









































































































































































































































































































































































































































































































































































































































































































Author: Егер С.М. Матвеенко А.М. Шаталов И.А.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты авиация самолетостроение авиационная промышленность гражданская авиация учебник для вузов издательство машиностроение
ISBN: 5-217-03142-5
Year: 2003




ДЛЯ ВУЗОВ
С.М. Егер,
AM. Матвеенко,
И.А. Шаталов
ОСНОВЫ
АВИАЦИОННОЙ
ТЕХНИКИ
Под редакцией И.А. Шаталова
3-е издание, исправленное и дополненное
Рекомендовано Министерством образования
Российской Федерагрт в качестве учебника
для студентов высших учебных заведений,
обучающихся по направлению «Авиа- и раке-
тостроение»
КГТУ им. АН .Туполева
БИБЛИОТЕКА
МОСКВА
«МАШИНОСТРОЕНИЕ»
2003
УДК 629.7(075.8)
ББК 39.52я7
Е28
Рецензенты:
Кафедра "Конструкции и проектирование летательных аппаратов"
Самарского государственного аэрокосмического университета
им. С.П. Королева; д-р техн, наук, профессор Ю.И. Толчеев
Егер С.М., Матвеенко А.М., Шаталов И.А.
Е 28 Основы авиационной техники: Учебник /Под ред. И.А. Шата-
лова. - Изд. третье, исправл. и доп. - М.: Машиностроение, 2003.
720 с.: ил.
ISBN 5-217-03142-5
Рассматриваются теоретические (аэродинамика, динамика полета, устойчи-
вость и управляемость, прочность) и инженерные (проектирование конструкций,
технология, экономика и экология) аспекты проектирования самолетов и
вертолетов.
Издание предназначено для студентов первого курса высших учебных заведе-
ний, изучающих предмет «Введение в специальность "Инженер по самолето- и
вертолетостроению"», и студентов несамолетных специальностей, изучающих на
втором - третьем курсе основы авиационной техники.
Первое издание под названием «Введение в специальность "Инженер-механик
по самолетостроению"» выпущено в 1983 г.; второе-"Основы авиационной техники"
в 1999 г.
ББК 39.52я7
ISBN 5-217-03142-5
© С.М. Егер, А.М. Матвеенко, И.А. Шаталов, 2003
© Издательство "Машиностроение", 2003
Посвящается 75-летию
Московского государственного авиационного института
и светлой памяти выпускника МАИ 1936 года
Сергея Михайловича Егера
Сергей
Михайлович
Егер
Герой Социалистического Труда, лауреат Ленинской и Государ-
ственных премий, член-корреспондент Академии наук СССР,
заслуженный деятель науки и техники РСФСР. Этих и многих
других званий и наград был удостоен авиационный конструктор
Сергей Михайлович Егер - ближайший помощник, заместитель
генерального конструктора Андрея Николаевича Туполева. Они
проработали вместе почти 35 лет. Егер был "правой рукой"
Туполева, соавтором в разработке технических проектов более 70
самолетов и в создании многих широко известных боевых и
гражданских самолетов: Ту-2, Ту-4, Ту-4А, Ту-16, Ту-95, Ту-104,
Ту-114, Ту-124, Ту-134, Ту-154, Ту-22, Ту-128, Ту-145.
Творчество Сергея Михайловича неразрывно связано с самыми
яркими этапами в деятельности знаменитого конструкторского
бюро: созданием реактивных самолетов, открытием новой эры в
гражданской авиации - преодолением звукового барьера и
проектированием новейших сверхзвуковых самолетов.
Сергей Михайлович, бесспорно, был одаренным от природы,
очень целеустремленным и необыкновенно работоспособным
3
человеком. Он родился в с. Романовка Тамбовской губернии 30
июля 1914 г. в семье железнодорожного инженера, немца по
национальности. Свою трудовую деятельность начал слесарем в
железнодорожных мастерских. С 1932 г., учась в Московском
авиационном институте, работал конструктором под непосред-
ственным руководством С.В. Ильюшина в конструкторско-
производственном отделе ЦАГИ. Отдел возглавлял А.Н. Туполев.
Совместная работа Егера и Туполева продолжалась и в Централь-
ном конструкторском бюро ЦКБ-29 НКВД, где, находясь в
заключении, трудились многие необоснованно репрессированные
в конце 1930-х гг. авиационные специалисты. Работая в ЦКБ-29
с 1938 по 1941 г., Сергей Михайлович руководил бригадой
технического проектирования самолетов.
В дальнейшем на протяжении трех десятков лет С.М. Егер
возглавлял в ОКБ А.Н. Туполева отдел, выдававший исходные
данные и компоновки самолетов для рабочего проектирования.
Отдел этот называли "главным штабом" ОКБ.
Способность непрерывно учиться, нестандартно мыслить (15
авторских свидетельств на изобретения), умение направить в
единое русло труд коллектива по праву позволили Сергею
Михайловичу занять достойное место в ряду лучших проектиров-
щиков авиационной техники.
