








































































































































Author: Додонов Б.П. Лифанов В.А.
Tags: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка различные отрасли промышленности и ремесла производство изделий из различных материалов транспорт конструкции издательство машиностроение техническая литература учебник для техникумов
Year: 1984



к
ч
т
'
Б.ПДодонов,БАЛифанов
‘•■/0%******
Jl-go
f/
ГРУЗОПОДЪЕМНЫЕ
И ТРАНСПОРТНЫЕ
УСТРОЙСТВА
кД о пущено Министерством
высшего и среднего
специ ального обра зо ва ни я СССР[
в качестве уч ебника
д ля машиностроительных
специальностей техникумов»
Москва
*МАШИНОСТРОЕНИЕ»
1984
ББК 39.9
Д60
УДК 621.86:67(075.8)
Рецензенты: А. А. Николаенко и С. К. Ященко
Додонов Б. П., Лифанов В. А.
Д60
Грузоподъемные и транспортные устройства: Учебник
для техникумов. — М .: Машиностроение, 1984.
—
136 с.,
ил.
30 к.
В учебнике на базе общетехнических дисциплин рассмотрены конструк
ции основных современных грузоподъемных и транспортных устройств, на
значение и принцип их действия, основы теории и способы расчета при ме
ханизации промышленных предприятий.
'
3601030000-202
Д 038(01)-84 202‘84
ББК 39.9
6П5.6
Борис Петрович Д одо но в,
Валентин Андреевич Лифанов
ГРУЗОПОДЪЕМНЫЕ И ТРАНСПОРТНЫЕ УСТРОЙСТВА
Редактор Н. А . Лебед ева
Художественный реда ктор И. К . Капр ал ова
Обложка художника А. Я. Михайлова
Технический редактор А. И. За харова
Корректоры А. П. Сизова и А. М. Усачева
ИБ К» 4020
Сдано в набор 26.05 83.
Подписано в печать 19.12.83.
Т-23711.
Формат 6 0X90’/i6- Бумага типографская No 3 .
Гарнитур а литературная.
Печать высокая.
Уел. печ. л. 8,5. Уел. кр.-от т. 8,75. Уч.-изд. л. 9,4. Тир аж
34.000 экз.
Заказ 1634. Цена 30 к.
Ордена Трудового Красного Знамени издательство «Машиностроение»,
.
107076, Москва, Стромынский пер., д. 4.
Московская типография Ке 4 Союзполиграфпрома при Государственном комитете
СССР по делам издательств, полиграфии и книжной торговли
129041, Москва, Б. Переясл авская ул., д. 46.
© Издательс тво «Машиностроение», 1984 г,
ВВЕДЕНИЕ
Цель учебника — помочь учащимся ознакомиться с устройством,
работой и конструкциями грузоподъемных и транспортных устройств,
овладеть методами решения типовых задач, приобрести необходимые
навыки их расчета и проектирования.
В «Основных направлениях экономического и социального р азви
тия СССР на 1981—1985 годы и на период до 1990 года» указано, что
необходимо поднять техническую вооруженность труда, всемерно внед
рять комплексную механизацию и автоматизацию производственных
процессов, неуклонно сокращать численность работников, занятых
ручным трудом, особенно на вспомогательных и подсобных работах.
Успешная работа современного предприятия базируется на массовой
механизации производственных процессов, в первую очередь таких
трудоемких и тяжелых, как транспортирование материалов, деталей
и изделий. Все транспортные операции, связанные с производственны
ми процессами, выполняются внешним и внутризаводским промыш
ленным транспортом.
Внешний транспорт (железнодорожный, автомобильный, водный,'
воздушный) доставляет на предприятия сырье, топливо и вспомога
тельные материалы, а также вывозит готовую продукцию. Внутриза
водской транспорт (краны, конвейеры и др.) перемещает сырье, по
луфабрикаты и детали внутри цехов, между цехами и вывозит готовую
продукцию на склад. Промышленный транспорт широко используют
непосредственно в технологическом процессе изготовления или сборки
выпускаемой продукции, например конвейеры.
Таким образом, промышленный транспорт является составной
частью производственного процесса.
В нашей стране созданы совершенные грузоподъемные и транспорт
ные машины, заменяющие тысячи рабочих рук. Однако внимание уде
лялось главным образом механизации основных производственных про
цессов. Механизация же вспомогательных операций и погрузочно-
разгрузочных работ производилась недостаточно интенсивно, поэтому
удельный вес ручного труда в некоторых отраслях промышленности
довольно высок. Директивами последних съездов КПСС обращено
особое внимание на комплексную механизацию и автоматизацию про
изводственных процессов, а такж е транспортных и погрузочно-разгру
зочных работ.
Совершенствование промышленного' транспорта базируется на
знании теории рабочих процессов, расчета и конструкции машин, а
также правильной организации технической эксплуатации оборудо
вания.
Д ля создания работоспособных, экономичных и долговечных гру
зоподъемных и транспортных устройств необходимо сочетание теории
с практическим опытом конструирования и эксплуатации.
История создания и применения грузоподъемных и транспортных
устройств начинается с древнейшего периода развития человеческого
общества. У же в странах древнего Востока, Китая и Индии появились
простейшие грузоподъемные и транспортные устройства (клин, рычаг
и каток) для передвижения каменных блоков массой до 90 т. В VII в.
до н. э. использовали блоки, а во II в. до н. э.
—
ворот с зубчатой и чер
вячной передачами — лебедку. Д л я подачи воды на орошаемые участки
применяли водоподъемники. Все механизмы были с ручным приводом,
поэтому при проведении крупных строительных работ использовали
громадное число людей.
В средние века при строительстве фортификационных сооружений
начали применять подъемники, краны и элеваторы для разрыхленно
го г рунта. В 1860 г. создан первый кран с паровым двигателем, а в 80-х
годах — с электрическим двигателем.
Бо ль ш ая заслуга в деле развития грузоподъемной и транспортной
техники принадлежит механикам России. Еще в XI в. при возведении
Софийского собора в Новгороде использовали сложную систему полис
пастов, а в 1677 г. на колокольню Московского Кремля подняли Боль
шой колокол массой 130 т. В 1769 г. для памятника Петру I был пере
мещен на большое расстояние каменный монолит массой более 1000 т.
В 1830 г. также с помощью полиспастов и воротов поставили колонны
Исаакиевского собора в Петербурге, каждая массой 100 т. В 1832 г.
перед Зимним дворцом в Петербурге установили Александровскую,
колонну массой более 600 т; было использовано 60 воротов, каждый
из которых приводили в движение 16 рабочих. .
Первые описания грузоподъемного и транспортного оборудования
появились в трудах АН и Московского университета: в 1722 г. Г. Г.
Скорняков-Писарев опубликовал «Краткий учебник механики», затем в
1763 г. М. В. Ломоносов описал его в книге «Первые основания металл
лургни, или рудных дел». Н ачало систематической научной работы по
грузоподъемному и транспортному оборудованию в России было по
ложено проф. И . А. Вышнеградским, выпустившим в 1872 г. первый
отечественный самостоятельный «Курс подъемных машин». Позднее
научная литература по подъемно-транспортному оборудованию обо
гатилась работами М. Н . Петрова, М. П . Берлова, Л. 3 . Ратновского
и др.
В условиях царской России подъемно-транспортное оборудование
выпускалось в очень малом количестве Брянским, Краматорским и
Путиловским заводами. Нужды.отечественной промышленности в этом
оборудовании обеспечивались в основном за счет ввоза его из-за гра
ницы.
После Великой Октябрьской социалистической революции вышли -
в свет известные работы А. О. Спиваковского и П. С. Козьмина по ма
шинам непрерывного транспорта и Л. Г . Кифера по грузоподъемным
4
машинам, а также работы Н. Ф. Руденко, К. В. Алферова и др. Созда
ны специализированные заводы по выпуску грузоподъемных и транс
портных устройств, а также научно-исследовательские и проектные
организации.
В «настоящее время грузоподъемное и транспортное машиностро
ение представляет собой самостоятельную отрасль промышленности,
которая достигла больших успехов. Отрасли промышленности Совет
ского Союза полностью обеспечены отечественным подъемно-транс
портным оборудованием.
Созданы новые типы шагающих экскаваторов с объемом ковша
14 ... 100 м3, землеройные машины непрерывного действия производи
тельностью до 5000 м3/ч, автопогрузчики и др.
Применение мощных шагающих экскаваторов и роторных землерой
ных машин непрерывного действия позволило осуществить разработки
месторождений руды и у гля открытым способом, снизив себестоимость
добываемого у гл я в 5 ...15 раз по сравнению с шахтным способом до
бычи. При этом вместо тяжелого подземного труда шахтера сегодня
используется труд оператора, управляющего машиной с поверхности.
XXVI съезд КПСС поставил задачи по комплексной механизации
и автоматизации производственных процессов.
Примером комплексной механизации производства является завод
по изготовлению поршней двигателей внутреннего сгорания, где рука
человека почти не касается изделий с начала и до конца процесса из
готовления и упаковки готовой продукции.
Перспективным направлением в развитии грузоподъемных и тран-
портных устройств является выпуск унифицированных узлов, блочных
конструкций для грузоподъемных машин и модулей для промышлен
ных роботов (редукторов, муфт, тормозов, ходовых колес, барабанов,
механических рук робота и др.) .
Классификация грузоподъемных и транспортных устройств. Гру
зоподъемными и транспортными устройствами осуществляются внутри
заводские, межцеховые и внутрицеховые транспортные операции иног
да по сложной транспортно-развитой трассе, состоящей из горизон
тальных, наклонных и вертикальных участков. Характер производ-
зтвенного процесса, его специфические особенности, род и физико-
яеханические свойства перемещаемых грузов определяют тип и конст-
>укцию применяемых грузоподъемных и транспортных устройств.
При выборе типа и конструкции грузоподъемного и транспортного
,'стройства необходимо учитывать: комплексность механизации по-
■рузочно-разгрузочных и транспортных операций на всех этапах про-
юводственного процесса; условия сохранности перемещаемого груза;
•оответствие производительностей транспортных и технологических
лашин, включенных в один поток, при дальнейшем росте производи-
ельности транспортных машин без их существенной переделки; созда
йте благоприятных условий труда для обслуживающего персонала
t другие факторы.
Выполнение этих требований в различных отраслях производств
фивел о к созданию разнообразных типов грузоподъемных и транс-
юртных устройств.
Рис. 1. Классификация грузоподъемных и транспортных устройств
Грузоподъемные и транспортные устройства можно разделить п>
принципу действия на две основные группы: периодического и непре
рывного действия (рис. 1).
Характерной особенностью машин периодического действия явлг
ется цикличность работы, подача груза порциями, соответствующим!
грузоподъемности рабочих элементов, непосредственно несущих траж
портируемый груз по произвольной пространственной трассе. Рабе
та таких машин обычно осуществляется по принципу попеременнс
возвратных движений: в одном направлении с грузом, в другом бе
груза. Загрузка и разгрузка рабочего элемента на машинах периоди
ческого действия производится во время остановки, иногда разгрузк
осуществляется в процессе движения.
Характерной особенностью машин непрерывного действия явл?
ется перемещение грузов непрерывным потоком по одной строго опр<
деленной трассе. Перемещаемый груз (обычно насыпной) располаг;
ется на рабочем органе сплошной непрерывной массой или отдельным
порциями в рабочих сосудах (ковшах, коробах), движущихся поел;
довательно. Загрузка и разгрузка рабочих органов таких машин пр<
изводится во время их движения.
Грузоподъемные устройства. В зависимости от конструкции мех;
низмов и обслуживаемой зоны грузоподъемные устройства делят к
простые (домкраты, лебедки, тали) и сложные (краны, подъемники
Дом кр ат —■простейшее грузоподъемно е устройство в виде т о лк ат ел я (вш
тового, реечного, гидравлического), поднимающее груз на небол ьшую высот]
Винтовой дом кра т (рис. 2) устанавливают под грузом 4. Под действием усили
рабочего Ft на рукоятку рычага 5 вращается винт 3 и осуществляет подъем ил
опускание гру за в вер тика льном напр ав ле нии. Переда точное отношение тол;
ко винтовой пары равно 70...80, и при усилии рабочего Ft = 0,1 ...0,4 к!
грузоподъемнос ть винтового дом кр ата с ос тавл яет 7 ...32 кН.
Реечный домкра т по казан на рис. 3. При действии усил ия рабочего F t т
рукоятку 5 вращается зубчатая шестерня и рейка поднимает груз 4. Грузоподъе;
ность реечного дом крата з ав исит от передаточного отнош ения зубчатой передач!
0
Рис. 2. Схема винтового домкра та :
Рис. 3. Схема реечного домкр ата:
/ —корпус; 2— гайка; 3— винт; 4— груз]
1— корпус; 2 — зубчатая рейка; 3 — ше*
5 —рукоятк а
стерня зубчатой передачи: 4 — груз; 5 —
рукоятка
Гидравлический домкра т (рис. 4) содерж ит рабочий цилиндр с порш нем 2
диаметром D для подъема груза 3. Насос с поршнем 4 диаметром d нагнетает
ккдкость 5 в рабочий цилиндр ,с помощью рыча га 6. Передаточное отно ш ение
идравлического домкрата ра вно D2/d3 и может быть большим при м алых габа-
'итах домкрата.
Лебедка — это более сложное устройство для подъема или транспортиро
вания гр у з а. Лебедки бывают тягов ые и подъемные. В ко нс тру кцию лебедки
ходит ворот и допо лн ител ьная пер едача в приводе. В вороте (рис. 5) гр у з /
однимается тяговым ор ганом 2 (канатом или цепью), нама тываемым на бар абан
'• Барабан, закрепленный на валу, вращается при повороте рукоятки 5. Пере-
аточное отношение во ро та нев елико, оно рав но отнош ению радиу са приводной
укоятки I к радиусу барабана R , поэтому и грузоподъемность ворота незна-
ительна. В лебедках любое тягов ое усилие достигаетс я увеличением переда-
очного отнош ения дополнител ьной пер едачи, ус танав лив аем ой между валом ба-
абана и рукояткой.
В тяговой лебедке (рис. 6) к грузу 1 крепят тяговой орган 2, который намл-
ывается на барабан 3. Барабан связан с рукояткой 5 через зубчатую или чер-
'ис. 4. Схема гидравлического дом
кр ата:
— корпус с цилиндрам»; 2— рабочий
оршень; 3 — груз; 4 — поршень насоса;
5— жидкость; 6— рычаг
Рис. 5. Схема ворота:
/ —"груз; 2 — тяговый орган (канат); 3 —
барабан; 4 — крепление каната к бараба*
ну; 5 — рукоятка
7
Рис. 6. Схема тяговой лебедки:
1 — груз; 2 — тяговый орган (канат); 3 —
барабан; 4 — зубчатая передача; 5 — руко
ятка; 6 — корпус
Рис. 7. Схема подъемной лебедю
1— груз; 2 — отклоняющий неподвижны
блок; 3 — тяговый орган (канат); 5 — б;
рабан; 6 — рукоятка
вячную передачу 4. Тяговые лебедки используют для горизонтального ил
близкого к нему перемещения груза по плоскости или по направляющим.
Подъемная лебедка (рис. 7) устроена аналогично тяговой только для подъе
ма свободно подвешенного или движущегося и направляющих груза использует
ся отклоняющий блок 2.
Лебедки изго то вл яют с ручным и машинным прииодом. Лебедки с привс
дом от электродвигателя называют электролебедками.
Таль— это подвесная подъемная лебедка для подъема или для подъем
и передиижения груза (рис. 8). Так как таль располагается выше поднимаемог
груза, то при ручном приводе используют цепное колесо 8, которое вращаете
с помощью бесконечной кру гл оз ве нной цепи 9, с пуск ающ ейс я и виде петли д(
уровня ру ки рабо чего. Цепное колесо через передачу 10 (зубчатую или червяч
иую) приводит во вращение барабан 13 (или звездочку) механизма подъема груза
где испо л ьзу е тся еще и пол испаст для выигр ыш а в силе, состоящий из т яго иоп
органа 11 (каната или цепи) и подвижного блока подвески 12. Поднятый гру
удерживается остановом или тормозом 7. Таль с электрическим приводом ее ме
ханизмов называют электроталью.
При малой грузоподъем ности и небольшой высоте подъема гру з а те леж к;
тали делают без приводных колес и называют кошкой.
В механизме п ер едвиж ения тали 6 с ручным приводом цепное колесо 2
вр ащ аем ое цепью 1, ч ер ез пер едачу 3 приводит во враще ние прив одные колес;
тележки 4, передвигающиеся по монорельсу 5. Тележки выполняют также с элек
трич ес ким приводом.
Тали выпу скают доста то чно большой груз оподъемности.
Кран — это наиболее сложная и универсальная грузоподъемная машина
включающая металлоконструкцию н несколько смонтированных на вей крано
вых механизмов.
'
Типовыми кранов ым и ме ха низм ами яв л яю т ся : м еханизм подъема (лебедка ■
по лиспастом); механизм передв иж ения, который осуществляет пер ем ещ ена
к р ап а или какой-л ибо его части (теле жки); механизм изменения выле та, меняю
щий в стре лов ом кр ане по лож ение гру зо вого крюка отно сител ьно ме талло кон
струкции; механизм вращ ения поворотной части крана.
8
5
Ч-
Рис. 8. Схема тали с ручным при-
Рис. 9. Схема настенного консольяо-
водом механизма подъема и пере-
го поворотного крана с постоянным
движения
вылетом
Краны применяют д ля перемещ ения штуч ных или нас ыпных гру з о в по
пространственной трассе произвольной формы и различной протяж енности. Они
бывают стрелового и мостового типов.
У стрелового кр ана груз подвешен к стреле (с постоянным вылетом ил н пе
ременным вылетом) и находится вне опорного контура кр а н а . К этому типу
кранон отно сятся настенные и по лноповор отные. У нас тенного кр а н а (рис. 9) с
постоянным вылетом, где вылет / равен ра ссто янию от оси вр ащ ен ия кр а н а до
23
Рис. 10. Схема настенного кон-
сольного поворотного кр ана с
переменным вылетом
Рис. 11. Схема свободностоя
щего полиоповоротного кон
сольного краиа на колонне с
постоянным вылетом
9
Рис. 12. Схема опорной кран-балки
Рис. 13. Схема подвесной кран-балки
•»!
точки подвеса груза 2 к стреле 1, груз, поднимаясь по вертикали, может повора
чиваться на полуокружности (обслуживаемая зона 3 в плане). У такого крана
должен быть мех анизм подъема груз а (лебедка) и механизм поворота стрелы.
В настенном кра не I с переменным вылетом (рнс. 10) изменение в ылета
о с уществляется перемещением т ележ ки 2 с механизмом подъема 3. Обс лу ж ив ае
мая зона 4 в плане — половина кр у га. Изменение вылета консо льного кра на
может производиться также за счет подъема и опускания стрелы.
У полноповоротного консо льного кра на (рис. 11) вокруг неподвижной ко
лонны t может поворачиваться металлоконструкция крана 2. Обслуживаемая
зона 3 — окружность при постоянном вылете и круг при переменном вылете.
Краны разделяют на с тационарн ые и пер едвиж ные. У мостовых кр ано в
груз подвешен к движущейся тележке и всегда находится в пределах опор
но го к он ту р а. Краны мостового типа бывают опорные и подвесные кран-
балки , мостовые, козло вые и кабельные.
Опорные кра н -бал ки (рис. 12) выпу скают относительно невысокой гру з о
подъемности и с небольшим пролётом L. По гла вной балке 1 пер едвигаетс я ме
ханиз м подъема 2, а сам кр ан передвигаетс я на ко л ес ах концевых бало к 3 по
подкрановым путям, уложенным на колоннах. Прямоугольная площадь обслу
жив аем ой зоны поз в ол яет перемещать гру з в любую точку цеха , над которым
установлен кр ан.
Подвесная кран-балка 1 (рис. 13) движется по путям, подвешенным к
строит ел ьным ко нс тру кциям здания 2. Это уменьшает габариты и дает возмож
ность передачи груза с одной балки на другую без перегрузки, так как концы
гл авной балки не загор аж ив аю т концевые бал ки.
Мостовой кран (рнс. 14) имеет большую грузо подъемно сть. Главные балки I
о бразу ют мостовую к онстру кцию, по которой пер едвигаетс я теле ж ка с ме ханиз
мом подъема груза 2.
Козловой кр ан (рис. 15) применяют на открытых пл ощ адках складов , напр и
мер для р азгру зки железнодорожных вагонов. По металлоконструкции крана I
движется тележ ка с механизмом подъема 2. Кр ан пер едвигаетс я по рельсам 3.
Рнс. 14, Схема мостового крана.
Рис. 15. Схема козлового крана
10
J
Кабельный кран (рис. 16) имеет
опоры 7, между которыми натянут ка
нат 2. По канату движется тележка 3 о
механизмом подъема.
Подъемники прим еняют д л я тр анс
по р тир о вания груз ов (грузовые) или
людей (пассажирские лифты) в в ерти
кальном на пра вл ени и. Они бывают
шахтные и с киповые. Гр узоне сущими
устройствами подъемнико в я в ляю т ся
кабины (клети), платформы и ковши.
Шахтный подъемник (рис. 17, а) имеет
шахту 1, кабину 2, соединенную тяго
вым органом с лебедкой 3. Направляю
щие для грузовой клети или кабины размещены внутри закрытой по всей
тр ассе шахты. ■
Подъемник (рис. 17, б) состоит из стойки 1 (несущей ко н стру кц ии), по кото
рой движется гру з ов ая платформа 2, с оедине нная тягов ым органом с лебедкой 4.
Тяговой ор ган перекинут через о тклоняющий блок 3. В этих подъем никах несу
щая конструкция имеет направляющие для грузовой платформы. Такие подъем
ники используют ка к строител ьные, подъемники -вышки .
Скиповый подъемник (рис. 18) служ ит для транспортирования насыпных
гру зо в ковшом 2, дв ижущимс я по направ ляющ им 1, форма котор ых обеспечи
вает опрокидывание ковша в месте разгрузки 5. Ковш передвигается лебедкой 4, .
тяговый ор ган пер екину т через отклоняющий блок 3.
Транспор тиру ющие ма шины периодического действия. Этот раздел объедин я
ет рельсовый и безрельсо вый наземный вну тр изав одской тра нс пор т: те ле ж ки,
кар ы, погрузч ики н промышленные роботы, а та к ж е скрепер ы.
Тележка— это платформа 2 (рис. 19, а), установленная на колесах 1, для
перевозки груза 3. Ручные тележки передвигают рабочие. В автокарах и элект
рокарах тележка приводится в движение двигателем (внутреннего сгорания или
электрич еским).
Погрузчик (рис. 19, б) снабжают машинным приводом (автопогрузчик или
электропогрузчик). Погрузчики 2 имеют вилы 3 для захвата штучных грузов I
или ковш дл я насыпных груз ов .
Промышленный робот (рис. 19, в) испо льзу ют вместо ч елов ека для выпо лне
ния однообразных и утомительных погрузочно-разгрузочных работ техноло
гич еского процесса мас со вого про изв одств а. Робот состоит из к орпу са , устройств
управления и передвижения 1 с манипулятором 2 для захвата и перестановки
груза.
Рис. 16. Схема кабельного крана
И
Скрепер служит для захвата, загрузки или разгрузки сыпучих грузов. На
рис. 19, г приведе на схема простейшего скре пер а (механической лопа ты). Лебед
ка / с канатом 2 передвигает ковш 3 с грузом 4.
Транспор тиру ющ ие ма шины непрерывного действия с тяговым, орган ом.
Этот ра здел объединяет машины, в которых тягов ое усил ие от д в ига те л я, для
транспортирования груза, передается гибким тяговым органом (лентой, цепью
или кана то м). Груз непрерывным потоком перемещается на тягов ом ор гане или
на устройствах, прикрепленных к нему.
Ленточный конв ейер (рис. 20) состоит из приводного 4 и нат яж н ог о бараба
на 1 с лентой 2, на которой транспортируется груз 3. Тяговое усилие от привод
ного б ар аба на к ленте передается за счет сил тр ения.
В цепных конвейерах тяговым органом является цепь, тяговое усилие от
звездочки к цепи передается с помощью зацепления. Для транспортирования
груза иацепь крепят специальные устройства: пластины (рис. 21), скребки
(рис. 2g), ковши (рис. 23 и 24), ступени (рис. 25). Конвейеры бывают подвесные
(рис. 26) и толкающ ие (рис. 27).
У пластинчатого конвейера (см. рис. 21) приводные 5 и н атяж ные 1 зв ездочки
охватываются цепью 3, к которой прикреплены пластины 2 для транспортирова
ния груза 4. У скребкового конвейера (см. рис. 22) имеется также приводная 4
н на тя ж на я 1 звездочки с цепью 2, к которой прикреплены скр ебки 3, н груз
5 движется по желобу. Ковшовый конв ейер (см. рис. 23 и 24) используют для
жидких и сыпучих грузов, которые помещаются в ковшах 1. У эскалатора (см.
рис, 25} метро у крепл ены на цепи ступени 1 для перемещения людей.
Подвесной конв ейер (см. рис. 26) состоит из подвесного пути 1 и непрерывно
движущейся цепи 3, к которой прикреплены ковши с грузом 2. Груз разгружают
нд ходу или останавливают весь конвейер. В толкающем конвейере (см. рис. 27)
пр подвесному пути 1 передвига ют т ел еж ки с грузом 2 только в том с луч ае, если
тблкатель цепи 3 зацепился за нее. В противном случае при непрерывно движу
щейся цепи тел еж ки с грузом будут стоять на месте, это удобно при сборочных
операциях.
Элеватор служит для транспортирования груза по вертикальному или близ
кому к вертикали на прав ле нию. Тяговым ор га ном с лу ж ит лента или цепь. На
рис. 28, а по ка за н ковшовый ленто чный эл е в атор , который состоит из приводно
го 1 и натяжного 4 барабанов, к ленте 3 прикреплены ковши 2 для груза. В виж-
нем положении ковши загружаются, а в верхнем; разгружаются. У цепного эле
ватора (рис. 28, б) имеются приводная 1 и натяжная звездочки 4, к цепи- 3
крепятся ковши 2 для груза.
Транспор тиру ющ ие ма шины непрерывного действия без тягового органа.
Этот р аздел объединяет гравитационный транс пор т, ролико вые, винтовые и
инерционные конвейеры, а та кж е пневматич еский и гидравлический транспорт.
Гравитационный тр анспорт имеет вид накло нных и винтовых спусков, по
которым под действием сил тяж ес ти гру з спу ск ае тся сверху вниз. Наклонный
..7
1
'
Рис. 19. Схема транспортирующих уст
ройств периодического действия:
а — тележка с ручным приводом; б —электропо
грузчик; в «- промышленный робот; г — механи
ческая лопата
12
Рис. 20. Схема ленточного конвейера
Рис. 21. Схема пластинчатого цепно*
го конвейера
O-i
'•111;I-!✓
Рис. 22. Схема скребкового цепного
конвейера
Рис. 23. Схема ковшового цепного
конвейера
Рис. 24. Схема ковшового (люлечио*
го) конвейера
26. Схема подвесного грузоне»
сущего цепного конвейера
Рнс. 27. Схема подвесного толкающе
го концейера
13
Рис. 28. Схема элеваторов:
а — ленточного ковшового; б — цепного люлечкого
спуск (рис. 29) состоит из двух участков. На участ
ке / с большим углом наклона груз 2 движется с
за данной с коростью, а иа у частке 3 зам едляе т дв и
жение и останавливается. Винтовой спуск (рис. 30)
использ уют д л я той же цели, но он имеет меньшие
габариты.
Роликовый конв ейер (рис. 31) состоит из р оли-
коопор I (без привода или с машинным приводом),
по которым тра нспор тиру етс я груз 2. Т акие кон
вейеры используют для перемещения груза с высо
кой температурой, напр имер в про катных ст ан а х .
Винтовой конв ейер работает по принципу дви
жения винта и гайки (рис. 32). Он состоит из корпу
са 1 и винта 2, между которыми транс пор тиру е тся
гру з 3. Д л я штучных гру зо в используют двухв интов ые конвейеры (с левой
и правой наре зкой). При встречном их вр ащении и п ара лле льном расположении
штучный груз пер ем ещ ается по поверхности винтов вдоль йх оси вращ ения.
Вййтобая тра нспор тиру ющ ая труба (рис. 33) состоит из вр ащ ающейся трубы 1
с Уйнтовйми выступами 2, Которыми гру з 3 передвигаетс я вдо ль оси трубы. Тр уба
вращ аетс я на ро ликоо порах 4. Пр имером .винтовой транспортирующей трубы
яв л яе тс я об ж иго в ая печь в цементной промышленности.
Качающ ийс я конв ейер предста вляе т собой подвешенный или о пир ающий
с я на неподвиж ную раму желоб, который со вершае т кол ебател ьные движ е ния
для перемещения нах одящ е гос я в нем гру з а. Качающиеся конвейер ы бывают
инерционные и вибрационные. У ин ерционного конвейер а (рис. 34) приводной
кривошип 4 вращается равномерно, а шарнирные стойки 2 совершают неравно
мерные кач ател ьные движ е ния с желобом 3 — в одну с торону с меньшей скор о
стью, чем в другую , поэтому груз 1 движется в одном напр авле нии (в сторону
движения платформы с меньшей скоростью) по инерции. У инерционного кон
вейера частота качания малая (100 ... 200 мин-1), а амплитуда большая. У виб
рационно го конвейер а наоборот: частота ка ч аний.бо льш а я (50 Гц), а а мплитуда —
/
Рис. 29. Схема наклонного гравцтат
ционного спуска
Рис. 31. Схема роликового конвейера
14
Рис. 30. Схема винтового гравитаци
онного спуска:
/ — груз; 2 — рабочий участок винтового
сп уска; 3 — участок для остановки груза
малая . Вибрационный конвейер (рис. 35) приводитс я в дв иж ение вибратором 1,
а на упругих стойках 4 крепится платформа 3, по которой движется груз 2.
Пневматичес кий и г идравлический тр анспорт основан на пр инципе сообще
ния сыпучему грузу скорости движущегося в трубопроводе потока воздуха или
жидкости. В пневмотранс порте (рис. 36) перемещаемый гру з I з а х в ат ыв а е тс я
струей воздуха и транспортируется по трубопроводу 2 н месту разгрузки 3.
Из грузо отделител я за гр яз не нный во здух поступает в пыл еотделитель 4. После
очистки во здух через трубопр овод подводится к ва куум-н ас ос у в выбрасы
в ае тся в атмосферу через патрубок 5.
Режим работы грузоподъемных и транспортных устройств. При
выборе грузоподъемных и транспортных устройств необходимо учи
тывать характер и свойства грузов, направление и длину пути транс
портирования, требуемую производительность, а также характер и осо
бые условия производственного процесса, которые влияют на режим
их работы.
Основным параметром грузоподъемных машин является их грузо
подъемность, х арактеризуемая массой номинального рабочего груза,
на подъем которого рассчитана машина. Н оминальная грузоподъем
ность, включая массу сменных грузозахватных органов и приспособ
лений, характеризует инерционные и гравитационные свойства транс
портируемого груза и не зависит от ускорения свободного падения в
месте действия машины.
В отличие от массы сила тяжести (сила притяжения тела к земле)
зависит от ускорения свободного падения вместе действия машины и
измеряется в единицах силы (Н). Вес тела — это сила, с которой тело
под действием силы тяжести воздействует на опору, при неподвиж
ной опоре относительно земли или при равномерном и прямолинейном
движении тела. При подъеме с ускорением вес тела больше силы тяж е
сти, а при спуске с ускорением вес тела меньше силы тяжести.
Рис, 35. Схема вибрационного кон-
Рис. 36. Схема
пневматического
вейера
транспорта
15
Основной характеристикой транспортирующих машин является
массовая Q (т/ч) или объемная производительность (м3/ч).
При любом способе перемещения груза возникают сопротивления,
препятствующие его движению. Силу F u действующую в нап р авле
нии движения и сообщающую ему движение с постоянной скоростью
v (м/с), называют тяговым усилием. По тяговому усилию и скорости
находят мощность (Вт) привода грузоподъемных и транспортных уст
ройств:
P=Fp.
(1)
Д л я приведения в движение рабочих органов грузоподъемных и
транспортных устройств используют два типа приводов: ручной и ма
шинный.
Н а выбор типа привода влияют: наличие и возможность исполь
зования того или иного вида энергии; грузоподъемность, производи
тельность и режим работы машины; соответствие габаритов двигателя
требованиям рациональной компоновки машины; удобство управления.
Наиболее древним и простым типом привода является ручной. В
настоящее время его применяют только в тех устройствах, которые
предназначены дл я подъема и перемещения небольших грузов с малой
скоростью и на короткие расстояния, например, в домкратах, монтаж
ных лебедках и тал ях . Ручной привод могут иметь механизмы подъема,
передвижения и поворота; Расчетные зависимости являются одинако
выми для всех типов механизмов.
Схемы механизмов подъема с ручным и машинным приводом при
ведены на рис. 37. Механизм подъема с ручным приводом состоит из
ворота (барабана 2 , на который наматывается канат с подвешенным к
нему грузом /), редуктора 3, тормоза 5 и приводного элемента — руко
ятки 4 или тягового колеса, к которому прикладывается усилие Ft ра
бочего.
В ручных передачах по соотношению силы тяжести груза Gr и уси
лием F t, прикладываемым к рукоятке, можно определить общее пере
даточное отношение привода
«о = 7У (Грл),
(2)
где г) — КПД передачи.
Рис. 37. Механизмы подъема:
в — с ручным приводом и зубчатой передачей; б —с ручным приводом и черничной переда
чей; ® — с машинным приводом
16
При радиусе г рукоятки
(колеса) момент, развиваемый
рабочим:
Рис. 38. Приспособление для руч
ного привода:
о -*■ приводная
рукоятка; б — тяговое
цепное колесо
Т Р = kpZpFtr,
(3)
где г р — число рабочих; /?.Р — коэффициент, учитывающий неодно-
временность приложения усилий при совместной работе нескольких
человек (kP — 0 ,8 при двух рабочих, k p — 0 ,7 при четырех рабочих).
Момент сопротивления на валу барабана от груза
где D а — диаметр барабана; Gr — сила тяжести поднимаемого груза
или натяжение тягового органа (в случае применения полиспаста).
При расчете ручного привода для механизма передвижения момент
сопротивления на валу ходовых колес
чгде F к — сила сопротивления передвижению колеса; D „ — диаметр
. "ходового колеса.
^
Ручной привод с рукояткой (рис. 38, а) применяют в том случае,
'•«■если можно расположить ось вращения рукоятки на высоте 900 ...
^1100 мм от уровня по ла. Если приводной вал механизма расположен
на большей высоте, применяют тяговые цепные колеса, приводимые во
вращение бесконечной цепью (рис. 38, б). Тяговые колеса имеют на
правляющие, препятствующие спаданию с них тягового элемента.
В зависимости от продолжительности работы усилие рабочего и
скорость его движений изменяются. При непрерывной работе усилие на
рукоятке Ft = 80 ...100 Н, скорость движения руки рабочего ир =
= 0,9 . ..1 ,2 м/с; при кратковременной работе Ft = 200 Н и ир =
= 0,5 ...0 ,6 м/с. При непрерывной работе усилие рабочего на тяговой
цепи Ft — 100 ...160 Н, ир — 0,6 ...1 ,0 м/с; при кратковременной ра
боте Ft = 300 ...400 Н, ир = 0,3 ...0 ,4 м/с. Проверку элементов руч
ного привода на прочность проводят на возможное усилие, равное силе
тяжести рабочего (800 Н).
Главным недостатком ручного привода является то, что сила, при
кладываемая рукой человека, невелика, а следовательно, мощность
привода незначительна, и возможность его использования сильно огра
ничена. Так, мощность ручного привода с руко ятко й радиусом 0,3 м
при непрерывной работе составляет Р — FtvP — 100 • 1 = 100 Вт.
В настоящее время все большее применение находит машинный
привод. Привод от двигателей внутреннего сгорания и паросиловой
установки чаще всего применяют в тех сл учаях , когда отсутствует эле
ктрическая энергия. Гидравлический привод используют в автомо
бильных и тракторных прицепах (для опрокидывания кузова), в по
Т0 — GTDб/2,
(4)
&
Гс = FJJJ2,
(5)
17
грузчиках навесного типа, а также в системах управления механиз
мами грузоподъемных и транспортных машин. Пневматический при
вод применяют во взрывоопасных помещениях и там, где имеется под
вод сжатого воздуха для нужд основного производства.
Из машинных приводов наибольшее распространение получил
электрический. Типовой механизм подъема грузоподъемных машин
показан на рис. 37, в. При подъеме г руза барабан 1 наматывает тяго
вый орган 2. Тяговый орган и подвижный блок с подвеской 3 образу
ют полиспаст, уменьшающий нагрузку на тяговый орган. Через ре
дуктор 4 вал барабана 1 вращается от электродвигателя 6 . Поднятый
груз удерживается от падения тормозом 5, установленным на шкиве
муфты электродвигателя.
Электрический привод является наиболее прогрессивным благода
ря высокому КПД, возможности индивидуального применения двига
телей для каждого механизма, удобству управления и постоянной го
товности к работе, возможности пуска двигателей под нагрузкой, так
как они допускают значительную кратковременную перегрузку, удоб
ству реверсирования, простоте подвода и невысокой стоимости элект
роэнергии.
