/



































































































































































































































Author: Гальперин И.И.
Tags: регулирование и управление машинами, процессами механика кибернетика
Year: 1964



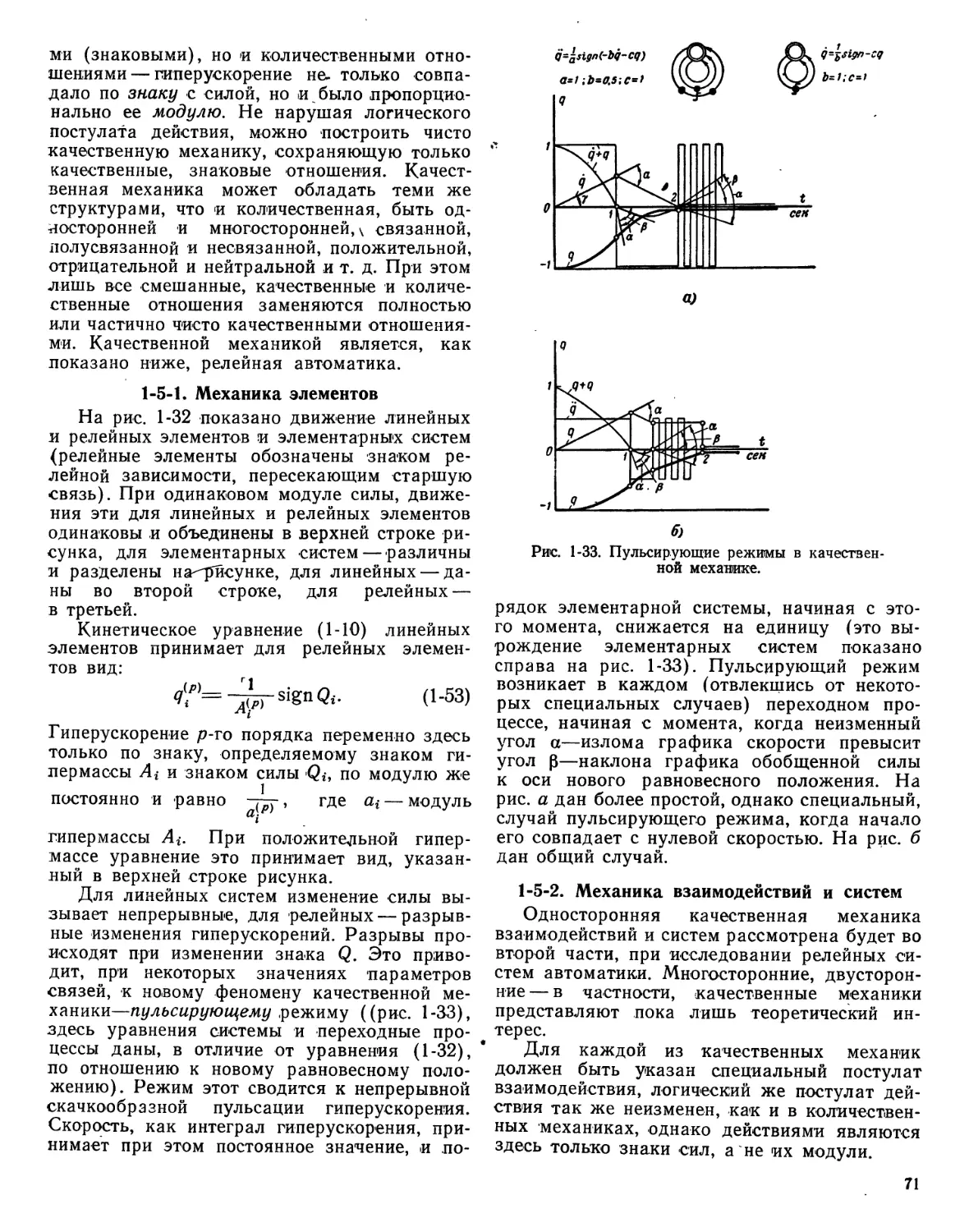
Text
ВСЕСОЮЗНЫЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ „
ТЕПЛОТЕХНИЧЕСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ Г I
имени Ф. Э. ДЗЕРЖИНСКОГО
И. И. ГАЛЬПЕРИН
АВТОМАТИКА
КАК ОДНОСТОРОННЯЯ
МЕХАНИКА
Т Д И И С.» 8 Г.;; Пи 3 г S ям я л я.?
ИЗДАТЕЛЬСТВО „ЭНЕРГИЯ»
МОСКВА 1964 ЛЕНИНГРАД
ЭТ-5-4
УДК 62-50
Г-15
Задачей книги является систематическое перестроение предмета на базе общей
концепции, указанной заглавием ее. Центральное место занимают ® ней поэтому во-
просы логической структуры автоматики — аксиоматика ее, исследование динамических
структур, анализ, синтез и классификация динамических систем, исследование их
структурных и ‘метрических свойств и отношений. Из числа этих свойств—структурной
устойчивости, структурной апериодичности, структурной монотонности и т. д.. выделе-
но определяющее для автоматики свойство нормальной структурной устойчивости. Ему
подчинены поиски алгоритма структурного синтеза.
Перестроением этим обнаруживается общность структурных методов в самых раз-
нородных по содержанию областях структурного исследования. Алгоритм структурно-
го синтеза, развертывающий гомологические ряды нулевых систем—насыщенных соеди-
нений химии, однократно подвижных соединений теории механизмов, жестких статиче-
ски определимых соединений строительной механики и устойчивых соединений автома-
тики, оказывается общим для всех этих разнородных систем. Выяснение этой общно-
сти — структурного изоморфизма — явилось второй задачей книги.
Третьей задачей книги явился конкретный синтез регулирующих и следящих си-
стем с заданными структурными и метрическими свойствами. Известные регулирующие
и следящие системы предстают при этом лишь как первые члены уходящих в беско-
нечность гомологических рядов с бесконечно разнообразными свойствами. Синтез этот
производится на материале регулирования турбогенераторов.
Поскольку каждая из систем автоматики реализует некоторый управляющий алго-
ритм, алгоритм структурного синтеза этих систем представляет собой алгоритм алго-
ритмов. Этим определяется общность и интерес этой задачи.
Общая задача книги — концепция, систематика, синтез, — адресована широкому
кругу читателей, следящих за общими проблемами кибернетики.
ГУ
I библиотека
I КИНЦВЕТМЕТ
j инв- ' - -- -'
Иосиф Иосифович Гальперин
Автоматика как односторонняя механика
264 с. с. черт.
Редактор В. Б. Рубин Техн, редактор В. И. Сологубов
Сдано в пр-во 10/1 1964 г. Подписано к печати|23/ГУ 1964 г.
Формат бумаги 84ХЮ81/1б 27,06 п. л. Уч.-изд. л. 32,5
Т-04290 Тираж 1 000 экз. Цена 1 р. 86 к. Зак. 1017
Московская типография № 10 Главполиграфпрома
Государственного комитета Совета Министров СССР по печати. Шлюзовая наб., 10.
ОТ ТУРБИННОГО ОТДЕЛЕНИЯ ВТИ.
Публикуемая работа «Автоматика как односторонняя механика» является даль-
нейшим развитием идей, изложенных в ранее изданной книге И. И. Гальперина «Син-
тез систем автоматики».
Принятая за основу концепция односторонней механики позволила автору изло-
жить теорию автоматического регулирования как механику особого рода, что связало
предмет в единую, стройную теорию.
Необычность подхода и в то же время широта охвата проблем автоматики тре-
бует, по нашему мнению, широкого их обсуждения.
Издавая настоящий труд, ВТИ надеется привлечь широкий круг читателей к об-
суждению этой системы взглядов.
ПРЕДИСЛОВИЕ
«В создании физической теории существенную' роль
играют фундаментальные идеи. Физические книги полны
сложных математических формул. Но началом физиче-
ской теории являются мысли и идеи, а не формулы».
(А. Эйнштейн и Л. Инфельд «Эволюция физики»)
Предлагаемая вниманию читателей книга
примыкает к предыдущей книге автора —
«Синтез систем автоматики». За короткий
срок, разделяющий обе книги, возникли но-
вые структурные задачи, развились структур-
ные методы, рассмотренные в первой книге,
произошли такого рода события, как два
Международных конгресса. Общее построение
предмета мало, однако, изменилось и пред-
ставляет столь же благодарный предмет кри-
тики, определившей содержание обеих книг.
Автоматика, эта наука об управлении, яв-
ляет сейчас грозное зрелище неуправляемо-
го роста. Бурный, ветвящийся и лавинообраз-
ный рост привел ее на грань подлинного
кризиса, уподобил конструкции, рушащейся
под собственным весом. Нарастающей массе
предмета противостоит слабость скелета —
отсутствие объединяющей концепции. Проти-
востоящее этому аморфному построению
предмета встречное движение, объединяемое
кибернетикой, само нуждается еще в объеди-
няющей концепции. Автоматика все еще
остается предметом неопределенной принад-
лежности и столь же неопределенного содер-
жания.
Структурному исследованию предстоит
ответить на им же поставленный исходный,
вопрос: что такое автоматика? Этот явно за-
поздалый для предмета с двухсотлетней исто-
рией вопрос нуждается еще, тем не менее, в от-
вете. Готовый ответ на него (так ответил нам
с трибуны 2-го Всесоюзного совещания по
теории регулирования известный советский ме-
ханик)— автоматика — прикладная наука, ре-
шающая методами механики и электротехники
задачи автоматического регулирования —
обладает лишь внешней убедительностью. Об-
щие принципы и уравнения классической меха-
ники и электротехники неприменимы прямо;
к динамическим системам автоматики. Продол-
жающиеся бесплодные попытки такого приме-
нения лучше всего свидетельствуют о господ-
ствующей здесь неясности. Структурное иссле-
дование, обнажив вместе с динамической'
структурой их систем логическую структуру'
обоих предметов, разъяснило причину этих
неудач: автоматика — теория динамических си-
3
стем наиболее общей структуры — порождает
концепцию наиболее общей механики, меха-
ники одностороннего действия. Ей не у кого
поэтому заимствовать свои концепции и прин-
ципы. Всего менее может она использовать го-
товые концепции механики и электротехники,
имеющих своим предметом системы наиболее
специальной структуры. Напротив, возмож-
ность сужения общих принципов ее до специ-
альных принципов механики и электротехники
явилась бы доказательством рационального по-
строения предмета. Автоматика представляет
собой механику одностороннего действия, сво-
бодную от постулата противодействия. Вывод
этот, относящийся к способу взаимодействия
элементов динамической системы — к динами-
ческой структуре ее, не зависит от того, ка-
кими агентами, механическими, электрически-
ми или иными, реализуется эта структура, и
в равной мере относится к электрическим, ме-
ханическим и любым иным системам. Пред-
метом кибернетики является общее содержа-
ние естественных наук—структура рассматри-
ваемых ими динамических систем, изучаемым
ею агентом—перерабатываемая этими систе-
мами информация.
Структурная теория не могла избегнуть
неизбежных для сколько-нибудь радикальной
теорий этапов — шумных опровержений и бес-
шумного и энергичного усвоения. Поставлен-
ный концепцией односторонней механики
20 лет назад и встреченный недоумением про-
тивниками ее подчеркнутый выше исходный
вопрос о природе автоматики заново обсуж-
дается ими теперь и, в отрыве от этой кон-
цепции, получает поистине беспомощные от-
веты. Общий ответ на него дан кибернетикой:
-автоматика — область антиэнтропийных си-
стем. Ответ этот является, однако, произ-
водным— автоматика в той лишь мере спо-
собна синтезировать антиэнтропийные систе-
мы, в какой она освобождается от постулата
противодействия. Подчиняющаяся этому по-
стулату механика еще способна поддерживать
в консервативных своих системах энтропию на
неизменном уровне, но не способна уменьшать
ее. Концепция односторонней механики яв-
ляется объединяющей концепцией и киберне-
тики.
Противники этой объединяющей концепции
•охотно представляют ее неким идеологиче-
ским излишеством. Речь, однако, идет о том,
является ли автоматика единым предметом,
дедуктивно развиваемым из нескольких физи-
ческих начал и занимающим определенное *
место в системе естественных наук, либо тео-
рией неопределенной принадлежности — пи-
тательной средой не связанных между собой
4
чисто математических построений? Концепция
односторонней механики снимает этот вопрос.
За отсутствие общей концепции автомати-
ка расплачивается не только хаотическим по-
строением предмета, но и чисто рецептурным
пониманием важнейших своих результатов и
прямыми ошибками, объединяющими ряд
учебников и монографий. Ошибки начинаются
с исходного пункта — аналитической записи
систем в относительных координатах, пред-
ставляющей собой, как это обнаруживается
структурным исследованием, запись в крите-
риях подобия, и распространяются, таким об-
разом, до конечных результатов. Записью этой
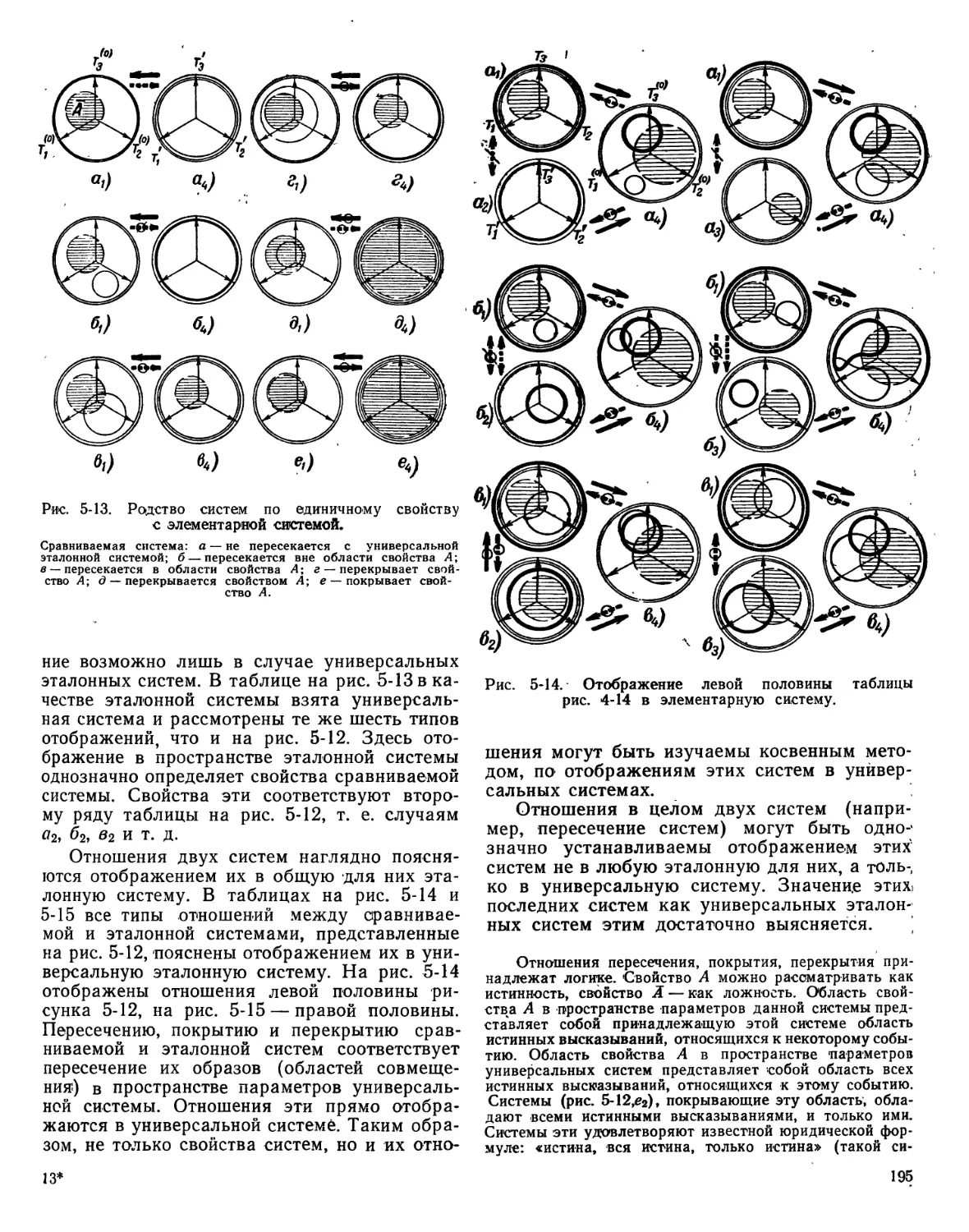
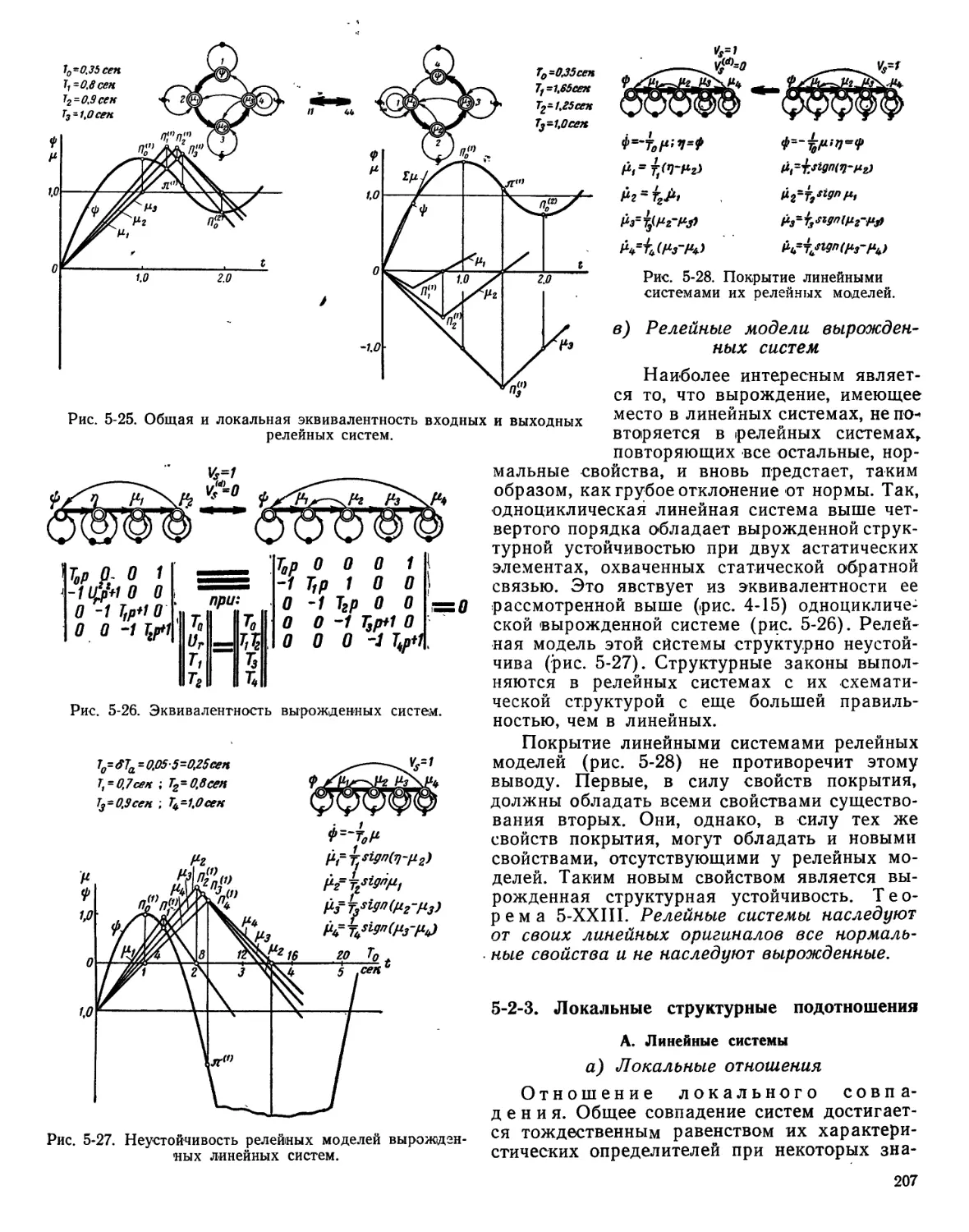
должны обнаруживаться независимые дина-
мические параметры системы, в частности —
неисключающиеся статические параметры си-
стемы— степени статической неопределимости
ее. Игнорируя теорию статической определи-
мости сервосистем, как часть односторонней
механики, авторы этих работ либо произволь-
но оставляют в уравнениях статически опре-
делимых систем все статические параметры,
либо столь же произвольно исключают все
статические параметры из уравнений стати-
чески неопределимых систем — ошибка, ана-
логичная попытке решить статически неопре-
делимые системы классической механики
с помощью одних уравнений статики. Эту
столь очевидную в классической механике
ошибку невозможно понять в автоматике —
односторонней механике, игнорируя природу
предмета. Игнорирование общей концепции
выступает здесь в обычной своей функции—'
защитной брони для плоского, рецептурного
понимания предмета.
Конкретным содержанием односторонней
механики являются свойства и отношения,
структурные и метрические, динамических си-
стем ничем не ограниченной структуры. Струк-
турное исследование необходимо предше-
ствует метрическому: прежде чем изучать
метрические свойства систем, необходимо от-
ветить на вопрос — по каким структурным
законам соединяются динамические элементы
в динамические системы, обладающие этими
метрическими свойствами. Такое перестроение
предмета, впервые проведенное нами в зада-
чах устойчивости, апериодичности, монотонно-
сти, астатичности, изодромности и определив-
шее понятия — структурная устойчивость,
структурная апериодичность, структурная мо-
нотонность и т. д., стало теперь эталонным
для остальных задач автоматики. Возобла-
давшее с таким запозданием новое построение
предмета последовательно выдерживается
в книге. При этом рассматривается главным
образом предшествующая, структурная сторо-
на задачи. Метрическая привлекается лишь
для пояснения общей связи между структу-
рой и метрикой динамических систем.
Центральной является задача струк-
турной устойчивости динамических систем,
формирующая общую концепцию теории регуг
лирования. Здесь задача структурного синте-
за устойчивых динамических систем получает
столь же общее, опирающееся на концепцию
валентности, решение, как и для жестких
статических, однократно подвижных кинема-
тических, насыщенных химических и иных ва-
лентных систем: динамические элементы со-
единяются в устойчивые динамические систе-
мы по законам динамической валентности,
столь же простым и общим, как законы хими-
ческой валентности. Этот центральный итог
структурной теории динамических систем
оспаривался, как обычно, с помощью различ-
ного рода вырожденных систем. Общей чер-
той противопоставляемых этой общей теории
и неявно питающихся ею частных теорий яв-
ляется отрицание таких начал общей теорией,
как принципы динамической валентности,
локальной и общей связанности, структурных
формул и замещений. Чтобы придать этому
отрицанию полную законченность, теории эти
кладут запрет на основные структурные поня-
тия— связь, замещение, динамическая ва-
лентность, структурные формулы, в деформи-
рованном виде присутствующие во всех их
построениях. Это сообщает мистифицирую-
щую сложность излагаемым в этих частных
теориях простейшим результатам. Игнориро-
вание центрального содержания задачи есте-
ственным образом смещает авторов этих тео-
рий на периферию ее, где она окаймлена, как
обычно, различного рода предельными и вы-
рожденными системами. Каждая такая си-
стема подвигает их на очередное полное опро-
вержение общей теории.
Само утверждение структурного изомор-
физма, объединение нами структурного син-
теза динамических систем со структурным
синтезом систем иной физической природы, но
того же структурного содержания, вызвало
резкие возражения как метод неоправданных
аналогий. С тех пор, однако, произошли и бо-
лее смелые структурные объединения, и ки-
бернетика достаточно выяснила смысл этого
структурного изоморфизма и наибольшую
общность понятия структуры и структурных
методов. Методы эти, где бы они ни возника-
ли, приносят на смену случайным поискам
закономерный синтез, на смену отдельным си-
стемам— системы систем, гомологические ря-
ды их. Здесь проходит в каждом предмете
грань, образованная в химии теорией валент-
ности, бутлеровой теорией строения, менде-
леевской периодической системой элементов,
в математике — клейновой эрлангенской про-
граммой, в механике—ассуровой теорией ме-
ханизмов. То же перестроение вносится этими
методами в теорию динамических систем. Эта
систематизирующая функция структурного
.исследования неизбежно сушит изложение и
предполагает прежде всего ищущего системы
читателя.
Эта же систематизирующая функция при-
водит неизбежно и к ряду новых понятий, тер-
минов и структурных символов и к пересмотру
старых. Значительная часть этих новых поня-
тий прочно вошла в теорию регулирования.
В оправдание большому их числу можно было-
бы сказать лишь следующее: в книге нет по-
нятий, которые не принадлежали бы единому
предмету — односторонней механике, не явля-
лись бы обобщением соответствующих поня-
тий классической механики и не возникали бы
поэтому принудительно, как единая система
понятий., О существующих понятиях и новых
их проектах можно сказать все, кроме того,
что они образуют систему понятий, если толь-
ко не трактовать понятие «система» так рас-
ширительно, как это делает Полоний в «Гам-
лете». Нигде неопределенная принадлежность
предмета не сказалась с такой ясностью, как
в произвольной, хаотической терминологии
автоматики.
То же относится и к -структурным симво-
лам. Принятые в книге структурные схемы
являются кинетостатическими силовыми схе-
мами. (Они, таким образом, прямо служат це-
лям исследования динамической, силовой
структуры. Этой задаче хуже служит опера-
торная форма записи, где стрелками с ука-
занными на них передаточными функциями
обозначены каналы системы. Эта вторая, так-
же вполне^универсальная форма записи в рав-
ной мере незаменима при приближенном,
аппроксимирующем опытные, характеристики,
описании систем с невыявленной структурой
и беспредметна для систем с явной структу-
рой. Взгляд этот с запозданием на 20 лет
возобладал уже в зарубежной литературе.
Введенные нами кинетостатические структур-
ные схемы односторонней механика с харак-
терньъм для нее символом самодействия —
одночленным циклом, и их циклическое раз-
ложение заново открыты, в менее полной и
общей форме (сигнальных графов) и безотно-
сительно к порождающей их односторонней
механике, в новейшей зарубежной литерату-
ре, и для систем с выявленной структурой за-
кономерно вытесняют операторную запись.
В современной автоматике, широко усвоив-
5
шей введенное нами понятие и символ (одно-
членный цикл) самодействия, категорически
отвергается односторонняя механика, которой
только и может принадлежать это понятие.
Это некритическое усвоение понятий, понуж-
дающих к ревизии всего предмета, хорошо ха-
рактеризует господствующую здесь логиче-
скую беспечность. Авторы, усвоившие этот
символ для одних лишь статических внутрен-
них связей, статических самодействий, изо-
бретают для внутренних связей иного поряд-
ка, имеющих то же логическое содержание —
представляющих те же самодействия, новые
геометрические символы — конусы, шары, пря-
моугольники. Поучительный пример теорети-
ческой инфантильности, переживаемой вполне
зрелым в своих практических приложениях,
предметом.
Задача книги — доказать не только воз-
можность построения автоматики как односто-
ронней механики, но и необходимость такого
построения, его упорядочивающую и эвристи-
ческую функцию. В этом построении* системы
регулирования представляют собой упругие
системы односторонней механики и основные
понятия автоматики — передаточные функции,
амплитудно-фазовые характеристики, изо-
дромность, автономность, инвариантность, —
простейшим образом возникают как обобще-
ние в односторонней эластомеханике таких
понятий классической эластомеханики, как
коэффициенты влияния. Систематическое по-
строение автоматики как односторонней ме-
ханики не вместилось в ограниченный объем
книги. Мы проявили бы непростительное
незнание истории науки, предположив, что
концепция, ревизующая саму природу пред-
мета, может победить без ожесточенной борь-
бы. В силах автора лишь возможно яснее из-
ложить новую концепцию, предоставив осталь-
ное борьбе идей. Ему остается также поже-
лать, чтобы борьба вокруг нее оставалась
только борьбой идей.
В книге избран концентрический способ
изложения нового предмета. В первой части
излагаются основания автоматики как одно-
сторонней механики, во второй части рассмат-
ривается структурное содержание ее как осно-
ва дальнейшего метрического исследования.
Неоценимая помощь в издании книги ока-
зана была М. С. Каминским. Многими мето-,
дическими замечаниями я обязан моему учи-
телю И. Н. Веселовскому и Б. М. Якубу.
В. Б. Рубин взял на себя труд редактиро-
вания.
Автор,
ЧАСТЬ ПЕРВАЯ
ДИНАМИЧЕСКИЕ СТРУКТУРЫ
ГЛАВА ПЕРВАЯ
ДЕДУКТИВНЫЕ МЕХАНИКИ
Кибернетика в предпринятом ею синтезе
естественных наук, в одной, по меньшей мере,
из них — теории строения вещества встретила
равного себе противника. Область эта должна
была, казалось, навсегда остаться запретной
для науки управления — трудно было пред-
положить, что в недрах вещества, в сфере эле-
ментарных отношений элементарных частиц,
может быть развернут сложный феномен
управления. События последних лет, в наи-
большей мере новые теории элементарных ча-
стиц, основанные на понятии «самодействия»,
радикально меняют положение. В основе
строения вещества лежит, в свете этих тео-
рий, элементарный цикл управления — само-
действие, самоуправление. Элементарные ча-
стицы возникают как первые структурные
образования, полученные элементарным актом
управления.
Понятие самодействия принадлежит одно-
сторонней, свободной от постулата противо-
действия, механике и возникло в автоматике
вместе с этой механикой, задолго до описы-
ваемых событий в физике. Автоматика пред-
ставила простейшую модель этой односторон-
ней механики. Здесь новая теория элементар-
ных частиц должна была бы найти готовые
модели некоторых своих понятий. До этого,
однако, сама автоматика должна быть по-
нята как односторонняя механика. Это иссле-
дование логической структуры предмета авто-
матики составляет задачу настоящей работы.
Предстоит: 1) построить одностороннюю меха-
нику как дедуктивную теорию, 2) доказать,
что автоматика является материальной мо-
делью этой дедуктивной теории. В таком по-
рядке, не придерживаясь его слишком строго,
рассмотрим эту задачу.
Чтобы решить первую ее часть, необхо-
димо исследовать все семейство дедуктивных
механик, порождаемых односторонней мехат
никой, и указать место в нем классической ме^
ханики.
1-1. ДЕДУКТИВНЫЕ МЕХАНИКИ
Логическая структура дедуктивных меха-
ник определяет динамическую структуру при-
надлежащих им-динамических систем. В этой
их связи рассмотрим обе структуры.
1-1-1. Логическая структура
А. Феномен управления
Автоматическое регулирование является
частью общей науки об управлении — кибер-
нетики. Задачей этой науки является получе-
ние в управляемых объектах заданного взаи-
модействия с внешней средой, заданных реак-
ций на внешние воздействия —на беспоря-
дочные случайные воздействия и на упорядо-
ченные управляющие воздействия. Реакция
неуправляемого объекта резко разнится, как
правило, от желаемой. Задача автоматическо-
го управления заключается в дополнении
объекта управляющей системой, формирую-
щей нужным образом его реакции. Резко ме-
няющиеся условия среды или недостаточное
знание этих условий могут принудить предо-
ставить системе свободу выбора реакций, по-
зволяющую ей реализовать накапливаемый ею
опыт. Неизменная реакция системы развивает-
ся при этом в приспосабливающееся к среде
поведение.
В чем, однако, заключается, в установив-
шихся естественно научных понятиях, самый
феномен управления и чем обеспечивается
возможность его?
Приведенное выше функциональное описа-
ние, если не говорить об аналогии с управле-
нием в живых организмах, ждущим, в свою
7
очередь, объяснения, нисколько не сближает
этот новый феномен со сложившимися есте-
ственнонаучными понятиями. Мы ощущаем
в нем лишь некую магию управления, магию,
ощущаемую не отвыкшим еще удивляться ре-
бенком, когда послушная нажиму детской ру-
ки кнопка возносит вместе с ним тяжелую
клетку лифта. Магия эта заключается в пред-
метном нарушении усвоенного уже детским
опытом закона противодействия. В более
сложных системах магия эта выражается
в возможности нужным образом изменять ре-
акцию системы. Та же магия управления про-
является и в живых организмах, когда чисто
нервный, т. е. практически лишенный энергии,
импульс преобразуется в мускульное усилие.
Любое число новых понятий неопределенной
принадлежности, таких как «спусковая систе-
ма», «активная система», «автомат» и т. д.,
неспособно разъяснить феномен управления,
если не установить связь их с существующими
понятиями. Наиболее радикальным способом
перебросить такой мост между новыми и ста-
рыми понятиями является взгляд на управле-
ние как одностороннее действие — действие
без противодействия. Это приводит к наиболее
общей, односторонней механике, порождаю-
щей, как специальные случаи, двустороннюю
классическую механику и все остальные воз-
можные двусторонние и многосторонние меха-
ники. Рациональное объяснение того, как ре-
шается в автоматике указанная выше общая
задача ее, заключается в выяснении общей
связи между механикой системы и ее реак-
циями на внешние возмущения — ее взаимо-
действием со средой. Этот кибернетический
критерий будет положен в основу классифика-
ции механик. Он должен указать место в се-
мействе возможных механик не только кибер-
нетики, но и классической механики. Управ-
ляющие системы кибернетики должны быть
поняты, с позиций механики, как системы
обобщенной механики, освобожденной от не-
которых своих постулатов, а натуральные си-
стемы классической механики — с позиций ки-
бернетики, как антиуправляющие системы
с управляющим алгоритмом, подчиненным за-
даче (нейтрализации внутренних сил систе-
мы), противоположной задаче ((активации этих
сил) автоматики.
Б. Постулат одностороннего действия
Феномен управления может быть отожде-
ствлен с односторонним действием — опреде-
ляющим свойством систем автоматики. Этому
наиболее общему свойству придавались наи-
более специальные и неопределенной принад-
лежности наименования — детектирование, на-
8
правленность, — сообщавшие столь же неза-
служенно специальный вид и столь же неопре-
деленную принадлежность наиболее обще^му
предмету— автоматике как односторонней
механике. Свойство это, однако, не нуждается
в новых понятиях. Достаточно, как сказано
было, назвать его своим именем — действие.м
без противодействия, чтобы включить его,
а с ним и всю автоматику, в систему понятий
односторонней механики, содержащей класси-
ческую механику как специальный свой слу-
чай. Этим выясняется рациональное содержа-
ние и принадлежность и этого понятия, а с ним
и всей автоматики.
Составляющее основу автоматики простей-
шее, неделимое далее одностороннее действие
реализуется, однако, в ней с помощью доста-
точно сложного механизма косвенного взаимо-
действия и представляет собой лишь видимую
картину этого скрытого механизма. В этом
косвенном взаимодействии управляющий (дей-
ствующий) элемент действует на управляемый
(воздействуемый) элемент с помощью внеш-
него источника энергии (сервоисточника).
Прямое взаимодействие между управляющим
элементом и сервоисточником, с одной сто-
роны, и между сервоисточником и управляе-
мым элементом, с другой, происходит в пол-
ном соответствии с постулатом противодей-
ствия. К сервоисточнику приложены силы про-
тиводействия управляемого элемента, не до-
стигающие по этой причине управляющего
элемента. Противодействие отсекается от дей-
ствующего (управляющего) элемента серво-
источником, чьей энергией производится
управление. Сервоисточник выступает здесь
в роли фильтра противодействий. Это косвен-
ное двустороннее взаимодействие создает ви-
димую картину прямого одностороннего дей-
ствия управляющего элемента на управляе-
мый. Достаточно исключить сервоисточники
из состава системы, чтобы оставить в грани-
цах системы одно лишь это одностороннее
действие и, таким образом, отказать постула-
ту противодействия.
Можно было бы сказать, что в автоматике
управляющий элемент приписывает себе силы,
действующие со стороны управляемого им
источника энергии, но переадресовывает дей-
ствительному источнику этих сил встречаемые
ими противодействия. Если скрыть механизм
одностороннего действия простейшей серво-
системы— двух гидравлических сервомоторов,
заключив оба сервомотора, их поршни, золот-
ники и рычаги в «черный ящик», и, выведя
-наружу только тяги поршней, изучать движе-
ние этих тяг под воздействием приложенных
внешних сил, то это наблюдаемое движение
Классическая механика критиковалась только
с позиций чистого опыта, как физическая тео-
рия. Здесь, по-видимому, никаких попыток
дедуктивного синтеза всех возможных меха-
ник не производилось. В общей теории относи-
тельности, объединившей оба движения,
эвклидова геометрия впервые подверглась
критике как физическая теория пространства
и использованы были заготовленные впрок
неэвклидовы геометрии. Критика классиче-
ской механики по-прежнему велась здесь лишь
с позиции новых опытных фактов. Столкнове-
ние с этими фактами разрушило надопытное
содержание 1-го и 2-го законов классической
механики, т. е. механику материальных точек,
но не затронуло 3-го закона ((Л. 6, 9, 10, 17,
24, 43, 51]; наиболее полная библиография
в [Л. 70, 86]). Этот последний закон стал не-
явно рассматриваться как имеющий чисго
логическое содержание, как динамическая ин-
терпретация логического закона достаточного
основания. В таком качестве он представлялся
неуязвимым для любой критики. В действи-
тельности, однако, 3-й закон представляет со-
бой сложное, из двух разнородных частей,
утверждение, лишь наполовину принадлежа-
щее логике, на вторую же половину состав-
ляющее специальное содержание классиче-
ской механики. Неуязвима лишь первая, логи-
ческая половина его; вторая, специальная, по-
стулативна для механики как дедуктивной
теории, и ей может быть отказано.
Эта сложная природа 3-го постулата могла
бы быть обнаружена дедуктивной критикой,
но, по сложившейся традиции чисто опытной
критики классической механики, этого не
произошло; ревизия 3-го закона вызвана была
также столкновением с новыми опытными
фактами, внесенными на сей раз вновь воз-
никшими сервосистемами — характерным про-
дуктом человеческой деятельности. Закон про-
тиводействия (в ньютоновской формулировке:
«Действию всегда противостоит равное и про-
тивоположное ему противодействие, иначе го-
воря, действия тел друг на друга равнопро-
тивоположны») может быть разложен, на что
не обращалось внимания, на два независимых
утверждения: 1) логический постулат
действия — противодействие равно дей-
ствию и 2) специальный постулат
взаимодействия — противодействие
приложено к действующему телу (мы пред-
почли инверсную формулировку постулата
действия: противодействие равно действию
обычной прямой: действие равно противодей-
ствию, поскольку именно противодействие пас-
сивно следует за действием, всегда произволь-
ным; это наиболее наглядно в случае инер-
9
будет подчиняться законам не двусторонней,
а односторонней механики. Позицию такого
наблюдателя, не посвященного во внутреннее
устройство «черного ящика» и формулирую-
щего лишь законы наблюдаемого движения,
намеренно отвлекаясь от скрытого механизма г
его — от избыточной информации, следует
признать в данном случае отвечающей интере-
сам целостного построения автоматики и уза-
конить. В интересах такого построения пред-
мета— остаться в данном случае на поверхно-
сти явлений, игнорировать этот скрытый меха-
низм косвенного взаимодействия, заменить его
наблюдаемой картиной прямого взаимодей-
ствия между управляющим и управляемым
элементами. Это означает — принять марионе-
точные силы, только управляемые управляю-
щим элементом, действующие же со стороны
внешнего источника энергии, за действие
управляющего элемента. Оставаясь верным
значению слов, эту видимую картину взаимо-
действия управляющего и управляемого эле-
ментов нельзя назвать иначе, чем действием
без противодействия. Этим постулатом
одностороннего действия: противо-
действие равно нулю — должен быть заменен
в односторонней механике постулат противо-
действия. В развернутом виде постулат одно-
стороннего действия должен был бы гласить:
в односторонней механике противодействие,
испытываемое действующим элементом, равно
нулю. Поскольку, однако, нет нужды рассмат-
ривать противодействия, приложенные к ис-
ключаемым из системы источникам энергии,
вовне системы, нет нужды в оговорке, содер-
жащейся в этой развернутой формулировке,—
достаточно ограничиться первой краткой фор-
мулировкой.
В. Третий постулат
Классическая механика с ее надопытными
постулатами абсолютных пространства и вре-
мени представляет такую же чисто дедуктив-
ную теорию, как эвклидова геометрия. Для
обеих дедуктивных теорий реальная вселен-
ная представляет лишь приближенную мо-
дель. Критика их развивалась, однако, раз-
лично. Опытные по существу своему исходные
положения геометрий самим Эвклидом отне-
сены были к постулатам и вплоть до Лобачев-
ского и Гаусса рассматривались как надопыт-
ные, априорные положения. Напротив, над-
опытные постулаты классической механики
рассматривались как чисто опытные законы.
Соответственно и критика эвклидовой геомет-
рии начата была с позиции чистой дедукции
и привела к формальному, дедуктивному син-
тезу всего множества возможных геометрий.
ционного противодействия). Оба различных
утверждения объединены в ньютоновой фор-
мулировке тождественной связкой «иначе го-
воря», как тождественные утверждения. Одна-
ко и в классической механике они не тожде-
ственны. Первое, общее утверждение принад-
лежит логике, представляет силовую интер-
претацию логического закона достаточного
основания и должно быть составной частью не
только любой механики, но и любой физиче-
ской теории. Действие и противодействие на-
ходятся в отношении субъекта к объекту и
невозможны одно без другого: противодей-
ствие является объектом действия, действие —
субъектом противодействия. Условно выра-
жаясь,— действие приложено к противодей-
ствию. Напротив, второе, специальное утверж-
дение постулирует специальную структуру си-
стем классической механики и может быть
снято как любой постулат. Отказ ему приво-
дит к логически безупречной дедуктивной тео-
рии. В автоматике, в частности, как простей-
шей модели этой дедуктивной теории, проти-
водействие со стороны воздействуемого
(управляемого) элемента сервопарь^приложе-
но не к действующему (управляющему) эле-
менту ее, а к питающему сервопару источнику
внешней энергии (сервоисточнику). Здесь,
если не включать в состав системы вспомога-
тельные источники энергии и отождествить
этим понятия — действующий и управляющий,
материально отказано специальной части по-
стулата. Исключение источников энергии из
состава системы означает нарушение для си-
стемы закона сохранения энергии. Это первое
из разрушений, наносимых классической меха-
нике отказом 3-му постулату.
Логическая часть 3-го постулата реали-
зуется уже в механике материальной точки —
в принципе Даламбера. Перенося в уравне-
нии 2-го закона Ньютона: mw = F левый член
в правую часть уравнения, в виде противодей-
ствующей силы инерции, мы утверждаем эту
логическую часть постулата — равенство дей-
ствия противодействию. Рассматриваемый
специальной частью 3-го постулата вопрос
о том, к какому элементу приложено это про-
тиводействие, остается здесь открытым — он
относится к механике системы. Логическая
часть 3-го постулата реализуется уже в меха-
нике материальной точки, специальная—толь-
ко в механике системы. Расходясь с классиче-
ской механикой только во второй части посту-
лата противодействия, односторонняя механи-
ка расходится с нею только в механике си-
стемы и совпадает в механике материальных
точек (элементов).
10
z Концепция односторонней механики встретила мно-
гочисленных противников. Наиболее полное выражение
эта оппозиция нашла в необычных действиях редакции
Трудов {Л. 64], изъявившей «особое несогласие» с этой
концепцией и самовольно изъявшей из трудов совеща-
ния заслушанный им доклад. Из трудов совещания,
впервые содержавших раздел структурной устойчивости,
изъят был редакцией доклад о работах, поставивших
эту задачу, давших само название этому разделу.
Развернуто полемизирует с этой концепцией но-
вейшая, наиболее распространенная монография (Л. 93].
Возражения ее заслуживают быть приведенными це-
ликом: 1) «Не следует |(как это иногда бывает),
говоря об особой механике следящих систем, противо-
поставлять ее обычной механике, основанной на
F—mW» (стр. 29), 2) «Теоретическое исследование
производится с помощью классической механики
(F—\mW) и электродинамики (законы Максвелла
или их частные случаи, законы Ома и Кирхгофа)»
(стр. 36). Испытывая все же некоторые за-
труднения в выводе понятий автоматики из этих за-
конов классической механики, авторы простейшим об-
разом, на той же странице, из них выходят: 3) «Однако
в процессе исследований систем автоматического управ-
ления с помощью законов механики и электричества
было выработано определенное число новых понятий,
применяемых ко всем системам автоматического управ-
ления и способствующих ясному пониманию предмета.
Именно этот круг новых понятий и называют теорией
автоматического регулирования или кибернетикой».
Разъяснения эти лишены содержания: ,1) опреде-
ляющим для классической 'механики (является не вто-
рой закон, в общей своей форме принадлежащий ло-
гике и, следовательно, всем дедуктивным теориям,
2) понятия автоматики принадлежат односторонней ме-
ханике и не могут быть поэтому выведены из законов
классической механики и электротехники. Приводимые
авторами несложные обоснования принадлежности
всех понятий односторонней механики ее наиболее
специальному случаю — классической механике наилуч-
шим образом представляют господствующую здесь не-
ясность. Концепцию эту спасает только та же логи-
ческая беспечность в дальнейшем анализе этих понятий:
4) «Это различие иногда представляют следующим об-
разом. Полет снаряда определяется законами механики
и начальными условиями вылета. Поведение же управ-
ляемого снаряда, наоборот, не’определяется при вылете.
Таким образом, управляющее устройство является как
бы устройством, «освобожденным» от детерминизма фи-
зических законов и обладающим собственной автоном-
ностью. Наивность подобных рассуждений очевидна»
(стр. 31).
Подобные рассуждения были бы действительно наив-
ны. Не менее наивна, однако, попытка определить по-
лет управляемого снаряда одними лишь законами клас-
сической механики. Взаимодействие снаряда со средой
определяется классической механикой, взаимодействие
его с управляющей системой—односторонней механикой.
Поскольку последняя охватывает классическую, движе-
ние смешанной, частично односторонней, частично клас-
сической, системы: управляющая система—снаряд—среда
подчиняется в целом односторонней механике. Полет
управляемого снаряда определяется законами односто-
ронней механики и начальными условиями вылета, и
в этом конкретно заключается подчинение управляемого
снаряда общему детерминизму физических законов.
Отказываясь признать этот простой вывод из концеп-
ции односторонней механики, «авторы оказываются не-
способными объяснить, простейшие феномены авто-
* матики. Этим определяется неясность общего построе-
ния книги, как и общего построения современной авто-
матики в целом.
Г. Логический постулат действия
В механике, рассматриваемой как дедук-
тивная теория, специальная часть 3-го посту-
лата может быть заменена любьШ другим
специальным утверждением, устанавливаю-
щим способ взаимодействия двух элементов,
например: «действующий элемент испытывает
со стороны воздействуемого элемента обрат-
ное воздействие, противоположное по знаку
(для скалярной механики обобщенных коор-
динат противоположность по знаку означает
противоположность по направлению) прямому
воздействию (такое обратное воздействие на-
зовем противодействием) и равное некоторой
части его» или: «действующий элемент испы-
тывает со стороны воздействуемого обратное
воздействие, совпадающее по знаку с прямым
(такое обратное воздействие назовем содей-
ствием} и равное ему по величине». Все эти
специальные утверждения, назовем их специ-
альными постулатами взаимодействия, рас-
сматривают различные возможные отношения
двух сил — прямого и обратного воздействий,
приложенных к двум взаимодействующим
элементам, и относятся поэтому только к дву-
сторонней механике. Возможны многосторон-
ние— трехсторонние, четырехсторонние ит. д.
механики, где специальные постулаты взаимо-
действия явятся уже не двусторонними,
а трех- и четырехсторонними отношениями, —
различными возможными отношениями не-
скольких сил, приложенных к нескольких эле-
ментам. Напротив, логическая часть 3-го по-
стулата, назовем ее для симметрии логическим
постулатом действия (в действительности это
логический закон), распространяется на все
возможные механики и рассматривает одина-
ковое во всех этих механиках отношение толь-
ко двух сил — действия и противодействия,
имеющих соответственно объектом и субъек-
том один элемент. Отношение это всегда яв-
ляется одним и тем же — отношением равен-
ства и противоположности. Не устанавливая
источника, субъекта действия, приложенного
к элементу [им является в случае самодей-
ствия сам элемент, в остальных случаях —
другие элементы системы или среды (серво-
источники)], и объекта противодействия, ока-
зываемого этим элементом [объектом этим
может быть один из элементов системы, как
в классической механике, или среды (серво-
источники), как в односторонней механике],
постулат действия устанавливает, что объек-
том действия может быть только противодей-
ствие элемента. Действие возможно лишь там,
где налицо этот объект — внутренний меха-
низм противодействия, и невозможно там, где
он отсутствует, в статике — в известных уже
астатических, в динамике — в рассматривае-
мых ниже адинамических элементах и си-
стемах. То, что постулат действия относит-
ся и к случаю самодействия, где участвует
один лишь элемент, достаточно поясняет неза-
е висимость этого логического постулата от спе-
циальных постулатов взаимодействия, пред-
ставляющих для й-сторонней механики отно-
шение k элементов.
Эта логическая часть постулата окажется
незыблемой во всех указанных выше и всех
возможных механиках. Постулат действия по-
стулирует логическое и, следовательно, одина-
ковое для всех механик отношение действия
на элемент к противодействию элемента; по-
стулаты взаимодействия постулируют спе-
циальные и, следовательно, различные для
различных механик отношения действующих
между элементами сил. к
Только в одной из двусторонних механик—
классической механике обе категории сил
совпадают: прямое и обратное воздействия яв-
ляются одновременно действием и противо-
действием. Во всех остальных механиках ка-
тегории эти не совпадают. Именно это совпа-
дение позволяет, к сожалению, в классиче-
ской механике слить два разнородных не толь-
ко по содержанию, но и по логической при-
роде, постулата в общий 3-й постулат. Во
всех остальных механиках такое слияние не-
возможно. Это легко возникающее слияние
двух разнородных положений в одно кратное
и с трудом расчленяемое положение делает
классическую механику наименее ясным от-
правным пунктом логического анализа.
Иным мы, однако, не обладаем. Этому затруд-
ненному отправному пункту односторонняя
механика немало обязана встречаемым ею за-
трудненным пониманием. С общей точки зре-
ния дедуктивных механик полезно было бы и
в классической механике расчленять ее 3-й по-
стулат на его составляющие.
3-й постулат должен был бы формулиро-
ваться как сложное, из двух частей, утверж-
дение: 1) специальный постулат взаимодей-
ствия— прямое и обратное воздействия двух
элементов равны по величине и противопо-
ложны по направлению (эту специальную
часть 3-го постулата назовем постулатом про-
тиводействия), 2) логический постулат дей-
ствия — каждое из этих воздействий встречает
в своем элементе равное противодействие.
Второе утверждение, как принадлежащее ло-
гике, могло бы быть опущено. В общеприня-
той краткой формулировке: «действие равно
противодействию» 3-м постулатом указывает-
ся только постулат действия и не указывается
постулат взаимодействия. Последний требует
11
более развернутой формулировки, которая
обычно и дается, однако, все еще в не расчле-
ненной на две свои части и потому все еще
недостаточно ясной форме.
В классической механике содержится слу-
чай— механика материальной точки, где тре-
тий постулат вынужденно расщепляется на
две свои части. Для одной точки специальная
часть его—постулат противодействия непри-
меним и остается лишь постулат действия.
Механика материальной точки может быть по-
строена поэтому в общем виде для всех воз-
можных механик.
Постулат действия и постулаты взаимо-
действия различны, как отношения, не только
по числу своих членов: первое — всегда дву-
стороннее, второе— в общем случае многосто-
роннее, но и по характеру: первым определя-
ется логическое отношение силы-субъекта
к силе-объекту, вторым специальное отно-
шение сил-субъектов. Первое отношение яв-
ляется внутренним для каждого элемента, вто-
рое— внешним. В специальном случае двусто-
ронних механик эти различные отношения со-'
впадают по числу членов. В специальном под-
случае этого специального случая —классиче-
ской механике могут совпасть и обе категории
сил, члены внутреннего отношения — явиться
одновременно членами внешнего отношения.
Этот специальный подслучай и постулируется
3-м постулатом. Узкоспециальное место клас-
сической механики в семействе возможных
механик этим достаточно выясняется.
В недвусторонних механиках — односто-
ронней или многосторонних — не может быть
ни «первого ни (второго совпадений. Допущение
многосторонних механик так же разрушает
3-й постулат, как допущение односторонней ме-
ханики. Возможной областью его действия
являются только двусторонние механики.
Классическая механика является двусто-
ронней механикой — ее неделимой далее
структурной единицей является двустороннее
взаимодействие. Неделимой структурной еди-
ницей односторонней механики является одно-
стороннее взаимодействие, вырождающееся
в этом случае в одностороннее действие. Ниже
даны будут примеры многосторонних механик,
где неделимыми явятся многосторонние взаи-
модействия. Все эти многосторонние механи-
ки охватываются односторонней механикой.
Неизменным во всех этих механиках останет-
ся постулат действия, логически предпослан-
ный им, как предпослана вся логика каждой
дедуктивной теории. Различным в каждой из
них явится специальный постулат взаимодей*
ствия, определяющий специальный характер
каждой механики.
12
Логический постулат действия относится^
разумеется, не только к элементам, но и к си-
стемам любой сложности, не только к сило-
вым, но и любым иным воздействиям. Это яв-
ствует из логической его природы. Нагляд-
ным подтверждением этого постулата в меха-
нике является феномен астатичности. В аста-
тических системах отсутствует механизм про-
тиводействия, и они, по постулату действия,
не могут быть в статике объектами сил, к ним
не могут быть приложены в статике силы.
В динамике все натуральные системы, в том
числе и астатические, обладают неограничен-
ным источником- инерционного противодей-
ствия в виде масс элементов. В классической
механике невозможны поэтому адинамиче-
ские, лишенные и в динамике механизма про-
тиводействия, системы. Такие системы возни-
кают в односторонней механике.
Д. Специальные постулаты взаимодействия
В двусторонних механиках, и только в них,,
специальные постулаты взаимодействия могут
быть построены на сопоставлении указанных
выше внутреннего и внешнего отношений сил,
поскольку оба отношения здесь двучленны.
Наряду с постулатом равного и противопо-
ложного по знаку обратного действия (посту-
латом противодействия) классической меха-
ники возникают при этом другие- специаль-
ные постулаты взаимодействия: 1) неравного
и противоположного по знаку обратного дей-
ствия (противодействия), 2) равного или не-
равного и совпадающего по знаку обратного
действия (содействия). Первый определяет,
как показано ниже, газодинамическую меха-
нику, совпадающую с классической механи-
кой по структуре систем, но отличающуюся
по метрике. Вторые могут быть легко реали-
зованы в сервосистемах.
Эта частная форма постулатов взаимодей-
ствия может оказаться непригодной в общем
случае, где, как в сервосистемах, действую-
щие между элементами внутренние силы си-
стемы находятся в отношениях, не зависящих
от приложенных вне системы противодей-
ствий. Она всегда непригодна в недвусторон-
них системах.
Можно указать и другие частные формы
специальных постулатов взаимодействия. Од-
ной из них является энергетическая форма.
Для гироскопического взаимодействия она
вытекает из определяющего энергетического-
свойства гироскопических сил — равенства
нулю работы их на любом действительном
бесконечно малом перемещении (определение
Томсона и Тета) . В энергетической форме
дается уравнениями Лагранжа и специальный
постулат натурального взаимодействия. Мож-
но представить в энергетической форме и
специальный постулат газодинамического вза-
имодействия.
Форма эта также не является общей. Она
вместе с самим понятием энергии имеет значе- -е
ние для тех лишь механик, где действуют за-
коны сохранения энергии. Значение это те-
ряется поэтому уже в одосторонней механике.
Общей, не ограниченной какими-либо спе-
циальными постулатами взаимодействия, ме-
ханикой является односторонняя механика.
Постулат одностороннего действия не являет-
ся ее специальным постулатом взаимодей-
ствия, более того — им постулируется разло-
жение в этой механике всех специальных вза-
имодействий на неделимые далее структур-
ные единицы — одностронние действия.
Общей формой задания специальных по-
стулатов взаимодействия является либо зада-
ние структуры внутренних сил системы — сил
взаимодействия (метод прозрачного ящика),
либо задание реакций системы на внешние
воздействия (метод черного ящика). Общей
задачей всех механик является установление
связи между двумя этими способами зада-
ния— между структурой системы и ее реак-
циями. При сколько-нибудь сложном, много-
стороннем взаимодействии форма эта являет-
ся единственно общей.
Любой неразложимый в своей специальной
механике способ взаимодействия — двусторон-
него, трехстороннего и т. д., может быть раз-
ложен в односторонней механике на соответ-
ствующее число определенным образом соот-
носящихся односторонних действий. Односто-
ронняя механика охватывает поэтому все воз-
можные механики. Любая из возможных ме-
ханик представляет специальный случай этой
общей механики.
Постулат одностороннего действия означа-
ет отрицание взаимодействия, вырождение его
в одностороннее действие. Это начальное от-
рицание взаимодействия приводит затем
к синтезу ничем не ограниченных способов
взаимодействия.
В делении механик по числу сторон взаи-
модействия односторонняя механика противо-
стоит всем остальным, неодносторонним меха-
никам, двусторонним или многосторонним,
как общая механика специальным механикам.
Различие по числу сторон взаимодействия
между двусторонней и другими многосторон-
ними механиками является уже внутренним
делением внутри класса неодносторонних ме-
ханик. В каждом из этих подклассов класса
неодносторонних механик — подклассе двусто-
ронних, трехсторонних и т. д. механик, меха-
ники будут делиться по взаимодействию их
систем со средой, по типу реакции этих систем
на внешние воздействия. Этот кибернетиче-
ский принцип деления может объединить дву-
сторонние, трехсторонние и т. д. системы в об-
щий класс статических или астатических,
динамических или адинамических и т. д. си-
стем. На одностороннюю механику это кибер-
нетическое деление распространяется в том
смысле, что ей принадлежат все эти неодно-
сторонние механики. Эта общая кибернетиче-
ская классификация рассматривается ниже.
Е. Парадоксы сервосистем
К выяснению логической структуры авто-
матики как дедуктивной теории и к новому по-
строению ее как односторонней механики по-
нуждают прежде всего парадоксы, возникаю-
щие при включении сервосистем в классиче-
скую механику.
1) Парадоксальна прежде всего сама фак-
тическая возможность действия без противо-
действия. Только в угоду привычке или
универсальной осторожности можно отри-
цать, что подъем многотонных щитов плоти-
ны нажимом кнопки представляет собой фак-
тическое действие без противодействия. Этот
исходный парадокс влечет за собой ряд про-
изводных парадоксов.
2) Аппель, впервые, по-видимому, введший
в курс рациональной механики сервосвязи
(liaisons comportant asservisement), отмечает
в этих системах следующую парадоксальную,
с точки зрения классической механики, воз-
можность — внутренний момент системы из-
меняет момент количества движения ее [Л. 9].
Этот парадокс следует назвать динамическим
парадоксом автоматики. Легко указать для
нее и ряд других динамических парадоксов,
также заключающихся в нарушении законов
сохранения классической механики. Пытаясь
разрешить свой парадокс в пределах класси-
ческой механики, Аппель относит сервосвязи
к особого рода неидеальным кинематическим
связям, производящим произвольно дозируе-
мую работу.
Включение в сервосистему произвольно до-
зируемых источников энергии и всего скрыто-
го механизма осуществления сервосвязей не
может, однако, обещать сколько-нибудь обще-
го построения механики как дедуктивной нау-
ки. Ничто так не обнаруживает беспомощно-
сти в общем построении современной теории
регулирования, как неспособность расстаться
с источниками энергии на чисто конструктив-
ном этапе рассмотрения. Переносить эту ис-
ходную методическую ошибку в механику
значило бы низвести ее до уровня ясности
13
современной автоматики. Источники энергии
должны быть рассматриваемы лишь как часть
механизма детектирования, механизма одно-
сторонних связей, могущая быть забытой пос-
ле того, как механизм этот постулирован. Ап-
пель исходит из противоположного взгляда.
Вместо того чтобы отвлечься от способа осу-
ществления сервосвязей и получить наиболее
простые законы наблюдаемого движения, хо-
тя бы отличные,от законов классической ме-
ханики, он предлагает ввести в рассмотре-
ние способы реализации этих связей, т. е. пи-
тающие их источники энергии («Pour ces me-
canismes on ne peut faire abstraction du mode
realisation des liaisons [Л. 9]). Отвлечься от
способа реализации сервосвязей действитель-
но нельзя, оставаясь' в классической механи-
ке. Здесь избегнуть противоречия можно,
только включив в систему сервоисточники,
т. е. наименее перспективным, с точки зрения
простоты и целостности построения предмета,
способом. Такое отвлечение становится воз-
можным лишь при выходе за пределы класси-
ческой механики.
3) Парадоксальна возможность равнове-
сия сервосистемы под воздействием одной
лишь внешней силы. Действительно, если счи-
тать единственной внешней силой системы ре-
гулирования изменение нагрузки объекта ре-
гулирования при неизменном управляющем
воздействии, силы же взаимодействия между
элементами системы регулирования, осущест-
вляемые динамическими связями ее, считать
внутренними силами системы (иной взгляд
был бы крайне искусствен и . сложен), то
в статике эта единственная внешняя сила
уравновешивается внутренними силами систе-
мы, реакциями, динамических связей ее. Рав-
новесие под воздействием одной только внеш-
ней силы парадоксально в классической меха-
нике. Этот парадокс следует назвать стати-~
ческам парадоксом автоматики.
4) Парадоксальна возможность масс любо-
го порядка и знака, простейшим образом реа-
лизуемая в автоматике [Л. 36].
5) Парадоксальна возможность изодром-
ных, т. е. с бесконечно большой жесткостью,
систем, отвечающих нулевыми деформациями
на нагрузку любой величины.
Список этих парадоксов легко было бы
продолжить, поскольку в автоматике, с точки
зрения классической механики, парадоксаль-
ны все положения, относящиеся к механике
системы. Достаточно, однако, и перечислен-
ных, чтобы потребовать общего их разреше-
ния. Этим разрешением может явиться с на-
шей точки зрения только отказ постулату про-
тиводействия.
14
Не формулируемый в системе понятий физики фе-
номен управления влечет за собой ряд новых понятий
неопределенной принадлежности. В известной полемике-
Эйнштейна -с Бором по основам квантовой механики
сторонники последнего ставили в виду Эйнштейну от-
рицание «несидовых воздействий». Приведем любопыт-
ную аргументацию одного из них — -академика
В. А. Фока:
«Ошибка Эйнштейна заключается, по нашему мне-
нию, в том, что Эйнштейн отрицает (объявляет телепа-
тией, стр. 67) всякие взаимодействия, кроме силовых.
Между тем можно привести из разных областей науки
и жизни много разнообразных видов взаимодействия»
которые все являются несиловыми. Ограничимся сле-
дующими примерами. Человек, входящий в коллектив,
испытывает взаимодействие ।(не силовое, конечно) с дру-
гими членами коллектива, и их судьба, например бо-
лезнь или смерть, неизбежно отражается и на нем («из-
меняет его состояние»). В случае гибели подчиненных
(«первая подсистема») неизбежно меняется состояние,
начальника («вторая подсистема») хотя бы потому, что
он перестает быть начальником; при этом бывший на-
чальник может оставаться целым и невредимым (отсут-
ствие прямого силового воздействия) \ Пример из дру-
гой области можно получить, рассмотрев взаимодействие
посредством сигнала ((телеграммы); эффект телеграммы
не стоит ни в какой связи с энергией, затраченной на
ее передачу, и в этом смысле взаимодействие можно
тоже назвать несиловым, в отличие -от чисто силового
взаимодействия между электростанцией и ' предприяти-
ем, потребляющим электроэнергию» (В. А. Ф о к, За-
мечания к автобиографии А. Эйнштейна, -сборник па-
мяти А. Эйнштейна, «Эйнштейн и современная физика»,
Физматгиз, 19*56).
Из примеров В. А. Фока наиболее нагляден послед-
ний. В нем выступает в явном виде феномен управ-
ления. «Несиловым воздействием» этот феномен являет-
ся лищь в том смысле, что управляющий элемент не
испытывает силового противодействия. Развиваемое
этим элементом воздействие является, разумеется, не
силовым, а информационным, управляющим. Однако»
преобразуясь во внешнем источнике управляющей энер-
гии, этот управляющий импульс становится силовым,
и именно в таком виде прилагается к управляемому
элементу. В схеме непрямого, косвенного воздействия,
характеризующей феномен управления, информацион-
ное воздействие преобразуется в сервоисточнике в си-
ловое, и называть это управляющее воздействие не-
силовым, вводя этим новое, неопределенной принадлеж-
ности понятие, нет нужды. Достаточно принять в кван-
товой механике возможность силового воздействия,
освобожденного от постулата противодействия, чтобы
уложить все эти новые понятия в систему понятий
расширенной механики.
В. А. Фок называет взаимодействие между электро-
станцией и предприятием силовым в одном лишь, излиш-
не узком смысле—подчинения постулату противодей-
ствия. (Подчинение это не является, однако, определяю-
щим признаком силового воздействия. Последнее лежит
и в о'снове односторонней механики, свободной от этого
постулата.
Спор между Эйнштейном и Бором велся, по суще-
ству, с позиций двусторонней и односторонней меха-
ник. Творец релятивистской механики отрицал в нем,
называл телепатией одностороннюю механику. Оппо-
ненты* его, допуская неявно возможность управления
в квантовой механике, относят его к несиловым воз-
действиям. 'Нельзя не признать, что аргументация
В. А. Фока, апеллирующая к несиловым воздействиям,
1 Этот или близкий к этому пример принадлежит
А. Д. Александрову.
подтверждает обвинение в телепатии. Только признание
возможности односторонних силовых воздействий и
концепция односторонней механики, способны, по-види-
мому, парировать его.
Во всех своих примерах В. А. Фок оперирует, в со-
временной терминологии, с сигнальными, управляющи-
ми системами. Число таких систем непрерывно умно-
жается конкретным кибернетическим анализом, обнару-"
живающим феномен управления под совершенно не-
ожиданной оболочкой. Приведем полярно различные
примеры вновь обнаруженных таких систем.
'Совсем новым таким примером является сигналь-
ный механизм действия ядовитой железы некоторых
змей, обнаруженный А. М. Захаровым. Выяснилось, что
известные две составляющие змеиного яда являются
не равноправными компонентами его, а управляемой
и управляющей частями общей сигнальной системы.
Здесь количественно ничтожный активатор — управляю-
щий сигнал активирует количественно подавляющую
ферментную составляющую — управляемую систему.
Сама активируемая компонента, выбрасываемая же-
лезой в момент укуса, разрушает легкую преграду —
оболочку клетки, отделяющую ее от активатора. В этом
практически мгновенном процессе активатор подобен
запалу, взрывающему пассивную массу заряда.
Примером более одухотворенной сигнальной систе-
мы является загадочный феномен рифмы. Известно как
третировалось многими великими прозаиками подчине-
ние художественной речи такому, казалось бы, случай-
ному и малосодержательному ограничению как рифма.
Несравненная сила поэтической речи заключается,
однако, в том сигнальном воздействии рифмы, которого
лишена прозаическая речь. Подобно пассивной части
змеиного яда поэтическая речь течет сквозь строй вос-
пламеняющих ее активаторов — рифм. В поэзии вели-
ких поэтов рифма приходится на наиболее значитель-
ные, сигнальные слова, использующие скрытую энер-
гию остальной, пассивной части строфы для много-
кратно усиленного воздействия (достаточно указать на
управляемый заключительной рифмой поворот смысла,
диалектическое отрицание, в конце каждой почти стро-
фы «Онегина»). Понятен качественный скачок воздей-
ствия, сообщаемый поэтической речи этим кибернети-
ческим принципом усиления.
Мы далеки от того, чтобы объяснить только сиг-
нальным воздействием рифмы всю силу поэтической
речи. Искусство возникает там, где содержанию прихо-
дится преодолевать ограниченность формы и само
является скрытым напряжением этой борьбы. В поэзии,
стесненной и размером и рифмой, напряжение это, и с
ним сила поэтического воздействия, .достигают предела.
Сигнальное воздействие рифмы является лишь одной
из составляющих этого общего воздействия.
Как ни полярно различны по действующим в них
агентам — химическому ферменту и поэтическому сло-
ву две этих системы, они едины в своем управляющем
алгоритме и в какой-то мере могут быть охвачены об-
щей теорией. Обе построены на кибернетическом прин-
ципе усиления — незначительным по объему сигнальным
воздействием активирующего агента многократно уси-
ливается воздействие подавляющего по объему акти-
вируемого агента.
Все примеры iB. А. Фока относятся к этому типу
управляемых систем и охватываются общей теорией
управления. В полемике с Эйнштейном В. А. Фок вы-
нужден, таким образом, апеллировать к управляющим
системам — к односторонней механике.
1-1-2 Динамическая структура
Односторонняя механика охватывает - все
остальные — специальные механики. Соот-
ветственно областью первой являются систе-
мы совершенно общей структуры, областью
вторых — системы специальной структуры.
Установим точный смысл понятия — динами-
ческая структура и связь между структурой и
реактивностью систем.
А. Динамическая структура
а) Уравнения односторонней механики
Спустившись в анализе до простейших, не-
делимых далее структурных единиц — одно-
сторонних действий, односторонняя механика
восходит затем к ничем не ограниченному
синтезу динамических систем. Ее моделью яв-
ляются поэтому динамические системы произ-
вольной, ничем не ограниченной структуры.
Системы эти, если ограничиться только ли-
нейными системами и вторым (положитель-
ным и отрицательным) порядком элементов—
обобщенных координат, имеют вид:
тп
(i = 1, 2,..., m).
Здесь каждый член уравнений — обобщен-
ная сила, одностороннее действие й-го элемен-
та системы на Z-й. В частном случае, когда
k=i, это самодействие — также односторон-
нее действие. В левой части уравнений распо-
лагаются силы, зависящие от координат си-
стемы и в этом смысле внутренние для нее;
в правой части — в общем случае не завися-
щие от координат системы и в этом смысле
внешние для нее (это деление принадлежит
односторонней механике). Эти обобщенные
силы удобно рассматривать как реакции ди-
намических связей, внутренние силы — внут-
ренних связей системы, внешние силы—внеш-
них связей системы, рассекаемых при ее вы-
делении. Для краткости будем сами члены
уравнений (1), представляющие собой лишь
реакции динамических связей, называть ди-
намическими связями. Старший член Auqi
каждого уравнения представляет собой взя-
тую с обратным знаком противодействующую
обобщенную силу инерции — объект воздейст-
вия всех остальных, действующих обобщен-
ных сил. Старшая внутренняя связь, чьей ре-
акцией является сила инерции, представляет
собой собственно элемент — объект связыва-
ния для остальных связей.
Параметры системы — Aih, Bik и т* д. суть
положительные, отрицательные либо равные
15
нулю действительные числа. Этот их знак
(включая условно в понятие знак и нуль —
знак отсутствующей связи) присвоим самим
связям и будем говорить соответственно о по-
ложительных, отрицательных и отсутствую-
щих связях. Знаки и абсолютные величины
(модули) параметров системы представляют
собой соответственно структурные и метриче-
ские параметры ее. Структура системы опре-
деляется матрицей структурных параметров
ее — матрицей знаков:
j| sign Ль sign B£fe, sign Cik, sign Dik, sign
метрика системы определяется матрицей мет-
рических параметров ее — матрицей модулей:
||то(1Лгй, modB2fe, rnodC^, modDift, mod£\&|[.
Модули параметров системы назовем пара-
метрами связей и будем обозначать соответ-
ствующими малыми буквами. Структурой си-
стемы определяются структурные свойства ее,
метрикой — метрические.
Внешние обобщенные силы Qf1) системы
также могут входить в уравнения ее относи-
тельными и абсолютными своими значениями.
Чтобы не вводить здесь двух символов, будем
считать, что входят в уравнения системы
в том же значении, что и параметры ее:
в уравнения, составленные в относительных
параметрах (в параметрах системы — Дг7г, Bik,
Cik), Q(1) входят относительными своими значе-
ниями, и абсолютными — в уравнения, состав-
ленные в абсолютных параметрах (параметрах
связей — aik, bik, cik). Уравнения (1-1) запи-
саны в неполной кинетостатической форме —
противодействующие силы инерции, описы-
ваемые членами Anqi, объединены в левых
частях их не со всеми, а лишь с внутренними
действующими силами, описываемыми , всеми
остальными членами левых частей. Обозначив
сумму этих остальных членов в каждом урав-
нении через Q<2), можно представить уравне-
ния (1-1) в виде:
A^-Q^Q?’ (1-2)
(t = 1, 2, ..tn).
Здесь Q*'1 и Q<2) — внешняя и внутренняя со-
ставляющие обобщенной силы Qi- Объединив
их в правой части уравнений, получим кинети-
ческую форму уравнений:
A^Q^+Q'^^Qi (1-3)
(/=1, 2, ..., т).
Перенеся левый член в правую часть, получим
полную кинетостатическую форму уравне-
ний:
Q'/’ + Q'2 —Аг9» = 0, (1-4)
где —Aaqi — силы инерции. фиктивные, по-
скольку этой операцией переноса субъект их
условно принимается за объект.
Формы (1-3) и (1-4) — общи для всех ме-
ханик, поскольку кинетическое противопостав-
ление в первой из них ’Противодействующих
сил действующим принадлежит общему для
всех механик логическому постулату действия,
кинетостатическое же объединение тех и дру-
гих сил во второй из них также представляет
общий для всех механик логический прием.
Однако в различных механиках силы инерции
могут принадлежать либо внешним, либо
внутренним силам системй. Так, в односто-
ронней механике они, в соответствии с приня-
тым выше определением, принадлежат внут-
ренним силам системы. В классической меха-
нике они, как показано будет ниже, принад-
лежат внешним силам системы. По этому
признаку полная кинетостатическая форма
(1-4) может быть представлена в двух непол-
ных кинетостатических формах:
Q*1 —А<<7< =—О',2’; (1-5)
Q*2>—A^i = —Q*”- (1-6)
Первая принадлежит, в частности, класси-
ческой механике, вторая — односторонней.
Этим прямым формам кинетостатических
уравнений, где знак сил инерции противопо-
ложен знаку масс — параметров этих сил,
можно сопоставить инверсные, с измененны-
ми знаками, кинетостатические же формы:
Atf-Q^-Q^O; (1-4')
О’5')
Auqi-^ = -^\ (1-6')
где знаки эти совпадают.
В прямой форме подчеркнуто то, что про-
тивопоставляет противодействующую силу
инерции остальным, действующим силам си-
стемы, — противоположность знаков. Положи-
тельной массе соответствует здесь отрицатель-
ная сила инерции. В инверсной форме под-
черкнуто то, что объединяет силу инерции
с остальными силами, — совпадение знака си-
лы со знаком динамической связи, чьей реак-
цией эта сила является. Положительной
" массе, соответствует здесь положительная си-
ла инерции.
16
^ЯгЛЯг^Яз^Яи
°)
affki + c„qt - ct2q2 = О
а22^2 + С22Яг~ C2l4l - с23Яз = #
аззЯз + сззЯз ” сзгЯз~ сз4Я*— О
G44&4.*** ^44 #4 ““ с4зЯз + ^4 = О
Рис. 1-1. Упругое взаимодействие в натураль-
ных системах.
Каждая из форм адэкватна в своем аспек-
те обеим механикам. Для односторонней ме-
ханики с ее массами произвольного порядка
и знака важнее второй аспект, где сила инер-
ции (реакция старшей внутренней связи эле-
мента), как и все остальные внутренние силы
(реакции остальных динамических связей си-
стемы), получает знак этой связи: положи-
тельный — при положительной массе, отри-
цательный— при отрицательной. Для класси-
ческой механики, с ее всегда положительной
массой, этот аспект несуществен, важнее —
первый. И для кинетостатических уравнений
вопрос адэкватности той или иной механике
решается, таким образом, однозначно: прямая
форма кинетостатических уравнений удобнее
в классической механике, инверсная — в од-
носторонней.
Легко теперь указать место исходной фор-
мы (1-1) уравнений односторонней механи-
ки в этой системе понятий — уравнения эти
являются инверсной формой (1-67) неполной
кинетостатической формы (1-6). К особенно-
стям этой формы нам придется неоднократно
возвращаться.
б) Структурные схемы
Структурные схемы. Динамическая
структура может быть наглядно представ-
лена кинетостатическими структурными схе-
мами, отвечающими инверсной полной кинето-
статической форме (1-47). На рисунках 1-1 ч-
1-5 это сделано для . некоторых типовых
структур — натуральных и ненатуральных.
Элементы системы — обобщенные, координа-
ты ее изображены здесь двойными кружками,
обобщенные силы и представляемые ими ди-
а22^2+ ^22^2^ ^2l4l ~ Ь2зЯз
аззЯз^ ьззЯз~ ЬзгЯг'- ^з^Яч
а^Я* + М ~ Мз + = О
Рис. 1-2. Диссипативное взаимодействие
в натуральных системах.
намические связи — стрелками, идущими от
элемента—субъекта силы к элементу—объек-
ту ее. Самодействия, имеющие один и тот же
элемент субъектом и объектом, замыкаются
при этом в одночленные (одноэлементные)
циклы. Каждый член уравнений изображает-
ся при этом стрелкой — динамической связью.
Члены с одинаковыми индексами — самодей^
ствия представляют собой внутренние связи
элементарных (одноэлементных) систем (или,
+снЯ}
и22Яг +с2гЯг~ ~агзЧз-°
аззЯз + сззЧз ~аз^Яг ~ азьЯь=О
«Й + 0^ «в
Рис. 1-3. Инерционное взаимодей-
ствие в натуральных системах.
2 И. И. Гальперин.
17
S)
O-n'i) ~ bjify - cftqt + Ъ12^г = 0
°2242 ~ с2зЧг ~ b2fii +• ^гзЯз ~ °
аЗзЬз ~ СЗЗЧз " ^?2#2“*’ %4^4 = ^
C44#4 + ^44^4 ~ 644^4 “* ^3^3
I
Рис. 1-4. Гироскопическая система.
кратко, внутренние 'связи), члены с разными
индексами—внешние связи элементарных си-
стем (или, кратко, внешние связи). Положи-
тельные связи обозначим тонкими стрелками,
отрицательные толстыми. Дифференциальный
порядок связи указывается числом знаков
дифференцирования (точек) или интегрирова-
ния (интегралов).
В кинетостатических структурных схемах
каждый элемент является узлом кинетостати-
ческого равновесия входящих в него динами-
ческих связей и их реакций — обобщенных
сил. Составить дифференциальные уравнения
системы означает'составить уравнения кине-
тостатического равновесия всех узлов струк-
турной схемы. Кинетостатические структурные
схемы однозначно отображают динамическую
структуру.
Типовые структуры. На рис. 1-1,
1-2, 1-3 представлена структура натуральных
систем (систем, чья потенциальная и кинети-
ческая энергии являются однородными квад-
ратичными функциями, соответственно, обоб-
щенных координат и обобщенных скоростей)
классической механики. На рисунках этих да-
ъпЪ + С/гЪ = о
^ггЯг + с22^2 ” c2i4i = О
^ззЯз + сззУз ~ сз2Яз = О
+ ^44^4”“ С43Ц3 = &
Рис. 1-5. Сервосистема.
ны последовательно упругое, диссипативное
и инерционное натуральное взаимодействия
(последнее представлено цепным физическим
маятником).
На рис. 1-4 дана ненатуральная система
классической механики — система гироскопи-
ческой стабилизации. На рис. 1-4,а дана двух-
элементная система — гироскопический одно-
рельсовый вагон, на рис. 1-4,6 — структурная
схема многоэлементной системы этого вида —
цепного гироскопического маятника. Обе си-
стемы подчинены известной теореме Кельви-
на— о четном числе неустойчивых степеней
свободы в гироскопически стабилизируемых
системах.
Поскольку приведенные на всех этих ри-
сунках кинетостатические уравнения даны
в форме уравнений (1-47) односторонней ме-
ханики, уравнения эти и соответствующие им
структурные схемы на этих рисунках пред-
ставляют собой описание специальных систем
классической механики в общей односторон-
ней механике. На рис. 1-5 дано, напротив,
описание в односторонней механике односто-
ронней же системы, не могущей быть описан-
ной ни в одной из специальных механик. Си-
стема на рис. 1-5 представляет собой простей-
шую, открытую (без обратной связи) серво-
систему. С помощью составляющих ее одно-
сторонних связей — односторонних действий
могут быть синтезированы системы пройз-
вольной структуры.
Ни одна из систем классической механики
не может быть материально разложена на эти
односторонние связи, хотя аналитически все
эти системы составлены такими связями. Не-
делимой далее структурной единицей каждой
из этих специальных систем является более
сложное образование — двучленный цикл
взаимодействия, симметричный (по знакам}
в натуральных системах и асимметричный —
18
в гироскопических. Симметричные, содержа-
щие четное число, в частности^ нуль, положи-
тельных связей, циклы назовем" отрицательны-
ми*, асимметричные, содержащие нечетное
число положительных связей, циклы — поло-
жительными. Наиболее специальна структура
натуральных систем, где отрицательным дву-
членным циклам взаимодействия всегда про-
тивостоят образованные связями того же по-
рядка положительные одночленные циклы са-
модействия. Структура элементарных (одно-
элементных) систем (элементарная структу-
ра) связана здесь, таким образом, со струк-
турой сложных (многоэлементных) систем
(сложной структурой). Такие взаимодей-
ствия и структуры назовем связанными. От
этого ограничения свободна структура гиро-
скопических взаимодействий и, разумеется, —
свободная ото всех вообще ограничений струк-
тура сервосистем. В обеих структурах элемен-
тарная структура независима от сложной. Та-
кие взаимодействия и структуры назовем не-
связанными. Специальные структуры могут
быть связанными, как натуральная, или не-
связанными, как гироскопическая. Общая
структура сервосистем всегда не связана.
В гироскопических системах происходит пер-
вое расширение натуральной структуры, в сер-
восистемах — полное освобождение ее.
Каждая из специальных структур подчи-
няется своей специальной механике, и все они
подчиняются односторонней механике. Гиро-
скопические системы представляют поэтому
в классической механике чужеродное вклю-
чение и должны были бы быть выделены
в свою гйроскопическук) механику (что неяв-
но и происходит в классической механике).
Ниже классической механикой будет назы-
ваться поэтому только механика натуральных
систем.
Назовем математическими моделями де-
дуктивных механик подчиняющиеся им систе-
мы уравнений и материальными моделями—
описываемые этими уравнениями материаль-
ные системы. Сервосистемы являются мате-
риальной моделью односторонней механики,
натуральные системы — классической двусто-
ронней механики, гироскопические системы—
гироскопической двусторонней механики. Обе
двусторонние механики, как и множество
иных возможных двусторонних и многосто-
ронних механик, являются специальными слу-
чаями односторонней механики.
в) Динамическая структура
Связевая структура. Структура
системы полно отображается только записью
уравненией ее в параметрах связей. Толька
£
2*
19
Qllfy * С//9/ * 9494*^72% ~
Q33 Чэ* сззЧз~ сзгЧг"с^^ ®
anQi +cnQi ~съЧь +с1гЧг ~ О
g32 Чг+G224i^c2! 4i ~ сгзЧз= &
^зЧз+СззЧз^згЧг-^Ч^О
а^Ч^^Чч~с^зЧз±с^Ч1 ~~Qt
Рис. 1-7. Динамические циклы.
такой записью выделяются из характеристи-
ческой матрицы матрица знаков и матрица
модулей и обнажается структура системы.
Запись в параметрах системы неполно отобра-
жает структуру системы.
Знак связей. Это пояснено на рис. 1-6,
где дана изолированная смешанная (с упру-
гим и диссипативным взаимодействием) си-
стема и приведены ее уравнения в парамет-
рах связей и характеристическая матрица., Из
последней выделены матрица модулей и мат-
рица знаков. Принятые нами структурные схе-
мы тождественны матрицам знаков, что отме-
чено на рис. 6 знаком тождества. Это отож-
дествление структурных схем с матрицами
знаков связей и вытекающий из него символ
самодействия — одночленный цикл, введен-
ные нами 20 лет назад, заново и неполно вво-
дятся сейчас за рубежом [Л. 73, 90].
Связевая структура. Описанную этим
способом, где центральным является по-
нятие о знаке связи, структуру назовем свя-
зевой структурой. Поскольку знак связей за-
висит в общем случае от системы координат,
связевая структура отображет относительные
свойства системы — свойства ее по отноше-
нию к некоторой системе координат. Чтобы
отобразить абсолютные свойства системы —
независимые от системы координат, следует
описать . структуру систем в абсолютных —
инвариантных к системе координат понятиях.
Таким понятием является знак цикла.
Циклическая структура. Струк-
туру системы, определенную знаками циклов,
назовем циклической. Циклическая структура
системы вытекает из связевой структуры, но
в отличие от последней, описывает абсолют-
ные структурные свойства системы.
Рассмотрим детальнее введенное выше
центральное структурное понятие — динамиче-
ский цикл. Назовем циклом замкнутую после-
довательность связей. Этому определению от-
вечают и одночленные циклы самодействий —
внутренних связей, и двучленные циклы взаи-
модействий.
Знак циклов. Знак циклов является цен-
тральным структурным свойством динамиче-
ских систем, прямо позволяющим судить о их
реакции на внешние воздействия. Знак этот
определяется четностью числа перемен знаков
сигнала, обегающего цикл,— положителен при
нечетном числе, отрицателен при четном.
В исходной, кинетической форме уравне-
ний перемена знака импульса выражается от-
рицательным знаком связи, и потому в про-
изводной, кинетостатической — положитель-
ным. В первой соответственно, знак цик/ла
определяется четностью числа отрицательных
связей, во второй — положительных связей.
Поскольку для всего дальнейшего изложения
принята кинетостатическая форма (1-1), поло-
жительными явятся циклы с нечетным числом
положительных связей, отрицательными —
с четным.
Уравнения на рис. 1-1—1-6 составлены
в указанных на этих рисунках системах ко-
ординат. Знаки внешних связей и сил зависят
от системы координат и в этом смысле пред-
ставляют относительные свойства связей и си-
стемы; знаки циклов инвариантны к системе
координат и в этом смысле представляют аб-
солютные свойства циклов и системы: в отри-
цательных циклах сигнал, обежав цикл, воз-
вращается в исходную точку с тем же знаком
и лавинообразно накапливается, в положи-
тельных — с противоположным знаком и ла-
винообразно вычитается. Вторые циклы пред-
ставляют собой поэтому фактор противодей-
ствия, в частности — положительной инерции
(это явствует из того уже, что положительная
масса изображается в этих структурных схе-
мах положительным одночленным циклом),
и устойчивости, первые — фактор содействия^
в частности — отрицательной инерции, и не-
20
устойчивости. Связь обоих свойств — инерции
и устойчивости — выяснится ниже.
Двучленные простые цикльи взаимодейст-
вия могут в свою очередь послужить элемен-
тами следующих по сложности составных
циклов (рис. 1-7). На рис. 1-7 консервативная
натуральная система, рассмотренная на
рис. 1-1, замкнута в цикл двумя различными
способами — симметричным (рис. а) и асим-
метричным (рис. 6). В первом образуется от-
рицательный четырехчленный составной цикл,
содержащий в себе 6 простых отрицательных
циклов — 4 двучленных и 2 четырехчленных
(рис. д). Во втором образуется положитель-
ный четырехчленный составной цикл, также
содержащий 6 простых циклов — 4 отрица-
тельных двучленных и 2 положительных че-
тырехчленных (рис. е).
Примененным в системе б искусственным
способом, с помощью рычага ЛВ, изменяюще-
го (нарушая изолированность системы) знак
импульса, в натуральной системе получены
положительные сложные циклы. Это удалось,
однако, лишь в неизолированной системе б;
в изолированной системе а не только дву-
членные сложные циклы, но и четырехчленные
сложные циклы отрицательны. Все сложные
циклы изолированных натуралънъьх систем
отрицательны. Положительными здесь могут
быть лишь элементарные циклы. Положитель-
ные сложные циклы означают поэтому выход
за пределы классической механики. С таким
выходом мы встретились уже в гироскопиче-
ских системах. В натуральной системе б та-
кой выход имеет место, если считать эту си-
стему изолированной, т. е. игнорировать ме-
ханизм перемены знака импульса. Выход за
пределы классической механики здесь дости-
гается тем же приемом игнорирования.
Продольные колебания натуральных си-
стем, открытой — на рис. 1-1 и циклической—
на рис. 1-7, аналогичны колебаниям струны
с дискретными массами. Если перейти от дис-
кретных масс и пружин к распределенным, то
колебания системы на рис. 1-7,а можно было
бы представить колебаниями тяжелой кольце-
вой упруго натянутой струны. Систему на
рис. 1-7,6 представить круговой струной не
удалось бы. Чтобы выразить в пространствен-
ных образах обе распределенные системы,
следовало бы представить первую систему
тяжелой упругой кольцевой ориентируемой
(двусторонней) поверхностью (рис. в), вто-
рую же — неориентируемой (односторонней,
лентой Мебиуса, рис. г).
Натуральная система а изолирована и,
следовательно, астатична. Все ее статические
реакции уравновешиваются как внутренние
в классической механике силы, и она не мо-
жет явиться объектом приложения внешних
сил. Натуральные изолированные системы ас-
татичны. Система б неизолирована и статич-
на, поскольку среди статических реакций ее'
имеется одна внешняя в классической меха-
нике сила —। реакция неподвижной опоры.
Поскольку можно, игнорируя механизм пере-
мены знака, считать систему б изолированной,
ненатуральной системой, мы приходим к тому
же выводу: ненатуральные изолированные си-
стемы в общем случае статичны, астатич-
ность — специальный феномен классической
механики. К системе а не могут быть поэто-
му приложены внешние силы, к системе б —
могут (на рис. б приложена сила Q\).
В системе б наглядно предстает сложный
циклический механизм лишь кажущегося
простым понятия противодействие. Приложе-
ние силы к одному из элементов положитель-
ного цикла вызывает, по возвращении им-
пульса в исходную точку, противоположного
знака противодействующую силу? способную
уравновесить приложенную силу; приложение
силы к одному из элементов отрицательного
цикла вызывает, по возвращении импульса
в исходную точку, того же знака содействую-
щую силу, слагающуюся с приложенной силой
и не способную, следовательно, уравновесить
ее. В задаче движения положительные циклы
представляют, таким образом, фактор проти-
водействия, в частности — положительной
инерции, отрицательные циклы — фактор со-
действия, в частности—
отрицательной инер-
ции. В задаче устойчи-
вости, в кибернетиче-
ских понятиях физио-
логий нервной деятель-
ности, положительные
циклы представляю?
фактор торможения,
отрицательные — фак-
тор возбуждения.
Поскольку торможение
является фактором устой-
чивости, возбуждение же—
фактором неустойчивости,
положительные циклы яв-
ляются фактором устойчиво-
сти, отрицательные — неус-
тойчивости. Это объясняет-
ся тем, что положительные
циклы и реализующие их
тормозящие связи являются
фактором информации, от-
рицательные циклы и реали-
зующие их возбуждающие
связи—фактором дезинфор-
мации. Тормозящие связи,
возвращающие сигнал в ис-
21
ходкую точку с противоположным знаком, означают
правильный учет и исправление ошибок — ‘информацию,
возбуждающие связи, возвращающие его с тем же
знаком, означают ошибочный учет и усугубление оши-
бок — дезинформацию. Об устойчивости как информа-
ционной проблеме сказано будет ниже.
Инвариантность знака цикла пояснена на
рис. 1-8 на примере системы 1-7,а. По сравне-
нию с рис. 1-7,а на рис. 1-8 изменено направ-
ление координатной оси 4-го элемента. Это
тождественное (связанное только с преобра-
зованием координат) преобразование системы
изменило знак всего пучка внешних связей,
сходящихся в этом элементе, но оставило не-
изменным знак всех циклов, составных и про-
стых — многочленных, двучленных и одночлен-
ных. Знак внутренних связей, поскольку они
образуют одночленные циклы, инвариантен
к системе координат.
Циклическая структура. Подобно тому как совокуп-
ность знаков связей (матрица знаков) образует связе-
вую структуру системы, совокупность знаков циклов
образует цик^ческую структуру. Так, циклическая
структура изолированных натуральных систем образу-
ется отрицательными двучленными и многочленными
циклами и положительными одночленными. Циклическая
структура гироскопических систем образуется положи-
тельными двучленными циклами и произвольного знака
одночленными. Циклическая структура сервосистем про-
извольна.
Связевой структурой определяются относительные,
циклической—абсолютные структурные свойства систе-
мы, локализация в ней факторов содействия и проти-
водействия, ' преобладание или уравновешивание этих
факторов. Она позволяет поэтому прямо судить о ха-
рактере реакций системы на внешние воздействия.
г) Структура нелинейных систем
Для построения структурных схем приня-
того выше вида существенна была не линей-
ность уравнений (1-1), а их аддитивная фор-
ма. Те же структурные схемы служат и для
нелинейных, но аддитивных уравнений. Пояс-
ним получение этих уравнений. Уравнения
(1-1) являются результатом линеаризации об-
щего вида уравнений движения:
(1-7)
(/, А = 1, 2,..., т),
где г — старший дифференциальный^ порядок,
s — старший интегральный. Если ограничить-
ся аналитическими (описываемыми аналити-
ческими функциями) непрерывными система-
ми (качественные механики разрывных система
рассмотрены будут в конце главы), то функ-
ции (1-7) могут быть разложены в ряд. Если
в этом разложении отсутствуют или могут
быть опущены неаддитивные члены с произве-
дениями переменных, уравнения (1-7) прини-
мают вид:
{+л'ЛЖ’г++•} +
+ +«"’г + • • }+
+ {с&Г’+ с‘А' [<'-=’)=+с™ + • • -I +
+ KVj”+Cto'r’l’+Сй'г + - }=0
(i, m — 1, 2, ..., ш). (1-8)
Линеаризация системы достигается отбра-
сыванием в каждой фигурной скобке всех чле-
нов, кроме первого. Однако и нелинеаризо-
ванная система (1-8) описывается теми же
структурными схемами, где каждая фигурная
скобка представляет определенного порядка
нелинейную динамическую связь. Первая
скобка представляет собой нелинейную связь
r-го порядка, вторая (г—1)-го порядка и т. д.
В отличие от линейных связей нелинейная
связь входит в матрицу знаков не одним эле-
ментом ее, а субматрицей — строкой. Так не-
линейная связь, описываемая первой фигур-
ной скобкой, входит в матрицу знаков суб-
матрицей — строкой знаков коэффициен-
тов Aik. Субматрица знаков коэффициен-
тов Aik представляет собой структурный пара-
метр этой нелинейной связи, субматрица мет-
рических значений этих коэффициентов —
метрический параметр ее. Во всем остальном
принятые выше структурные схемы относятся
в равной мере к линейным и к нелинейным
системам.
Мы рассмотрели динамическую структуру
систем, принадлежащих различным механи-
кам. Рассмотрим определяемую его реактив-
ность этих систем.
Б. Реактивность систем
а) Типы реактивности
В соответствии с выдвинутой выше кибернетической
программой исследования динамических систем, они
должны быть классифицированы прежде всего по типу
их реакций на внешние возмущения. Реактивность бо-
лее высоко организованных систем, «живых» в частно-
сти, принимает более сложные формы, являющиеся, од-
нако, развитием простых форм, имеющих место в дина-
мических системах.
Внешней силе приложенной к i-той точке си-
стемы, всегда отвечает, по постулату действия, внутрен-
няя сила реакции — равнодействующая реакций
всех сходящихся в этой точке динамических связей. На_
22
зовем, „соответственно, реактивность системы положи-
тельной, отрицательной, нулевой и бесконечно большой,
если реакции эти возникают при положительных (сов^
падающих по направлению с силой отрицатель-
ных, бесконечно больших и нулевых движениях х-той
точки, т. е. при тождественных, относительно диффе-
ренциального оператора р, соотношениях: у и тождест-
венно больше 0; уц тождественно меньше 0; у а ^0 *
Здесь у ц — передаточная функция канала i — i.
Для статики она переходит в статический коэффициент
влияния ац, а тождественные соотношения в простые
соотношения: <Хгг>0; (Хгг<0; ан = оо; агг==(0, соответст-
вующие^ положительной, отрицательной, бесконечно
большой (астатические системы) и нулевой (изодром-
ные системы) реактивностям.
В статике эти понятия о типах реактивности при-
обретают наиболее простое выражение: система обла-
дает положительной статическойu реактивностью в х-той
точке, если развиваемая ею в этой точке противодей-
ствующая сила возникает при перемещениях, совпадаю-
щих по направлению с действующей силой, и т. д. Ну-
левая статическая реактивность, имеющая место в аста-
тических системах, означает полную нейтрализацию, от-
сутствие противодействующих сил и следовательно, по
постулату действия, невозможность приложения дейст-
вующих сил. Астатичность предстает здесь в наиболее
общем свете — как статическая нейтральность, неспо-
собность системы быть объектом приложения сил.
Рассмотрим общую связь между структурой систем
и их реактивностью. Заметим прежде всего, что поло-
жительные и отрицательные циклы являются соответ-
ственно факторами положительной и отрицательной
реактивностей. Действительно, вызванный силой, прило-
женной к некоторой точке цикла, импульс возвращает-
ся в эту точку с обратным знаком, в виде противодей-
ствующей силы: в положительном цикле—при поло-
жительных движениях этой точки, в отрицательном цик-
ле— при отрицательных движениях. Нулевая реактив-
ность (нейтральность) может быть достигнута, очевид-
но,' только взаимной нейтрализацией обоих факторов.
Бесконечно большая реактивность связана с нулевой
реактивностью рассматриваемым ниже принципом ста-
тической двойственности. Рассмотрим детальнее эти ти-
пы реактивностей и связь их со структурой системы.
а) Нейтральность
В системах с неоднородной циклической структу-
рой, содержащих циклы обоих знаков . (циклическая не-
однородность), представленные этими циклами факто-
ры содействия и противодействия могут взаимно ней-
трализоваться. Это приводит к нейтральным, с нейтра-
лизованным, отсутствующим механизмом противодейст-
вия, системам, не способным, по постулату действия,
быть объектом внешних воздействий. Примером таких
систем являются в статике астатические системы. Ней-
тральность может быть достигнута и в однородных по
циклической структуре системах, содержащих одни от-
рицательные циклы (отрицательная циклическая одно-
родность). Возможность эта определяется тем, что в
четном числе отрицательные циклы являются таким же
фактором противодействия, каким в любом, четном или
нечетном числе являются .положительные циклы. В си-
стемах с положительной циклической однородностью
(составленных одними положительными циклами) ней-
тральность невозможна. Отсюда вытекает теорема 1-1.
-(теорема нейтральности): необходимым ус-
ловием нейтральности является циклическая неоднород-
ность либо отрицательная циклическая однородность.
Условие это, указывая лишь общие структурные
условия нейтральности, является только- необходимым.
Его следует дополнить еще локальными структурными
условиями и общими и локальными метрическими ус-
ловиями. Необходимым и достаточным условием общей
нейтральности, рассматриваемым ниже, является тож-
дественное (относительно р) равенство нулю всех пе-
Д г г
редаточных функций уц = . Эти передаточные функ-
ции и их каналы i—i назовем главными, поскольку в
числителе их стоят главные миноры стоящего в знаме-
нателе характеристического определителя. Все осталь-
ные передаточные функции ytk и их каналы i—k назо-
вем, по этому же признаку, неглавными. Кроме общей
нейтральности, возможна локальная нейтральность си-
стемы в отдельных главных каналах. Общей нейтраль-
ностью системы является локальная нейтральность ее
во всех главных каналах. Условием общей статической
нейтральности (астатичности) явится соответственно
локальная статическая нейтральность всех главных ка-
налов — равенство нулю всех коэффициентов влияния:
Ди * .
, где Дс — статический определитель системы,
-^с
статический остаток характеристического определителя,
возникающий после снятия в последнем всех членов
выше нулевого порядка. Поскольку достаточным усло-
вием астатичности системы является нейтральность од-
ного хотя бы канала, главного или неглавного, стати-
ческая нейтральность является специальным случаем
астатичности. Аналогично, динамическая нейтральность
является специальным случаем рассматриваемой ниже
адинамичности,—динамического свойства, аналогичного
астатичности. Астатичность достигается равенством ну-
лю статического определителя системы, а динамичность—
тождественным равенством нулю характеристического
определителя.
Астатичность. Теоремой нейтральности ука-
зываются структурные условия астатичности. Условия
эти реализованы на рис. 1-9, где получены простейшие,
одноциклические (с одним только сложным циклом)
астатические сервосистемы, полученные из открытой си-
стемы на рис. 1-5 с помощью положительных (нижняя
строка рисунка) или отрицательных (верхняя строка
рисунка) обратных связей. Чтобы оперировать в даль-
нейшем только абсолютными свойствами систем, назо-
вем внешние обратные и внутренние связи тормозящими
или возбуждающими, в зависимости от знака, положи-
тельного или отрицательного, образуемых ими много-
членных и одночленных циклов. В верхней строке ри-^
сунка возбуждающим являются только внешние обрат-
ные связи, в нижней—только внутренние связи.
Астатичность представляет собой смешанное свой-
ство — зависящее и от структуры их и от метрики. Си-
стемы могут быть поэтому астатичны в определенной
области значений метрических параметров — структур-
но астатичны, либо во всем пространстве метрических
параметров — безусловно астатичны. Структурная и бе-
зусловная астатичность являются структурными под*
свойствами смешанного, зависящего от структуры и от
метрики системы, свойства астатичности. То же относит-
ся и к остальным смешанным свойствам — структурная
и безусловная нейтральность, устойчивость, апериодич-
ность и т. д. являются структурными подсвойствами
смешанных свойств нейтральности, устойчивости, апе-
риодичности и т. д. Метрическими подсвойствами этих
свойств являются метрические соотношения между па-
раметрами системы, реализующие эти свойства. Безус-
ловная астатичность выражается тождественным ра-
венством нулю статического определителя, структурная
астатичность — нетождественным равенством (рис. 1-9).
Та же связь между безусловностью и структурностью
и тождественным и нетождественным выполнением кри-
териев имеет место для всех смешанных свойств, ч
23
Положительный
статизм
Нулевой статизм
(астатизм)
Отрицательный
статизм
а3)
а>)
О -
77777^7777777777777777^777777
Рис. 1-9. Статические и
астатические системы.
В системах на рис. 1-9 наглядно дано столкновение
двух начал — содействующего и противодействующего.
В системах верхней строки носителем первого начала
являются сложные циклы, второго — элементарные. В
системах второй строки выполнена противоположная ло-
кализация этих начал — носителем первого являются
элементарные, носителем второго — сложные циклы. В
системах левого столбца преобладает противодействую-
щее начало и статический определитель положителен
поэтому. В этих системах с положительной статично-
24
стью статические перемещения совпадают по знаку
(знак этот указан внутри кружков — элементов на
структурных схемах) с вызвавшими их силами. В си-
стемах правого столбца побеждает* содействующее на-
чало. В этих системах с отрицательным статизмом знак
статических перемещений противоположен знаку сил.
В обоих случаях, в соответствии с постулатом действия,
вызванные этими перемещениями реакции системы рав-
ны и противоположны действующим силам. В системах
среднего столбца оба начала взаимно нейтрализуются
и системы эти нейтральны, астатичны. Они не могут
поэтому явиться объектом внешних сил, а могут быть
лишь, в силу рассматриваемой ниже статической двой-
ственности, объектом перемещений (рис. 1-9).
Астатические системы первой строки назовем мину-
састатическими, второй строки — плю састатическими, в
соответствии со знакам их сложного цикла.
В. Реактивность систем
в) Положительная и отрицательная
' реактивности
В положительно статических системах рав-
нопротивоположная внешней силе реакция
системы достигается при положительном (сов-
падающем по направлению с силой) переме-
щении. Это свойство назовем положительной
статической реактивностью. Отрицательно
статические системы обладают отрицательной
статической реактивностью. Астатические си-
стемы обладают нулевой статической реактив-
ностью.
Статическая реактивность системы тем вы-
ше, чем меньшими статическими перемеще-
ниями ее вызываются статические реакции,
уравновешивающие внешние нагрузки. Для уп-
ругих систем синонимом реактивности являет-
ся жесткость — величина, обратная податли-
вости.
Астатические системы обладают нулевой
статической реактивностью — они не способ-
ны противопоставить какие-либо реакции
внешним силам.
Динамическая реактивность.Ана-
логично понятию о статической реактивности
возникает более общее понятие о динамиче-
ской реактивности, определяемой динамиче-
ской реакцией системы на внешние силы. Ди-
намическая реактивность также может быть
положительной, отрицательной и нулевой. Си-
стемы с нулевой динамической реактивностью
назовем динамически нейтральными. Подобно
тому как статическая нейтральность является
специальным случаем астатичности, динами-
ческая нейтральность является частным слу-
чаем адинамичности.
Адинамичность не может быть реализова-
на в классической механике, но легко реали-
зуется в односторонней механике. Вопрос этот
подробно рассматривается ниже.
Динамическая реактивность явится опре-
деляющим признаком классификации меха-
ник.
1-1-3. Дедуктивные механики
А. Логическая структура
а) Элементы, взаимодействия, системы
Определить некоторую механику означа-
ет — задать структуру и метрику ее систем..
В классической механике задача эта распа-
дается на две независимые части: L) задание
структуры и метрики элементов, 2) задание
структуры и метрики взаимодействия элемен-
тов. Первая из этих задач образует механику
элементов (механику материальной точки),,
обе в совокупности — механику системы.
Взаимодействие систем определяется здесь
настолько простым законом, что нет нужды
выделять его в особую механику взаимодей-
ствий.
Напротив, односторонняя механика может
порождать механики с настолько сложным
взаимодействием, что его следует выделить,
в отдельную механику взаимодействия. Объ-
ектом этой механики должны явиться обра-
зуемые внутренними силами взаимодействия
системы внутренние подсистемы ее. Механи-
ка взаимодействия явится, таким образом,,
механикой определенного вида систем. Поня-
тие механика употребляется здесь в обычном
своем значении — механики некоторых си-
стем. Исследование динамических систем раз-
бивается этим на три этапа: 1) механику эле-
ментов, 2) механику взаимодействий, 3) ме-
ханику систем. Первая определяется специ-
альным постулатом элементов, вторая—спе-
циальным постулатом взаимодействия,
третья — совокупностью их.
б) Связанные/ полу связанные и несвязанные-
механики
Такое деление возможно, однако, лишь
в тех механиках, где структура и метрика
элементов независимы от структуры и метри-
ки взаимодействий. Такие системы, взаимо-
действия и механики назовем несвязанными.
В односторонней механике легко синтезируют-
ся связанные системы — с элементами, зави-
сящими от взаимодействий, а также полусвя-
занные системы — несвязанные системы со
связанными внутренними подсистемами. К
числу последних систем принадлежат и на-
туральные системы (рис. 1-10). Системами
этйми образуются связанные и полусвязанные
механики.
На рис. 1-10,0! повторена изолированная
натуральная система рис. 1-6. На рис. 1-10, яо,
2S
ApsO Aq — O
Рис. ЫО. Структурные единицы натуральных систем.
аз из этой кинетостатической системы выделе-
ны последовательно кинетическая и статическая
внутренние подсистемы. Для этого на рис. а2
сняты старшие внутренние связи —' элементы,
а на рис. а3 — все нестатические связи. Сис-
тема а^ полусвязана — ее положительные 2-го
порядка элементы независимы от представ-
ленного внутренней подсистемой а2 их взаи-
модействия, само же взаимодействие (рис. а2)
представляет собой связанную систему, по-
скольку элементарная структура связана
в ней со сложной структурой. Связь эта явст-
вует из рис. б2: положительные 1-го порядка
элементы внутренней подсистемы — старшие
внутренние связи — совпадают по порядку
и противоположны по знаку старшим внеш-
ним связям ее.
Связь метрик показана во второй строке
рисунка. Для этого, каждая из внутренних
связей некрайних элементов метрически рас-
членена на две составляющие, пропорцио-
нальные соответственно жесткостям и сопро-
тивлениям левых и правых пружин и катарак-
тов. В разветвленных системах, где в некото-
рых элементах сходится не по две, как в ряд-
ных системах на рис. 1-10, а по нескольку
пружин и катарактов, пришлось бы расчле-
нить внутренние связи этих элементов на не-
сколько составляющих. В крайних элементах
и рядных и разветвленных систем сходится
по одной пружине и катаракту, и здесь нет
нужды в метрическом членении. Легко усмот-
реть, строго это доказывается ниже, что мет-
рический параметр каждой из этих состав-
ляющих внутренних связей равен одинаковым
метрическим параметрам обеих сходящихся
в элементе внешних связей того же порядка.
Это выявляется расчленением внутренних под-
систем на тождественные структурные группы
(рис. в2, в3). Эти неделимые далее атомы
структур назовем структурными единицами.
Их наложением (на рис. в2 и в3 введен специ-
альный символ наложения — квадратная скоб-
ка) образуется все многообразие структур.
Ниже доказывается теорема 1-II: в каждой
структурной единице изолированных нату-
ральных систем параметры всех связей одина-
кового порядка равны (метрическая однород-
ность). В наиболее простом виде все эти соот-
ношения предстают в статических подсистемах
(рис. а3, б3, в3).
Структурные единицы описывают струк-
турное содержание специальных постулатов
взаимодействия и для сколько-нибудь сложно-
го взаимодействия являются единственным
возможным способом описания. Метрическое
содержание должно быть дано дополнительно,
как дано оно для натуральных систем метри-
ческой однородностью. Повторяемость, тож-
дественность этих единиц — следствие тожде-
ственных для всех элементов данной механики
законов взаимодействия. Все связи, нарушаю-
щие эту тождественность, по одному этому не
входят в состав внутренних подсистем, в со-
став связей взаимодействия, а их реакции —
в состав внутренних сил системы. Повторяе-
мость эта представляет собой необходимое, но
недостаточное условие принадлежности к
•26
-внутренним силам системы. Так,
в гироскопической системе на | |
рис. 1-4 для внутренних связей §
1-го порядка отсутствует повто- g
ряемость, и реакции их представ- В
ляют поэтому внешние силы си-
стемы. Внешними силами яв- §
ляются здесь, однако, и реакции |
правильно повторяющихся вну- J §
тренних связей нулевого поряд- 5 $
ка. Необходимые и достаточные §
.признаки деления в данной меха-
нике сил на внешние и внутрен- <ь
ние силы системы даются спе- §
-циальными постулатами взаимо- з
действия этой механики. § g
Односторонняя механика не
ограничена какими-либо специ- *
.альными постулатами взаимодей-
ствия, и здесь поэтому структур-
ные единицы отсутствуют. Одно-
сторонняя связь — неделимая да-
лее единица этой общей ме-
ханики и всех структурных единиц
специ-
альных механик — не повторяется правильно
в общего вида односторонних системах и не
представляет поэтому структурной единицы.
в) Связанные механики
Связанные механики могут быть построе-
ны пока только синтетически, средствами сер-
восистем, — существующие механики все яв-
ляются несвязанными или полусвязанными.
Из односторонней механики может быть эти-
ми средствами выделено множество связан-
ных механик. Одна из них дана на рис. 1-11.
Структура элементов связана здесь со струк-
турой взаимодействий одинаковым знаком од-
ночленного и двучленного циклов и одинако-
вым дифференциальным порядком этих цик-
лов (порядок цикла — сумма порядков его
связей). Механика этих систем является'свя-
занной механикой. Связанность структуры
означает, что элементы здесь расчленяются
в отличие от несвязанной структуры натураль-
ных систем. Здесь внутренняя подсистема сов-
падает с самой системой и сама система рас-
падается на структурные единицы.
Системы первой строки рис. 1-10 находят-
ся в отношении тождества к системам 2-й
строки, последние же — в отношении нало-
жения к системам 3-й строки. На рисунке си-
стемы соединены символами этих отношений:
•обычным символом тождества и вновь вво-
димым символом наложения — квадратной
скобкой.
Изолированная связанная внутренняя статическая
сервосистема подсистема
III
при р>0
Рис. 1-11. Структурные единицы сервосистем.
г) Полу связанные механики
Натуральные системы представляют собой
полусвязанные системы. Связанность внутрен-
них подсистем здесь прямо подчинена задаче
взаимной нейтрализации противодействующе-
го и содействующего начал. Носителями пер-
вого являются здесь положительные одно-
членные циклы самодействий, носителями вто-
рого — отрицательные двучленные циклы
взаимодействий. Структурная и метрическая
связь тех и других такова в натуральных си-
стемах, что оба начала нейтрализуются, ха-
рактеристические определители внутренних
подсистем натуральных систем и их структур-
ных единиц тождественно равны нулю. Тео-
рема 1-Ш. Внутренние подсистемы натураль-
ных систем нейтральны. Следствие I. Изо-
лированные натуральные системы астатичны.
Системы с нейтральными внутренними подси-
стемами и их механики назовем полунейтраль-
ными. Натуральные системы и классическая
их механика являются полунейтральными.
Нейтральность внутренних подсистем в на-
туральных системах — определяющее свойст-
во этих систем — является прямым следстви-
ем постулата противодействия, обращающего
в нуль сумму внутренних сил системы. Посту-
лат противодействия — специальный посту-
лат взаимодействия классической механики—
мог бы быть задан в более общей, кибернети-
ческой форме как постулат полунейтрально-
сти. Выражаясь парадоксально, можно ска-
зать, что классическая механика в силу имен-
но своего постулата противодействия являет-
27
ся механикой систем, наименее противодей-
ствующих внешним силам, — противодейст-
вующих им лишь силами инерции своих эле-
ментов и не противодействующих — внутрен-
ними силами системы. Действие постулата
противодействия внутри системы полностью
парализует способность внутренних сил систе-
мы противодействовать внешним силам. Это,
таким образом, механика систем с наиболее
пассивной, слабой структурой. Специфиче-
ским ее феноменом является полунейтраль-
ность, в статике переходящая в нейтраль-
ность— в астатичность .изолированных систем.
Астатичность— специфический феномен клас-
сической механики.
д) Несвязанные механики
Примером несвязанных систем с несвязан-
ными внутренними подсистемами являются
гироскопические системы. Механика их яв-
ляется несвязанной механикой. Это показано
на рис. 1-12 на примере системы рис. 1-4. На
рис. 1-4 система эта не изолирована — внеш-
ними силами являются здесь, как пояснено
было выше, реакции всех нестарших внутрен-
них связей. На рис. 1-12 связи эти сняты,
и этим получена изолированная система. Ни
структура, ни метрика элементов ее не связа-
ны со структурой и метрикой взаимодействия.
Элементы внутренних подсистем лишены ка-
ких-либо внутренних связей (абстрактные
элементы) и также, следовательно, не связа-
ны с взаимодействием. Структурная единица
кинетической внутренней подсистемы (стати-
ческая внутренняя * подсистема отсутствует
здесь, за отсутствием статических связей) об-
разована одними внешними связями. Это яв-
ляется общим свойством несвязанных сис-
тем — поскольку структура элемента незави-
сима в них от структуры взаимодействия, эле-
менты не могут входить в структуру взаимо-
действия — в структурные единицы.