Сергей Михайлович щедро делился своим богатейшим опытом
с коллегами и студентами МАИ, где с 1959 г. он начал препода-
вать. Для них он написал свою первую книгу "Проектирование
пассажирских реактивных самолетов". Продолжая руководить
"главным штабом" ОКБ, Сергей Михайлович в 1968 г. возглавил
кафедру "Конструкции и проектирование самолетов" МАИ. Здесь
с его участием и под его редакцией были написаны базовые
учебники по проектированию самолетов, которые широко
используются в учебном процессе многих авиационных институтов
страны.
Огромный опыт работы в ОКБ, ежедневное общение со
специалистами убедили Сергея Михайловича в том, что все
интересное, новое, прогрессивное в авиации рождается "на стыках"
дисциплин, и в то же время именно здесь случаются неудачи и
самые горькие поражения. Поэтому он так много внимания
уделял "авианизации" фундаментальных, общеинженерных и
специальных несамолетных дисциплин. При этом он не имел в
виду, что авиационным специалистам нужны свои, отличные от
4
общепринятых история, экономика, физика, математика, сопротив-
ление материалов, электротехника, радиотехника и т.д., а считал,
что преподавание любой дисциплины в авиационном вузе должно
быть построено так, чтобы с самого начала обучения студенты
любой специальности получали представление о своем месте и
своей роли в деле создания самолета, понимали-значение каж-
дой дисциплины, осознавали междисциплинарные связи, влияние
требований, предъявляемых к самолету, на требования к работе
узкого специалиста.
Мы учились у Сергея Михайловича, будучи студентами,
инженерами, преподавателями, работали вместе с ним и разделяем
эту точку зрения.
Общительный и отзывчивый, Сергей Михайлович любил жизнь,
товарищей и друзей, всегда был желанным гостем в компании,
неплохо играл на пианино, у него было множество "несамолетных"
увлечений.
Сергей Михайлович ушел из жизни 31 июля 1987 г., когда рабо-
та над второй редакцией учебника была в самом разгаре. Мы, его
товарищи и соавторы, постарались сделать эту книгу такой, какой
мы вместе ее замышляли.
А. Матвеенко
4. Ш**0'
И. Шаталов
5
ПРЕДИСЛОВИЕ
С каждым годом ужесточаются требования к вновь создаваемым
самолетам. Объективно это приводит к возрастанию объема работ, их
сложности и, как следствие, к увеличению стоимости программы, а в
конечном итоге - цены самолета.
В процессе проектирования приходится решать трудные, как правило,
противоречивые задачи. Для снижения затрат и степени риска койструк-
тору и производителю требуется использовать новейшие достижения
науки и техники, в том числе имеющиеся в смежных отраслях.
Важной особенностью создания авиационной техники является
необходимость учитывать множество разнообразных факторов, что
неизбежно приводит к необходимости привлечения к процессу проекти-
рования, постройки и обеспечения эксплуатации большого числа
различных специалистов. При этом требуется обеспечить и по возмож-
ности упростить процесс обмена информацией.
Успех в решении поставленной задачи - создании нового самолета,
наиболее полно отвечающего требованиям заказчика, - зависит от
квалификации специалистов и, что крайне важно, от общего понимания
выполняемой программы. Это обусловливает непрерывный рост
традиционно высоких требований к подготовке специалистов для
конструкторских бюро, научно-исследовательских институтов и
предприятий авиационной промышленности.
Сегодня специфика работы конструкторского бюро требует от
инженера узкой специализации, но при этом высшее учебное заведение
должно давать своему выпускнику достаточно полное представление о
летательном аппарате, что позволит ему с большими пониманием и
ответственностью относиться к своей работе. В связи с этим в высших
учебныхзаведениях, ведущих подготовку специалистов для авиационной
промышленности, уже на младших курсах в учебную программу введены
обзорные, мировоззренческие дисциплины, формирующие у студентов
целостное, системное представление об объекте проектирования и
понимание того, что широкий кругозор помогает с большей эффектив-
ностью использовать на практике знания специальных предметов,
полученные в институте.
В процессе обучения студента в авиационном вузе необходимо
стремиться заложить основы технического мышления, без которого
6
конструктору невозможно обойтись. Это является задачей настоящего
учебника, призванного облегчить понимание сложных проблем, стоя-
щих перед проектировщиками самолета.
Сергей Михайлович Егер, с которым я долгие годы был связан
совместной работой и дружбой, стал инициатором и одним из авторов
такого учебника, изданного в МАИ в 1983 г. для студентов специализа-
ции "Проектирование самолетов", поскольку именно эти специалисты
чаще всего руководят процессом проектирования самолета в целом,
формируют потоки технической информации, вырабатывают стратегию
и тактику принятия решений. Эта книга, насколько мне известно, широко
использовалась во многих авиационных институтах страны для обучения
студентов различных специальностей. В ней с системных позиций
рассмотрены этапы создания самолета, его постройки и эксплуатации.
Книга написана увлекательно. Ясным, простым языком, надостаточ-
но высоком уровне в ней изложены сложные теоретические и инженерные
проблемы, которые приходится решать при создании самолета.
Тщательно подобранные иллюстрации помогают понять не только
общие принципы, но и наиболее существенные детали изложенного, а
также проектно-конструкторские решения.
Все это дает уверенность, что настоящая книга будет успешно
использоваться в учебном процессе авиационных высших учебных
заведений, в средних учебных заведениях и даже при профессиональной
ориентации школьников.
Генеральный конструктор,
академик РАН,
дважды Герой
Социалистического Труда Г.В. Новожилов
7
ОТ АВТОРОВ
Техника в современном понимании - это прежде всего совокупность
материальных средств человеческой деятельности, созданных для
осуществления процессов производства и обслуживания других
(непроизводственных) потребностей человека и общества. Термин
"техника" используют также для характеристики приемов, навыков,
умений и методов в каком-либо виде деятельности. В предлагаемом
учебнике рассмотрены основные аспекты целенаправленной, целесооб-
разной деятельности по освоению воздушного пространства с помощью
летательных аппаратов (ЛА) - рожденных разумом и воплощенных
руками человека технических устройств, способных создавать подъемную
силу, преодолевающую силу земного тяготения. Эта деятельность,
безусловно, позволила вписать ряд наиболее захватывающих страниц
в историю технического прогресса.
Стремительное развитие науки и техники, в том числе и авиационно-
космической, вызвавшее глубокий переворот во всех отраслях произво-
дстваи оказавшее огромное воздействие на все стороны жизни общества,
является одной из наиболее характерных особенностей научно-
технической революции, начавшейся во второй половинеXX в. В мето-
дологию и практику проектирования и производства образцов
авиационно-космической техники широко внедряются системный ана-
лиз и синтез, математическое моделирование, все большее значение
приобретает оценка эффективности проектируемого изделия с учетом
предполагаемых условий его эксплуатации.