В грузоподъемных машинах более удобными для использования яв
ляются двигатели постоянного тока (серии ДП), которые имеют повы
шенные пусковые моменты и позволяют регулировать скорость в широ
ких пределах. Однако применение двигателей постоянного тока тре
бует наличия специальных устройств (выпрямителей), преобразующих
переменный ток в постоянный. Поэтому преобладающее применение
нашли асинхронные электродвигатели переменного тока (трехфазные).
Электродвигатели переменного тока выпускают с короткозамкну
тым ротором и с контактными кольцами. Электродвигатели с коротко-
замкнутым ротором включают непосредственно в сеть, поэтому в пе
риод включения пусковой ток в 4 ...6 раз превышает номинальный
при установившемся движении, т. е. такие двигатели имеют повышен
ные пусковые моменты. Двигатели с контактными кольцами, как и дви
гатели постоянного тока, включают в сеть с помощью регулируемых
сопротивлений. Вследствие этого имеется водможность плавного из
менения крутящего момента и частоты вращения ротора электродви
гателя.
Д ля грузоподъемных машин ввиду повторно-кратковременного ре
жима их работы (частые пуски и остановки) применяют крановые трех
фазные электродвигатели типа МТ с контактными кольцами или типа
МТК с короткозамкнутым ротором.
Кроме специальных крановых электродвигателей применяют асин
хронные двигатели общепромышленных типов. Т ак, для привода кран-
балок и подъемников широко используют асинхронные электродвига
тели с повышенным скольжением (АС и АОС) и двигатели с фазовым
ротором (АК и АОК), а для привода транспортирующих устройств —
с повышенным пусковым моментом (АП и АОП).
Максимальный момент выбранного двигателя должен быть не мень
ше пускового (включающего как момент статического сопротивлени я,
так и инерционные моменты вращающихся и поступательно д в и ж у
18
шихся масс механизма и груза), определенного для самого тяжелого
режима работы с номинальным грузом.
Расчет грузоподъемных и транспортных устройств ведут в три эта
па: расчет производительности, силовой расчет, расчет на прочность.
Расчет производительности позволяет определить количество груза,
которое может перемещать грузоподъемная или транспортирующая
машина в единицу времени.
Производительность (т/ч), например для грузоподъемных машин,
определяют по формуле
Q = /2цщг = (3600/ta)mr,
(6)
где т г — номинальная масса поднимаемого груза, т; пц — число р а
бочих циклов машины, ч- 1 ,
—
продолжительность одного цикла, с.
При силовом расчете определяют необходимые мощности двигате
лей для каждого механизма, а также усилия, воспринимаемые и пе
редаваемые деталями проектируемого устройства. Н агрузки , которые
необходимо учитывать при расчете механизмов, определяют д л я двух
состояний: для полного использования грузоподъемности при нормаль
ном режиме работы; дл я полного использования грузоподъемности при
резких пусках и торможениях.
Расчет на прочность позволяет определить размеры деталей. Вы
бирая материал и допускаемые для него напряжения, необходимо
учесть требования, предъявляемые к грузоподъемным и транспортным
устройствам: обеспечение безопасности людей, сохранность груза и
целости машины; влияние ударной нагрузки, появляющейся при силь
но ослабленном канате, и т. п.; влияние режима работы механизма.
Нормы и правила, обязательные при конструировании, расчете и
эксплуатации грузоподъемных и транспортных устройств, устанавли
ваются в Советском Союзе законодательным путем, а разрабо тка пра
вил и контроль за их выполнением возложены на Госгортехнадзор.
Объективными показателями, характеризующими режим работы
механизма, являются:
коэффициент использования механизма по грузоподъемности
р — Gp/Gp,
коэффициент годового использования механизма
kr = А!365;
коэффициент суточного использования механизма
К = */24;
относительная продолжительность включения (%)
/7Д=Jhs. 100:
Ч
число включений механизма в течение одного часа ЧВ,
уде G'r , Gr — сила тяжести груза средняя за смену и номинальная; А —
шсло дней работы механизма в год; t — число часов работы механиз-
ла в сутки; fM-„
—
время работы механизма за цикл; ta — длитель
ность цикла.
19
Режимы работы
Таблица 1
Режим
ПВ, %
*гр
*с
ЧВ, не
более
*н
Ручной
До 15
Нерегуляр ная работа
1
Легкий (Л)
1...0 .25 0,25—0,5 0,33—0,67 60 1,1
Средний (С)
15...25 1.. .0 ,5 0 ,5 —1,0 0,67—1,0
120 1,2
Тяжелый (Т)
25...40 1., .0 ,75 0,75—1,0 0 ,67-1 ,0 240 1,3
Весьма тяж елый
(ВТ)
Весьма тяж елый
непрерывного дей
ствия
40...60 1
1
1
300 1,4
60...80 1
1
1
720 1,5
Износ и нагрев узлов механизма находятся в прямой зависимости
- от ЧВ, так как при каждом пуске и остановке механизма в его элемен
тах возникают дополнительные динамические усилия. В зависимости
от условий эксплуатации все механизмы грузоподъемных машин име
ют различные режимы работы (табл. 1).
Весьма тяжелый непрерывного действия режим работы является
следствием высоких требований, предъявляемых к производительности
машины. При этом режиме уведрч!гNoаются как загрузка механизма,
так и скорости движений, повышаются динамические перегрузки не-
установившегося движения (разгон и замедление), что отрицательно
сказывается на надежности механизма или машины.
Таким образом, от режима работы механизма зависит выбор как
коэффициентов запаса прочности его деталей, так и параметров при
водного двигателя, тормозного устройства и системы управления ме
ханизмами.
При расчете механизма и металлических конструкций различие в
режиме работы учитывают коэффициентом динамической нагрузки
£н, ориентировочные значения которого приведены в табл. 1.
При расчете деталей на выносливость необходимо исходить из сум
марного времени работы механизма за полный срок его службы и из
х арактер а изменения нагрузки в течение рабочего цикла. Желаемый
календарный срок службы механизма tL — 5
...12 лет.
По сроку службы tL находят суммарное время (ч) работы механиз
ма
th = 365*r24ftc (Л В 1100)tL.
Число нагружений детали механизма за весь срок ее службы
t = GOihn,
где п — частота вращения или среднее число нагружений детали в ми
нуту.
О правилах техники безопасности п ри эксплуатации грузоподъемных
и транспортных устройств. Грузоподъемные и транспортные устрой
ства, в первую очередь грузоподъемные, во время работы могут пред
20
ставлять опасность для обслуживающего персонала и лиц, находящихся
в зоне их действия. Поэтому при изготовлении основных грузоподъем
ных машин (кранов, подъемников и др.) и некоторых транспортирующих
машин (эскалаторов) запасы прочности в наиболее ответственных
механизмах, а также и правила их эксплуатации регламентируются
государственным законодательством. Разработка новых положений и
надзор за их выполнением осуществляется Госгортехнадзором во всех
отраслях промышленности. '
Госгортехнадзор ведет работу на местах через своих инспекторов,
контролирующих как заводы-изготовители, так и предприятия, экс
плуатирующие грузоподъемные устройства. Главная цель мероприятий
по технике безопасности— сделать труд рабочих безопасным и, кроме
того, способствовать лучшему использованию машин, уменьшению -
простоев и повышению производительности труда.
Техника безопасности предусматривает мероприятия, направлен
ные на устранение причин производственного травматизма, овладе
ние безопасными приемами работы и организацию содержания машин,
обеспечивающую безопасность работы.
Каждое новое подъемно-транспортное устройство, поступившее в
эксплуатацию, должно иметь заводской паспорт и инструкцию по тех
нике ее эксплуатации. Для приема машины в эксплуатацию админист
рация назначает комиссию. Акт приема комиссии служит основным тех
ническим документом, допускающим машину к эксплуатации. Перед
пуском в эксплуатацию машине присваивают инвентарный номер, под
которым ее регистрируют в специальной книге учета. Ответственность
за состояние машины в процессе ее эксплуатации возлагается прика
зом администрации на инженерно-технического работника соответст
вующей квалификации. Работу на машине, уход за ней, ежедневное
наблюдение, а такж е текущий ремонт пор учают'квалифицированным
рабочим.
По существующему законодательству грузоподъемные машины
допускаются к эксплуатации только в том случае, если они соответ
ствуют требованиям, разработанным Госгортехнадзором и обязатель
ным для всех предприятий, изготовляющих и эксплуатирующих подъ
емно-транспортные машины.
Безопасная эксплуатация грузоподъемных и транспортных уст
ройств обеспечивается при соблюдении следующих правил техничес
кого надзора:
через каждые 10 сут работы машины производится детальный осмотр
и проверка действия всех механизмов;
через каждые 12 мес независимо от того, работала машина или без
действовала, а также после капитального ремонта производится тех
ническое освидетельствование и испытание машины с составлением ак
та освидетельствования и записи в журнале осмотров.
Периодический контроль исполнения правил по эксплуатации ма
шины и техники безопасности изложен в прил. Ю
.
Раздел I
ГРУЗОПОДЪЕМНЫЕ УСТРОЙСТВА
Глава 1
ЭЛЕМЕНТЫ ГРУЗОПОДЪЕМНЫХ УСТРОЙСТВ
§ 1. ГИБКИЕ ТЯГОВЫЕ ОРГАНЫ
В грузоподъемных машинах гибкие тяговые органы (цепи, канаты
предназначены для подвешивания грузов, а также для приведения ]
движение механизмов с ручным приводом. Они должны обладать гиб
костью, иметь удобное гфепйбние рабочих органов, небольшое отно
сительное удлинение под нагрузкой и др. Кроме этого, они должнь
удовлетворять общим требованиям, предъявляемым ко всем элемента?
машин: прочностью и износостойкостью, невысокой стоимостью, пре
стотой изготовления и пр.
Цепи. По конструкции и способу изготовления цепи делят на свар
ные, пластинчатые или шарнирные и специальные (из ковкого чугуна
литые и пр.) . Сварная цепь состоит из. овальных взаимно перпендику
лярны х звеньев (рис. 39, а). Это обеспечивает большую гибкость в
всех направлениях и позволяет применять тяговые цепные колеса
звездочки или барабаны малых диаметров D 6 = (20 ...30)d. Цепи из
готовляют из стальных прутков марок Ст2, СтЗ я сталь 10.
Цепи бывают некалиброванные СН (отклонение размеров до 10%
и калиброванные СК (отклонение размеров до 3%). Цепи СН предна
значены для работы только на гладком барабане или как чалочные
Цепи СК-применяют в тех случаях, когда требуется точность шага ш
пи для работы со звездочками и барабаном, имеющим специальны
гнезда для укладки звеньев цепи.
Скорость цепи па барабане допускается не более 1 м/с, на звездо1
ке — не более 0,1 м/с. Это обусловлено изнашиванием звеньев в ме<
тах их сопряжения.
При растяжении в звеньях цепи возникают напряжения растяж*
ния и изгиба. Учитывая сварную конструкцию звена и недостаточну;
точность существующих методов расчета напряжений, по нормам Гсх
гортехнадзора каждый вид цепи испытывают на растяжение до ра:
рыва. Разруш ающая нагрузка F Р приводится в каталоге на цепь. Ра:
мер сварной цепи выбирают из соотношения
ГиК<Fp,
.
('
где Fu — максимальное рабочее усилие на цепь, определимое при подт
еме номинального груза, но без учета динамической нагрузки; k a -
коэффициент запаса прочности (табл. 2).
Пластинчатая цепь (рис. 39, б) состоит из пластин 1 с отверстиям1
в которые вставлены валики 2 . Число пластин в одном звене завис»
22
Таблица 2
Запасы прочности и тормозного момента грузоподъемных устройств
Запас прочности
Козффн-
Устройств о
Прив од
Режим
каната
циеит
запаса
работы
цепи
тормозного
*ц
kк
Ч
момента
Ручной
___
—
4,5
18
_
Кран
Машинный
л
с
—
“
5
5,5
20
25
1,5
1,75
ТиВС —
о
30...35 2.. .2,5
Грузовая лебедка Ручной
3 ...5
5,5
12
Грузовая лебедка Машинный
—
6...8
6
20
—
и таль
Лебедка дл я
Ручной
—
—
9
16
—
подъема людей
Машинный
9...15 24.. .40
>т разрушающей нагрузки и может быть от 2 до 12. Соединение звень-
в в пластинчатой цепи шарнирное. Элементы цепи (пластины и вали-
и) изготовляют из углеродистых сталей марок 40; 45 и 50 и подверга-
)т термообработке. Пластинчатые цепи не допускают изгиба в попе-
ечном направлении, их применяют только со звездочками при ско-
ости не более 0,25 м/с.
Грузовые пластинчатые цепи рассчитывают по формуле (7). Раз-
ывная нагрузка цепи в целом приводится в каталогах. Запас прочно-
тн /гц принимают по табл. 2. Вследствие шарнирного соединения звень-
в пластинчатые цепи гибкие и допускают применение рабочих органов
депных блоков, звездочек и тяговых колес) относительно малых диа-
етров.
Д ля обеспечения нормальной работы сварной и пластинчатой цепи
полном зацеплении должны находиться одновременно не менее двух
/бьев звездочки.
Рис. 39. Цепи:
а — сварная кругозвенная; £»— пластинчатая
23
Канаты. В грузоподъемных устройствах в качестве гибких тяго
вых органов чаще всего применяют стальные канаты. Пеньковые, хлоп
чатобумажные канаты (ГОСТ 483—75, ГОСТ 1088—71), а также кана
ты из искусственного волокна используют только для обвязывания
груза с целью прикрепления его к крюку механизма подъема.
Канаты пеньковые'состоят из нескольких прядей эллиптического
сечения (рис. 40), которые, в свою очередь, свиты из отдельных воло
кон и нитей. Эти канаты очень гибки, но обладают невысокой прочно
стью, малым сроком службы из-за воздействия различных р азруш аю
щих механических факторов и влаги.
Стальные канаты используют для подъема или горизонтального
перемещения грузов, при специальной конструкции их применяют
в качестве рельсов для кабельных кранов (несущие канаты), а также
для строповки перемещаемых грузов. Стальные проволочные канать
позволяют поднимать груз с большой скоростью, работают они бес
шумно. Их изготовляют из высокоуслеродистой стальной светлой ил!
оцинкованной проволоки (ГОСТ 7372—79) повышенной прочности ма-
рок В, I и II диаметром 0,2 . . .З ’мм. В грузоподъемных устройствах с
машинным приводом применяют проволочные канаты двойной свивки
(рис. 41). Проволоки свиваются в пряди, а пряди навивают на органи
ческий или. металлический сердечник. Различают канаты с точечных
касанием проволок между слоями прядей (ТК) и линейным касанием
(ЛК). Проволоки, из которых свивают канат, могут быть одинаково
го или разного диаметра. При разном диаметре проволок в обозначениг
каната добавляют букву Р, при одинаковом — О. Канаты с линейных
касанием имеют лучшее заполнение сечения, они более гибкие и изно
состойкие, чем канаты типа ТК. Однако вследствие односторонне!
свивки проволок в пряди и прядей в канате они раскручиваются по;
нагрузкой и требуют подвески груза на менее чем на двух ветвя;
каната. Д л я грузоподъемных машин применяют канаты ЛК-РС
ГОСТ 7668—80 и Т Л К -0 ГОСТ 3079—80 . Канаты типа ТК с крестово;
свивкой применяют, если груз подвешивают на одной ветви (для пред
отвращения поворота каната с грузом).
Свободные концы каната 1 (рис. 42) крепят с помощью коуша 2
«эаплеткой» или винтовыми зажимами 3.
а)
$)
Рис. 40. Канаты пеньковые;
а — обыкновенные; 6 — оборотные
Рнс. 41. Сечение стального пров<
лочного каната:
1 — проволока; 2 — прядь
24
Рис. 42. Стропы канатные:
J— канат. 2 — коуш; 3— винтовой
зажим
При наличии абразив
ной и коррозионной среды
предпочтительнее брать к а
наты, изготовленные из бо
лее толстой проволоки.
Д ля уменьшения изнаши
вания и повреждений ка
наты покрывают защитным
смазочным
материалом.
Разрушение каната проис
ходит постепенно и обнару
жить начавшееся разруше
ние можно по числу обор
вавшихся проволочек на
шаг свивки, что позволяет
своевременно сменить' ка
нат. Число оборванных
( ВариантX) (ВариантЖ)
Ик
проволочек определяется либо визуально, либо с применением элек"
тромагнитного дефектоскопа.
Проволока каната, получаемая методом холодного волочения с пре
делом прочности 1470 ...2268 МПа, разрушается в эксплуатации от ус-
Таблица 3
Каналы ЛК-Р по ГОСТ 2688—80
Диаметр
каната dK,
мм
Площадь
сечения всех
ПрОЕСЧШК,
мм4
Масса 100 м
каната, кг
Временное сопротивление разрыву материала
проволок каната. МПа
1470
|1568|1764|1960
Разрывная н агрузка каната, кН
4,1
6,55
64,1
9,75
10,85
4,8
8,62
84,4
—
--
'
12,85
13,90
5,1
9,76
95,5
—
—
14,60
15,80
5,6 •
11,90
116,5
.—
15,8
17,80
19,35
6,9
18,05
176,6
—
24,0
26,30
28,70
8,3
26,15
256,0
—
34,8
38,15
41,60
9,1
31,18
305,0
—
41,55
45,45
49,60
9,9
,
36,66
358,6
—
48,85
53,45
58,35
11,0
47,19
461,6
—
62,85
68,80
75,15
12,0
53,87
527,0
—
71,75
78,55
85,75
13,0
61,0
596,6
76,19
81,25
89,00
97,00
14,0
74,40
728,0
92,85
98,95 108,00 118,00
15,0
86,28
844,0
107,00
114,50 123-, 55 137,00
16,5
104,61
1025,0
130,00
139,00 152,00 166,00
18,0
124,73
1220,0
155.00
166,00 181,50 198,00
19,5
143,61
1405,0
179,50
191,00 209,00 228,00
21 ,0
167,03
1635,0
208,00
222,00 243,50 265,50
25
талости. Ввиду сложности конструкции каната определить напряжение
в его элементах затруднительно. Многочисленные иеаледования кана
тов позволили выявить основные факторы, определяющие предел вы
носливости проволоки по предельному числу перегибов каната. Этими
факторами являются максимальное натяжение каната и деформация
изгиба, зависящая от отношения диаметра блока или барабана к диа
метру каната. По нормам Госгортехнадзора по максимальному рабоче
му усилию ветви каната Г м и по запасу прочности каната к и (см.
табл. 2) определяют необходимое разрывное усилие
К kK< Fv,
(8)
по которому в каталоге подбирают диаметр каната (табл. 3).
Д ля обеспечения долговечности выбранного каната по правилам
Госгортехнадзора определяют минимально допустимый диаметр блока
или барабана, ограничивающий напряжение изгиба каната:
D5> М«,
(9)
где k d — коэффициент запаса, который принимают в зависимости от
типа грузоподъемного устройства и режима работы (см. табл. 2).
§ 2. РАБОЧИЕ ОРГАНЫ
К рабочим органам грузоподъемных машин относят узлы и детали,
воспринимающие усилия от тяговых органов: блоки, звездочки, полис
пасты, барабаны, грузозахватные устройства, остановы, тормоза и
ходовые колеса.
Блоки и звездочки служат для изменения направления движения
тягового органа. В отдельных случаях блок (канатоведущий) может
служить для передачи крутящего момента от вала к тяговому органу
или наоборот. Канатоведущие блоки, передающие крутящий момент,
имеют на ободе клиновидные желоба для передачи усилий за счет тре
ния между поверхностью каната и стенками желоба блока.
Направляющие блоки бывают чугунные, реже — стальные (свар
ные или литые) для больших нагрузок (рис. 43). Диаметры блоков
должны соответствовать
отношению
Dafdк, принятому при расчете каната
на прочность.
Для стальных канатов профиль кана
вок на ободе блока выполняют таким,
чтобы канат ложился в желобок плотно,
без лишних зазоров, но не заклинивал
ся в нем.
В целях обеспечения этих условий
радиус дна желоба канатного блока
г — (0,6 ...0,7)с/к, глубина желоба h =
= (1,5 ...2)dKи ширина желоба Вн =
= (1,6 ...3)dK.
Рис. 43. Канатный блок:
I— ступица; 2 —обод
26
Рис. 44. Звездочки:
а, б — круглозвенной цепи; в — пластинчатой цепи
Цепные колеса и звездочки для сварных калиброванных и для плас
тинчатых цепей показаны на рис. 44. Д л я сварных некалиброванных
цепей применяют блоки с гладким профилем канавок на ободе. Диаметр
окружности звездочки D д для калиброванной сварной цепи, на кото
ром располагаются центры поперечных сечений звеньев, зависит от
шага цепи s, диаметра цепного звена d и числа зубьев г.
Из треугольника ОВС (рис. 44, б) с углом а/2 = 1807г D e —
= "j/"[si sin 52_)2 -f [dl cos ^-^ .Минимальное число зубьев звездочки
для калиброванной сварной цепи zmlD ^ 4. Д л я ограничения изгиба
звеньев цепи диаметр звездочки при ручном приводе Dg 5 s 20 d, при
машинном приводе Ь б ^ 30d.
Аналогично диаметр звездочки для пластинчатых цепей Dg —
= si sin------ .
Для пластинчатых цепей принимают минимальное чис
ло зубьев zmm= 6 ...8.
Методы расчета размеров и построения профиля зубьев ведущих
звездочек с ячейками для круглозвенных цепей приведены в
ГОСТ 13561—77.
Звездочки для пластинчатой цепи изготовляют из проката (сталь
Ст4, Ст5) или отливают. Они представляют собой зубчатые • колеса,
зубья которых входят между пластинами цепей, соприкасаясь с вали
ками шарниров. Профиль зубьев звездочки пластинчатой цепи строят
по ГОСТ 592—75.
Полиспасты. Гибкие тяговые органы и блоки используют как прос
тейшие грузоподъемные устройства. При подъеме г руза через неподвиж
но закрепленный блок (рис. 45, а) натяжение сбегающей ветви F c к а
ната складывается из усилия, необходимого для подъема г руза Gr,n
сопротивлений от жесткости каната F к, а такж е сопротивлений Fg от
трения подшипников блока: Fc — Gr + F K + Fg. Жесткость каната
при сгибании на блоке проявляется в том, что расстояние от оси ручья
блока до средней линии каната на набегающей ветви увеличивается, а
на сбегающей уменьшается по сравнению с номинальным радиусом
блока D б/2; натяжение сбегающей ветви каната увеличивается на
FH= Сг(Ыа - 1)« Gr (0,01, .... 0,02).
'
27
Рис. 45. Механизм подъема грузов с полиспастом:
а — неподвижный отклоняющий блок; / — груз; 2 —канат; 3— оеь блока; 4—блок; б —•
цолиспаст для выигрыша в силе одинарного барабана; / — крюковая подвеска; 2 — канат»
# — одинарный барабан; в — полиспаст для выигрыша в скорости; / — канат; 2 — подвиж
ный блок; 3 — неподвижный гидравлический цилиндр
При отношении диаметра оси к диаметру ручья блока d /D 5 = 1/6
и коэффициентах трения скольжения / = 0,1 и качения / к = 0,02 сила
сопротивления от трения в подшипниках блока
Fe. = 2GTf KdlD6 х Gr (0,03 ...0,006).
КПД блока с подшипниками
скольжения
тщ = GrIFc fa
fa (0,94 ...0,96), а с подшипниками качения т]п = 0,97 ...0 ,98. Натя
жение перекинутого через неподвижный блок каната Fc = Gr/rjn.
Применение системы блока (с подвижными и неподвижными ося
ми), связанных гибкими тяговыми органами, привело к созданию по
лиспастов. Полиспасты могут быть самостоятельными грузоподъемны
ми устройствами (рис. 46) или
входить в состав механизмов
грузоподъемных машин.
Полиспаст- —
устройство для
подъема или подтягивания гру
за , состоящее из неподвижных 1
и подвижных блоков 2 , огибае
мых гибким тяговым органом 3,
смонтированных в обоймах. Груз
крепят к крюку нижней подвиж-
Рис. 46. Схемы полиспаста с блока
ми, расположенными в один ряд (а),
и полиспаста с блоками, расположен
ными иа общих горизонтальных осях
(б):
/ — обойма с неподвижными блоками; 2 —
аодоижные блоки; 3 —гибкий тяговый ор
ган (канат или цепь)
23
Рис. 47. Полиспаст сдвоенного барабана механизма подъем а с длинной (а) н
короткой (б) крюковой подвеской:
1 — ьрюьовая подвеска; 2 — тяговый орган; Я — сдвоенный барабан
юй обоймы, которую обычно называют крюковой
подвеской
рис. 45, б). Крюковая подвеска / с тяговым органом 2 и бараба-
юм 3 образуют полиспаст второго типа, т. е. входящий в механизм
юдъема грузоподъемного устройства. Основной характеристикой по-
шспаста является кратность in. Ее определяют при одинарном бараба-
:е (см. рис. 45, б) по числу ветвей каната, на которых подвешен груз.
1ри сдвоенном барабане (рис. 47) кратность полиспаста равна полови-
ie числа ветвей каната, на которых подвешен груз. Подвеска 1 двумя
<етвями тягового органа 2 соединена со сдвоенным барабаном 3, число
>абочих участков на барабане г б = 2.
Полиспаст используют для выигрыша в силе (см, рис. 45, б и
>ис. 47) и реже — для выигрыша в скорости (см. рис. 45, в). Полиспаст
1ля выигрыша в скорости применяют, например, в погрузчиках, где
фи небольшом ходе гидроцилиндра Н и относительно малой скорости
го движения высота подъема груза / увеличивается в i n раз, и скорость
юдъема груза возрастает.
Наибольшее распространение получили полиспасты для выигрыша
силе, где при неподвижном грузе натяжение канатов уменьшается в
п раз:
—
GJ (гб1п). При подъеме груза за счет потерь в блоках на-
яжение канатов увеличится, оно м аксим альное месте набегания кана-
а на барабан:
Р _ бг-}-бп
ГМ
гЬ*п Лп
( 10)
В то же время скорость каната, навиваемого на барабан, увеличит-
я в i'n раз по сравнению со скоростью подъема груза:
У0 = Vila.
(И)
29
Таблица 4
рекомендуемые кратности
полиспастов
Во столько же увеличивается и дли
на каната, навиваемого на барабан,
при высоте поднятия груза Н
1Я= Н1а.
~
(12)
При определении максималь
ного натяжения каната необходимо
учитывать нагрузку от крюковой
подвески
Сл = (0,01 ...0 ,015)G„
(13)
а такж е сопротивление от про
хождения каната через неподвиж
ный блок (см. рис. 45, а), при на
личии дополнительных отклоняющих блоков, например у консоль
ного крана.
По максимальному натяжению каната, найденному с учетом крат
ности полиспаста по формуле (10), определяют разрывную нагрузку
по формуле (8). Оптимальные габарйты механизма подъема грузо-
подъемных машин получают при выборе кратности полиспаста в соот
ветствии с табл. 4.
Барабаны. В зависимости от используемого тягового органа бара
баны делятся на цепные и канатные. Цепные барабаны применяют
сравнительно редко, главным образом в ручных поворотных кранах
грузоподъемностью до 5 т. Форма барабана цилиндрическая. Диаметр
его выбирают из тех же условий, что и диаметр блока. Коэффициент
полезного действия барабана с учетом сопротивления в подшипниках
г\ = 0,94 ...0,98.
Канатные барабаны служат для многослойной и однослойной на
вивки каната. Диаметр канатного барабана выбирают так же, как диа
метр блока. Бар абан для многослойной навивки применяют только прТ
весьма больших длинах навиваемого каната, когда при однослойное
навивке требуются чрезмерно большие размеры барабана. Барабае
для многослойной навивки по правилам Госгортехнадзора выполни
ют с гладкой поверхностью навивания и снабжают бортами, выступаю
щими над верхним слоем уложенного каната не менее чем на диаметр
каната. Д л я правильной укладки каната такие барабаны снабжаю'
канатоукладчиками (рис. 48). Д ля правильной укладки каната н;
поверхности барабана с однослойной навивкой делают винтовук
нарезку (см. рис. 47, а). Размеры канавок выбирают такими, чтобь
канат не заклинивался при укладке в канавки барабана. Эти канав
ки увеличивают поверхность соприкосновения каната с барабаном i
уменьшают напряжение смятия и изнашивание каната, поэтому npi
использовании нарезных барабанов срок службы каната увеличивается
Профиль канавок выбирают по нормам. Обычно радиус канавк!
r0 = 0,54dK, а шаг (мм) нарезки s = dK+ (2 ...3).
Барабаны, на которые наматывается одна ветвь каната, имеют од
ну винтовую нарезку, а барабаны, на которые наматываются две вет
Грузоподъ
емность, т
Кратн ост ь
полиспаста
in
Вяд
барабана
До 6,3
До 16
16 и более
2-3
2-3
4ивыше
Одинар
ный
Сдвоен
ный
То же
30
ей,— две противоположные винтовые нарезки. Сдвоенный бар абан с
двумя рабочими участками для наматывания каната представляет со
бой как бы два поставленных рядом одинарных барабана. Это в 2 раза
уменьшает нагрузку на канат и обеспечивает строго вертикальный
подъем груза.
Для увеличения долговечности тягового органа диаметр барабана
выбирают в зависимости от диаметра каната: D б ^ 12 ...40, как и для
канатных блоков. Длина нарезного барабана по правилам Госгортех
надзора должна быть такой, чтобы при низшем рабочем положении
грузозахватного приспособления на барабане оставались навитыми не
менее 1,5 . ..2 витков каната, не считая витков, находящихся под за
жимным устройством. Если / к — рабочая длина каната, наматываемо
го на барабан, то длина рабочего участка нарезной части барабана без
учета места для закрепления каната на барабане
Общую длину одинарного L 6 1 и сдвоенного Ьби барабана определя
е т по формулам:
ще l3 = s (2 ...3) — длина барабана для закрепления каната планкой;
'б =10...20мм—толщина бортика; lc~ Ln— 2Лм tgа —средняя
шсть сдвоенного барабана; L a — длина подвески, а = 4 . ..6° — м ак
симально допустимый угол отклонения оси каната от оси блока или оси
<анавки на барабане, чтобы не соскакивал канат, tg а « 0,1 (см.
тис. 47, а).
Барабаны бывают литые из чугуна или стали и сварные из стали.
Толщина стенки (в мм) литого барабана б = 0,02£>б + (6 ...10), свар-
юго б = 0 ,0 Юо + 3. От наматывания каната стенки барабана под
вергаются деформациям изгиба, кручения и сжатия.
Барабаны длиной более пяти диаметров применять не рекомен-
туется. У барабанов длиной менее трех диаметров напряжение от из-
иба и кручение не превышает 10 ...15% от напряжения сжатия.
3 этом случае стенки барабана рассчитывают на сжатие. Н апряжение
—
[Д/ (лТ)б) + (1.5
...2)ls.
(14)
(15)
(16)
Рис. 48. Канатоукладчик ку
лачковый (о) и кривошипно
шатунный (б):
1 — канат; 2 — барабан; 3 — кана-
31
сжатия в стенке барабана можно определить по формулам для расчета
толстостенных сосудов, находящихся под внешним равномерным дав
лением.
Рассматривая стенку барабана толщиной б как кольцо, нагружен
ное распределенным внешним давлением (толщина кольца незначи
тельна по сравнению с его диаметром), можно найти максимальные
напряжения сжатия на внутренней поверхности стенки:
°сж= F*!(&Х
Кш 1.
‘
(17)
где F u — рабочее натяжение каната; б — минимальная толщина стен
ки барабана; s — шаг винтовой нарезки на барабане; [асж] — допус
каемое напряжение сжатия.
Коэффициент запаса прочности для определения допускаемого на
пряжения выбирают в зависимости от материала барабана. Для сталь
ного барабана [стсЖ] = о т/1,5. Для чугунного [асж] = ав/4,25, где'о ,
и о в — соответственно предел текучести и предел прочности материа
ла.
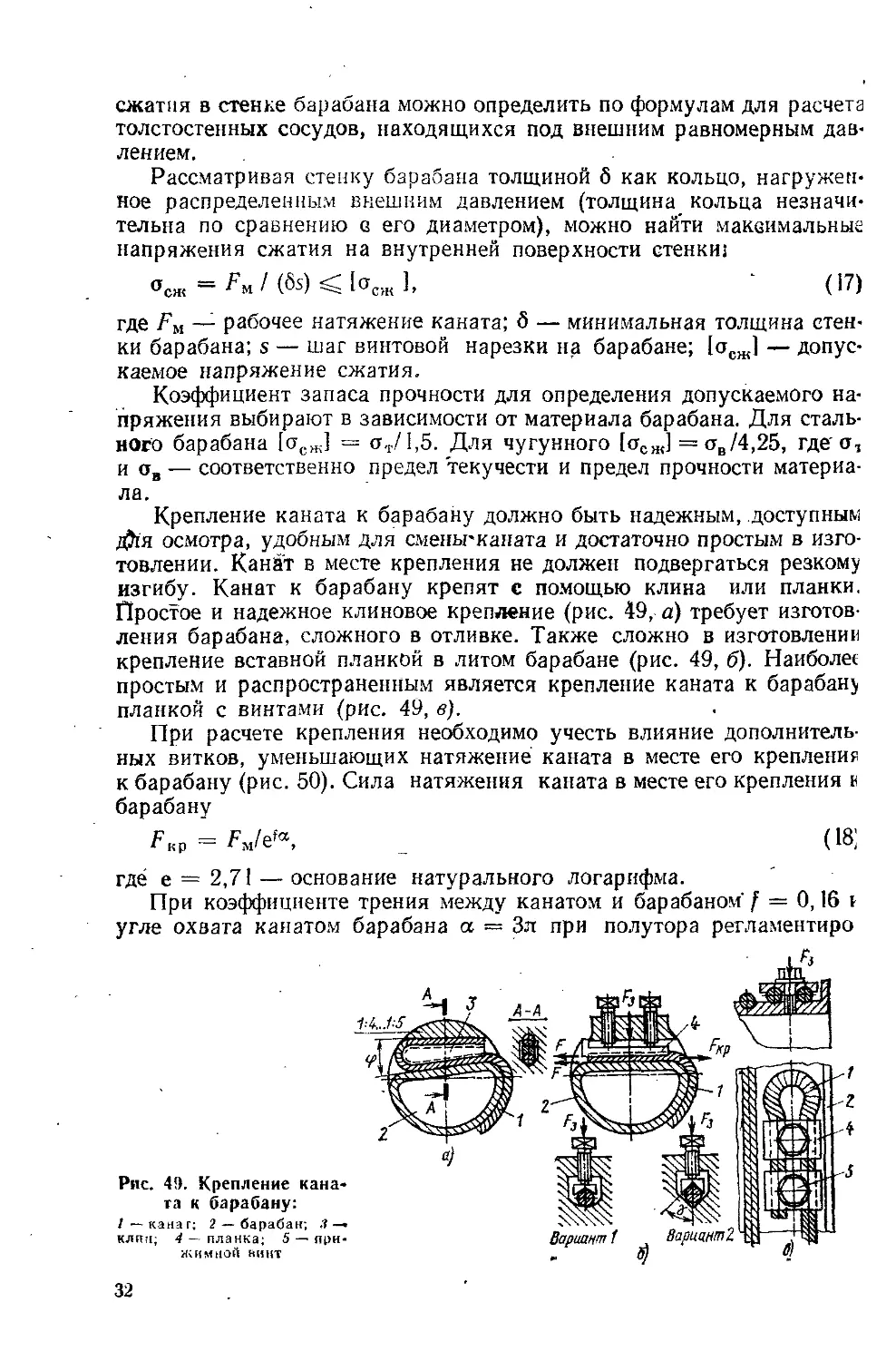
Крепление каната к барабану должно быть надежным, доступным
j$iя осмотра, удобным для сменьгканата и достаточно простым в изго
товлении. Канат в месте крепления не должен подвергаться резкому
изгибу. Канат к барабану крепят с помощью клина или планки.
Простое и надежное клиновое крепление (рис. 49, а) требует изготов
ления барабана, сложного в отливке. Также сложно в изготовлении
крепление вставной планкой в литом барабане (рис. 49, б). Наиболее
простым и распространенным является крепление каната к барабану
планкой с винтами (рис. 49, в).
При расчете крепления необходимо учесть влияние дополнитель
ных витков, уменьшающих натяжение каната в месте его крепления
к барабану (рис. 50). Сила натяжения каната в месте его крепления и
барабану
FKV=FJ^,
(18;
где е = 2,71 — основание натурального логарифма.
При коэффициенте трения между канатом и барабаном' f = 0 ,16 v
угле охвата канатом барабана а — Зл при полутора регламентиро
32
Рис. 50. Схема сил, действующих в месте
крепления каната:
/ — канат; 2 —барабан; 3 — прижимная планка
ванных
дополнительных
витках
FKp — Fm/4,d3.
Д ля надежного крепления каната
к барабану сила трения F должна
зыть не менее F Kp. Сила трения F
создается усилием зажимных винтов
л возникает между барабаном и кана
том, а также между планкой и ка
натом.
На планке с полукруглыми канавками (см. рис. 49,6 — вариант
I) сила затяжки винтов
F3 = FKPI (2/).
(19)
При планке с трапецеидальной канавкой (см. рис. 49, 6
—
вари-
знт 2) сила затяжки винтов
Fs= F11Р/(/4-/,),
(20)
■де / = 0,15 ...0 ,16 — коэффициент трения между стальными канатом
1 стальным барабаном; ft — ft ( sin у -f / cos у) — приведенный коэф
фициент трения между канатом и планкой, имеющей трапецеидальное
течение канавки; у « 40° — угол наклона боковой грани зажимной
санавки на планке.
