
Эти уравнения однородны относительно alf а2, а3) что можно легче
видеть после соответственной перегруппировки членов и деления
обеих частей каждого уравнения на со2:
TTljCtj-j CL] 772'2^-12^'2 *4“ ^3^13^3 = О,
Т/2^21 4“ ^2^-22 + ^3^23^3 ~ О»
^31»! "Ь ^2^32^2 "4“ ( W*33 “И ^3 = О’
(4.4)
Если такие однородные уравнения разделить, например, на
а1} то мы получим систему трех уравнений с двумя неизвестными
а2/аг и а3/ах. Разрешив хотя бы первые два из уравнений (4.4)
относительно этих неизвестных и подставляя найденные решения
в третье, мы, вообще говоря, ему не удовлетворим, т. е. получим
в левой части выражение, отличное от нуля. Решение системы
(4.4) может существовать лишь в том случае, когда имеет место
определенное соотношение между коэффициентами при неизве-
стных av а2, а3. Из теории определителей известно, что это соот-
ношение имеет вид
1 772-jCZii г I 11 7722^12 7723а13
'^'lCf21< 1 т2а22 ^2 7723(X23 = 0. (4.5)
^1^81 7772СХз2 1 m3a33 “2
Рассуждения здесь аналогичны приведенным на стр. 117 для
системы с двумя степенями свободы. Разлагая написанный опре-
делитель, получаем кубическое уравнение относительно 1/со2,
известное под названием «уравнения частот», которое имеет три
корня, определяющих три собственные частоты. Каждому из
этих решений соответствует система значений а2/а3 и а3/а1} которые
определяют конфигурацию системы при колебании. Таким обра-
зом, мы имеем три вида собственных колебаний.
Выполним подробно вычисления для простейшего случая,
который получим, полагая все массы равными между собой, т. е.
полагая = т2 = т3 = т и заменяя балку струною длины 4Z
с натяжением Т (рис. 4.2, а). Груз в 1 кГ, помещенный в положение
7, вызывает деформацию, показанную на рис. 4.2, б. Если натяже-
ние струны равно Т, то вертикальная составляющая этого натя-
жения, действующего слева от тп1} равна (д/l) Т, тогда как справа
от 772, она равна (6/3Z)T. Так как сумма этих вертикальных
174 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ IV
составляющих должна быть равна 1 кГ, то 6 = 4’Т‘^то иесть
деформация в точке 1 под действием груза в 1 кГ, приложенного
3 I
также в точке 2, иначе говоря, аи -у*
Деформации в точках 2 и 3 прикрепления двух других масс
под действием того же самого груза могут быть также легко
найдены из рис. 4.2, б. Для них получаем такие значения:
_ £ 3^ 1 — 1.А
а21 — з ’ 4 * т “ 2 ’ Т ’
— 1 1 1 — £ А
аз1 “ 3 ’ 4 ’ Т ““ 4 * т •
Остальные коэффициенты влияния находятся совершенно таким
Рис. 4.2. Иллюстрация определения
коэффициентов влияния для струны
с тремя массами.
же образом. Итак,окончательно
имеем:
_ I '
а22 — у
3 I
аи — азз — 4 * т *
- 1 1
СС12 — а21 — а32 — а23 — 2 ’ Т
>(4.6)
_ 1 z
а31 — а13 ~ 4” ’ т1 •
Между прочим, среди написанных соотношений мы можем усмот-
реть также соотношение, выражающее теорему Максвелла о
взаимности перемещений.
Уравнения движения мы получим, подставляя найденные
выше значения коэффициентов влияния в уравнения (4.1). Так
как почти все члены этих уравнений оказываются пропорциональ-
ными дроби ml/T, то мы можем разделить на нее эти уравнения
и при этом ввести для сокращения новую величину, называемую
функцией частоты и имеющую вид:
'г
mlto2
= F.
(4.7)
Тогда уравнения (4.4) примут вид:
а, 4- | а2 + Г а3 = О,
4- (1 — F) а2 + | а3 = 0, ,
f | «2 (| - = 0.
(4.8)
§ 41.
СВОБОДНЫЕ КОЛЕБАНИЯ ВЕЗ ЗАТУХАНИЯ
175
Деопервоея е из этих уравнений на аг, второе на а2 и вычитая
лчлпнно одно из другого, находим
“- = 2 —(4.9)
аг F х 7
Подставляя эту величину в первое из уравнений (4.8) и разре-
шая его относительно а3/ар получаем
^ = -7 + 4F + |, (4.10)
л
Наконец, подстановка обоих найденных отношений в третье
уравнение (4.8) приводит к следующему уравнению относительно
F (уравнение частот):
F« — +1-F-1. = 0. (4.11)
Z ci 4-
Конечно, это же самое уравнение можно было бы получить,
развернув определитель в уравнении (4.5). Очевидно, что урав-
нение (4.11) имеет три корня для F. Заметим, что ни один из этих
корней не может быть отрицательным, так как при любом отрица-
тельном значении F все члены слева отрицательны, а поэтому их
сумма не может быть равна нулю. Как видно из формулы (4.7),
отрицательное значение F соответствует мнимому значению о.
Отсюда очевидно, что наша система с тремя степенями свободы*
должна иметь три действительные собственные частоты. Это
верно не только для изучаемого нами частного случая. Можно
вообще показать, что всякая колеблющаяся система с п степенями
свободы без затухания или с затуханием, пропорциональным первой
степени скорости, имеет п действительных собственных частот,.
т. е. корни уравнений частот таких, как (3.7), (4.5) или (4.11),
всегда действительны и положительны.
Кубическое уравнение (4.11) решается путем подбора значе-
ний F. Так, мы видим, что F = 0 делает его левую часть равной
— (1/4), тогда как F = 2 делает ее равной (3/4). Очевидно,
что один из корней этого уравнения должен заключаться, во вся-
ком случае, между 0 и 2. Несколькими такими пробами мы убеж-
даемся, что F — 1/2 есть корень уравнения (4.11), которое теперь
может быть написано в виде
[F-^] (f2-2F + й = 0,
I Ci I I Ci I
откуда следует, что три корня этого уравнения таковы:
^,3=1±]/1.
176
СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Пользуясь равенствами (4.7), (4.9) и (4.10), мы можем сделать
окончательную сводку результатов в следующем виде:
Fx = 1,707; ю? = 0,59 ~ ; 1 ml ’ -2 = 1,41; — = 1
F2 = 0,500; 2 О б>2 = 2 —у : г ml ’ ^=0; °3 j
F3 = 0,293; 0з = 3,41 ; d ml -2 = - 1,41; «1 — = 1 «1
Эти соотношения определяют собою различные виды колеба-
ний системы, или так называемые «главные или нормальные
формы колебания», показанные на рис. 4.3. Итак, имеют место
Рис. 4.3. Три главных формы колебаний струны с тремя рав-
ными и равноудаленными массами.
только три конфигурации, в которых система может быть в
равновесии под действием сил, пропорциональных перемещениям
х (таковыми являются силы инерции). Второе главное колебание
особенно интересно, потому что средняя масса совершенно не
движется. Если бы это обстоятельство было известно заранее,
то частоту можно было бы найти очень просто, рассмотрев только
одну, например левую, часть системы, которая была бы системой
с одной степенью свободы с коэффициентом жесткости к = 2Т/Z
(см. задачу 28).
§ 4.2. Вынужденные колебания без затухания
Положим, что на первую массу в предыдущем примере дей-
ствует переменная сила Fosin cot (рис. 4.4, а). Эта сила Fosin cot
сама по себе должна вызвать статические деформации в точках
7, 2, 3, величины которых соответственно равны auPosinaZ,
а21 Ро sin cot, а31 Ро sin cot. Уравнения вынужденных колебаний
мы получим из уравнений (4.1), прибавляя к правым частям
этих уравнений только что написанные величины. Предполагая,
£ 4.2
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ
177
что решения имеют вид (4.2), мы приведем эти уравнения движения
к следующей алгебраической
форме:
[ft&jCCn — —И ^2а12^2
</ 'X • %
б.
а)
+ 77V7-i3a'3 — — ап м2 ’
^2^’22 '
б)
Ffl
+ ^з^гз^з — 67 21 “Г
У
Рис. 4.4. Вынужденные колебания стру-
ны с тремя массами. Существуют две
частоты, при которых возбуждаемая
масса не двигается; это, именно, те
O)Z=l\
ml
Т
ml
77^(7^^ ^2аз2®2
+ ^з^зз — “2^ ач = a3i —
С помощью коэфициентов
влияния (4.6) и функции
частоты F, определяемой ра-
венством (4.7), мы можем
таком виде:
частоты, при которых полностью про-
является эффект обобщенного дина-
мического поглотителя колебаний.
эти уравнения переписать еще в
н F) 0^ -+ о 4 а3 — _ ? А )
1 2 + ( 1 — F) а2 И д3 = _А А 1 2 та2 * |
1 4 1 “т" 2 а'2 + - -F! а3 = 1 Р° 1 4 то2 ‘ j г
(4.12)
Полученные уравнения уже ье являются однородными отно-
сительно аг, а2, а3, как это было с соответствующими им уравне-
ниями (4.8) для свободных колебаний. В самом деле, здесь мы имеем
систему трех уравнений с тремя неизвестными, которая решается
по обычным правилам алгебры. В наших вычислениях выражение,
стоящее в левой части кубического уравнения (4.11), появляется
в знаменателях, так что оно сможет быть разложено на три линей-
ных сомножителя, в результате чего имеем
ai = А т w2 Г* — F + - 4 4
(F - 1.707) (F - 0.500) (F - 0.293)
(7'7 —“ Io 1 / М - F F 2 1 2)
mw2 (F- 1,707) (F - 0,500) (F - 0,293)
«3 = 1 - F2 4
т to2 (^- 1.707) (F - 0,500) (F - 0,293)
12 Ден-Гартог - 2074
(4.13)
178. СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Физический смысл этих выражений лучше всего вскрывается
нанесением их на диаграммы, соответствующие резонансным
диаграммам рис. 2.18 на стр. 68 и рис. 3.8,а, б на стр. 130. Пред-
варительно заметим, что для этой цели величина F, будучи про-
порциональна величине 1 /о2, не является подходящей переменной.
В качестве ординаты у для наших диаграмм мы возьмем
2/1,2,3- ро1 •
т
Так как знаменатель P^l/T представляет собою «статическую
деформацию» середины струны, если бы в ней была помещена
постоянная нагрузка Ро при коэффициенте влияния
/
^•22 — jf ’
то величина у является «безразмерной амплитудой». За абсциссу
примем
ml
В этом выражении знаменатель может быть интерпретировав
как о2, т. е. как квадрат частоты массы тп, подвешенной на
Рис. 4.5. Пояснение см. под рис. 4.7.
Рис. 4.6. Пояснение см. под рис. 4.7.
пружине с коэффициентом жесткости Т/Z, вследствие чего ^х
есть «безразмерная частота». С помощью этих двух переменных
a 4.2
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БЕЗ ЗАТУХАНИЯ
179
уравнения (4.13) преобразуются к виду
__ -- л?2 4ж — 3 __ х — 2 \
(х — 0,59)(я — 2) (я? — 3,41) ’ У'2, (х — 0,59)(ж — 2) (я? — 3,41)' /
_ 1 " (4-14)
Уз = (аГ-0,59) (ж - 2) (® - 3,41) ‘ \
Рис, 4.7. Резонансные диаграммы
для движения массы 1 (рис. 4.5),
массы 2 (рис. 4.6) и массы 3 (рис.
4.7) системы, возбуждаемой в ме-
сте прикрепления массы 1. Из
всех масс только масса 1 не дви-
гается при двух частотах; осталь-
ные две (2 и 3) движутся при
всех частотах.
Соответствующие построения выполнены на рис. 4.5, 4.6 и 4.7.
Читателю предлагается убедиться, что в статическом случае при
х = 0 все три выражения (4.14)
дают собственно статическую
деформацию. Интересно отме-
тить одно свойство уравнений
(4.14), а именно то, что второе из
них может быть сокращено на
множитель (х—2). Этот факт
легко интерпретируется физи-
чески: дело в том, что средняя
масса не должна иметь беско-
нечных размахов при втором
резонансе, тогда как первая и
третья массы обе ’ должны
иметь безгранично возрастаю-
щие амплитуды. Чтобы убедить-
ся; в этом, достаточно только
взглянуть на второй тип коле-
бания, который изображен на
рис. 4.3.
В то время как числители
в выражениях для у2 и у3 не пред-
ставляют никаких особенностей,
мы видим, что числитель для
у^ является функцией второй сте-
пени, а поэтому он должен обра-
щаться в нуль при двух часто-
тах, а именно при частотах, соответствующих значениям х = 1
и х = 3 (рис. 4.5). При таких значениях частот первая масса, на-
ходящаяся под действием возмущающей силы, остается в покое,
тогда как две другие массы колеблются. Таким образом,
мы имеем здесь перед собою обобщение динамического погло-
тителя колебаний, изученного на стр. 126. Но если первая
масса не движется, то мы можем рассматривать ее как за-
крепленную, и тогда система приводится к одной из систем
с двумя степенями свободы (рис. 4.4). Такая система имеет
две собственные частоты, которые легко могут быть вычис-
лены, причем они оказываются соответствующими абсциссам
180 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ числом СТЕПЕНЕЙ свободы
ГЛ. IV
§4.3 СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ 181
ж=1 и я = 3. Действие системы может тогда представляться
следующим образом. При двух полученных выше резонансных
частотах система с двумя степенями свободы может быть
выведена из состояния покоя бесконечно малой возмущающей
силой, и при этом могут быть получены колебания конечном
амплитуды; в нашем случае это может произойти вследствие
бесконечно малого колебательного движения массы 1. На массу
1 (рис. 4.4, били 4.4. в) действуют две переменные силы, одна из
которых является вертикальной составляющей натяжения
струны справа от массы, а другая есть внешняя сила Posinaf.
Рис. 4.8. Резонансные диаграммы для симметричной струны с тремя мае
сами, из которых средняя возбуждается переменной силом.
Эти две силы должны быть все время равны друг Другу ио вели-
чине и противоположны по направлению, поскольку никакого
движения массы неь
С целью обобщения мы можем попытаться высказать такое
положение: если переменная сила действует на массу в системе
с п степенями свободы, то существует п— 1 частот, при которых
эта масса остается в покое, тогда как остальная часть системы
колеблется. Однако необходимо быть осторожным в таком слиш-
ком смелом обобщении. В самом деле, мы можем сейчас же указать
пример, который будет являться исключением из этого правила.
Это будет тот случай, когда мы действуем возбуждающим образом
на среднюю массу нашей системы. Так как эта масса расположена
в узле при втором резонансе (рис. 4.3), то сила не может совер-
шать работы при этой частоте, а поэтому не могут получиться и
бесконечные амплитуды. В данном случае «резонансная частота»
оказывается совпадающей с «частотой поглотителя колебании».
Если мы хотим наметить форму трех резонансных кривых при
Рис.4.9. Эффект виброгасител я в стру-
не с тремя массами, из которых
средняя подвергается возбуждению.
возбуждении средней массы, то необходимо иметь в виду, что
система симметрична, а поэтому диаграммы для у1 и для у3 должны
быть одинаковыми. Не производя подробных расчетов, мы все
же можем заключить. что в общих чертах результат должен полу-
читься такой, какой представлен на рис. 4.8.
При значениях ж, меньших 2, все три массы находятся водной
фазе, подобно тему, как это изображено на рис. 4.3, а\ при боль-
ших значениях частоты они оказываются в противоположных
фазах, как на рис. 4.3,в. Для
второй же собственной частоты
расположение, вследствие сим-
метрии, должно быть в соответ-
ствии с рис. 4.9. Амплитуда ко-
лебаний масс 1 и 3 должна быть
определена посредством возму-
щающей силы, причем сумма
ве р тика л ьн ых со ста в л я ющи х
натяжений двух участков струны слева и справа от 7?г2 должна
быть равна по величине и противоположна по напрявлению
возмушаюшей силе.
§ 4.3. Свободные и вынужденные колебания с затуханием
В случае системы со многими степенями свободы, обладающей
зал уханием, нас, с практической точки зрения, интересуют два
следующих вопроса: а) быстрота убывания амплитуды свободных
колебаний и б) величина амплитуды вынужденных колебаний
при резонансе.
Метод исследования, применяемый в точной классической
теории колебаний, мы продемонстрируем на примере струны с
тремя равными и равно-
удаленными друг от друга
массами.
Пусть сила затухания
— сх2 действует на среднюю
массу (рис. 4.10). Эта сила
вызывает деформации в трех
точках прикрепления масс, значения которых соответственно
будут — а12 сх2, — а22 с х2 и — сс32 сх2, Дифференциальные урав-
нения (4.1) свободных колебаний принимают вид
Рис. 4.10. Затухание в средней массе
струны.
777Х, — а12 т??^2 — а13 — а12 сх2. >
Х2 = ~ «21 — «22 — «23 ™Х3 ~ Д22 СХ2з ? (4. 15)
^3 = «31 ~ «32 W^2 - «33 W^3 -- «32 СХ2‘ )
Входящие сюда различные коэффициенты влияния определяются
по формулам (4.6). Подставляя значения этих коэффициентов в
182 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
комбинируя уравнения между собою, мы можем после простых
алгебраических выкладок преобразовать их к более удобному
для пас виду;
mx-i 4“ (*4 ж2) = о>
mx2 ч т (х2 — ®1) .+ у (^2 — ж3) + с.т2 — 0, Г* (4.И5)
, т
mx3 + т (z3 — Ж2) + - Х3 = 0.
уравнения системы
Рис. 4.11. Продольные колеба-
ния изображенной системы
полностью эквивалентны
колебаниям системы, изобра-
женной на рис. 4.10 или 4.12.
трения которой мы начал
Первое из уравнений (4.16) получено путем вычитания второго
из удвоенного первого уравнения той
же системы, т. е. путем составления
разности 2х1 — х2. Второе из урав-
нений (4.16) составлено посредством
вычисления выражения хх + х3— 2х2
и, наконец, третье — образованием
разности х2— 2ж3. Физический смысл
уравнений (4.16) очевиден: они пред-
ставляют собою уравнения, вытекаю-
щие из второго закона Ньютона для
различных масс, причем первый член
в каждом уравнении выражает собою
силу инерции, второй — вертикаль-
ную составляющую натяжения стру-
ны слева от массы, третий — такую
же составляющую, но справа oi
массы, и, наконец, четвертый —силу
затухания.
В данном случае можно (и это было
бы гораздо проще) прямо написать
уравнения в последней форме, не
пользуясь коэффициентами влияния.
Однако в случае балки, с рассмо-
и нашу главу (рис. 4.1), коэффициенты
влияния позволяют быстрее и проще подойти к решению задачи.
Прежде чем приступать к решению уравнений (4.16), следует
обратить внимание на то обстоятельство, что эти уравнения
могут относиться также в полной мере и к системам, изображен-
ным на рис. 4.11, 4.12. На рис. 4.11 массы установлены так, что
они могут совершать лишь вертикальные перемещения, причем
для полной аналогии с рисунком 4.10 следует постоянную пру-
жины к (коэффициент жесткости) положить равной Т/1. Другой
пример, представленный на рис. 4.12, относится к крутильным
колебаниям. Читателю рекомендуется интерпретировать резуль-
S 4.3 свободные и вынужденные колебания с затуханием 183
таты, данные на рис. 4.2—4.9, применительно к указанным двум
случаям.
Приступая к решению уравнении (4.16), вспомним, что допу-
щение существования решения вида х — a sin cot вполне законно
для колебания системы без затухания, но оно не оправдывается
при затухании. Было бы более правильно искать решение в
форме х = ае~& sin qt. Это рав-
носильно предположен ию, что
система решений имеет вид
хА = ахе5!, \
x2=a2esl, > (4.17)
)
где s есть комплексное число
5 — р 4- iq
Рис. 4.12. Крутильные колебания
системы, эквивалентные колебаниям
систем на рис. 4.10 или 4.11.
Величина р есть показатель степени, характеризующий бы-
строту убывания амплитуды, a q есть собственная частота коле-
баний (см. стр. 62). Подставляя значение (4.17) в уравнения
(4.16), имеем
T\ + 2 r) 7 -1a* + о = o,
7 — 4- (??2>S2 —h CS J- 2 ~[\ a2 -I “3 = 0.
0 1 ~~1 a2 4- pws- + 2 *-) a3 - 0.
Мы получим систему однородных линейных уравнений отно-
сительно а19 а2, а3, которая может иметь отличные от нуля решения
лишь в том случае, когда определитель системы обращается в нуль,
т. е. когда
т1
?ns2 4- 2 -j
т
“ I
0
7 + 0
I
7
ms- -4 cs 4- 2 j “ I = 0
1
“ I ms- 4 2 z-
По раскрытии определителя, имеем
ms- 4- 2 yj Г(?П52 -h 2 yll'ws2 4- cs 4- 2 jj — 2 (yj2| = 0.
(4.18)
184 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Это уравнение шестой степени относительно s известно также
под названием «уравнения частот»1), хотя в данном случае «9 уже
не является частотой в собственном смысле слова, а представляет
собою комплексное число, характеризующее одновременно как
частоту, так и убывание амплитуды. Поэтому величина s назы-
вается «комплексной частотой».
В нашем частном случае уравнение частот распадается на
два множителя, из которых первый приводит к выражению
вследствие чего получается решение вида
j
. lf2Ti . ]/"2Т
AeJ' + Be ' *m1 ,
которое, в свою очередь, может быть преобразовано к виду
[см. уравнение (1.8), стр. 24]:
1 Г 1 Г 2Т
COS|'^< + С* Sin \т1Л-
Таким образом, из этого решения получаем частоту
«>=R.
у ml
тогда как быстрота убывания амплитуды равна нулю вследствие
того, что s здесь не содержит действительной части. Эта частота
совпадает с частотой в случае, изображенном на рис. 4.3, б для
незатухающих колебаний, когда средняя масса является узлом.
Следовательно, сила затухания может не совершать работы, что
является причиной отсутствия убывания амплитуды в этом
втором типе колебания; это также объясняет тот факт, что соб-
ственная частота совершенно не искажается затуханием.
Другой множитель уравнения (4.18) после преобразований
приводится к виду
, . с Т А п Т с । п ( Т \2 п
s4 4--s + 4—,6^4-2 —— s 4- 2 —д — О-
m ml ml m \mll
*) Обычно это уравнение называется характеристическим уравнением.
(Прим, перев.)
8 4.3: СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ С ЗАТУХАНИЕМ 185
Эго уравнение содержит четыре корня для 5, в которых мы должны
ожидать наличие действительных частей, так как в двух типах
колебаний, представленных на рис. 4.3, а и 4.3, в, сила затухания
должна совершать работу. Корни полученного уравнения напи-
шутся в форме
«а = — А + jq»
= — Pi — jqi,
— Р2 + /5’,
= — Pi — /52,
так как комплексные корни алгебраического уравнения с действи-
тельными коэффициентами являются всегда попарно 'сопряжен-
ными.
Вычисление этих корней по численным значениям тть, с, Т
и I весьма обременительно даже для сравнительно простого
уравнения четвертой степени1). Таким образом, этот классический
метод оказывается непригодным для практического решения
задачи. Он рассмотрен здесь просто по той причине, что позднее,
в главе VII, нам придется иметь дело со случаями, в которых
действительная часть s становится положительной. Это значит,
что функция, характеризующая убывание амплитуды, имеет вид
e+v*, т. е. мы имеем дело не с убыванием, а с нарастанием колеба-
ний. Такое движение носит поэтому название «автоколебатель-
ного».
В практических случаях затухание обычно так мало, что
собственная частота, а также характер колебательных движении
искажаются им очень мало (рис. 2.16, стр. 64). Поэтому интен-
сивность затухания свободных колебаний может быть найдена
при допущении, что конфигурация и частоты системы таковы,
как если бы затухания не было. К этому мы сейчас и перейдем.
Если амплитуда колебаний средней массы равна а2 и частота
равна я, то из уравнения (2.30, стр. 79) получаем для величины
работы, рассеянной за одно колебание вследствие затухания,
следующее значение:
W = TtCGjal,
Кинетическая энергия системы при прохождении через среднее
положение равна
у (ж2) (а? + а? 4- а|) = у mccrfctt, (4.19)
1) Математический метод, применяемый в этих случаях, изложен в
книге Кармана Т. и Био М., Математические методы в инженерном
деле. Гостехиздат, 1946, стр. 218.
186 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
где множитель / зависит от конфигурации системы. Эта энергия
за время каждого колебания (период) уменьшается на величину
пссоа^, которая получается из следующих преобразований
d mtffafij = ma)2fa2da2 —
откуда
da2 лс
а2 maf *
Если при каком-либо главном колебании амплитуда одной из
масс уменьшается вдвое, то это же самое происходит и с прочими
массами, следовательно,
dax da2 da3 ттс
ai а2 аз mfa ’
В первом главном колебании (рис. 4.3, а) множитель f, определяе-
мый уравнением (4.19), очевидно, равен 2, тогда как
(У = ю, = ]/ 0,59 ,
1 у ml
а поэтому относительное убывание амплитуды за один период
определится соотношением
—х = 2,04сУтг .
а, у Тт
В третьем главном колебании величина / также равна 2, но для
частоты мы имеем значение
— ][3,41 ,
3 \ ml9
вследствие чего
— = 0,85 С]1 -- .
«1 \ Т m
Изложенный метод дает удовлетворительные результаты для
обычных значений коэффициента затухания. Но если только
затухание составляет значительную долю его критического зна-
чения ск, то, конечно, предыдущие рассуждения перестают быть
применимыми.
Для вынужденных колебаний с затуханием «классический»
метод еще более сложен, чем для свободных колебаний, причем
в этом случае он оказывается настолько запутанным, что для
практических числовых расчетов делается совершенно бесполез-
х) Здесь символ d условно относится к одному периоду. (Прим, перев.)
S 4.3 СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ с ЗАТУХАНИЕМ 187
ным. В то же время для технически важных значений затухания
изложенный энергетический метод дает нам для амплитуды при
резонансе, которою мы особенно интересуемся, очень хорошие при-
ближения.
Будем считать, как и прежде, что при резонансе сила затуха-
ния и возмущающая сила столь малы, по сравнению с силами
инерции и упругими силами (см. рис. 2.21 стр. 75 для случая одной
степени свободы), что характер движения оказывается практи-
чески неискаженным. Тогда рассеяние энергии при затухании
за один период может быть вычислено совершенно таким же обра-
зом, как это делалось для свободных колебаний. В случае уста-
новившегося режима это рассеяние должно быть равно работе,
совершаемой за один период приложенной к системе возму-
щающей силой или силами. Между этой силой и перемещением,
вообще говоря, имеется некоторая разность фаз. Как было выяс-
нено на стр. 78, фазовый угол в момент резонанса становится
равным тг/2, а при этой разности фаз энергия, сообщаемая системе,
при данном движении и данной силе имеет наибольшее значение.
В качестве примера объединим рис. 4.4, а и 4.10. Работа, совер-
шаемая приложенной силой за один период, равна тгР0
Тогда резонансная амплитуда вычисляется из равенства
пР0 щ — Ttccoal,
или
откуда
Для первого главного колебания мы имели (стр. 176)
-3 = 1,41
«1
и со = ][0,59 —,;
1 ml 1
следовательно,
(ai)pe3 = 0,65^],H.
Для двух других главных колебаний мы находим
(а1)рез = 00
= 0,27
(второе колебание),
(третье колебание).
Наиболее важное техническое применение изложенного метода
имеет место при изучении крутильных колебаний коленчатых
валов, двигателей Дизеля, о чем будет нтти речь в главе V.
188 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
§ 4.4. Струны и органные трубы. Продольные и поперечные
колебания однородных балок
Задачи этих четырех типов мы будем изучать совместно,
так как их математическая и физическая интерпретации тожде-
ственны
В предыдущих параграфах мы рассматривали струну с тремя
массами, причем сама струна предполагалась невесомой, а массы
считались сосредоточенными в нескольких отдельных точках.
Если мы вообразим теперь, что число масс неограниченно возра-
стает, го от дискретного рас-
пределения масс придем к
понятию струны с равномерно'
распределенной массой. Урав-
нение движения мы можем
получить,если напишем урав-
нение.. выражающее второй
закон Ньютона, для малого
элемента ds струны, для кото-
рого опять будем считать
натяжение Т постоянным.
Пусть деформированная ось
струны во время колеба-
ния изображается функцией
у(х, I), причем ордината кри-
вой изменяется как с пере-
Рис. 4.13. Вертикальные составляющие
натяжения, действующего на элемент
dx натянутой струны.
мещением вдоль струны, так и с течением времени. Вертикальная
составляющая натяжения Т струны, действующего влево в неко-
торой точке х (рис 4.13, а), равна
Ъх 9
причем эта величина отрицательна, так как составляющая на-
правлена вниз, в то время как положительные значения у откла-
дываются вверх. Производная берется здесь частная вследствие
того, что струна рассматривается в некоторый определенный
момент времени, т. е время достается постоянным при дифферен-
цировании. На правую часть взятого элемента dx действует верти-
кальная составляющая натяжения, равная
Эта величина уже положительная, так как составляющая направ-
лена вверх. Множительная выражает собой возрастание наклона
кривой вдоль dx. Так как эти две вертикальные силы, действую-
§ 4.4
СТРУНЫ И ОРГАННЫЕ ТРУБЫ
14'.*
щие на элемент dx, между собою не равны (рис. 4.13, б), то пол\?
чается некоторая равнодействующая
т
направленная вверх, которая должна сообщить элементу ускоре-
ние в этом направлении. Если мы обозначим массу единицы
длины струны через то масса элемента dx будет равна dx,
и тогда по закону Ньютона имеем
Деля на dx. мы получим
ний струны:
дифференциальное уравнение колеба-
являющееся уравнением с
частными производными.
Читателю предлагается
сравнить структуру этого
уравнения с первым уравне-
нием (4.16) и установить
физический смысл каждого
<4.20,
Рис. 4.14. Продольные колебания бруса.
Величина х определяет положения
произвольной точки, f — смещение
этой точки, имеющее место при коле-
бании.
члена.
Задача о продольных колебаниях стержня совершенно аналогич-
на задаче о колебаниях струны и представляет собою обобщение
задачи, схема которой дана на рис. 4.11 (только без затухания),
причем здесь мы берем большее число меньших масс и большее
число меньших пружин. Теперь мы уже не будем обозначать
массы номерами 2, 2, 3, как на рис. 4.11, а будем характеризовать
их положение абсциссой х вдоль стержня (рис. 4.14). Пусть
продольное перемещение каждой точки х обозначено гре-
ческой буквой являющейся как бы эквивалентом буквы х.
Тогда состояние движения стержня можно считать известным,
если мы знаем величину £(х. t) опять как функцию двух пе-
ременных.
Поперечное сечение х переходит в х + f, а сечение х + dx
переходит в (х + dx} + (£ 4- dg). В некоторый момент времени
t длина dx делается равной
dx + ™ dx,
дх
где производная как видим, является удлинением единицы
190
СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ IV
длины стержня (относительным удлинением). Это удлинение
вызывает возникновение растягивающего напряжения
где Е — модуль упругости (модуль Юнга).
Если бы стрежень был равномерно растянут по всей своей
длине, то величина Е оыла бы постоянной вдоль длины стержня,
Рис. 4.15. Предельные упругие
силы, действующие на элемент
бруса, рис. 4.14.
и какой-нибудь элемент dx подвергался бы совершенно одинако-
вому действию как слева, так и справа. Однако, если напряжение
Е,~ изменяется от точки к точке, то должна появиться некотора51
избыточная сила, действующая на
элемент и сообщающая ему про-
дольное ускорение.
На рис. 4.15 элемент dx изобра-
жен вместе с действующими на него
силами, каждая из которых равна
соответственному на пряжению, умно-
женному на поперечное сечение S.
Сила, действующая на левую часть
элемента, равна ES-, тогда как
на правую часть должна действовать
сила, равная Е8^> плюс еще некото-
рое приращение, вызванное возрастанием dx абсциссы. Это прира-
щение равно ^Е8 откуда избыток силы в правую сторону
будет
Е8Р dx.
гст!-*
Пусть масса, приходящаяся на единицу длины стержня, рав-
на Тогда по закону Ньютона имеем
(м, йж) g - Е8 g dx,
или
Ы2 Ьх2 3
(4.21)
где Е8 есть жесткость стержня на удлинение. Итак, мы получили
такое же дифференциальное уравнение, что и уравнение (4.20).
Видоизменение рассмотренного случая представляет собою
органная труба, в которой вместо стального бруса совершает
3 4.4
СТУНЫ И ОРГАННЫЕ ТРУБЫ
191
продольные колебания столб воздуха. Уравнение (4.21), очевидно,
юлжно быть такое же самое: уьг обозначает массу воздуха на
единицу длины трубы, Е — модуль упругости. Взамен напряжения
в предыдущем смысле слова мы здесь имеем давление. Для упругих
гел имеет место следующая зависимость:
напряжение __ удлинение
Е начальная длина
Для газов имеем
увеличение давления увеличение объема
Е начальный объем
ИЛИ
Для газов так же, как и для упругих тел, Е измеряется в ки-
лограммах на квадратный сантиметр
Наконец, рассматривая рис. 4.10, 4.11 и 4.12, мы приходим
к убеждению, что изучение крутильных колебаний однородного
вала с распределенным по длине моментом инерции приводит
опять к тому же дифференциальному уравнению. В данном случае
переменной величиной является угол закручивания ср(х, t), а
само дифференциальное уравнение имеет вид
^=01^Ъ’ (4’22)
где /лх есть момент инерции вала на единицу его длины, a Glp —
жесткость вала на. кручение. Читателю предлагается в качестве
упражнения вывести это уравнение.
Приступая к решению уравнения (4.20), (4.21) или (4.22),
мы сделаем предположение, что струна колеблется гармонически
с некоторой собственной частотой, обладая при этом некоторой
определенной формой (назовем ее собственной или нормальной
конфигурацией). Остается посмотреть, правильно ли такое допу-
щение. На математическом языке это значит, что мы принимаем
у(х> I) = у(х) sin ot. (4.23)
Подставляя это значение в уравнение (4.20), мы приведем его
к виду
g+^,-0. (4.24)
а это есть обыкновенное дифференциальное уравнение. Итак,
в предыдущих задачах подобные допущения упрощали обыкно-
венные дифференциальные уравнения, приводя их к алгебраиче-
192 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
ским. Здесь же мы имеем упрощение дифференциального урав-
нения с частными производными, которое приводится указанной
подстановкой к обыкновенному дифференциальному уравнению.
Легко видеть, что уравнение (4.24) того же вида, что и уравне-
ние (2.7) на стр. 52. Это можно выразить еще так: амплитуда
струны, как функция пространства, ведет себя совершенно
таким же образом, как и амплитуда системы с одной степенью
свободы, рассматриваемая как функция времени.
Таким образом, общее решение уравнения (4.24) на основании
уравнения (2.8) имеет вид
у(х) = С, sin х Ус2 cos х]1~- , (4.25)
что определяет форму струны в момент ее наибольшей дефор-
мации. Постоянные интегрирования Сх и О2могут быть определены
из того условия, что на концах струны ее отклонения должны
быть равны нулю, т. е.
у = 0 при х = 0 и х = k
Подставляя х = 0, получаем
у(0) = о = • 0 + С2 • 1;
следовательно, С2 — 0. При х == I получаем
у(1) =0=0 sin IУ . (4.26)
Это равенство удовлетворяется при СА — 0, что является верным,
но лишенным интереса решением, которое означает, что струна
остается в покое. Однако уравнению (4.26) можно удовлетворить
также, если сделать аргумент синуса числом, кратным числу от,
а именно, полагая,
^ = 0, тг, 2тг, Зтг,... (4.27)
Отсюда мы определяем собственные частоты, тогда как соответ-
ствующие главные типы колебаний могут быть найдены немед-
ленно по подстановке значений о? из уравнений (4.27) в уравнение
(4.25). Результаты подобных расчетов проиллюстрированы на
рис. 4.16.
Существует бесконечное число нормальных кривых и соот-
ветственно бесконечное число собственных частот. В каждом
из этих главных колебаний движение происходит так. что откло-
нение каждой точки струны изменяется с течением времени
по гармоническому закону, и следовательно, нормальная кривая
остается подобной самой себе. Поэтому, если струну вывести
из положения равновесия и придать ей одну из форм, изображен-
•ных на рис. 4.16, а затем предоставить ее самой себе, то она воз-
§ 4.4
СТРУНЫ И ОРГАННЫЕ ТРУБЫ
193
и для каждого элемента dx струны.
Рис.4.16.Три первых главных типа’попе-
речных колебаний однородной струны,
а также продольных или крутильных
колебаний однородного бруса,заделан•
ного обоими своими концами.
вратится в свое исходное положение по истечении времени,
определяемого периодом собственного колебания. При такой ча-
стоте и форме сила инерции и упругая сила находятся в равно-
весии в каждый момент времени
Если струне дается на-
чальное отклонение, форма
которого отличается от изо-
браженных на рис. 4.16,
например, такое, как на рис.
4.17, то такая форма может
быть представлена как со-
стоящая из ряда нормаль-
ных форм (вспомнить ряды
Фурье, стр. 33). Каждый член
ряда Фурье определяет со-
ответствующее ему колеба-
ние, но при этом каждое из
таких колебаний происходит
только с одной, свойственной ему частотой. Таким образом,
по1 истечении одной восьмой периода основного типа колебаний
отклонение основной составляющей уменьшится до 0,707 его
первоначального значения, отклонение составляющей при втором
главном колебании обращается в нуль, а отклонение четвертой
составляющей получает значение, равное
по величине первоначальному, но обрат-
ное по знаку. Следовательно, сложная
форма (рис. 4.17) не сохраняется во время
движения. Однако по истечении полного
периода основного колебания начальная
форма восстанавливается.
Формы рис. 4.16 сохраняются также
для продольных (и для крутильных) ко-
лебаний стержня с заделанными концами
или для колебаний органной трубы с за-
крытыми концами. Тогда только ординаты
условно означают перемещение вдоль
стержня. Очевидно, что частоты будут теми
же, только взамен натяжения Т придется
поставить жесткость ES на растяжение,
(или крутильных) колебаний стержня с
Рис. 4.17. Форма «ущип*
.лепной» струны и трех
первых составляющих ее
гармоник ряда Фурье.
Для продольных
одним заделанным концом или для органной трубы с одним откры-
тым концом общие выражения (4.25), определяющие форму коле-
баний, остаются в силе; однако условия на концах, служащие для
определения постоянных и С2, будут в этих случаях иными.
В закрытом конце трубы х = 0 мы опять имеем у ~ 0, так как
воздух не может проникать сквозь твердую стенку в этом конце.
13 Ден-Гартог - 2074
194
СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
1 Ко игольная
J балка
-------------Органная
I------------- труба
Рис. 4.18. Продольные колебания
стального бруса или столба воздуха
в трубе при одном заделанном и дру-
гом свободном копие.
Однако в открытом конце смещение уже возможно, но зато
здесь не может быть напряжения (в случае стержня) или избытка
давления (в случае органной трубы). При выводе дифференциаль-
ного уравнения это напряжение, как мы видели, пропорционально
производной Ц (или в обозначениях для струны ||j. Поэтому
граничные условия оказыва-
ются такими:
х — 0, у = 0;
X = I, = 0.
ах
Первое из этих условий дает
С2 = 0 в уравнении (4.25), тогда
как второе удовлетворяется,
если положить длину стержня
равной 1/4, 3/4, 5/4, и т. д. длины
волны/ как это показано на
рис. 4.18.
В заключение некоторые из
полученных выше результа-
тов представлены совместно на
рис. 4.19.
Первая из этих схем является
половиной схемы, изображенной
на рис. 4.3, б. вторая — часть
схемы на рис. 4.4. б и третья
есть то же, что и рис. 4.3, а.
Обозначенные на указанных
схемах частоты взяты из тех
же фигур, с той только разни-
цей, что здесь М обозначает общую массу всех колеблющихся
грузов, a L — всю длину струны.
В правой части рис. 4.19 к струне присоединены еще две массы,
помещенные в закрепленных концах. Так как эти массы не дви-
жутся, то они не влияют на частоту,но зато изменяют величину^/,
которая является всей массой системы. При увеличении числа
масс от I до 2, 3 и т. д. мы должны в конце концов подойти к
частоте основного типа колебаний непрерывной струны. В левой
части рисунка мы приближаемся к истинному значению частоты
колебаний непрерывной струны, как к верхнему пределу, идя
снизу, поскольку массы оказываются более тесно расположенными
к середине струны, где их инерция более эффективна
Напротив того, в правой половине рисунка массы ближе
подходят к неподвижным концам, а поэтому их суммарная кинети-
ческая энергия получается меньшей,чем при непрерывном распреде-
лении. Вследствие этого частоты должны быть слишком большими.
МЕТОД РЭЛЕЯ
195
Легко видеть, что, идя таким путем, мы приближаемся к
точному значению множителя тг2 = 9,87 очень медленно, а поэтому
Рис. 4.19. При увеличения числа равноудаленных масс на струне мы прибли-
жаемся постепенно к равномерному распределению массы. Однако вслед-
ствие слишком медленной сходимости этот процесс почти не имеет практи-
ческого значения.
указанный приближенный метод определения собственной частоты
с помощью смещения масс с практической точки зрения не может
быть признан удовлетворительным.
§ 4.5. Метод Рэлея
Задача о колебании струны является простейшей среди задач по-
добного рода для систем с бесконечным числом степеней свободы.
Хотя в данном случае и может быть получено точное решение,
по все же мы здесь еще очень далеки от возможности получить
точное решение общей задачи о колебаниях системы в том случае,
когда ее масса и гибкость распределены вообще по какому-то
закону. Вследствие этого чрезвычайно важно иметь такой при-
ближенный метод для определения наинизшей или основной
частоты колебаний, которым можно было бы пользоваться всегда.
Подобный метод был развит Рэлеем; он является обобщением
энергетического метода, изложенного на стр. 54.
Кратко говоря, сущность этого метода сводится к тому, что
мы заранее задаемся формой упругой кривой при первом или основ-
ном виде колебания; после этого вычисляются наибольшие зна-
чения потенциальной и кинетической энергии системы, которые
затем приравниваются друг другу. Конечно, если бы в основу
расчетов мы положили точную форму кривой, то получили бы
точное значение также и для частоты. Но для формы, так или
иначе отклоняющейся от точной, получается лишь практически
13*
196 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
полезное достаточно близкое приближение. Так как точное
решение задачи для струны нам уже известно, то для изложения
метода Рэлея мы возьмем именно эту задачу, что нам поможет
к тому же оценить погрешность
| приближенного результата.
£ I Для вычисления потенциаль-
Уо ной энергии мы заметим, что
деформированная струна имеет
aj? а: большую длину по сравнению с
Рис.4.20.Вычисление потенциала прямой. Так как она все время
ной энергии струны. подвергается действию натяжения
Т, то для ее перевода в деформи-
рованное состояние надо совершить работу, равную T4Z. Эта
работа поглощается струной в виде потенциальной энергии. Для
определения приращения длины струны воспользуемся известным
из дифференциальной геометрии выражением элемента длины ds
{рис. 4.20)
ds = \/dx* 2 * + dtf- = 1 + ^Гх \ dx [1 + 2 ^dx} ]dx-
Так как приращение длины этого элемента равно
, , 1 (dy\z ..
ds — dx = тг -гЧ dx,
2 [dx]
то потенциальная энергия выразится так:
= <4-28’
о
Этот результат можно получить также другим путем, что мы сей-
час к сделаем. При выводе уравнения (4.20) мы видели, что его правая часть
д2у
Т— обозначает вертикальную силу, действующую на единицу длины
Эгг2
струны. Представим себе теперь, что струна приведена в деформированное
состояние статической нагрузкой q(x), возрастающей пропорционально
деформации у(х). Тогда работа, совершаемая нагрузкой д(х), при пере-
мещении элемента dx из первоначального положения в данное,.определяемое
полной деформацией у(х), должна быть равна
вследствие чего для потенциальной энергии имеем выражение
I
U = - Jg(s) у(х) dx.
о
§ <5
МЕТОД РЭЛЕЯ
197
с?2г/
Но так как q(x) = — 'Г ^2» то
I
ry Т г d2y
U=~2iyd^dX‘ Я29)
О
Выполняя интегрирование по частям, мы можем показать, что придем к
выражению (4.28). В самом деле
Первый член справа здесь равен нулю, так как у = 0 при х = 0 и при х = I,
Что же касается интеграла во втором члене, то он может быть написан
так:
^dx =
J dx dx
о
2
dx.
Полная кинетическая энергия есть сумма кинетических энер-
гий (1/2) mv~ = (1/2) (^ dx) (усд)2 отдельных элементов: *
i
= 4 0)2 f^2 (4.30)
о
Как и в случае системы с одной степенью свободы (стр. 54,)
выражения (4.28) и (4.30) определяют максимум той и другой
энергии, причем максимум потенциальной энергии имеет место
в наиболее деформированном состоянии системы, тогда как
максимум кинетической энергии получается в недеформированном
состоянии, когда скорость наибольшая. Приравнивая обе энергии
друг другу, находим формулу для частоты
о;2 =
(4.31)
Величина о2, определяемая по этой формуле, зависит от формы
у(х), которую мы положили в основу расчета.
Рассмотрим сначала точную форму кривой
‘ТГ'У1
У = У о sin — .
198 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
По уравнению (4.28) получаем потенциальную энергию в виде
(см. стр. 18)
rr Т с ( п те 7 'J я2 1
и 2 J I I I I — 2 У» * 2
о
Подобным же образом находим кинетическую энергию
Рис. 4.21. Ду га параболы, как прибли-
женная форма (по Рэлею), колеблю- ААы получили точное значение,
дайся струны. Далее предположим, что стру-
на имеет форму дуги параболы.
В системе координат ху уравнение параболы, изображенной на
рис. 4.21, имеет вид
у ~ рхг.
Параболу можно заставить пройти через две точки (у = у0,
х = ±1/2), давая величине р значение 4у0/12. Уравнение
У = 4т/072
определяет совокупность ординат, образующих на рис. 4.21
штриховку фигуры.
Прогиб струны в какой-либо точке равен у^ минус соответ-
ственная ордината, т. е.
У = Уо
4ж2
Воспользовавшись этим значением у для уравнений (4.28) и (4.30)
и выполнив достаточно простое интегрирование, имеем
U=^Ty-f. Т = ^&1у>.
Тогда
Пи 1 [т
3,162 1/Т
Z I /11
т. е. частота получилась всего лишь на 0,7% больше своего точ-
ного значения. Погрешность оказалась удивительно малой, при-
чем уже с физической точки зрения ясно, что изогнутая струна
не может иметь точную форму параболы. В самом деле, пружиня-
§ 4.5
МЕТОД РЭЛЕ
199
щее действие струны, вследствие которого любая частица dx
стремится возвратиться в положение равновесия, определяется
кривизной струны или величиной Но в крайних точках струны
ее частицы не двигаются, а поэтому там, очевидно, нет ни силы
упругости, ни силы инерции Следовательно, точная форма кривой
должна быть такой, чтобы кри-
визна в крайних точках отсутство-
вала. Это условие и нарушается
параболой.
Чтобы испытать мощность
Рис. 4.22. Другая рэлеевская при-
ближенная форма для половины
с ни у со и да л ьп ой волны.
метода Рэлея, мы применим его
теперь к наиболее неправдопо-
добной форме кривой, по которой,
по нашему предположению, изги-
бается струна, а именно: положим, что эта кривая (рис. 4.22)
состоит из двух прямолинейных отрезков, причем уравнение ле-
вого отрезка имеет вид
у = у*т
2
при
Для энергии находим
и = 2Т , Т = ,
откуда
«1
3,464
I
/11
т. е. частота оказалась на 10% больше своего точного значе-
ния (4.32).
Приближенный метод Рэлея всегда дает для наинизшей соб-
ственной частоты более высокое значение, по сравнению с истинным.
Среди того или иного количества результатов, полученных
этим методом, наименьшее значение частоты является и наилуч-
шим ее приближением. Доказательство этого положения будет
дано на стр. 221.
В заключение мы решим комбинированную задачу о колеба-
ниях тяжелой струны массы М, в середине которой помещен
сосредоточенный груз такой же массы М. Эта задача опять экви-
валентна задаче о продольных (или крутильных) колебаниях
стержня с заделанными концами, имеющего посредине сосредо-
точенный груз, например в виде диска, масса которого (или момент
инерции) равняется массе (моменту инерции) самого стержня.
200 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Обращаясь к рассмотрению упругой линии деформированной
струны, мы можем сказать, что если средняя масса отсутствует,
то эта линия должна быть синусоидальной, а если отсутствует
масса струны, то она должна иметь форму, показанную на рис.
4.22. В действительности же кривая будет иметь какую-то про-
межуточную форму между двумя указанными Заметим, что, в
предположении синусоидальной формы, присутствие средней
массы остается без влияния на потенциальную энергию. Однако
кинетическая энергия благодаря этой массе увеличивается на
Ма>2уЦ2, что составляет удвоенное значение кинетической
энергии самой струны, так как М = /х/ Таким образом, полная
кинетическая энергия системы оказывается в три раза больше
ее значения для струны без средней массы, вследствие чего частота
будет в Уз раза меньше частоты для одной струны, т. е.
Если мы теперь предположим, что струна в деформированном
состоянии имеет форму, показанную на рис. 4.22, то для потен-
циальной энергии остается в силе найденное для этого случая
ее значение, тогда как кинетическая энергия увеличивается на
МаРу^^у е. ее новое значение становится больше предыдущего
в (1/2 + 1/6) : 1/6 = 4 раза. Поэтому частота оказывается равной
со
_ У12ЯТ _ 1Гт_
“ 21 “ 1,/o У Ml •
Так как найденное сейчас значение для частоты меньше найденного
выше, то оно является лучшим приближением, Решая задачу
точно, получим
».= 1.721
Это точное решение, являющееся, правда, более сложным, можно
выполнить на основании теории, изложенной на стр. 191. Уравнение (4.25)
является уравнением общей формы колеблющейся струны, и это уравне-
ние мы применим теперь к левой половине струны. Условие неподвижности
левого конца остается в силе. Поэтому, как и прежде, С.2 = 0, вследствие
чего форма левой половины струны определяется уравнением
у = G sin х
w’-
т
(4.33)
где С и ы пока неизвестны. Амплитуда С для нас здесь существенного зна-
чения не имеет, что же касается частоты со, то она определяется из «длины
волны» синусоиды. На рис. 4.23 показана форма этой кривой, причем правая
половина струны дана как зеркальное изображение ее левой половины.
§ 4.
МЕТОД РЭЛЕЯ
201
К средней массе М приложены сила инерции Мы2г/0 и упругая сила 2Т tg а.
Так как эти две силы должны быть в равновесии, то
27 tga = Ми2у0. (4.34)
Величины у0 и tg а представляют собою соответственно ординату кри-
вой (4.33) в той ее точке, где х = 112, и угловой коэффициент касательной
к ней в той же точке, или
Рис.4.23. Точное исследован ие дв и жен и я
тяжелой струны с центральной массой.
Но так как
получаем
I = М, то, подставляя эти значения в уравнение (4.34),
ю
2
Таким образом, нам предстоит найти такой угол, величина которого,
выраженная в радианах, равняется его котангенсу. Для угла 0° его вели-
чина в радианах также равна нулю, а котангенс имеет бесконечно большое
значение; для угла 90° его величина в радианах равна 1,6, а котангенс
равен нулю. Очевидно, что равенство имеет место где-то между 0 и 90°.
При помощи тригонометрических таблиц мы находим, что искомый угол
равен 49°,3 или же, в радианах, 0,8603. Таким образом,
« if Ж
- — = 0,8603,
2 [/ Т
или
У~Т~
М~Г
Так как наименьшее полученное значение для частоты есть
в то же время ее наилучшее значение, то, следуя Рэлею, иногда
пишут аналитическое выражение формы кривой, которое, однако,
не определяет ее вполне, так как содержит произвольный пара-
метр. С помощью этой формулы обычным путем находят частоту,
в выражение которой входит также этот параметр. Если теперь
давать ему различные значения, то и частота будет принимать
различные значения. Но наилучшим из последних является
наименьшее, а поэтому частота отыскивается как минимум функ-
ции от введенного параметра. Полученное таким путем прибли-
жение значительно лучше, чем при пользовании обычным методом
Рэлея.
Ритц обобщил указанный метод, распросгранив его на боль-
шее число параметров. Метод Ритца определения собственных
частот очень точен, но в то же время, к сожалению, требует исклю-
чительно кропотливых вычислений.
202 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Пример. Судовая двигательная установка состоит из двигателя, греб-
ного вала длиной 45 м и диаметром 25 еле и гребного винта, момент инерции
которого такой же, как момент инерции сплошного стального диска тол-
щиной 10 см и диаметром 120 см. Массу машины можно принять беско-
нечно большой. Найти собственную частоту крутильных колебаний.
Решение. Вследствие большой инерции машины конец вала со стороны
машины может считаться неподвижно заделанным, вследствие чего система
приводится к консольной балке, подвергающейся закручиванию. Если бы
не было винта, то упругая линия (здесь это будет кривая деформации,
определяющая величину угла закручивав ня р па расстоянии ж от машины)
должна представлять собою четверть синусоиды. Напротив того, если
пренебречь моментом инерции вала, по сравнению с моментом инерции
винта, то получаем прямую линию, проходящую через начало координат.
При пользовании методом Рэлея мы будем исходить из этой прямой, а
поэтому полагаем р = Сх.
Из курса сопротивления материалов имеем:
1) соотношение между крутящим моментом Л/ и углом закручивания
9?, которое будет
Mdx
*-«Г
2) величину потенциальной энергии элементарного отрезка dx вала
dU =
Л/2 dx
ZGI^'
где G1 р есть жесткость вала па кручение.
Так как, по нашему допущению, рэлеевская кривая имеет постоянный
du
наклон — = С, то из первого уравнения следует, что крутящий момент
dx
М = CGIр является постоянным по всей длине вала. В таком случае
второе уравнение может быть немедленно проинтегрировано, п мы полу-
чим
Л/2 I
и ------.
2GIP
Кинетическая энергия элемента dx вала равна 71da?<p2/2, где Ц есть
момент инерции массы единицы длины вала. Но так как
азМх
ф = = ыСх = ———,
G1 р
то кинетическая энергия вала принимает вид
2 J « а’ц
Угловая амплитуда колебаний винта (момент инерции которого I) есть
= С1 =
Ml
gk'
а поэтому соответственная кинетическая энергия
1 М-Р
_ ы2 ----.
2 G'-Pp
S 4.5
МЕТОД РЭЛЕЯ
203
Приравнивая сумму обеих кинетических энергий потенциальной
энергии и разрешая полученное уравнение относительно и2, находим
2 С1Р
ш2 =--------—
откуда видно, что к моменту инерции гребного винта надо прибавить
одну треть момента инерции вала.
Выполним теперь числовые расчеты, предполагая, что удельный вес
материала (стали) равен 7,8 и модутъ сдвига G — 8,4 • 10® кПсм2. Для
нашего случая имеем
1 о 1 /0,0078 \
I = — тт2 — — - • тгг2 • 10 г2 = 1620 кГ см сек2,
2 21 980 J
<0,0078 „ \ , ——— • ттг2 • 1 г21 = 1370 кГ см сек2, 1 980 )
1 1 2 8,4 • 105 71 —— — • - • 12,54 = 7,17106 кГ см. 4500 2
Вследствие этого
7,17 • 10е
1620 + - 1370
3
3440 сек~2,
и тогда
/ = — =я — У 3440 = 9,5 колебания в секунду.
2л 2тг
Точное решение этой задачи может быть получено подобно тому, как это
делалось на стр. 200. В самом деле, рис. 4.23 может быть использован
также и для гребного винта, для чего надо только установить аналогию
между величинами. Тогда уравнение частот примет вид
Д/ 1370
a tg а = — =-------- = 0,846,
& 1 1620
где а есть сокращенное обозначение величины
Полученное трансцендентное уравнение решается путем проб, которые
дают нам
а = 46°,3,
или же в радиальной мере,
а = 0,809,
откуда
W2 = (0,809)2 = 3410 сек~2.
Итак, мы видим, что полученная величина на 1% меньше той, какую дает
метод Рэлея.
204 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
§ 4.6. Колебания изгиба однородных балок
В руководствах по сопротивлению материалов дифферен-
циальное уравнение упругой линии балки обыкновенно пишется
М = еЛ, (4.35а)
dx2 '
в одном из следующих видов:
Рис. 4.24. Иллюстрация дифферен-
циальных уравнений изгиба балки.
ИЛИ
dW
О = ---
4 dx2
(4.35b)
где М — изгибающий момент.
После исключения М получим
d2 пт
q = EI
.1 dx2
'd2y\
(4.35c)
Здесь десть погонная нагрузка,
приходящаяся на единицу
длины балки.
Если поперечное сечение
балки постоянно по ее длине,
то множитель Е1 не зависит
от х, а поэтому последнее уравнение упрощается, принимая вид
7 = <4.36)
На рис. 4.24 показаны различные эпюры для балки, лежащей
на двух опорах и несущей одновременно две равномерно распреде-
ленные нагрузки, каждая из которых распространяется на часть
балки. Заметим, однако, чго уравнения (4.35) и (4.36) остаются
верными вообще, а в частности и для других видов закрепления
балок, например в случае консольных балок.
Если балка находится в состоянии установившегося колеба-
ния, происходящего с некоторой собственной частотой, то дей-
ствующей на нее «нагрузкой» являются переменные силы инерции.
Чтобы дать физический смысл такого утверждения, заметим,
что в положении наибольшего отклонения вниз упругой линии
балки (рис 4.24,5) к каждой ее частице приложено наибольшее
ускорение, направленное вверх. Умножим его на массу частицы;
мы получим силу инерции, направленную вверх. Это есть та сила,
с которой балка действует на выделенную частицу. Обратно, по
закону равенства действия и противодействия, частица должна
действовать на балку с силой, такой же по величине, но направлен-
ной вниз. Все эти направленные вниз силы, являющиеся резуль-
§ 4.6
КОЛЕБАНИЯ ИЗГИБА ОДНОРОДНЫХ БАЛОК
205
татом действия отдельных частиц, которые составляют балку,
•образуют нагрузку q, вследствие которой происходит деформа-
ция балки, причем зависимость между нагрузкой и деформацией
определяется уравнениями (4.35) или (4.36). Очевидно, что, когда
балка проходит через положение равновесия, ускорения ее частиц,
а следовательно, и нагрузки обращаются в нуль, но в этом случае
равны нулю также и прогибы.
Таким образом, дифференциальное уравнение колебаний балки
постоянного поперечного сечения принимает вид
7?7 ^У _ __ &У /л 07
Е1Ъх*~ * 9 (4.37у
где есть масса балки, приходящаяся на единицу ее длины1).
Предполагая, что происходят установившиеся колебания с
частотой со, мы имеем, как на стр. 191,
у (х, t) = у (х) sin cot, (4.23)
вследствие чего уравнение (4.37) принимает вид:
EI = ^у. (4.38)
dx*
Левая часть этого уравнения является выражением нагрузки
[см. уравнение (4.36)] через величины, характеризующие упругое
состояние балки, в то время как правая часть есть наибольшее
значение инерционной нагрузки. Отсюда мы видим, что с физи-
ческой точки зрения «нормальная упругая линия» характери-
зуется тем, что грузовая линия для q должна иметь такую же
форму, как кривая прогибов, т. е. как упругая линия. Всякая на-
грузка, которая способна вызвать деформацию с упругой линией,
подобной грузовой линии, может рассматриваться как инер-
х) Рассуждения автора при выводе уравнения (4.37) неточны. Во-
первых, сила инерции в обычном понимании направлена не по ускорению,
а против него; во-вторых, автор не принимает во внимание роль статической
нагрузки. Кроме того, нет никакой необходимости брать частный случай
положения балки, когда упругая линия занимает наинизшее положение.
Беря в основу вывода уравнение (4.36) и применяя принцип Далам-
бера, мы замечаем, что полной нагрузкой, приходящейся на единицу длины
балки, являются ее вес q = g и сила инерции, направленная противи-
92w Q2w Q2y
положно ускорению —, г. е. равная — (q/g) — или — . Тогда
dt2 dt2
уравнение (4.36) переходит в такое:
Легко видеть, что решение написанного уравнения можно искать в
виде суммы двух функций:
у(х, t) 4- г/0(ж),
206 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
ционная нагрузка при колебании. Собственная частота входит
здесь в постоянный множитель связывающий ординаты
обеих кривых.
Функция, удовлетворяющая уравнению (4.38), должна обла-
дать тем свойством, что после четырехкратного дифференцирова-
ния она должна принимать прежнюю форму, умноженную лишь на
постоянную положительную величину p^cP/EI. Вспомним, что
это свойство имеют четыре функции, а именно:
£ах, е~пх, sin ах, cos ах,
где коэффициент а определяется равенством
4
Таким образом, общее решение дифференциального уравнения
(4.38), содержащее четыре постоянных интегрирования, может
быть написано так: -
у(х) — Сгеах + С2е~ах + С3 sin ах 4- cos ах. (4.40)
Это выражение определяет форму различных нормальных
упругих кривых. Четыре постоянные интегрирования С должны
быть определены из граничных условий. Для каждого конца
балки мы располагаем двумя условиями, а поэтому для двух
концов получаем всего четыре требуемых условия.
Такими условиями являются:
для опертого конца у = 0. у" = 0 (нулю равны прогиб и из-
гибающий момент);
для свободного конца y" = Q, у'" = 0 (нулю равны изгибающий
момент и перерезывающая сила);
для заделанного конца ?/ = 0, у' = 0 (нулюравны прогиб и угол
наклона). * **
первая из
которых удовлетворяет уравнению
1W 1X1 <№’
а вторая
— уравнению
**У
EI — д.
dx*
Но последнее уравнение определяет кривую изгиба балки под действием
статической нагрузки; на ординаты этой кривой налагаются ординаты,
даваемые первым членом решения, который, собственно говоря, и опреде-
ляет колебания около положения статического равновесия. Так как нас
интересуют именно колебания, то мы поэтому и занимаемся уравнением
в упрощенной форме, т. е. уравнением (4.37). Если же действие силы тяже-
сти мы можем не принимать во внимание, например, в случае вертикального
положения балки, когда это делается с полным правом, то при статическом
равновесии упругая линия будет прямая, и полное решение определяется
членом у(х, <). (Прим, перев.)
§ 4.6
КОЛЕБАНИЯ ИЗГИБА ОДНОРОДНЫХ БАЛОК
207
Все эти условия становятся очевидными из рассмотрения
физического смысла производных различных порядков, как
это показано на рис. 4.24. Пользуясь для какого-либо частного
случая закрепления концов балки соответствующими гранич-
ными условиями, из уравнения (4.40) приходим к четырем одно-
родным алгебраическим уравнениям относительно четырех по-
стоянных С. Если определитель этой системы приравнять нулю,
то получим уравнение относительно а, являющееся, на основании
формулы (4.39) уравнением частот. Эти вычисления выполняются
для различных случаев закрепления балки (балка с двумя опер-
тыми концами, консольная балка или балка с одним заделанным
и другим свободным концом, балка с двумя заделанными концами
и т. п.). Однако мы предпочтем в дальнейшем находить приближен-
ные решения, пользуясь методом Рэлея. Лишь для балки, свободно
опертой своими концами, точное решение легко может быть
найдено из выражения (4.40).
В этом случае мы можем написать граничные условия таким
образом:
х — 0, у = у" — 0;
ж = /, у = у" - 0.
Мы видим сейчас же, что указанным условиям удовлетворяет
функция, изменяющаяся по закону синуса; что же касается осталь-
ных функций, т. е. косинуса и степеней е, то они здесь оказы-
ваются непригодными. Таким образом, для балки, лежащей на
двух опорах, уравнение (4.40) упрощается, принимая вид
у(х} = С sin ах,
и следовательно, упругие линии для прогибов однородной балки
на двух опорах получаются такие же, как и в случае струны,
показанные на рис. 4.16, с той лишь разницей, что здесь частоты
другие. Эти частоты могут быть найдены, если приравнять аргу-
мент синуса числу, кратному числу тс, а именно:
4 _
al = I = лзг (га = 1.2, 3,. . .),
откуда
__ п2п2 V Я/
~~ г 7Г
=
£я_2
Z2
(4.41)
Итак, в то время, как собственные частоты колебаний струны
возрастают пропорционально числам натурального ряда 1, 2, 3,
4, и т. д. (стр. 192), частоты колебаний балки на двух опорах
возрастают пропорционально квадратам этих чисел, т. е. пропор-
ционально числам 1, 4, 9, 16, и т. д.
208 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Рис. 4.25. Гармоники сосредоточенной на-
грузки.
Мы видели, что в каждом главном колебании однородной
балки грузовая линия сил инерции подобна кривой прогибов,
так как в каждой точке сила инерции dx а2у пропорциональна
прогибу у Следовательно, каждой форме колебания соответ-
ствует своя грузовая линия Такая точка зрения оказы-
вается полезной при разрешении многих задач, из которых мы
сейчас возьмем для рассмотрения один типичный пример.
Балка на двух опорах находилась в покое. В некоторый
момент к ней в середине прилагают внезапно нагрузку Р, удержи-
ваемую в течен ие секунд,
после чего нагрузка сни-
мается. Найти последу-
ющее движение балки.
Сосредоточенная на-
грузка не принадлежит к
числу «нормальных» в том
смысле, что она вызывает
не одно нормальное или
главное колебание, а мно-
жество таких колебаний.
Для решения задачи сле-
довало бы заданную на-
грузку разложить на нормальные нагрузки, т. е. соответствую-
щую функцию разложить в ряд Фурье. Однако дело осложня-
ется тем, что мы имеем сосредоточенную нагрузку. Заменим
ее равномерно распределенной нагрузкой интенсивности q, при-
ложенной на коротком расстоянии 6, так что qd = Р, Тогда,
пользуясь уравнением (1.12а) на стр. 34, находим коэффициент
Фурье: ,
I 2 + 2
2 г . . пх j Tix 2а г ‘ лх ^тгх
an^-\F(x)smn~rd-r = - j sinm_ d_ =
0 I Й
2 'З
где знак + надо брать для п = 1,5, 9 . . ., а знак — для п —
= 3, 7, 1 Г. . . Таким образом, сосредоточенная сила Р. приложен-
ная в середине балки, эквивалентна ряду синусоидальных нагрузок
одной и той же интенсивности 2Р/I. Несколько первых гармоник
разложения представлено на рис. 4.25.
Мы должны исследовать влияние па движение балки каждой
такой нормальной нагрузки в отдельности. Каждая из них влияет
лишь на то главнее колебание, к которому она относится. Под
действием любой из этих составляющих нагрузок система ведет
себя так, как если бы она имела одну степень свободы, а тогда мы
§ 4.6
КОЛЕБАНИЯ ИЗГИБА ОДНОРОДНЫХ БАЛОК
209
можем прямо применить решение задачи 48. Итак, для первой
составляющей полной нагрузки имеем
У = Уст [cos — *о) — cos
Кривая статических прогибов под действием нагрузки q =
= (2P/Z) sin (nitx/l) находится посредством четырехкратного ин-
тегрирования уравнения (4.36):
, . 2PZ3 . ппх
(Уст)п — Sin “~ •
Полное движение определяется как результат наложения
отдельных движений, соответствующих каждой гармонике; итак,
можно написать
П=во
п=Тз,5
(-1)~
, 2PZ3
У^х> $ — EI
П71Х
sm-------
--------- [COS G)n (t — Zo) — COS G)nt],
причем значения g>c находятся из уравнения (4.41).
Пусть нагрузка действует в течение промежутка времени t0,
кратного периоду первой гармоники и, следовательно, кратного
периодам всех высших гармоник. Тогда
cos cdc (t — Zo) = cos t и решение y(x, t)
обращается в нуль: после прекращения действия нагрузки ника-
кого движения нет.
Рассмотрим теперь случай, когда нагрузка удерживается
в течение * периода основной гармоники (следовательно, 9/2
периода третьей гармоники, 25/2 периода пятой гармоники и
т. д.). Тогда cos oc(i — Zo) = — cos и квадратная скобка
делается равной — 2 cos a)ct. Решение имеет вид
„=Гз, 5 1Р sm -р cos
Это движение содержит все гармоники, но их амплитуды
пропорциональны 1 /п4. Таким образом, если первая гармоника
имеет в середине пролета амплитуду 2Р1?1п4Е1, го соответствую-
щая амплитуда третьей гармоники составляет 1/81 от нее пятой
— 1/625 и 1. д.
При пользовании методом Рэлея выражение (4.30) кинети-
ческой энергии, выведенное для струны, сохраняет свою силу
также и для балки. Однако выражение (4.28) потенциальной
энергии, которое относилось к струне, уже оказывается непригод-
ным для случая балки. Выражение потенциальной энергии
балки должно отличаться от выражения потенциальной энергии
струны вследствие того, что упругий эффект в случае балки
14 Ден-Гартог • 2074
210 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
происходит в значительно большей степени вследствие сопротив-
ления изгибу, определяемого жесткостью Е1, чем вследствие
натяжения Т Из сопротивления материалов мы имеем следующие
формулы, определяющие величину потенциальной энергии, погло-
щаемой элементом длины dx балки:
ЛГУ J
dU = dx,
или
JT1 El (d2y\2 j
—~2'\d^] dx'
Написанные формулы могут быть весьма
просто выведены следующим образом. Рассмот-
рим элемент dx балки, находящейся под дей-
ствием изгибающего момента М (рис. 4.26).
Пусть этот элемент первоначально имел прямо-
Рис. 4.26. Потенциальная линейные очертания а затем был изогнут на
энергия изгиба элемен- Угол моментов М Если левый конец эле-
та балки мента предположить заделанным, то момент М
поворачивает на угол dy его правый конец.
Работа, совершаемая моментом М, действу-
ющим на балку, равняется \l2Mdy, где множитель 1/2 появляется
вследствие совместного возрастания от нуля до своих значений как
момента /И, так и угла dy Эта работа поглощается элементом балки
в виде потенциальной энергии Вычислим теперь угол dy. Положим, что
угол наклона левого конца элемента с абсциссой я определяется произвол-
ен/
вой — ; тогда соответственно для правого конца имеем
Отсюда находим разность углов:
и тогда
, d?y
dq> =
dx-
dU — ~ My" dx.
Пользуясь теперь дифференциальным уравнением изогнутой оси
балки
М = El у",
сейчас же приходим к обоим написанным выражениям.
Таким образом, полная потенциальная энергия балки будет
U =
EI r(d2y\z j
dX-
О
(4.42)
§ 4.6
КОЛЕБАНИЯ ИЗГИБА ОДНОРОДНЫХ БАЛОК
211
Предлагаем читателю в качестве упражнения вычислить
первую собственную частоту колебаний балки на двух опорах
путем подстановки в выражения (4.30) и (4.42) половины волны
синусоиды для у.
Вычислим теперь основную собственную частоту консоли,
т. е. балки, заделанной одним концом в стену и имеющей другой
конец свободным. Здесь нам необходимо выбрать такую кривую
для изогнутой оси (рис. 4.27), которая горизонтальна при я = 0
и не имеет кривизны (а следовательно, и изгибающего момента)
у" при х = I. Двум поставленным
требованиям удовлетворяет чет-
верть косинусоиды:
Рис. 4.27. Четверть волны косину-
соиды, как рэлеевская форма изо-
гнутой оси консоли.
У =
oos^j. (4.43)
I
Так как это выражение не мо-
жет быть приведено к форме (4.40)
путем того или иного использо-
вания множителей С, то поэтому
форма кривой, определяемая
уравнением (4.43), не является
точной формой нормальной кривой,
значение для у в выражения (4.42)
мулой интегрирования на стр. 29, мы
Подставля я на писанное
и (4.30) и пользуясь кфор-
получим
Т =
Рис.4.28. Первые два главных колебания
изгиба балки, заделанной одним кон-
цом (консоли).
Приравнивая друг другу эти
два выражения, мы найдем
частоту
л2 ]ГеГ
(D = --г = ~ /--г. =
01/3 2 F мЛ
О / -л-
4 л
3,66 ][Ё1 .. ...
=-p-F^- (4-44)
Точное решение содержит множитель 3,52, который на 4%
меньше полученного 3,66. На рис. 4.28 изображена точная форма
кривой для основного второго типа колебаний Нормальная
упругая кривая для балки с обоими заделанными концами должна
иметь форму, симметричную относительно середины, с горизон-
тальными касательными на концах (рис. 4.29). Простейшей кривой,
14*
212 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
удовлетворяющей этим условиям, является полная волна коси-
нусоиды, смещенная вверх на yQ:
Г. 2лЖ1
У = Уо 1 — cos— •
Последовательно находим
EI 2 16л4 £
2 > 2 ’
Т = ^у\ач[\ + 3).
— 4я2]/^Г=22,7 1ШГ
60 “ Уз F mU4 Р г Mi
(4.45)
Точное решение задачи получается, если взять множитель 22,4,
который на 1,3% меньше, чем 22,7.
Рассмотрим, наконец, балку со свободными концами, т. е.
балку, подвешенную, например, на одной или нескольких нитях
Рис. 4.29. Нормальная упругая кривая балки с заделан-
ными концами.
или же плавающую в жидкости. При простейшем типе колебаний
(рис 4 30) здесь должно быть два узла и должна отсутствовать кри-
визна у" на каждом конце Простейшей пригодной формой изгиба
может быть половина волны синусоиды, смещенной по вертикали
на некоторое небольшое расстояние а
“ПХ
У=Уо^-1----а-
Величина а вертикального смещения имеет важное значение,
так как она определяет положение двух узлов. При а = 0 они
находятся на концах балки, а при а = у^ оба узла совпадают,
находясь в ее середине.
Истинное значение а, лежащее между 0 и ?/0, может быть
найдено из тех соображений, что, поскольку ня балку не действуют
ннешние силы, сумма проекций количеств движения всех ее частиц
ва вертикальную ось должна быть равна нулю Когда балка при
колебаниях проходит через положение равновесия, скорости ее
концов равны оу и направлены вниз, в то время как скорость
середины равна тоже оу, но уже направлена вверх. Так как балка
§ 4.6
КОЛЕБАНИЯ ИЗГИБА ОДНОРОДНЫХ БАЛОК
213
однородна, т. е. все ее частицы dx имеют одинаковую массу, то
эти величины оу пропорциональны соответственным количе-
ствам движения. Сумма количеств движения равна нулю, если
Рис. 4.30. Нормальная упругая кривая балки со сво-
бодными концами.
площади фигур, получающихся выше и ниже осевой линии на
рис. 4.30, равны между собой, т. е., если имеем равенство
l i I
0 = j'ydx = yQ§sin dx — J a dx = - y01 — al,
оо 0
откуда
a = X
71
Зная теперь форму кривой при колебаниях, мы находим:
Т7 _ л4 Elyl
U ~ 4 /з
_ ___Л2___ ]ГЁГ _ 22,72 UEI
1/1 2 Г М4 & I Pi ‘
14“я2
(4.46)
Точный результат здесь такой же, как и в случае балки с заделан-
ными концами, т. е. множитель получается равным 22,4, что на 1%
меньше, чем 22,72.
Пример. Балка, заделанная одним концом и имеющая жесткость Е1,
длину I и массу на единицу длины (полная масса та = Z), несет на
своем свободном конце массу М Пользуясь методом Рэлея, определить
собственную частоту колебаний системы, а также найти, какую долю
массы m следует прибавить к массе /И, чтобы была применима формула
(2.10) на стр. 54
Решение Форма изогнутой оси балки должна удовлетворять тем же
самым требованиям, которые были поставлены при получении уравнения
(4.43), а поэтому написанное выражение мы сохраним и здесь. Добавление
массы М на конце балки не влияет на выражение потенциальной энергии;
с другой стороны, имея в виду, что амплитуда колебаний этого конца
равна ?/0, мы замечаем, что кинетическая энергия здесь уже оказывается
больше на величину 1/2 /Иы2?/20. Так как m = ^Z, то полная кинетическая
энергия может быть написана так.’
m 1 « Г /3 4\i 1
т = - “М [-’И + m 2 + О,23.'И).
214 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ, IV
Пользуясь выражением потенциальной энергии, приведенным на стр. 202t
мы можем найти частоту
3,03 Е1
~ Z3 (М + 0,23 т) ’
Итак, к массе, помещенной на конце, надо добавить 23% массы самой
балки. В случае, когда балка предполагается невесомой, т. е. т = 0,
значение со2 получается на_1% больше точного решения, где в числителе
стоит множитель 3.
§ 4.7. Балки переменного поперечного сечения
Во многих практических случаях поперечное сечение балки
не является постоянным по ее длине. Наиболее обычным примером
подобной балки, лежащей на двух опорах, может служить вал,
установленный на подшипниках: в самом деле, в средней своей
части вал обыкновенно имеет большее поперечное сечение, чем
вблизи концов. Стальной корабль, плавающий на воде, испыты-
вает иногда колебания, как балка со свободными концами, подобно
рис. 4.30. Эти колебания достигают большой величины, если
неуравновешенные силы двигателей имеют такую же частоту,
как и частота собственных колебаний корабля. При этом надо
заметить, что жесткость корабля на изгиб ни в какой мере не
может считаться постоянной по его длине.
Метод Рэлея может быть применен также к случаю такой
неоднородной балки, поскольку всегда возможно так или иначе
наметить форму упругой линии. Вычисления здесь выполняются
совершенно таким же образом, как- и для балки постоянного
сечения, с тем лишь очевидным исключением, что необходимо видо-
изменить выражение (4 42) для потенциальной энергии путем
введения переменной жесткости Е1 под знак интеграла. Если
жесткость изменяется вдоль длины х по более или менее сложному
закону, то вычисление интеграла для потенциальной энергии
может представить значительные трудности; однако, если даже
такое точное вычисление невозможно, величина интеграла всегда
может быть найдена графическим путем.
Стодола дал несколько иной метод определения частоты
собственных колебаний, применив его впервые к роторам турбин.
В этом методе расчет повторяется несколько раз, и после каждого
повторения получаются все лучшие и лучшие результаты. Кратко
говоря, здесь дело сводится к тому, что первоначально задают
упругую линию изучаемого вала. Умножая ординаты упругой
линии на соответственные массы и на квадрат неизвестной пока
частоты, т. е. на р^х) со2, мы получаем предполагаемую кривую
инерционной нагрузки (грузовую линию). Так как величина
си2 еще не известна, то в качестве исходного значения принимают
ее равной единице. После этого, располагая инерционной нагруз-
$ 4.7
БАЛКИ ПЕРЕМЕННОГО ПОПЕРЕЧНОГО СЕЧЕНИЯ
215
кой у^х) pjx) и пользуясь обычными методами графической
статики, строят кривую прогибов, т. е. упругую линию 2/п(ж).
Очевидно, что эта вторая упругая линия уи(ж) совпадает с пред-
положенной вначале упругой линией лишь югда, когда:
1) у{(х) есть в точности нормальная упругая линия,
2) собственная частота о точно равняется единице.
Первое из этих условий приблизительно выполняется, что
же касается второго, то оно, вообще говоря, далеко от истины.
Кривая прогибов #и(ж) в большей или меньшей степени имеет
такую же форму, как та, которую мы положили в основу расчета,
т. е. y(x)f но ее ординаты могут оказаться, например, в 10 000 раз
меньше, Если это так, то нам следует попытаться получить хотя
бы приблизительно равные .ординаты уп(х) и уД®), предположив,
что су2 = 10 000. В таком случае первоначальная инерционная
нагрузка должна быть в 10 000 раз больше, и конечные прогибы
^п(ж) тоже должны быть в 10 000 раз больше, т. е. примерно долж-
ны равняться предположенным вначале. Таким образом, отноше-
ние ординат и уц(х) является первым приближением для
квадрата частоты ®2.
Если мы сделаем достаточно близкое к истине предположение
о форме упругой линии, то указанным методом мы достигнем
очень хорошего результата. Когда же требуется еще большая
точность, то построение можно повторить, принимая уже 2/п(ж)
за исходную кривую и находя третью кривую #ш(а). На стр. 222
будет показано, что этот процесс определения основного типа
колебаний сходится, т. е. всякая последующая кривая ближе к
истинной форме упругой линии, чем предыдущая. При этом в
действительности указанная сходимость оказывается столь бы-
строй, что обычно даже нельзя обнаружить разницу между
формами кривых #ш(ж) и у{](х).
Детали описанного построения относятся скорее к области графиче-
ской статики, чем к динамике колебаний.
В качестве примера рассмотрим изображенный на рис. 4.31, 1 вал
длиной 1830 мм, покоящийся на двух подшипниках. Этот вал мы мыс-
ленно разделим на шесть участков равной длины, массы которых, а также
жесткости на изгиб EI приведены в нижеследующей таблице (стр. 217),
причем модуль упругости Е мы полагаем равным 2,1 • 106 кГ/см2. Пред-
полагаемая кривая прогибов (упругая линия) обозначена римской
цифрой II. Эта кривая имеет довольно пологую форму в своей средней
части по причине значительно большей жесткости этой части вала по
сравнению с остальными. Чтобы получить инерционную нагрузку
ур.,02 = ур,, 1,
необходимо умножить ординаты у данной кривой на массу приходя-
щуюся на каждый сантиметр длины вала, т. е. на числа второго столбца
нашей таблицы. Таким образом, мы получаем кривую///, которая построена
так, что каждый «сантиметр» представляет собою 0,00173 кПсм. Все длины
на чертеже измерены в сантиметрах, указанных на масштабе сверху схемы /.
216 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ числом степеней свободы
ГЛ. IV
Рис. 4.31. Графическое определение основной частоты собствен-
ных колебаний ротора.
§ 4.7
БАЛКИ ПЕРЕМЕННОГО ПОПЕРЕЧНОГО СЕЧЕНИЯ
217
Ордината кривой II в центре вала равна 38 см, а средняя ордината
(К/1^ 1 \
= 38 см • 0,004 ----— • 1---- .
см2 сек2)
кри-
Чтобы ^получить кривую прогибов под этой нагрузкой, необходимо
выполнить четыре интегрирования, разбивающихся на две груп-
пы, по два интегриро- вания в каждой Обра- щаясь к первой группе, мы видим, что из урав- нения cZ2M q = -уу (4.35b) dx2 Таблица 4.1
Номера участков Масса на погонный сантиметр к Г сек* 1см* Масса всего участка кГ сек* [см Е1 кГ см2
путем двукратного ин- 1 0,00100 0,0305 26,8 • 108
тегрирования можно по- 2 0,00225 0,0686 135,6 • 108
лучить изгибающий мо- мен т М. 3 0,00400 0,1220 428,0 • 108
Здесь первое ин те- 4 0,00400 0,1220 428,0 • IO8
грирование выполняется 5 0,00225 0,0686 135,6 • 108
графически посредством вычисления площадей фигур, ограниченных 6 0,00100 0,0305 26,8 • 108
осью абсцисс, шестью
участками кривой III и соответственными ординатами. Так, например, пло-
щадь первой из них, очень близкой по своей форме к треугольнику, равна
— • 30,5 см • 0,0246 кГ!см = 0,376 кГ.
Это есть уже полная центробежная сила (приы = 1 ——j всего первого
V сек2;
участка вала, а следовательно, эта величина представляет собою также и
разность перерезывающих сил, действующих на левый и правый концы
соответствующего участка 1. Шесть площадей кривой IIIотложены после-
довательно по вертикали сверху вниз на силовом плане IV, где, например,
АВ есть 0,376 кГ; на этом же плайе имеем ВС = 2,00 кГ, а именно, площадь
участка 2 кривой III и т. д. Таким образом, вертикальная прямая на плане
слева равна значению перерезывающих сил и является результатом первого
интегрирования Возьмем теперь произвольное горизонтальное расстояние
Нг (полюсное расстояние), которое положим здесь равным 10,2 кГ и соеди-
ним полюс О с точками А, В, С и т. д Далее, строим кривую V, проводя
линии, параллельные лучам IV, так, чтобы, например, прямая, параллель-
ная прямой ОВ (которая отделяет участок7от участка 2), проходила между
вертикальными пунктирными линиями, проведенными через центры
тяжести площадей 1 и 2 на кривой III и т. д. Полученная таким образом
эпюра V дает значения изгибающих моментов. Так, например, изгибающий
момент в середине вала оказывается равным 454 кГ см.
Чтобы перейти, наконец, от эпюры моментов V к упругой линии VIII,
мы должны выполнить еще два интегрирования, а именно, должны проинтег-
рировать дифференциальное уравнение
М d2y
El ~ dx2'
Это уравнение имеет совершенно такой же вид, как и уравнение-
(4.35b). Итак, кривая прогибов у может рассматриваться как «эпюра изги-
218 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
бающих моментов для балки с нагрузкой М!Е1ъ. Значения жесткости EI
для различных участков вала даны в последнем столбце таблицы, а кривая
VI представляет собой диаграмму для величин MIEI. №ъ\ можем повторить
весь предыдущий процесс, посредством которого мы перешли от кривой III
к кривой V при помощи плана IV В данном случае мы переходим от кривой
VI к кривой VIII посредством плана VII. Ординаты кривой III были изме-
рены в кПсм,, тогда как на кривой VI они измеряются вслс”1; следовательно,
размерности на диаграммах VI, VII, VIII получаются из размерностей на
соответствующих им диаграммах III, IV, V посредством деления на кило-
граммы В частности, полюсное расстояние Н2 на плане VII оказывается
величиной безразмерной, т. е это есть отвлеченное число.
Упругая лин ия VIII по своей форме может быть более или менее сходной
с первоначально предположенной линией II, однако ее средняя ордината
{стрела прогиба) теперь уже равна 31 см • 2,5 • 10”6 = 77,5 * 10-6 см =
= 0,000775 мм, тогда как прежде на кривой II мы для нее имели 38 см.
•Отсюда находим первое приближение для собственной частоты поперечных
«колебаний вала:
1Г 38
|/ 77,5 • Ю-s
= 700
1! сек,.
Что касается других графических и численных методов определения
собственных частот изгибных колебаний балки переменной жесткости,
то по этому поводу см. стр. 309.
§ 4.8. Нормальные функции и их применение
Обратимся теперь к доказательствам минимальной теоремы
Рэлея и сходимости процесса Стодолы. Хотя эти доказательства
и не являются существенными для понимания последующего
материала этой книги, все же они могут дать читателю более
ясное представление о природе «главных или нормальных типов
колебаний».
Мы уже видели, что в случаях струны и балки на двух опорах
различные нормальные упругие линии представляют собою
синусоиды:
Уг = 81П — ,
2тгя; . ппх
У* = sin —................уп = sm — .
В этих выражениях амплитуды колебаний произвольно положены
равными единице, т. е. такими, чтобы максимальные прогибы
равнялись 1 см.
С другой стороны, оказалось, что в случае консоли (стр. 211),
л также в случае балки с изменяющимся поперечным сечением
упругие линии представляют собою уже кривые с более сложной
структурой.
Мы знаем также (см. стр. 33), что какая-либо произвольная
кривая между О и I может быть разложена на ряд кривых соот-
ветственно разложению изображающей ее функции в тригоно-
§ 4.8
НОРМАЛЬНЫЕ ФУНКЦИИ И ИХ ПРИМЕНЕНИЕ
219
метрический ряд или в ряд Фурье, причем одно из наиболее
важных свойств таких рядов заключается в том, что
i
sin —— sin —j— dx = и (m -p n),
о
как это было показано на стр. 30.
В примечании к частному случаю колебаний струны это
о значает то, что всякая упругая линия у(х), форму которой
можно придать струне посредством некоторой внешней нагрузки,
может распадаться на ряд «нормальных» составляющих кривых.
Это положение остается верным не только для струны с ее сину-
соидами, но и вообще для всякой упругой системы.
Пусть будут у^х). Уч(х}, . уп(х) — нормальные упругие
кривые для некоторой системы длины I; тогда какая-либо произ-
вольная упругая, линия у(х) этой системы может быть разложена
в ряд
у(х) = аг у^х) + а2 у2(х} + ... + аг уп(х) + . , (4.47)
Больше того, здесь имеет место соотношение
i
уп(х) ут(х) dx = 0 (4.48)
о
а поэтому любой коэффициент ап в разложении (4.47) может
быть найден совершенно таким же приемом, который применялся
на стр. 34, и мы получаем
MiC®) Уп(х) dx Рис. 4 32. Определение
функции влияния.
Все это дает нам широкое обобщение понятия рядов Фурье.
Для доказательства равенства (4.48) рассмотрим упругую систему
(балку) длиной Z, упругие свойства которой определяются так называемой
«функцией влияния» I (х, а^), представляющей собою (рис 4.32) величину
прогиба балки в точке х. вызванного нагрузкой, равной 1 кГ, помещенной
в точке х1. В выражении функции Цх.х^ как х, так и х1 являются пере-
менными, изменяющимися в пределах от 0 до I (см. стр 171).
Теорема Максвелла о взаимности перемещений, доказываемая в курсах
сопротивления материалов, утверждает, что прогиб в точке 7, вызванный
единичной нагрузкой, приложенной в точке 2, равняется прогибу в точке 2
под действием единичной нагрузки в точке 7. Вследствие этого функция
влияния удовлетворяет соотношению
хг) = Цхи х).
220 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Положим, что балка колеблется с одной из ее собственных частот,
имея форму yn(x). Тогда наибольшая сила инерции, действующая на участок
dxA балки с единичной массой (массой, приходящейся на единицу длины)
есть
а прогиб в точке х, вызванный этой нагрузкой, равен
Ии ’Ы3^) 1 (®, ®i) ^1(^1) dxv
Но так как указанная инерционная нагрузка действует на каждый элемент
dxy балки между 0 и Z, то действительная упругая линия должна получиться
в результате суммирования всех таких функций, выражающих |со бою
отдельные упругие линии, являющиеся результатом действия элементар-
ных нагрузок, а именно:
1
уп(х) = Ш?1
J Уп(Х1)
о
1(х, хг) р^Х]) dxv
(4,50)
Это соотношение имеет место лишь в том случае, когда Уп(х) определяет
собою один из главных типов колебаний, так как только тогда балка
может находиться в равновесии под действием нагрузок, пропорцио-
нальных соответственным перемещениям.
Чтобы теперь доказать справедливость равенства (4.48), умножим обе
части уравнения (4.50) на р^(х) ут(х) dx и проинтегрируем в пределах
от 0 до I:
I I I
J/4(z) VmW Уг№) dx = J J*/n(#i) УпМ ^1) АЧ (®i>i (®) dx dxv (4.51)
a oo
Но так как уравнение (4.50) имеет место для любой собственной часто-
ты, то мы можем заменить п значком т и наоборот. После этого опять
умножим обе части полученного уравнения, но теперь уже на ^(х) уп(х) dx
и опять проинтегрируем. Получим
l ? I
Утг№) Уп(х) dx = Ы2т J Уп(х) Цх, хг) p^xj ^(х) dx-^dx.
о оо
В последнем двойном интеграле мы можем изменить порядок интегриро-
вания, т. е. поменять местами х и xv Тогда
l l I
j /Ч(*) Ут№ Уп(х) dx = J j ym^ yn^ j ^Х1) dx dxr
0 oo
Так как по теореме Максвелла
Цх, хх) — 1(хи х),
то легко видеть, что написанный сейчас двойной интеграл оказывается
таким же самым, как и в уравнении (4.51). Пусть его величина есть А;
тогда, вычитая почленно последнее уравнение из уравнения (4.51), получим
0 = (®2 — ы?п)А.
§ 4.8 НОРМАЛЬНЫЕ ФУНКЦИИ И ИХ ПРИМЕНЕНИЕ 221
Это значит, что при двойной интеграл А равен нулю, вследствие
чего обращается в нуль также левая часть (4.51) и, таким образом, соот-
ношение (4.48) доказано.
Доказательство минимальной теоремы Рэлея. Приближенная кривая
у(х), принимаемая в методе Рэлея, сама по себе не является нормальной
упругой кривой, но может быть разложена в ряд таких кривых:
у(х) = ^(я) + а2 у2(х) + а2 у3(х) 4- ... + ап уп(х) +...
Чтобы выразить то обстоятельство, что у(х) есть приближение у-Ах),
соответствующий коэффициент должен быть положен равным единице,
в то время как остальные коэффициенты а2, а2 и т. д. могут быть малыми
числами. Нормальная упругая линия уп(х) является кривой, по которой
изгибается балка под действием статической нагрузки со2 уп(х).
Тогда статическая нагрузка р(х), вызывающая изгиб по предполо-
женной кривой у(х), представится так:
р(х) = [о? уг(х) + а2 ш2 у2(х) ап w2 уп(х)].
Потенциальная энергия элемента dx есть
1
— у(х) р{х) dx,
а тогда полная потенциальная энергия выразится интегралом
I
U = 2 + °2 У2(Х} ОзУ3(х) +
о
• • • 4- ап уп(х) ап уп(х) 4-... ] dx.
Но по уравнению (4.48) все интегралы от произведений, где т п, равны
нулю. Поэтому
I
и = - J /л г/= dx +... +а= ыпг рл, у\ dx +... j.
О о
Кинетическая энергия элемента dx, проходящего при колебании через
свое равновесное положение со скоростью ыу(х), равна
1 о 2
- а-у-р., dx,
а тогда полная кинетическая энергия будет
l l I
= 1- J Mi № = 1- шр j Mi у; <^ +... + «и J Mi ?/n .
0 0 о
где опять пропадают все члены с произведениями ут уп.
Легко видеть, что как потенциальная ,так и кинетическая энергии
состоят из сумм отдельных энергий, присущих компонентам ylt у2, Уз и т. д.
Это положение имеет место лишь в том случае, когда у19 у2, . . определяют
главные или нормальные типы колебаний, если же этого нет, то необходимо
включить в рассмотрение также произведения уп ут.
222 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Пользуясь методом Рэлея, мы приравниваем эти две энергии друг
другу и разрешаем полученное уравнение относительно о2. Получаем
1 I
Е jMi У! +• • • + ап Jmi у\ -Н ..
oJ о
l ]
[ у* dx +... + а% т/2 cto +...
о о
или
где
символ
при 1, 2. 3,..., обозначает следующее выражение:
I
Ah Уп da
(?)=5—
| Mi у1 dx
о
Так как ы2 > ©j, > w2 и т. я., то из формулы (4.52) легко видеть,
что все члены в числителе, начиная со второго, больше соответствующих
членов знаменателя, а поэтому дробь, входящая в эту формулу, является
неправильной, откуда следует, что
W >> ©!,
т. е. частота ш, найденная с помощью метода Рэлея, получается гбольше,
чем первая собственная частота ыь что и требовалось доказать.
Заметим, что на основании того же равенства (4.52) это свойство
имеет место только для первой, т. е. наинизшей, частоты, но уже не имеет
отношения ко второй и высшим частотам.
Доказательство сходимости процесса Стодолы. Положим, что первая
допущенная нами кривая прогибов выражается функцией уАх), где
У(в) = г/^я) 4- а2 у2(х) 4- а3 Уз№ + • • • 4- ап У nW 4- • • •
Пусть масса распределяется по закону а произвольная частота
а = 1; тогда инерционная нагрузка имеет вид
УпУ = Mi?/1 4- a2Mi?/2 + ®зМ1?/з 4-.. • 4-апМ1?/п 4-...
Упругая линия для нагрузки Mi Уп определяется кривой уп. Следова-
„ _ апУп
тельно, под нагрузкой апУ'гУп получаются прогибы по закону ——, а
поэтому вторая упругая линия в данном процессе определится функцией
, > Уг(х) апУп(х)
Уи№ = —— + ... + ---------—
W 6)2
которая отличается от функции, выражающей первую кривую, тем, что
каждый член ряда делится на квадрат соответствующей частоты.
§ 4.9 МЕТОД СТОДОЛЫ ДЛЯ ВЫСШИХ ТИПОВ КОЛЕБАНИЙ 223
Поступая таким же образом и дальше, мы находим для (п 4- 1)-й
упругой линии выражение
1 Г Г“112п [wil2n 1
Так как Oj, < w2, ы1 < w3 и т. д., то легко видеть, что с возрастанием числа
п члены, содержащие у2, y3i... и искажающие основное колебание, умень-
шаются, а тогда первое (основное) главное колебание у} проявляется все-
в более и более чистом виде.
§ 4.9. Метод Стодолы для высших типов колебаний
Приведенное доказательство показывает, что попытка по-
строить вторую нормальную упругую кривую с помощью метода
Стодолы, обречена на неудачу, так как всякое искажение основ-
ной упругой кривой, содержащейся в пробной форме второй
кривей, будет увеличиваться и превзойдет ординаты самой
кривей. После большого числа повторных построений мы найдем,
что второй тип колебаний исчезает совершенно, и остается опять
лишь первый тип. Тем не менее все же возможно найти колеба-
ния второго типа, если перед каждой операцией упругую кривую
«очищать» от компонента первого типа Для этого, прежде
всего, необходимо достаточно точно знать форму первого типа
колебания.
Пусть у(х) есть предположенная форма второго типа, которая,
к несчастью, содержит какую-то долю «гармонической примеси»
(harmonic impurity) Ау^х). Тогда нам желательно найти выра-
жение
у(х) — Ау^х),
свободное от такого «гармонического засорения», Для нахожде-
ния величины А подставим это выражение в уравнение (4.48).
Получим
7
j/M®) IW) — Лг/1(а:)] уг(х) dx = О
О
или
Z I
|щ(а:) у(х) уг{х) dx = A J^(х) yj(x) dx,
о о
откуда
I ач(®) у(х) уг(х) dx
А = -------------. (4.53)
Vi(®) dx
226 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
Подставляя эти числа в уравнения (4.54) и умножая на постоянные
так, чтобы было ах = 1,000, находим
1,000, а2 = 0,116. а3 = —1.181, (II)
= 1,000, а2 = 0,051, а3 = —1,125, (Ш)
ау = 1,000, а3 = —0,024, а3 = —1,148. (IV)
В этом процессе все же в решении оказалась ошибка вслед-
ствие значительной доли первой гармоники; поэтому опять
необходимо произвести очищение с помощью уравнения (4.53).
= 1,000, а2 = 0,038, = —1,058. (IV, очищенн.)
Продолжаем вычисления
= 1,000, а2 — +0,018, а3 = —1,035, (V)
= 1,000, а2 = 0,000, а3 = —1,034. (VI)
Снова оказывается необходимым освободиться от вошедшей
доли первой гармоники.
аА = 1,000, “ +0,012, а, = —1,018, (VI, очищенн.)
= 1,000, $2 = +0,006, а3 = —1,012, (VII)
ау = 1,000, й2 = 0,000, а3 = —1,012, (vin)
= 1,000, +0.004, а3 = — 1,006, (VIII, очищенн.)
ах = 1,000, ^2 ~ +0,002, а3 = —1,004, (IX)
ау = 1,000, = 0,000, а3 — — 1,004. (X)
Отсюда видно, что сходимость очень медленная, и что первая
гармоника непрерывно «пробирается» в расчет, и поэтому от
нее необходимо избавляться почти на каждом этапе расчета.
§ 4.10. Кольца, мембраны и пластинки
Очень часто при изучении какой-либо сложной конструкции
или машины для предварительных расчетов бывает вполне до-
статочно применить полученные данные, касающиеся колебаний
струн и балок. При этом мы получаем удовлетворительную точ-
ность отображения действительного явления при помощи выбран-
ной нами схемы. Когда это оказывается невозможным, наша схе-
матизация может быть осуществлена путем использования более
сложных элементов, как-то: колец (кривых брусьев) мембран и
пластинок. Однако вычисление собственных частот колебаний
этих элементов значительно более сложно, чем в рассмотренных
выше случаях. Поэтому здесь мы приведем лишь готовые резуль-
таты, отсылая читателя за подробностями выводов к соответству-
ющей литературе, в особенности к книге С. П. Тимошенко. «Коле-
бания в инженерном деле».
§ 4.10
КОЛЬЦА, МЕМБРАНЫ И ПЛАСТИНКИ
227
Полное кольцо. Из всех возможных движений полного кольца
наибольшее значение имеют колебания изгиба. Можно показать,
что если кольцо имеет равномерно распределенную массу и
постоянную жесткость, то точная форма колебаний является
синусоидальной. Основные формы колебаний с четырьмя, шестью
и восемью узлами, или, что то же, с двумя, тремя или четырьмя
полными волнами по окружности, показаны на рис. 4.33.
Точная формула для собственной частоты имеет вид
_~п(пР- 1) V EI
Уп2 + 1 /
(4.55)
где п есть число полных волн, — масса, приходящаяся на еди-
ницу длины кольца, EI — жесткость на изгиб и В — радиус.
Рис. 4.33. Нормальные формы колебаний изгиба кольца в своей
плоскости.
Одно из наиболее важных применений приведенного результа-
та имеет место в колебаниях статоров электрических машин.
Так как эти машины часто несут выступающие полюсы, играю-
щие роль сосредоточенных масс (рис. 6.37, стр. 357), то точная
форма изогнутой оси уже не будет, вообще говоря, синусоидаль-
ной. Тем не менее, если обратиться к методу Рэлея, мы можем
в качестве приближенной формы взять также и синусоиду. Потен-
циальная энергия системы не изменяется от добавления полюсов,
зато кинетическая энергия систем изменится, перейдя от значения
Т* к значению Тк + Тп, где индекс «к» относится к кольцу, а индекс
«п» — к полюсам. Таким образом, формула (4.55) для частоты
должна быть исправлена введением множителя
][ тк
I 4-
(4.56)
В том случае, когда число полюсов есть 2п, т. е. равно числу
полуволн вдоль конца, и когда эти полюсы располагаются в
пучностях волн, обладая вследствие этого лишь поступательным
15*
228 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
движением (рис. 6.38,в), то поправочный множитель (4.56) прини-
мает здесь особый вид
мк
4- 2ИП
2тг2
п2 + 1
Мп
Мк
(4.57)
где Л/к есть масса полного кольца и 7ИП — общая масса всех
полюсов, вследствие чего Мп/Мк представляет собою отношение
массы одного полюса к массе части кольца, приходящейся на
один полюс
С другим важным случаем мы встречаемся тогда, когда 2п
полюсов расположены в узлах радиальных колебаний и испыты-
вают поэтому колебательные
движения вокруг осей соответ-
ствующих узлов. Для этого
случая (рис. 6.38,с) поправоч-
ный множитель имеет вид
Рис.4.34. Основная форма колебаний
изгиба части кольца в своей плос-
кости.
и колебании. Истинное положение
—г—Тт~ - -58)
п5 47 р
п2 + I MKB*
где 1р есть момент инерции од-
ного полюса относительно оси,
вокруг которой он вращается пр
этой оси иное, и точно определить его довольно трудно (так
как «узел» кольца, о котором идет речь, есть узел лишь для ради-
альных движений, и в то же время он может перемещаться взад
и вперед по касательной). Однако без большой ошибки можно
считать, что эта ось пересекает в узловой точке осевую линию
кольца.
Часть кольца. Очень часю статоры электромоторов или гене-
раторов прикрепляются болтами к фундаменту так, как показано
на рис. 4.34. а. Если фундамент или опорная плита имеет очень
большую жесткость, то статор можно рассматривать как часть
кольца с углом а, заделанную обоими концами. Основная форма
колебаний подобного кольца в его плоскости будет примерно
такая, как это помечено на рис. 4.34, б. Собственный период такого
колебания, вычисленный по методу Рэлея, выражается формулой
такого же самого типа, что и формула (4.55), с той лишь разницей,
что числовой множитель, стоящий перед радикалом, уже оказы-
вается зависящим от центрального угла а. Обозначая его через
/(а), имеем
(4-59>
§ 4.10
КОЛЬЦА, МЕМБРАНЫ И ПЛАСТИНКИ
229
Значения коэффициента /(а) для различных значений угла
а от а — 180° (половина кольца) до а = 360° (полный круг кольца,
заделанного в одной точке) даны на диаграмме рис. 4.35.
В том случае, когда статор несет выступающие полюсы, сле-
дует и здесь применять поправочный множитель (4.56). Так как
различные точки, где помещены полюсы (рис. 4.34,5), переме-
щаются, грубо говоря, с одинаковой амплитудой (в этом отноше-
нии рассматриваемый случай коренным образом отличается
от случаев, представленных на рис. 4.33), то без большой ошибки
мы можем считать, что массы
Рис. 4.35. Коэффициент/(а) в уравнении
(4.59) для частоты системы рис. 4.34.
полюсов равномерно распре-
деляются вдоль кольца. Соб-
ственная частота, вычислен-
ная по формуле (4.59) и по
рис. 4.35,обычно оказывается
несколько более высокой
(примерно на 10%) вслед-
ствие того, что основание
статора в действительности
не является вполне заделан-
ным, а допускает некоторые
угловые перемещен и я.
Если кольцо, изображен-
ное на рис. 4.34, имеет малые
размеры в направлен ии, перпендикулярном к плоскости чертежа (т.е.
в направлении оси цилиндра), то мы встречаемся с появлением еще
иного движения, которое в этих случаях нежелательно. Именно,
здесь получаются колебания, перпендикулярные к плоскости
чертежа. Если посмотреть сбоку на систему, изображенную на
рис. 4.34, то она представится нам в виде балки высотой h,
заделанной своим нижним концом. Поперечные колебания та-
кой балки будут иметь форму наподобие изображенной на
рис. 4.28, а.
В этом случае упругое сопротивление кольца состоит из
совокупности сопротивления изгибу и сопротивления скручи-
ванию, которое определяется величинами: Е12 — жесткости на
изгиб теперь уже в плоскости, перпендикулярной к плоскости
чертежа, т. е. под углом 90° к плоскости, где жесткость равна
той жесткости EI, которая входит в уравнения (4.55) и (4.59); С —
жесткости на кручение (которая равна GIP для бруса кругового
поперечного сечения).
Частота может быть написана в таком виде:
(4.60)
где числовой коэффициент перед радикалом определяется по
230 СИСТЕМЫ С ПРОИЗВОЛЬНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ ГЛ. IV
диаграмме, представленной на рис. 4.36. Эта диаграмма была
построена с помощью видоизмененного метода Рэлея и затем
подвергнута проверке лабораторными испытаниями, которые
подтвердили в существенных чертах справедливость результатов
расчета.
Мембрана представляет собою сильно натянутую пленку,
совершенно не имеющую жесткости на изгиб. Ее, следовательно,
плоскости.
можно рассматривать как двухмерное обобщение струны. Круглая
мембрана, например кожа барабана, имеет бесконечное число
типов колебаний, причем узловыми линиями служат ее диаметры,
а также концентрические окружности, меньшие, чем окружность
заделки. Однако в нашем рассмотрении мы ограничимся лишь
основным типом колебаний, когда нет никаких узловых линий,
за исключением контура. Форма мембраны при колебании прак-
тически представляет собою холм, образованный вращением
синусоиды (рис. 4.37). Частота таких колебаний равна
“=2'4oO?=4'26IG5- (4-б1)
где Т есть натяжение, отнесенное к 1 см длины какого-либо
сечения мембраны, — масса единицы плошади и S — вся пло-
щадь мембраны, равная ттТ?2.
4.10
КОЛЬЦА, МЕМБРАНЫ И ПЛАСТИНКИ
231
7?
Рис. 4.37. Основная форма
колебаний барабанной ко-
жи с частотой
Второй вид написанной формулы является пригодным для
использования в тех случаях, когда мембрана уже не круглая,
а имеет контур какой-либо иной формы, хотя бы в самой отдален-
ной степени напоминающей окружность (например, квадрат,
треугольник, половина или четверть круга и т. п.). Даже в этих
случаях формула (4.61) остается приблизительно верной, если
только величину £ положить равной площади данной некруговой
мембраны. В подобных случаях число-
вой множитель перед радикалом оказы-
вается несколько большим, чем 4,26.
