/




Author: Залманзон Л.А.
Tags: регулирование и управление машинами, процессами автоматика кибернетика
Year: 1985




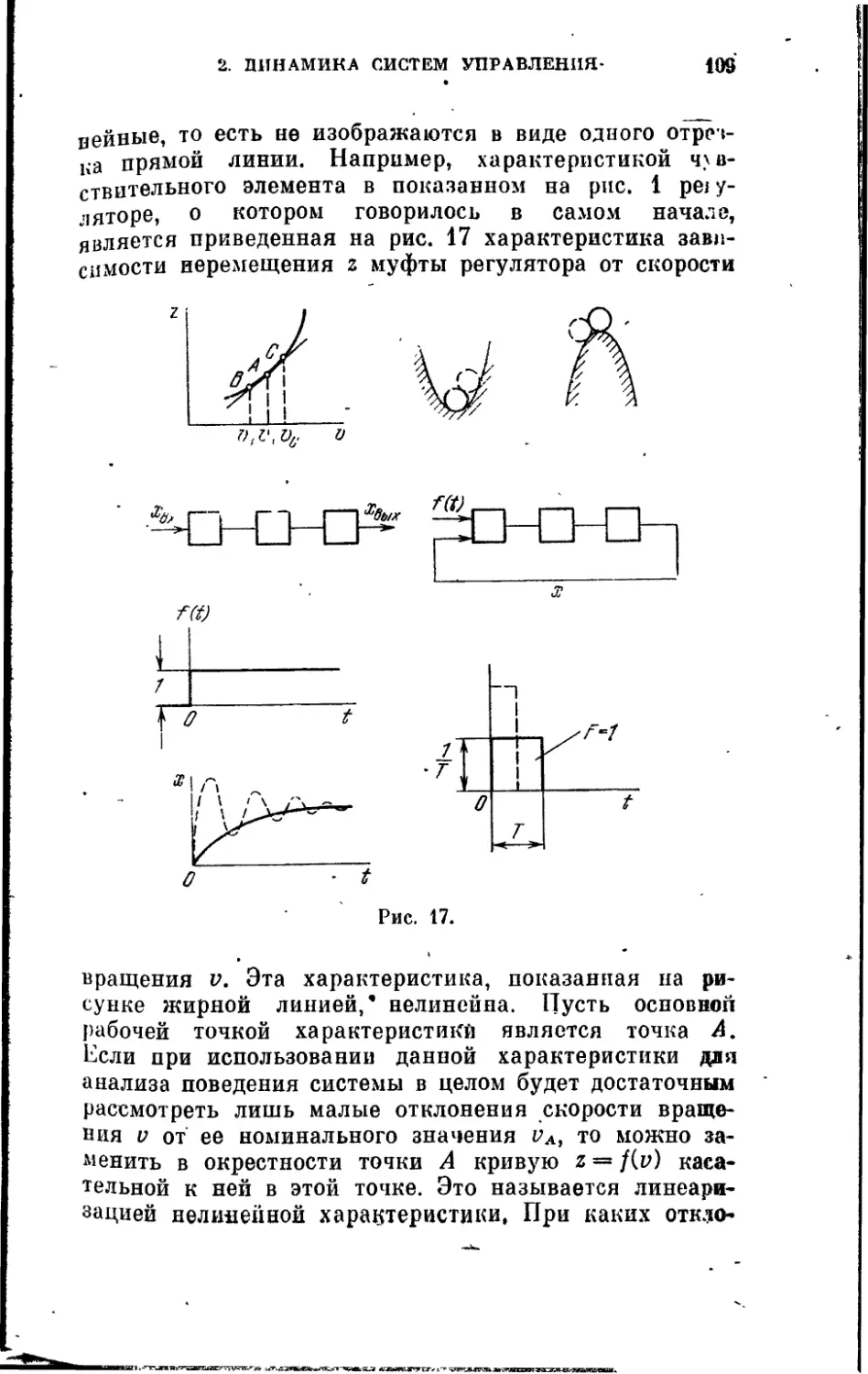
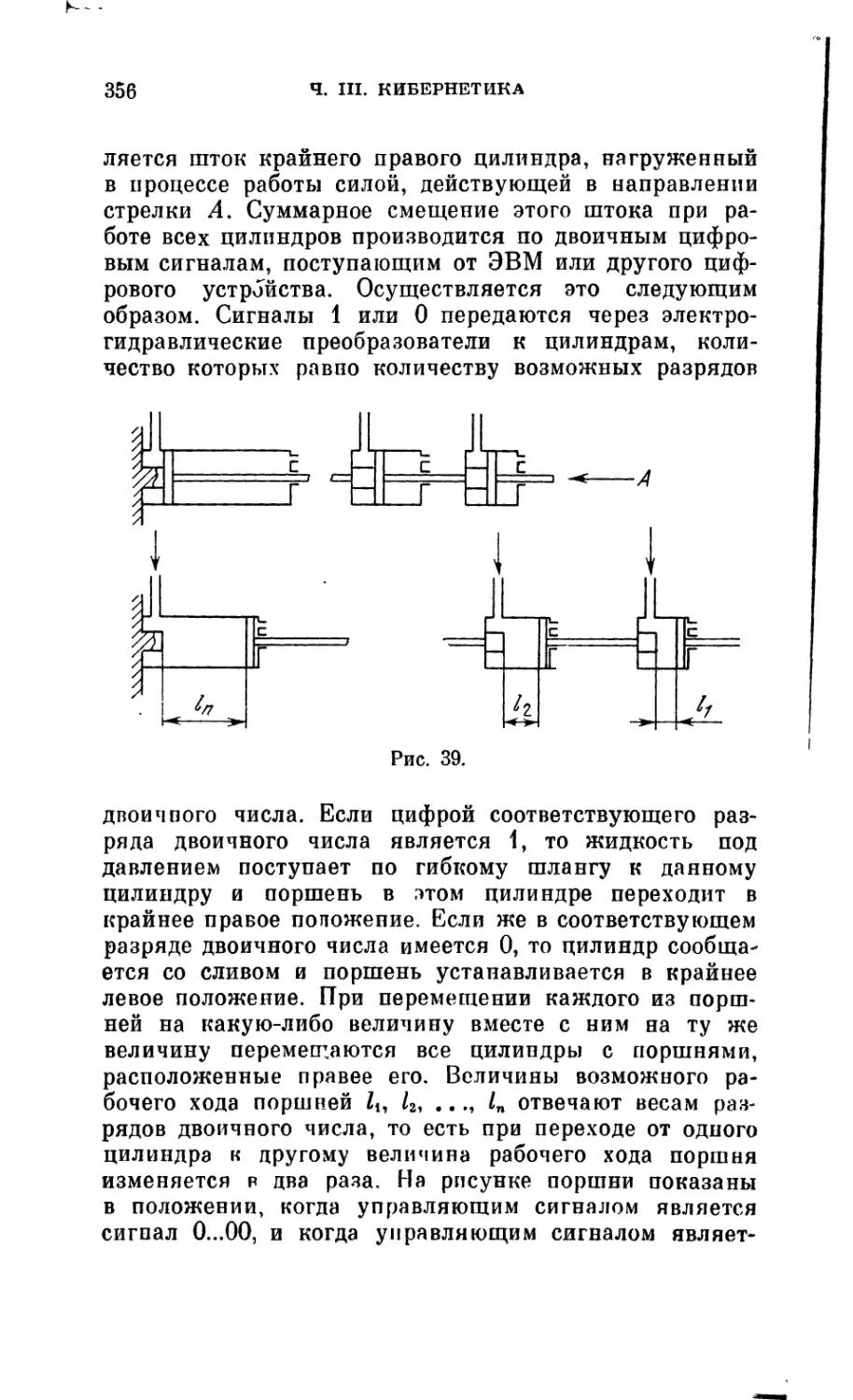
Text
Л.А. ЗАЛМАНЗОН
БЕСЕДЫ
ОБ АВТОМАТИКЕ
И КИБЕРНЕТИКЕ
ПРОБЛЕМЫ НАУКИ
И ТЕХНИЧЕСКОГО ПРОГРЕССА
Л. А. ЗАЛМАНЗОН
БЕСЕДЫ
ОБ АВТОМАТИКЕ
И КИБЕРНЕТИКЕ
ИЗДАНИЕ ВТОРОЕ СТЕРЕОТИПНОЕ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
19 8 5
32.81 .
3 23
УДК 62-50
Залманзон Л. А. Беседы об автоматике и кибернети-
ке.— М.: Наука. Главная редакция физико-математической ли-
тературы, 1985.—416 с.
В пойулярной форме рассказывается о принципах автома-
тического управления, устройствах и системах автоматики,
кибернетике, искусственном интеллекте, роботах.
Книга рассчитана на широкий круг читателей: от школьни-
ков-десятиклассников до специалистов в различных областях
знания.
Табл. 1. Ил. 40.
I
i
3
1502000000 - 054
053(02)-85
179-85
© Издательство «Наука»
Главная редакция
физико-математической
литературы, 1981
ПРЕДИСЛОВИЕ
Книга эта об устройствах и системах автоматики.
О принципах работы различных управляющих уст-
ройств/ начиная с простейших регуляторов и кончая
ЭВМ, которые все более широко применяются в систе-
мах управления. О теории автоматических систем, без
которой не могла бы развиваться техника автоматиче-
ского управления. О «думающих» машинах и роботах.
Понемногу обо всем, что нужно для того, чтобы пред-
ставить себе, хотя бы в общих чертах, как осуществля-
ется автоматическое управление и какими вопросами
занимается кибернетика.
Книга рассчитана на широкий круг читателей. От
школьников-десятиклассников и до специалистов в раз-
личных областях знания. Устройства автоматики при-
меняются практически во всех отраслях техники, без
них было бы невозможно усовершенствование производ-
ства и проведение важных научных исследований. Все-
общее внимание привлекают сейчас к себе вопросы
кибернетики, искусственного интеллекта, построения
роботов. В кибернетике получило развитие все, что
раньше было сделано в области автоматического управ-
ления. Вместе с тем для кибернетики характерен ряд
новых идей, новых методов.
Намерение написать по возможности популярно об
автоматике и кибернетике появилось у автора первона-
чально при чтении в течение ряда лет лекций в обще-
ственном университете. Так как слушатели его имеют
обычно различную подготовку, для многих из них было
бы полезным предварительное ознакомление с основа-
ми автоматики в популярном изложении. В дальнейшем
было решено попытаться написать книгу так, чтобы
круг ее читателей мог быть еще намного шире. Стави-
лось задачей рассказать об автоматическом управлении
и кибернетике доступно для школьника-десятиклассни-
ка. Принимались при этом во внимание сведения, Кото-
рые дает сейчас учащимся средняя школа.
ПРЕДИСЛОВИЕ
4
Первая часть книги описательная, чтение ее не дол-
жно быть затруднительным. По возможности без при-
влечения математического аппарата рассматриваются
и вопросы теории автоматических систем во второй час-
ти книги. Там же, где говорится о математических ме-
тодах теории автоматического управления, за исходный
взят материал школьных учебников и лишь при необ-
ходимости даются дополнительные сведения. Была сде-
лана попытка возможно более просто рассказать и обо
всем, чему посвящена третья часть книги.
Считалось целесообразным начать описание уст-
ройств автоматики с механических регуляторов, созда-
нием которых когда-то было положено начало практи-
ческому развитию техники автоматического управления.
То, что о них говорится уже в самом начале, имеет
существенное значение и для понимания процессов
функционирования рассматриваемых затем систем ав-
томатического регулирования, содержащих в своем со-
ставе ЭВМ, и биологических систем регулирования.
Второе издание воспроизводит без изменений пер-
вое. Исправлены лишь замеченные опечатки, а также
сделано добавление к «Обзору дополнительной литера-
туры» в конце книги.
ЧАСТЬ I
УСТРОЙСТВА
И СИСТЕМЫ АВТОМАТИКИ
1. Регуляторы-стабилизаторы
Познакомимся сначала с простейшими регулято-
рами, изобретенными еще 200 лет тому назад. Регу-
ляторы этого типа широко применяются и сейчас. Их
преимуществом является то, что они конструктивно
несложны. Но зато они в принципе не могут быть
абсолютно точными. Вообще же, при несогласован-
ном выборе характеристик, регулятор не только не
является стабилизатором режима, но может даже
ухудшить работу объекта регулирования по сравнен
нию с той, которая была бы без него. Рассмотрим
все это более подробно.
О регуляторах, с которых начнем эту беседу, вы на-
верно слышали. В 1765 г. И. И. Ползуновым был изо-
бретен регулятор уровня воды, в 1784 г. Дж. Уатт
создал центробежный регулятор скорости вращения.
Регуляторы уровня применяются сейчас в автомобиль-
ных карбюраторах. Центробежные регуляторы скорости
вращения имеются в автомобильных дизельных двига-
телях, паровых турбинах, двигателях реактивных само-
летов. Они предназначены для стабилизации режима
работы. Последний изменялся бы без регулятора при
внешних воздействиях на объект регулирования. К та-
ким воздействиям относится, в частности, изменение
нагрузки, с которой работает объект регулирования.
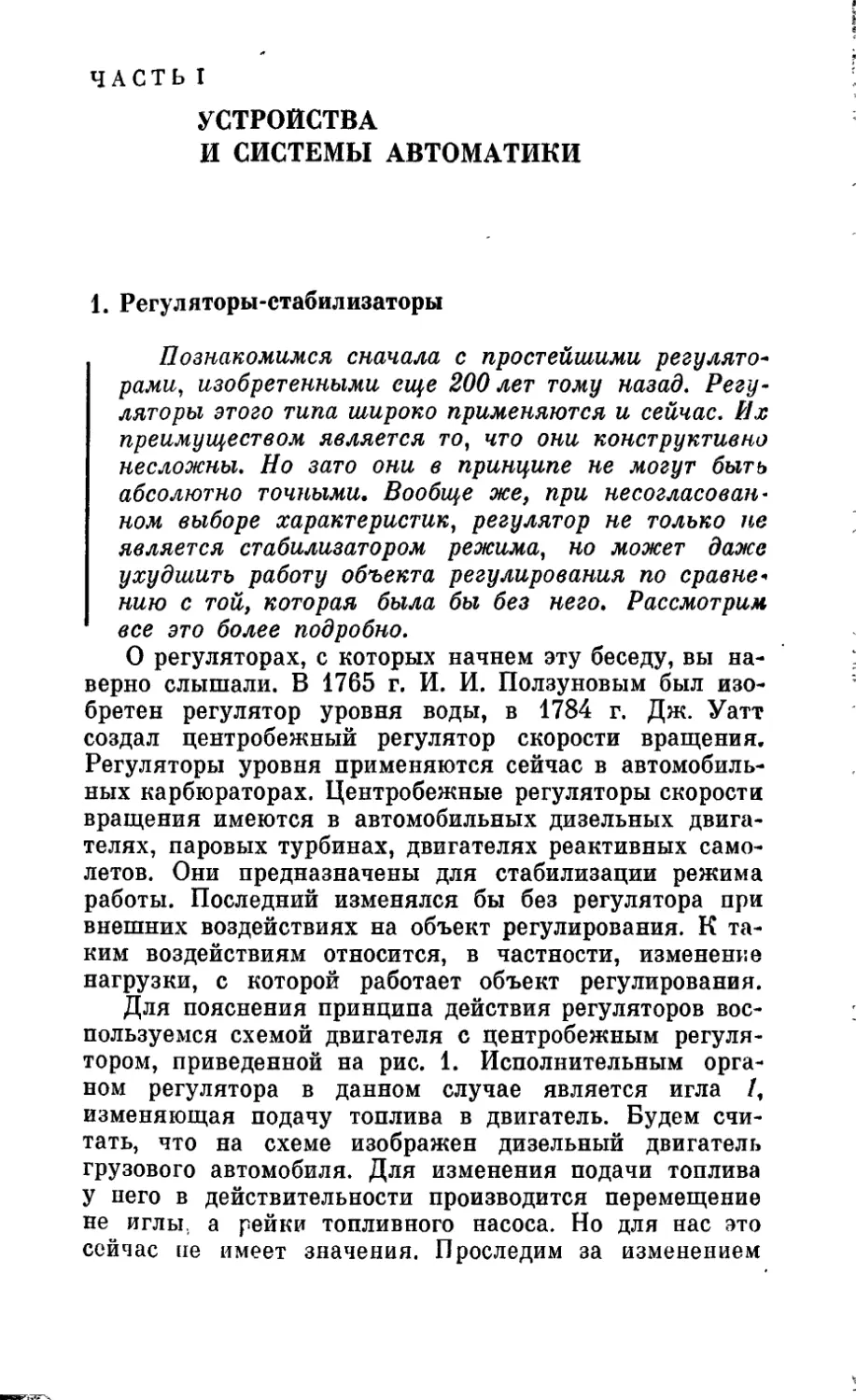
Для пояснения принципа действия регуляторов вос-
пользуемся схемой двигателя с центробежным регуля-
тором, приведенной на рис. 1. Исполнительным орга-
ном регулятора в данном случае является игла /,
изменяющая подачу топлива в двигатель. Будем счи-
тать, что на схеме изображен дизельный двигатель
грузового автомобиля. Для изменения подачи топлива
у него в действительности производится перемещение
не иглы, а рейки топливного насоса. Но для нас это
сейчас не имеет значения. Проследим за изменением
G " Ч. I УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
скорости вращения вала двигателя при изменении на-
грузки, с которой двигатель работает, и за тем, как
Пусть автомобиль сначала поднимался на гору, а
потом поехал под гору. Для движения с той же, что и
раньше, скоростью теперь уже требуется меньший кру*
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
7
тящий момент на валу двигателя (крутящий момент
это и есть та величина, которую мы имеем в виду, ког-
да говорим о нагрузке). С началом движения под гору
первоначально количество поступающего топлива такое
же, каким оно было до этого. При этом создается из-
быточный крутящий момент и скорость вращения вала
начинает расти. Под действием возросшей центробежной
силы расходятся грузики 2, преодолевая силу пружины
3 чувствительного элемента регулятора, муфта 4 регу-
лятора поднимается кверху и игла 1 опускается вниз.
Уменьшается подача топлива в двигатель и уменьшает-
ся скорость вращения вала двигателя. Таким образом,
регулятор противодействует изменению регулируемой
величины — скорости вращения, стремится стабилизи-
ровать ее значение.
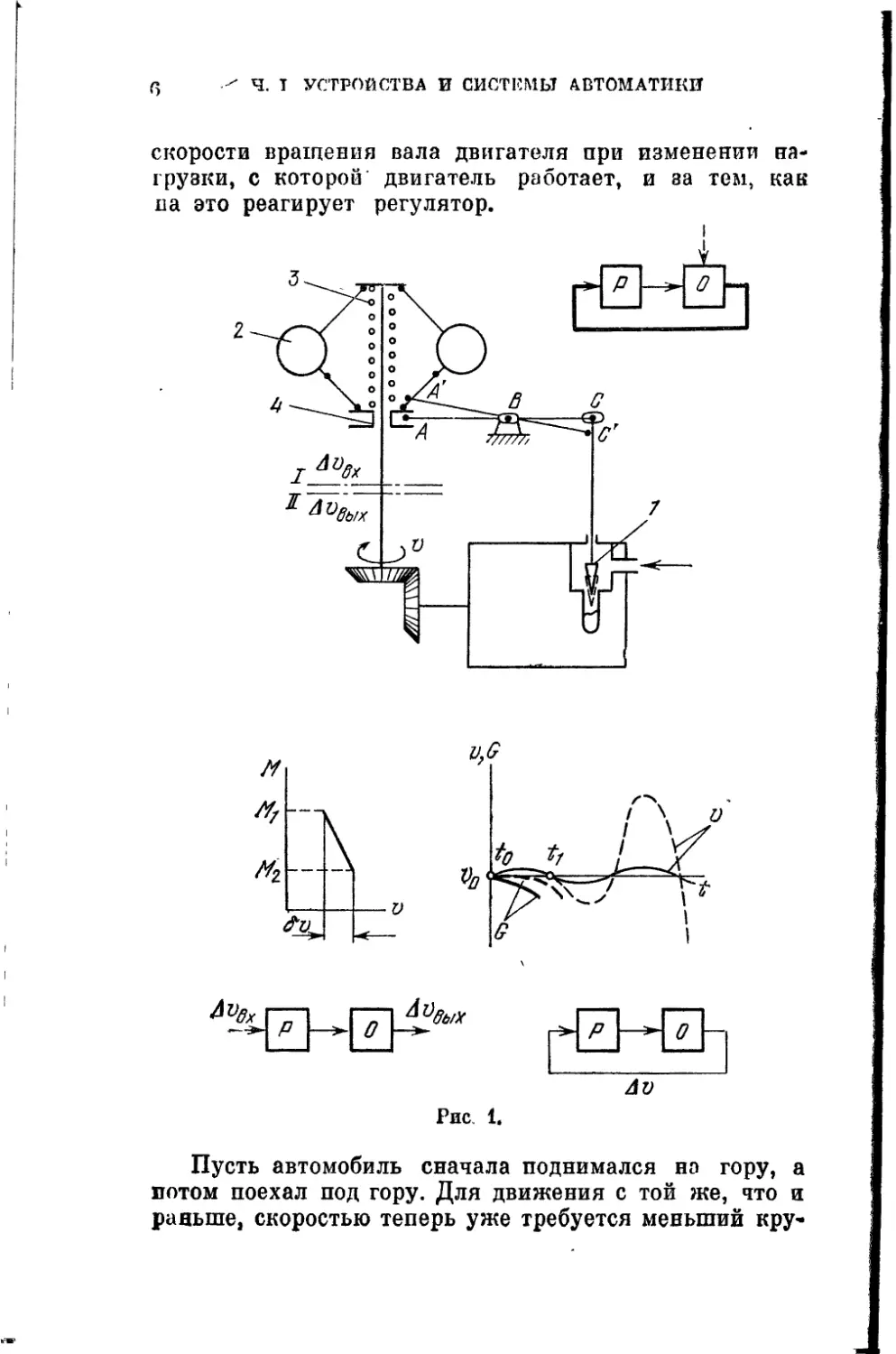
Регулятор и объект регулирования вместе образуют
замкнутую систему автоматического регулирования.
Система автоматического регулирования условно пред-
ставлена схемой с квадратиками, изображенной навер-
ху в правой части рис. 1. Регулятор Р управляет пода-
чей топлива в двигатель. Этому соответствует на схеме
тонкая сплошная линия со стрелкой. Изменение ско-
рости вращения вала двигателя, являющегося объектом
регулирования О, в свою очередь приводит к измене-
нию положения муфты регулятора. Это отображено на
схеме жирной линией со стрелкой. Имея в виду обрат-
ное воздействие объекта регулирования на регулятор,
говорят, что в системе автоматического регулирования
имеется обратная связь. Штриховой линией со стрелкой
на схеме показано внешнее воздействие на объект ре-
гулирования. У нас это было изменение нагрузки.
Рассматривая работу регулятора, мы сказали, что
он стремится поддерживать постоянное значение регу-
лируемой величины. Он должен был бы поддерживать
точно такое же ее значение после изменения нагрузки,
как и то, которое было раньше. Но он не может этого
сделать. Почему?
Чтобы разобраться в этом, вернемся к основной час-
ти рис. 1, на которой показан дизельный двигатель с
регулятором.
При данной постоянной скорости вращения вала
двигателя и, следовательно, при постоянной скорости 4
8
Ч. I. УСТРОЙСТВА XI СИСТЕМЫ АВТОМАТИКИ
движения автомобиля (считаем, что скорость движения
поддерживает регулятор и водитель не участвует в уп-
равлении) расход топлива, когда автомобиль поднима-
ется на гору, должен быть больше, чем тогда, когда он
съезжает с горы. Если в первом случае игла 7, от по-
ложения которой зависит подача топлива, занимает
положение, показанное на рисунке сплошными линия-
ми, то во втором она должна перейти в положение,
показанное на рисунке штриховыми линиями. Таким
образом, регулятор, стремясь поддержать неизменной
скорость вращения вала, переводит конец С рычага
АВС в положение С'. Но при этом весь рычаг повора-
чивается около неподвижной точки опоры В и конец
А его занимает положение А', то есть обязательно из-
меняется положение муфты 4 регулятора. Каждому
значению скорости вращения отвечает свое положение
муфты. В этом можно убедиться, проведя опыты на
испытательной установке, на которой вал регулятора
приводится во вращение от электромотора и на кото-
рой можно определять при разных скоростях вращения,
какое положение занимает каждый раз муфта регуля-
тора. Итак, каждому положению муфты 4 соответствует
своя скорость вращения. Перемещение точки А рычага
АВС в положение А', происходящее при работе регуля-
тора, когда изменяется нагрузка двигателя, обязатель-
но связано с увеличением скорости вращения. Вот так-
то и получается, что регулятор стремится поддержать
постоянную скорость вращения вала, но не может это-
го сделать. Если на графике (он показан в средней
части рис. 1 слева) отложить по вертикальной оси зна-
чения нагрузки — крутящего момента двигателя Л/, а
по горизонтальной соответствующие значения скорости
v вращения вала, то, соединив определяемые парными
значениями М и v точки, получим характеристику за-
висимости регулируемой величины v от нагрузки Л/.
При изменении нагрузки от максимальной до мини-
мальной М2 скорость вращения вала, поддерживаемая
регулятором, изменяется на величину 6р, которую на-
зывают статической ошибкой или статической погреш-
ностью регулирования (статическая — потому, что рас-
сматриваются хотя и различные, но установившиеся
режимы работы). Систему регулирования, в которой с
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
9
изменением нагрузки получается статическая ошибка
регулирования, называют статической системой.
Говоря о статической ошибке регулирования, счи-
тают, что после каждого изменения нагрузки или пос-
ле отклонения от заданного режима работы, которое
вызывается другими причинами, снова устанавливает-
ся постоянная скорость вращения вала, пусть не та,
что была раньше, но постоянная, и остается дальше
неизменным положение всех элементов регулятора.
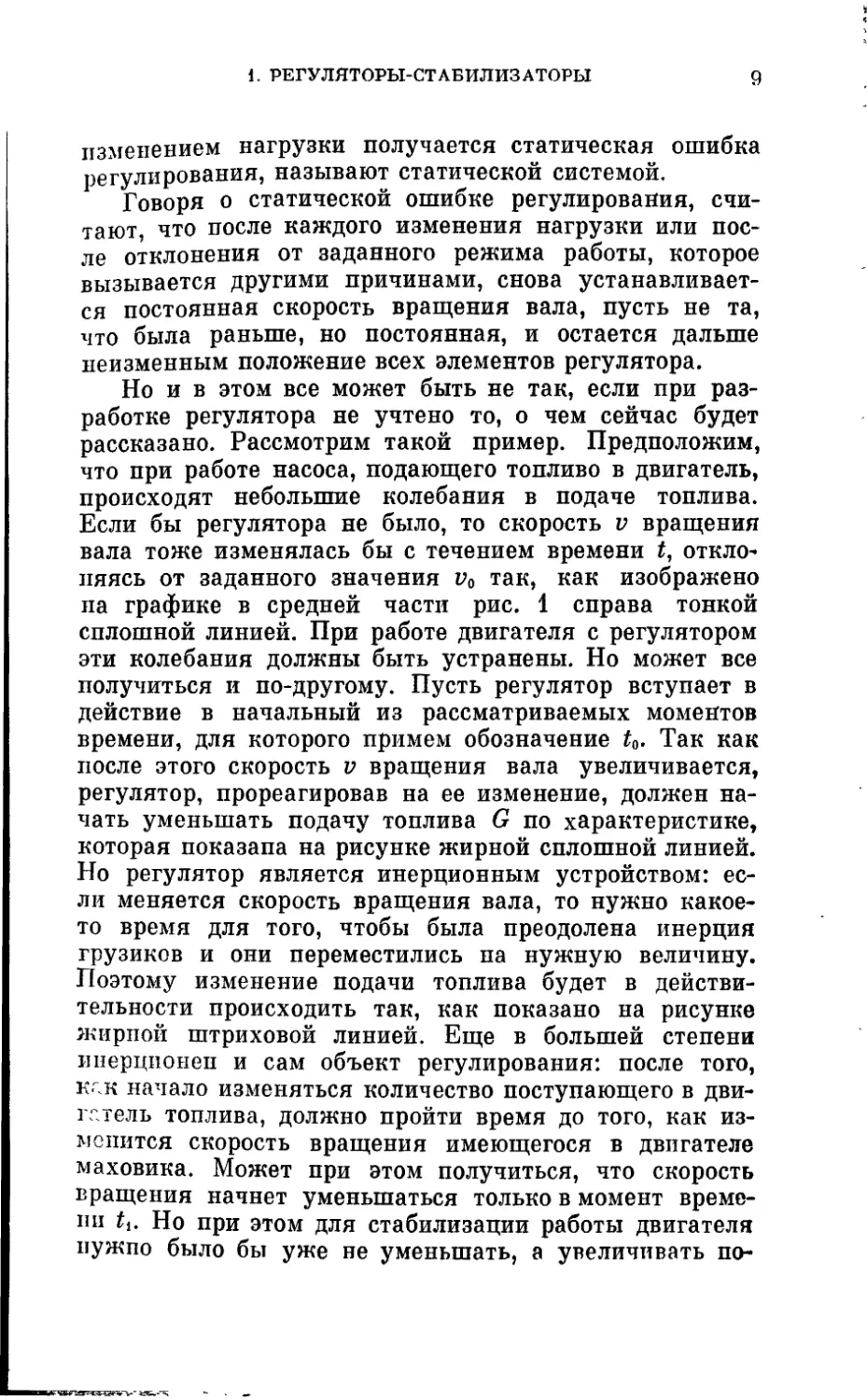
Но и в этом все может быть не так, если при раз-
работке регулятора не учтено то, о чем сейчас будет
рассказано. Рассмотрим такой пример. Предположим,
что при работе насоса, подающего топливо в двигатель,
происходят небольшие колебания в подаче топлива.
Если бы регулятора не было, то скорость v вращения
вала тоже изменялась бы с течением времени t, откло-
няясь от заданного значения v0 так, как изображено
на графике в средней части рис. 1 справа тонкой
сплошной линией. При работе двигателя с регулятором
эти колебания должны быть устранены. Но может все
получиться и по-другому. Пусть регулятор вступает в
действие в начальный из рассматриваемых моментов
времени, для которого примем обозначение t0. Так как
после этого скорость и вращения вала увеличивается,
регулятор, прореагировав на ее изменение, должен на-
чать уменьшать подачу топлива G по характеристике,
которая показана на рисунке жирной сплошной линией.
Но регулятор является инерционным устройством: ес-
ли меняется скорость вращения вала, то нужно какое-
то время для того, чтобы была преодолена инерция
грузиков и они переместились па нужную величину.
Поэтому изменение подачи топлива будет в действи-
тельности происходить так, как показано на рисунке
жирной штриховой линией. Еще в большей степени
инерционен и сам объект регулирования: после того,
кек начало изменяться количество поступающего в дви-
гатель топлива, должно пройти время до того, как из-
менится скорость вращения имеющегося в двигателе
маховика. Может при этом получиться, что скорость
вращения начнет уменьшаться только в момент време-
ни tit Но при этом для стабилизации работы двигателя
нужно было бы уже не уменьшать, а увеличивать по-
to
4. i. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
дачу топлива. Из-за того, что подача топлива уменьша-
ется, отклонение скорости v вращения вала двигателя
от нужного значения vQ под действием регулятора
только лишь еще больше усилится. И дальше это будет
происходить все в большей и большей степени (см. на
рисунке характеристику, показанную тонкой штрихо-
вой линией). Под действием регулятора в этом случае
происходит не стабилизация режима, а наоборот, сов-
сем нарушается работа объекта регулирования.
Если не создается такая неблагополучная ситуация,
как в рассмотренном примере, и регулятор выполняет
свои функции, то и при этом всегда после того, как под
действием возмущений, изменения нагрузки или дру-
гих, произошло отклонение от положения равновесия,
имеется переходный процесс, и в течение некоторого
времени регулируемая величина еще не соответствует
тому значению, которое должно установиться. Таким
образом, приходится учитывать не только статические
погрешности процесса регулирования, но и погрешно-
сти, наблюдаемые в переходном процессе, которые на-
зывают динамическими погрешностями.
В регуляторе, который изображен на рисунке, мож-
но заменить рычаг АВС другим, сместив точку опоры
В влево. При этом плечо АВ рычага будет меньше, чем
плечо ВС. и при максимальном изменении нагрузки,
когда игла 1 должна перейти из одного крайнего поло-
жения в другое (причем точка С займет положение С'),
точка А переместится на меньшую величину А А'. чем
при рычаге АВС, показанном на рисунке. Следователь-
но, мепыпей, чем показанная на графике слева на
рис. 1, будет величина 6у, характеризующая статиче-
скую погрешность регулирования. Однако при этом мо-
жет возрасти динамическая погрешность, так как даже
малое изменение скорости вращения приводит теперь
к значительному изменению расхода, что может небла-
гоприятным образом сказываться на характеристиках
переходных процессов.
Разберемся, кстати, более детально и с действием
механизма обратной связи. К тому, что здесь рас-
сказывается об обратной связи, нужно отнестись
особенно внимательно. Впоследствии не раз мы бу*
дем на это ссылаться.
1 РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ ‘
1!
Представим себе, что мы можем провести следую-
щий опыт. Разрежем вал привода регулятора так, как
показано штрих-пунктирными линиями на рис. i,
и верхний конец его I будем приводить во вращение не
от двигателя, а от другого устройства. Например, с по*
мощью электромотора, который имеется на испытатель-
ной установке. Мы имеем теперь два вала I и II. не
связанных прямо один с другим. Пусть вал I вращает-
ся с той же скоростью г0, с которой он вращался при
нормальной работе двигателя до того, что мы разъеди-
нили верхнюю и нижнюю части приводного вала регу-
лятора. Двигатель при этом будет работать так же, как
и раньше, и следовательно, вал II также будет вращать-
ся со скоростью г0. Увеличим теперь скорость враще-
ния вала I на величину, которую обозначим Дгвх. Вве-
дем обозначение ДгВЫх для величины изменения ско*
рости вращения вала II. считая ее, так же как и Дгвх,
положительной, если скорость вращения' становится
большей, чем исходная и0.
Ответим теперь на два вопроса, которые помогут
лучше понять, как действует механизм обратной связи.
Первый вопрос такой. При увеличении скорости
вращения вала I скорость вращения вала II будет уве-
личиваться или уменьшаться?
И второй вопрос. Насколько изменится скорость
вращения вала II при изменении скорости вращения
вала I на величину Дивх?
На первый вопрос ответить нетрудно. С увеличени-
ем скорости вращения вала I скорость вращения вала
II должна уменьшаться. Это объясняется тем, что гру-
зики 2 регулятора расходятся больше, игла 1 переме-
щается вниз, подача топлива уменьшается и скорость
вращения вала II действительно становится меньшей
чем г0.
Ответить же на второй вопрос труднее. Ведь абсо-
лютная величина Дгвых при заданной величине Дгв<
может быть различной в зависимости от многих фак-
торов: от того, насколько перемещается муфта 4 регу-
лятора при изменении скорости вращения вала I па
Д^вх (а это зависит от массы грузиков 2. их расстояния
от оси вращения, жесткости пружины 5); от того, ка-
кими взяты отношение плеч рычага АВС и профиль
12
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
иглы 1 и соответственно с этим насколько изменяется
расход топлива при данном перемещении муфты 4.
Абсолютная величина Дувых при заданной Дрвх зави-
сит также от характеристики двигателя, показываю-
щей, как изменяется скорость вращения его вала в
функции от расхода топлива; наконец, зависит от пе-
редаточного числа зубчатой передачи, которой вал II
связан с валом двигателя.
Все это нужно знать для того, чтобы ответить на
второй вопрос. Может, например, оказаться, что при
увеличении скорости вращения вала I на 10 оборотов в
минуту скорость вращения вала II уменьшится или на
10 оборотов в минуту, или на 100, или еще больше.
Попутно заметим, что отношение абсолютной величины
Д^вых к абсолютной величине Дрвх называют коэффи-
циентом усиления разомкнутой системы; введем для
него обозначение К. Если иметь в виду указанные вы-
ше цифры, то в первом случае К = 10:10=1, а во
втором К = 100 : 10 = 10.
Перейдем к дальнейшему. После того как мы разре-
зали вал привода регулятора, наша система оказалась
разомкнутой. Разомкнутую систему, содержащую ре-
гулятор Р и объект регулирования О, можно предста-
вить так, как показано внизу слева на рис. 1.
Запомним, что означают Дрвх и Дрвых, которые мы
ввели, рассматривая систему в разомкнутом состоянии.
А далее продолжим наш опыт следующим образом.
Снова соединим в’месте валы I и II и вернемся к тому,
что было первоначально, когда двигатель, показанный
на рис. 1, нормально работал со своим регулятором.
При замыкании системы валы I и II вращаются с од-
ной и той же скоростью, потому что это теперь опять
один и тот же вал. Если скорость вращения v не равна
Vo, то, пользуясь ранее введенными обозначениями,
следует написать, что Д рвых = — Дрвх. Мы получили
уравнение, которым описывается переход от разомкну-
той к замкнутой системе. Действительно, если, как бы-
ло выяснено, для разомкнутых систем могут быть раз-
личными соотношения между абсолютными величина-
ми Дрвых и Дрвх, то, производя замыкание, мы должны
принять их равными: как уже было сказано, один
и тот же вал не может в одно и то же время вращать-
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
13
ся с различными скоростями. Знак минус в правой час-
ти уравнения должен быть потому, что при положи-
тельном зн^ке Дрвх для разомкнутой системы, для ко-
торой были приняты обозначения Дивх и Дрвых, значе-
ние ДРвых является отрицательным (это было выяснено
при ответе на первый из поставленных ранее вопросов).
После того как мы вернулись к замкнутой системе ре-
гулирования, обозначения ДуВх и Дувых уже не имеют
смысла, и если происходит отклонение от заданной ско-
рости вращения и0, то для величины этого отклонения
достаточно ввести просто обозначение Др, как указано
внизу в правой части рис. 1, где показана система в
замкнутом состоянии.
Все рассуждения, которые мы провели, могут пока-
заться искусственными и вряд ли нужными. Но в
действительности это не так. Понимание того, как про-
изводится переход от разомкнутого к замкнутому сос-
тоянию, имеет большое значение для разработки и ис-
следования различных систем автоматического регули-
рования и других систем автоматического управления.
Уравнение ДрВЫх == — ДрВх встретится еще нам в даль-
нейшем. Вместе с тем мы более детально познакоми-
лись с действием механизма обратной связи. Это одна
из основ всей техники автоматического управления.
Если рассмотренный нами регулятор недостаточно
совершенен, то как улучшить его работу! Обсуждая
это, познакомимся с регуляторами прямого и непря-
мого действия, со статическими и астатическими си-
стемами регулирования, с изодромными регуляторами,
с тем, что представляет собой гибкая обратная связь.
Инженеры и ученые давно поняли, что регулятор
не может быть абсолютно точным, если иметь в виду
под этим сведение к нулю статической ошибки регули-
рования. Поняли они также, что если уменьшать ста-
тическую ошибку так, как мы пытались это сделать
(перемещая влево точку опоры В показанного на рис. 1
рычага АВС), то скорее могут возникнуть неблагопри-
ятные условия, при которых получается большая дина-
мическая погрешность регулирования.
Тогда начались поиски способов улучшения работы
регулятора. Было замечено, что отрицательное влияние
на динамические свойства системы регулирования ока-
14
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
зывает большая инерционность чувствительного эле-
мента регулятора. А грузики 2 в рассмотренном нами
регуляторе обязательно должны иметь большую массу и,
следовательно, являются весьма инерционными. Это
обусловлено тем, что энергия, которой располагает чув-
ствительный элемент, прямо используется для переме-
щения исполнительного органа— иглы I. Регуляторы,
в которых, таким образом, чувствительный элемент не-
посредственно связан с исполнительным органом, на-
зывают регуляторами прямого действия. С тем, чтобы
устранить указанный выше недостаток, присущий ре-
гуляторам прямого действия, были созданы регуляторы
непрямого действия. Это регуляторы, в которых между
чувствительным элементом и исполнительным органом
включается усилитель, работающий вместе с независи-
мым от чувствительного элемента источником энергии.
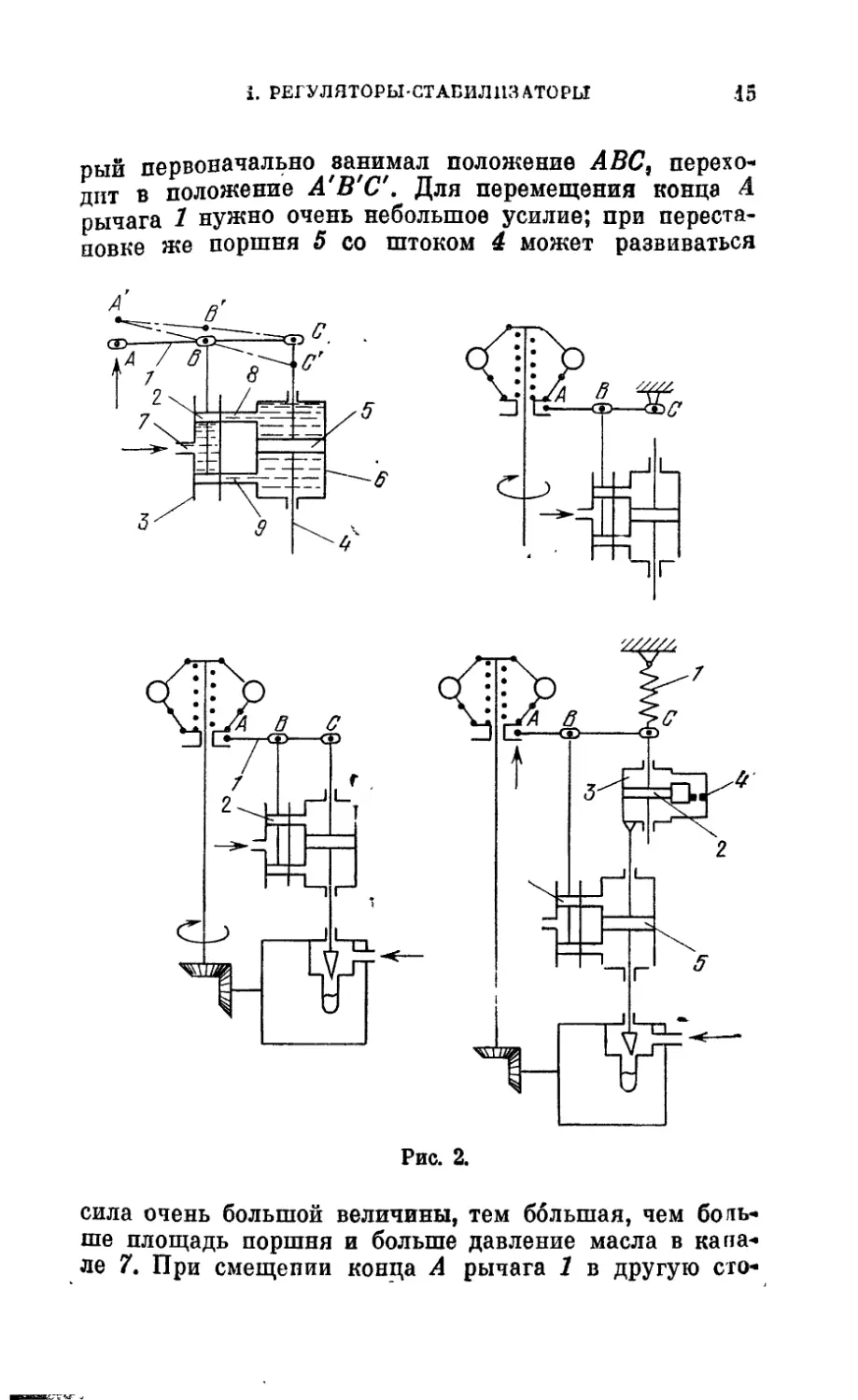
Первый из таких усилителей, гидравлический усили-
тель, сначала примененный самостоятельно, а потом в
регуляторах, изображен наверху слева на рис. 2. В уси-
лителе имеются рычаг 1 и золотник 2, который может
перемещаться в неподвижной втулке 8, а также имеет-
ся жестко посаженный на штоке 4 поршень 5, который
может перемещаться в цилиндре 6. Во втулке 3 име-
ются центральный канал 7, по которому подводится
масло под давлением, и каналы 8 и 9, которые при по-
казанном на рисунке равновесном положении золотника
перекрыты. Если левый конец рычага 1 перемещается в
направлении, показанном стрелкой, причем точка А
переходит в положение 4', то сначала рычаг повора-
чивается относительно точки С и занимает положение
А'В'С. При этом золотник 2 смещается относительно
своего исходного положения во втулке 8, начинает дви-
гаться поршень 5, который, будучи связанным рычагом
1 с золотником 2, возвращает последний в исходное
нейтральное положение. Происходит все это следующим
образом. Когда золотник первоначально смещается
вверх, открываются проходные сечения в каналах 8 и
9. По первому из них масло начинает поступать в по-
лость цилиндра 6 над поршнем 5, а канал 9 соединяет
полость в цилиндре под поршнем со сливом. Поршень
5 перемещается вниз до того, что пояски золотника 2
снова перекроют каналы 8 и 9. Йри этом рычаг, кото-
i. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
15
рый первоначально занимал положение АВС, перехо-
дит в положение А'В'С'. Для перемещения конца А
рычага 1 нужно очень небольшое усилие; при переста-
новке же поршня 5 со штоком 4 может развиваться
Рис. 2.
сила очень большой величины, тем большая, чем боль-
ше площадь поршня и больше давление масла в кана-
ле 7. При смещении конца А рычага 1 в другую его*
16
Ч. I УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
рону аналогичным образом поршень 5 со штоком 4
перемещаются в противоположном направлении.
Внизу слева на рис. 2 изображен центробежный ре-
гулятор с этим усилителем. При правильном его выпол-
нении он может быть лучше по своим динамическим
свойствам, чем регулятор прямого действия, о котором
раньше шла речь. Однако и с этим регулятором систе-
ма автоматического регулирования будет статической.
Действительно, на любом установившемся режиме ра-
боты золотник 2 занимает одно и то же нейтральное
положение и является фиксированным положение точ-
ки В рычага 7, и, так же, как это было для регулято-
ра, показанного на рис. 7, перемещение точки С рычага
(происходящее при изменении нагрузки) влечет за со-
бой изменение положения точки А, а следовательно,
получается статическая ошибка регулирования.
Наверху справа на рис. 2 показана часть регулято-
ра, при использовании которого полностью устраняет-
ся статическая погрешность. Система регулирования с
таким регулятором является, как говорят, астатиче-
ской. Этот регулятор отличается от ранее рассмотрен-
ного лишь тем, что шток поршня усилителя отсоединен
от рычага АВС и конец С рычага шарнирно закреплен,
как изображено на рисунке. При этом независимо от
того, какой является нагрузка объекта регулирования,
точка А рычага АВС всегда на установившихся режи-
мах работы занимает одно и то же положение (так как
зафиксировано положение точки С и при равновесном
положении золотника неизменно и положение точки В),
Если иметь в виду отсутствие статической погрешности
регулирования, то этот регулятор является абсолютно
точным. Но, как показал опыт, при такой схеме постро-
ения регулятора трудно получить приемлемые динами-
ческие качества системы. Это обусловлено тем, что
отсутствует обратная связь в самом регуляторе. Доста-
точно золотнику отклониться даже на малую величину,
как поршень усилителя начнет перемещаться. Остано-
виться он может только в том случае, если золотник
снова придет в положение равновесия, когда подача
топлива в точности будет соответствовать той, которая
нужна для работы с данной нагрузкой. Да и не в одной
нагрузке дело, Могут производиться различные воздей-
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
17
ствия на регулятор и на объект регулирования: это
колебания подмоторной рамы, на которой установлен
двигатель, и колебания в подаче топлива, о которых
говорилось раньше, и другие. Для того, чтобы мог на-
ступить равновесный режим, необходимо, чтобы тогда,
когда золотник проходит через положение равновесия,
скорость его движения была равна нулю, иначе он даль-
ше будет двигаться по инерции; при этом должны быть
равны нулю отклонение скорости и ускорение вращения
вала двигателя и должно быть равным нулю не только
отклонение подачи топлива от нужной, но и значение
скорости ее изменения по времени. В общем возможно-
сти применения регуляторов этого типа ограниченные,
и о них можно было бы не говорить здесь совсем, если
бы не оказалось весьма плодотворным сочетание поло-
жительных их качеств с положительными качествами
таких регуляторов, как описанный ранее, который был
изображен внизу слева на рис. 2. С тем, чтобы рассмот-
реть этот вопрос более подробно, подытожим ранее ска-
занное.
В регуляторе, показанном внизу слева на рис. 2,
имеется внутренняя жесткая обратная связь: конец С
рычага АВС соединен со штоком поршня усилителя и
благодаря этому золотник после отклонения от положе-
ния равновесия принудительно возвращается, когда
поршень приходит в движение, к исходному своему рав-
новесному положению. Такой регулятор обеспечивает
хорошие динамические свойства системы регулирования,
но при его применении неизбежна статическая погреш-
ность регулирования. В регуляторе же, построенном по
схеме, представленной наверху справа на рис. 2, сов-
сем отсутствует внутренняя обратная связь. При такой
схеме, наоборот, полностью устраняется статическая
погрешность регулирования, но обычно, как уже было
сказано, оказываются неудовлетворительными динами
ческие характеристики системы. Положительные каче-
ства обоих типов регуляторов использованы в регулято-
ре, названном изодромным (от греческих слов «изос» —
постоянный и «дромос» — бег), Этот регулятор в нача-
ле переходного процесса, вызываемого изменением на-
грузки, работает как рассмотренный нами регулятор
с жесткой обратной связью, что является благоприят-
18
Ч, I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
пым для динамических свойств системы. А затем, в хо-
де переходного процесса, действие обратной связи
ослабевает и, наконец, совсем устраняется, что позво-
ляет работать без статической погрешности, то есть по
этим данным система с изодромным регулятором явля-
ется астатической. Такая обратная связь называется
гибкой обратной связью.
Принцип построения изодромного регулятора иллю-
стрируется схемой, приведенной внизу справа на
рис. 2. Конец С рычага АВС соединен с пружиной Z,
второй конец которой закреплен; пружина может сжи-
маться или растягиваться. Конец С рычага АВС сое-
динен и со штоком поршня гидравлического усилителя,
но не непосредственно, как это было в регуляторе с
жесткой обратной связью, а он соединен с маленьким
поршеньком 2Ь который показан на рисунке в увели-
ченном виде, чтобы рисунок был более четким. Порше-
нек 2 может перемещаться в цилиндрике 5. Камеры
последнего, заполненные вязкой жидкостью, соединены
между собой боковым каналом, в котором имеется
пробка с отверстием 4 малого проходного сечения. Ци-
линдрик же 3 жестко соединен со штоком поршня уси-
лителя.
Работает регулятор так. Если скорость вращения
вала не соответствует заданному значению, то изменя-
ется положение грузиков регулятора и меняется поло-
жение конца А рычага АВС, Пусть, например, прои-
зошло перемещение его в направлении, показанном на
рисунке стрелкой. При этом первоначально положение
точки С рычага является неизменным, а смещается
вслед за точкой А кверху точка В, Золотник выходит
из положения равновесия и начинает двигаться вниз
поршень 5 вместе с цилиндриком 5. Сначала, как одно
целое с ним, движется и поршенек 2, так как нужно
время, чтобы жидкость могла перетечь через малое от-
верстие 4, Регулятор работает при этом как ‘регулятор
с жесткой обратной связью. При передвижении книзу
конца С рычага пружина 1 натягивается. Затем — с те-
чением времени — под действием силы натяжения пру-
жины 1 поршенек 2 смещается кверху; это происходит
по мере того, как жидкость перетекает через отверстие
4 из верхней в нижпюю камеру цилиндрика 3. Положе*
i. PEI УЛЯТОРЫ СТАБИЛИЗАТОРЫ
19
ние равновесия в системе устанавливается, когда пру-
жина 1 возвращается к исходному своему положению,
при котором она не натянута, и когда золотник нахо-
дится в показанном на рисунке нейтральном положе-
нии. При этом является строго определенным положе-
ние точек С и В рычага ЛВС, а следовательно, и
точки А. Следовательно, во всех случаях (до изменения
нагрузки или после того, как она изменилась) точка А
рычага АВС занимает всегда одно и то же положение,
а следовательно, на установившихся режимах работы
всегда, как бы ни изменялась нагрузка, является не-
изменной скорость вращения вала двигателя. Таким
образом, действительно, в конечном счете получается
то же, что и при работе регулятора, не имеющего внут-
ренней обратной связи.
Используется, как основной, принцип регулиро-
вания по отклонению. Но ведь стремятся к тому, что-
бы отклонений, во всяком случае значительных, во-
обще не возникало. Нет ли здесь противоречия! Про-
цессы регулирования могут быть улучшены путем
введения дополнительных воздействий по производ-
ным и по нагрузке, о которых здесь рассказывается.
Все рассмотренные нами до сих пор регуляторы ра-
ботают по принципу отклонения. Это значит, что регу-
лятор вступает в действие после того, как произошло
отклонение регулируемой величины от заданного ев
значения, или, как говорят тоже, при наличии рассогла-
сования между заданным и истинным значениями регу-
лируемой величины. Может потребоваться достаточно
большое рассогласование, для того чтобы регулятор на-
чал ощутимо воздействовать на объект регулирования.
В регуляторах скорости вращения, с которыми мы по-
знакомились, инерционным является центробежный
чувствительный элемент с вращающимися грузиками,
инерционны и другие элементы регулятора, да и сам
объект регулирования. К тому же чтобы муфта регуля-
тора пришла в движение, нужно преодолеть действие
силы трения. А для этого должна быть достаточно боль-
шой действующая сила, которая тем больше, чем боль-
ше величина отклонения, и которая равна нулю, если
отклонения нет. В общем, отклонения должны быть
достаточно большими, коль скоро на этом основана
20
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
работа регулятора. Это является неизбежным, если ис-
пользовать лишь указанный выше основной принцип
регулирования. Но обычно требуется, чтобы, наоборот,
рассогласования были возможно малыми; и еще лучше
было бы, чтобы вообще они не возникали.
Мысль людей начала работать над тем, как устра-
нить этот недостаток регуляторов, или если его совсем
устранить нельзя, то хотя бы уменьшить величины рас-
согласований по сравнению с теми, которые получают-
ся при использовании только одного лишь принципа
регулирования но отклонению. Было решено использо-
вать воздействия по производной. Что они представля-
ют собой и что они дают, поясним на следующем при-
мере.
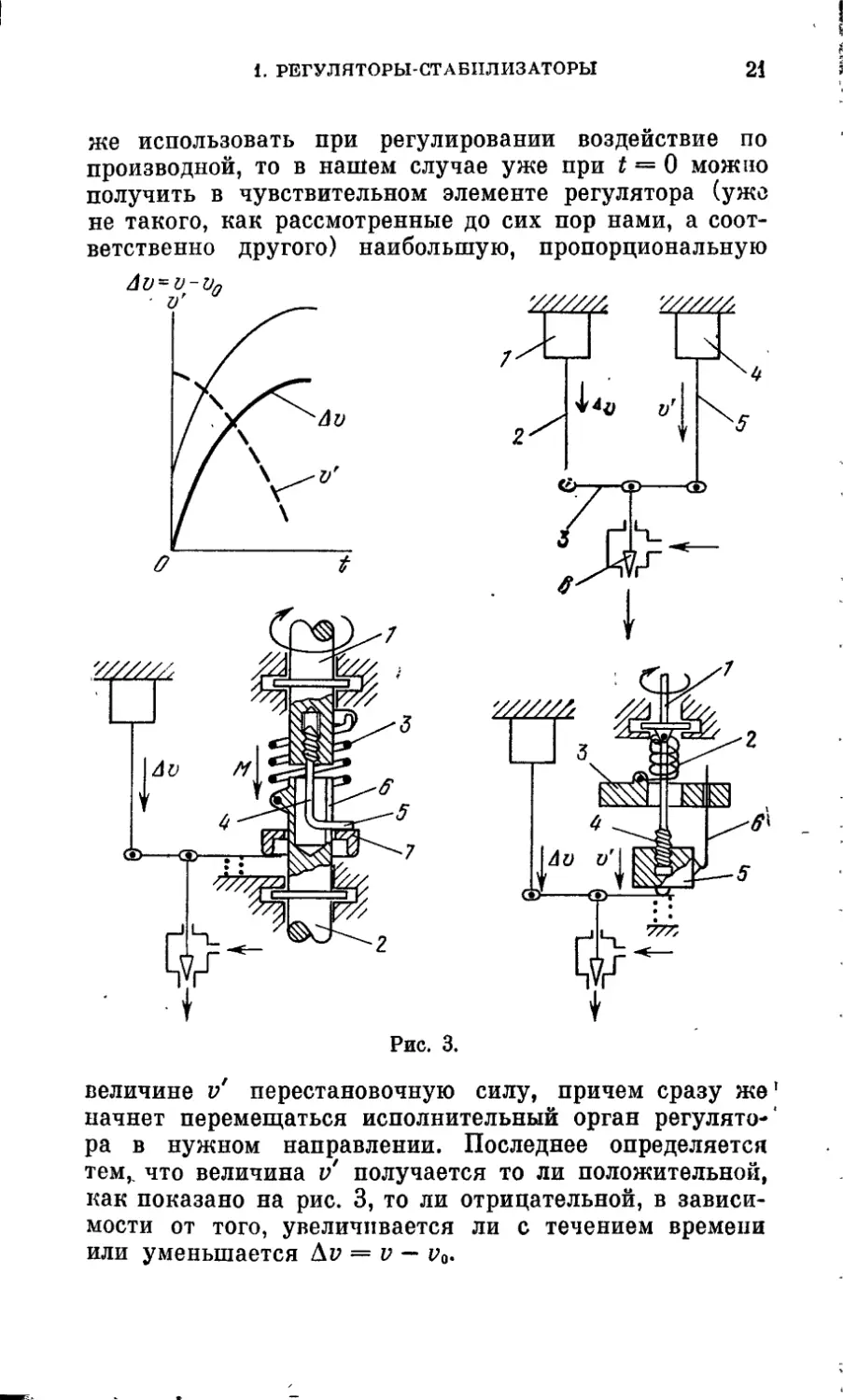
Пусть величина Ду, представляющая собой откло-
нение скорости вращения вала v от того значения р0,
которое должно поддерживаться регулятором, изменя-
лась бы при работе без регулятора в зависимости от
времени t так, как показано сплошной жирной линией
наверху слева на рис. 3. Величина Др может изме-
няться в зависимости от времени t вообще-то по-разно-
му. Характеристика же Ду=/(^), показанная на
рис. 3, похожа на участок синусоиды. Будем считать,
что в нашем примере величина Др действительно из-
меняется в функции от t по синусоиде. Посмотрим, по
какому закону изменяется при этом ускорение, опре-
деляемое, как известно из школьных курсов математи-
ки и физики, как производная от скорости и по вре-
мени i. Производной от функции р = sin t является
v'= cost. Косинусоида p'==cos£ показана на указан-
ном выше рисунке штриховой линией. Тогда как в
рассматриваемом нами случае Др = 0 при t = 0 и лишь
затем с ростом t величина Др постепенно нарастает,
максимальное значение р' получается при t = 0. Поэ-
тому в момент времени, обозначенный нами как t = 0,
изображенный на рис. 1 регулятор, работающий по
принципу отклонения, не может еще вступить в работу
в может пройти достаточно большое время до того,
как будет достигнута величина Др, при которой эффек-
тивным образом проявится действие регулятора. Это
является неблагоприятным, если иметь в виду динами-
ческие характеристики процесса регулирования. Если
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
21
же использовать при регулировании воздействие по
производной, то в нашем случае уже при t = 0 можно
получить в чувствительном элементе регулятора (уже
не такого, как рассмотренные до сих пор нами, а соот-
ветственно другого) наибольшую, пропорциональную
величине и' перестановочную силу, причем сразу же1
начнет перемещаться исполнительный орган регулято-'
ра в нужном направлении. Последнее определяется
тем, что величина и' получается то ли положительной,
как показано на рис. 3, то ли отрицательной, в зависи-
мости от того, увеличивается ли с течением времени
или уменьшается &v = v — р0-
22
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
Идея использования воздействий по производным
(могут использоваться воздействия не только по v', но
и по у", что также может быть полезным) хорошая,
даже очень хорошая. Но плохо то, что не имеется од-
нозначной зависимости между величинами Ду и и', а
поддерживать нужно не у', а заданное значение р0,
не допуская сколь-либо значительных отклонений
истинной скорости вращения от заданной. В том, что
величина Др не связана однозначной зависимостью с
у', можно убедиться следующим образом. Если бы ве-
личина Др изменялась по времени t не так, как пока-
зано на рисунке жирной сплошной линией, а так, как
показано на этом же рисунке тонкой сплошной линией,
то мы получили бы в этом случае ту же самую харак-
теристику изменения в зависимости от t величины v\
хотя значения Др и были бы значительно большими.
Действительно, в соответствующих одному и тому
же значению t точках одной и другой из показан-
ных на рис. 3 сплошными линиями кривых Др = /(£)
углы наклона касательных одинаковые (вторая из
рассматриваемых кривых получена смещением пер-
вой параллельно оси ординат) и, следовательно, оди-
наковы при данном значении t в обоих случаях ве-
личины v .
Сказанное выше об отсутствии однозначной зависи-
мости между скоростью вращения и ее производной —
угловым ускорением, вероятно, достаточно ясно чита-
телю. Если же это нужно, то приведем в пояснение еще
один пример. Предположим, что мы едем в поезде.
Мы ощущаем действие силы инерции, пропорциональ-
ной ускорению, когда поезд только трогается с места
и начинает набирать скорость, и когда он шел со ско-
ростью, пусть, например, равной 30 км/час, и далее
начал ускорять свое движение. В обоих случаях уско-
рение движения может быть одинаковым, хотя скоро-
сти движения различные. Хотя здесь имеется в виду
линейная, а не угловая скорость, как в нашей системе
регулирования, речь идет о том же самом.
Вернемся к тому, о чем мы говорили. Мы выясни-
ли, что воздействия по производным могут помочь
улучшению работы регулятора. Но принцип регулиро-
вания, при котором использовались бы только лишь одни
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
23
такие воздействия, не годится. Вместе с тем можно
улучшить работу регулятора, вводя воздействие по
производной, как дополнительное, и сохраняя — в ка-
честве основного — регулирование по отклонению. Та-
кое регулирование производится по схеме, приведенной
на рис. 3 наверху справа. Здесь показаны два чувстви-
тельных элемента, из которых элемент 1 реагирует на
изменение у, причем пропорционально величине Др ~
= v — vQ изменяется положение штока 2 и, следова-
тельно, левого конца траверсы 5, а элемент 4 реагиру-
ет па v = (Др)', и в зависимости от этой последней
величины перемещается шток 5 и связанный с ним
правый конец траверсы 3. При таком построении регу-
лятора его исполнительный орган 6 перемещается как в
зависимости от величины Др, так и в зависимости от
р'. В рассмотренном нами примере уже при t = 0 (ког-
да Др == 0) исполнительный орган 6 начнет переме-
щаться в нужном направлении: если величина Др, как
в нашем примере, первоначально с течением времени t
возрастает, то при этом'у' > 0, а если бы она в самом
начале уменьшалась бы, то было бы р' < 0, и, соот-
ветственно, тем или другим определяется направление
движения штока 5 и исполнительного органа 6. После
этого через некоторое время активно вступает в дейст-
вие реагирующий на Др чувствительный элемент /,
перемещается шток 2, и перемещение исполнительного
органа 6 происходит в связи с перемещением левого
конца траверсы 3. К концу переходного процесса до-
стигается нужное равновесное состояние в системе ре-
гулирования, при котором р' == 0 и Др =~ 0. Таким
образом, чаще всего получают лучшие характеристики
переходных процессов по сравнению с теми, которые
получаются при работе регулятора без воздействий по
производной.
Благоприятное влияние воздействий по производной
было показано на частном примере. Когда во второй
части книги будет подробнее говориться о динамике
автоматических систем, проиллюстрируем это и дру-
гим — более общим примером.
На рассмотренной схеме чувствительный элемент 7,
реагирующий на изменение скорости вращения, такой
*ке, как и в регуляторах, которые раньше были описа-
24
Ч I УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
ны. Чувствительный же элемент 4, реагирующий на
производную от скорости вращения — угловое ускоре-
ние вращательного движения,— может быть, например,
выполнен по схеме, изображенной на рис. 3 внизу спра-
ва. С вращающимся валом 1 соединен пружиной 2 ма-
ховичок <?. При любой постоянной скорости вращения
вала 1 маховичок 3 вращается как одно целое с ним.
Если же вал 1 начинает вращаться ускоренно или за-
медленно. то маховичок 3 по инерции вращается в
первое время с прежней скоростью. Величина углового
отклонения маховичка 3 от вала 1 при этом пропорци-
ональна величине ускорения и' вращательного движе-
ния вала 1. Это угловое отклонение преобразуется сле-
дующим образом в перемещение конца траверсы,
связанной с исполнительным органом и с другим чув-
ствительным элементом регулятора (следует сравнить
рассматриваемую схему с предыдущей). Согласно рас-
сматриваемой схеме на нижнем конце вала 1 имеется
винтовая нарезка 4, по которой навернута гайка 5, вра-
щающаяся вместе с маховичком 3, с которым она сое-
динена тягой 6. При угловом смещении маховичка 3
относительно вала 1 гайка 5, поворачиваясь, движется
и в осевом направлении (так как она перемещается по
винтовой нарезке 4 вала 2, а последний в осевом на-
правлении не смещается). Перемещение гайки 5, про-
порциональное величине i/, вызывает поворот правого
конца траверсы, которая связана с исполнительным
органом и левый конец которой соединен с основным
чувствительным элементом.
Могут быть полезными и воздействия по нагрузке.
Имеется при этом в виду вот что. В системе автомати-
ческого регулирования, изображенной на рис. 1, изме-
нение скорости вращения вала, вызываемое изменени-
ем нагрузки, происходит не сразу и должно пройти
поэтому некоторое время до того, что эффективным
образом вступит в действие регулятор скорости враще-
ния. Об этом уже говорилось раньше. Нагрузка в рас-
сматриваемом случае определяется величиной крутя-
щего момента М на валу двигателя. Можно для
улучшения характеристик процесса регулирования ис-
пользовать сигнал изменения М точно так же, как в
описанной раньше системе регулирования, работающей
1. РЕГУЛЯТОРЬТ-СТЛППЛПЗЛТОРЫ
с воздействием по производной, использовался сигнал
изменения величины i/. Используя воздействие по на-
грузке, можно уже в самый начальный момент време-
ни когда только что произошло изменение нагрузки,
начать перестановку исполнительного органа регуля-
тора в нужном направлении, не ожидая того, что
произойдет отклонение Др скорости вращения от за-
данного ее значения. Но воздействие по нагрузке тоже
можно применить при регулировании скорости враще-
ния только как дополнительное, так как величины М
и и не связаны между собой однозначной функциональ-
ной зависимостью. Например, при одном и том же
крутящем моменте М на валу дизельного двигателя,
установленного на автомобиле, последний будет разви-
вать (при включении одной и той же передачи) боль-
шую скорость при спуске с горы и меньшую при подъ-
еме на гору. В том и другом случае будут различными
и значения скорости v вращения вала двигателя, если
величина М неизменна. В общем здесь применима толь-
ко лишь схема регулирования, аналогичная показанной
в верхней части справа на рис. 3. Чтобы осуществля-
лось дополнительное воздействие по нагрузке, нужно
использовать дополнительный чувствительный элемент,
реагирующий на изменение величины Л/, а не v', как
на указанной ранее схеме. Чувствительный элемент,
реагирующий на изменение величины М, показан вни-
зу слева на рис. 3. Для того чтобы можно было приме-
нить такой чувствительный элемент, вращающийся вал,
передающий крутящий момент М, разрезан, как пока-
зано на рисунке, так что получились два вала, соеди-
ненные между собой упругой муфтой. Это валы 1 и 2,
а упругая муфта изображена в виде пружины 5. В име-
ющееся на торце вала 1 отверстие с резьбой ввернут
также имеющий на конце резьбу стержень 4. Загну-
тый его конец 5 входит в продольную прорезь 6, име-
ющуюся в концевой части вала 2. При изменении кру-
тящего момента изменяется величина скрутки пружи-
ны 3 и соответственно с этим изменяется относительное
угловое положение валов 1 и 2. Перемещающийся при
этом параллельно оси вала скользящий по прорези 6
загнутый конец 5 стержня 4 изменяет положение коль-
ца 7, с которым связан в своем перемещении конец
26
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
траверсы, соединенной с основным чувствительным
элементом и исполнительным органом регулятора.
Выли рассмотрены регуляторы многих, даже что-
то уж очень многих, различных типов. Все ли они
действительно нужны и все ли применяются на
практике? У большинства регуляторов, с принципом
действия которых мы познакомились, есть и другие
названия: П-, ПИ~, ПД- и ПИД-регуляторы.
Действительно, как мы узнали, существует много
различных типов регуляторов. Если одни из них по
принципу своего действия хорошие, а другие плохие, то
казалось бы всегда нужно использовать только самые
хорошие, а о других — плохих, вероятно, не следовало
бы даже и говорить. Но сначала нужно разобраться с
тем, что считать здесь хорошим, а что плохим. Вообще-
то хороший регулятор это такой, который обеспечи-
вает получение достаточно хороших характеристик про-
цесса регулирования и вместе с тем прост по своей
конструкции. Но мы видели, что улучшение характе-
ристик достигается усложнением конструкции регуля-
тора: это относится и к введению гибкой обратной свя-
зи в изодромном регуляторе и к использованию второго
чувствительного элемента в регуляторе, работающем с
дополнительным воздействием по производной. Нужно
иметь в виду и то, что различные объекты регулирова-
ния имеют неодинаковые собственные характеристики,
и поэтому регулятор, обеспечивающий удовлетворитель-
ную работу одного из них, может быть непригодным
для другого. Да и требования по точности (речь идет о
максимально допускаемых статических и динамиче-
ских погрешностях процесса регулирования) в разных
случаях различные. Это тоже должно учитываться при
выборе типа регулятора. Вот и оказывается, что в раз-
ных случаях должны считаться лучшими регуляторы
различных типов. В некоторых случаях можно обойтись
простейшим регулятором и тогда можно считать его
хорошим. Иногда же необходимы изодромный регуля-
тор или регулятор, работающий с дополнительным воз-
действием по производной. Все они применяются на
практике.
Реже других используются рассмотренные нами
регуляторы, работающие с дополнительным воздействие
1 РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
27
ем по нагрузке. Это связано с тем, что для их примене-
ния чаще всего нужны какие-то переделки в самом
объекте регулирования; так, в рассмотренном нами
примере использование регулятора этого типа оказа-
лось возможным лишь при условии, что приводной вал
составной и его части соединены между собой упругой
муфтой. Для подключения же регуляторов других типов
этого не требуется. Вообще, они могут строиться так,
что являются конструктивно независимыми от объек-
та регулирования. Поэтому одни и те же регуляторы
могут, если только устраивают их характеристики,
устанавливаться на различных объектах.
Для наиболее часто применяемых регуляторов иног-
да используются названия, отражающие их особенно-
сти, связанные со способом формирования в регуляторе
управляющих воздействий, которые передаются испол-
нительному органу регулятора. Для рассмотренных на-
ми регуляторов введем обозначение Дз для перемеще-
ния исполнительного органа регулятора. Проследим за
тем, что происходит с исполнительным органом, когда
регулируемая величина v скачком изменяется на Ду и
принимает значение v + Av. В изображенном на рис. 1
работающем по принципу отклонения простейшем ре-
гуляторе в процессе регулирования величина Дз тем
большая, чем больше отклонение Ду. Если считать, что
Дз изменяется пропорционально Ду, то такой регуля-
тор можно условно назвать пропорциональным. Так его
и называют: пропорциональный или сокращенно П-ре-
гулятор. Выражение пропорциональной зависимости
между величинами Дз и Ду имеет следующий вид:
Дз =СДу, где С — коэффициент пропорциональности.
Изодромные регуляторы называют по другому пропор-
ционально-интегральными или ПИ-регуляторами. По-
смотрим, с чем связано это название. Мы уже знаем,
что изображенный на рис. 2 внизу справа йзодромный
регулятор первоначально работает так же, как и пока-
занный слева от него р^егулятор, который является, как
и ранее указанный, пропорциональным, П-регулятором,
а в самом конце процесса регулирования работает как
астатический, изображенный на рисунке над изодром-
ным. В процессе же регулирования изодромным регу-
лятором осуществляются оба действия: одно, характер-
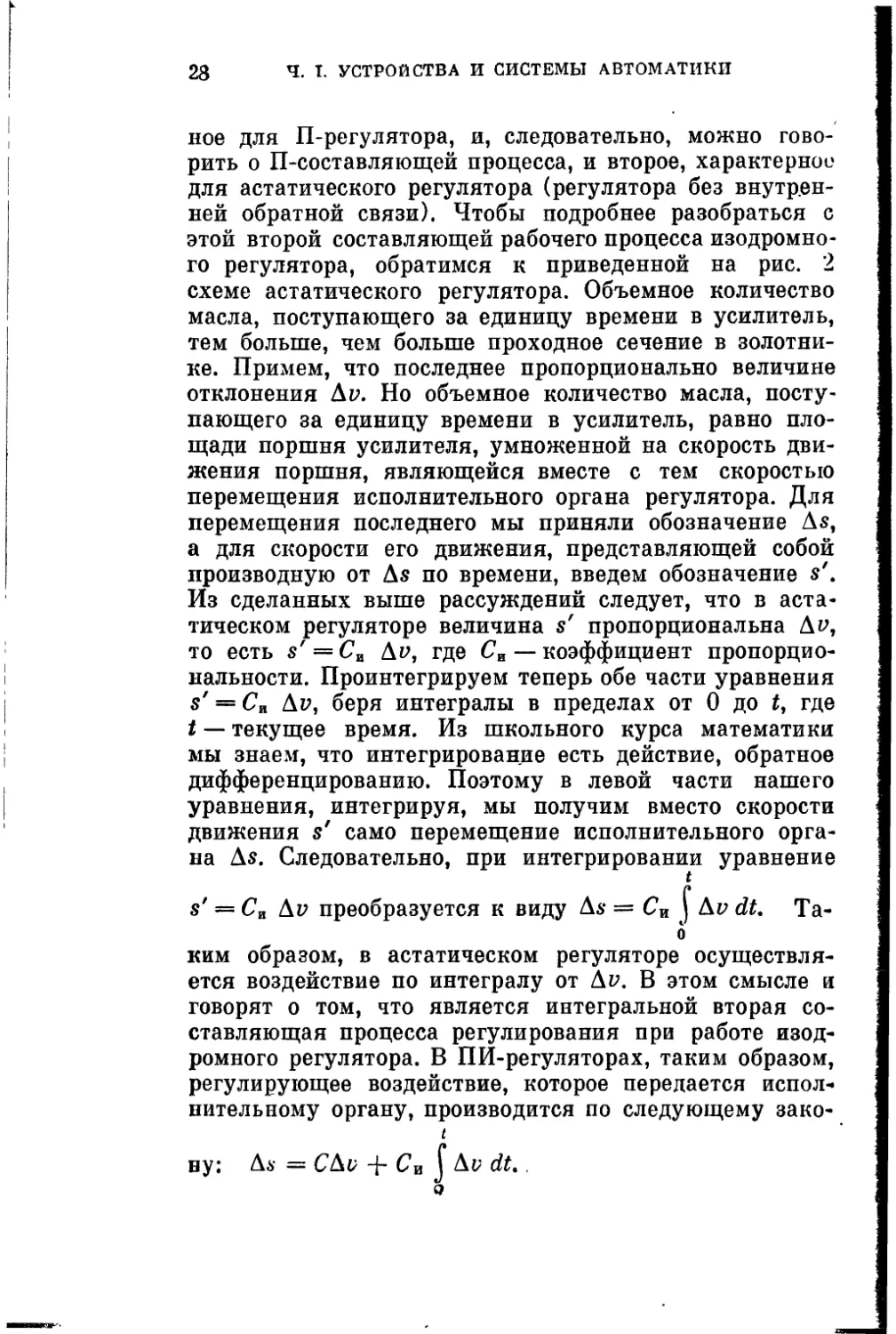
28
Ч. Т. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
ное для П-регулятора, и, следовательно, можно гово-
рить о П-составляющей процесса, и второе, характерное
для астатического регулятора (регулятора без внутрен-
ней обратной связи). Чтобы подробнее разобраться с
этой второй составляющей рабочего процесса изодромно-
го регулятора, обратимся к приведенной на рис. 2
схеме астатического регулятора. Объемное количество
масла, поступающего за единицу времени в усилитель,
тем больше, чем больше проходное сечение в золотни-
ке. Примем, что последнее пропорционально величине
отклонения Др. Но объемное количество масла, посту-
пающего за единицу времени в усилитель, равно пло-
щади поршня усилителя, умноженной на скорость дви-
жения поршня, являющейся вместе с тем скоростью
перемещения исполнительного органа регулятора. Для
перемещения последнего мы приняли обозначение Д$,
а для скорости его движения, представляющей собой
производную от Д$ по времени, введем обозначение s'.
Из сделанных выше рассуждений следует, что в аста-
тическом регуляторе величина s' пропорциональна Др,
то есть s' = Cn Др, где Си — коэффициент пропорцио-
нальности. Проинтегрируем теперь обе части уравнения
s' = Са Др, беря интегралы в пределах от 0 до t, где
t — текущее время. Из школьного курса математики
мы знаем, что интегрирование есть действие, обратное
дифференцированию. Поэтому в левой части нашего
уравнения, интегрируя, мы получим вместо скорости
движения s' само перемещение исполнительного орга-
на Д$. Следовательно, при интегрировании уравнение
t
s' = Си Др преобразуется к виду Д$ = Си J Др dt. Ta-
ti
ким образом, в астатическом регуляторе осуществля-
ется воздействие по интегралу от Др. В этом смысле и
говорят о том, что является интегральной вторая со-
ставляющая процесса регулирования при работе изод-
ромного регулятора. В ПИ-регуляторах, таким образом,
регулирующее воздействие, которое передается испол-
нительному органу, производится по следующему зако-
t
ну! Д$ = СДр -f- С*и Др dt..
о
1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ
29
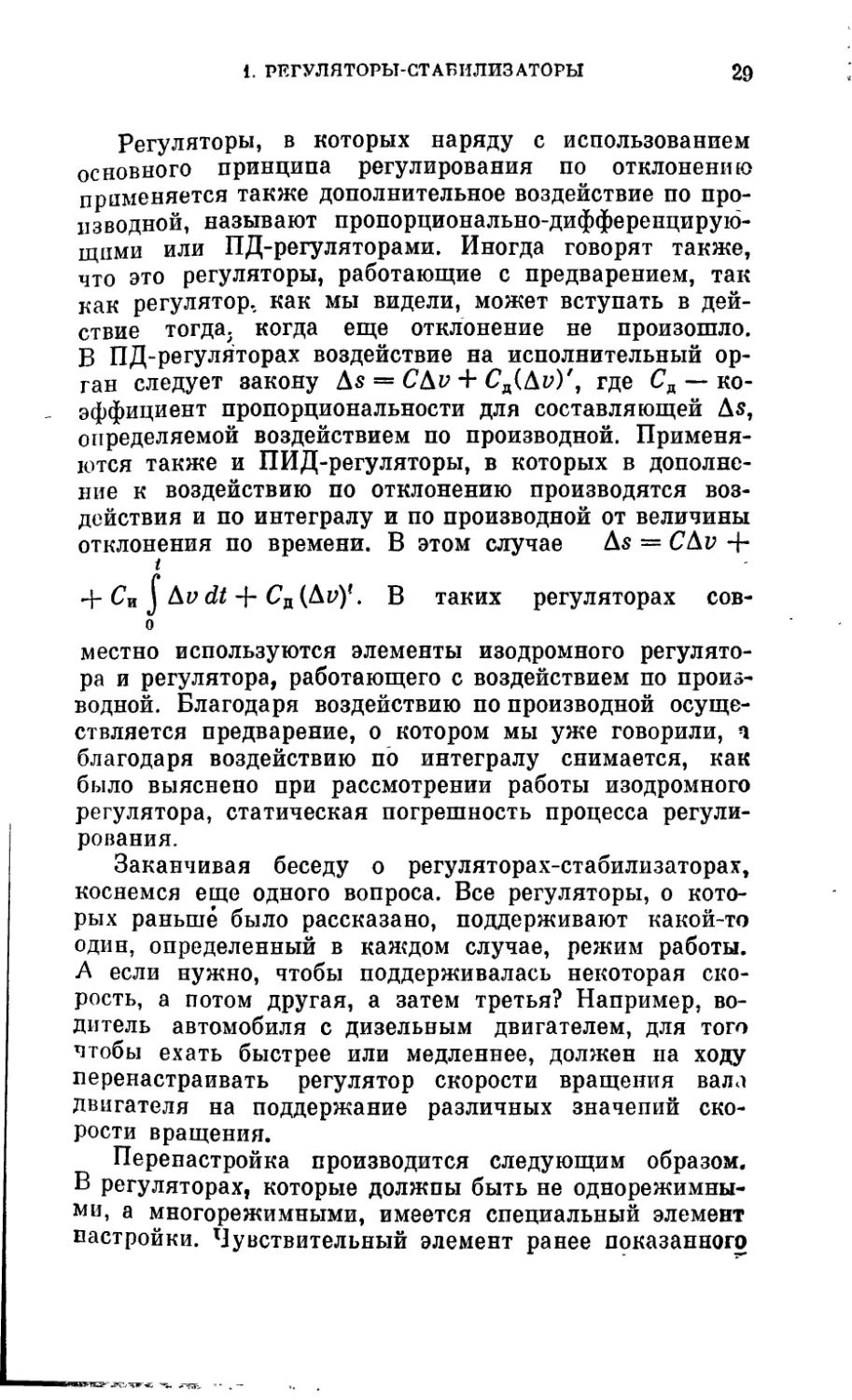
Регуляторы, в которых наряду с использованием
основного принципа регулирования по отклонению
применяется также дополнительное воздействие по про-
изводной, называют пропорционально-дифференцирую-
щпми или ПД-регуляторами. Иногда говорят также,
что это регуляторы, работающие с предварением, так
как регулятор, как мы видели, может вступать в дей-
ствие тогда, когда еще отклонение не произошло.
В ПД-регуляторах воздействие на исполнительный ор-
ган следует закону Д$ = СДр + Сд(Др)', где Сд — ко-
эффициент пропорциональности для составляющей Д$,
определяемой воздействием по производной. Применя-
ются также и ПИД-регуляторы, в которых в дополне-
ние к воздействию по отклонению производятся воз-
действия и по интегралу и по производной от величины
отклонения по времени. В этом случае Д$ = СДр +
I
4- Си J Д^ dt + Сд (Др/ . В таких регуляторах сов-
о
местно используются элементы изодромного регулято-
ра и регулятора, работающего с воздействием по произ-
водной. Благодаря воздействию по производной осуще-
ствляется предварение, о котором мы уже говорили, а
благодаря воздействию по интегралу снимается, как
было выяснено при рассмотрении работы изодромного
регулятора, статическая погрешность процесса регули-
рования.
Заканчивая беседу о регуляторах-стабилизаторах,
коснемся еще одного вопроса. Все регуляторы, о кото-
рых раньше было рассказано, поддерживают какой-то
один, определенный в каждом случае, режим работы.
А если нужно, чтобы поддерживалась некоторая ско-
рость, а потом другая, а затем третья? Например, во-
дитель автомобиля с дизельным двигателем, для того
чтобы ехать быстрее или медленнее, должен па ходу
перенастраивать регулятор скорости вращения вала
двигателя на поддержание различных значений ско-
рости вращения.
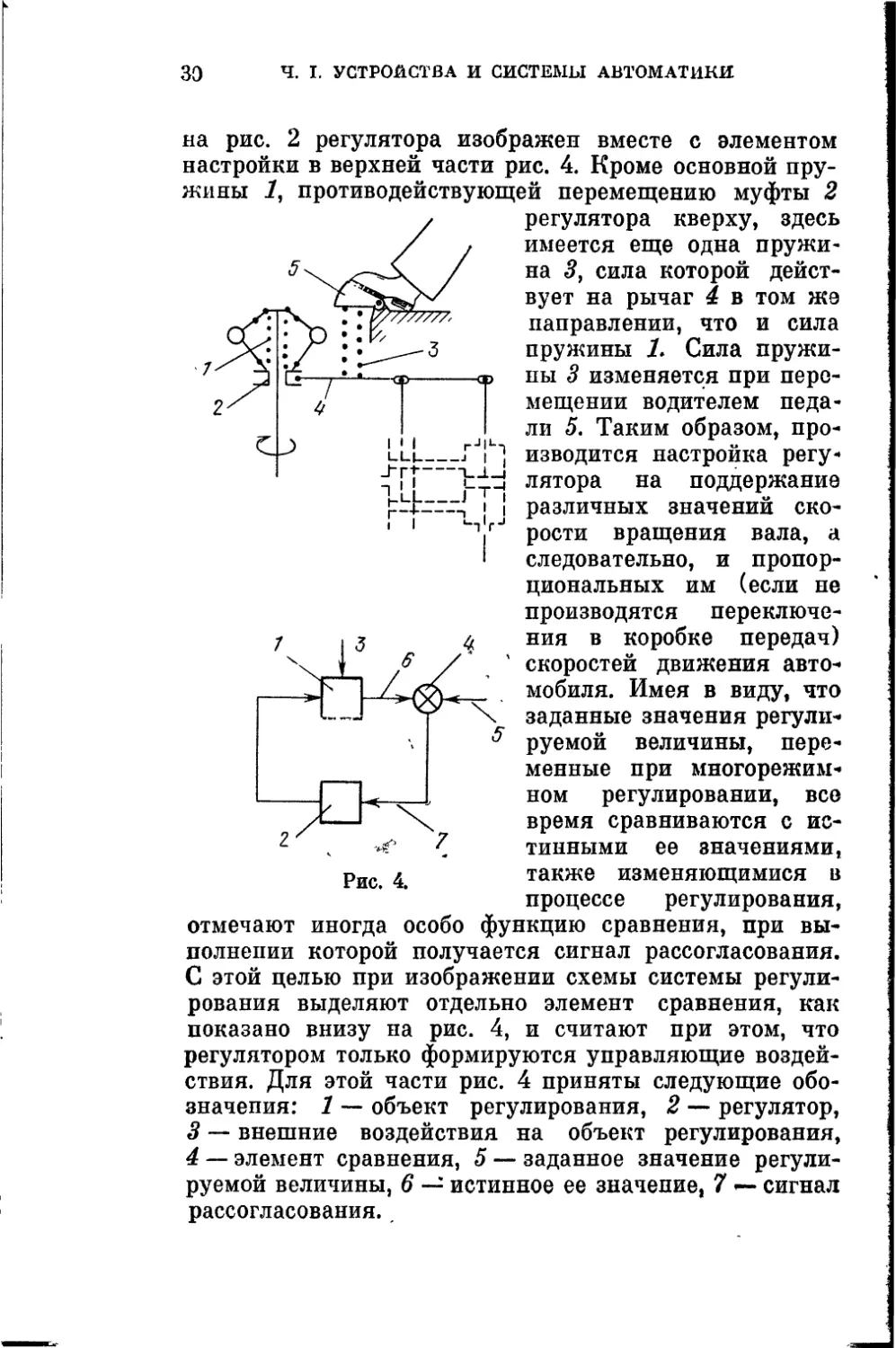
Перенастройка производится следующим образом.
В регуляторах, которые должны быть не однорежимны-
ми, а многорежимными, имеется специальный элемент
настройки. Чувствительный элемент ранее показанного
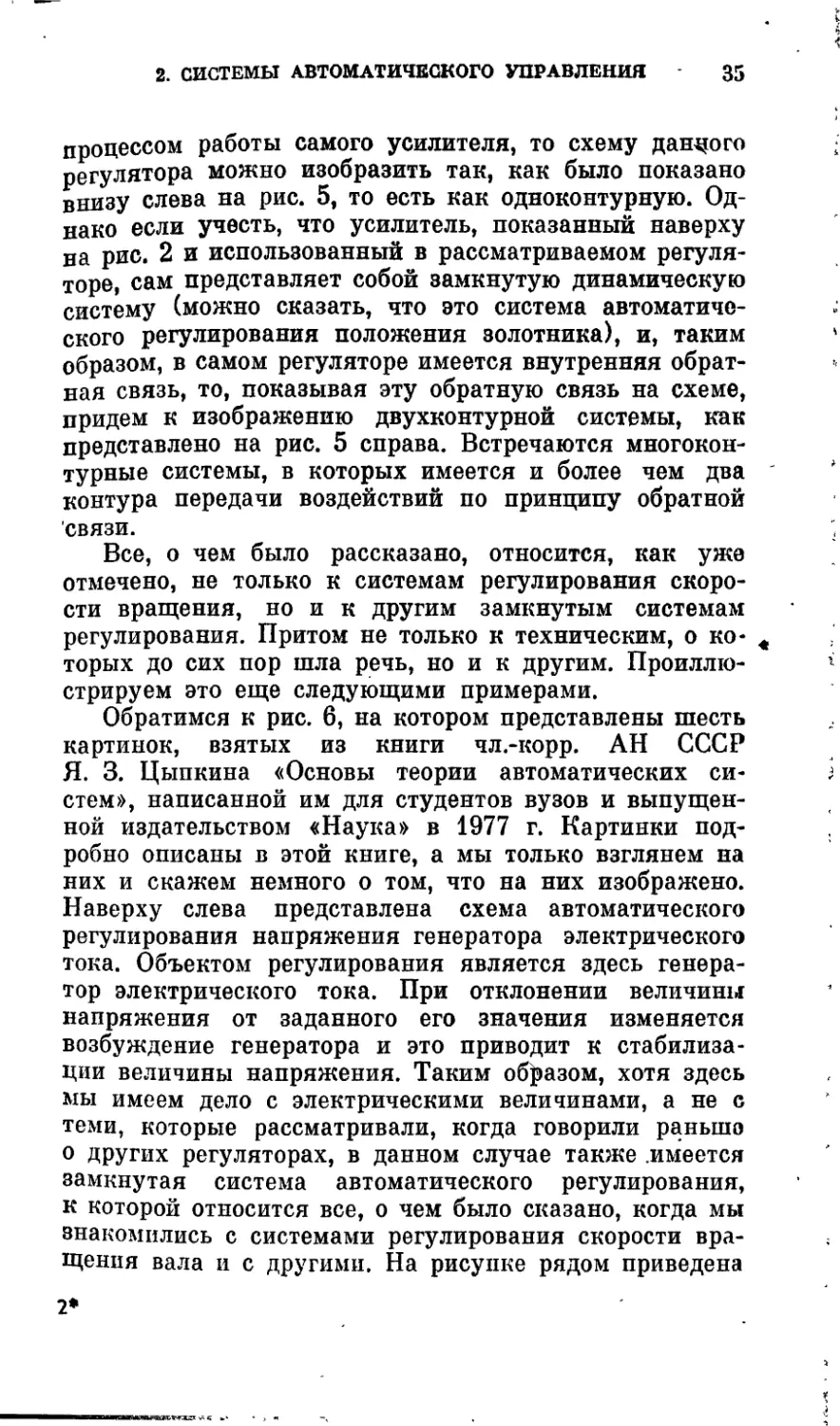
30
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
на рис. 2 регулятора изображен вместе с элементом
настройки в верхней части рис. 4. Кроме основной пру-
жины 7, противодействующей перемещению муфты 2
регулятора кверху, здесь
имеется еще одна пружи-
на 5, сила которой дейст-
вует на рычаг 4 в том же
направлении, что и сила
пружины 1. Сила пружи-
ны 3 изменяется при пере-
мещении водителем педа-
ли 5. Таким образом, про-
изводится настройка регу-
лятора на поддержание
различных значений ско-
рости вращения вала, а
следовательно, и пропор-
циональных им (если не
производятся переключе-
ния в коробке передач)
' скоростей движения авто-
мобиля. Имея в виду, что
заданные значения регули-
руемой величины, пере-
менные при многорежим-
ном регулировании, все
время сравниваются с ис-
тинными ее значениями,
рис 4 также изменяющимися в
процессе регулирования,
отмечают иногда особо функцию сравнения, при вы-
полнении которой получается сигнал рассогласования.
С этой целью при изображении схемы системы регули-
рования выделяют отдельно элемент сравнения, как
показано внизу на рис. 4, и считают при этом, что
регулятором только формируются управляющие воздей-
ствия. Для этой части рис. 4 приняты следующие обо-
значения: 1 — объект регулирования, 2 — регулятор,
3 — внешние воздействия на объект регулирования,
4 — элемент сравнения, 5 — заданное значение регули-
руемой величины, 6 ~ истинное ее значение, 7 *— сигнал
рассогласования.,
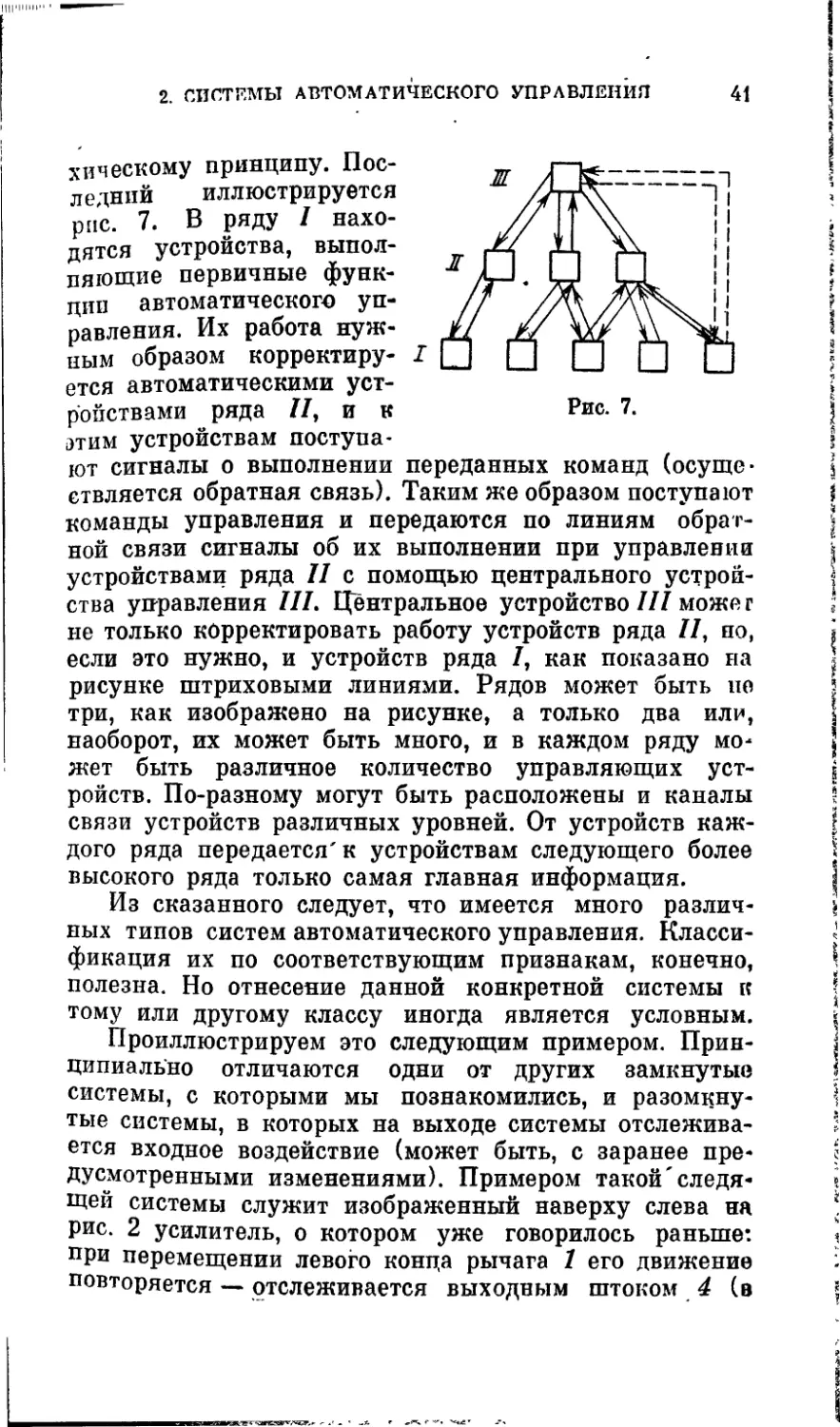
2. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
2. Системы автоматического управления
Относится ли то, что было рассказано раньше об
обратных связях, и остальное, только к регуляторам
скорости вращения, о которых шла речь, или и к
другим регуляторам! А к другим устройствам и сис-
темам автоматического управления тоже! Обратные
связи действуют в различных системах, в том числе
и в тех, о которых дальше пойдет речь.
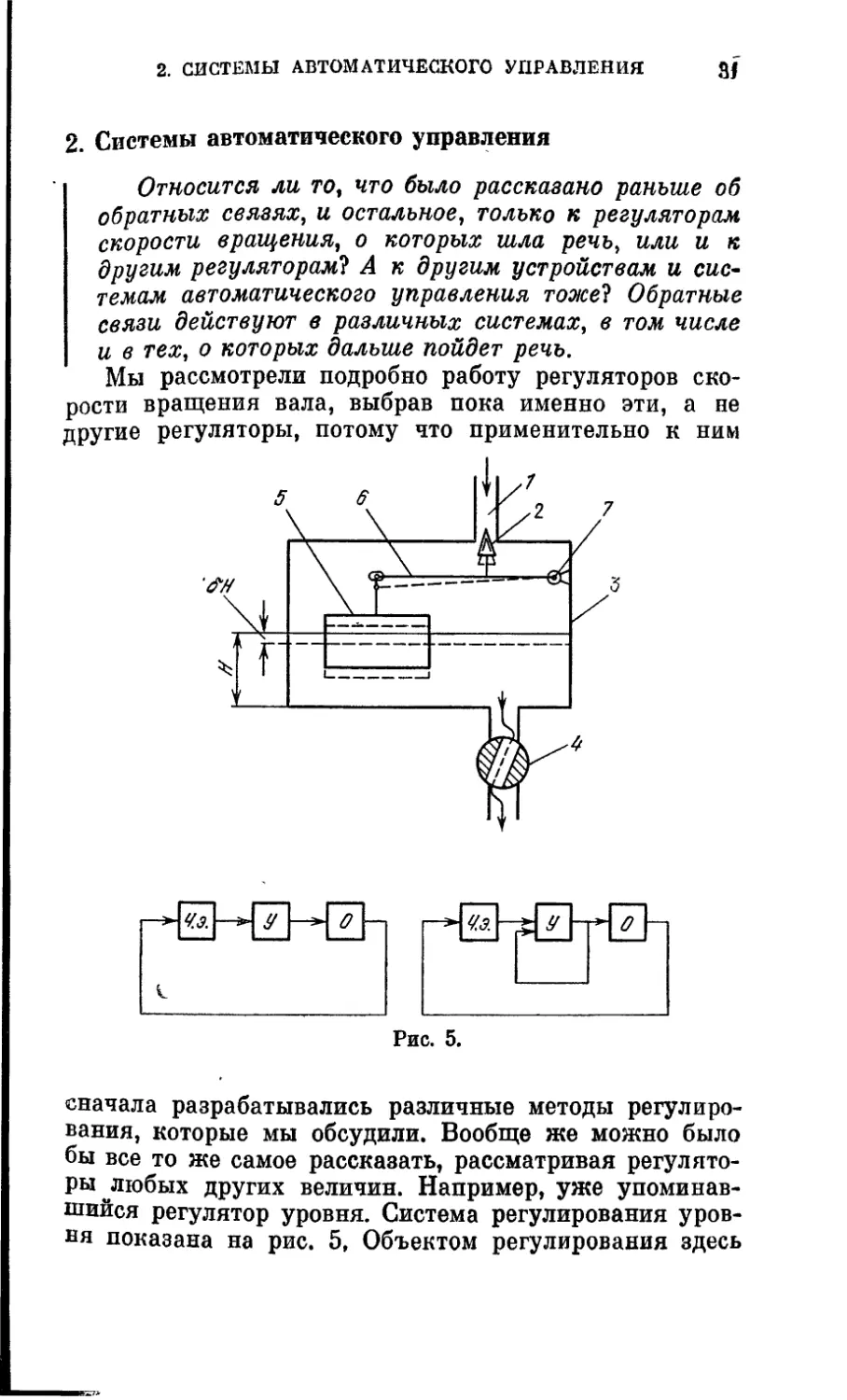
Мы рассмотрели подробно работу регуляторов ско-
рости вращения вала, выбрав пока именно эти, а не
другие регуляторы, потому что применительно к ним
Рис. 5.
сначала разрабатывались различные методы регулиро-
вания, которые мы обсудили. Вообще же можно было
бы все то же самое рассказать, рассматривая регулято-
ры ^любых других величин. Например, уже упоминав-
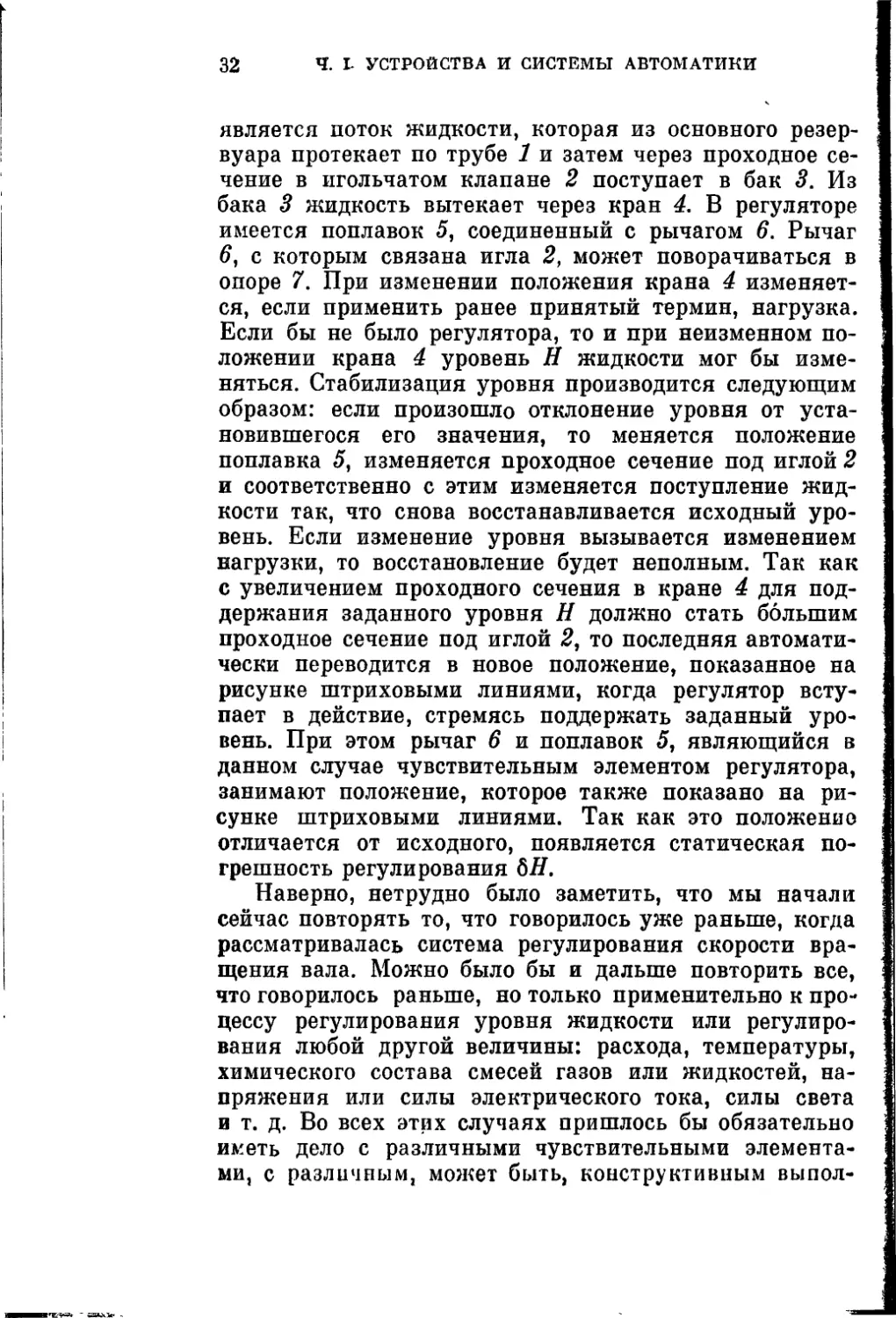
шийся регулятор уровня. Система регулирования уров-
ня показана на рис. 5, Объектом регулирования здесь
32
4. L УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
является поток жидкости, которая из основного резер-
вуара протекает по трубе 1 и затем через проходное се-
чение в игольчатом клапане 2 поступает в бак 5. Из
бака 3 жидкость вытекает через кран 4. В регуляторе
имеется поплавок 5, соединенный с рычагом 6. Рычаг
6, с которым связана игла 2, может поворачиваться в
опоре 7. При изменении положения крана 4 изменяет-
ся, если применить ранее принятый термин, нагрузка.
Если бы не было регулятора, то и при неизменном по-
ложении крана 4 уровень Н жидкости мог бы изме-
няться. Стабилизация уровня производится следующим
образом: если произошло отклонение уровня от уста-
новившегося его значения, то меняется положение
поплавка 5, изменяется проходное сечение под иглой 2
и соответственно с этим изменяется поступление жид-
кости так, что снова восстанавливается исходный уро-
вень. Если изменение уровня вызывается изменением
нагрузки, то восстановление будет неполным. Так как
с увеличением проходного сечения в кране 4 для под-
держания заданного уровня Н должно стать большим
проходное сечение под иглой 2, то последняя автомати-
чески переводится в новое положение, показанное на
рисунке штриховыми линиями, когда регулятор всту-
пает в действие, стремясь поддержать заданный уро-
вень. При этом рычаг 6 и поплавок 5, являющийся в
данном случае чувствительным элементом регулятора,
занимают положение, которое также показано на ри-
сунке штриховыми линиями. Так как это положение
отличается от исходного, появляется статическая по-
грешность регулирования 6Я.