Чтобы обеспечить процесс проектирования такого сложного изделия,
как летательный аппарат, в специализированных проектных организа-
циях- опытных конструкторских бюро (ОКБ) - объединяются усилия
множества специалистов различных инженерно-технических специаль-
ностей-инженеров-механиков по проектированию ЛА, его энергетичес-
кой (силовой) установки, электромеханических, пилотажно-навигацион-
ных, радиотехнических и других систем. Оптимально решить стоящую
перед ОКБ задачу возможно лишь в результате комплексного использо-
вания знаний различных специалистов, владеющих не только теорией
и практическими навыками своей профессии, но и необходимым объемом
знаний в смежных областях.
8
Настоящий учебник предназначен для студентов специализации
"Инженер по самолето- и вертолетостроению" на начальном этапе
обучения и для студентов несамолетных специальностей, изучающих
основы авиационной техники в таких курсах, как "Основы авиационной
техники", "Аэродинамика, динамика полета и конструкция ЛА" и др.,
и имеющих подготовку в объеме программы средней общеобразователь-
ной школы.
Цель авторов данного учебника - помочь студентам овладеть
основными понятиями предмета, показать основные принципы,
заложенные в техническое задание на проектирование, в компоновку
самолета и его конструкцию.
В учебнике с системных позиций рассмотрены теоретические и
инженерные основы авиации, дающие студентам достаточно полное
представление о конечном объекте проектирования - летательном
аппарате. Это позволит будущему специалисту достаточно четко
осознать характер дальнейшей практической работы и задачи, которые
ему предстоит решать.
В качестве основного объекта проектирования в учебнике рассматри-
вается самолет, однако авторы сочли полезным осветить и некоторые
аспекты, связанные с другими типами ЛА.
Авторы выделили разделы "Теоретические основы авиационной
техники" и "Инженерные основы авиационной техники" исходя из
исторических и методических соображений.
На начальных этапах развития авиационной техники интенсивно
развивались аэродинамика (и, в частности, динамика полета) и проч-
ность как науки, обосновывающие саму возможность полета. Методичес-
ки изучение этих наук предшествует изучению теоретических и
практических вопросов проектирования ЛА. В настоящее время любые
аспекты создания ЛА, рассмотренные в разделе "Инженерные основы
авиационной техники", имеют под собой мощную теоретическую базу,
которая непрерывно развивается вместе с практикой разработки,
постройки и эксплуатации ЛА.
Учебник является третьим изданием выпущенной в 1983 г. в
Московском авиационном институте книги С.М. Егера и И.А. Шаталова
«Введение в специальность "Инженер-механик по самолетостроению"»,
переработанным и значительно дополненным. Гл. 19, 22 написаны
С.М. Егером; гл. 15-А.М. Матвеенко;гл. 1,10,11,12,13-И. А. Шатало-
вым; гл. 2, 18, 20 - всеми авторами совместно; гл. 8 написана
А.М. Матвеенко и И.А. Шаталовым; остальные главы - С.М. Егером
и И.А. Шаталовым. В Приложение включены материалы из книги
9
П.П, Афанасьева, А.М. Матвеенко, Ю.М. Шустрова "101 выдающийся
летательный аппарат мира". Мы благодарим П.П. Афанасьева и
Ю.М. Шустрова за дополнения и уточнения, сделанные при подготовке
этого материала.
Мы благодарим И.И. Изотова, С.В. Меренкова и В.В. Скаковского
за точное воплощение замыслов авторов в эскизах иллюстраций;
С.А. Антошкина, Ю.Л. Бурова, А.Н. Гаврилова, А.Н. Копылова,
А.В. Лагоду, П.А. Лукина, В.Р. Мартиросова, Д.Е. Морозова, Е.Н. Пав-
лову, В.А. Садкова, С.А. Ткаченко, А.Н. Хананова, П.Б. Царенко,
Ю.М. Шустрова, которые под руководством и при участии В.Ю. Мищен-
ко подготовили иллюстрации для компьютерной верстки; В.В. Полян-
ского и В.В. Демкина за оперативное решение всех проблем, возникавших
при работе на компьютерах; Т.В. Максимович и Д.Б. Рыбкину,
принимавших участие в оформлении учебника. Мы выражаем призна-
тельность А.П. Красильщикову, А.Д. Миронову, Д.А. Соболеву,
В.Г. Ригманту, Г.П. Серову и В.Т. Шакирову за корректировку указателя
имен.
Авторы с благодарностью приняли замечания и советы А.И. Бетанели,
Ю.С. Богданова, Г.И. Житомирского, В.А. Комарова, В.В. Мальчев-
ского, О.С. Самойловича, Л.Я. Галина, С.В. Кувшинова, В.И. Нарин-
ского, В.В. Орлова, И.Ф. Склярова, В.К. Анастасова, А.И. Дудникова,
Е.Л. Мочиной и К.Р. Хучуа, принявших участие в подготовке рукописи
к печати.
Авторы выражают искреннюю признательность коллективу кафедры
"Конструкции и поектирование летательных аппаратов" Самарского
государственного аэрокосмического университета им. С.П. Королева и
д-ру техн, наук, профессору Ю.И. Топчееву, которые дали много
полезных советов при рецензировании учебника.