Чтобы дать понятие о вводимой по-
грешности, упомянем, что для квадрат-
ной мембраны множитель 4,26 в урав-
нении (4.61) становится равным 4,44,
для прямоугольной мембраны со сто-
ронами 2x1 он равен 4,97, а для пря-
моугольной мембраны со сторонами
3X1 он уже равняется 5,74.
Совершенно таким же образом, как
двухмерной струной, можно рассматривать пластинку как двух-
мерную «балку». Теория колебаний пластинок (даже в прибли-
женной форме Рэлея—Ритца) является весьма сложной. Резуль-
таты этой теории известны для круглой и прямоугольной пла-
стинок со свободными, с заделанными и со свободно опертыми
краями. Читателю, которому представится случай подобного
расчета, рекомендуется обратиться по этому поводу к более
исчерпывающим книгам Рэлея, Прескота и Тимошенко.
Задачи к гл. IV № 99—138.
Т
W = 2,40
мы считали мембрану
ГЛАВА V
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
§ 5.1. Неприятные явления, присущие машинам
с возвратно-движущимися частями
В машинах, части которых совершают возвратно-поступатель?
ные движения, имеют место две группы колебаний, важные с
практической точки зрения, а именно:
1) колебания, передаваемые фундаменту всей машиной в
целом;
2) крутильные колебания коленчатого вала и валов различных
ведомых механизмов.
Каждое из этих двух явлений обусловливается совокупно-
стью периодически изменяющихся ускорений движущихся ча-
стей (поршней, поршневых штоков, шатунов и кривошипов) и
периодическими изменениями давления пара или газа в цилинд-
рах.
Рассмотрим вертикальный одноцилиндровый двигатель. В
этом двигателе поршень совершает возвратно-поступательные
движения, т. е. он испытывает действие переменных вертикаль-
ных ускорений. Если поршень имеет ускорение, направленное
вниз, то, следовательно, на него действует сила, также направлен-
ная вниз, причем эта сила должна вызывать противоположную
реакцию, приложенную к неподвижным частям машины и направ-
ленную вверх. Таким образом, ускорение поршня, изменяю-
щееся по величине и по направлению, оказывается связанным с
переменной силой, приложенной к станине цилиндра, которая
вызывает колебания самой машины и ее фундамента. В попереч-
ном направлении, т. е. в направлении, перпендикулярном как к
коленчатому валу, так и к поршневому штоку, движущиеся части
также имеют ускорения: это относится к цапфе кривошипа и к
части шатуна. Силы, вызывающие эти ускорения, должны иметь
равные и противоположно направленные реакции, приложенные
к станине двигателя. Этот эффект носит название «горизонталь-
ной неуравновешенности». Что же касается продольного направ-
ления, т. е. направления вдоль коленчатого вала, то здесь силы
§ 5.1 НЕПРИЯТНЫЕ ЯВЛЕНИЯ. ПРИСУЩИЕ МАШИНАМ 233
инерции отсутствуют., поскольку все движущиеся части остаются
в плоскостях, перпендикулярных к валу двигателя.
Математическое соотношение, описывающее указанные дей-
ствия, есть не что иное, как второй закон Ньютона, устанавли-
вающий, что в механической системе скорость изменения коли-
чества движения равна результирующей F всех внешних сил, т. е.
d7^(^f)=F. (5.1)
Это есть векторное уравнение, эквивалентное трем обыкновенным
уравнениям. Из этих трех уравнений имеют значение только
два, а третье (для продольного направления) удовлетворяется
тождественно, так как проекции скоростей на это направление
всегда равны нулю.
Уравнение (5.1) допускает различные толкования. Прежде
всего рассмотрим «механическую систему», состоящую из всей
машины, которую предположим установленной на весьма гибких
пружинах, вследствие чего она окажется как бы свободно пла-
вающей в пространстве. Так как на эту систему не действуют
никакие внешние силы, то уравнение (5.1) говорит нам, что,
например, при ускорении поршня, направленном вниз, т. е. при
направленном вниз возрастании количества движения поршня,
цилиндр должен получить ускорение, направленное вверх. Пусть
масса цилиндра в 50 раз больше массы поршня. Тогда ускорение
цилиндра должно быть в 50 раз меньше ускорения поршня.
Рассмотрим теперь в качестве механической системы только
движущиеся части, т. е. поршень, шатун и коленчатый вал. Во
время работы машины эти части имеют определенное ускорение,
вследствие чего необходимо уже считаться с величиной
как в вертикальном, так и в горизонтальном направлениях.
Уравнение (5.1) определяет тогда значение силы F, действующей
на эти части, а следовательно, и значение реакции —F на непо-
движные части.
Уравнение (5.1) пишут иногда с выполненным дифференци-
рованием:
2[™£] = Г. (5.2>
Выражение взятое с обратным знаком, называется силой
инерции, так что мы получаем теорему, утверждающую, что
внешняя сила, действующая на систему, равна сумме всех сил
инерции движущихся частей, но направлена в противоположную
сторону.
Упомянутые различные силы инерции могут создавать моменты.
Рассмотрим двухцилиндровый вертикальный двигатель, криво-
234
МП0Г0ЦИЛИНДР0ВЫЕ ДВИГАТЕЛИ
ГЛ. V
шипы которого расставлены под углом 180°. В таком механизме,
если ускорение одного поршня направлено вниз, ускорение дру-
гого должно быть направлено вверх, и поэтому обе силы инерции
образуют пару, стремящуюся раскачивать машину около попереч-
ной оси. Подобно этому горизонтальные или поперечные силы
инерции двух кривошипов, будучи равными и противоположно
направленными, образуют пару, стремящуюся раскачивать маши-
ну вокруг вертикальной оси.
Раскачивание вокруг продольной оси может встретиться
также и в одноцилиндровом двигателе. В самом деле, если пор-
шень движется с ускорением, направленным вниз под действием
растягивающего усилия в шатуне, то, очевидно, это усилие должно
создать крутящий момент вокруг оси коленчатого вала. Но так
как ускорение поршня изменяется по величине и направлению,
то и момент сил инерции должен быть также переменным.
Закон моментов количеств движения, аналогичный второму
закону Ньютона, в применении к механической системе, на кото-
рую действует главный момент М внешних сил (будем называть
его для краткости просто внешним моментом), выражается урав-
нением
= (5.3)
где а есть радиус-вектор точки с количеством движения mv,
X— символ векторного умножения. Словами это можно выразить
так: внешний момент геометрически равен скорости изменения
главного момента количеств движения (кинетического момента)
системы. Выполняя дифференцирование, написанное уравнение
можно привести к виду
V[aXm^| = M. (5.4)
Это говорит нам, что сумма моментов сил инерции различных
.движущихся частей равна внешнему моменту (но имеет противо-
положное направление).
Подобно тому, как это делалось выше, мы можем в механиче-
скую систему включить весь двигатель, установленный на очень
мягких пружинах, либо можем рассматривать только его движу-
щиеся части. В первом случае внешний момент равен нулю, а
потому всякое возрастание в направлении вращения часовой
стрелки кинетического момента движущихся частей нейтрали-
зуется возрастанием в обратном направлении, т. е. против часовой
стрелки кинетического момента неподвижных частей машины.
Во втором случае возрастание в направлении часовой стрелки
кинетического момента движущихся частей должно вызываться
крутящим моментом или главным моментом внешних сил, при-
S 5.1
НАПРИЯТНЫЕ ЯВЛЕНИЯ. ПРИСУЩИЕ МАШИНАМ
235
Рис. 5.1. Сил а давлен ия газа водно-
цилиндровом двигателе.
ложенных к этим частям, направленном также по часовой
стрелке. Этот крутящий момент внешних сил вызывает реактив-
ный момент, приложенный к станине двигателя и направленный
против часовой стрелки. Если станина жестко связана с фунда-
ментом, то этот реактивный момент передается фундаменту, вслед-
ствие чего могут произойти повреждения. С другой стороны, если
машина установлена на мягких пружинах, то никакая реакция
на фундамент через эти пружины
не передастся, и реактивный мо-
мент просто поглотится как мо-
мент сил инерции (инерционный
момент) станиной и блоком цилинд-
ров. В этом случае блок должен
совершать колебания, по фун-
дамент не воспримет никакого
заметного крутящего момента,
т. е. получится «плавающая под-
веска» (см. стр. 111).
Формулы (5.1) и (5.3) явля’
ются достаточными для установ-
ления инерционных свойств дви-
гателя, что будет выполнено в
двух ближайших параграфах. Сей-
час мы обратим наше внимание
на действие переменного давления
пара или газа в цилиндрах.
Пусть на рис. 5.1 действие
сил инерции исключается, что
можно сделать либо предположив, что движущиеся части имеют
пренебрежимо малую массу, либо считая, что машина вращается
с чрезвычайно малой постоянной угловой скоростью оз. Пусть,
далее, сила давления на поршень равна Р, причем эта сила из-
меняется с течением времени (или с углом кривошипа at). Давле-
ние газа не только толкает поршень вниз, но и действует по на-
правлению кверху на головку цилиндра. Сила Р, приложенная к
поршню, передается через поршневый шток (сила 1) на крейц-
копф. Пренебрегая трением, мы можем сказать, что эта сила
уравновешивается силами 2 и 3.
Силы I, 2,3 на рис. 5.1,6 приложены все к крейцкопфу. Сила 3
есть сжимающее усилие в шатуне, а сила 2 является реакцией
давления крейцкопфа на правую направляющую параллель или
на станину, причем эта реакция равна Ftggx Сила 3, величина
которой равна P/eoscp, передается цапфе кривошипа (сила 4).
Переместив эту силу параллельно самой себе в точку О, мы должны
добавить пару с моментом уР/cosср, который является вращающим
моментом давления газа. Сила 5 воспринимается главными под-
236
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
гл. V
шипниками в точках О и может быть разложена на вертикальную
составляющую 6 и горизонтальную составляющую 7. Из равен-
ства силовых треугольников, один из которых образован силами
1, 2, 3, а другой — силами 5, 6, 7, мы сейчас же видим, что величина
силы 6 есть Р, а величина силы 7 есть Ptg р,
Итак, силы, передающиеся неподвижным частям машины^
оказываются следующими:
во-первых, сила Р, направленная вверх и приложенная к го?
ловке цилиндра;
во-вторых, сила -Р tg направленная вправо и приложенная
к направляющей крейцкопфа;
в-третьих, сила Р, направленная вниз и приложенная к глав-
ным или коренным подшипникам в точках О;
в-четвертых, сила Ftg<p, направленная влево и приложенная
к коренным подшипникам в точках О.
Общая результирующая сила, приложенная к станине, равна
нулю, но здесь получается, кроме того, результирующая пара
с моментом Рх tg ср. По закону Ньютона о равенстве действия
и противодействия этот момент должен быть равен по величине
и противоположен по направлению вращающему моменту, при-
ложенному к коленчатому валу и равному yP/cos ср, в чем легко
можно убедиться из рис. 5.1,6, замечая, что г/ = х sin гр. Таким
образом, давление газа в цилиндре не приводит к возникновению
какой-либо результирующей силы, действующей на станину дви-
гателя, а создает только крутящий момент вокруг продольной оси.
Резюмируя сказанное, мы должны отметить, что по продольной
оси машины не получается никаких сил, в то время как в попе-
речном и вертикальном направлениях появляются лишь силы
инерции. Что касается моментов, то вокруг вертикальной и по-
перечной осей мы нашли только моменты сил инерции, тогда
как вокруг продольной оси имеют место как момент сил инерции,
так и момент сил давления газа или пара в цилиндре, т. е.
вращающий момент.
Если мы предположим, что двигатель изготовлен из абсолютно
твердых тел, т. е. тел, не поддающихся упругим деформациям,
то тогда мы имеем перед собой только проблему «уравновеши-
вания». Станина или неподвижные части машины обычно до
известной степени удовлетворяют этому условию жесткости, но
зато коленчатый вал, как правило, может относительно легко
скручиваться, вследствие чего становятся возможными крутиль-
ные колебания. Поэтому тема нашего исследования разделяется
на три части:
а) уравновешивание сил инерции; здесь мы имеем проблему
уравновешивания машины только против действия вертикальных
и поперечных сил, а также против моментов вокруг вертикальной
и поперечной осей;
5.2
ДИНАМИКА КРИВОШИПНОГО МЕХАНИЗМА
237
Ь) реакция крутящего момента; в этой части нашей темы
мы занимаемся изучением действия крутящего момента вокруг
продольной оси (вызванного силами инерции или же давлением
газа в цилиндрах) на неподвижные части машины;
с) крутильные колебания коленчатого вала; здесь мы имеем
дело уже со следствиями действия того же крутящего момента
относительно продольной оси на движущиеся части машины.
Эффект с) имеет особо важное значение, так как он был при-
чиной многочисленных поломок коленчатых валов. Этих поломок
можно избежать, если изучить теорию крутильных колебаний.
Первым шагом в изучении этих трех проблем у нас будет
вывод выражений для вертикальных и боковых сил инерции
однокривошипного механизма, а также вывод формулы для соот-
ветствующего момента сил инерции.
§5.2. Динамика кривошипного механизма
На рис. 5.2 представлена схема двигателя одностороннего
действия. Введем следующие обозначения:
хп — перемещение поршня вниз от его верхнего положения;
cot — угол кривошипа, отсчитываемый от верхней мертвой
точки;
г — радиус кривошипа;
I — длина шатуна.
Допустим, что коленчатый вал вращается
с постоянной угловой скоростью, т. е.
<у'= const. Наша первая задача будет заклю-
чаться в определении положения поршня
в зависимости от угла cot Если бы мы
пренебрегали изменениями длин отрезков
по вертикальной оси, происходящими вслед-
ствие отклонения шатуна в различные про-
межуточные моменты времени от его сред-
него положения, то должны были бы поло-
жить расстояние хп равным отрезку DB на
нашей схеме. Это расстояние DB, являю-
щееся первым приближением для хп, равно
г(1 — cos cot).
Чтобы вычислить точное значение хп,
мы должны прибавить к написанной вели-
чине поправочный член, равный разности
Рис. 5.2. Кривошипный
механ изм.
длин АС и ВС:
I (1 — cos <р).
238
МН0Г011Ш1ИНДР0ВЫЕ ДВИГАТЕЛИ
ГЛ. V
Входящий сюда вспомогательный угол <р может быть выражен
через посредство ot, если мы заметим, что
АВ = I sin (р — т sin
ил и
sin ф ~ у sin cot (5.5)
и следовательно,
1Г ^2j—
COS ф = /1----sin2 G)t.
т у
Отсюда находим точное выражение для перемещения жп поршня
в зависимости от угла ю/ поворота кривошипа:
хп = r( 1 — cos ot) 4- I (1 — У1 — £2 sin2 - (5.6)
Эта формула вследствие имеющегося в ней квадратного корня
мало пригодна для дальнейших расчетов. Однако, она может
быть несколько упрощена, поскольку второй член под корнем
является величиной малой, по сравнению с единицей. В обычных
машинах отношение тП не превышает 1/4, так что этот второй
член оказывается меньше чем 1/16. Следовательно, квадратный
корень имеет вид У1 — 6, где 6<<(1. Разлагая этот корень в сте-
пенной ряд и пренебрегая в разложении членами, содержащими
6 в степени, выше первой, находим
УТ—
При 6 = получающаяся ошибка меньше 2ойо- Принимая
это во внимание, мы можем приближенно представить уравнение
(5.6) так:
хп съ r(l — cos cot) 4- sin2 ot.
Дальнейшее упрощение можно получить, выразив квадрат
синуса через косинус двойного угла посредством формулы
cos 2 ot = 1 — 2 sin2 ots
или
. о 1 — cos
Sin2 ot — ----Б—---.
Таким образом, перемещение поршня определяется уравне-
нием
яп = к +* У — г [ c°s ot + — COS 2ot 1. (5.7)
§ 5.2
ДИНАМИКА КРИВОШИПНОГО МЕХАНИЗМА
239
Отсюда путем дифференцирования мы можем получить ско-
рость и ускорение:
— ГО
(5.8)
(5.9)
Рис. 5.3.Ускорение поршня, как функция
угла кривошипа при отношен и и r/l = 1 /4.
sin ot 4- 4; sin 2ot I ,
Xn = Г®2 cos ot + J cos 2ю/ j .
По умножении на массу поршня эти выражения будут равны
соответственно его количеству движения и силе инерции, имеющим
вертикальное направление. Как видим, каждое из этих выра-
жений состоит из двух чле-
нов, один из которых из-
меняется с частотой, равной
угловой скорости вращения
вала, а другой — с удвоен-
ной частотой. Первый из
них определяет соответст-
венно количество движения
и силу инерции «первого
порядка», а второй — коли-
чество движения и силу
инерции «второго порядка».
Если бы шатун был беско-
нечно длинным, то вторые
члены должны исчезнуть, и
тогда поршень совершал бы
гармоническое движение. В
случае же
движение
ускорение
лича юте я
кого. В качестве примера на
инерции) для поршня двигателя, когда отношение l/т = 4.
Изучив динамические свойства поршня, обратимся к враща-
ющейся части, т. е. к кривошипу. Прежде всего упростим нашу
задачу, сосредоточив мысленно всю массу вращающегося криво-
шипа в его центре тяжести (сила инерции этой массы будет такая
же, как и результирующая всех сил инерции отдельных малых
частиц кривошипа). Далее, переместим эту массу из центра тя-
жести в цапфу кривошипа А, уменьшив ее при эюм обратно
пропорционально расстоянию от центра вала, благодаря чему
сила инерции не изменится
Таким образом, весь кривошип оказывается здесь замененным
одной массой шс, сосредоточенной в центре цапфы, вертикальное
перемещение которой может быть сейчас же найдено из рис. 5.2:
хс = т (1 — cos ot}, (5.10)
короткого шатуна
и в особенности
значительно от-
от синусоидаль-
рис. 5.3 дано ускорение (или сила
240
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
вследствие чего вертикальные составляющие скорости и уско-
рения принимают вид
Хс = ГСО sin G)t, I
(5.11)
xc = ГСО2 COS (ot. 1
Соответственные горизонтальные составляющие оказываются
равными:
ус — —Г 8Ш (ot, \
ус = —гео cos cot, > (5.12)
ус = гео2 sin cot. j
Количество движения (или сила инерции) получается из ско-
рости (или из отрицательного ускорения) умножением на массу
Цапфа
кривошипа
Цапфа
крейцкопфа
Рис. 5.4. Деление веса всего шатуна на
части поступательную и вращательную. !
тс вращающегося кривошипа.
Возвращаясь к рис 5.2,
мы замечаем, что силы инер-
ции поршня и кривошипа по-
следовательно облечены в
математическую форму, и
остается только сделать то
же самое с шатуном. Однако
здесь- то мы и встречаемся
с наиболее трудной частью
задачи, так как движение
шатуна достаточно сложно. В самом деле, верхняя точка
шатуна движется по прямой линии, нижняя — по окружности,
в то время как все прочие точки описывают кривые, по-
хожие на эллипсы. Таким образом, определение и последующее
суммирование сил инерции всех этих частиц шатуна требуют
больших математических выкладок. К счастью, это не является
необходимым. Дело в том, что если шатун заменить другим телом,
имеющим ту же самую массу и тот же центр тяжести, гак что
траектория центра тяжести при этом не изменится, то полная
сила инерции шатуна и нового тела окажутся равными между
собой. Это следует непосредственно из законов динамики, которые
утверждают, что результирующая сила инерции твердого тела
равна силе инерции центра тяжести в предположении, что в нем
сосредоточена вся масса тела.
С помощью этого положения задача может быть легко раз-
решена, если шатун заменить двумя сосредоточенными массами,
расположенными на его концах так, чтобы центр тяжести остался
тот же самый и чтобы сумма этих масс равнялась массе шатуна.
Это деление массы выполняется таким же образом, как вес шату-
на разделяется на две части посредством помещения его в гори-
зонтальном положении на двое весов, как показано на рис. 5.4.
§ 5.2
ДИНАМИКА КРИВОШИПНОГО МЕХАНИЗМА
241
Хотя деление массы шатуна на две сосредоточенные массы не изменяет
ни положения центра тяжести, ни общей массы системы, тем не менее
оказывается, что момент инерции двух сосредоточенных масс отличен
от момента инерции реального шатуна. Следовательно, такое деление,
показанное на рис. 5.4, будучи вполне закономерной операцией при
определении сил инерции системы, приводит к погрешности при опреде-
лении моментов этих сил. т. е. при изучении инерционных пар.
Разделив указанным способом всю массу шатуна на две части,
одна из которых совершает возвратно-поступательное движение
вместе с поршнем, а другая — вращательное движение вместе
с цапфой кривошипа, мы можем теперь обозначить через тпост
всю массу, движущуюся возвратно-поступательно, а через ^Bpaui
— всю массу, движущуюся вращательно. Иными словами, тппост
есть сумма массы поршня и части массы шатуна, а тпвращ есть
сумма эквивалентной массы кривошипа и другой части массы
шатуна.
В этих обозначениях полная вертикальная сила инерции
X (всех движущихся частей) для одного цилиндра будет
X = ^пост *^п ^вращ %с “
^.2
= — (гапост + И&вращ) Гй)2 cos tot — ^пост J to2 COS 2<ot, (5.13)
в то время как горизонтальная сила инерции Y есть
F = —твра1Ц ус = —твращ то2 sin at. (5.14)
Словами это можно выразить так: вертикальная составляющая
всех сил инерции состоит из двух частей — «первичной части»
или силы инерции первого порядка, представляющей собою ре-
зультирующую силу инерции масс, движущихся возвратно-посту-
пательно и вращательно в предположении, что они перемеща-
ются вверх и вниз по гармоническому закону с частотой, равной
угловой скорости вращения кривошипа и с амплитудой г, и, кроме
того, «вторичной части» или силы инерции второго порядка,
равной силе инерции массы цШ110СТ> перемещающейся вверх
и вниз также по гармоническому закону и с той же амплитудой
г но с частотой, равной удвоенной угловой скорости вращения
коленчатого вала.
Горизонтальная или боковая составляющая сил инерции со-
стоит только из первичной части, происходящей от вращающейся
массы
Наконец, нам остается определить крутящий момент сил
инерции относительно продольной оси О. Для определения вер-
тикальной и горизонтальной сил инерции мы заменяли шатун
двумя массами, помещаемыми соответственно в поршне и в цапфе
кривошипа, как показано на рис. 5.4, и при этом пришли к точному
результату. Однако подобный результат уже не будет верен,
16 ДспТартог - 2074
242
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
если такой же метод применить для определения момента
сил инерции, и может рассматриваться лишь как приближение
с допустимой степенью точности. Итак, заменим опять нашу
сложную систему, состоящую из поршня, шатуна и кривошипа,
двумя массами, одна из которых, равная тпост, совершает возврат*
но-поступательное движение по закону (5.7), а другая, равная
твращ, равномерно вращается вокруг оси О, не создавая, таким
образом, момента сил инерции относительно этой оси. Момент
сил инерции вызывается исключительно массой шпост, причем
его величина может быть найдена на рис. 5.1, б, из которого усмат-
риваем, что этот момент равен силе, приложенной к поршню,
умноженной на х tg ср. Вместо силы давления газа на рис. 5.1
сейчас такой силой является сила инерции — wn0CTxn, что, однако,
не влияет на ход рассуждений при вычислении момента. Рассто-
яние х будет
X = I COS Ср Г COS at КЗ 1 — 4/1 7 C0S 42 C0S
Далее, так как
tg ср = - sin ср р 4* ~ sin2 срj = sin cot р + sin2 at
то крутящий момент получается равным
Д/ = —7ППОСТ Хп • X tg ср =
= — ^пост то2 pos 4- cos2~ sin at р + sin2 юр х
X ip — 4- г cos at 4- cos Vat| .
При перемножении мы отбросим в этом выражении все члены,
пропорциональные второй и высшим степеням г/1. Происходящая
при этом погрешность будет такого же порядка, как и при пере-
ходе от выражения (5.6) к выражению (5.7). Итак, имеем
М = — шпост a2r2 sin at 4- cos at 4- cos 2юр .
Пользуясь тригонометрическим соотношением
sin at cos 2at = sin 3at — sin at,
z л
получаем окончательное выражение для крутящего момента:
_-2 тпост ю-г? I— sin cat + sin 2cat + sin 3cat). (5.15)
5.2
ДИНАМИКА КРИВОШИПНОГО МЕХАНИЗМА
243
Рис. 5.5. Силы, действую-
щие на шатун.
Эта важная формула для крутящего момента сил инерции, действу-
ющего на вал в направлении его вращения или на раму, вращаю-
щуюся вокруг О в противоположном направлении, является
достаточно точной для обычных типов двигателей, в которых
шатун состоит из двух довольно тяжелых подшипников, соеди-
ненных сравнительно легким стержнем. С другой стороны, в
звездообразном авиационном двигателе па конце «главного ша-
туна» имеется головка, несущая не только подшипник пальца
кривошипа, но еще п—1 подшипников,
в которых расположены пальцы п—1
«прицепных» шатунов. Очевидно, что ука-
занная замена такой системы двумя со-
средоточенными массами уже не является
целесообразной, а поэтому в данном случае
не лишено интереса точное исследование
движения шатуна, приводимое ниже.
Положим, что кривошип, изображенный на
рис. 5.5, вращается против часовой стрелки с
постоянной угловой скоростью сообщая тем
самым движение связанному с ним шатуну.
Поскольку мы можем силу инерции поршня
сейчас же получить из формулы (5.9), в данном
случае будем считать поршень невесомым. Пред-
положим, далее, что между поршнем и стен-
ками цилиндра трение отсутствует, а поэтому
имеем только нормальную реакцию F3 стенок,
приложенную к шатуну. Пусть, наконец, Fx и F2
будут силы реакции пальца кривошипа, дей-
ствующие на шатун, движущийся, следова-
тельно, заданным образом под влиянием трех
сил Flf F2, F3. Мы имеем случай плоско-парал-
лельного движения твердого тела, для которого, как известно из динамики,
можно написать три дифференциальных уравнения: в направлении оси х
F1 = mxG,
в направлении оси у
4- F,= myG
и уравнение моментов относительно центра тяжести
—Fta sin <р + F2a costp — F36cos<p = /ср.
Кинематически движение заранее известно. В частности, центр тя-
жести движется так, что выполняются равенства
b ус b
XG = + (хс — Хп) у = —j--1---. Уа = —1
где индекс с относится к концу кривошипа, а п — к поршню; а и b — рас-
стояния от центра тяжести G до точек С и Р, как показано на рис. 5.5.
Ускорения Хп, %с и Ус определяются из уравнений (5.9), (5.11) и (5.12).
Угол (р и функции от него, включая сюда <р> определяются из уравнения (5.5).
16*
244
МНОГО ЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Таким образом, три написанных уравнения динамики могут быть
разрешены относительно трех неизвестных F2, F3.
Из первого уравнения получаем
тпхга тхсЬ
v т = j----Ь ---j— — ^пост "Н ^вращ ^с»
а это приводит нас к результату уравнения (5.13), полученному ранее.
Аналогично для суммы F2+ F2 получаем величину, обозначенную нами
через У в уравнении (5.14). Итак, мы видим, что для сил инерции вы-
сказанные нами выше утверждения оправдываются (см. стр. 241).
Вычислим теперь крутящий момент в направлении часовой стрелки,
действующий на вал и вызванный силами инерции шатуна. Этот момент
будет
= — F^r sin (ot — F2r cos cot.
Мы видим, что необходимо найти F2 отдельно от F3. Это можно сделать
путем исключения F3 из второго и третьего дифференциальных уравнений
движения. Имеем
b Lq ip Fxas\n<p
= — 7Пвращ T rw2 sin ------------1----------.
I COS ф I COS <p
Исключая отсюда у с помощью уравнения (5.5) и
г
нами, содержащими — в степенях выше второй,
пренебрегая всеми чле-
находим
Ь 1q 1 F
F2 = — ^гвращ у rCl)2 si31 ----у- rt°2 sin + — 772 пост у rCl}2 sin 2w«.
Подставляя эту величину в выражение крутящего момента и выполняя
некоторые тригонометрические преобразования, окончательно получаем
1 г г / \ Зг . 1
/ИваЛ = — 772ПОСТ w2rs — sin — 1 Н------------- sin — —- sin Зии.
2 L2Z \ al f *2,1 J
(5.16)
Здесь k есть радиус инерции шатуна, определяемый по формуле тп&2 = 1о-
Этот результат является приближенным лишь в том смысле, что мы пре-
небрегли высшими степенями г/l. В остальных отношениях он точен.
Сравнивая полученное значение момента с его выражением (5.15), мы видим,
что разница получилась только за счет члена с удвоенной частотой, за-
висящей от момента инерции тк2.
Уравнение (5.15) определяет значение инерционного крутящего мо-
мента вала, приложенного со стороны шатуна, состоящего из двух сосредо-
точенных масс mall и тЫ1 на расстояниях Ъ и а от центра тяжести.
Такой шатун имеет радиус инерции к = УаЬ, а тогда, если выполнить
подстановку, легко видеть, что уравнение (5.16) приводится к уравне-
нию (5.15).
Для сопоставления численных значений моментов (5.15) и (5.16)
интересно рассмотреть два частных случая шатуна. Во-первых, возьмем
однородный шатун, для которого а = b = 1/2 и к2 — Z2/l2 В этом случае
член с удвоенной частотой в выражении (5.16) на 33% больше соответствую-
щего члена в приближенном выражении (5.15). Затем рассмотрим шатун,
для которого W2noCT = 0, т.е. Ъ = Z, и который, следовательно, имеет центр
тяжести на оси пальца кривошипа (можно считать всю массу, расположен-
ной в некоторой области вокруг этого пальца, что является грубой схемой
Ц 5.3
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ДВИГАТЕЛЕЙ
245
главного шатуна звездообразного двигателя). Предполагая, что к2 = Z2/10,
мы находим, что средний член в уравнении (5.16) такой же самый, что и
в уравнении (5.15),где только вместо ягПОст поставлено wz/10; кроме того,
знак здесь оказывается обратный.
Главный шатун авиационного мотора в действительности представ-
ляет собою комбинацию двух предыдущих случаев, причем увеличение
момента вследствие однородности шатуна более или менее компенсируется
его уменьшением, вызванным значительной величиной момента инерции
головки шатуна. Таким образом, для такого несколько необычного шатуна,
каким является главный шатун авиационного двигателя, приближенная
формула (5.15) оказывается достаточно точной.
Момент, действующий па станину двигателя вокруг оси О вала (рис.
5.5), можно найти, умножая силу 2?3 на плечо:
Л/стан = F3(Zcos<p + rcoswZ).
Разрешая относительно F3 написанные выше дифференциальные уравнения
движения шатуна, подставляя найденное значение F3 в это выражение
момента и пренебрегая высшими степенями г/l, после ряда математических
упрощений получим
1 _ _ (Г (г2 + 8Z2)(F — ab) га
Метан = = «пост и¥ ----------——----------h — sin at —
2 (L 4mZ2 2ZJ
rad — k2 1 гЗг (k2 — ab) 3ri i
— -----—----F I sm — ----------—------~ + -- sin 3wZ . (5.17)
I aZ I L 4aZ2 2Z1 '
В случае шатуна, состоящего из двух сосредоточенных масс по концам
(F _ эта формула опять приводится к формуле (5.15). Таким образом,
в общем случае шатуна инерционные моменты, приложенные к валу и
к станине, не равны друг другу, а отличаются на моменты сил инерции
различных частиц шатуна относительно оси О. Только в том случае, когда
шатун вырождается в две сосредоточенные массы, эти моменты обраща-
ются в нуль, так как из остающихся двух сил инерции конечных точек
одна проходит по оси цилиндра, а другая — по радиусу кривошипа, т. е.
в конце концов обе проходят через точку О, и их моменты поэтому ис-
чезают.
§ 5. 3. Уравновешивание сил инерции многоцилиндровых
двигателей
Неуравновешенность сил инерции одноцилиндрового двигателя
определяется уравнениями (5.13) и (5.14). В этих уравнениях посту-
пательно-движущаяся масса wnoCT всегда положительна, в то вре-
мя как вращающаяся масса тпвращ может быть сделана равной нулю
или даже отрицательной посредством «противовеса» на кривошипе
(рис. 5.6) Благодаря этому оказывается возможным привести
к нулю горизонтальную силу инерции У, тогда как вертикальная
неуравновешенная сила X продолжает всегда существовать1).
г) Была запатентована схема, в которой шатун продолжается за
цапфу кривошипа; это преследует ту цель, чтобы Gn на рис. 5.4 сделать
отрицательным. Вследствие этого Лапост также может быть сделано рав-
ным нулю. Однако подобного типа двигатели в действительности осу-
ществлены не были, так как при этом картер получил бы слишком большие
размеры.
246
МНОГОНИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Таким образом, одноцилиндровый двигатель по своему существу
является неуравновешенным.
Рассмотрим теперь двухцилиндровый двигатель, в котором
кривошипы расставлены под углом 180°. Так как оба кривошипа
расположены противоположно друг другу, то противоположными
оказываются и горизонтальные силы инерции, которые вследствие
этого взаимно погашаются (за исключением момента относи-
тельно вертикальной оси). Если принять во внимание, что поршни
движутся противоположно один
другому, то высказанное сейчас
утверждение остается верным и
для вертикальных сил инерции
первого порядка. Однако верти-
кальные силы инерции второго
порядка действуют в одном на-
правлении и поэтому складыва-
ются, Чтобы понять это, рекомен-
Рис. 5.6. Кривошип с противовесом.
дуется представить себе различные силы в виде проекций вра-
щающихся векторов (стр. 14.). Сейчас мы изложим этот вектор-
ный метод для общего случая многоцилиндрового двигателя.
Пусть в таком двигателе расстояние n-го кривошипа от первого
равно 1п, и угол между тг-м кривошипом и первым равен ал (угол
тг-го кривошипа). На рис. 5.7 первый кривошип показан в верти-
кальном положении, соответствующем наибольшему значению
Рис. 5.7 Силы инерции первого порядка четырехцилиндрового двигателя.
вертикальной силы инерции первого порядка. Второй кривошип
расположен на угол а2 радианов впереди первого, вследствие чего
соответствующая вертикальная сила инерции первого порядка
прошла через свое максимальное значение на а2/еэ секунд раньше.
Поэтому, если вращающийся вектор, изображающий вертикаль-
ную силу инерции первого порядка для первого цилиндра, нахо-
дится в вертикальном положении, то положение соответственного
вектора для второго цилиндра определится углом а2, и вообще
для n-го цилиндра положение вращающегося вектора определится
углом ап. То же самое имеет место и для горизонтальных сил
инерции первого порядка.
S 5.3
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ДВИГАТЕЛЕЙ
247
4
порядка
перво го
Рис. 5.8. Силы инерции второго
(а), а также момент сил инерции
(б) и второго (е) порядков четырехцилинд-
рового двигателя рис. 5.7.
Таким образом, схема расположения кривошипов на рис. 5.7, б,
рассматриваемая как векторная диаграмма (рис. 5.7, в), представляет
собоюте условия, в которых находятся силы инерции первого поряд-
ка. Так, например, в случае четырехцилиндрового двигателя такого
типа мы имеем уравновешивание сил инерции первого порядка.
Векторы, изображающие силы инерции второго порядка, вра-
щаются вдвое быстрее по сравнен ню с вращением коленчатого
вала. Обращаясь опять к рис. 5.7. а. мы видим, что если сила инер-
ции второго порядка для
кривошипа 7 изображается
ве р т и ка л ьн ым ве к т<) ром.
то соответственный вектор
для кривошипа 2 был вер-
тикальным в тот момент,
когда кривошип 2 занимал
вертикальное положение.
Но кривошип 2повернулся
на угол а2 от этого верти-
кального положения, вслед-
ствие чего вектор, опре-
деляющий силу инерции
для кривошипа 2, должен
повернуться уже на угол
2а2 от вертикали. Таким
образом, векторная диа-
грамма для сил инерции
второго порядка образует
между различными векторами и первым вектором. На рис. 5.8, а
представлена такая диаграмма для схемы двигателя, изобра-
женной на рис. 5.7.
Соображения, подобные изложенным, имеют место также и
при определении моментов сил инерции относительно поперечной
оси. Момент п-й силы инерции относительно центра оси первого
кривошипа равен этой силе, умноженной на ее плечо 1п (рис.
5.7, а). Плоскость, в которой действует этот момент, определяется
направлением силы и продольной осевой линией коленчатого
вала. Таким образом, момент может быть изображен также век-
тором, имеющим то же направление, что и сила инерции, вели-
чина которой должна быть умножена на соответствующее
плечо 1п.
Диаграмма для моментов сил инерции первого порядка двига-
теля, изображенная на рис. 5.7, а, дана на рис. 5.8, б, где 1г = О,
12 = 1, 13 = 21, 14 = 31. Диаграмма моментов сил инерции второго
порядка (рис. 5.8, в) строится подобным же образом.
Читателю предлагается, пользуясь этими векторными диа-
граммами, доказать следующие положения:
звезду с углами 2а2, 2а3,. , 2ап
248
МНОГО11ИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Рис. 5.9. Векторная
диаграмма для
трехцилиндровой
паровой машины.
ющих была бы
1) четырехцилипдровый двухтактный двигатель с углами кри-
вошипов 0°, 90°, 270° и 180° имеет уравновешенные силы инерции
первого и второго порядков, а также уравновешенные моменты сил
инерции второго порядка, тогда как моменты сил инерции первого
порядка остаются неуравновешенными;
2) четырехцилиндровый четырехтактный двигатель с углами
кривошипов 0°, 180°, 180° и 0° имеет уравновешенные силы инер-
ции первого порядка и их моменты, но неуравновешенные силы
и моменты сил инерции второго порядка;
3) шестицилиндровый четырехтактный двигатель с углами
0°, 120°, 240°, 240°, 120° и 0° имеет уравновешенными все силы
инерции и все моменты;
4) восьмицилиндровый однорядный двигатель с углами криво-
шипов 0°, 180°, 90°, 270°, 270°, 90°, 180°, и 0° является вполне
уравновешенным.
В этих примерах мысленно предполагалось, что все поршни
одинаковы и расположены на равных расстояниях друг от друга,
что и имеет место в современных двигателях
внутреннего сгорания. Однако указанный метод
может быть применен также к случаю нерав-
ных масс поршней и неравных расстояний между
цилиндрами. И действительно, первоначально
эта теория была разработана в применении к
большим судовым паровым машинам с трех- и
четырехкратным расширением (теория урав-
новешивания, данная Шликом около 1900 г.).
Пример. Паровая машина тройного расширения
имеет поршни, веса которых относятся как 1:1,5:2.
Каковы должны быть углы кривошипов, чтобы в
этой машине уравновесить силы инерции первого
порядка?
Решение. На диаграмме векторы имеют длины,
пропорциональные заданным числам. Проведем на
рис. 5.9 вектор, равный двум выбранным единицам,
вертикально вниз. Тогда условие равновесия требует,
чтобы два других вектора были расположены таким
образом, чтобы их горизонтальные составляющие
уравновешивались, а сумма вертикальных составля-
:вна двум единицам. Вводя на цис. 5.9 углы а и
Д, мы имеем
1 • sin а = 1,5 sin I • cos а + 1,5 cos ft — 2.
Для решения этих уравнений найдем из первого уравнения
cos а = У1 — sin2 а == У1 — 2,25 sin2 Д
и подставим во второе:
У1 — 2,25 sin2 /3 = 2 — 1,5 cos Д.
§ 5,3
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ДВИГАТЕЛЕЙ
249
Возводя в квадрат и упрощая, находим
6 cos = 5,25,
откуда
©os/3 = 0,88 и /3 28°.
Далее,
cos а = 2 — 1,5 • 0,88 г 0,68,
и тогда а — 47°.
Результаты, даваемые векторными диаграммами, мы можем
весьма просто перевести на математический язык. В самом деле,
для уравновешенности сил инерции первого порядка необходимо,
чтобы обращалась в нуль геометрическая сумма всех векторов,
изображенных на рис. 5.7, в. Но если это так, то должны равняться
нулю их горизонтальная и вертикальная суммы проекций:
V sin ап = О, 2 cos ап = 0- (5.18)
п п
Подобно этому, находим условия уравновешенности сил
инерции второго порядка:
3" sin 2ап — 0. 2^ 008 “ 9. & 19)
п п
Для моментов сил инерции первого порядка имеем
22 ln sin ап = 0, Д к 008 ап — О' (5.20)
п п
Для моментов сил инерции второго порядка
Д' sin 2ап =0, Д 008 %ап = 0. (5.21)
n »
Все эти формулы справедливы лишь для поршней с равными
массами Например, для четырехцилиндрового двигателя (рис.
5.7) мы имеем = 0°, а2 = 90°, а3 == 270°, а4 = 0°. вследствие
чего уравнения (5.18) принимают вид
0 + 1— 1+0 = 0, I + 0 + 0 — 1 = 0,
т. е. силы инерции первого порядка уравновешиваются.
В то же время, подставляя в уравнения (5.20). получаем
0-0+1 -1—2-1 + 3- 0= 1-2 ф 0,
0-1 + 1 • 0 + 2 • 0 + 3 • 0 = 3 +- 0,
т. е. моменты сил инерции первого порядка остаются неуравно-
вешенными.
Таким образом, мы можем исследовать уравновешенность
сил инерции в машинах либо с помощью формул (5.18)—(5.21),
либо с помощью векторных диаграмм
Напомним, что в приведенном анализе двигатель рассматри-
вался как сплошное твердое тело. Это имеет место обычно в
250
МНОГОЦНЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
автомобильных и авиационных моторах, где все цилиндры отли-
ваются в одном блоке. Однако в судовых двигателях цилиндры
иногда укрепляются отдельно друг от друга, вследствие чего
силы инерции кривошипных механизмов двух цилиндров или
моменты этих сил могут быть направлены в противоположные
стороны и могут не приводить в движение всю машину в
целом. Но зато они могут вызвать упругие перемещения одного
цилиндра по отношению к другому. Задача получается чрезвы-
чайно сложной.
Однако с практической точки зрения нет особой необходимо-
сти посвящать много времени ее решению. Аналогичная проблема
для вращающихся машин рассмотрена в § 6.5. куда мы и отсылаем
читателя.
§ 5.4. Собственные частоты крутильных колебаний
Коленчатый вал двигателя внутреннего сгорания со всеми
своими кривошипами, поршнями, маховиком и передаточными
механизмами представляет собою слишком сложную систему,
। чтобы пытаться определить точное
' значение частоты его собственных
Рис. 5.10. Эквивалентный мо-
мент инерции поршня изме-
няется с его положением.
нас не ясно, что делать с
частей. На рис. 5.10, а, б
крутильных колебаний. Поэтому
прежде всего необходимо в извест-
ной степени упростить или «идеали-
зировать» машину, заменив поршни
и т. п. эквивалентными дисками с
такими же моментами инерции, а
кривошипы — эквивалентными отрез-
ками прямолинейного вала с такой
же жесткостью на кручение. Дру-
гими словами, двигатель приводится
к схеме, представленной на рис. 5.12,а.
Указанный метод дает наилучшее
приближение при решении задачи.
Рассмотрим сперва эквивалент-
ный момент инерции каждого криво-
шипного механизма. Моменч инерции
7вращ частей, имеющих чистое вра-
щение, не представляет каких-либо
затруднений, но пока еще для
весом поступательно движущихся
поршень показан в двух поло-
жениях. Вообразим, что коленчатый вал не вращается, а
испытывает лишь малые крутильные колебания. На рис. 5.10, а
это имеет место при отсутствии движения поршня, зато на рис.
5.10,6 движение поршня (и его ускорение) можно считать таким
§ 5.4
СОБСТВЕННЫЕ ЧАС! ОТЫ КРУТИЛЬНЫХ КОЛЕБАНИЙ
251
Рве. 5.11. Кривошип длины I заме-
си-
н ястся отрезком однородного вала
IЫО длины/эко, имеющего ту же самую
на жесткость на кручение.
же, как и движение цапфы кривошипа. Тогда эквивалентный
момент инерции поршня в положении а равен нулю, в то время
как в положении б он равен тп110стг2 Таким образом, при вращении
коленчатого вала полный эквивалентный момент инерции криво-
шипного механизма изменяется между
^вращ ^вращ “Ь ^пост
имея среднее значение, равное
•^вращ "Ь 2" ^пост
Система с переменным момен
инерции (см. стр. 468) у
теперь заменяется системой
постоянным моментом инер:
I, где
= ^вращ “Ь 2" ^пост
Упростим теперь нашу
стему, заменив кривошип час
вала с такой же жесткостью
кручение. С физической то
зрения такая замена вполне возможна, по на деле вычисление
жесткости представляет собою весьма трудную задачу. Из рис.
5.11, а мы усматриваем, что если основной вал подвергается скру-
чиванию, то щеки кривошипа W оказываются под действием
изгибающих моментов, тогда как цапфа кривошипа Р работает
на кручение. В таком случае мы можем найти угол закручивания,
вызванный некоторым определенным крутящим моментом, при-
меняя к щекам и цапфе обычные формулы для бруса, работающего
на изгиб и кручение. Однако при этом получаются результаты,
далекие от действительности, так как эти формулы верны лишь
для длинных и гибких балок. Если же применить их к коротким
отрезкам, ширина и толщина которых примерно такого же поряд-
ка, как и длина, они приведут к существенным ошибкам. Больше
того, как видно из рис. 5.11, а, крутящий момент должен вызвать
не только вращение при закручивании свободного конца вала, но
и его боковое смещение, происходящее вследствие изгиба щек.
В действительности в машинах такому боковому движению
препятствуют коренные подшипники, вследствие чего жесткость
на кручение коленчатого вала увеличивается, особенно, если
зазоры в этих подшипниках малы.
Опыты, произведенные над большим числом коленчатых валов
больших тихоходных машин, показали, что «эквивалентная длина»
^кв на рис. 5.11,6 (т. е. длина обыкновенного вала, имеющего
ту же жесткость на кручение) приблизительно равна действ и-
252
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
тельной длине I. Отклонения определяются неравенством
0,951< 1ЗКЕ< 1,10 Z,
где наибольшее значение соответствует кривошипам малых ра-
диусов при жестких щеках, а наименьшее — кривошипам боль-
Массовик
Рис. 5.12. Для приближенного вычисления на-
инизшей собственной частоты двигатель за-
меняется системой, состоящей из двух масс.
ших радиусов при тон-
ких гибких щеках. Во
всех испытаниях диа-
метр основного вала
был равен диаметру
цапфы кривошипа, что
соответствует обычным
конструкциям.
В тех случаях, когда
цапфа кривошипа имеет
диаметр, отличный от
диаметра шипа корен-
ного подшипника (обыч-
но меньше последнего),
кривошип заменяется
прямолинейным отрез-
ком вала двух различных
диаметров. Переход се-
чения одного диаметра в
сечение другого диаметра располагается в той же перпендикуляр-
ной к оси вала плоскости, что и центр щеки. В легких быстроход-
ных двигателях — в особенности в авиационных двигателях, —
где щеки отклоняются от прямоугольной формы, имея для умень-
шения веса скругленные углы, эквивалентная жесткость полу-
чается много меньше той, которая находится при указанном
расчете. В исключительных случаях жесткость может оказаться
даже на 50% меньше найденной вышеизложенным способом.
Здесь лучше всего рекомендовать произвести сравнение тео-
ретического расчета с экспериментом для достаточного коли-
чества уже имеющихся коленчатых валов с подобными харак-
теристиками.
В том случае, когда одна часть системы соединена с другой
ее частью посредством зубчатой передачи, следует привести все
вращения к одной скорости. Как было изложено на стр. 50, это
может быть выполнено исключением зубчатых колес и умно-
жением моментов инерции и квазиупругих коэффициентов быстро
вращающихся частей на тг2. где п > 1 и обозначает передаточное
число.
Пусть рис. 5.12, а представляет собою схему шестицилиндро-
вого двигателя Дизеля с маховиком и генератором. Здесь мы
§ 5.4
СОБСТВЕННЫЕ ЧАСТОТЫ КРУТИЛЬНЫХ КОЛЕБАНИЙ
253
имеем восемь степеней свободы. Теоретически возможно, поль-
зуясь методом главы IV, найти восемь собственных частот, для
чего следует воспользоваться определителем с восемью строками
и восемью столбцами, который даст нам уравнение восьмой сте-
пени относительно а2. Однако этот путь решения является неже-
лательным, вследствие громоздкости вычислений
Вместо этого мы воспользуемся методом последовательных
приближений, исходя из предположенного первого грубого при-
ближения для частоты. Такое предположение относительно наи-
низшей собственной частоты можно сделать путем замены схемы
рис. 5.12, а схемой рис. 5.12,6, где 1а есть общий момент инерции
системы, соответствующий совокупности всех шести цилиндров,
а 1Ь — общий момент маховика и ротора генератора. На основа-
нии уравнений (2.4) и (2.10) частота колебаний этой последней
системы будет
G) —
у*
Tah
которая и является приближенным значением наинизшей частоты
системы, изображенной на рис. 5.12, а. Само приведение рис.
5.12, а к рис. 5.12, б несет в себе, без сомнения,отпечаток личного
усмотрения производящего расчеты. Имея некоторый опыт,
можно сделать оценку частоты с точностью до 10% ее истинного
значения.
Грубое приближение olf полученное таким образом, служит
базой в следующем способе, указанном Голъцером. Допустим,
что вся система находится в состоянии крутильных колебаний с
частотой 6^. Если есть собственная частота, то такое состояние
имеет место без действия на систему какого-либо внешнего крутя-
щего момента (случай свободных колебаний). Если же «1 не яв-
ляется собственной частотой, то предположенные колебания
могут происходить лишь тогда, когда в какой-нибудь точке систе-
мы периодически действует переменный внешний крутящий момент
с частотой <ур В этом случае мы имеем дело с вынужденными коле-
баниями. Сделаем совершенно произвольное предположение, что
угловая амплитуда первого диска на рис. 5.12, а равна одному
радиану. Крутящий момент, необходимый для приведения этого
диска в колебательное движение, равен
Дб?! sin
Этот момент может исходить лишь от вала справа от диска
Если этот вал имеет коэффициент жесткости при кручении
то его угол закручивания изменяется по закону
Л о? .
254
М1ЮГ0ЦИЛИНДР0ВЫЕ ДВИГАТЕЛИ
ГЛ. V
имея наибольшую величину, равную Но так как амплитуда
колебаний диска Zj есть один радиан, а вала-у-1 радианов, то
диск /2 должен колеоаться с угловой амплитудой 1---р2- ради-
анов. Следовательно, амплитуда крутящего момента, необходи-
мого для таких колебаний, должна быть равна
Этот момент образуется разностью крутящих моментов на
участках вала справа и слева от диска, а тогда, — так как момент
на участке kv известен, — мы можем вычислить момент на участке
к2. Отсюда находим угол закручивания участка &2, затем угловую
амплитуду диска Z3 и т. д., придя в конце концов к последнему
диску 18. Но справа от 18 нет вала, способного вызвать необхо-
димый крутящий момент. Поэтому, чтобы заставить систему
колебаться описанным образом, надо к Z8 приложить внешний
момент ZBHeuJ, величина которого определяется всем вычисли-
тельным процессом. Лишь в том случае, когда окажется соб-
ственной частотой, этот момент Твнсш получится равным нулю.
Таким образом, величина и знак Твнеш служат мерой того, на-
сколько значение отклоняется от значения собственной частоты.
Нужно сделать более или менее значительное количество таких
вычислений, исходя из различных значений Oj пока, наконец,
остаточный момент Т^иет можно будет считать равным нулю.
Преимущество этого метода заключается в том, что он позволяет
найти не только собственную частоту, но также и полную форму
главного типа колебаний, что как раз необходимо для вычисления
затрачиваемой работы, если принять во внимание неравномер-
ности крутящих моментов отдельных цилиндров (см. стр. 271).
Весь процесс вычислений становится наиболее ясным, если
его проиллюстрировать каким-нибудь определенным примером. К
такому примеру мы сейчас и перейдем.
§ 5.5. Числовой пример
В качестве примера рассмотрим современный быстроходный
легкий двигатель Дизеля, приводящий в движение электрогенера-
тор (рис. 5.13). Параметры установки частично показаны на
рис. 5.13. Остальные параметры, характеризующие систему,
следующие:
двигатель четырехтактный восьмицилиндровый 7-образный
дизель;
угол между рядами цилиндров 60°;
коленчатый вал — 0°. 180°, 180°. 0° с порядком вспышек 1 3 4 2;
§ 5.5
ЧИСЛОВОЙ ПРИМЕР
255
мощность 50 л. с. на цилиндр при 2000 об/мин,
400 л, с. на весь двигатель;
крутящий момент при полной нагрузке 1820 кГ см на цилиндр;
генератор 250 кет\
нормальная скорость 2000 об/мин.
Моменты инерции и коэффициенты жесткости, указанные
на рис. 5.13, вычислены по чертежу описанным выше способом.
Единственное нововведение здесь — это жидкостный виброгаси-
тель, состоящий из кожуха, в котором свободно может вращаться
специальный маховик. Связь между этим маховиком и кожухом
Рис. 5.13. Четырехтактный восьмицилиндровый Т-об-
разный дизель с вязким демпфером типа Гауда, при-
водящий в движение генератор. Все моменты инер-
ции даны в к Г см сек2, все коэффициенты жесткости
— в миллионах кГ см на радиан.
осуществляется только через посредство вязкого сопротивления
масла или жидкого препарата кремния, заполняющего все про-
странство внутри кожуха Виброгаситель такого типа будет
подробно описан на стр. 285, где будет показано, что эквивалент-
ный момент инерции всего виброгасителя равен сумме момента
инерции всего кожуха и половины момента инерции маховика.
Показанное на рис. 5.13 значение 9,2 кГ см сек2 получено именно
таким путем.
В 7-образном двигателе каждый кривошип связан с двумя'
шатунами и двумя поршнями. Каждое из показанных на рис.
5.13 чисел 1.7 кГ см сек2 слагается из момента инерции собственно
кривошипа с соответствующим противовесом, из моментов инер-
ции вращающихся частей массы шатунов, приведенных к центру
цапфой кривошипа и из половины моментов инерции поступа-
тельно движущихся их частей, а также поршней, приведенных
к той же точке.
Прежде всего мы должны дать оценку первой частоте схемы
на рис. 5.13. Замечая, что массы кривошипов малы по сравнению
с остальными массами, мы объединим два кривошипа с маховиком,
256
МНОГОНИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
а два других — с виброгасителем; при этом найдем эквивалентную
жесткость одного вала
1 1 I 1 -L — 4- — I 1 0 1 '47 1
к ”62 ‘31 31 31 41,5 ” и'1О/ ““ 7,30 ’
Рис. 5.14. Приведение системы
рис. 5.13 к трехмассовой систе-
ме дляоценки первой частоты.
Таким образом, приходим к системе трех дисков, изображен-
ной на рис. 5.14. Применяя со-
ответствующую формулу на стр. 568,
находим
= 30 • 104;
= 112- 104.
Первую из этих величин мы кла-
дем в основу расчета по таблице
Гольцера (габл. 5.1).
, стоящих в различных столбцах этой
таблицы, следующий: числа второго столбца представляют собою
моменты сил инерции каждого диска, рассчитанные на амплитуду
колебаний в 1 радиан с частотой, указанной в заглавии таблицы;
Физический смысл чисел
Таблица 5.1
Первый тип колебаний. Первое приближение ю2 == 30 • 104
№ 7 /си2. [О-*1 /<«20. 10_® Z/co’d 10-* к 10-1 i Г к
1 2 3 4 5 0 7
1 9,2 2,76 1.000 2,76 2,76 41,5 0,067
2 1,7 0,51 0,933 0,47 3,23 31,0 0,104
3 1,7 0,51 0,829 0,42 3,65 31,0 0,118
4 1,7 0,51 0,711 0,36 4,01 31,0 0,129
5 1,7 0,51 0,582 0,30 4,31 62,0 0,070
6 20,6 6,18 0,512 3,17 7,48 10,8 0,692
7 121 36,3 —0,180 —6,53 + 0,95
числа третьего столбца — угловые амплитуды fl каждого диска;
в четвертом столбце поставлены моменты сил инерции дисков
при амплитуде колебаний fl\ числа пятого столбца, равные суммам
чисел предыдущего столбца до данной строки, являются значе-
ниями крутящего момента на валу позади соответствующего
диска; в шестом столбце указаны коэффициенты жесткости участ-
ков вала; наконец, в седьмом столбце даны углы закручивания
каждого участка вала.
Мы начинаем заполнять таблицу с первых двух столбцов, а
также с шестого столбца (числа к\ Далее, мы вписываем все числа
в первую строку, идя слева направо. Крутящий момент непосред-
S 5.5
ЧИСЛО1ЮП ПРИМЕР
257
ственно слева от первого диска, т. е. от виброгасителя, есть крутя-
щий момент самого виброгасителя, так что число 2,76 мы престо
переписываем в столбец с суммами. Найденный угол поворота,
равный 2.76 : 41,5 = 0,067, вычитаем из угла /3 = 1.000 и находим
тем самым угол 3 = 0,937 для диска 2, который отображает пер-
вый цилиндр. Переходя ко второй строке, мы сразу можем запол-
нить ее до столбца с суммами Здесь мы должны прибавив 0.47 и
2,76, всего 3,23. Физически это значит. что крутящий момент
вала между дисками 2 и 3 есть сумма моментов сил инерции дисков
1 и 2 Читателю предлагается теперь проследить вычисления во
всей таблице, идя шаг за шагом
и никогда не упуская из виду
физическое значение каждого
числа. Последнее из них мы на-
ходим в V-столбце: 0,95X 106.
Оно равно сумме моментов сил
инерции всех семи дисков. Это
есть крутящий момент несу-
ществующего вала слева от
маховика,необходимый для под-
Рис. 5.15. Поведение остаточного мо-
мента пятого столбца таблицы в
методе Гольцера.
держания вынужденных колебаний при о2 = 30,Ю4 и = 1,000.
Остаточный момент, равный 0,95 и, следовательно, неравный
пулю, показывает, что мы не нашли точного значения собственной
частоты. Прежде чем делать испытания вслепую и строить таб-
лицу Гольцера для какого-либо иного значения <у2, мы приведем
некоторые рассуждения и посмотрим, что будет с этой таблицей
для очень малых значений оА близких к нулю. Числа во втором
столбце малые и положительные. Числа в первой строке стано-
вятся малыми, а потому /32 будет близко к единице, оставаясь
немного меньше ее. Продолжая дальше наши рассуждения, мы
заключаем., что остаточный момент (последнее число ^-столбца)
должен быть положительным и малым. Конечно, при со2 = 0
все числа столбцов 2, 4, 5 и 7 равны нулю. Построим теперь гра-
фик на рис. 5.15, на котором мы отложим остаточный момент в
зависимости от квадрата угловой частоты о2.
Об этом графике мы знаем только, что кривая проходит через
начало координат, что она лежит в положительной полуплоскости
при малых значениях о2 и проходит через нуль при собственных
частотах. Оказывается, что этих скудных сведений достаточно
для практических расчетов. Мы занимаемся прежде всего первой
или наипизшей собственной частотой, и наше первое испытание
дало нам положительный остаточный момент.
Из рис. 5.15 мы усматриваем, что наше приближение со2 было
слишком мало (если бы оно было слишком велико, jo момент
был бы положительный). Таким образом, для второго приближе-
ния мы возьмем несколько большее число, чем для первого.
17 Ден-Гартог - 2074
258
МН ОI О ЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Таблица 5.2
Первый тип колебаний. Второе приближение ю2 — 32 • 104
№ > 10-ь 0 iw* о- ю-’ 27co*d • 10-’ « ю-А к
1 2 3 4 5 6 7
1 9,2 2,94 1,000 2,94 2,94 41,5 0,071
2 1,7 0.543 0,929 0.50 3,44 31,0 0.11 1
3 1,7 0,543 0,818 0,44 3,88 31,0 0,125
4 1.7, 0.543 0,693 0.38 4,26 31,0 0.137
5 1,7 0,543 0,556 0,30 4,56 62,0 0,073
6 20,6 6,59 0.483 3,19 7,75 10,8 0.715
7 121 38,7 —0,232 —8,97 — 1,22
В результате мы приходим к отрицательному остаточному
моменту и из рис. 5.15 заключаем, что <у2 слишком велике для
первой собственной частоты Мы имеем две точки на кривой, и
притом расположенные достаточно близко друг к другу; поэтому
соответствующий участок кривой можно считать почти прямо-
линейным и применить линейную интерполяцию, с помощью
которой для третьего приближения получим
6? = 30 • 104 + Ji5. 0.5 (32 • Ю4 - 30 • 104) = 30,9 • 10*
В то же время остаточный момент получается ничтожно малым»
вследствие чего мы можем считать приближение хорошим.
Таблица 5.3
Первый тип колебаний. Третьи и последние приближения о2 = 30,9 • I04'
и = 556; частота —5420 колеб/мин
№ 1 1(0* 10-6 ь /со» a- io-6 10-’ к 10-- к
1 2 3 4 5 6 7
1 9,2 2,84 1,000 2,84 2,84 41,5 0,068
2 1,7 0,525 0.932 0,49 3,33 31.0 0,107
3 1,7 0,525 0.825 0.43 3,76 31,0 0,121
4 1,7 0,525 0.704 0.37 4,13 31,0 0.134
5 1,7 0,525 0,570 0,30 4,43 62,0 0,071
6 20,6 6,36 0,499 3,18 7.61 10,8 0,703
7 121 37,3 —0,204 —7,62 —0.01
§ 5.5
ЧИСЛОВОЙ ПРИМЕР
259
Переходя ко второму типу колебаний, мы кладем в основу
расчета наивысшую из двух собственных частот системы, пред-
ставленной на рис. 5.14.
Таблица 5.4
Второй тип колебаний. Первое приближение ю2 = 112 • 104
ЛЬ / Ю-« Lto'U- io-® Ю-8 к- 10-ь к
1 2 3 4 5 6 7
1 9,2 10,30 1,000 10,30 10,30 41,5 0,248
2 1,7 1.90 0,752 1,43 11,73 31,0 0,378
3 1,7 1,90 0,374 0,71 12,44 31,0 0,401
4 1,7 1,90 —0,027 -0,05 12,39 31,0 0,400
5 1,7 1,90 —0,427 —0,81 11,58 62,0 0,187
6 20,6 23,0 —0,614 — 14,10 — 2.52 10,8 —0,233
7 121 135.5 —0,371 —50,3 —52.82
Остаточный
отрицател ьн ым
в виду вторую частоту, делаем
вывод, что мы выбрали слишком
малое значение для <у2 Пробуем
последовательно еще два при-
ближения, получая при этом
следующий результат:
о2 = 120- 104 . . . оста-
точный момент — 27,95,
<у2 = 128 • 104. . . оста-
точный момент — 5,50.
момент оказывается очень большим и притом
Обращаясь к рис. 5.15 и вспоминая, что мы имеем
В обоих случаях испыты-
ваемая величина оказывается
слишком малой. Строя на гра-
фике соответствующие три точ-
ки. мы видим, что они не ле-
жат на одной прямой. Проводя
через них плавную кривую и
делая экстраполирование (опе-
Рис. 5.1б.Типы или формы колебаний,
соответствующие двум наинизшим
собственным частотам системы
рис. 5.13. •
рация. значительно менее удовлетворительная, чем интерполи-
рование), приходим к числу <у2 = 129 • 104.
На рис.5.16 показаны формы двух первых главных колебаний,
причем в качестве ординат взяты угловые амплитуды /3 отдель-
17*
260
МПОГО11ИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
ных масс. Из рисунка видно, что колебание n-го типа имеет п
узлов. Другое свойство изображения кривых, полезное для пред-
варительной грубой оценки, заключается в том, что суммарный
кинетический момент системы, соответствующий каждой кривой,
должен быть равен нулю или 7/3 = 0. На рис. 5.16 маховик
очень большой. Отсюда в первом типе колебаний произведение
его момента инерции 121 на амплитуду 0,204 равно численно и
противоположно по знаку сумме величин 1р для всех остальных
масс.
Таблица 5.5
Второй тип колебаний. Четвертое и последнее приближение ы2 = 129 • 10*;
и — 1136; частота 10 850 колеб1мин
№ / Iw*. 10-6 ь /су2/?. 10—6 ЯчМ- Ю-« к- 10—® j-l/ry*/? к
1 2 3 4 5 6 7
1 9,2 11,88 1,000 11,88 11,88 41,5 0.287
2 1,7 2,19 0,713 1,56 13,44 31,0 0.435
3 1,7 2,19 0.278 0.61 14.05 31,0 0.454
4 1.7 2,19 —0.176 —0,38 13,67 31,0 0,442
5 1,7 2,19 —0,618 — 1,35 12.32 62.0 0.199 ,
6 20,6 26,6 —0.817 —21,8 —9.48 10,8 —0,875
1 ’ 121 156.0 + 0,058 + 9,05 -0,43 i
В методе Гольцера тот факт, что различные цилиндры обычного
двигателя одинаковы, не дает никакого преимущества. В нашем
частном случае четырех кривошипов, когда система' приводится
к 7 массам, эта разница еще невелика, но бывают двигатели с
восемью кривошипами, приводимые к 9 или 10 массам. Тогда
можно в значительной мере сэкономить труд по расчету, если
воспользоваться методом, впервые примененным Льюисом
(F. М. Lewis), в котором весь двигатель рассматривается как одно
целое. В этом процессе упругости и инерции различных кривоши-
пов равномерно распределяются по всей длине машины, которая
вследствие этого, делается «валом» или «балкой», испытывающей
крутильные колебания (см. стр. 192)
В пашем примере суммарный момент инерции четырех ци-
линдров есть 4x1,7 =6.8 кГсмсек2', что касается упругости,
то определяющие ее коэффициенты жесткости, комбинируясь
при переходе от рис. 5.13 к рис. 5.17, дают 7,30 X 106 кГ см/рад. Эти
операции приводят к системе, показанной на рис. 5.17. Поведение
двигателя или «вала» определяется дифференциальным урав-
JS 5.5
ЧИСЛОВОЙ ПРИМЕР
261
пением (4.22, стр. 191), решение которого (4,25) может быть напи-
сано в форме
ft(x) = A cos
/ I/mjW2 I
к |/ аГр + а)
где А есть амплитуда и а — фазовый угол. Эти две постоянные
А и а должны определяться в каждом отдельном случае по гра-
ничным условиям. Если ввести обозначения / — для полного
момента инерции всего двигателя и К — для коэффициента жест-
кости всей его длины, так что
I = 1^1,
к =
то последний результат может быть написан
Д(я) =
= A cos
Здесь величина
« У ' = <у (5 24)
есть волновой аргумент
для полной длины дви-
гателя, иначе говоря,
соответствующее число
радианов в аргументе
косинусоиды (от я = 0 до
+ а| .
(5.23)
в таком виде:
10,8
Рис. 5.17. Система рис. 5.13, в которой масса
двигателя принята равномерно распределен-
ной вдоль его длины. Схема дана для расчета
по методу Льюиса.
т = /). Эта величина должна быть ясно
себе представлена и приближенно найдена до начала всех расчетов.
Крутящий момент в какой-либо точке по длине двигателя
есть
J7 = Glp 2 = Ла sin (0Т + (5-25)
или, в частности, на двух концах вала
начало (х = 0): Мх.-=п = Ас» ]/Z/Tsin а,
конец (х = /): — Асп /IK sin (6> + а).
(5.25a)
(5.25b)
Вычисление может быть выполнено с помощью трех формул
(5.23), (5.24) и (5.25). Возьмем, например, первый тип колебаний,
когда о2 — 30,9 I04 и со = 556
В левом конце машины, с которого мы начинаем расчет, поме-
щен сосредоточенный момент инерции, и мы оперируем здесь, как
в методе Гольцера. Имеем = 1.000. Момент сил инерции
ЛД = Itfp = 9,2 • 30,9 • IO4 • 1,000 = 2,84 • 106.
262
МПОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ V
Этот крутящий момент должен восприниматься валом двига-
теля. Поэтому он равен моменту (M12)i
Теперь, согласно уравнению (5.23),
= Л cos а = 1.000, (5.23а)
а, согласно уравнению (5.25а),
= Лш У IK sin ct = 2,84 • 106.
Деля эти два уравнения одно на другое, находим
2,84 -106 2,84 106 _ п 70Г
tgCZ= “ 556-7,05-103 ~ °’726’ а — 36 .
Далее, согласно уравнению (5.24),
0 = <у I/•£ = 556 • 0,96 • 10~3 = 0,539 рад, или 30°,5.
Тогда 6>н-а = 30с,6 — 36°.0 = 66°,5. Это означает, что кривая (3
вдоль двигателя есть часть волны косинусоиды, начинающаяся
при аргументе, равном 36е.0. и простирающаяся до аргумента,
равного 66°,5. Но из уравнения (5.23а) имеем
л 1,000 1,000 , пл
А = — ==’-—= 1,24.
cos а 0,809
Это означает, во-первых, что наибольшая высота косинусоиды
равна 1,24 (справа от массы 1 на рис. 5.17), во-вторых, что в точке
сосредоточения массы 7 имеем
1,24 • cos а = 1,000
и, наконец, в-третьих, что в точке сосредоточения массы 2, со-
гласно уравнению (5.23),
Д2 = A cos (0 + a) = 1,24 cos 66°,5 = 0,497.
Крутящий момент двигателя на втором конце равен
(7И12)2 = А со У IK sin (О -ha) =
= 1,24 • 556 • 7,05 • 103 • 0,917 = 4,45 • 106
Итак, мы закончили с машиной. Оставшийся расчет может
быть сделан по методу Гольцера.
Заметим, что последние два числовых результата являются
контролем для соответствующих чисел таблицы Гольцера на
стр. 258 Там /36 на маховике было найдено равным 0,499. что сопо-
ставляется с числом 0,497, полученным здесь Крутящий момент
на валу справа от маховика в таблице Гольцера был 4,43 104.
$ 5.5
ЧИСЛОВОЙ ПРИМЕР
263
тогда как здесь было найдено 4,45 • I06. Продолжаем наш расчет
(см. рис. 5.17):
М2 = = 20,6 • 30,9 • I01 • 0,497 = 3,17 • 106,
М23 = (М12)2 + М2 = (4,45 + 3,17) • 10е = 7,62 • 106,
о ___________ ^23 _ ^>61 _ 704
^23 &23 “ W,8 “ °’704’
д = д — д3 = 0.497 — 0,704 = —0,207,
М3 = Itffi = 121 • 30,9 • 104 (—0,207) = —7,74 • 106,
МОСТ==М23 + М3 = —0,12 • 10е,
т. е. получаем малую величину.
Для того чтобы показать этот метод яснее, вычисления для
второго типа колебаний выполнены без сопровождающих их
пояснений. Числовые данные взяты из рис. 5.17, при этом исполь-
зованы уравнения (5.23), (5.24) и (5.25).
Преимущество способа Льюиса заключается в том, что он
часто позволяет давать быструю и поразительно точную оценку
частоты. Это достигается зарисовкой кривых на рис. 5.16, вы-
полняемой еще до вычислении, но с соблюдением относительных
величин ’жесткостей. При этом надо помнить, что суммарный
кинетический момент должен обратиться в нуль, а поэтому
2Г7Д = 0 Из намеченных таким образом кривых мы выводим
приближенное значение для 0. иначе говоря, получаем число
радианов в аргументе косинусоиды вдоль длины двигателя, а
уже отсюда, с помощью уравнения (5.24), находим искомую
частоту.
Вычисления по методу Льюиса
Второй тип колебаний.
о2 = 129 • !04; о =1136,
Д = 1,000; = 9,2 • 129 • 104 • 1,000 = 11,88 • Ю6 =(М12)П
, 11,88 • 106
~ 1136*7050 ~ 1’482’ а — об ,
е = 1136 • 0,96 • 10-3 = 1,090 или 0 = 62,4°,
а + О = 118,4° = 90° + 28,4°,
Д = 1,79 • cos 118,4° = —1,79 sin 28,4° = —0,850,
(М12)2 = 1,79 • 1136 • 7050 • 0,879 = 12.60 • 106,
М2 = —20,6 • 129 • 104 • 0,850 = —22,60 • 106,
264
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
М23 = (12.60 — 22,60) • 106 = — 10.00 • 106,
&а = = -0,925; & = +0,075,
= 121 • 129,104 -0,075 = +11,8 10е,
Л10сТ = (— 10,00 + 11,8) • 106 = 1,8 • 10е.
т. е. опять получаем малую величину.
Существует другой метод, предложенный Портером и приме-
няемый некоторыми машиностроителями, который состоит в
замене всего двигателя «эквивалентным маховиком» с моментом
инерции /экв. Крутящий момент, действующий со стороны машины
на остальную систему, выражается формулой (5.25), приведенной
выше. Если бы машина в действи 1елыюсти состояла из одного
только маховика 7ЭКВ, колеблющегося с амплитудой конца двига-
теля, то крутящий момент был бы равен
/экв = 1ЗКВ(О2 cos е.
Приравнивая эту величину крутящему моменту реального
двигателя, определяемому из уравнения (5.25) и принимая во
внимание уравнение (5.24),
находим
/экп - 1 %в . (5.26)
©
Рис. 5.18 Судовая двигательная уста-
новка, состоящая из быстроходных тур-
бин! и 5, двойной редукционной переда-
чи 2, 3. 4 и гребного винга 6
Таким образом, машина
с действительным моментом
инерции / и упругим колен-
чатым валом действует, как
жестко посаженный маховик
с моментом инерции
колеблющийся с частотой,
определяемой величиной 0.
Остающиеся вычисления в
основном ВЫПОЛНЯЮТСЯ ПС
схеме Гольцера.
Метод Гольцера может
быть с успехом применен к
вычислению частот разветв-
ленных систем, подобно изо-
браженной на рис.5.18, где представлен главный привод судна,
построенного в 1940 г. для Морской комиссии США.
Диски 7 и 5 отображают моменты инерции паровых турбин низ-
кого и высокого давления, вращающихся со скоростью7980 об/мин.
Диски 2 и 4 представляют собой промежуточные шестерни,
§ 5.5
числовой ПРИМЕР
265
вращающиеся со скоростью 730 об/мин, тогда как 3 есть главное
зубчатое колесо, делающее 85 об/мин и связанное с гребным
винтом 6 Моменты инерции п< казаны в кГ см сек2 и уже умножены
на квадраты передаточных чисел (см. стр. 50). Коэффициенты
жесткости должны быть умножены па 109, чтобы быть выражен-
ными в кГ см/радиан, и также умножены на соответствующие
множители. Для нахождения наинизшей собственней частоты
мы заметим, что валы самой машины очень жестки по сравнению
с приводным валом. Поэтому, в качестве первого приближения,
мы .будем считать все массы турбинной установки связанными
с главным колесом, а тогда
9 k 0.082-109 ,_п
И ^Г = -48Л0^:= 17°-
Расчет по методу Гольцера показывает, что это значение занижено.
При окончательном значении о2 = 176, получаем следующий
результат вычислений:
о2 = 176; Д = 1,000; = /о% = 1,473 • I О9,
/;1г = 7,‘ = = О(,2; & = °'998’
М2 = = 0,209 109, М23 = Л/, + Л/г = 1.682 • 109,
|323 = 7--= 0.279. & =/32 - 0,279 = 0,719.
*23
Мы еще ничего не знаем об амплитудах в ветви 3—4—5; ведь
было лишь сделано предположение, что Д = 1,000. Тем не менее
мы заново исходим из допущения = 1,000 и опять подходим к
тому же диску. Итак1):
д5 = 1,000. М5 = 0,096, Д45 = 0,000, & = 1,000,
М4 = 0,220, М34 = 0,316, Д34 = 0.053, Д3 = 0,947.
Ясно, что угол Д3 не может в одно и то же время иметь ампли-
туду 0,719 и 0,947. Последнюю величину возможно сделать равной
числу 0,719 простым умножением всех чисел, стоящих в двух
последних строках, на отношение — 0,760. Тогда эти строки
будут таковы:
/35 = 0,760, М5 = 0,073, Д45 = 0,000, & = 0.760,
М, =0,168. М34 = 0,237. &4 = 0.040, /З3 = 0,719.
Переходя к зубчатому колесу 3, мы видим, что на него действует
не только собственный момент сил инерции А13 = = 0,051 >
х) Здесь и в последующих формулах опущен множитель 10э в выра-
жениях крутящих моментов. (Прим, перев.}
266
МПОГОНИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
но также и моменты М23 и ТИ34 двух ветвей. Таким образом, на
вход в гребной вал действует момент
Л736 = 0,051 4- 1,682 + 0.237 = 1,970.
Далее,
Ры = 24,01, & = —23,29, Л76 = — 1,970
Остаток оказывается равным 0.
Читателю рекомендуется подобным же образом найти второй
тип колебаний системы, которую в первом приближении можно
рассматривать как состоящую из одного турбинного диска, колеб-
лющегося относительно другого. Это приводит нас к цикличе-
ской частоте <у2 = 1929 и к упругой линии
р} = 1,000, Р, = 0.978, р3 = —2.064,
Рл = —4,87. Р^ = —4,89. pQ = +0.200.
При выполнении расчета по этому методу оказывается, что
последнее получаемое число есть малая разность двух больших
чисел, а это надо считать очень ненадежным в смысле точности.
Вследствие этого pQ вычисляется по уравнению (2.26, стр. 71),
причем считают, что гребной винт и его вал возбуждаются дви-
жением, характеризуемым величинами <у2 = 1929 и /З3 = 2,064,
которые известны с достаточной точностью.
§ 5.6. Исследование крутящего момента
Поскольку крутильные колебания коленчатого вала вызы-
ваются неравномерностью крутящего момента, мы сейчас зай-
мемся изучением свойств этого последнего.
В § 5.2 мы видели, что крутящий момент состоит из двух
частей, одна из которых обусловлена давлением в цилиндре,
а другая — силами инерции
На рис. 5.19, а показан крутящий момент от давления для
четырехтактного дизеля в функции от угла поворота кривошипа.
При четырех мертвых положениях кривошипа в течение двух
оборотов при одном рабочем ходе, момент равен нулю Когда
двигатель работает при неполной нагрузке при уменьшенном
впрыскивании горючего, кривая моментов изменяется только
в той четверти полного цикла, который соответствует воспламене-
нию Пунктирные линии 7 и 2 относятся к случаям отсутствия
нагрузки и к половинной нагрузке. При нулевой нагрузке давле-
ние в течение рабочего хода равно таковому при сжатии, так что,
если даже среднее значение крутящего момента равно нулю,
все же имеется переменный момент с более или менее значительной
амплитудой.
§ 5.6
ИССЛЕДОВАНИЕ КРУТЯЩЕГО MOzMEHTA
267
Можно видеть, что средний момент, соответствующий одному
цилиндру, составляет лишь малую долю наибольшего значения
момента при воспламенении Тот факт, что крутящий момент
оказывается столь неравномерным, является одним из недостатков,
присущих двигателям с возвратно-поступательным движением
Рис. 5.19. Крутящий момент сил давлен ия газа в одном ци-
линдре дизеля и его первые три гармоники.
по сравнению с турбинами, в которых этот момент выражается
горизонтальной прямой
Кривую на рис 5.19,а можно разбить на ряд гармонических
составляющих, как это было объяснено на стр. 33, и в качестве
иллюстрации здесь приведены первые три гармоники. Они известны
) 1 11
под названием гармоник g-roj-ro и 1g-го порядков, поскольку эти
числа показывают полное число синусоидальных волн, соответ-
ствующих одному обороту двигателя. В двухтактных двигателях
и в паровых машинах встречаются гармоники только целых
порядков, и только в четырехтактных двигателях внутреннего
сгорания мы имеем гармоники половинных порядков, обусловлен-
ные тем фактом, что периодичность крутящего момента опреде-
ляется ходом сгорания, т. е. двумя оборотами.
268
M1I0I ОШ1ЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Нетрудно видеть, чти кривые гармоник 1-го и l^-ro порядка,
складываясь, дают положительный результат вблизи ot = 45° и
отрицательный результат вблизи 720°—-45°, тогда как в довольно
широком диапазоне около 360° они почти уничтожаются
Таким образом, при сложении первых трех гармоник полу-
чаются грубые приближения истинной кривой крутящего мо-
мента; однако, чтобы описать эту кривую во всех подробностях,
требуется значительно большее число гармоник.
Наиболее полный и практически полезный гармонический
анализ крутящих моментов выполнен Портером в статье, озаглав-
ленной «Гармонические коэффициенты кривых крутящего момента
двигателей» (Harmonic Coefficients of Engine Torque Curves, Trans-
actions of the A. S. M. E., 1943, page A 3.3). В этой работе, которая
слишком велика для того, чтобы ее приводить здесь, дан анализ
для восьми значительно отличающихся друг от друга типов
двигателей (тихоходных и быстроходных двигателей, дизелей
и карбюраторных двигателей, двухтактных и четырехтактных
двигателей). Вследствие этого один из таких типовых двигателей
Таблица 5.6
Среднее индикаторное давление
(С. U D. = М. I Р = 140 фу нт! дюйм2 —
— 9,85 кГ см2)
Гармо-
ника •Л} %
0 — 22,2 22,2
‘/г — — 47,7
1 47,5 (20,1) 51,6
I1/, — — 49,6
2 42,3 (—4,1) 42,5
21/, — — 34,9
3 27,5 (—8,3) 28,7
з1/. — — 23,4
всегда достаточно
близко подойдет к
изучаемому конкрет-
ному двигателю.
Система гармо-
ник, наиболее близко
подходящих к гармо-
никам нашего легкого
быстроходного ди-
зеля средних разме-
ров (стр. 254),обозна-
чена Портером, как
система Р2. Наиболее
существенные числа
из его таблицы при-
ведены в таблице 5.6,
причем числа даны с
точностью до трех
знаков. Последний столбец, дающий ]/а2 + Ь2, продолжен в виде
таблицы 5.7 Ч.
х) Таблицы 5.6 и 5.7, восходящие к цитированной выше работе Пор-
тера, воспроизведены здесь с оригинала, и следовательно, коэффициенты
а и 5 выражены в английских мерах Однако далее производится деление
на коэффициент нулевой гармоники: получаются безразмерные величины,
для которых система единиц уже не имеет значения. Такова следующая
таблица 5.8, а такж€ рис. 5.19. (Прим, перев.)
« 5.6
ИССЛЕДОВАНИИ КРУТЯЩЕГО МОМЕНТА
269
Таблица 5.7
Гармоника 4 4х/я 5 5'/« 6 61/» 7 7х/2 8 зЧв о
М + Ь? 18,4 14,0 10,8 8,4 6,3 4.5 3,2 2,3 1.7 1,0 0,6
В оригинальной таблице лапы все коэффициенты ап и Ьп раз-
дельно до восемнадцатой гармоники включительно для восьми
различных значений среднего индикаторного давления с точностью
до пяти знаков, что более чем достаточно для практики.
Коэффициент ап есть n-я составляющая, начинающаяся, как
синусоидальная волна, из верхней мертвой точки; Ьп есть п-я
составляющая, начинающаяся, как косинусоидальная волна;
]/а2 + б2 есть полная гармоника, начинающаяся при некотором
фазовом угле. Все числа представляют собою давления, выра-
женные в фунтах на квадратный дюйм. Чтобы получить соответ-
ствующую гармонику крутящего момента для одного цилиндра,
необходимо 91 и числа умножить на площадь поршня и па радиус
кривошипа. Однако мы можем избежать эюй операции, приняв
во внимание нулевой коэффициент Ъо, выражающий среднее или
установившееся значение крутящего момента. Тогда можно каж-
дую гармонику крутящего момента выразить, как некоторую
долю (могущую быть больше единицы) этого установившегося
среднего значения. Практически нам необходимо иметь полное
значение составляющей момента У а2 4- b;v и мы в большинстве
случаев можем не обращать внимания на разложение полной
гармоники на синусоидальную и косинусоидальную составляющие.
Это разложение необходимо лишь для гармоник 7, 2, 3, поскольку
уравнение (5.15) на стр. 242 определяет значение крутящего
момента, имеющего эти гармоники. Чтобы сложить крутящие
моменты, обусловленные давлением газа и силами инерции, мы
должны знать разности их фаз. Из уравнения (5.15) видим, что
мы должны синусоидальную составляющую момента давлений
сложить с инерционным моментом и полученную сумму скомби-
нировать по формуле |/а2 + с косинусоидальной составляющей
момента давлений. Между прочим, важно отметить, что средний
член в правой части уравнения (5.15) отрицательный, тогда как
момент давлений положителен. Таким образом, вторая гармоника
момента давлений всегда противодействует второй гармонике
инерционного момента, и когда машина попадает в резонанс по
второй гармонике, то при малой нагрузке это не так плохо, как
при полной.
Разделим теперь величины + Ъ2 в предыдущей таблице на
= 22,2. Мы получим, таким образом, значения рп отклонений
270
M1IOI О ЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Таблица 5.8
и Ч, । 14, 24, 3 34, 4 44,
р 2.16 2,32 2,23 1,91 1,57 1,28 1,05 0,82 0.63
п 5 5»/2 6 61/, 7 71/, 8 81/ 9
р 0,48 0.38 0,28 0,20 0,14 0,10 0,08 0,05 0,04
полных амплитуд n-х гармоник крутящего момента к его среднему
установившемуся значению.
Мы получили то, что желали. Из этой таблицы видно, что
наибольшие значения первых трех гармоник мсмента давления
более чем вдвое превосходят его установившиеся значения.
Отсюда видно также, что интенсивность возмущающего момента
уменьшается по мере повышения порядка и, что. когда мы при-
ходим к восемнадцатой гармонике (п — 9). соответствующая
составляющая оказывается пренебрежимо малой.
Значения р в приведенной таблице, строго говоря, удовлет-
ворительны лишь для расчета при полной нагрузке, что же ка-
сается уменьшенных нагрузок, то для них следует пользоваться
соответствующими числами из таблицы Портера для меньших
средних индикаторных давлений. Тем не менее, по-видимому,
можно считать, что указанные в таблице числа ориентировочно
не зависят от нагрузки. Другими словами, если машина работает
па полную мощность, то возмущение 6-го порядка составляет
28% от всего крутящего момента при полной мощности; если же
машина работает вхолостую, то возмущение 6-го порядка состав-
ляет, грубо говоря, те же 28% от момента при полней мощности,
или, может быть, немного меньше. Приведенный расчет величин
р необходим для полной мощности, но он приблизительно верен
и для других мощностей Это обстоятельство помогает нам из-
бежать осложнений Единственное исключение из этого правила
делается для 1-го, 2-го и 3-го порядков, что связано с инерцион-
ным крутящим моментом
В судовых двигательных установках не только дизели спо-
собны вызвать их колебания Гребней винт, имея обычно три
или четыре лопасти, испытывает неравномернее действие реак-
тивного крутящего момента от воды Всякий раз, когда лопасть
проходит около кронштейна руля или около какого-нибудь дру-
гого препятствия, это препятствие оказывает влияние на псле
давления и тем самым изменяет крутящий момент Таким обра-
зом, возникают флуктуации крутящего момента с частотой про-
хождений лопастей. Что касается интенсивности этих изменений,
$ 5.7
РАБОТА, СОВЕРШАЕМАЯ КРУТЯЩИМ МОМЕНТОМ
271
то по последним данным они составляют около 7.5% от среднего
значения крутящего момента винта; при этом вычисленные ампли-
туды крутильных колебаний находятся в хорошем соответствии
с замеренными амплитудами на достаточно большом числе судов.
§ 5.7. Работа, совершаемая крутящим моментом
при колебаниях коленчатого вала
Предположим, что коленчатый вал находится в состоянии
крутильных колебаний, налагаемых на его основное вращательное
движение. Если одна из гармоник крутящего момента цилиндра
имеет гу же самую частоту, что и колебательное движение, то
момент производит работу при 'этом движении. Совершаемая
таким образом работа может быть положительной, отрицательной
или равной нулю в зависимости от фазовых соотношений.
Вообще говоря, каждая гармоника крутящего момента вызы-
вает в системе вынужденные крутильные колебания со своей
собственной частотой, так что движение вала вызывается столь-
кими гармониками, сколько их имеется в крутящем моменте.
Однако почти все эти гармоники имеют частоты, столь удаленные
от собственной частоты, что соответствующие амплитуды коле-
баний пренебрежимо малы. Если только частота одной из гар-
моник крутящего момента совпадает с одной из собственных
частот, то реакция системы становится заметной, и амплитуда
колебаний может сделаться большой. «Критические скорости»
машины, при которых может наступить такой резонанс, очень
многочисленны
Так, например, дизель-генераторная установка, описанная на
стр. 255. имеет наинизшую собственную частоту о = 556 рад/сек,
или 5420 колеб/мин Допустим, что машина вращается со скоростью
10 480 об/мин Поскольку здесь имеется четырехтактный двига-
тель, он будет давать в этом случае 5420 вспышек в минуту, т е.
будет находиться как раз в резонансе Таким образом, одному
обороту соответствует половина периода колебания, а поэтому
скорость 10 480 об/мин мы называем первой критической скоро-
стью (критической скоростью первого типа или первой степени)
1/2-го порядка Подобно этому при скорости 2710 об/мин могут
иметь место колебания с частотой 5420 колеб/мин, которые воз-
буждаются второй гармоникой кривой крутящего момента.
Скорость в 27\0 об/мин называется первой критической скоростью
п 5420
2-го порядка, иначе говоря, скорость колеб/мин есть крити-
ческая скорость n-го порядка Во втором типе колебаний при
частоте 10 850 колеб/мин критическая скорость n-го порядка есть
10 850 рг « г пл
----. Два спектра критических скоростей показаны на рис. 5.20.
272
МНОГОИИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Критические скорости, исследованные таким образом, в боль-
шинстве своем не опасны, поскольку для них очень мала работа,
затрачиваемая крутящим моментом Амплитуда соответствую-
щих колебаний возрастает до тех пор, пока работа момента не
сделается равной работе, рассеиваемой i
5^20кол/мин 6 31/г 3 gi/2
Dl------------1 i, l l- l- .1—L-t-J---
moo гооо
10850кпл/мин 9 8 6 4'/г
Ог______________, 1111 ri_Lj,.... I_L_
при затухании, как
2
—I----1 об/мин
3600
, *
---------------------------1 -| об/мин
1000 /000--------3000
Рис. 5.20. Спектры критических скоростей первых двух типов
колебаний дизель-генераторной установки, описанной на
стр. 255.
показано на рис 2.23 (стр. 80) Нашей задачей сейчас является
вычисление работы, поглощаемой системой при различных кри-
тических скоростях, для оценки их относительной опасности.
Рассмотрение вопроса о рассеянии энергии при затухании отло-
жим до следующего параграфа.
Работа, совершаемая за цикл одним тг-м цилиндром, равна
зт Mn fin sin (рп, где Мп есть гармоника крутящего момента, —-
амплитуда крутильных колебаний и (рп — разность фаз колебаний
момента (см. стр. 29) Посмотрим теперь, как эти величины
изменяются от одного цилиндра к другому. Гармоника момента
Рис.5.21. Гармоника крутящего момента AJ и амплитуда колебаний £ для ци-
линдров 1,2,3. Диаграмма сохраняет свою силу для гармоник любого
порядка, причем индексы при М обозначают номера цилиндров (а не поря-
док гармоник).
Мп имеет все время одинаковую амплитуду, но разные фазы для
различных цилиндров, поскольку мы предполагаем, что во всех
цилиндрах воспламенение происходит с одинаковой интенсив-
ностью. но. естественно, в разное Время. С другой стороны, угло-
вое перемещение меняется по величине от цилиндра к цилиндру
§ 5.7
РАБОТА, СОВЕРШАЕМАЯ КРУТЯЩИМ МОМЕНТОМ
273
в соответствии с рис. 5.16, но оно всюду имеет одну и ту же фазу,
так как все диски достигают наибольшего отклонения (или пере-
ходят через нуль) одновременно. Вследствие этого фазовый угол
<рп изменяется от одного цилиндра к другому. Это условно пока-
зано на рис. 5.21, где вектор, обозначенный двойной линией,
отображает гармонику момента, тогда как вектор, обозначенный
простой линией, отображает угловое отклонение при колебании.
Рис. 5.22. Работа, совершаемая всеми цилиндрами, находится посредством
сложения работ отдельно взятых цилиндров.
При этом надо брать горизонтальные проекции векторов. Скорость
вращения всех векторных диаграмм есть со, т. е. она равна цик-
лической частоте колебаний. Это не есть угловая скорость колен-
чатого вала, которая в т раз меньше о для критической скорости
m-го порядка.
Так как работа, совершаемая тг-м цилиндром, равна кМпрп$гпсрп,
то она не изменится, если, как это сделано на рис. 5.22, направ-
ление всех векторов, изображающих моменты и перемещения,
поменять на каждой диаграмме местами. Таким образом, будем
теперь рассматривать фиктивный случай, когда все моменты
для различных цилиндров оказываются в одной фазе, тогда как
фазы перемещений различны. Такое представление удобно для
сложения работ, совершаемых каждым, отдельно взятым, цилинд-
ром. Горизонтальная проекция вектора /Зп па рис. 5.22, а есть
Зпя1п<рл, вследствие чего работа, совершаемая одним цилиндром,
равна этой проекции, умноженной на пМп. Таким образом,
работа всех цилиндров равна увеличенной в раз горизон-
тальной проекции результирующего вектора., полученного сложе-
нием всех векторов /3, как показано на рис. 5.22,6. Здесь уже ока-
зывается некоторый фазовый угол ук зависящий от начального
угла первого кривошипа.
Угол или у) неизвестен, и его точное определение не входит
в нашу задачу. Тем не менее мы можем утверждать, что при
резонансе угол у) должен быть равен 90°, что можно объяснить
следующим образом. В момент резонанса амплитуда (рассматри-
ваемая как функция частоты) есть максимум, а потому и работа,
рассеиваемая вследствие затухания, также есть максимум. Но
эта работа соответствует рис. 5.22, б. Таким образом, фазовый
угол ^должен быть таков, чтобы совершаемая работа имела наи-
18 Ден Гартог - 2074
274
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
большее значение, т. е. этот угол должен равняться 90°. Теперь
мы для определения совершаемой работы уже не нуждаемся в
векторах, изображенных на рис. 5.22 двойными линиями. Для
этого нам необходимо просто построить пучок векторов с фазами
моментов но с амплитудами угловых перемещений fin. Вектор-
ная сумма этого пучка, численно умноженная на лМП) выражает
работу, совершаемую всеми цилиндрами одного ряда за один
период колебаний.
Для однорядных двигателей вопрос этим исчерпывается.
Однако для V-образных двигателей с двумя рядами цилиндров,
а также для W-образных или Х-образных с тремя или четырьмя
рядами дело несколько осложняется. Все ряды цилиндров дей-
ствуют на один и тот же коленчатый вал, и обычно цилиндры
каждого ряда имеют один и тот же порядок вспышек. Рассмотрим
V-образный двигатель с 7-углом между двумя рядами av. В
каком-либо цилиндре, пусть это будет в цилиндре № 1, вспышка
происходит, когда его кривошип находится в верхней мертвой
точке. Затем, когда кривошип повернется на угол av, он окажется
в верхней мертвой точке 1-го цилиндра другого ряда, в котором
тогда также произойдет вспышка.
Промежуток времени между вспышками в двух цилиндрах с
одним и тем же номером равен ccv/2ct части от времени полного
оборота. Для колебания n-го порядка (я = 1, 1 Va и т. д.)
за один оборот имеют место п колебаний. Таким образом, время
между вспышками в двух цилиндрах одного номера (на одном и том
же кривошипе) есть время av!2n оборота или время количества
пау/2тс периодов колебаний.
Предположим, что угол nav равен 360° или есть кратное
этого числа. Тогда вспышки в обоих рядах происходят в одной
и той же фазе колебаний, и, таким образом, оба ряда усиливают
друг друга. Работа, совершаемая двумя рядами, равна удвоенной
работе одного ряда, или, как говорят, 7-фактор равен 2. С другой
стороны, если пау равно 180°, то тогда вспышки в цилиндрах
первого ряда происходят, когда вал закручивается по направле-
нию вперед, а вспышки в цилиндрах второго ряда, когда вал
закручивается назад (конечно, здесь речь идет об n-й гармонике),
и работа одного ряда равна и противоположна по знаку работе
другого ряда: 7-фактор равен нулю. Обобщая эти рассуждения,
мы можем сказать, что 7-фактор есть векторная сумма двух
векторов единичной длины (за единицу принимается полная
работа одного ряда для колебаний я-го порядка) с углом nav
между ними (рис. 5.23). Таким образом,
7-фактор = 2 cos ртр] • (5.27)
Рассмотрим случай дизель-генератора на стр. 255 с углами криво-
шипов 0°, 180°, 180°, 0° и порядком вспышек 1, 3, 4, 2. Строим
?5 5.7
РАБОТА, СОВЕРШАЕМАЯ КРУТЯЩИМ МОМЕНТОМ
275
звездообразную векторную диаграмму (рис. 5.22,6) для разлив
ных порядков колебаний, принимая во внимание прежде всего,
только фазовые углы и не обращая вни-
мания на длины векторов.
При критической скорости 1/2-го по-
рядка, т. е. когда в течение одного оборота
совершается пол колебания, коленчатый
вал совершает полный оборот, в то время
как вектор колебания поворачивается
только на 180° или, пока коленчатый вал
поворачивается на 180°, вектор колебания
в промежутке между двумя последова-
тельными вспышками поворачивается всего
лишь на 90°. Это представлено на
рис. 5.24, а. Происходит вспышка в ци-
линдре 1. По истечении четверти оборота
диаграммы, т. е. половины оборота вала,
вектор цилиндра 3 оказывается в верх-
ней точке, и в этот момент происходит
Репетирующий
вентор
Рис. 5.23. Векторная диа-
грамма для определения
F-фактора двигателя.
и В2 — векторы рав-
ной длины, каждый из
вспышка и т. д.
Рассмотрим прежде всего колебания
первого порядка, а именно 1 колебание
в минуту. Вращение векторной диаграммы
таково же, как и вращение коленчатого
вала, а потому рис. 5.24, б есть диаграмма
также для вала.
Колебанию РД-го порядка соответ-
ствует векторная диаграмма, враща-
ющаяся в Р/2 раза быстрее коленчатого
которых представляет
полный крутящий мо-
мент 72-ГО порядка од-
ного ряда цилиндров,
с углом пау между
ними. Результирующий
вектор есть суммарный
крутящий момент
порядка. F-фактор
вен 2 cos
' nay
2
72-ГО
pa-
вала, с углами Р/г* 180° = 270° между последовательными^ век-
Рис. 5.24. Формы векторных диаграмм для различных порядков колебаний.
Пока длины векторов не принимаются во внимание.
торами (рис. 5.24, в). Наконец, колебанию 2-го порядка соот-
ветствует угол 2 *180° = 360° между векторами. Все стрелки
18*
276
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
направлены в одну сторону. Колебаниям 272-го порядка соот-
ветствует угол 2% • 180° = 360° + 90° между векторами, т. е.
то же самое, что 90° или ‘/2-й порядок и т. д. Таким образом,
диаграмма на рис. 5.24 представляет собою все возможные диа-
граммы для всех порядков колебаний; при этом из приведенных
четырех диаграмм две имеют одинаковый вид, а именно: диаграммы
10,332
0,032
.,0,570
\О,ОЗ<.
0,325
0,704 '
0,570
5=3,03
0,325
2=0,33
0,704-
10,570
Лор. ’/г,/'/г,2’/г1/тв.
5=0,03
\ 0,704
0,326
Лор. 7,3,5...
Лор. 2,5.,
Рис. 5.25. Полные звездообразные диаграммы (определение величины и
направления векторов) для одного ряда цилиндров двигателя, приведен-
ного для одного ряда на стр. 255, построенные для первого типа собствен-
ных колебаний. Длины векторов взяты из таблицы Гольцера 5.3 на стр. 258.
(а) и (&) являются зеркальным отражением одна другой, давая
одинаковые результирующие векторы, но только в противопо-
ложных направлениях. Однако, поскольку мы интересуемся только
=7,47
J 0,773
М73
I
0,775
кО,713-0,670
2^=Жт
\О,270-0,176
273=0,10
Лор. */2,77?., 2г/ги/п.З. Лор. 7,3,5...
Лор. 2,5..
Рис. 5.26. Полные звездообразные диаграммы для одного ряда цилиндров,
построенные для второго типа собственных колебаний (таблица Гольцера
5.5 на стр. 260).
численными значениями векторных сумм, но не их фазами, рисунки
5.24, а и 5.24, Ь в этом смысле оказываются тождественными.
Итак, имеется три различных типа диаграмм:
4-конечные для порядков 72, \г12з 21/2, 37г и т. д.
2-конечные для порядков 1, 3, 5, 7 и т. д.
1-конечные для порядков 2, 4, 6 и т. д.
§ 5.7
РАБОТА, СОВЕРШАЕМАЯ КРУТЯЩИМ МОМЕНТОМ
277
Теперьмыуже можем приступить к построению звездообразных
диаграмм с соблюдением масштаба векторов. На рис. 5.25 выпол-
нено такое построение для первого типа колебаний, а на
рис. 5.26 — для второго или для колебаний двухузлового типа.
Критические скорости 2-го, 4-го и т. д. порядков известны
под названием мажорных критических скоростей, в то время
как прочие называются минорными критическими скоростями.
Отличительное свойство мажорной критической скорости заклю-
чается в том, что все век-
торы на диаграмме имеют
одну и ту же фазу. С физи-
ческой точки зрения, это
означает, что в случае
жесткой машины (когда
коленчатый вал не может
подвер га т ься за кр у чива -
нию) работа при коле-
бании может совершаться
только за счет мажорных
скоростей, так как при
равных амплитудах
результирующий вектор
звездообразной диаграм-
мы, построенной для ми-
норных скоростей, обра-
щается в нуль.
Различие между ма-
жорной и минорной кри-
Рис. 5.27. Первая нормальная упругая кри-
вая для симметричной машины с двумя
очень тяжелыми маховиками.
тическими скоростями во-
все не предполагает того, что первая является более опасной,
чем вторая. В самом деле, для машин с более или менее
симметричной нормальной упругой кривой, подобно показанной
на рис. 5.27, равен нулю как раз результирующий вектор мажор-
ных критических скоростей, тогда как для минорных скоростей
порядков ИД, 472 и т. д. этот результирующий вектор становится
очень большим (рис. 5.24).
Возвращаясь теперь к случаю нашего дизель-генератора, мы
уже имеем все данные для выполнения расчета величины работы,
совершаемой за цикл. Для этой цели воспользуемся рисунком,
5.20 для критических скоростей, рисунками 5.25 и 5.26 для
векторных сумм уравнением (5.27) для И-фактора и табли-
цей 5.8 для интенсивности гармоник или для ^-фактора. Получаем
числовые значения, показанные в таблице 5.9 для первого типа
колебаний и в таблице 5.10 для второго типа
В этих таблицах числа последней строки р¥ 2/3 являются
мерой работы,, совершаемой за цикл. Нам остается только
278
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
Таблица 5.9
Первый тип колебаний
Порядок 2‘/, 3 3»/« 4 41/» 5
Число оборо- тов в минуту 2080 1810 1550 1360 1205 1085
7-фактор .... 0,52 0 0,52 1,00 1,41 1,73
р-фактор .... 1,57 1,28 1,05 0,82 0,63 0,48
£0 0,38 0,03 0,38 3,04 0,38 0,03
pVEfi 0,31 0 0,21 2,50 0,34 0,03
Таблица 5.10
Второй тип колебаний
Порядок 5 5‘/, ь б1/2 7 7>/, 8
тт Число оборотов в м ин у ту . . . 2170 1980 1810 1675 1555 1450. 1360
7-фактор 1,73 1,93 2,00 1,93 1,73 1,41 1,00
р-фактор 0,48 0,37 0,28 0,20 0,14 0,10 0,08
Хр 0,01 1,41 0,19 1,41 0,01 1,41 0,19
pVEfi 0,01 1,00 0,11 0,55 0,00 0,20 0,02
умножить числа pVна тгМср = л • 1820 кГ см, чтобы полу-
чить работу, совершаемую одним циклом при амплитуде вибро-
гасителя ft = 1 радиану. Эта работа приравнивается энергии,
рассеиваемой в системе, которая будет вычислена в ближайших
двух параграфах. Тем не менее, числа pVj£p достаточно хорошо
определяют относительные величины колебаний различных поряд-
ков. Мы видим, что среди критических скоростей первого типа
скорость 4-го порядка в 1360 об/мин является наиболее опасной.
Среди скоростей второго типа наихудшей является скорость
5У2-го порядка, равная 1980 об/мин.
§ 5.8. Затухание при крутильных колебаниях. Затухание
колебаний гребного винта
Работа, совершаемая газом и инерционными парами при
установившихся колебаниях с постоянными амплитудами в точ-
ности компенсируется рассеиванием энергии в системе1). В неко-
х) В сущности говоря, здесь нужно иметь в виду работу сил давления
газов, так как работа инерционных сил и инерционных пар получается
как промежуточный фактор аккумулирования механической энергии.
(Прим, перев.)
§ 5.8
ЗАТУХАНИЕ ПРИ КРУТИЛЬНЫХ КОЛЕБАНИЯХ
279
торых случаях бывает нетрудно найти место, где происходит это
рассеяние, например в случаях, когда система содержит демпфер
сухого трения или приводит в движение гидравлический насос
или гребной винт, или, наконец, имеет скользящее сцепление или
другое соединение. Однако, если таких очевидных мест рассеяния
энергии в силовой установке указать нельзя, то вопрос об утечке
энергии становится как бы окруженным какой-то таинствен-
ностью.
Литература, касающаяся этого вопроса, восходит к 1920 г.
Делались попытки объяснить рассеяние энергии внутренним тре-
нием в приводных валах, называемым иногда «внутренним гисте-
резисом» Произведенные измерения гистерезиса стали дали
исключительно низкие значения, далеко не могущие объяснить
рассеяние в реальных установках. Однако до последних лет
было принято делать тщательные вычисления рассеяния вследствие
гистерезиса в валах и умножать найденный результат на некото-
рый, достаточно большой, найденный эмпирически множитель.
Это приводит к разумной оценке действительно наблюдаемой
амплитуды, которая никогда не была больше ее удвоенного
вычисленного значения или меньше половины этого значения.
Нелепость или нецелесообразность этой процедуры произвела
впечатление на автора, когда он однажды был на нефтеналивном
дизельном танкере, на котором вычисленные таким образом
амплитуды крутильных колебаний оказывались опасными вслед-
ствие своей большой величины, тогда как, будучи замерены, они
были вдвое меньше вычисленных. При выполнении измерений
пришлось пройти весь корабль и, когда дошли до якорной цепи,
которая была удалена от двигателя почти на всю длину корабля,
было обнаружено, что одно из звеньев якорной цепи, лежавшей
на стальной палубе, вибрировало. Вибрацию можно было и
видеть, и слышать. Контроль с помощью секундомера показал,
что эти колебания происходили, без сомнения, с частотой крутиль-
ных колебаний двигателя. В этом случае крутильные колебания
оказались совпавшими с собственными изгибными колебаниями
всего судна, как бруса, и возбуждали эти последние. После того
как, согласно наблюдениям, было установлено, что часть энер-
гии, сообщаемая крутящим моментам от давлений газа, рассеи-
вается в якорной цепи на расстоянии около 150 м, автор этой
книги никогда больше не подсчитывал потери вследствие гистере-
зиса с умножением их на эмпирический множитель.
Положение вещей в настоящее время таково, что и при отсут-
ствии определенных гасителей, гребных винтов, насосов или
скользящих сцеплений затухание в системе обусловливается це-
лым рядом причин, часто неуловимых, могущих быть достаточно
сложными и различающимися от установки к установке. Посколь-
ку мы не знаем всех подробностей по этому поводу, приходится
280
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ V
полагаться па статистику. Ф. М. Льюис исследовал большое
количество подобных двигателей, вычислив для каждого из них
величину рУУ^М^ (стр. 278) в соответствии с типом и поряд-
ком колебаний.