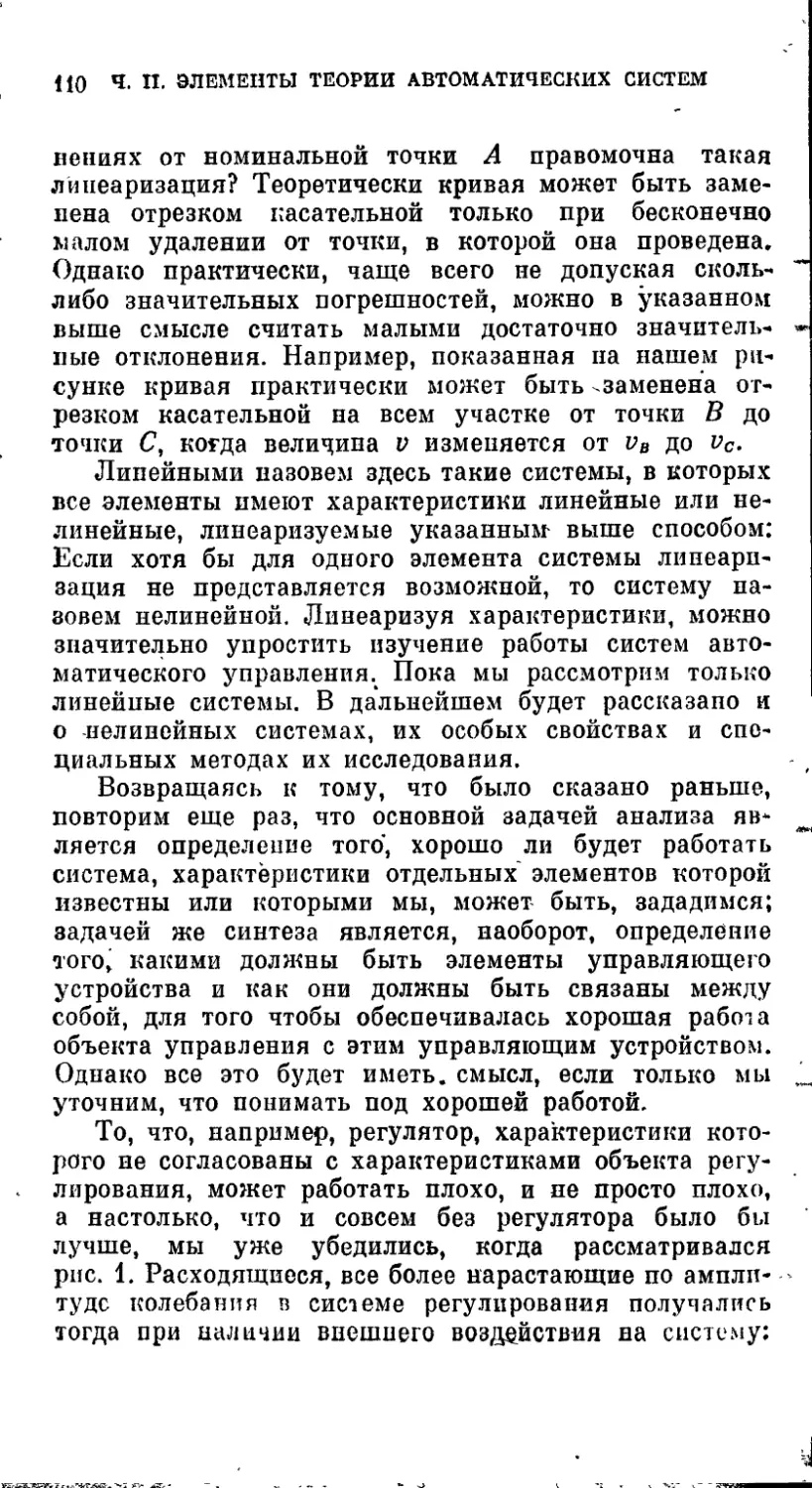
Наверно, нетрудно было заметить, что мы начали
сейчас повторять то, что говорилось уже раньше, когда
рассматривалась система регулирования скорости вра-
щения вала. Можно было бы и дальше повторить все,
что говорилось раньше, но только применительно к про-
цессу регулирования уровня жидкости или регулиро-
вания любой другой величины: расхода, температуры,
химического состава смесей газов или жидкостей, на-
пряжения или силы электрического тока, силы света
и т. д. Во всех этих случаях пришлось бы обязательно
иметь дело с различными чувствительными элемента-
ми, с различным, может быть, конструктивным выпол-
2. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
33
пением регуляторов (изготовляются и универсальные
регуляторы, предназначенные для регулирования раз-
личных величин). Но принципы регулирования явля-
ются общими и в одинаковой степени относятся к тому,
что связано с регулированием любой из указанных
выше величин.
В равной мере важно в любом из этих случаев
иметь ясное представление о действии механизма об-
ратной связи, о возможных статических и динамиче-
ских погрешностях процесса регулирования, о том, как
они могут быть уменьшены путем использования воз-
действий по интегралу и по производной от регулиру-
емой величины, и обо всем другом из того, о чем мы
раньше говорили.
То, что было рассказано, в частности, об обратных ->
связях, относится не только к системам регулирования,
но и к иным системам автоматического управления,
с которыми нам предстоит познакомиться. В этом мы
убедимся, постепенно расширяя круг рассматриваемых
систем.
Прежде чем перейти к рассмотрению последующих
примеров, которые помогут нам создать более общее
представление об автоматическом управлении, отметим,
что системы автоматического регулирования разделя-
ются по целому ряду признаков. Это характерно и для
других систем управления, с которыми мы познакомим-
ся в* дальнейшем.
Кроме разделения по ранее указанным признакам,
их можно разделить на системы непосредственного и
косвенного действия, мало- и многоэлементные, одно-
и многоконтурные. Поясним это.
О непосредственном действии здесь говорится в том
смысле, что регулятор какой-то величины используется
для регулирования именно этой величины. Например,
изображенный на рис. 5 регулятор уровня жидкости
используется для регулирования уровня. Однако этот
же регулятор применяется в некоторых случаях и для
стабилизации величины расхода жидкости. Это пред-
ставляется возможным при условии, что остается все
время неизменной площадь проходного сечения в кра-
не 4 и в других, может быть, расположенных за ним
дросселирующих поток устройствах. При этом величина
2 Д, а, Залманзон
34 Ч. Т. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
расхода прямо зависит от уровня жидкости в баке 3.
Поддерживая уровень постоянным, мы тем самым кос-
венным образом осуществляем и регулирование расхо-
да. Имеются регуляторы, специально предназначенные
для регулирования расхода, но если в указанном выше
случае стабилизирован уровень жидкости, то примене-
ние регулятора, непосредственно производящего регу-
лирование расхода, уже оказывается ненужным.
Разделение систем по количеству элементов, явля-
ется в какой-то мере условным. Конечно, имеются
такие системы, в которых структурных элементов ма-
ло, и такие, в которых их много или даже очень много.
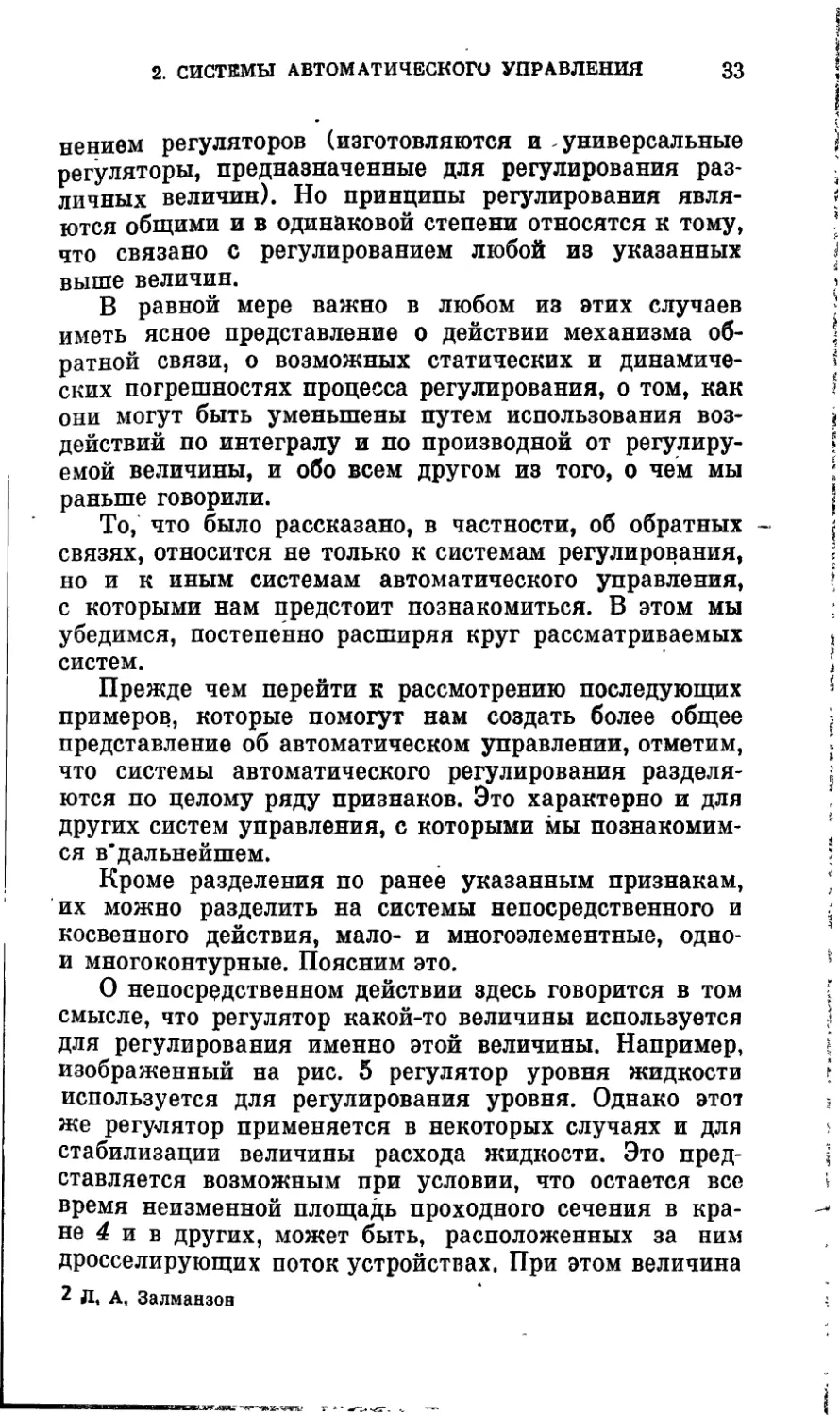
Однако можно различным образом подойти к тому,
что считать первичными элементами системы. Обратим-
ся, например, к показанной внизу на рис. 1 схеме
замкнутой системы регулирования, которая в равной
мере относится к изображенному на этом рисунке ре-
гулятору и к регулятору, изображенному внизу слева
на рис. 2. На данной схеме показаны только два квад-
ратика; здесь Р — регулятор и О - объект регулирова-
ния. Но можно представить схему последнего из ука-
занных выше регуляторов и по-другому, выделяя в
регуляторе два самостоятельных элемента, как изобра-
жено внизу слева на рис. 5: 5Г. а.— чувствительный
элемент; У — усилитель регулятора. При этом уже
рисуются на схеме три квадратика — она является
трехэлементной. Такой произвол в определении числа
элементов устраняется, если выделять элементы, пред-
ставляющие собой так называемые типовые звенья си-
стемы. Как они определяются, мы узнаем позднее.
Пока же еще несколько слов о том, что было ска-
зано в отношении разделения систем на одноконтурные
и многоконтурные. Это разделение производится в свя-
зи с тем, что наряду с внешним замкнутым контуром
в системах с обратными связями иногда имеются и
внутренние контуры. Проиллюстрируем это следующим
примером. То, что изображенная на рис. 1 схема зам-
кнутой системы одноконтурная, не вызывает сомнений,
А вот в отношении системы с указанным выше регуля-
тором, который был изображен на рис. 2, такое утверж-
дение является уже спорным. Действительно, если, рас-
сматривая усилитель регулятора, не интересоваться]
2. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
35
процессом работы самого усилителя, то схему данного
регулятора можно изобразить так, как было показано
внизу слева на рис. 5, то есть как одноконтурную. Од-
нако если учесть, что усилитель, показанный наверху
на рис. 2 и использованный в рассматриваемом регуля-
торе, сам представляет собой замкнутую динамическую
систему (можно сказать, что это система автоматиче-
ского регулирования положения золотника), и, таким
образом, в самом регуляторе имеется внутренняя обрат-
ная связь, то, показывая эту обратную связь на схеме,
придем к изображению двухконтурной системы, как
представлено на рис. 5 справа. Встречаются многокон-
турные системы, в которых имеется и более чем два
контура передачи воздействий по принципу обратной
связи.
Все, о чем было рассказано, относится, как уже
отмечено, не только к системам регулирования скоро-
сти вращения, но и к другим замкнутым системам
регулирования. Притом не только к техническим, о ко-
торых до сих пор шла речь, но и к другим. Проиллю-
стрируем это еще следующими примерами.
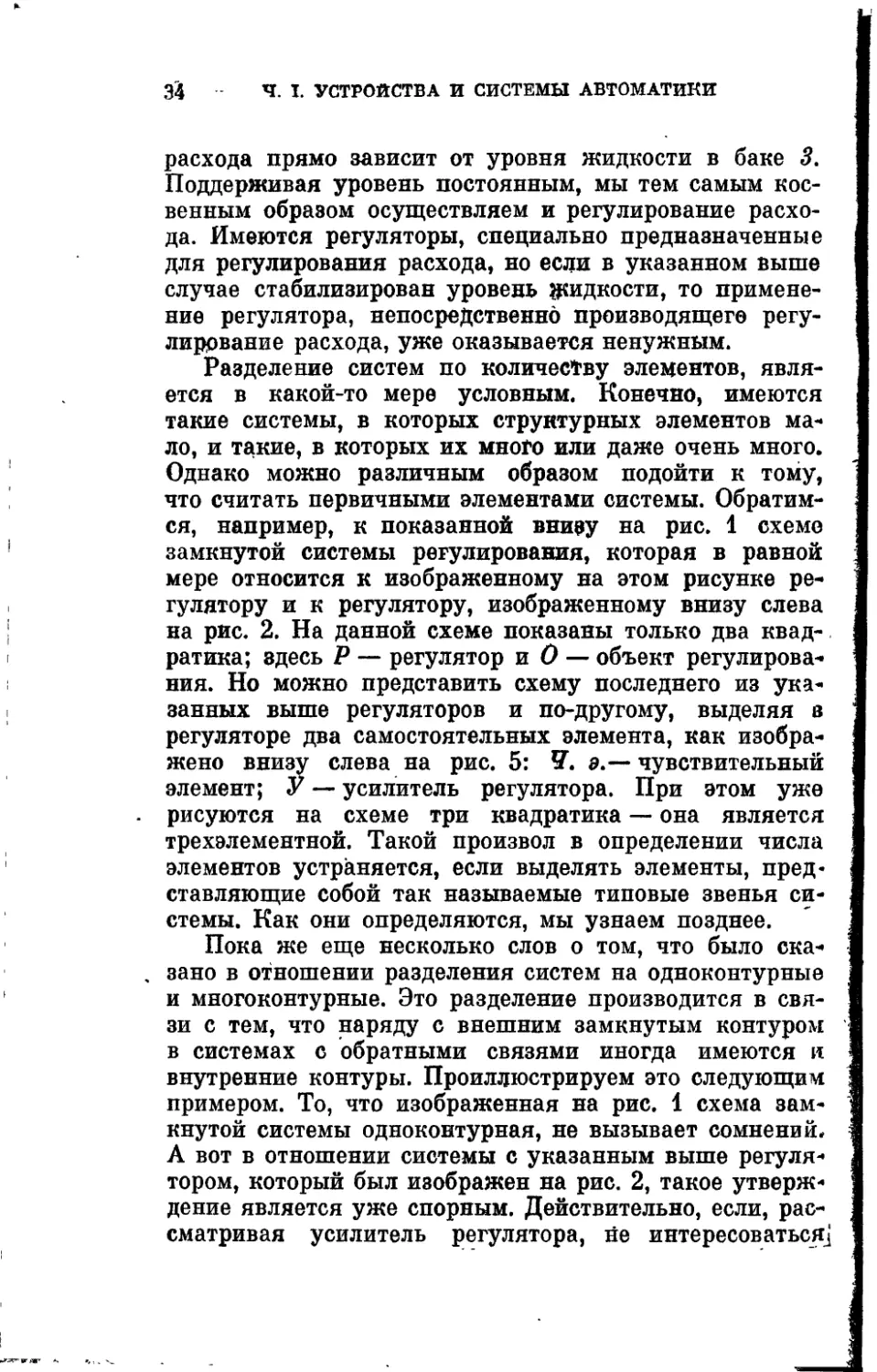
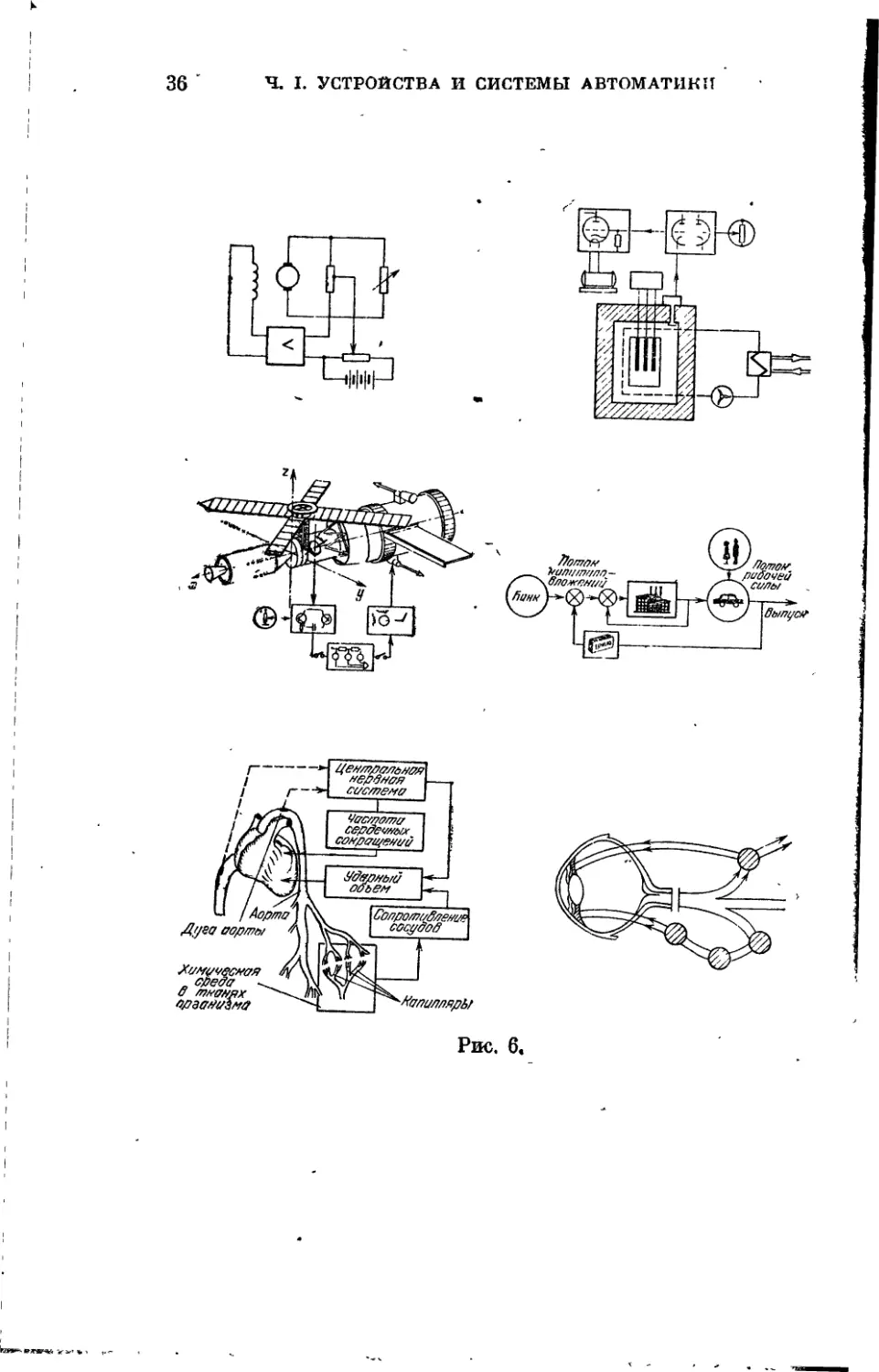
Обратимся к рис. 6, на котором представлены шесть
картинок, взятых из книги чл.-корр. АН СССР
Я. 3. Цыпкина «Основы теории автоматических си-
стем», написанной им для студентов вузов и выпущен-
ной издательством «Наука» в 1977 г. Картинки под-
робно описаны в этой книге, а мы только взглянем на
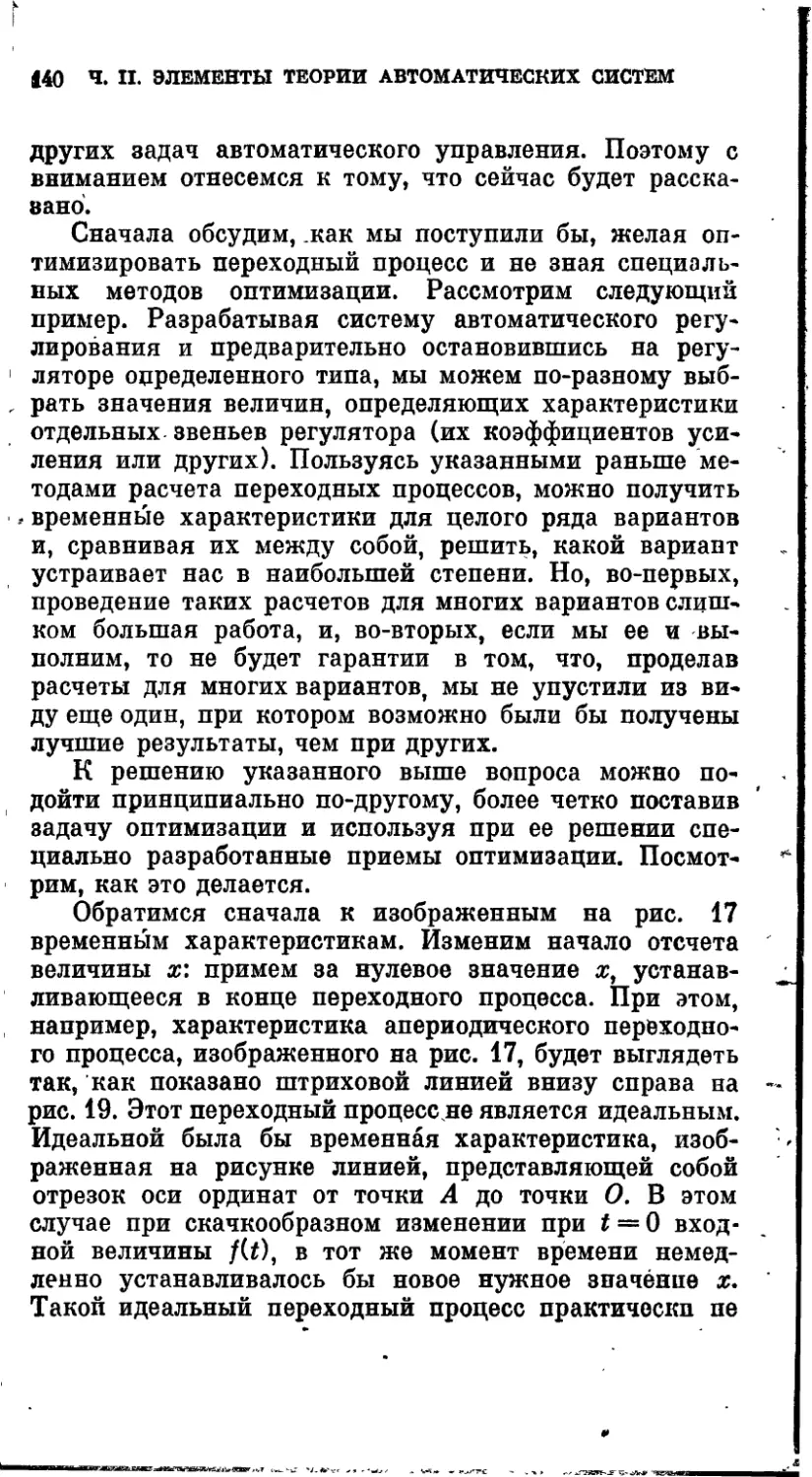
них и скажем немного о том, что на них изображено.
Наверху слева представлена схема автоматического
регулирования напряжения генератора электрического
тока. Объектом регулирования является здесь генера-
тор электрического тока. При отклонении величины
напряжения от заданного его значения изменяется
возбуждение генератора и это приводит к стабилиза-
ции величины напряжения. Таким образом, хотя здесь
мы имеем дело с электрическими величинами, а не с
теми, которые рассматривали, когда говорили раныпо
о других регуляторах, в данном случае также .имеется
замкнутая система автоматического регулирования,
к которой относится все, о чем было сказано, когда мы
знакомились с системами регулирования скорости вра-
щения вала и с другими. На рисунке рядом приведена
2*
36
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
Рис. 6<
2. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
37
схема системы регулирования мощности атомного реак-
тора. Измеряется и регулируется количество нейтронов
в реакторе, от которого зависит мощность; регулирова-
ние производится путем перемещения с помощью элек-
тромотора стержней, изготовленных из материала, по-
глощающего нейтроны (стержни показаны на рисунке
жирными черными линиями). Если количество нейтро-
нов отклоняется от нужного значения, то стержни
должны перемещаться таким образом, чтобы восстано-
вился заданный режим работы реактора. В следующем
ряду показана слева схема автоматического управления
ориентацией в пространстве космической орбитальной
станции. Измеряются отклонения от заданного угло-
вого положения относительно каждой из осей х, у и z;
это делается с помощью специальных приборов-гиро-
скопов. В зависимости от этих отклонений формиру-
ются сигналы управления двигателями ориентации, яв-
ляющимися в данной системе исполнительными орга-
нами. На рисулке показан контур стабилизации поло-
жения относительно одной из осей. Такие же контуры
управления имеются и для двух других. В системе
использованы блоки цифровой вычислительной маши-
ны, с помощью которых производится промежуточная
обработка сигналов. Эта система, которая также вы-
полняет функции автоматического регулирования,
сложнее, чем ранее рассмотренные. Она служит для
стабилизации положения космической станции в про-
странстве. На рядом расположенном рисунке показана
совершенно иная система управления. Это экономиче-
ская система. Производится управление основными
фондами завода, выпускающего автомобили. В данном
случае приходится иметь дело с совсем другими вели-
чинами: капиталовложения, которые поступают из
банка; поток рабочей силы; средства, получаемые при
реализации продукции... Однако это тоже замкнутая
система автоматического управления, в которой имеют-
ся два контура обратной связи. И наконец, внизу па
рис. 6 представлены системы управления, созданные
не человеком, а самой природой. Слева показана систе-
ма управления кровообращением у человека. В состав
ее входят две взаимодействующие системы: система
регулирования кровяного давления и система регули-
38
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
рования постоянства химического состава межклеточ-
ной жидкости, с изменением которого изменяется со-
противление сосудов, что влияет и на кровяное давле-
ние. Справа изображена система автоматического
управления величиной зрачка в глазу человека. При
изменении освещения окружающих предметов величи-
на зрачка должна изменяться так, чтобы была нужным
образом освещена сетчатка глаза; благодаря этому че-
ловек может видеть, когда все предметы кругом зали-
ты ярким светом, а также и тогда, когда они мало
освещены.
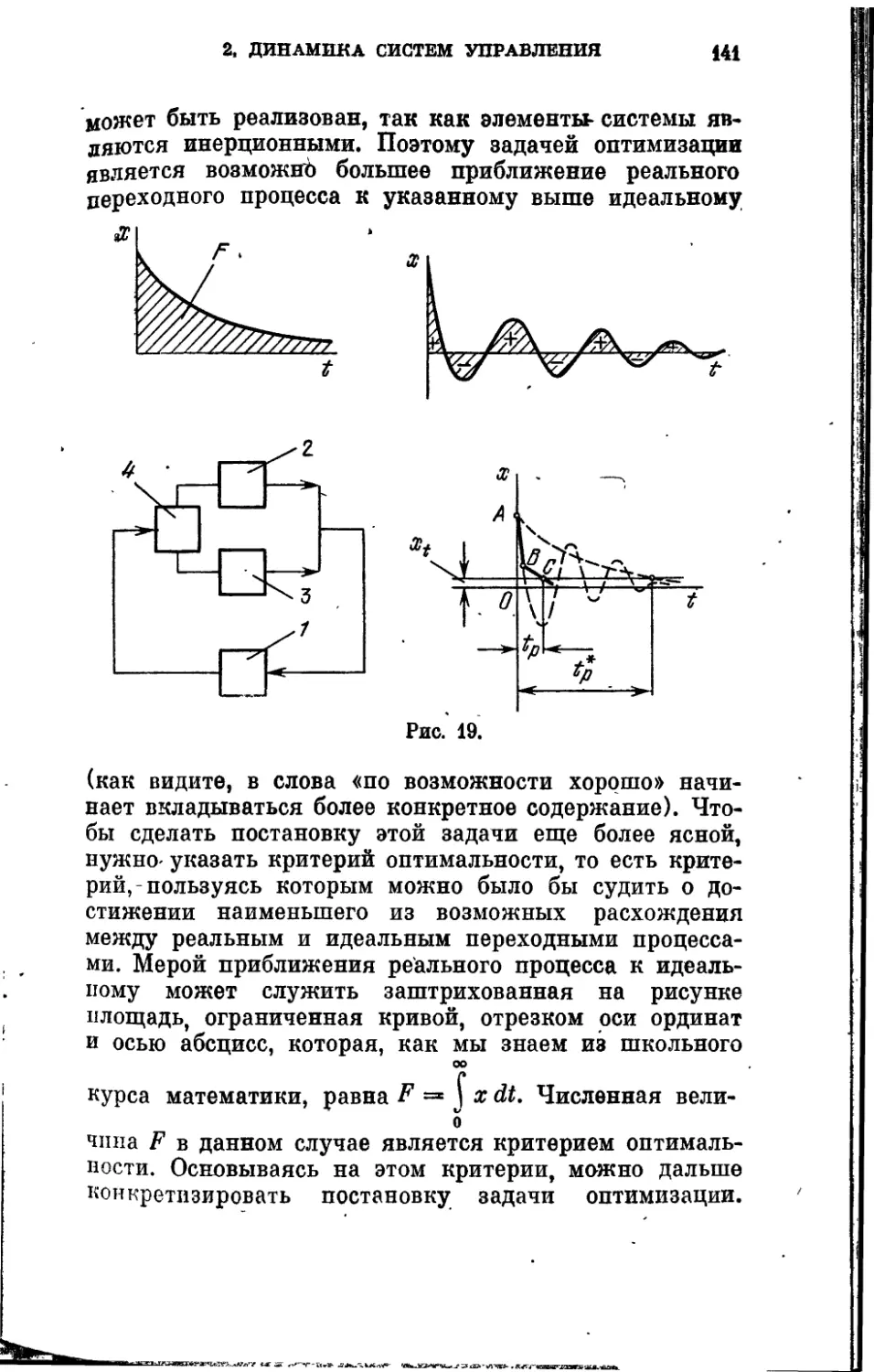
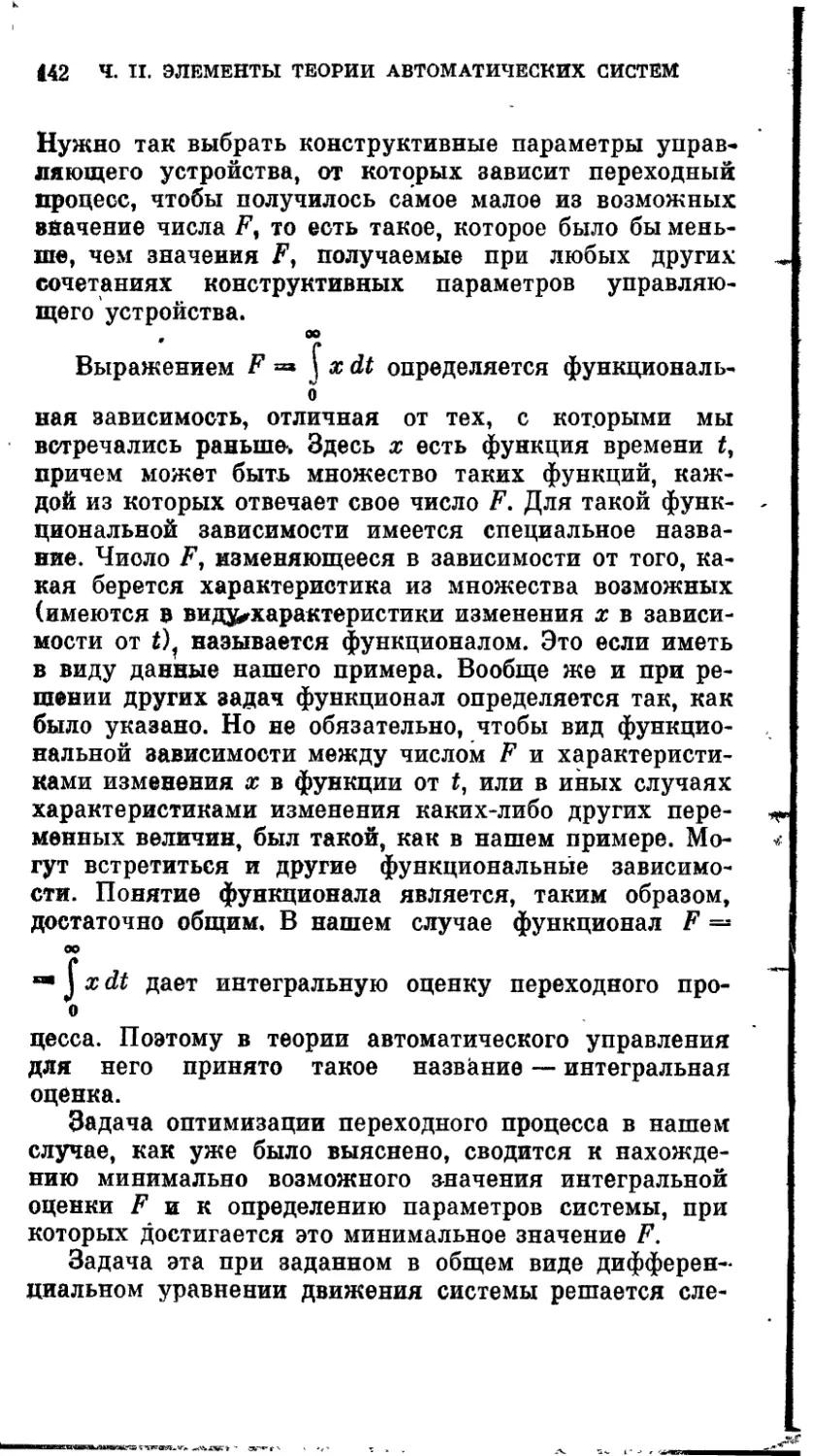
Каждая из этих систем автоматического управления
имеет свои особенности. Неодинаково показаны они и
па схемах: где-то вместо квадратиков нарисованы
кружки. Но это все неважно. Главное это то, что наи-
более существенное является общим для различных
систем, начиная от первоначально рассмотренной нами
простейшей системы автоматического регулирования и
кончая значительно более сложными системами, кото-
рые были изображены на показанных сейчас картин-
ках. И это, прежде всего, действие обратных связей,
характерное для любых замкнутых систем.
Технические книги часто начинаются с того, что
читателя знакомят с классификацией описываемых
объектов, с определениями, принятой терминологи-
ей. Мы этого вначале не сделали, а вводили новые
понятия и определения по ходу изложения. Но где-то
и у нас должно быть специально отведено всему это-
му уесто. Тем более, что рассмотренные нами си ст в-
мы регулирования представляют собой только лишь
один из видов современных систем автоматического
управления. Прежде чем перейти к другим средств
вам автоматики, к описанию принципов их дейст-
еия, приведем некоторые общие сведения о систем
мах автоматического управления.
Все системы автоматического управления иногда
разделяют на три класса: системы регулирования, си-
стемы программного управления и системы зависимого
управления. Примером первых служат знакомые теперь
уже нам системы, в которых регулятор должен под-
держивать с нужной точностью заданное значение ре-
гулируемой величины: уровня воды, скорости вращения
2. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 39
/
вала или других величин. Ко вторым относятся, напри-
мер, такие, в которых все операции управления произ-
водятся по заранее заданной программе. Третьи — это
системы, в которых в ходе процесса управления вели-
чины, характеризующие состояние объекта управления,
изменяются более сложным образом в зависимости от
других величин, таких, например, как величины внеш-
них или управляющих воздействий. Эта зависимость
определяется заданным алгоритмом управления (поня-
тие алгоритма нам известно из школьного курса мате-
матики, это последовательность точно указанных
действий, следующих одно за другим в установленном
порядке).
Системы автоматического управления различаются
и по другим признакам. К различным классам отно-
сятся непрерывные и дискретные системы. В первых
из них формирование и передача управляющих воздей-
ствий производятся непрерывно, во вторых — в дис-
кретные моменты времени. Существуют и гибридные
системы, содержащие устройства непрерывного дейст-
вия и устройства, дискретно работающие.
Относят к различным Классам системы управления
и в зависимости от того, изменяются ли характеризую-
щие состояние системы (и протекающие в ней процес-
сы) основные величины — параметры системы в функ-
ции от одной или от нескольких других переменных
величин. В первом случае параметры системы обычно
изменяются лишь с течением времени. Например, таки-
ми основными параметрами для изображенной на рис. 1
системы регулирования являются скорость вращения
вала двигателя v и расход топлива G. Изображая, как
мы это делали, элементы системы квадратиками, мож-
но считать, что каждая из этих величин относится
к определенному месту. У нас это были соединитель-
ные линии со стрелками; можно же считать, что ука-
занные величины относятся к определенным точкам
системы,— сосредоточены в них. Эти системы, рассмот-
рением которых мы в дальнейшем ограничимся, назы-
вают системами с сосредоточенными параметрами. От
них отличаются системы, имеющие, например, в своем
составе длинную электрическую или пневматическую
линию, передача сигналов по которым происходит
40
Ч. L УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
в связи с протеканием волновых процессов. Для них
такие характерные параметры, как напряжение или
сила тока в. первом случае и давление и скорость тече-
ния во втором, изменяются и в функции от времени
и при переходе от одних точек линии к другим. Эти
параметры здесь распределены, как говорят, по длине
линии. Системы, содержащие элементы этого вида, на-
зывают системами с распределенными параметрами.
Системы автоматического управления разделяются
/также на системы с постоянной и с переменной струк-
турой. У последних структура системы изменяется в
процессе ее работы.
Имеется и другой способ разделения систем управ-
ления на различные классы. Системы, у которых все
характеристики объекта управления и управляющего
устройства могут быть заранее точно предопределены,
называются детерминированными. Иногда же сущест-
венное влияние на работу системы управления оказы-
вают случайные воздействия. Такие системы относятся
к особому классу. Классификация систем управления
производится также и по признаку наличия или отсут-
ствия уже в начале процесса управления полной- ин-
формации об объекте управления. В системах, работаю-
щих с неполной начальной информацией, нужная ин-
формация получается в процессе управления. Системы
управления, в которых управляющее устройство само
в процессе управления приспосабливается к изменяю-
щимся с течением времени условиям работы объекта
управления, называются адаптивными.
Различают также системы автоматического управ-
ления простые и сложные. Примером простых систем
являются системы автоматического регулирования,
в которых применяются регуляторы по типу тех, кото-
рые были изобретены И. И. Ползуновым и Дж. Уаттом.
А сложные системы — это такие, которыми выполня-
ются более сложные функции управления. Например,
одним из элементов таких систем может быть ЭВМ,
обрабатывающая информацию, нужную для формиро-
вания управляющих воздействий. Сложная система
может иметь в своем составе много различных средств
автоматики. Для многих сложных систем автоматиче-
ского управления характерно их построение по иерар-
2. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 41
хическому принципу. Пос-
ледний иллюстрируется
рис. 7. В ряду I нахо-
дятся устройства, выпол-
няющие первичные функ-
ции автоматического уп-
равления. Их работа нуж-
ным образом корректиру-
ется автоматическими уст-
ройствами ряда II, и к
этим устройствам поступа-
ют сигналы о выполнении
ствляется обратная связь).
переданных команд (осуще-
Таким же образом поступают
команды управления и передаются по линиям обрат-
ной связи сигналы об их выполнении при управлении
устройствами ряда II с помощью центрального устрой-
ства управления IIL Центральное устройство III може г
не только корректировать работу устройств ряда II, но,
если это нужно, и устройств ряда I, как показано на
рисунке штриховыми линиями. Рядов может быть по
три, как изображено на рисунке, а только два или,
наоборот, их может быть много, и в каждом ряду мо-
жет быть различное количество управляющих уст-
ройств. По-разному могут быть расположены и каналы
связи устройств различных уровней. От устройств каж-
дого ряда передается'к устройствам следующего более
высокого ряда только самая главная информация.
Из сказанного следует, что имеется много различ-
ных типов систем автоматического управления. Класси-
фикация их по соответствующим признакам, конечно,
полезна. Но отнесение данной конкретной системы к
тому или другому классу иногда является условным.
Проиллюстрируем это следующим примером. Прин-
ципиально отличаются одни от других замкнутые
системы, с которыми мы познакомились, и разомкну-
тые системы, в которых на выходе системы отслежива-
ется входное воздействие (может быть, с заранее пре-
дусмотренными изменениями). Примером такой'следя-
щей системы служит изображенный наверху слева на
рис. 2 усилитель, о котором уже говорилось раньше:
при перемещении левого конца рычага 1 его движение
повторяется — отслеживается выходным штоком 4 (в
42 ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
%
зависимости от соотношения плеч рычага 1 повторяет-
ся точно ^ли в измененном масштабе). Но данный
усилитель' можно рассматривать, как уже отмечалось,
и как замкнутую систему автоматического регулирова-
ний положения золотника.
Считают также иногда, что принципиально иной
класс динамических систем, чем системы автоматиче-
ского управления, составляют системы передачи ин-
формации, или системы связи, изучение которых также
необходимо для понимания закономерностей работы
сложных систем управления. Такие системы связи
представляются как разомкнутые, если имеется в виду,
чтд производится передача по ним сигналов от источ-
ника информации через передатчик, основной канат
связи и приемник сигналов к получателю информации.
Но в современных системах связи, как правило, парал-
лельно с основным — прямым каналом связи —- вклю-
чается обратный канал, который служит для обнаруже-
ния и устранения ошибок. Передатчик и приемник
вместе с прямым и обратным каналом образуют замк-
нутую систему. По-разному, например, имея в виду
сказанное, можно подойти к рассмотрению системы
управления с Земли луноходом. Можно сказать, что
это следящая система, если иметь в виду, что движе-
ния, указываемые человеком, находящимся за пультом
управления, отслеживаются луноходом. Но если вник-
нуть в то, как это делается, то окажется, что управле-
ние движением здесь невозможно без использования
сигналов об истинном положении объекта управления
и сравнения истинных координат с заданными. С уче-
том величины рассогласования между теми и другими
формируются сигналы, используемые при последующем
управлении. Это уже похоже на иейользование дейст-
вия обратной связи в простейших замкнутых системах
автоматического регулирования, которые были перво-
начально нами рассмотрены.
Более подробное обсуждение классификации систем
управления не в плане нашей книги. Ограничимся тем,
что было сказано.
Главное — это общие представления о замкнутых
я разомкнутых системах, об обратной связи. Принцип
обратной связи, рассмотренный раньше нами примени-
3. АВТОМАТИЧЕСКИЕ ОПТИМИЗАТОРЫ
43
тельно к 'частным случаям, используется и во многих
других. Он является общим для всей области автома-
тического управления. В этом можно было убедиться,
познакомившись с рис. 6. Мы выяснили, что различные
системы автоматического управления можно представ-
лять так же, как это делали для простейших систел!
регулирования. Тогда мы изображали квадратиками
объект регулирования и регулятор. В общем случае это
объект управления и управляющее устройство.
В заключение сделаем еще одно замечание. Устрой-
ства автоматики используются не только в системах
автоматического управления, работающих без участия
человека, но и в автоматизированных системах управ-
ления, в которых может отводиться место, иногда глав-
ное, и человеку. Например, создаются автоматизирован-
ные системы управления (АСУ), в которых технические
устройства, воспринимающие и перерабатывающие ин-
формацию, выполняют вспомогательные функции, по-
могая человеку принимать решения, необходимые для
правильной организации процесса управления.
В общем техника автоматического управления весь-
ма многогранна.
Продолжим прерванное нами ненадолго ознакомле-
ние с конкретными видами устройств и систем автома-
тики.
3. Автоматические оптимизаторы
Все, что было рассказано раньше, касалось глав-
ным образом процессов регулирования — стабилиза-
ции. Но бывает и так, что стабилизация не является
полезной. Во многих случаях является эффективным
применение автоматических оптимизаторов, принци-
пы построения которых будут сейчас рассмот-
рены.
Часто наивыгоднейшими условиями работы объекта
управления являются такие, при которых выходная ве-
личина, изменяющаяся в функции от входной, дости-
гает максимального значения. Поясним это примера-
ми. Наиболее высекая температура топочного устрой-
ства получается при подаче определенного количества
44
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
топлива. Если при заданном расходе воздуха количе-
ство поступающего топлива будет больше или меньше,
чем наивыгоднеишее, то тем-
пература будет уменьшаться.
Или другой пример. В хими-
ческом реакторе, в котором
взаимодействуют два веще-
ства, являющиеся компонен-
тами рабочей смеси, наи-
большая скорость реакции
достигается при определен-
ном составе смеси. Если один
из компонентов подавать за
единицу времени в неизмен-
ном количестве, а поступле-
ние второго в единицу вре-
мени постепенно увеличи-
вать, то скорость реакции
сначала будет расти, достиг-
нет максимума при наивы-
годнейшем соотношении ко-
личеств компонентов, а при
еще большем относительном поступлении второго ком-
понента начнет уменьшаться. Можно было бы приве-
сти очень много таких примеров из различных областей
техники. Во всех случаях выходная величина (в рас-
смотренных примерах температура топки, скорость
реакции), которую обозначим буквой ш, изменяется
в зависимости от входной величины (в наших приме-
рах количество топлива, количество второго компонен-
та смеси), которую обозначим буквой и, так, например,
как показано сплошной линией на рис. 8.
Казалось бы, что для обеспечения оптимальных
условий работы нужно просто поддерживать постоян-
ное значение и, при котором величина w максимальна,
используя для этого обычный регулятор-стабилизатор
режима такой, как регуляторы, с которыми мы позна-
комились раньше. Однако иногда это не представляется
возможным, так как значение и, при котором получа-
ется максимальная величина w, непредвиденным обра-
зом изменяётся с течением времени. Так, количество
топлива, необходимое -для получения в печи максималь-
3. АВТОМАТИЧЕСКИЕ ОПТИМИЗАТОРЫ
45
пой температуры, изменяется, если не остается строго
постоянным массовый расход воздуха, изменяющийся
с изменением температуры воздуха. Это количество
топлива зависит также от состояния облицовки печи
и может изменяться в зависимости от других факторов,
например калорийности топлива и иных, которые иног-
да трудно бывает оценить заранее. Во втором из приве-
денных примеров оптимальное количество второго ком-
понента, при котором получается наибольшая скорость
реакции, также может изменяться, если не остаются
неизменными другие, кроме ранее указанных, компо-
ненты смеси, а также если изменяется в процессе
работы степень активности катализатора, добавляемого
к смеси для ускорения реакции, и т. д. Поэтому по
прошествии какого-то времени характеристика йзмене-
ния w в функции от и, показанная на рисунке сплош-
ной линией, может стать такой, как одна, а потом
п другая, из характеристик, изображенных на рисунке
штриховыми линиями. При этом может изменяться и
величина и, для которой достигается максимальное зна-
чение гр, и изменяется это последнее значение, как
показано на рисунке.
Для объектов управления, имеющих такие характе-
ристики w = f(u), поддержание с помощью регулятора-
стабилизатора постоянного на все время значения и
неприемлемо. Практически обычно является невозмож-
ной и ручная перенастройка регулятора в процессе
работы. Для автоматического поддержания в этих
условиях оптимального режима работы применяют спе-
циальные устройства, называемые автоматическими
оптимизаторами или экстремальными регуляторами.
Схема системы с автоматическим оптимизатором изо-
бражена внизу на рис. 8. Здесь: 1 — объект управле-
ния, 2 — автоматический оптимизатор. Системы управ-
ления этого типа называют самонастраивающимися, так
Как они сами настраиваются на поддержание оптималь-
ного режима; их называют также поисковыми, так как
производится автоматически поиск точки экстремума
характеристики w = /(и).
Разработаны различные принципы построения авто-,
матических стабилизаторов. Рассмотрим две схемы ~
выполнения самонастраивающихся систем.
48
Ч. Т. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
Работа одной из них иллюстрируется графиком,
приведенным наверху слева на рис. 9. Пусть первона-
чально рабочей точкой характеристики w = /(и) явля-
ется точка А или точка В, не совпадающие с точкой
максимума С, и неизвестно, на какой из этих точек
характеристики работает объект управления. Это авто-
матически определяется следующим, образом. Величина
и изменяется немного, на Ди, и специальным датчиком
определяется знак приращения w. Величина w возра-
стает с увеличением и, если рабочей точкой характери-
стики ip = /(u) является точка А; если же рабочей
точкой является точка В, то ip уменьшается с увели-
чением и. В зависимости от результата автоматически
3. АВТОМАТИЧЕСКИЕ ОПТИМИЗАТОРЫ
47
проведенного, таким образом, исследования знака при-
ращения Ди? величины w формируется команда на
следующее уже большее, не пробное, а рабочее, изме-
нение входной величины и. Если оказалось, что при
увеличении и выходная величина w растет, то форми-
руется сигнал, по которому производится дальнейшее
увеличение и и происходит, следовательно, перемеще-
ние по характеристике w =» /(и) от точки А в сторону
точки максимума ее С. Если же оказалось, что при
пробном увеличении и значение w уменьшилось, то
формируется сигнал, по которому производится после-
дующее уменьшение ц, и происходит перемещение по
характеристике w « f(u) от точки В опять-таки в сто-
рону точки максимума С.
Рассматривая указанный выше график, мы предпо-
лагали, что во время автоматического поиска при проб-
ных изменениях величины и она получает положитель-
ное приращение Ди. Последнее не является обязатель-
ным, можно и уменьшать на Ди величину и. Совпаде-
ние знаков приращений Ди и Ди? (++ или —) указы-
вает, что рабочая точка находился на левой ветви
характеристики и? =» /(и). Несовпадение же их (+ —
или —Ь) указывает, что она находится на правой ее
ветви. В зависимости от того, какое получается сочета-
ние знаков Ди и Ди? при поисковом пробном небольшом
изменении величины и, осуществляется затем болей
значительное изменение в нужном направлении данной
величины.
Как это делается, покажем на примере самона-
страивающейся системы, в которой изменение величины
и, в данном случае это количество топлива, подавае-
мого в топочное устройство, производится с помощью
заслонки, приводимой в движение электродвигателем.
При вращении вала электродвигателя по часовой стрел-
ке величина и растет, а при вращении его в противо-
положном направлении она уменьшается. То или
другое направление вращения вала электродвигателя
получается (в зависимости от сочетания знаков Ди и
Ди?) с помощью контактного преобразователя, изобра-
женного в нижней части рис. 9. В зависимости от
того, каковы знаки Ди и Ди?, каждый из штоков 1 и 2
контактного преобразователя смещается в направлении,
43
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
показанном на рисунке стрелками. При сочетаниях
знаков ++ или------благодаря замыканию участков
I и II электрической цепи ток течет в направлении,
показанном стрелками 5, и вал электродвигателя I
вращается по часовой стрелке. При сочетаниях же
знаков 4- — или —Ь происходит замыкание участков
III и IV цени, направление тока меняется, и он течет
так, как показано стрелками 5, причем изменяется на
противоположное и направление вращения вала элек-
тродвигателя 4.
Таким образом, обеспечивается отыскание точки
максимума характеристики w = f(u). В последующем
также — раз за разом — производятся малые пробные
изменения входной величины и и затем несколько
большие рабочие изменения ее. При этом происходят
малые колебания около точки максимума. Они могут
быть в общем столь незначительными, что работа бу-
дет происходить, если иметь в виду указанную выше
характеристику, в окрестности точки максимума, и все
время будет пбддерживаться значение ш, близкое к
максимальному. Оно поддерживается автоматически
таким, как бы ни менялось с течением времени в соот-
ветствии с рис. 8 положение точки максимума.
До сих пор мы говорили о системе автоматидеской.
оптимизации, самонастраивающейся на поддержание
максимального значения выходной для объекта управ-
ления величины w. Часто возникает необходимость
и в применении автоматических оптимизаторов для
поддержания минимального значения характеризую-
щей рабочий процесс величины. Например, можно
веети управление топочным устройством не из усло-
вия получения максимальной температуры, как это
было раньше, а имея в виду обеспечение наиболее эко-
номичного режима его работы: при любых изменениях
с течением времени внешних условий должен дости-
гаться минимальный удельный расход топлива, то есть
минимальный расход его на единицу получаемой при
его сжигании тепловой энергии. Можно было бы при-
вести много и других аналогичных примеров. Во всех
этих случаях характеристика объекта управления та-
кого вида, как показано на рис. 9 наверху справа.
Повторяя все ранее проведенные рассуждения, нетруд-
3. АВТОМАТИЧЕСКИЕ ОПТИМИЗАТОРЫ
49
но убедиться в том, что все в данном случае остается
таким же, как и при отыскании и поддержании значе-
ния максимума. Все, за исключением того лишь, что
при сочетаниях знаков Ди и До? ++ и--------при по-
иске направление последующего рабочего изменения
величины и должно быть здесь противоположным по
отношению к тому, которое было необходимым при
поддержании максимума: такое сочетание знаков здесь
указывает на то, что в данном случае рабочая точка
находится на правой, а не на левой, как. это было рань-
ше, ветви характеристики w = f(u) (см. рисунок).
И наоборот, сочетание знаков +— или — + свидетель-
ствует теперь о том, что рабочая точка находится на
левой ветви рассматриваемой характеристики. В пер-
вом случае, в отличие от того, что было для характе-
ристики с максимумом, необходимо, чтобы рабочее
изменение величины и было таким, при котором и
уменьшается, а во втором величина и должна увеличи-
ваться. Для управления здесь может использоваться
то же, что и раньше, устройство. Только для изменения
направления вращения электродвигателя 4 на противо-
положное надлежит пересоединить провода: провод в
соединить с клеммой 7 электродвигателя, а провод 8 —
с клеммой Р.
Особенностью рассмотренной, а также и других
поисковых систем является то, что в процессе их функ-
ционирования можно выделить два повторяющихся раз
за разом движения: поисковое и рабочее. При работе
по указанной выше схеме они чередуются, они могут
и накладываться по времени одно на другое.
Укажем дальше еще одну схему построения авто-
матического оптимизатора. Хотя в этом случае тоже
автоматически поддерживается экстремальный режим
работы объекта управления, принцип поиска точки
экстремума отличается от ранее описанного. Как и
раньше, первоначально будем считать, что характери-
стика w = f(u) объекта управления имеет точку макси-
мума.
Принцип работы рассматриваемой самонастраиваю-
щейся системы проиллюстрируем сначала графиками,
изображенными на рис. 10. Слева показана характери-
стика w = /(и), справа наверху представлено, как ме-
50
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
няется величина w с изменением времени t, а ниже —
как меняется с течением времени величина и. Пусть,
например, начальные значения и и w определяются
точкой, которая на всех трех графиках обозначена
буквой О. -Пусть затем исполнительный орган управ-
ляющего устройства перемещается так, что величина
и растет и рабочая точка изменяет свое положение на
характеристиках w = /(и) и ш = <р(£), двигаясь от точ-
ки О по стрелке 1. При этом величина w сначала тоже
растет, достигает своего максимума, а потом начинает
уменьшаться. Когда w становится меньше максималь-
ного ее значения на bw (см. рисунок), автоматически
изменяется направление движения исполнительного
органа и величина и начинает уменьшаться, причем
рабочая точка на каждой из указанных выше харак-
теристик перемещается так, как показано стрелкой 2,
3. АВТОМАТИЧЕСКИЕ ОПТИМИЗАТОРЫ
51
Когда w становится меньше максимального значения
на снова автоматически изменяется направление
движения исполнительного органа и величина и опять
начинает расти. Это дальше повторяется раз за разом.
Таким образом, все время совершаются колебания
около точки максимума характеристики Не-
важно, если положение точки максимума изменяется
с течением времени, как было показано на рис. 8. Ре-
жим работы все время поддерживается близким к опти-
мальному.
Автоматические оптимизаторы, действующие таким
образом, выполняются по-разному. В качестве примера
в нижней части рис. 10 приведена схема пневматиче-
ского автоматического оптимизатора.
На рисунке показаны следующие элементы самона-
страивающейся поисковой системы: 1 — объект управ-
ления; 2 — элемент, преобразующий выходной сигнал
объекта управления в соответствующий ему сигнал
изменения давления сжатого воздуха; 3 — мембранный
элемент, в котором имеются гибкая мембрана 4, упор-
ный штифт 5, пружина 6 и клапан 7; 8 — переклю-
чающее устройство и исполнительный орган; 9 — пере-
пускной клапан, обычно закрытый и открывающийся
только на короткое время при поступлении специаль-
ного сигнала от переключающего устройства. В даль-
нейшем будем считать, что преобразователь 2 отно-
сится к объекту управления и что для последнего
выходной величиной w является давление воздуха.
Рассматривая процесс работы этого автоматическо-
го оптимизатора, еще раз обратимся к указанньш
выше характеристикам. Когда величина w растет, кла-
пан 7 открыт и в камерах под мембраной 4 и над ней
давление воздуха одинаковое. После того как достига-
ется максимальное значение ш, как только величина и?
начинает уменьшаться, клапан 7 закрывается. При
этом в камере над мембраной 4 сохраняется, или, как
говорят, запоминается, давление и?, которое было в мо-
мент достижения точки максимума характеристики.
В камере же под мембраной 4 текущее значение дав-
ления w уменьшается. Когда разность между запом-
ненным максимальным и текущим значением давления
Достигает заданной величины под действием этой
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
разности давлений мембрана 4, преодолевая силу за-
а яжки пружийы 6, отходит вниз от упорного штифта 5
и смещается книзу связанный с мембраной 4 шток.
Перемещение последнего используется для формирова-
ния сигнала переключения исполнительного органа на
движение в противоположном направлении и меняется
знак приращения величины и. Затем, с небольшим за-
паздыванием по времени, переключающим; устройством
формируется сигнал, по которому открывается пере-
пускной клапан 9 и на короткое время камера над
мембраной 4 сообщается с атмосферным воздухом. При
этом давление в ней падает и все устройство оказыва-
ется подготовленным к работе при следующем повыше-
нии давления ш, Дальше весь этот процесс раз за ра-
зом повторяется ‘при чередующихся движениях испол-
нительного органа в направлении увеличения и умень-
шения входной величины и.
Показанный на рис. 10 автоматический оптимизатор
также может использоваться для поиска и. поддержа-
ния экстремального значения шив тех случаях, когда
точкой экстремума характеристики w = /(и) является
точка минимума. Только в этом случае давление воз-
духа на выходе преобразователя 2 должно уменьшаться
при нарастании величины истинного выходного сигнала
объекта управления. Это достигается при включении
в действие в преобразователе 2 дополнительного эле-
мента — инвертора.
Автоматические оптимизаторы строятся и .по дру-
гим схемам. Например, в # некоторых автоматических
оптимизаторах” для индикации прохождения точки
экстремума характеристики w = /(и) используются по-
даваемые на вход объекта небольшие синусоидальные
колебания, суммирующиеся с основной входной вели-
чиной и, и используется то, что при прохождении этих
колебаний через объект управления фаза их в точке
экстремума изменяется на 180°. Применяются также
так называемые шаговые автоматические оптимизато-
ры, время работы которьц разбивается на отдельные
интервалы — шаги; запоминаются и сравниваются
между собой каждый раз запомненные максимальные
значения w на данном и на предшествующем шаге и на
основании этого сравнения формируется управляющее
4. ЛОГИКА И АВТОМАТЫ
53
воздействие. В зависимости от динамических свойств
объекта управления и от того, какие ставятся требо-
вания по точности поддержания экстремума и по ско-
рости реагирования на смещения экстремальной точки
характеристики w = /(и), оказывается более целесооб-
разным . применение автоматических оптимизаторов
одного или другого из указанных выше типов. Учиты-
вается, конечно, и степень сложности конструктивного
выполнения различных оптимизаторов.
4. Логика и автоматы
Продолжим обзор принципов работы устройств
автоматического управления. Расскажем, как выпол-
няются логические операции. Посмотрим, что можно
делать с помощью логических элементов и элемен-
тов памяти.
Область возможного применения устройств автома-
тического управления значительно” расширяется при
использовании элементов, выполняющих логические
операции, которые для краткости просто будем назы-
вать логическими элементами. Прежде чем рассмотреть
схемы построения таких элементов, укажем, что вооб-
ще будем иметь в виду, говоря об устройствах логиче-
ского действия.
Как мы могли бы определить, что в своих собствен-
ных действиях мы обычно считаем логичным, логиче-
ски оправданным? Поставив перед собой некоторую
цель, мы считаем правильными, логичными те дейст-
вия, которые ведут к ее достижению.
Во многих случаях мы можем указать точный рас-
порядок действий, которому нужно следовать при неко-
торой одной ситуаций, и правила действий, которым
нужно следовать при других возможных ситуациях, для
того чтобы решить поставленную нами задачу. Можно
поручить затем автоматическому устройству реализа-
цию соответствующего алгоритма (слово «алгоритм»
уже встречалось нам раньше). Поясним это примерами.
В качестве первого примера укажем рассмотренный
нами раньше процесс автоматического управления объ-
ектом, характеристика которого, имеющая точку мак-
симума, была изображена па рис. 9. Было сказано, что
54
Ч. I. УСТРОЙСТВА И СИСТЕМЫ, АВТОМАТИКИ
в зависимости от соотношения знаков Ди и Дш при
поисковом небольшом изменении величины и должен
решаться вопрос о том, в каком направлении следует
затем менять величину и с тем, чтобы приблизиться
к точке максимума w. Эту задачу можно решать как
логическую. Как это делается и как строится автомати-
ческий оптимизатор на логических элементах, расска-
жем позднее, после того, как разберемся со схемами
построения логических элементов.
Приведем еще пример, показывающий, как прово-
дятся человеком логические рассуждейия, которые
затем могут быть представлены в виде задания авто-
матическому устройству. Последнее при различных
ситуациях должно действовать так же, как это делал
бы человек, давший ему задание. Пусть, например, для
контроля за состоянием воздуха в производственном
цехе предприятия химической промышленности исполь-
зуется прибор, который поочередно подключается чело-
веком-оператором к различным участкам помещения.
Совершенно недопустимо возникновение в воздухе
взрывоопасной концентрации газов, которые попадают
в него при неисправном состоянии технологического
объекта. Контрольный прибор обычно дает правильные
показания, и лишь очень редко проскакивают ошибоч-
ные. Проследим за ходом логических рассуждений
человека, следящего за показаниями контрольного
прибора, при следующих ситуациях. Пусть на каком-то
участке создалась, как показал прибор, опасная кон-
центрация газов в воздухе. Это означает, что нужно
немедленно приостановить работу всех технологиче-
ских установок цеха, что повлечет за собой большие
потери. Поэтому естественным, логически оправданным,
является желание оператора тут же произвести конт-
рольное измерение, чтобы убедиться в том, что первое
показание прибора не было ошибочным. Дальше име-
ются две возможности. Может быть так, что второе
показание совпадает с первым. Тогда уже больше сом-
нений быть не может и нужно останавливать техноло-*
гическии процесс. Может же случиться и так, что при
втором измерении не подтвердится первое показание.
Тогда возникнет неясность: какому из двух показаний
следует верить? Для того чтобы решить вопрос, нужно
k. ЛОГИКА И АВТОМАТЫ
55
в этом случае провести третье измерение. При этом
опять-таки имеются две возможности. Третье показа-
ние может подтвердить первое. Тогда нужно считать
второе случайным, ошибочным, и остановить процесс.
Если же третье показание такое же, как и второе, то
следует считать первое ошибочным. При этом Не сле-
дует выключать технологические установки ц? работы
и продолжать поочередное подключение контрольного
прибора к другим участкам цеха.
Мы видим здесь, как проводятся логические рассуж-
дения человеком. Цепь их ветвится: если возникнет
одна ситуация, то нужно делать то-то и так-то, если
другая, то следует идти по иному пути, и так посту-
пать многократно. Такие рассуждения могут быть
переведены на язык логических формул, или, как го-
ворят, формализованы. Эти формулы указывают, какие
в каждом случае нужно взять логические элементы
и как их соединить между собой для того, чтобы все
нужные логические действия выполнялись построенным
таким образом автоматическим устройством.
В области автоматического управления возникают
иногда задачи в сотни и тысячи раз более сложные,
чем указанные выше^ если иметь в виду количество
возможных различных ситуаций и многократность вет-
вления путей решения. Сколь угодно сложные устрой-
ства, выполняющие такие функции, могут строиться
при использовании логических элементов всего лишь
нескольких различных типов.
Принцип действия некоторых типовых логических
элементов иллюстрируется рис. 11. Наверху показана
схема элемента, выполняющего логическую операцию,
называемую операцией отрицания; говорят также, что
это элемент НЕ. При пропускании электрического тока
через обмотку 1 электромагнита 2 к якорю электромаг-
нита притягивается контактная пластинка 3 и при этом
прерывается ток в проводнике 4. Введем следующие
обозначения: х — наличие или отсутствие тока в об-
мотке 7, у — в проводнике 4. Если ток протекает, то
будем считать, что соответственно х и у равняются
единице, а если нет, то примем их равными нулю. Тог-
да зависимость между у и х представляется для рас-
сматриваемого элемента таблицей, расположенной ниже
56
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
х i
0—
X
у=Ух
У
ТГ I
о
4
У
0
О
о
1
х%.
~0
1
0
/.
о
о
/
/
рисунка; условно эта зависимость записывается в виде
у = х. Мы имеем дело .здесь с переменными величи-
нами х и у, каждая из которых может принимать всего
два значения: 1 или 0. Величина у является функцией
от х. Такие переменные вели-
чины называются булевыми
переменными; функции та-
кого рода тоже называются
булевыми функциями.
Двумя другими элемен-
тами, изображенными на
рис. И, реализуются функции
от двух булевых перемен-
ных. Элемент, показанный в
средней части рисунка, отли-
чается от ранее рассмотрен-
ного тем, что здесь имеются
два электромагнита 2 и дво
контактные пластинки 5, раз-
мыкающие проводник 4, ког-
да ток не пропускается че-
рез обмотки 1 одного и дру-
гого электромагнита. Если
ток протекает по обмоткам 1
и в проводнике 4, то это обо-
значается соответственно как
Xi = 1, ^2 = 1, у » 1, а если
тока нет, то Xi в 0, х2 = О,
у «=» 0. Функциональная за-
висимость между у й Xi и х2
определяется так, как указа-
но в таблице, расположен-
ной под схемой элемента*
Данная функция, для кото-
рой принято обозначение у =
= Xi &х2 имеет специальное
название: конъюнкция. Так
как у в> 1 только в том
и х2 = 1, то элементы этого типа
Рис. 11.
случае, если = 1
называются элементами И. Внизу на рис. 11 показал
элемент, при работе которого у =» 1, если или xi = 1,
или х2 «* 1 (или же обе эти переменные равны 1). Он
4. ЛОГИКА И АВТОМАТЫ 57
называется элементом ИЛИ. Выполняемая им логиче-
ская функция, обозначаемая у == V я2, тоже имеет
особое название: дизъюнкция.
Достаточно иметь элементы указанных выше трех
типов, то есть элементы НЕ, И, ИЛИ, чтобы можно
было реализовать любые логические функции, какими
бы сложными они ни были (может лишь потребоваться
для их реализации, в зависимости от степени их слож-
ности, большее или меньшее количество элементов
каждого из этих типов). Более того, для реализации
любых логических функций достаточно даже иметь
только элементы НЕ и И или только элементы НЕ
в ИЛИ.
Однако при использовании лишь этих элементов
схемы устройств логического действия получаются
иногда недостаточно простыми. Стремятся же обычно
к созданию возможно более простых устройств, реали-
зующих заданные функции. Часто уменьшение общего
количества элементов в схеме достигается путем ис-
пользования не только логических элементов указанных
выше типов, но и иных.
Другие из логических элементов основных типов
представлены на рис. 12. На рисунке наверху изобра-
жены логические элементы, выполняющие функции,
обозначаемые соответственно как у = я2, у »
= £1 ® я2, */ = я* Что представляет собой каждая
из этих функций, ясно из рассмотрения таблиц, при-
веденных под схемами элементов. Первую из этих
функций называют функцией равнозначности, так как,
согласно таблице, у = 1 только при совпадающих зна-
чениях Xi и я2: 0 и 0, 1 и 1. Вторая из рассматривае-
мых функций называется функцией неравнозначности,
по-другому ее называют «сумма по модулю 2». Третья
из этих функций называется импликацией. Слева в
средней части рис. 12 изображен элемент, выполняю-
щий функцию, называемую функцией запрета. Назва-
ние это связано с тем, что при х2 = 1 запрещается
передача сигналов Действительно, при х2 e 1 имеем
У в 0, какими бы- ни были значения xt; если же х2 == О,
то значения у совпадают со значениями
Существует еще два типа логических элементов,
особенностью которых является следующее. Элементы
Ч. Т. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
каждогч типа достаточны для того, чтобы, используя
только их, можно было строить любые логические уст-
ройства, пусть даже содержащие сравнительно большое
общее количество элементов. Это элемент НЕ И, вы-
полняющий функцию, называемую «штрих Шеффера»,
Рис. 12.
которая обозначается у == xjx2 и определяется следую-
щим образом: при комбинациях значений и х2, ука-
занных в таблицах для ранее рассмотренных других
элементов (то есть при сочетаниях 00, 01, 10, И), зна-
чения у соответственно равны 1, 1, 1, 0. Есть и другой
такого же рода логический элемент. Это элемент НЕ
ИЛИ, выполняющий функцию, которую называют
4. ЛОГИКА И АВТОМАТЫ
50
«стрелка Пирса», обозначаемую у == I хг и опреде-
ляемую так: при. указанных выше сочетаниях значений
и Хг функция их у принимает соответственно значе-
ния 1, 0, 0, 0. Попробуйте, читатель, сами нарисовать
схемы элементов НЕ И и НЁ ИЛИ, представляя их
аналогично тому, как это было сделано для других
типовых элементов на рис. 11 и 12.
Назвав два последних элемента и перечислив ос-
тальные, о которых говорилось раньше, мы вообще
перебрали все возможные значения у при рассмотрен-
ных комбинациях значений Xi и х2. Таким образом, мы
познакомились со всеми типами первичных элементов,
реализующих логические функции от двух перемен-
ных Xi и х2.
Для упрощения схем построения устройств логиче-
ского действия могут использоваться при необходимо-
сти элементы, реализующие логические функции и бо-
лее чем от двух переменных. Примером может служить
показанный в средней части справа на рис. 12 четы-
рехвходовый элемент И, с помощью которого реализу-
ется функция у » #1 & х2 & х2 & Хъ
Для того чтобы пояснить, как строятся устройства,
выполняющие в системах автоматического управления
логические операции, разберем более подробно первый
из рассмотренных раньше примеров. Покажем, как
можно представить в виде устройства логического дей-
ствия автоматический оптимизатор, производящий по-
иск точки максимума на представленной слева на рис. 9
характеристике w « /(и) объекта управления.
Имея в виду возможность различных сочетаний
знаков приращений переменных и и введем для
обозначения знаков (+ или — согласно рис. 9) специ-
альные обозначения. Будем делать это в зависимости
от того, как будет для нас удобнее, одним или другим
способом.
Первым способом введем обозначения следующим
образом. Если при поисковом движении величина Ди
имеет знак + или —, то будем это обозначать соответ-
ственно как Xi «= 1 и Xi« 0. Также для знаков + и —
при Дде введем соответственно обозначения х2 = 1<а
^2 == 0. Для знаков же изменения величины и при
основном рабочем движении, следующем за поисковым,
60
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
введем обозначения: у = 1, если величина и растет,
и у = 0, если она уменьшается.
Вторым способом знаки приращений обозначим, ис^
пользуя лишь одни буквенные обозначения. Там, где,
согласно первому способу, было бы указано xt =
х2 = 1, у = 1, просто будем писать я?, х2, у, а там, где
было бы указано Xt = 0, х2 = 0, будем писать ^i, ~^хи
Пользуясь второй системой обозначений, представим
в виде логической формулы то, что применительно к
данным нашего примера мы могли бы словами выразить
так: если при поиске положительны и Ди и Дw или;
отрицательны и Ди и Дш, то для движения по направ-
лению к точке максимума характеристики w = /(и)
нужно, чтобы при последующем основном изменении и
ее величина росла бы. В формульной записи это пред-^
ставляетея следующим образом: у = & х2) V [ (~Ъ1) &
&Гя2)].
Как только получена формула, описывающая нуж-|
ные логические действия, тут же может быть начерч
чена схема выполняющего их устройства. Из написан-j
ной формулы прямо следует, какие нужно взять!
элементы и как их следует соединить между собой.]
Для нашего случая схема реализации рассматриваемой
логической функции с помощью логических элементов]
И, ИЛИ, НЕ приведена внизу слева на рис. 12. На этой
схеме логические элементы изображены в виде квадра-
тиков, в каждом из которых написано, какая *логиче--
ская функция, выполняется данным элементом. Вообще^
Же при представлении логических схем пользуются
специальными условными обозначениями элементов?
Такие обозначения элементов И, ИЛИ, НЕ приведены^
на рис. 12 рядом со схемой, о которой было расска-
зано.
Рассматривая решение поставленной задачи, мы до
сих пор предполагали, хотя это и не оговаривалось, что
в нашем распоряжении имеются лишь логические эле-’
уенты НЕ, И, ИЛИ. При использовании элемента
другого типа рассматриваемая задача может быть ре-
шена иначе, чем это было указано. Но об этом скажем
позднее.
Пока же заметим, что коль скрро имеется формула,
описывающая заданную функцию, можно, используяf
4. ЛОГИКА И АВТОМАТЫ
б*
данную формулу, представить рассматриваемую функ-
цию также и таблицей (аналогично тому, как это
делалось раньше для типовых логических элементов).
Для того чтобы построить таблицу, перейдем от второ-
го к первому способу обозначений, имея в виду, что
при = 1 будет Ъ, = 0, а при = 0 будет = 1
и что то же относится и к х2 и пж2. Составляя таблицу,
сначала выполняем действия, указанные в скобках,
а затем, рассматривая выражения в скобках как ис-
ходные переменные, получаем и окончательные значе-
ния у, отвечающие различным сочетаниям значений
Xi и х2. Выполняя все эти действия, которые указаны
в приведенной на рис. 12 внизу таблице, на каждом
этапе используем то, что указано'в таблицах соответ-
ствующих функций НЕ, И и ИЛИ, представленных
на рис. 11.
Выделяя, как показано на рис. 12, из всей таблицы
только начальные ее столбцы, в которых представлены
различные сочетания значений Xi и х2, и последний
столбец со значениями у, получаем таблицу, сравнивая
которую с таблицей для элемента, выполняющего функ-
цию равнозначности, убеждаемся в их идентичности.
Какие же из этого можно сделать выводы?
Прежде всего вывод о том, что рассматриваемая
функция есть функция равнозначности. Если бы мы
раньше были более внимательны, то обратили бы вни-
мание на это сразу же, когда была указана словесная
формулировка задачи. Но практически это нам ничего
не дало бы, если бы мы могли строить схему только
на элементах И, ИЛИ, НЕ. Если же в нашем распо-
ряжении имеется логический элемент, реализующий
функцию равнозначности, то один-единственный такой
элемент может производить основную операцию из чис-
ла тех, с выполнением которых связана работа рас-
сматриваемого оптимизатора. Следовательно, и пере-
ключатель, показанный на рис. 9, может быть представ-
лен как логический элемент, реализующий функцию
равнозначности.
Из того, что рассмотренная функция есть у = хх со х2
и, вместе с тем, как было выяснено, есть у = (xt & х2) V
V & О^г)], следует, что со х2 = (xi & х2) V
• К Ъ1) & Oz2)]. Это одна из логических формул, по-
62 Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ ,
’ - лучаемых при использовании правил действия с буле-
выми переменными.
Возможно будет интересным для вас, читатели,
узнать, откуда происходят названия булевы перемен-
ные, булевы функции. Разработал булеву алгебру —
правила действий с логическими переменными, прини-
мающими лишь одно из двух значений «1» или «О»,
английский математик Дж. Буль (отец известной
писательницы Этель Лилиан Войнич, автора романа
«Овод»). С его именем и связаны указанные выше
названия.
Подходы к синтезу устройств логического действия,
проиллюстрированные нами простым примером, в об-
щем остаются такими же и тогда, когда решаются зна-
чительно более сложные задачи. При этом не всегда
наиболее простая схема устройства получается обяза-
тельно при применении элементов, реализующих функ-
цию равнозначности. Иногда наиболее простой вариант
схемы может быть получен при использовании элемен-
тов И, ИЛИ, НЕ, в других случаях при применении
элементов других типов. Чем большее количество раз-
нотипных элементов имеется в распоряжении разра-
ботчика схемы, тем больше обычно возможности выпол-
нения ее с использованием минимального общего числа
элементов.
Во все рассмотренные нами до сих пор функцио-
нальные зависимости между логическими переменными
время не входит. Предполагается, что они реализуются
единовременно.
Но ведь в обоих примерах, которые были приведе-
ны, изменения различных величин происходили в раз-
личные моменты времени. В инерционном объекта
управления с характеристикой, имеющей экстремум,
сначала производится изменение величины и на Ди,
потом получается изменение на Ди; величины и;, и за-
тем уже, после определения сочетания знаков Ди и
Ди;, формируется сигнал управления основным измене-
нием в нужном направлении величины и. При рассмот-
рении второго примера также указывалось, что после-
довательно одно за другим производятся измерения
для выяснения того, не получилась ли взрывоопасная
смесь газов с воздухом, и затем лишь сопоставляются
4. ЛОГИКА И АВТОМАТЫ
63
результаты этих измерений. В обоих этих случаях и в
ряде других, для того чтобы можно было произвести
указанные выше единовременные логические действия,
нужно сначала запомнить значения соответствующих
величин в предшествующие моменты времени. Так как,
выполняя логические функции, мы оперируем с буле-
выми переменными, принимающими лишь одно из
возможных для них значений 1 или 0, нужно и запо-
минать такие же величины. Такое запоминание дис-
кретных величин, принимающих в заданные моменты
времени значения 1 или 0, отличается от запоминания
непрерывно изменяющихся величин, например от запо-
минания максимальной величины давления воздуха
при работе автоматического оптимизатора, изображен-
ного на рис. 10.
Таким образом, для выполнения указанных логиче-
ских операций оказываются необходимыми также и
элементы памяти, запоминающие в отдельные моменты
времени дискретным образом сигналы 1 или 0. Их так
и называют дискретными элементами памяти. Вообще
же устройства и системы логического действия разде-
ляются на два класса: однотактные, или комбинацион-
ные, которыми все операции производятся единовре-
менно, и многотактные, или последовательностные, дей-
ствующие в различные следующие один за другим
моменты времени.
Принцип работы дискретного элемента памяти ил-
люстрируется схемой, представленной на рис. 13 на-
верху слева. На схеме показаны электромагниты I, 2
и 3 и проводник 4, по которому протекает ток, когда
замкнуты контакты 5 и 6. Обмотка электромагнита 2
представляет собой участок цепи, в которую включен
проводник 4. В отсутствие тока в обмотках всех трех
электромагнитов контакт 5 разомкнут, а контакт 6
замкнут. Для замыкания контакта 5 достаточно, что-
бы ток проходил по обмотке хотя бы одного из элек-
тромагнитов 1 или 2, Примем обозначения х == 1 и
^ = 0 и яс = 1 и хс = 0 соответственно для случаев,
когда есть или отсутствует ток в обмотках электромаг-
нитов 1 и 3, и обозначения х3 = 1 и х* — 0 для фактов
наличия или отсутствия тока в проводнике 4. Здесь
х — запоминаемая величина, яэ — запомненное ее зна-
64 •
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
чение, хс — сигнал команды стирания запомненного
значения х.
Работает элемент памяти следующим образом. Если
первоначально было х = 0, х3 = 0 и хс « 0, то при не-
изменном х определяемое этими значениями величин
Рис. 13.
я, х3 и гс0 состояние элемента памяти может сохранять*
ся сколь угодно долго. При изменении х с х === 0 на
х « 1 становится и х3 « 1. Последнее значение х9 удер*
к. ЛОГИКА И АВТОМАТЫ
65
жпвается прилгс = 0, если значение х изменяется затем
с х == 1 на гг == 0. Иначе говоря, запоминается то, что
был подан сигнал х == 1. Это состояние элемента памя-
ти также удерживается сколь угодно долго, если толь-
ко "ие поступает сигнал хс=1, по которому произво-
дится стирание ранее запомненного значения я3 = 1.
Сигнал xG = 1 подается так: кратковременно пропуска-
ется ток через обмотку электромагнита 5, причем раз-
мыкается контакт 6', что приводит при ж = 0 к размы-
канию и контакта 5 (так как выключается ток в об-
мотке электромагнита 2). После подачи сигнала х0 = t
восстанавливается исходное состояние х « 0, х3 0,
хс = 0, при котором элемент памяти подготовлен к за-
поминанию следующего сигнала. Если это будет
х = 0, то сохранится /3 = 0. Если же поступит сигнал
х«1, который может быть потом п будет снят/па
выходе запомнится х3 = 1. И так будет до поступления
следующей команды яс'=1, по которой поизводится
стирание запомненного значения х3 величины х. По-
следовательные состояния* элемента памяти указаны в
таблице около схемы элемента па рис. 13. Строки таб-
лицы отвечают различным, следующим один за другим
моментам времени. Дискретный элемент памяти, рабо-
тающий таким образом, называют также триггером
с раздельными входами, имея ц, виду, что как входные
величины могут рассматриваться х и хс.
Приведенные выше схемы электромагнитных кон-
тактных элементов, применяемых в некоторых устрой-
ствах автоматики, дают наглядное представление о
принципах выполнения элементарных логически <
операций и о принципе запоминания дискретных сиг-
налов. Наиболее же широкое применение получили
полупроводниковые (транзисторные) логические эле-
менты и элементы памяти и магнитные элементы па-
мяти. Они используются при построении электронных
вычислительных и управляющих машин и в различно-
го рода электронных устройствах, применяемых в си-
стемах автоматического управления.
О физике полупроводниковых элементов говорить
здесь не будем. С этим читатель, вероятно, хороню
знаком. В школьном учебнике для 9-го класса описаны
полупроводниковые диоды, термисторы и фотосопротив-
3 Л Л, Залмаи.»он
66 Я. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
ления 1). Там же указано,’ что представляют собой
электронно-лучевые трубки, что такое ферромагнетик !
и как происходит остаточное их намагничивание. На-
писано в школьном учебнике и о том, что такое элек-
тронная и дырочная проводимость и примесная прово-
димость. Рассказано там о донорных и акцепторных
примесях, о том, как течет электрический ток через
контакт полупроводников р- и n-типов, в р—п-переходо.
‘ Все это используется при разработке электронных
логических элементов. Этого мы касаться не будем,
а рассмотрим лишь функциональные схемы логических
элементов.
Полупроводниковые четырехвходовые логические
элементы И и ИЛИ изображены на рис. 13 вверху.
Первый из них посредине, второй справа. В элементе
И на каждом из его входов имеется дюлупроводниковый
диод, включенный так, что на выходе элемента созда-
ется соответствующее сигналу у = 1 напряжение толь-
ко в том случае, если подано напряжение того же
уровня на все входы элемента, чему отвечает = 1,
х2 = 1, xs = 1, = 1. На схеме показано электрическое
сопротивление-резистор, через которое элемент соеди-
нен с положительным источником электрического ток я.
В элементе ИЛИ диоды включены противоположным
образом. При этом выходной сигнал у = 1 получается,
если хотя бы одна из величин х2, хъ или xk прини-
мает значений 1. На рисунке изображены лишь один
элемент одного типа и один другого. При изготовлении
элементов и устройств логического действия способом
1) В предисловии к книге было оговорено, что она рассчи-
тана на широкий круг читателей, начиная со школьников-де-
сятиклассников, и что при ее написании принимались во
внимание сведения, которые дает сейчас учащимся средняя
школа. Делая в дальнейшем ссылки на школьные учебники,
будем иметь в виду следующие принятые в СССР для обуче-
ния в старших классах книги, каждая из которых с 1973 г.
п до времени написания нашей книги в 1980 г. была выпу-
щена издательством «Просвещение» многомиллионными тира-
жами. Это: учебники «Физика» для 9-го класса (авторы
Б. Б. Буховцев, 10. Л. Климонтовпч, Г. Я. Мякишев) и для
10-гох класса (авторы Г. Я. Мякишев и Б. Б Буховцев) и
учебные пособия «Алгебра» для 8-го класса (под редакцией
А? И. Маркушевича): «Алгебра и начала анализа» для 9-го я
10-го классов (под редакцией А. Н. Колмогорова). .
4. ЛОГИКА И АВТОМАТЫ
67
интегральных схем, о котором мы еще будем говорить
в дальнейшем, в миниатюрной пластинке размещается
большое количество транзисторов, диодов и резисторов,
с помощью которых могут выполняться различные ло-
гические функции.
Эти же составные компоненты интегральных схем
используются и для запоминания сигналов. В полупро-
водниковых элементах памяти запоминание сигналов
производится в принципе так же, как это было указа-
но для рассмотренного, ранее нами элемента памяти:
так же используется обратная связь по выходному
сигналу.
Применяется и целый ряд других элементов и уст-
ройств памяти. Широко используются магнитные уст-,
ройства, в которых происходит запоминание сигналов
1 или 0 при намагничивании соответственно в одном
п в другом направлении участка магнитного материала.
К числу их относятся устройства памяти с магнитной
лептой, магнитным барабацом или магнитными диска-
ми. В. устройствах автоматики и вычислительной тех-
ники запись дискретных сигналов 1 и 0 на магнитной
ленте, их запоминание и стирание производятся так
же, как это делается в магнитофонах, с той лишь раз-
ницей, что в последних запоминаются непрерывные
электрические сигналы. Поверхность магнитных дисков
пли барабана покрыта слоем магнитного материала.
Каждый из малых участков поверхности используется
в качестве отдельного элемента памяти. Диски или ба-
рабан вращаются с большой угловой скоростью. Запись
запоминаемых сигналов и считывание ранее запомнен-
ных производятся в строго определенные моменты
времени, когда соответствующий участок поверхности
проходит около головки записи — считывания. В левой
vacTn рис. 13 такая головка показана рядом с бараба-
ном 1. В головке 2 имеются обмотка записи 3 и обмот-
ка считывания 4. Когда бывает нужным ввести инфор-
мацию (.сигналы 1 пли 0), которая должна быть запом-
нена соответствующим участком магнитного слоя по-
верхности,, в момент прохождения его около головки
пропускается ток по обмотке 3; при этом производится
намагничивание данного участка. Изменение же на-
правления намагничивания материала поверхностного
з*
<3
Ч. Г УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
слоя при ранее произведенном запоминании сигнала
обнаруживается с помощью обмотки 4. *
Другим видом магнитных запоминающих устройств ;
являются тороидальные ферритовые сердечники, кото- ;
рые обычно соединяются проводами по схеме, показан-
ной в правой части рис. *13. При пропускании тока по
одному из вертикальных проводов 1 и одному из гори-
зонтальных проводов 2 изменяется нужным образом
магнитное состояние сердечника, через который прохо-
дят эти провода, причем запоминается им поданный
таким образом сигнал. Состояние других сердечников
при этом остается неизменным. Провод 5, который про-
ходит через все сердечники, служит для считывания
запомненных сигналов. Считывание также производит- -
ся при воздействии на сердечник совпадающих токов, .
пропускаемых через проходящие через данный сердеч- ;
пик провод 1 и провод 2. Для того чтобы после считы-
вания сохранялись запомненные сигналы, автоматиче-<
ски производится восстановление считанной инфор-
мации.
В последнее время начинают • все более широко
применяться запоминающие устройства на "магнитных
доменах. Доменами называются участки магнитного
материала, направление намагниченности на которых
отличается от направления намагниченности на других
его участках. Такой участок 1 пластины 2 показан вни-
зу слева па рис. 13. Пбд воздействием внешнего маг-
нитного поля домены могут перемещаться в заданном
направлении. Домены могут создаваться и уничто-
жаться. Сигналы 7 запоминаются путем перевода до-
мена в заданную точку пластины, отсутствие домена в
данной точке воспринимается как сигнал 0. Основное
значение имеют цилиндрические магнитные домены,
(сокращенно ЦМД), которые, если их просматривать
под микроскопом, имеют вид пузырьков. Домены видпы z
под микроскопом, так как они поворачивают плоскость
поляризации света. Запоминающее устройство на ЦМД
называют иногда пузырьковым. Основным элементом
пузырьковых запоминающих устройств является маг-
нитный кристалл, содержащий домены. На этот кри-
сталл наносятся пермаллоевые аппликации, служащие
для перемещения доменов. При вращении внешнего
4 ЛОГИКА И АВТОМАТЫ 60
магнптпого поля Н, как показано стрелкой па рис. 13
внизу справа, на концах Т-рбразйых аппликаций соз-
даются магнитные полюсы, знаки которых изменяются
каждый раз при повороте на 90° вектора напряженно-
сти внешнего магнитного поля IL Это используется
тля управления движением доменов. Домепосодержа-
щпй кристалл снабжается устройством считывания сиг-
налов и устройством для стирания при необходимости
запомненных сигналов. С помощью ЦМД не только
запоминаются сигналы, но также могут выполняться
и все рассмотренные нами ранее логические операции.
Разработаны также и другие запоминающие уст-
ройства: магнитные устройства па многоотвёрстпых ,
ферритовых пластинах, заменяющих комплекты ферри-
товых сердечников; запоминающие устройства с элек-
тронно-лучевыми трубками и иные. Имеемся и ряд
полупроводниковых запоминающих устройств: выпол-
няемые по способу интегральных схем на основе ме-
талл — окисел — полупроводник (МОП-транзпсторы),
на основе металл — нитрид — окисел — полупроводник
(МНОП)* на приборах с зарядовой связью (ПЗС).
Во многих случаях запоминание сигналов произво-
дится вместе с выполнением логических функций.
На этом закончим разговор о логических элементах
и устройствах памяти.
Может быть, по тому, чтб было рассказано, у вас
возникли вопросы. Почему логическая функция нерав-
нозначности по другому называется «сумма по модулю
два»? Почему разрабатывается так много различных
элементов и устройств памяти? Как следует понимать
то, что было сказано о запоминании сигналов вместе
с выполнением логических функций? Ответим на эти
вопросы по ходу следующих наших бесед.
А на один вопрос, более общий, ответим уже сей-
час. Что вообще можно делать с помощью логических
элементов и элементов памяти? С их помощью можно
реализовать любой алгоритм, ' то есть обеспечить ре-
шение любой задачи, для которой можно-указать, какие
ведущие к ее решению действия и в какой последова-
тельности нужно выполнять. Имея в виду, что в ре-
альных условиях любые устройства, автоматически вы-
полняющие эти действия, содержат конечное число
70
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ ’
входных и выходных каналов и конечным являетеч
число состояний элементов, их назвали конечными
автоматами. Конечными автоматами являются и элек-
тронные вычислительные цифровые машины, примене-
ние которых в области автоматического управления
приобретает все большее щ большее значение. Им мы
посвятим следующую нашу беседу.
5. ЭВМ в автоматике. Микропроцессоры
С применением электронных вычислительных
машин (ЭВМ) техника автоматического управления
вступила в новую стадию своего развития. Расска-
жем о том, как работают ЭВМ, как они устроены,
каковы их применения в области управления.
Наряду со всем этим интересно и практически важ-
но знать методы программирования решения задач на
ЭВМ. Но этого вопроса мы касаться не будем. Автор
с радостью рассказал бы и о программировании, только
вряд ли это было бы здесь целесообразным. Уже около
десяти лет прошло с тех пор, как средняя школа пере-
шла на обучение по новым программам, и этот вопрос
освещается в учебнике по алгебре для .8-го класса.
Программированию решения задач,на ЭВМ при этом
уделяется все большее внимание. В учебниках, которы-
ми пользовались школьники в начале и в середине
семидесятых годов, уже был раздел о программирова-
нии и было показано, как программируется решение
алгебраических задач па алгоритмическом языке
АЛГОЛ-60. В новом учебнике по алгебре для 8-го
класса, выпущенном в 1979 г., этот раздел, который
называется «Алгоритмы и элементы программирова-
ния» значительно расширен. В него включены три
самостоятельных подраздела: «Понятие об алгоритмах
и способы их записи», «Блок - схемы алгоритмов»/
«Начальные сведения о программировании для ЭВМ».
Вряд ли следует* повторять в нашей книге то, что есть
в школьном учебнике. Если наш читатель с этим не1-
знаком, так как учился в годы, когда все это в школе-
не изучали, отошлем его к книге, которую мы указали.
Расскажем об ЭВМ и их применениях в автоматике
то, чего в школьном учебнике нет. <
5. 9Blrf В АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ
71
При решении многих задач управления приходится
производить вычислительные операции: складывать,
вычитать, умножать и делить числа. К выполнению
таких операций сводится п решение дифференциальных
уравнений, описывающих _ процессы работы систем
автоматического управления; при этом производные
приближенно заменяются приращениями переменных
за заданный, условно единичный промежуток времени,
и заменяются значения каждой величины полусуммой
ее значений в начале и в конце данного промежутка
времени. С помощью вычислительных машин можно
обрабатывать не только цифровые данные, но и смыс-
ловую информацию, черпаемую из книг, статей, отчетов
или получаемую со слов человека, можно решать логи-
ческие задачи и синтезировать специализированные
устройства, служащие для решения таких задач.
Все цифровые операции выполняются вычислитель-
ными машинами, при работе которых используется
двоичная система счисления. Для того чтобы пояснить,
что она собой представляет, напомним сначала, как
определяются числа -в обычно принятой нами десятич-
ной системе счисления. Возьмем для примера число
369, в котором имеется 9 единиц, 6 десятков и 3 сотни.
Это число, так же как и любое другое обычное для нас
десятичцое число, можно представить в следующем
виде: ...+ е • 104 + 6 • 103 + «у • 102 + р • 101 + а • 10а, где
а — число единиц (10° =1), р — число десятков, 7 —
число сотен, б — число тысяч и т. д. Для числа 369
а = 9, р = 6, 7 = 3, б = е = .. . == 0. Цифры а, р, 7,
б, е, ..каждая из которых для различных чисел может
иметь значения от 0 до 9, называются коэффициентами
разрядов, а 10°, 101, 102, 103, 104, ... называются осно-
ваниями разрядов. Такая система представления чисел
называется десятичной.
Любое число может быть представлено и в двоичной
системе счисления, в которой основания разрядов рав-
ны 2°, 21, 22, 23, 24, .. ., а коэффициенты разрядов
Р» 7» б, 8, ... могут принимать лишь одно из двух
значений 1 или 0. При этом разделенное по разрядам
выглядит следующим образом: ... + 8 • 24 +•
у б • 23 4- 7.22 4- £ • 21 + а • 2°. Например, для пред-
варения в двоичной системе счисления любых деся-
72 ' Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
тичных цифр от 0 до 9 нужно не более четырех дво-
ичных разрядок. При этом, как и в десятичной системе
счисления, основания разрядов имеются в виду, но не
записываются, а записываются только коэффициенты
разрядов. Нули, предшествующие первой единице сле-
ва, не имеют значения^ их можно писать или же они
могут быть опущены. В таком двоичном представлении
обычные десятичные числа 0, 1, 2, 3, 4, 5, 6, 7, 8, 9
имеют соответственно следующий вид: 0000, 0001, 0010,
ООП, 0100, 0101, ОНО, 0111, 1000, 1001.
Двоичная система счисления удобна тем, что любые
числа представляются сочетаниями единиц и нулей.
Это позволяет просто передавать и обрабатывать число-
вую информацию: если на соответствующем участке
электрической цепи создается напряжение заданного
уровня, то это воспринимается как сигнал 1, если
нет,— то как сигнал 0. Таким же образом передается
и обрабатывается буквенная информация: буквы, сло-
ва, фразы. Например, используя незанятые для коди-
рования десятичных цифр от 0 до 9 сочетания цифр
четырех разрядов двоичного четырех разрядного числа
можно уже передать слово или фразу, содержащие
пять различных букв. Примем, например, следующие
обозначения для букв: 1010 — м, 1011 ы, 1100 — п,
1101 — и, 1110 — ш, 1111 — е. * Последовательно вводя
эти двоичные-числа от первого до последнего и повто-
рив под конец первое из них, представим, таким обра-
зом, фразу «мы пишем».
При программировании решения задач с помощью
ЭВМ используются также иногда восьмеричная и шест-
надцатеричная системы, основанием для которых слу*'
жат уже не числа 10 или 2, как в десятичной и двоич-
ной системах счисления, аг соответственно числа 8 и 16.
Однако тлавпое значение имеет двоичная система"
счисления. Как приводятся другие системы счисления
к виду, при котором они могут использоваться в ЭВМ,
можно показать на примере комбинированной десяти ч-
но-двоичпой системы. Здесь используются обычные де-
сятичные цифры, но каждая из них, отвечающая опре-
деленному разряду десятичного числа, кодируется
так, как было раньше указано,— двоичными цифрами
1 и 0, и в конечном счете передача сигналов произво-
5 ЭВМ В АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ
73
-пгся так же,.как и при обычном использовании дво
пчвой системы счисления.
Итак, вся работа ЭВМ сводится к передаче и обра-
ботке двоичных сигналов 1 и 0. Но с величинами, при-
нимающими только значения 1 или 0, выполняются
логические операции .и операция запоминания сигна:
лэв, о которых говорилось раньше. Эти операции вы-
полняются в ЭВМ и при вычислениях и при перера-
ботке буквенной информации. Например, сложение двух
двоичных цифр проводится по следующим правилам;
0 + 0 = 0, 0 + 1 = 1,-1 + 0.= 1, 1 + 1 = 0 (в последнем
случае имеем 0 в данном разряде, а 1 переносится в
следующий старший разряд). Если ввести обозначения
т, и х2 для слагаемых и г/ для функции от них, то ука-
занным выше правилам сложения цифр какого-либо
разряда двух двоичных чисел соответствует выполнение
логической операции неравнозначности. В этом можно
убедиться, взглянув па таблицу на рис. 12, с помощью
которой было дано, определение функции у = ^<r2.
Таким образом, логический элемент неравнозначности
может использоваться для сложения цифр разряда двух
двоичных чисел. Вот, кстати; получен ответ па вопрос,
заданный в конце прошлой нашей беседы: почему ло-
гпче'ская функция неравнозначности называется по
другому «сумма по цодулю 2»'. Под модулем 2 здесь
имеется в виду 2 как основание двоичной системы счи
слепня. Логические элементы и элементы памяти ис-
пользуются в ЭВМ при выполнении самых различных
действий.
За единицу информации, при указанном выше дво-
ичном ее представлении принимается значение двоич-
ной цифры одного разряда (1 или 0). Для такой еди-
ницы информации имеется специальное название бит
(от сокращенных английских, слов binary, digit, обозна-
чающих двоичную цифру). Более крупной единицей
информации является байт, под которым имеются в
виду значения цифр 8 разрядов двоичного числа,
то есть 1 байт = 8 бит.
Говоря об ЭВМ, будем дальше иметь в виду, если
ие будут сделаны особые оговорки, электронные цифро-
вые вычислительные машины (ЭЦВМ, ЦВМ). Применя-
ются также и непрерывно работающие, или по друго-
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
му — аналоговые, электронные вычислительные • маши-
ны; если последние объединяются с ЦВМ, то получа-
ются так называемые 'гибридные системы.
Об ЭВМ необходимо рассказать здесь подробнее,
так как их значение для техники автоматического
управления становится все большим и большим. С по-
мощью ЭВМ воспроизводится.и обрабатывается инфор-
мация об управляемом процессе, вырабатываются
управляющие воздействия, соответствующие * сигналы
передаются к исполнительным органам. Различают два
вида ЭВМ: универсальные и специализированные»
К последним относятся обычно управляющие ЭВМ,
составляющие часть системы автоматического управ-
ления определенного назначения, например системы
управления производственным процессом. Таким же
образом могут в принципе цримёняться и универсаль-
ные ЭВМ, служащие, однако, как правило, для реше-
ния более широкого круга задач. ЭВМ различных типов
широко используются в автоматизированных системах
управления (АСУ), в которых они выполняют функции
помощника человека, принимающего окончательные
решения на основе полученной с помощью ЭВМ и со-
ответствующим образом переработанной ею информа-
ции. АСУ применяются сейчас во всех отраслях дея-
тельности человека: административной, хозяйственной;
при инженерном проектировании, в медицине, при
проведении научных исследований и т. д. У нас в стра-
не поставлена задача разработки автоматизированных
систем планирования и управления всеми основными
отраслями народного хозяйства. Создаются сети вычис-
лительных центров, на базе которых должна быть
построена общегосударственная автоматизированная
система сбора и обработки информации для учета,
планирования и управления народным хозяйством
(ОГАС). Предусмотрен охват всех вычислительных
центров единой автоматизированной сетью связи.
Возникает необходимость в применении для авто-
матических и автоматизированных систем управления
различного назначения ЭВМ с соответственно различу
пыми характеристиками. Это относите^ к возможности
обработки сравнительно небольшой или, наоборот»!
очень значительной информации, к тому, что' необходим
5. ЭВМ В АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ 75
ма в'некоторых случаях относительно невысокая, а в
других весьма значительная скорость ее переработки.
Предъявляются различные требования к габаритным
размерам ЭВМ. Например, блоки ЭВМ, включенные в
показанную па рис. 6 систему управления космической
станцией, должны быть' малогабаритными; стационар-
ная же ЭВМ, предназначенная для обработки большой
информации, занимает большее место.
Сама ЭВМ является сложной автоматической систе-
мой с программным управлением. Она представляет
собой систему с переменной структурой: связи между
отдельными ее частями устанавливаются в процессе
работы так, чтобы обработка информации производи-
лась с максимальной скоростью и -наиболее рациональ-
ным образом. Имея в виду, что ЭВМ представляют
собой сложные комплексы элементов и узлов различ-
ного функционального назначения и производят все
более сложные действия, современные ЭВМ называют
вычислительными системами (ВС). Это название тоже
ле очень удачное, так как ЭВМ выполняют пе только
вычислительные операции, до также и логические, за-
поминают и представляют по требованию информацию
различного рода. Следуя тому, что принято, мы тчоже
будем говорить об ЭВМ и ВС, »пе предлагая других их
наименований.
Как устроены современные ЭВМ или ВС?
В ЭВМ имеются арифметическо-логическое устрой-
ство (АЛУ), производящее обработку информации, уст-
ройство ввода и вывода ее (УВВ), устройство управле-
ния работой всей системы (УУ) и различные запоми-
нающие устройства (ЗУ). В оперативном запоминаю-»
щем устройстве (ОЗУ) хранится только та информация,
которая используется в данное время при решении
конкретной задачи. Быстродействие ОЗУ, то есть ско-
рость записи, выборки и считывания информации, наи-
более высокое. Для длительного хранения больших
массивов данных используется внешнее запоминающее
устройство (ВЗУ) большой емкости, но работающее
с меньшей скоростью. Так как различные устройства
ЛВМ имеют разное быстродействие, возникает необхо-
димость в применении буферного запоминающего уст-
ройства (БЗУ), осуществляющего промежуточное хра-)
76 Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
пение информации; из БЗУ информацию получают^
отдельные устройства ЭВМ, работающие с различной
скоростью. Чтобы каждое из устройств ЭВМ могло ра-
ботать самостоятельно, не будучи связанным по скоро-
сти обработки и передачи информации с другими,
используются специальные управляющие цепи. Ариф-
метическо-логическое устройство вместе с последними'
называется устройством обработки информации или
процессором.
Обработка информации в ЭВМ производится по
частям. Из следующих одни за другими наборов едйпиц
и пулей, несущих информацию, выделяются части
стандартной длины, с которыми производятся все по-,
ложепные операции. Их называют машинными слова-
ми, длина их обычно 16 пли 32 бита (2 или 4 байта).
Каждый обрабатываемый байт или несколько байтов-,
имеют свой адрес в памяти машины. Управляющим
устройством вырабатываются сигналы, по которым за-
прашиваются данйые из памяти, и передается ей обра-
ботанная информация. В памяти машины информация-*
может храниться в виде так называемых стеков — упо-
рядоченных частей, к которым имеется односторонний.,
доступ.
Все современные большие ЭВМ работают по системе,
мультипрограммной обработки информации. Это зна-*
чит, что одновременно могут решаться различные зада-:
: чщ решение производится по соответственно различным’
| программам. При этом производится разделение време-.
( ни работы процессора для выполнения различных про/
1 w грамм. Имея в виду последнее, говорят о системах/
I работающих с разделением времени. В таких системах.
I может быть несколько пультов управления, которые
! могут находиться на большом расстоянии друг от друга
| (например, в различных городах), и с каждого из них
I может производиться управление данной ЭВМ так, как;
если бы она не обслуживала в то же время и ряд
। других потребителей. Для того чтобы увеличить ско-’
I рость работы процессора, обеспечивая переработку,ин-'
формации одновременно с вводом и выводом, исполь-
зуют так называемые информационные каналы, управ-#
: ляющие передачей информации на участках между,,
процессором, периферийными устройствами .ввода-вы-
5 ЭВМ В АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ 77
вода и запоминающими устройствами. Используются
селекторные информационные каналы, обеспечивающие
поочередное подключение к центральному процессору
различных * периферийных устройств ввода-вывода,
и мультиплексные, обеспечивающие не только такой
режим работы, jio и режим параллельной одновремен-
ной работы с несколькими устройствами ввода-вывода.
I) больших вычислительных системах селекторные и
мультиплексные каналы представляют собой самостоя-
тельные ЭВМ.