10
ПРИНЯТЫЕ СОКРАЩЕНИЯ
АК - авиационный комплекс
АНО - аэронавигационные огни
АНПК - авиационный научно-производственный комплекс
АНТК - авиационный научно-технический комплекс
АП - Авиационные правила
АР - Авиационный регистр
АРУ - автомат регулирования управления
АСУ - активная система управления; автоматическая система управления
АФУ - антенно-фидерное устройство
АЦСУ - автоматическая цифровая система управления
БАНО - бортовые аэронавигационные огни
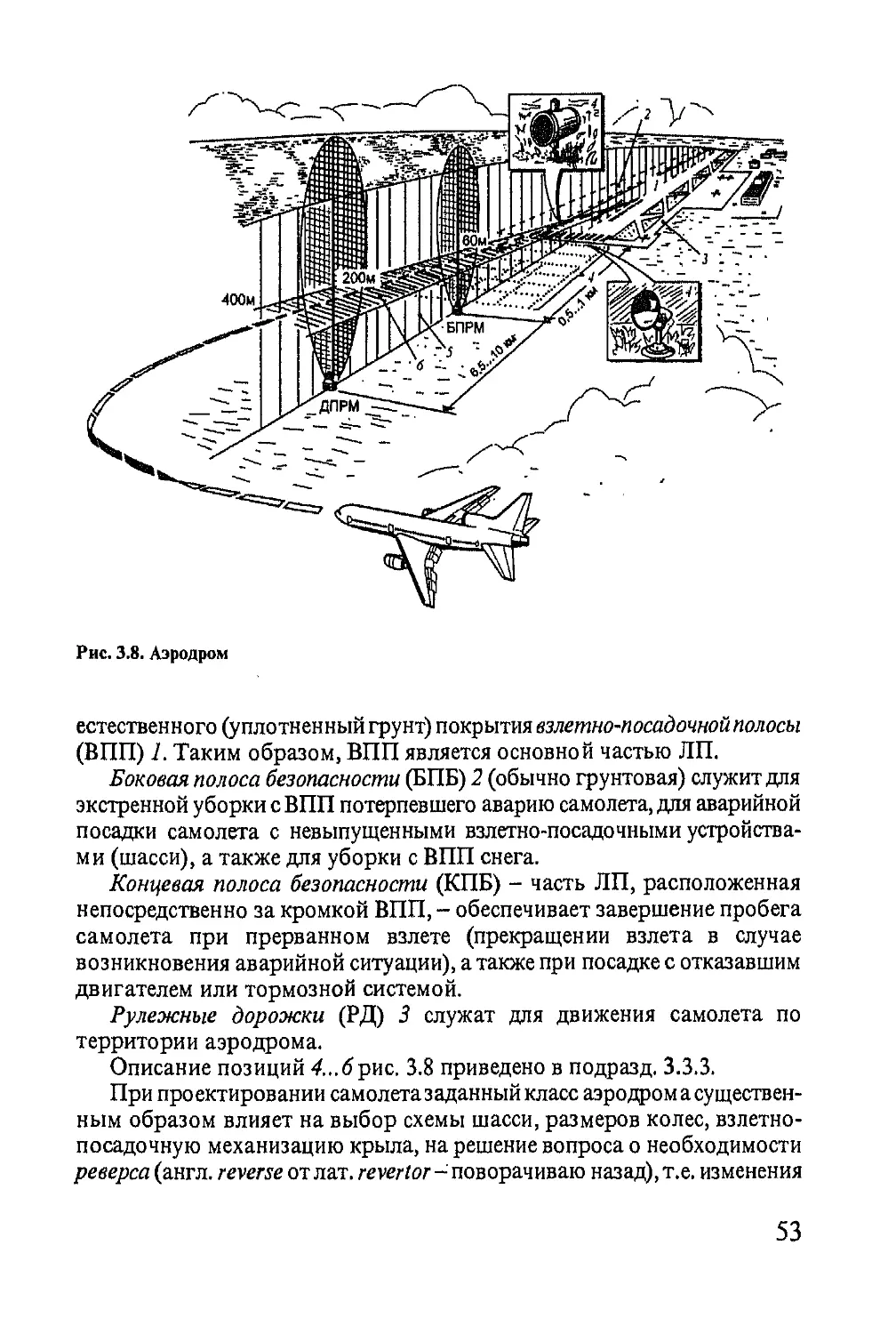
БПБ - боковая полоса безопасности
БПРМ - ближний приводной радиомаяк
БРЛС - бортовая радиолокационная станция
БРЭО - бортовое радиоэлектронное оборудование
БЦВМ - бортовая цифровая вычислительная машина
ВВлД - винтовентиляторный двигатель
ВВП - вертикальные взлет и посадка
ВВС - Военно-воздушные силы
ВИАМ - Всероссийский научно-исследовательский институт авиационных
материалов
ВИЛС - Всероссийский научно-исследовательский институт легких спла-
вов
ВКК - высотно-компеисирующий костюм
ВКС - воздушно-космический самолет
ВМ - вычислительная машина
ВНТК - вертолетный научно-технический комплекс
ВО - вертикальное оперение
ВПП - взлетно-посадочная полоса
ВРД - воздушно-реактивный двигатель
ВС - воздушное судно
ВСУ - вспомогательная силовая установка
ВШ - вертикальный шарнир
ГВЛ - грузовая ватерлиния
ГВФ - Гражданский Воздушный Флот
ГК - гермокабина
ГО - горизонтальное оперение
ГосНИИГА - Государственный научно-исследовательский институт
гражданской авиации
ГСМ - горюче-смазочные материалы
ГСН - головка самонаведения
11
ГТД - газотурбинный двигатель
ГШ — гермошлем; горизонтальный шарнир
ДПРМ — дальний приводной радиомаяк
ДРЛО - дальнее радиолокационное обнаружение
ДУ АС - датчик углов атаки и скольжения
ЕНЛГС - Единые нормы летной годности гражданских самолетов
ЕСКД - Единая система конструкторской документации
ЖРД - жидкостный ракетный двигатель
ЗШ - защитный шлем
ИК - инфракрасный
ИКАО - Международная организация гражданской авиации (ICAO -
International Civil Aviation Organization)
ИСЗ - искусственный спутник Земли
ИСОЖ - индивидуальные системы обеспечения жизнедеятельности
КВ - коротковолновый
КВП - короткие взлет и посадка
КИМ - коэффициент использования материала
КИС - контрольно-испытательная станция
КК - катапультное (катапультируемое) кресло
КМ - кислородная маска; композиционный материал
КОМТА - Комиссия по тяжелой авиации
КПБ - концевая полоса безопасности
КПД — коэффициент полезного действия
КР - косвенные расходы
КСМ - комбинированный стреляющий механизм
КСС - конструктивно-силовая схема
КЗ - критерий эффективности
ЛА - летательный аппарат
ЛИИ - Летно-исследовательский институт
ЛИС - летно-испытательная станция
ЛЛ - летающая лаборатория
ЛП - летная полоса
ЛТХ - летно-технические характеристики
МАК - Межгосударственный авиационный комитет
МВЗ - Московский вертолетный завод
МВКА - многоразовый воздушно-космический аппарат
МВКС - многоразовый воздушно-космический самолет
МВТУ - Московское высшее техническое училище
М3 - механизм загрузки
МИК - монтажно-испытательный корпус
МКЭ - метод конечных элементов
MCA - международная стандартная атмосфера
МСРП - магнитная система регистрации полета
МТКК - многоразовый транспортный космический корабль
МТЭ - механизм триммерного эффекта
НАЗ - неприкосновенный аварийный запас; носимый аварийный запас
12
НВ - несущий винт
НИАТ - Научно-исследовательский институт авиационной технологии
НИИАС - Научно-исследовательский институт авиационных систем
НЛГ - Нормы летной годности
НЛГС - Нормы летной годности гражданских самолетов
НУБС - непосредственное управление боковой силой
НУПС - непосредственное управление подъемной силой
НУРС - неуправляемый реактивный снаряд
ОИСЗ - орбита искусственного спутника Земли
ОКБ - опытное конструкторское бюро
ОРК - объединенный разъем коммуникаций
ОСП - оборудование слепой посадки
ОШ - осевой шарнир
ПВО - противовоздушная оборона
ПВРД - прямоточный воздушно-реактивный двигатель
ПГО - переднее горизонтальное оперение
ПД - поршневой двигатель
ПН - полезная нагрузка
ПНО - пилотажно-навигационное оборудование
ПОС - противообледенительная система
ППК - противоперегрузочный костюм
ППС - противопожарная система
ПЭР - прямые эксплуатационные расходы
РД - ракетный двигатель; рулежная дорожка
РДТТ - ракетный двигатель твердого топлива
РКК - ракетно-космический комплекс
РЛ - радиолокационный
РЛС - радиолокационная станция
PH - ракета-носитель
РПМ - радиопоглощающий материал
РТ - раздвижная тяга
РУД - рычаг управления двигателем
РЭБ - радиоэлектронная борьба
СА - спускаемый аппарат
САПР - система автоматизированного проектирования
САС - система аварийного спасения
СВВП - самолет вертикального взлета и посадки
СВП - система всепогодной посадки
СВС - система воздушных сигналов
СКВ - система кондиционирования воздуха
СКВП - самолет короткого взлета и посадки