Здесь Мср есть среднее значение крутящего момента для одного
цилиндра при полной мощности двигателя (в нашем примере
1820 кГ см), — амплитуда рассматриваемого гармонического
момента и V есть просто число, равное не более чем всему
числу цилиндров двигателя, но иногда очень малое или даже
равное нулю. Оно отображает число цилиндров, действующих
совместно при колебании данного порядка. Вследствие этого
величина рУМсрУ$ называется «возмущающим крутящим мо-
ментом» заданного порядка и заданного типа колебаний. При
резонансе эта величина приводи! к возникновению крутящего
момента вала в месте наибольшего момента вдоль вала, т. е. в
месте наибольшего наклона кривой на диаграмме 5.16. Она во
много раз превосходит крутящий момент. Сравнивая действитель-
ные значения момента вала 2Ивал при резонансе с вычисленным
значением рУ^$Мср возмущающего момента, замеренные на
большом числе двигателей, Льюис нашел, что резонансное уве-
личение колеблется от 25 до 100. Обычно оно принимается рав-
ным 50.
Отсюда мы получаем закон, выражаемый формулой
Мвалиаиб = 50 рК^Жрхннл > (5.28)
причем мы должны помнить, что в исключительных случаях,
если затухание чрезвычайно мало, множитель 50 может увели-
чиваться до 100. Таким образом, закон относится только к уста-
новкам без очевидных гасителей. В нашем примере с дизель-
генератором имеется вязкий демпфер на свободном конце двига-
теля, и мы позднее увидим (см. стр. 290), что наибольший крутя-
щий момент на валу только в пять, а не в 50 раз превосходит воз-
мущающий момент. Наша система не могла бы работать без
демпфера, так как при работе без демпфера на критической
скорости первого типа 4-го порядка вал очень быстро сломался
бы вследствие усталости.
В судовых двигателях обычно играет большую роль зату-
хание, вызванное действием воды на гребной винт.
Момент инерции судового двигателя установки обычно бывает
значительно больше, чем момент инерции гребного винта, вслед-
ствие чего амплитуда первого главного колебания винта очень
велика по сравнению с амплитудой подвижных частей двигателя.
Момент сил сопротивления оказывается противоположным по
фазе угловой скорости. При свободных колебаниях первого типа,
наложенных на установившееся вращение двигателя, скорость
§ 5.8
ЗАТУХАНИЕ ПРИ КРУТИЛЬНЫХ КОЛЕБАНИЯХ
281
винта бывает попеременно то больше, то меньше его номиналь-
ной скорости. Так как момент сил сопротивления окружающей
воды возрастает вместе со скоростью, то он всегда оказывает
положительное затухающее действие, что может быть объяснено
следующим образом. Пусть в течение половины периода угловая
скорость винта больше ее среднего значения Qp и равна Qp +
+ dQp; тогда момент сил сопротивления тоже может быть больше
своего среднего значения Мр на некоторую величину dMp и,
следовательно, будет равен Мр +dMp. Вследствие этого избыток
dMp момента будет замедлять движение винта, т. е. момент dMp
‘будет иметь направление, противоположное направлению из-
бытка угловой скорости dQp. Напротив того, в течение той поло-
вины периода, когда скорость винта меньше ее среднего значения
и равна разности Qp — dQp, момент сил сопротивления будет
равен разности Мр—dMp\ отрицательный избыток —dMp будет
вызывать ускорение. Но ведь в этом случае отрицательный избыток
скорости —dQp направлен также против скорости вращения £2Р,
т. е. опять против направления избыточного момента. Если для
этих малых изменений момента и скорости мы примем линейную
зависимость между моментом и скоростью, то коэффициент зату-
хания с, представляющий собою величину момента сил сопротив-
ления, отнесенного к единице угловой скорости, выразится
формулой
с - d™J>
“ dQp *
Согласно уравнению (2.30, стр. 79), работа рассеяния за один
период равна
IF = » (5.29)
где рр есть амплитуда колебаний гребного винта. Если эта ампли-
туда удваивается, то должна удвоиться также работа, производи-
мая цилиндром за один период, поскольку изменение амплитуды
колебаний на величину крутящего момента не влияет. В то же
время, как это видно из уравнения (5.29), при том же удвоении
амплитуды величина рассеянной энергии учетверяется. Таким
образом, мы можем прийти к заключению, что существует какая-
го определенная амплитуда, при которой поступление
ние энергии уравновешивают друг друга (рис. 2.23.
, • о dMD
Сспчас нам надо лишь наити значение
На рис. 5.28 дано соотношение между крутящим
и рассея-
стр. 80).
моментом
и скоростью винта при установившемся режиме. Кривая пред-
сгавляет собою обыкновенную параболу или некоторую другую
кривую, более крутую, выражающуюся уравнением Мр = Q”9
282
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
где величина показателя степени п заключается между 2 и 3.
Эта кривая может быть легко получена экспериментальным путем
для каждого судна посредством измерения вращающего момента
(по индикаторной диаграмме) и числа оборотов в минуту вала
для достаточно большого количества различных скоростей. Однако
наклон этой кривой
еще
5.28.
Рис.
судового
Углявая
винта
Характеристика
гребного винта.
не дает нам интересующую нас постоян-
ную затухания (коэффициент затуха-
ния с), так как на этой кривой ско-
рость судна возрастает вместе с числом
оборотов вала в минуту, тогда как при
быстрых изменениях Qp во время кру-
тильных колебаний скорость корабля
остается постоянной. Ниже, в разделе,
набранном мелким шрифтом, будет по-
казано, что при определенных значе-
ниях момента и скорости (например,
точка Р на рис. 5.28) наклон при
постоянной скорости судна оказывается
значительно больше, чем наклон кри-
режиме. Пунктирная линия, проходя-
вой при
щая через точку Р, определяет собою кривую, когда скорость
корабля остается постоянной, причем обычно
наклон пунктирной линии в точке вдвое
сплошной линии, считая наклон по тангенсу.
установившемся
принимается, что
больше наклона
Рассмотрим элемент лопасти гребного винта, вырезанный двумя
цилиндрическими поверхностями радиусов т и г + dr, оси Которых со-
впадают с осью гребного вала. Полученное таким образом сечение винта
Рис. 5.29. а) Направление потока воды и б) направление
силы, действующей на элемент лопасти винта.
напоминает нам сечение крыла самолета. Пусть эта лопасть перемеща-
ется вперед (рис. 5.29, а) со скоростью корабля V, имея, кроме того, скорость
Qpr, направленную по касательной. Вода будет натекать на эту лопасть
§ 5.8 ЗАТУХАНИЕ ПРИ КРУТИЛЬНЫХ КОЛЕБАНИЯХ 283
с относительной скоростью 7г, на нашем рисунке со стороны левого верх-
него угла. Винт конструируется таким образом, что направление этой
скорости образует с главным направлением сечения лопасти малый угол
а (угол атаки). Вследствие этого возникает аэродинамическая подъемная
сила L, приложенная к лопасти перпендикулярно к направлению потока
(рис. 5.29, б). Кроме того, получается еще небольшая сила лобового со-
противления в направлении потока, которою мы здесь пренебрежем.
Подъемная сила L может быть разложена на две составляющие Т и R:
сила Т является упорным давлением винта, а сила R — реакцией, вызы-
вающей реактивный момент Rr вокруг оси вала. Все силы Т, действующие
на отдельные элементы различных лопастей винта, в результате сложения
дадут сумму, равную полному упорному давлению гребного винта. Что
же касается суммы всех моментов Rr, то она будет равна и противопо-
ложна полному крутящему моменту двигателя при установившемся ре-
жиме.
Представим себе, что угловая скорость Qp винта подвергается пери-
одическим изменениям, в то время как скорость V судна остается посто-
янной. Тогда на рис. 5.29, а длина вектора Qpr должна меняться, а следо-
вательно изменяться будет и угол атаки а. Все это влечет за собою из-
менения подъемной силы L и момента Rr. Пусть величина Qp настолько
уменьшилась, что угол а, а вместе с ним подъемная сила L и момент Rr
обратились в нуль. Тогда обращается в нуль также крутящий момент
на оси гребного вала, так как в этом случае гребной винт свободно ввин-
чивается в воду, играющую, таким образом, роль обыкновенной гайки.
Скорости поступательного движения и вращения увязывают друг с другом
так, чтобы такое ввинчивание имело место без затраты усилия. В обыч-
ных конструкциях угол лопасти arctg изменяется между 20° и 80°
вдоль лопасти, в то время как величина угла атаки а колеблется около 5°.
На основании сказанного мы видим, что уменьшение Qp на 10 или 20%
бывает достаточно, чтобы обратить в нуль крутящий момент. Последнее
условие отмечено на рис. 5.28 точкой Q.
В наших рассуждениях мы мысленно предполагали, что скорость
изменения dQp/dt не оказывает влияния на само явление, иначе говоря,
мы вели наши рассуждения в предположении, что на рис. 5.29,а поток
является установившимся для любого значения отношения Qpr/V. В тех
случаях, когда изменения Qp происходят медленно, такая последователь-
ность установившихся потоков практически дает то же самое, что и дей-
ствительный поток. Однако для быстрых изменений (dQpldt велико) это
исследование становится вообще неприменимым. Заметим, что вполне
удовлетворительной теории затухания для гребного винта не существует
до настоящего времени; в тех же случаях, имеющих, кстати сказать,
важное значение, когда частота велика, только эксперименты на модели
могут дать достаточно надежные указания на явление.
В тех силовых установках, в которых либо гребной винт
не дает достаточного затухания, либо отсутствует передаточный
механизм, обеспечивающий по самой своей конструкции затуха-
ние, либо вообще нет каких-либо иных видимых источников
затухания, критической скорости будут соответствовать довольно
большие значения работы за цикл. Такие значения работы поме-
щены в последней строке таблицы на стр. 278. Это неизбежно
приведет к возникновению столь больших амплитуд, что колен-
чатый или приводной вал смогут разрушиться от усталости
материала. Чтобы предотвратить разрушение, мы можем восполь-
зоваться одним из нижеследующих мероприятий:
284
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
1. В случае машины, работающей на постоянном скоростном
режиме, что, например, имеет место при синхронной электриче-
ской передаче, можно путем изменения упругих свойств вала
или инерции масс отодвинуть эксплуатационную скорость доста-
точно далеко от наиболее важной критической.
2. Если машина работает на небольшом диапазоне скоростей,
предыдущая мера обычно оказывается достаточной Если же она
нас все-таки не удовлетворяет, то мы можем повлиять на относи-
тельную степень опасности минорных критических скоростей
путем изменения порядка воспламенения газа в цилиндрах.
Все это изложено на стр. 301.
3. Наконец, в случае работы машины на очень большом диа-
пазоне скоростей, как, например, в тепловозных и теплоходных
двигателях, избежать всех опасностей от крутильных колебаний
посредством двух предыдущих мероприятий довольно трудно,
а иной раз даже невозможно. В этом случае должен быть приме-
нен тот или другой вид искусственного поглотителя колебаний.
Три таких прибора, а именно: фрикционный демпфер Ланчестера,
центробежный маятник, описанный на стр 134, и гидравличе-
скую муфту, или так называемый «жидкий маховик», мы рассмот-
рим дальше.
§ 5.9. Поглотители и другие приспособления для успокоения
крутильных колебаний
Одним из наиболее ранних эффективных поглотителей или
демпферов был демпфер, изобретенный Ланчестером, который
состоит из двух дисков а, могущих свободно вращаться в под-
шипниках Ъ, насаженных на вал. Между ними имеется дисковая
втулка Л, заклиненная на валу. Эта втулка Л несет на своих поверх-
ностях тормозящие прокладки с, к которым диски а могут при-
жиматься путем подвинчивания пружин s.
Если двигатель, а следовательно и втулка h, совершает равно-
мерное вращение, то трение увлекает диски а вместе с валом,
вследствие чего диски просто увеличивают на небольшую долю
момент инерции двигателя. Однако если втулка совершает кру-
тильные колебания, то движение дисков уже должно зависеть
от величины трения между ними и втулкой. Когда момент сил
трения очень мал, диски вращаются равномерно, причем в этом
случае имеет место относительное скольжение между втулкой и
дисками, амплитуда которого равняется амплитуде колебаний
втулки. Таким образом, вследствие того, что момент трения
почти равен нулю, лишь очень небольшая доля работы переходит
в тепло. С другой стороны, в случае очень большого момента
рения диски птрижимаются к втулке и следуют за ее движением.
Тогда уже нет никакого скольжения, а поэтому нет и рассеяния
$ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
285
энергии. Между этими двумя крайними состояниями имеются
вообще как скольжение, так и момент трения, вследствие чего
происходит рассеяние энергии. Очевидно, должно существовать
какое-то оптимальное значение момента трения, при котором
рассеяние энергии наибольшее, как это показано на рис. 5.31.
Рис. 5.30. Демпфер Лан честера.
В демпфере Ланчестера ста-
рого типа использовано кулоново
или сухое трение между сталью
и специальной асбестовой про-
кладкой. Коэффициент трения та-
кой системы в значительной мере
Рис. 5.31. Рассеяние энергии в демпфере
Ланчестера как функция момента
трен ия.
зависит от степени загрязнения маслом, что трудно избежать,
поскольку демпфер располагается на конце коленчатого вала.
Для большей уверенности в характере тре-
ния в приборе сухое трение может быть заме-
нено вязким сопротивлением. В настоящее время
появилось много работоспособных демпферов
различных размеров, примером которых может
служить демпфер Гауда (Houde), изготовленный
фирмой Houdaille-Hersey Corporation. Этот дем-
пфер изображен на рис. 5.32. ЗдесьЯестьвтулка,
снабженная изнутри пазом, причем так, чтобы
она могла быть легко насажена на конец вала.
А есть маховик, который благодаря бронзо-
вому кольцу В может свободно вращаться на
втулке; С — кожух, приваренный к втулке Н.
Зазор между маховиком А и кожухом С
очень мал, однако он всегда имеется. Этот
?азор герметичен и весь заполнен жидкостью.
Здесь берется не масло, а жидкий препарат
кремния, имеющий вязкость такую же, что
Рис. 5.32. Вязкий
демпфер Ланчесте-
ра системы Г аула.
и масло, но не столь резко изменяющуюся
температурой, как вязкость масла. Вращательное движение А
286
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
относительно С и Н связано с крутящим моментом от вяз-
кого сопротивления, так что по существу демпфер действует
аналогично демпферу сухого трения, согласно рис. 5.31. Глав-
нейшие характеристики этого демпфера показаны на рис. 5.34
и 5.35. Первая из них показывает рассеяние энергии за период,
тогда как вторая показывает эффективный момент инерции ма-
ховика А (рис. 5.32) как долю действительного. Обе характе-
ристики построены как функции вязкости жидкости демпфера с.
Займемся теперь выводом этих соотношений. Пусть будут
<ph и cpd — соответственно мгновенные значения углов втулки
и маховика демпфера. Тогда мгновенное значение относительного
угла (или угла проскальзывания через жидкую пленку) оказы-
вается равным
Тг = Th — Td-
Крутящий момент, действующий на маховик демпфера согласно
закону Ньютонаг), равен Idcpd, причем этот момент возникает
вследствие вязкого трения
Рис. 5.33. а) Фазовые соотноше-
ния для движения маховика,
движения втулки и относи-
тельного движения вязкого
демпфера Ланчестера; б) движе-
ние маховика демпфера (или
крутящий момент), разложен-
ное на составляющие в одной
фазе и с разностью фаз в 90° по
отношен ию к движению втулки.
в жидкой пленке, которое создает
момент сфг. Таким образом,
= сФг (5.30)
Если мы предпишем втулке движе-
ние по закону
Th = Th0 sin at,
то получим дифференциальное ура-
внение относительно неизвестного
угла (pd. Это уравнение мы можем
разрешить и решение его интер-
претировать, что удобнее сделать
в векторном представлении, чем
в алгебраической форме. Для
установившегося движения при
некоторой частоте а углы cph и cpd
представляются векторами. Из урав-
нения (5.30) видно, что вектор кру-
тящего момента опережает по фазе вектор cpd на 180° и вектор
(рг на 90°. Следовательно, вектор <рг перпендикулярен вектору
cpd, что и показано на диаграмме (рис. 5.33). Перепишем урав-
нение (5.30) для того момента времени, когда входящие в него
величины достигают своих наибольших значений
Idcoztpd = CGXpr
0 Вернее, его аналога для вращательного движения. (Прим, перев.}
§ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
287
или, на основании рис. 5.33
— ($
Разрешая это уравнение относительно координаты маховика
демпфера (pd, находим
(5.31)
Отсюда мы устанавливаем тот физический факт, что при с = О
оказывается (pd = 0, тогда как для с = оо имеем yd = (ph.
Итак, наибольший крутящий момент, передаваемый втулкой
маховику демпфера, есть Id(p2<Pd-
Чтобы найти работу, совершаемую за цикл этим моментом,
мы должны найти движение, которое отличается от него по фазе
на 90°. Поскольку согласно уравнению (5.21) этот момент может
рассматриваться как крутящий момент вязкого сопротивления,
указанное движение есть движение относительное. Таким обра-
зом, работа за цикл, т. е. за одно полное колебание, есть
17 = л: (Ida2(pd)(pr = nldo2cpd — tp2d.
Подставляя сюда cpd из формулы (5.31) и производя преобразо-
вания, находим
2с
W = ^Id^-^-—2. (5.32)
1 + Г"
Эта величина представлена на графике рис. 5.34. Дробь,
стоящая здесьв качестве последнего множителя, достигает наиболь-
шего значения, равного единице, при c/ZdtD=l, как это легко
может быть найдено дифференцированием. Таким образом, мы
заключаем, что оптимальное затухание (для максимума рассеи-
вающейся энергии) определяется формулами
^опт “ /(/со, (5.33а)
(5.33b)
Вычислим теперь кажущийся момент инерции маховика
демпфера, т. е. момент инерции, воспринимаемый втулкою1).
г) В оригинале — чувствуемый (felt) втулкою. (Прим, перев.)
288
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
С точки зрения физики ясно, что при с = 0 (затухание отсутствует)
втулка не воспринимает ничего, тогда как при с = оо маховик
как бы затвердевает на втулке, которая воспринимает весь мо-
мент инерции ld. На диаграмме рис. 5.33 крутящий момент,
передаваемый втулке, направлен по одной прямой с углом фа.
Разложим этот момент на составляющие: 1) параллельно движе-
нию втулки и 2) перпендикулярно к нему. Первая из них есть
момент, воспринимаемый втулкою в фазе с ее движением как
инерционный момент. Вторая составляющая отличается на 90°
Рис. 5.34. Работа, рассеиваемая за период демпфером
Гауда или вязким демпфером Ланчестера как функция
момента трения.
по фазе от движения втулки, которая воспринимает ее как жид-
костное трение (вязкое сопротивление). Мы видим, что первая
составляющая равна полному моменту, умноженному на Ф^фь
Тогда эквивалентный инерционный момент (момент сил инерции)
есть
6КвЮ2<Р/, = Ud^CPi),
откуда эквивалентный момент инерции равен
или, согласно уравнению (5.31),
^экв
Id
(5.34)
§ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
289
• Для оптимального затухания с — ld о, откуда получаем
I — - 1
*экв — 2
(5.35)
Последние два результата представлены графически на рис. 5.35.
Таким образом, когда мы начинаем расчет по методу Гольцера
для системы, содержащей демпфер Ланчестера или Гауда, мы
заменяем демпфер моментом инерции, равным моменту инерции
Рис. 5.35. Действие эквивалентного маховика на втулку
плавающего маховика в демпфере Ланчестера или
Гауда в зависимости от момента затухания.
втулки и кожуха, плюс половина момента инерции свободного
маховика. Это было сделано на рис 5.13 Строго говоря, это
верно только тогда, когда затухание является оптимальным
согласно уравнению (5.33, а), что справедливо для заданного
демпфера лишь при одной определенной частоте колебаний. Но
мы начинаем расчет с допущения оптимального затухания Рас-
считываем систему, находим опасную частоту и тогда уже назна-
чаем затухание с для демпфера гак, чтобы иметь оптимум. Эго,
во всяком случае, может быть сделано не только посредством
выбора демпфирующей жидкости, но также и установлением
зазора между маховиком и кожухом, поскольку оба Э1 и фактора
влияют на величину с
Из рис. 5.34 и уравнения (5,ЗЗ.Ь) ясно, что демпфер должен быть
помещен в той точке вала, где амплитуда крутильных колебаний
достаточно велика Напротив того, прибор становится совершенно
бесполезным, если его поместить в узле колебаний. Это свойство
присуще демпферу Ланчестера и гребному винту.
19 Ден-Гартог - 2074
290
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. v
Теперь мы можем применить приведенную здесь теорию
демпфера к нашему примеру с дизель-генератором. Энергия,
поглощаемая системой за цикл колебаний (см. стр. 278), равна
Предполагая оптимум затухания, получим для рассеяния
энергии за цикл
I ld<&<Ph-
Приравнивая друг другу эти два выражения, находим
о
<Рл = Мф
В нашем двигателе Мср = 1820 кГ см, и для маховика демпфера
Id = 10,10 кГ см сек2, так что
<Ри = 360 -^2—
В первом главном колебании наиболее опасной является крити-
ческая скорость 4-го порядка, равная 1360 об/мин. Для этого
случая мы находим (таблица 5.3 стр. 258) ю? = 309 000 и pV =
= 2,50 (таблица 5.9 стр. 278). вследствие чего
360 • 2,50 п лплп
<Рь = -жГоо?Г = 0,0029 радиана.
Обращаясь опять к таблице Гольцера (табл. 5.3, стр. 258), где
& = 1,000, мы теперь условно интерпретируем 1,000, как 0,0029.
Все остальные числа в таблице должны быть умножены на 0,0029.
В частности, максимальный крутящий момент, имеющий место в
машине, есть наибольшее число в 5-м столбце, что соответствует
участку вала между маховиком и генератором. В данном случае
это есть
Мтах = 7,61 • 10* • 0,0029 == 22 000 кГ см.
Чтобы представить себе, что означает это число, мы сравним
его с двумя другими крутящими моментами:
1) среднее значение крутящего момента при полной нагрузке,
которое для восьми цилиндров равно
8 • 1820 = 14 560 кГ см-,
2) «возмущающий момент»
= 2,50 • 1820 = 4550 кГ см.
Отсюда видно, что резонансный крутящий момент для критиче-
ской угловой скорости 4-го порядка при 1360 об/мин примерно
в 5 раз больше, чем возмущающий момент.
§ 5.9 ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ 291
Прежде мы видели (стр. 280), что в случае отсутствия демпфе-
ра крутящий момент оказывается не в 5, а в 50 раз больше воз-
мущающего момента. Однако даже при таком демпфере пере-
менный (бесполезный) крутящий момент при 1360 об/мин оказы-
вается все же на 50% больше, чем полезный эксплуатационный
момент. Валы дизельных установок принято рассчитывать доста-
точно консервативными способами (по здравому смыслу), причем
момент в 22 000 кГ см приводит к допускаемому напряжению.
Для второго типа колебаний мы имеем наихудшую критиче-
скую скорость при об/мин порядка 5х/2, при pV~ 1,00 и
== 129 • 104. В этом случае
360 • 1,00 n nnnoTQ
<Ph = Г290000 = °-000278 радиана.
Максимальный момент (см. таблицу Гольцера 5.5 на стр. 260)
имеет место в середине коленчатого вала двигателя между мас-
сами 3 и 4; он равен
iWmax = 14,05 • 106 • 0.000278 = 3900 к Г см.
Этот момент, составляя менее чем 20% от момента первого типа
колебаний, при 1360 об/лшн приводит к напряжениям очень малого
числового значения.
Предыдущие расчеты были выполнены под углом зрения под-
чинения требованию «оптимального затухания». Для первого
наихудшего типа колебаний мы нашли, что оптимальное затуха-
ние характеризуется коэффициентом
с = = 10,10 • 556 = 5600 кГ см сек/рад,
т. е. 5600 кГ см при скорости проскальзывания в 1 рад/сек. В
настоящее время это значение коэффициента является обяза-
тельным для тех, кто изготовляет подобные приборы.
Согласно рис. 5.35, эффективный момент инерции демпфера
равен половине момента инерции маховика, т. е. —плюс
момент инерции кожуха, т. е. 4.15. что равно 9,2 кГ см сек1 Это
и есть го число, которое фигурирует на рис. 5.13 и во всех табли-
цах Гольцера. Если затуханию предписывается оптимальное
значение для первого типа колебаний, то оно, к сожалению, не
может быть также оптимальным и для второго. Так, в этом
случае оно должно было бы быть
с = /а о)2 = 10,10 • 1136 = 11 500 кГ см сек/рад,
тогда как мы только что нашли значение 5600 кГ см сек/рад.
Итак, оказывается, что затухание превышает оптимальное
немного больше, чем вдвое, а тогда, согласно рис. 5.34, эффек-
тивность демпфера уменьшается до 80%, вследствие чего напря-
19*
292
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
жение получается в 1,25 раза больше того, которое имеет место
в соответствии с только что произведенным расчетом, что опять
является пренебрежимо малой величиной Итак, согласно рис.
5.35, эквивалентный момент инерции маховика демпфера будет
равен уже не половине номинального значения, а 80% от него,
или Ц = 4,15 + 0,80 4- 10,10 = 12.23 кГсмсек?, где 4,15 отно-
сится к кожуху. Итак, мы получили 12,23 вместо прежнего числа
9,2. Таким образом, строго говоря, мы должны пересчитать
таблицу Гольцера 5.5, исходя из измененного значения Д Однако
практически это делается лишь тогда, когда получаемое напря-
жение имеет значительную величину, что не имеет места в данном
случае.
Чтобы вызвать большее рассеяние энергии в демпфере Лан-
честера при заданном моменте инерции маховика а (рис. 5.30),
можно увеличить относительное движение маховика а и втулки h
посредством монтирования маховика па соответственно настроен-
ных пружин; х. Таким образом, получается «настроенный вибро-
гаситель с затуханием», теория которого, с учетом рассеяния энер-
гии вследствие вязкости жидкости, была изложена на стр. 134—150.
Эта теория вполне описывает поведение подобного демпфера, как
простой системы, состоящей из пружины и массы, или «К — М-
системы» В применении к многсмассовой системе теория оказы-
вается значительно более сложной. Тем не менее полученные
выше результаты (стр 134—150) с осторожностью могут быть при-
менены и к многомассовсй системе при ее замене эквивалентной
простой К — М-системой, если удовлетворить следующим требо-
ваниям:
1) масса М одномассовой системы выбирается так, чтобы
при равных амплитудах для данного типа колебаний этой массы
и точки прикрепления демпфера многомассовой системы кинети-
ческая энергия той и другой системы была одна и та же;
2) коэффициент жесткости К одномассовой системы опреде-
ляется так, чтобы отношение было равно о2 в многомассовой
системе при колебании рассматриваемого типа;
3) возмущающая сила Р для одной массы М выбирается так,
чтобы работа при резонансе пРхл была равна полной работе,
совершаемой внешними силами, приложенными к многомассовой
системе при той же амплитуде ху точки прикрепления демпфера.
Другим прибором для предотвращения или гашения крутиль-
ных колебаний является гидравлическая муфта Феттингера,
известная также под названием «жидкий маховик» (рис. 5.36, а).
Прибор состоит из полой отливки А, имеющей форму половины
тора, заклиненной на ведущем валу. Подобная же отливка В
заклинивается на ведомом валу Кожух С. прикрепленный! посред-
ством отливки А к ведущему валу, может вращаться огноситель-
§ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
293
но ведомого вала. В части D имеется гидравлическое уплот-
нение с малым трением. Вся полость внутри А и В заполняется
жидкостью — маслом с малой вязкостью или же водою. На-
значение кожуха С состоит только том, чтобы удерживать
жидкость, наполняющую прибор. Торообразная полость разде-
ляется посредством перегородок на большое число открытых
Рис. 5.36. Гидравлическая муфта или* жидкий махо-
вик» передает крутящий момент за счет действия
кориолисовых сил.
отсеков, причем эти перегородки имеют полукруглую форму и
располагаются точно по радиальным плоскостям (рис 5 36,6).
Согласно закону Ньютона о равенстве действия и противодей-
ствия. крутящие моменты на ведущем и ведомом валах должны
быть равны по величине и противоположны по направлению.
Вследствие того, что прибор не межет работать без потерь, ско-
рость ведомого вала должна быть несколько ниже скорости
ведущего. Отношение скоростей валов равняется коэффициенту
полезного действия муфты, заключающемуся между 97 и 99%.
Жидкость, заполняющая муфту, находится под действием центро-
бежных сил, которые больше в ведущей части, чем в ведомой,
вследствие разности скоростей этих частей. По этой причине
294
Mi ЮГО1ШЛИ НДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
возникает циркуляция жидкости, движущейся в наружную
сторону в ведущей части и во внутреннюю в ведомой. Эта циркуля-
ция, вызванная разностью скоростей, и является причиной пере-
дачи крутящего момента от одного вала к другому.
Рассмотрим частицу жидкости dm в точке Р на рис. 5.36, в, Ес ско-
рость имеет радиальную составляющую г>, а ускорение Кориолиса этой
частицы равно 2£>гу и направлено по касательной к окружности с центром
на оси вала. Тогда кориолисова сила инерции равна 2Qvr dm и имеет
момент 2Qvrr d,mK направленный таким образом, чтобы замедлить ско-
рость Q вращения ведущего вала. Чтобы получить крутящий момент,
вызванный действием всех частиц жидкости, заполняющей трубку тока,
проходящую через точку Р, надо выполнить интегрирование
и
г г dr с dm dm с
J 2Qvrr dm — 2Q I — г dm = 2Q Jr dr — = 2Q — Jr dr = Q (r? — r|).
/
Входящий сюда множитель
dm
— представляет
dt
собою
массу жидкости.
протекающей в одну секунду через точку Р. Эта
Д т
Т
до 0 в ведущей части и от 0 до I в ведомой, деленной на
е. равна полной массе
Дтч
масса
заполняющей всю
постоянна и равна
трубку тока от 1
период циркуляции
Т. выраженный в секундах
Крутящий момент кориолисовых, сил на ведомом валу направлен
уже в сторону вращения Он вычисляется совершенно таким же образом,
но только угловая скорость здесь будет меньше на какую-то величину ДО
г. е. для этого момента имеем величину
Дт
(Q - М2) - (г*
отличную от величины предыдущего момента. Кажущееся противоречие
легко объясняется, если принять во внимание, что здесь имеет место
несколько иное распределение моментов В точке О жидкость с транс-
версальной скоростью £?г0 поступает из ведущей части в ведомую, ко-
торая в этой точке имеет трансверсальную скорость, меньшую на вели-
чину ДОг0.
Потеря за одну секунду
в соответствующей
составляющей количества
движения, таким образом,
быть равна силе действия
через Р, на ведомую часть
этой силы равно г0, откуда
равна
дт
и эта величина должна
жидкого потока в трубке тока, проходящей
в направлении вращения. Моментное плечо
4m
получаем момент AQr- — Следовательно,
полный момент, действующий на ведомый вал, представится как сумма
кориолисова момента и момента, вызванного изменением количества
дв и жен и я:
Дт
м = у
(5.36)
Подобным же образом обстоит дело с точкой / входа медленно движу-
щейся жидкости из ведомой части в ведущую, вращающуюся быстрее.
§ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
295
Здесь вози икает замедляющий момент AQ г2, , который в соединен и и
с кориолисовым моментом создает момент, опять выражаемый формулой
(5.36), замедляющий вращение ведущей части.
Крутящий момент (5.36) обусловлен действием только одной трубки
тока. Полный крутящий момент для всего прибора находится новым
интегрированием, причем переменными будут уже не только г(1 и т/, но
также и Т, поскольку период циркуляции различен для различных линий
тока жидкости Тем не менее, уравнение (5.36) может быть истолковано
как полный момент, если только рассма iривать Ат как массу воды во
всем торе, г0 и rt считать радиусами, относящимися к осевой линии тока,
а за Т принять среднее значение периода циркуляции
До сих пор мы рассматривали только установившееся действие муфты.
Учет затухания в обеих половинах муфты приводит к и лучению ее неравно-
мерного движения Пусть угловая скорость ведущего вала равна Q 4- фа*
j угловая скорость ведомого вала соответственно Q — A £> 4- Ф/, где фа
и ф/ -— изменения угловой скорости, зависящие от времени. Если эти
изменения происходят очень быстро, то вызванные ими изменения цент-
робежных сил происходят гоже столь быстро, что скорость циркуляции
жидкости от этого не меняется Тогда мы можем применить сюда изло-
женный выше анализ, относящийся к установившемуся движению, под
ставив только переменные угловые скорости вместо имевшихся постоянных
Таким образом, крутящий момент, действующий на ведомый вал в на
правлении вращения, оказывается равным
Ат . Ат
(Q - AQ+ фг) (г2 - г*) 4- (AQ -фГ + фа) г* —.
Нетрудно видеть, что это выражение есть сумма установившегося момента
(5.36) и переменной части
Ат
^перем = “уУ Ф/?’2). (5.37)
Таким же образом можно вычислить крутящий момент, действующий
на ведущую часть противсположнс вращению. Этот момент равняется
сумме кориолисова момента и момента, вызванного изменением количеств
движения при переходе жидкости из одной части в другую. В результате
получаем опять выражение (5.36) плюс переменная часть (5.37). Заметим,
что момент (5.37) пропорционален угловым скоростям, а поэтому он дей-
ствует как затухание. Это затухание может быть как положительным,
так и отрицательным в зависимости от знака скобки в (5.37), однако
в реальных установках, как оказывается, затухание, выражаемое этим
моментом, положительно. В связи с этим см. дальше задачи 204 и 205
на стр. 545.
Есть еще способ успокоения крутильных колебаний вала,
состоящий в применении- центробежного маятника, упоминав-
шегося на стр. 134. Так как в этом приборе отсутствует потеря
энергии, то он должен рассматриваться не как обычный аморти-
затор, а скорее как некоторая разновидность динамического
поглотителя Фрама, описанного на стр. 126. Маятниковый демп-
фер или антивибратор действует как бесконечная масса для
частоты, на которую он настроен, перемещая тем самым узел
колебаний в точку сосредоточения этой массы. Для других частот
он действует как масса, уже не являющаяся бесконечно большой.
296
М11ОГОНИЛИ НДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
и в этих случаях отсутствует также такой исключительный
эффект. Приведем доказательство этого положения.
Пусть на рис. 5.37 вал вращается вокруг центра О со средней
угловой скоростью Q, а на это вращение налагается колебание,
происходящее по закону a = а0 sin at = а0 sin nQt, где число
тгесть «порядок» колебания Пусть далее вокруг точки А качается
Рис. 5.37. Схема центро-
бежного маятника.
математический маятник длины г и массы
т, имеющий малый угол отклонения по
отношению к валу: ср = (р0 sin nQt. Обо-
значим угол АО Б буквой этот угол
равен
Рассматривая относительное движение
системы маятника по отношению к рав-
номерно вращающейся с угловой скоро-
стью Q системе вала и считая колебания
маятника малыми, мы можем пренебречь
кориолисовыми силами. Тангенциальная
(нормальная по отношению к АБ) со-
ставляющая центробежной силы равна
— mQ2 (Б 4- г) sin (ср — ip)
mQ2 (Б 4 г) (у — ip) — mQ2R(p.
С другой стороны, тангенциальное смещение точки Б в системе
координат, связанной с валом, равно а (Б -4- г) 4- срт. Таким
образом, дифференциальное уравнение движения маятника будет
(Б 4- г) а 4- гф = —Q2P(p,
которое по подстановке гармонических значений для углов а
и <р принимает вид
Ф0 п2 (R 4 г)
а0 R — пгт
(5.38)
Натяжение нити маятника mQ2(2? 4 И есть единственная
сила, передающаяся от маятника валу. Беря плечо этой силы
ОР = Бер, находим реактивный момент
М = mQ2 (Б 4 г) Б(р = mQ2 (Б + г) Б а0 sin nQt.
Принимая во внимание равенство (5.38), отсюда находим
_ _ т (R 4 г)2 9 . т (R 4 О2 ••
М = —------------sin —------------------------у--------а.
г ° г
1-----W2 1-----п2
§ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
297
Если вместо маятника прикрепить к валу тело с моментом
инерции /9КВ, то при угловом ускорении а вал получит реактив-
ный момент от этого тела, равный —аДкв, откуда следует, что
для малых колебаний незатухающий маятник вполне эквивалентен
маховику с моментом инерции
7ЭКВ = ”*(Д + г)2. (5.39)
dlYD у ' '
1---п2
П
Числитель в этом выражении есть момент инерции маятника,
защемленного на валу; знаменатель представляет собою некото-
рый поправочный коэффициент. Тогда маятник с «нормальной»
настройкой («tuned»)
п2 = Д (5.40)
эквивалентен бесконечно большому моменту инерции; маятник
с «верхней» настройкой («overtuned»)
представляет собою как бы большой положительный момент
инерции; наконец, маятник с «нижней» настройкой («undertuned»)
ведет себя как большой отрицательный момент инерции (см. рис-
2.18 на стр. 68).
Формула настройки центробежного маятника (5.40) кроет
в себе практические осложнения при расчете маятникового
демпфера В самом деле, в многоцилиндровом двигателе нежела-
тельны гармонические колебания, по крайней мере, третьего
порядка (п = 3), обычно даже более высокого порядка. С другой
стороны, радиальное расстояние R ограничено условиями габа-
рита: так, в звездообразном авиационном двигателе, где маятник
удобно располагать на противовесе кривошипа, наибольшее
расстояние R можно брать равным 7—8 см. Тогда по формуле
(5 40) длина маятника т должна быть меньше I см для п = 3, а
для гармонических колебаний высших порядков маятник должен
быть еще короче. Так как масса маятника не может быть слишком
малой, то конструкция, показанная на рис. 3 10. б. практически
невозможна. Для этой задачи найдены два решения, показанные
на рис. 5.38 и 5.39; в обоих случаях маятник помещается в проти-
вовесе коленчатого вала.
Первый тип подобного маятника, известный под названием
«бифиляркого», был изобретен Саразеном во Франции и незави-
298
МНОГОНИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
симо от пего Чилтоном в Соединенных Штатах Америки. Маятник
представляет собою большое С/-образное тело, свободно подве-
шенное к выступу кривошипа коленчатого вала В этом выступе
сделаны два круглых отверстия диаметра dv Подвешиваемый
U-образный противовес имеет отверстия такого же диаметра. Оба
тела соединяются между собою посредством двух штифтов диа-
Рис. 5.38. Бифилярный центробежный маятник Саразена — Чилтона.
метра d2, меньшего, чем диаметры отверстий. Благодаря такому
устройству маятник получает возможность катиться без скольже-
Рис. 5.39. Роликовый центро-
бежный маятник Саломона.
ния по штифтам, и при этом движении центр отверстия маятника
описывает малую окружность вокруг центра отверстия в вы-
ступе кривошипа. Таким образом, ра-
диус получающейся круговой траек-
тории оказывается равным d, — d2, и,
как легко видеть, все прочие точки
(7-образного маятника описывают
такие же траектории. Следовательно,
маятник колеблется параллельно са-
мому себе, двигаясь всеми своими
точками относительно кривошипа
по одинаковым окружностям радиуса
d-i — d2 Тогда сумма R 4- < в урав-
нении (5.40) представит собою рас-
стояние от центра тяжести маятника
до оси вала, причем г = dy— d2.
г может быть сделана весьма малой
Отсюда видно, что величина
при сохранении большой массы маятника.
Другая система, предложенная Саломоном во Франции, со-
стоит из цилиндра радиуса г2, катящегося или скользящего в
цилиндрическом вырезе радиуса г, (рис. 5.39).
В случае, когда цилиндр скользит без вращения, все его точки
описывают одинаковые круговые траектории радиуса — г2;
§ 5.9
ПОГЛОТИТЕЛИ^! ДРУГИЕ ПРИСПОСОБЛЕНИЯ
299
следовательно, эта величина эквивалентна длине т маятника.
В случае катящегося цилиндра колебания происходят медленнее,
а тогда г больше, чем — г2. Масса, применяемая в этой кон-
струкции, значительно меньше, чем в предыдущей системе, а
поэтому амплитуда колебаний цилиндра для его правильного
функционирования должна быть зпачичелыю больше, что приво-
дит к добавочным затруднениям.
Один маятник, выполненный в виде свободно подвешенного
противовеса, создает действующий на коленчатый вал момент,
так как сила, действующая на его направляющие, не проходит
через центр О, а направлена но ВА (рис. 5.37). Таким образом,
тангенциальная составляющая силы вдоль ВА, умноженная на
плечо R, представляет собою желаемый реактивный момент.
Однако в добавление к этому моменту появляется еше сила,
действующая на коленчатый вал. Эта переменная сила остается
неуравновешенной и может вызвать колебания центра О. Если
установить два маятника, один из которых поместить на противо-
весе, а другой диаметрально противоположно ему, т. е. на пальце
кривошипа, то эти маятники вызовут узлы в двух точках, соот-
ветственно местам их установки. Если бы возбуждение вала
было чисто крутильного характера, чо маятники колебались бы
с одинаковыми амплитудами в противоположных фазах, а их
реактивное действие приводилось бы к паре., Однако при возбуж-
дении вала только поперечными силами оба маятника колеба-
лись бы в одной фазе, и реактивное действие тогда привело бы к
силе. В случае смешанного возбуждения маятники будут коле-
баться с разными амплитудами так, что совокупность .их реакций
приведется к силе и моменту, равному и противоположному
возмущающему моменту
Из этих рассуждений и рассмотрения рис. 5.37 становится
ясным, что маятник может вызывать реакцию только в направ-
лении, перпендикулярном к радиусу О А, тогда как вдоль этого
радиального направления он действует как закрепленное твердое
тело. Итак, только что рассмотренная система двух маятников
не может предотвратить движения вдоль О А. Для того чтобы
были предотвращены все движения в плоскости радиуса криво-
шипа при возбуждении моментом, а также поперечной и радиаль-
ной силами, необходимо установить три маятника, расположен-
ных для этой цели под углами 120° друг к другу. Тогда эти
маятники будут колебаться с тремя различными амплитудами,
и сумма их трех реакций будет равна и противоположна сумме всех
возмущающих сил1).
Ч Это надо понимать в широком смысле, т. е. совокупность трех ре-
акции должна вообще создавать не только силу, проходящую через точку
О, но и пару: тогда реактивные силы и момент пары должны уравнове-
шивать возмущающие силу и момент. (Прим, перев.)
300
МНОГОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
При применении центробежного маятника к многоцилиндро-
вому двигателю важно помнить, что маятник не есть демпфер,
а поэтому для заданной критической скорости определенного
порядка и типа применимо уравнение Льюиса (5.28), причем
здесь коэффициент динамичности для напряжения равен 50.
Осложнение, вводимое в расчет центробежным маятником, обу-
словлено тем фактом, что для каждой критической скорости экви-
валентный момент инерции имеет свое значение, поскольку он,
согласно уравнению (5.39), зависит от п. Поэтому мы должны
составлять столько таблиц Гольцера, сколько можем подозре-
вать критических скоростей в рабочем диапазоне. Это обстоя-
тельство является обескураживающим в начале расчета и тре-
бует терпения. После достаточного количества удачно построен-
ных гольцеровских таблиц дело становится достаточно ясным
и вычисления производят уже с более удачными задаваемыми зна-
чениями.
Вообще практическое значение центробежного маятника в
последние годы несколько понизилось, и он в значительной
степени был вытеснен демпфером Гауда. Этот демпфер оказался в
соответствующих формах экономически более доступным. Он
хорошо действует в широком диапазоне большого числа крити-
ческих скоростей (см. стр. 292).
Последнее, что нам остается обсудить в данной главе, это —
влияние порядка вспышек в двигателе на опасность минорных
критических скоростей, о чем упоминалось па стр. 277.
Начнем с четырехкривошипного двухтактного двигателя, в
котором кривошипы расставлены под углом 90°. Систематически
выпишем возможные порядки последовательных вспышек. Мы
получим всего шесть возможностей:
1234 1243 1324 1342 1423 1432
Если начать с номера I, то у нас будет выбор одной из трех
возможностей для второго номера; выбрав же два первых номера,
получаем две возможности для третьего номера. Таким образом,
число последовательностей, могущих быть выписанными для
четырехцилиндрового двигателя, равно 3-2-1 =3!, вообще же
для п цилиндров, расположенных в один ряд, можно написать
таких последовательностей (п—1)1. Рассматривая шесть напи-
санных выше последовательностей, мы замечаем, что последняя
из них та же самая, что и первая, но читаемая наоборот, справа
налево; то же можно сказать и о других комбинациях. Итак,
последовательность вспышек образует зеркально отраженные
пары для образования различных векторных сумм, как это сде-
лано на рис. 5.25. Число различных возможных порядков вспы-
§ 5.9
ПОГЛОТИТЕЛИ И ДРУГИЕ ПРИСПОСОБЛЕНИЯ
301
шек в гс-цилиндровом двигателе должно быть
(гс - *)
2
Это дает нам поразительно большие числа. Так, например,
для 10-цилиндрового двигателя (а такие построены) мы имеем
число комбинаций, равнее 181 440. Когда мы только начинаем
проектировать такой двигатель, мы должны рассмотреть 181 440
возможностей и выбрать паилучшую из них. Каждый, отдельно
взятый, порядок вспышек предполагает свой особенный колен-
чатый вал, кривошипные углы которого вдоль двигателя имеют
свои особые значения. Многие из этих коленчатых валов являются
нежелательными с точки зрения уравновешивания сил инерции
(стр. 245), однако пссле их исключения остается еще большое
число валов. Задача тогда заключается в построении векторных
диаграмм, подобно представленным на рис. 5.25 и 5.26, где длины
векторов всевозможным образом меняются местами, а также в
построении векторной суммы и в выборе диаграммы с наимень-
шим результирующим вектором. Все описанное мы можем вы-
полнять только в проекте на бумаге. Если же машина уже по-
строена и испытывает неполадки, то изменение порядка Еспышек
уже невыполнимо для устранения этих неполадок, поскольку
для этого требуется установка нового коленчатого вала и новых
распределительных валов.
В качестве примера рассмотрим четырехцилиндровый двух-
тактный двигатель с тяжелыми маховиками по обоим концам,
подобно изображенному на рис. 5.27 Пусть гольцеровские ампли-
туды имеют следующие значения:
г Номер цилиндра . 1 2 3 4
Амплитуда + 3 + 1 -1 -3
Рассмотрим три возможных порядка вспышек
(А) 1234 (В) 1324 (С) 1243
Построением векторных диаграмм можно показать, что для
скоростей порядков I, 3, 5 и т. д. комбинация (В) является пред-
почтительной, потому что она дает векторную сумму 2.82, тогда как
комбина ция (А) дает 5,64 и комбинация (С) — 6,30 Сдругсй стероны,
для скоростей порядков 2,4,6 и т.д, предпочтительна комбинация(С),
302
MHOi ОЦИЛИНДРОВЫЕ ДВИГАТЕЛИ
ГЛ. V
дающая векторную сумму, равную нулю, тогда как две другие
дают 4 и 8. Эю иллюстрирует тот факт, что изменением порядка
вспышек мы только перемещаем в спектре опасную точку от одной
критической скорости к другой. Мы не можем освободиться от
неприятных явлений для всех скоростей простым изменением
порядка вспышек. Тем не менее, возможность выбирать порядок
вспышек является мощным орудием для удовлетворительного
проектирования двигателя, если для него предназначена в эксплу-
атации узкая полоса скоростей.
Задачи № 139—172.
ГЛАВА VI
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
§ 6.1. Критические скорости
Рис.6.1. Неуравновешенный вращаю-
щийся диск.
тяжести диска имеет радиальное
Рассмотрим диск массы т, насаженный на вал, лежащий
на двух подшипниках и вращающийся с постоянной угловой ско-
ростью о (рис. 6.1). Пусть центр
смещение е (эксцентриситет)
относительно осевой линии
вала. При вращении диска во-
круг этой осевой линии возни-
кает центробежная сила mA,
действующая на диск. Такая
сила, вращающаяся вместе с
диском, может быть разло-
жена на горизонтальную и
вертикальную составляющие,
оказываясь, таким образом,
эквивалентной совокупности вертикальной и горизонтальной
сил, возбуждающих колебания с одной и той же амплитудой
та»2е. Вследствие этого мы должны ожидать возникновения одно-
временных вертикальных и горизонтальных колебаний диска,
причем такие колебания должны быть особенно интенсивны в
том случае, когда импульсы указанных возмущающих сил будут в
резонансе с собственной частотой, т. е. когда угловая скорость со
вала будет совпадать с частотой соп собственных колебаний не-
вращающегося диска на упругом валу.
Сделанное заключение не ограничивается случаем одного
диска, симметрично установленного по отношению к жестким
подшипникам, но сохраняет свою силу также и в случае более
сложных систем. Скорости, при которых наступают интенсив-
ные колебания, носят название критических скоростей. Вообще
говоря, критические угловые скорости со какого-либо круглого
вала, установленного на двух или большем числе жестких подши-
пников и несущего на себе несколько дисков, вращающихся вместе
304
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
с ним, совпадают с собственными частотами колебаний этого вала
на его подшипниках при отсутствии вращения. Эти критические
скорости могут быть вычислены с помощью коэффициентов влия-
ния, подобно тому, как мы уже использовали эти коэффициенты
для определения частот в главе TV. Что касается определения
самих коэффициентов влияния, то это является задачей сопротив-
ления материалов.
К тому же самому результату мы можем прийти также не-
сколько иным способом, что сейчас и сделаем. Обратимся к рис.
6.2, который представляет собою разрез рис. 6.1 по плоскости
АА, перпендикулярной к оси вала.
Рис.6.2. Поперечные сечения
А А рис. 6.1 Здесь: В —
центр подшипников, 8 —
центр вала, G — центр тя-
жести.
Начало координат системы осей ху
взято в точке В, которая является
точкой пересечения прямой, соединя-
ющей центры обоих подшипников с
плоскостью АА. Отметим следующие
три замечательные точки при вращении
неуравновешенного вала:
В — центр подшипников,
8 — центр вала (в плоскости сим-
метрии диска),
G — центр тяжести (самого диска).
На рис. 6.2 все эти три точки взяты
на одной прямой BSG, которая пред-
полагается вращающейся вокруг точки
Вс угловой скоростью диска со. Далее будет показано, что такое
произвольное допущение является единственно возможным в
случае равновесия всех сил.
Введем следующие обозначения:
е — постоянное расстояние между 8 и G (эксцентриситет),
г = BS — прогиб вала в месте укрепления диска.
Если мы пренебрежем действием силы тяжести, то диск
окажется под действием двух сил: во-первых, силы упругости
вала, стремящейся выпрямить свою осевую линию, т. е. притянуть
точку 8 к точке В и, во-вторых, центробежной силы в центре
тяжести G, точка приложения которой описывает окружность
радиуса r + е. Величина первой из этих сил зависит от жесткости
вала на изгиб и пропорциональна прогибу, т. е. мы можем поло-
жить ее равной кг и направленной к центру. Центробежная сила
равна тсо2 (т 4- е) и направлена от центра во внешнюю сторону.
При установившемся вращательном движении эти две силы
должны быть в равновесии, т. е
кг = mco2r + тсо2е,
(6.1)
6.1
КРИТИЧЕСКИЕ СКОРОСТИ
305
прогиба г,
или, если разрешить это уравнение относительно
то
(6.2)
Написанное уравнение совпадает с уравнением (2.26) па стр
71 для случая простой системы к, т, возбуждаемой силон, пропор-
циональной квадрату частоты.
Вследствие этого уравнение (6.2)
можно представить также диа-
граммой на рис. 2.20, которая
воспроизведена на рис 6.3. Если
взять точки 8 и G на постоян-
ном расстоянии вдруг от друга,
то положение точки В по отно-
шению к этим двум точкам при
каждой частоте определится
проекцией ординаты соответ-
ственной точки кривой на вер-
тикальную ось. Мы видим сей-
час же, что при очень медлен-
ном вращении (со 0) радиус
вращения BS практически
можно считать равным нулю.
Напротив того, при критической скорости радиус r = BS ста-
новится равным бесконечности, тогда как при очень больших
скоростях точка В совпадает с точкой G. Таким образом, в случае
весьма больших скоростей центр тяжести остается в покое.
Этот факт легко понять и с физической точки зрения. В самом
деле, если бы это было не так, то сила инерции должна была
бы достигнуть очень больших (бесконечных) значений.
Уравнение (6.1) показывает, что при полной уравновешенности
вала (е = 0) сила упругости пружины кг и центробежная сила
торг находятся в равновесии. Так как и та и другая пропор-
циональны прогибу, то при резонансе вал должен находиться в
состоянии безразличного равновесия: он может непрерывно вра-
щаться, имея любой произвольный прогиб. В то время как при
скоростях ниже критической скорости вал оказывает известное
упругое сопротивление боковым силам, это не имеет места пр
критической скорости, когда малейшая боковая сила вызывает
неограниченное возрастание прогиба,
Из рассмотрения рис. 6.3 мы можем вывести еще одно интере-
сное заключение, а именно: при скоростях, меньших критической,
точка G лежит от центра В дальше, чем точка 8, тогда как при
20 Ден-Гартог • 2074
306 ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН ГЛ. VI
скоростях, больших критической, точка & лежит дальше, чем
точка G. Точки 8 и G при всех скоростях лежат по одну и ту же
сторону о'1 точки В. Следовательно, можно сказать, что при малых
скоростях (меньше критической), от центра «отходит тяжелая
часть диска», а при больших скоростях (больше критической) от
центра «отходит легкая часть диска».
Сила инерции, или центробежная сила, пропорциональна
эксцентриситету центра тяжести G, который при вращении равен
г + е\ что же касается силы упругости, то она пропорциональна
эксцентриситету центра 8 вала, который равен г. Коэффициенты
пропорциональности равны соответственно тсо2 и к. Для скоро-
стей, меньших критической, то2 меньше чем к, а поэтому сумма
г + е должна быть больше чем г. Это справедливо при условии,
что имеет место равновесие двух сил. При критической скорости
r + е равняется г, откуда с неизбежностью следует, что величина
остановится бесконечно большой. Для скоростей, больших крити-
ческой, г + е меньше чем г, вследствие чего г имеет отрицательное
значение.
Довольно трудно понять, почему вал, вращение которого
постепенно ускоряется, должен в момент наступления критиче-
ской скорости внезапно изменить относительное расположение
трех точек В, 8 и G. В самом деле, приведенное выше исследова-
ние говорит лишь о том, что при заданной постоянной скорости
конфигурация трех указанных точек, определяемая по диаграмме
рис. 6.3, есть единственная конфигурация, при которой возможно
равновесие между двумя силами. Будет ли это равновесие устой-
чивым или неустойчивым, мы пока еще не знаем. Можно показать
теоретически, а еще легче экспериментально, что равновесие устой-
чиво как ниже, так и выше критической скорости.
Устойчивость выше критической скорости обусловливается кори-
олисовым ускорением, которое появляется, как только центр тяжести
диска начинает двигаться в радиальном направлении от точки В. В таком
случае точка G получает движение в направлении, перпендикулярном
к радиусу, и приводится в коние-концов в положение по другую сторону
от точки В, причем во время этого процесса нарушается коллинеарность
точек В, S и G. Если такое поперечное перемещение каким-либо образом
предотвращено, т. е, если обеспечена коллинеарность трех упомянутых
точек,то равновесие выше критической скорости оказывается неустойчивьсм.
Теория, которая привела нас к рис. 6.3, применима также и к системе,
изображенной на рис. 6.4, где масса т вынуждена двигаться без трения
вдоль прямолинейной проволоки, которая, в свою очередь, вращается
с угловой скоростью to. Когда to = 0, пружина находится в ненапряженном
состоянии, а масса — в положении равновесия на некотором расстоянии
е от осевой линии вертикального вала. При возрастании со масса будет
двигаться все дальше и дальше в сторону Р и непосредственно перед дости-
жением критической скорости она остановится у края В. Выше крити-
ческой скорости положение равновесия массы будет уже по другую сто-
рону (около края Q) от вертикальной оси вала, вследствие чего центро-
бежная сила, направленная в сторону Q, будет уравновешиваться силой
§ 6.1
КРИТИЧЕСКИЕ СКОРОСТИ
307
упругости, направленной в сторону Р и вызванной сжатием пружины.
Однако это равновесие уже неустойчиво, в чем можно легко убедиться,
сместив слегка массу из положения равновесия. В самом деле, тогда цент-
робежная сила будет возрастать или убывать быстрее, чем сила упру-
гости, в результате чего масса устремится либо к точке Q, либо к точке
Р, смотря по тому, в каком направлении первоначально была смещена
эта масса. В описанном опыте коллинеарность
гается благодаря проволоке и боковое от-
клонение невозможно. В процессе движения
массы по проволоке эффект Кориолиса ска-
жется лишь на боковом давлении па прово-
локу, а это не повлияет на движение массы.
В случае отсутствия
тому, как это имело место в нашей перво-
начальной схеме (рис. 6.1)., радиальная ско-
рость массы будет связана с боковым ускоре-
нием (кориолисовым), вследствие чего приве-
денные сейчас рассуждения уже теряют силу.
Для доказательства устойчивости
стемы рис. 6.1
НЬЮТОНОВЫ j ~
случае, т. е. опуская предположение колли-
неарности. Единственное ограничение, ко-
торое мы здесь вводим, это то, что диск вра-
щается с постоянной угловой скоростью а
вокруг его центра что вполне допустимо,
если момент инерции лиска достаточно велик.
На рис. 6.5 расстояние SG постоянно и
равно е, в то время как расстояние BS есть
величина переменная, которую мы обозначим
через г. Пусть координаты точки 8 будут х и
тяжести должны
проволоки, подобно
си-
написать
уравнения1) для диска в общем
нам необходимо
трех точек В, S и G дости-
В G
в
Рис. 6.4. Вращающаяся про-
волока PQ, вдоль которой
может скользить масса т.
Выше критической скорости
эта система неустойчива.
быть
У-
Тогда координаты центра
Единственно
сила упругости
ха = х + е cos at,
Уа — У 4- 6 sin at.
реальной силой, действующей
кг, направленная к точке В и
—ку.
в нашем
Рис. 6.5. Доказательство
устойчивости системы рис.
6.1. при скорости выше
критической.
на диск, здесь является
имеющая своими проек-
циями на оси координат величины —кх и
—ку. Уравнения движения центра тя-
жести G
= — кх.
тУи = —ку
случае примут вид
+ кх = та2е cos at,
ту + ky = та2е sin at.
(6.3)
Из главы II мы уже знаем,что решение эти х
уравнений показывает,что движение проекции
точки 8 на каждую из осей координата: и у скла-
дывается из двух частей: свободного колебания с частотой, определяемой
х) В сущности говоря, здесь имеются в виду уравнения движения центра
тяжести. (Прим, перев.)
20*
308
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
§ 6.2
МЕТОД ГОЛЬЦЕРА
309
равенством са? = klm, и вынужденного колебания с частотой а. Оба вы-
нужден и ых колебал ия по осям х и у, отличаясь по фазе на 90° друг от друга,
создают установившееся вращение по типу рис. 6.2 (см. также задачу 37
на стр. 514). С другой стороны, свободные колебания, вследствие сопро-
тивления трения и т. п. по истечении некоторого времени затухают, так
что, действительно, в конце концов мы получаем круговое движение
с амплитудой, определяемой формулой (6.2). Вот эти-то постепенно за-
тухающие свободные колебания и создают боковое отклонение, нарушаю-
Рис.6,6. Резонансная диаграмма для
вала, вращающегося в подшипни-
ках, являющихся более жесткими в
вертикальном направлении, чем в
горизонтальном.
щее коллинеарность, о чем говори-
лось выше. Однако существуют вилы
трения, для которых вращение при
скорости, выше критической, дела-
ется неустойчивым (см. стр. 395).
До сих пор мы предполагали
подшипники машины абсолютно
жесткими. Если же предполо-
жить их упругими, то изло-
женные рассуждения почти не
приходится изменять,если счи-
тать, что жесткость подшипни-
ков одна и та же во всех на-
правлениях. В предыдущем ис-
следовании величина к пред-
ставляла собою силу, выра-
женную, например, в кило-
граммах, которую необходимо
приложить к диску, чтобы вызвать прогиб вала па 1 см. В случае
упругих подшипников эта величина к численно должна быль
меньше, чем в случае абсолютно жестких подшипников. Од-
нако такая поправка не вносит изменения в поведение, вала,
за исключением некоторого понижения его критической ско-
рости
Положение несколько изменяется, если подшипники прояв-
ляют различные упругие свойства в горизонтальном и вертикаль-
ном направлениях. Обычно при высоких подшипниках их гори-
зонтальная податливость больше (коэффициент к меньше), чем
вертикальная, т. е. жесткость в горизонтальном направлении
меньше, чем в вертикальном. Тогда надо просто разложить центро-
бежную силу таре на горизонтальную и вертикальную состав-
ляющие таре cos cot и таре sin at, а затем исследовать от-
дельно движения по вертикали и по горизонтали. В уравнениях
(6.3) это найдет себе отражение в том, что величина к в каждом из
этих уравнений должна иметь свое особое значение. Положим,
что при частоте наступает состояние резонанса для горизон-
тальных колебаний, в то время как амплитуда вертикальных
колебаний остается еще малой (рис. 6.6). Траектория центра 6
диска представит собою тогда эллипс, удлиненный по горизон-
тальной оси. При большей скорости а%, когда наступает резонанс
для вертикальных колебаний, получится эллипс, удлиненный в
вертикальном направлении. Таким образом, здесь оказываются
две критические скорости, при каждой из которых вряд ли уже
можно говорить о чистом «вращении» вала. Вернее сказать, центр
вала при этих скоростях колеблется почти прямолинейно.
Обобщение изложенной теории на случай валов с несколькими
дисками и с числом подшипников больше двух, имеющих притом
различную жесткость в обоих главных направлениях, достаточно
очевидно. Вообще говоря, в этих случаях число критических
скоростей равно удвоенному числу дисков.
§ 6.2. Метод Гольцера для определения критических скоростей
при изгибе
Обычный метод определения собственных частот или крити-
ческих скоростей валов или брусьев при изгибе есть итерацион-
ный метод Стодолы в графической или численной форме (см.
соответственно стр. 216 или стр. 225). Недавно несколькими авто-
рами был предложен другой метод получения того же результата.
Этот метод, в сущности, является распространением па изгибные
колебания метода Гольцера, развитого для случая крутильных
колебаний.
Прежде всего рассматриваемый брус делится на соответственно
выбранное число участков 1, 2, 3 и т. д., как это показано на рис.
4.31 (стр. 216). Подсчитанная масса каждого участка делится на
две половины, которые сосредоточиваются по концам этого участка.
Таким образом, брус оказывается невесомым между каждыми
двумя сечениями, а в самом сечении сосредоточена масса, равная
полусумме масс двух прилегающих к нему участков. Подобно тому,
как это делалось в методе Гольцера, мы задаемся частотой и совер-
шаем переход от одного участка к другому вдоль всего бруса.
При расчете крутильных колебаний (определяемых дифферен-
циальными уравнениями второго порядка) в каждом сечении были
две существенные величины: угол закручивания ср и крутящий
момент, пропорциональный величине^- (см. стр. 191). При расчете
изгионых колебаний (определяемых уравнениями четвертого
порядка) оказываются уже четыре существенные величины в
каждом сечении: прогиб у, наклон касательной 9 = у' = ,
изгибающии момент М = Ely" и перерезывающая сила S =
__ аМ _ - nt
~dx — • Необходимо найти соотношения между этими
величинами при переходе от одного участка к другому. Рис. 6.7
показывает отрезок бруса между и-м и (п + 1)-м сечениями
вместе с соответствующими величинами. Выбор знаков этих
310
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
величин показан па рис. 6.7. Необходимо заметить, что сечение
проводится непосредственно слева от сосредоточенной массы.
Масса тп, показанная на рисунке, равна половине массы отрезка
бруса между (п—1)-м и n-м сечениями плюс половина массы
отрезка между n-м и (п 4- 1)-м сечениями.
Таким образом, мы можем написать следующие четыре урав-
Sn+1 = + тпа*уп, (а)
Мп+1 = Мп + Sn+1 I, (Ъ)
Уп+1 — . Е1 2Е1 ’ ( ’
уп+1 = уп+0п1+^1-~Ц^. d)
пения для участка длиной
Рис. 6.7. Силы, действующие на
отрезок бруса.
Здесь уравнения (а) и (Ь)
представляют собою уравнения
равновесия участка бруса, под-
вергающегося действию силы
инерции или центробежной силы тпсо2уп с выбранной частотой
Уравнения (с) и (d) являются уравнениями деформации участка,
рассматриваемого как консоль, заделанная в левом конце под
соответственным углом вп и деформирующаяся под действием
силы Sn+i и момента Мп+А па правом конце.
Уравнения (а)—(d) позволяют нам вычислить значения у, 0,
М и S на правом конце отрезка бруса, зная значение этих вели-
чин на левом конце. Это может быть сделано посредством таблицы
Гольцера, аналогичной уже известной для крутильных колеба-
ний, но более расширенной и содержащей 17 столбцов вместо 7.
Если мы отправляемся от опертого конца, где у = 0 и М =
= Ely" = 0, то там наклон 0 и перерезывающая сила В не из-
вестны. В случае крутильных колебаний только амплитуда была
не известна, и она произвольно предполагалась равной 1,000.
Здесь мы предполагаем 0 = 1,000 и S = So. Если у нас имеется
один единственный! пролет, то по таблице Гольцера мы находим
значения у, 0, М и S на другой опоре, выраженные через So,
предположенное значение со2 и наклон 1,000. На опоре мы должны
иметь у = 0. Из этого условия определяется So и подставляется
в формулы. Далее находим численное значение изгибающего
момента М на опоре, что представляет собою аналог гольцеров-
ского «остаточного момента» в случае кручения. Повторяя не-
сколько раз вычисления для различных значений сэ2 и строя конеч-
ный момент в зависимости от о2, получаем кривую наподобие
кривой на рис. 5.15 (стр. 257). Собственные частоты будут в
нулевых точках этой кривой.
5 6.2
МЕТОЛ ГОЛЬЦЕРА
311
Случай многопролетной балки по существу тот же самый.
Начало расчета обычное, а дальше, когда приходим к первой
промежуточной опоре, полагаем у = 0 и находим решение для
80. Однако здесь оказывается новая неизвестная реакция и, следо-
вательно, новая перерезывающая сила на промежуточной
опоре. Таким образом, для участка между первой и второй про-
межуточными опорами расчет выполняется, как и прежде, с той
лишь разницей, что вместо So для предыдущего пролета теперь
пишется неизвестная величина 8Х.
Предположим теперь, что балка, вместо опоры, начинается
с консоли. Тогда па этом конце М = S = 0, тогда как у и 0 не
известны. Мы начинаем с предположения, что у = 1,000 и 0 = 0О,
а далее вычисления остаются те же самые. Для заделанного конца
у = 0 = 0 и мы начинаем с М = 1,000 и S = So.
В то время как в случае крутильных колебаний достаточно
рассчитывать с точностью до трех десятичных знаков, а потому
расчеты могут выполняться на логарифмической линейке, теперь
для значительно более сложного случая изгибных колебаний
это недопустимо. В самом деле, для получения надежного резуль-
тата с точностью до трех знаков, в процессе расчета необходимо
уже выводить восемь знаков, вследствие чего существенную по-
мощь могут оказать вычислительные машины. Действительно,
большие вычислительные машины сделались важным орудием
проектирования во многих больших предприятиях, и тогда для
определения критических скоростей с помощью таких машин опи-
санный итерационный метод Гольцера особенно удобен. До вве-
дения вычислительных машин метод Гольцера был непрактичен.
Тогда применялись методы Рэлея и Стодолы (стр. 195 и 215), хотя
они давали лишь приближенные результаты. В настоящее время
методом Гольцера пользуются широко, причем вычислительной
машине требуется для ответа всего лишь несколько минут. Если
проектировщик не удовлетворен ответом, то он делает не-
которые соответствующие изменения в проекте и опять набирает
данные на машине, пока не получится удовлетворительный
ответ. В этом процессе происходит преобразование многих
человеко-лет обременительных расчетов без всякого утомления
оператора.
Изложенный метод может быть распространен на более сложные
случаи как, например, скрученные турбинные лопатки, в которых главные
оси жесткости’при изгибе поворачиваются на некоторый угол вдоль длины
лопатки. Тогда колебания в одной плоскости становятся уже невозмож-
ными: движение в осевом направлении оказывается связанным с движе-
нием в тангенциальном направлении.
Пусть будут: х — осевое направление, у — тангенциальное направле-
ние, z — радиальное направление вдоль лопатки. Прежде всего вычислим
массу на единицу длины, жесткость на изгиб в осевом и тангенциальном
направлениях или пропорциональные им моменты инерции 1Х и 7У, а также
312
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
центробежный момент инерции 1ху1) «Все эти величины являются пере-
менными, зависимыми от длины z. Поэтому проведем в лопатке ряд сечений.
Возьмем средние значения 1Х, 1у, 1ху для каждого отрезка и будем
считать эти величины постоянными в пределах каждого отрезка (см.
рис. 6.7) Колебания происходят одновременно по осям х и у, а поэтому
мы будем иметь восемь уравнений, вместо четырех, приведенных на стр.
310. Уравнения (а) и (Ъ) остаются в силе, но теперь каждое из них имеет
место как для оси ж, так и для оси у. Уравнения (с) и (d) делаются более
сложными, поскольку они оказываются между собою связанными через
посредство члена, содержащего центробежный момент инерции 1ху.
Приводим без вывода упомянутые восемь уравнений
^Х,П+1 — &х,п Н- ^пы^хп->
Sy,n+i = Sy,n + ^п(й2уп,
^Х,П + 1 — *WX,n + ^Х,п + 1
^у,П+1 “ Му,/1 Ч" $У,П 1-1
Я?1+1 = ®п + „(Т—р : куп (Л/х П + 1 — —у— z) +
& U хп1 уп — хуп) L ' Z /
+ 7Хуп(^У.ПЧ1~^~-
Уп+i = Уп + pTTj-j------Г рхл (Л/у, п + 1 +
Uxn * уп 7 хуп) t \ 2 /
+ ^(мх,п+)-^у+- z|]-
жп+1 == хп + х’п I + — -—--— —труп (м.х.п + 1
Л U ХП * УП — 1 хуп) 1- \
+ Лхуп |^У,П+1
— -- sx, п + 1 J +
- 3Sy,n+l/|].
“ lSy'n+1 г)4
Теперь мы начинаем расчет с заделанного конца лопатки в нулевом
сечении при значениях х = у = х' = у' — 0.
Изгибающие моменты и перерезывающие силы в этом месте не изве-
стны. При этом в основании лопатки Мх == 1,000, Му = Л1у0, Sx == Sx0,
Sy = Sy0. Задаемся значением со2 и производим расчет от сечения к сечению
до свободного конца лопатки. Все величины, встречающиеся в расчете,
будут иметь три неизвестные; Sxo, Sy0, Му0. На свободном конце мы имеем
Л/х = Му = Sx — Sy = 0, что дает нам четыре уравнения. Из трех урав-
нений определяем Sx0, Sy0, Му0 и подставляем в четвертое, которое вообще
не удовлетворяется, как должно быть. Возьмем, например, Мх, которое
*) В оригинале в качестве жесткостей взяты непосредственно моменты
инерции 1Х и 1у В действительности, жесткостями являются произведения
Е1Х, Е1у, (Прим, перев.)
3 G.3
УРАВНОВЕШИВАНИЕ ЖЕСТКИХ РОТОРОВ
313
равно не нулю, а какой-то величине Мх к01и.чп. Строим точку на графике
Л^хконечн = У(ю2). Повторим всю процедуру несколько раз для других
частот и построим всю кривую. Пули этин кривой дадут собственные
частоты. Описанный метод совершенно немыслим без вычислительной
машины. Он отнял бы многие месяцы утомительного труда. В то же время,
как только мы его «запрограммируем» для машины, получение всей кривой
Мхконечн — будет уже делом нескольких минут.
§ 6.3. Уравновешивание жестких роторов
Если центр тяжести диска, изображенного па рис. 6.1, от-
стоит на расстоянии е от центра вала (вернее, от точки пересече-
ния осевой линии вала с плоскостью симметрии диска), то диск
будет колебаться, вследствие чего возникнут вращающиеся
силы, передающиеся подшипникам. Мы можем избавиться от
этих колебаний и добавочных давлений на подшипники путем
прикрепления некоторой малой массы к «облегченной» части
диска, чтобы таким образом привести в совпадение центр тяжести
О с центром S вала. Пусть начальный эксцентриситет равен е,
масса диска — М, компенсирующая масса — т, ее расстояние
по радиусу от S равно г. Тогда
тт = е М,
или
т = е- М.
Г
«Неуравновешенность», или «дисбаланс» диска тг измеряется
обычно в килограммосантиметрах. Если мы хотим, например,
увеличить вес противовеса, т. е. упомянутой компенсирующей
массы, вдвое, то должны этот удовоенный противовес располо-
жить на половинном расстоянии против его первоначального
положения, что совершенно ясно, так как центробежная сила
пропорциональна произведению тг.
Определение положения, компенсирующего груза является
задачей статики. Для этой цели мы можем положить вал, напри-
мер, на два горизонтальных параллельных рельса. Тогда вал
повернется так, что утяжеленная часть диска займет наинизшее
положение и компенсирующий груз может быть ориентировочно
помещен у верхнего края диска. Далее, вес этого груза мы можем
изменять до тех пор, пока диск не установится в положении без-
различного равновесия, т. е. не будет стремиться перекаты-
ваться, в каком бы положении мы его ни поместили. Чтобы по
возможности уменьшить могущие быть здесь ошибки или, как
говорят, для повышения чувствительности балансировочной ма-
шины рельсы должны быть изготовлены из твердой стали и вдела-
ны в тяжелое бетонное основание. Таким путем мы стремимся к
тому,чтобы упругая деформация установки была как можно меньше.
314
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
Описанная система горизонтальных рельсов или брусьев
представляет собою простейший тип статической балансировочной
машины. Заметим, что для машин, вращающиеся массы которых
имеют форму диска, т. е. продольные размеры которых (вдоль
оси) малы, статическая уравновешенность есть единственная,
которая требуется для обеспечения спокойной работы машины
на малых скоростях.
В том случае, когда ротор машины представляет собою удли-
ненное тело, одной статической уравновешенности недоста-
точно. На рис. 6.8 показан ротор, вполне симметричный относи-
Рис. 6.8. Динамически неуравнове-
шенный ротор вызывает реакции
в подшипниках, равные по вели-
чине ^противоположные по на-
правлению.
тельно оси вращения, почти
«идеальный», с тем лишь исключе-
нием, что к нему прикреплены в
двух противоположных симмет-
ричных относительно центра точ-
ках две одинаковые массы
и т2. Так как эти массы не сме-
щают центра тяжести ротора с его
оси, то совершенно очевидно,
что статическая уравновешенность
имеется. Однако стоит только
ротор привести во вращательное
движение, как появляются цен-
робежные силы от масс и
?п2, образующие пару, которая вызывает появление указанных
на чертеже добавочных реакций подшипников. Таким образом,
мы можем сказать, что наш ротор, уравновешенный статически,
оказывается неуравновешенным динамически, поскольку эта неурав-
новешенность может быть обнаружена лишь динамическим
испытанием, тогда как на статической балансировочной машине
он ведет себя, как вполне уравновешенное тело.
Мы сейчас покажем, что всякая неуравновешенность жесткого
ротора (статическая, динамическая или комбинированная) может
быть исправлена путем помещения соответствующих компенси-
рующих грузов в двух плоскостях, за которые обычно берутся,
по причине их большей доступности, концевые плоскости I и
II ротора (рис. 6.9). Пусть, например, существующий дисбаланс
составляет 4 кГ мм на одной четверти длины ротора и 3 кГ мм
посредине между плоскостями I и II, причем радиальное направ-
ление последней повернуто на 90° по отношению к первой. Для
нахождения компенсирующих масс, которые надлежит располо-
жить в плоскостях I и II, мы сначала определим компенсацию
дисбаланса в 4 единицы, затем определим компенсацию дисбаланса
в 3 единицы и,наконец, найдем суммарную компенсацию. Первый
дисбаланс должен вызвать вращающуюся центробежную силу
в 4 единицы, которую можно статически уравновесить силой в 3
§ 6.3
УРАВНОВЕШИВАНИЕ ЖЕСТКИХ РОТОРОВ
31 5
единицы в плоскости 1 и силой в 1 единицу в плоскости 77. Таким
образом мы должны поместить компенсирующую массу в 3
единицы в плоскости 7, притом так, чтобы ее радиус образовал
угол 180° с радиусом первой неуравновешенной массы, и, кроме
того, должны еще поместить единичную компенсирующую массу
в плоскости 77, опять на угловом расстоянии 180° от первой
неуравновешенной массы.
Дисбаланс в 3 единицы выправляется помещением двух рав-
ных масс по Р/г единицы па каждом конце. Итак, окончательно
нам необходимо отметить в плоскости 7 две массы, одна из которых
Рис. 6.9. В самом общем случае неуравновешенность жесткого роюра можеч
быть исправлена путем помещения корректирующих грузов в каждой из
двух плоскостей I и II.
равна 3 единицам, а другая — Р/г единицам, причем их радиусы
должны составлять между собою угол 90°. Соответствующие
этим массам центробежные силы могут быть сложены по правилу
параллелограмма, а поэтому вместо двух масс мы можем поместить
в плоскости 7 только одну массу, равную УЗ2 + 1,52 = 3,36 еди-
ницы и расположенную под углом а = arctg 0,5 к диаметру дисба-
ланса в 4 единицы. Подобным же образом полная компенсация в
плоскости 77 получается в виде массы в УI2 + 1,52 = 1,80 единицы,
помещенной под углом ft = arctg 1,5 к тому же самому диаметру.
Описанный процесс можно обобщить и на случай большего
числа неуравновешенных масс, вследствие чего любая неуравно-
вешенность жесткого ротора может быть исправлена с помощью
всего лишь двух масс, каждая из которых помещается в соответ-
ствующей плоскости.
Если мы возьмем произвольно какой-либо неуравновешенный
ротор, то, вообще говоря величина и расположение неуравнове-
шенности для него не известны и могут быть определены только
с помощью динамической балансировочной машины. Один из
типов такой машины, употребляемой для роторов малых и сред-
них размеров, показан на рис. 6.10. Здесь ротор устанавливается па
двух подшипниках, жестко связанных с легким столом Т (с
так называемой маятниковой рамой). В сбою очередь, этот стол
316
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. V
Рис. 6,10. Балансировочная машина для роторов
малых и средних размеров с двумя парами смен-
ных опорных штифтов.
поддерживается пружинами и может поворачиваться вокруг
какой-либо из двух осей Fr и F2j осуществляемых посредством
опорных штифтов, расположенных в плоскостях уравновешен-
ности / и 11. Ротор приводится во вращение посредством ремня
или же гибкого вала, благодаря чему двигатель оказывается
разобщенным от стола Т. Иногда в установке делается непосред-
ственная передача движения от небольшого мотора, жестко
монтированного на столе Т, но тогда увеличивается вес стола,,
что является нежелательным. На рис. 6.10 период не показан.
Переходим к описанию балансировки. Сначала, освобождая^
например, штифты F2, устанавливают штифты так, чтобы они
образовали ось вра-
щения стола, после
чего пускают в ход
мотор и увеличивают
скорость вращения
до тех пор, пока стол
на пружинах не ока-
жется в состоянии
резонанса. Наиболь-
шие колебания будут
иметь место на пра-
вом конце стола Т»
причем амплитуда ко-
лебаний отсчитыва-
ется по циферблату специального указателя. Несколько не-
обходимых здесь опытов определит нам величину и поло-
жение в плоскости II компенсирующего груза. После введе-
ния этого груза ротор со столом уже не должны испытывать
никаких колебаний. Если возможно еще существование неурав-
новешенности ротора, то во всяком случае эта неуравновешен-
ность не может давать момента вокруг оси штифтов Flt а
может лишь иметь равнодействующую, расположенную в плос-
кости I.
Затем освобождаются штифты Рг и подводятся к столу штифты
F2. Тогда, аналогично предыдущему, мы можем определить вели-
чину и положение компенсирующего груза в плоскости I. После
этого второго уравновешивания моменты всех центробежных
сил оказываются равными нулю относительно обеих осей. 7. е.
как Flf так и F2. Но, как известно из статики, в этом случае долж-
ны обращаться в нуль моменты относительно любых осей, иначе
говоря, ротор будет уравновешен вполне.
Обратимся теперь к самому методу определения компенси-
рующих грузов. Очевидно, что проще всего это сделать, прибегая
к соотношениям между фазами, которые показаны на рис. 2.22
(стр. 77). Дело в том, что если мы будем держать карандаш очень
-S 6.3
УРАВНОВЕШИВАНИЕ ЖЕСТКИХ РОТОРОВ
317
близко к вращающемуся и вибрирующему ротору, то этот каран-
даш будет прочерчивать линии на утяжеленной части ротора
при вращении вала со скоростью, меньшей критической, и наобо-
рот, он будет прочерчивать линии на облегченной части ротора
при вращении вала со скоростью, большей критической. Наконец,
если вал вращается со скоростью, в точности равной критической,
то наши отметки будут получаться в точках, расположенных на
90° позади утяжеленной части. Таким образом, посредством ука-
занных отметок мы можем определить положение неуравновешен-
ности. Что касается величины ком-
пенсирующего груза, то она может быть
найдена путем небольшого числа ис-
пытаний.
Описанный фазовый метод явля-
ется очень неточным, так как около
резонанса сдвиг фазы меняется весьма
резко при небольшом изменении ско-
рости, в то время как при скоростях,
значительно отличающихся от кри-
тической, амплитуды колебаний столь
малы, что весьма трудно получить в
удо влетво р и тел ином виде требуем ые
Рис. 6.11. Векторная диа-
грамма для определен ия дис-
баланса в плоскости с по-
ответы.
Более надежный метод заключается
в наблюдении только амплитуд, для
чего производят три исследования мощью трех, или четырех
вращающегося ротора в трех различ- наблюдений амплитуд,
ных условиях: во-первых, ротор берется
без всяких дополнительных грузов; во-вторых, к ротору добав-
ляется единичный неуравновешенный груз, располагаемый в
произвольном отверстии ротора; наконец, в-третьих, такой же
груз помещается в диаметрально противоположном отверстии.
Пусть на рис. 6.11 вектор О А представляет собою в некотором
масштабе первоначальный дисбаланс ротора и, следовательно,
в другом масштабе — амплитуду колебаний, происходящих при
определенной скорости вследствие неуравновешенности. Подоб-
ным же образом предположим, что вектор ОВ изображает сум-
марный дисбаланс ротора после помещения добавочного груза
в первое отверстие. Мы видим, что вектор ОВ может рассматри-
ваться как геометрическая сумма векторов О А и АВ, где АВ
представляет собою введенную дополнительную неуравновешен-
ность. Если теперь добавочный груз снять и поместить его
в противоположное отверстие, то новая неуравновешенность
должна изобразиться вектором АС, равным по величине и про-
тивоположным по направлению вектору АВ. Следовательно,
вектор ОС, являющийся суммой начального дисбаланса 0.1
318 ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН ГЛ. V]
и нового АС, представит собою полный дисбаланс в третьем
испытании1),
В результате наблюдений амплитуд в указанных трех испыта-
ниях мы узнаем относительные длины трех векторов ОА, ОБ,
ОС, ио еще не узнаем ни их абсолютных длин, ни углов между
ними. Однако мы все-таки знаем, что отрезок ОА должен быть
медианой треугольника ОВС, а поэтому задача сводится к
построению треугольника ОВС, для которого известны отношения
двух сторон и медианы. Для этого построения, не выходящего
за пределы евклидовой геометрии, удвоим отрезок О А и на полу-
ченном отрезке OD построим треугольник ODC, в котором
сторона DC равна отрезку ОБ, а потому все три стороны тре-
угольника оказываются известными. Следовательно, такой тре-
угольник мы построить можем, а тогда и будем знать отношение
длин АВ и ОА. Но так как АВ изображает известный дисба-
ланс, искусственно введенный нами, то отсюда сможем найти также
величину первоначального, неизвестного пока, дисбаланса ОА.
Тем самым мы определим и угол а, образуемый вектором началь-
ного дисбаланса ОА с вектором дополнительного дисбаланса АВ.
В описанном построении имеется все же одна неопределен-
ность. В самом деле, поскольку нам приходится строить треуголь-
ник по трем сторонам, мы вместо треугольника OCD можем
получить треугольник OCD. Далее, вследствие этого мы полу-
чим направление СВ' введенного дисбаланса вместо действи-
тельного направления СВ. Эта неопределенность устраняется,
если проделать еще четвертое испытание, которое послужит так-
же проверкой тщательности всех предыдущих. Заметим, что в
основе построения рис. 6.11 не было никаких предпосылок, кроме
предположения линейности системы, т. е. мы считаем, что все
амплитуды колебаний пропорциональны неуравновешенным мас-
сам. Это предположение в действительности для роторов цели-
ком не оправдывается, по все же оно с довольно большой степенью
точности верно. Если после выполнения всех описанных испыта-
ний и выполнения построений на рис. 6.11 мы с помощью этих
построений найдем и установим корреткирующий груз и если
после этого колебания все-таки будут, то они будут много меньше
первоначальных, а далее весь процесс рис. 6.11 может быть по-
вторен еще раз.
На заводах, где. как правило, приходится уравновешивать
большое число малых и средних роторов, уравновешивание по
способу, представленному на рис. 6.11, отняло бы слишком много
времени. Для таких практических применений балансировочная
машина, изображенная схематически па рис. 6.10, была усовер-
*) Это есть метод Б. В. Шитикова (см., например, книгу И. И. Артобо-
тевского «Теория механизмов и машин», Гостехиздат, 1951). (Прим, перее.)
S 6.3
УРАВНОВЕШИВАНИЕ ЖЕСТКИХ РОТОРОВ
319
шенствована в довольно сложный прецизионный прибор, в кото-
ром уравновешивание производится посредством так называемой
«балансировочной головки».
Балансировочная головка предоlaiwijici собою прибор, наглухо
связанный с испытуемым ротором и несущий в себе два рычажка
с грузами (рис. 6.12). Эти рычажки вращаются вместе с ротором
и занимают по отношению к нему все время одно и то же поло-
жение, во всяком случае до тех нор, пока не вмешается экспери-
ментатор. Возможность относительного вращения упомянутых
рычажков по отношению к ротору достигается сложной системой
зубчатых колес, муфт, магнитов или моторов.
Так как вся головка в целом вращается, то
электрический ток для ее действия приходится
подводить к ней посредством скользящих ко-
лец. Экспериментатор имеет перед собою две
кнопки. Если он нажимает одну из них, то
оба рычажка вращаются в одну и ту же сто-
рону, если же он нажимает другую, то рычажки
вращаются в противоположные стороны. В
обоих случаях скорость вращения рычажков
по отношению
за 5 сек
Так как
обусловлена
периментатор
и направление соответствующего добавочного
Заставив нажатием кнопки 7 обе массы вращаться в одну
и ту же сторону и наблюдая за указателем колебаний, экс-
периментатор увидит, что в течение 5 сек. имеет место один
максимум и один минимум амплитуды Сняв палец с конопки 1 в
момент наименьшего значения амплитуды и нажав кнопку 2.
Рис.6.12. Баланси-
ровочная головка с
двумя неуравно-
вешенными рычаж-
ками.
к ротору равна одному обороту
неуравновешенность головки
только рычажками, то экс-
вполне может изменять как
величину, так
дисбаланса.
он заставит теперь рычажки вращаться навстречу друг другу.
Так как при таком движении биссектриса угла между рычажками
остается в покое по отношению к ротору, то относительное на-
правление добавочного дисбаланса не изменяется, а изменяет-
ся лишь его величина в пределах от двух масс (при совпадении
рычажков) до нуля (когда рычажки образуют угол 180°). Приведя
таким образом колебания к нулю, ротор останавливают и по
положению рычажков в головке сейчас же определяют требу-
емые компенсирующие грузы. Как и в предыдущих машинах,
весь описанный процесс надо выполнять два раза, соответственно
двум различным положениям опорных штифтов.
Другой, совершенно отличный от предыдущего, способ урав-
новешивания был изобретен Сирлем (Thearle) в 1930 г. Здесь мы
имеем машину такого же типа, что и на рис. 6.10, снабженную
двумя парами штифтов и головкой, подобно изображенной на
320
ВI» Л ШЛЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
рис. 6.12, однако с той разницей, что оба рычажка могут свободно
вращаться но отношению к ротору независимо друг от друга.
Кроме того, эти рычажки могут закрепляться также на роторе.
В этой установке нет ни зубчатых передач, ни магнитов, а име-
ется только муфта, могущая закреплять или освобождать рычаж-
ки. Во время испытаний рычажки сначала зажимают, и вращение
машины доводится до скорости, превышающей критическую.
После этого рычажки освобождают и они сами автоматически
устанавливаются в положении полного уравновешивания, при
Рис. 6.13. Объяснение действия балансировочной
машины Сир л я.
Выше крити-
ческом скорости
котором прекращаются все колебания. Тогда опять зажимают
рычажки в данном положении и останавливают ротор.
Теория действия этого прибора очень интересна. Положим,
что оба рычажка закреплены под углом 180° один относительно
другого, вследствие чего головка с рычажками оказывается
вполне уравновешенной. Неуравновешенность системы может
иметь место только из-за ротора.
Пусть на рис. 6.13 точка В представляет собою сечение пло-
скости чертежа осевой линии подшипников, 5 — центр вала,
т. е. балансировочной головки, G — центр тяжести. Из рис. 6.13
мы знаем, что последовательность этих трех точек различна,
смотря по тому, будет ли скорость вала выше или ниже крити-
ческой. Вращение всей системы происходит вокруг осевой линии
В, вследствие чего центробежные силы, действующие на зажатые
рычажки, направлены от В.
Если при некоторой скорости, меньшей критической (рис.
6.13, а), рычажки отпущены, то центробежные силы повернут
их навстречу друг другу в сторону верхней части рисунка. После
такого поворота они оказываются на той стороне диска, где нахо-
дится точка G, т. е. на утяжеленной части. С другой стороны,
если рычажки освободить при скорости, большей критической,
§ 6.3
УРАВНОВЕШИВАНИЕ ЖЕСТКИХ РОТОРОВ
321
то, как видно на рис. 6.13,6, центробежные силы будут стремиться
повернуть их опять к верхней части рисунка, по только в данном
случае это будет уже облегченная часть. Когда рычажки будут
сближаться, общий центр тяжести G будет на нашем чертеже
подниматься, причем по истечении некоторого времени точка G
совпадет с точкой S, а следовательно, и с точкой В, и колебания
совершенно прекратятся.
В практическом применении два рычажка заменяются двумя
шариками, которые могут катиться по круговой концентрической
траектории. Интересно заметить, что в раннем изображении
Леблана (около 1900 г.) в качестве такой концентрической дуги
была предложена трубка, частично заполненная ртутью. Этим
предполагалось создать автоматическую балансировку, причем
теория вопроса была та же, что и теория Сирля, для которой был
приведен рис. 6.13.
Однако в то время как рычажки или шарики функционируют,
ртуть в том же канале не функционирует. Это легко объяснить,
если заметить, что при достижении уравновешивания центр
траектории, т. е. канала или трубки, совпадает с точкой S и
центробежные силы всюду перпендикулярны к круговой траек-
тории. Тогда шарик будет в любом положении па траектории в
безразличном равновесии, тогда как ртуть расположится равно-
мерно по дуге. В то время как шарики или рычажки, двигаясь по
дуге с центром в точке способны образовать конфигурацию,
исключающую неуравновешенность, для ртути это не имеет места.
Вследствие этого идея Леблана была ошибочной, а его изобретение
неудачным.
В последнее время (1947 г.) указанный принцип был исполь-
зован в домашних стиральных машинах (Thor washing machine,
U.S. Patent 2, 420, 592). Бак этой машины с пачкой сырого белья,
вращающийся со скоростью примерно 600 об/мин (центробежный
сушильный процесс), снабжен двумя свободно насаженными
кольцами. При малых скоростях эти кольца прижимаются друг
к другу по направлению к центру, а при скорости выше крити-
ческой они освобождаются и автоматически занимают такое
положение, в котором они противодействуют значительному
дисбалансу от белья.
При современном развитии радиотехники уже не является
необходимым доводить вращение балансировочных машин до
состояния резонанса. Эти машины могут успешно функционировать
на скоростях, достаточно удаленных от резонансных, причем
очень малые колебания подшипников воспринимаются электри-
ческими приборами, отдаваемое напряжение которых может быть
увеличено до желаемой степени посредством усилителей из элек-
тронных ламп. В следующем параграфе мы дадим описание машин,
в которых использованы такие усилители.
21 Ден-Гартог 2074
322 ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН ГЛ. VI
§ 6.4. Одновременное уравновешивание в двух плоскостях
Методы балансировки, описанные в предыдущем параграфе,
можно упростить, если есть средство измерить фазовый угол
между расположением дисбаланса ротора и направлением его
наибольших размахов при колебании. Положим, что ротор поддер-
живается двумя подшипниками а и Ь, которые обладают подат-
ливостью, например, в горизонтальном направлении, но вполне
жестки в вертикальном. Плоскости уравновешивания Z и ZZ не
проходят через подшипники а и Ь. Представим себе, что ротор
обладает идеальной уравновешенностью, а поэтому при его
вращении подшипники совершенно не подвергаются колебаниям.
Нарушим теперь уравновешенность нашего идеального ротора
путем единичного груза в плоскости уравновешивания Z, положе-
ние которого пусть определяется углом 0°. Эта операция вызовет
колебания в обоих подшипниках, которые мы обозначим через
ас1 и аЬ1. Здесь первый индекс обозначает подшипник, в котором
появляется это колебание, а второй — плоскость, где помещается
единичный груз в нулевом угловом положении. Если бы в системе
не было затухания, то числа а были бы действительными. Посред-
ством этих чисел мы отмечаем совпадение момента наибольшего
отклонения подшипников в горизонтальном направлении с момен-
том нахождения добавочного груза на конце горизонтального
радиуса. Однако при затухании должен появиться некоторый
фазовый угол между радиусом дисбаланса и горизонтальным
направлением в момент наибольшего отклонения подшипника, и
это обстоятельство мы можем отобразить математически, считая
а комплексной величиной.
Подобным же образом идеальный ротор может быть разбалан-
сирован единичным грузом, помещенным в угловом нулевом поло-
жении в плоскости ZZ, что вызовет колебания подшипников, кото-
рые мы теперь обозначим соответственно через aQll и аМ1. Четыре
полученные таким образом величины а называются комплексными
динамическими коэффициентами влияния установки. Если скорость
вращения ротора значительно выше критической, то затухание в
системе мало, и коэффициенты влияния близки к действительным
величинамх). Эти четыре коэффициента влияния вполнеопределяют
упругие и инерционные свойства системы при данной угловой
скорости, для которой они вычислены, но они совершенно не за-
висят от величины имеющейся неуравновешенности.
Предположим теперь, что дисбаланс в плоскости 1 не только
не является единичным по величине, но и угловое положение
его отличается от рассмотренного единичного дисбаланса; этот
дисбаланс мы выразим комплексным числом Uv Тогда этот дисба-
г) Коэффициенты при мнимой единице малы. (Прим, перев.)
§ 6.4 ОДНОВРЕМЕННОЕ УРАВНОВЕШИВАНИЕ В ДВУХ ПЛОСКОСТЯХ
323
ланс Ux вызовет колебание подшипника а, выражаемое произведе-
нием двух комплексных чисел аа] Uv
Установив эти обозначения, мы можем теперь изобразить
колебания обоих подшипников посредством векторов V, выра-
женных через векторы Ux и С7П дисбалансов в общем случае.
Итак, имеем:
К =аа1 U, +ао11 Un, )
(6.4)
Vb ~ аъ\ + ubu Uи. )
Векторы колебаний Йа и Vb мы можем найти путем измерения,
а тогда из системы уравнений (6.4) определятся вычислением
векторы дисбалансов Ux и С7П, для которых получаем следующие
значения:
77 _ а&Н Т7 aoII I? )
~~Л~ Уь, /
> (6.4а)
^ = 7)
В этих уравнениях величина Д = aQj • аьи —аЬ1 • аоП есть
определитель, составленный из коэффициентов уравнений (6.4).
Таким образом, система уравнений (6.4а) позволяет нам вычислить
неизвестные векторы дисбалансов, если мы можем измерить векто-
ры колебаний в обоих подшипниках и если мы знаем четыре ди-
намических коэффициента влияния.
Векторы V Могут быть измерены различными способами.
Очень удобный метод, разработанный в последние несколько
лет, заключается в использовании механизма громкоговорителя,
подобно тому, как это было описано на стр. 93. Упоминавшиеся
здесь чувствительные элементы присоединяются к двум вклады-
шам подшипников а и b балансировочной машины; эти элементы
отдают переменное напряжение, величина и фаза которого опре-
деляют вектор колебания. Этот принцип использован в балан-
сировочной машине Гишолт—Вестингауза (Gisholt—Westinghouse),
где имеется также электрический контур, посредством которого
уравнения (6.4а) решаются автоматически. Чтобы понять действие
такого контура, представленного на рис. 6.14, перепишем первое
уравнение (6.4а) следующим образом:
В этом уравнении модуль отношения аоП/ай11 меньше единицы,
так как числитель представляет собою реакцию подшипника на
действие единичного груза, расположенного вдали от него, а зна-
21*
324
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
менатель представляет собою аналогичную величину, вызванную
действием груза, расположенного вблизи. Во всех обычных систе-
мах это отношение меньше единицы. Таким образом, из уравнения
(6.5) мы видим, что дисбаланс в плоскости I определяется вычи-
танием из вектора колебаний подшипника а некоторой дробной
части вектора колебаний подшипника Ъ и умножением результата
на отношение b[X/At Упомянутая дробная часть вектора Vb есть
величина комплексная, но мало отличающаяся от действительной,
поскольку машина вращается со скоростью, значительно превыша-
Рис. 6.14. Схема электрического контура балансиро-
вочной машины Гишолт—Вестингауза.
ющей резонансную. Вычитание этих двух количеств выполняется
на рис. 6.14 путем последовательного включения полного напряже-
ния, отдаваемого катушкой громкоговорителя на подшипнике
а, и части напряжения, отдаваемого катушкой громкоговорителя
на подшипнике Ь. Эта дробная часть напряжения снимается движ-
ком потенциометра 1. Таким способом возможно к этой дроби
подобрать комплексное число, модуль которого меньше единицы.
Тот факт, что в правой части уравнения (6.5) стоит не плюс,
а минус, не имеет в дальнейшем существенного значения, так как
зажимы катушки можно поменять местами. Далее, напряжение,
выражаемое правой частью уравнения (6.5) поступает в усилитель,
а затем увеличенное напряжение умножается на комплексное
число аьп/Д посредством снятия его комплексной части движком
потенциометра 2. Ток на выходе контура читается на миллиампер-
метре. Одновременно им пользуются для приведения в действие
стробоскопической лампы, которая вспыхивает один раз при каж-
дом обороте ротора. Если только возможно установить движок 1
так, чтобы отобразить дробьаоП/с'М1, а движок 2 так, чтобы отобра-
зить дробь аьи/Д, то миллиамперметр покажет в некотором мас-
штабе сразу всю величину дисбаланса, тогда как стробоскопическая
лампа будет своими вспышками фиксировать ротор в таком поло-
жении, что неподвижная игла отметит угловое расположение
дисбаланса.
Описанный сейчас контур дает решение первого уравнения
(6.5). Для решения второго уравнения (6.5) необходимо скомби-
§ G.4 ОДНОВРЕМЕННОЕ УРАВНОВЕШИВАНИЕ В ДВУХ ПЛОСКОСТЯХ 325
пировать полный выход Vb с частью Va и результат, полученный
после усиления, умножить па новое комплексное число. Все это
выполняется в новом контуре движками 3 и 4, играющими такую
же роль, что и движки 1 и 2 в предыдущем случае.
Интересная особенность этого контура заключается в том,
что необходимое расположение контактов определяется не вычи-
слением, а рядом весьма простых испытаний. Предположим, что
требуется уравновесить большое количество одинаковых роторов,
получающихся при серийном производстве. Мы начинаем с уравно-
вешивания одного ротора каким-либо способом, пока не достигнем
его полной уравновешенности, что потребует, вообще говоря, зна-
чительного времени. Этот совершенный ротор, будучи помещен
на подшипники а и Ь, не должен вызывать их колебания, а поэтому
не должно быть напряжений VQ и Vb. Тогда миллиамперметр пока-
жет нуль. Теперь преднамеренно разбалансируем ротор путем
произвольного помещения единичного груза в нулевом угло-
вом положении в плоскости 7. При этом миллиамперметр
должен показывать амплитуду, а в стробоскопе будет нулевой
угол, но при условии, если включен контур (рис. 6.14) с контак-
тами 1, 2, т. е. если переключатель поставлен в положение 7.
Если же поставить переключатель в положение 77, то вступает в
действие новый контур с контактами 3, 4 и тогда миллиамперметр
должен дать нулевое показание. Совершенно естественно, что эти
показания не будут такими, какими они должны быть, поскольку
упомянутые четыре контакта еще не отрегулированы.
Из уравнения (6.5) следует, что в положении переключателя
77 нулевое положение миллиамперметра (когда дисбаланс нахо-
дится в плоскости 7) не может быть получено посредством кон-
такта 4, а обусловливается полностью контактом 3. Поэтому
мы перемещаем ручку движка 3 до тех пор, пока миллиампер-
метр не покажет нуль.
После описанной процедуры единичный неуравновешенный
груз удаляют из плоскости 7 и помещают в плоскость 77, устанав-
ливая одновременно переключатель в положение 7. Здесь опять
миллиамперметр должен показать нуль, что достигается регули-
ровкой контакта 7. Затем, оставляя единичный груз в плоскости
77, ставят переключатель в положение 77 и устанавливают кон-
такт 4 таким образом, чтобы амперметр показал единичную не-
уравновешенность, а стробоскоп — нулевое угловое положение.
Наконец, груз возвращают в плоскость 7, переключатель ставят
в положение 7 и соответствующей установкой контакта 2 дости-
гают единичного показания в амперметре и пулевого в стробо-
скопе. Весь процесс регулировки четырех положений отнимает
у опытного экспериментатора всего несколько минут, после чего
прибор является вполне отрегулированным для уравновешивания
любого ротора из данной серии. Самый процесс уравновешивания
326 ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН ГЛ. VI
после этих предварительных операций состоит в следующем.
Неуравновешенный ротор помещают в подшипники балансировоч-
ной машины, приводят его во вращательное движение посредством
ножного выключателя, действующего на ременную передачу, от-
считывают показание миллиамперметра и угловое положение,
ставя! переключатель в другое положение и опять отсчитывают
численное значение дисбаланса и его угловое положение. Весь
процесс занимает всего только несколько секунд и при этом отли-
чается высокой степенью точности.
В некоторых случаях требуется уравновесить только один
ротор, не являющийся представителем целой серии роторов в
массовом производстве, как, например, ротор турбины или гене-
ратора. Такой ротор должен быть уравновешен на силовой стан-
ции в своих подшипниках, п тогда ставится задача о создании
«идеального ротора». Тогда весь описанный процесс неосвобождает
пас от значительных трудности, но тем не менее все же представ-
ляется возможным и здесь применить установку (рис. 6.14),
если воспользоваться остроумным приемом, указанным Бекером
(J. G. Baker), который состоит в своеобразном применении контура
(рис. 6.14), ведущего себя так, как если бы мы имели дело с иде-
альным ротором, тогда как на самом деле ротор является неурав-
новешенным. Для этой цели ставятся два небольших генератора
переменного тока, приводимых в движение турбиной, подлежащей
уравновешиванию. Эти генераторы дают ток с частотой, равной
числу оборотов турбины; что же касается напряжения тока, то
оно может регулироваться как по величине, так и по фазе
(рис. 6.14). Кон тур здесь разрывается в двух местах, именно там, где
изображены катушки Va и Гс. Напряжение генераторов, соот-
ветственным образом измененное, поступает в эти разрывы и регу-
лируется так. что напряжение, индуктированное колебаниями в
каждой катушке входа, нейтрализуется равным и противополож-
ным напряжением, искусственно вводимым генераторами. Благо-
даря этому контур (рис. 6.14) не получает импульсов, а следова-
тельно, ведет себя так, как если бы вращался идеальный ротор.
Не снимая реактивного напряжения, производят три испытания
данного ротора1 1) без добавочных грузов, 2) с единичным доба-
вочным грузом в плоскости Z, 3) с единичным грузом в плоско-
сти 77. Таким образом, производится регулировка всех четырех
контактов, как это описано выше. После этого искусственно вве-
денное реактивное напряжение снимается, и тогда поведение
контура будет уже соответствовать действительному ротору
с действительно имеющимися в нем неуравновешенностями.
Еще более простой метод уравновешивания без посредства
опорных штифтов подсказывается уравнениями (6.4). Ясно, что
отсчет колебаний мы можем сделать в том месте подлине ротора,
где обращаются в нуль коэффициенты влияния аоП и ам. Это
§ 6.5 УРАВНОВЕШИВАНИЕ ГИБКИХ РОТОРОВ 327
значит, что измерение Va (или Т7Й) может быль сделано в таким
месте ротора (считая по его длине), которое не испытывает колеба-
ний, если неуравновешенный груз поместить в плоскости 11
(или 7). Это место называется «центром удара» плоскости II (или
Z). В этом случае каждый чувствительный элемент громкоговори-
теля или какой-либо иной электрический прибор покажет только
колебание, вызванное неуравновешенностью в одной плоскости,
а тогда, вместо решения системы совокупных четырех уравнений
типа (6.4) с четырьмя неизвестными, задача сведется к решению
двух систем уравнений, каждая из которых содержит два неиз-
вестных. Описанный сейчас метод применяется с некоторого вре-
мени в машине, сконструированной General Motors Research Labo-
ratory
§ 6.5. Уравновешивание гибких роторов. Уравновешивание
на месте установки
Когда мы рассматривали в двух предыдущих параграфах дей-
ствие неуравновешенных масс, мы предполагали, что сам ротор не
деформируется. Это допущение вполне оправдывается при враще-
нии со скоростью, значительно меньшей первой критической;
однако при скоростях, превосходящих половину первой критиче-
ской скорости, ротор получает деформации, которыми уже нельзя
пренебречь, так как они приводят к возникновению новых центро-
бежных сил, добавляющихся к основным, вызываемым первона-
чальной неуравновешенностью. Так, например, если мы имеем
единичный дисбаланс, расположенный в центре симметричного
жесткого ротора, то соответствующая единичная центробежная
сила вызывает добавочные реакции подшипников, каждая из
которых равна половине единичной центробежной силы. С другой
стороны, если ротор гибкий, то эта единичная центробежная сила
вызовет изгиб вращающейся части, сместив таким образом ее
осевую линию с первоначального положения. Следовательно,
изогнутая ось будет совершать вращательное движение, а добавоч-
ные центробежные силы будут изменять реакции подшипников.
Очевидно, что машину можно уравновесить добавлением
компенсирующего груза, помещенного как раз посредине напро-
тив первоначального дисбаланса. Однако мы предпочитаем про-
изводить уравновешивание в двух определенных плоскостях
вблизи концов. Пусть наш ротор представляет собою прямой
однородный вал, а плоскости уравновешивания расположены на
одной шестой длины вала от каждого ее конца. Очевидно, что
жесткий ротор может быть уравновешен двумя противовесами,
расположенными в каждой из плоскостей. Каждый из них сам по
себе дает дисбаланс величиною с половину дисбаланса, помещен-
ного в середине (рис. 6.15,а).