Все большее применение получают мультипроцес-
сорные вычислительные системы, содержащие несколь-
ко, иногда большое количество, процессоров. При раз-
биении задачи управления на ряд подзадач е помощью
мультипроцессорной вычислительной системы може г
параллельно производиться решение каждой из них,
что существенно сокращает общее время решения. Эго
имеет особенно большое значение при управлении ре-
альными процессами, когда обработка информации
должна производиться за время, не превышающее вре-
мя течения самого процесса. Говорят, что в этих слу-
чаях вычислительная система работает в реальном
масштабе времени.
Современные ЭВМ строятся на базе микроэлектрон-
ных интегральных схем, сейчас главнымг образом на
базе больших микроэлектронных интегральных схем
(БИС). Каждая из полупроводниковых интегральных
схем представляет собой единый кристалл полупровод-
ника.
Ниже приводятся некоторые цифры, дающие пред-
ставление о современных и вновь разрабатываемых
ЭВМ.
Большие ЭВМ производят за одну секунду сотни
миллионов первичных операций, таких, например, к^к
сложение цифр одного разряда двух двоичных чисел,
или элементарные логические операции.
Напомним, что .тогда, когда приходится иметь дело
с использованием очень большого числа элементов,
с обработкой огромной по объему информации, с очень
малыми временами выполнения операций или с други-
ми очень большими или очень малыми величинами, при
Указании соответствующих числеппых их значений в
78 4 t УСТРОЙСТВА И ЙЙЖЙЬТ АВТОМАТИКИ
литературе обычно используются укрупненные или
уменьшенные единицы их отсчета, для обозначения
которых делаются следующие приставки к обозначению ?
основной величины: 103 — кило (к или К), 108 — мега
(мг или М — это обозначение миллиона), 109 — гига
(Г — обозначение миллиарда), 1012 — тера (Т — обозна- -
чение тысячи миллиардов), 10“3 — милли (м), 1О’в —
микро (мк), 10“9 — нано или миллимикро (н, ммк),
Ю~12 — пикси или микромикро (п, мкмк)1).
При использовании больших интегральных микро-
электронных схем оказывается возможным строить ло-
гические устройства, переключаемые из одного рабоче- ,
го состояния в другое за время менее чем десятая доля
наносекунды (нс), и усилители, работающие на часто-
тах до гигагерца (ГГц).
Для различных видов запоминающих устройств ха-
рактерны следующие данные об объеме запоминаемой
информации, плотности ее размещения, времени ее
записи, считывания и поиска. В комплектах дисковых
запоминающих устройств может храниться очень боль- ’
шая информация, до миллиардов бит; плотность записи
ее составляет десятки тысяч бит на 1 см2; время поиска
нужных данных порядка десятка миллисекунд, ин-
формация передается со скоростью в несколько мега-
бит в секунду. Максимальная информационная емкость
блока накопителя на* ферритовых сердечниках состав-
ляет десятки миллионов бит, минимальное время меж- -
ду последовательными обращениями к запоминающему
устройству составляет здесь несколько микросекунд.
Широко ведется сейчас разработка запоминающих уст- J
ройств на ЦМД. Уже созданы запоминающие устрой- j
ства па ЦМД, способные хранить информацию объемом
в десятки мегабит; размеры такого накопителя не боль-
ine, чем у транзисторного радиоприемника. Минималь-
ное время между двумя последовательными обращения-*’
ми к запоминающему устройству этого типа равно
десятым долям миллисекунды. Скорость же передачи
’) Укрупненные единицы двоичных сигналов Кбит =='
= 1024 бит и К байт « 1024 байт (берется здесь не 10^ а
1024 210, что .более удобно, когда имеют дело с двоичными
величинами).
5. ЭВМ В АВТОМАТИКЕ. МИКРОПРОЦЕССОРЫ 79
информации для устройств этого типа до десяти мега-
бит в секунду. Возможная частота сдвига доменов со-
ставляет десятые доли мегагерца, в дальнейшем пред-
полагается довести ее до нескольких мегагерц.
Для внешних запоминающих устройств больших
вычислительных систем намечается довести в будущем
их емкость до тысячи терабит. Можно представить себе
эту величину следующим образом: такова информация,
содержащаяся во всех имеющихся в крупнейших биб-
лиотеках Москвы книгах, относящихся к самым раз-
личным областям знания,— во многих десятках мил-
лионов книг»
После того, что было рассказано, можно ответить
и па вопрос, поставленный в конце предыдущей нашей
беседы: почему разрабатывается так много различных
типов элементов памяти? Отчасти это объясняется тем,
что, как мы теперь знаем, даже в составе одной ЭВМ
имеются различные виды запоминающих устройств
(ОЗУ, ВЗУ, буферные ЗУ) и для каждого из них r
отдельных случаях дает преимущества применение
элементов того или иного Типа. С другой стороны, идут
все время поиски наилучших вариантов построения
запоминающих устройств каждого вида, и поэтому
параллельно ведется разработка элементов различных
типов, с тем чтобы в конечном счете можно было при-
$ менять лучшие из них.
Достижения в технике построения ЭВМ, о которых
рассказано, имеют огромное значение для области
автоматического управления. Основные тенденции
дальнейшего совершенствования ЭВМ: все большая
миниатюризация и дальнейшее увеличение за счет
этого скорости выполнения операций; все большее уве-
личение емкости памяти, главным образом для внеш-
них запоминающих устройств; увеличение гибкости
в ^работе, достигаемое соответствующей организацией
работы процессоров с различными устройствами вво-
да-вывода и запоминающими устройствами; многопро-
цессорная параллельная обработка информации и за
счет этого также увеличение скорости решения задач,
повышение производительности вычислительных систем.
Говоря о максимальной емкости запоминающих
Устройств и других параметрах вычислительных систем.
Ч. Т. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
80
мььдо сих пор имели в виду главным образом болыпн»
ЭВМ. При управлении различными процессами исполь-
зуются также ЭВМ средних размеров и малые, мини-
ЭВМ. Мини-ЭВМ применяются при решении сравни-'
тельпо несложных задач; при объединений ряда -таких*
ЭВМ в общую вычислительную сеть они служат и длч
выполнения более сложных функций. В больших вы-
числительных системах мини-ЭВМ используются в ка-
честве селекторных и мультиплексных каналов, о кото-
рых упоминалось раньше.
До сих пор ЭВМ представляли собой сложные у
дорогостоящие устройства и это во многих случаях
ограничивало их применение в системах автомати-
ческого управления. Новые необычайно широки*,
возможности для использования ЭВМ в 'области ав-
томатического управления появляются сейчас бла-
годаря созданию в последнее время микропроцессо-
ров и микро-ЭВМ, о которых пойдет речь дальше.
Что такое микропроцессор?
Мы уже говорили о применении в ЭВМ больших-
интегральных схем (БИС). Микропроцессор (сокращен-
но МП) это БИС с программируемой (перестраивае-
мой) логикой. Программа, по которой должен работать
МП, хранится в имеющемся в микропроцессорной си-
стеме запоминающем устройстве. Возможность построе-
ния МП появилась с созданием совершенной технолог-
ом изготовления интегральных схем. МП бывакн
однокристальные или для их построения используется
несколько кристаллов.
Рассмотрим однокристальный МП. БИС микропро-
цессора представляет собой крошечную пластинку
полупроводникового материала — кристалл, в который
с помощью специальных технологических приемов вве-
дены примеси так, что образовано множество микро-
скопических областей. В каждой такой области выпол;
няются функции какого-либо из элементов (транзисто-
ра, диода, конденсатора, резистора). В полупроводнико-
вом кристалле с размерами поверхности от нескольких
миллиметров до сантиметра и толщиной в десятые доля
миллиметра размещаются тысячи, сейчас уже » сотМ
тысяч, элементов. В каждой БИС микроэлементы сое-
динены между собой внутренними связями, благодаря.
5 ")ГЛТ В / ТУГОМ \THKE МИКРОПРОЦЕССОРЫ
81
1'оторым оказывается возможным выполнять нужные
операции. Имеется лишь небольшое количество кон-
тактов, обычно 20—40, для присоединения отводов, слу-
жащих для ввода и вывода информации и для внеш-
него управления работой БИС. Вместе с контактами
БИС монтируется в корпусе, и в таком виде МП при-
годен для использования в вычислительной системе
или в системе автоматического управления. В некото-
рых из выполненных образцов объем корпуса МП ме-
нее двух кубических сантиметров.
В МП может обрабатываться параллельно 8, 16 или
32 двоичных разряда (говорят соответственно о 8-, 16-
п 32-разрядпых МП); в качестве структурных блоков
микропроцессорных систем и в несложных устройствах
автоматики используются также 2-, 4- и 6-разряд-
пые МП.
На базе МП строятся микро-ЭВМ и микроконтрол-
леры. Микро-ЭВМ содержит МП вместе с запоминаю-
щим. устройством, устройством ввода-вывода информа-
ции и устройствами связи. Эти устройства могут вы-
полняться в виде отдельных БИС и составляют при
этом вместе с МП так называемый микропроцессорный
набор, или комплект. Изготовляются и однокристаль-
ные микро-ЭВМ. Микроконтроллер, или просто кон-
троллер, является устройством логического управления,
основные функции которого выполняет МП.
Говорят, что создание и внедрение в инженерную
практику микропроцессоров является революцией в
вычислительной технике и в технике автоматическою
управления. Это верно. На чем основано такое заклю-
чение?
С созданием микропроцессорной техники появилась
возможность столь массового применения ЭВМ, в част-
ности в области автоматического управления, о которой
раньше нельзя было даже и мечтать. Большие, сред-
ние по производительности, да и малые ЭВМ, которые
и в дальнейшем будут необходимы для обработки бо-
лее значительных массивов информации, по техническим
причинам и в силу экономических соображений не
могли использоваться для управления такими объек-
тами, как относительно несложные промышленные ус-
тановки, автомобили, / устройства бытовой техники.
82 ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
Сейчас микропроцессоры и микро-ЭВМ начинают все
более широко применяться в этих и в других отраслях. •
Прошло только несколько лет с начала разработки МП
и производство их в ряде стран достигло миллионов
штук в год; в дальнейшем производство их будет уве-
личиваться все больше и больше. МП выпускаются
сейчас так же, как и обычные радиодетали. При мас-
совом изготовлении стоимость их невелика, всего лишь
порядка нескольких рублей. Большое значение имеет
и то, что МП и микро-ЭВМ значительно надежнее
обычных ЭВМ. Это объясняется тем, что прй однокри-
стальном их выполнении отпадает необходимость в
соединительных проводах, кроме небольшого коли-
чества внешних выводов кристалла. Для питания
микро ЭВМ затрачивается меньше электрической энер-
гии, чем для питания комнатной осветительной
лампочки.
Условия эксплуатации микропроцессорных систем
отличаются от условий эксплуатации больших ЭВМ.
Использование последних является рентабельным, если
они все время загружены. Это становится возможным
при обслуживании одной и той же ЭВМ ряда заказ-
чиков. Микро-ЭВМ же настолько дешева, что ее при не-
обходимости можно использовать лишь время от вре-
мени. На основе применения большого количества сов-
местно работающих МП могут строиться более сложные
вычислительные системы и системы автоматического
управления. Характеризуя качественные изменения
в технике автоматического управления, происходящие
в связи с созданием микропроцессорной техники, ака-
демик АН Грузинской ССР И. В. Прангишвили пишет
в выпущенной в 1979 г. издательством «Энергия» книге
«Микропроцессоры и микро-ЭВМ» следующее: «Благо-
даря применению микропроцессоров стали возможными
качественные .изменения в стратегии управления и пе-
реход к децентрализованным (распределенным) систе-
мам управления, массовая замена традиционных ана-
логовых регуляторов микроконтроллерами, создание
по-настоящему мультимикропроцессорных вычислитель-
ных систем, содержащих сотни и тысячи микропроцес-
соров, обеспечивающих высокую производительность,
надежность и др.».
5. ЭВМ В АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ
83
Примеры использования МП в системах автоматики
приведем еще позднее. Пока же продолжим ознаком-
ление с самими МП и с микро-ЭВМ.
7 ? ; / 3
;лис. 14.
Раньше уже было сказано, что МП, если иметь
в виду кристалл БИС, в котором он выполнен, совер-
шенно крошечный. Десятки таких кристаллов могут
поместиться л наперстке. Будучи миниатюрным, МП
преете с тем представляет собой по выполняемым им
84
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
функциям сложное устройство. Точнее даже — он со-
держит в себе целый ряд устройств, участвующих % в
обработке информации, и соединяющие их каналы свя-
зи, по которым от одних из этих устройств к другим
передаются сигналы. Чтобы познакомиться со струк-
турой МП и мпкро-ЭВМ, обратимся к рис. 14. В верх-
ней части рисунка представлена взятая для примера
схема одного из ранее разработанных 'микропроцессо-
ров — МП 8080 американской фирмы Intel, внизу на
этом рисунке приведена схема построенной на базе
МП этого типа микро-ЭВМ MCS 80, содержащей не-
сколько кристаллов. Мы лишь очень коротко расскажем-
о том, что изображено на этих схемах. Более подробно
об этих МП и микро-ЭВМ, а также и об одной из на-
ших отечественных мпкро-ЭВМ написано в книге
А. В. Шплейко «Микропроцессоры и микро-ЭВМ», вы-
пущенной в 1980 г. издательством «Знание». Структура
различных МП и микро-ЭВМ детально рассмотрена в
названной выше книге И. В. Прангишвили. Микропро-
цессор МП 8080 детально описан в книге Б. М, Кагана.
и В. В. Сташина «Микропроцессоры в цифровых систе-
мах», которую издательство «Энергия»’ выпустило
в 1979 г. • *
В МП, показанном на рис. 14, имеются следующие
функциональные узлы. Арифметические и логические
операции выполняются арифметпческо-логическнм'
устройством 1, В его работе участвуют регистры 2, 3, 4
и 5, каждый из которых содержит несколько ячеек па-
мяти. Блок 6 используется при выполнении действий
с десятичными числами, представляемыми, как было
указано раньше, в виде последовательностей двоичных
цифр 1 и 0. В основном наборе регистров 7 имеются
общие и оперативные регистры, счетчик команд, ад-
ресный регистр и указатель стека, хранящий в памяти
адрес начальной ячейки стека. Здесь же имеются
устройства 8 и 9, используемые при управлении рабо-
* той набора регистров и обменом данными между ним
и внутренней шиной 10 микропроцессора (шина —- мно- .
гоканальная линия передачи сигналов). Набор регист-
ров соединен через выходной буфер .11 с адресной
шиной 12. В МП имеются также регистр команд 13 и
дешифратор команд 14. Через буферный регистр 15‘
5. ЭВМ Б АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ ‘85
осуществляется обмен информацией с внешней шиной
1б\ Блок управления 17 имеет ряд каналов 7S, по ко-
торым передаются сигналы внешнего управления:
сигнал останова, импульсные сигналы, разделяющие
каждый машинный цикл на отдельные такты (длитель-
ность одного тактового интервала здесь 500 нс, т. т.
половина миллионной доли секунды), сигнал прерыва-
ния (но которому МП переключается на обработку
другой информации, чтобы по окончании ее вернуться
к продолжению обработки ранее начатой) и другие
сигналы. Стрелками показаны на схеме направления
передачи сигналов. Работа производится по командам,
число которых в различных^модификациях данного МП
от 70 до 110. И все это сложнейшее по своим функ-
циям устройство размещается, напомним еще раз, в кро-
шечном кристалле.
Техника изготовления микропроцессоров всё более
совершенствуется. Еще недавно описанный МП считал-
ся одним из лучших, а сейчас уже разработаны МП
такого же типа, превосходящие era в 10 раз по произ-
водительности.
Для схемы микро-ЭВМ, показанной внизу на рис. 14,
приняты следующие обозначения: 1 — МП; 2 — такто-
вый генератор и усилитель; 3 — оперативное запоми-
нающее устройство (ОЗУ); 4 — программное_постоянное
запоминающее устройство (ПЗУ); 5 — блок систем-
ного управления; 6 — адресные усилители; 7 — блок
соединения с каналами связи; 8 блок соединения с
внешними устройствами; 9 — блок установки приори-
тета прерывания; 10 — шина данных; 11 — шина уп-
равления; 12— адресная чшина.
Рассмотренная нами микро-ЭВМ построена, на не-
скольких кристаллах: в одном из них содержится МП,
в остальных — другие из перечисленных устройств. Из-
готовляются, как было уже указано, и однокристальные
мпкро-ЭВМ. По прогнозам специалистов в следующие
годы будут выпускаться однокристальные микро-ЭВМ
С размещением в кристалле размером в копеечную
монету до ста тысяч транзисторов, а в дальнейшем/
возможно, и до миллиона. Является перспективным
использование в микропроцессорных системах запоми-
нающих устройств на цилиндрических магнитных до-
83
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
менах. Разрабатываются однокристальные ЗУ этого
типа емкостью в сотни Кбит.
В качестве примера управляющего устройства, по-
строенного на базе микропроцессора, рассмотрим циф-
ровой ПИ-регулятор. Этот регулятор работает в прин-
ципе так же, как и ПИ-регулятор непрерывного дей-
ствия, или по-другому, аналоговый, о котором мы
когда-то говорили. Однако обработка информации об
отклонении от заданного режима и формирование ха-
рактерных для этого типа регуляторов управляющих
сигналов производится путем' действий с двоичными''
числами. Это позволяет увеличить по сравнению
с обычным аналоговым ПИ-регулятором точность вы-
полнения соответствующих операций. Один МП может
использоваться для построения нескольких цифровых
регуляторов.
Уже упоминалось о подготовке к массовому исполь-
зованию МП в автомобильных системах управления.
Расскажем подробнее о том, что дает здесь их приме-
нение, и о выполняемых ими функциях. Микропроцес-
сорные системы управления автомобильными двигате-
лями обеспечивают более полное, чем это получается
сейчас, сгорание топлива, причем топливо более эко-
номно расходуется и уменьшается загрязнение выхлоп-
ными газами окружающей среды. Это достигается
благодаря усовершенствованию дозирования топлива:
с помощью МП обрабатывается информация о скорости
вращения вала двигателя, положении дроссельной за-
слонки, температуре и давлении поступающего возду-
ха, температуре охлаждающей жидкости, и на основа-
нии всех этих данных вырабатываются управляющие
воздействия. МП используется и для обработки инфор-
мации в системе автоматического управления установ-
кой угла зажигания. Другая цель, достижение которой
преследуется при использовании МП, это упрощение
управления автомобилем и повышение безопасности
движения. С помощью МП осуществляется управление
противоблокировочной системой торможения: произво-
дится обработка информации об условиях движений
каждого колеса, и па основании этого тормозные уси-
лия регулируются так, чтобы не происходила блоки-
ровка колес, при которой автомобиль движется на
, 5. ЭВМ В АВТОМАТИКЕ. МИКРОПРОЦЕССОРЫ
87
скользкой дороге юзом и становится неуправляемым.
Намечается также использование МП в противоаварий-
ной системе, уменьшающей возможность столкновения
с впереди идущим автомобилем при плохой видимости,
например при сплошном тумане; микропроцессором
обрабатываются практически мгновенно поступающие
от радиолокатора сигналы о расстоянии между авто-
мобилями, сигналы о скорости движения, а также о
возможных условиях торможения. При наличии опас-
ности включается звуковая сигнализация или же вво-
дится в действие автоматическое устоиство противоава-
рийного управления.
В качестве примера систем управления с МП, пред-
назначенных для бытовой техники, можно указать
системы управления работой кухонных электроплит
(предусматривается возможность использования более
100 различных программ приготовления пищи) и си-
стемы управления стиральными машинами.
Микропроцессоры начинают сейчас применять в си-
стемах управления станками, прессами, сварочными
аппаратами, а также» в устройствах управления работой
систем обработки данных измерений и в системах
телесвязи.
Наряду с указанными выше относительно простыми
применениями является перспективным применение
целых групп параллельно работающих микропроцессо-
ров в более сложных вычислительных системах, исполь-
зуемых для целей управления. При работе таким обра-
зом сотен или даже тысяч Микропроцессоров может
быть значительно сокращено время решения задач уп-
равления. При создании сшигем параллельно работаю-
щих микропроцессоров возникают трудности в обеспе-
чении согласованного их взаимодействия с общими
запоминающими устройствами и в программировании
решения задач. Ученые ведут сейчас исследования,
направленные па устранение этих затруднений.
Если регулируемый процесс непрерывный, то ис-
ходная информация преобразуется в дискретную
цифровую с помощью специального устройства —
аналого-цифрового преобразователя {АЦП), При не-
обходимости перевода полученного в цифровой фор-
ме управляющего сигнала в непрерывный использу*
88 Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ '
ется цифро-аналоговый преобразователь (ЦАП). АЦП .
и ЦАП также изготовляются методом технологии
интегральных схем. Проводятся работы, направлен-
ные на создание микро-ЭВМ, у которых объединены
в одном кристалле процессорные блоки, память, бло-'
ки ввода-вывода, АЦП и ЦАП. Познакомимся с прин-
ципами построения АЦП и ЦАП.
Сначала лпшь скажем несколько слов вообще об/
отсчетах отдельных — дискретных — значений непре-
рывно изменяющихся величин. Измеряя в какой-то мо-
мент времени вольтметром напряжение электрическое
тока пли измеряя таким же образом манометром дав-
ление воздуха, мы производим отсчет по шкале прибо- ’
ра, обычно проградуированной в привычной для нас
десятичной системе (о системах счисления см. стр. 71).
Иногда, правда, в нашей жизни мы производим отсче-
ты, пользуясь смешанными цифровыми представления-
ми. Так, производя отсчет текущего значения времени,
мы прочитываем на циферблате часов числовое значе-
ние, выраженное десятичными цифрами. Но дальше 3
пользуемся единицами/ не соответствующими единицам :
разрядов десятичного числа: в одной минуте 60 секунд,
в одном часе 60 минут, сутки содержат 24 часа. При
отсчетах же значений величин, с которыми должны:'
далее оперировать цифровые автоматы, в том числе и
ЭВМ, по попятным теперь уже нам причинам должна
использоваться двоичная система счисления. Будем
иметь это в виду, рассматривая преобразование сигна-
лов, выполняемое АЦП, и обратное преобразование/
осуществляемое ЦАП.
Разработаны различные принципы выполнения этих
преобразований. Создаются АЦП и ЦАП все новых и
новых типов, схемы их построения все время совер- ;
шенствуются.
Как могут автоматически выполняться аналого-циф-
ровые и цифро-аналоговые преобразования, покажем*
первоначально обратившись к схемам, изображенным л
на рис. 15. Сначала рассмотрим ЦАП; познакомившись*
с ним будет легче разобраться и с описываемым затей
АЦП. *
Основной частью ЦАП, схема которого приведена
в верхней части рис. 15, является сумматор 1. Выход-
5 ЭВМ В АВТОМАТИКЕ МИКРОПРОЦЕССОРЫ
&
пой сигнал У равен здесь сумме входных. сигналов Х|,
X ..• • •> %п- величины же Хь Х2, ..Xh ..Хп
* лрпнимают значения 1 или 0. Они представляют собой
цифры разрядов двоичного числа, поступающего на
Рис. 15.
вход преобразователя. Сум-
мирование производится с
учетом весов соответствую-
щих разрядов. Это достига-
ется благодаря тому, что
имеются различные сопротив-
ления 2 во входных каналах.
Сопротивление 3 в выходном
канале берется таким, чтобы
оно практически не оказы-
вало влияния на процесс
суммирования. Таким обра-
зом, при поступлении двоич-
ного числа на вход преобра-
зователя па выходе его по-
лучается соответствующая
числовая величина, отсчиты-
ваемая по непрерывной шка-
ле. Если, например, в четы-
рехразрядпом цифро-анало-
говом преобразователе па
вход поступают сигналы Xt = 1, Х2 = 0, Х3 .= 0, Х4 ~ 1,
' то на выходе получается сигнал У = 9, представленный
обычным способом в соответствии с десятичной-систе-
мой счисления. Найомпим, что двоичному числу 1001
отвечает число 9 в десятичной системе.
Внизу на рис. 15 приведена схема, иллюстрирую-
щая один из возможных принципов построения АЦП..
Элементами схемы являются: «элемент сравнения не-
прерывных сигналов 7, ЦАП 2 (например, такой, как
ранее рассмотренный), генератор импульсных сигналов
и реверсивный счетчик 4. Преобразуемые пепрерыв-
пые сигналы X поступают па вход 5 элемента сравпе-
Вия 7. Ко второму входному каналу 6 элемента срав-
нения 7 передаются непрерывные сигналы X*, форми-
руемые цифро-аналоговым, преобразователем 2. К пос-
леднему поступают цифровые сигналы Уп, ..У„ ...
У г, У1 с выхода реверсивного счетчика 4, который
90
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
работает следующим образом. На вход его все время
поступают импульсы от генератора импульсных сигнал
лов 3. Число сосчитанных счетчиком импульсов пред-
ставляется как двоичное число Yn,..., Уь ..., У2, Кь
Это число с поступлением каждого следующего им-
пульса пли увеличивается ^на единицу, или уменьшает-
ся па единицу, или же остается неизменным. Это за-
висит от того, какой сигнал передается по каналу 7
с выхода элемента сравнения. Число Уп, ...» Уь ...» Уг,
У1 увеличивается, если Х*<Х, уменьшается, если
X* > X, и остается неизменным при X* = X. Таким
образом, автоматически отслеживаются величины X* =
== X и получаются эквивалентные входным сигналам X
выходные сигналы в виде двоичных чисел Уя, ..., Yh ...
..., У2, Уь Весь преобразователь в целом представляет
собой замкнутую систему с обратной связью, аналогич-
ную системам автоматического регулирования, о кото-
рых шла речь в начале книги.
При разработке АЦП и ЦАП, используемых в ка-
честве функциональных узлов ЭВМ, большое внимание
уделяется сведению к минимуму времени выполнения
операций.- Вместе с тем стараются делать преобразо-
ватели так, чтобы они были по возможности не-
. ^сложными.
Рассмотрим, как решаются эти вопросы для АЦП.
АЦП, схема которого была приведена на рисунке,
является в достаточной степени быстродействующим
только при условии, что исходная непрерывная вели-
чина мало изменяется от одного ее отсчета к следующе-
му. При этом с переходом от одного отсчета данной
величины к другому происходит поступление немногих
импульсов от генератора импульсов к реверсивному
счетчику. В противном случае формирование выходного
сигнала происходит в процессе более длительной ра-'
боты реверсивного счетчика. По количеству используе-
мых для его построения элементов этот АЦП средней
степени сложности.
Наиболее быстродействующими являются так назы-.
ваемые параллельные АЦЙ. Так как они преобразуют
информацию с максимальной скоростью, то они нахо-
дят широкое применение в ЭВМ, несмотря па то, что
для их построения требуется много элементов. Для
5. ЭВМ В АВТОМАТИКЕ. МИКРОПРОЦЕССОРЫ
91
пояснения принципа их действия представим себе, что
имеется некоторая шкала измерений исходной непре-
' пивной величины, пусть, например, содержащая
100 делений. Параллельный АЦП содержит столько же
элементов сравнения. Единовременно производится
сравнение, с точностью до единицы шкалы, истинного
значения преобразуемой величины со всеми значения-
ми. отвечающими делениям шкалы. Элементами срав-
нения "являются релейные элементы, «настроенные так,
что переключение каждого из них происходит при
пороговом значении входного сигнала, соответствую-
щем одному из делений измерительной шкалы. Эти
пороговые значения различны для всех релейных
• элементов.
В результате сравнения происходит переключение
тех релейных элементов, для которых настроечная поро-
говая величина переключения меньше преобразуемой
величины или равна ей. По сигналу, поступившему от
того из переключившихся элементов, пороговое значе-
ние переключения. у которого наибольшее, на выход
преобразователя передается нужный цифровой сигнал
из числа выходных цифровых сигналов, заранее сфор-
мированных и запомненных для всех делений шкалы.
При этом не требуется затраты времени на формиро-
вание выходного цифрового сигнала.
Более простыми, по менее быстродействующими,
являются АЦП, работающие по принципу поразрядного
взвешивания. Этот принцип аналого-цифровых преоб-
разований может быть реализован при применении од-
вого-едипственногр элемента сравнения. Читателей,
которые пожелают более детально познакомиться с раз-
личными принципами построения АЦП, отошлем к вы-
лущенной в 1980 г. издательством «Знание» книге
ироф. И. И. Цуккермана «Проблемы современного те-
левидения».
* Наряду с другими вопросами он рассматривает
применение АЦП и ЦАП в перспективных цифровых
телевизионных камерах — «глазах» роботов; о пос-
ледних у пас пойдет речь дальше — в третьей
части нашей книги. АЦП и ЦАП этого назначения
также строятся па базе элементов мйкропроцессорной
92 Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ I
; ‘ Д
। 6. Неэлектронная автоматика и оптоэлектроника ;
। Мы познакомились с применениями ЭВМ в авто-
| матике. Электронные элементы используются и при
। построении многих приборов автоматики. Но совре-
менная автоматика не только электронная. Широко ’
применяются механические и другие элементы, в не-^*
которых случаях необходимы элементы пневмоники
и струйной гидроавтоматики. Если же иметь в виду
переработку в процессе управления с очень большой
скоростью очень больших массивов информации, то'
I основное значение в будущем, по-видимому, будут -•
иметь не просто электронные устройства, а опто-
электронные, акустооптические, магнитооптические,
оптические вычислительные машины. Поговорим*
1 сейчас обо всех этих технических средствах авто-
матики.
• Не нужно думать, что при управлении различными
процессами применяются уже сейчас и будут в буду-
щем использоваться лишь одни электронные приборы
и ЭВМ. В различных областях техники используются
механические регуляторы, о которых мы говорили вна-
чале. Это центробежные регуляторы скорости вращения
и многие другие. В роботах и манипуляторах; заменя-
ющих человека при выполнении тяжелой или однооб-
разной работы, механические «руки» захватывают
изделия,- устанавливают их в нужное положение, со-
' бирают, упаковывают их. Наряду с механическими
устройствами применяются и- устройства пневмогидро-
автоматикп. Это, например, поршневые устройства с ,
золотниковыми распределителями такие, как в регуля- _
торе, который был*, изображен на рис. 2, и мембранные .
по типу того, который был показан на рис. 10.
Новым < направлением в построении технических
средств автоматики является ппевмоника, отличитель- ;
। пая Особенность которой заключается в том, что раз-
личные операции (логические операции, запоминание
I дискретных и усиление непрерывных сигналов и дру-С’Г
| гие) выполняются пневматическими устройствами, не_
। содержащими механических подвижных частей, благо-'
। даря исключению которых значительно повышаются
надежность и быстродействие. Вог кцк определено сло-
I
fl НЕЭЛЕКТРОННАЯ АВТОМАТИКА, ОПТОЭЛЕКТРОНИКА Q3
во пиевмоника в «Словаре по кибернетике», выпущен-
ном в 1979 г. под редакцией академика В. М. Глушко-
ва Главной редакцией украинской советской энцикло-
педии: «Пиевмоника (от греческого nveupa — дунове-
нпе, порыв), струйная пневмоавтоматика — отрасль
ппевмогидроавтоматикп, занимающаяся разработкой
автоматических и вычислительных устройств, создавае-
мых из струйных (проточных) элементов, в которых
используются взаимодействия потоков воздуха и раз-
личные аэродинамические процессы в них». На тех же
принципах, что п устройства пневмонпки, строятся
устройства струйной гидроавтоматикп,- только они ра-
ботают с взаимодействием не струй воздуха или иных
газов, а струй воды, масла или других жидкостей.
Пиевмоника вместе со струйной гидроавтоматикой назы-
вается аэрогидродинамической техникой -автоматическо-
го управления.
В отличие от электронных элементов элементы пнев-
моникп предназначены для использования в относи-
тельно несложных устройствах автоматики, содержа-
щих всего лишь от нескольких элементов и самое боль*
шее до. нескольких тысяч Элементов. Скорость выпол-
нения струйными малогабаритными пневматическими
элементами, размеры сечения каналов в которых по- s
рядка десятых долей мм, характеризуется такими
цифрами: время переключения струйных реле состав-
ляет десятитысячные доли секунды, граница диапазона
пропускаемых частот для них около килогерца. Эта
скорость гораздо больше, чем для обычных пневмати-
ческих элементов с механическими подвижными частя-
ми, однако намного меньше, чем для электронных эле-
ментов/ о которых мы говорили раньше. Применение
элементов пневмонпки оказывается целесообразным,
а часто и единственно возможным в следующих
случаях. Прежде всего, тогда, когда электронные и
Другие элементы не могут использоваться из-за того,
что они неработоспособны в условиях- высокад темпе-
ратур, при значительных инерционных перегрузках и
Ударах, действии значительных электрических и маг-
нитных нолей, интенсивных радиационных воздействи-
ям Применение элементов пневмонпки дает преимунщ-
Ствп п при нормальных условиях эксплуатации,'если
Ч. Т. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
производятся сравнительно простые операции автома* 1
тического управления и несущественно ограничение
скорости их выполнения, но требуется очень высокая •
надежность работы. Испытания на надежность струй-
ных элементов, работающих с замкнутой циркуляцией
очищенного воздуха, показали, что они могут безотказ-’
но выполнять свои функции в течение многих лет,
совершая при этом десятки миллиардов циклов пере-
ключения.
Как работают элементы пневмоники? На рис. 16
наверху слева показана схема струйного элемента, ко-
торый в зависимости от того, как он построен, может
работать как релейный элемент или как элемент па-
мяти. Струя воздуха, вытекающая из сопла 1 под дей-
ствием постоянного давления питания и примкнувшая^
как показано на рисунке, к нижней стенке, отрывается
от нее п деребрасывается к верхней стенке, если соз-
дается давление во входном канале 2. При этом полу-
чается повышенное давление воздуха в выходном ка-
6 НЕЭЛЕКТРОННАЯ.АВТОМЛТИКА, ОПТОЭЛЕКТРОНИКА 95
але 3. В струйном релейном элементе после снятия
давления в канале 2 струя возвращается в свое исход-
ное" положение и исчезает повышенное давление в ка-
нале 3. Если же этот струйный элемент выполнен как
•элемент памяти, то после снятия давления в канале 2
струя остается примкнувшей к верхней стенке и сохра-
няется давление в канале 3. В данном случае примы-
кание струи к стенке и удерживание ее у стенки
происходят так же, как это можно наблюдать, если не-
достаточно наклонить чайник. Если кто-нибудь делает
так по неловкости, то' струя воды примыкает к стенке
горлышка и вместо того, чтобы попасть в чашку, сте-
кает на скатерть. Этот же эффект используется в рас-
сматриваемом струйном элементе для запоминания
сигнала. Для того чтобы стереть запомненный сигнал,
создается давление в канале 4, под действием, которого
струя отрывается от верхней стенки и примыкает
к нижней. После снятия этого давления струя остается
примкнувшей к нижней стенке, пока снова не будет
создано давление в канале 2. На схеме, изображенной
рядом, представлен струйный элемент, отличающийся
от ранее указанного тем, что, кроме входного капала 2,
имеется в нем еще один входной канал 5. Этот элемент
тоже может работать без запоминания или с запоми-
нанием сигналов. Рассмотрим сначала его работу как
логического элемента. Можно задавать величины вход-
ных давлений в каналах 2 и 5 такими, что создание
давления уже в одном или другом из этих каналов
будет достаточным для переброса струи от нижней
стенки к верхней и создания при этом давления в вы-
ходном канале 3. Примем х^ = 1, х^ = 0 и х2 == 1, хг = О
для обозначения того, что имеется или отсутствует дав-
ление соответственно в одном и в другом из указанных
выше входных каналов, и примем аналогичные обозна-
чения у = 1 и у = 0 дйя выходного канала 3. Тогда
данный струйный элемент можно рассматривать как
логический элемент ИЛИ (вспомним то, что говорилось
выполнении различных логических операций, когда
мы знакомились с элементами, схемы которых были
приведены' на рис. И и 12). Если использовать как
входной и канал 4, имеющий несколько большее про-
ходное сечение, чем у каналов 2 и 5, то при подаче
95
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
входных сигналов по каналам 4 и 2 или 4 и 5 выпол-
няется логическая операция запрета. При использова-
нии канала 6 в качестве выходного элемент работает
как логический элемент НЕ ИЛИ и пм может "выпол-'
няться также логическая функция импликации, пред-. -
ставляющая собой отрицание функции запрета. Нако-
нец, можно взять величины входных давлений для ка-**
налов 2 и 5 такими, что для переброса струи от ниж-
ней стенки к верхней окажется необходимым создание ?
давления в обоих входных каналах. При этом по вы-?'
ходкому каналу 3 элемент работает как логический
элемент И, а по выходному каналу 6 —- как логический *
элемент НЕ И. Данный струйный элемент является
многофункциональным логическим элементом. Если •
элемент построен так, что при перебросе струи и при-
мыкании ее к одной или к другой стенке струя удер--
живается около нее после того, как сняты входные "
давления, то рассматриваемым элементом могут сов-
местно производиться логические операции и. запоми-
нание. сигналов.
В указанном выше струйном элементе имеется ка-_
нал питания. Такие элементы называются активными. .
Простейший пассивный струйный элемент, то есть
элемент, имеющий только входные каналы и жыходной;
канал, изображен на рис. 16 наверху справа. Это логи-
ческий элемент И. При работе данного струйного эле-
мента давление в выходном канале создается только
в том случае, когда поданы давления по входным ка-
налам 1 и 2, причем происходит соударение вытекаю-
щих из них струй и образуется результирующая струя, х
направленная в сторону выходного канала 3. \
Кроме процессов взаимодействия струй и примыка-
ния потоков к стенкам, в пневмонике для выполнения
функций управления используются и другие аэрогидро^
динамические процессы. Например^ используется тур-
булизация течения в струе. Струйный активный четы-
рёхвходовой логический элемент НЕ ИЛИ, при работа
которого происходит турбулизация течения, показан па
рис. 16 внизу слева. Из канала питания 1 вытекает
* струя, частицы воздуха в которой движутся без пере-
мешивания; такая струя называется ламинарной. Если
не поданы давления к входным каналам 2, то стрри
6. НЕЭЛЕКТРОННАЯ АВТОМАТИКА, ОПТОЭЛЕКТРОНИКА 97
достигает выходного канала 5, в котором под действи-
ем ее создается давление. Если же имеется давление
хотя бы в одном из входных каналов 2, то из-за дей-
ствия вытекающей из него струи па основную в по-
следней движение частиц становится неупорядочен-
ным — турбулентным — и пропадает избыточное давле-
ние в выходном’канале 3. Применяются для управления
потоками воздуха или других газов струйные вихревые
элементы. Элемент этого типа изображен на рис. 16
внизу справа. Поток газа подводится по радиальному
каналу 1 в цилиндрическую камеру 2 и проходит через
выходное отверстие 3 в торцевой ее стенке в отводной
канал 4. При создании давления в тангенциально рас-
положенном канале управления 5 из пего вытекает
струя, под действием которой проиЪходит занихрива-
нпе основного потока в камере 2, уменьшается давле-
ние перед выходным отверстием 3 и уменьшается
расход в отводном канале 4.
Таким же образом'выполняются и элементы струй-
ной гидроавтоматики этого назначения. Устройства
пневмоники и струйной гидроавтоматики применяются
сейчас в различных отраслях техники. Они использу-
ются в системах управления роботами-манипулято-
рами, в регуляторах мощных паровых турбин, в хими-
ческой промышленности и находят другие при-
менения.
На элементах аэрогидродинамического действия по-
строен ряд устройств, служащих для измерения вели-
чин, являющихся входными при автоматическом управ-
лении различными процессами: давлений, скоростей те-
чения и расходов газов и жидкостей, линейных размеров,
скорости вращения вала, ускорений, величин, характе-
ризующих состав смесей газов, и целого ряда других
величин. Разрабатываются крупногабаритные струйные
элементы, предназначенные для работы в качестве ис-
полнительных органов систем автоматического управ-
ления: струйные переключатели потоков в системах
кондиционирования воздуха и вентиляционных сетях,
струйные вихревые элементы для ирригационных си-
стем и других гидротехнических сооружений. В эле-
ментах последнего типа диаметр камеры равен несколь-
ким метрам; с помощью такого вихревого клапана
А. Залманэ‘»а •
98
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
можно регулировать расход воды в вытекающей из
бассейна искусственной реке.
Из сказанного выше следует, что аэрогидродинами-
ческая техника автоматического управления не конку-
рирует с электронной; у нее имеются свои области ра-
ционального использования. Вместе с тем в некоторых
случаях оказывается целесообразным и использование *
пневматических и гидравлических элементов вместе
с электрическими.
В СССР налажен серийный выпуск системы струй- ч
пых элементов «Волга». Заводами выпускаются станки
и промышленные роботы с системами программного уп-
равления, построенными на этих элементах. Изготовля- '
ются также струйные элементы для систем управления
в газовой промышленности. Серийно производятся
струйные устройства для химической промышленности.
Устройства пневмоники устанавливаются на самолетах,
струйные элементы применены в медицинской аппара-
туре. Пневмоникой сейчас занимаются во многих стра-
нах мира.
Если читатель захочет подробнее познакомиться с
применениями.пневмоники и струйной гидроавтоматики
в промышленности и сельском хозяйстве, на транспор-
те и в энергетике, в авиационной и космической тех-
нике, в морском деле и в медицине и в иных областях,
отошлем его к другой книге, написанной автором этой*
книги. Называется она «Специализированные аэрогид-
родинамические системы автоматического управления»,
выпущена в свет издательством «Наука» в 1978 г.
На этом закончим наш разговор о ппевмонике.
Перейдем к другому новому и очень важному на-
правлению в технике построения вычислительных и-
унравляющих устройств, у которого впереди большое
будущее,— к оптическим средствам переработки инфор-
мация и к оптоэлектронике. Почему специалисты уде-
ляют большое внимание оптическим способам обработки,
информации?
Хотя средства микроэлектроники все больше совер-
шенствуются и создаются гибкие в работе, быстродей-
ствующие, перерабатывающие обширную информацию
ЭВМ, имеющие намять большой емкости, они все же
не обеспечивают решения многих задач управления»
е. ПЕЭЛЕКТРОННАЯ АВТОМАТИКА, ОПТОЭЛЕКТРОНИКА 99
В особенности это относится к тем случаям управления
сложными системами, когда требуется, чтобы перера-
ботка исходной информации и формирование управля-
ющих воздействий осуществлялись в реальном масшта-
бе времени, иногда практически мгновенно. Для этого
нужно дальнейшее увеличение скорости выполнения
операций, что требует создания еще более миниатюр-
ных элементов и устройств, чем те, которые сейчас
имеются. Это необходимо и для процессоров и для
устройств памяти. Для последних время поиска нуж-
ных данных и передачи их процессору во многом зави-
сит от того, насколько малы размеры устройства. Воз-
можности же еще большей миниатюризации элементов
ЭВМ и увеличения скорости их работы ограничены.
Это определяется технологией изготовления элементов
и устройств микроэлектроники, да и самим принципом
их работы.
Применение как оптических элементов и устройств,
так и оптоэлектронных, то есть вместе оптических и
электронных, дает следующие преимущества по срав-
нению с тем, что получается при использовании обыч-
ных элементов и устройств микроэлектроники. При
применении в вычислительных устройствах и устрой-
ствах управления оптических элементов оказывается
возможным значительно увеличить плотность записи
информации в запоминающих устройствах, увеличить
скорость выборки хранящихся в них данных и общую
скорость обработки информации. В оптических вычис-
лительных и управляющих устройствах может одновре-
менно преобразовываться большое количество инфор-
мации. На площади в один квадратный сантиметр
может быть размещено до десяти миллионов единиц
информации, передаваемой по параллельным оптиче-
ским каналам связи. С помощью оптических элементов
можно простым образом вводить в предназначенные
Для управления машины информацию, представленную
в виде целых страниц текста, рисунков, чертежей, об-
рабатывать и передавать ее дальше, воспроизводить и
распознавать зрительные образы. Однако и управляю-
щие цифровые ЭВМ тоже имеют свои преимущества.
К числу их относятся возможность программирования
Решения сложных задач, гибкость в работе, более вы-
100
Ч. I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
сокая точность выполнения операций, чем та, которая -
может быть получена в аналоговых оптических маши-
нах. Наиболее перспективными являются совместное
применение оптических и электронных процессоров,
применение ЭВМ с оптическими запоминающими уст-
ройствами и другие виды совместного использования
оптических и электронных устройств. В таких гибрид-
ных системах обработки информации с помощью оп-
тоэлектронных элементов оптическая информация
должна преобразовываться в цифровую и цифровая в <
оптическую.
Прежде чем прзнакомиться с разрабатываемыми -
сейчас оптоэлектронными и оптическими элементами,
вспомним то, что было пройдено в школе, когда изу-
чалась оптика.
Так же как и раньше, когда шла речь о полупро-
водниковых элементах, не будем сейчас пересказывать'
того, что написано в школьном учебнике по физике для
10-го класса о свете и об оптических элементах. На-
помним лишь в нескольких словах то, что использует-
ся из этих знаний при разработке оптических и опто-
электронных устройств вычислительной техники п
автоматики.
Вы помните, что свет распространяется с огромной
скоростью. Скорость света равна с = 300 миллионов
метров в секунду. Длина же волны света X очень мала»
от 0,4 • 10“6 м для фиолетового света до 0,8 10'6 м для,
красного, то есть равна десятым долям микрометра. Это .
значит, что частота колебаний света, которая равна
со = с/Х, составляет соответственно от 7,5 1014 до 3,75Х'
ХЮ14 герц, то. есть сотни терагерц, а период волны свега '
Т = !/(£> равен от 1,33 • 10~15 до 2,66 10~ts с, то есть'
равен лишь тысячным долям пикосекунды. Важными
свойствами световых волн являются иптерференцйя .
волн, при которой происходит усиление пли ослабление
результирующих колебаний в различных точках про- _
страпства, и дифракция, то есть огибание волной света ^
препятствий, которые по своим размерам соизмеримы,
с длиной волны. Упоминается в учебнике и принцип
Гюйгенса, согласно которому каждая точка среды, до >
которой при распространении волн доходит возмуще-
ний, сама становится источником вторичных волн, при-. ,
6 ПЕЭЛЕКТРОННАЯ АВТОМАТИКА, ОПТОЭЛЕКТРОНИКА <01
м в следующий момент" времени поверхность, каса-
теЧЬная ко всем вторичным волнам, является волновой
поверхностью, то есть поверхностью равной фазы. Этот
принцип был уточнен Френелем, показавшим, что вол-
новая поверхность в каждый момент времени образу-
ется в результате интерференции вторичных волн.
В школьном учебнике рассказано и о том, что пред-
ставляют собой когерентные волны. О них написано
следующее: «Для получения устойчивой интерферен-
ционной картины необходимо, чтобы источники воли
имели одинаковую частоту и фазы их колебаний сов-
падали или отличались на некоторую постоянную (не
зависящую от времени) величину. Иначе говоря, раз-
ность фаз колебаний обоих источников должна оста-
ваться неизменной. Источники, удовлетворяющие этим
условиям, называются когерентными. Когерентными на-
зывают и созданные ими волны». Там же описаны раз-
личные оптические устройства, начиная с линз, поля-
* рпзаторов света, дифракционных решеток, в которых
штрихи находятся друг от друга на расстоянии, состав-
ляющем десятитысячные доли миллиметра, п кончая
прозрачными гибкими волокнами — световодами, с по-
мощью которых па основе .использования полного
отражения света от прозрачной оболочки волокна ока-
зывается возможным передавать свет на расстояние
так же, как передается по проводам электрический ток.
С номощьйГ группы таких световодов могут передавать-
ся изображения предметов. Знания, нужные для озна-
комления с устройствами оптоэлектроники и оптиче-
скими устройствами автоматики и вычислительной
техники, дают и другие разделы школьного курса фи-
зики. Например, в разделе о принципах радиосвязи
рассмотрены амплитудная и частотная модуляция ко-
лебаний и их демодуляция. Модуляция и демодуляция
колебаний используются не только в радиотехнике, но
• И вообще при передаче сигналов, в том числе электри-
ческих и оптических.
Что же представляют собой элементы оптоэлектро-
ники и оптических машин, способы построения которых
продумывают сейчас ученые?
Основными элементами оптоэлектроники являются
оптроны, содержащие излучатели света вместе с прием-
102
4. T УСТРОЙСТВА I! СИСТЕМЫ АВТОМАТИКИ
пиками светового излучения, между которыми имеется
оптическая или электрическая связь или для связи 1
между которыми используются совместно оптические и
электрические эффекты: частицы света — фотоны —
воздействуют на электроны в полупроводниковом мате-
риале, при воздействии же электронов на специальные
материалы — люминофоры — происходит эмиссия фото-'
нов. Основными источниками света в оптоэлектронике
являются источники когерентного света — лазеры. 5
К оптической части устройств оптоэлектроники отпо- ?
сятся линзы, зеркала, светоделители, световоды и дру- j
гие оптические элементы.
Для оптических и оптоэлектронных вычислительных
и управляющих машин, которые в будущем предпола-
гается создать, сейчас лишь разрабатываются устрой-
ства, намечаемые к использованию в качестве функ-
циональных узлов этих машин. Такими устройствами
являются носители информации, дефлекторы и модуля-
торы света, управляемые динамические транспаранты.
Носители информации представляют собой устрой-
ства, при построении которых используются светочув-
ствительные материалы, предназначенные для. регист-
рации и запоминания информации.
Дефлекторы служат для отклонения пучка когерент-
ного света и направления его в любую точку светочув-
ствительного слоя; остронаправленный пучок света *
в принципе может воздействовать па участок светочув-
ствительного слоя столь малый, что его размеры срав.- ч
пимы с длиной волны света, причем не затрагиваются
соседние участки. Модуляторы света служат для ввода
сигналов.в оптическую систему; модуляция излучения
света производится с помощью волн другой природы.
Разрабатываются различные дефлекторы и модуляторы
света: механические, электрооптические, акустоойтиче-
ские, магнитооптические.
Управляемый динамический транспарант сочетает
в себе свойства модулятора й дискретно работающего
дефлектора света. Им осуществляются совместно про- ,
странственная и временная модуляция света. При по- •
даче па. вход динамического транспаранта электриче-
ских или других импульсов формируется поток света, ...
дате ищи нужное двумерное изображение, подлежащее
с. НЕЭЛЕКТРОННАЯ АВТОМАТИКА, ОПТОЭЛЕКТРОНИКА 103
дальнейшей’ переработке, хранению или регистрации;
при последующих входных воздействиях это изображе-
ние может быть заменено другими.
Наиболее широко проводятся сейчас поисковые ра-
боты, направленные на создание оптических запоми-
нающих устройств большой емкости, которые могли бы
использоваться вместе с ЭВМ. Для построения оптиче-
ских запоминающих устройств необходимв! светочув-
ствительные материалы, допускающие многократное
повторение операций записи, хранения, считывания и
стирания сигналов; это так называемые реверсивные
оптические среды. Разрабатываются оптические запо-
минающие устройства двух типов. В запоминающих
устройствах первого типа запись, запоминание и счи-
тывание информации выполняются поразрядно (по-
битно), адресация производится оптическим способом.
Весьма перспективными, но более сложными для реа-
лизации, являются оптические запоминающие устрой-
ства второго типа, работающие с постраничным (парал-
лельно осуществляемым) запоминанием информации,
называемые голографическими. Голограмма содержит
множество микроскопических - пятнышек, зафиксиро-
ванных в светочувствительном слое, например в свето-
чувствительном слое фотопластинки, при обычном про-
смотре которых невооруженным глазом или под микро-
скопом не создается представления о записанной на
голограмме информации; однако соответствующее изо-
бражение, отвечающее нормальному зрительному вос-
приятию человека, появляется при пр'освечпвании фо-
топластинки с голографической записью лучом исходя-
щего от лазера когерентного света. Таким же образом
должно производиться запоминание сигналов при при-
менении для их регистрации реверсивной, оптической
среды. Принцип работы этих устройств оспован на ис-
пользовании эффектов интерференции и дифракции
волн света и на использовании принципа Гюйгенса —
Френеля, о которых выше упоминалось.
О принципах построения голографических запомина-
ющих устройств будет еще говориться в третьей части
этой книги.
В разработке оптических запоминающих устройств
с побитным запоминанием'и считыванием информации
104
Ч I. УСТРОЙСТВА И СИСТЕМЫ АВТОМАТИКИ
уже достигнуты существенные практические результа-
ты. Уже созданы первые образцы гигантских по коли-
честву удерживаемой информации лазерных запомина-
ющих устройств. Например, объем информации, запо-
минаемой в одном диске оптического ЗУ производства
голландской фирмы Philips, составляет 10 миллиардов
бит, что эквивалентно емкости ЗУ на 25 магнитных
лентах. Вре*мя доступа к любым данным из этой массы
данных всего лишь около четверти секунды. Считыва-
ние и запись информации выполняются при этом с по-
мощью исходящих от диодного лазера лучей света.
Длительность используемых импульсов света составля-
ет 50 наносекунд, то есть лишь стомиллионные доли
секунды. Для оптических запоминающих устройств
этого типа характерна высокая эксплуатационная на-
дежность. Для них, согласно опубликованным данным,
установлен срок работы в 10 лет, что обеспечивается
выбором материалов и использованием системы само-,
очистки диска.' Благодаря применению специального
способа кодирования, реализация которого оказалась
возможной в оптическом ЗУ, практически полностью
исключается возможность ошибок при считывании и
записи сигналов. Такие лазерные запоминающие уст-
ройствй пока в основном предназначены для хранения
больших массивов информации, сравнительно редко из-
меняющейся, например, для хранения архивов. Одпако
ведутся работы в направлении еще большего увеличе-
ния плотности записи информации и дальнейшего по-
вышения скорости работы и намечается в будущем
использовать лазерные устройства памяти в каче-
стве ОЗУ.
Далеко продвинулись и работы, связанные с прак-
тическим использованием оптических волокон для пе-
редачи сигналов в системах автоматического управле-
ния и в системах связи. Уже проведены опыты по пе-
редаче по оптическому кабелю информации па
расстояние в несколько километров. Следует ожидать,
что в дальнейшем будет доведено до десятков и сотен
километров расстояние, на которое будут передаваться
по оптическим каналам сигналы, в том числе и сигнал
лы управления, с ретрансляцией, осуществляемой для
небольших участков (порядка 10 км) с помощью свею-
6 НЕЭЛЕКТРОННАЯ АВТОМАТИКА, ОПТОЭЛЕКТРОНИКА Ц)5
1Х и электро-световых преобразователей-усилителей.
Преимуществом оптических каналов по сравнению с
чедными электрическими кабелями является то, что
Оптические линии ' связи не подвержены действию
электрических помех. При массовом производстве опти-
ческих волокон стоимость их должна быть меньшей,
чем медных кабелей.
Разработка оптоэлектронных устройств, предназна-
ченных для обработки информации, находится лишь
в начальной стадии. Однако предполагается, что в бу-
дущем их применение будет иметь большое значение
для вычислительной техники и для техники автомати-
ческого управления. Большие надежды возлагаются и
на создание чисто оптических устройств этого назна-
чен ня.
Выяснена возможность плодотворного использова-
ния при создании оптоэлектронных систем не только
оптических и электрических устройств, ко также и
устройств, действие которых основано на других физи-
ческих принципах. Раньше уже было упомянуто об
а кустооптических и магнитооптических дефлекторах и
модуляторах света. А кустооптическое взаимодействие
основано на том, что волнами ультразвука вызываются
волны сжатия и разрежения в твердом теле или жид-
кости, вследствие чего в них, на соответствующих их
участках, изменяется показатель преломления света.
Построен ряд работающих таким образом опытных
акустооптических элементов. Начаты п работы по ис-
пользованию в оптоэлектронике прозрачных магнитных
кргсталлов, с помощью которых производятся магни-
тооптические преобразования.
С созданием оптоэлектронных устройств обработки
информации и оптических вычислительных машин ста-
нет возможным, как уже говорилось, обрабатывать
большие массивы информации значительно быстрее,
чем при использовании обычных ЭВМ. Какое это будет
иметь значение длг усовершенствования процессов уп-
равления сделается я полной мере ясным после того,
как будет рассказано о задачах кибернетики, о разра-
ботке машин, наделенных искусственным интеллектом.
° до этого сначала познакомимся с основами теории
ома ги чес кого управления,
ЧАСТЬ И
ЭЛЕМЕНТАРНЫЙ ОЧЕРК ТЕОРИИ
АВТОМАТИЧЕСКИХ СИСТЕМ
1. Введение
Что составляет предмет теории автоматических
систем? Что дает теория автоматических систем
практике? Как об этой теории будет рассказано в
нашей книге?
Рассматривая работу изображенного на рис. 1 регу-
лятора, мы выяснили, что при несогласованном выборе
характеристик регулятора и объекта регулирования вся
система оказывается неработоспособной. То, что было
рассказано об этой системе автоматического регулиро-
вания, относится и к другим замкнутым системам авто-
матического управления. В том числе и к таким, как
показанные на рис. 6. Подобно представленной на
рис. 1 простейшей системе автоматического регулиро-
вания, система управления ракетой с помощью ЭВМ,
схематически изображенная внизу на обложке нашей
книги, при неправильном задании ее параметров также
может оказаться непригодной.
Нужно не только обеспечивать работоспособность,
но и получать достаточно удовлетворительные показа-
тели процессов управления. Для этого необходимо
ясное представление о самой сущности процессов уп-
равления. Нужны и методы согласованного выбора
параметров элементов системы, при котором достига-
ется нужное качество ее работы. Изучением процессов
автоматического управления и методами рационального,
построения систем управления и занимается теория'
автоматических систем, о различных разделах которой
будет дальше рассказано. Лишь благодаря созданию
науки об автоматическом управлении и использованию
ее методов на практике, оказались возможными все до-
стижения техники автоматического управления.
Основой основ здесь является общая теория агг
тематического управления, занимающаяся изучением
динамики систем автоматического управления.
1. ВВЕДЕНИЕ
107
Теория автоматического управления дает методы
решения задач двух видов. Первые из них — это задачи
Анализа работы системы автоматического управления:
по известным характеристикам отдельных элементов
определяются общие характеристики системы и прово-
дится анализ ее рабочего процесса, причем выясняется,
насколько хорошо работает система управления. Вто-
рым видом задач являются задачи синтеза: если систе-
ма автоматического управления еще не построена,
а только указаны требования, которым должен удов-
летворять ее рабочий процесс, то решается, какой
должна быть структура системы и какими должны
быть отдельные ее элементы для того чтобы были
удовлетворены поставленные требования. Говоря о
теории автоматического управления как одной из важ-
нейших отраслей современной науки, нужно иметь
в виду не только методы решения указанных выше
задач, по и возможные принципы построения систем
автоматического управления, с учетом которых эти за-
дачи решаются. Принципам построения различных
систем управления были посвящены паши предшеству-
ющие беседы.
Теория автоматических систем является многогран-
ной, разветвленной. Мы рассмотрим основные методы
исследования динамики непрерывных систем автома-
тического управления. Аналогичным образом изучает-
ся и динамика дискретных систем. Сначала будем
иметь в виду детерминированные системы. Затем особо
расскажем о характеристиках случайных процессов,
с которыми часто приходится иметь дело при разра-
ботке систем управления. Познакомимся и с методами
проектирования оптимальных систем. Сначала об од-
ном из них будет сказано по ходу рассмотрения задач
динамики систем; другим посвятим затем отдельный
раздел. Наряду с общими вопросами теории автома-
тического управления большое значение имеют и спе-
циальные вопросы, возпикаюгцие при разработке от-
дельных видов автоматических систем. Подходы к их
решению рассмотрим на примере синтеза цифровых
автоматов (ЭВМ и других). Познакомим читателя и
с характерными методами машинной обработки пото-
ков информации.
108 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Как будет обо всем этом здесь рассказано? Там,
где возможно, совсем без математики. Так мы начнем
сначала рассказ о частотных характеристиках и. их.
использовании для суждения об устойчивости и каче-
стве переходных процессов в системах автоматического
управления. Но дальше придется упомянуть и ст ма-
тематических методах, используемых в теории авто-
матического управления. При этом будем исходить из^
того, что известно школьнику-десятикласснику. В ос-
новном этого будет достаточно нам, так как школьный
курс математики дает обширные знания. Одними из
основных в программе 9-го класса являются вопросы
техники дифференцирования и применения производ-.
ной к исследованию функций, а в 10-м классе учащие-
ся знакомятся с интегралами и дифференциальными'
уравнениями. Но кое-чего из того, что нам потребу-
ется, в учебниках для средней школы нет. Например,
что такое —так называемая мнимая единица?
Об этом будет сказано в дальнейшем. Вообще же по-
стараемся рассказать о теории автоматического управ-
ления возможно, более элементарно, как это было
обещано в самом начало.
2. Динамика систем автоматического управления
Сначала укажем, как системы автоматического*
управления разделяются на линейные и нелиней-
ные. Более конкретно, чем это делалось раньше, оп-
ределим, что такое устойчивость. Рассмотрим и
характеристики, по которым судят о качестве пере-
ходных процессов в системах автоматического
управления.
Все системы автоматического управления, как бы
они ни разделялись по другим признакам, могут быть
отнесены к одному из следующих классов: линейные
системы или нелинейные. Методы изучения каждого
из этих классов систем в чем-то являются общими,
однако имеют и существенные особенности. Укажем,
какие системы называются линейными и какие нели-
нейными.
Чаще всего статические характеристики отдельных^
элементов системы автоматического управления нели-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ-
109
пейные, то есть не изображаются в виде одного отрез-
ка прямой линии. Например, характеристикой чув-
ствительного элемента в показанном на рис. 1 pej у-
ляторе, о котором говорилось в самом начале,
является приведенная на рис. 17 характеристика зави-
симости иеремещения z муфты регулятора от скорости
вращения v. Эта характеристика, показанная на ри-
сунке жирной линией,* нелинейна. Пусть основной
рабочей точкой характеристики является точка А.
Если при использовании данной характеристики для
анализа поведения системы в целом будет достаточным
рассмотреть лишь малые отклонения скорости враще-
ния и от ее номинального значения vAi то можно за-
менить в окрестности точки А кривую z = /(р) каса-
тельной к ней в этой точке. Это называется линеари-
зацией нелинейной характеристики, При каких откдо*
ПО Ч. П. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
нениях от номинальной точки А правомочна такая
линеаризация? Теоретически кривая может быть заме-
нена отрезком касательной только при бесконечно
малом удалении от точки, в которой она проведена.
Однако практически, чаще всего не допуская сколь-
либо значительных погрешностей, можно в указанном
выше смысле считать малыми достаточно значитель-
ные отклонения. Например, показанная на нашем ри-
сунке кривая практически может быть заменена от-
резком касательной на всем участке от точки В до
точки С, когда величина v изменяется от ив до vc.
Линейными назовем здесь такие системы, в которых
все элементы имеют характеристики линейные или не-
линейные, линеаризуемые указанным* выше способом:
Если хотя бы для одного элемента системы линеари-
зация не представляется возможной, то систему на-
зовем нелинейной. Линеаризуя характеристики, можно
значительно упростить изучение работы систем авто-
матического управления. Пока мы рассмотрим только
линейные системы. В дальнейшем будет рассказано и
о нелинейных системах, их особых свойствах и спе-
циальных методах их исследования.
Возвращаясь к тому, что было сказано раньше,
повторим еще раз, что основной задачей анализа яв-
ляется определение того, хорошо ли будет работать
система, характеристики отдельных' элементов которой
известны или которыми мы, может быть, зададимся;
задачей же синтеза является, наоборот, определение
того, какими должны быть элементы управляющего
устройства и как они должны быть связаны между
собой, для того чтобы обеспечивалась хорошая работа
объекта управления с этим управляющим устройством.
Однако все это будет иметь, смысл, если только мы
уточним, что понимать под хорошей работой.
То, что, например, регулятор, характеристики кото-
рого не согласованы с характеристиками объекта регу-
лирования, может работать плохо, и не просто плохо,
а настолько, что и совсем без регулятора было бы
лучше, мы уже убедились, когда рассматривался
рис. 1. Расходящиеся, все более нарастающие по ампли-
туде колебания в системе регулирования получались
тогда при наличии внешнего воздействия на систему:
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
Ш
происходили колебания в подаче топлива. Представ-
ляет интерес поведение таких замкнутых систем, как
изображенная на рис. 1, и в том случае, если они ра-
ботают без внешних на них воздействий, а если пос-
ледние и имеют место, то это могут быть воздействия
другого вида, чем указанные выше, например, изме-
няется в некоторый момент времени настройка -регу-
лятора. Нужно для различных условий указать, какую
работу будем считать хорошей или, точнее, указать,
какие динамические свойства должны быть присущи
системе для того, чтобы можно было так считать. Мы
сделаем это применительно к таким простейшими си-
стемам регулирования, как показанная на рис. 1, но
то, что будет сказано, относится и к другим системам
регулирования, а также и к иным системам автомати-
ческого управления.
Обычно считается, что система работоспособна, ра-
ботает хорошо, если она устойчива и если удовлет-
воряет поставленным требованиям качество переход-
ных процессов, вызываемых воздействиями определен-
ного вида.
Понятие устойчивости является общим и относится
не только к системам автоматического управления, но
и к другим динамическим системам. Например, поло-
жение шарика в канавке, показанное на соответствую-
щем из рис. 17, является устойчивым, а положение
шарика на вершине гребня неустойчивое.
Укажем принятое определение устойчивости. Хотя
в дальнейшем, как было оговорено, будем иметь в виду
устойчивость показанной на рис. 1 системы регулиро-
вания и устойчивость других систем автоматического
управления, обратимся, с тем чтобы лучше предста-
вить себе то, о чем будет, говориться, к показанным
на рис. 17 шарикам, которые тоже* могут рассматри-
ваться -как образцы динамических систем, По опреде-
лению система является устойчивой, если, будучи
выведена из состояния равновесия (штриховой линией
показан на наших рисунках отклоненный шарик) за-
тем, в отсутствие внешних воздействий, она с течением
времени возвращается к исходному состоянию равно-
весия и остается в этом состоянии; в противном случае
система является неустойчивой*
112 Я. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
’ Для того чтобы система автоматического управле-
ния была работоспособной, она должна быть устойчи-
вой. Однако и в устойчивой системе могут различным
образом протекать переходные процессы, вызываемые
воздействиями различного вида, и это тоже является
существенным. В примере с шариком в зависимости *•
от того, какова его масса, какой уклон поверхности
канавки и как эта поверхность обработана, шарик *
может после начального отклонения плавно подойти
к положению равновесия или же, пройдя по инерции,
через нижнюю точку канавки, затем покатиться об-
ратно, и так несколько раз, пока колебания затухнут
и он остановится. Вообще переходные процессы в си- <
стемах автоматического управления бывают или не-
колебательными. или. как по другому их называют, .
апериодическими, или же колебательными. Различным
может быть в том и в другом случае время протекания
переходного процесса, что также имеет значение.
Для суждения о качестве переходных процессов
определяют, как изменяется выходная величина с те-
чением времени при изменении входной. Так опреде-
ляют качество переходных процессов и в разомкнутых
и в замкнутых системах. В разомкнутой системе, схема
которой показана слева в центральной части рис. 17,
для входной и выходной величин, изменяющихся в
функции от времени t, приняты соответственно обозна- *
чения хвх и Для замкнутой системы, схема кото- *
рой изображена рядом, входная величина обозначена
как /(£), а выходная, в качестве которой ^взята инте-
ресующая нас координата, обозначена через х.
Итак, о свойствах системы судят по виду кривой
переходного процесса. Но вид этой кривой будет не-
одинаковым при входных воздействиях различного
рода. Поэтому, для того чтобы можно было сравнивать
качество различных систем, обычно рассматривают Я
реакцию системы на воздействие одного определенного
вида. Выбирают в качестве стандартного такое вход-
ное воздействие, что, зная характеристику получаемого - 4
при нем переходного процесса на выходе системы, ?
можно по этой характеристике построить характери-
стики переходных процессов, получаемые при любых
других входных воздействиях, Одним из таких стан-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
113
дартпых входных воздействий является показанное
в левой части рис. 17 скачкообразное изменение вход-
ной величины (график построен для указанной выше
замкнутой системы): в начальный момент времени
t = 0 изменяют входную величину на единицу шкалы
f(t) и новое значение /(£) сохраняют после этого по-
стоянным. Имея в виду форму описанной характери-
стики, говорят также, что в данном случае f(t) есть
ступенчатая функция времени t. Получаемую при
этом входном воздействии характеристику переходного
процесса на выходе системы называют временной ха-
рактеристикой. Внизу слева на рис. 17 показаны вре-
менные характеристики при апериодическом и коле-
бательном переходном процессе, полученные для раз-
ных систем, или может быть и. для одной при ее
работе на различных исходных режимах. ”
Обычно сколь-либо значительные колебания не
допускаются; является недопустимым и слишком за-
тяжной апериодический процесс.
Иногда при теоретических ^исследованиях динамики
систем автоматического управления за стандартное
входное воздействие принимают не указанную выше
ступенчатую функцию, а другую функцию времени,
которую определяют следующим образом. Рассмотрим
сначала входное воздействие продолжительности Т и
величиной. 1/7\ действующее как импульс, изображен-
ный внизу справа на рис. 17. Площадь импульса F =
= 7X1/7) = 1. Перейдем теперь от этого импульса к
показанному на рисунке штриховыми линиями им-
пульсу, действующему меньшее время 7, но пропор-
ционально увеличенному по высоте; при этом по-преж-
нему площадь 7=1. Рассмотрим это входное воздей-
ствие при 7 0. Такая функция входного воздействия
имеет специальное название: 6-функция пли функция
Дирака. Реакцию системы на входное воздействие
в виде 6-функции называют функцией веса системы.
По временной характеристике можно найти, как
уже было сказано, переходные процессы при входных
воздействиях любого другого вида. Например, если
скачок в ступенчатой функции равен не 1, а состав-
ляет некоторую другую величину С, то в этом случае
характеристика - переходного процесса получается из
114 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
*
временной характеристики умножением всех ординат
последней на число С. Функция веса системы полу-
чается дифференцированием временной характеристи-
ки, а последняя, наоборот, может быть представлена
в виде интеграла от функции веса.
Вернемся снова к тому, что говорилось о возмож-
ных причинах неудовлетворительной работы, когда
рассматривалась приведенная на рис. 1 система авто-
матического регулирования. Тогда было сказано, что
причиной является несогласованность характеристик
элементов самого регулятора и объекта регулирования,
которые являются инерционными. А как связать это
с тем,* что сейчас было рассказано? Если известны ха-
рактеристики всех элементов системы (пусть, напри-
мер, они определены опытным путем), то что значит,
что они увязываются или не увязываются между со-
бой? Вероятно, увязываются, если система устойчива
и если достаточно удовлетворительно качество проте-
кающих в пей переходных процессов? Не существует
лмК каких-либо других входных воздействий из числа
тех, которые бь!ли названы стандартными; кроме воз-
действий, о которых упоминалось раньше? Ответим на
эти вопросы, рассматривая частотные характеристики
элементов и систем автоматического управления.
Расскажем о том, что представляют собой частот-
ные характеристики, как они получаются опытным
путем и как используются для суждения об устой-
чивости и качестве переходных процессов в систе-
мах автоматического управления.
Сначала отметим, что обычно исследуются вопросы
устойчивости, и только при условии, что система ус-
тойчива, исследуется качество переходных процессов;
при проведении последних исследований рассматрива-
ется реакция системы на входные воздействия, о ко-
торых было сказано раньше. А теперь перейдем к от-
вету па поставленные вопросы. Начнем с последнего
из них. Существует еще один вид входных воздей-
ствий, при котором получаются так называемые ча-
стотные характеристики, дающие полное представле-
ние о динамических свойствах элементов системы,
а если берется система в целом, то и о ее .свойствах.
Располагая частотными характеристиками всех элемен-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
115.
тов можно построить по пим результирующие частот-
ные характеристики всей системы, на основании ко-
торых можно судить и об устойчивости и о качестве
переходных процессов.
Как получаются частотные характеристики опыт-
ным путем, покажем на следующем простом примере.
Рис. 18.
116 я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Пусть имеется изображенный на рис. 18 массивный
брусок 7, к которому прикреплена пружина 2. Брусок
1 может перемещаться по смазанной маслом поверх-
ности 3. Будем двигать в одну и в другую сторону
левый конец пружины, для перемещений которого
примем обозначение и проследим за тем, как при
этом движется брусок 7, перемещения которого обо-
значим .твых. Заставим левый конец пружины совер-
шать колебания по синусоидальному закону явх =
= Хвх sin со£, где Хвх — амплитуда колебаний, со — их
частота, t — время. Проведем несколько опытов, при
которых' амплитуда колебаний Х8Х будет все время
неизменной, а частота колебаний со будет постоян-
ной при каждом опыте, но при переходе от одного
опыта к другому будей ее менять. При первом испы-
тании будем осуществлять колебания левого кон nt
пружины с малой частотой, при втором — с большей,
затем еще раз за разом'—все с большей. Посмотрим,
как при этом будет двигаться наш брусок. При мед-
ленных перемещениях левого конца пружины он ус-
певает следовать, за ними и совершает колебания
с амплитудой Хвых, равной Хвх. При испытаниях про-
водимых с большими частотами, из-за инерции бруска
и из-за действия трения амплитуда колебаний Хвых
будет становиться меньшей, чем амплитуда Хвх, и,
кроме того, будед наблюдаться сдвиг по фазе — от-
ставание выходных колебаний от входных. Наконец,
при очень большой частоте колебаний левого конца
пружины брусок совсем не будет успевать реагировать
на них и будет практически неподвижным, то есть
в этом случае Хвых = 0. В общем брусок совершает
колебания по закону явых = Хвых sin (wt +-ф), где со-
та же частота, что и для входных колебаний хвх —
= Хвх sin со£, а ср — измеряемый в радианах угол сдвига
но фазе. Если записать при некоторой промежуточной
постоянной частоте со колебания хвх левого конца пру-
жины и колебания явых бруска (для записи колебаний
используется специальный прибор — осциллограф), то
получится такая картина, как изображенная на рис. 18
справа от бруска с пружиной. Здесь — сдвиг вы-
ходных колебаний относительно входных по времени.
Указанная выше величина ф определяется по как
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
117
ф = со • St при условии, что (о измеряется в радианах
в секунду (иногда частота измеряется в герцах, то
есть просто берется число колебаний в секунду у;
имеет место соотношение со = 2лу). Из сказанного ра-
нее следует, что при постоянной амплитуде Хвх ампли-
туда Хвнх, следовательно, и отношение амплитуд
Л/ = Хвых/Хвх, а также и угол ф сдвига по фазе изме-
няются в функции от частоты со. По данным, полу-
ченным при описанной выше серии опытов, проведен-
ных при различных значениях о, например при соь
о)27 ..., сщ, ..(On, и т. д., можно построить характе-
ристику так, как сейчас будет указано. Построение
иллюстрируется графиком, который на рис. 18 распо-
ложен ниже изображения бруска с пружиной. Для
каждого значения (о откладывается, как показано на
рисунке, на луче, проведенном под углом ф к оси
абсцисс, отрезок, равный по величине Иначе гово-
ря, если воспользоваться знакомой нам по школьному
курсу геометрии терминологией, для каждой частоты
6) строится вектор с длиной М и направлением ср.
Проводя через точки концов всех векторов кривую,
получаем характеристику, которую называют ампли-
тудно-фазовой частотной характеристикой. Для каж-
дого значения частоты со эта характеристика после
того, что она построена, дает нам величину отношения
амплитуд выходных и входных колебаний М ’= Хвы^/Х^
и величину угла сдвига по фазе ср. Эта характеристика
была бы иной по численным значениям М и ср при
каждой со, если бы мы провели опыты -с бруском,
имеющим другую массу, с пружиной другой жесткости
н при других величинах трения между бруском и по-
верхностью, по которой он скользит. Амплитудно-фа-
зовая частотная характеристика, таким образом, полно
отражает особенности динамической системы, в нашем
случае системы брусок — пружина.
Если имеется амплитудно-фазовая частотная харак-
теристика, то по пей можно построить и другие ча-
стотные характеристики. Например, можно построить
отдельно характеристику изменения М = Хаых/Хах
в зависимости от частоты (О или построить характери-
стику изменения ф в функции от о. Их называют
соответственно амплитудной частотной характеристи-
118 Ч. И- ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
кой и фазовой частотной характеристикой. Иногда ис-
пользуются характеристики изменения в зависимости
от частоты (о проекции Р вектора М на ось' абсцисс
и изменения в зависимости от со его проекции Q на
ось ординат (см. рисунок, изображенный рядом с ра-
нее описанным). Первую из этих последних характе-
ристик называют вещественной частотной характери-
стикой, а вторую — мнимой частотной характеристикой.
Так же, как и в рассмотренном нами примере, по-
лучают частотные характеристики для различных
элементов систем автоматического управления. Частот-
ные характеристики для них иногда имеют такую же
форму, как та, которая была указана для бруска
с пружиной; в других случаях при частотных испы-
таниях получаются амплитудно-фазовые характеристи-
ки другой формы,— такой, как у характеристики, по-
казанной на . рис. 18 во втором ряду справа, или еще
иной формы. По виду амплитудно-фазовой частотной
характеристики сразу можно сказать, к элементам
какого типа относится тот, для которого получена
данная характеристика.
Ответим теперь на другие ранее поставленные
вопросы.
Пусть мы имеем экспериментальные амплитудно-
фазовые частотные характеристики всех элементов си-
стемы, включая, конечно, п сам объект управления,
а работающей системы автоматического управления в
целом, которую можно было бы испытать, еще нет: ве
построено, например, управляющее устройство и лишь
имеются его элементы, для которых сняты частотные
характеристики. Что в этЗм случае нужно сделать, для
тОго чтобы заранее можно было сказать, будет ли
устойчивой проектируемая система и каким будет при
ее работе качество переходных процессов?
Сначала ответим на этот вопрос коротко, потом мы
его рассмотрим более детально. Нужно по частотным
характеристикам отдельных элементов построить ча-
стотные характеристики всей системы и затем уже,
используя эти характеристики, определить, будет или
ве будет устойчивой система, и сделать суждение
о качестве переходных процессов. Если, например,
окажется, что система неустойчива, нужно будет из-
2. ПИН ШИКА СИСТЕМ'УПРАВЛЕНИЯ
119
менять ее параметры так, чтобы сделать ее устойчи-
вой, и убедиться в том, что это удалось — опять-таки
с помощью частотных характеристик. Укажем теперь,
как все это делается.
В качестве примера рассмотрим первоначально
разомкнутую систему, схема которой представлена ни-
же слева на рис. 18. Около каждого из квадратиков,
изображающих элейенты системы, показана соответ-
ствующая данному элементу амплитудно-фазовая ча-
стотная характеристика. Точки характеристик, отвеча-
ющие одному и тому же значению частоты, по-разному
могут быть расположены на этих характеристиках; па
рисунках сделаны отметки для одного значения часто-
ты (о = <оА, обычно же делаются отметки на каждой
характеристике для целого ряда частот. Амплитудно-
фазовая частотная характеристика всей разомкнутой
системы строится так. На амплитудно-фазовых частот-
ных характеристиках всех элементов берутся точки,
отвечающие некоторой данной частоте, например ча-
стоте eh. Соответствующие векторы, ^изображенные на
рисунке жирными линиями, умножаются по следу-
ющему правилу: длины векторов перемножаются, а уг-
лы сдвига по фазе складываются алгебраически.
Так находится длина и определяется направление
вектора, конец которого представляет собой точку
амплитудно-фазовой частотной характеристики всей
разомкнутой системы при <о = соА. Также получаются
и точки этой характеристики при других зпачепиях а).
Построенная таким образом амплитудно-фазовая ча-
стотная характеристика разомкнутой системы располо-
жена на рис. 18 справа от схемы, на которой элементы
этой системы были изображены в виде квадратиков.
Вопрос об устойчивости рассматриваемой разомкну-
той системы вообще не возникает, так как известно
следующее. Если только амплитудно-фазовые часют-
пые характеристики всех элементов такой формы, как
показанные при схеме с квадратиками, то разомкну-
тая система всегда устойчива. Но достаточно перейти
от этой разомкнутой системы к соответствующей ей
замкнутой системе (делая это так же, как при знаком-
стве с работой изображенного на рис. 1 регулятора),
пак может оказаться, что замкнутая система, схема
120 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
которой также показана на рис. 18, возможно, будет
и неустойчивой. Оказывается, что вопрос об устойчи-
вости замкнутой системы можно решить, лишь взгля-
нув на амплитудно-фазовую частотную характеристику
данной системы в разомкнутом состоянии: если, как
на указанной выше характеристике, .приведенной на
рис. 18, точка —1 на оси абсцисс не охватывается
характеристикой, то замкнутая система устойчива.
А если амплитудно-фазовая частотная характеристика
разомкнутой системы такая, как показано ниже на
рис. 18 сплошной линией, и точка —1 охвачена харак-
теристикой. то рассматриваемая замкнутая система
является неустойчивой. Чтобы сделать ее устойчи-
вой, нужно лишь уменьшить в нашем случае коэффи-
циент усиления системы в разомкнутом состоянии
(вспомним то, что было сказано о коэффициенте уси-
ления К разомкнутой системы, когда в начале наших
бесед мы знакомились с действием механизма обратной
связи в простейшей системе автоматического регулиро-
вания). При уменьшенной величине К амплитудно-фа-
зовая частртная характеристика разомкнутой’системы
такая, как показано на рисунке штриховой линией.
При этом она не охватывает точку —1 на оси абсцисс,
и, следовательно, замкнутая система устойчива. Ука-
занное выше правило суждения об устойчивости замк-
нутой системы по амплитудно-фазовой частотной ха-
рактеристике системы в разомкнутом состоянии (охва-
тывается ли последней пли .нет точка -1) называется
критерием Найквиста или частотным критерием устой-
чивости. Он таким же образом формулируется для си-
стем, содержащих любое число элементов, если ампли-
тудно-фазовые частотные характеристики элементов та-
кого же вида, как характеристики в рассмотренном
нами примере. Если же они другого вида, то частот-
ный критерий устойчивости замкнутой системы форму-
лируется несколько иначе, но и при этом учитывается
расположение амплитудно-фазовой частотной характе-
ристики разомкнутой системы относительно точки —1.
Пользуясь указываемым в курсах теории автомати-
ческого управления' правилом построения по известной
амплитудно-фазовой частотной характеристике разомк-
нутой системы частотных характеристик соответству-
2 ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
121
юшей замкнутой системы, легко получить и эти пос-
ледние. В частности, так может быть получена веще-
ственная частотная характеристика, используемая для
суждения о качестве переходные процессов в замкну-
той системе (для определения качества переходных
процессов в разомкнутой системе используется ее
вещественная частотная характеристика).
Укажем, как исследуется качество переходных
процессов. Рассмотрим ту же замкнутую систему, что
п раньше. Примем, что переходный процесс в системе
вызывается изменением настройки, которое произво-
дится по закону струпенчатой функции, то есть такой
вид имеет функция /(/). Для построения временной
характеристики, отражающей происходящее при этом
. изменение координаты х во времени используем
вещественную частотную характеристику. Пусть, для
пашей системы это будет характеристика изменения Р
в зависимости от со, показанная внизу в левой части
рис. 18 сплошной линией. Для построения временной
характеристики делают с вещественной част отпой ха-
рактеристикой следующее. Строят, как показано на ри-
сунке штриховыми линиями, несколько трапеций (на
i исунке трапеции ABDC, CDFE, EFHG, GH11, OKLD
так. чтобы граничные наклонные^ и горизонтальные
линии, являющиеся сторонами трапеций, были близ-
кими к вещественной частотной характеристике и ал-
гебраическая сумма площадей всех трапеций (площадь
трапеции OKL1 считается отрицательной, а остальных
трапеций —- положительной) была равна алгебраиче-
ской сумме площадей, образуемых вещественной ча-
стотной характеристикой и осями координат. Для
каждой из этих трапеций по таблицам, которые
обычно приводятся в книгах по теории автоматиче-
ского управления, без проведения каких-либо сложных
расчетов определяют характеристику изменения в
функции от времени t некоторой величины. Эти вели-
чины для трапеций, построенных при рассмотрении
нашего примера, обозначим х2, ж3, х4, хь'. Получен-
ные таким образом характеристики изменения xh х2,
*з, и хъ в зависимости от времени t показаны в са-
мом низу справа на рис. 18. Складывая алгебраически
при ряде значений t величины x2l x2i ц отме-
122 ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
чая значения этой суммы точками на графике и про-
водя через точки линию, получаем изображенную на
том же рисунке кривую изменения х в функции от
времени t Это и есть временная характеристика, о ко-
торой было рассказано раньше. Она могла бы быть
получена при испытании всей замкнутой системы, если
бы к ней было приложено входное воздействие /(/)
в виде ступенчатой функции. Но в том-то и дело, что
мы смогли определить временную характеристику еще
до того, как система построена, располагая лишь экспе-
риментальными частотными характеристиками ее эле-
ментов. И это уже очень важно. Но бывает и так, что
некоторые элементы управляющего устройства еще
только находятся в стадии разработки и их нельзя
испытать,* нельзя, может быть, провести и испытания
объекта управления. В этих случаях для определения
заранее того, будет ли система устойчивой и будет ли
достаточно хорошим при ее работе качество переход-
ных процессов, а также для обеспечения устойчивости
и качества оказываются необходимыми расчеты. Иногда
оказывается целесообразным совместное использова-
ние экспериментальных характеристик одних элемен-
тов и расчетных характеристик других.
И, наконец, еще одно замечание к тому, что было
рассказано об использовании вещественной частотной
характеристики для определения качества переходного
процесса. Часто оказывается возможным составить
примерное представление о качестве переходного про-
цесса по одному лишь виду вещественной частотной
характеристики, не строя по пей временную характе-
ристику. Если вещественная частотная характеристика
негладкая и имеет пики, то следует ожидать, что пе-
реходный процесс будет протекать в виде медленно
затухающих колебаний. Если, наоборот, по мере уве-
личения частоты (о величина Р все время убывает п
дйя всей вещественной частотной характеристики Р>0,
то значения х в переходном процесса не превышают
более чем на 18% значение х, устанавливающееся по
окончании переходного процесса. Имеется и ряд других
правил для приближенного суждения о качестве пере-
ходных процессов по одному лишь виду вещественной
частотной характеристики.
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
. 123
Полагаем, что все, что здесь было рассказано, ясно
нашим читателям. Но может быть и возникли какие-
либо вопросы. Например, должно быть понятным, по-
чему так, а не по-другому, называются амплитудная
п фазовая частотные характеристики. А вот другим
частотным характеристикам были даны странные на-
звания: вещественные и мнимые частотные характе-
ристики. Откуда взялись такие непонятные названия?
На этот вопрос ответим немного позднее.
А сейчас пойдет речь о типовых звеньях систем
автоматического управления. Обсудим и другие воп-
росы. Раньше было рассмотрено экспериментальное
определение частотных характеристик. Выясним
теперь, как быть, если система лишь проектируется
и опыты провести нельзя. Сделаем небольшие
экскурсии в область математики. Вспомнцм, что на-
писано в школьном учебник? о дифференциальных
уравнениях^ вспомним и простейшие квадратные
j алгебраические уравнения. Рассмотрим после этого
j различные способы исследования устойчивости си-
| стем автоматического управления и исследования
I качества переходных процессов.
Имеется огромное количество разнообразных систем
автоматического управления, в которых можно выде-
лить различные элементы: чувствительные элемен-
ты, усилители, исполнительные оргапы управляющих
устройств, сами объекты управления. Они бывают ме-
ханическими, электрическими или другими. Имеется
превеликое множество их. Однако по своим динамиче-
ским свойствам ‘ любой из них может быть отнесен
к одному ин всего лишь нескольких типов, что суще-
ственно упрощает задачу проектирования и исследо-
вания систем управления. Такое разделение произво-
дится по виду дифференциального уравнения, которым
описываются переходные процессы в данном элементе,
или по виду его амплитудно-фазовой частотной харак-
теристики. В этом смысле и говорят о типовых звеньях
систем автоматического управления.
О частотных ^характеристиках мы уже говорили.
Вспомним то, что рассказывалось в школе о дифферен-
циальных уравнениях. Один из самых первых разделов
в учебнике для 10-го класса так ведь п назывался:
f24 ч. ТТ ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
«Дифференциальное уравнение гармонических колеба-
ний». А' потом в разделе «Дифференциальное уравне-
ние показательного роста и показательного убывания»,
который тоже имеется в учебнике для 10-го класса, мьь
познакомились с тем, как учитываются при решении
дифференциальных уравнений начальные условия и
рассмотрели в качестве примеров дифференциальные
уравнения радиоактивного распада, роста населения
страны, нагревания тела. Вспомним и то, что мы про-
чли обо всех этих примерах в учебнике: «Эти примеры
позволяют понять, насколько мощным аппаратом ис-
следования являются дифференциальные уравнения.
Очень часто элементарные законы, управляющие ка-
ким-либо процессом, записываются в виде дифферен-
циальных уравнений, а для того чтобы выяснить, как.
процесс развертывается по вреаиени, приходится эти
дифференциальные уравнения решать». Что же, это
относится в равной мере и к законам управления,
к развертыванию по времени процессов, или, как мы
раньше говорили, к временным характеристикам эле-
ментов- и систем автоматического управления.
В общем, будем считать, что читатель с составле-
нием и решением дифференциальных уравнений зна-
ком. Но все же повторим здесь вывод самого простого,
первоначально встретившегося нам в школе, диффе-
ренциального уравнения — уравнения гармонических
колебаний. Рассмотрим только не шарик с пружиной,
как в учебнике, а показанный на рис. 18 брусок с пру-
жиной. В дополнение к тому, чточ учитывалось при
выводе уравнения в школе, а именно силы инерции
шарика (а у нас бруска) и силы действия пружины,
примем во внимание и силу трения при движении де-
тали по смазанной поверхности, или, как говорят,
силу вязкого трения.
Итак, снова обратимся к тому, что изображено в
верхней части слева на рис. 18. Примем, как и раньше,
обозначения хвх-дпя перемещения левого конца пру-
жины 2 и хзых для перемещения бруска 1. Введем
также следующие обозначения: М — масса бруска /,
С — жесткость пружины 2, Н — коэффициент вязкого,
трения, F — сила внешнего воздействия, приложенная
к левому концу пружины. Пусть, например, в началь-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
125
лый момент времени £=0, когда пружина расслаблена
л брусок неподвижен, на левый конец пружины на-
чинает действовать сила F, стремящаяся привнести
брусок в движение. Силе F в процессе движения брус-
ка будут противодействовать' сила инерции бруска,
которая, согласно второму закону Ньютона, равна
массе М, умноженной на ускорение #вых , и пропор-
циональная скорости движения \гВых сила вязкого тре-
ния Нх вых, С величиной деформации пружины, рав-
ной -Хбнх, движущая сила F связана соотношением
(^вх—^вых). Написав, что движущая сила равна
гумме противодействующих ей сил, получим уравне-
ние, которое легко привести к виду Т'.Гвых“Ьр#вых + .
-Ь^вь1Х=л:вх, где Х=М1С и $=*Н/С.
Таким же по виду дифференциальным уравнением
описываете# и движение чувствительного элемента в
показанных на рис. 1 и 2 центробежных регуляторах,
только в каждом случае другими являются значения
коэффициентов т и р и в правой части уравнения
появляется еще один коэффициент к (у нас просто он
сказался равным 1). Точно таким же по виду диффе-
ренциальным уравнением тгвых +₽£вых
описывается и изменение токов и напряжений в элект-
рических колебательных контурах, а также изменение
выходных величин при изменении во времени входных
величин'во многих других элементах систем автомати-
ческого управления. Указанное выше уравнение на-
зывается дифференциальным уравнением инерционного
звена второго порядка. Оно .так называется (так па-
♦ ывается и само звено) потому, что высшая производ-
ная в уравнении (яВых ) — второго порядка, т. е. вторая
производная от жвых по времени.
Если масса.показанного на рис. 18 бруска настоль-
ко мала и настолько незначительны возникающие ус-
корения, что сила инерции оказывается пренебрежимо
’•алой по сравнению с силой вязкого трения, то первое
слагаемое в рассмотренном уравнении можно принять
равным нулю, и тогда уравнение примет следующий
Т’т’д: Р^вых +явыХ=&явх. Таким уравнением, которое
называется дифференциальным уравнением инерцион-
126 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
кого звена первого порядка., также описывается движе-
ние многих элементов самых различных систем авто-
матического управления, например двигателя — объек-
та регулирования в системе регулирования, изображен-
ной на рис. 1. Если в левой части рассматриваемого
уравнения будет а не +., то соответствующее звено
является неустойчивым; так его и называют — неус-
тойчивое звено. Знакомясь с воздействиями по произ-
водной и по интегралу, мы уже встречались с уравне-
ниями вида Явых == Жих и явых = ти J #вх dt. Это урав-
6
нения движения соответственно дифференцирующего и
интегрирующего звеньев. Вот и все основные типовые
звенья систем автоматического управления: инерцион-
ные звенья второго и первого порядка и остальные,
которые были указаны выше. Попутно заметим, что
интегрирующее звено при охвате его жесткой обратной
связью (так, например, как в показанном в левой части
рис. 2 гидравлическом усилителе) превращается в инер-
ционное звено первого порядка.
Для каждого из типовых звеньев временная харак-
теристика п амплитудно-фазовая частотная характери-
стика имеют особый вид. С видом временной характе-
ристики связано то, что некоторые типовые звенья име-
ют и другие, кроме указанных выше, названия. Напри-
мер, для инерционных звеньев второго порядка чаше
всего характерен колебательный, переходный процесс,
протекающий так, как показано штриховой линией вни-
зу слева на рис. 17. Поэтому эти звенья по-другому на-
зывают колебательными. У инерционных звеньев перво-
го порядка временная характеристика всегда такого ви-
да, как показано па том же рисунке сплошной линией,
то есть переходный процесс здесь апериодический. Поэ-
тому эти звенья называют также апериодическими. Ин-
тегрирующие звенья иногда называют астатическими,
так как они обычно имеются в астатических системах.
С каким типом звепа мы имеем дело сразу можно ска-
зать, взглянув и па амплитудно-фазовую частотную
характеристику данного звена. Если, например, ампли-
тудно-фазовая частотная характеристика такого вида,
как показано внизу слева под схемой разомкнутой
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
127
спстемькна рис. 18, то ясно, что соответствующее звено
относится к инерционным звеньям второго порядка. Ес-
же амплитудно-фазовая частотная характеристика
такая по форме, как для двух других элементов этой
спсгемы, то сразу можно сказать, что оба они пред-
ставляют собой инерционные звенья первого порядка.
Имея дифференциальные уравнения звеньев систе-
мы, нетрудно составить по ним и для всей системы в
целом дифференциальное уравнение движения, кото-
рое затем используется для исследования ее устойчи-
вости и для построения характеристик переходных
процессов. Покажем сначала, как составляется диффе-
ренциальное уравнение разомкнутой системы. Возьмем
для примера разомкнутую систему, о которой только
сейчас говорилось. Здесь имеются три элемента 7, 2 и
3, дифференциальными уравнениями движения которых
являются
+ Р1.’/' + У =
p2z' + z = кгу,
Рз-Гвых 4" 2'вых =
&
В этих уравнениях у и z — промежуточные координа-
ты, указанные на рисунке. Исключая величины у и z,
сводим эти три уравнения к одному дифференциаль-
ному уравнению движения системы. Делается это сле-
дующим образом. Дифференцируя раз, а потом еще
раз, левую^ и. правую части уравнения $2z' + z = к2у,
получаем fi2z" + z' = к2у' и fi2z"' +*z" = к2у", где z” —
производная от z", то есть третья производная по вре-
мени от z (в школьном курсе математики встречались
только первая и вторая производные, последующим
дифференцированием могут быть точно так же получе-
ны третья, четвертая и последующие производные).
Подставляя определяемые из указанных выше уравне-
ний выражения у”, у' и у через z и ее производные
в первое из первоначально заданных уравнений, полу-
чаем уравнение, которое вместе с третьим из перво-
начально заданных уравнений образует систему двух
Уравнений. Исключая из них таким же способом-пере-
менную z и ее производные, приходим к следующе-
му дифференциальному уравнению рассматриваемой
128 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
разомкнутой системы:
#4*^ВЬ1Х^ “h Язевых + ^г^ВЫХ "Ь ^l^BblX 4" #ВЫХ ~ ^#нх>
где а4 = TiP2p3> а3 = Р^Рз + т{([\ +02), а2 = р2р3 -Р
+ М&2 + р3) + Ti, й( = + р2+ р8, К == k{k2k3. Коэфф 1<_ ’
циент К представляет собой коэффициент усиления ра-
зомкнутой системы, о котором уже говорилось раньше. -
Полученное дифференциальное уравнение 4-го порядка:
таков порядок старшей производной. Заметим, что запись,
указанных выше преобразований можно упростить, еч-
ли ввести для операции дифференцирования обозначе-
ние р (говорят в этом случае, что р — оператор диффе-
ренцирования), для повторного дифференцирования —.
р2, для третий раз проведенного — р3 и т. д., и рассмат-
ривать написанные при этих обозначениях уравнения
как алгебраические. В такой записи первое из исход-
ных уравнений принимает следующий вид: Ttp2p +
+ $1РУ + У — или (TfP2 + $ipy+ Dy = к{хв^ Два ?
других уравнения записываются следующим образом:
(р2р + l)z к2у, (03р + 1)#вых = k3z. Умножая правые
части всех трех уравнений и левые части их, и произ-
водя сокращение на yz, получаем уравнение (Ttp2 +
+ + 1)(р2р + 1)(£зР 4- 1)явых = кхк2к3хп. раскрывая в '
котором скобки и заменяя р, р2, р3, р4 соответствующие :
ми производными, приходим к указанному выше диф-
ференциальному уравнению рассмотренной нами ра-
зомкнутой системы.
Если нужно получить дифференциальное уравне-
ние движения для замкнутой системы, то ее сначала
мысленно размыкают, составляют описанным выше ♦
способохм дифференциальное уравнение для разомкну-
той системы, и, замыкая затем систему, преобразуют
последнее уравнение в дифференциальное уравнение '
замкнутой системы. Для того чтобы понять,, как этш
делается, нужно хорошо представлять себе действие'-
механизма обратной связи. Знакомство с показанной
на рис. 1 системой регулирования, с действием обрат-
ной связи в ней, здесь нам пригодится. Недаром мы
уже тогда мысленно размыкали, а потом снова замы/
кали рассматриваемую систему. Тогда мы поняли, в го
означает пришпие —при переходе от ра-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ '
129
зомкнутой к замкнутой системе. Затем вместо обозначе-
ний Д^вх и Д 1?вых мы вводили единое обозначение Др, так
как не могло быть различных значений одной и той же
величины и в данной точке замкнутой системы в один
и трт же момент времени. Вспомнив все это, используем
это сейчас. Только имея в виду пример, который мы
недавно рассмотрели, вместо ранее указанных величин
Дрвх, Д^вых, Др примем соответствующие обозначения
отклонений хвх, явых, х. И здесь при замыкании разомк-
нутой системы будем принимать хзх = — ^вых. Заметим
также, что, разомкнув, как показано штриховыми ли-
ниями, изображенную на рис. 18 замкнутую систему,
получим разомкнутую систему, входным воздействием
для которой является xnx + f(t). Поэтому движение
этой разомкнутой системы описывается тем же, что и
ранее,. дифференциальным уравнением, с той лишь
разницей, что в правой части уравнения будет те-
перь не zBS, a xm + f(t). Подставляя в измененное та-
ким образом уравнение хвх = — яВЫх, перенося затем с
учетом знака Кхзыт в левую часть уравнения и заменяя
явых на х, получаем для рассматриваемой нами замкну-
той системы следующее дифференциальное уравнение
ее движения: a4#(IV) + <hx"' + (hx" + ^х' + (К + 1)я =
= К/(х).
Получив дифференциальное уравнение движения,
можно, не решая его, сразу же сказать, будет ли систе-
ма устойчивой или нет. Система устойчива, если коэф-
фициенты при х и всех ее производных больше нуля
и если для рассматриваемой нами замкнутой системы
имеют место неравенства а4(а3а2 — а4а4) —(К + 1) > О
-и а2а^ — а3(К + 1) > 0. В противном случае система явля-
ется неустойчивой. Если все три звена в рассмотрен-
ной нами системе были бы инерционными звеньями
первого порядка, то в полученном нами дифференци-
альном уравнении замкнутой системы, если сравни-
вать его с приведенным выше уравнением, не было бы
первого* слагаемого и были бы другими значения коэф-
фициентов а3, а2 и а4 (считаем, что коэффициенты уси-
ления остались старыми). При этом критерием устой-
чивости является, кроме положительности коэффициен-
тов в левой части уравнения, лишь одно последнее из
Указанных неравенств. Разработаны аналогичные крите-
5 Л. а. Залманзон *
130 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
рии устойчивости, которые называются алгебраически-
ми, для систем, состоящих из любего числа звеньев,
движение которых описывается дифференциальными
уравнениями сколь угодно высокого порядка.
Если вопрос об устойчивости системы решается
указанным выше способом при использовании лишь
коэффициентов дифференциального уравнения движе-
ния без решения самого уравнения, то для получения
расчетным путем временной характеристики или ха-
рактеристик переходных процессов при других входных
воздействиях представляется необходимым решение
дифференциального уравнения движения системы. Од-
ним из удобных методов решения рассматриваемых,
дифференциальных уравнений является операторный
метод, основанный на том, что переменные величины
(х и ее производные, преобразуются определен-
ным способом, причем, как говорят, получаются их
изображения, и на основе этих преобразований просто
получается, с учетом начальных условий, выражение,
описывающее характеристику переходного процесса.
При преобразованиях исходные переменные величины,
являющиеся функциями времени t, представляются
как функции некоторой другой переменной величины
р. Обозначение р имеет здесь другой смысл, чем
раньше, когда мы считали, что р — это оператор
дифференцирования. Чтобы разобраться с этим, про-
делаем еще одну небольшую экскурсию в область
математики..
Вспомним прежде всего, что рассказывалось в шко-
ле о решении квадратных уравнений. Возьмем два
уравнения: х2 + 4 = 0 и а? — 4# + 13 «= 0. Нетрудно убе-
диться в том, что дискриминант D < 0, и если следовать
тому, что мы проходили в школе (обратимся к тому,
что написано в учебнике по . алгебре для 7-го класса),
то оба наши уравнения не имеют корней, то есть не
имеют решения. Это верно, если ограничиться обыч-
ными (действительными) числами, с которыми мы
встречались в школе. Если бы мы попытались напи-
сать выражения корней рассматриваемых уравнений, го
для первого из них получилось бы я—± ]/ — 4, а для
второго — я= 2 ± У — 9. Если исходить из того, что мы.
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
131
прошли в школе, оба эти выражения не имеют смысла,
так как мы знаем, что извлекать квадратнее корни
можно только из неотрицательных чисел. Но можно,
не думая об этом, ввести условное обозначение i== V—1
я принять, что г2 == — 1. Тогда, тоже условно, можно
записать решение первого из наших уравнений, как
х — ± V ± VI уГ— 1 == ± , а второго — как
х = 2 ± 1^9 1 = 2 ± 3i. При таком представлении
корней оказывается, что оба уравнения имеют реше-
ние, только лишь оно необычного пока для нас вида.
Выражение $= 1 называют мнимой единицей, та-
кие числа* как 2i, называют мнимыми числами, а такие,
как 2 + 3/,—комплексными числами. Чтобы отличить
от мнимых и комплексных чисел обычные числа, с ко-
торыми мы встречались раньше, последние называют
вещественными. В комплексном числе 2 + 3i число 2
называют вещественной частью этого комплексного чис-
ла, а число 3 — коэффициентом в мнимой части или мни-
мой частью данного комплексного числа. Указанные вы-
ше понятия распространяются и на алгебраические, три-
гонометрические и другие выражения. Например, а + bi
и а — Ы — комплексные алгебраические выражения, с
которыми обращаются, как с обычными вещественными,
помня лишь, что i ~ V — 1 и i2 =« — 1. Например, извест-
но нам, что произведение суммы двух вещественных
величин на их разность равно разности их квадратов.
Применение этого правила к комплексным величинам
в нашем случае дает (а+ ЫНа — Ы) = а2 — (bi)2 —
— ЬЧг = а2 + b2. Графически комплексные числа изоб-
ражаются следующим образом. По оси абсцисс откла-
дывается вещественная часть, а по оси ординат — мни-
мая часть комплексного числа (оси координат при этом
называют соответственно вещественной и мнимой).
Этими координатами определяется положение точки на
Плоскости. Таким образом, комплексное число пред-
ставляется точкой на плоскости. Можно также сказать,
что оно представляется вектором, расположенным
так, что начало его совпадает с началом координат, а
конец — с указанной выше точкой. Введение в рас-
смотрение комплексных велйчин значительно расширя-
ет в^змотадости^математики. Йапрцмер, ка?алрс>_бы,что
5*
132 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
функция еу и функции cos у и sin у никак между собой
не связаны. Это действительно так, если ограничить-
ся вещественными значениями у. Если же у есть
мнимая переменная, то есть у = ix' то eix = cos х +
+ г sin я. Эта формула известна под названием форму-
лы Эйлера.
Насколько практически полезно введение в рассмот-
рение комплексных переменных можно проиллюстри-
ровать хотя бы таким примером. Раньше было сказано
об операторном методе, позволяющем более просто ре-
шать дифференциальные уравнения при получении
характеристик переходных процессов. Было сказано,
что этот метод основан на том, что переменные вели-
чины х и ее производные и /(0, являющиеся все функ-
циями времени t, преобразуются так, что получаются
их, как говорят, изображения, представляющие собой
функции некоторой другой переменной величины р.
Теперь, после того, что мы познакомились с комплекс-
ными величинами, можно добавить, что,при указанных
выше преобразованиях в качестве переменной величины
р берется комплексная переменная р = a+coi; а и со—
соответственно значение ее вещественной и мнимой
частей. Операторный метод решения дифференциаль-
ных уравнений удобен и тем, что автоматически учи-
тываются в ходе преобразований начальные условия.
В дальнейшем, рассматривая дифференциальные урав-
нения, примем начальные условия нулевыми, то' есть
будем считать, что в начальный момент времени t = О
переменная величина х и все ее производные, кроме
самой высокой, равны нулю.
Покажем, как от дифференциального уравнения,
описывающего движение какого-либо звена системы или
всей системы, будь то разомкнутой или замкнутой,
можно, не решая дифференцйального уравнения, перей-
ти к выражению соответствующей амплитудно-фазо-
вой частотной характеристики или других частотных
характеристик, и как затем построить эти характеристи-
ки. Покажем это на примере инерционного звена второ-
го порядка, дифференциальным уравнением движения
которого, как мы уже знаем, является уравнение
™вых +^ + «^вых = кхзт. В операторной записи после
выполнения указанных выше преобразований это урав-
ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ 133
нение имеет следующий вид: (тр2+Рр+1)£ВЫх = &хвх.