Винты вставных прижимных планок (см. рис. 49, б) рассчитывают
ia сжатие [а прижимных (рис. 49, в) — на растяжение] и изгиб:
®сум
1,3F3
znd'f/4
МIT
г-0 ,1df
(21)
де dx — внутренний диаметр резьбы винта; z — число винтов. Коэф
фициент 1,3 учитывает напряжение кручения при затяж ке винтов.
Изгибающий момент Ми = /7кр/,'г д е / — расстояние от середины
. аната до места заделки винта. При расчете винта запас прочности
. олжен быть не менее 2,5. Независимо от расчета число одновинтовых
рижимных планок должно быть не менее двух, или одной при двух-
интовом креплении, для каната диаметром до 31 мм и по две планки
ри большем диаметре каната.
Грузозахватные устройства в грузоподъемных машинах еоединя-
>т перемещаемый груз с тяговыми органами. К ним относятся крюки
рис. 51, а), электромагниты (рис. 51, б), грейферы (рис. 51, в), а так
се специальные захваты для штучных грузов (рис. 52). Наибольшее
аспространение для захватов штучных грузов получили грузовые
рюки с блочными подвесками. Грузозахватные устройства изготов-
яют только специализированные заводы, имеющие разрешение Гос-
ортехнадзора.
К тележке (рис. 51, а) с механизмом передвижения 1 и механиз-
ом подъема 2 подвешивают на крюке 3 груз, предварительно обвязан-
m
Зак. 1G3*
строп
Fc= Grl(zcosa),
(22
где Gr — сила тяжести поднимаемого груза; z — число ветвей строп
а = arctg 11/ b2 + /2 /(2Л)] —угол отклонения ветвей от вертикали
Для подъема стальных и чугунных грузов 1 (рис. 51, б) при нор
мальной температуре широко применяют электромагниты 2 постояк
ного тока, подвешенные к крюку 3 и питаемые током через гибкий кг
бель 4. Д л я транспортирования немагнитных листовых материалов ис
пользуют вакуумные захваты.
Для порционного транспортирования сыпучего груза применяй:
ковши, бадьи и грейферы. Автоматизация захвата грузов решается пу
хват ластового материала
34
Рис. 53. Крюки однорогий (а ), двурогий (б) и петля Рис. 54. Схема к расчету
для крепления крюка к канату (в)
крюка на прочность
гем применения автоматических грузозахватных устройств — грейфе-
эов (рис. 51, в). Сыпучий груз 1 захватывается ковшами 2 при натяже-
ш и замыкающего каната 3. При натяжении подъемного каната 4 груз
юдннмается. Существуют и одноканатные грейферы с ручным и ма-
пинным приводом открывания ковшей, которые можно прикреплять
г стандартной крюковой подвеске механизма подъема.
Однорогие и двурогие крюки различной грузоподъемности вы-
гускаются отечественной промышленностью по ГОСТ 6619—75,
'ОСТ 6627-74 и ГОСТ 6628—73. Стандартные грузовые крюки изготов-
1яют ковкой или штамповкой из малоуглеродистой стали 20, что га-
>антирует от внезапного разрушения крюка (в случае перегрузки перед
(азрушением крюк будет разгибаться). Крюк крепят к подвеске
!помощью резьбового соединения (рис. 53, а и б), а крюк, подвеши-
демый к одному канату, имеет стержень с петлей (исполнение II ,
шс. 53, б). Нагрузка от поднимаемого груза прикладывается к зеву
:рюка а.
Форма крюка выбрана с таким расчетом, чтобы обеспечить мини-
тальные размеры при достаточной прочности, одинаковой во всех се-
ениях. Исходным размером при конструировании крюка является диа-
ютр его зева, который должен быть достаточен для размещения в нем
вух канатов или сварной цепи, в помощью которых подвешивается
руз. Рабочая часть крюка представляет собой брус (большой кривизны),
ентр кривизны которого находится в непосредственной близости от
еометрического центра зева крюка. Наибольшие напряжения от вер-
икальной нагрузки, проходящей через центр зева, имеют место в сече-
ни крюка ах — а2 (рис. 54), поскольку у этого сечения наибольшее
лечо и, следовательно, максимальный изгибающий момент. Чаще
35
всего крюки имеют трапециевидное поперечное сечение, причем
большая сторона трапеции лежит на внутреннем радиусе очертания
крюка. В -этом случае лучше используется материал крюка, так как
центр тяжести сечения приближается к центру зева, а изгибающий мо
мент в опасном сечении уменьшается.
Приложив в центре тяжести сечения две равные, противоположно
направленные силы Gr , можно привести нагрузку к силе Gr и моменту
Мя = —Grr , где г = а/2 + ех\ ег — расстояние от центра тяжести се-
,
,
2b, -f-6, h
чения до большего основания трапеции ог, ех = ~ь
■-д
-
Момент отрицательный, так как он уменьшает кривизну бруса.
В отличие от прямолинейного бруса, в котором при изгибе имеет
место линейный закон распределения нормальных напряжений и ней
траль ная линия проходит через цецтр тяжести сечения, в кривом брусе
нормальные напряжения меняются по гиперболическому закону, а
нейтральная линия смещена относительно центра тяжести сечения.
Согласно теории изгиба бруса большой кривизны нормальные на
пряжения в сеченин ах — а2 крюка
оу= ор-fои= Gt/A+Ма/(Ar) +IMJ(Ark)][у! (г+#)],
где у — расстояние рассматриваемого волокна от оси;
1г
—-—
йЛ; А=Ь'~
2h — площадь сечения крюка.
У~тг
2
Для стандартных крюков центр кривизны оси примерно совпадает
с центром отверстия крюка. В этом случае уравнение упрощается и
принимает вид
Ма
U
GT
U
v
Ark г+у
Ак гА-у
Подставляя значения у, получим напряжения на внутреннем кои
туре крюка
2Gr et
Aka
;io p],
(23)
на наружном контуре крюка
Gr е.
(24)
где [ср] — допускаемые напряжения для стали 20, при машинном при
воде [сгр] = 150 МПа, при ручном приводе — 160 МПа.
Для трапеции с основаниями Ъи Ь2 и высотой h коэффициент кри
визны
-1+
2г
Фх "г Ь-,
-\\1
■*)аЦ
Ьх—Ь2
(г+ег)1п—
----- (h — b.,)
г-ех
-
)
36
Приh—аиЬ^Ь2—пиимеем
k=
.
^ + 7 _[(1,5п„—0,5)1,098—(nv—1>]—1»0,1,
3("к+ I)2
Выражение для k является приближенным, так как оно не учиты
вает скруглений кромок поперечного сечения крюка.
Крюковые подвески. Хвостовик крюка входит в отверстие траверсы
крюковой подвески, где надежно закрепляется (рис. 55, 56). При гру
зоподъемности до 10 т на хвостовике нарезают треугольную резьбу,
при большей грузоподъемности — трапециевидную.
Стержень крюка рассчитывают на растяжение, возможный изгиб
стержня учитывается пониженными допускаемыми напряжениями
.nd'f/4 < 1 о„Г,
(25)
где [ор]' = 50 МПа — допускаемые напряжения при машинном при
воде и [орГ = 60 МПа при ручном приводе.
Минимальную высоту гайки определяют исходя из допускаемых
напряжений смятия резьбы, что обеспечивается при Нг = 0 ,8d. Гайка
крюка опирается либо на сферическую шайбу, либо на упорный ш ари
коподшипник (при грузоподъемности более 3 т). Чтобы исключить
на та
$7
Рис. 57. Схема к расчету трав*
крюковой подвески:'
1—*траверса; 2 —щека; 3 — кожух
латных блоков посредствен-
щек. Их изготовляют из лис-
товой или полосовой стали Стс
и рассчитывают на растяжение
в горизонтальном сечении, ос
лабленном отверстием по;
цапфу. В короткой подвеск*
(см. рис. 56) блоки 1 разме
щаются на удлиненных цап
фах 2 траверсы с подшипни
ком 3 и кожухом 4. Уко
роченная крюковая подвеск;
позволяет поднимать груз н:
большую высоту, чем длин
ная подвеска, но может быть применена только при четной кратносп
полиспаста. В этом случае крюк должен иметь удлиненный стержень
Траверса обеспечивает поворот крюка вокруг вертикальной oci
без закручивания тягового органа, а также позволяет крюку откло
няться от вертикального положения путем поворота вокруг горизон
тальной оси траверсы. Траверсу изготовляют из стали 20 или Ф
и рассчитывают на прочность по среднему сечению, ослабленном;
отверстием для хвостовика крюка, рассматривая ее как балку н;
двух опорах (рис. 57):
ои = MJW, < [ои].
(26
Максимальный изгибающий момент
МИ
G.,/
2-2
Gr d.
2-4
^-(/-0 ,5d3),
4
(27
где d3 — наружный диаметр, опорной шайбы подшипника.- Момент сс
противления сечения, ослабленного отверстием диаметром d2, шири
ной Ьт и высотой /гт, определяется по формуле W т = (Ьт— d2)hj/t
где bT = d3 + (10 ...20). Откуда
/хт =
6М„
(bj —d2) [ct„J
(26
При определении допускаемого напряжения [ои1 запас прочностг
учитывая сложность конфигурации траверсы, принимают не мене
трех.
Цапфу траверсы рассчитывают на изгиб ка к консольную балку
проверяют на смятие. Допускаемое напряжение смятия принимак
равным 30 МПа во избежание задира поверхности цапфы при повор<
те траверсы.
Упорный шарикоподшипник, поддерживающий к£юк, подбирак
по статической нагрузке с коэффициентом запаса 1,3 . . .1 ,5 (для учет
38
/дарной нагрузки) и по диам етру.^ (см. рис. 54) стержня крюка (см.
фил. 3, 4).
Подшипники качения для блоков выбирают по динамической гру-
юподъемности при расчетном сроке службы в зависимости от режима
заботы механизма.
Остановы. Д л я надежной работы грузоподъемных машин необхо-
фмы устройства, обеспечивающие удержание поднятого груза на весу,
1 также плавное опускание его с регулируемой скоростью. Д л я удер-
кания поднятого груза на весу используют храповые и фрикционные
ктановы.
Храповой останов (рис. 58) состоит из зубчатого храпового колеса
' и собачки 3. При подъеме груза храповое колесо / свободно повора-
[ивается вместе с валом
При спуске груза собачка 3 входит во впа-
1ины храпового колеса и припятствует его обратному повороту. Такие
хтройства вследствие повышенного износа собачки и зубьев храпово-
о колеса, а также шума во время работы обычно применяют в меха-
шзмах с ручным приводом.
Расчет храпового останова на прочность аналогичен расчету зуб
атых колес. Зуб храпового колеса рассчитывают на изгиб и проверя-
эт на смятие. При проектировании храповых механизмов следует учи-
ывать необходимость уменьшения силы удара во время их останов-
и. Д л я этого храповые колеса делают малого диаметра (в целях умень-
^ н и я окружной скорости) с небольшим шагом и числом зубьев z =
= 10...24.
Фрикционные остановы работают бесшумно и не дают толчков.
1аиболее простыми и совершенными фрикционными остановами яв л я
йся роликовые, которые обеспечивают безударное приложение на-
рузки при минимальном угле холостого хода, предшествующего за-
линиванию.
Роликовый останов (рис. 59) состоит из корпуса / , втулки 2, сое-
иненной с валом механизма, и роликов 3. При вращении втулки 2
ротив часовой стрелки (при неподвижном корпусе /) ролики увле-
39
каются силами трения в наиболее широкую часть клинового паза, что
обеспечивает свободное вращение втулки 2 относительно корпуса 1.
При изменении направления вращения втулки 2 ролики зах о дятв уз
кую часть клинового паза, что приводит к заклиниванию. В конструк
цию останова включены пружины 4, отжимающие ролики в узкий
угол паза.
Ролики рассчитывают на контактные напряжения сжатия от нор
мальной силы FT, которая определяется, по заданному крутящему
моменту Т, действующему на валу роликового останова
Fr = 2TI (zfD),
'
(29)
где z — число роликов (обычно г = 4); / = 0,06 — коэффициент трения
стальногоролика по стальным шлифовальным (цементованным и зака
ленным) поверхностям корпуса и втулки; D — внутренний диамет£
корпуса.
Из условия самоторможения должно сохраниться неравенство
/=tgр> tg(а/2),
где а — угол роликового останова,
cosа = (2а+ d)l(D—d);
а — расстояние от оси вращения до плоскости втулки; d — диамет]
ролика.
Длину ролика (при l— ],5d) приближенно определяют п а допус
каемому линейному давлению / = FT/ \р], где \р\ = 4,6 кН/см— до
пускаемое линейное давление для цементованной и закаленно)
углеродистой стали.
Тормоза в грузоподъемных и транспортных устройствах преднаэ
начены для удержания груза в неподвижном состоянии, для регули
рования скорости опускания груза, а такж е для поглощения инерци
поступательно движущихся масс тележки с грузом или крана. Эт
универсальность привела к созданию большого числа разнообразны
тормозов: стопорных, спускных и комбинированных; последние сл>
жат одновременно для остановки груза и регулирования скорости опу<
кания. Тормоза делят на две основные группы: с радиальным нажат»
ем (колодочные и ленточные) и с осевым нажатием (дисковые и кон»
ческие).
В грузоподъемных устройствах с машинным приводом применяй
дистанционно управляемые тормоза, которые затормаживаются грузо
или пружиной, а растормаживаются электромагнитом или электр)
гидротолкателем. Тормоз находится в нормально замкнутом состо
нии, чтобы груз не упал, при включенном двигателе тормоз расторм,
живается.
Существуют также и автоматические тормоза. К ним относятся цен
робежные (ограничители скорости) и тормоза, работающие под дейс
вием поднятого груза, которые часто называют грузоупорными.
В грузоподъемных машинах широкое распространение получи;
колодочные тормоза. Они состоят из рычагов и одной или двух кол
док. Торможение механизма колодочным- тормозом происходит за сч
40
Рис. 60. Схема одноколодочного тор
моза:
I —тормозной шкив; 2 — тормозная ко-
аодка; 3—рычаг; 4 —груз; 5 —электро
магнит
сил трения между тормозным
шкивом, связанным с одним из
валов механизма, и тормозной
колодкой, соединенной посред
ством рычажной системы с не
подвижными элементами конст
рукции.
В одноколодочном тормозе (рис. 60) сила тяжести Gr г руза 4 , при
ложенная к рычагу 3, создает силу Frt с которой колодка 2 действует
на рычаг 3. В результате на вращающемся шкиве возникает сила тре
ния Ft = /Tv, противодействующая вращению механизма. Евли мо
мент силы будет больше момента движущей силы, действующей на
валу, то произойдет замедление скорости движения и затем полное
прекращение движения. Дл я остановки движущихся масо сила трения
должна превысить окружное усилие не только от массы груза, но и его
инерции. Растормаживание производится электромагнитом 5 .
При расчете тормоза определяют необходимый тормозной момент
7\ = йтТс,
(30;
где k T — коэффициент запаса; Т'с — статический крутящий момент
на тормозном валу с учетом потерь в механизме.
Коэффициент запаса торможения по правилам Госгортехнадзора
для крановых механизмов подъема принимают в зависимости от режи
ма работы (см. табл. 2).
Статический крутящий момент на тормозном валу (см. рис. 37, е)
оответствует моменту на валу двигателя
Тс = GrDo40/ (2гпм0).
(31)
По тормозному моменту для одноколодочного тормоза определяют
силу нажатия колодки (см. рио. 60)
Fr = 27У (fDT).
'
(32)
Из условия равновесия рычага относительно его оси вращения на
ходим
Grp — Fr(/j + //2)//.
Знак плюс или минус в уравнении определяется направлением вра
щения тормозного шкива.
При одноколодочном тормозе сила нажатия колодки на шкив воа-
действует на вал тормозного шкива и подшипник вала, поэтому при
ходится увеличивать размеры вала и подшипников. Одноколодочные
тормоза применяют в основном в ручных механизмах.
Двухколодочные тормоза (рие. 61, 62, 63) не имеют недостатка од
ноколодочного тормоза, так как при одновременном прижатии двух
41
Рис. 61. Схема двуххв-
лодочного
тормоза с
грузовым замыканием и
размыканием от электро
магнита
диаметрально противоположных колодок компенсируются радиальные
силы на шкиве, и вал оказывается разгруженным от радиальной на
г рузки.
Двухколодочный тормоз (рис. 61) с грузовым замыканием работает
следующим образом. Под действием силы тяжести груза Grp рычаг 1
заставляет тягу 2 опускаться вниз. Тяга 2 поворачивает треугольник
3, с которым она шарнирно связана в точке В. Предположим, что точка
А неподвижна, тогда точка В опустится вниз; при этом точка Б пере
местится вправо. Это движение передается тяге 4 и рычагу 6 , который
прижмет колодку 8 к тормозному шкиву 11. Как только колодка 8 ока
жется прижатой к цщнву, точка Б станет неподвижной, и треугольник
3 уже будет вращаться во круг нее. Тогда точка А переместится влево,
и через рычаг 5 прижмет колодку 7 к шкиву. В действительности тре
угольник 3 не имеет неподвижной точки, и при опускании тяги 2 его
поворот происходит около меняющегося мгновенного центра вращения,
точка В движется вниз и одновременно влево, а точка Б — вправо. В
резу льтате обе колодки (7 и 8) одновременно зажимают тормозной
шкив. Т яг а 4 состоит из двух частей, соединяемых винтовой стяжкой,
что позволяет регулировать тормоз.
Тормоз всегда находится в затянутом (замкнутом) состоянии. Рас-
тормаживание производится с помощью электромагнита 9. Схема элект
роуправления обычно предусматривает блокировку двигателя и элект
ромагнита, благодаря которой при остановке двигателя даже от слу
чайных причин происходит автоматическое торможение.
При растормаживании якорь электромагнита поднимает рычаг 1 и
через тягу 2 поднимает вверх точку В треугольника 3. Как и при за
тормаживании, разобьем процесс отхода колодок на два периода. В
первый период относительно точки А поворачивается точка Б влево
и через тягу 4 отводит рычаг б вместе с колодкой 8 влево до тех пор,
пока регулировочный винт 10 не дойдет до упора и не остановит дви
жение рычага 6 . Затем треугольник 3 начинает поворачиваться отно
сительно точки Б и отводит точку А треугольника и связанный с ним
рычаг 5 вместе а колодкой 7 вправо.
42
Тормозной момент, развиваемый двухколодочным тормозом:
Г , = 2FJDJ2,
(33)
где FT — T J (fDr) — сила нажатия одной колодки. Так как
Fgfl — Frk и Fvl9 = Fзг/г, то
FST= Frljl = ТА! (fDJ),
(34)
FJJh = TAIJ (D,fU3).
Силу Grp определяют из условия равновесия тормозного рычага от
носительно точки б г с учетом потерь (10%) в ш арнирах рычажной сис
темы тормоза: Grp/r + G„Z4 + Gp/p = l ,lF pZ3, где G„ — сила тяжести
якоря электромагнита; Gp — сила тяжести тормозного рычага;
Grp = 1 ,17УЛ/ (fDТ1Й1Т) - GHlallr — Gplvllt{
(35)
Растормаживающее усилие электромагнита FM определяют из не
равенства F M/4 > Grp/r , откуда f M> Огр/г//4.
Тормозные колодки проверяют на давление р между колодкой и
шкивом и работу трения pv, где v — скорость обода тормозного шкива.
Давление на колодки
Р
Fj_
Л„
Ft
В к флКг/ЗбО
<[р].
(36)
где В к — ширина колодки; А и — площадь колодки; <р — угол охвата
шкива одной колодкой (в тормозах конструкции ВНИИПТМАШа <р =
= 70е); D T — диаметр шкива.
Поверхность колодок, которая должна соприкасаться со шкивом,
облицовывают фрикционными обкладками. Д л я получения малогаба
ритного тормоза, уменьшения мощности его размыкающего устройст
ва и получения большого тормозного момента в тормозах подъемно
транспортных машин используют для обкладок специальные м атериа
лы, обладающие повышенными фрикционными свойствами, например,
асбестовую и вальцованную ленту типа ферродо, хорошо работающую
в паре с чугунным и стальным шкивом. При отсутствии смазочных
материалов принимают следующие }а [р] для некоторых фрикционных
материалов (табл. 5).
Таблица 5
Фрикционные материалы
Материа лы
Коэффициент
трения /
Допускаемое давление
для тормоза, МПа
стопорный
спускной
Сталь по чугуну
0,15
2,0
1,5
Лента тормозная асбес товая по стали и 0,35...0,37
0,6
0,3
чугуну
Лепта вальцов анная по стали и чугуну
0,41
0,6
0,4
43
Размеры тормозных шкивов зависят в основном от энергии, погло
щаемой тормозом в течение часа, так как этим определяется изнаши
вание шкива и обкладки, а также нагрев шкива. В то же время удель
ный износ (отнесенный к 1 кВт • ч) зависит от материалов шкива и об
кладки, давления, окружной скорости и в большой степени от темпера
туры тормозного шкива. Это усложняет расчет тормоза. Поэтому в ка
честве исходных данных при расчете тормозов все еще используют экс
периментально установленные значения I/то].
Д ля стопорных тормозов условия работы более постоянны, чем для
спускных или ходовых. Д л я них с достаточной точностью можно опре
делить размеры на основании опытных данных. Д л я стопорных тормо
зов с обкладками из ферродо [/го] = 1,5 . ..3 ,0 МПа • м/с.
При л ег ки х условиях работы и среднем числе включений следует
принимать большие значения работы трения, а при тяжелых услови
ях — меньшие значения. Однако более строгой расчетной базой сле
дует считать проверку тормоза на нагрев. Методы для расчета тормо
за на нагрев имеются, но они пока недостаточно апробированы.
Минимальные размеры тормоза и обеспечение условий лучшего теп
лоотвода получаются при размещении тормозного шкива на самом быст
роходном валу (валу двигателя). Применение груза для замыкания
тормоза приводит к увеличению времени срабатывания тормоза вслед
ствие значительной инерции замыкающего груза. Колодочные тор
моза с грузовым замыканием применяют только на кранах старой кон
струкции. Более совершенны,ми являются колодочные тормоза с пру
жинным замыканием и размыканием от электромагнита или электро
гидротолкателя. Электромагниты постоянного тока типа МП и КМП,
переменного*»—типа МО-Б и КМТ. Электромагниты типа МП и
МО-Б
—
короткоходовые, а КМТ и КМП — длинноходовые.
Благодаря небольшой массе и малым габаритам наибольшее р ас
пространение получили двухколодочные тормоза ТК конструкции
ВНИИПТМАШа (рис. 62). Они замыкаются усилием сжатой пружины
Рис. 62. Схема двухколодочных тормозов с замыканием от пружины н размы
канием от электромагнита:
а — ТК.Т (заторможен); б —ТКП (расторможен)
44
и размыкаются короткоходовым электромагнитом, укрепленным непо
средственно на тормозном рычаге, и работают как от переменного тока
(тормоз типа ТКТ с короткоходовым клапанным электромагнитом
М О-Б),так и от постоянного тока (тормоз типа ТКП с поступательным
движением якоря электромагнита МП).
Тормоза этой конструкции работают следующим образом. Замы
кание тормоза производится усилием F0сжатой основной пружины, ко
торая своим правым.концом опирается на шайбу штока 5 и с помощью
рычага 1 прижимает левую колодку 3 к тормозном у шкиву. Левый
конец основной пружины опирается на стальную скобу 6 и с помощью
рычага 2 прижимает правую колодку 4 к тормозному шкиву. Колодки
к рычагам крепят шарнирно. При включении тока в катушку электро
магнита 9 якорь электромагнита 7 (рис. 62, а) поворачивается по часо
вой стрелке относительно оси 0 а, и стержень 8 давит на шайбу штока 5.
При включении тока в катушку электромагнита 9 (рис. 62, б) якорь 7
электромагнита МП передвигается влево. Вследствие этого сжимается
основная пружина F0 и шток 5 выдвигается из отверстия скобы 6’.
При этом под действием силы тяжести электромагнита и впомогатель-
ной пружины F Bрычаг 2 с колодкой 4 отходит вправо до тех пор, пока
регулировочный винт 10 не дойдет до упора. При дальнейшем выдви
жении штока пружина F Б отодвигает влево рычаг 1 с колодкой 3. Та
ким образом тормоз оказывается расторможенным.
Усилие вспомогательной пружины F B, предназначенной только для
отодвигания рычага 1, принимают в пределах 2 . ..6 даН в зависи
мости от размеров тормоза.
Для электромагнита типа МОБ (см. рис. 62, а)
Таa ki =Frdr\,
где Гэ — момент электромагнита, приведен в каталоге (Fа = T jls)>
а — максимальный угол поворота яко р я, рад; е — установочный
зазор отхода колодок от шкива (0,6 ... 1,5 мм); kx = 0,8 — коэффициент
использования хода яко ря электромагнита (для компенсации износа
тормозных накладок и деформаций рычагов); г] — КПД рычажной сис
темы (ц = 0,9 ...0,95). Палец шарнирно закрепленных Колодок (см.
рис. 61) нагружен силой Fr. При заданном тормозном моменте Т ттор
мозное усилие на конце рычага колодки
Туh
fDin l
(37)
Тормозное усилие FBг создается разностью усилий основной и вспо
могательной FB пружин: Fgr = F0— FB
.
К недостаткам тормозов с растормаживанием от электромагнита
относится резкое, сопровождающееся ударом якоря о сердечник, вклю
чение электромагнита и большие габариты тормоза при значительных
тормозных моментах.
Такие недостатки отсутствуют у тормозов о электрогидротолкате
лями (рис. 63). У них, к ак и в ранее рассмотренном тормозе, заторма
живание производится находящейся в скобе 9 сжатой пружиной 8 ,
которая через шток 7, рычаг 6 и тягу 5 сближает колодкн 3 и 4 (о по-
45
Ряс. 63. Схема двухколодочио-
го тормоза ТК.ТГ (заторможен)
с замыканием от пружины и
размыканием от электрогндро-
толкателя
мощью рычагов 1 и 2). Рас-
тормаживание тормоза про
изводится поршнем гидро-
толкагеля. В поршне раз
мещен небольшой электро
мотор с центробежным на
сосом, который при вклю
чении электромотора начи
нает нагнетать жидкость из полости над поршнем в цилиндр под пор
шень. Вследствие этого поршень выдвигается из цилиндра 11 и штоком
10 поднимает левый конец треугольного рычага 6 и, преодолевая уси
л ие пружины 8 , отодвигает рычаги с колодками от тормозного шкива,
что приводит к растормаживанию. Отход колодок регулируется вин
том 12.
Применение в тормозе ТКТГ пружины дл я его замыкания обеспечи
вает компактность и быстродействие, а использование для размыкания
электрогидротолкателя — плавность и большое усилие.
Кроме колодочных тормозов в грузоподъемных и транспортных
устройствах применяют тормоза с радиальным нажатием — ленточ
ные, которые являются более компактными но создают радиальную
нагрузку на вал. Ленточные тор
моза бывают простые (рис. 64, а),
дифференциальные (рис. 64, б) и
суммирующие (рис. 64, в). Тормо
жение осуществляется за счет тре
ния гибкой ленты 1 по цилиндри
ческой поверхности тормозного
шкива 2. Для прижатия ленты
к шкиву служит рычаг 3 с гру
зом 4. Ленту обычно изготовляют
из стали и покрывают фрикцион
ной накладкой 5 (рис. 64, г) типа
ферродо.
При огибании цилиндра гиб
кой лентой усилия в набегаю
щих Fa и сбегающих Fcq ветвях
Рис. 64. Ленточные тормоза!
и — простой; б — дифференциальный; в >
ми рующий
сум -
46
определяют по формуле Эйлера! F H = FC6 еа1. Учитывая, что F„ —
—
Fcо = Т TlrT,
Г? е^а
F _Гт
I
гт
(е^“ — i)
Гт (е^“—1)
(38)
где Т — тормозной момент; г т — р адиус тормозного шкива; f — ко-
эффициент трения между шкивом и фрикционным материалом ленты;
а — угол охвата тормозного шкива лентой, рад.
Сила затормаживания ленточного тормоза может создаваться та к
же грузом и пружиной. Силу затормаживания простого ленточного
тормоза определяют из условия равновесия рычага! G?VL = F c6 а,
откуда G = F c6a//P, или из соотношения Grv = — ---- j-—
.
гт/р е —1
В дифференциальных и суммирующих тормозах для затормажива
ния требуются значительно меньшие усилия, но эти тормоза склонны
к резкому торможению шкива лентой.
Ширину ленты в ленточных тормозах назначают по допускаемому
давлению Ьт=* FJrT[/?), где \р] = 0,3 ... 0,6 МПа (для ферродо).
Давление на единицу площади гибкой ленты в какой-либо точке равно
натяжению лекты в данной точке, деленному на радиус шкива и шири
ну
ленты,
но так как
натяжение
ленты
по длине
ее
меняется от Fco до Fa, то максимальное значение давления получим на
участке набегающей ветви;
т
1т
ггh
' т °т (е/а-1)
<[р1.
(39)
Благодаря простоте конструкции, компактности и способности
развивать большие тормозные моменты ленточные тормоза широко
распространены, но они имеют существенные недостатки, ог рани чи
вающие область их применения. К недостаткам следует отнести з н а
чительные радиальные усилия, изгибающие тормозной вал, зави си
мость тормозного момента от направления вращения, неравномерный
износ тормозной ленты и др.
В колодочных и ленточных тормозах сила, необходимая для полу
чения тормозного момента, действует в радиальном направлении. Су
ществуют тормоза (дисковые и конические), в которых это усилие дей
ствует вдоль оси тормозного вала. Дисковые тормоза делят на однодис
ковые и многодисковые. В двухдисковом тормозе (рис. 65) диски 4
фиксируются стержнями 5 в неподвижном корпусе, а диски 3 фикси
руются шлицевой втулкой 2 на вращающемся тормозном вал у 1. При
осевом сжатии обеих групп дисков пружиной 6 с силой Fa между ними
возникает сила трения, которая создает тормозной момент Т т= zrc X
X FJ, где z — число пар поверхностей трения; гс = (гн -f- гв)/2 —
средний радиус тормозных дисков; гв — наружный радиус тормозных
дисков; гв — внутренний радиус тормозных дисков.
Отсюда необходимое для создания тормозного момента усилие
Fа = 7V(zrcf).
(40)
*7
Дав ление на трущихся поверхностях
р= FJ\k(rl- л|)1< [р],
(41)
где [р\ — допускаемое давление дл я дисковых тормозов е осевым на
жатием.
Д ля уменьшения необходимого осевого усилия применяют кони
ческий тормоз (рис. 66), который состоит из подвижного / и непод
вижного 2 дисков. Осевым усилием Fa подвижный конус прижимает
ся к неподвижному, в результате на образующей поверхности сила
трения создает тормозной момент. Д л я затормаживания необходимо,
чтобы сила трения Fr, возникающая на соприкасающихся поверхно
стях, преодолевала окружное усилие T Jrc. Так как суммарная нор
мальная сила 21Fr =s FJsin
то осевое тормозное усилие Fa —
Из этого выражения видно, что выгодно применять малые значения
угла р/2. Однако,, чтобы избежать заклинивания конуса при размыка
нии, рекомендуется брать {V2 > 15°.
Увеличение рабочих скоростей грузоподъемных и транспортных
устройств обусловило повышение требований к надежности работы всех
механизмов. Это заставляет особо тщательно рассчитывать конструк
цию тормоза — одного из наиболее ответственных механизмов.
-
При конструировании тормозов особое внимание уделяется умень
шению инерции тормоза и упрощению его конструкции, снижению до
минимума числа рычагов и шарниров, деформация и износ которых
создают мертвый ход системы и понижают быстроту растормаживания
и затормаживания тормоза. Для регулирования скорости опускания
г руза применяют регуляторы (центробежные тормоза), которые не до
пускают увеличения скорости опускающегося г руза выше заданного
48
Рис. 6S, Дисковый тормоз
J
Рис. 66. Конический тормоз
Рис. 67. Центробежный тормоз
предела. Они только регулируют скорость, а остановить груз не могут,
поэтому для остановки груза необходим еще стопорный тормоз.
Обычно центробежные тормоза устанавливаю т на быстроходном
валу. При увеличении скорости вала возрастает центробежная сила
вращающегося груза Fr = тиг1г, где гп — масса одного г руза, кг;
v — скорость, м/с; г — радиус окружности, м. При этом создается дав
ление на неподвижную часть тормоза, вызывающее момент трения.
Наиболее распространены центробежные тормоза с грузами внутри
тормозного шкива и 'Дисковые. С помощью вращающихся грузов
(рио. 67) производится замыкание центробежного тормоза в следующем
порядке. На валу / закреплен диск 2, а на его втулке со шлицами —
диск 3. Пружина 4, упирающаяся во втулку диска 2 и втулку 5, поло
жение которой регулируется болтами, стремится раздвинуть диски
2 и 3, и грузы 6 , расходящиеся под действием центробежной силы,
стремятся сблизить эти диски. При сближении дисков между ними за
жимается неподвижный диск 7, который может быть выполнен в виде
храпового колеса, удерживаемого от вращения собачкой. При уста
новившейся скорости должно существовать равенство между моментом,
стремящимся вращать вал / с возрастающей скоростью, и моментом
трения между дисками, стремящимся остановить вращение вала. Н а
диски 2 и 3 действует сила Fц = zF^lJl^, где г — число грузов.
С учетом действия всех грузов и пружины Fn результирующее
осевое усилие Fa =
—
Fa—zу-Gr
—
Fп.
При двух поверхностях трения действительный тормозной момент
Центробежные тормоза в подъемниках и лифтах используют как
ограничители скорости движения кабины. При скорости кабины лифта,
больше допустимой, ограничитель скорости приводит в действие ава
рийные остановы, которые останавливают кабину.
ТТ— ‘2FJ(л„+ гп)/2 = FJ(rg+ г„).
Усилие пружины при заданной частоте вращения
49
§ 3, МЕХАНИЗМЫ ГРУЗОПОДЪЕМНЫХ МАШИН
Грузоподъемные машины состоят из р яда отдельных механизмов
число которых зависит от степени универсальности. Например, про
стая грузоподъемная машина — таль имеет только один механиз*
подъема, а универсальная машина — кран имеет три или четыре ме
ханизма: механизм подъема, один или два механизма передвижения,
механизм поворота и механизм изменения вылета стрелы крана.
Механизмы подъема. В любой грузоподъемной машине механизм
подъема груза является основным. Механизмы подъема бывают с руч
ным и машинным приводом. Независимо от конструктивных форм егс
выполнения механизм подъема (рис. 68) состоит из двигателя 1 иль
приспособления для ручного привода, тормоза 2 , зубчатой, червяднш'
или иной передачи 3 между ведущим валом двигателя и ведомым вало*
барабана 4 или звездочки для навивания гибкого тягового органа 5
неподвижного бло ка 6 , подвижного блока с обоймой 7, а также грузо
захватного устройства 8 .
Наибольшее распространение получил машинный привод с индиви
дуальным электродвигателем, т. е. механизм подъема состоит из ле
бедки с машинным приводом и полиспаста с грузозахватным устройст
вом. Обычно зубчатый цилиндрический или червячный редуктор со
единен с электродвигателем и барабаном муфтами. Особенности соеди
нения барабана с редуктором суще
^ ственно влияют на эксплуатацией
ные качества механизма подъема
Существует несколько вариан
тов выполнения этого у зла. Уста
7 новка вала барабана на двух самс
стоятельных опорах (см. рис. 37, в
8 удобна в работе, но приводит }
увеличению габаритов. В этом слу
чае вал барабана р аботает на из
гиб и кручение. Иногда крутяшш
момент на барабан передается с по
мощью открытой пары (см. рис. 68)
тогда ось барабана работает толькс
на изгиб. Наиболее рациональны*
решением является установка од
ной из опор оси барабана внутрь
консоли выходного вала редуктор;
(рис. 69). В этом случае ось бара
бана работает только на изгиб.
На конструкцию механизм;
подъема существенно влияет крат
ность полиспаста. Увеличение крат
ности полиспаста приводит к умень
шению диаметра каната, а следо
вательно, и диаметров барабана i
блоков. Однако при этом возра
Рис. 68. Схема механизма подъема
Рис. 69. Схема установки барабана
на выходном валу редуктора и эпю
ра изгибающих моментов оси бара
бана:
J — ось барабана; 2— барабан; 3— выход
ной вал редуктора
50
гает длииа каната* При сохранении скорости подъема это вызывает
величение частоты вращения барабана и уменьшение передаточного
пела редуктора лебедки.
Д ля грузоподъемных машин характерен режим работы, при кото-
ом периодически повторяются этапы работы; пуск (разгон), равно-
ерное установившееся движение, торможение (остановка). В периоды
уска и торможения движение неустановившееся. При пуске необхо-
има добавочная затрата работы для преодоления инерции покоя масс
еханизмов и г руза. В период торможения и остановки добавочную
аботу движущихся масс поглощает тормоз.
При установившемся движении статический момент на валу дви-
ателя
7 Fm^
или Гс = _о£Об_>
На
,2('п«оНо
(42)
те F M— максимальное натяжение каната на барабане, Н; Zo — чис-
о канатов, навиваемых на барабан; D в — диаметр барабана, м;
о — КПД механизма; и0 — передаточное отношение механизма; i„ —
ратность полиспаста.
Мощность двигателя (кВт) при установившемся движении
Рс = G,.w по,
(43)
це Gr — сила тяжести поднимаемого груза, кН; v — скорость подъе*
а груза, м/с.