Гироскопические системы (как и натураль-
ные) и их внутренние подсистемы (в отличие
от натуральных) структурно, т. е. при всех
Изолированная гироскопическая Внутренняя кинетическая
система подсистема
Рис. 1-12. Структурные единицы гироскопических систем.
значениях метрических параметров, не ней-
тральны. Это в данном случае результат не-
связанности этих систем. Нейтральность в не-
связанных внутренних подсистемах может
быть достигнута взаимной нейтрализацией
многочленных циклов. Это, однако, возможно
лишь в более сложных структурах. При всей
внешней сложности связанные структуры
внутренних подсистем натуральных систем
простейшим образом решают задачу ней-
трализации.
е) Внутренние и внешние силы систем
Внутренние подсистемы образуются внут-
ренними силами системы. Рассмотрим деталь-
нее деление сил на внутренние и внешние. Де-
ление это является специальным для каждой
механики и могло бы послужить специальным
постулатом взаимодействия ее. Существует,
однако, предшествующее этим специальным
делениям общее логическое деление: внутрен-
ними силами динамических систем являются
силы взаимодействия элементов ее — силы,
имеющие субъектом и объектом элементы си-
стемы. Это общее определение принимает раз-
личное конкретное содержание в различных
механиках вместе с различным конкретным
содержанием, получаемым в них понятиями—
субъект и объект силы. Наиболее общий
смысл понятия эти получают в односторонней
механике, где воздействующим элементом,
субъектом силы, является элемент, чьим дви-
жением сила определяется — от чьей коорди-
наты она функционально зависит, воздейст-
вуемым элементом, объектом силы, — эле-
мент, чье движение силой определяется, —
в чье уравнение она входит. Внутренние силы
следует рассматривать как реакции внутрен-
них связей системы, связей между элемента-
ми ее, внешние силы — как реакции внешних
связей системы, связей между системой и сре-
дой. Понятие — сила является здесь вторич-
ным и необязательным, однако весьма полез-
ным, — внешние силы заменяют воздействие
рассекаемых при выделении системы внешних
связей, сохраняя этим в соответствии
с логическим законом тождества тож-
дество рассматриваемых объектов.
Понятия «внутренние и внешние
связи системы» видоизменяются в раз-
личных механиках вместе с понятия-
ми «внутренние и внешние силы». Так,
самодействия, представляющие в од-
носторонней механике, в качестве вну-
тренних связей элементарных под-
систем, внутренние связи систем, в
классической и гироскопической меха-
щжах представляют собой внешние
28
связи системы, хотя и зависящие от ее
координат. Это вытекает из того, что
в первой механике реакции этих связей яв-
ляются внутренними силами системы, в двух
последних — внешними. Специальное деление
на внутренние и внешние силы определяется"
в каждой механике ее специальным постула-
том взаимодействия. Так, в классической ме-
ханике деление. сил на внутренние и внешние
силы системы определяется постулатом про-
тиводействия. Структурные единицы, посколь-
ку они, по определению, принадлежат внут-
ренним подсистемам, не могут содержать
внешних сил.
Делением сил на внутренние и внешние си-
лы системы определяется деление самих си-
стем на изолированные и неизолированные.
Первые не подвержены действию внешних
в данной механике сил, вторые — подвержены.
Общим для всех механик является вводимое
в классической механике деление систем на
автономные и неавтономные. В первых все
действующие на систему силы, внутренние и
внешние, зависят от координат системы, во
вторых — не все. В односторонней механике,
и только в ней, понятия «автономные и неав-
тономные системы» совпадают соответственно
с понятиями «изолированные и неизолирован-
ные системы». Так, натуральные системы на
рис. 1-1, 1-2, 1-3 являются неизолированными
в классической механике. Первые две являют-
ся при этом и не автономными, третья — авто-
номной. В односторонней механике первые
две сохраняют поэтому неизолированность,
третья же становится изолированной.
Внутренние подсистемы могут не разла-
гаться на более простые единицы. В этом слу-
чае система сама является своей несобствен-
ной структурной единицей.
Рассмотрим последовательно механику
элементов, взаимодействий и систем.
Б. Механика элементов
Механика элементов возникает для несвя-
занных и полусвязанных систем, где только
и могут элементы существовать изолированно.
В классической механике механикой элемен-
тов является механика материальной точки —
положительного элемента 2-го порядка.
Структура и метрика элементов могут быть
ничем не ограничены—это приводит к наибо-
лее общей механике элементов — или ограни-
чены какими-либо специальными постулатами
элементов — это приводит к специальным ме-
Пол о ж и те л ь н ы е Отрицательные
j 000889988000
? а/) б,) в,) г) д,) ег) Е,) Д,) Г,) в,) Б,) А,)
Рис. 1-13. Элементы и элементарные системы.
29
ханикам элементов. Так, структура элементов
классической механики ограничена постула-
том положительности и второпорядковости их
элементов — масс. Каждая специальная меха-
ника определяется, таким образом, специаль-
ным постулатом элементов и специальным по-
стулатом взаимодействия. Оба постулата в со-
вокупности определяют механику системы.
Для несвязанных и полусвязанных механик
они независимы. В односторонней механике
структура и метрика элементов так же неогра-
ниченна, как и систем, — здесь отсутствуют
оба специальных постулата. Элементы могут
обладать здесь произвольным знаком и по-
рядком и произвольной метрикой. Это приво-
дит к рассматриваемой ниже наиболее общей
механике элементов. Рассмотрим кратко, опе-
режая дальнейшее детальное изложение, эту
наиболее общую механику элементов.
а) Механика элементов
Элементами системы названы были ранее
обобщенные координаты. Определение это,
однако, неполно. В нем отсутствуют какие-
либо определяющие свойства элемента. Таким
определяющим свойством элемента является
в механике реакция его на внешние воздей-
ствия— способ развиваемого им противодей-
действия действующим силам: элементом яв-
ляется обобщенная координата с присущим ей
способом противодействия. В классической
механике способ этот единообразен — проти-
водействие пропорционально ускорению и
противоположно ему по знаку. Это соответст-
вует положительным элементам (массам) вто-
рого порядка и ускорениям, совпадающим по
знаку с действующей силой. В односторонней
механике могут быть синтезируемы различные
способы противодействия, различные, произ-
вольного порядка и знака элементы.
Элементы односторонней механики
(рис. 1-13) могут обладать произвольным по-
рядком и знаком потому уже, что они пред-
ставляют собой обращенные внутрь элемента
односторонние действия и так же свободны по
структуре, как эти последние. Порядок их
определяется порядком этих односторонних
действий, знак — способом обращения внутрь
элемента этих односторонних действий, зна-
ком замыкания их в одночленные циклы —
в положительные или в отрицательные.
Располагая простейшей, неделимой далее
структурной составляющей — односторонним
действием, односторонняя механика синтези-
рует произвольной структуры самодействия—
элементы и взаимодействия — сложные си-'
стемы.
30
Движение элемента р-го порядка, с поло-
жительным или отрицательным параметром
(гипермассой) р-го порядка описывается
уравнением
Д(р)9(р) = (2. (1-9)
Гиперускорение р-го порядка этого эле-
мента равно:
<’-ю>
Оно положительно—совпадает по направле-
нию с силой при положительной гипермас-
се и отрицательно — противоположно на-
правлению силы при отрицательной гипермас-
се. Соответственно элемент обладает положи-
тельной или отрицательной реактивностью.
Нулевой реактивностью обладают только аб-
страктные элементы. Такие нейтральные эле-
менты могут быть получены наложением от-
рицательного элемента на положительный —
тем же общим способом взаимной нейтрализа-
ции противодействующего и содействующего
начал, которым получены были выше
(рис. 1-9) сложные статически нейтральные
системы. Все эти необычные для классической
механики понятия будут материализованы
в следующей главе.
Уравнение (1-10) представляет обобщен-
ный 2-й закон классической механики. В фор-
ме (1-9) оно представляет динамическую ин-
терпретацию логического постулата действия.
Кинетический член левой части уравнения
(1-9) представляет собой объект действия —
противодействующую силу инерции, сила Q
в правой части — субъект действия—дей-
ствующую силу. Перенося кинетический член
направо:
Q_Л^р = 0, (1-11)
мы условно, кинетостатически, переносим си-
лу инерции с элемента-объекта ее на элемент-
субъект, условно переводим ее в категорию
самодействий. В отличие от всех остальных
самодействий сила инерции является самодей-
ствием лишь в этом условном, кинетостатиче-
ском, смысле.
б) Механика элементарных систем
Связывание элементов — старших внутрен-
них связей внутренними связями более низко-
го порядка — собственно связями образует
уже одноэлементные сйстемы — элементарные
системы (рис. 1-13). Реакция элемента — стар-
шей внутренней связи представляет собой
противодействующую силу инерции, реакции
всех остальных внутренних связей элементар-
ной системы — действующие силы. Внутренни-
ми силами элементарных систем являются са-
модействия — односторонние действия. По<
скольку такие действия возможны только
в односторонней механике, только в* ней эле-
ментарные системы могут быть изолированны-
ми системами (средняя строка рисунка). В
тех специальных механиках, где односторон-
ние действия невозможны, самодействия явля-
ются внешними силами, зависящими от коор-
динат системы—зависимыми внешними сила-
ми (нижняя строка рисунка), сами же элемен-
тарные силы вырождаются в элементы. По
этой только причине механика элементарных
систем, принадлежащая механике систем,
включена здесь в механику элементов.
Не следует, разумеется, смешивать элемен-
тарные подсистемы со структурными едини-
цами. Элементарные подсистемы являются
одноэлементными подсистемами как самих
многоэлементных (сложных) систем, так и их
внутренних подсистем и структурных единиц,
также многоэлементных. Структурные едини-
цы образованы только внутренними силами
системы, элементарные системы только в од-
носторонней механике образованы внутренни-
ми силами системы, в классической же—внеш-
ними.
Отрицательные элементы и элементарные
системы правой части рисунка получены из
положительных — левой части инверсией, из-
менением знаков всех связей. Это структурное
преобразование является эквивалентным (на
рисунке введен знак эквивалентности — двой-
ная стрелка) в том смысле, что не изменяет
характеристического уравнения системы, а с
ним—и общих свойств ее — устойчивости,
апериодичности и т. д. Оно, однако, не являет-
ся формальным тождественным преобразова-
нием — преобразованием координат, посколь-
ку знак одночленных циклов инвариантен
к системе координат. Это содержательное пре-
образование элементов, при неизменных об-
щих свойствах системы изменяющее локаль-
ные их свойства. Таким локальным свойством
является, в частности, гиперускорение, знак
которого изменяется инверсией. Эта связь
эквивалентных преобразований с общими и ло-
кальными свойствами системы подробно рас-
сматривается ниже.
Тем же общим способом, что и для слож-
ных систем (рис. 1-10, 1-11, 1-12), выделяют-
ся из элементарных систем кинетическая и
статическая внутренние подсистемы (рис.
1-14). Структурные единицы совпадают здесь
с самими системами.
В элементарных системах невозможна вза-
имная нейтрализация связей — элементарные
системы структурно не нейтральны.
Рис. 1-14. Реактивность элементарных систем.
В. Механика взаимодействий
Механикой взаимодействий является меха-
ника внутренних подсистем — кинетической
(динамика взаимодействий) и статической
(статика взаимодействий). Общая реактив-
ность сложной системы в некотором ее эле-
менте определяется кинетостатической реак-
цией этого элемента (силой инерции его) и
кинетической и статической реакциями слож-
ных внутренних, подсистем в этом элементе.
Если эти последние реакции равны нулю, —
если внутренние подсистемы нейтральны
в этом элементе (нейтральность в данном эле-
менте — локальная нейтральность, представ-
ляет собой локальное свойство системы в этом
элементе; необходимым, но не достаточным
условием его является рассмотренная выше
общая нейтральность — общее свойство систе-
мы), как это имеет место в статике у астати-
ческих внутренних подсистем, общая реакция
равна реакции отдельно взятого элемента. Ло-
кальная реактивность внутренней подсистемы
в данном элементе, совпадающая по знаку
с реактивностью элемента (знак последней
совпадает со знаком элемента), слагается
с ней, несовпадающая — вычитается. Прибе-
гая к грубой аналогии, можно было бы
сравнить внутреннюю подсистему со скелетом
системы. Системы с нейтральными внутренни-
ми подсистемами, кинетической или статиче-
ской, лишены соответственно кинетического
или статического скелетов, и реактивность их
базируется только на собственной реактивно-
сти элементов. Соединение элементов в такую
систему ничего не добавляет к реактивно-
сти их.
Реактивность в каждом элементе системы
слагается таким образом из реактивности это-
го отдельно взятого элемента и локальной ре-
активности в нем внутренних, кинетической и
статической, подсистем. Это и позволяет рас-
членить механику системы на механику эле-
ментов и механику взаимодействий. Статика
же изолированных систем прямо сводится,
31
как показано было выше, к механике стати-
ческих взаимодействий, механике статических
внутренних подсистем. Механикой взаимодей-
ствий полностью определяется статическая ре-
активность систем, и в определенной мере —
динамическая реактивность.
а) Связанные взаимодействия
Классическое взаимодействие.
.На рис. 1-15 рассмотрена механика взаимодей-
ствия натуральных систем классической меха-
ники — их реактивность. Общая и кинетиче-
ская реактивности системы в /-том элементе
определяются передаточными функциями*.
ун = статическая реактивность — коэф-
фициентами влияния: ац= т11, где Др и
Ая—соответственно характеристический и ста-
тический определители, Ан — их главные ми-
норы. Выражения эти даны на рисунке в ци-
клической форме:' структурная схема может
быть рассматриваема как циклическая форма
характеристического определителя системы;
циклическая форма главного минора i-го эле-
мента получается отбрасыванием всех сходя-
щихся в элементе связей (Л. 30, 36, 87]. Опре-
делителем определяются общие свойства си-
стемы, минором — локальные, отнесенные к
отдельным элементам, подсвойства этих об-
щих свойств. Передаточные функции пред-
ставляют собой локальные свойства системы
в данном элементе, — величины, обратные ло-
кальным реактивностям систем в этих эле-
ментах.
Из этой циклической формы легко усмат-
тривается безусловно положительная локаль-
ная реактивность в элементе ! системы и без-
условная локальная нейтральность в этом эле-
менте кинетической и статической внутренних
ее подсистем. В натуральных системах локаль-
ная нейтральность имеет место во всех эле-
ментах внутренней подсистемы (равномерная
нейтральность). Локальная нейтральность обу-
словлена здесь тем, что числитель уш и aik
больше нуля при равном нулю знаменателе
(общая нейтральность). Превышение это и
равенство нетождественны относительно пара-
метров системы. Это означает, что свойства
эти не безусловны, а лишь структурны. Одна-
ко благодаря метрической однородности на-
туральных' систем они всегда в них выполня-
ются, т. е. для них — безусловны.
В случае равенства нулю и числителя и
знаменателя возникает неопределенная ло-
кальная нейтральность Оба локальных свой-
ства — определенная и неопределенная ло-
кальные нейтральности являются локальными
подсвойствами общего свойства нейтрально-
сти (эю отношение свойств подробно рассмот-
рено ниже). Внутренние подсистемы нату-
ральных систем во всех элементах обладают
именно определенной локальной нейтрально-
стью и в этом смысле равномерно нейтральны
(слово определенно здесь и в дальнейшем
опускается).
Теорема 1 - IV. Внутренние подсистемы
натуральных систем равномерно безусловно
нейтральны. Следствие I. Изолированные
натуральные системы равномерно безусловно
астатичны.
Неклассические в заимодей-
ствия. Рассмотрим неклассические связан-
ные механики, положив в основу их класси-
фикаций тот же кибернетический критерий
реактивности. Механики систем с положи-
Изрлиробанная натуральная Внутренние подсистемы,
система кинетическая статическая
Рис. 1-15. Реактивность натуральных систем.
32
тельной, нулевой и отрица-
тельной реактивностями и
их динамические структуры ” |
назовем соответственно по-
ложительными, нейтральными g
и отрицательными механиками -|
и структурами. На рис. 1-16^
проведена по этому признаку^/
классификация двусторонних
внутренних подсистем и дву-
сторонних механик взаимо-
действия. Здесь возможны
одна положительная, одна от-
рицательная и три нейтраль-
ные механики — одна плюс-
нейтральная и две минусней-
тралъные (названия эти даны
нулевым механикам, как вы-
ше — астатическим системам,
по знаку сложных циклов их
Динамическух структур). В ле-
вом столбце рис. 1-16 даны
динамические структуры этих0^ f-
механик, в правом столбце —
структурные единицы. Цикли-
ческим развертыванием (Л. 36,
87] этих структурных единиц на рис. 1-16
доказано, что характеристический опреде-
литель структурных единиц положитель-
ных структур тождественно больше нуля,
отрицательных тождественно меньше нуля,
нейтральных — нетождественно равен нулю.
Это означает, что положительные и от-
рицательные структуры на рис. 1-16 безуслов-
но положительны и безусловно отрицательны,
нейтральные же только структурно нейтраль-
ны. В иных положительных, отрицательных и
нейтральных структурах эти структурные со-
отношения могут быть и иными. В принципе
положительность, отрицательность и нейтраль-
ность могут быть как структурными, так и без-
условными.
На рис. 1-17 даны трехсторонние системы
и трехсторонние механики взаимодействия.
Ввиду большого числа возможных трехсто-
ронних механик на рисунке приведены лишь
две нейтральные механики: плюснейтральная
и минуснейтральная. В левом столбце даны
нулевые нейтральные структуры и механики—
с наименьшим числом связей, при котором еще
возможна нейтральность. Это наименьшее
число связей Мг равно здесь 2m, где m —
число элементов структуры. В правом столбце
даны ненулевые, с избытком связей, структу-
ры и механики. Разность Vr=-Mr—Nr, где
Nr—наличное число связей, назовем числом
степеней реактивности.
Достаточным, но не необходимым метри-
Рис. 1-16. Связанные двусторонние механики.
ческим условием нейтральности нулевых
структурно нейтральных систем рис. 1-15 и
1-16 является метрическая однородность, для
ненулевых систем -необходимым, но недоста-
точным условием нейтральности является мет-
рическая нейтральность.
Структуры и механики на рис. 1-16 и 1-17
различаются только локализацией противо-
действующего и содействующего начал —
в одних механиках, в классической—в частно-
сти, первое локализовано в элементарных
циклах, второе — в сложных, в других имеет
место противоположная локализация.
Каждая из механик однозначно определя-
ется своей структурной единицей. Сложные
структуры этой механики могут получаться
одним лишь способом — наложением струк-
турных единиц, подчиняющимся теореме
наложения: наложение только положи-
тельных, только отрицательных и только нейт-
ральных структурных единиц образует соот-
ветственно положительные, отрицательные и
нейтральные структуры. Теорема эта позволи-
ла ограничить доказательства для систем на
рис. 1-16 доказательствами для их структур-
ных единиц. По теореме наложения доказа-
тельства эти распространяются на все слож-
ные структуры данной механики.
Ниже показано будет, что все изолирован-
ные натуральные системы могут быть пред-
ставлены в виде структур средней строки
рис. 1-16. Механика этих систем—классиче-
3 И. И. Гальперин.
33
Рис. 1-17. 'Связанные трехсторонние механики.
ская механика — является минуснейтральной
двусторонней механикой. Этим достаточно
очерчивается узкоспециальное место этой ме-
ханики в семействе дедуктивных механик. Ме-
сто это еще сужается тем, что классифика-
ция на рис. 1-16 охватывает только двусторон-
ние системы со связанной внутренней струк-
турой и не охватывает поэтому гироскопиче-
ских и иных систем с несвязанной структурой.
На рис. 1-16 дана классификация одних
лишь статических подсистем. Она же относит-
ся, однако, и к кинетическим внутренним под-
системам, где лишь знаки превышения и ра-
венства заменяются знаками тождественного
(относительно р) превышения и тождественно-
го равенства (рис. 1-10, 1-11, 1-14). Тождест-
венность относительно р следует здесь пони-
мать как тождественность относительно поло-
жительных значений р.
Легко проверить, что из двусторонних ме-
ханик на рис. 1-16 локально однородны поло-
жительная и все нейтральные, и неоднород-
на — отрицательная. Нейтральные трехсторон-
ние механики на рис. 1-17 все локально одно-
родны.
б) Несвязанные взаимодействия
Связанные структуры являются наиболее
специальными структурами. С первым же
освобождением структуры в гироскопических
системах возникает несвязанное взаимодей-
ствие, получающее дальнейшее развитие в
сервосистемах.
Гироскопическое взаимодей-
ствие. На рис. 1-18 рассмотрена механика
гироскопических взаимодействий. Кинетиче-
ская внутренняя подсистема здесь, как выяс-
нено было выше, не обладает общей ней-
тральностью и не обладает, следовательно,
локальной нейтральностью. Статическая внут-
ренняя подсистема отсутствует, что равно-
сильно равномерной локальной астатичности.
Теорема 1-V. Кинетическая внутренняя
подсистема гироскопических систем равномер-
но безусловно положительна, статическая —
равномерно безусловно нейтральна. След-
ствие I. Изолированные гироскопические си-
стемы равномерно безусловно положительно
реактивны и равномерно безусловно аста-
тичны.
Гироскопические системы кинетически ак-
тивнее натуральных, наиболее пассивных си-
стем. Они не лишены, как последние, кинети-
ческого скелета, и кинетическая реакция их
в каждой точке слагается из реакции самого
элемента и «подпирающей» его реакции внут-
ренней подсистемы. Этим, в частности, объяс-
няется их стабилизирующая способность.
Псевдостатика. Кинетическая сопротивляе-
мость внутренней подсистемы гироскопиче-
ских систем наиболее наглядно выражается
их 1-го порядка изодромностью. Поясним это
псевдостатическое понятие. Назовем порядко-
во однородными системы, составленные связя-
ми одинакового порядка. Порядково однород-
ные подсистемы наиболее низкого для данной
системы порядка назовем псевдостатическими
этого же порядка подсистемами, и лишь в слу-
чае нулевого порядка — статическими. Меха-
ники этих подсистем назовем соответственно
псевдостатикой и статикой. Статика является
частным случаем псевдостатики. Так, системы
на рис. 1-1 и 1-6 обладают статикой, системы
на рис. 1-2 и 1-3 лишь псевдостатикой соот-
ветственно 1-го и 2-го порядков. Изолиро-
ванные гироскопические системы (рис. 1-12,
1-18) обладают псевдостатикой 1-го поряд-
ка. Псевдо-статика является механикой уста-
новившегося движения и лишь в частном слу-
чае статики — механикой покоя. Для гироско-
пических систем установившимся явится дви-
жение с постоянными скоростями, подчиняю-
щееся псевдостатике 1-го порядка. Все поня-
тия*статики распространяются на псевдоста-
тику с соответствующим повышением (при
дифференциальной псевдостатике) или пони-
жением (при интегральной псевдостатике) по-
рядка. Это пояснено на рис. 1-19 сопоставле-
нием статики и лсевдостатики соответственно
двусторонней сервосистемы на рис. 1-11 с ги-
роскопической двусторонней системой на рис.
1-18. Статическая структура первой и псевдо-
статическая второй различаются только диф-
ференциальным порядком связей. Соответ-
34
система
Изолированная гироскопическая t Внутренняя кинетическая
подсистема
Рис. 1-18. Реактивность гироскопических систем.
ской системе—гироскопе с дву-
мя степенями свободы свой-
ство это выражается прецес-
сией — нулевой угловой ско-
ростью нагруженного кольца
гироскопа и постоянной ско-
ростью ненагруженного. В не-
четных псевдостатических дву-
сторонних системах, гироско-
пических в частности, устано-
вившееся движение под воз-
действием внешней силы так
же невозможно, как покой
в статических.
Выяснение того, что пре-
цессия представляет собой
псевдостатический, а не кине-
тостатический феномен, существенно облег-
чает понимание ее, подчиняя ее простым ста-
тическим соотношениям. Возможность эта
возникает, однако, лишь при игнорировании
циклических'координат и выходе, таким обра-
зом, за пределы классической механики.
В классической механике без такого игнори-
рования прецессия представляет собой кине-
тостатический феномен. Достигаемое этим вы-
ходом упрощение очевидно.
ственно только дифференциальным порядком
параметров движения должны отличаться и
статические свойства первой системы от псев-
достат,ических второй; в первой этим пара-
метром являются перемещения, во второй —
скорости. Свойства эти различны в четных
(с четным числом элементов) и нечетных си-
стемах и пояснены на рисунке качественными
линиями влияния — вместо простановки зна-
ков статических перемещений, как на рис. 1-9;
здесь зачернены все
смещающиеся в ста-
тике элементы и не зачернены
щиеся.
Теорема 1-VI. Четные
статические двусторонние си-
стемы обладают главной изо-
дромностью (ан = 0) во всех
элементах, нечетные — главной
астатичностью (ан = оо) во
всех элементах .
Это явствует из того, что
в четных системах равен нулю
числитель передаточной функ-
ции и отличен от нуля знаме-
натель, в четных же наоборот.
Для псевдостатических цепных
систем следует подразумевать
в этой теореме изодромность
соответствующего порядка,
для гироскопических систем,
в частности, — 1-го порядка.
Это означает, что устано-
вившееся под воздействием
.силы, приложенной к какому-
либо элементу, движение чет-
ной гироскопической системы
будет происходить при нуле-
вой скорости этого элемента и
ненулевых скоростях всех
остальных элементов. В про-
стейшей четной гироскопиче-
несмещаю-
Псевдостатика, как и статика, является
частным видом нейтральности. Нейтральность
не исчерпывается, однако, этими двумя слу-
Связанная сервосистема Гироскопическая система
Рис. 1-19. Статика и псевдостатика.
3*
35
чаями, относящимися только к порядково од-
нородным системам. Она может иметь место
и в порядково неоднородных системах.
Как указывалось выше, изодромность яв-
ляется специфическим феноменом некласси-
ческих, более активных, механик. В гироско-
пических системах она является опознова-
тельным признаком выхода за пределы клас-
сической механики. В еще более активных
механиках сервосистем возникает еще более
активный феномен — движения навстречу дей-
ствующей силе.
Сервовз аимодействия. Системы ав-
томатики призваны защищать объект от воз-
мущающих внешних воздействий. К ним
предъявляются поэтому требования наиболь-
шей реактивности. Натуральные системы яв-
ляются антиподом этих требований. Только
радикальным разрушением их структуры
можно было получить более реактивные гиро-
скопические системы и неограниченно реак-
тивные сервосистемы. Полностью освобож-
денная структура сервосистем позволила син-
тезировать изодромные системы — с беско-
нечно большой статической реактивностью.
Неизодромные системы. В первой строке
рис. 1-20 даны родоначальные для всей авто-
матики сервосистемы —* неизодромные систе-
мы регулирования числа оборотов двигателей
(в данном случае турбины), с положительным
(рис. Я1), нулевым (рис. б\) и отрицательным
(рис. 81) саморегулированием. Системы раз-
личаются только знаком связи саморегулиро-
вания. Системы, различающиеся лишь знаком
отдельных связей (переменных связей), отно-
сятся к одному семейству. Переменная связь
входит в матрицу знаков переменным знаком,
могущим принять одно из трех значений:
плюс, минус и нуль. Так, системы на рис. 1-20
относятся к однопараметрическому семейству
одноциклических систем. Семейство систем
описывается общей системой уравнений. Пе-
ременные связи входят в это уравнение пара-
метрами системы, все же остальные связи —
параметрами связей. Для каждой системы се-
мейства остается лишь указать интервалы из-
менения параметров переменной связи
(рис. 1-20).
Системы регулирования не обладают, строго гово-
ря, однородной односторонней структурой. Односторон-
ность структуры нарушена в паре объект-регулятор—
здесь имеет место двусторонняя связь. Однако силы
противодействия |(кориолиссовы силы инерции) центро-
бежного регулятора ротору турбины исчезающе малы
в масштабе действующих на объект сил.
Двусторонняя связь (обратная связь ее, -показан-
ная на рис. 1-20,а пунктиром), включена здесь в том
месте системы, где масштаб действующих сил скачком
изменяется на всю накопленную в усилительной цепи
36
величину, и лишь'потому может быть сочтена односто-
ронней. Здесь обнаруживается еще один механизм пре-
образования двусторонних связей в односторонние—
каскад масштабов. Механизм этот имеет место в клас-
сической механике в обычном отношении измерительно-
го прибора к объекту, позволяющем пренебрегать об-
ратным воздействием прибора на объект. В квантовой
механике он принципиально исключен принципом не-
определенности. В сервосистемах механизм этот, как
выяснено выше, может иметь лишь локальное приме-
нение.
Неделимыми единицами сервосистем яв-
ляются действительно простейшие, неделимые
ни в одной механике единицы — односторон-
ние связи. С их помощью могут быть синте-
зированы системы вполне произвольной струк-
туры. Элементы в этих системах вполне неза-
висимы от взаимодействий. В этой освобож-
денной структуре не составляет труда конст-
руировать циклы любого знака. Так, единст-
венный сложный цикл в сервосистемах
рис. 1-20 сделан положительным с помощью
одной перемены знака, реализуемой, как и в
системе на рис. 1-7,6, символическим рычаж-
ком АБ, подчеркивающим асимметрию поло-
жительных циклов
Системы на рис. 1-20, а\ и б\ содержат од-
ни лишь положительные циклы. Соответствен-
но и их характеристические определители со-
держат одни лишь положительные члены (эта
связь между знаками циклов и членов опре-
делителя доказывается ниже). Здесь налицо
одни лишь факторы противодействия. В сис-
теме 8ь совпадающей по структуре с систе-
мой нижней строки рис. 1-9, содержится один
отрицательный элементарный цикл, порож-
дающий отрицательные члены. Этот содейст-
вующий фактор повышает статическую и ди-
намическую податливость системы и при
некоторых метрических соотношениях мог бы
привести к астатичности. Однако противодей-
ствующий сложный положительный цикл вы-
полняется здесь с преобладанием, радикаль-
но ослабляющим это влияние. Назначение по-
ложительного цикла, образуемого здесь сис-
темой управления, и заключается в том, чтобы
повысить существующую положительную ста-
тическую реактивность объекта в системе
заместить отсутствующую реактивность его
в системе 61 и ослабить отрицательную ста-
тическую его реактивность в системе 8Ь Во
всех трех случаях управляющая система ра-
дикально усиливает реактивность объекта,
и в этом ее назначение.
Как и системы на рис. 1-9, система на
рис. 1-20, 61 структурно статична, системы а\
и 61 безусловно статичны (имеется в виду по-
ложительная статичность), и все три системы
безусловно положительно динамичны. В той
azz4z ^ггЧг + СггЧг " czi4i = °
ЪззЧз + сззЧз “ сззЧг = О
&44Ч4 + £44^4^— с^зЧз = О
^SS4S +с55%5 ~ Зг4?4 = О
Уравнения семейства
элементов:
Ъ& +£п?1 + cf5gs = &Р ротора
регулятора
Ьго каскада
2-го каскада
3-го каскада
+ QtQi + cts4s = &r )
^zzkz + ^ггЧг + czz4z — czi4t = О
ЪззЧз + сззЧз ~ сзгЧг = У
&44Ч4 +> ^44#4 “ сьзЧз'= У
^S54s + С5бЧб “ c5$44 = °
ЪббЧб + сббЧз + £55 4s = о
ротора
регулятора
l-го каскада
2-го каскада
З-го каскада
изодрома
l+fe
Рис. 1-20. Реактивность сервосистем.
же мере, в какой специфическим феноменом
натуральных систем является астатичность
и адинамичность внутренних подсистем, спе-
цифическим феноменом сервосистем являются
статичность и динамичность. Это наиболее ре-
активные системы.
Положительные циклы являются фактора-
ми не только противодействия, но и устойчи-
вости. Если для системы аь структурно устой-
чивой и в разомкнутом виде, замыкание в по-
ложительный цикл имеет значение лишь в пер-
вом смысле — повышения реактивности сис-
темы, уменьшения ее податливости, то для
систем 61 и в! оно имеет двойное значение —
ужесточения и стабилизации системы. На
рис. 1-20 указаны числа Vs—степеней неустой-
чивости системы. Избыточная отрицатель-
ная внутренняя связь объекта в системе не
изменяет числа Vs, поскольку образуемый ею
одночленный отрицательный цикл является
дестабилизирующим фактором. Это же отно-
сится к любому нечетному числу отрицатель-
ных циклов. В четном, числе отрицательные
циклы приобретают и противодействующую
(рис. 1-12,в) и стабилизирующую (рис. Ь4)
способности. Положительные циклы в любом
числе, отрицательные же — только в четных
сочетаниях представляют фактор устойчиво-
сти; в нечетных сочетаниях отрицательные
циклы представляют фактор неустойчивости.
Изодромные системы. В структурно устой-
чивой одноциклической системе может содер-
жаться не более одного астатического элемен-
та [Л. 25]. В случае статического объекта это
вакантное место может быть занято другим
элементом — астатическим регулятором или
37
астатическим сервомотором. В обоих случаях
возникают изодромные в точке «объект» сис-
темы с бесконечно большой статической реак-
тивностью в этой точке. В изодромных систе-
мах задача автоматического регулирования
решается наиболее полно — с нулевой стати-
ческой ошибкой.
Эти простейшие изодромные системы воз-
можны лишь для положительно статических
объектов. В общем случае задача устойчиво-
го и изодромного регулирования решается
с помощью специальных изодромных струк-
тур, одна из которых показана в нижней стро-
ке рис. 1-20. Простая внутренняя статическая
связь одного из сервомоторов заменена здесь
сложной («гибкой» — по установившемуся
неудачному выражению) связью, статически
незамкнутой для нулевой остаточной нерав-
номерности регулирования (рис. б2), статиче-
ски замкнутой в положительный цикл — для
положительной остаточной неравномерности
(рис. а2), и — в отрицательный цикл — для
отрицательной неравномерности (рис. в2).
Первая схема применена к астатическому
объекту, вторая — к положительно стати-
ческому объекту, третья — к отрицательно
статическому объекту (любая из этих схем
может быть применена к любому объекту).
Все вместе они образуют, таким образом,
двухпараметрическое семейство систем. Пе-
ременными связями являются здесь внутрен-
няя статическая связь саморегулирования
и внешняя статическая связь изодрома.
Сервосистемы на рис. 1-20 не разлагаются
на более простые структурные единицы. Каж-
дая из них является своей же внутренней ки-
нетической подсистемой и своей же структур-
ной единицей. Механика взаимодействий каж-
дой из этих систем охватывает всю систему
в целому и не сводится к механике взаимодей-
ствий более простых структурных единиц.
Это является общей чертой сервосистем об-
щего вида. Системы левого столбца рисунка
обладают конечной положительной статиче-
ской реактивностью, правого столбца — ко-
нечной отрицательной и среднего столбца —
бесконечно большой положительной. Все си-
стемы рисунка -обладают конечной положи-
тельной динамической реактивностью. В си-
стемах 1-го столбца все эти свойства яв-
ляются структурными, в системах двух ос-
тальных столбцов — безусловными. Эти не-
обычные для классической механики свойства
подтверждают сказанное выше: сервосистемы^
являются системами произвольной структуры
с произвольно синтезируемыми свойствами.
38
Г. Механика систем
Механика систем возникает как наложение
на механику элементов механики взаимодей-
ствий. Последняя, в свою очередь, сводите^
к механике единичных взаимодействий —
структурных единиц. Такое деление механик
позволяет свести общую задачу реактивности
систем к более простым задачам реактивно-
сти их элементов и внутренних подсистем.
Простейшим случаем такого сведения яв-
ляется статика изолированных систем: стати-
ка и псевдостатика изолированных систем
представляют собой механику статических
внутренних подсистем — механику статиче-
ских взаимодействий. Такое же сведение име-
ет место и в некоторых специальных случаях
динамики. Рассмотрим эти случаи.
Реакция системы в данном элементе сла-
гается из реакции самого элемента и реакции
всей остальной системы, назовем ее допол-
няющей подсистемой. Теорема 1-VIL Реак-
ция системы в каждом ее элементе равна сум-
ме реакций элемента и дополняющей подси-
стемы. Этому достаточно очевидному положе-
нию придана здесь форма теоремы, чтобы из-
влечь из него некоторые менее очевидные
следствия. Следствие I. Если из всех эле-
ментов системы один лишь является неабст-
рактным, реакция системы в этом элементе
слагается из реакции самого элемента и реак-
ции внутренней подсистемы в этом элементе.
Это явствует из того, что внутренняя подси-
стема является в этом случае дополняющей
подсистемой. Следствие II. Если в случае,
рассматриваемом следствием Z, внутренняя
подсистема локально нейтральна в неабст-
рактном элементе, реакция системы в этом
элементе равна реакции самого элемента. Это
явствует из того, что реакция внутренней под-
системы равна нулю в этом элементе. След-
ствие III. Реакция натуральных систем, об-
ладающих одним лишь неабстрактным эле-
ментом, равна в этом элементе реакции само-
го элемента. Это вытекает из полунейтраль-
ности натуральных систем.
Следствием I задача реактивности дина-
мической системы сводится к задаче реактив-
ности более простой динамической системы—
внутренней подсистемы. Задача еще более
упрощается и сводится к статике, когда эта
внутренняя подсистема является статической
или псевдостатической. Это имеет место,
в частности, в гироскопических системах. Для
нечетных систем, где внутренние подсистемы
локально нейтральны во всех элементах
(рис. 1-19), приложенная к единственному
инерционному кольцу системы сила будет
встречать только инерционное сопротивление
самого кольца.
К рассматриваемому следствием I «пре-
дельному случаю —< абстрактности всех, кро-
ме одного, элементов системы, близки ре-
альные случаи — малости параметров всех,
кроме одного, элементов: случай, например,
цепной гироскопической системы, когда масса
одного из колец многократно превышает мас-
сы всех остальных колец. В этом последнем
случае реакция системы в инерционном ее
элементе (кольце) на внешний момент распа-
дается на реакцию отдельно взятого кольца
(силу инерции его) и псевдостатическую ре-
акцию отдельно взятой псевдостатической
внутренней кинетической подсистемы.
Выделение механики взаимодействий при-
водит к наиболее наглядным результатам
в полунейтральных, в частности в классиче-
ской, механиках. Однако и в ненейтральных
механиках оно оказывается полезным. Некото-
рые качественные результаты можно извлечь
и из разделения системы на элемент и допол-
няющую подсистему. Теорема 1-VIII. При
одинаковых по знаку реактивностях элемента
и дополняющей этот элемент подсистемы знак
локальной реактивности системы в этом эле-
менте совпадает с этим знаком. Локальная
нейтральность системы в данном элементе мо-
жет быть достигнута лишь при различных зна-
ках реактивности элемента и дополняющей
подсистемы в результате взаимной нейтраль-
ности этих реактивностей.
Можно указать и ряд иных теорем, свя-
занных с разделением механик и расчленени-
ем реакций. Вопросы эти рассмотрены будут
ниже при рассмотрении конкретных специаль-
ных механик. Только для общей, односторон-
ней механики деление на механику элементов
и механику взаимодействий теряет смысл, по-
скольку взаимодействия — (внутренние кине-
тические подсистемы) сливаются здесь с са-
мими системами.
Рассмотрим в этой общей схеме — меха-
ника элементов, механика взаимодействий,
механика систем — основные дедуктивные ме-
ханики.
Дальнейшее систематическое построение
односторонней механики, охватывающей все
эти механики, может быть достигнуто либо
новым, дедуктивным построением ее, либо ин-
дуктивным построением — расширением клас-
сической механики, отчленением и снятием ее
специального содержания. Имея перед собой
законченное в основных чертах здание клас-
сической механики, естественно было бы из-
брать второй способ построения, использован-
ный уже выше в исходном пункте ответвле-
ния двусторонней механики от односторон-
ней — постулате противодействия. Отчленени-
ем в этом постулате специального содержания
от общего получен был постулат односторон-
него действия, определяющий одностороннюю
механику. Способ этот, однако неполон.
Индукция требует только отделения спе-
циального, вытекающего из постулата проти-
водействия, содержания классической механи-
ки от общего и снятия этого специального
содержания. Она, однако, недостаточна. Оста-
ток после такого снятия составит принадлежа-
щее односторонней механике общее содер-
жание двусторонней механики, но не всю од-
ностороннюю механику. Чтобы получить всю
одностороннюю механику, необходимым ока-
жется дополнить индукцию дедукцией. Более
простым оказалось поэтому избрать единый,
дедуктивный метод. Специальные, неодносто-
ронние, механики получаются при этом соот-
ветствующим ограничением общей односторон-
ней механики специальными постулатами эле-
ментов и взаимодействия.
Критерием правильности такого построе-
ния должно явиться объемлющее положение
всех понятий и предложений односторонней
механики по отношению к соответственным
понятиям и предложениям классической —
обычное отношение дедуктивной системы
к своей подсистеме.
Поясним этот переход от понятий односто-
ронней механики к понятиям классической
ближайшими примерами. Понятие «динамиче-
ская система» сохраняет в классической ме-
ханике то же содержание — системы взаимо-
действующих элементов, что’и в односторон-
ней, однако объем его сужается. В односто-
ронней механике возможно самовоздействие,
возможны, следовательно, одноэлементные
системы. Их внутренними силами явятся са-
модействия. В классической механике наи-
меньшими системами являются двухэлемент-
ные системы. Их внутренними силами явля-
ются взаимодействия. Объем понятия «дина-
мические системы» сужается в двусторонней
механике, из него исключается подпонятие—
«элементарные системы», одно из централь-
ных понятий односторонней механики. Это
сужение понятий и предложений односторон-
ней механики в двусторонней будет последо-
вательно прослеживаться.
Понятие — элементарная система разру-
шается при переходе от односторонней меха-
ники к двусторонней. Оно не может быть по-
этому получено при обратном переходе сняти-
ем специального содержания двусторонней ме-
ханики, индукцией. Это поясняет указанную
выше невозможность получения всей односто-
39
ронней механики таким снятием. Понятие это
может быть получено только дедукцией.
Представление классической механики
специальным случаем односторонней позволя-
ет с наиболее общих позиций переосмыслить
все понятия последней. Это потребует кропот-
ливого и порой утомительного логического
анализа.
1-2. ОДНОСТОРОННЯЯ МЕХАНИКА
1-2-1. Механика элементов
Выделение элементов из элементарных си-
стем односторонней механики показано на
рис. 1-13. На рис. 1-21 даны основные элемен-
тарные системы автоматики — дифферен-
циальные, положительные. Структура дина-
мических элементов односторонней механики
ничем не связана — здесь возможны элемен-
ты любого порядка и знака. Возможность
эта лишь косвенно вытекает из отказа посту-
лату противодействия — в результате этого
отказа возникают односторонние связи, про-
извольное обращение которых внутрь элемен-
та и приводит к синтезу элементов произволь-
ной структуры. Можно сконстрировать и
подчиняющиеся постулату противодействия
ненатуральные системы с элементами произ-
вольной структуры. Это, однако, возможно
лишь с помощью того же одностороннего дей-
ствия.
Элементы односторонней механики подчи-
няются более общим законам, чем 1-й и 2-й
законы классической механики. Если третье-
му постулату классической механики, опреде-
ляющему движения системы в целом, одно-
сторонняя механика отказывает, то остальные
два постулата классической механики, опре-
деляющие движение элементов (материаль-
ных точек) системы, обобщаются в односто-
ронней механике, применительно к тем совер-
шенно общего вида элементам, которыми она
оперирует. Следует поэтому прежде всего
определить понятие динамический элемент в
задаче движения.
Динамические элементы. Поня-
тию динамический элемент дано было выше
предварительное определение, требующее
дальнейшего развития. Понятие это приобре-
тает различное значение в различных меха-
нических задачах — равновесия, движения,
устойчивости и др. В каждой из этих задач
можно выделить воздействия и их объект.
Последний и является элементом в каждой из
этих задач.
В наиболее общей из них, задаче движе-
ния, воздействиями являются силы, объек-
том — фактор инерции. В классической меха-
нике, оперирующей только положительными
элементами 2-го порядка, фактором инерции
является обычная масса — параметр старшей
40
внутренней связи 2-го порядка. Эта связь
и образует динамический элемент в классиче-
ской механике. То же определение сохраняет-
ся и в односторонней механике, оперирующей
элементами любого порядка и знака И здесь
элементами в задаче движения являются
старшие внутренние связи. Реакции этих свя-
зей — противодействующие силы инерции —
противостоят действующим силам—реакциям
всех остальных динамических связей, как про-
тиводействие — действию, объект — субъек-
ту, реакция — силе. Поскольку в изолирован-
ной элементарной системе действующие силы,
причины движения, определяются значениями
всех нестарших параметров движения элемен-
та— пути, его производных ^(кроме старшей)
и интегралов, параметры эти должны быть
заданы в каждый момент движения как на-
чальные условия его. Старшая же производ-
ная — следствие действия этих сил, опреде-
ляющая противодействующую силу, не может
быть задаваема и должна быть определена из
уравнений движения. Это служит разделитель-
ным признаком для отделения старших свя-
зей, образующих элемент — объект приложе-
ния сил, от нестарших связей, являющихся
субъектом — источником сил. Вопрос о том,
какие из внутренних связей образуют в задаче
движения собственно элемент, объект сводит-
ся,.иначе говоря, к тому, какие из параметров
движения наследуются элементом от предше-
ствующего движения и какие определяются
действующими силами. Наследуются в виде
начальных условий интегралы и производные,
соответствующие всем дифференциальным и
интегральным внутренним связям, кроме стар-
шей дифференциальной связи. Определяется
действующими силами производная, соответст-
вующая старшей дифференциальной связи.
Она, следовательно, и является элементом.
Интеграл пути, соответствующий старшей ин-
тегральной связи, входит в состав наследуемо-
го и должен быть задан в начальных услови-
ях. Старшая интегральная связь не входит
поэтому в состав элемента.
Старшая дифференциальная внутренняя
связь противостоит, таким образом, всем ос-
тальным связям, внутренним и внешним, как
элемент, объект действия — действию. Если
все эти остальные связи осуществляют актив-
ный механизм действия, то она осуществляет
пассивный механизм противодействия. Этот
пассивный 'механизм противодействия выра-
жается в способности противопоставить любо-
му по величине действию равное ему проти-
водействие. Наличие такого механизма явля-
ется не чем-то само собой разумеющимся
и присущим всем динамическим элементам
и системам, а следствием определенной дина-
мической структуры. Ниже рассмотрены бу-
дут системы, лишенные этой способности.
Простейшим примером, понимаемым обычно
в более узком смысле, являются, как указы-
валось выше, астатические системы. Рассмат-
риваемая с этой общей точки зрения астатич-
ность представляет собой неспособность сис-
темы развить в статике противодействие
внешним силам. В астатических системах от-
сутствует механизм статического противодей-
ствия.
На рис. 1-13 даны положительные и отри-
цательные динамические элементы односто-
ронней механики, дифференциальные, инте-
гральные и граничные между ними элементы
нулевого порядка. Там же даны образуемые
этими элементами элементарные системы —
дифференциальные, интегральные, интегро-
дифференциальные, и—нулевого порядка. Эле-
менты этих элементарных систем образуются
старшей их внутренней связью. В дифферен-
циальных и интегродифференциальных эле-
ментарных системах элементом явится стар-
шая дифференциальная связь, в интегральных
элементарных системах — младшая инте-
гральная связь, в системах нулевого поряд-
ка — статическая связь (рис. 1-13). Ниже до-
казана будет физическая неосуществимость
интегральных элементов и, следовательно, ин-
тегральных систем. Напротив, интегродиффе-
ренциальные системы и системы нулевого по-
рядка с интегральными связями физически
выполнимы..
Элементарные системы образуются из эле-
ментов связыванием последних внутренними
связями порядка, уступающего порядку эле-
мента. Наложение на элемент внутренних
связей порядка, превышающего порядок эле-
мента, представляет собой уже не связыва-
ние, а совершенно иную по смыслу опера-
цию — преобразование исходного элемента
в другой элемент, более высокого порядка.
Элемент, связанный одной по меньшей мере
положительной или отрицательной внутрен-
ней связью уступающего порядка, образует
уже элементарную систему (рис. 1-13). Сово-
купность связывающих элементарную систе-
му внутренних связей уступающего порядка
образует структуру элементарной системы.
Элементарным системам можно присвоить
знак образующих их элементов и в этом
смысле говорить о положительных и отрица-
тельных элементарных системах.
Масса, положительная и отрицательная,—
элемент 2-го порядка, синтезируется элемен-
тарным актом управления, самоуправлением,
образующим одночленный положительный
41
или отрицательный элементарный динамиче-
ский цикл. Эта элементарная схема управле-
ния нуждается уже в источнике внешней
энергии. Масса возникает в результате упоря-
дочения этой внешней энергии простейшим
управляющим алгоритмом — элементарным
циклом. Ниже рассмотрена будет конструк-
тивная схема этого синтеза.
Второй закон. Определив понятие
элемент, можно указать теперь обобщенные
1-й и 2-й законы, определяющие в односто-
ронней механике движение соответственно
изолированных и неизолированных элементов.
Обобщенный 2-й закон. Движе-
ние неизолированного элемента происходит
так, что динамическая реакция его равна
и противоположна действующей силе.
Это означает, что гиперускорение соответ-
ствующего порядка (порядка-элемента) рав-
но частному от деления действующей силы на
соответствующего порядка (порядка элемен-
та) «массу» (параметр элемента) и направ-
лено по направлению действующей силы для
положительного элемента (для положитель-
ной «массы»), и — против действующей силы,
для отрицательного элемента (для отрица-
тельной «массы»).
Уравнения (1-1) принимают для элемен-
тов вид (1-9) и (1-10).
Уравнение (1-Ю) представляет собой
обобщенный 2-й закон: элемент i-го
порядка получает под воздействием силы ги-
перускорение собственного (т. е. того же i-го)
порядка, равное силе, деленной на параметр
элемента, и совпадающее с направлением си-
лы или противоположное ей в зависимости от
положительности или отрицательности этого
параметра.
Закон этот является следствием логическо-
го постулата действия и не содержит в себе
ничего специального, кроме указания на ли-
нейную форму зависимости ускорения от си-
лы. Линейность эта может быть нарушена при
переходе к нелинейным элементам так же,
как нарушена линейная форма 2-го закона
классической механики в релятивистской ме-
ханике. Если отвлечься от этой специальной
функциональной зависимости, закон этот име-
ет чисто логическое содержание, указываю-
щее на количественное соответствие следст-
вия причине: поскольку элемент в задаче дви-
жения составлен одной лишь старшей связью,
приложенная к нему сила может быть урав-
новешена реакцией одной лишь этой связи.
Линейной формой 2-го постулата опреде-
ляется суперпозиция сил, формулируема^
в классической механике как принцип неза-
висимости действия сил. Принцип этот сохра-
42
нится для любой механики при условии ли-
нейности ее обобщенного 2-го постулата.
Многообразные следствия, вытекающие
из такого расширенного понимания элемен-
тов в односторонней механике, не могут быть
систематически рассмотрены в этом кратком
изложении. Укажем на одно из них. Из от-
рицательности масс в отрицательных элемен-
тах вытекает отрицательность кинетической’
энергии таких элементов. Кинетическая энер-
гия, существенно положительная в двусто-
ронней механике, в односторонней механике
может быть и отрицательной величиной. Если
в первом случае уменьшение скорости эле-
мента связано с отдачей им энергии, с совер-
шением им работы, то во втором уменьшение
скорости элемента требует затраты дополни-
тельной работы. В односторонней механике
возникает, таким образом, отрицательная ки-
нетическая энергия. Отрицательная масса яв-
ляется аккумулятором этой отрицательной
энергии.
Принцип Даламбера. Обобщенный
2-й постулат можно представить уравнением
(1-11) в виде обобщенного принципа Далам-
бера: действующая сила кинето статически
уравновешивается динамической реакцией эле-
мента. Динамическая реакция элемента (про-
тиводействующая сила инерции) равна произ-
ведению параметра элемента на гиперускоре-
ние и, по логическому постулату действия,
всегда, независимо от знака элемента, опреде-
ляющего знак гиперускорения, направлена
навстречу действующей силе. Знак гиперуско-
рения таким именно образом определяется
знаком элемента, чтобы динамаческая реакция
была направлена навстречу действующей си-
ле. Слово «уравновешивается» не должно вы-
зывать недоразумений в этой формулировке.
Речь идет здесь не о статическом равновесии,
приводящем к покою, а о возникающем в дви-
жении , динамическом равновесии системы и
среды, силы и динамической реакции, действия
и противодействия, т. е. не о равновесии эле-
мента, а о равенстве действующих и реактив-
ных сил, приложенных, как это всегда имеет
место для силы и реакции, действия и проти-
водействия, к различным элементам. В дву-
сторонней механике противодействие прило-
жено к действующему элементу, в односто-
ронней—вовне системы. Равенство таких сил
не имеет, естественно, ничего общего с равно-
весием . элемента и представляет собой обоб-
щенную формулировку принципа Даламбера.
Обобщенный принцип Даламбера прини-
мает в односторонней механике чисто логиче-
ское содержание.
Первый закон. Обобщенный первый
закон односторонней механики (закон инер-
циального движения) не независим и являет-
ся, как и в двусторонней механике, лишь от-
рицательной формулировкой обобщенного
2-го закона.
Обобщенный первый закон: изо-
лированный элемент движется так, что дина-
мическая реакция его равна нулю, т. е. с ну-
левым гиперускорением собственного порядка.
Инерциальное движение дифференциаль-
ного элемента 3-го порядка, например, проис-
ходит так, что его ускорение 3-го порядка
равно нулю. Остальные, младшие производ-
ные шути и интегралы его принимают соот-
ветствующие интегральные значения. Инер-
циальное движение положительного элемента
2-го порядка будет происходить по закону
инерции классической механики — с нулевым
ускорением. Инерциальное движение элемен-
та первого порядка будет происходить при ну-
левой скорости. Инерциальное движение эле-
мента нулевого порядка будет происходить
так, что путь его примет постоянное значение,
пропорциональное силе. Инерциальное движе-
ние положительных и отрицательных элемен-
тов одинакового порядка совпадает. Знак
элемента не оказывает влияния на инерциаль-
ное движение его.
1-2-2. Механика взаимодействий
Как выяснено было выше, механика взаи-
модействий в односторонней механике в отли-
чие от специальных механик лишена собст-
венного содержания и сливается с механикой
системы. В односторонней механике можно,
как и в специальных механиках, выделить
внутренние кинетическую и статическую под-
системы, однако механика их в общем случае
ничем не будет отличаться от механики, ки-
нетики и статики самих систем. Необходи-
мость выделения механики взаимодействий
выяснится лишь ниже —„в специальных ме-
ханиках.
1-2-3. Механика систем
В отклонение от дедуктивного метода, где
статику следовало бы получить как специаль-
ный случай динамики, предварим динамику
статикой. Это оправдано тем, что принципом
Даламбера динамика сводится к кинетостати-
ке, дальнейшими же преобразованиями Лап-
ласа дифференциальные уравнения кинетоста-
тики сводятся к алгебраическим уравнениям
между изображениями координат и сил. Два
этих последовательных методических упроще-
ния дают здесь решительный перевес индук-
тивному изложению.
А. Статика
а) Уравнения статики
Уравнения статики получаются отбрасы-
ванием в уравнениях (1-1) всех нестатических
членов.
В развернутой форме уравнения эти при-
нимают вид:
+ C12q2 + .. • + C1Tn^w=Q(1I) ;
^2i9i + ^22^2 + • • • -{-C2rnqm = Q^ ; (1-12)
'-=«•
Назовем эти уравнения уравнениями стати-
ческие сил. Определитель A (q) системы (1-12)
назовем статическим определителем. Если
определитель этот отличен от нуля, т. е. мат-
рица системы является неособенной, система
может быть разрешена относительно обоб-
щенных координат:
<7. = «nQi0 + ^2 + • • • +
<h = + «2 Д” + • • •+
.................................(ЫЗ)
п ____ п ЛлС1) !_ „ п(Ц | I „
qm----&т1У1 “I "I • • • "Т“ •
Назовем эти уравнения уравнениями стати-
стических перемещений. Величины aih здесь
коэффициенты влияния
_ Чию
(1-14)
сохраняющие в односторонней механике тот
же смысл, что и в двусторонней механике —
статического перемещения q^k) в i-н точке, от-
несенного к вызвавшей его силе Q(^. Стоящий
в числителе минор назовем статическим мино-
ром. Коэффициент аи назовем главным коэф-
фициентом влияния г-го элемента, коэффици-
енты aik(i=^k) — его неглавными коэффициента-
ми влияния. Матрицы взаимно обратных ли-
нейных преобразований (1-12) и (1-13) взаим-
но обратны:
Il ||--------------II 1|*
(Ы5)
б) Статические свойства
Статические свойства системы определяют-
ся характером выражения (1-14). Система
статична или астатична в зависимости от то-
43
го, отличен от нуля или равен нулю стоящий
в знаменателе этого выражения статический
определитель ее. Каждое из этих общих
свойств системы имеет два локальных под-
свойства, определяющихся значениями стоя-
щего в числителе статического минора. Нера-
венство и равенство нулю этого минора в ста-
тической системе приводит соответственно
к конечно статическим и бесконечно статиче-
ским (изодромным) системам с конечной
и нулевой податливостью или, что то же, с ко-
нечной и бесконечной статичностью, обладаю-
щим соответственно конечными и нулевыми
коэффициентами влияния. Неравенство и ра-
венство его нулю в астатической системе при-
водит соответственно к определению астати-
ческим и неопределенно астатическим систе-
мам с определенной и неопределенной аста-
тичностью, обладающим соответственно бес-
конечно большими и неопределенными коэф-
фициентами влияния. Общие статические
свойства будут, таким образом, обозначаться
одним термином, локальные двумя. Это ис-
ключает возможность смешения.
Конечная статичность, возникающая в слу-
чае неособенных матриц статического опреде-
лителя и статического минора, является не-
особенным локальным свойством. Три осталь-
ных локальных свойства, возникающие в слу-
чае, когда одна из этих матриц является осо-
бенной, назовем особенными локальными
свойствами. Каналы — носители этих свойств,
и системы, содержащие такие каналы, назо-
вем соответственно неособенными и особен-
ными.
Статические свойства могут быть пред-
ставлены следующей матрицей статических
свойств:
Неособенные:
Особенные:
общие свойства
статичность
Д(<7)=^0
астатичность
Д «7) = О
локальные
подсвойства
конечная бесконеч-
ная
опреде- неопреде-
ленная ленная
Д»Л (9)^=0 Л<л (9)=0
Общие свойства относятся к системе в це-
лом и описываются ее определителем. Локаль-
ные свойства относятся к опрёделенному ка-
налу i—k (где k—индекс входного элемента
канала, к которому приложена сила Q&, i —
индекс выходного элемента канала, чье стати-
ческое перемещение qt под воздействием этой
силы отыскивается) и описываются как ста-
тическим определителем, так и статическим?
минором &ih(q) этого канала. Конечная ста-
тичность означает конечную статическую про-
44
водимостъ (и, следовательно, конечное статиче-
ское сопротивление) этого канала. Бесконеч-
ная статичность означает нулевую проводи-
мость (бесконечно большое сопротивление) ка-
нала. Определенная астатичность означает
бесконечно большую проводимость (нулевое
сопротивление) канала. Неопределенная аста-
тичность означает неопределенную проводи-
мость (неопределенное сопротивление) кана-
ла. При определенной астатичности всех кана-
лов, выходящих из &-го элемента, система не-
способна по логическому постулату действия
быть в этом элементе в статике объектом
внешних сил. При неопределенной астатично-
сти всех этих каналов силы могут быть прило-
жены к А-му элементу системы, однако рас-
пределение уравновешивающих их реакций
между статическими связями системы стано-
вится неопределенным.
Общее свойство статичности, как и локаль-
ное свойство конечной статичности, может
быть положительным и отрицательным. В пер-
вом случае это определяется знаком определи-
теля, во втором — совпадением знаков минора
и определителя.
Классификация механик производилась вы-
ше, применительно к статике, по знаку статиче-
ских перемещений — по локальным статиче-
ским свойствам. В локально однородных меха-
никах — нулевых, положительных и отрица-
тельных — локальные свойства совпадают с
общими. Только в локально неоднородных ме-
ханиках возможны, кроме положительной, от-
рицательной и нулевой конечных статичностей
(нулевой конечной статичностью является
определенная астатичность), локальных
свойств локально однородных — положитель-
ной, отрицательной и нейтральной — меха-
ник, такие смешанные статические свойства,
как бесконечная статичность и неопределенная
астатичность. Это объясняет невозможность
этих свойств в классической механике — ло-
кально однородной двусторонней механике.
Односторонняя механика является наиболее
общей локально неоднородной в общем случае
механикой, включающей в себя в качестве спе-
циальных все остальные однородные и неодно-
родные механики. В ней возможен поэтому
весь спектр свойств, однородных и смешанных.
в) Статическая двойственность
Из уравнений (1-12) и (1-13) явствует, что
статическая конфигурация неособенных систем
однозначно определяется как статическими пе-
ремещениями ее элементов, так и статически-
ми силами. И те и другие могут быть с рав-
ным основанием приняты за обобщенные ста-
тические координаты системы. Это предопре-
деляет статическую двойственность всех поло-
жений статики. Двойственными понятиями яв-
ляются в этих положениях понятия — статиче-
ская сила и статическое перемещение. Это по-
зволяет принять за обобщенные координаты
системы как первую, так и вторую системы ве-
личин. Уравнения (1-12) и (1-13) могут быть
рассматриваемы как уравнения преобразова-
ний этих координат, а рассмотренные выше
особые случаи — как особые случаи этого пре-
образования. Приняв, одну из двух систем ко-
ординат за обобщенные координаты системы,
следует вторую отнести к обобщенным силам.
Написав уравнения статики в обезличенных
символах, можно придать всем выводам двой-
ственную интерпретацию, приняв в одном слу-
чае в качестве обобщенных координат статиче-
ские перемещения, в качестве же обобщенных
сил — статические силы, в другом же случае
сменив эти две системы величин местами.
Условность деления обобщенных статиче-
ских координат системы на силы и перемеще-
ния предстает в односторонней механике Наи-
более явно. Можно приложить к системе извне
статические силы и результат назвать стати-
ческими перемещениями. Можно, однако, при-
ложить ,к системе извне и статические переме-
щения, выступающие в этом случае в роли
внешних воздействий (сил), и результат—ста-
тические силы реакции — также назвать ста-
тическими перемещениями. В этих общих по-
нятиях следует назвать обобщенными статиче-
скими силами внешние статические воздейст-
вия, обобщенными статическими перемещения-
ми — статические реакции системы, независи-
мо от физической природы этих воздействий
и реакций. По физической природе как воздей-
ствия, так и реакции могут быть как силами,
так и перемещениями. Для турбогенератора,
работающего изолированно, внешним воздейст-
вием, силой может быть только сила в собст-
венном смысле, т. е. изменение вращающего
момента. Статической реакцией, перемещени-
ем в этом случае явится статическое изменение
числа оборотов турбины. Для турбогенерато-
ра, работающего параллельно в сеть большой
мощности, обе величины меняются местами.
Приложенным к турбине внешним воздействи-
ем, силой может быть здесь только частота
сети, т. -е. изменение числа оборотов — преж-
нее перемещение. Статической реакцией, пере-
мещением явится при этом прежняя сила—
изменение вращающего момента. Эти два слу-
чая—изолированной и параллельной рабо-
ты— могут быть рассматриваемы как матери-
альная модель принципа статической двойст-
венности.
Рассмотрим применение этого принципа
к указанным выше особым случаям. Принцип
двойственности сливает здесь воедино два
внешне противоположных статических свой-
ства — изодромность и астатичность.
Изодромность (бесконечная статичность) и
астатичность (определенная) представляют со-
бой двойственную интерпретацию одного и
того же особого случая — равенства нулю
определителя уравнений обобщенных статиче-
ских перемещений и неравенства нулю соот-
ветственного минора. В случае астатичности
равен нулю определитель системы (1-12) и от-
личен от нуля соответствующий минор его, в
случае изодромности равен нулю определитель
системы (1-13), двойственной системе (1-12),
и отличен от нуля соответствующий минор его.
Изодромная по отношению к силе* система
явится астатической по отношению к переме-
щению, изодромная по отношению к переме-
щению — астатической по отношению к силе.
Обе системы могут быть сочтены в соответст-
вующей интерпретации как изодромными, так и
астатическими. Сила, приложенная к изодром-
ной системе, вызывает нулевые статические пе-
ремещения; статическое перемещение, прило-
женное к астатической системе, вызывает нуле-
вые силы статических реакций, и в этом смыс-
ле обе системы изодромны. Сила, приложенная
к астатической системе, вызывает бесконечно
большие статические перемещения; статиче-
ское перемещение, приложенное к изодромной
системе, вызывает бесконечно большие силы
упругой реакции, и в этом смысле обе системы
астатичны.
Астатические и изодромные системы пред-
стают в этом последнем случае, в соответствии
с принципом двойственности, как астатические
системы, к которым, по постулату противодей-
ствия, внешнее воздействие не »может быть
приложено за отсутствием объекта —^ противо-
действия. Новое понятие односторонней меха-
ники— изодромность, отсутствующее в дву-
сторонней механике, сливается .при этом со
старым понятием — астатичность. Принцип
двойственности объединяет изодромность и
астатичность (определенную), как двойствен-
ные интерпретации одного и того же понятия.
Та же двойственность имеет место, как пока-
зано ниже, и для объединяющего их свойст-
ва — неопределенной астатичности. Неопреде-
ленно астатические по отношению к деформа-
ции (т. е. неопределенно изодромные) систе-
мы изодромны по отношению к силам (парал-
лельная работа нескольких изодромных си-
стем); неопределенно астатические по отноше-
нию к силам (т. е. неопределенно астатиче-
ские) астатичны по отношению к деформа-
45
циям. Оба положения представляют двойст-
венную интерпретацию одного и того же по-
ложения.
Из статической двойственности вытекает
основная зависимость в построении изодром-
ных и астатических систем: изодромные систе-
мы строятся на астатических подсистемах,
астатические системы строятся на изодромных
подсистемах. Гомологические ряды изодром-
ных и астатических систем рассмотрены в
[Л. 87].
Принцип статической двойственности вводит яс-
ность в необычное смешение понятий, имеющее место
в современной теории регулирования. Понятия—аста-
тический элемент и астатическая система употребляются
в механике в общем для них и общенаучном смысле—
элементарной и сложной систем, неспособных в ста-
тике противостоять внешним силам. Те же два одно-
типных понятия употребляются в современной теории
регулирования в противоположных смыслах: первое—
в указанном выше общенаучном, вторым обозначаются
изодромные, т. е. бесконечно статические, отвечающие
нулевой деформацией на любой величины внешние силы.
Астатической именуется здесь бесконечно статическая
система. Столь грубое смешение понятий могло возник-
нуть лишь в результате неопределенной принадлежно-
сти предмета, открывающей полную свободу термино-
логии. Термин астатические по отношению к изодром-
ным системам объясняется в современной теории регу-
лирования тем, что системы эти содержат астатические
элементы |(хотя изодромные системы могут быть по-
строены и без астатических элементов), или еще менее
ясно.
Легко, однако, с позиций односторонней механи-
ки и ее принципа статической двойственности, игнори-
руемых современной теорией регулирования, объяснить
подлинное происхождение этого ошибочного термина:
системы, изодромные по отношению к обобщенным си-
лам, астатичны по отношению к обобщенным коорди-
натам, принятым за обобщенные силы. Изодромные
системы действительно астатичны, но лишь в указанном
выше двойственном смысле —по отношению не к си-
лам, а к координатам (астатичность эт^ скажется по-
этому лишь в параллельной работе). Обозначая аста-
тические элементы и изодромные системы одним тер-
мином—астатические, современная теория регулирования,
не отдавая себе в этом отчета, пользуется одновремен-
но понятиями двух противоположных, связанных двой-
ственностью, смысловых рядов, внося этим наибольшую
возможную в этой ситуации неясность.
Все сказанное составляет содержание прин-
ципа статической двойственности. Двойствен-
ными понятиями здесь являются:
статическая сила
деформация, вызванная
статической силой
статические коэффициен-
ты жесткости
изодромность относи-
тельно сил
астатичность относи-
тельно сил
статическая неопреде-
леннось относительно
сил (неопределенная
астатичность)
статическое перемещение
(деформация)
сила (статическая реакция),
вызванная деформацией
статические коэффициенты
влияния
астатичность относительно
деформаций
изодромность относительно
деформаций
статическая неопределен-\?
ность относительно де-
формаций (неопределен-
ная изодромность)
Принцип статической двойствен-
ности: замена в любом истинном предложе-
нии статики всех входящих в него понятий на
двойственные им приводит к истинным же,
двойственным первым, предложениям [Л. 36].
Принцип двойственности обнаруживается уже
в двойственной форме уравнений статических
перемещений (1-12), (1-13). Для локально
статических, т. е. неособенных, систем прин-
цип этот приводит к симметричным двойствен-
ным положениям: статическая сила вызывает
статическое перемещение, статическое переме-
щение вызывает статическую силу (упругой
реакции). Для особенных систем принцип при-
водит к указанным здесь несимметричным
двойственным положениям.
Статика, построенная на принципе двойст-
венности, приобретает наиболее простой и об-
щий вид. То, что принцип этот обнаружен
был в односторонней, а не двусторонней ме-
ханике, можно объяснить лишь специальной
структурой последней, скрывающей некоторые
наиболее общие зависимости. В односторон-
ней механике, вследствие произвольной струк-
туры ее систем и наиболее общего понимания
понятий — сила и перемещение, принцип этот
предстает в наиболее явном виде. Его, однако,
можно проследить и в двусторонней механике.
Двойственной интерпретацией одного и того
же положения являются в классической меха-
нике соотношения
Cik = Cki, (1-16)
а^=Шг. (1-17)
Первое из этих положений вытекает из на-
личия у системы потенциальной функции, вто-
рое представляет собой теорему взаимности
Максвелла. Соотношения эти определяются
специальной структурой двусторонних систем
и для односторонних систем не имеют места.
Ими определяется та специальная связь пара-
метров, при которой односторонними уравне-
ниями (1-12) и (1-13) описываются двусто-
ронние системы. Для односторонних систем
Cik и Cki, кш и dki—независимые положитель-
ные, отрицательные и равные нулю величины.
Б. Динамика
а) Динамические свойства
Уравнения (1-1) динамики односторонних
систем даны были выше. Динамические свой-
ства односторонних систем являют такой же,
как и в статике, полный спектр ненатуральных
в большинстве своем, возможных только в од-
носторонней механике, свойств. Свойства эти
46
проще всего обнаруживаются в операторной
форме уравнений (1-1). Уравнения приводятся
преобразованиями Фурье и Лапласа, при ну-
левых начальных условиях, к таким же ли-
нейным алгебраическим уравнениям, как
уравнения статики (1-12):
т
*=1
(1-18)
(Z= 1, 2,..т);
£ (Дikp* + Bihp + Eik -1^)
A = 1 4
(1-19)
(j — 1, 2,..., zn),
где F — изображение по Фурье, L — изображе-
ние по Лапласу, Q(r) и Q — гармоническая и
общего вида сила. Если определители систем
линейных уравнений (1-18) и» (1-19) (характери-
стические определители) не равны тождест-
венно нулю, т. е. матрицы обеих систем яв-
ляются неособенными, системы эти могут быть
разрешены относительно изображений обоб-
щенных координат:
Г (<л)=№ (Qr)+₽12f (Q2)+• • • + № (Qm);
p to) - M (Q.)+W (Q2)+• • • +(UF (Qm);
(1-20)
F (qm>= $miF (QJ+ pm2F (Qs) + • • • “F (Qm);
L (<7i) = YUF (QJ + Y12L (Q2) + • • • + 4imL (Qm);
L (<72) = Y21L (Qi) + Y22L (Q2) + • • • + Y2m£ (Qm)i
L (?m) — YmjF (Ql) Ym2F (Qa) Ч- • • • YmmF (Qm)-
(1-21)
Динамические коэффициенты, влияния
Pis и представляют собой соответственно
амплитудно-фазовые характеристики и переда-
точные функции каналов k—i:
r ^(<?h д о®) v ’
v ИЧИъ)) &ik (Р) /1 nq\
Уравнения (1-18) — (1-23) полностью ана-
логичны уравнениям (1-12) — (1-14) статики.
Преобразования Фурье и Лапласа устанавли-
вают между изображениями динамических сил
и динамических перемещений в линейных си-
стемах те же алгебраические отношения, кото-
рые существуют в этих системах между ста-
тическими силами и статическими перемеще-
ниями:
9i(k) z== aikQ(C)f
F(gi(ft)) = JhhF(Q<r>);
L(to) = Yihb(Q). (1-24)
В этом очевидный смысл этих преобразо-
ваний.
Выражения (1-14), (1-22), (1-23) измеряют
динамические влияния: первое — в статике, по
отношению к статическим, второе — к гармо-
ническим, третье — к произвольным силам.
Величины Q<c), Q<r>, Q представляют соответст-
венно статические, гармонические и произ-
вольные обобщенные силы. Наиболее общие
понятия автоматики — амплитудно-фазовые
характеристики и передаточные функции — яв-
ляются последовательными обобщениями при-
надлежащего односторонней механике поня-
тия — статические коэффициенты влияния. Эта
связь между статическими коэффициентами
влияния и передаточными функциями остает-
ся невыясненной в современной теории регу-
лирования, поскольку невыясненной остается
природа автоматики как односторонней ме-
ханики [Л. 36].
Выражения (1-14), (1-22), (1-23) могут быть
названы соответственно статическими, гармони-
ческими и общими функциями влияния, либо
статическими, гармоническими и общими пе-
редаточными функциями. Понятие «динамиче-
ские влияния» требует некоторых пояснений.
В той же мере, в какой определенными явля-
ются понятия «статическая сила» и «статиче-
ское влияние» [Л. 36], неопределенным оста-
ется в односторонней механике понятие «ди-
намическая сила», а с ним и понятие «динами-
ческое влияние», пока не указан закон изме-
нения ее во времени. Принятие простейшего
гармонического закона изменения для дина-
мической силы (гармоническая сила) сообща-
ет уже понятию динамическое влияние пол-
ную определенность. Приложенная к линей-
ной системе гармоническая сила вызывает во
всех точках системы установившиеся гармони-
ческие колебания. Амплитудой и фазой этих
колебаний однозначно определяется динами-
47
ческое влияние гармонической -силы. Динами-
ческими влияниями по отношению- к гармони-
ческой силе являются амплитудно-фазовые ха-
рактеристики. Они представляют, однако,
лишь наиболее простой из многих возможных
частных способов определения динамических
влияний. Общим способом определения дина-
мических влияний по отношению к изменяю-
щейся по произвольному закону динамической
силе являются передаточные функции.
Общие и локальные свойства. Де-
ление свойств на общие свойства «и их локаль-
ные подсвойства, рассмотренное выше на при-
мере статических свойств, распространяется и
на динамические свойства системы. Общие
свойства представляют -собой свойства систе-
мы в целом, их локальные подсвойства — вза-<
имные статические и динамические влияния
элементов. Общие свойства выражаются ха-
рактеристическим определителем системы, ло-
кальные подсвойства — минорами его. К об-
щим динамическим свойствам относятся, в ча-
стности, устойчивость, апериодичность, моно-
тонность, целиком определяемые характери-
стическим определителем. Локальными дина-
мическими свойствами системы являются ди-
намические влияния во всех каналах ее.
Матрица динамических свойств обобщает
рассмотренную выше матрицу статических
свойств:
Неособенные:
Особенные:
общие свойства
динамичность
А (р№
адинамичность
Д
локальные
подсвойства
конечная бесконеч-
ная
опреде- неопреде-
ленная ленная
Конечная динамичность означает конечную
динамическую проводимость (конечное дина-
мическое сопротивление) канала i—k (речь
идет о проводимости динамического импульса,
сигнала). Бесконечная динамичность означает
нулевую, проводимость (бесконечно большое
сопротивление) канала. Определенная адина-
мичность означает бесконечно большую про-
водимость (нулевое сопротивление) канала.
Неопределенная адинамичность означает не-
определенную проводимость (неопределенное
сопротивление) канала. Тот же -смысл, как
выяснено было выше, имеют статические ло-
кальные свойства по отношению к статической
проводимости каналов. Матрица статических
свойств является частным (статическим) слу-
чаем матрицы динамических свойств.
Оба возможные общие статические свой-
ства оказались возможными для двусторонних
систем. Из двух возможных общих динамиче-
ских свойств для двусторонних систем воз-
можным является лишь одно — динамичность.
Из четырех возможных статических локаль-
ных подсвойств для двусторонних систем воз-
можными были два — конечная статичность и
определенная астатичность, два остальных
явились новыми феноменами односторонней
механики. Из динамических локальных под-
свойств возможно для двусторонних систем
только одно — конечная динамичность, три
остальных являются новыми феноменами од-
носторонней механики. Ниже рассмотрены бу-
дут способы их реализации. Локальная ади-
намичность подобна своему частному слу-
чаю — локальной астатичности: система, и
в статике и в динамике, неспособна быть
в данном канале объектом силы, к &-му ее
элементу не может быть приложена сила.
Любопытно, что из всех этих ненатуральных свойств
в автоматике обнаружено было лишь одно—бесконеч-
ная динамичность (инвариантность). Беспорядочная
дискуссия, развернувшаяся вокруг этого вопроса,
утверждения о физической бессмысленности понятия
инвариантности '(полной компенсации — в первоначаль-
ной терминологии основоположных здесь работ
Г. В. Щи панов а 1[Л. 19]), хорошо отображают реакцию
классической механики на чужеродные для нее фено-
мены односторонней механики. Дискуссия эта вполне
исчерпывается концепцией односторонней механики —
все три ненатуральных свойства матрицы динамических
свойств, как и матрицы статических свойств, невозмож-
ны в двусторонней механике и возможны в механике
односторонней, а следовательно, и ib автоматике. В по-
следней они не -менее физически осмысленны, чем нату-
ральные свойства. Любопытно, что и сейчас, после реа-
билитации принципа полной компенсации и широкого
развития теории инвариантности, принадлежность этого
принципа односторонней механике все еще остается не-
ясной его сторонникам. -В проводимых ими делениях си-
стем на системы, реализующие и 'не реализующие прин-
цип инвариантности, среди всякого рода частных прин-
ципов (двухканальность и т. д.) отсутствует основной—
натуральность: в натуральных системах двусторонней
механики принцип этот, принадлежащий односторонней
механике, не реализуется. «Загадочность» принципа ин-
вариантности, как и ряда иных положений современной
автоматики, обусловлена тем, что они вводятся в виде
разрозненных положений неопределенной природы и при-
надлежности. Загадочность эта снимается концепцией
односторонней механики.
Динамическая двойственность.
Операторный метод, сводя динамические от-
ношения (1-1) сил и движений к статическим
отношениям (1-19) и (1-20) их изображений,
распространяет на динамику принцип стати-
ческой двойственности.
б) Основные понятия
Основные понятия. Односторонние
системы обладают произвольной структурой и
соответственно описываются наиболее общи-
ми уравнениями. Этими общими уравнениями
(1-1) описываются в односторонней механике
и натуральные системы. Для этих специаль-
48
ных систем общим уравнениям односторонней
механики может быть придана специальная,
энергетическая форма уравнений Лагранжа
2-го рода. Для односторонних систем такое
энергетическое описание в общем сЛучае не-
возможно. Предложения описывать системы
автоматики энергетическими уравнениями
Лагранжа (например, в сводной монографии
[Л. 62], Б. Н. Петров) принадлежат к числу
многих иных ошибок, вызванных неопределен-
ной принадлежностью предмета. Специальные
уравнения Лагранжа описывают специальные
натуральные системы в общей односторонней
механике, но не могут описать в ней общие
односторонние системы. Здесь в общем случае
отсутствуют кинетическая, потенциальная и
диссипативная функции. С отказом закону со-
хранения энергии теряет свое значение поня-
тие—энергия, как и остальные понятия—ко-
личество движения, момент количества дви-
жения, центр инерции, связанные с законами
сохранения. В односторонней механике не су-
ществует общих для нее энергетических урав-
нений. Центральным здесь является понятие—
сила, или, вернее сказать, — динамическая
связь, реакцией которой является сила. Веко-
вая борьба между энергетической—гюйгенсо-
вой и силовой — ньютоновой механиками од-
нозначно решается в односторонней механике
в пользу последней.
Более общий смысл приобретает поэтому
в односторонней механике и понятие — обоб-
щенная сила. Произведение обобщенной силы
на обобщенную координату не должно уже
здесь иметь размерность энергии. Обобщенны-
ми силами являются здесь произвольной раз-
мерности воздействия.
Элементарные системы. В двусто-
ронней механике противостоят друг другу
элементы и сложные системы и понятие — эле-
ментарная система является лишь вспомога-
тельным. Изолированные элементарные систе-
мы не содержат здесь внутренних сил и вы-
рождаются в элементы. В односторонней ме-
ханике понятие это столь же важно, как два
остальных. Элементарные системы являются
здесь посредствующим понятием между слож-
ными системами и элементами, позволяющим
выделить элементы,—системами в полном
объеме этого понятия, содержащими внутрен-
ние силы. Чтобы выяснить значение этого по-
нятия, следует рассмотреть классификацию
систем по признаку подчинения или включе-
ния (иерархическая классификация).
Иерархическая классификации.
Примем, что класс общей системы на единицу
превышает класс наиболее сложной из входя-
щих в нее составляющих подсистем. Состав-
ляющие системы будем обозначать римскимй
цифрами. Исходным, нулевым классом будем
считать класс элементарных систем. Класс со-
ставляющей системы будет обозначаться араб-
ской цифрой в квадратных скобках в верхней
части римской цифры, обозначающей эту си-
стему. Общая система будет, таким образом,
всегда обозначена римской единицей, по-
скольку она содержится в единственном числе
(рис. 1-22,а).
Одноциклические системы регулирования
в верхней строке рис. 1-20, элементами кото-
рых являются системы нулевого класса, пред-
ставляют в этой классификации системы 1-го
класса. Соединение их в параллель (в энерге-
тических системах) или в многомерные систе-
мы связанного регулирования образует уже
системы 2-го класса. Следующая ступень под-
чинения — соединение отдельных энергетиче-
ских систем в единую энергетическую систе-
му—образует систему следующего, 3-го клас-
са и т. д. Системы 1-го класса (простейшие из
неэлементарных систем) назовем простыми
системами. Системы всех следующих классов
назовем составными. Составными системами
2-го класса являются все двусторонние систе-
мы, поскольку они составлены из двучленных
простых систем как из элементов.
Эта общая систематика построена по одно-
му лишь наиболее общему признаку — подчи-
нения. В дальнейшем системы будут класси-
фицироваться внутри нее по ряду более част-
ных признаков.
Динамическая освобождае-
мо с т ь. В классической механике формули-
руется принцип освобождаемости (который
мы назовем теперь принципом кинематической
освобождаемости), утверждающий возмож-
ность отбрасывания в движущейся или покоя-
щейся системе кинематических связей с одно-
временным приложением к системе реакций
этих связей. Это почти тривиальное положение
имеет тем не менее важное методическое зна-
чение в построениях классической механики.
Еще более полезным оно оказывается приме-
нительно к вводимым в односторонней меха-
нике нового вида связям — динамическим свя-
зям. Здесь оно может быть сформулировано
как принцип динамической осво-
бождаемости: отбрасывание динамиче-
ских связей системы с одновременным прило-
жением к ней реакций отбрасываемых связей
представляет собой тождественное преобразо-
вание системы. Принцип этот верен, разумеет-
ся, и в классической механике и не формули-
руется в ней потому лишь, что в ней несформу-
лированным остается само понятие — динами-
ческая связь.
-4 И. И. Гальперин.
49
Рис. 1-22. Иерархическая классификация.
Оба принципа — кинематйческой и динами-
ческой освобождаемое™ имеют, разумеется,
чисто логическое содержание и могут быть
рассматриваемы как соответствующие интер-
претации принципа логической освобождаемо-
сти, который легко было бы сейчас сформули-
ровать. 1
Внутренние и внешние силы и
связи. Принцип динамической освобождае-
мости проясняет прежде всего понятия о внут-
ренних и внешних силах и связях, вокруг ко-
торых группируются все остальные понятия
механики.
На рис. 1-22 принцип этот показан в дей-
ствии. Здесь симметричная, для простоты, си-
стема 2-го класса (рис. а) последовательно
освобождается от связей системы 2-го класса,
(рис. 6), затем 1-го (рис. в), затем нулевогр
(рис. г). Рассекаемые динамические связи за-
меняются их реакциями — обобщенными сила-
ми. Тождественность систем, получаемых этим
приемом освобождения, указана на рис. 22
знаками тождества. Во всех этих трех опера-
циях происходит освобождение составляющих
систем все более низкого класса от внешних
по отношению к ним связей системы. Само вы-
деление общей системы из внешней среды (по-
казанное пунктиром на рис. а) следует рас-
сматривать как освобождение общей системы
от внешних ее связей. Реакция этих внешних
связей, прилагаемых к системе в соответствии
с принципом динамической освобождаемое™,
и суть внешние силы системы (рис. а).
Принцип динамической освобождаемое™
разъясняет введенные выше понятия об эле-
менте, элементарной системе и ее внешних и
внутренних связях. Неосвобождаемым далее
конечным продуктом динамического освобож-
дения являются динамические элементы
(рис. в). При этом выясняется, что собствен-
50
но элементом является старшая внутренняя
связь. Принцип динамической освобождаемо-
сти позволяет, таким образом, выделить из
элементарных динамических -систем собствен-
но элементы, противостоящие всем остальным
внутренним связям элементарной системы, как
объект связывания.
Если придать связям и их реакциям индекс’
(в квадратных скобках) класса той подсисте-
мы, к которой они принадлежат, то уравнения
(1-1) могут быть записаны в -следующем виде:
SQ*01 + SQ}1’+ ...== О (1-25)
(i— 1, 2, .m).
Индексом Q!001 обозначена здесь внешняя си-
ла системы, поскольку класс ее должен пре-
вышать любой возможный класс системы
(рис. 1-22). Все силы, стоящие слева от какой-
либо из этих сумм, вместе с силами, заклю-
ченными в этой сумме, являются, в соответст-1
вии с данным выше определением внутренних
и внешних сил, внутренними силами подсисте-
мы, обозначенной индексами этой суммы; все
силы, стоящие справа от этой -суммы, являют-
ся внешними для этой подсистемы. Силы Q-001
являются внешними для системы и, -следова-
тельно, для всех ее подсистем; силы Q-01 яв-
ляются внутренними для всех подсистем. Си-
лы эти, принадлежащие элементарной системе
нулевого класса, образуемой i-м элементом,
являются внутренними силами и этой, неде-
лимой далее, подсистемы. Имея i-й элемент и
источником и объектом, выходя из этого эле-
мента и возвращаясь в него, они образуют од-
ночленные циклы. Тогда как все остальные
силы представляют собой взаимные воздейст-
вия элементов, эти последние силы представ-
ляют собой самовоздействия. В их числе на-
ходится сила инерции, представляющая соб-
ственно элемент.
Эта формализованная схема рассуждений, пояснен-
ная рис. 22, показывает, что деление сил на внешние
и внутренние по признакам, принятым выше для одно-
сторонней механики, имеет для нее силу логической не-
обходимости. С этим необходимо возникающим делени-
ем сил на внутренние и внешние силы системы связано
такое же деление динамических связей, реакциями ко-
торых эти силы являются. (Понятия внутренние и внеш-
ние -связи употребляются здесь, таким образом, в наи-
более общем, логическом их значении: внешние связи
элементарных систем являются внутренними связями
следующих по сложности простых систем, внешние свя-
зи этих простых систем явятся внутренними связями
составных систем, содержащих эти простые системы
в качестве элементов, и т. д. Только внутренние связи
неделимых далее элементарных систем ((кратко называе-
мые в дальнейшем просто внутренними связями) сво-
бодны от этой двойной функции—для всех составляю-
щих систем нарастающей сложности, на которые может
быть разбита сложная система, связи эти являются
внутренними.
Эту принадлежность логике центральных структур-
ных понятий и терминов приходится подчеркивать, так
к:ак первый из них — внутренние связи, уже после вве-
дения его нами, использован -был рядом авторов в -ином,
чисто изобразительном смысле—для обозначения диа-
гональных связей. Это привело к существенной порче
структурной терминологии.
Внутренние связи элементарных систем
представляют собой самовоздействия элемен-
тов, т. е. свойства элементарных систем — их
массы, катаракты, статичности и т. д. Внеш-
ние связи элементарных систем представляют
взаимные воздействия элементов, а именно
воздействия элемента, обозначенного вторым
индексом -связи, на элемент, обозначенный
первым ее индексом. Естественно поэтому рас-
сматривать внутренние связи, обозначаемые
одинаковыми индексами, как самовоздействия
элементов (это всего лучше выражается не-
зависимо от этих представлений сложившими-
ся наименованиями этих свойств — с пристав-
кой само*, самоиндукция, саморегулирование,
самовыравнивание, самовыключение). Это не-
обычное представление свойств элементов как
их внутренних связей или самовоздействий
явится основой дальнейшего рассмотрения.
Возможность представить и взаимодействия
элементов и их самовоздействия — свойства
в виде внешних и внутренних связей, .различ-
ных форм одного и того же понятия—связь,
сообщает многообразному материалу динами-
ческих систем неожиданное единство.
Взаимодействия. На рис. 1-23 дана
сводка основных понятий односторонней ме-
ханики. Первичной, неделимой далее состав-
ляющей является одностороннее действие
в открытой (действие) ййи замкнутой (само-
действие) формах. Этими простейшими со-
ставляющими образуются показанные на ри-
сунке упорядоченные многосторонние дей-
ствия (взаимодействия, структурные единицы)
и многосторонние механики. Взаимодействия
верхней половины рисунка образованы толь-
ко отрицательными циклами. Взаимодействия
нижней половины могут быть образованы од-
ними положительными циклами только при
частичной связанности. При максимальной
связанности (последняя строка рисунка), т. е.
наличии всех возможных связей, система, со-
держащая более двух элементов, нё может
состоять из одних положительных циклов.
Для нечетных систем это выясняется уже при
‘частичном связывании, вводящем все возмож-
ные двучленные циклы (предпоследняя строка
51
X
лэ
сь
Б
о
Рис. 1-23. Основные понятия односторонней механики.
рисунка). Поскольку нечетные системы явят-
ся подсистемами всех четных систем, содер-
жащих более двух элементов, вывод этот рас-
пространяется и на эти нечетные системы.
Теорема 1 -IX. Максимально связанные си-
стемы могут содержать одни отрицательные
циклы и не могут содержать одни положитель-
ные циклы.
Максимальное число связей не следует
смешивать с полным числом связей, равным
в задаче реактивности удвоенному числу эле-
ментов (§ 1-1-3). Помимо этих порождаемых
ею упорядоченных взаимодействий специаль-
ных механик, лишь частично приведенных на
рисунке, односторонняя механика порождает и
принадлежащие только ей произвольного вида
взаимодействия. В состав взаимодействий вхо-
дят здесь и самодействия и взаимные воздей-
ствия элементов, образующие в общем случае
сложный узел связей, не
поддающийся словесной
формулировке и требующий
структурной формулы — в
'виде структурных единиц.
Элементы односторонней ме-
ханики также представляют
собой самодействия, стар-
шего порядка, и входят в
круг тех же понятий. Воз-
можность представить все
понятия односторонней ме-
ханики с помощью одного
Лишь понятия — односторон-
ней связи — сообщает всему
предмету полное единство.
1-3. ДВУСТОРОННИЕ
МЕХАНИКИ
К двусторонним механи-
кам относятся классическая,
газодинамическая, гироско-
пическая и ряд других. Рас-
смотрим их в этой последо-
вательности, сосредоточив
основное внимание на клас-
сической механике, рас-
сматривая ее в новом аспек-
те — как специальный слу-
чай односторонней меха-
ники.
1-3-1. Классическая
механика
А. Механика элементов
Классическая механика
элементов ограничена поло-
жительностью и 2-м поряд-
ком этих элементов. Для классической меха-
ники, как дедуктивной теории, ограничение
это является ее специальным постулатом эле-
ментов.
Классическая механика элементов являет-
ся специальным случаем рассмотренной выше
общей, односторонней механики элементов.
Ее положительные, 2-го порядка специальные
элементы отвечают по законам этой общей
механики на внешние силы ускорениями того
же знака и 2-го порядка. Инерциальным дви-
жением этих элементов явится по тем же за-
конам движение с постоянной, в частности —
нулевой, скоростью.
Элементарные системы возможны в клас-
сической механике лишь, как подсистемы
сложных систем (рис. 1-24). Изолированные
элементарные системы вырождаются в клас-
сической механике в элементы, поскольку реак-
52
Элемент
чеснаяидис- ческая
cu.namu.B~
ная
пативная ческая и
адисси-
пативная
Элемент
стати- отрица- отрица-
чеснаяи тельно- тельно-
диссипа- ^сталш- t-диссипа-
тивная ческая главная
изолированных автономных систему неизолированных автономных систем i
Элементарные подсистемы:
Рис. 1-24. Элементарные подсистемы классической механики.
ции их внутренних связей являются здесь внеш-
ними силами (рис. 1-13). Это пояснено рис. 1-25.
В первой строке рисунка даны элементарные
системы, во второй — их динамическая струк-
тура, в третьей—статические подсистемы. Изо-
лированная элементарная система (рис. 61)
в классической механике может быть только
астатична. Неизолированные системы (рис. а\,
ej могут обладать положительным или отри-
цательным статизмом. Статическими подсисте-
мами их являются положительный (рис. а3)
или отрицательный (рис. б3) идеальные эле-
менты. Реакции этих подсистем являются од-
нако, внешними силами элементарных систем
(рис. 1-13), и системы эти вырождаются здесь
в элементы. Статической подсистемой астати-
ческой элементарной системы б2 является аб-
страктный элемент б3, лишенный каких бы то
ни было связей — каких бы то ни было внут-
ренних механизмов противодействия. По логи-
ческому постулату действия такой элемент не
может быть объектом каких бы то ни было сил
и представляет собой лишь абстрактный узел
связей и сил.
Б. Механика взаимодействия
а) Уравнения динамики
Для классических двусторонних систем
возникает специальная, им одним присущая
возможность описания систем энергетическими
уравнениями Лагранжа (2-го рода). Уравне-
ния эти, как показано ниже, описывают нату-
ральные двусторонние -системы в односторон-
ней механике и могут быть названы поэтому
односторонними энергетическими уравнениями
двусторонних систем. В них содержится и ме-
ханика элементов и механика взаимодействий.
Односторонние энергетические
уравнения. В уравнениях Лагранжа со-
держится вся двусторонняя механика системы.
Уравнения эти имеют вид:
д f дТ \
& \ dqi J
dqi dqi i °4i й 1
(1-26)
(i = 1,2,.. .,/n).
Здесь q и Q — обобщенные коорди-
наты и силы,
/7, Т и R — энергетические функ-
ции — потенциальная
и кинетическая энер-
гии системы и дис-
сипативная функция
её.
Рассмотрим структуру этих
уравнений применительно к нату-
ральным системам — системам, для
которых энергетические функции
могут быть представлены однород-
ными квадратичными формами (в
дальнейшем к классической меха-
нике будут относиться только на-
туральные системы; ненатуральные
53
системы принадлежат в принятой здесь кон-
цепции к неклассическим механикам):
т т
j—1 k=\
т tn
(b27)
i=l
m m
T = ~2
/=1 *=1
Лагранжевы уравнения (1-26) принимают для
них вид:
X + Cibflkl — Qfi} (1-28)
Л=1
(Z = 1, 2, ..т).
Здесь Aih, Bik, Cik — зависящие от координат
и от времени квазиинер-
ционные, квазидиссипатив-
ные и квазистатические
параметры системы:
, _ д2П _ д2П
ih dqidqk dqkdqt
d2R _ d2R
dqidqk dqkdqt
(1-29)
d2T _ d2T
dqidqk dqkdqi
Лагранжевы уравнения (1-28) представля-
ют собой специальный случай уравнений (1-1)
односторонней механики, определяемый соот-
ношениями (1-29). Последние вытекают из на-
личия у систем энергетических функций. Пред-
ставленная лагранжевыми уравнениями дву-
сторонняя механика являет, таким образом,
специальный случай односторонней механики.
В лагранжевых уравнениях, однако, постулат
противодействия явно не дан, и в этом смысле
форма их неадэкватна специальному содержа-
нию, неспециализирована.
Это исходное несоответствие вызывает и
ряд производных. Одно из них обнаруживает-
ся в делении сил на внутренние и внешние.
В правой части лагранжевых уравнений рас-
полагаются обобщенные силы, не зависящие
от координат системы и, следовательно, внеш-*
ние для нее в определениях односторонней
механики, в левой части — зависящие и, в тех
54
же определениях, внутренние. Группировка
сил в лагранжевых уравнениях принадлежит
односторонней механике. Уравнения эти пред-
ставляют собой по этому признаку уравнения
двусторонних систем в односторонней механи-
ке, описание этих специальных систем в по-
рождающей их общей механике неспециализи-
рованными уравнениями этой механики. Рас-
смотрим определяющее классическую механи-
ку специальное ее деление сил на внешние и
внутренние силы, вытекающее из постулата
противодействия.
Выделение, всегда условное, динамической
системы из внешней среды служит исследова-
нию движений ее относительно этой среды.
Среда при этом фиксируется, и относительные
движения выделяемой системы становятся аб-
солютными. Во всех механиках со связанным
взаимодействием, в классической — в частно-
сти, каждая из связей зависит от относитель-
ного движения всех элементов структурной
единицы: в двусторонних механиках — двух
элементов, трехсторонних — трех и т. д. Толь-
ко в односторонней механике и в механиках
с несвязанным взаимодействием, в гироскопи-
ческой — в частности, каждая из связей зави-
сит от абсолютного движения ведущего эле-
мента. Реакциями натуральных связей — свя-
зей классической механики являются одновре-
менно две силы — действующая и противодей-
ствующая, зависящие от координат взаимо-
действующих элементов. Фиксация среды и
выделение из нее системы ничега не изменяет
для внутренних связей системы—связи эти и
их реакции (внутренние силы) по-прежнему
функционально зависят только от относитель-
ного движения связываемых ими элементов;
для рассекаемых, внешних связей системы по-
ложение меняется, один из их элементов —
элемент среды фиксируется, и связи эти и их
реакции (внешние силы) функционально зави-
сят теперь только от абсолютного движения
элементов системы — движения относительно
неподвижной уже среды. В натуральных си-
стемах каждая из внутренних сил функцио-
нально зависит от разностей координат (и их
производных) двух элементов системы, каж-
дая из внешних сил — от координаты (и ее
производных) одного из элементов системы.
В натуральных системах не только внутрен-
ние, но и внешние силы системы являются
функциями координат ее. Это относится ко
всем механикам со связанным взаимодейст-
вием.
В классической механике не может быть,
таким образом, внешних сил, не зависящих от
координат системы. Не зависящие от коорди-
нат системы внешние силы в правых частях
уравнений Лагранжа (1-25) суть слабо зави-
сящие и лишь приближенно принятые постоян-
ными силы. Так, вес крановой тележки мосто-
вого крана лишь в той мере является посто-
янной силой, в какой деформация крановой
фермы несравнима с расстоянием до центра
земли. Это количественно ничтожное уточне-
ние принципиально важно для понимания под-
черкнутых выше положений.
В односторонней механике все физические
связи являются односторонними — зависящи-
ми только от абсолютного движения ведущего
элемента связи. Реакцией каждой из этих свя-
зей является только одна сила, действующая
со стороны ведущего элемента связи на ведо-
мый элемент ее. При фиксации среды и выде-
лении из нее системы, реакции рассекаемых
связей (внешних связей системы) приложены
к среде и зависят от координат системы, если
ведущим элементом в этих связях является
элемент системы, и приложены к системе
(в качестве внешних ее сил) и зависят от ко-
ординат среды и не зависят от координат си-
стемы, если ведущим элементом является эле-
мент среды. Внешние силы односторонних си-
стем не зависят от координат этих систем.
Для внутренних сил односторонних систем,
как и для двусторонних, выделение системы
из среды не вносит никаких изменений и они
по-прежнему зависят от абсолютных движений
элементов системы, от координат этих эле-
ментов.
В обоих случаях, в классической и односто-
ронней механиках, внешние силы системы яв-
ляются, до выделения ее из среды, внутренни-
ми силами системы плюс среда. В классиче-
ской механике силы эти определяются, до вы-
деления системы, относительным движением ее
и зависят от координат системы и среды. По-
сле выделения системы и фиксации среды эти
относительные движения становятся абсолют-
ными, а внешние силы системы — зависящими
только от координат системы. В односторон-
ней механике силы эти определяются, до вы-
деления системы, абсолютным движением сре-
ды и зависят только от координат среды. Пос-
ле фиксации среды и выделения системы силы
эти становятся постоянными.
Определения внешних и внутренних сил
расходятся, таким образом, в общей — одно-
сторонней и специальной—классической меха-
никах. Признаки деления первой необходи-
мы, но недостаточны во второй. Здесь эти оп-
ределения должны отвечать дополнительно по-
стулату противодействия. Функциональная за-
висимость силы от элемента необходима, но
недостаточна для того, чтобы элемент явился
субъектом этой силы. Так, реакции всех само-
действий являются в классической механике
внешними силами системы, хотя они и зависят
от координат ее. Это явствует из того, что са-
модействия не могут быть :в классической ме-
ханике внутренними силами системы, всегда
' выступающими в ней попарно и симметрично,
по постулату противодействия. В классической
механике элемент является субъектом силы
в том лишь случае, когда он одновременно
является объектом равнопротивоположной си-
лы, имеющей субъектом объект первой силы.
Это дополнительное условие исключает реак-
ции самодействий из числа внутренних сил си-
стемы и переводит их в категорию внешних
сил.
В обеих механиках внутренними для систе-
мы являются силы взаимодействия ее элемен-
тов, внешними — силы воздействия среды на
систему. Постулат противодействия сообщает
внутренним силам системы дополнительное
свойство—сумма обеих реакций каждой внут-
ренней связи и, как следствие, сумма всех
внутренних сил системы равны нулю. Этим
дополнительным свойством, определяющим за-
коны сохранения двусторонней механики, не
обладают в общем случае односторонние си-
стемы. В односторонней механике несправед-
ливы поэтому в общем случае законы сохра-
нения. Это дополнительное свойство внутрен-
них сил принимается иногда в двусторонней
механике как определение внутренних сил.
Оно, однако, является лишь специальным вы-
ражением подчеркнутого выше общего для
обеих механик определения и не должно слу-
жить определением.
То, что внешние в классической механике
силы одних и тех же натуральных систем в од-
носторонней механике все становятся внутрен-
ними, а системы — изолированными, может
показаться парадоксальным. Следует, однако,
помнить, что одновременно изменяются и за-
коны, которым подчиняются эти силы, движе-
ние же системы остается неизменным. Единст-
венное требование, которое должно быть
предъявлено к различным механикам, заклю-
чается в том, чтобы 'различные представления
в них одних и тех же систем давали одинако-
вые физические результаты. Парадоксальным
было бы различное движение одной и той же
системы в различных охватывающих ее меха-
никах.
Элементы представлены в уравнениях (1-28)
членами Aaqi. Все остальные члены левой части,
сумму их обозначим Q(.2), суть составляющие
обобщенной силы Qi, зависящие от координат
системы. Сила Q(.l), стоящая в правой части,
представляет собой составляющую обобщенной
55
силы Qi, не зависящую в указанном выше при-
ближенном смысле от координат системы.
Обобщенная сила Qi равна сумме: •
Лагранжевы уравнения не позволяют раз-
делить эти составляющие обобщенной силы на
внутренние и внешние, в описываемой ими клас-
сической механике, силы системы. Они позво-
ляют отнести к внешним силам силу Q{^, не
зависящую от координат системы. Однако и
среди составляющих силы Q(2), зависящих от
координат системы, могут находиться внешние
силы. Определяемое этими уравнениями деле-
ние обобщенных сил на силы Q(.2) и Q(.°, зави-
сящие и не зависящие от координат системы,
принадлежит, как указано было выше, одно-
сторонней механике. В ней эти силы являются
соответственно внутренними и внешними си-
лами системы. В этом смысле лагранжевы
уравнения представляют собой уравнения
натуральных систем в односторонней меха-
нике,
В лагранжевых уравнениях все составляю-
щие обобщенных сил представлены функция-
ми не относительных, а абсолютных движений.
И в этом смысле форма их также не отобра-
жает специального содержания классической
механики и представляет описание натураль-
ных систем в односторонней механике.
Преобразуем лагранжевы уравнения к фор-
ме, отображающей их специальное содержа-
ние: 1) постулат противодействия, 2) вытека-
ющее из него деление на внутренние и внеш-
ние силы, 3) зависимость первых только от
относительного движения элементов системы,
вторых—только от абсолютного.
Двусторонние энергетические
уравнения. В векторных силовых уравне-
ниях динамики и в их скалярных проекциях
на оси декартовых координат постулат проти-
водействия предстает в явном виде—внутрен-
ние силы натуральных систем выступают
в этих уравнениях только попарно, в виде рав-
ных и противоположно направленных векто-
ров. Это позволяет непосредственно разбить
силы, входящие в эти уравнения, на внутрен-
ние и внешние силы системы. Такие уравнения
натуральных систем назовем двусторонними,
все же остальные формы их уравнений — од-
носторонними. Оба понятия относятся только
к двусторонним системам — уравнения одно-
сторонних систем всегда односторонни в этом
смысле. В лагранжевых энергетических урав-
нениях натуральных систем явное в этом смы-
сле выражение постулата противодействия те-
ряется. Члены этих уравнений также являют-
ся силами составляющими обобщенной силы.
56
Силы эти, однако, сгруппированы по совер-
шенно иному, принадлежащему односторонней
механике, признаку—зависимости от абсолют-
ного движения элементов. Это не позволяет
непосредственно разбить эти силы на внешние
и внутренние. Доказательства законов сохра-
нения, вытекающих из равенства нулю суммы
внутренних сил в натуральных системах, мо-
гут поэтому проводиться лишь с помощью дву-
сторонних силовых уравнений этих систем и
не могут с помощью лагранжевых энергетиче-
ских уравнений — односторонних уравнений
натуральных двусторонних систем.
Лагранжевы энергетические уравнения на-
туральных систем могут быть, однако, пред-
ставлены и в адэкватной их содержанию дву-
сторонней форме, в явном виде отображаю-
щей постулат противодействия и вытекающее
из него специальное разбиение сил на внеш-
ние и внутренние силы системы. Такие двусто-
ронние энергетические уравнения могут быть
использованы, в частности, для доказательства
законов сохранения. Для натуральных двусто-
ронних систем уравнения эти получаются лег-
ко прослеживаемым тождественным преобра-
зованием лагранжевых уравнений (1-28):
( дЧ , р д*Т \ ..
I й2 Zj dqidqk j4i —
/ d*R - Vl d2R \ . / д2П -
\ dqi L dqtdqk )qi ( dqj
\ k / X
। VI д’П \ VI d*T 4
+ S d<hdqk dqidqk
k J k
k k
(l-30>
(& = 1,. 2, ..i — 1, Z—1, ..m)
(i = 1, 2, ..m).
(
В этой записи постулат противодействия
явно выражен противоположным знаком ско-
бок (flk—qi) и (qi—qk) соответственных чле-
нов в уравнениях взаимодействующих i-ro и
й-то элементов.
Левая часть уравнения представляет собой
взятую с обратным знаком противодействую-
щую обобщенную силу инерции Z-го элемента.
Правая часть содержит действующие обоб-
щенные силы. В первой строке правой части
находятся внешние, в классической механике,.
силы системы, во второй — внутренние: инер-
ционного (первый член), диссипативного (вто-
рой член) и упругого (третий член) "взаимо-
действия.
В натуральных системах все эти силы явля-
ются, как выяснено было выше, сложными,
зависящими от нескольких координат, внут-
ренние силы — от двух, внешние — от многих.
Одночленные слагаемые этих сложных сил,
зависящие каждая от координаты одного эле-
мента, назовем элементарными силами. Чле-
d2n п \ \ д*Т
нами ч—s- (qk — 7г), (7ft —7г),
иЦгОЯъ. dqtdqb dqidqk
Х(7а — 7г) описываются внутренние силы си-
стемы, упругие, диссипативные, инерционные.
ю д2П d2R • д2Т •• к
В членах же ——ту 7г, —^7г объединены
<fy2 dqf dq-
ные знаки) из этих членов суммы Vj
внешние силы с элементарными составляющими
внутренних сил. Вычитая (члены в скобках
первой строки уравнений имеют всегда различ-
ат?
dq<dqkgi'
k
Ld2R VI д2Т ••
-—~7г, у ~——Qi ЭТИХ элементарных со-
dqidqk Li dqidqk
k k
ставляющих, отъединяем внешние силы от
внутренних. Переход от односторонних энерге-
тических уравнений (1-26), (1-28) к двусторон-
ним (1-30) позволил представить в явном виде
постулат противодействия и разделить внешние
и внутренние силы системы. Специальная форма
этих последних уравнений полностью отобра-
жает их специальное содержание.
В соответствий с постулатом противодейст-
вия внутренние силы зависят от относитель-
ного движения элементов и выступают только
д2П , ч
попарно — каждой из сил — qi),
— г'го Уравнения
dqidqk dqidqk
соответствует равная ей и противоположно на-
правленная сила й-го уравнения: (qi—7ft),
y-y-(^ — q^, -т—r-{pi — qk). Равенство этих
dqkdqi dqkdqi
сил вытекает из соотношений (1-29), противопо-
ложность— из противоположного знака скобок
{qh — q^ и (qi — qh).
Эти внутренние в классической механике
силы представляют собой в каждом из уравне-
ний (1-30) в сумме внутреннюю составляю-
щую обобщенной силы Qi. Силы, стоящие
в первой строке правой части уравнений (1-30),
зависящие и приближенно не зависящие от
координат системы, представляют собой в сум-
ме внешнюю в классической механике состав-
ляющую Q(p обобщенной силы Q2*. Внешняя
в этой механике составляющая обобщенной
силы может быть, как выяснено было выше,,
зависима от координат системы.
** Эта группировка сил в правой и левой ча-
стях двусторонних уравнений (1-30) по их (сил)
зависимости от соответственно абсолютного
и относительного движений элементов отлична
от группировки их в лагранжевых односторон-
них уравнениях (1-26), где в правой и левой
частях уравнений группировались силы, соот-
ветственно зависящие и не зависящие от абсо-
лютного движения элементов. Последняя груп-
пировка отвечает делению сил на внутренние
и внешние в односторонней механике.
С учетом соотношений (27) уравнения (30)
принимают вид:
(Аи + Aih) q{ = Q(.”— (Ви + £ Bik) qi -
k k
(Cii 4“ ^ik) 7i , Aik (7ft 7г)
k . k
- VBift(7ft-7\)- £С^(^-.^) = 0 (1-31)
ft k
(& = 1, 2,..., i—1, /-{-1,..., m),
(i— 1, 2,..., m).
На рис. 1-26, 1-27, 1-28 даны в верхней ча-
сти рассматривавшиеся выше (рис. 1-1, 1-2,
1-3) натуральные системы с соответственно
упругим, диссипативным и инерционным взаи-
модействиями. В левой части рисунка даны в
инверсной кинетостатической форме лагран-
жевы односторонние энергетические уравнения
(1-28) этих натуральных систем, описывающие
их в односторонней механике, и соответствую-
щие этим уравнениям односторонние структур-
ные схемы. В правой части рисунков даны в
прямой кинетостатической форме двусторон-
ние энергетические уравнения (1-31) этих же
систем,.описывающие их в классической меха-
нике, и соответствующие этим уравнениям
двусторонние структурные схемы. В обеих,
структурных схемах каждая стрелка обознача-
ет один из членов уравнения, одну составляю-
щую обобщенной силы. В двусторонних схе-
мах силы эти являются сложными, в односто-
ронних—элементарными.
На рис. 1-26, 1-27, 1-28 дано, таким обра-
зом, описание натуральных систем в класси-
ческой и односторонней механиках. Возмож-
ность двойного описания специальных си-
стем—и в их специальной и в общей механи-
ках, а также различный вид этих описаний,—
понятны. Невозможно описание общих систем
57
|ЛЛЛ/ ]ллл/( т2 ]ллллИллл?
<>777777^77777x777^7777777777777777777777^77777777777777777777777
d?
с)
+0.+«2.+&,+г«.
-ЯнЪ
'>rCi2(Cl2~Cll}~~
an 'ii + £7/<27 с12Уг = О
а22Яг+ С22 Q2 — c2ffy ~ с2зЧз = О
азз93 + сззЯз “ сзгЧ2~^ = *0
4- ^«4^ - fy3q3 + = О
-a22qz + (-022-^21 + C23YI2- с2/(9г-^)+с2з(Яз-Яг) = 0
~ аззЧз + (~сзз+с32 + сзь)Чз~ сзг(Яз^сЩ'¥Сз^Г’ЧзУ==' О
-а^-8^+(-см+см )^-с^(^-113)
Рис. 1-26. Односторонние и
двусторонние уравнения натуральных систем.
в -специальной механике, и это является ис-
точником указанных выше парадоксов.
В обеих -структурных схемах связи и их ре-
акции— силы направлены от субъекта силы
и связи к объекту их. Для самодействий субъ-
ект и объект силы сливаются, и связи само-
действия образуют одноэлементные, одночлен-
ные циклы. Связи взаимодействия образуют
двучленные циклы, а в более сложных систе-
мах—и многочленные циклы. В двусторонних
схемах и представляемой ими классической
механике остается один лишь вид самодейст-
вия—силы инерции. Все остальные самодейст-
вия односторонних структурных схем пред-
ставляют собой в двусторонних схемах внеш-
ние силы.
Оба типа структурных схем представляют
собой кинетостатические силовые схемы. Урав-
а) 9+Яз 9+fy
Glikt + bnqf ~ ^12^2 = О + + biz)it +Ь12(У2 -Ц1)—О
аггЯг + b22qz - b2fqf - = О а— ~а22Уг ^(-‘ь22^ ьг) * ^2з)Яг— bZJ(q2 - Ъ) + Ь2з(Чз~^2}—0
иззЧз + ьззУэ “ b32q2 ~ b3Jik = О ^u33q3 ^(-Ь33^ b32^ Ьз4)^з-b32(q3-q2)Yb3^(q4-q3) = о
G^q^ + b^q4 - b43q3 + = 0 -a^q4 - Q$J+(-b^+ b^ )q4 - bk3(q^q3) = 0
Рис. 1-27. Односторонние и двусторонние уравнения натуральных систем.
a1lkl + CffV/ - а12^2 ® °
аггЯ2 + c22ff2 - a2Jqt - a23q3 = 0
*3343 + С33^3 ~ а32^2 — a34$4 = О
<W* + - а4эд3 + {$> = о
—faf/ - 0/2c1ffy **“ а12(Яз
a2J а23)$2~Сг2Фз~ a2lf&Z '~il} + а2з(^3~ Hz) 9 &
-~(азз~a32— а34)Чз~сззУз ~ азг(Чз —9z)+ ~ 4з)<.~ &
-(a^-a^ у&-*сыЧ4- S’. = 0
Рис. 1-28. Односторонние и двусторонние уравнения натуральных систем.
нения динамики -системы могут быть получены
из этих схем как уравнения кинетостатическо-
го равновесия их элементов. Эти строгие опре-
деления должны быть противопоставлены раз-
личным не вполне четким и не совпадающим
определениям, приданным впоследствии вве-
денному нами понятию 6 динамической струк-
туре.