По виду оно совпадает с уравнением, которое было бы
получено, если бы мы, как делали это раньше, просто
заменили обозначения первой и второй производной
обозначениями р и р2, и которое сразу может быть на-
писано, если задано исходное дифференциальное уравне-
ние. Но вместе с тем данное уравнение отличается от
уравнения, которое было бы получено просто при услов-
ном обозначении производной знаком р и второй произ-
водной знаком р2. В нашем случае сейчас р есть неко-
торая комплексная переменная, то есть р = a а
над #вых и ^вх проставлены черточки, указывающие- на
то, что это не сами переменные, зависящие .от времени
а их изображения, являющиеся функциями комп-
лексной переменной р. Из приведенного выражения
найдем отношение яВых/явх? для которого примем обоз-
начение W(p) и которое назовем передаточной функ-
цией; для рассматриваемого звена РИ(р) ==/с/(тр2 4-
+ рр + 1). Примем в выражении р = а + cof, что а = О,
то есть будем считать р мнимой величиной, и примем,
что со в р = (м есть частота. Заменяя в Ж(р) величину
р на ш, получим тогда выражение амплитудно-фазо-
вой частотной характеристики нашего звена. Сделаем
эту замену и преобразуем полученное выражение к
виду ИЧон) = P(<d) + (?(g))j, где Р(ш) и QM или про-
сто Р и Q, как будем дальше писать для краткости,—
функции от ш, представляющие собой соответственно
вещественную и мнимую части ИЧен). Будем при этом
помнить, что г2 = —1. Имеем FFCcoi) =/с/[т(<оО2 +
+ р(ш) + 1] ===&/[—т(о2 + Р(в$+1] =М(1-тшг) + fknl.
Далее, помня, что (а + bi) (а — Ы)~а2 + умножим
в последнем выражении ИЧоО числитель и знамена-
тель на [(1 ~ то2) — рой. Это позволит нам избавиться
от мнимости в знаменателе. В результате получа-
ем Ж(оО = Ю-то2)/[(1-то2)2 + р2<й2] — {Лр<х>/[(1 —
— то2)2 + р2ш2Ш. Строится далее амплитудно-фазовая
частотная характеристика следующим образом. Зада-
емся некоторым значением со и подсчитываем для
него Р =» Л(1 — то2)/[(1 — то2)2 + р2ш2] и Q = — Афсв/[(1 —
— то2)2 + Р2©2]. Рассматривая плоскость чертежа как
плоскость комплексной переменной, откладываем по
вещественной оси подсчитанное значение Р и по мни-1
134 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
мой оси подсчитанное значение Q, и так, как показано
посредине во втором ряду на рис. 18, определяем
положение точки амплитудно-фазовой частотной ха-
рактеристики, отвечающей взятому нами значению
со. То же самое делаем для ряда других '"значений
со и строим всю амплитудно-фазовую частотную ха-
рактеристику. Можно и отдельно построить, проводя
расчеты с использованием полученных зависимостей
Р от (о и Q от со, вещественную и мнимую частотные
характеристики.
Итак, мы пришли к следующему. Раньше было рас-
сказано, как определяются частотные характеристики
опытным путем. А теперь показано, как эти же харак-
теристики можно рассчитать. И стало ясным, откуда
взялись показавшиеся нам сначала такими странными
названия последних из указанных выше частотных ха-
рактеристик. Вместе с тем из того, что было рассказа-
но, следует, что равносильны способы задания звена
дифференциальным его уравнением, передаточной его
функцией или же частотными его характеристиками.
Имея одни из этих данных, можно тут же указать и
другие.
Так же, как и для рассмотренного звена, могут быть
определены передаточные функции и могут быть затем
построены расчетные частотные характеристики для
любых других звеньев и для целых систем автомати-
ческого управления, содержащих ряд звеньев. Для ра-
зомкнутой системы ее передаточная функция Жр(р)
получается как произведение передаточных функций
всех звеньев системы. Для замкнутой одноконтурной
системы такой, как показанная на рис. 18, ее' переда-
точная функция. ГИ3(р) == £//(£) определяется следую-
щим___образом: 1¥з(р) = Wp (р)/[ 1 + РГр(р)] (заметим,
что fit) в написанном выражении не является, как fit),
функцией времени t, а есть функция переменной р;
это уже было пояснено раньше). Если система двух-
кентурная, такая, например, как показанная в правой
части рис. 5, то часть системы, охваченная внутренней
обратной связью, рассматривается как отдельная замк-
нутая система, и по указанному выше правилу нахо-
дится ее передаточная функция. Эта часть системы за-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
135
тем считается одним из звеньев всей общей системы,
превращающейся при этом в одноконтурную, и для
определения передаточной функции последней исполь-
зуются указанные выше правила. С помощью пере-
даточных функций во всех случаях получаются выра-
жения частотных характеристик и последние могут
быть построены точно так же, как в ранее приведен-
ном примере.
Вот и все в основном, что следовало рассказать
здесь о расчете частотных характеристик, о получении
их из дифференциальных уравнений и передаточных
функций систем автоматического управления. Сделаем
еще лишь несколько дополнительных замечаний и
разъяснений.
Во-первых, вспомним то, что говорилось при рас-
смотрении рис. 3 о благотворном влиянии воздействий
по производным на динамические свойства системы
управления. Тогда было обещано проиллюстрировать
это еще одним примером. Сейчас, после того как мы по-
знакомились с элементарными звеньями систем автома-
тического управления и с их характеристиками, это
можно сделать. Рассмотрим одноконтурную замкнутую
систему, аналогичную тем* с которыми мы встречались
в предшествующих примерах. Пусть, как и раньше, сис-
тема состоит из инерционных звеньев первого и второго
порядка, их может быть сколько угодно, и, кроме это-
го, в данной системе имеется астатическое (интегриру-
ющее) звено и рядом с ним или где-то среди других звень-
ев имеется еще одно астатическое звено. Используя
алгебраический критерий устойчивости, нетрудно пока-
зать, что такая система не может быть сделана устой-
чивой ни при каких параметрах ее элементов, то есть,
как говорят, является структурно неустойчивой. Вме-
сте с тем достаточно ввести хотя бы в одном из инер-
ционных звеньев дополнительное воздействие по про-
изводной, как система становится структурно устойчи-
вой, то есть в принципе можно взять характеристики
ее звеньев такими, чтобы она была устойчивой. Струк-
турно устойчивая система при неправильном выборе
ее параметров может быть тоже неустойчивой, но это
уже поправимо. Для обеспечения устойчивой ее работы
нужно лишь изменить соответствующим образом ее
136 ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
характеристики (например, если нужно, то для замк-
нутой системы уменьшить коэффициент усиления сис-
темы в разомкнутом состоянии, как это было в случае,
о котором говорилось, когда мы знакомились с частот-
ным критерием устойчивости). Приведенный пример
показывает, насколько эффективным может быть вводе*
ние дополнительных воздействий по производным и
еще раз подтверждает то, что говорилось об этом нами
раньше. Однако не нужно думать, что воздействия по
производным всегда улучшают динамические характе-
ристики системы. Их применение, во всяком случае
такое, при котором эти воздействия не в меру значи-
тельны, может быть и вредным. Если, например, бла-
годаря воздействию по производной в начале переход-
ного процесса происходит слишком большое переме-
щение исполнительного органа в изображенном на
рис. 3 регуляторе, то это может привести к тому, что
переходный процесс будет чрезмерно колебательным.
В общем, как мы теперь уже знаем, имеется большое
количество различных способов формирования управ-
ляющих сигналов, и нужно в каждом случае наилуч-
шим образом их использовать.
Сделаем дальше разъяснения в отношении сказан-
ного раньше о преобразовании переменных при реше-
нии дифференциальных уравнений операторным мето-
дом и при получении выражений передаточных функ-
ций. Было сказано, что такие переменные величины, как
величина х и ее производные, и функция /(£), все яв-
ляющиеся функциями времени £, преобразуются так, что
получаются их изображения, представляющие собой
функции другой величины — комплексной переменной
р = а + ($1. То, что это преобразование полезно и дает
замечательные результаты, следует из ранее изложен-
ного. Но читателю, вероятно, будет интересно узнать
и о том, как производится это преобразование. Расска-
жем об этом.
С величиной ж, а то, что будет сказано, делается
и с другими названными величинами, производятся
следующие преобразования. Величина х умножается
на' где р = а + (ai — комплексная переменная, и
берется интеграл от xe~pi по времени в пределах от
О до то есть изображение зависящей от времени 2
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
137
величины х определяется как
со
J xe~ptdt.
о
Так как величина определенного интеграла с постоян-
ными пределами интегрирования не зависит от пере-
менной интегрирования (это проходили в школе), то
в результате данного преобразования получается функ-
ция переменной р. Если имеется дифференциальное
уравнение и производится рассмотренное преобразова-
ние со всеми членами левой и правой частей его, то
равенство не нарушается. У указанного выше интег-
рального преобразования есть специальное название.
Когда берется интеграл
со
J xe~pidtt
О
то говорят, что по отношению к переменной х выпол-
няется преобразование Лапласа. Если принять, как мы
это делали при переходе от передаточных функций к
частотным характеристикам, что а = 0 в р = а + со/,
т. е. р = со/, то указанное выше интегральное преобра-
зование заменяется преобразованием
со
J xe~iatdt.
О
Это последнее тоже имеет особое название. Его назы-
вают интегральным преобразованием Фурье. При ука-
занной выше записи данного интеграла принимается,
что до момента времени t = который считаем на-
чальным, я==0. Если это не так, то интегрирование
должно производиться в пределах от —00 до и интег-
ральное преобразование Фурье, для которого примем
обозначение Ф(со), имеет следующий вид:
00
Ф(®)= f xe~iatdt.
—оо
Из того, что было рассказано раньше, следует, что ин-
тегральное преобразование Фурье имеет наглядное фл-
<38 Я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
зическое представление: «производя его, мы получали
амплитудно-фазовые частотные характеристики. Если
известно интегральное преобразование Фурье, то функ-
ция х определяется по нему следующим образом:
00
х = [1/(2л)1 j* O(w)eiattto,
—оо
Последнее выражение называют обратным преобразо-
ванием Фурье, или интегралом Фурье.
Если для функции х существует интегральное пре-
образование Фурье, то формула этого преобразования
для нее получается из формулы преобразования Лап-
ласа заменой в ней р на Например, если известно
преобразование Лапласа для некоторой функции х
времени t и имеется другая функция, повторяющая
первую со смещением всех ее значений по времени на
постоянную величину = то выражение преобразо-
вания Лапласа для второй функции находится умно-
жением выражения преобразования Лапласа для первой
на е“ра. Аналогично сдвиг по времени на величину \t=a
отображается умножением выражения преобразования
Фурье на Эти свойства указанных выше преоб-
разований используются при расчете .систем автомати-
ческого управления, передача сигналов в которых про-
исходит с запаздыванием по времени.
Были рассмотрены различные методы исследова-
ния устойчивости и качества переходных процессов.
Когда какими из них лучше пользоваться? Как оп-
тимизируются переходные процессы? Отвечая на эти
вопросы, покажем также, что дальнейшее улучшение
временных характеристик может быть получено
иногда применением устройств управления с пере-
менной структурой. Расскажем и о некоторых дру-
гих способах обеспечения хорошего качества процес-
сов управления.
Как было показано, действительно имеется много
разных методов исследования устойчивости и ка-
чества переходных процессов. Но все они могут при-
меняться так, что будут разумным образом дополнять
друг друга. Чаще всего методы, основанные на исполь-
зовании дифференциального уравнения движения сис-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
139
темы в качестве исходного, применимы в тех случаях,
когда система лишь проектируется и все ее элементы
не могут быть испытаны. Наиболее трудоемким обыч-
но оказывается определение численных значений коэф-
фициентов дифференциальных уравнений. Частотные
методы удобны, как уже говорилось, в тех случаях,
когда могут быть проведены испытания и могут ис-
пользоваться экспериментальные частотные характе-
ристики. Однако большое практическое значение имеет
и то, что, как было показано, частотные характеристи-
ки можно получать расчетным путем. При этом для
некоторых элементов, которые удалось испытать, бе-
рутся за исходные опытные их частотные характери-
стики, а для элементов системы, которые только лишь
разрабатываются и не могут быть испытаны, берутся
их частотные характеристики, полученные расчетом.
Такое сочетание при исследовании устойчивости и ка-
чества переходных процессов опытных и расчетных
данных оказывается весьма полезным.
Перейдей теперь к вопросу об оптимизации пере-
ходных процессов. Посмотрим, как решается задача
обеспечения по возможности хорошего качества пере-
ходных процессов. Слова «по возможности хорошее»,
если в них вдуматься, сами по себе могут показаться
не очень хорошими. Очень уж неопределенно звучит
«по возможности». Однако сказано так не зря, так как
недостаточно указать, чего мы хотим, но нужно опре-
делить и то, чего можно предельно добиться в реаль-
ных условиях, когда имеются определенные ограниче-
ния на пути реализации того, к чему мы стремимся.
Вообще, под оптимизацией имеют в виду выбор наи-
лучшего по некоторому признаку решения из множе-
ства возможных. Решение задач оптимизации процес-
сов управления это один из главных вопросов теории
автоматического управления. Возникает необходимость
в оптимизации различных процессов управления, при-
чем по-разному ставятся и решаются задачи оптимиза-
ции. Разработаны различные методы решения этих за-
дач, о которых еще будет сказано в дальнейшем. Однако
И то, что мы рассмотрим сейчас, имея в виду опти-
мизацию переходных процессов в ранее указанных си-
стемах, в ч^сти методики решения характерно и для
440 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
других задач автоматического управления. Поэтому с
вниманием отнесемся к тому, что сейчас будет расска-
зано.
Сначала обсудим, .как мы поступили бы, желая оп-
тимизировать переходный процесс и не зная специаль-
ных методов оптимизации. Рассмотрим следующий
пример. Разрабатывая систему автоматического регу-
лирования и предварительно остановившись на регу-
ляторе определенного типа, мы можем по-разному выб-
< рать значения величин, определяющих характеристики
отдельных звеньев регулятора (их коэффициентов уси-
ления или других). Пользуясь указанными раньше ме-
тодами расчета переходных процессов, можно получить
, временные характеристики для целого ряда вариантов
и, сравнивая их между собой, решить, какой вариант
устраивает нас в наибольшей степени. Но, во-первых,
проведение таких расчетов для многих вариантов слиш-
ком большая работа, и, во-вторых, если мы ее и вы-
полним, то не будет гарантии в том, что, проделав
расчеты для многих вариантов, мы не упустили из ви-
ду еще один, при котором возможно были бы получены
лучшие результаты, чем при других.
К решению указанного выше вопроса можно по-
дойти принципиально по-другому, более четко поставив
задачу оптимизации и используя при ее решении спе-
циально разработанные приемы оптимизации. Посмот- *
рим, как это делается.
Обратимся сначала к изображенным на рис. 17
временным характеристикам. Изменим начало отсчета
величины х: примем за нулевое значение ж, устанав-
ливающееся в конце переходного процесса. При этом,
например, характеристика апериодического переходно-
го процесса, изображенного на рис. 17, будет выглядеть
так, как показано штриховой линией внизу справа на -
рис. 19. Этот переходный процесс ле является идеальным.
Идеальной была бы временная характеристика, изоб-
раженная на рисунке линией, представляющей собой
отрезок оси ординат от точки А до точки О. В этом
случае при скачкообразном изменении при t = 0 вход-
ной величины /(f), в тот же момент времени немед-
ленно устанавливалось бы новое нужное значение х.
Такой идеальный переходный процесс практически пе
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
141
может быть реализован, так как элементы» системы яв-
ляются инерционными. Поэтому задачей оптимизации
является возможно большее приближение реального
переходного процесса к указанному выше идеальному
Л
Рис. 19.
(как видите, в слова «по возможности хорошо» начи-
нает вкладываться более конкретное содержание). Что-
бы сделать постановку этой задачи еще более ясной,
нужно, указать критерий оптимальности, то есть крите-
рий,-пользуясь которым можно было бы судить о до-
стижении наименьшего из возможных расхождения
между реальным и идеальным переходными процесса-
ми. Мерой приближения реального процесса к идеаль-
ному может служить заштрихованная на рисунке
площадь, ограниченная кривой, отрезком оси ординат
и осью абсцисс, которая, как мы знаем из школьного
OQ
курса математики, равна F =» J х dt. Численная вели-
о
чипа F в данном случае является критерием оптималь-
ности. Основываясь на этом критерии, можно дальше
конкретизировать постановку задачи оптимизации.
<42 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Нужно так выбрать конструктивные параметры управ-
ляющего устройства, от которых зависит переходный
процесс, чтобы получилось самое малое из возможных
вйачение числа Fy то есть такое, которое было бы мень-
ше, чем значения F, получаемые при любых других
сочетаниях конструктивных параметров управляю-
щего устройства.
ж 00
Выражением F « J х dt определяется функциональ-
о
ная зависимость, отличная от тех, с которыми мы
встречались раньше. Здесь х есть функция времени ty
причем может быть множество таких функций, каж-
дой из которых отвечает свое число F. Для такой функ-
циональной зависимости имеется специальное назва-
ние. Число F, изменяющееся в зависимости от того, ка-
кая берется характеристика из множества возможных
(имеются в вид^характеристики изменения х в зависи-
мости от t\ называется функционалом. Это если иметь
в виду данные нашего примера. Вообще же и при ре-
шении других задач функционал определяется так, как
было указано. Но не обязательно, чтобы вид функцио-
нальной зависимости между числом F и характеристи-
ками изменения х в функции от t, или в иных случаях
характеристиками изменения каких-либо других пере-
менных величин, был такой, как в нашем примере. Мо-
гут встретиться и другие функциональные зависимо-
сти. Понятие функционала является, таким образом,
достаточно общим. В нашем случае функционал F =
00
J х dt дает интегральную оценку переходного про-
о
цесса. Поэтому в теории автоматического управления
для него принято такое название — интегральная
оценка.
Задача оптимизации переходного процесса в нашем
случае, как уже было выяснено, сводится к нахожде-
нию минимально возможного значения интегральной
оценки F и к определению параметров системы, при
которых достигается это минимальное значение F.
Задача эта при заданном в общем виде дифферен-
циальном уравнении движения системы решается еле-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
143
дующим образом. На первом этапе ее решения произ-
водится преобразование всех членов дифференциаль-
ного уравнения — осуществляется преобразование
Лапласа, о котором мы говорили раньше (см. стр. 137).
Из полученного при этом уже не дифференциального,
а алгебраического уравнения находится изображение
х переменной х. На втором этапе полученное выраже-
ние х, в которое входят величины параметров системы
(которые мы собираемся выбрать такими, как это будет
нужно), сравнивается с выражением интегральной
оценки F. Это позволяет получить уравнение, выража-
ющее зависимость F от параметров системы. На треть-
ем этапе находится минимум величины F, причем оп-
ределяются параметры системы, при которых получа-
ется это самое минимальное из всех возможных значе-
ние F.
Поясним то, что относится ко второму и к третьему
этапам решения задачи. Сначала — ко второму. Раньше
было сказано о том, что представляет собой изображе-
ние х переменной х\ преобразование Лапласа для пе-
со
ременной х определялось как х == J xe~~pidt. Но в этом
о
00
выражении при р 0 остается J х dt, а это и есть не
о
что иное, как наша интегральная оценка F. Следова-
тельно, получив из преобразованного дифференциаль-
ного уравнения движения системы (при рассматрива-
емом преобразовании оно, как уже отмечалось, прев-
ращается в алгебраическое уравнение) выражение х
как функции параметров системы й переменной р,
нужно положить в нем лишь р »0, и тогда получаем
уравнение зависимости интегральной оценки F от па-
раметров системы. Сделаем теперь пояснения и к треть-
ему этапу решения. Рассмотрим зависимость F от ка-
кого-либо одного параметра, например от коэффициен-
та усиления или от какого-либо из коэффициентов диф-
ференциального уравнения, являющихся в свою оче-
редь функцией других параметров. Поясним, как на-
ходится оптимальное значение этого параметра. Из то-
го, что было пройдено еще в 9-м классе школы, а потом
144 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
повторялось и в Ю-м классе, мы знаем, что в точке эк-
стремума функции производная от этой функции равна
нулю (конечно, при условии, что производная в этой
точке существует). По изменению знаков производной
до и после точки экстремума мы определяли, явля-
ется она точкой минимума или максимума. В нашем
случае заведомо ищется минимум функционала F, в
других же задачах оптимизации, с которыми мы в
дальнейшем встретимся, потребуется и отыскание точ-
ки максимума. Итак, в нашем случае для отыскания
минимума величины F нужно взять производную от
F по рассматриваемому параметру и приравнять ее ну-
лю. При этом получается уравнение, решая которое на-
ходим значение интересующего нас параметра, отвеча-
ющее минимальной величине F.
Рассмотренная интегральная оценка может исполь-
зоваться только в том случае, если заранее известно, что
переходный процесс апериодический. Чаще всего, такой
уверенности нет, и тогда интегральная оценка F —
со
J х dt оказывается неприемлемой. * Действительно,
о
если переходный процесс колебательный, такой, как по-
оо
казанный наверху справа на рис. 19, то J х dt пред-
о
ставляет собой алгебраическую сумму заштрихованных
площадей, которая здесь равна нулю или близка к ну-
лю. Эта величина в данном случае никак не характе-
ризует переходный процесс. Пригодны в равной мере’
для апериодических и колебательных процессов интег-
ральные оценки другого вида. Например, квадратиче-
сс
ская интегральная оценка J x*dt. Обычно использует-
о
со
ся интегральная оценка I = J {х* + <г# (ж')2] dt3 где т*—
о
коэффициент, величина которого определяется в ходе
расчета. Этой оценкой более полно учитывается плав-
ность кривой (степень колебательности) переходного
процесса. Разработана методика определения парамет-
ров системы, при которых минимизируется величина
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
145
функционала /. Эта методика несколько отличается от
той, которая была указана для интегральной оценки
f но в конечном счете также решается задача опти-
мизации переходного процесса.
Не возникло ли вопросов по тому, что было расска-
зано, у читателя? Может быть, он заметил, что все
время говорилось о значениях параметров системы, при
которых минимизируется величина интегральной оцен-
ки, а не об одном каком-либо параметре. Когда же рас-
сматривался пример минимизации интегральной оцен-
ки, то было оговорено, что производится минимизация
по одному параметру. Сделано это было умышленно.
Во-первых, из-за того, что такая задача тоже возника-
ет на практике. Главным же образом из-за того, что
такого рода задачи решаются уже в школе. Вообще же
известны и методы нахождения экстремумов функций
нескольких переменных. Принципиальной разницы
здесь нет. Это в равной мере относится к решению за-
дач минимизации таких интегральных оценок, как
оценка F, и таких, как I.
Мог возникнуть и другой вопрос. Как согласуется
метод оптимизации переходных процессов, о котором
только что было рассказано, с методами исследования
качества переходных процессов, о которых говорилось
раньше? Применение метода, о котором сейчас гово-
рилось, дает возможность уже на первых этапах раз-
работки новой системы автоматического управления
указать значения ее параметров, при которых переход-
ный процесс оптимизируется, если иметь в виду какой-
либо из указанных критериев оптимальности. Но ин-
тегральные оценки лишь приближенно отражают ха-
рактеристики переходного процесса, лишь в общем:
они дают представление только о некотором среднем
его показателе. При разработке же систем автоматиче-
ского управления обычно должны учитываться и более
конкретные показатели качества переходного процес-
са: время его протекания, то есть время, за которое
отклонение достигает заданной достаточно малой вели-
чины, причем в дальнейшем величина отклонения не
превышает достигнутого значения; для колебательных
процессов характерным также является максимальное
отклонение, возникающее после того, как в переходном
146 Я. П. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
процессе уже однажды достигается значение рассмат-
риваемой переменной величины, устанавливающееся в
конце переходного процесса (для процессов регулярен
вания его называют перерегулированием), показатель-
ным также является число колебаний за время регу-
лирования. В связи со сказанным выше разумным пред-
ставляется такой подход к использованию различных
методов расчета и исследования переходных процессов*
Если составлено дифференциальное уравнение движе-
ния системы, то целесообразно на первом этапе расчет
тов определить методом интегральных оценок оптималь-
ные (согласно выбранному критерию оптимальности)
параметры системы. Дальше, применяя иные, ука-
занные ранее методы, можно определить другие, наз-
ванные выше показатели качества переходного про-
цесса. Если то, что получается, не удовлетворяет по-
ставленным требованиям, то вносятся коррективы для
ранее принятых значений параметров системы и прово-
дятся повторные контрольные расчеты. Такой путь ока-
зывается более коротким, чем тот, которому следуют
при первоначальном переборе множества различных
вариантов, о чем говорилось уже.
Вообще же порядок расчетов предопределяется тем,
какие используются исходные данные. Имеет значе-
ние и то, насколько жесткие требования предъявляют-
ся к качеству переходных процессов. Например, в не-
которых случаях необходимо, чтобы процесс был
апериодическим, а в других допускаются колебания;
различные требования предъявляются в отношении вре-
мени протекания переходных процессов и т. д. Во
многих случаях метод интегральных оценок является
основным методом определения параметров системы,
при которых обеспечивается хорошее качество переход-
ных процессов.
То, с чем мы познакомились в части постановтй
и подходов к решению задачи оптимизации, а именно
формулировка критерия оптимальности, представление
зависимостей в виде функционала, нахождение экстре^
мумов функций и все остальное, как уже отмечалось,
характерно и для других задач оптимизации.
Обычно удается получать достаточно хорошее ка-
чество переходных процессов, выбрав соответствующим
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ 147
образом структуру системы управления и соответству-
ющим образом задавая конструктивные параметры ее
элементов. Если, например, имеется в виду процесс ре-
гулирования, то мы можем остановиться на одном из
типов регуляторов, взять или П-регулятор, или ПИ-
регулятор, или же ПИД-регулятор, и установить над-
лежащим образом имеющийся обычно в регуляторе
элемент настройки: так, чтобы получались приемле-
мые характеристики процесса. После того как регуля-
тор настроен и установлен на объекте регулирования,
система регулирования работает такг как это предоп-
ределяется ее структурой. Последняя во всех рассмот-
ренных нами до сих пор случаях в процессе работы
остается неизменной. Если ставятся особенно жесткие
требования по качеству переходных процессов и не
удается удовлетворить их, применяя регуляторы ранее
указанных типов, то лучшие результаты, чем при ра-
боте с последними, иногда можно получить, используя
конструктивно более сложные регуляторы с перемен-
ной структурой, то есть такие, структура которых из-
меняется в процессе работы.
Для того чтобы пояснить принцип ‘построения си-
стем с переменной структурой^ обратимся сначала к
характеристикам переходных процессов, приведенным
на рис. 17. Если колебания недопустимы, то регулятор
должен работать так, чтобы переходный процесс был
апериодическим. Будем считать, что показанная на
рисунке характеристика апериодического процесса оп-
тимальная, и меньшее время регулирования при таком
процессе нельзя получить используя ранее указанные
принципы построения регуляторов. Заметим, что при
изображенном на рисунке колебательном процессе гораз-
до быстрее, чем при апериодическом, достигается в пер-
вый раз нужное значение регулируемой величины, но
затем происходит перерегулирование и, как было ска-
зано, такой переходный процесс в рассматриваемом слу-
чае в целом неприемлем. Предположим теперь, что у нас
имеются два регулятора, соединенные с объектом регу-
лирования так, что в процессе работы действует то
ОДИН из регуляторов, то другой, причем включение их
в Действие йли отключение производятся автоматиче-
ски. Пусть один из этих регуляторов, если бы все вре-
148 я* И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
мя работал только он, а второго совсем не было, осу*
ществлял регулирование так, что получался бы рас*
сматриваемый колебательный процесс. А при работе
только одного второго пусть получается апериодиче*
ский переходный процесс. Заставим теперь регуляторы
работать следующим образом: до того как после на*
чального большого отклонения будет достигнуто отно*
сительно малое, работает первый ’ регулятор, а затем
он отключается и вступает в действие второй. Схема
такой системы регулирования показана в нижней ча*
сти рис. 19, где: 1 — объект регулирования, 2 и 3 —
указанные выше регуляторы, 4 — переключающее
устройство, реагирующее на относительную величину
отклонения и включающее в зависимости от последней
во время переходного процесса в действие один или
другой из регуляторов. Получаемая при этом харак-
теристика переходного процесса показана внизу на
рис. 19 сплошными линиями; штриховыми линиями изо-
бражены те же переходные процессы, что и на рис. 17.
Кривая переходного процесса имеет в рассматривае-
мом случае два участка: участок АВ совпадает с уча-
стком характеристики при колебательном процессе, а
участок ВС представляет апериодическую часть про-
цесса. Здесь xt заданное, малое по величине, отклоне-
ние. Время, за которое оно достигается, принимается
за время регулирования. Рисунок показывает, что по-
лученное-при работе системы с переменной структурой
время'регулирования fp, значительно меньше, чем вре-
мя регулирования которое было бы получено при
применении второго из указанных регуляторов. Вме-
сте с тем процесс не является колебательным.
Практически то, что было рассказано, может быть
достигнуто и более просто: при применении не двух
различных регуляторов, а одного, в котором в процес-
се работы могут включаться в действие или отклю-
чаться отдельные его элементы. При этом изменяется
структура регулятора. Например, могут включаться
или отключаться элемент гибкой обратной связи, эле-
мент воздействия по производной или другие элемен-
ты. В некоторых случаях улучшение качества переход-
ных процессов достигается путем изменения в процес-
се работы коэффициента усиления какого-либо из
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
149
звеньев системы или какого-либо другого из характер-
ных параметров. Разработано много различных прин-
ципов построения систем с переменной структурой.
Например, в некоторых случаях оказывается возмож-
ным улучшить качество переходного процесса путем
полного отключения регулятора при уменьшающейся
в переходном процессе с течением времени абсолют-
ной величине отклонения и при вмешательстве регуля-
тора в рабочий процесс только тогда, когда абсолютная
величина отклонения нарастает.
Вообще же, как уже было сказано, чаще всего тре-
буемое качество переходных процессов достигается в
простейших системах автоматического регулирования
при неизменяемой их структуре. При этом конструк-
тивные усложнения, с которыми связан переход к работе
по принципу переменных структур, являются неоправ-
данными. Однако для некоторых более сложных систем
автоматического управления; содержащих большое чи-
сло элементов, выполнение их с переменной структу-
рой представляется вполне эффективным.
Для достижения устойчивости и хорошего качества
переходных процессов начинают применяться и другие,
кроме ранее рассмотренных нами, методы автоматиче-
ского управления. Говоря раньше о дополнительных
воздействиях по нагрузке, мы отметили, что реализа-
ция таких, например, схем, как показанная на рис. 3
схема с дополнительным датчиком крутящего момента,
может быть затруднительной. Однако при использова-
нии сейчас в технике управления ЭВМ оказывается
возможным и другой подход к тому, чтобы при возник-
новении внешнего возмущающего воздействия можно
было практически мгновенно прореагировать на него
и вмешаться в работу инерционного объекта, не ожи-
дая того, что под действием возмущения произойдет
значительное отклонение регулируемых величин от
заданных их значений. Для этого составляется приб-
лиженное математическое описание работы объекта
управления, которое вводится в ЭВМ, и таким образом
создается модель объекта, действующая в процессе его
работы. При поступлении сигналов, отражающих прои-
зошедшее возмущение, ЭВМ — модель объекта управ-
ления решает за короткое время (меньшее времени,
150 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
за которое происходит достаточно существенное изме-
нение состояния системы) дифференциальные уравне-
ния движения объекта. В результате определяется,
каким может быть дальнейшее изменение-регулируемы к
величин в связи с имеющимся возмущением и автома-
тически вырабатываются сигналы управления, необхо- „
димые для предотвращения большого отклонения про-
цесса работы объекта от заданного. Из-за неточности
модели небольшие отклонения все же получаются. На
они более легко уже могут быть ликвидированы регу-
лятором, включенным независимо от модели и обра-*
зующим вместе с объектом управления обычный замк-
нутый контур регулирования*
Специальный класс автоматических систем состав-
ляют системы, в которых регулируемые величины во-
обще не зависят от внешних возмущений, что достига- :
ется путем компенсации действия возмущений. На
возможность построения таких систем, названных инва-~
риантными, было обращено в 1939 г. внимание про-
фессором Г, В. Щипановым. Сделанные им выводы
первоначально критиковались и явились предметом ост-
рых дискуссий. Однако они были подтверждены дру-
гими крупными учеными и позднее получили всеоб- \
щее признание. Принцип инвариантности в теории
автоматического регулирования зарегистрирован как
научное открытие. Разработанная академиком Б. Н. Пет-
ровым, профессором В. Ю. Рутковским и другими со-
ветскими учеными теория инвариантных автоматиче- .
ских Систем стала одним из важных разделов общей
теории автоматического управления. Широко ведутся
работы по практической реализации и использованию
таких систем в современной технике.
Теперь перейдем дальше к другим вопросам дина-
мики систем автоматического управления.
Особыми свойствами обладают нелинейные сис?
темы. Изображенная на рис. 10 система с автомата*
ческим оптимизатором работает в автоколебательном . <
режиме. Какие еще можно привести примеры авто*
колебательных систем^ Это, например, часы, элект* z
рические генераторы колебаний, ..., наше сердце.
Говоря о нелинейных системах, особое внимание'
уделим методам исследования автоколебаний.
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ Ш
Мы уже раньше познакомились с тем, какие систе-
мы автоматического управления называются линейны-
ми и нелинейными, и с тем, как производится, там где
это возможно, линеаризация нелинейных характери-
стик. Тогда же было сказано, что встречаются и эле-
менты, имеющие нелинейные характеристики, которые
Рис. 20.
нельзя линеаризовать. Системы, содержащие такие
элементы, и- были названы нелинейными.
С примеров нелинеаризуемых нелинейностей нач-
вем рассказ об особых свойствах .нелинейных систем.
На рис. 20 слева изображена харатЛеристика изме-
нения площади проходного сечения F* в зависимости
от перемещения з* золотника гидравлического усили-
теля, которая получается, если ширина пояска золот-
ника больше ширины канала. Раньше, описывая пока-
занные на рис. 2 гидравлические усилители, мы имели
в виду, что оба эти размера одинаковы. Применяются
же оба типа золотников. Рядом на рис. 20 представле-
152 я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
на петлевая характеристика, или, как говорят, имею-
щая петлю гистерезиса. Такая характеристика полу*
чается, например, при передаче движения от одного
штока к другому в случае, когда в соединении между
ними имеется люфт. Такой же по виду является ха-
рактеристика изменения в зависимости от действую-
щей силы величины перемещения изображенного на
рис. 18 бруска, если он движется по несмазанной по-
верхности, то есть если имеет место сухое трение. Пет-
лю гистерезиса имеют и характеристики применяемых
в технике автоматического управления магнитных эле-
ментов. Характеристики такого вида, как указанные
выше, которые не могут быть линеаризованы, называ-
ются существенно нелинейными. К их числу следует
отнести и характеристики де = /(и) объектов оптималь-
ного управления, о которых рассказывалось раньше.
Линеаризация этих характеристик не имеет смысла,
так как здесь нет одной неизменной точки исходного
статического режима, отклонения от которой мы рас-
сматривали при описании работы обычных регулято*
ров; при работе автоматического оптимизатора с тече-
нием времени рабочая точка перемещается, занимая
различные положения на кривой Нелинейной
является и упоминавшаяся раньше система* с перемен-
ной структурой.
Давая раньше определение нелинейной системы, мы
имели в виду невозможность линеаризации Статиче-
ской характеристики хотя бы одного из бе элементов.
Мы в дальнейшем рассмотрим нелинейные системы,
в которых какой-либо из элементов имеет статиче-
скую характеристику такого вида, как одна из по-
казанных на рис. 20 (иногда, но не так часто, приходит-
ся встречаться с так называемыми динамическими
нелинейностями, проявляющимися лишь в процессе
движения).
Нелинейные системы, если сравнивать их с линей-
ными, во многих случаях обладают особыми свойства-
ми. Например, нелинейная система автоматического
регулирования может быть устойчивой при малых от-
клонениях и неустойчивой- при больших, что можно
образно представить себе, если взглянуть на изображен-
ный на рис. 20 шарик.
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
Лишь в нелинейных системах могут возникать ав-
токолебания. , Автоколебаниями называют незатухаю-
щие колебания, генерируемые самой системой в отсут-
ствии внешних воздействий на нее. Примером автоко-
лебательной системы является изображенная на рис. 10
самонастраивающаяся система, когда она работает в
режиме установившихся колебаний около точки экст-
ремума. Автоколебательную систему представляют со-
бой часы. К числу систем этого рода относятся элект-
рические "генераторы колебаний, имеющиеся в некото-
рых устройствах автоматики. Примером автоколеба-
тельной системы может служить сердце человека. Это
все примеры полезного использования автоколебаний.
Часто они являются вредными. Например, они могут
иногда возникать в системах регулирования, нарушая
нормальную их работу. В этих случаях бывает необхо-
димым принимать специальные меры для их устране-
ния; вообще же возможность возникновения таких ко-
лебаний должна предотвращаться при разработке си-
стемы управления.
Автоколебания представляют, собой сложный про-
цесс. Энергия, расходуемая при колебаниях, восполня-
ется, поступая от внутреннего источника энергии, ко-
торым, например, в часах является заведенная пру-
жина, а в часах последних , выпусков — электрическая
батарейка. При этом автоматически дозируется ровно
такое количество энергии, которре необходимо для .под-
держания колебаний определенной амплитуды и ча-
стоты, не большее и не меньшее. Так это происходит
во всех автоколебательных системах.
Изучение автоколебаний, так же как и других про-
цессов в нелинейных системах, имеет большое прак-
тическое значение. Возникают различные задачи ис-
следования автоколебаний. Если проектируется авто-
колебательная система, то нужно уметь рассчитать ее
с тем, чтобы получить колебания заданной частоты и
амплитуды. При разработке же системы, в которой
автоколебаний не должно быть, нужно иметь возмож-
ность с помощью предварительных расчетов убедиться
в том, что их не будет, и во избежание их появления
соответствующим образом выбрать параметры системы.
Наконец, если нежелательные автоколебания все же
154 Ч п. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
возникли при работе уже построенной системы, то
нужно уметь найти способы их устранения или умень-
шения их амплитуды до допустимых пределов.
Трудность расчета и исследования нелинейных сис-
тем автоматического управления определяется тем, что.
их движение описывается так называемыми нелиней-
ными дифференциальными уравнениями, которые, в
отличие от линейных, могут быть решены только в не-
которых простейших случаях. С линейными дифферен-
циальными уравнениями мы встречались в школьном
курсе математики и в наших беседах. Это были такие
уравнения, в которые зависимая переменная (у нас это
была выходная координата элемента системы или
всей системы) и все ее производные от первой и до
высшей входят в первой степени. В нелинейных же
дифференциальных уравнениях какие-либо из них име-
ют другую степень, например возведены в квадрат,-
или же в уравнение входят другие нелинейные их
функции. В связи с тем, что в большинстве случаев
такие дифференциальные уравнения движения не мо-
гут просто быть решены, для исследования работы не-
линейных систем автоматического управления исполь-
зуют специальные приемы.
Во многих случаях оказывается возможным выде-
лить в системе нелинейный элемент, заданный своей
статической характеристикой, например какой-либо
из характеристик вида илия2 = ф(#1), пред-
ставленных на рис. 20. Остальную часть системы пред-
ставляет линейная ее часть, движение которой может
быть описано линейным дифференциальным уравне-
нием и с исследованием характеристик которой мы
познакомились раньше. Представленная таким образом
нелинейная система, в которой выделены нелинейная
ее часть — Ни линейная часть — Л, изображена внизу
на рис. 20.
Дальше речь пойдет главным образом об автоколе-
баниях. На практике наблюдаются автоколебания двух*
типов: очень часто возникают автоколебания, близкие
по своей форме к гармоническим, то есть к таким, ко-
торые имеют вид синусоиды или косинусоиды. Вместе
с тем встречаются и автоколебания другой формы. Для
автоколебании первого типа разработан метод опреде-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
155
ления условий их возникновения, а если они появля-
ются, то и определения их частоты и амплитуды, на-
зываемый методом гармонического баланса. Этот ме-
тод, являющийся приближенным, может использовать-
ся при расчете и исследовании систем с линейной ча-
стью, движение которой описывается дифференциаль-
ным уравнением сколь угодно высокого порядка. Для
определения условий возникновения и расчета пара-
метров автоколебаний второго типа разработаны точ-.
ные методы, которыми можно пользоваться лишь ь
тех случаях, когда движение всей нелинейной системы
описывается нелинейным дифференциальным урав-
нением только второго или самое большее третьего
порядка, то есть когда такого порядка старшая произ-
водная от зависимой переменной. Эти последние мето-
ды применимы и по отношению к автоколебаниям пер-
вого типа, но тоже при указанных выше ограниче-
ниях, касающихся порядка дифференциального урав-
нения. х
Прежде чем перейти к описанию метода гармониче-
ского баланса, о котором только что упоминалось, при-
ведем краткие сведения о представлении сложных функ-
ций в виде ряда простых и о прохождении сигналов
различной формы через линейные и нелинейные эле-
менты и системы.
Все это имеет большое значение не только здесь,
по и для всей теории автоматического управления. По-
этому просьба к читателю внимательно отнестись к то-
му, что сейчас будет рассказано.
Любую рассматриваемую далее функцию времени
t, будь это какая-либо функция f(t), или координата х
(или у) изображенной на рис. 20 системы, можно пред-
ставить в виде суммы гармонических функций — сину-
соид и косинусоид. Такой ряд синусоид и косинусоид,
сумма ординат которых в каждый момент времени t
Дает значение исходной функции, называется тригоно-
метрическим рядом Фурье для данной функции (под-
робнее о рядах Фурье скажем немного позднее).
Почему мы заинтересованы в таком представлении
различных функций?
Это прежде всего связано с упрощением определе-
ния того, как передаются сигналы в линейных систе-
156 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ* АВТОМАТИЧЕСКИХ СИСТЕМ
мах и как они проходят через линейную часть нели-
нейной системы. Поясним это.
При анализе работы линейных элементов и систем
может '’использоваться принцип суперпозиции (нало-
жения) сигналов, заключающийся в следующем. При
представлении входного сигнала как суммы ряда дру-
гих выходной сигнал определяется как сумма выход*
пых сигналов, которые были бы получены, если бы
каждое из входных слагаемых действовало в отдель*
ности.
В чем же здесь упрощение? Дело в том, что, имея
амплитудно-фазовую частотную характеристику систе-
мы или части ее элементов (вспомним все, что говори-
лось о частотных характеристиках раньше), мы сразу
можем сказать, какой амплитуды и с каким сдвигом по
фазе будут выходные колебания при входных гармони-
ческих колебаниях с заданными амплитудой и часто-
той, Поэтому, представив сколь угодно сложный вход-
ной сигнал в виде ряда синусоид и косинусоид, можно
с помощью амплитудно-фазовой частотной характери*
стики определить соответствующие им выходные сигна-
лы и, просуммировав их для ряда значений £, получить
характеристику изменения по времени интересующей
нас выходной величины. Это простейший способ опре-
деления реакции линейной системы или линейной ча-
сти нелинейной системы на входной сигнал произволь-
ной формы.
К нелинейным элементам сказанное выше не отно-
сится. При подаче на вход нелинейного элемента сину-
соидального сигнала на выходе получаются обычно ко-
лебания сложной формы, которые могут быть, если
это потребуется, представлены в виде ряда гармониче-'
ских функций, но это уже не будет лишь одна сину-
соида или косинусоида. Какой формы получаются, на-
пример, выходные колебания у при пЬдаче синусоидаль-
ных колебаний на вход нелинейного элемента с петлевой
характеристикой показано жирной сплошной линией на-
верху в правой части рис. 20. Для нелинейного элемента
также можно построить характеристику, играющую ту
же роль, что амплитудно-фазовая частотная характери-
стика, для линейного элемента. Однако нелинейные эле-
менты рассматриваемого вида безынерционные, и по-.
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ 157
этому для них не имеет значения, с какой частотой из-
меняется входная величина. Значение же амплитуды
д* входных синусоидальных колебаний здесь не без-
различно: при разных А* получаются выходные коле-
бания различной формы, в чем легко убедиться, изме-
няя в рассматриваемом примере величину А*. Точнее,
имеет значение даже не сама величина А* а отноше-
ние ее к характерному параметру статической харак-
теристики нелинейного элемента, к такому, например,
как в рассматриваемом случае е — половина зоны не-
чувствительности, или, по-друГому скажем, половина
ширины петли гистерезиса (характерными параметра-
ми являются также показанные на рисунке р и Я, ве-
личины которых, как и величину е, считаем заданны-
ми). Если указанную выше характеристику (о которой
говорилось, что она играет ту же роль, что амплитуд-
но-фазовая частотная характеристика для -линейных
элементов) преобразовать, как скажем дальше, то она
примет в рассматриваемом примере такой вид, как по-
казано внизу справа на рис. 20.
Чтобы было яснее все последующее об исследова-
нии автоколебаний методом гармонического баланса,
сначала расскажем немного о разложении функций в
ряд Фурье.
Начнем с такого примера. На рис. 21 показана
кривая 7, изображающая некоторую функцию /(0.
В данном случае при каждом значении t можно полу-
чить точку этой кривой, сложив соответствующие ор-
динаты кривых 2, 3 и 4, приведенных на том же рисун-
ке. Здесь 2 — косинусоида, 3 и 4 — синусоиды. В при-
веденном примере сразу же было указано, в виде сум-
мы каких * гармонических функций представляется
функция /(£). А если бы мы этого не знали и это нужно
было бы определить, то как нам следовало бы посту-
пить?
Способом представления любой функции /(£) в ви-
де ряда синусоид и косинусоид и является разложение
ее, как говорят, в ряд Фурье. Для того чтобы послед-
нее было возможным, требуется лишь, чтобы’ функция
была периодической, то есть чтобы, будучи заданной
нв интервале длины Т, она затем повторялась бы на
следующих интервалах протяженности Т так, как по-
<58 Я, II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
казано наверху в правой части рис. 21. Нас интересу-
ет лишь основной интервал длины Г, а как могла бы
быть продолжена кривая fit) за его пределами в дан-
ном случае для нас несущественно. Число Т называют
периодом функции fit). Для возможности разложения
функции в ряд Фурье также необходимо соблюдение
некоторых других условий, на практике обычно вы-
полняющихся, и о которых поэтому говорить здесь не
будем. В примере, который был рассмотрен, функция fit)
представлялась всего лишь в виде косинусоиды и двух
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
159
синусоид. В общем случае, теоретически, при разложе-
нии функции в ряд нужно взять бесконечно большое
число членов ряда. Практически же число членов ряда,
как и в нашем примере, конечное.
Разложение функции в тригонометрический ряд
фурье производится по формуле
со
f (t) = а0/2 + 2 ’ (ап cos naijt + bn sin
n—1
В этой формуле (Di »= 2 л/Г, а коэффициенты ап (а так-
же Яо) и Ъп определяются так:
т
ап = (2/Т) J / (Z) cos dt для п = 0, 1, 2,...
о
й
т
Ьп = (2/Г) J / (0 sin n(oxZ dt для n = 1, 2,,..
о
Если задано выражение функции /(£), то эти коэффи-
циенты находятся расчетом. Если же функция /(£),
так же как это было в нашем примере, задана графи-
чески, то коэффициенты вычисляются следующим об-
разом. Берутся значения /(£) при ряде t, каждое из
которых затем умножается на соответствующее дан-
ному t значение cosneM или sinncM. Строятся графи-
ки f(t) cosncM и fit) sin n®it. Графически определяются
величины интегралоь в. выражениях ап и Ъп (то, что
определенный интеграл представляется величиной*
площади под соответствующей кривой, известно из
школьного курса математики). Эти величины умножа-
ются затем на 2/Г.
Сделаем еще несколько замечаний, касающихся ко-
эффициентов ряда Фурье. Величина а0/2 представляет
собой среднее за период Т значение функции /(/); на-
помним, что а0 есть ап при пет0. Коэффициенты и
получаемые при п»=1, являются амплитудами коси-
нусоиды и синусоиды, образующих вместе первую гар-
монику функции /($). Первая гармоника имеет частоту
^1=-2л/7, период ее такой же, как и период Т функ-
ции /(г). Коэффициенты и &2, получаемые при п =*
160 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
== 2, являются амплитудами косинусоиды и синусоиды,
образующих вторую гармонику, частота которой равна.
2c0i. То же самое можно сказать о получаемых при
пв3 коэффициентах а3 и Ь3,— частота третьей гармо-
ники равна 3G>i и т. д. В нашем примере а0 = 0, =»
*= S, bi=4, а2 = 0, Ъг = 4, все остальные ап и Ьп при
п = 3, 4, ... равнялись нулю.
Чтобы закончить здесь рассказ о разложении функ-
ций в тригонометрический ряд Фурье, поясним ска-
занное выше о том, что при п~1 косинусоида и сину-*
соида образуют вместе первую гармонику, и это же
при других п будет относиться к следующим более
высоким гармоникам. Дело в том, что выражение
cos (о^+ bi sin сМ можно представить в виде только
лишь одной косинусоиды или синусоиды, которая и
мыслится, когда в данном случае говорят о первой гар-
монике. Чтобы представить данное выражение таким
образом, умножим и разделим в нем каждое из двух
слагаемых на af + bf . Введя обозначения
]Ai + Ь1 = АЪ Я1/К«1+ 61 = COS<P1S
bj/]/"я? 4- = sin (pj
и вспомнив встречавшуюся нам в 9-м классе формулу*
косинуса разности двух аргументов, получим at cos со it 4*
+ bism<B1J«e-4lcos((0if — фЛ Здесь tg <pi == bjai. Если
вернуться к данным нашего примера, иллюстрируемого
рис. 21, то полученная таким образом первая гармони-
ка представлена смещенной по фазе косинусоидой 5,
отвечающей косинусоиде 2 и синусоиде 5. Без смеще-
ния по фазе на угол (pt это была бы косинусоида 6.
Величина qb и показанная на рисунке величина £Ф1 свя-
заны между собой зависимостью: (pt = 2л£Ф1/Г. В нашем
примере Xi = 5, qpi = 0,256л. При .указанном выше^
представлении гармоник формула тригонометрического
ряда Фурье принимает следующий вид:
' °° г-
/ (0 = я0/2 + S Ап cos (na>it — <pn)t
n=l
где ’ 7; ______
«я j/"tg (pn bn!an*
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ 1'И
И, наконец, еще несколько слов о графике, кото-
рый приведен на рис. 21 внизу справа. Здесь по осч
частот о отмечены: частота первой гармоники;
в два раза больщая, чем <о4> частота 2cdi второй гар-
моники; в три раза большая частота третьей гармо-
ники. Соответствующие вертикальные отрезки даю г
численные значения амплитуд каждой из этих гар-
моник. Приведены данные, отвечающие разобранному
нами примеру: 4о = 0, А^б, 42=Ь2 = 4 (так как
Л2 == а а2 в 0), А3 = 0. Такой график называ-
ется амплитудным спектром функции /(£). Амплитуды
гармоник представляются здесь отрезками прямых ли-
ний. Если амплитудный спектр дополнить еще дан-
ными об углах сдвига по фазе для соответствующих
гармоник, то получим полное представление о нашей
функции /($), так как она, как мы уже знаем, полу-
чается суммированием всех ее гармоник. Имея в виду
спектральное представление функции, говорят об ее
отображении в частотной области. Такое представле-
ние функций используется наряду с обычным их пред-
ставлением во временной области. Частотные пред-
ставления этого рода имеют большое значение при
разработке новых направлений в технике автоматиче-
ского управления. Мы еще встретимся с ними в даль-
нейшем.
После всего, что было сейчас рассказано, мы можем
вернуться к тому, на чем остановились. Это были во-
просы прохождения сигналов через линейные и нели-
нейные элементы, и мы собирались позцакомиться
с методом гармонического баланса, используемого, как
уже говорилось, для определения условий возникнове-
ния автоколебаний* близких по форме к синусоидаль-
ным, и для определения параметров этих автоколеба-
ний. Ну что же, пожалуй, мы сейчас подготовлены
к тому, чтобы продолжить наш рассказ.
Какова идея метода гармонического баланса? Преж-
де всего рассмотрим условия возникновения автоколе-
баний, близких по форме к синусоидальным в изобра-
женной внизу на рис. 20 нелинейной системе, в кото-
рой могут быть выделены линейная (л) и нелинейная
(н) ее части так, как это показано на рисунке.
& А. Залманзон
162 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Предположим, что такая система построена и ра-
ботает, причем величина х, которая нас интересует,
с течением времени постоянно изменяется по закону
х = A sin ©t Эти колебания поступают па вход нели-
нейной части системы, на выходе которой получаются
колебания у сложной формы, пусть, например, такие,
как показано наверху справа на рис. 20. Разложив эти
последние колебания в ряд Фурье, получим ряд гар-
моник, поступающих на вход линейной части системы.
Пройдя через линейную часть системы, они будут
представлять собой преобразованные гармоники, при
сложении которых, казалось бы, должны были также
получиться колебания х сложной формы.
Но ведь с самого начала было сказано, что величи-
на х в рассматриваемой системе изменяется по закону
х = A sin tot Раз колебания синусоидальные, значит,
они не другой формы. В чем же здесь дело?
Чтобы разобраться в этом, немного отвлечемся.
Вспомним то, что говорилось раньше о бруске с пру-
жиной, изображенном на рис. 18, и о частотных харак-
теристиках этого элемента. Тогда было сказано, что
если увеличивать частоту колебаний левого конца пру-
жины, то в конце концов при какой-то достаточно
высокой частоте брусок из-за своей инерции совсем
не будет успевать следовать за колебаниями левого
конца пружины и практически будет оставаться не-
подвижным.
Всякий инерционный элемент и всякая инерцион-
ная система имеют такую границу диапазона про-
пускаемых частот. Это относится и к нашему случаю.
Пусть для линейной части изображенной на рис. 20
системы амплитудная частотная характеристика имеет
такой вид, как показано наверху на рис. 22. Здесь
о* — частота, называемая частотой среза характери-
стики; при частотах, больших чем со*, амплитуда вы-
ходных колебаний Лйых практически равна нулю, и, со-
ответственно с этим, практически равна нулю величи-
на отношения амплитуд на выходе и на входе М =
= -^выхМвх. Предположим теперь, что на выходе нели-
нейной части системы получились колебания, которые
при разложении их в ряд Фурье дают первую гармо-
нику, частота toi которой меньше to*, и вторую, тре-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
163
тью и более высокие гармоники, частоты которых, со-
ответственно равны 0)2 = 20)!, ©3 = 3(01 и т. д., все
больше чем ©* (см. указанный выше рисунок). В этом
случае линейная часть является фильтром нижних
частот: она пропускает
лебаний у и не пропу-
скает все остальные, бо-
лее высокочастотные,
гармоники. Только при
условии, что линейной
частью системы пропу-
скается лишь первая
гармоника колебаний у,
а остальные отфильтро-
вываются, могут возни-
кать колебания ж, прак-
тически синусоидальные
(при наличии резонанса
может проходить не
первая, а какая-либо
другая гармоника, но
этот случай не характе-
рен для рассматривае-
мых здесь систем авто-
матического управле-
ния). То, что было рас-
сказано, и составляет основу метода гармонического
баланса. Укажем, как используется этот метод при ис-
следовании автоколебаний.
Так как имеется в виду отфильтровывание линей-
ной частью системы всех гармоник функции, кроме
первой, то рассматривается только одна эта гармоника.
Таким образом дело представляется так, как будто бы
при поступлении на вход нелинейной части системы
синусоидальных колебаний на выходе ее получаются
измененные по амплитуде и по фазе синусоидальные
колебания. Зависимость между параметрами тех и дру-
гих колебаний определяется при этом характеристикой
нелинейной части WBi аналогичной амплитудно-фазо-
вой частотной характеристике линейной части,
с той лишь разницей, что каждой точке характери-
стики отвечает своя частота со колебаний х
6*
1П4 я. IT. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
= A sin at, а каждой точке характеристики WB — свое
значение амплитуды 'А. Как уже говорилось раньше,
обычно указывается отношение величины А к пара-
метру, которым определяется статическая характери-
стика нелинейного элемента. В случае, иллюстриро-"
ванном графиком, приведенным наверху справа на
рис. 20, это было отношение А/е. График характери-
стики WB9 так же как это было и для может
быть представлен так, как будто плоскость его изо-
бражения есть плоскость комплексной переменной ве-
личины.
Если мысленно разомкнуть рассматриваемую сц?
стему, как показано штриховыми линиями на схеме,
представленной на рис. 20, то преобразование сигна-
лов в разомкнутой системе будет определяться вели-
чиной ТГнРГл. При последующем замыкании системы
эта величина должна быть по абсолютному значению’
равна единице, перед которой следует поставить знак/
минус (вспомним уравнения Дрвх в —Д уВых или явх =»
= “^вых, о которых шла речь, когда мы знакомились
с системой автоматического регулирования, изображен-
ной на рис. 1, и потом говорили о переходе от разомк-
нутой к замкнутой системе). Если в получаемом при
этом уравнении РИЛИГН = — 1 обозначить —l/WB^ZBt
то получим выражение условия гармонического ба-
ланса в виде e ZH.
На одном и том же графике строятся амплитудно-
фазовая частотная характеристика Жл линейной части
и характеристика ZH нелинейной части. Рассчитывать
характеристики ZH обычно не приходится, так как
в книгах по теории автоматического управления для
типовых нелинейностей приводятся такие характери-
стики уже готовые, и остается лишь перерисовать ту
из них, которая нужна.
В ранее рассмотренном примере характеристика ZB
имела такой вид, как было изображено на рис. 20
внизу справа. Пусть, например, совместно представ-
ленные характеристики РКЛ и ZH расположены одна
относительно другой так, как показано сплошными
линиями на рис. 22 внизу. Точка пересечения этих*
характеристик определяет собой параметры автоколе-
баний. Частота их определяется по отметке ю, сделан-
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
165
ной около данной точки на характеристике Жл, а от-
носительная величина амплитуды определяется по от-
метке Л/е, сделанной около данной точки на характе-
ристике 2И. По тому, в каком направлении вблизи
точки пересечения характеристик нарастают вдоль кри-
вой Wn значения А/е, судят об устойчивости цикла
колебаний. Устойчивыми колебаниями, то есть собствен-
но автоколебаниями, являются в нашем случае только
те, которые соответствуют лишь одной из двух точек
пересечения кривых.
Что нужно сделать для того, чтобы устранить авто-
колебания, если они возникли в реальных условиях и
являются недопустимыми? Если иметь в виду данные
нашего примера, то достаточно так изменить парамет-
.ры линейной части системы, чтобы ее амплитудно-фа-
зовая частотная характеристика W„ стала такой, как
показано на рисунке штриховой линией. При этом
кривые Wjt и ZH не пересекаются; значит, не возникает
автоколебаний, близких по форме к синусоидальным.
Если проведенный анализ показывает, что в систе-
ме автоматического управления не должны возникать
такие автоколебания, то это еще не значит, что не мо-
жет быть автоколебаний другой формы. Для исследо-
вания автоколебаний произвольной формы разработаны
другие методы, которые, однако, как уже указывалось,
могут практически использоваться только в тех слу-
чаях, когда нелинейное дифференциальное уравнение,
описывающее движение системы, не выше второго или
третьего порядка. Эти методы основаны на представ-
лении движения, как говорят, на фазовой плоскости
или в фазовом пространстве.
Фазовой плоскостью называют плоскость с осями
координат, по одной из которых откладываются значе-
ния рассматриваемой переменной величины х, а по
Другой значения ее производной x't Если, например,
переходный процесс x = f(t) такой, как показано на
рис. 23 наверху слева, то можно для любой из точек
характеристики переходного процесса, будь то точки
А В, С или какие-либо другие, указать соответствую-
щие ей значения х и х (последние определяются,
пак мы знаем, величиной угла наклона касательной
к кривой х = /(О в каждой данной точке ее). Пары
166 Я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
значений х и х представляют собой соответственно
координаты точек А, В, С и других на фазовой плос-
кости, показанной на рисунке, приведенном рядом
с вышеуказанным. Когда изменяется положение точки
Рис. 23.
I 1
характеристики х перемещается и точка на
фазовой плоскости, называемая изображающей. Харак*
теристика х' ==* <р(я), получаемая при перемещений
изображающей точки, называется фазовой траекторией
Преимуществом изображения движения на фазовой
плоскости является то, что упрощается изучение всей
2. ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ 167
возможных форм движения системы, в том числе и
автоколебаний. Это прежде всего связано с тем, что
при описании движения нелинейными дифференциаль-
ными уравнениями второго порядка получаются диф-
ференциальные уравнения фазовых траекторий первого
порядка, которые обычно просто решаются. Получение
этих уравнений проиллюстрируем следующим приме-
ром. Пусть, например, движение системы описывается
нелинейным , дифференциальным уравнением агх" +
+ + F{x} » 0, где F{x} — нелинейная функция от х.
Обозначим х9 == у. Тогда заданное уравнение приво-
дится к виду ад' + сцу + F(x) = 0, откуда у' ==» —[ад +
+ Р(х)]/а2. Введя для производных обозначения у' =
t^dy/dt и х *= dx/dt и поделив соответственно левые
и правые части указанных вышр выражений у9 и
получим дифференциальное уравнение фазовых траек-
торий ч
dy/dx = —[ад + Г(ж)]/(ад),
являющееся дифференциальным уравнением первого
порядка. Это уравнение просто решается. Пользуясь
им, можно построить фазовые траектории и графиче-
ским способом, имея в виду, что в полученном урав-
нении dy/dx есть производная от у по х, величиной
которой определяется наклон касательной, проведенной
к фазовой траектории в данной ее точке. Беря х и у
для начальной точки переходного процесса и подстав-
ляя их в правую часть указанного выше уравнения,
найдем величину dy/dx в данной точке. Проведя в этой
точке под соответствующим углом прямую, беря на
ней вблизи от данной точки другую, в которой таким
же образом определяется направление касательной
к фазовой траектории, и проделывая затем это же для
ряда других точек, можно прочертить всю фазовую
траекторию. Беря на фазовой плоскости различные на-
чальные точки, будем получать различные фазовые
траектории. Можно заполнить ими всю фазовую плос-
кость. При этом, как говорят, получается фазовый
портрет системы. Он дает наглядное представление
о всех видах движения, которые для нее возможны.
В средней части рис. 23 показаны фазовые портреты
Устойчивой и неустойчивой систем. Направление, дви-
168 Ч. П. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
женин изображающей точки везде показано стрелками.
В первом случае фазовые, траектории сходятся к нача-
лу координат. Следовательно, в данном случае вели-
чины х и y—xf с течением времени устремляются
к нулю, что свидетельствует об устойчивости системы.
Bq втором случае фазовые траектории расходящиеся,
и, следовательно, система неустойчивая. Внизу слева
па рис. 23 представлен фазовый портрет нелинейной
системы, устойчивой при малых отклонениях от поло-
жения равновесия и становящейся неустойчивой при
больших. Последними являются такие отклонения, при
которых изображающая точка, положение которой оп-
ределяется значениями х и у = х\ оказывается за
пределами области, охваченной граничной замкнутой
фазовой траекторией 1. На рис. 23 внизу справа по-
казан фазовый портрет автоколебательной системы.
Здесь замкнутая фазовая траектория 1 отображает
устойчивый цикл колебаний — автоколебания. В какую
сторону ни отошла бы изображающая точка в своем
движении от замкнутой фазовой траектории, она к ней
возвращается, так как все другие фазовые траектории
сходятся к замкнутой фазовой траектории 2.
Заметим, что раньше, говоря об устойчивости, мы
имели в основном в виду возвращение системы авто-
матического управления после начального отклонения
к положению равновесия. Сейчас же мы встретились
с понятием устойчивости движения: предельный одкл
колебаний, отображаемый замкнутой фазовой траекто-
рией 7, является неустойчивым в случае, представ-
ленном на рис. 23 внизу слева, и является устойчивым
в случае, который представлен на этом рисунке-внизу
справа.
Сделаем дальше замечание, касающееся того, каким
образом располагаются точки пересечения фазовых
траекторий с любой прямой, проходящей через начало
координат. На последнем из указанных выше рисунков
такими прямыми являются прямая 2 или оси коорди-
нат. Только прй движении изображающей точки по*
замкнутой фазовой траектории совпадают на прямой
исходное и конечное положения ее при прохождении
его по фазовой траектории участка от одного пересе-
чения последней с прямой до другого. Это используй
2 ДИНАМИКА СИСТЕМ УПРАВЛЕНИЯ
169
ется для того, чтобы можно было применять метод
фазовой плоскости при исследовании автоколебаний
без воспроизведения полного фазового портрета систе-
мы. Если найдена показанная на рисунке замкнутая
фазовая траектория 2, отвечающая автоколебаниям, то
отрезок, отсекаемый ею на оси ж, дает значение ампли-
туды автоколебаний, а отрезок, отсекаемый на оси
ординат, дает значение максимальной скорости дви-
жения при автоколебаниях.
Пусть теперь мы имеем дело с системой, движение
в которой описывается нелинейным дифференциаль-
ным уравнением третьего порядка, например уравне-
нием а3х" + а2х" + diX +Fkx) = 0, где, как и ранее,
Fkx) — нелинейная функция х. Введем обозначения
х = у и х” = у' = z. При этом рассматриваемое урав-
нение приводится к виду a3z? + + aty + F(x) = 0.
Проводя дальнейшие преобразования, как и в ранее
рассмотренном примере, можно получить из этого
уравнения и из уравнений х' — у, у' = z дифферен-
циальные уравнения фазовых траекторий. Только здесь
получаются траектории, по которым изображающая
точка движется не на фазовой плоскости, а в фазовом
пространстве, причем "координатными осями являются
оси ж, у и z. Этот случай является уже более сложным
для исследования, чем случай, когда движение систе-
мы описывается нелинейным дифференциальным урав-
нением второго порядка. Однако при изучении про-
цесса работы некоторых нелинейных систем автома-
тического управления такое представление движения
в фазовом пространстве оказывается полезным.
Ограничимся этими сведениями о методах иссле-
дования автоколебаний в системах автоматического уп-
равления. В заключение ответим лишь на вопросы,
которые, возможно, возникли у читателя.
В самом начале было сйазано, что является авто-
колебательным режим работы самонастраивающейся
системы, изображенной на рис. 10. Как же применя-
ются методы расчета и исследования, о которых сейчас
говорилось, к таким системам? При изучении работы
систем с автоматическими оптимизаторами часто поль-
зуются фазовым представлением движения, и это об-
легчает решение задач. В некоторых случаях исполь-
170 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИ^СКИХ СИСТЕМ
зуется здесь и метод гармонического баланса. Если ха-
рактеристики объекта оптимального управления с те-
чением времени изменяются так, как было показано
на рис. 8, причем смещение их происходит с большой
скоростью, то могут стать неустойчивыми колебания,
происходящие в ходе процесса работы оптимизатора.
Благодаря тому, что мы знаем уже многое о функ-
ционировании нелинейных систем, оказывается воз-
можным принятие нужных мер для обеспечения их
нормальной работы, в частности мер к тому, чтобы ра-
бочие движения в системе были устойчивыми.
Было сказано и о том, что сердце — автоколеба-
тельная система. Применяются ли к нему методы рас-
чета, которые мы рассмотрели? Вся сердечно-сосуди-
стая система человека может служить примером очень
сложной динамической системы. Ее изучением зани-
маются ученые, ведущие работы в разных направле-
ниях: физиологи, гидродинамики и другие. Большое
значение имеет и представление ее работы с позиций
теории автоматического управления. При рассмотрении
сердца, как автоколебательной системы важно" даже
не умение рассчитать что-то, а понимание природы
автоколебаний, того, как они * происходят. Это-то и
дают здесь методы анализа автоколебаний, о которых
было рассказано.
3. Случайные процессы. Идентификация
Система автоматического управления может быть
подвержена случайным воздействиям. Для выясне-
ния их влияния на работу системы управления
нужно знать их характеристики. Для определения
этих характеристик приходится обрабатывать боль*
шую информацию. Обычно такая обработка инфор-
мации производится с помощью ЭВМ. Познакомим
читателя с характеристиками случайных процессов
и с методами их определения. Дополним то, что
раньше говорилось о частотной форме представле-
ния сигналов. Расскажем и об идентификации объ-
ектов управления.
Часто бывает необходимым учитывать случайный
характер воздействий, оказываемых на систему авто-
' 3. СЛУЧАЙНЫЕ ПРОЦЕССЫ. ИДЕНТИФИКАЦИЯ ’ '
магического управления в процессе ее работы. Это
могут быть внешние воздействия, а также и случай-
ные помехи, шумы, возникающие при работе объекта
управления и управляющей аппаратуры.
С понятием вероятности события мы встречались
еще в школе, в разделе о применениях комбинаторики
к теории вероятностей. В этом разделе учебника для
9-го класса вероятность события была определена как
отношение числа благоприятствующих ему случаев
к общему числу исключающих друг друга случаев.
Тогда же мы познакомились с решением задачи о ве-
роятности того, что при выборочном контроле хотя бы
одно дефектное изделие попадет в выборку. С такими
задачами теории вероятностей мы знакомы.
В области автоматического управления главным
образом приходится решать другие задачи. Возникает
необходимость в определении на основании опытных
данных характеристик случайных воздействий и в оп-
ределении влияния последних на работу системы авто-
матического управления. Для этого обычно должна
обрабатываться очень большая информация, получае-
мая при измерениях, производимых в различные мо-
менты времени. В некоторых системах управления
одним из функциональных узлов системы является
устройство, служащее для определения характеристик
случайных процессов. Для обработки исходной инфор-
мации и получения нужных характеристик случайных
процессов используются ЭВМ.
Чтобы можно было составить представление о том,
какая обработка исходных данных при этом произво-
дится, рассмотрим характеристики случайных процес-
сов, которые чаще всего подлежат определению. Пред-
варительно отметим то, что приходится иметь дело как
с дискретными, так и с непрерывными случайными
процессами. В первом случае заранее непредвиденные
значения рассматриваемой величины х получаются в
Дискретные моменты времени t, и картина случайного
процесса такая, например, как показано наверху слева
на рис. 24. Во втором — значения случайной величи-
ны х непрерывно получают с течением времени, как
показано на рисунке ниже. Различают случайные
процессы стационарные и нестационарные. Стационар-
172 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ные процессы это такие, у которых указываемые да-
лее статистические их характеристики, определенные
для достаточно большого интервала времени Т, не из-
меняются, если взять любой другой, также достаточно
Рис. 24.
большой интервал времени Т, смещенный относитель-
но первого. Рассматриваемые нами стационарные слу-
чайные процессы обычно бывают эргодическими. Это
значит, что статистические характеристики случайного
/з. СЛУЧАЙНЫЕ ПРОЦЕССЫ. ИДЕНТИФИКАЦИЯ
173
процесса, определенные при одной его реализации
в течение длительного времени, совпадают со стати-
стическими характеристиками большого количества
одновременных реализаций случайного процесса, или,
как говорят, совпадают статистические характеристи-
ки случайного процесса по времени и по множеству.
Эргодическое свойство случайных процессов позволяет
заменить испытания большого количества однотипных
объектов управления или однотипных образцов управ-
ляющих устройств испытаниями в течение длительного
времени одного соответствующего образца, что обычно
является более доступным.
Итак, рассмотрим основные характеристики случай-
ных процессов, используемые при , анализе влияния
случайных воздействий на работу систем автоматиче-
ского управления.
Обратимся к упоминавшемуся -уже графику, изо-
браженному в верхней части рис. 24. Пусть на весь
рассматриваемый интервал времени Т приходится Af
значений интересующей нас случайной величины ж,
отстоящих друг от друга по времени на величину Д,
как это показано на рисунке для первых значений я.
Проведем, как также показано чна рисунке, горизон-
тальную линию на расстоянии h от оси абсцисс. Под-
считаем, сколько имеется значений x<h на всем ин-»
тервале Т. Пусть их оказалось Nh. Изменяя h, будем
получать различные Nh и соответственно различные
Nh/N. При изменении h во всем возможном диапазоне
(теоретически от до +<») величина Nh/N изменя-
ется в пределах от 0 до 1. График функции Nh/N5=3
= Ш) представлен наверху в правой части рис. 24.
Функция F(fe), называемая функцией распределения
случайного процесса, дает наиболее полное представ-
ление о нем. Производная w(/i) = F'(&) от функции
распределения F(h) по h называется плотностью рас-
пределения^ Имея в виду, что рассматривается распре-
деление значений случайной величины -ж, пишут так-
же FU), ю(я). При определении функции распределе-
ния, плотности распределения и других указываемых
далее статистических характеристик случайных про-
цессов теоретически интервал времени Т должен быть
неограниченно большим; практически же при обработ-
174 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ке исходных данных он всегда является ограничен*
ным, и при этом получают приближенные характери-
стики или, как говорят, оценки истинных характе-
ристик.
Часто пользуются числовыми характеристиками
случайного процесса, к которым относятся среднее его
значение х и дисперсия Dx, величина которой дает
представление о степени разброса значений случайного
процесса относительно среднего его значения.
Среднее значение х9 или, как его называют по-дру-
гому, математическое ожидание случайного процесса,
определяется следующим образом^ Весь интервал воз-
можных значений х разбивается на т малых участков,
средние значения х для которых соответственно равны
^2, ...» Выясняется, сколько значений Nj
из N попадает за весь интервал времени Т на участок
со средним значением Xj. Определяется затем величина
+ x2N2 + ... + XjNj^r... + zM/N или в другой
m
записи 2 Xj (Nj/N). При достаточно большом (тео-
5=1
ретически неограниченно большом) W величина Nj/N
может рассматриваться как вероятность pj появления
значения Xj величины х. Если случайный процесс не4
прерывный, то, вводя в рассмотрение плотность веро-
ятностей w(x)9 переходя от суммы к интегралу и сби-
тая, что интегрирование по х проводится от —<» до
+°о, получим следующее выражение математического
ожидания:
00
х = J xw (х) dx.
—сю
Дисперсия определяется следующим образом;
Dx = (х — х)2.
Подсчитывается она так. Для всех значений х нахо-
дятся величины х-& и их квадраты и определяется
среднее значение случайной величины (х —х)2. Часто
случайный процесс характеризуется_величиной средне-
квадратического отклонения о. «= VP*.
Наряду с этими характеристиками случайных про-
цессов в теории автоматического управления широко
> 3. СЛУЧАЙНЫЕ ПРОЦЕССЫ. ИДЕНТИФИКАЦИЯ Щ
используются Характеристики, на основании которых
судят о Статистической зависимости между смещенны-
ми относительно друг друга по времени значениями
.случайного процесса, или, как говорят, об автокорре-
ляции случайного процесса. Используются также ха-
рактеристики, дающие представление о степени зави-
симости друг от друга, или иначе взаимной корреля-
ции, различных случайных процессов.
Первая из этих зависимостей определяется следую-
щим образом. Каждое отвечающее данному моменту
времени t значение ж, которое обозначим #(£), умно-
жается на значение x(t + т), отвечающее моменту вре-
мени, смещенному относительно t на величину т. Все
# таких значений x(t)x(t + т) складываются и полу-
ченная сумма делится на N. Все это проделывается
раз за разом для различных величин т, например для
т = 0, т = А, т = 2А, т = ЗД и т. д. (см. величины Д
на графике наверху слева на рис. 24). Таким образом
определяются для дискретного случайного процесса
соответствующие различным т точки характеристики
зависимости от т указанной выше функции, называе-
мой автокорреляционной функцией, которая для про-
цесса x(t) обозначается как Rx(x). Для непрерывного
случайного процесса
т
Rx (т) == (i/T) J х (t) x (t + т) dt.
о
Если, например, процесс x(t) задан графиком, то для
определения точки характеристики Rx(x) при данном
значении т нужно построить график функции
x(t)x(t + x), найти величину интеграла как площадь
под кривой x(t)x(t + x) и разделить ее на Т. Можно
взять и ряд отдельных значений x(f) и x(t + т) и оп-
ределить Rx(x) так, как было указано для дискретного
случайного процесса. Автокорреляционная функция
Rx(x) имеет следующие свойства. Являются одинако-
выми ее значения при равных по абсолютной величи-
не положительных и отрицательных т, то есть 2?ж(т) —
четная относительно т функция. Максимального своего
значения Rx(x) достигает при т=»0. Если случайный
процесс не смешан с другим неслучайным, то график
176 Я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
/
функции 2?х(т) имеет такой вид, как показано слева
на рис. 24. При этом Rx(x) 0 при т -> Если же
случайный процесс наложен на неслучайный, являю-
щийся гармоническим колебанием частоты о, то функ-
ция Дх(т) имеет такой вид, как представлено _на
рис. 24 справа, причем для колебания Ях(т)
также имеют частоту о. Таким образом, если полез-
ный синусоидальный сигнал настолько забит помеха-
ми, шумами, представляющими собой случайный про-
цесс, что непосредственно нельзя определить его ча-
стоту, то это можно сделать, построив график автокор-
реляционной функции. ,
Чем уже характеристика Яж(т), тем меньше корре-
ляционная связь между значениями случайного про-
цесса х. Если же /?я(т)=*0 при всех значениях т
за исключением т = 0 (это б-функция, о которой
мы когда-то говорили), то соответствующий процесс
называется чисто случайным или иначе белым шумом.
Аналогично тому, как определяется для случайного
процесса x(t) его автокорреляционная функция Ях(т),
определяется. и взаимная корреляционная функция
RxyM для двух различных' случайных процессов x(t)
и y(i). Разница лишь в том, что каждое из значений
x(t) умножается каждый раз не на x(t + x), а на
y(t + т). Для непрерывного случайного процесса
т
Rxy (у) = (1/Т) J X (0 у (t + т) dt.
О
Напомним еще раз для функций Rx(x) и R^tx) то,
что раньше было сказано в отношении вообще всех
статистических . характеристик случайного процесса:
теоретически они определяются при Т «>, в действи-
тельности же с практически достаточной точностью
находятся их приближенные значения для конечных
интервалов времени Т. Заметим также, что приведен-’
ные выражения Яж(т) и Яху(т) справедливы для слу-
чайных процессов с х = О и и = 0. Если же это не так,
то при расчете величин Rxlx\ и R^x) умножаются
значения x(t)—x и x(t + x)— х, или x(t)—x и y(t +
+ т) — г/, где, как и раньше, х — есть математическое
ожидание случайного процесса xU), а у — есть мате^;
3. СЛУЧАЙНЫЕ ПРОЦЕССЫ. ИДЕНТИФИКАЦИЯ 177
матическое ожидание случайного процесса y(t). Отме-
тим также, что Rxy(x) ^Ryx^x).
Наряду с определением указанных выше характе-
ристик. оказывается полезным определение так назы-
ваемых спектральной плотности Sx(<o) случайного про-
цесса x{t) и взаимной спектральной плотности 5ух(<о)
случайных процессов y(t) и x(t). Первая из них пред-
ставляет собой интегральное преобразование Фурье
для функции Ях(т), а вторая —для функции Яух(т).
Заметим, что для белого шума спектральная плот-
ность 5х(со) является постоянной при любых частотах
о) от 0 до 00 и, следовательно, белый шум имеет гар-
монические составляющие одинаковой интенсивности
для всего диапазона частот.
Из сказанного выше следует, что для определения
рассмотренных характеристик требуется проведение
большого количества вычислений. Они выполняются
с помощью ЭВМ.
Но для чего нужны эти характеристики? Как они
используются при разработке и исследовании систем
автоматического управления, а в некоторых случаях
и в ходе их рабочего процесса?
Чтобы ответить на эти вопросы, приведем следую-
щие примеры. С различного вида шумами приходится
иметь дело при управлении многими технологическими
процессами; сигналы управления космической стан-
цией, передаваемые на расстояние в миллионы кило-
метров, встречают на своем пути огромное количество
помех и т. д. Нужно знать характеристики этих слу-
чайных процессов, уметь отделить от шумов полезные
сигналы. Все это делается при использовании .корре-
ляционных функций.
Часто бывает необходимым определение характе-
ристик объекта управления или всей системы автома-
тического управления в процессе работы, причем из-за
высокого уровня шумов или по другим причинам нель-
зя применить частотный и другие методы исследова-
ния, о которых говорилось раньше. Эта задача решается
на основе использования функций спектральной плот-
ности. Если, например, имеется линейная система ав-
томатического управления, для которой х — входная
и У — выходная величины, представляющие собой слу-
178 Ч, II. ЭЛЕМЕНТЫ' ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
чайные процессы, и получены для них характеристики
спектральной плотности &(©) и 5ух(со), то амплитудно-
фазовая частотная характеристика системы ТГ(гш) оп-
ределяется следующим образом:
W(l^^SyxM/SM
Если же входной сигнал представляет собой белый
шум, для которого 5х((о)«1, то IT(ta)) ==^х(®). Такой
способ определения амплитудно-фазовой частотной ха-
рактеристики системы имеет исключительно большое
практическое значение. Практически важным является
и вопрос о том, как проходят через элементы системы
или через всю систему случайные сигналы, как они
ими преобразуются. Пусть, например, имеется звено
системы или целая система, для которых х и у, как
и ранее,—входная и выходная величины и для кото-
рых известна их амплитудная частотная характеристи-
ка Л/(со) и известна спектральная плотность входного
случайного сигнала 5ж(<о). .Спектральная плотность
выходного случайного сигнала 8у(ы) определяется сле-
дующим образом:
SyM^M4(^)SxM.
Если же определена Sy(<o), то может быть найдена и
дисперсия выходного сигнала:
оо
= (1/2л) J Sy (ю) do.
—00
Итак, мы знаем теперь, как по опытным данным
находятся автокорреляционные и взаимные корреля-
ционные функции случайных процессов, а по ним оп-
ределяются спектральные плотности соответствующих
случайных процессов, имеющие, как уже отмечалось,
большое значение для анализа работы систем автомат
тического управления при случайных возмущениях.
Спектральные же плотности случайных процессов, как
было сказано, получаются при выполнений для корреля-
ционных функций интегрального преобразования Фурье.
В связи с тем, что было рассказано,, дополним не-
много приведенные ранее сведения об интегральном
преобразовании Фурье и интеграле Фурье, а также
, 3. СЛУЧАЙНЫЕ ПРОЦЕССЫ. ИДЕНТИФИКАЦИЯ
179
о разложении функций в ряд Фурье. Это целесообраз-
но сделать здесь, так как то, о чем пойдет сейчас речь,
широко используется в теории автоматического управ-
ления*
Напомним, что о преобразовании Фурье и интегра-
ле Фурье первый раз было нами упомянуто, когда
говорилось о расчете частотных характеристик (см.
стр. 137). Сейчас мы еще раз встретились с их при-
менением. Когда же мы знакомились с исследованием
автоколебаний методом гармонического баланса, то
увидели, как используется разложение функций в ряд
Фурье. Имеется ли какая-либо связь между последним,
с одной стороны, и интегралом Фурье и интегральным
преобразованием Фурье, с другой?
Раньше было указано в качестве исходного для
периодической функции f(.t) с периодом Т следующее
выражение ряда Фурье:
<ю
/ (t) == (а0/2) + 2 (ап cos n^t + Ъп sin
где
<ох = 2п!Т^
т
ап = (2/Г) J / (0 cos na^t dt при , п = 0, 1, 2А..
о
т
Ъп = (2/Г) J / (t) sin n^t dt при n = 1, 2,...
о
Если воспользоваться формулой Эйлера, о которой то-
же говорилось раньше (стр. 132), то можно перейти
от этого представления ряда Фурье к представлению
его в комплексной форме
/и- Т
П=—ОО
где с„ = (an — ibn)/2. При таком представлении ряда
Фурье суммирование производится не только по поло-
жительным, но и по отрицательным значениям со, ко-
торые оказывается удобным ввести в рассмотрение,
хотя они и не имеют физического смысла. Соответст-
венно с этим амплитудный спектр приобретает такой,
180 *2. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
например, вид, как показано внизу на рис. 24, где
симметрично относительно оси ординат расположены
спектральные линии для положительных и отрицатель-
пых со. Представленный в этом виде амплитудный
спектр функции f(t) называют линейчатым ее спект-
ром, а иногда просто спектром ее. Его можно постро-
ить, если имеется спектр данной функции такого ви-
да, как тот, о котором говорилось, когда рассматри-
вался рис. 21 (для комплексного и тригонометриче-
ского рядов Фурье периодической функции f(t) коэф-
фициенты членов ряда при со == 0 одинаковые, а при
других значениях <о для комплексного ряда в два раза
меньше, чем при тех же <о для тригонометрического).
Говоря о линейчатом спектре периодической функции
f(t) в дальнейшем будем иметь в виду разложение ее
в комплексный ряд Фурье.
При Т «J функция /(£1 уже не является перио-
дической. Разложение ее в ряд Фурье заменяется при
этом ее представлением в виде интеграла Фурье.
Прежде чем еще раз напомнить то, что было о нем
сказано, когда рассматривался расчет частотных ха*
рактеристик, выясним, что происходит со спектром
функции /(£) при Т <». Рассмотрим сначала пред-
ставленный на указанном выше рисунке линейчатый
спектр для периодической функции /(£), имеющей ко-
нечный период Т. Здесь ан -7- частота первой гармони-
ки, и вместе с тем на велИчину coi удалена каждая
следующая линия спектра от предшествующей. Так
как <о1 = 2л/Т, то при Т <» величина a)i->0 и дис-
кретный линейчатый спектр превращается в непрерыв-
ный. При этом сумма членов комплексного ряда Фурье
заменяется интегралом и функция /(£) представляется,
в виде интеграла Фурье
оо
/(О =(1/2л) J Ф(г®)Л®,
—-ОО
где
оо
Ф (to) = J
—00 _
— преобразование Фурье для функции /(<), о котором
мы говорили раньше. Для заданной функции /(£) но
S. СЛУЧАЙНЫЕ ПРОЦЕССЫ ИДЕНТИФИКАЦИЯ
181
последней формуле выполняется интегральное преоб-
разование Фурье, по первой же из приведенных фор-
мул, наоборот, по заданной функции Ф(г<в) находится
исходная функция f(t). Поэтому эту формулу называ-
ют формулой обратного интегрального преобразования
Фурье.
До сих пор мы говорили о разложении в ряд Фу-
рье и о представлении в виде интеграла Фурье вели-
чины х, являющейся функцией времени t, то есть
функцией одной переменной. Аналогичным образом
могут соответственно быть представлены функции двух
переменных. Например, при использовании информа-
ции, хранимой фотопластинкой, сила света, проходя-
щего через отдельные ее участки, изменяется в зави-
симости от того, какая информация (буквы текста,
цифры, части рисунка) запечатлена на каждом данном
участке. Положение каждой точки в плоскости пла-
стинки определяется ее координатами х и у, сила про*
ходящего света является функцией этих двух величин.
При разложении таких функций в ряд Фурье дважды
производится суммирование с учетом того, что имеют-
ся две переменные величины, а при определении для
них интеграЛа Фурье дважды производится интегри-
рование, сначала по одной, а затем по другой из пере-
менных величин. Аналогичным образом, только соот-
ветственно при трехкратном суммировании или интег-
рировании, находятся выражения разложения в ряд
Фурье или интеграла Фурье в тех случаях, когда при-
ходится иметь дело с функцией трех переменных. На-
пример, если с течением времени t изменяется осве-
щение фотопластинки, то сила проходящего через’ нее
света является функцией переменных х, у и t Разло-
жение функций в ряд Фурье и выполнение преобра-
зований Фурье является основой и для разработки ме-
тодов хранения и обработки информации, применяе-
мых при создании новых перспективных оптических
и оптоэлектронных устройств обработки информации
в процессе управления. К этому мы еще раз вернемся
в последнем разделе этой части книги.
На этом закончим рассказ о случайных (или, как
их по-другому называют, стохастических) процессах.
Вероятно, читателю, впервые встретившемуся с комп-
182 4. IL ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
лексными величинами, трудно к ним привыкнуть. Од-
нако пользу от их введения в рассмотрение он должен
был оценить. Впервые — когда было показано, как
просто получаются расчетные амплитудно-фазовые
частотные характеристики при их построении на комп-
лексной плоскости. Да и сейчас — после того, что было
выяснено, как используется преобразование Фурье для
получения характеристик, по которым судят о прохож-
дении случайных сигналов от входа к выходу сйстемы
автоматического управления, и характеристик, с по-
мощью которых определяются амплитудно-фазовые
частотные характеристики элементов и систем автома-
тического управления, если их нельзя получить ранее
указанными методами.
На последнем остановимся еще раз, так как это
относится к решению задач идентификации, занимаю-
щих важное место в общем комплексе задач теории
автоматического управления. Вообще, под идентифика-
цией имеется в виду построение математической мо-
дели функционирования объекта по данным, получен-
ным опытным путем в процессе нормальной его рабо-
ты. Основной целью идентификации является опреде-
ление дифференциального уравнения или выражений
передаточной функции, или весовой функции, или
формулы временной характеристики, или же частотных
характеристик, представляющих математическую мо-
дель объекта. Что здесь первоначально определяется,
неважно, так как, располагая дифференциальным урав-
нением, как мы уже знаем, можно получить выраже-
ние передаточной или весовой функции и любую из
указанных характеристик и, наоборот, перейти, если
это нужно, от них к дифференциальному уравнению.
Необходимость в проведении опытов на нормально
работающем объекте возникает в тех случаях, когда
недопустимы даже небольшие отклонения от основного
рабочего режима, неизбежные при снятии временной
характеристики или частотных характеристик, или же
не представляется возможным смонтировать нужную
для снятия этих характеристик экспериментальную
аппаратуру, или, наконец, получение их оказывается
затруднительным из-за возникновения при работе по-
мех, как это бывает во многих случаях. В этих уело-
3. СЛУЧАЙНЫЙ ПРОЦЕССЫ. ИДЕНТИФИКАЦИЯ . (83
виях идентификация производится с использованием
шумов, естественным образом возникающих при рабо-
те, или при искусственном их создании, и применя-
ются методы корреляционной теории случайных про-
цессов, о которых было рассказано. Полученные при
идентификации данные могут использоваться при по-
следующих исследованиях или же математическая мо-
дель объекта управления может быть автоматически
передана машине и использована ею при формирова-
нии управляющих воздействий.
Часто встречаются объекты управления, движение
которых приближенно может быть описано линейными
дифференциальными уравнениями первого, второго или
третьего порядка. Для таких объектов управления со-
ставлены таблицы, с помощью которых по виду авто-
корреляционных и взаимно корреляционных функций
без каких-либо расчетов сразу может производиться
оценка структуры модели и ее параметров, вплоть до
определения численных значений коэффициентов диф-
ференциальных уравнений. Эти таблицы,, которые мо-
гут использоваться исследователями или же могут
быть переданы машине и запомнены ею, составлены
в Институте проблем управления Академии наук СССР
профессором Н. С. Райбманом и его сотрудниками?
При идентификации может быть установлено, в ка-
кой‘степени существенна нелинейность характеристик
объекта управления и насколько правомочно описание
движения линейными дифференциальными уравнения-
ми, может быть вообще произведена оценка степени
близости принятой модели действительному объекту,
может быть проверено, насколько справедливы при-
нимаемые предположения о стационарности и эргодич-
ности исследуемых случайных процессов.
Большое внимание уделяется сейчас созданию иден-
тификаторов, автоматически формирующих по наблю-
даемым входным и выходным сигналам модель объек-
та управления непосредственно в ходе его фукциони-
рования. Применяя такие идентификаторы, можно
строить более совершенные адаптивные системы уп-
равления,^чем те, которые были известны раньше. Это
показано в изданной в 1980 г. Институтом проблем
Управления книге академика В. А. Трапезникова, про-
<Я4 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
фессора Н. С. Райбмана и научных сотрудников ин-
ститута В. М. Чадеева, В. А. Лотоцкого, А. С. Манде-
ля и В. Н. Дынькина «АСИ — адаптивная система
с идентификатором». В этой книге описан принцип
действия адаптивных систем с идентификаторами в це*-
пи обратной связи и рассмотрены их применения для
управления технологическими процессами, а также
для управления многономенклатурными запасами и
при управлении процессами передачи данных.
Принципиальная блок-схема АСИ показана внизу
на рис. 24, где 1 — объект управления, 2 —- управляю-
щая ЭВМ. Намечается в ближайшие годы строить АСИ
при использовании микропроцессоров и микро-ЭВМ,
так как создание микропроцессорной техники открывает
возможности для эффективной реализации таких ме-
тодов. управления. Микропроцессорное управление яв*.
ляется программным. Однако на рассматриваемой схе-
ме для большей наглядности управляющая часть си-
стемы условно показана так, как если бы аппаратура
она была выполнена в виде трех блоков. На рисунке
это блок управления 5, текущий идентификатор 4 и
стратегический идентификатор 5. Название одного и
другого идентификатора отражают выполняемые ими
функции, о которых будет дальше рассказано. Вход-
ные сигналы объекта х передаются на входы всех
трех блоков. На входы обоих идентификаторов посту-
пают и выходные сигналы объекта у. В блок управ-
ления вводятся также и заданные характеристики
< рабочего процесса (при случайном изменении величин
х и у величина у0 может, например, представлять
собой заданное математическое ожидание, дисперсий
или требуемые корреляционные характеристики). Сиг-:
налы управления и, передающиеся от блока управле-
ния к объекту, поступают также на вход обоих иден-
тификаторов. Стратегический идентификатор, обраба-
тывая информацию об изменении входной х и выход-?
ной у переменных величин объекта управления и об
управляющих воздействиях и, формирует структуру
модели объекта управления и оценивает ее параметры
(производится оценка степени нелинейности характе-
ристик и степени идентичности создаваемой модели
реальному объекту, оценивается экономическая эффек*
.
4. ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
185
тивность работы системы). Информация, получаемая
при работе стратегического идентификатора, переда-
ется текущему идентификатору. Как следует из его
названия, он определяет текущие параметры модели.
Этот идентификатор уже непосредственно связан с
блоком управления.
Для АСИ возможны два режима работы. Одним
из них является режим обучения машинной системы,
при котором управление выключается и производится
коррекция оценок параметров модели. Другим режи-
мом является режим управления. Переход от первого
режима работы ко второму производится автоматиче-
ски. Это происходит при сближении характеристик
формируемой модели объекта управления и самого
объекта. Критерием для перехода от режима обучения
к режиму управления является достижение в ходе
обучения машинной системы заданной достаточно ма-
лой величины Dy_y*IDv, где у* — прогнозируемое зна-
чение выходной переменной, получаемое на созданной
в процессе идентификации модели объекта, у — истин-
ное значение выходной переменной объекта, Dy^ и
Dy — дисперсии соответственно величин у— у* и у
(о том, как определяется дисперсия, было рассказано
раньше, см. стр. 174).
В определенном смысле АСИ выполняет функции
оптимального управления.
Вопросы оптимального управления имеют большое
практическое значение. Рассмотрим их дальше особо.
Посвятим им следующую нашу беседу.
4. Оптимизация управления
Задачи оптимального управления многообразны.
Их решение часто представляется сейчас возмож-
ным лишь при включении ЭВМ в систему управ-
ления. Разработаны различные методы оптимального
управления. Один из них основан на линейном
программировании. Вспомним, что написано о нем
в школьном учебнике для 10-го класса. Применя-
ется также метод динамического программирования^
о котором будет рассказано. При решении задач
186 я. IT. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
I оптимизации во многих случаях пользуются графа-
ми, в которыми мы тоже познакомим читателя.
Мы уже дважды встречались с решением задач
оптимизации, но это были относительно простые зада-
чи. Была рассмотрена работа оптимизаторов, с помо-
щью которых достигается максимум или минимум ха-
рактеристики объекта экстремального регулирования.
Затем говорилось об интегральных оценках качества
переходных процессов в системе автоматического уп-
равления, и мы познакомились с теоретической поста-
новкой задачи оптимизации. Тогда имелось в виду
определение параметров системы, при которых полу-
чается наилучшее из возможных качество переходных
процессов, если за критерий качества принять интег-
ральную оценку.
Возникает необходимость и в решении других за-
дач оптимизации. Например, часто, в особенности при
управлении сложными системами, бывает нужным
найти план действий, в результате которых наилуч-
шим образом достигается поставленная цель. Иначе
говоря, оптимальным образом организовать процесс уп-
равления. В общем случае решение задачи оптимиза-
ции обычно сводится к такому выбору структуры и
параметров системы или к такой организации процес-
са управления, при которых достигается максималь-
ное или минимальное (в зависимости от того, какая
задача поставлена) значение величины, принятой за
показатель качества работы системы. Показатели ка-
чества — критерии оптимальности — могут быть раз-
личными. Процесс управления, наивыгоднейший в ка-
ком-либо одном смысле, например по точности выпол-
нения нужных операций, может быть не лучшим
в другом, например по скорости выполнения этих опе-
раций, и т.' д. Поэтому при постановке задачи опти-
мального управления прежде всего выделяют главный
показатель, по которому судят о качестве функциони-
рования данной конкретной системы. Задают для нее
основной критерий оптимальности. О задачах такого
рода будет идти речь дальше (более сложными явля-
ются случаи, когда необходимо учитывать несколько
критериев качества,—это так называемые многокри-
териальные задачи оптимизации). Обычно, как и в слу-
4. ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
187
чае минимизации интегральных оценок качества пе-
реходных процессов, критерием оптимальности являет-
ся достижение минимума или максимума некоторого
функционала — величины, каждое числовое значение
которой отражает определенного вида характеристику
состояния системы или процессов его изменения.
Обычно имеются ограничения, в силу которых воз-
можны лишь некоторые решения поставленной зада-
чи, и бывает нужным выбрать лучшее из этих решений.
Существуют различные методы решения задач оп-
тимального управления, некоторые из них больше под-
ходят к решению одних задач, другие — иных. Позна-
комимся с некоторыми из них. Чтобы стала ясной идея
этих методов, приведем самые простые примеры их
использования, когда не требуется обязательно про-
ведение вычислений с помощью ЭВМ. Затем укажем
задачи, решение которых связано с обработкой боль-
ших массивов информации, причем без ЭВМ уже
обойтись нельзя.
Сначала вспомним то, что нам ^известно из школь-
ного курса математики о линейном программировании.
В учебнике по математике для 10-го класса написано
об этом следующее.
Задачами линейного программирования называются
задачи, которые сводятся к нахождению наибольшего
или наименьшего значения линейной функции
5 = biXi 4 b2x2 +... + bnxn
переменных xt, х2, ..., Хп в некоторой области, кото-
рая задается системой неравенств
dijXi + a2jx2 4... 4- anjxn < Cj
при 1 < m и линейных уравнений
' + а2Кх2 4... 4- dnhXn =
при 1 С к < з, то есть эти задачи сводятся к решению
системы линейных неравенств и уравнений. Решение
задач этого типа было рассмотрено в школе на сле-
дующем примере, подробно разобранном в учебнике.
Бетон, производимый на заводах А и В, нужно раз-
везти по строительным площадкам № 1, 2 и 3. Завод
4 производит 320 т бетона в сутки, а завод В — 380 т<
{88 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Суточная потребность в бетоне — 200 т на стройпло-
щадке № 1, 280 т — на стройплощадке № 2 и 220 т —
на стройплощадке № 3. Стоимость перевозки одной
тонны бетона с завода А на стройплощадки № 1, 2
и 3 соотретственно равна 2, 4 и 6, а на эти же строй-
площадки с завода В равна соответственно 4, 5 и 3.
Требуется составить план перевозок бетона, при кото-
ром стоимость перевозок будет наименьшей. Для этой
задачи в учебнике указано следующее решение. Коли-
чества бетона, которые перевозятся в сутки с завода А
на стройплощадки № 1 и 2, обозначены соответствен-
но х и у; при этом на стройплощадку № 3 поступает
*с завода А за сутки бетон в количестве 320 — х — у.
Тогда с завода В остается завезти на стройплощадки
№ 1, 2 и 3 бетон в следующих соответственно коли-
чествах: 200 — х, 280 —у и 220— (320 — х — у) = х +
+ у —100. С учетом указанной стоимости отдельных
перевозок суммарная стоимость всех перевозок равна
Six; у) = 2х + Ьу + 6(320 - х - у) + 4(200 - х) +
+ 5(280 ~ у) + 3U + у - 100) ==* 3820 - 5х - 4у.
Далее находятся значения х и у, при которых могут
быть минимальными значения Six; у). Это делается
с учетом того, что перевозимые количества бетона за-
ведомо неотрицательны, то есть должны выполняться
условия х 0, у > 0, 320 — х — у > 0, 200 — х > 0,
280 — у > 0, х + у — 100>0. Этими неравенствами оп-
ределяется область значений х и у в плоскости ix\ у).
Из рассмотрения приведенного в учебнике изображе-
ния этой области, имеющей форму многоугольника,
следует, что наименьшее значение Six; у) может быть
только при значениях х и у, соответствующих верши-
нам многоугольника. С подстановкой, в ранее полу-
ченное выражение Six; у) последовательно значений
х и у для каждой из вершин, находим ряд значений
Six; у) и отбираем из них наименьшее, являющееся
искомым. Это в нашей задаче значение 5(200; 120) =*'
«2340, получаемое при перевозке с завода А на
стройплощадки № 1, 2 и 3 соответственно 200, 120
и 0 т бетона, а с завода В — 0, 160 и 220 т. Были ре-
шены в школе и две другие задачи на применение ме*
ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ 189
тода линейного программирования, условия которых
указаны в учебнике. Одна из них на составление
имеющего наименьшую стоимость рациона при откор-
ме скота на животноводческой ферме с соблюдением
того, что каждое животное получает не менее задан-
ного количества белков, жиров и углеводов. Для со-
ставления рациона используются корма двух сортов,
для каждого из которых заданы стоимость единицы
его веса и количество приходящихся на единицу веса
белков, жиров и углеводов, различные для каждого
сорта. Вторая задача была на планирование, нужно
было получить наибольшую прибыль на фабрикц, вы-
пускающей два вида продукции, изготовляемой при-
использовании трех видов сырья, ресурсы которых ог-
раничены. Такие задачи, при которых необходимо най-
ти наилучший план производства при ограниченных
ресурсах, сводящиеся к решению систем линейных не-
равенств и уравнений, и решаются главным образом
методом линейного программирования. В учебнике на-
писано также, что создание методов линейного про-
граммирования составляет существенную часть работ
советского математика Л. В. Канторовича. •
Мы почти полностью пересказали все, что написа-
но о линейном программировании в учебнике для 10-го
класса. Обсудим теперь, как это связано с обработкой
большой по объему информаций, с применением ЭВМ.
В тех задачах, которые даны в учебнике для 10-го
класса, требуется определить наименьшее или наиболь-
шее зйачение величины, зависящей от небольшого
числа переменных, двух или трех, для которых долж-
ны удовлетворяться заданные неравенства и уравне-
ния. При решении же практических задач распределе-
ния ресурсов, рациональной загрузки большого коли-
чества станков, производства сложного оборудования,
планирования перевозок и других' часто приходится
иметь дело с десятками или даже еще с бблыпим ко-
личеством переменных величин и оперировать с боль-
шим числом неравенств и уравнений. При этом гео-
метрическая .интерпретация задачи линейного про-
граммирования, которая была указана в школьном^
учебнике, оказывается уже неприемлемой, и для ре-
шения задачи применяются не геометрические, а вы-
190 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
числительные методы. Среди них основным является
так называемый симплекс-метод, основанный на том,
что в ходе решения вводятся новые переменные и
при последовательных пересчетах постепенно, раз за
разом, улучшается решение задачи. Для нахождения
наибольшего или наименьшего значения величины, за-
висящей от многих переменных, необходимо произво-
дить большое количество вычислений. Практически это
оказывается возможным лишь при применении ЭВМ.
Разберемся дальше в том, почему линейное про-
граммирование считается методом управления и рас-
сматривается не только в учебниках по математике,
но и в курсах теории автоматического, управления.
Говоря об управлении, имеют в виду целенаправлен-
ные воздействия на систему, переводящие ее из одних
состояний в другие или изменяющие процессы ее
функционирования. Раньше мы договорились о том,
что будем рассматривать наряду с автоматическим
управлением, осуществляемым без участия человека,
также и автоматизированное управление, которое про-
изводится человеком, использующим вспомогательные
устройства , обработки информации, например ЭВМ.
Окончательные решения на основании полученных при
обработке поступившей информации данных здесь
принимаются человеком. Учитывая это, рассмотрим
задачи линейного программирования, о которых было
рассказано. Человек, ответственный за перевозки бе-
тона на стройплощадки, дает указание, с каких заво-
дов и в каких количествах надлежит перевезти бетон.
Так он управляет перевозками. Он старается делать
это оптимальным образом, для чего использует реше-
ние задачи линейного программирования, полученное
с помощью ЭВМ. Может оказаться необходимым ре-
шать задачу, раз за разом если, например, появляется
возможность перевозки бетона и с некоторых других
заводов, или временно используются на отдельных
участках другие транспортные средства и из-за этого
изменяется стоимость перевозок на этих участках.
Такое* управление подходит под наше определение
автоматизированного управления. Пойдем теперь даль-
ше. При полной автоматизации по сигналам, поступаю-
щим от ^управляющей ЭВМ^ может производиться ав-
4. ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
191
томатически подача. бетона в контейнеры в нужных
количествах и автоматически могут включаться в дей-
ствие транспортировочные линии, причем транспорти-
рование будет осуществляться оптимальным образом
на основе решения соответствующей задачи линейного
программирования. Согласно принятой нами термино-
логии такое управление будет уже автоматическим.
Решения задач линейного программирования на ЭВМ
могут использоваться и иным образом. Например, на
некоторых молочных фермах было введено индивиду^
альное автоматическое дозирование корма для каждой
коровы с учетом удоя молока. При изменяющемся со-
ставе кормов может быть целесообразной автоматиче-
ская коррекция работы дозаторов с помощью ЭВМ,
осуществляющей решение задачи, аналогичной одной
из упоминавшихся задач линейного программирования,
указанных в школьном учебнике.
Способ программирования, который мы обсудили,*
называется линейным программированием. Название
это связано с тем, что отыскиваются значения пере-
менных, при которых достигается экстремум линейной
функции этих переменных, то есть функции, в выра-
жение которой все переменные входят в первой степе-
ни, и одновременно удовлетворяется система лйнейных
неравенств.
Дальше рассмотрим метод оптимального управле-
ния, называемый методом динамического программи-
рования. Этот метод, разработанный американским
ученым Р. Веллманом, является одним из методов не-
линейного программирования. Удобно его применять
в случаях, когда весь процесс, часто это процесс, раз-
вертывающийся во времени, можно разбить на ряд
этапов, то есть данный метод является методом опти-
мизации многоэтапного процесса. Метод динамического
программирования основан на использовании принци-
па оптимальности, согласно которому на каждом эта-
пе, при каких бы условиях он ни был достигнут, нуж-
но стремиться к оптимальному, с учетом этих усло-
вий, продолжению всей оставшейся незавершенной ча-
сти процесса. Чтобы пояснить идею этого метода, при-
меняемого при решении многих задач оптимального
Управления, рассмотрим следующий пример.