СКП - система кислородного питания
СЛА - сверхлегкий летательный аппарат
СПС - сверхзвуковой пассажирский самолет
СУ - силовая установка; система управления
СУВП - самолет укороченного взлета и посадки
13
СУП - система управления полетом
ТВВД - турбовинтовентиляторный двигатель
ТВД - турбовинтовой двигатель
ТВлД - турбовентиляторный двигатель
ТВРД - турбовентиляторный реактивный двигатель
ТЗ - техническое задание
ТКР - типовое конструкторское решение
ТО - техническое обслуживание
ТОиР - техническое обслуживание и ремонт
ТП - техническое предложение
ТПП - технологическая подготовка производства
ТРД - турбореактивный двигатель
ТРДД - турбореактивный двухконтурный двигатель
ТРДДФ - турбореактивный двухконтурный двигатель с форсажной камерой
ТРДФ - турбореактивный двигатель с форсажной камерой
ТСМ - телескопический стреляющий механизм
УВД - управление воздушным движением
УВТ - управление вектором тяги
УКВ - ультракоротковолновый
У ПС - управление пограничным слоем
УРС - управляемый реактивный снаряд
УС - управляющий сигнал
УТС - учебно-треннровочный самолет
ФАИ - Международная авиационная федерация (FAI - Federation
Aeronautique Internationale)
FAR - Federal Aviation Regulations (Государственные требования США
к гражданским самолетам)
ЦАГИ - Центральный аэрогидродннамический институт
ЦИАМ - Центральный институт авиационного моторостроения
ЦПГО - цельноповоротное горизонтальное оперение
ЦУП - Центр управления полетом
ЭИПОС-электроимпульсная противообледенительная система
ЭЛТ - электронно-лучевая трубка
ЭМЗ - Экспериментальный машиностроительный завод
ЭОП - эффективная отражающая поверхность
ЭПР - эффективная площадь рассеяния; эффективность поверхностного
радиорассеяния
14
РАЗДЕЛ I
СОВРЕМЕННЫЙ ЛЕТАТЕЛЬНЫЙ
АППАРАТ - СЛОЖНАЯ ТЕХНИЧЕСКАЯ
СИСТЕМА
Глава 1
СИСТЕМНЫЙ ПОДХОД К ПРОЕКТИРОВАНИЮ
ЛЕТАТЕЛЬНОГО АППАРАТА
Потребность в любом техническом устройстве (в частности, в
летательном аппарате) возникает в результате развития общества,
диктуется социально-экономическими условиями. С древнейших времен
до наших дней с развитием общества изменялись и его потребности в
различных транспортных средствах.
Создание летательного аппарата - естественный этап в развитии
транспортных средств. Человек давно мечтал о полете, однако техничес-
кие и экономические возможности для реализации этой мечты,
объективная необходимость создания транспортного средства,
способного двигаться в околоземном воздушном пространстве, -
самолета - появились сравнительно недавно.
В современном понимании самолет - это летательный аппарат
тяжелее воздуха с силовой установкой для создания тяги и крылом,
создающим (при наличии поступательного движения под действием тяги)
подъемную силу.
Интересно, что задолго до создания летательного аппарата тяжелее воздуха
в русском языке существовало слово "самолет" с иными значениями. "Самоле-
том" называли примитивное орудие для пахоты, нечто вроде сохи; ткацкий
челнок, которым нить утка протягивалась между нитями основы ткани не
вручную, а ударом специального рычага-"погонялки"; детская летающая
игрушка-стрела; речной паром, прикрепленный канатом к якорю и переправляв-
шийся через реку за счет течения с помощью системы водяных рулей.
Слово "самолет" предельно точно выражает идею летательного аппарата
тяжелее воздуха и поэтому вытеснило применявшиеся на заре развития авиации
его названия "воздухоплавательный снаряд", "аппарат", "аэроплан".
Практически только в начале XX в. появился и новый вид человечес-
кой деятельности - проектирование, постройка и эксплуатация
летательных аппаратов тяжелее воздуха. По существу, при жизни одно-
го поколения людей пройден путь от первого полета человека на
15
самолете к массовому применению летательных аппаратов для решения
хозяйственных задач и обеспечения обороноспособности страны.
Деятельность человека в околоземном пространстве определяется
понятиями:
• авиация (франц, aviation от лат. avis - птица) - относится к полетам
на аппаратах тяжелее воздуха (самолетах, вертолетах, планерах) в
околоземном воздушном пространстве;
• воздухоплавание - относится к полетам на аппаратах легче воздуха;
• космонавтика (от греч. kosmos - мир, Вселенная и греч. nautike -
искусство мореплавания, кораблевождения) - относится к полетам в
космическом пространстве.
Этадеятельность обеспечивается совокупностью различных отраслей
науки и техники. Важнейшей из них является проектирование -
разработка проекта (от лат. projectus - брошенный вперед) летательного
аппарата.
ЛА можно с полным основанием считать одним из наиболее
совершенных творений человека. Создание современного ЛА требует
расходования огромных интеллектуальных и экономических ресурсов
общества. И все этапы жизненного цикла современного ЛА оказывают
определенное воздействие на различные стороны жизни общества.