Пусковой момент, приведенный к валу двигателя;
Тп—Т0-f Та,ъ+ Та,а,
(44)
те Та,в — момент сил инерции вращающихся элементов привода;
и.п — момент сил инерции поступательно движущихся частей груза.
Момент инерции вращающейся массы т а о радиусом инерции R0
те Gq — сила тяжести вращающихся частей, g — ускорение свобод-
ого падения; D — диаметр вращающейся массы.
Если предположить, что изменение скорости в процессе пуска
роисходит по линейному закону, то момент сил инерции вращаю-
щхся масс
Т = Ito/tn = GoDoco/(4^n),
де to — угловая скорость; ta — время пуска.
Выражение D qG0 — 4g l называют маховым моментом. Значения
аховых моментов дл я роторов электродвигателей приведены в катало-
ах на двигатели.
Ввиду того, что наибольший момент сил инерции имеют детали,
асположенные на валу двигателя, для механизмов грузоподъемных
ашин моменты остальных, более тихоходных валов, учитываются ко-
ффициентом б = 1,1 .. . 1,2. Подставляя значения угловой скорости
51
to = я л /30 (л — частота вращения вала двигателя, мин-1), получаем
выражение для момента инерции вращающихся частей механизма
подъема
Г в. в = 6G0Dgn/(375/n).
(45)
Аналогично можно определить момент^сил инерции от поступатель
но движущихся масс. Сила инерции поступательно движу щегося[груза
Fu = тгаг = — j - создает на барабане момент
ё‘п
Т
1'г°б
hi 2т)п
‘^hhl tn Нп
где т)п — КПД полиспаста; тТ— масса груза, кг; аг и » г — ускорение
и скорость груза.
Подставляя значение скорости груза vP и приводя момент от еил
инерции Fa к валу двигателя, получаем момент сил инерции на валу
двигателя от поступательно движущегося груза
Grп
375«q tn До
(46)
Для механизма подъема время пуска /п = 1,5 . . . 5 с, для механиз
ма передвижения ( п = 3 . .. 8 с. Тогда выражение дЛя пускового мо
мента примет вид
Т
Gr D6 s GeD*n
Dln
П 2inи„до
375/ п
375иЦ /п д0
Электродвигатель выбирают по статическому моменту с последую
щей поверкой выбранного двигателя на перегрузку в период пуска.
По выбранной мощности двигателя определяют номинальный момент
Тп= /Уш,
.
(47)
где Рн — номинальная мощность двигателя, Вт, приведена в каталоге-
Перегрузка двигателя характеризуется коэффициентом перегрузки
Ч' = TJTHед[.
(48)
Допустимее значение (ф] приведено в каталогах электродвигателей,
обычно [ф] = 1,5 ... 3.
-
Наряду с поверкой электродвигателя на перегрузку необходимо
учитывать возможность перегрева двигателя, которая зависит от ин
тенсивности его работы. Интенсивность работы двигателя характери
зуется относительной продолжительностью включения ПВ, %.
По заданной частоте вращения барабана
60уо 60г.’г ifi
лОо
л£>о
(49)
и по частоте вращения вала выбранного электродвигателя п можно оп
ределить передаточное отношение механизма подьема
«о = п/пб.
(50'
p'tc. 70. Схема механиз
ма передвижения тележ-
консольного крана с
переменным вылетом
По полученному значению и0 подбирают стандартный редуктор
!ли рассчитывают передачу. В механизмах подъема мостовых кранов
фименяют горизонтальные редукторы серии РМ или ЦД. В механиз-
iax передвижения крановых тележек используют вертикальные ре-
укторы серии ВК.
При электрическом приводе в механизмах подъема на валу двига-
еля устанавливают обычно двухколодочные тормоза. Наибольший тор-
юзной момент необходим при спуске груза
7Т= ± Т’с -f-Ти п+ Т'а.а ИЛИ
т- [ °т°611,1|б°о°0п ; °т
П'Ь
(51)
т
2uttia
375/,
'
375«J
де t r — 1 .. . 1,5 с — время торможения механизма. Знак плюс ста-
ят при торможении спускающегося груза, зн ак минус — поднимающе
еся груза.
Вместо формулы (51) можно использовать выражение (30). Коэф-
шциент йт берут не менее рекомендованных значений (см. табл. 2).
По тормозмому моменту Т т выбирают тип тормоза и рассчитывают
го детали.
Механизмы передвижения служат для перемещения механизмов
одъема в горизонтальной плоскости, например крановых тележек в
ределах остова крана или всей грузоподъемной машины. Привод
механизма передвижения может быть ручным и машинным.
Различают две принципиально отличные схемы механизмов пере-
вижения тележек. Первый тип (см. рис. 51, а) — весь механизм р ас
оложен непосредственно на перемещаемом объекте. Ходовое колесо
элежки движется по подкрановым путям. Колесо Через передачу со
чинено с двигателем и тормозом, размещенными на передвигаемой
ележке.
Второй тип (рис. 7 0 ) — механизм расположен отдельно от переме-
щемого объекта 6 и соединяется с ним посредством гибкого органа 5.
ибкий орган перекинут через неподвижный блок 7 и наматывается на
арабам 4. Через передачу 3 барабан соединен е двигателем 1 и тормо-
эм 2.
Краны и тележки грузоподъемных машин с помощью ходовых ко-
ес (рис. 7 1 ) передвигаются по рельсовым путям. В качестве рельсовых
утей используют полосовую сталь, специальные рельсы, железнодо-
эжные рельсы, двутавровые и тавровые профили. В зависимости от
гльсовых путей применяют ходовые колеса с линейным или точечным
энтактом (рис. 7 2 ) .
53
Рис. 71. Цилиндрическое колесо с р
бордами:
1 — цилиндрическое колесо с ребордами; i
вал; £ — зубчатая передача
Диаметр и ширин.а поверхност
катания ходовых колес определяй:
исходя из контактного напряжени
смятия. Расчет производят по э!
вивадентной нагрузке с учето
коэффициента режима работы м<
ханизма. При начальном линейно
контакте максимальные напряж*
ния сжатия
О н = 0,418 VGEJ(lra) < 1оя],
(5!
при точечном контакте
он = 0,388 VGE*/rk < [он], (51
где G — нагрузка на колесо; Еп = 2Е1Ег/(Е1+ Е2)— приведении
модуль упругости материалов; Ех и Е% —модуль упругости рельс
и колеса; I — длина контактируемой поверхности цилиндрическо!
колеса; 1/гп = Мгг + 1lrt — приведенный радиус кривизны коле<
и рельса.
Допускаемые контактные напряжения сжатия [он! (МПа) назн;
чают в зависимости от твердости контактируемых материалов. При л 1
нейном контакте [он] = 5 НВ (1 — 0,001 НВ), при точечном контак'
]он1 = 10 НВ (1 — 0,001 НВ), где НВ — единицы твердости повер.
ности касания по Бринеллю.
Рис. 72. Профили обода ходового цилиндрического (о) и конического (б) ко.’
са с ребордами:
1 — колесо; 2 — рельс
54
не. 73. Схема к определению коэф-
нциента сопротивления качения ко
леса по рельсу:
—к олесо; 2 — рельс; 3 — эпюра контакт*
ных напряжений
Рис. 74. Схема к определению сопро
тивления передвижения тележки:
I—колесо; 2—подшипник; 3—ось; 4—
рельс
Половина
ширины
площадки
смятия
(рис.
73) bt=
: 1,522VGra!/(l Е а). Она определяет коэффициент сопротивления ка-
■нию колеса по рельсу k = 4b1/(3n). При r2 = jo, ЕП= Е1 — Е2 имеем
k = 0,915 ] / Gr1/(/£'д).
(54)
В механизме передвижения, как и в механизме подъема, различа-
г три периода работы: пуск (разгон), период равномерного установив-
егося движения и период торможения (остановка). В период устано-
[вшегося движения при перемещении тележки или крана возникает
'противление передвижению F r, которое складывается из трения на
ция колеса и трения в ребордах колеса из-за перекоса тележки или
)ана (рис. 74):
fT=(Gr+ GT)fd+2k
'-реб»
(55)
e Gr — сила тяжести перемещаемого груза; GT — сила тяжести те-
:жки или крана; f — . ко эффициент трения в цапфах; для подшипни-
)в скольжения / = 0,08 . .. 0,1, для подшипников качения / . =
0,01 ... 0,015; DK и d — диаметры колеса и его цапфы, м; k — ко-
(фициент сопротивления качению колеса по рельсу, при . качении по
:льсу колеса диаметром.Ок = 0,5 ... 0,7 м k = 5 ... 8* 10_4м; kpe6 —
>эффициент, учитывающий трение в ребордах и ступицах колес, для
лежки &реб — 1,2 ... 1,3, для крана kpe0 = 1,3 ... 1,5.
При d/DK= 1/4 ... 1/6 с подшипниками качения общий коэффи-
1ент сопротивления качению колеса по рельсу
fca = (M + 26)/DK,
(56)
•и хороших условиях работы km = 0,02.
Механизм передвижения тележки второго типа (см. рис. 70) иног-
служит и механизмом для изменения вылета консольного крана
ис. 75). Тележка 3 передвигается присоединенным к ней бесконеч-
55
Рис. 75. Схема консольного ша
стенного поворотного крана с т
ременным вылетом и ручным щ л
водом
ным канатом 4, который,
свою очередь, приводится
движение цепным колесом i
Груз поднимается лебедкой i
Канат для подъема гру»
огибает блоки, укреплении
на тележке; один его кон*
прикреплен к ферме крана
второй наматывается на бара
бан механизма подъема. %
Сопротивление
перадв*
жению тележки Г п.т при ад
менении вылета крана равно сопротивлению в ходовых колесах та
лежки F T и блоках Faai
= (Gr + 0T+ GT.0) -&±*L kpefl+ (Fn- P cfl),
где GT— сила тяжести тележки; Gr — сила тяжести груза; GT.e -
сила тяжести тягового органа; Fn и Fea — натяжение в набегающей :
сбегающей ветви тягового органа механизма при движении тележки
Благодаря размещению механизмов подъема и механизмов пера
движения вне тележки резко сокращается ее масса и габариты. Поэтом;
обычно усилия сопротивления передвижению больше сил инерции, ;
последние не учитывают при скоростях передвижения меныпн:
ут = 3 м/мин.
Недостатком данной системы является повышенный износ тяговог
органа механизма подъема. Мощность двигателя (кВт) механизма п«
редвижения
Рс = /?хут/(60ц),
(67
где у т — скорость тележки, м/мин; tj — КПД механизма.
Пусковой момент Т п — Тс + Т и.„ + Тп.п. Пусковой момеш
приведенный к валу двигателя механизма передвижения:
т _ FTDK g G„Djri (Ог+ Ог)Р£я
п
2и0ц ‘
375/п +
375ы^п т)
’
где /„ = 6 . .. 8 с — время пуска механизма передвижения.
Как и при расчете механизма подъема, для механизма передвижени
по значению Рс выбирают мощность электродвигателя и определяю
общее передаточное отношение механизма ы„ = п!пк, где п — частот
вращения электродвигателя, мин-1 , п к — ут/(яD K) — частдта враще
1гия ходового колеса, мин-1 .
56
По передаточному отношению дл я выбранной схемы механизма
передвижения подбирают редуктор по каталогу.
Для обеспечения возможности трогания с места тележки без бук
сования ходовых колес должно быть соблюдено условие
где FCn — сила сцепления между ведущими колесами тележки и рель
сами; £Сц = 1,1 ... 1,2 — коэффициент запаса; Етяг — тяговое усилие
на приводных колесах в период пуска.
Силу сцепления определяют по формуле Fcn = Д 0 /\ где ДG =
= Gr + GTzn/z0 — суммарная нагрузка на ведущие колеса; г п — чис
ло приводных колес; г0 — общее число колес; f — коэффициент тре
ния, / ' = 0,15 ... 0,17 для рельсовых кранов при работе в помеще
нии, f = 0,12 .. . 0,14 при работе вне помещения.
Тяговое усилие на приводных колесах в период пуска
Д ля нормальной работы механизма передвижения максимальный
момент двигателя должен быть равен максимальному пусковому мо
менту или быть меньше его, в противном случае возможна пробук
совка ходовых колес. Если сцепная сила при расчете получается мень
ше тягового усилия, умноженного на коэффициент йСц, то число веду
щих колес тележки надо увеличить.
У мостовых кранов (см. рис. 12 . . . 15) механизмы передвижения вы
полняют по различным схемам (рис. 76).
Схему механизма передвижения с тихоходным валом (рис. 76, о)
применяют для кранов с пролетом до 15 м. В этом случае ведущие (при
водные) ходовые колеса соединяются с валом 4 через редуктор 3 и
муфту 2 с валом двигателя /. Вместе с муфтой 2 или на другом конце
вала двигателя находится тормоз 5. Мостовой кран с пролетом L и б а
зой В устанавливают на оси ведущих 6 и ведомых 7 ходовых колес.
Если число ходовых колес более четырех, то их помещают на балан
сирах на концевых балках. Механизм с тихоходным валом прост по
устройству, надежен в эксплуатации, но имеет длинный тяжелый в ат.
Механизм со среднескоростным валом (рис. 76, б) имеет более лег
кий вал, но большее число редукторов. У механизма с быстроходным
валом (рис. 76, в) вал легкий, а редукторы установлены на концевых
балках. Недостатком этой схемы является необходимость точной ба
лансировки ходового вала, который работает с большой частотой вра
щения. Быстроходный вал необходимо проверять на жесткость при кри
тической частоте вращения.
Д л я . стальных валов критическую частоту вращения (мин-1 )
можно определить по приближенному выражению
где d' — диаметр вала, м; I — длина вала между опорами, м.
Критические частоты вращения должны быть больше рабочих на
(58)
Fтяг — ^F Bti0x\/DK.
(59)
л вр = 121Od/F,
15 ... 20%.
57
Чтобы при движении не было недопустимого забегания менее на
груженной стороны моста (см. рис. 76, а . .. в), углы закручивания
трансмиссионного вал а не должны превышать 1/3° на длине I м.
ТI180
Угол закручивания ф =
—
—
,
где Г кр — передаваемый валом
Ор/р л
крутящий момент; I — длина участка в ал а, нагруженного моментом;
Gp — модуль упругости при кручении; / р = nd432 — полярный мо
мент инерции круглого сечения вала.
Стремление избавиться от трансмиссионного вала, являющегося
весьма трудоемким узлом как при изготовлении, так и при монтаже,
привело к появлению схемы, показанной на рис. 76, г.
Исследования ВНИИПТМАШ показали, что при L/B ^ 6 можно
применять систему раздельного привода, не предусматривая никакой
искусственной связи кроме самой металлоконструкции.
Схема механизма передвижения с раздельным приводом получается
наиболее легкой и удобной в изготовлении.
При использовании механизмов передвижения с центральным при
водом и двумя ведущими ходовыми колесами (см. рис. 76, г) последние
рекомендуется выполнять с коническим ободом и устанавливать так,
чтобы вершины конусов находились вне пролета. Забегание одной сто
роны кр ан а относительно другой вызывает качение отстающего ходово-
Рис, 76. Схемы механизма передвижения мостовых кранов с машинным при*
иодом:
о —с шхоходиым валом; 6 — со среднескоростным валом; в
с быстроходным валом; а
с раздельным приводом
58
Рис. 77. Схемы кранов на
.
неподвижной колонне:
о — без противовеса; б —кран
i
i
с противовесом
"&г
V
го колеса по большому диаметру и автоматическое выравнивание крана.
Ведомые колеса крана,
а также
все ходовые колеса тележек вы
полняют с цилиндрическим ободом.
На механизмах передвижения всех кранов с машинным приводом
при скорости передвижения более 30 м/мин у станавливают тормоза.
Тормозной момент
где Fr — сопротивление тележки при £реб = 1 ; ir — время тормо
жения, для механизма передвижения и поворота / т = 3 ... 8 с.
Механизмы поворота и изменения вылета. Механизмы поворота
в. грузоподъемных машинах служ ат для приведения во вращательное
движение металлоконструкции крана с поднимаемым грузом. В за
висимости от конструкции поворотной части краны дел ят на две основ
ные группы: краны на колонне (рис. 75, 77) и краны на поворотной
платформе (рис. 78).
У крана на колонне (рис. 77) опрокидывающий момент уравнове
шивается горизонтальными R r и вертикальной R Bреакциями в опорах
(рис. 79, 80).
Механизм поворота рассчитывают по номинальной грузоподъем
ности при максимальном вылете, а металлоконструкию крана — на
усилия, возникающие от массы поднимаемого груза и от массы металло
конструкции.
Д ля уменьшения изгибающего момента, действующего на колонку
крана, необходимо выбрать оптимальную массу противовеса (см. рис.
77, б). Сила тяжести противовеса (контргруз) должна уравновесить
силу тяжести металлоконструкции крана и частично силу тяжести под
(60)
(Gr+GT+GJD°nr|o
F'T DHпо
375ug tT
2«о
(61)
59
Рис. 78. Кран на поворотной платформе:
а — обший вид; б — детали поворотной платформы; I —рельс; 2 — каток (колесо); 3 — не*
подвижная колонна; 4 — поворотная платформа
нимаемого груза. При нагруженном кране RM = GJ 4- GJ, —
—
GK.r/2. откуда
R?=(GJ+GJ, -
Gh.p/,)/A;
(62)
при ненагруженном кране
Rr = (G„.T h - GJ,)lh.
Оптимальный момент от противовеса определяют из условия R r =а
= R'v или GJ + GJ — GK.,7a = GH.J2 — G«/1( откуда
G„.r/a = (Gr/2) t + GK/X.
(63)
Выбирая плечо /2, определяем из выражения (63) массу противове
са. Вертикальная реакция R B подпятника крана равна сумме сил тя
жести груза , металлоконструкции и противовеса!
Rs—Gp+GK+ GK.P.
.]
(64)
Как в механизмах подъема и передвижения, наибольший момент
для поворота кр ан а в округ вертикальной оси будет в период неустано-
вившеговя движения. У равнения моментов при пуске и торможении-
д л я механизма поворота имееют вид
___
гр
I'Л
t
Ф
IТ*
Т
rPf
I rVr
Iф*1
nr**
п—
*с"т*7
“г7И2"т**цЗ>'т = /и1ТЬ2Т^иЗ—/о,
где Тс — статический момент сопротивления поворота крана в опорах
(в случае работы на открытых площадках необходимо учесть сопротив
ление от ветра); Ти1 — момент сил инерции вращающихся элементов
5
4
Рис. 79. Нижняя опора поворотного
крана с подшипниками качения:
/ — корпус; 7 — колонка; 3 — радиальный
подшипник; 4 — упорный подшипн ик; 5 —
сферическая опора
60
72
3
Рис. 80. Верхняя опора поворотного крана с подшипниками скольжения (с) и
качения (б):
1'—корпус; г — втулка; 3 — цапфа
трнвода; Уи2 — момент сил инерции г руза, вращающегося относитель-
оси поворота и расположенного на максимальном вылете; Та3 —
—
момент сил инерции поворачивающихся частей металлоконструк-
дии (крана и противовеса).
Момент сопротивления от трения в цапфах, нагруженных реакция
ми /?г, а также от трения в подпятнике, нагруженном реакцией R B!
Тс = RJ {dx/2 -f d2/2) -f- RBfd2/2,
(65)
'де dj — диаметр цапфы; d2 — диаметр пяты.
Для подшипников скольжения коэффициент трения f = 0,1 , для
юдшипников качения / = 0,01 ... 0,02.
Чтобы сообщить грузу , расположенному на вылете /, угловое уско
рение duldt, необходимо к стреле приложить момент Т г = / е =
= (Grl2lg) соП а.
Как и прежде, принимаем ускорение в течение процесса пуска по
стоянным, тогда da/dt = ш//п. Подставляя значение угловой скорости
о — ппс/30 и выражая частоту вращения стрелы п0 через частоту вра-
цения двигателя: пс = п!и0, получаем момент, приведенный к валу
щигателя:
1б<?а п
с^
3751П
Сг Рп
93,5и% la и
-ОмDlп
375ц,( /п и
(66)
де ZGMDj-,
—
суммарный маховой момент металлоконструкции и про-
ивовеса.
Время пуска для механизма поворота зависит от р ежима работы
фана: ta — 60р/(Плс), где п0 — 1 . . . 3 мин- 1 — частота вращения
:трелы; р — угол поворота стрелы за время пуска, рад; для легкого
режима р = л /12, для среднего — Р = я/9, для тяжелого — р = л/6.
Как и для рассмотренных механизмов, уравнение моментов меха-
шзма поворота при торможении имеет вид
Г,=б
Goп
3757Т
бг 1%пг) .
93,5ug /T ^ 37571 tT
(67)
де /т = 4 ... 8 с — время торможения.
61
Рис. 81. Схемы размещения механнз*
ма поворота консольного крана:
1— неподвижно закрепленный венец зуб*
чатого колеса; 2 —шестерня зубчатой пе*
редачн механизма поворота, закрепленное
го вместе с вращающейся колонкой; 3 —
по во ротная колонка крана; # — зубчатое
Колесо за к реп ле но на вращающей ся колон*
ке; 5 — шестерня неподвижно закреплен*
ного механизма поворота
Мощность привода механизма вращения
Р = 7’ся с/(975л).
(68)
При частоте вращения вал а двигателя п передаточное отношение ме
ханизма поворота
н„ = п!пс.
(69)
Механизм вращения крана устанавливают на поворотной (рис.
81, а) или неповоротной частях кр ан а (рис. 81, б). В первом случае
зубчатый венец укрепляю т на неповоротной части кр ана, во втором —
на поворотной части. При большом диаметре зубчатого венца послед
ний может быть выполнен как цевочное колесо с большим передаточ
ным отношением.
В связи с тем, что частота вращения поворотной части крана обыч
но не превышает 8 мин-1 , передаточное отношение даже при тихоход
ных двигателях получается очень большим (м0 > 100). Поэтому в ме
ханизмах вращения часто применяют червячное передачи (рис. 82).
Механизм вращения состоит из двигателя 5, червячного редуктора 4,
зубчатой передачи 2 и 3. Венец зубчатой передачи укрепляю т на по
воротной колонне крана 1.
Вследствие больших динамических усилий при пуске и торможе
нии, точное определение которых в большинстве случаев затрудни-
Рис. 82. Схема механизма поворота
кра на с машинным приводом;
Рис. 83. Предохранительная фрикци
онная коническая муфта червячного
редуктора механизма поворота крана
6?.
Рис. 84. Схема к определению усилия
для изменения вылета консольного
крана путем наклона стрелы:
J— механизм подъема груза; 2 — меха-
;7'
ннзм изменения вылета стрелы; 3 — стре
ла крана
тельно, и из-за возможности поломки редукторов необходимо предохра
нительное устройство. В простых механизмах предохранительное уст
ройство выполняют в виде срезающихся штифтов, а в сложных — в ви
де фрикционных муфт (рис. 83), где от червячного колеса 3 коническим
диском 2 вращение передается валу 1. Предохранительное устройство
рассчитывают на передачу момента Т врел = (1,15 ... 1,25) Т п.
В консольных кранах (см. рис. 78, а), где изменение вылета про
изводится наклоном стрелы, устанавливают дополнительную лебедку
(рис. 84), которая работает совместно с лебедкой механизма подъема
груза. Для изменения вылета стрелы дополнительная лебедка разви
вает усилие
Домкраты относятся к группе простейших подъемных механизмов,
применяемых для подъема различных грузов на высоту, обычно не пре
вышающую 1м. В отличие от других подъемников домкраты поднимают
груз снизу, чем создают неустойчивое равновесие, требующее предохра
нения от опрокидывания.
По принципу действия и конструктивным особенностям докра-
ты подразделяются на винтовые (рис. 85, а), реечные (рис. 85, б) и
гидравлические (рис. 85, в). Домкраты бывают с ручным и механиче
ским приводом. Винтовые домкраты просты по устройству и надежны
в эксплуатации, не требуют стопорных и тормозных устройств. Винты
домкратов имеют самотормозящую прямоугольную или трапецеидаль
ную резьбу. Грузоподъемность ручных винтовых домкратов 1 ... 20 т.
Винтовой домкрат (см. рис. 85, а) состоит из винта 2 g головкой 4,
гайки 3 и корпуса 1. Ниже головки на стержне винта находится рукоят
ка 5 с трещоткой для вращения винта. Усилие на приводной рукоятке
для подъема груза без учета трения в резьбе винта и в пяте опорной
головки
7 в ■(Grl ~г Gc■]])/[ — f\,iM)/h,,
(70)
Глава 2
ОСНОВНЫЕ ГРУЗОПОДЪЕМНЫЕ УСТРОЙСТВА
§ 1. ДОМКРАТЫ
Fo — Gv(rjl)tg а.
63
Действительное усилие (Н) а учетом трения
Ft = G„(rjl) [tg (а + о) + (rr/re)f],
(71),
где Gr — сила тяжести поднимаемого груза, Н; гс — средний радиус
винтовой резьбы, r0 = (d + dJ/4; / — плечо приводной рукоятки, см.
гг— средний радиус пяты опорной головки, см; а — угол подъема вин
товой линии, а < 6°; q = arctgfж6° — угол трения;
0,1 — ко
эффициент трения в резьбе и в опорной пяте головки.
КПД, домкрата 0
I) = tg a/[tg (a + q) (rj/rc) /].
(72)
Недостатком винтовых домкратов является низкий КПД (0,3 . .. 0,5)
и малая скорость подъема груза (15 ... 35 мм/мин).
Подъемный винт домкрата работает на сжатие и кручение. При
большой длине вылета винта необходима проверка его на устойчивость
и на продольный изгиб. Нарезку винта проверяют на смятие.
В ручных реечных домкратах (рис. 85, б) подъем осуществляется
с помощью зубчатой рейки, которую перемещают вдоль направляющих,
расположенных внутри кожуха домкрата. Реечные домкраты делят на
рычажно-реечные и на реечно-зубчатые. Грузоподъемность рычажно-
Рис. 85. Домкраты:
и — вшловой; б —реечный с зубчатой передачей; в — гидравлический поршневой
61
реечных домкратов может достигать 15 т. Домкраты с зубчатой рейкой
изготовляют грузоподъемностью 0,5 . .. 25 т. Реечные домкраты по
правилам Госгортехнадзора приводятся в движение безопаеной ру
кояткой.
Для уменьшения массы н компактности конструкции в реечно-
вубчатых домкратах применяют ведущие шестерни с минимальным чис
лом зубьев (zmln = 4).
Реечный домкрат (см. рис. 85, б) имеет кожух 1 из листовой стали,
в котором находится зубчатая рейка 2. Вверху рейка заканчивается
вращающейся на пальце опорной головкой. При подъеме груза движе
ние от рукоятки 4 передается через ведущий вал, шестерню 3 к шестер
не б, которая находится в зацеплении о рейкой 2. Поднятый груз удер
живается храповым остановом 5. Передаточное отношение зубчатой пе
редачи
и=
(73)
где гш — радиус шестерни 6\ ц — КПД зубчатой передачи, р « 0 ,8 3 .
Гидравлические домкраты отличаются от реечных и винтовых дом
кратов большей грузоподъемностью (до 750 т), относительно высоким
КПД и плавностью подъема.
Обычный поршневой гидравлический домкрат (рис. 85, в) состоит
из цилиндра 1, поршня 2, резервуара 3 для жидкости, в которой поме-
ден плунжерный насос 4, приводимый в действие рычагом 5.
Большая грузоподъемность гидравлических домкратов достигает
ся благодаря высокому передаточному отношению между площадями
тодъемного поршня D и плунжера d насоса и высокому КПД. Переда
точное отношение
При работе плунжерного насоса жидкость подается в цилиндр и
юднимает поршень домкрата с гр/зом. После прекращения подъема
ш фываются клапаны 7 и 9 и жидкость из цилиндра перетекает в ре-
юрвуар, что влечет опускание поднятого поршня. Клапаны 7 и 9 от
крываются упором 6 и штоком 8 при повороте рукоятки 5 вправо до
зтказа.
Давление в цилиндре домкрата р —
; необходимая сила
1а приводном рычаге
F,=
лй1
4Р
1_
L
~
9
Ч
де D —диаметр поршня; d — диаметр плунжера насоса; L — длина
[риводного рычага; I — длина кулачка, движущего плунжер; rj —
СПД домкрата, равный 0,85.
По манометру, показывающему давление р в гидравлическом дом-
рате, в отлцчие от других систем домкратов можно постоянно следить
а нагрузкой. -
3®к .1634
G>
Толщину стенок цилиндра домкрата определяют по формулам,при
водимым в курсе «Сопротивление материалов» при расчете на прочность
толстостенных сосудов, работающих под действием равномерного вну
треннего давления.
§ 2. ЛЕБЕДКИ
Лебедки применяют для перемещения груза с помощью гибкого ор
гана. Она может входить как составная часть в более сложные грузо-
подъемные устройства (кран, подъемник и пр.) . Лебедки могут быть (
ручным и машинным приводом.
При ручном приводе на валу лебедки крепят рукоятку. По правя
лам Госгортехнадзора все ручные подъемные механизмы должны снаб
жать ся устройствами, предотвращающими опасное для обслуживаю
щего персонала произвольное вращение рукоятки под действием груза
Такие устройства называют безопасными рукоятками.
При прекращении вращения рукоятки тормоз под действием гру
зового момента автоматически развивает тормбзный момент, пропор
циональный массе груза, останавливает его и удерживает в подвешенное
состоянии. Д л я опускания г руза необходимо в течение всего времен!
спуска прилагать внешний момент со стороны привода.
В случае машинного привода тормоз устанавливают на втором о'
двигателя валу, чтобы на работу тормоза меньше влияла динамика вра
щающихся частей. К безопасным относится рукоятка, сконструиро
ванная по типу дискового грузоупорного тормоза с размыкающимися
поверхностями трения, которые замыкаются грузом (рис. 86). Н
валу 5 закреплена на шпонке резьбовая втулка с диском 1. Второй дис!
4 представляет собой гайку с рукояткой. Между этими дисками нахс
дится храповое колесо 2 с собачкой 3. Храповое колесо свободно сиди
на втул ке диска 1. Зазор между трущимися поверхностями ограниче
шайбой. Резьба иа втулке диска 1 направлена так, что при вращени
рукоятки по часовой стрелке (при подъеме груза) гайка перемещаете
влево и зажимает храповое кс
лесо 2 между дисками / и <
Благодаря
соответствующем
направлению зубьев храповог
колеса диски и храповое колес
могут свободно вращаться пр
подъеме г руза. По окончани
подъема груз останавливаете?
так как храповое колесо уде[
живается от обратного вращеии
собачкой 3, а диски 1 и 4 cuei
лены с храповым колесом сило
трения (момент от груза ка
Рис. 86. Схема безопасной рукояп
лебедки
66
Рис. 87. Лебедка общего назначения с ручным приводом
при подъеме, так и при спуске направлен в одну и ту же сто
рону).
Для спуска груза необходимо вращать руко ятку против часовой
стрелки. Так как вал 5 и диск 1 закреплены от осевого смещения, то
диск 4 будет перемещаться по резьбе вправо до тех пор, пока момент
трения между дисками и храповым колесом станет недостаточным для
удержания диска от вращения под дёйствием силы тяжести груза. При
этом груз начнет опускаться. Свободное опускание груза продолжается
до тех пор, пока угловая скорость диска 1 не превысит угловой скорости
вращения рукоятки, тогда втулка диска 1 опять начнет передвигаться
по резьбе и перемещать диск 4 влево, увеличивая момент трения между
дисками и храповым колесом и прекращая их относительное перемеще
ние. Это относительное перемещение переходит в непрерывное скол ь
жение дисков 1 и 4 по храповому колесу 2, при котором груз опускается
со скоростью, не превышающей соот
ветствующей скорости вращения ру
коятки.
Станина 1 лебедки (рис. 87) скреп-
денр тягами 2. Вращение от рукоятки
1 передается барабану 3 через зубчатую
тередачу 4. Поднятый груз удерживает
ся храповым колесом 5. При многосту-
тенчатой зубчатой передаче передаточное
лношение следует распределять так,
ггобы большее передаточное отношение
Зыло у барабана, а меньшее у рукоятки.
3 этом случае удлиняется срок службы
губчатых передач и уменьшается сопро-
'ивление сил инерции, что особенно
(ажно при машинном приводе.
Лебедки с машинным приводом
рис. 88), чаще всего с электрическим,
Рис. 88. Лебедка общего назначения с
электрическим приводом
87
широко применяют в механизмах подъема кранов различных кон:
струкций. Лебедка состоит из барабана / , редуктора 2, тормоза 3 и
электродвигателя 4. Все эти механизмы крепят на общую раму 5.
§3. ТАЛИ
Обособленную группу механизмов подъема, отличающуюся компак
тностью, составляют тали с ручным и электрическим приводом. Они
предназначены для подъема грузов 0,25 ... 10 т на небольшую высоту
(до 24 м) со скоростью до 8 м/мин. Тали с ручным приводом бывают
червячные (рис. 89, а) и шестеренные (рис. 89, б).
Червячные тали изготовляют грузоподъемностью от 0,5 до 10 т.
Червячную передачу для повышения КПД делают несамотормозящей-
ся и обычно применяют двухзаходный червяк. По принципу действия
тал ь напоминает лебедку. В качестве тягового органа (рис. 90) для тали
используют пластинчатую цепь 8, а для обеспечения компактности ме
ханизма — звездочку 1 с малым числом зубьев. Тали имеют дисковый
или конический тормоз 3 грузоупорного типа, замыкающийся ат осе
вого усилия червяка 7. Вращение червяка и червячного колеса 4 про
изводится приводной круглозвенной цепью 6 через цепное колесо 5.
При необходимости перемещения груза в горизонтальном направле
нии тал ь подвешивают на крюке 2 к кошке или к приводной тележке.
Тележка (рис. 91) перемещается по рельсу. Д л я этого имеются ко
леса 1 с осями 2, закрепленными в боковых накладках 3. Боковые на-
Рис. 89. Схема тали с ручным
приводом:
а — червячная; б — шестеренная
Рис. 90. Червячная таль
68
Рис. 91. Монорельсовая тел еж ка с ручным механизмом передвижения
кладки стянуты шпильками 4, а для подвешивания тали имеется травер
са 5. Колеса 9 приводятся во вращение цепью 8 через зубчатую пере
дачу 6 с колесом 7.
При грузоподъемности до 1 т, небольшой высоте подъема и неболь
шом расстоянии для перемещения груза тележка может выполняться
без привода. В этом случае тележка передвигается при толкании под
вешенного груза.
При большой грузоподъемности или высокой скорости подъема
применяют таль с электрическим приводом — электроталь (рис. 92).
Она состоит из двигателя 1, грузового барабана 2, редуктора с зубчаты
ми колесами 3, корпуса редуктора 4, дискового тормоза 6 и грузоупор
ного тормоза 5. При небольшой грузоподъемности и легком режиме
заботы электроталн грузоупорный тормоз иногда не устанавливают.
Тал ь передвигается на тележке g электрическим приводом
'рис. 93) по подвесному пути. Двигатель 1 через зубчатую передачу
6Э
Рис. 93. Схема монорельсовой тележки с элек
троприводом
(2, 3 и 4) приводит во вращение колеса
5, с помощью которых тележка переме
щается по монорельсу 6. При скорости
передвижения
электротали
более
30 м/мин механизм передвижения тележ
ки снабжают тормозом. Для меньших
скоростей передвижения тележки изго
тавливаются без тормоза.
При малой грузоподъемности и большой скорости передвижения
применяют электротягачи, в которых приводное колесо тележки выпол
нено в виде ролика, покрытого резиной.
§ 4. КРАНЫ
Краном называют грузоподъемную машину, осуществляющую
подъем г руза и перемещение его в горизонтальной плоскости с после
дующим опусканием к месту доставки. Краны бывают стрелового и мо
стового типов с ручным и машинным приводом, стационарные и пере
движные. Рассмотрим стационарные краны, относящиеся к грузо-
подъемным машинам общего назначения, которые применяют при ме
ханизации подъемно-транспортных работ во всех отраслях народного
хозяйства.
Краны стрелового типа. Основными параметрами поворотных кр а
нов являются грузоподъемность, скорость подъёма г руза, скоростг
передвижения и поворота крана, вылет стрелы, наибольшая высотг
подъема, угол поворота и габариты.
Вылет стрелы I (см. рнс. 77) крана — расстояние по горизонтал!^
от оси вращения кр ана до вертикальной линии, проходящей через точ
ку подвеса груза. Краны бываю;
с постоянным вылетом стрель
(рис. 94) и с переменным (см
рис. 75). Краны с переменным вы
летом способны обслуживать боль
шие площади. Стационарные пово
ротные краны предназначены дл?
обслуживания отдельных рабочи?
мест в производственных участка?
и цехах, при призводстве строи
тельно-монтажных и погрузочно
разгрузочных работ. В зависимо
Рис. 94. Настенный консольный кран
постоянным вылетом стрелы:
/ — поворотная колонна; 2 — металлоконстру»
пия крана; 3 — неподвижный отклоияющи
блок механизма подъема груза
70
:ти от расположения опор и способов установи!! стационарные пово-
>отные краны делят на краны с внешней верхней опорой (см. рис. 75,
Щ и краны без внешней верхней опоры — свободностоящие с непод-
!ижной колонной (см. рис. 77) и краны на поворотной платформе
см. рис. 78).
В кране с внешней верхней опорой подъемная лебедка расп ол аг а
ется на металлоконструкции. Поворот стрелы осуществляется на угол
120... 180°. Грузоподъемность таких кранов редко превышает 1,5 т.