В двусторонних структурных схемах явно
представлен специальный постулат противо-
действия двусторонней механики и определяе-
мая им специальная структура двусторонних
систем. Чтобы явно представить противопо-
ложность знаков сил взаимодействия, на рис.
1-26, 1-27, 1-28 изменен, против уравнений
(1-31), порядок членов в первой из двух ско-
бок, описывающих эти силы. Двусторонние
структурные схемы состоящие из попарно рав-
ных и противоположных по знаку сложных
сил, явно отображают постулат противодейст-
вия. В односторонних структурных схемах, об-
разуемых попарно равными и совпадающими
по знаку элементарными силами, отображаю-
щими соотношения (1-29), постулат этот дан
так же неявно, как и в представленных ими
лагранжевых уравнениях. Более того, здесь
возникает новое, центральное для всей одно-
сторонней механики понятие — самодействие
(и новый, стоЛь же важный символ его —
стрелка, образующая одночленный цикл), са-
мим наименованием своим противоречащее
этому постулату. Этим вновь подтверждается,
что лагранжевыми уравнениями натуральные
системы описываются в односторонней механи-
ке, в понятиях, выходящих за пределы класси-
ческой механики. Уравнения эти можно рас-
сматривать как специальный аппарат односто-
ронней механики для описания в ней специ-
альных для нее натуральных систем.
В двусторонних структурных схемах нату-
ральных систем возникает один лишь вид са-
модействия— силы инерции (рис. 1-26, 1-27,
1-28). Самодействие это, однако, — результат
образующего кинетостатику условного перено-
са сил инерции с их объекта, где они реальны,
на субъект, где они фиктивны. В действитель-
ности противодействующие силы инерции
приложены не к воздействуемым, а к воздей-
ствующим элементам и не образуют самодей-
ствия. Для действующих сил классической ме-
ханики самодействие исключено постулатом
противодействия. В кинетических, а не кинето-
статических, двусторонних структурных схе-
мах натуральных систем самодействие отсут-
ствовало бы полностью. В этом же условном
смысле являются самодействиями силы инер-
ции и в односторонней механике. В классиче-
ской механике их объединяет с остальными
59
самодействиями принадлежность к внешним
силам системы, в односторонней—принадлеж-
ность к внутренним силам системы. В одно-
сторонней механике, благодаря присущей ей
инверсной форме уравнений, силы инерции
объединяются с остальными силами системы,
как реакций динамических связей, одинако-
вым образом совпадающие по знаку, при по-
ложительных параметрах связей, или не со-
впадающие, при отрицательных параметрах
связей, со знаком соответствующего этой свя-
зи параметра движения. В классической меха-
нике благодаря присущей ей прямой форме
кинетостатических уравнений силы инерции
противостоят в этом смысле остальным силам.
Логический постулат действия одинаково
представлен в односторонних и двусторонних
схемах кинетостатическим равновесием каж-
дого из элементов системы.
Превосходство инверсной кинетостатиче-
ской формы над прямой наглядно подтверж-
дается сопоставлением односторонних и дву-
сторонних структурных схем — в первых поло-
жительные статичности, диссипации, массы
изображаются положительными связями, во
второй из этого общего правила выпадают
массы, положительные .массы изображаются
отрицательными связями (рис. 1-26, 1-27,
1-28).
В односторонней схеме на рис. 1-26,6 си-
стема а по окончании переходного процесса
будет находиться в равновесии (поскольку она
статична) под воздействием одной лишь внеш-
ней силы. В односторонней механике это не
парадоксально. Система эта обладает статич-
ностью нулевого порядка. Система на
рис. 1-27,а астатична, не обладает статично-
стью нулевого порядка, неспособна противо-
поставить действующим на нее силам равно-
весие нулевого порядка (т. е. при постоянных
значениях всех координат и нулевых значе-
ниях скоростей и ускорений). Она, однако, об-
ладает псевдостатичностью 1-го порядка—спо-
собна .противопоставить действующим силам
псевдоравновесие 1-го порядка (т. е. при по-
стоянных значениях всех скоростей и нулевых
значениях ускорений). В этом же смысле си-
стема на рис. 1-28,а обладает псевдостатич-
ностью 2-го порядка. В односторонней меха-
нике обе последние системы, поскольку они
обладают соответственно псевдостатичностью
1-го и 2-го порядков, также могут находиться
соответственно в псевдоравновесии 1-го и 2-го
порядков под воздействием одной только силы
(рис. 1-27,6) или, в общем случае, ненулевой
(с неравными нулю главным вектором и глав-
ным моментом) системы сил. В системе на
рис. 28,а обобщенными силами являются мо-
менты QW сил тяжести G. В односторонней
механике силы эти, как функции координат
системы, являются внутренними ее силами
(рис. 1-28,6), в классической — внешними
(рис. 1-28,в).
Порядок псевдостатики каждой системы
определяется наинизшим порядком ее связей.
В интегральных системах он будет отрица-
тельным, в дифференциальных'—со статиче-
скими связями— нулевым (рис. 1-26), без ста-
тических связей — положительным (рис. 1-27,
1-28). Псевдостатика этих систем сводится
к статике соответствующими дифференциаль-
ными подстановками (например, для системы
на рис. 1-27 принятием скоростей за обобщен-
ные координаты).
Псевдоастатичности различных порядков
не следует смешивать с адинамичностью. Пер-
вые означают, что система неспособна проти-
востоять внешним силам при постоянных зна-
чениях параметров движения (путей, скоро-
стей, ускорений и т. д.) 6-го порядка, где k —
порядок псевдостатики. Вторая означает, что
система ни при каких значениях параметров
движения не способна противостоять внешним
силам. Псевдоастатичность относится к по-
рядковооднородной подсистеме младшего по-
рядка, адинамичность — к системе в целом.
Псевдоастатичность определяется тождествен-
ным равенством нулю характеристического
определителя этой подсистемы, адинамич-
ность — системы в целом. Понятие «подсисте-
ма» имеет двоякий смысл: 1) подсистемы по
элементному составу, охватывающей лишь
часть элементов -системы, однако со всеми
принадлежащими им связями, и 2) подсисте-
мы по связевому составу, охватывающей все
элементы системы, однако лишь с частью при-
надлежащих им связей. Псевдоастатичность
&-го порядка относится к подсистемам по
связевому составу, охватывающим только свя-
зи &-го порядка. Для порядково однородных
систем оба понятия — астатичность и адина-
мичность — сливаются.
Системы на рис. 1-26 и 1-27 обладают
астатичностью и псевдоастатичностью, нулево-
го и первого порядков соответственно, лишь
вследствие своей неизолированное™ (внешни-
ми являются здесь силы крайних левых пру-
жины и демпфера). Изолированные натураль-
ные системы псевдоастатичны. Это вытекает
из равенства нулю суммы внутренних сил си-
стемы.
Специальные односторонние
v уравнения. Уравнения (1-31) принадле-
жат классической механике. Чтобы получить
специальное описание натуральных систем
в односторонней механике (специальная
60
структура всех специальных си-
стем, натуральных в частности,
может быть, очевидно, исследо-
вана лишь в объемлющей их од-
носторонней механике), следует
перегруппировать силы в этом
уравнении в соответствии с их
!&( circtz)qf
% -сг1(дг^с^Яз-^о
“°
делением на внешние и внутрен-
ние силы системы в односторон-
ней механике:
(Аг + У Ай) Qi 4“ (Аг 4“
k
' а»ч,-(в„-Щ -в,Jiri)-о
°' Mi
0»% “°
4~ у Вц,) qi -|- (Сц У Cih) q{ -|-
Т *1
+ У Aik (<7а — Яд + У Bik (Як —
k k
»)
— яд + У Cik (Як — яд —
k
(ап -Оп)Ч+СпЧг -^to-ty’0
(азГазгаз^Яз+сЛ~азг(Чг~^'^(!к~Ч})=0
(a^-av ‘°
Рис. 1-29. Натуральные структуры.
(1-32)
;(& = 1, 2,..., i — 1, Z4- 1,../п),
(z = 1, 2,..., тп).
От лагранжева общего описания (1-28)
двусторонних систем в односторонней механи-
ке специальное описание (1-32) отличается
тем, что постулат противодействия, опреде-
ляющий эти специальные с точки зрения од-
носторонней механики системы, дан здесь
явно. Это позволяет выяснить специальные
свойства двусторонних систем в односторон-
ней механике.
Для полной адэкватности односторонней
механике сложные силы (скобки) этих урав-
нений должны быть расчленены на элементар-
ные составляющие (одночленные слагаемые).
На рис. 1-29 представлено такое описание
и отвечающие ему структурные схемы для
систем на рис. 1-26, 1-27, 1-28. Уравнениями
на рис. 1-29 повторяются в односторонней ин-
версной кинетостатической форме уравнения
1-26,в, 1-27,в, 1-28,в, с учетом того лишь, что
выражения в скобках, описывающие на
рис. 1-26,в, 1-27,в, 1-28,в внешние силы изо-
лированных от внешних сил элементов и, сле-
довательно, равные нулю, опущены уже на
рис. 1-29. Чтобы сохранить связь уравнений
на рис. 1-29 с уравнениями на рис. 1-26, 1-27,
1-28, в первых уравнениях сохранены еще
сложные силы вторых. В структурных схемах
на рис. 1-29 они разложены уже на элемен-
тарные силы односторонней механики.
Это приводит к рассмотренной уже выше
(рис. 1-10) расчлененной структуре натураль-
ных систем, обнажающей внутренние подси-
стемы и структурные единицы их (рис. 1-29).
На рис. 1-30 эти структурные единицы упру-
гого (рис. а), диссипативного (рис. б) и инер-
ционного (рис. в) взаимодействий даны от-
дельно, причем в двух первых элементы осво-
бождены от их масс (массы приняты исчезаю-
ще малыми), в третьей же это невозможно,
поскольку массами этими образуется здесь
не только самодействие, но и взаимодействие.
Соответственно системы а и б, образованные
только внутренними силами, не способны раз-
вить противодействия и не могут поэтому
быть объектом сил (система а астатична, си-
стема б псевдоастатична), система же в обла-
дает одним лишь инерционным противодей-
ствием (астатична, но не адинамична). Ади-
намичность систем а и б и неадинамичность
систем в явствуют из тождественного равен-
ства нулю характеристического определи-
теля Др для первых двух и неравенства —
для последней. Здесь легко проследить взаим-
ную нейтрализацию противодействующего и
содействующего начал. Первое воплощено
в двух положительных одночленных циклах и
образуемом ими положительном члене опре-
делителя, второе — в двучленном отрицатель-
ном цикле и в образуемом им отрицательном
члене определителя. Каждая из двух слож-
ных сил взаимодействия распадается в этих
структурных группах на две равные элемен-
тарные силы — действия и самодействия. Ес-
61
сиЪ ~С12Ч2"~ О —Ь12д2—0 (&H—Qt^hi + ai29i~ai2*i2-0
с22$2 ~czi%/ s О b22q2- bziQt =0 \а22~а21)Чг + агЛг “ aziii
cM~cJ2~c2i — сгг Ьп=Ь12=Ь21 =b22 ап> a/2=a2f< а2г
&q=Cuc22-Ci2c21=0 ^p-bljb2zp2‘-bj2b2lp2=0 Ьр^аца^р^-af2aZip*^> О
Рис. 1-30. Структурные единицы натуральных систем.
ли сложные силы натуральных систем связа-
ны законом действие равно противодействию,
то элементарные их силы связаны столь же
простым законом действие равно самодейст-
вию. Оба закона в совокупности приводят
к равенству всех четырех элементарных сил
структурной единицы.
Нас не должна удивлять неожиданная
сложность структуры двустороннего взаимо-
действия. Оно наиболее простым из возмож-
ных способов решает задачу нейтрализации
внутренних сил системы. Не существует иного
способа решить эту задачу, чем столкновени-
ем двух противоположных начал, и более про-
стого способа столкнуть их, чем это сделано
в натуральных структурах.
Системы на рис. 1-29 образованы струк-
турными единицами взаимодействия, на кото-
рые наслоены внешние и инерционные силы.
Только вторые силы позволяют этим системам
быть объектами первых сил. Все остальные
силы системы, равные в сумме нулю, как вну-
тренние силы, не способны противостоять
внешним силам. Структурным анализом обна-
руживается механизм этой нейтрализации
внутренних сил — нейтрализация положи-
тельных одночленных циклов отрицательны-
ми двучленными. Этим объясняются особен-
ности натуральной структуры: 1) структур-
ная антисимметрия — положительность всех
одночленных циклов и отрицательность всех
многочленных, 2) метрическая симметрия —
равенство соответственных метрических пара-
метров тех и других циклов. Этими особенно-
стями определяется зависимость внутренней
структуры и метрики элементарных подсистем
(элементарной структуры) ют внешней для
них структуры взаимодействий (сложной
структуры). Особенности эти не могли быть
обнаружены общим, в форме (1-28),
односторонним описанием двусторон-
них систем, для этого необходимым
оказалось специальное их односторон-
нее описание (1-32).
Натуральные двусторонние структу-
ры обладают также специальными, вы-
текающими из их натуральности, а не
двусторонности, особенностями струк-
туры и метрики: 1) структурной сим-
метрией сложных циклов (signDifc=
= signZ>fei, = где sign
означает знак связи Dik, dif — диффе-
ренциальный порядок ее), 2) метриче-
ской симметрией сложных циклов
(dik = dki, где d — параметр связи D).
Эти особенности вызваны наличием
энергетических функций и могли бы
отсутствовать у двусторонних систем,,
не имеющих этих функций.
Натуральные структуры подчинены, таким
образом, задаче нейтрализации внутренних
сил системы и решают эту задачу взаимной
нейтрализацией противодействующих и со-
действующих начал, положительных и отрица-
тельных циклов. Внутренние силы этих систем
не образуют противодействующей структуры
и не способны противостоять .внешним силам.
Противодействующим началом натуральных
систем является только инерционное противо-
действие. Оно, однако, не связано со специ-
альным постулатом взаимодействия. Легка
представить, а в односторонней механике — и
синтезировать основанную на постулате про-
тиводействия безмассовую двустороннюю ме-
ханику, представленную на рис. 1-30 система-
ми а и б. В такой механике постулат проти-
водействия, нейтрализуя внутренние силы си-
стем, приводит к тому, что в целом изолиро-
ванная система не может быть противодейст-
вующим субъектом и, следовательно,—по по-
стулату действия, — объектом действия. Бла-
годаря инерционности натуральных элемен-
тов это определяющее свойство натуральных
систем реализуется в чистом виде только
в статике — в астатичности изолированных
систем. Последняя может быть понята теперь
в самом общем своем смысле — как специ-
фическая нейтральная реакция натуральных
систем на внешние возмущения.
Двусторонняя механика, эта, по наимено-
ванию определяющего ее постулата, механика
противодействия, является в действительности
таковой лишь в меру общего для всех дина-
мических систем логического постулата дей-
ствия. В меру своего специального постулата
‘ взаимодействия механика эта, напротив, яв-
ляется механикой содействия внешним силам,
62
механикой наиболее пассивных систем с наи-
более слабой, податливой структурой, в чи-
стом своем виде вообще не способной противо-
стоять внешним воздействиям: Это объясняет
энтропийность ее систем, непригодность их
в качестве управляющих систем, где задачей
является -наибольшая помехоустойчивость —
независимость от возмущающих воздейст-
вий.
Активизация систем, способность противо-
стоять внутренними силами внешним воздей-
ствиям, возникает с освобождением от дву-
сторонней структуры. Полное освобождение
динамической структуры достигается в одно-
сторонних структурах. Между этими двумя
полюсами, наиболее специальной двусторон-
ней структурой и наиболее общей — односто-
ронней, располагается ряд промежуточных
форм.
’ В уравнениях (1-32) односторонней меха-
ники силы инерции (первый член) занимают
место среди внутренних сил, в уравнениях
(1-31) двусторонней механики (второй член) —
среди внешних (первая строка). В обеих ме-
ханиках силы инерции противостоят, в соот-
ветствии с общей частью постулата противо-
действия, всем остальным силам как противо-
действие действию, объект субъекту, и в кине-
тостатических уравнениях объединяются
с действующими силами лишь условно —
в качестве фиктивных сил. Это не исключает
возможности и необходимости общей со все-
ми остальными силами классификации сил
инерции, в частности—отнесения их к вну-
тренним или внешним силам системы. Кинето-
статические уравнения образуют статическую
модель динамической системы. В этой модели
силы инерции уже не фиктивны, а столь же
реальны, как и все остальные силы модели
(реальность этих сил в самой системе, как сил,
приложенных к связям, не требует разъясне-
ний), и являются в односторонней механике
внутренними силами этой модели, а в клас-
сической — внешними. Опуская в дальнейшем
подразумевающееся понятие — статической
модели, мы будем относить их прямо к вну-
тренним или внешним силам системы.
• Обозначим стоящую с обратным знаком в
левой части£цвусторонних уравнений (1-31) силу
инерции — диссипативную внешнюю силу
(второй член правой части) — Q^), гквазиупру-
гую внешнюю силу (третий член правой части) —
Q(.^r Описываемые тремя последними членами
правой части внутренние сильГобозначим соот-
ветственно Q(2\, Q<*> Q(2\. Уравнения (1-31)
примут в этих обозначениях вид:
нчС+C+Ci 0-33)
(/ = 1, 2, ..., тп),’
а даламберовы уравнения (1-32) — вид:
Ш<’.>+С+С1=° (,-34>
(/ = 1, 2, ..., /п),
т. е. сумма действующих на элемент сил,
включая в их число и силу инерции, равна,
нулю (принцип Даламбера).
Следует еще устранить неопределенность
в обозначениях (верхних 'индексах сил), вы-
званную тем, что одни и те же силы двусто-
ронних систем являются внутренними в одно-
сторонней механике -и внешними — в двусто-
ронней. Чтобы не вводить дополнительных
обозначений, условимся, что и в конструктив-
ных схемах систем, в их структурных схе-
мах, и в их уравнениях силы будут делиться
на внешние и внутренние и обозначаются со-
ответствующими индексами по определениям
той механики, которой принадлежат эти си-
стемы, схемы и уравнения.
Заключенные в первую квадратную скобку
члены уравнений (1-34) представляют собой
внешнюю, в классической механике, состав-
ляющую Q(I) обобщенной силы Qi. Первое сла-
гаемое этой скобки — внешняя сила, не зави-
сящая от координат системы, второе, в круглой
скобке, слагаемое — внешние силы, зависящие
от координат системы. Заключенные во вторую
квадратную скобку члены представляют собой
внутреннюю составляющую Q^2) обобщенной
силы Qi. Уравнения (1-34) могут быть поэтому
представлены в виде:
(1-35)
б) Статические взаимодействия
Двусторонние уравнения стати-
к и. Принятие в двусторонних уравнениях ди-
намики (1-31) динамических членов равными
63
нулю приводит к двусторонним уравнениям
статики:
Q? - (Cfi+ 2 Cik) qi-^ Cih (qi-qk) = 0
k k
(6 = 1, 2, ..., i — 1, /+1, zTz);.
(/ = 1, 2, m). (1-36)
Два первых члена в этих уравнениях пред-
ставляют собой внешние статические силы
системы; независимые от 'координат ее
«(первый член) и зависимые (второй член).
При отсутствии первых сил система изолиро-
вана от независимых внешних сил (автоном-
на), при отсутствии вторых — изолирована от
зависимых внешних сил. Третий член уравне-
ний представляет собой внутренние статиче-
ские силы системы.
Статические внутренние подсистемы нату-
ральных систем, как все их внутренние подси-
стемы, нейтральны, и это приводит к астатич-
ности этих систем. В статике натуральных
систем обнажена определяющая их черта —
нейтральность внутренних подсистем.
Двусторонними уравнениями обнаружива-
ются специальные статические свойства нату-
ральных систем. Полученный выше вывод об
астатичности изолированных натуральных си-
стем может быть сейчас уточнен. Поскольку
сумма внутренних статических сил системы
равна нулю, равна нулю и -сумма внешних
статических сил системы. Из равенства нулю
суммы зависимых составляющих внешних
статических сил следует равенство нулю и
суммы их независимых составляющих. Систе-
ма не может быть в этом случае объектом не-
зависимых внешних сил, астатична по отноше-
нию к ним: изолированные от зависимых
внешних статических сил натуральные систе-
мы астатичны по отношению к независимым
внешним силам. Натуральные системы могут
быть статичны лишь будучи не изолирован-
ными от зависимых внешних сил. В односто-
ронней механике не существует зависимых
внешних сил — все зависимые силы являются
в ней внутренними. Здесь статическими могут
быть и изолированные системы, точнее гово-
ря — статичность системы не зависит от ее
изолированности.
В. Механика систем
Механика систем образуется в классиче-
ской механике наложением положительной
2-го порядка механики элементов на ней-
тральную 1-го и нулевого порядков механику
взаимодействий. Центральным содержанием
<64
этой полунейтральной механики систем явля-
ются законы сохранения.
а) Законы сохранения
Законы сохранения доказываются обычно
с помощью силовых уравнений. Разбив ука-
занным выше способом обобщенные силы
в двусторонних энергетических уравнениях на
внутренние и внешние составляющие, можно
доказать теперь эти законы с помощью этих
энергетических уравнений, не прибегая к си-
ловым уравнениям. Проследим ход этих дока-
зательств, чтобы установить разрушения, на-
носимые классической механике отказом по-
стулату противодействия.
Сложив уравнение (1-35) для всех элемен-
тов системы, учтя при этом, что сумма вну-
тренних сил системы равна нулю, получаем:
пг пг
(1-37)
Z=1 Z=1
т. е. сумма взятых с обратным знаком сил
инерции системы равна сумме внешних сил ее.
В статике левая часть уравнения (1-37)
равна нулю, и уравнение это принимает вид:
пг
Sq',‘^0, (1-38)
Z=1
в статике сумма внешних сил системы равна
нулю. Относя силу инерции к внешним силам
системы, можно распространить этот закон и
на динамику: сумма внешних сил системы,
включая силы инерции, равна нулю. В клас-
сической механике порознь равны нулю сум-
мы внутренних и внешних сил системы.
Развернув левую часть уравнения (1-37),
получаем:
пг пг
(Ь39)
1 = 1 k Z=1
(k = \, 2,..., i—1, i + 1,..., ni).
Для изолированной (не подверженной дейст-
вию внешних сил) системы уравнение (1-39)
принимает вид:
пг
(1-40)
Z = 1 k
(& = 1, 2,..., i— 1, z’4-1, ... ,АП)
Уравнением этим описывается инерциаль-
ное движение системы. Из него вытекают за-
коны сохранения классической механики —
закон сохранения количества движения и за-
кон сохранения скорости центра инерции си-
стемы. Рассматривая уравнения (1-40) для
адиссипативных -систем, можно получить за-
кон сохранения энергии. В односторонней
механике все эти законы сохранения разру-
шаются, и этим снимается динамический па-
радокс. Статический и псевдостатический па-
радоксы — статическое и псевдостатическое
равновесие под воздействием одной лишь си-
лы снимается тем, что в односторонней ме-
ханике не имеет места равенство нулю отдель-
но взятых сумм внутренних и внешних сил.
Парадокс этот возникает и для натуральных
систем, рассматриваемых в односторонней ме-
ханике, и для сервосистем, рассматриваемых
<в классической механике. Для первых он воз-
никает в результате того, что зависимые
внешние силы попадают в односторонней ме-
ханике в разряд внутренних сил системы
(рис. 1-1, 1-2), для вторых (рис. 1-5)—в ре-
зультате исключения сервоисточников с при-
ложенными к ним внешними силами из соста-
ва системы. В обоих случаях единственная
внешняя, в смысле односторонней механики,
сила уравновешивается внутренними, в смыс-
ле этой же механики, силами. В односторон-
ней механике положение это не парадоксаль-
но, в двусторонней — парадоксально.
Оба общих статических свойства — статич-
ность и астатичность — реализуются в класси-
ческой механике, первое только в неизолиро-
ванных, второе — во всех изолированных от
зависимых сил и некоторых неизолированных
ее системах. Астатичность является не только
возможным в классической механике свойст-
вом, но и определяющим ее свойством, типи-
ческим для ее структур и присущим поэтому
всем изолированным ее системам. Напротив,
статичность не типична для этой нейтральной
механики и возможна в ней лишь в неизоли-
рованных системах как функция их внешних
сил. Понятно, что в основу классификации ме-
ханик могло быть положено только отношение
внутренних сил к внешним — способность си-
стемы противостоять внутренними своими
силами внешним силам, взаимодействие си-
стемы со средой. Специфическая для класси-
ческой механики способность противопостав-
лять независимым внешним силам зависимые,
определяющая возможность в ней неизолиро-
ванных статических систем, не могла бы по-
служить основой сколько-нибудь общей клас-
сификации.
б) Статические свойства
Общие статические свойства натуральных
систем рассмотрены были выше. Рассмотрим
локальные статические свойства натуральных
систем. Неизолированные натуральные систе-
мы могут быть конечно статичны, но не могут
быть, при конечных значениях статических па-
раметров, бесконечно статичны. Они могут
быть определенно астатичны, но не могут
быть неопределенно астатичными. Таким обра-
зом, при общей статичности они конечно ста-
тичны во всех своих точках, при общей аста-
тичности — определенно астатичны во всех
своих точках. Из четырех возможных в одно-
сторонней механике локальных свойств в на-
туральных системах классической механики
реализуются только два натуральных свойст-
ва — конечная статичность и определенная
астатичность. Два остальных, ненатуральных
свойства—бесконечная статичность и неопре-
деленная астатичность — представляют собой
новые феномены односторонней механики.
Бесконечно статические изодромные системы,
отвечающие нулевой деформацией на сколь
угодно большие нагрузки, соответствуют аб-
страктному понятию—абсолютно твердое тело
классической механики. В сервосистемах это
абстрактное представление легко реализуется.
в) Динамические свойства
Динамические свойства натуральных си-
стем принимают такой же специальный вид,
как и статические. Определяющей чертой
классической механики является принадлеж-
ность ее к полунейтральным механикам. Этой
чертой определилась астатичность статически
изолированных от зависимых статических сил
систем классической механики и определилась
бы их адинамичность при условии динамиче-
ской изоляции от зависимых динамических
сил. Последняя означает, однако, невозмож-
ную в двусторонней механике изоляцию от
сил инерции, т. е. от самих элементов. Подоб-
но тому как статичность в классической ме-
ханике представляет собой лишь статическое
уравновешивание независимых внешних сил
зависимыми статическими внешними силами,
динамичность в этой механике представляет
собой кинетостатическое уравновешивание не-
зависимых внешних сил зависимыми 2-го по-
рядка силами инерции. Последние выступают
здесь в роли зависимых внешних сил. Разли-
чие между обеими ситуациями—статической
и динамической заключается в том лишь, что
изоляция от статических зависимых внешних
сил и вытекающая из нее астатичность воз-
можны в классической механике, изоляция же
от зависимых сил инерции и вытекающая из
нее адинамичность невозможны в ней. Ади-
намические по внутренней своей структуре
системы классической механиКи; динамичны
И. И. Гальперин.
65
нулю приводит к двусторонним уравнениям
статики:
Q?’ - (С,ч+ 2 Cih) <н - Cik (qi-qh) = О
k k
(£ = 1, 2, ..i—1, • • •, w);
(/ = 1, 2, ..., zn). (1-36)
Два первых члена в этих уравнениях пред-
ставляют собой внешние статические силы
системы; независимые от 'координат ее
►(первый член) и зависимые (второй член).
При отсутствии первых сил система изолиро-
вана от независимых внешних сил (автоном-
на), при отсутствии вторых — изолирована от
зависимых внешних сил. Третий член уравне-
ний представляет собой внутренние статиче-
ские силы системы.
Статические внутренние подсистемы нату-
ральных систем, как все их внутренние подси-
стемы, нейтральны, и это приводит к астатич-
ности этих систем. В статике натуральных
систем обнажена определяющая их черта —
нейтральность внутренних подсистем.
Двусторонними уравнениями обнаружива-
ются специальные статические свойства нату-
ральных систем. Полученный выше вывод об
астатичности изолированных натуральных си-
стем может быть сейчас уточнен. Поскольку
сумма внутренних статических сил системы
равна нулю, равна нулю и сумма внешних
статических сил системы. Из равенства нулю
суммы зависимых составляющих внешних
статических сил следует равенство нулю и
суммы их независимых составляющих. Систе-
ма не может быть в этом случае объектом не-
зависимых внешних сил, астатична по отноше-
нию к ним: изолированные от зависимых
внешних статических сил натуральные систе-
мы астатичны по отношению к независимым
внешним силам. Натуральные системы могут
быть статичны лишь будучи не изолирован-
ными от зависимых внешних сил. В односто-
ронней механике не существует зависимых
внешних сил — все зависимые силы являются
в ней внутренними. Здесь статическими могут
быть и изолированные системы, точнее гово-
ря— статичность системы не зависит от ее
изолированности.
В. Механика систем
Механика систем образуется в классиче-
ской механике наложением положительной
2-го порядка механики элементов на ней-
тральную 1-го и нулевого порядков механику
взаимодействий. Центральным содержанием
64
этой полунейтральной механики систем явля-
ются законы сохранения.
а) Законы сохранения
Законы сохранения доказываются обычно
с помощью силовых уравнений. Разбив ука-
занным выше способом обобщенные силы
в двусторонних энергетических уравнениях на
внутренние и внешние составляющие, можно
доказать теперь эти законы с помощью этих
энергетических уравнений, не прибегая к си-
ловым уравнениям. Проследим ход этих дока-
зательств, чтобы установить разрушения, на-
носимые классической механике отказом по-
стулату противодействия.
Сложив уравнение (1-35) для всех элемен-
тов системы, учтя при этом, что сумма вну-
тренних сил системы равна нулю, получаем:
m m
(i-37)
i=l
т. e. сумма взятых с обратным знаком сил
инерции системы равна сумме внешних сил ее.
В статике левая часть уравнения (1-37)
равна нулю, и уравнение это принимает вид:
m
и-38)
в статике сумма внешних сил системы равна
нулю. Относя силу инерции к внешним силам
системы, можно распространить этот закон и
на динамику: сумма внешних сил системы,
включая силы инерции, равна нулю. В клас-
сической механике порознь равны нулю сум-
мы внутренних и внешних сил системы.
Развернув левую часть уравнения (1-37),
получаем:
m m
£ — П-39)
t = l k i = l
(k — \, 2,..., i— 1, «4-1,..., ni).
Для изолированной (не подверженной дейст-
вию внешних сил) системы уравнение (1-39)
принимает вид:
m
2(а<-£ай)^=0 (1-40)
i=l k
(6 = 1, 2,..., i— 1, z'+l, ...,m)
Уравнением этим описывается инерциалъ-
нбе движение системы. Из него вытекают за-
коны сохранения классической механики —
закон сохранения количества движения и за-
Сц-^Ci^Q
k
(1-48)
(k — \. 2,..., i—1, i4- 1,..., m)
(4=1, 2, ..m).
Условия (1-47) и (1-48) парализуют
в классической механике механизм диссипа-
тивного и статического противодействия, при-
водят к* астатичности первого и нулевого по-
рядков соответственно. В ней невозможно,
однако, парализовать механизм инерционного
противодействия, т. е. невозможно условие
= 0 (1-49)
к
(& = 1, 2, ..., i—1, 4*+1, ..., т)
и вытекающее из него условие
= = O (1-50)
(Л=1, 2, i—1, i + l, zn),
в ней невозможны безынерционные системы—
с астатичностью 2-го порядка. Этб опреде-
ляется полусвязанностью этой механики.
Инерционное противодействие ее независи-
мых элементов является неограниченным ис-
точником противодействия натуральных си-
стем, позволяющим приложить к пушинке
многотонное усилие. В системах, в которых
парализованы были бы все три механизма
противодействия, парализована была способ-
ность противостоять каким бы то ни было
внешним силам, способность быть объектом
внешних сил. Такие адинамические системы
невозможны в классической механике, по-
скольку в ней всегда налицо механизм инер-
ционного противодействия независимых ее
элементов:
С)=л«-2лй>о (1-51)
к
(fe = l, 2, ..i—1, i-1- 1, ..m)
(7 = 1, 2, ..m)
Ац>^А{к (1-52)
k
(£ = 1, 2,..., 4—1, 4-f-l,..., m)
(4 = 1, 2, ..., m).
Адинамическими системы эти могут быть
лишь в псевдостатике, где инерционное про-
5*
тиводействие отсутствует и адинамичность
совпадает с псевдоастатичностью. С этой об-
1цей точки зрения псевдоастатичность пред-
ставляет собой статическую адинамичность,
неспособность системы противостоять в ста-
тике и псевдостатике внешним силам. Это
придает феномену астатичности и псевдоаста-
тичности, как единственному возможному
в классической механике проявлению адина-
мичности, высокий теоретический интерес.
В односторонней механике адинамичность
возможна и в динамике и включает в себя,
как подсвойство, псевдоастатичность и аста-
тичность. Последняя содержит в себе общую
логическую схему адинамических систем — си-
стем, лишенных механизма противодействия,
и, согласно логическому постулату действия,
не способных быть объектом приложения сил.
Схема эта будет использована при синтезе
адинамических систем односторонней механи-
ки, систем, не способных противостоять внеш-
ним силам.
Равенство нулю одной из сил или
или обеих вместе, означает для автоном-
ной системы соответственно диссипативную,
статическую и общую изолированность в 4'-м
элементе. Равенство одновременно и силы
(что возможно лишь в односторонних систе-
мах) означает адинамичность системы в этом
элементе. Все эти градации изолированности
представляют, таким образом, локальные
свойства системы, свойства ее в отдельных
элементах. Лишь будучи распространены на
все элементы системы, они становятся общи-
ми свойствами ее. Это соотношение общих и
локальных свойств будет ниже подробно рас-
смотрено. Сама автономность также представ-
ляет собой локальное свойство.
Для элементов, в которых система адина-
мична, должна была бы быть равной нулю и
сумма внутренних сил системы, приложенных
к этому элементу, поскольку адинамичность
означает неспособность к противодействию не
только внешним, но и внутренним силам. Для
двусторонней системы, адинамичной во всех
своих элементах, нулю должна была бы рав-
няться, следовательно, не только сумма всех
внутренних сил системы, как у всех натураль-
ных систем, но и сумма внутренних сил,
приложенных к каждому элементу. Как по-
яснялось уже, в натуральных системах
адинамичность невозможна, и здесь может
иметь место лишь первая зависимость.
Напротив, в односторонних системах адина-
мичность возможна, и здесь в этом случае
имеет место вторая зависимость, первая же
в общем случае не имеет места.
67
1-3-2. Газодинамическая механика
Первое освобождение натуральная струк-
тура претерпевает в простейшей газодинами-
ческой системе — потока газа в канале пере-
менного сечения (рис. 1-31,а). Канал этот мо-
жет быть представлен дискретной моделью —
цепочкой дискретных объемов и дискретных
гидравлических сопротивлений (рис. б).
Структурная схема этой дискретной модели
двусторонней системы дана в общем односто-
роннем описании на рис. в, в специальном —
на рис. г. Связь между обоими описаниями
здесь такая же, как и в двусторонних систе-
мах (рис. 1-26, 1-27, 1-28, 1-29). Обобщенной
координатой каждого z-го объема является,
при заданной политропе расширения, давле-
ние р в нем. Соответствующей ему обобщен-
ной силой является аккумулируемое в этом
объеме количество газа —Gi(i+1).
Каждый из двух членов правой части —
функция давлений в двух соседних объемах,
функция «относительного движения» их— га-
зодинамическая механика является полусвя-
занной механикой.
При колебаниях газового столба в канале,
на которые не наложено переносное движение
всего столба, система представляет собой на-
туральную систему с метрически симметрич-
ным (Cik = Cki), подчиняющимся постулату
противодействия, взаимодействием. Как по-
казано было В. Б. Рубиным [Л. 96, 97], при
наложении на газовый столб переносного дви-
жения метрическая симметрия нарушается
(Cik>Cki), С ростом скорости этого движения
обратные связи ослабевают, по сравнению
с прямыми, и натуральная структура посте-
пенно разрушается. Полное разрушение на-
ступает при критическом перепаде в одном
из сопротивлений (среднем на рис. 1-31).
Двустороннее действие переходит здесь в од-
ностороннее — количество газа, протекающее
через дроссель, зависит только от давления
до него и не зависит от давления за ним. Вто-
рое давление находится при этом под воздей-
ствием первого, первое же независимо от вто-
рого. В этой системе, в зависимости от ско-
рости переносного движения, возникают все
градации видимого разрушения постулата про-
тиводействия —от полностью симметричного
двустороннего действия до чисто односторон-
него.
Г азодинамическая структура отличается
от натуральной лишь метрической асимметри-
ей. Различие между газодинамической и на-
туральной механиками является не структур-
ным, а лишь метрическим. Чтобы придать ме-
трической асимметрии внешнее выражение,
68
Рис. U-3il. Газодинамическая структура.
ослабленные обратные связи будут обозна-
чаться пунктиром или полностью сниматься
при критических перепадах (рис. 1-31). Это
позволит и внешне различать двусторонние и
газодинамические структуры.
Специальное одностороннее описание га-
зодинамических структур (рис. г) позволяет
установить некоторые их особенности, неяв-
ные в общем одностороннем их описании
(рис. в). Выясняется, в частности, что с ослаб-
лением обратных связей ослабляются в той
же мере и соответствующие им составляКшхие
внутренних связей (также показанные пунк-
тиром) элементарных систем. При полном
разрушении обратной связи в критическом се-
чении канала разрушается и соответствующая
составляющая внутренней связи.
Канал на рис. а может быть рассматри-
ваем как грубая схема парового тракта бло-
ков котел — турбина. В них также раздели-
тельным между котлом и турбиной сечением
является промежуточное сечение регулирую-
щей ступени, в котором на частичных режи-
мах возникают критические скорости.
При критической скорости разрушается,
разумеется, лишь специальная часть 3-го по-
стулата и разрушается, как в сервосистемах,
лишь видимым образом. Вытекающая из соп-
ла струя находится под воздействием давле-
ний по обе стороны ее. Оба действия уравно-
вешиваются в соответствии со специальным
постулатом противодействия. Однако давле-
ние в левом объеме, воздействуя на струю
(изменяя ее плотность при неизменной скоро-
сти), воздействует этим на давление в пра-
вом объеме, последнее же, воздействуя на
струю (втекающую во второй объем при дав-
лении, большем господствующего в нем),
только разрушает ее, не влияя на "давление
в левом объеме. Это действительное косвен-
ное взаимодействие, подчиняющееся постула-
ту противодействия, можно, игнорируя, как
и в сервосистемах, скрытый механизм его,
заменить видимым прямым односторонним
воздействием левого объема на правый. Од-
ностороннее воздействие возникает и здесь
в результате того же приема игнорирования.
Достаточно специальный феномен критиче-
ской скорости приобщается этим приемом
к односторонней механике. Этой принадлеж-
ностью к односторонней механике объясняет-
ся парадоксальность этого феномена в двусто-
ронней.
Специальный постулат взаимодействия га-
зодинамической механики может быть легко
сформулирован с помощью коэффициента
асимметрии S, указывающего отношение об-
ратного воздействия к прямому. Для двусто-
ронней механики коэффициент этот равен 1,
для односторонней — нулю, для газодинамиче-
ской механики принимает промежуточные,
^между единицей и нулем, значения.
х Метрическая асимметрия газодинамиче-
ской структуры является кососимметрич-
ностью: обе составляющие каждого обратного
воздействия — действие и само действие —
изменяются в одном и том же отношении S.
Это приводит к сохранению нейтральности
внутренней подсистемы — газодинамическая
механика является полунейтральной механи-
кой. Поскольку внутренняя подсистема обла-
дает нулевым порядком, полу нейтральность
означает здесь астатичность. Если изолиро-
вать газодинамическую систему от зависимых
внешних сил (для входных из внешней среды
ее сечений это достигается при критических
перепадах, для выходных — такая изоляция
не достигается и критическими перепадами и,
следовательно, невозможна), то любое неза-
висимое внешнее воздействие (увеличение од-
ного из входных сечений) повлекло бы неог-
раниченный рост всех давлений.
Газодинамическая механика представляет
собой, исключая предельный случай критиче-
ских скоростей, двустороннюю полусвязанную
механику с положительной, 1-го порядка, ме-
ханикой элементов и нейтральной, нулевого
порядка, механикой взаимодействий. В пре-
дельном случае критических скоростей меха-
ника эта переходит в одностороннюю меха-
нику.
В газодинамической структуре разрушается
метрическая симметрия натуральной структу-
ры, но сохраняется полусвязанность. Более
глубокие разрушения Натуральной структуры
содержат гироскопические структуры.
1-3-3. Гироскопическая механика
В еще более явном виде предстает прием
игнорирования при рассмотрении ненатураль-
ных, гироскопических — в частности, струк-
тур классической механики. Здесь игнориру-
ются циклические координаты скрытых, вра-
щающихся масс, и игнорирование это возме-
щается введением видимого действия гироско-
пических и обобщенных центробежных сил.
Это игнорирование циклических координат,
замена скрытого косвенного, через вращаю-
щиеся массы, взаимодействия двух элементов
видимым прямым, также разрушает натураль-
ную структуру и наносит такие же разрушен
ния классической механике, как те же приемы
в сервосистемах и в газодинамике.
Гироскопическая структура сохраняет тем
не менее достаточно специальный вид — неде-
лимой ее единицей является также двучлен-
ный цикл, всегда положительный и образо-
ванный связями 1-го порядка. Здесь сохране-
на метрическая симметрия сложных циклов
(6ife = &M),. структурная же лишь частично
(difBift = difBfei, signBife^signBfei). Эта струк-
турная несимметрия является, однако, наибо-
лее важным из всех возможных различий —
в основе гироскопических систем лежат не от-
рицательные, а положительные двучленные
циклы. Поскольку внутренние подсистемы
этих систем не связаны и образуются, следо-
вательно, только этими положительными дву-
членными циклами, они положительны. Ги-
роскопическая механика является несвязан-
ной двусторонней механикой с положитель-
ной, 2-го порядка, механикой элементов и по-
ложительной же, 1-го порядка, механикой
взаимодействий. Более детальные свойства
этой механики рассмотрены были выше.
1-4. МНОГОСТОРОННИЕ МЕХАНИКИ
1-4-1. Многосторонние механики
Между многосторонними и двусторонними
механиками различие скорее количественное,
чем качественное. И те и другие противостоят
порождающей их односторонней механике.
В несвязанных и полусвязанных многосторон-
них механиках механика элементов незави-
сима от механики взаимодействий и в общем
виде изложена выше. Механика же взаимо-
действий приобретает в й-сторонних механи-
ках, с увеличением k, все более сложные фор-
мы и в общем случае может быть задана
только указанием структуры и метрики струк-
турных единиц. Единицы эти для трех- и че-
69
тырехсторрнних механик рассмотрены были
’на рис. 1-23. Теперь может быть рассмотрена
в общем виде классификация механик.
1-4-2. Общая классификация механик
Механика определяется специальной
структурой принадлежащих ей систем, и это
открывает неограниченные -возможности дроб-
ления механик. Первым шагом в классифика-
ции механик должно явиться поэтому деление
механик по их общности и подчинению. Вну-
три этой иерархической классификации ме-
ханики должны классифицироваться по всем
остальным признакам.
Поясним эту классификационную схему
рассмотренными примерами. Гироскопическая
механика — механика гироскопических систем
представляется в существующем построении
механики как часть классической механики.
Это верно, однако, лишь до тех пор, пока не
игнорируются, заменяясь эквивалентными си-
лами, циклические координаты—скрытые вра-
щающиеся массы. Полученные таким игнори-
рованием системы не подчиняются уже спе-
циальным постулатам класси-
ческой механики, и гироскопи-
ческая механика из ранга под-
механик классической механики
переходит в ранг механик. Та
же логическая операция игно-
рирования сервоисточников пе-
реводит сервомеханику — меха-
нику сервосистем — из ранга
подмеханик классической ме-
ханики в ранг надмеханйки,
более того — наиболее общей,
односторонней механики. Ранг
общности механики опреде-
ляется, таким образом, вполне
однозначно. Исходным рангом
общности может здесь слу-
жить классическая механика.
Подмеханиками ее являются
механики консервативных,
диссипативных и т. д. систем,
надмеханиками — односторон-
няя механика и все порождае-
мые ею механики, превосходя-
щие по общности классиче-
скую механику. Равными ей
по рангу механиками явля-
ются газодинамическая, ги-
роскопическая и иные энерге-
тические механики, порождае-
мые односторонней механикой.
Механики, принадлежащие
одному рангу общности или
различным рангам, могут за-
тем классифицироваться по иным призна-
кам — кибернетическим (реактивность, ней-
тральность, астатичность), структурным (мно-
госторонность, связанность, дифференциаль-
ный порядок, структурная симметрия
и т. д.) или метрическим (метрическая
симметрия). В этой логической схеме механи-
ки одинакового ранга — классическая, гиро-
скопическая и газодинамическая — являются:
первая — двусторонней полусвязанной полу-
нейтральной механикой 2-го порядка, вто-
рая— двусторонней не связанной положи-
тельно реактивной механикой 2-го порядка,
третья — двусторонней полусвязанной полу-
нейтральной механикой 1-го порядка. Механи-
ка сервосистем является в этой схеме одно-
сторонней несвязанной механикой произволь-
ного порядка и произвольной реактивности —
наиболее общей механикой.
1-5. КАЧЕСТВЕННЫЕ МЕХАНИКИ
В рассмотренных выше механиках старшие
параметры движения — гиперускорения свя-
заны были с силами не только качественны-
70
ми (знаковыми), но и количественными отно-
шениями— гиперускорение не. только совпа-
дало по знаку с силой, но и было пропорцио-
нально ее модулю. Не нарушая логического
постулата действия, можно построить чисто
качественную механику, сохраняющую только
качественные, знаковые отношения. Качест-
венная механика может обладать теми же
структурами, что и количественная, быть од-
носторонней и многосторонней, \ связанной,
лолусвязанной и несвязанной, положительной,
отрицательной и нейтральной и т. д. При этом
лишь все смешанные, качественные и количе-
ственные отношения заменяются полностью
или частично чисто качественными отношения-
ми. Качественной механикой является, как
показано ниже, релейная автоматика.
1-5-1. Механика элементов
На рис. 1-32 показано движение линейных
и релейных элементов и элементарных систем
(релейные элементы обозначены знаком ре-
лейной зависимости, пересекающим старшую
связь). При одинаковом модуле силы, движе-
ния эти для линейных и релейных элементов
одинаковы и объединены в верхней строке ри-
сунка, для элементарных систем — различны
и разделены на-^рисунке, для линейных — да-
ны во второй строке, для релейных —
в третьей.
Кинетическое уравнение (1-10) линейных
элементов принимает для релейных элемен-
тов вид:
^-^-signQp (1-53)
Гиперускорение р-го порядка переменно здесь
только по знаку, определяемому знаком ги-
пермассы Ai и знаком силы Qi, по модулю же
1
ПОСТОЯННО И равно “pF’ ГДе ai— модуль
гипермассы 4г-. При положительной гипер-
массе уравнение это принимает вид, указан-
ный в верхней строке рисунка.
Для линейных систем изменение силы вы-
зывает непрерывные, для релейных — разрыв-
ные изменения гиперускорений. Разрывы про-
исходят при изменении знака Q. Это приво-
дит, при некоторых значениях параметров
связей, к новому феномену качественной ме-
ханики— пульсирующему режиму ((рис. 1-33),
здесь уравнения системы и переходные про-
цессы даны, в отличие от уравнения (1-32),
по отношению к новому равновесному поло-
жению). Режим этот сводится к непрерывной
скачкообразной пульсации гиперускорения.
Скорость, как интеграл гиперускорения, при-
нимает при этом постоянное значение, и по-
Рис. 1-33. Пульсирующие режимы в качествен-
ной механике.
рядок элементарной системы, начиная с это-
го момента, снижается на единицу (это вы-
рождение элементарных систем показано
справа на рис. 1-33). Пульсирующий режим
возникает в каждом (отвлекшись от некото-
рых специальных случаев) переходном про-
цессе, начиная с момента, когда неизменный
угол а—излома графика скорости превысит
угол р—наклона графика обобщенной силы
к оси нового равновесного положения. На
рис. а дан более простой, однако специальный,
случай пульсирующего режима, когда начало
его совпадает с нулевой скоростью. На рис. б
дан общий случай.
1-5-2. Механика взаимодействий и систем
Односторонняя качественная механика
взаимодействий и систем рассмотрена будет во
второй части, при исследовании релейных си-
стем автоматики. Многосторонние, двусторон-
ние — в частности, качественные механики
представляют пока лишь теоретический ин-
терес.
Для каждой из качественных механик
должен быть указан специальный постулат
взаимодействия, логический же постулат дей-
ствия так же неизменен, как и в количествен-
ных механиках, однако действиями являются
здесь только знаки сил, а не их модули.
71
ГЛАВА ВТОРАЯ
МАТЕРИАЛЬНЫЕ МОДЕЛИ
2-1. МАТЕРИАЛЬНЫЙ СИНТЕЗ
2-1-1. Материальные модели
Механика одностороннего действия яв-
ляется механикой динамических систем про-
извольной структуры. Чтобы доказать, что та-
кая механика является не только логически
безупречной дедуктивной теорией, но и мате-
риально интерпретируется, находит подчи-
няющиеся ей материальные модели, следует
выяснить приемы материального синтеза ди-
намических систем общей структуры. Для
этого достаточно указать приемы материаль-
ного синтеза динамических связей, поскольку
все содержание динамических систем, вклю-
чая и элементы их, сведено было выше к кон-
фигурации связей.
Выход за пределы двусторонней механики
в другие специальные механики может быть
достигнут многими рассмотренными выше спо-
собами — в гироскопических, газодинамиче-
ских и даже натуральных (рис. 1-7) системах.
Синтез односторонних связей и выход в наи-
более общую, одностороннюю механику до-
стигается прежде всего в сервосистемах. По-
следние являются первой материальной мо-
делью односторонней механики.
2-1-2. СЕРВОМОДЕЛИ
Рассмотрим детальнее прием игнорирова-
ния, сводящий действительное двусторон-
нее действие к видимому од-
ностороннему. На рис. 2-1,а
дана простейшая сервоси-
стема — открытая цепочка
элементов одностороннего
действия (сервоэлемёнтов).
Роль одностороннего филь-
тра, сортирующего импуль-
сы и пропускающего их в
одном лишь направлении,
играет здесь золотник. Каж-
дый из сервоэлементов снаб-
жен здесь своим сервоис-
точником, в данном слу-
чае—насосом Е.
Рассмотрим структуру
этой системы в двусторон-
ней и односторонней меха-
никах. Первая из этих за-
дач обречена, на первый
взгляд, на неудачу. Действи-
тельно, в наиболее. общей .
односторонней механике можно представить
любые системы, в том числе системы охваты-
ваемой ею двусторонней механики. Это проде-
монстрировано было на рис. 1-1,6, 1-2,6 и
1-3,6. В двусторонней механике представить не
подчиняющиеся ей (постулату противодей-
ствия) сервосистемы невозможно. Это затруд-
нение может быть обойдено только включени-
ем в состав системы серво'источников. В этом
предположении система подчиняется двусто-
ронней механике. Структурная схема ее
в упрощенном виде представлена на рис. 2-1,в.
Здесь имеет место двустороннее взаимодей-
ствие между сервоэлементами и их сервоис-
точниками.
В понятиях односторонней механики струк-
тура сервосистемы представлена на рис. 5.
Действующими элементами здесь являются
только сервомоторы, поскольку только их пе-
ремещениям пропорциональны действующие
силы. Понятие — действие совпадает здесь
с понятием — управление. Сервоисточники вы-
падают из рассмотрения. Это представляет
решающий довод в пользу представления ав-
томатики односторонней механикой. Только
таким путем могут быть игнорируемы серво-
источники. Включение в состав сервосистемы
сервоисточников ее не сулит, очевидно, сколь-
ко-нибудь простого и целостного построения
автоматики. Последнее невозможно поэтому
в пределах двусторонней механики.
+ = &
вггЧг + ^ггЧг + СггЧг ~ сггЦ> = О
аззЧз + ^зз^з + сззЧз ~ сзгЧг = &
” с4зЧз = О
Рис. 2-1. Сервосистема.
а — открытая сервосистема; б — структурная схема ее в односторонней механике; в —
структурная схема ее в двусторонней механике.
72,
Одностороннее действие в автоматике
(рис. б), если не игнорировать скрытый меха-
низм его («рис. в), происходит’в полдом соот-
ветствии с .постулатом противодействия. Силы,
действующие на воздействуемый элемент
сервопары, исходят не от действующего эле-
мента, а от управляемого этим действующим
элементом сервоисточника, представляющего
необходимую скрытую часть этой пары. Меж-
ду сервоисточником и воздействуемым элемен-
том существует такой же двучленный цикл
натурального взаимодействия, как и между
действующим элементом и сервоисточником
(рис. в). Каждый из этих циклов образован
в -соответствии с постулатом противодействия
двумя равными и противоположно направлен-
ными силами, первый — управляемыми сила-
ми, второй — существенно меньшими управ-
ляющими силами. Этот каскад сил и энергий
достигается питанием системы энергией из
промежуточного сервоисточника (закон сохра-
нения энергии для сервосистемы, рассматри-
ваемой без -своих сервоисточников, как изоли-
рованная система, нарушен здесь самым пред-
метным способом). В этом различии масшта-
ба, уровня управляющих и управляемых сил
и энергий, создающем каскад сил и энергий,
и заключается эффект управления. Каскад
этот в указанной на рис. в развернутой схеме
осуществим в классической механике, в пол-
ном согласии с третьим ее постулатом. Сле-
дующий, однако, шаг, игнорирующий эту пол-
ную схему взаимодействия и заменяющий ее
односторонним действием (рис. б), в котором
исходящая от сервоисточника высокого уров-
ня сила приписывается непосредственно
управляющему элементу, выводит за пределы
классической механики. Игнорирование испы-
тываемого управляющим элементом противо-
действия, происходящего на низком уровне
управляющих сил, и присвоение этому элемен-
ту' действия, исходящего от сервоисточника,
приводит к ‘ видимой схеме односторон-
него действия, действия без противодейст-
вия.
В правильно спроектированной сервопаре
сервоисточник способен развить под воздей-
ствием ничтожных управляющих усилий, под
воздействием, условно выражаясь, не мускуль-
ной, а чисто нервной команды, любой величи-
ны усилия, приложенные к управляемому
элементу. Равное и противоположное этим си-
лам противодействие будет, в полном соответ-
ствии с постулатом противодействия, прило-
жено со стороны управляемого элемента
к этому источнику энергии (источники энер-
гии на рис. 2-1 могли бы быть представлены
поршневыми насосами, к поршням которых
приложены силы, противодействующие силам,,
приложенным к поршням сервомоторов). Так-
же расшифровывается волевая схема управле-
ния, имеющая место в живых организмах. В
интересах целостного построения автоматики
^выгодно, однако, игнорировать эту трехчлен-
ную схему и скрытый в ней механизм противо-
действия и счесть марионеточную силу, исхо-
дящую, в видимой схеме, от управляющего
элемента сервопары, за истинную, т. е. при-
нять видимую двучленную схему, приписать
самому управляющему элементу силу, исходя-
щую от внешнего источника энергии и только
управляемую этим управляющим элементом.
Это и делается принятым выше для односто-
> ровней механики определением действующего^
элемента. Возникающую при этом видимую
силовую схему нельзя, следуя точному значе-
нию слов, назвать иначе, чем действием без
противодействия.
Сам логический прием игнорирования из-
быточной информации, прием «черного ящи-
ка» — намеренной замены сложного скрытого
механизма явления, хотя бы этот механизм
был детально известен, видимой его стороной,
замены, производимой в интересах целостно-
го построения предмета, получил в науке важ-
ные применения.
Так же игнорируются в классической ме-
ханике циклические координаты скрытых вра-
щающихся масс.
В уравнениях на рис. 2-1 учтены массы
поршней сервомоторов, мало влияющие на
процесс и обычно опускаемые. С учетом масс
сервомотор представляет собой элементарную
систему 2-го порядка, обладающую всеми вну-
тренними связями — статической в виде вы-
ключателя и связью 1-го порядка в виде ка-
таракта, образуемого окнами золотника. Эле-
ментом в этой одноэлементной системе яв-
ляется масса поршня, описываемая старшей
внутренней связью. Она является объектом
для всех внутренних сил элементарной систе-
мы, представляющих собой реакции всех
остальных, нестарших внутренних связей ее.
Под элементами динамических систем следует,
как говорилось выше, понимать не бескачест-
венную обобщенную координату, а обобщен-
ную координату с обозначенными динамиче-
скими свойствами. Свойства эти во всех слу-
чаях указываются старшей внутренней связью,
представляющей в этом смысле собственно^
элемент, противостоящий, как источник про-
тиводействия, объект приложения сил, всем
остальным сходящимся в нем связям, внеш-
ним и нестаршим внутренним.
Двусторонние уравнения не приведены под:
структурной схемой на рис. в, поскольку они:
13.
требуют знания характеристик сервоисточни-
ка. Существенно, что такие уравнения суще-
ствуют для каждой сервосистемы.
2-1-3. Материальный синтез
В рассмотренных выше структурных схе-
мах автоматики совершенно неограниченно
употреблялись символы дифференциальных и
интегральных элементов и связей произволь-
ного порядка и знака. Элементы и связи эти
•столь же произвольно соединялись в системе.
Следует теперь доказать, что все эти весьма
необычные пока операции материально осу-
ществимы, доказать, что материальный синтез
в автоматике так же свободен, как и логиче-
ский. Синтез самодействий способен, в част-
ности, дать конструктивную схему того синте-
за вещества, массы, о котором говорилось вы-
ше. Принципиальное значение такой схемы
очевидно.
Весьма важно также получить материаль-
ные модели таких трудно воспринимаемых но-
вых понятий односторонней механики, как от-
рицательные массы, отрицательная кинетиче-
ская энергия, адинамические системы, и таких
старых, но предстающих в новом свете поня-
тий двусторонней механики, как противодей-
ствие, масса, астатичность.
Чтобы осуществить материальный синтез
динамических систем, следует указать: 1) об-
щие приемы материального синтеза элемен-
тов и динамических связей; 2) приемы соеди-
нения их в систему. Поскольку сами элемен-
ты представляют собой лишь старшие вну-
тренние связи, следует начать с синтеза
связей.
2-2. СИНТЕЗ ДИНАМИЧЕСКИХ СВЯЗЕЙ
Конструктивным приемом, разрешающим
задачу синтеза систем произвольной структу-
ры, является одностороннее действие. С по-
мощью этого приема можно осуществить ди-
намические элементы и связи произвольного
порядка и знака.
Выше осуществлены были конструктивно,
с помощью рычажной передачи от сервомо-
торов к золотникам, только статические внеш-
ние и внутренние связи. Внутренние связи 1-го
и 2-го порядков были заданы принудительно,
в виде натуральных свойств элемента — его
положительной массы и положительного ка-
таракта. Следует преодолеть эти ограничения
и найти материальное воплощение таких умо-
зрительных пока понятий односторонней ме-
ханики, как положительные и отрицательньре,
дифференциальные и интегральные элементы
((«массы») и связи [Л. 36].
2-2-1. Синтез внешних связей
Для того чтобы осуществить дифферен-
циальные и интегральные связи, связи неста-
тические, необходимо иметь дифференцирую-
щий либо интегрирующий прибор, измеряю-
щий соответственного порядка производные
либо интегралы по времени от пути ведущего
элемента и передающий с помощью односто-
ронней динамической связи пропорциональ-
ный результату этих измерений импульс ве-
домому элементу. Ниже излагается общий ме-.
тод материального синтеза динамических свя-
зей на примере гидравлических сервомоторов,
принятых выше в качестве единообразных
изображающих элементов сервосистем. Он
легко может быть распространен и на любой
другой вид немеханических сервоэлементов.
А. Статические связи
На рис. 2—2,а дан способ, которым осу-
ществлялись выше статические связи. Пере-
дача от поршня управляющего сервомотора
к золотнику управляемого сервомотора осу-
ществлена здесь кинематически. Ее, однако,
можно осуществить динамически, как силовое
соотношение, способом, показанным на
рис. б, где передаточное отношение между
поршнем управляющего сервомотора и золот-
ником управляемого зависит от жесткостей Ci
и С2 измерительной пружины 1 и эталонной
пружины 2. Найдем это передаточное отноше-
ние. Обозначим перемещения точек В и D
через Xi и х2 и изберем направления положи-
тельного отсчета их так, как это показано на
рис. б. Из уравнения моментов относительно
точки А
с^а—c2x2\(a+'d) =0 (2-1)
находим это передаточное отношение:
(2-2)
2 а + d с2 1 v 7
Кинематически перемещения точек А, В и D
связаны уравнением
Х* a + d Xs'
Рис. 2-2. Кинематический и динамический способ синте-
_ за статических связей.
74
Подставляя (3) в (2), получаем:
<4* *]" L4 14 "р* (4 02 \ 14 €4 J ^2*
Выбирая отношение достаточно малым,
можно пренебречь членами, содержащими квад-
рат этого отношения, и тогда
__ ad Ci
Xi (a + d)2 ~с7^'
(2-5)
Перемещение х2 точки D и подвешенного
к ней золотника управляемого -сервомотора
пропорционально перемещению управляю-
щего сервомотора, измеряет это перемещение.
Рассматривая автоматику как одностороннюю
механику, следует представить все соотноше-
ния в сервосистемах как силовые соотноше-
ния. Будем считать поэтому, что усилие, воз-
никающее на поршне сервомотора, пропорцио-
нально перемещению золотника. В сервомото-
рах с проточным золотником это может быть
достигнуто профилировкой окон золотника.
В этом случае на поршне управляемого
сервомотора возникает усилие, пропорцио-
нальное перемещению управляющего серво-
мотора, т. е. осуществляется статическая
связь. Динамическая связь любого порядка
будет осуществляться такими сервомоторами
как чисто -силовое соотношение, как пропор-
циональность силы, действующей на поршень
управляемого сервомотора, соответствующего
порядка производной по времени от движе-
ния управляющего сервомотора.
Поскольку такой сервомотор явится основ'ным эле-
ментом дальнейших построений, следует -подробнее по-
яснить его конструкцию. Необходимо прежде всего,
Рис. 2-3. Сервомотор с линейной силовой харак-
теристикой.
чтобы сервомотор этот лишен был собственных нату-
ральных свойств — статичности катаракта массы,—т. е.
представлял бы собой в чистом виде механизм одно-
стороннего действия, позволяющий синтезировать
искусственные, синтетические свойства. Необходимо так-
же осуществить линейную силовую характеристику.
Это достигается способом, указанным на рис. 2-3. Зо-
г лотник сервомотора состоит здесь из двух проточных зо-
лотников, объединенных общим штоком и изменяющих
давления в полостях сервомотора (рис. а). Давление
в каждой из полостей зависит от сечения, открытого
золотником, и от постоянного сечения дроссельной шай-
бы на сливе. Окна в буксе золотника могут быть так
очерчены, что давления в обеих полостях будут линей-
ными -функциями хода золотника (JL 26]. Золотник
выполнен так, что с ростом давления в одной полости
падает давление в другой. Гидравлическая схема серво-
мотора дана на рис. б, характеристика — на рис. в.
Усилие, действующее на поршень, является линейной
функцией хода золотника. Тот же результат мог бы
быть достигнут заменой одной из двух гидравлических
пружин, образуемых этими гидравлическими устрой-
ствами, натуральной пружиной, как это делается
в обычных проточных сервомоторах. На рис. 2-3 взята
для наглядности первая, симметричная схема. Если сер-
вомотор этот не обладает ни натуральной массой, ни на-
туральным демпфированием, то он представляет собой
в чистом виде ту идеальную схему одностороннего дей-
ствия, о которой говорилось выше. Такой идеальный
сервомотор будет условно изображаться так, как это
показано на рис. '2-3—со схематическими поршнями.
Обобщенные силы могут быть приложены к такому
элементу одним из трех указанных на рис. а способов:
1) в виде натуральной силы, приложенной непосред-
ственно к штоку сервомотора; 2) сдвигом золотника;
3) сдвигом буксы золотника. -Все три способа дают
один и тот же результат—неуравновешенную силу Q(I),
приложенную к поршню сервомотора. На рис. 2-3 по-
казаны все три способа.
Выполняя пружины 1 и 2 достаточно жест-
кими, можно получить достаточно энергичное
и безынерционное устройство, не увеличиваю-
щее практически числа степеней свободы
сервомотора. Таким энергичным устройством,
с пружинами большой жесткости, можно,
естественно, нагружать лишь достаточно
энергичный элемент. Все устройство представ-
ляет собой как бы пружинные весы, на кото-
рых «взвешиваются» перемещения управляю-
щего элемента и сообщается затем управляе-
мому элементу импульс, пропорциональный
этим перемещениям.
Б. Дифференциальные связи
Разумеется, нет нужды выполнять стати-
ческую связь, легко осуществимую обычным
кинематическим способом (рис. 2-2,а), более
сложным силовым способом (рис. б). Послед-
ний описан лишь затем, чтобы .пояснить вы-
полнение нестатических связей (рис. 2-4,
2-5), где силовой способ является единствен-
но возможным и где он менее нагляден. На
тех же «весах», на которых «взвешивались»
на рис. 2-26 перемещения управляющего эле-
мента, можно «взвесить» и скорости и уско-
75
Рис. 2-4. Синтез внешних
Рис. 2-5. Синтез внешних связей 2-го порядка.
связей 1-го порядка.
рения его и осуществить таким -образом свя-
зи более высокого порядка. Для этого необхо-
димо в первом случае опереть рычаг «весов»
не на измерительную пружину, а на измери-
тельный катаракт (рис. 2-4), во втором же
случае—на измерительную массу (рис. 2-5).
Во всех трех случаях рычаг представляет со-
бой коромысло этих весов. Опорой этого ко-
ромысла являются соответственно измеритель-
ная пружина, измерительный катаракт и из-
мерительная масса. Один конец коромысла,
одна «чаша весов», нагружается, фигурально
выражаясь, измеряемыми перемещением, ско-
ростью и ускорением, и уравновешивается на
втором конце коромысла — второй «чаше ве-
сов» усилием эталонной пружины, выполняю-
щей в этих весах функцию эталонов, разнове-
сов в обычных весах.
Для того чтобы измерить скорость и осу-
ществить связь первого порядка, заменим из-
мерительную пружину измерительным ката-
рактом (рис. 2-4) с силой жидкостного сопро-
тивления F = bx. Уравнение моментов относи-
тельно точки А (рис. а):
— с2х2 (а + d) = 0. (2-6)
Передаточное отношение (2-2) принимает здесь
вид:
Связь первого порядка осуществлена — пере-
мещение точки D измеряет скорость qx управ-
ляющего сервомотора и передает через под-
вешенный к точке D золотник пропорциональ-
ное этой скорости усилие на поршень управ-
ляемого сервомотора. На рис. а осуществлена
отрицательная внешняя связь 1-го порядка,
на рис. б — положительная.
Осталось измерить тем же приспособлением
ускорение q. Подвесим для этого в точке В
(рис. 2-5), вместо катаракта и пружины изме-
рительную массу тп0-
В точке В приложена теперь сила инерции
F = тох1. У равнение моментов относительно
точки А
т^а — с2х2 (a-{-d) = 0. (2-10)
Передаточное отношение (2-2) принимает здесь
вид:
Дифференцируя дважды (2-3) и подставляя
его затем в (2-11), получаем:
__ a d т0 •• । / а \2т0 ••
Х*~+ ~ъХ*'
(2-12)
Вновь выбирая достаточно малым
отноше-
а
ние jTpy, получаем:
Дифференцируя
получаем:
(2-3) и подставляя в (2-7),
_ ad т9 ••
2 (a + d)2 с2 ч*'
(2-13)
____ a d Ьх
2 a -j- d л -j- d c2
• . / a V •
+ ( „ j — X2.
' \a-\-a c2 2
(2-8)
И здесь, выбрав отношение плеч a^_d до-
статочно малым, можно принять:
Х» = (а + ау ~с^1- (2’9)
Связь 2-го порядка осуществлена — пере-
мещением точки D измеряется ускорение qx
ведущего сервомотора и вызывается пропор-
циональное этому ускорению усилие на порш-
не ведомого сервомотора.
В этом и предыдущем случаях, отбрасы-
вая члены с 1-й и 2-й производными, содер-
жащие множителем а мы пренебрегали
76
несущественной степенью свободы, вносимой
в систему катарактом и массой, т. е. считали
все приспособление безынерционным диффе-
ренцирующим прибором. Это допущение со-
вершенно законно при условии достаточно
а
малых д при которых измеряющий при-''
бор не оказывает существенного влияния на
измеряемую величину. Наложение этого
условия не является, конечно, особенностью
описанных дифференцирующих приборов. Ана-
логичное ограничительное условие существу-
ет для каждого прибора, которому ставится
требование не оказывать существенного об-
ратного воздействия на измеряемую величи-
ну. Для выполнения этого требования необхо-
димо также, чтобы усилие измерительной
пружины 2 было более высокого порядка ма-
лости величиной по сравнению с «энергией»
(масштабом сил) сервомотора. Прямое урав-
новешивание усилий сервомотора усилием
пружины должно быть при этом несуществен-
ным по сравнению с косвенным уравновеши-
ванием усилий сервомотора циклическим ме-
ханизмом синтетической внутренней связи.
Дифференцирующие приборы указанного вида
измеряют, таким образом, с тем же прибли-
жением, что и всякий иной прибор. Содержа-
щаяся в них идея измерения производных лю-
бого порядка совершенно обща и пригодна
для измерения производных не только геоме-
трических координат, но и любых иных.
В рассматриваемом случае для того, что-
бы измерить производные геометрической, ко-
ординаты, ’понадобились две натуральные
внутренние связи — 0-го (в виде пружины) и
1-го (в виде катаракта) порядков. Натураль-
ная внутренняя связь 2-го порядка (масса)
была здесь использована лишь затем, чтобы
ускорить измерение производных высокого
порядка и сама эта натуральная связь 2-го
порядка могла бы быть получена уже синте-
тически, при помощи первых двух связей. Сле-
довательно, если для
Рис. 2-6. Совместный
синтез связей (различно-
го порядка.
какой-нибудь негеоме-
трической координаты,
чьи производные нуж-
но измерить, можно
найти две натуральные
внутренние связи нуле-
вого и первого поряд-
ков, то отталкиваясь от
них, можно по той же
схеме построить связи
любого порядка. Пусть
например, такой коор-
динатой является элек-
трический заряд. Две
натуральные внутренние связи нулевого и пер-
вого порядков этой координаты суть емкость
и омическое сопротивление. Первая играет
роль пружины прибора, вторая — роль ката-
ракта. Рычаг механического прибора следует
для данного случая заменить соответствующим
электрическим контуром и, следуя указанной
механической схеме, измерять производные
любого порядка. Чтобы ускорить наращива-
ние производных, можно воспользоваться су-
ществующей для координаты «электрический
заряд» натуральной внутренней связью 2-го
порядка — самоиндукцией.
В схемах на рис. 2-2, 2-4, 2-5 точкой опоры
коромыслу «весов» служили неподвижная точ-
ка в схеме 2-2,а и, условно выражаясь, упру-
гое, катарактное и инерционное противодей-
ствие в схемах 2-2,6, 2-4, 2-5. Этим осущест-
влены были, при указанном на схемах на-
правлении координатных осей, отрицательные
связи. Помещая точку В вне рычага AD, как
это показано в правой части рисунков 2-4,
2-5, получим отрицательные связи. В первом
случае перемещения, скорости и ускорения
поршня управляющего сервомотора вызывают
того же знака усилие на поршне управляе-
мого сервомотора, во втором случае — обрат*4
ного знака.
С помощью приема одностороннего дейст-
вия, отталкиваясь от натуральных механиче-
ских свойств, получены были выше положи-
тельные и отрицательные связи 0-го, 1-го и
2-го порядков. Метод этот позволяет весьма
простое, с помощью одного лишь рычага, од-
новременное выполнение нескольких связей
различного порядка и знака (рис. 6). Муль-
типлицируя указанный прибор, можно полу-
чить связи не только 2-го, но и любого более
высокого порядка (рис. 2-7). Пусть (рис. а)
перемещение х2 точки измеряет ускорение
qx сервомотора /. Присоединяя точку Pi
к точке А2 следующего такого же рычага
с измерительным катарактом, получаем в точ-
ке Р2, на выходе его, перемещение х3, изме-
77
Рис. 2-8. Синтез интегральных связей 1-го порядка.
0-fF* *©
<9
Рис. 2-9. Синтез интегральных связей 2-го порядка.
ряющее уже q\. Повторяя этот прием еще од-
нажды, получаем в точке D3 следующего ры-
чага перемещение измеряющее ускорение
еще более высокого нечетного порядка, «и т. д.
Еще быстрее наращивается порядок связей,
если мультиплицировать дифференцирующий
прибор 2-го порядка (рис. б). Этим способом
можно получить все связи четного порядка.
Комбинируя оба прибора, можно получить
связи всех порядков. Для устранения обрат-
ного влияния каждого следующего прибора
при такой мультипликации необходимо, что-
бы «энергия» каждого следующего прибора,
т. е. масштаб действующих в нем усилий —
жесткости измерительных пружин и соответ-
ственно коэффициенты b и 1/и0, резко убывали.
Удобство такого силового моделирования
динамических связей заключается в том еще,
что оно оставляет выбор между синтетиче-
ским и натуральным выполнением свойств
элемента. Масса элемента, например, может
быть выполнена синтетической, как на рис. 2-5,
или натуральной, в виде тяжелого поршня
моделирующего сервомотора.. Натуральная
масса—натуральная внутренняя связь 2-го
порядка — может быть при этом выполнена
одновременно с синтетическими внутренними
связями иного порядка. Этой возможностью
мы будем все время пользоваться.
В. Интегральные связи
Простым обращением синтеза дифферен-
циальных связей является синтез связей ин-
тегральных (рис. 2-8, 2-9). Эталонная пружи-
на 2 меняется здесь местами с измерительной
пружиной 1 (рис. 2-2), катарактом (рис. 2-4)
и массой (рис. 2-5), помещается вблизи што-
ка сервомотора, и деформацией своей изме-
ряет, «взвешивает» путь ведущего сервомото-
ра (рис. 2-8, 2-9). Усилие пружины передает-
ся на катаракт (рис. 2-8) или массу (рис. 2-9),
подвешенные к рычагу в месте подвески зо-
лотника ведомого сервомотора. Скорость ка-
78
таракта и ускорение массы пропорциональны
усилию пружины, т. е. пути поршня .ведущего
сервомотора. Соответственно пути точек под-
вески катаракта и массы измеряют величины
J qidt и J q\d№ и передают через золотник
поршню ведомого сервомотора силы, пропор-
циональные этим величинам.
Рассмотрим интегральную связь первого
порядка (рис. 2-8). Уравнение моментов от-
носительно точки А
с^а — b2x2 (а + d) = 0. (2-14)
Передаточное отношение
Кинематически перемещения точек Д, В и £>
связаны соотношением (2-3). Подставляя (2-3)
в (2-15), получаем:
+ (2-16>
При малом можно принять:
• __ ad Ci
Х*~ (а + 0}г ~b7<!1
или
(2-17>
(2-18>
Схема на рис. 2-8,а осуществляет, таким
образом, отрицательную внешнюю связь по-
первому интегралу. Переместив пружину во-
вне рычага AD (рис. б), получим положитель-
ную связь по первому интегралу.
На рис. 2-9 показано выполнение инте-
гральной связи по второму интегралу. Урав-
нение моментов относительно точки А:
CiXia — d)—0„ (2-19),
|+£/ l+?2
Рис. 2-10. Совместный синтез инте-
гральных связей различного порядка.
Рис. 2-11. Синтез дифференциальной внутрен-
ней связи 1-го порядка.
Передаточное отношение
__ а
2 a + d т*
(2-20)
Подставляя (2-3) в (2-20), получаем:
a d с2
2 а + d а + d т0
или, приближенно, с учетом малости
С помощью интегральных связей образу-
ются рассматриваемые ниже простые изо-
дромные системы.
2-2-2. Синтез внутренних связей
Используя полученный выше общий метод
синтеза внешних связей любого порядка и зна-
ка, можно получить общий метод синтеза
внутренних связей. Принципиальное значение-
этой задачи заключается в том, что синтезом
произвольного вида внутренних связей дости-
гается синтез элементов произвольной струк-
туры.
’• __ ad с2
Х2~~ (a + d)2
(2-22)
«Дтнн (2123)
Постоянные интегрирования здесь и выше
приняты равными нулю.
Схема на рис. 2-9 осуществляет интеграль-
ную связь 2-го порядка. Тем же способом, что
и для дифференциальных связей (рис. 2-6),
наращивается и порядок связей интеграль-
ных. На рис. 2-10 показано совместное выпол-
нение нескольких интегральных связей раз-
личного порядка. В отличие от дифферен-
циальных связей (рис. 2-6), интегральные
связи, выполняемые на одном рычаге, могут
иметь только один знак (рис. 2-10).
Значение внешних интегральных связей
определяется тем, что с помощью их можно
радикально устранить остаточную неравно-
мерность, вызванную как статичностью регу-
лирования, так и нечувствительностью его.
Действительно, самое небольшое отклонение
управляющего элемента от равновесного по-
ложения вызывает на поршне управляемого
элемента усилие, нарастающее с течением
времени до любой величины и преодолеваю-
щее любую нечувствительность.
Рис. 2-12. Синтез дифференциальной внутрен-
ней связи 2-го порядка.
Рис. 2-<13. Синтез внутренних связей высо-
кого порядка.
79
Рис. 2-14. Синтез интегральной внутренней
связи 1-го порядка.
Рис. 2-15. Синтез интегральной внутренней
связи 2-го порядка.
Для синтеза внутренних связей достаточно
подвесить к точке D рис. 2-2, 2-4, 2-5 вместо
золотника управляемого сервомотора золот-
ник самого управляющего сервомотора, чьи
внутреннее связи синтезируются. Управляю-
щему сервомотору переданы будут эти им-
пульсы, пропорциональные его собственным
перемещению, скорости и ускорению, т. е. осу-
ществлены внутренние связи соответствующе-
го порядка. Этим способом синтезированы на
рис. 2-11—2-15 дифференциальные и инте-
гральные, положительные и отрицательные
внутренние связи.
2-3. СИНТЕЗ ДИНАМИЧЕСКИХ ЭЛЕМЕНТОВ
2-3-1. Синтез динамических элементов
Синтезом внутренних связей решается так-
же задача синтеза динамических элементов,
представляющих, как выяснено было выше,
старшие внутренние связи элементарных си-
стем. На рис. 2-11—2-15 синтезированы, сле-
довательно, положительные и отрицательные,
дифференциальные и интегральные элементы,
в том числе и единственный элемент класси-
ческой механики — натуральная масса
(рис. 2-12). Вместе с нею синтезирован и
Элементарная система Элемент
Рис. 2-16. Элемент и элементарная система.
столь необычный для классической механики
элемент, как отрицательная масса.
Отрицательная масса, тяготеющая и инертная, рас-
сматривалась также Г. Бонди [Л. 95] как одно из поня-
тий общей теории относительности. Нами отрицательная
масса рассматривается только как инертная масса. Во-
прос об отношении инертной и гравитационной масс
выходит за пределы механики.
'Положительность масс классической механики выте-
кает не из постулата противодействия, а из принципа
наименьшего действия (Л. 79]. Отрицательная масса
не противостоит постулату противодействия и в равной
мере принадлежит односторонней и двусторонней меха-
никам. Последняя, однако, вынуждена считаться ?с по-
ложительностью натуральных масс как с опытным фак-
том, преодолеть который не в ее средствах: «В ньюто-
новской физике закон действия и противодействия
подразумевает равенство активной и пассивной грави-
тационных масс, равенство же инертной массы с этими
двумя представляет собой отдельный эмпирический
факт. Знак этих обеих масс может принимать любое
значение, и тот факт, что он всегда положителен, яв-
ляется дополнительным эмпирическим результатом»
(Г. Бонди, цитированная работа). Напротив, односто-
ронняя механика, располагая односторонним действием,
образует с его помощью синтетические элементы любо-
го порядка! и знака. Не составляет труда с помощью
рассмотренной выше односторонней модели этих синте-
тических масс синтезировать в ней и такие нелинейные
элементы, как эйнштейнова меняющаяся со скоростью
масса. То, что для получения синтетической м^ассы при-
менена здесь, в качестве измерительного, дифференци-
рующего прибора, натуральная масса т0, не является,
разумеется, порочным кругом. В качестве прибора, из-
меряющего ускорения, мог бы быть применен любой
другой дифференцирующий прибор. Натуральная масса
взята здесь в качестве такого прибора лишь для на-
глядности. Система на рис. 2-12 наглядно поясняет воз-
можную схему выделения первых структурных образо-
ваний—элементарных масс элементарным актом управ-
ления.
На рис. 2-16,а синтезирована интегродиф-
ференциальная элементарная система; на
рис. б выделен образующий ее отрицательный
элемент — отрицательная старшая дифферен-
циальная связь. Элементарная система на
рис. а поясняет способ совместного выполне-
80
ния дифференциальных и интегральных, по-
ложительных и отрицательных связей.
Легко заметить, что схемы интегральных
элементов на рис. 2-14 и 2-15 содержат внут-
реннее противоречие. Как выяснено было вы-
ше, динамический элемент р-го порядка под
воздействием постоянной силы движется так,
что ускорения выше р-го порядка принимают
нулевые значения, ускорение р-го порядка —
постоянное значение, все же ускорения более
низкого порядка — соответствующие инте-
гральные значения. Для интегральных элемен-
тов это означает, что движение их под воздей-
ствием постоянной силы должно происходить
при постоянном значении интеграла по време-
ни, соответствующего интегральному порядку
элемента, и нулевом значении пути. Оба эти
требования несовместимы. Постоянство инте-
грала требует бесконечно большого пути в на-
чальный момент. Таким именно и будет дейст-
вие интегральных элементов на рис. 2-14 й
2-15. Поскольку, как объяснялось выше, же-
сткость измерительной пружины исчезающе
мала по сравнению с действующими на эле-
мент силами, силы эти будут вызывать в пер-
вый момент бесконечно большие перемещения.
Противодействующие силы, вызываемые пере-
мещениями буксы, возникнут здесь с запозда-
нием. Бесконечно большие перемещения свя-
заны с бесконечно большими расходами рабо-
чего агента. Интегральные элементы пред-
ставляют, таким образом, лишь логическую
схему, не реализуемую физически. В дальней-
шем это получит и иное, более общее объяс-
нение. Интегральные связи не могут быть по-
этому применены в качестве старших внутрен-
них связей. Применение их в качестве внеш-
них или нестарших внутренних связей ничем,
разумеется, не ограничено.
Мультиплицируя внутренние связи низших
порядков, можно, как и в случае внешних свя-
зей, получить элементы более высокого поряд-
ка (рис. 2-13).
2-3-2. Нейтрализация натуральных свойств
В автоматике могут быть указанным выше
способом синтезированы любые, дифференци-
альные и интегральные, возбуждающие и тор-
мозящие внутренние связи, т. е. любые свой-
ства элементов. Назовем эти синтезированные
внутренние связи или свойства синтетически-
ми в отличие от натуральных свойств, нату-
ральных внутренних связей, заданных прину-
дительно в виде натуральных статичностей,
катарактов и масс элементов. С помощью этих
синтетических связей может быть теперь ре-
шена многократно ставившаяся задача ней-
трализации нежелательных внутренних связей.
Для этого достаточно наложить на натураль-
ную внутреннюю связь синтетическую связь
обратного знака. В схемах на рис. 2-2—2-16
предполагалось, что сервомотор не обладает
никакими натуральными свойствами ни ката-
рактом, ни массой. Он представлял лишь иде-
альную схему одностороннего действия, спо-
собную синтезировать эти свойства. С по-
мощью этой же схемы можно нейтрализовать
любую из таких нежелательных натуральных
внутренних связей сервомотора, если она в нем
6 И. И. Гальперин.
81
имеются, наложив на нее искусственную, син-
тетическую связь обратного знака. На
рис. 2-17,а показан такой сервомотор, облада-
ющий натуральными массой, катарактом и ста-
тичностью. Массу сервомотора можно умень-
шить или совсем нейтрализовать, свести к ну-
лю, наложив на сер!вомотор искусственную от-
рицательную связь 2-го порядка (рис. б).
Точно так же нейтрализуется натуральный ка-
таракт, образуемый окнами золотника серво-
мотора (рис. в). Можно было бы таким обра-
зом нейтрализовать все натуральные динами-
ческие свойства элемента и получить упомяну-
тую выше идеальную схему, обладающую од-
ной лишь статической внутренней связью (так
называемый идеальный элемент, рис. а).Прак-
тическое осуществление такого элемента по-
требовало бы неограниченных расходов рабо-
чего агента и энергии. Таким способом могут
быть поэтому лишь ослаблены, но не сняты
все динамические внутренние связи элемента.
Нейтрализация же отдельных динамических
внутренних связей практически осуществима и
демонстрирует необычные возможности авто-
матики [Л. 18].
На рис. бив употреблен знак эквивалент-
ности (дойная стрелка), устанавливающий
эквивалентность элементарных систем с нало-
женной на них отрицательной нейтрализую-
щей связью (рис. б2, в2, г2, д2) системам с ней-
трализованной уЖе, т. е. отсутствующей внут-
ренней связью (рис. б3, в3, а3, д3). Эквивалент-
ность, подробно рассматриваемая ниже, озна-
чает совпадение характеристических полино-
мов систем при определенных метрических со-
отношениях параметров. В данном случае со-
отношения эти сводятся к равенству парамет-
ров нейтрализующей и нейтрализуемой свя-
зей.
2-3-3. Идеальный и абстрактный элементы
Можно было бы попытаться нейтрализо-
вать в идеальном элементе (рис. г) и послед-
нюю остающуюся в нем связь — статическую
связь в идеальном элементе (выполняемую на
рис. 2-17 пружиной, нагружающей поршень
сервомотора) и получить свободный от всех
внутренних связей абстрактный элемент
(рис. б), т. е. рассмотренную выше абстракт-
ную схему одностороннего действия. Абстракт-
ный элемент физически невыполним по тем же
причинам, что и идеальный элемент. Он, одна-
ко, представляет собой столь же полезную
абстракцию. Абстрактный элемент принципи-
ально не мог бы быть объектом приложения
внешних сил, не обладая внутренними связя-
ми, способными реакцией своей уравновесить
эти силы.
82
Абстрактный элемент является элементар-
ной адинамической, т. е. неспособной развить
противодействие и не могущей поэтому быть
объектом приложения сил системой. Ниже рас-
смотрены будут сложные адинамические си-
стемы.
Отрицательные массы и связанные с ними отри-
цательные энергии возникают в релятивистской кван-
товой мехайике и лишены в ней сколько-нибудь на-
глядного представления («До сих пор, правда, столь
фантастическая ситуация не наблюдалась на практике,
как и вообще не наблюдалось, чтобы частица обладала
отрицательной массой» [Л. 95]). В автоматике ситуация!
эта вполне реальна, и ее конструкции в автоматике*
могли бы послужить наглядными моделями таких «фан-
тастических» ситуаций релятивистской квантовой меха-
ники, как отрицательные массы, аннигиляция вещества
(абстрактные элементы).
2-4. СИНТЕЗ ДИНАМИЧЕСКИХ СИСТЕМ
Решение задачи синтеза элементов и свя-
зей произвольного порядка и знака решает
задачу синтеза систем произвольной структу-
ры. Средствами автоматики можно как вновь
синтезировать системы натуральной структу-
ры, из разложения которой возникли эти
средства, так и двигаться в новых направле-
ниях.
Рассмотрим синтез динамических систем
в порядке нарастающей сложности — одно-
элементные (элементарные) системы и эле-
менты (самодействия), двухэлементные си-
стемы (взаимодействия), многоэлементные
системы (сложные взаимодействия) — и по-
строим сервомодели движения этих систем.
2-4-1. Элементарные системы (самодействий)^
Выше показано было уже, что элементы
обладают механизмом пассивного самодейст-
вия, противостоящего в качестве противодей-
ствия приложенным к элементу активным си-
лам — внутренним силам элементарной си-
стемы (активным самодействиям) и внешним:
ее силам. Это пассивное самодействие пред-
ставляет собой реакцию старшей внутренней
связи элемента, тогда как активные самодей-
ствия представляют реакции нестарших вну-
тренних связей. Рассмотрим с помощью серво-
моделей этот внутренний механизм пассив-
ного самодействия, позволяющий элементу
противостоять любой величины активным
внешним силам.
Попытаемся прежде всего уяснить себе
с помощью этих моделей такие трудновоспри-
нимаемые положения, как отрицательные
массы и их ускорение навстречу действующей
силе. Такая модель позволяет наглядно пред-
ставить достаточно сложный внутренний ме-
ханизм положительного и отрицательного»
инерционного^ сопротивления.
А. Движение положительных масс
Начнем с рассмотрения на сервомодели
движения элемента с положительной синте-
тической массой (рис. 2-18). В соответствии
со вторым законом односторонней механики
движение элемента должно происходить так,
чтобы динамическая реакция его была равна
и противоположна действующей силе. В инер-
циальном движении динамическая реакция
элемента должна быть поэтому равна нулю
и, следовательно, золотник его сервомодели
должен оставаться в среднем положении при
любом направлении скорости (рис. а). В ус-
коренном движений, вызванном силой Q, сила
эта должна уравновеситься динамической ре-
акцией элемента и золотник его сервомодели
должен отклониться из среднего положения
и развить соответствующее оротиводействую-
щее усилие (силу инерции) (рис. б). Элемент
получает именно такое ускорение, при кото-
ром эта противодействующая сила равна дей-
ствующей. Для положительной массы ускоре-
ние это совпадает по направлению с дейст-
вующей силой (рис. б). Циклический харак-
тер инерционного противодействия, образуе-
мый им одночленный цикл пассивного само-
воздействия получают в сервомодели полную
прозрачность.
Конструкция сервомодели обеспечивает это
автоматическое уравновешивание действую-
щих сил динамическими реакциями элемента.
Инерциальное с постоянной скоростью дви-
жение такого элемента не вызовет смещения
буксы и не встретит, следовательно, никакого
сопротивления (рис. а). Ускоренное движение
(рис. б), вызванное силой Q, вызовет смеще-
ние буксы на величину, определяющую рав-
ное и противоположно направленное противо-
действие сил давления, имитирующих здесь
пассивную силу инерции. Противодействие
Инерциальное движение
Рис. 2-1В. Сервомодель движения положительной массы.
это, однако, в односторонней механике прило-
жено не к действующему, в ее понятиях, т. е.
управляющему элементу, управляющему зо-
лотником воздействуемого сервомотора, т. е.
не к этому золотнику, а к внешнему источни-
ку энергии — маслонасосу системы. Сервомо-
дели динамических элементов односторонней
механики наглядно поясняют механизм одно-
стороннего действия.
Определим численную величину инерцион-
ного противодействия сервомодели.
Разделив уравнение (2-13) на величину $0
(рис. 2-3) и учтя, что -^-=з, ПРИ ма-
лых -j- равно приближенно получим:
а=-Г-3-7Г^ <2-24)
«ои с2
Величина а и усилие Q(a) (сила инерции), раз-
виваемое золотником на поршне сервомотора
и равное и противоположное силе Q, связаны
соотношениями (рис. 2-3):
Q(a) = -Q = -2aP (2-25)
о = (2--26)
Подставляя (2-26) в (2-24), получаем:
<?=2^ттг«.=тл- <2'27>
Здесь сложная величина, обозначенная
—синтетическая масса. Ускорение, получае-
мое поршнем сервомотора под воздействием
силы Q (рис. 2-18,6), будет равно:
’=£ (2-28)
т. е. для синтетического элемента 2-го поряд-
ка с положительной массой, описываемой
формулой (2-27), действителен, естественно,
2-й закон классической механики, описываю-
щий движение материальной точки с нату-
ральной массой.
Инерционное противодействие Q
синтетического сервомотора, сила инерции его
получается за счет открытий золотника, воз-
никающих при ускоренном движении элемен-
та (рис. 2-18,6), и определяется величиной о
этого открытия по формуле (2-25). Механизм
инерционного противодействия предстает здесь
в анатомированном виде.
83
Б. Движение отрицательных масс
В отрицательном синтетическом элементе
противодействующее усилие может быть соз-
дано только при ускорении, направленном на-
встречу силе (рис. 2-19,6). Этим объясняется,
в свете 2-го закона односторонней механики,
противоположное направлению силы ускоре-
ние, получаемое отрицательной массой. Инер-
циальное движение отрицательного синтети-
ческого элемента происходит, так же как и
положительного, при среднем положении зо-
лотника (рис. 2-18,а, 2-19,а).
Если имеется некий «черный ящик» с не-
известным внутренним устройством и выведен-
ными вовне лишь внешними точками прило-
жения внешних сил, то, каково бы ни было
это внутреннее устройство, если только оно
подчиняется классической механике, прило-
жение внешних сил к внешним точкам может
вызвать ускорение этих точек только в на-
правлении сил. Это является одним из крите-
риев «классического» содержания представ-
ленной этим черным ящиком системы. Пер-
вым отклонением от этого «классического»
поведения является отрицательная реактив-
ность— поведение сервосистем с отрицатель-
ными массами, ускоряющимися в направле-
нии, противоположном действующей силе. От-
клонение это является критерием «некласси-
ческого» содержания системы.
Приведенные выше рассуждения устанав-
ливают для элемента с отрицательной массой
лишь возможность предусматриваемого обоб-
щенным 2-м законом движения с отрицатель-
ным ускорением, направленным навстречу
силе. Возможность эта заключается в том, что
элемент с отрицательной массой при отрица-
тельном ускорении, и только при отрицатель-
ном ускорении, способен, в соответствии с по-
стулатом действия, противопоставить дейст-
вующей силе равно противоположное проти-
водействие, ответить равной и противополож-
но направленной динамической реакцией.
Только эта кинетостатическая возможность и
констатируется силовой схемой на рисунке
2-19,6. Такая возможность устанавливается и
сервомоделью на рис. 2-18,6 и для положи-
тельной массы. Может показаться, что реали-
зация этих возможностей различна, что дви-
жение отрицательной массы, в отличие от
движения положительной, структурно неус-
тойчиво. Это означало бы, что первая из этих
возможностей реализуется, вторая же нет.
Чтобы убедиться в том, что это не тай, рас-
смотрим в общих чертах, опережая дальней-
шее полное изложение, задачу структурной
устойчивости элементов.
Инерииальное движение
Рис. 2-19. Сервомодель движения отрицательной массы.
В. Структурная устойчивость
Условия структурной устойчивости элемен-
тов (рис. 2-20) удобнее всего получить, выяс-
нив эти условия для элементарных систем
(рис. 2-21, 2-22) и рассматривая затем эле-
мент как простейшую элементарную систему.
Под устойчивостью здесь и везде в дальней-
шем понимается асимптотическая устойчи-
вость.
Устойчивость элемента^, может рассматри-
ваться по отношению к различным парамет-
рам движения его — координате (пути) и раз-
личного порядка производным и интегралам
ее по времени. Параметр движения элемента,
по отношению к которому определяется ус-
тойчивость (и, в частности, указывается число
степеней неустойчивости Vs), назовем пара-
метром устойчивости. Порядок его и назовем
порядком параметра устойчивости или крат-
ко — порядком устойчивости и будем обозна-
чать равным ему числом знаков дифференци-
рования (при положительном порядке пара-
метра устойчивости) или интегрирования (при
отрицательном порядке параметра устойчиво-
сти), проставляемых внутри кружка, изобра-
жающего элемент (рис. 2-20). Для устойчиво-
сти по координате (нулевой порядок парамет-
ра устойчивости) отпадает в такой системе
обозначений надобность в каком-либо обозна-
чении порядка параметра устойчивости, и кру-
жок, обозначающий элемент, будет пуст
(рис. 21). Параметр устойчивости, порядок
которого равен порядку элементарной систе-
мы, назовем собственным ее параметром ус-
тойчивости.
Отрицательные элементы правой половины
рис. 2-20 эквивалентны соответственным (того
?ке порядка) положительным элементам ле-
вой половины, связаны с ними эквивалентным
Положительные
зеементы Отрицательные элементы
VS=Z7
е>) г') Ft) ?) Bt) А,)
vs=o
6 г) гг) Гг) Вг) Бг) Аз)
Рис. 2-20. Положительные и отрицательные элементы в задаче устойчивости.
структурным преобразованием инверсии — пе-
ремены знаков всех членов уравнения. Пре-
образование это не является, конечно, тож-
дественным преобразованием — локальные
Рис. 2-21. Элементарные системы с непрерывными очередностями внутрен-
них связей.
структурные свойства (реактивности) тех и
других элементов противоположны. Общие их
структурные свойства, определяемые харак-
теристическим уравнением, тождественны. Ин-
версия является общеэквива-
лентным, локально же неэкви-
валентным преобразованием.
Здесь важно отметить, что
даже для элементов и элемен-
тарных систем не, сливаются
общие и локальные свойства и
соответственно общая и ло-
кальная эквивалентности.
Назовем кратко элементар-
ные системы, образованные
положительным и отрицатель-
ным элементами, положитель-
ными и отрицательными эле-
ментарными системами. Поло-
жительные элементарные си-
стемы могут обладать непре-
рывными очередностями вну-
тренних связей (рис. 2-21)
или прерывными (рис. 2-22).
В первом случае они содер-
жат непрерывную очередность
положительных внутренних
85
Положительные элементарные Отрицательные элементарные
системы системы
Рис. 2-22. Элементарные системы с прерывной очередностью внутренних
связей.
связей всех порядков, от старшего порядка р
до младшего порядка г включительно (полный
состав связей). Во втором случае очередность
эта терпит разрывы в виде отсутствующих
(пропущенных, рис. а, в) или отрицательных
,(рис. б, г) связей. Порядок старшей из отсут-
ствующих или отрицательных связей, обра-
зующих этот разрыв, назовем порядком раз-
рыва. Порядок разрыва равен на рис. а иб—
нулю, на рис. в — минус единице, на рис. г —
минус двум. Первого вида элементарные си-
стемы назовем непрерывными, второго вида—
прерывными.
На рис. 2-21 расположены непрерывные
элементарные системы, на рис. 2-22 — пре-
рывные, в левой части — положительные,
в правой — отрицательные. Соответственные
системы левой и правой частей связаны экви-
валентным преобразованием инверсии и по-
тому эквивалентны — обладают одинаковыми
общими структурными свойствами. Они обла-
дают, в частности, одинаковым числом степе-
ней неустойчивости по отношению к парамет-
рам устойчивости одинакового порядка.
Теорема 2-1. Непрерывные элементар-
ные системы структурно устойчивы по отно-
шению ко всем параметрам устойчивости, по-
рядок которых равен порядку младшей связи
элементарной системы или превышает его, и
структурно неустойчивы по отношению к па-
раметрам устойчивости, порядок которых ус-
тупает порядку младшей связи системы.
В первом случае (первая строка рис. 2-£1)
системы эти являются нулевыми (Vs=0), во
86
втором (вторая^ строка)—со-
держат избыточные связи
(Vs<0). Избыточными явля-
ются в этом случае все связи,
порядок которых уступает по-
рядку устойчивости. В третьем
случае (третья -строка) в си-
стемах этих имеется недоста-
ток связей. Непрерывные си-
стемы структурно устойчивы и
в не показанном на рис. 2-21
частном случае теоремы, когда
порядок устойчивости превы-
шает порядок системы.
Теорема 2-II. Прерыв-
ные элементарные системы
структурно неустойчивы по от-
ношению ко всем парамет-
рам устойчивости (рис. 2-22).
Они структурно неустойчивы,
в частности, и в не показанном
на рис. 2-22 случае, когда по-
рядок устойчивости превышает
порядок системы. Системы
эти, таким образом, структурно неустойчивы
во всех возможных случаях — по отношению
ко всем возможным параметрам устойчи-
вости.
Элементы могут быть рассматриваемы как
предельный случай непрерывных элементар-
ных систем (рис. 2-23), и к ним применимо
указанное выше для этих систем правило.
Элементы структурно устойчивы по отно-
шению к параметрам устойчивости, порядок
которых равен порядку элемента (собствен-
ным параметрам устойчивости) или превы-
шает его, и структурно неустойчивы по отно-
шению к параметрам устойчивости, порядок
которых уступает порядку элемента. Для эле-
мента, рассматриваемого как элементарная
система, наибольший интерес представляет
устойчивость по отношению к собственному
параметру устойчивости, поскольку ею опре-
деляется возможность реализации 2-го зако-
на. Положительные элементы структурно
устойчивы по отношению к собственному пара-
метру устойчивости (обычная масса — по от-
ношению к ускорению) (рис. 2-23). Отрица-
тельные элементы, показанные в правой ча-
сти рисунка 2-20, эквивалентны в силу инвер-
сии соответственным положительным элемен-
там левой части рисунка и, следовательно,
также структурно устойчивы по отношению
к собственному параметру устойчивости. Эле-
менты любой природы, любого дифференци-
ального порядка и знака структурно устойчи-
вы по отношению к собственным параметрам
устойчивости и к параметрам превышающего
предельный случай непрерыв-
Нулевые элементарные
системы ( Vs~0)
'М *г) -М
Ь) 6г) Б3)
Рис. 2-23. Элементы как
ных элементарных систем.
{порядок собственных параметров) порядка и
•структурно неустойчивы по отношению к па-
раметрам уступающего (порядку собственных
параметров) порядка. Правило это является
частным выражением указанного выше пра-
вила для непрерывных элементарных систем.
Им дается ответ на поставленный выше во-
прос— положительные и отрицательные мае-
сы в равной мере структурно устойчивы по
отношению к собственным параметрам дви-
жения; подчиненное обобщенному 2-му закону
механики движение их в равной мере устой-
чиво.
.В силу этой же эквивалентности структур-
но устойчивы элементарные системы, образо-
ванные отрицательным элементом и полным
составом отрицательных связей (рис. 2-21).
Структурно неустойчивы только элементар-
ные системы, в которых непрерывная очеред-
ность нарушена либо отсутствием некоторых
связей, либо несовпадением знака связи со
знаком элемента. В последнем случае
возникает, на первый взгляд, двузначность
в определении Vs, поскольку стабилизировать
элементарную систему можно в этом случае
либо изменив знак не совпадающих по знаку
с элементом связей, либо изменив знак само-
го элемента. В действительности Vs опреде-
ляется только первой операцией — связыва-
нием элементарной системы положительными
связями, нейтрализующими отрицательные
внутренние связи. Эти числа V8 и показаны
на рис. 2-21, 2-22. Вторая операция — замена
отрицательного элемента положительным —
имеет смысл, совершенно отличный от связы-
вания, и не может поэтому определять собой
числа Vs.
Элементы в задаче устойчивости (рис. 2-20)
отличаются от элементов в задаче движения
(рис. 1-13). В задаче движения элемент обра-
зуется только старшей дифференциальной
.связью, т. е. только указанием порядка эле-
мента, в задаче устойчивости — указанием
порядка элемента и порядка параметра ус-
тойчивости. В обоих случаях элементом яв-
ляется объект: приложения сил — в задаче
движения, связывания — в задаче устойчиво-
сти.
Г. Стабилизация отрицательных масс
Положительные и отрицательные элемен-
ты, в частности — массы, в равной мере
устойчивы относительно собственных парамет-
ров устойчивости. Стабилизация относитель-
но несобственных параметров устойчивости
(р—1)-го, (р—2)-го и т. д. порядков до-
стигается связыванием элемента связями
(р—1)-го, (р—2)-го и т. д. порядка, соответ-
ственно положительными или отрицательны-
ми, налагаемыми в непрерывной очередности.
Помимо этой стабилизации элементов внутри
элементарных систем, возможна стабилиза-
ция их внутри сложных систем. Элементы
стабилизируются внутри сложных систем за-
мещением недостающих внутренних связей
внешними обратными того же порядка и зна-
ка связями. На рис. 2-24 показана стабили-
зация этим способом положительных элемен-
тов и элементарных систем. В первой строке
даны изолированные нулевые элементарные
системы, во второй строке — их соединение
в открытую нулевую систему, в третьей стро-
ке — получение из этой открытой нулевой си-
стемы замкнутых нулевых систем способом
входного замещения внутренних связей внеш-
ними. Способ этот прямо отвечает принципу
равномерной локальной связанности и зани-
мает поэтому, как показано ниже, централь-
ное место в задаче синтеза структурно устой-
чивых систем. Этим же способом могли бы
быть стабилизированы и отрицательные эле-
менты, что привело бы к системам, инвер-
сным системе на рис. в.
87
тельных элементов.
Этим способом стабилизируются элемен-
тарные системы с однородной знаковой струк-
турой. Для стабилизации систем с разнород-
ной знаковой структурой может быть исполь-
зована гироскопическая стабилизация. Для
положительных элементарных систем она да-
на на рис. 1-4; для отрицательных—получает-
ся инверсией этого решения (рис. 2-25). Си-
стема гироскопической стабилизации отрица-
тельных масс (рис. б) получается из системы
гироскопической стабилизации элементов с по-
ложительным статизмом (рис. а) эквивалент-
ным преобразованием—инверсией, переменой
знака всех связей системы. На рис. в систе-
ма б приведена к канонической форме тож-
дественным преобразованием — инверсией
(переменой знака) координатной оси одного
из элементов, безразлично какого. Все три
системы структурно устойчивы относительно
всех параметров устойчивости, не ниже нуле-
вого порядка. На рис. 2-25 использованы от-
У равнения систем г
-ufrr&tt&o -и&т£+^т,£г-о
Xа ра к теристическое уравнение :
(^Ta+T„^)p4TeTa-T„Ta)p2+(T„-l^)p +1-0
Рис. 2-25. Стабилизация отрицательных элементов.
а — гироскопическая стабилизация элементов с отрицательным
статизмом; б, р — гироскопическая стабилизация элементов
с отрицательными массами.
цосительные координаты. В этих координатах
все динамические параметры получают раз-
мерность времени, а статические исключают-
ся. Эквивалентность всех тре^ систем выра-
жается в общности характеристического урав-
нения.
Стабилизация отрицательных масс отно-
сительно любых параметров устойчивости
внутри элементарных и сложных систем не
составляет затруднений, и массы эти, следо-
вательно, так же реальны, как и положитель-
ные массы.
Д. Инерциальное движение
Инерциальное движение элементов с по-
ложительной и отрицательной массами 2-го
порядка одинаково и следует первому зако-
ну — происходит с постоянной скоростью
(рис. 2-18,а, 2-19,а). Разница в знаке массы
де находит отражения в инерциальном дви-
жении, поскольку закон инерции представляет
лишь отрицательную формулировку 2-го пос-
тулата.
Легко представить с помощью той же сер-
вомодели движение элементов любого поряд-
ка и знака.
2-4-2. Двухэлементные системы (простые
взаимодействия )
Следующими по простоте, за образован-
ными самодействием одноэлементными систе-
мами, являются образуемые взаимодействием
двухэлементные системы. Именно способ
взаимодействия разделяет различные меха-
ники.
А. Натуральное взаимодействие
Для натуральных систем двусторонней ме-
ханики определяющим является натуральное
взаимодействие, подчиненное постулату про-
тиводействия. На рис. 2-26, 2-27, 2-28 синте-
зированы структурные единицы (рис. б) рас-
смотренных выше упругого, катарактного и
инерционного натуральных взаимодействий
(рис. а). Первая — астатична, вторая и
третья — псевдоастатичны. Астатичность • и
псевдоастатичность достигнуты в сервомоде-
лях одинаковыми передаточными числами
внешних и внутренних связей (рычагов). Са-
модействие и взаимодействие, слитые в полу-
связанной механике натуральных систем,
в несвязанной механике сервомоделей пред-
стают в расчлененном виде. В синтетическом
взаимодействии может быть получен также
положительный цикл внешних связей, что еще
радикальнее разрушает структуру натураль-
ного взаимодействия. В сервосистемах может
88
'lywwl*
a) --->- +4'м+?г“
Рис. 2-26. Упругое натуральное взаимодей-
ствие и его сервомодель.
б)
Рис. 2-28. Инв|р|циальное натуральное
взаимодействие и его сервомодель.
Рис. 2-27. Катарактное натуральное
взаимодействие и его сервомодель.
быть, таким образом, синтезирован произ-
вольный способ взаимодействия.
Сервомодели (рис. б) натурального взаимо-
действия (рис. а) подчиняются тем же за-
конам движения классической механики, об-
ладают той же кинетической и потенциальной
энергией и той же диссипативной функцией,
что и их натуральные прообразы. Для наблю-
дателя, не посвященного во внутреннее
устройство тех и других систем и наблюдаю-
щего лишь видимое движение их, системы
эти были бы неразличимы. Те же, однако,
средства позволяют радикально выйти за
пределы натуральной структуры и классиче-
ской механики. Это имеет место в самом уже
приеме одностороннего действия и во всех
тех ненатуральных взаимодействиях, которые
могут быть с помощью этого приема синтези-
рованы.
Б. Гироскопическое взаимодействие
На рис. 2-29 представлены сервомодель и
структурная схема простейшей гироскопиче-
ской системы — астатического гироскопа. На-
туральная структура здесь дважды наруше-
89'
Рис. 2-29. Сервомодель гироскопического
взаимодействия.
ма: 1) взаимодействие образует положитель-
ный цикл, т. е. обладает кососимметрической
структурой, 2) порядок самодействия не со-
впадает с порядком взаимодействия. Этим
разрушением натуральной структуры объяс-
няются «ненатуральные» свойства гироскопи-
ческих систем.
В. Общего вида взаимодействия
С помощью одностороннего действия мо-
жет быть, очевидно, синтезировано взаимо-
действие общего вида с положительным или
отрицательным двучленным циклом, с лю-
бым метрическим отношением между пара-
метрами обеих связей этого цикла и любым
отношением порядков внешних и внутренних
связей. Синтезом определенного способа
взаимодействия синтезируется определенная
механика системы, так же как синтезом опре-
деленного способа самодействия синтезирует-
ся определенная механика элемента (мате-
риальной точки).
Г. Астатические и адинамические системы
Выше рассмотрены были способы получе-
ния астатических и адинамических одноэле-
ментных (элементарных) систем. Способы эти
заключались в нейтрализации существующих
внутренних связей элементарной системы
внутренними связями противоположного зна-
ка. Для двухэлементных систем, образуемых
взаимодействием, возникают новые, более об-
щие способы синтеза астатических и адинами-
ческих систем.
Адинамические системы строятся по тем
же принципам, что и системы астатические.
Структура астатических систем тем и инте-
ресна, что позволяет выяснить внутренний
механизм нулевого противодействия, статиче-
ского и динамического, различные принципы
его, которые могут быть затем использованы
для конструирования адинамических систем.
Астатические системы представляют собой
в этом смысле статические модели адинами-
ческих систем. Простейший из этих принци-
пов содержится в натуральных астатических
системах (рис. 2-26, 2-27). Положительные
одночленные циклы самодействия нейтрали-
зуются здесь отрицательным двучленным цик-
лом натурального взаимодействия. Это пара-
лизует внутренний механизм противодействия,
система не способна противостоять в статике
внешним силам.
На рис. 2-30,а показан на сервомодели ме-
ханизм нулевого статического противодейст-
вия в натуральной астатической системе,
образуемой упругим взаимодействием
(рис. 2-26). В любом положении сервомодели
отклонения золотников от среднего положе-
ния равны нулю. Поршни сервомоторов урав-
новешены поэтому равными давлениями в обе-
их полостях сервомоторов и не могут проти-
востоять внешним силам. На рис. б дана сер-
вомодель статической системы. Статичность
введена здесь положительным двучленным
циклом. В соответствии с принципом двойст-
венности к астатической системе может быть
приложено только перемещение, к статиче-
ской— только сила (рис. 2-30).
На рис. 2-31 дана построенная по тому же
принципу адинамическая сервосистема. Здесь
также положительные одночленные циклы
нейтрализуются отрицательным двучленным
циклом и отсутствует поэтому механизм про-
тиводействия. Это явствует из того, что система
находится в ускоренном движении при отсут-
ствии каких-либо внешних сил. Поршни ее
сервомоторов уравновешены в этом ускорен-
ном движении равными давлениями в обеих
полостях сервомоторов и не могут служить
объектом приложения внешних сил.
Сервосистема на рис. 2-31 адинамична
лишь в определенной области значений пара-
метров (т. е. не безусловно, а лишь структур-
но адинамична), отвечающей метрическому
условию:
А р =ах ia22p*—ai2a2\P4=0, (2-29)
*90
так же, как астатическая система на рис. 2-28
^статична при метрическом условии:
Ад = СИС22—С12С21 =0, (2-30)
где Ар — характеристический определитель
уравнений динамики,
Ад — уравнений статики. Метрическому
условию (2-29) не отвечает облада-
ющее той же структурой натураль-
ное инерционное взаимодействие
(рис. 2-28). Оно образует поэтому
динамическую систему. Метрическое
условие (2-29), а с ним и адинамич-
ность, невыполнимы в натуральных
системах.
В качестве простейшего примера, поясня-
ющего противоположный феномен — динамич-
ность, рассмотрим систему, образуемую объ-
единением двух масс (рис. 2-32,а). Рассмо-
трим с помощью сервомодели (рис. б) свой-
ство аддитивности масс: масса тела равна
сумме масс частей его.
Инерционное взаимодействие кинематиче-
ски связанных масс двойного маятника обра-
зует, как все натуральные системы, отрица-
тельный двучленный цикл (рис. 1-3). Это оз-
начает, что инерционное противодействие не
полностью (не до состояния жесткости) свя-
занной системы меньше инерционного проти-
водействия ее как жесткого целого. Приве-
денная к любой точке двойного маятника его
масса (в данном случае момент инерции)
меньше массы его как жесткого целого. В про-
стейшем, однако, случае жесткого объедине-
91
Рис. 2-32. Слияние масс.
ния масс (рис. 2-32) массы эти просто сум-
мируются. Взаимодействие таких сливающих-
ся масс, поскольку силы инерции их сумми-
руются, должно образовывать не отрицатель-
ный, а положительный двучленный цикл. Это
подтверждается уравнениями системы на
рис. а:
£-4 = 0. (2-31)
Сервомодель такого слияния масс (рис. б)
наглядно поясняет аддитивность масс и сил
инерции. Ведущая масса испытывает при
этом противодействие ведомой массы, внеш-
няя же сила Q — противодействие обеих масс,
измеряемое перепадом давлений на поршне
сервомотора 1. Ведомая масса, являясь по-
следней в рассматриваемой двучленной це-
почке, ничьего противодействия не испыты-
вает. Приложенное к ней воздействие веду-
щей массы уравновешивается реакцией ведо-
мой массы. В сервомодели ведомой массы
уравновешивание это выражается в противо-
положных по открытию окон золотника, rt
оставляющих поэтому неизменным это откры-
тие и перепад давлений на поршне, движениях
золотника и буксы. Легко таким же способом
построить сервомодель цепочки сливающих-
ся масс и наглядно пояснить механизм инер-
ционного противодействия. Как выяснено было
выше, фактором такого противодействия яв-
ляются положительные циклы. В системе сли-
вающихся масс и сложные и элементарные
циклы положительны и представляют этот
фактор.