В жизненном цикле ЛА (пути, который проходит ЛА за время своего
существования) можно выделить следующие основные этапы:
• проектирование ЛА;
• постройка и испытание опытных экземпляров;
• разработка технической документации на серийное производство;
• серийное производство и поставка ЛА эксплуатирующей организа-
ции (заказчику);
• эксплуатация ЛА и модернизация его в процессе эксплуатации;
• утилизация ЛА, отработавших установленный срок(т.е. использова-
ние элементов конструкции и систем ЛА в качестве вторичного сырья).
1.1. ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ
Формирование целей, для достижения которых будет использоваться
ЛА, обоснование необходимости новой разработки осуществляются на
основе анализа и предсказания изменений во внешней среде - естествен-
ной, т.е. в природе, и искусственной, т.е. созданной руками человека, -
и последствий (экологических, политических, технических), к которым
приведут разработка проекта, производство ЛА. и его функционирова-
ние. Эта работа (иногда ее называют внешним проектированием) ведется
совместно организациями заказчика и разработчика, например в
гражданской авиации авиакомпанией, которая намерена эксплуатиро-
16
вать новый самолет, и Государственным научно-исследовательским
институтом гражданской авиации (заказчик) совместно с опытным
конструкторским бюро (разработчик). В результате определяются
потребные летно-технические характеристики (ЛТХ), технологические,
эксплуатационные и другие требования к ЛА, выбираются критерии
(показатели) эффективности выполнения ЛА поставленной задачи и
формируется техническое задание (ТЗ) на проект ЛА.
Рассматривая в самом общем виде задачу, решаемую с помощью ЛА,
как транспортную операцию, ТЗ на проектирование ЛА можно
представить следующим образом.
Необходимо спроектировать ЛА, который способен заданную
полезную нагрузку в определенных условиях комфорта и обслуживания
при заданных условиях эксплуатации и применения доставить за
определенное время на определенное расстояние с заданными критериями
(показателями) эффективности выполняемой транспортной операции.
1.2. СЛОЖНЫЕ (БОЛЬШИЕ) СИСТЕМЫ,
ИХ ОСНОВНЫЕ СВОЙСТВА
Очевидно, что приведенную выше общую формулировку задания на
проектирование можно отнести к различным ЛА: и к самым современ-
ным самолетам, и к самолетам, созданным на заре развития авиации.
Очевидно и то, что современные самолеты существенно отличаются не
только от самых первых самолетов, но и от самолетов десяти-, двадцати-
летней давности. Изменились не только внешний облик и размеры
самолета, что весьма важно. Изменились его силовая установка, система
управления, электрооборудование и другие системы. На борту самолета'
появились принципиально новые системы, например бортовая ЭВМ,
система автоматического пилотирования и т.д. Изменились и конструк-
ция самолета, и технология его изготовления. Усложнение решаемых
задач и, как следствие, увеличение сложности и стоимости проектирова-
ния, изготовления и эксплуатации ЛА, насыщенность разнообразными
сложными системами и оборудованием, широкое применение новых
материалов, конструктивно-технологических решений, высокая
трудоемкость изготовления, увеличение времени полного цикла
создания - эти тенденции характерны для всех типов ЛА. И хотя целью
проектирования всегда является создание проекта ЛА, изменились
подход к проектированию,'его методология.
Разработка (синтез) проекта ведется в настоящее время методом
моделирования. Разрабатывается ряд частных моделей (логических,
физических, математических, графических и др.), которые описывают
(отражают) отдельные свойства ЛА (функциональные, аэродинамичес-
17
кие, прочностные, весовые и др.). Используя достаточно большое число
таких взаимосвязанных моделей, можно весьма точно описать ЛА,
отразить всю совокупность его свойств.
Одним из частных, но прогрессивных подходов к описанию свойств
объекта является системный подход, при котором объект исследования
описывают как систему, описывают его системные свойства.
Система (греч. systema - целое, составленное из частей, соединение),
или системный объект, - это обладающий определенной завершенностью,
целостностью объект (например, самолет), состоящий из взаимосвязанных
элементов, отличающийся от окружающей его внешней среды и взаимо-
действующий с ней (взлетает и садится на взлетно-посадочную полосу
аэродрома-взаимодействие с искусственной внешней средой, совершает
полет в атмосфере - взаимодействие с естественной внешней средой).
Системный объект в наиболее общем виде обладает следующими
свойствами.
1. Объект создается ради определенной цели и в процессе достижения
этой цели функционирует и развивается (изменяется).
Так, для нового пассажирского самолета целью разработки и
постройки может являться более комфортабельная, безопасная и
экономически выгодная (по сравнению с существующими самолетами)
перевозка пассажиров. В процессе функционирования (эксплуатации,
например, в течение 60 000 летных часов за 20 лет полетов) самолет
ремонтируется, оснащается новыми оборудованием и системами.
2. В составе системного объекта имеется источник энергии и
материалов для его функционирования и развития.
Двигатели и запас топлива на борту самолета обеспечивают
возможность полета, наземные службы, например аэродромные,
проводят наземное обслуживание и подготавливают самолет к полету,
система управления воздушным движением обеспечивает навигацию,
ремонтные службы - ремонт и оснащение самолета новыми оборудовани-
ем и системами.
3. Системный объект - управляемая система. Для управления
системным объектом используется информация о его собственном
состоянии и о состоянии внешней среды и моделируется поведение объек-
та во внешней среде.
В процессе полета летчик (или автоматическая система управления)
изменяет траекторию движения самолета на основании информации о
положении самолета в пространстве, о работе всех его бортовых систем
и в соответствии с указаниями службы управления воздушным
движением.
18
4. Объект состоит из взаимосвязанных компонентов, выполняющих
определенные функции в его составе.
5. Свойства системного объекта не исчерпываются суммой свойств
его компонентов.
Все компоненты ЛА при их совместном функционировании
обеспечивают новое свойство, которым не обладает в отдельности ни
один из них, - возможность управляемого полета.
Системный подход предполагает, что компоненты ЛА также могут
рассматриваться как системы. С другой стороны, сам ЛА является
компонентом системы более высокого уровня. Например, пассажирский
самолет является компонентом транспортной системы страны» включаю-
щей в себя авиационный, железнодорожный и другие виды транспорта.
Следовательно, существует иерархия (от греч. hieros - священный и
arche-власть) систем, т.е. расположение частей иди элементов целого
в порядке от высшего к низшему ("пирамида" систем).
Таким образом, проект ЛА объединяет частные, взаимоувязанные,
взаимообусловленные модели. Он отражает большое число параметров
и связей между ними, весьма сложных для формализованного описания
(т.е. описания с помощью последовательности взаимосвязанных формул).