Лростота и небольшая стоимость являются главным преимуществом
'а кого крана. Один из недостатков такого настенного поворотного
фа н а заключается в том, что угол его поворота не более 180°.
Этот недостаток отсутствует у стационарного полноповоротного к р а
га на неподвижной колонне (см. рис. 77, а), который устанавливают на
открытых площадках фабрик и заводов. Лебедка подъемного механиз
ма крана расположена на крановой металлоконструкции и вращается
шесте с краном вокруг колонны. Колонна крепится к фундаменту
щя обеспечения устойчивости крана от опрокидывания. Для, умень-
нения изгибающего момента колонны на краны часто устанавливают
лротивовес (см. рис. 77, б). Грузоподъемность крана без противовеса
>бычно не превышает 25 т.
Краны мостового типа. Широкое распространение получили мосто-
ш е и козловые краны (см. рис. 12 . . . 15) для перемещения грузов вну
три цехов п складов. В зависимости от конструкции моста краны де
лят на однобалочные (кран-балки) и двухбалочные.
Параметрами мостовых кранов являются грузоподъемность, пролет
грана, скорость рабочих движений и режим работы крана. Пролет L
фан а (см. рис. 12) — расстояние между вертикальными осями подкра-
ювых рельсов, по которым передвигается кран. Расстояние между хо-
щвыми колесами крана, измеренное параллельно подкрановым рель
сам, называют базой крана В.
Наиболее простой конструкцией мостового крана является кран-
Залка, которая с помощью двух тележек на ее концах может переме
чаться вдоль цеха по рельсовым путям. Рельсовые пути опираются на
голонны (опорная край-балка, см. рис. 12) или эти пути подвешивают
г строительным конструкциям (подвесная кран-балка, см. рис. 13).
1 о нижней полке двутавровой балки крана перемещается обычная таль
; ручным или электрическим приводом. Грузоподъемность кран-ба-
юк 0,25 ... 5 т, пролет 8 ... 15 м. Скорость подъема груза 6 ... 8 м/мин,
скорость передвижения электрической тали 30 ... 80 м/мин.
При большой грузоподъемности (5 ... 20 т) и значительных проле
тах (5 ... 32 м) применяют мостовые краны с машинным приводом,
готорые представляют собой конструкцию из главных (продольных)
i концевых (поперечных) балок, опирающихся на ходовые колеса,
"лавные балки моста крана располагаются поперек подкрановых пу
тей и предназначаются для установки и передвижения по ним крановой
'ележки. Концы главных балок жестко соединяют с концевыми бал
лами, расположенными вдоль подкрановых путей. Главные балки мо
стовых кранов выполняют в виде сплошных балок или решетчатых
|)ерм.
7!
Механизмы подъема и передвижения тележки мостового крана рас
полагаются на тележке (см. рис. 51, а). Механизм передвижения край,
выполняют по одной из схем, приведенных на рис. 76. Д л я механизм,
подъема мостовых кранов используют стандартные горизонтальные ре
дукторы серии РМ или ЦД. В механизмах передвижения крановы;
тележек применяют вертикальные редукторы серии ВК, а в механиз
мах передвижения моста — редукторы обеих указанных серий.
Козловые краны (см. рис. 15) — это мостовые краны с двум:
опорами, в которые вмонтированы тележки с ходовыми колесами дл:
передвижения по наземным рельсовым путям.'Козловые краны приме
няют в промышленном и гражданском строительстве в качестве пере
грузочных устройств на складах и для обслуживания открытых строи
тельных площадок. Грузоподъемность козловых кранов 1...300 т
пролет 15 ... 40 м.
Кабельные краны (грузоподъемность 1,5 .. . 25 т, пролет 250..
...
,900 м) обычно применяют на открытых складах и для подачи строи
тельных материалов при строительстве крупных сооружений. Кабёль
ный кран (см. рис. 16) состоит из двух опор 1 и натянутого между ним!
несущего каната 2, по которому с помощью тягового каната 3 передви
гается грузовая тележка подъемного механизма.
Металлоконструкции кранов. Н а металлоконструкции монтирую
все рабочие механизмы, электрооборудование, двигатели и прибор!
управления краном. Металлоконструкция крана воспринимает нг
грузки от собственной массы, массы поднимаемого, г руза и передае
эти усилия на фундамент или опорные конструкции здания. Металле
конструкции бывают клепаные и сварные, в виде сплошных бало
или ферм.
Расчет фермы поворотного крана (см. рис. 77) заключается в опре
делении усилий и моментов, возникающих в стержнях фермы при рг
боте кр ан а и в подборе их сечений. Усилия в стержнях возникают о
полезной нагрузки крана, натяжения гибкого органа механизма подъе
ма или механизма изменения вылета и собственной массы крана. Уси
лия в стержнях любой фермы можно найти, как известно, аналитиче
ским или графическим способом, последний является более наглядным
Сначала строят график стержневых усилий от полезной нагрузк,
Gr (рис. 95). Конструкция фермы задается вылетом /, заданной высота
подъема груза Н тах и принятым по местным условиям расстоянием >
между подшипниками. Заданной величиной является только Gr, а не
известными — стержневые усилия Rlt R2, R3 и реакции Rr, RHи R t
Так как при решении статических задач с фермами внешние сил!
должны быть приложены к ее узлам, то вместо действительных реаи
ций временно введем в расчет фиктивные, условные реакции, прилс
женные к узлам II и III , по которым легко определить действительны
реакции. Неизвестные величины определяют путем мысленного выре
зания отдельных узлов фермы и рассмотрения системы сил, действу!
щих на каждый узел.
Построение диаграммы Кремона начинают с узл а / , на которы
действуют нагрузка Gr, стержневые-усилия Rt и R 2. Эти три силы, т
ходящиеся в р авновесии, должны составить в силовом графике замкн)
72
Рис. S5. Схема для опре
деления усилий в стерж
нях фермы крана
L
тый треугольник векторов. Известна по величине и направлению сила
<?г, а также направления R x и R2. Длины сторон 1 и 2 определяют в
принятом для построения графика масштабе значения усилий R x и
/?2, а непрерывность векторов — характер этих усилий: усилие R t
стержня 1 направлено от узла / , значит этот стержень растягивается си
лой Rlt усилие R 2 стержня 2 направлено к узлу /, следовательно,
стержень 2 сжимается силой R 2.
На узел I I действуют стержневые усилия R t и R 3 и реакция R r.
Здесь также известно одно усилие ^ и направление двух других сил.
Направление известной силы R 1для узла I I противоположно направле
нию этой силы для узла I (новое направление силы R x обозначено на
графике двойной стрелкой). Из равновесия узла I I определяем по тре
угольнику неизвестные силы.
Аналогично рассматривают и узел I I I , на который действуют из
вестные уже силы R 2 н R 3 и неизвестные R ’„ и R n. По существу этот
узел можно и не рассматривать, так как ясно, что Rr = Rn и R B — G„
но для полноты картины и подтверждения правильности решения за
дачи необходимо довести ее решение до конца.
Таким же образом определяют дополнительные усилия в стержнях
фермы от натяжения гибкого тягового органа.
Дальнейший расчет фермы крана проводят в следующей последо
вательности:
1) по неполным стержневым усилиям от полезной нагрузки и натя
жения гибкого тягового органа определяют сечения стержней по по
ниженным (примерно на 15 ... 20%), допускаемым напряжениям и вы
бирают профили стержней по таблицам;
2) рассчитывают массу стержней и распределяют их вместе с мас
сами установленных на ферме механизмов крана по узлам;
3) строят графики стержневых усилий от реальных собственных
масс фермы с механизмами;
4) определяют суммарные полные стержневые усилия;
5) проводят окончательный проверочный расчет принятых сечений
стержней.
73
Рис. 96. Кран-балка с
ручным приводом:
I — механизм
подъема
(таль); 2 — механизм пере*
движения; д — главная бал*
ка; 4 — концевые балки
Горизонтальные реакции в подшипниках получают из равенства
моментов: Rrh = R'rh',
откуда Rr = R? h'fh и RP= RH.
Сечение растянутых стержней рассчитывают на растяжение с учетом
ослабления сечений отверстиями для заклепок (при клепаных фермах).
Сжатые стержни рассчитывают с учетом продольного изгиба
: <*сш = Я/(фЛбр) < [<ТсжЬ
(75),
где R — сила, сжимающая стержень; /1 бр — площадь сечепия сжато
го стержня без учета ослабления отверстиями под заклепку; ср — ко
эффициент уменьшения допускаемого напр яжения при продольном
изгибе, который определяют по справочнику в зависимости от гибкости
стержня X — Иг — //"j/"~^lln ; I — длина стержня; / га1„ — минималь
ный момент инерции стержня.
Для л '= 0 . .. 200 коэффициент <р = I . .. 0,19. Допускаемые на
пряжения на растяжение и на сжатие для стали СтЗ берут в пределах
140 ... 160 МПа в зависимости от режима работы крана.
При работе стержня.одновременно на растяжение и изгиб или сжа
тие и изгиб определяют суммарные напряжения растяжения или
сжатия и сравнивают с допускаемыми.
В мостовых кранах малой грузоподъемности (рис. 96) основным
несущим элементом моста является двутавровая балка. Балку мосто
вого крана рассчитывают на изгиб от собственной массы и от давления
ходовых колес тележки с грузом. Если расстояние между осями колес
тележки составляет менее 0,1L, то расчет балки ведут как от сосредо
точенной нагрузки.
Независимо от прочности крановые балки должны обладать доста
точной жесткостью во избежание сильных вибраций при работе. Д л я
этого определяют прогиб балок в середине пролета от сил тяжести г ру
за Gr и тележки GT. Прогиб каждой балки двухбалочного крана
у=0,5(Gr+ GT)L3/48£7< [у|.
74
где / — момент инерции сечения балки б плоскости действия изгибаю
щего момента.
Для кранов с механическим приводом прогиб должен быть не бо
лее [у\ <; /./700.
Очень часто последний расчет бывает решающим, так как для обес*
печения требуемой жесткости сечение крановой балки приходится де*
лать больше, чем требуется при расчете ее на прочность.
Для предварительных расчетов иногда необходимо знать силу т я
жести тележки или крана. Их берут или по аналогам выполненных кон
струкций или вычисляют ориентировочно: сила тяжести тележки мо
стового крана GT = 0,4Gr, а полная сила тяжести мостового крана
GK = (0,84 ... 0,96) Gr .
§ 5. ПОДЪЕМНИКИ
Подъемниками называют грузоподъемные машины, транспорти
рующие грузы по вертикальному либо близкому к вертикальному на
правлению. В зависимости от назначения подъемника грузонесущими
устройствами являются клети, ковши или площадки. Подъемники
применяют на промышленных предприятиях, в жилых многоэтажных
домах и на строительных площадках. Наиболее распространены кле-
тьевые шахтные подъемники (лифты).
Лифты. Шахтные подъемники (рис. 97, 98) применяют для вер*
тикального перемещения (подъема и спуска) грузов и людей (грузовые
и пассажирские лифты). Их устройство, эксплуатация и нормы расче
та регламентируются правилами Госгортехнадзора.
Основными частями лифта (рис. 97) являются кабина 4 ,напр авляю
щее устройство 5 для кабины, шахта 6, противовес /, канат 2 для под
вешивания кабины и механизм подъема 3. В зависимости o r высоты
подъема и скорости движения лифты делят на тихоходные, быстро
ходные и высокоскоростные. Скорость движения кабины лифтов
0,15 ... 1 м/с, в высотных зданиях до 3,5 м/с. Грузоподъемность лифтов
колеблется в значительных пределах: для пассажирских лифтов 140 ...
...
700 кг (от 2 до 10 человек), для грузовых лифтов 0,25 ... 10 т.
, Обычно кабина лифта размещается в шахте, ограниченной со всех
сторон сплошными несгораемыми стенками, в случае расположения
лифта в лестничной клетке шахта ограничивается металлической сет
кой. Площадь пола кабины пассажирского лифта принимается из р ас
чета 0,3 . .. 0,5 м2 на одного человека. Сила тяжести кабины зависит от
площади пола А п. При грузоподъемности лифта 5 т сила тяжести ка
бины (кН) GK«г 3 + А п, где А п — площадь пола кабины, м2.
В качестве механизма подъема в лифтах применяют лебедки бар а
банного типа или лебедки с канатоведущими шкивами (рис. 99). В
случае применения лебедки барабанного типа (рис. 99, а) канат, при-
соединеняемый через блок к кабине, навивается на барабан и осу
ществляется подъем кабины. При большой высоте подъема барабан
лебедки может достигать больших
размеров, ограничивающих
применение привода этого типа.
75
3
Рис. 97. Лифт с верхним располо
жением привода (с канатоведущим
шкивом)
Рис. 98. Лифт с нижним расположе
нием привода
Более совершенным типом привода лифта является лебедка е ка
натоведущим шкивом (рис. 99, б), передающим тяговое усилие от дви
гателя канату трением. Канатоведущий шкив рассчитывают на проч
ность из условия передачи канату канатоведущим шкивом двойной
статической нагрузки. Н а привод от канатоведущего шкива не влияет
высота подъема лифта, что способствует их широкому применению.
Лйфты могут быть е верхним и нижним расположением привода.
Лифты с верхним расположением привода (см. рис. 97) более компакт
ные, особенно лифты с канато
ведущим шкивом, но в жилых
домах в целях уменьшения шу
ма иногда применяют нижнее р ас
положение привода (см. рис. 98).
В этом случае кабина 6 лифта
движется по направляющим 5
шахты 4. Кабина и противовес 3
Рис. 99. Схемы механизмов подъема
лифта:
J — привод от барабана лебедки; 2-~ка*
кат; 3 — кабина ; 4 — противовес; 5 — при*
эод ог каиатоведущего шкива
соединены канатом 2, который приводится в движение лебедкой 1.
Лебедку размещают в подвальном помещении. Лебедки как барабан
ного типа, так и с канатоведущим шкивом оборудованы тормозом,
который автоматически замыкается при выключении тока. Д л я созда
ния бесшумности и безопасности работы в механизмах подъема при
меняют червячные редукторы.
Для снижения нагрузки на двигатель кабину уравновешивают про
тивовесом. В зависимости от режима работы лифта сила тяжести про
тивовеса
Опр=Он+ (1-о)Ог,
(77)
где GK— сила тяжести кабины; Gr — наибольшая сила тяжести под
нимаемого груза; а = 0 ,4 . . . 0,5 — коэффициент уравновешенности.
Мощность двигателя механизма подъема при установившемся дви
жении, кВт:
Р=(1—a)Grt>/r),
(78)
где v — скорость кабины, м/с; г) — общий КПД.
Стальные канаты для подвешивания кабины рассчитывают по наи
большему допускаемому напряжению с обязательным учетом массы
кабины, массы канатов от точки сбегания с барабана или шкива до
кабины и максимальной грузоподъемности лифта. Коэффициент запаса
прочности для каната принимают 8 ... 15 в зависимости от скорости
движения кабины, а также назначения лифта. Дл я уменьшения диа
метра блоков и канатов в лифтах применяют подвески из двух, четырех
или шести канатов.
Д ля предотвращения самопроизвольного падения кабины все лиф--
ты снабжены специальными механизмами — ловителями для немед
ленной остановки кабины в случае обрыва каната или при скорости
движения кабины на 15% выше заданной. В последнем случае лови
тель приводится в действие ограничителем скорости.
Для тихоходных лифтов применяют ловители резкого торможения,
а для быстроходных — ловители скользящего типа, которые останав
ливают кабину не мгновенно, а на некотором участке пути. Наиболее
простым и распространенным типом ловителя является клиновой
(рис. 100). Клин ловителя 4 соединен рычагом 1 с натянутым грузовым
канатом 2. При обрыве каната 2 клин под действием пружины 3 входит
в зазор между колодкой 6 й направляющей 5. При этом башмаки 7
прижимаются к направляющей лифта 5 и останавливают кабину, со
единенную с башмаками. Схема привода ловителя при двухканатной
подвеске кабины приведена на рис. 101, а. При обрыве одного каната
(рис. 101, б) траверса подвески 2 повернется и, воздействуя на рычаги
3, приведет в действие ловители 4.
Д ля ограничения скорости кабины применяют ограничители цент
робежного типа (рис. 101, в). Они состоят из центробежного регулято
ра / , зажимного устройства 2 и бесконечного каната 3, соединенного
с ловителями кабины лифта 4. При увеличении скорости движения лиф
та и каната 3 выше допустимой грузы центробежного регулятора / ,
77
Рис. 100. Схема клинового ловителя лифта
Рис. 101. Схемы привода ловителя
приводимого в движение бесконечным канатом 3, расходятся и приво
дят в действие зажимное устройство 2. Последнее останавливает дви
жение бесконечного каната. Остановившийся канат при движущейся
кабине лифта заставляет сработать механизм ловителя.
Скиповые и строительные подъемники. Д л я подъема однород.
ного сыпучего материала под большим углом наклона к горизонту или
по вертикали применяют скиповые подъемники. Скиповый подъемник
п
(рис. 102) состоит из вертикальной или наклонной шахты S с направ
ляющими 7, загрузочным устройством 6 и приямком 5. В стальной раме
4 шарнирно укреплен ковш 2, который при движении роликами 3
опирается на направляющую 1. Стальным канатом 9 механизм подъе
ма 10 поднимает ковш 2. З а счет конфигурации направляющей 1 подня
тый наверх ковш опрокидывается и автоматически разгружается. В ка
честве подъемного механизма применяют лебедки барабанного типа G
машинным приводом. Скорость движения ковша скипового подъемни
ка выбирают в пределах 0,5 ... 2,0 м/с. Вместимость ковша 0,5 ... 10 м3.
Строительные подъемники (рис. 103) применяют на строительных
площадках для подъема различных материалов на верх сооружаемого
здания. Несущая конструкция подъемника имеет незащищенные на
правляющие 1 для площадки 2, которая с помощью лебедки 3 передви
гается канатом 4. Грузоподъемность таких подъемников 0,5 . . . 1,5 т
при скорости движения площадки 1,0 . . . 1,5 m/ g.
t
»
Раздел II
ТРАНСПОРТНЫЕ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
С ТЯГОВЫМ ОРГАНОМ
Глава 3
РАЗНОВИДНОСТИ ТРАНСПОРТНЫХ МАШИН
§ 1. ТИПЫ ТРАНСПОРТНЫХ МАШИН
Транспортные машины непрёрывного действия перемещают груз
непрерывным потоком в большинстве случаев по одной и той же опре
деленной трассе. Грузовой поток может быть в виде сплошной струи
сыпучих или кусковых материалов либо в виде отдельных порций этих
материалов, а также штучйых грузов. Транспортные машины обычно
применяют д л я перемещения одинаковых грузов, для которых транс
портные операции отличаются однотипностью, поэтому они значитель
но легче поддаются автоматизации, чем грузоподъемные.
Машины непрерывного дей ств ия'с тяговым органом разнообразны
по типам и конструкциям. Общим для них является наличие тягового
органа, который одновременно может явл ять ся и рабочим органом (на
пример, ленточные конвейеры) или нести на себе рабочие органы (эле
ваторы и др .) . У машин непрерывного транспорта с тяговым органом,
несмотря на конструктивные особенности, имеются узлы, теория р а
бочего процесса которых является общей. К числу общих вопросов
этой теории относится определение коэффициента сопротивления пе
редвижению и мощности двигателя, расчет приводного и натяжного
устройства и др.
Транспортные машины разделяют по степени подвижности на ста
ционарные и передвижные. Наибольшее распространение во всех от
раслях промышленности получили конвейеры."Ленточные конвейеры
предназначены для транспортирования насыпных (порошкообразных,
мелко- и среднекусковых материалов), а также мелких штучных гру
зов в горизонтальном или близком к нему направлении.
В цепных конвейерах груз лежит на пластинах (пластинчатые кон
вейеры), в ковшах (ковшовые конвейеры). Пластинчатые конвейеры
предназначены для транспортирования крупнокусковых, абразивных
и нагретых материалов, а также крупных штучных грузов в горизон
тальном или несколько наклонном направлении. Ковшовые конвейеры
предназначены для транспортирования насыпного груза в ковшах в
горизонтальном, наклонном или вертикальном направлениях.
Элеваторы служат для перемещения грузов в ковшах в вертикаль
ном или крутонаклонном направлении. Тяговым органом у элеваторов
является лента или цепь.
80
§ 2. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ВЫБОР ТРАНСПОРТНЫХ
МАШИН
При выборе транспортных машин необходимо учитывать следую
щие факторы:.
состояние транспортируемого материала, его физические и химиче-
свие свойства (крупность кусков, хрупкость, коррозионные свойства,
возможное измельчение при перемещении,- склонность материала к сли
панию и слеживанию, плотность, угол естественного откоса, размеры);
необходимую производительность машины;
длину и направление пути перемещения, размеры и форму помеще
ний;
технологический процесс, перспективы расширения предприятия;
технику безопасности;
хранения материалов и способы загрузки и р азгрузки конвейеров;
экономические показатели, т. е. капитальные затраты, срок амор
тизации машины, степень использования, стоимость ремонта и техниче
ского ухода, расход электроэнергии, трудозатраты, стоимость и трудо
емкость перемещения 1 т груза.
Только после анализа всех факторов можно решить, какой тип
транспортирующей машины наиболее рационален для данных конкрет
ных условий.
§ 3. ХАРАКТЕРИСТИКА ТРАНСПОРТИРУЕМЫХ ГРУЗОВ
Грузы делят на штучные и насыпные.
Характеристиками штучных грузов являются масса (от долей ки
лограмма до нескольких тонн), размер (от нескольких сантиметров до
нескольких метров), хрупкость (стекла), температура (стального про
ката), взрывоопасность и пожароопасность и др.
Основными характеристиками насыпных грузов являются форма и
размер частиц, плотность р, угол естественного откоса <р, абразивность,
предельный угол подъема груза на гладкой ленте (5, максимальная ско
рость транспортирования (табл. 6).
Насыпной груз по размеру частиц делят на крупнокусковой (раз
мер куска более 160 мм), кусковой (10 ... 160 мм), зернистый ( 0,5
...
10 мм), порошкообразный (0,05 ... 0 ,6 мм) и пылевидный (менее
0,05 мм). Угол естественного откоса <р — угол между боковой поверх
ностью свободно насыпной кучи сыпучего материала и горизонтальной
плоскостью.Если сыпучий материал находится в движении, то в ре
зуль тате колебаний при перемещении на конвейере увеличивается под
вижность его частиц, а угол естественного откоса уменьшается. По
абразивности насыпной груз делят на четыре группы: А — неабразив
ный, В — малоабразивный, С — среднеабразивный, Д — высокоабра
зивный. Абразивный груз истирает поверхности соприкасающихся с
ним материалов (лент). Учитывают такж е липкость, смерзаемость, кор
розионную активность, ядовитость и другие факторы транспортируе
мого г руза, которые приведены в справочниках.
81
Таблица 6
Характеристики насыпных грузов
Груз
Пло тность ,
т/м3
ф,- *
Абра
зив-
ность
3.“
Максималь
ная скорость
транспорти
рования, м/с
Аппатит порошковый
1,5...1,7
_
_
20
0,8...1.2
Гравий
1,7... 1,9
45
в
20
1...3
Земля, песок
1,2... 1,8
45
с
24
1...4
Зерно (пшеница)
ОД..0,8
35А
20
1,5 -4
Зола
0,4...0,7
50D
—
0,8...1,2
Кокс
0,4...0,5
50D
20
1-1 ,6
Мука (пшеничная)
0,4...0,6
55А
17
0,9 -1 ,2
Руда железная
2,1...3,5
50 D.
20
2
Уголь каменный
ОД..1,5
45
С
18
1-4
Цемент
0,9... 1,2
43
С
12
0,8...1,2
Шлак
0,7-1
45
С
—
I...3
Щебень
1Д..2
45
D
18
1...2
Глава 4
ЛЕНТОЧНЫЕ КОНВЕЙЕРЫ
§ 1. УСТРОЙСТВО ЛЕНТОЧНОГО КОНВЕЙЕРА
Ленточный конвейер является широко распространенным типом
транспортирующих машин непрерывного действия с тяговым органом.
Ленточный конвейер состоит из следующих элементов (рис. *104);
привода, в который входят электродвигатель 12, редуктор 9 и муфты 8;
станины 13; приводного барабана 6; натяжного барабана 2; замкнутой
бесконечной ленты 4, охватывающей приводной и натяжной барабаны
и являющейся одновременно тяговым органом и рабочим органом, не
сущим груз 15 на верхней ветви; верхних роликоопор 5 (прямых или
желобчатых), поддерживающих ленту и придающих ей прямую или
желобчатую форму; нижних роликоопор И , поддерживающих нижнюю
82
?етвь ленты; натяжного устройства 1 (грузового или винтового), обес-
гечивакмцего передачу требуемого окружного усилия и допустимый
ipoeec ленты между роликоопорами; отклоняющего устройства 14, на
герегибах ленты ставят барабан или роликоопоры; загрузочного уст
ройства 3\ концевого разгрузочного устройства 7 (для промежуточной
разгрузки по длине конвейера устанавливают плужковый сбрасыва-
ель или сбрасывающую тележку); скребка (щетки) 10 для очистки по-
рерхности ленты от прилипших к ней частиц перемещаемого груза; ос-
'анова 16.
Плужковый сбрасыватель (рис. 105) устанавливают на пути дви*
кущейся ленты 1, которая имеет приводной барабан 5. Сбрасыватель
? с тележкой 6 сдвигает груз 2 по спуску 4 с ленты 1.
Длина ленточных конвейеров зависит от прочности ленты. Обычно
•ни имеют длину 25 ... 100 м при одном приводном барабане и текстиль-
юй ленте. Производительность ленточных конвейеров зависит от ши-
шны ленты, скорости ее движения, транспортируемого груза и колеб-
ются в весьма широких пределах (от несколькиж десятков до несколь-
;их сотен и даже тысяч тонн в 1ч). Производительность ленточных
•.онвейеров с многобарабанным приводом длиной до 2 км достигает
0 000 т/ч. Серийно выпускаемые ленточные конвейеры имеют ширину
!енты до 2 м при скоростях движения 1 . .. 5 м/с.
Для механизации погрузочно-разгрузочных работ на складах, в
;ехах и на строительных площадках широко применяют передвижной
енточный конвейер.общего назначения по ГОСТ 2103—78. Серийно
ыпускаемые ленточные конвейеры общего назначения по ГОСТ
2644—77 и ,22647—77 комплектуются зародамшизготовителями из
тдельных узлов: барабанов (приводных, натяжных и отклоняющих),
рйвбдбв, роликовых опор, натяжных устройств, очистных устройств
л я лент и барабанов (скребков или вращающихся щеток), загрузоч-
ых устройств и разгрузочных приспособлений (барабанных тележек,
брасывателей). Станины, на которых крепят рамы приводов, а также
атяжное устройство с поддерживающими роликоопорами серийно не
ыпускают, их надо проектировать д л я каждого конвейера отдельно.
Основными параметрами серийных ленточных конвейеров являются
[ирина ленты, скорость ее движения и диаметр приводного бараба-
а.
8J
В ленточных конвейерах ленты являются тяговым органом и исполь
зуются для размещения на них транспортируемого груза. Поэтому до
статочно надежными могут быть только такие ленты, рабочая поверх
ность которых не повреждается перемещаемым материалом. Основным
типом конвейерной ленты является резинотканевая лента. Лента со
стоит из нескольких слоев прокладок 1 (рис. 106, а и б) хлопчатобу
мажной ткани, называемой бельтингом, соединенных слоями резины
и покрытых сверху и снизу слоем резиновых обкладок 2 и 3, предохра
няющих ленту от изнашивания, механических повреждений, влаги,
от гниения и разрушения. Прокладки в ленте воспринимают про
дольную растягивающую нагрузку.
Встречаются такж е высокопрочные ленты (рис. 106, г) со сталь
ными тросами 5, которые завулканизированы между прокладками. Лен
ты общего назначения применяют при температуре г руза до 65° С.
Специальные (рис. 106, в) сорта ленты с обкладками 4 из теплостойкой
резины позволяют перемещать грузы при температуре до 100° С.
Ленточный конвейер может перемещать грузы как по горизонталь
ному, так и по наклонному направлению при угле подъема Р не более
21а угла естественного откоса материала в движении, т. е. для строитель
ных материалов не более 22° при прорезиненной ленте и 14° при сталь
ной ленте. Д л я перемещения материалов в резко наклонном и верти
кальных направлениях можно использовать конвейеры со шланговой,
при движении автоматически
свертывающейся в трубки, лентой
(рис. Ю6, д).
Наша промышленность выпускает резинотканевые ленты шириной
0,3 .. . 2 м с числом прокладок 3 ... 12. Коэффициент запаса прочности
*р-п = 9 ... 12 в зависимости от угла подъема конвейера: при горизон
тальном конвейере kp a = 9 ... 10, при наклонном fep.n = 11 ... 12.
Предел прочности резинотканевой ленты на разрыв (по прокладкам)
для бельтинга Б-820 0 р.п = 0,61 кН/см, для уточно-шнуровой ткани
Ср.л = 1,32 кН/см.
В настоящее время промышленность выпускает также резиноткане
вые ленты из комбинированной лавсанохлопчатобумажной ткани типа
БКНЛ-65 или БКНЛ-100, а также капроновые типа ТЛК— 100 или
§ 2. ТЯГОВЫЕ ОРГАНЫ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
t23
Рис. 106. Ленты для конвейеров
84
и —*плоской; 0 — плоской с дополнительными неподвижными бортами; в— желобчатой; з н
д — плоской с кусковым грузом
ТЛК-200 и др. Цифры в обозначении типа ткйней характеризуют пре
дел прочности (даН/см) при разрыве 1 см прокладки ткани.
Ширину ленты В (рис. 107) выбирают в зависимости от переме
щаемого груза и необходимой производительности конвейера. Насып
ной груз располагается на плоскости под углом естественного откоса
ф. Н а ленте конвейера (рис. 107, а) насыпной груз при движении имеет
угол ф, = 0,35ф. Д л я увеличения площади сечения перемещаемого г ру
за иногда по бокам ленты устанавливают борта (рис. 107, б), но это
увеличивает сопротивление передвижению груза. Чаще всего приме
няют желобчатую ленту (рис. 107, в), производительность которой поч
ти вдвое выше производительности плоской ленты той же ширины.
Наименьшую ширину ленты для транспортирования штучных гру
зов берут на 100 мм больше ширины груза.
Число прокладок в ленте
Z=
V n /(B°p.n).
(7Э)
"де
—м а ксимальное натяжение ленты, кН; В — в см.
В месте соединения кондов лента имеет меньший предел проч
ности, чем по основному, неослабленному сечению, например, сшив
ка резинотканевой ленты уменьшает предел прочности на 50% . Луч
шим соединением считается горячая вулканизация, которая обеспе
чивает предел прочности соединения около 80% прочности р езино
тканевой ленты.
Ориентировочно линейная плотность' ленты
рл=1,1Вф+б^б,),
(80)
'де В — ширина ленты, м; г — число прокладок; б — 1,25 — толщина
эдной текстильной прокладки, мм; 6t =? 1,5 ...6 , 6г = 1... 1,5 — тол-
дины верхней и нижней обкладок, мм.
85
Для транспортирования абразивных материалов, нагретых (120..
300,СС) или агрессивных грузов применяют стальные ленты. Наиболь
шее распространение получили ленты из углеродистой или коррозион
но-стойкой стали шириной 500...650 мм и толщиной б = 1 мм. Преде.
прочности стальных лент о в = 1200 МПа. Это позволяет применят!
их для конвейеров длиной 1000 м и выше. Существенным педостатко'
стальных лент является их малая гибкость — необходимо применят;
натяжные и приводные барабаны больших диаметров.
§ 3. ПРОИЗВОДИТЕЛЬНОСТЬ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ
При равномерном движении груза непрерывным потоком производи
тельность (т/ч) транспортной машины равна массе груза, проходящей
через данное сечение в единицу времени.
Q = 3600 Avр,
где А — площадь поперечного сечения слоя груза, м2; v — екорост]
ленты, м/с; р — плотность груза, т/м3.
Производительность можно также определять по следующей форму
ле:
Q= 3,6 прг,
(81
где рг — средняя линейная плотность г руза, кг/м.
Производительность конвейера при транспортировании штучны:
грузов
Qmi — 3,6 vm:'s,
(8i
где m — масса одного груза, кг; s — шаг размещения груза на ленте
мг
В ленточном конвейере с плоской лентой поперечное сечение насып
ного груза имеет вид треугольника с основанием В 0, высотой h и угла
ми при основании фх. Выражая стороны треугольника через ширин;
ленты В , а угол срх, через угол естественного откоса ср, получим
А = 0,5-0,8 В-0,4 Bkptg срх = 0,16 В% tg (0,35<p),
где
—
коэффициент, учитывающий дополнительное рассыпание гру
за на наклонной ленте конвейера (см. рис. 104): пр'и угле наклон;
конвейера к горизонту Р < 20° k$ = 1, при Р ^ 20° ftp = 0,85.
Подставив А в формулу производительности, получим ширину (м
плоской ленты
В а = VQ/K576 kf,pv tg (0,35tp)j,
(85
и желобчатой ленты (рис. 407, е)
Bm = VQ/{160 ф!3,6 % tg (0,35<р) + 1).
(84
Прир 45°и
= 1 ширину ленты можно-определить по фор
мулам;
Вп « 0,075T/Q/(po), B m « 0,05 VQ/foSj.
86
§ 4. ОПРЕДЕЛЕНИЕ ПРИБЛИЖЕННОЙ МОЩНОСТИ
ПРИВОДА КОНВЕЙЕРА
В ленточном конвейере мощность расходуется на горизонтальное
перемещение груза, на подъем груза вверх, если конвейер наклонный;
за преодоление инерции покоя; на преодоление силы трения в подшип
никах роликоопор, приводного, натяжного и отклоняющего б ар аба
нов; на перегиб ленты на барабанах и роликоопорах; на преодоление
юпротивления в загрузочных,
разгрузочных и очистных устрой-
:твах.
Разные типы конвейеров имеют разные, иногда значительно отли-
шющиеся один от другого по величине, коэффициенты сопротивлений
из-за различий конструкции и применяемых материалов в конвейере).
Д ля предварительного расчета мощность (кВт) привода ленточного
сонвейера можно определить по формуле
Р„ = (0,00015 QLr + kiLTv ± 0,0027 QH) k%,
(85)
д е плюс — движение ленты на подъем; при опускании стоит знак ми-
iyc; Lr — длина горизонтальной проекции конвейера, м; v — скорость
(вижения ленты, м/с; Я — высота подъема груза, м;
и
—
коэф
фициенты, зависящие от ширины и длины ленты.
Ширина ленты, мм 400 500 600 800 1000 1200 1400
kx ........................ 0 ,012 0,015 0,020 0,024 0,030 0,035 0,040
Длина транспор
тера. м
.
.
.
.
До 15 15...30 30 .. .45 Cs.45
к, ........................
1,25 1,12
1,05
1.0
Тяговое усилие (кН) на приводном барабане
Ft = PJv.
(86)
По формуле Эйлера, выведенной для расчета передач гибким орга-
ом, можно найти максимальное натяжение в ленте
Fmax =
-
1),
(87)
те / — коэффициент трения между лентой и барабаном (при трении
ез смазочного материала резинотканевой ленты о стальной барабан
= 0,35); а — угол обхвата барабана лентой, рад.
По максимальному натяжению можно определить необходимое чис-
о прокладок ленты.
Точное определение мощности приводного барабана ленточного
онвейера производят по тяговому усилию, вычисленному методом об
ода контура конвейера по точкам.
§ 5. БАРАБАНЫ
На концевых участках ленточного конвейера (см. рис. 104) устанав-
Фвают приводной и натяжной барабаны. Если в конвейерах имеются
эвороты, то устанавливают отклоняющие барабаны. Барабаны
эычно делают литыми из чугуна или сварными из стали СтЗ (рис. 108).
риводные барабаны для центрирования ленты имеют небольшую стре-
gr
Рис. 108. Схема установки барабана на оси и валу:
/• —> лепрнводией; / / —г приводной футерованный; III — приводной нефутерованный; J — ос»
2 — барабан; 3— лента; 4— футеровка барабана; 5 —вал
лу выпуклости / в, которая составляет 0,005 длины барабана Bt, илг
' в среднем 1,5 .. .5 мм. При длинных конвейерах и большой производи
’ тельности конвейера для лучшего сцепления ленты с поверхностью ба
рабана и устранения ее буксования приводной барабан покрываю
(футеруют) резиной или деревом.
При использовании прорезиненной ленты диаметр приводного бара
бана D c = (125... 150) z, где г — число прокладок в ленте. При сталь
ной ле нтеZ7с = (800... 1200) б, где б — толщина стальной ленты, мм.
Диаметр барабана натяжного D H — 2£>б/3, отклоняющего £>„■=
= 0 ,5 D б. Полученную величину округляют до ближайшего стандарт
ного размера барабана по ГОСТ 22644—77: 160, 250, 320, 400, 500
630, 800, 1000, 1250, 1600, 2000 и 2500 мм. Д лину барабана В, беру
на 100 мм больше ширины ленты.
§ 6. ПРИВОДНЫЕ УСТРОЙСТВА
Привод ленточного конвейера (рис. 109, а) состоит из приводног*
барабана 1 и механизмов 3, передающих движение от электромотор
4 к барабану. Лента приводится в движение силой трения. Д л я увели
чения угла охвата барабана лентой устанавливают специальный отк
лоняющий барабан 2. Привод монтируют на раме 5. Передача враще
ния от электродвигателя к валу барабана осуществляется через редук
тор 3. Редуктор уменьшает габариты и увеличивает срок службы привс
да. Соединение валов двигателя и барабана с валами редуктора осу
ществляется с помощью стандартных муфт.