192 я. TI. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Спортсмен, который должен участвовать в беге па
10 км, продумывает вместе со своим тренером тактику
бега с тем, чтобы показать наилучшее для этой дис-
танции время. Давайте, и мы попробуем принять уча-
стие в том, что они сейчас обсуждают. Посоветуем
нашему спортсмену, как^ лучше ему бежать. Сразу же
как можно быстрее? Так, как он бежал бы, если бы
были соревнования в беге на 100 м или на 500 м?
Нет, это будет плохой совет.-К концу каждой из этих "
коротких дистанций он уже израсходует все свои силы
и дальше будет бежать так медленно, что наверняка
покажет плохой результат. Тогда, может быть, бежать
по-другому, все время экономя свои силы? Но и это
не даст ничего хорошего. Нужно разработать програм-
му бега, так соразмеряя темп его, чтобы пройти все
расстояние в 10 км за минимальное время.
От чего же зависит оптимальный в этом отношении
темп бега на различных участках дистанции? От мно-
гих факторов. Это и общее физическое состояние
спортсмена в день соревнований, от которого будет
зависеть запас сил, остающихся после того, как пред-
шествующие части дистанции будут уже пройдены. .
Существенно и то, кто еще окажется в группе бегу-
нов, и как наш спортсмен будет реагировать на то, а
что вместе с ним будут участвовать в соревновании
сильные или слабые соперники. Важными факторами
являются погодные условия, рельеф местности, по ко-
торой проходит путь бегунов, и другие. Нужно пред-
усмотреть, какое влияние смогут оказать на резуль-
таты соревнования все эти факторы в различных их
сочетаниях. При этом имеет значение, как будет про- }
являться их влияние на каждом из участков дистан-
ции. Например, часть маршрута проходит по Десной
тропе, и даже если в день соревнования будет паля- , .
щее солнце, это не осложнит прохождение этого участ-
ка. На другом участке дорога идет в гору и придется
бежать по глинистой почве, что может оказаться труд-
ным, если за несколько часов до начала соревнований .
пройдет дождь и дорога будет скользкой. Окончатель-
но вся ситуация станет ясной в день соревнований, /
и тогда можно будет наметить оптимальный темп бега k
на отдельных участках. Но для этого нужно уже
L ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
193
сейчас заблаговременно указать, что является опти-
мальным при том или другом сочетании перечислен-
ных выше факторов. Учесть все, о чем говорилось,
сразу для всей дистанции трудно. Поэтому целесооб-
разно разбить дистанцию в 10 км на ряд этапов, на-
пример на 20 этапов по 500 м, и определить опти-
мальный темп бега на каждом из них. Сделаем это
следующим образом.
Рассмотрим сначала только последний этап, потом
последний вместе с предпоследним, потом эти два эта-
па вместе с еще одним, им предшествующим, и т. д.
Какими бы ни были условия начала последнего этапа,
ясно, что здесь нужно бежать изо всех сил, как можно
быстрее. Однако в зависимости от условий начала
этого этапа (состояния к этому времени спортсмена,
погоды и т. д.) время, которое он займет, будет раз-
личным. Оценим величины этого времени при любых
возможных условиях. Считая эти величины времени
известными, рассмотрим теперь последний этап вместе
с предпоследним. Принимая во внимание все возмож-
ные условия начала предпоследнего этапа, определим
для каждого из них минимальное время прохождения
этого этапа вместе с последним. Рещение' этой части
задачи облегчается тем, что для любых условий, кото-
рые могут быть в конце предпоследнего и, следова-
тельно, в начале последнего этапа, мы уже знаем, за
какое время сможет быть пройден последний этап.
Для того чтобы было минимальным время прохожде-
ния этих двух этапов, может оказаться, что на пред-»
последнем этапе нужно бежать не с максимальной
скоростью и пройти его не за минимально возможное
для него время. Чтобы понять это, вспомним то, что
говорилось в самом начале о неприемлемости бега на
начальном участке дистанции с самой большой ско-
ростью, какую может развить спортсмен/ Такая же
ситуация может быть и для предпоследнего этапа, ко-
гда останутся лишь этот и последний этапы. Дальше
таким же образом поступим по отношению к двум
Указанным выше этапам вместе с третьим, им пред-
шествующим. Опять рассмотрим все возможные усло-
вия начала этого третьего от конца дистанции этапа
и для каждых из них таким же образом: определим
Л. А, Залманзон
494 я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
время прохождения этого этапа, при котором будет
минимальным время прохождения всех трех послед-
них этапов. Решение этой части задачи такЖе облег-
чается тем, что для любых условий, которые могут
быть к началу предпоследнего этапа, мы уже раньше
определили минимальное время прохождения двух
последних этапов. Двигаясь так от конца к началу
дистанций, мы в конце концов придем к отправной ее
точке — к началу первого этапа. Так же как и для
других этапов, определяется скорость бега на первом
этапе, при которой минимизируется время прохожде-
ния этого этапа вместе со всеми последующими, то
есть находится уже оптимальный темп бега на всей
дистанции. Если ко днф соревнований все условия,
о которых говорилось раньше, начальные и для всех
следующих этапов, будут известны, то, переходя от
одних этапов к другим уже в прямом, а не в обрат-
ном направлении, получим оптимальное для этих ус-
ловий распределение времен прохождения отдельных
этанов, прй котором суммарное время прохождения
всей дистанции будет минимальным. При этом будут
использованы определенные при искусственном развер-
тывании процесса от конца его к началу оптимальные
распределения темпа бега при любых возможных ус-
ловиях. Йо теперь — для конкретных условий — из
множества решений окажется выделенным одно-един-
ственное, оптимальное при этих условиях решение.
Неизвестно, послушаются ли нашего совета о таком
программировании бега спортсмен и его тренер, или
они предпочтут какой-либо другой способ определения
оптимальной тактики проведения соревнования. Пре-
доставим это решить им самим. Для нас же рассмот-
ренный пример полезен в том отношении, что* мы
познакомились на нем с общим подходом к решению
задач оптимального управления методом динамическо-
го программирования.
При динамическом программировании во всех слу-
чаях сначала весь процесс развертывается от конца
к началу, а затем при заданных фиксированных на-
чальных условиях выясняется, какими должны быть
управляющие воздействия, или, просто скажем, уп-
равления, на каждом этапе для того, чтобы было по-
Ь ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ 195
лучено минимальное (или в других случаях — макси-
мальное) значение критерия оптимальности рассмат-
риваемого процесса. В нашем примере управлениями
были затраты мышечной энергии спортсмена, при ко-
торых достигается та или другая скорость бега. Кри-
терием оптимальности было сведение к минимуму вре-
мени прохождения всей дистанции. Это время равно
сумме времен прохождения каждого из этапов, на ко-
торые была разбита дистанция^ Критерий оптималь-
ности такого вида называется аддитивным. Метод ди-
намического программирования главным образом при-
способлен для решения задач с аддитивным критерием
оптимальности. Если критерий оптимальности друго-
го вида, то иногда удается свести его к аддитивному.
При первоначальном развертывании процесса от кон-
ца его к началу всегда, так же как это было и в на-
шем примере, делаются предположения о всех возмож-
ных условиях протекания процесса и так, как было
указано, находится для каждого этапа множество ре-
шений, отвечающих различным условиям. Соответст-
вующие управления называются условными оптималь-
ными управлениями. При последующем же разверты-
вании процесса в прямом направлении определяется
истинно оптимальное управление процессом для всех
его этапов. ;
С рассмотренным примером сходен следующий при-'
мер. На строительство и освоение промышленного
предприятия выделяются определенные средства. Ста-
вится задача такого их распределения по годам и квар-
талам каждого года, чтобы был максимальным к за-
данному времени, прошедшему после начала строи-
тельства, экономический эффект от каждой единицы
вложенных в строительство средств. Вложение всех,
средств в строительство сразу же будет неэффектив-
ным. Хотя при этом предприятие и будет построено за
короткий срок, не удастся обеспечить его в полной
мере сырьем и рабочей силой, не будут еще налажены
необходимые связи с предприятиями-смежниками, не
удастся подвести транспортные линии. В этом сход-
ство с тем, что говорилось раньше р старте нашего
бегуна. Сходен этот пример с первым и в остальном.
Здесь также для нахождения оптимального решения
7 *
195 Я. П. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
задачи надлежит просмотреть описанным способом
весь процесс от конца его и до начала, а затем уже
повторно в прямом направлении. Этот пример отлича-
ется, однако, от первого тем, что здесь легче подда-
ются численному учету все факторы, влияющие на ход
строительства и освоения предприятия, и можно на-
писать формулы, по которым рассчитывается зависи-
мость достигаемого экономического эффекта от разме-
ра вложенных средств.
Специалисты, познакомившиеся с условием этого
примера, возможно останутся неудовлетворенными,
так как мы недостаточно четко указали, что в данном
случае ( представляет собой критерий оптимальности,
и не сказали о том, что делается с той частью выде-
ленных средств, которая сразу не используется, не*
сказали, как распределяются ресурсы в целом. Не бу-
дем спорить с ними, может быть, и в самом деле фор-
мулировка указанной выше задачи недостаточно пол-
ная. Сейчас это для нас неважно: ставилось целью
лишь в общих чертах обрисовать метод динамического
программирования. Подробно можно познакомиться „
с решением методом динамического программирования.
различных задач управления распределением ресурсов
по книге Е. С. Венуцель «Элементы динамического
программирования», выпущенной издательством «Нау-
ка» в 1964 г? к Решаются, например, такие задачи.
Распределяются средства между двумя отраслями про-
мышленности, приносящими определенный доход, при-
чем по истечении каждого года оставшиеся средства
снова распределяются между отраслями. Методом дй-.
намическогр программирования определяется, в какие
сроки надлежит осуществлять вложения средств в од-
ну и в другую отрасль промышленности с тем, чтобы
был получен к концу установленного срока максималь-
ный суммарный доход. Эти задачи решаются и с уче-
том того, что вложение средств на различных этапах
дает неодинаковый доход, и с учетом того, что полу-
') Вопросам динамического программирования посвящена
и одна из глав книги Е. С. Вентцель «Исследование операций;
задачи, принципы, методология», вышедшей в свет в 1980 г.,
(издательство «Наука»).
Ь. ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
<• 197
* чаемый доход полностью или частично вкладывается
вместе с основными средствами в производство. В ином
варианте задачи распределения ресурсов средства пе-
редаются из одной отрасли промышленности в другую,
причем увеличение дохода последней зависит от того,
сколько времени прошло с момента вложения средств
в первую отрасль. Во всех этих случаях задача реша-
ется поэтапно, аналогично тому, как это было указано
раньше при определении оптимальных скоростей бега
во время спортивных соревнований. Таким же образом
решаются задачи об оптимальном распределении
средств на приобретение оборудования, закупку сырья
и наем рабочей силы, р наилучшем распределении
товаров и т. д.
Наряду с указанными выше задачами в названной
книге рассмотрены и другие. Например, методом ди-
намического программирования решаются задача, о на*
боре летательным аппаратом заданных высоты и ско-
рости полета при минимальном расходе горючего, за-
дача выбора наискорейшего пути и другие задачи. При
решении всех этих задач уравнения, используемые
для отыскания оптимальных управлений, составляются
по единой методике ~ в соответствии с общим ходом
процесса динамического программирования, с которым
мы познакомились на примере со спортсменом.
Метод динамического программирования в несколь-
ко измененном виде применяется и тогда, когда со-
стояние управляемой системы изменяется случайным
образом. При этом, осуществляя управление, мы лишь
частично воздействуем на систему в желательном на-
правлении, а частично процесс функционирования си-
стемы зависит от случайных факторов. Получается не
одна-единственная, как при решении ранее рассмот-
ренных задач, оптимальная программа управления:
выясняется, как нужно вести управление на каждом
этапе при любой случайным образом складывающейся
в конце предшествующего этапа ситуации, и оптималь-
ное управление, являющееся.при этом случайным, вы-
бирается в ходе самого процесса.
В отношении использования ЭВМ при решении ме-
тодом динамического программирования задач управ-
ления можно сказать то же самое, что было указано,
198 Ч, II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
когда говорилось о линейном программировании. При
применении метода динамического программирования
для управления сложными системами (например, для
оптимального управления целыми отраслями промыш-
ленности) приходится иметь дело с большими масси-
вами информации, обработка которых на каждом из
этапов практически невозможна без применения ЭВМ.
То, как динамическое программирование используется
для оптимального управления, было показано на при-
мере со спортсменом; это же относится и к другим
указанным выше задачам.
Метод ’динамического программирования широко
применяется. Во многих случаях является весьма эф-
фективным и метод оптимального управления, осно-
ванный на использовании так называемого принципа
максимума, сформулированного Л. С. Понтрягиным.
Он был разработан первоначально для систем с сосре-
доточенными параметрами, но был обобщен в даль-
нейшем А. Г. Бутковским таким образом, что позво-
лил оптимизировать управление некоторыми часто
встречающимися на практике системами с распреде-
ленными параметрами.
Закончим рассмотрение вопросов оптимального уп-
равления тем, что расскажем о графах. Они использу-
ются сейчас при решении различных задач теории ав-
томатического управления. Мы же, после того как
приведем >общие сведения о графах, укажем лишь, как
они применяются в области управления при решении
задач оптимизации.
При -анализе и синтезе систем управления, в том
числе и систем оптимального управления, бывает удоб-
ным представлять состояния системы и исследовать
возможные их изменения в процессе управления с по-
мощью графов. Граф представляет собой множество
точек, называемых вершинами, которые соединены
между собой отрезками линий. В некоторых случаях
показываются стрелками направления, следуя которым
можно перейти из одних вершин в другие. Примером
графов этого типа, называемых ориентированными,
может служить граф, изображенный наверху слева на
рис. 25. Отрезки линий, соединяющие вершины на этом
графе, называются дугами. Каждая дуга ориентиро-
L ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
199
ванного графа выходит из соответствующей вершины-
предшественника и подходит к соответствующей вер-
шине-последователю. Говорят, что дуга инцидентна
вершине, если она выходит из нее или подходит к ней.
Последовательность дуг, конец каждой из которых
#3
0 1 0 0 0 0 0
0 0 1010 0
0 10 1110
0 0 0 0 1 оо
ООООО 10
OO1OOQ1
0 0 0 0 0 0 1
Рис. 25.
совпадает с началом другой, называется цутем на гра-
фе (например, на рассматриваемом графе есть пути
п’2Хз^6^7 и Я1Я2Я3Я5). Замкнутый путь, то есть такой,
для которого совпадают начальная и конечная вер-
шины, называется контуром (например, и
х2ХьХвХзХ2). Контур, состоящий из одной-единственной
дуги, называется петлей (на рассматриваемом графе
имеется петля при вершине я7). Графы, у которых на
дугах стрелки не проставлены, называются неориен-
тированными. Для неориентированных графов вместо
названий дуга,, путь, контур иногда применяются со-
ответственно названия ребро, цепь, цикл. Одним из
видов графов являются графы, называемые деревья-
200 Ч. И- ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ми. Дерево — это не содержащий циклов граф. Его
можно изобразить так, как показано наверху справа
па рис. 25 (если повернуть рисунок на 180°, то полу-
чится изображение, напоминающее ветвистое дерево).
Обычно деревья относятся к неориентированным гра- —
фам. Однако если считать, что для показанного на
рисунке дерева исходным является корень (корневая
вершина) и каждое ребро — ветвь дерева — исходит '
из вершины-предшественника^ меньшим номером при
ж, чем номер при х у вершины-последователя, то это
равносильно тому, что рассматривать данное дерево
как ориентированный граф. В некоторых случаях бы-
вает удобным пользоваться смешанными графами,
у которых направления указаны лишь для части дуг.
Во многих случаях каждой из дуг ориентированно-
го графа или каждому ребру неориентированного гра-
фа приписывается значение некоторой величины. Если,.
например, вершины графа обозначают состояния си-
стемы, а дуги — переходы из одного состояния в дру-
гое, то при дугах могут быть указаны, при необходи-„
мости, соответствующие > значения времени переходов. '
Если вершины отвечают координатам системы автома-
тического управления и рассматриваются передаточ-
ные функции звеньев, для которых эти координаты
являются входными и выходными, то выражения этих
передаточных функций могут быть указаны при соот-
ветствующих дугах и т. д. Внизу справа на рис. 25
в виде графа представлена схема различных путей,
соединяющих пункт с пунктом я19 и проходящих
через пункты, для которых приняты обозначения от
х2 до #18. При дугах указаны расстояния между пунк-
тами: lit 2 — между пунктами #4 и х2, в — между
пунктами #3 и Ха и т. д.
Разработаны правила исследования и преобразова-
ния графов, пользуясь которыми можно во многих^,
случаях простейшим образом определить передаточную
функцию многоконтурной системы автоматического уп-
равления по заданным передаточным функциям от-
дельных ее' звеньев или построить схему содержащего
логические элементы и элементы памяти автомата так,<
чтобы им выполнялись заданные функции, иди же про- ,
вести решение других задач.
ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
201
Графы широко используются, как уже упомина-
лось, при решении задач оптимизации. В частно-
сти, графовые представления оказываются полез-
ными и при решении этих задач методом динами-
ческого программирования, о котором говорилось
раньше.
В качестве примера рассмотрим решение задачи
определения кратчайшего пути между пунктами #4 и
Х19> изображенными как конечные вершины графа,
показанного внизу на рис. 25. Решение проводится по
этапам так, как это обычно делается при пользовании
методом динамического программирования. На рисун-
ке указаны пять этапов. Сначала рассматривается по-
следний, пятый, этап. В какой бы пункт #14, #», #н,
Хп или #18 мы ни пришли к началу пятого этапа, един-
ственным и, следовательно, самым кратчайшим будет
путь, длина которого соответственно равна о»
Ле. 1», in. 19 или be, 19* Для начала предпоследнего, чет-
вертого, этапа исходными могут быть пункты #ю, Хь
#12 и #1з. Если исходным является пункт Хо, то для
двух последних этапов имеется единственный крат-
чайший путь #1о#к#18 протяженностью /10, 14 + 1и, 19. От
исходного пункта #ц возможны уже три различных
пути к пункту #i9: #n#i5^i9; #n#ie#i9 и #ц#п#19. Если
is 4" ^1в, 19 меньше, чем 1цг 15 j9 и чем 1цг и 4* Zi?, <9,
- то лишь путь #ц#1б#19 является условно оптимальным,
а пути #ц#15#19 и #ц#и#19 при последующем анализе
исключаются из рассмотрения. Переходя, таким обра-
зом, от пункта к пункту на этом этапе, а затем и на
предшествующих этапах, и каждый раз определяя ус-
ловно оптимальные пути, ведущие из каждого данного
пункта к конечному #i9, в конце концов приходим в от-
правной пункт #i. При этом оказывается найденным
уже не условно оптимальный, а ♦ действительно опти-
мальный, кратчайший путь между пунктами #i и #i9.
Все остальные возможные пути оказались исключен-
ными так же, как это было для участков пути #n#i5^ie
и #ц#17#19, когда для четвертого этапа вместе с пятым
рассматривались переходы из пункта #н в #«. То, что
повторно не приходится их рассматривать, существен-
но упрощает решение задачи. В общем решение нахо-
дится здесь в принципе точно так же, как это было
I 202 ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
i
!
| у нас при определении наивыгоднейшей тактики бега
I при спортивных соревнованиях.
! К задаче нахождения кратчайшего пути на графе
। сводятся многие другие задачи, возникающие в обла-
! сти автоматического управления. Таким образом нц- .
ходится минимальное количество операций, необходим
мых для решения поставленных задач, и минимизи-
руется время работы ЭВМ, затрачиваемое на решение/
В особенности оказывается эффективным использовав
ние ЭВМ при решений задач, аналогичных рассмотрен-
ной, в тех случаях, когда бывает нужным учитывать
влияние на процесс управления многих факторов.
Иногда приходится иметь дело с графами, содержа-
щими сотни вершин.
Хотя в рассмотренном примере и использовалось
графовое представление задачи, она решалась знако-
мым теперь уже нам методом динамического програм-
мирования. Для решения других задач оптимизации
на графах применяются специальные методы. В ка-
честве примера укажем, как решается следующая за-
дача. Известны расстояния между каждой парой из V
вершин, и нужно так соединить между собой эти вер-
шины, чтобы получился неориентированный граф*
дерево, у которого была бы минимальной суммарная
длина всех ветвей. Это может быть оптимальная сум-,
марная длина путей, которые соединяют между собой
N пунктов, или проводов, служащих для подключения
N различных точек в системе управления к общему
источнику питания, или оптимальная суммарная дли-
на других коммуникаций.'
Правило построения такого оптимального дерева
следующее. Строится ребро, соединяющее две верши-
ны, расстояние между которыми самое малое. Одна
из этих вершин принимается за корень дерева, а вто-
рая соединяется со следующей вершиной, выбираемой
так, чтобы расстояние от нее до этой вершины было
меньше, чем расстояние от нее до любой другой из
оставшихся вершин. После построения этого ребра
таким же образом достраиваются другие ребра. Про-
пускается при этом и в дальнейшем только лишь по-
строение ребер, образующих циклы с ранее построен-
ными. Так каждый раз берется следующая вершина.
k. ОПТИМИЗАЦИЯ УПРАВЛЕНИЯ
203
ближайшая из еще свободных по отношению к рас-
сматриваемой, и пристраивается соответствующее реб-
ро. Таким образом получается простым построением
содержащее N — 1 ребро дерево с заданными вершина-
ми, суммарная длина ребер у которого минимальна.
Если попробовать решить эту же задачу, не пользуясь
указанным выше правилом, а осуществляя перебор
всех возможных вариантов построения дерева, то ока-
жется необходимым рассмотреть большое количество
вариантов, тем большее, чем больше число При
# == 9 количество возможных вариантов оказывается
уже больше миллиона и дальше с увеличением N оно
быстро возрастает, становится равным миллиардам,
сотням и тысячам миллиардов...
Пользуясь методами теории графов, оказывается
возможным во многих случаях исключить необходи-
мость в переборе для. нахождения оптимального ва-
рианта из всех возможных вариантов. Такой перебор
часто оказывается настолько трудоемким, что стано-
вится не под силу даже наиболее быстродействую-
щим ЭВМ.
Графы удобны тем, что все операции с ними могут
выполняться ЭВМ. Как ЭВМ оперирует с графами?
Ведь граф — это рисунок, а как же может иметь дело
с рисунком ЭВМ, которая умеет обращаться с двоичны-
ми величинами, представляемыми различными сочета-
ниями символов 1 и 0?
Графы могут задаваться не только в виде рисун-
ков, но могут быть представлены и матрицами (табли-
цами), содержание которых‘ легко закодировать с по-
мощью символов 1 и 0. Одной из используемых для
ориентированных графов матриц является, например,
так называемая матрица смежности вершин графа.
Она содержит W строк и # столбцов, где /V—- число
вершин графа. В пересечении i-й строки и /-го столб-
ца этой матрицы ставится 1, если в графе имеется
Дуга, идущая из вершины Xt в вершину х^ (в этом
случае, как уже говорилось, называют xt вершиной-
предшественником, a Xj — вершиной-последователем).
Если же такой дуги не имеется, то ставится 0; Матри-
ца смежности вершин графа, изображенного наверху
слева на рис. 25, показана на этом же рисунке внизу.
204 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ’ АВТОМАТИЧЕСКИХ СИСТЕМ:
5. О теории цифровых автоматов
Логические устройства автоматики были рас-
смотрены в первой части нашей книги. Дополним7
сказанное там о них. При ознакомлении с задача-
ми теории цифровых автоматов обсудим следующие
вопросы,. Какие бывают цифровые автоматы} Как ,
проектируются логические устройства ЭВМ и дру-
гих цифровых автоматов? Каким образом миними-
зируется число элементов в логической схеме ав-
томата?
Ответим на все эти вопросы. Сначала расскажем,
что представляют собой цифровые автоматы. Под
цифровыми автоматами понимаются автоматические
устройства, оперирующие с информацией, представ-
ленной в виде последовательностей двоичных цифр 1
и 0. Как было показано раньше, с помощью символов
1 и 0 может представляться не только числовая ин-
формация, но и другая. Цифровые автоматы относятся
к конечным автоматам, о которых уже упоминалось
ранее. Примером цифровых автоматов являются ЭВМ.
Широко применяются й иные цифровые автоматы.
Это, например, цифровые устройства программного
управления * станками и цифровые счетчики, исполь-
зуемые для счета изделий, перемещаемых конвейером.
По способу организации цифровые автоматы разде-
ляются на синхронные и асинхронные. Синхронным
называется автомат, у которого моменты появления
сигналов на выходах всех или части элементов согла-
сованы по времени с поступлением специальных син-
хронизирующих импульсов. Если сигналы могут в
автомате передаваться в произвольные моменты вре-
мени, то такой автомат называется асинхронным.
Раньше было сказано о том, что устройства и си-*
стемы логического действия разделяются на комби-
национные и последовательностные. Комбинационные
логические устройства используются и независимо. -
Вместе с тем они обычно являются составной частью
цифрового автомата последовательного действия.
Любой последовательностный автомат может быть
изображен так, как показано наверху слева на рис. 26«
Здесь выделены комбинационный блок I, содержащий t
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
2)5
только логические элементы, и блок 2, содержащий
элементы памяти. .Обозначения 3 и 4 приняты для
каналов связи между этими двумя блоками. На ри-
сунке показаны к каналов, по которым передаются
входные сигналы Х2, ..., Xk, и т каналов, по ко-
торым передаются выходные сигналы У2, ..Ут.
Совокупности входных Х2, ..Xft и выходных
У’ь Уг, ..Ут сигналов иногда представляют соот-
ветственно в виде одного обобщенного сигнала X и од-
ного обобщенного сигнала У.
206 Ч, II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Работать автомат должен таким образом. В сле-
дующие один за другим дискретные (тактовые) мо-
менты времени поступают заданные входные сигналы
и в результате их переработки должны в соответству-
ющие моменты времени получаться также заранее
заданные выходные сигналы.
Задачей теории цифровых автоматов является по-
строение по заданным последовательностям входных
и выходных сигналов устройства, выполняющего нуж-
ное преобразование входных сигналов в выходные.
При этом построенное устройство должно быть воз-
можно более простым и надежно работающим.
Прежде чем рассмотреть решение этой задачи,
сделаем два разъяснения по приведенному описанию
схемы автомата. Одно из них будет касаться того, что
здесь имеется в виду под элементами памяти, другое —
формы представления перерабатываемых сигналов.
В качестве элементов памяти могут использоваться *
при построении цифровых автоматов триггеры с раз--
дельными входами. Схема такого элемента памяти
была приведена в первой части книги. К элементам
памяти условно относят также элементы задержки
сигналов на такт. Автомат с такими элементами в бло-
ке памяти и был изображен на рассмотренной нами
суеме (элементы задержки обозначены на рисунке
цифрами 5). Для построения цифрового автомата мо-
гут также использоваться так называемые триггеры
со счетным входом. Элемент этого типа работает еле*
дующим образом. При подаче на его вход следующих'
один за другим сигналов 1 и 0 на выходе его сигналы
1 появляются с частотой, в два раза меньшей. Элемент
этого типа иногда называют делителем частоты на
два. Можно пояснить работу триггера со счётным
входом, сравнив, с ним шариковую ручку с кнопкой,
при нажатии на которую выдвигается стерженек,
а при следующем нажатии — убирается. Приписав
обозначение 1 каждому нажатию на кнопку и каждое
му выдвижению стерженька, получим, что на выходе,
тЬ есть для стерженька, сигналы 1 получаются в два
раза реже, чем . на входе, то есть для кнопки. Разра-
ботаны методы построения цифровых автоматов при
использовании различных элементов памяти.
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ 207
В отношении формы представления перерабатывае-
мых сигналов заметим следующее. Обычно задание па
проектирование цифрового автомата представляется
в виде входо-выходных последовательностей. Поясним
это примером. Пусть в последовательные моменты
времени входная величина X принимает значения
0, 1, 0, 0, и нужно, чтобы в соответствующие (не обя-
зательно те же самые) моменты времени выходная
величина Y принимала при этом значения 0, 0, 1, 0;
если же последовательные значения X будут в дан-
ные моменты времени равны 1, f^O, 0, то необходимо,
чтобы выходная величина У принимала соответствен-
но последовательные значения 1, 0, 0, 1. Вводя бук-
венные-обозначения xt для Х = 0, х2 для X—1, Iji для
У = 0 и у2 для Ув1, указанные выше взаимосвязан-
ные последовательности входных и выходных сигналов
можно в нашем случае записать так. Если на вход
поступает последовательность сигналов XiX2XiX^ то на
выходе должны появиться сигналы в последователь-
ности У1У1УгУ^ а если входная последовательность
сигналов x2x2XiXt, то выходные сигналы должны быть
в последовательности y2yiyiy2. При нескольких входных
и выходных каналах (на рассмотренной нами схеме
было к входных и т выходных каналов) входо-выход-
ные последовательности задаются для всех каналов.
В нашем примере были указаны четыре последователь-
ных момента времени. Вообще же, они задаются для
множества моментов времени, для всего времени, в те-
чение которого должен работать цифровой автомат.
В теории цифровых автоматов разработаны прави-
ла, по которым, используя в качестве исходных задан-
ные входо-выходные последовательности, определяют
структуру реализующего их цифрового автомата. На-
ходится структура блока памяти и комбинационного
блока. В дальнейшем мы рассмотрим только некоторые
вопросы синтеза цифровых автоматов, главным об-
разом относящиеся к построению комбинационного
блока. Весь порядок синтеза цифровых автоматов был
Указан академиком В. М. Глушковым в его книге
«Синтез цифровых автоматов», изданный Физматгизом
еЩе в 1962 г. Хотя с тех пор теория цифровых авто-
матов получила значительное развитие, главным об-
2С8 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
разом в связи с созданием новых ЭВМ, первоначаль-
но разработанные положения теории автоматов служат
и сейчас основой для дальнейших исследований и
разработок?
Названная выше книга доступна читателю, имею-
щему достаточную математическую подготовку. Ука-
занный В. М. Глушковым порядок всех действий, вы-
полняемых при синтезе цифровых автоматов, описан
применительно к устройствам пневмоники в книге
автора «Теория аэрогидродинамических систем авто-
матического управления», выпущенной издательством
«Наука» в 1977 г. Если читатель после ознакомления
с . рассматриваемыми далее отдельными вопросами
пожелает познакомиться и со всей процедурой синтеза
цифровых автоматов, отошлем его к этой книге. После
всего, что нами здесь было рассказано,, чтение ее не
должно быть затруднительным.
Прежде чем перейти к более конкретным вопро-
сам, сделаем следующее замечание. Было сказано, что
цифровой автомат строится для реализации заданной
входочвыходной последовательности сигналов, а также
и то, что к цифровым автоматам относятся ЭВМ. Не
следует ли из этого, что для каждой новой входо-вы-
ходной последовательности, то есть для решения каж-
дой новой задачи, нужно строить свою ЭВМ? Нет,
конечно. Чтобы не возникло здесь недоразумения,
нужно сделать разъяснение. В принципе ЭВМ являет-
ся цифровым автоматом и при использовании методов
теории цифровых автоматов строятся отдельные функ-
циональные узлы ЭВМ. Но количество этих узлов та-
кое и связь. между ними столь гибкая, что оказыва-
ется возможной реализация различных алгоритмов
переработки информации. Достаточно лишь составить
программу решения задачи (так, как это было указано
в школьном учебнике по алгебре для 8-го класса)
и ввести ее в ЭВМ, для того чтобы решение дальше
производилось автоматически. '
Рассмотрим дальше вопросы построения и миними-
зации комбинационных схем. Актуальность этих во-
просов определяется тем, что комбинационные устрой-
ства являются составной частью цифровых автоматов
и имеют и самостоятельное применение.
5, О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
209
В первой части книги на примере синтеза логиче-
ской части автоматического оптимизатора было пока-
зано, как -логическая формула получается из словес-
ной формулировки задачи, потом уже была составле-
на таблица соответствующей функции. Во многих
случаях бывает удобным начинать с табличного пред-'
ставления функции и уже затем переходить к логи-
ческим формулам.
Как это -делается, проиллюстрируем примером.
Рассматривая данный пример, покажем, какие возни-
кают вообще вопросы при разработке комбинационных
схем и как они решаются. Разберем решение задачи
синтеза трехразрядного двоичного сумматора. Для
различных значений /грех двоичных цифр xh х2, х3
в сумматоре должны получаться соответствующие
значения двоичных цифр суммы ус и цифр переноса
в следующий разряд уа. Если вспомним ранее рас-
сказанное о правилах сложения двоичных цифр, то
сразу сможем составить для нашего сумматора табли-
цу. Она приведена на рис. 26 наверху справа. Пока-
жем сначала, как получается логическая формула
функции ус от переменных „х^ х2, х3. Рассмотрим
строки таблицы, в которых данная функция прини-
мает значение 1. Согласно первой из строк, в которой
Ус 1 (в таблице вторая строка сверху), это имеет
место, если Xi = 0 и х2 = 0 и х3=*1. Или, обращаясь
к следующей строке (третья сверху), в которой ус«1,
видим, что это получается, если = 0 и х3« 0 и х2 —
= 1. Или же ус = 1, если хи х2, х3 принимают значе-
ния, указанные в следующих двух строках (пятая и
восьмая сверху). Переходя ко второй из указанных в
первой части книги форм обозначения значений логи-
ческих переменных, получим следующее выражение
искомой функции:
Ус 5=3 [Oxt) & Ох2) & Х3] V [Oxi) & х2 & Ох8)] V
* 5’ V [Х1 & Ох2) & Ох3)] V [х4 &х2&х3].
Каждая из квадратных "скобок отвечает здесь соответ-
ствующей из указанных выше строк таблицы. Ана-
логичным образом получается и для функции уа
210 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ '
следующее выражение:
уа “ [(”W & Хг & Хз1 У [х1 & Г^Хг) & XS1 V
У [Xi & Х2 & Oxs)] V [Xi & Хг & Х3].
В полученных выражениях функций ув и ув име- •
ются соединенные знаками дизъюнкции, заключенные
в квадратные скобки, конъюнктивные группы, каждая
из которых содержит по одному разу переменные xt,
х2, х3 или их отрицания. Такая форма представления
булевых функций называется совершенной дизъюн-
ктивной нормальной формой (сокращенно СДНФ).
После того как получены формулы для функций ул
и уа, можно сразу начертить схему реализующего эти
функции устройства (аналогично тому, как это дела-
лось раньше для другой функции, когда была полу-
чена схема, изображенная на рис. 12 внизу слева).
Попробуйте, читатель, вычертить схему такого устрой-
ства. Вы увидите, что в этом устройстве должно быть
много элементов. Возникает задача возможного сокра-
щения числа их. Для этого выражения функций,
полученные первоначально в СДНФ? далее минимизи-
руются. Для минимизации используются преобразова-
ния, основанные на применении к рассматриваемым
функциям нужных правил булевой алгебры. Укажем
основные формулы булевой алгебры; затем 'покажем,
как они применяются при минимизации функций.
Для преобразования логических функций исполь-
зуются следующие формулы, булевой алгебры:
xV0 = x, х&0 = 0, xVl = l, х&1 = х,
хУ х=>х, х&х — х, х V Ох) — 1, х& Ох) = 0.
Применяются также формулы
Xi V Х2 = Хг V Xt, Xi&Xi = X2&xh
Xi V (x2 V xj)=(xi V x2) V xs, Xt & (x2 & xs)e(xt & x2)& x3,
Xt V(x2 & xs)=(xl V x2)&(xt V x3), Xi &(x2 V xs) =
. e(Xj & Xi) V (Xt & xs).
Из указанных выше формул булевой алгебры получается
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
211
и ряд других, например:
Xi V^2 Ю#1) & (~Ъ2)], Xi&X2 == [(^i) V (”Ъ2)],
(#i & #2) V & Оха)] « Xi.
Ясно, что логические переменные в этих формулах
можно было бы обозначить не только буквами Xi и х2,
НО и любыми другими, ну, ХОТЯ бы буквами Ui и и2.
При этом, например, последняя формула будет иметь
следующий вид:
(щ & u2) V & 0u2)] === Ui.
Всеми указанными формулами предусматривается
выполнение логических операций дизъюнкции, конъ-
юнкции и отрицания. С указанными операциями свя-
заны другие логические операции, о которых говори-
лось в первой части книги. Эта связь определяется
следующими формулами:
Xi V х2 = (#11 х2) | Ui I х2\ "Vt =* х I я,
XiV Х2 — (Xi/Xi)/(x2/x2), — x/x,
XiV X2=* Xi® Xz® (Xi & #2), == X ® 1,
Xi °° x2 kxi&Xt) V [(~^) & n#2)] •
Правильность последней формулы была доказана
с помощью таблицы, приведенной на рис. 12. Попробуй-
те, читатель, таким же образом доказать*, что правиль-
ны и все другие из указанных выше формул.
Возвращаясь к примеру, который мы начали рас-
сматривать, покажем, как используются формулы
булевой алгебры для минимизации функций. Пусть
не смутит вас то, что при этом сначала мы будем не
сокращать, а увеличивать число дизъюнктивных чле-
нов в выражении функции. Возьмем для примера
полученное нами выражение
уа ==* [("biХ& х2 & х<\ V [#! & (Ъ2) & я81 V
* V [xi&x2& (^х3)] У [Xi&Xz&Xii^
Так как, согласно одной из приведенных выше формул,
х V х === х, то можно в правой части данного выраже-
ния приписать
• У {xi & х2 & £3] V [#i & х2 & х3]
I
L12 Ч И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
так, что оно не изменится. Теперь у нас будет в вы-
ражении уп уже не четыре, а шесть квадратных ско-
бок. Объединим их попарно следующим образом:
первую и последнюю, вторую и предпоследнюю, две
средних. Затем преобразуем каждую пару так, как
сейчас скажем. Возьмем, например, скобки, которые
у нас теперь оказались средними. Воспользуемся фор-
мулой _
(ui & u2) V [и4 & (*Ъ2)] = Иц
Принимая во внимание, что в нашем случае =
= #1 & х2 и и2 = получаем
[^i & х2 & V [а?! & х2 & (Ъ3)] & х2.
Проделав то же самое с другими двумя парами скобок,
приходим к выражению
уа = (Xi & Х2) V (Xi&Х2) V (х2 & Хз).
Для такой реализации функции уп уже требуется зна-
чительно меньшее количество элементов.
В полученном нами выражении функцияуа тоже
представлена в дизъюнктивной нормальной форме
(ДНФ), но это уже не совершенная дизъюнктивная
нормальная форма. В данном случае наша функция
представлена в минимальной ДНФ. Иногда для дру-
гих логических функций бывает целесообразным
первоначально представлять их в конъюнктивной нор-
мальной форме (КНФ). Например, с помощью основ-
ных формул булевой алгебры легко перейти от функ-
ции t/п, представленной в СНДФ, к функции Пуп,
записанной в совершенной конъюнктивной нормальной
форме (СКНФ):
^Уп = (*1 v (Ъ2) V СЪ3)] & [(Ъ4) V х2 V (Ъз)1 &
& [(Ъ,) V (Ъ2) V х3] & [(^) V (Ъ2) V (Ъ3)Ь
При минимизации логических функций от неболь-
шого числа переменных, как в нашем. случае (а во-
обще до восьми переменных), можно не делать указан-
ные. выше преобразования. Минимизированные
выражения -функций сразу получаются "с помощью
так называемых карт Вейча — Карно.
Для функции уп карта Вейча — Карно, заполнен-
ная по таблице функции уп, показана па рис. 26 (под
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
213
таблицей функций ус и уп). В клетках карты Вейча —
Карно, соответствующих значениям х^ хг и х3, при
которых в таблице указана 1, также проставляется 1.
На карте вычерчиваются прямоугольники так, чтобы
каждый прямоугольник охватывал, или, как говорят,
покрывал, наибольшее, равное целой степени двух,
количество соседних клеток с единицами. На рассмат-
риваемой карте это прямоугольники I, II и III. Запись
функции сразу в минимальной ДНФ производится с
помощью карты Вейча — Карно следующим образом.
Если для какой-то переменной на участке, покрытом
прямоугольником, имеются значения 1 и 0 (имеются'
в виду значения переменных, указанные сверху и
слева от клеток карты), то считается, что по этой
переменной соответствующие члены СДНФ уже скле-
ены и она не принимается во вниманйе (точнее, счи-
тается равной 1). Это, например, имеет место для
переменной х^ если рассматривается прямоугольник I.
Последнему, поэтому'в минимальной ДНФ соответст-
вует конъюнктивная группа (#2&я3). Таким же обра-
зом получается конъюнктивная группа (х^&хз) для
прямоугольника II и (#i&x2) для прямоугольника III.
Соединяя эти группы знаками дизъюнкции, приходим
сразу, минуя запись интересующей нас функции уа
в СДНФ, к уже знакомому нам ее выражению в ми-
нимальной ДНФ:
уа = (Xi & Xz) V (Xi & Х3) V (х2 & я3).
Если на заполненной карте Вейча — Карно имеют-
ся единицы в крайних столбцах, то клетки с такими
единицами, расположенные в одной строке, при пост-
роении прямоугольников также рассматриваются как
соседние (карта мысленно свертывается в кольцо).
Если карта Вейча — Карно строится для минимизации
функции более чем от трех переменных, то также
соседними считаются клетки с единицами в верхней
и нижней строках карты, принадлежащие одному и
тому же столбцу. Являются Соседними и все угловые
клетки.
Прежде чем привести пример, поясняющий ска-
занное, сделаем еще одно замечание. Для нашей функ*-
h
i
I
| 214 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
I ции jAj мы перенесли на карту Вейча — Карно указан-
1 ным выше способом из таблицы единицы, заполнив
1 ими соответствующие клетки. Таким же образом обыч-
I но заполняются и клетки карты, отвечающие строкам
таблицы функции, в которых проставлены ее значения.
!• 0. Эти значения указываются в соответствующих клет-
| ках карты Вейча — Карно. Если после всего этого не-
। которые клетки карты остаются незаполненными, в них
[ проставляются черточки. С этими последними клетка-
। ми можно обращаться по произволу. При. построении
возможно больших прямоугольников, покрывающих
। клетки карты с единицами, на равных началах склет-
। ками, в которых проставлены единицы, рассматривают*
! ся и клетки, в которых проставлены черточки.
| Приведем теперь пример минимизации с помощью
( карты Вейча — Карно функции у от четырех перемен-'
ных Xi, х2, #з, «^4, таблица которой приведена на рис. 26
! внизу слева. Справа от таблицы представлена отвечаю*
1 щая данной функции карта Вейча — Карно, заполнен-
ная по указанным выше правилам. В соответствии
| с тем, что было сказано, угловые клетки I, II, III и
| IV с единицами или черточкой считаются принадле-
I жащими одному прямоугольнику. Кроме того, наибо-^
I лее крупными из возможных прямоугольников, покры-
вающих нужным образом клетки с единицами и
j черточками, здесь являются прямоугольники V, VI и
I VII. Этому объединению клеток в группы соответству-
; ет сразу прочитываемое по карте Вейча — Карно
следующее минимизированное аналитическое выраже-
ние рассматриваемой'функции:
у в ("1^2 & ~Ъ4) VXi V х3 V U2 &xj.
j Конъюнктивные группы этой минимальной ДНФ функ-
! ции у (к которым относим Xt и Хз) записаны в поряд-
। ке, отвечающем принятой нами нумерации прямоуголь-
! ников. Предлагаем читателю убедиться в этом, записы-
вая функцию у шаг за шагом так же, как это было
; раньше показано на примере функции уп.
। При минимизации с помощью карты Вейча —
। Карно функции от пяти переменных х^ х3, х^ х*
; карта имеет, еле дующий вид. Располагаются рядом две
карты для переменных х^ х^ х3, xk такие же, какз
।
*5. О ТЕОРИИ ЦИФРОВЫХ АВТдМАТОВ - 215
рассмотренная только что нами. В одной из этих карт
заполняются клетки в предположении, что
в другой из них —в предположении, что л:5 = 0. При-
мер отображения такой функции на карте Вейча —
Карно в дальнейшем будет приведен.
Как уже говорилось, картами Вейча — Карно удоб-
но пользоваться при минимизации логических функций
не более чем от восьми переменных. G помощью ЭВМ —
производится минимизация функций и от значительно
большего числа переменных. Для этого применяются
другие методы минимизации. Однако и они основаны
на использовании рассмотренных нами основных по-
нятий. Имеются в виду представление функций в
СДНФ с последующим переходом от этой формы
представления к минимальной ДНФ или аналогичные
преобразования функций, представленных в СКНФ.
Разработаны и такие машинные методы минимизации
функций, при которых, как и при пользовании карта-
ми Вейча — Карно, первоначальное приведение функ-
ций к СДНФ или СКНФ не представляется необхо-
димым.
Все, что было рассказано до сих пор о минимиза-
ции логических функций, относилось к функциям,
строящимся на базе элементов И, ИЛИ, НЕ. Исполь-
зование элементов, выполняющих и другие известные
нам функции, позволяет в ряде случаев получить еще
более экономные решения. Это было показано раньше
на примере замены схемы, изображенной внизу на
рис. 12, одним лишь элементом, выполняющим функ- ’
цию равнозначности. При минимизации схем, пост-
роенных не только на элементах И, ИЛИ, НЕ, но и на
элементах других типов, е используются формулы, при-
веденные нами вслед за основными формулами булевой
алгебры.
Методами теории цифровых автоматов решаются
не только указанные выше вопросы, но и другие.
Одни из главных среди них это обнаружение и
устранение возможности возникновения состязаний
(гонок) сигналов, которые могут нарушать нормаль*
ную работу автомата. Как возникают состязания
сигналов и что делается для их устранения, вы
сейчас узнаете.
21G Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
При разделении логических устройств автоматики
па комбинационные и последовательностные (частью х '
крторых обычно являются комбинационные) было ока-
зано, что комбинационными устройствами все опера-
ции выполняются единовременно. Но единовремеп-
ность можно представить себе только теоретически.
В действительности при прохождении сигналов по
различным каналам связи между элементами логи- •
ческого устройства может быть хоть малый сдвиг -
между ними по времени. Насколько малый? Может
быть, это будут сотые, тысячные или же миллионные
доли секунды. Во всяком случае может оказаться, что
от одних из предшествующих элементов сигналы из-
менения 1 на 0 или 0 на 1 придут к последующему
элементу несколько раньше или позже, чем сигналы от
других предшествующих элементов. Из-за этого могут
возникать переходные состязания или гонки в пере-
даче сигналов.
Чтобы пояснить, что имеется в виду под переход-
ными состязаниями, обратимся к схеме соединения
логических элементов, показанной на рис. 27 наверху
слева.
Рассмотрим пока лишь то, что показано на схеме
сплошными линиями. Элемент, показанный штрихойы- J
ми линиями, пока не будем принимать во внимание.
О нем дальше будет сказано особо.
С помощью этой системы элементов реализуется
логическая функция, представленная в ДНФ следую-
щим образом: ..
у = (xt V [#2 & (П#з)1.
Прослёдим за переходным процессом, для которого
^начальными являются значения #1 = 1, Xz^i, #3 = 1,
причем, согласно приведенному выше уравнению, и у = *'
= 1. Пусть затем при сохранении указанных значений
Xi и #2 величина х3 меняет свое значение с 1 на 0. <
При #1 = 1, #2 = 1, #з = 0 в соответствии с указанным
уравнением также у = 1. Так как начальным и конеч-
ным значением у является у = 1, то казалось бы, что _
это значение должно сохраняться в течение всего
переходного процесса. Однако в действительности в 4,
данном случае это не так. При изменении значения
5, О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ ‘
^217
Хз с 1 на 0 передается сигнал быстрее по ветви 1,
в которой согласно рисунку имеется только один ло-
гический элемент и которая содержит соединительные
каналы меньшей длины, чем по ветви 2, в которой
имеется два логических элемента и содержатся более
длинные соединительные каналы. При этом в течение ка-
-кого-то времени по каналу 3 передается сигнал и =* Xi &
& = 0 jj^aK как х3 = 0) и по каналу 4 передается сигнал
Гг=#2&( = 0 (так как запаздывает передача сиг-
218 Я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
нала и пока еще поступает сигнал "Ъз = 0\
В это время, согласно уравнению, которое было при-
ведено выше, имеем у == 0, то есть появляется ложный/
сигнал. Для рассматриваемой комбинационной схемы,
не содержащей обратных связей, после того как будет
получено значение v=*x2& ("W = 1, снова становится-
у — 1 и, таким образом, получается последовательная .
смена во времени значений у. 1 — 0 —• 1.
Ложный сигнал появляется только при некоторых
начальных значениях величин xlf х2 и х3. Например,,,
для рассматриваемой схемы при начальных значениях
хх — 1, х2 — 1, ^==0 смена я3 = 0 на —1 не сопро-,
вождается появлением ложного сигнала. Однако он
появился бы и в этом случае, если бы канал 5 .был
удлинен настолько, что время передачи сигналов в
ветви 1 стало большим, чем в ветви 2.
Длительность действия ложного сигнала зависит
от разности между временами задержки сигналов в
ветвях 1 и 2. При.близких по величине временах
передачи сигналов по линиям 1 и 2 эта разность
мала и ложный сигнал может быть или может не
появиться. Так как в данных, условиях (для комби-"'
пационной схемы, не имеющей каналов обратной свя-
зи) возможны только кратковременные появления
ложного выходного сигнала, то говорят о возникнове-~
нии переходных состязаний в передаче сигналов.
Сами по себе переходные состязания в комбинат
ционных схемах, может быть, и не были бы опасны.
Но если данная комбинационная схема соединяется с
элементом памяти, то достаточно возникновения в ней
ложного сигнала даже на короткое время для долго-
временного изменения состояния элемента памяти.
Это уже может привести к полному расстройству ра-
боты всего цифрового устройства, в котором находят-
ся рассматриваемые элементы. Вообще, в последова-
тельностной системе, имеющей обратные связи, таким
образом могут возникать статические состязания, ха-
рактерные тем, что при установившихся входных
сигналах ложный выходной сигнал может удерживать-
ся сколь угодно длительное врейя, что является не-
допустимым. Из сказанного выше должно быть ясным,
насколько большое значение имеет устранение пере-
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
219
Ходных состязаний в комбинационных схемах и при
построении последовательностных систем.
Как же устраняются переходные состязания в ком-
бинационных схемах?
Для этого в тех случаях, Цогда они могли бы
возникать, приходится несколько увеличивать число
элементов в схеме по сравнению с тем, которое полу-
чается при минимизации числа элементов ранее ука-
занными способами. В нашем примере достаточно до-
бавить в схеме еще один элемент И, показанный на
рисунке штриховыми линиями. При этом данной схе-
мой реализуется функция
у «а (xi & х3) V [х2 & ()] V (х! & я2).
Эта функция тождественна исходной функции
у == (.х^ & х3) V [х2 & (Ъ3)],
в чем можно убедиться<, составив для обеих функций'
таблицы так, как мы это делали раньше для других
логических функций. Перебрав все возможные вариан-
ты прохождения сигналов по каналам связи, нетрудно
убедиться в том, что действительно здесь уже ни
при каких условиях не могут возникать переходные
состязания. Покажем дальше, как обобщается то, что
было рассмотрено нами на частном примере.
В общем случае возникают две задачи. Во-первых,,
нужно бывает выяснить, могут ли’ быть переходные
состязания в схеме, отвечающей минимальной ДНФ.
Если они могут возникать *в такой схеме, то ставится
вторая задача: преобразовать схему так, чтобы пере-
ходные состязания не возникали.
Обе задачи просто решаются при использовании
знакомых теперь уже нам карт Вейча — Карно. Рас-
скажем, как это делается, и поясним затем сказанное
примерами.
Если на карте с покрывающими единицы прямо-
угольниками, построенными при минимизации соответ-
ствующей функции, не осталось соседних единиц, не
покрытых одним и тем же прямоугольником, то в схе-
ме, отвечающей минимальной ДНФ, переходные со-
стязания не могут возникать. В противном случае они
могут возникать. Для их устранения нужно ввести в
220 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ДНФ дополнительные члены и соответственно ввести
дополнительные элементы в схему. Эти дополнительные
члены ДНФ получаются при дорисовке на карте не-
хватающих прямоугольников, как и обычно, возможно
более крупных.
Для пояснения сказанного обратимся к ранее ра-
зобранному примеру. Карта Вейча —Карно, с помощью«
которой получена минимальная ДНФ интересующей
нас функции, изображена на рис. 27 рядом с . рас-
смотренной нами схемой. Для построения минималь-
ной ДНФ
у = Ut & ^3) V [х2 & (Ъ3)1
использованы прямоугольники I и II. На карте при
этом остались две соседние единицы, не покрытые об-
щим прямоугольником. Этого не будет, если показать
еще прямоугольник III. При этом рассматриваемая
логическая функция приводится к ранее указанному
виду
у = («Г1 & х5) V [х2 & (ПЯз)1 V (xt & х2\
которому отвечает рассмотренная схема с элементом
И, доказанным штриховыми линиями.
В качестве второго примера возьмем логическую
функцию пяти переменных, минимальной ДНФ кото-,
рой является
у в ) & х2 & #5] V [Oxf) & х2 & я4] V х3 & х3).
Эта минимальная ДНФ получена с помощью изобра-
женной на рис.. 27 посредине карты Вейча — Карно, ,
на которой для минимизации были взяты прямоуголь-
ники /, II и III. Так как имеются при этом соседние
единицы, не покрытые общим прямоугольником, то .
схема, отвечающая минимальной ДНФ, не свободна
от переходных состязаний. Возможность возникновения
последних устраняется при введении в рассмотрение
еще одного прямоугольника IV (в данном случае квад*
рата), которому отвечает дополнительный член ДНФ -
х2&х3&Х5, и, следовательно, свободная от переходных
состязаний схема соответствует функции
у = [(“М &х2&х3] V [("bf) V _
У (xi & & х5) (х2 &х>& Я5).
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
221
Предоставим самому читателю проверить, что йред-
ставленная таким образом функция у тождественна
ранее указанной, приведенной к минимальной ДНФ,
и вычертить структурные схемы логических устройств,
реализующих данные функции. После того что было
рассказано раньше, ато не должно составить большого
труда.
Картами Вейча — Карно, как уже указывалось,
удобно пользоваться при минимизации (а теперь, до-
бавим,— и для устранения переходных состязаний),
в случаях, когда рассматривается функция не более
чем восьми логических переменных. Описанный метод
в несколько видоизмененной форме используется для
определения условий возможного возникновения пере-
ходных состязаний и их устранения и в тех случаях,
когда число переменных настолько велико, что возни-
кает необходимость в представлении рассматриваемых,
функций иными средствами, чем отображение их на
картах Вейча — Карно.
В системах, не содержащих обратных связей, мо-
гут возникать лишь переходные состязания, о которых
шла речь. В системах же с обратными связями состя-
зания при передаче сигналов могут приводить к пере-
ходу системы в непредусмотренное (неправильное)
устойчивое состояние, сохраняющееся сколь угодно
длительное время, если продолжается или прекрати-
лось действие входного сигнала, вызвавшего данный
переход, и не поступил следующий входной сигнал.
Об этом уже говорилось раньше, когда упоминалось
о статических состязаниях. Правильнее назвать их
состязанием устойчивых состояний. Условия одновре-
менной передачи в. системе более чем одного сигнала,
которые могут приводить к состязанию устойчивых
состояний, называются критическими.
Чтобы выяснить, могут ли в системе возникнуть
критические состязания, необходимо в каждом случае
рассмотреть для любых возможных изменений вход-
ных сигналов все возможные переходы в системе и
определить, к каким устойчивым состояниям она
может прийти. Для построения асинхронных цифро-
вых автоматов, работающих без критических состяза-
ний, используют метод Хафмена. Рассматривать его
222 ^4S II, ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ ‘
здесь не будем. Читателя, который захочет с ним
познакомиться, отошлем к книге автора, на которую
была сделана раньше ссылка (см. стр. 208). Там при-
ведены примеры, поясняющие пользование этим ме-
тодом.
Все, что было рассказано до сих пор о состязаниях,’
относилось к цифровым автоматам, работающим та-
ким образом, что последовательно изменяются входные
величины одна за другой, и не происходит одновре-
менного изменения нескольких входных 4 величин.
Если это не так, то для предотвращения неправильной
работы цифрового автомата принимаются специальные
меры. Например, вся система строится как синхрон-
ная или синхронизируется работа какой-либо ее части,'
причем переходные процессы успевают закончиться
до момента поступления каждого следующего тактово-
го сигнала.
Во многих случаях указанные выше вопросы воз-
никают только при первоначальной разработке
типовых. функциональных блоков цифрового автомата.
Это относится к наиболее распространенному сейчас
блочному (модульному, агрегатному) способу построе-;
ния ЭВМ и других цифровых автоматов. Заключается
он в следующем. Первичными ячейками для автомата^
являются раз и навсегда отработанные блоки-модули,
с помощью которых без проведения дополнительных .
конструкторских работ реализуются различные схемы.
Необходимо только в каждом случае подобрать из
числа стандартных модулей те, которые нужны для
реализации заданных функций, и соответствующим
образом соединить их между собой. При правильном
выполнении каждого из модулей исключена возмож-
ность нарушения его работы из-за состязаний в пере-
даче сигналов по внутренним каналам данного модуля.
Иногда при построении асинхронных функциональ-
ных блоков, на входы-которых параллельно подается
несколько сигналов, не удается исключить возмож-
ность неодновременной передачи сигналов. Для устра-
нения отрицательного влияния разнобоя во времени .
прохождения сигналов на работу устройства принима-
ются специальные меры. Проиллюстрируем это следу*
ющим примером.
5. О ТЕОРИИ ЦИФРОВЫХ АВТОМАТОВ
223
Рассмотрим работу блока сравнения двух п-разряд-
пых двоичных чисел, которым одновременно должны
сравниваться цифры всех разрядов. На выходе блока
сравнения сигнал у = 1 должен получаться, когда оба
числа равны. Не * допускается даже кратковременное
появление выходного сигнала- 1, если сравниваемые
числа не равны. Блок сравнения показан внизу на
рис. ?7. В каждом разряде от 1-го до n-го сигналы
цифры одного числа передаются по линии I, сигналы
цифры другого числа —по линии 2 (обозначения ука-
заны на рисунке для i-ro разряда, такими Же являют-
ся и узлы сравнения других разрядов). В каждом узле
имеются элементы 3 и 4 (например, это формировате-
ли уровня входных сигналов), из-за наличия которых
при одновременном поступлении сигналов на входы
линий 1 и 2 во время прохождения сигналов по кана-
лам 5 и 6 один из сравниваемых сигналов может
опережать другой или отставать от него. Следователь-
но, на подходе их к элементу сравнения 7 .(элемент
равнозначности) могут возникать переходные состяза-
ния. При этом не исключено появление ложного Сиг-
нала 1 на выходе какого-либо из элементов сравнения.4
Однако дальше сигналы передаются по каналам 8 к
элементу 3, реализующему функцию И от п перемен-
ных величин. При вероятности Р появления в пере-
ходном процессе в некоторый момент времени ложно-
го сигнала 1 на выходе какого-либо из элементов
сравнения й при равных условиях независимой работы
каждого из п входных узлов вероятность прохождения
ложного сигнала через элемент 9 была бы равна Рп,
то есть при Р < 1 и достаточно большом п была бы
уже малой. В действительности же она оказывается
значительно меньшей, так как частота смены цифр
в различных разрядах неодинаковая и соответствую-
щие Переходные процессы могут быть смещены по
времени. Неодновременное поступление сигналов к эле-
менту 9 может быть обусловлено и различной длиной
каналов 8. Таким образом, появление на выходе эле-
мента 9 .ложного сигнала практически исключается.
При построении сложных цифровых автоматов
использование ручных методов синтеза бывает затруд-
нительным и представляется эффективным примене-
224 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ние машинных методов. Применительно к ЭВМ разра-
ботаны общие методы машинного синтеза логических
устройств разного вида. С помощью ЭВМ осуществля-
ется минимизация булевых функций и составляются
Комбинационные и последовательностные схемы, ли- х
шенные состязаний. При машинном синтезе цифровых
автоматов используются методы синтеза, специально
приспособленные к обработке информации с помощью у
ЭВМ. К ним относится, в частности, метод, основан-
ный на изображении логических функций в виде
графов. С графами мы познакомились раньше.
6. Машинная обработка потоков информации
При решении сложных задач управления обычно
возникает необходимость в обработке больших мас-
сивов информации. 'Машиной выполняются отд ель- t
ные операции несравненно быстрее, чем человеком. ;
Однако даже и при этом время решения многих *
задач оказывается недопустимо большим. Во мно-_
гих случаях первостепенное значение имеет рацио-
нальная организация машинной обработки потоков
информации. Чтобы познакомиться с характерными^
методами обработки информации, нам придется еще*
раз немного заняться математикой. Но сначала об-^
судим, как вообще ставятся рассматриваемые здесь
вопросы.
Говоря о том, что обработка информации осущест-^
вляется рациональным образом, будем иметь в виду,^
что она производится с требуемой точностью, надежно ?
и притом за возможно малое время. Последнее зави-
сит от точности: чем большая точность требуется, тем
соответственно большими оказываются и затраты^
времени.
Насколько остро ставится вопрос о времени выпол-,
нения операций, можно судить по следующему. При4
управлении сложными системами для учета связей
между сотнями или тысячами составных их элементов
иногда оказывается нужным анализ многих миллиар-
дов различных вариантов. Но если это требует машин*-
ного времени в десятки или сотни лет, то такое ре-
шение является явно неприемлемым. Все более важ<
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 225
ньгми становятся, как уже указывалось, задачи обра-
ботки в процессе управления поступающей информа-
ции в реальном масштабе времени, во многих случаях
практически мгновенно. Это должно позволить усовер-
шенствовать управление космическими летательными
аппаратами, многими технологическими и другими
объектами, является важным и для решения проблем
искусственного интеллекта, рассматриваемых в треть-
ей части книги.
Можно указать несколько направлений, в которых
ведутся работы по обеспечению приемлемой скорости
обработки информации.
Во-первых, разрабатываются по возможности болео
экономичные методы поиска решений.
Во-вторых, совершенствуются цифровые ЭВМ. Ус-
корение получения нужных данных достигается в ппх
путем параллельной обработки информации.
В-третьих, ведутся работы по созданию гибридных
вычислительных систем (ГВС), в которых произво-
дится обработка и дискретной информации и аналого-
вой — непрерывной. Дело в том, что не всегда требу-
ется, чтобы решение было одновременно и высокоточ-
ным и занимало малое время. Даже при решении
одной и той же задачи часто бывает необходимым
быстро получить хотя бы приближенные значения ве-
личин, чтобы затем, с течением времени, их уточ-
нить. Во многих случаях, таким образом, задачи могут
решаться при использовании в ГВС "" аналоговой ее
части для быстрого выполнения операций, не требую-
щих большой точности, и при использовании цифро-
вой ЭВМ для получения более точных решений,
требующих большого времени. Иногда преобразования
дискретной информации в аналоговую и дискретиза-
ция аналоговой должны производиться в процессе ра-
боты ГВС практически все время. Одной из главных
задач развития техники автоматического управления
является создание высокопроизводительных ГВС, име-
ющих в своем составе цифровые ЭВМ и оптические
или оптоэлектронные аналоговые процессоры и запо-
минающие устройства.
В-четвертых, для повышения скорости выполнения
операций в сочетании с обеспечением достаточно вы-
8 Л. А. Залманзон
226 Ч, II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
сокой точности и главным образом надежности, широ-
ко используется переход от временного представления
функций к частотно-спектральному их представлению.
В какой мере при этом достигается упрощение, а со-
ответственно сокращается и время обработки инфор-
мации можно судить по ранее приведенным примерам
(вспомним то, что говорилось раньше о получении
частотных характеристик системы по расчетным ха-*
рактеристикам звеньев, а также об отфильтровывании
шумов от полезных сигналов). Наряду с указанным
выше переходом от одних представлений к другим
выполняются и обратные преобразования, в результа-
те которых получают функции в обычной временной
форме по их частотно-спектральным изображениям.
И, наконец, применяются специальные приемы об-
работки информации для характерных, часто встре-
чающихся видов ее. Некоторые из них мы рассмотрим.
Поступающая информация во многих случаях мо-
жет быть представлена характеристиками такого вида,
как характеристика #»=/U), показанная сплошной
линией наверху слева на рис. 28. Например, может
быть, что х —• какая-либо из измеряемых в процессе
управления величин, a t — время. Для краткости вве-
дем для функции х38:48 fit) обозначение xit). Если
функция x(t) получается опытным путем, то часто
бывает нужным иметь и математическое ее описание.
Последнее обычно получается следующим образом.
Пусть нас интересуют только значения xit) для
интервала времени Т, а как изменяется х эа предела-
ми этого интервала, для нас безразлично. При этом
можно предположить, что за пределами данного ин-
тервала времени xit) периодически повторяется. Тогда
функцию xit) можно представить в виде суммы ряда
синусоид и косинусоид —• тригонометрического ряда
Фурье, о котором было рассказано раньше. Напомним,
что он определяется так:
со
х (0 = а0/2 + (О'п cos n^t + bn sin
n=i
где
coj = 2л/Га
6, МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 227
Т
ап = (2/Т)^ х (t) cos narf dt для n=0,1, 2,..
о
т
Ъп = (2/Т) J х (0 sin ncoxf dt для п 1А 2,...
о
Таким образом, получается точное математическое
описание функции хЦ\ Но ряд синусоид и косинусоид,
Рис. 28.
точно описывающий функцию x(t\ бесконечный.
Бесконечные величины можно рассматривать лишь
228 Ч. II- ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
теоретически, действительно же оперировать с ними
невозможно. Конкретным примером было проиллюст-
рировано то, что для практических целей обычно
достаточно взять конечное число членов ряда
(рис. 21).
В отношении выбора величины п* возникает во-
прос, с которого мы начали обсуждение проблем ма-
шинной обработки потоков информации. Можно вели-
чину п* взять достаточно большой, и тогда математи-
ческое описание функции xU) будет практически
точным. Но для этого потребуется большая затрата
машинного времени. Можно последнее сократить, если
взять п* малым, но тогда представление функции xkt)
будет более приближенным. Полученная суммирова-
нием членов ряда характеристика x*(t) может уже
отличаться от истинной характеристики x(t). Напри-
мер, она может быть ^акой, как показано на рассмат-
риваемом рисунке штриховой линией.
Расхождение в среднем для интервала Т между
заданной характеристикой x(t) и приближенной ха-
рактеристикой x^{t) оценивается обычно величиной
так называемой среднеквадратической ошибки, опре-
.деляемой следующим образом:
т
Д = J [ж (i) — х* (t)]2dt.
О
Вообще, можно составлять приближенное матема-
тическое описание характеристик x(t), используя в ка-
честве исходных базисных функций и не sinn<ott и
cos мЦ й иные.
Однако базисные функции вида sinnco^ и cosnco^,
так же как и другие ортогональные функции, обла-
дают следующим замечательным свойством. При при-
ближенном представлении заданной xit) в виде суммы
ряда таких базисных функций с соответствующими
коэффициентами при данном числе п* членов ряда
среднеквадратическая ошибка А. получается меньшей,
чем при использовании для составления ряда каких-
либо других базисных функций.
Только что мы сказали, что это свойство вообще
характерно для рядов, построенных на базе ортого*
6 МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 229
нальных функций. С использованием ортогональных
функций мы еще встретимся в дальнейшем, но что
такое ортогональное функции, расскажем уже сейчас.
Если имеется бесконечная система функций /0U), fitt),
М*), ..то ее называют ортогональной в
интервале Т, если
т
J in (0 /т (0 = о при п ф т,
о
т
J fn(t) dt = Спу=0 для любых пит.
о
Величину Сп называют нормой функции fM. Гово-
рят, что функция fn(t) нормированная, если для нее Сп=
₽ 1. Указанная выше система функций называется орто-
нормированной, если любые две различные функции
этой системы взаимно ортогональные и нормированные.
Знакомый нам ряд Фурье тригонометрический.
Если же имеется в виду любая система базисных
ортогональных функций, а не обязательно тригоно-
метрических, то называют аппроксимирующий функ-
цию x(t) ряд
x(t) « kQfQ(t) + kJW +... + knfM +. •.
обобщенным рядом Фурье. Коэффициенты его опреде-
ляются так:
т
О
Тригонометрический ряд Фурье представляет собой
частный случай обобщенного ряда Фурье. В связи
с рассматриваемыми вами здесь вопросами позднее
еще вернемся к другим, не тригонометрическим ба-
зисным функциям. Пока же будет идти речь о разло- -
жёнии периодических функций в тригонометрический
ряд Фурье (последний для апериодических функций
заменяется интегралом Фурье, см. стр. 138).
Итак, мы познакомились с одним из характерных
видов обработки информации — с получением матема-
тического описания такой функции x(t\ как изобра-
женная на нашем рисунке. Функция эта непрерывная.
230 Я. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ .
Во многих случаях возникает необходимость в исполь-
зовании такой первичной информации для последую-
щей ее обработки с помощью цифровой ЭВМ. Но
последняя оперирует с дискретной информацией,
которая должна поступать в машину в заданные
тактовые моменты времени. Поэтому, если исходная
характеристика x(t) непрерывная, то бывает нужным
ее дискретизировать. Отсчитанные в дискретные мо^
менты времени значения могут дальше перерабаты-
ваться цифровой машиной.
Расскажем, как производится дискретизация не-
прерывных функций при машинной обработке инфор-
мации. Непрерывная информация x(t) дискретизиру-
ется так, как показано на рисунках, расположенных
ниже ранее рассмотренного. Берутся значения xd
функции x(t) в моменты времени £, отстоящие один от
другого на величину т, то есть при значениях t, рав-
ных 0, т, 2т, С/V— 1)т, где Л" —общее число от-
счетов. Совокупность взятых таким образом дискрет-
ных значений образует отвечающую исходной непре-
рывной функции x(t) дискретную функцию, которую
обозначим Xd(t). Выражением ее является
N-1
/ ^(0*= 3 X (0 б (< —/Т).
5^0
В этом выражении 6(f —/т) есть б-функция, о которой
упоминалось ранее (стр. ИЗ). Напомним, что
для нее F^i (рис. 17) и 6U — /т)=0 при t&jx. При
отсчетах можно пользоваться и нормированным вре-
менем, отсчитываемым в единицах t/x: соответствую-
щие обозначения приняты для времени на рисунке,
на котором представлены значения х<№.
Рассмотрим, как при дискретизации непрерывных .
функций ставится и решается вопрос о сведении к ми-
нимуму времени выполнения операций при условии
получения приемлемой точности. Основной проблемой
при дискретизации является выбор числа отсчетов N.
Можно взять число отсчетов небольшим, и тогда
дискретизация исходной функции x(t) займет меньшее
время. Но при небольшом N точность будет неболь-
шой. Как показано на рис. 28 внизу слева, через точки.
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 231
взятые для отсчета, может, кроме интересующей нас
КРИВОЙ ПРОХОДИТЬ И МНОЖеСТВО ДРУГИХ KpHBHXi
Более точно можно передать информацию при дискре-
тизации функции, если взять число N по возможности
большим. Но при этом потребуются большие, затраты
времени. В общем, нужно брать число отсчетов мень-
шим или большим ~в зависимости от того, что важнее:
требование обеспечения большего быстродействия или
большей точности. Более конкретно этот вопрос ре-
шается при следующих условиях.
Часто при выборе приемлемого числа отсчетов N
учитывается, что от временного представления функ-
ции будут переходить к частотно-спектральному ее
представлению. О смысле такого преобразования уже
говорилось. Чтобы после дискретизации функции и
представления ее в частотно-спектральной форме мож-
но было при необходимости восстановить ее в исход-
ном виде, то есть снова представить как функцию вре-
мени, число отсчетов N при дискретизации должно’
выбираться следующим образом. Оно должно быть не
меньше, чем число 2к спектральных линий в линейча-
том спектре исходной функции. Иначе говоря, частота
дискретизации Й = 2л/т должна быть больше удвоен-
ной предельной частоты линейчатого спектра функции
или хотя бы равна ей (см. спектр функции, изобра-
женный на рис. 28 наверху справа). Предельной в этом
отношении является частота дискретизации Q = =
« 2faox. Ей отвечает N = 2к. Это число отсчетов обыч-
но и берется при дискретизации функций.
Указанное выше правило выбора числа отсчетов,
известное как теорема Котельникова, основано на
следующем. Для непрерывной функции получается
один-единственный частотный спектр, такой, напри-
мер, как показанный в верхней части рис. 28. При
дискретизации же непрерывной функции образуется
множество побочных спектров, таких же, как основ-
ной, но смещенных относительно него по частоте. Это
связано со специальными свойствами комплексных
величин. При малой частоте дискретизации Q (при
больших интервалах т) основной и побочные спектры
накладываются друг на друга. Огибающие их показа-
ны соответственно сплошной и штрихпунктирными ли-
232 я. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ниями на графике, помещенном на рис. 28 под
графиком основного спектра. Точное восстановление
исходной функции по такой смешанной частотно-спект-
ральной картине не представляется возможным. При
увеличении же частоты дискретизации Q (при умень-
шении интервалов т) побочные спектры отходят в сто-
роны, как показано стрелками на графике, представ^,
ленном на рис. 28 под ранее указанным. При т Q
и соответственно Q побочные спектры уходят в
бесконечность и остается один-единственный- спектр.
Большое число отсчетов может быть неприемлемым,
как уже говорилось, так как требует большого машин-
ного времени. Поэтому и берется предельное значение
N=*2k, при котором, как показано внизу на рис. 28,
побочные спектры не перекрывают основной. С по-
мощью специальных фильтров гармоник они отделя-
ются от основного спектра. По последнему восстанов-
ление исходной функции уже оказывается возможным/
при условии, что учитываются и фазы составляющих
спектра.
Мы рассмотрели еще один из характерных видов
машинной обработки информации — дискретизацию не-
прерывных функций. При этом мы имели в виду то,
что бывает необходимым переходить от временного
представления функций к частотно-спектральному и
от последнего, вслед за выполнением преобразований
в частотной области, обратно к временному.
Во многих случаях исходная информация является
дискретной и возникает необходимость в непосредст-
венном, сразу же, переходе от, представления ее во
временной области к ее представлению в частотно-
спектральной области. Такая необходимость возникает
и в отношении дискретных функций, получаемых при
дискретизации непрерывных. Этот переход осущест-
вляется с помощью так называемого дискретного пре-,
образования Фурье (ДПФ), а обратный переход с по-
мощью* соответствующего обратного дискретного пре-
образования Фурье (ОДПФ). Первое из этих преобра-
зований проводится по формуле t
X (и) = (1/АГ) 2 X (0) W'n0 при 0,1Г.N - 1,.
о—о
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 233
второе — по формуле
'~N-1 .
х(е)= 2 Х(п)ТГ*0 при 0 = 0,1,
п~0
Ц этих формулах 17 = е2л!'^, 1, п —отношение
текущего значения частоты в спектре к частоте пер-
вой гармоники, 0 — дискретное время, деленное на
период времени Т, в течение которого производится N
отсчетов.
Указанные выше формулы получаются из общих
выражений тригонометрического ряда Фурье, пред-
ставленных в комплексной форме (об этом представ-
лении ряда Фурье тоже было уже рассказано,
см. стр. 179). Сделаем следующее замечание, чтобы
у читателя не возникли неясности из-за того, что при
определении ДПФ было употреблено слово «преобра-
зование». Не нужно путать преобразование, о котором
здесь идет “речь, с упоминавшимся раньше интеграль-
ным преобразованием Фурье. Последнее, как указыва-
лось, используется, когда имеют дело с непрерывными
апериодическими функциями. ДПФ же дает выраже-
ние линейчатого спектра дискретной периодической
функции.
ДПФ и ОДПФ хорошо приспособлены к машинно-
му их рыполненигр. Оказывается удобным и то, что
перегруппировкой членов ряда и введением масштаб-
ного коэффициента оказывается возможным преобра-
зовать выражение ОДПФ так, что алгоритм вычисле-
ния ДПФ может использоваться и для вычисления
ОДПФ. Из приведенной выше формулы ДПФ следует,
что основное значение имеет вычисление комплексных "
величин вида
N-1
С(п) = 2 х(0)И/-пе при п = 0, 1,.. .j TV — lf .
е=о
где W — число отсчетов функции я(0).
Широко применяется способ ускоренного выполне-
ния дискретного преобразования Фурье, называемый
быстрым преобразованием Фурье (БПФ). Этот способ
позволяет часто во много раз сократить машинное
время, затрачиваемое на преобразования. Что оп собой
234 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
представляет, выясним, рассматривая следующий при-
мер. Пусть отсчеты функции я(0) такие, как на гра-
фике, представленном наверху на рис. 29. Здесь ука-
заны N отсчетов для 0 от 0 до TV — 1; 0, как и ранее —
дискретное время, деленное на величину периода
функции. Следующим образом производится про ре -
живание отсчетов. Берутся отсчеты с пропуском че-
рез один. При этом образуется система N/2 отсчетов
(от 0 = 0 до 0= (А72) — 1), изображенных на графике
внизу слева. Все остальные отсчеты образуют систе-
му N/2 отсчетов, изображенных на графике внизу,
справа. Обе эти системы отсчетов рассматриваются
самостоятельно. Для соответствующих дискретных
функций введем обозначения а\(0) и я2(0). Так же как
для исходной функции я(0) вычислялась сумма
2V-1
с (п) = 2 X (0) W-ne при п = 0, 1,.. ,XN - 1,
0=0
для функций яДб) и я2(0) можно вычислить соответ-
ственно
(2V/2)~1 (W/2)-l
Ci(n)= 2 2 ®a(0)Wn0a
0=0 0=0
при ra = 0,
Если Ci(n) и C2(n) таким образом получены, то вме-
сто того, чтобы определять С(п) для исходной функции
я(0) указанным выше способом, можно найти ее,
воспользовавшись следующей формулой:
С(п) = [С1(п) + Ж~пС2(п)]/2.
Находят так С(п) для n = 0, 1, *.(2V/2) — 1, а затем
С(п) для и = (Д72), ..., АГ-1.
Вся эта процедура, называемая БПФ, позволяет
во много раз сократить машинное время по сравнению
с тем, которое затрачивается на проведение ДПФ
обычным способом. Выигрыш времени тем больше, чем
больше количество отсчетов взято для исходной функ-
ции я(0). На графике, приведенном наверху на
рис. 29, указаны шестнадцать отсчетов. При реше-
нии многих задач приходится иметь дело с обработкой
больших массивов информации. Иногда при дискрети-
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 235
зации функций производятся сотни и тысячи отсчетов.
При использовании БПФ время работы машины
сокращается по сравнению с обычным ДПФ примерно
в 7 раз, где. 7 представляет собой отношение времени,
затрачиваемого на проведение операций умножения
при определении спектра с
помощью обычного ДПФ, ко
времени, необходимому для
выполнения этих операций
при БПФ (умножение зани-
мает относительно большое
время и поэтому берется за
основу при сравнении). Подг
считывается величина 7 по
формуле у = (N— 2) /log2 N,
График зависимости 7 от,
N приведен внизу на рис. 29.
При больших значениях N
получается выигрыш во
времени в десятки и сот-
ни раз. Он столь велик пото-
му, что каждая из получен-
ных в результате прорежи-
вания систем отсчетов еще
таким же образом проре-
живается, причем эта про- i
цедура может повторяться
много раз.
Указанные выше пре-
образования используются
Рис. 29.
очень широко. Можно указать множество задач, ко-
торые иначе не могли бы быть решены. Это многие
задачи управления, генерирование и анализ случайных
процессов, формирование сложных сигналов с задан-
ными корреляционными свойствами и многие другие.
Все, что мы говорили до сих пор, имея в виду
преобразование функций времени, относится и к преоб-
разованиям функций нескольких других переменных.
При этом лишь производится многократное суммиро-
вание при выполнении БПФ (по числу переменных).
Мы рассмотрели несколько характерных, видов
обработки информации, часто используемых в процес-
236 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
се работы систем управления. Все время речь шла о
преобразованиях, основанных на разложении функций
в ряд Фурье. Имелся в виду тригонометрический ряд
Фурье, единственный, с которым мы пока знакомы,
хотя при упоминании об обобщенном ряде Фурье было
сказано, что в качестве базисных функций могут быть
взяты не только синусоиды и косинусоиды, но и
другие ортогональные функции.
По какой причине и когда следует отдавать пред-
почтение синусоидам и косинусоидам при аппроксима*
ции (приближенном представлении) функций рядами
Фурье? Какие еще существуют ортогональные функ-
ции, по которым может производиться разложение
в ряд Фурье? Когда следует ими пользоваться?
Насколько все это существенно, если иметь в виду
общую задачу всемерного сокращения машинного вре-
мени, затрачиваемого на обработку информации?
Поставленные вопросы имеют большое практиче-
ское значение. И вот почему.
Широкое использование синусоид и косинусоид
в качестве базисных функций связано с тем, что
гармонические колебания при прохождении их через
любую линейную систему сохраняют свою форму.
При этом колебания на выходе системы могут отли-
чаться от входных колебаний .только по амплитуде и
фазе. На этом основан частотный метод исследования
динамических систем, о котором было рассказано
раньше.
Использование этих и некоторых иных ценных
свойств синусоид и косинусоид как базисных функ-
ций для ряда Фурье во многих случаях представляет-
ся совершенно необходимым. В других же (также
многих) случаях оно не обязательно. При этом более
выгодным оказывается принятие за базисные других
систем ортогональных функций (определение ортого-
нальности было дано нами вначале, когда говорилось
о приближенном представлении функций обобщенны-
ми рядами Фурье). К таким ортогональным функциям,
используемым там, где это допустимо, как базисные
для рядов Фурье, относятся функции Уолша, Хаара
и другие так называемые кусочно-постоянные ортого-
нальные функции, о которых дальше пойдет речь.
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 237
Прежде чем рассказать о них, поясним, почему
вообще использование функций этого класса вместо
синусоид и косинусоид может давать огромную эко-
номию в количестве выполняемых операций и соот-
ветственно в затратах машинного времени при обра-
ботке потоков информации рассмотренными нами
методами,
Чтобы пояснить это, сначала обратимся к какой-
либо функции времени, например к изображенной на-
верху слева на рис. 28, и вспомним, как определяются
для нее коэффициенты тригонометрического ряда
Фурье. Например, коэффициент
т
ап = (2/Т) J х (t) cos n^t dt.
о
Практически величина этого интеграла при данном
п определяется цифровой ЭВМ следующим образом.
Вводится в ЭВМ ряд значений xkt) на протяжении
периода Г, обычно достаточно большое количество их.
Р»аждое значение xkt) умножается на созмю^ при со-
ответствующем t. Вычисляется сумма всех значений
x(t) cos псМ, по которой определяется приближенное
значение интеграла^ и находится затем величина ап.
Наибольшее время затрачивается на умножение всех
значений x(t) на соответствующие cosncM. Для вы-
числения ап при других п нужно при каждом данном
t умножить xlt) каждый раз на функцию cosnco^,
имеющую уже другую величину. При приближенной
аппроксимации указанной нами функции и мно-
жества других функций xkt) тригонометрическими ря-
дами Фурье, а также при других рассмотренных нами
раньше характерных видах обработки информации
цифровыми. ЭВМ, эту операцию умножения прихо-
дится иногда производить многие миллионы и милли-
арды раз.
Расскажем теперь о том, что представляют собой
кусочно-постоянные ортогональные функции и укажем,
в чем (там, где они применимы) они имеют преиму-
щество перед синусоидами и косинусоидами. Вспом-
ним приведенную вначале формулу члена обобщенного
238
Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ряда Фурье:
о
К этой формуле приводится и рассмотренная нами
только что формула
т
ап = (2/Т) J х (0 cos n^t dts
о
если принять обозначение кп^ап и положить Сп=*
— Т/2, a IM ~ cosnoit Предположим теперь, что
вместо функций синуса и косинуса берется в качестве
фазисного для аппроксимирующего ряда набор других
ортогональных функции fnU). Пусть это будут функ-
ции, которые могут принимать только одно из двух
значений: 1 или 0. При этом произведение x(t) на
fn(t) просто равно x(t) (если /п(^) == 1) или равно нулю
(если fn(t) «« 0). Так как исключается последователь-
ность умножений — наиболее длительных операций,
то намного сокращается время всего преобразования.
Известны различные системы кусочно-постоянных
ортогональных функций.
Один из простейших наборов таких функций /n(z)
показан наверху на рис. 30. Они заданы для значений
t в интервале от 0 до Г (в интервале 0««t/T от 0 до
1). Любые две из этих функций взаимно ортогональ-
ны: их произведение равно, нулю во всем указанном
интервале и имеются участки, для которых каждая
из функций, будучи умноженной на самое себя, не
равна нулю.
Для того чтобы при рассматриваемой нами обра-
ботке информации можно было использовать кусочно-
постоянные ортогональные функции, нужно, чтобы
так же, как синусоиды и косинусоиды, они принима-
ли бы не только положительные, но и отрицательные
значения. Если такими значениями являются только
/„(£) = 1 и /П(О = —1, то выполнение операции умно-
жения a;(i)X/n(i) сводится к тому, что берутся зна-
чения с соответствующим знаком. Они суммиру-
ются и затем находится коэффициент кп. Все это де-
лается машиной за время, намного меньшее, чем умпо-
в. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 239
ясение x(t) на различные для разных t величины fn(t).
Примером удовлетворяющих* указанному требованию
кусочно-постоянных ортогональных функций явля-
ются функции Радемахера. Внизу на рис. 30 пред-
ставлены первые функции
ЯДО), Я2(0), Я3(0), Я4(0) на-
бора этих функций. Каждая
из последующих функций
Радемахера получается из
предшествующей увеличе-
нием в два раза частоты че-
редования интервалов, на ко-
торых она принимает значе-
ния +1 и — 1. В отличие от
полного набора синусоид и
косинусоид все функции
Радемахера нечетные (по-
нятие четности и нечетности
функций дается в школьном
учебнике математики для
9-го класса). То, что все
функции Радемахера нечет-
ные, препятствует аппрокси-
мации с помощью их чет-
ных функций x(t) (они об-
।___________и---------1 в
0 0,5 f
Рис. 30.
разуют, как говорят, непол-
ный набор функций). Поэто-
му применение их ограни-
ченное.
Этого недостатка лишен широко применяемый ба-
зисный набор функций Уолша, являющийся полным.
Для сравнения в верхней части рис. 31 слева пред-
ставлен график с косинусоидами и синусоидами,
а справа — график, на котором показаны восемь, пер-
вых функций Уолша. Эти функции обозначаются
чуаЦде, 0), где депорядковый номер функции. Но-
мера де указаны в первом столбце таблицы справа от
графика. В связи со сходством расположенных в этом
порядке функций Уолша с функциями cos (п • 2л0)
и sin (п • 2л0) для них приняты также обозначения
соответственно cal (тг, 0) и sal (п, 0), указанные слева
от графика. .
240 Ч. П. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
Функции Уолша просто получаются как произве-
дения взятых в соответствующих степенях функций
€0867-2X9) .........
-МЫп (/• 2x9) *
W(1-2rr9)
Sin (2-2x9) ^X_y^V7
J&os (Z-2x9)
bln (5-2x9)
dos (3-2x9) X^^X/X^
sin (4-2x9) ^ХУХУХ/Ху
i-----------1--1/
О 0,5- 7
W&(0,9) ....-----~
sai .....—4"
col (t, 9) I -4=
sal (2.9)'—I - Г~Я —
cal (2,9) П -4^1- 4^
sal (3,9) "l^JTbr^b:
caH3.#4-R- -П-F
salft^TJTJLFE
1111 1
1-111-1
Рис. 31.
Радемахера. Так, для первых восьми функций Уолша
имеем:
wal (0, 0) = Я? (0) RI (0) = 1;
wal(l, 0) = Я1(0)Я?(0) = Я1(0)}
wal (2Л 0) = Ях (0) Я2 (0);
wal (3,0) = Я®(0)Я2(0) = Яг(0);
wal (4, 0) = Я? (0) Я2 (0) R3 (0) = Я2 (0) Я3<0);
wal (5, 0) = Ях (0) Я2 (0) Я3 (0);
в. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 241
wal.(6, 0) = Rt (0) R* (0) R3 (0) « Rt (0) R3 (0)|
wal (7, 0) = R* (0) Я" (0) R3 (0) « R3 (0).
По общей формуле, которую приводить здесь не
будем, также определяются и следующие функции
Уолша.
На рассмотренном нами графике функции Уолша
расположены в том же порядке, как и соответствую-
щие косинусоиды и синусоиды, с которыми мы их
сравнивали. В этом случае говорят, что они упорядо-
чены по Уолшу. Можно изменить их нумерацию и
перестроить график так, чтобы ойи были расположены
в другом порядке, что иногда оказывается более
целесообразным.
Если принять нумерацию в порядке ft=*l, 2, 3,4,..,
имея в виду связь между значениями w и ft, опреде-
ляемую первым и вторым столбцами упоминавшейся
таблицы на рис. 31, и расположить функции Уолша
в порядке возрастания й, то они будут идти одни за
другими в последовательности, о которой говорят, что
это функции Уолша, упорядоченные по Адамару. Эти
функции, обозначаемые had (й, 0), иногда просто на-
зывают функциями Адамара или функциями Уол-
ша — Адамара. Если же принять нумерацию в порядке
р = 1, 2, 3, 4, ..., имея в виду связь между значения-
ми w и р, определяемую первым и третьим столбца-
ми указанной таблицы, и расположить функции Уол-
ша в порядке возрастания р, то они -разместятся одни
за другими в последовательности, о которой говорят,
что это функции Уолша, упорядоченные по Пэли.
Обозначения wal(w, 0), had (ft, 0), pal(p, 0) приняты
в соответствии с фамилиями ученых, разрабатывавших
данные наборы кусочно-постоянных ортогональных
функций. Это Walsh, Hadamard, Paley.
Последовательность функций had (ft, 0) может быть
образована и с помощью так называемых матриц
Адамара. Как строятся матрицы Адамара, показано
внизу справа на рис. 31. Здесь показано, как образу-
ется матрица Я2п из матрицы Нп для различных п,
начиная с п = 1. Приведены изображения матриц Я2,
Я4 и Я8. Если в последней матрице ввести, как это
сделано, обозначения ft для всех строк, отвечающие
242
4. IL ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
упорядочению функций Уолша по Адамару, то рас-
положение в каждой строке +1 и —1 будет соответ-
ствовать расположению участков с +1 и —1 на гра-
фике функции had (h, 0) при каждом данном значений h.
Для функций Уолша амплитудные .значения рав-
ны +1 и —1. Это, как указывалось, сокращает машин-'
ное время вычисления коэффициентов аппроксимирую-
щего функцию x(t) ряда по сравнению с тем, которое
затрачивается на вычисление соответствующих коэф-
фициентов тригонометрического ряда Фурье. Чтобы
получать хорошие приближения к заданной функции
x(t) при небольшом. числе членов ряда (во многих
случаях меньшем числе членов, чем для ряда, пост-
роенного на базе функций Уолша), не проигрывая, во
всяком случае существенно, во времени иногда в ка- .
честве базисного набора функций используют кусочно-
постоянные ортогональные функции Хаара. Эти функ-
ции могут принимать три значения: + А, 0 и — А.
Величина А, будучи постоянной для каждой данной
функции Хаара, изменяется с переходом к функциям
более высокого порядка. Первые из набора функций
Хаара показаны внизу слева на рис. 31. Они вычер-
чены не в одном масштабе, при каждой функции ука-
заны ее амплитудные значения А.
В принципе так же, как и дискретное преобразова- «
ние Фурье, производятся дискретные преобразования у
Уолша (ДПУ) и Хаара (ДПХ).
Разработаны и методы быстрого преобразования
Уолша (БПУ) и быстрого преобразования Хаара (БПХ),
аналогичные рассмотренному нами быстрому преобра-
зованию Фурье.
При применении этих методов получается двоякая
экономия машинного времени. Прежде всего, благода-
ря преимуществам, которые дает в этом уже само
использование кусочно-постоянных функций. И, кро-
ме того, за счет применения специальных алгоритмов
обработки' информации, таких, например, как БПУ.
Еще раз напомним, что в ряде случаев незаменимы
тригонометрические ряды Фурье. В равной мере ис-
пользуются на практике быстрое преобразование Фурье
и быстрые преобразования Уолша или Хаара. Все эти
преобразования производятся с функциями одной
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 243
переменной такими, например, как функция времени
#(Z), о которой мы говорили, а также и с функциями
нескольких переменных такими, например, kSk функ-
ции от двух координат, определяющих положение
точки на плоскости, или с функциями от большего
числа координат.
Даже при применении описанных специальных
методов скорость обработки информации на цифровых
ЭВМ часто оказывается недостаточной, так как не
удовлетворяет требованиям, которые ставятся при ре-
шении задач.
Если на каких-то этапах решения сложной задачи
не требуется высокая точность обработки информации,
обеспечиваемая цифровой Э$М, то,, как указывалось
вначале, для ускорения выполнения операций могут
использоваться аналоговые устройства. Это могут быть
электронные или оптические устройства, имеющиеся
в гибридной вычислительной системе наряду с Цифро-
вой ЭВМ. Оптические устройства способны производйть
обработку целых массивов информации со скоростью,
равной скорости прохождения лучей света, то есть
практически мгновенно.
Одной из основных операций, которые могут просто
осуществляться оптическими устройствами, является
интегральное преобразование Фурье, о котором было
рассказано раньше (стр. 137). Укажем, как оно вы-
полняется оптическими элементами. Рассмотрим, как
преобразуется в частотно-спектральную форму инфор-
мация, первоначально представленная в обычном виде
на фотопластинке. На рис. 32 наверху показана фото-
пластинка 1 с исходным изображением и линза
Через пластинку пропускается параллельный пучок
когерентного света.
Коэффициент пропускания света ф неодинаков для
различных точек пластинки, и величина ф является
функцией координат х и р, определяющих положение
точки на поверхности пластинки (на оси х лежат по-
казанные на рисунке точки А и В, ось у перпендику-
лярна к плоскости рисунка), Для упрощения рассмот-
рим сначала лишь точки, имеющие различные ко-
ординаты х и одну и ту же координату у. Условно
считая, что величина ф’ зависит только от х, введем
244 Ч. II. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
для нее обозначение *ф(о:). В соответствии с принципом:
Гюйгенса — Френеля каждая точка поверхности
пластинки представляет собой новый источник света,
распространяющегося во всех направлениях, как по-
казано на рисунке для точек А и В. Лйнзой собира-
ются параллельные пучки света. Например, исходящие
от всех точек пластинки лучи света, составляющие
угол а с оптической осью линзы (показаны на рисун-
ке сплошными линиями), собираются линзой так, что
все они сходятся в точке С ее фокальной плоскости 3.
Лучи света, составляющие угол £ с оптической осью
линзы (показаны на рисунке штриховыми линиями),.-
сходятся в точке D фокальной плоскости линзы. Так,
каждая точка фокальной плоскости линзы освещается
светом, исходящим ото всех точек плоскости пластин-
ки. Это лежит в основе выполнения операции интегри-
рования. В зависимости от того, где расположены ня
пластинке 1 точки, свет проходит неодинаковый путь.
Поэтому волны света, достигая ’ некоторой точки в
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 245
фокальной плоскости линзы, оказываются смещенны-
ми одни относительно других по фазе. Когда раньше
в первый раз было упомянуто об интегральном преоб-
разовании Фурье (стр. 137), то было, сказано о том, что
запаздывание в передаче сигнала отображается при
выполнении этого преобразования умножением исход-
ной функции на е~<<во. В нашем случае это будет е“г<0*,
где х — соответствующим образом отсчитываемая ко-
ордината. В данном случае интегральное преобразо-
вание Фурье имеет следующее выражение:
оо
Ф (со) = J (х) е""шхйх.
—00
Здесь в выражении еф(х) исходной функции множитель
ф(х) представляет собой переменную ее часть, ха-
рактеризующую, как уже было сказано, изменение
коэффициента, пропускания света в зависимости от
положения точки вдоль оси х; множитель е~{*х характе-
ризует величину сдвига по фазе, вызываемую раз-
ностью хода лучей, исходящих из точки с текущей
координатой х и из начальной точки, для которой
принято х=*0. Пределы интегрирования взяты так,
как следует из определения преобразования Фурье
(от —оо до +°о); практически же приходится иметь
дело с диапазоном частот, ограниченным конечными
предельными значениями частоты. Если учесть изме-
нение коэффициента пропускания света также и по
координате у, то получим выражение интегрального
преобразования Фурье, содержащее двойной интеграл:
один раз интегрирование производится по переменной
х, второй — по переменной у.
Расположив, как показано на рис. 32 внизу, за
фокальной плоскостью 3 линзы на расстоянии, равном
расстоянию между этой плоскостью и линзой, другую
линзу 4, получим в ее фокальной плоскости 5 восста-
новленное исходное изображение. Таким образом,
вслед за прямым интегральным преобразованием Фурье
производится обратное интегральное преобразование
Фурье. Может возникнуть вопрос о том, зачем вы-
полнять сначала прямое, а затем обратное преобразо-
вание, если в результате получается исходное изоб-
246
Ч. II ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
ражение? Действительно, выполнять их просто так,
как было сказано, не имеет смысла. Но при неболь-
шом дополнении рассматриваемой схемы уже получа-
емся практически важное оптическое устройство обра-
ботки информации, с помощью которого можно улуч-
шить исходное изображение, отфильтровывая искаже-
ния, которые возникли возможно при первоначальном
его получении из-за действия помех, шумов. Во многих
случаях последние занимают в частотной области
участок более высоких частот, чем те, которые соот-
ветствуют основному изображению. При выполнении
прямого интегрального преобразования Фурье высоким
частотам отвечают удаленные от оптической оси 00
периферийные участки. Поэтому, установив в фокаль-
ной плоскости 3 линзы 2 диафрагму, пропускающую
только основную центральную часть лучей и отсекаю-
щую те из них, которые находятся в периферийной
части, можно отфильтровать высокочастотные шумы.
При этом исходная Информация восстанавливается
в таком виде, в каком она была бы представлена
первоначально, если бы не была искажена из-за дей-
ствия помех.
Кроме фильтрации сигналов может производиться
па основе выполняемого оптическими линзами интег-
рального преобразования Фурье и другая обработка
сигналов. Например, на этом принципе строятся опти-
ческие корреляторы.
Мы уделили относительно большое внимание воп-
росам машинной обработки потоков информаци, так
как, как уже отмечалось, эти вопросы для техники авто-
матического управления имеют исключительно важное
значение. Вообще же они возникают и при машин-
ном решении других задач науки и техники. Ап-
проксимаций функций с помощью рядов Фурье и
Уолша, алгоритмы БПФ и БПУ, выполнение интег-
ральных преобразований Фурье — все это начинает
занимать среди прикладных математических методов
одно из главных мест. О том, насколько управление,
связанное с машинной обработкой больших массивов
информации, затрагивает самые различные виды дея-
тельности людей, можно судить по тому, что ‘будет
рассказано в третьей части нашей книги.
6. МАШИННАЯ ОБРАБОТКА ПОТОКОВ ИНФОРМАЦИИ 247
7 Прежде чем повести следующие наши беседы,
ответим на, вопрос, который давно уже мог возник-
нуть у читателя. Мы много говорили, да и дальше
будем рассказывать, о технике автоматического уп-
равления, создание которой является одним из
величайших достижений человечества. Она не могла
бы возникнуть без развития теории систем автома-
тики. Кто же является создателем теории и техни-
ки автоматического управления?
Ответим на этот вопрос так: многие изобретатели
и ученые.
Упоминались имена И. И. Ползунова и Дж. Уатта,
построивших первые регуляторы. У истоков разра-
ботки теории автоматического управления были вы-
дающийся английский физик Д. К. Максвелл, напи-
савший в 1868 г. статью «О регуляторах», знаменитый
русский ученый И. А. Вышнеградский, основопо-
лагающие работы которого о процессах регулирова-
ния были опубликованы в 1876 и 1877 гг., известный
словацкий ученый А. Стодола, фундаментальные ра-
боты которого о регулировании турбин были напеча-
таны в 1893 и 1894 гг. Большой вклад в развитие тео-
рии автоматического управления внесли многие уче-
ные двадцатого века. Широко известны, например,
имена советских ученых академика А. А. Андронова,
который применил для решения нелинейных задач
теории автоматического управления метод фазовой
плоскости и фазового пространства, профессора
А. А. Фельдбаума — автора многих научных трудов и
книг, посвященных оптимальному управлению и адап-
тивным системам, члена-корреспондента АН СССР
М. А. Гаврилова, который первым указал на целесо-
образность использования математической логики при
построении релейных управляющих устройств и си-
стем. В наших беседах упоминались и имена других
советских и иностранных ученых.
Однако не ставилось целью указать всех, кто сде-
лал вклад, пусть даже значительный, в развитие тео-
рии управления и в создание техники автоматических
систем. Сделать это в данной книге было бы трудно.
В области автоматического управления работало
раньше и сейчас работает в нашей стране и за ру-
248 Ч. И. ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ
бежом много талантливых ученых. Много ученых
занято и разработкой новой вычислительной техники,
микропроцессорной и оптоэлектронной, используемой
при построении современных систем автоматики. Даже
если бы мы попытались сказать совсем немного о каж-
дом из них, о том, что им сделано или делается сей-
час, то получилась бы книга значительно большего
объема, чем эта.
Далее там, где по ходу рассказа представится це-
лесообразным, будем ссылаться на мнения специа-
листов по обсуждаемым вопросам, где-то приведем
выдержки из их статей и книг. Но это не будет исто-
рическим очерком или обзором работ, которые ведутся
в данное время. Нащей дальнейшей задачей будет
только дать общее представление о том, что имеют,
в виду, когда сейчас говорят о кибернетике.
ЧАСТЬ III
КИБЕРНЕТИКА
1. Кибернетика. Искусственный интеллект. Роботы
Сначала ответим на несколько вопросов общего
характера. Что же такое кибернетика? Что такое
искусственный интеллект? Что представляют собой
роботы? Каковы особенности сложных систем управ-
ления? Как связана кибернетика с бионикой? В чем
ЭВМ уступают человеку и в чем они уже сейчас
превосходят человека? Как используются и будут
дальше использоваться в кибернетике аналогии
между процессами управления в машинах и в живой
природе? Что написано обо всем этом в других кни-
гах? Чему будут посвящены наши следующие беседы?
В литературе по-разному определяется, что такое
кибернетика, искусственный интеллект, роботы. При-
ведем определения, которых будем в дальнейшем при-
держиваться.
Слово «кибернетика», которое употреблялось и рань-
ше (происходит от греческого слова, означающего в
переводе «кормчий»), начали применять в современном
смысле с 1948 г., когда вышла в свет книга американ-
ского ученого Норберта Винера «Кибернетика или
Управление и связь в животном и машине». Хотя эта
книга и была посвящена постановке и рассмотрению
сложных задач управления в живых организмах и в
машинах, уже во введении к этой книге было сказано,
что имеется в виду вся теория управления и связи.
«Было решено назвать всю теорию управления и связи
в машинах и живых организмах кибернетикой»,—пи-
сал автор этой книги. Однако сложным системам управ-
ления, какими являются биологические системы управ-
ления и некоторые усовершенствованные технические
системы управления, которые сейчас разрабатываются,
присущ ряд особенностей. То, что кибернетика глав-
3^
250
Ч. III. КИБЕРНЕТИКА
ным образом занимается изучением этих особенностей,
позволило считать ее новой наукой. Крупный совет-
ский ученый — академик А. Н. Колмогоров, математи-
ческие работы которого, упоминаемые Н. Винером,
имеют большое значение для кибернетики, писал после
выхода указанной выше книги: «Сейчас уже поздно
спорить о степени удачи Винера, когда он в своей из-
вестной книге в 1948 году выбрал для новой науки
название «кибернетика». Это название достаточно
установилось и воспринимается как новый термин, ма-
ло связанный со своей греческой этимологией. Кибер-
нетика занимается изучением систем любой природы,
способных воспринимать, хранить и перерабатывать
информацию и использовать ее для управления и ре-
гулирования. При этом кибернетика широко пользуется
математическим методом и стремится к получению кон-
кретных специальных результатов, позволяющих как
анализировать такого рода системы (восстанавливать
их устройство на основании опыта обращения с ними),
так и синтезировать их (рассчитывать схемы систем,
способных осуществлять заданные действия)». В из-
данной в 1974 г. в Киеве «Энциклопедии кибернетики»
о кибернетике говорится, что это «...наука об общих
законах получения, хранения, передачи и преобразова-
ния информации в сложных управляющих системах.
При этом под управляющими системами здесь пони-
мают не только технические, а и любые биологические,
адмидйстративные и социальные системы. Примерами
очень сложных управляющих систем являются нерв-
ные системы живых организмов, в особенности орга-
низм человека, а также аппарат управления в челове-
ческом обществе».
Эти определения кибернетики дают общее представ-
ление о ней как об отрасли науки.
Из сказанного выше следует, что к кибернетике
имеет прямое отношение все, о чем было рассказано
раньше в нашей книге, а вместе с тем и другое, на-
пример, то, что имеется в виду при упоминании об
ЭВМ, играюпшх в шахматы, переводящих с одного
языка на другой, распознающих зашифрованные запи-
си, в том числе старинные письменности и т. п.
Выполнение машинами последних функций относится
1. КИБЕРНЕТИКА. ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ. РОБОТЫ 251
к тому, что определяется как искусственный интел-
лект. Последний, как сказано в выпущенном в
1979 г. «Словаре по кибернетике»,— это «искусственная
система, имитирующая решение человеком сложных
задач в процессе его жизнедеятельности». Иногда при-
водятся и другие формулировки. Так Л. А. Растригин
и П. С. Граве дают следующее определение: «искус-
ственный интеллект представляет собой программу для
ЭВМ, с помощью которой машина приобретает способ-
ность решать нетривиальные задачи и задавать нетри-
виальные вопросы».
Название «робот», используемое для автоматов, на-
поминающих по выполняемым ими функциям человека,
впервые было употреблено в 1920 г. чешским писате-
лем Карелом Чапеком, который так назвал в написан-
ной им фантастической повести искусственные суще-
ства, обладающие «невероятно сильным интеллектом».
Различают сейчас роботы с искусственным интеллектом
и промышленные роботы или роботы-манипуляторы,
действующие по заданным им жестким программам.
Мы будем иметь в виду дальше роботы того и друго-
го типа.