Положительный цикл, образуемый слива-
ющимися массами, не противоречит нулевой
структуре классической механики. Слияние
масс представляет собой, очевидно, вырожден-
ный случай взаимодействия во всех возмож-
ных механиках, образующий положительный
цикл. Во всех возможных механиках массы
аддитивны. Невырожденное инерционное
взаимодействие, имеющее место в кинемати-
чески связанных массах (рис. 1-3), имеет
нормальную натуральную структуру — с от-
рицательными двучленными циклами.
Системы обоих классов, астатические и
адинамические, не могут развить реакций
противодействия и не могут служить поэто-
му объектом приложения сил, первая — толь-
ко в статике, вторая — ив статике и в дина-
мике. Подобно тому как астатической системе
могут быть приданы произвольно большие
перемещения без приложения сил, адинами-
ческой системе могут быть сообщены произ-
вольно большие ускорения без приложения
силы.
Адинамическую систему на рис. 2-31 мож-
но рассматривать как способ нейтрализации
положительной массы элемента с помощью
сложной отрицательной связи, включающей
в себя положительный элемент (рис. 2-33,а).
Этот способ нейтрализации может быть рас-
сматриваем как развитие (рассматриваемая
подробно ниже замена простой связи сложной
связью) указанного выше способа нейтрали-
зации положительных масс с помощью про-
стой отрицательной внутренней связи
(рис. 2-17) либо как способ взаимной нейтра-
лизации двух положительных масс. Возможна
нейтрализация массы элемента в адинамиче-
ской системе с помощью сложной положи-
тельной связи, содержащей отрицательный
элемент (рис. 2-33,6). Все способы образова-
ния астатических систем пригодны для обра-
зования адинамических систем.
Адинамические системы безынерционны,
несмотря на инерционность составляющих их
элементов. Системы эти наглядно иллюстри-
руют те необычные возможности, которыми
располагает односторонняя механика. Пра-
ктически к таким системам и в односторонней
92
Рис. 2-33. Адинамические системы.
механике можно лишь приблизиться, посколь-
ку выполнение их связано, как для рассмот-
ренной выше простейшей адинамической си-
стемы— абстрактного элемента, с неограни-
ченным расходом энергии. В классической
механике они и теоретически невозможны, по-
скольку в ней силы инерции, iHe являясь внут-
ренними силами системы, не могут быть ней-
трализованы — уравновешены другими внут-
ренними силами системы.
Легко было бы с помощью сервомоделей
сконструировать и ряд иных, столь же пара-
доксальных с точки зрения классической ме-
ханики, зависимостей. Особая природа авто-
матики, как механики одностороннего дейст-
вия, достаточно выясняется рассмотренными
моделями.
2-4-3. Многоэлементные системы (сложные
взаимодействия )
Синтезом самовоздействий и взаимодейст-
вий произвольной структуры, т. е. одноэле-
ментных элементарных и двухэлементных
сложных систем, решается и задача синтеза
многоэлементных сложных систем, подчиняю-
щихся определенной этими способами само-
воздействия и взаимодействия механике. Рас-
смотрим простейшие из этих сложных систем.
А. Односторонние системы
Односторонние сложные системы характе-
ризуются произвольной структурой самовоз-
действий и взаимодействий. Простейшими из
них являются рассмотренные уже выше
(рис. 1-20) одноциклические системы, могу-
щие, подобно рассмотренным выше одноэле-
ментным (самовоздействия) и
двухэлементным (взаимодейст-
вия) системам, образовывать
положительные и отрицатель-
ные циклы.
На рис. 2-34 открытая (не
образующая циклов) система
на рис. а замкнута -в сим-
метричный отрицательный
(рис. 6) и асимметричный по-
ложительный (рис. в) циклы.
Асимметрия цикла достигается
во втором случае изменением
знака замыкающей связи
с помощью такого же допол-
нительного рычага АВ, как на
рис. 1-7, 1-20.
Система на рис. 2-34,6 аста-
тична по той же причине, чтр
и двухэлементная система
упругого взаимодействия на
рис. 2-26 — положительные одночленные цик-
лы самодействия нейтрализуются отрицатель-
ным многочленным циклам. Напротив, система
на рис. 2-34,в статична — одночленные и мно-
гочленный циклы ее обладают одинаковым
знаком.
В сервосистемах на рис. 2-34 принято, что
сервомоторы являются элементами 1-го по-
рядка, т. е. опущено несущественное влияние
масс. Система в может быть рассматриваема
как составленная из однотипных элементов
динамическая модель систем регулирования
на рис. 1-20. Обе системы одноцикличны, и
обе образуют положительный цикл.
Б. Двусторонние системы
В составные положительные и отрицатель-
ные циклы могут быть замкнуты и натураль-
ные двусторонние системы (рис. 1-7). Не со-
ставляет труда сконструировать сервомодели
этих двусторонних систем. На рис. 2-35, 2-36
сконструированы, однако, лишь односторон-
ние модели этих исходных систем, т. е. при
неизменном элементном составе все двусто-
ронние связи заменены односторонними. Од-
носторонние модели представляют собой од-
носторонние подсистемы по связевому соста-
ву исходных систем.
В. Односторонние модели
С односторонними моделями связан ряд
рассматриваемых ниже важных теорем. Ука-
жем, без доказательства пока на одну из
них — теорему 1-1: условия структурной ус-
тойчивости односторонней модели являются
достаточными (но не необходимыми) усло-
виями структурной устойчивости исходной си-
стемы. Так, односторонняя модель на рис. 2-35
:93
приобретает структурную устойчивость (вы-
рожденную, структурно-неапериодическую, как
доказывается ниже) при всех статических и
не более чем одном адиссипативном элемен-
те. Это же является достаточным условием
вырожденной структурной устойчивости дву-
сторонней исходной системы, но не необходи-
мым— чтобы сообщить этой консервативной
системе вырожденную структурную устойчи-
вость, достаточно ввести диссипацию в один
лишь элемент. Эти зависимости указаны на
.рисунке числом — степеней структурной
устойчивости, отсчитываемым от вырожден-
ной структурной устойчивости. Число степе-
ней структурной неустойчивости V(sn), отсчиты-
ваемое от нормальной структурной устойчи-
вости, равно для обеих систем четырем — чи-
слу отсутствующих во всех
элементах катарактов. Для
систем на рис. 2-36, замк-
нутых в положительный
цикл, возникает после это-
го еще одна возможность:
не нарушая структурной
устойчивости, лишить один
из элементов статизма.
Обе системы на рис. 2-35,
исходная двусторонняя си-
стема и ее односторонняя
модель, астатичны, а на
рис. 2-36 — статичны. Для
двусторонних систем это
объясняется изолированно*
стью системы в первом слу-
Уравнения системь»
+ сиЯ»+ Qi — О
ЪггУз + СггЧг — c2ify = О
ЬззУз + сззЯз — сзгЧз = в
+ £44^4 ~ = У
чае и неизолированностью во втором, для од-
носторонних— борьбой двух начал, положи-
тельных и отрицательных циклов, в первом
случае и объединением в элементарных и
сложных циклах только первого начала — во*
втором случае.
Легко объяснить теперь, почему централь-
ное для динамических систем понятие о ди-
намических связях возникло не в классиче-
ской, а в односторонней механике — автома-
тике. В классической механике понятие это
могло быть только абстракцией, впервые ма-
териализованной в автоматике. Простейшие^
^неделимые далее, составляющие двусторон-
них систем — двусторонние связи представ-
ляют собой уже следующее по сложности об-
разование— двучленный цикл. Простая одно-,
рторонняя связь, представляющая неделимую
далее простейшую состав-
ляющую односторонних си-
стем, могла быть выделена,
в материальном виде только
средствами автоматики, раз-
делившими двучленный цикл
натурального. взаимодейст-
вия на две его действитель-
но неделимые далее простые
составляющие.
Между тем понятие -о ди-
намической связи занимает
неявно и в классической ме-
ханике не меньшее место,,
чем в односторонней. В не-
свободных системах двусто-
ронней механики присутст-
Уравнения системе»
+ cttqt — = О
^ггЯг + сггЯг ~ сггЧ1 =
УззЯз + сззЯз — сззЯз ~ У
4* GfyifQk С$зЯ ~ У
Уравнения системы
W/ + С11Я1 + <?/4#4 = У
ьггЯз + сгзЯ2 - c2i4i = У
ьззЯз + сЗзЯз ~ сзгЯг = У
+ сььЯь — сЬзЧз = &
Рис. 2-34. Однбциклические сервосистемы.^
94
Уравнения системы
T-п Qi. + сп Qi ” ^4 Q** “ Qz s
'г?Лг + с22$2 “ сг№ ~ с'гз$з =
’ззЧэ + сззЯз * ь32^2 ~ сз4& =
?44$4 + £4404 - С43%3 “ С*№ ~
Уравнения системы
O-tiQi + G11Q1 ~ £/4 #4
а22$2 + ^22^2 ~ C21Qt
О-ззЧз + сззЦэ — сзгЧг
аььУь + — с^дэ
Уравнена я системм
fyjfy + ^nQi "* £/4^4 *“ CizQz =
^92^2 + С22Чг “ Cztfy ” С2зЧэ ~
^ЗзЯз + сззЧэ “ сзгЯ2 “ Г‘зьЧ* в
О .. л
#44^4 ^44^4 ” СЬЗ°Л + c<t.lQi ~ V
Уравнения системы
anQt ** GuQ.1 + CiuQk
а2гЧ» * сгг0,2 ” c2lQi
Q33Q3 + c33Qa ~ c3zQ2
+ £44^4 сьзЯз
Рис, 2-35. Односторонняя модель консервативной системы,
замкнутой в отрицательный цикл.
Рис. 2-36. Односторонняя модель консервативной системы,
замкнутой в положительный цикл.
о
сл
вуют и кинематические и динамические свя-
зи — системы эти несвободны, связаны и кине-
матически и динамически. В лагранжевых
уравнениях несвободных систем кинематиче-
ские связи исключены и присутствуют только
динамические связи. Самый переход к описа-
нию несвободной системы лагранжевымиурав-
нениями 2-го рода может 'быть рассматриваем
как приведение кинематически и динамически
несвободных, связанных систем к одной лишь
динамической связанности. Описание нату-
ральных систем лагранжевыми уравнениями
оставляет одни лишь динамические связи, как
это имеет место в односторонних системах, где
кинематические связи, всегда двусторонние,
невозможны. Однако в первом случае все эти
динамические связи двусторонни, во вторам —
односторонни.
Опыт построения односторонней механи-
ки, где динамическая связанность, динамиче-
ское принуждение является единственным и
всепроникающим видом принуждения, дол-
жен оказать обратное влияние на двусторон-
нюю механику и импортировать в нее поня-
тие о динамическом принуждении, динамиче-
ской связанности. В свете этого опыта назы-
вать свободными атомные и планетные систе-
мы классической механики, движение кото-
рых сковано динамическими связями, дина-
мическим принуждением, до точности (обес-
печиваемой устойчивостью движения), мало
уступающей точности кинематически принуж-
денного движения, не так уж естественно,
как ранее. И здесь, в классической механике,
должны, по-видимому, возникнуть параллель-
ные понятия — о кинематическом и динами-
ческом принуждении, кинематической и дина-
мической связанности, кинематической и ди-
намической свободе.
Система постулатов односторонней меха-
ники отвечает требованиям независимости, со-
рместности и, по отношению к теории регули-
рования, полноты. Она содержит наименьшее
число первичных (неопределяемых) понятий—
.время, координата, динамическая связь, и
в этом отношении также отвечает требова-
ниям, предъявляемым к дедуктивным теори-
ям. Массы и силы являются здесь уже про-
изводными понятиями — первые представляют
.собой реакции старших дифференциальных
связей, вторые — реакции всех остальных
связей. Новое построение автоматики, как ме-
ханики одностороннего действия, диктуется
прежде всего логической противоречивостью
остальных, в том числе и существующе-
го, построений ее. Сколь бы абстрактным
преимуществом для прикладной дисциплины
,ни казалась, на первый взгляд, логическая
«безупречность, она упорядочивает весь пред-
мет и оказывается в конечном счете решаю-
щим практическим преимуществом. Обнару-
жить это должно дальнейшее конкретное по-
строение предмета. Из общей односторонней
.механики для этого дальнейшего построения
необходима теория упругих систем — эласто-
механика, поскольку системы регулирования
представляют собой упругие системы односто-
ронней механики.
ГЛАВА ТРЕТЬЯ
ЭЛАСТОМЕХАНИКА
К упругим системам во всех механиках
следует отнести статические системы. Всегда
статические, конечно или бесконечно, систе-
мы регулирования представляют собой упру-
гие системы односторонней механики, теория
регулирования — одностороннюю эластоме-
$анику. Для односторонних упругих систем
розникают те же задачи, что и для двусторон-
них: исследование структурных, определяемых
только структурой, метрических, определяемых
только метрикой, и смешанных, определяемых
и структурой и метрикой, статических и дина-
/Мических свойств. В этой главе рассмотрены
будут главным образом структурные свойст-
ва упругих систем. Смешанные и метрические
их свойства: рассматриваются во второй части.
В общей механике возможны два построе-
ния предмета. Первое, индуктивное, предва-
96
ряет статикой как частной теорией — динами-
ку как общую теорию. Динамика может быть
при этом построена как кинетостатика. Вто-
рое построение, дедуктивное, выводит стати-
ку как частный случай динамики. Выше, для
общей односторонней механики, использова-
но было второе построение. Для эластомеха-
ники выбор предрешен тем уже, что здесь
уравнения динамики получают с помощью
уравнений статики решающие упрощения, без
которых рассмотрение динамики затрудни-
тельно. Упрощения эти заключаются в пере-
ходе к связанным со статикой систем кано-
ническим относительным координатам и ис-
ключении сих помощью всех, — в статически
определимых системах, или наибольшего чи-
сла,—в статически неопределимых системах,
статических параметров. Последующее исклю-
чение наибольшего числа динамических пара-
метров приводит к описанию системы наи-
меньшим числом остающихся параметров —
критериев подобия.
В односторонней эластомеханике возника-
ет, таким образом, в более общем, чем в клас-
сической, виде задача статической определи-
мости — возможности определения статиче-
ских реакций системы с помощью одних лишь
.уравнений общей статики, без уравнений эла-
стостатики. Задача эта связана с задачей ста-
тических влияний. В этой последовательности
рассмотрим эти задачи.
3-1. ЭЛАСТОСТАТИКА
Эластостатика — статика реальных упру-
гих систем противостоит статике твердых
тел — статике абстрактных бесконечно твер-
дых тел. Последняя является в то же время
предельным частным случаем первой. Урав-
нениями односторонней эластостатики явля-
ются уравнения (1-12) (1-13) с принятым вы-
ше специальным требованием статичности:
А=#0. Рассмотрим статические свойства серво-
систем—односторонних упругих систем.
3-1-1. Статические влияния
, Статические влияния в общем виде рас-
смотрены были выше (§ 1-2-2). Рассмотрим
их в сервосистемах.
А. Линии влияния*
На рис. 3-1 построены с помощью серво-
моделей линии влияния (инфлюентные линии)
для рассмотренной выше (рис. 1-9,а, б, 2-32,в)
простейшей сервосистемы — обычной одноци-
клической системы регулирования. Во второй
ртроке рисунка даны сами сервомодели,
в третьей — их структурные схемы. В первой
строке рисунка даны для сравнения двусто-
ронние упругие системы.
На рис. 02, #2, Яз, б3 построена линия влия-
ния нагрузки (обобщенной силы), приложен-
ной к объекту регулирования, статическому—
на рис. 02, 0з и астатическому — на рис. б2,
<б3. На рис. вг, вз, для второй системы построе-
на линия влияния нагрузки, приложенной
jc одному из сервомоторов. Нагрузками, при-
via)=0
Ф Z7 А? р2 Р-1 Р« <7 Р1 Р2 Р.З Pt Ф У • Р1 &г J*3 Р*
t Ч Р, к л. н. т ! м w
аз) Бз) вя)
Рис. 3-1. Статические влияния.
7 И. И. Гальперин.
97
доженными не к объекту, а к регулятору или
одному из сервомоторов, являются воздейст-
вия задатчиков. С этой общей теперь уже
установившейся точки зрения [Л. 25, 36] мно-
готысячекиловаттная нагрузка генератора тур-
бины и осуществляемые ручными задатчиками
натяжения пружины регулятора или переста-
новки опор рычагов сервомоторов суть равно-
правные обобщенные силы системы. На пер-
вую из них система регулирования, чтобы от-
вечать своей задаче, должна отвечать нуле-
выми или достаточно малыми деформациями,
на вторые, чтобы допускать ручную переста-
новку,—достаточно большими.
Нагрузка объекта осуществлена в сервомо-
дели на рис. а2 сдвигом буксы золотника. Что-
бы осуществить такой сдвиг в элементе с вы-
ключателем (моделирующим саморегулирова-
ние объекта), необходимо сместить опору ры-
чага выключателя (рис. а2). В системах б2 и
б3, где у сервомотора, моделирующего астати-
ческий объект, отсутствует выключатель, на-
грузка объекта осуществляется непосредствен-
ным сдвигом буксы. Во всех случаях новое
равновесное положение достигается системой
только в положении отсечки всех золотников.
Этим условием определяется построение ли-
ний влияния.
В системе а2 и а3 положительная нагруз-
ка вызывает положительную деформацию во
всех точках системы (новое равновесное поло-
жение системы дано пунктиром на рис. а2).
Знак деформации указан внутри кружков, изо-
бражающих элементы на структурных схемах.
Совокупность этих знаков образует качествен-
ную линию влияния данной нагрузки. Линии
нового равновесного положения на рис. а2,
б2; в2 дают количественные линии влияния. Из
всех возможных видов сервомоделей, электри-
ческих, гидравлических и т. д., только приня-
тые здесь сервомодели с рычажными связями
позволяют изобразить количественные линии
влияния.
На рис. в2 положительная нагрузка вызы-
вает отрицательную деформацию перед собой,
-и нулевую — после себя. Нагрузка Q4 вызы-
вает здесь деформацию объекта — изменяет
заданное значение регулируемой координаты
и способна поэтому служить заданием. Эта
способность имеет место не во всех случаях.
Чтобы пояснить это, введем понятие о функ-
циональной структуре.
На рис. а3, б3, в3 наряду с динамической
структурой указана греческим алфавитом
функциональная структура системы. Одна и
та же динамическая структура может §ыть
использована для различных функциональных
структур. Это показано на рис. в3, где прямой
98
функциональной структуре (греческие буквы
без скобок), в которой единственным возмож-
ным в такой системе астатическим элементом
является объект, сопоставлена обращенная
функциональная структура (греческие буквы
в скобках), где этим элементом является один
из сервомоторов. Этот прием обращения, по-
зволяющий получить -из одной и той же дина-
мической структуры ряд функционально раз-
личных систем регулирования, подробно рас-
смотрен ниже. Для обращенной функциональ-
ной структуры на рис.- в3 нагрузка Q4 не мо-
жет служить заданием, поскольку она (на-
грузка) не вызывает деформации системы
в точке «объект»; система в этой точке изо-
дромна по отношению к этой нагрузке (не-
главная изодромность объекта).
Здесь мы впервые встречаемся с рассмот-
ренным выше феноменом изодромности. Одно-
циклическая система' с одним астатическим
элементом (в структурно устойчивой одноци-
клической системе может быть только один
такой элемент [Л. 25, 30]): 1) по отношению
к нагрузке, приложенной к астатическому эле-
менту, неизодромна во всех точках (рис. б3),
2) по отношению к нагрузке, приложенной
к одному из статических элементов, изодромна
во всех точках между нагруженным и астати-
ческим элементами, включая нагруженный
элемент и исключая астатический (рис. в3)-
Это означает, что в обращенной системе
aSi = 0 (3-1}
(s = z, (Z-Hl), k(Z+2), ..., (г—1)),
где i — индекс нагруженного элемента, г — ин-
декс астатического элемента. В обращенной
системе аОо = 0, она изодромна в точке объект
по отношению к нагрузке, приложенной в этой
же точке (главная изодромность объекта).
Это, таким образом, простейшая изодромнця
система. Задание в ней может быть осущест-
влено только нагрузками элементов, располо-
женных между астатическим и нагруженным
элементами, включая астатический элемент,
так как только по отношению к этим нагруз-
кам объект не обладает здесь внешней изо-
дромностью. Одноциклическая система, не со-
держащая астатических элементов, неизодром-
на во всех элементах по отношению ко всем
нагрузкам (рис. а3).
Рассмотрим в понятиях односторонней ме-
ханики такие специальные понятия автомати-
'ки, как степень неравномерности и степень за-
дания (ручной перестановки). Они представ-
ляют собой метрические подсвойства локаль-
ного смешанного свойства — конечной статич-
ности.
Б. Степень неравномерности
Статичность в различных точках статиче-
ских систем по отношению к различным си-
лам может быть измерена коэффициентами
влияния:
А(<7) ’
(3-2)
измеряющими обратную статичности величи-
ну— податливость системы в соответственном
ее канале, или обратными им величинами, из-
меряющими жесткость системы в этом канале:
c'22z — с’21® =°;
с',,/»! — c'S2z =0;
c'44/n2 —c'4J»ii=0;
— cr64m2 = 0.
(3-5)
Пользуясь формулой (3-2), определим значе-
ние степени неравномерности регулирования
статического объекта 8С в этой системе. По-
скольку приложенная к объекту нагрузка при-
няла в уравнениях (3-5) единичное значение,
неравномерность совпадает со значением an:
1 = А (?)
bik(q)'
(3-3)
8c = a
А.» to)
ч— A to)
Коэффициенты aik назовем неглавными ко-
эффициентами влияний i-го элемента, коэффи-
циент ан—главным коэффициентом влияния
i-го элемента. Наибольший практический ин-
терес представляют главный коэффициент
влияния объекта — ап (объект обозначен
здесь индексом 1) и неглавные коэффициенты
влияний его—aOfe. Первый представляет собой
степень неравномерности регулирования и
должен быть достаточно мал для уменьшения
статической ошибки, в изодромных системах
он равен нулю; вторые представляют собой
степень задания (ручной перестановки), и по
меньшей мере один из них должен быть до-
статочно велик для эффективной ручной пере-
становки. Этим требованиям должна удовле-
творять любая регулирующая система. Оба
коэффициента влияния могут быть, разумеет-
ся, найдены лишь из абсолютных уравнений
системы. Для трехкаскадной одноциклической
системы регулирования статического объекта
уравнения эти суть (за начало отсчета всех
координат приняты их старые равновесные
значения):
^11®
^22^ 4“ ^22^ “4” ^22^" ^21® ^2>
ЙЗЗ^! + 6?33^1 — Сз2? = Р 3; С3'4)
bjn2 + c^m2 — c^mx = F4;
+ <?65/n3 — c^ni2 = F5.
Здесь Fr — нагрузка объекта, все осталь-
ные F могут быть рассматриваемы как задания.
Деля левые части всех уравнений на правые,
оставляя одну лишь нагрузку объекта и отбра-
сывая нестатические члены, получаем уравне-
ния статики:
При астатическом объекте (сп = 0) выражение
это еще упрощается:
8 'С ггС 33С 44С 55 ГЗ-71
° ^Л15^'Л21^Л32^/4а^/54
Таким образом, степень неравномерности
представляет собой главный коэффициент
влияния объекта по отношению к номинально-
му значению внешней нагрузки, принятому за
единицу.
Из сравнения формул (3-6) и (3-7) выте-
кает формула, определяющая елияние саморе-
гулирования на неравномерность:
Б. П. Мурганов, недостаточно точно ойерируя вве-
денными нами каноническими относительными коорди-
натами, приходит к ошибочному выражению для фор-
мулы i(3-8) <((Л. 80], формула {4]). Правильные резуль-
таты получены в [Л. 94].
Влияние саморегулирования на неравномерность на-
глядно поясняется рисунками б и в. На втором поло-
винная нагрузка вызывает ту же деформацию, что пол-
ная на первом.- Ослабление статической структуры си-
стемы астатическим элементом здесь вполне наглядно.
В. Степень задания
Чтобы получить формулу для степени зада-
ния, осуществляемого одним из элементов,
например регулятором, приложим к этому эле-
менту единичную нагрузку. Уравнения статики
для этого случая:
<i® +<5/«» = 0;
& зз^ £*21® — 1,
с'зз'П1 — c'32z =0;
«’„in, —c*4»»i1 = 0;
—сг64/п2=0.
(3-9)
7*
99
Степень задания совпадает с неглавным
коэффициентом влияния aik и для рассматри-
ваемого случая равна:
5 ____„ __ ^12 G?)
— «12 = Д(<7)
Г. Статические передаточные функции
Формулой (3-6) определяется достаточно
сложная зависимость степени неравномерно-
сти от статических параметров системы. Сте-
пень неравномерности—податливость системы
в той точке ее, куда помещен объект, — тем
меньше, чем больше параметр внутренней ста-
тической связи объекта, чем меньше парамет-
ры всех остальных внутренних статических
связей и чем больше параметры всех внешних
статических связей. Еще более сложна зави-
симость, выражаемая формулой (3-10). Столь
сложная форма (простых зависимостей не мо-
жет быть признана удовлетворительной. Она
может быть упрощена, если ввести статиче-
ские передаточные функции элементарных ка-
налов {коэффициенты усиления):
„ ___ С' i(i-l)
1 C'ii
(3-11)
Элементарный канал образуется элемен-
том и входящей в него связью. Статический
параметр с'ц назовем внутренним статическим
оператором элемента, параметр с'щ_\) — внеш-
ним статическим оператором элемента. Стати-
ческая передаточная функция элементарного
канала равна частному от деления внешнего
статического оператора на внутренний. ,
Формула (3-6) примет в этих понятиях
вид:
Sc = au
1
с'ц
1 + a,a2a3a4a5
(3-12)
Формулой (3-12) определяется значитель-
но более простая и наглядная, чем формулой
(3-6), зависимость степени неравномерности
от статических параметров системы: степень
неравномерности тем меньше, чем больше
коэффициент саморегулирования и статиче-
ские передаточные функции всех элементар-
ных каналов. Заметив, что числитель форму-
лы представляет собой неравномерность 8с0)
отдельно, без системы регулирования, взятого
объекта, можно еще упростить формулу:
8С = &(0) ——. (3-13)
1 J- ajdaOjC^aj ’
Дробным множителем указывается статиче-
ский эффект регулирования статических объ-
ектов — уменьшение деформации статического
объекта в замкнутой системе регулирования.
Еще большие упрощения достигаются вве-
дением передаточных функций в формулы
(3-10) для внешних передаточных функций:
5 =а =5(0) , , **-------. (3-14)
12 12 ° 1 + ai«2a3a4a5 V
Мы останавливаемся столь детально на
этих элементарных понятиях статики, посколь-
ку рассмотренные выше (гл. 1) сложные опе-
раторные понятия динамики, составляющие
содержание операторного метода, являются
•прямым обобщением этих понятий статики и
таким путем могут быть проще всего введены.
3-1-2. Статическая определимость
Понятие статической определимости имеет
для односторонних упругих систем тот же об-
щий смысл, что и для натуральных—незави-
симость в статике реакций статических связей
от метрических параметров этих связей.
Вопросы статической определимости схема-
тичнее всего предстают в дискретных упругих
системах — фермах. Сервосистемы с дискрет-
ными параметрами представляют собой в ста-
тике фермы одностороннего действия. Каждая
внутренняя и внешняя статическая связь мо-
жет быть рассматриваема как односторонняя
связь, односторонний «стержень» такой фер-
мы, обладающий жесткостью Cik. Величина
cikqh представляет собой упругую реакцию
этой статической связи. Аналогия статики сер-
восистем со статикой ферм распространяется,
как будет показано ниже, на все понятия по-
следней. Каждый элемент сервосистемы пред-
ставляет собой в статике узел односторонних
статических связей (односторонних «стерж-
ней») и в этом смысле аналогичен шарниру
фермы. Поскольку реакции связей в каждом
узле сервосистемы суммируются не векторно.
а алгебраически, ферма эта аналогична не
двумерной (плоской) натуральной ферме,
а одномерной (линейной).
Статическая определимость натуральные
ферм характеризуется определенностью реше-
ний векторных уравнений фермы, составлен-
ных для каждого ее узла. (В эти векторные
уравнения входят известные по направлении:
(совпадающему с направлением стержней) v
неизвестные по величине реакции стержней
Решения этих уравнений определены, еслр
в каждое из них входят для трехмерньц си-
стем— три неизвестные реакции, для двумер-
ных — две, для одномерных — одна. Этом)
100
Рис. 3-2. Абсолютная статическая определимость двусторонних и одно-
сторонних систем.
условию отвечают статически определимые си-
стемы. Для (простейших из них, образованных
наслоением диад (рис. 3-2,а), векторные урав-
нения решаются последовательно — так, что
в каждом следующем уравнении содержится
только две неизвестных реакции. Для одно-
мерных двусторонних ферм (такие фермы из
соединенных шарнирами и вытянутых в одну
линию стержней легко сконструировать) в каж-
дое следующее уравнение должна входить
одна лишь неизвестная реакция.
Все это в равной :мере относится и к сер-
восистемам, рассматриваемым как одномер-
ные односторонние фермы. И здесь в каждое
следующее уравнение должна входить одна
лишь неизвестная реакция (рис. 3-2Л). Для
односторонних систем вопрос еще упрощается
тем, что система уравнений статики распада-
ется здесь на отдельные уравнения.
А. Абсолютная статическая определимость
Распределение статических перемещений
(деформаций) однозначно определяет стати-
ческие реакции системы. Статическая реак-
ция Rm статической связи Cikqk равна:
Rik = Cikqk» (3-15)
Подставляя эти выражения в уравнения
статических сил (1-12), получаем уравнения,
не содержащие в явном виде деформаций:
m
^Rik=Q(P (3-16)
(i — 1, 2,..., m).
Назовем эти уравнения статики твердых тел
кратко — уравнениями статики в отличие от
уравнений эластостатики — (1-12), (1-13).
Распределением деформаций (1-13) опре-
деляется и распределение сил (1-12). Сущест-
вуют, однако, в односторонней механике, как
и в классической, бистемц,
для которых рёакции статиче-
ских связей определяются не-
посредственно из уравнений
статики 3-16, без привлече-
ния уравнений эластостати-
ки (уравнений деформаций).
В этом случае “Эти реакции не
зависят от метрических пара-
метров системы и определя-
ются только ее структурой.
Это , структурное свойство си-
стем — возможность определе-
ния из уравнений статики аб-
солютных величин реакций —
назовем абсолютной статической определи-
мостью цх. Рассмотрим условия^ однозначной
разрешимости уравнений статики (3-16) отно-
сительно входящих в них .реакцйй связей, усло-
вия статической определимости.
Б. Двусторонние и односторонние уравнения статики
Выше говорилось уже, что сервосистемы
с дискретными параметрами аналогичны фер-
мам классической механики. В натуральных
упругих системах классической механики па-
раметрами статических связей являются жест-
кости Cik=iCki двусторонних упругих связей
(стержней в фермах); в сервосистемах, упру-
гих системах односторонней механики, пара-
метрами односторонних статических связей
также являются их «жесткости» ' Сгь=/=С&г
(в общем случае).
Уравнения статики натуральной фермы
могут быть записаны в виде векторных урав-
нений узлов фермы:
Л+2^=0 (3-17)
1,2, ..., i/n),
где F — приложенная к узлу внешняя сила,
Rik — реакции стержней фермы.
Отличие уравнений (3-16) —статики одно-
сторонних систем от (3-17)—двусторонних
систем заключается: 1) вскалярности величин
Rik и Qi и 2) в одностороннем характере реак-
ций Rik. Это второе отличие приводит к рас-
паду систем (3-16) на уравнения отдельных
элементов. Для натуральной фермы Rik =
——Rki, т. е. одна и та же реакция входите раз-
личным знаком в уравнения двух узлов. Это
связывает уравнения (3-17) в систему. Для
сервосистем это равенство реакций не имеет
силы из-за односторонности связей, и система
(3-16) распадается на независимые уравнения.
«Поясним это на примере, сервосистем на
р-ис. 3,а, А. Уравнения статики для первой
101
входной (образованной входным замещением
(Л. 87]) системы, при силе, приложенной
.к первому элементу ее, имеют следующий вид:
+#а«=0
+*«.=<) ' (3-18)
+^. = 0
^es + ^oe=O>
для второй системы:
«..+«. ^,.=0
^92 “1“ ^3 /?Зв == 0
Я4з + *44 Я4в=о (3-19)
^S4~F^55 ^5в:=0
Обе системы распадаются на независимые
уравнения^ поскольку каждое из неизвест-
ных Rik входит только в одно из уравнений.
Система уравнений статики сервосистем рас-
падается на отдельные независимые уравне-
ния. Нераспадающимися для сер-
восистем являются лишь уравнения
эластостатики.
В. Относительная статическая
определимость
Из уравнений (3-18) вытекает,
что для системы а абсолютное зна-
чение реакции может быть опреде-
лено для одного лишь первого эле-
мента, в который входит одна лишь
статическая связь: /?i6 = Q(11). Для
всех остальных элементов, в кото-
рые входит по две статические свя-
зи, могут быть определены лишь
относительные значения реакций:
реакции здесь попарно равны и
противоположны по знаку:
«#21 — —/?26
(3-20)
/?32 =-#36
Абсолютные значения реакций
статических связей элементов, в ко-
торых сходится по одной лишь ста-
тической связи (реакция #16 систе-
мы а), определяются непосредствен-
но из уравнений статики; относительные зна-
чения реакций остальных статических свя-
зей—лишь из уравнений эластостатики (1-12).
Эту возможность определения относитель-
ных величин реакций назовем относительной
статической определимостью. Входные систе-
мы относительно статически определимы по
отношению к силе, приложенной к первому их
элементу.
Векторные системы уравнений статики на-
туральных ферм допускают последовательное
решение уравнений в том случае, когда в каж-
дое следующее по порядку решения уравне-
ние входит не более двух неизвестных реак-
ций. К такой распадающейся системе уравне-
ний приводят простейшие фермы, образован-
ные наслоением диад (рис. 3-2а). Скалярные
системы уравнений статики сервосистем, все-
гда распадающиеся, допускают последователь-
ное решение уравнений (определение абсо-
лютных значений реакций) в том случае, когда
в каждое следующее уравнение входит одна
лишь неизвестная реакция (рис. 3-2Л).
В обоих случаях разрешимость этих систем не
зависит ор системы внешних сил (рис. аь аг,
Ль Л2). Абсолютная статическая определи-
мость односторонних и двусторонних систем
безотносительна к системе внешних сил
(рис. 3-2). Возможность определения относи-
Рис. 3-3. Относительная статическая определимость сервосистем.
102
тельных значений реакций зависит от системы
внешних сил. Относительная статическая
определимость относится к определенной си-
стеме внешних сил (рис. 3-3).
Из каждого неоднородного скалярного
уравнения можно определить не более одной
неизвестной реакции, а из однородного —
только одно отношение реакций. Таким обра-
зом, из уравнений статики /п-элементных сер-
восистем может быть определено не более
пг абсолютных статических реакций или
)(Мс = 2/п—k) абсолютных и относительных
реакций, где k — число внешних сил. Это чис-
ко Мс является полным числом связей отно-
сительно статически определимых систем.
Вследствие распада уравнений статики на
отдельные уравнения вопрос о статической
определимости сервосистем решается в отдель-
ности для каждого узла, причем здесь при
рассмотрении только уравнений статики, воз-
никают указанные выше две градации стати-
ческой определимости. Для элементов, в ко-
торых сходится по одной лишь статической
связи (первый элемент системы рис. З-За и
все элементы системы 3-2А), имеет место абсо-
лютная статическая определимость—абсолют-
ное значение реакций сходящейся здесь един-
ственной статической связи непосредственно
определяется из уравнения статики такого
элемента:
/?ix=Qi. (3-21)
Для элементов, в которых сходится по две
статические связи и ни одной внешней силы,
имеет место относительная статическая опре-
делимость — здесь не могут быть определены
из уравнений статики абсолютные значения
реакций, но могут быть определены их отно-
сительные значения. Уравнение статики тако-
го элемента
= (3-22)
откуда
'Rix~
= —1. (3-23)
Агу
Таковы >все, кроме первого^ элементы си-
стемы на рис. З-За. Абсолютные значения ста-
тических реакций не могут быть определены
для таких элементов потому уже, что уравне-
ния статики этих элементов независимы от
уравнений статики остальных элементов, на-
груженных внешними силами, определяющи-
ми эти реакций. Связь абсолютных реакций
с внешними силами определяется лишь урав-
нениями эластостатики. Реакции эти могут
быть поэтому найдены только из уравнений
эластостатики. Это и приводит для сервоси-
стем к двум градациям статической определи-
мости. Относительные реакции относительно
статически определимых систем так же неза-
висимы от параметров связей, как и абсолют-
ные реакции абсолютно статически определи-
мых систем. Это только и придает значение
"понятию «относительная статическая опреде-
лимость». • *
Элементы, в которых: а) сходится более
чем две статические связи, либо б) внешняя
сила и более чем одна статическая связь, ста-
тически неопределимы. Здесь из уравнений
статики не могут быть определены ни абсолют-
ные, ни относительные реакции. Уравнение ста-
тики такого элемента для случая а):
• • .==0. (3-24)
и для случая б):
- Q'/Ч- Rix + Riy +... = 0, (3-25)
В обоих случаях из уравнений статики не
могут быть определены ни абсолютная, ни от-
носительная реакции. В первом случае неопре-
деленным является соотношение между реак-
циями, во втором случае неопределенным яв-
ляется распределение внешней силы между ре-
акциями.
Статическая определимость в отдельных
элементах системы представляет собой локаль-
ное свойство систем. Статическая определи-
мость во всех элементах системы становится
уже общим свойством ее. Это общее свойство
названо было выше статической определи-
мостью системы. Статическая определимость
системы, как общее свойство ее, сохраняется
общими эквивалентными преобразованиями,
статическая определимость лишь в отдельных
элементах, как локальное свойство системы, не
сохраняется ими.
В число статических связей во введенных
выше и вводимых в дальнейшем определениях,
относящихся к статической определимости, не
должны включаться статические связи, иду-
щие от элементов, изодромных по отношению
к рассматриваемой в этих определениях си-
стеме. сил. Статические реакции таких связей
равны нулю, независимо от параметров этих
связей, и выпадают поэтому из уравнений ста-
тики. Квазистатические параметры таких ква-
зистатических связей (статических — по при-
знаку нулевого порядка их, и квазистатиче-
ских — по признаку нулевых статических ре-
акций) не связаны уравнениями- статики. Ква-
зистатические параметры (например, парамет-
ры «гибких» связей изодромов) не определяют
статических характеристик системы (статиче-
скую неравномерность изодромных систем),
а определяют лишь динамические ее характе-
103
ристики (динамическую неравномерность изр^
дромных систем) и в этом смысле являются не
статическими, а динамическими параметрами.
Для сервосистем именно относительная
статическая определимость имеет основное
значение, ею, как показано ниже, определяют-
ся критерии «подобия этих систем. Назовем по-
этому кратко статически определимыми по от-
ношению к данной системе сил сервосистемы,
все узлы которых обладают по отношению
к этой системе сил то меньшей мере относи-
тельной статической определимостью. Условия
статической определимости сервосистемы по от-
ношению к некоторой системе внешних сил
сводятся к тому, чтобы в нагруженных эле-
ментах сходилось не более одной статической
связно в ненагруженных же — не более двух.
Для того, чтобы сервосистема была статически
определима относительно произвольной систе-
мы сил, небходамо и достаточно, .чтобы в -каж-
дом элементе сходилось по одной лишь ста-
тической связи. Этому условию удовлетворяют
сервосистемы на рис. 3-1. В этом случае, одна-
ко, она абсолютно статически определима. Для
того чтобы система была статически определи-
ма относительно системы сил, состоящей из
одной силы, достаточно, чтобы в нагруженном
этой силой элементе сходилась одна лишь ста-
тическая связь, а в остальных элементах —
не более двух. Общие условия статической
определимости даются следующей теоре-
мой 3-1: для статической определимости серво-
системы по отношению к данной системе сил
необходимо и достаточно, чтобы общее число
статических связей, сходящихся в каждом эле-
менте системы, включая в это число и внеш-
нюю статическую силу, приложенную к эле-
менту, не превышало двух. Ввиду особой важ-
ности для дальнейшего случая «приложения од-
ной силы выделим его из этой теоремы в ви-
де отдельного * следствия. Следствие I.
Для статической определимости сервосистемы
по отношению к одной силе необходимо и до-
статочно, чтобы в нагруженном элементе схо-
дилась одна лишь статическая связь, во всех
же остальных — не более двух.
Следствие II. Входные системы стати-
чески определимы относительно системы сил,
состоящей из внешней силы, приложенной к
первому их элементу, и статически неопредели-
мы относительно всех остальных систем сил.
Это явствует из соблюдения в этих системах
локальной статической структуры, указывае-
мой следствием I, в одном лишь первом эле-
менте.
Статическая определимость сервосистем,
как и натуральных систем, определяется, -та-
ким образом, общей и локальной статической
связанностью их. Общее число Nc статических
связей в статически определимых по отноше-
нию к одной внешней силе (в дальнейшем бу-
дет рассматриваться только такая статическая
определимость и подразумевающиеся сло-
ва «по отношению к одной внешней си-
ле» — опускаться) системах не может пре-
вышать полного общего числа статиче-
ских связей — Мс=2пг—1. Наличие полного
общего числа статических связей определяет
полную общую статическую связанность си-
стемы. Как и во всех структурных задачах,
условие, требующее, чтобы общая статическая
связанность системы не превышала предела
Л4С, является необходимым, но недостаточным.
Для равномерной связанности системы необ-
ходимо еще, чтобы и локальная статическая
связанность системы не превышала предела,
вытекающего из следствия I: не более одной
статической связи в нагруженных элементах,
не более двух статических связей — во всех
остальных элементах. . Этот предел назовем
полной локальной статической связанностью.
Находящиеся на этом пределе системы явля-
ются нулевыми в задаче статической опреде-
лимости. Полная локальная статическая свя-
занность обеспечивает равномерное распреде-
ление статических связей в системе, отсутствие
в ней узлов (элементов) с избыточной стати-
ческой связанностью, -при недостаточной стати-
ческой связанности остальных узлов. -Превы-
шение над полной локальной статической свя-
занностью приводит к образованию статиче-
ски неопределимых узлов с избыточным
числом статических связей. При этом общее
число связей может и не превышать Мс.
Формулу
М{'} — 2т — 1 (3-26)
назовем структурной формулой относитель-
ной статической определимости. Избыток
наличного числа статических связей над пол-
ным их числом Мс назовем числом степеней
относительной статической неопределимо-
сти У(сг):
V(rc} = Nc— (3-27)
Введем также аналогичные понятия Л1(а), У(а>
для абсолютной статической определимости:
Ж(са)==т; (3-28)
У(са>=#с — Ж(са). (3-29)
Эти числа указаны на рис. 3-2 и 3-3. Числа
У(сг), У<°> и все вводимые в дальнейшем числа У
назовем валентностями системы в данной
1Q4
задаче. Системы с нулевой валентностью назо-
вем нулевыми системами. Все системы на
рис. 3-2 являются нулевыми в- задаче абсолют-
ной и, следовательно, относительной- статиче-
ской определимости. Система на рис. 3-3,а
является нулевой только в задаче относитель-
ной статической определимости. Все остальные
системы этого рисунка не являются нулевыми
ни в одной из этих двух задач.
:Для сопоставления двусторонних и одно-
сторонних статически определимых и неопре-
делимых систем могут служить рассмотренные
выше одноциклические системы. Здесь нагляд-
но видны независимость относительных ста-
тических реакций сервосистем от метрических
параметров в статически определимых узлах
системы и зависимость — в статически неопре-
делимых (рис. 3-1). В качестве двусторонней
системы на рис. 3-1 взята двухопорная балка,
статически определимая на рис. б\ и в\ и од-
нократно статически неопределимая на рис. «ь
В качестве односторонней системы взята обыч-
ная система регулирования, на рис. б3 и в3 —
астатического объекта и потому статически
определимая, и на рис. а3 — статического объ-
екта и потому однократно статически неопре-
делимая. По указанным выше причинам речь
идет для двусторонних систем об абсолютной
статической определимости, для односторон-
них — об относительной.
Можно указать теперь принцип, решающий
во всех структурных областях задачу синтеза
нулевых систехМ — задачу равномерной свя-
занности. Принцип локальной свя-
занности. Достаточным условием получе-
ния нулевых систем является полная локаль-
ная связанность системы во всех элементах ее.
Локальная связанность находит, естественно,
различное выражение для различных задач.
Для задачи статической определимости она
определяется следствием I теоремы 3-1. Для
задачи структурной устойчивости она прини-
мает рассматриваемое ниже более сложное
выражение. В любой из этих областей задача
синтеза нулевых систем решается принципом
локальной связанности. Структурные формулы
являются лишь следствием этого принципа.
В дальнейшем будет рассматриваться толь-
ко относительная статическая определимость
сервосистем, и слово «относительная» и ин-
декс «г» будут поэтому опускаться.
3-1-3. Канонические уравнения эластостатики
Возможность определить часть статических
реакций из уравнений статики означает в ана-
литическом плане возможность исключения-
той же части статических параметров из
уравнении эластостатики и эластодицамики и
приведения этих уравнений к наиболее просто-
му, каноническому виду. Возможность эта ре-
ализуется методом канонических относитель-
ных координат. Исключение с помощью урав-
нений статики наибольшего числа статических
-параметров из уравнений эластостатики со-
ставляет основное содержание этого метода.
Число неисключающихся статических пара-
метров в канонических уравнениях равно чи-
слу степеней относительной статической не-
определимости. В относительно статически
определимых системах исключаются все ста-
тические параметры. Канонические уравнения
содержат наименьшее число независимых па-
раметров и в этом смысле представляют собой
описание задачи в критериях подобия.
В абсолютных уравнениях (уравнениях
в абсолютных координатах) эластостатики чи-
сло статических параметров системы равно
числу статических связей и все эти параметры
независимы. При переходе к относительным
координатам и относительным уравнениям
эластостатики независимость эта . теряется.
Статические параметры оказываются связан-
ными дополнительными зависимостями, позво-
ляющими исключить часть этих параметров из
уравнений эластостатики. В том случае, когда
исключено максимально возможное для дан-
ной системы число статических параметров,,
остающиеся в наименьшем возможном для
данной системы числе статические параметры
представляют собой по этому подчеркнутому
признаку критерии статического подобия си-
стем. Только для абсолютно статически опре-
делимых систем критерии эти независимы от
системы внешних сил, для относительно ста-
тически определимых — зависимы. Рассмот-
рим эту зависимость -и общий вид относитель-
ных уравнений статики. Разделим каждое из
уравнений (1-12) на некоторое номинальное
значение Q(.1} силы Q^, стоящей в правой части
его. Относительные силы --р- обозначим
через 2^. Новые значения статических парамет-
ров С, возникшие в результате этого деления,,
обозначим — С'.
Согласно теореме 3-1, наибольшее число
статических параметров исключается при на-
гружении одной только силой.’ Возникающая
для этого Случая система относительных коор-
динат приводит, следовательно, к наиболее
простому виду уравнений. Уравнения эти мо-
' гут быть в качестве канонических использова-
* ны и для всех остальных- случаев- нагружения.
Рассмотрим, какой вид принимают относитель-
105
иые уравнения эластостатики для этой про-
стейшей базовой системы сил;
= 1;
= Л2 =... = =
= ... = 2m^=:Xm = 0. (3-30)
Предполагая, что все aib отличны от нуля,
произведем по отношению к этой системе сил
следующее линейное. преобразование коорди-
нат q системы (1-1):
; е2=—;...; *,»=—, (3-31)
1 «16 2 «26 “mb
т. е. отнесем все координаты к полным стати-
ческим их изменениям, возникающим под воз-
действием единичной силы, приложенной
к 6-му элементу. Координаты 5 в отличие от
иных относительных координат назовем кано-
ническими относительными координатами.
Уравнения эластостатики (1-12) системы (1-1)
в результате перехода к относительным силам
и относительным координатам примут вид:
'С'4“ С'гзагЬ^2 4“ • • • 4~ C'imamb'm — Я, (3-32)
(/ = 1, 2,..., т).
Обозначив здесь статические параметры Cikaib
через S’ik, получим уравнения (3-32) в виде:
(/ = 1, 2,..., т).
Здесь S — относительные статические пара-
метры системы. Соответствующие абсолют-
ным параметрам системы А, В, С, D, Е
относительные параметры системы U, Т, S,
R, Q будут подчеркиваться, а модули их обо-
значаться теми же неподчеркнутыми буквами
U, Т, S, R, Q. Это означает, что U — modU,
U — U sign U. Дополнительный символ (подчер-
кивание) введен здесь не для модуля, а для
его относительной величины, поскольку урав-
нения в относительных координатах в дальней-
шем будут писаться в параметрах связей (мо*
дулях), параметры же систем — вводиться лишь
в уравнения семейств (рис. 1-20).
Согласно условию (30) в уравнениях (33)
все Лг-, за исключением Ль, равны нулю, а 1Ь
равно единице. Поскольку для этой системы
сил все относительные перемещения равны
в статике Afsignaib:
~ sign alb; =-^-=sign a2b;...;
5m=^=^signaTOb, t (3-34)
подставляя (3-34) в (3-33) и сокращая эти по-
следние уравнения на Яь, получаем, обозначив
Sih (sign Sik• sign через Sik, уравнения, свя-
зывающие^ одни лишь эти новые статические
параметры:
4~•З'(ь-1)г4~ • • • 4“ S'(b-i)m — 0;
Sji 4-£b2 4----+£^ =1;(3—I)
S'tb+ih + ^'(6+1)2 4- • • • 4- s'lb+pm—0;
4~ • • • 4~ S'mm -0.
Пользуясь этими уравнениями, можно ис-
ключить из уравнений эластостатики статиче-
ские параметры всех неизбыточных статиче-
ских связей. Система (!) состоит из пг неза-
висимых (поскольку входящие в какое-нибудь
одно из уравнений неизвестные не входят ни
в одно из остальных) уравнений, из которых
(т—1) однородны, а одно, b—е, неоднородно.
Деля каждое i—е из (т—1) однородных урав-
нений системы (!) и соответствующее ему
уравнение системы (33) на входящий в него
параметр несобственной статической связи
исключаем из каждой системы (т—1)
этих параметров. Система (!) примет после
деления следующий вид:
1
S.,
•$а>-1)4~- • • 4~5(ь-1)(ь-з)4~ • 4~^(ь-1)(ь-1)4~ • • • 4~*^(b-i)T»=0(3!!)
sbl 4~-«- 4~ 4~^&(ь-2)4~^ь(ь-1) 4~ ^ьь 4~ • • • 4~^&т =1
S(b+i)i4~S(b+i)2 4~ • • • 4” ^(ь+1 >(б-о 4~ 1 4~ £(ь+1)(ь+1)4~ • • • 4- Зд>4-1)т=о
*^«4 4~*3>n2 4~ • • • 4~ 1 4- $тт = 0-
106
Определив затем из т уравнений системы
(!!) еще т -статических параметров через
остальные и подставляя эти выражения в
уравнения (3-33), исключаем из эти** исходных
уравнений еще т Параметров. Удобно исклю-
чить таким способом -параметры т внутренних г
статических связей или замещающих их внеш- ’
них статических связей. В этом не раскрывае-
мом здесь окончательном виде, который бу-
дем называть каноническим и обозначать ин-
дексом (!!!), в уравнениях (3-33) останутся
параметры одних лишь избыточных статиче-
ских связей — критерии статического подобия.
Систему силЛ по отношению к которой про-
изводится переход к относительным координа-
там, назовем базовой системой сил. В рассмот-
ренном случае она состояла из одной лишь
силы, приложенной к 6-му базовому элемен-
ту. Выбор базовой системы сил служит толь-
ко выбору системы относительных координат,
т. е. базовая система сил не находится в об-
щем случае ни в какой связи с действующей
системой сил. Определяемая базовой системой
сил система относительных координат пригод-
на для любой действующей системы силы, при-
чем всегда будут соблюдаться уравнения
(3-33) эластостатики. Однако соотношения
(3-34) будут соблюдаться в том только слу-
чае, когда действующая система сил совпадает
с -базовой системой сил. Желание соблюсти
эти соотношения может побудить прибегнуть
к более сложным базовым системам сил, сов-
падающим с действующими системами сил.
Это имеет место, в частности, в многомерных
системах, где нагрузка только одной Из регу-
лируемых координат, взятая в качестве базо-
вой системы сил, нарушила бы симметрию
системы, и естественно принять в качестве ба-
зовой системы сил совокупность полных на-
грузок, приложенных ко всем регулируемым
координатам. Это необходимо также в тех слу-
чаях, где сравниваются в критериях -подобия
переходные процессы подобных систем под
воздействием подобных систем сил. Рассмот-
рим поэтому относительные уравнения эласто-
статики для более сложной системы сил, где
не одна, а несколько сил отличны от нуля:
Л1 = 2а=Л3=1;
Л4 = 25 = ... = 2т = 0. (3-30)
Пусть При ЭТОМ все суммы (а»!-|-аг2 + агз)
отличны .от нуля. Линейное преобразование (31)
примет в этом случае вид:
g _____ffi___. £ ______£2____.
1 а114“а12 + а13 ’ 2 *21 + а22 +а2з’ ’
Чтп
L..
ат1 + ат2 + атпз
(3-31')
Уравнения (32) примут вид:
С «1 (®и “I- ®12 4* ®is) “1“ is (®ai 4~ ®22 ”1“ ®га) ^2 4“
“I- • • • 4" C'im (®пц 4“ ®та 4~ ®nia) ^tn ==
(i = l, 2, m). (3-32')
Обозначив здесь ' статические параметры
С'4л(®й1 + ®й2-Е«ьз) через S'ih, получим урав-
нения (32') в виде:
S'ix?» “F^t’a^a 4" ’•• 4" S'in&n —
(Z=l, 2, m). (3-33')
Под воздействием системы сил (30') все коор-
динаты примут в статике значения:
В =------------£1----------=
1 “11 + “12 + “12
£ ____ ^2 __
2 а21 + ®12 + а23
Ч“ ^2 Ч”
^ЧАЧ-Л; (3-34')
t _ Чтя.2 12 _1_ 2.
и уравнения (!) примут вид:
mm
3-1-4. Статическое подобие
В общем случае системы «к» отличных от
нуля внешних статических сил из уравнений эла-
стостатики могут быть исключены параметры
(2m—k) статических связей. Неисключенными
остаются параметры избыточных, по отноше-
нию к относительной статической определи-
мости, статических связей. Число их равно
числу степеней относительной статической
неопределимости по отношению к данной си-
стеме сил. Параметры эти представляют
собой метрические критерии статического по-
добия. Структурным критерием статического
подобия двух систем является тождество их
статических структур. Из уравнений систем,
относительно статически определимых по от-
ношению к данной системе сил, могут быть
107
исключены все статические параметры. В этом
случае метрические критерии статического
подобия отсутствуют, статическое подобие
обеспечивается одним лишь структурным
критерием—тождеством статических структур.
Статическое подобие статически определи-
мых систем сводится к структурному усло-
вию — одинаковости.. статической структуры.
Для статически неопределимых систем возни-
кают дополнительные метрические условия —
равенство соответственных критериев подобия.
Статическое подобие систем определяется
следующими условиями. Абсолютно статиче-
ски определимые системы статически подоб-
ны при одинаковой статической структуре. Си-
стемы, относительно статически определимые
по отношению к данной системе сил, статиче-
ски подобны при одинаковой статической
структуре по отношению к данной системе сил.
Системы, относительно статически неопредели-
мые по отношению к данной системе сил, ста-
тически подобны по отношению к ней при оди-
наковой статической структуре и равенстве со-
ответственных неисключающихся статических
параметров — параметров избыточных стати-
ческих связей. Параметры эти являются ме-
трическими критериями статического подобия.
Для количественного исследования дина-
мических систем в относительных координатах,
построения переходных процессов в них,
в качестве базовой системы сил, определяю-
щей систему относительных координат, удоб-
но, хотя и не необходимо, принимать дейст-
вующую систему сил.’ Качественное исследова-
ние линейных динамических систем, исследо-
вание их общих и локальных свойств — ста-
тичности, устойчивости и т. д., безотноситель-
но, как и. эти свойства, к действующим на си-
стему внешним силам и здесь выбор той или
иной базовой системы сил, для перехода к от-
носительным координатам, является всего
лишь выбором системы относительных коорди-
нат и в той же мере произволен.
Здесь возникает, таким образом, возмож-
ность выбора канонической базовой системы
сил и соответствующей ей канонической си-
стемы относительных координат, приводящей
к исключению наибольшего числа статических
параметров и, как следствие, к наиболее про-
стому, каноническому, виду уравнений стати-
ки. Такой канонической базовой системой сил
является, как выяснено было выше, система
(3-30), приводящаяся к канонической системе
координат (3—31), в которой исключается
максимальное число (2/и—1) статических па-
раметров. 7?-тый элемент динамической си-
стемы, к которому приложена единственная
отличная от нуля сила базовой системы (3-30),
назовем базовым элементом системы. Нейс-
ключающиеся статические параметры являют-
ся критериями статического подобия и в этом
качественном исследовании. Каноническая ба-
зовая система сил никак не связана с дейст-
вующими на систему силами и определяет со-
бой лишь систему относительных координат.
Удобство количественного исследования
динамических систем требует для каждой си-
стемы сил своей системы относительных коор-
динат. Качественное исследование динамиче-
ских систем может производиться в безотно-
сительной к силам канонической системе отно-
сительных координат. В обоих случаях неис-
ключающиеся статические параметры являют-
ся критериями статического подобия.
Поясним процесс исключения статических
параметров и перехода к каноническим урав-
нениям статики на примере многократно ста-
тически неопределимой системы на рис. З-ЗЛ.
Исходные уравнения статики (3-33) примут
вид:
Поскольку все аг-ь здесь положительны, уравне-
ния (!) принимают вид:
, +S'le = l;
-S'« + S'2, +S'2e = 0;
- S'S2 + S'33 + S'3e = 0; (3-36)
-S'4s + S'« +S'4e = 0;
-S'64 + S'S5 + S'56 = 0;
— S' +S' =0;
65 I 6o 7
уравнения (!!) принимают вид:
S„ +$..=1;
— 1 + Sa2 + S2e = 0;
— 1 + S33 + S3e = 0; (3-37)
1646
•2
Уравнения (3-35) эластостатики после той
же операции деления уравнений на параметры
несобственных связей примут вид:
Sn5j H_Sle5e::=l»
“ ’ " ‘ +S2A = 0;
+ SMe.=O;
4-S4e?e^0;
55л+56л=0;
— + S.A ;= 0.
(3-38)
108
Определяя из (3-37) параметра внутренних
связей:
= 1 *^1в» S33 = 1 S3e; Ss5 = 1 Sse;
S22 = 1 - S26; S44 = 1 - S4e; See = 1, (3-39)
и подставляя полученные выражения (3-39)
в (3-38), получаем в окончательном виде (!!!)
канонические относительные уравнения ста-
тики:
Система четырехкратно статически неопре-
делима. Нейсключающимися статическими па-
раметрами являются только степени нагруже-
ния Soi, 5q2, S03, S04, обратно пропорциональ-
ные степеням неравномерности. Степень само-
регулирования So определяется через них.
Та же система канонических уравнений (3-36')
пригодна для любой системы действующих
сил, не совпадающей с базовой системой сил.
В системе параллельно работающих турбо-
(1 - sie)ik
-^ + (1-5^
-S2 + (1-S3e)?3
-53 + (l-S4e)£4
(3-40)
-g4 + (l-Sse)H6 + Sse$e = O;
-Л+ 5e=0.
Канонические уравнения динамики получа-
ются из этих уравнений статики добавлением
к каждому f-му уравнению члена Канони-
ческие статические параметры Sih являются
здесь критериями статичёского подобия, вре-
мена Тi — динамического подобия.
Рассмотрим более сложную систему — па-
раллельной работы турбогенераторов, где aib
могут иметь различный знак. За базовый эле-
мент ее естественно принять объект системы—
элемент ф (частота энергосистемы). Уравнения
системы (понятные без структурной схемы)
принимают при этом симметричный вид:
ЛФ + М 4" ‘SoiP’i 4“ *$02р2 4- 50зРз +
Т 1^1 + + 510ф = 0;
Г2н2 + 522|х2-520ф=0; (3-35')
7* зРз + ^ЗзРз 530ф = 0;
+ S4ft — 54оФ = 0-
Здесь также все aib положительны и урав-
нения (!) принимают поэтому вид:
S'22-S'20 = 0; (3-36')
•S'33 5'зо = 0;
S'44-S'40 = 0.
Деля однородные уравнения этой системы на
параметры несобственных связей, получаем
уравнения (!!), из которых определяем пара-
метры внутренних связей:
So—l—(Soi+S02+S03+S04);
S ] 1 = Si о—S22=S20=533=,5зо—S44=S4o=*1.
(3J39Z)
генераторов возможен, однако, и иной случай,
когда одна из подсистем, например первая,
изодромна. Это проще всего достигается аста-
тичностью ее сервомотора. В этом случае эле-
мент ф не пригоден в качестве базового эле-
мента, поскольку коэффициенты влияния во
всех остальных составляющих системах будут
нулевыми. Единственным базовым элементом,
свободным от этого недостатка, является здесь
астатический сервомотор изодромной под-
системы. По отношению к приложенной
к нему положительной базовой силе его
коэффициент влияния будет отрицателен,
коэффициенты же влияния всех осталь-
ных элементов положительны. (Предпола-
гается, что уравнения системы составлены уже
в канонической (по знакам) системе коорди-
нат и выбор этой системы не может быть по-
этому подчинен условию положительности всех
dib. Последние получают поэтому различные
знаки. Для входных систем каноническим на-
правлением положительного отсчета положе-
ний сервомотора является направление закры-
тия. Положительной нагрузкой сервомотора
является поэто!му закрытие его, т. е. разгрузка
подсистемы. Оно приводит к снижению часто-
ты и нагружениям остальных подсистем — от-
крытиям их сервомоторов, т. е. к отрицатель-
ным aib всех этих элементов). Соответственно
уравнения (!) примут вид:
— S'o 4“ S'ol — S'O2 — S'O3 S'O4 = 0;
s'io = l;
-S'22 + S'20 = 0; (3-36")
Деля однородные уравнения на параметры
несобственных связей (первое из уравнений,
109
где сходятся четыре несобственных связи, раз-
делим на Soi), получаем уравнения (!!), из ко-
торых определяем параметры внутренних свя-
зей:
== (*“>02 50Г Н” *^04 1 )>
^10 — ^22 — ^20 = *^«3 = ^30—^44=‘^40=1 ’ (3“39")
Подставляя эти значения (и согласно
условию нулевое значение 5ц) в i(3—36'), по-
лучаем канонические уравнения. Они пригод-
ны для любых действующих сил, но наиболее
наглядны дляч случая нагружения первой под-
системы, когда действующая сила совпадает
с базовой силой.
Уравнения (40) записаны относительно ста-
рого положения равновесия (т. е. в связанной
с этим старым положением системе коорди-
нат). Относительно нового равновесного поло-
жения они будут иметь тот же вид, лишь
в правой части первого уравнения вместо
единицы появится нуль. •
Выбор канонической базовой системы сил,
определившей систему относительных коорди-
нат-и связь между статическими параметрами,
является всего лишь выбором системы коорди-
нат. При канонической базовой системе сил
уравнения системы принимают канонический
вид (!!!). В канонических уравнениях исклю-
чается наибольшее возможное число—(2 m—1)
статических параметров, по два параметра
в каждом не &-м уравнении подин параметр—
в &-<м. В этом -исключений наибольшего числа
статических параметров и состоит первая цель
перехода к.относительным координатам.
Можно -было бы, разумеется, и многими
иными способами исключить из канонических
уравнений статики (2m—1) статических пара-
метров. Принятый выше способ исключения
параметров именно несобственных связей и
внутренних (или замещающих их внешних)
статических связей наиболее естествен ввиду
особого места, занимаемого этими связями,
а для открытых систем является единствен-
ным.
При любом способе исключения статиче-
ских параметров может быть исключено не бо-
лее Мс= (2т—1) параметров. Теорема З-П:
из уравнений динамических систем может
быть исключено не более Мс—(2m—1) стати-
ческих параметров. Доказательство теоремы
и способ исключения указаны выше. Парамет-
ры избыточных, сверх 7ИС, статических связей
заведомо не могут быть исключены. Число их
было названо выше числом степеней статиче-
ской неопределимости.
Число это может оказаться больше нуля и
тогда, когда общее число статических связей
ПО
не превышает (2m—1). Это имеет место в том
случае, когда нарушена равномерная локаль-
ная статическая связанность. В этом случае
одни элементы окажутся статически избыточ-
но связаны, другие же — недостаточно.
В уравнениях первых, статически неопредели-
мых, элементов появятся в этом случае неис-
ключающиеся статические параметры — кри-
терии статического подобия. Из уравнений ди-
намических систем, общее число статических
связей которых равно или меньше (2m—1),
можно, при отсутствии элементов с избыточ-
ной статической связанностью, полностью
исключить все статические параметры.
В случае, когда система в некоторых эле-
ментах изодромна относительно базового эле-
мента, преобразование (3-31) для нее невоз-
можно. Поскольку, однако, статические реак-
ции всех выходящих из этого элемента квази-
статических, как мы их назвали выше, связей
равны нулю, общий ход рассуждений, приводя-
щий к каноническим уравнениям статики, не
изменяется. Выбор базовых величин для та-
ких элементов произволен. Параметры квази-
статических связей представляют собой такие
же динамические параметры, как постоянные
времени, и не могут быть поэтому определены
из уравнений статики. Квазистатическим па-
раметрам может быть придана квазистатиче-
ская форма с помощью понятия о динамиче-
ской неравномерности регулирования.
Рассмотренные выше условия исключения
всех статических параметров сводятся к входу
не -более одной статической связи в один из
элементов системы, базовый ее элемент, и не
более двух статических связей — в каждый из
остальных элементов. Условия эти совпадают
с условиями относительной статической опре-
делимости, относительно канонической базо-
вой системы сил, полученных в предыдущем
разделе.
Теорема полного исключения.
Статически определимые относительно базо-
вой системы сил динамические системы допу-
скают исключение всех статических парамет-
ров из уравнений статики.
Назвав, в дополнение к введенным ранее
понятиям, полным числом статических связей
системы число 7ИС, полным числом статических
связей базового элемента — единицу и полным
числом статических связей небазового элемен-
та — число два, можно объединить все указан-
ные выше частные теоремы исключения сле-
дующей общей теоремой исключе-
ния. Теорема З-Ш. В канонических урав-
нениях статики исключаются статические па-
раметры всех статически определимых элемен-
тов с полным и недостаточным числом стати-
ческах связей, один статический параметр
в статически неопределимых базовых элементах
и по два статических параметра в статически
неопределимых небазовых элементах:. Число
неисключающихся статических параметров
равно числу степеней статической неопредели-
мости. Доказательство теоремы явствует из
предыдущего. Если все элементы системы об-
ладают полным или избыточным числом ста-
тических связей, из канонических уравнений
ее исключается наибольшее число — Мс стати-
ческих параметров. Если часть элементов ста-
тически определима при недостатке статиче-
ских связей, часть же статически неопредели-
ма, число исключающихся параметров меньше
числа (2m—1) на сумму недостающих связей
в статически определимых элементах. В кано-
нических координатах число неисключающих-
ся статических параметров равно во всех слу-
чаях числу -степеней статической неопредели-
мости. Параметры эти представляют собой
критерий статического подобия.
3-2. ЭЛАСТОДИНАМИКА
3-2-1. Канонические уравнения
эластодинамики
Исключение Мс статических параметров из
уравнений статики исключает их из уравнений
динамики, приводя и последние вместе с урав-
нениями статики к каноническому виду. Сле-
дует лишь дополнительно проследить, как бу-
дут изменяться при этом преобразовании па-
раметры нестатических связей.
Для дифференциальных систем уравнения
(1-1) в результате перехода к относительным
силам -и преобразования координат (3-31)
примут вид:
m
(А'нРьтЪк + Bikahrih-|- C'ihakrbh) = Л* (3-41)
£=i
(/ = 1, 2,... , т),
или же, обозначив
A ik^kr = В ik^kr-------Т ikt С ik&kr — «S ife,
m
У (U'
ЛяшЛ --- ------ -------
6=1
(6 = 1, 2,...,от). (3-42)
Деля затем одновременно с переходом от
уравнений (!) к уравнениям (!!) каждое из урав-
нений (3-42) на параметр S't несобствен-
ной статической связи и обозначая
получаем:
m
£ (^А + (3-43>
*=1
(i = 1, 2,..., m).
Динамические параметры U, Т, S имеют
размерность времени (сек) и представляют со-
бой постоянные времени второго, первого и
нулевого порядков.
Для интегродифференциальных систем:
уравнения (1-1) примут вид:
m
X ( + Sik\h + U dt +
£=1 -- ----- — ----------
+ЙИ^)==Аг <3'44>
(* = 1, 2, ..m).
Подставляя в последнее уравнение выра-
жения вида (3-39) для параметров внутренние
статических связей, определяемых через-
остальные статические параметры из уравне-
ний (!!), получаем в окончательном виде кано-
нические уравнения динамики сервосистем.
Уравнения эти содержат уже в себе канониче-
ские уравнения статики (!!!) вида уравнений
(3-40). Из канонических уравнений динамики
исключается наибольшее возможное число*
статических параметров. Для статически опре-
делимых систем из канонических уравнений
динамики исключаются все статические пара-
метры.
3-2-2. Динамическое подобие
Чтобы получить динамическую запись си-
стемы в критериях подобия, необходимо, в до-
полнение к исключенному выше наибольшему
чисЛу статических параметров, исключить наи-
большее число динамических параметров.
Оставшиеся параметры представят собой кри-
терии динамического подобия.
Параметры канонических уравнений назо-
вем каноническими параметрами. Поскольку
канонические параметры имеют одну лишь
размерность —времени, они позволяют до-
полнительно, в соответствии с л-теоремой тео-
рии подобия, исключение одного лишь дина-
мического параметра принятием его за едини-
цу времени. После этого и динамические кано-
нические параметры системы становятся кри-
териями подобия. Динамические канонические*
параметры, отнесенные к одному из них, яв-
ляются критериями динамического подобия
динамических систем. Это явствует из того, что-
они представляют собой наименьшее число ’Не-
зависимых параметров, описывающих систему,
11»
Величины U, Т, S, R, Q представляют со-
бой канонические параметры системы, их аб-
солютные величины If, Т, S, R, Q — канониче-
ские параметры связей. И те и другие имеют
размерность времени. Все обозначения пара-
метров могут быть представлены следующей
таблицей:
абсолютные
относительные
(канонические)
параметры системы: параметры связей:
А, В, Ct Dt Е а, Ь, с, d, е
U* (сек*); Т^(сек); _3° (сек0);#"1 (сек"1); Q~* (сек"*) U* (сек*); Т (сек); 3° (сек0); R"1 (сек"1); Q~* (сек"*)
Первая и нулевая степени при параметрах бу-
дут в дальнейшем опускаться. Для симметрии
первой строки таблицы со второй следовало
бы относительные параметры системы обозна-
чить большими «последними буквами латинско-
го алфавита, относительные параметры свя-
зей— малыми. Буквой Т принято уже, однако,
обозначать параметры связей 1-го порядка, и
это заставило отклониться от симметрии.
Поясним все это на простейших примерах.
В нулевой одноциклической системе регулиро-
вания на рис. 3-1,63 содержится Л4С статиче-
ских связей. В каждом элементе ее, кроме ба-
зового элемента, сходится по две статические
связи — одна внешняя и одна внутренняя.
В базовом элементе сходится одна лишь внеш-
няя статическая связь. Система образована
входным замещением и статически определима.
Действительно, уравнения (!) принимают
для нее, если ограничиться тремя каскадами
усиления, вид:
S'14=l;
S'22 S'21=0;
S'ss — S'32=0;
S'44 S'43=0.
(3-45)
Все [статические параметры этой системы
могут быть указанным выше способом обраще-
ны в единицы: S'l4= 1; S'22 = S'21 = 1; S'33 =
= S'i2 — 1; S'44 == S'43 = 1 и канонические урав-
нения статики принимают вид:
t*»=0;
—ф =0;
Р-2 —1*1 = 0;
Нз — На = О.
(3-46)
Уравнения динамики получаются добавле-
нием динамических членов к этим уравнениям
статики:
ТЛ +Нз = 0;
ЛЙ1+Н1-Ф =0; (3-47)
ЛНа + На —Н1 = 0;
7>, + н, —Н2 = 0.
Здесь То, 7\, Т2, Та — канонические параметры.
Приняв Го за единицу времени, записываем эти
уравнения в критериях подобия:
Ф +нз = 0;
ЛоН1 + Н1-ф =0; (3-48)
^аоНа I На Hi 0,
ЛоНз + Нз — На = О.
Здесь 7’10 = 7^; = тзо — -^*~ — Крите-
рии динамического подобия.
Критерии подобия статически определимых
систем состоят только из критериев динамиче-
ского подобия. Статическое подобие обеспе-
чивается здесь одинаковой статической струк-
турой, и критерии статического подобия отсут-
ствуют поэтому. Напротив, в критерии подо-
бия статически неопределимых систем входят
критерии статического подобия — статические
канонические параметры, и критерии динами-
ческого подобия—динамические канонические
параметры. Так, условием подобия двух си-
стем входного замещения, обладающих стати-
чески определимой структурой, указанной на
рис. 3-3,а является соответственное равенство
всех динамических критериев подобия:
Г1О=Г'1О; 7'20= Т"20; ...; Гб0=Г"60, (3-49)
где одним штрихом обозначены критерии по-
добия первой из этих систем, двумя — второй
из них. Для многократно статически неопреде-
лимой системы на. рис. З-ЗД, чьи уравнения
статики представлены уравнениями (3-40),
к динамическим критериям подобия (3-49) до-
бавятся статические критерии подобия:
57 Q77 . Q7 ,077 . 07 077 .
16 =О 16, 26—М 26, 36 — о 36,
S'46=S"46; S,56=5"56. (3-50)
На рис. 3-4 показаны в качестве примера
смешанные системы, образованные входным
замещением, идущим от периферии к центру
(рис. а) и от центра к периферии (рис. б), и
даны их качественные линии влияния. В отли-
чие от системы на рис. 3-3,а, образованной за-
мещением только тормозящими обратными
внешними связями, смешанные системы обра-
<12
Уравнения в а6солн)тньис координатах :
с а с т е м ы и)
bitty
~C2!ty
~C5tQt
“Ь cieQs ~
+ b22q2 -С25Ч5 > = Z7
— СзгЯг* b33q3 + СзсДц
— ~ сЬзЧз ^44 ?4 „ @
- c^qu 4- b55q5 - О
— сбвЧ5 + b6eqff+ce6q6= 0
с и c rn e м ы 5)
bitty * Cl6Qs ~&r
-c.2lqi + b3?q2 + c25qc, = 0
— c3zq?. — bjjty + Cj^qt —
- С^З + ^44 ty + = °
- C33q3 T ^4?4 * b55$3 = °
- c62q3 - c65*i + ЬббЯб = °
относит ельнькх
, У равнения в
системы а)
г th = z'
+ r2l2 + l,5 =0
- + Т&З + ^4 = °
- Ьг- + гД4 - =0
-ъ - =°
- 4$+7^4 ^=Z7
координатах :
системы б)
Tity •*• ’= *>
- 4/ + Тг^г + S2^4j = О
~ Д2 + ТЛз + = °
- К3 + + S44U = °
” Sw4j“" ®
~^2 ~ 454-гЛ = /7
Рис. 3-4. Статическая определимость сервосистем с изодромными элементами.
зованы замещением как тормозящими обрат-
ными, так и возбуждающими прямыми связя-
ми (Л. 87]. Регулярные свойства систем, обра-
зованных входным замещением одними лишь
обратными связями,— их структурная устой-
чивость, в частности,— нарушены в смешан-
ных системах. Система а, как показано ниже,
структурно неустойчива, система б обладает
вырожденной структурной устойчивостью. Од-
нако условия статической определимости оста-
ются для них неизменными. Обе системы ста-
тически определимы, как все системы входно-
го замещения. В первой -из них нет элементов,
изодромных по отношению к базовой системе
сил, во второй — изодромны все элементы,
кроме последнего. Выводящие из этих изо-
дромных элементов статические связи квази-
статичны. В первой -поэтому нет квазистатиче-
ских связей, во второй — квазистатичны все
статические связи, кроме обратной, выходя-
щей из единственного неизодромного элемен-
та. Параметры всех статических связей исклю-
чаются, параметры квазистатических связей
остаются неисключенными. Эти квазистатиче-
ские параметры представляют собой, как вы-
яснено было выше, динамические параметры.
Неисключенными остаются при этом лишь па-
раметры собственных квазистатических свя-
зей. Параметры несобственных статических
связей исключаются в любом случае—статич-
ности или квазистатичности.
На примере построения качественных ли-
ний влияния систем на рис. 3-4 выясняется
смысл кинетостатических структурных схем.
Знаки всех статических перемещений могли
бы «быть, разумеется, найдены аналитически,
с помощью формулы (1-15). Это, однако, может
быть достигнуто более простым способом с по-
мощью структурных схем, имея в виду, что
каждый узел схемы представляет собой урав-
нение статического — в статике и кинетостати-
ческого —в динамике равновесия. Из условий
статического равновесия вытекает, что дефор-
мация системы а в элементе 6 положительна,
поскольку лишь в этом случае реакция связи
Ci6q6 положительна и уравновешивает отрица-
тельную внешнюю силу Здесь существенно
то, что реакция положительной связи совпа-
дает по знаку с деформацией ведущего эле-
мента связи, реакция же отрицательной связи
противоположна по знаку этой деформации.
Деформация элемента 5 должна быть поло-
8 И. И. Гальперин.
113
жительна, чтобы реакция связи C^q$ была
отрицательна и уравновешивала положитель-
ную реакцию связи С66?6. Деформация эле-
мента 1 должна быть положительна, чтобы
реакция связи C2\q\ была отрицательна и
уравновешивала в элементе 2 положительную
реакцию связи C2^q^. Таким же способом опре-
деляются последовательно деформации эле-
ментов 4, 2, 3 системы а и элементов систе-
мы б.
Канонические уравнения, как уравнения с наимень-
шим числом параметров — уравнения в критериях по-
добия, введены были нами в 1947 г. [Л. 42] и были
затем широко использованы для исследования наибо-
лее сложных систем — связанного регулирования, парал-
лельной работы, регулирования блочных установок
[Л. 57, 58, 59, 80, 89, 94, 96, 97]. С тех пор опубликован
был ряд специальных монографий, рассматривающих
подобие систем регулирования безотносительно к кано-
ническйм уравнениям. Некоторый шаг вперед делается
в (Л. 92], где в качестве критериев подобия предлагают-
ся коэффициенты дважды нормированного характери-
стического полинома. Коэффициенты эти представляют
в наименьшем числе общие параметры системы и яв-
ляются поэтому критериями общего подобия систем.
Совпадением этих коэффициентов у сравниваемых си-
стем достигается лишь общее подобие, т. е. тождество
общих свойств сложных систем, и не достигается ло-
кального подобия — тождества локальных свойств слож-
ных систем. Полное подобие систем, т. е. тождество об-
щих и локальных свойств их, достигается только соот-
ветственным равенством представленных в наименьшем
числе локальных параметров системы. Такими парамет-
рами являются канонические параметры системы. Они
и представляют собой критерии локального подобия.
Только для элементарных систем, случая тривиального,
общее подобие является и локальным и, следовательно,
полным.
Игнорирование в современной автоматике теории
статической определимости и вытекающей из нее тео-
рии подобия, принадлежащих односторонней механике,
результат все той же неопределенной принадлежности
предмета и открываемого ею логического произвола.
Структурное исследование позволяет в наи-
более общем виде представить теорию подо-
бия. Для того чтобы динамические системы
были подобны, т. е. процессы в них различа-
лись только масштабом величин, необходимо
и достаточно тождество их структур. Тожде-
ство одних лишь статических структур приво-
дит к одному лишь статическому подобию,
тождество и статических и динамических
структур — к полному статическому и динами-
ческому подобию. В подобных системах соот-
ветственным выбором системы координат и
системы параметров процессы могут быть
представлены не только подобными, но и тож-
дественными. Этой задаче отвечают канониче-
ские в указанном выше смысле координаты.
Единичные, принадлежащие отдельным свя-
зям параметры преобразуются этими коорди-
натами в наименьшее число групповых, при-
надлежащих всей системе параметров. По-
114
следние представляют собой критерии подо-
бия. Записанные в этих критериях дифферен-
циальные уравнения динамических систем
тождественны. Тождественны® этих критериях
и переходные процессы, определяемые этими
уравнениями.
Поясним детально связь между единичны-
ми и групповыми параметрами. Общее число
параметров динамической системы равно чис-
лу членов ее дифференциального уравнения.
Не все эти параметры, однако, определяют
инвариантное, не масштабное —связанное
с системой единиц, содержание процессов в си-
стеме. Так, в статически определимых систе-
мах регулирования инвариантное содержание
переходных процессов определяется не сово-
купностью единичных статических параме-
тров — передаточных чисел рычагов, жестко-
стей пружин и т. д., а объединяющим их груп-
повым параметром — неравномерностью д.
Параметр этот входит в уравнение регулято-
ра, однако, как и остальные канонические па-
раметры регулятора — C72r, Tr, Sr, определяет-
ся не только единичными его параметрами —
массой грузов, массой муфты, силой катарак-
та, жесткостью пружины, но и всей совокуп-
ностью единичных параметров системы и всей
ее структурой. Канонические групповые пара-
метры так же независимы, как единичные па-
раметры. Они представляют собой, однако,
минимальное число независимых групповых
параметров, однозначно описывающих систе-
му, и являются поэтому критериями подобия.
Критериями подобия является любое мини-
мальное для данной системы число парамет-
ров, однозначно описывающее инвариантное
содержание системы. Критерии подобия явля-
ются инвариантными параметрами динамиче-
ских систем. Этим, в частности, определяется
безразмерный их характер.
Тот же результат — инвариантность пара-
метров мог бы быть, казалось, достигнут без-
размерностью их, отнесением всех координат
системы к произвольным базовым величинам.
Этим, однако, эти базовые величины лишь при-
нимались бы за систему координат. Действи-
тельная инвариантность параметров системы
заключается в независимости их от любой си-
стемы координат, в том числе и базовой. Та-
кими инвариантными параметрами, определяе-
мыми только содержанием системы, являются
канонические параметры. Они и являются по-
этому критериями подобия.
Групповыми параметрами дискретных ди-
намических систем являются канонические
параметры — относительные постоянные вре-
мени и параметры статической неопредели-
мости. ч
3-2-3. Динамические влияния
Эластостатика начата была задачей стати-
ческих влияний, поскольку задачей этой опре-
делились канонические уравнения статики и
динамики. Эластодинамика заканчивается за-
дачей динамических влияний, поскольку к ним
сводится все содержание ее—все задачи ди-
намики могут быть (Представлены как задачи
о динамических влияниях. Эта более сложная
вторая задача сводится к более простой пер-
вой преобразованиями Фурье и Лапласа
(§ 1-2-3) и составит предмет всего дальнейше-
го изложения.
3-3. АВТОМАТИКА КАК ЭЛАСТОМЕХАНИКА
3-3-1. Общая задача регулирования
Система понятий односторонней механики
охватывает все статические и динамические
свойства сервосистем единой систематикой.
Такие, неопределенной принадлежности, поня-
тия современной автоматики, как астатич-
ность, •изодромность, статическая и динамиче-
ская независимость (автономность), общая и
локальная, односторонняя и двусторонняя ин-
вариантность,— сводятся все к равенству нулю
статических и динамических коэффициентов
влияния, статических и динамических про-
водимостей, соответствующих каналов, объ-
единяются принадлежащим односторонней
механике общим понятием о статических
и динамических влияниях. Свойства эти
являются в равной мере структурными и
метрическими, точнее говоря — прежде струк-
турными, затем метрическими. Для независи-
мого регулирования необходимо прежде всего
видоизменить структуру системы — дополнить
ее перекрестными связями связанного регули-
рования, а затем подчинить передаточные чис-
ла этих связей метрическим условиям незави-
симости. Такое же предшествующее положе-
ние занимает структурное исследование и во
всех остальных без исключения задачах авто-
матики.
Динамические локальные свойства имеют
тот же общий смысл, что и статические свой-
ства. В частности, статическая и динамиче-
ская независимости в связанном регулирова-
нии многомерных систем представляют собой
соответственно тождественное равенство нулю
соответствующих статических и динамических
передаточных функций — особенные локаль-
ные свойства. Примером неособенных локаль-
ных свойств является быстродействие по «кана-
лу скорость распространения сигнала
из й-й точки в Z-ю. Оно определяется видом
передаточной функции угл-
В этих понятиях могут быть сейчас сфор-
мулированы все задачи автоматики. Очерчен-
ная в начале работы общая задача автомати-
ки— получение заданных реакций системы —
сводится к синтезу систем, обладающих за-
’ данными проводимостями соответствующих
каналов. Поясним это на примере различных
частных постановок этой общей задачи.
Рассмотрим задачу получения заданных
статических реакций. Задача изодромного ре-
гулирования сводится к требованию нулевой
статической проводимости главного канала;
объект — объект, при конечной статической
проводимости неглавного канала: регуля-
тор— объект. К входам этих каналов прило-
жены внешние силы системы, к объекту — на-
грузка его, к регулятору — задание. Задача
изодромности требует нулевой статической
реакции системы в той точке ее, куда поме-
щен объект, на внешнюю силу (нагрузку),
приложенную к нему же, т. е. нулевого зна-
чения главной статической передаточной функ-
ции аоо объекта. Задача изменения задания,,
ставящаяся перед каждой системой, требует
конечной статической реакции системы в той
точке ее, куда помещен объект, на внешнюю
силу (задание), приложенную к регулятору»
т. е. конечного значения неглавной статиче-
ской передаточной функции аог. Обе задачи
сводятся к получению заданных статических
реакций. В решении их участвуют поэтому
только статические передаточные функции.
Рассмотрим задачу получения заданных
динамических реакций, например, задачу так
называемой инвариантности. Задача инвари-
антности, регулируемой координаты требует
нулевой динамической реакции системы в точ-
ке «объект» по отношению к внешней силе
«нагрузка», т. е. тождественного равенства
нулю главной передаточной функции у<м>
объекта. Вторая задача — изменения задания
остается здесь той же, что и в предыдущем
случае.
Пусть ставятся для многомерной системы
чисто статические задачи — изодромного ре-
гулирования ьй регулируемой координаты ее
и статической независимости ее от одной, S-й,
из остальных координат. Задача сводится
к требованию нулевого значения главного
коэффициента влияния аа и нулевого значе*
ния соответствующего неглавного коэффициен-
та влияния a2S. Пусть ставится смешанная»,
статическая и динамическая, задача изодром-
ности и динамической независимости регули-
рования Z-й регулируемой координаты от всех
остальных регулируемых координат. Задача
сводится к требованию нулевого значения аг»
и тождественного равенства нулю всех уг*.
8*
115
Задача независимого регулирования пред-
стает в самых различных рассмотренных выше
сочетаниях. Крайнее ее выражение — взаим-
ная динамическая независимость всех регули-
руемых координат при изодромном регулиро-
вании их — сводится к требованию нулевых
значений всех агг- и тождественного равенства
нулю всех ум-
Задача фильтра — пропускания или не-
пропускания по отдельным каналам колеба-
ний различных частот—формулируется ана-
логичным образом, как задача неравенства
или равенства нулю для данных частот, гар-
монических проводимостей ргь этих каналов.
Все эти задачи относятся к числу особен-
ных. Неособенной задачей является требова-
ние определенного вида переходных процес-
сов в некоторых f-х точках системы по отно-
шению к приложенным в k-x точках внешним
силам. Решение этой задачи сводится к требо-
ванию определенного вида общей проводимо-
сти (передаточной функции) у^. К числу этих
задач относится и задача быстродействия.
Поставленные таким образом задачи могут
оказаться физически невыполнимыми, как не-
которые задачи инвариантности, или несовме-
стными. Все, однако, задачи регулирования
могут быть поставлены с помощью этого
ограниченного числа единообразных понятий.
В господствующей в современной автома-
тике пестроте понятий и терминов, где тожде-
ственные по содержанию задачи рядятся под-
час в различную словесную форму, а затем
порознь решаются, единообразие это является
особенно важным.
Так, новая задача инвариантности пред-
стает в этой общей трактовке как обобщение
старой статической задачи изодромности и
астатичности. Весь аппарат синтеза бесконеч-
но статических (изодромных) и астатических
систем, рассматриваемый ниже, распростра-
няется на синтез бесконечно динамических
(инвариантных) и адинамических систем.
Этим решается в общем виде и вопрос о реа-
лизуемости условий инвариантности. Инвари-
антность, как и все остальные, упускаемые со-
временной теорией регулирования ненатураль-
ные свойства систем, может иметь место лишь
в ненатуральных системах. Инвариантность
в натуральных системах так же невозможна,
как невозможна в них изодромность. Оба не-
натуральных феномена принадлежат односто-
ронней механике. Отсутствие этого наиболее
общего условия реализуемости в посвященных
этому вопросу многочисленных работах —
плата за ту же неопределенную принадлеж-
ность предмета.
116
Центральные понятия современной теории
регулирования — передаточные функции, ам-
плитудно-фазовые характеристики и возни-
кающие из них понятия — изодромности, авто-
номности, инвариантности, фильтра обобщают
принадлежащее односторонней эластомехани-
ке понятие о статических влияниях и их коэф-
фициентах. Концепция односторонней механи-
ки объединяет все эти понятия общим поня-
тием —о динамических влияниях.
Рассмотрим в этом свете наиболее общие,
относящиеся к многомерным системам, задачи
регулирования.
3-3-2. Независимое регулирование
Условия статической независимости (авто-
номности), впервые строго сформулированные
И. Н. Вознесенским (Л. 13, 16] и затем много-
кратно рассматривавшиеся [Л. 22, 35, 57], для
простейшего случая исчерпываются матрич-
ным соотношением:
IP*uv II = lj Suv ||(3-51)
(«, 0 = 1, 2, ..., /п),
устанавливающим обратность искомой матри-
цы передаточных чисел i регулирования за-
данной матрице статических связей S объек-
та. Отсутствие общей концепции с наибольшей
ясностью сказалось в специальных, вне всякой
связи с общим соотношением (1-15) элавтоме-
ханики, выводах этого частного соотношения
[Л. 107]. В односторонней эластомеханике
специальное соотношение это без дальнейших
доказательств получается из общего соотно-
шения. Матрицы коэффициентов жесткости и
влияния упругих систем всегда обратны, как
матрицы взаимно обратных линейных преоб-
разований. Можно, таким образом, заранее
утверждать, что в сервосистемах, односторон-
них упругих системах, матрицы коэффициен-
тов жесткости и влияния так же обратны, как
и в натуральных упругих системах. Рассмот-
рим, что вносится в это тривиальное в одно-
сторонней механике положение независимо-
стью регулирования.
Запишем уравнения независимого регули-
рования в обычных относительных координа-
тах Стодола. Уравнения объекта:
ai?i + + S'12?2 + • • • + S'lmVm + \ 1Н1 +
+ *^i2lx2 + • • • + (3-52)
T a2?2 + ^21? i + $'22^2 + • • • + + S2ilh +
+ ЗзгРг • • • +
7* “4“ “4“ гпгФг 4“ • • • “4“ “t-
~ «Sni2p*2 + • • • “4“ ==:
Уравнения регуляторов:
= ?1/8п *Ч2 = ?2/82; • • • ; 1т = Чт^т- (3-53)
Уравнения сервомоторов:
“4“ (^n^i “4“ Чг’Чг ~4~ • • • "4“ Чт'Чш) О»
(3-54)
^сгИг 4“ Рг (^*21*41 “4“ I22I2 "4“ • • • "4“ ^mlm) := О»
cmP'm “И Нт (Gni'Hi "4~ ^тг’Пг “4" • • • “И ^тпт'Лт)
В независимом регулировании, и только в нем
\ = lv l2 = lv • • •> = (3-55)
Подставляя (3-55) в (3-52), и опустив пока в
последнем саморегулирование, получаем в
статике:
^11Р1 “Ь *^12^2 “F • • • “I” ^imP*m ’ ^1»
+ ^22Р*2 ”4“ • • • “4“ ^2т^т = (3-52')
*^ТП1Р1~И ‘^тгРгЧ’- • • • "4“^тт^т=^т •
В свою очередь, уравнения (3-54) получают в
статике вид:
Уравнения (3-52') и (3-54') суть такие же
уравнения упругой системы, решенные относи-
тельно обобщенных сил т] и обобщенных де-
формаций ц, как и уравнения (1-42), (1-43).
В независимом регулировании положение
каждого из регуляторов однозначно опреде-
ляется его нагрузкой (уравнения (3-55). По-
ложения эти в той же мере, что и нагрузки,
представляют, таким образом, независимые
обобщенные силы по отношению к перемеще-
ниям сервомоторов как обобщенным коорди-
натам. Отсюда без дальнейших доказательств
вытекает соотношение (3-51), исчерпывающее
задачу определения передаточных чисел не-
зависимого регулирования. Передаточные чис-
ла перекрестных связей независимого регули-
рования выступают здесь как коэффициенты
влияния, статические параметры объекта —
как коэффициенты жесткости.
В работе (Л. 58, 89], базирующейся на вве-
денных нами структурных методах и канони-
ческих относительных координатах объекта ф,
координатам этим наряду с полезным приме-
нением придается также значение, которого
они не имеют,— утверждается, что только
в них соотношение (3-51) имеет место. Как
явствует из приведенного выше доказательст-
ва— в неканонических координатах Стодола,
вывод этот ошибочен — соотношение (3-51)
верно во всех системах относительных коорди-
нат, в которых в статике внешние си-
лы однозначно представляются положениями
регуляторов.
Соотношением (3-51) указываются усло-
вия одной лишь статической независимости.
Подвергнув уравнения (3-52) и (3-54) преоб-
разованиям Лапласа, можно получить в той
же матричной форме и условия динамической
независимости (это сделано в работе [Л. 105],
сжато излагающей важные результаты). По-
следние, таким образом, так же прямо выте-
кают из односторонней эластомеханики, как
и первые.
В отличие от известных формул И. Н. Воз-
несенского (Л. 16] соотношение (3-51) спра-
ведливо лишь при отсутствии саморегулиро-
вания и взаи-морегулирования (S\fe = 0). При
учете только саморегулирования i(S\fe=0, при
i^k), соотношение это лишь видоизменяется,
поскольку здесь по-прежнему т)г = Хг-. После
подстановки (3-55) и (3-53) в (3-52) получа-
ем в этом случае:
~4~ “4“ • • • “4“ = (1 S ц^) Т]1,
^гхНх “И “4“ • • • “4" == (1 228г) ^2»
“4“ ”4“ • • • "4“ — (1 5 тт$) *Лт*
(3-52")
Разделив левые части уравнений на скобки
правых, получим соотношение (3-51) в не-
сколько измененном виде.
При учете и взаиморегулировании (S'ife=/=0,
при г#=£), соотношение (3-51) разрушается,
поскольку величины т] не представляют в этом
случае однозначно внешние силы Q (Tb#=Qi)-
Все эти положения являются простейшими
следствиями общих положений эластомеха-
ники.
В независимом регулировании, и только
в нем, при отсутствии взаиморегулирования
перемещения регуляторов однозначно пред-
ставляют внешние обобщенные силы и сами
являются, следовательно, независимыми обоб-
щенными силами односторонней упругой си-
стемы. По отношению к ним вступает поэтому
в силу соотношение (3-51). Здесь обратны
матрицы перемещений регуляторов и серво-
моторов. В зависимом регулировании и в не-
зависимом — при наличии взаиморегулирова-
ния независимыми обобщенными силами серт
117
ъосистемы — односторонней упругой системы
являются только внешние силы ее, перемеще-
ния же регуляторов взаимозависимы. Здесь
обратны только матрицы этих внешних сил
Q(1) и координат ц. Координата же каждого
из регуляторов определяется всеми нагрузка-
ми. Координаты эти взаимозависимы и не яв-
ляются независимыми обобщенными силами.
Для них не имеет места поэтому соотношение
(3-51). В зависимом регулировании общее со-
отношение (1-15) связывает перемещения ц
с силами Q(1), в зависимом — с представляю-
щими здесь эти силы перемещениями ц. Этим
определяются в последнем случае передаточ-
ные числа независимого регулирования.
Все эти выводы односторонней эластоме-
ханики распространяются на локальную, ча-
стичную и полную независимости. Вся теория
независимого регулирования в наиболее про-
стом и общем виде вытекает из односторонней
эластомеханики.
3-3-3. Локальные, частичные
и полная независимости
Рассмотренная выше полная независимость
представляет собой общее свойство системы,
образованное, однако, упорядоченной сово-
купностью независимых локальных под-
свойств — локальных независимостей. Таким
же делимым, распадающимся на независимые
локальные подсвойства, свойством является
общее свойство статической определимости.
Напротив, такие общие свойства, как устой-
чивость, апериодичность и т. д., неделимы.
Полная независимость достигается наиболь-
шим, полным числом локальных независимо-
стей — каждой из координат от всех осталь-
ных. Используя различные упорядоченные
части этого полного числа, можно получить
различные частичные независимости.
А. Локальная независимость
Назовем соответственно статической, гар-
монической и общей локальными независимо-
стями системы в канале k—i равенства:
<ХгА = О» ргл^О, ylft = 0. Они означают соответ-
ственно отсутствие в канале k—i статическо-
го, гармонического и общего влияния нагруз-
ки Qft на i-й элемент. Рассмотрим условия
локальной статической независимости. К ним
приводятся преобразованиями Фурье и Лап-
ласа и условия гармонической и общей неза-
висимостей.
Структурные условия определяются тео-
ремой 3-1V: локальная статическая незави-
симость aik^O в канале k—i может быть до-
стигнута наложением одной лишь перекрест-
ной статической связи регулирования, идущей
от k-го регулятора к i-му сервомотору.
Для доказательства теоремы запишем
уравнения (3-52) в следующем виде:
rei'Pl=Q;,,+Q‘2,=Qi;
7’a2,?2=Q(<2)+Q<22)=Q2; (3-56)
Здесь внешние составляющие Q(1), Q(1),...,
/ ] \ 12
обобщенных сил равны, соответственно,
Л2, ..., внутренние же составляющие —
О(2) О(2) О(2) пяпикг
Ч, , ч2 , • • •» Ч равны.
Q1 >— + 3'12^2 + • • • +
”F 4“ *^12^2 ”F • ’ ’ “F *^imlxm)j
Q(22)= + S'22<P2 + • • • + ^2Л+ (3-57)
4“ ^21^1 “F ~F • • • “F 32m^m)]
— (4S'nu<P1-|-‘S'rn2?2_|“ • • • -hS'ww?w-|-
“F •SmiP'i ~F “F • • • ~F
Условием локальной независимости i-й ко-
ординаты объекта от Л-й его координаты яв-
ляется равенство нулю коэффициента влияния
канала k—i односторонней упругой системы:
<^=# = 0. (3-58)
Выражение это может быть представлено в
виде:
п ____ dQi __________________q /П CQ\
ik~dQk ~~dQt d4)t dQk ~l- (3’5y>
В специальном случае изодромного регули-
рования B = = = 0 и уравнение (3-59)
(Kci
тождественно удовлетворяется при любых зна-
чениях передаточных чисел: изодромность
регулирования i-й координаты является до-
статочным условием статической независи-
мости ее от всех остальных координат.
В общем случае — неизодромного регулирова-
ния равенство (3-59) может иметь место только
при f^-=0 всегда отлично от нуляУ
or.k \oQk J /
Поскольку составляющая Q',- постоянна, по-
<<» п
следнее требование принимает вид =0.
Опуская пока саморегулирование в (3-57), можно
118
придать этому требованию следующую раз-
вернутую форму:
JQi_dQj idQi dp.2 . . dQi ______q
dr^k ’ dp.2 d^k ’ ‘ ’ * * д^т д-Цк
(3-60)
Здесь суть передаточные числа связей не-
зависимого регулирования. Все
одного передаточного числа -
они, кроме
новой пере-
крестной связи, реализующей, по теореме,
условие aife = 0, должны быть известны как
передаточные числа старых связей. Через них
может быть определено из (3-60) передаточное
число новой связи. Теорема доказана. Ею
указывается способ осуществления любой ло-
кальной статической независимости.
Как явствует из доказательства, локаль-
ную независимость можно получить наложе-
нием и других перекрестных связей. Указы-
ваемая теоремой схема осуществления локаль-
ной независимости наиболее проста.
Односторонняя локальная независимость
возможна лишь в односторонней механике.
В классической механике, по теореме взаимно-
сти, возможна лишь двусторонняя локальная
статическая независимость (а^=’а^=0). Од-
нако представить этот новый феномен одно-
сторонней механики в понятиях классиче-
ской— значило понять общую его природу.
Упорядоченными сочетаниями локальных
независимостей можно получить различные
градации общей независимости. Так, каждая
из треугольных матриц динамических локаль-
ных автономностей yik=0:
ТифО; Т12 = 0; у18=0; = 0
Т21ф0; у22ф0; Т22=0; Y24=e0
Yai^O; г32Ф0; т33^0; y31=o
Т«Ф0; Т42ф0; Т43ф0; у44ф0
ГиФО; Т12ф0; у18ф0; Т14ф0
?21==0; у22ф0; Т23ф0; Т24ф0
Т31 = 0; у32=0; у33фО; ?34ф0
Т42=о> у4з=0;
приводит к односторонне независимому регули-
рованию, так же распадающемуся в смысле
общих свойств системы на составляющие си-
стемы, как и двусторонне независимое регу-
лирование, общая теория которого дана была
И. Н. Вознесенским [Л. 13,16]. В первой (3-61)
из этих систем равны нулю передаточные
функции всех прямых (i>k) каналов, во вто-
рой (3-62)—всех обратных (i<k) каналов.
Для двусторонне независимого регулирования
матрица локальных независимостей принима-
ет вид диагональной матрицы:
Тпф0; у12 = 0; у13 = 0; Т14 = 0
Y2i^=0, Y22 0» Y23 — Y24 ==Р
Т31 = 0; Y32 = 0; Y33^0; YJ4=0
y«=0; Т42=0; Ьз=0; y44^o
Общим свойством системы является также
независимость всех координат системы от одной
из них:
ТпФ°; Yi2^°; ТиФО; т14фо
т22=°; y22^°; ТазФО;
Тз1=0; y32^°; ТззФО; Тз4Ф0
Y« = 0; Y42^0; Y43^0; Y44^0
или одной из них от всех остальных координат
системы:
Ти^О; Yt2=0; Ъз=0; ъ4=о
у21Ф0;
Ys! Ф °;
Y4i^0;
y22^°;
Y32^0;
y«2 °;
Y23 0;
Yss^O;
Y43 Ф 0;
Y24 Ф 0
Y34 °
Y44 Ф 0
(3-65)
Аналогично, как различные упорядоченные
сочетания локальных независимостей, могут
быть построены и другие градации независи-
мости — другие способы частично независимого
регулирования.
Неудобство термина автономность в общей теории
связанного регулирования явствует из невозможности
выразить им локальные отношения — выражение: «неза-
висимость одной координаты от другой» не может быть
заменено выражением: «автономность одной координаты
от другой». Термин этот, щрочно занятый к тому же
другим понятием аналитической механики (§ 1-1), не
мог не быть здесь заменен термином независимость.
Односторонне независимое регулирование предложе-
но было нами в 1946 г. в [Л. 35, 46, 64, 81], где введе-
ны были само понятие и термин — односторонняя неза-
висимость. Затем оно повторно рассматривалось
А. М. Поповским [Л. 64], Б. В. Ильиным (Л. 77] и
В. Г. Морозовским (Л. 403]. Лежащее в основе одно-
сторонней независимости понятие’ о локальной незави-
симости и доказательство возможности ее были введе-
ны нами тогда же [Л., 35, 46, 64, 81] и затем рассма^
тривалось В. С. Кулебакиным (Л. 47] под наименова-
нием селективной инвариантности.
В односторонне независимом регулирова-
нии, при половинном числе связей, достигает-
ся тот же результат — распад системы на со-
ставляющие, что и в двусторонне независимом.
В двусторонне независимом регулировании и
координат ценой наложения п(п—1) пере-
крестных связей регулирования достигается
автономность каждой регулируемой координа-
119
ты по отношению ко всем
остальным, т. е. распад
общей системы на состав-
ляющие. Тот же, однако,
результат — распад си-
стемы на составляю-
щие— может быть до-
стигнут в односторонне
независимом регулирова-
нии при половинном чис-
ле связей, перестроением
общей системы в откры-
тую цепь составляющих
систем [Л. 35, 46, 64, 81].
Рис. 3-5. Несвязанное регулирование.
Назовем открытой
цепью систем такую об-
щую систему, в которой составляющие систе-
мы связаны либо одними прямыми перекрест-
ными связями, либо одними обратными. Это
означает, что в этой цепи существует такая
нумерация составляющих систем, при которой
все связи между системами идут либо только
от систем с меньшим индексом к системам
с большим индексом (прямые связи), либо
только в обратном направлении (обратные
связи). Характеристические матрицы подоб-
ных систем представляют собой нижнюю и
верхнюю квазитреугольные матрицы. Характе-
ристический определитель открытой цепи си-
стем представляет собой произведение опреде-
лителей составляющих систем. Система распа-
дается на составляющие системы, динамиче-
ские свойства каждой из которых (корни ха-
рактеристического уравнения) зависят только
от внутренних ее связей и не зависят от
свойств остальных систем и от оставшихся
только прямых или только обратных перекре-
стных связей между системами.
В односторонне независимом регулирова-
нии ценой половинного числа наложенных свя-
зей достигается тот же результат — распад об-
щей системы на составляющие, что и в дву-
сторонне независимом регулировании. Остает-
ся односторонняя.связь между системами, т. е.
каждая из составляющих систем, кроме пер-
вой (назовем ее головной), испытывает воз-
мущения со стороны всех предыдущих систем.
Эти возмущения будут затухать в каждой из
составляющих систем с частотами и декремен-
тами, зависящими только от свойств этой си-
стемы. Возмущения в отдельных составляю-
щих системах представляют для всех последу-
ющих систем открытой цепи лишь внешние на-
грузки. Головная система не испытываем и
этих внешних возмущений и находится в тех
А» Аз»
То1Р^гц О 8,у О %!
чАЪр*1) о о/ О 0
lO -5г/; ТогР~$гг О о
40 о '^г/М О О
о О ° §32 Tfr3pS33
О О О О Ьз&зР*1}
же условиях, что и в двусторонне независимом
регулировании.
Б. Полная независимость
Рассмотрим детальнее эти градации об-
щей независимости. Начнем с полной незави-
симости, достигаемой в двусторонне независи-
мом регулировании. На рис. 3-5,а оно дано для
наглядности в простейших структурной и ги-
дравлической схемах [Л. 40, 72]. На рис. 3-в
дано для сравнения несвязанное регулиро-
вание.
Структурные условия двусторонней незави-
симости, представляющей при п регулируемых
параметрах совокупность п(п—1) локальных
независимостей, даются известной теоремой,,
требующей для этого случая такого же числа
перекрестных связей регулирования. Связи эти
даны в конструктивной и структурной схемах
на рис. 3-5,а.
Метрические условия двусторонней неза-
висимости вытекают из соотношения (3-51):
у __ -4ц . у ___ -^12
та* 12 — п^н’
'“ггаг г=-=ет- <3‘66>
где А — соответствующие миноры.
Передаточные отношения (3-66), получен-
ные из уравнений (3-52) и (3-54), подчинены
двум требованиям: выполнению условий ста-
тической независимости и получению всех но-
минальных нагрузок X. Эти различные условия
могут быть расчленены. Составим условия не-
зависимости всех остальных п—1 координат
120
TOfp-Su
hifliPty ~Чг О ~Чз О
0 3f2 S S/5
О —S2f
^21 0 1гАтгР+[ О 123
О
& V §32
о ~1ц2 О
О О
L3l
^О!Р~^П О О S/J
О О ~4з °
0 ТогР-Згг 0 0
0 о 0 0
О * О §32 тозР~^зз
О 0 О О ьззРзР*^
^озР-§зз
^(ТзРЧ)
при:
f УЪъ
Jrs'^
feS=/.2.3)
л. ЗЛ О
при: ЗЛ
i ^3i *зз S.z Ль
Т^р-^ц О 3t2 О Sfj t/2 Р ~4з 0
0 -S2; тогр-$2< О 0 —
0 0 ЪгРгР*1) О 0 при'
О 0 О S32 ТозР~§зз ' ^24 S.4
0 О 0 О 433&ЗР*О *22 f -^3! 113—jT *33
0 0 =л, &2 $л =0
&2 ЗЛ
§Л Д3
1 Ьр
т0,р-^„ infaP*') 0 Sf2 lf2 ° 0 ~4з §13 О Д/ 0
° ~§2/ 0 0 ^огР~^22 IgzfTzP*1) О О О l23 при: ^2
О О 0 0 TqiP~§H ь&рч) 0 §.32 О 0 0 §t2 О О 'озр-$зз Ьзз&зРЧ) о 8/3 0 0 1 -^г1 #22 : ^31 Jf3-~r~ *33 i ~^зг 1г!Г~^з S.Z Д/ ^3 §л
О ~S2/ с2, О т02^22 ^гг^гР^ 0 О О О при: ^2
0 О L31 ° 1отР~$п О §32 ^32 О О S12 -42 0 Т03Р~$зз ЬзОзР*?) О S/з Р 0 4 -А12 J21 п *11 j _ ; ^Агз J32- *22 О Д/ *3 S.I
0~§2i l21 О Т02Р~§2Ъ ^ггОгР^} 0 О р О при: Su
О 0 L31 0 О S32 ~^32 О Тозр-^33» <<зз(тзР^) l/^Z д Рр : _ Д!3 *11 0 О ^3
— ^1^2 ^3^^
Рис. 3-6. Связанное регулирование.
а — полностью связанное регулирование; б, в — частично связанное регулирование; г — одно-
сторонне независимое регулирование с головной первой системой; д — односторонне незави-
симое регулирование с головной последней системой; е — отделение первой системы
от остальных систем.
12В
от координат Условия эти могут быть пред-
ставлены п—1 уравнениями (3-60):
dQi OQi дщ । dQi dp-2 । 1
дц» д&1 дт\» "т“ d-fy * * * *
I dQi ^p»n _q,
‘ФГ’^7 ’
dQ(v-i) dQ(t>-i) дРч I dQ(t,-i) di*2 i
dyv др-i d/lV * dp>2 dfy "f
dp-n
dp-n
d<?M-0 _ dQ(»+i) I dQ(v+i) dp2 ।
<bh> dp*i diqv- Ф2 dfy ‘
| dQ(p4-i) ^P*n j____Q.
‘ dp-n dr[v ’
dQn _ dQn дрч । dQn dp-2
dfy др-i дт^ * dp»2 drv
I dQn dp»n _____ q.
T^n ’
(v — 1, 2,..., n).
Система n — 1 уравнений (3-67) записывает
только условия независимости всех регулиру-
емых координат по отношению к регулируемой
координате <pv, отделяя эти условия от усло-
вий независимости автономности по отношению
к остальным регулируемым координатам.
Имея в виду, что ^,...,^7 суть пере-
даточные числа /1Г, /2Г,..., inVi а величины
—параметры Suv связей объекта, деля
каждое из уравнений (3-67) на ivv и обозначив
отношения передаточных чисел значком juv
^vv
— относительные передаточные числа),
можно записать систему (3-67) следующим об-
разом:
^и/1® 4“ ^12/2® 4“ • • • Н“ $i(v-i)i(v-i)v “Ь
I ^1V “j“ Sl(v+l)j(v+i)v "4“ • • • “Н ^ininv ==
^2111V “f” ^22/2V ”j“ * ’ •
*^2V “Н ^2(v + l)j(v+l)v ~Н • ‘ • “4~ $2ninv — О*
Из этих п—1 неоднородных линейных урав-
нений однозначно определяются п—1 относи-
тельных передаточных чисел jUv, обеспечиваю-
щих независимость всех регулируемых коор-
динат от о-й координаты. Таким же образом
находятся передаточные числа, обеспечиваю-
щие независимость всех регулируемых коор-
динат от каждой из остальных координат. За-
дача и здесь распадается на п независимых
задач. Условия статической независимости
определяются, таким образом, не п2 переда-
точными числами iUv, а (п—1)п относительны-
ми передаточными числами jUv по числу пере-
крестных связей регулирования.
Для определения передаточных чисел jUv
нет нужды, разумеется, производить выкладки
(3-67) и (3-68), приведенные для доказатель-
ства того, что условия независимости опреде-
ляются только относительными передаточны-
ми числами. Матрица /ift получается из ма-
трицы:
|| iuv || —
41 4г 4з • • •
41 4г 4з•••
41 4г 4з•••
(3-69)
простым делением элементов каждого столбца
на диагональный элемент:
11 iuv II—
4з
*21 | *23
*11 *33
*31 *32 |
*11 *22
1 /12 /13 ’ * ’
/21 1 /2З * * *
/з1 /з2 1 ’
| ^21 А1
А22 -<488
-<412 1 -^32
л; •••
4з J
41 -^22
(3-70)
В. Частичная независимость
Осуществим сейчас для рассматриваемого
объекта—теплофикационной турбины локальную
независимость ^-=^- = 0. Для этого допол-
ним несвязанное регулирование одной перекре-
стной СВЯЗЬЮ ОТ Т)3 К JAj (рис. 3-5,6).
Придадим явный вид осуществляемому нами
требованию ^^- = 0,
сила Qi зависит от
Ь и |i3:
учтя, что обобщенная
всех трех заслонок —
dQi dp>i [ dQi dp-2iOQi dp.8_Q
dp-i dri3 ‘ dp-2 d^2 ‘ др.3 дъ
122
3десЬ дн —^12’ ^13 Па’
раметры неперекрестной и перекрестных связей
объекта;
— i33—известное уже передаточное число
старой неперекрестной связи регулирования;
—искомое передаточное число но-
вой перекрестной связи;
= *23—равное нулю передаточное число
отсутствующей связи от т]3 к р.2.
Осуществление локальной независимости
определяется относительным передаточным
числом /13:
b‘=fe=-t <3-72)
Введя матрицу
S*3 (3-73)
53i S33
рассматриваемой локальной независимости,
можно представить это выражение в общем
виде (3-70):
(3-74)
Осуществим затем еще одну локальную не-
дФ1 дОл л тт
зависимость: -^=-^- = 0. Для этого доста-
VY2 </^2
точно провести еще одну перекрестную связь
от второго регулятора к первому сервомотору
4рис. 3-5,в). Условие ^- = 0 примет вид:
(/^2
dQi _____ । dQt ^р*2 । dQi др»з_____________________Q /q 7
<^2 Ф*1 ^2 * d&s df\2 ‘ '
Учтя, что третий член равен нулю (поскольку
отсутствует связь от т]2 к р3), получаем для /12
выражение, аналогичное (3-72):
= (3-76)
или, по отношению к матрице
Sii S12
S21 *$22
(3-77)
рассматриваемой локальной независимости,
• _____
/12
Л22
(3-78)
Подобным же способом может быть осу-
ществлена любая иная локальная независи-
мость. Выражение (3-70) для относительных
передаточных чисел / остается неизменным,
не зависящим от числа осуществленных ло-
кальных независимостей, при все усложняю-
щейся с увеличением этого числа матрице
(3-73), переходящей для полностью независи-
мого регулирования в матрицу уравнений
(3-68).