В этом смысле о проекте ЛА можно говорить как о большой, сложной
модели, которая отражает все свойства будущего реального ЛА и, как
правило, представляет собой ряд зависимостей между целями проектиро-
вания, возможными средствами их достижения, окружающей средой и
ресурсами. Средства достижения целей проектирования--это возможные
варианты проектных решений - альтернативы (франц, alternative от
лат. alter - один из двух).
Для выбора из ряда альтернативных вариантов некоторого
проектного решения определяют критерий выбора - некоторый
показатель, обобщенно характеризующий степень достижения поставлен-
ной цели тем или иным вариантом проекта. В качестве обобщенного
критерия для выбора рационального варианта и для оптимизации его
параметров обычно используют показатель эффективность -стоимость,
отражающий соотношение между эффективностью решения поставлен-
ной задачи и суммарными затратами на ее решение (стоимостью данного
варианта). Задача может быть сформулирована двояко:
1) обеспечить максимальную эффективность системы при заданных
затратах;
2) обеспечить минимальную стоимость системы при заданном уровне
эффективности.
Таким образом, на всех стадиях проектирования, изготовления и
эксплуатации ЛА можно рассматривать как систему, как совокупность
взаимосвязанных управляемых компонентов (подсистем), объединенных
общей целью функционирования для решения заданной проблемы в
19
некотором диапазоне условий. Именно с этих позиций мы должны
рассматривать летательные аппараты и отдельные их компоненты.
Поскольку всякая система взаимодействует с внешней средой, то
любые изменения внешней среды влияют на систему и в то же время
свойства внешней среды изменяются в результате работы системы.
Внешняя среда (естественная и искусственная), в которой существует и
функционирует ЛА., является динамической системой (ее параметры
изменяются во времени). Следовательно, проектируя ЛА надостаточно
длительный период эксплуатации, мы должны не только учитывать
сегодняшнее состояние внешней среды, но и уметь прогнозировать ее
изменения. Прогноз должен учитывать изменения внешней среды,
вызванные функционированием создаваемого ЛА и других систем, не
только в техническом, но и в экологическом, социально-политическом
и других аспектах.
Поскольку всякая система состоит из взаимосвязанных компонентов
и представляет определенную целостность, то изменение параметров
любого из компонентов системы вызывает изменение работы системы
и ее выходных параметров. Следовательно, при проектировании ЛА
необходимо предусмотреть возможные отказы (нарушения работоспо-
собности) систем и агрегатов ЛА и обеспечить либо возможность
передачи функций отказавшей системы или агрегата другой системе или
агрегату ЛА, либо резервирование (от лат. reservo - сберегаю, сохраняю)
систем и агрегатов. Простейшим видом резервирования является
дублирование (от франц, doubler - удваивать), при котором наряду с
основной системой имеется еще одна (резервная), включаемая в работу
при отказе основной системы.
К сожалению, наши прогнозы на будущее не являются абсолютно
точными. Поэтому при проектировании необходимо предусмотреть
возможность различных модификаций (от позднелат. modifico -
видоизменяю, меняю форму), т.е. принципиальных изменений систем и
ЛА в целом, если произойдут непредусмотренные изменения внешней
среды.
В соответствии с существующей иерархией систем при проектирова-
нии мы должны рассматривать ЛА как часть системы высшего уровня
(авиационного или ракетно-космического комплекса) и выбирать
параметры ЛА так, чтобы они обеспечивали оптимальное функциониро-
вание этой системы (комплекса). Поэтому критерием оценки системы
должен являться ее показатель, обеспечивающий оптимальность
вышестоящей системы.
Таким образом, можно считать, что проектирование с системных
позиций (системное проектирование') - это проектирование части целого
как элемента целого.
20
1.3. ЛЕТАТЕЛЬНЫЙ АППАРАТ - ГЛАВНЫЙ ЭЛЕМЕНТ
АВИАЦИОННОГО И РАКЕТНО-КОСМИЧЕСКОГО
КОМПЛЕКСОВ
На начальном этапе развития авиации основными критериями оценки
качества проекта самолета или непосредственно самолета, находящегося
в эксплуатации, являлись его высокие летные характеристики. Такие
критерии, позволяющие оценить главное достоинство самолета -
способность летать, являются абсолютно верными и правомочными.
Однако если самолет с высокими летными данными для своего
базирования требовал длинных взлетно-посадочных полос (ВПП), он
мог эксплуатироваться с ограниченного числа аэродромов; если самолет
требовал сложной и длительной подготовки к полету, он больше
простаивал на аэродроме, чем летал. Это потребовало от конструкторов
иного подхода к оценке качества самолета. Необходимо оценивать не
только летные характеристики самолета, но и условия его эксплуатации.
Отсюда-системный подход к проектированию ЛА: при проектировании
рассматривается не только ЛА, но и весь комплекс, обеспечивающий
выполнение поставленной задачи. В данном случае комплекс (от лат.
complexus-связь, сочетание) - минимально необходимый состав средств
и служб, совместная работа которых позволяет выполнить поставленную
задачу.
Авиационный комплекс (АК) - совокупность объектов, элементов и
устройств, совместная работа которых обеспечивает выполнение
определенного задания в заданных условиях самолетом данного типа.
Укрупненный состав авиационного комплекса представлен на рис. 1.1.
В него входят парк самолетов, вспомогательные и подготовительные
средства.
Парк самолетов-совокупность самолетов разных типов, спроектиро-
ванных и построенных для выполнения определенной задачи. Классифи-
кация самолетов по назначению представлена на рис. 1.2. Вероятно, что
появление новых задач, которые можно решить с помощью самолетов,
потребует создания самолета нового типа.
Вспомогательные средства (аэродром и комплекс средств управления
полетом) обеспечивают
базирование самолета .--------------------=-----------------
на земле и его точную АВИАЦИОННЫЙ КОМПЛЕКС j
навигацию в полете. I ------- .J
Подготовительные ---й*
тедства Гпяпк мятпин ПАРК ВСПОМОГАТЕЛЬНЫЕ ПОДГОТОВИТЕЛЬНЫЕ I
среоства (парк машин, ____самолетов средства | средства I
механизмов и устройств) ---------- —
обеспечивают техничес-
Рис. 1.1. Укрупненный состав авиационного комплекса
21
САМОЛЕТЫ
ЗАДАЧИ, РЕШАЕМЫЕ
С ПОМОЩЬЮ САМОЛЕТОВ
(классификационный признак)
Пассажирские
Перевозка пассажиров
Транспортировка груза
Учебные
Обучение летного состава
| Экспериментальные t: Проведение летных экспериментов I
I I ' * J----------------"""Г"-------------Г"' "
[сельсюхозяйствегжы^^ Обраболм^льскохозяйствтнькугодг^
Военные
,------1 --------1
I Спортивные
^Обеспечение обороноспособности страны |
| Санитарные
Оказани^ротно^вди^ской^^^ощ^^
Воздушная разведка недр
Рис. 1.2. Классификация самолетов по назначению
кое обслуживание самолета на земле, его подготовку к полету, контроль
технического состояния самолета и всех его систем.