При необходимости создать компактное приводное устройство дви
гатель и передачу размещают внутри приводного барабана. Стандарт
ный электродвигатель 5 (рис. 109, б) размещают в неподвижном ци
линдрическом корпусе 4, в котором смонтирован также редуктор а
88
Рис. 109. Приводные устройства ленточного конвейера
передающий вращение барабану 2. Корпус 4 закрепляю т на раме тран
спортер а с помощью цапфы 1. Электродвигатель снабжен вентилятором
7 У1я наружного обдува. Преимущество такой схемы — компактность
привода и малая масса, недостаток — сложность конструкций.
По рассчитанной мощности привода по каталогу выбирают стандарт
ный двигатель с точностью ± 5 % расчетной мощности. При частоте
вращения двигателя п и барабана п 0 = 60 v/(nDб) определяют переда
точное отношение привода
и = п/пц.
(88)
По мощности привода и передаточному отношению по каталогу с .
точностью ± 5 % расчетного передаточного отношения подбирают стан
дартный редуктор или рассчитывают передачу на прочность. Редуктор
лучше выбирать зубчатый закрытого исполнения, так как у него выше
кпд.
§ 7. НАТЯЖНЫЕ УСТРОЙСТВА
Д ля обеспечения сцепления ленты с приводным барабаном и устра
нения провисания ее между роликоопорами в конвейерах устанав лива
ют натяжное устройство. Обычно натяжное устройство размещают на
участках ленты с наименьшим натяжением, например, для исключения
лишних перегибов ленты на конце конвейера (см. рис. 104).
Натяжные устройства (рис. ПО) бывают механические и грузовые
автоматического действия. Д л я натяжения ленты 3 в винтовом н а тяж
ном устройстве (рис. 110, а) барабан 4 с осью 5 и ползуном 7 передви
гается винтом 2, гайка 1 закреплена на неподвижном упоре. При вра
щении винта 2 ползун 7 перемещается по направляющим 6. При парал
лельных ветвях ленты у натяжного барабана усилие натяжного винто
вого или винтового с пружиной устройства
Ош.,= F',+к;+КП0ЛЗ,
(89)
где F и, F'c — натяжения набегающей и сбегающей ветвей ленты кон
вейера у натяжного барабана; КП0ЛЗ = Сб/ « (100...250) Н — сопро
тивление при передвижении в ползунах натяжного барабана.
Ъ9
3
Рис. 110. Схемы натяжных устройств
ленточного конвейера:
а —винтовое; б — винтовое с пружиной;
в— грузовое
Рис. 111. Винтовое натяжное устрой
ство ленточного конвейера
Рис. 112. Грузовое натяжное устрой
ство
Винт натяжного устройства (рис. 110, а) работает на растяжение,
он выступает за габариты конвейера. Этот недостаток отсутствует у
винтового натяжного устройства (рис. 111). Барабан 1 с осью и подшип
никами 2 передвигается в направляющих с помощью винтов 3. При вы
тяжке ленты винты периодически поворачивают с помощью ключа, что
является недостатком.
Винтовое натяжное устройство с пружиной до некоторой степени
компенсирует вытяжку ленты. Винт 4 (рис. 110, б) свободно проходит
через неподвижный упор 3. Пружина 2 находится между упором 3 и
гайкой 1. При завертывании гайки 1 создается натяжение ленты. Б л а
годаря простоте эти устройства применяют в передвижных и корот
ких конвейерах (до 50 м).
Грузовое натяжное устройство (рис. 110, в) автоматически компен
сирует вытяжку ленты и создает равномерное натяжение ленты. Тяго
вый орган (канат) 2 крепят к ползуну 3 и перекидывают через непод
вижный блок 1. Груз 4 создает усилие для передвижения натяжного
барабана
GH.r = 1,1 (Fa + Fa + Гаолп).
(90)
Грузовое натяжное устройство может находиться и под конвейером
(рис. 112). Устройство, состоящее из груза 4, трех барабанов (одного
90
натяжного 3 и двух отклоняющих /), устанавливают на нижней ветви
ленты 2 конвейера. Недостаток этого типа натяжного устройства —
большие габариты, поэтому их применяют только на стационарных
конвейерах. Длину хода барабана натяжного устройства принимают
равной 1% длины горизонтального конвейера и 1,5% длины накло н
ного.
§ 8. РОЛИКОВЫЕ ОПОРЫ,
ЗАГРУЗОЧНЫЕ И РАЗГРУЗОЧНЫЕ УСТРОЙСТВА
Д ля уменьшения провисания ленты между барабанами вдоль кон
вейера устанавливают роликовые опоры или настилы. Изготовление
настилов из дерева или листовой стали проще и дешевле роликовых
опор, но движение ленты по настилам приводит к большому износу
ленты и к увеличению расхода энергии. Поэтому настилы применяют
при малых скоростях и только для коротких конвейеров (до 20 м) с
нагрузкой до 50 кг на 1 м2 ленты.
Верхние (рабочие) роликоопоры поддерживают груженую ветвь
(рис. 104) ленты, а нижние (холостые) — нижнюю ветвь ленты. Р аз
личают роликоопоры плоские и желобчатые (обычно три ратина с у г
лом наклона крайних роликов-200). Плоские применяют для транспор
тирования насыпных грузов при небольшой производительности кон
вейера, а также для перемещения штучных грузов. Плоские ролико
опоры ставят на нижней (холостой) ветви ленты. Желобчатые ролико
опоры (см. рис. 107), придавая ленте вогнутую форму, предохраняют
груз от высыпания и повышают производительность конвейера.
Роликоопоры,
установленные
на
подшипниках
качения
2 (рис. 113), вращаются на неподвижных осях 1, которые укреплены
в кронштейнах. Корпус 3 ролика изготовляют из трубы диаметром 108
. . . 109 мм. Д лина роликовой опоры превышает ширину ленты на 100...
200 мм.
Расстояние (шаг) между рабочими, роликоопорами
/Р= А —0,625 В,
(91)
где А — коэффициент, при плотности груза менее 1 т/м3 А = 1750 мм;
при- плотности более 1,5 т/м3 А — 1550 мм.
Шаг роликоопор холостой ветви ленты конвейера
1Х = 2/р.
(92)
В местах загрузки ленты расстояние между рабочими роликоопора
ми уменьшают до 500 мм. При штучных грузах расстояние между
роликоопорами должно быть таким, чтобы груз опирался не менее чем
на два ролика.
На рабочей ветви ленты 1 в месте минимального натяжения стрела
провисания /шаХ между роликоопорами 2 (рис. 114)
/max“ (Рг ~ЬРл)/рl(8Fmjn)
t/m jn],
(93)
где
-
Рг = Q /(3,6о);
(94)
91
23
Рис. 113. Роликоопора с под-*
шштннками качения:
а—из трубы; б—литая
Рис. 114. Схема к определению
прогиба ленты между ролико-
опорами
/ р — расстояние между рабочими роликоопорами; P mln — минималь
ное натяжение груженой ветви ленты, определяемое методом обхода
контура по точкам; [/mIn] —допускаемое провисание ленты:
■[W I <(0,025...0 ,03)/Р.
-
(95)
Для рабочей ветви ленты конвейера условная линейная плотность
желобчатых роликоопор
Рр.Ж = ^Ж^Р>
(96)
где т ж — 10В.К + 7 — масса роликоопор при желобчатой ленте.
При плоской ленте та— 10Вп+ 3.
На рабочей и холостой ветви ленты с плоскими роликоопорами
Рр-п = т а/1р, Рх.п = fna/lx,
(97)
Насыпные грузы подают на конвейер через загрузочный лоток
3 (см. рис. 104), устраняющий рассыпание груза при загрузке. Мощ
ность, расходуемая на преодоление сопротивлений от загрузочного
лотка, кВт:
Р‘л = (0,05...0 ,1)цРл,
.
(98)
где L n — длина загрузочного лотка, м.
Разгрузка насыпного груза производится через приводной барабан
в приемную воронку 7 (см. рис. 104). При наличии плужкового сбрасы
вателя (см. рис. 105, а) расходуемая мощность
-
Р пл = 0,0075 QB.
(99)
При разгрузке с помощью самоходной тележки
Р р. т = 1,2 QHT!367,
.
(100)
где # т — высота подъема груза на тележке.
Д ля обеспечения надежной работы конвейеров необходимы автома
тические очистные устройства: вращающиеся барабанные щетки или
скребки для очистки тяговых органов от частиц налипшего на них гру
за.
92
§ 9. ОПРЕДЕЛЕНИЕ ТЯГОВОГО УСИЛИЯ
ЛЕНТОЧНОГО КОНВЕЙЕРА МЕТОДОМ
ОБХОДА КОНТУРА ПО ТОЧКАМ
Сущность нахождения усилия натяжения методом обхода KOHfypa
по точкам заключается в следующем: натяжение тягового органа в ка ж
дой последующей по его ходу точке контура Ft равно сумме натяжения
в предыдущей точке F t. . . у и сопротивления на участке между этими
точками Ft- X ... г:
=
>.../•
( 101)
При использовании этого метода замкнутый контур, образованный
тяговым органом, разбивают на участки так, чтобы на каждом из них
характер сопротивления был неизменным. Затем точку сбегания тяг о
вого органа с приводного барабана принимают за начало и обходят п о
следовательно весь контур по ходу движения тягового органа, подсчи
тывая сопротивления на отдельных участках и натяжение в тяговом
органе.
Пусть натяжение в точке 1 тягового органа, сбегающего с п р и во д
ного барабана, равно Fx (рис. 115). Натяжения в следующих по на
правлению движения ленты точках определятся по следующим вы р а
жениям: .
вточке 2F2=Fl+Fu„2;1
вточке3Fa=Fz+F2...з; |
(Ю2)
в точке 4F4=F34-F3'"t,]
где Fv..2, F2...a, F3..,4— сопротивления на участках I...2, 2...3 и
3....4 .
При расположении привода на головном конце конвейера (см.
рис. 115) Fx — Fc\ Fi = F„. Натяжения гибкого тягового органа долж
ны удовлетворять уравнению Эйлера:
FH= Fc е,а.
Сопротивление между точками 1
яий движению порожней ветви кон
вейера:
F\...2 (P.j “НРх.п)
Рл 4]у
(104)
где LT= L cos р — горизонтальная
:оставляющая пути перемещения
'руза; k 0)n — коэффициент сопро
тивления [см. формулу (56)] дви-
кению ленты по прямым ролико-
зпорам, при опорах на шарикопод-
нипниках и средних условиях ра-
5отыk„m —0,022;Я=Lrtgp—
высота подъема
перемещаемого
'РУза.
(103)
и 2 складывается из сопротивле-
точного конвейера
93
Сопротивление между точками 2 и 3 складывается из сопротивлений
движению на натяжном барабане;
F2...3= &б.II^2>
(105)
где &с.п— коэффициент сопротивления на натяжном барабане. При
угле охвата барабана лентой 180° ka .H = 0,05 ...0 ,07. Сопротивление
между точками 3 и 4 складывается из сопротивлений движению груже
ной ветви:
Рз...Л (Рг 4" Рл Рр. ж)
+ (Рг+ Рл)Н’
(106)
где каж — коэффициент сопротивления движению л ента по желоб
чатым роликоопорам и при опорах на шарикоподшипниках и средних
условиях работы /гсож = 0,025.
Подставляя значения Fj... , , F3...3, F 3...4 в приведенные выраже
ния, определим F 4 через неизвестное натяжение F t :
Ft=E.F,+Бг,
'
(107)
где Б г и Б 2 — значения подсчитанных сопротивлений.
Реш ая (107) совместно с уравнением F4 = Fjef®, полученным из
(103), определяем неизвестное F 1( а затем F 2, F я и F 4.
Уточненное тяговое усилие определяют по выражению
F x.y
-
F4_ F X+ F4 ...lt
(108)
где F*...! = k6n (F4 + F,)
(I09j
—
сопротивление на приводном барабане; kga = 0 ,03 .. .0 ,05 — коэф
фициент сопротивления на приводном барабане с подшипниками каче
ния.
Уточненная мощность двигателя
Ру = FT.y v/ц,
(ПО)
* где 1] — КПД передачи механизма привода.
При параллельных ветвях ленты усилие натяжного устройства
определяют по формуле (90): G„.r = 1,1 (F2 + F 3 + F noJI3).
Натяжение во всех точках ленточного конвейера схематически
показано на рис. 115.
Внезапная остановка заг руженного наклонного ленточного кон
вейера может вызвать самопроизвольное обратное движение ленты с
грузом вниз, если продольная составляющая силы тяжести груза Gr —
= p rL sin р, лежащего на ленте, окажется больше сопротивлений дви
жению ленты. В целях предупреждения самопроизвольного обрат
ного движения ленты с грузом на главном или вспомогательном валу
привода конвейера с большой высотой подъема устанавливают специ
альное стопорное устройство (храповой, роликовый или ленточный ос
танов). Ленточные остановы применяют при длине конвейера не более
50 м. На длинных наклонных конвейерах, а также прн большой про
изводительности ставят храповые остановы и электромагнитные тор
моза.
•94
Устройства безопасности на машинах непрерывного транспорта
(тормоза и остановы) устанавливают на наклонных конвейерах для
предотвращения самопроизвольного движения ленты с грузом вниз и
при возможном нарушении кинематической связи в приводах. Кроме
того, применяются устройства на случай обрыва тягового органа и т.п.
Глава 5
ЦЕПНЫЕ КОНВЕЙЕРЫ
| 1. ТЯГОВЫЕ ОРГАНЫ
В цепных конвейерах тяговым органом является цепь. Наиболее
распространены пластинчатые втулочно-роликовые и втулочно-кат-
ковые цепи (рис. 116) с шагом 80 ... 800 мм. В отличие от приводных и
грузовых цепей, у которых каждому габариту шарнира соответствует
определенный шаг, в тяговых цепях (ГОСТ 588—81) габариты шарнира
не зависят от шага цепи. Тяговые цепи рассчитывают аналогично гру
зовым, однако в инженерной практике обычно расчеты на прочность
не проводят, а подбирают цепи по разрушающей нагрузке при опреде
ленном запасе прочности, который в целях обеспечения долговечности
цепи принимают 7...10 в зависимости от размеров цепи и условий эксп
луатации. Обычно скорость цепных конвейеров не превышает 1 м/с.
В транспортирующих машинах применяют также разборные тяго
вые цепи из штамповых звеньев и валиков с удлиненными головками.
Разборная цепь (рис. 117) состоит из парных секций, каждую из которых
собирают из двух наружных звеньев 2, валика 3 и внутреннего звена 1.
Вследствие односторонней опорной поверхности внутренних звеньев и
наличия зазоров между внутренними и наружными звеньями разбор
ные цепи допускают боковой поворот звеньев на угол до 7°. Возмож
ность поворачиваться в двух направлениях позволяет применять их в
конвейерах с пространственной трассой.(подвесных).
fj
Рис. 116. Цепи тяговые:
а — штыревая; б —втулоч
ная;
в — втулочно-ролико
вая;
г — втулочно-катковая
без реборд; д, е — втулочно-
катковые с ребордами; 1—•
пластина; 2 — валик; 5 —
втулка; 4 — ролик; 5 — каток
95
Рис. 117. Цепь разборна я
По сравнению с конвейерной
лентой тяговая цепь позволяет
удобно и надежно крепить гру-
зонесущие и ходовые элементы
конвейера, обеспечивает надеж
ную передачу тягового, усилия
зацеплением цепи звездочкой и мало вытягивается под нагрузкой.
Недостатком цепного тягового органа является большое число шарни
ров, нуждающихся в регулярном наблюдении и периодическом сма
зывании, а также интенсивное изнашивание цепи при высоких ско
ростях вследствие динамических нагрузок.
§ 2 . ПЛАСТИНЧАТЫЙ КОНВЕЙЕР
Д л я транспортирования тяжелых тарно-штучных грузов, а также
агрессивных или нагретых грузов применяют пластинчатые конвейеры
по ГО СТ22281—76. Груз транспортируется рабочими органами, скр еп
ленными с тяговым органом (цепями). К цепным относятся наклонные
конвейеры метрополитена (эскалаторы).
При сходстве общих схем пластинчатый и ленточный конвейеры
конструктивно отличаются. Пластинчатый конвейер (рис. 118) пред
ставляет собой бесконечное движущееся полотно, состоящее из двух
параллельных тяговых цепей 5 (применяют также конвейеры с одной
цепью), к которым прикреплены поперечные пластины 3 для тарно-
штучных грузов или лотки 2, несущие сыпучий груз и образующие
4
Рис. 118. Схема пластинчатых кон
вейеров:
в — С лотковым настилом; б — с плоским
настилом; в —с волнистым настилом; г —»
элементы тяговой цепи
96
непрерывный настил. Цепи огибают приводную 4 и натяжные 6 звез
дочки. Опорой для пластин и цепей служат ходовые ролики 1, катящие
ся при движении конвейера по направляющим станины. Н а рис. 118, а
обе цепи опираются на стационарные ролики, которые не показаны.
Вращение от электродвигателя на приводной вал передается обычно
через редуктор, а также дополнительную цепную или клиноременную
передачу. Обычно натяжное устройство винтового типа, ход /г„.у = 2s,
где s — шаг цепи. В отличие от ленточных конвейеров, в которых на
тяжное устройство обеспечивает передачу тягового усилия трением,
в пластинчатых конвейерах тяговое усилие передается зацеплением,
и предварительное натяжение берут минимальным (0.5 . . .3 кН) для лик
видации прогиба тягового органа. Пластинчатые конвейеры изготов
ляют с плоским (рис. 118, б), волнистым или коробчатым настилом
(рис. 118, в). Д л я ориентировочных расчетов линейную плотность на
стила (кг/м) определяют по формуле
рн=60В+К,
(111)
где В — ширина настила, м; К — коэффициент, зависящий от ширины
В и типа настила. Например, при Я = 0 ,5 м и легком типе настила
=40,присреднем—К =60,притяжелом—К =80.
'
Настил крепят с помощью уголков к пластинам цепи. Ширина насти
ла зависит от размера кусков перемещаемого груза и производитель
ности транспортера. При насыпном грузе и настиле без бортов ориен
тировочно ширина настила
Я = К Q/(400cp) + 0,1,
(112)
где Q — производительность конвейера, т/ч; р — плотность груза,
т/м3, v — скорость движения, м/с.
Для штучных грузов ширину настила берут на 100 мм больше мак
симального размера груза.
Пластинчатые конвейеры в большинстве случаев тихоходные (0,1 ...
0,6 м/с). При плоском настиле угол подъема пластинчатого конвейера
не превышает 18°. При коробчатом настиле с поперечными планками
или волнистом настиле угол подъема конвейера увеличивают до 30...
45°.
Площадь сечения груза (материала) на настиле и производитель
ность конвейера определяют так же, как и для ленточного конвейера.
Необходимую мощность (кВт) на валу приводных звездочек пластин
чатых конвейеров средней длины и простой конфигурации без учета по
терь в плужковых сбрасывателях можно ориентировочно определить по
формуле
Ра = 0,0024 рнvLT+ 0,003 Q(0,11 Lr ± Я),
(113)
где рн — условная линейная плотность настила, кг/м; Ь г — горизон
тальная проекция полной длины конвейера, м; Я — высота подъема
или спуска груза, м; Q — производительность конвейера, т/ч. З нак
плюс берут при подъеме груза, знак минус при спуске.
4 Зак. 1634
97
Рис. 119. Схема к расче
ту ценного пластинчато
го конвейера
Так как для цепных конвейеров соотношения Эйлера неприменимы,
то при расчете выбирают минимальное натяжение цепи F mjn = 0 ,5 .. .
3 кН, для скребковых конвейеров FmlD ^ 10 кН.
Д ля конвейеров сложной конфигурации натяжение в тяговом орга
не и мощность привода определяют методом обхода контура по точ
кам.
Контур цепного конвейера разбивают на участки как для ленточно
го конвейера. Так, горизонтальный пластинчатый конвейер имеет че
тыре точки разбивки контура. В точке 1 минимальное натяжение Рг =
= Fmln (рис. 119). Натяжение в точке 2
F2=/4+Fv..t=/ч+Рн/Аж,
(1Н)
где F^ . , 2 — сопротивление на участке 1 .. . 2\ kaH— коэффициент со
противления качению ходовых роликов.
Этот коэффициент определяют как для колеса, перемещаемого по
рельсам [см. формулу (54)]. Д л я пластинчатых втулочно-роликовых це
пей йши = 0 ,06 .. .0 ,13 при использовании подшипников скольжения,
/гин = 0 ,02...0 ,045 при закрытых подшипниках качения.
Натяжение в точке 3
Fз — F%-\- F2...з = F2+ &(окF2= F2(1 + й(о„),
—
(115)
где kaK — коэффициент сопротивления на натяжной /гшк = 0,05...
. . . 0 ,07 или приводной йшк = 0,03...0,05 звездочке.
Натяжение в точке 4
F3+ F,...t = F3-f- (рГ+ рн) /.Ли,,,
(116)
где pr — средняя линейная плотность груза [см. формулу (94)], кг/м.
По найденным натяжениям находят уточненное тяговое усилие на
приводной звездочке
/\., = ^4-Fi+F*...!=Ft~Ъ
(Ft + FJ.
(117)
Мощность двигателя приводной станции и осевое усилие на винте
натяжной станции определяют как для ленточного конвейера [см. фор
мулы (НО) и (89)]. Мощность на плужковом сбрасывателе и загрузоч
ном лотке определяют по формулам (98) и (99). Мощность электродви
гателя привода
Рлв= 1,2 (Ру+ РЛ+ РиЛ
98
(П8)
При малой скорости движения конвейера стандартные тяговые
цепи рассчитывают по разрушающей нагрузке с запасом прочности
6... 14 в зависимости от типа цепи и угла наклона конвейера.
При высокой скорости движения конвейера и большом шаге цепи
расчетную нагрузку на цепь определяют с учетом динамических уси
лий.
§ 3. КОВШОВЫЕ КОНВЕЙЕРЫ
Ковшовые конвейеры широко применяют для транспортирования
и межоперационного перемещения по ходу технологического процес
са тарно-штучных и насыпных грузов. Конвейер (рис. 120, а) состоит
из тягового органа, приводных и натяжных звездочек и несущих эле
ментов — ковшов. Конструкции ковшов разнообразны; их размеры и
форма зависят от размеров, формы и массы перемещаемого груза.
Грузы на конвейере часто перемещаются по весьма сложной трассе
(рис. 120, б), состоящей из горизонтальных и вертикальных участков,
расположенных в вертикальной плоскости. Загрузка и разгрузка ков
шей производится как вручную, так и автоматически.
Производительность ковшовых конвейеров определяют как и для
ленточных конвейеров для штучных грузов, у которых шаг размеще
ния груза равен шагу между ковшами. Скорость движения тягового
органа у ковшовых конвейеров обычно определяется условиями техно
логического процесса и редко превышает 0,25 м/с. Дл ина го ризонталь
ного перемещения грузов не превышает 150 м при высоте вертикальных
участков 20 ... 30 м. Расчет тягового усилия и мощности ковшовых
конвейеров производят по методике, приведенной для пластинчатых
конвейеров.
При транспортировании сыпучих грузов загрузка ковшей произво
дится с помощью специального загрузочного устройства, подающего
груз определенными порциями. Разгрузка ковшей возможна в любом
месте, что является большим преимуществом этих конвейеров. Ковши
Рис. 120. Общий вид (а) и трассы цепей (в) ковшовых конвейеров:
1—цепь; 2—люлька
4*
99
доходят до специальных упоров и опрокидываются, высыпая груз. Пос
ле опорожнения ковши занимают исходное положение. Недостатком
ковшовых конвейеров является большая масса ходовой части и высокая
стоимость изготовления.
Производительность (т/ч) ковшового конвейера для сыпучих гру
зов
Q = 3,6 1Л|5рг vis,
(119)
где V — объем ковша, м3; ф — коэффициент заполнения ковша, ф =
= 0 ,7 .. .0 ,9; s — расстояние (шаг) между ковшами, м.
§ 4. ПОДВЕСНЫЕ КОНВЕЙЕРЫ
Подвесные конвейеры (рис. 121) состоят из одинарной линии замк
нутого тягового органа, замкнутого подвесного рельсового пути, при
водного и натяжных устройств. Их применяют для непрерывного и
периодического перемещения штучных грузов по сложной пространст
венной траектории, состоящей из горизонтальных, вертикальных и
наклонных участков. К кареткам 6, прикрепленным к тяговому орга
ну, присоединены подвески 9, на которые укладывают груз. Каретки
(рис. 122, а) состоят из катков 1, кронштейна 2 и вилки 3. Они движутся
по подвесному пути 5 (см. рис. 121), изготовленному из двутавра, угол
ка или полосовой стали. Заг рузка и разгрузка конвейера призводится
на ходу, вручную или автоматически.
Пространственная трасса является главным преимуществом под
весного конвейера. В процессе транспортирования на подвесном кон
вейере изделия часто проходят различные технологические операции:
Рис. 121. Схема подвесного конвейера:
- натяжное устройство; 2 — участок загрузки; 3 — участок разгрузки; 4— приводное уст
ройство; 5 — путь для кареток; 6 — каретка; 7 — цепь; в — груз; 9 — подвеска
100
очистку, сушку, окраску и пр. В качестве тягового органа в конвейерах
используют цепь или канат (см. рис. 122).
Наибольшее распространение получили грузотолкающие подвес
ные конвейеры. В этом конвейере (см. рис. 122, г) тележка 7 с подвес
ками для грузов движется по дополнительным путям 8, получая дви
жение от толкателей 6, соединенных с цепью 9. Цепь находится над
fs
*)
Рис. 122. Конструкции кареток подвесных конвейеров н способы их крепления:
а — к разборной цепи; б — к круглозвенной цепи; в — к стальному проволочному канату;
г — тележка толкающего конвейера
101
рельсом 8, удерживаясь от провисания ползунами 5, скользящими по
полкам направляющих уголков 4.
Тележки толкающего подвесного конвейера можно вывести с трассы
конвейера на рельсовые пути, являющиеся ответвлениями основного
пути. Это свойство легкого и удобного вывода тележек с грузом с трас
сы конвейера и включения их в конвейерный ход является основным
преимуществом толкающих конвейеров. Конструкция и расстановка
тел ежек на тяговом органе определяется характером и размером груза,
а также требованиями технологического процесса. Длина трассы под
весного конвейера может достигать 500 м и более.
Толкающие конвейеры могут быть напольными. Q этом случае цепь
конвейера находится под полом цеха, а к толкателям, проходящим в
щ елях , подсоединяют тележки, которые движутся по полу цеха.
Производительность подвесного конвейера определяют как для
ковейеров штучных грузов. Скорость движения (0,05..! 0,5 м/с) уста
навливают в зависимости от массы груза, производительности конвейе
ра и способов загрузки и выгрузки грузов. У технологических конвей
еров скорость определяется требованиями призводства. Тяговый р ас
чет подвесного конвейера аналогичен расчетам других видов цепных
конвейеров. Минимальное натяжение в тяговом органе подвесного
конвейера 0 ,5 . .. 1 кН. Тяговый орган выбирают по максимальному рас
четному натяжению, которое определяют с помощью обхода контура по
точкам.
Глава 6
ЭЛЕВАТОРЫ
Конвейер для транспортирования грузов в ковшах, жестко прикре
пленных к тяговому органу, в вертикальном или крутонаклонном на
правлении называют элеватором (рис. 123, 124). Тяговым органом /
102
Рис. 123. Схемы элеваторов для насыпных грузов
Рис. 124. Схема элеватора для штучных грузов
может служить лента (рис. 123, о), цепь
(рис. 123, б и в), одна или две. Тяговый ор
ган огибает приводной 3 и натяжной 4 ба
рабаны или зБездочки, укрепленные в
крайних точках элеватора. В вертикаль
ных элеваторах небольшой высоты между
крайними точками опор для тягового орга
на обычно не делают. В наклонных и вы
соких вертикальных элеваторах лента опи
рается на направляющие ролики, а цепь
либо катится роликами по направляющим
(рис. 123, г), либо опирается, как и лента, на
направляющие ролики (рис. 123, д). Элева
тор целиком защищают металлическим ко
жухом 5 с окнами для осмотра. Наклонные
элеваторы могут быть открытыми (без ко
жуха).
При движении тягойсго органа ковши
2 зачерпывают груз (материал) и транс
портируют его вверх, где под действием
силы тяжести и инерции материал высы
пается из ковша и поступает в разгрузоч
ное отверстие.
Широкому распространению элеваторов способствует ряд преиму
ществ: простота конструкции, малые габариты, возможность подачи
груза по вертикали (до70 м), большая производительность (до 70 м3/ч).
К недостаткам элеваторов относятся чувствительность к перегрузкам
и необходимость равномерной подачи материалов.
Производительность и мощность привода элеваторов рассчитыва
ют по методике расчета ковшовых конвейеров.
Раздел III
ТРАНСПОРТНЫЕ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
БЕЗ ТЯГОВОГО ОРГАНА
Глава 7
ГРАВИТАЦИОННЫЙ ТРАНСПОРТ
§ 1. ПРЯМОЛИНЕЙНЫЕ И ВИНТОВЫЕ СПУСКИ
Устройства, в которых груз перемещается сверху вниз под действием
силы тяжести, называют гравитационными. Они являются наиболее
простыми и экономичными, так как не требуют приводных механизмов.
Д ля тарно-штучных грузов применяют плоские спуски и желоба,
дл я сыпучих—желоба и трубы. Сечения желобов бывают U-или V-об-
разными. Трубы имеют круглое или прямоугольное сечение. Материа
лом для них служит металл или дерево.
Чтобы выдержать требуемую высоту спускного устройства при ми
нимальных габаритах, необходимо иметь два участка (рис. 125): кру
той, на котором груз приобретает значительную скорость, и пологий,
гасящий накопленную кинетическую энергию.
Угол наклона крутого участка следует брать больше уг ла трения,
а пологого участка — меньше угла трения.
Угол, под которым груз движется вниз по наклонной плоскости с постоян
ной скоростью под действием силы тяжести, называют углом трения движе
н ия. Этот угол легко вычислить по коэффициенту трения, значения которого
определяют опытным путем и приводят в справочниках.
Скорость движения груза на крутых участках рекомендуется не бо
л ее 5 м/с, а на пологих — не менее 1,5 м/с. Скорость груза в любой точ
ке спускного устройства зависит от начальной скорости, угла наклона,
длины транспортирования, вида груза и опорной поверхности спускно
го устройства.
Определим зависимость между этими компонентами при движении
по крутому и пологому участкам прямолинейного гладкого спуска.
Груз, сила тяжести которого G, опускается с высоты /гх с начальной
скоростью vB. Груз произведет работу Ghly которая затратится на прео
доление сил трения на пути
= GfLl cos
+ (G/2g) (y2 — y£).
Так как
= Lx sin P1( скорость груза в конце крутого участка спу
ска
v=V2gLt(sinPi—/cosPi)+ t>H-
(120)
Для пологого участка Gh2 = Gf cos p2 — (G/2g) (v2— y£), где h2 =
^ Г2sin.Psj.
104
Рис. 125. Схема к расчету дви
жения груза по прямолинейно
му наклонному спуску:
1 — участок спуска груза с уско
рением
движения; 2 — участок
спуска груза с замедлением дви
жения
Рис. 126. Винтовой гравитаци
онный спуск:
I — лоток винтового спуска; 2 — -
г руз
Аналогично находим скорость груза в конце пологого участка спус
ка
vK-=Y2gL2{s\n$ —/cos Р)+ п2.
(121)
Пользуясь этими уравнениями, можно проводить расчет прямоли
нейных гладких спусков.
Пропускная, способность (т/ч) желобов и труб
Q = 3600 AvKy,
(122)
где А — площадь поперечного сечения желоба или трубы, м2; ф — коэф
фициент заполнения, ф = 0,2...0,6.
При спуске груза с относительно большой высоты может не ока
заться места для установки прямолинейного гладкого спуска, который
обеспечивает движение груза с допустимой скоростью. В таких слу
чаях лоток изготовляют в виде винтовой спирали (рис. 126), где
движущей силой является составляющая G sin р, направленна*
вдоль поверхности спуска. При движении груза G возникает сила тре
ния о днище спуска Ft = f G cos p. Опускающийся груз вращается от
носительно оси спуска и под действием центробежной силы Fn прижи
мается к бортам лотка. Сила трения груза о борт лотка F2 = fF^ =■
— f iGtg) (v2/r), где г — радиус кривизны траектории спуска по
борту. Из условия равновесия сил, приложенных к грузу, получа
ем G sin р = f {Gig) (v2/r) -f fG cos p. Откуда скорость движения
груза в винтовом спуске
v—V[gr(sin Р—/cos р)/1//.
5 зэк. 1631
(123)
105
§ 2. РОЛИКОВЫЕ КОНВЕЙЕРЫ
Роликовые конвейеры выпускают без привода и с механическим при
водом. Широкое распространение для перемещения штучных грузов в
горизонтальном или слегка наклонном положении получили роликовые
конвейеры без привода.
Роликовый конвейер без привода (см. рис. 126) состоит из рамы,
на которой в подшипниках качения укреплены оси роликов. Ролики
обычно изготовляют из стальных труб. Движение грузов происходит
под действием толкающей силы рабочего или составляющей силы тя
жести груза. В .последнем случае конвейер называют роликовым спус
ком. Уклон роликовых спусков 2...4%. В конце роликового спуска
должны быть установлены тормозящие устройства, так как при значи
тельной длине транспортирования скорость движения грузов может
быть большой. Простейшим тормозным устройством является гладкий
настил. Перемещаемые на роликах штучные грузы должны иметь плос
кую опорную поверхность или устанавливаться на специальных под
донах.
Роликовые конвейеры с индивидуальным или групповым приводом
применяют в .прокатных цехах для подачи горячего металла к
стану и от стана.
Глава 8
ВИНТОВЫЕ КОНВЕЙЕРЫ И ТРАНСПОРТИРУЮЩИЕ
ТРУБЫ
§ 1. ВИНТОВЫЕ КОНВЕЙЕРЫ
Винтовые конвейеры применяют для перемещения сыпучих и мелко
кусковых материалов. Они работают "по принципу кинематической па
ры — винта и гайки. Гайкой в данном случае является перемещаемый
материал в желобе конвейера, а винтом — вал с насажденной на него
винтовой лопастью. При вращении винта 4 (рис. 127) в подшипниках
3 материал в желобе 5 с крышкой 2, удерживаемый от вращения силой
106
тяжести и трением о желоб, продвигается от загрузочного люка / к
разгрузочному патрубку 6. Вал винта получает вращение от электро
мотора через редуктор 7.
Загрузка и разгрузка винтового конвейера возможна в любой точке.
Это одно из его преимуществ. Обычно винтовые конвейеры применяют
для перемещения груза в горизонтальном или наклонном (5... 10°)
направлении. Их используют и для вертикального перемещения сыпу
чих материалов. В этом случае винтовые конвейеры работают при на
личии подпора материала снизу. Иногда они являются звеном техно
логического процесса.
Длина винтового конвейера обычно не превышает 40 м, произво
дительность 2... 150 м3/ч. В некоторых случаях недостатками винтовых
конвейеров являются: сравнительно высокий расход энергии, обуслов
ленный интенсивностью перемешивания, дробления и.заклинивания ча
стиц материала, и необходимость равномерной подачи транспорти
руемого материала.
Производительность (т/ч) винтового конвейера
Q= 60 (я02/4) sn^p^g,
(124)
гдеD —диаметр винта, щ s—шаг винта, м; п
частота вращения
винта, мин-1 ; р —плотность транспортируемого материала, т/м3; ф =
= 0 ,25...0 ,45 — коэффициент наполнения, т. е. отношение площади по
перечного сечения материала к площади круга диаметром, равным диа
метру винта; k&= 1...0 ,65 — коэффициент, учитывающий наклон
конвейера.
Мощность (кВт) на валу винта на основании опытных данных опре
деляют по формуле
Р — (Q/367) (Lrka + Н),
(125)
где Lr — горизонтальная проекция пути перемещения материала, м;
Н — высота подъема материала, м; ka — 1 . ..4
—
коэффициент, завися
щий от свойств перемещаемого материала, при неабразивном и сухом
материале ka= 1,2, при сильноабразивном или липком ka = 4.
§ 2. ТРАНСПОРТИРУЮЩИЕ ТРУБЫ
Д ля транспортирования горячих материалов, а также материалов,
выделяющих вредные пары, применяют транспортирующие трубы
(рис. 128). По внутренней стенке трубы 1 большого диаметра устанав
ливают спираль 2. При вращении трубы, установленной на роликах 3,
материал 4 за один оборот трубы перемещается на шаг спирали. Так как
при вращении трубы материал все время перемещается и крошится,
то применение транспортирующих труб ограничено, например, исполь
зованием их в цементной промышленности для обжига клинкера.
Глава 9
КАЧАЮЩИЕСЯ КОНВЕЙЕРЫ
§ 1. ИНЕРЦИОННЫЕ КОНВЕЙЕРЫ
Качающийся конвейер представляет собой подвешенный или опи
рающийся на неподвижную раму желоб или трубу, которые совершают
колебательные движения для перемещения груза. В инерционном к а
чающемся конвейере груз перемещается силами инерции. При прямом
ходе желоба силы инерции груза не превышают сил трения, поэтому он
движется совместно с желобом. При обратном ходе желоба силы инер
ции груза превышают силы трения и он движется вперед по инерции.
Инерционные конвейеры изготовляют с переменным и постоянным
давлением груза на желоб. Они работают с малой частотой качаний
5...6 Гц при радиусе кривошипа 10 ...20 мм.