Две осуществленные выше локальные неза-
висимости и привели к полной неза-
<ЭД2 дФз F
висимости первой координаты по отношению к
остальным двум, при этом каждая из пере-
крестных связей регулирования /12тд2, /13т}3 ней-
трализовала одну из перекрестных связей объ-
екта *$12^2» *^13^*3 *
На рис. 3-5 структурные схемы отождеств-
лены с характеристическими матрицами, по-
скольку связями первых изображаются эле-
менты вторых. Это позволяет рассматривать
преобразования систем в матричной форме.
В частности, переход от несвязанного регули-
рования к связанному независимому пред-
ставляет собой преобразование матрицы кква-
зидиагональной форме (рис. 3-5,а). Следует
иметь в виду, что параметры С, i в преобразо-
ванной матрице не совпадают по величине
с соответствующими параметрами в исходной
матрице.
Так осуществляется для двухотборной тур-
бины независимость наиболее ответственного
и притом работающего в параллель регулиро-
вания координаты <о (угловая скорость рото-
ра) от координат р\ и р2 (давления в отборах)
с помощью всего лишь двух перекрестных свя-
зей. Тем же способом может быть отщепле-
на от общей системы каждая из составляю-
щих систем. Это лишь одна из многих возмож-
ностей, представляемых сочетанием локаль-
ных независимостей. Наиболее важной из них
является односторонне независимое регулиро-
вание.
Общая система может быть перестроена
в открытую цепь односторонне независимого
регулирования так, чтобы составляющие си-
стемы следовали в ней в любом заданном по-
рядке. Для этого достаточно нейтрализовать
все обратные по отношению к этому заданно-
му порядку следования связи объекта, т. е.
осуществить развязку
= о («>») (3-79)
(напомним, что в двусторонне независимом
регулировании u=£v).
123
Поясним подробнее это на примере. Пусть
дана система несвязанного регулирования
двухотборной турбины и требуется перестро-
ить ее в открытую цепь систем в следующем
порядке: головной — первой в ряду — поме-
стить регулирование числа оборотов, второй—
регулирование высокого давления, третьей —
регулирование низкого давления (рис. г).Для
этого следует нейтрализовать все обратные
' д<& dQ\ dQ2
связи объекта, т. е. связи , ч—,
(77)2 <”1з
идущие навстречу этому произвольно выбран-
ному порядку, т. е. провести перекрестные связи
дм.1 др.2
регулирования связать дополни-
тельно первый сервомотор с регулятором дав-
ления второго отбора. На рис. д дано другое
перестроение в открытую цепь односторонне
независимого регулирования, в котором го-
ловной системой является регулирование вто-
рого отбора, а регулирование числа оборотов—
последней. В первом случае наложением всех
обратных перекрестных связей регулирования
нейтрализуются все обратные связи объекта,
во втором случае наложением всех прямых
связей регулирования нейтрализуются все об-
ратные связи объекта. Оба способа односто-
ронне независимого регулирования могут быть
рассматриваемы как преобразование характе-
ристической матрицы соответственно к ниж-
ней или верхней квазитреугольной форме.
Для двухотборной турбины имеется, оче-
видно, шесть возможных порядков расположе-
ния в открытую цепь. Из них практически ин-
тересен порядок на рис. г, ставящий наиболее
ответственное регулирование числа оборотов,
по которому к тому же ведется работа в па-
раллель, в голову цепи, т. е. в полностью не-
зависимое положение.
Каждую из составляющих систем можно от-
щепить от общей системы, не только нейтра-
лизуя связи, идущие к отщепляемой системе
от всех остальных составляющих систем
(рис. в), но и нейтрализуя связи, идущие от
отщепляемой системы по всем остальным со-
ставляющим системам (рис. е). Первый спо-
соб ставит в более выгодное положение от-
щепляемую систему, второй—остающуюся
часть общей системы. Можно ценой четырех
перекрестных связей нейтрализовать все свя-
зи, идущие к отщепляемой системе и от нее,
и получить таким способом двустороннюю не-
зависимость отщепляемой и остающейся си-
стем. Сочетанием локальных независимостей
можно осуществить и ряд иных систем частич-
ной независимости.
Следует заметить, что число перекрестйых
связей регулирования должно быть равно не
числу нейтрализуемых внутренних связей объек-
та, а числу осуществляемых локальных неза-
висимостей. Так, для автономного регулирова-
ния двухотборной турбины необходимо затра-
тить полное число п (п—1) перекрестных свя-
зей регулирования, хотя число внутренних
связей машины неполно (отсутствуют связи
р.‘2)-*фз и |1(з2) — ф2.).
Все эти условия относятся только к стати-
ческой независимости, частичной или полной.
Для того чтобы каждая локальная независи-
мость соблюдалась не только в статике,
но и в динамике, необходимо, помимо соблю-
дения определенного выше передаточного числа
связи регулирования juv, соблюдение равенства
времен zz-ro и у-го сервомоторов. Для двусто-
ронне независимого регулирования требование
это приводит к указанному И. Н. Вознесен-
ским требованию равенства времен всех серво-
моторов.
Возможностыприменения упрощенных систем'
связанного регулирования определяется преж-
де всего характером нагрузки — изолированной
или параллельной работой регулируемых ма-
шин. Первой задачей связанного регулирова-
ния является автономность тех > регулируемых
координат, по которым ведется работа :в па-
раллель. Регулирование объекта с нескольки-
ми изодромно регулируемыми координатами^
работающего изолированно (не в параллель)г
всегда, как при связанном, так и при несвязан-
ном регулировании, статически Независимо-
Действительно, значения регулируемых коорди-
нат в статике неизменны при любом сочетании
внешних нагрузок. Вывод этот важен и для
неизодромных систем регулирования с нор-
мальными, т. е. достаточно малыми, величина-
ми неравномерности. В такой неизодромной
системе каждая из регулируемых координат
будет изменяться в статике как от своей, так и
от не своих нагрузок, притом тем меньше, чем
меньше ее неравномерность. Неравномерность
каждой из регулируемых координат будет при
этом равна сумме неравномерностей, происхо-
дящих от своей и каждой из не своих нагру-
зок, т. е. достаточно мала. Вмешательство ма-
шиниста в статике здесь так же излишне, как
и в первом случае изодромного регулирова-
ния, и в этом смысле система не теряет права
называться автоматической.
Иначе обстоит дело в случае работы машин
в параллель по какой-нибудь из регулируемых
координат фи. Регулятор этой координаты свя-
зан значением ее в сети и не способен исправ-
лять наносимые ей возмущения. Изменение
нагрузки Qv на какую-нибудь другую регули-
124
руемую координату той же машины вызовет
в этом случае перераспределение нагрузки Qu
между работающими в параллель машинами.
Это потребует непрерывного вмешательства со
щита для восстановления исходного положе-
ния, что лишает систему права называться
автоматической. Координата, по которой ве-
дется работа в параллель, должна быть по-
этому во всех возможных схемах регулирова-
ния статически независима по отношению
к остальным. Статическая независимость при-
обретает, таким образом, особое значение для
параллельной работы. Важно при этом также
соблюдение и динамической независимости,
исключающее перераспределение нагрузки Qu
в динамике. Для машин, в которых по всем
регулируемым координатам ведется работа
в параллель, необходимо поэтому двусторон-
не независимое регулирование. Для машин, ра-
ботающих в параллель по одной лишь коорди-
нате, достаточно перестроить систему в откры-
тую цепь, поместив в ней головной системой
регулирование этой координаты, или отсечь
регулирование этой координаты от общей си-
стемы. В машинах, не работающих в парал-
лель, достаточно было бы прибегнуть к одно-
сторонне независимому регулированию или же
выбором параметров раздвинуть частоты от-
дельных систем, не прибегая вообще к связан-
ному регулированию.
Классификация и синтез механик по знаку (реактив-
ности подобны римановой классификации и синтезу
геометрий по знаку кривизны. Для аналитических про-
странств общего вида длина элемента дуги «выражается
формулой:
ds =
=\/~ a dx2-\-b d y2-\-cdz2-{-fdx d y-\-g d у dz-\-h dxdz,
(3-80)
где коэффициенты квадратичной формы (первой основ-
ной формы Гаусса) зависят от ее переменных. Условием
постоянства кривизны и, следовательно, возможности
движения в этих пространствах является -возможность
привести это выражение к виду
dx* 4- dy2 + dz2 (3.81)
i+4r(x2+*'2+z2)9
где постоянная а-кривизна пространства: положитель-
ная, равная нулю или отрицательная. В первом случае
имеет место классическая эвклидова геометрия, во вто-
ром и третьем—неклассические геометрии Лобачевского
и Римана (в узком смысле).
Для внутренних подсистем динамических систем
общего вида локальная реактивность определяется пере-
„ , v &ik
даточной функцией: . Условием постоянства
знака реактивности во всех каналах системы является
здесь совпадение знаков числителя и знаменателя, так-
же зависящих от коэффициентов квадратичных форм
энергетических функций для классической механики и от
коэффициентов уравнения /(1-1) для 'механик общего ви-
да. Подобно трем геометриям постоянной кривизны, воз-
можны только три механики «постоянной локальной
реактивности: положительной, равной нулю и отрица-
тельной — с передаточными функциями угь, тождествен-
но (относительно дифференциального оператора р) по-
ложительными, равными нулю и отрицательными для
Чзсех Z, k, всех каналов системы. IB первом случае имеют
место ну ль ре активные механики (в частности — класси-
ческая), во втором и третьем — неклассические, плюс-
реакт ивная и минусреактивная, механики.
Так же как -между геометриями постоянной кривиз-
ны располагаются геометрии переменной кривизны, по-
рождаемые общей римановой геометрией, между меха-
никами постоянной реактивности располагаются механи-
ки переменной реактивности, порождаемые общей одно-
сторонней механикой. Так же как понятием кривизны
указывается предельное положение классической геомет-
рии в общем семействе геометрий, понятием реактив-
ности указывается предельное положение классической
механики в общем семействе механик: общего вида
механики переходят в классическую — при локальной
реактивности внутренних подсистем, стремящейся к ну-
лю, так же как общего вида геометрии переходят
в классическую эвклидову—при кривизне пространства,
стремящейся к нулю. Условие постоянной реактивности
во всех каналах внутренних подсистем занимает в ме-
ханике то же место, которое-в геометрии занимает усло-
вие постоянной кривизны пространства. В обоих слу-
чаях оно является условием неизменности локальных
свойств во всех точках рассматриваемой геометрической
или механической системы и однородности этой системы.
Простота классической геометрии и классической меха-
ники объясняется именно этой однородностью. В обоих
случаях для классификации избрана локальная харак-
теристика: локальная кривизна—*в геометрии и локаль-
ная реактивность — в «механике. В обоих случаях эта
локальная характеристика (дополненная в геометрии
второй локальной характеристикой — второй основной
формой Гаусса) полностью описывает систему—геомет-
рию и механику, не только локальные, но и общие их
свойства. Можно было бы в обоих случаях избрать для
классификации и какие-либо из общих характеристик
системы. Для геометрий ими явились бы асимптотиче-
ские линии, для механик — знак ((включая сюда и ра-
венство нулю) характеристического определителя Д,
указывающий знак общей реактивности системы. Харак-
теристики, эти, однако, неполны. Определяя общие свой-
ства систем (форму поверхности, общую реактивность
динамической системы), они не определяют локальных
их свойств (локальной кривизны поверхности, локаль-
ной реактивности динамической системы).
Аналогия эта неслучайна. «В обоих случаях речь идет
о связи локальных и общих свойств системы с локаль-
ной (тензоры — в пространственных структурах, переда-
точные функции — в динамических структурах) и «общей
(поле тензоров, поле переда точных функций) структур-
ной системы.
Блестящий геометр и биограф неэвклидовых геомет-
рий В. Ф. Каган, излагая полувековую историю игнори-
рования, злобных опровержений, единодушных особых и
неособых «несогласий с ними, замечает: «Откуда это
безграничное море клокочущей злобы, поднявшееся
вокруг этих отвлеченных идей, казалось бы, лежащих
по ту сторону добра и зла, за пределами людских стра-
стей и живых интересов?». Как ни 'мало соразмерен
масштаб научных событий в синтезе всех возможных
геометрий, вызванном отказом 5-му постулату классиче-
ской механики, и в синтезе всех возможных механик,
вызванном отказом 3-му постулату «классической механи-
ки, источник одинаково активного недовольства в обоих
случаях один и тот же — диктуемое новой концепцией
перестроение предмета.
ЧАСТЬ ВТОРАЯ
СТРУКТУРНЫЙ СИНТЕЗ
ГЛАВА ЧЕТВЕРТАЯ
СТРУКТУРНЫЕ СВОЙСТВА
4-1. СТРУКТУРНЫЕ, МЕТРИЧЕСКИЕ
И СМЕШАННЫЕ СВОЙСТВА
4-1-1. Структурная и безусловная устойчивость
Не только практика, но и теория регули-
рования оперировали до сравнительно недав-
него времени единственной — одноцикличе-
ской системой. С такими дополнениями, как
гибкая связь и импульс по производной, систе-
ма эта удовлетворяла всем практическим и
теоретическим потребностям времени. Класси-
ческая линейная теория этих систем в работах
Вышнеградского, Стодола, Толле доведена бы-
ла до ясности, с практической точки зрения не
оставлявшей желать ничего лучшего. Завер-
шающими явились здесь работы И. Н. Возне-
сенского, принадлежащие этому периоду как
по классической ясности изложения, так и по
намеренно строго ограниченному кругу идей
классической линейной теории, лишь распро-
страняемых на новые области (связанное ре-
гулирование). В этих работах наиболее не-
примиримо утверждалась принципиальная за-
конченность основ теории регулирования, огра-
ниченное число принципов регулирования —
принцип Уатта, принцип Понселе, принцип
Сименса. Они, однако, непосредственно при-
мыкают к периоду коренной ломки именно
основ теории и нового широкого продвижения
по всему, недавно еще застывшему фронту
предмета. Структурное исследование, обнару-
жив алгоритм синтеза всех возможных систем
регулирования и указав в этом множестве
скромное место систем классической теории,
вновь обнаружило тщетность в науке всякого
рода ограничительных утверждений. Принци-
пов регулирования оказалось столько же,
сколько различных устойчивых структур. Вы-
яснилось неожиданно, что в исчерпанной, ка-
залось, задаче устойчивости линейных систем
не затронутыми оставались некоторые поло-
жения, относящиеся к самым основаниям за-
дачи.
126
Каков, однако, смысл выражения — воз-
можные системы регулирования, какие из ди-
намических систем являются в потенции систе-
мами регулирования? Первым требованием,
которому должна удовлетворять система регу-
лирования, является устойчивость хотя бы для
некоторых значений параметров, т. е. сущест-
вование области устойчивости в пространстве
параметров системы. На первый взгляд, этому
категорическому требованию может удовле-
творить любая динамическая система—доста-
точно, например, в одноциклической системе
прямого или непрямого регулирования взять
статический параметр системы — неравномер-
ность регулирования и динамический пара-
метр объекта регулирования — время разбега
его достаточно большими, а динамические па-
раметры всех остальных элементов — их вре-
мена разбега — достаточно малыми, чтобы си-
стема стала устойчивой. Если, однако, -в такой
системе регулятор, обладающий массами, не
снабдить катарактом (адиссипативный регу-
лятор), то система будет неустойчивой при
всех метрических значениях остающихся пара-
метров. У системы отсутствует область устой-
чивости в пространстве параметров. Здесь на-
лицо качественный, структурный порок, не мо-
гущий быть исправленным никакими количе-
ственными, метрическими соотношениями. Та-
кие системы мы назвали структурно неустой-
чивыми в отличие от структурно устойчивых
систем, обладающих такой областью [Л. 25,
30].
Теперь легко ответить на поставленный вна-
чале вопрос — возможными системами регули-
рования являются только структурно устойчи-
вые системы, синтез систем автоматики явля-
ется прежде всего синтезом структурно устой-
чивых систем. Этим выясняется место задачи
структурной устойчивости в автоматике и об-
щей задаче устойчивости—ею проводится пер-
вый 'круг, отсеивающий системы, не подлежа-
щие дальнейшему метрическому исследова-
нию, Задача структурной устойчивости являет-
ся таким образом, вводной главой автоматики.
Выясняя условия возникновения самого фено-
мена устойчивости — определяющего свойства
систем автоматики, она обнаруживает общую
концепцию предмета.
Структурная устойчивость представляет со-
бой структурное подсвойство общего свойства
устойчивости. Вторым, также структурным, хо-
тя и менее значимым подсвойством того же
свойства является безусловная устойчивость—
устойчивость при любых значениях парамет-
ров. Если структурная устойчивость означала
существование области устойчивости в прост-
ранстве параметров, то безусловная устойчи-
вость означает заполнение, покрытие этой об-
ластью всего пространства параметров, т. е.
несуществование области противоположного
свойства—неустойчивости. Структурная устой-
чивость — подсвойство существования, без-
условная устойчивость — подсвойство несуще-
ствования. Оба типа структурных подсвойств
и их антиподы, для устойчивости — струк-
турная неустойчивость и небезусловная устой-
чивость, вместе с метрическими подсвойства-
ми, могут иметь место по отношению к каж-
дому динамическому и статическому, общему
и локальному, свойствам.
4-1-2. Структурная и безусловная
изодромность
Вторым, менее категорическим, но также
определяющим требованием к регулирующим
системам является строгая или приближенная
изодромность — поддержание в статике строго
или приближенно неизменных заданных зна-
чений регулируемой координаты. Локальное
свойство изодромности имеет те же два струк-
турных подсвойства. Задача синтеза изодром-
ных систем также делится на предшествую-
щую задачу — структурного синтеза, синтеза
структурно изодромных и безусловно изодром-
ных систем, и последующую задачу—метриче-
ского синтеза, получения в этих системах за-
данных метрических свойств.
Обе задачи — динамическая и статическая,
устойчивости и изодромности — формируют
теорию регулирования. Обе они получают об-
щее решение в односторонней механике.
4-1-3. Структурные, метрические и смешанные
свойства
Рассмотренные структурные свойства явля-
ются лишь структурными подсвойствами сме-
шанных свойств. Смешанными будем называть
свойства, зависящие как от структуры систе-
мы, так и от метрики ее и имеющие соответ-
ственно структурные и метрические подсвойст-
ва. Структурная и безусловная устойчивость
представляют собой структурные подсвойства
смешанного свойства устойчивости, структур-
ная и безусловная изодромность (изостатич-
ность) — смешанного свойства статичности.
Примером структурных свойств является
статическая определимость, не зависящая от
метрики системы, примером метрических
свойств — метрическая однородность, не зави-
сящая от структуры системы. И структурные
свойства, и структурные подсвойства смешан-
ных свойств являются структурными свойства-
ми. Их следует, однако, различать и вторые
будут для этого именоваться подсвойствами.
То же относится к метрическим свойствахМ и
метрическим подсвойствам смешанных систем.
Каждому смешанному свойству могут быть
логически сопоставлены четыре структурных
подсвойства: 1) позитивное — существование
области положительного свойства; 2) контра-
позитивное — несуществование области поло-
жительного свойства; 3) негативное — сущест-
вование области отрицательного свойства;
4) контранегативное — несуществование обла-
сти отрицательного свойства. По отношению
к исходному свойству устойчивости позитив-
ным подсвойством явится структурная устой-
чивость, т. е. существование области устой-
чивости, контрапозитивным — структурная не-
устойчивость — несуществование области
устойчивости, негативным — небезусловная
устойчивость — существование области не-
устойчивости, контранегативным — безуслов-
ная устойчивость — несуществование области
неустойчивости.
Положительными названы здесь свойства,
получающиеся из отрицательных свойств на-
ложением дополнительных условий. Так,
устойчивость возникает из неустойчивости,
апериодичность из неапериодичности, моно-
тонность из немонотонности — наложением до-
полнительных условий — критериев устойчиво-
сти, апериодичности, монотонности. Первые из
этих пар свойств являются положительными,
вторые отрицательными.
Этой системе терминов присуща асимме-
трия, связаная с применением двух определяю-
щих терминов — структурно и условно. Пол-
ная симметрия могла бы быть достигнута при-
менением одного лишь из этих двух терминов.
Применение только первого из них привело бы
к следующей системе терминов: неструктурная
устойчивость (наличие области устойчивости),
структурная неустойчивость (отсутствие обла-
сти устойчивости), структурная устойчивость
(отсутствие области неустойчивости), неструк-
127-
турная неустойчивость (наличие области не-
устойчивости). Применение второго из них
привело бы к системе терминов: безусловная
устойчивость (отсутствие области неустойчи-
вости); условная устойчивость (наличие обла-
сти неустойчивости); безусловная неустойчи-
вость (отсутствие области устойчивости);
условная неустойчивость (наличие области
устойчивости). Первая система неудобна, по-
скольку все ее подсвойства являются струк-
турными и деление их на структурные и не-
структурные вносит неясность. Вторая система
свободна от этого недостатка. Понятия услов-
ная и безусловная применены здесь в смысле
подчинения или неподчинения метрическим
условиям, т. е. в своем прямом смысле.
Каждому положительному свойству —
устойчивости, апериодичности ц т. д. — может
быть противопоставлено отрицательное свой-
ство— неустойчивость, неапериодичность ит. д.
По признаку знака свойства структурные под-
свойства могут быть разбиты на 2 класса:
подсвойства положительных свойств и под-
ввойства отрицательных свойств. По признаку
существования области этих свойств структур-
ные подсвойства эти можно разделить на два
других класса — подсвойства существованиям
подсвойства несуществования. Первые указы-
вают на существование в пространстве пара-
метров области смешанного свойства, вто-
рые— на несуществование такой области. Оба
класса структурных .подсвойств связаны меж-
ду собой следующим образом. Несуществова-
ние области некоторого свойства означает по-
крытие пространства параметров областью
противоположного свойства. Подсвойства не-
существования могли бы быть поэтому назва-
ны также подсвойствами покрытия.
Структурные подсвойства могут быть пред-
ставлены после этого следующей матрицей
«структурных подсвойств:
области положи-
тельных свойств
области отрица-
тельных свойств
подсвойства подсвойства
существования: несуществования:
позитивные конт рапозитивн ые
негативные копт ранегативные
Заглавия столбцов и строк матрицы должны
здесь читаться как единый термин: например,
позитивные структурные подсвойства пред-
ставляют собой подсвойства существования об-
ласти положительных свойств.
Для исходного свойства устойчивости, на-
пример, матрица эта в асимметричной систе-
ме терминов примет вид:
подсвойства
существования:
подсвойства
несуществовании:
области положитель-
ного свойства—устой-
чивости
области отрицатель-
ного свойства—неус-
тойчивости
структурная устойчивость структурная неустойчивость
небезусловная устойчивость безусловная устойчивость
В симметричной системе терминов, образован-
ной одним лишь определяющим термином
условно, та же матрица приняла бы симме-
тричный вид:
подсвойства подсвойства
существования;
несуществования:
области положитель-
ного свойства—устой-
чивости
области отрицатель-
ного свойства—неус-
тойчивости
условная устойчивость безусловная неустойчивость
условная неустойчивость безусловная устойчивость
Преимущества симметричной системы тер-
минов достаточно очевидны. Асимметричная
система терминов уже вызвала разнобой—ряд
немецких авторов именуют безусловную устой-
чивость структурной устойчивостью [Л. 76].
Возникающая в структурном рассмотрении
сложная система структурных свойств настоя-
тельно требует, на наш взгляд, перехода
к симметричной системе терминов. Часть этих
симметричных терминов занята, однако, ины-
ми понятиями, асимметричные же (структур-
ная устойчивость и неустойчивость), нами же
введенные, прочно установились. Вопрос о пе-
реходе к симметричной системе терминов дол-
жен быть обсужден, очевидно, вместе со всей
терминологией автоматики.
В терминах логики подсвойства существования
представляют собой экзистенциальные выска-
зывания: для некоторых параметров система обла-
дает исходным свойством, подсвойства несуществова-
ния—у ниве.реальные высказывания: для всех
параметров система не обладает исходным свойством.
Пользуясь кванторами £ и Л этих высказываний и
знаком отрицания высказываний—чертой над ними, обо-
значив параметры системы—а, Ь, с и критерий исходно-
го свойства — ki (a, b, с)>0, k2(at b, с)>0, ..km(a,
b, с)>0, можно представить матрицу структурных под-
свойств в виде:
подсвойства подсвойства
существования: несуществования:
области положи-
тельных свойств
области отрица-
тельных свойств
позитивное Е (лг>0) а, Ь, с конт рапозитивное Е (v>0)= А (лг>0) а, Ь, с а, Ь,с
негативное Е (лг>0) а, Ь, с конт ранегативпое Ё" (лг>0)= А (лг>0) а, Ъ, с а, Ь, с
Как явствует из этой матрицы, подсвойства несуще-
ствования 'могут быть записаны в двух тождественных
формах—экзистенциальной и универсальной, как свой-
ства несуществования и свойства покрытия. Свойства
128
Рис. 4-1. Матрица структурных подсвойств.
существования лишены этой двойственности и выража-
ются одной лишь экзистенциальной формой.
Пюдсвойства каждой строки матрицы связаны от-
рицанием квантора существования, подсвойства каждо-
го стол!бца—отрицанием функций—высказываний (кри-
териев свойства), стоящих под знаком кванторов.
Для устойчивости в качестве критериев k могут
быть взяты неравенства Гурвитца: Д1>0, Д2>0, • • •>
Дт>0. Необходимым и достаточным условием без-
условной устойчивости является тождественное их вы-
полнение. Необходимым и достаточным условием струк-
турной устойчивости является наличие области веще-
ственных решений этих неравенств.
В терминах логики -силлогизмов утвержде-
ние позитивного свойства представляет -собой
частно утвердительное суждение, негативно-
го— частно отрицательное суждение, контра-
позитивного — обще отрицательное суждение,
контранегативного — обще утвердительное
суждение. Матрицей структурных подсвойств
представлены, таким образом, все четыре фор-
мы суждений классической логики.
На рис. 4-1 матрица структурных под-
свойств представлена в логических схемах.
Область положительного свойства А представ-
лена здесь заштрихованным кругом, вся ос-
тальная часть пространства параметров (очер-
ченного символически окружностью) представ-
ляет^ собой область отрицательного свойст-
ва А. Подсвойства несуществования сильнее
подсвойств существования, т. е. включают в се-
бя последние: безусловная устойчивость
{сильное свойство) является также и струк-
турной устойчивостью {слабое свойство),
структурная неустойчивость (сильное свойст-
во) — небезусловной устойчивостью (слабое
свойство). Только у систем, обладающих сла-
быми структурными свойствами (существова-
ния), возникают метрические подсвойства,
описывающие метрику области существова-
ния— величину и ф°РмУ этой области и -рас-
положение ее в пространстве параметров.
У систем, обладающих сильными структурны-
ми свойствами (несуществования), таких ме-
трических -подсвойств не существует.
Динамическая система обладает по отно-
•тпению к любому исходному свойству двумя, и
только двумя, из этих структурных под-
свойств. Если она обладает одним из сильных
свойств, то одновременно обладает и объем-
лющим его слабым и никакими более иными.
Сильные свойства являются подсвойствами
слабых свойств. Так, если она обладает кон-
транегативным подсвойством (например, без-
условной устойчивостью), то обладает и пози-
тивным (структурной устойчивостью) и не об-
ладает ни негативным (небезусловной устой-
чивостью), ни контрапозитивным (структурной
неустойчивостью). Если она обладает слабым
подсвойством одной из двух строк матрицы
подсвойств, то одновременно обладает одним
из подсвойств, слабым или сильным, второй
строки. Так, если она обладает позитивным
свойством (например, структурной устойчи-
востью), то одновременно обладает либо не-
гативным (небезусловной устойчивостью), ли-
бо контранегативным (безусловной устойчи-
востью). Если она обладает негативным свой-
ством (небезусловной устойчивостью), то од-
новременно обладает либо позитивным (струк-
турной устойчивостью), либо контрапозитив-
ным (структурной неустойчивостью). Свойства
каждой строки матрицы структурных под-
свойств являются подсвойствами слабого свой-
ства другой строки.
По строкам матрицы свойства находятся
в отношении контрадикторной противополож-
ности, по столбцам — в отношении сходства,
и по диагоналям — в отношении подчинения.
Все эти отношения свойств являются, оче-
видно, динамической интерпретацией извест-
ных категорий логики отношений. Матрицей
структурных подсвойств логически исчерпыва-
ются возможные структурные подсвойства.
Матрица структурных подсвойств распро-
страняется на все динамические и статические,
общие и локальные смешанные свойства —
устойчивость, апериодичность, монотонность
переходного процесса, статичность, изодром-
ность и т. д. Для некоторых из этих свойств
(устойчивость, апериодичность, статичность,
изодромность) все получаемые этим логиче-
ским путем четыре подсвойства реализуются
в физических системах; для других — отдель-
ные из. этих подсвойств не реализуются ни
в одной физической системе (так, например,
не существует, по-видимому, безусловно моно-
тонных сложных систем). Рассмотренные
в предыдущем разделе динамические струк-
9 И. И. Гальперин.
129
турные свойства представляют собой струк-
турные подсвойства двух лишь смешанных
свойств — устойчивости и статичности.
4-1-4. Валентные задачи
Структурные свойства подчиняются общей
концепции валентности, объединяющей весь
предмет, и в этом их значение. Поясним эту
концепцию и содержание подчиняющихся ей
структурных задач (валентных задач) про-
стейшими аналогиями. Дальнейшее рассмот-
рение покажет, что аналогии эти представля-
ют собой далеко идущий изоморфизм валент-
ных структурных задач самых различных об-
ластей исследования.
В задаче подвижности кинематических це-
пей траектории точек механизма определяют-
ся метрическими параметрами его — размера-
ми звеньев. Однако прежде чем отыскивать дли-
ны звеньев, обеспечивающие эти метрические
свойства системы (траектории точек), необхо-
димо решить предшествующую структурную
задачу. Задача эта заключается в установле-
нии числа степеней свободы и подвижности
кинематической цепи, образующей механизм.
Чтобы лечь в основу механизма, цепь эта дол-
жна быть прежде всего цепью принужденного
движения, однократно подвижной цепью, це-
пью с определенными траекториями всех
звеньев. Это структурное свойство системы
не зависит для нормальных систем от метри-
ческих параметров и определяется только
структурными параметрами ее — числом и ва-
лентностью кинематических элементов (звень-
ев) и кинематических связей и их взаимной
конфигурацией. Полное число связей опреде-
ляется структурными формулами кинематики,
правильная конфигурация—теоремами конфи-
гурации Ассура (Л. 8]. С помощью этих фор-
мул легко распознаются вырожденные случаи
жесткости при полном числе или даже недо-
статке связей (мгновенная жесткость).
Возможность несения фермой заданной на-
грузки также зависит от размеров образую-
щих ее стержней. Однако и здесь, прежде чем
устанавливать эти размеры, необходимо ре-
шить ту же отвлекающуюся от них предшест-
вующую структурную задачу определения чис-
ла степеней подвижности кинематической це-
пи, образующей эту ферму. Чтобы послужить
фермой, цепь эта должна быть прежде всего
жесткой, должна обладать нулевым или отри-
цательным числом степеней подвижности, оп-
ределяемым структурными формулами строи-
тельной механики. С помощью этих же фор-
мул легко распознаются вырожденные случаи
подвижности при полном числе или даже из-
бытке связей {мгновенная изменяемость).
130
Такой же предшествующей задачей в хи-
мии является задача синтеза насыщенных
т. е. также устойчивых, химических соедине-
ний. И здесь это структурное свойство — на
сыщенность и, следовательно, устойчивость со-
единения определяется структурными пара
метрами — числом, валентностью и конфигу-
рацией химических элементов и химические
связей. И здесь полное число связей опреде-
ляется структурными формулами. Концепция
валентности позволяет распознать отдель-
ные случаи вырождения — недонасыщенные и
перенасыщенные, такие, как перекись водоро-
да, соединения, и объяснить их пониженную
устойчивость.
Задача структурной устойчивости анало-
гична всем этим структурным задачам, и, так-
же отвлекаясь от метрической стороны зада-
чи— метрических параметров системы, долж-
на оперировать ‘ одними лишь структурными
параметрами — числом, валентностью и кон-
фигурацией динамических элементов и соеди-
няющих их динамических связей. Метрической
задаче устойчивости, исследующей величину и
форму области устойчивости и расположение
ее в пространстве параметров, задача струк-
турной устойчивости, устанавливающая само
наличие области устойчивости в функции от
структуры системы, противостоит как предше-
ствующая структурная, топологическая зада-
ча. И здесь концепция валентности приводит
к синтезу гомологических рядов динамических
соединений. И здесь она позволяет отделить
норму от вырождения.
Все эти задачи объединяются общей кон-
цепцией валентности — статической, кинемати-
ческой, динамической, химической и т. д.
В каждой из них концепция эта приводит к по-
нятиям: валентности элементов и связей, пол-
ного числа связей, их избытка и недостатка
(число степеней свободы, подвижности, не-
устойчивости и т. д.), локальной и общей свя-
занности, структурных фбрмул. Системы, под-
чиняющиеся общим законам валентности, и
задачи, решаемые этими законами, назовем
валентными. Приобщение задачи устойчиво-
сти к этой общенаучной концепции -валент-
ности, доказательство валентности динамиче-
ских систем и их структурных задач, является
центральным результатом структурного иссле-
дования сервосистем. В натуральных системах
двусторонней механики эти общие законы ва-
лентности завуалированы специальной струк-
турой, приводящей к вырожденной структур-
ной устойчивости, и не могли быть поэтому
обнаружены. Они обнаруживаются впервые
в системах односторонней механики, с их об-
щей структурой. Смешение нормы с вырожде-
нивхМ могло, таким образом, лишь предшество-
вать концепции валентности й принадлежит
предыстории предмета. ПоследующееГуже по-
сле -обнаружения этой концепции, смешение,
противниками этой концепции, гомологических
рядов нормальных систем с отдельными вы-
рожденными системами имеет чисто полемиче-
ский смысл и сообщает их построениям ту же
мистифицирующую сложность, какую приоб-
рела бы, например, химия при отказе (с ссыл-
кой, например, на перекись водорода) от кон-
цепции валентности.
Валентной является для динамических си-
стем не только задача структурной устойчи-
вости, но и все остальные, относящиеся к по-
зитивным структурным подсвойствам задачи—
структурной апериодичности, структурной мо-
нотонности и т. д. Задача структурной устой-
чивости является наиболее общей из этих ва-
лентных задач, поскольку апериодичность, мо-
нотонность и т. д. являются всего лишь под-
свойствами устойчивости. Структурная устой-
чивость, не сопровождаемая всеми этими под-
свойствами — структурной апериодичностью,
структурной монотонностью и т. д., должна
быть рассматриваема как вырожденная. Это
позволяет выделить из всей совокупности ва-
лентных задач, относящихся к динамическим
системам, наиболее общую задачу — нормаль-
ной структурной устойчивости, включающей
в себя все остальные позитивные структурные
подсвойства.
4-2. СТРУКТУРНЫЕ ПОДСВОЙСТВА
4-2-1. Сервосистемы
А. Структурное содержание классической теории
Простейшие примеры структурной неустой-
чивости указаны были для прямого регулиро-
вания структурными теоремами классической
Уравнения системы а) Уравнения системы б) Уравнения системы в)
Yoj>+Se<l>+(l-Sg)T}=O Тор ♦ =0 To<p+Soj>+(1-So)q=(l
иг7}+Тгт]+з] - =0 Up?] ~
Рис. 4-2. Теоремы Вышнеградского для прямого регу-
лирования.
линейной теории регулирования [Л. 3, 5J.
Прямое регулирование астатического объекта
(объекта регулирования) астатическим регу-
лятором структурно неустойчиво (первая
теорема Вышнеградского). Прямое
регулирование астатического объекта адисси-
пативным статическим регулятором структур-
но неустойчиво (2-я теорема Вышнеград-
ского). Структурный порок, указываемый
первой теоремой Вышнеградского, может быть
исправлен дополнительной связью по произ-
водной— прямое регулирование астатического
объекта астатическим регулятором с дополни-
тельным импульсом по производной структур-
но устойчиво (теорема Стодола). В более
общей форме некоторые из этих положений
рассмотрены были Максвеллом (Л. 1].
Структурные теоремы классической теории
регулирования получают простейшее объясне-
ние в общей теории структурной устойчивости..
На рис. 4-2 приведены в структурной форму-
лировке теоремы Вышнеградского и то про-
стейшее объяснение, которое они получают
в общей теории структурной устойчивости
[Л. 25, 30, 36, 44, 49, 87}. В системе а стати-
ческий объект регулируется статическим и дис-
сипативным регулятором. Система эта содер-
жит одну избыточную связь. За избыточную
связь может быть принята, и затем отброше-
на, либо внутренняя статическая связь объек-
та (рис. 6), либо внутренняя статическая
связь регулятора (рис. в). Нулевые системы б
и в содержат, по рассматриваемой ниже струк-
турной формуле, полное число связей — четы-
ре связи (в это число не вошли старшие внут-
ренние связи, представляющие собой, как по-
яснено было выше, собственно элементы,,
а не связи). Снятие в системе б какой-либо
связи, внутренней статической связи регулято-
ра (рис. г — первая теорема Вышеградского),
или внутренней его связи первого порядка
(рис. д — вторая теорема Вышнеградского),.
приводит к структурной неустойчивости (Vs —
= 1). Снятие обеих связей (рис. е) приводит,
условно выражаясь, к двукратной структурной
неустойчивости (Vs = 2).
На рис. 4-2 приведены канонические урав-
нения отдельных систем. Из всех систем ри-
сунка статически неопределима (однократно^
лишь система а. В уравнения статически опре-
делимой системы Ь вошел статический пара-
метр лишь потому, что за базовый элемент
принят здесь, как во всех остальных системах
рисунка, объект—статический элемент систе-
мы. Одна из двух входящих в него статиче-
ских связей избыточна (§ 3-1-2). В уравнение
этого элемента входит один неисключаю-
щийся статический параметр. Из уравнений
9*
131
всех остальных, нулевых и, следовательно,
статически определимых систем все статиче-
ские параметры исключаются. Исключаться из
этих уравнений должен и групповой статиче-
ский параметр — неравномерность. Исключе-
ние это достигается отнесением координаты
объекта Дсо не к номинальному значению ее — %,
как это предложено было Стодола, а к ее ста-
тическому изменению — 8<о0. Неканоническая
относительная координата Стодола <р = —
и каноническая относительная координата ф =
Д<о
связаны соотношением <р — 8ф. Некано-
ническая и каноническая постоянные времени
связаны соответственно обратным соотношением:
Та=уТ0. Уравнения нулевой двухкаскадной
одноциклической системы имеют в неканони-
ческих координатах вид:
Tai + Иг =°;
f/r4 + ?’r7| + ll-<p/6=0;
Лр-i+is — "ч =0;
+ — Р-1 =°- С4”1)
В канонических координатах исключается
последний оставшийся не исключенным стати-
ческий параметр этой статически определимой
системы — неравномерность 8:
Tjt +^ = 0;
U2r ’i+ Tr^i Н-iQ —Ф =0;
ЛР1+Н1— ч =0;
7>2 + i\-H = 0. (4-V)
Вышнеградский доказал свои теоремы для
прямого регулирования. Они, однако, распро-
4Д.-------Г
Рис. 4-3. Теоремы Вышнепрадского для непрямого регулирования.
Уравнения системы в}) Уравнения системы в?)
, Ъ? ,*Рг=° , Щ ,.*Рг=°
=0 Urri*Tr71 -U&-? =о
Т1р1* РГП Т1Рг> Рг*1 =0
тгРг* Рг ~PiТгРг* Рг ~Р<
Рис. 4-4. Теорема Стодола.
страняются и на непрямое регулирование
(рис. 4-3). Для второй теоремы Вышнеград-
ского, начиная с двухкаскадного регулирования
(рис. б2), возникает при этом тот же фено-
мен вырожденной структурной устойчивости,
который обнаружен был выше в натуральных
системах. Система б2 структурно устойчива
вопреки нарушенным в ней условиям валент-
ности — недостатку одной связи. Устойчивость
эта носит поэтому вырожденный характер —
она, как показано ниже, сопровождается
структурной неапериодичностью. Это делает
структурно устойчивую систему б2 столь же
непригодной практически, как структурно не-
устойчивая система
На рис. 4-4,а дана в структурной форму-
лировке теорема Стодола. Недостающая, по
первой теореме Вышнеградского, внутренняя
статическая связь регулятора (рис. 4-2,г) за-
мещена в нулевой системе на рис. 4-4,а внеш-
ней связью 1-го порядка. Если во
входном и выходном замещении
(рис. 4-2,6, в) внутренние стати-
ческие связи замещались внеш-
ними связями равного порядка,
т. е. также статическими, то тео-
ремой Стодола устанавливается
возможность замещения их свя-
зями превышающего, порядка. За-
мещение внешними связями усту-
пающего порядка невозможно
в нормальных системах. Теорема
Стодола формулировалась им
для прямого регулирования (рис.
а и Л). Она верна, однако, как
все имеющие место в нормаль-
ных системах структурные соот-
ношения, для систем любого по-
рядка (рис. 6, в).
Замещение связями равного
132
б) г)
Рис. 4-5. Задача Стодола.
или превышающего порядка является необхо-
димым, но недостаточным условием правиль-
ной конфигурации. Так, внутренняя статиче-
ская связь может быть замещена только внеш-
ней связью 1-го порядка (верхняя строка ри-
сунка). Замещение связями 2-го порядка (ниж-
няя строка рисунка) образует неустойчивые
системы. Неустойчивость вызвана здесь непра-
вильной конфигурацией при полном числе свя-
зей (A4S—7VS = O). В этих случаях, как условле-
но было выше, оба несовпадающих числа, Vs
и Ms—Ns, указываются на структурных схемах
раздельно. Это является указанием на не-
устойчивость, вызванную неправильной конфи-
гурацией, при полном числе связей. В том
случае, когда указывается одно лишь число V5,
оно по структурной формуле совпадает с чис-
лом Ms—Ns. Неустойчивость в этом случае вы-
звана недостатком связей. Все эти соотноше-
ния, как все вообще нормальные, относящиеся
к нормальным структурным свойствам соотно-
шения, не зависят, как показано на рис. 4-4,
от числа элементов.
Все системы на рис. 4-4 обладают недо-
статком одной статической связи по отноше-
нию к статической определимости: Vc =
= —>(Л4С—N.c) = — (2m—1)—Nc =—1. Все они
поэтому однократно статически определимы.
Системы на рис. 4-5 многократно статически
определимы.
Классическая теория указала теоремой
Стодола один из способов решения первой за-
дачи Вышнеградского, обнаружив этим одно-
временно первую устойчивую изодромную си-
стему. Вопрос о решении второй задачи Вы-
шнеградского оставлен был открытым. После-
дующие решения этой второй задачи, не ру-
ководимые общей концепцией структурной
устойчивости, привели, как говорилось выше,
к «рекомендации вырожденных, непригодных
практически систем. Рассмотрим нормальные
решения обеих задач.
Решение методом Стодола обобщенной 1-й
задачи Вышнеградского — о регулировании
астатическими элементами может быть рас-
«9
Рис. 4-6. Задача Вышнеградского.
пространено и на астатические сервомоторы
(рис. 4-5). Налагаемые в непрерывной, без
пропусков, очередности внешние связи могут
заместить такое же число снимаемых в непре-
рывной же очередности внутренних связей
(рис. а, б, в). Это составляет содержание до-
казываемой ниже теоремы очередности. Пре-
рывная очередность может образовать непра-
вильные конфигурации (рис. г).
На рис. 4-6 дано одно из решений 2-й за-
дачи Вышнеградского. Попытка решить эту
задачу тем же способом, что и первую, тер-
пит неудачу при астатическом объекте (рис.а).
На рис. А произведено тождественное преоб-
разование системы а, объясняющее ее не-
устойчивость. Преобразование это заклю-
чается в перестановке элементов и инверсии
координатной оси объекта. При этом выяс-
няется, что система а образована смешанным,
входным и выходным, замещением (катаракт
регулятора замещен, входным образом, внеш-
ней связью 1-го порядка, статичность объек-
та,—выходным образом, внешней статиче*
ской связью) и потому структурно неустойчи-
ва. Смешанное замещение, как доказывается
ниже, образует структурно неустойчивые си-
стемы. И здесь, несмотря на полное число свя-
зей (Als—Ns=0), система структурно неустой-
чива (Vs>0) вследствие неправильной конфи-
гурации. В структурной схеме указаны поэто-
му оба несовпадающих числа Vs и (Ms—Ns)>
То же решение — замещение внешней свя-
зью 1-го порядка — становится возможным
при статическом объекте (рис. б). На рис. Б
это объяснено с помощью того же тождествен-
ного преобразования. Здесь катаракт регуля-
тора замещен, входным образом, замыкающей
133
внешней связью 1-го порядка, замыкающая же
внешняя статическая -связь или оставшаяся не
замещенной ею внутренняя статическая связь
регулятора являются избыточными (Vs =—1)
и могли бы быть отброшены.
Неиспользованная в системе б замещаю-
щая способность главной статической связи
может быть использована единственным спо-
собом— для замещения также и статичности
регулятора (рис. в). На рис. В с помощью то-
го же тождественного преобразования показа-
но, что возникающая при этом нулевая систе-
ма получена входным замещением. В -этой си-
стеме одновременно решаются обе задачи Вы-
шнеградского.
Б. Нормальные и вырожденные свойства и системы
В теоремах классической теории речь идет
о нормальной, сопровождаемой структурной
апериодичностью структурной устойчивости.
В них рассматриваются две относящиеся
к нормальным системам классические задачи,
ставшие на долгое время средоточием струк-
турных исследований и лишь в недавнее вре-
мя поглощенные легко объяснившей их явно
формулированной постановкой общей задачи
структурной устойчивости. Первая из этих за-
дач— об устойчивом регулировании астатиче-
ским регулятором (задача Стодола), ре-
шающая одновременно вторую по практиче-
ской важности структурную задачу — об изо-
дромном регулировании, сохранила свое прак-
тическое значение до настоящего времени.
Вторая задача — о регулировании адиссипа-
тивным регулятором (задача Вышне-
градского) — представляет для современ-
ной автоматики с ее идеальными регулятора-
ми преимущественно теоретический интерес.
Исследование этой задачи классической тео-
рией регулирования обнаружило первые вы-
рожденные структурно устойчивые системы.
Первая такая система с адиссипативным ре-
гулятором указана была Стодола [Л. 4] приме-
нительно к гидротурбинам. Общей структур-
ной теорией легко обнаружены были затем
с помощью структурных формул отдельные
вырожденные системы и в ряде других задач.
Структурные теоремы Вышнеградского и
Стодола были распространены вскоре на не-
прямое регулирование. Характерный для клас-
сической теории регулирования интерес к об-
щей концепции предмета, к качественной сто-
роне задачи, был затем надолго утерян. С мо-
мента выхода книги Толле, подытожившей
классическую теорию, и до начала сороковых
годов не только не было обнаружено ни од-
ной новой по содержанию структурной теоре-
мы, но и заново формулировались в качестве
134
независимых теорем положения, тождествен-
ные по содержанию со структурными теорема-
ми классической теории и лишь отнесенные
к иной функциональной структуре. Интерес
сосредотачивается почти исключительно на
метрической стороне задачи, на расчете не-
большого числа уже обнаруженных систем.
Этим ограничено было и само метрическое
исследование. Не сопровождаемое структур-
ной классификацией, проводимое для разроз-
ненных систем, оно приняло достаточно слу-
чайный, беспорядочный характер, ^формули-
рованными остались такие центральные для
автоматики понятия, как структурная неустой-
чивость, статическая определимость, нуле-
вые системы. К этой пропущенной дальнейшим
развитием вводной главе предмета — теории
динамической валентности структурное иссле-
дование вернулось с опозданием на полстоле-
тия, назвав ее на сей раз своим именем—зада-
чей структурной устойчивости. Разрозненные
структурные теоремы классической теории ре-
гулирования предстали в этой общей теории
как простейшие следствия двух-трех общих
принципов. Возникла структурная классифи-
кация, в рамках которой могло вестись даль-
нейшее метрическое исследование. Разделение
задачи устойчивости на предшествующую
структурную и последующую метрическую за-
дачи послужило своего рода эталоном нор-
мального построения для остальных задач
автоматики.
Начала структурного исследования можно обнару-
жить в важной работе А. В. (Михайлова [Л. 18]. Струк-
турные задачи не отделены, однако, здесь от метрических
и в сколько-нибудь явном виде не поставлены. Это же
относится и к работе Принца (Л. 32], опубликованной
уже после постановки нами этих задач [Л. 25, 30]. В яв-
ном виде задача структурного исследования вновь ста-
вится в следующей затем работе Б. Н. Петрова (Л. 33],
рассматривающей одно из структурных преобразований.
Повторяя введенное нами отождествление структурных
схем с характеристическими матрицами, работа вводит
удобные обозначения дифференциального порядка свя-
зей. Существенным шагом назад является отказ в ней
от центрального, вытекающего из 'концепции односторон-
ней механики, представления — о внутренних связях
как самодействиях, образующих одночленные циклы.
В работе Д. И. Марьяновского [Л. 38]—для одноцикли-
ческой системы, и в важном цикле работ М. В. Мееро-
ва (Л. 67, 83]—для широкого класса систем, исследует-
ся связь между структурой -и метрическими условиями
устойчивости. Центральным содержанием исходных ра-
бот по структурной устойчивости [Л. 25, 30, 35, 36, 42,
44, 55, 87] явилась концепция односторонней механики
и динамической валентности. Вне этой концепции зада-
ча эта решается для простейших линейных систехМ в рабо-
тах М. А. Айзермана, Ф. Р. Гантмахера, С. Ленина,
Е. С. Пятницкого [Л. 45, 61, 64, 78, '108]. Те же системы
рассмотрены Е. С. Пятницким при наличии запаздыва-
ния (Л. 102]. Отказ от диктуемой этой концепцией
нормальной классификации и, как следствие, смешение
слитной массы нормальных систем с несколькими
разрозненными вырожденными системами придает
1в этих работах мистифицирующую сложность решению
простейших задач. Рассмотрение не только ограничено
здесь одноциклической системой, но и сама эта простей-
шая система ограничена условиями, исключающими из
рассмотрения такие важные случаи, как гироскопически
стабилизируемая система — однорельсовый вагон
(рис. 1-4).
Структурное исследование динамических систем
имело перед собой классические образцы в весьма да-
леких, казалось бы, областях — статических, кинемати-
ческих, химических и иных систем. Здесь в специальной
форме возникали, каждый раз заново, общеструктурные
понятия—валентности, нулевых групп и систем, полно-
го числа связей, числа степеней свободы. Здесь отчет-
ливо высказан был принцип разделения функциональной
и динамической структур <(Рело), принцип структурных
формул 1(Чебышев, Сомов, Грюблер), принцип изоме-
рии и гомологии ((Бутлеров, Ассур).
Во все еще не полностью оцененной работе
Л. ;В. Ассура, далеко продолженной советской школой
теории механизмов, разработаны были в кинематической
форме некоторые общеструктурные, по существу, ме-
тоды синтеза нулевых систем. 'В том, что эти обще-
структурные идеи механики с таким запозданием про-
никли в автоматику, повинна исходная неясность—при-
роды предмета. ’В принадлежащих уже новой полосе
развития работах Найквиста, И. Н. Вознесенского,
А. В. Михайлова и совсем уже новых зарубежных ра-
ботах все еще отсутствуют понятия—структуры, струк-
турных свойств, даже структурной схемы. Говорится
о скелетных схемах, о блок-схемах «и т. д. Эти поиски
нужного и уже готового в смежных областях общенауч-
ного понятия и слова характеризуют изолированное раз-
витие автоматики и тот незаслуженно специальный вид,
который придан был этому наиболее общему предмету
таким развитием.
Не менее важной задачей, чем синтез
структурно устойчивых систем, является, как
выяснено было выше, отсев из их числа вся-
кого рода вырожденных систем, окаймляю-
щих во всех структурных задачах слитное мно-
жество нормальных систем. Вырожденные
структурно устойчивые системы так же непри-
годны для практического применения, как и
структурно неустойчивые системы, и выделе-
ние их из числа структурно устойчивых систем
так же практически важно, как выделение
структурно неустойчивых систем из числа
всех динамических систем. Если вторая зада-
ча может еще решаться по частям и случай-
ными поисками, то решение первой — отделе-
ние нормы от вырождения — есть прежде все-
го дело общей концепции и под силу только
ей. Предсказать и объяснить патологические
свойства вырожденных систем, предостеречь
практику от их использования может только
общая концепция валентности. Смешение нор-
мы с вырождением представляет исчерпываю-
щий признак отсутствия такой концепции.
Структурная устойчивость нормальных си-
стем сопровождается структурной апериодич-
ностью, область устойчивости этих систем за-
ключает в себе апериодическое ядро—область
апериодичности. В таком виде она представ-
ляет собой нормальное структурное свойство,
соблюдение которого связано с общими соот-
ношениями динамической валентности, подоб-
ными соотношениям химической валентности
или кинематическим структурным формулам.
В отдельных вырожденных системах структур-
ная устойчивость сохраняется в вырожденном
виде при нарушенных условиях динамической
валентности, как сохраняется в ослабленном
виде при нарушенных условиях химической
валентности устойчивость перекиси водорода.
В обоих случаях устойчивость эта носит вы-
рожденный характер, представляет вырожден-
ное структурное свойство. Красноречивым, но
не единственным, опознавательным призна-
ком вырожденной структурной устойчивости
является структурная неапериодичность, де-
лающая эти системы практически непригод-
ными. Структурная устойчивость, не сопро-
вождаемая структурной апериодичностью, вы-
рождена; область устойчивости системы ли-
шена здесь своего апериодического ядра.
Структурные свойства, лишенные некоторых
своих подсвойств, как и несущие их системы,
назовем вырожденными. Возможно и вторич-
ное вырождение, восстанавливающее потерян-
ные в первичном вырождении подсвойства,
но влекущее другие признаки вырождения.
Первым признаком вырождения является,
для всех валентных систем, зависимость струк-
турных свойств от неструктурных факторов —
метрических параметров системы или разме-
ров (число и порядок элементов) ее. Структур-
ные свойства нормальных систем определяют-
ся чисто структурными соотношениями между
числом и валентностью элементов и связей
системы и не могут быть зависимы от не-
структурных факторов. Эти универсальные
структурные соотношения могут быть, однако,
стеснены в отдельных случаях размерами си-
стемы (как это бывает при очень малом числе
элементов) или искажены в узкой области
значений ее параметров (как это имеет место
в мгновенно изменяемых и мгновенно жестких
кинематических системах). Тогда наступают
единичные случаи вырождения, патологиче-
ские черты которого могут быть объяснены
только отклонением от этих универсальных
соотношений. Вырожденные свойства могут
возникнуть и в развитых, с большим числом
элементов, системах в результате недостатка
связей или неправильной конфигурации.
И здесь они окажутся зависимыми от не-
структурных факторов — числа и порядка
элементов.
Структурные соотношения^ имеющие мес-
то в нормальных динамических системах, так-
же универсальны и не зависят от размеров
135
системы (числа элементов и их дифференци-
ального порядка, определяющих в совокупно-
сти дифференциальный порядок системы). На-
личие такой зависимости и здесь является без-
ошибочным признаком вырождения. И здесь
отделение нормы от вырождения является од-
ной из центральных задач структурного ис-
следования.
Важность этой задачи определяется преж-
де всего тем, что только для нормальных .си-
стем действуют общие соотношения валентно-
сти, позволяющие объединить эти системы об-
щей теорией синтеза. Смешение нормальных
систем с вырожденными, для которых эти со-
отношения всегда нарушены, .игнорирует об-
щую теорию валентности. Такое смешение ана-
логично было бы требованию — не проводить
в химии качественного различия между насы-
щенным соединением Н2О и перенасыщенным
Н2О2 и для этого отказаться от концепции
химической валентности — и в той же мере
бесплодно. Центральным результатом структур-
ного исследования в автоматике явилось дока-
зательство того, что динамические элементы
соединяются в устойчивые динамические си-
стемы по тем же простым и общим законам
валентности, по которым химические элемен-
ты соединяются в насыщенные химические со-
единения. В обоих случаях законы эти имеют
место лишь для нормальных систем и требуют
поэтому отделения нормы от вырождения.
Данный выше ответ на исходный вопрос —
о возможных регулирующих системах — дол-
жен быть теперь еще ограничен. Возможны-
ми регулирующими системами являются не
все структурно устойчивые системы, а лишь те
из них, которые обладают нормальной струк-
турной устойчивостью. Задачей структурного
исследования в автоматике является синтез
нормальных структурно устойчивых систем и
отсев вырожденных. В основе его лежит син-
тез нулевых, т. е. с полным числом связей,
устойчивых систем, поскольку все остальные
устойчивые системы могут быть получены од-
ним лишь способом — наложением новых, из-
быточных связей на нулевые системы.
В. Нулевые системы
а) Задача Вышнеградского — Стодола
Классическая теория регулирования обна-
ружила, теоремой Стодола, один лишь способ
решения задачи Стодола и ни одного спосо-
ба решения задачи Вышнеградского. Рассмот*
рим предварительно (доказательства даны
будут в 6-й главе) возможные решения обеих
задач, указываемые общей теорией структур'-
ной устойчивости. Это сделано на рис. 4-7.
В первой строке рисунка расположена ис-
ходная для всей таблицы нулевая открытая
система {базовая система). Системы 2-йстро-
ки получены наложением на эту нулевую си-
стему новых связей и потому не только струк-
турно устойчивы, но и обладают избытком свя-
зей. Вновь налагаемые внешние связи могут
быть, однако, использованы для замещения
соответствующего числа внутренних связей
(3-я и 4-я строки рисунка). Это приводит к ну-
левым замкнутым системамГВ 3-й строке по-
лучены этим способом решения задач Стодола
и Вышнеградского, в 4-й — совместной задачи
Вышнеградского — Стодола. Снятие одной хо-
тя бы связи в нулевых системах (3-я и 4-я
строки рисунка) приводит к структурно не-
устойчивым по недостатку связей системам
(5-я строка). Нарушение конфигурации нуле-
вых систем приводит к структурной неустой-
чивости по неправильной конфигурации . (ше-
стая строка). В системах седьмой строки ри-
сунка налицо обе причины структурной не-
устойчивости.
Нулевыми названы здесь системы, облада-
ющие нормальной структурной устойчивостью
при наименьшем, полном числе связей.
Нулевые, т. е. в меру связанные, системы
занимают такое же граничное положение
между избыточно связанными устойчивыми
системами и недостаточно связанными не-
устойчивыми, какое в химии занимают насы-
щенные системы между перенасыщенными и
недонасыщенными, в механике — жесткие ста-
тически определимые системы между жестки-
ми статически неопределимыми и подвиж-
ными.
В трех первых столбцах рисунка решается
задача Стодола о регулировании астатическим
регулятором, в трех последних — задача Вы-
шнеградского о регулировании адиссипатив-
ным регулятором. В 3-й и 4-й строках даны
наиболее экономные по числу связей, т. е_
в виде нулевых систем, решения.
Решение задачи Стодола о регулировании
астатическим регулятором может быть полу-
чено тем же способом, что и исходная зада-
ча-регулирование астатического объекта
статическим регулятором (рис. в1), — входным
замещением {входные системы). Это приво-
дит к структурно устойчивой, но неизодром-
ной системе в2. Решение этой же задачи мо-
жет быть получено и способом Стодола
(рис. 83) с помощью регулятора по производ-
ной. Этим решается вместе с задачей струк-
турной устойчивости и задача изодромности.
Решение задачи Вышнеградского также
может быть получено либо входным замеще-
нием внешней связью того же первого поряд-
136
Рис. 4-7. Задача Вышнегр адского — Стодола.
ка, что и у замещаемой внутренней связи
(равнопорядковое замещение) (рис. Вь В2),
либо связью превышающего, второго порядка
(вышепорядковое замещение) (рис. В3)- Не-
возможно, однако, замещение связями усту-
пающего порядка (нижепорядковое замеще-
ние). Поэтому попытки решить задачу Вы-
шнеградского с помощью статических заме-
щающих связей приводят к структурно не-
устойчивым системам (рис. Д2).
В системе задача Вышнеградского — за-
мещение катаракта регулятора решена незави-
симо от обычно предшествующей задачи — за-
мещения статичности объекта (рис. 81). В си-
стеме отсутствует поэтому статическая обрат-
ная связь. Наложение обоих правильных заме-
щений образует здесь неправильную конфигу-
рацию (рис. Д\). В то же время показанное
в 5-й строке наложение других правильных
замещений, образующих в 4-й строке нулевые
системы, приводит к правильным, нулевым си-
стемам. Наложение замещений назовем струк-
турной суперпозицией, а свойство их образо-
вывать из налагающихся частных нулевых си-
стем общие нулевые системы — структурной
суперпозиционностью.
К системам с неправильной конфигураци-
ей относятся, кроме системы Д2, с замещением
катаракта регулятора — первопорядковой
внутренней связи его — статическими внешни-
ми связями, и другие системы с нижепорядко-
вым замещением (нижняя строка рисунка),
с неправильным расположением замещающих
связей (рис. д2, Д3), с чрезмерным превы-
шением порядка замещающей связи над по-
рядком замещаемой (рис. д3), с неправильной
очередностью замещения связей (рис. di).
Общее содержание всех этих отдельных не-
правильностей конфигурации будет выяснено
ниже.
137
Сопоставление 2-й и 4-й строк выясня-
ет содержание структурных теорем классиче-
ской теории регулирования. В одноцикличе-
ской системе вх потому возможен один лишь
астатический элемент, элемент с отсутствую-
щей внутренней статической связью, что в ней
содержится одна лишь замещающая внешняя
статическая связь. Структурная неустойчи-
вость регулирования астатическим (первая
теорема Вышнеградского, рис. 21) и адисси-
пативным (вторая теорема Вышнеградского,
рис. Л) регуляторами вызвана тем, что от-
сутствующие внутренняя статическая связь
регулятора в первом случае и 'внутренняя 1-го
порядка связь во втором — не замещены каки-
ми-либо внешними связями. Теорема Стодола
(рис. в3) указывает один из возможных спосо-
бов замещения первой из этих связей. Струк-
турная неустойчивость вызвана здесь недо-
статком связей и устранена восстановлением
полного их числа.
Избыток связей, против полного их числа
в нулевых системах (вторая строка), не мо-
жет, разумеется, послужить причиной струк-
турной неустойчивости. Наложение новых свя-
зей (связывание) так же не может лишить
динамическую систему структурной устойчи-
вости, как кинематическую систему — жестко-
сти. Под связыванием следует понимать толь-
ко наложение связей, не повышающее порядка
системы. Наложение связей, повышающее
порядок системы, представляет собой не свя-
зывание той же системы, а переход от нее
к другой системе, т. е., при внешнем сходстве,
совершенно иную по смыслу операцию. Тео-
р е м а 4-Г(теор ем а связывания): связы-
вание сохраняет структурную устойчивость ди-
намических систем. Теорема в более общем
виде доказана будет в следующей главе. Из нее
вытекает теорема 4-II (теорема с к е-
летности): необходимым и достаточным
условием структурной устойчивости системы
является наличие в ее составе по меньшей ме-
ре, одной, нулевой подсистемы. Существенным
в условии теоремы является достаточность его.
Необходимым условием это является в том
лишь тривиальном смысле, что при отсутст-
вии в составе структурно устойчивой системы
нулевых подсистем она сама является нуле-
вой системой и может быть рассматриваема
как своя несобственная нулевая подсистема.
Нулевые системы служат скелетом избыточ-
но связанных структурно устойчивых систем,
синтез последних сводится к синтезу первых.
Так избыточно связанные системы 2-й строки
потому лишь структурно устойчивы, что ^со-
держат в качестве подсистем нулевые систе-
мы 3-й строки. Отсутствие такого скелета при-
водит, при любом избытке связей, к структур-
ной неустойчивости, либо к вырожденной
устойчивости.
Условием правильной конфигурации систем
с избытком связей является наличие в их со-
ставе нулевой подсистемы. Условия правиль-
ной конфигураций самих нулевых систем рас-
сматриваются ниже (глава VI). Здесь же мож-
но, без доказательств пока, заметить одно из
них. Теорема порядка: нулевые системы
могут быть образованы только равнопорядко-
вым и вышепорядковым замещением. Ниже-
порядковое замещение приводит к структурно
неустойчивым или вырожденным системам.
Рассмотрим раздельно обе независимые
причины структурной неустойчивости — недо-
статок связей и неправильную конфигурацию.
б) Полное число связей
Число степеней неустойчивости системы
определяется структурной формулой валент-
ности:
VS=M-NS, (4-2)
где Ms — полное число связей, Ns — наличное
число связей. В обоих случаях речь идет об
общем числе внутренних и внешних связей.
Одинаковая природа тех и других достаточно
выясняется теоремами замещения и структур-
ными формулами. Vs положительно для струк-
турно неустойчивых систем, равно нулю для
нулевых систем и отрицательно для избыточно
связанных структурно устойчивых систем.
Полным числом связей систем данного эле-
ментного состава является число их в -нуле-
вой системе этого же состава. Поскольку пол-
ное число связей одинаково для всех систем
одинакового элементного состава, для опреде-
ления его можно воспользоваться простейшей
из них — базовой системой а. Для нее число
это определяется очевидной формулой:
пг
= + (4-3)
z=i
где ш — число элементов. Формула эта яв-
ляется структурной формулой полного числа
связей.
Для дифференциальных систем Vf=pi, и
для них эта формула принимает вид:
пг
Ms =(m — 1) 4- £ Pi. (4-3')
i=l
Ms одинаково для всех систем одинакового
состава, в частности—для всех систем рис. 4-7.
Для нулевых и недостаточно связанных си-
стем Vs равно M—Ns, т. е. определяется толь-
138
ко структурной формулой (4-2). Для систем
с неправильной конфигурацией Vs не равно
—N8, поскольку неустойчивость вызвана не
недостатком связей. Здесь должны указывать-
ся оба числа (рис. 4-7). Структурная формула
не отвечает в этом случае на вопрос о числе
степеней неустойчивости, необходим анализ
конфигурации системы. По структурной фор-
муле можно судить о структурной неустойчи-
вости системы в одном лишь случае — недо-
статка связей (5-я строка рис. 4-7).
в) Правильные конфигурации
Для кинематических -систем, где связи не
различаются качественно — порядком и зна-
ком, существует одна лишь причина непра-
вильной конфигурации — неравномерная ло-
кальная связанность системы. При полном чи-
сле связей отдельные части системы оказыва-
ются чрезмерно связанными и статически не-
определимыми, другие — недостаточно связан-
ными и подвижными, система же в целом —
подвижной. В динамических системах, где
связи различаются порядком и знаком, возни-
кают и другие причины неправильной конфи-
гурации.
Задача правильной конфигурации наибо-
лее схематично решается поэтому в образо-
ванных равнопорядковым и равнозначным за-
мещением входных и выходных системах.
Здесь, как и в кинематических системах, усло-
вием правильной конфигурации является
только равномерная локальная связанность,
автоматически обеспечиваемая операциями
входного и выходного замещения. Внутренняя
связанность элементарных систем заменяется
при этом внешней, суммарная же локальная
связанность остается неизменной. Такие си-
стемы, поскольку задача структурной устойчи-
вости решается в них локально, назовем ло-
кально разрешимыми. Правильные конфигу-
рации могут получаться и неравнопорядковым
(рис. 4-7) и неравнозначным замещениями. За-
кон их, однако, сложнее.
В общем виде закон этот будет получен
в гл. 6, здесь же рассмотрим лишь свойство
структурной суперпозиционности, позволяю-
щее получать сложные правильные конфигу-
рации наложением более простых. Свойством
этим, как выяснено было выше, обладают не
все систему. Рассмотрим его происхождение.
г) Структурная суперпозиция
Свойство суперпозиционности возникает во
всех случаях, где налагаются результаты не-
зависимых воздействий (§ 1-3). В задаче
структурной устойчивости свойство это мо-
жет возникнуть поэтому лишь в тех случаях,
когда замещающие способности Связей неза-
висимы. Этим свойством обладают внешние
связи в локально разрешимых системах. За-
мещающая способность каждой из них незави-
сима от всех остальных. Очередность замеще-
ния здесь поэтому безразлична. Это объясняет
структурную суперпозиционность локально
разрешимых систем. Этим же свойством об-
ладают частично и некоторые другие системы,
приводящиеся к локально разрешимым систе-
мам нормальными, сохраняющими структур-
ную устойчивость при неизменном числе свя-
зей, преобразованиями. Такие системы назо-
вем приводимыми. Вопрос этот будет детально
рассмотрен в 6-й главе.
Поясним свойство суперпозиционности на
рассмотренных выше примерах рис. 4-7. Ло-
кально разрешимые системы в2 и В2 суперпо-
зиционны, так как замещающая способность
каждой из их внешних связей не зависит от
всех остальных. Наложение (суперпозиция)
этих нулевых систем образует поэтому нуле-
вую же систему в2В2, также локально разре-
шимую. Очередность замещения внутренних
связей здесь безразлична. Напротив, локаль-
но неразрешимая нулевая система Вх не су-
перпозиционна с локально разрешимой нуле-
вой системой в1 и их наложение образует не-
нулевую • систему Д1.
Суперпозиционны между собой и локально
неразрешимые нулевые системы в3 и В3, даю-
щие при наложений нулевую же локально не-
разрешимую систему в3В3. Суперпозицион-
ность этих систем, однако, лишь частична.
Они суперпозиционны по отношению к диффе-
ренциальным замещающим связям, чьи заме-
щающие способности взаимно независимы.
Способности эти зависят, однако, от наличия
ранее проведенной статической главной обрат-
ной связи. Вопрос этот отдельно рассмотрен
на рис. 4-8, 4-9.
На рис. 4-8 для частных и общей задач
указаны правильные и неправильные реше-
ния. Все частные системы обладают полным
числом связей (Als—Ns = 0), и неправильность
решений вызвана только неправильностью
конфигурации. Для локально разрешимых си-
стем первых двух строк неправильность эта
заключается: в строке а — в неравнопорядко-
вом замещении, в строке б — в неравноориен-
тированном замещении, смешанном, входном
и выходном. В остальных строках рисунка,
относящихся к локально неразрешимым систе-
мам, неправильность заключается в замеще-
нии связями уступающего (в задаче Вышне-
градского) или чрезмерно превышающего
(в задаче Стодола) порядка.
139
Mg=(m-1)+iVi = (3-i) + ( 1+2+1) = 6
Правильные {Неправильные Правильные {Неправильные Правильные I Правильные и неправильные
конф игурацииуконфигу рации конфигураций конфигурации конфигурации I конфигурации
Частная задача
Стодола
Частная задача
Вышнеградского
Общая задача
Вышнеградского -Стодола
Рис. 4-8. Структурная суперпозиция.
На рис. 4-8 решение общей задачи полу-
чено наложением (суперпозицией) частных ре-
шений, причем наложение это производится
внутри каждой строки. На рис. 4-9 приведены
решения общей задачи, получаемые наложе-
нием, производимым между строками рисун-
ка 4-8. В обоих случаях наложение .правиль-
ных конфигураций образует правильные же
конфигурации (1-й столбец общей задачи), на-
ложение.же неправильных на правильные (2-й
и 3-й столбцы общей задачи) и неправильных
на неправильные (4-й столбец общей задачи)
дает более сложную картину.
Не все, однако, правильные решения су-
перпозиционны. Суперпозиционность в обла-
сти метрических воздействий — определяющее
свойство линейных систем не распространяет-
ся на область структурных воздействий — не
все линейные системы обладают свойством
структурной суперпозиционности. По отноше-
нию к этому центральному свойству линейные
динамические системы могут быть разбиты на
три класса: 1) безусловно обладающих им,
2) обладающих им при определенных усло-
виях, 3) не обладающих им ни при каких усло-
виях. Рассмотрим задачу в этой последова-
тельности.
д) Локально разрешимые системы
Для того, чтобы суперпозиционность имела
место для некоторого класса воздействий, не-
обходимо и достаточно, чтобы эти воздействия
были независимы. Простейшим примером это-
го является суперпозиция сил в механике (за-
кон независимости действия сил). В задаче
структурной устойчивости стабилизирующее
воздействие внешних связей заключается
в их замещающей способности — в спо-
собности замещать отсутствующие внутренние
связи. Для того, чтобы воздействия эти обла-
дали свойством суперпозиционности, необхо-
димо и достаточно, чтобы они были незави-
симы, чтобы замещающая способность каж-
дой внешней связи была независима от осталь-
ных внешних связей, чтобы связь эта способ-
на была замещать определенную внутреннюю
связь безотносительно к наличию других внеш-
них связей. Структурная суперпозиция пред-
ставляет собой суперпозицию замещений.
Такие решения задачи структурной устой-
чивости назовем локальными, а полученные
ими нулевые системы — локально разрешимы-
ми. Локально разрешимые системы относятся
к первому из указанных выше классов си-
стем—безусловно суперпозиционных.
140
Определим точнее структурную суперпози-
цию. Операция получения суперпрзицией об-
щей системы из двух частных систем заклю-
чается в объединении в общей системе замеща-
ющих внешних связей обеих частных систем и
отбрасывании в ней внутренних связей, заме-
щенных хотя бы в одной из систем. В логиче-
ских терминах и для тех и для других связей
производится дизъюнкция: или — или. В об-
щей системе оставляются замещающие внеш-
ние связи, входящие в одну или во вторую ча-
стную систему, и изымаются внутренние свя-
зи, замещенные в одной или во второй
частной системе. На рис. 4-8, 4-9 операция эта
Рис. 4-11. Десуперпозиция локально разрешимых систем.
приводила к нулевым общим системам, т. е.
частные нулевые системы на этих рисунках
были суперпозиционны. На рис. 4-10 операция
эта показана для несуперпозиционных нуле-
вых систем, чье наложение приводит к нену-
левой системе. На этом рисунке использован
введенный выше (рис. 1-10, 1-11) специальный
знак суперпозиции.
Доказательством суперпозиционности неко-
торого класса систем является возможность
разложения, дёсуперпозиции каждой системы
этого класса на единичные замещения. На
рис. 4-11 дана десуперпозиция входной ло-
кально разрешимой системы, рассмотренной
на рис. 4-7, 4-8, на рис. 4-12 — локально нераз-
решимой системы. Продуктом первой являют-
ся нулевые системы, второй — ненулевые.
Локально разрешимые системы одинакового эле-
ментного состава образуют алгебраические коммута-
тивные группы. Групповой операцией является здесь
структурная суперпозиция. Операция эта обладает со-
четательным и переместительным свойством. Нейтраль-
ным ।(единичным) элементом этой группы является ба-
зовая система этого состава. Обратным каждой системе
элементом также является базовая система. Последнее
вытекает из следующего. Замещению внутренних свя-
зей внешними (прямое замещение) противостоит обрат-
ная операция — замещение внешних связей внутренними
(обратное замещение). Подобно тому как базовой
для прямого замещения является открытая система,
где ни одна ,из внутренних связей не замещена внеш-
ними, базовой для обратного замещения может слу-
жить любая, например, пучковая (рис. 3-3, 3-4) замкну,
тая система, где все внутренние связи замещены внеш-
ними или, иначе говоря, ни одна из внешних связей не
1
Рис. 4-10. Структурная суперпозиция.
Рис. 4-12. Десуперпозиция локально неразре-
шимых систем.
141
замещена внутренней (системы с полным прямым за-
мещением). Для прямого замещения существует одна
лишь базовая система, для обратного — большое число
базовых систем. Каждая нулевая система с полным
прямым замещением является базовой для обратного
замещения. Открытая нулевая система является систе-
мой с полным обратным замещением. Наложение ее
на любую систему приводит к этой же открытой си-
стеме, как нейтральному элементу. Она является, следо-
вательно, обратным элементом всех систем. Теория ло-
кально разрешимых систем могла бы быть построена
с помощью теории групп.
Уже простейшие структурные задачи клас-
сической теории обнаруживают такое многооб-
разие правильных и неправильных решений,
в котором нельзя разобраться без общей
структурной теории. Многообразие это еще
многократно умножается эквивалентными и
тождественными структурными преобразова-
ниями. Рассмотрим простейшие из них.
Структурные преобразования.
Единственными локально разрешимыми систе-
мами на рис. 4-7 и 4-8 являются входные, обра-
зованные входным замещением, системы. Чис-
ло локально разрешимых систем может быть
удвоено транспонированием входных систем —
транспонированием их характеристических ма-
триц. Входное замещение переходит при этом
в выходное замещение, входные системы —
в выходные (рис. 4-13). Очевидно, что и вы-
ходные системы локально разрешимы, по-
скольку и они десуперпозицией указанного на
рис. 4-11 вида могут быть разложены на ну-
левые системы.
Транспонирование систем является общим,
т. е. не изменяющим общих структурных
свойств эквивалентным преобразованием.
Преобразование это обозначено на рис. 4-13
двойной стрелкой. Локальные структурные
свойства будут при этом в общем случае раз-
личны и, как явствует из рис. 4-13, эквива-
лентные в этом смысле системы в общем слу-
чае поэтому не только не тождественны, но и
резко различны. Только в частных случаях,
для простейших систем, содержательные эк-
вивалентные преобразования вырождаются
в чисто формальные тождественные преобра-
зования, изменяющие лишь форму аналитиче-
ской и графической записи системы, не изме-
няя самой системы. Таким простейшим случа-
ем является транспонирование одноцикличе-
ской системы на рис. 4-13,а, а'. Им выясняет-
ся, что одноциклическая система может быть
представлена как в виде входной, так и в виде
выходной системы. Обе системы тождествен-
ны, на них, однако, различным образом нало-
жена функциональная структура системы (ука-
занная греческим алфавитом), и это приводит
к функционально различным системам. В систе-
142
Рис. 4-13. Эквивалентные и тождественные
преобразования.
ме а с единственным астатическим элементом
системы совмещен объект, в системе а' — сер-
вомотор. Соответственно система а' (и все си-
стемы правого столбца) изодромна (в функ-
циональной точке «объект»), система а (и все
системы левого столбца) неизодромна. Такие,
динамически тождественные, функционально
же различные системы назовем обращенными,
а сам прием получения функционально раз-
личных систем регулирования из динамиче-
ски тождественных систем — обращением.
Прием этот рассматривался уже выше (§ 3-1г
рис. 3-1) и подробно рассмотрен будет ниже.
Остальные транспонированные системы —
б и б7, в и в', г и г7 — различаются не только
функциональной, но и динамической структу-
рой. При общей эквивалентности они локаль-
но неэквивалентны во всех своих каналах. Как
показано будет ниже, общая эквивалентность
может сопровождаться полной, т. е. во всех
каналах, локальной эквивалентностью только
тогда, когда эта общая эквивалентность вы-
рождается в тождественность, как в рассмот-
ренном случае на рис. а, а7. Во всех осталь-
ных, невырожденных случаях общая эквива-
лентность сопровождается локальной неэкви-
валентностью, по меньшей мере, в одном ка-
нале.
Структурные отношения. Системы,
связанные структурными преобразованиями,
связаны и определенными отношениями струк-
турных свойств — структурными отношениями.
Примером таких отношений являются тожде-
ство и эквивалентность, общие и локальные,
возникающие в результате тождественных и
эквивалентных структурных преобразований.
Общеэквивалентным и локальноэквивалент;
ным в зеркально сопряженных каналах пре-
образованием является транспонирование си-
стем.
Эквивалентность, общая и локальная, озна-
чает тождество всех структурных свойств, со-
ответственно общих и локальных. Наличие
всех структурных свойств одной системы в со-
ставе свойств другой означает уже менее тес-
ное отношение — одностороннюю эквивалент-
ность второй системы первой системе. Эквива-
лентность (сейчас ее следует называть двусто-
ронней эквивалентностью) представляет собой
двойное отношение — две односторонние эк-
вивалентности. Еще менее тесным отношени-
ем является тождество части структурных
свойств — пересечение систем.
Пересечение, как и эквивалентность, мо-
жет быть общим и локальным. Односторон-
нюю эквивалентность, как одностороннее от-
ношение, будем обозначать односторонней
сплошной стрелкой, двустороннюю эквива-
лентность и пересечение, как двусторонние от-
ношения, двусторонними стрелками — сплош-
ной и пунктирной. Все эти отношения подроб-
но рассматриваются в следующей главе.
Принцип локальной связанно-
сти. Объединяющим свойством локально раз-
решимых систем является безусловная супер-
позиционность. Теорема 4-Ш (частная
теорема суперпозици и),. Локально
разрешимые системы безусловно суперпози-
ционны. Теорема явствует из независимости
замещения в этих системах.
Центральное место локально разрешимых
систем в задаче структурной устойчивости
определяется тем, что структура их базирует-
ся на рассмотренном выше (§ 3-2) принци-
пе локальной связанности: доста-
точным условием нормальной структурной
устойчивости является равномерная локаль-
ная связанность системы. Равномерной ло-
кальной связанностью названа здесь связан-
ность каждого элемента, q-ro интегрального
порядка и р-го дифференциального, — полным
составом связей, от ^-го до*(р—1)-го порядков,
т. е. схождение (либо только вход — во вход-
ном замещений, либо только выход — в вы-
ходном:) в элементе всех этих связей.
Локально разрешимые системы не только
обладают нормальной структурной устойчиво-
стью, но и являются эталоном ее. Основной,
наиболее широкий класс структурно устойчи-
вых систем — приводимые системы — лишь по-
тому обладает нормальной структурной устой-
чивостью, что приводится нормальными пре-
образованиями к локально разрешимым си-
стемам. Теорема 4-IV. Локально разреши-
мые системы обладают нормальной структур-
ной устойчивостью. Теорема вытекает из
принципа локальной связанности и вместе
с ним доказана будет ниже.
е) Локально неразрешимые системы
с Локально неразрешимые нулевые системы
делятся на 2 класса — приводимых и неприво-
димых систем. Первые приводятся нормаль-
ными, т. е. сохраняющими нормальную струк-
турную устойчивость при неизменном числе
связей, преобразованиями к локально разре-
шимым системам. Вторые—не приводятся.
Первые подчиняются поэтому общей структур-
ной формуле приводимых систем, для вторых
такая формула отсутствует. В каждом под-
классе вторых возникает своя структурная
формула, причем полное число связей
может только превышать указываемое форму-
лой (1) найденное полное число связей при-
водимых систем: M(sa/) > Это означает,
что в приводимых системах внешние связи об-
ладают наибольшей валентностью (равной
единице), в неприводимых же она снижена.
Приводимые и неприводимые локально не-
разрешимые системы занимают соответствен-
но 2-е и 3-е места в приведенной выше клас-
сификации систем по их суперпозиционности.
Первые условно суперпозиционны, вторые —
безусловно несуперпозиционны.
Рассмотрим локально неразрешимые си-
стемы в этом порядке.
Приводимые системы.. Приводимы-
ми являются все локально неразрешимые ну-
левые системы в таблицах на рис. 4-7, 4-8, 4-9.
При полном числе связей все они, как
показано будет ниже, обладают нормальной
структурной устойчивостью и в этом смысле
приводятся к локально разрешимым системам
этих рисунков. Из приводимости не вытекает,
однако, суперпозиционности. Это пояснено
рис. 4-10, где наложение двух приводимых ну-
левых частных систем образует ненулевую
общую систему. То, что наложение приводи-
мых нулевых систем на рис. 4-8, 4-9 всегда
приводит к нулевым системам, вызвано специ-
альной структурой налагающихся приводимых
систем и в общем случае не будет иметь места.
Легко установить, какой должна быть
структура налагающихся приводимых систем
для того, чтобы они были суперпозиционны.
Содержащиеся в них решения различных част-
ных задач не должны быть одинаковыми,
в противном случае наложение систем приво-
дит к наложению связей и слиянию несколь-
ких наложившихся одинаковых связей в одну
связь. Специальная структура частных систем
на рис. 4-8 и 4-9 и заключается, как явствует
143
из сравнения этих рисунков с рис. 4-10, в том,
что в первом случае наложение систем не при-
водит к наложению и слиянию одинаковых
связей, во втором — приводит. Слияние связей
приводит к уменьшению общего их числа и
к структурной неустойчивости по недостатку
связей (рис. 4-10). Слияние является основной,
но не единственной причиной несуперпозицион-
ности приводимых систем. Примером этого яв-
ляется система на рис. 4-7Д1, полученная су-
перпозицией нулевых систем в] и и, не-
смотря на отсутствие слияния, структурно не-
устойчивая. Общие причины несуперпозицион-
ности приводимых систем рассмотрены будут
ниже (гл. 6-я). Пока же можно отметить лишь
•суперпозиционность однотипных решений и
несуперпозиционность разнотипных. Однотип-
ными решениями являются, в частности, вход-
ное замещение и замещение в непрерывной
очередности. Разнотипными являются входное
замещение (рис. 4-7,ei) и замещение в пре-
рывной очередности (рис. Bi). Их суперпози-
ция приводит к ненулевой системе Д\.
Слияние связей при наложении систем воз-
никает в тех случаях, когда в частных си*
стемах различные внутренние связи замеща-
ются одинаковыми внешними связями. В ло-
кально разрешимых системах между замещае-
мыми внутренними и замещающими внешними
связями существует единственным образом
устанавливаемое взаимно однозначное соот-
ветствие, и слияние здесь поэтому невозможно.
Это объясняет теорему 4-Ш.
Рассмотрим зависимости, возникающие
в общем случае наложения нулевых и нену-
левых систем (2 и 3-й столбцы общей задачи
на рис. 4-8 и 4-9). Замещающая способность
внешних связей сохраняется в приводимых си-
стемах этих рисунков, т. е. не может быть ней-
трализованд в них присутствием других внеш-
них связей. Для 2 и 3-го столбцов рис. 4-8 и
4-9 должно быть поэтому Vs > 1, для 4-го
столбца этих рисунков — Vs > 2. Этому не
противоречит то, что в отдельных системах 2
и 3-го столбцов происходит слияние связей, по-
скольку в слиянии этом участвуют здесь не
более одной связи, обладающей замещающей
способностью.
Однако в общем случае приводимых систем
замещающая способность связей не сохраняется
при наложении, как это явствует уже из нало-
жения, приводящего к ненулевой системе на
рис. 4-7Дг Число V(s0) общей системы может,
таким образом, превышать сумму чисел ча-
стных приводимых систем, равняться ей гили
уступать ей. Последний случай будет иметь
место тогда, когда внешние связи, не обладав-
444
шие замещающей способностью в частных си-
стемах, приобретают ее в общей системе. По-
лучаемые таким наложением нулевые системы
не разлагаются на независимые нулевые под-
системы и, следовательно, локально неразре-
шимы. В системах 2-го и 3-го столбцов общей
задачи на рис. 4-8 нет такого приобретения, и
i
для них V^0)=^V^. Напротив, в тех же столб-
цах на рис. 4-9 и в 4-м столбце обоих рисун-
ков в отдельных системах имеет место такое
приобретение и соответственно: V(s0)>2V(s£). Во 2-м
и 3-м столбцах рис. 4-9 наложение нулевой си-
стемы на ненулевую, а в 4-м столбце обоих
рисунков—наложение двух ненулевых систем
может привести к образованию нулевой общей
системы. Это имеет место в том случае, когда
неправильное решение одной из частных задач
является правильным решением второй, и—на-
оборот.
На рис. 4-8, 4-9 рассмотрена половина всех
возможных решений частных классических за-
дач. Вторая половина может быть получена,
как это сделано на рис. 13, транспонированием
всех систем рисунка, 1переводящим входное за-
мещение в выходное. Значительно меньше по-
ловины решений общей классической задачи
представлено на рис. 4-8 и 4-9. Не указаны
наложения аб, ба. ав, ва, аг, га, т. е. еще 24
правильных и 24 неправильных решения. Чи-
сло нетранспонированных правильных реше-
ний равно 48, а общее их число—96. В простей-
шей из структурных задач предстает чрезвы-
чайное многообразие решений, из которого
классическая теория могла обнаружить теоре-
мой Стодола одно лишь решение (рис. 4-8,<?i).
Упорядочить и объяснить это множество ре-
шений может лишь общая теория структурной
устойчивости, рассматриваемая ниже.
Неприводимые системы. В локаль-
но разрешимых нулевых системах существует
единственным образом устанавливаемое вза-
имно однозначное соответствие замещаемых
внутренних и замещающих внешних связей.
В приводимых локально неразрешимых систе-
мах такое взаимно однозначное соответствие
устанавливается не единственным образом.
В неприводимых локально неразрешимых си-
стемах такое соответствие отсутствует. Здесь
каждой замещаемой внутренней связи не мо-
жет быть сопоставлена определенная един-
ственным или многими способами внешняя
связь, как в двух первых случаях, и лишь
всей совокупности замещаемых связей — вся
совокупность замещающих.
Примером неприводимых систем являются
рассмотренные выше (рис. 1-4) гироскопиче-
аз> 83) г,)
Рис. 4-14. Приводимые и неприводимые сервосистемы.
ские системы. Система на рис. 1-4 обладает
нормальной структурной устойчивостью при
наименьшем для систем этой структуры числе
связей т. е. является нулевой. Действи-
тельно, снятие любой из связей приводит здесь
к потере структурной устойчивости. Между тем
на единицу больше ЛГ* > и система, следо-
вательно, неприводима. Гироскопические непри-
водимые системы будут подробно рассмотрены
ниже, здесь же рассмотрим неприводимые сер-
восистемы. Неприводимые нулевые сервоси-
стемы, как и гироскопические неприводимые
системы, содержат в четном количестве воз-
буждающие связи. На них распространяется,
таким образом, теорема Кельвина.
На рис. 4-14 в первой строке дано последо-
вательное, вплоть до полного, замещение внут-
ренних тормозящих связей внешними. Во вто-
рой строке замещенные тормозящие внутрен-
ние связи заменены возбуждающими. Если бы
эти возбуждающие связи обладали нулевой
валентностью, наложение их не изменило бы
числа Vs. Если бы они, как тормозящие связи,
обладали бы единичной валентностью, нало-
жение их уменьшило бы число V3 на число
этих связей. Имеет место, однако, промежу-
точный случай — связи эти обладают частич-
ной валентностью, причем лишь в тех систе-
мах, где число их больше единицы и они мо-
гут вступать в четные сочетания. Наложение
их уменьшает число Vs, од-
нако— не на всё число нала-
гаемых связей. Системы вто-
рой строки обладают по-
этому избыточными связями.
Избыточные внешние тор-
мозящие связи сняты в 3-й
строке рисунка. Системы 3-й
строки являются нулевыми,
вопреки содержащимся в них
избыточным возбуждающим
связям, поскольку эти возбуж-
дающие связи не обладают, как
доказано будет ниже, заме-
щающей способностью, т. е.
обладают нулевой валент-
ностью, и могут быть отброше-
ны без нарушения устойчиво-
сти системы. Так в системе а3
может быть отброшена воз-
буждающая связь 1-го элемен-
та, в системе г3— последнего.
Возбуждающие связи облада-
ют частичной или нулевой ва-
лентностью.
Подсчет связей в нулевых
системах 3-й строки после отбрасывания свя-
зей с нулевой валентностью, позволяет устано-
вить полные числа связей в этих непри-
водимых системах. Числа эти указаны на ри-
сунке. Они превышают число M*s , следова-
тельно системы неприводимы.
Системы нижней строки могут быть рас-
сматриваемы как обратное замещение внеш-
них тормозящих связей систем верхней строки
внутренними возбуждающими связями. Из-за
сниженной, половинной валентности послед-
них каждая тормозящая связь замещается
двумя возбуждающими, что приводит к пре-
вышению числа над числом Alj. В приво-
димых системах все связи обладают макси-
мальной, единичной валентностью, в неприво-
димых — возбуждающие связи обладают сни-
женной, половинной валентностью.
Результат этот может быть понят в свете рас-
смотренного выше информационного воздействия тормо-
зящих связей и дезинформационного—(возбуждающих.
Одна возбуждающая связь не может иметь информа-
ционного и, следовательно, стабилизирующего значения,
две — могут иметь. Так для судебного процесса бесполе-
зен один лжесвидетель, столкновение же показаний
двух лжесвидетелей может нести полезную информацию.
Системы на рис. 4-14 весьма необычны.
С помощью дифференциальных внешних свя-
зей здесь достигаются устойчивое регулирова-
ние астатического, или даже отрицательно ста-
10 И. И. Гальперин.
145
тического, объекта отрицательно статическими
и отрицательно диссипативными регулятором и
сервомоторами. Системы эти будут подробно
рассмотрены ниже.
В приводимых системах каждой замещае-
мой связи можно сопоставить замещающую ее
внешнюю связь, в неприводимых — можно
лишь всей совокупности замещаемых связей
сопоставить всю совокупность замещающих
связей. Этим определяется безусловная несу-
перпозиционность неприводимых систем. Не-
приводимые системы безусловно несуперпози-
ционны.
Укажем вкратце остальные структурные
свойства рассмотренных нулевых систем. Все
они структурно апериодичны и, следовательно,
обладают нормальной структурной устойчиво-
стью. Ни одна из них не обладает безусловной
устойчивостью. Все они структурно монотонны.
Этим исчерпываются основные динамические
их структурные свойства. Из статических
свойств укажем на безусловную изодромность
выходных систем (правый столбец рис. 4-13)
•и структурную неизодромность входных си-
стем (левый столбец рис. 4-13) в первом их
элементе, с которым на рис. 4-13 совмещен
объект.
Упорядочим все сказанное. Правильные
решения могут быть локальными и нелокаль-
ными, а образуемые ими нулевые системы, со-
ответственно локально разрешимыми и нераз-
решимыми. Наложение локально разреши-
мых систем образует локально разрешимые
же системы. Наложение локально разреши-
мых нулевых систем на ненулевые системы
образует ненулевые или локально неразреши-
мые нулевые системы. Наложение ненулевых
систем образует все три вида систем: ненуле-
вые системы, локально неразрешимые нулевые
системы, локально разрешимые нулевые -си-
стемы.
Рассмотренные частные зависимости яв-
ляют на первый взгляд крайне разнохарактер-
ную картину, которую лишь предстоит объяс-
нить общей теории. Выяснились пока лишь:
деление нулевых систем на локально разреши-
мые и неразрешимые, общая для всех валент-
ных задач зависимость структурной устойчи-
вости от общего числа связей и их конфигура-
ции, теоремы связывания, скелетности и по-
рядка. Обнаружилось также, что структур-
ная неустойчивость, предстающая в теоремах
классической теории регулирования в виде не-
которого изолированного феномена, исключе-
ния, охватывает широкий класс систем. Счаст-
ливым исключением может быть сочтена ско-
рее структурная устойчивость. Беспорядочное,
не руководимое общей теорией структурной
146
устойчивости проектирование легко может
привести к ошибочному выбору структурно не-
устойчивых либо в той же мере непригодных
вырожденно устойчивых систем.
Г. Вырожденные системы
Особенностью отношений валентности яв-
ляется их универсальность, независимость от
объема системы, от числа и порядка элемен-
тов. Особенность эта находит выражение в про-
извольной длине и одинаковой структуре гомо-
логических рядов химических, кинематических
и иных структурных соединений. Естественно
поэтому, что структурные теоремы Вышне-
градского и Стодола, доказанные ими для пря-
мого регулирования, распространяются, как
показано выше, на однокаскадное непрямое и
должны были бы распространяться и на мно-
гокаскадное. Так действительно обстоит с пер-
вой теоремой Вышнеградского (первый стол-
бец рис. 4-3) и с теоремой Стодола (верхняя
строка рис. 4-4). Неизменными, не зависящи-
ми от объема системы, остаются не только
правильные решения (верхняя строка рис. 4-3) „
но и неправильные (нижняя строка рисунка).,
Отклонения возникают, на первый взгляд, для
второй теоремы Вышнеградского (второй
столбец рис. 4-3) — структурно неустойчивое
при одном каскаде (рис. б\) регулирование
адиссипативным регулятором приобретает
структурную устойчивость цри двух каскадах
(рис. б2). Тезис Вышнеградского—«нет регу-
лятора без катаракта» теряет как будто бы
свою общность и относится только к недоста-
точно развитым системам регулирования. За-
коны динамической валентности также как
будто приобретают ограниченное значение..
Подобного рода выводы основываются, од-
нако, на случайном подходе к задаче. Об-
щая структурная теория безошибочно пред-
сказывает вырожденность структурной устой-
чивости во всех устойчивых системах
с нарушенными условиями валентности. Си-
стема б2, структурно устойчивая вопреки недо-
статку одной связи, структурно неапериодич-
на. Область устойчивости этой системы лише-
на апериодического ядра, структурная устой-
чивость носит грубо вырожденный характер.
В третьем столбце рисунка показано, что вы-
рождения не возникает в общей задаче Выш-
неградского — о регулировании адиссипатив-
ным и астатическим регулятором.
Для вырожденных систем в дополнение
к числу (оно в дальнейшем, как и выше,,
будет обозначаться кратко Vs) —числу свя-
зей, недостающих для нормальной структур-
ной устойчивости (число нормальных степеней
Характеристические уравнения
^W+ T0tf(Tt+T2)pb+T0 (^TtTz)p^
+To(Tf>Tz)p2<-Top+1=O
+(T,o+T2O)vz+v+i=0; v-Top
Критерии устойчивости
^2 = UroV^2O^°
^(lo-Wo^-U^-T2^ >0
Характеристические
уравнения
тор(т#+1Хтгр+1)+1=о
тгЛ^(Тго+т30)уг^1=а
Граница области
устойчивости
&г^го*1зо)-'Ггогзо-&
0.25
а)
Рис. 4-15.
ft
Пространство параметров вырожденной одноциклической системы.
неустойчивости), будет указываться число
V^a) — число связей, недостающих для вырож-
денной структурной устойчивости (число 'вы-
рожденных степеней неустойчивости). Для си-
стемы б2 первое из этих чисел равно единице,
второе нулю, по отношению к задаче нормаль-
ной структурной устойчивости система эта не-
достаточно связана, по отношению к задаче
вырожденной структурной устойчивости — ну-
левая. Для системы в2 первое число равно
двум, второе — единице, система недостаточно
связана по отношению к обеим задачам.
Рассмотрим свойства вырожденной одно-
циклической системы на рис. 4-3 б2, принад-
лежащей к рассмотренным Стодола [Л. 4] вы-
рожденным системам и затем предлагавшейся
в качестве нормального решения задачи
Вышнеградского [Л. 45]. Первые два не-
равенства Гурвитца удовлетворяются здесь
тождественно (рис. 4-15), т. е. при любых зна-
чениях параметров связей (на рис. 4-15,а вве-
ден символ — «тождественно больше»), по-
следнее неравенство определяет область устой-
чивости системы, показанную на рисунке. За-
пись в критериях подобия1 позволяет вместить
область устойчивости 4-параметрической си-
стемы в трехмерное пространство параметров.
Гипербола с асимптотами Т10=1 и Г20=1
в координатной плоскости Г10, Г20 представ-
ляет собой границу области устойчивости од-
ноциклической подсистемы 3-го порядка, воз-
никающей из рассматриваемой системы при
идеальном регуляторе (рис. б). Допустимое по
устойчивости значение постоянной времени UrG,
оценивающей величину масс регулятора, тем
больше, чем дальше значения Т10 и Т20 от этой
гиперболы и от осей координат, и не может
превышать произведения TiQT2o. В области
значений Тю, Ло, обеспечивающих достаточное
качество процесса (Тю = 0,1; Т20=0,5), допу-
стимые значения Utq, т. е. масс регулятора,
весьма малы. Непригодность этого способа
регулирования адиссипативным регулятором
заключается, однако, не столько в этой форме
области устойчивости, сколько в вырожденном
характере этой устойчивости. Переходные про-
цессы в такой вырожденной устойчивой систе-
1 См. (3-43)4
10*
147
Характеристические
уравнения:
ToP(TlP^W2P^+^0
и, 7гР+ Wtyp2* Тор+ы
Т2ОГзо^ЧГго^зо^^°
Граница области
устойчивости:
^2= (Тго*Тзо) "^го^эо"0
Характеристические
уравнения:
lop(Ttp+»(T2P+1)(T3p+1)+l=O
ТОТ1ТгТзР^То^Т1Т^ТгТ3)р3+
+ Т0(Т,^Т3)р3+Т0р-И=Р
3,о^мУ^(ТюТго+Т1ОТзо+Т2ОГзо)и^
Граница области
устойчивости:
^3^10^20^0 ?30+ ^20^30^ ^2О+^3^
^1ЛоЪо~^0^20^10^30^2оТз0^2'^
Область
tvSSSSI устойчивости
Область
апериодичности
0.5
0,25
го
Рис. 4-16. Пространство параметров
нормальной одноциклической системы.
ме 5-го порядка практически мало отличаются
от переходных процессов в структурно не-
устойчивой системе 4-го порядка (рис. 4-3,6^,
получающейся из первой идеализацией одного
из сервомоторов. Обе системы в равной мере
практически непригодны.
Рассмотрим подробнее это свойство вы-
рожденных систем. На рис. 4-16,а дано для со-
поставления пространство параметров нор-
мальной трехкаскадной системы с идеальным
регулятором. Область устойчивости его содер-
жит расположенное у начала координат апе-
риодическое ядро —область апериодичности.
На рис. 4-16,6 дано пространство (плоскость)
параметров двухкаскадной подсистемы этой
системы (подсистема эта получена идеализа-
цией 1-го каскада). Плоскость эта представ-
ляет собой координатную плоскость Тю—Т2о
пространства параметров исходной системы и
совпадает с той же плоскостью на рис. 4-15,а,
поскольку совпадают подсистемы на обоих ри-
сунках. Плоскости эти содержат область апе-
риодичности, однако на рис. 4-16 область эта
является следом области апериодичности ис-
ходной нормальной системы, на рисунке дсе
4-15 область апериодичности в координатной
плоскости не является следом области аперио-
148
дичности вырожденной системы, поскольку
область эта здесь отсутствует. Это — весьма
явственный признак вырождения.
Зависимость нормальной структурной
устойчивости от полного числа связей и пра-
вильной их конфигурации разъясняется тео-
рией информации. Динамическая связь — си-
ноним информаций. Нормальная структурная
устойчивость достигается полнотой информа-
ции о состоянии системы, т. е. полным чис-
лом связей. Это объясняет, почему из всех
структурных задач валентной является имен-
но задача нормальной структурной устойчи-
вости. Полное число связей при правильной
конфигураций их означает полноту информа-
ции, неполное число связей или неправильная
конфигурация их—неполноту информации, из-
быточное число связей, при правильной кон-
фигурации, — избыточность информации.
Д. Функциональная и динамическая структуры
Структурному исследованию динамических
систем должна предшествовать критическая
работа, очищающая предмет исследования —
динамическую структуру систем — от прочно
сросшихся с ним понятий, относящихся к функ-
циональной структуре систем и лишь затем-
Рис. 4-17. Обращение сервосистем.
няющих этот предмет. Эта ныне достаточно
очевидная задача привела в свое время к по-
становке задачи структурной устойчивости.
Образцом и здесь послужила критико-очисти-
тельная работа, начатая в теории механизмов
Рело и Ассуром [Л. 2, 8].
а) Функциональная и динамическая структуры.
Теория механизмов со времени Рело начи-
нает исследование механизма отвлечением от
функциональной его структуры и выделением
лежащей в основе механизма абстрактной ки-
нематической цепи, определяющей кинематиче-
скую структуру механизма. Относящиеся к его
функциональной структуре функциональные
понятия — кривошипы, шатуны, ползуны
и т. д., — определяющие функции различных
звеньев, заменяются кинематическими поня-
тиями звено, кинематическая пара, — относя-
щимися только к кинематической структуре.
Возврат к конкретному исследованию, приуро-
ченному к функциональной структуре, проис-
ходит затем на расширенной основе. Ставя ки-
нематическую цепь поочередно на каждое из
ш ее звеньев, как на стойку, теория механиз-
мов одним этим приемом обращения получает
из абстрактной кинематической цепи m раз-
личных конкретных механизмов. Медленное
развитие теории механизмов в эпоху, предше-
ствующую Рело, в наибольшей мере объяс-
няется тем, что исследователь влачил за собой
груз функциональных понятий, не только из-
лишних, но и затемняющих предмет до такой
степени, что тождественные по кинематической
структуре системы рассматривались раздельно,
как независимые. Этот неизбежный, по-види-
мому, этап повторился затем в теории регули-
рования и занял в ней 50 с лишним лет.
Первая теорема Вышнеградского легко
была распространена на непрямое регулиро-
вание. В непрямом регулировании должна бы-
ла возникнуть еще одна структурная теоре-
ма: регулирование астатического объекта
астатическим сервомотором структурно не-
устойчиво. В выключателе Фарко найден был
способ сообщать статичность новым элемен-
там непрямого регулирования — отсечным
гидравлическим сервомотором. Однако лишь
30 лет спустя, впервые, по-видимому, Штей-
гном, в статье с сенсационным заглавием
[Л. 11], было выяснено, что регулирование
статического объекта (объекта с саморегули-
рованием) астатическим сервомотором струк-
турно устойчиво (для астатического регуля-
тора вывод этот получен был ранее Максвел-
лом [Л. 1] и Стодола [Л. 4]. Штейн формулирует
и доказывает это положение как независимую
от формулированных выше общих положе-
ний теорему, не замечая, как и предшествен-
ники его и продолжатели — в последующем
десятилетии, что все четыре случая (регули-
рование астатического объекта статическим
регулятором и сервомоторами и статического
объекта — астатическими регулятором и сер-
вомоторами) представляют собой одно и то же
предложение, различающееся лишь связанной
с функциональными понятиями словесной обо-
лочкой и в освобожденном от этой оболочки
виде гласящее (теорема 4-V): структурно
устойчивая одноциклическая система не мо-
жет содержать более одного астатического
элемента [Л. 25 и 30], (рис. 4-17,а). Эта первая,
полученная в обезличенной, отвлеченной от
функциональной структуры, формулировке,
структурная теорема дала начало общепри-
нятой теперь отвлеченной формулировке всех
структурных положений автоматики. *Ценой
отвлечения от таких функциональных понятий,
как объект, регулятор, сервомотор, замены их
структурными понятиями элемент и связь, до-
стигнут был характерный для структурного
исследования результат — несколько разно-
родных на первый взгляд положений слились
в одно. Если объект астатичен, то единствен-
ное вакантное место астатического элемента,
указываемое теоремой 4-V, занято объектом,
и устойчивая система не может содержать
астатического регулятора или астатического
сервомотора (рис. б). Это и составляет со-
держание функциональной первой теоремы
Вышнеградского. При статическом объекте ва-
кансия эта освобождается и может быть за-
нята либо астатическим регулятором (рис. в),
либо астатическим сервомотором (рис. г). Это
составляет содержание функциональной тео-
ремы Штейна.
Астатический сервомотор является интег-
рирующим элементом. .Именно наличием та-
кого элемента, обеспечивающего в статике ну-
левую интегральную ошибку, и, следовательно,
нулевую неравномерность регулирования, объ-
ясняется изодромность обращенной системы г..
149
Эта связь между изодромностью и регулиро-
ванием по интегралу будет ниже подробно
рассмотрена.
б) Обращение сервосистем
Переход от абстрактной формулировки
теоремы 4-V, относящейся только к динами-
ческой структуре системы, к каждой из трех
вытекающих из нее конкретных функциональ-
ных теорем полностью аналогичен операции
обращения механизмов и должен быть наз-
ван обращением регулирующих систем. От-
влекшись вначале от функциональной струк-
туры регулирующей системы и выделив из нее
этим способом абстрактную динамическую
систему (рис. 4-17,а), можно затем, совмещая
объект с каждым из ш элементов этой абст-
рактной системы, получить m конкретных и
функционально различных регулирующих си-
стем. Тождественные по динамической струк-
туре (это отмечено на рисунке знаком тож-
дества) прямая (рис. б) (с астатическим объ-
ектом) и обращенные (с астатическим регуля-
тором или сервомотором) (рис. в, г) одно-
циклические системы различны по отношению
к функциональной структуре уже в статике:
в них с различными точками системы, обла-
дающими различными локальными свойства-
ми, совмещены функционально различные
элементы.
Отвлечение от функциональной структуры
и последующий возврат к ней на расширен-
ной основе приводят в теории регулирования,
как и в теории механизмов, к многократному
увеличению числа резко различных практиче-
ски систем регулирования. Обе области —
кинематического и динамического структурно-
го синтеза, — как и вообще структурное ис-
следование в самых разнородных областях,
связаны при ближайшем рассмотрении дале-
ко идущей общностью содержания, методов и
результатов. Этим общим содержанием явля-
ются принуждение, стеснение — кинематиче-
ское, динамическое и иное — степеней свобо-
ды, неустойчивости и других.
Отвлечением от функциональной структуры, перехо-
дом к так называемым типовым звеньям, открывается
теперь любой элементарный учебник. Отвлечение это
предстает тем не менее в этих изложениях как опера-
ция настолько тривиальная, что подчеркиваемая обычно
при этом важность ее не может не вызывать недоуме-
ния. Виновато в этом, однако, изложение. Отвлечение
от функциональной структуры явилось в автоматике та-
ким же поворотным моментом, как в свое время в тео-
рии механизмов. В автоматике накопилось к этому вре-
мени столько тождественных положений, облеченных
в мистифицирующую функционально различную форму,
что этот шаг отвлечения, снимавший мнимые различия,
неизбежно должен был слить функциональные теоремы
150
в структурные теоремы и поставить задачу структурной
устойчивости. То, что задача эта не была поставлена
в предшествовавших работах, вводивших частотные ме-
тоды и также поэтому наталкивавшихся на необходи-
мость разделения функциональной и динамической
структур, может быть объяснено только отсутствием
сколько-нибудь явной и ясной постановки вопроса о та-
ком отвлечении. Это может послужить оправданием
той декларативной постановки его, которая дана была
в первых наших работах (Л. 2'5, 30]. Последующее раз-
витие оправдало такую постановку, хотя современное
•изложение сохранило от нее одну лишь декларативность
и термины — функциональная и динамическая структу-
ра. Отделяя постановку вопроса от породившей ее за-
дачи обращения, оно свело содержание его к едва
различимому остатку. Крайне неудачен термин — звено
(вместо — элемент), содержащий в себе чуждые этому
понятию пространственные представления.
Е. Нелинейные системы
Полученные выше условия структурной
устойчивости линейных систем не только яв-
ляются условиями структурной устойчивости
«в малом» нелинейных систем с непрерывны-
ми характеристиками, но и распространяются
в неизменном виде на важный класс нелиней-
ных систем с разрывными характеристиками—
трехпозиционные релейные системы. Системы
эти принадлежат рассмотренной выше
(§ 1-3-3) качественной механике.
а) Релейные элементы
Уравнение f-ro элемента линейной системы
может быть представлено в виде:
4!) м)
*=1
z = l, 2, ...,(z—1), (z-{-1),..., щ,
(*)=>•2.....'
где — операторные полиномы ik-ro пакета
связей (*)-го порядка. Будем называть эле-
мент релейным, если уравнение это приобретает
вид:
+4^ ’J Яг]’ (4-5)
/ = 1, 2, ...,(z— 1), (z-f-1),... ,wz,
zG) Zz\
где ZY.' — параметр l . j -го порядка старшей
связи z-ro элемента. Для элемента 2-го порядка
уравнение это примет вид:
^=--^"sign [SD/^
Qk + (T
(4-6)
i = l, 2,..., (t — 1), (i +1),..., m.
Для элемента 1-го порядка оно примет вид:
Чг
т
[S
Л=1
(4-7)
Z = l, 2,...,(/— 1), (i 4“ 1), •••>'ГС-
Ускорение элемента в первом случае и ско-
рость во втором постоянны по модулю и сов-
падают по знаку со знаком выражения в квад-
ратных скобках — внешнего воздействия. От
линейных элементов релейные элементы от-
личаются только независимостью от модуля
внешнего воздействия; зависимость от знака
внешнего воздействия в обоих случаях одна
и та же — при изменении знака этого воздей-
ствия изменяется знак старшей (т. е. равной
порядку элемента) производной. Сравнение
переходных процессов в релейных и линейных
элементах произведено было выше (рис. 1-32,
1-33).
б) Релейные связи
Аналогично понятию „релейный элемент*
понятие релейная связь. Будем называть связь
релейной, если ее операторный полином D^qh
принимает вид: sign D^qk.
Очевидно, что в элементарной системе ре-
лейной может быть выполнена только стар-
шая внутренняя связь — собственно элемент.
Этим определяется старшая производная
движения элемента. Все нижеследующие за
ней производные принимают в релейном
элементе интегральные, по отношению
к этой старшей производной, значения,
независящие, в интервалах интегриро-
вания, от внутренней структуры элемен-
тарной системы. В элементарных систе-
мах релейные внутренний связи реализу-
ются только в качестве старших связей.
Наличие при этом также и нестарших
релейных связей явилось бы внутренним
противоречием и привело к структурной
неустойчивости (рис. 4-18).
Элементарная система может быть
рассматриваема как пакет внутренних
связей (оператор qt). Те же выводы
относятся поэтому и к пакетам внешних свя-
зей (операторам qk). Здесь также релей-
ной может быть лишь старшая связь пакета.
Это явствует из того, что эквивалентным
структурным преобразованием пакеты внешних
связей переводятся в пакеты внутренних свя-
зей (обратимость внешних и внутренних свя-
зей). Оператор релейного пакета внешних
связей имеет вид:
(4-8)
Здесь также наличие в пакете нестарших
релейных связей приводит к структурной не-
устойчивости (рис. 4-19). В обоих случаях
к числу степеней неустойчивости системы
должно быть добавлено число неправильно
размещенных (в качестве нестарших связей)
релейных связей.
Аналогия между релейными элементами и
релейными связями может быть продолжена и
дальше. Легко доказать, что для структурной
устойчивости необходимо иметь по меньшей
мере один элемент системы нёрелейным. Из
обратимости внешних и внутренних связей вы-
текает, что для структурной устойчивости не-
обходимо по меньше мере один пакет внешних
связей иметь нерелейным (рис. 4-19). Легко
также доказать, что в структурно устойчивых
системах и внутренние и внешние пакеты свя-
зей, состоящие из одной только статической
связи, не могут быть релейными (рис. 4-19).
в) Релейные системы
Релейность одних только внутренних свя-
зей, в частности — одних только старших
внутренних связей (элементов), назовем
внутренней релейностъю системы (рис. 4-19а2),
релейность одних только внешних связей —
внешней релейностъю системы (рис. б2), ре-
Линейные * Релейные
Рис. 4-18. Релейные пакеты внутренних связей.
151
<Ри»с. 4-19. Линейные и релейные нулевые системы.
лейность тех и других связей — смешанной
релейностью системы (рис. в2, г2, б2).
Релейность всех, кроме одного .(условие
структурной устойчивости), элементов систе-
мы (рис. а2) назовем полной внутренней ре-
лейностью ее. Аналогично возникает понятие
полная внешняя релейность (рис. б2). Полной
общей релейностью назовем соединение пол-
ных внутренней и внешней релейностей (рис.
02, <?2, б2) .
На рис. 4-19 в первой строке даны линей-
ные нулевые системы, во второй — той же
структуры смешанные, частично линейные, ча-
стично релейные системы. В них соблюдены
указанные выше условия правильной конфи-
гурации, и все они поэтому также явля-
To=&Ta=0.04-b,b=Ut Шеек
ются нулевыми. В системах
третьей строки условия эти на-
рушены и системы эти струк-
турно неустойчивы: в систе-
ме аз все пакеты внутренних
связей (все элементарные си-
стемы) релейны, в системе
б3 — все пакеты внешних свя-
зей релейны, в системе вз ре-
лейна одна из старших связей,
в системе гз релейна статиче-
ская единственная связь паке-
та (неправильность, имеющая
место и в системе бз, вдвойне,
таким образом, неправиль-
ной), в системе дз содержатся
все эти неправильности вместе.