Рассмотрим некоторые вопросы, существенные Для
кибернетики. Это прежде всего —вопрос о* принципи-
альных возможностях машин. Могут ли они делать
больше, чем предусмотрено при составлении человеком
программы их действия? Может ли быть машина ум-
нее своего создателя — человека? Могут ли машины
сами приспосабливаться к окружающим условиям, са-
мообучаться, могут ли они, Как и живые существа,
быть самовоспроизводящимися?
Возможно, что уже на первый из заданных вопро-
сов, основной, читатель захочет ответить отрицательно.
Ведь в школьном учебнике, на который мы ссылались^
было написано об ЭВМ следующее : «Когда говорят,
что ЭВМ играет в шахматы, предсказывает погоду,
управляет работой железнодорожного узла и т. д., надо
понимать, что машина, какой бы совершенной она ни
была, сама по себе сделать все это не может. Машина
просто выполняет элементарные команды сложнейших
программ, которые для нее составляет человек. Чтобы
настроить машину на новый вид работы, достаточно
252
Ч. Ш. КИБЕРНЕТИКА
ввести в нее соответствующую команду»1). Не согла-
симся в этом случае с читателем, хотя в учебнике все
написано правильно.
Правильно, если исходить из того, что уже достиг-
нуто наукой, если иметь в виду современное состояние
вычислительной техники и техники управления.
। Не написано лишь то, что возможно создание про-
; грамм, которые могут. дальше совершенствоваться са-
। мой машиной при получении ею информации из внеш-
него, мира, информации, заранее неизвестной состави-
телю первоначальной программы. А как раз здесь-то
и заложена возможность деятельности машины, в ка-
кой-то мере аналогичной творческой деятельности че-
ловека.
Почему об этом ничего не сказано в учебнике? Во-
обще в школьных учебниках всегда пишется только
о том, что уже полностью подтверждено открытиями
ученых и не -вызывает у них сомнений. То же, что
является делом будущего, еще не полностью сформи-
ровалось и не до конца проверено, а сейчас лишь со-
ставляет предмет исканий, исследований, в школьных
учебниках не отражается. Обсуждая дальше постав-
ленные вопросы, нужно иметь в виду, что нет пока
единого мнения по ним и среди ученых.
В отношении различных мнений по обсуждаемым -
нами вопросам можно сказать следующее. Нужно про-
сто разграничивать, не принимая одно за другое, то,
что уже сейчас получается или может быть получено
в ближайшем будущем, и более далекие перспективы
развития кибернетики. Правильная оценка последних
имеет большое значение, так как позволяет целе- •
устремленно вести исследования, по правильному пути
направлять поиски дальнейших усовершенствований
управляющих машин. Еще в упоминавшейся книге
Н. Винера (мы еще не раз будем* ссылаться на нее)
автор ее утвердительно отвечает на вопрос о том, мо-
жет ли быть машина умнее создавшего ее человека.
1) Здесь и далее делаются ссылки на 3-е издание учебного
пособия для 8-го класса «Алгебра», выпущенного под редак-
цией Л. И. Маркушевича в 1975 г. При переизданиях его (см. <
выпуск 1979 г.) текст раздела об алгоритмах и программ иро-
вании решения задач на ЭВМ был изменен.
1. КИБЕРНЕТИКА. ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ РОБОТЫ 253
Это нужно понимать так, как уже было сказано: по-
лучая информацию из внешней среды, о которой чело-
век, построивший управляющую машину, не знал,
а может быть, и анализируя то, что в нее было зало-
жено, соответствующим образом выполненная машина
в принципе может производить заранее не предусмот-
ренные действия, сама формируя программы, являю-
щиеся дальнейшим развитием первоначально состав-
ленной программы.
Нужно дать положительный ответ и на следующий
из поставленных вопросов. Уже сейчас разрабатывают-
ся теория и техника построения адаптивных, то есть
самоприспосабливающихся к окружающим условиям,
машин. Одним из новых, интенсивно разрабатываемых
разделов теории, автоматических систем является тео-
рия обучающихся и самообучающихся машин. Практи-
кой уже сейчас подтверждена возможность машинного
проектирования и автоматического изготовления ма-
шин. В этом смысле можно говорить и об их способно-
сти к самовоспроизведению.
Технические системы будущего, предназначенные
для выполнения более широкого класса функций уп-
равления, чем те, которые реализуются с помощью
современных ЭВМ, должны будут обладать некоторыми
особыми свойствами, характерными для .систем управ-
ления, имеющихся в живых организмах.
Одним из них является ббльшая степень сложности
системы управления, при достижении которой каче-
сгвенно изменяются возможности системы. Говоря о
степени сложности, учитывают общее число элементов
и структуру системы. Для сравнения укажем, что мозг
человека содержит миллиарды первичных элементой-
нейронов.
Другой особенностью сложных кибернетических си-
стем является го, что процессы их функщюнпрования
обычно стохастические. Во второй части нашей книги
было рассказано о случайных воздействиях на объекты
* управления или управляющие устройства и о способах
анализа характеристик этих воздействий. Здесь же име-
ется в виду использование характеристик случайных
процессов для синтеза систем управления. Это одна из
основ кибернетики как науки о сложных системах уп-
251
Ч ПТ КИБЕРНЕТИКА
равления. Указывая на то, что «автоматы и физиологи-
ческие системы цржно охватйть одной теорией»,
Н, Ринер отмечал, что «теория чувствующих автоматов
является статистической».
Перейдем к вопросу об использовании в кибернети-
ке аналогий между процессами деятельности живых
организмов и процессами функционирования машин.
Вопросом этйм занимается не только кибернетика, но
и бионика, бионика — это отрасль науки, задачей ко-
торой является изучение деятельности биологических
объектов с целью усовершенствования технических
устройств. Но она занимается не только вопросами
управления. Например, она изучает механику движе-
ния дельфинов и акул с тем* чтобы увеличить скорость
кораблей. Кибернетика же занимается изучением зако-
нов управления любыми процессами, и не только в
живых организмах и машинах, но и в области эконо-
мики и в других областях. Таким образом, бионика
и кибернетика представляют собой различные научные
дисциплины, каждая из которых имеет свою собствен-
ную проблематику. Но имеются и вопросы, являющие-
ся для них общими. Это вопросы изучения процессов
управления в биологических системах с целью созда-
ния более Свершенных, чем существующие, вычисли-
тельных Й управляющих машин.
Созданные уже сейчас и вновь разрабатываемые
машины во многом уступают человеку. Хотя они и
начинают уже выполнять некоторые функции интел-
лекта человека, они не способны в полной мере мыс-
лить, как человек, не могут, как человек, ставить цели,
которые в дальнейшем должны быть достигнуты.
Но вместе с тем они уже сейчас намного превосхо-
дят человека по скорости выполнения вычислительных
операций»
Чтобы представить себе, насколько они в этом пре-
высили возможности человека, рассмотрим следующий
пример. Попробуем произвести несложные вычисления
и заметим, сколько времени они у нас займут. Возь-
мем какое-либо четырехзначное число, пусть, напри-
мер, это будет 9873. Прибавим к нему другое число,
например 2489. То, что получится, разделим на число 2.
Попробуем это сделать устно, или возьмем лист бума-
1. КИБЕРНЕТИКА. ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ. РОБОТЫ 255
ги и запишем все действия. Сколько уйдет у нас на
это времени? Во всяком случае, не меньше нескольких
десятков секунд. Сколько при этом мы выполним опе-
раций таких, как сложение цифры с цифрой, перенос
цифры в следующий разряд и т. д.? Немного. Сколько
операций выполняется в одну секунду? Тоже немного.
В настоящее же время строятся ЭВМ, выполняющие
сотни миллионов операций в секунду. Правда, дополни-
тельные операции требуются для перевода десятичных
чисел в двоичную систему счисления, принятую для
ЭВМ, но все равно ЭВМ может за то же время посчи-
тать в миллионы раз больше, чем человек.
И не только посчитать. С огромной скоростью, не-
доступной для человека, могут быть произведены в
процессе управления логические операции при большом
числе логических переменных, и название «вычисли-
тельные» по отношению к ЭВМ является, сейчас, как
мы это уже указывали, условным, не отражает всех их
истинных возможностей.
Все, что создано человечеством, в том числе и вся
современная техника, включая и технику управления,
является результатом сознательной деятельности лю-
дей. Мозг человека — орган мышления — представляет
собой совершенное творение природы. Следует ли ожи-
дать, что со временем люди смогут наделить управля-
ющие машины искусственным мозгом, таким же, как
головной мозг человека?
Вероятно, в этой части будет так же, как было и с
другими попытками воспроизведения в технике того,
что подсказывало человеку наблюдение окружающего
мира, изучение живой природы.
Это не было простым копированием. Возьмем хотя
бы такой пример. Еще в глубокой древности, тысячи
лет тому назад, люди уже мечтали научиться летать,
как птицы. Вспомним миф о Дедале и Икаре. Наблю-
дение за полетом птиц позднее подтолкнуло человека
к тому, чтобы овладеть техникой полета. Но прямое
подражание птицам, полет с помощью машущих, как
у птицы, крыльев, существенных результатов не дало.
Эта форма полета, необходимая птицам для маневриро-
вания на коротком расстоянии при добывании пищи,
при погоне за мотыльками и мошками, оказалась для
256
Ч. Ш. КИБЕРНЕТИКА
человека ненужной. Что-то было, правда, использовано
и из непосредственных наблюдений за полетом птиц. '
Полезным оказалось изучение профиля крыла. Так же, <
как птицы, парят в воздухе планеры. Но главные пути
развития техники летательных аппаратов оказались
иными. Созданные человеком самолеты летают сейчас-
со сверхзвуковой скоростью, что птицам недоступно.
Более того, построенные человеком летательные ап- ?
параты уже бороздят просторы Вселенной, удаляясь на
миллионы километров от Земли.
То же самое и с машинами, которые человек хочет .
наделить интеллектом. В, чем-то, как уже было сказа- k
но, даже в настоящее время они значительно превос-
ходят человека; многое из того, на что способен ду-
мающий человек, они смогут делать в будущем. Но
будут делать это вероятно не точно так, как человек,
а по-другому. Иного от них и не потребуется. Лишь бы
«умные» машины были верными помощниками чело-
века, служили ему так же, как служат скоростные
самолеты и космические корабли.
Пример с полетом птицы и созданием самолетов
и космических кораблей является характерным. Но в
отношении мозга человека и искусственного интеллек-
та дело обстоит иначе. Еще до создания сверхзвуковых
самолетов и космических кораблей ученые уже исчер* <
пывающе изучили и раньше использовали все, что свя-
зано со строением крыла и с механизмам полета пти-
цы, и новых идей это предшествующее изучение уже
здесь не могло дать. Изучение же процессов функцио-
нирования мозга человека, процессов мышления толь-
ко начинается. В этом имеются огромные, вероятно,
беспредельные, возможности для того, чтобы черпать .
новые идеи, которые пусть и не непосредственно, но
в измененном виде будут использованы в кибернетике.
Аналогии с соответствующими процессами в живой
природе будут использоваться при этом, по-видимому,
лишь на отправных этапах так же, как и в примере
с самолетом. А дальше при создании искусственного
разума он уже не будет .таким, как человеческий, а дру-
Гйм,— машинным.. Это уже проглядывается в подходах
к созданию ^кусственного интеллекта, которые сейчас-
наметились, "
2. ВОСПРИЯТИЕ ДАННЫХ РАСПОЗНАВАНИЕ ОБРАЗОВ 257
Как мы уже говорили, кибернетика, искусственный
интеллект, роботы привлекают сейчас к себе всеобщее
внимание. К настоящему времени выпущен ряд попу-
лярных книг, в которых затронутые нами вопросы ки-
бернетики и искусственного интеллекта рассмотрены
более детально. В некоторых из них более подробно
освещены одни из них, в иных —• другие. Укажем не-
• которые из таких доступно написанных книг. Это:
книга А. П. Быкова и А. В. Вейца «От нейрона к ис-
кусственному мозгу», выпущенная издательством «На-
ука» в 1971 г.; книги Л. А. Растригина и Л. С. Граве
«Кибернетика как она есть (кибернетика и психика)»,
Г. В. Максимовича «Беседы с академиком В. Глушко-
вым» и А. Г. Чачко «Искусственный разум» издатель-
ства «Молодая гвардия», выведшие в свет соответст-
венно в 1975, 1976 и 1978 г.; книга А. В. Тимофеева
«Роботы и искусственный интеллект», выпущенная
издательством «Наука» в 1978 г. Назовем также кни-
гу Б. Рафаэла «Думающий компьютер», выпущенную
в 1979 г. издательством «Мир». Последняя книга хотя
и рассчитана на более квалифицированного читателя,
но в значительной своей части понятна и школьнику.
Особо отметим вышедшую в свет в 1972 г. (издатель-
ство «Советское радио») научную монографию Д. А. По-
спелова и В. Н. Пушкина «Мышление и автоматы»,
написанную тоже в доступной широкому кругу чита-
телей форме.
. - Покажем, как уже сейчас выполняются некоторые
функции искусственного интеллекта, и рассмотрим
дальнейшие перспективы развития кибернетики.
2. Восприятие информации машинами.
Распознавание образов
Говоря и дальше о кибернетике, мы коснемся
ряда более конкретных вопросов. В числе их следу-
ющие. Восприятие окружающего мира человеком и
машиной. Органы чувств человека и чувствительные
элементы машин. Восприятие машиной символьной
информации как отправная точка в работах по со-
зданию искусственного интеллекта. Распознавание
образов персептроном^ уроки первых персептронов.
9 Л, а. Залманзоа •
253
Ч. III. КИБЕРНЕТИКА
Эвристики и алгоритмы. Значение случайных про-
цессов для организации сложных систем. Статисти-
ческие способы распознавания образов. Распознава-
ние образов с использованием фреймов. Не нужно
пугаться незнакомых слов в подзаголовке темы этой
беседы} что они означают, вы сейчас узнаете.
Из указанных вопросов — первый о том, как осу-
ществляется восприятие внешней среды, окружающе-
го мира человеком и в какой мере аналогичные функ-
ции могут выполняться машинами.
Зрение, слух, осязание, обоняние дают возможность
человеку получать извне всю информацию, используе-
мую им в его деятельности. Виденное, слышанное,
почувствованное запоминается человеком. Мыслящий
человек наряду- с текущей информацией, получаемой
с помощью органов чувств, черпает нужные ему све-
дения и из своей памяти.
Аналогичным образом вводится информации в ма-
шины. Элементами зрительных восприятий машины в*
простейшем случае являются отдельные фотоэлементы,
на выходе каждого из которых появляется сигнал 1
(есть ток в выходном проводнике), если ‘на фотоэле-
мент падают лучи света, и появляется сигнал 0 (нет
тока в выходном проводнике) — в противном случае.
Используются и наборы-матрицы фотоэлементов; на
выходе матрицы уже получается множество сигналов,
дающих представление о том, каки^ участки соответ-
ствующей поверхности освещены, а какие остаются
затемненными. Наконец, во вновь разрабатываемых ро-
ботах используются телевизионные камеры, если нуж-
но, чтобы робот видел то, что находится перед ним.
На экране телевизора, который сейчас имеется в каж-
дой квартире, отображается все, что происходит в
окружающем нас мире. И если недавно изображения
были черно-белыми, то теперь они уже цветные и пе-
редают вето гамму красок. Со временем будут созданы
и голографические телевизоры, передающие ‘объемные
изображения. Электрические сигналы, преобразуемые
при телевизионной передаче в видимое нами изображе-
ние на экране, прямо могут вводиться в йашину.
Звуки передаются машине с помощью микрофона
такого, как в приемной трубке телефона. На выходе
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 259
микрофона тоже получаются электрические сигналы,
представляемые затем в таком виде, какой приемлем
для машины.
Нечто аналогичное осязанию, тактильным, то есть
получаемым при прикосновении, ощущениям человека
может получаться и в машине, причем различными
способами. При прикосновении к предмету пальцев
руки робота — искусственных тактильных датчиков —
могут замыкаться электрические контакты. У одного
из экспериментальных роботов каждый палец руки
оканчивался несколькими иголками, которые могли
выдвигаться на различную величину, что позволяло
ощупывать ими поверхности предметов той или дру-
гой формы. При этом получались электрические сигна-
лы, отражающие величины расстояния до отдельных
точек поверхности.
Человек иногда по запаху обнаруживает наличие
в окружающем воздухе примеси постороннего газа.
Даже самые малые концентрации газов определяются
специальными приборами, которые могут быть^чувстви-
тельными элементами машины.
В некотором. смысле чувствительные элементы ма-
шин располагают значительно большими возможностя-
ми, чем органы чувств человека. От них могут пере-
даваться машине данные о числовых значениях раз-
личных величин, измеренных с большой точностью.
Например, так может производиться измерение темпе-
ратур, в том числе и очень высоких, порядка сотен или
даже тысяч градусов, и очень низких, близких к абсо-
лютному нулю. С помощью радиолокаторов обнаружи-
ваются предметы, находящиеся очень далеко, заведомо
за пределами видимости и слышимости их человеком,
и определяете#, на каком расстоянии они находятся.
От чувствительных элементов поступает в' машину и
другая информация, не воспринимаемая непосредствен-
но человеком, например информация об интенсивности
магнитных полей или об уровне радиации.
Чувствительные элементы машин не только элект-
рические. Применяются и другие. Так, электроконтакт-
ные датчики непригодны для индикации и измерения
уровня расплавленного металла, который после плавки
разливается из ковша в литейные формы.
9*
260
Ч, Ш. КИБЕРНЕТИКА
Для индикации или измерения уровня в условиях
очень высоких температур применены пневматические
чувствительные элементы. В таких элементах струя
воздуха под постоянным давлением вытекает из коль-
цевого сопла, образуя воздушную завесу. При прибли-
жении поверхности металла к соплу изменяется давле-
ние в центральном канале, подходящем к области,
охваченной воздушной завесой. Это давление переда-
ется к пневмоэлектрическому преобразователю, на вы-
ходе которого получается соответствующий электриче-
ский сигнал.
Такие чувствительные элементы имеются и в про-
мышленных роботах, работающих при нормальной тем-
пературе окружающей среды; там они применены по-
тому, что они надежнее электрических. О том, что
аэрогидродинамические чувствительные элементы ис-
пользуются для измерения не только расстояния до
поверхности, но и многих других величин, уже упоми-
налось нами раньше.
Часто наиболее удобными для‘применения оказы-
ваются оптические и акустические, ультразвуковые или
другие, чувствительные элементы.
От чувствительных элементов может передаваться
машине текущая информация; кроме этого, могут ис-
пользоваться и ранее запомненные ею данные, ана-
логично тому, как это происходит у человека.
Машинами может восприниматься и перерабаты-
ваться самая различная информация. Это могут быть
данные, передающиеся в процессе управления от изме-
рительных устройств, и информация, черпаемая из
различного вида документов и из книг, и любая другая.
Очень важно, что современные ЭВМ способны вос-
принимать и перерабатывать не только числовую, но
и любую символьную информацию. То, что ученые
смогли заставить ЭВМ оперировать с символьной ин-
формацией, и явилось, как нам кажется, отправной
точкой для работ по созданию искусственного ин-
теллекта.
С символьной информацией мы уже встречались в
первой части книги, хотя тогда это название и не
употреблялось. Закодировав в двоичном коде десятич-
ные цифры, мы использовали незанятые^ комбинации
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 261
четырех символов 1 или 0 для того, чтобы закодиро-
вать приемлемым для машины способом фразу «мы
пишем», К действиям с числами это уже не имело от-
ношения. Составляя различные комбинации не из че-
тырех символов 1 или 0, а из большего их количества,
можно в принципе закодировать этими символами,
понятными для машины, не только одну фразу, а все,
что написано людьми, содержимое всех книг, храня-
щихся во всех библиотеках мира. Мы встречались
с символьной информацией и еще раньше, когда гово-
рили о выполнении логических операций. Мы тогда
увидели, кик в виде действий с теми же символами 1
и 0 представляется выполнение логических функций,
например таких, как функция или по-другому
конъюнкция: у ~х{&х2. Наконец, мы познакомились
с тем, как в такой же форме, тоже с помощью симво-
лов 1 и 0, могут быть представлены графы: матрица
смежности вершин графа, эквивалентная самому графу,
была составлена при использовании этих символов.
Таким же образом — с помощью множеств .различ-
ных комбинаций знаков 1 и 0 могут быть закодированы
и введены в машину чертежи, портреты, пейзажи,
речь человека, пение птиц,— все, с чем мы встречаем-
ся в окружающем нас мире. Все это как символьная
информация доступно для машины. Лишь с началом
ее использования ЭВМ перестали быть арифмометра-
ми, способными производить только арифметические
действия так, как это делается, например, сейчас в
кассовых аппаратах, имеющихся в магазинах и в уч-
реждениях, в которых производятся денежные рас-
четы. С тех пор, как машицы начали оперировать
с символьной информацией, оказался открытым путь
для развертывания работ, направленных на то, чтобы
наделить машины способностью к выполнению функ-
ций, аналогичных тем, которые до этого были возмож-
ны только для мыслящего человека.
Мы уже выяснили, что различная информация, не-
обходимая для создания образов окружающего мира,
может приниматься чувствительными элементами ма-
шин, причем во многом более полно: чем это возмож-
но для органов чувств человека. Но от получения этой
информации до создания того или .другого образа еще
262
Ч. Ш КИБЕРНЕТИКА
далеко. У человека все, что воспринимается органами
чувств, передается от них по цепочкам нейронов, через
нейронные сети в мозг человека, где формируются об-
разы предметов, явлений, ситуаций, процессов. Эти
образы запоминаются человеком и в нужную минуту
всплывают в памяти. Если на экране телевизора, ко-
торым снабжен робот, появляется изображение, будь
то портрет человека, пейзаж, чертеж или внешний вид
технического устройства, то его тоже можно передать
в память машины. Это можно сделать, перенумеровав
все точки изображения и закодировав различными по-
следовательностями знаков 1 и 0 номер каждой точки
изображения и ее характеристики такие, например,
как то: зачернена данная точка или нет, а если она
цветная, то какого цвета и т. д.
Все это можно уложить в память машины и путем
последующего анализа воспроизвести то, что можно
было бы назвать машинным образом.
Сравнив затем, опять-таки точка за точкой, другой
образ, который будет предъявлен машине, можно будет
сказать, совпадает ли он с первым или пет, то есть
произвести распознавание образов. Машина может де-
лать это, воспринимая образы указанным способом,
а при распознавании сличая их с другими во всех де-
талях, до мельчайших подробностей всех элементов
изображения (то, что мы говорим сейчас о зрительных
образах, относится и к другим, например, звуковым).
Конечно, процесс этот чрезвычайно трудоемкий,
требующий даже от быстродействующей машины боль-
шого времени. В простейших случаях такое распозна-
вание образов приемлемо, однако для сложных картин
окружающего мира оно может стать настолько трудо-
емким и длительным, что в конце концов трудно будет
н§ основании изучения отдельных элементов изображе-
ния, отдельных деталей, воспроизвести общую картину.
Может случиться так, как гласит поговорка: за деревь-
ями не станет видно леса.
То, что было сказано о таком машинном восприятии
и различении образов, иногда используется и челове-
ком. В некоторых случаях, изучая отдельные элементы
явления или процесса, человек в конце концов полу-
чает возможность представить себе общую картину
2.'9GEf(iitr^u "*» j т- —, ________________ ♦ _____
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 263
того, что его интересует. Так часто происходит при
научных исследованиях.
Но человек способен и к другому восприятию и рас-
познаванию образов, п^и котором образы формируются
и запоминаются не в деталях, а сразу в самом общем
виде, в целом, причем отдельные детали могут быть
и опущены. И самое главное, что это происходит мгно-
венно. Например, человек сразу отличает знакомого
человека и незнакомого; увидев портреты мужчины и
женщины,-он их тоже сразу различает; инженер сразу
отличаёт один чертеж или одну схему от других;
опытный врач часто тут же, не проводя детального об-
следования, ставит диагноз заболевания.
Как это происходит у человека, в мозгу человека?
Этот вопрос много раз ставили перед собой ученые.
Н. Винер, о котором мы уже говорили, писал: «Как мы
узнаем индивидуальное человеческое лицо, когда ви-
дим его в разных положениях: в профиль, в три чет-
верти или анфас? Как мы узнаем круг как таковой,
независимо от того, большой он или маленький, вблизи
оп или вдали? Как мы видим лица животных и геогра-
фические карты в облаках? Как мы перекладываем
в слова крик птицы или стрекотанье насекомого?»
' Если суметь ответить на эти вопросы, то можно
было бы научить такому же распознаванию образов и
машины. Не трудно себе представить, какое это имело
бы практическое значение: во многих случаях машины
тоже смогли бы мгновенно схватывать общую картину
увиденного или услышанного, смогли бы распознавать
образы, отличая их сразу один от другого без длитель-
ной, трудоемкой, кропотливой работы.
Точного ответа на поставленные вопросы ученые
пока не смогли дать, делались лишь догадки о том,
как это может происходить. Эти догадки основывались
на том, что, как показали исследования, в нервных
тканях^ по которым передаются сигналы от органов
чувств в мозг человека, первичные элементы нервной
ткани — нейроны — образуют волокна, которые распо-
ложены случайным образом, не имеют строго опреде-
ленной длины, по-различному разветвляются. Вместе
с тем проведенные исследования привели к выводу о
том, что память человека не сосредоточена на строго
264
*к<1. III. КИБЕРНЕТИКА
определенных участках коры головного мозга, а рас-
пределена между многими участками, причем распре-
деление это также является в какой-то мере случай-
ным. Было предположено, что так собирается, ассоции-
руется информация, передающаяся от органов чувств
в мозг. На основании этих наблюдений, предположе-
ний, догадок была сделана попытка создать машину,
распознающую сразу, единовременно, образы так, как
это делает человек.
Несколько упрощенная схема такой машины, по-
строенной Ф. Розенблатом и названной им персептро-
ном, изображена наверху на рис. 3.3. Составными ча-
стями персептрона являются рецепторное поле 7, эле-
менты ассоциативного поля 2, реагирующий элемент
3 с выходным каналом 4, элементы настройки 5.
Рецепторное поле персептрона образовано большим
количеством фотоэлементов, с которыми соединены про-'
2, ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 265
рода, по которым протекает электрический ток, если
фотоэлемент освещен, и не протекает, если к фотоэле-
менту не поступает свет. Провода собираются в груп-
пы, в каждой из которых находится одинаковое коли-
чество проводов, случайным образом взятых от раз-
личных точек рецепторного поля. Каждая группа
проводов соединена с входом соответственно одного из
элементов 2. образующих ассоциативное поле. На ри-
сунке показаны лишь четыре ассоциативных элемента,
в построенном персептроне их было много. Эти ассо-
циативные элементы работают следующим образом: на
выходе элемента появляется ток только в том случае,
если превысит заданное пороговое значение число
входных проводов, по которым протекает ток, то есть
проводов, соединенных с освещенными фотоэлемента-
ми. Выход каждого из ассоциативных элементов 2 сое-
динен через свой элемент настройки 5 с реагирующим
элементом 3, который также является пороговым: в вы-
ходном канале 4 появляется ток лишь в том случае,
если превысит- заданное значение сумма токов на входе
этого элемента. Сигналы, поступающие от ассоциатив-
ных элементов 2, можно корректировать с помощью
элементов настройки 5 так, чтобы при появлении на
выходе каждого данного ассоциативного элемента тока
можно было бы по желанию усиливать его или ос-
лаблять.
Как работает персептрон? Сначала ему предъявля-
ются образы, относящиеся к тому же классу, как и те,
которые он после обучения должен научиться распо-
знавать. Делается это так. Если, например, он должен
научиться распознавать букву А, отличая ее от буквы
Б или от других букв алфавита, то вырезаются из кар-
тона буквы А, написанные разными почерками. Выре-
занные буквы А, например такие, как в правой части
рис. 33, накладываются на рецепторное поле, часть
которого, перекрытая буквой, оказывается затененной,
а остальная освещена светом от лампочки 6. Процесс
обучения заключается в следующем. Если при показе
персептрону буквы А в канале 4 появляется ток (сиг-
нал «1»), а при показе буквы Б не появляется (сигнал
«О»), то настройка персептрона не изменяется. Если
же оказываемся, что по каналу 4t наоборот, в первом
266
Ч, Ш. КИБЕРНЕТИКА
случае передается сигнал 0 или во втором сигнал 1, то
ио определенным, * заранее выработанным правилам
производится корректировка так, чтобы на выходе, то-
есть по каналу 4, поступали требуемые сигналы: в пер-
вом случае 1 и во втором 0. Проведенные опыты пока-
зали, что после такого обучения, проведенного с доста-
точно большим количеством букв различных начерта-
ний, персептрон начинает правильно распознавать
буквы, выдавая соответственно сигналы 1 или 0 при
показе ему букв А или Б, по написанию отличающихся
от тех, которые ему показывались раньше.
Если сделать от выхода каждого из ассоциативных
элементов по нескольку ответвлений, подключить к
каждому из них по реагирующему элементу и устано-
вить на каждой из линий передачи сигналов элемент
настройки, то придем к схеме персептрона, предназна-
ченного для распознавания образов, относящихся к не-
скольким различным классам (для распознавания, если
иметь в виду рассмотренный пример, не только двух
букв алфавита, но и других). Опыты, проведенные с
персептронами, показали, что при обучении их указан-
ным выше способом они по мере обучения все лучше
и лучше распознают образы: меньше ошибаются и ча-
ще, а затем и почти во всех случаях, правильно рас-
познают образы, отличая относящиеся к одному классу'
от относящихся к другим. При обучении распознава-
нию восьми различных букв персептрон, который пер-,
воначально был настроен так, что лишь в 10% случаев
давал правильные ответы, после предъявления ему,
букв каждого класса по 10 раз, с последующим каж-
дый раз обучением, давал правильные ответы уже в
50% случаев, после предъявления ему 6yi<B по 20 раз —
в 80% случаев, после предъявления букв -каждого
класса по 30 раз — более чем в 90% случаев, а после
предъявления их по 40 раз, тоже с последующим каж-
дый раз обучением, распознавал их затем уже почтя
безошибочно. Оказалось, что хотя при уменьшении
числа ассоциативных элементов работа персептрона
ухудшается, но все же он продолжает выполнять свои
функции. В этом оп .также оказался аналогичным моз-
гу человека, функции которого часто восстанавливают-
ся при повреждении отдельных его участков. В усовер-
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 267
шенствованном варианте персептрон был сделан много-
слойным, содержащим два или большее количество
рядов ассоциативных элементов, соединенных так, что
на вход каждого ассоциативного элемента следующего
ряда поступали сигналы от группы ассоциативных
элементов предшествующего ряда.
Персептроны оказались способными не только к обу-
чению, но и к самообучению. Схема работы персептро-
на с самообучением приведена внизу на рис. 33, где:
1 — сам персептрон, такой же, как и показанный в
верхней части рисунка; 2 — автоматическое устрой-
ство, представляющее образы персептрону как в про-
цессе обучения персептрона, так и при последующей
его работе; 3 — обучающее устройство, содержащее
элемент сравнения, к которому подходят информаци-
онный канал 4 и канал обратной связи 5. В процессе
обучения проходящий по каналу 4 сигнал о том, каким
должен быть выходной сигнал персептрона при предъ-
явленном ему образе, сравнивается с истинным выход-
ным сигналом, передающимся по каналу 5. При их
совпадении не производится коррекция, а если они не
согласуются, то пб выходному каналу 6 обучающего
устройства передаются сигналы к элементам настройки
персептрона и коррекция производится так же, как и
при обучении персептрона человеком. Обученный та-
ким образом персептрон производит классификацию —
указывает, относятся ли предъявляемые ему в процессе
работы образы к одному классу или же к различным
классам.
Персептроны, когда они были впервые построены,
вызвали большой интерес, и на них возлагались боль-
шие надежды, которые, однако, не оправдались. Ока-
залось, что для практического применения они мало
пригодны. При смещении в сторону или повороте букв
в пределах рецепторного поля так, что они перекры-
вали другие его участки, нужно было заново произво-
дить обучение. Первые персептроны такие, как указан-
ный выше, оказались неспособными распознавать более
сложные образы, что в ряде случаев необходимо для
построения устройств, наделенных искусственным ин-
теллектом. Например, для построения роботов, самосто-
ятельно ориентирующихся в окружающей обстановке.
268
4, HL КИБЕРНЕТИКА
Неудачи, из-за которых были прекращены дальней-,
шие работы с персептронами указанного типа, объяс-
няются не тем, что неправильны идеи, положенные в
основу схемы их построения (как было сказано, спо-
собность персептрона распознавать образы, пусть про--
стейшие, пусть при определенных условиях в отноше-
нии расположения изображений, была подтверждена '
опытами). Причиной этих неудач явилось то, что была,
по-видимому, чрезмерно упрощенной' принятая схемаД
функционирования головного мозга человека, и неко- .
торые важные особенности процессов работы мозга,
пока неизвестные ученым, не смогли быть использова-
ны при построении персептрона.
Несмотря на то, что работы по персептронам, о ко- *
торых было рассказано, по указанным причинам не
были продолжены, они оказались полезными, так как
был дан толчок к дальнейшим изысканиям.
На этом можно было бы закончить разговор о пер-
септрона*. Но в связи с их созданием оказался затро- -
нутым целый ряд вопросов, имеющих фундаменталь-
ное значение, если иметь в виду решение проблем
искусственного интеллекта. Можно сказать, что пер- ч
септроны дали урок, да и не один, а несколько уроков, .
ученым, ищущим пути к машинному распознаванию/'
образов. 1,
Какими же были уроки, извлеченные из работ по
персептронам?
Первым из них был тот, что если рассмотренный
нами персептронный способ распознавания образов не-/
достаточно совершенный, то необходима разработка
других, в большей степени пригодных для практиче-
ского использования.
Было еще раз подтверждено значение случайных -
процессов в организации систем, выполняющих слож-
ные функции управления. Попутно заметим^ что к это-
му времени были высказаны предположения о том,
что случайные процессы имеют существенное значение
не только при работе головного мозга, но и при функ-
ционировании других систем управления в организме "
человека. О том, что случайные процессы играют боль-
шую роль в организации работы сложных систем yiP w
равления, которые сами должны приспосабливаться к
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 269
окружающим условиям, свидетельствовали и данные
других работ, проведенных на ранней стадии поиска
путей построения искусственных самоорганизующихся
систем. В этой связи нужно упомянуть о построенном
у, Р. Эшби гомеостате — демонстрационном устройстве,
состоящем из четырех одинаковых блоков, в каждом
из которых имелся подвижный электромагнит, повора-
чивавшийся при протекании тока по его обмоткам.
Каждый из блоков, соединенный со всеми другими
через автоматически действующие элементы настрой-
ки, осуществлявшие изменение коэффициентов усиле-
ния передачи, мог случайным образом переходить из
одного состояния в другое, причем изменялось и общее
состояние гомеостата. Всего последний мог находиться
в 254 = 390 625 различных состояниях, часть из кото-
рых были устойчивыми, а другие — неустойчивыми. Не
производя перебор соответственно всех возможных ком-
бинаций величин коэффициентов усиления, первона-
чально выведенный из положения равновесия гомеостат
путем случайного поиска, случайным_ образом изменяя
величины коэффициентов усиления, сам быстро, всего
лишь после нескольких переключений, приходил к со-
стоянию равновесия и дальше сохранял это состояние.
Было высказано предположение о том, что процесс
такого поддержания положения равновесия представ-
ляет собой модель процессов гомеостазиса — автомати-
ческого поддержания в живых организмах постоянства
важных для их существования величин таких, напри-
мер, как у человека давление крови или температура
тела.
Опыты, проведенные с персептронами, заставили
ученых еще раз задуматься и^над тем, что наряду с
управлением, основанным на использовании запрограм-
мированных алгоритмов, то есть точных предписаний
машине, производимых шаг за шагом так, что они. обя-
зательно приводят к решению поставленных задач,
может быть полезным и эвристическое управление.
Эвристика это догадка, основанная на использова-
нии предшествующего опыта, на интуиции. На догад-
ках ученых о том, что так может быть, так должно
быть, основывались создание персептрона и гомеоста-
та. Вообще, мы часто делаем предположения, догадки,
270
Ч. Ш. КИБЕРНЕТИКА
потом стараемся проверить их. Появилась мысль по-
пытаться научить догадкам-эвристикам и машины.
Вопрос об эвристиках и алгоритмах сейчас один из
главных при решении проблемы искусственного интел-
лекта. При постановке этого вопроса учитывается
следующее. Как было показано на примере персептро-
на, используя догадку о том, как распознает образы
человек, оказалось возможным на основании этой до-
гадки построить машину, способную в оговоренных
ранее простейших случаях тоже распознавать образы
мгновенно, без длительной, трудоемкой обработки ис-
ходных данных. То, что так может получаться, явля-
ется преимуществом эвристического подхода. Но в рас-
смотренном примере, а это относится и к любым другим
возможным применениям эвристик, поставленная цель
достигается не наверняка, не со стопроцентной гаран-
тией. В отличие от того, что дает алгоритмическое ре-
шение различных задач, в том числе и задач распозна-
вания образов, при использовании эвристик нет уве-
ренности в том, что задача обязательно во всех случаях
будет решена. Обученный персептрон правильно рас-
познавал простейшие образы почти всегда, но иногда
он и ошибался; он распознавал образы правильно лишь
с какой-то, пусть даже высокой, степенью вероятности,
но не наверняка. При эвристическом подходе к реше-
нию пробуют применить сделанное предположение,
и затем проверяют, не привело ли это к ошибочному
результату. По существу эвристический метод сводится
к так называемому методу проб и ошибок. Применение
эвристик оказывается нужным там, где у нас нет твер-
дых знаний; по мере их появления, когда мы знаем,
как нужно сделать то или иное, эвристики заменяются
точными алгоритмами. Во многих случаях оказывается
эффективным совместное применение алгоритмов и эв-
ристик. Как могут вводиться эвристики в машину и
использоваться ею, покажем в ходе этой нашей беседы
на конкретном примере немного позднее.
Пока же рассмотрим, как практически производит-
ся машинами сейчас распознавание образов, пусть не
так быстро и изящно, как это предполагалось делать
с помощью персептронов, о которых мы говорили, но
так, чтобы хотя бы для отдельных практических при-
2. ВОСПРИЯТИЕ ДАННЫХ, РАСПОЗНАВАНИЕ ОБРАЗОВ 271
менений это было приемлемым. Как и при описании
персептрона, будем пока рассматривать распознавание
букв алфавита, имея в виду, однако, что этими же ме-
тодами могут распознаваться и любые другие образы.
Один из применяемых методов основан на сравне-
нии изображения с эталонами. Поле, часть которого
занимает буква, разделяется на ряд ячеек. Как пока-
зано в верхней части рис. 34, для букв А и Б получа-
ются сигналы 0 в ячейках, перекрытых буквой, и сиг-
налы 1 в ячейках, не перекрытых ею. Мы здесь гово-
рим о распознающем образы устройстве, имеющем
такое же рецепторное поле, как и у изображенного на
рис. 33 персептрона, однако могут также получаться
сигналы 0 и 1 при использовании специального опти-
ческого аппарата, считывающего, например, печатный
текст книги. Матрица распознаваемой буквы сравнива-
ется машиной с эталонными матрицами различных
букв. Отнесение прочитанной буквы к тому или друго-
му классу, например к классу букв А или классу
букв Б, производится по наилучшему совпадению дан-
ных сравнения: сравниваются сигналы «1» или «О»,
получаемые в каждой из точек матрицы, или же суж-
дение делается на основании подсчета общего количе-
ства знаков 0 или по количеству их в некоторых выде-
ленных областях поля.
Если производится сравнение данной буквы с ^та-
лонами всех букв алфавита, то это требует выполнения
большого числа операций и соответственно затраты
относительно большого машинного времени. Недостат-
ком рассматриваемого метода является и то, что так
могут распознаваться лишь буквы, напечатанные точно
так же, кац и соответствующие им эталонные. Кроме
того, могут возникать ошибки и при смещениях рас-
познаваемой буквы в ту или иную сторону относитель-
но центра поля: буквы здесь должны быть привязаны
к своему месту так же, как стилизованные цифры в
индексе пункта назначения на почтовых конвертах и
открытках.
В ряде случаев эти недостатки устраняются при
применении другого машинного метода распознавания
образов, основанного на том, что при разделении обра-
зов па классы они сравниваются по характерным при-
272;
я. HI, КИБЕРНЕТИКА
г
- t У У У 1 У 1 У У 1
• 1 У У У У У У 1 У У
У У О О О О О О У У
, У У О О О О О О У У
У У О О У У О О У 1
У , У О О 1 1 О О У У
У У О О О О О О У У.
У У О О О О О О У Г
У У О О У У 0 0 У У
У У О О У 7 О О У У
У У У У У У У У У У
У У У У У У У У У У
ч
< | У У У У У У У У 11
< 1111111111
у У 0 0 0 О 0 0 У у
: у у о о о о о о у у
' 1100111111
- 1100000011
1100000011
1100110011
< У У О О У У 0 0 1 У
‘ 1100000011
У У У У У У У У У У
У У У У У У У У У У
ЯБЕГДЕЖЗИКЛМНППРЕТУФХЦЧШЩЗЮЯ [
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 273
знакам. В отношении того, какие признаки считать
характерными, имея в виду, что они эффективно смо-
гут быть использованы, первоначально можно делать
лишь догадки. Догадки-эвристики. Вот эдесь-то мы
познакомимся с тем, как может пользоваться эвристи-
ками машина.
Но сначала чуть подробнее расскажем о том, как
производится классификация образов данным методом
при выбранных признаках. В качестве примера возь-
мем все буквы русского алфавита, напечатанные таким
шрифтом, как показано на рис. 34. Пусть первоначаль-
но делается попытка разделить их по следующим двум
признакам: по общему количеству отрезков прямых
линий п и. количеству горизонтальных линий пг в на-
чертании каждой из сравниваемых между собой букв.
Эти данные могут быть получены машиной при ее ра-
боте вместе с соответствующим образом устроенными
оптическими датчиками. Группировка всех указанных
выше букв по взятым признакам п и пг иллюстриру-
ется графиком, изображенным в нижней части рис. 34.
Каждой из букв на этом графике отвечает точка
с координатами п, пР, соответствующими данной букве.
Для того чтобы было возможным разделение букв по
выбранным признакам, должны выполняться два усло-
вия: различным буквам обязательно должны отвечать
различные точки плоскости (п, пР), расстояние между
этими точками должно быть как можно большим. Вы-
полнение первого условия является совершенно необ-
ходимым, второго — желательным. Согласно рис. 34
-поставленные условия выполняются, например, в пол-
ной мере для пар букв1) «С» и «X», «С» и «М», «С»
и «Ж». По первому условию оказывается также возмож-
ной классификация по выбранным нами признакам
букв: «Б», «Ж», «М», «С», «X», «Щ». Если бы стави-
лась задача распознавания только этих букв, то задан-
ные нами разделительные признаки были бы, в общем,
удовлетворительными. Для некоторых букв, таких, на-,
пример, как «Ц» и «Ш»; применение признаков п и пР
оказалось безрезультатным: эти буквы оказались пред-
1) Ввиду отсутствия в наборе букв такого начертания,
как на рис. 34, ниже они в тексте берутся в кавычки,
274
Ч. III. КИБЕРНЕТИКА
ставленными одной точкой плоскости (п, пг). Одной
точкой плоскости (п, пг) оказалась представленной и
целая группа.букв: «А», «Л», «О», «Р», «У». Чтобы
было возможным разделение и этих букв, нужно взять
другие разделительные признаки. Например, буквы
«Ц» и «Ш» различаются по тому, что в первой имеется
отрезок прямой ниже строки, а во второй его нет.
Можно попытаться разделить все - буквы, используя и
другие характерные признаки, крторые можно попро-
бовать придумать. Например, такие: имеется ли гори-
зонтальная линия в верхней, в средней или в нижней
части буквы, имеется ли вертикальная линия, ограни-
чивающая букву слева или справа, и т. д. Если исполь-
зовать три признака, то характеристика буквы будет
уже представлена точкой не на плоскости, как на
рис. 84, а в трехмерном пространстве. При большем
количестве разделительных признаков уже не пред-
ставляется возможным отобразить их в виде наглядной
геометрической картины; в этом случае интересующие
нас точки находятся, как говорят, в многомерном про-
странстве. Но можно факты совпадения или несовпаде-
ния по каждому из признаков для одной и другой из
рассматриваемых букв в случае, когда признаков два,
представить как значения 0 и 1 логических перемен-
ных и х2 и о разделении судить по получению зна-
чения «1» функции у^х&х^ если же используется
несколько, например А, признаков, то это будет зна-
чение 1 функции у =» Xi & х2 & ... & xh. Выполнение
этой операции с целью выяснения того, производит-
ся или не производится разделение, легко доступно
машине.
Более сложны вопросы нахождения подходящих
разделительных признаков. Догадки, о которых раньше
было сказано, делались пока нами, а не машиной,
и каждая из них при пользовании ею и последующей
проверке то ли приводила к требуемому результату, то
ли нет. Так, по признаку «наличие отрезка прямой
ниже строки» мы смогли-разделить буквы «Ц» и «Ш»,
используя этот признак вместе с ранее указанными.
Один он не позволил бы нам разделить в пространстве
признаков буквы «Ц» и «Щ». Однако введение допол-
нительно этого признака не помогло нам разделить бук-
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 275
вы из группы «А», «Л», «О», «Р», «У» или из группы
«д», «Е». Разделение последних букв может быть про-
изведено при использовании признака «наличие верти-
кальной линии, ограничивающей букву слева». По по-
следнему признаку отделяется от других букв первой
группы буква «Л» и т. д.
В общем, чтобы найти эффективные разделительные
признаки, нужно делать догадки — одни за другими —
и затем производить проверки того, что они дали. Если
одни догадки не оправдались, то нужно пытаться де-
лать другие.
Можно составить список всех наших догадок, всех.
• возможных, с нашей точки зрения, разделительных
признаков и передать их машине, дав ей указание про-
бовать их, проверяя каждый раз, получаются ли нуж-
ные результаты. Если получаются, то поиск остано-
вить, если нет, то продолжать его дальше,—делать
другие догадки. Учитывая ранее накопленный опыт
(например, перейдя после распознавания показанных
на рис. 34 букв или к распознаванию русских букв,
напечатанных другим шрифтом, или к распознаванию
букв латинского алфавита, или к распознаванию цифр),
машина сможет его в дальнейшем использовать. Это
значит, что ее можно соответствующим образом запро-
граммировать. Можно также дать ей рекомендации,
когда целесообразно делать догадки в той или другой
последовательности, стараясь быстрее добиться резуль-
тата, или же эти рекомендации могут быть выработаны
самой машиной на основании анализа накопленного
опыта (того, что откладывается в ее памяти). Это тоже
может быть запрограммировано первоначально.
Приведенный пример показывает, как вообще мо-
гут использоваться эвристики машиной.
Буквы печатного текста, о которых шла речь,—
лишь один из объектов, распознавание которых имеет
практическое значение. Возникает также необходи-
мость и в распознавании другие образов. Это могут
быть кривые, показанные на рис. 35, или кривые иной
формы. Или же возникает задача распознавания окруж-
ностей и шестиугольников —по типу изображенных на
том же рисунке, или любых других образов, сколь
угодно сложных.
276
Ч. III. КИБЕРНЕТИКА
Машинные методы распознавания образов в том ви-
де, в каком они были нами рассмотрены, пригодны
для относительно узкого круга объектов. Значительно
более широкой является область применения статисти-
ческих машинных методов распознавания»образов, с ко-
торыми нам будет нетрудно познакомиться после того,
что было рассказано раньше. Знакомиться с этими ме-
тодами мы также начнем на примере распознавания
букв.
Пусть имеется большое количество букв А и Б, на-
писанных от руки разными почерками. Мы указываем
здесь их обозначения с кавычками, подчеркивая эгиму
2.~В0СПРИЯТИЕ ДАННЫХ РАСПОЗНАВАНИЕ ОБРАЗОВ 277
что имеется в виду та или другая буква вообще; даль-
ше будут указаны некоторые из возможных видов их
написания. Разделительные признаки, например п и
пг, если ими пользоваться как и раньше, оказываются
здесь непригодными, так как .уже не разным буквам,
как было представлено на рис. 34, а одной и той же,
пусть букве «А», по-разному написанной, могут отве-
чать различные точки плоскости (и, пг). Поясним это.
Рассмотрим буквы
Я, А, А.
Для первой из них п ~ 4, пг = 2, для второй п = 3,
пг = 1, для третьей п = 5, пг == 3. Могут не быть одина-
ковыми значения п и пР и для написанных различными
почерками букв «Б». Теперь уже в плоскости (п, пг)
каждой из букв «А» и «Б» отвечают не отдельные точ-
ки; а множества точек, целые области плоскости при-
знаков. Это одна из особенностей того, к чему мы
сейчас переходим.
Но пойдем дальше. При большом количестве, на-
пример сотнях или тысячах образцов данной буквы, на-
писанных разными почерками, при последовательном
их просмотре можно считать случайным событием то,
что для следующей буквы получится одно или другое
сочетание значений п и пг, и, следовательно, мы по-
падем в ту или другую точку указанной ранее области
плоскости (п, пР). Посчитав, сколько раз всего мы по-
падаем в данную точку, и поделив это число раз на
общее количество просмотренных за все время букв,
мы определим частоту попадания в ч рассматриваемую
точку и эту частоту приближенно примем за вероят-
ность попадания р. То 'же самое можно сделать и для
других точек плоскости (п, пг). Если, например, при
просмотре 1000 написанных различными почерками
букв «А» для 20 из них, как и для А, получатся зна-
чения ^ = 3, пР = 1, то будем считать, что для точки
плоскости (п, пР) с этими координатами р = 20/1000 =
= 0,02. То же самое можно сделать и для буквы «Б».
Таким же образом можно было бы поступить, если
бы мы рассматривали не буквы, а некоторые другие
объекты I и II, приняв для них за характерные какие-
278
Ч. Ш. КИБЕРНЕТИКА
то признаки п{ и п$. Откладывая при этом для каждой
из рассматриваемых точек плоскости (пъ пР по верти-
кальной оси соответствующее ей значение р, мы смог-
ли бы построить в пространстве (пй nh р) поверхности,
на которых находились бы полученные так точки для
объектов I и II. Такие картины распределения веро-
ятностей изображены на рис. 35 слева в средней его
части. Показана проведенная в плоскости (п/, п,) ли-
ния между областями, относящимися к объектам I и IL
Пусть уравнением этой кривой будет /(пг, пР»0.
Функция /(пй пР, называемая дискриминантной, может
быть определена, если известны указанные области
плоскости (п<, пР. Линия /(п<, пр==0 делит плоскость
(nf, пР на две части. При переходе с одной из них на
другую, например с заштрихованной на рисунке на
незаштрихованную, меняется знак функции nj)
(например, с + на —).
Распознавание образов производится этим методом
так. Первоначально производится обучение, как это
было и для персептрона, о котором мы говорили сна-
чала. Здесь оно заключается в том, что при предъявле-
нии распознающему устройству достаточно большого
количества объектов классов I и II, для каждого из
них каждый раз получаются (различные или сЪвпада-
ющие, как в ранее рассмотренных нами примерах) зна-
чения nir а также и значения nh и одним из блоков
устройства, выполняющим нужную обработку данных,
формируется дискриминантная функция /(n(, nJ. Когда
же после обучения распознающему устройству предъ-
является другой объект какого-либо из этих классов,
то вторым специализированным блоком устройства оп-
ределяется при соответствующих данному объекту
значениях ni и знак функции /(пъ В зависимости
от того, каков этот знак, + или предъявленный об-
раз относится или к классу I, или к классу II.
По тому, что было рассказано, нужно сделать не-
сколько дополнительных замечаний.
Прежде всего заметим, что при распознавании по
признакам тц и nj образов, относящихся не к двум,
а к большему числу классов, на указанном рисунке
соответственно большим будет количество областей,
для определения принадлежности к которым должны
2. ВОСПРИЯТИЕ ДАННЫХ. РАСПОЗНАВАНИЕ ОБРАЗОВ 279
формироваться дискриминантные функции. За крите-
рий разделимости классов принимается вероятность
ошибки классификации или же берутся другие, более
удобные для вычислений, критерии. Если вернуться к
рисунку, о котором мы до этого говорили, то вероят-
ность ошибки тем меньше, чем дальше находятся друг
от друга в плоскости (пь п0 области, отвечающие клас-
сам I и II. Если же эти области пересекающиеся, как
показано на рисунке рядом, то вероятность ошибки
заведомо будет большей.
Отметим дальше, что для классификации может
оказаться необходимым использование не двух Харак-
терных признаков П{ и щ (признаки называют также
информативными), но и большего их количества, в об-
щем случае N признаков nt, ....., nN,
Это должно быть сейчас ясным после того, что рас-
сказывалось о распознавании букв ранее рассмотрен-
ным методом (вспомним то, что говорилось о графике
с буквами, изображенном в нижней части рис. 34). Для
пояснения можно привести и такой пример. Если дол-
жны распознаваться характеристики изменения за пе-
риод Т некоторой величины х в функции от времени t
(рассматривается множество характеристик, одна из
которых изображена на рис. 35 внизу слева), то за
информативные признаки могут быть приняты значе-
ния х в моменты времени ..., th ..., tN.
При более чем двух характерных признаках, так
же как это было указано раньше, находится дискри-
минантная функция в процессе обучения, теперь
лишь —в общем случае—-это /(nb ..., ...,
и затем определяется знак ее при предъявлении рас-
познающему устройству новых объектов.
Схема устройства для статистического распознава-
ния образов представлена внизу нет рис. 35. На схеме:
1 — блок формирования дискриминантной функции,
2 — блок определения знака этой функции.
До сих пор мы говорили о статистическом распоз-
навании образов на основе предварительного обучения
распознающего устройства. Классификация в принципе
может производиться и без использования обучающего
множества объектов; в этом случае просто производит-
ся группировка объектов по сходным признакам. Та-
280
Ч. Ш. КИБЕРНЕТИКА
кую классификацию называют автоматической клас-
сификацией или классификацией без учителя.
Выбор характерных признаков имеет большое зна-
чение. Мы убедились в этом, рассматривая предыду-
щий метод распознавания; в полной мере это относится
п к статистическому методу. Процедура выбора при-
знаков также может быть автоматизирована. При этом
распознающее устройство включает в себя блок фор-
мирования признаков и блоки, которые были показаны
на рис. 35.
Статистическое распознавание образов, о котором
сейчас говорилось, в чем-то напоминает то, которое
должно было производиться первыми персептронами.
И там и здесь используются свойства случайных про-
цессов. Производится при применении статистического
метода, о котором только что было рассказано, и пред-
варительное обучение или же выполняется автоматиче-
ская классификация. Но есть и существенные различия
между этими методами. Действие персептрона момен-
тальное, второй же метод основан на машинной обра-
ботке большой информации. Зато этот метод резуль-
тативный, а попытки практического использования пер-
вых персептронов, как уже упоминалось, оказались
безрезультатными, хотя в простейших случаях эти
персептроны и были работоспособными.
Хорошо было бы создать машины, более быстро
распознающие образы, чем это сейчас получается. Соз-
дать машины, возможности которых в этом были бы
ближе к возможностям мозга человека. Но как же все-
таки распознаются образы человеком? Если первона-
чальные догадки, положенные в основу построения
первых персептронов, пусть и правильные, не явля-
ются исчерпывающими/то что другое можно было бы
предположить, что бы навело на путь дальнейших по-
исков и разработок? Ученые продолжали думать об
этом, и совсем недавно, лишь несколько лет тому
назад, появилась новая догадка о том, как же получа-
ется, что человек быстро распознает образы. Эта до-
гадка была сделана американским ученым М. Минским,
разработавшим теорию фреймов.
Слово фрейм толкуется как скелет, остов. Догадка
же, о которой было сказано, заключается в следующем.
2. ВОСПРИЯТИЕ ДАННЫХ РАСПОЗНАВАНИЕ ОБРАЗОВ - 281
В мозгу человека удерживаются стереотипные, то есть
часто встречающиеся, образы, причем прочно удержи-
вается основная их часть, а не основная, отдельные
детали, которые могут быть разными для различных
образов одного и того же класса, если они и имеются,
легко могут быть заменены. Структура элементарного
образа представляется при этом в виде такого дерева,
как то, о котором говорилось во второй части книги
(оно было показано на рис. 25). Корневая вершина и
вершины следующего ряда соответствуют основной не-
изменной части образа; вершинам же нижнего ряда,
называемым здесь терминалами, отвечает информация,
которая легко может заменяться.
Как происходит, согласно этой теории, воспроизве-
дение образов? Сразу всплывает в памяти соответству-
ющий стереотип, а затем производится, если можно
•так сказать, дорисовка отдельных деталей. Насколько
это ускоряет представление того или другого образа и
его распознавание? Конечно, намного. Это то же самое,
как если бы художник долгое время писал картину,
и уже почти готовая, в зависимостп от нескольких по-
следних штрихов, она принимает тот или другой окон-
чательный вид.
Есть ли что-либо, что говорило бы в пользу того,
что действительно в памяти человека хранятся фрей-
мы — остовы, скелеты образов?
Может быть подтверждением этому может служить
следующее. Попробуем восстановить в памяти какой-
либо образ,. например лицо знакомого человека (по-
пробуйте тоже это сделать, читатель). Он представля-
ется расплывчатым, вырисовывается лишь в общих
чертах. Если же мы встретим этого человека или уви-
дим его фотографию, то восстанавливаются и детали
созданного образа. Не является ли подтверждением
того, что в памяти человека хранится огромное ко-
личество стереотипов, остовов образов, то, что они
всплывают из глубин памяти, когда мы спим и ви-
дим сны?
Как используются фреймы при восприятии челове-
ком нового, какое отношение имеет теория фреймов
к распознаванию образов, о котором до сих пор шла
речь? Вот что говорят об этом ученые, занимающиеся
282
Ч. III. КИБЕРНЕТИКА
вопросами искусственного интеллекта. М. Минский в
книге «Фреймы для представления знаний» (издатель-
ство «Энергия», 1979 г.) писал: «...человек, пытаясь
познать новую для себя ситуацию или по-новому
взглянуть на уже привычные вещи, выбирает из своей
памяти некоторую структуру данных (образ), называе-
мую нами фреймом, с таким расчетом, чтобы путем
изменения в ней отдельных деталей сделать ее пригод-
ной для понимания более широкого класса явлений
или процессов». Председатель Научного совета по про-
блеме «Искусственный интеллект» комитета по систем-
ному анализу при Президиуме Академии наук СССР
чл.-корр. АН СССР Г. С. Поспелов в предисловии к
переводу книги М. Минского дает такое определение
фрейма: «Фрейм любого вида — это та минимально
необходимая структурированная информация, которая
однозначно определяет данный класс объектов. Нали-
чие фрейма позволяет относить объект к тому классу,
который им определяется».
Многообещающим является применение принципа
фреймов в машинах. Действительно, если в памяти
машины будут находиться фреймы различных классов
объектов, упростится и быстрее будет производиться
представление образов и их распознавание.
3. Машинное решение задач
и доказательство теорем
Вопросы, к обсуждению которых мы сейчас при-
ступим, тесно связаны с теми, о которых шла речь
раньше. Например, распознавание образов использу-
ется при решении различных задач и вместе с тем
может рассматриваться как самостоятельная зада-
ча. Возникают и такие задачи, для решения которых
представляется необходимым проведение логических
рассуждений. Среди вопросов, касающихся машин-
ного решения задач и доказательства теорем, выде-
лим следующие. Типы задач. Общие подходы к их
решению. Машинная логика. Представление знаний.
Дальнейшие применения фреймов. Способы поиска
решений. Современное состояние разработки машин-
ных методов решения задач.
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
283
Возникает необходимость в решении весьма различ-
ных задач, простых и сложных. Сложные задачи уп-
равления относятся к кибернетике. При определении
того, что такое искусственный интеллект, было сказа-
но, что это — «искусственная система, имитирующая
решение человеком сложных задач в процессе его жиз-
недеятельности». В отношении задач, предназначенных
для машинного решения, подчас нелегко указать, какие
из них следует считать простыми, какие —-'сложными.
То, что является трудным для человека, иногда легко
дается машинам. Например, если требуется проведение
больших по объему вычислений. И наоборот, то, что
часто просто, походя делается человеком, представляет
большие трудности для машины. Человеку в жизни
приходится решать множество задач. Это не только
математические задачи, которые каждый из нас решал
в школьные годы. С решением огромного количества
задач связана вся жизнедеятельность человека, повсе-
дневные его действия. Что бы мы ни делали, все это
может рассматриваться как решение тех или других
задач. Утром нужно одеться, умыться, позавтракать,
пойти на занятия или на работу, при пользовании го-
родским транспортом сесть в идущий в нужном на-
правлении автобус, произвести массу нужных действий
в течение рабочего дня, в часы отдыха сыграть с това-
рищем в шахматы, стараясь, конечно, выиграть партию.
Сложные задачи часто связаны с выполнением функ-
ций управления. Человек воздействует, решая эти за-
дачи, на внешний мир. Управляет он постоянно и
своим поведением. Человеком решаются задачи созда-
ния новых машин, создаются произведения искусства.
Почему, начиная говорить о машинном решении за-
дач, мы прежде всего вспомнили обо всех этих сторо-
нах деятельности человека? Это связано с тем, что
люди стараются не только научить машины хорошо
решать математические задачи, но и сделать так, что-
бы в будущем роботы, наделенные искусственным ин-
теллектом, могли вести себя, как человек, когда им
придется самим ориентироваться в незнакомой обста-
новке и самостоятельно принимать в этих условиях
нужные решения. Например, тележка-робот, разнося
в больнице лекарства, должна будет не заблудиться в
284
Ч. Ш КИБЕРНЕТИКА
больничных коридорах, найти каждый раз нужную па-
лату, войти в палату, подойти к больному и передать
прописанные^ ему лекарства. Робот, наделенный ис-
кусственным интеллектом, должен будет правильно
сориентироваться в случае создания непредвиденной
обстановки при выполнении порученной ему работы по
ремонту атомного реактора. Правильно должен дей-
ствовать в незнакомой обстановке, робот-планетоход.
Имея в виду эти перспективные применения в будущем
кибернетики, ученые, занимаясь разработкой методов
машинного решения задач, уделяют уже сейчас боль-
шое внимание наряду с математическими задачами
также и таким, как указанные выше, которые назовем
задачами обыденного поведения (обыденного — для че-
ловека). Для машин задачи этого вида оказываются
наиболее трудным^.
Во многих случаях в жизни людей складываются
ситуации, аналогичные встречающимся в играх, когда
существенны действия противоборствующей стороны.
Игровые задачи тоже привлекают к себе внимание
специалистов по искусственному интеллекту.
Примем такое разделение для рассматриваемых на-
ми задач: математические задачи, задачи управления
и задачи обыденного поведения, игровые задачи, зада-
чи творчества. Разделение это условное. Например, за-:
дачи обыденного поведения иногда сводятся к игровым,
а творческий процесс создания новых видов машин п
приборов может включать в себя на каких-то этапах,
и расчеты, для проведения которых используются ма-'
тематические формулы.
Во многом сходно с решением математических за-7
дач и доказательство теорем. Однако постановка воп-
роса здесь иная. Для задачи является заданным ее ус-
ловие и требуется путем соответствующих преобразо- -
ваний прийти от исходного условия к ответу, заранее
неизвестному. Для теоремы же являются заданными-
и исходные посылки (аксиомы) и формулировка теоре-
мы. Требуется путем рассуждений перейти от первых
к последней и таким образом доказать справедливость
теоремы.
Рассмотрим сначала математические задачи различ-
ной степени сложности.
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
285
С машинным решением несложных математических
задач мы знакомы. На рис. 36 наверху представлена
блок-схема, отражающая логическую структуру про-
цесса решения машиной зада-
чи нахождения корней квад-
ратного уравнения ахг + Ъх +-
4- с = 0. Прямоугольниками,
ромбами и кружком обозна-
' чены блоки, в которых вы-
полняются в ходе решения
различные операции. Схема
эта взята из школьного учеб-
ника по алгебре для 8-го
класса средней школы, где
она описана. Там же подроб-
но рассказано, как записыва-
ется программа решения
данной задачи на алгорит-
мическом языке АЛГОЛ-60.
Для численного решения за-
программированной таким
образом задачи в, каждом
конкретном случае нужно за-
дать лишь значения коэффи-
циентов а, Ь, с машине и
дальше определение корней
уравнения производится ею
уже автоматически. Заметим,
что программа решения да-
же этой простейшей задачи
является разветвленной: в
зависимости от -того, равен
нулю или нет дискриминант
О = Ъ2, — 4ас, и если нет, то
в зависимости от его знака
машина выбирает каждый
раз одно из двух возмож-
ных продолжений решения.
Однако, коль скоро эти данные о величине D получе-
ны, остается одна-единственная программа.
Если машина запрограммирована для решения ка-
кой-либо задачи такой степени трудности, то нельзя
286’
Ч. III. КИБЕРНЕТИКА г
считать, что умение решать задачи этого типа уже яв-
ляется проявлением интеллектуальных способностей
машины. Однако то, что разработаны программы, по
которым машина может решить любую из алгебраиче-
ских задач, указанных в школьном учебнике, отмеча-
ется в книгах по искусственному интеллекту как одно
из достижений.
Сложные задачи, если рассматривать решение их
человеком,—это такие, над которыми нужно изрядно
потрудиться, хорошо подумать, поломать голову, как
говорят, над их решением. Для машины понятие слож-
ности связано с тем, в какой мере необходимо приме-
нение аппарата логики и применение других специаль-
ных приемов, насколько сложным и разветвленным
является поиск решения, насколько широко' использу-
ются в процессе решения знания.
К относительно сложным математическим задачам
относится интегрирование функций, если имрть в виду
интегралы любого вида. Это задачи сведения сложного
интеграла к элементарным табличным интегралам (см.,
например, таблицу элементарных первообразных функ-
ций в конце учебника для 10-го класса). Разработаны
машинные программы интегрирования любых функций,
для которых только интегрирование возможно.
Дальше расскажем об общих подходах к решению
задач.
Как правило, решение каждой сложной задачи про-
изводится, будь то человеком или машиной, по этапам,
на каждом из которых решается какая-то из более
простых задач, то есть сложная задача расчленяется,
на ряд более простых.
Рассмотрим хотя бы следующий интеграл:
§ — 3/я4 + 5/(х Ух) + 1/sin2 (л/6 4- х/3) +
+ х/У 1 — 2х] dx. *
Это пример, объединяющий тип примера, подробно4
разобранных в школьном учебнике (мы взяли только
здесь неопределенный интеграл, подстановка пределов
при вычислении определенного интеграла не составля-
ет труда для машины)..
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ ' 287
Согласно первому из правил интегрирования, ука-
занных в учебнике, прежде всего надлежит предста-
вить данный интеграл в виде суммы пяти интегралов
(по числу членов алгебраической суммы в подынте-
гральном выражении). Первый из них уже прямо яв-
ляется табличным. В следующих двух, согласно второ-
му из указанных в школьном учебнике правил, нужно
вынести постоянный множитель за знак интеграла и
привести затем подынтегральные выражения 1/хк и
l/U/я) соответственно к виду x~k и я*"3/2, после чего
и эти два интеграла становятся табличными. Четвер-
тый из выделенных интегралов подстановкой £ = л/6 +
+ х/Ъ, dt = dx/& приводится, как трже было указано
в школьном учебнике, к интегралу J 3d£/sin21 и после
вынесения множителя 3 за знак интеграла к таблич-
ному: J dtf/sin2 L И, наконец, пятый интеграл приво-
дится, что также указано в школьном учебнике, к таб-
личным путем замены, выполняемой по формуле t —
= 1 — 2т, откуда следует: х » (1 — £)/2.
Как видим, задала расчленяется на ряд подзадач.
Сведение задачи к подзадачам, каждая йэ которых
уже более просто решается, характерно и дДя обыден-
ного поведения человека. Часто это делится маши-
нально, подсознательно, без акцентирования на э^ом
нашего внимания. Если, например, я нахожусь за
письменным столом и мне понадобилась книга, которая
стоит в книжном шкафу, то, решая задачу, заключаю-
щуюся в том, чтобы взять книгу, я должен произвести
целый ряд промежуточных действий, каждое из кото-
рых является одной из подзадач: встать из-за стола;
пойти к шкафу;' если на пути встретилось препят-
ствие •— стул, то убрать его в сторону или обойти; по-
дойти к шкафу; отыскать, с какой стороны книжной
полки находится книга; если это будет, например, пра-
вая сторона, То отодвинуть влево правую из стеклян-
ных створок шкафа; взять книгу; вернуться к письмен-
ному столу. Также обычно сводятся к ряду подзадач
задачи и в тех случаях, когда к их решению привле-
кается сознание человека.
Характерным для многих задач, которые должны
решаться человеком или машиной, является необходи-
288
Ч, Ш. КИБЕРНЕТИКА
мость предпосылки последующему их решению общей
оценки ситуации, наметки общего -плана решения/ ко- -
торый потом, возможно, будет уточняться. Для этого
формируется модель, на которой отрабатывается про--
цедура решения. Говоря о модели, будем иметь в виду .
выделение главного, действительно необходимого для
решения задачи, при отвлечении от того, что является \
в данном отношении второстепенным. Это касается и. ~
математических задач, но особенно важно для задач,
названных нами задачами обыденного поведения..
Различают формальные и неформальные методы
решения задач. |
Используются цри решении задач логический вы- |
вод —дедукция — и узнавание. Одним из видов по- -
следнего является распознавание образов,, которому
была посвящена прошлая наша беседа.
Раньше мы познакомились о символьной информа- |
цией, получение и -обработка которой доступны для |
машин. Сейчас увидим в полной мере, какие это от- а
крывает возможности для представления машинным ||
способом отношений между различными явлениями Л
внешнего мира, для установления и анализа различ- ||
ных причинно-следственных связей. ^1
Чтобы машина могла делать нечто аналогичное ||
нашим логическим рассуждениям, логические действия i|
должны быть формализованы, то есть должны описы-Jl
ваться формулами или таблицами, и в конечном счете Ц
должны быть представлены просто некоторыми после- i|
довательностями символов 1 и 0, с которыми опери-1|
рует машина. Ц
В первой части книги было рассказано, как выпол-л
няются элементарные логические функции технике-1|
скими устройствами, и в качестве примера устройств,я
выполняющих такие или более сложные логические 11
функции, были рассмотрены автоматический оптими-1]
затор и автоматическое устройство,. останавливающее?!
• техно логический процесс химического производствам
при создании аварийных условии. i
Исторически сначала учеными был создан аппарату
математической логики (основатель булевой алгебры;]
Дж. Буль жил в XIX веке) и уже позднее, лишь в по*.Л
следние десятилетия, начали применять его в технике^]
3 МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
289
Покажем, как логические функции и формулы,
определяющие правила действий с логическими функ-
циями, используются не только в технике, но и более
широко.
Обратимся к обычным рассуждениям человека и
посмотрим, что и как в них может быть формализова-
но. Рассмотрим в качестве примера следующее выска-
зывание: «То, о чем мы сейчас говорим, интересно».
Если это правда, и, следовательно, данное высказыва-
ние является истинным, то обозначим это символом 1.
Если же в действительности то, о чем рассказывается,
вас не заинтересовало, кажется вам скучным, то при-
менение этого высказывания в данном случае будет
ошибочным, ложным. Это можно обозначить симво-
лом 0. Обобщая то, что относится к истинности или
ложности нашего высказывания, можно ввести в рас-
смотрение некоторую логическую переменную величи-
ну ж, принимающую значение 1, если оно истинно,
и принимающую значение 0, если оно ложно. Сделаем
теперь высказывание, противоположное ранее указан-
ному: «То, о чем мы сейчас говорим, неинтересно».
В зависимости от того, истинно оно или ложно, для
него тоже можно принять обозначения соответственно
символами 1 и 0. Но ясно, что если первое высказы-
вание истинно, то второе ложно, и наоборот, если
первое ложно, то второе истинно. Следовательно, если
то, о чем мы сейчас говорим, действительно интересно,
то применительно к первому высказыванию это ото-
бражается символом 1, а применительно ко второму —
символом 0, а если неинтересно, то первому высказы-
ванию будет отвечать символ 0, но зато второму —
символ 1. Второе высказывание можно рассматривать
как логическое отрицание первого. Поэтому если при-
нять первое за исходное, обозначая как х«1 или
я == 0 истинность или ложность его, то соответственно
истинность или ложность второго высказывания мо-
жет быть представлена как функция отрицания логи-
ческой переменной х, то есть i/ = "b*(c этой и другими
первичными логическими функциями мы встречались
в первой части книги). Дальше рассмотрим следующее
высказывание: «Для ознакомления с основами мате-
матической логики нужно проштудировать книгу.., и
Юл. А, Залманзон
290
Ч. ПТ КИБЕРНЕТИКА
прочесть книгу...». Будем считать, что там, где у нас
многоточия, в действительности указаны названия той
и другой книги. Это высказывание уже может быть
представлено как логическая функция двух первичных
высказываний: «нужно проштудировать книгу» одну
и нужно «прочесть книгу» другую. Каждое из этих
двух высказываний само по, себе может быть истин-
ным или ложным. Например, первое является ложным,
если первая из названных книг никакого отношения
к математической логике не имеет, а второе ложно,
если в_ первой книге вопросы математической логики,
наоборот, изложены столь исчерпывающе, что вторую
кйигу читать не нужно. Выражая истинность или лож-
ность первого из этих высказываний значениями i и 0
логической переменной xh второго из них — соответ-
ствующими значениями логической переменной ж2,
придем к тому, что истинность или ложность всего
исходного высказывания представляется соответствую-
щими значениями конъюнкции y = xi&x2, А если бы
исходным высказыванием - было «... нужно проштуди-
ровать книгу ... или прочесть книгу...», то мы таким
же образом пришли бы к формуле логической дизъ-
юнкции у = Xi V х2. Или еще один пример: «Я взял с
собой плащ, он мце пригодится, если пойдет дождь
и (в другом варианте пусть будет здесь «или») будет
ветрено». В этом случае имеем высказывание, состав-
ными частями которого являются уже несколько вы-
сказываний, каждое из которых, при том же подходе
к нему, что и раньше, может быть истинным или лож-
ным. Может быть ложным то, что я взял с собой плащ.
Например, я хотел его взять, но позабыл это сделать.
А если и взял его с собой, то, возможно, он мне не
пригодится, так как если не будет ветрено, а только
пойдет дождь, то у меня есть при себе зонт, и плащ
будет не нужен. Только что были сделаны некоторые
дополнительные высказывания, которые, если нужно
учесть их, должны быть рассмотрены вместе с ис-
ходным.
В общем, здесь мы имеем более сложные связи,
которые, однако, также указанным выше способом
можно описать логическими формулами. Кроме пер-
вичных формул у ~ "Ъ, у == Xi & x2i y^=XiVx2) так же
3 МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
291
как и для известных нам приложений в технике, мо-
гут использоваться и другие первичные логические
формулы. Так смысл формулы у = xv ж2, в том, что
некоторые высказывания равносильны (этой формулой
выражается мысль «тогда и только тогда»). Формула
у = х2 прочитывается как «если ..то...», «толь-
ко если», «влечет за собой».
Мы пришли к тому, что сложные высказывания
могут быть представлены в функции от других, более
простых, и зависимости между различными высказы-
ваниями могут быть выражены формулами булевой
алгебры.
Все это относится к так называемому исчислению
высказываний. В последнем определены законы поль-
зования логическими связками «и», «или», «не», «тог-
да и только тогда» и другими в самых общих случаях.
Выполнение таких логических действий доступно ма-
шине, так как применительно к конкретным высказы-
ваниям оно сводится к оперированию символами 1 и О,
взятыми в соответствующей каждый раз последова-
тельности.
Исчисление высказываний применяется самостоя-
тельно и, вместе с тем, входит как составная часть в
так называемое исчисление предикатов, позволяющее
выполнять логические* действия еще боле.е широкого
класса. Исчисление предикатов в основном и применя-
ется сейчас при разработке устройств управления, ко-
торые пытаются наделить искусственным интеллектом.
Что называют предикатом? Пусть х представляет
собой какой-либо элемент из множества элементов {х},
a F(x) общее высказывание об х, которое, будучи при-
менено к любому конкретному х из множества {#},
принимает одно из двух значений: «истинно» или
«ложно» (1 или 0).
Такое, неопределенное в общем виде, высказывание
и называется предикатом. Поясним сказанное приме-
ром. Пусть, например, {#} — есть множество названий
предметов, в числе которых имеются «регулятор» и
«пальто», a F(x) представляет собой высказывание «х
является одним из элементов системы автоматического
регулирования». В общем виде это высказывание не-
определенное. Но если вместо «х» мы подставим в него
Ю*
292
Ч. Ill КЙВЁРЙЕТЙКА
слово «регулятор», то оно станет определенным, истин-
ным, а если подставим слово «пальто», то станет тоже
определенным, но ложным. Таким образом, предикат
представляет собой функцию, принимающую одно из
двух' значений «истинно» или «ложно» в зависимости
от того, к какому из элементов множества она приме-
нена.
Аналогично тому, как и для высказывания F(#),
дается определение предиката в случаях, когда выска-
зывание относится к нескольким элементам, например
к элементам я£, хъ я3, каждый из которых задан на
своем множестве. При этом предикат представляет со-
бой высказывание Fixi9 xit я3), которое при конкрети-
зации значений я<, я2, х3 также принимает одно из
двух значений «истинно» или «ложно».
Кроме символов &, V, » и других, используе-
мых в исчислении высказываний, в исчислении преди-
катов применяются еще' символ ух, называемый кван-
тором всеобщности, и символ Зя, называемый кванто-
ром существования. В применении к высказыванию
Fix) выражение VxF(x) означает, что Fix) истинно для
каждого х из множества {я}, а выражение ^xF(x) оз-
начает, что Fix) истинно хотя бы для какого-либо од-
ного я из множества {я}.
Указанное выше исчисление предикатов иногда на-
зывают исчислением предикатов первого порядка, так
как известны исчисления предикатов более высоких
порядков. Их мы касаться не будем ввиду того, что
при машинном решении различных задач в качестве
основного языка обычно используется исчисление пре-
дикатов первого порядка.
Исчисление высказываний и исчисление предикатов
используются при машинном решении задач и доказа-
тельстве теорем.
Могут доказываться машиной не только теоремы,
подобные знакомым нам по школьному курсу геомет-
рии, но и такие, которые относятся к области, назван-
ной нами обыденным поведением. Что здесь имеется
в виду под теоремой, поясним следующим примером.
Пусть исходными посылками — аксиомами — являются
«я могу читать текст, напечатанный мелким шрифтом,
только тогда, когда я в очках» и «я сейчас читаю
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
293
текст, напечатанный мелким шрифтом». Логическим
следствием этих посылок — теоремой — является ут-
верждение «я сейчас в очках». Здесь цепочка рассуж-
дений совсем короткая. При доказательстве более
сложных теорем приходится иметь дело с соответст-
венно более длинными цепочками рассуждений. Ма-
шине задаются аксиомы и задается предложение, ко-
торое должно быть доказано, и доказательство состоит
в том, что путем логических рассуждений осуществля-
ется последовательный переход от исходных условий
к конечному результату.
Разработаны. различные методы машинного доказа-
тельства теорем. Наиболее широко используется пред-
ложенный Дж. А. Робинсоном метод, который приме-
нительно к исчислению высказываний называют мето-
дом пропозициональной резолюции, и основанный на
нем более общий метод резолюции в исчислении пре-
дикатов. Основным в методе пропозициональной резо-
люции является то, что сначала теорему считают лож-
ной, и эта приводит к противоречивому или явно
невозможному результату. Этот принцип доказатель-
ства теорем, в общем, нам знаком. Вспомним, как во
многих случаях, доказывая в школе геометрические
теоремы, мы шли от противного. Ход рассуждений при
этом был таким. Нужно доказать то-то и то-то. Пред-
положим противное. Дальше доказывалось, что утверж-
дение, противоположное тому, которое нужно доказать,
неправильно^ ложно. Следовательно, истинно исходное
положение, и, таким образом, говорили мы, теорема
доказана, Читателей, которые пожелают более деталь-
но познакомиться с методом резолюции, отошлем к на-
зывавшимся нами ранее книгам А. В. Тимофеева и
Б. Рафаэла.
Для машинного решения задач и доказательства
теорем нужно, чтобы в соответствующей форме были
представлены знания как исходные, так и получаемые
машиной в ходе решения или доказательства. При со-
ставлении программы действий машины производится
описание логической системы и правил, по которым
выполняются логические преобразования. Чтобы маши-
ной могли производиться логические рассуждения, все,
необходимое для их проведения, описывается на язы-
Ч. Ш. КИБЕРНЕТИКА
294
ке, доступном машине, например на языке исчисления
высказываний или на языке исчисления предикатов.
Строки символов при этом строятся по определенным
грамматическим правилам. Составленные таким образом
строки символов называются правильно построенными
формулами, сокращенно ППФ. Решение задач на
основе преобразований производится синтаксическим
или семантическим методом. Первый из них основан
на использовании принятых грамматических правил
произведения действий с символами, по этим правилам
из одних ППФ получаются другие. Второй метод осно-
ван на рассмотрении возможного смысла получаемых
ППФ.
То, что машинам стал доступным логический вывод,
является большим достижением кибернетики. Однако
возможности логических методов не беспредельны. Яв-
ляются перспективными и другие методы. В частности,
метод фреймов, о котором упоминалось раньше в свя-
зи с распознаванием образов. Он открывает новые
возможности не только для распознавания образов,
но и для решения широкого круга других задач.
При пользовании этим методом в соответствую-
щем виде представляются и знания, получаемые ма-
шиной.
До сих пор мы ограничились тем, что привели лишь
общее определение фрейма. В основе же метода фрей-
мов лежит оперирование не с изолированным фреймом,
а с системами родственных взаимосвязанных фреймов.
Различные фреймы могут иметь общие терминалы, что
дает возможность использовать для их заполнения бо-
лее обширную информацию. В общей системе фреймы
изображаются не в виде отдельно йзятых деревьев,
а в фцрме сетевых графовых структур, таких, напри-
мер, как показанная внизу на рис. 36.
С помощью фреймов представляются не только раз-
личные ситуации в статике, но и переводы от одних
ситуаций к другим, процессы движения, при решении
задач — последовательные этапы перехода от одних
этапов решения к другим.
Использование фреймов производится при этом в
принципе так же, как, например, и при зрительном
восприятии образов.
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
295
По этому поводу М. Минский пишет следующее:
«При зрительном восприятии образов системы фреймов
используются следующим образом: различные фреймы
соответствуют различным позициям наблюдателя, ана-
лизирующего одну и ту же сцену, а трансформации
между ними отражают результаты перемещения наблю-
дателя из одного места в другое. Для систем других
типов различия между фреймами могут соответство-
вать результатам выполнения каких-либо действий, оп-
ределенным причинно-следственным связям между объ-
ектами внешнего мира или разным точкам зрения по
одним и тем же вопросам. Одни и те же терминалы
могут входить в состав нескольких фреймов системы —
это один из центральных моментов теории, позволяю-
щий согласовывать информацию, поступающую из раз-
личных источников. Теория фреймов во многом вы-
игрывает благодаря возможности использования в ней
ожиданий и других видов предположений».
В зависимости от того, какие решаются задачи,
имеют дело с фреймами зрительных образов, семанти-
ческими фреймами (если требуется понимание смысла
слов и предложений), фреймами-сценариями (для ка-
ких-либо действий) и т. д.
Особенностью метода фреймов является его актив-
ный характер. Структуризованная информация, кото-
рую содержит фрейм, включает в себя наряду с основ-
ными исходными сведениями указания к их использо-
ванию, а также указания о том, к каким результатам
предположительно должны привести соответствующие
действия, и как следует поступить, если фактические
результаты разойдутся с ожидаемыми. В тех случаях,
когда ни один из имеющихся фреймов не дает доста-
точно детального представления о реальной ситуации
или о реально совершаемых действиях, формируются
так называемые субфреймы-ожидания, с помощью ко-
торых производится предположительное описание
структуры объектов и связей между ними.
При применении метода фреймов для программи-
рования действий роботов, которые должны ориентиро-
ваться в окружающей обстановке, фреймы приспосаб-
ливаются к реальным ситуациям, строятся так, чтобы
они могли адаптироваться с учетом складывающихся
298
Ч. ПТ КИБЕРНЕТИКА
условий. Процесс такого приспособления описан
Ф. М. Кулаковым — одним из руководителей работы
по использованию метода фреймов при создании ин-
формационно-управляющего комплекса манипуляцион-
ного робота (работа эта проводилась в Ленинградском
научно-исследовательском вычислительном центре АН
СССР). В статье, приложенной к русскому переводу
упоминавшейся книги М. Минского, он так характери-
зует процесс приспособления фреймов к реальным си-
туациям: «По мере поступления новой информации
выясняется, что некоторые из первоначально выбран-
ных из памяти субфреймов не согласуются с реаль-
ностью. Они заменяются другими более подходящими
субфреймами... В простейшем случае такая замена осу- *
ществляется путем так называемой операции согласо-
вания. Она имеет место, когда отсутствуют особые
знания относительно того, как поступать при смене
фрейма, кроме некоторой общей стратегии». Далее
рассматривается один из вариантов программы выбора ‘
субфреймов, реализующей такую стратегию: «Опа
сравнивает каждое предложение входного текста с суб-
фреймами графоподобной структуры знаний и отбира-
ет те. субфреймы, смысл которых соответствует анали-
зируемым предложениям. Затем она выбирает фреймы,
объемлющие все отобранные в результате анализа
интерпретируемого текста предложения. Очевидно, эта
программа отбора — один из вариантов рассматриваемой
стратегии приспособления фрейма к реальности».
К вышесказанному добавим, что для представления
последовательностей действий используются фреймы-
сценарии, отражающие характерные, часто встречаю-
щиеся элементы этих действий. Одним из способов
формализации фреймов-сценариев является такой, при
котором они сводятся к графам.
Фреймы дают возможность экономно представлять
информацию: значительно сокращается количество
программ, с которыми должна оперировать машина,
при данном общем количестве знаний и данных сведе-
ниях о том, как надлежит использовать эти знания
при решении задач.
Применительно к решению задач управления близ-
ким к методу фреймов является метод так называемого
- 3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ 297
ситуационного управления. Его разработка началась
в СССР с публикации работ проф. Д. А.. Поспелова
еще до того, как М. Минским были высказаны идеи
теории фреймов. Сущность метода ситуационного уп-
равления, получившего развитие в работах Д. А. Пос-
пелова, Ю. И. Клыкова и других советских ученых,
заключается в следующем. Задача управления реша-
ется путем формирования модели «проблемной» ситуа-
ции, т. е. той, к которой стремятся. Эта модель созда-
ется на основе установления главных (в плане решае-
мой задачи) связей проблемной ситуации и исходной
ситуации. Особенностью ситуационного управления
является то, что используются в основном так назы-
ваемые семиотические или знаковые модели. Чтобы
пояснить, что здесь имеется в виду, сошлемся на вы-
сказывания по этому вопросу Г. С. Поспелова. В его
статье, опубликованной в сборнике «Вопросы киберне-
тики. Проблемы искусственного интеллекта», изданном
в 1980 г. Научным советом по комплексной проблеме
«Кибернетика» АН СССР, он отмечает, что традицион-
ные формально-математические и другие аналогичные
им модели в ряде случаев оказываются неудовлетвори-
тельными. В связи с этим он пишет: «Для ряда объек-
тов диспетчерского управления, таких, как грузовой
морской порт, перекресток магистралей в городе, мно-
жество самолетов над аэродромом посадки, цеха, ра-
бочие и участки механических цехов предприятий
и т. п., попытки построить АСУ на базе упомянутых мо-
делей мало что дают. Модели получаются громоздкими,
сложными и почти непригодными для работы в реаль-
ном масштабе времени. Однако люди справляются с
управлением столь сложными объектами и ничего дру-
гого не используют для управления, кроме фраз и тек-
стов родного языка. А отсюда вывод — раз человек на
языковом знаковом уровне управляет объектами тако-
го типа сложности, то почему бы не заставить ЭВМ
действовать аналогичным образом. Эти рассуждения
и привели к представлению о семиотических моделях,
лежащих в основе ситуационного управления. Исполь-
зование семиотических моделей означает, что теперь в
ЭВМ кодируются содержательные смысловые характе-
ристики конкретного объекта управления. Далее на-
298
Ч. III. КИБЕРНЕТИКА
блюдения показали, что, несмотря на подчас необозри-
мое число возможных ситуаций в объекте управления,
диспетчер принимает ограниченное число решений.
Так, при регулировании простого перекрестка прини-
мается всего два решения: открыть движение в прямом
направлении, соответственно закрыв перпендикуляр-
ное, и наоборот. Это означает, что^ требуется обобще-
ние ситуаций по их структурам и отнесение их к ряду
классов ситуаций так, чтобы каждому классу соответ-
ствовало свое решение. Структурные обобщения необ-
ходимы всегда в системах представления знаний и фак-
тов. Для этой цели Минским было предложено поня-
тие фрейма. Как видно, в ситуационном управлении
значительно раньше появления понятия фрейм исполь-
зовались при обобщении те же самые идеи».
Прервем пока рассказ о ситуационном управлении.
Вернемся к нему немного позднее, когда пойдет речь
о разработке машинных методов игры в шахматы.
Перейдем к следующему вопросу.
В сочетании с другими процедурами машинного ре-
шения задач широко .применяются специальные про-
цедуры поиска решения. Вопрос этот занимает боль-
шое место среди других, возникающих при решении
задач. Дело в том, что одна и та же задача часто мо-
жет быть решена различными способами. Одни из ним
быстро приводят к конечному результату, применении’
других менее эффективно: решение оказывается более
сложным и длительным. Третьи же могут быть совсем
неподходящими. Наконец, может быть и так, что за-
дача вообще неразрешима. В последнем случае бывает
важным своевременно это обнаружить. В различных
случаях по-разному могут использоваться знания, на-
чальные и приобретаемые в ходе решения. В различ-
ной мере могут быть эффективными и эвристические
подходы к поиску решений.
Несмотря на такое многообразие условий решения
различных задач, можно указать некоторые общие пра-
вила поиска решения, которым обычно следует чело-
век и которые являются обязательными и для машины.
Чтобы можно было обсудить это более детально,
приведем сначала следующие простейшие примеры ре-
шения математических задач.
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
299
Цусть требуется найти корни уравнений
х* + х + 2 = ]/я4 4- х + 4 и я2 — Зх — 6 =« х — 1.
Для первого из этих уравнений не имеется готовой
формулы решения. Однако можно попытаться его ре-
шить таким образом. Задаваясь рядом значений ж,
можно подсчитать для каждого из них отдельно вели-
чины я3 + я + 2 и Уя4 + я + 4. Определяя затем раз-
ность этих величин и прослеживая за тем, как она
изменяется с изменением х. можно найти такие значе-
ния х (если только они. существуют), при которых
разность данных величин обращается в нуль. Это и
будут искомые, корни нашего уравнения. Мы быстрее
или медленнее придем к конечному результату в за-
висимости от того, насколько удачно возьмем области
значений ж, для. которых поведем поиск, или, как го-
ворят, каким будет выбрано пространство поиска. Са-
му процедуру поиска можно при этом организовать
по-разному. Например, можно, ведя последовательно,
шаг за шагом, поиск, сравнивать указанные выше раз-
ности величин и по знаку и по абсолютному их зна->
чению. Это позволит после каждых двух шагов поиска
определить, какими значениями ж, большими или мень-
шими, чем раньше, следует дальше задаваться. Можно
вести сравнение рассматриваемых величин и только по
знаку их, что упростит выполнение отдельных опера-
ций поиска. Но возможно, что это не ускорит реше-
ние, так как при одинаковых для каждых двух после-
довательных шагов поиска знаках указанных разно-
стей останется неясным, следует ли дальше пытаться
увеличивать или уменьшать значение х. Наиболее це-
лесообразной может быть здесь комбинированная стра-
тегия поиска: при выборе пространства поиска, когда
первоначально берутся далекие одно от другого зна-
чения ж, сравнивать указанные разности только по
знаку, а при последующем поиске в более узких обла-
стях значений х вести сравнение и по знаку и по аб-
солютной величине. В общем, поиск решения можно
здесь вести различными способами.
Это же относится и к решению других уравнений.
В нашем случае такими же способами можно решать
300
Ч. Ш. КИБЕРНЕТИКА
и второе уравнение. Но по отношению к нему это бу-
дет нерациональным, так как х2 — Зх — 6 = х — 1 явля-
ется квадратным уравнением, общую формулу решения
которого мы знаем. Нужно лишь в заданном уравне-
нии перенести х — 1 с обратными знаками в левую
часть его и, произведя приведение подобных членов, пре-
образовать его к обычной форме квадратного уравне-
ния. Решая после этого уравнение по известной нам
формуле, сразу найдем его корпи: -1 и 3.
Изменим теперь условие первого примера. Пусть
требуется найти не все корни уравнения х3 + х 4- 2 =
= а какой-либо один из них, безразлично
какой. Процедуры пойска решения при этом могут
быть такими же,-как и раньше. Но можно при реше-
нии этой и других аналогичных задач попытаться ис-
пользовать эвристики (догадки), которые, возможно,
упростят решение. Например, можно попробовать про-
верить прежде всего, не является ли корнем уравнения
х = 0. Это всегда просто сделать, так как обращаются
в нуль все члены, содержащие х, в левой и в правой
частях уравнения. Для первого примера тайая провер-
ка сразу же показывает, что действительно х = 0 явля-
ется корнем уравнения. Если нужно найти лишь один
корень, то на этом решение задачи заканчивается. От-
падает необходимость в выполнении всех указанных
нами операций поиска. Для второго примера такая
проверка показала бы, что х = 0 не есть корень урав-
нения, то есть наше предположение не подтвердилось
бы. В данном случае это не имеет значения, так как
уравнение, как мы знаем, просто решается по извест-
ной нам формуле.
Мы рассмотрели решение обоих примеров с пози-
ций человека, имеющего знания и способного делать
догадки о том, какие возможны способы решения,
и сравнивать их по степени сложности и скорости до-
стижения цели. На основании того, что было сказано,
можно, однако, сделать выводы и в отношении про-
цедуры поиска при решении задач машинами, притом
не только таких простых задач, как указанные выше,
но и значительно более сложных.
Выводы эти сделаем, имея в виду следующие воп-
росы: определение пространства поиска, упорядочен-
3, МАШИННОЕ РЕШЕНИЕ ЗАДАЧ 301
ность процедуры поиска, возможность различных путей
поиска, использование знаний в процессе поиска.
Границы пространства поиска не могут’быть чрез-
мерно широкими или узкими. В первом случае вычис-
лительные процедуры могут оказаться столь громозд-
кими, что практически их нельзя будет выполнить даже
с помощью быстродействующей ЭВМ. Во втором —
искомое решение может оказаться за пределами про-
странства поиска и поиск окажется безрезультатным.
Является целесообразным последовательное сужение в
процессе отыскания решения пространства поиска.
Так, в первом из рассмотренных нами примеров пока-
занием для сужения пространства поиска будет то, что
определявшиеся разности величин различного знака
(это свидетельствует о том, что имеются промежуточ-
ные значения х, являющиеся искомыми корнями урав-
нения).
Процедура поиска решения должна быть упорядо-
ченной. Это значит, что все дперации поиска должны
производиться в определенной последовательности по
принятым правилам. Эта последовательность была ука-
зана нами при рассмотрении приведенных примеров.
В дальнейшем будет рассказано о способах упорядо-
ченного поиска, применимых не только при решении
одного какого-либо вида задач (у нас это были урав-
нения), но и задач самых различных типов.
На первом примере было показано, что может быть
целый ряд путей поиска решения. Это, прежде всего,
связано с тем, что некоторые задачи могут иметь раз-
личные решения и к каждому из них нужно идти сво-
им путем. Вместе с тем и тогда, когда результат един-
ственный, для получения его могут, как было показано
на примере, использоваться различные приемы реше-
ния. Это относится не только к математическим зада-
чам, но и к любым другим. Является важным нахож-
дение наилучших путей поиска. Таких, которые обес-
печивали бы получение приемлемых решений за крат-
чайшее время.
В некоторых случаях оказывается необходимым
проведение машиной поиска решении без использова-
ния знаний, передаваемых ей извне или появляющих-
ся в самом процессе поиска, и без пользования ею
302
Ч. Ш. КЙВЯРНЕТИКА
эвристиками. В других — дополнительные знания и эв-
ристики используются для усовершенствования проце-
дуры поиска. Знания при этом передаются машине
при составлении первоначальной программы процеду-
ры поиска или формируются в ходе поиска. Может
быть задан машине и список эвристик, которые она
должна применить одну вслед за другой или выбрать
те из них, эффективность которых кажется более ве-
роятной.
Перейдем к рассмотрению наиболее общих алгорит-
мов поиска, применяемых при решении различных
задач.
При описание алгоритмов поиска решений и при
практическом пользовании ими удобно представлять
процесс поиска в виде дерева такого, например, как
показанное на рис. 37 наверху слева. Корневая вер-
шина дерева (на рисунке вершина О) отвечает исход-
ным. условиям задачи, остальные вершины — отдель-
ным стадиям ее решения. Соединяющие вершины ли-
нии — ветви дерева — отражают переходы от одних
стадий рёгйенйя к другим. Каждому переходу может
быть приписала определенная стоимость. Стоимость
может исчисляться в различных величинах. Например,
это может рыть время, затрачиваемое на выполнение
сОответствуЙ^дих операций.
Каждый йз путей, ведущих от корневой вершины
к другим вершинам, является одним из возможных
путей поиска. Лишь придерживаясь некоторых путей,
лфг придём к требуемому конечному результату. Соот-
вётствуюХДйе конечные вершины называются целевы-
ми. Пусть, например, целевыми являются вершины,
очерченные на рисунке кружками так же, как и ис-
1$$1ая корневая вершина.
Дерево поиска может быть задано и в неявном
виде, то есть не в виде уже готового рисунка или со-
оТЭётстйуЮщей информации, введенной в ЭВМ, а лишь
в виде правил, следуя которым можно его построить.
Часто используется понятие глубины поиска. Это
количество Й вершин в глубину (считая от корневой),
на которые распространяется поиск.
Одной из принятых общих процедур поиска яв-
ляется поиск в ширину. При этом последовательно
к*. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
303
Рис. 37,
304 Ч ПТ КИБЕРНЕТИКА
проходят слева направо все вершины глубины /7 = 1.
Если среди них не обнаруживается целевая вершина, то
затем также обследуются по порядку все вершины глу-
бины Н = 2 и так далее, пока не будет обнаружена
целевая вершина, то есть не будет получено решение
задачи. Так как целевых вершин может быть несколь-
ко, то при необходимости поиск продолжается до тех
пор, пока не будут найдены все решения.
Другой из применяемых процедур поиска является
поиск в глубину. При этом после достижения первой
же из вершин глубины 1 осуществляется переход к
следующей за ней вершине глубины 2, и так до по-
следней наиболее глубокой из вершин, к которой ведет
данный путь. Если это не целевая вершина, то таким
же образом обследуются следующая из вершин глу-
бины 1 и другие связанные с нею вершины. Так как
некоторые из них являются точками ветвления, то про-
ходят сначала в глубину по одной из ветвей, затем от
точки ветвления также проходят в глубину по каждой
из других ветвей.
Применяется и комбинированная процедура поиска. *
Производится сначала поиск лишь на некоторую за-
данную глубину, не максимальную. Если он не даег
результатов, то глубина поиска увеличивается на не-
которую величину, и, если решение опять не найдено,
увеличивается еще раз, и т. д. Данный способ поиска
промежуточный между поиском в ширину и поиском
в глубину.
Выбор наилучшей применительно к задачам того
или другого вида стратегии поиска имеет большое
практическое значение. Этот вопрос является предме-
том специальных исследований.
Поиск обычно может ^ыть усовершенствован при
использовании дополнительных знаний, получаемых в
ходе решения задачи. Имеются в виду знания, полу-
чаемые при анализе складывающихся ситуаций. Таким
образом, удается выбирать (выбор делается в ходе ре-
шения машиной) наилучшие продолжения пути по-
иска. При этом отпадает необходимость в переборе
всех ситуаций, во многих случаях неоднократно повто-
ряющихся. Сокращается перебор различных вариан-
тов, часто бесполезный. Сразу же «обрубаются» многие
3 МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
305
ветви дерева, обследование которых не представляет ♦
интереса.
Как это делается, покажем на примере решения од-
ной из задач. В качестве характерной в книгах по ис-
кусственному интеллекту часто рассматривается так на-
зываемая задача о Ханойской башне. Для большей на-
глядности возьмем упрощенный ее вариант, описанный
в книге Б. Рафаэла, на которую мы раньше ссылались.
Задача эта ставится следующим образом. Имеются
показанные вверху на рис. 37 стержни I, II и III и на-
саженные на стержень I диски, из которых один —
большой — находится внизу, а другой — маленький —
над ним. Требуется пересадить диски на стержень III
так, чтобы они были .размещены на нем в том же по-
рядке. За каждый ход разрешается перемещение лишь
одного из дисков. Каждый из дисков может любым
образом пересаживаться с одного из стержней на дру-
гой, лишь бы при этом не оказалось, что большой диск
расположен над маленьким (это запрещенок
Без использования знаний, которые может дать ана-
лиз промежуточных ситуаций, решение задачи произ-
водится путем последовательного перебора всех возмож-
ных вариантов. Вся процедура поиска решения пред-
ставляется в виде дерева, показанного в средней час-
ти рис. 37. Исходная корневая вершина и целевая вер-
шина показаны здесь кружками, остальные вершины
обозначены прямоугольниками.
Чтобы облегчить читателю рассмотрение отдельных
позиций и переходов от одних из них к другим, правая
половина дерева поиска изображена еще раз в увели-
ченном масштабе внизу.
Поиск в данном случае также может производиться
или в ширину, или в глубину, или же комбинирован-
ным способом.
Рассматривая'данное дерево поиска, можно сделать
следующие заключения. Поиск, проводимый в преде-
лах очерченной штриховым контуром левой части де-
рева, безрезультатен: здесь не находится целевая вер-
шина. В процессе поиска встречаются повторно одни
и те же ситуации, перебор которых также бесполезен.
Заметим тут же, что в отсутствие других способов
поиска не имеет смысла говорить о безрезультатности
вое
Ч. III. КИБЕРНЕТИКА
или бесполезности того, что делается при полном пере-
боре всех вариантов. По-другому при этом ничего сде-
лать нельзя, так как в действительности дерево поиска
задается в неявном виде и машинное воспроизведение
его осуществляется путем постепенного наращивания
его ветвей. Если не используются дополнительные зна-
ния, то такой способ ведения поиска единственно воз-
можный.
Посмотрим теперь, что дают знания, получаемые
при анализе .складывающихся ситуаций, если их ис-
пользовать надлежащим образом. Пусть первыми вер-
шинами, обследованными в процессе поиска, являются
вершины А и В. Анализ ситуаций А и В приводит
к заключению, что первая из них хуже, чем вторая.
Действительно, в этим случае на стержень III (рис. 37)
посажен малый диск. Так как он должен находиться
в конце решения задачи над большим диском, то пока
его нужно будет со стержня III снять. Ситуация же В
ближе к искомой — конечной.
Руководствуясь правилами оценки ситуаций, кото-
рые, могут быть заранее запрограммированы, машина,
сравнив в нашем примере ситуации А и В, установит,
что ситуация А хуже, чем В. При этом она уже не бу-
дет заниматься дальше обследованием путей, идущих
от вершины А. Исключается перебор всех вершин де-
рева поиска, находящихся в части дерева, обведенной
у нас на рисунке штриховой линией. Дальнейший по-
иск ведется только от вершины В. Дальше также срав-
ниваются ситуации, которым отвечают вершины С, D
и Е. На4 основании оценки ситуаций признается луч-
шей ситуация С, и дальше рассматриваются лишь пу-
ти, идущие от соответствующей вершины дерева. Пере-
бор их тоже может быть исключен, если запрограмми*
ровать такое правило: «если на стержень III посажен
большой диск, то при следующем ходе нужно посадить
на этот стержень малый диск». Таким образом, дости-
гается сразу конечная целевая вершина, и на этом ре-
шение задачи заканчивается. На дереве поиска ока-
зался в пашем случае выделенным один-единственный
путь. Он показан па рисунке утолщенными линиями.
Необходимость в полном переборе возможных вариан-
тов была исключена.
3. МАШИННОЙ РЙШЁЙЙЕ ЗАДАЧ 807
Этот простейший пример показывает, насколько эф-
фективным может быть при решении задач использова-
ние знаний, получаемых машиной в ходе решения. Осо-
бенно большое значение оно приобретает при решении
сложных задач, когда дерево поиска имеет больше вет-
влений, является намного более обширным, и поиск
требует значительного времени.
Чтобы дать представление о масштабах времени,
рассмотрим решение задачи о Ханойской башне, задан-
ной так, как это рассказывается в одной из дошедших
до нас легенд. Имеются все те же три стержня, но на
стержень I посажены 64 диска, каждый из которых, на-
чиная со второго снизу, меньше расположенного под
ним (как в детской игрушечной пирамидке). Нужно,
перемещая каждый раз по одному диску и следя за
тем, чтобы нигде больший диск не оказался над мень-
шим, пересадить все диски на стержень III так, чтобы
они были расположены, как это было первоначально,
когда они были посажены на стержень I. Подсчитано,
что при затрате на каждый ход долей секунды решение
этой задачи должно занять чуть ли не миллиард лет.
То же самое оказывается при попытках решения неко-
торых практически важных задач управления методом
перебора. Ймея в виду невозможность решения их та-
ким образом с помощью даже наиболее быстродейству-
ющих ЭВМ, ученые говорят 'и пишут иногда сейчас
о «кошмарах перебора», «кошмарах размерности».
Рассмотренный нами пример показал, насколько мо-
жет быть полезным использование знаний в процессе
поиска. Во многих случаях оказывается эффективным
сочетание поиска с выполнением логических операций.
Часто дает положительные результаты использование
эвристик.
При классификации встречающихся на практике
задач были указаны игровые задачи, имеющие сущест-
венное значение и для области управления. Для них
разработаны специальные приемы поиска решения. Од-
ним из них является просмотр игры впепед и затем
возвращение назад к текущей ситуации. Так же, как
было указано раньше для ограниченного поиска в глу-
бину, просмотр вперед чаще всего производится не до
конца игры (это во многих случаях затруднительно),
308
Ч- ПТ. КИБЕРНЕТИКА
а на несколько ходов. По результатам этого просмотра
делается оценка текущей ситуации. Для этого вводят-
ся в рассмотрение так называемые оценивающие функ-
ции. Оценка производится в баллах. На основании про-
смотров вперед с возвращением назад к текущей ситу-
ации и ее оценок машина, исходя из максимальной
оценки, выбирает наивыгоднейший вариант продолже-
ния игры.