328
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
Когда неуравновешенный ротор вращается с первой критиче-
ской скорое! ыо, w его упругая линия есть синусоида (см. стр. 207),
амплитуда которой столь велика, что вводимый благодаря этому
новый дисбаланс оказывается значительно больше, чем перво-
начальный единичный дисбаланс. Этот последний не будет поэтому
Рис. 6.15. В гибких роторах
компенсирующие грузы, по-
мещаемые в плоскостях 7
и 77, которые действи-
тельно выправляют не ура в-
оказывать влияния на форму изогнутой
оси, прогибы которой в плоскостях
уравновешивания равны половине про-
гиба в середине. Следовательно, в дей-
ствительности каждый из противовесов
должен быть равен первоначальному
неуравновешенному грузу. Это легко
уяснить себе, предположив, что вал
получает небольшой дополнительный
прогиб. Так как мы имеем сейчас в
виду случай резонанса, то можем
утверждать, что в любом положении
вала его центробежные силы (исклю-
чая первоначальный дисбаланс) нахо-
дятся в равновесии с упругими силами.
При увеличении прогиба в середине на
величину 8 работа, совершаемая перво-
начальным дисбалансом, равна 5*1, а
работа, совершаемая каждым из ком-
пепсирующих грузов, равна -^8 • 1.
Итак, мы видим, что равновесие дела-
повешенностъ, изменяются ется безразличным (что именно и ха-
со скоростью вращения рактеризует состояние ротора при
критической скорости), когда каждый
из компенсирующих грузов берется равным единице (рис. 6.15,6).
На второй критической скорости центральный дисбаланс
не смещается со своего положения, вследствие чего компенсиру-
ющие грузы не требуются. На третьей критической скорости
компенсирующие грузы должны быть взяты в два раза меньше
и помещены с противоположной стороны по отношению к гой, на
которой они располагаются при малых скоростях (рис. 6.15, в. г).
На основании изложенного мы приходим к заключению, что
гибкий ротор можно уравновесить в двух плоскостях только для
одной скорости. При иных скоростях машина, как правило,
оказывается опять неуравновешенной. Большие турбинные валы
или роторы турбогенераторов в современных установках работают
обычно на скоростях, заключающихся между первой и второй кри-
тическими скоростями. Если подобные агрегаты уравновешены
для достаточно малых скоростей с помощью машины, схемати-
чески представленной па рис. 6.10, то они, тем не менее, весьма
§ G.5 УРАВНОВЕШИВАНИЕ ГИБКИХ РОТОРОВ 329
часто имеют очень неровный ход на полной скорости, вращаясь
в тех же неподвижных подшипниках. Это обстоятельство является
одной из причин того, что уравновешивание на станках является
недостаточным, и такие машины должны быть уравновешены опять
на месте установки в эксплуатационных условиях. Так как в
этих условиях, конечно, нет опорных штифтов, то весь процесс
уравновешивания отнимает значительное время. Как правило,
здесь применяется метод амплитуд, изложенный на стр. 317, однако
с целью большей надежности выполнения уравновешенности необ-
ходимо всю операцию повторить несколько раз, переходя от одной
плоскости уравновешивания к другой, и обратно.
С 1950 г. роторы больших турбогенераторов стали такими
длинными и гибкими, что они работают в интервале между второй
и третьей критическими скоростями. Уравновешивание в двух
плоскостях теперь уже недостаточно, и в настоящее время в
практику некоторых крупных фирм вошло уравновешивание таких
роторов на станках в трех или даже в большем числе плоскостей.
В то время, как теоретически возможно уравновешивание для
заданной скорости в двух плоскостях, практически иногда ока-
зывается, что корректирующие грузы получаются недопустимо
большими, а тогда рекомендуется уравновешивание в трех,
а иногда в четырех плоскостях. В принципе мы можем обобщить
процесс, описанный на стр. 315, когда измерением колебаний в
двух плоскостях определяют веса необходимых корректирующих
грузов в двух других плоскостях с помощью системы двух вектор-
ных уравнений (6.4). Таким образом, в данном случае, если мы
производим п измерений в п местах, то мы можем построить п
векторных уравнений, определяющих п корректирующих грузов в
п плоскостях.
Известны исключительные случаи, когда в течение нескольких
недель систематической работы по уравновешиванию машины
во время эксплуатации не могли достигнуть ровного хода машины.
В таких случаях неравномерность хода машины, очевидно, вызы-
вается иными причинами, чем обычная неуравновешенность. Так,
при испытании одной машины было обнаружено, что по небреж-
ности в полой части турбины был забыт компенсирующий груз,
благодаря чему экспериментаторы оказались в заблуждении.
В самом деле, поскольку груз, примерно в 0,5 кГ весом, свободно
перемещался в этом пространстве, не было никакой возможности
уравновесить машину.
Недавно получили объяснение многие интересные случаи
колебаний паровых турбин, наблюдавшихся в течение последних
пятнадцати лет. Так, подмечено, что турбина, очевидно вслед-
ствие имеющейся неуравновешенности, начинает колебаться с
частотой, равной угловой скорости ее вращения, причем интен-
сивность колебаний обычно периодически изменяется и притом
330
вращающиеся части машин
ГЛ. VI
Рис. 6.16. Иллюстрация
спирального перемеще-
н ия дисбаланса в роторе,
вызванного его неравно-
мерным нагревай ием или
охлаждением.
весьма медленно. В некоторых турбинах промежуток времени
между двумя последовательными максимумами колебаний был
равен 15 минутам, в других случаях он достигал даже 5 часов.
Серьезность этого нежелательного явления заключалась в том,
чю каждый последующий максимум был хуже предыдущего,
вследствие чего по истечении примерно 6 таких циклов машину
приходилось выключать.
Были сделаны наблюдения над фазовым углом колебаний,
т. е. над углом, образованным вертикальным и радиальным на-
правлениями определенной точки ротора
в некоторый определенный момент вре-
мени, например, когда подшипник при
своем колебании в горизонтальном на-
правлении пол у чае *1 наибольшее откло-
нение вправо. Этот угол можно измерять,
наблюдая иглу помешенного на подшип-
нике в стробоскопическом освещении
виброметра, дающего одну вспышку за
один оборот и управляемого контактором,
приводимым в действие от ротора. Ока-
зывается, этот фазовый угол непрерывно
растет, увеличиваясь на 360° в каждый
интервал между двумя последователь-
ными максимумами колебаний. Это явле-
ние объясняется «блуждающим дисбалан-
сом», который медленно перемещается в
роторе и прибавляется к первоначальному
постоянному дисбалансу, находясь с ним в одной фазе в момент
максимума колебаний и в противоположной — в момент мини-
мума. Подробное объяснение такого медленного движения дисба-
ланса в роторе недавно дал Крун (R. Р. Кгоог). К этой теории мы
сейчас и переходим.
Пусть на рис. 6.16, изображающем поперечное сечение ротора,
вектор 08 есть статический дисбаланс ротора, т. е. точка О пред-
ставляет собою геометрический центр ротора, а точка 8 — его
центр тяжести при отсутствии вращения. При очень медленном
вращении ротор будет прогибаться под действием центробежной
силы в направлении 08, но при больших скоростях направление
наибольшего отклонения не будет уже совпадать с направлением
статического дисбаланса. Направление наибольшего отклонения
определится вектором динамического дисбаланса OD, где D есть
положение геометрического центра ротора при его вращении. Так
как 08 есть «сила», а 02) — «смещение», то сюда можно применить
результат рассмотрения рис. 2.21 и 2.22,6, на основании чего мы
усматриваем, что прогиб всегда отстает от радиуса дисбаланса на
§6.3
УРАВНОВЕШИВАЛИ!'’ ГИБКИХ РОТОРОВ
331
угол ср, который меньше 90° при скоростях, меньших резонансной
скорости, и заключается между 90 п 180° при скоростях, превы-
шающих резонансную.
Несимметричность направления 01), вызванная прогибом рото-
ра, может быть связана с местным нагреванием в области В, кото-
рое может произойти либо вследствие трения на периферии этой
области, либо в случае полого ротора вследствие конденсации.
Капли воды от конденсации пара перемещаются под действием
центробежной силы в сторону В, вызывая тем самым дальнейшую
конденсацию и нагревание в этой области. Нагревание в В, в свою
очередь, приводит к удлинению соответствующих волокон ротора,
а следовательно, и к его упругому прогибу с последующим смеще-
нием центра тяжести. Тогда точка 8 передвигается в S', причем
вектор 88' имеет направление ОВ. Новый статический дисбаланс
OS' оказывается таким образом повернутым на некоторый угол
по отношению к OS. При этом угол достается прежним, а потому
вектор ОВ также слегка поворачивается по часовой стрелке.
Итак, мы видим, что дисбаланс медленно вращается в сторону,
противоположную вращению ротора. Так как длина OS' несколько
больше длины 08, то точка 8 описывает в роторе некоторую спи-
раль. Таким образом, мы убедились в том, что местное нагревание
в отклоненной области при скорости, меньшей резонансной, при-
водит к обратному движению по раскручивающейся спирали.
Подобным же способом легко показать, что при скорости, большей
резонансной (ср > 90°), движение будет опять обратным, но уже
по закручивающейся спирали Если в отклоненной области
имеет место не нагревание, а охлаждение, то до резонанса мы
получаем прямое движение по закручивающейся спирали, а после
резонанса — также прямое движение, но по раскручивающейся
спирали.
В случае очень гибких роторов, скорость вращения которых
настолько больше первой критической скорости, что находится
даже вблизи второй, значения фазового угла ср больше 180°, и
тогда анализ, опирающийся на теорию движения систем с одной
степенью свободы, становится неприменимым. Однако общие сооб-
ражения и здесь остаются те же, несмотря на то, что угол ср будет
уже другим.
В связи с изложенным интересно упомянуть еще один темпе-
ратурный эффект, наблюдаемый в паровых турбинах. Дело в том,
что если турбина в течение некоторого времени бездействовала,
то верхние волокна ротора обычно имеют несколько более вы-
сокую температуру, чем нижние, вследствие чего ротор слегка
выгибается кверху. Если теперь агрегат привести во врашение,
то, очевидно, мы получим очень большую неуравновешенность,
332
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
так как прогиб оси в 0,002 см при роторе в 20 т уже дает дисба-
ланс в 40 кГ см. Поэтому попытка сразу привести машину в движе-
ние на полной скорости может привести к катастрофе. Чтобы
предупредить катастрофу, необходимо сперва дать валу вра-
щаться примерно в течение одного часа на малой скорости. За
это время температурная разница достаточно выравнится, после
чего машина уже может быть пушена на полный ход.
§ 6.6. Критические скорости второго рода
Кроме главной или обычной критической скорости, причина
которой лежит в неуравновешенных массах, некоторые возму-
щения вызывает также скорость, равная половине этой крити-
ческой, т. е. для простого диска (рис. 6.1) такие возмущения наб-
людаются при скорости со =
Указанный эффект можно заметить только на горизонтальных
валах, тогда как в случае вертикальных валов он отсутствует,
что указывает на то, что причиной такого явления должна быть
только сила тяжести.
Существуют два типа по-
добных возмущений, вы-
зываемых силой тяжести
совместно с неуравно-
вешенными массами и си-
лой тяжести в совокупно-
сти с неоднородной жест-
костью вала на изгиб.
Рис. 6.17. Поперечное сечение вала, жест-
кость которого различна по различным
направлен ням.
Это явление известно под названием эффекта вторичной
критической скорости или критической скорости второго рода
и, как показывает само название, его влияние и опасность меньше,
чем в случае обычных первичных критических скоростей, или
критических скоростей первого рода. Теория действительного дви-
жения в этих случаях очень сложна, и подробное ее рассмотрение
мы вынуждены отложить до последней главы (стр. 447—468).
Здесь мы имеем в виду дать только физическое объяснение явления
и вычислить амплитуду появляющихся в этих случаях возму-
щающих сил.
Для этой цели представим себе, что простой вал, изобра-
женный на рис. 6.17, вращается при отсутствии колебаний, и
попытаемся найти, какие переменные силы действуют на диск.
Для обычной критической скорости (см. стр. 304) мы имеем центро-
бежную силу тсо2е, где т — масса всего диска и е—эксцентриси-
тет его центра тяжести, причем эта сила может быть разложена на
горизонтальную и вертикальную составляющую. Каждая из полу-
ченных таким образом переменных сил имеет частоту со и ампли-
туду тсо2е.
S 6.6
КРИТИЧЕСКИЕ СКОРОСТИ ВТОРОГО РОЛЛ
333
Рис. G. 18. Объяснен не
появления критичес-
кой скорости второго
рода вследствие не-
уравновешенности и
влияния силы тя-
жести.
Рассмотрим далее случаи вполне уравновешенного диска (е =
= 0), вращающегося на валу, жесткость которого не одинакова в
различных направлениях. Так как поперечное сечение вала имеет
две главные оси, относительно которых момент инерции имеет
наибольшее и наименьшее значения, то легко убедиться, что же-
сткость вала в вертикальном направлении переходит от макси-
мума к минимуму за каждую четверть оборота вала (рис. 6.17).
За время одного полного оборота жесткость дважды достигает
максимума и дважды минимума, т. е. в течение одного оборота вала
имеют место два полных цикла изменения
его жесткости.
Если коэффициент жесткости вала из-
меняется от наименьшего значения к— Лк
до наибольшего к + Лк, имея среднее
значение к, то при равномерном вращении
вала с угловой скоростью со его жесткость
изменяется по закону
к + Лк sin 2 at.
Если диск не колеблется и вертикаль-
ный прогиб вала под ним при вращении
равен 5, то на него действуют две вертикаль-
ные силы, а именно:
1) вес тд, направленный вниз;
2) сила упругости (к + Лк • sin 2at) д,
направленная вверх.
Очевидно, что вес и постоянная часть упругой силы должны
взаимно уравновешиваться, вследствие чего мы имеем вертикаль-
ную возмущающую силу с частотой 2а и амплитудой
Лк • 6 = Лк -’5 = IF • .
Если вал вращается со скоростью, в два раза меньшей крит ической,
то импульсы этой силы имеют частоту, равную частоте собствен-
ных колебаний, вследствие чего мы должны ожидать возникнове-
ния колебаний.
Случай, когда неуравновешенный диск насажен на однородный
вал, является несколько более трудным. Допустим, что колебания
отсутствуют, т. е. что центр S вала остается в покое и совпадает
с точкой В. Положим далее, что эксцентриситет равен е, т. е. центр
тяжести G описывает круговую траекторию радиуса е (рис. 6.18).
Вес W диска вызывает появление на валу крутящего момента,
который замедляет вращение, когда W находится в левой половине
(рис. 6.18), и ускоряет, когда П7 находится в правой половине.
Величина этого момента равна TFesinat Если момент инерции,
диска относительно оси вала равен mg2, где g — радиус инерции,
то угловое ускорение вала, вызванное этим моментом, равно
334
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
IVe .
----$ Sin 0)t.
mg2
Точка G при своем круговом движении имеет ускоре-
ние, радиальная пли центростремительная составляющая которого
в данном случае нам не интересна, так как она приводит к крити-
ческой скорости первого рода. С другой стороны, вследствие угло-
вого ускорения точка G имеет тангенциальную составляющую
ускорения, которая равна
We2 .
---г Sin Q)t.
mQ2
Эго значит, что должна быть тангенциальная сила, действующая
п W D
на G и равная sin a>t. Вертикальная составляющая этой
силы получается отсюда умножением на sin oi, т. е. она равна
IV е2 IV е2
—v sin2 cot = const — cos 2oi.
g2 2g2
Постоянная часть этой силы определяет собою небольшой постоян-
ный прогиб вала и не представляет поэтому интереса. В то же
We2
время переменная часть имеет частоту 2о и амплитуду .
Zg
Подводя итоги, мы имеем для амплитуды возмущающей силы
следующие выражения:
при критической скорости первого рода та2е\
при критической скорости второго рода 2
под действием веса ................... 2о ’ ;
при критической скорости второго рода |
для вала переменной жесткости....... "fc” • '
(6.6)
На практике оказывается, что порядок величины e/Q следует
обычно ожидать таким же, как и порядок отношения ЛЖД, при-
чем обе величины, вообще говоря, очень малы, примерно порядка
0,001. Тогда мы видим, что возмущающая сила, происходящая
вследствие неуравновешенности веса на критической скорости
второго рода, является малой величиной более высокого порядка,
чем возмущающая сила от переменной жесткости вала, так как
в первом случае дробь e/Q входит в квадрате. Поэтому в большин-
стве случаев, где наблюдается критическая скорость 2-го рода,
последняя объясняется скорее неоднородностью вала, чем его
неуравновешенностью. Природа возникающих нарушений спокой-
ного хода машины может быть выяснена путем уравновешивания
машины на критической скорости 1-го рода. Если амплитуда коле-
баний на критической скорости 2-го рода не изменится после ука-
занного уравновешивания, то ясно, что эта скорость обязана своим
происхождением переменной жесткости вала.
Более глубокое исследование этой задачи приведено ниже,
па стр. 447—468.
S 6.7
КРИТИЧЕСКИЕ СКОРОСТИ РОТОРОВ ВЕРТОЛЕТОВ
335
§ 6.7. Критические скорости роторов вертолетов
Около 1940 г. было обнаружено, что применяемые в верто-
летах роторы обычных конструкций с шарнирно подвешенными
лопастями вступают в ярко выраженное критическое состояние при
скорости, значительно более низкой, чем вычисленная по фор-
муле
Л k
69 = М ’
Это случается в то время, когда машина еще стоит на земле непо-
средственно перед взлетом, вследствие чего эта скорость назы-
вается наземной критической скоростью. Указанное явление было
объяснено Колеманом (R. R. Cole-
man of Langley Field) в отчетах
Рис 6 20 Трехлопастный ротор.
N.A.C.A. за 1942 и 1943 гг. Простейшая часть результатов ис-
следования Колемана представляет большой интерес и поэтому
здесь приводится.
Система изображена на рис. 6.19. Лопасти ротора вертолета
шарнирно подвижны в точках Н так, что они могут свободно пово-
рачиваться вокруг Н в плоскости вращения. Втулка ротора сов-
падает с вершиной Т кабана ОТ, который предполагается в точке
□ заделанным в корпус вертолета. Пусть будут: к — коэффициент
жесткости кабана относительно силы, приложенной в точке Т
в плоскости ротора, М — вся масса втулки и прикрепленных к
ней лопастей. Тогда оказывается, что наблюдаемая критическая
скорость а много меньше, чем ]fk/m.
Рассмотрим трехлопастный ротор на рис. 6.20, где точка О
есть основание кабана, если смотреть сверху. Т — его вершина.
336
ВРАЩАЮЩИЕСЯ части машин
ГЛ. VI
смещенная вправо на расстояние ОТ = е, называемое эксцентри-
ситетом. Кабан предполагается имеющим упругий прогиб е,
причем вся фигура вращается с угловой скоростью о вокруг верти-
кальной оси О, как твердое тело. Лопасти оказываются повернуты-
ми вокруг их шарниров Н на малые углы е так, что их осевые линии
с центробежными силами проходят через центр вращения О. Во
время вращательного движения эти углы еостаются постоянными
и, таким образом, относительное движение по отношению к шар-
нирам /7 отсутствует. Вычислим теперь центробежные силы всех
трех лопастей и втулки. Сумму этих центробежных сил приравняем
величине восстанавливающей упругой силы ке кабана. Тем самым
мы найдем критическую скорость.
В треугольнике ОТН угол ОТН равен 120°, а угол ТНО
равен е. Этот угол рассматривается как малый; радиус шарнира
ТП = а\ эксцентриситет ОТ, равный е, опять есть малая вели-
чина по сравнению с а. На основании геометрических соображений
читатель легко найдет
' У 3 б Т1 । ®
sin е е = —— ; ОН = а 4- .
Zi а £
Таким образом, центробежная сила лопасти 2 на рис. 6.20
есть mat (а + Ъ + е/2) и направлена вдоль НО. Эта сила раскла-
дывается теперь на составляющие, из которых одна параллельна,
а другая перпендикулярна к ОТ. Составляющая, параллельная
ОТ (направленная вправо), равна
тла)2^а 4- 6 4- cos (60° — е) =
(cos 60° + е sin 60°) =
= тла2 J a + b + -fj +1 =
= + b) + e p + . (6.7)
Для лопасти 3, вследствие симметрии, результат будет тот же
самый. В то же время составляющие центробежных сил лопастей
2 и 3, перпендикулярные к ОТ, взаимно уничтожаются. Центро-
бежная сила лопасти 1 вдоль ТО, направленная влево, равна
(а + b — б). (6.8)
Центробежная сила самой втулки, направленная вправо, равна
?тгвт(у2б. (6.9)
Следовательно, полная центробежная сила, направленная вправо,
= тло)2 а 4- Ъ 4-
§ 6.7
КРИТИЧЕСКИЕ СКОРОС III РОТОРОВ ВЕРТОЛЕТОВ
337
равна удвоенному выражению (6.7) минус выражение (6.8) плюс
выражение (6.9), т. е.
w2e[mBT + шДз + у all •
Пусть будет М вся масса,
М = ™вт + 3//?л
и^ — отношение подвешенных масс 3//?л ко всей массе М, т. е.
сила мо-
написана
__3m л
Тогда полная цен-
тре бежиая
жет быть
так:
Л/Л(1 + g).
Приравнивая это зна-
чение силе упругости
ke, найдем критиче-
скую частоту по фор-
муле
2 k 1
® ” М pb
(6.10)
Отсюда видно, что в случае отсутствия подвешенных масс, т. е.
при /х = 0, квадрат собственной частоты равен 1с/М\ имеющиеся
Рпс. 6.22. Двухло-
пастный ротор.
подвешенные массы уменьшают эту час-
тоту. Написанное уравнение представлено
сплошной кривой на рис. 6.21. Хотя выше-
приведенный анализ выполнен для трехло-
пастного ротора, тем не менее полученный
результат остается в силе и для случая
ротора с большим числом лопастей, как это
изложено на стр. 339.
В то же время для случая двухлопастного
ротора результат в значительной степени
отличается от предыдущего. Рис. 6.22 экви-
валентен рисунку 6.20, но для двух лопастей.
До повторения рассуждений применительно
к данному случаю заметим, что на рис. 6.22
эксцентриситет ОТ построен перпендикулярно
к прямой НН, соединяющей два шарнира.
Вели предположить тот предельный случай, когда эксцентри-
ситет ОТ совпадает с линией подвешивания НН, то угол а = 0,
22 Дев-Гартог • 2074
338
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. V]
шарниры совершенно не отклоняются и, следовательно, частота
определяется по формуле
т. е. о) не испытывает эффекта подвешивания. Напротив того,
в положении, показанном на рис. 6.22, этот эффект оказывается
наибольшим из возможных.
Главнейшие этапы расчета укажем по рис. 6.22
sin е е = -, ОН = а.
а
Центробежная сила одной лопасти равна тл со2 (а + Ь). Ее состав-
ляющая, параллельная ОТ, равна тл со2 (а + 6)-.
Тогда полная центробежная сила, направленная вправо,
равна
2шл(у2 (а 4- Ь) — 77гвт<592е = ,
где через по-прежнему обозначено отношение подвешенной
массы к полной массе
2т л __ 2тл
2тл -|- mBT М
Приравнивая и здесь центробежную силу силе упругости
ке, получим уравнение для критической скорости
представленное на рис. 6.21 пунктирной линией.
Для случая, когда при вращении эксцентриситет образует
угол а0 с линией подвешивания НН, уравнение (6.11), как это
будет показано ниже (см. мелкий шрифт), видоизменяется, при-
нимая более общий вид
k
~м
о-
I 4- — sin2 а0
(Л
(6.12)
Это уравнение приводится к виду (6.11) при а0 = 90° и к виду
о2 = к/М при а0 = 0°. Для угла а0, лежащего между 0° и 90°,
из этого уравнения получаются промежуточные значения ча-
стоты.
Отсюда следует, что для двухлопастного ротора при какомлибо
значении сс0 возможно появление больших амплитуд при некото-
рой скорости вращения в заштрихованной области рис. 6.21.
§6.7 КРИТИЧЕСКИЕ СКОРОСТИ РОТОРОВ ВЕРТОЛЕТОВ 339
Таким образом, двухлопастный ротор имеет неустойчивую
область, показанную штриховкой на рис. 6.21, тогда как много-
лопастный ротор имеет просто кри тическую скорость, выше кото-
рой он опять становится устойчивым. Все изложенное хорошо
согласуется с экспериментом.
При выводе общей теории применительно к многолопастному ротору
мы начинаем исследование с одной лопасти, расположенной пол произволь-
ным углом а к направлению эксцентриситета ОТ (рис. 6.23). Принимая
прежнее допущение, что эксцентриситет е мал по сравнению с а, из тре-
угольника ОТН имеем
OS = е sin а, г = — sin а,
а
ОН = HS = НТ — 8Т = а — е cos а.
Центробежная сила этой лопасти равна
тл w2 (а 4- b — е cos а),
а ее составляющая в направлении эксцентриситета
ОТ равна
— тпл ю2 (а 4- b — е cos a) cos (а 4- е) —
= — тл со2 [(а 4- b) cos а — е (I 4- — sin2 а) 4- . . . | =
о I ( b\ b 1
— — тл ш2 (а 4- о) cos а — е 11 4---I 4- е cos 2а .
Рис.6.23.Геометрия
лопасти произволь-
ного ротора.
Допустим теперь, что ротор имеет ДО равноуда-
ленных лопастей. Угол между лопастями равен
= л, и тогда, если для первой лопасти угол
а равен а0, то для (р 4- D-й лопасти он равен а0 4* рА.
Подставляя это значение для угла а и производя суммирование по
всем лопастям, мы найдем составляющую вдоль ОТ центробежных сил
всех лопастей
— тл ю2
(а 4- 6) У cos (р А 4- а0) — ДОе 1 4---4.
рТо ' 2а>
—' У cos (2р А 4- 2а0)
р-0
(6.13)
Первая из сумм, входящих в написанное выражение, может быть
интерпретирована как сумма горизонтальных проекций отдельных век-
торов звезды лопастей. Так как результирующая этих векторов равна
пулю, то такова будет и горизонтальная проекция. Вторая сумма отно-
сится уже к звезде векторов с углом 2А между каждыми двумя соседними
векторами, т. е. для мпоголопастного ротора и здесь будем иметь опять
нуль. Итак, обе суммы исчезают, и компонент центробежных сил вдоль ОТ
есть просто
m^Ne
22*
340
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
Прибавляя сюда центробежную силу втулки ттгвт w2e и приравнивая
полную сумму силе упругости fee, получим в результате уравнение (6.10),
независимое от числа N лопастей, а также от угла а0.
Суммирован не выражений (6.13) для двухлопастного ротора происхо-
дит иначе. Первая сумма равна
cos an + cos (180° + а0),
т. е. получается опять нуль.
В то же время вторая сумма получается равной
cos 2а0 + cos (360° 4* 2а0) = 2 cos 2а0.
Таким образом, составляющая центробежной силы для двухлопастного
ротора равняется
тла2 |2е ( 1 4- — — cos 2cx0j = [2?плы2е 4- — sin8 а0
Если прибавить сюда центробежную силу втулки и приравнять сумму
величине ке. то придем к уравнению (6,12).
§ 6.8. Гироскопический эффект
Диск, расположенный в середине пролета вала (рис. 6.1)
совершает колебания в своей плоскости. Если тот же диск поме-
стить около одного из подшипников, . в особенности на конце
вала, то его колебания уже не будут происходить
Рис. 6.24. Критические скорости
систем (а) и (б) не равны друг
другу даже в случае одинаковых
валов, несущих одинаковые массы
на конце.
в его плоскости.
Тогда система, представленная
па рис. 6.24 б, будет иметь кри-
тическую скорость 1-го рода, от-
личную от таковой для систе-
мы на рис. 6.24, а, хотя бы мас-
са и жесткость стержня были в
обоих случаях одинаковые. Это
происходит вследствие того, что
центробежные силы различных
частиц диска не лежат в одной
плоскости (рис. 6.25) и, таким
образом, образуют пару, стремя-
щуюся выпрямить вал. Прежде
чем переходить к вычислению
момента этой пары, необходимо
совершенно ясно представить себе
характер движения.
Пусть мы имеем вполне урав-
новешенную машину, вал которой
вращается с критической скоростью в слегка изогнутом состоянии.
Положим, что угловая скорость происходящего вследствие этого
возмущенного движения центра вала такая же, как и угловая
§ 6.8
ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ
341
скорость вращения самого вала. Это значит, что некоторая опре-
деленная частица диска, взятая на его внешней стороне (на
рис. 6.24, б она отмечена черным кружком) ,будет все время оста-
ваться на внешней стороне. На против то го, частица, взята я на внут-
ренней стороне (отмечена крестиком), на внутренней же стороне
и будет оставаться. Далее, растянутые волокна вала остаются
растянутыми в течение всего времени его вращения, а сжатые
волокна остаются сжатыми. Таким образом, всякая отдельно
Рис. 6.25. Центробежные силы диска стремятся изогнуть вал с диском таким
образом, чтобы поставить диск в плоскости, перпендикулярной к валу в
его равновесном положении. Вследствие этого указанные силы играют
роль добавочных пружинящих сил.
взятая точка диска движется по окружности в плоскости, пер-
пендикулярной к невозмущенной осевой линии вала.
На рис. 6.25 дано распределение центробежных сил при
таком движении. Из рис. 6.25, б мы усматриваем, что центробеж-
ная сила элементарной массы dm, равная о2^ dm, направлена
от точки В. Эта сила может быть разложена на две составляющие:
о)2д dm, направленную по вертикали вниз, и apt dm, направлен-
ную во внешнюю сторону диска, т. е. от центра 8 вала. Силы
о25 dm, относящиеся к различным элементам массы диска, скла-
дываются, приводясь к одной силе тсРд, где т — вся масса
диска. Эта сила действует вертикально вниз и приложена в точке
8 (рис. 6.25,6). Силы aPrdm перпендикулярны оси вращения
диска 8 и их действие становится ясным из рис. 6.26, к изучению
которого мы сейчас и переходим. Составляющая силы oPrdm по
оси у равна оРу dm. Моментное плечо относительно оси х этой
элементарной силы равно уср, где ср есть малый угол отклоне-
ния диска от вертикали. Таким образом, если момент силы,
342
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. V)
соответствующий элементарной частице dm, равен со2у2ср dm,
то полный момент М центробежных сил равняется
М = а2(р J у2 dm = б)2д>7(
d>
Рис. 6.26. Вычисление момента центро-
бежных сил.
где ld есть момент инерции диска относительно одного из его
диаметров.
Итак, конец вала подвергается действию силы то2Ь и пары
с моментом cy2Zrf<p, под влиянием которых он получает прогиб
д и поворот на угол Такая деформация может произойти только
при некоторой угловой ско-
рости cd. Что же касается
самого вычисления критиче-
ской угловой скорости, то
оно приводится к задаче ста-
тики^ именно, к нахождению
значения величины су, при
которой конец вала полу-
чает прогиб 6 и поворот ср
под действием силы Р= тМ
и момента М = Idco2cp.
Мы можем произвести этот
расчет во всех подробностях для
случая вращающегося вала с вы-
ступающим свободным концом жесткости EI и длины Z, несущим па
себе диск.
Из курса сопротивления материалов мы знаем формулы, определяю-
щие прогиб и угол поворота конца консоли под влиянием сосредоточенной
нагрузки Р и момента М'.
PV
Ьр = ---,
Р 3EI
PZ2
«Рр = ----,
2E1
Ml-
= -----
2EI'
Ml
(pM = ---
El
На основании этих формул мы можем написать следующие уравнения:
Z3 Z2
6= ,
OlbJ. Z
Z2 /
<Р = (mw26)—— — (7dbja<p) —
z Ivj
которые после соответствующих преобразований принимают вид:
<Р — О,
_”nw2w)a + + 'Ь = о-
Й 6.8
ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ
343
Эта система однородных алюбрапческих уравнений может иметь
решения для 6 и <р, отличные от нуля лишь в том случае, когда определитель
системы обращается в нуль (см. стр. 173 пли 183), откуда получается сле-
дующее уравнение относительно ш2:
]2Е1 ( ml2 i 12Л7272
+ ы2----------- / _ -— = 0.
mldl3\ 3 J ш/jZ4
Эю уравнение мы можем решить, определив из пего ю2. Однако, прежде
чем искать его решение, удобно привести написанное уравнение к безраз-
мерному виду, что можно сделать с помощью введения новой переменной
величины (функции критической скорости)
У ml3
EI
и постоянной (воздействие диска)
D =
ml2
В этих обозначениях уравнение принимает вид
(4 \ 12
к4 + К*\Т> - 12 - D = °-
Решение этого уравнения определяется формулой
в которой только положительный знак перед корнем дает положительное
значение для К2 и, следовательно, действительное значение для К.
На рис. 6.27 представлен график уравнения (6.14), причем по
оси абсцисс отложены значения D «воздействия диска», а по оси
ординат — квадрат «безразмерной собственной частоты» (Я2), т. е.
V дГ Л
квадрат величины, которую нужно умножить на I/ , чтобы полу-
чить частоту. В случае сосредоточенной массы (см. рис. 6.24, а)
величина D равна нулю, и тогда частота определяется формулой
2 %Е1
аг = —тг •
ml3
С другой стороны, при ld = оо (случай диска, масса которого
расположена по окружности очень большого радиуса) никакой
конечный угол (р, отличный от нуля, не возможен, так как тогда
потребовался бы бесконечный крутящий момент, который вал
не способен развить. Поэтому диск остается параллельным самому
себе, а самый вал становится более жестким, чем при отсутствии
воздействия диска. В этом случае частота определяется равен-
ством
9 12Е2
ml3 *
344
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. V)
До сих пор в наших рассуждениях диск предполагался очень
тонким. Если его толщина, увеличиваясь, достигает, напри-
мер, величины диаметра, то диск можно скорее рассматривать
как точку, и его гироскопический эффект должен быть малым.
Если же диск становится еще длиннее, длиною в несколько диа-
метров, то он становится уже стержнем.
Изобразив для этого случая центробежные силы по типу
рис. 6.25, мы увидим, что теперь соответствующие пары сил оказы-
Рис. 6.27 Изменение собственной частоты системы рис. 6.24, вызванное
эффектом центробежных сил, увеличивающих жесткость системы.
ваются обращенными по сравнению с предыдущими: диск под
действием пары центробежных сил стремится возвратиться
в свое исходное положение, тогда как стержень, поворачиваясь,
выводится из него. Рассмотрим в общем случае одну частицу
(рис. 6.28). Здесь центр тяжести тела находится на оси вращения
ж, так что результирующей центробежной силы нет, есть только
момент. Сила, приложенная к одной частице, есть о?у dm, ее
моментное плечо относительно G есть х, а поэтому момент равен
аРху dm.
Интегрируя по всей массе тела, имеем
(У2 J ху dm.
Для случая тонкого диска х = уу, что приводит к прежнему
результату. Рассмотрим теперь две главные оси 1 и 2 тела
§ 6.8 ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ 345
(рис. 6.28). Пусть моменты инерции относительно этих осей будут
соответственно Л и Z2. Указанная система осей образует угол tp
с координатным углом ху. С помощью круга Мора для центробеж-
ного момента инерции относительно ху имеем
J ху dm = 11 2 7 2 sin 2у & (7Х — Z2) у.
Последнее приближенное выражение написано для малых углов
у. Для тонкого диска, для которого Ц = 21 d, Z2 = ld., мы получаем
подтверждение уже найденного выше результата. Для диска диа-
метра D и толщины b мы
т _______ тВ2
j __ mD2 mb2 уЛ
/2"“Тб“+“12
вследствие чего гироско-
пический момент равен
®2 (А — А) <р =
/ тВ2 mb21 9
Отсюда мы видим, что момент центробежных сил равен нулю
при Ь = 0,877) и становится отрицательным для больших значе-
ний длины. Рис. 6.27 остается применимым и для этого случая.
Следует только под величиной ld подразумевать все выражение
в скобках. Пунктирная часть кривой в левой части рисунка
приобретает смысл для тонкого стержня. Чтобы не искажался
результат, необходимо, чтобы вал доходил непосредственно до
центра цилиндра, не сливаясь с цилиндром1). Если же вал при-
крепляется к цилиндру в его конце, как это обычно и бывает,
то упругие коэффициенты влияния должны измениться.
Только что описанное явление относят в литературе вообще
к гироскопическому эффекту. Здесь это название неудачно, так
как в обычном смысле слова гироскоп есть тело, очень быстро
вращающееся около своей оси, которая, в свою очередь, совер-
шает медленное вращательное движение. В рассмотренном диске
ось вращается с такой же скоростью, как и сам диск, который
поэтому вряд ли можно назвать гироскопом.
Гироскопический эффект в прямом смысле этого слова имееп
место в установке, изображенной на рис. 7.10 (стр. 393), где
небольшой мотор подвешен посредством трех очень гибких пру-
жин, оказываясь практически подвешенным в своем центре тяже-
х) Случай, очевидно, идеализированный. (Прим, перев.)
346
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
сти. Вычислим собственные частоты различных типов колеба-
тельных движений, при которых центр тяжести О остается в
покос, а вал совершает вращательное движение около точки О
в конусе с углом 2g)(рис. 6.29,б)1).
Рис. 6.29. Объяснение гироскопичес
эффекта прибора, показанного на рис.
иск, насаженный на вал мотора,
вращается очень быстро,
тогда как,вследствие боль-
шой гибкости пружин, на
которых подвешен мотор,
вращение оси вала вокруг
неподвижной точки про-
исходит значительно мед-
леннее, чем его вращение
вокруг этой оси.
Введем обозначения:
Q — угловая скорость
\ быстрого враще-
ния диска вокруг
| его оси,
I а — угловая скорость
/ медленного вра-
• щен и я осевой ли-
нии вала (пре-
эго цессии),
.10. — момент инерции
неподвижных и
вращающихся частей (тпссителыю оси, проходящей
через точку О и перпендикулярной к плоскости чертежа,
12 — момент инерции вращающихся частей относительно
оси вала,
к — величина, характеризующая жесткость упругой системы
на кручение (коэффициент жесткости), т. е. крутящий
момент относительно точки О при угле ср, равном
1 радиану.
Положим, что диск вращается в направлении, противополож-
ном движению часовой стрелки, если смотреть справа, вслед-
твие чего вектор, изображающий кинетический момент диска
Z2 должен был быть направлен так, как это показано на
рис. 6.29, а. В том случае, когда вращение оси происходит в том же
направлении, что и вращение диска, геометрическая производная
кинетического момента, т. е. скорость его конца, направлена от
В к С (рис. 6.29, б). Следовательно, она перпендикулярна к пло-
скости чертежа и направлена в сторону читателя. Но эта скорость
геометрически равна моменту сил, действующих со стороны рамы
) Это движение называется прецессией оси диска. (Прим, перев.)
§ 6.8
ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ
347
мотора на диск, а тогда реактивный момент, т. е. момент сил,
действующих на мотор, направлен за плоскость чертежа и стре-
мится поэтому уменьшить угол <р. Вследствие этого получается
как бы добавочное увеличение первоначальной жесткости пру-
жины, характеризующейся числом Л Иначе говоря, вращение
оси в направлении вращения диска повышает частоту собствен-
ных колебаний. Аналогично можно показать, что при вращении
оси противоположно вращению осн вала гироскопический эффект
понижает частоту колебаний.
Для нахождения величины эффекта обратимся к рис. 6.29, б,
из которого видно, что
d (Л Q)
i2q
ВС _ _В£ АВ
О В ~~ А В О В
= о dt • ср.
Следовательно, гироскопический момент определится уравпе
нием
(Л&) = wpl2Q.
Так как момент упругих сил пружин равен fap, то полный момент
равен
(к + оШ2) (р,
где знак плюс берется в случае одноименных вращений, знак
минус — в случае разноименных. Так как стоящее здесь выраже-
ние в скобках эквивалентно новому коэффициенту жесткости, то
для собственных частот получаем уравнение
2 — * ±
.
или
(Ус + — Qcdc — t =0,
h Л
откуда
= (6.15)
Из двух знаков перед квадратным корнем следует взять
только плюс, так как, беря знак минус, мы получаем для <ус
два отрицательных значения, которые соответственно равны по
величине и противоположны по знаку двум положительным
значениям (ус, получаемым тогда, когда перед корнем берется
плюс.
348
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
Результат, получаемый из уравнения (6.15), представлен
графически па рис. 6.30, где по оси абсцисс отложены различные
значения угловой скорости ротора, умноженной для получения
безразмерной величины на некоторую постоянную, а по оси
ординат — отношения собственной частоты, имеющей место в
действительности, к ее значению
при отсутствии гироскопического
эффекта, т е. при отсутствии
вращения вала вокруг своей оси.
Из графика мы видим, что кри-
вая собственной частоты, вслед-
ствие гироскопического эффекта,
распадается на две ветви, соот-
ветствующие частотам двух раз-
личных колебаний: медленного,
когда вращение оси противопо-
ложно вращению самого вала, и
быстрого, когда эти вращения
совпадают по направлению.
В рассуждениях, изложенных
на стр. 341, маховик участво-
вал в двух вращениях с одной
и той же угловой скоростью, и
в одном и том же направлении,
а именно: ро вращательном движе-
нии вместе с изогнутой осевой
линией вала вокруг ее недеформи-
рованного положения и во враща-
тельном движении вокруг этой
оси1). Наблюдались случаи, когда
Рис.6.30. Две собственные частоты
системы рис. 6.29. При большей
частоте прецессия а имеет то же
самое направление, что и соб-
ственное вращение О\ при мень-
шей частоте эти направления
противоположны.
вращение оси вала и вращение
диска происходят с различными угловыми скоростями и иногда
даже в противоположных направлениях. Для разъяснения этого
вопроса мы выполним в общем виде расчет свободных частот
колебаний вала с одним диском, совершающим упомянутое дви-
жение оси при некоторой угловой скорости собственного враще-
1) У автора, как и вообще в англо-американской литературе, для
первого из этих движений принято название «whirling», т. е. вихревое
или коловратное движение. Оно может интерпретироваться, как результат
сложения поперечных упругих колебаний вала в различных направлениях,
в частности в двух взаимно перпендикулярных. В нашей отечественной
литературе именно такая интерпретация и имеет место. С точки зрения
кинематики это есть как бы обобщенный случай прецессии диска, когда
его ось совершает вращение вокруг неизогнутой оси вала, которая может
быть даже параллельной оси собственного вращения, например, в случае
симметричного расположения диска в середине двухопорного вала. (Прим*
перев.)
$ 6.8 ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ 349
ния Q. Хотя на рис. 6.31 изображен консольный вал с диском па
конце, тем не менее расчеты, к которым мы приступаем, будут
носить совершенно общий характер и будут применимы также к
другим случаям валов. Предположим, что осевая линия вала,
показанная на рисунке в изогнутом состоянии, вращается с угло-
вой скоростью со вокруг ее неизогнутого положения ОА. Поло-
жим, далее, что одновременно и независимо от этого вращения,
диск и вал вращаются вместе вокруг изогнутой осевой линии с
угловой скоростью Q. Читателю рекомендуется представить себе
случаи, когда со = <а0, Q — 0 и наоборот, когда со — О, Q = Qq.
Случай, когда со = Q, представляет собою движение, рассмотрен-
ное на стр. 340. Путем комбинации этих случаев мы можем попы-
таться найти кинетический момент диска и для самого общего
случая любых значений со и Q. Если диск не колеблется и, следо-
вательно, не прецессирует, а только вращается, то его кинети-
ческий момент есть вектор IpQ< где 1р есть полярный момент
инерции диска относительно изогнутой оси вала. Стрелка показы-
вает, что диск, если смотреть справа, вращается против часовой
стрелки.
Предположим теперь, что вращение отсутствует (Q = 0)
и имеют место только поперечные колебания с угловой частотой со.
Тогда диск оказывается в качающемся состоянии по отношению к
неподвижному пространству, причем достаточно трудно предста-
вить себе его угловую скорость. Однако такое представление облег-
чается, если обратить внимание на то, что в точке С вал всегда
перпендикулярен к диску, а тогда мы можем изучать угловое
движение не диска, а вала. Прямая С А есть касательная к осевой
линии вала в точке С и элемент ds этой линии, прилегающий к
диску, движется вместе с прямой АС, описывающей конус с
вершиной в точке А. Скорость точки С при прецессирован и и против
часовой стрелки, если смотреть справа, т. е. в направлении соб-
ственного вращения Q, перпендикулярна к плоскости чертежа,
направлена от читателя и равна соу. Отрезок АС в данный момент
лежит в плоскости чертежа, но по истечении времени dt точка С
окажется уже за чертежом на расстоянии coy dt.
Угол между двумя положениями отрезка АС при этом ока-
зывается равным coydt/AC, а так как у/АС — 0, если 0 есть
малый угол, то угол поворота отрезка АС за время dt равен
coOdt, а тогда угловая скорость этого отрезка, а следовательно и
диска, равна соО. При этом диск вращается вокруг своего диа-
метра в плоскости чертежа, перпендикулярного к АС в точке С,
причем для тонкого диска соответствующий момент инерции
есть Id=~Ip. Вектор кинетического момента диска при прецес-
сии равен ld0co и направлен так, как это показано на рис. 6,31.
Полный кинетический момент есть сумма векторов IpQ и Zd0o.
350
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
Найдем теперь скорость изменения этого вектора. Для этого
на рис. 6.31,6 разложим его на составляющие, из которых одна
параллельна, а другая перпендикулярна к осевой линии ОД
Составляющая, параллельная ОА, вращается вокруг ОА, оста-
ваясь параллельной самой себе и имея радиус вращения у. Так
как ее длина при этом не изменяется, то скорость изменения этого
вектора равна нулю. В то же время, как видно из рис. 6.31,6,
Рис. 6.31. Вал с диском, прикрепленным
к нему в точке С. Вал показан в состоянии
боковых колебаний,вызывающих прецессию
лиска, с амплитудой у и углом отклонения
оси диска 0. Стрелками показаны мгновен-
ные значения составляющих кинетического
момента диска.
составляющая, перпенди-
кулярная к О А есть век-
тор, направленный по СВ,
начало которого описы-
вает окружность с центром
в точке В. Из рис. 6.31,6
видим далее, что при ма-
лом угле 0 указанная со-
ставляющая равна
— Id0(D =
— ld О (2Q — су)
и направлена от ВкС. В
момент времени £ = 0. Этот
вектор лежит в плоскости
чертежа. В момент dt он
уже оказывается за черте-,
жом, образуя с последним
угол codt. Приращение
вектора, направленное перпендикулярно к чертежу за его плос-
кость, есть длина самого вектора, умноженная на <у dt, или
Id0 (2Q — су) су dt,
а тогда скорость изменения кинетического момента есть
ld0 (2Q — су) су.
Согласно известной теореме механики это выражение равно
моменту, действующему на диск со стороны вала, а согласно
закону действия и противодействия, момент, действующий на
вал со стороны диска, равен этому моменту по величине, но про-
тивоположен по направлению, т. е. это есть вектор, направлен-
ный перпендикулярно к плоскости чертежа в точке С по направле-
нию к читателю, как это показано на рис. 6.321). Кроме этой пары,
имеется еще действующая на диск центробежная сила тагу
(рис. 6.32).
х) На этом рисунке знак минус у величины —ldGa (2£>— ы) указы-
вает на то, что момент в векторном представлении в правой системе напра-
влен в сторону читателя, как и сказано в тексте. (Прим, персе.)
§ 6.8
ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ
351
Рассмотрим теперь упругие свойства вала в месте прикреп-
ления диска. Эти свойства характеризуются тремя коэффициен-
тами влияния:
ап — прогиб у в точке прикрепления диска под действием
силы в 1 кГ,
а12 — угол поворота 0 диска под действием силы в 1 кГ и в
то же время, по теореме Максвелла,
04 2 — есть прогиб у в точке прикрепления диска под
действием момента в 1 кГ см,
а22 — угол поворота 0 диска под действием момента в 1 к Г см.
Этими определени-
ями охватываются все
возможные случаи. На-
пример, для изображен-
ной консоли имеем
= ОТ ’
12
012 “ 2 VI 1
_ I
«22 -
[2 §2 ~(d]
Рис. 6.32. Инерционные силы и пара, действу-
ющие со стороны диска на вал, вызванные
вращеннем £2 вала и его боковыми колебани-
ями, вызывающими прецессию.
Теперь можно написать уравнения для вала, выразив, что прогиб
у вала происходит под действием силы тпхсРу и момента, согласно
рис. 6.32
у = ссц тпсо-у — а12 ldco (2X2 — о) 0,
0 — а12 тпо)2у — а22 Idco (2X2 — о) 0.
Эти уравнения, как и должно быть, однородны относительно
у и 0. Уравнение частот получается, если определить отношение
у/О из первого и второго уравнений и приравнять полученные
значения друг другу. Располагая результат по степеням а, по-
лучим
(— т «и а22 Id + т «^ Id) «4 4- (га «п «22 Л 2X2 — т а?2 Id 2X2) о3 4-
4- («22 Id + т а11) 0)2 (- «22 1(1 ® — 1=0.
.->го уравнение содержит семь параметров системы: а>, Х2, т, ld,
«и, «12^ «22л а это очень затрудняет отчетливое интуитивное пред-
ъявление решения.
Поэтому целесообразно, насколько возможно, уменьшить число
параметров, вводя безразмерные величины. Здесь мы можем
352
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ V]
сделать это уменьшение с семи до четырех, посредством введения
новых переменных:
F = oj ]Ахи тп — безразмерная частота,
/) — ££52_2 — воздействие диска (Disk effect),
т аТ]
Е — — коэффициент упругой связи (Elastic
ai1 а22 coupling),
6’ = Q — безразмерная скорость.
> (6.16)
С помощью этих величин уравнение частот преобразуется к
виду:
_ 28 Fs + Л*1.. - „Я, F - = 0. (6.17)
D (Hj L) Hi — I U (Hi — 1)
Итак, получено алгебраическое уравнение четвертой степени
относительно F. Следовательно, для заданного вала Е, несущего
данный диск D и вращающегося с некоторой скоростью 8, имеют
место четыре собственные частоты поперечных колебаний, со-
здающих вращение оси вала.
Для учшего понимания весьма важного уравнения (6.17)
рассмотрим некоторые его частные случаи. Допустим сначала,
что вся масса сосредоточена в одной точке. Следовательно, D — 0.
В таком случае третий и пятый члены становятся столь большими
по сравнению с остальными, что только они могут быть приняты
во внимание. Тогда уравнение упрощается, принимая вид
F2 = 1,
откуда F — 4-1 или F = —1, т- е- oj = + . Так как ап = у
Уап т к
(в обычных обозначениях), то получаем хорошо известный ре-
зультат.
Рассмотрим теперь случай отсутствия упругой связи, т. е.
Е = 0. Это значит, что сила вызывает только прогиб у без угла
поворота 0, а пара — только поворот 0 без прогиба у. Это есть
случай вала, свободно лежащего в двух подшипниках и имею-
щего диск в середине пролета. Уравнение приводится к виду
F4 _ 28 F3 — —±2 F- + 28 F 4-1=0.
Из физических соображений следует, что F = \ должно быть
решением, независимо от скорости 8. Это легко может быть
§ 6.8
ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ
353
проверено. Тогда левая часть уравнения распадается на множи-
тели
(# + 1) (# _ 1) ( /?2 _ = 0.
На рис. 6.33 по оси абсцисс отложена безразмерная скорость 8, а по
оси ординат — безразмерная частота /б При -лом принято D— 1.
Значит, диск рассчитан так, что при отсутс твии вращения, т. е. при
8 = 0, частота его колебании при поступательных перемещениях
в своей плоскости такова же, что и при качаниях без этих пере-
Рис. 6.33. Собственные частоты боковых колебаний
симметричного вала на двух опорах с диском по-
средине в зависимости от скорости вращения.
мещений. Из графика рис. 6.33 видно, что каждой скорости соот-
ветствуют четыре собственные частоты. При отсутствии вращения
(8 ~ 0) эти четыре частоты приводятся к двум: F = + 1. Однако
в действительности они приводятся только к одной частоте,
так как значение F = + 1 соответствует колебаниям, создаю-
щим вращение оси, т. е. прецессию против часовой стрелки, а
значение F = — 1 соответствует подобным же колебаниям 3, соз-
дающим вращение (прецессию) оси по часовой стрелке.
Теперь уже мы можем обратиться к построению графика
для общего случая уравнения (6.17). Для этой цели возьмем диск,
насаженный на консольный вал (рис. 6.31). Для такого вала из
коэффициентов влияния получаем Е=3/4. При этом опять выберем
диск с постоянной D = 1. Уравнение принимает вид
F* — 28 F* — 8F2 4- 88 F 4-4 = 0. (6.18)
0 В смысле колебаний оба эти случая представляют собою зеркальное
отражение один другого. (Прим, перев.)
23 Ден-Гартог • 2074
354
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VJ
На этот раз в уравнении нет никакой симметрии. Оно представ-
ляет собою просто уравнение четвертой степени, имеющее четыре
корня, определение которых требует большой вычислительной
работы. Но ведь сейчас нашей целью является построение зави-
симости F — f(S) (рис. 6.34). Это можно сделать различными
Рис. 6.34. Четыре собственные частоты колебаний
диска, укрепленного на конце вращающейся
коп сол и.
путями. В одном из них мы задаемся значениями 8 и решаем урав-
нение четвертой степени относительно F. В другом — задаемся
значениями F и решаем линейное уравнение относительно 8. Идя
последним путем, из уравнения (6.18) находим
__ _ SF2 4
д _ 8У •
Для F — 1' получаем 8 = 0,500 и т. д. Таким способом построен
график на рис. 6.34, и такое же построение может быть сделано
для других значений D и Е, т. е. для других дисков и валов. Мы
видим, что при отсутствии вращения (8 = 0) имеются только две
собственные частоты F =+0,74 и F = +2,73, соответствующие
двум степеням свободы у и 0 невращающегося диска. Если же диск
вращается, то имеют место все четыре различные собственные
частоты.
§ 6.8 ГИРОСКОПИЧЕСКИЙ ЭФФЕКТ 355
Кривые симметричны относительно вертикальной оси F. Это
означает, что для +$ и —8 получаем одни и те же значения F1),
иначе говоря, четыре частоты получаются независимо от того, про-
исходит ли вращение диска но часовой с 1релке или противнее.
На рис. 6.34 приведено несколько топких пунктирных пря-
мых, проходящих через начало. Вдоль каждой из них сохраняется
постоянным отношение F/S = o/Q. Главной из этих прямых яв-
ляется прямая о = Q, пересекающая кривую в точке А. При
скорости 8, которой соответствует определенное число оборотов
в минуту и которая определяется этой точкой А, имеет место
«прямая прецессия» с той же скоростью, что и вращение. На рис.
6.27 (стр. 344) построена кривая точек пересечения Л для различ-
ных значений постоянной D — «воздействия диска». Такой тип
возмущения, очевидно, вызывается дисбалансом. Здесь мы имеем
дело с резонансом, причем амплитуда колебаний при критической
скорости пропорциональна величине дисбаланса. Если мы пред-
ставим себе, что амплитуда в этих условиях возрастает, то центро-
бежная сила дисбаланса должна совершать работу на этом возра-
стании и, таким образом, будет происходить перекачивание энер-
гии в колебания.
Теперь мы подходим к любопытному и до сего времени еще частич-
но не объясненному явлению. В классическом труде Стодолы по па-
ровым турбинам указывалось,что критическое состояние наблюда-
лось также в точке В, где со = — Q. Это явление было названо
«обратной прецессией». При этом не было дано объяснение, откуда
перекачивается энергия. При вычислении работы силы дисбаланса
за полный цикл, даже в’случае вала переменной жесткости, при
увеличении амплитуды получается нуль. В то время как прямая
прецессия, т. е. обычная критическая скорость, наблюдается в
каждой машине, обратная прецессия представляет собою явле-
ние чрезвычайно редкое. Автор этой книги тщательно искал ее
сам и спрашивал по поводу нее своих друзей в течение 15 лет.
Поскольку все эти поиски были безрезультатны, уже можно было
сделать вывод, что обратная прецессия — явление только вооб-
ражаемое, но вот представился соответствующий случай. Была
построена модель, которая проявляла неспокойное поведение в
вычисленной точке В, причем стробоскопическое наблюдение в
самом деле показало прецессию по направлению, противополож-
ному вращению. При испытаниях на этой модели были найдены
амплитуды колебаний при соответствующей критической скоро-
сти в функции, во-первыхл дисбаланса и, во-вторых, срезов вала
(стр. 332). Было установлено, что ни дисбаланс, пи переменная
Ъ Точнее говоря, указанная осевая симметрия имеет место, если ниж-
нюю половину чертежа зеркально отразить на верхнюю, т. е. если совер-
шенно игнорировать знак перед F. (Прим, перее.)
23*
356 ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН ГЛ. VJ
жесткость вала не дают устойчивой постоянной амплитуды.
При испытаниях установка несколько раз разбиралась и употреб-
лялись новые валы и диски. После каждого такого демонтажа и
повои сборки амплитуда колебаний при обратной прецессии
оказывалась отличной от предыдущей и часто явление вообще
отсутствовало. Так, неустойчивость наблюдалась при отношениях
co/Q, отличных от —1, в частности, при co/Q = + 2 и + 3. Под-
ходящего объяснения такого явления не было. При этом есть
основания предполагать, что здесь роль играет затухание или
внутреннее трение (стр. 394 и рис. 7.11 на стр. 395). Во всяком
случае практическое значение критических скоростей, отличных
от co/Q == + 1, невелико.
§ 6.9. Вибрации рам электрических машин
Между статором и ротором электромотора или динамомашины
возникают силы электромагнитного поля, интенсивность которых
претерпевает небольшие быстрые изменения с частотой, равной
числу зубцов ротора, проходящих через какое-либо определенное
место статора в одну секунду Если эти силы окажутся в состоя-
нии резонанса с одной из собственных частот колебаний рамы
Рис. 6.35. Нормальная и танген-
циальная составляющие силы 7?,
действия ротора на полюс
статора.
статора, то они могут вызвать
сильные колебания последней.
Для машин, работающих на посто-
янной скорости, эти колебания мо-
гут быть устранены путем изме-
нения жесткости рамы, благодаря
чему нарушится условие резонан-
са. Что касается машин, пред-
назначенных для работы на до-
вольно широком диапазоне ско-
ростей, то здесь требуются уже
другие меры для предотвращения
подобного рода колебаний,а имен-
но, меры, аналогичные тем, с которыми мы уже встречались в
§§ 5.7—5.9 при изучении двигателей Дизеля.
Умножая число зубцов ротора на число его оборотов в минуту,
мы получаем очень высокие значения частоты, причем в то же
время амплитуды колебаний, наблюдаемые на практике, неиз-
менно оказываются столь малыми, что вряд ли приходится опа-
саться за безопасность конструкции. Однако упомянутые высокие
частоты получаются как раз в пределах наибольшей чувствитель-
ности человеческого уха, вследствие чего мы здесь сталкиваемся
с проблемой шума машин. Эта проблема приобретает особо важное
значение в двигателях подводных лодок, имеющих очень легкие
рамы и потому склонных к звучанию, так как издаваемый ими
§ 6.9
ВИБРАЦИИ РАМ ЭЛЕКТРИЧЕСКИХ МАШИН
357
п тангенциальную состав-
4
Рис. 6.36. Изменение магнит-
ных сил в зависимости от
времен и.
Рис. 6.37. Статор электродвигателя
подводной лодки.
гул может легко восприниматься неприятельскими звукоулови-
телями.
Подробности явления можно пояснить с помощью рис. 6.35,
на котором представлены одни полюс статора и часть ротора.
Магнитная сила Rlf действующая между статором и ротором,
может быть разложена на нормальную
ляющие Ад и Tv Эти силы с течением
времени остаются приблизительно по-
стоянными. Однако они все же под-
вержены очень малым, по очень бы-
стрым изменениям, амплитуды которых
назовем Af и Т. Частота их определя-
ется числом зубцов ротора, проходя-
щих через сечение статора (рис. 6.36).
Для вычисления точного значения
сдвига фазы упомянутых изменений
сил, т. е. для определения положе-
ния зубцов ротора по отношению к
полюсу статора в момент, когда N и Т обращаются в пуль, необ-
ходимо обратиться к электротехнике, что, однако, не требуется
для нашего настоящего исследования. Нам достаточно только
знать, что как 7V, так и Т проходят через один полный цикл
своего изменения за тот промежуток времени, когда зубец пере-
мещается на величину одного шага, т. е. полный цикл завершается
расположение полюса и ротора
изменяется на рис. 6.35от &до а.
Прежде чем исследовать, ка-
ким образом изменения ампли-
туд сил N и Т могут возбуж-
дать колебания,мы обратимся к
изучению возможных движе-
ний рамы.
Рассмотрим восьмиполюс-
ную машину для подводных
лодок (рис. 6.37). Здесь полюсы
являются достаточно тяжелыми
телами, по сравнению со
из прокатной стальной плас-
стальной рамой, изготовленной
тины, к которой они прикреплены болтами. Таким образом,
полюсы как бы образуют «массы» системы, а роль ее «пру-
жин» играет корпус рамы. Так как каждый полюс, как твер-
дое тело, имеет шесть степеней свободы (см. стр. 40), то вся
рама в целом должна иметь 48 различных типов движений. Однако
некоторые из них, как, например, 6 возможных движений всей
рамы, как твердого тела, являются тривиальными, а многие
из других имеют собственные частоты, значительно удаленные
358
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
от частоты изменения магнитных сил N и Т. Четыре основных
типа колебаний, могущих вызвать нежелательные явления
в установках, действительно встречающихся, показаны на
рис. 6.38, а—г.
На первой из этих фигур полюсы перемещаются параллельно
самим себе в радиальных направлениях, тогда как кольцо рамы
попеременно оказывается в состояниях чистого растяжения и
сжатия. На рис. 6.38,6 движение каждого отдельного полюса
Рис. 6.38. Четыре типа главных колебаний кольцевой рамы,
изображенной на рис. 6.37.
такое же, как и в предыдущем случае, но только перемещения
каждых двух соседних полюсов отличаются по фазе на 180°.
а рама подвергается изгибу. Рис. 6.38, в показывает вращение
полюсов вокруг их продольных осей, что опять сопровождается
изгибом рамы. Эти три случая имеют то общее свойство, что
все поперечные сечения полюсов, лежащие в плоскостях, перпен-
дикулярных коси вращения, обладают одним и тем же движением.
Иную картину мы видим на рис. 6.38, а. Здесь полюсы вращаются
вокруг их поперечных осей, и кольцо рамы работает одновре-
менно на кручение и изгиб. Тогда на цилиндре получаются 8 узло-
вых образующих и одна средняя узловая окружность. Все они
отмечены на рисунке буквой п.
Допустим сначала, что зубцы и прорезы ротора параллельны
оси вращения и что силы Т и N достигают своего наибольшего
значения в один и тот же момент вдоль всего полюса. Тогда
ясно, что движения типа, показанного на рис. 6.38, а и 6.38, б.
могут быть вызваны только нормальной силой N. Тангенциальная
сила Т может вызвать движение только типа, показанного па
6.9
ВИБРАЦИИ РАМ ЭЛЕКТРИЧЕСКИХ МАШИН
359
рис. 6.38, в. Движение типа, показанного на рис. 6.38, г, не будет
вызываться вообще. В самом деле, если нормальная сила способ-
ствует такому движению на одном конце полюса, то она противо-
действует на другом конце того же самого полюса.
Даже при больших изменениях силы N, происходящих с
частотой, равной собственной частоте колебаний типа, пред-
ставленного на рис. 6.38, а или па рис. 6.38, б, возбуждение
таких колебаний далеко не является неизбежным. Если число
зубцов ротора, приходящихся
зубцов, деленное па 8, есть
число целое, то сила 2^ до-
стигает максимума в один и
тот же момент на всех по-
люсах. Совершенно естествен-
но, что тогда возбуждается
движение, показанное на
рис. 6.38. а, а работа, затра-
ченная на движение, пока-
занное на рис. 6.38, б, если
бы оно произошло, за пол-
ный цикл колебания равня-
ется нулю. В самом деле,
сила N, притягивая 4 при-
ближающихся полюса, со-
вершает положительную ра-
боту, а притягивая 4 уда-
па один полюс, т. е. полное число
Рис. 6.39. Изменение переменной части
силы действия магнита вдоль образую-
щих ротора с постоянным скашиванием
обмотки по всему шагу.
ляющихся полюса, совершает работу отрицательную, чис-
ленно равную предыдущей. С другой стороны, если имеем
п Ч- * зубцов, приходящихся на каждый полюс, то возбуждается
движение не по типу рис. 6.38, а, а по типу рис. 6.38,6. Подобные
же соображения имеют место и для движения, показанного на
рис. 6.38, s, которое возбуждается изменениями тангенциаль-
ной силы Т, если на каждый полюс приходится п 4- | зубцов.
Очевидно, что одного изменения числа зубцов приходящихся
на полюс, еще недостаточно для того, чтобы одновременно избе-
жать возбуждения всех четырех типов колебаний.
Другая возможность влияния на указанные явления заклю-
чается в скашивании прорезей или зубцов арматуры по отноше-
нию к оси вращения. На рис. 6.39 показано такое скашивание
на один полный шаг зубца по длине ротора. В этом случае сила
N или Т в какой-либо момент времени изменяется от точки к точке
вдоль длины полюса. При этом можно легко видеть, что кривая
силы в функции от положения точки вдоль полюса должна быть
тождественна с кривой этой силы в какой-либо одной точке полюса
360
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. Vi
в функции времени. Сбоку на рис. 6.39 представлена эта кривая
силы в зависимости от положения последней, причем изменение
этой силы далеко не обязательно должно происходить по закону
синуса.
Так как Л7 и Т представляют собою переменные части величин
Л7! и Т1} то их интегралы по времени, распространенные на полный
период колебания, обращаются в нуль (рис. 6.36), В частности,
из рис. 6.39 мы видим, что притяжение между полюсом и ротором
вдоль одной половины длины полюса компенсируется отталки-
Рис. 6.40. Диаграмма сил для обмотки,
скошенной в виде елочки
ванием вдоль другой ее поло-
вины.
Очевидно, что для ма-
шины, построенной по типу
рис. 6.39. не получается воз-
буждения колебаний по ти-
нам рис. 6.38, а, б, в безотно-
сительно к числу зубцов, при-
ходящихся на полюс. Одна-
ко в то же время мы можем
ожидать неприятностей от
колебаний по типу рис. 6.38. г.
В самом деле, хотя и верно
то, что интегралы от зна-
чений Л7 и Т, взятые по
всей длине полюса, равны
нулю, тем не менее это обстоятельство еще не находится
в связи с движением, представленным на рис. 6.38, г. Результи-
рующая сила равна нулю только по той причине, что на
одной стороне полюса имеется притяжение, а на другой —от-
талкивание. Но ведь на рис. 6.38,г мы имеем сближение частей
машины на одном конце полюса и удаление на другом, вследст-
вие чего получается возможность большой затраты энергии на
такое движение.
Чтобы обойти и последнее затруднение, было предложено
скашивать зубцы «в елочку», как изображено на рис. 6.40,6, где
каждый зубец скашивается на один полный шаг на протяжении
половины длины ротора. При таком расположении зубцов кривая
сил получается примерно такая, как представлено на рис. 6.40,'а,
причем она, вообще говоря, может быть, а может и не быть сину-
соидой. В то же время график радиальных скоростей различных
точек вдоль полюса есть прямая линия (см. рис. 6.38, г). Можно
легко убедиться в том, что работа, затрачиваемая за один полный
период, которая пропорциональна интегралу от произведения
ординат двух кривых на рис. 6.40, а, равна нулю. Мы видим, кроме
того, что интеграл от силы по всей длине полюса также равен
нулю. Следовательно, ротор со скошенной обмоткой в виде «елоч-
§6.10
ВИБРАЦИЯ ВИНТА САМОЛЕТА
361
ки», где величина скашивания определяется одним шагом зубца
на половину длины ротора, делае’1 раму свободной от колебаний
всех четырех типов, показанных па рис. 6.38, независимо от
числа зубцов, приходящихся па каждый полюс.
§ 6.10. Вибрация винта самолета
С тех пор как в авиации нашли себе применение винты из
сплавов алюминия, было зарегистрировано много аварий из-за
поломки винта, вследствие, усталости материала. В некоторых
случаях следы усталости материала были своевременно замечены
в виде появившихся трещин, тогда как в других, .менее счастли-
вых случаях либо целая лопасть, либо ее конец срывались в полете.
Поскольку такие аварии происходили, несомненно, вследствие
усталости материала, мы должны отнести причину этого явления
к вибрациям винта. Прежде чем изучать возможные возбуждения,
действующие на лопасть винта, интересно рассмотреть вопрос об
определении его собственных частот. Эти частоты оказываются
различными для различных чисел оборотов, поскольку центро-
бежная сила стремится возвращать колеблющуюся лопасть в
ее среднее положение, действуя, таким образом, как упругая сила.
В действительности лопасть винта представляет собою доста-
точно сложную систему. Схематично ее можно себе представить
как консоль, для которой, однако, изменяются вдоль длины как
жесткость EI. так и масса на единицу длины. Точное вычисление
собственной частоты, даже если пренебречь действием центробеж-
ных сил, очень сложно. В каждом отдельном случае мы можем
это сделать, пользуясь методом Рэлея, для чего надо только
подобрать достаточно вероятный вид деформации и найти потен-
циальную и кинетическую энергию. При этом потенциальная
энергия будет состоять из двух частей: одной — вследствие изгиба,
а другой — вследствие центробежного эффекта. Как и всегда
бывает при пользовании методом Рэлея, найденное таким образом
значение собственной частоты оказывается несколько высоким
(см. стр. 199 и 221).
Заметим, что численное нахождение частоты указанным
способом требует запутанных вычислений, которые можно избе-
жать, применяя теорему Саусвелла.
Теорема Саусвелла (Southwell). Если в некоторой упругой си-
стеме силы упругости могут быть разделены на две части так,
что полная‘потенциальная энергия явится суммой двух соответ-
ствующих потенциальных энергий, то собственная частота со
может быть приближенно вычислена по формуле
со2 = 4- col, (6.19)
где Oj и со2 — точные значения собственной частоты видоизменен-
362
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VJ
ной системы, в которой отсутствует один из упругих эффектов.
Найденное отсюда значение со оказывается несколько низким
по сравнению с истинным.
Очень простой случай, иллюстрирующий высказанное поло-
жение, это — одна масса т, подвешенная к стене на двух парал-
лельно поставленных пружинах кг и к2 (рис. 2.12 стр. 58). Соб-
ственная частота такой системы определяется уравнением
(У2 = “ (fcj 4- k2),
что в точности равно
9 । 9 k-i . 1Сп
Wj 4- —2.
* z т т
В данном случае точный ответ получился вследствие того, что
конфигурация системы при колебании не нарушилась, несмотря
на удаление одной из пружин.
В применении к лопасти винта теорема утверждает, что
хорошее приближение для собственной частоты (со) при вращении
может быть получено посредством соотношения (6.19), если
знать точное значение (ojJ собственной частоты при отсутствии
вращения и точное значение (<а2) собственной частоты соответ-
ственной цепочки без жесткости на изгиб, но с таким же распре-
делением масс, что и в винте при вращении с полной скоростью.
Для доказательства теоремы Саусвелла применим метод Рэлея к
точной форме колеблющейся лопасти во время ее вращения. Пусть будут
тогда:
С7ИЗГ — потенциальная энергия лопасти, вследствие ее изгиба при
отсутствии вращения,
(/центр — потенциальная энергия лопасти, вследствие действия центро-
бежных сил,
ы2К — кинетическая энергия лопасти, причем w2 есть точное зна-
чение квадрата частоты собственных колебаний.
Тогда
2 _ (/нзг + U центр (/нзг Uцентр
^точн - —у у- + —
Таким путем мы находим точный ответ на вопрос об определении собствен-
ной частоты, так как предварительно была предположена истинная кон-
фигурация системы при колебаниях (см. стр. 197). Однако точная форма
лопасти при колебании во время вращения отличается от точной формы
при отсутствии вращения, а также от точной формы вращающейся цепи.
Тем не менее мы все же можем рассматривать первую форму, как прибли-
жение последних двух, а тогда два члена в правой части написанного урав-
нения являются рэлеевскими приближениями для и w2, т. е. для точных
значений собственных частот лопасти при отсутствии вращения и для
вращающейся цепи. Но рэлеевские приближения всегда слишком высоки,
а поэтому
(/изг . (/центр « , 9
Н----тН- > Ч +
§ 6.10
ВИБРАЦИЯ ВИНТА САМОЛЕТА
363
или
ш2 а; + w?»
причем порядок ошибки такой же, какой обычно бывает при пользовании
методом Рэлея.
Рис. 6.41. Вычисле-
ние собственной
частоты тяжелой
вращающейся це-
почки.
Польза приведенной теоремы заключается в том, что частота
сог при отсутствии вращения винта может быть легко определена
для любого конкретного случая экспериментальным путем. В то же
время частоту со2 цепи, выражающую эффект
вращательного движения, можно без особых
затруднений найти путем вычисления. В том
случае, когда центральная втулка имеет пре-
небрежимо малые размеры по сравнению с дли-
ной лопасти, мы находим для частоты колеба-
ний цепи исключительно простое значение:
w2 = (6.20)
г. е. собственная частота колебаний цепи,
вращающейся около одного из своих концов О,
как около центра, равна угловой скорости
вращения. Этот результат является независи-
мым отзакона распределения массы вдоль цепи,
что можно пояснить следующим образом. По-
скольку плоская сторона лопасти винта прак-
тически лежит в плоскости ее вращения, то в
первом типе колебаний (с наинизшей частотой)
частицы движутся приблизительно перпен-
дикулярно к плоскости вращения, т е. параллельно оси вращения.
Предположим, что изогнутая ось цепи представляет собою пря-
мую линию, образующую малый угол ср с осью цепи в положении
равновесия ОА (рис. 6.41). Рассмотрим элемент dm на расстоянии ъ
от точки О. На этот элемент действуют силы натяжения вверх и
вниз, направления которых совпадают с направлением цепи, и
центробежная сила Q2rdm. Если угол ср мал, то условие равнове-
сия в вертикальном направлении требует, чтобы натяжение,
направленное вниз, превосходило натяжение, направленное вверх,
как раз на эту величину. Тогда в горизонтальном направлении
мы получаем результирующую силу, равную <pQ2rdm и направ-
ленную к положению равновесия. Так как наша «кривая», по
предположению, является прямой, то отклонение элемента dm
от равновесного положения равно уг. Следовательно, эта избы-
точная горизонтальная сила может рассматриваться как упру-
гая сила с коэффициентом жесткости к — й2 dm. Частота колеба-
ний данной частицы равна
uQ2dm__ п
1т~ ~
364
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. Vi
Такой же результат мы получаем для любой частицы на взятой
прямой. Отсюда мы можем сделать вывод, что предположенная
прямолинейная форма изогнутой оси есть ее истинная форма, так
как в противном случае различные частицы должны были бы иметь
различные частоты. Заметим, что в методе Рэлея предполагается
неточная форма кривой. Тогда расчет должен дать для отдельных
частиц различные частоты. При суммировании энергии для
всех частиц мы, следуя Рэлею, находим некоторое среднее значе-
ние всех индивидуальных частот.
Мы доказали, что первая собственная частота малых коле-
баний цепи, показанной на рис. 6.41, равняется ее угловой ско-
рости, а так как в доказательстве совершенно не затрагивался
вопрос о распределении массы, то результат является справед-
ливым для распределения массы по любому закону.
Дадим другое доказательство того же соотношения с помощью метода
Рэлея. Опять предположим, что изогнутая при деформации ось цепи есть
прямая линия Центробежная сила, действующая на частицу dm. равна
Q2r dm. Эта частица при своем движении от равновесного положения А
к положению С на рис. 6.42 перемещается против центробежной силы на
расстояние АВ = — г<р2. Поэтому ее потенциальная энергия равна
1 2
Q2rdm • -гср2. а полная потенциальная энергия всей цепи тогда будет
2 I
Рис. 6.42. Потен-
циальная энергия
одного элемента
вращающейся це-
почки.
Q2®2 г 1
U = —— J г2 dm = - £2<р270.
О
Если цепь колеблется по гармоническому закону
с частотой ы2, то кинетическая энергия ее элемента
равна
— dm • v2 — —
2 2
— dm • <р2г2ы
2
2’
а тогда для всей цепи имеем
Т = J’’2 dm = 1- а&210.
О
Приравнивая друг другу обе энергии, приходим
к известному уже результату w2 — который, таким
образом, не зависит от закона распределения масс.
Итак, мы получаем
женное значение для
вращающейся лопасти
окончательно прибли-
собственной частоты
воздушного винта
(D2 = о? + Q2.
dm BC'2w|
Для колебаний более высоких порядков имеем аналогичный
результат, выражаемый в общем виде уравнением
-^Раш = + a Q2.
(6.21)
§ 6.10
ВИБРАЦИЯ ВИНТА САМОЛЕТА
365
где Q — угловая скорость вращения и а — некоторый числовой
коэффициент, принимающий различные значения для различных
типов колебаний. Этот коэффициент имеет следующие приближен-
ные значения:
колебания 1-го типа
» 2-го »
» 3-го »
1,5
а яз 6
аъ 12
Главный источник возбуждения колебаний лопасти заклю-
чается в крутильных
На рис. 6.43 представлены
деляемые уравнением (6.21).
два семейства кривых, пер-
вое из которых — семейство
парабол — показывает соот-
ношение между собственными
частотами лопасти при коле-
баниях различных порядков
и скоростью вращения, т. е.
здесь именно графически ин-
терпретируется уравнение
(6.21). Второе семейство —
это пучок прямых линий, про-
ходящих черезначало,дающих
соотношение между возму-
щающей частотой и скоро-
стью. Тангенсы углов на-
клона этих прямых пропор-
циональны порядкам коле-
баний, т. е. числам колеба-
импульсах коленчатого вала двигателя.
графически соотношения, опре-
На этой диаграмме мы усматриваем
Рис. 6.43. Диаграмма частот. Прямые ли-
нии дают возмущающие частоты, пара-
болы — собственные. Точки пересе-
чения определяют разонансные ско-
рости.
ний за один оборот. Для четырехтактных двигателей внутрен-
него сгорания, применяемых обычно на самолетах, эти порядки
колебаний выражаются числами натурального ряда с проме-
жуточными «половинчатыми», как показано на чертеже. Пере-
сечение каждой прямой возмущающей частоты с каждой кривой
собственной указывает на возможность возникновения здесь
резонанса крутильных колебаний.
Определение собственных частот невращающейся лопасти,
т. е. точек пересечения парабол с осью ординат на рис. 6.43 ока-
зывается задачей не столь простой, как это казалось бы на пер-
вый взгляд. Дело в том, что изгибные колебания лопасти не могут
рассматриваться изолированно от крутильных колебаний колен-
чатого вала: оба эффекта связаны друг с другом. Следовательно,
частота колебаний лопасти зависит также от того, на какой
двигатель поставлен данный винт. Тем не менее, желательно
иметь общий критерий для определения характеристик любого
366
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
винта независимо о; двигателя, связанного с ним. Это оказы-
вается возможным с помощью некоторых рассуждений, опираю-
щихся на рассмотрение рис. 6.44, а, б, в.
Разрежем мысленно вал около втулки винта, как показано
на рис. 6.44, а. Положим, что величина крутящего момента, пере-
даваемого через проведенное сечение, равна Мо sin cot\ тогда
крутильные колебания в этом сечении определятся величиной
<posinct^. Рассматривая изолированно только один винт, т. е.
левую часть рис. 6.44, а, мы можем утверждать, что Мо и <р0 свя-
Рис. 6 44. а) Разделение систем па две части для ее исследования, б) Диаг-
рамма импеданса для левой части (сплошные линии) и для правой части
(пунктирные липни), в) Формы колебаний лопасти при различных частотах.
заны определенным соотношением, не зависящим от величины
М
cpQ, но являющимся функцией частоты колебаний. Отношение —2 .
Фо
называемое иногда механическим импедансом винта, представлено
на рис. 6.44, б в виде сплошных линий. На рис. 6.44, в показаны в
соответствующих положениях различные формы собственных
колебаний, относящихся к разным частотам. На рис. 6.44, б имеется
ряд точек с нулевыми ординатами и, кроме того, ряд точек с беско-
нечными ординатами. В точках первой группы крутящий момент,
отнесенный к втулке винта, равен нулю, т. е. эти точки соот-
ветствуют собственным частотам винта со свободной втулкой.
В точках второй группы равен нулю угол закручивания при
конечном крутящем моменте, т. е. здесь мы имеем собственные
частоты в случае заделанной втулки. Действительное поведение
втулки соответствует промежуточному состоянию между ее пол-
ным освобождением и защемлением и зависит от свойств двига-
теля. с которым она связана.
Обращаясь теперь к правой части системы на рис. 6.44, а
и откладывая опять отношение крутящего момента к углу закру-
§6.10
ВИБРАЦИЯ ВИНТА САМОЛЕТА
367
чивания (уже теперь с отрицательным знаком), мы получим
пунктирную кривую на рис. 6.44,6. Эта кривая определяет «меха-
нический импеданс» (отрицательный) двигателя, и в сущности
она является обычной резонансной кривой для системы с одной
степенью свободы (рис. 2.20). Чтобы получить собственную
частоту связанной системы рис. 6.44. а, мы должны иметь одинако-
вые отношения момента к углу для левой и правой частей. Иными
словами, собственные частоты комбинированной системы полу-
чатся в пересечений сплошных и пунктирных кривых рис. 6.44,6.
Эти частоты должны быть отложены по оси ординат в системе осей
рис. 6.43, который тогда определит критические скорости системы,
вызванные чисто крутильным возбуждением.
В лопастях винта наблюдаются также колебания, имеющие
иные причины. Так, если двигатель не вполне уравновешен, то
центр втулки винта совершает поперечные движения в ту и дру-
гую сторону, которые совершенно не зависят от кручения и свя-
заны только со смещением центра тяжести двигателя. Основ-
ной причиной такого поведения является, несомненно, неуравно-
вешенность, но здесь, как установлено, дело объясняется также
изменением крутящего момента. Так, если в коренных подшипни-
ках двигателя имеются зазоры, если коленчатый вал является
недостаточно жестким, то периодические изменения давлений на
пальцы кривошипов при вспышках смеси в цилиндрах могут дефор-
мировать вал и вызвать его движение вследствие имеющихся зазо-
ров в подшипниках, и тогда центр тяжести вала будет смещаться.
Так как все это происходит по причине действия внутренних сил
системы, то перемещения центра тяжести вращающейся части
должны быть связаны с перемещениями центра тяжести непо-
движной части, куда относится также подшипник около втулки
винта. Таким образом, делаются возможными поперечные дви-
жения центра втулки винта, имеющие частоту воспламенении в
цилиндрах.
Поперечное колебательное движение центра втулки винта
с частотой со вызовет колебания напряжений в винте, частота
которых будет уже иная. Согласно изложенному выше, эта частота
должна быть равна о 4- Qb или со— Qb. Если, как это обычно
делается, винт соединяется с двигателем посредством редуктора,
то скорость винта составляет некоторую часть скорости двига-
теля. Дробь, выражающая передаточное число, часто имеет доводы
9
но сложный вид. Пусть она равняется, например,^. Тогда,
наблюдая частоту изменений напряжения, мы можем отличить
колебания, вызванные чисто крутящим возбуждением, от коле-
баний, вызванных поперечным возбуждением. Чтобы уяснить
себе соотношение между частотами упомянутых колебаний,
рассмотрим рис. 6.45. Здесь изображена лопасть винта, вращаю-
§ 6. ю
ВИБРАЦИЯ ВИНТА САМОЛЕТА
369
368
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VJ
Рис. 6.45. Вращение ло-
пасти с одновременным
движением втулки
винта.
щегося с угловой скоростью Ц, тогда как центр его втулки дви-
жется в поперечном направлении по закону %0 sin cot. Переме-
щение разложено на составляющие вдоль лопасти и
перпендикулярно к ней Продольное перемещение не вызывает
изгиба лопасти, поперечное же перемещение обязательно должно
вызвать изгиб. Перемещение основания лопасти в направлении,
к ней перпендикулярном, равно
sin cot cos Qbt,
или, на основании тригонометрических соотношений, приведенных
на стр 29,
cos (<у Qb) t — — sin (от 4- Qb) t.
Следовательно, поперечное движение осно-
вания лопасти вызовет изгибные колеба-
ния лопасти с теми же самыми часто-
тами, что и колебания основания, а это
и доказывает сделанное выше утвержде-
ние. Легко можно убедиться, что в слу-
чае поперечного перемещения основания
лопасти в вертикальном направлении или
вообще в любой фазе по отношению к вра-
щению мы придем к такому же результату.
Однако, возможно еще иное возбуждение изгибных колебаний
лопастей винта, которое обусловливается аэродинамическими
силами. Дело в гом, что в современных больших самолетах винты
помещают впереди передней кромки крыла, вследствие чего каж-
дая лопасть при своем вращении дважды за один оборот проходит
вблизи крыла. Поле скоростей воздуха непосредственно около
крыла отлично от поля скоростей в некотором удалении от него,
поэтому аэродинамические силы, действующие на лопасть пропел-
лера. подвергаются периодическим изменениям с двумя циклами
за каждый оборот. Как выяснено, это обстоятельство также .вле-
чет за собою изгибные колебания в лопасти.
Резюмируя изложенное, мы можем сказать, что изгибные коле-
бания лопасти винта, вызванные крутящим возбуждением, имеют
частоту, кратность которой угловой скорости двигателя или ее
половине выражается целым числом. Изгибные колебания, вы-
званные поперечным колебанием втулки винта, имеют частоту,
кратную угловой скорости двигателя или ее половине плюс или
минус угловая скорость винта. Наконец, изгибные колебания,
вызванные аэродинамическим возмущением, имеют частоту, крат-
ную скорости винта.
Внутреннее трение в стальных или алюминиевых лопастях
очень мало, а потому здесь имеет значение затухание, вызванное
действием на колеблющуюся лопасть лишь аэродинамических
сил. Это затухание имеет ту же природу, что и в случае судового
гребногсгвинта, о чем была речь на стр. 282. Колебания лопасти,
изображенной на рис. 5.29, в направлении наибольшей гибкости
(наименьшей жесткости) вызывают периодические изменения угла
атаки а, а вследствие этого и периодические изменения аэродинами-
ческой подъемной силы. Читателю предлагается подробнее иссле-
довать это явление и показать справедливость утверждения, что
изменения подъемной силы, вызванные таким движением, про-
исходят так, что эта сила направлена противоположно скорости
движения, вызывая тем самым сопротивление колебаниям, спо-
собствуя их затуханию. Однако все это остается верным лишь
для относительно медленных колебаний, так как соображения,
лежащие в основе наших рассуждений относительно затухания,
опираются на так называемую последовательность установив-
шихся состояний. Дальше, в главе VII (стр. 428), мы увидим, что
при очень быстрых колебаниях в больших воздушных скоростях
приведенные рассуждения перестают быть справедливыми. При
таких колебаниях лопасть может подвергнуться действию
«отрицательного затухания)) и перейти в состояние так назы-
ваемого «флаттера». Когда это имеет место, аэродинамические
силы делаются очень большими, почти такого же порядка, что
силы упругости и силы инерции, а потому при флаттере частота
колебаний лопасти значительно отличается от собственной
частоты изгибных колебаний, вычисленной без учета действия
воздушного потока.
Серьезные случаи колебаний встречаются не только в про-
пеллерах, но и в судовых гребных винтах Возмущения, действу-
ющие на винт, распадаются на две группы: возмущения линейные
и возмущения крутильные. Когда отдельная лопасть проходит
вблизи корпуса судна или кронштейна, поддерживающего трубу
гребного вала, она оказывается в области водяного потока, отлич-
ного от потока в более или менее открытой воде. Следовательно,
гидродинамические силы, действующие на лопасть, будут периоди-
чески изменяться, а поэтому винт будет подвергаться периодиче-
ским возмущениям, частота которых равна угловой скорости
винта, умноженной на число лопастей. Изменения крутящего
момента, вызванные этим эффектом, тем значительнее, чем ближе
к винту расположены кронштейны. В настоящее время мы еще
мало знаем о таком воздействии частей судна на винт. Мы можем
лишь констатировать, что хорошее среднее приближение изме-
нений крутящего момента по отношению к полному моменту на
гребном валу определяется величиной в 7,5%. Описанное действие
потока на винт является причиной того, что даже в турбинных
пароходах были найдены определенные критические скорости
гребных валов, при которых наступает резонанс. Предварительное
24 Ден Гартог - 2074
370
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
вычисление этих скоростей вошло в практику, причем это делается
так, как было изложено на стр. 264 и в задаче 167.
Гидродинамические силы на лопастях винта показывают также
реактивное воздействие на кронштейны и корпус судна. Изме-
нения этих сил были определены экспериментальным путем
Льюисом на модели корабля в бассейне. Они получились равными
12.5% полного упорного давления винта. Очевидно, эта цифра
в значительной мере зависит от зазоров в кронштейнах и от рас-
стояний между лопастями, но, тем не менее, она является весьма
удовлетворительным средним значением для современных кон-
струкций судов. Указанные силы, действуя на корпус корабля,
являются причиной колебаний, обычно наблюдаемых в кормовой
части пароходов. Этим колебаниям не придавали особого значения
до тех пор, пока они не проявили себя на большом французском
трансатлантическом пароходе «Нормандия». Дело в том, что па
«Нормандии» гидродинамические силы винта имели те же собствен-
ные частоты, что и весь пароход в целом, взятый как балка со
свободными концами (см. стр. 212), вследствие чего возникали
колебания с весьма значительной амплитудой. Первой мерой
против такого нежелательного явления была замена трехло-
пастных винтов четырех лопастными, чем и были нарушены усло-
вия резонанса.
§ 6Л1. Вибрации колес и лопаток паровых турбин
С точки зрения конструкции мы можем подразделить большие
реактивные паровые турбины на два основных типа: на дисковые
турбины и барабанные турбины. В дисковом типе ротор или
шпиндель состоит из вала, на котором плотно насажено несколько
дисков. Диаметр этих дисков примерно в четыре раза больше
диаметра вала, и турбинные лопатки прикреплены к ободку
каждого диска. В барабанной турбине шпиндель состоит из полой
отливки и имеет диаметр, равный внешнему диаметру дисковой
турбины, причем лопатки укреплены непосредственно на внешней
стороне шпинделя. В турбинах обоих типов случались аварии
из-за поломки лопаток вследствие усталости материала. Надо за-
метить, что в барабанном типе эти поломки ограничивались только
поломкой лопаток, в то время как в дисковом типе разрушения
распространялись и на самые диски.
Как и в случае винта самолета, мы встречаемся здесь с явле-
нием резонанса при совпадении собственной частоты колебаний
диска с некоторой определенной угловой скоростью, кратной
эксплуатационной скорости. Прежде чем переходить к объяснению
происхождения возмущающих сил, необходимо ясно представить
себе типы главных колебаний. Для этой цели, во-первых, рассмот-
рим диск в состоянии покоя, т. е. без вращения, допуская в то же
§6.11 ВИБРАЦИИ КОЛЕС И ЛОПАТОК ПАРОВЫХ ТУРБИН 371
время его колебания. Центр диска зажат на оси, а края с лопат-
ками могут свободно колебаться. В такой системе мы получаем
бесчисленное множество типов главных колебаний, из которых
только немногие имеют значение в данной проблеме. Четыре типа
колебаний, которые обычно были причиной аварии, оказываются
такими, при которых периферия диска изгибается по синусоиде
с 4, 6, 8 или 10 узлами. Эти колебания называются изгибпыми
колебаниями типа п, где число п соответственно равно 2, 3,4 или 5.
Первые из этих двух типов, являющиеся наиболее важными,
показаны на рис. 6.46. Для получения таких фигур диск, удержи-
ваемый в горизонтальном положении, покрывается тонким слоем
мелкого песка, после чего возбуждается колебание (обычно
посредством электромагнита, питаемого переменным током с
изменяющейся частотой). При наступлении резонанса песок
ссыпается с колеблющихся частей диска и собирается по узловым
линиям. Вследствие этого окружность диска делится на целое
число равных частей, которые попеременно двигаются вверх и
вниз. Знаки Ч- и — поставлены в пучностях колебаний и отно-
сятся к некоторому определенному моменту времени. В этот
момент плюс указывает, что диск в данном месте выгнут кверху,
а минус, — что диск здесь прогнут книзу. По истечении полпе-
риода знаки меняются. В узлах никакого движения, конечно, нет.
Колебания с 8 и 10 узлами здесь не иллюстрируются, но они могут
быть легко представлены. Прогибы по окружности распределяются
гак, что если периметр развернуть в прямую, то кривая прогибов
представится приблизительно в виде синусоиды с п волнами для
колебания с 2п узлами.
24*
372
ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН
ГЛ. VI
как это имело место в случае лопасти
Рис. 6.47. Постоянная сила 2*". действующая
водном и том же месте неподвижного про-
странства, может увеличивать энергию
вращающегося и колеблющегося лиска.
больше единицы и имеет
Условия, которые создадутся во вращающемся диске, будут
немного иными. Пусть весь рисунок 6.46 вращается с угловой
скоростью Q, равной скорости колеса. В таком случае появляются
центробежные силы, которые повышают частоту колебаний, а
также несколько изменяют вид главных колебаний. Однако
этот последний эффект имеет очень небольшое значение, а поэтому
рассматривать его мы не будем. Что же касается возрастания
собственной частоты о, то оно происходит аналогично тому,
пропеллера в предыдущем
параграфе, т. е. может
быть приближенно выра-
жено параболическим со-
отношением
а)2 = 4- BQ1, (6.22)
где Q есть угловая ско-
рость вращения, а В —
ч исл е н н ый ко эффи ц иен т,
различные значения для
колебаний различных порядков, о чем говорилось на стр. 365.
Вывод написанного уравнения выполняется подобно выводу
уравнения (6.21). Правда, здесь он несколько сложнее, чем в пре-
дыдущей задаче, так как приходится вводить пластинку вместо
балки.
Колебания типов рис. 6.46 могут возбуждаться во вращающем-
ся диске постоянной силой, неподвижной в пространстве, напри-
мер посредством струи пара, направленной на диск из непо-
движного сопла. Это становится ясным из рассмотрения рис.
6.47, представляющего собою ?г-ю часть развернутого периметра
диска, колебания которого таковы, что они имеют 2п узлов. Откло-
нения частиц окружности периодически меняются с течением
времени между сплошной кривой и пунктирной. Положим, что
одновременно кривая (с узловыми точками А, С и Е) перемещается
вправо с окружной скоростью колеса, тогда как сила достается
неподвижной в пространстве. Пусть период колебаний и окруж-
ная скорость связаны таким образом, что, когда ючка С придет
в положение А, пройдет половина периода колебаний, вследствие
чего периферия примет форму, показанную пунктиром. Для
большей точности мы предположим упомянутое соотношение
между скоростью и колебаниями таким, что, когда сила F нахо-
дится
против А, прогибы распределяются по сплошной кривой,
» В, прогибов нигде пет,
» (7, прогибы распределяются по пунктирной кривой,
» D, прогибов нигде нет.
4 G. 11
ВИБРАЦИИ КОЛЕС И ЛОНА'ЮК ПАРОВЫХ ТУРБИН
373
Таким образом, когда участок АС кривой проходит против
силы F, эта кривая переходит из своего положения, отмеченного
сплошной линией, в положение, отмеченное пунктирной линией.
В течение этого времени все точки кривой АС имеют скорости,
направленные вверх, так что сила F совершает положительную
работу. Но когда через F проходит участок СЕ, кривая переходит
из пунктирной в сплошную, что опять связано со скоростями на
участке СЕ, направленными вверх, а поэтому и здесь работа силы
F положительная. Правда, в это же время участок АС переходит
вниз в положение, обозначенное сплошной линией, но в данном
случае он уже не находится против силы F.
Скорость, при которой имеет место такое явление, называется
«критической скоростью» диска. Она получается, когда за время
одного периода колебания происходит 1/п оборота вала. Иначе
говоря, мы имеем такие соотношения:
число оборотов в секунду = ~, j
Как уже было сказано выше, коэффициент больше единицы,
вследствие чего последнее уравнение практически совпадает с
уравнением (6.21). Поэтому оно может быть изображено также
графиком на рис. 6.43, причем следует заметить, что состоянию
резонанса при колебаниях с 2п узлами соответствует точка
пересечения параболы с прямой, имеющей угловой коэффициент п.
В частности, мы видим, что колебания с двумя узлами (тг ~ 1,
один узловой диаметр) невозможно возбудить посредством по-
стоянной силы F. В турбинах также не встречаются возмущения
дробных порядков (целые числа с половиною).
Из рассмотрения рис. 6.43 ясно, что здесь возможно большое
число критических скоростей. Так как диски турбины значительно
меняются по своим размерам от конца высокого давления к концу
низкого давления, то очень часто один или несколько дисков при
работе турбины оказываются в таких условиях, что их скорость
попадает в ряд критических скоростей. Этим обстоятельством
и объясняется большое количество аварий, которые происходили,
пока не были изучены их причины.
Для того чтобы избежать аварии, связанной с появлением резо-
нанса, диски должны быть рассчитаны так, чтобы их критические
скорости не совпадали с эксплуатационной скоростью. Поскольку
анализ явления здесь довольно грубый, так что нельзя ожидать
точных результатов вычислений, и так как, кроме того, частота
существенно зависит от давления материала в центре, получаю-
374
ВРАЩАЮЩИЕСЯ ЧАСТИ МАЩИН
ГЛ, VI
щегося вследствие усадки, то расчет приходится производить,
опираясь на эмпирические данные, полученные из сравнения
с предшествующими конструкциями. После того как турбина
построена и смонтирована, частоты тех дисков, от которых можно
ожидать аварию, определяются экспериментальным путем (по-
средством возбуждения колебаний с помощью механического
вибратора или электромагнита переменного тока, дающих возму-
щающую силу изменяемой частоты). Если окажется, что такая
частота лежит очень близко к рабочей скорости диска» то она
может быть изменена соответствующей «настройкой» посред-
ством снятия тонкого слоя металла, обычно у краев. Наименьшая
допускаемая в практике разница между критической и рабочей
скоростями составляет 15% для колебаний с 4 узлами и 10%
для колебаний с 6 и 8 узлами.
В турбинах барабанного типа поломки, вследствие усталости
отдельных лопаток или групп лопаток, неоднократно повторя-
лись. Объяснение этого явления точно такое же, как и в случае
дискового типа. Дело в том, что барабан с рядом лопаток можно
рассматривать как диск, центральная часть которого является
бесконечно жесткой. В таком случае мы встречаемся с другими
возможностями появления резонанса, чем только что описанные.
В самом деле, вообразим себе турбину (дискового или барабан-
ного типа), в которой лопатки прикреплены только своими осно-
ваниями и совершенно не связаны между собою ни скрепляющим
обручем, ни проволоками, вследствие чего каждая лопатка может
колебаться вполне самостоятельно. Если при этом имеется только
одно сопло, то первое главное колебание лопатки (когда узлы
получаются только в месте закрепления) может возникнуть в
том случае, когда в течение одного оборота имеет место целое число
периодов колебания. Это объясняется следующим образом. Пусть
лопатка проходит под струей как раз в тот момент, когда она при
своем колебании отступает от струи; тогда струя, действуя .на
лопатку, совершает положительную работу. Если число колеба-
ний, приходящихся на один оборот, есть число целое, то всякий
раз, когда лопатка попадает под струю, фаза ее колебаний оказы-
вается одной и той же. А в таком случае возможны многие нежела-
тельные явления. Однако на практике во всех турбинах лопатки
связываются между собой либо все вместе, либо по группам,
примерно по 8 лопаток в каждой группе. И вот такие группы
имеют собственные частоты колебаний, которые могут возбуж-
даться описанным образом.
Описанное сейчас явление неоднократно было причиной
серьезных аварий за последние несколько лет. Приведем цифро-
вые данные, относящиеся к одному такому случаю, имевшему
место в действительности. В колесе первой ступени турбины
высокого давления лопатки подвергались действию пара с давле-
§ 6.11 ВИБРАЦИИ КОЛЕС И ЛОПАТОК ПАРОВЫХ ТУРБИН 375
нием 84 кГ/см2 при температуре 480° С. Лопатки имели размеры
около 2,5 см высоты и 2,5 см ширины, и поэтому при большой
скорости под действием пара высокого давления каждая из них
развивала мощность около 100 л. с. Были обнаружены поломки
лопаток по истечении примерно 5 часов работы турбины. Соб-
ственная частота лопаток соответствовала приблизительно 60
полным колебаниям за один оборот. Оказалось, что последователь-
ные критические скорости отличались друг от друга только на
1,5%, вследствие чего было практически невозможно избежать
резонанса изменением настройки системы. Следовало бы ожидать,
что лопатка, пройдя мимо парового сопла и приобретя некоторую
амплитуду колебаний, стала бы совершать затухающие колебания,
которые свелись бы на нет по истечении 60 периодов. Проходя
мимо того же сопла, лопатка получает новый импульс. В описы-
ваемом случае лопатки были рассчитаны с большой прочностью,
достаточной для того, чтобы противостоять такой переменной
нагрузке. Однако, в действительности оказалось, что затухание,
вызванное внутренним сопротивлением в лопатках, было настолько
мало, что после указанных 60 периодов, т. е. в конце полного обо-
рота, амплитуда уменьшалась очень мало, вследствие чего лопатка,
попадая опять в струю пара, имела еще значительные размахи.
Тогда при определенных фазовых соотношениях возбуждались
колебания с амплитудой, во много раз большей, чем амплитуда,
полученная от однократного воздействия струи. Описанное явле-
ние объясняется тем, что упругий гистерезис при температурах,
приближающихся к температуре красного каления, значительно
меньше, чем гистерезис при комнатной температуре. Частичной
мерой для предотвращения этих нежелательных явлений может
служить сглаживание краев паровой струи посредством устрой-
ства соответствующих каналов в сопле.
Исследования внутреннего гистерезиса при высоких темпера-
турах привели к результатам, повлекшим за собой применение
специальной молибденовой стали, у которой затухание в несколь-
ко раз больше, чем у углеродистой стали. В настоящее время
в паровых турбинах применяется почти исключительно молиб-
деновая сталь. В последнее время подобные же явления имели
место в газовых турбинах, в которых рабочие температуры еще
выше. Это привело к применению особых сортов жароустойчивых
сталей. К сожалению, в настоящее время нет такой стали, которая
обладала бы хорошей механической прочностью при высокой
температуре и одновременно высокой гистерезисной потерей.
Однако металлурги усиленно работают над созданием такой
стали.
В реактивных турбинах нет таких сопел активного действия
па лопатки, которые давали бы определенную силу F, согласно
рис. 6.47. Однако всякое отклонение распределения давления от
376 ВРАЩАЮЩИЕСЯ ЧАСТИ МАШИН ГЛ. VI
радиальной симметрии действует таким же образом, как и сопло.
При вращении лопатка перемещается в переменном поле давлений,
основная составляющая которого имеет частоту, равную угловой
скорости вращения, но которое в то же время имеет и высшие
гармонические составляющие. Рассмотрим, например, n-ю гар-
монику этого поля. Эта гармоника может возбудить колебания,
если лопатка вращается с такой скоростью, что за один оборот
имеет место п периодов ее собственных колебаний. Тогда фаза
колебаний будет такова, что при прохождении лопатки в области
повышенного давления n-й гармоники полного давления эта лопат-
ка отступает в своем колебательном движении, в то время как в
области пониженного давления той же гармоники она переме-
щается вперед. Мы видим, таким образом, что в принципе резонанс
может наступить в том случае, если какая-либо частота собствен-
ных колебаний одной лопатки или группы лопаток оказывается
целым числом, кратным угловой скорости вращения турбины,
предполагая при этом, что давления неравномерно распределены
по окружности.
Задачи № 173—195.
ГЛАВА VII
АВТОКОЛЕБАНИЯ
§7.1. Общие замечания
Явления, которыми мы занимались до сих пор, относились
либо к свободным колебаниям, либо к вынужденным, причем
мы сосредоточивали свое внимание на тех из них, которые явля-
лись наиболее опасными в практике. Однако во многих случаях
наблюдались такие возмущенные состояния системы, которые
относятся к совершенно иному классу явлений, известных под
названием самовозбуждающихся колебаний, или автоколебаний.
Сущность отличия этих по-
следних от предыдущих
лучше всего может быть вы-
яснена на примерах. । —
Рассмотрим прежде всего
обыкновенную одноцилин-
дровую паровую машину,
поршень которой совершает Рис.7.1.Неуравновешенный вал какпри-
возвратно-поступателыюедви- мер системы, совершающей вынужден-
жение. Это движение мож- ные к°лебапия-
но рассматривать как своего
рода колебание. Очевидно, что сила, поддерживающая такое коле-
бательное движение, получается вследствие давления пара, дей-
ствующего попеременно то на одну, то на другую сторону поршня.
Далее рассмотрим неуравновешенный диск, укрепленный на
гибком валу, вращающемся в двух подшипниках (рис 7.1). Центр
диска совершает колебательное движение, причем это движение
поддерживается неуравновешенной центробежной силой, тол-
кающей диск попеременно то вверх, то вниз.
В случае паровой машины мы имеем дело с автоколебаниями.
тогда как диск испытывает обыкновенные вынужденные колебания.
Допустим, что закреплением крейцкопфа или маховика мы пред-
отвратили движение поршня. Тогда тем самым будут лишены
движения парораспределительные клапаны, а вследствие этого
не будет также переменной силы давления пара на поршень.
378
АВТОКОЛЕБАНИЯ
ГЛ. VII
С другой стороны, предположим, что мы предотвратили
колебания диска, установив, например, на валу около диска два
шаровых подшипника а, а и прикрепив их внешние кольца к
неподвижному фундаменту. Тогда колебания диска отпадают,
и его вращательное движение становится невозмущенным. Однако,
в этом случае все же остается вращение неуравновешенных масс,
вследствие чего остается и переменная сила.
Таким образом, мы можем отметить следующее различие.
В автоколебаниях переменная сила, поддерживающая движение,
создается или управляется самим движением, и при прекращении
движения эта переменная сила исчезает.
В вынужденных колебаниях поддерживающая движение перемен-
ная сила существует независимо от движения и остается даже
в том случае, когда колебательное движение прекращается.
Существует еще другой взгляд на автоколебания, согласно
которому они рассматриваются как свободные колебания с
отрицательным затуханием. Следует отдать себе отчет в том, что
эта новая точка зрения не противоречит предыдущей. Дело в
том, что обычная сила вязкости, вызывающая затухание, есть
сила, пропорциональная скорости колебания и направленная
против нее. Отрицательная же сила затухания также пропор-
циональна скорости, но направлена в сторону скорости. Поэтому
вместо уменьшения амплитуд при свободных колебаниях в данном
случае вследствие отрицательного затухания мы имеем их увели-
чения. Так как сила затухания, будь она положительна или
отрицательна, исчезает при остановке движения, то второе
определение находится в согласии с первым.
Рассмотрим теперь дифференциальное уравнение движения
системы, имеющей одну степень вободы, при отрицательном
затухании:
х — сх Ц- к ~ 0. (7.1)
Так как это уравнение отличается от уравнения (2.12) на стр. 60
только знаком перед коэффициентом с, то его решение может быть
написано в виде
с
х — е 2т (A cos qt + В sin qt), (7.2)
откуда ясно, что мы имеем делос колебаниями, амплитуда которых
возрастает, как показательная функция (рис. 7.2).
Система с положительным затуханием иногда называется
динамически устойчивой, тогда как в случае отрицательного
затухания она называется динамически неустойчивой. Между
устойчивостью статической и устойчивостью динамической имеет-
ся разница. Механическая система статически устойчива, если
при ее отклонении от положения равновесия возникает сила
S 7.1
ОБЩИЕ ЗАМЕЧАНИЯ
(или пара), стремящаяся возвратить ее в равновесное положение.