Все эти ограничения выяс-
няются качественной механикой. При соблю-
дении их релейные системы подчиняются тем
же условиям структурной устойчивости, что и
линейные системы.
г) Релейные модели
Наиболее важным практически классом
релейных систем являются системы с полной
внутренней или полной внешней релейностя-
ми — релейные модели. Значение этих систем
определяется простотой интегрирования их.
Интегрирование производится здесь графоана-
литически, по интервалам, между точками пе-
реключения релейных элементов [Л. 58, 87].
Поясним его на простейшей релейной модели
одноциклической системы (рис. 4-20). Здесь
Рис. 4-20. Переходные процессы в релейной модели одноциклической системы.
152
Рис. 4-22. Переходные процессы в нулевых си-
стемах с импульсом по второй производной.
Рис. 4-21. Переходные процессы в нулевых системах
с импульсом по первой производной.
здесь в момент равенства нулю разностей
в скобках, т. е. в момент пересечения соответ-
ствующих кривых. Эти моменты назовем точ-
ками переключения (рис. 4-20). Ход интегри-
рования понятен из рисунка. Буквами П
отмечены точки переключения, буквами л —
, соответствующие им точки сопряжения на
кривой г|).
В верхней части рис. 4-20 дан колебатель-
ный переходный процесс, нижней — апериоди-
ческий. Первый возникает при нарастающих,
как обычно, временах сервомоторов, второй —
при убывающих. Во втором «случае возникает
характерный для качественной механики
(рис. 1-33) пульсирующий режим, приводя-
щий к слиянию более быстрых ведомых эле-
ментов с -более медленными ведущими. Более
быстрые ведомые элементы вырождаются при
этом в идеальные элементы (рис. 4-20 б2, б3),
взята в качестве релейной модели система с пол-
ной внутренней релейностью. Ее уравнения:
: 1
1 о
Hi = 7; sign (i) — ti,) (4-9)
Р-2 =7; sign (Hi —Р-г)
Ps = sign (р.2 — р.3)
Переключения релейных элементов — из-
менение знака их скорости — происходит
а вся усилительная цепочка—в простую связь
саморегулирования (рис. б4). В релейных си-
стемах выгодна убывающая последователь-
ность времен сервомоторов.
На рис. 4-21 дана более сложная нулевая
система — с импульсом по производной, в ли-
нейном (рис. а) и релейных (рис. б, в) ис-
полнениях. На рис. б представлена полная
внутренняя релейность, на рис. в — полные
внутренняя и внешняя. На рис. 4-22 дана ну-
левая система с полной внутренней релей-
ностью и импульсом по 2-й производной. Сов-
падение условий структурной устойчивости
линейных и релейных систем позволит в даль-
нейшем заменять в доказательствах теорем
структурной устойчивости линейные системы
более простыми в рассуждениях релейными
их моделями.
153.
4-2-2. Гироскопические системы
А. Теорема Кельвина
Г ироскопические системы
занимают промежуточное по-
ложение между натуральными
системами и сервосистемами—
в них преодолена специальная
структура натуральных систем,
но не достигнуто еще полное
освобождение структуры, отли-
чающее сервосистемы. То же
промежуточное положение за-
нимает и структурное содер-
жание их теории — оно бога-
че, чем для натуральных си-
стем, и беднее, чем для серво-
систем. Здесь впервые вместе
с разрушением натуральной
структуры возникает структур-
ная теорема Кельвина — о четном числе не-
устойчивых степеней свободы в гироскопиче-
ски стабилизируемых системах. Теорема эта
дана на рис. 4-23.
На рис. а здесь базовая для гиро-
скопических систем открытая система. В от-
личие от рассмотренных выше статически
связных, образованных только статическими
несобственными связями базовых систем, эта
базовая система статически несвязна, образо-
вана дифференциальными несобственными
связями. Все остальные системы рисунка по-
лучены из этой базовой системы замещением
Рис. 4-23. Гироскопические системы.
v<n)=o
vs(n)=o
Рис. 4-24. Локальная
разрешимость сервосистем -и неразрешимость гиро-
скопических и натуральных систем.
внутренних тормозящих связей 1-го порядка
внешними тормозящими того же порядка свя-
зями (рис. 6) или совокупностью тормозящих
внешних :и возбуждающих внутренних связей
(рис. в. г). Для первой из этих систем (рис. б)
можно установить взаимно однозначное соот-
ветствие между замещающими внешними и
замещаемыми внутренними связями, и она
поэтому приводима. Для двух остальных это
потому уже невозможно, что в них число за-
мещающих связей больше числа замещаемых,
и они поэтому неприводимы.
Б. Приводимые системы
Приводимые гироскопические системы
(рис. 4-23,а) могут быть рассматриваемы как
решение обобщенной задачи Вышнеградско-
го — синтеза структурно устойчивых систем
из адиссипативных элементов. Задача эта ре-
шена здесь, на первый взгляд, тем же спосо-
бом— входного замещения в открытой базо-
вой системе, что и в локально разрешимых
сервосистемах. Здесь, однако, имеет место
лишь внешнее сходство — приводимые гиро-
скопические системы локально неразрешимы.
Это показано на рис. 4-24. На этом рисунке
одна и та же указанная выше задача — синте-
за устойчивых систем из адиссипативных эле-
ментов — решена в локально разрешимых
сервосистемах (первый столбец), в гироско-
пических системах (второй столбец) и в на-
туральных системах (третийстолбец). В серво-
системах положение единственного диссипа-
тивного элемента однозначно определено —
в нулевых системах он должен быть либо по-
следним (входные системы, рис. ai), либо
154
первым (выходные системы, рис. а4). Проме-
жуточные его положения приводят к структур-
ной неустойчивости (рис. аг, й3). В гироско-
пических и натуральных системах положение
этого элемента произвольно. Сервосистемы
локально разрешимы, гироскопические и нату-
ральные системы локально неразрешимы.
Произвол в расположений адиссипативно-
го элемента, вполне очевидный для натураль-
ных систем (где назначением этого элемента
является .диссипация, безразлично, в каком
месте системы), не очевиден для гироскопиче-
ских систем и будет ниже доказан. Здесь же
может быть доказан транспонированием этих
систем (рис. 4-25) только произвольный выбор
между двумя крайними положениями этого
элемента.
На рис. 4-25 транспонированы серво- (1-я
строка), гироскопические (2-я строка) и нату-
ральные (3-я строка) системы. Во всех трех
случаях транспонирование приводит к зеркаль-
но отображенному расположению соответст-
венных элементов. Для нулевых локально раз-
решимых систем это расположение является
единственным, для гироскопических и нату-
ральных систем — одним из многих показан-
ных на рис. 4-24.
Транспонирование, представляющее собой
для сервосистем эквивалентное в общем слу-
чае преобразование (рис. 4-25,а), вырождает-
ся для гироскопических и натуральных систем
(рис. 4-25,6, в), как и для одноциклической
системы (рис. 4-13,а), в тождественное преоб-
разование. Это вытекает из доказываемой
ниже теоремы 4-VI: транспонирование си-
стем с симметричной или кососимметричной
матрицей внешних связей представляет собой
тождественное структурное преобразование
системы.
Рис. 4-25. Транапонирование цепных систем.
В. Неприводимые системы
Неприводимые нулевые гироскопические
системы даны в нижней части рис. 4-23.
В каждой из них содержится, по теореме
Кельвина, четное число отрицательно стати-
ческих элементов, один отрицательно диссипа-
тивный элемент, один положительно диссипа-
тивный и все остальные — адиссипативные.
Системы эти решают задачу синтеза нулевых
систем из таких элементов — обобщенную за-
дачу Стодола — Вышнеградского. Как и не-
приводимые сервосистемы, они образованы
возбуждающими собственными связями, и
здесь обладающими сниженной валентностью.
И здесь это приводит к превышению числа Ms
над Л4* и к неприводимости. ч
Все гироскопические системы рис. 4-23 яв-
ляются нулевыми — в каждой из них отбра-
сывание одной хотя бы связи приводит, как
показано ниже, к потере структурной устой-
чивости. Для приводимой системы б, однако,
полное число связей Ms равно M*s , для не-
приводимых систем в и г оно на единицу
больше.
Гироскопические системы, приводимые и
неприводимые, будут подробно рассмотрены
ниже. Здесь же заметим, что в этих системах
отсутствует вырожденная структурная устой-
чивость, т. е. имеет место либо структурная
неустойчивость, либо нормальная структурная
устойчивость. Теорема 4-VII. Гироскопи-
ческая структура исключает вырожденную
структурную устойчивость. Теорема доказана
будет ниже.
4-2-3. Натуральные системы
В натуральных системах, напротив, пред-
ставлена, как и в сервосистемах, и нормальная,
и вырожденная устойчивость. Здесь возникает
впервые и вторичное вырождение, возвращаю-
щее первично вырожденным системам утерян-
ные или структурные подсвойства.
А. Первичное и вторичное вырождение
На рис. 4-26 представлены все эти градации
структурной устойчивости в натуральных си-
стемах. На рис. а дана базовая для всех этих
систем статически связная открытая система.
Из энергетической замкнутости явствует струк-
турная неустойчивость консервативной систе-
мы, получаемой из системы б отбрасыванием
катаракта в последнем элементе (устойчиво-
стью кратко названа была выше асимптотиче-
ская устойчивость).
Структурная неустойчивость вытекает
здесь и из недостатка связей. Чтобы сообщить
системе структурную устойчивость, достаточ-
155
v(n)=v<d'=o
Рис. 4-26. Натуральные системы.
но ввести диссипацию в любой элемент ее
(рис. б). Этим восстанавливается и полное
число связей. Структурная устойчивость этой
системы будет, однако, как показано ниже,
вырожденной. Красноречивым, но не единст-
венным признаком вырождения является
здесь структурная апериодичность. Причина
вырождения здесь очевидна — система обла-
дает полным числом связей, однако конфигу-
рация ее вдвойне неправильна: во входном
замещении нарушены и равнозначность и
равнопорядковость замещения. По той же
причине вырождена структурная устойчи-
вость систем в и г, н только в системе д с пол-
ным составом внутренних связей восстанавли-
вается нормальная структурная устойчивость.
Структурная апериодичность восстанавли-
вается уже в системе г; здесь, однако, оста-
ются другие признаки вырождения. Система
эта являет пример вторичного вырождения.
Структурная апериодичность восстанавли-
вается в натуральных системах, если они не
содержат 2 соседствующих адиссипативных
элементов. Транспортирование импульса через
адиссипативный элемент, имеющее место при
таком соседстве, приводит к структурной не-
апериодичности. Структурно неапериодической
трехэлементной натуральной системе на
рис. 4-27,6 можно сообщить структурную апе-
риодичность, сместив единственный адиссипа-
тивный элемент ее в середину системы. Одна-
ко для показанного в левой части рис. 4-27
гомологического ряда натуральных систем
с одним диссипативным элементом такая воз-
можность возникает лишь для трехэлемент-
ных систем, где выбором расположения адис-
сипативного элемента можно получить либо
первичное (рис. б), либо вторичное вырожде-
ние. Для двухэлементных систем (рис. аД) вы-
бор этот отсутствует, и здесь принудительно
возникает вторично вырожденная система.
Система аА не только безусловно устойчива
и структурно апериодична, нои обладает более
сильным свойством — покрывает всю область
устойчивости (а следовательно, и апериодич-
ности) пространства коэффициентов. Тем не
менее в ней могут быть указаны вторичные
прианаки вырождения структурной устойчи-
вости.
В обеих системах вторичное вырождение возни-
кает в результате малого числа элементов, недостаточ-
ного для развертывания общих для данной структуры
структурных соотношений. При более чем 3 элементах
в системах этого гомологического ряда всегда сосед-
ствуют по меньшей мере два адиссипативных элемен-
та и вторичное вырождение невозможно.
Ко вторично вырожденным системам этого типа
принадлежит система М. 3. Хейфеца (Л. >14], где отсут-
ствующий катаракт регулятора замещен возбуждающей
обратной связью (в виде дополнительной пружины ре-
гулятора, опертой на рычаг выключателя сервомотора),
образующей в составе системы двучленную подсистему
типа системы а4. Структурно устойчивая, струкгурно
апериодическая, и даже покрывающая, вторично вы-
рожденная система Хейфеца, из-за ряда вторичных при-
знаков вырождения, почти так же мало пригодна
практически для замещения катаракта, как и первично
вырожденная система Стодола [Л. 4]. Это не умаляет
теоретического значения обеих систем, возникших
до общей теории структурной устойчивости, способной
обнаружить вырождение. Рекомендация вырожденных
систем для практического использования, производимая
156
уже после возникновения этой теории, принадлежит
к числу многих иных курьезов, вызванных отсутствием
общей концепции.
Б. Гомологические ряды
На примере натуральных систем легко по-»'
яснить понятие о гомологических рядах дина-
мических систем. Подобно гомологическим
рядам химических соединений, гомологические
ряды динамических систем представляют со-
бой системы одинаковой структуры с нара-
стающим числом элементов. На рис. 4-27 даны
два гомологических ряда: левый ряд — нуле-
вых вырожденно устойчивых систем (первич-
ное вырождение) с одним лишь диссипатив-
ным элементом и правый ряд — вырожденно
устойчивых систем с одним лишь адиссипа-
тивным элементом, т. е. избытком связей (вто-
ричное вырождение). Двухэлементная систе-
ма аА принадлежит обоим рядам как крат-
чайшая их система. Для первого ряда она яв-
ляется вырожденной — не вмещает в себя, по
малому числу элементов, структуру его, для
второго — нормальной, и обладает поэтому
структурными свойствами второго.
Существование гомологических рядов, ря-
дов систем с нарастающим числом элементов,
но одинаковой структурой и, как следствие,
однаковыми структурными свойствами, — на-
глядное подтверждение независимости нор-
мальных структурных свойств от числа эле-
ментов. Независимость эта распространяется,
как явствует из рис. 4-27, и на вырожденные
системы — внутри определяющих их свойств,
в данном случае — вырожденной устойчиво-
сти. Вторичное вырождение, наступающее
в результате недостаточного для развертыва-
ния нормальных структурных зависимостей
объема системы, только подчеркивает незави-
симость нормальных структурных свойств от
числа элементов. Нормальная по признаку
структурной апериодичности структурная
устойчивость вторично вырожденных систем
обладает другими, рассматриваемыми ниже
признаками вырождения, делающими эти си-
стемы столь же непригодными, как и первично
вырожденные системы.
Базовая система натуральных систем
(рис. 4-25) отличается от базовой системы ги-
роскопических систем (рис. 4-22). Первая
статически связна, вторая — статически не-
связна. Приводимая система на рис. 4-22,6
показывает, что входное равнопорядковое и
равнозначное замещение возможно и в ста-
тически несвязных системах.
Структурная устойчивость натуральных си-
стем является и безусловной устойчивостью,
гироскопических систем и цепных сервоси-
стем— небезусловной. Значительно менее оче-
видная, и притом небезусловная, структурная
устойчивость гироскопических систем являет-
ся тем не менее нормальной, вполне же оче-
видная и безусловная структурная устойчи-
вость натуральных систем — вырожденной.
Теорема 4-VIII. Структурная устойчи-
вость натуральных систем с более чем одним
адиссипативным элементом является вырож-
денной. Теорема доказана будет ниже.
4-3. МЕТРИЧЕСКИЕ ПОДСВОИСТВА
Метрическому исследованию сервоси-
стем — рассмотрению метрических подсвойств
смешанных свойств — должно предшество-
вать рассмотрение структурного свойства
статической определимости, определяющего
методы этого метрического исследования.
4-3-1. Статическая определимость
Общие условия статической определимости
получены были выше (§ 3-1-2). Рассмотрим
приложение их к сервосистемам.
А. Нулевые системы
Из теоремы 3-1 явствует, что входные
системы статически определимы. Общая ста-
тическая определимость как общее свойство
систем не изменяется эквивалентными преоб-
разованиями систем. Можно показать, что она
не изменяется и всеми остальными нормаль-
ными преобразованиями, связывающими все
Приводимые нулевые системы с исходным для
них классом систем — входными системами.
Теорема 4-IX. Приводимые нулевые систе-
мы статически определимы. Установив приво-
димость нулевой системы, можно непосредст-
венно, не проводя всех операций исключения,
принимать все статические параметры ее
равными единицам.
Эта возможность пояснена рисунком 4-28.
Здесь из избыточно связанной структурно
устойчивой системы а, обладающей избытком
именно статических связей и, следовательно,
многократно статически неопределимой, вы-
делены некоторые нулевые по отношению
к структурной устойчивости и, следовательно
(по теореме IX), нулевые и по отношению
к статической определимости подсистемы б, в,
г, д. В канонических уравнениях четырех-
кратно статически неопределимой системы а
остаются четыре неисключающихся статиче-
ских параметра. Канонические уравнения ста-
тически определимых систем не содержат ста-
тических параметров.
Нулевые системы представляют собой ске-
лет всех остальных структурно устойчивых
157
Рис. 4-28. Статическая
определимость сервосистем.
систем. Необходимым и достаточным условием
структурной устойчивости системы является
наличие в составе ее по меньшей мере одного
такого скелета — одной нулевой подсистемы.
Следует уметь поэтому выделять из состава
системы ее нулевые подсистемы.
Эта операция — выделение нулевых подси-
стем из систем с избыточными связями — и
показана на рис. 4-28. Система на рис. а мно-
гоциклична. Кроме положительного главного
цикла, образованного тормозящей главной
обратной связью, в ней содержится ряд так-
же тормозящих диагональных обратных свя-
зей, образующих диагонали этого цикла. Тор-
мозящий характер этих связей отмечен в кон-
структивных схемах теми же изменяющими
знак импульса маленькими рычажками, до-
полнительными к большим рычагам, что и вы-
ше. Система на рис. а структурно устойчива,
поскольку она обладает не только полным чис-
лом связей, содержащимся в каждой из ее
нулевых подсистем — б, в, г, д, но и избытком
связей. Избыточными по сравнению с систе-
158
мой б являются в системе а не только диаго-
нальные связи, но и внутренняя статическая
связь объекта—саморегулирование его. Па-
ровые турбины обладают по отношению к уг-
ловой скорости слабым, газовые же — весьма
сильным положительным саморегулированием.
Если, как принято, было выше, назвать число
связей, недостающих системе для нормальной
структурной устойчивости, числом степеней
неустойчивости Vs, то для системы а с избы-
точным числом связей Vs отрицательно и
равно —4.
Наличие полного числа связей является
лишь необходимым, но недостаточным услови-
ем нормальной структурной устойчивости.
Связи эти могут находиться в неправильной,.
образующей структурно неустойчивую или вы-
рожденно устойчивую систему конфигурации.
Для систем с избытком связей необходимым
и достаточным условием правильной конфигу-
рации, обеспечивающей нормальную струк-
турную устойчивость, является наличие в со-
ставе системы по меньшей мере одной нуле-
вой нормальной подсистемы того элемент-
ного состава. Для самих же нулевых подси-
стем условие правильной конфигурации дает-
ся принципом локальной связанности.
Б. Входное ъи выходное замещение
Система на рис. 4-28,а содержит в своем
составе не одну, а весьма большое число ну-
левых подсистем. На рис. 4-28 выделены в ка-
честве примера лишь четыре из них — б, в,
г, д. Четыре избыточные связи системы а сня-
ты в системах б, в, г, д четырьмя различными
способами, обнажающими четыре из большого
числа содержащихся в системе а нулевых
подсистем, каждой из которых достаточно бы-
ло бы, чтобы сообщить системе а нормальную
структурную устойчивость. Все эти нулевые
подсистемы образованы входным или выход-
ным замещением. Такие системы кратко на-
званы были выше входными и выходными.
Они образуют исходный для всей задачи класс
локально разрешимых систем. Локально раз-
решимые системы являются по ряду свойств
эталонными. К ним относятся, в частности,
элементарная и открытая системы.
Входное и выходное замещения являются
нормальными, в указанном выше смысле,
структурными преобразованиями базовой от-
крытой системы, поскольку они сохраняют не-
изменным общее число связей и, как доказы-
вается ниже, нормальную структурную устой-
чивость.
Первая и простейшая из нулевых подси-
стем на рис. 4-28 — одноциклическая входная
система б. Вторая — пучковая входная систе-
ма в (образована входным! замещением — заме-
щением внутренних статических связей трех
первых элементов пучком внешних статических
связей, входящих в эти элементы) — многоцик-
лична, в ней содержатся три цикла, образо-
ванные внешними связями. Третья — пучковая
выходная система г — также многоциклична
и связана с системой в эквивалентным преоб-
разованием — транспонированием систем.
Транспонирование систем сводится к транс-
понированию их матриц знаков. Преобразо-
вания матриц знаков назовем структурными
преобразованиями. Преобразования эти со-
храняют различную степень родства исходной
и производной (преобразованной) систем.
Эквивалентность — результат эквивалентных
структурных преобразований — представляет
собой наиболее тесное родство систем (не счи-
тая тождества систем — результата тождест-
венных структурных преобразований, изменя-
ющих лишь способ записи системы). Исход-
ными удобно считать здесь входные системы,
производными — выходные. Первые, в частно-
сти, прямо отвечают условиям статической
определимости (рис. б, в), вторые же — лишь
косвенно, в силу эквивалентности (рис. а, д).
Для отдельных задач (интегральные систе-
гмы), однако, расстановка эта меняется — ис-
ходными явятся выходные системы [Л. 87].
Остальные системы на рис. 4-28 находятся
в менее тесных отношениях покрытия и пере-
сечения. Отношения эти не связаны со стати-
ческой определимостью и рассматриваются
ниже.
Первый и последний элементы входных и
выходных систем -назовем крайними. Из них
последний элемент систем входного замеще-
ния и первый выходного {соответственные эле-
менты обеих систем) назовем замковыми.
Замковые крайние элементы сохраняют при
входном и выходном замещениях все внутрен-
ние связи, поскольку последние не могут быть
замещены внешними обратными связями. Да-
же в пучковых системах имеет место поэтому
неполное замещение — незамещенными оста-
ются внутренние связи замковых элементов.
Удобно, тем не менее, рассматривать пучко-
вые системы (системы в и г) как случай пол-
ного замещения (входного и выходного), за-
мещения всех внутренних связей внешними.
Для этого нужно единственную остающуюся
в них не замещенной внутреннюю статическую
связь замкового элемента рассматривать как
кратчайшую, вырожденную внешнюю обрат-
ную связь.
Системы б, д являют пример частичного
замещения — в них замещена лишь часть вну-
тренних связей.
В. Смешанное замещение
Система на рис. 4-28,6 получена смешан-
ным (входным и выходным) замещением, об-
разующим в общем случае неправильную,
структурно неустойчивую конфигурацию, при-
водится тождественными преобразованиями
(переносом последнего элемента системы
в начало ее с одновременной инверсией его
координатной оси) к чисто выходной системе
и лишь потому устойчива (рис. 4-29). Систе-
ма эта лежит в основе разрабатываемых ВТИ
и турбостроительными заводами систем новой
структуры [Л. 36, 40, 41, 42, 44, 58, 60, 63,
65, 69, 72, 82, 98, 104].
Все эти приводимые нулевые системы ста-
тически определимы по теореме 4-IX, и это
позволяет непосредственно, минуя все опера-
ции перехода к каноническим относительным
координатам, принимать их статические пара-
метры в канонических уравнениях равными
единице (рис. 4-28).
159
статические параметры (рис. 6,
в, г, д).
Это свойство статически
определимых систем реализу-
ется только в канонических от-
Рис. 4-29. Тождественное преобразование смешанного
хощное.
Нулевые по отношению к структурной
устойчивости системы могут быть по отноше-
нию к статической определимости нулевыми
же или ненулевыми — с недостатком связей.
Второе -имеет место в тех случаях, когда ста-
тические связи замещаются динамическими
связями, как на рис. 4-4, 4-5, 4-6, и общее чис-
ло первых уменьшается по сравнению с базо-
вой системой, т. е. с Л4С. Нулевые в задаче
устойчивости системы не могут обладать из-
бытком статических связей в задаче статиче-
ской определимости и, следовательно, все ста-
тически определимы. Это вытекает из того, что
в задаче устойчивости, как вытекает из теоре-
мы порядка, допустимо замещение внутренних
связей только внешними связями превышаю-
щего порядка. Общее число статических свя-
зей в исходной нулевой системе — -базовой си-
стеме (рис. 4-7,а), равно полному числу ста-
тических связей Мс и может затем только
оставаться равным или уменьшаться в полу-
ченных из нее замещением производных ну-
левых системах. Нулевые в задаче устойчиво-
сти системы поэтому статически определимы,
и из их уравнений могут быть исключены все
статические параметры.
Г. Канонические уравнения
Рассмотрим канонические уравнения эла-
стомеханики (§ 3-1-3, 3-2-1) применительно
к сервосистемам. На рис. 4-28,а даны канони-
ческие уравнения четырехкратно статически
неопределимой системы. Здесь все избыточные
по отношению к структурной устойчивости
связи являются статическими и, следователь-
но, избыточными и по отношению к статиче-
ской определимости. Числа Vs и Vc поэтому
равны по модулю. Различие в знаке опреде-
ляется тем, что, по определению, первое чис-
ло — число недостатка, второе — избытка.
Число неисключившихся статических парамет-
ров системы а равно Vc. Исключены, как это
принято было для канонических уравнений,
т параметров внутренних статических связей
и (т—1) параметров несобственных статиче-
ских связей. В статически определимых нуле-
вых подсистемах системы а исключаются все
б) носигельныхкоординатах. Вот-
замещения в вы- носительных координатах Сто-
дола (Л. 4, 7] уравнения нуле-
вой и, следовательно, стати-
чески определимой одноциклической системы
имеют вид:
Та? +р-п =0;
^чЧ-7> + Ч-?/8=О; (4-10)
+ р — ц =0.
Вопреки статической определимости системы,
в ней остался неисключенным статический
параметр 3. Это вызвано непоследовательностью
относительных координат Стодола. Тогда как
изменения координат регулятора и сервомотора
относятся здесь к статическим их измене-
ниям от базовой нагрузки, изменение коорди-
наты объекта относится к номинальному зна-
чению ее: <р = —. Координата объекта здесь
wo
неканонична. Переход к канонической относи-
тельной координате объекта достигается отне-
сением Да» к статическому изменению Зш0: <|> =
=5^-. Каноническая и неканоническая отно-
0®о
сительные координаты связаны соотношением
ф = <р, их постоянные времени — обратным
соотношением TQ — STa.
Канонические относительные координаты
позволяют установить правильное написание
уравнения статического объекта и в самих ко-
ординатах Стодола. О существующей здесь
неясности можно судить по тому, что ни одна
из мыслимых форм уравнения объекта
Т а?+ ^ооф 4“ — 0;
Та? -И + Н=0; (4-11)
Гаф+ ? + &отр.=0;
ГаТ-!- тЧ- 1* = 0,
где k — независимые параметры, не осталась
неиспользованной в современной литературе.
Между тем, все эти формы в равной мере
ошибочны. Первая и последняя ошибочны, по-
скольку оставляют в уравнениях однократно
статически определимой системы: первая —
два независимых статических параметра, по-
160
следняя — ни одного. Вторая и третья оши-
бочны, поскольку принимают произвольные
отношения между статическими параметрами
объекта. В канонических относительных коор-
динатах параметры эти связаны уравнения-
ми (3-1). Если записать уравнение объектам
в этих координатах в виде
Т’оФ + ‘5ооФ4“‘^отР’=0, (4-12)
то, в соответствии с (3-!),
5OO + Som = l. (4-13)
Пользуясь уравнением (4-13), можно исклю-
чить из уравнений системы один из этих ста-
тических параметров. Удобнее исключить .па-
раметр регулирования SOm, оставив в уравне-
ниях параметр саморегулирования Soo:
50ТО = (1 - SJ. (4-14)
Это несущественное отклонение от представ-
ленной на рис. 4-28,а канонической записи, где
исключается параметр Soo, позволяет оставить
в уравнениях параметр саморегулирования,
более * наглядный, чем параметр регули-
рования.
Подставляя (4-14) в (4-13), получаем ка-
ноническую форму уравнений, приведенную
на рис. 4-2.
Статические параметры зависимы и в ко-
ординатах Стодола. Зависимость эту проще
всего получить, перейдя в уравнении (4-12)
к координатам Стодола:
+ (4-15)
или же
Т'$ + S'omP = 0- (4-16)
Неканонические параметры уравнения (4-16)
связаны с каноническими параметрами уравне-
ния (4-15) соотношениями
Т'о = -у Т0; S'M — -у Soe; S'tm — (4-17)
Подставляя два . последних соотношения
в (4-13), получаем зависимость между стати-
ческими параметрами объекта в координатах
Стодола:
8S'qe + S'om=l.
(4-18)
Поскольку 2-е и 3-е из уравнений (4-11) не
отвечают этой зависимости, они ошибочны.
Правильная запись уравнения объекта в ко-
П И. И. Гальперин.
ординатах Стодола получается исключением
И (V18)) паРаметРа регулирования SOm.
S'oW=l-6S'oo. (4-19)
Подставляя (4-19) в (4-16), получаем урав-
нение объекта в координатах Стодола:
+ S'00<P + (1 - 8S'OO) р.= 0. (4-20)
Физический смысл приведенного на рис. 4-1
канонического уравнения статического объ-
екта
Т0ф+500ф + (1 -5оо)ф=О (4-21)
весьма прост: первый его статический член из-
меряет долю внешней нагрузки, уравновеши-
ваемую саморегулированием, второй — долю,
уравновешиваемую регулированием. Сумма
обоих воздействий равна единице — единич-
ной базовой нагрузке. Более сложный смысл
получает уравнение (4-20) статического объ-
екта в координатах Стодола. В нем остается
зависимый статический параметр б, входящий
затем и в уравнение регулятора.
Для обращенных статически определимых
систем, приведенных в нижней части рисунка
4-17, каноническая запись, с исключением всех
статических параметров, могла бы быть до-
стигнута только отнесением »к обращенной ка-
нонической системе координат, где базовым
элементом является не статический в этих си-
стемах объект, а астатический .регулятор, и все
координаты относятся к статическим их изме-
нениям от базовой нагрузки, приложенной
к этому базовому элементу. Теоретически
обращенная каноническая система координат
ничем не уступает рассмотренной выше пря-
мой, где базовым элементом являлся объект,
и для обращенных систем является единствен-
ной канонической системой. Практически мо-
жет оказаться удобнее пользоваться и для
этих систем прямой системой координат, т. е.
уравнением (4-21) для объекта, оставляя
в статически определимой системе один неис-
ключившийся статический параметр.
Д. Параметр саморегулирования
Параметр саморегулирования зависит, та-
ким образом, от системы относительных коор-
динат. Рассмотрим его значения для тепло-
вых двигателей в различных системах коор-
динат.
Режимы тепловых двигателей могут быть
представлены диаграммой режимов на
рис. 4-30, состоящей из двух семейств харак-
161
Рис. 4-30. Статические характеристики дви-
гателей.
а) постоянная
нагрузка
6) линейная
нагрузка
6) квадратичная
нагрузка
Рис. 4-13>1. Статические характеристики различных типов двига-
телей и нагрузок.
теристик — двигателя и нагрузки. Характери-
стики двигателя взяты для различных откры-
тий р, клапанов его, от соответствующего но-
минальному режиму полного открытия клапа-
нов р=рю до открытия холостого хода Ц = ’|1х.
Характеристики нагрузки также взяты для на-
грузок разной величины X, от чисто внутрен-
ней его нагрузки холостого хода Хх, вызванной
внутренними его потерями на трение и венти-
ляцию, до различных степеней внешних на-
грузок. На рис. 4-30 даны лишь моментные
характеристики двигателя и нагрузки, по-
скольку уравнения двигателя (объекта) суть
уравнения моментов. Из них умножением
каждой ординаты на абсциссу можно полу-
чить и мощностные, характеристики (рис. 4-31).
Режим двигателя получается пересечением ха-
рактеристик двигателя и нагрузки. На рис. 4-30
обозначены режимы, соответствующие номи-
нальным оборотам двигателя. Режим холосто-
го хода определяется пересечением характе-
ристик |ix и Лх. Для того чтобы можно было
получить таким общим способом и режим хо-
лостого хода, необходимо, чтобы моментные
характеристики двигателя измеряли, как на
рис. 4-30, не отдаваемый момент турбины на
муфте генератора (эффективный момент),
а производимый ею момент на лопатках тур-
бины (индикаторный момент).
Параметр саморегулирования определяет-
ся раствором обеих характеристик в каждой
точке. Раствором этим измеряется зависящий
от числа оборотов свободный момент, ускд-
ряющий ротор турбины. Угол раствора равен
сумме углов наклона к горизонтали характе-
162’
ристик двигателя и нагрузки, иначе говоря,
саморегулирование нагруженного двигателя
слагается из саморегулирования двигателя и
саморегулирования нагрузки. Для представ-
ленного на рис. 4-30 объекта (активная тур-
бина) раствор этот существенно меняется,
объект существенно нелинеен. Определим ко-
личественную величину его для тепловых дви-
гателей.
На рис. 4-31 даны моментные и мощност-
ные характеристики основных типов двигате-
лей и нагрузок. Характеристика б относится
к активным турбинам — основному типу со-
временных турбогенераторов. Момент умень-
шается здесь линейно с увеличением отноше-
<» и -
ния скоростей — и при у = 1 — при удвоении
номинальной угловой скорости равен нулю.
Постоянная нагрузка соответствует работе
двигателя на фрикционную нагрузку, линей-
ная нагрузка — работе турбогенератора на ос-
ветительную нагрузку, квадратичная — работе
на насосную нагрузку.
На рис. 4-32 представлена работа линей-
ного двигателя — активной турбины на все
три типа нагрузок. Канонический параметр
саморегулирования Soo равен изменению сво-
бодного момента при изменении угловой ско-
рости на Дф=1, что соответствует Ako = 6cdo-
Величина его равна, как это пояснено построе-
нием на рисунке, для первого случая — 6, для
второго — 26, для третьего — 36. Во всех трех
случаях параметр этот, как явствует из.
рис. 4-30 (изображающего работу линейного
двигателя на квадратичную нагрузку), отно-
Рис. 4-32. Характеристики саморегулирования линейного двигателя при различных типах нагрузки.
сится к номинальному режиму. Он уменьшает-
ся с уменьшением нагрузки и практически ра-
вен нулю для холостого хода. Рассматривая
энергосистему как единый турбогенератор
с некоторыми средними параметрами и об-
щей неравномерностью 6=0,05, работающий
вблизи номинальной нагрузки, можно считать,
что параметр саморегулирования ее Soo колеб-
лется, в зависимости от преобладания пред-
ставленных на рис. 4-32 типов нагрузки, меж-
ду б и 36, т. е. вблизи величины 0,1. Такая
величина канонического параметра саморегу-
лирования должна быть признана значитель-
ной, поскольку для системы регулирования
с одним каскадом усиления уже при
Soo=0,lll наступает безусловная устойчи-
вость (Л. 57]. Это объясняет высокую устой-
чивость регулирования частоты в энергосисте-
ме, значительно превышающую устойчивость
регулирования числа оборотов турбины на хо-
лостом ходу ее.
Как явствует из рис. 4-32, канонический
параметр саморегулирования пропорциона-
лен 6. Зависимость эта понятна — влияние
саморегулирования тем значительнее, чем зна-
чительнее отклонения регулируемого пара-
метра, последние же пропорциональны 6. Не-
канонический параметр саморегулирования
*Szoo=-y не зависит от б, и здесь действи-
тельная зависимость влияния саморегулиро-
вания от 6 остается скрытой.
Каноническое уравнение объекта для трех
случаев на рис. 4-32:
Гоф+ 8ф+(1- 8)|Х=О;
Гоф +28ф + (1 - 28) = 0; (4-22)
Гоф + 38ф + (1-38)^ = О.
В координатах Стодола уравнения эти примут
вид:
г.?+ ?+(1- 8)»ь=0;
Т'о? + 2f + (1 - 28) I*=0; (4-23)
Т’,в? + 3? + (1-38)|ь=О.
Параметр саморегулирования получает во
второй записи обманчиво большие, мешающие
оценить действительное влияние саморегули-
рования, значения. Так, для первого случая
на рисунке 4-32 каноническое уравнение
объекта при 6=0,05 имеет вид:
Твф_|_О,О5Ц-0,95|1 = 0, (4-24)
неканоническое же, в координатах Стодола:
Tjf + ? + 0,95р.=О. (4-25)
Оба уравнения правильны, однако в первом
действительное весьма слабое влияние само-
регулирования вполне наглядно (саморегули-
рованием уравновешивается в статике 0,05
внешней нагрузки к, клапанами — 0,95), во
втором же — скрыто большим значением па-
раметра саморегулирования. Этим вновь вы-
ясняется естественность канонических относи-
тельных координат.
Диаграммы на рис. 4-30, 4-31, 4-32. позво-
ляют определить саморегулирование и для
остальных тепловых двигателей на различ-
ных режимах. Так, для газовой турбины, где
во внутреннюю нагрузку входит весьма значи-
тельная квадратичная нагрузка турбокомпрес-
сора, саморегулирование на холостом ходу
определится диаграммой на рис. 4-32,Б, в и.
будет Значительным. Во всех случаях канони-.
11*
163
ческие относительные координаты позволяют
наиболее простым и ясным способом оценить
величину и влияние саморегулирования.
Только в. канонических относительных ко-
ординатах после исключения наибольшего
числа статических параметров остающиеся
статические параметры представляют собой
независимые параметры —- критерии статиче-
ского подобия; Число их равно числу степеней
статической неопределимости системы. В этом
очевидное значение метода относительных
координат. Метод этот принадлежит теории
статической определимости.
"Так же произвольно вводятся в современ-
ной литературе и статические параметры
(коэффициенты усиления) в уравнения регу-
лятора и сервомоторов:
U*rii + Tr7| + ^rrig —&го<р = О;
г
' Т>2 + ^22^2 — ^21Н1 = 0; (4-26)
РпР*п | ^пп^п ^п(п - 1)^п - 1-
Иногда, как и в приведенных выше уравне-
ниях объекта, оставляется лишь часть этих
статических параметров. Все это делается
безотносительно к статической определимости
систем, понятие о которой все еще отсутствует.
Еще большая неясность возникает для более
сложных, многократно статически неопреде-
лимых систем.
Коэффициенты усиления возникают в та-
кой записи уравнений в результате примене-
ния не относительных координат Стодола, где
базовыми величинами являются статические
изменения координат от некоторой базовой
нагрузки, а лишь безразмерных координат,
отнесенных к некоторым условным, номиналь-
ным- базовым величинам. Подчеркиваемый
при этом произвол в выборе системы базовых
величин является существенным шагом вспять,
по сравнению с введенным Стодола преобра-
зованием координат, лишающим это преоб-
разование основного назначения. Этим основ-
ным назначением является достижение неза-
висимости параметров системы от системы
единиц. Переход к безразмерным координа-
там заменяет зависимость от системы единиц
зависимостью от системы произвольных базо-
вых величин, представляющих лишь иную* си-
стему единиц. Переход к каноническим отно-
сительным координатам, где сами базовые ве-
164
личины зависят от статических свойств систе-
мы, делает параметры системы зависящими
только от свойств ее, инвариантными к лю-
бым преобразованиям координат, величина-
ми. Единственной остающейся условной вели-
чиной является единичная, базовая нагрузка.
Возможность исключения наибольшего
числа статических параметров служила не-
сомненно для Стодола, а затем Толле, после-
довательно развившего метод Стодола, пря-
мой целью метода относительных координат.
В работах Толле не могло быть, однако, вы-
яснено, на чем основывается эта возможность
и каковы его границы. Это могло быть выясне-
но лишь концепцией односторонней механики
и вытекающей из нее теорией статической
определимости. В современной литературе не
только игнорируется эта теория, вне которой
не может быть понят общий смысл метода
Стодола, но утерян и первоначальный смысл
этого метода.
Е. Критерии подобия
Как выяснено было выше (гл. 1) услови-
ем подобия, статического и динамического, яв-
ляется одинаковость 1соответственно статиче-
ской и динамической структур. Подобные си-
стемы описываются одинаковым числом пара-
метров— критериев подобия. В этих парамет-
рах уравнения подобных систем одинаковы,
т. е. все семейство подобных систем описы-
вается одной системой уравнений. Критерии
подобия представляют собой наименьшее чис-
ло параметров, однозначно определяющее
установившиеся и переходные процессы в си-
стеме. Для дискретных систем они могут быть
получены следующим образом.
Канонические относительные. координаты
позволяют сократить до наименьшего значе-
ния Кс число статических параметров. Остаю-
щиеся после этого статические параметры —
параметры статической неопределимости яв-
ляются критериями статического подобия.
В этих параметрах уравнения статики всех
статически подобных систем, систем с одина-
ковой статической структурой, принимают оди-
наковый вид. Параметры статической неопре-
делимости являются критериями статическо-
го подобия. Число их равно Vc.
Дополнительными критериями динамиче-
ского подобия являются относительные по-
стоянные времени. Число их равно Р—1 (где
Р — порядок системы). Общее число крите-
риев подобия равно:
К=Ус+(Р-1).
Так, для системы на рис. 4-7,б2 число это
равно 2+1(4—1)=5. Уравнения этой системы
в критериях подобия имеют виД:
Ф+5оф + (1-5о)и = О;П
^ГОТ) + т roTt+ (1 — Sr) 7) + Sr|i — <|>=0; (4-27)
7’sol*+ I1 —1 = 0,
1де t/ro = -=-; 7'ro = -=-; 7’So = -=r-.
1 О 1 О 1 о
Системы этой структуры описываются общей
системой уравнений, если все их 5 критериев
подобия: So, Sr, t/r0, Tr0, Ts0 соответственно
равны. Система на рис. 4-28а четырехкратно
статически неопределима. Число критериев
подобия равно здесь, по формуле 2-16,
4+(4—1)=7. Критерии эти суть So3, Si2, Si3,
•$23, Тго, Т’зо- Системы этой структуры
описываются общей системой уравнений толь-
ко в случае равенства.
Все дальнейшие выкладки будут вестись
только в критериях подобия. Теорией статиче-
ской определимости определяется возмож-
ность исключения избыточных статических па-
раметров. Каноническими относительными ко-
ординатами возможность эта только и реа-
лизуется.
Теория статической определимости позво-
ляет разделить метрическую задачу на две:
1) для статически определимых систем, где
статические параметры не входят в число
варьирующихся параметров системы, 2) для
статически неопределимых, где они варьиру-
ются. Рассмотрим задачу в этом порядке.
4-3-2. Статически определимые системы
А. Функциональная и динамическая структуры
К статически определимым системам отно-
сятся прежде всего локально разрешимые си-
стемы. На рис. 33 дана упорядоченная табли-
ца таких систем. Системы расположены в ней
в порядке удлинения обратных связей, —
признака, в наибольшей мере определяющего
метрику системы. Такие упорядоченные каким-
либо структурным признаком ряды систем
назовем структурными рядами в отличие от
гомологических рядов систем, связанных
общностью происхождения. Системы на
рис. 4-33 представляют структурный ряд
удлиняющихся обратных связей.
Введем несколько функциональных поня-
тий, разъясняющих структуру таблицы. Си-
стемы регулирования могут быть всегда раз-
биты на регулируемую подсистему (объект) и
регулирующую подсистему (регулятор). Регу-
лируемая подсистема может представлять со-
бой элементарную, как на рис. 4-33, или слож-
ную систему. Регулирующая подсистема так-
же может являться элементарной (прямое ре-
гулирование) или сложной (непрямое регу-
лирование) системой. В последнем случае
регулирующая подсистема представляет со-
бой следящую систему, в которой выходной
элемент усилительной цепочки отрабатывает
и передает объекту команду, получаемую от
объекта входным элементом ее. На рис. 4-33
представлены системы регулирования и от-
дельно их регулирующие подсистемы. Послед-
ние представляют и самостоятельный интерес
в качестве следящих систем.
Все системы регулирования получены здесь
из своих регулирующих подсистем общим
приемом — присоединением объекта с по-
мощью простейшей нулевой группы — динами-
ческой диады (рис. Б). Присоединение таких
нейтральных групп не изменяет числа V3 си-
стемы.
В системах на рис. 4-33, кроме систем
первой строчки, все внутренние связи элемен-
тов замещены внешними связями. Это, таким
образом, системы с полным замещением. Не-
замещенными остаются в них внутренние свя-
зи замковых элементов. Отнеся и эти связи
к обратным внешним связям (кратчайшим,
выродившимся во внутренние связи), можно
считать замещение в этих системах полным.
Локально разрешимые системы на рис. 4-33
находятся в обозначенных на рисунке простых
отношениях, частично рассмотренных выше.
Входные и выходные системы, помимо общей
эквивалентности, локально эквивалентны в
главных каналах зеркально сопряженных
элементов, в частности—в главных кана-
лах незамковых крайних элементов, представ-
ляющих для систем регулирования главный
канал — «объект — объект». Локальная экви-
валентность находит частное выражение
в совпадении статических, перемещений (ста-
тических передаточных функций ан и а'вв; на
рис. 4-34 указан знак их — качественные ли-
нии влияния) и переходных процессов (дина-
мических передаточных функций уп и у'6б,
рис. 4-35) в этих каналах у входных и выход-
ных систем. Локальная эквивалентность, пред-
ставляющая собой локальное подотношение
отношения общей эквивалентности, отмечена
на рис. 4-33, 4-34 символом общей эквива-
лентности, дополненным двойными индексами
эквивалентных каналов. Под символом общей
эквивалентности (двойной стрелкой) будут
указываться индексы всех каналов, для кото-
рых имеет место локальная эквивалентность
(на рис. 4-33 и 4-34). За недостатком места
165
Рис. 4-33. Локально разрешимые системы.
указаны индексы главных каналоводной лишь
пары зеркально сопряженных элементов — не-
замковых крайних элементов, тогда как ло-
кальная эквивалентность имеет место для
всех таких пар)*. В случае, когда имеет место
только общая эквивалентность, локальная же
эквивалентность отсутствует, место под стрел-
кой будет пустовать.
Все локально разрешимые системы пересе-
каются, как доказывается ниже, с исходной
открытой системой а. Поскольку последняя
безусловно апериодична, все они поэтому
структурно апериодичны и, -следовательно,
нормально устойчивы. Все они также пересе-
каются между собой (что не обозначено на
рисунке), а замыкающие таблицу пучковые
системы покрывают все остальные системы,
что обозначено на рисунке лишь по отноше-
нию к открытой системе.
Входное и выходное замещение произво-
дится в регулирующих подсистемах нарастаю-
щими по длине (идя сверху таблицы на
рис. 4-33 вниз) обратными связями. В систе-
ме а каждая из этих связей обводит один эле-
мент. При этом обратные связи вырождаются
во внутренние связи элементов. В системе б
каждая обратная связь обводит два элемента,
в системе в — три элемента, в системе г —
четыре элемента, в системе д — пять элемен-
тов. Обвод этого нарастающего числа элемен-
тов становится возможным все для меньшего
числа связей. Остальные связи проводятся
166
’ Входное замещение
Выходное замещение
Системы
регулирования \
Системы
регулирования
Рис. 4-34. Качественные линии влияния.
максимально возможной длины. Процесс за-
канчивается -пучковой системой д, где все свя-
зи имеют максимальную длину. Системы стро-
ки а, кроме главного цикла, содержат только
одночленные циклы, системы строки б — од-
ночленные и двучленные, системы строки в —
одночленные, двучленные и трехчленные
и т. д. По мере удлинения замещающих свя-
зей область пересечения систем с открытой
системой в пространстве параметров послед-
ней непрерывно увеличивается и для замы-
кающих таблицу пучковых систем покрывает
все пространство параметров открытой си-
стемы.
Б. Общие метрические свойства
Рассмотрим крайние статически определи-
мые системы структурного ряда на рис. 4-33—
одноциклическую и пучковую. Промежуточ-
ные структуры занимают промежуточное по
своим свойствам положение между этими дву-
мя крайними системами.
Общее число параметров этих статически
определимых систем равно порядку системы,
причем все эти параметры являются динами-
ческими параметрами — постоянными време-
ни. Приняв одну из этих постоянных, напри-
мер постоянную базового элемента, за едини-
167
Рис. 4-35. Переходные процессы.
цу времени, можно в соответствии с л-теоре-
мой подобия исключить время этого элемента
и снизить на единицу размерность простран-
ства параметров. В трехмерное пространство;
поддающееся еще наглядному изображению,*
может быть вмещено этим способом простран-
ство параметров систем четвёртого и пятого
порядков (рис. 4-15, 4-16). Рассмотрим эти
системы.
Одноциклическая нулевая система четвёр-
168
того порядка (рис. 4-35) представлена урав-
нениями (4-28). На рис. 4-36 и в дальнейшем
базовый элемент обозначен *индексом нуль.
Характеристическое уравнение этой “системы:
1) (1\р+ 1) (Л^ +1) + 1=0 (4-28)
или же
TtTJ2T3p4 + т„ (Т\Т2 + ГЛ + Т2Т3)р3 +
+ Го(Т1 + Л + Г,)^ + Т^+1=О. (4-29)
Перейдя в этом уравнении к новой перемен-
т
ной v — T'j) и относительным временам: =1=7’10;
* о
т т
^ = Т20;^=Л0, т. е. приняв постоянную вре-
*9 * 0
мени базового элемента (объекта) То за еди-
ницу времени, можно придать уравнению (4-29)
симметричный относительно всех остальных па-
раметров вид:
4“ (^10^*20“1“Veo “Ь го?*зо)у3 “Ь
+ (Ло + T2Q + T30)v^v +1=0. (4-30)
Симметрия достигнута тем, что из уравне-
ний исключено время именно объекта — един-
ственного астатического элемента системы,
нарушающего однородность системы.
Гурвитцевым условием устойчивости систе-
мы является:
Аз = (ЛоЛо + ЛЛо + ЛоЛо) (Ло + ^20 + Ло) -
- T10T2QT3Q-(T10T2Q+ Г107\0 + Т20Г30)2>0. (4-31)
Приравняв Дз нулю, получим уравнение
граничной поверхности рассмотренной уже
выше (рис. 4-16) области устойчивости, пока-
занной на рис. 4-6 (заштрихована).
В соответствии с симметрией уравнения
(4-31) относительно времен Гю, Т2о, ^зо,
область устойчивости располагается в прост-
ранстве параметров симметрично 'относитель-
но координатных осей. Область эта пересе-
кается с координатными плоскостями по рав-
носторонним гиперболам с асимптотами Гю=
= 1, Т20=1, 7зо=1. Эти координатные плоско-
сти представляют собой рассмотренные выше
(рис. 4-15, 4-16) пространства параметров
одноциклической системы третьего порядка
[Л. 34, 41].
Как явствует из рис. 4-36, одноциклическая
система может быть устойчива при произволь-
но большой величине любого из этих относи-
тельных времен. Произвольным является и
время объекта Го, служащее единицей време-
ни. Таким образом, устойчивость одноцикличе-
ской системы может быть достигнута при про-
извольно больших значениях времен двух эле-
ментов— объекта и одного из сервомоторов.
Относительное время второго сервомотора не-
должно при этом превышать единицы, а вре-
мя третьего должно быть тем меньшим едини-
цы, чем больше время первого. Эти соотноше-
ния распространяются на одноциклические си-
стемы любого порядка. Поскольку перестанов-
ка элементов в одноциклической системе явля-
ется эквивалентным 'преобразованием, все эти
соотношения безличны, т. е. существенна сово-
купность значений времен сервомоторов, рас-
пределение же их между сервомоторами (со-
отнесение этих времен определенным серво-
моторам) несущественно. По практическим
условиям времена сервомоторов в одноцикли-
ческой системе обычно нарастают по ходу им-
пульса, вместе с нарастанием их энергии.
С точки зрения устойчивости они могли бы
распределяться любым иным образом.
На рис. 4-36 показаны четыре тождествен-
ные одноциклические системы, получаемые из
исходной системы входного замещения (рис. а)
тождественным преобразованием обращения
(рис. 4-17). При указанной на этих схемах не-
изменной индексации переставляемых элемен-
тов все четыре системы описываются указан-
ным на этом же рисунке*’общим пространст-
вом параметров. Область апериодической
устойчивости (не показанная на рис. 4-36)
располагается, как будет показано ниже, у на-
чала координат, также симметрично относи-
тельно координатных осей. Величина То опре-
деляет масштаб областей устойчивости и апе-
риодичности и пространства параметров в це-
лом. Считая количественным показателем
устойчивости .приближение к апериодичности,,
можно было бы грубо определить количествен-
ные условия устойчивости одноциклической
системы следующим образом: одноцикличе-
ская система тем устойчивее, чем больше вре-
мя Т0 = бГа объекта и чем меньше времена
всех остальных элементов. Смысл этого усло-
вия достаточно очевиден. При равенстве нулю
времен всех сервомоторов одноциклической си-
стемы последние становятся идеальными эле-
ментами, а вся система — эквивалентной объ-
екту с весьма сильным саморегулированием —
Sn=(l—6) и апериодическим переходным
процессом. Многочленный-цикл внешних ста-
тических связей преобразуется в одночленный
цикл внутренней статической связи.
Выше была рассмотрена задача обраще-
ния структурных соотношений, относящихся
к одноциклической системе, и несколько струк-
турных по содержанию теорем классической
теории, формулированных в функциональных
понятиях, объединены были одной, отвлечен-
ной от этих понятий структурной теоремой
(§ 4-2-1). Ту же операцию обращения можно
169
Характеристические
уравнения:
(Ttp^)(T2p^)(Tap+l)tTopf1^O
v+1=0
"Граница области устойчивости
4&~( Vzo+Vso* ЪоЬ)( ^о^го^зо) ”
* Тю Ъо Тзо" (Ъ TtfV&rko ^зоf= О
теперь произвести и над полученными только
что в функциональных понятиях метрически-
ми соотношениями. Поскольку в этих соотно-
шениях объектом назван был единственный
в устойчивой одноциклической системе астати-
ческий элемент, сервомоторами же — все ос-
тальные статические элементы (никакого ино-
го значения это словесное различие элементов
не могло, очевидно, иметь для динамического
исследования), то безличная их формулировка
должна быть следующей:
нулевая одноциклическая
система тем устойчивее,
чем больше время ее аста-
тического элемента и чем
меньше времена всех ста-
тических элементов. Как
уже было пояснено выше,
вакантное место астати-
ческого элемента может
быть занято не только
объектом, но и регу-
лятором или одним из
сервомоторов. Обр ащен-
ные таким способом
тождественные одноци-
клические системы, по-,
лученные из -исходной си-
стемы рис. а, показаны на
рис. 6, в, г. На рис. 4-36
рассмотрены системы -с
идеальным регулятором.
Динамическая структура
этих систем не измени-
лась бы, если вместо пер-
вого сервомотора был бы
регулятор с катарактом и
без массы, какими явля-
ются, например, регуля-
торы гидродинамического
регулирования [Л. 60].
Обращенные системы,
обладающие общим ха-
рактеристическим уравне-
нием и общей областью
устойчивости, практиче-
ски резко различаются.
Чтобы установить это раз-
личие, следует -вновь вер-
нуться к функциональным
определениям. Для исход-
ной системы на рис. а
масштабом этой общей
области устойчивости яв-
ляется время объекта, ко-
торое выгодно иметь по-
этому наибольшим, вре-
мена же остальных элементов—сервомото-
ров — наименьшими, для производных систем
на рис. 6, в, г масштабом области устойчиво-
сти является время Тг регулятора или время
Тс одного из сервомоторов, которое должно
поэтому быть наибольшим, времена же всех
остальных элементов, в том числе и объек-
та,—наименьшими. Тогда как выполнение
первого требования (наибольшего То=Та)
почти не во власти конструктора, поскольку
170
7а задано самим объек-
том, неравномерность же
<6 может варьироваться
в очень узких пределах,
выполнение второю тре-
бования — увеличения Тк
или одною из Тс—пред-
ставляет для конструкто-
ра не затруднение, а об-
легчение. Таким образом,
во всех случаях, когда
устойчивость не может
б.ыть достигнута в си-
стеме а вследствие ма-
лых времен астатиче-
ского объекта и больших
времен сервомоторов, она
легко может быть до-
стигнута в системах б,
в, г — увеличением вре-
мени Тк или одного из
времени Тс [Л. 25]. При
этом, однако, возрастет
динамическое перерегули-
рование, что ограничивает
применение обращенных
систем случаями с плавно
меняющейся нагрузкой.
Регулирование в указан-
ных обращенных систе-
мах б, в, г происходит с
нулевой неравномерно-
стью. Это, таким образом,
пр остейш ие из од р о мн ы е
системы.
Следует заметить, что
эти количественные выво-
ды получились и ранее
[Л. 11, 12] при раздельном
рассмотрении системы а,
б, в, г. Не говоря о той
затрате труда, с которой
это было связано, такое
рассмотрение приводило к
недостаточно отчетливым
и зачастую непонятным
результатам (в [Л. 31], на-
пример, в условия устой-
чивости обращенной линейной системы входит
даже К — величина возмущения). Раздельное
исс л е дю в а н и е тождеств енн ы х систем, р а зли -
чающихся только словесным наименованием
элементов, отчетливо представляет «дострук-
турные» методы теории регулирования. Тем
же методом построена на рис. 4-37 область
устойчивости пучковых систем. Все четыре
системы, показанные на этом рисунке,
эквивалентны. Все они получены экви-
Рис. 4-37. Область устойчивости пучковых систем.
валентными перестановками связей и обла-
дают поэтому при соответственной индексации
общим характеристическим уравнением, об-
щим пространством параметров и, в частности,
общей областью устойчивости. Исходной здесь
является система а, образованная входным за-
мещением. Система выходного замещения на
рис. а' получена из этой исходной системы
транспонированием характеристикой матрицы
ее; системы б и б' получены соответственно из
171
систем а и а' эквивалентной перестановкой
элементов и также являются соответственно
транспонированными системами. Структура
пространства параметров этих систем асим-
метрична и резко отлична от одноциклической.
Пучковая система не только обладает значи-
тельным превосходством перед одноцикличе-
ской по быстродействию, но и, теряя некото-
рые области устойчивости, присущие этой вто-г
рой системе, приобретает новые важные обла-
сти. При достаточно малых Т20 времена серво-
моторов Тю, Тзо могут
иметь в области устойчи-
вости сколь угодно боль-
шие значения в отличие
от одноци1кл1ической си-
стемы, где время одного»
лишь сервомотора может
быть неограниченно боль-
шим. В случае, когда по
практическим условиям
два сервомотора трехкас-
кадной системы могут
быть выполнены лишь
весьма медленными, од-
но/циклическая система
непригодна и необходи-
мым окажется прибег-
нуть к пучковым или
близким к ним системам.
Полученные выше фор-
мальным синтезом новые
и весьма необычные си-
стемы обладают, таким
образом, важными прак-
тическими свойствами.
На рис. 4-38 даны
области устойчивости се-
мейства эквивалентных
нулевых систем с одной
короткой диагональной
связью. К нему принад-
лежит получившая широ-
кое применение в паро-
вых турбинах система бг
[Л. 36, 51, 52, 60, 63,
69, 82]. На рис. 4-39 даны
области устойчивости се-
мейства нулевых систем
с двумя короткими диаго-
нальными связями. Си-
стемы эти совпадают по
структуре с системами В
и В' рис. 4-33. В системах
с короткими диагональ-
ными связями (рис. 4-38,
4-39),так же как в пучко-
вых системах (рис. 4-37),
наряду с потерей некоторых областей устойчиво-
сти одноциклической системы приобретаются
новые области устойчивости. Каждая из таких
систем обладает резко выраженными отличи-
тельными свойствами, делающими ее предпо-
чтительной для вполне определенных практи-
ческих задач.
На рис. 4-40 дано семейство систем с одной
длинной диагональной связью. Ослабление
структуры системы привело здесь к резкому
уменьшению области устойчивости.'По срав-
172
нению с одноциклической системой здесь на-
лицо одни лишь, и весьма значительные, по-
тери областей устойчивости и' нет никаких при-
обретений.
Однородность структуры. Для си-
стемы на рис. 4-36—4-40 сечение некоторыми с
координатными плоскостями трехмерной обла-
сти устойчивости трехкаскадной системы со-
держит или не содержит области устойчивости
двухкаскадной системы той же структуры.
Рассмотрим этот вопрос детальнее.
Будем говорить, что динамические системы
обладают однородной структурой по отноше-
нию к некоторой совокупности их статических
элементов, если идеализация (превращение
в идеальный элемент) всех этих элементов или
любой части их сохраняет неизменной струк-
туру системы. Однородность структуры рас-
сматривается только по отношению к статиче-
ским элементам, так как только для этих эле-
ментов процесс идеализации имеет ясный фи-
зический смысл — постепенного ослабления и,
в пределе, снятия всех внутренних связей вы-
ше нулевого порядка. Для элементов астати-
ческих смысл этот теряется. Так, системы, од-
ноциклического семейства (рис. 4-15, 4-16,
4-36), и только они, обладают однородной
структурой по отношению ко всем своим по-
ложительно статическим элементам.
У семейства систем, обладающих однород-
ной структурой по отношению к некоторой
части своих элементов, структурные свойства
не зависят, как явствует из определения, от
числа этих элементов. Это и объединяет эти
системы в семейства и позволяет изучать их
структурные свойства в общем виде.
Однородность структуры позволяет рас-
пространить все полученные выше для одно-
циклических систем 4-го порядка структур-
ные свойства на одноциклические системы
всех следующих порядков.
Пучковые системы на рис. 4-37 однородны
по отношению к единственному своему ста-
тическому элементу 3 — идеализация этого
элемента преобразует трехкаскадную пучко-
вую систему в двухкаскадную пучковую же
систему. Соответственно в координатной пло-
скости Т1ОГ2о трехмерной области устойчиво-
сти трехкаскадной пучковой системы содер-
жится прямоугольная область устойчивости
[Л. 41, 51] двухкаскадной пучковой системы
(рис. 4-37).
Системы смешанной структуры на рис. 4-38
неоднородны по отношению к обоим своим
статическим элементам; идеализация элемен-
та 1 преобразует их в двухкаскадные пучко-
вые системы, идеализация элемента 3 —
в двухкаскадные одноциклические. В соответ-
ствующих координатных плоскостях T2QT30 и
^10^20 содержатся поэтому области устойчи-
вости этих двухкаскадных систем.
Системы на рис. 4-39 идеализацией един-
ственного их статического элемента 3 преоб-
разуются в двухкаскадные пучковые системы.
Область устойчивости последних расположена
в координатной плоскости TioT2o.
Системы на рис. 4-40 идеализацией любого
из двух их статических элементов преобра-
зуются в двухкаскадные пучковые системы.
Области устойчивости последних расположе-
ны в каждой из координатных плоскостей
TioT2o и Т10Т30.
Такая проверка может служить контролем
правильности общих построений областей
устойчивости.
Мы ограничились рассмотрением одной
лишь устойчивости — центрального для си-
стем регулирования общего свойства. Стати-
ческая определимость систем радикально
упростила это рассмотрение. Остальные об-
щие метрические свойства будут частично рас-
смотрены в следующей главе, вместе с метри-
ческими отношениями. Рассмотрим локаль-
ные метрические свойства статически опреде-
лимых систем.
В. Локальные метрические свойства
Из локальных метрических свойств рас-
смотрим быстродействие — столь же централь-
ное для систем регулирования свойство. Для
этих систем оно определяется передаточной
функцией канала «объект—объект». Показа-
телем быстродействия является здесь перере-
гулирование объекта.
Быстродействие системы регулирования
пропорционально скорости распространения
сигнала в регулирующей подсистеме, скорость
же эта — длине обратных связей. Процесс
удлинения* замещающих связей соответствует
постепенному нарастанию быстродействия си-
стем. Прохождение импульса тормозится тор-
мозящими обратными связями. Чем короче
эти связи, тем сильнее торможение импульса
и соответственно ниже быстродействие систе-
мы. Поскольку внутренние связи представ-
ляют собой кратчайшие (вырожденные) внеш-
ние обратные связи, системы на рис. 4-33,а,
с самовыключением всех элементов внутрен-
ними связями, являются наименее быстродей-
ствующими системами. Противоположным
пблюсом таблицы являются пучковые системы
g с предельно длинными обратными связями
и, соответственно, с предельным быстродей-
ствием.
173
1~Tgt)=0
2
5
4
3
Характеристические
уравнения
Wp (%P+1)ToP+fr3P+№0p+TipT0p+i=o
^Ws^P^T^oP3'1'^ +ТзЯ’орг+Тор+1=О
v+ 1=0
Граница области устойчивости
^3= T10T2o(T10^30^~TWT20T30~T10r20=0
Рис. 4-39. Область устойчивости систем с двумя «короткими диагональными связями.
174
175
Для систем регулирования повышение
быстродействия их регулирующих подсистем
является также условием повышения устой-
чивости — снижения колебательности. При
идеальной регулирующей подсистеме (вырож-
дающейся в идеальный регулятор) система
регулирования апериодична. Повышение бы-
стродействия локально разрешимых регули-
рующих систем, идя в таблице на рис. 4-33
сверху вниз, сопровождается повышением
устойчивости их систем регулирования. Эти
новые и весьма необычные системы, состав-
ленные, не считая замкового элемента, одни-
ми астатическими элементами, обладают не
только нормальной структурной устойчиво-
стью, но и высоким качеством переходных
процессов. Качество это повышается с удли-
нением обратных связей и повышением бы-
стродействия. Наиболее необычные для совре-
менной автоматики пучковые системы обла-
дают наиболее качественными переходными
процессами (рис. 4-35).
Несмотря на локальную эквивалентность
и совпадение переходных процессов в глав-
ном канале «объект—объект», входные и вы-
ходные системы практически далеко не рав-
ноценны. Качество переходных процессов
в этих системах определяется монотонным на-
растанием постоянных времени, идя от зам-
ковых элементов [эти эпюры времен даны на
рис. 4-35,е]. Это приводит в системах входно-
го замещения к падению времен в усилитель-
ной цепочке, по ходу импульса (рис. е, £), и
к нарастанию их в выходных системах
(рис. е', £'). В реальных системах регулиро-
вания времена в усилительной цепочке вы-
нужденно нарастают по ходу импульса, с ро-
стом «энергии» элементов.. Выходные системы
практически более пригодны поэтому, чем
входные системы. Это предопределило выбор
в системах ВТИ (рис. 4-29, 4-37) структуры
выходного замещения [Л. 36, 42, 49, 52, 63, 69,
72, 81, 82, 96, 104].
Метрические условия локального совпаде-
ния транспонированных систем (эпюры вре-
мен] (рис. е, Е, е', £') так же зеркально со-
пряжены, как и структурные условия локаль-
ной эквивалентности.
Представленное рис. 4-35 качество пере-
ходных процессов в локально разрешимых
системах таблицы на рис. 4-33 тем выше, чем
выше показатель k прогрессии, образуемой
временами. На рис. 4-35,е, Е показатель этот
взят много ниже (& = 2) практически приме-
няемых, с тем чтобы явственнее выявить ка-
чество систем. При обычных значениях fe=
=((54-10) и принятом на рис. Е значении наи-
большего из времен (Т0 = 3,2 сек) все, кроме
176
одноциклической, системы обладают аперио-
дическими переходными процессами
(рис. 4-35).
Рассмотренным выше метрическим свой-
ствам локально разрешимых систем — повы-
шению быстродействия в следящих системах
и уменьшению перерегулирования в системах
регулирования можно дать точное количест-
венное выражение. Назовем быстродействием
f следящей системы величину, обратную пло-
щади F указанной на рис. 4-35,e:f= ^--Пло-
щадь F, измеренная в относительных едини-
цах, оценивает отставание переходного про-
цесса в выходном элементе рассматриваемой
системы от скачкообразного переходного про-
цесса в выходном элементе идеальной безы-
нерционной следящей системы. Быстродейст-
вие может быть определено как величина, об-
ратная этому отставанию. Перерегулирова-
нием назовем, как обычно, превышение регу-
лируемой координаты над новым равновес-
ным положением. Связь между обеими вели-
чинами определяется следующими теоремами.
Теорема 4-Х (теорема быстродейст-
вия). Быстродействие локально разрешимых
следящих систем нарастает при любом удли-
нении замещающих связей. Теорема 4-XI
(теорема перерегулирования). Пе-
ререгулирование локально разрешимых си-
стем регулирования уменьшается при любом
удлинении завещающих связей следящих си-
стем, образующих их регулирующие подси-
стемы. Очевидна связь обеих теорем, иллю-
стрируемая рисунком 4-35: с удлинением за-
мещающих связей регулирующей подсистемы
нарастает (по теореме быстродействия) бы-
стродействие ее как следящей системы, а с
ним уменьшается, по теореме перерегулиро-
вания, перерегулирование в системе регули-
рования.
Столь простые, монотонные зависимости
от длины обратных связей имеют место толь-
ко по отношению к быстродействию и перере-
гулированию локально разрешимых систем.
По отношению к устойчивости зависимости
эти сложнее. Напрашивающееся и часто вы-
сказываемое утверждение о снижении устой-
чивости локально разрешимых систем регу-
лирования при удлинении замещающих свя-
зей неверно, как явствует уже из рис. 4-35.
Ошибочный взгляд этот возник в результате
исследования устойчивости входных систем
при обычном для практики, но противопока-
занном им нарастании постоянных времени
(рис. 4-35Е'). При естественном для них убы-
вании постоянных времени (рис. Е) удлине-
ние связей повышает устойчивость систем ре-
гулирования (средние столбцы рис. 4-35) по-
вышением быстродействия * регулирующих
подсистем, хотя и снижает устойчивость са-
мих регулирующих подсистем (крайние столб-
цы рис. 4-35).
Как показано на рис. 4-34, все входные
системы неизодромны во всех элементах по
отношению к приложенной к объему нагруз-
ке (чем вновь выясняется эталонное зна-
чение этих систем), -выходные системы не-
изодромны лишь в объекте (в силу локаль-
ной эквивалентности), в ряде же элементов
усилительной цепочки изодромны. Выходя-
щие из этих элементов статические связи ква-
зистатичны и могут быть использованы для
получения релейных характеристик (Л. 72, 96,
97]. Это ’ является важным дополнительным
преимуществом выходных систем, использо-
ванным в системах ВТИ и обеспечившим им
высокое быстродействие (Л. 52, 63, 69].
4-3-3. Статически неопределимые системы
А. Общие метрические свойства
Метрическое исследование статически не-
определимых систем осложнено появлением
варьирующихся статических параметров. По-
ясним это на рассмотренной уже выше
(рис. 3-1) простейшей статически неопреде-
лимой системе — одноциклической системе со
статическим объектом.
Канонические уравнения такой системы
приведены на рис. 1-20 при положительном
(а), отрицательном (б) и нулевом (в) само-
регулированиях. Приравнивая нулю второй
определитель Гурвица, получим показанные
на рис. 4-41, 4-36 граничные кривые областей
устойчивости.
Для случая положительного саморегули-
рования внутри замкнутых граничных линий
находятся области неустойчивости, вне их —
области устойчивости. Семейство замкнутых
граничных линий вырождается, с одной сто-
роны, в гиперболу (при коэффициенте само-
регулирования So, равном нулю), ограничи-
вающую область устойчивости той же систе-
мы с астатической машиной (рис. 4-41), и,
с другой, — в точку (при So=0,11) (Л. 57]. Ус-
ловия устойчивости резко улучшаются с появ-
лением саморегулирования. Помимо прежней
области устойчивости, требовавшей малого
времени одного из сервомоторов, приобрета-
ются новые области, допускающие большие
времена обоих сервомоторов. При So = O,ll
область неустойчивости исчезает, система без-
условно устойчива.
При отрицательном саморегулировании се-
мейство незамкнутых граничных линий вы-
рождается, с одной стороны, при ослаблении
отрицательного саморегулирования, в ту же
гиперболу, соответствующую нулевой одно-
"циклической системе, с другой — при усиле-
нии отрицательного саморегулирования —
в точку, вершину координат. Нулевая одно-
циклическая система (рис. в) занимает гра-
ничное между этими схемами положение.
В схеме с положительным саморегулиро-
ванием с усилением коэффициента саморегу-
лирования исчезает область неустойчивости,
при отрицательном саморегулировании с уси-
лением этого коэффициента исчезает область
устойчивости. Стабилизирующее влияние тор-
мозящих внутренних связей и дестабилизи-
рующее — возбуждающих — на устойчивость
предстает здесь в наиболее явном -виде.
Представленный на рис. 4-41,6 процесс
усиления внешней и ослабления (уменьше-
ния S) внутренней связи можно рассматри-
вать как процесс постепенного вытеснения
внутренней связи внешней связью, заканчи-
вающийся в системе в полным замещением
первой связи второй. Более развернуто про-
цесс этот представлен для трехкаскадной си-
стемы на рис. 4-42. Здесь из безусловно устой-
чивой открытой системы (рис. а) постепен-
ным вытеснением (рис. б, в) и, наконец, заме-
щением (рис. г) внутренней связи объекта
внешней замыкающей связью возникает нуле-
вая одноциклическая система (рис. г). Раз-
витие открытой нулевой системы а в одноци-
клическую нулевую систему г проходит через
промежуточные статически неопределимые
системы б и в с промежуточными свойствами.
По мере усиления внешней связи сужается
область устойчивости системы, переходя в ко-
нечном этапе (рис. г) в рассмотренную уже
выше (рис. 4-36) область устойчивости нуле-
вой одноциклической системы. Граничные по-
верхности на рис. б и в так же замкнуты, как
и граничные линии на рис. б (это не нашло
отображения на рисунке из-за ограниченных
его размеров).
Поскольку одноциклическая система обла-
дает однородной структурой по отношению ко
всем своим элементам, координатные плоско-
сти пространства параметров трехкаскадной
системы совпадают с плоскостью параметров
двухкаскадной системы (рис. 4-41). Замкну-
тые линии этой второй плоскости представ-
ляют собой следы пересечения замкнутых по-
верхностей первого пространства с его коор-
динатными плоскостями. Точка (So = O,ll),
в которую вырождается семейство замкнутых
12 И. И. Гальперин.
177
Уравнения системы
7оФ-^юФ+3агР=О'
TtPt + Pt =0 -
ТгРг + Рг -pt = 0 ,
(Т0Р Soo) (TtP +1) (TgP^hO + Soo)
(v -Soo)(JtoV^)(T^)+0+s^O
302~s00=1j sOZ = 1 + s<n
-О I Характеристические
уравнения
1 Уравнения статически
J неопределимого узла
yiPi + p, - <p -o
J2P+PZ ~P1=O
(ToP^^pfOiTzp-i-O+di-Sa))^
( V*^o)(TioV^)(T2oV+lM^Soo)~0
302 + Sqo~ 1 i $02=1 - Sqq
Рис. 4-41. Области устойчивости двухкаскадных статически неопределимых систем.
Ура. в нения с и с темь /
^оФ + $ооФ
Уч * Pt - Ф =°
ТгЙ-2+ Рг * Pt = 0
гзЙз+ Рз'Рг=0
Характеристическое уравнение
C^oP+soo^riP^)(hP^)(bP+0 + l^O
(и^оо)(Т,^П(Т2ои^)(Т^1)^^О
Уравнения статически неопределимого угла
^оо+^оз =;
S03~^S0O
Рис. 4-42. Области устойчивост»
одноцикличеоких статически
неопределимых систем.
178
Уравнения статически
неопределимые узлов
Ъгг+312-$1а~0
$и+$12=$О = *
'5’// = Z"*S/2
Sj1~Sf2~$1O=0
$H~S12~SfO=*
Sp-i +$/2
?22~$23~$21=0
S22~S23-S21~1
*>22~1 *$23
ЪР+ЪМЪР+ЪгХЪР+О^
f TM । T__
4> Hi Hz Нз
^Т1Р+^пУ^2Р^?22^^зР+^оР'~^2з(ЪР'1'^11У^оР~^12^3Р^У^оР1~^=^
(JlQp*$lP^2d^+$22^^3d^*^^~'$23^0^$fl^^$12 (JzQU+tyU+l-O*
; Рис. 4-44. Области устойчивости статически неопределимых систем с двумя короткими диагональными связями.
кривых в этой плоскости, представляет собой
точку касания замкнутых поверхностей с ко-
ординатными плоскостями в первом простран-
стве. Касание это происходит при So = 0,1 1,
полное же исчезновение области неустойчиво-
сти (безусловная устойчивость) возникает,
следовательно, для трехкаскадной системы
при больших значениях коэффициента само-
регулирования. Точно так же по виду плоско-
сти координат двухкаскадной одноцикличе-
ской системы с отрицательным саморегулиро-
ванием (рис. 4-41,а) легко представить
область устойчивости трех- и многокаскадных
одноциклических систем.
. На рис. 4-43 показан тем же способом про-
цесс возникновения нулевой системы с корот-
кой диагональной связью (рис. г) из нулевой
одноциклической (рис. а). В верхнем ряду
рисунка показано постепенное вытеснение
(рис. б, в) и наконец замещение (рис. г) вну-
тренней статической связи диагональной
связью. В системах нижнего ряда проведана
не тормозящая, а возбуждающая диагональ-
ная связь. Ее усиление (рис. д, е, ж) закан-
чивается не замещением внутренней связи,
а одновременным усилением ее (сумма пара-
метров всех трех сходящихся в элементе 2
статических связей должна быть в соответ-
ствии е уравнениями (!) равна нулю). Об-
ласть устойчивости стремится и при этом
к указанной на рис. ж форме.
На рис. 4-44 рассмотрен тем же методом
процесс возникновения нулевой системы с дву-
мя короткими диагональными связями, на
рис. 4-45 — с длинной диагональной связью,
а на рис. 4-46 — нулевой пучковой системы
(верхний ряд рисунков). Здесь усиление воз-
буждающих диагональных связей приводит
к безусловной устойчивости (нижний ряд ри-
сунка). При этом также возникают новые воз-
можности.
Статически неопределимые системы сле-
дует разделить по их общим свойствам на си-
стемы с тормозящими (верхняя половина
рис. 4-42—4-45) и возбуждающими (нижняя
половина рисунков) связями. Для систем пер-
180
S11+Sf3^^f
sn~1
9 Pf Pi Рз 9 Pl Рг p3
(T-jp+S^CIzp+MTgp+l) TqP +$1зГ0р * 1~0
$H~S13"S10~a
SlTS13=Sur*
1+S13
4> Pl Pz Рз
{'T1P+^1i)^)(T3p^)Top-Sl3Top^1^O
Рис. 4-45. Области устойчивости статически неопределимых систем с длинной диагональной связью.
вого типа статические параметры принимают
промежуточные (дробные) значения между
единичными значениями параметров статиче-
ски определимых систем. Этим определяются
и промежуточные свойства статически неопре-
делимых систем. Если учесть, как резко раз-
нятся между собой свойства статически опре-
делимых систем, как широко «расставлены»
эти свойства (4-37-ь4-41), возможность полу-
чения промежуточных свойств окупает все
расчетные осложнения, возникающие в стати-
чески неопределимых системах. Для систем
второго типа статические параметры статиче-
ски неопределимых узлов могут принимать
неограниченные значения. Соответственно си-
стемы эти предлагают выбор новых свойств,
резко разнящихся от свойств статически опре-
делимых систем.
Б. Локальные метрические свойства
Локальные метрические свойства статиче-
ски определимых и неопределимых систем на-
ходятся „в том же отношении, что и общие,—
резко разнятся для систем с возбуждающим^
связями и занимают промежуточное положе-
ние для систем с тормозящими. Локальные
метрические свойства статически неопредели-
мых систем так же зависят от их варьирую-
щихся статических параметров, как и общие
свойства.
Упорядоченное исследование метрических свойств
динамических систем невозможно без учета их статиче-
ской определимости. Игнорирование этого определяю-
щего свойства приводит к многочисленным ошибкам.
Приводим примеры изложения этого вопроса в совре-
менных учебниках: «Выбор постоянных базисных вели-
чин, необходимых для безразмерных обобщенных коор-
динат, вообще говоря, произволен. Однако чаще всего
за базисные величины принимают наибольшие или сред-
ние значения координат» [Л. 56]. Так бессодержательно,
вне всякой связи со статической определимостью, вопрос
этот трактуется во всей современной литературе {[Л. 62];
Наша критика такого изложения («Известия ВТИ»,
1952, № 3) привела к поправкам, наилучшим образом
освещающим общее состояние предмета: «Выбор ба-
зисных величин используют иногда для уменьшения
числа коэффициентов, входящих в уравнения процесса
регулирования и имеющих значения, отличные от еди-
ницы» (Л. ^68]. Эта случайная трактовка определяющего
181
Уравнения статически -неопределимых узлов
$w* S/s “ ^ю1*^
Sfl* S»es^
Sffa 1 " Sf3
§23~§21яО
S& + Sfl3*!
1 * s23
T30
тю
^го
б)
Системы
Sg-Ofi
$23=0,5
$11=0,5
$22*0fi
4
Е^2
Рг
а)
Ус=о Я
<Р Pi Рг Рз
SW * s13~ snaQ
§11 “ S!3~ S1O=1
5/; e / ♦ $13
Sz2~ S23-S21=O
$22 ~ $23 $30***
$22 ** 1 * $23
Системы а,д,6,Ж
Рг Рз
(Т] Р ‘I'S^lTgP t S^f^p-t-fjTgP + S^TgP^ + $H$qIqP + $1зТдР + 1*О
(^IOV4‘sli)(^iDv't'^(^3lP,1'0o ♦ $гзТю^ + O/fS^U + $}3v + 19O
Ус=0
Рг
Рз
О)
Тзо
Ъо
$13*0,5
$23*0fi
$n*1)5
$22=1,5
S0—ео
S# — 00
S„—«»
S2— 00
e)
IB
ОК)
Т30
№ № fy
(Ър^^п)0гР^^С^Р^)^оР^2з^^о^ $п$гз&Р~$1з1оР*1
• s/3v+1=0
Рис. 4-46. Области устойчивости пучковых статически неопределимых систем.
свойства динамических систем — их статической опре-
делимости не может не влечь ошибок Выбором кано-
нических базовых величин определяется возможность
исключения всех статических параметров в статически
определимых системах и всех неизбыточных статических
параметров — в статически неопределимых. Исключение
это приводит к обращению исключивтпихся параметров
в единицы только в статически определимых узлах и си-
стемах, где имеет место не уменьшение числа этих па-
раметров, а полное их исключение. В статически не-
определимых узлах и системах, где имеет место такое
уменьшение, исключающиеся статические параметры не
обращаются в единицы.
Неясность в этом центральном вопросе приводит
к смешению статически определимых систем со стати-
чески 'неопределимыми и произвольному исключению
в последних всех статических параметров, либо введе-
нию в статически определимые системы произвольного
числа статических параметров в виде коэффициентов
усилений отдельных элементов. Неясность эта вызвана
отсутствием в современной теории регулирования необ-
ходимого понятия о статической определимости сервоси-
стем, принадлежащего односторонней механике.
ГЛАВА ПЯТАЯ
СТРУКТУРНЫЕ ОТНОШЕНИЯ
Свойства систем могут изучаться непосред-
ственно, безотносительно к свойствам других
систем, или сравнительным методом, по отно-
шению к свойствам других систем. Этим вто-
рым методом устанавливается связь между
свойствами и отношениями систем. Некото-
рые из структурных отношений — пересечение,
покрытие, эквивалентность, тождество — и
устанавливаемая ими связь свойств рассматри-
вались уже выше. Следует привести эти отно-
шения в систему и найти их место в общем
классе структурных отношений динамических
систем.
Синтез основного класса устойчивых си-
стем— приводимых систем сводится, как яв-
ствует уже из предыдущего, .к синтезу исход-
ного класса нулевых систем — локально-раз-
решимых систем и к последующим структур-
ным преобразованиям каждой исходной си-
стемы в семейство производных систем. При
этом неизбежно возникает вопрос о связи ди-
намических свойств производных систем со
свойствами исходной, о наследовании и новом
приобретении этих свойств, вопрос структур-
ных отношений систем.
Тот же вопрос встает и в общем случае,
когда две сравниваемые системы не связаны
происхождением, т. е. ни одна из них ни в ка-
ком смысле не является исходной или произ-
водной по отношению к другой, и речь идет
лишь о сравнении двух независимых систем.
В этом общем случае систему, чьи свойства
уже известны, назовем эталонной, систему же,
чьи свойства требуется установить сравне-
нием, — сравниваемой. Эталонными система-
ми всего лучше служат элементарные, откры-
тые и некоторые другие системы с наиболее
схематически выраженными свойствами. При
сравнении свойств систем, связанных струк-
турными преобразованиями, исходные систе-
мы являются эталонными, производные —
сравниваемыми.
Поясним все это на примере систем на
рис. 4-28. Входная и выходная пучковые си-
стемы в и г общеэквивалентны и обладают
одинаковыми общими структурными подсвой-
ствами. Они, кроме того, локально эквива-
лентны в главных каналах зеркально сопря-
женных элементов и здесь обладают одина-
ковыми локальными структурными подсвой-
ствами. Во всех остальных каналах системы
эти локально не эквивалентны. Это означает,
что общая эквивалентность не переходит
здесь в тождество. Системы связаны проис-
184
хождением — система г получается из систе-
мы в транспонированием. Вторая система яв-
ляется исходной, первая — производной.
Со всеми остальными системами рисунка
пучковые системы находятся в несимметрич-
ном общем отношении — они покрывают все
эти системы, те же лишь пересекаются с ни-
ми. Как пояснено ниже, эти отношения покры-
тия и пересечения всегда выступают совмест-
но. Из общего покрытия явствует, что обе
пучковые системы обладают всеми общими
структурными подсвойствами существования
всех остальных систем рисунка. Из общего
пересечения этих остальных систем с пучко-
выми явствует, что первые обладают частью
общих структурных подсвойств существова-
ния вторых. Локальные отношения систем
остаются здесь невыясненными.
Пучковые системы не связаны происхожде-
нием с остальными системами рис. 4-27 и яв-
ляются поэтому для них не исходными»
а только эталонными. В этом качестве они,
однако, мало пригодны, так как свойства их
недостаточно схематичны и лишь подлежат
выяснению. Значительно удобнее в качестве
эталонных систем открытые нулевые системы,
обладающие такими схематическими сильны-
ми структурными свойствами, как безусловная
устойчивость и безусловная апериодичность.
Из пересечения всех систем на рис. 4-33 с ис-
ходными для них открытыми системами а яв-
ствует структурная устойчивость и структур-
ная апериодичность этих систем, образующие
в совокупности нормальную структурную
устойчивость. Теорема 5-1. Локально разре-
шимые системы обладают нормальной струк-
турной устойчивостью. Эти отношения и вы-
текающая из них теорема будут ниже дока-
заны. Вывод этой общей теоремы из теории
отношений достаточно поясняет значение по-
следней.
5-1. СТРУКТУРНЫЕ, МЕТРИЧЕСКИЕ
И СМЕШАННЫЕ ОТНОШЕНИЯ
5-1-1. Отношения систем
Подобно свойствам, отношения могут быть
абсолютными, общими или локальными. По-
добно свойствам, все эти отношения могут
быть структурными — зависящими только от
структуры, метрическими — зависящими толь-
ко от метрики, и смешанными — зависящими
и от структуры и от метрики. Последние мо-
гут иметь соответственно структурные и мет-
рические подотношения.
Примером структурных отношений явля-
ются рассмотренные выше отношения вклю-
чения между системой и ее внутренними и
иными подсистемами, примером метрических
отношений — все безотносительные к структу-
ре отношения между метрическими парамет-
рами. Простейшим примером смешанных от-
ношений является отношение тождества, тре-
бующее, очевидно, структурного и. метриче-
ского тождества.
5-1-2. Структурные и метрические отношения
Структурными, метрическими и смешан-
ными отношениями устанавливаются соответ-
ственно отношения структурных, метрических
и смешанных свойств. Смешанные отношения
занимают то же центральное место в струк-
турном исследовании, что и отображаемые
ими смешанные свойства. Структурные отно-
шения более элементарны и в основном рас-
смотрены выше. Метрические отношения вы-
ступают главным образом в виде метрических
подотношений смешанных отношений.
5-1-3. Смешанные отношения
Смешанные отношения, общие и локаль-
ные, как и смешанные свойства, обладают
метрическими и структурными подотноше-
ниями. Каждому смешанному исходному (по-
ложительному) отношению может быть про-
тивопоставлено противоположное (отрица-
тельное) отношение и для обоих построена
4-членная матрица структурных подотноше-
ний, аналогичная матрице структурных под-
свойств. Теория структурных отношений
строится, таким образом, по той же логиче-
ской схеме, что и теория структурных свойств,
и может быть рассматриваема как структур-
ная интерпретация общей логики отношений.
Нарастающее родство систем определяется
следующими двумя смешанными отношения-
ми: 1) общим совпадением систем — совпаде-
нием всех общих свойств систем и 2) локаль-
ным совпадением систем — совпадением всех
локальных их свойств в некотором канале.
Первое из этих отношений является общим,
второе — локальным. Оба они являются сме-
шанными и дают начало 4-членным матрицам
общих и локальных структурных подотноше-
ний. Рассмотрим в этом порядке, начав с об-
щих и закончив локальными, отношения си-
стем и вытекающие из них свойства.
А. Отношение - общего совпадения
Назовем две системы одинакового поряд-
ка совпадающими для данных значений их
параметров, а их отношение — общим совпа-
дением, или, кратко, совпадением, если все об-
щие структурные подсвойства их совпадают.
Для линейных систем это означает совпаде-
ние характеристических полиномов. Совпаде-
ние систем является положительным отноше-
нием. Противоположным ему отрицательным
отношением является несовпадение. Совпаде-
ние ставит в соответствие каждой точке про-
странства параметров одной из систем (по-
крываемая точка) одну или несколько точек
пространства параметров второй системы (по-
крывающие точки). Назовем эти точки совпа-
дающими, области этих точек в обоих про-
странствах — областями совпадения, области
всех остальных точек — областями несовпаде-
ния. Для этих областей отношений возможны
четыре общих структурных подотношения,,
аналогичных структурным подсвойствам: по-
зитивное — структурное совпадение (суще-
ствование областей совпадения), контра-
позитивное — структурное несовпадение (не-
существование областей совпадения), контра-
негативное — безусловное совпадение (несу-
ществование областей несовпадения), нега-
тивное — небезусловное совпадение (сущест-
вование областей несовпадения).
Б. Отношение локального совпадения
Та же система понятий возникает для ло-
кального совпадения систем в некотором ка-
нале. Назовем две системы локально .совпа-
дающими в данном канале, а их отношение—
локальным совпадением в данном канале, ес-
ли все локальные структурные подсвойства их
совпадают в этом канале. Для линейных си-
стем это означает совпадение передаточных
функций. Необходимым условием локального
совпадения хотя бы в одном канале является
общее совпадение систем. Для линейных си-
стем это явствует из того, что знаменателем
передаточной функции является характери-
стический полином. Локальное совпадение яв-
ляется, таким образом, локальным подсвой-
ством общего совпадения. Так, общее совпа-
дение входных и выходных линейных систем
во всем пространстве параметров (общая эк-
вивалентность) сопровождается у этих систем
локальным совпадением в главных каналах
зеркально сопряженных элементов (рис. 4-33,
4-34), также во всем пространстве парамет-
ров (локальная эквивалентность). Локальное
совпадение является здесь метрическим под-
отношением общего совпадения, локальная
эквивалентность — структурным подотноше-
нием общей эквивалентности.
18S
Общим совпадением систем в данной точ-
ке их пространств параметров (т. е. при не-
которых значениях их метрических парамет-
ров) , обеспечивается одинаковость общих
свойств системы в этой точке. Локальным со-
впадением в некотором канале двух систем
обеспечивается одинаковость их локальных
свойств, в частности — одинаковость переход-
ных процессов в этих каналах при одинако-
вых начальных условиях.
Все остальные понятия, введенные выше
для общего совпадения, распространяются в
том же смысле на локальное совпадение.
5-2. СТРУКТУРНЫЕ ПОДОТНОШЕНИЯ
5-2-1. Структурные подотношения
А. Матрицы подотношений
Для каждого смешанного отношения, об-
щего. и локального, можно составить такую
же матрицу структурных подотношений, как
и для свойств:
подотношения подотношения
существования: несуществования:
области положи-
тельных отноше-
ний
«области отрица-
тельных отноше-
ний
позитивное контрапозитивное
негативное контранегативное
Заглавия столбцов и строк матрицы долж-
ны здесь читаться как единый термин. Так,
позитивные структурные подотношения пред-
ставляют собой подотношения существования
^области положительных отношений.
Применительно к отношению совпадения
матрица эта примет вид:
подотношения подотношения
существования: несуществования:
«области совпаде-
ния
•^области несовпа-
дения
структурное совпадение структурное несовпадение
небезусловное совпадение безусловное совпадение
Термины — безусловное и небезусловное
совпадение, перенесенные в матрицу струк-
турных подотношений из матрицы структур-
ных подсвойств, не так наглядны в первой,
как во второй. Безусловное совпадение не оз-
начает, что сравниваемая система в любой
точке своего пространства параметров совпа-
дает с эталонной системой в любой точке
пространства параметров последней, а озна-
чает лишь, что сравниваемая система в каж-
дой своей точке совпадает с одной или не-у
сколькими точками эталонной системы. Удоб-
но поэтому пользоваться более краткими тер-
186
минами: пересечение систем — вместо струк-
турное совпадение, непересечение — вместо
структурное несовпадение, покрытие — вместо
безусловное совпадение, непокрытие — вместо
небезусловное совпадение.
В этих частично рассмотренных уже выше
терминах матрица отношений имеет вид:
подотношения подотношения
существования: несуществования:
области НИЯ совпаде- пересечение непересечение
области дения несовпа- непокрытие покрытие
Между структурными подотношениями и
структурными подсвойствами имеется разли-
чие, общее для отношений и свойств. Сущест-
вует одна лишь, в одном пространстве пара-
метров, область каждого свойства и две,
в двух пространствах параметров соотнося-
щихся систем, области отношения. Структур-
ные подотношения поэтому раздваиваются,
в отличие от структурных подсвойств. Они мо-
гут быть односторонними и двусторонними.
Это относится не ко всем структурным подот-
ношениям, а лишь к подотношениям отрица-
тельных отношений—к негативному и контр а-
негативному, к непокрытию и покрытию си-
стем.
Эти свойства структурных подотношений
принадлежат логике отношений и могут быть
сформулированы в ее понятиях. Все струк-
турные подотношения очевидно рефлективны.
Вопрос о их симметричности и транзитивно-
сти решается следующей легко доказываемой
теоремой 5-II: позитивное и контрапози-
тивное подотношения симметричны и нетран-
зитивны, негативное — несимметрично и не-
транзитивно и контранегативное — несиммет-
рично и транзитивно.
Так, пересечение и непересечение систе-
мы А с системой Б означает также, соответ-
ственно, пересечение и непересечение систе-
мы Б с системой В. Пересечение системы А
с системой Б и системы Б с системой В не
означает пересечения системы А с системой В.
Непокрытие системы Б системой А не озна-
чает непокрытая системы А системой Б. Не-
покрытие системы Б системой А и системы В
системой Б не означает непокрытая систе-
мы В системой А. Покрытие системы Б систе-
мой А не означает покрытия системы А систе-
мой Б. Покрытие системы Б системой А и си-
стемы В системой Б означает покрытие систе-
мы В системой А.
Позитивное и контрапозитивное структур-
ные отношения отличаются, таким образом,
ют негативного и контр ане-
гативного симметричностью.
Это означает, что отношения
покрытия и непокрытая мо-
гут быть <как односторонни-
.ми, так и двусторонними.
Отношения пересечения и
непересечения могут быть
только двусторонними.
Чтобы избегнуть неопре-
деленности, вытекающей из
этого раздвоения, будем от-
носить в дальнейшем все
раздваивающиеся отноше-
ния только к эталонной си-
стеме: покрытием и непокры-
тием будем называть соот-
ветственно покрытие и непо-
крытое эталонной системы
сравниваемой системой. На
рис. 5-1 даны в этих терми-
нах логические схемы *мат-
Подотношения
существования
Подотношения
несуществования :
Негативное
Контрапозитибное
Zj непересечение
Контранегативное
Рис. 5-1. Матрица структурных подотношений систем в целом.
рицы структурных под отно-
шений. Пространство параметров эталонной
системы очерчено жирной окружностью, срав-
ниваемой системы—тонкой окружностью. Об-
ласти совпадения очерчены той же толщины
окружностями: образ первого пространства во
втором — жирной окружностью, второго в пер-
вом — тонкой окружностью.
Знаком пересечения является здесь дву-
сторонняя пунктирная стрелка, представляю-
щая собой две слившихся односторонних, зна-
ком покрытия — односторонняя сплошная
стрелка, направленная от покрываемой систе-
мы к покрывающей. Это направление стрелки,
обратное направлению покрытия, должно ка-
заться непонятным, если не иметь в виду, что
стрелка представляет собой здесь логический
знак импликации или включения. При покры-
тии образы всех точек покрываемой системы
включаются в состав покрывающей системы.
Это означает, что стрелка — знак включения—
должна быть направлена от покрываемой си-
стемы к покрывающей. Этим же направле-
нием указывается и направление переноса
свойств — все позитивные подсвойства покры-
ваемой системы принадлежат и покрывающей
системе.
Знаками непересечения и непокрытая яв-
ляются соответственно перечеркнутые знаки
пересечения и покрытия (рис. 5-1). На рис. 5-1
показана симметрия подотношений положи-
тельных отношений и несимметрия подот-
ношений отрицательных отношений. Нижняя
из каждых двух стрелок, изображающих не-
симметричные подотношения, представляет
лодотношение сравниваемой системы к эта-
лонной, верхняя — эталонной к сравниваемой.
Для верхней строки матрицы оба подотноше-
ния совпадают, образуя симметричное дву-
стороннее подотношение обеих систем, для ниж-
ней строки — не совпадают, образуя несим-
метричное двустороннее подотношение систем.
Покрытие всегда сопровождается пересече-
нием. Только в специальном случае двусто-
роннего* покрытая пересечение это переходит
в обратное покрытие, образуя симметричное
двустороннее отношение.
Симметричные и несимметричные отноше-
ния возникали уже выше, во входных и вы-
ходных системах (рис. 4-33). Входные и
выходные системы находятся, вообще говоря,
в симметричном отношении пересечения с ис-
ходной для них открытой системой. Симмет-
рия эта нарушается только для пучковых
входных и выходных систем. Как покрываю-
щие системы, они-покрывают открытую систе-
му, последняя же с ними только пересекается
(рис. 4-33). На рис. 4-33 обозначены отноше-
ния систем входного и выходного замещения
только к открытой системе. В таком же отно-
шении пересечения находятся эти системы и
между собой.
Области совпадения определяются взаим-
ным отображением пространств параметров
сравниваемых систем. Отображение должно
производиться в силу условий совпадения.
Для линейных систем условия эти являются
условиями тождества характеристических по-
линомов и даются отображающими уравне-
ниями, приравнивающими коэффициенты ха-
187
Рис. 5-2. Одностароннее и 'двустороннее покрытие и
эквивалентность.
рактеристических полиномов при членах оди-
наковых степеней.
Отображение пространства параметров
сравниваемой системы в пространство пара-
метров эталонной (или, кратко, отображение
сравниваемой системы в эталонную) назовем
прямым, и обратным — обратное отображение.
Одностороннее безусловное совпадение (по-
крытие) представляет собой отображение по-
крывающей системы на покрываемую и так-
же может быть прямым или обратным. Пря-
мым безусловным совпадением (прямым по-
крытием) является отображение сравнивае-
мой системы на эталонную, обратным безус-
ловным совпадением (об-
ратным покрытием) — ото-
бражение эталонной си-
стемы на сравниваемую.
Первое означает, что каж-
дой точке эталонной систе-
мы соответствует одна или
несколько точек сравнивае-
мой; второе — что 'каждой
точке сравниваемой системы
соответствует одна или не-
сколько точек эталонной си-
стемы.
Покрытие систем — ото-
бражение покрывающей си-
стемы на покрываемую не
является в общем случае од-
нозначным и непрерывным.
В том специальном случае,
когда оба эти условия со-
блюдаются, назовем покры-
тие односторонней эквива-
лентностью покрывающей
Подотношения существования
в единичном свойстве
j Позитивное
Негативное
/ непокаытие единичного
системы покрываемой. Одностороннее покры-
тие является необходимым, но недостаточным
условием односторонней эквивалентности.
Взаимную одностороннюю эквивалентность
двух систем назовем двусторонней эквива-
лентностью или, кратко, эквивалентностью.
Она означает взаимно однозначное и взаим-
но непрерывное отображение (соответствие)
пространств параметров систем—эквивалент-
ность этих пространств в смысле теории'мно-
жеств. Двустороннее покрытие является не-
обходимым, но недостаточным условием дву-
сторонней эквивалентности.
Односторонние отношения характеризуют
один лишь из членов отношения и имеют по-
этому вторым членом все остальные системы.
Если система односторонне покрывает ка-
кую-либо иную систему или односторонне
эквивалентна ей, то она в таком же отноше-
нии будет и ко всем остальным системам того
же порядка. Понятия — односторонне покры-
вающая система и односторонне эквивалент-
ная система (или кратко — покрывающая и
эквивалентная системы) характеризуют одну
лишь систему — ее одностороннее отношение
ко всем остальным системам. Понятия дву-
сторонняя эквивалентность и двустороннее
покрытие (кратко — эквивалентность и покры-
тие) характеризуют двусторонние отношения
двух систем и требуют указания обеих систем..
Двусторонняя эквивалентность является
симметричным, как явствует из ее наимено-
вания, и транзитивным отношением. Если си-
стема А эквивалентна системе Б, а систе-
ма Б — системе В, то А эквивалентна В.
Подотношения несуществования
в единичном свойстве.
Контра позитивное
(не пере сечение в единич-
ном свойстве}
Контранегативное
(покрытие единичного
свойства )
Рис. '5-3. Матрица структурных ^одотношений систем по единичному свойству.
188
На рис. 5-2,а дана логическая схема одно-
сторонних покрытия и эквивалентности, а на
рис. 5-2,6 — двусторонних. Различие между
эквивалентностью и покрытием, заключаю-
щееся в характеризующих первую однознач-
ности и непрерывности отображения, не на-
ходит отражения в логических схемах, и схе-
мы эти поэтому совпадают для покрытия и
эквивалентности.
Б. Структурные отношения и структурные свойства
Конечной задачей теории Структурных под-
отношений является установление родства си-
стем, связи их структурных и метрических
свойств. Следует различать родство в целом
систем, определяемое пересечением про-
странств параметров их (рис. 5-1), и родство
по единичному свойству, определяемое пере-
сечением систем в области этого единичного
свойства (рис. 5-3). Отношения в области еди-
ничного свойства будут обозначаться теми же
символами, что и отношения в целом, с до-
бавлением кружка, пересекающего стрелку.
а) Родство в целом систем
Связь между структурными отношениями
и свойствами при родстве в целом устанавли-
вается следующими теоремами.
Теорема 5-III. При эталонной системе,
обладающей одним из сильных структурных
подсвойств, пересекающаяся с нею в целом
сравниваемая система обладает объемлющим
его слабым подсвойством. Слабым подсвойст-
вом, объемлющим данное сильное свойство,
является свойство, расположенное с ним на
одной диагонали матрицы структурных под-
свойств: позитивное — для контр анегативно-
го, негативное — для контрапозитивного. В ка-
честве эталонных систем наиболее удобны
поэтому системы, обладающие сильными под-
свойствами. К ним относятся прежде всего
открытые системы, безусловно устойчивые и
безусловно апериодические. Пересекающиеся
с ними системы будут, по теореме 5-Ш, струк-
турно устойчивы и структурно апериодичны.
Теорема 5-IV. При эталонной системе,
обладающей одним из слабых структурных
подсвойств, или, тем более, объемлемым им
сильным структурным подсвойством, покры-
вающая ее в целом сравниваемая система об-
ладает этим же слабым подсвойством. Так,
если эталонная система структурно устойчива,
или, тем более, безусловно устойчива, покры-
вающая ее сравниваемая система структурно
устойчива.
Теорема 5-V. При эталонной системе,
обладающей одним из сильных структурных
подсвойств, покрываемая ею & целом сравни-
Рис. 5-4. Теоремы родства в целом.
ваемая система обладает этим же сильным
подсвойством. Так, если эталонная система
безусловно устойчива, покрываемая ею срав-
ниваемая система также безусловно устой-
чива.
Теорема 5-VI. Сравниваемая система,
находящаяся в целом в отношении двусторон-
него покрытия к эталонной системе, обладает
всеми структурными подсвойствами послед-
ней.
Доказательства теорем пояснены рис. 5-4.
Каждому двустороннему отношению соответ-
ствует здесь одна теорема отношений, каж-
дому одностороннему — две. Из теорем этих
явствует, что чем более слабыми структурны-
ми подсвойствами обладает эталонная систе-
ма, тем более тесными должны быть отноше-
ния к ней сравниваемой системы, чтобы на их
основании судить о свойствах последней. Эк-
вивалентность, представляющая лишь более
упорядоченное покрытие, ничего не добавляет
к устанавливаемым покрытием структурным
отношениям свойств.
б) Родство систем по единичному свойству
Введем еще одно исходное отношение —
совпадения систем в области единичного свой-
ства. Единичными свойствами назовем такие
отдельные свойства, как устойчивость, апе-
риодичность, монотонность и т. д., или их со-
четания — апериодическая устойчивость, ус-
тойчивая изодромность и т. д. Так две линей-
ные системы совпадают в области единичного
свойства, если характеристические полиномы
их тождественно равны при значениях пара-
метров, находящихся у обеих систем в обла-
стях этого свойства. По отношению к этому
единичному отношению (являющемуся под-
отношением рассмотренного выше множест-
189
венного отношения (отношения в целом) сов-
падения. в пространстве параметров) имеет
место та же 4-членная матрица структурных
подотношений (рис. 5-3), что и для этого мно-
жественного отношения и всех множествен-
ных смешанных отношений (рис. 5-1):
подотношения
существования:
подотношения
несуществования:
области положи-
тельных отноше-
ний
области отрица-
тельных отноше-
ний
позитивное контрапозитивное
структурное сов- падение (пересе- чение) в единич- ном свойстве структурное несовпаде- ние (непересечение) в единичном свойстве
негативное не без условное совпадение (не- покрытие) в еди- ничном свойстве контранегативное безусловное совпадение (покрытие)в единичном свойстве
К этой матрице относятся и все рассмот-
ренные выше свойства структурных подотно-
шений множественных смешанных отношений.
Для единичных отношений возникают, кроме
того, подотношения перекрытия, которых не
может быть для отношений в целом.
Множественные и единичные отношения
могут иметь 'место по отношению к общим или
локальным свойствам и быть соответственно
общими или локальными отношениями. В этом
разделе рассматриваются только общие, еди-
ничные и множественные, отношения. Локаль-
ные отношения будут рассмотрены в следую-
щем разделе.
Связь между единичными структурными
отношениями и единичными свойствами при
родстве по единичному свойству устанавли-
вается следующими теоремами.
Теорема 5-VII. При эталонной системе,
обладающей одним из слабых структурных
подсвойств некоторого свойства, пересекаю-
щаяся с нею в области этого свойства сравни-
ваемая система обладает этим же слабым под-
свойством. Так, сравниваемая система, пере-
секающаяся со структурно устойчивой систе-
мой в области устойчивости последней, струк-
турно устойчива.
Теорема 5-VIII. При эталонной системе,
обладающей одним из слабых структурных
подсвойств некоторого свойства, сравниваемая
система, покрывающая область этого свой-
ства, обладает этим же слабым под свой-
ством. Так, при структурной устойчивости эта-
лонной системы, покрывающая область устой-
чивости этой системы сравниваемая система,
структурно устойчива.
Теорема 5-IX. При эталонной системе/
обладающей одним из слабых структурных
Рис. 5-5. Теоремы родства по единичному свойству..
подсвойств некоторого свойства, сравниваемая
система, перекрывающая область этого свой-
ства, обладает, как и в случае покрытия, этим’
же слабым подсвойством, притом всем тем
объемом этого свойства, которым обладает
эталонная система. Поясним подробнее поня-
тие— объем свойства. Объемом некоторого*
свойства являются для данной системы все
обладающие этим свойством системы с той же
структурой, но различной метрикой, для ли-
нейных систем — все обладающие этим свой-
ством характеристические полиномы, могущие*
быть полученными выбором метрических па-
раметров этой системы. Для линейных систем:
это, таким образом, отображение области это-
го свойства из пространства параметров дан-
ной системы в пространство коэффициентов^
ее (Л. 87]. Вопрос этот подробно рассмотрен
ниже. -
Теорема 5-Х. При эталонной системе,
обладающей одним лишь из слабых структур-
ных подсвойств некоторого свойства, сравни-
ваемая система, покрываемая областью этога
свойства, обладает соответственным сильным
подсвойством. Так, если область устойчивости
эталонной системы покрывает сравниваемую*
систему, последняя безусловно устойчива.
Доказательства теорем пояснены рис. 5-5.
Теоремы 5-III—15-Х относятся к линейным'
и нелинейным системам, к общим и локаль-
ным их свойствам и отношениям. Рассмотрим?
их в этом порядке.
в) Универсальные системы
Наиболее полно свойства систем выясня-
ются отношением этих систем к универсаль-
ным системам—системам, обладающим все-
190
Рис. 5-6. Отображение в универсальную систему матрицы структурных
подсвойств.
ми возможными для систем данного порядка
структурными и метрическими свойствами.
Системы эти обладают полным объемом каж-
дого свойства. Для линейных систем универ-
сальными эталонными системами являются
системы, для которых соответствующим вы-
бором параметров может быть получен лю-
бой характеристический полином, т. е. системы,
покрывающие пространство коэффициентов —
покрывающие системы.
Если пересечение системы в области неко-
торого свойства с неуниверсальной эталонной
системой является лишь достаточным усло-
вием наличия у системы этого свойства, то
такое же пересечение с универсальной эталон-
ной системой является необходимым и доста-
точным условием. Все указанные выше тео-
ремы отношений соответственно усиливаются
по отношению к универсальным эталонным
системам.
В универсальную эталонную систему мо-
жет быть отображена (рис. 5-6) матрица
структурных подсвойств (рис. 4-1). В нее же
могут быть отображены отношения исходных
и производных систем или сравниваемых и
эталонных (неуниверсальных). На рис. 5-7
в универсальную систему отображена матри-
ца структурных подотношений систем в целом
(рис. 5-1), на рис. 5-8 — матрица структурных
подотношений систем по единичному свой-
ству (рис. 5-3). Пространство параметров
универсальной эталонной системы обозначено
здесь двойной окружностью, а сами парамет-
ры — нулевым верхним индексам в скоб-
ках.
Поскольку отношения к
универсальной системе, од-
нозначно определяющие*
свойство рассматриваемой
системы, приобретают осо-
бое значение, следует крат-
ко обозначить их. Условим-
ся матрицы отношений в це-
лом и единичных отношений
относить к универсальным:
системам, если не оговари-
вается иная эталонная си-
стема. Пересекающими и не-
пересекающими, покрываю-
щими и непокрывающимщ.
перекрывающими и непере-
крывающими будут имено-
ваться в дальнейшем систе-
мы, находящиеся в этих от-
ношениях к универсальным
системам (к любой из них,—
те жеотношения будут иметь
при этом место и ко всем:
остальным). Пересекающими данное свойство
(устойчивость, апериодичность, монотонность
и т. д.) и не пересекающими, покрывающими
и не покрывающими его, перекрывающими и
не перекрывающими его будут именоваться:
системы, находящиеся в этом отношении к об-
ласти этого свойства универсальных система
(так же любой из них).
Рис. 5-7. Отображение в универсальную систему матри-
цы структурных подотношений в целом.
191
Рис. 5-8. Отображение в универсальную систему матри-
цы структурных тодотношений в единичном свойстве.
г) Наследование и приобретение свойств
Выясним условия наследования производ-
ными системами некоторого единичного свой-
ства — устойчивости, апериодичности, моно-
тонности, — принадлежащего исходной си-
стеме. Определим более точно понятия сона-
следуемых и приобретаемых свойствах.
Пересечение систем в пространстве пара-
метров означает общее родство этих систем,
т. е. родство их в области некоторых свойств;
пересечение в области единичного свойства
означает родство систем в области этого кон-
кретного свойства, т. е. наследование этого
свойства производной системой от исходной.
При наличии совместного свойства у исход-
ной и производной систем будем считать, что
свойство это унаследовано, частично или пол-
ностью, производной системой от исходной
лишь в том случае, когда, соответственно, обе
системы пересекаются или покрываются в об-
ласти этого свойства; во всех остальных слу-
чаях будем считать свойство это приобретен-
ным производной системой. Этих остальных
случаев может быть два: 1) рассматриваемое
свойство производной системы отсутствует г
у исходной системы и, следовательно, могло
быть только приобретено первой; 2) свойство
192
это наличествует и у исходной системы, од-
нако обе системы не пересекаются в его об-
ласти (это находит выражение в том, что
области совпадения не пересекаются с обла-
стями этого свойства). И во втором случае
свойство, имеющееся у исходной системы, при-
обретается производной системой заново, в но-
вой области, и также, следовательно, не на-
следуется ею от исходной системы.
Наличие у сравниваемой сйстемы единич-
ного свойства устанавливается через отноше-
ние ее к эталонной системе, обладающей этим
свойством, теоремой VII. В этом случае свой-
ство это частично наследуется сравниваемой
системой от эталонной. Указываемое теоремой
условие является, однако, только достаточ-
ным, но не необходимым; так, свойство это мо-
жет быть приобретено сравниваемой системой,
непересекающейся в области этого свойства
с эталонной системой. Это 'пояснено логиче-
скими схемами на рис. 5-9. Рис. а поясняет
достаточность условий леммы, рис. б — не не-
обходимость их.
Необходимые и достаточные условия на-
личия у системы единичного свойства дают-
ся теоремой 5-XI: необходимым и доста-
точным условием наличия у сравниваемой си-
стемы некоторого единичного свойства яв-
ляется пересечение ее в области этого свой-
ства с универсальной эталонной системой.
Теорема явствует из того, что универсальные
системы обладают полным объемом данного
единичного свойства. Теорема пояснена логи-
ческими схемами на рис. 5-10.
Из доказательства теоремы явствует, что
она справедлива не только по отношению
к универсальной эталонной системе, но и по
Рис. 5-10. Теорема 5-XI.
отношению к любой эталонной системе, обла-
дающей полным объемом данного свойства.
Это формулируется теоремой 5-XII: необ-
ходимым и достаточным условием наличия
у сравниваемой системы некоторого единично-
го свойства является пересечение ее в обла-
сти этого свойства с эталонной системой, обла-
дающей полным Объемом его. Так, открытые
системы обладают, как доказывается ниже,
полным объемом свойства апериодичности. По
теореме 5-XII необходимым и достаточным
условием структурной апериодичности яв-
ляется для каждой системы пересечение с от-
крытой системой. Теорема пояснена логиче-
скими схемами на рис. 5-11. Для того чтобы
обладать полным объемом свойства 4, эта-
лонная система (рис. а) должна покрывать
или перекрывать его в универсальной системе
(рис. б). Если это имеет место, то пересече-
ние в области этого свойства сравниваемой
системы (рис. в) с эталонной (рис. а) являет-
ся необходимым и достаточным условием на-
личия этого свойства у сравниваемой системы.