Во время игры с соперником при его ходе текущей
позиции приписывается самое малое из оценочных чи-
сел. Эту процедуру определения наивыгоднейшего хо-
да называют минимаксной. Вообще минимаксом назы-
вают наименьшее значение функции /(ж, у) переменных
х и I/, которое она принимает, когда первоначально оп-
ределяется максимум данной функции по у при фик-
сированном значении х, а затем определяется минимум
рассматриваемой функции по Это записывается сле-
дующим образом: min, max j(x, у).
X у
Использование ограниченного просмотра вперед
с формированием оценочных Функций, применение ми-
нимаксной процедуры, использование эвристик харак-
терны для ряда разработанных к настоящему времени
машинных игровых программ.
При решении задач, для которых конечный резуль-
тат зависит от многих факторов, наиболее приемлемым
может быть случайный поиск, проводимый по указы-
ваемым далее правилам. Рассмотрим их на примере
машинного проектирования новых машин, относящего-
ся к числу творческих задач. Имеется в виду создание
новых машин, которые должны обладать лучшими ха-
рактеристиками, чем существующие. При создании но-
вых машин обычно можно заранее указать критерии их
качества. Это, например, надежность, быстродействие,
экономические и другие показатели. Каждая из крите-
риальных величин принимает различные значения в
зависимости от многих конструктивных параметров.
Выбор этих параметров из условия получения наилуч-
ших значений соответствующих критериальных вели-
чин проводится методом случайного поиска так. Пер-
воначально задаются в качестве исходных конструк-
тивные параметры существующих машин. Затем они
случайным образом несколько изменяются. Для каж-
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
309
дого из полученных таким образом вариантов опреде-
ляются значения критериальных величин, выбранных
для оценки качества проектируемой машины. Отбирает-
ся из числа случайно полученных вариантов лучший
согласно этой оценке. Дальше за исходные берутся кон-
структивные параметры, при которых был получен этот
лучший до сих пор вариант проекта. Вся эта процедура
может быть неоднократно цовторена. В ходе произво-
димого таким образом поиска может быть оценено
очень большое количество вариантов, и каждый раз из
них отбираются все лучшие и лучшие до тех пор, пока
не будут исчерпаны возможности поиска. Человек —
конструктор машины — не може^ таким образом пере-
брать тысячи и десятки тысяч различных вариантов.
А соответствующим образом запрограммированной ЭВМ
это по силам. Для решения задач этого типа исполь-
зуются в ЭВМ генераторы случайных чисел.
Посмотрим теперь, каково современное состояние
разработки машинных методов решения задач и дока-
зательства теорем. Хотя разработка этих методов нача-
та недавно, всего около двух десятилетий тому назад,
в данной области уже имеются существенные достиже-
ния. Определились и пути дальнейших исследова-
ний. Разработан целый ряд программ, руководствуясь
которыми машины решают задачи и доказывают теоре-
мы. Главным образом машинное решение задач прово-
дилось до сих пор в порядке экспериментирования.
Большей частью ставилось целью проверить принципи-
альную возможность выполнения машинами такого
рода функций. Однако некоторые из разработанных
программ уже успешно используются для решения
практических задач управления.
К настоящему времени получены следующие ре-
зультаты.
Были разработаны программы решения машинами
различных алгебраических задач и программы интег-
рирования функций. Интересно отметить, что первая
из доведенных до стадии достаточно полной разработ-
ки машинных программ интегрирования функций была
во многом эвристической. Благодаря широкому приме-
нению эвристик, часто получались изящные решения,
но не было гарантии получения нужного конечного
310
Ч. III. КИБЕРНЕТИКА
результата. Более поздний вариант программу интег-
рирования функций, был основан на строгом алгоритме
решения, машина оказывалась способной интегриро-
вать любые функции, которые ей задавались. Машин-
ным способом был доказан ряд теорем булевой ал-
гебры.
Большое внимание ученые уделяют задачам управ-
ления и задачам, названным нами задачами обыденно-
го поведения. Здесь исследования ведутся-в нескольких
направлениях. Проведены опыты с машинами, запро-
граммированными так, чтобы они были в какой-то сте-
пени универсальными — могли решать различные зада-
чи этого вида. При этом использовалась следующая
методика решёния. Машине передаются списки пред-
метов, с которыми, возможно, придется иметь дело,
списки возможных действий, списки связей, зави-
симостей. На этой основе формируете# смысловая (се-
мантическая) сеть. Указывается машине ситуация,
к достижению которой она должна стараться прийти.
Получая информацию из внешней среды, машина соз-
дает для себя представление о текущей ситуации. Дей-
ствия машины программируются таким образом, чтобы
она постоянно сравнивала текущую ситуацию с задан-
ной и представляла решения, направленные на то, что-
бы сблизить их, уменьшить различия между ними. Ис-
следования показали, что создание машин, решающих
таким образом любые задачи, затруднительно. Это
связано с тем, что память машины пока не может вме-
щать достаточно обширные сведения, а оперирование
с большими списками данных (необходимо выбирать из
них в каждом случае нужные, отделяя их от ненуж-
ных) оказывается чрезмерно трудоемкой и долговре-
менной процедурой. К решению задач достаточно об-
щего характера машины подходят пока еще поверх-
ностно. Опыты в указанном направлении были до сих
пор в основном познавательного характера. Более ус-
пешным было решение задач рассматриваемого вида
для узких областей предметов, действий с ними, свя-
зей. При выполнении указанной выше процедуры срав-
нения и уменьшения различий между текущей и ко-
нечной ситуациями машиной производился логический
вывод, пользовалась она и эвристиками.
3. МАШИННОЕ РЕШЕНИЕ ЗАДАЧ
311
Другой интересный подход к решению задач уп-
равления был принят в исследованиях, проведенных
А. Г. Чачко п его сотрудниками. В сспову процессов
управления им были положены сценарии событий. Этот
подход близок к подходу, основанному па применении
фреймов-сценариев М. Минского, о которых мы расска-
зывали раньше..Использовались сценарии событий, са-
мостоятельные и входящие в семантическую сеть. Этот
метод решения был применен при управлении элек-
тростанцией, ее котлами и турбинами. В данном слу-
чае машина работала вместе с человеком-оператором,
помогая ему в принятии решений. Образно рассказал
об этой разработке автор ее. Здесь по его словам «се-
мантическая сеть... имеет одну характерную особен-
ность: она не обычная модель внешнего мира, забран-
ная с воли и заключенная в компьютер, а модель, свя-
занная с миром тысячами нитей. Датчики температуры,
давлений, уровней, калорий снабжают машину своими
сведениями, и эти сведения становятся на свои места
в семантической сети, насыщают сеть..., сеть дышит
свежим воздухом, отвлеченное знание сталкивается
с сиюминутным, чтобы родить не абстрактные, а опера-
тивные решения».
Разработан также ряд программ, руководствуясь
которыми движущиеся объекты (в принципе это неко-
торые из будущих роботов) должны сами, без участия
далее человека, ориентироваться в окружающей среде,
обходить встречающиеся на их пути препятствия, при
необходимости снабжать себя питанием (были, напри-
мер, проведены опыты с роботом-тележкой, который,
двигаясь по коридору сам, находил, когда иссякал за-
ряд его батарей, розетки и подключался к ним для под-
зарядки). Программы этого вида тоже в основном "бы-
ли до сих пор экспериментальными, но разработка их
находится сейчас в такой стадии, что следует ожидать
в скором времени широкого их использования в ро-
ботах.
В отношении машинного решения игровых задач,
о которых уже упоминалось, дело обстоит так. Были
разработаны программы игры в шашки, при которых
машина играет на уровне сильнейших игроков-людей.
В более сложную игру — шахматы — машины пока иг-
342
Ч. in. КИБЕРНЕТИКА
рают на уровне игроков средней категории, однако
программы игры в шахматы все время совершенству-
ются. В разработанных машинных программах поиск
сочетается с логическим, анализом складывающихся
ситуаций. Простой перебор возможных вариантов иг-
ры с целью отыскания наилучшего хода в большинст-
ве случаев был бы практически невозможным, так как
при этом по подсчетам некоторые партии должны были
бы занять у наиболее быстродействующих машин тыся-
чи лет. Для сокращения перебора вариантов ходов спе-
циальным образом строится структура программы игры.
Например, согласно одной из разработанных программ
этого вида, производится двоякий анализ ситуаций.
С одной стороны, упорядочиваются фигуры и опреде-
ляется, куда может быть перемещена каждая фигура
при следующем ходе. С другой — анализируются поля:
учитывается, какая, фигура занимает данное поле и ка-
кие фигуры могут перейти на него. На основании свод-
ного анализа производится по различным признакам
сравнительная оценка ситуаций и выбирается наивы-
годнейший ход так же, как это было у нас в задаче
о Ханойской башне. Осуществляется ограниченный про-
смотр вперед, применяется минимаксная процедура.
Но об этом мы уже говорили.
Значение анализа подходов к игре в шахматы игро-
ками различной квалификации и значение разработки
машинных программ игры определяется тем, что на-
капливаемый при этом опыт полезен для решения мно-
гих прикладных задач управления в технике и эконо-
мике. В частности, это относится к уже упоминавшим-
ся задачам ситуационного управления. О. Г. Чораян,
о работах которого в области кибернетики пойдет еще
речь в следующих разделах нашей книги, указывает
при обзоре литературы по ситуационному управлению,
что «...отношения, связи, наблюдаемые между отдель-
ными элементами ситуации, играют ведущую роль в ос-
мысливании исходной ситуации, создании модели про-
блемной ситуации и использовании ее при решении
проблемы... В качестве иллюстрации обычно использу-
ется разбор игры в шахматы начинающим шахматистом
и опытным мастером. Осмотр шахматной ситуации не-
опытным шахматистом характеризуется равномерным,
3. МАШИНЙОЕ РЕШЕНИЕ ЗАДАЧ Я1.Ч
сканированием глазами по всем фигурам, расположен-
ным на доске. Опытный же игрок, напротив, не рас-
сматривая или почти не рассматривая всей шахматной
доски, уделяет основное внимание главным шахматным
фигурам, отношению между ними, узловым элементам
шахматной позиции. Для шахматного мастера ситуа-
ция, сложившаяся на доске, определяется не столько
набором отдельных фигур, расположенных на опреде-
ленных полях шахматной доски, сколько возможными
комбинациями, связями между фигурами (проходная
пешка, вилка, возможности шаховых ситуаций, двой-
ного удара или защиты и т. д.). Именно такое проблем-
ное представление ситуации, определяемое конечной
целью — созданием матовой ситуации, дает возмож-
ность опытному мастеру игры в шахматы действовать
быстро и достаточно эффективно». Эти соображения,
так же как и ранее рассмотренные нами, принимают-
ся сейчас во внимание при составлении машинных шах-
матных программ и программ ситуационного управле-
ния различными объектами.
Многие годы занимается уже разработкой машин-
ных программ игры в шахматы экс-чемпион мира по
шахматам доктор технических наук М. М. Ботвинник.
Совершенствование программ игры машин в шахматы
стимулируется проведением международных турниров
ЭВМ-шахматистов. На первом таком турнире, па кото-
ром в 1974 г. в качестве претендентов на звание чем-
пиона выступили машинные программы, представлен-
ные восемью странами, победителем стала программа,
разработанная в Институте проблем управления Ака-
демии наук СССР Г. М. Адельсоном-Вельским,
В. Л. Арлазаровым и М. В. Донским.
Все более широко сейчас применяется на практике
машинное проектирование, которое было рассмотрено
ками как пример решения машинами творческих задач.
На этом закончим рассказ о машинном решении за-
дач и доказательстве теорем.
По ходу рассказа были затронуты вопросы синтак-
сического и семантического подхода к решению задач.
К этим вопросам мы еще вернемся в следующей нашей
беседе, когда пойдет речь о рабочих языках машин и
языках общения человека с машиной. Данные вопросы
814
Ч. Ш КИВКРНГТИКА
возникают при более общей трактовке того, как маши-
ны должны понимать, воспринимать речь, читать и пи-
сать. Рассмотрим все эти вопросы дальше более под-
робно.
4. Как ученые пытаются создать машины,
которые должны понимать человека, говорить с ним,
читать, писать, чертить, рисовать
Рассказывая об этом, упомянем об искусственных
языках программирования. Сравним их с естествен-
ным языком, на котором говорят люди между собой
и которому тоже хотят обучить машины. Приведем
некоторые сведения и о машинном переводе текстов*
Познакомим читателя с распознаванием машиной ре-
чи человека и с синтезом ею речи. Покажем, как
может машина, управляя полетом наэлектризован-
ных капель, делать многокрасочные рисунки и вести
любые записи.
Начнем с понимания. Это самое главное. Все ос-
тальное уже несколько проще.
Говоря о понимании, прежде всего нужно догово-
риться о том, что мы под этим разумеем. Могут быть
различные виды понимания. Один из них, наиболее
простой, уже достигнут. Это значит, что мы можем пе-
редать машине программу действий, которые хотим,
чтобы она выполнила, и можем получить от нее понят-
ное для нас сообщение о результатах их выполнения.
Но это еще* не то понимание, о котором говорят, когда
имеют в виду общение людей между собой. Как выяс-
няется, понимают ли друг друга люди? Если, например,
человек говорит с иностранцем? Наблюдая за ними,
можно сделать суждение об этом по вопросам, которые
они задают один другому, и по их ответам. Одной из
задач, к решению которых лишь приступают специа-
листы по искусственному интеллекту, является созда-
ние вопросно-ответных программ, обеспечивающих воз-
можность такого же диалога человека с машиной, как
и при разговоре человека с человеком.
С указанным выше вопросом тесно связан вопрос об
языке, служащем для общения человека с машиной.
Язык этот должен быть таким, чтобы было возможным
Ь. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
315
общение. Вместе с тем он должен быть удобным для
человека и должен допускать эффективное использо-
вание машины. Для решения задач на ЭВМ люди раз-
работали искусственные языки программирования. Эти
языки все время совершенствуются, некоторые из них
в чемнго приближаются к естественному языку челове-
ка, но все же существенно от него отличаются. Наибо-
лее простым было бы общение человека с машиной, ес-
ли бы машина могла понимать человека, слушая его
речь, и отвечать ему человеческим голосом. На пути
создания машин, понимающих таким образом челове-
ка, много трудностей. Что-то, пусть пока немногое,
в этом направлении уже сделано. Об этом дальше рас-
скажем. Но сначала рассмотрим то, что касается язы-
ков искусственных и языка естественного.
Искусственные языки придуманы людьми. Приме-
ром ранее созданных искусственных языков являются:
нотный язык музыки, язык шахмат, язык знаков улич-
ного движения, основанный на азбуке Морзе теле-
графный язык, языки математической логики (напри-
мер, знакомые теперь уже нам язык исчисления выска-
зываний и язык исчисления предикатов).
Формирование множества искусственных языков,
предназначенных для общения людей с машинами, На-
чалось с того времени, когда были построены и начали
применяться ЭВМ. Был разработан целый ряд фор-
мальных языков. Это множества последовательностей
символов, обращение с которыми производится по уста-
новленным правилам, которые называют грамматикой
языка. К формальным языкам относятся логико-мате-
матические, информационно-поисковые и другие. На-
иболее интересны для нас языки программирования, то
есть языки, на которых программируется людьми ре-
шение задач, выполняемое ЭВМ.
Языки, предназначенные для применения при реше-
нии определенного круга задач, часто оказываются не-
достаточно Приспособленными для решения задач дру-
гого вида.
Поэтому создаются различные проблемно-ориенти-
рованные языки. Создаются и универсальные языки.
Всего к настоящему времени разработано уже более
Двухсот языков программирования.
316
Ч. Ш. КИБЕРНЕТИКА
С одним из языков программирования, описанным
в школьном учебнике для 8-го класса, читатель знаком.
Это язык АЛГОЛ-60. Об этом языке в учебнике напи-
сано: «Он получил название АЛГОЛ-60 (ALGOL —это
сокращение от английских слов ALGOrithmic Langua-
ge, т. е. алгоритмический язык; 60*— год, когда было
опубликовано описание языка)» (мы здесь ссылаемся
на то, что было написано в первых изданиях учебника,
например в выпущенном в 1975 г. третьем издании;
затем раздел о программировании на ЭВМ был расши-
рен и текст его несколько изменили). Перед описанием
языка АЛГОЛ-60 стоит эпиграф: «То, что может быть
сказано, должно быть сказано ясно, а о том, о чем -не-
возможно говорить, следует молчать». Дальше в учеб-
нике говорится о связи алгоритмического языка с ма-
шинным языком, то есть с языком, непосредственно
реализуемым машиной: «Алгоритмический язык суще-
ственно упростил сам процесс программирования, так
как позволил описывать решение задачи более совер-
шенными средствами, чем машинный язык. Последова-
тельность указаний машине на алгоритмическом языке
записывается намного проще и нагляднее. Важно отме-
тить, что программа, написанная на алгоритмическом
языке, может быть использована на любой ЭВМ. Для
этого только машина должна иметь специальную про-
грамму-переводчик, с помощью которой ЭВМ сама пе-
реведет все символы, слова и фразы программы на ал-
горитмическом языке в программу на машинном язы-
ке, т. е. в последовательность элементарных команд
данной машины. Такая программа-переводчик называ-
ется транслятором. Транслятор не только переводит
программу, но и обнаруживает ошибки, допущенные
программистом при составлении программы на алгорит-
мическом языке, т. е. при переводе внимательно про-
веряет составленную человеком программу».
Сказанное выше о трансляторах относится и к ис-
пользованию в ЭВМ программ, написанных на других
языках программирования.
Язык АЛГОЛ-60 предназначен главным образом для
программирования решения математических задач и
задач, возникающих при научных исследованиях.
Назначение других употребительских языков про-*
к. КАЙ СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
317
граммирования следующее. Язык ФОРТРАН IV
(FOPmula TRANslation— перевод, трансляция формул)
предназначен для решения задач, в ходе которого про-
изводится много вычислений. Язык КОБОЛ (COmmon
Buisiness Oriented Language — язык, ориентированный
на обычные деловые задачи) предназначен для реше-
ния задач технико-экономического характера и для
обработки коммерческих данных. Язык PL/I (Program-
ming Language One — язык программирования один)
используется для решения более широкого круга задач
как в области науки, так и в экономике. В языке PL/I
обобщены подходы к программированию, характерные
н для других указанных выше языков. Предусмотрена
возможность удобного оперирования не только с число-
вой, но так же и с символьной информацией в языке
АЛГЭМ — алгоритмическом языке программирования
экономических и математических задач.
Создание новых языков программирования связано
и с необходимостью решения специальных вопросов,
возникающих при разработке систем искусственного
интеллекта. Рассматривая машинное решение задач,
мы говорили, например, о том, что большое значение
приобретает сейчас обработка списков данных. К этому
приспособлены специально языки программирования
ЛИСП (Ь181 Information Simbol Processing — обработка
списков символьной информации) и ИПЛ-V (Informa-
tion Processing Language — язык обработки информа-
ции). Языки ЛИСП и ИПЛ-V построены так, что при
пользовании ими оказывается возможным легко обра-
батывать данные, структура которых не остается по-
стоянной, изменяется в процессе обработки. Разра-
ботаны языки, дающие возможность хорошо описы-
вать качественные данные при представлении знаний
в машинах. К ним относятся язык KAL (Knowledge
Acquisition Language — язык приобретения знаний) и
некоторые другие .языки программирования. Специаль-
ный язык служит для описания моделей различных
объектов и моделей различных процессов, это так на-
зываемый СИМСКРИПТ (Simulation Programming
Language — язык программирования моделирования).
На основе языков КОБОЛ и PL/I разрабатываются
сейчас универсальные языковые системы, предназна-
318
Ч. III. КИБЕРНЕТИКА
ченные для оперирования с так называемыми банками
данных, или, по-другому, информационными банками.
В таких банках содержатся“болыпие массивы информа-
ции, осуществляется передача в них новой информа-
ции и получаются из них необходимые справочные
данные.
Языки программирования все время совершенству-
ются. Вслед за языком АЛГОЛ-60 был создан между-
народный алгоритмический язык АЛГОЛ-68 (оконча-
тельная версия его была принята в 1974 г.). Так же
как и язык PL/I, он относится к многоцелевым. На ос-
нове этого языка удобным образом производится так
называемое модульное (структурное) программирова-
ние, при котором программа представляется в виде от-
дельных блоков-модулей, которые стандартным спо-
собом включаются в общую программу. Благодаря этому
существенно упрощается программирование решения
сложных задач: программа разделяется на блоки, каж-
дый из которых формируется независимо от других.
Можно было бы указать и другие особенности на-
званных выше и иных языков программирования. Так,
язык PL/I, являясь универсальным, хорошо приспособ-
лен для систем, работающих в реальном масштабе вре-
мени. Разработан язык ЯАП (язык ассоциативного
программирования), используемый при решении инфор-
мационно-логических задач, и язык Аналитик-74, ори-
ентированный на описание алгоритмов , численных и
аналитических решений задач, автоматическое распозна-
вание эквивалентности выражений, определение подо-
бия их структур.
Все, что было здесь рассказано об языках програм-
мирования, должно дать представление о том, какое,
внимание уделяется сейчас их разработке и совершен-
ствованию. Это имёет существенное значение для раз-
вития различных, отраслей науки, так как везде все
более широко производится машинная обработка ин-
формации. С этим связано и дальнейшее развитие ра-
бот по искусственному интеллекту.
Наряду с разработкой множества искусственных
языков ученые сейчас усиленно ищут подходы к реше-
нию проблемы использования в диалоге человека и ма-
шины естественного языка человека. Это заставило за-,
4, КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
819
пяться углубленным изучением того, как мы говорим
и понимаем в разговоре друг друга, изучением с этих
позиций нашего естественного языка.
Естественный язык человека тесно связан с мышле-
нием человека. Он служит для выражения и передачи
мыслей. Возникновение членораздельной речи относит-
ся ко времени возникновения человеческого общества,
к началу трудовой деятельности людей. Развитие языка
отразило в себе весь ход истории людей,, все этапы ста-
новления человеческой культуры. Формирование есте-
ственного языка происходило стихийно на протяжении
многих тысячелетий.
Естественный язык (языки, если иметь в виду то,
что у разных народов свои языки) сложился (сложи-
лись) в процессе исторического развития.
Естественному языку присущ ряд особенностей, бла-
годаря чему он существенно отличается от искусствен-
ных языков. Эти особенности его не всегда приемлемы
для машин. С этим приходится считаться ученым, кото-
рые сейчас ищут подходы к тому, чтобы научить ма-
шины естественному языку человека.
Что же это за особенности естественного языка лю-
дей? (
Прежде всего, его неоднозначность. В нашем язы-
ке много омонимов (одно слово имеет различные зна-
чения) и синонимов (различные слова имеют одно и то
же значение).
Далее, это зависимость многих слов от слов, явля-
ющихся их соседями. Слово, которое пишется и произ-
носится определенным способом, приобретает тот или
другой смысл в зависимости от того, какие у него со-
седи. Некоторые слова пишутся одинаково, а произно-
сятся по-разному, приобретая, опять-таки, различный
смысл.
Не задумываясь над этим, мы обычно даже не об-
ращаем внимания, насколько часто все это бывает в
нашем языке.
Вот несколько примеров. Отдельно взятое слово «от-
личный» означает очень хороший. Но смысл этого сло-
ва может быть и другим: отличающийся от других и,
возможно, очень плохой. «Произведение» нескольких
величин может быть получено как результат арифме*
320
Ч. Ш КИБЕРНЕТИКА
тического действия умножения, но под «произведени-
ем» может иметься в виду и литературное произведе-
ние. Слово «отвечает» имеет один смысл, если говорит-
ся о том, что ученик отвечает учителю, но другой,
если имеется в виду ответственность человека за что-
либо или же соответствие чего-либо чему-то. «Поло-
жить» можно предмет на стол, но это же слово озна-
чает «принять решение». Различны значения слова
«мой» в фразах «мой портфель» и «мой руки!». Приме-
ром слов, которые пишутся одинаково, но приобретают
различный смысл в зависимости от слов-соседей, а в
устной речи в зависимости от того, на какой слог пада-
ет ударение, могут служить слова в выражениях «бел-
ка спрыгнула» и «содержание белка». В произнесенной
вслух команде «остановить нельзя работать!» в зависи-
мости от интонации голоса, небольшой паузы до или
после второго слова (в письменном тексте в соответст-
вующем месте должна быть поставлена запятая), смысл
меняется па противоположный.
Таких примеров можно было бы привести превели-
кое множество.
Для естественного языка характерна его избыточ-
ность. Пропуски отдельных букв, а иногда и целых сло-
гов, опечатки или описки в тексте чаще всего не меша-
ют нам правильно понимать его. С другой же стороны,
в разговорной речи иногда одно лишь восклицание ока-
зывается уже весьма многозначительным.
В общем, естественный язык человека очень свое-
образен, является насыщенным красочным. Он следует
полету мысли или сливается с ней. Он способен пере-
дать все, что связано с мыслями, чувствами, пережи-
ваниями человека, отражает все происходящее во внеш-
нем мире.
Если иметь это в виду, то что же представляют со-
бой попытки обучить естественному языку машины?
При современном уровне развития кибернетики ес-
тественный язык во всем его многообразии еще не мо-
жет быть освоен машинами. Поэтому пока учеными ста-
вятся и решаются более скромные задачи. Прежде все-
го, ограничивается предметная область. Для передачи
команд машине и получения от нее отчета об их вы-
полнении (или другой информации) на первых порах
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
321
достаточно использование в разговорном языке не-
скольких сот или тысячи слов.
Но это должен быть не просто набор слов. Пусть
в ограниченной области, но речь машины должна быть
осмысленной; она должна вести с человеком разумный
разговор.
Чтобы выяснить, как это достигается, вернемся к
семантическим сетям и к вопросно-ответным системам,
о которых раньше лишь мелькохм упоминалось.
Машине передаются списки предметов, о которых
может идти речь, списки возможных действий с ними,
списки различных служебных слов и указываются пра-
вила, руководствуясь которыми можноустановить смыс-
ловую связь между отдельными словами. При этом от-
дельные слова, фразы, предложения, охватываются об-
щей смысловой сетью, вплетаются в эту единую семан-
тическую сеть.
Чтобы показать, что это дает, А. Г. Чачко в упо-
минавшейся его книге приводит такой простейший ил-
люстративный пример. Человек вел разговор с маши-
ной на узкую тему — о выпечке пирожков. На вопрос
человека, чем раскатать тесто, машина ответила, что
нужно взять скалку. Когда же было ей сказано, что
скалки нет, она предложила взять .в качестве замени-
теля бутылку. Этот ответу оказался возможным благо-
даря тому, что машине первоначально, наряду с основ-
ными терминами, были указаны и их заменители.
В связи же между тем, что нужно раскатать тесто, и
применением для этого скалки или бутылки, машина
сама уже разобралась, обрабатывая списки по предпи-
санным ей правилам.
Сейчас уже проведен целый ряд опытов с система-
ми, отвечающими на вопросы, то есть с такими систе-
мами, которые способны делать логические выводы и
находить из множества данных нужные для ответа. .
В указанной выше книге вслед за использованием
семантической сети в беседе с машиной о печении пи-
рожков семантические сети рассматриваются в приме-
нении к решению более сложной и практически важной
задачи — управлению работой морского порта.
К настоящему времени разработан ряд программ,
рассчитанных па то, чтобы обеспечивалось понимание
11 Л А За имин <он ,
322
Ч. Ill КИБЕРНЕТИКА
машиной естественного языка при использовании огра-
ниченного количества исходных данных и исключении
возможности неоднозначного толкования. В основе этих
программ главным образом смысловой анализ текста.
Интересна, например, одна из тдких программ, преду-
сматривающая понимание машиной рассказа, ответы
ею на относящиеся к нему вопросы, постановку вопро-
сов машиной, пересказ текста в сокращенном или в рас-
ширенном виде.
Возможность анализа машиной предложений, сфор-
мулированных на естественном языке, и синтеза ма-
шиной правильных и разумных предложений подтверж-
дена и работами по машинному переводу текстов с од-
ного естественного языка на другой.
Об этих работах расскажем немного позднее.
Сначала обратим внимание читателя вот на что.
Для передачи машинам правил обработки текстов и
правил составления правильных и разумных ответов
все эти правила должны быть формализованы, то есть
выражены так, что в конечном счете они смогут быть
представлены некоторыми последовательностями нулей
и единиц, с которыми оперирует машина.
Чтобы прийти к пониманию правил речеобразования
и к представлению их в таком виде, оказалось нужным
заняться изучением грамматик естественных языков и
изысканием способов их формального описания. В нау-
ке о языке — лингвистике — появился новый быстро
сейчас развивающийся раздел ее, который назвали ма-
тематической лингвистикой. Основополагающими для
создания формальных грамматик явились идеи Н. Хом-
ского, в частности идея порождающих грамматик.
Формальной грамматикой называют систему правил,
служащих для описания закономерностей естественного
языка. Различают формальные грамматики распознаю-
щие и порождающие. Распознающие грамматики вклю-
чают в себя правила, используемые для выяснения то-
го, относится ли то или другое предложение к данно-
му языку. Порождающие грамматики дают возможность
не только строить различные предложения, но и опре-
делять их структурные характеристики. Это является
важным, так как по заданным синтаксическим прави-
лам может образовываться и множество бессмыслен-
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
323
ных предложений. Необходимо иметь возможность оп-
ределять граничные условия в различных расстановках
слов в предложении, при которых не нарушается смысл
его. На нижнем уровне порождающей грамматики на-
ходится так называемая грамматика составляющих,
имеющая дело с исходным набором символов и прави-
лами их замены. Далее следует трансформационная
грамматика — система правил, по которым путем пос-
ледовательных преобразований-трансформаций мно-
жество предложений образуется из небольшого количе-
ства исходных.
Одной из интересных идей, появившихся при изуче-
нии способов формального описания естественного язы-
ка, является идея наличия поверхностной и глубинной
структур языка. Имеется одно глубинное смысловое
значение ряда предложений, единым образом воспри-
нимаемое нами, а на поверхности соответствующая
мысль может выражаться по-разному (не сходна ли с
этой идеей идея фреймов, о которой было рассказано
раньше?).
Занимаясь изучением естественного языка ученью
обратили внимание на то, как формируется граммати-
ка языка у ребенка, когда он начинает говорить. Поль-
зуясь небольшим количеством слов, он строит речь по
своим грамматическим правилам, отличным от грамма-
тических правил, которые потом предстоит ему изучать
$ школе. Это не мешает тому, чтобы его понимали.
Грамматика языка ребенка все время изменяется по
мере того, как он учится говорить. Многое дало и изу-
чение того, как связана наша речь с мышлением. Час-
то, начав фразу, мы еще не знаем, как ее закончим,
мысль и речь сливаются воедино.
Вот сколько различных вопросов затрагивается прп
подходе к тому, чтобы машина понимала естественных!
язык человека!
Чтобы закончить обсуждение ранее сказанного, вер-
немся еще раз к тому, что говорилось о трудностях по-
нимания естественного языка машиной, и к тому, что
было сказано, пока в порядке упоминания, о машин-
ном переводе.
Раньше было сказано о том, что осуществление диа-
лога человека с машиной пока возможно лишь при ог-
П*
324
Ч. Ш. КИБЕРНЕТИКА
раниченной узкими пределами предметной области.
При этом могут быть взяты лишь однозначные слова,
что упрощает решение задачи. Однако в дальнейшем
эти ограничения будут становиться менее жесткими.
На это можно рассчитывать, учитывая уже достигну-
тое’ сейчас в данной области и в близкой к ней облас-
ти машинного перевода.
При машинном переводе текстов с одного естествен-
ного языка на другой естественный язык выполняется
ряд функций. Обнаружив в слове несколько слов-омо-
нимов, машина должна выбрать подходящее в каждом
случае слово. Логически рассуждая, машина должна
при этом определить смысловое значение не только от-
дельно взятых слов, но и слов-соседей, учитывая об-
щую структуру и смысл данного предложения, а может
быть, и предложений предшествующих и последующих.
Поэтому все, что относится к машинному переводу,
представляет интерес и при решении задач управления
машинами, при общении с ними человека на естествен-
ном языке.
Можно указать несколько стадий в работах по соз-
данию систем машинного перевода с одного естествен-
ного языка (назовем его входным) на другой естествен-
ный язык (выходной). Сначала внимание в основном
уделялось лишь словарю и применялись • упрощенные
алгоритмы перевода. Затем все большее место стали
занимать данные, касающиеся входного и выходного
языков, и большое значение приобрело формальное их
описание. Начали разделять процедуры анализа вход-
ного языка (имеется в виду определение структуры
переводимого текста) и синтеза текста на выходном
языке. Анализ переводимого текста, а затем и синтез
получаемого текста, стали многовариантными, создава-
лись все большие возможности для выбора лучших ва-
риантов перевода в условиях, когда приходится иметь
дело с различными значениями отдельных слов и вы-
ражений. В современных системах машинного перевода
применяются не только синтаксические, но и семанти-
ческие анализ и синтез. После анализа входного текста
оп представляется в форме, ^удобной для последую-
щей обработки, и записывается машиной на промежу-
точном языке или, как его называют, языке-посредни-
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
325
ке. Машинный перевод выполняется в. следующей пос-
ледовательности: производится поиск в автоматическом
словаре, который хранится в памяти машины, опреде-
ляется, нет ли в тексте групп слов, которые могут пе-
реводиться лишь совместно, далее производится синтак-
сический (иногда до этого морфологический) анализ
входного текста, осуществляется семантический, а за-
тем синтаксический и морфологический синтез выход-
ного текста. Иногда этот порядок действий несколько
изменяется. После того как текст переведен машиной,
он может быть откорректирован человеком.
Разработан ряд систем машинного перевода. Они
описаны в книге О. С. Кулагиной «Исследования по
машинному переводу», выпущенной издательством «На-
ука» в-1979 г. К 1978 г. в СССР было опробовано И си-
стем машинного перевода, в том числе система перево-
да с французского языка на русский, подробно рассмот-
ренная в названной выше книге, ш система перевода
с английского языка на русский. Работы по машин-
ному переводу, ведутся во многих странах. О степени
сложности реализованных систем можно судить по сле-
дующим данным. В одной из практически действую-
щих систем русско-английского перевода словарь си-
стемы содержит около 40 000» единиц, составлен он на
основании текстов объемом 2 800 000 слов, возможная
скорость перевода до 300 000 слов в час. В этой систе-
ме для перевода многозначных слов используется не-
сколько сот подпрограмм, каждая из которых служит
для правильного выбора значения слова в зависимости
от того, как оно связано со словами-соседями и от
значений этих последних. В другой практически дей-
ствующей системе русско-английского перевода содер-
жится 150 000 основ общеупотребительных слов и
160 000 специальных терминов. Этцм единицам русско-
го текста сопоставлено до 400 000 английских эквива-
лентов. Возможная скорость перевода здесь тоже до
300 000 .слов в час. Пока еще качество переводов, дела-
емых машинами, не всегда достаточно удовлетвори-
тельное, но системы машинного перевода все время со-
вершенствуются.
Опыт всех этих работ используется и при создании
машин, которые должны понимать человека.
326
Ч. Ш. КИБЕРНЕТИКА
Что и как могут понимать машины? По каким кри-
териям' следует оценивать понимание машиной челове-
ка? Как должны строиться диалоговые системы, чтобы
они были возможно более совершенными? Эти вопросы
широко обсуждаются специалистами, занимающимися
разработкой методов организации диалога человека и
машины.
Ученые пришли к следующему заключению: для то-
го чтобы машина разумно отвечала на поставленные
вопросы, нужно, чтобы она могла представлять смысл
того, о чем говорится, а для этого необходимо создание
модели внешнего мира, охватывающей предметную об-
ласть темы разговора.
О критериях для оценки степени понимания чело-
века машиной мы уже говорили. Было сказано, что яв-
ляются показательными ответы машины на поставлен-
ные человеком вопросы. Но различны уровни понима-
ния, проявляющегося в ответах машины на прямо по-
ставленные и непрямые вопросы.
В первом случае машина отвечает на поставленный
вопрос лишь на основании соответственно прямого
лингвистического анализа текста, смысл которого выяс-
няется в ходе анализа. Уже в такой, относительно про-
стой, диалоговой системе должен использоваться спе-
циальный промежуточный язык, названный языком
смыслов. При этом диалоговая система рассматривает-
ся как система «перевода с одного языка на другой
с помощью сопоставления соответствующих конструк-
ций в языке смыслов». Какими должны быть структу-
ра такой диалоговой системы, а также и структура
рассматриваемой дальше более совершенной диалого-
вой системы, было показано профессором Д. А. Поспе-
ловым в его статье, напечанной в 1980 г. в Ученых
записках Тартуского государственного университета
(выпуск 519: «Семантика и представление^знаний. Тру-
ды по искусственному интеллекту. II»).
Чтобы понимание ситуации было настолько глубо-
ким, что машина сможет отвечать и на непрямые воп-
росы, должны не-только использоваться знания о внеш-
нем мире, заранее переданные машине («априорные»,
то есть предшествующие опыту и независимые от него),
не только должна в общем использоваться модель внеш-
Ь. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ .327
него мира, о которой говорилось выше, но необходимо,
чтобы машина, формируя ответ, осуществляла логиче-
ский анализ того, о чем идет речь. Она должна это
делать так, как делал бы на ее месте человек, логи-
чески оценивающий ситуацию. При этом может ока-
заться, что ответ и не будет совсем определенным,
как это' бывает в разговоре человека с человеком, ес-
ли не представляется возможным сделать точное су-
ждение. Для оперирования с «моделью мира» в ма-
шине, таким образом участвующей в диалоге с чело-
веком, должен использоваться специальный модельный
язык.
Что имеется в виду под прямо поставленными перед
машиной и непрямыми вопросами, поясняется в ука-
занной выше статье наглядным примером. О вопросах
первого типа и ответах на них машины сказано вот что:
«Пусть в ЭВМ введен текст: «Поезд пришел в Москву
с опозданием на один час. Только в 9 часов Иванов
встретил ее у выхода из вагона». Если теперь ЭВМ
задать вопросы типа: «Кто встретил ее у вагона?» или
«На сколько опоздал поезд?», то, используя лишь ту
информацию, Которая есть в тексте, ЭВМ в состоянии
на основании лишь лингвистического анализа текста
дать правильный ожидаемый ответ».
В отношении непрямо поставленных перед машиной
вопросов в связи с тем же примером говорится следую-
щее: «Если же ЭВМ будут заданы вопросы типа: «Где
была она в 8 часов?» или «Сколько приблизительно
времени Иванов был на вокзале?», то формирование
ответов на них не может быть осуществлено в рамках
лингвистического анализа введенного в ЭВМ текста.
Ответы на подобные вопросы предполагают априорные
знания о сути явлений, протекающих в реальном фи-
зическом мире. Например, при ответе на вопрос «Где
была она в 8 часов?» необходимо провести следующие
рассуждения: если в 9 часов она вышла из вагона, и
поезд опоздал на один час, то в 8 часов она, по-види-
мому, находилась в вагоне поезда. Эти рассуждения
позволяют нам сформировать ответ: «В 8 часов она,
по-видимому, находилась в вагоне поезда, идущего в
Москву» Важным в сказанном является появление сло-
ва «по видимому». Оно характеризует неопределен-
$23
Ч. Ш. КИБЕРНЕТИКА
ность ответов такого рода. У нас нет полной информа-
ции для детерминированного ответа на непрямые воп-
росы. Могло, например, оказаться, что интересующая
нас пассажирка села в поезд за полчаса до его прибы-
тия к месту встречи. В этом случае сформированный
ЭВМ ответ будет неверным. Однако особенностью опи-
сываемой ситуации является то, что при отсутствии ап-
риорной информации у спрашивающего ответ ЭВМ бу-
дет вполне «человеческим», и этот ответ вполне удов-
летворяет спрашивающего. Формирование ответов на
непрямые вопросы, как мы уже сказали, требует нали-
чия специальных знаний о внеязыковой действительно-
сти и использования рассуждений типа логического вы-
вода».
Структурной схемой машины, которая должна так
отвечать на вопросы человека (соответствующим обра-
зом понимать его), предусматривается использование
трех процессоров: лингвистического, семантического и
исполнительного. Первым из них производится морфо-
логический анализ, а также поверхностный и глубин-
ный синтаксический анализ сказанного человеком. Вто-
рой из этих процессоров, выполняющий дальнейшие
операции, необходимые для формирования ответа, со-
держит «модель мира», о которой говорилось выше.
Третий процессор работает по командам, поступающим
от второго.
В статье, о которой было рассказано, профессор
Д. А. Поспелов делает предположение, что уже в бли-
жайшем десятилетии будут решены вопросы создания
языка смыслов и модельного языка, «эквивалентных по
своим возможностям моделирования ограниченных, но
весьма богатых областей человеческого мира». В даль-
нейшем же впереди — грандиозная цель создания для
диалоговых систем языка смыслов и модельного, «не
уступающих по моделирующей силе естественным язы-
кам», и, как сказано, «это вдохновляет». Такие прогно-
зы основаны не только на том, что сейчас вырисовались
новые подходы к определению структуры диалоговых
человеко-машинных систем, но и на бурном развитии
самой техники построения машин. Имеются в виду но-
вые принципы построения машин, например их вы-
полнение на базе сетей микропроцессоров, о которых
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
329
мы говорили раньше, и использование принципа ассо-
циативной памяти, о котором пойдет еще речь в 6-м
разделе этой части нашей книги. Следует ожидать
быстрого продвижения в разработке все более совер-
шенных диалоговых систем — создания машин, все луч-
ше понимающих человека.
После рассмотренных нами аспектов понимания ма-
шиной человека перейдем к следующим.
Для понимания машиной переданного ей человеком
письменного текста нужно, чтобы она смогла прочесть
его. Для понимания речи человека нужно, чтобы ма-
шина была способна воспринять ее и уловить смысл
слов и предложений.
О распознавании машиной знаков печатного или
письменного текста мы уже говорили.
Так же, в общем, по характерным признакам произ-
водится и распознавание машиной речевых сигналов.
Однако здесь возникают ббльшие трудности, чем при
распознавании письменных знаков.
Последнее связано с тем, что в речи человека, при
звучании голоса генерируется масса различных акусти-
ческих сигналов. Они оказываются уже другими, когда
человек- говорит быстрее или медленнее, громче или ти-
ше, зависят от интонации. Порождаются различные
звуки при произнесении одного и того же слова раз-
ными людьми.
Поэтому распознаванию речевых сигналов предше-
ствует специальная их обработка. Производится она
различными способами.
Для поступающих с выхода микрофона электриче-
ских сигналов, отражающих звуки человеческой речи,
получают спектральные их характеристики. О частот-
но-спектральном представлении временных функций
было рассказано раньше. При распознавании речевых
сигналов производят спектральный анализ поступаю-
щих сигналов отдельно для следующих" одни за други-
ми малых, порядка сотых долей секунды, интервалов
времени. При ограниченном числе команд, которые
должны приниматься машиной с голоса человека, ока-
зывается возможным хранить в памяти машины эта-
лонные спектральные характеристики различных рече-
вых сигналов. Сравнивая с ними текущие спектраль-
330
Ч. III. КИБЕРНЕТИКА
ные характеристики, машина определяет, какое слово
было произнесено.
Обычно таким и другими способами, о которых; ска-
жем дальше, распознаются сначала не слова и не сово-
купности слов в фразах, а первичные элементы рече-
вых сигналов. Основными единицами звукового строя
являются фонемы, получаемые при расчленении речи.
Когда говорят о фонемах, имеют в виду не отдельные
звуки, а все звуки речи при произношении той или
другой буквы в. фонетической ее транскрипции. Точнее,
вводится в рассмотрение совокупность признаков, по
которым эти звуки резделяются в разных случаях; на-
пример, одним из признаков, служащих ддя выделения
фонем при расчленении речи, в русском языке являет-
ся мягкость или твердость согласных (сравним слова
«мель» и «мел»). Используется и ряд других признаков.
Фонемы являются элементами морфем. Морфемой
называют минимальную значащую часть высказы-
вания.
Выделяются признаки речевых сигналов на основе
кодирования артикуляционных движений губ, языка и
других органов речевого тракта при произнесении че-
ловеком различных звуков.
При анализе речи выделяются типовые сегменты, та-'
кие, например, как гласная-гласная или гласная-соглас-
пая-гласная. :
При формировании разделительных признаков при-!
пимается во внимание ряд факторов. Учитывается диа-
пазон частот элементов спектра. Определяется распре-
деление энергии акустических сигналов. Получаются
и анализируются огибающие полос спектра. Произво-
дится определение корреляционных функций сигналов.
Осуществляется машиной логический анализ всей по-
лучаемой при этом информации.
Для построения моделей различных речевых сигна-
лов в память машины вводятся не только основные
эталонные спектральные характеристики, но запомина-
ются й правила образования межфонемных переходов.
Как уже было сказано, разработаны различные спо-
собы распознавания речевых сигналов. Для этого ис-
пользуется соответственно и различная аппаратура.
Созданию машин, способных воспринимать устные ука-
Ь. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
331
зания человека, уделяется большое внимание у нас
в стране и за рубежом.
Из отечественных работ можно сослаться, например,
на работы Института кибернетики Академии наук Ук-
раинской ССР.
Расскажем о некоторых машинных системах распоз-
навания речи человека, разработанных зарубежными
фирмами.
В японской системе DR-100 входным устройством
является аналого-цифровой преобразователь, практиче-
ски мгновенно преобразующий речевые сигналы в со-
ответствующие им цифровые. Последние передаются в
специализированный анализатор речи. С выхода анали-
затора они поступают в центральный процессор маши-
ны. В центральный процессор передаются из запомина-
ющего устройства и эталонные сигналы, с которыми
сравниваются сигналы, поступающие из анализатора
речи. В машине имеются блок принятия решений и
блок управления выполнением всех указанных опера-
ций. При обработке речевых сигналов этим методом
они разделяются на фрагменты, протяженность кото-
рых в зависимости от общего количества слов, с кото-
рыми имеет дело машина, берется в пределах от 0,2 до
0,3 с. или от 0,8 до 1,2 с. Для каждого такого фрагмен-
та блоком принятия решений принимается решение
о фонемном составе данного фрагмента. Для ряда пос-
ледовательно выделенных фрагментов на основании
проведенного анализа делается вывод о смысле этой
части речи. Это устройство, предназначенное для при-
менения в системах управления промышленными робо-
тами, практически безошибочно распознает любое сло-
во из 50 слов лексикона робота.
В составе другой системы, используемой для про-
граммирования голосом работы ЭВМ п для такого же
управления через ЭВМ работой станков и роботов, име-
ются мини-ЭВМ, преобразователь речи и другие функ-
циональные узлы. Это система VNG-200, получив-
шая применение в США для программирования голо-
сом рабочего цикла сверлильных и токарных станков,
Для управления по устным командам лазерами, обра-
батывающими полупроводниковые и сверхтвердые мате-
риалы, и для управления распределением посылок на
332
Ч. Ш. КИБЕРНЕТИКА
почтовых конвейерах. Эта система применена также
для управления голосом- движениями механической ру-
ки и использована при проведении исследований в об-
ласти искусственного интеллекта. Количество исполь-
зуемых слов здесь также невелико — порядка несколь-
ких десятков.
До последнего времени с небольшим количеством
слов оперировали и другие системы ввода в ЭВМ дан-
ных с голоса. Это относится/ например, .к системе
EMI Threshold. 500, в которой речь человека также пер-
воначально преобразуется в цифровую форму. Особен-
ностью этой системы распознавания речевых сигналов
является то, что она адаптивная. Первоначально неко-
торое время она работает в режиме тренировки — при-
способления к произношению человека, который будет
дальше говорить машине, что она должна делать.
В этой системе имеется предпроцессор, обрабатываю-
щий сигналы, поступающие с выхода микрофона,
и нормализующий спектр речи, и имеется выделитель
признаков, в котором на основе предварительного ана-
лиза сигналов формируются разделительное признаки.
Имеется в системе и микро-ЭВМ.
Более совершенной, ^ем вышеуказанные системы
распознавания речевых сигналов, является система
NEAC 3100, принятая недавно к серийному производ-
ству японской фирмой Nippon Electric. Размер словаря
здесь уже больший: 120 слов слитной речи или 1000
изолированных слов. Какие слова будут включены в
этот словарь, и, следовательно, на какую тему пойдет
разговор, решает человек, обращающийся к ЭВМ. Он
должен лишь произнести при тренировке машины выб-
ранные слова всего один или два раза и машина сфор-
мирует при этом и запомнит образы этих слов, исполь-
зуемые затем ею при распознавании речи. Последнее
производится в реальном масштабе времени: за доли
секунды машина обрабатывает речевую информацию,
улавливая 'смысл того, что ей говорится. Для читате-
ля, вероятно, будет интересным узнать, что эти резуль-
таты получены благодаря оптимизации процессов срав-
нения акустических образов цепочек слов, осуществляе-
мой здесь методом динамического программирования,
о котором было рассказано во второй части нашей кии-
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ’
333
ги. Рассматриваемая система распознавания речи реа-
лизована с помощью нескольких микропроцессоров,
один из которых специально предназначен для выпол-
нения операций динамического программирования.
Наряду с этими работами проводятся сейчас и рабо-
ты по созданию автоматических устройств, которые по
поступающим от ЭВМ сигналам должны синтезировать
речь человека и говорить человеческим голосом. Осу-
ществляется это следующим образом. После лингвисти-
ческой и фонетической обработок, выполняемых ЭВМ,
сигналы поступают в электронное устройство, где от-
рабатываются основные характеристики спектра речи
(определяется частотный его состав, выделяются вер-
шины спектра-форманты), задается последовательность
произношения звуков и придаются речи нужные ритм
и мелодичность, надлежащие интонации и ударения.
ВоспроизвЬдятся акустические явления в речевом тракте
человека при произнесении им соответствующих зву-
ков. Искусственным образом получают акустические
характеристики, наблюдаемые при формировании чело-
веком отдельных гласных и согласных звуков и в связ-
ной его речи. В синтезаторе речевых сигналов имеется
генератор сложных периодических колебаний, с по-
мощью которого формируются гласные звуки. Он вы-
полняет такие же функции, как у человека голосовые
связки. Генераторы шума используются для формиро-
вания шумных согласных звуков, таких, например, как
С и Ц. Формирование же таких согласных звуков, как
Ж и 3, производится при использовании генератора пе-
риодических колебаний вместе с генераторами шума.
Для воспроизведения резонансных свойств гортани, ро-
товой и носовой полостей используются специальные
резонаторы. Осуществляется согласованное управление
работой всех этих элементов.
Кроме этого способа, используется и другой, более
простой Делается заранее магнитофонная запись про-
изнесенных человеком отдельных слов, и по поступаю-
щим от ЭВМ сигналам они собираются таким образом,
что получается связная речь нужного содержания.
Указанные выше синтезаторы речи предназначены
для устных ответов машины на вопросы, которые зада-
ет ей человек, и для того, чтобы отчитываться, также
334
4. III. КИБЕРНЕТИКА
устно, перед человеком о выполнении приказанных им
действий. Вместе с тем разрабатываются синтезаторы
речи и другого назначения, например для произнесе-
ния вслух прочитываемого текста. Одна из опытных си-
стем синтеза речи, работающая в реальном времени,
читает вслух напечатанный текст со средней скоростью
150 слов в минуту. Создание таких машинных систем
предоставит возможность слепым слышать все, что на-
писано в книгах, напечатанных обычным шрифтом.
Синтезаторы речи являются частью и другого оборудо-
вания, разрабатываемого с тем, чтобы создать условия,
при которых слепые могли бы, программируя на ЭВМ
решение различных задач, получать доступным образом
информацию о выполнении поданных команд.
Работами по созданию устройств для распознавания
речевых сигналов и для машинного синтеза речи зани-
маются сейчас специалисты по искусственному интел-
лекту и лингвисты, инженеры-аэродинамики и физики-
акустики.
Так обстоит дело с попытками заставить машины
понимать речь человека и говорить человеческим го-
лосом.
Рассмотрим дальше, что делается для того, чтобы
машины могли писать, чертись, рисовать.
Когда рассматривались принципы работы ЭВМ, бы-
ло показано, как на входе в ЭВМ числовая и символь-
ная информация преобразуется в соответствующие пос-
ледовательности единиц и нулей, с которыми опериру-
ет машина. Выходными устройствами ЭВМ выполняет-
ся обратное преобразование и по получаемым при этом
сигналам может производиться управление печатанием
текста и выполнением чертежей и рисунков.
Получаются текстовые записи, чертежи и рисунки
различными способами. Например, цифры и буквй тек-
ста печатаются автоматической пишущей машинкой,
у которой каждая клавиша соединена со своим элек-
тромагнитом, включающимся в действие по поступаю-
щим от ЭВМ сигналам. Иногда применяются электро-
химические устройства, в которых изображение текста
и рисунков получается при пропускании электрическо-
го тока через соответствующие участки поверхности
бумаги, пропитанной электролитом. Это также делается
4, КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
335
по сигналам, поступающим с выхода ЭВМ. Предпри-
нимались попытки применить магнитографические уст-
ройства, в которых намагничиваются участки поверхно-
сти магнитного материала, которые покрывают затем
магнитным красящим порошком. Притяжение крася-
щего порошка к наэлектризованным участкам бумаги
(электризация также производится под управлением
ЭВМ) используется в так называемых ксерографиче-
ских печатающих устройствах.
Недавно разработан новый способ высокоскоростной
печати, основанный на использовании электрофотогра-
фического устройства с лазером и блоком скоростной
обработки бумаги (применен в подсистеме печати ма-
шины IBM 3800). Выходная информация печатается
на бумажной ленте, движущейся со скоростью 80 см
в секунду.
Расскажем более подробно о другом новом перспек-
тивном способе получения печатного или письменного
текста, чертежей и рисунков, основанном на том, что
электризуются капли красящей жидкости и ЭВМ уп-
равляет полетом наэлектризованных капель. Пролетая
с большой скоростью, капли покрывают лист бумаги
так, что получается нужное изображение.
Устройство, используемое для такой записи, показа-
но на рис. 38 наверху слева. В этом устройстве имеют-
ся следующие рабочие узлы: узел формирования ка-
пель, содержащий заполненную красящей жидкостью
камеру 7, сопло 2, генератор 3 ультразвуковых колеба-
ний, которые передаются через пьезокристалл 4 жид-
кости в камере 7, насос 5, подающий жидкость под дав-
лением в камеру 1 из резервуара 6, в который стека-
ют из ловушки 7 капли жидкости, не попавшие на по-
верхность бумаги 8, на которой производится запись,
узел дозирования сообщаемых каплям жидкости элек-
трических зарядов, содержащий канал Р, по которому
от ЭВМ передаются сигналы, несущие информацию
о требуемой величине заряда, а также содержащий фор-
мирователь зарядов 10 и зарядные пластины 77, узел
формирования электрического поля, отклоняющего за-
ряженные капли жидкости, в котором имеются источ-
ник высокого напряжения 12 и пластины 13. Бумага 8,
па которой производится запись, движется с постояи-
зи
Ч. ПТ КИБЕРНЕТИКА
пой скоростью в направлении, перпендикулярном плос-
кости нашего рисунка. Может быть также, что бумага
неподвижна^ а перемещается записывающая головка.
Рис. 38.
Работает это устройство следующим образом. Под
действием колебаний, передающихся от генератора ко-
лебаний 3 через пьезокристалл 4 жидкости, находя-
щейся в камере Z, струя жидкости, вытекающая из
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ
837
сопла 2, распадается на капли. На участке каплеобра-
зования между пластинами 11 происходит электризация
капель и заряженные капли, проходя между пластина-
ми 13, отклоняются под действием электрического по-
ля от оси сопла. Каждая капля в зависимости от того,
какой ей придан электрический заряд, отклоняется на
соответствующую величину у.
При синхронизации с процессом движения бумаги
или записывающей головки процессов каплеобразования
и придания каждой капле заряда, отвечающего соответ-
ствующему сигналу, получаются буквы, цифры, целые
страницы печатного текста, чертежи, рисунки.
При описанной выше схеме, поясняющей* рассмат-
риваемый принцип записи сигналов, необходимо, на-
пример, для формирования буквы А, чтобы при смеще-
нии головки _с соплом вдоль оси х (расстояние отсчи-
тывается. как показано наверху справа на рис. 38) на
величину следующие одна за другой капли попали
в точки, одна из которых имеет ординату у^, а другие
ординаты 1/2, Уз, Ук и 2/5. После перемещения сопда в.
следующее положение, определяемое координатой х2,
капли должны быть направлены так, чтобы одна из
них попала в точку с ординатой у^ а другая в точку
с ординатой уъ и т. д. Буквы, цифры и другие знаки
формируются с помощью капель, попадающих в опреде-
ленные соответствующие данному знаку точки матри-
цы, изображенной внизу под описанным только что
графиком.
Незаряженные капли не отклоняются (движутся по
оси сопла). Они попадают в ловушку 7 и возвращают-
ся в резервуар 6,
Разработка этого метода управляемой от ЭВМ печа-
ти потребовала решения целого ряда технических воп-
росов. Должны получаться капли, возможно близкие по
размерам одни к другим; и должна быть стабильной*
частота каплеобразования. То и другое необходимо для
создания единообразных условий полета капель, что
является важным при синхронизации указанных ранее
процессов. В связи с этим возникает необходимость ав-
томатической стабилизации среднего давления в каме-
ре.. От величины этого давления зависит при прочих
равных условиях скорость движения капель, а следо-
Ч. III. КИБЕРНЕТИКА
33»
вательно, 'и время, за которое каждая данная капля
проходит расстояние от сопла до листа бумаги. Для
возможности синхронизации процессов работы системы
интервалы между движущимися одна за другой капля-
ми должны быть такими, чтобы для всех капель при
их полете на рабочем участке создавалось одинаковое
аэродинамическое сопротивление.
Все эти вопросы были решены, и описанный способ
регистрации выходных данных ЭВМ был доведен до
начала практической его реализации. Для получения
мелких капель одинакового размера оказалось необхо-
димым использование сопел малого проходного сечения
и создание больших давлений жидкости в камере перед
соплом. Для обеспечения большой скорости печати соз-
даются в камере с красящей жидкостью высокочастот-
ные колебания. В построенных устройствах рассмат-
риваемого типа имеются сопла с диаметром, равным
сотым долям миллиметра, давление жидкости порядка
десятков атмосфер, частота колебаний составляет де-
сятки тысяч герц. В одном из построенных устройств
такой записи, в котором имеется ряд сопел, через каж-
дое сопло подается 40 000 капель в секунду.
Разработаны различные принципы управления поле-
том заряженных капель по поступающим от ЭВМ сиг-
налам. На рис. 38 ниже, чем ранее рассмотренная схе-
ма, представлена схема управления, аналогичная схеме
управления потоком электронов в электронных лучевых
трубках. Здесь капли, получающиеся при распаде выте-
кающей из сопла 1 красящей жидкости, приобретают
при прохождении через кольцо 2 электрический заряд
и в дальнейшем при пролете их между пластинами 3
И пластинами 4 отклоняются в двух взаимно перпенди-
кулярных направлениях.
Разработаны и другие методы управления полетом
заряженных капель.
Особенностью рассматриваемого способа печати яв-
ляется то, что просто получаются'многокрасочные изо-
бражения. При этом ЭВМ производит синхронное уп-
равление потоками ‘капель жидкости, вытекающей из
нескольких сопел. Чтобы пояснить, как это делается,
обратимся к схеме, представленной на рис. 38 внизу.
Жидкости различных цветов вытекают из сопел 7, 2
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ 339
и 5, причем управление движением капель осуществля-
ется таким образом (элементы системы электризации
капель и управления их движением на рисунке не по-
казаны), что в одну и ту же точку поверхности бума-
ги 4, укрепленной на вращающемся барабане 5, попа-
дают капли различных цветов. В промышленно изготов-
ляемом, специализированном устройстве получается
цветное изображение, в котором при использовании
в качестве исходных лишь трех различных цветов
(красный, синий, желтый) может быть более тридцати
различных цветов и’оттенков.
Разрабатываются устройства записи заряженными
каплями, предназначенные для получения крупнофор-
матных и миниатюрных изображений текста вместе с
рисунками. О возможностях, которые дает этот способ
печати, можно судить по тому, что была отпечатана
таким образом географическая карта района с большим
количеством надписей на кусочке бумаги, лишь в не-
сколько раз большем, чем обычная почтовая марка.
Закончим на этом обсуждение того, что*касается
письма и выполнения чертежей и рисунков машинами.
Беседа эта наша близится к концу. В заключение
еще раз вернемся ко всему рассказанному здесь. В ка-
кой мере все это связано с тем, что говорилось раньше
о распознавании образов, о делаемых машинами логи-
ческих выводах, о теории фреймов? Насколько деталь-
но были освещены поднятые в этой беседе вопросы?
В какой степени касаются они научных исследований
в областях, смежных с кибернетикой?
Ответим сначала на первый вопрос. Имеется тесная
связь. Например, принципы распознавания образов,
описанные раньше,, когда рассматривалось распознава-
ние зрительных образов (различение букв и др.), пол-
ностью относятся и к распознаванию речевых сигна-
лов. Такими же методами формируются здесь раздели-
тельные признаки, хотя в отношении речевых сигналов
и имеется, как было показано, своя специфика. Упоми-
налось и о том, что выполнение рассматриваемых опе-
раций в ряде случаев связано с логическим анали-
зом. В этой части используется то, о чем говорилось,
когда мы знакомились с методами машинного решения
задач. ' ,
340 Ч Ш КИБЕРНЕТИКА
Было затронуто много вопросов. От использования
искусственных и естественного языков при общении че-
ловека с машиной и до техники выполнения машиной»
записей и рисунков. Насколько подробно представилось
возможным рассказать обо всем этом? В общем, только
кратко, весьма сжато. Лишь так, чтобы можно было
дать общее представление о данной области.
Вообще же, по некоторым из вопросов, которых мы
касались, имеются различные подходы к их решению,
и можно было бы рассказать в связи с этим здесь и
многое другое-. Например, имеются различные опреде-
ления того, что представляет собой процесс понима-
ния человеком или машиной. Так теория фреймов ис-
ходит из того, что «понимание» происходит «путем
конкретизации терминалов фреймов и согласования воз-
можных для каждого из них понятий с вполне опреде-
ленной, существующей во внешнем мире обстанов-
кой»,— говорит Ф. М. Кулаков. В упоминавшейся
статье он пишет: «В своей теории М. Минский не про-
водит границы между теорией человеческого мышления
и теорией построения «думающих» машин (искусствен-
ного интеллекта). Он полагает, что процессы человече-
ского мышления базируются на хранящихся в его па-
мяти материализованных многочисленных запомненных
структурах данных-фреймах, с помощью которых чело-
век осознает зрительные образы (фреймы визуальных
образов), понимает слова (семантические фреймы), рас-
суждения, действия (фреймы-сценарии), повествования
и т. д. Процесс понимания при этом сопровождается ак-
тивизацией в .памяти соответствующего фрейма и сог-
ласованием его терминальных вершин с текущей си-
туацией. В случае неудачи из памяти с помощью сети
поиска информации, объединяющей системы фреймов,
«выбирается» другой фрейм, терминалы которого, воз-
можно, окажутся между собой в более подходящих от-
ношениях применительно к той же рассматриваемой
ситуации. Процесс последовательной замены одного
фрейма другим особенно наглядно проявляется в таких
областях человеческого мышления, как понимание ес-
тественного языка, рассуждение, вывод по аналогии
и др.». Здесь делается поцытка объяснить сам процесс
понимания.
4. КАК СОЗДАЮТСЯ «УМНЫЕ» МАШИНЫ 341
Имеются и другие, кроме тех, которых мы касались,
вопросы техники распознавания образов и «понима-
ния» машиной того, с чем она имеет дело. Например,
при не очень четком изображении предметов на экране
телевизора для их распознавания машина должна вы-
делить контуры предметов и уже потом окажется воз-
можным проанализировать, что они собой представля-
ют. Выделение резко очерченных граничных линий про-
изводится специальными методами цифровой обработки
изображений.
Вопросы такой машинной обработки изображений
тоже могли бы быть включены в план этой беседы или
о них можно было бы рассказать особо. Можно было бы
подробнее рассказать и о том, как машины рисуют,
и познакомить читателя с запрограммированными деть-
ми и выполненными машиной умилительными рисунка-
ми птички, паука, мясного пирога и пугала, которые
приведены в книге Б. Рафаэла. Можно было бы в час-
ти рисования ~ рассказать и о более практических
вещах. Например, о разрисовке машиной тканей и
о создании с помощью- ЭВМ мультипликационных
фильмов.
Но для этого нужно было бы написать более объ-
емистую книгу. Ограничимся тем, что по затронутым
до сих пор вопросам было сказано. Тем более, что
о многом еще нужно будет рассказать дальше.
Ответим-только на последний из поставленных вод-
росов. Исследования, которые проводятся с целью соз-
дания машин, понимающих человека, близко связанщ
с тем, что делается в других смежных отраслях науки. -
Так, упоминавшиеся нами применения математической
лингвистики представляются актуальными и при про-
ведении ряда биологических исследований. Например,
ученые готовятся сейчас к тому, чтобы заговорить с
дельфинами на их языке. Выяснено, что в их языке
имеется четыре тональности, что «речь» их значитель-
но быстрее человеческой, проаналйзирован и» частот-
ный состав издаваемых ими звуков. Все, это говори-
лось об искусственных языках, созданных человеком,
и об естественном языке человека, принимается сейчас
во внимание при проведении работ, связанных с поис-
ком внеземных цивилизаций.
342
4. HI. КИБЕРНЕТИКА
Однако не будем отвлекаться от собственных проб-
лем кибернетики. Имеется масса интересных, требую-
щих изучения вопросов в самой кибернетике.
5. Другие проблемы кибернетики
Наряду с ранее указанными проблемами, такими,
например, как распознавание образов и решение за-
дач машинами, с развитием кибернетики возник и
ряд других. Лучше даже сказать не наряду, а в свя-
зи, в тесной связи с ними. Краткий обзор возникших
вопросов будет сделан в ходе этой нашей беседы.
Будут затронуты в связи с кибернетикой, с задачами
создания искусственного интеллекта следующие те-
мы. Целеобразование. Совершенствование иерархии
структур. Кодирование и передача информации, ми-
ниатюризация устройств хранения информации. Раз-
мытые количественные оценки качества. Способность
к абстрагированию. Логические выводы и экспери-
. ментальное исследование. Совместная обработка не-
прерывных и дискретных сигналов. Есть еще и дру->
гие вопросы, которые тоже нам будет нужно обсу-
дить. В общем, будет затронут широкий круг раз-
личных вопросов. Они различны по постановке и
по тому, в какой мерЪ проглядываются сейчас пути
их решения. Но во всех случаях, действительно,
пойдет речь о кардинальных проблемах кибернетики.
Начнем с целеобразования. Кибернетические ма-
шины отличаются от человека тем, что основные цели,
на достижение которых направляются их действия, им
задаются. Сами они, во всяком случае сейчас, перво-
начально ставить задачи неспособны.
Постановка целей у человека обусловлена влияни-
ем многих факторов. Это и биологические потребности
человека, и его интересы, желания. Это и внешние фак-
торы, к которым следует отнести социальные условия
жизни. Цели поведения формируются в результате рас-
судочной деятельности человека или под влиянием эмо-
ций. При изменении обстановки человек способен по
ходу дела сам придумать новый план действий, кото-
рый может существенно отличаться от ранее имевше-
гося. Для машин все это сейчас недоступно.
5. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
343
Не изучены достаточно и процессы целеобразования
у человека.
Ученые считают, что изучение психики людей помо-
жет лучше понять, как действует у них механизм це-
леобразования. Считается, что это откроет возможности
для дальнейшего усовершенствования систем искус-
ственного интеллекта. В СССР сейчас проводятся в ря-
де научных организаций исследования психической дея-
тельности человека с учетом вопросов, представляющих
интерес для области искусственного интеллекта. Рабо-
ты эти ведутся в различных направлениях. Например,
А. М. Емельянов разработал аппарат -описания и ана-
лиза структуры поступков человека посредством по-
строения их фреймов. Фреймы поступков строятся на
основе анализа структуры личности и ее окружения.
Некоторые из ученых направили свои исследования на
то, чтобы выяснить состав и свойства мозговых струк-
тур, участвующих в формировании положительных и
отрицательных эмоций. Делаются попытки построить
модель процесса мышления на основе изучения межней-
ронных связей между структурами мозга и т. д. Все
это, вероятно, поможет в будущем найти подходы к
раскрытию природы целеобразования.
Имеется в виду и то, что обычно постановка цели
бывает связана с прогнозированием будущего. Основа-
нием для тех или иных действий часто является пред-
положение о возможном развитии событий при есте-
ственном их ходе и при вмешательстве в них. Так как
на практике в сложных системах приходится иметь дело
со случайными процессами, задача машинного прогно-
зирования обычно ставится как статистическая. Прогно-
зирование при этом осуществляется следующим обра-
зом. Анализируется, если это возможно, предшествую-
щий ход рассматриваемого процесса или же, если это
не представляется возможным, то некоторый ограничен-
ный участок в текущей части процесса, и на основании
этого с определенной степенью вероятности прогнози-
руется дальнейшее его течение. При статистическом
прогнозировании используются характеристики случай-
ных процессов, о которых было рассказано во второй
части книги. Как указывалось, обычно они определя-
ются при обработке информации с помощью ЭВМ.,
344
Ч. Ш, КИБЕРНЕТИКА
Указанная выше проблема целеобразования одна из
основных в кибернетике.
Важными также являются вопросы совершенствова-
ния иерархической структуры машин. В этой части мо-
гут служить образцом системы управления в живых
организмах. Полную картину иерархической структуры
процессов жизнедеятельности человека нарисовали
Л. А. Растригин и П. С. Граве. В упоминавшейся их
книге говорится: «Если внимательнее посмотреть на
жизнь с позиций управления, то легко убедиться, что
организм имеет большое число уровней управления, на
каждом из которых оно обладает своей спецификой
(такие системы управления в кибернетике называются
иерархическими). Начнем «сверху».
* 1. Сознание — это одна из наиболее тонких и, следо-
вательно, наиболее уязвимых форм управления. Созна-
ние позволяет нам управлять поведением системы (ор-
ганизмом) в непривычной обстановке. Управление ею
в привычных ситуациях осуществляется ниже, на сле-
дующем уровне подсознанием.
2. Подсознание является системой управления в
уже известных, ранее часто встречавшихся ситуациях;.
Автоматизм подсознания разгружает верхний контур
управления поведением (сознанием) от рутинных опе-
раций (ходьба, бег, координация движений, професси-
ональные навыки и т. д.) для решения интеллектуаль-
ных задач, которые моТут быть решены лишь на созна-
тельном уровне.
3. Нервно-соматический уровень управления, обес-
печивающий безусловно-рефлекторную . деятельность
(глазные рефлексы — мигательный, конъюнктивальный
и др., кашель, глотание и т. п.). Ф; Акционирование это-
го уровня достаточно «жестко» и передается по наслед-
ству, то есть отражает опыт предыдущих поколений.
4. Управление на уровне функциональных систем
осуществляется главным образом вегетативной нервной
системой и обеспечивает Целостность организма.
5. Следующий уровень управления организмом реа-
лизуется йшическим путем при помощи гормонов — спе-
циальных сигнальных веществ. Гормоны разносятся
током крови и воздействуют на организм в целом. Этот
уровень управления называют гормональным.
' б. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
345
6. И, наконец, последний уровень клеточный. Уп-
равление на уровне клетки определяет регуляторные
механизмы клетки и ее взаимоотношения с внешней
средой (органом, а через него и организмом в целом).
Этот вид управления осуществляется с помощью фер-
ментов — белков специального вида. Поэтому управле-
ние на уровне клетки часто называют ферментативным.
Это последний уровень управления организма и, сле-
довательно, самый надежный, самый защищенный.
Известно, что некоторые клетки могут существовать вне
организма и «чувствуют» они себя при этом превос-
ходно».
Столь рациональное распределение функций управ-
ления в сложной биологической системе представляет
большой интерес. Очень интересна динамика переходов
от уровня сознания к уровню подсознания и динамика
обратных переходов. То, что первоначально делается
сознательно, но затем часто повторяется, становится
привычным, не требует напряжения мысли, переходит
на уровень подсознания и начинает выполняться маши-
нально. И наоборот, если возникают вопросы, которые
таким образом не решаются, то к их решению привле-
кается сознание человека.
Усовершенствование сложных машинных систем уп-
равления, имеющих уже сейчас иерархическую струк-
туру (вспомним рассказанное об этом в начале книги),
осуществляется не в порядке прямого подражания то-
му* что имеется в живых организмах. Но многое из то-
го, что характерно для иерархического построения
биологических систем управления, несомненно будет
использовано в технике.
В какой-то мере связано с указанным выше разде-
ление в разрабатываемых сейчас машинах функций
оперативных и внешних запоминающих устройств
и использование стандартных подпрограмм в ходе ч
решения задач. Но это не совсем то, о чем мы го-'
ворили.
Ясно лишь, что дальнейшее усовершенствование
сложных кибернетических машин во многом будет за-
к висеть от того, насколько удачной будет их структура
и насколько полно будет использоваться при их постро-
ении иерархический принцип. ,
346
Ч. КИБЕРНЕТИКА’
Следующие из названных вначале проблем — это
проблемы- кодирования и передачи информации и ми-
ниатюризации устройств хранения информации. Чтобы
пояснить, что здесь имеется в виду, снова обратимся
к примерам живой природы.
Изумительным образом кодируется и передается
наследственная информация в живых организмах.
В одних лишь половых клетках оказывается сосредо-
точенным огромное количество данных. Информация
кодируется и передается таким образом, что дети при-
обретают внешнее сходство с родителями, наследуют
от них черты характера и многое другое.
Раскрытие в середине двадцатого века биологиче-
ского кода позволило объяснить, как осуществляется
передача наследственных признаков. Сделанные откры-
тия имеют большое значение для кибернетики.
Было выяснено, что. наследственная информация за-
шифровывается в молекулах нуклеиновых кислот. Она
определяется порядком следования нуклеотидов — сое-
динений, входящих в состав нуклеиновых кислот. Нук-
леотиды отличаются одни от других по содержащимся
в них азотистым основаниям. В дезоксирибонуклеиновой
кислоте (ДНК) имеются основания четырех различных
видов: аденин, гуанин, цитозин, тимин. В рибонуклеи-
новой кислоте (РНК) тоже основания четырех различ-
ных видов, три из которых те же, что и в ДНК. Это:
аденин, гуанин, цитозин и урацил. Встречаются, но не
часто, и другие основания. Кодирование и передача ге-
нетической информации производятся поэтапно. Сна-
чала в определенных областях ДНК синтезируются
молекулы информационной РНК. При этом происходит
так называемый процесс транскрипции: последователь-
• ность нуклеотидов ДНК преобразуется («переписывает-
ся») в последовательность. нуклеотидов РНК. На сле-
дующем этапе на основе последовательности нукле-
отидов в информационной РНК формируется при
посредстве так называемой транспортной РНК после-
довательность аминокислот в белке. Иначе говоря, с
помощью РНК осуществляется передача информации,
содержащейся в молекулах ДНК, к синтезируемым мо-
лекулам бедков. Установлено, что генетический код яв-
ляется триплетным; одну аминокислоту! общее число
5. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
347
разновидностей которых в белке* (во всей живой приро-
де) равно двадцати, кодируют группы из взятых по три
Таблица 1
Второй нуклеотид кодона
У ц А Г
1 Первый нуклеотид кодона 1 У УУУ)фенил- УУЦ -ала- /ни л УУА) УУГ (лейцил УЦУ УЦЦ УЦА УЦГ серил УАУИиро- УАЦ/зил УАА УАГ УГУ УГЦ УГА УГГ 1цисте- /инил трипто- фенил У ц А Г | Третий нуклеотид кодона |
Ц ЦУУ) ЦУЦ ЦУА [лейцил ЦУГ/ ЦЦУ ЦЦЦ ЦЦА ццг] пролил ЦАУ1ГИСТИ- ЦАЦ/дил ЦАА|глюта- ЦАГ/минил ЦГУ ЦГЦ арги- ЦГА нил ЦГГ У ц А Г
А АУУ АУЦ АУА АУГ 1изо- | лейцил метио- нил АЦУ АЦЦ АЦА АЦГ Трео- нил ААУ|аспара- ААЦ/гинил Ад л изи л АГУ А ГЦ] АГА: ATrj 1 серил 1арги- [нил У ц А Г
Г ГУУ] ГУЦ ГУА ГУГ валил ГЦУ гцц ГЦА ГЦГ аланил ГАУ1аспар- ГАЦ/тил ГАА|глюта- ГАГ/мил ГГУ ГГЦ ГГА ГГГ глицил У ц А Г
в соответствующих последовательностях оснований (от
одной до шести таких групп). Группу оснований, соот-
ветствующих одной аминокислоте белка, называют
кодоном. Здесь приводится таблица 1 словаря
РНК — аминокислотного кода. Приняты следующие
обозначения: У — урацил, Ц — цитозин, А — аденип,
Г — гуанин. Фенил-аланил, лейцил и другие названия,
указанные в клетках таблицы, представляют собой на-
звания аминокислот. Из таблицы следует, что генетиче-
ский код является избыточным: некоторые триплеты
остаются незанятыми.
Более подробно можно познакомиться с кодирова-
нием и передачей наследственной информации по кв и-
348
Ч. III. КИБЕРНЕТИКА
ге В. В. Налимова «Вероятностная модель языка.
О соотношении естественных и искусственных языков»,
выпущенной в 1979 г. издательством «Наука».
У читателя может возникнуть вопрос о том, какое
отношение имеет кодирование наследственной инфор-
мации к языкам, о которых было рассказано раньше,
в прошлой нашей беседе. Язык биологического кода то-
же является одним из языков, о котором мы просто
раньше не упоминали. Генетический код рассматрива-
ется как «алфавит и грамматика, используемые клеткой
для перевода текста с 4-буквенного языка нуклеиновых
кислот на 20-буквенный язык белка».
В общем, многое уже сделано по изучению кодиро-
вания и передачи наследственной информации. Одна-
ко все это еще недостаточно для того, чтобы можно
было подойти к практическому использованию сделан-
ных выводов в кибернетике.
Несмотря на большой прогресс в миниатюризации
элементов ЭВМ, достигнутое здесь еще очень далеко от
того, что характерно для элементов передачи наслед-
ственной информации в живых организмах. Дальнейшее
усовершенствование методов кодирования и передачи
информации в*машинах и изыскание способов постро-
ения миниатюрных устройств хранения больших масси-
вов информации являются одними из важнейших проб-
лем. От продвижения в этой области во многом будет
зависеть успех дальнейшего развития кибернетики.
Перейдем теперь к следующим проблемам, о кото-
рых было сказано в начале этой беседы. Пойдет дальше
речь о том, что было названо размытой количественной
оценкой качества и было названо абстрагированием.
Это два разных вопроса. Общим для них является лишь
то, что могут быть в какой-то мере едиными пути их
решения. В обоих случаях "имеется в виду то, что в
пределах возможностей человека, но до сих пор было
недоступным для машин (и, что очень важно, чтобы
они тоже могли делать).
Начнем с оценки качества. Человек очень часто
оценивает качество предметов и качественные характе-
ристики явлений с большой степенью неопределенно-
сти. При этом оценки получаются не совсем четкими;
расплывчатыми, размытыми. Приведем примеры. О со-
5. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
849
ответствующем* цвете говорят: «голубоватый» или «се-
роватый». Таким же образом характеризуют и другие
цвета. Иногда можно услышать высказывания о чело-
веке: «он еще молодой», «недостаточно опытный».
Постоянно приходится иметь дело с качественными
оценками следующего вида: «тяжелый», «легкий», «го-
рячий», «холодный», «красивый», «уродливый», «весе-
лый», «грустный» и т. п.
Для того чтобы в машинных программах молено бы-
ло отразить такого рода расплывчатые качественные
оценки, необходимо, чтобы им была приписана некото-
рая количественная характеристика, пусть также рас-
плывчатая, размытая.
Путь к этому был открыт опубликованной в 1965 г.
работой американского ученого Л. А. Заде. Он являет-
ся создателем теории размытых множеств, приобрета-
ющей для кибернетики, по мере ее разработки, все
большее и большее значение.
Применительно к рассматриваемому здесь вопросу
понятие размытого множества используется следующим
образом. Пусть, например, нужно передать мысль о
том, что отопительная батарея лишь чуть тепловатая.
Это может быть связано с тем, что плохо работает сис-
тема отопления, или же последняя была дишь недавно
включена и батарея не успела прогреться, или, может
быть, по сезону и не нужно лучше топить. Все это для
нас сейчас не имеет значения. Важно лишь, что бата-
рея тепловатая. Но что значит здесь «тепловатая»?
Передается эта мысль таким образом. Указывается
множество значений температуры и каждому из. них
приписывается некоторая численная величина, харак-
теризующая степень соответствия данного значения
температуры понятию «тепловатая». В зависимости от
выбора этих величин и формируется то, что отражает
данное понятие. Элементы размытого множества обо-
значаются как где — сам г-й элемент, а щ —
функция принадлежности. В нашем случае можно, на-
пример, охарактеризовать то, что батарея тепловатая,
построив следующее размытое множество: 0/0,012; 5/0,1;
10/0,6; 15/1; 20/0,9; 25/0,7; 30/0,4; 40/0,02. Здесь 0,
5, 10, 15, 20, 25, 30, 40 —возможные значения темпе-
ратуры. То, что температуре 15° приписано значение 1
350
Ч. III. КИБЕРНЕТИКА
функции принадлежности, указывает на то, что она
определенно относится к нашему множеству; темпера-
туры же 20°, 25° и 10° относятся соответственно к не-
му в меньшей степени, а 30°, 5°, 40° и 0° еще в мень-
шей степени.
В дальнейшем понятие размытости было распро-
странено на широкую область операций. Была созда-
на алгебра, оперирующая с размытыми величинами
(определены правила, пользуясь которыми можно уси-
ливать или ослаблять размытость). Появилась размытая
алгебра логики. Здесь утверждению и отрицанию соот-
ветствуют уже не значения переменных 1 и 0 как в
обычной булевой алгебре, а множества в том и другом
случае величин, больших нуля и меньших единицы,
каждому из которых так же, как было указано выше,
приписывается некоторое значение функции принад-
лежности.
Совершенно новыми являются представления о не-
четких алгоритмах (раньше алгоритм определялся как
система четко сформулированных правил действия) я
о размытых конечных автоматах. Появились понятия
размытых языков и грамматик. Указано на возмож-
ность их использования для описания нечетких, заби-
тых шумами изображений. Предложено использовать
методы теории размытых множеств при разработке
систем машинного. представления речевых сигналов.
В сочетании с теорией динамического программирова-
ния Р. Веллмана, о которой рассказывалось во второй
части нашей книги, теория размытых множеств явля-
ется основой для разработки методов принятия реше-
ний при нечетко определенных условиях.
Созданы уже машинные программы для описания и
реализации операций на размытых множествах.
Все это очень важно, так как в реальных условиях
человеку часто приходится иметь дело с нечеткой, рас-
плывчатой информацией, и впервые сейчас появляется
возможность сделать так, чтобы могла оперировать о
этой информацией машина.
В последнее время учеными все чаще высказывает-
ся мнение о том, что нечеткие, размытые алгоритмы
вообще характерны для мыслительной деятельности че-
ловека; этим объясняется спасобность человеческого
б, ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
351
мозга находить решение неформализуемых задач. Для
исследований, которые ведутся в данном направлении,
является существенным то, что установлены возмож-
ность перехода при определенных условиях от размы-
тых к неразмытым алгоритмам и возможность перехода
в ряде случаев от функции принадлежности к веро-
ятностным мерам. Это, по-видимому, позволит создать
в дальнейшем весьма общую теорию кибернетических
систем. На основе сделанных в данной области выво-
дов, вероятно, удастся намного продвинуться вперед и
в практической реализации систем искусственного ин-
теллекта. Использование элементов размытой логики в
мыслительной деятельности человека подробно рассмот-
рено в книге О. Г. Чораяна «Размытые алгоритмы мыс-
лительных процессов», выпущенной в 1979 г. издатель-
ством Ростовского университета.
О том, насколько большое значение придают ученые
теории размытых множеств, можно судить по следую-
щим данным. За дзадцать лет, прошедшие со време-
ни опубликования указанной выше первой работы
Л. А. Заде, были сделаны тысячи научных публикаций,
посвященных теории размытых множеств и ее прило-
жениям. Эти вопросы рассматривались при проведении
ряда международных семинаров и конгрессов. С 1978 г.
начал издаваться специальный журнал по теории раз-
мытых множеств и систем.
Возможно, что применение методов теории размы-
тых множеств позволит подойти и к решению следую-
щей из указанных проблем. Это то, что было названо
абстрагированием. Способность к абстрагированию яв-
ляется замечательным свойством человека; реализация
подобного в машинах пока не представляется воз-
можной.
Говоря об абстрагировании будем иметь в виду сле-
дующее.
Человек может сосредоточить свое внимание на
чем-то одном, а все остальное при этом как бы прохо-
дит мимо него, его не затрагивает. При необходимости,
по обстоятельствам, внимание переключается с одного
на другие. Поясним это примером. Представьте себе,
что вы находитесь на автобусной остановке, вдали от
которой установлены,часы, и если смотреть и том же
852
Ч. Ш. КИБЕРНЕТИКА
направлении, то можно увидеть дом, на котором име-
ется дощечка с номерным знаком. Если вы ждете ав-
тобуса и притом спешите, опаздываете куда-либо, го,
взглянув в указанном направлении, вы заметите, какое
время ‘ показывают часы. Много раз совершая поездку,
вы можете не обратить внимание на номер дома. Если
же в первый "раз приехав на эту остановку и выйдя на
ней из автобуса, вы должны выяснить, как пройти по
имеющемуся у вас адресу, то взор ваш сразу же обра-
тится к номерному знаку на ближайшем доме, и при
этом вы не только не заметите, который час сейчас, но
возможно вообще не обратите внимания на находящие-
ся в поле вашего зрения часы. И так везде и во всем.,
Ненужная нам информация или совсем не воспринима- >
ется нами, или же воспринимается нечетко^ расплывча-
то, и при этом не отягощает нас. Если бы передавалась
без разбора в мозг человека и одинаково обрабатывалась
вся информация, которую могут доставить органы чувств,
то поток информации буквально захлестнул бы нас.
Мы не смогли бы выбраться из него и были бы беспо-
мощны в окружающем нас мире.
Таким образом, нечеткость, расплывчатость наших
восприятий и четкое выделение в каждом случае лишь
нужных данных для человека являются великим бла-
гом. Как происходит абстрагирование у человека, еще
неизвестно ученым. Можно лишь предположить, что
здесь тоже приходится иметь дело с нечеткостью, раз-
мытостью. Имеются указания на то, что размытая ин-
формация передается от глаз в мозг человека.
В машинах при получении ими информации извне
тоже будет полезным выделение еще в процессе вос-
приятия только нужных данных. Что и как в этой час-
ти из того, что дадут исследования соответствующих
процессов у человека, сможет быть использовано для
усовершенствования машин, покажет будущее.
Все, чему до сих пор была посвящена эта наша бе-
седа, в значительной мере касалось использования для
усовершенствования кибернетических машин того, что
подсказывает изучение процессов передачи и преобра-
зования информации в живых организмах. Для работ,
которые будут проводиться в будущем, это важно.
Но сейчас основные достижения в разработке машин-
5. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
353
ных программ обусловлены пока главным образом соз-
данием и применением специальных, специфических
для рассматриваемой области методов. Это методы фор-
мального описания различных процедур, используемых
при решении задач и доказательстве теорем, о которых
было рассказано раньше. Применяются и эксперимен-
тальные методы, используются эвристики, о которых
тоже рассказывалось. Все это представляется естест-
венным, и читателю должно было, вероятно, показаться
неясным, почему сочетание логических выводов с экс-
периментальным исследованием было указано, как одна
из проблем кибернетики. В чем принципиальное зна-
чение постановки этого вопроса?
Ученые-математики, занимавшиеся формальной ло^
гикой, раньше считали, что если задано конечное коли-
чество непротиворечащих одни другим исходных посы-
лок, аксиом и заданы описанные на соответствующем
формальном языке правила преобразований, то, сделав
некоторое утверждение, сформулированное на том же
языке, всегда можно путем строгих логических преоб-
разований — рассуждений — установить, справедливо
или нет данное утверждение. Однако в 1931 г. австрий-
ский математик К. Гёдель, доказав свои так называе-
мые теоремы о неполноте, показал, что это не так.
Оказалось, что формальная логика не всесильна и
что наше мышление осуществляется не только по за-
конам логики.
В применении к машинам это может означать, что
если, например, машина делает выводы в соответствии
со строгими правилами формальной логики, то не
исключено, что она не придет ни к доказательству
сделанного утверждения, ни к его опровержению.
В этом случае оказывается целесообразной постановка
математического эксперимента. Путем непосредствен-
ных проверок, выполняемых в ходе статистического
моделирования, выясняется справедливость сделанного
утверждения. Опа считается доказанной, если при боль-
шом числе опытов, подтверждающих данное утвержде-
ние, не оказывается ни одного такого, который его
опровергал бы.
Таким образом, сочетание логических выводов с эк-
спериментальным исследованием действительно являет-
12 Л. А. Залмапзои
354
Ч, III. КИБЕРНЕТИКА
ся одной из серьезных проблем. Практическим реше-
нием может быть здесь, например, такое. Машина де-
лает логические выводы, а если обнаруживается, что
она зашла в тупик, то автоматически включается в
действие система статистического моделирования. Мо-
гут быть и другие решения.
Рассмотрим далее проблему сочетания методов об-
работки дискретных и непрерывных (аналоговых) сиг-
налов. С развитием кибернетической техники вопросы
совместной обработки непрерывной и дискретной ин-
формации и перехода от одной из них к другой приоб-
ретают исключительно большое значение. Академик
А. Н. Колмогоров в опубликованной в 1961 г. статье
«Автоматы и жизнь» писал: «Несомненно, что перера-
ботка информации и процессы управления в живых
организмах построены на сложном переплетении дис-
кретных (цифровых) и непрерывных механизмов...».
Это все в большей степени относится и к создаваемым
сейчас техническим системам управления. Однако ка-
кое «переплетение дискретных и непрерывных меха-
низмов» является наиболее рациональным при реше-
нии того или другого круга технических задач и как
наилучшим образом организовать совместную работу
цифровой и аналоговой части системы управления,—
это вопросы, которые только-только сейчас начинают
серьезно исследоваться.
О методах преобразования аналоговой информации
в цифровую и цифровой в аналоговую мы в этой кни-
ге уже говорили: первый раз, когда, рассматривая при-
менения ЭВМ в автоматике, привели схемы построения
АЦП и ЦАП, затем в разделе о машинной обработке
потоков информации говорилось о дискретизации не-
прерывной информации при переходе от временной и
пространственной формы ее представления к спектраль-
но-частотной. Тогда же было сказано, что при дис-
кретной обработке информации достижима высокая
точность, а при аналоговой достигается большая ско-
рость выполнения операций, и является важным эф-
фективное использование обоих этих качеств.
При обсуждении данного вопроса нужно иметь в
виду различные применения. Например, АЦП и ЦАП
используются при разработке машинных систем рас-
5. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
355
познавания речи человека и синтезаторов речи. Во
многих случаях оказывается необходимым сочетание
аналоговой и цифровой обработки сигналов и в дру-
гих периферийных устройствах систем управления —
входных их устройствах и в исполнительных ор-
ганах.
Является перспективным создание на основе ис-
пользования аналого-цифровых и цифро-аналоговых
преобразований усовершенствованных телевизионных
глаз роботов. Профессор И. И. Цуккерман в его книге,
на которую мы уже ссылались, отмечает, что при вы-
полнении этих преобразований становится возможным
выполнение принципиально новых функций. Сравнивая
телевизионные глаза робота с живым прототипом, он
пишет: «Зрительная система принципиально отличается
от примитивной технической системы «вводное устрой-
ство — ЭВМ» уже основами своей структуры. Здесь
изображение не просто переносится из одного места в
другое, но фильтруется, «сжимается», сокращенно опи-
сывается совокупностью признаков зрительных образов.
При всех этих процессах широко используются обрат-
ные связи от высших отделов мозга к периферии.
Развитие цифрового телевидения создает основу для
моделирования такой функциональной структуры». Он
указывает, что «аналого-цифровые и цифрово-аналого-
вые преобразователи — АПЦ и ЦАП — непременные
блоки любой цифровой телевизионной системы».
Сейчас широко ведется, как уже упоминалось, раз-
работка АЦП и ЦАП па основе микропроцессорной
техники. Обычно с помощью ЦАП по цифровым сиг-
налам, поступающим от микропроцессора или ЭВМ,
формируются аналоговые сигналы, необходимые для
управления непрерывно перемещающимся исполни-
тельным органом (в некоторых случаях требуется,
например, чтобы такими были перемещения «руки»
робота). Необходимость в применении специальных
цифро-аналоговых выходных преобразователей отпада-
ет, если функции цифро-аналогового преобразователя
выполняет сам исполнительный орган. Примером ис-
полнительных органов этого вида является поршневой
гидропривод, изображенный на рис. 39. Он показан
здесь в двух положениях. Выходным его элементом яв-
12*
356
Ч. III. КИБЕРНЕТИКА
ляется шток крайнего правого цилиндра, нагруженный
в процессе работы силой, действующей в направлении
стрелки А. Суммарное смещение этого штока при ра-
боте всех цилиндров производится по двоичным цифро-
вым сигналам, поступающим от ЭВМ или другого циф-
рового устройства. Осуществляется это следующим
образом. Сигналы 1 или 0 передаются через электро-
гидравлические преобразователи к цилиндрам, коли-
чество которых равно количеству возможных разрядов
двоичного числа. Если цифрой соответствующего раз-
ряда двоичного числа является 1, то жидкость под
давлением поступает по гибкому шлангу к данному
цилиндру и поршень в этом цилиндре переходит в
крайнее правое положение. Если же в соответствующем
разряде двоичного числа имеется 0, то цилиндр сообща-
ется со сливом и поршень устанавливается в крайнее
левое положение. При перемещении каждого из порш-
ней на какую-либо величину вместе с ним на ту же
величину перемещаются все цилиндры с поршнями,
расположенные правее его. Величины возможного ра-
бочего хода поршней 12, ..., 1п отвечают весам раз-
рядов двоичного числа, то есть при переходе от одного
цилиндра к другому величина рабочего хода поршня
изменяется в два раза. На рисунке поршни показаны
в положении, когда управляющим сигналом является
сигнал 0...00, и когда управляющим сигналом являет-
5. ДРУГИЕ ПРОБЛЕМЫ КИБЕРНЕТИКИ
357
ся 1...11. При таком перемещении поршней реализует-
ся одно из движений «руки» робота, отличных от
естественных движений руки человека. Выходной
шток движется здесь поступательно, удлиняясь или
укорачиваясь в соответствии с тем, какие поступают
цифровые сигналы (рассмотренный привод напоминает
телескопическую антенну радиоприемника, которая вы-
тягивается, когда ее выдвигают, и укорачивается при
возвращении ее в гнездо).
В общем, в различных случаях могут быть целесо-
образными различные формы цифрового или аналого-
вого управления как в отдельности, так и в сочетании
их. Определение наилучших в этой части решений яв-
ляется важной проблемой.
Перейдем теперь к вопросу совсем другого плана.
Учеными уже много раз высказывалась озабочен-
ность в связи с тем, что в будущем роботы, наделенные
интеллектом, могут при некоторых условиях быть опас-
ными для человека. Предотвращение возможности соз-
дания такой опасности тоже является одной из проб-
лем кибернетики.
Вопросы безопасности пользования машинами воз-
никают при применении любых машин, промышлен-
ных, сельскохозяйственных или транспортных, таких,
например, как автомобили и самолеты. Машины обыч-
ного вида оказываются опасными для человека при
их неисправности. Если, например, при движении ав-
томобиля из-за его неисправности будет потеряно
управление, то это может привести к гибели водителя,
пассажиров и людей, которые окажутся на пути неуп-
равляемой машины. Чтобы исключить такую возмож-
ность, принимаются специальные меры. Соображения
безопасности эксплуатации берутся во внимание при
разработке конструкций машин и при назначении
сроков их профилактического осмотра и ремонта.
Все это касается и кибернетических машин. Для
них тоже большое значение имеет надежность. Однако
методы обеспечения их надежной, безотказной рабо-
ты во многом являются специфическими. К этому мы
еще вернемся.
Сейчас же отметим другое, что не менее важно,
если иметь в виду обсуждаемый вопрос. Запрограмми-
358
Ч. III. КИБЕРНЕТИКА
рованный робот, действуя точно по заданию, может
продолжить его выполнение и тогда, когда из-за изме-
нения внешних условий этого делать уже не нужно.
Например, нанося удары по каменной глыбе, чтобы
разбить ее, он продолжит запрограммированные дви-
жения, если перед ним окажется человек.
С другой стороны, роботы, наделенные интеллектом,
будут иметь известную свободу действий. Если они
неправильно используют ее, то их действия могут ока-
заться неприемлемыми. При некоторых обстоятельст-
вах робот может совершить что-либо опасное для че-
ловека.
Как же это предотвратить?
Выходом было бы, например, если бы можно было
запрограммировать роботы так, чтобы они выполняли
следующие три закона робототехники, сформулирован-
ные А. Азимовым: «1) Робот не может причинять вред
человеку или своим бездействием допустить, чтобы че-
ловеку был причинен вред. 2) Робот должен повино-
ваться всем приказам, которые отдает человек, кроме
тех случаев, когда эти приказы противоречат Первому
закону. 3) Робот должен заботиться о своей безопасно-
сти в той мере, в какой это не противоречит Первому
и Второму законам».
Можно ли будет когда-либо запрограммировать та-
ким образом роботы или же не следует принимать
всерьез предложение о введении подобных законов?
Сейчас ничего по этому поводу сказать нельзя. Одна-
ко проблема, о которой шла речь, существует, и
так или иначе будут изыскиваться подходы к ее
решению.
Рассмотрим еще один специальный вопрос, которо-
му посвятим следующую нашу беседу,— это надеж-
ность кибернетических устройств, в частности запоми-
нающих устройств.
Здесь же нужно нам остановиться. Слишком уж
много было затронуто в этой беседе различных вопро-
сов, касающихся кибернетики и смежных с ней
областей знания. Но что делать, если кибернетика
принесла столько новых идей и если с возникновением
ее появилось такое множество нерешенных пока
задач.
6. НАДЕЖНОСТЬ ПАМЯТИ ЧЕЛОВЕКА И ПАМЯТИ МАШИН 359
6. Надежность памяти человека и распределенной
(голографической) памяти машин
Побеседуем теперь о надежности технических
устройств управления и о надежности мозга челове-
ка. Ответим на несколько вопросов, которые, вероят-
но, поначалу покажутся читателю странными. По-
чему на фотографии получается плоское, а не
объемное изображение предметов! Можно ли пога-
сить светом свет! Можно ли без фотоаппарата полу-
чить изображение предмета, засветив фотопластинку
светом, исходящим от источника освещения, и све-
том, отраженным от предмета! Можно ли с такой
засвеченной пластинки, к тому же нечаянно раско-
лотой на куски, с каждого из ее осколков получить
полное изображение, и не простое, а пространствен-
ное! Что такое голография! Что представляет собой
распределенная память! Наконец, какое все это име-
ет отношение к надежности систем управления, к
кибернетике!
Надежность в работе, то есть способность безотказ-
но выполнять заданные функции в течение положенно-
го времени, является важнейшим качеством любых
технических устройств, в том числе и устройств управ-
ления. Для того чтобы управляющее устройство и вся
система управления надежно работали, важно, чтобы
были возможно более надежными элементы, на которых
они построены. Но для сложной системы, содержащей
большое количество элементов, это может быть недо-
статочным. Пусть имеются элементы, выход из строя
каждого из которых в отдельности маловероятен. Но
если одновременно работает очень много таких элемен-
тов, то все же трудно гарантировать, что через некото-
рое время хотя бы один из них не выйдет из строя.
Например, невелика вероятность того, что только что
установленная электрическая лампочка перегорит все-
го лишь через несколько дней. Если же пронаблюдать
за десятками тысяч лампочек, то вероятность отказа в
работе за то же время хотя бы одной из них будет зна-
чительно большей. Это же относится и к многоэлемент-
ным системам управления. Поэтому необходимо стро-
ить систему управления так, чтобы нарушение работы
360
Ч. III. КИБЕРНЕТИКА
какого-либо одного элемента или части ее элементов
не было критическим, не приводило бы к нарушению
нормального ее функционирования; нужно исключать
возможности потери важной информации на всех ста-
диях ее хранения и переработки. Задача построения
надежно работающих систем управления на недоста-
точно надежных элементах — одна из самых главных
в кибернетике. При отыскании подходов к решению
этой задачи создателям сложных технических систем
есть чему поучиться у живой природы.
Рассмотрим способы обеспечения надежного функ-
ционирования сложных систем, наблюдаемые в приро-
де и используемые сейчас при разработке новых видов
технических систем управления.
Одним из них является построение системы с из-
быточным числом элементов,— в которой в случае на-
рушения работы некоторых элементов их функции бе-
рут на себя другие, автоматически включающиеся в
работу. Передача функций вышедших из строя элемен-
тов другим элементам часто происходит в живых орга-
низмах. Она наблюдается как на уровне отдельных
клеток, так и целых органов. В технических системах
управления при наличии в них избыточных элементов
или избыточных функциональных узлов замена ими
дефектных производится сравнительно легко при усло-
вии, что система строится на базе так называемых од-
нородных структур, причем элементы и функциональ-
ные узлы системы формируются в однородных средах.
Это значит, что имеется большое количество однотип-
ных ячеек, которые в зависимости от степени их
сложности являются первичными элементами или
функциональными узлами. При отказе в работе одной
из таких ячеек автоматически включается в схему дру-
гая, к этому времени не занятая. Этот способ обеспе-
чения надежной работы все более широко применяется
при построении систем управления с многоэлементны-
ми устройствами переработки информации.
Другим важным способом повышения надежности
сложных систем управления является преобразование
используемой при их работе информации, при котором
переходят от обычной, естественной пространственно-
временной формы ее представления к частотпо-спект-
6. НАДЕЖНОСТЬ ПАМЯТИ ЧЕЛОВЕКА И ПАМЯТИ МАШИН 3tfl
ральной форме, в которой далее она хранится, обраба-
тывается, передается по каналам связи. На этом
способе остановимся более подробно. Есть основания
предполагать, что именно так осуществляется восприя-
тие и переработка информации человеком. К этому мы
еще вернемся позднее. Пока же поясним этот способ,
имея в виду технические системы, и покажем, что да-
ет его реализация для повышения надежности.
Для этого сначала вспомним пример, который был
приведен во второй части книги, когда говорилось о
разложении периодической функции fit) в ряд Фурье.
Тогда был получен для функции fit) амплитудный
спектр и было сказано, что так же может быть постро-
ен и фазовый спектр. Было тогда же выяснено, что,
располагая этими данными, можно перейти от такого
частотно-спектрального представления функции fit) и
обратно к обычному ее представлению. Предположим
теперь, что с функцией fit) в процессе управления про-
изводятся какие-то действия, причем недопустимо, что-
бы хотя бы для малого интервала времени t была по-
теряна получаемая информация. В этих условиях более
надежно оперировать не с самой функцией времени
fit), а с ее спектром, так как каждая линия спектра
содержит информацию о данной функции на всем пе-
риоде Т ее изменения. Если происходит небольшое ис-
кажение спектра, то при восстановлении (па конечном
этапе обработки информации) исходной или преобра-
зованной функции времени t по ее спектру обычно
имеют место соответственно небольшие искажения
функции, и не происходит полной потери информации
для какого-либо участка времени. В процессе управле-
ния, конечно, приходится иметь дело не с одной какой-
либо исходной функцией времени fit), а и с другими,
получаемыми в ходе обработки исходной информации.
Представлению каждой из них во временной области
отвечает соответствующее ее представление в частот-
ной области. Поэтому сказанное выше относится ко
всему процессу обработки информации.
Эту же мысль поясним другим примером. Рассмот-
рим дальше не функцию времени, а функцию коорди-
нат, которыми определяется положение точки на плос-
кости. Вспомним о хранении информации с помощью
362
Ч. Ш. КИБЕРНЕТИКА
фотографических диамикрокарт и микрофильмов и о
возможности ввода такой информации в ЭВМ. При про-
свечивании фотопластинки с текстом, рисунками, циф-
рами или другими данными, лучи света попадают на
матрицу фотоэлементов, с выхода которой снимаются
электрические сигналы, которые вводятся в ЭВМ и мо-
гут использоваться в процессе управления. При неод-
нократном пользовании фотопластинкой может случить-
ся, что будет поврежден малый участок ее поверхности,
возможно, лишь малые доли квадратного миллиметра
поверхности, но и это уже может оказаться достаточ-
ным для того, чтобы важная информация была безвозв-
ратно потеряна. Можно ли исходные данные, которые
содержит каждый участок поверхности такой пластин-
ки, перевести в соответствующие им данные, распре-
деленные по всей поверхности другой фотопластинки,
на которой та же информация представлена в частотно-
спектральной форме? Не будет ли более надежным
хранить таким образом представленную, распределен-
ную по всей поверхности информацию, и не только
хранить, но и перерабатывать ее в этой форме, чтобы,
когда это потребуется, снова вернуться к естественно-
му представлению преобразованных данных? Положи-
тельный ответ на эти вопросы предопределяется уже
частично тем, что было сказано раньше о частотно-
спектральном представлении функции /U), когда был
рассмотрен первый пример. Чтобы более детально ра-
зобраться, о чем сейчас идет речь, сначала ответим на
вопросы, которые были поставлены вначале. Эти во-
просы, как может показаться, не относятся к делу,
по это не так.