-Она статически неустойчива,если возникающая в таком случае
сила стремится увеличить отклонение. Таким образом, при
статической неустойчивости мы имеем отрицательное значение
коэффициента жесткости (лучше сказать, квазиупругого коэффи-
циента) к или, выражаясь более общо, отрицательное значение
квадрата одной из собственных частот ф2.
На рис. 7.2 представлено поведение системы в различных
ее состояниях в смысле устойчивости. Необходимо заметить,
что динамическая устойчивость уже предполагает устойчивость
Рис. 7.2. Свободные движения системы, различные в смысле устойчивости:
а — статически неустойчивое, б — статически устойчивое, но динами-
чески неустойчивое, в — статически и динамически устойчивое.
статическую (рис. 7.2, в), но обратное утверждение неверно:
статически устойчивая система может быть динамически неустой-
чивой (рис. 7.2, б).
Обращаясь к частоте автоколебаний, следует сказать, что
в большинстве случаев, встречающихся на практике, отрицатель-
ная сила затухания очень мала по сравнению с силами упругости
и с силами инерции. Если сила затухания равна нулю, то частота
колебаний есть собственная частота системы. Сила затухания
как положительная, так и отрицательная, несколько понижает
собственную частоту, как это было выяснено выше (см. стр 64,
рис. 2.16), Однако в большинстве случаев, встречающихся в
машиностроении, эта разница пренебрежимо мала, а потому
частота автоколебаний есть в то же время собственная частота
системы. Только если сила отрицательного затухания велика по
сравнению с силами упругости или с силами инерции, то частота
автоколебаний значительно отличается от частоты собственных
колебаний. Такие колебания известны под названием релакса-
ционных колебаний. Они будут рассмотрены ниже (см. стр. 485).
Паровая машина является примером, где сила отрицательного
затухания (давление пара) очень велика в сравнении с упругой
силой (которая здесь вообще отсутствует), Следовательно, для
такой машины частота ее колебаний значительно отличается от
собственной частоты (равной нулю).
Мы можем лучше уяснить себе явление, если обратимся к
энергетическим соотношениям. В случае положительного зату-
380
АВТОКОЛЕБАНИЯ
ГЛ. VII
хания ла затухания, будучи все время направлена против
скорости, совершает отрицательную работу. Механическая энер-
гия переходит в тепло, что происходит обычно в масле демпфера.
Таким образом, энергия отнимается от колеблющейся системы.
Каждое последующее колебание обладает меньшей амплитудой
и меньшей кинетической энергией, причем потерянная кинети-
ческая энергия поглощается вследствие затухания. В случае отри-
цательного затухания сила затухания, которая является теперь
движущей силой, совершает положительную работу, причем
работа, производимая за каждый период колебаний, дает увели-
Рис.7.3. Величина работы, совершае-
мой за один период гармонической
силой и вязким сопротивлением при
разных амплитудах.
чение кинетической энергии
системы и идет на возрастание
колебаний. Совершенно очевид-
но, что автоколебания не могут
существовать без внешнего
источника энергии, каковым
является хотя бы паровой ко-
тел в нашем первом примере.
Частота изменения этой энер-
гии не должна совпадать с ча-
стотой рассматриваемого коле-
бательного движения. Напро-
тив того, как раз в большин-
стве случаев энергия получается
от источника без каких-либо
переменных свойств, как, на-
пример, резервуар с паром или
с водой под давлением, установившийся ветер, установившийся
крутящий момент машины и т. п. Однако есть все же несколько
случаев (они рассмотрены на стр. 506 и 507), где источник обладает
колебательными свойствами, частота изменений которых много
выше, чем частота возбуждаемых им колебаний.
В случае строго линейной самовозбуждающейся системы ампли-
туда с течением времени должна расти безгранично, так как с
каждым периодом энергия системы становится все больше и больше
(рис. 7.2, б). Однако такие бесконечно большие амплитуды про-
тиворечат наблюдениям. Дело в том, что в большинстве систем
механизмы самовозбуждения и затухания существуют одновремен-
но и независимо друг от друга. На рис. 7.3 отложены значения
энергии за один период соответственно различным значениям
амплитуды колебаний. Для линейной системы энергия затухания
образует параболу вследствие того, что величина рассеяния энер-
гии за один период равна тгет’о (стр. 79). Если сила отрица-
тельного затухания также линейна, то мы получим другую пара-
болу, соответствующую энергии, получаемой системой за один
период. Система будет находиться в состоянии самовозбуждения
§ 7.2 МАТЕМАТИЧЕСКИ!"! КРИТЕРИЙ УСТОЙЧИВОСТИ 381
пли затухания, смотря пи тому, какая из двух парабол окажется
выше. Нужно,однако, заметит!), что во всех практических случаях
оказывается, что либо самовозбуждение, либо затухание, а может
быть и то и другое не подчиняются линейному закону, вследствие
чего кривые, соответствующие получению энергии и ее рассеянию,
пересекаются. Так, например,если на рис. 7.3 амил из уда равняется
ОА, то система больше получает энергии, чем рассеивает ее, а
потому амплитуда растет Напротив того, если амплитуда оказы-
вается равной ОС, то затухание преобладает над самовозбужде-
нием, и колебания убывают. В обоих случаях амплитуда стремится
к своему значению ОД где обе энергии уравновешиваются.
Получаемое таким образом движение является не затухающим,
а установившимся свободным колебанием.
Так как нелинейность сил затухания или возбуждения соз-
дает большие математические трудности (см. гл. VIII), то мы
обычно вводим допущение линейности системы при очень малых
амплитудах и определяем, какая энергия преобладает: энергия
затухания или энергия возбуждения. Если окажется, что система
неустойчива, то это значит только, что амплитуда начнет воз-
растать, а сколь далеко пойдет это возрастание, зависит исклю-
чительно от нелинейных свойств системы.
В электротехнике автоколебания имеют еще большее значение, чем
в области механики. В качестве электрической аналогии вынужденных
колебаний мы имели электрическую цепь, в которую включены последо-
вательно самоиндукция, емкость и источники переменного гока (см, рис.
2.5 па стр. 46) Примером электрической самовозбуждаюшейся системы
может служить цепь, в которую включена электронная лампа. Батарея В
является источником энергии постоянного тока. Что касается частоты,
то она определяется значениями индуктивности L и емкости С цепи и
отрицательным затуханием, вызванным периодическим запиранием сеткой
лампы потока электронов.
§ 7.2. Математический критерий устойчивости
Для систем с одной степенью свободы, подобно тем, которые
будут рассмотрены в §§ 7.3—7.6, обычно бывает достаточно
разобрать явления с физической стороны, чтобы показать отри-
цательность коэффициента затухания с. Таким образом, критерий
динамической устойчивости может быть получен скорее физи-
ческим анализом, чем математическим исследованием.
Однако в случаях систем с двумя, тремя и т. д. степенями
свободы физическое представление хотя и является всегда очень
полезным, тем не менее оно все-таки не может дать полной интер-
претации того, что происходит. Поэтому необходим математиче-
ский подход к явлению, а это значит, что прежде всего надо
составить систему дифференциальных уравнений для каждой
данной задачи. Коль скоро мы имеем дело с малыми колебаниями
382
АВТОКОЛЕБАНИЯ
ГЛ. VII
(не обращая поэтому внимания на могущие быть нелинейные
характеристики движения), мы получаем все уравнения линейные
2-го порядка, наподобие уравнений (3.18) или (4.16). Решение
этих уравнений найдем, как обычно, положив:
пр — г/'
"И — max v »
Жо —— ^2 mav
& 4 Hid л 7
(7.3)
/у -— л» pSt
л,п ‘"птах ’
где 5 есть комплексное число, действительная часть которого
определяет затухание, а мнимая часть — собственную частоту.
Подставляя значения (7.3) в дифференциальные уравнения сво-
бодных колебании, мы преобразуем эти уравнения в систему
однородных линейных алгебраических уравнений относительно
комплексных неизвестных ж1тах, . . ., жлтах. В процессе исключения
неизвестных мы придем к одному уравнению, не содержащему
вовсе этих неизвестных. Такое уравнение носит название «урав-
нения частот»1) и имеет вообще степень 2п относительно s. Так,
в случае системы с двумя степенями свободы получаем уравнение
четвертой степени; в случае системы с тремя степенями свободы —
уравнение шестой степени и т. д.
Алгебраическое уравнение степени 2п относительно величины
$ имеет 2п корней, т. е. определяет значений величины з. Дей-
ствительные значения величины $ приводят нас к величинам
est в решении уравнений, которые редко встречаются в реальных
случаях колебательных систем (рис. 2.14 стр. 62). Корни sобыкно-
венно бывают комплексными и притом всегда попарно сопряжен-
ными
5т = А + 7?р
$2 ~ Ра — 7?р
5з = Рг + 7&>
«4 = Рг — 7&>
Решение, относящееся к одной из искомых функций совокуп-
ных дифференциальных уравнений движения системы, имеет
вид:
= С^1 + С2е^-1 + 0^ + . . .
Из уравнений (2.15), (2.18) и (2.19) (см. стр. 62) мы знаем, что
г) Строго говоря, это есть характеристическое уравнение, которое
переходит в уравнение частот при чисто мнимых корнях s, если положить
s = iq. (Прим, перев.) :
S 7.2
МАТЕМАТИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ
383
члены, входящие в это решение, могут быть скомбинированы
попарно в выражения вида
+ C2es*1 = еР'1 (/1 sin qxt + В cos &/),
где мнимая часть числа 8есть частота, а его действительная часть
определяет собою быстроту затухания. Таким образом, если
действительная часть всех значений s отрицательна, то система
является динамически устойчивой', если же действительная часть
хотя бы одного значения числа s положительна, то система динами-
чески неустойчива.
Итак, вопрос об устойчивости системы может быть решен
из рассмотрения знаков действительных частей решений уравне-
ния частот. При этом нет необходимости в действительности
выполнять решение, так как существуют правила, согласно
которым можно сделать заключение об устойчивости или неустой-
чивости только на основании изучения коэффициентов уравнения
частот. Эти правила, данные Раусом (Routh) в 1877 г., являются
достаточно сложными для уравнений частот высших степеней,
но в большинстве практических случаев (в случае уравнений тре*
тьей или четвертой степени) они очень просты.
Рассмотрим сперва кубическое уравнение
s3 -1- 4* Я- /Iq 0, (7.4)
которое встречается в случае системы с двумя степенями свободы,
когда одна масса или один коэффициент жесткости обращается
в нуль (в условном смысле мы тогда говорим, что имеем полторы
степени свободы). Если корнями этого уравнения являются
s3, то уравнение может быть написано так:
(S — 5г) (5 — S2) (8 — З3) = О,
или
«S3 - ($.} §2 4“ $3) -j- 4“ S^Sg $2^3) --- ^1^2*^3 = (7.5)
Сравнивая с уравнением (7.4), находим:
42 = — (s3 4- $2 + S3), )
/Ij = ^1^2 4“ $1^3 ~l“ s2s3, > (7.6)
z4n = -- )
Один из трех корней кубического уравнения должен быть непре-
менно действительным, а два других либо действительными, либо
комплексными сопряженными. Отделяя в корнях $2, зя дей-
ствительные части от мнимых, мы можем написать
*1 = й,
*2 = + Ж
384
АВТОКОЛЕБАНИЯ
ГЛ. VII
Подстановка этих выражений в формулы (7.6) приводит нас к
соотношениям:
4, = — (Pi + 2р2), \
= 2р> р2 + pi + <$> j (7.7)
^о= "Ру (Pi н- ?2)- )
Признак или критерий устойчивости заключается в том,
что обе величины, как plf так и р2, должны быть отрицательными.
Итак, мы прежде всего видим, что все коэффициенты Л2, Ах> Ао
должны быть положительными, так как, если бы оказалось, что
один из них отрицательный, то из равенств (7.7) следует, что либо
plt либо р2, либо, наконец, обе величины рг и р2 должны быть поло-
жительными. Можно доказать, что это требование сохраняет
свою силу и для уравнений высших степеней. Таким образом,
уравнение частот любой степени, имеющее один или большее число
отрицательных коэффициентов, определяет собою неустойчивое
движение.
Допустим, что все коэффициенты Ао, А1 и А2 положительны.
Тогда третье из уравнений (7.7) требует, чтобы р3 было отрица-
тельным. Однако из этих уравнений мы еще не получаем никакого
указания относительно знака р2. Следует заметить, что на границе
устойчивости при переходе от неустойчивого состояния системы
к устойчивому величина р2 должна менять знак, переходя через
нуль от положительного значения к отрицательному. Положим
р2 = 0. Тогда уравнения (7.7) принимают вид:
А2 = — ри \
4 = ^2* / (7.8)
^0 = —Р1?2- '
Эти соотношения должны выполняться па границе устойчивости.
Исключая Pi и q2, мы находим
Ао = А] А2.
Мы пока еще не знаем, с какой стороны этого равенства имеет
место устойчивость. Этот вопрос проще всего решить путем испыта-
ния каких-либо частных значений 5 Пусть, например, Sj = — 1,
5г,з = — 1 i 1, что, очевидно, соответствует устойчивости. Под-
ставляя в равенства (7.7), получаем
А2 = 3, Ал = 4, Aq = 2,
т. е.
Aq< АаА2.
Итак, полный критерий устойчивости системы, имеющей
кубическое уравнение частот (7.4), заключается в том. чтобы
§ 7,2 МАТЕМАТИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ 385
все коэффициенты А были положительны и чтобы выполнялось
неравенство
Л А2 Ло. (7.9)
Практические применения этого результата даны в §§ 7.7
и 7.8. Рассмотрим теперь уравнение четвертой степени
я4 + Д$3 + + Ло = О, (7.10)
с которым поступим аналогичным образом. Так как целая раци-
ональная алгебраическая функция четвертой степени может быть
разложена на произведение двух многочленов второй степени,
ю мы можем написать для корней выражения:
= Рх + 1
= (7.11)
«з = Pi + 77г>
«4 = Pi — 77г '
и подставить их в уравнение (7.10), разложенное предварительно
на произведение четырех множителей по известному правилу
алгебры. Тогда путем сравнения находим
А.3 = — 2 tp. + р2), \
4 = р' + Рг + ?? + qi + «да, ( (7 ,9.
4 = — 2р1 (pl + $) — 2р2 4- й), (
4 = (Pi + 71) (Рг + ?!)• /
В случае устойчивости обе величины как ри так и р2, должны
быть отрицательны. Подставляя отрицательные значения р2 и
р2, мы видим из уравнений (7.12), что все значения А получаются
положительными, откуда следует первое требование для устой-
чивости, а именно, чтобы все коэффициенты А были положитель-
ными. Допустим, что это условие выполнено. Тогда из первого
уравнения (7.12) вытекает, что, по крайней мере, одна из величин
Рг или р2 отрицательна. Пусть отрицательно pv Нам необходимо
установить критерий отрицательности также для р2. На границе
между устойчивостью и неустойчивостью р2 = 0. Подставляя
это значение в уравнения (7.12), получаем:
4 = — 2Р1, }
4 = р? + 71 + ?!, ' ,7 .
Л = -2Р172г, I >
А о = (Р? + 7?) 71. /
т. е. четыре уравнения с тремя неизвестными plf и q2. Исключая
25 Ден-Гартог • 2074
386
АВТОКОЛЕБАНИЯ
ГЛ. VII
эти неизвестные, получаем условие совместности в виде соотноше-
ния между коэффициентами А'
АгА2А3 = А] 4- Л|Л0.
Чтобы определить, с какой стороны этого равенства имеет
место устойчивость, мы опять прибегнем к испытанию некоторых
простых значений s, заведомо соответствующих устойчивому
состоянию. Положим, например:
•$1,2 = — 1 + <$3,4 = — 2 + 2/.
Тогда из уравнений (7.12) находим
4 = 6, Л2 =18, 4 = 24, 4=16,
4,/Мз > 4? + AfA0.
Следовательно, полный критерий устойчивости системы, имею-
щей уравнение частот четвертой степени (7.10), заключается
в том, чтобы все коэффициенты А были положительны и чтобы
выполнялось неравенство
4 4 4 > 4 + 4 л0. (7.14)
Применения этого соотношения будут даны в §§ 7.7, 7.9 и 7.10.
Системы с тремя степенями свободы имеют вообще уравне-
ние частот шестой степени и в случаях вырождения — пятой
степени. Тогда мы имеем три действительные части корней $ и,
помимо требования положительности всех коэффициентов А,
имеются еще два других требования, каждое из которых оказы-
вается более сложным, чем предыдущие. За подробностями
в этой области читателю следует обратиться к оригинальной
работе Рауса г).
l) Routh Е. J., A Treatise on the Stability of a Given. State of Motion.
Cambridge. 1877. Кроме критерия Рауса, весьма распространен также
критерий Гурвица, который заключается в следующем. Положим, что
имеем уравнение
4- 4- а2а?п~2 4- . . . 4- ап = 0,
где а0 >• 0, что, очевидно, можно сделать всегда (путем изменения знаков
всех коэффициентов, если ап отрицательно). Составим определители:
I сц а0 0 I
а\ ао
Dj = ах, D2 = , LZ} = a2 °i! » • • ’
I I |
a5 at I
§ 7.3
НЕУСТОЙЧИВОСТЬ ВСЛЕДСТВИЕ ГРЕНИЯ
387
§ 7.3. Неустойчивость вследствие трения
Во многих случаях сила трепня, вместо того, чтобы способ-
ствовать положительному затуханию, является причиной воз-
никновения отрицательного затухания. Одним из наиболее из-
вестных случаев является тот, когда струна скрипки приводится
смычком в колебательное движение. Здесь струна представляет
собою колеблющуюся систему, а непрерывное воздействие па
нее смычка, увлекающего струну за собою, равносильно неперио-
дическому источнику энергии. Трение между струной и смычком
Рис.7.4.а) Характеристики сил сопротивления,обусловливающих затухание,
с положительным и отрицательным наклоном; б) часть подъемного моста,
обрушившаяся вследствие отрицательного наклона характеристики трения
в подшипнике с.
имеет то свойство, что для малых скоростей скольжения оно
больше и, наоборот, для больших скоростей — меньше. В этом
отношении сухое трение прямопротивоположно сопротивлению
вязкости (рис. 7.4, а). Рассмотрим смычок, двигающийся с постоян-
ной скоростью по колеблющейся струне. Так как струна двигается
попеременно то в одну сторону, то в другую, то относительная
а} а0 0 0 ... О |
а.. а, ап ... О |
а2П — 1 —2 ............. &П
причем а/ = 0, если Чтобы корни написанного уравнения n-й степени
имели отрицательную действительную часть, необходимо и достаточно,
чтобы все определители были положительны, т. е. Z), >• 0, где i = 1, 2.п.
Доказательство теоремы Гурвица см., например, в книге А. К. Сушке-
вича «Основы высшей алгебры», ГИТТЛ, 1941. (Прим, перев.)
25*
388 АВТОКОЛЕБАНИЯ ГЛ. VII
скорость, или скорость скольжения смычка по струне, все время
меняется. Абсолютная скорость смычка всегда больше, чем
абсолютная скорость струны при ее колебании. Вследствие этого
направление скольжения остается всегда одно pi то же. С другой
стороны, при согласном направлении движения струны и смычка
скорость такого скольжения мала и, следовательно, сила трения
велика. И наоборот, при обратном движении струны скорость
скольжения велика, а поэтому трение мало.
Мы замечаем, что большая сила трения действует в направ-
лении движения струны, тогда как меньшая сила трения действует
против ее движения. Так как струна совершает гармоническое
движение х), то работа, совершаемая силой трения за полпериода
колебания струны при ее перемещении в одном и том же направ-
лении, равна 2^г’о, где F есть среднее значение силы трения,
а г*0 — амплитуда колебания. Но сила F имеет большее значение
в течение полного размаха струны вперед (когда сила трения,
приложенная к струне, совершае'1 положительную работу),
чем при обратном размахе (когда совершается отрицательная
работа), а поэтому полная работа, совершаемая трением в течение
всего периода колебания, положительна, вследствие чего должно
быть нарастание колебаний.
Некоторые колебания в машинах, относящиеся к «дрожаниям»,'
могут быть объяснены подобным же образом. Дрожание можно
наблюдать, например, в резце токарного станка, в ведущих коле-
сах паровоза или вообще локомотива. Так, при отправлении со
станции тяжелого поезда мы нередко видим, как ведущие колеса
паровоза буксуют, скользя по рельсам. Если такое буксование
происходит более или менее равномерно, то иногда можно наблю-
дать сопровождающее его дрожание. Кроме этого главного вра-
щения со скольжением, колеса испытывают также крутильные
колебания, могущие, в свою очередь, вызвать большие перемен-
ные по величине и знаку напряжения в цапфах кривошипов и
спарников. Отрицательный наклон кривой трения между колесами
и рельсами в зависимости от скорости (рис. 7.4, а) типичен для
такого рода явления.
Подобного рода явления могут наблюдаться в чрезвычайно
распространенных и весьма простых случаях. Так,, дверь, за-
едающая в петлях, издает характерный скрипящий звук при
открывании; аналогичное явление мы имеем, когда пишем на
доске, держа мел перпендикулярно к ней. Приведем еще случай,
который служит также предметом демонстрации на занятиях по
физике; обычный чайный стакан издает звук, если его края проти-
рать влажными пальцами. Крутильные колебания такого типа
наблюдались в приводных валах корабельных гребных винтов
х) Это, конечно, грубо приближенно. (Прим, перев.)
§ 7-3 НЕУСТОЙЧИВОСТЬ ВСЛЕДСТВИЕ ТРЕНИЯ 389
при очень малых скоростях вращения. Такой вал обычно поддер-
живается двумя отдельными подшипниками из материала типа
бакаута или эбонита, который смачивается водой. При малых
скоростях водяная пленка еще не может образоваться, и под-
шипники оказываются «сухими», вследствие чего возникают
крутильные колебания вала с одной из собственных частот,
обычно в диапазоне слышимости. Лопасти гребного винта имеют
собственные частоты, не слишком удаленные от этих частот,
и действуют наподобие громкоговорителя, издавая своеобраз-
ное пение, обнаруживаемое под водою даже на большом рас-
стоянии.
Яркий технический пример автоколебаний, вызванных сухим
трением, представляет собою система большого подъемного
моста, изображенная на рис. 7.4. б. Полотно а моста уравно-
вешивается большим бетонным противовесом Ь, который вместе
с направляющим механизмом и поддерживающей башней образует
параллелограмм, как это мы и видим на рисунке.
Здесь будет описан случай, когда одна из башен моста после
его годичной работы обрушилась, причем осмотр показал, что
несомненной причиной разрушения была усталость материала.
Испытания, произведенные над другой, уцелевшей, половиной
моста, установили, что при подъеме и опускании полотна возни-
кали сильные колебания всего сооружения, частота которых ока-
залась весьма низкой, всего около шести колебаний в течение
времени одного подъема. Объяснение было найдено в подшипнике
с, которому приходилось выдерживать колоссальную нагрузку
от противовеса Ъ. Тавот, введенный в подшипник в начале эксплу-
атации моста, очень скоро был весь выдавлен оттуда по причине
большой нагрузки, и подшипник оказался совершенно сухим.
Колебания, вызванные сухим трением, были вполне достаточны,
чтобы привести в конце концов к разрушению.
Очевидным средством против такой возможности разрушения
являются штауферы с тавотом, помещаемые на подшипниках,
которые должны содержаться в полной исправности и подвер-
гаться ежедневному осмотру.
Приведем еще интересный пример явления, причиной которого
служит «отрицательная характеристика» затухания (см. рис. 7.5
и 7.6). В камеру А достаточно больших размеров вдувается
воздух посредством вентилятора., Из камеры он выходит через
определенные отверстия В. Практическим случаем, для которого
рис. 7.5 представляет упрощенную схему, является котельная
на пароходе. В ней поддерживается вентилятором небольшое
давление, и воздух вынужден вытекать из нее через топки и
дымовые трубы, играющие здесь роль отверстий В Установлено,
что при определенном режиме потока в отверстиях В, т. е. при
определенной паропроизводительности, в котельной начинались
390
АВТОКОЛЕБАНИЯ
ГЛ. VII
§ 7.3
НЕУСТОЙЧИВОСТЬ ВСЛЕДСТВИЕ ТРЕНИЯ
391
сильные колебания давления с частотой, примерно равной одному
периоду в секунду.
Частичное объяснение описанного явления можно получить
с помощью рис. 7.6, на котором представлена характеристика
вентилятора. Здесь нагнетаемый объем отложен по оси абсцисс,
Рис. 7.5. Вентилятор,вдувающий воздух через длинную
трубу в камеру А.
а развиваемо им давление — по оси ординат. Точка Р, очевидно,
соответствует тому состоянию, когда отверстие В закрыто все, и
из камеры, в которой поддержи-
поэтому воздух не выходит
Рис. 7.6. Характеристика вентилятора.
В точкеР выходное отверстие закрыто.
В точке Q воздух из вентилятора по-
ступает в атмосферу. Между точками
С п D наклон характеристики имеет
обратный знак, вследствие чего нару-
шается устойчивость.
вается, таким образом, макси-
мальное давление. Точка Q
соответствует действию вен-
тилятора в свободную атмо-
сферу. где уже никакого из-
бытка давления нет и в то
же время вентилятор не-
прерывно посылает большие
количества воздуха. При из-
менении величины отверстия
В па рис. 7.5 мы можем
получить непрерывную по-
следовательность различных
режимов работы вентилятора,
отображаемых па рис. 7.6
точкой, перемещающейся по
характеристике от Р почти
до Q. Как видим из чертежа,
большая часть кривой имеет нисходящий наклон по направлению
от точки Р до точки Q. Однако на участке от С до D наклон ста-
новится обратным. Такова характеристика вентилятора, которую
мы можем считать относящейся к определенной конструкции.
Заметим, что чрезвычайно трудно построить такой вентилятор,
для которого характеристика давала бы монотонное убывание от
Р до Q, т. е. все время с наклоном одного знака, и при этом
был бы большой коэффициент полезного действия в области
между Q и 7),для которой, собственно говоря, и рассчитывается
вентилятор.
Легко показать, что действие установки вблизи точки А на
рис. 7.6 устойчиво, тогда как около точки В оно неустойчиво и
приводит к описанному выше колебательному процессу. Пред-
положим, что действие системы отображается точкой А или
точкой, близкой к ней, и положим, далее, что давление в камере
на рис. 7.5 немного выше нормального. Как видно из рис. 7.6,
это означает некоторое уменьшение объема воздуха, нагнетаемого
вентилятором. Следовательно, когда отдача вентилятора ниже
нормальной, она вызывает- понижение давления в камере, а так как
оно было выше нормы, то равновесие будет
восстанавливаться. Подобным же образом
если давление в камере случайно окажется
ниже нормального, то отдача вентиля-
тора возрастет, увеличив тем самым дав-
ление, и равновесие опять будет восста-
новлено.
С другой стороны, рассмотрим действие
системы вблизи точки В на рис. 7.4.
Пусть на мгновение давление в камере
оказалось выше нормального. Тогда венти-
лятор будет посылать еще большие объемы
Рис. 7.7. Прецессия вала,
вызванная сухим тре-
воздуха, чем при нормальных условиях, нием.
а поэтому давление в камере будет увели-
чиваться. Таким образом, случайное повышение давления в ка-
мере приводит сейчас же к форсированию работы вентилятора,
а отсюда и получается неустойчивое состояние.
Еще важный случай возбуждения колебаний сухим трением
мы имеем в автоколебаниях вала, вызванных слишком свободной
направляющей цапфой, или слишком недостаточной смазкой
подшипника при чрезмерном зазоре. Пусть па рис. 7.7 круг А
обозначает внутреннюю часть подшипника или цапфы, а В —
поперечное сечение вертикального вала, вращающегося в этом
подшипнике, например, в направлении часовой стрелки. Пусть,
далее, этот вал получил случайное отклонение из своего равно-
весного положения, концентрического с кругом А, так что он
стал тереться о левую часть А. Вследствие вращения вала должны
возникнуть силы трения F и F', из которых Т^есть сила, действую-
щая на вал, a F' = — F есть сила, действующая па цапфу или на
подшипник. Сила F может быть заменена параллельной силой
такой же величины, но проходящей через центр вала В и парой с
моментом Ft. Действие пары на вал, который мы предполагаем
вращающимся с постоянной скоростью, является только тор-
мозящим, а поэтому он скажется лишь в том, что потребует
некоторого увеличения крутящего момента, что, в сущности
392
АВТОКОЛЕБАНИЯ
ГЛ. VII
говоря, не повлечет за собою каких-либо последствий. Что ка-
сается силы F, приложенной к центру вала, то эта сила будет
стремиться переместить вал па нашей схеме вниз, или. говоря
точнее, в направлении касательной к кругу А. Так как направле-
ние силы F изменяется вместе с изменением положения сечения
В в круге А, то вал будет вынужден двигаться вокруг среднего
положения в направлении, указанном на чертеже круговой
пунктирной стрелкой. Следует заметить, что вал будет двигаться
вокруг зазора в направлении, противоположном собственному
Рис.7.8.Трение в точке соприкаса-
н ия шара с опорной поверхностью
вызывает кручение этого шара.
вращению вала. Если вал враща-
ется, оставаясь в середине цапфы
или подшипника, не касаясь его,
ю он находится в устойчивом
состоянии. Но стоит только ему
вследствие какий-либо причин
коснуться цапфы, как он начи-
нает интенсивно прецессировать.
Указанный эффект проявля-
ется во многих видоизменениях.
Для его демонстрации можно
предложить следующую очень
простую модель. Возьмем коническую чашку с очень большим
углом растворения (рис. 7.8) и стальной шарик диаметром 2—3 см.
Положим шарик на дно чашки, закрутив его в этот момент
пальцами Такое положение враща-
ющегося шарика оказывается неустой-
чивым, так как при случайном откло-
нении его на очень малое расстояние
из средней части чашки точка сопри-
касания шарика с чашкой уже не будет
больше лежать на его вертикальной
оси вращения. Поэтому начнется
скольжение шарика,а следовательно,
возникнет также сила трения, пер-
пендикулярная к плоскости чертежа,
которая погонит шарик вокруг чаш-
ки. Направление такого перекаты-
вания шарика противоположно на-
правлению сообщенного ему вра-
щения.
Описанное явление не ограни-
чивается цилиндрическими цапфами
или подшипниками, но наблюдается
шипниках. На рис. 7.9 изображен
Рис. 7.9. Прецессия оси вала
вследствие трения в опорном
полшипн и ке.
также и в упорных под-
схематически упорный под-
шипник и часть вала, равновесное положение которого определя-
ется проведенной на чертеже вертикальной осевой линией.
§ 7.3
НЕУСТОЙЧИВОСТЬ вследствие трения
393
Допустим, что упругая система, частью которой является вал,
способна совершать собственные колебания определенного типа,
при которых осевая линия вала прецессирует вокруг вертикали,
имея эксцентриситет 8 и угол откло-
нения а. Тогда центр А бортика,
представляющего собою диск, опи-
сывает окружность радиуса 6, а вал
описывает конус с углом при вер-
шине 2а. Этот тип движения явля-
ется самовоз бу жда ющимся бла го -
даря трению, так как при колебании
бортик прилегает к подшипнику
только одной своей стороной. Вслед-
ствие этого, на той же самой сто-
роне возникает сила трения, застав-
ляющая точку А двигаться в на-
правлении, противоположном направ-
лению вращения бортика. Очевид-
ный способ предупреждения такого
рода возмущения движения — это
сделать опору подшипника настоль-
ко гибкой, чтобы, несмотря на уг-
ловое отклонение, давление на раз-
личные части подшипника распре-
делялось равномерно.
Очень поучительная модель, де-
монстрирующая этот эффект, может
быть построена следующим образом
(рис. 7.10). Небольшой мотор А, не-
сущий на конце своего горизонталь-
ного вала диск В поддерживается
тремя очень гибкими пружинами,
лежащими в плоскости, проходящей
через центр тяжести мотора и пер-
пендикулярной коси вала При вра-
щении мотор может совершать соб-
ственные колебания многих типов,
два из которых особенно интересны.
Эти последние изображены на рис.
7.10, в и на рис. 6.29 (стр. 346). Здесь
вал описывает конус, определяемый
величинами би а, причем ось его прецессирует либо в направлении
собственного вращения вала, либо противоположно ему. Соб-
ственные частоты этих двух движений представлены на рис. 6.30.
Положим, что кусок войлока или бумаги О поднесен к краю
внешней стороны диска. Об этот кусок будет ударяться диск
Рис. 7.10. Самовозбуждающееся
вращение, вызываемое гре-
нием диска В
394
АВТОКОЛЕБАНИЯ
ГЛ. VII
(или плотно прижиматься к нему) при величине угла а (а следо-
вательно, и 6), изображенного на рис. 7.10, в. Пусть на рис. 7.10, а
диск В вращается по часовой стрелке. Тогда препятствие С вызо-
вет силу трения, стремящуюся толкать диск вниз. На основании,
тех же рассуждений, что и в случае рис. 7.7, мы можем эту силу
трения заменить замедляющей парой и силой, проходящей через
центр. Действие пары сводится только к небольшому замедлению
движения. Зато сила, приложенная в центре диска, будет толкать
этот центр вниз, т. е. в направлении вращения оси по часовой
стрелке Таким образом, трение на лицевой стороне С диска спо-
собствует возникновению прецессионного движения в том же
самом направлении, что и собственное вращение.
Напротив того, если кусок D прижимается к задней стороне
вращающегося диска В, то он будет ударять и вызывать трение,
когда а и 6 определяют положение, как раз противоположное
изображенному на рис. 7.10, в. Трение опять отталкивает диск
вниз, потому что вращение направлено по-прежнему по часовой
стрелке. Однако эта сила, направленная вниз, теперь уже вызы-
вает прецессию оси в направлении, обратном вращению часовой
стрелки, поскольку отклонение 5 сейчас противоположно тому,
которое показано на рис. 7.10, в.
Опыт состоит в том, что помещают трущий предмет у лицевой
стороны диска и отмечают самовозбуждение высокочастотного
типа колебаний с прецессионным движением в направлении вра-
щения. Затем этот предмет переносят на обратную сторону
диска, вызывая здесь трение, при этом констатируют очень бы-
строе затухание прежнего типа движения и возникновение нового
(прецессия против вращения), быстро нарастающего и имеющего
частоту, которая много ниже предыдущей. Это последнее движе-
ние опять может быть энергично погашено трением с лицевой
стороны диска. Различие двух частот указанных движений
вызывается гироскопическим действием диска, как об этом гово-
рилось на стр. 347.
§ 7.4. Внутренний гистерезис валов и масляные пленки
от смазки подшипников как причины неустойчивости
Другой весьма интересный случай самовозбуждающихся коле-
баний обусловливается внутренним гистерезисом в металле,
из которого изготовлен вал. Гистерезис есть отклонение от закона
Гука, устанавливающего линейную зависимость между напряже-
нием и деформацией. Он имеет место в большинстве материалов,
подвергающихся воздействию знакопеременных усилий. На ди-
аграмме рис. 7.11, а закон Гука должен быть изображен прямой
линие а тогда точка, отображающая напряженное состояние
волокна колебл ющегсся вала, испытыва ющего попеременно
§ 7.4
ВНУТР НИН ИСТЕРЕЗИС ВАЛОВ
395
действие растяжения и сжатия, должна была бы двигаться
вверх и вниз вдоль этой прямой между точками РА и Р3 В действи-
тельности же зависимость между напряжением и деформацией
изображается длинной узкой фигурой, весьма похожей на эл-
липс, которую точка обходит всегда но часовой стрелке. Эллипс,
изображенный на рис. 7.11, имеет сильно преувеличенную ширину.
На самом деле он настолько узок, что его едва можно отличить
от прямолинейного отрезка РА Р3.
Рассмотрим вертикальный вал с цен тральным диском, враща-
ющийся в двух подшипниках, как показано на рис. 7.11,6. Во
Рис. 7.11. Вращение оси вала, вызванное гистерезисом материала.
рем я вращательного движения изогнутой оси вала ее центр 8
описывает окружность вокруг точки В на осевой линии под-
шипников. Точка В представляет собою нормальное или равно-
весное положение точки 8 при отсутствии вращения самой оси
вала. На рис. 7.11, в дано поперечное сечение середины вала,
причем РА QAP2P3P4 есть контур сечения, а пунктирная окруж-
ность обозначает траекторию точки 8 при вращательном движе-
нии изогнутой оси вала. Практически возможным является прогиб
В8, изображенный на рис. 7.И. в. Что касается рис. 7.11,6, то
здесь он утрирован.
Мы полагаем, что как вращение вала вокруг своей оси, так
и вращение самой оси происходит по часовой стрелке, как пока-
зано на рисунке. Вал изгибается, и прямая АА делит его на
две части так, что волокна вала выше линии АА растянуты,
а волокна ниже линии АА сжаты. Линия АА может быть на-
звана нейтральной осью деформации, которая вследствие откло-
нения от закона Гука не совпадает с нейтральной осью напряжений.
Чтобы уяснить сказанное, рассмотрим точку РА на рис. 7.11, в.
которую мы можем представить себе как некоторую отметку,
сделанную, например, красным цветом на вале. Во время враще-
396
АВТОКОЛЕБАНИЯ
ГЛ. VT1
ния вала эта отметка последовательно проходит через положения
Qls Р2, Р3 и г д., но в то же время происходит вращение изогнутой
оси вала, при котором точка 8 и линия АА двигаются вокруг
пунктирной окружности. Скорости обоих вращений совершенно
не зависят друг от друга. В случае равенства этих скоростей
отметка Рг будет всегда находиться на продолжении отрезка
BS, иными словами, Рг будет всегда лежать на наиболее удли-
ненном волокне. Если вращение вала вокруг своей оси происходит
быстрее, чем вращение самой оси, то точка Рг обгоняет точку 8
и, следовательно, достигает положения Р2 (где нет ни удлинения,
ни сжатия), Р3 (наибольшее сжатие) и т д. И наоборот, если
вращение вала оказывается более медленным, по сравнению с
вращением его оси, то точка Рг должна пойти другим путем
(отставая от 8) и должна занимать последовательно положения
Р1Л Р4, Р3, Р2 и т. д.
Рассмотрим прежде всего тот случай, когда вращение вала
быстрее вращения его оси. Деформированное состояние волокон
вала в различных точках Plf Р2> Р3» Р* рис. 7.11, в отмечено такими
же буквами на диаграмме рис. 7.11а На этой последней точка
Qi, показывающая отсутствие напряжения, лежит между РА и Р2.
Соответствующая ей точка Qx показана на рис. 7.11а и то же
самое сделано с точкой Q2 между Р3 и Р4. Таким образом, прямая
QiQ2 является линией отсутствия напряжений (нейтральная ось
напряжений), причем все волокна выше имеют растяги-
вающие напряжения, тогда как волокна ниже Q2 имеют сжи-
мающие напряжения. Такая система напряжений дает в резуль-
тате упругую силу Р. Эта сила Р имеет не только составляющую,
направленную к В (обычная упругая сила), но также небольшую
составляющую, направленную вправо и стремящуюся поворачи-
вать весь вал по пути вращения его изогнутой оси. Следовательно,
мы имеем здесь самовозбуждающееся вращение оси вала. Пред-
лагаем читателю самому убедиться в том, что, если вращение
вала происходит медленнее, чем вращение его оси, то наклон
прямой (hQ2 будет обратный, и упругая сила будет вызывать
торможение (вместо того, чтобы дать движущую составляющую,
как в предыдущем случае)
Вращательное движение изогнутой оси вала определяется
прежде всего упругой силой вала, направленной к центру В,
в совокупности с силой инерции диска (см. стр. 346), вследствие
чего оно происходит с собственной частотой вала. Незначительная
по величине движущая составляющая упругой силы, направленная
по касательной, лишь преодолевает затухание. Внутренний
гистерезис вала действует как затухание при скорости, ниже
критической, тогда как выше этой скорости может происходить
нарастание самовозбуждающегося вращения оси вала, соответ-
ствующее критической скорости. Внутренний гистерезис в мате-
§ 7,4
ВНУТРЕННИЙ ГИСТЕРЕЗИС ВАЛОВ
397
lx, где они ооуслов-
Рис. 7.12. Масляная
пленка в подшипнике
вызывает прецессию
шипа вала вследствие
того, что направле-
ния силы тяжести
и оси симметрии О А
не совпадают.
риале вала обычно очень мал. Однако встречаются случаи, где
петля гистерезиса бывает выражена более резко, что происходит
именно там, где в самом деле имеет место скольжение, как, напри-
мер, в случаях горячей свободной посадки, а также и в других
случаях соединений. Так, вал с достаточно свободно насаженным
па него диском почти наверное вызовет вращение своей оси с
частотой, превышающей критическую угловую скорость.
Автоколебания имеют место 1акже в случае вала, лежащего
в обильно смазанных втулочных подшипник?
лены некоторыми свойствами масляной
пленки. Для уяснения этого явления не-
обходимо заметить, что горизонтальный вал,
вращающийся в направлении против часо-
вой стрелки в подшипнике, покрытом внутри
масляной пленкой, не стремится занять
среднего положения, а несколько отклоня-
ется от него вправо (рис. 7.12). Мы можем
легко сообразить, куда должно быть на-
правлено это отклонение, если заметить,
что оно противоположно тому направлению,
по которому, на первый взгляд, следовало
бы ожидать взбегания шипа. Так как на
этот шип действует вес W, как указано на
чертеже, то результирующая сила Р всех
давлений масла на шип должна быть равна
силе G и должна образовать некоторый
угол а с прямой ОА, соединяющей центр
подшипника с центром шипа.
Рассмотрим теперь вертикальный на-
правляющий подшипник с валом. Если нет
никаких боковых нагрузок на вал, то он будет
стремиться занять середину подшипника. Однако, если по каким-
либо причинам вал начнет бегать внутри подшипника, то в какой-
либо произвольный момент времени он займет эксцентричное
положение. Больше того, если во время такого обегания давление
масла будет такое, как показано на рис. 7.12 (где сила И’должна
быть заменена теперь центробежной силой в направлении ОА),
то равновесие между силой 7? и центробежной нагрузкой нару-
шится, причем получится некоторая небольшая результирующая
сила, стремящаяся двигать шип внутри подшипника против
часовой стрелки. Таким образом, давление масла, распределяю-
щееся по определенному закону, приводит к возникновению
самовозбуждающейся прецессии оси вала в направлении его
вращения, погашая в то же время прецессию в направле-
нии, противоположном вращению, если она почему-либо
возникнет.
398
АВТОКОЛЕБАНИЯ
ГЛ. VII
Остается рассмотреть условия, при которых давление масляной
пленки во время вращения оси вала оказывается таким же, как
и в случае установившегося движения вала в горизонтальных
подшипниках при весовой нагрузке. Мы изучим два крайних
случая, когда отношение угловых скоростей вращения оси и
вала вокруг этой оси либо очень мало, либо очень велико.
Положим, что .в первом случае вал делает, например, 100
оборотов, тогда как его ось за то же время перемещается вокруг
оси подшипника всего лишь на 5°. Очевидно, что такое медленное
движение оси не повлечет за собою изменения в распределении
давлений, а именно: прм-медленном вращении оси возникает ма-
сляная пленка, вызывающая автоколебания. Во втором случае
центр шипа быстро двигается вокруг своего среднего положения,
тогда как сам шип почти не вращается. Следовательно, при таком
движении масляная пленка не образуется, и просто получается
колебание как бы в масляном резервуаре, что, очевидно, ведет
к сильному затуханию колебаний.
Итак, мы видим, что при малых частотах движения оси вала,
по сравнению с угловой скоростью вращения, возникают колеба-
ния, в то время как в обратном случае все колебательные движе-
ния гасятся. Отношение угловой скорости вращения вала к угло-
вой скорости прецессии его оси, при котором затухание переходит
от положительного значения к отрицательному, может ыть
определено только экспериментальным путем.
Из опытов было найдено, что при угловой : корости прецессии
оси вала, равной угловой скорости его вращения или меньшей
ее половины (т. е. когда вал вращается быстрее, чем это соот-
ветствовало бы его удвоенной критической скорости), возникают
автоколебания. Указанное обстоятельство приводит к серьезным
затруднениям в случаях быстроходных машин с вертикальными
валами. Преодолеть в этих случаях колебания бывает весьма
трудно. Описанное явление было теоретически исследовано Хэггом
(Hagg). Пусть на рис. 7.13 радиальный зазор равен е, радиус
вращения оси шипа — 6 и диаметр шипа — D. В случае медленной
прецессии распределение скоростей в масляной пленке линейное,
и, если скорость периферии шипа есть V, то объем масла (отнесен-
у
ный к единице длины), переносимого через А, равен (е — <3),
у
в то время как объем, протекающий через В, равен «(е+б).
Если предположить отсутствие утечки в концах, то оказы-
вается, что количество масла, втекающего в нижнюю часть под-
шипника, равно Гб. Пусть теперь шип прецессирует с частотой
(угловой скоростью) /. При этом скорость v центра шипа оказы-
вается равной
v = / • 2от6.
S 7.4
ВНУТРЕННИЙ ГИСТЕРЕЗИС ВАЛОВ
399
Площадь нижней половины масляной пленки возрастает
со скоростью vD = / • 27tt5Z). Если прецессия происходит мед-
ленно, то вал при вращении подает в нижнюю половину количе-
ство масла, достаточное для заполнения пустот, образующихся
вследствие движения вала вверх при его прецессии. При большей
скорости прецессии вращением вала не будет переноситься доста-
точное количество масла, и пленка разорвется. Это происходит
тогда, когда имеет место равенство
Гб = / • 2тгбЛ.
Окружная скорость Г связана с угловой
V = irZ)nceK,
где nveK — число оборотов в секунду.
Подстановкой находим
Рис. 7,13. Распределение
скоростей в масляной
Отсюда видно, что если скорость прецес-
сии не больше чем половина скорости ва-
ла, то масляная пленка разрывается, и са-
мовозбуждения нет. Если по концам
имеется утечка, то этот разрыв про-
исходит уже при скорости прецессии, пленке.
меньшей половины скорости вращения.
Сравнивая рис. 7.13 с рис. 7.7, мы замечаем, что, в то время
как в случае сухого трения направления вращений самого вала
и его оси противоположны друг другу, они оказываются одинако-
выми при возбуждении движения оси посредством масляной
пленки.
В случае горизонтальных подшипников при определенной
нагрузке также возникают колебания, когда скорость вращения
превосходит удвоенную критическую скорость. Объяснение этого
явления выполняется тем же путем, что и для вертикального
вала. При набегании шипа давление масла будет иметь не строго
радиальное направление. Тангенциальные составляющие этого
давления могут служить движущими силами лишь в течение части
периода прецессии оси вала, тогда как в остальное время опн
будут оказывать замедляющее действие. Для того чтобы имело
место возбуждение движения, необходимо, чтобы полная работа,
совершаемая тангенциальными составляющими сил, была положи-
тельна за полный период вращения оси, т. е чтобы была положи-
тельной средняя величина этой составляющей, которая только
при этом условии может быть движущей силой.
400
АВТОКОЛЕБАНИЯ
ГЛ. VII
§ 7.5. Галопирование линий электропередачи
При определенных состояниях погоды наблюдались случаи
колебаний линий электропередачи высокого напряжения, при-
чем эти колебания происходили с большой амплитудой и очень
малой частотой. Такая линия состоит из проволок более или
менее правильного кругового сечения, натянутых между мачтами,
находящимися друг от друга на расстоянии, примерно равном
100 м. Каждый пролет этой линии колеблется, образуя половину
волны (рис. 4.16, а, в) с частотой в один период в секунду и ампли-
тудой около 3 ж в средней части. Описанное явление вряд ли
может быть отнесено к колебаниям в узком смысле слова, и
обычно известно под названием «галопирования». Оно никогда
не наблюдалось в странах с теплым климатом ею случается при-
близительно один раз в течение зимы в северной части США и в
Канаде, когда температура воздуха колеблется от 0° в ту или
другую сторону и когда дует сильный порывистый ветер в попе-
речном к линии направлении. Кроме того, на этих проводах в
таких случаях очень часто находили осевший на них мокрый снег.
По грубому подсчету получается собственная частота колебаний
пролета примерно той же величины, что и частота, действительно
наблюдавшаяся. Установленный факт, что возбуждение колеба-
ний, раз начавшись, непрерывно и с одинаковой, притом весьма
значительной, интенсивностью поддерживается иногда в течение
24 часов, не позволяет объяснить это явление как вынужденные
колебания Такое объяснение должно предполагать существова-
ние регулярных порывов ветра, частота которых с поразительной
степенью точности совпадает с собственной частотой линии. Так,
например, положим период Т — ] сек Тогда, если в течение 10
минут произойдет не 600 равноудаленных по времени друг от
друга порывов ветра, а 601, го колебания за первые 5 мин. будут
нарастать, а за последующие 5 мин. убывать. Чтобы поддержать
колебания линии в течение 2 часов, требуется, чтобы ошибка
в регулярности порывов ветра не превосходила 1 : 7200. Итак,
очевидно, что от подобного объяснения надо отказаться.
Мы имеем здесь случай автоколебаний, вызванных ветром, дей-
ствующим на провод, который вследствие прилипшего к нему
снега принял такую форму, что поперечное сечение получившегося
тела уже не имеет очертания круга. Для объяснения явления нам
придется обратиться к некоторым положениям аэродинамики.
Если поток воздуха, осуществляемый в данном случае ветром,
натекает на круглый цилиндр (рис. 7.14, а), то он воздействует
на этот цилиндр силой, имеющей направление ветра, что вполне
очевидно из соображений симметрии Для стержня некруглого
сечения (рис. 7.14,6) такое положение уже не имеет места. В этом
случае между направлением силы и направлением ветра обра-
§ 7.5
ГАЛОПИРОВАНИИ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ
401
зуется некоторый угол. Хорошо известным примером здесь может
служить крыло, для которого направление силы почти перпенди-
кулярно к направлению воздушного потока (рис. 7.14,в).
Посмотрим теперь на линию электропередачи во время ее
галопирования и сосредоточим свое внимание на ней в тот момент,
47
Рис. 7.14. Направления
ветра и вызванной им
силы образуют между
собою некоторый угол в
случае несимметричного
сечения.
во воем я движения
когда провод перемещается по направ-
лению вниз. Если бы не было вечра, ю
этот провод вследствие своего движения
находился бы под действием ши ока воз-
духа, направленного снизу. Пусть теперь
ветер дует сбоку со скоростью V. Тогда
провод, перемещающийся вниз со скоро-
стью v, должен испытывать действие ветра,
дующего снизу под сравнительно неболь-
шим углом к горизонту, равным arctgy.
Если бы провод имел круговое попереч-
ное сечение, то сила, действующая па него
под влиянием ветра, имела бы небольшую
вертикальную составляющую, направлен-
ную вверх (рис. 7.15). Но так как этот
провод движется вниз, то указанная верти-
кальная составляющая оказывается на-
правленной противоположно движению,
а поэтому она должна его гасить. Однако в
случае некругового сечения сила, возни-
кающая от действия ветра, может иметь
вертикальную составляющую, направлен-
ную вниз, вызывая тем самым отрица-
тельное затухание (рис. 7.14,6)
Рассматривая условия, имеющие мест
провода вверх при его колебании, мы можем видеть подобным
же образом, что провод воспри-
нимает поток воздуха, идущий на
него наклонно сверху,причем вы-
зываемая им сила в случае круг-
лого провода имеет вертикаль-
ную составляющую, направлен-
ную вниз, которая должна вы-
звать затухание. Однако, если
сечение некруглое, то упомя-
нутая сила может иметь вер-
тикальную составляющую, на-
тогда она будет иметь то же
направление, что и движение, то ее действие будет эквивалентно
СКОР°Ь1
Рис.7.15. При движении провода вниз
горизонтальный боковой ветер имеет
кажущееся направление наклонно
снизу.
правлепную вверх, а так~ как
отрицательному затуханию.
26 Ден-Гартог 2074
402
АВТОКОЛЕБАНИЯ
ГЛ. VII
Если прилипший к проводу снег будет иметь поперечное
сечение, обусловливающее взаимное расположение направлений
ветра и силы, показанное на рис. 7.14,6, то будет случай динами-
ческой неустойчивости. Пусть по какой-либо причине провод
получил небольшую скорость, направленную вверх. Тогда ветер
будет толкать его дальше по тому же направлению и притом до
Рис.7.16. Воздушный по-
ток вокругволу круглого
цилиндра.
тех пор, пока возникающие в проводе упругие силы не приоста-
новят такого движения. После этого те же упругие силы заставят
провод двигаться вниз. Этому движению ветер будет опять
помогать, вследствие чего малые колебания
очень скоро вырастут в большие.
Остается определить, какие попе-
речные сечения являются динамически
устойчивыми (как,например, круг) и какие
неустойчивыми. В связи с этим вопросом
мы вступаем уже в область аэродина-
мики и неправильных поперечных сече-
ний, где наших общих знаний еще недо-
статочно. Единственное, что мы можем
сделать — это произвести непосредствен-
ное испытание. Однако в некоторых ти-
пичных случаях мы можем получить
ценные для нас указания на основании
соображений качественного характера.
Интересно отметить, что наиболее «не-
устойчивым» из известных сечений явля-
ется полукруг, поставленный своей плос-
ветру. На рис. 7.16 представлено такое
набегающий на него поток воздуха идет
кой частью навстречу
сечение, причем
слегка сверху, что соответствует движению вверх галопи-
рующего провода электропередачи. Внизу воздушный поток остав-
ляет провод у нижнего острого края, а сверху он его обтекает во-
круг верхнего края, перемещаясь еще на некоторое расстояние за
этот край. Это происходит вследствие того, что поток имеет слегка
наклоннее направление.
Область, покрытая точками, заполнена завихрениями, на-
ходящимися в полном беспорядке и характеризующими собою
турбулентное состояние воздуха, причем все, что мы знаем об
этой области, это то, что здесь среднее давление приблизительно
равно атмосферному. Говоря точнее, в нижней половине круговой
поверхности цилиндра давление равно атмосферному, т. е. оно
равно давлению воздуха в некотором удалении от его возму-
щенного состояния, вызванного проводом. Выше данного сечения
линии тока воздуха загибаются книзу. Все это приводит к.;тому,
что давление падает в направлении от а к Ъ. В самом деле, рассмот-
рим частицу воздуха в потоке. Если бы никакие силы на данную
§ 7.5
ГАЛОПИРОВАНИЕ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
403
частицу не действовали, то она двигалась бы' по прямой, а так как
в действительности ее траектория1) искривляется по направлению
вниз, то на эту частицу должна действовать сила, толкающая ее
сверху. Но эта сила может быть вызвана лишь избытком давления
на частицу сверху по сравнению с давлением на нее снизу. Иначе
говоря, давление в а должно быть больше, чем давление в Ъ. Так
как в точках а (которые достаточно удалены от возмущенного
состояния) давление равно атмосферному, то, следовательно, в
точках b оно должно быть ниже атмосферного. Таким образом,
вследствие разности давлений сверху и снизу полукруглое сечение
испытывает действие силы, направленной вверх, причем эта
сила обусловлена потоком воздуха, т. е. ветром, направленным
Рис.7.17. Прибор для демонстрирования галопирования линий
электропередачи.
вниз. На основании сказанного, случай, представленный на
рис. 7.16, должен быть охарактеризован как неустойчивый.
Все это может быть продемонстрировано на простом опыте.
Возьмем очень легкий деревянный брусок полукруглого сечения
(длины примерно 35 см и диаметра 5 см) и подвесим его с помощью
четырех пружин таким образом, чтобы получить частоту соб-
ственных вертикальных колебаний, соответствующую примерно
6 колебаниям в секунду (рис. 7.17). Если при укреплении пру-
жин на бруске или на раме принять необходимые меры для того,
чтобы свести затухание к минимуму, то прибор, будучи поме-
щен перед обыкновенным настольным вентилятором, сможет
вызвать такие нарастающие колебания бруска, амплитуда кото-
рых превысит его радиус. Брусок в этом приборе должен быть
возможно более легким, благодаря чему при данных частоте и
амплитуде как сила упругости, так и сила инерции получаются
достаточно малыми. Заметим, что сила действия ветра опреде-
ляется исключительно геометрическими размерами и формой
бруска и не зависит от его веса. Поэтому, изготовляя брусок из
легкого материала, мы тем самым делаем возможно большим
отношение между силой ветра и упругой силой.
х) Строго говоря, линии тока, т. е. кривые, в каждой точке которых
скорость направлена по касательной, нельзя смешивать с траекториями.
Те и другие кривые совпадают лишь в случае установившегося движения.
(Прим, перев.)
26*
404
АВТОКОЛЕБАНИЯ
ГЛ, VII
Рис. 7.18. Эффект потока вокруг
прямоугольного сечения явля-
ется менее резко выраженным,
чем в случае полукруглого
сечения.
Другой известный пример неустойчивого сечения — это
сильно удлиненный прямоугольник, обращенный своей широкой
стороной к направлению ветра (вообще потока, могущего быть
потоком жидкости или газа). II здесь объяснение остается тем
же самым, как в случае полукруг-
лого бруска (рис. 7.18), с той лишь
разницей, что в данном случае явле-
ние не так резко выражено. Это
явление легко наблюдать, если взять
плоскую пластинку, один конец ко-
торой держать в руке, а другой
погрузить в вертикальном направ-
лении в воду. Двигая пластинку в
воде так, чтобы широкая сторона
прямоугольного сечения была., ра-
сположена перпендикулярно к на-
правлению движения, мы увидим,
что в действительности пластинка
будет перемещаться зигзагообразно,
и, наоборот, если пластинку толкать
узкой стороной вперед, то именно это
движение и будет осуществляться
и притом достаточно устойчивым
образом.
брусок с неустойчивым поперечным .
Если мы опять возьмем
сечением и вместо того, чтобы подвешивать на пружинах, как
показано на рис. 7.17, закрепим его в середине на оси так, чтобы
он мог вращаться вокруг нее (рис. 7.19), то мы получим случай
самовозбуждающегося вращения или авто-
ротации. Когда такой прибор находится
в покое, то ветер, очевидно, не вызывает
никакого крутящего момента, но стоит
только сообщить бруску вращение, как
от ветра возникает момент, усиливающий
вращение в том же направлении. Направ-
ление вращения определяется направ-
лением первоначального вращения, т. е.,
в сущности говоря, случаем. Эта очень
интересная игрушка известна под назва-
нием «воздушного вихря» Ланчестера.
В аэродинамике обычно принято раскладывать полную силу
давления воздуха на две составляющие:
а) на составляющую в направлении потока —лобовое сопротив-
ление D,
Ь) на составляющую, перпендикулярную потоку. — подъем*
ную силу L.
Рис. 7.19. Вихрь Лан-
честера.
§ 7.5
Г АЛО ПИРОВ АП И Е Л11Ш1Г1 ЭЛЕКТРОПЕРЕДАЧИ
405
Рпс. 7.20. Полная сила дей-
ствия потока разлагается и а
лобовое сопротивление D
и подъемную силу L.
Обе эти силы могут быть легко измерены посредством спе-
циальных инструментов (аэродинамические весы).
Положим, что на рис. 7.20 изображено сечен ik, совершающее
колебательное движение и перемещающееся в данный момент
вниз, вследствие чего дующий вечер оказывается направленным
несколько снизу под углом а — arctg к горизонту. Подъемная
сила L и лобовое сопротивление 1) нмеют^составляющпс, направ-
ленные вертикально вверх (т. е. противоположно направлению
движения) и равные соответственно
Leos а и D sin а. Тогда полная верти-
кально направленная сила F действия
ветра, гасящая движение, будет:
F = L cos а + D sin а. (7.15)
Мы не так интересуемся самой силой
« dF
F, как ее производной т.е. измене-
нием этой силы, направленной вверх,
при изменении угла а или, что то же,
при изменении отношения -у . Пусть
сила F имеет большое значение, а про-
dF п
изводная j— равна нулю. В таком слу-
чае некоторая часть веса провода воспринимается уже не
мачтами, а самим ветром. Так как ^- = 0, то колебание,
или галопирование, линии не отразится на той части веса провода,
которая поддерживается воздухом, а потому аэродинамический
эффект не отразится па колебаниях. Затем предположим, что
dF
производная отрицательная. Это значит, что сила F возра-
стает при переходе угла а к отрицательным значениям и убы-
вает при переходе этого угла к положительным значениям. Тогда,
очевидно, мы имеем тот случай, когда переменная сила действует
на линию возбуждающим образом, как это уже выяснилось
выше. Итак, имеем следующий критерий динамической устой-
чивости:
dF п
^— < 0 неустойчивость,
-ч— > 0 устойчивость.
Приступая к дифференцированию уравнения (7.15), необходи-
мо заметить, что при малых колебаниях величина v мала, по
сравнению с величиной 7. Тогда лесть малый угол, и его косинус
406
АВТОКОЛЕБАНИЯ
ГЛ VII
может быть принят равным единице, а его синус настолько мал
по сравнению с единицей, что им можно пренебречь. Итак, имеем
dF dL r . . dD . . ~
5— = -г— cos a — L sin a + -7— sm a + D cos a =
da da da
= sin al — L
+ —1
da J
+ cos a
da
Таким образом, система неустойчива, если
dL
da
+ D < 0.
(7.16)
Значения подъемной силы и лобового сопротивления для
произвольного поперечного сечения не могут быть вычислены
теоретическим путем, а определяются на основании испытаний
в аэродинамической трубе. Результаты таких испытаний обычно
наносятся на диаграмму наподобие представленной па рис. 7.21.
Рис.7.21. Для продолговатого симметричного поперечного
сечения подъемная сила и лобовое сопротивление яв-
ляются функциями угла атаки.
Соотношение (7.16) мы можем выразить следующими словами:
сечение динамически неустойчиво, если отрицательный наклон
кривой подъемной силы больше ординаты кривой лобового сопро-
тивления.
Из рис. 7.21 видно, что продолговатое сечение всегда устойчиво,
если держать его «вдоль»ветра (а = 0°), но если держать его «по-
перек» ветра (а == 90°), то оно неустойчиво. Если линия электро-
передачи покрывается мокрым снегом, примерно при температуре
$ 7.5
ГАЛОПИРОВАНИЕ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ
407
воздуха 0°, то очень легко могут получиться ледяные сосульки,
более или менее вытянутые в вертикальном направлении, что и
соответствует углу а = 90° на диаграмме.
При этом значении угла и при малых амплитудах колебания
(когда угол изменяется, например между 89 и 91°) провод полу-
чает энергию в течение каждого периода колебания. Вслед-
ствие этого получается возрастание амплитуды, и это возраста-
ние продолжается до тех пор, пока имеется избыток энергии,
сообщаемой ветром. При некоторой, достаточно большой, ампли-
туде указанный избыток энергии обращается в Е1уль, вследствие
чего мы имеем энергетическое равновесие, а тогда амплитуда
достигает своего конечного значения. На рис. 7.21 это имеет место,
по-видимому, при изменении угла а от 30 до 150°. В середине
каждого размаха провод получает энергию, а вблизи концов
размаха энергия рассеивается вследствие затухания, так как в
соответствующих фазах величина + D оказывается больше
нуля (см. также рис. 8.32 на стр. 486). Значение конечной ампли-
туды может быть найдено графическим или численным интегри-
рованием по изображенным графикам, как об этом уже говори-
лось выше.
До сих пор мы предполагали, что система имеет одну степень
свободы, чего, конечно, нет в действительности для пролета элек-
тропровода, каждая точка которого колеблется со своей амплиту-
дой (в середине пролета амплитуда больше,а около мачт меньше)1).
Так как сила, создаваемая действием ветра на провод, мала, по
сравнению с силой упругости и силой инерции при колебании,
то конфигурация колеблющейся системы должна быть такая же,
как и в случае отсутствия ветра. Иными словами, провод будет
колебаться с первой собственной частотой. Конечное значение
амплитуды может быть определено, если найти величину энергии,
поглощенной целым пролетом провода. Если для некоторой
предварительно предположенной амплитуды эта энергия полу-
чается положительной, то амплитуда взята слишком малой и,
наоборот, если энергия получается отрицательной (затухание),
то амплитуда взята слишком большой. Определение величины
энергии влечет за собою двойное графическое интегриро-
вание: один раз по углу а каждой точки провода, а затем по
х) Следу ет^заметить, что амплитуды различных точек провода могут
быть различными также и в случае существования одной степени свободы.
Так, например, это имеет место, если провод в любой момент времени обра-
зует полуволну синусоиды, все точки которой колеблются по одному
закону, имея лишь разные амплитуды. В действительности же на эт\
еолну, определяющую основной тон колебаний, накладываются волны,
соответствующие обертонам, имеющие другие периоды. Строго говоря,
здесь мы имеем бесконечно большое число степеней свободы. (Прим,
пер ев.)
408
АВТОКОЛЕБАНИЯ
ГЛ. VII
координате х, определяющей положение точки на линии. Весь
процесс не влечет за собою каких-либо принципиальных труд-
ностей при выполнении, но все же требует много времени.
Рассмотренные сейчас колебания линии передачи характери-
зуются очень малой частотой и большой амплитудой. Это явление
наблюдается довольно редко и зависит от метеорологических
условий. Оно имеет место тогда, когда провода обволакиваются
замерзшей снежной массой и подвергаются действию сильного
бокового ветра. Однако существует еще разновидность колеба-
тельных движений линий передач, которые имеют большую частоту
и малую амплитуду. Эти колебания встречаются чаще, и для их
возникновения не требуется бокового ветра. Объяснением такого
явления служит так называемая «вихревая дорожка Кармана».
§ 7.6. Вихри Кармана
При обтекании цилиндра жидким потоком кильватерная
область позади цилиндра уже не имеет правильного строения,
а заполняется вихрями,образующими своеобразный узор, наподо-
бие того, как это изображено на рис. 7.22. Вихри идут в чере-
дующемся порядке в смысле направления вращения по часовой
Рис. 7.22. Зарождение вихрей Кармана.
стрелке и против нее. Они отрываются от цилиндра в правильной
последовательности и связаны с поперечной силой переменного
направления. Это явление было исследовано экспериментально,
причем было найдено, что между частотой / сбегания вихрей,
диаметром D цилиндра и скоростью V потока имеется определен-
ное соотношение, выражаемое формулой
-^ = 0,22. (7.17)
Иначе говоря, цилиндр перемещается вперед на 4g диаметра за
время одного периода колебаний (т. е. сбегания). Мы видим, что
эта дробь безразмерная, и поэтому число 0,22 не зависит от выбора
единиц. Оно известно под названием числа Струхаля. Отделение
вихрей на чередующихся сторонах цилиндра является причиной
ВИХРИ кЛрмлнл
409
S 7.6
возникновения на нем гармонически изменяющейся силы, перпен-
дикулярной к направлению потока. Наибольшая интенсивность
этой силы может быть представлена в (|юрме, обычно применяемой
к аэродинамическим силам (таким, как подъемная сила и сила
лобового сопротивления):
FK = sin ь)1. (7.18)
Индекс К здесь поставлен в честь Кармана: Учесть сила Кармана,
Ск —безразмерный коэффициент Кармана, 8 — площадь. Доста-
точно точное численное значение коэффициента Ск неизвестно.
Более или менее удовлетворительное его значение принимается
равным единице (Ск = 1), что пригодно для большего диапазона
чисел Рейнольдса — от 102 до 107. Это значит, что амплитуда
переменной силы, действующей на единицу площади сечения, при-
ближенно равна давлению стационарного потока.
Механизм отделения вихрей от цилиндра представляет собою
чистое самовозбуждение, поскольку поток сам по себе не обла-
дает колебательными свойствами, в то время как частота отделе-
ния вихрей определяется числом Струхаля. В то время как обу-
словленные самовозбуждением автоколебания, которые мы рас-
смотрели в этой главе, опасны сами по себе, этого нельзя сказать
о самовозбуждении в данном случае. Нас мало интересует то,
что происходит в потоке; нас интересует только величина силы,
действующей на цилиндр, определяемая формулой (7.18). Как
правило, здесь никаких последствий ожидать не приходится.
Мы можем встретиться с неприятностью лишь в том случае,
когда частота самовозбуждения, т. е. отделения вихрей, стоящая в
формуле (7.17), совпадает с собственной частотой конструкции,
подвергающейся действию вихрей. Тогда имеет место резонанс,
могущий привести к аварии. Объекты, где это наблюдалось,
многочисленны и разнообразны: линии передач, перископы под-
водных лодок, фабричные трубы, висячий мост, нефтяной бак и
маленькие капельки дождя.
Рассмотрим сначала линию передачи с проводом диаметра
2,5 см при скорости ветра 47 км/час. Число Струхаля по уравнению
(7.17) дает 116 колебаний в секунду. Колебания линий при таких
высоких частотах с малыми амплитудами часто наблюдались
и неоднократно кончались усталостными разрывами При этом
очевидно, что резонанс имеет место на высших гармониках линий,
получаемых для пролета, который подразделяется на несколько
синусоидальных полуволн, количество которых может бы^ь
примерно от 20 до 30. Так как здесь мы имеем колебания большой
частоты и малой амплитуды, то оказалось возможным и практич-
ным применить здесь динамические виброгасители с затуханием.
Простейшая и наиболее обычная конструкция, известная под
410
АВТОКОЛЕБАНИЯ
ГЛ. VII
названием «колодочного демпфера» (Stockbridge dampfer), показана
на рис. 7.23. Здесь кусок стального кабеля с грузами на его концах
наглухо прикреплен к проводу. Кабель действует, как пружина,
причем настройка делается приблизительно на частоту ожи-
даемых колебаний. Всякое движение провода линии в точке А
вызывает относительное движение в элементах кабеля, причем
трение между его проволоками приводит к рассеянию энергии.
Точка А прикрепления выбирается на линии так, чтобы она не
совпадала с узлом колебаний. Иначе демпфер был бы бесполезен.
Так как длина полуволны си-
Рис. 7.23. Колодочный’ демпфер
для линий передачи, состоящий
из куска витого стального кабеля
длиной примерно 30 см, несущего
на каждом конце по чугунному
грузу весом около 0,4 кГ.
нусоиды варьирует от 2,4 м до 60м,
то помещение демпфера на рас-
стоянии около 1,8 м от точки
подвеса провода к мачте будет
наиболее эффективным для гаше-
ния колебаний большинства ча-
стот и длин волн. Описанное сейчас
приспособление показало себя
весьма эффективным в смысле
защиты линий от колебаний, об-
условленных вихрями Кармана.
Что же касается попытки рас-
считать такие демпферы для гало-
пирующих линий (см. стр. 401), где частота примерно в 100 раз
меньше, а амплитуда в 100 раз больше, то это оказалось совер-
шенно непрактичным, так как вес прибора получился бы равным
нескольким тоннам.
Перископы подводных лодок, представляющие собой консоли
длины 6 и более метров (в раздвинутом состоянии) и диаметра
около 20 см оказываются в состоянии резонанса с вихрями Кар-
мана при скорости примерно 8 км/час. Так как здесь жидкой
средой является вода с большой плотностью q, то возмущающая
сила, согласно уравнению (7.18), очень велика, и вибрация оказы-
вается резко выраженной, что приводит к размыву изображения
в приборе. Мерой против этого является замена кругового сечения
трубы сечением обтекаемой формы. Однако перископ должен
свободно поворачиваться во всех направлениях, необходимых
для обозрения. Все это приводит к конструктивным осложнениям,
вследствие чего задача еще не может считаться решенной.
Стальные фабричные трубы систематически показывают явле-
ние резонанса, вызванного вихрями Кармана, при скоростях
ветра в пределах от 45 до 50 км/час. Кирпичные или бетонные
трубы не подвержены этому явлению.
В стальных трубах дело ухудшается при замене клепки сваркой,
так как тем самым понижается рассеяние энергии за счет внутрен-
них сил. Недавно (в 1953 г.) имел место случай, когда стальная
§ 7.6
ВИХРИ КАРМАНА
411
Рис.7.24. Демпфер с трением, вмонтиро-
ванный в проволочную оттяжку ды-
мовой трубы.
труба диаметром 4,8 м и высотою 90 м оказалась в состоянии
резонанса при собственной частоте, равной 1 колебанию в секунду
(при скорости ветра примерно 80 км/час), причем колебания были
столь сильны, что труба получила прогиб, и в материале образо-
валась трещина, простиравшаяся по окружности на 180°.
Угрожающая верхняя половина трубы была снята и сделана
заново, причем новая труба была снабжена виброгасителями.
Эти последние были поставлены в тросах, соединяющих вершину
грубые землей,как показано
на рис. 7.24, В качестве вибро-
гасителя на каждом тросе
были взяты две большие пру-
жины А, имевшие достаточ-
ную длину, и вся система,
состоявшая из пружин и
троса, была подвергнута на-
чальному натяжению так,
что пружины были, примерно
на 20 см длиннее, чем в
ненапряженном состоянии.
Между пружинами был по-
мещен амортизатор такого
типа, который применяется
в больших грузовиках. Когда
труба начинает колебаться,
в амортизаторе происходит
относительное движение, благодаря которому рассеивается энергия.
При этом расчет производится так, чтобы количество энергии, рас-
сеивающейся в демпфере, было приблизительно такое, какое рассеи-
вается в самой трубе; этим естественное затухание удваивается,
что достаточно для предотвращения повреждения трубы.
Осенью 1940 г. в штате Вашингтон произошла катастрофа
с Такомским мостом (Tacoma Narrows): при умеренном ветре
обрушился большой висячий мост через Такомское ущелье, быв-
ший в эксплуатации всего лишь около года. В то время причина
катастрофы с достаточной точностью не была установлена. Пред-
лагались объяснения, основанные либо на вихрях Кармана,
либо на явлении флаттера (стр. 428). Несколько лет спустя после
катастрофы в Вашингтонском университете были осуществлены
тщательно поставленные опыты в специально сконструированной
аэродинамической трубе, после чего стало ясно, что причиной
катастрофы была вихревая дорожка Кармана. На этот раз объек-
том изучения был не цилиндр, а двутавровый профиль. Исследуе-
мое явление имеет место для всевозможных форм сечения. Фор-
мулы для частоты (7.17) и для интенсивности (7.18) сохраняют
свою силу для различных сечений, отличаясь лишь значениями
412
АВТОКОЛЕБАНИЯ
ГЛ. VII
безразмерных коэффициентов Струхаля и Кармана. В данном
случае ветер дул достаточно устойчиво в течение часа со скоростью
67 км/час. Частота схода вихрей совпала с частотой крутильных
колебаний полотна моста на растяжках, что в результате резо-
нанса привело к поворотам полотна на угол до 45° по каждую
сторону от горизонтали. Вдоль пролета укладывались при коле-
баниях две полуволны синусоиды. Это и вызвало разрушение
моста. После тщательно проделанной исследовательской работы
мост был восстановлен
Рис. 7.25. Поперечное сечение проезжей части
Такомского моста: а) старый, обрушившийся
мост имел сплошное полотно и сплошные
боковые балки жесткости; 6) новый мост
имеет боковые решетки, щели в полотне и,
кроме того, нижнюю решетку, замыкающую
коробчатое сечение.
с тремя существенными
изменениями в кон-
струкции. Во-первых,
боковые балки жест-
кости были заменены
стержневой конструк-
цией, так что ветер мог
дуть сквозь нее без об-
разования больших вих-
рей. Во-вторых, в по-
лотне моста были сде-
ланы продольные щели
(с решеткой между ли-
ниями движения), вслед-
ствие чего, если бы да-
же образовались боль-
шие вихри, то не было
бы большой разности
давлений с верхней и
нижней стороны полотна. В-третьих, «открытое» сечение (рис.
7.25, а) было заменено «закрытым» коробчатым сечением (рис.
7.25,6), причем были смещены вниз боковые решетки, которые
внизу были связаны между собой еще горизонтальной решеткой.
Такое закрытое коробчатое сечение является примерно в 100 раз
более жестким на кручение, чем открытое сечение. Благодаря
этому собственная частота крутильных колебаний оказывалась
за пределами резонанса со скоростью ветра.
Полотно Такомского моста’ имело ширину 12 м (39 фут), но
это соответствовало еще не наибольшему вихрю Кармана. Наи-
больший вихрь наблюдался в баке нефтехранилища в Венесуэле.
Бак был без крыши, обычной цилиндрической формы, диаметром
около 46 Л! и высотой 14,6 м. Когда он был еще новый, он был
наполнен морской водой до уровня на 1,2 м ниже его верха. Под
влиянием пассата, устойчиво дующего в этом месте со скоростью
примерно 48 км/час, образовалась стоячая волна высотою около
2,4 м между верхом бака и его основанием. Частота волн не
была определена. Однако имеется формула для скорости V рас-
§ 7.7 КОЛЕБАНИЯ РЕГУЛЯТОРА ПАРОВОЙ МАШИНЫ 413
прострапения океанских тяжелых воли длины Z:
J7 = 1/ "I
\ 2зг
Фотографии вихревых цепей показали, что длина волны
I равна диаметру, т. е. 46 м, а поэтому V = 8,4 м/сек. Полный
период равен времени прохождения вершиной волны всего диа-
метра бака от одного его конца до другого, равного 46 м, что дает
для периода волны величину =5,5 сек. Пользуясь формулой
(7.17) и принимая высоту бака 14,6 м за «диаметр», мы находим
скорость ветра, равную 12 м/сек или 44 км/час, что, может быть,
несколько грубо, но все же подтверждалось произведенными на
месте наблюдениями. Мерой против возникающих при этом
сильных колебаний послужила установка в баке вертикальных
перфорированных пластин параллельно его внешней стенке на
расстоянии 30 см от нее.
В наименьшем масштабе вихри Кармана проявляются в
водяных каплях диаметром примерно в 1 мм. Метереологиче-
скими наблюдениями было установлено, что дождевые капли
в спокойном воздухе падают вертикально, за исключением капель,
диаметр которых равен точно 1 мм. Такие капли при падении отно-
сятся в разные стороны. Если подсчитать скорость падения такой
капли и применить уравнение (7.17), то будет определена частота
вихря. Оказывается, что собственная частота колебаний капли
такого размера при ее переходе от сферической формы к эллип-
соидной, под влиянием поверхностного натяжения та же, что и
частота схода вихрей. Таким образом, при падении капли пульси-
руют, и их траектория оказывается уже не вертикальной прямой,
а линией неправильной формы.
§ 7.7. Колебания регулятора паровой машины
Очень интересные автоколебательные явления наблюдаются
в паровых машинах и турбинах, с которыми связаны центробеж-
ные регуляторы прямого действия. В этом случае части регуля-
тора, являющиеся чувствительными к изменению скорости, т. е.
его шары, находятся в непосредственном соединении с дроссель-
ным клапаном. В очень больших паровых машинах или турбинах
требуется слишком много энергии для непосредственного откры-
вания и закрывания дросселя, благодаря чему в таких машинах
регулятор действует непосредственно лишь на электрические
контакты или масляные клапаны (реле), которые в свою очередь
уже приводят в движение дроссельный клапан. Такой регулятор
непрямого действия мы, однако, здесь рассматривать не будем.
414
АВТОКОЛЕБАНИЯ
ГЛ. VII
На рис. 7.26 изображена схема регулятора прямого действия.
Пусть по какой-либо причине скорость машины а возросла. Тогда
шары регулятора приподнимут муфту Ь, немного прикрыв тем
самым вентиль с паропровода. Вследствие этого машина будет
получать меньшее количество пара, и ее скорость понизится.
Но так как вся система обладает инерцией, то скорость упадет
ниже нормальной, в результате чего регулятор теперь уже от-
кроет клапан сверх нормы. Таким образом, в машине возникнут
колебания скорости, которые, смотря по обстоятельствам, могут
Рис. 7.26. Регулятор Уатта, непосредственно
соединенный с дроссельным клапаном, регу-
лирующим доступ пара в турбину. При от-
сутствии затухания эта система неустойчива
и вызывает колебания регулятора.
быть как затухающими,
так и само возбуждаю-
щимися. Если машина
с резко изменяющейся
скоростью соединяется
с генератором, то на-
пряжение тока также
должно колебаться,
вследствие чего мы ясно
увидим мигание света
электрических лампо-
чек.
Чтобы легче уяснить
описанное явление, луч-
ше всего исходить из
дифференциальных урав-
нений движения регу-
лятора. Прежде всего
мы видим, что регулятор представляет собою обыкновенную
колеблющуюся систему, состоящую из массы, пружины и демп-
фера (катаракта). Вследствие этого мы должны получить три
члена в дифференциальном уравнении. Кроме того, регулятор
связан с машиной таким образом, что при возрастании угловой
скорости ф машины на массу регулятора начинает действовать
сила, направленная вверх и вызванная центробежными силами
шаров. Отсюда получаем уравнение
тх + сх + кх = Сгф,
(7.19)
где х — вертикальное перемещение вверх муфты регулятора,
отсчитываемое от ее нормального положения при определенной
нагрузке; т — эквивалентная масса муфты регулятора (при-
веденная масса); с — коэффициент затухания муфты регулятора;
к — коэффициент жесткости пружины; ф — разность между
мгновенной угловой скоростью машины и ее нормальной или
средней скоростью при определенной нагрузке; С\ — величина
возрастания силы, приложенной к муфте и направленной вверх
§ 7.7 КОЛЕБАНИЯ РЕГУЛЯТОРА ПАРОВОП МАШИНЫ 415
(от действия центробежных сил шаров), вызванного увеличением
угловой скорости машины на один радиан в секунду.
Мы видим, что, вводя две координаты ж и <р, мы исходим из
некоторых «нормальных» условий, которые имеют место, когда
машина вращается с постоянной скорое нло при постоянной на-
грузке и при постоянно открытом дроссельном клапане, а муфта
не движется по вертикали. При этих условиях х = 0, вследствие
чего х принимает положительные значения, когда муфта регуля-
тора оказывается выше своего нормального положения, и отрица-
тельные значения, когда она ниже этого положения. Подобным
же образом ф отрицательно, когда машина временно имеет ско-
рость ниже нормальной.
Собственно говоря, машина сама по себе не является колеба-
тельной системой, так как в ней нет пружин (понимаемых в
широком смысле), возвращающих ее в равновесное положение.
Однако, с другой стороны, мы имеем здесь массу, или, вернее,
момент инерции Z. Действием момента сил затухания машины
мы в нашем исследовании пренебрегаем. Машина связана с регуля-
тором таким образом, что, когда его муфта ниже нормального
положения (х отрицательно), клапан открыт больше обычного,
вследствие чего получается избыток положительного или враща-
ющего момента, действующего на машину. Поэтому дифферен-
циальное уравнение движения машины принимает вид
= — С2х, (7.20)
где I — эквивалентный момент инерции машины (приведенный
момент инерции); С2 — величина возрастания крутящего момента,
действующего на машину вследствие давления пара, вызванного
понижением муфты регулятора на 1 см.
Уравнения (7.19) и (7.20) определяют собою свободные колеба-
ния всей системы в целом (машина и регулятор), так как в этих
уравнениях отсутствует периодическая сила. В этом случае
решением должна быть функция вида
ср* cos qt, (7.21)
где q есть частота собственных (притом затухающих) колебаний,
а коэффициент р, который может быть как положительным, так
и отрицательным, является мерой затухания. Вместо того,чтобы пи-
сать решение в форме (7.21), мы можем представить его в виде
причем действительная часть этого выражения та же, что и в
формуле (7.21); или, что будет еще короче, можно положить
где $ есть комплексное число («комплексная частота»).
416
АВТОКОЛЕБАНИЯ
ГЛ. VII
Подставляя значения (7.3) в дифференциальные уравнения
<7.19) и (7.20), деля затем эти уравнения на est, мы получаем
(msn- + os + к) хтм — С,в<рпм = 0,
+ ^тах = 0-
Итак, мы имеем систему однородных алгебраических уравнений,
имеющих отличные от нуля решения <ггаах и <ртах лишь в том
•случае, если удовлетворяется уравнение
77?S2 + CS + к __ (\в
О> ~~ ~ ~Т& 9
или
з® + - 82 + - 8 + = 0. (7.22)
т т т 1 v ’
Уравнение (7.22) есть уравнение частот для системы (7.19) и
(7.20). Это уравнение, вследствие отсутствия «пружины», в системе
самой машины является кубическим, а не четвертой степени,
как это следовало бы ожидать для обычной системы с двумя
•степенями свободы.
Из двух признаков устойчивости, приведенных на стр. 384,
удовлетворяется всегда лишь первый, требующий, чтобы все
коэффициенты были положительными. Что касается второго,
выражаемого неравенством (7.9), то здесь он принимает вид
с к С\
т т " ml 3
или
С > (7.23)
Если затухание в катаракте регулятора больше, чем указы-
ваемое этой формулой, то система возвратится к спокойному
состоянию после внезапного изменения нагрузки, в противном
случае, т. е. при затухании, меньшем требуемого, система регуля-
тора окажется недействительной (см. рис. 7.2,6).
В том случае, когда машина жестко связана с электрогене-
ратором, питающим большую сеть, задача становится значительно
более сложной. Дело в том, что здесь появляется своеобразная
«пружина машины», так как сеть стремится удерживать ротор
генератора в определенном положении, определяемом углом его
поворота. Всякому отклонению от этого синхронного положения
противодействует момент, вызванный магнитным полем, играю-
щим роль пружины в воздушном пространстве генератора. В
таких случаях в уравнение (7.20) войдет еще один добавочный
член кеср, а если есть затухание также в генераторе, обеспечи-
§ 7.7
КОЛЕБАНИЯ РЕГУЛЯТОРА ПАРОВОЙ МАШИНЫ
417
ваемое обмоткой электрического поглотителя, то в уравнении
(7.20) оказываются даже два добавочных члена. Таким образом,
система дифференциальных уравнений для нашей задачи прини-
мает вид
тх 4- ctfc Н- крх = С\ф,
1(р + Смф + кк<р = — С2х.
(7.24)
где индекс «р» относится к регулятору, а индекс «м» — к машине.
Очевидно, что I обозначает собою приведенный момент инерции
всех вращающихся частей, т. е. системы машины и генератора.
Упомянутый сейчас катушечный гаситель как прибор, способ-
ствующий затуханию, был изобретен Лебланом в 1901 г. Этот
прибор имеет своим назначением уменьшение неприятных явлений,
связанных с колебаниями скорости. Он состоит из коротко замк-
нутой медной обмотки на внешних сторонах полюсов вращаю-
щейся части генератора. Пока генератор вращается с постоянной
(синхронной) скоростью, в этой обмотке нет никаких токов, а
поэтому нет и никаких препятствий к движению. Но как только
скорость меняется, в обмотке возникают индуктивные токи,
которые в совокупности с магнитным полем в воздушном про-
странстве генератора вызывают появление момента, пропорцией
нального величине отклонения ф угловой скорости от нормаль-
ного ее значения и направленного противоположно ф, т. е. оказы-
вающего тормозящее действие, если машина временно вращается
слишком быстро, и, наоборот, ускоряющего вращение, если оно
происходит слишком медленно.
Предполагая, что решение уравнения (7.24) имеет форму
(7.3), подставим соответствующие значения х и ср в уравнение
(7.24). Тогда уравнение частот примет вид
S4 +5.з[^! + £Р| + +
[I m] [ Z т Im J ‘
I л [СР | СМ кр | 2 >
+ S[mT + 7 т+1^Г)
Дц/ьр __ р,
Гт ’
где, как видно, все коэффициенты положительны. Критерий
устойчивости (7.14) напишется так:
см £р\ (£р
Гт [т
| СМ ^Р |
Г ‘ I т ' Im j
£р ^Р . б\С2\2 кр (СМ | £pj2
т Г ' Г т Гт J Гт т]
(7,25)
Выполнение этого неравенства зависит от величин затухания
Ср См
в регуляторе, затухания у в машине, собственных частот
27 Ден-Гартог - 2074
418
АВТОКОЛЕБАНИЯ
ГЛ, VB
= у и = ~ > а также от «коэффициента связи» • Един-
ственное простое заключение, которое может быть сделано отно-
сительно неравенства (7.25), состоит в том, что при полном отсут-
ствии затухания (ср = см = 0) его левая часть обращается в
(
нуль, тогда как правая часть есть -7— » и неравенство нару-
шается. Следовательно, если никакого затухания нет, то колеба-
ния системы не успокаиваются.
Чтобы уяснить физический смысл неравенства (7.25), рассмот-
рим частный случай, когда отсутствует затухание в машине, т. е.
см = 0. Это неравенство принимает тогда вид
Ср — <4) > 1. (7.26)
В случае, если частота регулятора сэр меньше, чем частота
машины t»M, то левая часть получается отрицательной, и нера-
венство нарушается, что обозначает неустойчивое действие даже
при очень большом ср. Напротив того, если сор больше, чем сом,
то левая часть положительна, и тогда устойчивое действие будет
преобладать, если только затухание регулятора удовлетворит
неравенству
р т м - •>«) •
Мы видим, таким образом, что неравенство (7.23) есть частный
случай этого более общего результата.
Рассмотрим другой простой случай, когда затухание имеется
только в машине, а в регуляторе отсутствует, т. е. когда ср = 0.
Неравенство (7.25) здесь также упрощается, принимая вид
см^- I. (7.27)
откуда видно, что неустойчивость безусловно имеет место, если
частота регулятора больше, чем частота машины. В противном
случае система может быть устойчива, если затухание в машине
достаточно велико.
Подводя итоги, мы можем сказать, что если оказалось, что
система, движение которой определяется уравнениями (7.24),
неустойчива, то можно предпринять следующие меры:
1) когда частота регулятора больше частоты машины, необ-
ходимо усилить затухание в катаракте регулятора,
2) когда частота регулятора меньше частоты машины, необхо-
димо ввести затухание в машину или в генератор.
§ 7.8
ФОРСУНКИ ДВИГАТЕЛЕЙ дизеля
419
§ 7.8. Форсунки двигателей Дизеля
Обычное устройство топливного клапана или форсунки с
соплом для двигателя Дизеля показано схематически на рис. 7.27.
Камера V непрерывно остается наполненной жидким топ-
ливом, имея соединение с топливным насосом посредством узкого
канала В. Нормальным положением иглы Л форсунки является
ее положение на седле N. В тот momcih, когда поршень двигателя
Рис. 7.27. Топливная форсунка ди-
зеля. При отсутствии затухания игла
форсунки динамически неустойчива.
Рис. 7.28. Колебания иглы форсунки
в состояв иях:а) неустойчивом, б) без*
различном и е) устойчивом.
должен начать свой рабочий ход, топливный насос подает опре-
деленное количество горючего в камеру V, где вследствие этого*
давление резко повышается. Поскольку диаметр стержня иглы?
сверху больше, чем снизу, то это давление стремится поднять ее1
вверх. Как только давление сделается достаточно большим, чтобы?
преодолеть восстанавливающую силу пружины S, стержень под-
нимется и произойдет вбрызгивание горючего через сопло N
в головку цилиндра. В конце хода топливного насоса давление в
камере V падает, и пружина S опять закрывает клапан.
В таких форсунках наблюдались автоколебания иглы по
типу, показанному на рис. 7.28. На этих фигурах по горизонтали
отложено время, а по вертикали — перемещение х иглы форсунки..
Заштрихованная часть относится к периоду нагнетания горю-
чего через канал В. Случай в) указывает положительное зату-
хание, случай б) — отсутствие затухания, а случай а) — отрица-
тельное затухание.
27*
420
АВТОКОЛЕБАНИЯ
ГЛ. VII
Рассмотрим физическую сторону явления. Во время колеба-
ний часть иглы перемещается из камеры V вверх, горючее пода-
ется через канал В и выходит из камеры через сопло N\ все это
оказывает влияние на давление в камере. В случае, когда среднее
давление имеет большее значение при движении иглы вверх,
чем вниз, получается переход части энергии давления в энергию
колебаний. Если эта энергия больше, чем ее рассеяние, вследствие
трения в сальнике, то колебания будут самовозбуждающимися
или автоколебаниями.
Легко убедиться, исходя из чисто физических соображений,
что при отсутствии затухания в сальнике система оказывается
неустойчивой. В самом деле, рассмотрим сейчас только тот про-
межуток времени, когда топливный насос действует, причем
сделаем предположение, что через канал В горючее течет с постоян-
ной скоростью. Что же касается истечения горючего через сопло,
то его скорость изменяется в зависимости от положения иглы.
Пусть эта игла колеблется около некоторого среднего положения.
При этом среднем положении иглы количество вытекающего через
сопло горючего равняется количеству притекающего через канал
В\ если же игла находится выше (ниже) среднего положения, то
истечение больше (меньше), чем приток. Давление в камере V
зависит от количества горючего в ней: чем больше горючего, тем
больше давление. Рассмотрим иглу в ее среднем положении при
ее движении вверх. В течение двух ближайших четвертей периода
колебания истечение будет превосходить приток, и давление вслед-
ствие этого понизится. Таким образом, когда игла будет опять
находиться в среднем положении, но уже при своем движении
вниз, давление будет наименьшее. Совершенно таким же образом
можно показать, что давление получается наибольшим при
среднем положении иглы во время ее движения вверх. Итак, мы
видим, что при колебаниях иглы давление совершает работу.
В наших рассуждениях не было упомянуто одно обстоятель-
ство, а именно то, что игла, вследствие ее движения, изменяет
объем горючего в камере V, вызывая тем самым изменения давле-
ния. Так как полное давление, имеющее место вследствие действия
топливного насоса, очень велико, то мы предполагаем, что эти
изменения не влияют на истечение горючего, т. е. на его подачу в
цилиндр, которое зависит лишь от величины отверстия сопла.
Кроме того, указанные изменения давления находятся в одной
фазе с перемещением иглы, а поэтому они действуют не как
фактор, вызывающий затухание, а как своего рода топливная
пружина.
Рассуждая математически, мы придем к таким же самым
заключениям. Дело в том, что двумя нашими зависимыми пере-
менными являются вертикальное перемещение х (отсчитываемое
вверх) иглы клапана и давление р в камере, причем отсчет х
§ 7.8 ФОРСУНКИ ДВИГАТЕЛЕЙ ДИЗЕЛЯ 421
и р ведется от их средних значении за время одного колебания;
независимой переменной является время. Таким образом, мы
получаем три силы, действующие на иглу:
1) сила упругости — FQ— кх\
2) сила затухания —сх\
3) сила давления + pS + рп8.
Здесь в первом выражении FQ есть сила упругости пружины
8 при установке, а к — ее коэффициент жесткости; в третьем
выражении S' есть поперечное сечение иглы в сальнике и р0 —
среднее значение давления. Постоянные силы —FQ и +Ро8
равны друг другу по величине и противоположны по направле-
нию, а поэтому они взаимно уравновешиваются. Таким образом,
дифференциальное уравнение движения иглы имеет вид
тх + кх + сх — р8 = 0, (7.28)
причем в это уравнение входят обе переменные, как х, так и р
Второе уравнение мы найдем, рассматривая изменение объема
горючего в камере V и сопоставляя его с изменением давления.
Как уже допущено, приток горючего через канал В происходит
с постоянной скоростью в течение одного хода насоса. Кроме
того, было найдено, что с достаточной степенью точности скорость
истечения горючего через сопло можно считать пропорциональной
расстоянию от иглы до сопла. Это расстояние состоит из среднего
расстояния Xq, к которому добавляется переменная величина
смещения иглы х. Количество топлива, вытекающего через сопло
при среднем положении иглы, определяемом величиной х^, рав-
няется количеству топлива, втекающего через канал В. Таким
образом, избыточный объем топлива, поступившего в камеру за
1 сек, равен —Сх, где С есть полный объем горючего, протекаю-
щего через сопло за 1 сек., когда х^ равняется единице длины.
Однако, коль скоро игла перемещается, входя в камеру и частично
выходя из нее, объем V этой камеры не остается постоянным.
Изменение объема за секунду, вследствие такого движения
иглы, равно 8х. Тогда выражение
— С х — 8х
определит собою скорость нарастания объема втекающей жид-
кости сверх постоянного объема V. Эта величина может быть
„ dV г‘7
представлена в виде производной = F. Модуль упругости жид-
кости при всестороннем сжатии определяется уравнением
dV dp
422
АВТОКОЛЕБАНИЯ
ГЛ. VII
откуда следует, что
F_р
V~E ’
Вследствие этого второе дифференциальное уравнение принимает
вид
р = — (Сх ч- 8х). (7.29)
Переменная р может быть исключена из уравнений (7.28) и (7.29),
если первое из них продифференцировать по времени, а затем
подставить в него значение р из второго. Тогда получим
- t f 1 , 82Е\ . , SEC „ п Qn.
тх Ч- сх Ч- Ч- х Ч—— х = 0. (7.30)
Подстановка решения типа (7.3) приводит нас к уравнению ча-
стот
5 +
SES
mV
(7.31)
= 0,
в котором все коэффициенты положительны, вследствие чего
условие устойчивости (7.9) принимает вид
с / к 82£Л SEO
т \т ' mV ) mV ’
или
СЕ mS
(7.32)
Отсюда мы видим, что движение будет устойчивым лишь тогда,
когда затухание в сальнике или где-либо еще будет определяться
коэффициентом, большим написанного значения.
Интересно отметить, что выражение, стоящее здесь в скобках
в знаменателе, можно рассматривать как некоторый приведенный
коэффициент жесткости пружины и жидкости в камере, тогда
как дробь 8E/V обозначает собою скорость увеличения давле-
ния горючего, вызванного отклонением иглы на 1 см от ее сред-
него положения. Таким образом, мы можем видеть, что уравнения
частот (7.22) и (7.31), составленные казалось бы для совершенно
различных задач (регулятор Уатта и форсунка Дизеля), имеют
одинаковую структуру. Коэффициент Л2 является мерой зату-
хания, А2 — квадратом собственной частоты, Ао определяет
собой интенсивность перехода энергии, от которого зависит
самовозбуждаемость системы.
§79 КОЛЕБАНИЯ ТУРБИН. ВЫЗВАННЫЕ ПРОСАЧИВАНИЕМ ПАРА 423
§ 7.9. Колебания турбин, вызванные просачиванием пара
Явления, сходные с описанными, наблюдались в некоторых
паровых и водяных турбинах. Так, было обнаружено, что шпин-
дель турбины и жестко связанный с ним ротор генератора колеб-
лются в подшипниках в осевом направлении, имея частоту около
20 колебаний в секунду. Эти нежелательные колебания объ-
ясняются изменением давления в пространстве позади «уравно-
вешивающего поршня», происходящим вследствие просачивания
пара в это пространство. Так же. как и в форсунке Дизеля, интен-
Рис. 7.29. Паровая турбина с уравновешивающим
поршнем D, лабиринтом В, упорным подшипником
FG и уравнительной трубой Е.
сивность этого просачивания зависит от продольного положения
шпинделя турбины.
В общих чертах конструкция показана на рис. 7.29. Пар
высокого давления вступает в отверстие А и проходит налево
через лопатки в конденсатор. Вследствие разности давлений в
котле и конденсаторе получается довольно значительная сила,
приложенная к шпинделю и действующая влево, которую необ-
ходимо уравновесить. Это уравновешивание осуществляется ча-
стью уравновешивающим поршнем D, а частью упорным подшип-
ником F.
Очень небольшое количество пара высокого давления просачи-
вается через лабиринт В в камеру С, которая соединяется по-
средством «уравнительной трубы» Е (общей длиной, доходящей
До 5 м) с конденсатором. Таким образом, давление в С приблизи-
тельно равно (вернее, немного выше) вакууму в конденсаторе.
424
АВТОКОЛЕБАНИЯ
ГЛ. VII
ж»
вследствие чего возникает сила, прижимающая уравновешиваю-
щий поршень D вправо, уменьшая тем самым осевую результиру-
ющую давлений пара. Детали устройства лабиринта В в различных
конструкциях сильно разнятся между собой, но все же общей
чертой их является то, что осевое перемещение ротора изменяет
скорость утечки пара. Вследствие значительной длины трубы
2? продольные колебания столба пара в ней связаны с изменениями
давления в камере С, что, в свою очередь, отражается на движении
шпинделя. Для затухания осевых колебаний шпинделя необхо-
димо, чтобы среднее давление пара в О' во время движения шпин-
деля влево было меньше, чем при его движении вправо. Так как
сила давления пара обычно бы-
вает мала по сравнению с упру-
гими силами пружин G, вхо-
дящих в систему упорного под-
шипника, то частота происхо-
дящих колебаний шпинделя
практически оказывается рав-
ной частоте его собственных
колебаний на упомянутых пру-
жинах.
Если длина уравнительной
трубы Е близка к четверти дли-
ны стоячей звуковой волны, имеющей ту же частоту, что и осевые
колебания турбины, то закон колебаний столба пара в этой
трубе получается достаточно сложным (рис. 4.18, б, в). Однако в
большинстве случаев длина трубы бывает значительно меньше
указанной критической длины, вследствие чего можно считать,
что пар перемещается в трубе вперед и назад, как несжимаемое
тело. Пружинящим телом, благодаря которому происходят коле-
бания этой массы пара, является пар в камере С, где давление
изменяется вследствие возвратно-поступательного перемещения
столба пара в трубе Е-. Таким образом, мы приходим к схемати-
ческому изображению системы, представленной на рис. 7.30, где
на массу т можно смотреть как на поршень (состоящий из пара),
скользящий взад и вперед в уравнительной трубе. Заметим,
что в трубе имеет место общий поток пара т, направленный
вправо. Для нашего исследования необходимо вычесть из действи-
тельной скорости пара среднее значение скорости, иначе говоря,
Рис. 7.30. Идеализированная схема
турбины, совершающей осевые ко-
лебав ия
рассматривать лишь переменную часть скорости массы т.
В существующих конструкциях величина объема V очень
мала, а поэтому представляется интересным рассмотреть с физи-
ческой точки зрения поведение системы (рис. 7.30) при объеме
F, равном нулю. Пусть масса М (шпинделя турбины и ротора
генератора) совершает прямолинейное колебание согласно рис.
7.31. Так как объем V предполагается равным нулю, то движение
3 7.9 КОЛЕБАНИЯ ТУРБИН. ВЫЗВАННЫЕ ПРОСАЧИВАНИЕМ ПАРА
425
массы т непосредственно определяется количеством пара, просачи-
вающегося около М Вследствие этого наибольшая скорость
перемещения массы т вправо имеет место при наибольшей утечке
пара, именно тогда, когда масса М занимает крайнее левое поло-
жение (точка А на рис. 7.31). Когда же М находится в крайнем
правом положении, утечка наименьшая, во всяком случае, ниже
среднего значения, а поэтому т имеет наибольшую скорость
направленную влево (точка В на рис. 7.31). Таким образом,,
находится кривая, определяющая положение массы т. Поскольку
эта масса не подвергается
действию пружины (понимае-
мой в широком смысле сло-
ва), то ее движение опреде-
ляется давлением пара в ма-
лом объеме V Между точ-
ками А и В столб пара полу-
чает ускорение, направлен-
ное влево, что означает, что
давление в объеме V ниже
среднего значения. А это, в
свою очередь, значит, что
между точками А и В сила
давления пара в объеме V
(где, как видим, создается
Рис. 7.31. Графики движения системы,
изображенной на рис. 7.30, в случае
нулевого объема V.
некоторое разрежение) за-
ставляет двигаться массу М вправо. Но поскольку в этом интер-
вале масса М уже двигается вправо, то, следовательно, дви-
жение — само воз бу ж дающееся. Сделаем теперь обратное пред-
положение, т. е., что объем V очень велик. Тогда изменение в
величине утечки пара вряд ли повлияет на давление в объеме
V, вследствие чего изменение суммарного действия давлений
пара на массу Ms будь оно положительное или отрицательное,
очень мало. В таком случае даже легкое трение в системе по-
глотит отрицательное затухание, которое сможет возникнуть.
На самом деле, в машинах подобные осложнения предотвраща-
ются путем введения камеры объемом около 50 дм3, помещаемой
между пространством С и уравнительной трубой Е (рис 7.29).
Другой пример мы имеем на рис. 7.32, где изображена биротатив-
ная паровая турбина шведской фирмы «Юнгстрем» (Ljungstrom).
Здесь А и В — два одинаковых электрических генератора, при-
водимых в движение роторами А' и В' турбины, вращающимися
с равными скоростями, но в противоположных направлениях.
Пар из котла высокого давления поступает в центр турбины D
и течет в радиальных направлениях в пространство В, непосред-
ственно связанное с конденсатором. Турбинные лопатки располо-
жены на роторах круглыми концентрическими рядами. Для пре-
426
АВТОКОЛЕБАНИЯ
ГЛ, VII
дотвращения утечки пара из области D' высокого давления в
область Е низкого давления сделано лабиринтовое уплотнение F
между роторами и кожухом турбины. Этот лабиринт состоит из
множества очень узких проходов, сквозь которые должен про-
сачиваться пар при утечке Обнаруженные колебания относятся
к типу прецессии, т. е. осевые линии системы вал—диск АА' и
ВВ' изгибались и в таком деформированном состоянии вращались
вокруг недеформированной осевой линии с угловой скоростью,
Рис. 7.32. Биротативная паровая турбина Юнгстрема, имеющая автоколе-
бания типа прецессии с частотой, отличной от угловой скорости; эти
автоколебания возбуждаются вследствие изменений давления пара при
просачивании в проходах лабиринта.
равной собственной частоте, по не угловой скорости вращения
валов (см. стр, 393), Гироскопический эффект дисков в'лияет
на собственную частоту. Однако система симметрична в своих
частях А и В, а потому, если обе половины прецессируют в том
же направлении, что и их роторы (т. е. прецессия А противо-
положна прецессии В), то и собственные частоты частей А и В
одинаковы. При таком движении диски А' и В' поворачиваются на
малые углы в перпендикулярном к оси направлении то в одну
сторону, то в другую, изменяя тем самым просветы в лабиринтах
F, вследствие чего давление пара в F периодически изменяется.
Фаза этих периодических изменений давления на диски оказы-
вается такой, что их моменты действуют в направлении скорости
указанных поворотов дисков, благодаря чему система получается
неустойчивой. Здесь попытки борьбы с такими недостатками
были предприняты в двух направлениях: путём изменения кана-
лов лабиринта изменялись фазовые соотношения между измене-
ниями давления на диск и его собственным движением; в другом
случае эти же изменения осуществлялись так, что уменьшались
самые изменения давления. Последнее мероприятие оказалось
более эффективным.
§ 7.9
КОЛЕБАНИЯ ТУРБИН. ВЫЗВАННЫЕ ПРОСАЧИВАНИЕМ ПАРА
427
Аналогичное явление наблюдалось несколько лет назад на
одном гидравлическом турбогенераторе обычного типа с верти-
кальным валом, когда ротор генератора расположен над ротором
турбины на том же самом валу, причем этот вал в верхнем своем
конце подвешен к коренному подшипнику Кингсбери. Эта уста-
новка оказалась в состоянии интенсивных колебаний, как кон-
соль, изогнутая ось которой совершает вращательное движение.
При этом верхняя точка кожуха описывает круговую траекторию
диаметром примерно 1,5 мм, тогда как нижние части машины
Рис. 7.33. В водяной турбине Фрэнсиса возбуждаются авто-
колебания рабочего колеса, обусловливающие его прецес-
сию, вследствие изменения давления при просачивании
воды через зазоры D.
вблизи основания остаются почти неподвижными. Такое движе-
ние, напоминающее прецессию, имеет частоту, совершенно отлич-
ную от угловой скорости машины и встречается только при на-
грузках, больших половины тех, на которые рассчитана эксплуата-
ционная мощность, причем частота этих колебаний уже не зави-
сит от нагрузки.
Поскольку были замечены автоколебания, были предпри-
няты многочисленные попытки нахождения причины самовоз-
буждения. Так, были сделаны различные видоизменения в упор-
ном подшипнике Кингсбери, в ненагруженных направляющих
подшипниках вертикального вала, в напряжении магнитного
поля генератора и, наконец, в рабочем колесе. В конце концов
было установлено, что причина лежит в рабочем колесе и именно
в той его части, которая соответствует лабиринту (рис. 7.32).