Следствие I. Область каждого единично-
го свойства сравниваемой системы в прост-
ранстве ее параметров является образом об-
ласти пересечения в пространстве параметров
эталонной системы, обладающей полным объ-
емом этого свойства, области совпадения с об-
ластью этого свойства. Так, область аперио-
дичности каждой системы явится образом об-
ласти пересечения в пространстве парамет-
ров открытой системы областей совпадения и
апериодичности. Это вытекает, по следствию /,
из того, что открытая система обладает пол-
ным объемом свойства апериодичности.
Теорема 5-XI также является лишь след-
ствием теоремы 5-XTI, поскольку универсаль-
ные системы обладают полным объемом всех
единичных свойств, и выделена здесь в виде
отдельной теоремы лишь потому, что рассма-
триваемые ею универсальные системы явля-
ются исходными для всего класса систем,
обладающих полным объемом какого-либо
единичного свойства. Все остальные, произ-
водные системы этого класса лишь постольку
обладают полным объемом этого единичного
свойства, поскольку покрывают или перекры-
вают его в универсальных системах (рис. 11).
Рассмотрим с помощью теорем 5-XI и
5-XII возможные случаи родства двух систем
по единичному свойству 4, представленные,
в порядке нарастающего родства, в таблице,
на рис. 5-12. Эталонная система фиксируется
при этом, сравниваемая же постепенно при-
ближается по свойству 4 к эталонной систе-
ме. Свойства сравниваемой системы опреде-
ляются на этой таблице с помощью теоремы
5-VII, т. е. сравнительным методом — отобра-
жением в эталонную систему. При этом сра-
зу же обнаруживается недостаточность тако-
го отображения для однозначного суждения
о свойствах сравниваемой системы, двузнач-
ность получаемых выводов. Двузначность эта
определяется тем, что условия теоремы толь-
ко достаточны, но не необходимы, и находит
выражение в том, что каждому из возможных
случаев, представленных на рис. а\—eif соот-
ветствуют два возможных случая на рис. а2,
аз, б2, б3 и т. д.
На рис. Hi—в1 исчерпаны все возможные
по отношению к единичному свойству типы
отображений сравниваемой системы в эталон-
ную. На рис. Я1 отсутствует область совпаде-
ния, сравниваемая система не пересекается
в пространстве параметров с эталонной. На
рис. 61 область совпадения налицо, однако
область эта не пересекается с областью свой-
ства 4. Сравниваемая система пересекается
здесь с эталонной в пространстве параметров,
но не пересекается с нею в области единично-
го свойства 4. На рис. в! показано пересечение
сравниваемой системы с эталонной в области
свойства 4. На рис. 21 область совпадения пе-
рекрывает область свойств 4, на рис. di —
перекрывается этой областью, на рис. е\ — по-
крывает ее.
Случаю «1 соответствуют два возможных
случая — а2 и а3. В случае а2 сравниваемая
система не обладает областью свойства 4,
в случае а3 обладает областью свойства 4,
однако область эта целиком приобретена, по-
скольку системы не пересекаются.
13 И. И. Гальперин.
193
Рис. 5-12. Родство систем по единичному свойству.
а — сравниваемые системы не пересекаются с эталонной системой; б—сравниваемые системы пересекаются с эта-
лонной системой вне области свойства А; в — сравниваемые системы пересекаются с эталонной системой
в области свойства Д; г — сравниваемые системы перекрывают свойство А эталонной системы: д — сравниваемые
системы перекрываются свойством А эталонной системы; е — сравниваемые системы покрывают свойство А эта-
лонной системы.
Из двух случаев — б2 и б3, соответствую-
щих случаю 61, в первом сравниваемая си-
стема не обладает свойством Л, во втором —
обладает только приобретенным свойством Л,
поскольку пересекается с эталонной системой
вне области свойства Л.
Из двух случаев — в2 .и в3, соответствую-
щих случаю 81, в первом свойство Л полно-
стью наследуется сравниваемой системой от
эталонной, во втором — частично наследуется,
частично приобретается.
Случаи г2 и г3, совпадающие внешне со
случаями в2 и в3, имеют, однако, иной смысл,
чем эти последние, поскольку различны ото-
бражения тех и других двух случаев в эталон-
ной системе (рис. вь 21). Сравниваемая си-
стема на рис. г2 наследует свойство Л от эта-
лонной системы не только полностью, как си-
стема в2, но и целиком, т. е. во всем объеме
этого свойства, которым (объемом) распола-
гает эталонная система. Это означает, в слу-
чае линейных систем, что все принадлежащие
эталонной системе характеристические поли-
номы, обладающие свойством Л, принадлежат
сравниваемой системе. В этих понятиях срав-
ниваемая система в2 наследует свойство Л
полностью, но не целиком, система в3 — не
полностью (т. е. частично) и не целиком, си-
стема г2—полностью и целиком, система г3—
не полностью, но целиком.
Из двух случаев — д2 и д3 в первом свой-
ство Л наследуется сравниваемой системой
полностью, но не целиком, и покрывает ее, во
втором наследуется не полностью, не целиком
и не покрывает ее.
Из двух случаев-— е2 и е3 в первом свой-
ство Л наследуется сравниваемой системой
целиком и полностью и покрывает ее, во вто-
ром— не полностью и не покрывает её. Слу-
чай е2 представляет, таким образом, наиболее
тесное родство систем по единичному свойству.
д) Единичное родство систем
с универсальными системами
Отражение сравниваемой системы в эта-
лонную систему общего вида не позволяет, та-
ким образом, однозначно судить о свойствах
сравниваемой системы. Однозначное сужде-
194
Рис. 5-13. Родство систем по единичному свойству
с элементарной системой.
Сравниваемая система: а — не пересекается с универсальной
эталонной системой; б — пересекается вне области свойства А;
в — пересекается в области свойства Д; г — перекрывает свой-
ство А; д — перекрывается свойством 4; е — покрывает свой-
ство А.
ние возможно лишь в случае универсальных
эталонных систем. В таблице на рис. 5-13 в ка-
честве эталонной системы взята универсаль-
ная система и рассмотрены те же шесть типов
отображений, что и на рис. 5-12. Здесь ото-
бражение в пространстве эталонной системы
однозначно определяет свойства сравниваемой
системы. Свойства эти соответствуют второ-
му ряду таблицы на рис. 5-12, т. е. случаям
02, б2, 02 И Т. Д.
Отношения двух систем наглядно поясня-
ются отображением их в общую для них эта-
лонную систему. В таблицах на рис. 5-14 и
5-15 все типы отношений между сравнивае-
мой и эталонной системами, представленные
на рис. 5-12, пояснены отображением их в уни-
версальную эталонную систему. На рис. 5-14
отображены отношения левой половины ри-
сунка 5-12, на рис. 5-15 — правой половины.
Пересечению, покрытию и перекрытию срав-
ниваемой и эталонной систем соответствует
пересечение их образов (областей совмеще-
ния) в пространстве параметров универсаль-
ной системы. Отношения эти прямо отобра-
жаются в универсальной системе. Таким обра-
зом, не только свойства систем, но и их отно-
Рис. 5-14. Отображение левой половины таблицы
рис. 4-14 в элементарную систему.
шения могут быть изучаемы косвенным мето-
дом, по отображениям этих систем в универ-
сальных системах.
Отношения в целом двух систем (напри-
мер, пересечение систем) могут быть одно-'
значно устанавливаемы отображением этих
систем не в любую эталонную для них, а толь-,
ко в универсальную систему. Значение этих5
последних систем как универсальных эталон-
ных систем этим достаточно выясняется.
Отношения пересечения, покрытия, перекрытия при-
надлежат логике. Свойство А можно рассматривать как
истинность, свойство А — как ложность. Область свой-
ства А в пространстве параметров данной системы пред-
ставляет собой принадлежащую этой системе область
истинных высказываний, относящихся к некоторому собы-
тию. Область свойства А в пространстве параметров
универсальных систем представляет собой область всех
истинных высказываний, относящихся к этому событию.
Системы (рис. 5-12,е2), покрывающие эту область, обла-
дают всеми истинными высказываниями, и только ими.
Системы эти удовлетворяют известной юридической фор-
муле: «истина, вся истина, только истина» (такой си-
13*
195
Рис. 5-15. Отображение правой поло-вины таблицы на
рис. 4-14 в элементарную систему.
стемой является идеальный свидетель). Перекрывающие
эту область системы (рис. г2) удовлетворяют лишь двум
первым частям: «истина, вся истина». Перекрываемые
этой областью системы |(рис. д2) удовлетворяют лишь
первой и третьей частям: «истина, только и'стина», пере-
секающиеся с нею системы (рис. в2) — одной лишь пер-
вой части: «истина». Не пересекающиеся с этой обла-
стью системы ((рис. а2, б2) не обладают ни одной ча-
стью этой формулы.
Двучленные отношения на рис. ’5-12 и ’5-13 и трех-
членные— на рис. 5-14 <и 5-1’5 представляют, таким
образом, логические отношения. Содержанием силлогиз-
мов классической логики является установление отно-
шений двух множеств через отношение их к третьему
множеству, т. е. трехчленные отношения указанного на
рис. 5-14 -и 5-15 типа. Этим третьим множеством может
быть либо универсальное множество — пространство па-
раметров универсальной системы, либо неуниверсальное
множество — пространство параметров неуниверсальной
системы. Трехчленные отношения на рис. 544 -и 5-15
могут быть рассматриваемы как модусы силлогизмов.
Как показано будет ниже, не все эти модусы, т. е. логи-
чески возможные отношения, реализуются в динами-
ческих системах.
Для дальнейшего окажется необходимой
следующая теорема, относящая к родству" си-
стем по единичному свойству. Т е о р е-
м a 5-XIIL Пересечение сравниваемой си-
196
стемы с эталонной системой, обладающей по
отношению к свойству А контранегативным
структурным подсвойством, является доста-
точным условием для того, чтобы сравнивае-
мая система обладала по отношению к свой-
ству А позитивным структурным подсвойством.
Так, поскольку все нулев’ые системы пересе-
каются с открытой системой, а последняя об-
ладает безусловной апериодичностью, все они
структурно апериодичны, т. е. обладают нор-
мальной структурной устойчивостью. Теоре-
ма вытекает из теоремы 5-VII.
е) Множественное родство систем
Центральной для множественного родства
систем (родства по нескольким единичным
свойствам) и для структурного исследования
в целом является теорема пересечения
(теорема 5-XIV): связыванием сохраняется пе-
ресечение систем в областях положительных
свойств. С л е д ств ие I. Связыванием уста-
навливается наследование дополнительно свя-
занной системой всех позитивных структурных
подствойств исходной системы, т. е. полное
множественное родство. Доказательство тео-
ремы дано будет в следующей главе.
Теорема связывания (теорема 4-1) яв-
ляется следствием теоремы пересечения и мо-
жет быть теперь усилена: связыванием сохра-
няется не только структурная устойчивость,
но и нормальная структурная устойчивость.
Это явствует из того, что оно, по теореме пе-
ресечения, сохраняет и структурную устойчи-
вость и структурную апериодичность. Из тео-
ремы этой вытекает, что связывание не толь-
ко сохраняет позитивные структурные под-
свойства, но и сохраняет их, по крайней мере
частично, внутри того объема этих свойств,
которым обладала связываемая система.
Поясним эти теоремы важными для даль-
нейшего примерами. Пересечение с безуслов-
но-устойчивой вырожденной натуральной си-
стемой (рис. 4-25,в) является, по теореме
5-ХШ, достаточным условием структурной
устойчивости, но, по теореме 5-ХП, не необ-
ходимым, поскольку система эта не обладает
полным объемом свойства устойчивости, не
покрывает этого свойства (в пространстве
коэффициентов). Нулевая открытая система
обладает полным объемом свойства аперио-
дичности и контранегативным подсвойством
его — она безусловно апериодична. Пересече-
ние с открытой системой является, по теоре-
ме 5-XIV, необходимым и достаточным усло-
вием структурной апериодичности, т. е. кри-
терием нормальной структурной устойчивости.
Множественное родство систем опреде-
ляетея тремя градациями родства их в целом:
Рис. 5-17. Общее родство систем с эле-
ментарной системой.
б,) бг) .
в/) ер вд)
Рис. 5-16. Множественное родство систем.
1) непересечением сравниваемой системы с эта-
лонной, 2) пересечением обеих систем,
3) покрытием эталонной системы сравни-
ваемой системой. Эти градации нарастаю-
щего родства систем даны в таблице на
рис. 5-16. Первому случаю (рис. а) соот-
ветствует полное отсутствие родства, вто-
рому (рис. б) — частичное или полное насле-
дование некоторых единичных свойств (при-
чем частично могут быть унаследованы все
единичные свойства, полностью — лишь часть
свойств), третьему — полное наследование
всех единичных и, следовательно, всех группо-
вых свойств. Наследование каждого единич-
ного свойства и, следовательно, группы
свойств, устанавливается здесь теоремами
предыдущего раздела также лишь двузначно
(рис. а2, а3, б2, б3, вь вз). Однозначно вопрос
о наследований групповых свойств уста-
навливается только родством с эталонной
системой, обладающей полным объемом всех
единичных свойств — универсальной эталон-
ной системой. Следует рассмотреть поэтому
общее родство с этой системой.
ж) Множественное родство систем
с универсальной системой
Те же градации множественного родства
систем приобретают по отношению к универ-
сальным эталонным системам однозначный
смысл (рис. 5-17). Первый случай (рис. 5-16,а)
здесь невозможен, поскольку все системы пе-
ресекаются с универсальными. Пересечением
этим (рис. 5-17,а) устанавливается полное
наследование некоторых единичных свойств
универсальных систем. Покрытием универ-
сальной эталонной системы сравниваемой си-
стемой (рис. 5-17,6) устанавливается насле-
дование, полностью и целиком, всех единич-
ных и групповых свойств универсальной си-
стемы, т. е. всех свойств, возможных для си-
стем данного порядка. Эти покрывающие
сравниваемые системы были частично рас-
смотрены выше. Обладая универсальной ха-
рактеристикой— полным составом всех воз-
можных структурных и метрических свойств,
они играют особую роль в структурном иссле-
довании.
Отношения системы к универсальным си-
стемам позволяют установить ее отношения
ко всем остальным системам данного порядка.
Это вытекает из следующих теорем.
Теорема 5-XV. Каждая из покрываю-
щих универсальную систему систем покрывает
все системы данного порядка.
Теорема 5-XVI. Все покрывающие
универсальную систему системы находятся
между, собой в отношении двустороннего по-
крытия.
Первая теорема явствует из транзитивно-
сти покрытия и из покрытия универсальной
системой всех остальных систем. Формули-
ровка ее с помощью логических схем
дана на рис. 5-18. Она вытекает так-
же из более общей теоремы 5-XVII:
система, покрывающая какую-либо другую
систему, покрывает и все остальные системы
того же порядка, вытекающей из общих
197
Ри-с. 5-18. Теорема 5-XIII.
Рис. 5-19. Теорема 5-XIV.
свойств односторонних отношений — односто-
ронние отношения определяются свойствами
только первого их члена. Употребляя тер-
мин— покрывающая система, можно, таким
образом, не указывать объектов покрытия —
ими являются все системы данного порядка.
Вторая теорема (рис. 5-19) также выте-
кает из более общей теоремы 5-XVIII:
две системы, покрывающие третью, находятся
в отношении двустороннего покрытия. В тео-
ремах XV и XVI общие теоремы XVII и XVIII
лишь отнесены для удобства к универсальной
эталонной системе.
Теоремы I—XVIII в равной мере относят-
ся к общим и локальным отношениям. Рас-
смотрим последовательно приложение их
к тем и другим отношениям.
5-2-2. Общие отношения
А. Линейные системы
Общее совпадение двух линейных систем
означает совпадение, тождественное равенст-
во, их характеристических полиномов—равен-
ство коэффициентов при членах одинаковых
степеней. Равенствами этими образуются
отображающие уравнения, взаимно отобра-
жающие пространства параметров обеих си-
стем. Отношения линейных систем выясняют-
ся взаимным отображением их пространств
параметров.
а) Пересечение систем *
Поясним метод отображений на простей-
ших примерах. Открытая и одноциклическая
198
нулевые системы а и вх на рис. 4-7 описы-
ваются, соответственно, характеристическими
уравнениями:
(То/’ + W2r Р3 + Trp+1) (Т1Р+1) =0; (5-1)
T'vP (U'2r Р3 + T'rp +1) (Т\р +1) 4-1 = 0, (5-2)
и взаимно отображаются отображающими
уравнениями:
т.и2тх =Т'9и'г2т\-,
TtTrTl + Таи3 + и3 7\ =Т\ГГТ\ + Т'0и'г3; (5-3)
TJr+TJA-TrT, + и3== Г9Гг + Г.т; + 17'г;
r.+Л +Тг =Т'О.
Задав некоторые значения параметров Т
исходной системы (т. е. указав некоторую
точку в пространстве ее параметров) и решая
затем отображающие уравнения (5-3) отно-
сительно параметров Т' производной систе-
мы, определяем одну или несколько точек —
образ первой точки в пространстве парамет-
ров производной системы (обратное отобра-
жение) . В этих совпадающих точках обеих
систем характеристические их полиномы тож-
дественно равны, и системы совпадают. Для
того чтобы образ этот существовал, чтобы си-
стемы пересекались, необходимо, чтобы кор-
ни уравнений (5-3) были положительными
действительными числами в соответствии
с физической природой параметров Т и U.
Тем же способом определяется прямое ото-
бражение— образ каждой точки пространст-
ва параметров производной системы в прост-
ранстве параметров исходной. Совокупность
первых образов определит область совпаде-
ния обеих систем в пространстве параметров
производной системы, совокупность вторых —
в пространстве параметров исходной. Обе об-
ласти отображаются одна на другую.
Заставляя параметры производной систе-
мы (обозначенные штрихами) пробегать все
возможные значения и определяя через них,
из уравнений (5-3), параметры исходной си-
стемы (без штрихов), находим прямое ото-
бражение— производной системы в исходную.
Таким же путем находим и обратное отобра-
жение. Поскольку для уравнений (5-3) суще-
ствует, как будет показано ниже, область по-
ложительных вещественных корней — пара-
метров исходной и производной систем, си-
стемы пересекаются. Поскольку исходная от-
крытая система безусловно устойчива и, если
ограничить параметры регулятора областью
значений, при которых собственное движение
его апериодично (можно доказать, что пере-
сечение происходит в этой области), безу-
словно апериодична, производная одноцикли-
ческая система, по теореме 5-ХШ, структурно
устойчива и структурно апериодична — обла-
дает нормальной структурной устойчи-
востью.
б) Односторонние покрытие
и эквивалентность
Рассмотрим отношения систем в2В2 и
в3В3 (рис. 4-7), приняв первую из них — пуч-
ковую за эталонную. Их характеристические
уравнения:
тои2 Т1Р*+TJJ2T р»+тот Г1р*+
+ 7’ор+1=О;
(5-4)
т\р* + rou'2 р>+U'2orp‘ +
+ Т'отр +1=0; (5-5)
отображающие уравнения:
т^т, T'oU'*T\
Тои; —
ТЛТГ1
То T'Qr
(5-6)
{последние, в отличие от уравнений (5-3), за-
писаны в матричной форме]. Уравнения (5-6)
однозначно решаются относительно параметров
эталонной системы (прямое отображение):
rj'2 гт'2
1 о — 1 or, 1 Т1--+7 V ——р? — 1 х
* or г or
(5-7)
и многозначно — относительно параметров срав-
ниваемой системы (обратное отображение):
т
T'0r = T0-, U’^TJrv г=т\.
(5-8)
Здесь свободным параметром сравниваемой
системы является параметр J7'2, которому
могут быть приданы в этом отображении
произвольные значения. Многозначность вы-
звана во втором случае тем, что во второй
системе одна из статических, с исключаю-
щимся параметром, связей первой системы за-
мещена динамической, с неисключающимся
параметром, связью. Вызванное этим повыше-
ние размерности пространства параметров
второй системы, по сравнению с первой, исклю-
чает возможность взаимно однозначного и
взаимно непрерывного отображения — экви-
валентности и оставляет только возможность
покрытия. Система в2В2 односторонне эквива-
лентна системе в3В3, последняя же только
односторонне покрывает первую. Отсюда сле-
дует, что первая система односторонне
эквивалентна всем системам рисунка, вторая
же система только односторонне покрывает
их все.
в) Двусторонние покрытие
и эквивалентность
Системы в3В3, В2в3, В3в2 (рис. 4-7) явля-
ются покрывающими и между собой нахо-
дятся, следовательно, в отношении двусторон-
него покрытия. Покрытие это не является,
однако, эквивалентностью.
Рассмотрим отношения пучковых, входных
и выходных, систем (рис. 4-33). Первая яв-
ляется здесь исходной и, следовательно, эта-
лонной, вторая — производной и, следователь-
но, сравниваемой. Характеристические урав-
нения этих систем:
TJJt Т<р* + TtT3Ttp' + TJ^p* +
4-7^+1=0;
(5-9)
r4r,r;r^+r4r',rap«+
+ Г4Г,^ + Т^+1=0. (5-10)
Параметры производной системы, в отли-
чие от исходной, отмечены штрихом. Отобра-
жающие уравнения для этих систем:
В общем случае отображение многозначно
и сами области занимают лишь часть своих
пространств. В рассматриваемом случае ото-
бражение это взаимно однозначно и обе об-
ласти заполняют пространство параметров:
Т
Т
Т
Т
1
2
3
4
Л
т'2
г,
(5-12)
199
Матричным равенством этим даются усло-
вия совпадения. Условия эти сводятся к ра-
венству постоянных времени зеркально сопря-
женных элементов. Здесь каждой точке одно-
го из пространств соответствует одна и только
одна точка второго пространства. Оба прост-
ранства связаны взаимно однозначным и вза-
имно непрерывным отображением, топологи-
чески гомеоморфны. Такое отношение систем
названо было выше двусторонней эквивалент-
ностью или, кратко, эквивалентностью их, свя-
зывающее системы преобразование транспо-
нирования— эквивалентным, а сами систе-
мы — эквивалентными. Эквивалентность пуч-
ковых систем входного и выходного замеще-
ний может быть записана в следующем виде:
турой системы. Возможные свойства систем
n-го порядка определяются структурой прост-
ранства коэффициентов полинома n-й степе-
ни, которое названо было выше кратко прост-
ранствам коэффициентов системы. Действи-
тельные свойства системы определяются
структурой пространства параметров системы.
Свойства конкретной -системы можно, однако,
определить, не прибегая прямо к построению
структуры пространства параметров ее, а кос-
венным способом, исследуя отображение
пространства параметров системы в простран-
ство коэффициентов ее, сравнивая таким пу-
тем структуру обоих пространств. Этот вто-
рой сравнительный метод явится основным
в дальнейшем исследовании.
Т\р
—1
О
о
0 0 1
Тгр 0 1
—1 Т*р 1
0 —1 (Лр+1)
т2
т3
при:
Л
Т.
т2
Т3
(Т1Р+1) 1 1 1
—1 Т2р о о
о —1 Т3р о
о 0-1 1\р
(5-13)
Обозначение параметров производной си-
стемы штрихом, принятое в уравнениях (5-10),
заменено здесь отнесением (наклонной чер-
той— указателем) матрицы параметров каж-
дой из двух систем к своему характеристиче-
скому определителю.
Двусторонняя эквивалентность представ-
ляет наиболее упорядоченное отображение
систем и, соответтвенно, наиболее тесное род-
ство их.
г) Пространства параметров
и коэффициентов
Общие свойства систем однозначно опре-
деляются отображением систем — их прост-
ранств параметров в одну из универсальных
систем или, для линейных систем, в эквива-
лентное всем универсальным системам прост-
ранство коэффициентов. Рассмотрим свойства
этого отображения.
Установим связь межку возможными к дей-
ствительными общими свойствами систем.
Возможные свойства систем n-го порядка
определяются свойствами полинома n-й сте-
пени, свойствами корней его. Из этих возмож-
ных свойств реализуется в каждой конкрет-
ной системе, переходит в действительный
свойства ее, лишь часть, определяемая струк-
В пространстве параметров системы рас-
полагаются области ее устойчивости, аперио-
дичности, монотонности и всех остальных об-
щих свойств системы. В пространстве кдэф-
фициентов характеристического полинома
расположены соответственно области полино-
мов, удовлетворяющих условиям устойчиво-
сти, апериодичности, монотонности и всем ос-
тальным возможным алгебраическим свойст-
вам полинома. Можно условно назвать и эти
области в пространстве коэффициентов
областями его устойчивости, апериодич-
ности, монотонности и т. д. Все сказанное
можно упорядочить, введя несколько новых
понятий. Назовем полином с параметрически
заданными коэффициентами структурным по-
линомом в отличие от метрических полиномов,
чьи коэффициенты заданы числами. Про-
странство коэффициентов является простран-
ством параметров метрического полинома.
Примерами структурных полиномов являются
характеристические полиномы динамических
систем. Структурные полиномы, обладающие
в пространстве параметров областью устой-
чивости, назовем устойчивыми структурными
полиномами. Система структурно устойчива,
если ее характеристический полином являет-
ся устойчивым структурным полиномом.
Свойства структурных ' полиномов могут
быть исследованы в пространстве их пара-
200
метров, свойства метрических полиномов —
в пространстве их коэффициентов. Исследова-
ние свойств структурных полиномов может
быть достигнуто также косвенным спосо-
бом— отображением пространства парамет-
ров в пространство коэффициентов. Коэффи-
циенты структурных полиномов будут обозна-
чаться ниже малыми начальными буквами
алфавита, а коэффициенты метрических по-
линомов — большими.
Пусть
aoJpn + a1Jpn-1 + a2jon*a + .. - + «„ = 0 (5-14)
— характеристическое уравнение системы
с параметрически заданными коэффициента-
ми. Левая часть его представляет собой струк-
турный полином. Уравнение
А.уп + А1Уп -1 + А2уп -2 +... + Ап = 0 (5-15)
пусть представляет того же порядка уравне-
ние с положительными числовыми коэффи-
циентами. Левая часть этого уравнения пред-
ставляет метрический полином. Коэффициен-
ты первого уравнения суть функции парамет-
ров системы: а0=ао(С/^, Tik, Sik), ах = ах(1Цк,
Tik, Sik), и т. д. Коэффициенты второго урав-
нения — произвольные положительные числа.
Назовем условно первое уравнение характе-
ристическим уравнением системы в простран-
стве параметров ее, второе — характеристиче-
ским уравнением системы в пространстве ко-
эффициентов ее.
Взаимные отображения пространств пара-
метров и коэффициентов динамической систе-
мы получаются приравниванием коэффициен-
тов при соответственных членах характеристи-
ческих уравнений (5-14) и (5-15). Полу-
чающиеся таким образом отображающие
уравнения разрешены уже относительно ко-
эффициентов А и могут быть рассматриваемы
как прямые функции. Решая их относительно
параметров Tik, Sik, получаем обратные
функции. Назовем прямые функции
= aQ (Uik, Tik, Sik)i
Ai (^-Afc, Tik, Sik), /с 1 £>\
An — &П (Цik* Tikt S{k),
отображающие пространство параметров ди-
намической системы в пространство коэффи-
циентов ее (т. е. в пространство параметров
элементарной эталонной системы), прямым
отображением этой системы, обратные же их
функции
Uih — UihkA^ Д, . . ., Ап)\
Tik—Tik(A0, Д, ..., Лп); (5-17)
SihИо, А19 ..., Ап),
отображающие пространство коэффициентов
в пространство параметров, — обратным ото-
бражением ее.
Оба отображения, прямое и обратное, не-
прерывны для линейных систем, если размер-
ности пространств параметов и коэффициен-
тов одинаковы. Между ними, однако, име-
ются существенные различия.
Первое различие заключается в том, что
прямое отображение однозначно, поскольку
каждой совокупности параметров (каждой
точке пространства параметров) соответст-
вует одно характеристическое уравнение (од-
на точка пространства коэффициентов); об-
ратное отображение, вообще говоря, много-
значно, поскольку многим совокупностям
параметров системы может соответствовать
одно и то же характеристическое уравнение.
Второе различие заключается в том, что
образ пространства параметров занимает
лишь часть пространства коэффициентов,
т. е. пространство параметров отображается
в пространство коэффициентов; образ же
пространства коэффициентов заполняет все
пространство параметров, т. е. пространство
коэффициентов отображается на пространст-
во параметров. Пространство параметров
в общем случае только пересекается с прост-
ранством коэффициентов, пространство же
коэффициентов всегда покрывает пространст-
во параметров. Это второе различие опреде-
ляется тем, что каждой заданной совокупности
параметров конкретной системы соответст-
вует определенный метрический характеристи-
ческий полином, но не каждому заданному
метрическому характеристическому полино-
му соответствует совокупность действитель-
ных положительных параметров системы.
Может оказаться, что некоторыми метриче-
скими характеристическими полиномами дан-
ная конкретная система не может описывать-
ся ни при каких значениях ее параметров.
Различие это находит выражение в том, что
уравнения (5-16) при любых значениях па-
раметров U, Т, S совместны в поле положи-
тельных чисел относительно переменных А
[это явствует из того, что в форме, разрешен-
20 Г
Рис. 5-20. Покрывающие системы.
ной относительно этих переменных, уравнения
эти представлены уже в виде исходных урав-
нений (5-16)], уравнения же ;(5-17) совмест-
ны (также в поле положительных чисел) от-
носительно U, Т, S не при любых значениях
коэффициентов А.
На рис. 5-6 дано было отображение матри-
цы структурных подсвойств (рис. 4-1) в про-
странство коэффициентов, поясняющее это
второе различие. Пространство коэффициен-
тов, являющееся одновременно пространством
параметров элементарных покрывающих си-
стем, очерчено здесь двойной окружностью —
символом элемента.
Особый интерес представляют системы,
для которых это второе различие отсутствует,
т. е. образ пространств параметров покрывает
пространство коэффициентов, пространство
параметров отображается на пространство
коэффициентов. Для таких систем отсутствует
и первое различие. Образ пространства пара-
метров системы в пространстве коэффициен-
тов ее назовем, в отличие от других областей
совпадения, областью совмещения. Системы,
чье пространство параметров отображается на
пространство /коэффициентов, названы были
выше покрывающими. У таких систем область
совмещения заполняет все пространство ко-
эффициентов (рис. 5-20).
Положение области совмещения в прост-
ранстве коэффициентов однозначно определя-
ет все структурные свойства системы. Если,
и только в этом случае, область совмещения
пересекается с областью устойчивости прост-
ранства коэффициентов, то характеристиче-
ский полином системы является устойчивым
структурным полиномом, система структурно
устойчива; прообразом этого пересечения яв-
ляется область устойчивости в пространстве
параметров. Если, и только в этом случае,
область совмещения пересекается с областью
апериодичности, то система структурно апе-
риодична; прообраз этого пересечения пред-
ставит область апериодичности в пространств
ве параметров. Если, и только в этом случае,
область совмещения пересекается с областью
202
неустойчивости пространства коэффициентов,
система небезусловно устойчива; прообраз
этого пересечения представит область не-
устойчивости в пространстве параметров,
и т. д. Логическая схема матрицы структур-
ных подсвойств, показанная на рис. 4-1, мо-
жет быть теперь пояснена отображением
в пространство коэффициентов. Это сделано
на рис. 5-6. Также разъясняется отображени-
ем в пространство коэффициентов (рис. 5-7) и
логическая схема матрицы структурных под-
отношений, рассмотренной на рис. 5-1. По-
крывающие системы, поскольку пространство
параметров их отображается на пространство
коэффициентов, структурно устойчивы, струк-
турно апериодичны, структурно монотонны
и т. д., небезусловно устойчивы, небезуслов-
но апериодичны и т. д., т. е. обладают универ-
сальной качественной характеристикой — все-
ми возможными для систем данного порядка
свойствами существования и ни одним из
свойств несуществования (рис. 5-20). Более
того, коэффициентам характеристических по-
линомов покрывающих систем можно надле-
жащим выбором значений параметров при-
дать любые наперед заданные значения, т. е.
системе — любые наперед заданные метриче-
ские свойства. Теорема 5-XIX. Покрываю-
щие системы обладают полным объемом всех
свойств, возможных для систем данного по-
рядка. Покрывающие системы являются, сле-
довательно, универсальными системами.
Операцию отображения удобно в ряде слу-
чаев производить с нормированными уравне-
ниями, снижая этим размерность пространст-
ва коэффициентов. Можно ограничиться
первым нормированием, разделив каждое из
уравнений (5-14) и (5-15) на свободный член:
bopn + Ь1Рп-* + М”-2 + ...-1-1=0; (5-18)
Воуп + В1Уп ~ ‘ + В2у«-2 + ... + 1=0. (5-19)
С помощью подстановок р= ;-?7—, у =
OqlI П
= z, можно произвести по Вышнеградскому
второе нормирование, обращающее в единицу
и коэффициент при старшем члене уравнения:
v” + d1on-l + dao”-2 + ... + l=0; (5-20)
z" + D1z«-1 + D2zn-2 + ... + l=0. (5-21)
Заметим, что по отношению к отображаю-
щим уравнениям (5-17) первое нормирование
уравнений (5-14) и (5-15) означает деление
I Хаоакт&пистические иоабнения г
UJt U?2 U& U^ffl + UnUgUz ЪаР7 +
U„ 4 1&Р? +
и*рг О 0 (Т„р+1)
-1 U& 0 (Тг4р*1)
О -1 и^рг(т^1)
0 0-1 (1&+Ър*1)
+ Un 4 &ps + UnUzP' + + Unp2 + + £ —О
6) в пространстве коэффициентов:
В0у8 + Biy? + вгУв + взУ5 + + Bsy3+ Betf + В?у * / = О
И Отображающие уравнения :
G) отображение пространства параметров в пространство коэффициентов
BfUnU&i ^п^гг ^зз i fy=^// tyz ^33^44 i &o~Un U^U^U^i
б) отображение пространства коэффициентов в пространство параметров
Рис. 5-21. Покрытие лучковыми системами пространства коэффициентов.
всей системы (5-17) на последнее ее уравне-
ние. Операция эта законна по отношению
к отображающим уравнениям, т. е. не вносит
в них посторонних корней, тогда лишь, когда
система (5-17) совместна.
д) Покрывающие системы
Рассмотрим важнейшие покрывающие си-
стемы.
Элементарные системы. Метриче-
ский полином (5-15) эквивалентен характери-
стическому полиному элементарной системы:
Ур”+Хр+... V3p3 + U2p2+Тр+1=0,
(5-22)
поскольку параметры У, X, ..., У, U, Т суть
такие же произвольные числа, как коэффи-
циенты Aq, Ai, А2, ..., Ап. Элементарные си-
стемы являются простейшими покрывающими
системами, пространство параметров их сов-
падает с пространством коэффициентов. Ото-
бражение исследуемой системы в пространст-
во коэффициентов можно рассматривать как
отображение ёе в элементарную систему,
сравнение с элементарной системой.
Свойства любой системы могут быть ис-
следованы косвенным способом — отображе-
нием ее в пространство коэффициентов, т. е.
в универсальную систему.
Пучковые системы. Исследуем этим
методом свойства входной пучковой системы
(5-9). Характеристическое уравнение (5-9)
системы дано уже в однократно ^нормирован-
ном виде. На рис. 5-21 оно представлено, для
203
Характеристические уравнения;
а) в пространстве параметров
= 0
^13 Ьг
+ ЪгР
+ ТвЧПзгР
б) в пространстве коэффициентов
От о бр аж аюши-е уравнения
сОвтовражение пространства б)Отооро
параметров в пространство
коэффициентов
8о~Тиигггзз'>в/-Уа»вз9и/з> вз=Т1з
____сражение пространства
коэффициентов в пространство
параметров Ти = иаг^ -иаг\
Vi3=Q1
Ри'с. 5-22. Покрытие последовательно очередными системами про-
странства коэффициентов.
мы пространству коэффициентов-
Следствие I. Пучковая си-
стема покрывает пространство коэф-
фициентов. Это явствует из того, что
свойство покрытия содержится в
свойстве эквивалентности.
Следствие II. Пучковая си-
стема покрывает все системы данно-
го порядка. Это явствует из покры-
тия их пространством коэффициен-
тов и из транзитивности покрытия.
Следствие III. Пучковая си-
стема находится в отношении дву-
стороннего покрытия со всеми по-
крывающими системами. Это явст-
вует из следствия II и из транзитив-
ности покрытия.
Следствие IV. Пучковая си-
стема находится в отношении дву-
сторонней эквивалентности со
всеми системами, эквивалентными
элементарной системе. Это явствует
из транзитивности эквивалентности.
Последовательно о ч е-
системы с элементами второго порядка, в цик-
лической форме. Отображая уравнение (5-9)
в пространство коэффициентов однократно
нормированного метрического полинома (5-19),
получаем уравнения прямого отображения: *
Г3
Т3 т<
(5-23)
р е д н ы е системы. На рис. 5-22
показано покрытие пространства коэффициен-
тов системой с последовательной очередностью
замещения — последовательно очередной сис-
темой. В отличие от элементарных и пучковых
покрывающих систем, последовательно очеред-
ная система содержит свободные, сверх чис-
ла отображающих уравнений, параметры—па-
раметры старших связей. Параметрам этим
MOityT быть приданы произвольные значения
при решении этих уравнений.
Все три рассмотренные покрывающие си-
стемы являются системами с полным замеще-
Решая эти уравнения относительно пара-
метров Т, получаем обратное отображение —
пространства коэффициентов в пространство
параметров:
нием: первая—с обратным полным замещени-
ем всех внешних связей внутренними, две по-
следних—с прямым полным замещением всех
внутренних связей внешними-
Обратное отображение
(5-24) здесь так же одно-
значно и непрерывно, как
и прямое отображение
(5-23).
Теорема 5-ХХ. Пуч-
ковая и элементарная си-
стемы эквивалентны. Тео-
рема явствует из эквива-
лентности пучковой систе-
а) Линейная система
б) Внутренняя в) Внешняя г) Внутренняя и д) Смешанная
релейность ** релейность внешняя релейность система
Рис. 5-23. Покрытие линейными системами релейных систем.
204
Ниже рассмотрены будут покрывающие
системы с неполным замещением.
Б. Релейные системы
а) Отношения релейных и линейных систем
Исследование отношений линейных си-
стем и их релейных моделей, представ-
ляющих 'как бы логические модели линейных
систем, позволяет с общей точки зрения свя-
зать и объединить свойства линейных и релей-
ных систем. Отношения эти были частично
рассмотрены выше при исследовании релей-
ных моделей (§ 4-2). Они могут быть исчер-
паны теперь следующей теоремой 5-XXI:
релейные и смешанные системы покрываются
линейными системами того же элементного и
связевого состава. Теорема пояснена рис. 5-23.
Она доказана была выше (§ 4-2) и требует
лишь некоторых дополнительных пояснений.
Отношение общего совпадения между ре-
лейными системами, или релейными и линей-
ными системами, не может базироваться на
совпадении, характеристических полиномов,
поскольку последнее понятие теряет смысл
для релейных систем. Здесь остается, однако,
в силе общее для релейных и линейных систем
определение: общие свойства системы опреде-
ляются структурой переходных процессов ее,
общее совпадение систем заключается в сов-
падении этих структур. Структурой переход-
ных процессов названы здесь точечно линей-
ные комплексы, образуемые координатными
осями, кривыми переходных процессов и точ-
ками переключений. Структуры совпадают,
если топологически гомеоморфны эти ком-
плексы.
б) Релейные модели нормальных систем
Структуры процессов хорошо видны на
рйс. 5-24, где построены переходные процессы
в релейных моделях входных линейных си-
стем таблицы на рис. 4-33. Различие в струк-
туре этих систем сказалось лишь в уравне-
ниях переключения. Для одноциклической си-
стемы на рис. а уравнения эти имеют вид:
«о— р-в=0;
= — Hj=O;
= —р.а = 0;
а8 = р.2 —|i3=b; (5-25)
с4 = }»,3 —|х4 = 0;
«5=1ч—р-5=°;
в» = И-5 —
Для замыкающей эту таблицу пучковой
системы уравнения переключения принимают
вид:
°о= р-в=0;
= ф —у.в = 0;
аг=Н1 — р-в=0; (5_26)
оз=Н2 — ^=0;
°4=Рч — нв=°;
°6=р-4 — !хв=°;
ав=н6 — ив=0-
Различие это определило различия в по-
строении переходных процессов, понятные из
рис. 5-24. Устойчивость этих систем явствует
из того, что точка переключения л, отмечаю-
щая конец первого интервала, находится над
осью абсцисс. Это означает уменьшение ам-
v плитуды следующей полуволны и сходимость
процесса в целом.
Переходные процессы на рис. 5-24 нагляд-
но обнаруживают снижение устойчивости и
в этом смысле ослабление структуры системы
при удлинении тормозящих связей. Наиболее
устойчива одноциклическая система а с вну-
тренними, т. е. кратчайшими, тормозящими
связями, наименее устойчива пучковая систе-
ма д с наиболее длинными связями. Чтобы
получить устойчивый процесс, необходимым
оказалось увеличивать время объекта по мере
удлинения связей.
Нарастание быстродействия с удлинением
тормозящих связей, характерное для линей-
ных систем, не имеет места в релейных си-
стемах. Быстродействие последних, если из-
мерять его максимальным перерегулировани-
ем, не зависит от структуры системы. Глав-
ное преимущество замещения длинными
связями — повышение быстродействия — те-
ряется, таким образом, для релейных систем,
и оптимальной здесь является оптималь-
ная по устойчивости одноциклическая систе-
ма а.
Теорема 5-ХХ11. Релейные модели на-
ходятся между собой в тех же общих и
локальных отношениях, что и их линейные
оригиналы. Входные и выходные релейные си-
стемы обще и локально эквивалентны
в главных каналах зеркально сопряженных
элементов (рис. 5-25).
205
Т^=дТа-0,05-6,0=0,3сек, 1f=0,8сек, К^бЗсек, 7j=O,3ceK
То =О Та=0,05-7,0=0,35сек, 7}= 0,88сек, Тг=0,91сек, Т3=0,9Ьсек,
Рис. 5-24. Переходные процессы^ релейных моделях входных систем.
206
Рис. 5-25. Общая и локальная эквивалентность входных и выходных
релейных систем.
&г-’тг£> ^г-г,^яп р,
^3-i3(Pz-Ps>
Рис. 5-28. Покрытие линейными
системами их релейных моделей.
в) Релейные модели вырожден-
ных систем
Наиболее интересным являет-
ся то, что вырождение, имеющее
место в линейных системах, не по->
вторяется в релейных системах,
Рис. 5-26. Эквивалентность
вырожденных систем.
Рис. 5-27. Неустойчивость релейных моделей вырожден-
ных линейных систем.
повторяющих все остальные, нор-
мальные свойства, и вновь предстает, таким
образом, как грубое отклонение от нормы. Так,
одноциклическая линейная система выше чет-
вертого порядка обладает вырожденной струк-
турной устойчивостью при двух астатических
элементах, охваченных статической обратной
связью. Это явствует из эквивалентности ее
рассмотренной выше (рис. 4-15) одноцикличе-
ской вырожденной системе (рис. 5-26). Релей-
ная модель этой сйстемы структурно неустой-
чива (рис. 5-27). Структурные законы выпол-
няются в релейных системах с их схемати-
ческой структурой с еще большей правиль-
ностью, чем в линейных.
Покрытие линейными системами релейных
моделей (рис. 5-28) не противоречит этому
выводу. Первые, в силу свойств покрытия,
должны обладать всеми свойствами существо-
вания вторых. Они, однако, в силу тех же
свойств покрытия, могут обладать и новыми
свойствами, отсутствующими у релейных мо-
делей. Таким новым свойством является вы-
рожденная структурная устойчивость. Тео-
рема 5-ХХШ. Релейные системы наследуют
от своих линейных оригиналов все нормаль-
ные свойства и не наследуют вырожденные.
5-2-3. Локальные структурные подотношения
А. Линейные системы
а) Локальные отношения
Отношение локального совпа-
дения. Общее совпадение систем достигает-
ся тождественным равенством их характери-
стических определителей при некоторых зна-
207
чениях параметров. Локальное
совпадение систем в данном
канале достигается тождест-
венным равенством их переда-
точных функций в этом канале
при некоторых значениях пара-
метров. При этом тождествен-
но равны коэффициенты влия-
ния амплитудно фазовые
характеристики Pife и переда-
точные функции у^. Тождество
всех трех функций влияния
сводится к тождеству наибо-
лее общей из них — передаточ-
ной функции.
Назовем передаточные
функции главных каналов
i—i главными передаточными
функциями i-го элемента,
главные функции каналов
i—k — неглавными передаточ-
ными функциями этого элемента. Будем гово-
рить, что системы локально совпадают в 1-м
элементе при данных значениях параметров,
если при значениях параметров главные
передаточные функции этих элементов в обе-
их системах тождественно равны:
т. е.
Yh=Y н,
(р) _А'ц(р)
Д (/?) Д' (р) ’
(5-27)
(5-28)
В аналогичном смысле будет говориться
о локальной эквивалентности в данном эле-
менте.
Штрихом здесь обозначены характеристи-
ческие определитель и минор производной си-
стемы, без штриха — исходной.
Структурные подотношения.
Для локальных исходных отношений, для ло-
кального совпадения в частности, может быть
составлена та же матрица производных струк-
турных подотношений, что и для общих ис-
ходных отношений. Введя понятие об области
локального совпадения, получаем ту же мат-
рицу производных структурных отношений:
для положитель-
ных локальных
отношений
для отрицатель-
ных локальных
отношений
свойства суще-
ствования обла-
сти локального
совпадения:
свойства несуществова-
ния области локального
совпадения:
пересечение 'систем непересечение систем
непокрытие покрытие
систем систем
И здесь справедлива теорема структурных
отношений. Оба верхних отношения являются
двусторонними, оба нижних — односторонни-
ми. И здесь отношение локального покрытия
Рис. 5-29. Локальная эквивалентность пучковых систем входного
замещения.
может быть усилено до локальной эквивалент-
ности, односторонней и двусторонней.
Локальная эквивалентность. Из всего мно-
гообразия локальных отношений ограничимся
рассмотрением важной для дальнейшего дву-
сторонней локальной эквивалентности. Пояс-
ним это новое отношение на том же централь-
ном примере входных и выходных систем
(рис. 5-29). Выше, на рис. 4-34 и 4-35, проде-
монстрирована была локальная эквивалент-
ность этих систем в главных каналах не-
замковых крайних элементов. Локальная экви-
валентность имеет место, однако, в главных
каналах не только этих, а всех зеркально со-
пряженных элементов. Теорема 5-XXIV:
входные и выходные системы локально экви-
валентны в главных каналах зеркально сопря-
женных элементов, и только в них. Поясним
доказательство теоремы на рассмотренном уже
выше (рис. 3-4) примере локальной эквива-
лентности пучковых входных и выходных си-
стем в главных каналах (рис. 5-29). Переда-
точные функции систем в этих элементах суть:
_Дц(/>)_______Т2Т3Т\р* + Т\Т3рг + тгр + 1
‘ч— — Т^Т.Т^+ТгТгТ^+Т.Т^+Т.р+Х’
(5-29)
1 « Д'(?)
__ T\rtrtp* + TJ\p* + T‘zp + 1
— Т\Т\ГгТ\р* + ПТ'зЛр3 + T'tT’tp* + T'tp +1 •
, (5-30)
Условия тождественного равенства этих пе-
редаточных функций, т. е. локальной эквива-
лентности, совпадают, как легко убедиться,
с полученными уже выше условиями общей
эквивалентности — равенством зеркально со-
208
пряженных параметров обеих систем. Для Из структурной записи на рис. 5-29 явству-
пучковых ^систем на рис. 5-21 эти условия мо- ет, что главным минором каждого элемента
гут быть записаны следующим образом: системы является характеристический опреде-
Т1Р 0 0 1
-1 Т2р 0 1
О -1 Т3р 1
О 0-1 (7>+1)
Эта условная запись означает тождествен-
ное равенство характеристического определи-
теля (знаменателя передаточной функции) и
выделенного в нем характеристического мино-
ра (числителя ее), при условии указанного под
знаком тождества матричного равенства (зер-
кально сопряженных параметров). Она отме-
чает, таким образом, общую эквивалентность
пучковых входных и выходных систем и ло-
кальную их эквивалентность в главных кана-
лах незамковых крайних элементов, соответ-
ствующих выделенным в этой записи минорам.
В структурной форме та же запись имела бы
вид, показанный на рис. 5-29. В знаменателе
передаточной функции стоит здесь структурная
схема всей системы, представляющая в нашем
изображении лишь иную форму записи харак-
теристического определителя системы [Л. 36,
87]. В числителе стоит структурная схема глав-
ной подсистемы незамкового крайнего элемен-
та, представляющая собой такую же форму
записи главного минора главных каналов это-
го элемента. Из структурной записи ясно: ло-
кальная эквивалентность явилась здесь след-
ствием того, что во входных и выходных си-
стемах характеристические определители и
характеристические миноры главных каналов
зеркально сопряженных элементов ' обладают
зеркально сопряженной структурой. Условия
совпадения определителя и его минора, т. е.
числителя и знаменателя передаточной функ-
ции, данные на ри£ 5-29 и в уравнении (5-31)
матричным равенством, одинаковы поэтому и
являются условиями совпадения передаточной
функции в целом. Поскольку условиями этими
определяется гомеоморфность пространств па-
раметров обеих систем, системы эти локально
эквивалентны в этих каналах. Теорема доказана.
Для пучковых входных и выходных си-
стем главные подсистемы незамковых крайних
элементов также являются пучковыми систе-
мами (рис. 5-29). Такое совпадение структур
не имеет места для остальных входных и вы-
ходных систем.
литель подсистемы, получающейся отбрасы-
ванием этого элемента со всеми идущими к не-
му и от него связями [Л. 87]. Такую подсисте-
му каждого элемента, описываемую его глав-
ным минором и определяющую главную его
передаточную функцию, назовем главной под-
системой этого элемента. В числителе глав-
ной передаточной функции каждого элемен-
та системы стоит характеристический опре-
делитель главной подсистемы этого элемента,
в знаменателе — характеристический опреде-
литель системы. Так, на рис. 5-29 в числителе
структурных изображений передаточных функ-
ций незамковых крайних элементов пучковых
систем стоят структурные схемы главных под-
систем этих элементов; в знаменателе — струк-
турные схемы самих систем.
На рис. 5-29 введен символ отношения ло-
кальной эквивалентности — по концам двусто-
ронней стрелки, обозначающей общую эквива-
лентность, указаны индексы каналов, для ко-
торых имеет место локальная эквивалентность.
Последняя предполагает уже общую эквива-
лентность, является подотношением последней.
На рис. 5-29 указаны индексы главных кана-
лов одних лишь незамковых крайних элемен-
тов, для которых приведено на этом рисунке
доказательство локальной эквивалентности Как
явствует из теоремы 5-XXI, эти индексы могут
быть заменены общими индексами И—i'i' —
главных каналов зеркально сопряженных эле-
ментов.
б) Локальные свойства
Пространства передаточных
функций и переходных процессов.
Уточним введенное выше понятие — простран-
ство параметров. Каждой точке этого про-
странства может быть сопоставлена некоторая
функция параметров системы, в частности:
1) характеристический полином системы,
2) передаточная функция или амплитудно-
фазовая характеристика одного из каналов
ее. В первом случае назовем пространство
параметров системы пространством характе-
14 И. И. Гальперин.
2Q9
ристических полиномов, во втором — про-
странством передаточных функций. Первым
описываются общие свойства системы, вто-
рым — локальные свойства ее. Во всем пре-
дыдущем изложении, рассматривавшем толь-
ко общие свойства, понятие — пространство
параметров употреблялось только в первом
смысле. Вводя в рассмотрение также локаль-
ные свойства системы, следует расчленить
оба подчеркнутые выше понятия.
Общая эквивалентность систем — совпаде-
ние всех их общих структурных свойств до-
стигается топологической гомеоморфностью их
пространств характеристических полиномов.
Локальная эквивалентность систем в данном
канале—совпадение всех их локальных струк-
турных свойств в этом канале достигается то-
пологической гомеоморфностью их прост-
210
ранств передаточных функций этого канала.
По отношению к определенным внешним
возмущениям, пространства передаточных
функций представляют собой уже пространст-
ва переходных процессов. последние про-
странства могут быть отображены в простран-
ство коэффициентов, где они наложатся на
область совмещения. Это сделано на рис. 5-30:
для одноциклической системы, и на <рис. 5-31—
для пучковых систем входного и выходного»
замещения, по отношению к единичному воз-
мущению, приложенному к объекту. По теоре-
ме 5-XXIV пучковые системы входного и вы-
ходного замещений локально эквивалентны^
в частности, в главном канале объекта, и
в этом канале обладают тождественными пе-
редаточными функциями и переходными про-
цессами.
в) Локальные отношения и свойства
Подобно тому как общие свойства системы
устанавливались выше через общие отноше-
ния ее к эталонной в общем смысле, т. е. с из-
вестными уже общими свойствами, системе,
локальные свойства системы могут быть уста-
новлены через локальные отношения ее к эта-
лонной в локальном смысле, т. е. с известны-
ми уже локальными свойствами, системе. Ис-
следуем этим сравнительным методом локаль-
ные свойства локально разрешимых систем.
г) Локальные отношения и свойства локально
разрешимых систем
Рассмотрим связь между отношениями, и
свойствами тех же двух, входного и выходно-
14*
го, подклассов центрального класса систем —
локально разрешимых систем. Это было сде-
лано уже частично выше, в § 4-3, где по пере-
ходным процессам во входных системах уста-
навливались переходные процессы в выходных
системах. Рассмотрим более детально эти от-
ношения и свойства.
Восстановим общие отношения этих систем.
Как показано в таблице на рис. 4-33, входные
и выходные системы соответственно эквива-
лентны в общем смысле и пересекаются с ис-
ходной открытой системой. Все они также пе-
ресекаются между собой (это не указано на
рисунке). Эти отношения симметричны. Отно-
шения же замыкающих таблицу пучковых си-
стем к исходной открытой системе несиммет-
ричны: открытая система только пересекается
211
Рис. 5-32. Прямое отображение пучковых систем.
Рис. 5-33. Обратное отображение пучковых систем.
212
с пучковой системой (это указано односторон-
ней пунктирной стрелкой), пучковая же си-
стема покрывает открытую систему (это ука-
зано односторонней сплошной стрелкой), как
покрывает все вообще системы.
Общая эквивалентность. Общая эквива-
лентность транспонированных систем поясне-
на, на примере пучковых систем," рисунками
5-32 (прямое отображение) и 5-33 (обратное
отображение). Обе эквивалентные системы об-
ладают общим пространством характеристиче-
ских полиномов и общей областью совмеще-
ния, покрывающей в данном случае простран-
ство коэффициентов. Этим определяется со-
впадение всех общих свойств этих систем.
Локальная эквивалентность. Транспониро-
ванные системы находятся также, по теореме
5-XXIV, в отношений локальной эквивалентно-
сти в главных каналах зеркально сопряжен-
ных элементов (рис. 5-34). На рис. 5-29 по-
казана была локальная
эквивалентность транспони-
рованных систем (пучко-
вых) в главных каналах
незамковых крайних эле-
ментов. На рис. 5-34 пока-
зана локальная эквивалент-
ность транспонированных
систем (непучковых) в глав-
ных каналах замковых
крайних элементов. В пер-
вом случае главная подси-
стема сохраняет струк-
туру системы, во втором —
не сохраняет ее. В обоих
случаях, однако, и во всех
остальных случаях для зер-
кально сопряженных эле-
ментов, имеет место локаль-
ная эквивалентность в глав-
ных каналах. Именно она
приводит к общим для
обеих систем пространствам
передаточных функций и пе-
реходных процессов в глав-
ных каналах этих эле-
ментов (рис. 5-31).
На рис. 5-35 показана
статическая эквивалентность
транспонированных систем,
вытекающая из динамиче-
ской их эквивалентности.
Сравнение систем только
по общим их свойствам не-
достаточно и может повести
к ложным выводам. Так об-
щая эквивалентность регу-
лирования с диагональной
связью (рис. 5-36,6) регулированию по произ-
водной (рис. а) [Л. 87] оставляет эти способы
регулирования далеко не равноценными. Как
показано на рис. 5-36, обе системы локально
неэквивалентны в главном канале объекта
и обладают, следовательно, различными пере-
ходными процессами в этом канале. Регули-
рование по производной обладает в этом кана-
ле большим быстродействием и меньшим пере-
регулированием, чем регулирование с диаго-
нальной связью.
На; рис. 4-35 даны были переходные про-
цессы в локально разрешимых системах та-
блицы на рис. 4-33, вызванные единичными на-
грузками, приложенными к незамковым край-
ним элементам. В главных каналах этих эле-
ментов транспонированные системы локаль-
но эквивалентны. Переходные их процессы
в этих каналах поэтому тождественны.
Рассмотренная выше система структурных
Рис. 5-35. Статическая локальная эквивалентность' транспонирован-
ных систем.
213
Рис. 5-36. Локальная неэквивалентность общеэквивалентных систем с им-
пульсом по производной и диагональной связью.
отношений и свойств далека от полноты. Она
достаточна, однако, для того, чтобы выяснить
существование именно системы отношений и
свойств. Продолжающиеся и поныне случай-
ные, вне такой системы, поиски отдельных
свойств и отношений возвращают задачу в ис-
ходное ее положение.
Б. Релейные системы
Подобно общим отношениям, локальные
отношения релейных моделей повторяют ло-
кальные отношения их линейных оригиналов.
Это очевидно для статики (рис. 4-34), совпа-
дающей для линейных систем и их релейных
моделей, и наглядно пояснено для динамики
рис. 5-24.
5-3. МЕТРИЧЕСКИЕ ПОДОТНОШЕНИЯ
5-3-1. Метрические подотношения
Метрическими подотношениями смешан-
ных свойств являются метрические отношения
в областях этих свойств. Общими метрически-
ми отношениями являются метрические отно-
шения в областях общих свойств, локальны-
ми— в областях локальных свойств.
Рассмотрим их на примере исходного се-
мейства — одноциклических систем.
5-3-2. Общие метрические подотношения
А. Семейство одноциклических систем
Понятие—семейство систем разъяснено бы-
ло выше (§ 1-1-3, рис. 1-20). Для двухкаскад-
ных одноциклических систем с идеальным ре-
гулятором уравнения этого семейства имеют
вид:
+ —So) р2 = 0;
ЛМ- р-i— Ф=°;
Т’аР'аЧ' Н'а— 1* = 0. (5-32)
Параметром системы, т. е.
параметром, могущим прини-
мать относительные, положи-
тельные, отрицательные и ну-
левые значения, является здесь
параметр So. Все остальные па-
раметры этих уравнений (пара-
метры Т) суть параметры свя-
зей — положительные числа.
Уравнения (5-32) описывают,
таким образом, однопарамет-
рическое семейство систем-
•Параметром его является Sq.
Принадлежащие семейству
<(5-32) системы показаны на
рис. 5-37. Системы объединя-
ются общим параметром систе-
мы So — коэффициентом само-
регулирования объекта. Каж-
дой из систем соответствует различный интер-
вал абсолютных значений So этого параметра
системы, т. е. значений параметра связи са-
морегулирования — внутренней статической
связи объекта.
На рис. 5-37 под каждой из систем указано
уравнение объекта, в котором вместо парамет-
ра системы Sp фигурирует его абсолютная ве-
личина— параметр связи So. В такой конкрет-
ной записи уравнения объекта, явлйясь все ча-
стными случаями первого из уравнений (5-32),
различны. Каждое описывает конкретную си-
стему семейства.
Изменяясь в интервале — oo<So<oo, ко-
эффициент саморегулирования описывает все
семейство одноциклических систем. При S0=l
возникает исходная для всего семейства от-
крытая система (рис. а), при So=0 — получа-
ющаяся из нее входным замещением нулевая
одноциклическая система (рис. б). Для си-
стем с положительным саморегулированием
объекта (рис. в) So изменяется в интервале
0<So<l. Для систем с отрицательным само-
регулированием объекта (рис. г) So изменяет-
ся в интервале — oo<S0<0. Наконец, для си-
стем с возбуждающей обратной связью
(рис. д) изменяется в интервале l<S0<oo.
Приведенными во втором ряду рис. 5-37
четырьмя одноциклическими системами исчер-
пываются все системы описываемого уравне-
нием (5-32) семейства одноциклических си-
стем. Все они структурно устойчивы. Первая
из них является нулевой. Вторая и третья по-
лучены наложением на нее избыточной связи
саморегулирования и, независимо от знака
этой избыточной связи, структурно устойчивы
по теореме связывания. Последняя в этом ря-
ду система g, замкнутая возбуждающей об-
ратной связью в отрицательный цикл, также
214
представляет собой систему регу-
лирования. Такие необычные си-
стемы регулирования, не умень-
шающие, а увеличивающие стати-
ческие изменения координаты
объекта, получили, в частности,
применение в новейших мощных
энергетических установках (бло-
ках котел-турбина) в качестве
форсирующего регулятора «до се-
бя» (Л. 96]. Система эта получа-
ется наложением на нулевую от-
крытую систему а избыточной за-
мыкающей связи и, также незави-
симо от знака этой связи, струк-
турно устойчива по теореме свя-
зывания.
Включение в одноциклические
системы с возбуждающей обрат-
ной связью хотя бы одного эле-
мента с отрицательным или нулевым статиз-
мом, в одноциклические же системы с тормо-
зящей обратной связью — более одного тако-
го элемента, привело бы к структурной не-
устойчивости.
Пример этот достаточно поясняет понятие
«семейство систем». Семейство систем описы-
вается общей системой уравнений, содержа-
щих параметры системы, и различными для
каждой системы семейства системами уравне-
ний, содержащих только параметры связей.
Теорема 5-XXV. Системы семейства, па-
раметры которого являются параметрами из-
быточных по отношению к какому-либо пози-
тивному структурному подсвойству, связей, пе-
ресекаются между собой в области этого свой-
ства. Так, параметром семейства (5-32) яв-
ляется параметр избыточной, по отношению
к нормальной структурной устойчивости (т. е.
по отношению к структурной устойчивости и
структурной апериодичности), связи саморе-
гулирования. Все системы этого семейства
пересекаются поэтому в областях устойчиво-
сти и апериодичности. Теорема вытекает из
теоремы пересечения (теоремы 5-XIV).
Б. Метрические и структурные свойства
Рассмотрим свойства семейства одноцикли-
ческих систем, начав с двухкаскадных систем
3-го порядка. Это наинизший порядок, для ко-
торого свойства систем предстают в развер-
нутом, свободном от вырождения виде и мо-
гут быть в то же время рассмотрены на плос-
кости, поскольку и пространство параметров
и пространство коэффициентов систем 3-го по-
рядка могут быть представлены двумерными
пространствами. Исследование будет вестись
сравнительным методом — методом отображе-
Уравнения семейства
5/ WbpfrSfK9
se*o o<sB<i d>sg>-oo
Уравнения объектов конкретных систем
Рис. 5-37. Семейство одноциклических систем.
а) исходная открытая система; б) регулирование объекта с нулевым статизмом
(астатического объекта); в) регулирование объекта с положительным статизмом;
г) регулирование объекта с отрицательным статизмом; д) регулирование с воз-
буждающей обратной связью.
ний. Следует поэтому установить свойства
универсальных эталонных систем 3-го поряд-
ка — свойства пространства коэффициентов
систем 3-го порядка.
а) Пространство коэффициентов систем 3-го
порядка
Пространством коэффициентов систем 3-го
порядка является известная диаграмма Вы-
шнеградского (рис. 5-38). Диаграмма эта со-
держит области устойчивости и неустойчиво-
сти, колебательности и апериодичности, моно-
тонности и немонотонности. Это означает, что
—Область устойчивости
апериодичности
6,0
5,0
4,0
3,0
>2,0
'ТОД[|]-0£/7а£лм>
монотонности
О 1,0 2,0 3,0 4,0 5,0 в,0 7,0
Рис. 5-38. Пространство коэффициентов систем 3-го
порядка (диаграмма Вышнеградского).
2J5
ЪаТгоР3^ (Ъо+Тго)рг+р+1=0
p3+DJpi+Dzp 1-1 = 0
О)
б)
Рис. 5-39. Прямое отображение одноциклической системы,
а) пространство параметров; б) пространство коэффициентов.
элементарная система обладает по отношению
ко всем этим единичным свойствам — устойчи-
вости, апериодичности, монотонности, — струк-
турными .подсвойствами существования — по-
зитивным и негативным, и не обладает струк-
турными подсвойствами несуществования —
контрапозитивным и контранегативным.
Рассмотрим более детальную структуру
этого пространства. Оно содержит области
устойчивости и неустойчивости. (Первая, в свою
очередь, делится на подобласти колебательной
и апериодической устойчивости. С каждой из
последних пересекается область монотонности,
образуя этим еще две подобласти — монотон-
ной колебательной устойчивости и монотонной
апериодической устойчивости.
Области неустойчивости и немонотонной
колебательной устойчивости являются обла-
стями одного только свойства; области моно-
тонной колебательной устойчивости и немоно-
тонной апериодической устойчивости — обла-
стями двух свойств; область монотонной апе-
риодической устойчивости —областью трех
свойств. Эта последняя, небольшая по объему
область, совмещающая в себе <все три каче-
С1 венных показателя — устойчивость, аперио-
216'
дичность и монотонность — соответствует наи-
более высокому качеству переходного процес-
са. В области монотонности, колебательной и
апериодической, процесс происходит без пере-
регулирования, в Областях немонотонной апе-
риодической и колебательной устойчивости —
с перерегулированием.
Рассмотрим методом отображений свойст-
ва одноциклических систем. Начнем с простей-
шей из них — статически определимой нулевой
системы и затем рассмотрим более сложные
статически неопределимые ненулевые системы.
б) Регулирование астатических объектов
Отобразим нулевую одноциклическую си-
стему в пространство коэффициентов. Послед-
ним является в данном случае диаграмма Вы-
шнеградского. Структура этой диаграммы —
структура пространства параметров элемен-
тарной системы — детально исследована. До-
статочно исследована также структура прост-
ранства параметров одноциклической системы
[Л. 34, 41]. Такое раздельное исследование не
исчерпало, однако, задачи. Новые результаты
могут быть здесь получены взаимным отобра-
жением обоих пространств. На рис. 5-39 дано
прямое отображение, на рис. 5-40 — обратное.
Рис. 5-40. Обратное отображение одноциклической системы.
Сравниваемой системой является здесь иссле-
дуемая одноциклическая система, эталонной
системой — элементарная система (простран-
ство коэффициентов). Отображение первой во
вторую представляет собой, как принято было
выше, прямое отображение, второй в первую—
обратное отображение.
Уравнения двухкаскадной одноциклической
системы в канонических относительных коор-
динатах суть:
т’оФ +р-2=°;
t’iP'j+pi —Ф =°; (б-зз)
Ли»—1*2—Pi=0-
Система статически определима, все стати-
ческие параметры ее исключились поэтому из
уравнений. Характеристическое уравнение си-
стемы:
+ + W + =0. (5-34)
Приняв То за единицу времени и перейдя таким
образом к относительным временам (это равно-
сильно преобразованию переменной р: р = -^~К
* о
получаем:
+ (Ло + Т20) V8 + v +1 = 0, (5-35).
где
J* У 2
1° — 7У У20 —
Эта 'подстановка снижает на единицу раз-
мерность пространства параметров и позво-
ляет для систем 3-го порядка совместить это
пространство с плоскостью.
В уравнении (5-35) произведено уже пер-
вое нормирование. Производя второе норми-
рование, подстановкой ='(r10T20)“1/3w, полу-
чаем:
^’+(Ло+Ло) (г1Ог2оГ2/3^ +
+ (7’107’2O)-,/3w + 1=0. (5-36).
Отображение пространства параметров
этой системы в пространство коэффициентов,
ее достигается тождественным приравнивани-
ем характеристического полинома (5-36) этой
217'
системы метрическому полиному, также дваж-
ды нормированному:
w8 4- diW* 4- D2w 4-1 = 0, (5-37)
где Di и D2—произвольные положительные чи-
сла. Пространством коэффициентов явится
здесь диаграмма Вышнеградского. Тождест-
венное равенство обоих полиномов означает
равенство коэффициентов при членах одинако-
вых степеней. Выполняя это условие, полу-
чаем уравнения обратного отображения — ото-
бражения пространства параметров в прост-
ранство коэффициентов:
= (Ло 4“ ^2о) (^Ю^2о) I » (5-38)
О2 = (7’107'20)-,/3.
Решая эти уравнения относительно Гю и
Т2о, получаем уравнения обратного отображе-
ния— отображения пространства коэффициен-
тов в пространство параметров:
10 2О| — У V 2D22 ) ’
Прямое отображение однозначно, обратное — дву-
значно. Каждой точке шрюстранства параметров
(рис. 5-39,а) соответствует одна точка пространства коэф-
фициентов |(рис. б); каждой точке пространства
коэффициентов' соответствуют две тючки пространства
параметров, расположенные симметрично относительно
биссектрисы координатного угла. Двузначность эта
отображает симметрию уравнений (5-33) —(5-36) отно-
сительно параметров Тю и Тго сервомоторов. Из этой
симметрии явствует, что границей области совмещения
явится здесь образ биссектрисы координатного угла
плоскости параметров. Действительно, отобразить плос-
кость параметров означает для несимметричных систем
отобразить ее границы—обе 'координатные оси и бес-
конечно удаленнук) прямую. Для симметричных же си-
стем это означает отобразить границы треугольника,
•образованного биссектрисой координатного угла, одной
из координатных осей и бесконечно удаленной прямой.
Второй треугольник, образованный тем же способом
второй координатной осью, отображается, в силу дву-
значности отображения, на первый. Образ биссектрисы
-является поэтому, для всех симметричных систем,
одной из компонент границы области совмещения.
Подставляя уравнение T^ = T2Q этой бис-
сектрисы в уравнения (5-38) и исключая за-
тем параметр Т, получаем уравнение границы
области совмещения (5-33):
с5*40)
На рис. 5-33 дано .прямое отображейие
системы, причем в качестве системы коорди-
:218
нат пространства параметров взяты декарто-
вы прямолинейные координаты. Координаты
эти отображаются в пространство коэффи-
циентов в виде кривых, параметрические
уравнения которых могут быть получены
из уравнений (5-38) подстановкой в них
T10=’const=X, или T20=const= Y. Отображая,
например, координатную прямую Хь Х\,' про-
изводим подстановку в (5-38) Т^=Х{:
^1=’(Х1 + Т20) (Х^)-2/3;
A='(X1T20)-V3. (5-41)
Придавая затем параметру Т20 все воз-
можные положительные значения, получаем
кривую ХхХ\ в пространстве коэффициентов,
отображающую эту прямую. Симметричные
относительно биссектрисы координатного угла
точки пространства параметров отображаются
в одну и ту же точку пространства коэффици-
ентов; поэтому координатная прямая Уь У'ь
симметричная относительно той же биссектри-
сы с прямой Хь Х'ь отобразится в ту же кри-
вую, что и последняя. В частности, две асимп-
тоты Х3, Х'з и Уз, У'з к граничной гиперболе
области устойчивости отобразятся в кривую
Х3У3, Х'зУ'з с заштрихованной внутри об-
ластью. Восемь обозначенных римскими циф-
рами областей, на которые делится этими
асимптотами пространство параметров, ото-
бражаются в соответственно обозначенные че-
тыре области пространства коэффициентов.
Каждые две области пространства парамет-
ров, симметричные относительно биссектрисы
координатного угла, отображаются в одну об-
ласть пространства коэффициентов. Огибаю-
щей всех этих кривых является парабола
(5-40).
На рис. 5-40 дано для той же системы об-
ратное отображение — пространства коэффи-
циентов в пространство параметров. В качестве
координатной системы пространства коэффи-
циентов взята криволинейная система коорди-
нат, образуемая кривыми У равной степени
колебательности (Л. 56] и лучами X, опреде-
ляемыми тангенсом угла наклона их к оси jDi.
Кривые эти отображаются соответственно
в два семейства кривых пространства пара-
метров. Первое из этих семейств представля-
ет в пространстве параметров линии равной
колебательности. Две замыкающие кривые
этого семейства, для р,=0 и |i = °°, образуют
границу устойчивости и апериодичности. Этим
простейшим способом обратного отображения
могут быть найдены и все остальные харак-
теристические линии пространства парамет-
ров, как образы соответствующих линий про-
странства коэффициентов. Это относится, ра-
зумеется, не только к одноциклической, но и
к любой иной системе. Методом отображений
указывается наиболее общий -способ раскры-
тия топологической структуры пространства
параметров системы.
в) Регулирование статических объектов
В случае регулирования статического объ-
екта в уравнениях (5-33) изменится лишь
уравнение объекта. В канонических относи-
тельных координатах оно примет вид:
Т’оФ + 50ф + (1 - So) н, = 0. (5-42)
С учетом уравнения (5-42) характеристиче-
ское уравнение (5-34) примет для регулиро-
вания статического объекта вид:
T.T.V+(г.г,+т0т2+здЛ) рг+
+ (r0 + SoT1+SoT0)jP+1 =0. (5-43)
Произведя над ним те же операции норми-
рования, которые произведены были выше над
уравнением (5-34), получаем:
Р* + (Г10 + Г20 + S0T10T20) (Г1о7'го)-2/3^+
+ (1 + Sorio+S0Tao)(rioTao)-,/3p+l=0. (5-44)
Уравнения прямого отображения получают
здесь вид;
D, = (Г10 +' Т20 + S0T10T20) (Г1ОГ2О)-2/3;
D2 = (1 +S0Tl0 +5оГ20)(Г10Г20Г1/3 . (5-45)
Граница областей совмещения определяется
здесь, ввиду симметрии этих уравнений отно-
сительно 7\0 и Г20, тем же способом, что и для
нулевой одноциклической системы—отображе-
нием биссектрисы координатного угла прост-
ранства параметров в пространство коэффициен-
тов. Подставляя в (5-45) уравнение Г10= Г20= Т
этой биссектрисы, получаем в параметрической
форме уравнения граничных кривых областей
совмещения:
D^(2T + SO7’2)T~4/3;
D2 = (1 + 2S0T) Т~2/3. (5-46)
Уравнения эти описывают в параметриче-
ском виде границы областей совмещения.
Исключая из них параметр Г, получаем урав-
нение этих границ:
D* D} - 4(S0D3 4- D3) + 18ЗДО2 - 27S2 =0.
(5-47)
Принимая здесь So = 0, получаем уравнение
границы (5-40) для нулевой одноциклической
системы; принимая So = 1, получаем уравнение
границы открытой системы:
Р2 D2 — 4 (D3 + D3 ) + 18Ор2 — 27=0. (5-48)
Последнее представляет уравнение границы
области апериодичности в диаграмме Вышне-
градского. Этим доказывается теорема
5-XXVI: открытые нулевые системы, состав-
ленные элементами 1-го порядка, покрывают
апериодичность. Открытые нулевые системы
этого вида обладают, таким образом, полным
объемом свойства апериодичности, и на них
распространяется теорема XII. Это свойство
открытых систем будет использовано ниже
при доказательстве основных теорем.
На рис. 5-41 построено семейство кривых
(5-47) для различных значений параметра So-
С помощью уравнений (5-46) на эти кривые
нанесены значения параметра Г, изменяющие-
ся в интервале от 0 до сю. Уравнениями
(5-46) и (5-47) описывается семейство клино-
видных* (клиновых) 'кривых, включающее в се-
бя границу апериодичности диаграммы Вы-
шнеградского. Зависимость эта весьма приме-
чательна. Она позволит получить ниже ряд
усиливающихся необходимых условий аперио-
дичности. Клиновидные области, очерченные
этими кривыми, .представляют собой области
совмещения одноциклических систем.
Из покрытия открытой системой свойства
апериодичности элементарной системы явству-
ет, что открытая система обладает полным
объемом свойства апериодичности (покрыва-
ет свойство апериодичности). Это свойство от-
крытой системы будет использовано ниже при
доказательстве ряда основных теорем.
Клиновую форму области совмещения
имеют лишь для положительных So. Для нуле-
вого значения So клиновидная граница вытя-
гивается в рассмотренную выше параболу, для
отрицательных значений 50 — в более сложные
кривые параболического вида.
Рассмотрим некоторые свойства клиновых
кривых. Первой общей чертой их является то,
что параметры Тъ вершин клиньев равны
Если, обобщая понятия механики, рассматри-
вать So как коэффициент жесткости объекта,
то 4- представит собой коэффициент податли-
Oq
вости объекта. Параметр вершины клина равен
коэффициенту податливости объекта:
Ть = ± (5-49)
*
219*
Рис. 5-41. Прямое отображение семейства одноциклических систем.
В частности, для открытой системы, 7,& = 1,для
нулевой системы 7,ь = оо. Подставляя *(5-47) в
(5-45), получаем координаты вершин клиньев:
D2=3S%3.
(5-50)
Исключая из этих
получаем уравнение
ского места вершин
область совмещения
(рис. 5-41):
уравнений параметр So,
параболы — геометриче-
клиньев, очерчивающей
всего семейства систем
(5-51)
Верхнюю ветвь каждой клиновой кривой об-
разуют значения параметра Т, меньшие -J-,
нижнюю — большие.
Второй общей чертой клиновидных обла-
стей является то, что все точки с одинаковым
значением параметра Т располагаются на
одной прямой (рис. 5-41). (Прямые эти обра-
зуют два пучка, огибаемых кривой (5-51),
показанной отдельно на рис. 5-44. iB верхний
пучок, сходящийся в верхней части диаграм-
мы, входят прямые, объединяющие точки
с параметром Т, меньшим единицы. Точки эти
расположены только на верхних ветвях
220
клиньев. В нижний пучок, сходящийся
в нижней части диаграммы, входят
прямые, объединяющие точки с пара-
метром 7\ большим единицы. Для си-
стем с возбуждающей обратной связью
точки эти расположены только на ниж-
них ветвях клиньев; для систем с тор-
мозящей обратной связью они перехо-
дят в верхнюю ветвь клина. Пря-
мая, объединяющая точки с парамет-
ром, равным единице, разделяет оба
пучка.
Третьей общей чертой клиновых
кривых является «нацеленность» их
вершин в начало координат: касатель-
ные к вершинам клиновых кривых про-
ходят через начало координат (рис.
5-42). Поскольку все клиновые об-
ласти совмещения нацелены своими
вершинами в начало координат—в по-
люс неустойчивости, удалению от этой
вершины в глубь клиновидных обла-
стей совмещения сопутствует повыше-
ние устойчивости системы. Эта предва-
рительная трактовка рассматриваемо-
го свойства получит ниже детальное
обоснование.
Рис. 5-42. Свойства касательных клиновых кривых.
Монотонное удаление, с увеличением So,
самих вершин клиновых кривых от начала
координат т^кже означает повышение устой-
чивости этих систем. Наиболее устойчивыми
(безусловно устойчивыми) оказываются си-
стемы с отрицательным циклом, замыкающие
этот процесс. Это, несколько неожиданное для
систем, содержащих дестабилизирующий от-
рицательный цикл, свойство объясняется пре-
обладающим стабилизирующим влиянием
более короткого, одночленного положитель-
ного цикла саморегулирования, сопутствую-
щего этому отрицательному циклу и усили-
вающегося вместе с ним. Преобладающее
влияние более коротких циклов будет в даль-
нейшем неоднократно встречаться.
Исследованием всего семейства одноцик-
лических систем выясняется удобство выбора
для него в качестве параметра семейства не-
канонического параметра So вместо канони-
ческого параметра S&i (•§ 3-1-3). Только
первый из этих параметров изменяется для
всего семейства непрерывно от —оо до 4-оо.
Второй равен нулю для системы а (рис. 5-37),
единице — для системы б, изменяется в интер-
вале 0<So<l—для системы в, в интервале
1 <So< оо — для системы г, в интервале
—оо<50<0—для системы д. Изменение здесь
не непрерывно.
Параметр семейства одноциклических си-
стем является избыточным как по отношению
к структурной устойчивости, так и по отноше-
нию к структурной апериодичности. По теоре-
ме 5-XIV все системы семейства пересекаются
в областях обоих этих позитивных структур-
ных подсвойств. Системы эти, таким образом,
обладают не только нормальной структурной
устойчивостью, но и общей областью ее. Это
наглядно поясняется рисунком 5-41.
Отображение семейства одноциклических
систем в пространство коэффициентов позво-
ляет определить все их структурные свойства.
Области совмещения систем с отрицательно
статическими и астатическим объектами
(S0<0) пересекаются с областями: устойчи-
вости и неустойчивости, апериодичности и не-
апериодичности, монотонной апериодической
устойчивости и немонотонной апериодиче-
ской устойчивости, и не пересекаются с об-
ластью монотонной колебательной устойчи-
вости (рис. 5-41)*. Это означает, по теоре-
* Докажем это для граничной системы этого клас-
са — с астатическим объектом (это явится доказатель-
ством и для остальных систем — с отрицательно стати-
ческими объектами). Определим для этого точки пере-
сечения границы (5-40) области совмещения этой си-
стемы с границей (5-48) области апериодичности.
Решая совместно оба уравнения (5-40) и (5-48), полу-
чаем, после исключения уравнение:
0,5Z>!3—27=0, (5-52)
221
ме 5-XI, что по отношению к свойствам
устойчивости, апериодической устойчивости,
монотонной апериодической устойчивости си-
стемы эти обладают всеми структурными под-
свойствами существования и ни одним из под-
свойств несуществования, т. е. обладают
позитивными и негативными структурными
подсвойствами и не обладают контрапозитив-
ными и контранегативными. По отношению
к свойству монотонной колебательной устой-
чивости системы эти, по той же лемме, обла-
дают контрапозитивным и, следовательно,
негативным подсвойствами.
Области совмещения систем с положитель-
но статическими объектами, при So< тр пе-
ресекаются с теми же областями, что и пре-
дыдущие системы, и обладают теми же струк-
турными свойствами. При So^-д-системы эти
не пересекаются с областью неустойчивости,
т. е. приобретают безусловную устойчивость
(рис. 5-41).
Области совмещения систем, замкнутых
в отрицательный цикл, пересекаются с обла-
стями: апериодической устойчивости, монотон-
ной апериодической устойчивости, монотонной
колебательной устойчивости, и не пересекают-
ся с областями неустойчивости и колебатель-
ной устойчивости. По отношению к свойствам
апериодической устойчивости, монотонной апе-
риодической устойчивости и монотонной коле-
бательной устойчивости системы эти обладают
всеми подсвойствами существования и ни од-
ним из подсвойств несуществования; по отно-
шению к свойству устойчивости — позитивным
и, следовательно, контранегативным подсвой-
ствами; по отношению к свойству колебатель-
ной устойчивости — контрапозитивным и, сле-
довательно, негативным свойствами. Систе-
мы эти безусловно устойчивы.
г) Пространства параметров
одноциклических систем
Тем же методом отображений, которым
построена была выше детальная структура
пространства параметров нулевой одноццкли-
ческой системы, на рис. 5-43 построена де-
тальная структура пространств параметров
всего семейства одноциклических систем.
В каждом из пространств построены области
устойчивости, апериодичности и монотонности.
Поскольку открытые системы обладают пол-
имеющее один лишь -вещественный корень. Этот веще-
ственный корень определяет первую точку пересечения
кривых (точка В на рис. 5-40). Вторая точка пересече-
ния находится в бесконечности, что доказывает теорему.
222
ным объемом свойства апериодичности, об-
ласть апериодичности в каждом из этих
пространств представляет собой, согласно’
следствию I теоремы 5-XII, образ открытой
системы в этом пространстве. На рис. 5-43 да-
но, таким образом, обратное отображение
исходной открытой системы во все остальные,
производные системы. Там же, на рис. б, дана
и прямое отображение всех производных си-
стем в открытую систему. В обоих случаях
области совпадения очерчены жирными ли-
ниями.
Для систем с положительным и отрица-
тельным саморегулированием все построения
произведены для различных значений So; для
систем, замкнутых, в отрицательный цикл, по-
строения эти, чтобы не затемнять рисунка,
произведены для одного лишь значения
So = 2,0, для 'которого дана была на рис. 5-41
область совмещения.
Структура пространств параметров одно-
циклических систем построена на рис. 5-43 ме-
тодом отображения. Прямое построение ее
было бы затруднено сложностью уравнений
граничных кривых. Отображаемой координат-
ной сеткой является система только абсцисс
или только-ординат, вместе с пучком лучей.
Каждая из разделенных биссектрисой поло-
вин координатной плоскости обладает при
этом своей системой координат, причем обе
симметричные системы отображаются в одну
систему в пространстве коэффициентов.
Рассмотрим отображение этой координат-
ной сетки, показанной на рис. 5-43, в прост-
ранство коэффициентов. Заметим, что два
симметрично сопряженных луча пространства
параметров (т. е. симметричных относительно
биссекторного луча):
T20 = kT10; (5-53)
Г10 = ^Г20 (5-54)
отображаются, вследствие биссекторной сим-
метрии (симметрии относительно биссектрисы
координатного угла) пространства парамет-
ров, в одну кривую пространства коэффициен-
тов. Кривая эта может быть получена подста-
новкой безразлично (5-53) или (5-54) в (5-45).
Произведя первую из этих двух подстановок^
получаем:
- [(1 - k) Т„ + S'kT2w] kT^>3-, (5-55)
Г>г = 11+£0(1+^)Т10]^-2/3. - (5456>
Такой же результат, с заменой Тю на Т2ог
дала бы вторая подстановка— (5-54) в (5-45).
Уравнения (5-55) и (5-56) представляют
собой параметрические уравнения проходящих
внутри клиновой области петлевых кривых
Рис. 5-43. Пространства параметров семейства одноциклических систем
(обратное, отображение).’
(рис. 5-44). На каждую из этих кривых ото-
бражаются два симметрично сопряженных
луча пространства параметров с одинаковым
значением k [уравнения (5-53) и (5-54)]. Счи-
тая значения параметра Т, нанесенные на
петлевые кривые, значениями Тю, получаем
нижний из этих двух лучей; считая их значе-
ниями Т2о, получаем верхний луч. Заполняя
каждую клиновую область совмещения про-
странства коэффициентов семейством петле-
вых кривых, отображающим семейство лучей
пространства параметров, получаем полное
отображение второго пространства в первое.
Для нулевой одноциклической системы семей-
ство петлевых кривых вырождается в семей-
ство парабол, для нулевых систем с отрица-
тельным саморегулированием — в семейство
простых (без точек возврата) кривых
(рис. 5-44).
Линии, соединяющие точки петлевых кри-
вых с одинаковыми значениями параметра Т
(на рис. 5-44 линии эти не показаны), пред-
ставляют собой образы прямых: Tio^const и
Г2о = const. Совокупность лучей и этих прямых
образует отображаемую координатную систе-
му пространств параметров семейства одно-
циклических систем (естественность такой си-
стемы координат для семейств с биссекторно
симметричными пространствами параметров
понятна); совокупность петлевых кривых и
кривых Т=const образует отображающую ко-
ординатную систему пространства коэффи-
циентов.
Рассмотрим некоторые свойства петлевых
кривых. Каждая петлевая кривая касается
своей клиновой кривой в 4-х точках: пет-
лею— в двух конечно-удаленных точках, вет-
вями, асимптотически, — в двух бесконечно
“223
О 1 2 3 и ,5 6 7D1
Рис. 5-44. Свойства петлевых кривых.
удаленных точках (рис. 5-44). Каждая клино-
вая кривая является, таким образом, огибаю-
щей семейства 'петлевых кривых. Она может
быть рассматриваема сверх того, как* петле-
вая кривая с петлей, выродившейся в точку —
вершину клина.
При этом все петлевые кривые асимтоти-
чески касаются своих клиновых кривых верх-
ними своими ветвями, при параметрах Т,
стремящихся к нулю. Это означает, что при
уменьшении параметров Тю и Т20 свойства
всех одноциклических систем 3-го порядка
сближаются, а именно—приближаются к свой-
ствам статического элемента 1-го порядка.
Это понятно, поскольку при этом уменьшении
вся одноциклическая цепочка вырождаемся
в такой элемент.
Имеет место также асимптотическое каса-
ние нижних ветвей клиновой кривой и всех
принадлежащих ей петлевых кривых, при па-
раметрах Т, стремящихся к оо. Это означает
сближение свойств систем, расположенных на
различных лучах пространства параметров,
при увеличении параметра Т.
Каждая петлевая кривая содержит одну
точку самопересечения. Все точки самопересе-
чения лежат, как легко показать, на касатель-
ной к вершине клиновой кривой.
Каждая из петлевых кривых с параметром
ki пересекает своей петлей все предшествую-
щие ей (т. е. с параметром й>6г) петлевые
кривые в четырех точках {точки двойного пе-
ресечения) . По отношению к клиновой кривой,
предшествующей всем петлевым кривым, эти
четыре точки пересечения сливаются в две
точки .касания (рис. 5-44). Для двух петлевых
•224
кривых, параметры k которых
связаны соотношением:
1 _ 1
Ь £
(5-57)
две из точек пересечения сли-
ваются в одну, поскольку в
этом случае обе кривые пересе-
каются в точке самопересече-
ния предшествующей из них
(точка тройного пересечения —
рис. 5-45).
Во всех этих точках каса-
ния, пересечения и самопересе-
чения петлевых кривых различ-
ным точкам пространства па-
раметров соответствует одна и
та же точка пространства'коэф-
фициентов, одни и те же общие
свойства системы. В этих точ-
ках имеет место самосовпаде-
ние и, следовательно, самопе-
ресечение системы. Это само-
совпадение является характер-
ной чертой систем с избытЬч-
ными связями. Его не было ни в
пучковой, ни в одноциклической
нулевых системах (рис. 5-40).
На каждом луче простран-
о
ства параметров систем с поло-
жительным саморегулированием имеются че-
тыре точки, в которых система самосовпадает
с четырьмя соответственными точками на каж-
дом из остальных лучей. Речь идет, разумеет-
ся, о зеркально несопряженных лучах, распо-
ложенных только в верхней или только ниж-
ней половине координатного угла простран-
ства параметров. Соединяя эти точки кривой,
можно было бы получить в пространстве пара-
метров каждой системы замкнутые кривые
неизменных общих динамических свойств.
В каждую точку двойного пересечения
петлевых кривых отображаются, следователь-
но, две точки, а в точку тройного пересече-
ния— три точки, из каждой половины коор-
динатного угла пространства параметров, т. е.
всего, считая обе половины, четыре или шесть
точек. Если для одноциклических систем с ну-
левым и отрицательным саморегулированием
отображение в пространство коэффициентов
двузначно вследствие биссекторной симмет-
рии, то для систем с положительным саморе-
гулированием оно четырех- или шестизначно.
Самопересечение пространства параметров
означает одинаковость общих динамических
свойств системы при различных значениях па-
раметров. Так, четырем точкам пересечения
6
5
3
г
t
и
1 2 3 Ь 5 6 7Щ
Рис. 5-45. Точки тройного пересечения одаоцикличеоких систем.
петлевых кривых &=0,25 и k=0,1 системы
So=0,5 соответствуют точки пространства па-
раметров: Т10=0,2; 0,7; 20,0; 80,0 для первой
кривой и Тю=80,0; 5,0; 8,0; 0,5 для второй.
Для каждой соответственной пары точек (на-
пример, точки Тю = 0,2 первой кривой и
Т1о = 80,0 второй кривой) общие динамические
свойства системы одинаковы, поскольку обе
точки отображаются в одну точку (£>i = 5,2;
£>2 = 4,9) пространства коэффициентов. Для
взятого примера практическое выполнение па-
раметров, соответствующих первой точке
(Т1о = 0,2; Т2о=&£ю = 0,05), затруднительно,
получение же параметров второй точки
(Тю = 80,0; Т2о = &£1о = 8,0) весьма просто.
Между тем общие динамические свойства си-
стемы, соответствующие обеим точкам, оди-
наковы.
Самопересечение системы представляет,
таким образом, дополнительные возможности
выбора параметров системы, удовлетворяю-
щих заданным общим свойствам ее. Локаль-
ные свойства систем будут при этом различны,
поскольку самопересечение системы имеет
здесь место лишь по отношению к общему
совпадению систем, а не к локальному. Пере-
ходные процессы в этих точках общего совпа-
15 И. И. Гальперин.
225
дения будут поэтому резко различны по ам-
плитуде и фазе. В частности, для второй точ-
ки, с большими значениями Ло и Г20, будет
иметь место весьма большое перерегулиро-
вание.
Пользуясь этой детальной структурой об-
ластей совмещения, легко теперь построить
обратным отображением структуру прост-
ранств параметров. Чтобы найти в простран-
стве параметров системы границу какого-либо
свойства, достаточно найти точки пересечения
петлевых кривых этой системы с границей
этого свойства в пространстве коэффициентов,
а соответствующие этим точкам значения па-
раметра Т (нанесенные на петлевые кривые)
перенести на соответственные лучи простран-
ства параметров. Этим способом построены
границы областей всех свойств на рис. 5-43.
Этим же способом могут быть определены
и отношения между системами, в частности
показанное на рис. 5-43 пересечение одно-
циклических систем с исходной для них от-
крытой системой. Границы областей совпаде-
ния могут быть найдены следующим образом.
Точка пересечения двух соответственных, т. е.
с одинаковым параметром k, петлевых кривых
определит одну точку совпадения систем. На-
нося отвечающие этой точке пересечения
параметры Т обеих петлевых кривых на соот-
ветствующие им лучи пространств параметров
этих’ систем, получаем две совпадающие точки
этих пространств. Производя эту операцию
над каждой парой соответственных петлевых
кривых, получим всю границу области совпа-
дения. Этим способом найдем границы обла-
стей совпадения одноциклических и открытой
систем, показанные на рис. 5-43. В простран-
ствах параметров одноциклических систем об-
ласти эти представляют собой одновременно,
как пояснено было выше, области апериодич-
ности. В пространстве параметров открытой
системы область совпадения некоторой систе-
мы представляет собой область возможных
для этой системы вещественных корней.
Последнее явствует из следующего. Урав-
нение (5-34) распадается для открытой систе-
мы, и характеристическое ее уравнение при-
нимает вид:
(Тор +1) (Лр +1) (Т2р +1) = 0 (5-58)
или, после перехода к относительным време-
нам: v
(р+1)(Т10р+1)(Т20р + 1)=0. (5-59)
Приведя это уравнение открытой системы
к виду:
ЛоЛ»(Р +1) (/>+/У (/>+ =°> (5-60)
убеждаемся в том, что величины Тю и Т2&
открытой системы представляют собой взятые
с противоположным знаком обратные величи-
ны двух вещественных корней полинома 3-го
порядка, при третьем вещественном корне,
приведенном (умножением всего полинома на
постоянное число) к единице.
В. Структурные подсвойства
Структурные свойства семейства пол-
ностью выясняются прямым отображением его
(рис. 5-41) и последующим обратным отобра-
жением (рис. 5-43).
Общим структурным свойством всех си-
стем семейства является их пересечение, в со-
ответствии с теоремой XXV, в области апе-
риодичности (рис. 5-41). Это означает, что все
эти системы структурно апериодичны, т. е. об-
ладают нормальной структурной устойчи-
востью, и является следствием того, что все
они получены из нулевых систем, открытой
(рис. 5-37,а) и одноциклической (рис. б), на-
ложением избыточных связей. Общим струк-
турным свойством всех (трех) систем семей-
ства, замкнутых в положительный цикл, явля-
ется структурная колебательная немонотон-
ность, точнее говоря — контрапозитивное свой-
ство по отношению к монотонной колебатель-
ной устойчивости, отсутствие области моно-
тонной колебательной устойчивости.
Легко заметить на рис. 5-43,6 два типа
областей обратного совпадения. Первый, ог-
раниченный двумя исходящими из начала ко-
ординат ветвями и одной гиперболической
ветвью, принадлежит замкнутым в положи-
тельный цикл системам; второй, ограничен-
ный лирообразной кривой, — замкнутым в от-
рицательный цикл системам. Аналогично и
области прямого совпадения, являющиеся од-
новременно областями апериодичности, раз-
биваются на эти два типа, следующие, однако,
здесь в обратном порядке — первый тип при-
надлежит системам отрицательного цикла
(рис. а), второй—системам положительного
цикла (в, г, д). Это непонятное на первый
взгляд изменение порядка следования типов
граничных кривых объясняется следующими
общими соотношениями: для двух пересекаю-
щихся одноциклических систем область сов-
падения будет очерчена границей первого
типа у системы, чья клиновидная область со-
вмещения расположена выше, границей вто-
рого типа — у второй системы, чья клиновая
область совмещения расположена ниже. Кли-
новая область совмещения открытой системы
находится ниже клиновых областей совмеще-
ния систем с отрицательным циклом и выше
клиновых областей систем с положительным
226
циклом. Это поясняет прямой порядок обоих
типов границ в пространстве параметров от-
крытой системы (рис. б). Напротив, клййовая
область совмещения систем с отрицательным
циклом находится выше клиновой области от-
крытой системы, систем же с положительным
циклом — ниже этой области. Это объясняет
обратный порядок обоих типов границ в про-
странствах параметров циклических систем
(рис. а, в, г, д).
Пространство параметров открытой систе-
мы (рис. б), поскольку она покрывает аперио-
дичность, содержит лишь две области — не-
монотонной апериодичности и монотонной
апериодичности. Пространство параметров си-
стем с отрицательным циклом (рис. а), по-
скольку они безусловно устойчивы и, кроме
того, не пересекаются с областью немонотон-
ной колебательной устойчивости, содержат
три области — монотонной колебательной
устойчивости, монотонной апериодической
устойчивости и немонотонной апериодической
устойчивости.
Пространства параметров одноцикличе-
ских систем со статическим объектом (рис. в)
содержат при So< -g- четыре области — не-
устойчивости, немонотонной колебательной
устойчивости, немонотонной апериодической
устойчивости, монотонной апериодической
устойчивости, и не содержат области моно-
тонной колебательной устойчивости. При
So=y системы приобретают безусловную
устойчивость [Л. 57]. Это соответствует пока-
занному на рис. 44 моменту соприкосновения
вершины клина с границей устойчивости. Са-
мо значение 50= -у может быть простейшим
путем получено совместным решением урав-
нения (5-51) — вершин клиновых кривых
с уравнением (5-48) граничной гиперболы об-
ласти устойчивости диаграммы Вышнеград-
ского:
D2=^. (5-61)
Корнями этой системы уравнений явятся значе-
ния: 1)1 = 32/3; D2 = 3~1/3. Подставляя эти зна-
чения в (5-40), находим So=~. Это гранич-
ное значение So, приводящее к безусловной
устойчивости, обозначим S°r).
Области апериодичности и монотонности
систем на рис. 5-43,в даны в увеличенном
масштабе на рис. в'.
Пространство параметров нулевой одно-
циклической системы (рис. 5-43,а) содержит
четыре области — неустойчивости, немонотон-
ной колебательной устойчивости, немонотон-
но# апериодической устойчивости и монотон-
ной апериодической устойчивости. Граница
области устойчивости здесь разомкнута
[Л. 34, 41]. Область устойчивости группирует-
ся около апериодического своего ядра, кото-
рому соответствуют малые, не превышающие
0,25, значения Т10 и Т2о. С появлением само-
регулирования граница области устойчивости
замыкается и возникают, как показано было
в [Л. 57], новые области устойчивости, в обла-
сти больших значений Тю и Т2о (рис. в). На
рис. в показано также, что при этом возника-
ют новые области апериодичности, соответст-
вующие большим значениям Тю и Г2о, хотя
граница области апериодичности и остается
разомкнутой.
Пространство параметров систем с отрица-
тельным саморегулированием объекта (рис. д)
содержит те же четыре области — неустойчи-
вости, немонотонной колебательной устойчи-
вости, немонотонной апериодической устойчи-
вости и монотонной апериодической устойчи-
вости. Динамические свойства системы, резко
ухудшаются с усилением отрицательного са-
морегулирования. При отрицательном саморе-
гулировании семейство незамкнутых гранич-
ных линий .вырождается с одной стороны, при
ослаблении отрицательного саморегулирова-
ния, в ту же гиперболу, соответствующую ну-
левой одноциклической системе, с другой, при
усилении отрицательного саморегулирова-
ния— в точку, вершину координат. Нулевая
одноциклическая система занимает граничное
между этими схемами положение. В схеме
с положительным саморегулированием с уси-
лением коэффициента саморегулирования
исчезает область неустойчивости, при отрица-
тельном саморегулировании с усилением это-
го коэффициента исчезает область устойчиво-
сти. Стабилизирующее влияние тормозящих —
и дестабилизирующее возбуждающих внут-
ренних связей на устойчивость предстает
в наиболее явном виде.
Характер областей устойчивости систем
с отрицательно статическим объектом разъ-
ясняется, если продолжить эти области в отри-
цательные квадранты пространства коэффи-
циентов (рис. 5-46). Появление одного отрица-
тельно статического элемента в устойчивой
одноциклической системе делает возможным
появление в ней одного отрицательно диссипа-
тивного элемента.
Общим структурным свойством всех трех
одноциклических систем, замкнутых в. поло^
15*
227
Рис. 5-46. Пространство коэффициентов систем с отри-
цательно статическим объектом.
жительный цикл, является структурная немо-
нотонность, точнее говоря — контрапозитивное
структурное подсвойство свойства монотонной
колебательной устойчивости. Это явствует из
того, что верхние ветви клиновых граничных
кривых областей совмещения асимпотически
касаются верхней ветви клиновой границы
области апериодичности и, следовательно,
нигде не пересекают эту границу и не выходят
в область монотонной колебательной устой-
чивости. Все они, однако, пересекаются с об-
ластью монотонной апериодической устойчиво-
сти и в этом смысле структурно монотонны.
Как доказано было выше, одноциклические
системы, замкнутые в положительный цикл,
лишены области монотонной колебательной
устойчивости. Одноциклические системы, за-
мкнутые в отрицательный цикл, лишены обла-
сти немонотонной колебательной устойчиво-
сти. Это вытекает из того, что области совме-
щения этих систем не пересекаются с об-
ластью монотонной колебательной устойчиво-
сти (рис. 5-41).
Одноциклическим системам, замкнутым
в положительный цикл, недоступна, таким
образом, область монотонной колебательной
устойчивости; замкнутым в отрицательный
цикл — область немонотонной колебательной
*устойчивости. Открытой системе, разделяющей
оба класса одноциклических систем, недоступ-
ны обе области колебательности — монотонной
и немонотонной.
Одноциклическим системам, замкнутым
в положительный цикл, недоступна, таким об-
разом, область колебательных переходных
процессов без перерегулирования. Одноцикли-
ческим системам, замкнутым в отрицательный
цикл, недоступна область колебательных пе-
реходных процессов с перерегулированием.
Первым системам доступна, правда, область
апериодических процессов без перерегулиро-
вания, вторым же — область апериодических
процессов с перерегулированием. Апериодич-
ность, однако, трудно достижима для одно-
циклических систем, замкнутых в положитель-
ный цикл (требует очень малых времен серво-
моторов), и общей практической чертой этих
систем является, перерегулирование в пере-
ходных процессах. Отличительной чертой это-
го исторически первого и все еще основного
класса систем автоматического регулирова-
ния является перерегулирование.
Это поясняет практическую важность син-
теза систем иной структуры, обеспечивающей
отсутствие перерегулирования. Своеобразны-
ми такими системами являются замкнутые
в отрицательный -цикл одноциклические систе-
мы. Отсутствие перерегулирования является,
как выяснено было только что, для этих си-
стем такой же типовой чертой, как наличие
его в одноциклических системах, замкнутых
в положительный цикл. Системы эти могут,
однако, найти применение лишь для очень
узкой области объектов, обладающих настоль-
ко сильным положительным саморегулирова-
нием и, как следствие, настолько малой соб-
стенной (т. е. вне системы регулирования)
неравномерностью, что увеличение этой не-
равномерности, вызванное включением объек-
та в отрицательный цикл регулирования, все
еще оставит ее в допустимых пределах. Одно
из важных применений отрицательный цикл
получает в регулировании блочных установок
[Л. 96, 97].
Г. Метрические подсвойства
Отображение системы в пространство ко-
эффициентов выясняет и метрические свойст-
ва системы. Часть из них рассмотрена была
уже выше. Рассмотрим одно общее для всех
систем метрическое свойство. Заметим, что
петлевые кривые с уменьшением k отступают
от вершины клиновой области в глубь ее
(рис. 5-44, 5-45). Это отступление, представ-
ляющее, как пояснено было выше, отступле-
ние от полюса неустойчивости, сопровождает-
ся повышением устойчивости системы. Умень-
шение k соответствует нарастанию постоян-
ных времени в цепи усилений. Устойчивость
одноциклических систем нарастает, следова-
^8
тельно, с нарастанием постоянных времени.
Вывод этот многократно получался иными
способами. Поскольку в одноциклическцх си-
стемах любые перестановки элементов пред-
ставляют эквивалентные преобразования, су-
щественно в этой зависимости не нарастание
постоянных времени, а их «разброс».
Этот же вывод легко распространяется на
нулевую одноциклическую систему, где петле-
вые кривые вырождаются в параболы
(рис. 5-44), и на системы с отрицательным са-
морегулированием объекта, где петлевые кри-
вые вырождаются в иного вида простые кри-
вые (рис. 5-44).
С уменьшением параметра Т петлевые
кривые уходят в область монотонной аперио-
дической устойчивости, с увеличением его —
в область колебательной устойчивости с силь-
ным затуханием. Обоим этим процессам по-
ляризации соответствует повышение устойчи-
вости, хотя и различного характера. Новые
области устойчивости, при больших значениях
Т10 и Т20, возникающие для одноциклических
систем со статическим объектом (рис. 5-43,в),
неравноценны по характеру устойчивости ста-
рым, имевшим место в нулевой одноцикличе-
ской системе (рис. 5-43,г). Средним значениям
параметра Т, располагающимся в вершинной,
обращенной к вершине клина, части петле-
вой кривой, соответствует снижение устойчи-
вости.
Д. Структурные отношения
Основным общим структурным отношени-
ем одноциклических систем является их пере-
сечение. Системы с положительным циклом
пересекаются между собой в доступных им об-
ластях неустойчивости, апериодической устой-
чивости и немонотонной колебательной устой-
чивости. Системы с отрицательным цик-
лом пересекаются между собой в доступных
им областях апериодической устойчивости и
монотонной колебательной устойчивости. Си-
стемы с положительным -циклом пересекают-
ся с системами с отрицательным циклом толь-
ко в доступной тем и другим области аперио-
дической устойчивости (рис. 5-41).
Основным локальным отношением одно-
циклических систем является локальное несов-
падение их во всех элементах. Для каждой
конкретной одноциклической системы необхо-
димо поэтому строить свое пространство пе-
реходных процессов.
Е. Метрические отношения
К метрическим отношениям принадлежат
условия совпадения, легко устанавливаемые
для одноциклических систем по пересечению
петлевых кривых. Частично, для отношений
между открытой системой и одноциклически-
ми, условия эти были выше рассмотрены. Ме-
трические отношения между самими одно-
циклическими системами представляют мень-
ший интерес и здесь не рассматриваются.
ГЛАВА ШЕСТАЯ
СТРУКТУРНЫЙ СИНТЕЗ
Рассмотрим задачу синтеза систем, обла-
дающих упорядоченными выше динамически-
ми и статическими структурными свойствами,*
прежде всего, определяющими свойствами
сервосистем — устойчивостью и изодром-
ностью. Поскольку к изодромным системам
предъявляется уже требование устойчивости,
синтез динамических свойств, устойчивости
в частности, должен предшествовать синтезу
статических свойств.
Из динамических общих структурных под-
свойств рассмотрим лишь нормальную струк-
турную устойчивость. Может оказаться, что
задача нормальной структурной устойчиво-
сти— одна из целого семейства перечислен-
ных выше задач — не заслуживает такого
преимущественного внимания. Из всего этого
семейства, однако, одна лишь эта задача под-
чиняется общим законам валентности, являет-
ся валентной задачей. Только по отношению
к нормальной структурной устойчивости дина-
мические системы являются валентными си-
стемами. Этим определяется ее значение. При-
ведя к синтезу устойчивых динамических си-
стем, столь же свободному, как современный
синтез всех остальных валентных систем —
жестких систем в кинематике или органиче-
ских соединений в химии, новая задача обна-
ружила целые гомологические ряды и семей-
ства новых регулирующих и следящих систем,
обладающих новыми важными свойствами.
Известные уже системы регулирования пред-
стали как первые члены этих гомологических
рядов, уходящих в глубь неисследованного
еще множества сйстем. В ряду остальных
структурных задач задача нормальной струк-
229
турной устойчивости занимает особое место.
Именно ею формируется та общая концепция
валентности, о которой говорилось выше.
Остальными, сопутствующими структурными
задачами рассматриваются лишь различные
нормализующие подсвойства структурной
устойчивости. Основные структурные теоремы
рассмотрены были выше (глава 4-я) без дока-
зательств. Рассмотрим доказательства этих
теорем и синтезируемые ими системы.
6-1. НУЛЕВЫЕ СИСТЕМЫ
Рассмотрим более детально понятие о ну-
левых системах, центральное в задаче струк-
турной устойчивости.
6-1-1. Теорема связывания
Рассмотрим исходное для структурного
синтеза положение — теорему связыва-
ния (теорема 6-1): связывание системы
сохраняет позитивные структурные подсвой-
ства. Теорема эта формулировалась выше
(теорема 4-1) для одного лишь свойства устой-
чивости. Она верна, однако, для всех положи-
тельных свойств.
Теорема вытекает из теоремы пересечения
(теорема 5-XIV) и доказана будет вместе
с последней в конце главы. Рассмотрим де-
тальнее ее содержание.
Налагаемые по условиям теоремы новые
связи не должны, разумеется, повышать диф-
ференциального или интегрального порядков
системы. В противном случае наложение их
представило бы не операцию, указанную
в условии теоремы, — дополнительное связы-
вание той же системы, а замену этой системы
другой системой. В этом, смысл введенного
нами деления внутренних связей на старшие
и нестаршие. Только вторые, не повышающие
порядка системы, представляют собой связи
в собственном смысле слова. Только наложе-
ние таких связей представляет собой связы-
вание системы. То же относится и к внешним
связям.
Связывание неспособно разрушить пози-
тивные подсвойства. Напротив, развязывание
разрушает, начиная с некоторого предела, эти
подсвойства. Пределом этим является полное
число связей М, Для каждого позитивного
подсвойства существует свое, определяемое
структурной формулой, полное число связей,
ниже которого подсвойство это не может
иметь места. Все остальные, сверх полного
числа, связи являются по отношению к этому
полному числу избыточными. *
При связывании сохраняются пози-
тивные подсвойства — структурная устойчи-
230
вость, структурная апериодичность и т. д. и
могут не сохраняться негативные, контрапози-
тивные и контранегативные подсвойства —
небезусловная устойчивость, структурная не-
устойчивость и безусловная устойчивость,
небезусловная апериодичность, структурная
неапериодичность и безусловная апериодич-
ность и т. д.
Поясним все это важными для дальнейше-
го примерами. Открытая система, составлен-
ная из нулевых элементарных систем произ-
вольного порядка, безусловно устойчива и
структурно апериодична. Наложение новой,
замыкающей связи разрушает свойство не-
существования области неустойчивости, но со-
храняет свойства существования области
устойчивости и области апериодичности — си-
стема не безусловно устойчива, но структурно
устойчива и структурно апериодична. Откры-
тая система, составленная из элементов толь-
ко первого порядка, не только безусловно
устойчива, но и безусловно апериодична. На-
ложение новой, замыкающей связи, разруша-
ет свойство несуществования области неапе-
риодичности, но сохраняет свойство существо-
вания области апериодичности — система не
безусловно, но лишь структурно апериодична.
Дальнейшее связывание полученной таким
способом одноциклической системы сохранит
оба свойства существования — все получен-
ные при этом системы будут структурно устой-
чивы и структурно апериодичны, т. е. будут
обладать нормальной структурной устойчи-
востью.
В рассмотренном примере связывание раз-
рушало одни лишь контранегативные под-
свойства несуществования. Примером разру-
шения связыванием контрапозитивных свойств
является обычное возникновение структурной
устойчивости. Пример разрушения связыва-
нием негативных подсвойств существования
рассмотрен был на рис. 4-26,а, где наложе-
ние диссипативной связи обращало структур-
но неустойчивую консервативную систему
в безусловно устойчивую диссипативную, раз-
рушая этим негативное подсвойство существо-
вания области неустойчивости.
Заметим, что в этом случае возникала
лишь вырожденная, не сопровождаемая
структурной апериодичностью безусловная
устойчивость. Только по отношению к вырож-
денным свойствам связывание способно раз-
рушить негативное подсвойство существова-
ния. По отношению к нормальным свойствам
связывание сохраняет все, позитивные и нега-
тивные, подсвойства существования.
Следствие I. Двусторонние системы
обладают позитивными подсвойствами суще-
ствования всех своих односторонних моделей.
Это явствует из того, что двусторонние систе-
мы получаются из всех своих односторонних
моделей связыванием. Теорема 1-1 охваты-
вается этим следствием.
Опровержением теоремы связывания '(«Автоматика
и телемеханика», 1948, № 4) начата была дискуссия по
•структурной устойчивости. В опровержении этом до-
казывалось на примерах, что связывание способно ли-
шить систему структурной устойчивости. Номером спу-
стя («Автоматика и телемеханика», 1949, № 1) это
радикальное опровержение было снято «и заменено ме-
нее смелыми, но столь же ошибочными. Редакция жур-
нала не указала в своем заключении по дискуссии, что
опровержение общей теории структурной устойчивости
велось с более чем ошибочных и негласно оставленных
позиций.
6-1-2. Нулевые системы
Из теоремы связывания вытекают понятия
о нулевых системах и числе степеней неустой-
чивости. Элементным составом системы на-
звана была выше совокупность входящих
в нее элементов. Так, все системы на рис. 4-7
являются системами одинакового элементно-
го, но различного связевого состава.
Существование различных нулевых систем
одинакового элементного состава полностью
подобно явлению изомерии в химии и сами
эти системы могли бы быть названы динами-
ческими изомерами. В обоих случаях из одно-
го и того же состава элементов, химических
или динамических, различными способами со-
единения этих элементов, образуются системы
одинакового состава, но различной структуры
и соответственно резко различных свойств.
Нулевыми в задаче устойчивости названы
были выше структурно устойчивые системы
с наименьшим для данного состава системы,
т. е. полным, числом связей. Нулевые системы
занимают в задаче устойчивости такое же
граничное положение между структурно устой-
чивыми и структурно неустойчивыми система-
ми, какое в задаче подвижности жесткие ста-
тически определимые кинематические цепи
занимают между жесткими статически неопре-
делимыми (фермы) и подвижными (механиз-
мы) цепями, или в химии насыщенные соеди-
нения — между перенасыщенными и недо-
насыщенными. Наложение новых, избыточных
связей на нулевые системы сохраняет, по тео-
реме связывания, их структурную устойчи-
вость; снятие хотя бы одной связи разрушает
либо их структурную устойчивость, либо их
связность — приводит к распаду системы.
Система может быть нулевой по отноше-
нию к любому структурному свойству, завися-
щему от полной связанности: связности
(Vfe = 0), устойчивости (Vs = 0), периодичности
(Ур = 0), монотонности (Уш=0), статичности
(Ус—0) и т. д. Нормальные нулевые системы
являются нулевыми по отношению к нормаль-
ной структурной устойчивости (Vs=0,
УР = 0). Вырожденные нулевые системы яв-
ляются нулевыми по отношению к вырож-
денной структурной устойчивости (У8=0,
Vp>0). Поскольку апериодичность представ-
ляет собой подсвойство устойчивости, струк-
турная неапериодичность представляет собой
не независимое свойство, а лишь один из мно-
гих сопутствующих признаков вырожденной
устойчивости. Практический интерес пред-
ставляют только нормально устойчивые систе-
мы; вырожденно устойчивые системы следует
научиться распознавать затем лишь, чтобы
избегнуть ошибки нечаянного их применения.