Качающийся конвейер с переменным давлением груза на желоб
(рис. 129) состоит из стального желоба 1, соединенного с шатуном 2 и с
наклонными пружинящими стержнями 3 шарнирно. С помощью криво
шипно-шатунного механизма желоб совершает продольные качания,
причем вследствие наклонного положения поддерживающих стержней
желоб при движении вперед (вправо) несколько приподнимается, а при
движении назад опускается. При движении желоба вперед и вверх бл а
годаря инерции частицы груза прижимаются к желобу, что увеличивает
силу трения, и движутся вместе с ним. При движении же желоба назад
и вниз инерция груза уменьшает давление его на желоб, при опреде
ленных условиях желоб выскальзывает из-под груза и последний по
лучает поступательное движение по желобу.
В инерционных конвейерах с постоянным давлением груза желоб
движется прямолинейно на катках. С помощью специального криво
шипно-шатунного механизма желоб движется в одну сторону с боль
шим, а в другую с меньшим ускорением, чем достигается движение
г руза по желобу.
Инерционные конейеры с малой частотой колебаний имеют длину
до 15 м и транспортируют груз в горизонтальном или наклонном на-
Рнс. 129. Качающийся конвейер
108
травлении с производительностью до 100 м3/ч. Обычно скорость дви-
кения груза по горизонтальному желобу 0 ,1...0 .2 м/с.
Производительность (т/ч) инерционных конвейеров
Q= 3,6 оАЯи
(126)
’де v — скорость груза в желобе транспортера, м/с; А — площадь
'.ечения груза в желобе транспортера, м?,
= 0,8q — насыпная
шотность транспортируемого груза в разрыхленном состоянии, кг/м*.
Мощность (кВт) привода инерционного конвейера вычисляют по
>мпирической формуле
Р=0,14G0,
(127)
де G0 — сила тяжести груза и движущихся частей качающегося
сонвейера, кН.
Качающиеся конвейеры просты по конструкции, надежны и удоб-
1ы в эксплуатации.
Недостатками этих устройств являются изнашивание желоба при
юремещении абразивных грузов, образование пыли при перемещении
1ылевидных веществ, непригодность их для липких грузов.
§ 2. ВИБРАЦИОННЫЕ КОНВЕЙЕРЫ
Вибрационные качающиеся конвейеры устроены аналогично инер
ционным с переменным давлением груза. Отличие заключается в малой
мплитуде (доли миллиметра) и высокой частоте колебаний (до 50 Гц),
:ри этом часть груза отрывается от желоба.
Для приведения в движение вибрационного конвейера применяют
[еханические и электрические приводы — вибраторы (рис. 130). Же-
об (труба) 1 подвешен на подвесках 2 и связан с колеблющейся частью
вибр-атора. Вибратор 4 с помощью подвески 5 шарнирно связан с же-
обом 1. Н аправление перемещения вибратора не совпадает с осью
рубы (а = 20°), поэтому частицы груза совершают мйкропрыжки и
еремещаются вперед. Амплитуды колебаний, создаваемых вибрато-
ом, невелики, а значительная частота (50 Гц) обеспечивает высокую
роизводительность вибрационных конвейеров. З а счет упругой связи
эис. 130, в) якоря электромагнита вибратора с трубой амплитуда ее
Рис. 130. Вибрационный конвейер:
а —общий вид; б —схема движения груза; в — схема крепления вибратора
109
Рис. 131. Схема вибрационного элеватора
колебаний превышает амплитуду колебаний
якоря магнита, этому способствует такж е ре
зонансный характер процесса.
Преимуществом вибрационных конвейеров
с электромагнитным вибратором является
простота конструкций, обусловленная отсут
ствием вращающихся частей.
Вибрационный конвейер представляет со
бой двухмассовую систему, в которой Массг
конвейера^ и масса вибратора т2 связань
пружиной жесткостью С. Массу вибратора выбирают из расчета при
мерно 500 кг на 1 кВт потребляемой мощности. Коэффициенты со
противлений для вибрационных конвейеров изучены недостаточно, для
инженерных расчетов мощность (кВт) привода определяют по прибли
женной формуле
Р = 0,0018QLr + 0,055Go,
(128
где G0 — сила тяжести качающихся частей, кН.
Необходимое число вибраторов г при мощности одного вибратора Р
вычисляют по формуле
г = Р/Рг.
Производительность вибрационных конвейеров 50... 150 т/ч. Ввидл
незначительной амплитуды крошение груза и выделение пыли при пере
мещении почти отсутствуют.
Практически конвейеры могут иметь любую длину.
К недостаткам вибрационных конвейеров с электромагнитным при
водом нужно отнести трудность синхронизации работы большого числ;
электровибраторов и значительную массу.
Для подъема груза на высоту существуют вибрационные конвейеры
элеваторы (рис. 131), представляющие собой цилиндр, на внутренне]
или наружной поверхности которого размещен спиральный желоб 1
При колебательных движениях во круг продольной оси и вдоль нее сы
пучие грузы поднимаются по спиральному желобу и разгружаютс;
наверху 2. Вертикальные вибрационные элеваторы выпускаютс:
высотой до 8 м и производительностью до 20 т/ч.
Глава 10
ПНЕВМАТИЧЕСКИЙ ТРАНСПОРТ
§ 1. ОБЩИЕ СВЕДЕНИЯ
Пневматический транспорт применяют для перемещения кусковых
пылевидных, волокнистых и других материалов. Его действие основан
на способности витания твердых частиц вещества в потоке воздуха
Если в трубу, через которую проходит поток воздуха снизу вверх с
по
скоростью v ввести твердое тело массой т, то на него будут действовать
сила тяжести и сила скоростного потока воздуха
Fs = kAifi,
(129)
где k — коэффициент; А — площадь миделева сечения, т. е. сечения,
нормального к направлению воздушной струи. Действием силы трения
тела о воздух пренебрегаем ввиду ее незначительности.
Очевидно, при m g > Fs тело будет опускаться вниз, а при mg <
< Fs — подниматься вверх; при mg = Fs тело будет находиться
на месте в состоянии витания.
Скорость воздуха при витании тела определяют из выражения
tC-p = V mgi(kA).
(130)
Таким образом, для транспортирования твердого тела в воздушном
потоке необходимо, чтобы скорость воздуха в трубопроводе была боль
ше скорости витания.
При решении вопроса о целесообразности применения пневматичес
кого транспорта следует принимать во внимание следующие факторы]
удельную массу материала (чем больше удельная масса, тем выше ско
рость потока воздуха и тем больше потери в трубопроводах), твердость
и форму частиц материалу (при твердых острогранных частицах про
исходит изнашивание трубопровода), влажность материала (при повы
шении влажности пневматический транспорт не рекомендуется).
Преимуществами пневматического транспорта являются высокая
степень автоматизации, незначительные потери груза (герметичные
пути), возможность устройства большого числа ответвлений в необхо
димых местах и приспособляемость к месту разг рузки, легкий доступ
ко всем частям установок, возможность совмещения технологических
операций с транспортными, невысокая стоимость, широкий диапазои
производительности при дальности транспортирования до 2 км.
К недостаткам пневматического транспорта относятся большой рас
ход энергии (в 8 ... 14 р аз больше, чем при механическом транспорте),
изнашивание деталей, соприкасающихся с грузом (колена и за кру г
ления трубопроводов при транспортировке золы или шлака).
§ 2. ТИПЫ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТА
Пневматический транспорт бывает всасывающего (рис. 132), нагне
тающего (рис. 133) и смешанного типов.
Схема всасывающего устройства приведена на рис. 132, а. Вакуум-
насос 9 создает разряжение в системе. Атмосферный воздух врывается
з сопло 2 и увлекает материал 1. Из сопла материал, увлекаемый воз
духом через гибкий шланг 3 и трубопровод 4, поступает в разгружатель
5. В разгружателе скорость воздуха резко уменьшается и изменяется
то направлению, поэтому материал выделяется из воздуха и падает н а
дно разгружателя, откуда непрерывно выводится в предназначенное
зму место через шлюзовый затвор 6. Фильтр 7 очищает воздух от остав
шейся в нем мелкой пыли. Если пыль не представляет ценности, то
зчистка воздуха от пыли производится водой, если пыль является цен-
111
Rlaxy-
умному
насосу
Рис. 132. Схема всасывающего пневматического транспорта
ной, ее отделяют от воздуха с помощью матерчатых фильтров и выводят
из фильтра через шлюзовый затвор 8. Очищенный воздух через ва
куум-насос удаляется в атмосферу. Схема нагнетающего пневматичес
кого транспорта приведена на рир. 133. Из компрессора 1 воздух по;
давлением подается в ресивер 2, а затем поступает в трубопровод, в ко
торый из шлюзового затвора 3 поступает материал. Воздух с материа
лом по трубопроводам проходит в разгружатель 4, в котором материал
отделяется от воздуха. Назначение фильтра 5 и шлюзовых затворов t
-
и 7 понятно из предыдущего.
Смет а нный пневматический .транспорт представляет собой комбина
цию всасывающего и нагнетающего устройств: из р азгружателя вса
бывающего устройства материал через шлюзовый затвор поступает в во
ронку нагнетающего устройства.
'
Схема сопла, через которое материал втягивается в трубопровод
движущимся с большой скоростью воздухом, приведена на рис. 132, б
Трубопроводы для пневматического транспорта выполняют из бесшов
пых или сварных труб. Гибкие рукава составляются из отдельны?
стальных элементов, соединенных гибкой лентой и заключенны?
в кожух из прорезиненного полотна.
Наиболее простая схема разгружателя приведена на рис. 132, в
Воздух с материалом входит в разгружатель с большой скоростью
здесь скорость смеси значительно уменьшается вследствие увеличена?
поперечного сечения каналов, по которым происходит движение. Вы
делению материала содействуют резкие повороты на пууи от входа к вы
ходу воздуха. Выделяемый из воздуха материал выгружается из ни?к
него штуцера через шлюзовый затвор. В вертикальной отводящей.тру
бе скорость воздуха должна быть меньше скорости витания, чтобь
с воздухом могла выходить лишь тонкая пыль.
Шлюзовые затворы во веасы
вающих устройствах служат дл?
выведения материала из простран
ства с пониженным давлением i
пространство с атмосферным дав
лением. Материал через шлюзовьп
затвор проходит сверху вниз. Ле
Рис. 133. Схема нагнетающего пневма
тического транспорта
112
вый штуцер (см. рис. 132, г) соединен с атмосферой, а правый — с про
странством пониженного давления. При вращении вала с радиальны
ми перегородками против часовой стрелки в секциях, отмеченных
знаком 0, давление атмосферное, а в секциях со знаком мину с— пони
женное. При работе затвора загружаются секций с пониженным дав
лением и разгружаются секции, в которых давление атмосферное.
§ 3. РАСЧЕТ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТА
Для перемещения груза по трубопроводу необходима скорость дви
жения потока воздуха, превышающая критическую:
пв = (1,25...2 ,5) окр.
(131)
Из опыта скорость воздуха в трубопроводах выбирают в пределах
10...25 м/с в зависимости от транспортируемого материала. Скорость
перемещения груза в трубопроводе иг = (0,65... 0,85) v B. Чем выше ско
рость воздуха в трубопроводе, тем больше может быть массовая кон
центрация смеси, т. е. насыщенность воздуха частицами груза. Коэф
фициент массовой концентрации смеси
р = Q/(3600 УвРв),
(132)
где Q — производительность, т/.ч; V B— расход воздуха (объем пере
мещаемого воздуха), м3/с; р в = 0,00124 т/м8 — плотность воздуха.
Для всасывающего пневматического транспорта коэффициент кон
центрации смеси р = 3. ..35, для нагнетающего — р = 40... 75.
При достижении предельной концентрации происходит выпадение от
дельных частиц груза и может произойти закупоривание трубопровода
в месте его наибольшего сопротивления.
Диаметр (м) трубопровода определяют по формуле
d=VWJ (jivb).
(133)
Мощность (кВт) воздушного насоса
Р = Риоли Кв,
(134)
где Рполи — давление, кПа.
Давление воздуха расходуется на преодоление сопротивлений при
вводе материала в трубопровод р в, на перемещение материала и возду
ха р ш\ на преодоление вертикального подъема материала и воздуха
ри, на сопротивление в коленах и отводах р„, а также в разгружателе
р р и фильтре рф. С учетом неучтенных потерь для всасывающей сис
темы
РпОЛН—1.25[рв+ рм+ Рп+ 2(рк+ Рр+Рф)1.
Здесь
рь = 0,0625 vi (10+0,5 р); рм = 0,0625 vl [(/ + h)/d] х
X (1 + &р) (0,0 125 + 0,001 \ld ) (где при диаметре трубопровода d, го
ризонтальной длине / и высоте h коэффициент k = 0,45 ...0 ,24). Д л я
пв= 15...25м/с ра= 1,224h(1+р); рк= 0,116Qoi; рр=
= 2кПа;рф—1кПа.
Необходимая мощность (кВт) двигателя воздушного насоса
Ря = Р /т], где т] — КПД привода, г) = 0,65...085.
113
Раздел IV
ТРАНСПОРТНЫЕ МАШИНЫ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ
Глава 11
РЕЛЬСОВЫЙ И БЕЗРЕЛЬСОВЫЙ ВНУТРИЗАВОДСКОЙ
ТРАНСПОРТ
§ 1. РЕЛЬСОВЫЙ ТРАНСПОРТ
Д ля перемещения грузов по территории заводов и цехов используют
различные тележки, которые передвигаются по рельсам или без них.
В состав рельсового транспорта входят: рельсовый путь и путевое
хозяйство; подвижной прицепной состав— вагоны и вагонетки; тяго
вые и маневровые устройства (локомотивы, электровозы и др. , которые
в данном курсе не рассматриваются).
Рельсовый транспорт различают по ширине колеи. В СССР шири
на нормальной колеи (расстояние между внутренними гранями головок
рельсов) принята 1524 мм, узкой колеи — 750 мм.
Д ля внутризаводского транспорта в большинстве случаев исполь
зуют узкоколейный рельсовый путь (рис. 134), по которому передвига
ют вагонетки. На земляное полотно 1 настилают слой балласта 2.
Поверх шпал 3 на подкладках 5 укладывают рельсы 4. Рельсы к шпа
лам крепятся костылями 6.
При перевозке сыпучих грузов применяют опрокидывающиеся те
лежки (рис. 135). Д л я перевода подвижного состава с одного пути на
другой используют стрелки или поворотные круги.
Расчет сопротивления передвижению тележки изложен в разделе
механизмов передвижения грузоподъемных машин.
Широкое применение в промышленности нашли различные грузо-
подъемные и транспортирующие устройства на подвесных путях (под
весные дороги). Их используют для перемещения тяжелых грузов на
участках с небольшим грузопотоком. Подвесные пути позволяют осво
бодить пол цеха и территорию предприятий от рельсовых путей или
других транспортных средств. Жесткие подвесные однорельсовые
дороги изготовляют из проката (двутавра), по которому пе
ремещаются кошки (при ручном приводе) или тележки —
электрические тали. Путь подвешивают на специальных крон-
111
а)
5)
Рис. 135. Опрокидывающиеся рельсовые тележки:
о — для опрокидывания ковша с боку от рельс; б —для опрокидывания ковша с поворо
том в любую сторону
штейнах или прикрепляют к перекрытиям, здания. Применение
стандартных электроталей позволяет механизировать транспорт
ные операции на предприятиях различных отраслей промышленности.
Расчет усилия для перемещения тележки аналогичен расчету, при
веденному в разделе грузоподъемных машин, а для подвесных рельсо
вых дорог с цепной н канатной тягой расчет аналогичен приведенному в
разделе транспортирующих машин непрерывного действия с тяговым
органом (цепные подвесные конвейеры).
§ 2. БЕЗРЕЛЬСОВЫЙ ТРАНСПОРТ
В зависимости от х арактера и количества перемещаемых грузов,
а также расстояния используют ручные, самоходные тележки или ав
томобильный трайспорт. П е
редвижение тележек обычно
осуществляется по асфальти
рованным дворам и полу це
хов.
Ручные тележки приме
няют для перемещения гру
зов на небольшие расстояния
(до 100 м). Их грузоподъем
ность 250... 1000 кг. К само-
Рис. 136. Электрокар с подъемной
платформой для перевозки груза
I
4
115
ходным тележкам относятся электрокары грузоподъемностью до 2 т.
Они предназначены для межцеховых перевозок грузов на расстояния
100...500 м.
Электрокары представляют собой тележки, приводящиеся в движе
ние электродвигателем, который получает энергию от установленной
на тележке аккумуляторной батареи. Электрокара типа ЭК-2 имеет
неподвижную платформу. Более удобными являются электрокары с
подъемной платформой 1 (рис. 136). Груз 2 уложен на столиках, что
сокращает время погрузки и разгрузки электрокар.
Электрокары работают бесшумно и не выделяют газов, но нужда
ются в специальном уходе, ремонте и зарядке аккумуляторных бата-
рей.
Глава 12
ПОГРУЗОЧНО-РАЗГРУЗОЧНЫЕ МАШИНЫ
§ 1. ПОГРУЗЧИКИ
Погрузчиками называют машины, оборудованные устройствами для
захватывания груза, перемещения его в вертикальном и горизонталь
ном направлениях, укладки в штабель, погрузки в транспортные
средства (железнодорожные вагоны, автомобили и др.) и выгрузки
из них.
Погрузчик с электрическим приводом называют электропогрузчик,
а с приводом от двигателя внутреннего сгорания — автопогрузчик.
Обычно погрузчики снабжают сменными захватами. Вилы предназна
чены для захвата тарно-штучных грузов, а ковш—для сыпучих грузов.
Наша промышленность выпускает электропогрузчики грузоподъ
емностью 0,5... 1,5 т.
Грузоподъемность автопогрузчика 1,5 ...7 ,5 т, высота подъема до
4 м. Скорость подъема груза 8. .. 12 м/мин, скорость передвижения ав
топогрузчика до 40 км/ч. Автопогрузчик (рис. 137) состоит из ходовой
и подъемкой частей. Ходовая часть обычно изготовлена из стандартных
автомобильных деталей и узлов: двигателя 16 с коробкой передач 15,
заднего моста 24, передних ходовых 23 и задних 21 колес, рулевого уп
равления 14 и т. д . В отличие от обычных автомобилей двигатель и по
воротные колеса установлены в автопогрузчиках сзади, а задний
мост со сдвоенными пневматическими колесами — спереди. Это объяс
няется большей нагрузкой передней части автопогрузчика за счет
находящегося здесь подъемного устройства и захвата для груза.
Поворот управляемых колес осуществляется с помощью гидравли
ческого усилителя, шток 19 которого связан с рамой погрузчика, а
подвижной цилиндр 18 снабжен зубчатой рейкой, находящейся в зацеп
лении с шестерней 20 стойки поворотных задних колес 21. Напр авляю
щий гидрораспределитель 17 закреплен на цилиндре, его ш ток'с вязан
с рулевым управлением. Жидкость в цилиндр 18 толкателя подает на
сос. Ходовая часть автопогрузчика не имеет рессор, поэтому он не при
способлен для высоких скоростей движения.
П6
1
Подъемная часть автопогрузчика состоит из вертикальной рамы 9,
шарнирно укрепленной на раме автопогрузчика, и рамы 7, по которой
перемещается каретка 5. Рама 7 служит для увеличения высоты и ско
рости подъема каретки с захватом 6. Д л я уменьшения консольного
вылета захвата основная рама может наклоняться назад на угол a t
(до 12°), для лучшего захвата груза.она может наклоняться также
вперед на угол а 2 (до 4°).
Приводы механизмов подъема и наклона — гидравлические тол ка
тели, в которых жидкость через направляющий гидрораспределитель
подается от насоса, приводимого карданным валом от двигателя авто
погрузчика, в гидромагистраль.
Подъемный механизм состоит из рамы 9, на нижней балке которой
установлен цилиндр толкателя 8\ шток 4 его поршня оканчивается по
перечиной 2, несущей звездочки 1 для пластинчатых грузовых цепей
3. Поперечина связана с рамой 7. Грузовая цепь укреплена на основ
ной раме 9, перекинута через звездочку и вторым концом закреплена
на каретке.
При перемещении поршня в цилиндре вспомогательная рама пере
мещается вместе с ним, а каретка движется с удвоенной скоростью '
и проходит путь, равный удвоенному пути поршня.
Гидравлический толкатель 22 механизма наклона передает через
шток 25 усилие на основную раму подъемника. Меняя место крепления
штока 25 к раме 9, можно получить различные углы отклонения вер
тикальной рамы. Толкатели управляются направляющими гидрорас
пределителями 10 и 11.
117
Гидравлические толкатели автопогрузчиков работают при давле
нии около 6,5 МПа. Это давление создают лопастные насосы 12 и 13,
приводимые двигателем автопогрузчика.
§ 2 . СКРЕПЕРЫ
Д ля перемещения на .складах сыпучих грузов, допускающих раз
мельчение и дробление кусков, часто применяют скрепер (рис. 138, а).
Он состоит из ковша 4, двухбарабанной лебедки 2, головной станции о
направляющими блоками 1, хвостовой станции с направляющими бло
ками 6, путей склада 7 для перемещения хвостовой станции, холостой
5 и рабочей 3 ветвей каната.
Скреперы выполняют как стационарными, так и передвижными.
Обычно их производительность 50... 100 т/ч, хотя встречаются установ
ки с производительностью более 600 т/ч. Груз перемещается в среднем
на расстояние 60...70 м, в отдельных случаях до 150 м.
Скреперы применяют на открытых и закрытых складах для тран
спортирования песка, гравия, угля, золы и других грузов. В зависи
мости от грузооборота вместимость ковша колеблется от 0,5 до 5 м*.
Масса ковша составляет 0 ,4 .. .0 ,6 от массы зачерпываемого груза. Ско
рость каната обычно 1,2 ...2 ,5 м/с. Скорость обратного хода в 1,5 раза
больше рабочего.
Скрепер работает следующим образом. При включении рабочего бара
бана лебедки 2 (ом. рис. 138, а) рабочая ветвь каната 3 передвигает ковш
4 к бункеру у головной станции 1. Ковш (см. рис. 138, б), двигаясь
открытой стороной вперед, врезается в груз, захватывает и транспор
тирует его. При выключении рабочего барабана и включении холостого
хода ковш движется в обратном направлении без груза. Передвигая
хвостовую станцию, можно разгрузить всю территорию склада.
,
Для управления ковшом применяют двухбарабанные скреперные
лебедки, конструкция которых мало отличается от конструкции обыч-
Рис. 138. Скрепер
113
ных лебедок грузоподъемных машин. Ориентировочно тяговое усилие
рабочего каната берут равным удвоенной силе тяжести захваченного
ковшом груза.
Простейшим скрепером является механическая лопата (см. рис.
19, г), используемая, например, для разгрузки железнодорожных ва
гонов. Она состоит из обычной лебедки I; тяговый орган 2 и щиток 3 з а
носится за кучу сыпучего груза 4. При включении лебедки происхо
дит транспортирование груза щитком 3 к ак ковшом.
Глава 13
ПРОМЫШЛЕННЫЕ РОБОТЫ
§ 1. УСТРОЙСТВО И РАБОТА ПРОМЫШЛЕННОГО РОБОТА
В последние годы быстро развивается роботостроение. Внедрение
роботов на производстве позволяет автоматизировать технологические
процессы при значительном повышении производительности труда.
Промышленные роботы позволяют заменить ручной труд на монотон
ных утомительных операциях, связанных, например, с перемещением
и загрузкой изделий на конвейеры, операциях сборки, транспортиро
вания и т. д. Робот представляет собой универсальный автомат для
выполнения механических действий по соответствующей программе.
В настоящее тремя отечественная промышленность серийно вы
пускает различные промышленные роботы, например, «Циклон-35»,
«Универсал-50М», «Универсал-15М», ПВВ-50 и др. Последние цифры
в марке робота указывают грузоподъемность в деканьютонах. Роботы
быстро перестраиваются на выполнение разнообразных операций, от
вечая требованиям современного производства с частой сменой тех
нологического процесса.
По степени совершенства и системам управления промышленные
роботы разделяют на три поколения.
К первому поколению относят роботы-манипуляторы, работающие
по жесткой программе, записанной на перфоленте или магнитной ленте.
В этих роботах используется числовое программное управление. Д л я
их переналадки на выполнения других операций достаточно изменить
программу. Недостаток таких роботов заключается в том, что многие
производственные операции не могут быть запрограммированы жест
кой программой.
Второе поколение роботов — манипуляторы, работающие по гиб
кой программе с управлением от ЭВМ. Они обладают свойствами час
тичной адаптации, а именно, приспособлением к условиям внешней
среды в результате сбора и переработки"информации в процессе движе
ния исполнительного механизма.
Третье поколение роботов — манипуляторы с элементами искусст
венного интеллекта, управляемые ЭВМ. Они будут полностью адапти
роваться, т. е. с помощью системы чувств (искусственного сл ух а, зр е
ния, осязания и т.д .) воспринимать и распознавать обстановку, автома
119
тически принимать решения о своих дальнейших действиях и выпол
нять их, а также самообучаться по мере накопления опыта работы.
Все три поколения не исключают друг друга и используются при
менительно к своим задачам.
Промышленный робот (рис. 139, а) состоит из манипулятора 1 —
исполнительного органа, несущего схват 2, устройства передвижения
УП, если робот не стационарный, устройства управления. Как мани
пулятор, так и устройство передвижения являются исполнительными
органами робота, взаимодействующими по сигналам устройства управ
ления.
Устройство управления включает пульт у правления, служащий
для ввода и контроля задания, выданного оператором. Запоминающее
устройство ЗУ служ'ит для хранения программы работы. Вычисли
тельное устройство В У реализует алгоритм управления и блок управ
ления приводами манипулятора и устройства передвижения БУП.
Управляющее устройство может быть встроено в корпус робота или
размещено в отдельном блоке (см. рис. 139).
Связь всех устройств робота показана на рис. 139, б. Оператор вво
дит задание на работу, используя пульт управления ПУ. Блок управ
ления приводами БУП осуществляет воздействие на технологическое
оборудование ТО (см. рис. 139, а), которое обслуживает робот, и на
технологический процесс ТП, выполняемый манипулятором робота.
Система управления включает также измерительное устройство, вы
являющее состояние робота и внешней, среды.
Манипулятор — это устройство, предназначенное для воспроизве
дения рабочих функций руки человека (рис. 140, а). Он имеет семь сте
пеней свободы, поскольку число степеней свободы незамкнутой цепи
равно сумме подвижностей кинематических пар. З ахват может зани
мать любое положение в пространстве в пределах, определяемых раз*
г
Рис, 139, Устройство промышленного робота
120
Рис. 140. Схема механизмов манипулятора робота:
1— поршень; 2 —рейка; 3 — магнит; 4—транспортируемая деталь: 5 —вакуумный присос
мерами звеньев. Копирующие манипуляторы широко применяются для
выполнения операций в условиях, исключающих возможность при
сутствия человека возле перемещаемого изделия (вакуум, радио ак
тивность, высокая температура и т. д .) .
Передача движения'звеньям может осуществляться зубчатыми пере
дачами, рычагами, гидро-и сервоприводами. М анипуляторы оснащают
следящими системами, обратная связь которых информирует о силах,
действующих на исполнительный механизм, и изменяет положение уп
равляющих звеньев. Такие системы называют двусторонними, по
скольку следящий привод обеспечивает передачу движений в двух на
правлениях: от входа к выходу и обратно. Алгоритмом управления на
зывают совокупность предписаний, определяющих движение схвата,
для выполнения заданной цели. Системы управления манипуляторами
строят обычно по принципу программного управления, они могут р а
ботать в режиме обучения и рабочем режиме. В режиме обучения опе
ратор с помощью обучающей системы проводит исполнительный ме
ханизм через требуемую последовательность рабочих положений. При
этом информация от датчиков положения звеньев кодируется и посту
пает в запоминающее устройство, затем манипулятор работает автома
тически по этой программе.
Рабочая зона промышленного робота — часть рабочего объема, не
обходимая для выполнения рабочих операций. Эту зону х ар актеризу
ют расположением зах вата по отношению к объекту.
В качестве приводов механических захватов используют гидравли
ческие и пневматические цилиндры, штоки которых через систему ры
чагов приводят захват в действие. На рис. 140, б, в показаны схемы
механических захватов с рычажно-кулисным и реечно-рычажным
механизмами. Усилие на захват с рычажно-кулисным механизмом
(рис. 140, б) зависит от положения поршня / , поэтому для обеспечения
достаточного усилия зажима деталей предусматривается набор смен-
121
7
ных захватов. Реечно-рычажный захват (рис. 140, в) обеспечивает
постоянное усилие при любом положении поршня 1 и рейки 2.
Получили также распространение электромагнитный (рис. 140,г)
и вакуумный (рис. 140, д) захваты.
На рис. 141 приведен узел механизмов выдвижения и перемещения
захвата робота «Универсал-50М». К корпусу / крепят привод 2, диффе
ренциальный редуктор 3 и переходной редуктор 4. Крутящий момент
передается на два квадратных вала 5 и далее на дифференциальную го
ловку 6. От привода 8 выдвижения захвата 7 через реечно-зубчатую
передачу момент передается на каретку 9, застав ляя ее выдвигаться из
корпуса 1. Грузоподъемностъ робота 50 кг, число степеней подвижности
пять. Подача масла в гидросистему осуществляется от гидропанели
10. Робот оснащен механизмами поворота манипулятора вокруг вер
тикальной оси, поворота в вертикальной плоскости и выдвижения
захвата.
§ 2. ПРИМЕНЕНИЕ ПРОМЫШЛЕННЫХ РОБОТОВ
В ближайшие годы намечается увеличение производства и внедрение
промышленных роботов в большинстве отраслей промышленности.
Увеличение использования роботов в промышленности обусловлено
ка к экономическим, техническим аспектами, так и социальным — не
прерывно увеличивающийся объем производства ведет к дефициту
трудовых ресурсов.
В будущем промышленные роботы заменят основную массу ра
бочих, занятых ручным трудом, отличающимся монотонностью и
неблагоприятными условиями.
Для погрузочно-разгрузочных работ применяют простейшие ко
мандные манипуляторы, устанавливаемые, например, на электрока
ры, а также на тележках, перемещающихся по направляющим, укреп
ленным на колоннах.
Наибольшее распространение в отечественной промышленности
получили пневмо-и гидроавтоматические манипуляторы с цикловым
управлением и грузоподъемностью до 50 кг, например, роботы «Цик-
лон-ЗБ», ПР-10, ПФ-201М, «Универсал-50», «Спрут-1» и др. Эти роботы
применяют в заготовительных и механосборочных цехах. В кузнечно
прессовом производстве применяют роботы типа РПГ-40 и Р П Г -10, по-
122
зволякмцие автоматизировать процессы ковки и штамповки при повы
шении производительности труда в 2—3 раза.
Применение промышленных роботов в поточных линиях позволяет
автоматизировать процессы загрузки-разг рузки станков, ориентиро
вание заготовки, транспортирование ее от станка к станку и укладку
в тару. Значительные преимущества дает применение роботов в свароч
ных и окрасочных работах,
В ряде случаев роботы являются единственными средствами, позво
ляющими обеспечить решение сложных проблем.
Во Франции построено и эксплуатируется судно-робот «Теленот»,
способное обнаруживать и перемещать грузы на глубине до 1 км. Ши
роко используют также роботы для бурения скважин на больших глу
бинах (масса таких роботов до 3 т, высота подъема г руза до 7,5 м).
Управление такими роботами осуществляется с поверхности.
Д ля изучения и освоения планет Солнечной системы необходимы
роботы. Их проектируют с учетом дополнительных требований. Они
должны работать в условиях вакуума, значительной радиации, рез
кого изменения температуры и невесомости.
ПРИЛОЖЕНИЯ
-*
1. ПРИМЕР РАСЧЕТА МЕХАНИЗМА ПОДЪЕМА
Требуется рассчитать механизм подъема тележки электрического мостово
го крана с грузовым крюком, сила тяжести груза Ог = 70 кН, высота подъема
Я = 18 м, скорость подъема аг = 22 м/мин, режим работы тяжелый.
Расчет ведут в следующей последовательности.
Уточнение схемы механизма подъема и определение наибольшего натяжения
гибкого тягового органа. Схема расположения механизма подъема на тележке
электрического мостового крана показана на рис. 51, а ; полиспаст сдвоеииый о
двумя подвижными блоками в подвеске и четырьмя ветвями каната (см рис. 47,6).
Максимальное натяжение в одной ветви каната, набегающей на барабан, опре
деляем по формуле (10), в которую подставляем из формулы (13) силу тяжести
крюковой подвески Gn = (0,01 ... 0,03) • 70 = 1,2 кН и КПД полиспаста с под
шипниками качения г) = 0,98:
70+1,2
2-2-0,98
18,1 КН.
Выбор типа гибкого тягового органа. Вкачестве гибкоготягового органа
можно использовать стальной проволочный канат. Механизмы подъема с ма
шинным приводом и тяжелым режимом работы выполняют с запасом прочности
тягового органа ftK= 6 (табл. 2).
По ГОСТ 2688—80 выбираем стальной канат двойной свивки типа ЛК-Р
(см. рис .41). Разрывное усилие каната вычисляется по формуле (8).- .По получен
ному разрывному усилию в табл. 3 подбираем канат диаметром d K = 14 мм.
Предел прочности проволок этого каната ов — 1764 МПа, а допускаемая раз
рушающая нагрузка F v ’ =
108,0 кН.
Выбор т ипа подвески. Грузозахватное устройство—крюк. Выбираем ко
роткую подвеску (см. рис. 56), которая позволяет уменьшить размеры механизма
подъема, при сдвоенном полиспасте груз перемещается строго в вертикальном
направлении. Крюк крепится в отверстии траверсы подвески. На цапфах тра
версы установлены два подвижных блока.
Определение размера блоков. Диаметр подвижных блоков равен диаметру
барабана, по формуле (9) D $ = 30 • 14 = 420 мм. По ГОСТ 22644—77 принима
емDq= 400мм.
При наматывании каната на барабан подвижные блоки и барабан вращаются
с частотой, которую определяют по формуле (49):
пб = 22 •2/(3,14 •0,4)= 35мин-1.
Каждый подвижный блок (грл = 2) устанавливают на двух (гподШ= 2)
радиальных шарикоподшипниках и эквивалентная динамическая нагрузка для
одного радиального подшипника
F3= Frk6 — ------ ^
----- *0= —
- 1,5 = 26,25 кН,
•
гбл ^подш
2*2
где kQ— коэффициент запаса.
об.
Динамическая грузоподъемность подшипника
С= Fg3 ~\/L = 26,25X
XУЩ> = 26,25•2,32=60,9кН.
По ГОСТ 8338—75 выбираем радиальные однорядные шарикоподшипники
No312 (внутренний диаметр d = 60 мм, наружный диаметр £>н = 130 мм, ширина
одного подшипника Ьа = 31 мм), у которого С = 64,1 кН.
Размеры блоков следующие (см. рис. 43): радиус канавки под канат г —
= 0,6 ... 0,7 dK= 8,5 мм, высота канавки Нк — ( 1,5 ... 2) dK= 25 мм, ширина ка
навки Ьк — (1,6 ...3)dK= 30мм, длина ступицыблока /ц= 2Ьп + 3= 65мм.
Выбор грузового крюка. Выбираем удлиненный однорогий крюк типа Б
грузоподъемностью 8 т для тяжелого режима работы (прил. 3 и 4).
Основные размеры крюка, необходимые для расчета на прочность деталей
подвески, следующие (см. рис. 53 и 54): а = НО мм, Ь, = 65 мм, Ь2 — 26 мм,
h= 100.мм, резьба на стержне крюка М56 (d= 56 мм, dx = 48,8 мм, шаг резь
бы 5,5мм), d0= 60мм.
По статической нагрузке (с коэффициентом запаса 1,3 ... 1,5) G=(l,3 —1,5) X
XGr= 1,4 • 70 =98 кН для крюка выбираем упорный шарикоподшипник No8312.
Внутренний диаметр подшипника соответствует диаметру стержня крюка d0 =
= 60 мм. По наружному диаметру упорного подшипника (£>п = 110 мм) опре
деляем ширину траверсы подвески bT — D a + (10 ... 25) = 120 мм.
Проверка крюка на прочность. Наибольшие напряжения в сечении а, — а2
от растяжения и изгиба находим по формуле (23) для бруса большой кривизны:
Долговечность подшипника L =
= 60 «35•6000/10®= 12,6 млн.
70-40 -100
4550-0,09 -55
124 МПа < [стр] = 150 МПа.
Здесь площадь сечения крюка А = h(6Х+ Ь.г)/2= 100(65+ 26)/2=
= 4550 мм2; расстояние до центра тяжести сечения А
=
40
3 , &i+i>2
3
65+ 26
е2—h
—
et—100—40=60мм;г= а/2+et=55+40=95мм(
коэффициент кривизны
£= —1+
2г
(*!+&,)*
&2+A^(^+ ^2)]ln^-----.&-&*)}=
=—1
2-95
(65+ 26) 100 {[26+ - ^ р -(95+ 60)]1п
95+60
95—4Р
— (65—26)| = 0,09.
Расчет деталей подвески на прочность.Рассчитаем на прочность траверсу.
Она работает на изгиб. Наибольшие напряжения изгиба траверсы в сечении,
ослабленном отверстием, подсчитывают по формуле (26). При допускаемых на
пряжениях изгиба [ои1 = 70 МПа и изгибающем моменте по формуле (27) опре
деляем
МИ= (70•200/4—70 •110/(2•4))=254кН•мм,
находим необходимый момент сопротивления опасного сечения траверсы
й7! = МИ/ [ои1= 254000/ 70 = 3630 мм*.