На рис. 7.33 буквой А обозначено вращающееся колесо Френсиса,
а буквой В — неподвижная часть. Вода проникает из части В
на лопатки А и далее вниз, во всасывающую трубу. Давление
воды в пространстве Див прилегающих частях А высокое, тогда
как во всасывающей трубе Сив соединительных частях С' —
низкая. Большая часть воды течет из В в С через лопатки А, и
428
АВТОКОЛЕБАНИЯ
ГЛ. VB
только небольшая ее часть просачивается через кольцевые зазоры
D, образующие своеобразное уплотнение между вращающейся и
неподвижной частями. Размеры зазора примерно таковы: 1,5 мм
(1/16 дюйма) ширины, 7,5 см (3 дюйма) высоты и 2,4 % м
(8тг футов) длины. При боковом колебательном движении ротор А
перемещается в боковом направлении по отношению к не-
подвижной части В, вызывая тем самым периодическое изме-
нение ширины лабиринта. Вследствие малости этой ширины —
всего лишь 1,5 мм (1/16 дюйма),
даже очень малое абсолютное
перемещение ротора вызывает
значительные относительные из-
менения ширины, а вследствие
этого и колебания давления в
уплотненном кольце. К несча-
стью, эти изменения давления,
как показали произведенные
измерения, оказываются в фазе
со скоростью боковых колеба-
ний ротора, что приводит к
неустойчивости.
Мерой против таких неприят-
ностей является замена деталей
aJ б)
Рис. 7.34, Детали зазоров В на
рис. 7.33. а) Зазоры, приводящие к
автоколебаниям, б) зазоры, по-
давляющие прецессию.
D, а именно вместо схемы рис. 7.34, а принимается схема рис.
7.34,6. Дело в том, что в первом случае (рис. 7.34.а) потеря напора
обусловлена в значительной степени вязкостью и отчасти умень-
шением кинетической энергии, тогда как во втором случае (рис.
7.34, 6) эта потеря происходит лишь в небольшой части вследствие
вязкости, но зато с двукратным уменьшением кинетической энер-
гии. Но в то время как в схеме на рис. 7.34, а изменения давления
действуют по всей поверхности уплотнительного кольца, высотою
7,5см (3 дюйма), в схеме на рис. 7.34,6 во внутреннем кольцеобраз-
ном пространстве почти нет изменения давления, поскольку и
относительные изменения ширины здесь почти равны нулю.
В практике эксплуатации турбин случаи автоколебаний,
вызванных изменением утечки, чрезвычайно редки. Однако, если
они встречаются, то приведенное описание помогает быстро обна-
ружить их.
§ 7.10. Явление флаттера в крыльях самолета
В некоторых самолетах, летящих с очень большой скоростью,
неоднократно наблюдались весьма значительные колебания кры-
льев, причем это явление получало особенно резко выраженный
характер при попадании самолета в воздушную яму. Во многих
случаях такие колебания, представляющие собою совокупность
§ 7.10 ЯВЛЕНИЕ ФЛАТТЕРА В КРЫЛЬЯХ САМОЛЕТА 429
колебаний изгиба и кручения и называемые флаттером, были
столь велики, что служили причиной поломки крыльев во время
полета.
Посмотрим, нельзя ли объясни!ь флаттер с точки зрения
явления, описанного в § 7.5. Для крыла самолета, теряющего
равновесие, кривая подъемной силы имеет отрицательный наклон
(рис. 7.21), и тогда колебательное дли жен по крыла вверх и вниз,
рассматриваемого как балка, заделанная одним концом, неустой-
чиво. Это действительно и наблюдается. Однако допущенное
здесь условие не соответствует истинным условиям полета,
и зарегистрированные случаи флаттера имеют место при малых
углах атаки крыла, когда наклон характеристики подъемной
силы является безусловно положительным. Следовательно, интер-
претация явления с помощью теории, изложенной в § 7.5, указы-
вает на некоторое определенное положительное затухание.
Мы различаем два типа флаттера: срывной флаттер — с
большими углами атаки (а > 15°) и классический флаттер — с
малыми углами атаки. Первый из них имеет большое значение в
лопатках турбомашин, в частности, в лопатках компрессоров
реактивных двигателей, где борьба с ним является важной про-
блемой, не решенной еще до сих пор (1955 г.). В крыльях и рулях
самолета имеет место классический флаттер, который наблю-
дается особенно в последнее время в связи с полетом на звуковых
и сверхзвуковых скоростях. Вообще всякая попытка объяснить
явление флаттера на базе системы с одной степенью свободы,
например, при колебаниях крыла только вверх и вниз, наподобие
консольной балки, обречена на неудачу. В действительности мы
имеем здесь новый случай связанной системы с двумя степенями
свободы, так как крыло при колебаниях не только перемещается
вверх и вниз.но одновременно еще закручивается. И вот взаимодей-
ствие вертикальных и крутильных колебаний с потоком воздуха,
как источником энергии, может привести к неустойчивости. Воз-
можность такого случая легко объяснить с помощью простых
рассуждений на основании физических соображений.
При каждом определенном значении угла атаки о. (рис. 7.35, в)
крыло испытывает действие определенной аэродинамической по-
дъемной силы, а также и крутящего момента, направленного по
часовой стрелке. Когда крыло совершает крутильные колебания,
очевидно, угол а изменяется, вследствие чего нам интересно
знать как зависят подъемная сила и крутящий момент от
этого угла.
На рис. 7.35, а и 7.35, б такие соотношения представлены гра-
фически на основании испытаний в аэродинамической трубе.
Заметим, что для обычных значений угла а, при которых про-
исходит полет (от 0 до 10°), графики могут быть вполне приняты
за прямые.
430
АВТОКОЛЕБАНИЯ
ГЛ. VII
Пусть вертикальные и крутильные колебания крыла связаны
таким образом, что во время движения крыла вверх при его коле-
бании угол а больше, чем при движении вниз. Тогда, согласно
рис. 7.35, а, подъемная сила при движении вверх должна быть
также больше, чем при движении вниз, откуда, в свою очередь,
следует, что ветер сообщает колебаниям энергию. Передача энер-
гии возможна также и согласно диаграмме рис. 7.35,6. Это сле-
дует из тех соображений, что угол атаки меняется при вертикаль-
ных колебаниях даже и без скручивания, как мы это уже видели
Рис. 7.35. Графики подъемной силы и момента для крыла само-
лета в воздушном потоке имеют почти прямолинейную форму
при малых углах атаки.
на рис. 7.15. Благодаря этому угол атаки,а следовательно и крутя'-
щий момент, становятся больше при движении вниз и меньше
при движении вверх. Таким образом, если при движении крыла
вниз оно закручивается по часовой стрелке, энергия погло-
щается системой, и колебания растут.
Форма флаттера, обычно встречавшегося несколько лет тому
назад, представляла собою изгибы крыла, связанные с колебания-
ми элеронов. Допустим, что элерон подвешен на оси, не проходя-
щей через его центр тяжести, и допустим, что крыло совершает
колебательное движение вверх и вниз. Даже независимо от аэро-
динамических сил вертикальное колебательное движение оси
подвеса должно вызвать угловые движения элерона, поскольку
его ось подвеса не проходит через его центр тяжести. Однако эле-
рон ограничен в этих движениях, так как он управляется при-
крепленными к нему проволочными тягами, действующими по
причине неизбежной упругости наподобие пружины. Поэтому
элерон становится своеобразным маятником, имеющим собствен-
ную частоту, которая может быть выше или ниже собственной
частоты флаттера крыла. Таким образом, колебательное движение
§ 7.10
ЯВЛЕНИЕ ФЛАТТЕРА В КРЫЛЬЯХ САМОЛЕТА
431
Рис. 7.36. Профиль крыла самолета с двумя,
характерными точками центр тяжести О »
центр кручен ия Т.
элерона по отношению к крылу может быть в той же фазе или в
противоположной (если разница частот велика), но может слу-
читься и так, что разность фаз колебаний элерона и крыла со-
ставляет около 90° [если частоты близки друг к другу (см. стр.
77)]. В последнем случае движение элерона отстает от силы»
вследствие чего в середине перемещения крыла вниз элерон ока-
зывается наверху, вызывая тем самым направленную вниз силу
давления воздуха на крыло. Это и приводит к неустойчивости.
Такого рода явления своевременно узнаются, причем обычным
средством борьбы слу-
жит такая установка
элерона, при которой
его ось подвеса прохо-
дит через центр тяжес-
ти элерона, для чего
обязательно вводится
противовес. Указанная
мера сама по себе мо-
жет быть еще недоста-
точна для предотвра-
щения ((инерционной па-
ры» Чтобы уяснить себе
это, рассмотрим однород-
ный прямоугольный элерон, подвешенный около его оси симмет-
рии. Добавим теперь к этому элерону два одинаковых груза, рас-
положенных в противоположных углах прямоугольника, но так»
чтобы центр тяжести не сместился. При поступательном возму-
щении оси подвеса, когда она перемещается вверх и вниз,элерон
остается уравновешенным и не проявляет тенденции вращаться..
Однако если этот элерон помещен на реальное крыло, соверша-
ющее, как консоль, колебания с большой амплитудой на конце и с
меньшей в средней части, то силы инерции двух добавочных грузов,
будут уже различаться между собой, а тогда на элерон будет дейст-
вовать вращающий момент относительно его оси подвеса. Полное
уравновешивание относительно всех возможных движений может
быть осуществлено лишь при выполнении требования, чтобы
не только центр тяжести лежал на оси подвеса, но также чтобы
эта последняя была главной осью инерции (т. е. чтобы были равны
нулю центробежный момент инерции элерона относительно оси
подвеса и относительно оси, ей перпендикулярной).
Было бы идеально, если бы конструктор смог удовлетворить
одновременно как условиям проекта, так и условиям исключения
флаттера. Все это относится не только к элеронам, но также в
к другим движущимся поверхностям (рулям поворота и высоты)»
которые могут привести к возникновению флаттера во взаимодей-
ствии со всем фюзеляжем самолета.
432
АВТО КОЛЕБАНИЯ
ГЛ. VII
Обратимся теперь к количественному анализу явления флат-
тера, как изгибно-крутильного колебания сплошного крыла без
элерона, для чего составим дифференциальные уравнения движе-
ния. В действительности крыло ведет себя более или менее как
балка, заделанная одним концом в фюзеляж, но для упрощения
мы предположим его абсолютно твердым телом, подвешенным
на пружинах таким образом, что оно может перемещаться вверх
и вниз, а также вращаться вокруг своей продольной оси. На
рис. 7.36 начало координат О взято в средней точке размаха крыла
в положении его равновесия Отклонение крыла от этого поло-
жения определяется двумя величинами х и 0, как показано на
чертеже. Кроме центральной точки размаха С, в изображенном
положении крыла весьма важную роль играют еще две точки
профиля, а именно центр тяжести G и «центр кручения» Т. Первая
из них связана с инерционными свойствами крыла. Что касается
второй, то она характеризует упругие свойства подвешивания и
определяется как точка приложения вертикальной силы к крылу,
вызывающей только его вертикальное перемещение, но не соз-
дающей вращения. Больше того, точка Тесть также такая точка
крыла, которая остается на месте, если крыло подвергается
чистому кручению, вызывающему лишь поворот сечения. Указан-
ные два свойства точки Т неразрывно связаны друг с другом, как
это можно легко показать с помощью теоремы Максвелла о взаим-
ности перемещений.
Пусть кх есть коэффициент жесткости для вертикальных пере-
мещений крыла, a к0 — коэффициент жесткости на кручение
(отнесенные к единице длины крыла). Пусть, далее, L есть аэро-
динамическая подъемная сила, являющаяся функцией переменных
х, 0 и времени t, и М — момент всех аэродинамических сил отно-
сительно точки О, считаемый положительным в направлении часо-
вой стрелки и зависящий от тех же величин х, 9, t (рассчитанных
также на единицу длины). Тогда дифференциальные уравнения
движения напишутся так:
m (х 4- а0) 4- кх (х 4- ЬО) = L,
IqO Н- к^9 4~ кх (х 4- Ь9) (Ъ — а) 717 —"La.
Входящие в эти уравнения двучлены х + а9 и х 4- Ъ9 пред-
ставляют собою вертикальные перемещения точек G и Т. Буквы
m и 1G означают массу и момент инерции не только самого крыла,
но и некоторой части воздуха, окружающего крыло. Обычно
здесь берется воздушный цилиндр радиуса с/2. Эффект этого
воздуха, будучи несущественным для лопастей воздушного
винта, имеет, однако, большое значение для крыла, которое весит
не более чем в три раза больше окружающего его воздушного
цилиндра.
(7.33)
§ 7.10 ЯВЛЕНИЕ ФЛАТ! ЕРА В КРЫЛЬЯХ САМОЛЕТА 433
Переменная аэродинамическая сила L, действующая на крыло,
в действительности достаточно велика и имеет тот же порядок,
что сила упругости и сила инерции. Во всех предшествующих
случаях, рассмотренных в этой книге, возмущающие и демпфи-
рующие силы были малы по сравнению с силами инерции и силами
упругости, вследствие чего резонансная частота определялась
только выражением к/m и не зависела о г возмущающей силы.
Здесь возмущающая сила L, будучи величиной того же порядка,
что и сила упругости, воздействует на частоту, и поэтому частота
флаттера значительно отличается от какой-либо собственной
частоты самолета в спокойном воздухе.
Подъемная сила L (отнесенная к единице длины) для устано-
вившегося состояния равна с CL, причем ее коэффициент
CL пропорционален углу атаки воздушного потока. Угол атаки
равен 0—В этом выражении первый член уже нам встре-
чался, во втором члене х есть вертикальная составляющая скоро-
сти ветра относительно крыла. Теория крыла устанавливает для
коэффициента пропорциональности постоянную величину, рав-
ную 2тг. Таким образом
ь = -2 qV2c 2тг [0 - = тг (0 -
Теория крыла в установившемся дозвуковом потоке показывает,
что эта подъемная сила приложена в точке, лежащей на одной
четверти ширины крыла от его передней кромки, вследствие чего
момент аэродинамических сил относительно центра тяжести
равен
'г (в
Подставляя полученные два выражения в уравнение (7.33), мы
можем для оценки устойчивости применить критерий Рауса.
Если задаться обычной формой решения (7.3, стр. 382), то урав-
нения (7.33) принимают вид:
х [ms2 4- 4- xqVcs] 4- 0 [mas2 4- кхЬ — тгдПс] = 0,
х[ кх (Ъ — а) 4- л: qV — с aj sj 4-
4- 0 I lcs2 4- к0 4- кхЬ (Ь — а) 4- (са — = 0.
Исключая из этих двух уравнений х и 0 (перемножением
28 Ден-Гартог - 2074
434
АВТОКОЛЕБАНИЯ
ГЛ. VII
квадратных скобок по диагонали и вычитанием произведений),
получим уравнение частот
s4 -+• s3 [ ”• 7— [ 1q + та2 — т ^-11 +
[ mlc I ° 4 / I
4-52|^+^ + ^ (Ь_а}2 +
[1С 1 т 10 10 ( 4JJ
+ 5л_еД[^_ + + = о.
mlG | ( 4/J lm/G mIG I 4J|
Выражение, стоящее в левой части уравнения, очень сложно.
В зависимости от размеров а и Ъ некоторые коэффициенты могут
оказаться отрицательными. Рассматривая прежде всего послед-
нюю скобку, обозначаемую через Ао, мы видим, что второй член
становится отрицательным, если Ъ меньше чем с/4, т. е., если
центр кручения расположен близко к центру крыла, как это
имеет место для случая тонкого симметричного профиля. Система
делается неустойчивой, если Ло принимает отрицательное значе-
ние, что имеет место, когда
тг кв)
или
[72
7tQC (С — 46)
(7.34)
Это выражение имеет очень простой физический смысл: оно
характеризует собою не флаттер, а просто статическую неустой-
чивость того типа, которому соответствует рис. 7.2 (стр 379).
Представим себе неколеблющееся крыло в воздушном потоке
при угле атаки, равном нулю, вследствие чего отсутствует подъем-
ная сила. Теперь вообразим, что крыло подвергается закручива-
нию на угол атаки 0, что вводит в действие подъемную силу
n@V2 св, приложенную в точке, лежащей на четверти хорды.
Ее моментное плечо относительно центра кручения есть j — о,
вследствие чего крутящий момент аэродинамической пары, кото-
рому противодействует момент пары упругих сил kQ 0, равен
пдУ2св — Ъ
При малых скоростях потока момент аэродинамических сил
меньше, чем момент упругих сил, вследствие чего крыло будет
стремиться возвратиться в положение 0 = 0 Однако при возра-
стании скорости потока до определенной величины оба момента
уже при любом угле 0 становятся равными друг другу, вслед-
§ 7.10 ЯВЛЕНИЕ ФЛАТТЕРА В КРЫЛЬЯХ САМОЛЕТА 435
ствие чего имеет место безразличное равновесие в любом поло-
жении, определяемом углом 0. Такое явление статически безраз-
личного равновесия получило у аэродппамиков название диверген-
ции, а скорость, при которой оно наступает и которая опреде-
ляется из уравнения (7.34), — скорости дивергенции.
Другой критерий неустойчивости связан с переходом в об-
ласть отрицательных значений коэффициента А2 в зависимости
от его последнего члена. Это наступает тогда, когда размер а
мал, т. е. когда центр тяжести близко подходит к центру крыла.
Соответствующая этому критическая скорость определяется соот-
ношением
[72 s
-Ь 4А?Х
[<6-«)2+S]
71 ос (с — 4а)
(7.35)
Эта скорость может быть как больше, так и меньше скорости,
определяемой из неравенства (7.34). Если она меньше предыду-
щей, то имеет место классический флаттер при скорости более
низкой, чем та, которая необходима для дивергенции.
Приведенный анализ имеет силу только для случая флаттера
с низкими частотами (при малой жесткости крыла па кручение),
так как выражение для подъемной силы L и аэродинамического
момента М относились к установившемуся состоянию. При
малых частотах колебаний подъемная сила следует за изме-
нениями угла атаки, т. е. мы имеем «последовательность уста-
новившихся состояний», к которым и применим наш анализ.
В случае быстрого флаттера (более 20 колебаний в секунду) эти
рассуждения уже перестают быть справедливыми. В этом случае
анализ становится настолько сложным, что исследование флаттера
сделалось самостоятельной специальностью, которой некоторые
инженеры посвящают все свое время.
Выражения для подъемной силы и момента, рассчитанных на единицу
длины крыла, совершающего гармонические колебания при дозвуковой
скорости, были получены Теодорсеном (1935) с помощью достаточно слож-
ного анализа в его работе, ставшей теперь классической. В результате
этих исследований получены выражения:
6= яе^с[у (е _£) + (1 + \
> (7.36)
с21 / 0С1 i
М = яеР-|р(0-_) + (1_У)_]. )
Здесь весьма осложняющим дело обстоятельством является то, что
величина Y не только комплексная, но еще зависит от частоты флаттера,
а именно:
Y = F - iG,
(7.37)
28*
436
АВТОКОЛЕБАНИЯ
ГЛ. VII
где обе величины F и G суть функции отношения — (здесь ю — угловая
частота флаттера). Значения F и G представлены на рис. 7.37, заимствован-
ном из работы Теодорсена При этом предполагается, что крыло уже
находится в состоянии флаттера, т. е. на границе между положительным
и отрицательным затуханиями и. следовательно, совершает чисто гармони-
ческое движение Величина s, упоминавшаяся на стр. 382, здесь предпола-
гается не имеющей действительной части р. тогда как ее мнимая часть q
может быть' отождествлена с частотой ю флаттера. Все это делает не-
приемлемыми условия устойчивости, выражаемые соотношениями (7.9)
или (7.14).
Если бы мы попытались теперь составить уравнение частот так, как
было указано на стр. 382. то оказалось бы. что это уравнение содержит F
и 6\ а следовательно, оно будет теперь иметь значительно более сложную
структуру относительно в или а, не являясь, во всяком случае, алгебраиче-
ским уравнением четвертой степени. Теодорсен делает в уравнениях
(7.33) подстановку
х = x0elo}t, 6 = 0oeItoZ
и затем исключает п 0О, полагая определитель равным нулю, как и
прежде. Тогда уравнение частот будет содержать действительную и мни-
мую части, каждая из которых должна быть в отдельности равна нулю.
Таким образом, находятся два уравнения, которые должны удовлетворяться
на границе между положительным и отрицательным затуханиями. В этих
двух уравнениях имеются две неизвестные величины: скорость V флаттера
и частота ю флаттера. По эти уравнения нелинейны относительно V и w,
так как зависят от кривых на рис. 7.37. Детали этого анализа слишком
сложны, чтобы помещать их здесь, и читателю мы можем лишь рекомендо-
вать обратиться к оригинальной работе Теодорсена. В опубликованной
затем работе Кассиера и Фингадо приводится номограмма, основанная на
анализе, подобном анализу Теодорсена, по которой скорость флаттера
отдельного крыла может быть определена в несколько минут, если только
найдены все необходимые постоянные.
В другом методе, впервые предложенном Бликни и Хэммом (Bleakny
and Hamm) и широко используемом в настоящее время, задаются числен-
ными значениями скорости V и частоты w флаттера. Тогда по формулам
(7.36) могут быть вычислены силы и подставлены в уравнения (7.33),
§ 7.10
ЯВЛЕНИЕ ФЛАПЕРД В КРЫЛЬЯХ САМОЛЕТА
437
которые, конечно, не будут удовлетворяться, поскольку для V и а взяты
неверные значения. Однако уравнения (7.33) могут быть удовлетворены,
если подобрать соответствующие значения коэффициентов жесткости
и которые входят в эти уравнения линейно, а потому легко могут
быть вычислены С физической точки зрения это означает, что произвольно
выбранные V и ю являются истинными скоростью и частотой флаттера для
крыла, жесткость которого отлична о i жесткости исследуемого крыла.
Результат расчета представлен на рис. 7.38 в виде двух точек, отмеченных
цифрой 2, из которых одна дана на графике V — со. а другая —на графике
кх— ко. Далее весь расчет повторяется для другого значения частоты
флаттера со, но той же скорости V (точка 2 на графике V — со). Результат
расчета представлен точкой 2 на графике кх — к0. Третий расчет выпол-
няется для точки 3. Действительная жесткость крыла отображается точкой
Рис. 7.38. Определение
скорости Fn частоты флаттера со.
А на графике кх — ко. Обращая внимание на относительное расположение
точек, мы отмечаем на графике V — со точку 4, как первое приближение.
Этот процесс продолжается до тех пор, пока мы не найдем на плоскости
V — со такую точку, отображение которой на плоскости кх—кв не будет
достаточно близко подходить к желаемой точке А.
До сих пор задача касалась крыла, как системы с двумя степенями
свободы, иначе говоря, рассматривалось крыло, амплитуды колебаний
которого не меняются по его размаху. Приближенное значение скорости
флаттера получается заменой реального крыла другим крылом той же
жесткости, но инерция которого сосредоточена в точке по размаху крыла
на расстоянии 70% его длины, считая от места закрепления1). Тем самым
система приводится к схеме, изображенной на рис. 7.36. Лучший результат
можно получить численным интегрированием по длине крыла. При этом,
как в методе Рэлея, делается допущение наиболее вероятной формы дефор-
мированного крыла. Мы принимаем здесь формы колебаний изгиба и кру-
чения крыла без аэродинамических сил, определяемых формулами (7.36),
и предполагаем, что изгнбные и крутильные колебания совершаются р
одной и той же фазе с частотой w флаттера. Далее, следуя Бликни и /Хэмму,
зададимся численными величинами V и ю. Тогда будут известны упомяну-
тые аэродинамические силы и моменты, сила инерции ы*у dm и сила упру-
гости Е1уЮ [см. уравнение (4.36) на стр. 204]. Если предположенная
форма колебаний окажется правильной, то будут равны нулю как сумма
этих трех сил для каждого элемента крыла [согласно первому уравнению
(7.33)], так и сумма моментов соответственно сил инерции, упругости и
аэродинамических [согласно второму уравнению (7.33)]. Однако поскольку
предположенная форма вообще не верна, равновесие будет нарушено .для
1) Очевидно, в точке сосредоточивается масса, кроме которой должен
быть принят во внимание также момент инерции. (Прим, перев.)
438
АВТОКОЛЕБАНИЯ
ГЛ. VII
каждого, отдельно взятого элемента их. Тем не менее, следуя Рэлею, мы
можем выполи in ь интегрирование по всей длине крыла и удовлетворить
условиям равновесия в целом. Так, отдельные члены уравнений (7.33)
приводят к интегралам, взятым по длине крыла
1
to2 j /да?) щх) dx 4- £70
п
I
г Е1(х)
.) КП
I
d^y , г
-— dx — L(x) dx.
dxA J
n
I I
n r x r^(a?) d2B г
w“ 0(a?) Iq(x) dx- + C(1 —— — dx — [M(x) — a/Да?)] dx.
J J О о CvX J
0 0 0
(7.38)
Эти уравнения написаны для крыла с изменяющимся поперечным
сечением, для которого масса /х, жесткость па изгиб EI, жесткость на
кручение С. перемещение центра тяжести у = х 4- а 0, угол 0 и расстояние
а являются функциями координаты х, изменяющейся пс длине крыла от 0
до А В этих уравнениях жесткость Е10 па изгиб у основания крыла и
жесткость Со на кручен не у основан ня крыла вынесены за знаки интегралов.
На рис. 7.38 вместо постоянных коэффициентов 1сх и кв мы откладываем
упомянутые жесткости Е1 и С. При вычислениях скорости флаттера, вы-
полненных по этому способу, может получиться ошибка на 10%
Другой приближенный метод основан на испытании модели. Рассмот-
рим модель крыла в уменьшенном масштабе, изготовленную из того же
материала, что и крыло, но пропорционально уменьшенное во всех измере-
ниях и деталях Поместим эту модель в аэродинамическую трубу с той же
скоростью потока, что и для реального крыла. Для того чтобы не изменять
величину в квадратных скобках, в уравнениях (7.36) необходимо умень-
шить единицу времени в том же отношении, что и единица длины. Однако
читатель может легко убедиться, что тогда силы упругости, сила аэро-
динамическая и сила инерции на модели крыла уменьшатся в Z2 раз, г. е.
в квадрат отношения масштабов длины и времени. В таком случае скорость
флаттера К, имеющая размерность Z/Z, останется неизменной, тогда как
частота флаттера w возрастет в линейном отношении масштабов. Такое
испытание имеет еще то достоинство, что оно применимо также для скоро-
стей, близких к скорости звука или лаже превышающих ее. в то время как
формулы (7.36) при таких скоростях становятся уже непригодными.
Однако описанное испытание на модели требует очень тщательного
выполнения самой модели и хорошей испытательной аппаратуры в аэро-
динамической трубе.
Для дозвуковых воздушных скоростей вычисления сравнительно
проще и отнимают меньше времени, чем испытания. Однако для звуковых
и сверхзвуковых скоростей в настоящее время модельные испытания явля-
ются единственной возможностью, поскольку мы еще не имеем надежных
формул для аэродинамических сил в звуковой и сверхзвуковой областях.
§ 7.11. Явление шимми
в колесах
автомобилей
Примерно около 1930 года стали значительно уменьшать,
по сравнению с прежним, давление в пневматиках автомобилей,
что имело целью получить более плавные эксплуатационные
характеристики. Такое изменение качества побочного эффекта
повлекло за собой возникновение особого явления в передних
колесах, названного шимми. Это явление доставляло в течение
g 7.]]
ЯВЛЕНИЕ ШИММИ В КОЛЕСАХ АВТОДЮБИЛЕЙ
439
нескольких лет неприятности, пока с ними не научились бороться
путем соответствующего поднятия параметров и при помощи
независимой подвески передних колес.
Шимми представляет собою колебания вращения передних
колес около вертикальных осей н в большинстве случаев отно-
сится к автоколебаниям. Для правильного понимания и объясне-
ния явления необходимо рассматривай три степени свободы в
Рис. 7.39. Иллюстрирование связи между движениями: «шимми» ipt
«трамп ин га» у и боковыми колебаниями х.
системе, вследствие чего эта задача является более сложной,
чем любая из изученных выше.
На рис. 7.39, а изображен вид автомобиля спереди, причем А
есть передняя ось, а В — поворотные шкворни. Вследствие упру-
гости пневматиков в вертикальном направлении эта ось может
поворачиваться в вертикальной плоскости па некоторый угол ср
по отношению к дороге. Кроме того, по причине боковой гибкости
рессор, а также и пневматиков она может еще перемещаться в
боковом направлении по отношению к кузову или к дороге (откло-
нение х). Посмотрим теперь на переднюю част! автомобиля
сверху (рис. 7.39,6). Мы видим, что колеса могут совершать также
колебания, поворачиваясь на угол в горизонтальной плоскости.
Вот это явление и представляет собою виляние колес, которое мы
440
АВТОКОЛЕБАНИЯ
ГЛ. VII
называем шимми. Так как оба колеса соединены между собою
жесткой соединительной штангой С, то угол виляния гр должен
быть одинаковым для обоих колес. Заметим, что возможны также
и некоторые другие движения, но, имея в виду настоящую цель
(исследование шимми), мы можем ими пренебречь.
Итак, мы имеем систему с тремя степенями свободы, положе-
ние которой определяется параметрами у, тр, х. Чтобы показать
возможность автоколебаний, необходимо установить, что, во-
первых, движения, соответствующие этим трем параметрам,
связаны между собою и, во-вторых, действует некоторый источник
энергии
Приступая к исследованию, заметим, что масса передних
колес и оси значительно меньше массы надрессорного строения
автомобиля. Так как колебания типа шимми происходят при
достаточно большой скорости, то корпус автомобиля (надрес-
сорное строение) оказывается почти неспособным принять участие
в этом движении. В последующем исследовании предполагается,
что корпус автомобиля перемещается прямолинейно вперед
вдоль дороги, тогда как передние колеса и ось совершают коле-
бания.
Рассмотрим боковое колебательное движение колес по отно-
шению к корпусу или к дороге, которое может быть выражено
уравнением
х = х^ sin cot.
Такое движение имеет место при поперечном перекашивании
рессор и приводит к возникновению переменной внешней силы,
действующей на ось. Часть этой упругой силы идет на ускорение оси
в направлении ж-ов, а оставшаяся часть вызывает реакцию, кото-
рая может быть осуществлена только в виде сил трения, действую-
щих со стороны дороги на шины. Далее эти реактивные силы дают
пару в плоскости рис. 7.39, а, стремящуюся вызвать колебатель-
ные движения, определяемые переменным углом ф и называемые
трампингом. С другой стороны, это последнее движение, вслед-
ствие гироскопического действия быстро вращающихся колес
связано с явлением шимми, характеризуемым переменным углом гр.
Так, например, если колесо имеет угловую скорость ф трампинга,
то возникающий при этом гироскопический момент будет стре-
миться уменьшить угол гр. Помимо этого, гироскопическим эффек-
том объясняется вращательное встряхивание рулевого штур-
вала, когда одно из колес переезжает через какое-либо препятствие
на дороге.
Источник энергии можно найти довольно легко. Как мы уже
видели, боковое движение х связано с боковыми силами трения
на поверхности катания колес. В свою очередь, эти силы вызы-
вают скольжение если не по всей поверхности соприкосновения
§ 7.Н ЯВЛЕНИЕ ШИММИ В КОЛЕСАХ АВТОМОБИЛЕЙ 441
шины с дорогой, то, по крайней мере, на некоторой ее части. Следо-
вательно, боковое перемещение н боковая сила F, приложен-
ная к шине, вообще говоря, уже не будут связаны между собой
обычной простой зависимостью для упругих деформаций, т. е.
зависимостью вида F — кх. Теперь эы зависимость должна
быть более сложной.
Даже если не входить в технические детали, все же ясно,
что при определенных фазовых соотношениях между перемеще-
нием х и силой F действия дороги эта последняя может совер-
шать работу при колебаниях. Очевидно, что эта работа является
результатом кинетической энергии движения автомобиля.
В случае, когда разность фаз перемещения и силы благоприят-
ствует возникновению неустойчивости, колебания должны про-
исходить тем интенсивнее, чем меньше гибкость системы и чем
жестче соединения. Наиболее существенное изменение в кон-
струкции передних колес автомобиля за последние несколько лет
заключается в применении особых шин, называемых баллонами,
большая мягкость которых делает возможными большие изме-
нения угла у. Широкое распространение сверхбаллонов, весьма
желательных для обеспечения комфортабельности езды, задер-
жалось, однако, на много лет вследствие осложнений, связанных
с их вилянием.
Математическое исследование задачи хотя и возможно, но
даже в наиболее элементарных случаях (когда делаются многие
значительные упрощения) оно приводит к уравнению частот
шестой степени, тогда как при более полном анализе мы приходим
к уравнению восьмой степени. Затруднения, связанные с подоб-
ными расчетами, в значительной степени обесценивают их.
Хотя в большинстве случаев шимми принадлежит к автоколе-
баниям, все же это еще не является правилом без исключения.
В самом деле, периодическое возмущение может быть вызвано
также неуравновешенностью колес, которая до некоторой степени
существует всегда, особенно когда покрышки оказываются не-
равномерно изношенными.
Допустим, что неуравновешенный груз на левом колесе нахо-
дится в наивысшем положении, в то время как на правом колесе
он занимает наинизшее положение. В таком случае центробеж-
ные силы от этих неуравновешенностей вызовут явление трам-
пинга с переменным углом у, что, в свою очередь, приведет к
возникновению шимми. Если угловая скорость вращения колес
совпадает с собственной частотой шимми, то возмущение полу-
чается особенно большим, и тогда мы имеем дело с обычным явле-
нием резонанса. Так как, по нашему предположению, диаметры
обоих колес различны, то, если, например, они отличаются друг
от друга на Vsoo своей величины, неуравновешенности обоих колес
окажутся совпадающими по направлению после 250 оборотов.
442
АВТОКОЛЕБАНИЯ
ГЛ. vn
причем в этом случае они возбуждают движение только вверх
и вниз, не связанное с шимми. Типичные медленные биения
подобного рода, наблюдаемые в действительности, показаны
на рис. 7.40.
Наиболее эффективный способ освобождения от колебаний
типа шимми, как вынужденных, так и самовозбуждающихся,
заключается в упразднении гироскопической связи, что и делается
в некоторых автомобилях путем независимого подвешивания колес.
В таких машинах передняя ось .отсутствует совершенно, а колеса
устанавливаются так, что они могут перемещаться лишь вверх и
Рис. 7.40. Вынужденные колебания типа «шимми», вызван-
ные неуравновешенностью колес.
вниз параллельно самим себе, оставаясь в одной плоскости. Этим
исключается вращение, определяемое углом у. В таких системах
можно ставить очень мягкие шины и мягкие передние рессоры,
не рискуя получить при этом нежелательные результаты.
Интересно .указать еще на одно явление автоколебаний,
очень сходных с явлением шимми в колесах автомобиля, а именно
па виляние трамвайных вагонов и электровозов. Подобного
рода возмущения часто случаются вообще в повозках, установлен-
ных на тележках, обладающих некоторой боковой гибкостью, и
проявляются в виде сильных боковых качаний с периодом, доходя-
щим до нескольких секунд. Здесь очевидно лишь то, что мы имеем
дело с автоколебаниями, энергия которых получается вследствие
трения колес о рельсы. В данном случае нет той гироскопической
связи, которая имеется в автомобилях. Следует заметить, однако,
что механизм этого виляния в настоящее время еще нельзя счи-
тать изученным. Явление шимми наблюдается не только у двух
колес на общей оси, как это изображено на рис. 7.39, но и у оди-
ночных колес. Так, ручные тележки, употребляемые в заводской
практике, обычно имеют четыре колеса, два из которых, укреп-
ленные в передней части тележки, имеют неподвижные оси,
тогда как два задних колеса могут поворачиваться вокруг верти-
кальных осей, причем между осью поворота-и вертикалью, про-
ходящей через точку опоры колеса, имеется некоторое расстоя-
ние, отличное от нуля. Замечено, что такие колеса, имеющие
$ 7.11
ЯВЛЕНИЕ ШИММИ В КОЛЕСАХ АВТОМОБИЛЕЙ
443
малый диаметр, совершают интересные колебания типа шимми,
особенно если ось поворота хорошо связана и если пол, по которому
катится тележка, твердый и гладкий. Надо сказать, что такое
явление в тележках никого не беспокоит. Однако совершенно
другое дело, если очень большие и очень дорогие самолеты терпят
катастрофу по причине шимми колес шасси, что и случалось неод-
нократно. Шимми колес шасси самолета периодически причиняло
неприятности и периодически здесь принимались соответствующие
меры. Новейшие наиболее тяжелые самолеты с хвостовыми
поворотными колесами доставляли в этом отношении много забот,
пока не были найдены способы рационального конструирования
этих колес. В последнее время, когда в современных тяжелых
самолетах стали переходить к носовому колесу, вместо хвосто-
вого, трудности вновь возникли, и в настоящее время не пред-
ставляется возможным предсказать теоретически, при какой
скорости колеса данной конструкции начнется шимми. Эта проб-
лема подвергается усиленному теоретическому и эксперименталь-
ному изучению, однако опа очень сложная, и здесь дело обстоит
пока столь же неудовлетворительно, как и в проблеме флаттера
крыла.
Мы дадим сейчас весьма упрощенный анализ явлений, причем
только для того, чтобы показать принцип исследования. Заметим
еще раз, что этот анализ слишком упрощен, чтобы иметь большое
практическое значение в реальном случае.
Предположим, что масса и жесткость самого самолета велики
по сравнению с этими величинами для поворотного колеса шасси,
вследствие чего можно считать, что точка прикрепления его оси
к самолету движется вперед с постоянной скоростью V. Предпо-
ложим далее, что шина является жесткой. На рис. 7 41, где в
плане представлено колесо, подвергающееся шимми, точка О
есть точка прикрепления стойки колеса к самолету. Эта точка
движется вправо с постоянной скоростью V. Точка Б есть нижняя
точка стойки. Нормально точка В лежит как раз под точкой С,
но при шимми стойка предполагается прогибающейся в сторону
на расстояние х. Колесо находится позади точки В под углом <р,
являющемся углом шимми, который равен нулю при нормальном
идеальном функционировании шасси. Точка А есть центр колеса,
а точка G — центр тяжести всего шасси. При шимми вследствие
трения возникает реакция F грунта, действующая на опорную
поверхность колеса. Далее, масса, колеблющаяся при поворотах
стойки, испытывает в точке В со стороны стойки силу кх. Таким
образом, для малых х и уравнения движения этой массы имеют
вид
т (х + by) + kx F — О,
kxb — Fa =
(7.39}
444
АВГОКОЛЕБАНИЯ
ГЛ. vn
Имеем два уравнения с тремя неизвестными: х, ср, F. Третье
уравнение получается из геометрического условия отсутствия
скольжения колеса. Это уравнение показывает, что касательная
к траектории точки Л должна иметь направление ЛБ1)
й? 4- 1$
-----------------------------— = tg <р р» <р
ил и
х + 1ф 4- Ftp = 0. (7.40)
Исключая силы F из уравнении (7.39), получаем
т (х 4- Ьф) 4- кх 4- ~ х — ~ ф = 0. (7.41)
Если сделать обычные предположения
х = x$esl, ср = <poesf,
то получим
жо5 + <ро (F + = 0,
х^ (ams2 4- kl) + <р0 (— IGs2 4- mabs2) = 0.
откуда находим уравнение частот, которое после упрощения
принимает вид
,3 + 32 . о № , ЕН =
4- та2 Iq 4- та2 ' Iq 4- та2
Поскольку здесь все коэффициенты положительны, остается
только одно условие Рауса [(7.9) стр. 385], согласно которому
будет иметь место устойчи-
вость, если
Рис. 7.41. Шимми поворотного колеса.
mat > lG 4- та2.
Полагая 1G = мы мо-
жем условие устойчивости
написать проще, а именно:
система устойчива, если
ab > (7.42)
Почти во всех существующих конструкциях шасси это нера-
венство нарушается, что можно видеть из решения или даже
Точнее говоря, это условие есть кинематическое, связывающее произ-
водные от координат, и притом так называемое неголономное, т. е. не могу-
щее быть проинтегрированным независимо от уравнений движения. (Прим,
перев.)
$ 7.11 ЯВЛЕНИЕ ШИММИ В КОЛЕСАХ АВТОМОБИЛЕЙ 445
просмотра задач № 213 и 214. Если имеются две массы (рис. 7.41),
сосредоточенные в точках А и В, причем эти массы соединены
невесомым стержнем, то аЪ = g- и система находится на границе
возникновения или исчезновения шимми1). Если А и В — то-
чечные массы, соединенные стержнем, также имеющим массу,
то ab >
В действительности колесо А имеет всегда большую массу,
которая выходит влево за точку Л, вследствие чего во всех прак-
тических случаях ab < т. е. имеет место неустойчивость в
смысле возникновения шимми.
В большинстве существующих конструкции в точке В на
рис. 7.41 имеется демпфер, гасящий крутильные колебания,
причем затухание в этом демпфере имеет существенное значение
для правильного функционирования шасси (задача 216). Другой
способ введения затухания состоит в установке па общем валу
двух параллельных друг другу колес, связанных между собою,
вследствие чего они могут вращаться только вместе с одной и той
же угловой скоростью. Это приводит к возникновению трепня
грунта, действующего как эффективное затухание Что касается
неравенства (7.42), то оно говорит нам о том, что момент инерции
колеса следует брать малым, а расстояние а + Ь = / большим.
В большинстве конструкций имеет место обратное, а поэтому
требуется введение мощного демпфера.
Анализ, приведенный выше (см. стр. 444 и рис. 7.41), весьма
схематичен. В более обстоятельном исследовании должны быть
приняты во внимание два важных фактора: динамика резиновой
шины и конечность фюзеляжа.
Заметим, что зависимость между боковой силой F шины
(рис. 7.41) и отклонением касательной к траектории в точке А
от угла ср очень сложная, которая найдена экспериментальным
путем лишь для низких частот, но которая далеко не достаточно
известна для высоких частот, наблюдаемых в шимми (более 20
колебаний в секунду).
При таких высоких частотах точка С фюзеляжа (рис. 7.41)
уже не будет вести себя так, как если бы она имела бесконечную
массу и бесконечную жесткость.
1) Автор говорил только об исчезновении или возникновении шимми.
•Но это имеет место лишь при таком изменении параметров системы, когда,
например, совершается переход из области неустойчивости [неравенство
(7.9) не удовлетворяется] в область устойчивости [неравенство (7.9) удов-
летворяется]. При противоположном изменении параметров совершается
обратный переход, приводящий к возникновению шимми. На самой гра-
нице области устойчивости, когда неравенство (7.9) заменяется равен-
ством, действительное поведение системы определяется нелинейными чле-
нами, не вошедшими в уравнение движения при их составлении. (Прим,
перев )
446 АВТОКОЛЕБАНИЯ ГЛ. VII
Фюзеляж представляет собою столь сложную систему, что
целесообразно найти импеданс Z точки С экспериментальным
путем Для этого следует небольшой неуравновешенный мотор
прикрепить в нижней точке С самолета, и тогда можно определить
отношение боковой силы к боковому перемещению для целого
ряда частот. Этот импеданс войдет тогда в дифференциальные
уравнения движения вместо значения Z = oo, как было прежде.
В диапазоне частот, встречающихся на практике, кривая Z =
=/(со) обычно имеет несколько пиков (очень больших, грубо
говоря, бесконечных значений) и несколько нулей (точнее, очень
малых значений).
Задачи № 196—216
ГЛАВА VIIJ
КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
СИСТЕМ
§ 8.1. Принцип наложения
Математическое исследование всех задач, встречавшихся нам
до сего времени, могло быть выполнено при посредстве линейных
дифференциальных уравнений с постоянными коэффициентами.
С физической точки зрения это означает, что все массы постоянны,
все восстанавливающие силы пропорциональны соответствующим
отклонениям и все силы затухания пропорциональны скорости.
В настоящей главе предполагается рассмотреть случаи, где эти
условия уже не выполняются, причем вследствие возникающих
при этом значительных осложнений наше исследование будет
ограничено лишь системами с одной степенью свободы. Отступ-
ления от классической задачи, выражаемой уравнением (2.1) на
стр. 44, здесь будут двоякого рода Прежде всего в §§ 8.2—8.4
мы займемся дифференциальными Уравнениями, которые остаются
по-прежнему линейными, но в которых коэффициенты являются
функциями времени; колебания, выражаемые такими уравнения-
ми, называются квазигармоническими. В конце главы мы обратимся
к нелинейным дифференциальным уравнениям: колебания, выра-
жаемые этими уравнениями, называются псевдогар ионическими.
Заметим сейчас же, что разница между теми и другими чрезвы-
чайно большая.
Рассмотрим типичное линейное дифференциальное уравнение
с переменным коэффициентом при х\
тх + сх + /(£) х — 0, (8.1)
которое определяет движение системы, когда коэффициент же-
сткости зависит от времени. Допустим, что мы знаем два частных
решения этого уравнения, а именно:
х = (p^t) и х = <р2(0-
448 КВАЗИГАРМОНИЧ ИСКИ Е И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
Тогда решением будет также 0^(0, где Сг — постоянная, а
поэтому общее решение уравнения (8.1) представится в виде
ж = 0^(0 4- C2<p2(t}, (8.2)
так как и здесь два частных решения могут быть сложены, давая
при этом третье решение Таким образом, имеем следующее поло-
жение: принцип наложения (или суперпозиции} сохраняет свою
силу также для дифференциальных уравнений с переменными коэф-
фициентами.
Доказательство высказанного положения очень просто: мы имеем
+ c<p}(t) 4- f(t). = О,
== 0.
Умножая первое уравнение на С'р а второе на С2 и складывая, находим
т + с fCVM*) 4- ЩМП] 4- /(0 + C2<p2(i)] = 0.
Отсюда видно, что выражение
(6^(0 4- С2ф2(0]
удовлетворяет дифференциальному уравнению (8.1) и поэтому является
•его решением.
В прикладных вопросах механики переменной величиной обыч-
но бывает коэффициент жесткости, чему соответствует уравнение
(8.1) Однако есть один важный случай, где переменной величиной
оказывается масса (см. рис. 5.10, стр. 250) Этот случай может
быть исследован на основе того же дифференциального уравнения,
если только отсутствует затухание. В самом деле, в этом случае
мы имеем
mlt) • х 4- kx = 0, (8.3)
где m(t) есть переменная масса. Деля написанное уравнение
на m(t), получим уравнение
х + х = 01 (8-4)
ТП1 (г)
относящееся к случаю системы, масса которой равна единице и,
следовательно, постоянная, а коэффициент жесткости зависит от
времени
Нелинейное дифференциальное уравнение есть такое урав-
нение, р которое перемещение х или его производная входят
нелинейным образом, т. е. не в первой степени, как, например,
в уравнении
тх 4- kx2 = 0 (8.5)
или в более общем виде
тх 4- f(x) = 0. (8.6)
§ 8.2 ПРИМЕРЫ СИСТЕМ С ИЗМЕНЯЮЩЕЙСЯ ЖЕСТКОСТЬЮ 449
Для нелинейных уравнений принцип наложения уже не имеет
места, т. е. линейная комбинация частных решений не будет
решением.
Высказанное утверждение легко проверить. В самом деле, пусть
Ж1 = и являются решениями уравнения (8.5). Следовательно,
m<h 4- fcfai(0]2 = О,
Wi + £[фа(0]2 ’ 0.
Отсюда сложением находим
4- $2<0] 4- ^{[<Г1(0]2 4- [W0]2} = 0.
Если бы сумма срг + <р2 была также решением, то последняя скобка должна
бы равняться (tpi 4- р2)2. В данном случае недостает члена 2p1p2i вследствие
чего выражение 4- р2 не есть решение уравнения (8.5).
Несмотря на сделанные оговорки, все же общее решение
уравнения (8.5) или (8.6) должно включать в себя две произволь-
ные постоянные Сг и О2, так как для его решения нам так или
иначе необходимо выполнять два раза интегрирование. Однако
в то время как в случае линейных уравнений знание двух частных
решений немедленно приводит к общему решению в форме (8.2),
этого, как мы видим, уже нет в случае нелинейных уравнений.
Имеется только очень небольшое число нелинейных уравнений,
общие решения которых известны, но, как правило, все, что мы
здесь можем сделать, это ограничиться отысканием частных реше-
ний, да и то лишь приближенным путем.
§ 8.2. Примеры систем с изменяющейся жесткостью
В этом параграфе рассматриваются с физической точки зре-
ния семь случаев, причем частично дается также объяснение
соответствующих явлений. Более детальное исследование их
должно быть выполнено безусловно с помощью математических
выкладок, что нами и будет сделано в двух ближайших параграфах.
Первый случай. Рассмотрим систему, состоящую из диска,
укрепленного в середине вертикального вала, вращающегося в
двух подшипниках В, из которых только верхний показан на
рис. 8.1. Поперечное сечение вала не является кругом, и вообще оно
таково, что имеет два главных направления с наибольшей и наи-
меньшей жесткостью. Пусть это будет, например, прямоуголь-
ник. Положим, кроме того, что на валу, в непосредственной близо-
сти к диску, имеются две круговые заточки Л, А. Эти заточки
могут скользить в двух прямолинейных направляющих, ограни-
чивающих движение вала одной плоскостью, например плоско-
стью, перпендикулярной к плоскости чертежа. Таким образом,
диск, подчиненный упругому действию гибкого вала, представляет
собою колеблющуюся систему с одной степенью свободы. Во время
вращения вала его коэффициент жесткости изменяется в зависи-
29 Ден-Гартог • 2074
450 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
мости от времени, достигая дважды за один оборот наибольшего
значения к + Лк, и дважды наименьшего к — Лк, вследствие чего
дифференциальное уравнение движения имеет вид
тх + (к + Лк sin cokt) х = 0, (8.7)
где ок есть удвоенная
угловая скорость вращения вала, а индекс
& поставлен для того, чтобы подчеркнуть,
что здесь мы имеем дело с изменением ве-
личины к.
Далее, расположим тот же вал гори-
зонтально в вертикальных направля-
ющих А, благодаря чему колебания диска
будут ограничены вертикальным направ-
лением. В этом случае в качестве до-
бавочной силы появится вес диска G,
вследствие чего уравнение (8.7) изменится,
приняв вид
тх + (к + Лк sin ок1) % = G. (8.8)
Если бы упругие свойства вала не изменя-
лись, то между уравнениями (8.7) и (8.8)
не было бы никакой существенной раз-
ницы, так как второе из них переходит
в первое при простом изменении начала
отсчета я-ов (расстояние между прежним
началом и новым должно быть равно
статическому прогибу вала под диском).
Однако переменный коэффициент жест-
кости меняет дело.
Введем новую переменную:
у — х + С,
Рис. 8.1. Диск, укреплен-
н ый на вал у, сечение кото-
рого имеет различную
жесткость по разным
направлениям. Система
имеет то свойство, что
колебания вала могут
происходить только в од-
ной плоскости. где С есть постоянная, которую надлежит
определить так, чтобы результат полу-
чился возможно проще. Подставляя в уравнение (8.8), имеем
ту + (к + Лк sin G)kt) у = G + кС + СЛк sin cokt. (8.9)
Если бы изменение коэффициента жесткости Лк было равно
нулю, мы могли бы выбрать коэффициент С равным —G/k, приведя
тем самым уравнение (8.9) к виду (8.7). Однако при Лкф 0 это
уже невозможно. Интересно отметить, что если вообразить, что в
последнем уравнении G = 0, то в уравнении (8.7), при простом
перемещении начала координат, появляется правая часть, которая
может считаться внешней переменной силой частоты сок [см.
формулу (6.6 с) на стр. 334].
§ 8.2 ПРИМЕРЫ СИСТЕМ С ИЗМЕНЯЮЩЕЙСЯ ЖЕСТКОСТЬЮ 451
Итак, мы видим, что уравнения (8.7) и (8.8) не могут быть
преобразованы одно в другое. Они являются принципиально
различными, и с ними следует оперировать как с различными.
Сделаем предположение, что изменения величины к малы
по сравнению с самой этой величиной (Лк нс превышает 10%
от к\ Тогда упругая сила соответствует величине к, и колебания
Рис. 8.2. Объяснен ня неустойчивости срезанного вала
при половинной и полной критической скорости.
диска являются почти гармоническими с частотой оп = у — .
При определенном соотношении между собственной частотой
колебаний оп и частотой изменения жесткости <ок, а также при
соответствующей зависимости между фазами возможно большое
нарастание колебаний. Рассмотрим две кривые на рис. 8.2,а
и 8.2,6, иллюстрирующие движение х диска с частотой Рас-
смотрим также изменения коэффициента жесткости, происходя-
щие с частотой, в два раза большей, чем собственная частота коле-
баний системы. Эти графики относятся к случаю вертикального
вала (эффект силы тяжести отсутствует), так что прямая О А опре-
деляет равновесное положение при отсутствии изгибающих
напряжений в вале. Таким образом, упругая сила представится
произведением ординат рис. 8.2,6 и 8.2,а, отсчитываемых от линии
О А. При том соотношении фаз, для которого построены графики,
мы видим, что при движении диска от центрального положения
(7—2 и 3—4) упругая сила меньше своего среднего значения, в
29*
452 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
то время как при движении диска по направлению к централь-
ному положению (2—3 и 4—5) упругая сила больше среднего
значения. Таким образом, упругая сила оказывается меньшей,
когда она противодействует движению, и большей, когда она спо-
собствует движению. Следовательно, за весь полный цикл коле-
бания упругая сила совершает положительную работу, увеличи-
вая тем самым энергию системы, и колебания нарастают. Мы
имеем поэтому неустойчивое состояние.
При действии силы тяжести упругая сила по-прежнему будет
выражаться произведением коэффициента к на отклонение (рис.
8.2,а), но теперь ордината должна отсчитываться уже не от О А,
а от другой прямой ОБ. находящейся от О А на расстоянии стати-
ческого прогиба 6СТ. Существование этой разницы 8СТ не нарушает
предыдущих рассуждений, относящихся к изменениям коэффи-
циента к в соответствии с рис. 8.2,5 однако теперь уже оказы-
вается возможным получить работу при другом изменении коэф-
фициента к, представленном на рис. 8.2,6, когда 2с» = ок (вал
вращается со скоростью, равной половине критической). Это
происходит по той причине, что упругая сила мала (при пере-
мещении от положения 2 до положения 4), когда диск уходит от
своего равновесного положения ВБ, и велика (при перемещнии
от положения 1 до положения 2 или от 3 до 4), когда он к нему
приближается.
Работа, совершаемая за цикл, вообще равна
J F dx = — J kxdx,
где х = 6СТ — #osin cot. Мы подставляем вместо к его варьирован-
ное значение к — Лк sin Zed (рис. 8.2,5). Читателю предлагается
подставить это значение в интеграл и показать, что работа равна
+ Дкх%, т. е. не зависит от 6СТ. Для случая на рис. 8.2,в мы
подставляем к + Лк cos ot вместо к, и тогда работа оказывается
равной + дтД&я06ст, т. е. она получается отличной от нуля
только при действии силы тяжести. Таким образом, физический
анализ приводит нас к нижеследующим заключениям.
1. В системе, движение которой выражается уравнением
(8.7), т. е. в случае вертикального вала с плоскими срезами,
всякие могущие быть малые колебания с собственной частотой
ос = возрастают до больших амплитуд, если вал вращается
со своей полной критической скоростью (ок = 2сос).
2. Для системы, движение которой выражается уравнением
(8.8), т. е. в случае горизонтального вала с плоскими срезами,
такой же тип неустойчивости имеет место как при полной крити-
ческой скорости, так и при скорости, равной ее половине.
$ 8.2
ПРИМЕРЫ СИСТЕМ С ИЗМЕНЯЮЩЕЙСЯ ЖЕСТКОСТЬЮ
453
Высказанные заключения являются лишь ориентировочными.
Исследование уравнений в ближайших параграфах покажет нам,
в какой мере они должны быть пополнены.
Валы, встречающиеся на прак i икс, сечение которых отличается
от кругового и для которых могут иметь место критические ско-
рости, равные половине нормальной критической, изображены на
рис. 8.3. Здесь слева показан круглый вал со шпоночной канавкой.
В данном случае вредное
воздействие канавки может
ыть устранено, если вы-
резать еще две уравно-
вешивающие, симметрично
расположенные канавки,
благодаря которым жест-
кость вала получается
одинаковой по всем на-
Рис. 8.3. Случаи неравномерной жесткости
вала и ротора.
правлениям.
Другим примером мо-
жет служить поперечное
сечение двухполюсного
ротора турбогенератора, в котором пропилены желобки
для электрической обмотки, причем сплошные твердые части
образуют лицевые стороны полюсов. В этом случае
неравномерное распределение упругих свойств
не может быть избегнуто, вследствие чего двух-
полюсный ротор всегда обладает неспокойным
\ ходом на половине критической скорости.
Рис. 8.4. Нить с
изменяющимся
Второй случай, весьма сходный с только что
рассмотренным случаем вала, это — упругая
нить или струна, несущая массу т в своей сере-
дине и имеющая переменное натяжение, изменяю-
щееся с частотой (ok от максимума Т +1 до
минимума Т — t, что можно осуществить, если
тянуть с переменной силой за один конец
(рис. 8.4). Если мы будем усиливать натяжение,
когда масса т движется к центру, и ослаблять
при ее движении от центра, то таким путем можно
достигнуть значительного нарастания колебаний.
За тот же промежуток времени, за который масса
натяжением, т совершает одно полное колебание, конец струны
каквторой при- совершает два колебания. Здесь мы имеем слу-
уравненияН(8Н7)Я ча^’ соответствующий случаю на рис. 8.2,6. Если
же взять горизонтальную струну, то вступает
в действие еще сила тяжести, которая подводит нашу систему
под случай, соответствующий уравнению (8.8) и рис. 8.2,в. Периоди-
ческое изменение натяжения может быть вызвано также
454 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
изменением температуры. Проволока, по которой течет пере-
менный ток, имеет температурные изменения, а следовательно
и изменения натяжения, происходящие с частотой,равной удвоен-
ной частоте электрического тока. Нарастание боковых колебаний
мы получим, если собственная частота окажется равной частоте
тока или в два раза больше его.
Третий случай показан на рис. 8.5. Здесь мы имеем матема-
тический маятник, состоящий из грузика, подвешенного к одному
концу нити, другой конец которой перемещается вверх и вниз
по гармоническому закону. Так как квазиупругий коэффициент
Рис. 8.5. Маятник переменной длины.
^^математического маятника равен то периодическое изме-
L нение длины I обозначает
в то же время изменение
этого квазиупругого коэф-
фициента. Поэтому боко-
вые перемещения грузика
подчиняются уравнению
(8.7). Для того чтобы ко-
лебания могли возрасти до
большой величины при
изменении длины с часто-
той со1{ = 2фс = 2^“, нео б-
ходимо тянуть нить вверх
при крайних положениях,
в середине размаха и отпускать вниз
вследствие чего грузик будет описывать фигуру наподобие восьмер-
ки, как показано па рис. 8.5. Натяжение нити оказывается больше
при малых значениях угла р и меньше при больших, что объясняется
следующими причинами. В крайних положениях это натяжение
равно весу грузика, умноженному на cosp. В этих положениях
cos меньше единицы. В середине, где costp равен единице, натя-
жение равно всему весу, да еще сложенному с центробежной
силой грузика, движущегося по своей криволинейной траектории.
Таким образом, втягивая нить в среднем положении, мы действуем
против большого натяжения, тогда как при отпускании нити в
крайних положениях натяжение мало. В конце концов сила,
приложенная к системе и действующая непосредственно на
нить, заставляя ее изменять свою свободную длину, производит
некоторую положительную работу, которая увеличивает кинети-
ческую и потенциальную энергию грузика, совершающего вслед-
ствие этого возрастающие колебания.
Четвертый пример значительно труднее понять с физической
точки зрения. Здесь мы имеем приблизительно то же, что и в
Здесь с физической точки зрения было бы неправильно называть к
коэффициентом жесткости. (Прим, перев.)
§ 8.2
ПРИМЕРЫ СИСТЕМ С ИЗМЕНЯЮЩЕЙСЯ ЖЕСТКОСТЬЮ
455
предыдущем случае, с той лишь разницей, что маятник представ-
ляет собою жесткий стержень постоянной длины, но его точка
опоры (вокруг которой он может свободно вращаться) совершает
быстрые вертикальные гармонические колебания, осуществляе-
мые посредством небольшого электромотора. Ниже будет пока-
зано (см. стр. 466), что такой маятник обладает поразительным
свойством, а именно, он может стоять в вертикальном положении
на своей точке опоры. Квазиупругий коэффициент такого физи-
ческого маятника равен опять
, но Л здесь уже есть «при-
веденная длина». В этом опыте
длина Л постоянна, зато перио-
дически изменяется ускорение
силы тяжести д. Такое измене-
ние величины д легко можно
понять, если рассмотреть дав-
ление человека на пол кабинки
лифта. Когда лифт стоит на
месте или движется с постоян-
ной скоростью, давление равно
весу человека; если же уско-
рение лифта направлено вверх,
то оно больше веса, а при
ускорении, направленном вниз,
меньше. Наблюдатель, находя-
щийся в ускоренно движущемся
лифте, может заметить, что зна-
чение д в этом случае отлича-
ется от его значения на земле.
Также обстоит дело и с маятником: когда ему сообщается уско-
рение вверх, значение д становится, очевидно, больше. Таким
образом, мы показали периодичность изменения квазиупругого
коэффициента, а тем самым и применимость в данном случае
уравнения (8.7). Более подробное изучение этого вопроса будет
дано на стр. 467.
Пятый случай, который нам предстоит рассмотреть, является
наиболее важным с точки зрения технических приложений.
Здесь дело заключается в том, что в ведующей системе электро-
возов с передачей движения спарниками наблюдаются сильные
крутильные колебания в некоторых областях скоростей. Эти
колебания вызываются периодическими изменениями или пульса-
циями, происходящими в коэффициенте жесткости системы, как
это можно видеть на рис. 8.6, изображающем одну из простейших
конструкций подобного рода. Электромотор укреплен на раме и
соединяется с ведущей осью посредством спарника с каждой
456 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. УШ
стороны электровоза. Так как кривошипы обеих сторон расстав-
лены под углом 90° между собой, то вся ведущая система в целом
не имеет мертвых положений. При обычных условиях работы
колеса сцепляются с рельсами силой трения, но в то же время,
вследствие гибкости спарников, мотор имеет возможность не-
сколько поворачиваться, не вызывая вращения колес. Когда
какой-либо спарник оказывается в одной из своих мертвых
точек, то он совершенно не может противодействовать мотору
повернуться на некоторый малый угол, т. е. его доля в полном
значении коэффициента жесткости к равна нулю. Напротив, при
отклонении от мертвого положения на 90° этот же спарник при-
Рис. 8.7. Коэффициент жесткости системы рис. 8.6
как функция угла поворота.
дает системе большую жесткость, так как для возможности малого
поворота мотора либо должен удлиниться этот спарник, либо
должен изогнуться палец кривошипа. Таким образом, коэффи-
циент жесткости только одного спарника изменяется между
некоторым максимумом и некоторым минимумом, практически
равными нулю, совершая два полных изменения за каждый оборот
колеса. Изменение гибкости совокупности обоих спарников выра-
жено менее резко и имеет четыре цикла за один оборот. Кривые
1 и 2 на рис. 8.7 показывают величину крутящего момента на
валу мотора, приходящегося на один радиан закручивания, когда
включен только один спарник 1 или 2. Кривая 3, ординаты кото-
рой равны сумме ординат кривых 1 и 2, показывает изменение
результирующего коэффициента жесткости к для всей системы.
Крутильные колебания мотора под влиянием пружинящего
действия спарников налагаются на основное его вращение. Опи-
санное явление математически выражается уравнением (8.7),
где величина (ок в четыре раза больше угловой скорости колес.
Следовательно, естественно ожидать возникновения значительных
колебаний, когда
сус = ^ • 4 • 2tcN,
а
где N — число оборотов в секунду.
§8.2
ПРИМЕРЫ СИСТЕМ С ИЗМЕНЯЮЩЕЙСЯ ЖЕСТКОСТЬЮ
457
Рис. 8.8. Мотор
электрических ча-
сов представляет
собою систему, со-
вершающую осе-
вые колебания,
где роль пружин
играют электро-
маги и ты В.
Шестым примером может служить небольшой синхронный
мотор в электрических часах (рис. 8.8). Вращающаяся часть таких
моторов обычно состоит из очень легкой металлической пластинки
А, вращающейся вокруг полюсов Л, по обмоткам которых течет
переменный ток. Ротор может скользить в под-
шипниках вдоль оси, но в то же время удержива-
ется в определенном по ложен и и магнитным полем
полюсов В. Магнитное действие этих полюсов
подобно действию пружины, причем, в случае
тока в 60 периодов в секунду, напряжение поля
обращается в нуль 120 раз в секунду, вследствие
чего изменение квазиу пругого коэффициента здесь
очень велико (100%). Нежелательные явления
выражаются в виде продольных колебаний ро-
тора, сопровождающихся шумом.
Седьмая и последняя иллюстрация урав-
нений (8.7) это — электрическая аналогия.
Достаточно взглянуть па таблицу, приве-
денную на стр. 47, чтобы заметить, что здесь
мы имеем дело с электрическим контуром,
включающим в себя индуктивность L и ем-
кость С, причем емкость коденсатора периодически изменяется,
например, посредством кривошипного механизма, показанного
на рис. 8.9. Перемещению х в уравнении (8.7) в данном
Рис. 8.9.Электрический контур с
переменной емкостью (здесь кон-
денсатор соответствует пру жине).
когда заряд Q, а вместе с ним
случае соответствует величина
заряда Q пластинок конденса-
тора. Постоянная правая часть
уравнения (8.8) определяется ис-
точником постоянного тока —
батареей, включенной в цепь.
Рассмотрим сначала систему без
батареи. Две заряженные обклад-
ки конденсатора находятся в
механическом взаимодействии,
притягивая друг друга. Электри-
ческий ток в контуре с L и С
имеет колебательный характер
с частотой б?с = . Положим,,
что действие кривошипного ме-
ханизма рассчитано так, что
пластинки удаляются, когда за-
ряд Q большой, и сближаются,,
и притягивающая сила малы. Таким
образом, кривошипный механизм (угловая скорость вращения ко-
торого равна удвоенной частоте тока, т. е. со1{ = 2соп) совершает
458 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VII]
механическую работу, преобразующуюся в электрическую энер-
гию системы. В случае мошной батареи и малых колебаний заряд
каждой обкладки конденсатора совершенно не меняет знака,
а поэтому действие системы при частоте ык = сос происходит
подобно тому, как это представлено на графике рис. 8.2,в.
§ 8.3. Решение уравнения
Решение большинства задач, рассмотренных в предыдущем
параграфе, определяется решением дифференциального уравнения
типа
тх = [к + Лк • f(t)] х = 0, (8.10)
где f(t) есть периодическая функция времени, имеющая обычно
вид:
f(t) = sin сок1.
Общее решение этого уравнения, известного под названием уравне-
ния Мапгьё (Mathieu), содержащее две произвольные постоян-
ные, до сих пор еще не найдено. В самом деле, существует лишь
очень небольшое число уравнений с переменными коэффициентами,
для которых решения известны. Однако здесь мы интересуемся
не столько самим решением, т. е. отысканием iочной формы дви-
жения, как вопросом о том, является ли решение «устойчивым»
или «неустойчивым», иначе говоря, определяет ли оно устойчивое
или неустойчивое движение. Простейшее решение уравнения
(8.10) есть х = 0. Иными словами, система может оставаться
в покое неопределенно долгое время. Если же было дано некоторое
начальное возмущение (х = х0 или х = г>0), то система уже не
может оставаться в покое, и тогда нашей задачей в данном случае
является установление различия между движением устойчивым
и неустойчивым. Под устойчивым движением мы будем подразу-
мевать такое, когда возмущение с течением времени постепенно
пропадает, подобно тому, как это имеет место в затухающих
колебаниях, тогда как в случае неустойчивого движения ампли-
туды со временем нарастают (рис. 7.2)1).
Если «пульсация» f(t) коэффициента жесткости или вообще
квазиупругого коэффициента имеет частоту то движение
хотя может и не быть периодическим, все же обнаруживает какую-
то закономерность по истечении каждого интервала Т = — .
г) Возбуждение колебаний, обусловленное периодическим изменением
коэффициента жесткости, являющегося одним из параметров, характери-
зующих систему, называется параметрическим возбуждением, а наступаю-
щий при определенных условиях рост амплитуд колебаний такой системы
называется параметрическим резонансом. (Прим, перев.)
S 8.3
РЕШЕНИЕ УРАВНЕНИЯ
459
Пусть система приходит в движение в момент t = 0, имея
отклонение х = xQ и скорость х = vQ. Пусть, далее, х = F(t)
представляет собою (пока неизвестное) решение уравнения.
Сделаем, наконец, еще предположение, что по истечении одного
периода Т = — отклонение и скорость сделались равными
своим начальным значениям, умноженным па некоторый множи-
тель s (положительный или отрицательный):
(х) ^n=sxQ\ (х) (8.11)
f Е= - I = ------------
<4^ <4к
Является ли последнее допущение справедливым, нам еще
надо проверить. Если оно справедливо, то второй период коле-
бания начинается при отклонении и скорости, соответственно
в s раз больших своих значений вначале первого периода. Легко
показать также, что и движение в течение всего второго периода
происходит в s раз большем масштабе по сравнению с движением
в соответствующие моменты в пределах первого периода и, в
частности, что третий период начинается с отклонения s2#0.
Доказательство выполняется следующим образом. Пусть х = F(t)
есть решение уравнения (8.10) с начальными условиями:
= х0 и (±)/e0 = v0. (8.12)
Для перемещения в течение второго периода движения введем новую
переменную у = sx, тогда дифференциальное уравнение, после умножения
на s, примет вид
ту + [& + Л к • = 0. (8.13)
Если теперь отсчитывать время от момента начала второго периода,
то начальные условия будут таковы:
(y)t^o = sxQ = у0- (y)t=0 = sw0 = yQ. (8.14)
Таким образом, мы видим, что уравнения (8.13) и (8.14) совершенно такие
же, как и уравнения (8.10) и (8.12), а поэтому у = F(t) есть решение. Следо-
вательно, поведение величины у = sx в течение второго периода таково
же, как и поведение величины х в течение первого периода.
Итак, если предполсжение, выражаемое равенствами (8.11),
правильно, то мы имеем решение, повторяющее свои значения
после каждого периода, соответствующего частоте ок> только
эти значения всякий раз умножаются на постоянный множитель
совершенно таким же образом, как это имеет место в уравнении
(2.19) или на рис. 7.2. Если величина s меньше единицы, то дви-
жение затухает и оно устойчиво; если же s больше единицы,
то движение неустойчиво. Для произвольной периодической
функции /(0 уравнение (8.10) не может быть разрешено. В то же
время, когда мы имеем частный случай «прямоугольной пульсации»,
460 КВЛЗИГАРМОННЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
составляющей Лк коэффициента жесткости к (рис. 8.10), решение
получаеюя сравнительно просто. Хотя в большинстве практи-
ческих случаев эта пульсация происходит скорее по синусоидаль-
ному закону, чем по прямоугольному, тем не менее общее пове-
дение системы почти одинаковое, будет ли пульсация происходить
согласно рис. 8.10 или по гармоническому закону.
к
Если обозначить - = и
т с
Л0 = ±Ь то дифференциальное
уравнение (8.10) при 0< сок t< тг
примет вид
л
а
О л 2л Зл 4л
Рис.8.10. Случай изменения коэффи-
циента жесткости, когда уравнение
(8.10) может быть решено.
х + (со* х = 0, (8.15)
при Л<(0к1<2л или при
— л < (Dkt < 0 оно будет
х = 0. (8.16)
Решение
(2.8) на
Так как в этих уравнениях
коэффициенты при х оказыва-
ются теперь постоянными, то они оба легко решаются,
для первой половины периода [см. уравнения (2.7)
стр. 52] есть
и
= Ст sin p-J + С2 cos p^t,
где
и для второй половины периода
х2 = О3 sin p2t 4- С4 cos p2t>
(8.17)
(8.18)
где
]/о ~Kk
р2— / «а — —
vc т
Эти два решения должны находиться между собою в таком
соответствии, чтобы при okt = л они давали одинаковые откло-
нения и одинаковые скорости. Кроме того, они должны определять
собою движение, линейные элементы которого в конце первого
периода были бы в s раз больше соответствующих их значений в
начале периода. Отсюда получаем условия в виде четырех урав-
нений:
(^i)e*i=o = (жа)®л«в0 >
= (^2)®И»0 >
(^К^^Я = я»
= S($i)®j.fe —п>
(8.19)
S 8.3
РЕШЕНИЕ УРАВНЕНИЯ
461
из которых могут быть определены четыре произвольные постоян-
ные в уравнениях (8.17) и (8.18). Первые два из уравнений (8.19)
приводят к простому результату:
С. = С.„ G\ P1C1 .
4 7^2
тогда как вторые приводят к более сложному результату:
Со sin—----Н Сл cos — я С, sin 4- s Go cos -- ,
Wfr 9 й>/< Wj{ “ Wk
Рг Cs cos - p2 Ct sin = s Pl Cj cos -b s p, C2 sin
Wk Wk Wk wk
или после подстановки C4 = C2 и C3 = имеем
Cx sin — + s sin + Co (cos — s cos -^-1 = 0,
1 \p2 Wk Wk j Wk Wk )
<?i (рг cos — s pr cos —] 4- Col — sin - — — p1 s sin —) = 0.
1 I/ 1 Wk 11 Wk ) l Ы1{
Мы получили два однородных уравнения относительно С2 и С2.
С-,
Определяя из каждого уравнения отношение >г, приравнивая
о2
эти отношения друг другу и группируя члены нового урав-
нения по степеням s,окончательно получим
s2 — 2s (cos cos — — р-2 sin — sin —I 4-1=0. (8.20)
( Wk Wk ^P1P2 Wk wk j
Если для сокращения обозначить выражение в скобках через А,
то решение уравнения (8.20) примет вид
s = Л + У J2 — 1. (8.21)
В случае, когда А > 1, одно из двух возможных значений s боль-
ше единицы, и решение определяет собою неустойчивость. По
истечении каждого периода колебания с частотой увели-
чившееся отклонение имеет то же самое направление, так что
за каждый период колебания — имеют место 1, или 2, или 3
Wk
и т. д. периодов свободных колебаний с частотой юс.
Если А оказывается между —1 и 4-1, то оба значения s
становятся комплексными. Это указывает на то, что сделанное
предположение, выражаемое равенствами (8.11), невозможно.
В то же время, мы видим, что действительная часть s представляет
собою правильную дробь. Следовательно, можно ожидать дви-
жение, которое не является регулярно возрастающим с течением
времени, т. е. система устойчива.
462 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
Наконец, когда А меньше, чем —1, одно из значений s будет
также меньше, чем —1. С физической точки зрения это значит,
что после одного полного колебания с частотой coh отклонение, и
скорость системы принимают обратные направления и становятся
несколько больше по абсолютной величине. По истечении двух
периодов они принимают прежние знаки, делаясь в то же время
еще больше (так как перемещение и скорость умножаются на
s2, а эта величина положительная и больше единицы). Опять мы
Рис.8.11. Основная диаграмма,определяющая устойчивость
системы с переменной упругостью. Заштрихованные об-
ласти устойчивые, а белые—неустойчивые (по Ван-дер-Полю
и Стрэтту).
имеем здесь неустойчивость, но в течение каждого периода коле-
баний сок мы имеем B/g, 2V2 и т. д. периодов свободных коле-
баний.
Таким образом, система неустойчива, если | А | > 1 или если
имеет место неравенство
1008^С08ЛР?_^_±Р1 sin^sin^l > ]. (8.22)
w/{ 2рг р2 ык I
где вертикальные прямые черточки указывают на абсолютную
величину выражения. Что касается значений и р2, то они опре-
деляются формулами, данными непосредственно после уравнений
(8.17) и (8.18). В написанном соотношении имеются две перемен-
ные величины p-Jcok и Pzl(Dk или, лучше сказать, o)c/o)k (отношение
«свободной» и «упругой» частот) и Лк/к (отношение амплитуды
пульсации коэффициента жесткости к среднему значению послед-
него, см. рис. 8.10).
§ 8.4
ИНТЕРПРЕТАЦИЯ РЕЗУЛЬТАТА
463
W|2
Результат (8.22) представлен графически на рис. 8.11, где
для удобства по оси абсцисс отложены значения
ординат — произведения
2
, а по оси
. Причина выбора за абсциссы
квадратов отношения частот заключается в том, что мы желаем
иметь возможность строить на графике также и отрицательные
квазиупругие коэффициенты (как, например, в вертикальном
астатическом маятнике), которые сейчас могут быть нанесены
/юД2 к
как отрицательные значения =— 7^2’ в то время как в
случае откладывания первых степеней сос/сок абсциссы для отрица-
тельного квазиупругого коэффициента получились бы мнимыми.
Далее, если бы мы приняли за ординаты отношение Д/Л, то в случае,
когда постоянная часть этого коэффициента отсутствует, т. е.
к = 0, мы получили бы для этого отношения бесконечное значе-
ние; такого неудобства можно избегнуть, если по ординатам
строить — =-^g. На нашей диаграмме сплошные линии
соответствуют значению левой части (8.22), равному +1, а пунк-
тирные — значению, равному —1. В заштрихованных областях
рис. 8.11 левая часть неравенства (8.22) меньше единицы, что
указывает на устойчивость, тогда как в незаштрихованных
областях значение этой части больше единицы. Следовательно,
имеем неустойчивость. Числа 1/2, 1, Р/2 и т. д., поставленные в
областях неустойчивости, показывают числа колебаний системы
в течение одного периода изменения жесткости (соответствующего
частоте сок).
§ 8.4. Интерпретация результата
На основании диаграммы, представленной на рис. 8.11, мы
можем более точно судить о поведении различных систем, рас-
смотренных в § 8.2, чем могли бы это сделать, опираясь на физи-
ческие соображения, изложенные в § 8.2. Все приведенные приме-
ры можно подразделить на три группы:
а) вал, проволока, электровоз и конденсатор переменной
емкости; во всех этих случаях мы имеем частоту изменения пру-
жинности сок, которая сама может меняться в довольно значитель-
ных пределах, причем относительные изменения квазиупругого
Лк
коэффициента (коэффициента жесткости) малы, т. е. у <$С 1* и
к положительно',
Ъ) мотор электрических часов, имеющий постоянную частоту
сок\ ему присущи большие изменения квазиупругого коэффициента
МЛ д f
у = 1 и также положительное значение к\
4G4 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
с) маятник, стоящий на своем конце (астатический маятник),
имеющий переменную частоту сок и отрицательное значение k,
1. е. случай статической неустойчивости.
Прежде чем приступать к подробному исследованию какого-
либо из упомянутых случаев, необходимо напомнить, что диа-
грамма на рис. 8.11 построена в предположении «прямоугольного
закона пульсации», а поэтому мы вправе ожидать от нее лишь
приближенных результатов для большинства случаев, имеющих
место в действительности, когда пульсация жесткости происходит
почти по гармоническому закону. Тем не менее приближение
оказывается достаточно хорошим. Кроме того, здесь мы не при-
нимаем во внимание затухание.
Обратимся прежде всего к примерам группы (а). Здесь в каж-
дом случае относительное изменение отношения и средняя
т гдг
собственная частота = V постоянны. Единственной перемен-
ной в системе является частота изменения упругих свойств
величины G)k. На нашей диаграмме ординаты неизменно больше
соответствующих абсцисс в Лк/k раз. Вследствие этого всякая
точка, изображающая положение системы, может двигаться
только вдоль прямой линии, проходящей через начало координат
(рис. 8.11) и наклоненной под углом arctg к горизонту. На диа-
грамме проведена прямая ОА, соответствующая отношению
д
— = 0,4 (т. е. относительное изменение составляет 40%). Медлен-
ные изменения жесткости с частотой сок соответствуют точке,
лежащей далеко от начала О, тогда как точки вблизи начала
имеют малое значение величины ~1 > а поэтому соответствуют
большему значению ак, т. е. быстрым изменениям жесткости. Мы
видим, что громадное большинство точек линии ОА оказывается
в устойчивых областях, где не следует бояться колебания, но в
то же время мы видим, что эта прямая пересекает большое число
(теоретически бесконечно большое) областей неустойчивости,
расположенных достаточно близко друг к другу. Это имеет место
приблизительно при значениях = 72, К П/а, 2, 2х/2 и т. д.
Представим себе теперь, что электровоз очень медленно
-отправляется от места стоянки и постепенно увеличивает свою
скорость до тех пор, пока, наконец, изменения упругих свойств
движущейся системы (частота которых в 4 раза больше угловой
скорости колес) не достигнут частоты, равной удвоенной частоте
крутильных колебаний. На диаграмме рис. 8.11 это соответствие
движению по прямой ОА из бесконечности до той точки,
где 1^1 ==^, а тогда легко видеть, что при таком процессе
§ 8.4 ИНТЕРПРЕТАЦИЯ РЕЗУЛЬТАТА 465
приходится переходить через бесчисленное множество критических
скоростей
На основании изложенного в § 8.2, мы, по-видимому, можем
сделать заключение, что наибольшие значения имеют две скорости,
при которых — = 1 и — =Д. Что касается остальных крити-
ческих скоростей, то они менее существенны. Однако избежать
таких неустойчивых состояний на малых скоростях путем изме-
нения конструкции невозможно, если, конечно, не добиться обра-
щения в нуль изменения коэффициента жесткости Лк. Колебания
такого рода причиняли большие неприятности в прошлом В
настоящее время они преодолеваются главным образом посред-
ством введения рессорных соединений для обеспечения гибкости
на скручивание между зубчатым колесом мотора и его криво-
шипом или же между ведущим колесом электровоза и соот-
ветственным кривошипом. Эти соединения играют двоякую роль.
Во-первых, они перемещают собственную частоту в сторону
более низких ее значений, вследствие чего все критические обла-
сти оказываются лежащими ниже достаточно малых скоростей,
например, скоростей порядка 30 км в час, а при таких малых ско-
ростях вряд ли можно ожидать большого поглощения энергии
колеблющейся системой. Кроме того, рессоры, особенно если они
листового типа, обладают некоторым внутренним трением, бла-
годаря чему в систему вводится затухание.
Аналогичные результаты имеют место также и для всякого
иного примера из группы а). В частности, вал с двумя плоскими
гранями должен проходить через большое число областей кри-
тических скоростей. Однако в действительности при опыте
с подобным валом эффективными оказываются только две из этих
скоростей, одна из которых соответствует половине обычной
критической скорости «первого рода», а другая — полной такой
скорости.
В группе Ь) мы имеем осевые колебания мотора электрических
часов, вызываемые периодическим исчезновением «упругости».
Здесь у = 1, что для переменной скорости представится пря-
мой линией, наклоненной к оси абсцисс под углом 45° (прямая
ОБ на диаграмме). Легко видеть, что в данном случае области
неустойчивости шире, чем области устойчивое!и, а это создает
больше возможностей для нежелательных явлений.
Последний случай, именно случай обращенного маятника,
хотя и менее важен с технической точки зрения, все же является
сам по себе наиболее интересным.
Прежде всего квазиупругий коэффициент к для такого маят-
ника отрицателен. Это станет ясно, если мы вспомним определе-
ние величины к, которая представляет собою силу, возвращающую
30 Дец-Гартог • 2074
466 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VII]
систему в положение равновесия при единичном отклонении
от него. Однако в данном случае составляющая сила тяжести
стремится удалить маятник от вертикали, вследствие чего к
отрицательно, а тогда отрицательно также ®2 = -~. Для под-
вешенного маятника ^ == |-. где А есть приведенная длина (в
случае однородного бруска, подвешенного своим концом, А =
Рис. 8.12. Деталь рис. 8.11, дающая
объяснение устойчивости обращен-
ного маятника (по Ван-дер-
Полю и Стрэтту).
полной его длины). Для обращен-
ного маятника
л *
Пусть движение точки опоры
маятника определяется выраже-
нием esincfy^, из которого полу-
чаем ускорение, равное —sin <okt.
Относительное изменение квази-
упругого коэффициента будет
Лк Лд ею*
* ~' 9 ~~ 9 ’
а тогда ордината на рис. 8.11
становится равной
лк /w_nl2_e_
А
являясь отношением амплитуды колебаний точки опоры к при-
веденной длине маятника. В то же время абсцисса
Рс)3_______9_
(w/J Л ы2
представляет собою отрицательную величину и притом малую при
большой скорости колебаний точки опоры.
На рис. 8.12 представлена деталь главной диаграммы, изо-
браженной на рис. 8.11, которая имеет важное значение для обра-
щенного маятника. Заметим, что диаграмма на рис. 8.12 построена
для точного решения в случае синусоидального закона пульсации
квазиупругого коэффициента (который не исследуется в настоя-
щей книге), тогда как рис. 8.11 относится к прямоугольному
закону пульсации. Между прочим легко видеть, что разница
между обоими случаями невелика.
Если маятник начинает колебаться при заданной амплитуде
i точки опоры и при возрастающей частоте сок, то мы должны
передвигаться вдоль горизонтальной прямой от А к В. Когда
сок имеет малые значения, то система, очевидно, неустойчива, но
§ 8.4
ИНТЕРПРЕТАЦИЯ РЕЗУЛЬТАТА
467
в дальнейшем, при некоторой определенной скорости, она всту-
пает в область устойчивости, в которой остается до тех пор, пока
в точке В частота колебаний точки опоры не сделается беско-
нечно большой. Однако, если отношение е/А будет взято больше,
чем, например, 0,5, то существуем также некоторая большая
скорость колебаний опорной точки, при которой маятник вторично
оказывается в неустойчивом состоянии, что отмечено точкой А"
на прймой А' А". Все это подтверждено экспериментально.
Доказательство положен ия, что эффект движения точки опоры маятника
эквивалентен изменению ускорения силы
тяжести, можно выполнить, написав ма-
тематическое выражение второго закона
Ньютона, иначе говоря, написав диффе-
ренциальные уравнения движения.
Пусть на рис. 8.13 будут:
а — расстояние точки опоры от цен-
тра тяжести G; esinw^Z — закон
движения опорной точки; I — момент
инерции относительно оси, проходящей
через G\ в—угол маятника с вертикалью
яг, у — вертикальное и горизонтальное
перемещения точки О (первое из них
отсчитывается вверх, а второе—вправо);
X, Y — вертикальная и горизонтальная
составляющие реакции опоры маятника
(отсчитываемые подобно предыдущему).
Тогда при малых значениях угла 0
для перемещений точки G можно написать
х — s 4- a cos 9 4 а,
у ~ a sin 6 а9.
Рис. 8.13.Маятник, точка опоры
которого совершает гармони-
ческое движение, эквивален-
тен маятнику с неподвижной
опорой, помещенному в про-
странстве с изменяющимся
ускорением силы тяжести.
Три дифференциальных уравнения плоско-параллельного движения
(два для перемещения точки G и одно для вращения вокруг этой точки)
имеют вид
X — тд = тх ms,
Y = ту та9,
Ха sin 0 — Ya cos 0 Хав — Ya = 19.
Исключая отсюда реакции X и F, которые нужно определить из
первых двух уравнений и подставить в третье, получаем уравнение
1в — тёав 4- тдав — та?Ъ
или
{I 4- та2) 9 — та(д 4- s)0 = 0.
Выражение L 4- wa2 есть момент инерции около точки опоры, а
квазиупругим коэффициентом является выражение —• та (д 4- ё). Эта
величина отрицательна, и ее изменения могут быть истолкованы как
изменения ускорения силы тяжести д на величину ё, представляющую
собою ускорение опорной точки.
Исследуем, наконец, случай переменной массы, показанный
на рис. 5.10, стр. 250. Рассмотрим простой кривошипный механизм,
соединенный гибким валом к с маховиком бесконечного момента
зо*
468 КВАЗИ! ЛРМОНН'Н СКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIIT
инерции (рис. 8.14). Пусть маховик вращается с постоянной ско-
ростью, Тогда мы получаем систему с одной степенью свободы,
совершающую крутильные колебания и имеющую постоянный
коэффициент жесткости к, но переменный момент инерции (что
эквивалентно переменной массе).
На стр. 448 мы видели, что такая система математически
эквивалентна системе с переменной упругостью и постоянной
массой, а поэтому сюда можно применить диаграмму рис. 8.11.
Согласно этой диаграмме, система вступает в области критиче-
Рис. 8.14. Система с периодически изменяющейся инерцией.
ских скоростей, когда ее средняя собственная частота t»c —
составляет I, Р/2, 2,. . . частоты изменения массы. Легко
видеть, что главная или основная частота изменения массы' в
два раза больше числа оборотов машины, вследствие чего крити-
ческие скорости должны появляться при о)с = 1, 2, 3,. . . угло-
вой скорости вращения машины, тогда как простая приближенная
теория, завершившаяся уравнением (5.15) (стр. 242), дает в случае
бесконечно длинного шатуна только одну критическую скорость,
соответствующую ос, равной удвоенной скорости вала машины.
§ 8.5. Примеры нелинейных систем
Нелинейность системы заключается в том, что один или
несколько коэффициентов т, с или к зависят от перемещения х.
В механических системах нелинейность главным образом встре-
чается в вопросах, связанных с затуханием или с пружинящим
эффектом, тогда как в электротехнике наиболее обычным яв-
ляется случай нелинейной индуктивности (которая соответст-
вует массе).
S 8.5
ПРИМЕРЬ] НЕЛИНЕЙНЫХ СИСТЕМ
469
Рассмотрим сперва несколько примеров, в которых нелиней-
ность обусловлена пружинами. На рис, 8.15 показаны три случая,
когда восстанавливающая сила пружин не пропорциональна
перемещению, в то время как каждая отдельно взятая пружина,
входящая в систему, является самой обыкновенной витой пружи-
ной с линейной зависимостью между силой и просадкой. Первый,
случай очень распространен в системах, имеющих зазоры. Здесь
масса может беспрепятственно перемещаться внутри зазора, не
испытывая действия пружин, но как юлько она выходит за
Рис. 8.15. Три комбинации витых пружин с линейными характеристиками,
дающие системы с нелинейными характеристиками: а — пружины с зазо-
рами; б — пружины с упорами; в — пружины с упругими ограничителями
(два комплекта пружин, один из которых с зазорами).
пределы зазора, сейчас же одна из пружин начинает сжиматься,
подчиняясь при этом линейному закону, действующему лишь с
момента соприкасания тела с пружиной. Во втором случае пру-
жины имеют начальное сжатие, причем их возвращение в не-
напряженное состояние предотвращается тонкими шайбами а,
упирающимися в выступы Ь, Масса т, не будучи связана с шай-
бами, не может все же перемещаться до тех пор, пока приложен-
ная к ней сила не сделается равной начальной сжимающей силе F
пружин. Третьим примером могут служить пружины в упругих:
ограничителях. В данном случае система при малых перемещениях
находится под влиянием только одной группы пружин, но затем,
вступают в действие другие пружины, делающие таким образом,
всю упругую систему много жестче. Вторая группа пружин часто
осуществляется в виде упора, который практически можно счи-
тать вполне жестким, вследствие чего после удара тела об угор
упругая характеристика идет почти вертикально.
Совершенно естественно, что все три случая рис. 8.15 имеют
свои ан логи в кручении. В частости, сюда относятся пружины,
470 КВАЗИГАРМОНИЧ ЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
имеющие начальное закручивание (рис. 8.15,6). Они широко при-
меняются в соединениях, обеспечивающих известную гибкость на
скручивание.
На рис. 8.16 изображена пружина в виде консоли, которая,
будучи изогнута, ложится на криволинейные жесткие направляю-
щие, вследствие чего свободная длина пружины укорачи-
вается, и пружина становится жестче. По этой причине ее харак-
V
Рис. 8.16. Пружина с посте-
пенно возрастающей жест-
костью.
теристика становится более крутой для
возрастающих прогибов. Такие более
или менее искривленные характерис-
тики пружин встречаются на практике
очень часто. В самом деле, большинство
применяющихся пружин имеет прямо-
линейные характеристики только для
малых просадок, после чего они ис-
кривляются, образуя тем большие углы
наклона, чем больше просадка.
Рассмотрим теперь некоторые виды
нелинейного затухания. Линейная сила
затухания пропорциональна скорости,
что может быть написано в виде сх.
Эта сила известна также под назва-
нием силы вязкости» поскольку она
встречается в демпферах или аморти-
заторах с вязкой жидкостью.
Другими типами сопротивления, которые часто встречаются,
являются сухое или кулоново трение и аэро- или гидродинами-
ческое со п ро т ивл е н ие
воздуха или жидкости,
объясняющееся турбу-
лентным состоянием сре-
ды; эти силы также вы-
зывают затухание. Пер-
вая из них не зави-
сит от величины ско-
рости, но направлена
всегда против движе-
ния. Аэро- или гидроди-
Рис. 8.17. Различные типы силы затухания в
случае гармонического движения; а—сопро-
тивление вязкости ей (или линейное); Ъ— ку-
лоново трение ±/^(постоянное); с— вихревое
сопротивление ± с.г2 (квадратичное).
намическое сопротивле-
ние пропорционально
квадрату скорости и на-
правлено также противо.
положно скорости. На
рис. 8.17 построены кри-
вые для различных сил, вызывающих затухание, причем за аргу-
мент взято врем я, а движение предполагается по закону синуса.
§"85
ПРИМЕРЫ НЕЛИНЕЙНЫХ СИСТЕМ
471
В практических задачах механики масса обычно бывает вели-
чиной постоянной. Однако мы можем также представить себе
систему, в которой этот коэффициент меняется с перемещением.
Обратимся для этого к рис. 8.18, где положим, что поршень яв-
ляется очень легким и что количест-
во воды в цилиндре очень мало, по
сравнению с ее количеством в резер-
вуаре. Очевидно, что здесь колеб-
лющейся системой будет поршень с
водяным столбом над ним, так как
движение остальной части воды в
резервуаре во вр^мя колебаний
очень мало. Но высота водяного
столба, а следовательно, и его мас-
Рис. 8.18. Нелинейная система,
масса которой зависит от пе-
ремещен ия
са зависят от перемещения х. В то
время как при малых колебаниях
поршня массу, участвующую в дви-
жении, можно считать постоянной,
это уже нельзя
Рис. 8.19. Нелиней-
ный электрический
контур с насыщен-
ным сердечником
индуктивной ка-
тушки.
и отсутствовать
стали, который
полагать для боль-
ших движении, вследствие чего мы получаем
нелинейную систему с переменным коэффициен-
том инерции, т. е. с переменной массой.
Приведенный пример не имеет практи-
ческой ценности, а потому для нахож-
дения более важных случаев, где масса
зависит от х, мы обратимся к области электри-
чества.
Рассмотрим простои контур рис. 8.19 с
индуктивностью L и емкостью С, причем
в этот контур может быть включен также
генератор переменного тока, но он может
Катушка содержит сердечник из мягкой
становится магнитно
насыщенным при определенном зна-
чении силы тока. Эго показано на
рис. 8.20, где при заданной частоте
по оси абсцисс отложены силы тока,
а по оси ординат — напряжение. Из
графика ясно видно, что для больших
значений силы тока линейность не имеет
Сила тока
Рис. 8.20. Кривая
ния индуктивной
рис. 8.19.
насыще-
катушки
места.
Так как напряжение в индуктив-
ной катушке есть электрический экви-
валент механической силы инерции,
то мы имеем перед собой случай зависимости массы
от пег
реме щен ия
472 КВАЗИГАРМ0НИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
§ 8.6. Свободные колебания систем с нелинейными
характеристиками
Новое, наиболее существенное обстоятельство, с которым
мы встречаемся в свободных колебаниях нелинейных систем,
заключается в том, что при нелинейности упругой характеристики
собственная частота колебаний уже не является независимой
от амплитуды колебаний. В то же время при нелинейности затуха-
ния (если только затухание невелико) частота очень мало зави-
сит от амплитуды. Причину этого легко уяснить. Действительно,
квадрат собственной частоты в известном смысле есть отношение
величины упругой силы к силе инерции, приходящейся на единицу
частоты. В линейных колебаниях как упругая сила, так и сила
инерции пропорциональны упруго-
му перемещению, вследствие чего
отношение этих величин не должно
зависеть от перемещения, иначе го-
воря от деформации. С другой сто-
роны, если упругая сила не пропор-
циональна перемещению, как в слу-
чае нелинейных систем, то собствен-
ная частота уже не может оставаться
постоянной.
Обращаясь к затуханию,мы преж-
Рис. 8.21. Фазовая диаграмма
для линейной незатухающей
свободной системы. Окружно-
сти пробегаются по часовой
стрелке, так как в точке А ско-
рость Л положительна, т. е.
возрастает, а поэтому дви-
жение направлено вправо.
де всего должны заметить, что сила
сопротивления, вызывающая зату-
хание, отличается по фазе от пере-
мещения на 90°. вследствие чего ее
влияние на изменение частоты опре-
деляется малыми величинами второго
порядка малости (рис. 2.16, стр. 62).
Это положение остается справедли-
линейно или нет. Таким образом, в
вым, будет ли затухание
случае нелинейного затухания амплитуда не влияет существенно
на частоту.
Общий метод исследования нелинейных систем состоит в по-
строении графика смещен и я-скоро ст и, который носит название
фазовой диаграммы1) Прежде всего полезно посмотреть, как
этот метод применяется к обычным линейным системам.
Ускорение х может быть представлено в следующем виде:
dx dx dx . dx
^ = = = x T-
dt dx dt dx
(8.23)
Плоскость координат смещение-скорость, на которой производится
это построение, называется фазовой плоскостью. (Прим, перев.)
§ 8.6
СВОБОДНЫЕ КОЛЕБАНИЯ
473
Это преобразование позволяет нам выполнить одно интегрирова-
ние любого дифференциального уравнения второго порядка свобод-
ной системы, как линейной, гак и нелинейной, 1. е. описываемой
линейным или нелинейным дифференциальным уравнением.
Применяя указанный метод к свободным незатухающим коле-
баниям линейной системы, имеем
тх 4- кх = Q, тх У -Н кх — О,
ах
л2 х2
тх dx 4- кх dx = 0, т\, 4- к 2 = const.
Если мы отобразим этот результат на фазовой диаграмме,
то получим семейство концентрических эллипсов, центр которых
совпадает с началом координат. С помощью преобразования
коэффициентов эти эллипсы целесообразно преобразовать в
окружности. В самом деле, мы имеем
——х2, = у • const. = const.
к к
т
ИЛИ
(—]2 4- х2, = const.
Принимая теперь % и х за координаты, как это сделано на
рис. 8.21, мы получаем семейство концентрических окружностей,
представляющих собою результат первого интегрирования. Преж-
де чем приступать ко второму интегрированию, из которого можно
получить зависимость
х = /(О,
мы обратимся к другим случаям, поскольку это второе интегриро-
вание выполняется по существу одинаково для всех систем.
Итак, рассмотрим сейчас затухающие свободные колебания,
для которых имеет место уравнение
тх 4- сх 4 кх = 0.
Применяя сюда преобразование (8.23), имеем
772<г 4- сх 4- кх — 0,
ах
dx с к х
dx т т х
474 КВАЗИГАРМО НИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. УШ
ИЛИ
d ГаН _ С__________Х_
dx |wc] mwc х
wc
(8.24)
На’фазовой диаграмме левая часть этого уравнения определяет
собою наклон к оси х кривой, выражающей зависимость величи-
ны (#/®с) от х, тогда как правая часть может быть численно найдена
Рис. 8.22. Свободные затухающие колебания
с
при ----— 0,1, и е. при затухании, равном
7П(ОС
5% критического. Изоклины, согласно урав-
нению (8.24), — прямые, проходящие через на-
чало координат; каждая интегральная кривая
есть сходящаяся, т. е. приближающаяся к
началу, спираль. Для случая отрицатель-
ного затухания остается в силе та же ди-
грамма с изменением направления стрелки на
спирали, иначе говоря, получается расходя-
щаяся (удаляющаяся в бесконечность)спираль.
для каждой течки (х^/со^
этой диаграммы. Таким
образом, написанное
уравнение позволяет
заполнить всю диа-
грамму короткими на-
правляющими отрезка-
ми во всех точках, че-
рез которые должна
проходить кривая (рис.
8.22) Нанесение этих
отрезков упрощается
п р ед ва р ите л ьн ым по -
строением изоклин, т. е.
линий, соединяющих
точки диаграммы, име-
ющие один и тот же
угловой коэффициент
(cF j' Уравнение таких
изоклин получается из
уравнения (8.24) при-
равниванием правой
части(которая является
у г ло в ым ко эффиц иен -
том) постоянной вели-
чине. Между прочим,
в данном случае мы ви-
дим , что изо клины —
это прямые, проходя-
щие через начало координат. Для горизонтальной радиальной
линии имеем я = 0, т. е. правая часть уравнения (8.24) обраща-
ется в бесконечность и, следовательно, касательные вертикаль-
ны На рис. 8.22 направляющие отрезки построены для изо-
клин: горизонтальных, вертикальных и расположенных под углом
45° по отношению к ним.
Читателю рекомендуется выполнить построение для направле-
ний, соответствующих 225° и 67°,5. После этого, исходя из какой-
либо произвольной точки, можне построить интегральную
§ 8.6
СВОБОДНЫЕ КОЛЕБАНИЯ
475
кривую, следя за наклонами направляющих отрезков от точ-
ки к точке.
Посмотрим, что произойдет с диаграммой на рис. 8.22, есле
затухание будет возрастать и перейдет через свое критическоа
значение. Прежде чем рассматривать этот вопрос, ответим ни
Рис. 8.23. Фазовая диаграмма для линейной сис-
( с
темы с закритнческим затуханием— — 1,25
left
Имеются две изоклины АА и ВВ, направле-
ния которых во всех точках совпадают с
направлениями отрезков. Здесь, как и в
предыдущем случае, при отрицательном зату-
хай ии следует изменить направления стрелок
на интегральных кривых.
другой вопрос: имеются ли на рис. 8.22 изоклины, на которых
направляющие отрезки совпадают с самими изоклинами?
Так как наклон радиальной изоклины в точке (х, xic>c) определяется
угловым коэффициентом то ответ на последний вопрос
можно получить, рассмотрев уравнение
X
toc _ d / х
х dx (twc
или, на основании уравнения (8.24),
476 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ .VIII
откуда
X
2
с
X
Отсюда видно, что при докритическом затухании радикал в пра-
вой части есть мнимый, а поэтому нет действительных изоклин,
которые обладают тем свойством, что они направлены вдоль упо-
минавшихся отрезков. Однако при с> 2тсос, т. е. для закрити-
ческого сопротивления, радикал есть вещественный, и мы имеем
две такие изоклины. Это показано на рис. 8.23 для случая, когда
= 1,25. Здесь же нанесены интегральные кривые. Две
особые изоклины сами являются интегральными кривыми. Другие
интегральные кривые пересекать их не могут. Они касаются их
в начале координат.
Фазовые диаграммы на рис. 8.22 и 8.23 могут быть использова-
ны также для случая отрицательного затухания, гак как член
сх не меняет знака при одновременном изменении знаков у с
и у х Таким образом, при отрицательном затухании —с нам
следует только изменить положительное направление вертикаль-
ной оси х, что приведет к обращению направления движения
по интегральным кривым, в результате чего мы получим раскручи-
вающиеся спирали вместо закручивающихся.
В то же время для линейного отрицательного квазиупругого
коэффициента к, например в случае малых отклонений обращен-
ного маятника около его положения неустойчивого равновесия,
фазовая диаграмма на рис. 8.21 уже неприменима. Применяя
обычный метод, находим последовательно
тх — lex = О,
тх — кх = О,
dx
dx
dx
О Ж
X
X
(8.25)
Приравнивая правую часть этого уравнения постоянной вели-
чине, найдем уравнения изоклин, которые опять оказываются
радиальными прямыми.
§ 8.6
СВОБОДНЫЕ КОЛЕБАНИЯ
477
Займемся теперь вопросом об изоклинах, совпадающих с
направляющими отрезками, когда
X
d ( х । __ ыс
dx (wc) х
Комбинируя это с последним уравнением, получаем
X
X (Ус
X ~ х
или
(X
Ь>с
X
откуда
X
к = ±1
X
г. е. два луча под углами + 45°.
Диаграмма представлена на
Ряс. 8.24. Фазовая диаграмма для ли
нейной незатухающей системы с от-
рицательным коэффициентом жест
кости
рис. 8.24. Здесь мы имеем две
особые изоклины, являющиеся интегральными кривыми. Все
прочие интегральные кривые — гиперболы, получаемые интегри-
рованием уравнения (8.25). В самом деле
х dx j
—— = xdx.
i ( ЗЦ2 1
2 Ы = .J + const.
или
(—F — xi 2 = const..
г. e. гиперболы.
Рисунки 8.21—8.24 иллюстрируют изложенный общий метод
применительно к простым линейным системам. При этом никаких
новых результатов не получено, и обычный метод решения, изло-
женный на стр. 52—76, приводит к тем же результатам, но более
простым путем. Единственный смысл введения нового метода
478 КВАЗИГАРМОНИЧЕСКИЕ ^НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
заключается в том, что он в полной мере может быть
нен также и на нелинейные системы1).
Начнем с системы с зазорами (рис. 8.15,а), для
сейчас не сможем построить фазовую диаграмму
Прежде всего строим дветочкиД
и А2 на расстоянии в половину
зазора от начала. Справа от А2
и слева от Лгмы имеем простую
распростра-
которой мы
(рис, 8.25).
Рис. 8.26. Одна масса,зажатая между
двумя пружинами с упорами. Каж-
дая пружина имеет предварительное
сжатие на величину а (рис. 8.15,6).
Рис. 8.25. Фазовая диаграмма для дви-
жем ия одной массы т между двумя
пружинами кс зазорами а с каждой
стороны от среднего положения
(рис. 8.15,а). Амплитуда х0~ а + rQ.
линейную (к— т)-систему, (т. е. систему с массой т и жестко-
стью к\ Поэтому мы можем использовать рис. 8.21 и построить
на рис. 8,25 соответствующие полуокружности. В области
между А} и А2 имеется зазор. Там на массу не действует ни
сила упругости, ни какая-либо другая сила, вследствие чего
масса движется с постоянной скоростью, т. е. вдоль горизон-
тальной прямой. Комбинируя две полуокружности с двумя гори-
зонтальными прямолинейными отрезками, получим на рис. 8.25
замкнутые кривые, изображающие периодическое движение.
г) На указанных рисунках в начале координат О невозможно определить
по дифференциальному уравнению направление касательной. Поэтому
точка О носит название особой точки, которая в отдельных случаях имеет
специальные наименования. Так, на рис. 8.21 имеем центра на рис. 8 22 —
фокус, на рис. 8.23 — узел и на рис, 8.24 — седло. (Прим, перев.)
§ 8.6
СВОБОДНЫЕ КОЛЕБАНИЯ
479
Рассмотрим теперь пружины с упорами (схема — рис. 8.15,в,
фазовая диаграмма — рис. 8.26). Когда масса находится справа
действие силы упругости пру-
имеет соответствующий центр
от центра О, она испытывает
жины, которая линейна, но
в точке Р> где экстраполиро-
ванная сила должна быть равна
нулю Вследствие этого диа-
грамма справа от точки О со-
стоит из кривых дуг с центром в
точке Р. Аналогично слева от
точки Омы имеем круговые дуги
с центром в точке Q.
В случае,представленном на
рис. 8.15,6 и 8.27, дополнитель-
ная система пружин с жестко-
стью к2 вступает в действие на
расстоянии а от центра (имеем
упругие ограничители при боль-
шом к2).