Число связей, Гнедостающих системе для
нормальной структурной устойчивости, можно
было бы обозначить через У(5Я), для вырожден-
ной — V^\ Обозначения эти могут быть, од-
нако, упрощены. Нормальная структурная
устойчивость, представляющая основной теоре-
тический и практический интерес, будет в даль-
нейшем именоваться кратко — структурной
устойчивостью, число степеней ее У(5Л) (равное
числу Ур) — обозначаться кратким символом У5,
нормальные нулевые системы — именоваться
кратко—нулевыми системами. Полные термины и
обозначения — вырожденная структурная не-
устойчивость, вырожденно устойчивые системы,
вырожденные нулевые системы, число степеней
вырожденной структурной неустойчивости V* *—
будут сохранены лишь для вырожденных систем.
Число ys определяется общими законами валент-
ности, изоморфными рассмотренным выше об-
щеструктурным законам валентности — химиче-
ской, кинематической, статической и т. д.
Число как всегда для случаев вырож-
дения, определяется частными, своими для каж-
дого отдельного 'случая вырождения, зависи-
мостями. Смешение тех и иных зависимостей
означало бы отказ от общей теории.
Для структурной устойчивости системы не-
обходимо и достаточно, чтобы в ней заключа-
лась, по меньшей мере, одна нулевая струк-
турно устойчивая подсистема того же элемент-
ного состава. Действительно, в этом случае
можно считать, что система получена из этой
нулевой подсистемы наложением избыточных
связей и, по теореме связывания, структурно
устойчива.
Для нормальной структурной устойчивости
системы необходимо и достаточно, чтобы
в ней содержалась, по меньшей мере, одна ну-
231
левая нормально устойчивая подсистема того
же элементного состава. Действительно, в этом
случае можно считать, что система получена
из этой нулевой подсистемы наложением но-
вых связей, и, по теореме связывания, струк-
турно устойчива и структурно апериодична,
т. е. обладает нормальной структурной устой-
чивостью.
Из подчеркнутых положений (названных
выше (§ 4-1) теоремой скелетности) явствует,
что нулевые подсистемы образуют как бы ске-
лет содержащей их системы, обусловливаю-
щей ее устойчивость. Отсюда вытекает общий
прием анализа структурной устойчивости си-
стемы: чтобы доказать структурную устойчи-
вость системы, необходимо и достаточно об-
наружить в ней хотя бы одну нулевую подси-
стему. Синтез нормальных структурно устой-
чивых систем также сводится к синтезу нор-
мальных нулевых систем: первые системы по-
лучаются из вторых только наложением новых
связей. Это поясняет центральное место зада-
чи синтеза нормальных нулевых систем в за-
даче структурной устойчивости.
6-2. НОРМАЛЬНЫЕ СИСТЕМЫ
Синтез нормальных устойчивых систем
сводится, как объяснялось выше, к синтезу
нормальных нулевых систем. Последние пред-
ставляют собой граничный класс — нормаль-
ных устойчивых систем, обладающих полнйм
числом связей. Все остальные нормальные
структурно устойчивые системы могут быть
получены только наложением избыточных
связей на нормальные нулевые системы.
Нормальные нулевые системы могут быть
разделены на локально разрешимые и локаль-
но неразрешимые. Первые возникают в ре-
зультате локального решения задачи синтеза
нулевых систем — условия их структурной
устойчивости локальны, формулируются по
отношению к каждому элементу в отдель-
ности. Для вторых такая локальная формули-
ровка невозможна, условия их устойчивости
нелокальны.
Локально разрешимые системы (входные
и выходные системы) представляют основной
класс нулевых систем. К ним сводится нор-
мальными, в частности эквивалентными, пре-
образованиями значительная часть локально
неразрешимых систем (приводимые локально
неразрешимые системы). Существуют, однако,
неприводимые локально неразрешимые систе-
мы, не сводящиеся нормальными преобразова-
ниями к локально разрешимым системам.
В этой классификационной схеме:
нулевые системы
локально разрешимые
входные
выходные
I
локально
неразрешимые
приводимые неприво-
димое
и будет решаться ниже задача синтеза нуле-
вых систем.
6-2-1. Локально разрешимые системы
Задача синтеза локально разрешимых си-
стем исчерпывается принципом локальной
связанности [Л. 36, 42, 44, 49]. Им образуются
локально разрешимые нулевые системы, вход-
ные и выходные. Все множество приводящих-
ся к ним локально неразрешимых нулевых
систем — приводимых систем может быть за-
тем получено нормальными преобразования-
ми, преобразующими исходные локально раз-
решимые нулевые системы в производные
локально неразрешимые. В такой последова-
тельности задача и будет рассматриваться
ниже. Этим путем не могут быть получены не-
приводимые системы. Задача их синтеза ре-
шается общим для приводимых и неприво-
димых систем методом, базирующимся на
рассматриваемом ниже аналитическом кри-
терии структурной устойчивости.
Оба класса исходных систем — входных и
выходных — в свою очередь связаны эквива-
лентным преобразованием — транспонирова-
нием.
А. Принцип локальной связанности
Назовем полной локальной связанностью
статически связной системы в элементе с ва-
лентностью Vs наличие входящих в этот эле-
мент Vs тормозящих собственных связей, без-
различно внешних или внутренних, по одной
связи каждого порядка. Полную локальную
связанность системы во всех элементах назо-
вем равномерной локальной связанностью.
Принцип локальной связанности:
достаточным условием нулевости системы яв-
ляется равномерная локальная связанность ее.
Условие это не является необходимым, так
как ряд нулевых систем, не отвечая ему пря-
мо, приводятся к нему эквивалентными преоб-
разованиями.
Принцип локальной связанности — простое
физическое начало, лежащее в основе струк-
турной устойчивости наиболее широкого клас-
са нулевых систем — локально разрешимых
систем. Все нулевые системы с только тормо-
зящими связями прямо, через входное заме-
щение, или косвенно, через нормальные
232
преобразования, подчиняются
этому принципу. Это указывает,
на /особое место, занимаемое
в задаче структурной устойчи-
вости системами с только тор-
мозящими связями. Чтобы со-
общить структурную устойчи- £
вость этим системам, достаточ- §
но, поскольку связи эти одно- 5
валентны, связать валентность з
каждого из элементов соответ-
ствующим числом тормозящих £
связей, безразлично внешних
или внутренних. В системах а
с возбуждающими связями, об-
ладающих лишь частичной
(меньшей единицы) валент-
ностью, действуют более слож-
ные зависимости.
а) Входное замещение
Принцип локальной связан-
ности, доказываемый ниже,
реализуется теоремой о входном заме-
щении: входное замещение внутренних свя-
зей в элементарных системах статически связ-
ной нулевой открытой системы обратными тор-
мозящими того же порядка внешними связями
образует нулевые же замкнутые системы.
Входное замещение в рядных и разветвленных
системах пояснено на рис. 6-1.
б) Выходное замещение
Локально разрешимыми являются не
только входные, но и выходные системы, по-
скольку и в них задача структурной устойчи-
вости решается локально — решение может
быть сформулировано по отношению к каждо-
му элементу в отдельности. Для этого доста-
точно в данном выше определении полной
локальной связанности заменить слово вхо-
дящих словом выходящих, т. е/ принять, что
локальная связанность системы в некотором
ее элементе определяется совокупностью свя-
зей, не входящих в него, а выходящих из него.
В первом случае будет иметь место входная
локальная связанность, во втором — выходная
локальная связанность. Оба способа связыва-
ния элементов и оба класса систем — входные
и выходные — равноправны и каждый из них,
в задаче структурной устойчивости дифферен-
циальных систем, может быть с равным пра-
вом принят за исходный, второй же — за про-
изводный. В иных задачах, в задаче статиче-
ской определимости в частности, вновь выяс-
няется исходное положение систем входного
Открытые базовые системы
Рис. 6-1. Входное замещение в рядных и разветвленных системах.
замещения. Напротив, в задаче структурной'
устойчивости интегральных и интегродиффе-
ренциальных систем исходным является вы-
ходное замещение [Л. 87].
в) Рядные системы
Приведем в действие алгоритм входного
и выходного замещения и оценим практиче-
скую пригодность синтезируемых им систем.
Системы эти могут быть рядными и развет-
вленными. Последние всегда лишены глав-
ного цикла, первые могут обладать или не
обладать им.
Систем ы с главным циклом. Ряд-
ные локально разрешимые системы с глав-
ным циклом синтезированы на рис. 4-33. Все
регулирующие подсистемы на этом рисунке,
кроме пучковых, совпадающих по структуре
со своими системами регулирования, лишены
главного цикла. Все системы регулирования
на этом рисунке обладают главным циклом.
Главный цикл возникает здесь в результате
объемлющего присоединения динамических
диад, которым получены здесь системы регу-
лирования из своих регулирующих подсистем
(в этом способе диада присоединяется к край-
ним точкам регулирующей подсистемы). На
рис. 6-2 объемлющее присоединение динамиче-
ских диад дано в конструктивной схеме при-
менительно к пучковым системам регулирова-
ния. Здесь система регулирования сохраняет
структуру своей регулирующей подсистемы,,
поскольку последняя также получена после-
довательным объемлющим наслоением диад
233.
Входное замещение Выходное замещение
Система регулирования Система регулирования
Рис. 6-2. Присоединение объекта к регулирующей системе.
JJI. 42]. Регулирующие подсистемы всех
остальных систем регулирования на рис. 4-33
получены необъемлющим наслоением диад, и
здесь структура систем регулирования не сов-
падает поэтому со структурой их регулирую-
щих подсистем.
Системы без главного цикла.
Необъемлющим присоединением динамиче-
ских диад можно получить регулирующие си-
стемы без главного цикла (рис. 6-3). Здесь
цикл, содержащий объект, не является глав-
ным циклом, поскольку он не содержит одно-
го из элементов системы — замкового. Замко-
вые элементы в этих системах с центральным
выключением не входят в усилительную цепь
и являются чисто стабилизирующим устрой-
ством, производящим централизованное вы-
ключение всех остальных элементов, лишен-
ных здесь собственных выключателей. Вну-
тренние связи у всех элементов, входящих
в цикл объекта, замещены в этих системах
полностью. Это приводит к еще более высо-
кому быстродействию, чем у систем с глав-
ным циклом, где по меньшей мере у одного
элемента (замкового) внутренние связи
остаются незамещенными.
Объемлющим присоединением диад в си-
стемах входного замещения сохраняется свой-
. ство покрытия, необъемлющим — не сохра-
няется. Этим объясняется наличие этого
свойства у пучковых систем входного заме-
щения и отсутствие — у всех остальных систем
входного замещения. По этой же причине не
наследуют этого свойства от своих пучковых
регулирующих подсистем системы регулиро-
вания на рис. 6-3,а.
Наличие главного цикла не является, та-
ким образом, структурным признаком, отде-
ляющим системы регулирования от следящих
систем, как это вытекало, на первый взгляд,
из таблицы на рцс. 4-33. Таких структурных
признаков не существует, поскольку оба по-
нятия относятся не к динамической, а к функ-
циональной структуре системы. Задачей си-
стем регулирования является определенная
реакция системы на возмущение объекта,
определенная передаточная функция в глав-
ном канале «объект—объект». Задачей следя-
щих систем является определенная реакция
системы на управляющее воздействие, опреде-
ленная передаточная функция в неглавном
канале «входной элемент — выходной эле-
мент». Обе функционально различные задачи
могут решаться одной и той же динамической
структурой. Поскольку задачей систем регу-
лирования является также определенная ре-
акция и на управляющие воздействия (зада-
ние), системы эти могут рассматриваться как
следящие системы: по отношению к заданию
системы регулирования являются следящими
системами.
Каноническая по знакам система коорди-
нат различна для входных и выходных систем.
Если в тех и: других системах считать для
объекта направлением положительного отсче-
та его координатной оси направление увели-
чения ф, то для всех остальных элементов —
регулятора и сервомоторов — положительным
234
Системы регулирования без главного цикла
Рис. 6-3. Системы регулирования без главного цикла.
будет направление закрытия во входных си-
стемах и открытия в выходных. В этих коор-
динатах статические перемещения всех эле-
ментов входных систем от крайних нагрузок
положительны, выходных—положительны, от-
рицательны или равны нулю (рис. 4-33). Этим
еще раз выясняется эталонное положение
входных систем и каноничность принятой си-
стемы координат.
г) Разветвленные системы
Транспонирование разветвленных систем
изменяет тип базовой системы: расходящаяся,
с расходящимися от ствола ветвями, базовая
система входных систем преобразуется в схо-
дящуюся, со сходящимися к стволу ветвя-
ми,— выходных (рис. 6-4).
На рис. 6-5 даны полученные этим спосо-
бом разветвленные нулевые системы регули-
рования и их регулирующие подсистемы, по-
лученные с помощью сложных обратных свя-
зей. В верхнем ряду произведено входное
(рис. а, Л) и выходное (рис. Л', а') замещение
в рядной базовой системе сложными статиче-
скими (содержащими статический промежу-
точный элемент) обратными связями. Оно, как
явствует из рисунка, сводится соответственно
к входному и выходному замещению в раз-
ветвленной базовой системе простыми стати-
ческими обратными связями. Входное замеще-
ние происходит здесь в расходящейся базовой
системе, выходное — в сходящейся. В обоих
случаях имеет место правильная базовая кон-
фигурация и образуются нулевые системы.
В нижнем ряду произведено входное и вы-
ходное замещение в рядной базовой системе
сложными интегральными (содержащими
астатический, интегрирующий промежуточный
элемент) обратными связями. Оно сводится
к входному и выходному замещению в развет-
235
одною за.ме1цвниЬ s б ыходное замещениз
Рис. 6-4. Входные и выходные разветвленные системы.
Ра з ве т в л в н н ы в с и с т е м ы :
Выходное замещение в сходящейся базовой системе входное замещение в расходящейся базовой системе
б) неправильная конфигурация
Рис. 6-5. Разветвленные регулирующие и следящие системы.
236
Структурно неустойчивые системы'.
а) по недостатну связей
Рис. 6-6. Структурно неустойчивые системы.
вленной базовой системе простыми статиче-
скими связями. Здесь, однако, входное заме-
щение сложными связями приводит к выход-
ному замещению простыми связями, притом
в расходящейся базовой системе (рис. 6, 5),
выходное же замещение сложными связями —
к входному замещению простыми связями,
притом в сходящейся базовой системе
(рис. Б', б'). В • обоих случаях имеет место
неправильная базовая конфигурация и, как
следствие, ‘ структурная неустойчивость. При-
чинами неправильной конфигурации в раз-
ветвленных системах могут явиться: 1) сме-
шанное (входное и выходное) замещение,
2) входное или выходное замещение в сме-
шанной (частично расходящейся, частично
сходящейся) базовой системе, 3) входное за-
мещение в сходящейся базовой системе и вы-
ходное— в расходящейся (рис. 6, Б, Б', б').
Неправильность конфигурации этих систем
может быть понята с еще одной точки зре-
ния. Сложные связи этих систем являются
и простыми интегральными связями. Нало-
жение этих избыточных интегральных связей
на нулевые системы может привести, по теоре-
ме связывания, и действительно приводит в
рассматриваемом случае, к потере структур-
ной устойчивости, поскольку оно повышает ин-
тегральный порядок системы. В рассматривае-
мом случае потеря устойчивости вызвана тем,
что интегральные связи являются обратными
связями. Прямые интегральные связи приво-
дят к устойчивым, притом изодромным систе-
мам [Л. 87].
Отклонение от полного числа связей
(рис. 6-6,а) и правильной конфигурации
(рис. 6-6,6), тем более оттого и другого вме-
сте (рис. в), влечет за собой потерю струк-
турной устойчивости. На рис. 6-6 нарушения
эти произведены в системах трех последних
строк рис. 4-33. Полученные при этом системы
все структурно неустойчивы.
Б. Критерий нормальной структурной устойчивости
Мы рассмотрели в действии принцип
локальной связанности. Для доказательства
его необходимо располагать критерием нор-
мальной структурной Устойчивости. Рассмот-
ренная выше теория структурных отношений
обнаруживает этот критерий.
а) Покрывающие полиномы
Характеристические полиномы линейных
систем представляют собой частный случай
структурных полиномов — полиномов с пара-
метрически заданными коэффициентами.
Структурные полиномы, являющиеся характе-
ристическими полиномами физических систем,
и сами эти системы, назовем физическими си-
стемами. Структурные полиномы эти всегда
237
могут быть представлены некоторой конфигу-
рацией физических связей. К ним относятся
все рассмотренные-выше структурные полино-
мы. Произвольного вида структурные полино-
мы не являются, вообще говоря, характеристи-
ческими полиномами физических систем, од-
нако могут обладать теми же общими струк-
турными свойствами — структурной устойчи-
востью и т. д., что и характеристические по-
линомы. Это позволяет считать их также си-
стемами— математическими системами, а их
одночленные слагаемые — математическими
связями. Добавление новых таких слагаемых
назовем математическим связыванием. Для
физических систем, являющихся частным ви-
дом систем математических, верны все отно-
сящиеся к последним теоремы.
Аналогия между физическими и математи-
ческими системами может быть последова-
тельно продолжена. Подобно физическим си-
стемам математические системы могут нахо-
диться в отношении пересечения, покрытия,
двустороннего покрытия и эквивалентности.
Важнейшими из покрывающих математиче-
ских систем являются характеристические по-
линомы элементарной системы (5-22) и пуч-
ковых входных:
U2U2 ...и2 p2m +U2U2 ...и2 Tmp2m~1 +
+ + • • • +
-J- t/SaS3... Smp2 T. Smp -f-
+ ,.Sm=0 (6-1)
и выходных:
• -U2mP2m+Tjj2ij2.. +
+ SJJ2U2... U2 p2<m~l>-\-S,T2U2U2. . . I
1 x 2 з 1 1 * a 4 ms 1
. t/2p2(’»-a> +... +
+ s3sa... sm_jj2mp2+SA... 8т_хттр+
+ад...$т=о (6-2)
систем. Назовем эти покрывающие полиномы
и их одночленные слагаемые—математические
связи (циклические члены характеристиче-
ского определителя — члены, образованные со-;
четанием циклов, рис. 5-21, 5-22), соответст-
венно,— элементарными, входными и выход-
238
ными. Полиномы и члены смешанной (из эле-
ментарной, входной и выходной структур)
структуры назовем смешанными. Циклические
члены покрывающих полиномов назовем ске-
летнымиони образуют, условно выражаясь,
скелет характеристического полинома, опре-
деляющий устойчивость системы. Элементар-
ные скелетные члены будут подчеркиваться
одной чертой, входные и выходные — двумя,
смешанные—тремя. Статические параметры S,
фигурирующие во входном и выходном поли-
номах (6-1) и (6-2), равны единицам для этих
статически определимых систем. В этих поли-
номах остается, таким образом, Р независи-
мых параметров (Р— порядок системы), по
числу отображающих уравнений. Это соответ-
ствие числа параметров статически определи-
мых систем числу отображающих уравнений
достигается только в канонических относи-
тельных координатах, в которых число пара-
метров принимает наименьшее значение, а са-
ми параметры эти становятся критериями по-
добия.
Математическим аналогом нулевых физиче-
ских систем являются структурные полиномы,
обладающие, при полном (т. е. наименьшем
для нормально устойчивых систем данного по-
рядка) числе математических связей, нормаль-
ной структурной устойчивостью. Это наимень-
шее число математических связей — членов
характеристического полинома равно для
устойчивых систем порядку системы. Нор-
мально устойчивые математические системы
с полным числом связей назовем нулевыми.
Примером нулевых математических систем яв-
ляются характеристические полиномы всех
рассмотренных выше покрывающих систем —
элементарной и пучковых. В отличие от физи-
ческих нулевых систем, могущих быть покры-
вающими и непокрывающими, математические
нулевые системы всегда являются покрываю-
щими. Теорема 6-II. Нулевые математиче-
ские системы являются покрывающими. Тео-
рема явствует из одночленности обоих частей
отображающих уравнений таких систем.
Подобно тому, как необходимым и доста-
точным условием нормальной структурной
устойчивости физической системы является на-
личие в составе ее, по меньшей мере, одной,
нулевой физической подсистемы, условием
нормальной структурной устойчивости мате-
матической системы является наличие в соста-
ве ее, по меньшей мере, одной математической
нулевой системы — одного, по меньшей мере.
. покрывающего полинома. Поскольку физиче-
ские системы являются частным видом мате-
матических, последним условием доставляет-
ся аналитический критерий (скелетный Крите-
рай) нормальной структурной устойчивости
физических систем, позволяющий доказать
такие геометрические критерии, как ^принцип
локальной связанности.
б) Скелетный критерий
Назовем скелетными физические и матема-
тические системы, содержащие одну, по мень-
шей мере, нулевую подсистему, соответствен-
но.— физическую и математическую. Нулевые
подсистемы являются подлинным скелетом
физических и математических систем, посколь-
ку в обоих случаях скелетность, физическая и
математическая, является необходимым и до-
статочным условием нормальной структурной
устойчивости. Лишенные этого скелета систе-
мы либо структурно неустойчивы, либо обла-
дают вырожденной структурной устойчи-
востью. Чтобы доказать это, рассмотрим свой-
ства и отношения, определяемые скелетностью
систем.
К математическим системам относятся все
теоремы отношений (теорема 5-1—5-XVI), по-
лученные выше для физических систем. Для
искомого аналитического критерия особое зна-
чение имеет теорема пересечения (теорема
5-XIV), определяющая множественные отно-
шения, возникающие при связывании. Нор-
мальная структурная устойчивость представ-
ляет собой множественное структурное свой-
ство, включающее в себя такие подсвойства
как структурная апериодичность, структурная
монотонность. Критерий этого множественного
свойства следует искать в множественных от-
ношениях систем. Теорема 5-XIV (назовем ее
теперь теоремой физического пере-
сечения) для математических систем пере-
ходит в теорему математического
пересечения (теорему 6-Ш): математиче-
ским связыванием сохраняется пересечение си-
стем в областях положительных свойств. Тео-
рема явствует из непрерывной зависимости в
отображающих уравнениях корней от коэффи-
циентов. Теорема физического пересечения,
данная выше без доказательств, является про-
стым следствием теоремы математического пе-
ресечения. Она хорошо поясняется рассмот-
ренным выше (§ 5-3) семейством одноцикли-
ческих систем: все системы этого семейства
получены связыванием открытой системы и пе-
ресекаются поэтому со всеми положительными
свойствами этой системы — апериодичностью
и монотонностью, т. е. обладают соответствую-
щими позитивными структурными подсвойст-
вами—структурной апериодичностью и струк-
турной монотонностью.
Так же как из теоремы физического пере-
сечения вытекает теорема физического связы-
вания (теорема 6-1), из теоремы математиче-
ского пересечения вытекает теорема мате-
матического связывания (теорема
6-IV): математическим связыванием сохраня-
ются позитивные структурные подсвойства.
Теорема пересечения представляет собой бо-
лее сильное утверждение, устанавливающее не
только наличие этих свойств у производной.
(связанной, полученной связыванием) систе-
мы, но и наследование их от исходной (связы-
ваемой) системы.
Из теоремы математического связывания
вытекает теорема математической
скелетности (теорема 6-V): достаточ-
ным условием нормальной структурной устой-
чивости математической системы является ма-
тематическая скелетность — наличие в соста-
ве системы одной, по меньшей мере, нулевой
математической подсистемы. Поскольку нуле-
выми математическими системами являются
по теореме 6-II только покрывающие полино-
мы, из теоремы математической скелетности;
вытекает скелетный критерий (теоре-
ма 6-VI): достаточным условием нормальной
структурной устойчивости физических систем;
является их математическая скелетность — на-
личие в их составе одного по меньшей мере*
покрывающего полинома. Отсутствие некото-
рых позитивных структурных подсвойств яв-
ляется не единственным признаком вырожде-
ния. С учетом всех остальных признаков вы-
рождения скелетный критерий является не
только достаточным, но и необходимым усло-
вием нормальной структурной устойчивости.
Этим определяется центральное место era
в этой задаче. Скелетный критерий послужит
в дальнейшем основным методом синтеза ну-
левых систем. Им доказываются все теоремы,
главы IV.
Для физических систем возникают, таким
образом, два равносильных критерия нор-
мальной структурной устойчивости: 1) физи-
ческая скелетность (наличие одной, по мень-
шей мере, физической нулевой подсистемы),
2) математическая скелетность (наличие од-
ной, по меньшей мере, математической нуле-
вой подсистемы — покрывающего полинома).
Из равносильности обоих критериев явствует,
что второй является необходимым и доста-
точным аналитическим критерием первого.
Для избыточно связанных физических си-
стем критерием нормальной структурной
устойчивости может явиться первый крите-
рий— физическая скелетность, наличие в их
составе нулевой подсистемы. Критерий этот не
может, однако, служить для предшествующей
задачи — распознания самих нулевых систем.
<23^
Рис. 6-7. Первый покрывающий полином открытой системы.
Эта задача может быть решена с помощью
только второго критерия — математической
скелетности. Возможность эта определяется
тем, что математические нулевые системы яв-
ляются подсистемами всех физических нуле-
вых систем. Физическое связывание равно-
сильно многократному математическому свя-
зыванию (наложение физической связи вызы-
вает появление в характеристическом полино-
ме одного, по меньшей мере, вообще же —не-
скольких новых членов — новых математиче-
ских связей).
в) Кратчайшие системы
Назовем полными математическими и фи-
зическими системами системы, обладающие
полным (необходимым для нормальной струк-
турной устойчивости) числом математических
и физических, соответственно, связей. Для фи-
зических систем число это равно, по структур-
ной формуле, сумме несобственных и собст-
венных связей: (ш—1)+Р; для математиче-
ских систем оно равно степени полинома Р,
т. е. числу только собственных связей физиче-
ских систем. Полной математической системой
является структурный полином, содержащий
по одному члену каждой степени.
Математические и физические системы
с недостатков или избытком математических
и физических связей, против этих двух чисел,
назовем, соответственно, недостаточными и
избыточными системами. И в математических
и в физических системах недостаточность яв-
ляется достаточным условием структурной не-
устойчивости или вырожденной устойчивости,
^40
полнота же и даже избыточность — лишь не-
обходимыми, но недостаточными условиями
нормальной структурной устойчивости. По-
следняя требует, кроме полного числа связей,
правильной конфигурации их. Это и обеспечи-
вается для тех и других систем скелетностью.
Полные и избыточные системы могут, таким
образом, не быть нулевыми системами.
Физические системы, чей характеристиче-
ский полином является полной математиче-
ской системой, т. е. имеет кратчайший вид, на-
зовем кратчайшими системами. Полные мате-
матические системы и, следовательно, крат-
чайшие физические, могут быть, по теореме
6-П, либо покрывающими, либо ненулевыми.
Промежуточный случай — нулевых, но непо-
крывающих кратчайших систем — здесь ис-
ключен. Теорема 6-VII: кратчайшие нуле-
вые физические системы являются покрываю-
щими. Выше рассмотрены были нулевые и,
следовательно, кратчайшие физические систе-
мы (элементарная и пучковые системы).
В дальнейшем рассмотрены будут ненулевые
кратчайшие системы — структурно неустойчи-
вые или вырожденно устойчивые.
г) Доказательство принципа локальной
, * связанности
Докажем с помощью скелетного критерия
теорему о входном замещении и с нею — прин-
цип локальной связанности.
Теорема содержит два утверждения:
1) о нормальной структурной устойчивости
входных систем, 2) о нулевое™ этих систем.
Докажем их в этой последовательности.
1-й покрывающий
полином
3-й покрывающий
полином
2-й покрывающий
полином
u^iPe^iiT„ps^^i„p\ ।
+1^г^1пР3+^гг1^пРг'>'1г2^зз1пР+1г^\ *1htVaP ★ЦвМггрг+ЪМггР
+ГГ-27
4-й покрывающий 5-й покрывающий 6-й покрывающи-й
полином полином полином
Рис. 6-8. Разложение характеристического определителя открытой системы иа покрывающие полиномы.
Разложение на покрывающие полиномы.
Рассмотрим структуру характеристического
полинома открытой нулевой системы (рис. 6-7).
Индексы при единицах здесь и в дальнейшем
обозначают представленные этими единицами
исключившиеся статические параметры. Бу-
дем производить развертывание этого уравне-
ния (перемножение скобок) следующим обра-
зом. Выделим сначала первый из содержа-
щихся в нем входных покрывающих полино-
мов, показанный на рис. 6-7 в циклической
форме. Буквами «и т. д.» обозначены все ос-
тальные, не вошедшие в этот полином цикли-
ческие члены характеристического определи-
теля. Можно и эту часть уравнения разложить
на покрывающие полиномы. Для этого доста-
точно изменить порядок скобок, т. е. порядок
элементов в системе, как это показано на
рис. 6-8. Каждый из возможных порядков по-
рождает один покрывающий полином. Общее
число покрывающих полиномов в характери-
стическом полиноме открытой системы равно
m (!).
Однако сумма покрывающих полиномов не
образует еще характеристического полинома.
В нее не входят семь нескелетных цикличе-
ских членов (обозначим их через Е), показан-
ных на рис. 6-9, и входит в то же время ряд
повторяющихся скелетных циклических чле-
нов. Так, (6—1) раз повторяются члены
Ц1^22^зз Р6 и I11I22I33, отличаясь в различ-
ных покрывающих полиномах только поряд-
ком сомножителей; (6—3) раза повторяются
члены типа U2U2Tp5; (6—3) раза повторяются
члены типа С721/21р4; (6—3) раза повторяются
члены типа (7211. Общее число повторяющих-
ся членов, обозначим их F, равно здесь: F=
=2(6—1) -4-4(6—3)=22. С помощью разложе-
ния на покрывающие полиномы характеристи-
ческий полином открытой нулевой системы мо-
жет быть записан в виде: SG = 2D+SE—SF,
где SG — сумма всех циклических членов ха-
рактеристического полинома открытой систе-
мы, 2D— сумма всех скелетных членов пг (!)
покрывающих полиномов открытой нулевой
системы. Общее число членов G характеристи-
ческого полинома m-элементной открытой ну-
левой системы элементов р-ro порядка равно
(р+1). Для системы на рис. 6-8 число это рав-
но (2 + 1)3=27. Общее число всех скелетных
членов D равно (Р+1) пг (!), где Р—порядок
всей системы. Для системы на рис. 6-8 оно
16 И. И. Гальперин.
241
ООО
ufi Тег^ззР4
Ъг^ззР3
8 О О
/// т33р*
Рис. 6-9. Нескелетные члены характеристического поли-
нома открытой системы.
равно (3*2+1) *3* 2 • 1=42 (все эти члены да-
ны на рис. 6-8). Прибавляя к этому последне-
му числу 7 нескелетных членов Е и вычитая из
него 22 повторяющихся скелетных члена F,
получим 27 циклических членов характеристи-
ческого полинома этой открытой системы. Та-
ким же образом характеристический полином
открытой системы мог бы быть разложен на
выходные покрывающие полиномы. Заметим,
что каждый из входных и выходных покрыва-
ющих полиномов открытой нулевой системы
содержит параметры всех связей системы
(рис. 6-7 и 6-8). Снятие хотя бы одной из свя-
зей разрушает поэтому все покрывающие по-
линомы открытой системы.
Теорема о входном замещении. Докажем,
что входное замещение оставляет неразруша-
емым первый входной покрывающий полином
открытой системы и поэтому образует нор-
мальные структурно устойчивые системы. Про-
ведем это доказательство сначала для рядных
(рис. 6-10), затем для разветвленных
(рис. 6-11) систем.
Начнем с замыкания открытой системы
(рис. 6-10,а) в цикл, заместив внешней стати-
ческой связью внутреннюю статическую связь
первого элемента (рис. 6). От снятия внут-
ренней связи разрушаются все скелетные чле-
ны, содержащие параметр 1ц. В каждом из
покрывающих полиномов разрушится скелет-
ный член нулевой степени, и все покрывающие
полиномы окажутся разрушенными. Замеща-
ющая внешняя статическая связь вносит один
лишь новый циклический член 114I21I32I43, об-
разованный статическими связями вновь воз-
никшего главного цикла. Член этот является
скелетным. По первым индексам своим он
принадлежит первому покрывающему полино-
му и восстанавливает его, замещая разрушен-
ный член 1 п I22I33I44. Входное замещение свя-
зей привело лить к замещению скелетных чле-
И сходн ая нулевая рядная система
входное замещение
+ ЪгШн^ЪРггЪзЬчР +,/4 * +ЪТггЪзЧьр2+Ти12ь1згЬзР^Ь^гвзг^з + +г1Мзг14зР * 12взгЪз * +7//
+ и.гп.д.=О
ht ht ?зз ha
+ и.т.д.—О + и.т д.-О
Замещаемые скелетные члены
ТпЬгЬзвМьР Th ^zz ?зз PZ
Замещающие скелетные члены
Ъ/ Uzz f33рэ
Рис. 6-10. Доказательство теоремы о входном замещении для рядных систем.
3) Тп U22 f3k ’ЬзР-
£42
А) Снятие внутренней связи Б) ВхЬдное замещение В) Снятие внутренней связи
циклической обратной связью
Г) входное замещение нецин*
пачесной обратной связью
У2 Угг Узз U** У55 Уббр19 * У2Угг УззУ2ь У25ТббР
................... • + U2y32t33lW*551B6P
Г - - 1+У иггз гзз i f55 ^sP
'Ыгл^з^^вв
УпУггУззУ^УззУббР12^ У2УггУ^У2Щ55 ^ббрП+
............... *и2Угггзз1*нй55{вбр£ *
*У„ Т2б f53 f^zгзз,вбрЛ * У2izzhs^WbbP2 *
Mies *
У2У2ги^ у25УмР*+ УпУяУМУ&Т№рп^
*УиУггУззУ2ьУ551ббР,° +1 ~ 1 +
^УпУгзУззУ^зз^ббР2 *..................*
+ hp22133 55^68 и /П d. ^=0
*4/ m.d ~0
У2 УггУзз уЛ у/з УббР*^УпиггУззУа>У55 ТббР +
^УиУггУззУ^У^ббР ^+1 . —J4,
^УиУиУззУ^55^вбр8 *.......................
+ЬРзг*зз55l6S ♦ Уп^зз^яв^^^гУззР *
+ и. тд. = О
а) Разрушенный, скелетный член 8) Замещающий скелетный
член
© 8
Рис. 6-11. Доказательство теоремы о входном замещении для разветвленных систем.
в) Разрушенный скелетный г) Нескелетный член, вносимый
член нециклической обратной связью
. 243
нов в первом входном покрывающем полино-
ме, сохранив его целость. Это обусловило нор-
мальную структурную устойчивость получен-
ной системы. Проведем вторую внешнюю
связь (рис. в), замещающую внутреннюю ста-
тическую связь второго элемента. Снятие внут-
ренней связи разрушит все циклические чле-
ны, содержащие параметр Ьг. В каждом из'
покрывающих полиномов разрушится по од-
ному циклическому члену (различной степе-
ни), и все покрывающие полиномы окажутся
разрушенными. Замещающая внешняя связь
вносит один лишь новый циклический член —
член первого порядка. Этим скелетным чле-
ном восстанавливается один лишь из разру-
шенных входных покрывающих полиномов —
первый. И здесь входное замещение оставило
неразрушенным первый входной покрываю-
щий полином.
Проведем третью внешнюю связь, заме-
стив теперь внутреннюю связь первого поряд-
ка (связь с параметром Т22) во втором эле-
менте (рис. г). Снятие этой внутренней связи
разрушает все покрывающие полиномы от-
крытой цепи. В первом входном покрываю-
щем полиноме оно разрушит член T11T22I33I44P2.
Снятая внутренняя связь замещается при
входном замещений того же порядка внешней
тормозящей обратной связью с параметром
Т23. Этой внешней связью вносится в первый
входной покрывающий полином скелетный
член ТцТ24I3214зР2, восстанавливающий разру-
шенный член третьего порядка и с ним — пер-
вый покрывающий полином (рис. г). Это вос-
станавливает структурную устойчивость систе-
мы. Остальные входные покрывающие поли-
номы этой связью не. восстанавливаются.
И здесь входное замещение привело к заме-
щению членов в первом, неразрушимом при
таком замещений покрывающем полиноме и
к еще более глубокому, чем в случаях бив,
разрушению остальных покрывающих поли-
номов. Входное замещение заканчивается пуч-
ковой системой (рис. д), в которой характери-
стический полином образуется одним лишь
первым входным покрывающим полиномом,
остальные же полностью разрушены. Нераз-
рушимым во всех операциях входного замеще-
ния остается первый покрывающий полином.
Во всех входных системах содержится, таким
образом, по меньшей мере, один входной по-
крывающий полином, а именно первый. В со-
ответствии со скелетным критерием все эти
системы обладают нормальной структурной
устойчивостью. Первая часть теоремы о вход-
ном замещений доказана.
Нормальные преобразования, эквивалент-
ные в частности, должны, поскольку ими со-
244
храняется структурная устойчивость, сохра-
нять покрывающий полином, лишь преобразо-
вывая его в другую форму. Так, при транспо-
нировании входных систем их входные покры-
вающие полиномы переходят в выходные.
Чтобы доказать вторую, часть теоремы
о входном замещении — нулевость систем
входного замещения, достаточно заметить, что
каждая из связей исходной открытой системы
(рис. а) входит своим параметром во все по-
крывающие полиномы этой системы. Снятие
в ней хотя бы одной из связей разрушает все
ее покрывающие полиномы и лишает систему
нормальной структурной устойчивости.
Чтобы распространить это доказательство
на разветвленные системы, достаточно было
бы показать, что в таких системах существу-
ет индексация, при которой первый входной
покрывающий полином не разрушается вход-
ным замещением. Такой индексацией явля-
ется введенная выше каноническая индекса-
ция. При этой индексации все рассуждения и
выводы, приведенные для рядных систем, пол-
ностью повторяются для разветвленных сис-
тем. Это показано на рис. 6-11. На рис. А в
исходной открытой нулевой системе снята од-
на из внутренних связей, на рис. а показан
разрушенный этим скелетный член. На рис. Б,
б показано входное замещение этой внутрен-
ней связи и возникающий при этом замещаю-
щий скелетный член. Этим доказывается тео-
рема о входном замещений и для разветвлен-
ных систем.
Замещающей способностью обладают толь-
ко собственные связи, образующие цикл с не-
собственными связями системы (независимая
циклическая реализация связи). К ним отно-
сится обратная связь на рис. Б и все вообще
обратные связи, соединяющие элементы ство-
ла или, как на рис. 5, идущие от ветвей
к стволу. Такие связи назовем циклическими.
Обратные связи, идущие от одной ветви к дру-
гой, не образуют циклов с несобственными
связями и не являются поэтому циклическими,
хотя и могут образовывать циклы с помощью
собственных связей (зависимая циклическая
реализация связи). Нециклические обратные
связи не вносят скелетных членов и не обла-
дают поэтому замещающей способностью. Это
показано на рис. В и Г. На рис. В снята еще
одна внутренняя связь (в 5-м элементе). На
рис. в дан разрушенный при этом скелетный
член. На рис. Г показано замещение этой свя-
зи нециклической обратной связью, на рис. г—
единственный вносимый ею член. Член этот
не является скелетным, и, следовательно,
связь не обладает замещающей способностью.
6-2-2. Локально неразрешимые системы
В локально разрешимых системах замеща-
ющая способность каждой связи не зависит
от конфигурации всей системы. Вопрос о воз-
можности замещения каждой из внутренних
связей соответствующей внешней связью ре-
шается здесь локально—только для этих двух
связей. Это сообщает задаче неожиданную
простоту. В локальна неразрешимых системах
вопрос этот решается нелокально — конфигу-
рацией всей системы, и задача усложняется.
Основная часть локально неразрешимых систем
приводится (по общему числу связей и по
нормальной устойчивости) нормальными,
в частности — эквивалентными, преобразова-
ниями к локально разрешимым системам. Та-
кие системы назовем приводимыми в отличие
от неприводимых систем, не сводящихся нор-
мальными преобразованиями к локально раз-
решимым системам.
Рассмотрим задачу синтеза нулевых си-
стем в этой последовательности.
А. Приводимые системы
Особенностью систем входного и выход-
ного замещения, определившей их локальную
р азрешимость, является равнопорядковое,
равнозначное и равноориентированное заме-
щение— замещаемые внутренние и замещаю-
щие внешние связи обладают в этих системах
одинаковыми порядком, знаком и ориентаци-
ей (считая, что внутренние связи являются
кратчайшими обратными связями и, следова-
тельно, обладают одинаковой с последними
ориентацией). Локально неразрешимые нуле-
вые системы образуются неравнопорядковым
(разнопорядковым), неравнозначным (разно-
значным) и неравноориентированным (разно-
ориентированным) замещением.
а) Разнопорядковое замещение
В нулевых системах, образованных нерав-
нопорядковым замещением, возможно заме-
щение внутренних связей внешними связями
только равного или превышающего порядка
и невозможно замещение”связями уступающе-
го порядка.
Разнопорядковое замещение следует раз-
делить на два случая: замещение в бездиа-
гональных системах — наиболее схематически
решаемый случай, и замещение в диагональ-
ных системах — более сложный случай.
Бездиагональные системы. До-
статочные условия синтеза бездиагональных
нулевых систем даются простейшим прави-
лом — замещением в непрерывной очерёдно-
сти (рис. 6-12). Случай этот относится к за-
мещению главными- внешними связями, следо-
вательно, к системам с главным циклом. Си-
стемы на рис. 6-12 обладают несколькими
главными циклами. В число главных связей
входят здесь все несобственные прямые свя-
гзи и собственная главная обратная связь. Эти
статические связи образуют исходный стати-
ческий главный цикл. В число главных связей
входят и все остальные собственные связи, об-
разующие со связями исходного главного ци-
кла все остальные, производные нестатические
главные циклы. И исходный и производные*
главные циклы охватывают все элементы си-
стемы. Все внешние связи систем на рис. 6-12
входят в главные циклы, исходный и произ-
водные, и являются главными связями.
Непрерывные (т. е. без пропусков) очеред-
ности снятия внутренних связей показаны,
в левой части таблицы на рис. 6-12, нало-
жения главных внешних связей — в правой ча-
сти этой таблицы. Непрерывную очередность,
при которой снимаются последовательно сна-
чала все внутренние связи -одного элемента,
затем следующего и т. д., назовем последова-
тельной очередностью снятия в отличие от па-
раллельной очередности, где сначала снима-
ются у всех элементов связи нулевого поряд-
ка, затем связи первого порядка и т. д. Ана-
логично, непрерывную очередность, при кото-
рой налагаются последовательно связи всех
порядков между двумя какими-нибудь элемен-
тами, затем между двумя другими элемента-
ми и т. д., назовем последовательной очеред-
ностью наложения в отличие от параллельной
очередности наложения, где сначала налага-
ются между каждыми двумя последователь-
ными элементами связи нулевого порядка, за-
тем первого порядка и т. д. В смешанной не-
прерывной очередности снятия и наложения
смешаны последовательная и параллельная
непрерывные очередности. Теорема оче-
редности (теорема 6-VIII): замещение
в нулевой открытой системе внутренних свя-
зей, снятых в любой непрерывной очередности,
главными внешними связями, наложенными
в любой непрерывной же очередности, обра-
зует нулевые системы.
В нижнем ряду рис. 6-13 теорема показана
в действии. Здесь дано девять нулевых систем,,
получающихся замещением любой из очеред-
ностей левой части таблицы любой очеред-
ностью .соответствующего столбца правой ча-
сти таблицы. На рис. 6-13 замещение это про-
изведено лишь для IV и 4-го столбцов правой
и левой частей. Таким же образом оно могло*
бы быть произведено для любых двух столб-
цов этой таблицы, в том числе и для не вме-
стившихся в таблицу V и VI, 5-го -и 6-го столб-
цов. В VI столбце должны были бы быть сня-
245
В) Смешанная Б)Параллельная А) Последовательной
Исходная
открытая килевая система
в) Смешанна» 6) Параллельная (^Последовательная
Ms=(m-l)tLpi =(т-1)+тр=(3-1)+3 2=8, VS=MS-KS=8-8=O
Характеристические уравнения ;
системы Аа : ^^р^и^^р^и^р^ $3+!£рг+ Ър*]^ 0 ,
системы AS -• UnЦ^ззР *^22^33PSt^п^ггР^*ЪзУзгР^Тя'ЪгР*'’'ЪР Ър*+ ЪР**ЪзР *Тз?Р = 0}
системы Ав л Ц11^гг^ззР6^^п^^ззР5'1'^1^ггР^+^г1^гР3^^21Рг Т&Р + 1 * ^21ТзгР2 О
Рис. 6-12. Разнопорядковое замещение (теорема очередности).
ты все внутренние связи элементов и достиг-
нуто полное замещение.
Теорема очередности распространяет тео-
рему Стодола на системы и связи произволь-
ного порядка. В подчиняющихся ей системах
отсутствуют диагональные связи. Такие систе-
мы назовем бездиагональными в отличие от
диагональных систем, содержащих такие свя-
зи. Теорема доказывается скелетным критери-
ем. На рис. 6-13 показана скелетность трех пер-
вых систем нижнего ряда. Первая из них яв-
ляется кратчайшей и покрывающей, две ос-
тальных—некратчайшими, не покрывающими.
В первой смешаны скелетные члены двух
структур—входной и элементарной, во второй
трех структур—входной, элементарной и сме-
шанной (принадлежность той или иной струк-
туре отмечена подчеркиванием). Также до-
казывается скелетность всех остальных си-
стем, удовлетворяющих условиям теоремы
очередности, что доказывает теорему.
Диагональные системы. Для диа-
гональных систем задача неравнопорядкового
замещения решается с помощью скелетного
критерия.
Снятие одной из связей в исходной откры-
той нулевой системе вызывает разрушение
всех ее входных покрывающих полиномов.
При этом в различных покрывающих полино-
мах разрушаются члены различного порядка.
Восстановить структурную устойчивость систе-
мы можно, восстановив, внесением соответст-
вующих связей, любой из т (!) покрывающих
полиномов. «Чинить», условно выражаясь, ча-
стично разрушенные покрывающие полиномы
можно либо тем же «материалом» (напри-
мер, частично разрушенные входные покрыва-
ющие црлиномы членами входных же покры-
246
Исходная открытая нулевая система
TjUlp34-T&ff+Ttf +2* " m.6. = 0
Снятие внутренних связей в последовательной непрерывной очередности
1S==S ^SSSS^SSSS SS^^S^Z SSSE^SSS SSSS^SS^^SSK 5SSSSSSSS ^^SSSSSS XS^SSS^S^S^S СЖ1
+ TjP *1 1+ и m.d. = O +1 1*1 \+и m.d.=O *1 1*Г \+um.d=O *1 1*1 1—0
Замещение внешними связями
вающих полиномов, как это имеет место во
входном замещений), либо покрывающими
членами каких-либо иных, элементарного или
смешанного, покрывающих полиномов. Чтобы
исчерпать все возможные структурно устойчи-
вые системы заданного состава, следует вы-
делить все покрывающие полиномы, содержа-
щиеся в открытой системе этого состава, и,
снимая в определенном порядке внутренние
связи элементов этой системы, восстанавли-
вать затем в каждом из покрывающих поли-
номов разрушенный в нем при этом снятии
скелетный член наложением соответствующей
внешней связи.
Этот общий порядок синтеза методом по-
крывающих полиномов показан на рис. 6-13.
247
•Здесь внутренние связи последовательно сни-
маются и замещаются внешними, восстанав-
ливающими разрушенный снятием внутренних
связей первый входной покрывающий поли-
ном. Этот способ синтеза приводит к типовой
для задачи структурной устойчивости правой
треугольной матрице нулевых систем
(рис. 6-13). Внутри заполненного треугольни-
ка матрицы располагаются системы с замеще-
нием внешними связями превышающего по-
рядка. Пустующий левый треугольник матри-
цы свидетельствует о невозможности замеще-
ния связями уступающего порядка. Правая
главная диагональ матрицы, разделяющая оба
треугольника, образуется входным замещени-
ем связями равного порядка, подчиняющимся
теореме о входном замещении. Таблица замы-
кается пучковой системой.
На рис. 6-13 в первой строке матрицы внут-
ренние связи открытой системы снимаются
в последовательной непрерывной очередности.
В такой же последовательной непрерывной
очередности наложены на систему во второй
отроке внешние связи. Чтобы исчерпать зада-
чу синтеза систем с непрерывными очередно-
стями, следовало бы построить матрицы нуле-
вых систем для всех возможных непрерывных
(последовательной, параллельной и смешан-
ной) очередностей. Матрицы эти, опускаемые
здесь, имели бы ту же типовую треугольную
форму, что и матрицы на рис. 6-13.
Матрица на рис. 6-13 обладает типовой
структурой. По диагонали ее расположены ис-
ходные входные локально разрешимые систе-
мы, по столбцам — локально неразрешимые
системы, полученные из этих исходных систем
удлинением связей, в соответствии с рассма-
триваемой ниже теоремой охвата, по стро-
кам— системы, полученные из исходных си-
стем очевидным из построения матрицы об-
щим способом, который можно было бы на-
звать обобщенной теоремой очередности. В ча-
стности, верхняя горизонталь представляет
доказательство теоремы очередности для слу-
чая последовательной очередности. Матрица
нулевых систем содержит, таким образом, до-
казательство теоремы о входном замещении,
теоремы очередности, теоремы охвата. Теоре-
ма очередности доказана здесь лишь дляслу-,
чая последовательной очередности. Составив
такие же матрицы для остальных правильных
очередностей, можно доказать ее для общего
случая. Крайний правый столбец содержит
только кратчайшие покрывающие системы.
В этой матрице синтез ведется методом
восстановления первого входного покрываю-
щего полинома. Можно многократно увели-
чить число нулевых систем того же состава,
248
восстанавливая остальные входные покрыва-
ющие полиномы. Для этого следовало бы, ме-
няя расположение элементов в исходной от-
крытой системе, выделить все входные покры-
вающие полиномы и налагать внешние связи
так, чтобы они восстанавливали разрушения,
причиняемые каждому покрывающему поли-
ному снятием внутренних связей, т. е. постро-
ить треугольные матрицы для каждого из воз-
можных расположений элементов в этой цепи.
Это сделано в таблице на рис. 6-14 для одно-
го лишь случая прерывной очередности сня-
тия внутренних связей. На этом рисунке сня-
та внутренняя связь первого порядка у регу-
лятора— его катаракт, минуя статическую
внутреннюю связь, т. е. в прерывной очередно-
сти. Таблица эта решает, следовательно, зада-
чу Вышнеградского — о регулировании адис-
сипативным регулятором, подобно тому как
таблица на рис. 6-13 решает задачу Стодо-
ла — о регулировании астатическим регулято-
ром. Решение этой задачи производится ука-
занным выше общим способом. Для выделе-
ния всех m (!) покрывающих полиномов и,
этим способом, — всех возможных решений
меняется расположение элементов в открытой
системе, подобно тому как это делалось в та-
блице на рис. 6-8. Снятие катаракта регуля-
тора разрушает в различных покрывающих
полиномах члены различного порядка. Дол-
жен изменяться и дифференциальный порядок
замещающих внешних связей.
Задача приводит к такой же треугольной
матрице, в которой диагональ, образованная
входным замещением связями равного поряд-
ка, отделяет допустимое замещение связями
превышающего порядка от недопустимого,
приводящего к неустойчивым системам, заме-
щения связями уступающего порядка. Систе-
мы в матрицах на рис. 6-13 и 6-14 могут быть
все транспонированы и число полученных в
них нулевых систем еще удвоено. Диагональ
входных систем переходит в матрице транспо-
нированных систем в диагональ выходных си-
стем. Эти последние матрицы следует назвать
выходными, в отличие от входных матриц на
рис. 6-13 и 6-14.
Системы на рис. 6-13 и 6-14 лишь в не-
большой мере раскрывают множество всех
возможных нулевых систем, построенных на
четырехэлементной подсистеме А. Все 10 си-
стем матрицы на рис. 6-15 построены на базе
одного лишь первого покрывающего полинома
открытой системы А. Такая же матрица мог-
ла бы быть построена на базе каждого из
zn(!) =24 покрывающих полиномов этой от-
крытой системы. Этим были бы исчерпаны
(притом лишь частично, поскольку замещаю-
Исходная открытая нулевая система
^^P4&+T^PJ+TiT2Pe+JiP
Снятие внутренних связей в прерывной очередности
Замещение внешними связями
щие внешние связи на рис. 6-13 можно еще
многими способами варьировать) одни лишь
системы с непрерывными очередностями сня-
тия и наложения связей. Системы с прерыв-
ными очередностями также лишь в небольшой
мере исчерпываются матрицей на рис. 6-14,
построенной на базе четырех покрывающих
полиномов. Число возможных нулевых систем
одинакового состава—динамических изомеров,
как мы их назвали, таким образом, весьма ве-
лико. Среди них, после восстановления исход-
ного расположения элементов, окажется зна-
чительное число систем с прямыми диагональ-
ными связями.
17 И. И. Гальперин.
249
Vs=O
Ъф + Рз = о
Tzfit — ф + р3 = О
Т3Рг “ Pi + Рз = О
Ърз-рг + Рз - О
Ър1+ Ф + Ткф = о
ТгРг + Т&Ф “Pt = О
ЪРз + Ьф-Рг - О
Т$ф ~Рз“О
ТМ + ф+Ъф+и^Ф =0
Тгрг-Р1 +и»ф = О
ТзРз ~Рг и О
ТаФ~ Рз * О
Т^+ф + Т*ф+и£ф+$ф =0
ТгРг~Р1 *“0
Тзрз-Рг “О
Т^Ф-Рз -О
Характеристические
уравнения
тТ^ + ЪТгТзрР+Т,^
+ Т}р- 1 =0
ТцР
-J
О
о
О
тггР
-1
О
О 1
о 1
Тззр 1
-1 fcp+i
Т}ТгТ3Т^+ mrf+T'T&fi ^ТгТзТ^+Т^+и^р2
+Ткр + 1-0
+ Тпр + 1 = 0
Т,ТгТ3Т4р^р3+1^рг-
★T^p + I =0
при.
Tip
о
Ър
-1
о
Ткр+1
t&p+i
Т3Р Т^р+1
-1 Т.р
при
Тг
Тз
И
Г«
Тг
Тз
Ъ
Т»
-1
о
о
О
ТгР
-1
О
OO&T^i)
О Ц*Рг
ТзР О
-1 1,р
при.
1
Т>
Тг
Тз
к
,ТК
TiP
-1
о
Тгр
— 1
о
ТзР
-1
О
О
Т.Р
=0
о
о
о
о
Г3Я ||ТЛ|
Рис.
6-15. Разнопорядковое замещение (повышение порядка
обратных замещающих связей).
Синтез методом покрывающих полиномов
важен тем, что, идя «облавой» на все возмож-
ные устойчивые системы, исключает воз-
можность упустить какую-нибудь из них. Ряд
получаемых при этом систем (например, си-
стемы с прямыми диагональными связями) не
представляет практического интереса, зато ни
одна из систем, могущих иметь практическое
значение, не может быть пропущена.
Как явствует из матрицы прерывного за-
мещения на рис. 6-14, бездиагональные нуле-
вые системы могут быть получены и замеще-
нием в прерывной очередности. В обоих слу-
чаях, прерывного и непрерывного замещения,
локальная неразрешимость систем с неравно-
порядковым замещением предстает в наибо-
лее явном виде. Способ замещения внешней
связью очередной внутренней связи зависит от
того, в какой очередности, прерывной или не-
прерывной, замещены были все предшествую-
щие связи. Вопрос этот не может быть, следо-
вательно, решен для этих двух связей ло-
кально.
Докажем приводимость нулевых систем,
полученных разнопорядковым замещением. На?
рис. 6-15 показан алгоритм повышения поряд-
ка замещающих связей. Пучок тормозящих
обратных статических связей, идущих от по-
следнего элемента системы (рис. а), эквива-
лентен пучку тормозящих обратных связей
первого порядка, идущих от последнего эле-
мента (рис. б). Этот последний пучок связей
по отношению к исходной системе а «сдвинут»
к началу системы на один элемент. Кратчай-
шая из пучка статических связей исходной си-
стемы а — внутренняя статическая связь,
охватывающая один элемент, переходит в про-
изводной системе во внешнюю диагональную
связь первого порядка, охватывающую два
элемента. Следующая по длине, внешняя уже,
статическая связь исходной системы, охваты-
вающая два элемента, переходит в связь пер-
вого порядка, охватывающую три элемента.
Наконец, диагональная статическая связь,
охватывающая три элемента, переходит
в главную связь первого порядка. Одновре-
250
менно с повышением на единицу порядка об-
ратных связей они удлиняются по длине охва-
тываемого ими участка базовой подсистемы
на один элемент. Главная статическая связь
исходной системы а остается незамещенной
в производной системе б, поскольку в послед-
ней нет более длинных связей. Этот процесс
удлинения диагональных связей и повышения
их порядка продолжен в системе в и завер-
шен в системе г заменой всех диагональных
статических обратных связей системы а глав-
ными, т. е. наиболее длинными, связями соот-
ветственно повышенного порядка. Доказа-
тельство эквивалентности этих систем исход-
ной пучковой системе дано на рис. 6-15. Вза-
имно однозначное соответствие пространств
параметров обеих систем указано на этом ри-
сунке матричными равенствами.
Все четыре системы на рис. 6-15 являют-
ся кратчайшими покрывающими системами.
Эквивалентные преобразования преобразуют
здесь входной покрывающий полином систе-
мы а в смешанные покрывающие полиномы
систем б — г.
Назовем порядком охвата обратной связи
сумму дифференциальных' порядков охваты-
ваемых ею элементов базовой подсистемы. По-
рядок охвата каждой из пучка связей исход-
ной системы а, при преобразовании ее в систе-
му б, повышается на единицу, в систему в —
йа два, в систему г— на три. Можно было бы,
разумеется, увеличивать порядок охвата не
всего пучка связей, а каждой из связей пучка
порознь. Каждой из них соответствовало бы
в этом случае свое увеличение порядка охвата.
Теорема охвата (теорема 6-IX). Удли-
нение обратных связей с одновременным по-
вышением их дифференциального порядка на
величину повышения порядка охвата является
эквивалентным преобразованием. Доказатель-
ство теоремы дано с помощью скелетного кри-
терия в таблицах* на рис. 6-13, 6-14 (вер-
тикали таблиц). В крайнем своем выражении,
при переходе к бездиагональным системам
(рис. 6-15,г), теорема сливается с теоремой
очередности.
Система на рис. 15,г представляет собой
бездиагональную систему с последовательной
очередностью замещения, типа системы на
рис. 12,Л,а. Эквивалентностью системы на
рис. 15,г исходной системы а доказывается
приводимость класса диагональных систем.
Практические следствия этой теоремы по-
казаны на рис. 6-16. На рис. а даны два спо-
соба решения задачи Стодола о регулирова-
нии астатическим регулятором. Диагональная
статическая связь (рис. а) эквивалентна, в со-
ответствии с этой теоремой, главной связи по
17*
Рис. 646. Разнопорядковое замещение (повышение по-
рядка обратных замещающих связей).
производной (рис. А). Если учесть конструк-
тивную простоту первой связи и сложность
второй, требующей специального регулятора
по производной, может показаться достаточ-
ным во всех случаях выполнение диагональ-
ной статической связи и излишним выполне-
ние главной связи по производной. Однако об-
щей эквивалентностью систем а , и А опреде-
ляется лишь совместность общих свойств их
при весьма различных локальных свойствах.
Различны здесь и статические влияния (систе-
ма а неизодромна, система А изодромна) и
динамические (различны переходные процес-
сы— толчок нагрузки, приложенный к объек-
ту, мгновенно сообщает первому сервомотору
в схеме А полный импульс по производной,
в схеме же а — нулевой импульс; этим опре-
деляется высокое быстродействие и, соответ-
ственно, малое перерегулирование в системе А
по сравнению с системой а). Обе системы, та-
ким образом, практически далеко не равно-
ценны— статическая связь в системе а обла-
дает лишь частью преимуществ (относящихся
к общим свойствам — устойчивости, аперио-
дичности и т. д.) связи по производной в си-
стеме А.
На рис. 6-16,6 и в даны возможные реше-
ния задачи Вышнеградского способом входно-
го замещения диагональными связями. На
рис. Б и В замещение это преобразовано в со-
251
Исходная нулевая система
-1 тгр о о о +1
0-1 Т3р О 0+1
о 0-1 т4р о +1
о о 0-1 Т5р +1
0 0 0 0 -1 (Tsp+1)
Эн в и 6 ал е н m ны е
подстановки знаков
Vs=o
-т,р в
-1
о
о
0
-1
о
о
-Т3р о
о
о
о
о
-1
-1
~Ър
-1
о
о
о о
Т2р О
-1
о
ТзР
-1
о
о
о
И.Р
о
о
о
о
-1
-1
-1
+Т,р о
-1
о
о
+ТгР
-1
о
о
о
-ТзР
-1
о
о
о
о
о
о
о
+1
-1
О 0 0-1 -Т5р +1
0 0 0 0 ~1-(TSP+1)
^ткт6т6р6^ Т,ТгТ3Т<.Т6р5-> TJ^p3-t Т, + Ttp + 1 « О
0 0 0 —1 Т5р -1
0 0 0 0 -1-(ТерИ)
О 0 0 -1 +Т5р -1
0 0 0 0 - 1~(Т6р+1)
Рис. 6-17. Разнозначное замещение. »
ответствии с теоремой охвата, в замещение
главными связями более высокого порядка,
рассмотренное на рис. 4-6. Здесь, в силу ло-
кальной неэквивалентности (рис. 5-36), при
общей эквивалентности, правые системы обла-
дают более высоким быстродействием, чем
левые, и наиболее практически интересны.
Системы разнопорядкового замещения по
практической важности занимают следующее
за локально разрешимыми системами место.
В них решаются, в частности, обе структурные
задачи классической теории — Вышнеградско-
го и Стодола.
В системах на .рис. 6-15,6, в, г имеет место
в чистом виде разнопорядковое замещение —
знак и ориентация здесь совпадают у заме-
щающих и замещаемых связей, в отличие от
систем на рис. 6-12, где имеет место разнопо-
рядковое и одновременно разнозначное заме-
щение— тормозящие внутренние связи заме-
щаются возбуждающими внешними связями.
Рассмотрим разнозначное замещение в чистом
виде.
б) Разнозначное замещение
Разнозначное замещение в пучковых си-
стемах показано на рис. 6-17,6, в, г, где пока-
зана эквивалентность этих систем исходной
нулевой системе входного замещения а и, сле-
довательно, их приводимость. Эквивалент-
ность этих систем вытекает из тождественно-
го равенства их характеристических полино-
мов при равенстве метрических параметров
соответственных (имеющих общие индексы)
связей. Из эквивалентности систем б, в, г ну-
левой системе а явствует нулевость этих по-
следних систем.
На рис. 6 пучок тормозящих обратных свя-
зей системы а замещен пучком чередующихся
тормозящих и возбуждающих обратных свя-
зей. Одновременно все тормозящие внутрен-
ние связи элементов заменены возбуждающи-
ми. На рис. в тормозящей является одна
лишь главная связь, все же остальные—воз-
буждающими; на рис. г первые три связи пуч-
ка—тормозящие, последние три—возбуждаю-
щие?
252
Знак каждой замещающей внешней связи
в системах на рис. 6-17 определяется знаками
предшествующих ей элементов. Задала струк-
турной устойчивости не может быть, следова-
тельно, решена здесь локально — системы эти
локально неразрешимы.
Системы . разнозначного замещения на
рис. 6-17 не имеют того практического зна-
чения, какое имеют рассмотренные выше си-
стемы разнопорядкового замещения. Это опре-
деляется наличием в них таких необычных
пока составляющих, как элементы с отрица-
тельными временами. В то же время наличие
таких элементов сообщает высокое быстродей-
ствие системе, и не следует поэтому исклю-
чать возможность дальнейшего их практиче-
ского применения.
в) Разноориентированное замещение
Разноориентированное замещение в чистом
виде, т. е. замещение связей, отличающихся
только ориентацией (внутренних связей, пред-
ставляющих собой, как пояснялось выше,
кратчайшие, вырожденные обратные связи,
прямыми и обратными внешними связями) и
совпадающих по порядку и знаку, приводит
к структурно неустойчивым системам. Струк-
турно устойчивые системы можно получить
при разноориентированном и одновременно
разнозначном замещении. Устойчивость эта
носит, однако, вырожденный характер.
На рис. 6-18 дано смешанное по ориента-
ции и знакам полное входное (левая часть та-
блицы) и выходное (правая часть таблицы)
замещение тормозящих внутренних связей
возбуждающими прямыми и тормозящими об-
ратными связями. Заметим прежде всего, что
прямые связи непосредственно не образуют
циклов с базовой системой, но могут образо-
вывать с ней циклы с помощью обратных свя-
зей. Все они, в частности, образуют циклы
(циклическая реализация) с помощью глав-
ной обратной связи (рис. 6-18). Наличие глав-
ной обратной связи достаточно поэтому для
циклической реализации всех диагональных
прямых связей и в системах с главным цик-
лом все прямые связи циклически реализуют-
ся (рис. 6-18). В обличие от обратных связей,
циклическая реализация которых происходит
только с помощью несобственных связей и не-
зависима поэтому от конфигурации остальных
собственных связей, от конфигурации систе-
мы (независимая циклическая реализация),
циклическая реализация собственных прямых
связей происходит с помощью собственных
же обратных связей и зависит, таким образом,
от конфигурации системы (зависимая цикли-
ческая реализация). Зависимой становится
ехиднее замещение выходное замещение
Рис. 6-18. Разноориентированное замещение.
при этом и замещающая способность прямых
связей, в отличие от совершенно независимой
замещающей способности обратных связей.
Зависимая циклическая реализация не сооб-
щает, однако, прямым связям той правильной
замещающей способности, которой обладают
независимо реализующиеся обратные связи.
Поясним это на простейших примерах. Си-
стемы на рис. 6-18,а и б образованы чередую-
щимися прямыми и обратными связями, обра-
зующими в совокупности разбросанный пучок
связей, содержащий по одной связи каждой
длины. В этом смысле системы эти аналогич-
ны пучковым системам. В системе а замеще-
ние идет от периферии системы к центру ее,
в системе б — от центра к периферии. Соот-
ветственно в системе а замковый элемент за-
нимает периферийное, а в системе б — цен-
тральное положение. Это незначащее, каза-
лось бы, различие сообщает этим системам
различные свойства: система а — структурно
неустойчива, система б — структурно устойчи-
ва. Устойчивость эта носит, однако, вырож-
денный характер, система б, как показано бу-
дет в дальнейшем, структурно неапериодична.
Число V8 означает здесь число связей, недо-
стающее системе для нормальной структурной
253
Рис. 6-19. Разнотипное замещение (повышение порядка прямых замещающих связей).
устойчивости. В данном случае рно равно
двум — числу неправильно замещенных (пря-
мыми возбуждающими связями, лишенными
замещающей способности) внутренних связей.
Вырожденной устойчивостью обладают не
только пучковые системы с полным замеще-
нием от центра к периферии (рис. б), но и си-
стемы с неполным замещением от центра к пе-
риферии (рис. в).
В общем случае разноориентированное
входное и выходное замещение приводит
к структурно неустойчивым системам (рис. г,
д). Это явствует из того уже, что в нем могут
возникать заведомо неустойчивые системы без
замкового элемента (рис. г). Для таких си-
стем тождественно равен нулю член (Р—1)-го
порядка характеристического полинома Р-го
порядка.
Фазноориентированное замещение образу-
ет, таким образом, системы неправильной кон-
фигурации, приводящей к структурной не-
устойчивости либо к вырожденной структур-
ной устойчивости. Системы эти, следователь-
но, неприводимы. Вырождение вновь возника-
ет здесь как следствие неправильной конфи-
гурации.
г) Разнотипное замещение
Разноориентированное замещение, даже
будучи совмещенным с разнозначным заме-
щением, неспособно, как выяснилось в преды-
дущем разделе, образовывать нулевые систе-
мы. Однако в совмещении с разнопорядко-
вым замещением (такое совмещение разнопо-
рядкового, разнозначного и разноориентиро-
ванного замещения назовем разнотипным за-
мещением) оно может приводить к нулевым
системам.
Нулевые системы разнотипного замещения
показаны на рис. 6-19. На рис. а дана исход-
ная пучковая система входного замещения.
На рис. б, в, г она\квивалентно преобразова-
на в производную систему с возбуждающими
прямыми, 1-го (рис. б) и затем все повышаю-
щегося (рис. в, г) порядка, диагональными
связями. Эквивалентность этого преобразова-
ния вытекает из соответственного тождества
систем рис. 6-19 системам рис. 6-15. Каждая
из систем рис. 6-19 получается из обозначен-
ной тем же индексом системы рис. 6-15 про-
стым тождественным преобразованием — пе-
реносом последнего элемента системы в нача-
ло ее и инверсией координатной оси этого эле-
мента. Из приводимости систем рис. 6-15 явст-
вует поэтому приводимость систем рис. 6-19.
Системы на рис. 6-19 не являются, таким
образом, новыми системами, а представляют
лишь тождественные перестроения систем на
рис. 6-15. Перестроения эти позволяют по-но-
вому понять эти последние системы. Эквива-
лентные преобразования на рис. 6-19 можно
рассматривать как алгоритм повышения по-
рядка прямых замещающих связей, подобно
тому как преобразования на рис. 6-15 указы-
вают алгоритм повышения порядка обратных
замещающих связей. Оба алгоритма связаны
между собой тождественными преобразова-
ниями. Поясним эту связь и саму возможность
повышения порядка замещающих связей бо-
лее детально.
Пучковая система на рис. 20,а описывает-
ся уравнениями:
ЛЛ +н,=0;
— Ф +рз=°;
Лз^г—h + ii3=0;
ЛиНз —Рз + |*з = 0- (6-3)
Из уравнения объекта определим р.3 через ф:
^=-Гиф. (6-4)
Подставляя (6-4) во все остальные уравне-
ния системы (6-3), получаем новую систему:
ЛхФ + 1*3=0;
Лзй1 —Ф — Л1Ф1=°;
т’ззНз — р-х — Л1Фз=0;
^з-Рз-Т'хх^О, (6-5)
совпадающую в силу уравнения (6-4) с систе-
мой (6-3) при всех значениях параметров. Си-
стемы (6-3) и (6-5) связаны смешанным,
структурным и метрическим преобразовани-
ем — в~ производной системе преобразована и
254
Уравнения систем
Туф + рз = о
Т22 p.f — ф + уз = О
Тззрг ~pi + уз = О
fays ~Рг + уз ~ °
Туф + у3 = о
Т22У1 “ ф ~ Ъф = °
Тззуг ~ pi ~ Т&ф — О
Т^уз ~ уг ~ 1мФ ~ О
Ъу, + т^ф. + ф = о
Тггуг + Тг4ф - р = о
Тззуз + Ъчф ~ уг= О
тыФ ~уз=0
Характерис m иче ские уравнения
~1\Р
-1
О
О
О 0 1
T2tP °, 1
--- \ТцР О О
при: -(Тг^вТггР ' О
Тп&зз^Р ЧЪЪрЧ&P^P+f ~Т>> ТггТззТлР^^Рзз^Р^Т^Т^рг+ Тг1р+1 — Т* T^T^p^+Tj, T^Tg^pP+T,, T^p^T^p-^I^O
Рис. 6-20. Тождественность разнотипного замещения разнопорядковому и эквивалентность — равнопорядковому.
матрица знаков исходной системы и матрица
параметров ее. Содержащееся в этом смешан-
ном преобразовании структурное преобразо-
вание— только матрицы знаков — имеет вид:
Т'иф + f, = Q-,
Г>2-ф-Г2,ф = 0;
т^ззНз p*i ^зхФ =0;
^Л-^-Г41ф=0. (6-6)
Штрихами обозначены здесь и в дальней-
шем параметры производных систем.
Система показана на рис. 21,6. Здесь тор-
мозящие обратные статические связи исходной
системы а заменены возбуждающими прямы-
ми первого порядка.
Докажем, что системы а и б эквивалентны.
Приравняем для этого коэффициенты при
членах -одинаковых степеней характеристиче-
ских уравнений обеих систем:
Т 111 т'„
Т 1 и т 1 11 Т 1 22 т т 1 22 л 33 == г31 Т’ 1 41 тг 1 22 тг 1 22 Т'зз • (6-7)
т 1 11 ^22 33 ^44 тг 1 11 тг л 22 'ГТ 'ГГ 1 33 1 44
Этими уравнениями устанавливается сле-
дующее взаимно однозначное соответствие то-
чек пространств параметров обеих систем и,
следовательно, эквивалентность систем:
т 1 11 Tf 1 11
т J 22 тг 1 22
т 1 33 Tf 1 33
Г' 1 44 (6-8)
Ttl Г'21
т 1 11 Т'31
т 1 11
255
Нулевая открытая система
а)
Ненулевы е открытые системы
Vs~2
V~2
vs~l
*^+CZZI+u т.д.*0 *1 \ч-1_ + ит.д.*0 + Тпр +| |+ и
Нулевые структурно уст ойчивые
ТпТггТззТ&Р * TnT&fap +TnTgP* ТпТггГззЪР** ^пЪ^ззР ^У^ггР* *L—I*
~ - _ • — ।/ + ц m.d.=Q
систем Ы
ЕвЭ
^тЛик /Ш^ЕК^ЕКТ^кк Ла
1
о
Л
ТпТгРззТ'АР*'*’ Тп ТггГззР^ТЦ^)-
’ ’ 1=0
SzJnP + + и т.<
<?
m.i.sQ +Тнр + i
/и!^Ш?ЯЗ?жк Л1К^2
(^(W© те
ПУцР4 + ТяЪгЪз^Р
*r*p+1
>0<
*1 + и maSi'O
'Л5>*5Лв-2
ZkTU
xfNW
^Лдк
К
1
Э5ТЕ
<*>
УпЫъР** ^ггЪзР^О^э^)
TtilQpZ+fylfip+fa+i/ т&=0
<S>
<s>
Ч,
al
Ыг-2
» 0
Ek
Структурно неустойчивые системы
o«?J
zfi
^К-Л/5—/ _______
/ШЛ^АЛ(2
>!И
SEk
\. r„W^W^
+ 814 + и т-&
2
2
jjk^l
3
^)^^s==^i^~2
zUx^UkSlilWSk
&.ЬЫ»р4*
+ 7j,p +S„+ и т.д.-0
ТпТ&ТззЪр** I ,
+ Т*Р * 2 * а т &
Рис 6-21. Статически связные неприводимые системы,
!56
Пространства параметров обеих систем
имеют здесь различную размерность, посколь-
ку в производной системе статические связи
с исключающимися параметрами замещены
связями нестатическими с неисключающимися
параметрами. Отображение является поэтому
взаимно однозначным, но не непрерывным.
Системы находятся в отношении двусторонне-
го покрытия, но не эквивалентности. Оба от-
ношения, однако, устанавливают одинаковую
связь между структурными свойствами систем
и будут в дальнейшем обозначаться общим
термином — эквивалентность и общим симво-
лом — двусторонней стрелкой.
Систему б, с пучком прямых замещающих
связей, можно с помощью указанного выше
тождественного преобразования преобразо-
вать в систему в, с пучком обратных замеща-
ющих связей. Условия тождества, как условия
эквивалентности выше, даны на рис. 6-21 в ви-
де матричных равенств.
Пучковая система входного замещения эк-
вивалентна, таким образом, двум тождествен-
ным рядам предельно быстродействующих си-
стем— на рис. 6-15 и 6-20. Это не означает,
однако, что она обладает всеми теми же дина-
мическими свойствами, что и эти системы. По-
скольку здесь имеет место лишь общая, а не
локальная эквивалентность систем, совпада-
ют лишь общие свойства; локальные свойства
этих систем, в том числе быстродействие, не
совпадают. В каждой из двух таблиц, на
рис. 6-15 и 6-19, быстродействие систем нара-
стает, идя слева направо. В обоих случаях
пучковая система является наименее быстро-
действующей.
Однотипное, входное и выходное, замеще-*
ние всегда, в силу принципа локальной свя-
занности, приводит к нулевым системам. Бес-
порядочное, разнотипное замещение приводит
в общем случае к структурно неустойчивым
системам. Только будучи связанным нормаль-
ными преобразованиями с нулевыми система-
ми однотипного замещения, разнотипное за-
мещение способно образовывать нулевые си-
стемы.
К приводимым системам относятся также
интегральные нулевые системы. Все они сво-
дятся нормальными преобразованиями к диф-
ференциальным системам выходного замеще-
ния (Л. 87].
К нормальным преобразованиям, образую-
щим класс приводимых локально неразреши-
мых нулевых систем, относятся все рассмот-
ренные выше способы замещения, поскольку
замещение оставляет неизменным общее чис-
ло связей системы. Класс этот весьма широк
и, таким образом, намного превышает класс
исходных локально разрешимых систем. Этим
определяется важность образующих их нор-
мальных преобразований. Неменьшую прак-
тическую важность представляет и более уз-
гкий класс —неприводимых локально разре-
шимых нулевых систем.
Б. Неприводимые системы
Нормальные преобразования оставляют неиз-
менным общее число связей системы. Число
является, таким образом, инвариантом этих
преобразований — полным числом связей для
всех приводимых систем. Нулевые системы с
полным числом связей уступающим числу
или превышающим его, заведомо неприво-
димы поэтому. Нормальных нулевых систем
первого вида — с уступающим числу пол-
ным числом связей — не сущест-
вует, приводимые системы обладают наимень-
шим возможным для нормальных нулевых си-
стем полным числом связей Напротив,,
получить нулевые системы с полным числом
связей превышающим число
>М(% не составляет труда. Примером таких
систем являются системы гироскопической ста-
билизации (рис. 4-23). Для этих систем —
— 1, однако ни одна из связей не может
быть отброшена без потери системой струк-
турной устойчивости. Системы эти являются,
следовательно, нулевыми, требующими, однако^
для нулевости большего числа связей,
чем приводимые нулевые системы. Этим
определяется неприводимость таких систем-
Превышение будет указываться на!
структурных схемах неприводимых систем вме-
сте с числом Vg, определяемым для неприво-
димых систем той же общей формулой, что и
для приводимых:
Va = Me-Ns. (6-9)»
Для суждения о неприводимости нулевой-
системы достаточно, таким образом, установить
в ней превышение числа Ms над числом М^-
Нулевые системы, общее число связей которых
равно всегда приводимы, как это пока-
зано было выше на примере разнопорядкового,
разнозначного и разнотипного замещения.
Неприводимые системы могут быть разби-
ты на два класса: статически связных и ста-
тически несвязных систем. Приводимые ста-
тически несвязные системы приводятся к ста-
257
тически связным локально разрешимым систе-
мам. Для неприводимых систем такое приве-
ление невозможно.
а) Статически связные системы
В основе приводимых нулевых систем ле-
жат нулевые же открытые системы. Неприво-
димые системы с возбуждающими связями, по-
строены на ненулевых открытых системах
с возбуждающими внутренними связями
(рис. 6-21, бь б2, в3, в4), чем и обуславливает-
ся неприводимость их. Возбуждающие связи
в этих системах обладают сниженной валент-
ностью (§ 4-2-1, рис. 4-14). •
Рассмотрим вопрос о числе связей нуле-
вых неприводимых систем, т. е. о наименьшем
числе связей в структурно устойчивых систе-
мах этого класса. Для этого следует выявить
наименее разрушенный покрывающий поли-
ном исходных нулевых открытых систем. Наи-
меньшие разрушения первому покрывающему
полиному открытой нулевой системы
(рис. 6-21,а) возбуждающие внутренние свя-
зи наносят в том случае, когда они располо-
жены в начале системы, как это показано
в строке 61—б4. При этом в первом входном
покрывающем полиноме становятся отрица-
тельными, т. е. разрушаются: 1) при одной
возбуждающей связи — один скелетный член
нулевой степени (рис. б^, 2) при двух воз-
буждающих связях — один член первой степе-
ни (рис. б2), 3) при трех возбуждающих свя-
зях— два члена, второй и нулевой степеней
(рис. б3), 4) при четырех возбуждающих свя-
зях— два члена, третьей и первой степеней
(рис. б4). При пяти и шести возбуждающих
связях разрушаются три члена, при семи и
восьми — четыре члена и т. д. Число разру-
шающихся скелетных членов, равное числу
степеней неустойчивости, для открытой систе-
мы с более чем одной возбуждающей связью
меньше числа возбуждающих связей.
Для открытых систем, представляющих
вырожденный случай — распадающиеся на
части квазисистемы, — это аналитическое оп-
ределение числа степеней неустойчивости, как
числа недостающих скелетных членов, не
совпадает с очевидным физическим определе-
нием, по которому число степеней неустойчи-
вости открытой системы равно сумме степе-
ней неустойчивости отдельных элементов. Со-
гласно последнему определению, число это
равно для системы б2 не единице, а двум, для
системы б3 — не двум, а трем и т. д. На
рис. 6-21 указаны числа степеней неустойчиво-
сти, соответствующие аналитическому опреде-
лению — числу недостающих скелетных чле-
нов.
258
Это свидетельствует о том, что возбужда-
ющие связи могут иметь стабилизирующее
влияние. С аналитической стороны это стаби-
лизирующее влияние выражается способно-
стью возбуждающих связей, если число их
больше единицы, вносить положительные ске-
летные члены в первый входной покрываю-
щий полином. Однако в отличие от тормозя-
щих связей число скелетных членов, вносимых
возбуждающими связями, не равно числу этих
связей, а меньше его. Это означает, что воз-
буждающие связи обладают меньшей валент-
ностью, что они неравноценны, неравновалент-
ны тормозящим связям и стабилизация с их
помощью возможна лишь при общем числе
связей, превышающем число Ms-
Поясним все это на примере. Системы
с возбуждающими связями могут быть стаби-
лизированы двумя способами: 1) игнорируя
слабое стабилизирующее действие возбужда-
ющих внутренних связей, 2) с учетом этого
стабилизирующего действия. В первом случае
стабилизирующие внешние тормозящие связи
проводятся так, как если бы возбуждаю-
щие внутренние связи отсутствовали. При
этом все возбуждающие связи оказываются
избыточными и могут быть оставлены в виде
избыточных связей (рис. г2) либо могли бы
быть отброшены. Этот случай сводится к рас-
смотренным уже выше законам замещения
внутренних связей , тормозящими внешними.
Во втором случае число стабилизирующих
внешних связей берется равным числу разру-
шенных покрывающих членов, т. е. меньшим,
чем в первом случае. При этом либо только
часть возбуждающих связей (в статически за-
мкнутых системах г2, д3, е4, в3, г3 — первая
из возбуждающих связей) может быть отбро-
шена, либо ни одна из них (в статически не-
замкнутых системах в2, в4, г4, д4). В последнем
случае системы являются нулевыми, несмотря
на вынужденный (против приводимых систем)
избыток связей (Ms—Ns<0). Из избытка свя-
зей явствует уже, что эти нулевые системы
неприводимы. В первом случае системы так-
же являются нулевыми, поскольку избыточ-
ные возбуждающие связи не вносят здесь ске-
летных членов, т. е. обладают нулевой валент-
ностью. Одиночная возбуждающая связь всег-
да обладает нулевой валентностью (рис. в\).
Синтез систем с возбуждающими связями
приводит к тем же треугольным матрицам ну-
левых систем (рис. 21). Системы, располагаю-
щиеся по диагонали матрицы, аналогичны си-
стемам входного замещения в том смысле; что
разрушенные введением возбуждающих свя-
зей покрывающие полиномы восстанавлива-
ются в^этих системах тем же способом, что и
во входном замещении. Восстановление раз-
рушенных скелетных членов всех остальных
систем треугольной таблицы на рие. 6-21 про-
изводится тем же способом, что и в таблицах
на рис. 6-13 и 6-14.
В последней строке рисунка помещены лишенные
покрывающего полинома и потому структурно неустой-
чивые системы. Системы эти не входят в состав матри-
цы, содержащей только устойчивые системы. Утвержде-
ние, что одна из этих неустойчивых систем (система
ж2) содержит покрывающий полином и этим опровер-
гает скелетный критерий (Ф. iP. Г а н т м а х е р, «Ав-
том. и телемех.», 1953, № 1), элементарно ошибочно,
как явствует из рисунка, вместе с иными приводивши-
мися в этой дискуссии опровергающими примерами.
Все они основаны на игнорировании смысла записи
уравнений в относительных координатах. Запись эта
представляет собой запись в критериях подобия с наи-
меньшим числом параметров—критериев подобия. Ос-
тавляя в уравнениях системы произвольное число па-
раметров и оперируя ими, авторы этих примеров легко
доказывают и опровергают любые положения [Л. 87].
В отличие от матриц приводимых систем
на рис. 6-13 и 6-14, матрица на рис. 6-21 со-
держит перечисленные выше системы с избы-
точными связями. Связи эти не отброшены
затем лишь, чтобы не нарушить структуру
таблицы.
б) Статически несвязные системы
Наиболее важными системами этого клас-
са являются гироскопические системы. К ним
относится рассмотренная выше структурная
теорема классической механики — теорема
Кельвина о четном числе неустойчивых степе-*
ней свободы. Следует определить место этой
теоремы в общей структурной теории.
В книге рассмотрены только системы постоянной
структуры, главным образом линейные. Из нелинейных
систем рассмотрены лишь релейные модели этих линей-
ных систем. Такое ограничение материала вызвано тем,
что в этом именно классе систем решаются вопросы
общей концепции всего предмета. Теория систем пере-
менной структуры, выросшая в последние годы на ба-
зе той же задачи структурной устойчивости и задачи
оптимального управления, целиком принадлежит одно-
сторонней механике, и дальнейшее развитие ее долж-
но определиться в первую очередь пониманием этой
принадлежности. В классической механике рассматри-
вается движение элементов неизменной структуры, се-
бетождественных элементов. Только в односторонней
механике снимается и это ограничение. Средствами ав-
томатики лишь потому удается осуществить элементы
и системы переменной структуры, что автоматика яв-
ляется материальной моделью этой механики. Одно-
временно и независимо возникший в квантовой меха-
нике и в автоматике, в первой — гипотетически, во
второй — материально, выход за пределы себетождест-
венных элементов и систем в обоих случаях принадле-
жит односторонней механике и ею только объеди-
няется.
Мы рассмотрели, таким образом, лишь ограничен-
ную область автоматики, подчинив это рассмотрение
новому построению предмета. Естественность такого
построения еще в большей мере выявляется в статике
этих систем и в исследовании более сложных систем—
многомерных систем, параллельно работающих систем,
везде, где выступают сложные системы систем и вопро-
сы динамической структуры их становятся решающи-
ми. Вопросы эти не могли полностью вместиться в ог-
раниченный объем книги. Еще менее могли быть осве-
щены метрические свойства и отношения — конечная
задача исследования, для которой структурная клас-
сификация является лишь подготовительной операцией.
Если на этом ограниченном материале удалось, хотя
бы неполно, показать в действии концепцию, указан-
ную заглавием книги, основная задача книги выполне-
на. Остальное является делом систематического иссле-
дования.
Основными направлениями этого исследования яв-
лялись до сих пор, в порядке их общности:
1) исследование логической структуры предмета;
2) исследование динамической структуры его систем;
3) расчленение структурных и метрических свойств;
4) выделение из числа первых центрального, системо-
образующего свойства — нормальной структурной
устойчивости и синтез устойчивых систем.
Первое из них связано с концепцией односторонней
механики, лишь сейчас с 20-летним запозданием встре-
чающей ясное понимание. Запоздание это вызвано бы-
ло не столько трудностью этой концепции, сколько ши-
роко использованным против нее оружием вульгарной,
и в этом своем качестве неуязвимой, критики, вольно
или невольно смешивающей выход за пределы класси-
ческой механики с покушением на внутреннюю целост-
ность ее, апеллирующую в этом вопросе логической
структуры к здравому смыслу и т. д. Этот этап остав-
лен сейчас теорией позади. Впереди ничем не стеснен-
ное систематическое построение автоматики как одно-
сторонней механики, лишь схематически очерченное
книгой.
Основоположной является здесь возможность пред-
ставить исходное понятие кибернетики — управление
как производное понятие — одностороннее действие.
В кибернетике оно вводится как первичное, неопреде-
ляемое понятие, если не считать определениями всякого
рода аналогии — технические, биологические и иные.
Оно, однако, может быть низведено в категорию вто-
ричных, определяемых понятий, сведено к существую-
щим естественнонаучным понятиям. Для этого доста-
точно лишь решиться назвать управление и его анти-
под — абсолютное подчинение своим, хотя и необыч-
ным именем — действием без противодействия, одно-
сторонним действием. Этот сейчас уже неоспоримый
шаг приводит к осмыслению автоматики как односто-
ронней механики — к выяснению природы предмета и
места его в системе естественных наук.
Второе направление, тесно связанное с первым,
пройдя этап чисто операторного и потому затруднив-
шего понимание этой связи исследования, возвращает-
ся в современной теории графов к прямому исследо-
ванию силовой структуры динамических систем, прямо
обнажающему эту связь. Оказавший столь значитель-
ные услуги исследованию сложной структуры динами-
ческих систем операторный метод оказался, по-види-
мому, недостаточно тонким орудием для исследования
элементарной их структуры, области действия элемен-
тарных законов — области аксиоматики предмета.
Следует заметить, что и теория графов далеко не
не адекватна еще содержанию динамических структур.
Возникнув из топологии линейно точечных комплексов,
когда безличные до этого линейные элементы этих ком-
плексов обогатились первым качественным признаком—
ориентацией и его символом — стрелкой, она все еще
ограничена этим недостаточно общим содержанием.
Чтобы охватить этой теорией содержание динамических
структур, следует дополнить этот первый качественный
признак линейных ее элементов еще по меньшей мере
259
тремя — знаком, дифференциальным порядком, релей-
ностью; (|езличные же точечные ее элементы—первым
качественным признаком в виде дифференциального по-
рядка устойчивости. Лишь после этого теория графов
достигнет общности существующего уже аппарата струк-
турного исследования динамических систем.
Третье направление возобладало со столь же зна-
чительным запозданием и *так эйе, по-видимому, реши-
тельно. Все новые и новые задачи перестраиваются
в нормальный порядок, где основанием для последую-
щего метрического исследования служит предшествую-
щее — упорядочивающее и классифицирующее — струк-
турное исследование (последней в этом ряду перестраи-
вающихся задач явилась задача помехоустойчивости).
Предшествовавший этому новому положению затянув-
шийся этап беспорядочного накопления чисто количе-
ственных зависимостей [аналогичный положению в хи-
мии середины прошлого века, когда «Знания, относя-
щиеся к количественной стороне химических превра-
щений, далеко опередили изучение качественных отно-
шений» (Менделеев)] в значительной мере преодолен,
хотя все еще недостаточно явно, без достаточно ясной
постановки вопроса о таком размежевании, без необ-
ходимого предшествования структурного исследования
метрическому. Все же недавние утверждения о том,
что такое размежевание и первый его эталон—теория
структурной устойчивости представляют второстепен-
ный интерес, прозвучали бы сейчас курьезом, и это от-
четливо измеряет возросшую зрелость предмета.
Четвертое направление привело к необычной и
в высокой мере поучительной для ближайшей истории
автоматики ситуации. Сама задача структурной устой-
чивости также после многолетней борьбы стала необ-
ходимой частью современного изложения теории регу-
лирования. В большинстве этих изложений господст-
вуют, однако, всякого рода нейтральные заменители
радикальной теории. Общие и простые принципы ее—
динамическая валентность, локальная связанность, ис-
черпавшие общую задачу синтеза нормальных систем,
вытеснены сложными таблицами, перебирающими едва
обозримое и все еще относящееся к простейшим систе-
мам число случаев. Игнорирование этих общих реше-
ний простейшим же образом достигается здесь отказом
от нормальной классификации и смещением нормы
с вырождением. Сопротивление это следует понять
прежде всего в его обусловленности.
Структурное исследование обнаружило изоморф-
ность задачи структурной устойчивости широкому ряду
таких же задач из совершенно иных областей. Этот
изоморфизм разъясняется теорией информации. Собст-
венные связи системы несут информацию о ее состоя-
нии. Число их, устанавливаемое общей теорией струк-
турной устойчивости, равно сумме порядков элементов,
т. е. размерности фазового пространства системы. Свя-
зи эти несут, таким образом, полную информацию о
состоянии системы; полное число связей означает пол-
ноту информации, избыточное их число—избыток ин-
формации, -недостаточное число—(недостаток информа-
ции. Устойчивые системы различной структуры разли-
чаются только распределением этой информации, полно-
та же ее остается для них неизменным условием. Это
условие sb равной мере относится к линейным и нели-
нейным системам, системам постоянной и переменной
структуры. Если в последних уменьшается число свя-
зей самой структуры, то возникают связи, идущие к пе-
реключающему эту структуру устройству, в свою оче-
редь являющемуся частью новой структуры. Общее
число связей остается при этом неизменным—диктуе-^
мым условием полной информации. Необходимым и до-"
статочным условием нормальной структурной устойчи-
вости является полная информация; достаточным усло-
вием является избыточная информация; недостаточная
информация приводит к потере нормальной структур-
ной устойчивости. Проблема структурной устойчивости
представляет собой информационную проблему, дина-
мические связи—информационные связи. Связью с пол-
нотой информации объясняется центральное место за-
дачи нормальной структурной устойчивости в общем,
семействе структурных задач.
Теория структурной устойчивости с ее понятиями,
о динамической валентности, полном числе динамиче-
ских связей и числе степеней неустойчивости занимает,
таким образом, в теории динамических систем то же
место — вводной главы предмета, какое для систем
кинематических занимает теория подвижности с ее по-
нятиями о кинематической валентности, полном числе-
кинематических связей и числе степеней свободы. По-
нуждаемое этой концепцией перестроение предмета не
могло избегнуть обычной оборонительной реакции сто-
ронников существующего состояния его, в столь же
обычных формах — всякого рода безобидных сурро-
гатов радикальной теории, и основанных на них опро-
вержениях этой теории. Об уровне структурных пред-
ставлений, достигаемом в этих частных теориях, можно
судить по тому, что опровержения эти начаты были,
опровержением теоремы связывания. После крушения
этого тезиса, утверждающего восстановление структур-
ной устойчивости при уменьшении информации, опро-
вержение продолжено было, не говоря о главным об-
разом ошибочных системах, с помощью различного ро-
да вырожденных систем, где структурная устойчивость
выступает в неполном объеме — лишена тех или иных,
своих нормальных подствойств: структурной апериодич-
ности, структурной монотонности и т. д. Такая ущерб-
ная, вырожденная структурная устойчивость может
быть достигнута и при неполной информации.
Этот, все разъясняющий общий взгляд и вытекаю-
щее из него деление систем на нормальные и вырож-
денные могут быть достигнуты лишь в объемлющей
весь предмет общей концепции, объединяющей же чер-
той противопоставляемых этой общей теории частных
теорий является отрицание этой общей концепции —
полноты информации, полной общей и локальной свя-
занности нормальных устойчивых систем. Начатая при-
мечательным тезисом о потере устойчивости при свя-
зывании дискуссия завершена была столь же примеча-
тельным утверждением, что вырожденные по общей
теории системы с недостатком связей, недостатком ин-
формации являются в действительности нормальными
и единственно практически интересными, нормальные
же по этой теории системы с полным числом связей,
полной информацией — излишне связанными практи-
чески неинтересными. Оба замыкающих эту многолет-
нюю дискуссию тезиса точно очерчивают горизонт слу-
чайных, не руководимых общей концепцией поисков.
Смешение нормы с аномалиями и в результате отрица-
ние нормы и общее смешение всего предмета являются
обычной платой за отсутствие системы и вытекающей
из нее нормальной классификации. Замещение в со-
временной учебной и неучебной литературе радикальной
теории нейтральными заменителями лишь дополняет
здесь общую картину арьергардных сражений старой
теории с ревизующей ее основания новой теорией.
Теория структурной устойчивости может занять
принадлежащее ей по праву место вводной главы пред-
мета, только упорядочив собственные представления,
очистившись от дезориентирующего практику беспо-
мощного смешения нормы с вырождением, обнаружив^
в себе объединяющую концепцию всего предмета.
ЛИТЕРАТУРА
1. Maxwell J. C., On governors, The Proce-
edings of the Royal (Society, 11868, № 100.
2. R e 1 a u x, F r., Theoretische Kinematik, Braun-
schweig, 1875.
3. Вышнеградский И. А., О регуляторах пря-
мого действия, Известия С.-Петербургского практическо-
го технологического института, 1877.
4. S t о d о 1 a A., Ueber die Regulierung von Tur-
binen, Schweizerische Bauzeitung, 1893—1894.
5. iS t о d о 1 a A., Das ‘Siemenssche tRegulierprinzip
und die amerikanische Jnertie-Regulatoren, Z. d. VDI,
1899.
6. Voss A., Die prinzipien der rationellen Mecha-
nik, Encyclopadie der Mathematischen Wissenschaften,
Bd IV, Leipzig, 1901—4908.
7. Tolle M., iRegelung der Kraftmaschinen, Berlin,
1909.
8. Ассур Л. В., Исследование плоских стержне-
вых 'механизмов *с низшими парами с точки зрения
структуры и классификации, 'Известия Петроградского
политехнического института, 1913—19118.
9. Appel IP., Traite de mecanique rationelle, quatri-
eme edition, t. 2, Paris, 4923.
10. Whittaker E. T., A treatise of the analytical
dynamics of particles and rigid bodies, Cambridge, 1927.
И. Stein G., Selbstregelung — ein neues Gesetz der
Regeltechnik, iZ. d. VDI, 1928, № 6.
12. Штейн Г., Регулирование и выравнивание
в паровых установках, ГНТИ, 1934.
13. В о з н е с е н с к и й И. Н., К вопросу о выборе
схемы регулирования теплофикационных турбин, Сб.
«За советское энергооборудование» (ВИТГОЭ), 1934.
14. Хейфец М. 3., Работы ЛМЗ им. Сталина
в области регулирования паровых турбин, Сб. «Регу-
лирование паровых турбин», ОНТИ, 1936.
15. -Кантор С. А., Работа регулирования при па-
раллельном соединении турбин, Сб. «Регулирование па-
ровых турбин», ОНТИ, 1936.
16. Вознесенский И. Н., О регулировании ма-
шин с большим числом регулируемых параметров, «Ав-
томатика и телемеханика», 1938, № 4—6.
17. Filon L., Mass and force in Newtonian Mecha-
nics, Mathematical Gazette, XXII, p. 9—16, 1938.
18. -Михайлов А. В., Метод гармонического ана-
лиза в теории регулирования, «Автоматика и телемеха-
ника», 1938,1№ 3.
19. Щипано в Г. В., Теория и методы проектиро-
вания автоматических регуляторов, А и Т, № 1, 1939.
20. Ар т об о л е в с к и й И. И., Структура, кине-
матика и кинетостатика > многозвенных плоских меха-
низмов, ГОНТИ, 1939.
21. А рт о б о л е в с к и й И. И., Доброволь-
ский В. В., Структура и классификация механизмов,
М., 1939. .
22. С о л о в е й В. Е., Регулирование паровой тур-
бины с двумя отборами пара, «Автоматика и телеме-
ханика», 1939, № 2.
23. Г а л ь п е р и н И. И., Построение планов уско-
рений многозвенных механизмов, Труды Кр. МММИ,
Выпуск прикладной механики, 1940.
24. Pends С. G., On mass and force in Newtonian
Mechanics, Philosophical Magazine, i(7) XXIX, pp. 472—
484 i(1940).
25. Гальперин И. И., О возможных способах
устойчивого регулирования с нулевой неравномерно-
стью, «Известия ВТИ», 1940,1№ 6.
26. Г а л ь п е р и н И. И., Расчет дроссельных зо-
лотников, «Известия ВТИ», 1940, № 8.
27. Н a m m е 1 G., Die Axiome der Mechanik, Hand-
buch der Physik, m. V, Berlin, 4927.
28. Lamb H., Dynamics, Cambridge, 1929.
29. N о r d h e i m L., Die Prinzipe der Dynamik,
Handbuch der Physik, m. V., Berlin, 1927.
30. Г а л ь п e p и н И. И., Структурное исследование
регулируемых систем, «Известия ВТИ», 194'1, № 4.
31. Во з н е сен ск и й И. Н., О принципах и схе-
мах автоматического регулирования, «Прикладная ма-
тематика и механика», вып. 1, 1942.
32. Prinz, Contributions to the theory of automatic
ontrollers and followers, J. of Scientific Instruments,
21, 4, 4, 4944.
33. Петров Б. H., О построении и преобразова-
нии структурных схем. «Известия ОТН АН», 1945,
№ 12.
34. Лурье А. И., Влияние силы трения в измери-
тельном органе регулятора на процесс непрямого регу-
лирования, «Советское ко^лотурбостроение», 1946, № 3.
35. Гальперин И. И., Структура и число связей
регулируемых систем, диссертация, ВТИ, 1946.
36. Гальперин И. И., Структура и число связей
регулируемых систем, «Известия ВТИ», 1946,
№ 7—8, 12.
37. W i е n е г N., Cybernetics, or control and com-
municaton in the animal and mashine, New York, 1948.
38. M a p ь я н о в с к и й Д. И., Устойчивость линей-
ных схем автоматического регулирования, «Электриче-
ство», 1946, № 9.
39. В е л л е р В. Н., Гидродинамическое регулиро-
вание паровых турбин, «Электрические станции», 1946,
№ И.
40. Гальперин И. И., Гидравлические схемы
связанного регулирования, «Известия ВТИ», 1947, № 7.
41. Щегляев А. В., Процессы регулирования тур-
бин при системах с двумя усилениями, «Известия ВТИ»,
1947, № 8.
42. Г а л ь п ер и н И. И., Структурный синтез ре-
гулируемых и следящих систем, «Известия ВТИ», 1947,
№ 10.
261
43. S i m о n H. A., The axsioms of Newtonian Me-
chanics, Philosophical Magazine, v. 38, p. 888—905, De-
cember, 1947.
44. Гальперин И. И., Об одном общем зако-
не структурного синтеза регулируемых и следящих си-
стем, «Известия ВТИ», 1947, № 12.
45. А й з е р -м а н М. А., О некоторых структурных
условиях устойчивости систем автоматического регули-
рования, «Автоматика и телемеханика», 4948, № 2.
46. -Система односторонне независимого регулирова-
ния паровых турбин или вообще машин с несколькими
регулируемыми параметрами, Авт. овид-ство № 92737,
1948.
47. К у л е б а к и н В. С., О применимости принци-
па абсолютной инвариантности в физических реальных
системах, ДАН, 1948, т. 60, № 2.
48. Г е й л е р Л. Б., К вопросу об апериодической
устойчивости линейных систем, «Успехи математических
наук», т. IV, выпуск 2 «(30), 1949.
49. Г а л ь п е р и н И. И., О задаче структурного
синтеза устойчивых регулирующих и следящих систем,
«Известия ВТИ», 1949, № 1.
50. Моисеев Н. Д., Очерки развития теории
устойчивости, М.—Л., 1949.
51. Киракосянц Г. А., -Регулирование со сме-
шанной связью, «Известия ВТИ», 1950, № 5.
52. Щегляев А. В., Гальперин И. И., Си-
стема гидродинамического регулирования для турбины
мощностью 50 000 кет, «Известия ВТИ», 1950, № 5.
53. Щегляев А. В., Гальперин И. И., Гид-
родинамическое регулирование ВТИ для .предвключен-
ной турбины высокого давления мощностью 25 000 кет,
«Известия ВТИ», 1951, № 7.
54. Кац А. М., Теория и применение регуляторов
скорости с упругоприсоединенным катарактом, «Автома-
тика и телемеханика», 1951, № 2.
55. Гальперин И. И., Доказательства теорем
о входном замещении и о структурной формуле, «Ав-
томатика и телемеханика», 1951, № 3.
56. Б л о х 3. Ш., Динамика линейных систем авто-
матического регулирования, ГИТТЛ, 1952.
57. Б о л о б а н П. Е., Исследование динамических
свойств статически независимых регулируемых систем
с двумя отборами пара, диссертация, ВТИ, 1951.
58. С ю з ю м о в а Е. М., Статические и динамиче-
ские характеристики новых систем регулирования па-
ровых турбин, диссертация, ВТИ, 1954.
59. М у р г а я о в Б. П., Некоторые исследования
условий параллельной работы турбоагрегатов, диссер-
тация, ВТИ, 1954.
60. Веллер В. Н., Гидродинамическое регулиро-
вание. Госэнергоиздат, 1952.
61. Айзерман М. А., Гантмахер Ф. Р.,
Условия существования области устойчивости для одно-
контурной системы автоматического регулирования,
ПММ, 1954, № 1.
62. Основы автоматического регулирования (тео-
рия), под редакцией В. В. Солодовникова, Машгиз,
1954.
63. Га льперин И. И., Сережкина Л. П.»
Панфилов В. А., Испытания гидродинамического ре-
гулирования ВТИ для предвключенной турбины высоко-
го давления мощностью 25 000 кет, «Теплоэнергетика»,
1954, № 1.
64. Труды 2-го Всесоюзного совещания по теории
автоматического регулирования, т. I, АН СССР, 1955.^
65. Кац А. М. Автоматическое регулирование ско-
рости двигателей внутреннего сгорания, Машгиз, 1956.
66. Мерк ин Д. Г., Гироскопические системы, Гос-
техтеоретиздат, 1956.
262
67. М е е р о в М. В., Введение в динамику авто-
матического регулирования электрических машин, АН
СССР, 1956.
68. А й з е р м а н М. А., Лекции по теории авто-
матического регулирования, Гостехтеоретиздат, 1956.
69. Бернштейн М. Г., Гальперин И. И.,.
Иоффе Л. С., Комиссаров Л. А., Рабино-
вич А. В., Щегляев А. В., Регулирование новой
серии тур-бин средней мощности, «Теплоэнергетика»,
1957, № 1.
. 70. Jammer М., Concept of force, Cambridge,
71. General systems, Yearbook Society for the Ad-
vancement of General Systems Theory, Ann Arbor (Mi-
chigan), 1956.
72. Г а л ып e p и н И. И., Новые гидравлические
схемы регулирования теплофикационных турбин, «Тепло-
энергетика», 1957, № 4.
73. М a s о n S. I., Feedback theory-further proper-
ties of signal flow graphs, Proc. J. R. E., v. 44, July,
1956.
74. Г а л ь п e p и н И. И., О рефлекторной природе
управляющих машин, «Вопросы философии», 1957, № 4.
75. Гальперин И. И., Горелов И. Н., Пан-
филов В. А., П р и к а з ч и к о в Г. Ф., Регулирование
турбоагрегатов -по скорости и ускорению, «Электриче-
ские станции», 1958, № 2.
76. Regelungstechnik, Moderne Theorien und ihre
Verwendbarkeit, Verlag R. Oldenburg, Munchen, 1957.
77. Ильин Б. В., О системах взаимосвязанного
регулирования, Труды Ленинградского технологического
института им. Ленсовета, № 38, 1957.
78. -L е h n i g k S., Die strukturelle Stabilitat linearer
einlaufiger >PID—‘Regelkreise mit differenzierender Wir-
kung hochstens zweiter Ordnung, Regelungstechnik,
H. 7, 1958.
79. Ландау Л. Д., Лифшиц E. M., Теоретиче-
ская физика, том I (механика), Физматгиз, 1958.
80. М у р г а н о в Б. П., Некоторые вопросы устой-
чивости регулирования турбоагрегатов при параллель-
ной работе, «Усовершенствование конструкции и эксплуа-
тации турбинных установок», Госэнергоиздат, 1959.
81. Гальперин И. И., О способах регулирова-
ния объектов с -несколькими регулируемыми координа-
тами, сборник «Усовершенствование конструкции и экс-
плуатации турбинных установок», Госэнергоиздат, 1959.
82. Г а л ь п е р и н И. И., Регулирование современ-
ных мощных турбин, «Электрические станции», 1959,
№ 9.
83. М е е р о в М. В., Синтез структур систем авто-
матического регулирования высокой точности, Физмат-
гиз, Москва, 1959.
84. Р у б и н В. Б., Динамика регулирования турбо-
генераторов с промежуточным перегревом пара, «Тепло-
энергетика», I960, № 6.
85. D и с г о с q A., Legique generate des systemes
et des effets, Diinod, Paris, 1’960.
86. J a m m e r M, Concept of mass in classical and
modern physics, Cambridge, 1960.
87. Гальперин И. И., Синтез систем автоматики,
Госэнергоиздат, Москва, 1960.
88. Б л о х 3. Ш., Переходные процессы в линей-
ных системах автоматического регулирования, Физмат-
гиз, 1961.
89. С ю з ю м о в а Е. М., Некоторые вопросы свя-
занного регулирования, «Автоматика и телемеханика»,
1960, № 6.
90. Н u g g i n g W. H., Flowgraph-representation of
systems, C6. «Operations Research and Systems Enginee-
ring», Baltimore, 1961.
91. Кузнецов Б. Г., Эволюция картины мира,
ИАН СССР, 1961.
92. Крутов В. И., Анализ работы систем авто-
матического регулирования, Машгиз, 1961.
93. Жиль Ж., Пелегрен М., Декол ьн П.,
Теория и техника следящих систем, Машгиз, -1961.
94. Рубин В. Б., Статические характеристики
блочных установок по давлению пара, при основных
возмущениях, Сборник «Повышение параметров пара и
мощности агрегатов в теплоэнергетике», ГЭИ, 1961.
95. Бонди Г., Отрицательная масса в общей тео-
рии относительности, Сборник «Новейшие проблемы гра-
витации», И. Л., 1961.
96. Рубин В. Б., Регулирование мощности блоч-
ных установок прямоточный котел—турбина, «Тепло-
энергетика», ,1962, № 3.
97. Рубин В. Б., Регулирование мощности блоч-
ных установок прямоточный котел—турбина, диссерта-
ция, МЭИ, 1962.
98. Щегляев А. В., С Мельницкий С. Г., Ре-
гулирование паровых турбин, Госэнергоиздат, 1962.
99. Ш а т а л о в А. С., Структурные методы в тео-
рии управления и электроавтоматике, Госэнергоиздат,
1962.
100. Гуд Г. X., М а к к о л Р. Э., Системотехника,.
Изд. «Советское радио», М., 1962.
101. Бер ж К., Теория графов и ее применение,.
Изд. иностр, лит., М, 1962.
102. Пятницкий Е. С., О структурной устойчиво-
сти одноконтурных систем регулирования при наличии.!
запаздывания, А. и Т., 1962, № 7.
103. Мороз овский В. Г., О полной и частич-
ной автономности многомерных линейных САР, «Авто-
матика и телемеханика», № 9, 1962.
104. Комм П. С., Л ап узин В. С., Н е м и-
ров В. С., Фридман А. Е., Щербина С. А.,.
Динамика регулирования газотурбинной установки ти-
па ГТУ-50-800 Харьковского турбинного завода, «Энер-
гомашиностроение», 1962, № 112.
105. Любая Е. А., Условия автономности регу-
лирования турбин с отборами пара, «Энергомашино-
строение», 1963, № 5.
106. Масленников А. С., Нахождение переда-
точной функции линейной САР по ее структурной схе-
ме, Труды ЦИНИКА, вып. 9, Москва, 1963.
107. Ч и н а е в П. И., Многомерные автоматические:
системы, Гостехниздат УССР, 1963.
СОДЕРЖАНИЕ
Предисловие....................• . . . . 3
Часть первая
ДИНАМИЧЕСКИЕ СТРУКТУРЫ
Глава первая. Дедуктивные механики .... 7
1-1. Дедуктивные механики . . ............. 7
1-1-1. Логическая структура................ 7
1-1-2. Динамическая структура.............. 15
1-1-3. Дедуктивные механики.......«... 25
1-2. Односторонняя механика............... 40
1-2-1. Механика элементов................. 40
1-2-2. Механика взаимодействий............ 43
1-2-3. Механика систем.................... 43
1-3. Двусторонние механики................ 52
1-3-1. Классическая механика.............. 52
1-3-2. Газодинамическая механика.......... 68
1-3-3. Гироскопическая механика........... 69
1-4. Многосторонние механики.............. 69
1-4-1. Многосторонние механики............ 69
1-4-2. Общая классификация механик ..... 70
1-5. Качественные механики . ............. 71
1-5-1. Механика элементов................. 71
1-5-2. Механика взаимодействий и систем ... 71
Глава вторая. Материальные модели............ 72
2-1. Материальный синтез.................. 72
2-1-1. Материальные модели ,.............. 72
2-1-2. Сервомодели........................ 72
2-1-3. Материальный синтез................ 74
2-2. Синтез динамических связей........... 74
2-2-1. Синтез внешних связей.............. 74
2-2-2. Синтез внутренних связей.......... 79
2-3. Синтез динамических элементов...... 80
2-3-1. Синтез динамических элементов .... 80
2-3-2. Нейтрализация натуральных свойств . . 81
2-3-3. Идеальный и абстрактный элементы . . 82
2-4. Синтез динамических систем.......... 82
2-4-1. Элементарные системы (самодействия) . 82
2-4-2. Двухэлементные системы (простые взаи-
модействия).......................... 88
2-4-3. Многоэлементные системы (сложные
взаимодействия)...................... 93
Глава третья. Эластомеханика................ 96
3-1. Эластостатика...................... 97
3-1-1. Статические влияния.............. 97
3-1-2. Статическая определимость........... 100
3-1-3. Канонические уравнения эластостатики . 105
3-1-4. Статическое подобие . .............107
3-2. Эластодинамика.......................Ц1
3-2-1. Канонические уравнения эластодинамики 111
3-2-2. Динамическое подобие...............111
3-2-3. Динамические влияния...............115
3-3. Автоматика как эластомеханика.........115
3-3-1. Общая задача регулирования.........115
3-3-2. Независимое регулирование...........116
3-3-3. Локальные, частичные и полная незави-
симости ...............................118
Часть вторая
СТРУКТУРНЫЙ СИНТЕЗ
Глава четвертая. Структурные свойства ... 126
4-1. Структурные, метрические и смешанные
свойства........................................126
4-1-1. Структурная и безусловная устойчи-
вость ..............................126
4-1-2. Структурная и безусловная изодром-
ность ..............................127
4-1-3. Структурные, метрические и смешанные
свойства............................127
4-1-4. Валентные задачи......................130
4-2. Структурные подсвойства.................131
4-2-1. Сервосистемы..................131
4-2-2. Гироскопические системы.......154
4-2-3. Натуральные системы...........155
4-3. Метрические подсвойства.................157
4-3-1. Статическая определимость.....157
4-3-2. Статически определимые системы ... 165
4-3-3. Статически неопределимые системы . . 177
Глава пятая. Структурные отношения .... 184
5-1. Структурные, метрические и смешанные
отношения.......................................184
5-1-1. Отношения систем.................184
5-1-2. Структурные и метрические отношения 185
5-1-3. Смешанные отношения..................185
5-2. Структурные подотношения...........186
5-2-1. Структурные подотношения.........186
5-2-2. Общие отношения......... .... 198
5-2-3. Локальные структурные подотношения 207
5-3. Метрические подотношения...............214
5-3-1. Метрические подотношения.............214
5-3-2. Общие метрические подотношения . . . 214
Глава шестая. Структурный синтез............229
6-1. Нулевые системы........................230
6-1-1. Теорема связывания...................230
6-1-2. Нулевые системы......................231
6-2. Нормальные системы..................... 232 .
6-2-1. Локально разрешимые системы......232
6-2-2. Локально неразрешимые системы . . . 245
Литература......................................264