125
Момент сопротивления прямоугольного сечения траверсы Ц7Т = (ft,— b2) X
X Л2 / 6 . Из этой формулы, подставив известные величины d2 = d0 + (2 — 5) =
= 65мм,ds= Da= 110мм, l=Ln= bT+ln+15мм=120+65+15=
= 2 0 0 мм, найдем высоту сечеиия [формула (28)]
Лт = 1/6 • 3630/ (120— 65) = 62,5 мм.
Напряжение изгиба в цапфе траверсы (см. рис. 57)
аи= -у
--у
- j(0,Ыц)=-у -
-у
- / (0,1-603)= 52 МПа < [ои]=
= 70 МПа.
Определение размеров барабана. Д иам етр бар абан а, как и диам етр подвиж ны:
блоков, принимаем равным Dg = 400 мм. Канат навивается на барабан в одш
слой. Д ля уменьшения изнашивания каната на барабане делают канавки (см
рис. 47): шаг нарезки s = dK+ (4 ... 9 мм) = 19 мм, радиус канавки г* =
= (0,6 ... 0,7) dnж 9 мм, глубина канавки с = (0,6 ... 0,9) dHя: 9,5 мм.
Определение канато вмко сти и по лной длины барабана. При сдвоенном поли
спаст е бар абан имеет дв а рабочих уч ас тка . На каждый рабочий уч ас то к нам аты
вается канат длиной /к = # in = 18-2 = 36 м. Длина рабочего участка нарезно:
части бар абана (одной половины)
/р=Г/к/(яОб)+(1,5 ...2)]s= [36/(3,14 •0,4)+ 2]19= 570мм.
Полная длина сдвоенного бараба на с кладыв ае тся из двух рабочих уч астко1
с винтовой нарезкой 21р = 2 • 570 = 1140 мм, двух участков для креплени:
каната на барабане планками 1Ъ=» 3 • а « 50 мм и среднего участка /с = L n —
—
2(imin tga = 200— 2 • 600 ■0,11 = 64 мм, где расстояние между ветвям:
каната на подвеске L a = 200 мм. При максима льном допустимом угле а = 6
отклонения каната от оси канавки барабана имеем tga = tg6° - = 0 , 11 , минималь
ное ра сс то яние между осями подвиж ных блоко в подвески и осью бар абан:
= }>5Пб = 600 мм.
Общая длина барабана по формуле (16) Lg = 2/р + 2/3 -f- 2/д+/с=П40-[ -
+ 100+ 40+64= 1344мм.
Барабан получится не громоздким, так как Lg < (3 ... 5)Z?g.
Определение толщин ы стенки барабана и проверка его на прочность. Толщин}
стенки бар аб ана выбира ют из те хноло гич еских со ображений. У литых чугунны:
барабанов толщина стенки 6 = 0,020б+ (6 ... 10)= 0,02 •400+ 8 =16 мм
Стенки барабана на х одят ся в слож ном напряж е нном состоянии, они рабо
тают на изгиб, кру че ние и с жатие. Основным явл яе тс я расчет на сжа тие , ш
формуле (17) находим
Нсж= 18100/(16•19)=62,8МПа,
что меньше допускаемых напряжений для чугуна Сч 15 ([оС!К] = 80 МПа).
Таким образом, прочно сть бар абана достаточна.
Выбор схемы кре пл ен ия каната. Принимаем винтовое кре пление каната :
сдвоенному бар аба ну с пл анкам и (см. рис. 49, в). По нормам Госгортехнадзор :
число в интов дол жно быть не менее двух .
Планки имеют трапецеидальной формы зажим ные ка навки с углом на
кло на у — 40° (рис. 49, б). На тяж ени е каната в местах кр епле ния его планкам:,
уменьшается в результате трения двух запасных витков каната о барабан. Пре
коэффициенте тре ния стал и о стал ь или чугун f = 0,16 и угл е обхвата двух
запасных витков каната a = 4я по формуле (18) находим
FKp=18 100/2,71 o,i е-4 -э. !4 = 2290#.
Планкн удержат канат [формула (20)], если сила затяж ки винтов
Л
2290
0,16 + 0,22
= 6030#,
h
/
sinу+/cosу
_______
0.16
sin 40° +0,16 cos 40°
= 0,22.
126
Стерж ень в инта рабо тает на р ас тяж ен ие , круч ение и изгиб. Диам етр виита
-
1,2dK= 1,2 •14 « 16мм.
Принимаем два винта (г = 2) с резьбой М16; стержень винта по внутрен-
ему диаметру резьбы dx = 13,4 мм. Ниабольшие напряжения в стержне винта
учетом кручения формула [(21)]
2-3 ,14 -13,4^
4
2290-13,5/2
2-0 ,1 -13,43
= 40 МПа.
Допускаемые напряжения для стали СтЗ [о] = 80 МПа и прочность винта
■беспечена.
Определение мощности двигателя пр и установившемся движении м еха низм а
юдъема с учетом крюковой подвески. При КПД полиспаста, барабана и редуктора
1и = 0,85 по формуле (43) получаем
= (Gp+Gt) pp = (/о + 1,2) 22/(60 •0,85) = 30,5 кВт.
00г|0
Выбор двигателя. Д л я кра но во го механизма подъема нз к ат ал о га выбираем
то расчетной мощности асинхро нный эле ктр одв игат ел ь переменного т о ка с повы-
ненным скол ьж е нием 4АС180 (пр ил. 5).
При тяжелом режиме работы двигатель имеет Р н = 31 6 кВт, п = 1500 мин 1
I диаметр вала двигателя dB — 65 мм.
Определение передаточного отношения приводного механизм а, выбор схемы
гривода и л и с тандартного редуктора. Передаточное отношение [формула (50)1
1 = 1500/ 35 = 42,8. Крутящий момент на валу барабана, с которым соеди-
тяется выходной вал редуктора, Тц = (^г + Gn)De = (70 oqo _j_ 1200)0,4 /(2 X
2iu
>' 2) = 7120 H • m . По крутящему моменту и передаточному отношению с точ-
юстыо ± 5 % подбираем (прил. 7) стандартный двух ступенч атый редуктор Ц2У-
315 Н, передаточное отношение которого и0 — 40. Выходной в а л р едуктор а сое-
тиняе тся непосредственно с барабаном (см. схему на рис. 51,а). По диаме тру вала
твигателя d T = 65 мм подбираем стандартную упругую втулочно-пальцевую
муфту МУВП с тормозным шкивом диаметром D T = 200 мм.
Выбор месторасположения и тип а тормоза. Д л я по лу чения м инимальных
габаритов тормоз надо у становить на в а лу с наименьшим кру тящ им моментом,
г. е. на валу электродвигателя. Принимая двухколодочный тормоз, мы обеспе
чиваем разгрузку тормозного вала от радиальных нагрузок.
Определение тормозного момента. Наибольш ий момент тормоз до лж ен раз-
зивать при опускании груза. По формулам (30) н (31) получаем
Гт= 2 •70000■0,4 •0,85/(2•2 -40)=297Н•м.
Выбор стандар тного тормоза и расчет его основных деталей. По тормозному
моменту и диаметру тормозного шкива выбираем (пр ил. 9) двух кол одо ч ный тор
моз с гидротолкателем ТКТГ-200 (схема по к аз а на на рис. 63). Максим альный
тормозной момент тормоза Т Т = 300 Н • м. Ширина колодок Вк = 90 мм,
угол охвата тормозного шкива (3 = 70°. Усилие при ж а тия колодок к тормозно
му шкиву
Fr
Тт.2
D?f■2
297
0,2 -0 ,35
= 4242Я.
Давление между колодкой и тормозным шкивом по формуле (36)
р=4242
/ 3,14 -200-90 -70
360
0,38 МПа.
Давление не превышает допустимых знач ений для тормозных обкл адок из фер-
родо (см. т абл . 5) и долгов ечно сть работы тормоза обеспечена.
127
2. ПРИМЕР РАСЧЕТА ЛЕНТОЧНОГО КОНВЕЙЕРА
Требуется р ассчитать ленточный конвейер производительнос тью Q = 5 4 0 т/ч,
транспор тиру емый материал — щебень, длина конвейер а по горизон тальному
на правл ению L P = 34 м, угол накло на конвейер а к горизонтальной плоскости
3= 14°.
Расчет ленточного конвейер а проводят в следующей по следовательнос ти.
Уточнение схемы. Принимаем схему ленточного конвейера, приведе нную на
рис. 115. З а гру з к а верхней рабочей ветви л енточного конвейера про изв одитс я в
месте расположения натяжного барабана, а разгрузка —приводного барабана.
Плотность щебня р = 1,8 т/м3, угол естественного отко са в покое fp = 45°. При
угле подъема конвейера Э = 14° коэффициент, учитывающий возможно е рас сы
пание груза с ленты, £ ^ =0 ,95 . Лента конвейера прорезиненная. Скорость лен.
т ы дл я тр анспортир ов ки щебня принимаем v = 1,5 м/с. На рабочей ветви ко нв ейе
ра лента поддерж ивае тся желобчатыми рол ико опор ами, состоящими из тр ех ро
л и ко в . На холостой ветви лента пло ска я, поддерж ивается рол икоо порам и, состоя
щими из одного ролика. Высота подъема конвейера Н = L r tg (3 = 34 tg 14° =
= 8,5м.
Определение .ширины ленты. Ш ирину ленты желобчатой формы находим
по ф ормуле (84):
вж= 1/540/160•1,5 •1,8[3,6 •0,95■tg(0,35 •45)+ 1]=0,78м.
Выбираем резинотканеву ю л енту из бел ьтинга Б-820 шириной В = 800 мм.
Запас прочности £рп = 9 ,5 при пределе прочности те кстил ьной ленты о р. п =
= 6,1 МПа. Ленты такой ширины выпускают с числом прокладок г — 3
...
6.
Д ля обоснованного выбора числа про кл адок в л енте определим предв арительно
мощность пр ивода, а по ней — тяго вое усил ие и максимал ьно е на тяж е ние ленты.
Определение пр едва ри тельной мощности привода. По формуле (85)
Ра= (0,00016•540•34+0,024•34•1,5+0,0027•540•8,5)1=
= 2,75 + 1,22 + 12,4 = 16,37 кВт.
Определение предварительного тягового ус и ли я . По формуле (86)
Fn= 16,37/1,5«11кН.
Определение предварительного максимально го натяжени я ленты. Д л я л у ч
ш его с цепл ения ленты с поверхностью прив одного барабана его футеруют дер е
вом. Коэффициент трения резины по дереву f = 0 ,35. При угле обхвата бара
бана лентой а — я = 180° получаем е^а = 2,71°-35 ' 3-14 = 3.
По формуле (87)
F.nax =
е1а/е,а— 1 = 11 -3/(3 — 1) = 16,5 кН.
Определение числа пр ок л ад ок в ленте. По формуле (79)
г= 16,5 •9,5/(80-0,61)=3,26.
Принимаем г = 4. Толщина р езиновых обкл адок на рабочей стороне ленты
= 4,5 мм. на нерабочей стороне 62 = 1,5 мм.
Линей на я плотность ленты. По формуле (80).
рл= 1,1 •0,8(1,25•4+4,5+ 1,5)= 12кг/м.
Средняя линейная плотность транспортируемого груза. По формуле (94)
'
'_
_
_
_
рг = 540/ (3,6 • 1,5) = 100 кг/м.
Условная линейная плотность роликоопор. При ширине ленты В — 800 мм
наружный диаметр рОлйкоопоры Dp = 159 мм. Для плоских роликоопор с
хорошо защ ищенными от пыли ш ар ико подш ипникам и коэффициент сопро тив
ле ния качения kan => 0,022, д ля желобчатых р ол ико опор &мж = 0,025.
Шаг ро лико опор на рабочей ветви конв ейера [формула (91)]
/р= 1550—0,625•800 = 1000мм.
128
Масса р олнкоо пор рабочей ветви
тт= 10Вт+7=10•0,8+7=15кг.
Условная линейная плотнос ть же лобча тых ро лико опор [формула (96)1
Ррж= mj/р= 15/1—15кг/м.
Шаг роликоо пор на холостой ветви [формула (92)]
/х==2■1000=2000мм.
Масса ро ликоопор на холостой ветви
тп=10ВП+3=10■0,8+3=11кг.
Линейная плотность пло ских рол ико опор хол остой ветви [формула (97)]
Рр.п = 11/2 = 5,5 кг/м.
Определение размеров барабана. Диаметр приводного барабана Од = г (120...
150) = 4 • 150 = 600 мм. По ГОСТ 22644—77 принимаем Dg = 630 мм. Длина
барабана Вх = В + 100 = 800 + 100 = 900 мм. Чтобы лента не спадала с бара
бана, он имеет стрелу выпуклости /„ = 0,005 В1 — 0 005 • 900 = 4,5 мм.
Диаметр натяжного барабана DH = (2/3)£>д = 400 мм.
Определение натяжения ленты конвейера методом обхода контура по точка к.
Разбиваем контур ленточного конвейера на четыре участка. Натяжение ленты а
точке 1 (см. рис. 115) принимаем за неизв естную ве лич ину . Затем находим н а т я
жение ленты в остальных точках через неизвестное натяжение в точке 1 |по
формулам (102)]:
?2= ^1+Р\...2= Fi+(Рл+ рхп)L,кап—ряН=F1-\
' + 024-5 .5) 34.0 .022-12 .8^ =
кН;
102
F3= F2+ f2...3= F2+k6BFt=(1+ k5B)Fz= (! + 0,05)(F,-0 .88)=»
= иоб/7!—0,926 кН;
F4—Fs F3 4 Fз-f-(рг4“pд"ЬРрж)
^o*
^Pr4“Рл)H
_
1 prj- 0 g2c ■ (100+ 12+15)34-0,025
(100+ 12)8.5
= 1,05Ft -j- 9,45kH.
Решая совместно последнее уравнение и F4 = F l t ^ a , находим натЯжеЯи
яеиты в точке 1:
l,05F1+ 9,45= F, • 3, Ft = 9,45/1,95= 4,86кН. Откуда
f2= Fx—0,88 = 3,97кН;F3= 1.05F, = 0,926= 4,16кН;F4= 1,05F,-f-
-
1- 9,46 = 14,56 кН.
Проверка провисания ленты между роликоопорами. Наибольший прогиб
ленты на рабочей стороне ленточного конвейера будет в точке 3 :
/ш„ - (g+ qa)WFs) ==(100+ 12)12/(8-425)-0 ,03 м.'
129
Допустимый прогиб f/maxl ^ (0,025 ... 0,03)/р = (0,025 ... 0,03) • 1 =■
= 0,025 ... 0,03 м, т. е. натяжение ленты достаточно.
Определение уточненного тягового у с и ли я на приводном барабане .
/Vy = F4-F i + JF4...i = 14,56— 4,86+ 0,03(14,56+ 4,86)=.
= 10,3 кН.
Уточненная мощность привод ной ст а нц ии . По формуле (ПО)
Ру= 10,3 •1,5/0,85 = 18,2 кВт.
Перемещаемый гру з пыле видный, поэтому в качестве дв и гат ел я выбираем
эл ектр одвигат ел ь переме нного то ка з а кр ыт о го ис полнения с повышенным пус ко
вым моментом 4АР160М (прил. 5).
Рн = 18,5 кВт, частот вращения п = 1500 мин—1.
Ра зр аб отка пр иво дной с та нции . Часто та вр ащ ения приводного бараба на
п б = ЛИО- = 60-1,5/(3,14-0,63) = 45,4 мин-1
.
яОб
Передаточное отно шение передачи по ф ормуле (50)
и = 1500/ 45,4 = 33,2.
Схема приводной станции приведена на рис. 109, а. По кру тящ ему моменту
на валу барабана
Гб=FT.уОб/2= 10300•0,63/2=3244Н•м
и передаточному отношению подбираем по ГОСТ 20758— 75 стандартный редук
тор Ц2У-250 (пр ил. 6 ), с бор ка 12 по ГОСТ 20373— 74 с передаточным отношением
и — 31,5 . Вал ы редуктора соединяются стандартными муфтами.
Разработка натяжной с т а нци и . Принимаем схему натяжной
станции,
п ока за нную на рис. ПО,а. С на тяж ным усилием
Сц= 1,1(F2+ F3-j-15)= 1,1(3,97+ 4,16-j-0,15)яг9,1 кН.
Выбор останова. При д ли не л енто чн ого ко нвейера менее 50 м применяют
простые ленточные остано вы в виде отре зка ленты, закр е пле нной у приводного
барабана (см. рис. 115). В этом с лу ча е при обратном движении конвейера отр е
зок ленты заклинивается между лентой и барабаном, предотвращая движение
груза в обратном направлении.
3. КРЮКИ ОДНОРОГИЕ. ГРУЗОПОДЪЕМНОСТЬ, т
Н
о
м
е
р
к
р
ю
к
а
М
е
х
а
н
и
з
м
с
р
у
ч
н
ы
м
п
р
и
в
о
д
о
м
Механизм
с машинным
приводом
для режимов
работы
Н
о
м
е
р
к
р
ю
к
а
М
е
х
а
н
и
з
м
с
р
у
ч
н
ы
м
п
р
и
в
о
д
о
м
Механизм
с машинным
приводом
для режимов
работы
Н
о
м
е
р
к
р
ю
к
а
М
а
х
а
н
и
з
м
с
р
у
ч
н
ы
м
п
р
и
в
о
д
о
м
Механизм
с машинным
приводом
для режимов
работ
Л,С Т.ВТ
л.с1Т,ВТ
Л.С Т,ВТ
1 0,4 0,32 0,25
9 2,5
2,0
1,6
17
16 12,5 10
2 0,5 0,4 0,32 10
3,2 2,5 2
18
20
26
12,5
3 0,63 0,5 0,4
11
4
3,2 2,5
19
—
20
16
4 0,8
0,63 0 ,5
12
5
4
32 20
—
25
20
51
0,8
0,63 13 6,3 5
4
21
—
32
25
6
1,25 1,0
0,8
14
8
6,3 5
22
—
40
30
7 1,6
1,25 1
15 10
8
6,3 23
—
50
40
82
1,6
1,25 16 12,5 10
8
"
130
4.
КРЮКИ ОДНОРОГИЕ.
РАЗМЕРЫ И МАССА (ГОСТ 6627—74)
Н
о
м
е
р
к
р
ю
к
а
Размеры, мм
Масса, кг
а
VЬ,hd„
d
L
l
и
и
п
Ri «с
Г
и
п
А
а:
С
Т
и
п
A
Т
и
п
Б
12014121812'Ml2601253020103
11 25 0,16 0,24
22216132112М12651353020104
12 28 0,2
0,3
32518152415М14701453520134
13 32 0,32 0,47
43022182617М16851604525155'14370,450,65
53222202817М16401704525165,5 1640 0,550,72
63626223220М201001805030185,5 18450-,8
1,2
74030243620М20ПО195603020 8
20 50 1,0
1,5
8 4536264025М241252106035 22 6
.30
55 1,5
2,0
95038304530М27145240704025 7
36 65 2,4 3,2
10 5540345230МЗО155285854530 8
38 70 3,0 4,0
11 6045385535МЗЗ1753308550329
42 80 4,2
6,0
12 6550406540М36190375955534 9
45 90 5,4
8,2
137555487545М42210425105603810
50100 8,2 П,5
148565548260М48230475130704212
60 ПО 11,2 15,0
159575609055М52260520140754813
65 125 15,6 21
16НО856510060 М56280580150 80 55 13
75 140 22,5 30
17120907511570М64325640180 90 60 14
35 155 29,5 40
18 130100 80130 75ТР70 360 700190 95 65 16
90 170 40
52
19 150120 90150 85ТР80420 760210ЮО 75 18 105 200 55
70
20 170 130 102 164 100 ТР90 470 820 250 115 80 20
120 220 84 105
21 190 145 115 184 ПО ТР100 525 875 285 130 95 23
135 245 |П5 140
22 210 160 130 205 120 ТР110 590 940 310 140 100 25
150 272 154 185
23 240 180 240 240 140 ТР120 660 1000 340 150 120 30
170 320 230 275
5. ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
ЗАКРЫТОГО ИСПОЛНЕНИЯ (ОБДУВАЕМЫЕ)
(ГОСТ 19523—81Е)
Тип
/Мощность (кВт) при син
хронной частоте вращения,
Тип
Мощность (кВт) при син
хронной частоте вращения,
30U0 1500 1000
750
3000 1500 1000
750
4АА56А 0,18 0,12
4А112МБ
4,0 3,0
4АА56В 0,25 0,18 —
—
4A132S
—
7,5 5,5 4,0
4АА63А 0,37 0,25 0,18
—
4А132М
11,0 11 ,0
7,5 5,5
4АА63В
0,55 0 ,37 0,25 —
4A160S
15,0 15,0 11,0
7,5
4А71А
0,75 0,55 0 ,37 —
4А160М
18,5 18,5 15,0 11 ,0
4А71В
1,1
0,75 0,55 0 ,25 4A180S
22,0 22 ,0
—
—
4А80А
1,5
1,1
0,75 0,25 4А180М
30,0 30,0 18,5 15,0
4А80В
2,2
1,5
1,1
0,55 4А200М
37,0 37,0 22,0 18,5
4А90А
3,0
2,2
1,5 0 ,75 4A200L
45,0 45,0 30,0 22,0
4А90В
—
—
____
1,1
4А220М
55,0 55,0 37,0 30,0
4А100А
4,0 3,0
2
4A250S
75,0 75,0 45,0 37,0
4А100В
5,0 4,0
2,2
1,5 4А250М
90,0 90 ,0 55 ,0 45,0
4А112МА 7,5 5,Ь 3,0
2,2
131
Продолжение
Тип
Мощность (кВ т) при с и н
хронной частоте вращения,
мин —*
1ип
Мощность (кВт) при син
хронной частоте вращ ен и я,
мин —»
3000 1500 1000 | 750
3000 1500 1000 750
Двига тели с повышенным
Двига тели с повышенным
пусковым моментом
скольжением
4API 60S
_
15,0 11,0 7 ,5 4АС132
10,0 8,5 6,3 4,5
. 4АР160М
___ _
18,5 15,0 11,0 4АС132М —
11,8 8,5 6,0
4АР180
—
22,0 18,5 15,0 4AC160S
—
17,0 12,0 9,0
4АР180М ____ 30 ,0 22 ,0 18,5 4АС160М —
20,0 16,0 12,5
4AC180S
—
26,5 19,0 16,0
4АС180М — 31 ,6 26,5 19,0
6. ЦИЛИНДРИЧЕСКИЕ ДВУХСТУПЕНЧАТЫЕ РЕДУКТОРЫ
Типоразмер
Номинальные
передаточные
числа и
Номинальный
кр утящий момент
на выходном
валу, Н.м
Номинальная
радиальная
нагрузка на вы
ходном валу, Н
Масса, кг
Ц2У-100
8; 10; 12,5; 16
250
4 000
35
Ц2У-125
500
5 600
53
Ц2У-160
18; 20; 22,4; 25
1000
8 000
95
Ц2У-200
28; 31j6;
2000
11 200
170
Ц2У-250
35,5; 40
4000
16 000
320
7. ЦИЛИНДРИЧЕСКИЕ ДВУХСТУПЕНЧАТЫЕ РЕДУКТОРЫ
ГОРИЗОНТАЛЬНЫЕ С ПЕРЕДАЧАМИ НОВИКОВА
Типоразм ер
Номинальные
передаточные
числа и
Номинальный
крутящий момент
на тихоходном
'валу, Н-M
Номинальная
радиальная
нагрузка на вы
ходном валу. II
Масса, кг
Ц2У-315Н
8 ; 10; 12,5; 16;
25; 31,5; 40
50
7 800
22 400
520
Ц2У-400Н
15 900
31 500
940
Ц2У-450
33 400
60 000
15 130
Ц2У-500
45 200
80 000
2 100
132
8. ТОРМОЗА ТКТ С КОРОТКО
ХОДОВЫМ ЭЛЕКТРОМАГНИТОМ
Тип тормоза
Т
о
р
м
о
з
н
о
й
м
о
м
е
н
т
п
р
и
П
В
,
'
2
5
.
.
.
4
0
%
,
Н
•
м
Длина
рычага,
mmJ
Ш
и
р
и
н
а
к
о
л
о
д
к
и
В
к
,
м
м
Д
и
а
м
е
т
р
т
о
р
м
о
з
н
о
г
о
ш
к
и
в
а
£
>
т
,
м
м
1h
ТКТ-100
201007070100
TKT-2Q0/100 40 205 135 90 100
ТКТ-200
160 205 135 90 200
ТКТ-300/200 240 430 100 140 200
ТКТ-30Э
500 430 190 140 300
9. ТОРМОЗА С ЭЛЕКТРО
ГИДРОТОЛКАТЕЛЕМ
Тип тормоза
Т
о
р
м
о
з
н
о
й
м
о
м
е
н
т
,
Н
•
м
Длина
рычага,
мм
Ш
и
р
и
н
а
к
о
л
о
д
к
и
В
к
,
м
м
Д
и
а
м
е
т
р
т
о
р
м
о
з
н
о
г
о
ш
к
и
в
а
D
T
,
м
м
1h
ТКТГ-200 300 205 135 90 200
ТКТГ-300 800 330 190 140 300
ТКТГ-400 1500 525 250 180 40 0
ТКТГ-500 2500 665 315 200 500
ТКТГ-600 5000 800 380 240 60 0
10. ТЕХНИКА БЕЗОПАСНОСТИ
ПРИ ЭКСПЛУАТАЦИИ ГРУЗОПОДЪЕМНЫХ МАШИН
Обеспечение безопасности при работе с грузоподъемными м аш инами требу-
т своевременного и качественно го к он тро ля за соблюдением действующих норм
пр ав ил по техник е безопасности. В нормах и пра ви ла х по т ех нике безопасности,
такж е в инстру кциях Госгорте хнадзор а СССР изложены тр ебо ва ния, подле-
сащие выполнению в процессе про ектир о ва ния и экс плуа тац ии гру зо подъем-
ых машин.
1.
В процессе эксплуа тации груз оподъемны е машины долж ны подвер гаться
ериодическому полному техническому освидетельс твованию, которо е вкл юч ает
спытание машины и тщател ьный технический осмотр всех мех анизм ов, электро*
борудования, тормозов, ка нато в и других элементов.
Срок пер иодических испытаний груз оподъемных м ашин, та к их , к а к кр аны,
рузовые электрич еские те ле ж ки, пер едвигающие ся по ре льсовым пу тям, руч-
ые" и эле ктр ич еские тали и лебедки дл я подъема гру з а, установлен один ра з в
ри года, а дл я лебедок, ис польз ующ ихс я дл я подъема людей? один раз в год.
(ром е полного техническо го о свидете льс твов ания грузоподъем ные машины не
!еже одного раза в год долж ны подв ерга тьс я частич ному техническому осви-
. ет ел ьс тв о ва нию, при котором испытания не пров одятся.
Статические испытания гру зоподъемной машины пр оводят с целью пр оверки
е прочности, в клю ча я проч нос ть отдельных ее элементов, а для с трел овых
:ранов еще груз ов ой устойчивости. Динам ически е испытания пр оводят с цел ью
фовер ки механизмо в машины и тормозов.
При статических испытаниях мостовых и пер едвижных конс ольных кр анов
вде ж ку устанавл ив ают в пол ож ение, соответствующе е наибо льш ему прогибу
Ьерм, а у стреловых кра нов с трелу ус танав лив аю т в полож ение, соответствую-
цее минимальной устойчивости кр ан а. Затем крюком или заме няющ им его
/стройством зах ват ывают гру з и поднимают иа высоту 200...300 мм (рис. 142).
'р уз берут в 1,25 раза тяжелее предельного рабочего груза, установленного для
щиного грузоподъем ного ус тройств а, а д ля лебедо к с ручным и машинным при-
юдом, использующ ихс я для подъема людей, в 1,5 раза тяжелее .
Кран считается выдерж авшим испыта ние, если в течение 10 мин гру з не
шустится на землю, а также не будет обнаружено трещин, деформаций и других
ювр ежде ний.
При динам ических испытаниях повторно поднимают и о пуска ют груз в
,1 раза тяж елее предельного, причем при испытании можно исп ол ьз о ват ь ра-
Зочий груз . При динамич еских испыта ниях про водят повторные пер едви ж ен ия
133
Рис. 142. Схема испытания краиа:
I—кран;2—груз
1
Рис. 143. Схема к определению раз
мера и шага свивки каната:
1 — крестовая свивка каната; 2 —односто
ронняя свивка каната
тележки с грузом, с остановками в различных точках пролета, повторный подъем
и опускание груза с одновременным передвижением тележки.
Срок очередных испытаний регистрируется на грузоподъемном устройстве.
2.
Стальные канаты (тросы) грузоподъемных машин подвергают тщательно
му осмотру н при необходимости бракуют. Установлены нормы браковки сталь
ных канатов в зависимости от предельно допустимого числа обрывов проволок
на длине одного шага свивки каната.
Шаг свнвки каната определяют следующим образом (рис. 143). Измеряют
диаметр каната, как показано на рисунке. На поверхности какой-либо прядн ва-
носят метку а , от которой отсчитывают вдоль центральной оси каната столько
прядей, сколько нх имеется в сечении каната (шесть на рис. 143). На последующую
прядь (седьмую) наносят вторую метку б . Расстояние между метками соот
ветствует шагу свивкн. У многопрядных канатов шаг свнвки определяют по
числу прядей в наружном слое каната. Нормы браковки стальных канатов
приведены в таблице.
Число обрывов проволок на одном шаге свиикн, как признак браковки ка
ната, конструкция которого не указана в таблице, определяют исходя из данных
этой таблицы для каната, ближайшего по числу прядей и числу проволок.
Канаты, предназначенные для подъема людей, а также взрывчатых и ядо
витых веществ, бракуют при числе обрывов проволок на одном шаге свивки
вдвое меньшем, чем указано в таблице.
Число обрывов при перво
на ча льн ом коэффицие нте
Конструкция каната
Тин свивки
зап ас а прочности
До6 6,7
Се. 7
6x19(1+6+12)4-1 ° - с
Крестовая
12
14
16
Односторонняя
6
7
8
6Х37(1+6+12+18)+1 о.с Крестовая
22
26
30
Односторонняя
11
13
15
6x61(1+6+12+18+
Крестовая
36 38
40
+24)+1 о.с
Односторонняя
18
19
20
18x19(1+6+6+6)+ ! о.с Крестовая
36 38
40
Односторонняя
18
19. 20
134
При наличии у каната существенного поверхностного износа или коррозии
проволок число допустимых обрывов ва шаге свивки уменьшают на 50%. При
износе или коррозии, достигших 40% первоначального диаметра проволок, ка
нат бракуют. В этих случаях диаметр проволок измеряют при отгибании кон
ца проволоки в месте обрыва.
При обнаружении в канате оборванной пряди канат бракуют.
СПИСОК ЛИТЕРАТУРЫ
1. Александров М. П. Подъемно-транспортные машины. М.: Высшая школа,
1979. 558 с.
2. Александров М. П., Решетов Д. П. Атлас конструкций ПТУ. М.: Высшая
школа, 1973. 250 с.
3. Анурьев В. И. Справочник коиструктора-машиностроителя. М. Машино
строение, 1979, т. 1. 526 с.; т. 2. 559 с.; т. 3. 527 .с.
4. Приводы машин. Справочник / Под ред. В. В. Длоугого. Л .: Машино-
Остроение, 1982. 350 с.
5. Долин П. А. Справочник по технике безопасности. М.: Энергоиздат,
1982. 340 с.
6. Егоров К. А. Справочник механизатора погрузо-разгрузо4ных и транс
портных работ. Л .: Машиностроение, 1979. 265 с.
7. Зеиков Р. П., Ивашков И. И., Колобов Л. Н. Машины непрерывного
транспорта. М.: Машиностроение, 1980. 356 с.
8. Марой Ф. Л ., Кузьмин А. В. Справочник по расчету механизмов подъе
мно-транспортных машин. Минск: Высшая школа, 1977. 272 с.
9. Павлов Н. Г. Примеры расчетов кранов. Л .: Машиностроение, 1976„
320 с.
10. Падня В. А. Погрузо-разгрузочные машины. Справочник. М.: Транс
порт, 1981. 448 с.
11. Устройство промышленных работов / Е. И. Юревич, Б. Г. Аветиков,
О. Б. Корытко и др. Л .: Машиностроение, 1980. 233 с.
12. Эрлих В. Д. Подъемно-траиспортные устройства в легкой промышлеи.
вости. М.: Легкая и пищевая промышленность, 1982. 245 с.
ОГЛАВЛЕНИЕ
Введение / [ .................... ... . ,
........................................ ................................... 3
Раздел I
ГРУЗОПОДЪЕМНЫЕ УСТРОЙСТВА
Глава 1. Элементы грузоподъемных устройств . . .................................... 22
§ 1. Гибкие тяговые о р г а н ы ................................................................ 22
§ 2. Рабочие органы
................................................................................ 26
3 §. Механизмы грузоподъемных машин
... .. .. .... .. .. .... . .....
^50
Глава 2. Основные грузоподъемные у с т р о й с т в а .................................... 63
§ 1. Д о м к р а т ы ...................................................... ... ........................... .... . 63
§ 2. Лебедки . . ........................................................................................ 66
§ 3. Т а л и ............................................................................................ ' .
.
.
68
§ 4. Краны
.............................................................................................. 70
§ 5. Подъемники ............. .............................................................................75
Раздел II
ТРАНСПОРТНЫЕ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
С ТЯГОВЫМ ОРГАНОМ
Глава 3. Разновидности транспортных машин.......................................... 80
§ 1. Типы транспортных машин
.......................................... 80
j 2. Факторы, влияющие на выбортранспортных машин .... 81
§ 3. Характеристика транспортируемых г р у з о в ................................... 81
Г Д а в а 4. Ленточные конвейеры
............................ ................................... 82
§ 1. Устройство ленточного к о н в е й е р а ............................................... 82
§ 2. Тяговые органы ленточных конвейеров ................................... 84
§ 3. Производительность ленточных конвейеров .
86
§ 4. Определение приближенной мощности привода конве.'.ера . . 87
§ 5. Барабаны .
.
............................................ ............................................... 87
§ 6. Приводные устройства ....................................................................... 88
§ 7. Натяжные устройства . . .* ........................................................
.
89
§ 8. Роликовые опоры, загрузочные и разгрузочные устройства 91
§ 9. Определение тягового усилия ленточного конвейера мето
дом обхода контура по точкам .................................................... 93
Глава 5. Цепные конвейеры . ................................................................ 95
.
§ 1. Тяговые о р га н ы ................................................................................... 95
§ 2. Пластинчатый конвейер ...................................................................96
§ 3. Ковшовые ко н вейер ы .................. ■
...................................................... 99
§ 4. Подвесные конвейеры .
................................................................100
Г л а в a G. Э ле ва торы .......................... ............................................................... 102
139
Раздел III
ТРАНСПОРТНЫЕ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
БЕ З ТЯГОВОГО ОРГАНА
Глава 7. Гравитационный т р а н с п о р т ...................................................................104
§ 1. Прямолинейные и винтовые с п у с к и ............................................... 104
§ 2. Роликовые к о н в е й е р ы ............................................................................... 106
Глава 8 . Винтовые конвейеры и транспортирующие трубы
106
§ 1. Винтовые к о н в е й е р ы ................................................................................ 106
§ 2. Транспортирующие т р у б ы ....................................................................... 107
Глава 9. Качающиеся к о н в е й е р ы ......................................................................... 108
§ 1. Инерционные к о н в е й е р ы ......................................................................... 108
§ 2. Вибрационные к о н в е й е р ы ........................................................................ 109
Глава 10. Пневматический т р а н с п о р т .............................................................. 110
§ 1. Общие с в е д е н и я ....................................................................................... ПО
§ 2. Типы пневматического т р а н с п о р т а .......................................................111
§ 3. Расчет пневматического т р а н с п о р т а ..................................................... 113
Раздел IV
ТРАНСПОРТНЫЕ МАШИНЫ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ
Глава 11. Рельсовый и безрельсовый внутризаводской транспорт
114
§ 1. Рельсовый т р а н с п о р т ................................................................................ 114
§ 2. Безрельсовый т р а н с п о р т ............................................................................ П5
Глава 12. Погрузочно-разгрузочные машины
116
§ 1. П о г р у з ч и к и .................................................................................................116
§ 2. С к р е п е р ы ..................................................................................................... 118
Глава 13. Промышленные р о б о т ы ........................................................................ 119
§ 1. Устройство и рабо та промышленного р о б о т а .................................. 119
§ 2. Применение промышленных р о б о т о в ................................................ 122
П р и л о ж е н и я .................................................................................................................. 124
1. Пример ра счета мех анизма п о д ъ е м а ...................................................... 124
2. Пример расчета ленточного к о н в е й е р а ..................................................... 128
3. Крюки однорогие. Г р у з о п о д ъ е м н о с т ь ....................................................... 130
4. Крюки однорогие. Разм еры и м а с с а ....................................................... 131
5. Электродвигатели переменного тока закрытого исполнения (обду
ваемые)
..........................................................................................................131
6. Цилиндрические двухступенчатые р е д у к т о р ы ........................................ 132
7. Цилиндрические двухступенчатые редукторы горизонтальные с
передачами Н о в и к о в а .................................................................................. 132
8 . Т ормоза ТКТ с короткоходовым эле ктромагнитом
.
.
.
.
133
9. Тормоза ТКТГ с э л е к т р о г и д р о т о л к а т е л е м ............................................... 133
10. Техника безопасности прн эксплуатациигрузоподъемных машин
133
Список л и т е р а т у р ы ..................................................................................................... 135
«МАШ И НО СТРОЕН НЕ»