Рассмотрим здесь области
изменения х при хУ меньшем чем
а, и при ху большем чем а. Если
#<а,то система строго линейна,
и на диаграммемы имеем концен-
трические окружности. Здесь
должны быть именно окруж-
ности. Это следует из того, что
по оси ординат мы откладываем
— =-^=, где есть коэффи-
1 / к 1
у т
циент жесткости именно для тех
пружин, которые находится в
действии.
Для областей вне интервала
— а< -х< а мы опять имели бы
окружности, если бы по ордина-
там были отложены величины
. Но так как в действи-
+ *2)
Рис.8.27. Система с упругими ограни-
чителями. Интегральные кривые во
внутренней области —окружности,
во внешней — эллипсы с центрами в
точках Q. Эллипсы сопрягаются с
дугами окружностей в точках и
Р2, имея общие касательные. Видо-
изменяя эту диаграмму, мы можем
за ординаты принять величины
— = ----; тогда внутренние
4- к2)/т
кривые будут эллипсы, а внешние —
дуги окружностей с центрами в
точках Q, и Q2 (рис. 8.15. в).
т
тельности ординаты отличаются от этой величины на постоян-
ный множитель, то кривые должны иметь форму вытянутых
окружностей, т. е. эллипсов, имеющих центры в точках Q,
являющихся центрами упругих сил внешней области. Эллипс,
проходящий через точки Р-, и Р2, обладает тем свойством, что
480 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. УШ
в этих точках он имеет общие касательные с сопрягающимися
с ним дугами окружности внутренней области.
В качестве последнего примера рассмотрим большие движения
(перекрывающие 360°) математического маятника, имеющего два
Рис. 8.28. Диаграмма зависимости угловой скорости от угла дл небольших
движений математического маятника.
положения равновесия: одно устойчивое в нижней части (при
ср = 0), другое — неустойчивое в верхней части (при ср = тг или
180°). Уравнение здесь нелинейное:
у sin ср = 0. ф + у- sin ср = 0
I dcp I
или
д sin tp
dcp 1 ф
Уравнение изоклин имеет вид
д sin ср .
7 —Н- = Const.
I ф
или
ф — С sin ср.
Имеем синусоиды, изображенные на рис. 8.28.
Полагая в качестве ординат величины
Ф ф
«с 1/7 *
Г I
изучим детали всей диаграммы для малых областей в окрестно-
§ b.i
СВОБОДНЫЕ КОЛЕБАНИЯ
481
стях ср — 0, 2л, 4л . . ., а также q = п, Зл,. . . При ср, близком к
нулю, мы имеем малые колебания линейного маятника, т. е. маят-
ника, рассматриваемого как линейная система (представленные
на рис. 8.21). При ср, близком к л, имеем движения линейного
обращенного маятника с озрпшпелиным квазиупругим коэффи-
циентом (рис. 8.24).
Таким образом, интегральные кривые вблизи ср = 0 являются
окружностями, а вблизи ср = л — равнобочными гиперболами.
Рассматривая различные изоклины синусоид, исходящих из точки
ср = 0, мы сейчас же замечаем характер изменения направлений
касательных для интегральных кривых, начиная с малой окруж-
ности в окрестности tp = 0. Синусоиды с начальным наклоном
в 45° приобретают большое значение для точки ср — л, поскольку
здесь направление изоклины совпадает с направлением самой
интегральной кривой Если построить эти интегральные кри-
вые1) (т.е. проходящие через точку ср = л и аналогичные), то вся
плоскость окажется разделенной на области Кривые, оказав-
шиеся внутри таких разделяющих кривых, являются замкнутыми
кривыми, окружающими точки ср = 0.2л и т. д. и приближающи-
мися по форме к окружности, находящейся в непосредственной
близости к точке ср = 0, Внешние кривые являются незамкнутыми
волнообразными линиями, части которых около точек ср = л и 1 д.
приближаются по форме к равнобочным гиперболам. Переме-
щение по всем кривым направлено вправо при положительных
значениях ф и влево — при отрицательных2)
С помощью общего метода изоклин на плоскости х—х мы
всегда можем построить фазовую диаграмму для любого случая
нелинейных колебаний системы с одной степенью свободы. Нам
остается теперь, пользуясь этой диаграммой, выполнить второе
интегрирование. Рассматривая элемент кривой, соответствующий
приращению абсциссы dx (рис. 8.29), мы имеем:
. da ,. dx
х — j- или dt = .
dt х
В правой части этого равенства dx есть элемент расстояния
по горизонтали, з х — вертикальная ордината. Отсюда мы можем
вычислить время, необходимое для прохождения расстояния^,
а тогда вообще
t = (8.26)
За один период незатухающего колебания соответствующая
кривая (фазовая траектория) замыкается, а поэтому, перемещаясь
*) Они называются сепаратрисами или разделяющими. (Прим, перев.)
2) Речь идет о перемещении так называемой изображающей точки.
координаты которой равны tp и ф (или 0/юс), нли же ж и Ф (соответственно
х и £/wc). Траектория этой точки называется фазовой траекторией. (Прим,
перев.)
31 Ден-Гартог - 2074
482 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
один раз по такой замкнутой кривой, мы имеем для полного пери-
ода колебания
г dx
(8.26а)
Этот интеграл всегда может быть вычислен, хотя для ярко выра-
женных нелинейных случаев это обычно требует применения
численных методов по отдельным участкам пути интегрирования.
Для симметричных систем время, затрачиваемое на каждую
четверть полного цикла движения, одно и
то же, а поэтому интеграл упрощается,
и для симметричной упругой силы мы
имеем:
^тах
О
(8.27)
Рис.8.29. Время, затрачен
ное на перемещение dx,
находится из уравнения
dt =—. Это приводит к
Л
результату, выражаемо-
му формулами (8.26) и
(8.27).
В качестве примера рассмотрим сна-
чала случай линейной системы без зату-
хания (рис. 8.21). В этом случае
(ос х)2 + х2 = const = ж* ах ,
или
Подставляя это значение х в уравнение (8.27), имеем
т. е. уже известный результат.
В качестве второго примера возьмем систему с зазорами
(рис. 8.25). Интеграл (8.27) распадается на две части, первая
из которых берется вдоль прямолинейного отрезка от Р до Q,
а вторая — вдоль четверти окружности от Q до R. Между Р и Q
скорость постоянна, х = сус г0, где есть радиус рассматри-
§ 8.6
СВОБОДНЫЕ КОЛЕБАНИЯ
483
ваемой окружности. Таким образом, время, затрачиваемое для
перехода из Р в Q, согласно уравнению (8.26), равно
а ____ a J т
Ыq Tq Xq “ CL j/ к
Время, требуемое для перехода из Q в R, равно четверти периода
свободных линейных колебаний. Однако формально нам следует
опять обратиться к помощи уравнения (8.26), для чего предвари-
тельно находим
+ (х — а)2 = const = (ж0 — а)2 = г2,
Тогда
х = cdc — (х — а)2.
гр ______ 1 г dx_____________________£ г d(x — а)
QR ~ “с J — й>с J уг2 - (х- а)®
а а
1
1 f dz 1 .I1 71 л ][тп
— v_________ = — arcsin z = — = - / -у- .
wc J у 1 _ g2 wc |о 2ыс 2 / к,
О
Все время перехода от Р к R (т. е. четверть периода) равно сумме
двух предыдущих выражений
Т 1/т л / j > Д ° 1
4 ” р 2 [ л х0 - а]
и собственная частота оз колебаний системы с зазорами равна
_ _________1 [ [] । 2 °
Т \ т I тг я?о — а ,
(8.28)
Отсюда видно, что частота зависит от амплитуды хъ. Она при-
водится к обычному значению |/^- в случае, когда зазор а обра-
щается в нуль (рис. 8.30).
Если нелинейность имеет место вследствие затухания в си-
стеме, то амплитуда не влияет на собственную частоту, которая
1/Т
остается приблизительно равной и—. Единственно интересным
вопросом здесь является быстрота убывания амплитуды. Точное
31*
484 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
решение такой задачи может быть получено методом графического
или численного интегрирования уравнения движения по элемен-
тарным интервалам. Однако эта процедура чрезвычайно трудо-
емкая Точное простое решение существует лишь для простого
случая кулонова сухого трения Достаточно хорошее для прак-
тических целей приближение получается посредством вычис-
ления рассеяния энергии, вследствие действия сил сопротйв-
Рис. 8.30. График зависимости собст-
венной частоты от амплитуды колеба-
ний системы с зазорами (рис. 8.15,а).
Точная кривая получается из урав-
нения (8.28), а приближенная —
с помощью метода, иллюстрирован-
ного на рис. 8.39
ления, и сравнения этой энер-
гии с потерей кинетической
энергии колебательного движе-
ния. Чтобы иметь возможность
вычислить эту потерю, мы
должны знать форму движе*
ния, которая, очевидно, теперь
уже отлична от синусоидальной
и приближается к ней лишь
для малых значений затухания.
Это сходство тем больше, чем
меньше затухание, так как в
случае гармонического движе-
ния большие силы упругости и
инерции изменяются по гармо-
ническому закону, и лишь малая
сила затухания вызывает от-
клонение движения от гармо-
нического. Итак, допустим, что
движение гармоническое:
х = sin cot.
Если сила затухания изображается функцией /(ж), то ее
работа за один период представится в виде
Т 2л
И7 == dx = Jf(x) x dt = ж0 j f(x) cos cot d(cot).
о 0
Потеря кинетической энергии за тот же промежуток времени
равна
2 W6J2 (ж0 — Дх)2 =
= Дх — ~ то2 (Дх)2 Дх
Приравнивая друг другу написанные выражения, мы найдем
величину убывания амплитуды за один период:
2я
Дх = f f(x) cos cot d((dt)
VUo- J
(8.29)
§ 8.7
РЕЛАКСАЦИОННЫЕ КОЛЕБАНИЯ
485
Этот интеграл всегда может быть вычислен, и если не точно,
то, по крайней мере, приближенно (например, графическим
путем).
В качестве примера рассмотрим затухание вследствие кулонова
трения, когда f(x) = +#. Скорость и сила сопротивления для
этого случая показаны на рис. 8.31. Ин теграл в уравнении (8.29),
как видно, состоит из четырех равных частей:
п
2
4 J F cos (cot) d(cot) = 4F,
о
и тогда величина убывания
амплитуды за каждый период
равняется
. 4F . F к 1 . F
Лх = —5- = 4 -г------„ — 4 ,
ты2 к т w2 к
(8.30)
Рис. 8.31. Сила кулонова трения.
иначе говоря, она равна учетверенной статической деформации
пружины под действием силы трения. Полученный результат
замечателен тем, что амплитуды убывают все время на одну и ту
же величину, т. е. подчиняются закону арифметической прогрес-
сии, тогда как в случае сопротивления вязкости амплитуды убы-
вают в геометрической прогрессии (см. стр. 64). Между прочим,
интересно отметить, что результат, представленный формулой
(8.30), совпадает с упомянутым выше точным решением.
§ 8.7. Релаксационные колебания
В линейной колебательной системе с отрицательным зату-
ханием теоретически должны получаться колебания бесконечной
амплитуды (рис. 7.2,Ь). Однако с физической точки зрения, оче-
видно, что это невозможно, и, в действительности, в любой си-
стеме при достаточно больших амплитудах затухание опять
становится положительным, тем самым ограничивая движение.
Примером может служить здесь линия электропередачи, рассмот-
ренная на стр. 400—408.
Хотя действительное соотношение между коэффициентом зату-
хания и амплитудой изменяется от случая к случаю, все же для
общего уяснения дела полезно задаться простейшим математиче-
ским выражением силы затухания, из которого получаем отрица-
тельное значение этой силы для малых амплитуд х и положитель-
ное для больших. Пусть такое выражение имеет вид
сила затухания = — (Сг — С2х2) х.
(8.31)
486 КВАЗИГАРМОНПЧЕСКИР И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VII1
Здесь коэффициент затухания есть функция от х, что показано
графически па рис. 8.32. Легко видеть, что затухание обращается
в нуль при отклонении
Дифференциальное уравнение для системы с одной степенью
свободы, имеющей нелинейное затухание такого типа, есть
?пх — (С\ — С2 ж2) х 4- кх = 0. (8.32)
Так как сейчас нам предстоит дать общее исследование это.вб
уравнения, то чрезвычайно важно упростить его насколько
Рис. 8.32. Простейшее матема-
тическое выражен ие для коэф-
фициента нелинейного зату-
хания, который отрицателен
при малых амплитудах и ста-
новится положительным при
больших амплитудах.
возможпо. а для этой цели следует
уменьшить число входящих в него
коэффициентов, которых пока име-
ется четыре: т, С1д С2 и к. Для этого
мы разделим уравнение на тп и
введем обозначен не — = о2 Тогда
т
получим
х — - -2 ж2] х 4- ю2 х — 0.
\т т ) 11
(8.33)
Далее, из оставшихся трех постоян-
ен С
пых , —2, со2 две могут быть погло-
щены переменными, если мы перей-
дем от прежних переменных ж и к но-
вым безразмерным. Для этой цели рас-
смотрим прежде всего время t, измеряемое в секундах. Вместо поль-
зования этой общепринятой единицей, мы будем теперь измерять
время в новыхединицах,связанных снашейсистемой. Пусть,напри-
мер, такой един ицей будет Т/2л:. Это значит, что для медленно колеб-
лющихся систем новая единица получается большой, в то время
как для систем, совершающих быстрые колебания, эта единица
мала. Итак, мы будем предпочтительно измерять время не в секун-
дах, а в периодах, деленных на 2 от. Пусть будет t' — новая величина
времени (измеренного в Т/2от), тогда как прежняя величина есть
t (в секундах). В таком случае имеем соотношение
г
2л
Вследствие такой замены производные примут вид
d2x d2x t'2 2 ^2ж ^х dx
d^ = dt^ Р ~ Wc df* ’ dt ~ a<dt'
§ 8.7
РЕЛАКСАЦИОННЫЕ КОЛЕБАНИЯ
487
Подставляя эти значения в уравнение (8.33) и деля его на со2,
имеем
х------—- (I — fra л:2] х х = О,
mwc | Су I
где точки сверху обозначают уже дифференцирование по безраз-
мерному времени t'.
Теперь у нас остаются только два параметра: Cjma)c и (\/Сг.
Перемещение г пока имеет размерность длины, а чтобы сделать его
безразмерным, лам необходимо ввести новую единицу перемеще-
ния, опять связанную с уравнением. Подходящая единица ука-
зана на рис. 8.32. Это есть амплитуда при которой силы
положительного и отрицательного затухания уравновешиваются.
Таким образом, новым «безразмерным перемещением» будет слу-
жить величина
У = -?=- •
Гл
•вследствие чего дифференциальное уравнение принимает вид
j/ — е (1 — у2) у 4- у — 0. (8.34)
Итак, уравнение, наконец, приведено к одному параметру
£ = , который имеет важное физическое значение, а именно,
в случае гармонического движения этот параметр представляет
собою отношение наибольшей силы отрицательного затухания
к наибольшей упругой силе, т. е.
• О • г \ Хи* • I
сила упругости
Это положение легко может быть проверено. Пусть
х = г0 sin coct. Отсюда х = х0сос cos coct. На основании урав-
нения (8.31) наибольшая сила отрицательного затухания имеет
место в середине размаха (при х = 0) и равна Сг rrmax = С^х^.
С другой стороны, наибольшая упругая сила есть Z%rmax = 1сх$ —
= й£тх0. Итак, высказанное утверждение, выражаемое урав-
нением (8.35), доказано.
Во всех случаях, рассмотренных нами до сего времени, прило-
женная к системе сила, вызывающая отрицательное затухание,
была много меньше упругой силы, иначе говоря, величина в
была очень мала (е<<С 1). При этом подразумевается, что движение
происходит по гармоническому закону с собственной частотой сос.
Конечное значение амплитуды, до которой должно происходить
нарастание колебаний, может быть найдено из энергетических
488 КВАЗИГАРМОНИЧЕСКИЕ Н НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
соотношений. Если амплитуды меньше предельной, то сила зату-
хания F = e(l —у2) у увеличивает энергию системы, если же
амплитуды больше этой предельной величины, ю затухание
вызывает рассеяние энергии. Итак, для конечной амплитуды мы
имеем за весь период
О = J F dy = j Fy dt' — Je (1 — у2) у2 dt'.
о о
Так как движение предполагается гармоническим:
У = Уъ sin й)с1 — у0 sin t'.
то
2л
О = е|(1 — у2 sin2 t') yl cos2 t' dt' 9
о
или
2л
cos2С dt’
sin2 f cos2 f dt' 4
Вычисление этих интегралов рассмотрено на стр. 29.
Таким образом, для малых значений параметра s амплитуда
колебаний х есть
^0 = 2 У g , (8.36)
т. е. эта амплитуда вдвое больше той, при которой сила затухания
обращается в нуль. Из рис. 8.32 мы видим, что полученный ре-
зультат является вполне правдоподобным. В самом деле, в средней
части размахов система поглощает энергию вследствие действия
отрицательного затухания, а затем, вблизи концов, где затухание
уже положительно, рассеивает ее. Таким образом, мы имеем
своего рода нейтрализацию энергии.
До сих пор введение дифференциального уравнения (8.32)
или (8.34) не дало нам ничего нового. Эти уравнения приобретают
важное значение, главным образом, в том случае, когда приложен-
ная извне сила, вызывающая отрицательное затухание, велика по
сравнению с упругой силой, т. е.
е»1.
Тогда в уравнении (8.34) наиболее важным из трех членов
левой части является средний нелинейный, а поэтому предполо-
жение о гармоническом характере движения, вполне оправды-
РЕЛАКСАЦИОННЫЕ КОЛЕБАНИЯ
489
ваемое при малом среднем члене, сейчас делается незаконным.
Следовательно, мы должны ожидать значительного искажения
движения, содержащего теперь большое
число гармоник высших порядков, а также
надо ожидать и отклонения частоты от сос.
Применяя к уравнению (8.34) общий
метод, изложенный на стр. 472 -483, мы
приходим к уравнению
2 = '<1-Й- 18.37)
которое позволяет нам заполнить фазовую
диаграмму в координатах у и у короткими
направляющими отрезками, построенными
в различных точках. Имея такое полное
поле касательных, мы можем получить ре-
шение, отправляясь от произвольной точки
плоскости (соответствующей произвольным
начальным значениям перемещения у и ско-
рости у) и строя кривую по касательным.
Рис. 8.33 (построенный для е = 10) пока-
зывает, например, что, выходя из точки,
где у — 15 и у = —2, кривая идет сначала
вниз, затем поворачивает вверх, потом
опускается опять вниз и после этого обра-
зует непрерывную замкнутую фигуру. Таким
же образом видно, что, отправляясь от по-
ложения покоя (т. е. от начала координат),
мы, по истечении некоторого короткого
времени движения, достигаем опять той же
самой замкнутой кривой. Обычное устано-
вившееся гармоническое колебание отобра-
зилось бы на этой диаграмме в виде эллип-
са, откуда видно, что при €=10 движение
сильно отличается от гармонического.
Теперь мы можем преобразовать диа-
грамму на рис. 8.33 в соответствующую
ей диаграмму, которая представляла бы
соотношение у = f(t'), как это показано на
рис. 8.34. Абсцисса любой точки кривой на
рис. 8.33 соответствует ординате кривой на
рис. 8.34, тогда как ордината той же точки
на рис. 8.33 определяет наклон кривой на
рис. 8.34. Таким образом, переход от рис. 8.33
Рис. 8.33. Первое ин-
тегрирование уравне-
ния (8.34) для релак-
сационных колеба-
ний в случае е = 10.
крис. 8.34 совершается посредством второго графического интегри-
рования.
490 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
Наши ожидания относительно природы движения вполне под-
тверждаются окончательным результатом, представленным гра-
фически па рис. 8.34. Как видим, движение значительно отли-
чается от гармонического. Период равен не 2от единицам «нового»
времени (каждая единица равняется а 2s таких единиц, или
2s ~ сек. Отсюда, если принять во внимание соотношение (8.35),
то следует, что
2г 2С\ о С\
период = - = —А- = 2 т сек.,
г ыс к
(8.38)
т. е. период оказывается уже не зависящим от отношения массы
к коэффициенту жесткости, а зависит от отношения коэффициента
отрицательного затухания к коэффициенту жесткости. Выражение
(8. 38) равно удвоенному времени релаксации (см. стр. 6G) системы
Рис. 8.34. Типичная форма релаксационных колебаний, полученная гра-
фическим интегрированием кривой рис. 8.33.
с положительным коэффициентом По этой причине колебания
такого типа, как представлено на рис. 8.34, оказываются релак-
сационными колебаниями.
Для лучшего уяснения результата, выражаемого формулой
(8.38), а также для уяснения общей формы колебаний, представлен-
ной на рис. 8.34, полезно обратиться к следующему физическому
анализу явления.
При е = 10 действие затухания велико по сравнению с упругим дей-
ствием пружины. Проследим за движением по рис. 8.34, отправляясь от
точки А, где отклонение х — 2 I/ —. На основании рис. 8.32, коэффициент
затухания в точке А положительный и остается положительным до тех
пор, пока отклонение не уменьшится до половинного своего значения (точка
В). Между точками А и В скорость должна быть очень мала, так как
сравнительно небольшой упругой силе противодействует сила затухания,
коэффициент которой велик. Влияние инерции за это время, по-видимому,
сводится к нулю. В точке В затухание меняет знак, становясь отрицатель-
ным и притом большим, вследствие чего масса перебрасывается с большой
скоростью через точку С, где сила затухания опять меняет знак. Между
§ 8.7
РЕЛАКСАЦИОННЫЕ КОЛЕБАНИЯ
491
точками В и С сила отрицательного затухания, приложенная к массе,
должна совершать работу и, кроме того, должна давать телу достаточно
большое количество движения. Это количество движения поглощается
положительной
до тех пор, пока
что отклонение
х = 2 / — , что
’ ^2
силой затухания, начинающей действовать от точки С
масса снова не остановится в точке D. Вполне естественно,
точки D приближенно может быть представлено, как
следует из равенства (8.36), выведенного для случая гар-
монического движения.
Так как для перемещения точки из В и D время почти не затрачивается,
го мы можем вычислить период, удвоив время движения от А до В. Полу-
ченный при этом ответ будет несколько мал.
Стремясь упростить весь расчет, мы усматриваем из рис. 8.32, что
’1/Д
и х = 2 V — может быть удов-
' С2
коэффициент затухания между х = I/ —
г
летворительно определен линейным соотношением:
коэффициент затухания = —ЗСг -|-— х.
1/А
Va
сила затухания =
Этой силе противодействует только упругая сила
дифференциальное уравнение такого медленного
движения между точками А и В примет вид
— кх. Таким образом,
или релаксационного
или
I „ ЗС\ \
—3 Н----— х |
I/-3 I
V On I
dx
— = —kxt
dt
При интегрировании этого
изменении времени t от 0 до — (полпериода) величина х изменяется от
уравнения мы должны иметь в виду, что
Т
2 ...“..............
при
до
а поэтому
36?!
~к
492 КВАЗИГАРМОНИЧ ЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
После подстановки пределов находим
ЗС, Т
Т(-1п2+1,=У’
ИЛИ
6’1
т = 6 (1 — In 2)-^ = 1,84-^.
к к
Если принять во внимание, что для движения от В до D все же потре-
буется некоторое время, то, как видно, равенство (8.38) подтверждается.
Соответствующие резуль-
таты графического интегри-
рования для более обычного
случая, когда, например,
е = 0,1, показаны на рис.
8.35 и 8.36.
С релаксационными коле-
баниями часто приходится
встречаться в радиотехнике.
За подробностями отсылаем
читателя к оригинальным
работам Ван-дер-Поля (Van
der Pol), где дано большое
число практических прило-
жений в этой области. Что
касается машиностроения, то
здесь подобного рода явле-
Рис.8.35. Первое интегрирование уравне- ния имеют меньшее значение,
ния (8.34) в случае малой силы зату- Рассмотрим случай, ле-
хания, когда е==0,1. жащий на границе между
механикой и электротехни-
кой, а именно, случай периодических изменений скорости
вращения электромотора постоянного тока с независимым
Рис. 8.36. Второе интегрирование уравнения (8.34) при г — 0,1. Из графика
видно нарастание нелинейных самовозбуждающихся колебаний до их
конечной амплитуды.
возбуждением, питаемого сериес-генератором постоянного тока,
вращающимся с постоянной скоростью (рис. 8.37).
§ 8.7
РЕЛАКСАЦИОННЫЕ КОЛЕБАНИЯ
493
Напряжение тока, получаемое в равномерно вращающемся
генераторе, пропорционально напряжению его магнитного поля.
Если бы не было магнитного насыщения, то напряжение поля было
бы пропорционально силе тока Л создающего поле, а в сериес-
машинах эта сила тока такова же, как и в магистрали. Влияние
насыщения сказывается в понижении интенсивности роста напря-
жения поля, и характеристика генератора (рис. 8.38) может
бы г ь н р и б л и же нпо выражена
соотношением]
Рис. 8.37. Мотор с независимым воз-
буждением, приводимый в движение
сериес-генератором, имеет периоди-
ческие изменения скорости, соот-
ветствующие кривой па рис. 8.34.
Е* = Cj i — С2 i\
Ц' Это напряжение преодоле-
вает, во-первых, индукцию об-
Рис. 8.38. Характеристика (кривая
напряжение — сила тока) сериес-
генератора, вращающегося с по-
стоянной скоростью.
моток своего же поля во-вторых, сопротивление (Ri} цепи
и, в-третьих, реакцию мотора. Мотор имеет постоянное магнитное
поле и переменную угловую скорость со. Его напряжение пропор-
ционально скорости, т. е. равно Сд со. Насыщение не дает здесь
никакого эффекта, так как поле поддерживается постоянным.
Тогда «уравнение равновесия напряжений» примет вид
(\г — C2i3 = С^со Н- -h Ri (8.39)
Другое соотношение между « и со можно получить на осно-
вании тех соображений, что энергия, поглощаемая мотором за
одну секунду, определяется произведением его напряжения С3со
на силу тока i. Коль скоро этот мотор не имеет нагрузки, получен-
ная им энергия идет на ускорение вращающихся частей, момент
494 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
инерции которых обозначим через 7. Кинетическая энергия мотора
равна | 7бА а тогда
С3аг = I /и21 = 1а ~ ,
d dt 12 j dt '
или
Из уравнения (8.39) мы можем теперь исключить угловую
скорость, для чего его надо продифференцировать по времени и
в полученный результат подставить выражение (8.40):
di о/"! *9 п d(^ г d-г р) d'l
&=G*1U+Ldfi +Rdi'
или
L S -{0* - E -£+?i=°-
Это уравнение эквивалентно уравнению (8.32). Кроме того,
величины Сх— R. О8 и I в моторах обычно таковы, что пара-
метр
а - п iFi
о9 F L
значительно больше единицы. В таком случае мы получаем силу
тока г, периодически изменяющуюся в соответствии с графиком
на рис. 8.34, а тогда, согласно уравнению (8.40), угловая скорость
со должна давать также периодические изменения. На основании
уравнения (8.38) период таких изменений равен
т _ о — R у
Отсюда видно, что он пропорционален моменту инерции мотора.
Если бы указанные колебания были гармоническими, то их период
был бы пропорционален квадратному корню из момента инер-
ции.
§ 8.8. Вынужденные колебания при нелинейной
восстанавливающей силе
Здесь мы ставим задачу о колебании незатухающей системы
с криволинейной упругой характеристикой под действием гар-
монической возмущающей силы. Уравнение такого движения
имеет вид
тх + f(x) = PQ sin at.
(8.41)
S «.fe ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ 495
Коль скоро точное решение этой задачи существует лишь
в случае простейшей характеристики типа рис. 8.15,6, и притом
оно слишком сложно, то это решение почти лишено практической
ценности. Сейчас мы имеем в виду дать приближенное решение,
опираясь на допущение, что движение х ~ f(t) имеет синусо-
идальный характер и происходит с частотой, равной частоте
изменения возмущающей силы. Очевидно, что это предположение
не вполне верно, причем о степени его точности можно судить
только по величине отклонения действительного перемещения от
перемещения, получающегося па основании указанного допу-
щения. Итак, положим,
х ” х0 cos cot. (8.42)
Сила инерции —тх равна тх0со2 cos cot, причем эта сила
достигает своего наибольшего значения ?n&)2z0 в тот момент,
когда достигают наибольшего, по абсолютной величине, значения
как внешняя, так и восстанавливающая силы. Максимальное
значение первой из них равно 7%, а второй f(x0). Уравнение
(8.41) эквивалентно условию равновесия этих трех сил в произ-
вольный момент времени в процессе негармонического движения
Удовлетворим этому условию в случае гармонического движения
(что можно сделать соответствующим выбором амплитуды х0)
для того момента времени, когда х = х0. Принимая во внимание
знаки, мы можем написать
— /П02Жо 4- f(x0) = Ро,
или
/(ж0) = Ро 4- (8.43)
В тот момент, когда х = 0 (в середине размаха), все три силы
обращаются в нуль, вследствие чего условия равновесия опять
выполняются. В случае, когда /(ж) равняется кх все три члена
уравнения (8.41) оказываются пропорциональными sin cot, а
поэтому из этого уравнения делением на sin cot получаем уравне-
ние (8.43), где /(я0) = кх$, и тогда условие равновесия должно
удовлетворяться при всех значениях х между 0 и z0, Однако,
если f(x)ф кх, то это уже не будет верно, и равновесие нарушится
в большинстве точек между 0 и z0. Итак, все, что можно достичь
при данных обстоятельствах, это — удовлетворить условию
равновесия в двух точках х = 0 и х = х0. Тогда амплитуду
вынужденных колебаний можно приближенно найти из алгебраи-
ческого уравнения (8.43),
Наиболее удобно и наглядно все это выполнить графически.
Будем откладывать по оси абсцисс (рис. 8.39) амплитуды х$,
а по оси ординат — силы. Левая часть уравнения (8.43) пред-
496 КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
ставляет собою упругую характеристику, изображаемую на
нашем чертеже некоторой кривой, тогда как правая часть опре-
деляет прямую линию, отсекающую на оси ординат отрезок Ро
и имеющую наклон, равный arctg та2. В тех точках, где указан-
ные линии пересекаются, сила, стоящая в левой части уравнения
(8.43), равняется силе в правой части, вследствие чего имеет
место равновесие (в конце размаха). Отсюда сейчас же находится
Рис.8.39. Приближенно еграфиче-
ское определение амплитуд вынуж-
денных нелинейных колебаний.
х0, как абсцисса точки пересе-
чения Для частот медленных
колебаний (малые наклоны
тсо2) имеется только одна та-
кая точка пересечения Аь Но
для больших частот при той же
силе таких точек оказывается
три: А2, В2,С2. Иными словами,
мы имеем три возможных ре-
Рис. 8.40. Резонансная диаграмма
для системы, жесткость которой пос-
тепенно возрастает.
шения. Для большей наглядности мы приводим еще диа-
грамму" (рис. 8.40), где по оси абсцисс отложены значения
а по оси ординат — амплитуды я0. Это — резонансная диа-
грамма, соответствующая диаграмме на рис. 2.18 (см. стр. 68),
которая была построена для линейного случая. Кстати сказать,
диаграмма на рис. 2.18 может быть построена совершенно точно
по точкам на основании рис 8.39, если взять характеристику в
виде прямой. Предлагаем читателю изучить построение рисунка
8.40 на основании рисунка 8.39. и в особенности убедиться, что
для частот ниже ВС.А существует только одно решение, а для
частот выше ВС^ — три решения. Кроме того, следует убедиться
еще в том, что ветвь А на диаграмме изображает движение, находя-
щееся в одной фазе с силой 7% sin cot, тогда как ветвь В, С опре-
деляет движение, отличающееся по фазе на 180° от этой силы.
Указанная особенность совершенно такого же рода, как и на
рис. 2.18.
$ 8.8
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
497
соответствующими другим
Рис. 8.41 Объяснение неустойчи-
вости ьетви С на рис. 8.40.
Найдено, что из трех возможных движений типов А, В и
С последнее, т. е. движение С, является неустойчивым, тогда
как А и В представляют собою движения устойчивые, что можно
проверить опытным путем. Для пояснения необходимо дополнить
диаграмму на рис. 8.40 кривыми,
значениям силы Ро, что и сде-
лано на рис. 8.41. Средняя жир-
ная кривая построена для Fo = 0,
или, иными словами, для сво-
бодных колебаний. Эта кривая
найдена путем проведения на
рис. 8.39 через начало О прямых
с различными наклонами, опреде-
ляемыми углами тсо2, и путем
определения их пересечений с ха-
рактеристикой. Для частот cd,
лежащих ниже некоторого значе-
ния боо, эти наклоны на рис. 8.39
слишком малы, чтобы можно
было получить пересечение. Если наклон возрастает, то величины
я0 становятся все больше и больше. Для очень малого значения
возмущающей силы Ро мы получаем на рис. 8.41 кривую 1, тогда
как для больших значений Ро имеем кривые 2 и 3.
Рассмотрим какую-либо точку на ветви А одной из кривых
на рис. 8.41. Если при заданной частоте сила Ро возрастает,
то возрастает также и ампли-
туда я0 (мы перемещаемся вдоль
вертикальной линии на рис. 8.41).
То же самое остается справед-
ливым и для всякой точки на
ветви В кривых. Что касается
ветви О, то здесь увеличение
силы Ро обозначает на рис. 8.41
движение вниз (от кривой 1 по
направлению к кривой 2), а это,
в свою очередь, значит, что при
возрастании силы получается
убывание амплитуды. Правда, в
действительности это не может
случиться, и то, что имеет место
Рис. 8.42. Разрывы в амплитудной
кривой нелинейной системы с по-
степенно увеличивающейся же-
сткостью.
на самом деле, показано на
рис. 8.42, изображающем ту же самую кривую, что и на рис. 8.40,
но уже с учетом затухания. Как и в линейных системах, затуха-
ние здесь сглаживает резонансный пик Если теперь амплитуду
силы Рц поддерживать постоянной, а частоту cd постепенно увели-
чивать, то амплитуда я0 внезапно перескакивает вниз от В к
32 Ден-Гартог - 2074
498
КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБА НИЯСИСТЕМ ГЛ. VIII
Рис. 8.43. Резонансная диаграмма
для пружины, жесткость которой
убывает с амплитудой.
С, продолжая уменьшаться вдоль кривой в сторону D. При умень-
шении со мы проходим последовательно точки D и С и попадаем
в точку Е> где амплитуда совершает мгновенный скачок в F и
затем продолжается до А. Неустойчивая ветвь BE представляет
собою движения, не могущие существовать в действительности..
Характеристика, изображенная на рис. 8.39, относится к
пружине, которая при возрастании амплитуды становится посте-
пенно более жесткой. Вследствие этого вместе с амплитудой
возрастает также собственная частота, как показано на рис. 8.41
жирной кривой, загибающейся
вправо. Для пружин с умень-
шающейся жесткостью (как, на-
пример, рис. 8.15,в) кривая соб-
ственных частот загибается влево,,
и неустойчивая ветвь С кри-
вых лежит слева от средней кри-
вой. Это показано на рис. 8.43>
где скачок амплитуды вверх про-
исходит при возрастающей частоте.
Payiuep (Rauscher) предложил
интересный метод решения этой
задачи, дающий высокую сте-
пень точности с помощью после-
довательных приближений для
произвольной упругой характе-
(даваться частотой и затем искать
решение для амплитуды, как это показано на рис. 8.39, Раушер
исходит из отношения амплитуд т0/Р0, после чего отыскивает
частоту. Итак, в уравнении (8 41) частота о считается еще не
найденной, и мы делаем лишь первое предположение о движении
посредством уравнения (8.42), в котором величине £о дается
определенное значение, в то время как частота со изменений
силы пока неизвестна. Тогда мы можем написать
истики. Вместо того, чтобы
Т"> . Р О®
PG cos cot = —— ,
Я?0
преобразуя, таким образом, возмущающую силу из функции
времени в функцию перемещения. Перенесем теперь возмущаю-
щую силу в левую часть уравнения (8.41) и объединим ее с вое*
станавливающей силой f(x). Такой операцией мы сводим нашу
задачу к задаче с свободных колебаниях, которая может быть
решена с помощью фазовой диаграммы и последующего интегри-
рования. Хотя полученная таким образом кривая зависимости
перемещения от времени не будет такой, какой она должна бы
быть в соответствии с первой предположительной формой по
уравнению (8.42), но она будет иметь ту же амплитуду я0. С
S 8.8 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ 499
этой новой функцией, выражающей перемещение, мы обращаемся
опять к дифференциальному уравнению (8.41), преобразовываем
возмущающую силу из функции времени t в функцию расстояния
х и переносим ее в левую часть, объединяя с восстанавливающей
силой. Таким образом, получаем третье решение для х = /(£).
Эти последовательные решения для изучаемого движения быстро
сходятся к точному решению.
Рассмотренный метод «итераций» очень близок к методу
Стодолы, изложенному на стр. 214—226. Здесь так же, как и там,
если первое предположение о движении оказывается верным, то
второе решение будет тождественно с первым. Справедливость
этого лучше всего может быть продемонстрирована на применении
метода Раушера к линейному случаю
тх + кх = Ро cos at.
В качестве первого приближения предполагаем, что движение
происходит по закону х = х0 cos at. Но, как известно, при опре-
деленном значении амплитуды х0 это уравнение выражает собою
истинный закон движения с некоторой частотой а. Тогда
cos at — -~°х-
и далее
тх + [к — —] х ~ 0.
I жо/
Последнее уравнение есть дифференциальное уравнение сво-
бодных колебаний линейной системы наподобие уравнения (2.7)
с решением по формуле (8.42), где частота со определяется уравне-
нием
Но мы видим, что это есть уже точный результат, соответствую-
щий уравнению (2.23) на стр. 67. Некоторое своеобразие метода
Раушера заключается в том, что вместо того, чтобы искать на
рис. 8.41 пересечение кривых с вертикальной прямой (т. е. искать
решения для я0 при заданном значении со), определяется их пере-
сечение с горизонтальной прямой (следовательно, задается я0
и отыскивается со). Конечно, такое изменение нисколько не ухуд-
шает дела.
При исследовании электрической цепи на рис. 8.19 мы получаем
такие же линии, с той лишь разницей, что сила инерции (напряжение
на концах индуктивной спирали) имеет криволинейную характеристику»
тогда как характеристикой упругой силы (разности потенциалов на об-
кладках конденсатора) служит прямая.
32*
500
КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
В наших рассуждениях было принято, что движение происходит
с частотой возмущающей силы. Это соответствует случаю линей-
ных систем. Хотя это есть единственно возможное движение
нелинейных систем, слегка, отличающихся от линейных, все же мы
увидим ниже (стр. 504), что при резко выраженной нелинейности
возможно также возбуждение колебательных движений, происхо-
дящих в 1,2, 3, 4,. . . раза медленнее по сравнению с изменением
возмущающей силы, определяемой частотой о.
§ 8.9. Вынужденные колебания при нелинейном
затухании
Дифференциальное уравнение, соответствующее такому дви-
жению, имеет вид
тх + f(x) + кх = Fo sin ot, (8.44)
где f(x) уже не равняется сх.
Поскольку член, выражающий затухание, является нелиней-
ным, то движение негармоническое. Точное решение уравнения
(8.44) известно только для случая кулонова трения, добавляю-
щегося к линейному затуханию, т. е. когда f(x) — +F + сх,
да и то лишь в пределах некоторой области частот.
В практических случаях затухание бывает обычно достаточно
мало, а поэтому в основу приближенного исследования мы можем
положить синусоидальный закон движения. Наиболее общий
метод здесь состоит в замене члена f(x) эквивалентным членом
сх с постоянным коэффициентом с, а затем определяют «экви-
валентный коэффициент затухания» с таким образом, чтобы
при гармоническом движении действительная сила сопротивления
f(x) совершала за один период такую же работу, что и эквива-
лентная сила сх. Определяемая таким образом величина с не
является в действительности постоянной, а представляет собою
функцию частоты со и амплитуды xQ. Итак, система (8.44) при
определенных значениях о и х0 может быть с известной степенью
приближения заменена линейной системой, в которой, однако,
коэффициент затухания с имеет различные численные значения
для различных значений о и xQ.
Приступая к выполнению такого анализа, прежде всего
положим, что движение происходит по закону
[я = xQ sin ot.
Работа, совершаемая за один период эквивалентной силой сопро-
тивления сх, .равна лсох^ (см. стр. 79). Что касается работы
за тот же период действительной силы сопротивления, обозна-
§ 8.9 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ПРИ НЕЛИНЕЙНОМ;ЗАТУХАНИИ
501
чаемой нами в общем виде через /(ж), то ее выражение было уже
найдено на стр. 484. Она равна
2л
%Q J f(x) COR (cot) d(ci)t).
0
Приравнивая обе величины друг другу, находим эквивалентный
коэффициент затухания
2л
с = —-— f f(x) cos (cot) d(cot).
я соа?(> J
о
(8.45)
Амплитуда такого «линеаризованного» уравнения (8.44), как мы
видели на стр. 75, выражается так:
(2.28а)
Для вычисления этой амплитуды в уравнение (2.28а) следует
подставить значение с из формулы (8.45).
Указанный общий метод может быть применен к любому
типу затухания, даже если его закон дан просто в виде кривой.
Но тогда интеграл (8.45) должен быть вычислен графически. В
качестве примера возьмем случай сухого трения =
На стр. 485 мы нашли величину интеграла (8.45), которая оказа-
лась равной 4J7. Отсюда получаем эквивалентный коэффициент
затухания
4J7
С. =--------,
который, как видим, зависит как от частоты, так и от амплитуды.
Подставляя с в формулу (2.28,а), имеем
или
откуда
1---------
о2
(8.46)
502
КВЛЗПГЛРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
Заметим, что для этого случая существует также точное
решение. Ио получение его слишком сложно, чтобы давать его
здесь. Поэтому мы ограничиваемся лишь приведением на рис. 8.44
и 8.45 окончательных результатов, немногим отличающихся от
результатов, даваемых формулой (8.46). Читателю рекомендуется
6МС
Рис. 8.44. Резонансная диаграмма для системы, затухай не которой обуслов-
лено сухим трением. Сравнить с рис. 2.22, а (стр. 77).
В случае кулонова трения, меньшего определяемого из отно-
F я g,
шения =• = - , амплитуды при резонансе безгранично растут
независимо от затухания. На первый взгляд кажется странным
то обстоятельство, что затухающие колебания могут иметь
бесконечную амплитуду. Однако этот парадокс объясняется
довольно просто, если принять во внимание, что возмущающая
сила PQ sin cot совершает работу, увеличивающую энергию систе-
мы, а поскольку работа есть произведение силы на перемещение,
то величина этой энергии пропорциональна амплитуде. Вслед-
ствие постоянства силы трения F величина рассеяния энергии
при затухании также пропорциональна амплитуде. Таким обра-
зом, если сила трения мала по сравнению с возмущающей силой
IF < > то энергия, поглощенная системой, вследствие работы
§ 8.9 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ПРИ НЕЛИНЕЙНОМ ЗАТУХАНИИ 503
последней силы больше энергии, рассеянной по причине затуха-
ния, причем эти соображения остаются в силе, как бы ни были
велики амплитуды. Итак, амплитуда растет беспредельно. Это
можно выразить и иначе, сказав, что в установившемся состоянии
системы амплитуда бесконечна. В случае вязкого затухания (т. е.
линейного) сама сила сопротивления пропорциональна ампли-
туде, вследствие чего рассеяние энергии пропорционально квад-
Рис. 8.45. Диаграмма сдвига фазы в случае сухого трения.
Сравнить с рис. 2.22, б.
рату амплитуды. Таким образом, даже при малом коэффициенте
затухания с всегда имеется такая конечная амплитуда, при кото-
рой рассеяние энергии становится равным ее поглощению вслед-
ствие действия возмущающей силы.
В связи с тем, что при резонансе в случае кулонова трения
также встречаются бесконечно большие амплитуды, сдвиг фазы в
момент резонанса претерпевает разрыв непрерывности, как это
видно на рис. 8.45.
В случае кулонова трения сила трения (нелинейная, так как
меняет знак) по величине постоянна, тогда как силы инерции и
упругости (обе линейные) растут вместе с амплитудой. Таким
образом, при больших амплитудах колебательное движение
можно считать синусоидальным, а тогда приближение (8.46) яв-
ляется вполне удовлетворительным. При малых амплитудах
кривая перемещений значительно искажается, вследствие чего
504
КВАЗИГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VII]
упомянутое приближение амплитуды оказывается неудовлет-
ворительным. Ниже пунктирной кривой на рис. 8.44 мы имеем
движения с одной остановкой или паузой за полпериода, как это
показано на рис. 8.46,а. В незаполненной линиями левой нижней
Рис. 8.46. Принужденное дви-
жение с одной (а) и двумя
(6) паузами за полпериода,
имеющими место при боль-
шом кулоновом трении и
низких частотах.
угловой части рис. 8.44 движение имеет
за по л пер иода больше одной паузы.
Это показано на рис. 8.46,6. Для этой
области не может быть получено реше-
ния. В случае всевозможных движений,
относящихся к типам рис. 8.46, при-
ближенная формула (8.46) неприме-
нима. Однако на практике мы ин-
тересуемся главным образом только
условиями, создающимися вблизи ре-
зонанса, а здесь ошибки формулы (8.46)
не превышают нескольких процентов.
Таким образом, общий метод, даваемый
уравнениями (8.45) и (2.28,а), имеет
безусловно, большую практическую
ценность. Его выводы для случая аэро-
ил и гидродинамического сопротивления,
т. е. когда /(ж) = сг2, достаточно разработаны и претворены
в диаграммы, наподобие рис. 8.44 и 8.45. За подробностями
в этой области отсылаем читателя к специальной литературе.
§ 8.10. Субгармонический резонанс
В этом параграфе мы рассмотрим некоторые случаи, когда
движение значительно отличается от гармонического, вследствие
присутствия в системе каких-либо ярко выраженных нелиней-
ных факторов. При этом для нас неважно, обусловливается ли
нелинейность упругостью или затуханием.
В линейных системах, подвергающихся действию постороннего
возмущения, могут возбуждаться колебания с большими амплиту-
дами при собственных частотах, выражающихся целыми числами,
кратными основной частоте изменения возмущающих факторов.
Наиболее важный в техническом отношении пример подобного
рода был рассмотрен в главе V, а именно: крутильные колебания
двигателя внутреннего сгорания. Обратный случай, т. е. возбуж-
дение больших колебаний при низших частотах, по сравнению с
основной частотой (составляющих | , i, |,. . . этой частоты)
2 3 4 I
возмущающей силы, никогда не встречается в линейных си-
стемах.
В нелинейных системах указанные случаи могут быть. Рас-
смотрим в качестве примера самовозбуждающиеся релаксацион-
§8.10
СУБГАРМОНИЧЕСКИЙ РЕЗОНАНС
505
ные колебания типа рис. 8.14. Подвергнем систему действию
малой гармонической силы, частоты которой в 2, 3, 4,. . . раза
больше частоты свободных или собственных колебаний, равной
Так как свободные колебания содержат все высшие гармоники,
имеющие к тому же в нелинейных случаях большие амплитуды,
то возмущающая сила (при соответственной разности фаз) должна
совершать работу на одной из
этих гармоник, вызывая тем са-
мым фактическое ее появление. Но
эта гармоника является неотъем-
лемой частью полного движе-
ния по рис. 8.34 и должна по-
этому привести к возникнове-
нию вместе с собою также и
других гармоник. В результате
возбуждается движение с боль-
шими амплитудами при частоте,
низшей сравнительно с частотой
изменения возмущающего фак-
тора (первая составляет неко-
торую дробную часть послед-
ней, например х/2, 1/3 и т. д.)<
названием «субгармонического
кации частоты».
Рис.8.47. Субгармонический резонанс
в самовозбуждающемся электри-
ческом контуре.
Такое явление известно под
резонанса» или «демультипли-
Заметим, что до сего времени подобных практически важных
случаев в машиностроении не встречалось, тогда как в электро-
технике эти случаи имеют некоторые значения и начинают нахо-
дить приложения.
Пусть мы имеем электрический контур, содержащий неоновую трубку,
конденсатор, сопротивление и батарею, которые расположены таким
образом, чтобы могли возникнуть релаксационные колебания по типу рис.
8.34. Пусть, далее, этот контур возбуждается некоторым небольшим
переменным напряжением с постоянной частотой со При изменении емкости
О собственный период Тп системы несколько изменяется (в данном случае
он пропорционален не У ДО, а произведению ВС). Если бы здесь не было
возбуждения с частотой со, то период автоколебаний изменился бы по
закону пунктирной линии, показанной на рис. 8.47. Однако при действии
указанного возбуждения получается иная картина. Дело в том, что система
всегда колеблется с периодом, кратным периоду возбуждения Твозб (а
тогда частота будет составлять соответственную дробную часть от частоты
возбуждения со), причем из всевозможных кратных периодов избирается
тот, который лежит ближе всего к собственному периоду, как по-
казано на рис. 8.47. В подобном контуре демультипликация частоты до-
ходит до 200.
Хотя описанное явление впервые наблюдалось в релакса-
ционных колебаниях, тем не менее, приведенное объяснение
показывает, что оно не ограничивается только этим типом коле-
506
КВАЗИ ГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VIII
баний, но может встречаться также в любой системе с доста-
точно выраженной нелинейностью при малом «эффективном
затухании». Под эффективным затуханием мы подразумеваем пол-
ное рассеяние энергии за один период, вызванное совокупностью
сил положительного и отрицательного затухания. Таким образом,
наши рассуждения оказываются применимы к линейным автоколе-
баниям, а также к нелинейным вынужденным колебаниям без
затухания или с очень малым затуханием. В последнем случае не-
Рис.8.48.^Система с механическим субгармоническим
резонансом. Масса может быть приведена в колеба-
тельное движение с собственной частотой действием
возмущающей силы значительно более высокой
частоты, 6) Магнитные и упругие восстанавлива-
ющие силы, действующие на массу (рис. а).
линейность обычно обусловливается пружинами (понимаемыми,
конечно, в широком смысле слова). Рассмотрим теперь два
примера.
Положим, что мы имеем консоль с укрепленным на ней сталь-
ным грузом, который помещен между двумя постоянными маг-
нитами (рис. 8.48,а). «Пружина» здесь состоит из двух частей:
упругий стержень (характеристика линейная) и магнитное поле
(характеристика нелинейная и отрицательная). Чем ближе под-
ходит груз к одному из магнитов, тем больше его притягивающая
сила (являющаяся отрицательной восстанавливающей силой),
как показано на рис. 8.48,6. При такой комбинации «пружин»
свободные колебания содержат большое число высших гармоник.
Предположим теперь, что груз подвергается действию небольшой
переменной силы, частота которой является приблизительно
кратной собственной частоте. Эту силу можно осуществить
многочисленными способами, между прочим, установкой на грузе
§ 8- JO
СУБГАРМОНИЧЕСКИЙ РЕЗОНАНС
507
маленького неуравновешенного мотора. Тогда переменная сила
может совершить. работу на какой-то n-й гармоника движения
и тем самым поддерживать систему в состоянии колебаний. В
этом примере нет никакого иного источника энергии, кроме упомя-
нутого колебательного (мотор), и мы видим, что частота такого
колебательного источника энергии должна быть кратной соб-
ственной частоте.
Далеко не является необходимым иметь внешнюю возмущаю-
щую силу, действующую на систему: субгармонический резонанс
может быть вызван также
смотренные в §§ 8.2—8.4,
имели линейные «пружины»
(точнее говоря, «упругие»
характеристики), но толь-
ко их интенсивность из-
менялась со временем.
Было показано, что в этих
случаях резонанс может
иметь место при частотах,
переменной жесткостью. Случаи, рас-
Рис.8.49. Действие системы, изображенной
на рис. 8.48, при переменном токе в обмот-
ках электромагнитов.
высших, по сравнению с
частотой изменения жест-
кости, а также и при
половине этой частоты,
но ни при каких других низших субгармониках (порядка
7з, 1/4 и т. д.). Однако если мы имеем нелинейную пружину, изме-
няющуюся с течением времени (т. е. такую пружину, жесткость
которой изменяется и с перемещением и со временем), то могут
возникнуть также и низшие гармоники. Примером подобной систе-
мы может служить система, представленная на рис. 8.48,а, где
теперь магниты сделаны из мягкой стали и несут обметки с пере-
менным электрическим током. Сила притяжения этих магнитов
изменяется не только с перемещением, как показано на рис.
8.48,6, но и со временем, причем последние изменения происходят
с частотой, равной удвоенной частоте тока Таким образом,
магнитные силы оказываются способными совершать работу
при колебании, если, конечно, имеется подходящее соотношение
фаз. что ясно из рис. 8.49 Кривая / здесь изображает движение
груза, кривая II изображает «упругую» силу магнитов в предполо-
жении, что по ним течет постоянный го к наконец, кривая III
показывает интенсивность изменения магнитного поля с течением
времени, при условии, что масса неподвижна (частота этого
изменения здесь принята равной ушестеренной частоте колеба-
тельного движения).
Полная сила действия магнитов на груз равна произведению
ординат кривых II и III. Непосредственно слева от прямой АА
магнитная сила действует против движения, а непосредственно
508 КВАЗИ ГАРМОНИЧЕСКИЕ И НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ СИСТЕМ ГЛ. VID
справа от этой линии она способствует движению. Кривая III
должна быть расположена так, чтобы слева от АА напряжение
поля было мало, а справа от А А — велико. То же самое должно
выполняться и вблизи прямой ВВ, Таким образом, энергия погло-
щается системой. Нелинейность системы здесь весьма суще-
ственна, так как в противном случае кривая II должна быть
синусоидой, а тогда, согласно рис. 1.16 (стр. 30), никакого погло-
щения энергии системой не происходит. Заметим, что на некото-
ром небольшом расстоянии ст А А или ВВ кривая II имеет очень
малые ординаты. Это обстоятельство имеет место в связи с погло-
щением энергии. Вопрос о том, каково должно быть соотношение
между фазами кривых 7 и III, может быть разрешен только с
помощью математического анализа. Так как подобное исследова-
ние связано с нелинейным уравнением с переменными коэффи-
циентами, то разрешение этого вопроса довольно затруднительно.
Задачи № 217—233.
ЗАДАЧИ
Глава I
I. Сила Р 0 sin со £ действует на перемещении
х = х0 sin (со£ 4- 30°),
где Ро = 5 кГ, х0 — 2 см в w = 68 сек \
а) Найти работу, совершаемую силой в течение первой секунды.
1
Ь) Найти работу, совершаемую силой в течение — секунды, считая
с момента начала движения. 4Ю
2. Сила Posin3(i)f действует на перемещении a?osin2<ac. Таким
образом, два периода изменения силы совпадают с тремя периодами движе-
ния. Вычислить работу силы на соответствующем перемещении за следую-
щие половины периода движения:
а) первую, Ь) вторую, с) третью,
d) четвертую
3. Функция задана следу-
ющим образом: она равна Ро в
интервалах времени 0 < at < тс,
2л < at < 3 л, 4 тс <Z at < 5л,
и т. д. и равна нулю в про-
межуточных интервалах
< 2 я, 3 тс < at < 4 тс, и 1. д. Тре-
буется найти разложение этой функции в
что данная функция имеет некоторое
[art—>-
К задаче 3.
ряд Фурье. Следует заметить,
среднее значение, отличное
от нуля. Необходимо, прежде всего, найти это среднее значение, далее.
вычесть его из разложения и посмотреть, на основании изложенного в
первой главе, что представляет
собой полученный остаток.
4. Задана периодическая
кривая f(t). изображенная на
рисунке.
Показать, что
8 / 1 . п
/(f) = ~2 Sm XT Sm ^t +
Л ( 32
+ — sin bat — ... I.
5Z )
5. Возвращаясь к рис. 1.18, положим, что анализируемая кривая
является синусоидой, вследствие чего ^“1,3 все остальные коэффициенты
а и Ъ равны нулю.
Сделать набросок формы кривой на столике В (см. рис. 1.18), пред-
полагая, что шестеренка В и кривошип вращаются с одинаковыми скоро-
510
ЗАДАЧИ К ГЛ. I
стями. Форма замкнутой кривой на столике Е зависит от того, каким»
образом сцеплены колеса
Показать, что при повороте колеса на 90° одно относительно другого
кривая на столике изменяет свой вид, переходя из окружности в прямую,,
наклоненную пол углом 45° Найти площадь замкнутой кривой на столике
Е и доказать, что о, = 1. \ — 0
6. Нарисовать кривые на столике Е задачи 5 для случаев, когда кри-
вошип вращается в 2 3. . . раза быстрее, чем колесо В
Показать, кроме того, что во всех этих случаях площади, измеряемые
планиметром, равны нулю.
7. Вывести уравнение (1.6), приведенное на стр. 16 с помощью тригоио
метр ии.
f(d)t)
К задаче 8.
8. Найти коэффициенты
ордината равна в течение — периода и равна — а в течение — периода.
Фурье изображенной кривой, если дано, что
3____________ 5
а< и л р Г1МЛД.С4»
О 8
9. Сила выражается уравнением
Р =
В о sin
в интервале 0 < «г < 2 л, причем в последующих интервалах этот закон
повторяется, т. е кривая состоит из полуволн синусоиды в верхней полу-
плоскости Найти коэффициенты Фурье.
10. Сила имеет постоянную величину Ро в промежутках времени
— у < at < + ф. (2л — ф) < at < (2 л + р), и т. д., в то время как она
равна нулю в интервалах у < at < (2л — р), и т. д.
К задаче 9.
К задаче 10.
Требуется: а) найти коэффициенты Фурье: Ь) рассмотреть
случай полученной
неограниченно
11. Кривая составлена из параболических дуг, причем гак, что между
II - п
- и х == н- - имеет место уравнение у = а
чается посредством зеркальных отражений самой себя относительно верти-
I I
х —
, . , . . . . предельный
решения, когда Ро неограниченно возрастает, а у
убывает, причем произведение Рор остается постоянным.
а далее она полу-
калей х =------и т = + —.
2 2
Вычислить коэффициенты Фурье.
ЗАДАЧИ К ГЛ. П
51)
Глава П
12. Вывести уравнения (2.28а) и (2.28Ь) способом, указанным непосред-
ственно после уравнения (2.27).
13. Вывести уравнение (2.23) энергетическим методом.
14. Однородный брус весом G и длиной I шарнирно укреплен в точке
на расстоянии четверти его длины от одного конца, тогда как на расстоянии
четверти длины от другого конца он удерживается пружиной с коэффициен-
том жесткости к, образующей с ним угол 45° Найти собственную частоту
колебаний: а) в данном положении, Ь) после поворота системы на 90°
так, чтобы брус свешивался по вер-
тикали вниз.
15. Два массивных диска весом
25кГ каждый соединены между собой
К задаче 15.
стержнем в своих центрах, а также спарником, подобно ведущим колесам
паровоза. Стержень и спарник весят также по 25 кГ. Колеса могут катиться
без скольжения по горизонтальному пути. Найти собственную частоту
малых колебаний около положения равновесия.
16. Изогнутый под прямым углом стержень, имеющий полную длину
всю массу 2т (из коих на каждое плечо приходится соответственно
к горизонтальному
в вертикальной плоскости.
2Z и
т и Z), подвешен
штифту
Найти периодмалых колебаний пол
действием силы тяжести.
/7
К задаче 17.
17. Невесомый горизонтальный брус длиной 3/ несет три сосредоточен-
одинаковые массы т. Брус имеет шарнирную опору
живается двумя пружинами с коэффициентом
кости к каждая. Найти собственную частоту малых
колебан ий.
18, Ротор веса G с моментом инерции / относи-
своими цапфами
кри-
ные
жест-
в точкеД и поддер-
R
тельно его оси симметрии положен
на две направляющие поверхности с радиусом
визны R. Радиус цапф равен г Когда ротор катится
без скольжения по этим направляющим, он совершает
гармонические колебания около наинизшей точки сво-
его пути Найти частоту колебаний (применив энер-
гетический метод, о чем см стр 54 и 60)
19, Решить ту же задачу (18), предположив, что направляющие поверх-
ности плоские (Й =' оо) и что ротор имеет неуравновешенный груз веса
расположенный на расстоянии гг от его оси.
К задаче 18.
512
ЗАДАЧИ К ГЛ. Д
20. Два цилиндрических вала расположены на расстоянии 2а друг
от"’др у га. Их подшипники укреплены неподвижно, а валы вращаются с
большой угловой скоростью се) в противоположных направлениях. Сверху
на них положен брус длины I и веса
G. Если предположить, что имеется
сухое трение с коэффициентом / меж-
ду валами и брусом, последний будет
совершать продольные возвратно-по-
ступательные колебания а)Чему равна
частота колебаний? Ь) Если один конец
А бруса толкнуть за плоскость чер-
тежа, а другой В на себя, будет ли рав-
новесие устойчивым или неустойчивым?
К задаче 21.
К задаче 20.
21. Маятник состоит из жесткого
массу m на своем конце (см. рисунок).
К задаче 23.
К задаче 24.
невесомого бруса длины /, несущего
К этому брусу прикреплены две пру-
жины к на расстоянии а от его
верхнего конца. Вычислить частоту
колебаний при малой амплитуде.
22. Перевернув рисунок в задаче 21, найти: а) соотношение между
величинами a, mt I, при котором равновесие устойчиво; Ь) частоту коле-
баний.
23. Невесомый брус длиной 21 подвешен в своей середине. В своем
верхнем конце он несет сосредоточенный груз И7, а в нижнем — со-
средоточенный груз 21V В середине расстояния между точкой подвеса
и нижним грузом установлена пружина жесткости к. Найти собственную
частоту малых колебаний в вертикальной плоскости.
24. Брус длиной I, имеющий массу т, равномерно распределенную по
его длине, подвешен шарнирно к верхней точке и удерживается двумя пружи-
нами жесткости к в средней точке. Найти собственную частоту колебаний.
25. Вычислить частоту колебаний статора (рис. 2.43), если продольная
жесткость каждой из четырех пружин характеризуется коэффициентом к, их
среднее расстояниеот центра ротораравно а и момент инерции статора равен/.
26. Решить ту же задачу для рессорной системы на рис. 2.44. Бруски с
изготовлены из стали с модулем упругости Е. Их размеры Z2, s, h пока-
заны ^на чертеже.
ЗАДАЧИ К ГЛ. И
513
27. Жесткий невесомый горизонтальный брус длины I может свободно
качаться около одного конца и несет массу т на другом конце (см. ри-
сунок). Этот брус удерживается посредством нерастяжимого шнура длины
h. Если массу оттянуть перпендикулярно к плоскости чертежа и за-
тем отпустить, то она начнет колебаться. Найти частоту этих колебаний
28. Масса т укреплена в середине тонкой проволоки поперечного
сечения S и длины I, туго натяпутой^межлу двумя неподвижными опорами,
причем сила натяжения равна Т кГ Модуль упругости проволоки равен Е
Вычислить частоту колебаний массы в плоскости, перпендикулярной
к проволоке.
29. Тяжелый, абсолютно твердый цилиндр диаметра D, длины I и
массы т может кататься по гори-
зонтальной плоскости. Две пру-
жины к прикреплены посредине
его длины на расстоянии а от оси
цилиндра. Найти частоту коле-
баний.
К задаче 29.
Горизонталь-
—• нал праеРцал
т вертикаль-
Я нал г/р секция
ff
К задаче 30
30. Система состоит из одной сосредоточен ной массы т, прикрепленной
к концу абсолютно жесткого невесомого стержня длины I В нормальном
положении стержень горизонтален, причем его ненагруженный конец
прикреплен посредством шарового шарнира к стене. Стержень удерживается
двумя пружинами, прикрепленными в его середине и
горизонтальной плоскости, а
также вертикальной струной
длины h Найти собственную
частоту колебаний.
31. Найти собственную
частоту системы зубчатой пе-
редачи, пренебрегая массой
валов и зубчатых колес. Мате-
риал валов — сталь.
8см
*
Ж-*—75см
' 1,^788Гсм сскг
расположенными в
/6см
—75см-
кем
1___
1г=128Г см cek2
32. Найти выражение для
К задаче 31.
коэффициента жесткости пру-
жины к при линейной деформации для случая винтовой] пружины из
стальной проволоки диаметра d, с диаметром витка Z) и числом витков п
Вычислить к, если d — 0,2 см, D = 4 см, п= 10 Прин ять G = 8.4 • 105кГ1см2
33. Найти выражение для коэффициента жесткости винтовой пружины
при ее кручении, т.е. предполагая, что к концам винтовой пружины прило-
жены крутящие моменты вокруг продольной ее оси. Найти численное значение
этой величины к, взяв данные из предыдущей за дач и. Прин ять Е- 2,5 • WkTIcm2.
34. Найти выражение для коэффициента жесткости к винтовой пру-
жины при ее изгибе, т. е. отношение изгибающего момента, приложенного
к концам пружины, к углу поворота этих концов относительно друг друга
Найти численное значение величины к, взяв данные из предыдущих двух
задач.
35. Найти выражения коэффициента жесткости: а) для консольной
балки длин ы 1с жесткостью на изгиб Е1, когда груз приложен в конце бал ки.
L) для балки длины Z. лежащей на двух опорах и несущей груз посредине.
33 Ден-Гартог • 2074
514
ЗАДАЧИ К ГЛ. U
с) для балки длины заделанной обоими концами и несущей груз по-
средине.
36. Найти частоту малых вертикальных колебаний массы изобра-
женной на рисунке. Оба бруска предполагаются жесткими и невесомыми.
Масса находится в середине между к3 и &4, a к3 — в середине между кг
и к2. При этом масса может лишь двигаться вверх и вниз. Кроме того,
она может свободно поворачиваться, но не имеет момента инерции.
777
К задач? 36.
К задаче 37.
37. Некоторая точка машины совершает одновременно горизонтальные
и вертикальные колебания одной и той же частоты. Будучи наблюдаема
в сейсмический микроскоп, описанный на стр. 100, эта точка представляется
в виде эллипса (см. рисунок). Путем наблюдения найдены длины h и АВ.
а) Зная эти величины, найти сдвиг фазы между горизонтальным и вер-
тикальным движениями. Найти, какую форму примет эллипс при:
7Т
Ь) <р = 0; с) ср — - .
38. а) Чему равно процентное отношение затухания колебаний к его
критическому значению, если при колебаниях каждая последующая ампли-
туда на 2% меньше предыдущей (за полный период колебания) Ь) Если ко-
леблющаяся система, упомянутая в а), состоит из груза весом 0,5 к,Г и
пружины с коэффициентом жесткости к = 2 кПсм, то чему равен численно
коэффициент затухания1) и в каких единицах он выражается?
39. В затухающей колебательной системе с пружиной и грузом весом
9 кГ статическое удлинение пружины равно 1,3 см Наблюдения показали,
что амплитуда свободных колебаний за 20 периодов уменьшилась с 1 ем
до 0.25 см Вычислить коэффициент затухания с в кГ сек! см
К задаче 39.
si п cot
61см
Is 1,73кГсм секг
с=Зд>37<Гсм cek2/paff
0=30°
со =16рад/се к
К задаче 40.
Е^ВЛ-Ю^Г/см?
40. Механическая мешалка рассчитана так, что ее . верхний “’конен
совершает гармонические колебания по закону 0 = 0osinot При лей-
xi См. примечание на стр. 43. (Прим, персе.)
ЗАДАЧИ К ГЛ. 11
515
ствпп в воздухе машина колеблется с ничтожно малым затуханием. Испыта-
ния показывают, что при нормальной работе с лопатками, погруженными
в жидкость, эта последняя гасит движение крутящим моментом с ==
= 38,5 к Г см сек! рад и. кроме того,ее действие приводит к удвоению момента
инерции лопаток.
Найти наибольшее касательное напряжение и угловую амплитуду
колебаний лопаток в состоянии установившегося движения в двух случаях:
а) в воздухе, Ь) в жидкости.
41. Система, совершающая затухающие колебания, состоит из пружины
с постоянным коэффициентом жесткости k = 3,64 кПсм и из груза 4,54/сГ.
Затухание таково, что каждая амплитуда со-
ставляет 99% от предыдущей, т.е. за один период
амплитуда уменьшается на 1%
а) Найти частоту колебаний по формуле и из
диаграммы, изображенной на рис. 2.9.
Ь) Найти коэффициент затухания.
с) Найти амплитуду силы резонансной
частоты, необходимую для поддержания коле-
баний системы с амплитудой 2,54 см
d) Какова будет быстрота возраставия ам-
плитуды, если при амплитуде 2,54 см возмуща-
ющая сила (при резонансной частоте) удвоится?
е) Каково конечное значение амплитуды, к
которой будет стремиться система под действи- задаче 43.
ем этой удвоенной силы?
О Найти соотношение между амплитудой и временем при этом возра-
стающем колебан ии
42. Найти выражения для крутящего момента при установившемся
режиме п при отсутствии сопротивления: а) для вала k, изображенного
на рис. 2.6 и Ь) для вала &2, изображенного на рис. 2.7
43 Крутильный маятник, состоящий из диска, весящего 9,7 кГ и
имеющего диаметр 25,4 см, подвешен на стальном стержне длиной 76 см
и диаметром 1,27 см
Маятник подвергается воздействию крутящего мо-
гармоническому закону с частотой 7
мента, изменяющегося по простому
колебаний в секунду Материал вала имеет предел
текучести на сдвиг 1400 кПсм*
Найти амплитуду Л4/о приложенного момента, со-
ответствующую коэффициенту безопасности, равному 2.
44. Определить эквивалентные коэффициенты жест-
кости пружин, поддерживающих шлифовальный ста-
нок, весящий 22,7 к. Г и делающий 3000 об!мин,, для
уменьшения в 10 раз его воздействия на стан ину, пред-
полагаемую абсолютно жесткой по сравнению с воздей-
ствием при непосредственном закреплении на станине.
45. Требуется изготовить сейсмометр для измере-
ния простых гармонических колебаний порядка 5
колеб/сек, ошибка которого не превышала бы 10%.
Найти налагаемое этим условием ограничение на
собственную частоту прибора.
46. Машина для статического уравновешивания
К задаче 46 (стр. 314) состоит из подшипника В, наклоненного
под углом а к вертикали (см рис.). Ротор, помещен-
ный в этот подшипник, имеет момент инерции I и несет неуравновешенную
массу т на расстоянии г от центра
Написать дифференциальное уравнение колебаний ротора, взяв за пере-
менную величину, определяющую его положение, угол его поворота ср.
Определить частоту собственных колебаний, полагая колебаниям малыми.
33*
516
ЗАДАЧИ К ГЛ. II
47. Найти собственную частоту малых колебаний сплошного тяжелого
полуцилиндра (сечение которого ограничено полукругом и диаметром),
катающегося без скольжения по горизонтальной плоскости.
48. Некоторая система, характеризующаяся коэффициентом жесткости
к и массой т, находится в покое Затем к массе т прикладывают постоян-
ную силу Р. действующую в течение промежутка времени Zo. после чего
силу отнимают Найти движение системы после удаления силы
49. Написать дифференциальные уравнения движения системы, изо-
браженной на рис. 2.7, и затем привести их к одному уравнению посред-
<р2
ством введения переменной w = ср-,-, представляющей собою некоторый
п
угол, обращающийся в нуль при отсутствии скручивания вала. Проверить
таким путем выводы, приведенные на стр 50
50. Невесомый жесткий стержень шарнирно подвешен за один конец. На
расстоянии / от этого конца укреплена масса т, на расстоянии 21—амор-
тизатор с коэффициентом затухания с. наконец, на расстоянии 31 — пружи-
на с коэффициентом жесткости к и переменная возмущающая сила PsinwL
Составить дифференциальное уравнение движения системы Пред-
полагая затухание малым (но отличным от нуля), вычислить собственную
частоту. Найти, кроме того, амплитуду вынужденных колебаний точки
прикрепления пружины при возмущающей частоте, равной собственной
и равной половине собственной.
51. Круглый тяжелый диск массы М и радиуса г, расположенный
горизонтально, подвешен к неподвижному потолку посредством трех
вертикальных проволок длины /. прикрепленных на равных расстояниях
к окружности диска.
а) диск повернули на малый угол вокруг вертикальной осевой линии
и предоставили ему колебаться. Найти собственную частоту вращатель-
ных колебаний, считая их малыми.
Ь) Диск сместили в сторону на малое расстояние, не вращая его, и
отпустили, вследствие чего он начал качаться. Найти собственную частоту
малых колебаний
52. Доказать высказанное на стр. 89 положение, что в сейсмическом
приборе нет искажения фаз, если характеристика сдвига фазы на рис.
2.22,6 представляет собою прямую, проходящую через начало по диаго-
нали прямоугольника.
53. Масса т подвешена к потолку с помощью пружины с постоянной к
и демпфера с постоянной с. Потолок имеет вынужденное движение а0 sin vt.
Найти работу, совершаемую за один период в состоянии установив-
шихся колебаний Ответ дать в безразмерной форме.
54. В системе, изображенной на рис 2 3 и на рис. 2.22.а, наибольшая
работа, совершаемая приложенной силой, выражается в фун книи от частоты
при помощи приближенной формулы яР^х^ где “ амплитуда при
G)
— = I. В действительности наибольшая работа имеет место при отношении
«о
частот, немного отличающемся от единицы.
Доказать, что этот максимум получается из выражения лРояо умно-
жением его на поправочный множитель
и показать, что ошибка не превосходит 0.1% при затухании, доходящем
с
до — = 20%.
ск
ЗАДАЧИ К ГЛ. D
517
55. В 1940 г. около Рютленда в штате Вермонт (Grandpa’s Klob, Rut-
land, Vt) был сооружен большой двухлопастный ветродвигатель, могу-
щий давать 1250 квпг электроэнергии. Диаметр окружности лопастей равен
53,5 м (175 фут), скорость вращения 30 об/мин, причем плоскость вращения
можно считать в нашей задаче вертикальной.
Лопасти установлены на головке с вертикальной осью, вокруг которой
она может медленно поворачиваться так, чтобы направлять под ветер
плоскость лопастей Поскольку здесь ротор имеет всего только две лопасти,
его момент инерции относительно вертикальной оси (ось башни) значитель-
но больше, когда лопасти расположены горизонтально, чем тогда, когда
они вертикальны. Пусть Q — постоянная угловая скорость ротора, ы —
значительно меньшая угловая скорость головки, Zmax и 7ГП1П — наибольшее
н наименьшее значения момента инерции относительно вертикальной осн.
а) Предполагая движущийся механизм головки весьма гибким на
кручение, т. е. не вызывающим крутящего момента, за исключением мо-
мента трения, которым мы пренебрегаем, найти отношение между наиболь-
шим и наименьшим значениями ы
Ь) Предполагая этот механизм весьма жестким на кручение, т. е.
считая, что угловая скорость ы безусловно постоянна, найти выражение
крутящего момента механизма головки1).
56. Ротор вертолета Найти собственную частоту малых вертикаль-
ных колебаний вращающейся лопасти (угловая скорость — £), при этом
втулка предполагается не могущей двигаться по вертикали (она только
вращается); лопасти абсолютно жесткие. Дать ответ через размеры th b,
массу лопастей М и ее момент инерции
57. Однородный брусок весом G и длиной / укреплен в верхней точке
посредством шарнира с горизонтальной осью. Сначала брусок висел вер-
тикально, затем всю систему привели во вращательное движение с угловой
скоростью Q вокруг вертикальной оси.
а) Найти положение динамического равновесия бруска, выразив
его угол отклонения а от вертикали через угловую скорость Q.
Ь) Найти собственную частоту малых колебаний около вертикального
положения а = 0
е) Найти собственную частоту малых колебаний около произвольного
положения равновесия а = а0 (что имеет место при большой угловой
скорости Q).
58. Однородный брусок длиной I = 24 см может вращаться без трения
вокруг шарнира в верхней точке. Этот брусок возбуждается гармониче-
*) Иначе говоря, гироскопического момента. (Прим, перев.)
518
ЗАДАЧИ К ГЛ. D
ампли-
устано-
бруска,
ски действующей силой с^частотой 1 колеб/сек и амплитудой’г0,225^кГ,
приложенной на четверти длины от опоры и направленной го рпзонтально
Найти угловую
туду вынужденных
вившихся колебаний
если его вес = 1,8 кГ.
^/Л/’
к=7,27<Г/см
9
К задаче 58.
с=9,27кг оек/см
7777/7777/.
Menoffffuo/сная опора
К задаче 59.
59. Верхняя точка системы, состоящей из пружины, груза и демпфера,
совершает вертикальные гармонические колебания с амплитудой 0,13 сл/
и частотой, равной частоте собственных незатухающих колебаний системы.
Найти: а) амплитуду силы упругости и Ъ) амплитуду силы зату-
хания.
60. Были рассмотрены два различных'*’случая резонансных кривых:
I) возмущающая сила 2% sin of имеет постоянну ю амплитуду PQ> резонанс-
ная кривая начинается на высоте 1
стр. 68); 2) амплитуда возмущающей
К задаче 61.
и кончается на высоте 0 (рис. 2.18,
силы А со2 sin со t пропорциональна
со2; резонансная кривая начинается
на высоте 0 и кончается на высоте 1
(рис. 2.220, стр 72)
Требуется рассмотреть новый слу-
чай возмущающей силы Лео sin соt,
когда ее амплитуда пропорциональ-
на первой степени частоты. Вывести
уравнение резонансной кривой, при-
вести его к безразмерной форме и
найти, на какой высоте эта кривая
начинается и на какой кончается.
Определяя статические отклонение,
как от клонен ие, вызванное ампли пд-
иым значением силы при частоте, рав-
Лсос «
нои собственной частоте, т. е. яст =-, найти два отношения частот —,
к ыс
при которых резонансная кривая имеет единичную высэту.
61. Система с одной степенью свободы, имеющая очень малое затуха-
ние, работает вблизи резонанса. При этом коэффициент динамичности
(определяющий нарастание колебаний) столь велик, а возмущение столь
мало, что наши измерительные приборы нс в состоянии с достаточней
точностью измерить статическую амплитуду ОА Все, что можем изме-
рить, это — наибольшая амплитуда rrmax, амплитуды ж, в двух боковых
точках диаграммы на расстоянии 24 со друг от друга, разность частот
24 со и собственная частота сос.
Из этих данных должно быть получено отношение коэффициентов
G
затухания. Формулы для —
в функции от указанных величин вывести -в
ЗАДАЧИ К ГЛ. Ill
519
Л со x-t
— и -------являются малыми вели-
те ^лтах
упрощающих предположениях, что —
чинами. & с*
62. Верхняя точка изображенной на рисунке колебательной системы
совершает движение по закону а0 sin
Вывести дифференциальное уравнение абсолютного движения массы
и привести его к нормальной форме. Написать в безразмерной форме урав-
А сос
пение семейства кривых на резонансной диаграмме, полагая яст =
С
— = 0,1,
Ск
к
Двигатель
Фундамент
К задаче 63.
- = 0.
Ск
63. Двигатель с возвратно-поступательным движением подверга-
ется воздействию периодической возмущающей силы, частота ко-
торой равна угловой скорости двигателя. Двигатель, весящий вместе
со станиной 223 кГ, установлен на системе виброизолирующих пружин,
эквивалентный коэффициент жесткости которой равен 54 кПсм, вве-
денный в систему демпфер рассчитан так, что получается затухание, рав-
ное 20% от критического. Найти: а) в каком диапазоне скоростей ампли-
туда переменной силы, передающейся фундаменту, больше амплитуды са-
мой возмущающей силы, Ь) в каком диапазоне скоростей амплитуда пере-
менной силы, передающейся фундаменту, больше
амплитуды самой возмущающей силы, с) при какой
скорости амплитуда передаваемой силы начинает
составлять не более 20% амплитуды возмущения.
Глава ID
64. Вычислить абсциссы и ординаты точек zL, Р
и Q на рис. 3.13.
65. Вычислить собственную частоту колебаний
воды в системе трубопровода, изображенного на
рисунке.
66. Найти метацентрическую высоту h плава-
К задаче 64
Идедлизированная
цистерна Фрама.
ющего в воде твердого тела, изготовленного из ма-
териала с удельным весом, равным 0,5, и имеющего призматическую фор-
му в случаях: а) квадратного поперечного сечения hxh, b) треугольного
поперечного сечения с основанием b и высотой Д. когда основание тре-
угольника погружено в воду, а вершина из нее выступает; е) того же
треугольного сечения, но с вершиной, погруженной в воду
67. Стальной вал диаметром 1,27 см, подвергающийся скручиванию,
заделан своими концами в стены. Вал несет два маховика диаметром 30,5
см и толщиной 5 см, находящиеся на расстоянии 25.4 см друг от друга
520
ЗАДАЧИ К ГЛ. IU
и каждый на таком же расстоянии от соответствующей стены. Найти соб-
ственные частоты колебаний, выразив их в колебаниях в минуту.
68. а) Вычислить две собственные частоты колебаний системы, пред-
ставленной на рисунке, состоящей из невесомого бруса длиной 21, двух
масс т и двух пружин к. Ь) Найти положение «узла» или центра вращения
этого бруса при каждом из двух типов колебаний.
К задаче 67. К задача 68
69. Невесомая струна длиной 3Z натянута большой силой в Т кГ между
двумя неподвижными жесткими опорами К этой струне прикреплены
две массы на расстояниях I и 21 от одной из опор. Найти путем рассуж-
дений (не прибегая к математическим вычислениям) вид главных коле-
баний и затем определить обе собственные частоты (см. задачу 28).
70. Однородный брус длиной I и массой m несет на своем правом конце
добавочную массу, также равную т. Этот брус опирается своими концами
на две одинаковые пружины с коэф-
фициентом жесткости к. Найти две
собственные частоты и соответству-
ющие формы колебаний.
71. Система состоит из сплошного
цилиндра радиусом R и весом б?,
могущего катиться без скольжения
К задаче 70.
по горизонтальному пути. К цилиндру в его центре прикреплен шарнирно
однородный брусок длиной 37? и весом G, равным весу цилиндра. Вывести
уравнения движения системы и най-
ти собственные частоты малых коле-
баний.
72. Цилиндр радиусом г и массой
2т имеет центр тяжести G на рас-
7
стоянии — от геометрического цен-
тра, причем момент инерции ци-
линдра относительно оси, проходя-
щей через его центр тяжести и па-
раллельной его геометрической оси,
равен Iq = mr8. В точке А на
т
расстоянии — от центра, расположенной противоположно точке О, ци-
линдр имеет штифт, к которому подвешен однородный брусок длиной Зг и
массой тп, равномерно распределенной по длине бруска. Цилиндр может
ЗАДАЧИ К ГЛ. Ill
521
катиться по опоре с большим трением и без скольжения. В точке А
трения нет. Вывести дифференциальные уравнения движения для упро-
щенного случая малых углов ср и 0 и найти собственные частоты,
73. Невесомая струна длиной 4/ несет две массы, каждая из которых
расстоянии четверти длины струны от
равна т и укреплена в точке на
неподвижной точки Натяжение струны
равно Т Первая масса возбуждается си-
лой FokT, частота изменения которой
1/‘37г „
со = /---Найти установившиеся вы-
F 2ml
К задаче 73
нужденные колебания обеих масс.
74. Пусть в незатухающем поглотителе колебаний (рис. 3.6) отношение
М
масс — = 5, причем поглотитель настроен по отношению к главной системе
т
К
гак, что — = 5. Пусть, далее, внешняя сила Ро отсутствует,
к
Требуется найти два главных вида движения, т. е. отношения ампли-
туд масс М и т при соответственных собственных частотах и, кроме того,
вычислить эти частоты.
75. Пусть система в задаче 74 снабжена амортизатором, поставленным
на пружине поглотителя, причем коэффициент затухания составляет 5%
(У 4 к т |
с = 20 7 Предполагая, что главные
виды колебаний, найденные в задаче 74, почти не искажены таким малым
затуханием, определить скорость затухания каждого из обоих видов
главных колебаний.
76. Период колебаний парохода «Conte di Savoia (см. стр. 158) при
его боковой качке равен 25 сек, метацентрическая высота равна 67 см при
водоизмещении 45 000 т. Найти: а) момент инерции судна относительно
оси вращения при качке, Ь) наибольший кинетический момент, если паро-
ход отклоняется в каждую сторону на угол 10°
Характеристики каждого из трех гироскопов, установленных на
борту парохода, таковы.
момент инерции — 2,02 • 104 к.1 м сек,
угловая скорость — 800 об1мин
Положим, что угол прецессии ip этих гироскопов изменяется от
— 30° до 4-30°, и положим, далее, что это изменение происходит в течение
промежутка времени, достаточно короткого по сравнению с полупериодом
колебания корабля при качке (например, 2 сек} Пусть, наконец, эта пре-
цессия имеет место в середине полного размаха корабля при качке таким
образом, чтобы вызывалось положительное затухание.
В этих предположениях найти: е) быстроту убывания колебаний
судна при качке, считая, что никакого затухания, кроме вызванного дей-
ствием гироскопов, нет.
77 Автомобиль имеет рессоры, сжатые на 10 см действием его веса.
Предполагается, что шины бесконечно жестки. Автомобиль поставлен на
платформу, которая в начальный момент находится в покое, а затем вне-
запно начинает двигаться вниз с ускорением 2д
а) Найти, насколько опустится платформа, прежде чем колеса авто-
мобиля покинут ее.
б) Предполагая, что автомобиль движется со скоростью 48 км!час,.
начертить профиль дороги, который соответствовал бы ускорению плат-
формы 2д.
Этот вопрос имеет значение только для передних колес.
522
ЗАДАЧИ К ГЛ. Ш
78. Автомобиль (задача 77) едет по дороге, поверхность которой обра-
зует синусоидальные волны с амплитудой 2,5 см (т е. разность высот
между гребнями и впадинами равна 5 см), причем расстояние между двумя
последовательными гребнями составляет 13 м. Поглотителей толчков
нет. Найти
а) критическую скорость автомобиля,
б) амплитуду вертикальных колебаний остова при скорости поступа-
тельного движения, равной 64 к.м!час
79. Двойной маятник состоит из двух одинаковых масс т, подвешен-
ных на невесомых проволоках, каждая длиной I В дополнение к силе
тяжести здесь действуют еще
две пружины с коэффициентом к В равно-
весии маятник располагается по верти-
кали.
Составить дифференциальные урав-
нения движения и найти две собственные
частоты для малых углов.
80 Переходные процессы в канатах
подъемников высоких зданий при пуске в
ход Длинные канаты подъемников (до-
ходящие до 300 .и) проявляют достаточную
гибкость в продольном направлении1).
Лебедки подшипника обычно распо-
лагаются наверху в здании, и когда
El—
К задаче 80
кабина находится внизу, крутящий момент двигателя может на нее
воздействовать только через посредство упругих свойств каната Таким
образом, прежде всего приходит в действие лебедка, натягивая канат, а
затем уже начинает двигаться кабина лифта. В идеализированной схеме
имеем две массы и пружину, причем масса тг эквивалентна массе лебедки,
т. е. массе, расположенной по окружности барабана, имеющей тот же мо-
мент инерции, — масса кабины, к —- коэффициент жесткости канатов.
Пусть будет F приложенная сила. т. е. крутящий момент, деленный на
радиус барабана.
Рассмотрим вначале случай, когда сила F возникает мгновенно, т. е.
F — 0 при *< 0 и F = Fo при J > 0
Требуется вывести соответствующие дифференциальные уравнения
и из них получить одно дифференциальное уравнение только для натяжения
каната, отвлекаясь от движения каждой массы и в отдельности.
Из получен но го уравнен ия найти натяжен ие каната в фу н кции времен и
и к нему добавить постоянную статическую силу т2д Канат движется
вверх пульсирующим образом, и его наибольшее ускорение равно удвоен-
ному среднему значению. Для уяснения этого построить кривую F = /(£).
81. Для улучшения характеристики подъемника в предыдущей задаче
закон изменения крутящего момента задается так, чтобы сила тяги выра-
стала по линейному закону от пуля при t = 0 до Fo при <ас£ = 2л, т. е.
за полный период собственных колебаний. Далее эта сила остается постоян-
ной, равной Fq.
Ь Иначе говоря, упругую податливость на растяжение. (Прим, перев.)'
ЗАДАЧИ К ГЛ. 111
52
Вывести и в этом случае дифференциальное уравнение для натяжения
каната, не содержащее в отдельности хх и а?2; показать, что теперь действие
системы оказывается плавным, и натяжение никогда не превосходит его
значения при установившемся движении.
82. Обобщение двух предыдущих задач. Движущая сила лебедки
опять возрастает по линейному закону в4 зависимости от времени, из»
меняясь от нуля до наибольшего значения Fo. Од-
нако это возрастание происходит не в течение вре- мени, равного 0 (задача 80), и не н течение времени 2тт t, ——(задача 81); это время^ возрастания опреде- б)с леятся равенством ыс t = а. Показать, что отношение наибольшей силы, развиваемой в канате, к силе FQ определяется формулой ^тах , . 1 -.г», г. = 1 -]— У 2 — 2 cos а. Fo а 1 \ i
К задаче 83.
Построить эту зависимость до значения
а = 6л и показать, что эта формула распрострапя-
ется и на две прсдудыщпе задачи, которые являются частными случаями
данной.
83. Изображенная на рисунке симметричная система, представляющая
собою идеализированную раму балансировочной машины, состоит из одно-
родного тонкого жесткого бруса весом G = 45 кГ, поддерживаемого
в каждом конце пружиной с коэффициентом жесткости 72 кГ)см.
а) Найти амплитуду усилия в каждой пружине, вызванного действую-
щей на брус гармонически изменяющейся силой с амплитудой = 9 /сГ
и частотой 12 колебаний в секунду.
б) Решить ту же задачу, когда сила заменена парой, имеющей прежнюю
частоту и амплитуду момента Мо = 450 кГ см.
84. К пружине, коэффициент жесткости которой равен к, подвешена
масса т. Найти механический импеданс Z верхней точки пружины.
85. Найти механический импеданс Z потолка, к которому подвешена
масса т через посредство пружины с коэффициентом жесткости к и парал-
лельно включенного демпфера с
коэффициентом затухания с.
86. Найти механический им-
педанс Z потолка, к которому
подвешен груз на пружине к,
причем между массой и землей
включен демпфер с
87. Система, представленная
на схеме, есть частный случай си-
стемы, изображенной на рис. 3.27
в тексте. Найти амплитуду коле-
баний демпфера и силу, переда-
ваемую на землю.
88. Вывести уравнение (3.49),
приведенное в тексте (см стр 170).
89. Найти механический им-
педанс Z массы /И, связанной с
землей пружиной К.
90. Машина с массой тх, возбуждаемая силой Posin w£, установлена
с помощью виброизолирующих пружин К на основании, импеданс которого
взять из предыдущей задачи. Найти коэффициент передачи.
524
ЗАДАЧИ К ГЛ. Ill
91. В центробежном маятнике (рис. 3.10,6) даны следующие величины;
Q — угловая скорость диска, а — расстояние от центра диска до оси под-
веса маятника, b — расстояние от оси подвеса до центра тяжести маят-
ника, к — радиус инерции маятника относительно его оси подвеса.
Найти собственную частоту и попытаться рассчитать маятник так,
чтобы он совершал три полных колебания за один оборот.
92. Доказать, что наилучшее затухание в вязком демпфере Ланчестера
(кривая 3 на рис. 3.14.с. стр 144) определяется уравнением
К задаче 93.
——— — [2 (1 + At) (2 + ^)] 2-
2?п£
93. Идеализированный грехло-
пастный винт самолета представляет
собою три невесомые плоские консоль-
ные пружины, расположенные пол
углом 120° друг к другу и несущие
сосредоточенные массы т на своих
концах на расстояниях R от оси вала.
Эти пружины вделаны во втулку с
моментом инерции / на расстоянии г
от оси вала, причем образуется по-
стоянный угол а между плоскостью
каждой лопасти и плоскостью всего
винта в целом (см рисунок). Пусть
коэффициент жесткости каждой лопасти
в направлении наименьшей жесткости есть kz, а в направлении наи-
большей жесткости (перпендикулярно к предыдущему) лопасть является
абсолютно жесткой, не подвергаясь изгибу. Пусть, далее, втулка насажена
на вал с коэффициентом жесткости на кручение кх
Найти две собственные частоты системы при отсутствии вращения
(частоту лопастей и частоту втулки) в зависимости от угла а и определить
также, возрастает или понижается частота лопастей при увеличении
угла а.
94. Решить предыдущую задачу при следующем изменении условия:
вал абсолютно жесткий на кручение, но поддается растяжению (соответ-
ствующий коэффициент кх). Таким образом, втулка может совершать
продольные колебания вдоль оси вала. Инерционные свойства втулки
задаются теперь уже не моментом инерции, а ее массой М.
95. Задача 93, в которой только лопасти обладают в своих плоскостях
не бесконечной жесткостью. Пусть коэффициент жесткости каждой лопа-
сти в плоскости наибольше"
шей жесткости fc3, кг —
коэффициент жесткости ва-
ла при кручении. Для упро-
щения положить 7 = 0.
96. Комбинация задач
94 и 95. Лопасть имеет коэф-
фициенты жесткости и fc3,
вал абсолютно жесткий на
кручение, но податлив на
растяжение с коэффициен-
том кг. Для упрощения по-
ложить М = 0.
97. Масса тп подвешена к потолку на расстоянии / от него посредством
двух одинаковых пружин к, расположенных симметрично под углом а к
ЗАДАЧИ К ГЛ. IV
525
вертикали. Этот угол а обусловлен статическим действием .груза на пру-
жины. Найти собственную частоту:
а) вертикальных колебаний:
Ь) боковых колебаний.
98. Однородный диск весом G и радиусом г может катиться без скольже-
ния по плоскому столу. В своем центре диск имеет палец, к которому под-
вешен невесомый маятник длиной Zc сосредоточенной массой G± на конце.
Найти собственные частоты колебаний системы в плоскости чертежа
Глава IV
99. Вывести уравнение (4.И), развернув определитель (4.5).
100. Обыкновенная невесомая балка длиной 4Z с жесткостью на изгиб
EJ несет две равные массы т на расстоянии I от каждой из опор. Найти:
а) три коэффициента влияния,
Ь) две собственные частоты колебаний;
с) два главных колебания.
101. Невесомая упругая балка длиной Z с жесткостью на изгиб Е1
свободно оперта по своим концам и несет две одинаковые массы т на рас-
стояниях, соответственно равных 1/4 I и х/21 от одного из концов. С помо-
щью коэффициентов влияния найти две собственные частоты колебаний.
102. Пусть па рис. 3.1 = т, — Ь т, кг = к, Zr2 = 3 к и — 7 к.
Пусть, далее, на массу действует сила /J0smo£ Найти:
а) частоту о для Ро, при которой масса т2 не движется,
Ь) амплитуду колебаний массы тп2 и соответствующую частоту.
Решить эту задачу, не пользуясь подробными формулами, а опираясь
лишь на соображения физического характера, воспользовавшись для рас-
суждений рис. 4.4.
103. Вывести уравнение (4.22).
104 Проверить значения различных частот,обозначенных на рис. 4.19.
105. Пользуясь методом Рэлея, найти частоту собственных колебаний
струны длиной 3Z с натяжением Т, несущей массы т на расстояниях I и
2Z от одного из концов. Масса самой струны Зтп
106 Балка длиною I с жесткостью Е1 и единичной массой (вся
масса т = p^Z), лежащая на двух опорах, песет в середине сосредоточен-
ную массу М.
Пользуясь методом Рэлея, определить собственную частоту колебаний,
а также найти, какую долю массы т надо прибавить к массе /И, чтобы
иметь возможность применить простую формулу(2.10)
107 Условия предыдущей задачи измен яются лишь
тем, что сосредоточенная масса М находится в сере-
дине балки массой т, заделанной обоими концами.
108. Невесомая консольная пружина длиной 2Z с
жесткостью на изгиб Е1 несет два сосредоточенных
груза, каждый массой т, из которых один распо-
ложен на свободном конце консоли, а другой — в
середине
Найти две собственные частоты.
109. Блок, имеющий радиус г и момент инерции
2mra. несет две одинаковые массы т. подвешенные
к шнуру посредством двух различных пружин с
коэффициентами жесткости к и 2к.
Вывести уравнен и я движен и я и найти собственные
частоты системы.
110. Если ограничиться только малыми вертикальными перемещениями
масс системы, изображенной на рисунке, то число ее степеней свободы
равно трем.
526
ЗАДАЧИ К ГЛ. IV
а) Пользуясь законом Ньютона или коэффициентами влияния, вывести
систему уравнений движения,
771
с помощью которой можно определить
все собственные частоты и формы коле-
ба н и й
b 'Система имеет три формы коле-
баний. Найти какую-либо одну из них,
а также соответствующую ей собствен-
ную частоту, воспользовавшись для этого
любым методом
111. Невесомая консольная балка,
имеющая жесткость на изгиб#/ и длину/,
загружена двумя равными массами т, из
которых одна находится на конце, а дру-
К задаче 110.
лагая, что основной
низшую собственную
гая — в середине консоли.
Пользуясь методом Рэлея и предпо-
формой является парабола у = ах2, *найти наи-
частоту колебаний.
К задаче 111.
К задаче 1 1 2.
112. Изображенная на рисунке невесомая балка длиной 3/ и жесткости
Е1 имеет две сосредоточенные массы т.
Найти формы и собственные частоты колебаний.
113. Невесомая консольная балка постоянной жесткости Е1 при-
креплена левым концом к брусу, совершающему вертикальное движение
по закону aosin со£ Не равные между собою массы расположены, как ука-
зано на рисунке. Найти: а) коэффициенты влияния ап, а12, а22, Ь) собствен-
ные частоты системы, с) главные формы колебаний, d) такую частоту возму-
щения ыу, при которой масса «2» действует как виброгаситель для массы «1».
К задаче 1 13.
sin art
К задаче 1 1 4.
W 50кГ 60 кГ
К задаче 1 15.
114. Система состоит из трех масс: m, 3m и 2m, соединенных двумя
пружинами с коэффициентами жесткости к и 2к. Масса 2m возбуждается
силой Ро sin at
Составить дифференциальные уравнения движения и найти из них, за кон
движения возмущаемой массы 2m Сделать набросок резонансной диа-
граммы и вычислить для нее координаты трех или четырех основных точек,
115. Три неравных груза укреплены симметрично на невесомой балке,
как показано на рисунке. Коэффициенты влияния следующие: ап = а33 вя
= 20: = 35: ct12 — ®2i ~ азз = ^32 = 25, = ct31 =15.
ЗАДАЧИ К ГЛ. IV
527
Здесь единицей измерения является 10“4 см)кГ.
Найти первую собственную частоту, воспользовавшись итерационным
метолом Сто долы.
116. Стальной вал диаметром 2,5см, несущий три точечных груза по 18 кГ
каждый, установлен в подшипниках таким образом, что при определении
критических скоростей его можно рассматривать как балку, свободно
У 38сл^ [ 38 сл^
у..у
ф Ф1-....... —
38см? | 38сл/'\
G}=G2=G3=18kr
£=2,130&кГ/см?'
К задаче 1 16
опертую по концам. Распределенная масса вала уже учтена в точеч-
ных грузах. Коэффициенты влияния для такой системы следующие: <zu
= а33 = 9,55, а22 == 17,10, а12 — а21 — а23 = а32 = 1 1,80; а13 — а33 = 7,50.
Единица измерения — 10“3 см!кГ Найти:
а) первую собственную частоту (или критическую скорость), пользуясь
методом итераций,
Ь) вторую собственную частоту (что легко сделать по причине симмет-
ричности второй формы, а поэтому итерационный метод приводится к одно-
му шагу).
с) третью собственную частоту, воспользовавшись условием ортого-
нальности при определении третьей формы
117. Видоизменить предыдущую задачу, переменив величину груза
G3 с 18 на 27 кГ и сделав, таким образом, систему несимметричной.
Найти три частоты. В данном случае точный метол, описанный при
решении дифференциальных уравнений, требует меньшой затраты труда,
чем итерационный.
118. Формула для частоты (2.9) на стр. 53 выражена через параметры
балки в общем виде. Показать, что опа может быть представлена так:
30
N = — ап
Яд
у ?'
где N — число колебаний в минуту, к — радиус инерции поперечного
сечения балки, у — вес единицы объема материала балки.
Применить эту формулу к трем часто встречающимся случаям: к
балке прямоугольного сечения bh, к сплошной балке кругового сечения
диаметром с? и к тонкостенной трубе диаметром d с толщиной стенки t.
Материал всюду сталь (у = 7,8 • 10“3 кПсм\ В — 2,1 • 10б кПсм2).
Показать, что в этих случаях имеют место формулы1
а)
Ь)
с)
прямоугольное сечение высотой
h
N = 1.42 ИО6 - ап;
I2
круговое сечение диаметром
тонкая труба диаметром d-
d
d\ N = 1,22 ’ 10е -
Z3
d
N = 1,74 < 106- an.
Здесь все длины выражены в сантиметрах. Следует заметить, что ни тол-
щина стенок трубы, ни ширина прямоугольной балки не влияют на частоту.
119. Найти первую собственную частоту консоли (см. рис 4.28 на стр.
211), пользуясь методом Рэлея и предполагая, что изогнутая ось консоли
есть- а) парабола, Ь) соединение обычной параболы с параболой кубической
(у = Ся3), причем точка сопряжения подобрана так. чтобы изгибающий
момент, а следовательно, и кривизна на свободном конце равнялись нулю.
528
ЗАДАЧИ К ГЛ. TV
120. а) Дана система, состоящая из невесомой струны или невесомого
вала, опирающегося по концам и загруженного п сосредоточенными гру-
зами. Пользуясь методом Рэлея и предполагая, что форма деформированной
струны или оси вала в первом главном колебании совпадает с кривой стати-
ческой деформации, показать, что собственная частота определяется
по формуле
,, — „][+ б'2 Уз + «3 Уз
°C ~ У-----
G, ?/? + в2?Л +
где Уъ, Уз “ статические перемещения точек приложения нагрузок.
При вычислении энергии деформации следует заметить, что она равна
работе, совершаемой силами веса Таким образом, вместо вычисления
интеграла вдоль всей длины струны или вала, находят работу, совер-
шаемую этими силами.
Ь) Пользуясь приведенной формулой, проверить величину первой
частоты в задаче 116
121. Для однородной балкн, опертой по концам, нормальной формой
колебаний является половина волны синусоиды Предположим, что этот
факт не известен и что собственная частота отыскивается по методу Сто-
долы. Допустим, что в первом главном колебании изогнутая ось балки есть
парабола у — у0 1 — 4 — , причем за начало координат принята середина
неизогнутой балки.
Применяя метод Стодолы, воспользоваться этим выражением при
выполнении соответствующего интегрирования (не графическим путем)
। уr . f 7_______________ 1 и определить таким образом первое при-
J « ближение собственной частоты.
, 122. Балка длиной 31 постоянного по-
перечного сечения имеет жесткость на изгиб
Е1 и массу на единицу длины или dS
К задаче 122 ^та балка опирается в точках х = 0 и
х = 2/
а) Задаваясь для применен ия метода Рэлея формой кривой, выраженной
уравнением
найти коэффициент а таким образом, чтобы удовлетворить геометриче-
скому условию при х = 21 Определить
также изгибающий момент на конце при . I _ ( _ I _ । _ I ж ।
® = 31 г
Ь) Задаваясь формой кривой, выра- ..
жен ной уравнением W
?/= х + ах* + Ьх* + м* к задаче 123
найти а, 6, с так, чтобы удовлетворить
тому же условию, а также условию обращения в нуль изгибающего мо-
мента при х = 0 и при х = 31
с) Пользуясь методом Рэлея, найти частоту колебаний либо с помощью
предположения (а), либо с помощью предположения (Ь)
3 ,
123 Однородная балка полной длины I имеет две опоры, из которых
одна находится на конце балки, а другая — на расстоянии двух третей ее
длины от первой Масса самой балки равна т Кроме того, имеется сосредо-
точенная масса т/3 в середине пролета и еще такая же масса на конце
консоли. Жесткость на изгиб равна EI.
ЗАДАЧИ К ГЛ. IV
529
а) Составить алгебраическое уравнение рэлеевской формы колебаний,
удовлетворив условиям нулевой кривизны на двух концах балки.
b) С помощью полученной кривой найти по методу Рэлея собственную
частоту.
124. Однородная балка свободно опирается в двух точках, находя-
щихся от ее концов на расстояниях, равных четверти длины балки.
Найти методом Рэлея собственную частоту. Рекомендуется в каче-
стве рэлеевской формы воспользоваться алгебраическим полиномом,
удовлетворяющим граничным условиям.
125. Балка длиной I лежит на двух опорах. Высота балки возрастает
по линейному закону от опор, где она равна нулю, к середине, где она
наибольшая. Для половины балки — EI = С2х2.
Приняв за форму рэлеевской кривой обыкновенную параболу, найти
собственную частоту.
126. Консоль длиною / имеет постоянную жесткость на изгиб Е1.
Масса консоли изменяется вдоль ее длины. В заделанном конце масса
консоли, отнесенная к единице длины, равна /х0, а в свободном — 2/л0.
Между этими точками масса изменяется по линейному закону.
Приняв в качестве первой формы колебаний параболу, найти:
а) пользуясь методом Рэлея, собственную частоту,
Ь) пользуясь методом Стодолы. следующее лучшее приближение
деформированной оси и дать оценку соответствующей частоты
127. Применить метод Стодолы к определению собственной частоты
простой однородной консоли. Принять, что первое приближение формы
колебаний есть парабола у — Сх* Интегрированием найти следующее
приближение деформированной оси, далее приравнять прогибы в конце в
обоих случаях и отсюда найти частоту
128. Гребной вал парохода (считая между машиной и гребным винтом)
имеет длину 60 м. Диаметр вала 30 см. Винт имеет такой же момент инер-
ции, что и сплошной однородный стальной диск диаметром 120 см и тол-
щиной 15 см. Модуль сдвига для вала G = 8,4 105 кПсм*.
Предполагая вал заделанным в машине, найти собственную частоту
его колебаний с помощью метода Рэлея, учитывая инерцию вала (удельный
вес стали 7,8).
129. Винтовые пружины для клапанов автомобилных моторов часто
колеблются так, что отдельные витки пружины перемещаются вверх и
вниз по продольной оси пружины. Это происходит вследствие того, что
винтовая пружина, рассматриваемая как брус с равномерно распределенной
массой и постоянной жесткостью, может совершать продольные колебания
в соответствии с уравнением (4.21а)
Найти величины, эквивалентные величинам и ES в уравнении
(4.21а), выразив их через диаметр D пружины, диаметр d проволоки,
число витков на 1 см, модуль сдвига G и массу пружины на один виток т1.
Вычислить также период первого главного колебания пружины
Длиной I (п = п,/), предполагая оба конца ее заделанными.
130. Балка, полная длина которой равна 2Z, имеет жесткость Е1 и
единичную массу /ьц вдоль части Z, прилежащей к заделанному концу, тогда
как другая ее половина имеет жесткость ЬЕ1 и единичную массу ан/2.
Пользуясь методом Рэлея, найти основную частоту колебаний.
131. Кольцевая рамка небольшого мотора в х/8 л. с. имеет следующие
данные (рис. 4.34):
а = 220°, R = 7 см, 1 = 0,154 сл4,
Е = 2 • 10е кГ1см\ у,-! = 0,000037 кГ • сек*1см\
Найти основную частоту колебаний.
132. Некоторая масса подвешена к концу винтовой пружины (рис. 2.3,
где только отсутствуют затухание и возмущение).
34 Ден-Гартог - 2074
530
ЗАДАЧИ К ГЛ. IV
Считая, что массой самой пружины пренебречь нельзя по сравнению
с массой подвешенной, найти, какую долю массы пружины нужно приба-
вить к массе подвешенного груза, чтобы частоту найти по формуле
т
Решить задачу двумя методами: а) методом Рэлея, Ь) точным метолом.