Начнем с первого из них. Почему на фотографии
получается плоское, а не объемное, изображение пред-
метов? Примером объемного изображения предмета
является скульптурный его образ. Имея перед собой
сам предмет или скульптурное его изображение, можно,
отойдя на несколько шагов в сторону, увидеть, как он
выглядит сбоку, заглянуть в пространство за ним. С фо-
тографией этого сделать нельзя. Почему же при фото-
графировании не получаются объемные изображения
предметов? Это объясняется тем, что на светочувстви-
тельный слой фотопластинки оказывает в фотоаппарат
6. НАДЕЖНОСТЬ ПАМЯТИ ЧЕЛОВЕКА И ПАМЯТИ МАШИН 363
те воздействие лишь интенсивность исходящего от
предмета света, зависящая от амплитуды световой вол-
ны. Для получения же объемного представления о
предмете нужно было бы регистрировать и фазы волн
света, излучаемых различными точками поверхности
предмета. Непосредственно измерить фазу световой
волны практически невозможно, так как период волны
света Т всего лишь порядка 10"15 секунды, смещения
по фазе 6t составляют только доли периода (см. график
в верхней части рис. 40) и не имеется приборов для
измерения столь малых интервалов времени. И все же
изменения фазы колебаний света оказывается возмож-
ным регистрировать. Чтобы выяснить, как это делается,
рассмотрим второй из поставленных вопросов. Можно
ли погасить светом свет? Ответ на этот вопрос следует
из того, что мы уже знаем из школьного курса физи-
ки,— из того, что написано в учебнике по физике об
интерференции волн. Рассмотрим это подробнее. Ана-
логичными являются процессы интерференции волн
света и интерференции волн, распространяющихся на
поверхности воды, которые мы сможем наблюдать,
если поставим следующий опыт. Будем вызывать вол-
ны, производя колебания находящихся на расстоянии
друг от друга связанных между собой грузиков, погру-
жаемых в воду. Колебания обоих грузиков происходят
с одной и той же частотой, и от них расходятся по по-
верхности воды волны, которые, встречаясь, наклады-
ваются одни на другие — интерферируют. Если при
этом гребень одной волны приходится против гребня
другой, то колебания в этом месте усиливаются; если
же гребень одной волны приходится против впадины
другой, то возмущения гасятся. При неизменном рас-
стоянии между грузиками и колебаниях их в одной
фазе или с постоянной разностью фаз получается уста-
новившаяся интерференционная картина, которую мож-
но сфотографировать. Если изменить начальную раз-
ность фаз колебаний грузиков, что можно сделать,
меняя длину подвеса одного грузика относительно дли-
ны подвеса другого, то получится уже другая интерфе-
ренционная картина, также установившаяся, неизмен-
ная при новой постоянной разности фаз колебаний.
Иная интерференционная картина получится и при
364
Ч. Ш. КИБЕРНЕТИКА
1 мс 40.
i
6. НАДЕЖНОСТЬ ПАМЯТИ ЧЕЛОВЕКА И ПАМЯТИ МАШИН 365
изменении расстояния между грузиками, так как волны
будут встречаться при других фазах колебаний. Ана-
логичным образом ведут себя и волны света.
Не имея возможности прямо измерить величину
разности фаз волн света, судят о ней по интерферен-
ционной картине, получаемой при наложении волн
света, исходящих от различных точек предмета и име-
ющих соответственно с этим различные фазы, и эта-
лонных волн света, фаза которых является строго
неизменной. Это оказывается возможным при исполь-
зовании когерентного света (источником которого яв-
ляется квантовый генератор света — лазер) с разде-
лением пучка света на два: эталонный, опорный,
направляемый прямо на фотопластинку, и рабочий,
направляемый на предмет, интерферограмму волн
света для которого хотят получить, и затем после
отражения или рассеяния предметом также попадаю-
щий на фотопластинку. Одни и другие волны света
накладываются друг на друга, как это было и с
волнами на поверхности воды при колебании грузи-
ков. Разница лишь в том, что происходит интерфе-
ренция опорных волн света и большого количества
волн света, исходящих от всех точек поверхности
предмета. Поэтому получается интерференционная
картина, имеющая микроскопическую структуру. Фо-
топластинка с таким изображением интерференци-
онной картины, будучи проявленной, внешне вы-
глядит как равномерно засвеченная. Схема установ-
ки, с помощью которой таким образом получается
описанная выше интерференционная картина, приве-
дена также наверху на рис. 40. Здесь: 1 — лазер,
2 — линза, расширитель пучка света, 3 — линза, фор-
мирующая параллельный пучок света, 4 — зеркало, 5 —
фотопластинка, 6 — предмет. В полученной интерфе-
ренционной картине оказывается заложенной вся
информация о внешнем виде предмета. Это определя-
ется тем, что регистрируется не только интенсивность
отраженного или рассеянного всеми точками поверх-
ности света, но и фаза излучаемых ими световых волн,
точнее смещение по фазе соответствующих колебаний
относительно колебаний в опорном пучке света. Так
как смещение по фазе зависит от расстояния каждой
366
Ч. III. КИБЕРНЕТИКА
точки поверхности до плоскости, в которой получается
интерференционная картина, то последняя содержит
информацию о рельефе поверхности предмета, о про-
странственной его форме. Эта информация в проявлен-
ной фотопластинке, на которой отображена интерфе-
ренционная картина, содержится в скрытом виде. Но
если затем фотопластинку поставить в описанной уста-
новке на свое место, а предмет удалить и пропустить
снова, как и раньше, опорный пучок света от лазера,
то, взглянув через фотопластинку, как через окошко,
увидим предмет так, как если бы он не был удален.
Получается объемное изображение отсутствующего
предмета благодаря тому, что фотопластинка, на кото-
рой изображена интерференционная картина, при про-
пускании через нее опорного пучка света ведет себя,
как дифракционная решетка: свет дифрагирует на мно-
жестве мельчайших интерференционных полосок, и при
этом восстанавливаются первоначальные волны света,
которые раньше были отражены от предмета, когда он
еще был на своем месте и указанным выше способом
была получена для него данная интерференционная
картина.
Фотопластинка, на которой зарегистрирована интер-
ференционная картина предмета, называется его го-
лограммой. Рассмотренный нами метод ее получения
и восстановления затем по ней изображения называет-
ся голографией.
Голограмма обладает рядом замечательных свойств.
Прежде всего отметим возможность получения полно-
го изображения предмета, пусть несколько менее чет-
кого, но полного, с отдельных ее частей-осколков, о
которых было упомянуто вначале. Это объясняется тем,
что свет, излучаемый каждой точкой поверхности пред-
мета во всех направлениях, участвует в формировании
всей интерференционной картины, и, следовательно,
любая часть засвеченной указанным выше образом фо-
топластинки несет информацию о внешнем виде всего
предмета. Замечательным свойством голограмм являет-
ся и то, что на одной и той же фотопластинке могут
быть зарегистрированы не одна, а несколько различ-
ных голограмм. Это относится к фотопластинкам с тон-
ким, как обычно, светочувствительным слоем, которые
6. НАДЕЖНОСТЬ ПАМЯТИ ЧЕЛОВЕКА И ПАМЯТИ МАШИН 367
применяются в голографии со времени изобретения ее
Д. Габором. Значительно расширил возможности голо-
графии 10. Н. Денисюк, показавший, что множество
разлитых голограмм может формироваться в трехмер-
ной d$?feie, в толстом слое фотоэмульсии, причем по
каждой из них может быть независимо восстановлено^
исходное изображение.
Указанным выше образом могут быть получены го-
лограммы самых различных объектов, начиная с груп-
пы людей, пейзажа, скульптуры, деталей машин и
кончая печатным текстом, таблицей с цифрами, матема-
тическими формулами, записью программ управления.
Исходным объектом может быть не только предмет,
от которого свет отражается так, как было указано
раньше, но и фотопластинка или управляемый динами-
ческий транспарант с соответствующим изображением,
сквозь который проходят волны света. При этом схема
голографирования в остальном не меняется. Информа-
ция, представленная голограммой, с помощью оптико-
электронных преобразователей может быть введена в
ЭВМ для последующей ее обработки. Вместе с тем
оказывается возможным и искусственное создание го-
лограмм различных объектов с помощью ЭВМ: если
имеется математическое описание волнового поля объ-
екта, то, синтезируя по нему голограмму на ЭВМ,
можно затем получить соответствующий ему зритель-
ный образ. Процесс получения голограммы математи-
чески представляется как прямое преобразование
Фурье или другие связанные с ним преобразования,
а процесс восстановления изображения по голограмме
как соответствующее обратное преобразование. Это от-
носится в равной мере и к представлению информации,
используемой в системах управления, и к воссозданию
любых других зрительных образов, например пейза-
жей, портретов и т. п. В качестве примера в верхней
части рис. 40 приведена синтезированная таким обра-
зом голограмма, а рядом с ней показан полученный по
ней портрет человека. Слева внизу изображен этот же
портрет, полученный при использовании для восстанов-
ления образа лишь 1/4 площади данной голограммы.
Вспомним, что уже было сказано о возможности полу-
чения полного изображения с каждого из осколков
368
Ч. Ш. КИБЕРНЕТИКА
пластинки с голограммой. Последнее из указанных вы-
ше изображений менее четко, но оно все же дает пол-
ное представление об объекте, то есть действительно
получается так, как было рассказано раньше. Есдш же,
наоборот, взять не одну целую голограмму тат#^, как
было указано, а приложить к ней еще несколько таких
же, как она, то изображение станет еще более четким,
чем изображение, полученное с одной исходной голог-
раммы. Это можно проиллюстрировать следующим при-
мером: на рис. 40 внизу справа показано изображение,
полученное с мозаичной голограммы, составленной из
9 таких голограмм, как указанная выше исходная
(здесь уже исходную голограмму можно рассматривать
как один из осколков составной мозаики). Это изобра-
жение еще более четкое, чем то, которое было показано
рядом с исходной голограммой. Все они, конечно, плос-
кие, так как представлены здесь на фотографиях, но,
как уже говорилось, с голограмм могут быть получены
и объемные трехмерные изображения. Показанные на
рисунке голограмма и восстановленные изображения
взяты из книги Л. П. Ярославского и Н. С. Мерзляко-
ва «Методы цифровой голографии», выпущенной в
1977 г. издательством «Наука».
Рассмотрим теперь в какой мере связаны между
собой первый и второй из приведенных примеров.
В обоих случаях, будь то в одном из них функция
времени, в другом — функция координат (вообще же
могут изменяться сразу и время и пространственные
координаты), информация представляется в частотно-
спектральной форме, чему отвечает разложение исход-
ной функции в ряд Фурье или выполнение по отноше-
нию к ней интегрального преобразования Фурье. При
этом информация оказывается рассредоточенной, рас-
пределенной так, как было показано на разобранных
примерах.
По ходу рассказа мы ответили на все первоначально
поставленные вопросы, кроме последних, к которым
перейдем сейчас. Не отвлеклись ли мы, говоря о голог-
рафии, от общей темы наших бесед об автоматическом
управлении и кибернетике? Нет. Создание голографи-
ческих запоминающих устройств и голографических
процессоров для обработки информации имеет большое
6. НАДЕЖНОСТЬ ПАМЯТИ ЧЕЛОВЕКА И ПАМЯТИ МАШИН 369
практическое значение, предоставляет принципиально
новые возможности для построения систем управления.
Практическое значение использования голографиче-
ских методов в области автоматического управления
определяется тем, что открываются возможности для
создания запоминающих устройств очень большой ем-
кости. В принципе она может быть в тысячи, десятшИ
тысяч раз большей, чем для полупроводниковых и маг-
нитных запоминающих устройств. Хотя разработка го-
лографических методов хранения и обработки инфор-
мации находится еще в начальной стадии и на пути
реализации этих методов встречаются затруднения,
главным образом из-за сложности аппаратуры, уже
сейчас имеются опытные образцы голографических за-
поминающих устройств большой емкости, в которых
запись информации производится в светочувствитель-
ной среде и считывается информация при использова-
нии света, излучаемого лазером. Следует надеятся на
то, что при преодолении встретившихся затруднений
со временем будут созданы малогабаритные голографи-
ческие запоминающие устройства для хранения сотен
миллиардов единиц информации. Интенсивно ведутся
сейчас и поисковые работы, направленные на создание
эффективно работающих голографических процессоров.
Голографическая память высоконадежна потому,
что, как было показано, каждая единица исходной ин-
формации, которая при обычном ее запоминании при-
ходилась бы на участок поверхности протяженностью
в сотые доли миллиметра, оказывается распределенной
по всей поверхности голограммы и благодаря этому
становится мало уязвимой.
Возможность создания такой искусственным путем
распределенной памяти представляет интерес в связи
с изучением вопроса об аналогиях между управлением
в живых организмах и в машинах, так как имеются
данные, позволяющие высказать предположение о том,
что и у человека восприятие и обработка информации
также осуществляются на основе промежуточного пре-
образования ее в частотно-спектральную форму. Это
предположение основано на том, что память человека
тоже является распределенной в указанном выше
смысле
370
4. HI. КИБЕРНЕТИКА
Данный вопрос представляет интерес пе только в
связи с вопросом о надежности памяти. Важным ка-
чеством памяти человека является то, что она ассоци-
ативна: один образ может вызывать у человека появ-
ление других образов. Этот принцип запоминания
^сигналов может быть реализован и в машинных голог-
рафических ЗУ. Особенностью таких ЗУ является то,
что нахождение и выборка нужной информации вы-
полняются в них по совокупности признаков, а не по
адресам ячеек памяти, как это обычно делается в запо-
минающих устройствах ЭВМ. Ассоциативная машинная
память имеет большие преимущества перед обычной
адресной в тех случаях, когда хранится большая инфор-
мация и нужно всемерно сократить время поиска нуж-
ных данных. С созданием ассоциативных ЗУ коренным
образом меняется архитектура вычислительных машин
и по новому осуществляется управление сложными
системами. Разработка ассоциативных ЗУ имеет пря-
мое отношение и к решению задач искусственного ин-
теллекта.
Интересные соображения, касающиеся аналогий
между биологической и голографической памятью и
использования голографического принципа при реали-
зации ассоциативных ЗУ, высказаны финским ученым
Т. Кохоненом. В выпущенном в 1980 г. издательством
«Мир» переводе его книги «Ассоциативная память»
сказано следующее: «В последние годы было собрано
много экспериментальных данных, указывающих на то,
что биологическая память основана на распределенном
хранении информации. В распределенной памяти каж-
дый запоминающий элемент или участок запоминаю-
щей среды содержит следы многих образов. Иными
словами, имеет место пространственное наложение об-
разов в памяти. С другой стороны, каждый элемент
записываемой информации распределяется по большой
области запоминающей среды. Для того чтобы инфор-
мация одного элемента не терялась в памяти в резуль-
тате смешивания с информацией других элементов,
необходимо, чтобы преобразования информации в про-
цессе записи не затрагивали связи между элементами.
Так, в голографической памяти преобразования элемен-
тов при записи осуществляются в результате оптиче-
1. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
371
ской дифракции когерентных волн...» и дальше: «...рас-
пределенная память не требует сложного механизма
управления поиском, поскольку в ней отсутствуют
ячейки с определенными адресами, подлежащими де-
кодированию на этапе записи или выборки». В назван-
ной выше книге имеется указание и на то, что «следы
памяти», соответствующие «различным типам и уров-
ням опыта, находятся в различных областях мозга,
хотя локально, внутри той или иной области, следы,
несомненно, пространственно распределены». Техниче-
ским аналогом организованной таким образом памяти
человека является не одна отдельно взятая голограмма,
а набор голограмм.
Говоря, что голографическая машинная память ана-
логична памяти человека, мы имеем в виду, что та и
другая являются распределенными. Однако, тогда как
мы хорошо знаем, каким образом производится голог-
рафическое запоминание информации, основанное на
использовании рассмотренных нами оптических эле-
ментов, функционирование головного мозга человека
связано с протеканием совершенно иных по своей фи-
зической природе процессов, которые пока еще мало
изучены.
Возможно, что в форме, аналогичной голограммам,
представляются хранящиеся в памяти человека фреймы
различных образов, о которых упоминалось раньше.
Сходством с голографической памятью памяти челове-
ка может быть объяснена большая ее емкость, условно
оцениваемая в 1014 — 1015 бит.
Изучение указанных выше аналогий представляет
научный и практический интерес. Оно может быть по-
лезным для раскрытия секретов работы мозга человека
и должно способствовать дальнейшему усовершенство-
ванию устройств запоминания и обработки информации
в технических системах управления.
7. Применения кибернетики сейчас
и в ближайшем будущем
Что дает уже сейчас кибернетика практике? Что
сможет дать она дальше, в скором уже времени?
Чтобы выяснить это, рассмотрим перспективные об-
372
Ч. Ш. КИБЕРНЕТИКА
ласти применения роботов и думающих компьютеров.
Остановимся на следующих вопросах: кибернетика
и техника, кибернетика и экономика, кибернетика и
естествознание, кибернетика и педагогика, киберне-
тика и медицина, кибернетика и другие, самые раз-
личные, сферы деятельности человека. Обсудим, чем
кибернетика может быть полезной музыканту. Ре-
шим после всего этого, как оценить современный
этап развития кибернетики.
Уточним прежде всего наши отправные позиции.
Вернемся еще раз к приведенному в начале этой части
книги определению кибернетики. Вспомним о сказан-
ном Н. Винером в отношении того, что «было решено
назвать всю теорию управления и связи... кибернети-
кой».
Поэтому отнесем к кибернетике и разделы науки об
автоматическом управлении, о которых было рассказано
во второй части книги. Наука эта дала уже методы
построения устройств и систем управления, с использо-
ванием которых так или иначе связаны многие дости-
жения во всех других отраслях науки, достижения
всей современной техники. Лучше даже сказать не
многие, а почти все.
Вместе с тем будем иметь в виду новые идеи, о ко-
торых шла речь раньше в этой части книги. Реализация
их сейчас лишь начинается, главным образом при соз-
дании роботов и при других разнообразных применени-
ях ЭВМ. Рассматривая применения кибернетики, мы
коснемся использования ЭВМ в таких, например, облас-
тях, как медицина или искусство, даже в тех случаях,
когда это не связано непосредственно с решением за-
дач управления.
О применениях различных устройств автоматики и
ЭВМ уже говорилось. Сейчас дополним ранее сказанное.
Начнем с применения роботов. Напомним, что робо-
ты могут быть двух видов. Первыми из них, называе-
мыми промышленными роботами или автоматическими
манипуляторами, все операции производятся по про-
граммам, не предусматривающим выполнение функций,
аналогичных тем, которые характерны для мыслящего
существа. Вторые содержат то, что названо думающим
компьютером, или связаны с ним в работе.
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
373
Роботы первого типа уже применяются в промыш-
ленности. Председатель научного совета Академии наук
СССР по теории и принципам устройства роботов и
манипуляторов чл.-корр. АН СССР И. М. Макаров в
статье, опубликованной в 1979 г., привел такие сведе-
ния о перспективах развертывания их выпуска в
нашей стране: «За последние три года в Советском
Союзе выпущено свыше 1000 универсальных и специ-
ализированных роботов. К концу пятилетки парк их
превысит 5000 штук и будут созданы мощности для
производства 7000 роботов в год. Это превышает пла-
новые задания. Однако выпуск таких машин значи-
тельно отстает от спроса на них». В статье было указа-
но, что уже к 1980 г. потребность в роботах по данным
министерств составила 26 000 штук, а в недалеком бу-
дущем должна превысить 100 000.
Роботы второго типа, которые смогут выполнять
не только заранее заданные операции, но и самостоя-
тельно ориентироваться в окружающей среде, в той
мере в какой это допускает то, что мы охарактеризо-
вали во время наших предшествующих бесед как ис-
кусственный интеллект, являются делом будущего.
Такие роботы, сначала не очень совершенные, будут
уже скоро разработаны и начнут использоваться на
практике; потом они будут усовершенствоваться все
больше и больше.
Из того, что было сказано сейчас, следует, что ду-
мающий компьютер может быть частью робота.
Но имеется огромная область применения ЭВМ,
а дальше и ОВМ и комбинированных электронно-опти-
ческих машин и машин с искусственным интеллектом,
не только в связи с роботами. Это автоматизированные
системы управления и отдельные машины-советники
или целые сети таких машин, которые, обрабатывая
большую информацию, подсказывают возможные реше-
ния человеку, выбирающему наиболее рациональные из
них и осуществляющему на основании этого управ-
ление.
Возникает необходимость в упорядоченном хране-
нии и в обработке машинами все большего и большего
количества информации, быстро увеличивающегося из
года в год по мере развития науки и техники и расши-
г
374 Ч. III. КИБЕРНЕТИКА !
рения хозяйственной и иной деятельности людей. Что
это за информация? Самая различная: содержимое
множества книг и статей, формулы и таблицы, исполь- 1
зуемые при расчетах, чертежи приборов и машин,
финансовые отчеты, подборки патентов по той или
другой тематике, сведения о номенклатуре выпуска-
емых изделий и графики работы предприятий, данные
об урожае различных сельскохозяйственных культур,
географические карты, метеорологические сводки...
В общем все, что угодно. Все сведения, которые могут ।
потребоваться или для управления промышленностью,
или при организации научных исследований, или для
личного пользования,— которые могут потребоваться,
в общем, где бы то ни было. Может существовать ог-
ромный объем первичной информации, но, разумеется,
еще в большем количестве может потребоваться
последующая ее обработка при решении задач уп-
равления.
Трудно даже сейчас себе представить, какими циф-
рами определяется количество информации, которую
должна хранить память машин и которая, по мере не-
обходимости, оперативно должна представляться для
переработки и обрабатываться машинами же.
Чаще всего возникает необходимость в использова-
нии каждый раз лишь некоторых данных из числа тех,
которые хранятся в памяти машин, причем эти данные
относятся к определенной предметной области (напри-
мер, при управлении промышленным предприятием или
отраслью промышленности могут потребоваться данные
об отчетах по всем проведенным за целый ряд лет ра-
ботам, данные о сметной и фактической стоимости этих
работ, о сроках их выполнения, фамилии руководителей
и исполнителей работ и т. п.). В каждом таком случае
бывает нужным обеспечить быстрое нахождение тре-
буемых данных и представление их в удобном для по-
следующей обработки виде. При этом часто требуется
получение не только отдельных данных, но и сведений
о связях, отношениях между ними. Бывает и так, что
хранящаяся информация должна с течением времени
пополняться, изменяться в чем-то. Может потребоваться
изменение на ходу даже самой структуры построения
информационной системы.
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
375
В свете всего этого большое значение имеет разра-
ботка рациональных способов управления данными,
запоминаемыми машиной. Этот вопрос прямо связан с
рассматриваемыми здесь вопросами применения кибер-
нетики. Последнее определяется тем, что системы уп-
равления хранящимися в памяти машин данными яв-
ляются составной частью любых кибернетических
систем, и от степени их совершенства во многом вообще
зависит успех применений кибернетики. Возникает не-
обходимость в управлении массивами информации и в
тех случаях, когда в целом не преследуется решение
задач кибернетики (например, часто бывает нужным
просто получение справочных данных).
Обычно в информационных системах используются
так называемые базы данных. Это множества данных,
характеризующих элементы некоторой предметной об-
ласти и отражающих отношения между ними. Если
эти отношения изменяются с течением времени и в
процессе функционирования базы данных, при поступ-
лении запросов к ней, складываются новые отношения,
то базу данных называют реляционной (от английско-
го слова relation — отношение, связь). На основе баз
данных создаются банки данных. Они содержат не
только сами данные, но и программные, языковые, орга-
низационные и технические средства, необходимые для
хранения данных и предоставления возможности удоб-
ного доступа к ним пользователей, при необходимо-
сти — целых коллективов пользователей.
На основе реляционных баз данных строятся реля-
ционные банки данных, в которых под действием уп-
равляющих сигналов происходит изменение в нужном
направлении структуры баз данных и банка в целом и
при необходимости формируются новые отношения
между данными (это, например, может быть необходи-
мым при создании в машине модели внешней среды).
Для построения таких баз и банков данных использу-
ется специальное табличное представление информа-
ции, предложенное в 1970 г. американским ученым
Е. Ф. Коддом. С тех пор информационная техника да-
леко продвинулась вперед. В последние годы Л. Т. Ку-
зиным, В. Э. Вольфенгагеном, В. И. Саркисяном и дру-
гими советскими учеными, занимающимися вопросами
376
4. Hi. КИБЕРНЕТИКА
кибернетики, разработаны эффективные реляционные
методы проектирования банков данных, предназначен-
ных к применению в системах принятия решений. При
построении информационных банков и управлении про-
цессами их функционирования используются методы,
с которыми читатель познакомился, когда рассматри-
вались общие подходы к решению задач кибернетики.
Здесь это, прежде всего, все более широко применяе-
мая фреймовая организация массивов информации.
Применение в области информационной техники идеи
фреймов сочетается с логической обработкой информа-
ции, осуществляемой при использовании аппарата тео-
рии исчисления предикатов. С применением фреймов
связывается придание реляционным банкам свойства
адаптивности, приспособления их к обслуживанию сис-
тем принятия решений различного вида, в том числе и
таких, в которых подчас формируются нечеткие, раз-
мытые решения, так же, как это иногда бывает при
принятии их человеком. При организации работы бан-
ков данных применяются и эвристические методы.
Используется иерархический способ моделирования и
обработки информации. Широко ведутся сейчас работы,
направленные на создание так называемых интеллек-
туальных банков данных, являющихся неотъемлемой
частью систем искусственного интеллекта, в составе
которых имеются наряду с базами данных базы целей
и базы знаний.
С применением указанных выше новых методов уп-
равления информацией непосредственно связано ис-
пользование кибернетики в уже применяемых и во
вновь разрабатываемых автоматизированных системах
управления и создание в дальнейшем роботов с искус-
ственным интеллектом.
Рассмотрим дальше вопросы применения кибернети-
ки в различных отраслях, что тесно соприкасается с
тем, о чем мы говорили до сих пор.
Прежде всего, это вопрос о том, что дает уже сей-
час и что сможет дать в будущем кибернетика технике.
Техника обширна, имеется много различных ее от-
раслей: промышленная, энергетическая, строительная,
сельскохозяйственная, дорожно-транспортная, морская,
авиационная, космическая и другие. И в каждой из них
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
377
имеется множество объектов управления. Для управ-
ления используются самые различные средства авто-
матики. С учетом современного уровня их разработки
ведутся и прикладные работы, связанные с использо-
ванием в технике новых идей, которые несет киберне-
тика. В частности, это касается работ по созданию и
применению роботов.
Является перспективным применение роботов в раз-
личных отраслях техники.
В промышленности они освободят людей от работы
в опасных для здоровья условиях, например в литей-
ных цехах или во вредных цехах химического произ-
водства. На конвейерах машиностроительных заводов
они заменят людей, выполняющих однообразные и,
следовательно, утомительные операции. Они будут ис-
пользованы при добыче ценных ископаемых со дна
моря. Будут заниматься профилактическими осмотрами
и ремонтом атомных реакторов, внутрь которых чело-
век проникнуть не может. Доставленные автоматиче-
скими космическими аппаратами на другие планеты
они будут работать на их поверхности. В общем, робо-
ты будут применяться везде все более и более широко.
Для применения в некоторых из указанных выше
областей сейчас разрабатываются специализированные
роботы. Например, испытывались уже построенные в
СССР роботы, предназначенные для выполнения работ
на морском дне, на больших глубинах. Робот, управ-
ляемый с корабля, назван «Манта-1500» (манта — раз-
новидность морских скатов, 1500 — максимальная глу-
бина в метрах). Другой разрабатываемый сейчас робот
«Скат» предназначен для самостоятельной работы на
дне моря. Он должен будет вести ремонтные работы на
подводных буровых скважинах, а также выполнять и
ряд других работ.
В упоминавшейся статье И. М. Макарова так оце-
ниваются ближайшие перспективы использования ро-
ботов: «Из перспективных задач наиболее актуальным
представляется создание роботов и целых комплексов
манипуляторов, способных заменить людей на тяжелых
подземных работах, в загазованной и взрывоопасной
среде, при повышенной радиации и в других экстре-
мальных условиях. В самом ближайшем будущем вста-
Г"
378 Ч. Ill КИБЕРНЕТИКА
нет задача передать роботам ряд операций в строи-
тельстве и сельском хозяйстве».
Чем более совершенными будут системы управления
роботов, чем в большей степени они смогут выполнять
действия, требующие осмысливания, интеллектуальной
деятельности, тем более широкой будет сфера их ис-
пользования.
Применительно к промышленным и другим техни-
ческим системам должны выполняться и функции ор-
ганизационного управления, о которых было сказано
раньше. Управление различными технологическими
процессами может быть полностью автоматизировано
или же может в других случаях осуществляться опти-
мальным образом человеком при помощи машин-совет-
ников. Первичными ячейками ОГАС, о которой гово-
рилось, являются ЭВМ, обслуживающие отдельные
объекты, установленные часто, если иметь в виду про-
мышленность, прямо на производственных предприя-
тиях.
Упоминавшееся нами ранее ситуационное управле-
ние, являющееся по существу одним из видов искус-
ственного интеллекта, начинает применяться при ор-
ганизации работы так называемых больших систем
(примеры таких систем — крупное промышленное пред-
приятие, транспортная система целого города, крупный
аэропорт, большой морской порт). Отличительными
особенностями этих систем является большое количе-
ство элементов, характеристики которых не остаются
постоянными и обычно нечетко определены, а также и
то что в процессе функционирования системы возника-
ет множество ситуаций, которые часто заранее трудно
предвидеть. В силу этого точное математическое опи-
сание таких систем практически не представляется воз-
можным или, если оно и возможно, то, как правило,
является неэффективным.
Непосредственно связаны с усовершенствованием
промышленной, сельскохозяйственной, энергетической
и иной техники вопросы экономического развития.
Об управлении по экономическим показателям упо-
миналось уже в первой части книги. Там на рис. 6
была представлена схема системы управления основ-
ными фондами предприятия. Затем мы вспомнили то,
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
379
что было известно еще в школе о применении метода
линейного программирования для определения мини-
мальной стоимости перевозок. Было также рассказано
о методе динамического программирования, использу-
емом при решении задач оптимального распределения
ресурсов.
При оптимальном управлении по экономическим
показателям часто бывает необходимым предваритель-
но оценить множество возможных вариантов, что прак-
тически сейчас возможно лишь при использовании
ЭВМ и при применении методов решения, которые да-
ет наука об управлении.
В области экономики возникают и задачи несоизме-
римо более сложные, чем те, о которых шла речь рань-
ше. Например, многокритериальная задача оптимально-
го управления экономикой в масштабах целой отрасли
промышленности или всей страны. Или, например, за-
дача оптимального с экономической точки зрения уп-
равления распределением товаров в определенных
районах или тоже во всей стране. Или же задача оп-
тимального управления экспортом и импортом товаров
и внешней торговлей в целом с учетом экономических
показателей всего народного хозяйства.
Характерным для решения таких задач управления,
при котором незаменимыми помощниками становятся
уже сейчас ЭВМ-советники, является то, что на ход
рассматриваемых процессов может влиять множество
случайных факторов: урожай сельскохозяйственных
культур может колебаться в каких-то пределах в зави-
симости от погодных условий, внешняя торговля может
развиваться по-разному под влиянием ряда факторов,
многие из которых могут изменяться случайным обра-
зом и т. д.
Одними из эффективных методов решения задач
управления в этих условиях являются методы, осно-
ванные на использовании имитационных моделей. С по-
мощью ЭВМ генерируются последовательности случай-
ных величин, от которых предположительно зависят
процессы, управление которыми должно осуществлять-
ся. На модели может воспроизводиться иногда за ко-
роткое время (истинные рассматриваемые процессы
при этом могут быть весьма длительными, например,
380
Ч. III. КИБЕРНЕТИКА
занимать ряд лет) множество различных ситуаций, для
каждой из них могут быть перепробованы различные
управляющие воздействия и может быть выяснено,
какие из них и в какой мере обеспечивают получение
желательных результатов, а какие должны оказаться
при соответствующих условиях непригодными. Имита-
ционная модель дает лишь приближенное представле-
ние о возможных действительных условиях протекания
процессов. В ряде случаев оказывается необходимой
последовательная, многоэтапная ее разработка, посте-
пенное ее усовершенствование на основе сравнения то-
го, что она дает и что получается в действительности в
течение какого-т" времени. Зато позднее можно с по-
мощью имитационной модели прогнозировать развитие
рассматриваемых процессов при соответствующих уп-
равлениях.
Машины-советники и автоматизированные системы
управления (АСУ) находят все более широкое приме-
нение в области административно-организационного
управления. В СССР создана «АСУ-прибор» для всей
отрасли приборостроения, средств автоматизации и сис-
тем управления и созданы АСУ на важнейших голов-
ных объектах энергетики, металлургической промыш-
ленности, машиностроения, транспорта, легкой про-
мышленности, других отраслей народного хозяйства
(АСУ специально посвящены книга Э. Л. Ицковича
«ЭВМ в системе управления предприятием», издатель-
ство «Наука», 1980, и книга О. И. Авена «Что такое
АСУ?», издательство «Наука», 1981). Как уже упоми-
налось в первой части нашей книги, разработан план
создания у нас в стране общегосударственной автома-
тизированной системы сбора и обработки информации
для учета, планирования и управления народным хо-
зяйством— ОГАС. Согласно данному плану на первом
этапе его выполнения, который сейчас уже реализу-
ется, создаются отраслевые и ведомственные автомати-
зированные системы управления во всех министер-
ствах и ведомствах страны, а на втором этапе осуще-
ствляется переход на автоматизированную систему
управления всем народным хозяйством (о плане ОГАС
подробно написано в книге Г. В. Максимовича «Бесе-
ды с академиком В. Глушковым», на которую мы
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
381
ссылались раньше, и в книге В. М. Глушкова и
В. Я. Валиха «Что такое ОГАС?», выпущенной в свет
издательством «Наука» в 1981 г.).
Использованию АСУ в области организационного
управления уделяется все большее внимание. Вот что
писал, например, о системе «АСУ-прибор» К. Н. Руд-
нев в бытность его министром приборостроения,
средств автоматизации и систем управления СССР.
В статье, напечатанной в 1980 г., незадолго до его
смерти, об этой автоматизированной системе управле-
ния говорилось, что она представляет собой «эффектив-
ный инструмент планирования и оперативного управ-
ления ходом производства, реализацией продукции,
материально-техническим снабжением, финансами и
другими ключевыми направлениями деятельности» ми-
нистерства и всесоюзных объединений. Он писал даль-
ше следующее: «Мы рассматриваем систему «АСУ-при-
бор» как неотъемлемое звено в комплексной системе
руководства отраслью, как важный организационно-тех-
нический фактор повышения эффективности управле-
ния производством, поскольку из ряда существующих
направлений применения АСУ наибольший эффект да-
ет улучшение качества и повышение обоснованности
принимаемых стратегических и тактических управлен-
ческих решений за счет объективной, своевременной и
специально подготовленной информации. Практика
повседневно убеждает нас в плодотворности использо-
вания «электронных советчиков». Система «АСУ-при-
бор» ежедневно выдает на все уровни руководства от-
раслью (всесоюзные промышленные объединения,
функциональные управления, руководство министерст-
ва) необходимую информацию, характеризующую дея-
тельность предприятий; система представляет аналити-
ческие, прогнозные данные о возможных отклонениях
от нормального хода производства и причинах таких
отклонений. Это единственные оперативные данные,
которые служат информационной основой решений,
принимаемых по горячим следам событий или даже их
упреждающих, сигналом к оказанию необходимой по-
мощи предприятиям Система облегчает управление
материально-техническими ресурсами, позволяет более
правильно установить потребность в них для обеспече-
382
Ч. III. КИБЕРНЕТИКА
ния плана производства. Распределение материальных
ресурсов осуществляется только с помощью автомати-
зированной системы управления. К настоящему време-
ни накоплен достаточный опыт создания систем, ап-
робированы образцы АСУ на всех уровнях: начиная
с регулирования технологических процессов, автомати-
зации средств руководства цехом, производством, пред-
приятием, автоматизации проектно-конструкторских
разработок».
В той же статье говорилось также о планах даль-
нейшего развития указанной АСУ в связи с комплекс-
ным подходом к управлению, при котором одновремен-
но с созданием интегрированных АСУ проводятся
работы по совершенствованию технологии и оснащению
предприятий оборудованием, отвечающим требованиям
автоматизации. В этой части было написано вот что:
«Мы полагаем, что такой комплексный подход позволит
интенсифицировать производственный процесс, повы-
сить качество изделий, сократить цикл освоения новой
техники, обеспечить ритмичный выпуск продукции на-
шими научно-производственными объединениями и
предприятиями. При этом управление отраслью и все-
союзными объединениями как единым производствен-
но-хозяйственным комплексом усложнится. Мы это
предвидим и потому поставили задачу: приступить
к поэтапному созданию и реализации модели отрасли
в рамках системы «АСУ-прибор» и осуществлять
управление отраслью на базе такой модели — перед
тем, как принимать какие-то решения, «проигрывать»
на ней возможные варианты и выбирать наиболее
эффективные. Отрасль, подчеркну еще раз,— единый
производственно-хозяйственный комплекс, и поэтому
при принятии решения, улучшающего один вид дея-
тельности, через сложную цепь взаимосвязей возможны
нежелательные отклонения показателей других видов
деятельности. На модели можно будет оценивать всю
совокупность отдаленных последствий при принятии
конкретного локального решения».
При организационном управлении бывает необхо-
димым принимать во внимание не только технические
данные, но и факторы, которыми определяются поведе-
ние человека и коллектива. Сейчас разрабатываются
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
383
математические методы для учета этих факторов при
моделировании экономических процессов
Профессор В. Н. Бурков, книга которого «Основы
математической теории активных систем» была выпу-
щена в 1977 г. издательством «Наука», к числу этих
факторов относит факторы морального, материального,
престижного и психологического характера, математи-
ческое моделирование которых сопряжено с большими
трудностями. Говоря о многообразии проявлений «ак-
тивности» экономических систем, он так определяет
понятия активного элемента и активной системы и сле-
дующим образом характеризует предмет математиче-
ской теории активных систем: «Принятие заниженных
встречных планов, невыполнение планов по новой тех-
нике, завышение сроков реализации проектов, затрат
на их реализацию и, наоборот, соревнование за повы-
шение качества, количества и снижение себестоимо-
сти — все это примеры активности экономических сис-
тем. Формализация ряда отмеченных свойств и привела
к понятию «активный элемент» и «активная система»
(система, в которой объектами управления являются
активные элементы). На содержательном уровне опре-
деления активным называется элемент, имеющий цели
(интересы), способный искажать информацию и рабо-
тать с разной эффективностью (в соответствии со свои-
ми интересами). С математической точки зрения тео-
рию активных систем можно рассматривать как раздел
теории игр, однако яркая содержательная направлен-
ность этой теории заставляет выделить ее в отдельное
направление. Достаточно привести ряд терминов (план,
реализация плана, закон управления, механизм функ-
ционирования и др.), чтобы стало ясно, что речь идет
о теории управления организационными (в основном
экономическими) системами». Формализация действий
активных элементов необходима для того, чтобы можно
было учитывать при машинном моделировании эконо-
мических систем факторы, определяющие то или иное
поведение в соответствующей ситуации каждого чело-
века в отдельности и коллективов. Это должно способ-
ствовать проведению работ, направленных на изыска-
ние стимулов для повышения производительности труда
и улучшения экономических показателей.
384
Ч. 1П. КИБЕРНЕТИКА
Из сказанного выше должно быть ясным, какое
значение имеет применение в области организационного
управления и в области экономики методов, основанных
на использовании специальных приемов представления
и машинной обработки информации.
Дальше поговорим об использовании кибернетики
при изучении биологических систем, изучении природы,
и рассмотрим вообще ее влияние на развитие естество-
знания.
Когда раньше, во время прошлых наших бесед шла
речь о бионических аспектах кибернетики, имелось в
виду использование изучения процессов управления в
живых организмах и изучение мышления человека для
усовершенствования техники управления. Мы увидели,
какой размах приняли исследования, ведущиеся в этом
направлении, и поняли их практическое значение. Но
также важным является и то, что в ходе этих исследо-
ваний увеличиваются наши знания о процессах уп-
равления в живой природе, и удается все глубже про-
никнуть в тайны мозга человека. Исследования,
проведенные естествоиспытателями вместе со специа-
листами в области кибернетики, позволили создать
модели нейронов и нейронных сетей. Персептрон, фрей-
мовые структуры, голографическая память, стохастиче-
ские методы распознавания, машинное решение задач,
операции с нечеткими множествами — все это упро-
щенные модели, дающие представление о существе тех
или других сторон естественной интеллектуальной де-
ятельности человека. Работы по кибернетике дали
мощный толчок исследованиям в лингвистике и психо-
логии. Эта двусторонняя связь, взаимное обогащение
кибернетики и естествознания в результате постановки
всех таких исследований будут приобретать в будущем
все большее и большее значение. Изучается главным
образом высшая нервная деятельность человека, рабо-
та головного мозга. Столь же важным в научном пла-
не и в практическом отношении должно быть в буду-
щем содружество кибернетики и естествознания при
изучении и других процессов управления, например
процессов управления механизмом наследственности.
О том, что практически дает для изучения деятель-
ности живых организмов использование принятых в
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
' 385
кибернетике подходов к анализу сложных систем, мож-
но судить хотя бы по такому примеру из области ис-
следования нейрофизиологических процессов. Применив
при анализе опытных данных методы теории размытых
множеств и размытых алгоритмов в сочетании со
статистической обработкой информации А. Б. Коган и
О. Г. Чораян выяснили, как ведут себя в различных
условиях нейронные ансамбли (объединения нервных
клеток), имеющие, как сейчас предполагается, основ-
ное значение в организации деятельности мозга. Было
установлено, что для одних и тех же нейронов функ-
ция принадлежности их к ансамблю оказывается су-
щественно различной при различных воздействиях
внешней среды: световых воздействиях или электриче-
ском раздражении зрительного нерва, прямом электри-
ческом раздражении коры мозга и т. д. Использование
теории размытых множеств позволило подойти к изу-
чению процессов адаптации нервных клеток при повто-
ряющихся раздражениях. Была изучена и степень ор-
ганизованности нейронных популяций на различных
расстояниях от условного центра нейронного ансамбля.
Полученные при этих исследованиях характеристики
нейронных ансамблей приведены в уже упоминавшей-
ся нами книге О. Г. Чораяна «Размытые алгоритмы
мыслительных процессов».
Можно было бы привести и ряд других примеров
использования методов кибернетики в области естество-
знания. Но мы ограничимся тем, что было сказано вы-
ше. Приведенный пример интересен тем, что здесь речь
идет об изучении физиологических процессов, знание
которых имеет важное значение для понимания ме-
ханизмов функционирования мозга человека.
Перейдем теперь к совершенно другому вопросу —
к вопросу о кибернетике в связи с педагогикой.
Является эффективным применение ЭВМ для про-
граммированного обучения. Оно заключается в том, что
частично учащийся ведет изучение предмета с помощью
машины, которая передает ему знания и, контролируя
их усвоение, приспосабливается к индивидуальным
способностям каждого учащегося и устанавливает при-
емлемый для него темп обучения. При этом роль чело-
века — преподавателя — не уменьшается, а, наоборот,
13 л, А. Залманзон
Ч. Ш. КИБЕРНЕТИКА
ЗЙ&
становится еще более значительной. При дифференци-
рованном подходе к каждому учащемуся преподаватель
может тем, кто продвигается наиболее быстро, предло-
жить дополнительный материал и может уделить боль-
ше внимания учащимся, испытывающим затруднения.
Вообще же программированное обучение требует от
учащихся минимального напряжения, так как запро-
граммированная соответствующим образом машина все
время следит за ходом обучения, предлагая к изучению
новый материал по мере получения учащимся до этого
знаний, необходимых для его усвоения и их закреп-
ления.
На основе этого становится возможным эффектив-
ное внедрение прогрессивных методов развивающего
обучения. Сущность развивающего обучения заключа-
ется в том, чтобы не просто пассивным образом дать
знания учащимся, но максимально развить их спо-
собности к приобретению знаний, привить им навыки
приобретения знаний.
С применением обучающих машин открывается но-
вая страница в педагогической науке.
Дальше рассмотрим применения техники управле-
ния и кибернетики в медицине.
С появлением ЭВМ и другой кибернетической тех-
ники стало возможным существенно усовершенствовать
методы лечения и обслуживания больных..
Память создаваемых сейчас машин способна вме-
стить данные о том, когда каждый человек, начиная с
рождения, чем болел, как и где лечился, какие получал
за все это время лекарства, какие из них можно ему
давать, а какие пет, если он имеет склонность к аллер-
гии, и т. п. Представим себе, что человек пришел на
амбулаторный прием, или в тяжелом состоянии до-
ставлен в больницу, и в последнем случае не может
сообщить все эти данные врачу, а может быть он их
вообще не помнит. Ясно, какую ценность представляет
такая информация, которую машина может немедленно
предоставить врачам. Много времени тратят сейчас
врачи на записи в картах пациентов, на ведение исто-
рий болезни. Все это можно передать машинам, вы-
свободив время врачей для более обстоятельного про-
ведения основных лечебных мероприятий. Отметим
1. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
387
также большое значение машинной обработки электро-
кардиограмм и данных других обследований, А управ-
ление различными медицинскими службами, координа-
ция их работы? К этому относится многое из того, что
раньше было сказано об управлении работой промыш-
ленных предприятий.
Имитационные модели, о которых было рассказано,
используются для прогнозирования возникновения и
распространения эпидемий и для принятия мер к их
пресечению.
Когда еще только начиналось применение в меди-
цине современной техники управления, советский уче-
ный Н. М. Амосов так обрисовал перспективы приме-
нения в этой области устройств автоматики. Он писал,
что «можно наметить несколько типов диагностических
машин: маленькие автоматы, предназначенные для
выполнения технической работы, вроде анализов крови;
простые машины релейного типа для узкого круга за-
болеваний, которые по признакам, найденным врачом,
могут указать наиболее вероятные диагнозы; машины-
дешифраторы, предназначенные для расшифровки кри-
вых; полная диагностическая машина, которая сама
собирает информацию — записывает ряд кривых, сама
их расшифровывает, находит признаки болезни и, об-
рабатывая их по заложенной программе, выдает веро-
ятные диагнозы и рекомендации к дополнительным ис-
следованиям. Логическая часть такой машичы целиком
отражает логическую программу хорошего врача, до-
полненную большими статистическими материалами,
позволяющими оценить вероятность диагноза при раз-
личных сочетаниях признаков. Кроме машин для диаг-
ноза, уже сейчас создаются своеобразные автоматы для
лечения. Это, например, следящие системы. По такому
типу строят автоматические наркозные аппараты и
электрические стимуляторы сердца; аппарат следит за
электрокардиограммой и в момент резкого замедления
ритма включает электрический стимулятор, который
подает импульсы тока на сердце и навязывает ему
свой ритм сокращений».
Для отдельных видов болезней, например для глаз-
ных болезней, созданы уже программы, работая по ко-
торым машина самостоятельно ставит диагнозы.
13*
Ч. III. КИБЕРНЕТИКА
,388
Все более широко ведутся сейчас исследования, на-
правленные на использование ЭВМ непосредственно в
ходе лечения болезней.
В качестве одного из примеров, когда ЭВМ исполь-
зовалась при хирургической операции, укажем следу-
ющий. В лаборатории профессора М. А. Айзермана,
в Институте проблем управления АН СССР, сотрудни-
цами лаборатории Е. А. Андреевой и О. Е. Хуторской
был разработан метод анализа биоэлектрических потен-
циалов, возникающих в мышцах человека при возбуж-
дении мышечных волокон, основанный на обработке с
помощью ЭВМ характеристик колебаний потенциалов-
электромиограмм; заключается он в том, что произво-
дится спектральный анализ огибающих электромио-
грамм (используется дискретное преобразование Фурье,
машиной реализуется алгоритм БПФ). Этот метод
анализа был применен при хирургическом лечении бо-
лезни Паркинсона, при которой происходят ритмиче-
ские колебания конечностей, головы и всего тела боль-
ного. Операция производится следующим образом:
вводится в мозг больного игла шприца и в заданную
заранее расчетную точку выпускается некоторое коли-
чество жидкого азота, разрушающего небольшой уча-
сток мозга. Управление перемещением иглы произво-
дится при контроле ряда параметров, в том числе
важное значение может иметь и то, что дает спект-
ральный анализ огибающей электромиограммы. При
разработке данного метода опыты проводились следую-
щим образом1). В ходе операции, производившейся в
клинике нейрохирургии Института неврологии АМН
СССР, руководимой профессором Э. И. Канделем, сиг-
налы электромиограмм передавались по телефонному
кабелю машине, установленной в Институте проблем
управления, обрабатывавшей мгновенно сигналы, и ре-
зультаты этой обработки также мгновенно передава-
лись хирургу, который учитывал их при продвижении
иглы в ходе операции.
Другим характерным примером использования в
медицине для обработки информации машин может
*) Статья, в которой об этом написано, напечатана в жур-
нале «Автоматика и телемеханика», № 11 за 1977 г.
7 ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
389
служить их использование в недавно созданной ядер-
ной медицине, задачами которой, в частности, является
ранняя диагностика рака и получение данных для ле-
чения опухолей. В организм человека вводятся радио-
активные изотопы и производится машинная обработка
получаемых с их помощью сигналов, причем воспроиз-
водится картина распределения изотопов в исследуе-
мом органе. В различных частях исследуемого органа
в зависимости от его строения получается различи; я
концентрация изотопов, она изменяется в местах об-
разования опухолей. Это обнаруживается на получа-
емых изображениях соответствующих органов — их
сцинтиграммах. Последние в ядерной медицине играют
такую же роль, как рентгеновские снимки в рентгено-
диагностической технике. Является существенным то,
что могут получаться картины распределения радиоак-
тивных изотопов на различных глубинах. В ряде слу-
чаев радиоизотопная диагностика, дополняя рентгено-
графию, дает возможность обнаруживать злокачествен-
ные опухоли, не определяемые другими способами,
и более точно программировать лучевое их лечение.
В одном из видов выпускаемой аппаратуры этого типа
использована запись сцинтиграммы с помощью струй
окрашенной жидкости, распадающихся на капли, ко-
торым сообщается электрический заряд и которые от-
клоняются под действием электрических импульсов, по-
ступающих от машины, регистрирующей распределение
радиоактивных изотопов в исследуемом органе. Об этом
способе регистрации выходных данных мы уже упоми-
нали во время одной из наших прошлых бесед. Здесь
это производится следующим образом. Сопла элемен-
тов, из которых вытекают струи жидкостей красного,
синего и желтого цвета, располагаются со смещением
(как было показано внизу на рис. 38). Их работа ав-
томатически синхронизируется так, что путем наложе-
ния капель различного цвета получается, в зависимо-
сти от концентрации радиоактивных изотопов в данной
точке исследуемого органа, та или иная окраска соот-
ветствующей точки поля сцинтиграммы. Последняя
печатается на бумаге, закрепленной на вращающемся
барабане, рядом с которым расположены сопла. Кра-
сочная сцинтиграмма исследуемого органа (легких, по-
Г890
Ч. Ш. КИБЕРНЕТИКА
чек, печени), на которой данный орган изображается
в натуральную величину, получается за короткое вре-
мя, всего лишь около одной минуты или даже мень-
шее. И не требуется заниматься проявлением и сушкой
снимков, как в рентгенографии. Врач имеет возмож-
ность получить за короткое время ряд снимков, сде-
ланных на различных глубинах, дающих совместно
представление о пространственном виде опухоли.
Приведенные примеры показывают, каким образом
медициной берутся на вооружение методы и техниче-
ские средства обработки сигналов, принятые в кибер-
нетике.
Заканчивая рассмотрение вопроса о связи медицины
с кибернетикой, заметим еще, что особый интерес к
кибернетике проявляют врачи психиатры. Это объяс-
няется наличием аналогий между патологией психики,
возникновением психических заболеваний, с одной сто-
роны, и неустойчивостью и различного вида отклоне-
ниями от нормальных условий работы в машинах,
с другой.
Такое же значение, как и для техники, экономики,
медицины, приобретает применение кибернетики и для
других областей.
Для каких именно? Это вся сфера обслуживания
населения, торговля, материально-техническое снабже-
ние предприятий, средства связи. С помощью ЭВМ
производится анализ литературных стилей, чем зани-
маются ученые-филологи, и определяется авторство
безымянных произведений, рукописи которых обнару-
живаются время от времени. Разрабатываются кибер-
нетические устройства, предназначенные для помощи
инвалидам,- например роботы для обслуживания пара-
лизованных и роботы, выполняющие функции собаки-
поводыря для слепых. Кибернетика находит примене-
ние и в других отраслях науки, кроме естествознания,
о котором мы говорили. Так, имитационные кибернети-
ческие модели используются для прогнозирования роста
населения в разных странах и на всем земном шаре и
при других демографических исследованиях. Как было
сказано в школьном учебнике, ЭВМ применяются для
расшифровки древних письменностей. Кибернетика ис-
пользуется при математических исследованиях, с но-
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
391
мощью ЭВМ получены ранее неизвестные доказатель-
ства некоторых теорем.
В общем, кибернетика затрагивает многие стороны
жизни людей. Она имеет большое значение для всей
науки и техники.
Ну, а искусство? Литература, живопись, музыка?
Может ли и здесь быть полезной кибернетика? Оказы-
вается, да. Но каким же образом?
Чем, например, кибернетика может быть полезной
музыканту?
Так же как и применения ЭВМ в других областях
искусства (живопись, кино, техническая эстетика), при-
менения их при создании музыкальных произведений
и при исследованиях в области музыки рассмотрены в
книге А. Моля, В. Фукса и М. Касслера «Искусство и
ЭВМ», перевод которой был выпущен издательством
«Мир» в 1975 г. Этим вопросам сейчас посвящено и
много других книг и статей. Расскажем, например,
о музыке.
Итак, чем кибернетика может быть полезной му-
зыканту?
Если машине заданы элементы музыкальных про-
изведений, то комбинируя их случайным образом, она
может создать, по существу, новые музыкальные про-
изведения. Это подтверждено рядом опытов. Нужно ли
такое сочинение музыки? Во всяком случае оно инте-
ресно с точки зрения изучения процессов музыкального
творчества: там, где у композитора источником вдох-
новения является его творческое воображение, при со-
чинении машинной музыки это воображение заменяет-
ся случайным выбором и преобразованием отдельных
элементов, заложенных в машину. Насколько такая
работа машины может быть интересной для музыкан-
та, обсудим позднее.
Но не это представляется главным.
О том, что здесь вообще является основным, хорошо
сказал один из ведущих специалистов по машинному
синтезу музыки Д. А. Мурер. В его статье, посвящен-
ной этому вопросу, можно прочесть следующее: «Есте-
ственно задать вопрос — почему вдруг композитор об-
ращается за помощью к машипе? Прежде всего, это
связано со стремлением расширить выбор выразитель-
392 Ч. III. КИБЕРНЕТИКА
ных средств: ведь нам не хочется раз и навсегда огра-
ничиться тесными возможностями существующих
оркестровых инструментов. В качестве второй причины
можно указать точность исполнения. Вычислительная
машина способна осуществить «микрохирургическое»
препарирование исполняемого звука, придав ему не-
повторимый колорит. Например, частоту цифровых
генераторов можно довести до какой угодно точности
и воспроизводимости. Нас интересует не столько ими-
тация звуков существующих музыкальных инструмен-
тов, хотя в отдельных случаях это и важный способ
проверки качества методов синтеза, сколько расшире-
ние разнообразия естественных, а также создание со-
вершенно новых звуков. Однако даже при синтезе зву-
ка с совершенно новым тембром мы обязательно
стараемся сохранить в нем как можно больше естест-
венности». И дальше: «Композитор хочет получить
возможность управлять всеми характеристиками звука:
временем звучания, частотой, громкостью, тембром и
пространственным распределением. Мы хотим иметь
возможность использовать естественные звуки как от-
правные точки при попытках понять мир тембра. Мы
хотим изучить восприятие, чтобы лучше понять, как
мы слышим и как будут восприниматься наши музы-
кальные произведения». О восприятии говорится сле-
дующее: «Большую роль при восприятии музыки игра-
ет пространственная структура звука, обусловленная
всем окружением исполнителя. В современных студиях
звукозаписи на собственно музыкальные звуки можно
наложить звуки «концертного зала»». Здесь сказано об
имитации с помощью ЭВМ внешних акустических ус-
ловий, то есть имитации пространственного располо-
жения источников звука и имитации эффекта ревер-
берации.
Поясним встретившиеся нам музыкальные термины.
Реверберация — это остаточное звучание, сохраняюще-
еся благодаря отражению звуковых волн в концертном
зале после того, как прекратилось звучание инструмен-
тов или голоса певца. Упоминалось и о тембре звука.
Тембр, или, как по-другому говорят, «окраска» звука
есть качество его, по которому различаются тоны одной
и той же высоты и благодаря которому при исполнении
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
393
одного и того же музыкального произведения различ-
ными исполнителями получается различное звучание.
Раньше мы говорили об основанном на разложении ко-
лебаний в ряд Фурье гармоническом анализе (см.
рис. 21) применительно к сигналам, которые передают-
ся в технических системах автоматического управления.
Точно так же и при исполнении музыкальных произ-
ведений получаются звуковые колебания, которые мо-
гут быть представлены как сумма синусоид с крат-
ными частотами. На основную первую гармонику (ос-
новной тон) накладываются другие более высокие, это
и дает определенный тембр звука. Оказывается, что
секреты музыкального мастерства также связаны с тем,
с чем мы познакомились, рассматривая разложение
функций в ряд Фурье. На низкие музыкальные тойы
оказывают влияние до двадцати и более гармоник, на
высокие — обычно не более трех гармоник. То, о чем
мы сейчас говорим, относится к фундаментальным воп-
росам теории музыкальных звуков.
ЭВМ используются и при анализе структуры музы-
кальных произведений. Интересные результаты дал
статистический анализ музыкальных произведений раз-
личных композиторов, проведенный с помощью ЭВМ
на основе изучения распределения интервалов между
нотами и распределения высот звуков. Оказалось, что
таким образом можно определить, какому композитору
принадлежит- то или другое произведение. Машинный
анализ рассеяния высот звуков в произведениях компо-
зиторов, живших в разные времена (был охвачен пери-
од в пятьсот лет), показал, что по данному признаку
произведения каждой эпохи отличаются от произведе-
ний других, и позволил установить, по какому закону
в этом идет развитие музыки.
После того что было рассказано, вернемся еще раз
к машинному сочинению музыки. С принципом его
можно познакомиться на следующей упрощенной мо-
дели. Попробуем сыграть в такую игру: зададимся ис-
ходным музыкальным текстом, возьмем игральные
кости (кубики, которые мы в детстве много раз под-
брасывали, играя в различные игры и ожидая, какой
выпадет номер) и, бросая их, в зависимости от выпав-
шего номера по специально составленной таблице будем
394
Ч. III. КИБЕРНЕТИКА
подбирать каждый следующий такт. Это и будет подо-
бием машинного сочинения музыки. Только ЭВМ сам?
генерирует случайные числа.
Может ли такое занятие, как указанная выше игра
со случайным сочинением музыки, заинтересовать серь-
езного музыканта? Вероятно, да, если такими играми
увлекались великие композиторы Ф. Э. Бах, Гайдн,
Гендель, Моцарт и другие. Еще в 1757 г. было издано
«Руководство к сочинению полонезов и менуэтов с по-
мощью игральных костей» композитора И. Ф. Кирнбер-
гера, а в 1793 г,—через два года после смерти Моцар-
та — был опубликован якобы изобретенный им способ
сочинения вальсов с помощью игры в кости при поль-
зовании таблицей, определяющей выбор очередного
такта создаваемой пьесы. В заглавии инструкции по
пользованию таблицей было указано, что для сочине-
ния таким способом вальсов не требуется никакого
знания музыки и не нужно владеть искусством ком-
позиции.
Эта инструкция с таблицей цифр и частью таблицы
музыки приведена в называвшейся книге А. Моля и
его соавторов.
Данный способ сочинения музыки является прото-
типом современных машинных способов. У соответству-
ющим образом запрограммированной машины, содер-
жащей генератор случайных чисел, имеются, конечно,
значительно большие возможности. Может использо-
ваться и метод, аналогичный тому, о котором было
рассказано, когда мы рассматривали машинное проек-
тирование. В указанной книге написано, что великие
композиторы ясно сознавали роль случайности в общем
строении музыкального сообщения, и сделано предпо-
ложение о том, что они, вероятно, с большим интересом
отнеслись бы к тем опытам, которые сейчас проводятся
с машинным сочинением музыки.
К машинным способам сочинения музыки превлече-
но внимание многих специалистов в области музыки и
кибернетической техники. В Советском Союзе замеча-
тельные результаты при сочинении музыки с помощью
ЭВМ получил Р. X. Зарипов. Он рассказал о них в
своей книге «Машинный поиск вариантов при модели-
ровании творческого процесса» (1983).
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ ' 395
Раньше уже было высказано наше мнение о том,
что не получение музыкальных произведений этими
способами является здесь существенным. Основное —
это познавательное значение проводимых опытов и, са-
мое главное, практическая помощь композиторам, о ко-
торой говорилось.
Если дать машине полную свободу действий, не за-
кладывая в нее исходных музыкальных данных, то,
в общем, получаются сочетания звуков, далекие от то-
го, что можно было бы назвать музыкой. Между тем
еще в самом начале работ по машинному синтезу дела-
лись попытки представить выданное машиной за му-
зыку нашего бурного века, которая якобы должна
заменить классическую музыку. Это естественно вызва-
ло справедливые нарекания. Д. Д. Шостакович, имея
в виду такие машинные сочинения, говорил, что «они
убивают душу музыки — мелодию, разрушают форму,
красоту гармонии, богатство естественных ритмов,
уничтожая вместе с этим какой-либо намек на содер-
жательность, человечность музыкального произведения».
Раньше было показано, чем кибернетика может быть
полезной музыканту. Претензии же на большее являют-
ся неоправданными. Просто нужно подходить здесь ко
всему разумно. Н. Винер писал: «Человеку — человече-
ское, вычислительной машине— машинное».
Сказанное выше относится и к тому, в какой мере
кибернетика может быть полезной в других отраслях
искусства.
Например, на грани между музыкой и изобразитель-
ным искусством находится светомузыка, начало которой
было положено известным русским композитором
А. Н. Скрябиным, создавшим первое в мире светомузы-
кальное произведение «Прометей».. Совместное действие
музыки и световых изображений усиливает впечатление
гармонии. Применение к колебаниям звука и света ме-
тодов гармонического анализа, с которыми мы познако-
мились, говоря в этой книге о разложении функций в
ряд Фурье, привело к созданию теории светомузыки.
Оказалось, что простое подражание светом музыке (ис-
пользование одного и того же вид,а гармоник и точное
соответствие по времени световых и звуковых сигналов)
неприемлемо, так как утомляет зрителя-слушателя и не
396
Ч. III. КИБЕРНЕТИКА
дает желательного эффекта. Композитор А. Н. Скрябин
обладал особым даром создания светомузыкальных гар-
моний. Другой композитор, который был и художником,
и в творчестве которого воедино сливались музыкальные
и художественные образы,— это выдающийся предста-
витель литовского народа М. К. Чюрлёнис. Хотя он не
сочинял светомузыку, как А. Н. Скрябин, в его творче-
ства (около 300 музыкальных произведений и столько
же картин) музыка была наполнена игрой красок,
а картины, которые он не даром называл сонатами,
прелюдами й фугами, дышали музыкой. Машины не
способны к такому творчеству, во всяком случае сей-
час и в обозримом будущем. Вместе с тем и при сочи-
нении светомузыки, или, скажем по-другому, цветому-
зыки, композиторам-художникам может помочь маши-
на, используемая ими так же, как это было указано
раньше, когда мы говорили о создании и исполнении
обычных музыкальных произведений.
На этом мы закончим обсуждение того, в какой мере
машина может участвовать в музыкальном творчестве
и насколько могут здесь быть полезными методы обра-
ботки сигналов, используемые в кибернетике.
Приведенные примеры показывают, что использу-
емые в кибернетике методы обработки информации мо-
гут быть полезными и в других областях, когда даже не
имеются в виду непосредственно процессы управления.
Все, о чем до сих пор шла речь в нашей беседе,
касалось лишь применений кибернетики в мирной сози-
дательной деятельности людей. А какое значение она
имеет для военной техники? Насколько последняя мо-
жет стать еще более грозной в результате усовершен-
ствования управляющей аппаратуры снарядов и бомб,
усовершенствования систем наведения ракет, примене-
ния и в этой технике роботов?
Создание новых, все более совершенных устройств
управления, конечно, имеет большое значение для во-
енной техники. Более того, многие исследования в об-
ласти кибернетики проводились сначала в связи с пос-
тановкой задач усовершенствования военной техники.
Так было вначале, когда решались вопросы статисти-
ческой обработки сигналов при прогнозировании попа-
дания снарядов в_ летящий самолет-бомбардировщик
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
397
(об этом писал Н. Винер в книге «Кибернетика или
Управление и связь в животном и машине»).
Так было и позднее.
При военных применениях ЭВМ иногда может
иметь серьезные последствия даже какая-либо одна-
единственная ошибка, произошедшая из-за неисправ-
ного состояния машины. С тех же пор, как машины
стали использоваться в системах принятия решений,
возникла еще и другая угроза. Раньше, говоря о про-
блемах кибернетики, мы уже упомянули о том, что^ ис-
правная, прошедшая обучение кибернетическая маши-
на может вообще-то не так, как это сделал бы человек,
оценить ситуацию, и что это тоже может быть в неко-
торых случаях опасным. В особенности это существен-
но, если имеется в виду использование кибернетики в
военной технике. Возникновение такой опасности пред-
видел Н. Винер. Приведем здесь отрывок из статьи,
написанной им еще в 1961 г. (за три года до его смер-
ти). Статья эта, включенная во второе издание его
книги «Кибернетика...», несколько раз затем печата-
лась у нас, последний раз в сборнике «Кибернетика —
неограниченные возможности и возможные ограниче-
ния. Итоги развития», выпущенном в 1979 г. издатель-
ством «Наука». Вот, что в ней сказано:
«Самая большая опасность сейчас — III мировая
война. Заслуживает внимания вопрос: в какой мере
эта опасность может корениться в неосмотрительном
применении обучающихся машин? Много раз я слышал
утверждение, что обучающиеся машины не могут под-
вергнуть нас каким-либо новым опасностям, потому что
мы можем выключить их когда захотим. Но действи-
тельно ли можем? Чтобы действительно выключить
машину, мы должны получить информацию, что насту-
пило опасное положение. То обстоятельство, что мы
создали машину, еще не гарантирует, что мы будем
иметь надлежащую информацию для такого вмеша-
тельства. Этот вывод уже содержится неявно в утверж-
дении, что шашечная машина может обыграть своего
программиста, и притом после очень небольшого време-
ни подлаживания к нему. Кроме того, само быстродей-
ствие современных цифровых машин может воспрепят-
ствовать нам заметить и продумать признаки опасности.
398
Ч. Ш. КИБЕРНЕТИКА
Мысль о нечеловеческих устройствах, наделенных
большим могуществом и большой способностью вести
свою политику, и об их опасности не имеет в себе ниче-
го нового. Ново лишь то, что теперь мы располагаем
эффективными устройствами такого рода. В прошлом
подобные возможности постулировались для методов
магии и волшебства, составляющих тему множества
легенд и народных сказок. В этих сказках тщательно
разбирается моральное положение волшебника. Я уже
рассматривал некоторые аспекты легендарной этики
волшебства в своей предыдущей книге, озаглавленной
«Человеческое использование человеческих существ».
Повторю здесь кое-что из сказанного там, чтобы свя-
зать это с обучающимися машинами.
Хорошо известна волшебная сказка из стихотворе-
ния Гёте «Ученик чародея». В ней чародей оставляет
своего ученика и помощника одного, приказав ему при-
нести воды. Ленивый и хитрый юноша поручает эту
работу метле, произнеся волшебные слова, слышанные
им от учителя. Метла покорно делает за него работу и
не хочет остановиться. Юноша едва не тонет. Он обна-
руживает, что не выучил или забыл второе заклина-
ние, которое должно остановить метлу. В отчаянии
хватает он метлу, переламывает ее о колено и к ужасу
своему видит, что обе половины продолжают носить
воду. К счастью, прежде чем он погиб, возвращается
учитель, произносит Властное Слово, останавливающее
метлу, и задает порядочный нагоняй ученику.
В «Тысяче и одной ночи» есть сказка о рыбаке и
джине. Рыбак вытащил сетью кувшин, запечатанный
печатью Соломона. В этот сосуд Соломон заключил
мятежного джина. Джин выходит в виде гигантского ;
облака дыма и говорит рыбаку, что в первые годы
своего заточения он хотел вознаградить своего спаси- J
теля могуществом и богатством, а теперь решил убить
его тут же на месте. К счастью для рыбака, ему уда-
ется уговорить джина войти опять в бутылку, которую i
он бросает на дно океана. -
Еще страшнее притча об обезьяньей лапе, принад- ?
лежащая перу английского писателя начала текущего
столетия У. У, Джекобса. Старый удалившийся на по- j
кой английский рабочий сидит за столом с женой и |
7. ПРИМЕНЕНИЯ КИБЕРНЕТИКИ
399
другом, вернувшимся из Индии британским сержан-
том. Сержант показывает хозяевам талисман в виде вы-
сушенной, сморщенной обезьяньей лапы. Один индий-
ский святой человек, хотевший доказать, как безумно
искушать судьбу, наделил эту лапу способностью ис-
полнить три желания каждого из трех человек. Солдат
говорит, что не знает первых двух желаний первого
владельца, но последнее было — смерть. Сам он,—
объявляет сержант друзьям,— второй владелец, но не
будет рассказывать о своих страшных переживаниях.
Он бросает лапу в огонь, однако его друг спасает лапу
и хочет испытать ее силу. Его первое желание — полу-
чить 200 фунтов стерлингов. Вскоре раздается стук в
дверь и в комнату входит служащий фирмы, где рабо-
тает его сын. Отец узнает, что сын убит машиной,
но фирма, хотя и отклоняет от себя всякую ответствен-
ность, желает предложить отцу вознаграждение в
200 фунтов. Убитый горем отец называет свое второе
желание — чтобы сын вернулся, и когда опять разда-
ется стук в дверь и она открывается, появляется нечто,
представляющее собой — об этом много не говорится —
призрак сына. Последнее желание — чтобы призрак
удалился прочь.
Суть всех этих историй в том, что волшебные силы
выполняют все дословно, и если мы просим у них для
себя какой-либо дар, мы должны просить то, что нам
действительно желательно, а не то, что нам кажется
таковым. Новые и реальные силы обучающейся маши-
ны также выполняют указания буквально. Если мы
программируем машину на победу в войне, то должны
ясно представлять себе, как мы понимаем победу. Обу-
чающаяся машина должна программироваться опытом.
Единственный опыт ядерной войны, который не при-
водит сразу же к катастрофе,— это опыт военной игры.
Если мы хотим использовать этот опыт как руководство
для нашего поведения в действительном кризисе, то
ценности победы, которые мы принимали в играх про-
граммирования, должны быть теми самыми ценностями,
к которым мы стремились бы в глубине души в дей-
ствительной войне. Ошибка в этом отношении может
означать лишь немедленную, полную и окончательную
гибель, Мы не можем рассчитывать на то, что машина
400
Ч. Ш КИБЕРНЕТИКА
будет подражать нам в тех предрассудках и эмоцио-
нальных компромиссах, благодаря которым мы позво-
ляем себе называть разрушение победой. Если мы тре-
буем победы и не знаем, что подразумеваем под этим,
мы встретимся с призраком, стучащимся к нам в
дверь».
Радикальным решением поднятого здесь вопроса
являются запрещение ядерного и другого оружия, все-
общее разоружение, ликвидация военной техники,
в том числе и военных кибернетических машин.
Мы не будем больше касаться военных применений
кибернетики. Вернемся к тому, о чем говорилось до
этого.
Сделаем заключительные замечания, относящиеся
к теме этой нашей беседы
Кибернетика уже сейчас много дает практике,
и прикладные аспекты ее становятся все более важ-
ными.
Не согласимся поэтому с тем, что иногда говорится
сейчас о том, что она многое пообещала и пока мало
дала практике,— что выдано здесь много векселей,
которые остаются неоплаченными.
Конечно, суждения могут быть различными в зави-
симости от того, что иметь в виду под кибернетикой.
Если исходить, как мы это сделали, из того, что это
вся наука об управлении и связи, то большие практиче-
ские результаты использования ее выводов несомненны.
Если же рассматривать лишь новые проблемы, о ко-
торых мы рассказали в последней части книги, то
большим достижением является самая их постановка.
Нужно считаться и с тем, что эти проблемы киберне-
тики очень сложны, а работы, о которых было сказано,
начаты совсем недавно. Однако даже то, что здесь
начинает делаться, будь то в отношении роботов, на-
деленных искусственным интеллектом, или сложных
информационных систем и систем управления, увязыва-
ется с решением практических задач. Эти применения
будут становиться уже в ближайшем будущем все бо-
лее значительными.
Интересны и более далекие перспективы развития
кибернетики. Чего следует ждать здесь в дальнейшем,
пусть и не скоро? Этому посвятим следующую беседу.
8. ПЕРСПЕКТИВЫ РАЗВИТИЯ КИБЕРНЕТИКИ
401
8. Перспективы дальнейшего развития кибернетики
О далеком будущем кибернетики сейчас трудно
говорить. Но все же можно попытаться сделать неко-
торые предположения о том, каким оно будет. При
этом нужно лишь разделить то, что действительно
можно уже сейчас утверждать, и то, что относится
к области фантастики. Выскажем свои соображения
по поводу первого, коснемся и второго.
С уверенностью можно сказать следующее. В буду-
щем, так же как и сейчас, выдвижение новых идей в
кибернетике и их реализация будут способствовать соз-
данию все более совершенных технических средств и
все лучших практических методов управления. Вместе
с тем усовершенствование технической базы киберне-
тики позволит ставить и решать новые теоретические
проблемы. И в дальнейшем будут использоваться в ки-
бернетике совместно математические и эксперименталь-
ные методы, широкое развитие получит собственная
теория кибернетических систем.
Даже при решении тех задач, которые уже сейчас
поставлены, следует ожидать появления в будущем
качественно новых способов управления. В особенности
это будет зависеть от того, как развернутся работы по
искусственному интеллекту.
Можно ожидать, что будут сделаны открытия, ко-
торые окажут большое влияние на все дальнейшее раз-
витие кибернетической науки и техники. Возможно,
что эти открытия будут сделаны в области оптической
обработки и запоминания сигналов. Может быть, прог-
ресс кибернетики будет связан с использованием био-
логических сред в машинах и с созданием белковых
запоминающих устройств, намного превосходящих по
своим возможностям те, которые имеются в современ-
ных машинах. Не исключено, что поворотным пунктом
в развитии кибернетики явятся дальнейшее раскрытие
механизмов наследственности и освоение управления
происходящими здесь процессами. Может быть, реша-
ющее значение для будущего кибернетики будет иметь
открытие способов прямого ввода, с помощью биотоков,
информации из головного мозга человека в машину
402
Ч. III. КИБЕРНЕТИКА
и также прямой передачи информации от машины в
мозг человека.
Эти вопросы уже сейчас в поле зрения ученых.
Может быть, в будущем появятся и другие.
Будут использоваться выводы, к которым приведут
исследование процессов управления в живых организ-
мах, вообще исследование жизнедеятельности организ-
мов, изучение мышления человека. Все это будет при-
меняться так, как мы говорили в начале этой части
книги, когда привели пример с полетом птицы и ско-
ростного самолета. Аналогии между живыми организ-
мами и машинами будут использоваться только на ис-
ходных, отправных этапах. А затем будут создаваться
кибернетические устройства, во многом превосходящие
их естественные прототипы.
Делая предположения о путях развития киберне-
тики, следует учитывать накопленный уже сейчас опыт.
Например, стало ясным, что эффективное использова-
ние автоматизированных систем управления возможно
обычно лишь при должном, начиная с первичных
звеньев системы, уровне автоматизации и надлежащем
уровне технической культуры. В будущем также необ-
ходимо, чтобы разработка всех разделов кибернетики
и практическое применение ее результатов были во
всем согласованными.
Получат широкий размах работы, направленные на
создание и применение во всех областях техники усо-
вершенствованных роботов.
Будут совершенствоваться диалоговые человеко-ма-
шинные системы. В таких системах успех решения
различных задач будет обеспечен тем, что в ходе ре-
шения человек, испытывая затруднения, будет обра-
щаться к машине, а машина, исчерпав свои возможно-
сти, будет призывать на помощь человека. Уже имею-
щийся сейчас опыт свидетельствует о том, что такое
слаженное обоюдное действие человека и машины во
многих случаях представляется весьма результативным.
Таковы, как нам кажется, реальные перспективы
дальнейшего продвижения в кибернетике.
Вместе с тем все это дает обильную пищу для вся-
кого рода фантастических планов.
Можно отнестись к ним критически.
8. ПЕРСПЕКТИВЫ РАЗВИТИЯ КИБЕРНЕТИКИ
403
Но многое из того, что казалось в кибернетике еще
недавно несбыточным, сейчас уже реализуется. Здесь
дело обстоит так же, как и в других областях. Ведь
всего лишь несколько десятилетий тому назад многие
достижения современной науки и техники показались
бы фантастическими. И телевизионная передача изоб-
ражений, и атомные электростанции, и луноход, и мно-
гое другое. В романе Алексея Толстого «Гиперболоид
инженера Гарина» рассказывалось о луче света, прон-
зающем, рассекающем все па своем пути, «самом
страшном оружии, когда-либо выдуманном человече-
ством». Это было до изобретения лазера и тогда было
фантастикой. А сейчас излучаемый лазером свет мо-
жет быть действительно и грозным оружием, но он же
заменяет скальпель в руках хирурга при тончайших
операциях и используется для обработки различных
материалов.
Что-то из того, что было раньше написано в фанта-
стических повестях и романах, сбылось и сбывается.
Но, конечно, далеко не все, далеко не обязательно.
На то фантастика таковой и является, в отличие от
науки, базирующейся на фактах, занимающейся рас-
крытием объективных закономерностей мира и исполь-
зованием открытий для создания нового.
Принимать ли или нет то, что пишут сейчас о бу-
дущем кибернетики писатели-фантасты, за возможное,
сбыточное, зависит во многом от того, насколько это
согласуется с данными науки, с прогнозами ученых.
Но мнения их, как мы уже говорили, расходятся: неко-
торые считают, что машины никогда не смогут делать
больше того, что запрограммировано человеком (наши
соображения по этому поводу были тогда же высказа-
ны), другие исходят из того, что в принципе возмож-
ности искусственного разума неограничены. Это уже
может быть основой для далеко идущих предположений
фантастического характера.
Что же пишется о кибернетике в фантастических
повестях и романах? Что говорят об этом ученые?
Обратимся, например, к тому из написанного писа-
телями-фантастами, о чем рассказано в упоминавшейся
уже нами книге Г. В. Максимовича «Беседы с акаде-
миком В. Глушковым», в которой, вслед за реальными
404'
Ч. III. КИБЕРНЕТИКА
применениями в различных отраслях компьютеров
сейчас и в ближайшие годы, указаны и предполагаемые
их применения в нескором будущем. Рассказывается
о том, как люди отправляются в далекое космическое
путешествие, которое продлится тысячи лет (кроме ко-
роткого времени высадки на встретившиеся по пути
планеты, путешественники все время будут находить-
ся или в состоянии анабиоза, или как-либо будет за-
медляться жизнедеятельность их организмов или, как
сказано, она даже будет периодически консервировать-
ся), а чтобы не отстать от развития земной культуры
за это время, они оставляют свое самосознание маши-
нам, которые, накапливая и обрабатывая информацию,
пополняют его и возвращают людям по окончании их
путешествия. В этой книге говорится и о другом. Ака-
демиком В. М. Глушковым даются положительные от-
веты на следующие вопросы: «Судя по тому, о чем вы
рассказали, машина сможет стать интеллектуальным
наследником человека...», «Если я правильно понял
вас, человек может передать компьютеру не только на-
копленные им в течение жизни знания, но и все свои
эмоции, чувства и даже черты характера?», «Следова-
тельно, вместе с интеллектуальной информацией, с са-
мосознанием в машину переходят и привычки, привя-
занности, склонности, желания?». И дальше в связи с
ответом на эти вопросы делается следующее заключе-
ние: «Как видите, начали мы с бессмертия творческо-
го, а закончили^полным интеллектуальным бессмертием
в недрах компьютера. Что из этого реально, а что нет,
как я уже говорил, покажет будущее. Ведь многое из
того, о чем мы сейчас говорили, построено на гипоте-
зах, которые еще не доказаны. Но гипотезы эти выска-
зывались крупнейшими учеными, так что отмахиваться
от них не стоит. Да и вполне возможно, что люди гря-
дущих поколений будут мыслить несколько иначе, чем
мы, и просто не захотят такого бессмертия, не захотят
жить вечно».
Исходя из принципиальных возможностей киберне-
тики, можно было бы предложить много различных
сюжетов для фантастических повестей. Но ограничим-
ся тем, что было рассказано, так как, в общем, это пе
в плане нашей книги.
8. ПЕРСПЕКТИВЫ РАЗВИТИЯ КИБЕРНЕТИКИ 405
Вернемся к тому, с чего мы начали эту беседу.
К тому, о чем, как нам кажется, можно уже сейчас
говорить уверенно.
Прежде всего, следует ожидать больших успехов в
развитии кибернетики. Сейчас теоретическими иссле-
дованиями в данной области и практическим использо-
ванием их результатов занимается во всем мире много
специалистов, много талантливых ученых. И если в
наше время кибернетике уделяется огромное внимание,
то в будущем интерес к ней будет все большим и
большим.
Успехи кибернетики, являющейся уже сейчас одной
из основных научных дисциплин, и в дальнейшем бу-
дут иметь существенное значение для других отраслей
науки и для техники. Вместе с тем новые результаты,
полученные в других областях, будут использоваться
при решении задач кибернетики.
Bto позволит все в большей и большей степени усо-
вершенствовать управление различными процессами.
ЗАКЛЮЧЕНИЕ
Беседы наши подошли к концу и пришло время по-
прощаться с читателем.
Сделаем лишь еще одно замечание. Автоматизация
производственных процессов и использование киберне-
тических машин как помощников человека в его ин-
теллектуальной деятельности затрагивают различные
стороны жизни человеческого общества. В связи с этим
возникает много вопросов. В числе их имеются и та-
кие, которых мы лишь коснулись или которые вообще
нами не рассматривались. Например, является акту-
альным вопрос о социальных последствиях автоматиза-
ции. Интересны философские вопросы кибернетики.
Эти вопросы требуют специального обсуждения, и им
должна быть посвящена отдельная книга.
В данной же книге было рассказано только о мето-
дах автоматического управления и их технической ре-
ализации, о теории автоматических систем, об основ-
ных идеях кибернетики, практическом использовании
ее достижений и перспективах дальнейшего ее раз-
вития.
Хочется надеяться, что, прочитав эту книгу, чита-
тель заинтересуется автоматикой и кибернетикой на-
столько, что у него появится желание заняться более
углубленным их изучением. Если это будет так, то
можно будет считать, что цель, поставленная при на-
писании книги, достигнута.
ПРИЛОЖЕНИЕ
ОБЗОР ДОПОЛНИТЕЛЬНОЙ ЛИТЕРАТУРЫ
В конце нашей книги была высказана надежда на то, что
познакомившись с нею, читатель заинтересуется автоматикой
и кибернетикой настолько, что у него появится желание за-
няться более углубленным их изучением. Если действительно
будет так, то как это сделать? Что читать дальше? Какую ли-
тературу использовать для более детального изучения того,
о чем было рассказано в нашей книге? На ряд источников были
сделаны ссылки в тексте книги. Если они незнакомы читателю,
то к ним советуем ему в первую очередь обратиться. Что еще
можно рекомендовать? Автоматике и кибернетике уделяется
большое внимание. По вопросам, имеющим к ним отношение,
выпускается в СССР и за рубежом много книг. Они рассчитаны
на читателей с различной подготовкой. Мы ориентируемся
прежде всего на тех из них, кто, заканчивая обучение в сред-
ней школе и усвоив программу школьных учебников по матема-
тике и физике, почерпнул еще некоторые дополнительные
сведения по математике из нашей книги. Кроме того, в каче-
стве читателей имелись в виду специалисты различного про-
филя. Привести здесь обстоятельную библиографию по автома-
тике и кибернетике для этого круга читателей не представляет-
ся возможным. Пришлось поэтому ограничиться только указа-
нием некоторых книг, изданных в СССР за последние полтора-
два года, т. е. незадолго до того, как настоящая книга поступит
в библиотеки и на прилавки книжных магазинов. В этих кни-
гах есть ссылки на другие, ранее изданные. Читатель, которому
мы лишь помогли составить общее представление о технике ав-
томатического управления, кибернетике, используемых в этой
области методах исследования, сможет обратиться впоследствии
к указываемой дополнительной литературе.
Вопросам теории линейных и нелинейных автоматических
систем посвящены соответственно книги: Воронов А. А. «Осно-
вы теории автоматического управления. Автоматическое регу-
лирование непрерывных линейных систем» (М.: Энергия, 1980);
Попов Е. П. «Теория нелинейных систем автоматического регу-
лирования и управления» (М.: Наука, 1979). При самостоятель-
ном ознакомлении с этими книгами (теория автоматического
управления изучается и в вузах соответствующего профиля)
для понимания ряда разделов достаточно знания математиче-
ского анализа в объеме программы средней школы или в не-
сколько расширенном объеме (см., например, Никольский С. М.
«Элементы математического анализа» (М.: Наука, 1981)) и зна-
ния того, о чем рассказывалось в нашей книге. Вообще же, для
изучения этих книг нужно знание математики, которое дает
408
ПРИЛОЖЕНИЕ
технический вуз (укажем, например, учебник: Пискунов Н. С.
«Дифференциальное и интегральное исчисление», т. I, II (М.:
Наука, 4978). При такой подготовке становятся доступными и
книги, касающиеся специальных вопросов теории автоматиче-
ского управления. К ним относится учебник: Росин М. Ф., Бу-
лыгин В. С. «Статистическая динамика и теория эффективности
систем управления» (М.: Машиностроение, 1981).
Ряд книг касается вопросов кибернетики и искусственного
интеллекта. Среди них назовем сначала следующие: Амо-
сов Н. М. «Алгоритмы разума» (Киев: Паукова думка, 1979);
Шапиро С. И, «Мышление человека и переработка информации
ЭВМ» (М.: Советское радио, 1980); Растригин Л. А. «Современ-
ные принципы управления сложными объектами» (М.: Совет-
ское радио, 1980); «Проблемы построения систем понимания
речи», под ред. Г. И. Цемеля и В. Н. Сорокина (М.: Наука, 1980);
Уинстон П. «Искусственный интеллект» (пер. с англ.— М.: Мир,
1980); Шеридан Т. Б., Феррелл У. РлСистемы человек-машина»
(пер. с англ,— М.: Машиностроение, 1980); Баласанян В. Э.,
Трахтенгерц Э. А. «Диалоговые системы» (Изд. Ин-та проблем
управления, 1979). Отметим еще две книги, в которых рассмот-
рены вопросы автоматизации поиска решений при управлении
сложными системами. Одна из них — книга Д. А. Поспелова
«Логико-лингвистические модели в системах управления» (М.:
Энергоиздат, 1981), посвященная новому и быстро развивающе-
муся направлению в теории управления. К тому, чтобы взять
эту книгу в руки, мы в какой-то мере подготовили нашего чита-
теля, сообщив ему пока предварительные и лишь общие све-
дения о том, что такое семантические сети, реляционные си-
стемы, исчисление высказываний и исчисление предикатов,
фреймовые представления структур. Другая из упомянутых
книг: Айзерман М. А., Малишевский А. В. «Проблемы логическо-
го обоснования в общей теории выбора. Общая модель выбора
и ее классически-рациональные основания» (Изд. Ин-та проблем
управления, 1980). В этой книге, знакомящей читателя со взгля-
дами на логику «обоснованного» выбора решения из ряда воз-
можных, обсуждаются такие понятия, как «основания для вы-
бора», «лучшие варианты» и т. п.
Большое место в литературе отводится разработке АСУ.
В напечатанной в журнале «Приборы и системы управления»,
№ 2, 1981 статье министра приборостроения средств автоматиза-
ции и систем управления СССР доктора технических наук
М. С. Шкабардня при подведении итогов работы отрасли за пять
лет дальнейшее расширение работ в области создания и внед-
рения АСУ охарактеризовано как «важный фактор в развитии
отрасли и ее активного влияния на темпы технического про-
гресса в народном хозяйстве». АСУ разрабатываются «для всех
уровней управления: технологических агрегатов, производств,
предприятий, комбинатов и производственных объединений, от-
раслей, непромышленных объектов, территориальных комплек-
сов». В этой статье отмечено, что при этом расширен круг ре-
шаемых задач и повышен технический уровень АСУ: «созданы
системы, основанные на современных научных принципах по-
ПРИЛОЖЕНИЕ
409
строения и функционирования: непосредственного цифрового
управления, адаптивные и интегрированные, многоуровневые
иерархические, а также сложные системы массового обслужи-
вания, первые системы с распределенным управлением». Из вы-
лущенных в последнее время книг по АСУ укажем следующие:
Мамиконов А. Г., Цвиркун А. Д., Кульба В. В. «Автоматизация
проектирования АСУ: применение вычислительных машин в ис-
следованиях и управлении производством» (М.: Энергоиздат,
1981); Четвериков В. Н. «Подготовка и телеобработка данных
в АСУ» (М.: Высшая школа, 1981).
Из технических средств автоматики основное внимание от-
водится сейчас в литературе применениям ЭВМ и разработке
и использованию микропроцессорной техники. О том, насколько
успешно шло развитие последней в СССР в истекшем пятиле-
тии можно судить по следующим данным, опубликованным в
журнале «Приборы и системы управления», № 2, 1981: «Объем
выпуска изделий с применением микроэлектронной техники —
интегральных схем, микропроцессоров и микро-ЭВМ возрос бо-
лее чем в 3 раза и в 1980 г. превысил 2 млрд, рублей». Вопросы
применения ЭВМ в народном хозяйстве рассмотрены в книге:
Мясников В. А., Майоров С. А., Новиков Г. И. «ЭВМ для всех.
Электронно-вычислительная техника в народном хозяйстве» (М.:
Знание, 1980). Интерес к микропроцессорной технике, возрастав-
ший в последние годы все больше, увеличился в самое послед-
нее время, так как стало ясно, что БИС и СБИС (сверхбольшие
БИС, содержащие более 10000 элементов в одном кристалле)
будут в дальнейшем использоваться вообще для построения
всех ЭВМ. Созданию микропроцессорных систем посвящена кни-
га: Прангишвили И. В., Стецюра Г. Г. «Микропроцессорные си-
стемы» (М.: Наука, 1980). Изданы книги с описанием МП и
микро-ЭВМ, разработанных в СССР: «Микро-ЭВМ «Электрони-
ка С 5» и их применение» (Гальперин М. П., Кузнецов В. Я.,
Масленников Ю. А. и др. Под ред. В. М. Пролейко.— М.: Совет-
ское радио. 1980); «Микропроцессорные БИС и микро-ЭВМ: По-
строение п применение» (Васенков А. А., Воробьев Н. М., Джху-
нян В. Л. и др. Под ред. Васенкова А. А.— М.: Советское радио,
1980); Бедрековский М. А., Волга В. В., Кручинкин Н. С. «Мик-
ропроцессоры»' (М.: Радио и связь, 1981); Никитюк Н. М. «Мик-
ропроцессоры и микро-ЭВМ. Применение в приборостроении и
в научных исследованиях (М.: Энергоиздат, 1981). Выпущены
также в свет переводы иностранных книг по микропроцессор-
ной технике: Вайда Ф., Чакань А. «Микро-ЭВМ» (пер. с венг.—
М.: Энергия, 1980); Клингман Э. «Проектирование микропроцес-
сорных систем» (пер. с англ.— М.: Мир, 1980); Морисуэ М., Ёси-
кава Т. «Микро-ЭВМ за три дня» (М.: Мир, 1981). Проблемы
создания усовершенствованных СБИС рассмотрены в статье:
Нестеров П. В. «Сверхбольшие интегральные схемы: проблемы
создания и ожидаемые результаты» (Зарубежная радиоэлектро-
ника, 1980, № 12). Большое внимание уделяется сейчас у нас
в стране и за рубежом использованию ЦМД как элементов па-
мяти микропроцессорных систем. Этот вопрос, наряду с другими
вопросами применения магнитных элементов, освещен в статье:-
410
ПРИЛОЖЕНИЕ
Розенблат М. А. «Тенденции и перспективы развития и приме-
нения магнитных средств преобразования, обработки и хране-
ния информации» («Измерения, контроль, автоматика (ИКА),
1980, вып. 9—10).
В последнее время изданы книги и опубликованы статьи,
в которых с развитием микроэлектроники связываются перспек-
тивы развития отдельных видов систем автоматики и киберне-
тики в целом. К ним относится книга: Булгаков А. А. «Програм-
мное управление системами машин» (М.: Наука, 1980), а также
статья: Растригин Л. А. «Искусственный интеллект, адаптация
и микроэлектроника» (Микроэлектроника, 1981, вып. !)•
Укажем также следующие книги, касающиеся отдельных
вопросов, которые были нами рассмотрены: Салтыков А. И., Се-
машко Г. Л. «Программирование для всех» (М.: Наука, 1980);
Бахтиаров Г. Д., Малинин В. В., Школин В. П. «Аналого-циф-
ровые преобразователи» (М.: Советское радио, 1980); Уиньон М.
«Знакомство с голографией» (пер. с англ.—М.: Мир, 1980).
Ознакомление с указанной литературой позволит читателю
расширить и углубить знания об автоматике и кибернетике.
Добавление ко второму изданию
За время, истекшее после выхода в свет первого издания,
выпущен ряд новых книг, затрагивающих рассматриваемые
нами вопросы. Из технических средств автоматики все большее
внимание уделяется микропроцессорным средствам. Появляют-
ся книги, в которых описывается их применение для управле-
ния различными процессами. Использованию МП для регули-
рования работы электроэнергетических устройств посвящена
книга: Башнин О. И., Буевич В. В. и др. «Микропроцессоры в
энергетике» (Л.: Наука, 1982). В книге «Микропроцессоры и
управление потоками жидкостей и газов» (М.: Наука, 1984),
написанной автором настоящей книги, описаны отечественные
и зарубежные МП и микро-ЭВМ и показано, как они применя-
ются при управлении потоками жидкостей и газов в различных
отраслях техники и медицины.
Из новых книг, в которых рассматриваются теоретические
вопросы кибернетики, особо советуем читателю прочесть, кни-
гу: Поспелов Д. А. «Фантазия или наука: на пути к искусствен-
ному интеллекту» (М.: Наука, 1982). Интересны книги: Шилей-
ко А., Шилейко Т. «Информация или интуиция?» (М.: Молодая
гвардия, 1983); Адельсон-Вельский Г. М., Арлазаров В. Л., Бит-
ман А. Р., Донской М. В. «Машина играет в шахматы» (М.: Нау-
ка, 1983).
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абстрагирование 351
Автоколебание 150, 153
Автокорреляция 175
Автомат конечный 70
— цифровой 204
---- асинхронный 204
----синхронный 204
Автоматика неэлектронная 92
Адамара матрица 241
Алгебра булева 02
Алгоритм управления 39
База данных 375
---- реляционная 375
Байт 73
Банк данных 375
----реляционный 375
Барабан магнитный 67
Бионика 254
Бит 73
Вейча —Карно карта 212
Вероятность события 171
Взаимодействие акустооптическое
105
Взвешивание поразрядное 91
Воздействие по нагрузке 24
----производной 20
Восприятие информации 257
Гистерезис 152
Глубина поиска 302
Голография 359
Гомеостат 269
Грамматика формальная 322
Граф 198
— неориентированный 199
— ориентированный 198
— смешанный 200
Гюйгенса принцип 100
Делитель частоты 206
Дизъюнкция 57
Динамика систем автоматическо-
го управления 103
Дирака функция ИЗ
Диск магнитный 67
дисперсия 174
Доказательство теорем машинное
282
Доаден магнитный 68
— — цилиндрический (ЦМД) 63
Единица информации 73
— мнимая 131
Задача линейного программировав
ния 187
— о Ханойской башне 305
— оптимизации многокритериаль-
ная 186
Звено апериодическое 126
— астатическое 126
— дифференцирующее 126
— инерционное второго порядка
125
----первого порядка 125—126
— интегрирующее 126
— колебательное 126
— неустойчивое 126
— типовое 34, 123
Идентификация 170, 182
Импликация 57
Интеграл Фурье 138
Интеллект искусственный 249
Инцидентность дуги вершине 199
Исчисление высказываний 291
— предикатов 291
Канал информационный 76
----мультиплексный 77
----селекторный 77
Карта Вейча — Карно 212
Квантор всеобщности 292
— существования 292
Кибернетика 249
Классификация автоматическая
280
— без учителя 280
— систем автоматического управ-
ления 41
Когерентность 101
Кодирование 346
Контроллер 81
Конъюнкция 56
Корреляция взаимная 175
Котельникова теорема 231
Коэффициент разряда 71
— усиления разомкнутой системы
12
Критерий Найквиста 120
— оптимальности 141
---- аддитивный 195
—^устойчивости алгебраический
— — частотцый 120
412
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Лазер 102
Лапласа преобразование 137
Линеаризация нелинейной харак-
теристики 109
Масштаб времени реальный 77
Матрица Адамара 241
— смежности вершин графа 203
Машина вычислительная аналого-
вая 74
---1 цифровая 73
---электронная (ЭВМ) 70
Медицина 386
Метод гармонического баланса
155
— операторный 130
— ^пропозициональной резолюции
— резолюции 293
— ситуационного управления
296—297
Микроконтроллер 81
Микропроцессор 70
Микро-ЭВМ 80
Минимакс 308
Множество размытое 349
Морфема 330
Музыка 391
Набор микропроцессорный 81
Надежность 359
Найквиста критерий 120
Норма функции 229
Обработка информации мульти-
программная 76
— потоков информации машинная
224
Обучение программированное 385
Ожидание математическое 174
Оператор дифференцирования 128
Операция логическая 53
— отрицания 55
Оптимизатор автоматический 43
---шаговый 52
Оптимизация 139
— многоэтапного процесса 191
— управления 185
Оптоэлектроника 92, 98
Ортогональность кусочно-постоян-
ных функций 238
— функций 228—229
Основание разряда 71
Отклонение среднеквадратическое
174
Оценка интегральная 142
--- квадратическая 144
Ошибка среднеквадратическая 228
— статическая 8
Память ассоциативная 370
— распределенная 359
ПД-регулятор 29
Педагогика 385
Передача информации 346
Переменная булева 56
Перенастррйка 29
Перерегулирование 146
Период функции 158
Персептрон 264
ПИД-регулятор 29
ПИ-регулятор 27
Пирса стрелка 59
Плоскость фазовая 165
Плотность распределения 173
— спектральная 177
---взаимная 177
Пневмоника 92
Погрешность динамическая 10
— статическая 8
Подсознание 344
Поиск 298
— случайный 308
Портрет фазовый 167
П-регулятор 27
Предикат 291
Представление комплексного чис-
ла 131
Преобразование Лапласа 137
— Фурье быстрое (БПФ) 233
---дискретное (ДПФ) 232
-------обратное (ОДПФ) 232
---интегральное 137
--- обратное 138
-------интегральное 181
Преобразователь аналого-цифро-
вой (АЦП) 87
---параллельный 90
— цифро-аналоговый (ЦАП) 88
Принцип Гюйгенса 100
— иерархический 40—41, 344—345
— инвариантности 150
— максимума 198
— оптимальности 191
— суперпозиции 156
Программирование динамическое
185; 191
— линейное 185
Пространство поиска 299
— фазовое 169
Процесс переходный апериодиче-
ский 112
---колебательный 112
— случайный 170
---нестационарный 171
---стационарный 171
— эргодический 172
Процессор 76
Радемахера функция 239
Разделение времени 76
Разложение функций в ряд Фурье
157
Распознавание образов 257
— речевых сигналов 329
Реверберация 392
Регулятор изодромный 17
— многорежимный 29
— непрямого действия 14
— однорежимный 29
— пропорционально-дифференци-
рующий 29
— пропорционально-интегральный
27
— пропорциональный 27,
— прямого действия 14
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
413
Регулятор, стабилизатор 5
— центробежный 5
— экстремальный 45
Решение задач машинное 282
Робот 249
Ряд Фурье обобщенный 229
•--тригонометрический 155
Самообучение 267
Светомузыка 395
Свойство эргодическое 173
Связь обратная 7, 10
---- гибкая 18
Сердечник ферритовый 68
Симплекс-метод 190
Система автоматическая 106
— автоматического регулирования
замкнутая 7
•---управления 31
------- линейная 108
---- — нелинейная 108
— адаптивная 40
— активная 383
— вычислительная (ВС) 75
----гибридная (ГВС) 225
— гибридная 39, 74
— детерминированная 40
— дискретная 39
— зависимого управления 38
— инвариантная 150
— косвенного действия 33
— логического действия комбина-
ционная 63
„ _ — многотактная 63
------- однотактная 63
------- последовательностная fe#
— малоэлементная 33
— многоконтурная 33
-- многоэлементная 33
— непосредственного действия 33
— непрерывная 39
— одноконтурная 33
— поисковая 45
— программного управления 38
— простая 40
— регулирования 38
---- астатическая 16
— с неполной начальной инфор-
мацией 40
— с переменной структурой 40,
147
— с постоянной структурой 40
— с распределенными параметра-
ми 40
— с сосредоточенными парамет-
рами 39
— следящая 41
— сложная 40
— статическая 9
— структурно неустойчивая 135
---- устойчивая 135
— счисления восьмеричная 72
---- двоичная 71
---- десятичная 71
----десятично-двоичная 72
---- шестнадцатеричная 72
<— управления автоматизирован-
ная 43
----самонастраивающаяся 45
Система функций ортонормиро-
ванная 229
Слово машинное 76
Спектр амплитудный 161
Сознание 344
Состязание сигналов 215
— линейчатый 180
Среда оптическая реверсивная 103
Средство переработки информации
оптическое 98
Стек 76
Степень колебательности 144
Стрелка Пирса 59
Струя ламинарная 96
Сумма по модулю 2 57
Схема интегральная 67
---микроэлектронная 77
Счетчик реверсивный 89
Тембр 392
Теорема Котельникова 231
— о неполноте 353
Теория автоматических систем 106
Терминал 281
Техника автоматического управ-
ления аэрогидродинамическая 93
— военная 396
Точка изображающая 166
Траектория фазовая 166
Транслятор 316
Триггер с раздельными входами
65
— со счетным входом 206
Турбулизация течения 96
Уолша функция 239
Управление автоматическое 31
— оптимальное 185
---условное 195
— эвристическое 269
Усилитель регулятора 34
Устойчивость 111
Устройство запоминающее опти-
ческое голографическое 103
— — пузырьковое 68
— магнитное 67
Форма дизъюнктивная нормальная
(ДНФ) 212
-------совершенная (СДНФ) 210
— конъюнктивная нормальная
(КНФ) 212
---совершенная (СКНФ) 212
Формула правильно построенная
(ППФ) 294
— Эйлера 132
Фрейм 280, 294, 340
Функционал 142
Функция автокорреляционная 175
— булева 56
— веса ИЗ
— Дирака ИЗ
— дискриминантная 278
— запрета 57
— корреляционная взаимная 176
— неравнозначности 57
— нормированная 229
414
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Функция оценивающая 308 —- передаточная 133 — принадлежности 349 — равнозначности 57 — Радемахера 239 — распределения 173 — ступенчатая ИЗ — Уолша 239 — Хаара 242 Частота пропускаемая 162 — среза 162 Число вещественное 131 — комплексное 131 — мнимое 131 Шина 84 Штрих Шеффера 58 Шум белый 176
Фурье интеграл 138 —^преобразование быстрое (БПФУ дискретное (ДПФ) 232 обратное (ОДПФ) 232 — — интегральное 137 обратное 138 интегральное 181 — ряд обобщенный 229 тригонометрический 155 Эвристика 269 Эйлера формула 132 Элемент активный 383 — И 56 — ИЛИ 57 — логический 53 — НЕ 55 — НЕ И 58 — НЕ ИЛИ 58 — памяти 53
Хаара функция 242 Характеристика временная 113, 121 — существенно нелинейная 152 — частотная амплитудная 117— 118 амплитудно-фазовая 117 вещественная 118 мнимая 118 — — фазовая 118 дискретный 63 — струйный 96 активный 96 пассивный 96 — чувствительный 34 Язык 314 — искусственный 315 — смыслов 326
Целеобразование 342 Цикл предельный 168 6-функция 113
СОДЕРЖАНИЕ
Предисловие............................................ 3
Насть I. Устройства и системы автоматики ... 5
1. Регуляторы-стабилизаторы......................... 5
2. Системы автоматического управления .... 31
3. Автоматические оптимизаторы......................43
4. Логика и автоматы................................53
5. ЭВМ в автоматике. Микропроцессоры .... 70
6. Неэлектронная автоматика и оптоэлектроника . 92
Часть II. Элементарный очерк теории автоматических
систем................................................106
1. Введение........................................106
2. Динамика систем автоматического управления . К 8
3. Случайные процессы. Идентификация . . . . 170
4. Оптимизация управления..........................185
5. О теории цифровых автоматов . .... 204
6. Машинная обработка потоков информации . . 224
Часть III. Кибернетика................................249
1. Кибернетика. Искусственный интеллект. Роботы . 249
2, Восприятие информации машинами. Распознавание
образов ..... ................\ ' 257
3. Машинное решение задач и доказательство теорем 282
4. Как ученые пытаются создать машины, которые
должны понимать человека, говорить с ним, чи-
тать, писать, чертить, рисовать....................314
5. Другие проблемы кибернетики.....................342
6. Надежность памяти человека и распределенной
(голографической) памяти машин.....................359
7. Применения кибернетики сейчас и в ближайшем
будущем . . ч ..............................371
8. Перспективы дальнейшего развития кибернетики 401
Заключение.......................................... 406
Приложение. Обзор дополнительной литературы . . . 407
Предметный указатель . . .............,411
Лев Абрамович Залманзон
БЕСЕДЫ ОБ АВТОМАТИКЕ
И КИБЕРНЕТИКЕ
Редакторы А. А. Могилевский,
Л. А. Чулъский
Технический редактор И, Ш. Аксельрод
Корректоры О. А. Сигал, Т. С. Вайсберг
ИБ Ка 12803
Печать с матриц. Подписано к печати 26.12.84,
Т-25420. Формат 84х108‘/з2. Бумага •fun. № 3.
Гарнитура обыкновенная. Печать высокая.
Усл. печ. л. 21,84. Усл. кр.-отт. 22,26.
Уч.-изд. л. 22,07s Тираж 57000 экз. Заказ № 1168
Цена 1 р. 50 к.
Ордена Трудового Красного Знамени
издательство «Наука»
Главная редакция
физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
2-я типография издательства «Наука»
121099 Москва Г-99, Шубинский пер., 6
ЗА СТРАНИЦАМИ УЧЕБНИКА
SHEBA.SPBPU/ZA
Хочу всё знать (теория)
ЮНЫЙ ТЕХНИК (ПРАКТИКА)
ДОМОВОДСТВО (УСЛОВИЯ)