133. Однородная балка длиной I с жесткостью на изгиб EI и массой
на единицу длины свободно опирается в двух точках на расстояниях
Z/6 от каждого конца.
Пользуясь методом Рэлея, найти первую собственную частоту коле-
баний.
134. Гребной вал судна, подобный изображенному схематически на
рис. 5.18, длинной 57 320мм и диаметром 482 мм несет на одном конце греб-
ной винтвесом22700кС, а на другом — зубчатое колесо такого же веса. Это ко-
лесо находится в зацеплении с паровыми турбинами, не влияющими на про-
дольные колебания системы. По другуюсторону от колеса вал упирается в
упорный подшипник Кингсбери, причем система укрепления допускает
податливость вала в продольном направлении. Коэффициент жесткости
вала в этом направлении равен 4.45 • 10б кГ]см. Вал изготовлен из стали с
удельным весом 7,8 и модулем упругости 2 • 10е кПсм*. Винт четырех-
лопастный, сообщающий валу четыре продольных импульса за один
оборот.
Вычислить две критические скорости установки, рассматривая ее
как систему с двумя степенями свободы и считая массу вала поровну
распределенной на винт и зубчатку.
135. Дать точное решение предыдущей задачи, считая массу вала равно-
мерно распределенной по его длине, и найти численное значение наинизшей
критической скорости. Данные задачи 134 взяты из действительно имею-
щейся установки, колебания которой предотвращались путем увеличения
жесткости упорного подшипника.
136. Для вычисления по методу Рэлея частоты трехузловой формы
колебаний балки со свободными концами длиной 2Z принимаем в качестве
такой формы полную волну синусоиды от —180° до -4-180° с повернутой
на некоторый угол осевой линией так. что она пересекается с синусоидой
еще в двух точках, кроме начала.
а) Определить угол наклона упомянутой прямой так, чтобы кинети-
ческий момент балки относительно центра оставался все время равным
нулю.
Ь) Вычислить собственную частоту, соответствующую найденной
кривой.
137. Потенциальная энергия мембраны (см. рис. 4.37) вычисляется
посредством умножения натяжения Т мембраны на приращение площади
всех элементов, вызванных упругой деформацией.
а) Если деформированная поверхность является поверхностью вра-
щения, симметричной относительно центральной оси (как изображено
на рис. 4.37), то показать, что потенциальная энергия выражается фор-
мулой
Ь) Предполагая, что профиль этой поверхности есть синусоида, вы-
числить по методу Рэлея собственную частоту.
138. В связи с численным методом Стодолы или методом итераций,
рассмотренным на стр. 223, произвести следующие расчеты:
а) принимая в качестве первого допущения для формы второго типа
колебаний а, = 1,000, а2 = 0,500, а3 = — 0,750, выполнить последователь-
ЗАДАЧИ К ГЛ. V
531
ные шаги расчета без исключения первого типа и обратить внимание на то,
что решения последовательно сходятся не ко второму, а к первому типу;
Ь) при определении формы третьего типа, исходя из допущения tjj =
= а3 = 1,000, а2 = — 1,000, исключить из решения первую и вторую гар-
монические составляющие; обратить внимание на то, что получаемая при
этом форма соответствует точному решению.
Глава V
139. Одноцилиндровый двигатель имеет общий вес 150 кГ, его поступа-
тельно движущиеся части весят 6 кГ, вращающиеся — 3 кГ, ход поршня
2г = 12 см, скорость вращения — 500 оборотов в минуту.
Найти;
а) амплитуду вертикальных колебаний двигателя в предположении,
что он установлен плавающим образом на очень мягких пружинах',
Ь) амплитуду переменной силы, действующей на фундамент, пред-
полагая, что двигатель наглухо связан с фундаментом.
При решении задачи считать шатун бесконечно длинным.
140. Построить кривую ускорений поршня (рис. 5.3) для двигателя с
очень коротким шатуном (— = 3
141. Дать набросок для полного цикла изменения момента сил инер-
ции [уравнение (5.15)] в случае машины, для которой = 3.
г
142. Доказать четыре положения об уравновешивании сил инерции,
указанные на стр. 248.
Найти также свойства уравновешивания трехцплипдрового двигателя
с углами 0°, 120°, 240°.
143. У четырехцилиндрового двигателя оси всех четырех цилиндров
лежат в одной плоскости, причем цилиндры расположены соосно по
два и связаны с двумя криво-
шипами, образующими между
собой угол 90°.
Найти:
а) величину необходимых
противовесов в Л и А', чтобы
привести силы инерции каж-
дого кривошипа и пары порш-
ней к постоянной по величине
силе, вращающейся противо-
положно коленчатому валу;
Ь) силу инерции второго
порядка одного кривошипа,
с) необходимые противо-
весы и их угловое располо-
жение в В и О (шестерни
вращаются с передаточным
К задаче 143.
числом 1 : 1 в сторону, про-
тивоположную вращению коленчатого вала) для уравновешивания сил
инерции и их моментов первого порядка.
144. На рисунке представлена схема дискового двигателя («wobbl-
plate» engine) Некоторое число неподвижных цилиндров располагается на
одинаковых друг от друга угловых расстояниях вокруг центрального вала.
Путем соответственного подбора отношений величин и геометрических
характеристик масс поршней со штоками к величине и геометрической
характеристике массы диска можно достигнуть полного у равно-
34*
532
ЗАДАЧИ К ГЛ. V
вешивания машины. Для выполнения
себе, что поршни и штоки имеют массу,
il
К задаче 144
занное положение сделать наглядным
такого анализа можно представить
равномерно распределенную вокруг
оси вращения Далее предпола-
гается, что диск весом (жд имеет
массу, равномерно распределен-
ную по площади круга радиусом
Rd. Полный вес всех поршней и
штоков равен Gp, причем их
масса сосредоточена на окруж-
ности радиусом Rp с осью ж.
Найти соотношение между
этими величинами для полного
уравновешивания двигателя.
145. Амплитуды крутильных
колебаний вала двигателя при
малых скоростях очень велики,
но связанные с ними напряже-
ния в материале коленчатого ва-
ла малы. Для того чтобы выска-
, рассмотрим систему, состоящую
из двух дисков Ц и 12, соединении валом к, подвергающуюся действию
крутящего момента T0sino^, приложенного только к диску Zv
Вычислить и построить в зависимости от частоты:
а) амплитуду диска Д,
Ь) крутящий момент вала.
146. Вычислить первую собственную частоту колебаний четырех-
цилиндрового нефтяного двигателя, соединенного с генератором, если
этот двигатель характеризуется следующими данными:
А, 2, з, 4 (кривошипов, поршней и т. д.) = г50 кГсмсск2 каждый,
Z5 {маховика вместе с генератором) = 1000 кГсмсек2
кх — к9 — к2 = к* = 10? кГсм/рад.
147. Система, совершающая крутильные колебания, состоит из трех
маховиков, моменты инерции которых соответственно равны 200, 100 и
1000 кГсмсек2 Маховики соединены
двумя валами, каждый из которых имеет
коэффициент жесткости 106 кГ см!рад
Сделать ориентировочную оценку
первой собственной частоты с помощью
которой выполнить расчет по методу
Гольцера.
На основании результата этого рас-
чета сделать заключение, была ли пред-
положенная частота слишком высокой или
148. Двигатель состоит из четырех
один ряд; каждый из цилиндров имеет эквивалентный момент инерции
100 кГсм сек2 Посредством вала с коэффициентом жесткости, k = 104
кГсм/рад двигатель вращает генератор, для которого 1 = 2000 кГ см сек2.
Каждая из трех цапф коленчатого вала между четырьмя цилиндрами
имеет коэффициент жесткости к ~ 105 кГ см/рад.
С помощью метода Гольцера найти первую и вторую собственные
частоты.
149. Приведенная схема изображает шестицилиндровый (четырехтакт-
ный) двигатель грузовика.
н из кой.
цилиндров, расположенных в
ЗАДАЧИ К ГЛ. V
533
Дать оценку собственной частоты и сделать расчет по методу Лыоиса.
Считая ответ удовлетворительным, указать, дает ли он значение
частоты с избытком или с не-
достатком.
Определить критические ско-
рости третьего и шестого поряд-
ков. Являются ли эти скорости
мажорными и почему?
На схеме указаны моменты
инерции не масс, а весов, т. е.
выражения вида GR2 х), едини-
цей измерения которых служит
в кГсм!рад.
530 530 530 530 530 530
>8,5
К задаче 149.
9350
I
кГсмг. Коэффициенты жесткости даны
150. В шестицилиндровом двигателе, связанном с тяжелым генерато-
ром, приведенный момент инерции каждого цилиндра равен 50 кГсмсек?,
а жесткость каждого участка коленчатого вала определяется коэффици-
ентом к = 60 • 10е кГсм!рад. Момент инерции генератора равен 2000
к Гсмсек2
Дать оценку собственной частоты, выразив ее в колебаниях в ми-
нуту.
151. В восьмицилиндровом однорядном двигателе момент инерции
каждого цилиндра равен 5000 кГ см сек2, а жесткость каждого участка
коленчатого вала — 10е кГсм/рпд. Двигатель связан с маховиком,
k»/OskOсм/рад I, =/005кГсм сек2
0=5'/О 6кг см/рад 1г =30000кГсм сек 2
К задаче 152.
момент инерции которого ра-
вен 50000 кГсмсек2. посред-
ством вала, для которого
к == 2 • 10е кГсм1рад.
а) 1 lain н по метолу Льюиса
первую собственную частоту.
Ь) Дать оценку второй
частоты.
152. Восьмицилиндровый
двигатель приводит в дви-
жение тяжелый винт посред-
ством упругого вала.
а) Найти приближенное значен ие со* 2 для первого типа коле бан ий,
пригодного для первого расчета по таблице Гольцера.
Ь) Найти приближенное значение со2 для второго типа колебаний,
пригодное для первого расчета по методу Льюиса или по таблице Голь-
цера.
с) Пусть углы кривошипов будут: 0°, 180°, 90°, 270°, 270°, 90°, 180°,
0° и порядок вспышек 1 625837 4. В колебаниях первого типа рас-
сматриваем критические скорости х/2‘го» 2-го и 4-го порядков. Какая из
этих скоростей является опасной?
d) Тот же вопрос, но относящийся к колебаниям второго типа. Пред-
полагается, что все критические скорости находятся в диапазоне эксплуата-
ционных скоростей двигателя
153. Двигатель Дизеля имеет полный момент инерции веса GR2 =
~ 59 • 104 кГсм2 2) и полную жесткость всего коленчатого вала
5,8 • 106 кГсм!рад. Один конец двигателя непосредственно соединен с
маховиком, для которого GR2 = 295 • 104 кГсм2.
х) GR2 есть четверть так называемого махового момента^ равного
GD2, где D — диаметр инерции, равный удвоенному радиусу инерции.
(Прим, перев.)
2) См. примечание к задаче 149. (Прим, перев.)
534
ЗАДАЧИ К ГЛ. V
Дать удовлетворительное приближение собственной частоты системы
и проверить его по методу Льюиса. Результат расчета принять за второе
приближение, но дальнейший расчет не выполнять. Второе приближение
дать в колебаниях в минуту.
154. Шестицилиндровый дизель непосредственно связан с генерато-
ром. Момент инерции каждого кривошипа равен I, генератора 51.
Жесткость на кручение участка вала между двумя цилиндрами опреде-
ляется коэффициентом к, между последним цилиндром и генератором
2к (эквивалентная длина вала равна половине его длины между
цилиндрами).
Пользуясь методом Льюиса, найти первые две собственные частоты
системы.
155. Восьмицилиндровый однорядный дизель приводит в движение
два генератора посредством зубчатой передачи Каждый из восьми цилинд-
ров имеет момент инерции 1000 кГ см сек2, жесткости участков вала опре-
деляются коэффициентом 10 • 10е кГ см1рад\ моменты инерции генераторов
— 15 000 кГ см сек2 и 5000 кГ см сек2\ жесткости соответствующих привод-
ных валов — 10 • 10s кГ см/рад и 20 • 106 кГ см1рад. Требуется:
а) дать краткое описание комбинации методов Льюиса и Гольцера для
данной разветвленной системы,
Ь) дать оценку первой частоты и выполнить первый расчет по методу
Льюиса — Гольцера.
k=1O/OB f
’ и
У Же приведен,
к скорости
двигателе
I-2JSW0B/ff80
К задаче 156.
156. Два двигателя, из которых один обладает вдвое большим моментом
инерции, чем другой, вращающиеся с одной и той же скоростью, приводят
в движение винт через посредство редуктора. Жесткости и моменты инер-
ции указаны на схеме.
Найти первые три собственные частоты.
!57.а) Объясните кратко, почему в четырехтактном двигателе крутиль-
ные колебания бывают порядков, выражаемых как целыми числами, так и
целыми с половиной, тогда как в двухтактных двигателях встречаются
колебания только целых порядков.
Ь) Некоторый двухтактный четырехцилиндровый двигатель имеет
порядок вспышек I 86 429 75 3. Нарисовать векторные диаграммы для
порядков от I до 9 (принимая длины векторов равными). Сколько среди
этих диаграмм получается различных?
с) Какой порядок колебаний из общего количества от I до 9 является
наиболее опасным, если считать, что в первом типе амплитуды колебания
для всех цилиндров одинаковые?
d) Если принять, что во втором типе колебаний амплитуды, соответ-
ствующие последовательным цилиндрам от I до 9, выражаются в градусах
числами 4, 3, 2, I. 0, — I, —2, —3, —4, то какой из порядков колебаний от I
до 9 является наиболее опасным?
158. Четырехтактный дизель имеет 16 цилиндров на восьмикривошип-
ном коленчатом валу, расположенных в двух блоках по 8 цилиндров
в каждом и с углом между ними в 60°. На рисунке приведены диаграмма
ЗАДАЧИ К ГЛ. V
535
кривошипов и форма одного из главных колебаний при порядке вспышек
1 6 2 5 8 3 7 4, Двигатель может давать до 2400 оборотов в минуту.
Требуется рассмотреть четыре возможные критические скорости,
для которых в нижеследующей таблице приведены р-факторы (отношения
гармоник переменного момента к его среднему значению):
порядок 5х/2 6 6х/2 7
р-фактор 0,38 0,28 0.20 0,14
Какая из этих четырех критических скоростей наиболее опасна?
Перечислить критические скорости в порядке их опасности.
159. Двухтактный дизель фирмы Джеперал Моторе (General Motors
тип 12-567, 6 цилиндров в ряде, 2 блока, угол V равен 45°) приводит в дви-
жение генератор Элиотта, делающий 720 об!мин. На схеме все моменты
инерции указаны в к, Гсмсек2,
все коэффициенты жесткости
указаны в кГ см1рад.
Дать приближенную оценку
частот первых двух типов колеба-
н ий. Опираясь на этиоцен ки, най-
ти порядок критической скорости,
близкой к эксплуатационной ско-
рости в 720 об!мин для первого
(одноузлового) и второго (двух-
узлового) типа колебаний.
160. Вопрос предыдущей задачи, относящийся к другому типу двухтакт-
ного дизеля той же фирмы (General Motors, тип 16-276 А, 8 цилиндров в
ряде, 2 блока с углом Г — 40°). Числовые данные указаны на схеме.
Демпфер
Maxoeu/t
Генератор
450
3070
К задаче 159.
52
Демпфер
Муфта Маховик
Генератор
Ш К=17,1Н0е jij
557
3520
К задаче 160
161. При вычислении приведенного момента инерции одного криво-
шипа коленчатого вала можно считать, что кривошип, как таковой, и
поршень с шатуном имеют моменты одного порядка. Поэтому при решении
данной задачи можно предположить, что момент инерции 1 кривошипа
равен удвоенному значению момента инерции поршня и шатуна.
536
ЗАДАЧИ К ГЛ. V
Двигатель грузовика «Автокар» (The Autocar Со., модель 3770 HV)
имеет следующие характеристики:
число цилиндров в одном ряде ......................... 6
вес поршня............................................ 0,936 кГ
вес конца шатуна, совершающего вращательное движе-
ние ............................................... 1,361 к/
вес конца шатуна, совершающего возвратно-поступа-
тельное движение .................................. 0,567 кГ
радиус кривошипа .................................. 63,5 мм
расстояние между кривошипами .................... 130,0 мм
диаметр вала ...................................... 82,5 мм
диаметр цапфы кривошипа ........................... 60,4 мм
Длина цапфы кривошипа равна длине участка вала в коренном под-
шипнике. Двигатель, как это обычно бывает в автомобилях, является
«свободным» в переднем конце и несет «большой» маховик в заднем конце.
Позади маховика система «очень мягкая», т. е. коэффициент к приводного
вала между двигателем и колесами значительно меньше коэффициента вала.
Дать оценку наинизшей собственной частоты для последующего расчета
по методу Льюиса или Гольцера
t 162. Центробежный маятниковый поглотитель колебаний 3-го порядка
рассчитан для двигателя, делающего 800 оборотов в минуту. Радиальное
расстоян ие от осевой линии вала до точки подвеса маятн ика равно 11,5 см.
Переменный момент, создаваемый маятником, равен 17,3 кГ см, а допуска-
емый угол относительного отклонения равен 0,1 радиана.
Чему равен требуемый вес маятника?
163. Центробежный маятник состоит из точеч-
ной массы т на невесомой струне длиной а, при-
крепленной к точке, отличной от центра вращения.
Угловая скорость диска равна Q.
а) Найти собственную частоту малых коле-
бан ий
Ь) Если струну маятника сначала удержи-
вать в положении В под углом 90° к радиаль-
ному направлен ию, то с ка кой скоростью маят-
ник будет проходить через радиальное положе-
ние А? Угловая скорость Q остается постоянной.
164. а) Набросать кривую моментов давления пара для цилиндра
паровой машины двойного действия, если впускной клапан остается откры-
тым в течение четверти оборота после мертвого положения. В течение
следующей четверти оборота пар расширяется по уравнению pv = const.
Машина работает без сжатия пара
Ь) Набросать всю кривую момен то в для машины, составленной из
трех цилиндров предыдущего типа, коленчатый вал которой имеет схему
углов кривошипов в 120°, 240°, 360° Начертить также полную кривую
моментов для шестицилиндрового дизеля, положив в основу рис. 5.19,а.
Сравнить между собою оба чертежа
К задаче 165 Заданный коленчатый вал.
165. Начертить четыре основные звездообразные диаграммы для двига-
теля, изображенного на рис. 5.27, использовав каждый из четырех возмож-
ных порядков зажигания для данного коленчатого вала (см. рисунок).
ЗАДАЧИ К ГЛ. V
537
166. Исследовать звездообразные диаграммы для восьмицилиндрового
двигателя (0°, 180°, 90°, 270°, 270°, 90°, 180°, 0°), не рассматривая при этом
упругую линию вала. Сколько здесь получается основных диаграмм и
каким порядкам колебаний они соответствуют?
167. Судовая турбинная установка, изображенная на рис. 5.18 (стр.
264), возбуждается только четырехлопастным гребным винтом, возму-
щающий момент которого составляет 0,075 главного крутящего момента.
Величина сопротивления движению винта принимается соответствующей
удвоенному наклону (т. е. удвоенному тангенсу угла) кривой затухания на
рис. 5.28, которая предполагается параболой. Затуханием в других частях
установки пренебрегаем.
а) Вычислить амплитуду винта при резонансе.
а) С помощью расчета по Гольцеру, приведенному на стр. 265 и 266,
найти резонансную амплитуду крутящего момента в валах 2—3 и 3—4.
с) Определить критическое число оборотов винта.
168. В задаче 167 определяется резонансная амплитуда судовой уста-
новки (рис. 5.18). Резонансная кривая вблизи такого критического состоя-
ния находится вычислением незатухающей резонансной кривой и нанесением
в ней кривой при затухании. Точки упомянутой незатухающей кривой опре-
деляются путем вычисления таблицы Гольцера для соседних частот и путем
истолкования «остаточного момента» как возмущающего момента гребного
винта. Основной крутящий момент винта равен 72 600 к.Г при эксплуата-
ционной скорости 90 об1мин< а вообще пропорционален квадрату скорости.
Найти амплитуды вынужденных колебаний винта при со2 = 145 и
ы2 = 250 и по полученным результатам построить резонансную кривую.
169. Современный авиационный мотор состоит из двух однорядных
шестицилиндровых блоков, расположенных параллельно друг другу и
связанных между собою на каждом копие тремя динаковыми цилиндри-
ческими колесами так, что вращение в обоих блоках происходит с одной и
той же скоростью в одну и ту же сторону. Одна сово-
купность собственных колебаний имеет узлы на обоих
концах каждого блока.
а) Какое изменение надо сделать в первой стро-
ке обычной таблицы Гольцера, чтобы привести узел
к одному концу?
Ъ) Каково будет условие Гольцера на другом
конне?
с) Чему равняется величина О в методе Льюиса
(стр. 261)?
d) Вычислить наинизшую собственную частоту
системы, состоящей из шести одина ко вых дисков с
моментами инерции I, связанных между собой и с
двумя неподвижными стенками на каждом конце
посредством семи одинаковых валов с коэффициен-
тами жесткости на кручение к.
170. Один вариант, введенный Чилтоном, маят-
никового демпфера, схематически представленного на
рис. 5.37, состоит из стального куска весом G с закаленной цилиндри-
ческой нижней частью, который может кататься по закаленной цилин-
дрической направляющей (см рис.). Радиусы кривизны Z?-, и 2?2 сопри-
касающихся поверхностей велики, а их разность 47? мала. Расстояние
между центром тяжести G и точкой соприкасания равно а, а радиус
инерции относительно точки G равен Q а) Найти собственную частоту
малых колебаний при катании тела по поверхности в поле силы тяжести д.
Ь) Вся система вращается с угловой скоростью Q вокруг центра О.
Расстояние *OG — rG. Силой тяжести пренебрегаем. Найти частоту малых
колебаний.
К задаче 170.
538
ЗАДАЧИ К ГЛ. VI
171. Восьмицилиндровый четырехтактный двигатель имеет порядок
вспышек: 1 7468253и углы кривошипов 0°, 90°, 270°, 180°, 180°, 270°,
90°, 0°.
а) Начертить векторные диаграммы для колебаний различных поряд-
ков, не принимая во внимание величины векторов.
Ь) Пусть при некотором типе колебаний гольцеровы амплитуды
таковы: № 1, 1,000; № 2, 0,900; Яр 3, 0,800 и т. д. до № 8, 0,300. Пусть гар-
моника З^-го порядка крутящего момента равна 1150 кГ м.
Найти работу, поглощаемую системой за один период при резонансе
этого порядка, считая, что амплитуда колебаний вала на оси цилиндра
№1 равняется 1°.
с) Принимая, что указанный тип колебаний имеет место в случае,
когда в таблице Гольцера о2 — 2000, найти критическое число оборотов
31/2’Го порядка.
d) Какова наиболее опасная скорость этого двигателя?
е) Какова уравновешенность двигателя?
172. Идеализированная паровая машина простого действия с беско-
нечно длинным шатуном характеризуется постоянным давлением в течение
всего хода (без отсечки). Диаграмма крутящего момента (в функции от
угла) машины имеет вначале форму половины синусоиды в 180°. Далее
имеет нулевой момент и т. д., причем момент никогда не делается отрица-
тельным. Пользуясь методом Фурье, найти гармонические составляющие
крутящего момента, выразив их через среднее значение момента.
Глава VI
173. Рассмотрим простую балку длиной / и жесткостью на изгиб EI,
свободно лежащую своими концами на гладких опорах. Допустим, что
балка невесома, но нагружена в середине сосредоточенной массой т. В
таком случае, как известно, собственная частота изгибных колебаний
„ 4877
определяется формулой о2 -------• .
wZ3
Подставить это точное значение частоты в схему расширенного метода
Гольцера (стр. 310) и убедиться, что изгибающий момент на конце равен
нулю, как это и должно быть. Затем выполнить еще два аналогичных
w2 mZ3
расчета с величинами-------- 40 и 60 —один раз с более низкой, другой —
EI
по сравнению с истинной. Каковы значения
с более высокой частотой
«остаточного» изгибающего момента в этих двух случаях?
174. Найти критическую угловую скорость в оборотах в минуту для
системы, показанной на рис. 6.1, где стальной диск имеет диаметр 12 см
и толщину 2 см. Полная длина стального вала между подшипниками равна
40 см, а его диаметр — 1 см. Подшипники имеют одинаковые упругие свой-
ства по всем направлениям, определяемые коэффициентом к = 15кГ/см для
вала, который
Удельный вес
каждого из них. При расчете пренебречь влиянием массы
здесь принимается за балку, свободно опертую по концам.
стали —7, 8, а ее модуль упругости —2,1 • 10е кГ /см2.
175. Решить ту же задачу в предположении различной
гости подшипников, для которых коэффициенты жес ости
= 15 кГ 1см, &вер = 30 кГ/см.
176. На горизонтальной платформе установлены два небольших мотора
4 и В, валы которых горизонтальны и параллельны
стоянии 2а друг от друга. Моторы не уравновешены
вивает вращающуюся центробежную силу.
н той же угловой скоростью в одном и том же направлении.
степени упру-
равньг &гор =
и находятся на рас-
каждый из них раз-
Моторы вращаются с одной
Их центро-
ЗАДАЧИ К ГЛ. VI
539
бежные силы равны по величине, но находятся между собой на угловом
расстоянии а.
а) Пусть О обозначает мгновенную точку пересечения двух центро-
бежных сил моторов А и В. Доказать, что геометрическое место точек С
есть окружность, проходящая через
Л и Вс центром на перпендикуляре,
проведенном через середину АВ.
Ь) Опираясь на предыдущий ре-
зультат, доказать, что равнодейству-
ющая двух центробежных сил есть
вращающаяся сила вокруг непо-
движной точки, расположенной на
вышеупомянутом перпендикуляре на
а
расстоянии atg — от АВ.
177. На рисунке изображена
К задаче 177.
машина с жестким ротором, име-
ющим выступающую часть. Первоначальная неуравновешенность опре-
деляется величинами дисбалансов 1 кГмм в середине главного ротора
и 2кГмм в диске, укрепленном на выступающей части вала, причем
последний дисбаланс расположен под углом 90° к первому.
Найти величину и положение компенсирующих грузов в плоскостях
I и II.
178. Ротор необходимо уравновесить с помощью машины (рис. 6.10),
причем качания происходят вокруг опорных штифтов 1<\. При критической
скорости наблюдались следующие значения амплитуд:
1) 0,7 мм для ротора без добавочных грузов,
2) 0,5 мм. с грузом 0,1 к.Г при угле, равном 0°,
3) 1,1 мм с грузом 0,1 к.Г при угле, равном 90°,
4) 1,1 мм с грузом 0,1 к.Г при угле, равном 180°.
Найти величину и положение компенсирующего груза (рис. 6,11).
179. Требуется уравновесить короткий ротор или маховик. Наблюде-
ния колебаний в одном из подшипников были произведены в четырех
случаях вращения со следующими результатами:
1) ротор без добавочных грузов амплитуда 0,6 мм
2) груз 0,4 к,Г при угле, равном 0°: » 0,5 »
3) » 0,4 » » й « 180°: » 1,0 »
4) и » 0,4 » v . » 90°- » 1,05 »
Найти величину и угловое положение компенсирующего груза.
180. Пусть во время процесса уравновешивания получились следующие
результаты:
а0 — амплитуда колебания ротора, взятого как он есть,
aL — амплитуда ротора с добавочной единичной компенсацией в
положении 0°,
а2 — амплитуда с такой же компенсацией, но уже в положении 180°.
Идеальный ротор, не уравновешенный только вследствие присутствия
единичного дисбаланса (и не имеющий поэтому первоначальной неуравно-
вешенности), будет иметь некоторую амплитуду колебаний, которую
измерить мы не можем. Обозначим ее через х. Пусть неизвестное положение
первоначального дисбаланса определяется углом tp.
Требуется определить х и <р в зависимости от а0, av а2 и показать, что
в ответе получается двойственность вследствие знака (именно это подтверж-
дает необходимость четырех испытаний для полного определения диаграм-
мы, изображенной на рнс. 6.11).
181. В балансировочной машине Сирля (стр. 320) общая масса враща-
ющихся частей есть Л4, эксцентриситет — е, масса каждого из шариков
на концах рычажков равна т, радиус рычажков — г.
540
ЗАДАЧИ К ГЛ. VI
Найти угол а, который будут составлять между собою рычажки в
положении равновесия после их освобождения выше резонансной скорости.
182. Стальной диск диаметром 12 см и толщиной 2 см укреплен посре-
дине стального вала диаметром 1 см и полной длиной 50 см, принимаемого
за балку, опертую по концам (рис. 6.1). Цилиндрическая поверхность вала
слегка спилена с двух противоположных сторон по всей длине (рис. 6.17,а)
таким образом, что количество удаленного материала с каждой
стороны
сечения вала составляет — часть всего
500
уменьшен ие
сечен ия,
сечения
т. е. полное относительное
'^РаВН° 250’
—~ Принимая для стали
7,8 и модуль упругости 2,1
критические скорости l-ro и 2-го рода.
Кроме того, найти амплитуду переменной
силы, обусловливающей критическую скорость
2-го рода, и вычислить тот дисбаланс, который
должен дать такую же силу при критической
скорости 1-го рода
вал длиной I между подшипниками (которые принять
за простые опоры) несет в своем центре диск, момент инерции массы кото-
рого относительно его диаметра равен Id. Диск закреплен так, что его
ось образует малый угол у0 с осью вала. При вращении с постоянной
угловой скоростью ы центробежные силы стремятся уменьшить угол у0
до его какого-то нового
удельный вес равным
10е кПсм\ найти
К задаче 183.
183. Невесомый
значения <р0 — у.
Найти отношение — в зависимости от угловой скорости ы.
То
184. Имеется просто опертый вал с центральным диском. Один воз-
можный тип колебаний не дает смещений центра диска и обусловлен лишь
наклонами его плоскости. Коэффициент жесткости вала в месте прикреп-
, 12Я7
ления диска к, = ---- есть величина момента, который необходимо при*
дожить в центре вала для получения единичного угла у поворота сечения
в этом месте.
а) Найти собственную частоту таких колебаний невращающегося
диска (Q = 0). Пусть это будет w0.
b) Найти собственную частоту (или частбты) w для случая, когда
диск вращается с угловой скоростью Q.
с) Представить результат в виде графика зависимости w/w0otO/w0.
185. Найти критическую скорость диска диаметром 25 см и весом
10 кГ, прикрепленного к концу консольного вала длиной 25 см и диаметром
1,2 см. Вал стальной (Е = 2,1 • 10б кПсм*).
К задаче 185.
К задаче 186
186. Вал, имеющий длину 21 и жесткость на изгиб Е1, поддерживается
двумя подшипниками, как показано на рисунке. Эти подшипники по-
зволяют валу свободно измен ять его угол, не допуская в то же время пере-
ЗАДАЧИ К ГЛ. VI
541
мещений в этих двух точках. Диск, укрепленный на конце, имеет момент
инерции 1р относительно оси вращения (здесь I измеряется в сл14, 1Р — в
кГ см сек2), масса диска равна тп.
Найти критическую скорость.
187. Вал жесткости EI длиной I с пренебрежимо малой массой сво-
бодно опирается своими концами. На одном из них он несет диск массы
т с моментом инерции 1а относительно диаметра. Этот диск расположен
вплотную к подшипнику, причем так, что он. может лишь покачиваться без
смещения центра тяжести.
а) Найти собственную частоту при отсутствии вращения.
Ь) Попытаться найти критическую скорость возникновения прецессии,
но не затрачивать на это более 3 минут.
с) Составить общее уравнение частот, связывающее угловую ско-
рость вращения Q и уголвую скорость прецессии w. Привести это урав-
нение к безразмерной форме с помощью
функций К и R: I-»--------1
rr Ы n Q Т -----
К -------- , S
][Е1 ][Е1
]/ Idl ]1 Idl К задаче 187.
d) Решить это уравнение и результат представить в виде графика.
Проверить ответ на вопрос (а) и дать ответ па вопрос (Ь).
188. Вал жесткости Е] и длиной I свободно опирается своими кон-
цами. На четверти длины вала между подшипниками укреплен диск массы
m с моментом инерции относительно диаметра 1а.
Найти:
а) собственную частоту невращающегося вала,
Ь) угловую скорость прецессии, т. е. частоту боковых колебаний.
189. Вал, имеющий длину Z, лежащий в двух концевых подшипниках,
несет два диска в точках, расположенных соответственно на четверти
длины вала от каждого подшипника. Масса каждого диска равна т, момент
инерции каждого из них относительно диаметра равен Лг Жесткость вала
равна Е1.
а) Вывести уравнение для боковых колебаний вала, вызывающих
прямую синхронную прецессию. Частота этих колебаний измеряется
числом оборотов (в минуту или в секунду).
Ь) Привести уравнение частот к безразмерной форме посредством
двух функций, а именно, функции К критической скорости и функции D
воздействия диска.
т ZW 1Л
К2 =-------. D = —.
EI ml2
с) Найти скорость прецессии для следующих трех случаев:
Г) = О, D = оо, D = —.
12
d) Предположить, что вращение вала отсутствует. Для этой, по суще-
ству иной, задачи исследование остается тем же самым. Продумать, какие
изменения это вносит в исходные положения, и определить те малые
изменения, которые, тем самым, вносятся в конечное уравнение для К и D.
Найти также частоты для D = О, D = со, D = 1/12
190. Диск массы М и радиуса R закреплен на жестком невесомом
валу, поддерживаемом пружинами с коэффициентами жесткости кх и к2
на расстояниях ах и а2- Более близка’я пружина имеет большую жесткость,
причем кхах = к2а2. Вал вращается с угловой скоростью Q.
542
ЗАДАЧИ К ГЛ. VI
Найти собственные частоты
системы и построить график величины
w Q
— в функции от —, где
«2 = (ку + к2)1М,
/ MR2
= (М? + кго^ —— = 4а>‘.
191. Вычислить абсциссы и орди-
наты нескольких точек кривых, изобра-
женных на рис. 6,43, воспользовавшись
уравнением (6.21).
конечную жесткость Е1 на протяжении
ительпом расстоянии 1у. Абсолютно жест-
192. Консольный вал имеет
I и абсолютно жесток на до по л н
кая часть имеет массу т, а масса гиб-
кой части принимается равной нулю.
Найти собствен н ые частоты в
h
функцииототношения — для интервала
Zj *
О < — < 1 и построить график.
К задаче 192.
193. В одном лабораторном опыте маленький электромотор приводил
в движение другой электромотор посредством длинной витой пружины
с числом витков п, диаметром витка D и диаметром проволоки d. Роторы
моторов имели моменты инерции Ц и 72-
а) Найти наинизшую собственную частоту крутильных колебаний
установки.
Ь) Считая концы пружины заделанными в валы роторов, найти крити-
ческую скорость вращения установки, при которой наступает прогиб
пружины в ее середине.
194. Поперечное свободное колебание трубы, через которую протекает
жидкость. Если жидкость неподвижна, то можно воспользоваться иссле-
дованием, данным на стр. 204 применительно к балке, но только вместо
надо поставить ^лтр 4-
а) Пусть жидкость течет через трубу со скоростью Ро. Показать, что
дифференциальное уравнение движения имеет вид:
Э4?у Э2г/ Э2г/ Э2г/
£72 —— + 72 —- 4- 2 иж 70-------------1- (иж 4- uTn) т?— = 0-
Эг4 "8а:2 ° Эа: Э< р 8<2
Ь) Допустим, для упрощения, что третий член слева в написанном
сейчас уравнении имеет меньшее значение по сравнению с остальными. Ре-
шить дифференциальное уравнение для этого упрощенного случая и пока-
зать, что собственная частота для случая свободно опертых концов трубы
выражается уравнением
— п 1
М-тр 4” М'ж
где to0 — собственная частота при 70 — 0.
с) Полученный сейчас результат показывает, что w убывает с возраста-
нием 70, иначе говоря, жесткость уменьшается. Найти, при какой скорости
70 Кр поперечная жесткость исчезает, так что задача приводится к стати-
ческой. Для случая /лтр << /лж выразить 7окр через длины полуволн трубы
( за период колебаний, предполагая жесткость неподвижной.
195. Силовая установка в аэродинамической трубе состоит из мотора
Zv связанного с большим вентилятором 72, создающим поток воздуха в
ЗАДАЧИ К ГЛ, VII
543
трубе, посредством вала, работающего на кручение с коэффициентом к.
Аэродинамическая труба здесь идеализируется и уподобляется органной
трубе длиной I с поперечным сечением S Связь между вентилятором и
столбом воздуха в трубе выражается двумя постоянными Сх и С2, которые
имеют следующее значение. есть постоянная, связывающая перемещение
воздуха в трубе с угловым перемещением вентилятора: £~ — (\(р2. С$
К задаче 195.
есть постоянная, связывающая изменения крутящего момента вен тиля то-
ра с изменением давления в трубе: изменение крутящего момента опреде-
ляется величиной С2 В этих выражениях ^обозначает расстояние по оси
трубы от левого неподвижного сечения ее до рассматриваемого сечения,
тогда как g есть переменная составляющая смещения воздуха по оси трубы,
отсчитываемая как и предыдущая величина, слева направо.
Составить дифференциальные уравнения движения системы и вывести
из них уравнение частот.
Глава VII
196. Исследовать на устойчивость следующие уравнения частот:
а) s3 + 5s2 + 3<s + 2 = 0; b) s* + 8s3 + 1 Os2 + 5s + 7 = 0.
c) s4 — 2$з 4- 5s2 — 3s + 2 = 0.
197. На земле самолет поддерживается посредством шасси с двумя
колесами, осн которых предполагаем жестко связанными фюзеляжем,
а)
К задаче 197.
и посредством заднего колеса, ось которого может поворачиваться вокруг
вертикальной оси. Центр тяжести самолета должен быть расположен так?
544
ЗАДАЧИ К ГЛ. VII
чтобы его проекция попадала внутрь треугольника, образованного тремя
колесами.
а) Показать, что
вперед неустойчиво в
при таком расположении колес движение самолета
том смысле, что после малейшего поворота оси хво-
стового колеса угол поворота этой оси продолжает возрас-
тать уже самопроизвольно и самолет начинает колесить, т.е.
описывать на земле петли.
Ь) Показать также, что при расположении третьего
колеса впереди двух колес с неподвижными осями по так
называемой системе «трицикла» движение устойчиво.
198. Маятник, состоящий из легкого (невесомого) стерж-
ня а и тяжелого груза массы Л4, находящегося на расстоя-
нии /от точки подвеса, висит на круглом валу S.
Предполагая, что вал вращается с большой угловой
скоростью w и что момент трения на валу есть То, найти:
а) равновесное положен ие маятника, определяемое его
углом а0 с вертикалью.
Далее, исследовать малые колебания, которые маятник
__ может совершать около равновесного положения в следую-
К задаче 198. щих случаях:
Ь) момент трения То в точности постоянный,
с) Tq слегка возрастает при увеличении скорости скольжения,
d) То слегка убывает при увеличении скорости скольжения.
199. Груз G покоится на столе. Коэффициент трения между столом и
грузом равен /. Пружина к одним концом привязана к грузу, а другой ее
конец движется по закону
' < о, f = °, а —*- »в
/ > О, V = v0, ''
иначе говоря, в момент £=0 пружина
внезапно начинает двигаться с постоян- К задаче 199.
ной скоростью v0.
Исследовать движение и построить графики перемещений в зависимости
от времени для случаев, аналогичных случаям Ь), с) и d) предыдущей задачи.
200 Пусть некоторое сечение имеет аэродинамические характе-
ристики, представленные на рис. 7.21 и выражаемые уравнениями-
К задаче 201
подъемная сила L — Losin2a,
£>О 9
— cos 2а.
2
лобовое сопротивление D — —
Пусть, далее, брусок с таким
новлен в приборе, изображенном
положении а = 90° Найти, при каком
отношения Lo/£)„ наступает неустойчивость.
201 На рисунке изображен регулятор Уатта,
для которого величины a, m, М и к известны.
Пружина к такова, что при спокойном сосюянии
регулятора она удерживает ручки, несущие шары,
отклоненными от вертикали на угол а = 30о. При
полной угловой скорости вращениям угол а — 45°.
Требуется: а) выразить постоянную пружины
к через другие величины, характеризующие регу-
лятор, Ь) вычислить частоту собственных
баний при неподвижном состоянии регулятора,
сече нием уста-
ва рис. 7.17, в
значении
коле-
с) вычислить собственную частоту, когда ре гул я гор вращается со
скоростью Q.
ЗАДАЧИ К ГЛ. VII
545
202. Преобразовать неравенство (7.25) в соотношение между четырьмя
безразмерными величинами, за которые принять:
безразмерную характеристику или коэффициент связи F,
одно отношение частот
и два отношения затуханий
/ =
Ь>М ’
относя индекс «м» к машине, а индекс «р» к регулятору. Представить полу-
ченные результаты графически для некоторого определенного значения
причем по оси абсцисс отложить значения Ср, по оси ординат — значения
См, a F принять за параметр для различных кривых. Выяснить смысл этих
графиков
203. Для системы, показанной на рис. 7.30, найти частоту собственных
колебаний столба пара т на «паровой пружине» камеры V. Массу М считать
неподвижно заделанной.
204. Система состоит из машины с приведенным моментом инерции Д,
приводящей в движение вал с коэффициентом жесткости кх. На другом
конце вала установлена гидравлическая муфта (см. стр. 293), ведущая
часть которой имеет момент инерции 12 Ведомая часть связана с приводи-
мой в движение машиной, момент инерции которой равен 13.
Составить дифференциальные уравнения движения системы, восполь-
зовавшись уравнением (5.37, а), написать уравнение частот и выяснить,
способна ли система к самовозбуждающимся колебаниям.
К задаче 204.
205. Решить такую же задачу, условия которой осложняются тем,
что ведомая часть муфты'с моментом инерции 13 вращает вал с коэффициен-
том жесткости к2, на другом конце которого находится маховик с моментом
инерции 74.
206. Ротор ветряной мельницы, имеющий момент инерции Уг, приводит
в движение посредством вала с коэффициентом жесткости к машину с
моментом инерции /2. Крутящий момент, передаваемый от ветра к ротору,
вблизи эксплуатационной скорости равен То + где То — установив-
шееся или среднее значение момента и w — мгновенное значение угловой
скорости мельницы. Сг — постоянная, могущая быть как положительной
(момент возрастает со скоростью), так и отрицательной (момент убывает
со скоростью). Приводимая в движение машина развивает противодей-
ствующий момент То, который постоянен независимо от скорости. В системе
имеется регулятор, не позволяющий скорости уходить от эксплуатационной.
Однако этот регулятор реагирует так медленно, что он не приходит в
движение при возникновении в системе крутильных колебаний.
Будет ли система устойчива по отношению к крутильным колебаниям?
Рассмотреть случаи положительного и отрицательного О,.
35 Ден-Гартог • 2074
546
ЗАДАЧИ К ГЛ. V1J
У///^//////////////^//Л
ц ТТ7 * Т 1
—1---WVVV-----
I
I
207. Система состоит из двух маятников, масса каждого из которых,
равная т, сосредоточена в грузе на конце невесомого стержня длиной I.
Маятники соединены пружиной к на расстоянии а от точек подвеса. Один
из грузов имеет полусферическую
форму. Ветер дует со скоростью 70 и
воздействует силой В = только
на полусферический груз.
Будут ли малые колебания сис-
темы около положения равновесия
устойчивы или неустойчивы?
208. Камера имеет два отверстия,
как показано на рисунке. Установив-
шийся поток воздуха входит в отвер-
стие А и выходит из отверстия В через
клапан. Когда клапан находится в
771
*0
771
К задаче 207.
положении равновесия, имеет место
баланс входящего и выходящего воздуха, и поэтому давление в сосуде
остается постоянным. Уравнения системы могут быть написаны так:
+ кх — Sp, р — Сх.
Здесь 8 есть площадь поршня, х — координата клапана, р — давление в
камере и О' — постоянная, показывающая, что расход воздуха через отвер-
стие В пропорционален перемещению клапана.
а) Рассмотреть знак постоянной О для двух случаев (а) и (6), показан-
ных на рисунке.
Ь) Исследовать устойчивость клапана в этих случаях.
209. В предыдущей задаче добавить к клапану демпфер с, включив
его параллельно с пружиной. После такого видоизменения дать ответ на
вопрос (Ь).
210. В цилиндре поршень массы т удерживается пружиной к. Поршень
играет роль клапана для воздушного потока, входящего в цилиндр через
большое число очень малых отверстий. Воздух вытекает через узкую
трубку. В состоянии равновесия поршень не движется, и количество втекаю-
щего под поршень воздуха равно количеству вытекающего. Пусть будут:
х — направленное вверх перемещение поршня из его равновесного поло-
ЗАДАЧИ К ГЛ. VII
547
жения, S — площадь поршня, р — избыточное давление в цилиндре по
отношению к давлению при равновесии, Схх — объем секундного количе-
ства воздуха, входящего в цилиндр (сверх того количества, при котором
имеет место равновесие), С2р — объем секундного количества вытекающего
воздуха (также сверх нормального).
Вывести уравнения процесса и найти условия устойчивости. Воздух
предполагается несжимаемым.
К задаче 210.
К задаче 211.
211. Обобщение предыдущей задачи: цилиндр имеет переменные пло-
щади притока и расхода; принимается во внимание сжимаемость газа.
Вводятся обозначения:
х — перемещение поршня вверх от положения равновесия,
Ро> 2о— давление и плотность газа в цилиндре при равновесии,
Vo — объем цилиндра при равновесии,
S — площадь поршня,
р, о — давление и плотность газа в цилиндре в произвольный мо-
мент времени,
р' ~ р — Ро — избыточное давление в цилиндре сверх р0,
= Сгх — С2р' — скорость втекания массы газа в цилиндр (сверх
втекающего количества при равновесии),
w2 & С3х + <\р' ~~ скорость истечения массы газа из цилиндра
(сверх вытекающего количества при равновесии).
Предполагается, что состояние газа в цилиндре подчиняется уравне-
нию p/qy = const.
Вывести условия устойчивости. Уменьшается ли устойчивость вслед-
ствие сжимаемости? Является ли необходимым демпфер для устойчивости?
212. Прежде чем было вполне определенно установлено, что катастрофа
с Такомским мостом была вызвана вихрями Кармана, были предложены
теории, объяснявшие разрушение явле-
нием флаттера.
Для схематизации существа дела мы
можем допустить, что движение описы-
вается следующими уравнениями:
т х + кх х = А V2 (б — р j,
/0 + k8e = aAV2 р — р),
X
где 0----- есть кажущийся угол атаки,
К задаче 212.
А — некоторый коэффициент.
35:
548
ЗАДАЧИ К ГЛ. VI»
Таким образом, правая часть первого уравнения есть подъемная сила.
Во втором уравнении а есть моментное плечо (обычно около четверти про-
лета), определяющее действующий на мост крутящий момент ветра.
Исследовать явление с помощью критерия Рауса и иайти скорость,
при которой начинается флаттер.
213. Сложное тело состоит из двух масс т, и т2, соединенных между
собою невесомой связью (стержнем) длиной I между центрами тяжести
составляющих тел. Эти тела имеют моменты инерции Ц и 12 относительно
их центров тяжести.
Найти момент инерции системы относительно общего центра тяжести
G и доказать, что ab < q2g х). Только в том случае, когда 1г и 12 равны нулю
(сосредоточенные массы при невесомом стержне) ab—Q2^. Если таким
образом схематизировать шасси самолета, то можно видеть, что колесо
неустойчиво относительно шимми [см. уравнение (7.42) на стр. 444].
214. Две точечные массы т, и т2 соединены однородным стержнем
массы т2.
Найти положение центра тяжести G всей системы и ее момент инерции
относительно G. Доказать, что ab > о2, за исключением случая, когда
т2 = 0. В этом случае ab — Q2. Таким образом, если эта система схемати-
чески представляет собою шасси самолета, то колесо оказывается устой-
чивым относительно шимми. Однако схематизация, данная в задаче 213,
является более близкой к действительности по причине формы самого
шасси.
215. Пусть на схеме шасси самолета точка О есть точка встречи с
землей оси вращения ненапряженной стойки колеса. Вертикальная стойка
обладает гибкостью, характеризуемой коэффициентом жесткости fc, и
при колебаниях типа шимми отклоняется в сторону на расстояние х. Пусть
будет А — точка пересечения изогнутой оси стойки с горизонтальной
плоскостью на расстоянии г над землей. Далее, пусть будет 0 угол шимми
при скорости приземления V Предположим, что точка О движется вперед,
т. е. что шимми переднего колеса не толкает самолет в бок. Было найдено,
что резиновые шины подвергаются со стороны земли действию силы,
пропорциональной углу между вертикальной плоскостью колеса и напра-
К задаче 215.
влением относительного движения вперед,
а) Показать, что этот (малый) угол выражается
суммой
X 4- аО
Ь) Предполагая, что массу имеет только ко-
лесо, показать, что уравнения (малых) движений
колеса имеют вид:
с|о +
X 4- ад А
—р~)
4- lex = — т (х 4- а$)у
кха = 1^0.
с) Найти, при каких условиях эти уравнения соответствуют устой-
чивому движению колеса (без шимми).
х) Система предполагается плоской; а, Ь — расстояния точки G от цент-
ров тяжести масс тх и т2, о0 — радиус инерции системы относительно
точки G. (Прим, перев.)
ЗАДАЧИ К ГЛ. VU1
549
2t6. В простейшей схеме колеса шасси самолета (рис. 7.41), подвер-
гающегося шимми, добавить на оси поворота демпфер крутильных колеба-
ний, создающий момент с<р в точке В.
Требуется дополнить анализ, данный на стр. 443—444, введением этого
нового члена и показать, что условия устойчивости выражаются неравен-
ством
mV
с> —у— — ab),
которое содержит в себе неравенство
ствии затухания.
(7.42) как частный случай при отсут-
Глава VUI
217. В середине цилиндра АА поперечного сечения S (см. рисунок)
может скользить без трения поршень массой т. Поршни В, В, переме-
щаясь вперед и назад в противоположных направлениях (имея, следова-
тельно, противоположные фазы), изменяют
давление воздуха в цилиндре А в пределах
от 95% до 105% атмосферного давления.
Предполагается, что изменение давления про-
исходит изотермически, т. е., что ?;р = const.
Объем половины цилиндра А вместе с трубой
и цилиндром В равен V.
Найти частоту или частоты движения
поршней В, В, когда масса т оказывается
в состоянии неустойчивого равновесия. Вы-
полнить общее исследование с помощью
рис. 8.11.
218. Маятник состоит из однородного
бруска длиной 12 см и весом 200 Г. Точка
К задаче 217.
его опоры совершает вертикальное гармоническое движение с амплиту-
дой е = 1 см.
Найти, при какой скорости мотора, вызывающего это движение, маят-
ник приобретает устойчивость в вертикальном обращенном положении.
При решении задачи принять кривую, изображенную на рис. 8.12, за пара-
болу, проходящую через начало и через точку с координатами х = —0,1.
у = 0,5.
219. Рассмотреть свободные колебания простой системы, состоящей из
массы и нелинейной пружины с характеристикой f(x), данной графически.
Показать, что изоклины (см. стр. 474) являются кривыми, подобными
упругой характеристике. Построить фазовую диаграмму (т. е. диаграмму
х— Ж) и показать, что для линейного случая
^1_ллллл в кх она приводится к рис. 8.21.
<1 '/VVW |g 220. Найти собственную частоту изобра-
женной системы в функции от амплитуды х0.
К задаче 220. В положении равновесия груза пружины
не напряжены.
221. Пользуясь метолом рис. 8.39, найти приближенное значение соб-
ственной частоты системы, изображенной на рис. 8.15,а.
222. Вычислить и представить графически собственную частоту
системы (рис. 8.15,6) в функции от амплитуды. Сделать это как точным
методом по уравнению (8,26), так и приближенно с помощью рис. 8.39,
223. Система с одной степенью свободы состоит из массы т и нелиней-
ной пружины, характеризуемой коэффициентом жесткости к для отклоне-
550
ЗАДАЧИ К ГЛ. VIII
ний, меньших чем а (с обеих сторон), и имеющей постоянную силу, не зави-
сящую от ж, для значений х, больших чем а (также с обеих сторон).
Найти собственную частоту свободных колебаний в функции ампли-
туды х0. В частности, найти частоту при х0 = 2а.
К задаче 224.
224. Найти собственную частоту изображенной системы, в которой
пружины имеют начальное сжатие силой Fo.
225. Решить задачу 222 для системы, изображенной на рис. 8.15,с
(воспроизводится здесь).
К задаче 225.
226. Решить задачу 220 при начальных зазорах а с каждой сто-
роны массы.
227 Найтн несколько касательных на рис. 8.33 и по полученной
кривой построить одну волну кривой на рис. 8.34.
228. Рассмотреть видоизмененное уравнение Ван-дер-Поля для релак-
сационных колебаний
у — е (1 — S/4) у 4- У ~ 0.
Здесь четвертая степень у стоит вместо второй в обычном уравнении Ван-
дер-Поля. Для почти синусоидальных колебаний, т. е. для малых е, найти
величину безразмерной амплитуды у, приобретаемой системой в предель-
ном состоянии установившихся колебаний.
229. Дана простая колеблющаяся система с линейной пружиной и
массой, подвергающаяся воздействию сухого трения.
Показать, что уравнение движения имеет вид
_ (— F при > 0,
тх
(+ F при % < 0.
Построить и исследовать диаграмму х—— (фазовую диаграмму),
сос
из которой найти убывание амплитуды за период [см. уравнение (8.30)].
230. Ремень с горизонтальным участком, охватывающий два шкива,
движется с постоянной скоростью Ко. На горизонтальном участке имеется
груз Сг, привязанный пружиной к. Коэффициент сухого трения груза о
ремень равен fa при движении и fs при относительном покое, причем fs = 2/^.
ЗАДАЧИ К ГЛ. VIII
551
Построить фазовую диаграмму перемещение-скорость для этого слу-
чая и обратить внимание, что траектории на этой диаграмме состоят
исключительно из отрезков прямых и из круговых дуг. Найти предельные
К задаче 230.
циклы, т. е. установившиеся состояния движения и показать, что они
достигаются при отправлении из любой точки диаграммы.
231. Исследовать уравнение (8.46) для случая вынужденных колебаний
системы с затуханием, пропорциональным квадрату скорости (F = ±сж2).
х
232. Рассмотреть фазовую диаграмму х-для системы с линейными
wc
массой и пружиной, но с нелинейным затуханием. Доказать, что полная
энергия системы (кинетическая + потенциальная) пропорциональна квад-
рату радиуса-вектора, проведенного из начала в соответствующую точку
кривой. Таким образом, для системы без затухания (рис. 8.21) энергия
постоянна, а при затухании (рис. 8.22, 8.23 или 8.33) энергия непрерывно
изменяется.
Объяснить изменение этой энергии.
233. Доказать, что в графике скорость—перемещение ускорение в какой-
либо точке Р выражается длиной «субнормали», т. е. расстоянием по оси
х между точкой ее пересечения с нормалью и кривой в точке Р и проекцией
этой точки на ось а?.
ОТВЕТЫ К ЗАДАЧАМ
I. а) — 157,0 кГ см; Ь) 4- 0,40 кГ см.
2.
6 „
c) “’ PqXq\
D
d)
3,
8,
9.
10,
6
a) — PqXq,
о
6
b) — P o®o>
D
M = т + 2Ро( . , sm a)t 71 I 1 + 3
Если п = 1, 3, 9, . . . , то
Если п = 5. 7, 13, ... , то
Если п = 2, 10, 18, ... , то
Если п — 4, 8, 12, , то
Если п ~ 1, 7, 9 то
Если п = 3, 5, И то
Если п = 2, 6. 10 то
Если п = 4, 12, 20 то
Если п = 8, 16, 24 то
Ьо = 2Р0 4
71 л 4п2 — 1
а) ап = 0; . Л)<р Ьо = ; 71 Ьп =
b) On = 0; h Р°Ф. 6О = ; 7Т Ьп
cos
sin 3wZ +
bf
b.
— sin
5
a /2
Ttn
a/2
Ttn
2a
JPX
— 7 r o^o-
k5
5wZ -j- ... j.
itn
bn = 0:
2a 2 4-/2
an = H-----
nn
2a
an = H------
Ttn
2a
2
2-/2
2~
11.
y(-l)n
£ n*
14. a) co?
6 kg .
7 G ’
Tin
4a
71П
an ~ O’
о
—, an —
2P0 .
----sm n<p,
mt
2Р0Ф
2mtx
7Г
6 kg 12 g
b) +
0.
15. wc — 2,3 рад/сек,
ОТВЕТЫ К ЗАДАЧАМ
553
За
16. о? . 17.
2 V2Z
2 5k
ис = 7—
6 72?
г2
18. W2 = --------
R — r
G
Gr2
19. ша =
G
Gr2
где G —
общий вес тела,
9
/ — полный
момент
инерции.
9
20.
а)
W2
21.
W2
9
I
22.
а)
24.
W2
27.
to-
—; b) равновесие
a
2ka2
-I--— (см. теорему
ml1
m9l , . „ 9
4k Ь)и‘=-7^^-
9 A 4fai2
7 4--1. 25* w2
I m)
4У
w- = —- .
ml
неустойчиво.
на стр. 361).
2 ка2
26.
30.
32.
а)
а
1
h "и 2т'
Gd*
f. 28'
h
к
29.
il)
4
3
33.
а)
пружины,
34.
а)
23.
2 I к9
Wp = —-----
12 G
2Ea2wt3
W2 =-------------------.
Щ (41. + 3ZS)
т
35.
а)
36.
31. wc = 155 рад/сек.
ъ________
8nD3 ’
, El
к = — , где
равная nDn,
nd4 E
~~E '
’ 2G
48E1
b) -3-
4
к =
32Z
3E1
T"
w2 -
т
b) к =
Е1
Ь) к —
0,26 кГ/см.
жесткость на изгиб, а / —
1,31 кГсм/рад.
Ь) к = 0,75 кГ см /рад.
1921*72
с) —-
к.
'4.
%9
3
полная длина
АВ
a) sin <р = ----;
h
Ь) прямая линия, проходящая
координат; с) эллипс, главные оси которого направлены по
горизонтали.
38. а) 0,318%; Ь) 0,0002 кГсек/см. 39. 0,0055 кГсек/см.
37.
через начало
вертикали и
40. a) 655 кГ/см2\ 34°3: b) 1810 кПсм2\ 38°9.
41. а) ы = 27,8 радиана в секунду, или / = 4,42 периода в секунду;
Ь) с = 0,00041 кГ см~г сек; с) Fn = 0,029 кГ; d) в начале движения 1% за
d
период, а затем медленнее, е) 5,08 см; 0 х = 5,08 — 2,54е
554
ОТВЕТЫ К ЗАДАЧАМ
где
42. а) Крутящий момент равен
m ^2
1 о7 Г
2
W2’
W2
(Л 4- ^г)
w2 = ------- -------
21 22
Ь) То же самое, что (а), где лишь вместо /2 надо поставить n27s. а вместо
1 1
поставить — Ч——
к п2кг
133 кГсм. 44. 208 кПсм, 45. /< 1,51 колеб!сек,.
тдт sin а
“ = т
1
к
43.
46.
47.
а) 1<р 4- wapr sin a sin ф = 0, b)
8g
48.
момента
49.
ш2 = ----.
г (9л — 16)
Р
х = — [cos ac(t — t0) — cos wcZ],
к
приложения
IJ2n2
где время г отсчитывается от
50.
5 1.
9Л
a) w2 = —
m
. 2
a) co2 = — ;
нагрузки.
k-ik^n2
fcj + k2n2
16c2
1
53. ~
ка%
/2ra2
------------ gin wt.
Ц + Т2п2
16c2 , ЗР0 ]Гт
b,a:" = -47h; 0)
b) w2 = g-
c
работа
период cK 0r
т0 =
с2
4 32 .
3 к I 81 km /’
2
, где у есть
относительное перемеще-
ние элементов системы в демпфере, определяемое уравнением (2.28а), в
котором сила Fn = ?nw2a0.
__ . ытах ^тах
55. а) ---- = -—;
Qmin min
Ь) момент = wQ (Imax — /min) sin 2QI есть очень большая величина,
вследствие чего в практических расчетах следует предпочесть случай (а),
Mab + 1g + Mb2
Mb2 + Ig
3g
21Q2 ’
9,2°, считая от вертикали.
— = 0,62 и 1,62. 61. — =
wf ск
56.
57.
58.
60.
63.
66.
же, что
о
w2 = Q2
a) cos а =
3g
b) a? = — — P2; o)
59. a) 1,25
Zlw
Зо
ш2 = — cos а — Q2 cos 2а.
21
кГ\ Ь) 0,91 кГ.
a) 205 об!мин. b) 427 об1мин-
#max
65.
20
а) — (неустойчивое состояние); Ь)
Ь).
w2 = —
ttR
b2 2 - K2
-----------h-----------: с) to
6h ][2 3
ОТВЕТЫ К ЗАДАЧАМ
555
67. 477 к,олеб!мин\ 828 колеб1мин.
. к
68. й)2 = 0,76— с узлом на расстоянии 2,62/ вправо от левой массы.
т
к
= 5,24 — с узлом на расстоянии 0,38/ вправо от левой массы.
Т ЗТ
gg. w2 _— . ю2 —
ml ml
к
70. = 0,73 — с узлом на расстоянии 0,17/ влево 'от левого
к
«1=3,27 — с
т
конца;
71.
«1 == 0;
узлом на расстоянии 0,14/ влево от правого конца.
2
W == ---.
3R
|2 =
о2
72. —
9
19
33
У229
* 33“
F
73. .т. == 0; х2 = —2/—.
7
к он
74. «2 » 0,64— при отношении — = -И 0,36,
w. ос2
«2 = 1*56— при отношении — = —0,56.
т х2
75. Убывание амплитуды составляет 10% за период в первом главном
колебании и 24% — во втором.
76. а) 4,7 • 108 кГмсек?-, Ь) 2,08 • 10* к.Гмсек,\ с) убывание по закону
арифметической прогрессии, угол отклонения при качке уменьшается па
2°,6 за каждый размах.
77. 11 см. 78. а) 74 км}час\ Ь) 10,4 см. 79. «а = — + ~ (2 ± /5).
т I
?722
80. /'’канат = ~ /% (1— cos «с0 + т2д, где
?П1 + т2
tri 1
81- /'’канат = ---- (ыс* — sin «CZ) + m2g
тх + т2 2 л
стания силы;
к(тх + т2)
«/ =---------—.
тхт2
в период нара-
^канат= /%------;---- в последующем.
тх + т2
83. а) 5,35 кГ — в обеих пружинах либо растяжение, либо сжатие.
Ь) 19,5 кГ — в одной растяжение, в другой — сжатие.
1
?72«2 — j(0C
556
ОТВЕТЫ К ЗАДАЧАМ
87.
= =
/ (ш2)2 4-
Р
тw2
сила = сыж0.
.2
,2'
89.
к
— классическая резонансная кривая.
90.
Коэффициент
передачи =
1
91
93.
I — 27?! W 2
ZC — Мы2
где
1Г5Ъ
° ~ Q Г к2'
3mR2
4- —-— cos2 а
Зк2
= —•
Зт
+ — sin2 а
/И
w4
3k2R2
4- = 0.
2 _
ы' ~ I ’
94. w4 1
- w2
3 fcnl .. ку
где^ = -(
3^2
.
Зт
95.
w-
3&2-В3
“V
cos
Зк3Р2
sin2 а
- ш2
Зк2к3Н2
где w2
3&2
3w? ’
3^2
тку
w2w2 = 0-
96.
W? ~ — •
Зт
Зк2 Зк3
—- sin2 а Ч—— cos2 а
ку ку
— w2
«2
, ЗА^З ] , <» ч п
4-----— 4- = 0.
ткг .1
упрощаются и делаются
Предлагаем определить
В предыдущих четырех задачах решения
физически наглядными при а — 0° и а = 90°.
частоты при этих значениях угла а. Увеличение угла атаки а лопасти
знаменует собою усиление «связи» между двумя типами колебаний, что
всегда приводит к удалению обеих частот друг от друга (см. рис. 3.2
~ " лопасти
была ли она
и 3.7). Таким образом, при возрастании угла
либо повышается, либо понижается в зависимости
первоначально выше или ниже частоты двигателя.
2к\ д 2к (
97. а) ю? = —• cos2 а + v sin2 а = — cos2 а I -
т I т \
а частота
от того,
^СТ с- 2
— sin2
а
п Я
Ь) а? = — sin2 а 4 - cos2 а.
т I
Результатом этой задачи можно воспользоваться для
ответа к задаче 14а), где не принят во внимание эффект веса.
9 ( 2
98. ш? = 0; “1 = 7 1+ “ •
I \ О (JT J
исправлен ия
ОТВЕТЫ К ЗАДАЧАМ
557
100.
а)
3Z3
“Х1 “ “22 “ 1Ё1 1
II3
а19 -----------:
12 13J57Z
Ь)
w2
т (ап ± а12)
при —
я2
± 1.
101.
16 I3
a1t = — ------;
11 768 EI
&12 —
/з
_ 9
768 Е1; Я22 “ 768
/з
EI ’
ь?! = 5,63
EI
ml3'
1/ #7
w2 = 28,5 [' —- .
2 г ml3
1/П
102.
Ь)
рв
1к
a) w = / —
F m
6 T
o2 = — -^у.если принять, что колеблющаяся струна имеет форму
линии, состоящей из трех прямолинейных отрезков.
К средней массе надо прибавить половину массы балки. Упругая
кривая принимается за половину волны синусоиды.
3
107. В расчет входят -
8
волны синусоиды,
]П^~
Wj = 0,59
105.
ломаной
106.
полной
108.
109
wf = 0;
ml3
1
110.
k
W? = z—,
2m
к
112.
•? = 0,933
т
Е1
113.
а)
ml3
I3
Ь)
att =-----;
11 3EI
2
7 mF'
wf =
Е1
114.
116.
117.
119.
с)
Уг) «1
А =
Wi
а)
Ь)
массы балки; упругая кривая берется в виде
смещенной по вертикальному направлению,
4
2fc
(9
т
±
V17)-.
т
111. w\
64 Е1
17
ml3
El
10,29-—.
ml3
_ 8 I3
3 eF *
EI
w| = 6 ——.
ml3
и
3 ^2
I w4 — —- w2 -I-
1 m
'2fc
--------со2
Я] 2
d)
W2
5
6
Z3
EI
6 El
11 ml3
115. cjj = 52,3 рад/сек.
= 40 радюек,, о2 = 160 рад/сек,, w3
= 37,6 рад/cetc, w2 = 143 рад1сек;
= 367 рад}сек.
w3 = 355 рад!сек.
л ][
= 3,57 Г —- (точное значение
F /л,/4
коэффициента равно 3,52).
558
ОТВЕТЫ К ЗАДАЧАМ
121. у
jr6 5Z2®2
90Z2 96~
0,0106 Z4
If EI
“’ = 9’74^
П
a)O = -;
(точное значение
коэффициента равно л2 = 9,87).
122.
Ь) а = 0, Ь =
123
х
а) У = j
3 ж3 la4
2 ~Р + 2 7’
124.
126.
127.
3 1 ]/ EI
— Гй . с = Тега’ с) “1 = 1156 ----М-
8Z2 16Z3 У /XjZ4
1ГЁГ
b) w7 = 4,07 и —-.
У ml3
' - 10'9й'
El
b) w? = 7,6 —-.
ш, = 22,22
125.
Е1
P^t4'
Е1
a) Wi2 = 10,9 —-,
Е1
а? = 13,85—(точное значение коэффициента равно 12,39).
/Л,/4
и2 = 3030 сек-2-, 7 = 8,76 колеб}сек.
Величиной, эквивалентной щ, является эквивалентом для
Л Gd*
SE служит выражение ———.
8^2)®
128.
129.
yr2 Gd*
w2 = --------------.
El
130. w2 = 2,80----, причем упругая кривая представляет собою
четверть волны синусоиды; если более жесткая часть балки вообще не
может изгибаться, то кривая прогибов будет состоять из — волны коси-
8
нусоиды и из отрезка прямой. Тогда коэффициент 2,80 заменится коэффи-
циентом 1,35.
131. 770 &олеб!сек.
132. а) Предполагая, что деформация подчиняется закону прямой
1
лилии, мы должны к массе груза прибавить — массы пружины,
о
Ь) Частота определяется из трансцендентного уравнения
w
ут
1/ ®
У
wz
Т
т
где ms — масса пружины. Если ms < m, то, пользуясь разложением в ряд
Тэйлора и удерживая только два первых члена, мы приходим к прежнему
результату, т. е. к тому, что к массе груза следует прибавить — массы
о
пружины.
ОТВЕТЫ К ЗАДАЧАМ
559
л4 EI
133. w- = ----------предполагаем, что кривая есть волна сину-
3 4
2 л
co иды, проходящая через точки
130 оборотов в минуту
Р (9 + г)
134.
51
6
— и
6
и 372 оборота в минуту.
135.
tg р/ =
p-iw2
где p2 = W’
qr —
7 - ES
Л42ы2 — k
ES
Трансцендентное уравнение решается путем ряда испытаний ыа.
Уравнение можно решить графически, строя кривые для левой и правой
----л .. --------- .... -------------- Первая критическая скорость
частей и отыскивая их точку пересечения. Первая
соответствует 126 об)мин.
ттх 3 х ла
136. а) у = sin —----------b) w2 — —------------
I vt I 6
Точное решение, приведенное на стр. 571, как
El Е1
-- = 15’75”ТТ-
tJbl4 цЛ*
Точное решение, приведенное на стр. 571, как а2 для балки с
шарнирным, другим свободным концом имеет коэффициент 15,4.
л2 л2 + 4 71 Т
137. ш2 =-----—— — =5,80------.
4 л2 — 4 р №
Точное решение, получаемое с помощью бесселевых функций,
коэффициент 5,74.
139. а) 3,6 мм по вертикали; Ь) 152 кГ по вертикали.
142. Силы инерции первого и второго порядков уравновешены,
ветствующие моменты остаются неуравновешенными.
одним
имеет
соот-
143. а) — б?пост» т. е. половине приведенного веса поступательно-дви-
жущихся частей (поршня н части шатуна).
Ь) Нуль.
(а + Ь)2 + Ь2
------------; а а = 0, а А = 90°.
(а + 2Ь)2 Д
Ъ
а + Ъ
cos2 а
2
I м \2
с) б?пост
~ 180° arotg
G г)ЕУ
144. —р
G.E*
d d
145. а) —
Г»
к
о +
ас = 180+ arotg —-—
1
_Л__
Л +Л*
к (Ф1—Та) = ^1 + ^2
т-
560
ОТВЕТЫ К ЗАДАЧАМ
146.
148.
149.
wx = 168 сек*1. 147. w| = 2800 рад/сек2.
w2 = 27,4; w| = 629,3.
16 800 колеб/мин: скорость 6-го порядка 2800 об/мин: скорость
3-го порядка 5600 об/мин.
150. 2800 колеб/мин.
151.
152.
153.
155.
157.
а) О = 110°. w = 3,45; b ) в = 270°, w = 8,48.
a) w2 == 730: b) w2 = 16 000: с) 4: d) —.
1Г
154. wj = 0,350 у у\
156. Wj = 67,5;
с) 9. d) 2 и 7.
1570 колеб/мин.
Wo
158.
Wj = 21,3 рад/сек,
Ь) 1,8: 2,7; 3,6; 4,5; 9.
5^
w2 =
97,5; w3 = 188 рад/сек.
6, 6-, 7.
2
колеб/мин: 6630 колеб/мин.
колеб/мин\ 5530 колеб/мин.
162. 2,22 кГ.
b) V = ст 1/2.
159. 3810
160. 1215
161. w, = 2080 рад/сек.
163. a) wr = Q:
166. Пять основных диаграмм:
1
4- ,
2
порядков 1, 3, 5, 7 и т. д.
1 Л 1
порядков 1-, 2-,
Для
1 1
порядков — , 3 - ,
7- и
2
д.
2)
3)
Для
Для
Для
51, 6^
2 2
порядков 2, 6, 10 и т. д.
и
т. д.
4)
5) Для мажорных скоростей порядков 4, 8, 12 и
167. а) 0,0047 рад: Ь) 3 370 кГм и 4 760 кГм: с) 31,6 об/мин.
168. — 0,00359 рад: +0,00423 рад.
169. а) /3 = 0; крутящий момент для первого вала задается произвольно;
л2
с) © = л или 180°; d) w2 = —
Ь) на конце /9 = 0;
170.
а)
0
о2 + а2
Т?2 — а ЛИ
AR
Ь)
AR
R? — a AR — а2 —
rG
т. д.
k
I
171.
вешен.
Ъ)
Q2 rG
q2 + а2
46 кГм: с) 120,0 об/мин: d) 107,0 об/мин:
AR
е) двигатель уравно-
172.
л
—; все остальные а равны нулю.
2
---- для четных п\ Ьп = 0 для нечетных п.
п2 — 1
а.
Ьп —
ОТВЕТЫ К ЗАДАЧАМ
561
Порядок । 2 3 4 5 6
% от среднего зна- чения момента . . . 157 66,7 0 13,3 0 5,7
_ EI Е1
173. + 0.35——; — 1,3——. 174. 1050 об/мин.
L L
175. 1050 об/мин при горизонтальных раскачиваниях и 1320 об/мин
при вертикальных.
177. Если отсчитывать углы от дисбаланса в +1 к дисбалансу в +2
(где угол « 90°), то коррегирующие грузы должны быть расположены
следующим образом: в плоскости 7 груз 2,06 кГмм под углом 104°, в пло-
скости II груз 4,03 кГмм под углом 263°.
178. 0,14 кГ под углом 315°. 179. 0,46 кГ под углом 306°.
1ОП > °i+°l , а?—05
180. ж2 =--------од сояф —------------.
2 4одт
Получается неопределенность выбора между +ф п —ф.
Me
181. а = 2 arccos---.
27ПГ
182. Скорость 1-го рода соответствует 1420 об/мин, а 2-го — 710 об/мин.
Амплитуда переменной силы во втором случае равна 0,0143 кГ, соответ-
ствуя дисбалансу в 25,4 • 10“4 кГсм.
183. 2_ =----------
Фо 12D7
1 +---------
7^ю2/
1207
184. а) ш2 «= — —.
185. 665 об/мин.
12
186. К2 = -у
ные обозначения,
/ Н ] ! 9
2 — - + V — — — + 4 . где К и D — сокращен-
и) г D“ 4D
применяемые в уравнении (6.14).
187. а) О)2 = 3EI Ь) не существует;
К2 К /28 1 1 1
188. а) ~ — г 1 + —- Ч = 0:
64 64 | 9 4DJ 3D
/<2 К /28 1 1 1
Ь) — 1 - - — 1 Г- - — = 0.
64 64 1 9 4DJ 3D
d) К = R ± V~n* + 3.
771Z3W2
>89. с) —— = 48; 192; 96.
EI
7П13О2
d) — = 48; 192; 25,6; 358.
EI
190. Если определять положение системы координатой х центра
диска и углом ф оси вала, то получаем два дифференциальных уравнения,
36 Ден-Гартог - 2074
562
ОТВЕТЫ К ЗАДАЧАМ
куда войдет гироскопический член — AH?2Qw<p (w — угловая скорость
вращения оси вала). Уравнение частот распадается на два уравнения второй
степей и:
2
2
2
2 —
w0
0.
'а.
вместе с Q, и обратное
w
Здесь два корня — = ±1 не зависят от Q и определяют прямое и обратное
WQ
вращение оси вала параллельно самой себе, два других корня определяют
прямое вращение оси с частотой, возрастающей
вращение с частотой, убывающей при возрастании
192. Если построить кривую
и2
—-77 = /(Ч
т
то эта кривая будет между абсциссами - — 0 и
близка к прямой, соответствующие ординаты которой
Второй тип колебаний будет иметь узел в абсолютно
очень высокую частоту, изменяющуюся от оо при — = 0 до 567 при — = 1
L I
на том же графике.
Ed4 (2, + /2)
----Ь) 22,4
321) пкЦ
1 и будет очень
будут 3,0 и 2,9.
жесткой части и
193. a) w2 —
Е'
2G
где q — плотность материала пружины (сталь).
194. с) 21, длина одной полной волны за период.
195. + к — <р2) = 0,
w wZ
/2<% + к (<р2 — <рх) — СгС2 - tg— <р2 « 0,
с с
— к» 4- (— Zjw2 -j- к) (—- /2 w2 к — С*! С2 — tg •—] •— 0,
\ СО)
][
где с = /----- — скорость звука (см. стр. 190).
196. а) Устойчивость;
То
198. a) sin а0 —
Mgi
деляемой из формулы w2
b) ис) — неустойчивость.
. Ь) незатухающие колебания с частотой, опре-
д
= — cos а0; с) затухающие колебания той же
частоты; Ь) амплитуды возрастают.
1 Гт ( ,][ к | iG
199. b) х = vot* — v0 \ — sin Z* 1/ — I , где t* — t--------— ;
г к \ ! m) kv
ОТВЕТЫ К ЗАДАЧАхМ
563
с) затухающие колебания около основного движения х — vQt,*t
d) колебания с возрастающей амплитудой, которая приводит к дви-
жению с периодическими остановками массы.
mQ2 ( а ]/ 21 к
201 а) к = —-------- 1 н-----— , О) oj* — -----------,
Уб ___2 \ ? ) Л/ 4 2т
к(Уб — 1) — - т 522
с) га2 ~--------------------—
т 4- М
202. Для полного решения с помощью кривых рекомендуем обратиться
к журналу Trans А. I. Е. Е., 1933, стр. 340,
204. 4- fcj (<Рт — ф2) = 6,
Ат
+ ку (д>., — <р,) + — (г2 ф, — г- ф3) = О
Л т
^з0з 4- “ фя — 0») ~ 0:
4 т (кл гд к^гд ^’1 ИЦ |
Т17Г77 Л/7 + ц ц 11 ” 0
Система устойчива.
205. 4- к, (<Рт —<р2) = U
, Лт дт о
Мз + к, (<р2 —tp}) 4- — гв 02 ~ рГ 7а = 0-.
, , Атп и Дт
Ltffa + ^2 (фз — Ф«) 4- — ГА 03 ~ ГВ 02 =
^404 4- к2 (<р4 — <р3) = 0;
4* si 4* 5s 4~ Л2 >92 -4 As s 4 Ло = С,
где
Л?п rr‘A r^i k, к, к., ks
+ а^ц+Т2+Т, + ц
а = — к1 + 214 + ’’д + к* + 44 + М.
- Т [ЦЦ lyl, 1у12 [31, + 1,1, Ц1ЛГ
д &2 k-i к2 к-i к2
1 “ mJ tjt, + тй + mJ'
Дт (^1 ^г<д ^-’2 гд 1с2 к2
Ла =: — | 1 ~4 " 4 “ ' 4 - 1 I
Т u2 z3 Л Л h и Ц Ц L Ц 12 ц)
Система устойчива.
36*
564
ОТВЕТЫ К ЗАДАЧАМ
206. Пр» С, < 0 система устойчива, при С, > 0 — неустойчива.
( ка \
207. 0 > —I— — всегда устойчивость.
I ml)
208. Неустойчивость в обоих случаях.
209. Устойчивость при условии —> — 80.
т
210. кО2>8О}.
211. Единственное условие устойчивости:
(С2 + С4) к 7> (С] — С3) 8.
215. Усточивость при условии к>—.
а
217. Неустойчивые частоты выражаются формулой
о = а.
'282р
mV
2 2 2
где а = 2. I, —. —, - и т. д.» а р — атмосферное давление, равное
3 4 5
1,033 кГ)см2. Наклон соответствующей линии на диаграмме (рис. 8.11)
равен 0,1.
218. 1370 об! мин»
ОТВЕТЫ К ЗАДАЧАМ
565
224. Точное решение:
приближенное решение:
1
где х0 есть — полного размаха.
228. г/уст = 1,68.
G х
230. Предельный цикл есть окружность с центром х == /а—, — = О,
к сос
, (* &
проходящая через точку x=fs — , — =—, срезанная сверху прямой
Л/ (Ур
* ^0 u ]Г кд
— = — . Частота есть ыс = / —.
toc £0? f G
п cu,ip«
где и = —— есть безразмерная переменная величина, зависящая от
коэффициента затухания с, причем сила сопротивления равна са?2.
ПРИЛОЖЕНИЕ
ФОРМУЛЫ И ПОСТОЯННЫЕ
1. Коэффициенты жесткости, относящиеся к продольным
перемещениям
{выражаются в килограммах нагрузки на сантиметр линейного
упругого перемещения)1).
Витая пружина, работающая на растяжение. (D — диаметр витка, d — диаметр проволоки, п — чи- сло витков.) к G d4 (1)
8nZ)s
Балка с защемленным концом (кон- к ЗЕ] (2)
соль). Р
h*—Z —»- А- _ X То же. к 2Е2 (3)
Z8
4 Балка с опертыми концами и загру- женная в середине. 48Ж
г? — к Z® (4)
L Балка с опертыми концами и загру- женная в произвольном месте. к ЗЕК
1— (о)
<L, 1 Балка с защемленными концами, нагруженная в середине. 192^
U—1 — —1 к = (6)
х) В формулах для стали здесь всюду принято = 2,10 • 106 кПсм*
G = 8,4 • 105 кПсм*, удельный вес 0,0078 кГ)см3. (Прим, перев.)
ПРИЛОЖЕНИЕ
567
MS Круглая пластинка свободно опертая толщиной 1, по периметру
1 77^ и загруженная в центре.
О — жесткость пластинки.
(jb — пуассоново отношение, при-
чем рь яз 0,3.
1 -j- fjb
= й2~~ з"+ у/
Et?
D =-------------
12 (1 -м*)
(7)
(7а >
Круглая пластинка, защемленная
по периметру.
(8)
1
—w-Wv- А, Две пружины, соединенные после- довательно. 4- = 1 1 1- —
пг fc, к.
(9)
1 6 л 7)
к ~ яГ
2, Коэффициенты жесткости, относящиеся к угловым
перемещениям
(выражаются в килограммосантиметрах момента на радиан
упру I ого поворота)
Витая пружина, работающая на
кручение. (D — диаметр витка,
d — диаметр проволоки, п —
число витков.)
I
Витая пружина, работающая на
из г и б.
(iWUWiJ
Спиральная пружина. (Полная дли-
на — Z, момент инерции попе-
речного сечения — Z.)
к = Ed4 32nD HO)
k — Ed4 1 (11)
32 nD E
20
к = El i • (12)
Полый вал круглого сечения, рабо-
тающий на кручение. (D — вне-
шний диаметр, d — внутренний
диаметр, I — длина.) Для стали
к = 8,28
D4 — d4 кГ см
Ю4----.-------—
f Dad
71 6г (D4 — d4)
32 7
(13)
Балка с защемленным конном
(кон соль)
(14)
Z
568
ПРИЛОЖЕНИЕ
То же.
Балка, свободно опертая по
концам (или с шарнирными
концами), пара в середине.
Балка с двумя защемленными
концами, пара в середине.
к ~ 2Е1 1 (15)
к = 12Е1 (16)
к = 1SE1 1 (17)
3. Собственные частоты простейших систем
/И — масса на конце, т —
масса пружины, к — ко-
эффициент жесткости при
растя жен и и —сжатии
1 — момент инерции диска,
Ls — момент инерции вала,
к — коэффициент жестко-
сти при кручении
Два диска на валу
(18)
(19)
(20)
Балка, защемленная одним
концом, т — масса балки,
М — масса груза, коэффи-
циент к определяется по
формуле (2)
Балка, опертая по концам.
т — масса балки. М —
масса груза в середине, ко-
эффициент к определяется
по формуле (3).
Зубчатая передача при неве-
сомых зубчатках. Отноше-
ние скорости диска Z2 к
скорости диска Z, равно
п (передаточное число).
][ k
г М 4- 0,23m’
= L 1 к (22)
М 4- 0,5/7? ’
- / 1 Ц + п2/й
/ 1 , 1 + п*к. (23)
(24)
1 к5 kL + к3\
Вал с тремя дисками. ис = — -—И -—I-------------------±
2 \ 11 Zз Z 2 /
(?! + 19 -h Z3),
ПРИЛОЖЕНИЕ
569
4. Однородные стержни
н
п=0
(Продольные и крутильные
Продольные колебания стер-
жня, заделанного одним
концом. S — площадь сече-
ния, Е — модуль упругости,
— масса на единицу
лл ины. п = 0. 1, 2, 3 — числа
узлов.
Для стали при длине I, выра-
женной в сантиметрах, ча-
стота колебаний в секунду
Продольные колебания стер-
жня с обоими заделанными
(или свободными) концами.
п — числа полуволн вдоль
стержня (?? = 1, 2, 3 . . .).
Для стали при длине Z, выря-
женной в сантиметрах, ча-
стота колебаний в секунду
колебания)
]ГЁ8
м- ,25>
wc
2л
1,28 - 10’
2п)----------
(25а)
V ES
Ы,- = ПЛ |/-------
Г
2,56 * 10й
2 п
(26)
(26а)
Крутильные колебания стер-
жня. Тс же формулы (25)
и (26), в которых жесткость
ES на растяжение заменя-
ется жесткостью ( па кру-
чение (равною G7p
кругового сечения), а масса
АЦ на погонную единицу
заменяется моментом инер-
/
ции г1 = -
t
относительно его оси на
погони у ю един ицу
для
массы стержня
(27)
Органная труба, открытая
на одном конце и закрытая
на другом-
для воздуха при температуре
16° С, запол няющего трубу
в I см1);
8550
7 = — = (1 4- 2п) (27а)
2 л I
п -- О, 1, 2, 3, . ..
М Для воздуха в предположении адиабатичности процесса имеем
][И = 1/ УРо.
У АН hr Г 2о '
где у — показатель адиабаты — 1,4, р0 — давление в кГ/см*. соответствующее
760 мм ртутного столба и 0°, которое равно 1,033 кГ/см\ q0 — плотность при
тех же условиях, равная 1,29 • 10-6 980 кГсек?/см*. Подставляя, находим
значение корня, равное скорости звука в воздухе при нормальных условиях.
г. е. 332 м/сек. при t — 16° Ц имеем 332 1 *+ • 16 = 342 м/сек. Деля это на4
получаем 8550 см/сек. (Прим, пепев.)
570
ПРИЛОЖЕНИЕ-
для водяного столба в же-
сткой трубе, закрытой на
одном конце.
Органная груба с обоими
закрытыми (или открыты-
ми) концами’
для воздуха при температуре
16° О
для водяного столба в жесткой
трубе с обоими закрытыми
(или открытыми) концами
(п здесь, как и выше, число
полуволн)
для водяного столба в неже-
сткой (упругой) трубе, где
Етр — модуль упругости
материала трубы, D — диа-
метр трубы, t — толщина
ее стенок.
= (1 4- 2п)
шс _ 17 100
2 л I
п • 34 200
36 100
I
(27b)
(28а)
(28b)
/упр _ ___________.
/жсстк [ 21 100 D
2 л
5. Однородные балки
(Поперечные или изгибные колебания)
Здесь для всех случаев имеет место одна общая формула, аналогичная при-
веденной выше, а именно:
Ши —
11 EI
Г
(29)
'де Е1 есть жесткость балки в данном сечении на изгиб, / — длина балки, —
facca на единицу длины, равная полному весу, деленному на ап — численный
коэффициент, имеющий свое особое значение для каждого из приводимых случаев1
Балка с одним защемленным и другим сво-
бодным кондом
От = 3,52.
а2 — 22,0,
оз= 61,7,
а4 = 121,0,
а5 == 200,0
_^Laf Балка, свободно опертая по концам (или с
____ шарнирными концами).
-1'-—
а1 = л2 = 9,87,
a-z = 4 л2 — 39,5,
— 9л2 — 88,9,
“ 16 л2 = 158,0,
а* = 25л2 = 247,0.
Балка с обоими свободными концами (пла-
вающий корабль).
» 22,4,
= 61,7,
а3 == 121,0.
а4 — 200,0,
<?5 = 298,2.
ПРИЛОЖЕНИЕ
571
Балка с защемленными концами (имеет
те же частоты, что и балка со сво-
бодными концами).
аг = 22,0,
а2 = 61,7,
а3 = 121,0,
л4 = 200,0,
а5 = 298,2
Балка с одним шарнирным и другим ах = 15,4,
защемленным концом (может рас- а2 — 50,0,
сматриваться как половина балки а3 — 104,0,
с защемленными концами для коэф- а4 = 178,0,
фициентов а с четными индексами). а5 = 272,0
Балка с одним шарнирным и другим = о,
свободным концом (крыло может = 15,4,
рассматриваться как половина бал- «з = 50,0.
ки со свободными концами для сц = 104,0,
четных а). а5 = 178,0
6. Кольца, мембраны, пластинки
Угловая частота колебаний
с весом единицы объема у
растяжения—сжатия кольца радиуса
I
г
юе
У
(30)
Изгибные колебания кольца радиуса г с массой на единицу длины
происходящие в его плоскости с п полными волнами синусоиды, по
окружности имеют угловую частоту
«31)
Круглая мембрана с натяжением Т на единицу периметра, массой
на единицу площади и радиусом г имеет угловую частоту
Т
^г2
мс — аС(/
(32)
Постоянные aCd приведены в нижеследующей таблице, где индекс с
о боз начает чи ело узловых окру ж но- ________________________
стей, а индекс d— число узловых диаметров. Мембрана произвольной формы с площадью S, имеющая примерно одинаковые размеры во всех направ- d 1 - 3
0 2,40 5,52 8,65
пениях, колеблется с основной ча- 1 3,83 7,02 10,17
стотой 2 5,11 8,42 11,62
]/ Т 3 6,38 9,76 13,02
Шс = О У 77- (33) 1
572
ПРИЛОЖЕНИЕ
Постоянная а имеет значения:
для круга а = 2,40 тг — 4,26,
для квадрата а = 4,44,
для четверти круга (квад-
ранта) а — 4,55,
для прямоугольника с от-
ношением сторон 2:1 а = 4,97.
Круглая пластинка радиуса г с массой на единицу площади имеет
частоту
wc = a \ -------, (34)
Здесь D есть жесткость пластинки на изгиб, определяемая по формуле
(7а) (стр. 567), а постоянная а имеет различные значения для различных
способов закрепления пластинки и различных типов колебаний, именно:
Края свободны, два перпендикулярных узловых диаметра а = 5,25.
Края свободны, одна узловая окружность, узловых диа-
метров нет ............................................... а= 9,07.
Края заделаны, основное колебание .................... а= 10,21.
Края свободны, заделка в центре, форма колебаний в
виде зонта ...............................................а = 3,75.
Прямоугольная пластинка со сторонами и Z2, свободно опертая по
краям, имеет угловые частоты, определяемые формулой
(35)
где т = 1, 2, 3, . . . , п = 1, 2, 3, . ..
Основная частота колебаний квадратной пластинки со стороной а,
заделанной по краям, равна
36
72
w
(.36)
ОБОЗНАЧЕНИЯ
a, b — вообще постоянные величины, употребляемые в различ-
ном смысле.
«о — амплитуда колебаний точки опоры.
ап, Ъп — коэффициенты Фурье соответственно при sin nut и
cos nut
с — коэффициент затухания колебаний как линейных (кГсм-1
сек.), так и крутильных (кГсмсек).
С — емкость конденсатора.
— критическое значение коэффициента затухания
— постоянные.
Т), d — диаметры
— аэродинамическое лобовое сопротивление.
е — эксцентриситет, а также (в § 8.4) амплитуда колебаний
точки опоры маятника.
Е — модуль упругости 1-го рода (модуль Юнга).
Ео — наибольшее значение напряжения тока (Ео sin ut).
/ — Частота колебаний вообще I/= —|
I 2л/
/с — частота собственных колебаний (собственная частота).
f.g — безразмерные коэффициенты, употребляемые в каждом
из нижеследующих параграфов только водном определен-
ном смысле, я именно: в § 3.3 согласно уравнению 3.23,
стр. 138, в § 4.3 согласно уравнению 4.19, стр. 185
Е — сила вообще, в частности сила сухого трения.
Е — функция частоты (уравнение 4.7) на стр. 174.
д — ускорение силы тяжести.
G — модуль упругости 2-го рода (модуль сдвига).
О — вес.
h — высота вообще, в частности метацентрическая.
? — сила тока.
I — момент инерции.
? = У— 1 — мнимая единица.
К, к — коэффициенты жесткости.
Лк — изменение коэффициента жесткости (стр. 450).
I — длина вообще, в частности шатуна (гл, V),
In — расстояние n-го кривошипа от первого (§ 5.3)
Е — индуктивность, а также кинетический момент.
L — аэродинамическая подъемная сила.
m, М — масса.
/И — крутящий момент или изгибающий момент.
п — вообще некоторое число, в частности передаточное.
Лт — некоторое число, смысл которого всякий раз оговари-
вается.
574
ОБОЗНАЧЕНИЯ
Р
Р
Pt> Р?
7
г
R
•s
8
S
I
т
т
и
v, F
v, V
W
IF
х
*0
#СТ
у = Vo sin Mt
У
а
ап
аТПП
6С7-
£
X
А*
Мз
е
Q
<Р
<Рп
Ч>
— действительная часть комплексной частоты s (стр. 185).
— давление.
— величины, встречающиеся в s ^.3 и определяемые урав
нениями 8.17 в 8.18 на стр. 460.
— наибольшее значение переменной силы (PosinwO.
— собственная частота затухающих колебаний (стр. 62
и 185).
— интенсивность нагрузки балки, т. е. нагрузка на единицу
длины (стр. 204).
— заряд конденсатора.
— радиус окружности.
— длина кривошипа.
— сопротивление цепи.
— комплексная частоты ±p±iq (стр. 185).
— множитель» показывающий нарастание колебаний (только
в § 8.3).
— площадь поперечного сечения.
— перерезывающая сила.
— время.
— кинетическая энергия, а также период колебаний (Т =
= !:/)-
— наибольшее значение переменного крутящего момента
(То sin at).
— натяжение струны, веревки и т. п.
— потенциальная энергия.
— скорость.
— объем.
— работа вообще, в частности за один период колебания.
— вес (в некоторых случаях вместо обычного G)
— перемещение.
— амплитуда колебаний.
— статическая деформация (обычно = Ро: к).
— перемещение в относительном движении (у0 — ампли-
туда).
— прогиб балки или струны.
— угол вообще, в частности угол атаки крыла.
— угол между n-м и первым кривошипами в поршневом
двигателе.
— коэффициент влияния, определяющий деформацию в
точке «тп» под действием единичной нагрузки в точке «п».
— угловая амплитуда колебаний ^-го кривошипа (гл. V).
— вектор, изображающий /Зп на векторной диаграмме.
— малая величина вообще, длина в частности.
— статическое удлинение.
— параметр, определяемый уравнением 8.35 (стр. 487).
— длина.
— отношение масс m: М (§§ 3.2—3.3).
— масса, отнесенная к единице длины.
— продольное перемещение частицы вдоль бруса (стр. 189).
— радиус инерции.
— площадь сечения.
— угол вообще; в частности сдвиг фазы.
— разность фаз при колебаниях между перемещениями п-го
и первого кривошипов.
— угол.
ОБОЗНАЧЕНИЯ
575
w — угловая или круговая циклическая частота, равная
2nf\ кроме того, угловая скорость
Q — большая угловая скорость.
wc, йс — собственные круговые частоты.
Векторные величины отмечены черточкой сверху, которую не имеют
величины скалярные.
Жирные буквы употребляются в тех случаях, когда различные вели-
чины обозначаются одной и той же буквой и могут встречаться одновре-
менно.
Индексы при буквах употребляются, главным образом, в следующих
значениях: а — поглотитель; к — критическое значение, е — машина,
/ — трение; g — регулятор, а также гироскоп, к — изменения коэффициента
жесткости; р — гребной винт; г — относительный; s — корабль, ст — ста-
тический. Кроме того, во многих специальных случаях вместо индексов
взяты сокращения русских слов, относящихся к соответствующим поня-
тиям.
ИМЕННОЙ УКАЗАТЕЛЬ
Бентли 93
Био М 185
Бликни 436
Брок 146
Ван-дер Поль 466, 492
Вильберфорс 124
Гауд 285, 300
Гейгер 91
Гольцер 253, 256, 258, 259, 260,
262, 264, 290, 309. 310. 311
Гурвиц 253
Де Форест 98
Драй пер 93
Дэтвейлер 98
Карман Т. 185, 40b
Касснер 436
Колеман Р. Б. 335
«Манчестер 145
Леблан 417
Льюис Ф. М. 260, 261, 262, 263, 280
Матье 458
Монтгомери 38
Портер 264, 268
Прескот 231
Радж 98
Pave 383, 386
Pavujep 498
Рити 201
Рэлей 55, 195, 196, 207, 214, 227,
231. 299, 466
Саммер 92
Саразен 298
Саусвелл 361
Сименс 97
Симмонс 98
Сирль 319
Сперри 156
Столола 214, 218, 222, 223
Сушкевич А. К. 387
Теодорсен 435, 436
Тимошенко С. П. 226, 231
Уэнт 38
Фин гало 436
Фрам 126, 153
Хэгг 398
Хэмм 436
Чилтон 298
Шитиков Б. 8, 318
Шл и к 154
Эджертон 101
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоколебание 185, 377
Авторотация 404
Акселерометр 87
Амплитуда колебаний 11, 139, 496
— — безразмерная 178
— резонансная 79, 140, 145
Анализ гармонический 34
Анализатор гармонический 37
' Антивибратор 126, 295
Балка переменного поперечного се-
чения 126
Биения 18
Блики и и Хэмма метод 436
Быстрота затухания 63
Вариация магн итного сопротивле-
ния 95
Векторные диаграммы для различ-
ных порядков колебаний 275
Вибрация винта самолета 361
— рам электрических машин 356
— турбин паровых 370
Вибро гаситель 126, 292
Виброграф 71, 89, 90
Виброизоляция 102, 105
— нестойких оснований 165
Виброметр 86, 89
Виляние 160, 442-
Вихрь Кармана 408
— Ланчестера воздушный 404
Вращение самовозбуждающееся 404
Время релаксации 66, 490
Высота метацентрическая 151
Галопирование 160
— линий электропередач 400
Гармоники 33, 208, 267
Гаситель Леблана катушечный 417
Гироскоп Шлика 154
Гистерезис 394
Головка балансировочная 319
Гольцера метол 256, 264. 309, 311
37 Ден-Гартог • 2074
Датчик «Дипалог» для измерения
давления 99
— сейсмоэлектрический 93, 94
— тензометрический проволочного
сопротивления 97, 98
Двигатель внутреннего сгорания
232
Движение автоколебательное 185,
377
— вихревое 348
— гармоническое 11
— коловратное 348
— негармоническое периодическое
32
— неустойчивое 458
— устойчивое 458
Декремент затухания логарифмиче-
ский 64
Демпфер Гауда 285, 300
— колодочный 410
— Ланчестера 144, 146. 284. 285
— маятниковый 295
Дем V 11> 1 пил и к.1 и ня ч,1С1оп>1 505
Деформация ciicicmi.i с ia i ipirvh.iя
127. 138
Диаграмма векюрная 65. /5, 2/2,
276
— резонансная 496, 498, 502
— сдвига фазы 503
— устойчивости системы с пере-
менной упругостью 462
— фазовая 472, 475, 477, 478, 479
Дивергенция 435
Дизель четырехтактный 255
Динамика кривошипного механизма
237
Дисбаланс 330
Диск неуравновешенный 303
Длина эквивалентная 251
Дорожка вихревая Кармана 408
Жесткость 42, 45, 312
578
предметный указатель
Засорение гармоническое 232
Затухание колебаний гребного вин-
та 278
— — крутильных 278
— критическое 62
— нелинейное 470
— оптимальное 140, 146. 147
— отрицательное 369
Измеритель частоты 84
Импеданс 76
— кажущегося сопротивления 136
— механический 168
— — винта 366
Инструменты сейсмические 93
Искажение фазы 89
Кармана вихри 408
Качка 160
Колебания балок 188
— в переходном процессе 81
— вынужденные без затухания 67,
176
— — с затуханием 74, 181, 186
— — при нелинейной восстанавли-
вающей силе 494
— — — нелинейном затухая ин 500
— главные 118, 119, 176, 211. 227,
228, 230, 231
— иглы форсунки 419
— изгиба однородных балок 204
— квазигармонические 447
— крутильные коленчатого вала
237
— незатухающие 53, 54
— псевдогармовические 447
— регулятора первой машины 413
— релаксационные 379, 487, 490
— самовозбуждающиеся 377
— свободные 54. 115, 116
— — без затухания 171
— — с затуханием 60, 181, 378
— — системы с нелинейными ха-
рактеристиками 474
— стержня продольные 189
— типа шимми вынужденные 442
— трубопровода 19
— турбины 423
— установившиеся 81
Колесо зубчатое с звукопоглоти-
тельными кольцами 150
Кольцо 226, 227
Консоль 211
Контур электрический интегрирую-
щий 94, 95
Конфигурация струны собственная
191
Коэффициент влияния 171. 172.
224, 574
— — динамический 322
— восстанавливающий 42
— динамичности 68, 73, 80, 81
— жесткости 42. 45, 59. 567. 568.
573
— — приведенный 59
— затухания 43, 45, 573
— — критического 76, 138, 573
— —• эквивалентный 500
— квазиупругий 42, 58, 465, 467
— — пружины 121
— — сложных систем 59
— нарастания колебаний 68, 73
— передачи 103, 104, 169
— связи 418
— — упругой 358
— упругости 42
Кривая упругая 212, 213, 219
Критерий Гурвица 386
— Рауса 383, 384, 386
— устойчивости 381, 383, 384, 386,
405, 406, 416, 417
Круг Мора 118
Ланчестера демпфер 144, 146, 284.
285
Леблана гаситель 417
Льюиса метод 260. 261, 262, 263
Максвелла теорема 219
Масса эквивалентная 132
Матье уравнение 458
Маховик жидкий 282
Машина балансировочная Гишолт-
Вестингауза 323, 324
— — динамическая 315, 316
— — Сирля 320
— — статическая 314
Маятник 297
— центробежный бифилярный Са-
разена-Чилтона 298
— — роликовый Саломона 298
Мембрана 230
Метод Бликни и Хэмма 436
— Гольцера 253, 264, 309, 311
— итераций Раушера 498
— итерационный 311
— комплексных чисел 22
— Льюиса 260/ 261, 265
— Портера 264
— Ритца 201
- Рэлея 55, 195, 196, 199, 207, 214.
227
— Стодолы 214, 223
ПРР.ДМ1 1ПЫ11 УКЛ Mil 'll
Метод Шитикова определения дисба-
ланса ротора 318
— энергетический 55, 60, 186, 187
Механизм кривошипный
Муфта гидравлическая Фетипгера
292
Наложение колебаний различных
частот 17
Настройка оптимальная 146
Неуравновешенность горизонталь-
ная 232
— динамическая 314
Неустойчивость вследствие трения
387
— динамическая 378
Опора рессорная с затуханием 104
Остойчивость 151
Период биений 18
— колебания II
Плоскость фазовая 472
Поглотитель беспружиннын 146
— динамический без затухания 125
— — Фрама 126, 133
— крутильных колебаний 284
— маятниковый 134
— пружинный 134
— с затуханием 134
— — постоянной настройкой 143
— толчков 164
Подвеска плавающая 111, 235
Подвешивание рессорное 113
Портера метол 264
— таблица 268, 269, 270
Поршень с амортизатором 65
Прецессия обратная 355
— оси вала вследствие гистерезиса
395
— — — — сухого трения 391, 392.
399
— — диска 346
— шипа вала вследствие масляной
плен ки 397, 399
Примесь гармоническая 223
Принцип наложения (суперпозиции)
448
Пружина Вильберфорса 124
Работа гармонической силы при
гармоническом движении 25, 27.
29, 31
— крутящего момента 271
— негармонической силы 34
— рассеиваемая 147
—, — в демпферах 288
Разность фаз 13
37*
Рауса hpn irpliil 1НЗ, IHI, 186
Р.тVllK'I'.i Mr Hj'I 4ЧН
I’eTumilir /0
— СУ 6l Ирмин ii'ii i к lift hO ! 511b
Plllll.l МГ Hl I '/III
Рули Гн ни nti.it IbK, lb’i
Рэлея мг юл bb, lU't, Pin, I 4'1, yo/,
214. 22/
—* юорема минHMii'ii'iiJiH 21H, 22I
Рил Фуры 3.3
Саусвелла iriipt мн
Сейсмо) рлф НЧ
(гпара1рпсп 4КI
Сила иочм Villi' кинин 4 3, 103
—- затухании 43
— инерции 233
— пороланагман 104
— со про I нн.ш'н ин 43, 4 4
— упругая пружины 44
Система динамячееки uryt rnH’iiilniii
378
— — устойчивая 3/8
— С двумя С1ГПГНЯМН С по Г|П л 1,1 IIP
— — одной eiciiriiHio (НоПолн 40
— — Про|13|!<)Л|.НЫМ ЧИСЛОМ (Hill
ней с но болы 1/1
Скорость безразмерная .352
— дивергенции 435
— критическая Bcpio'ieia 3.3b
— — второю рода .332
— — лиска 373
— — мажорная 2//
— — минорная 277
— — угловая 303
Стабилизатор i проскопический
( neppii 156. 158
— корабля активный 15.6
Степень свободы 40, 115. 171
Сто долы метол 214, 223
Стробоскоп 100. 101
Струна 188
Струхаля числи 408
Таблица Гольцера 256, 258, 250,
260, 262, 290, 310
— Портера 268, 269, 270
Тахометр Фрама 85
— язычковый 84
Тензометр 97
Теорема Максвелла о взаимности
перемещений 219
— Рэлея минимальная 218, 221
— Саусвелла 361
Теория уравновешивания Шлика
248
580
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Торсиметр Сименса—Мак-Наба 91
Торсиограф 90, 91, 94
— механический Саммера 92
— со сдвигом фазы 101
Точка изображающая 481
— особая 478
Траектория фазовая 481
Трампинг колес автомобиля 439,
440
Труба органная 188, 190
Трубопровод 19
Турбина 423
— барабанная 370
— водяная Фрэнсиса 427
— дисковая 340
— паровая 423, 426
Угол сдвига фазы 13
Удлинение статическое 55, 76
Уравнение Льюиса 280, 299
— Матье 458
— частот 117. 118. 173, 175, 184.
382
Уравновешивание 236
— в двух плоскостях одновремен-
ное 322
— роторов гибких 327, 328
— — жестких 313
— сил инерции 236, 245
Условия устойчивости Рауса 444
Успокоение качки корабля 150
Успокоитель Фрама 153
Установка Сперри гироскопическая
156
Устойчивость динамическая 378
— статическая 378
Фаза начальная 13
Фильтр частот полосовый 39
Флаттер 369, 428, 429
Форсунка дизеля 419
Функция влияния 219
— частоты 177
Фурье ряд 33
Характеристика судового гребного
винта
Центр удара 327
Цистерна Фрама стабилизирующая
153
Частота автоколебаний 379
— безразмерная 156, 178
— биений 18
— колебания 12, 573
— — затухающего 64
— комплексная 184
— круговая 12, 14
— резонансная 70, 78, 129
— собственная 54, 118, 129, 175
— — главной системы 127, 138
— — затухающих колебаний 78.
574
— —- круговая 53, 575
— — крутильных колебаний вала
250
— — незатухающих колебаний 78
— — поглотителя колебаний 127,
128
— — угловая 53
— — циклическая 53, 575
— угловая 12, 575
— циклическая 12, 575
Частотомер язычковый 84
Число Струхаля 408
Шимми колес автомобилей 438, 440
— поворотного колеса самолета 443
Шитикова метод 318
Шлика теория уравновешивания 248