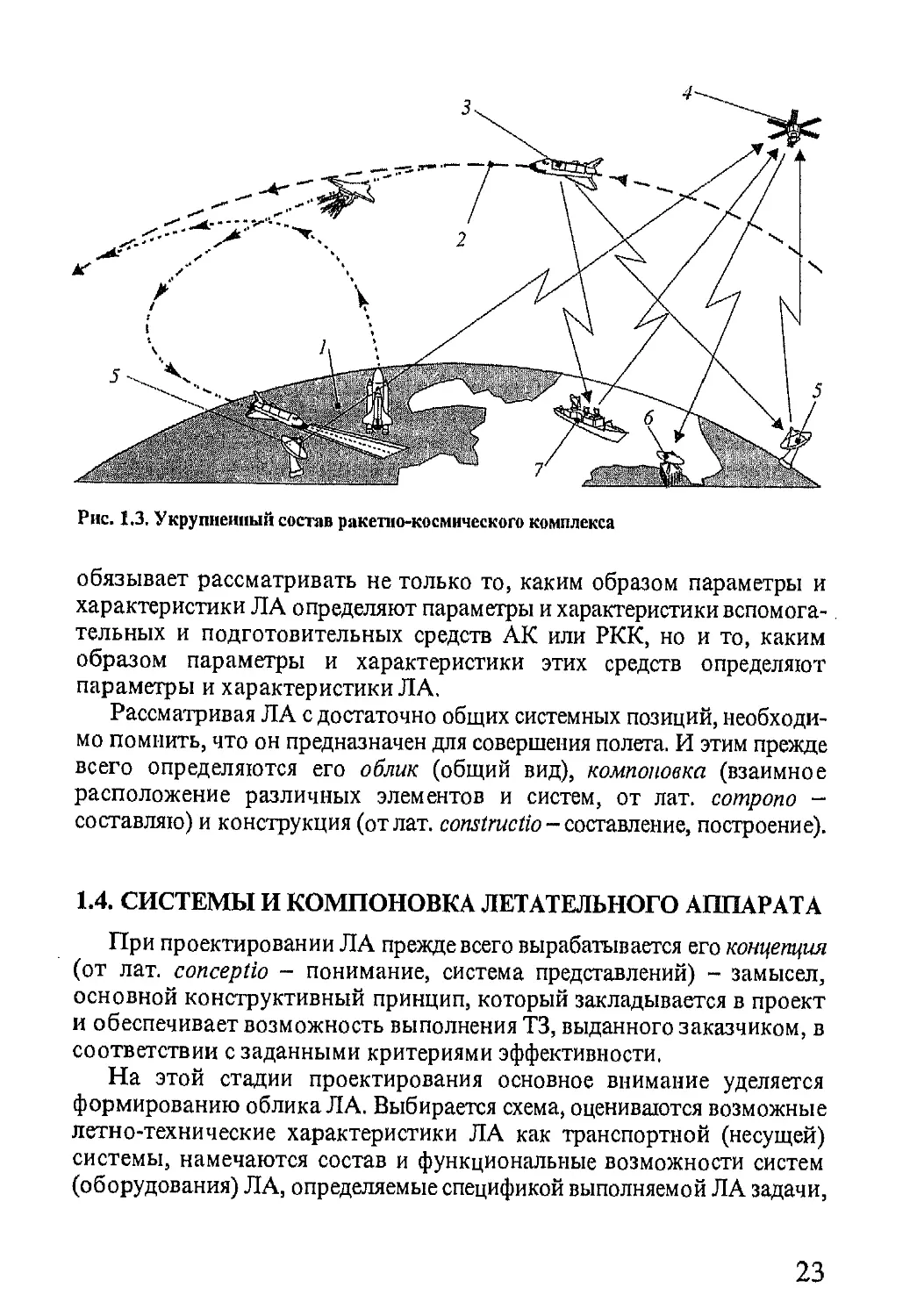
На рис. 1.3 показан укрупненный состав ракетно-космического
комплекса (РКК), обеспечивающего на базе ракет-носителей (PH) полет
ЛА по траектории искусственного спутника Земли (ИСЗ).
Стартовый ракетный комплекс 1 обеспечивает наземную подготовку
и старт PH, выводящей на орбиту ИСЗ 2 полезную нагрузку 3, например
многоразовый воздушно-космический самолет (МВКС). После
завершения полета МВКС садится на посадочную полосу стартового
комплекса, который осуществляет и командно-информационное
обеспечение запуска. Центр управления полетом (ЦУП) 6 с помощью
наземных станций 5, кораблей слежения 7 и спутников связи 4 осуще-
ствляет командно-информационное обеспечение полета ЛА на орбите,
координацию действий стартового комплекса и поисково-спасательных
служб, обеспечивающих посадку ЛА.
ЛА - главный элемент АК или РКК, без него в принципе невозможно
выполнение задач, связанных с полетом в воздушном или космическом
пространстве. Тем не менее проектирование ЛА с системных позиций
22
3
4
Рис. 1.3. Укрупненный состав ракетно-космического комплекса
обязывает рассматривать не только то, каким образом параметры и
характеристики ЛА определяют параметры и характеристики вспомога-
тельных и подготовительных средств АК или РКК, но и то, каким
образом параметры и характеристики этих средств определяют
параметры и характеристики ЛА.
Рассматривая ЛА с достаточно общих системных позиций, необходи-
мо помнить, что он предназначен для совершения полета. И этим прежде
всего определяются его облик (общий вид), компоновка (взаимное
расположение различных элементов и систем, от лат. сотропо -
составляю) и конструкция (от лат. constructio - составление, построение).
1.4. СИСТЕМЫ И КОМПОНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА
При проектировании ЛА прежде всего вырабатывается его концепция
(от лат. conceptio - понимание, система представлений) - замысел,
основной конструктивный принцип, который закладывается в проект
и обеспечивает возможность выполнения ТЗ, выданного заказчиком, в
соответствии с заданными критериями эффективности.
На этой стадии проектирования основное внимание уделяется
формированию облика ЛА. Выбирается схема, оцениваются возможные
летно-технические характеристики ЛА как транспортной (несущей)
системы, намечаются состав и функциональные возможности систем
(оборудования) ЛА, определяемые спецификой выполняемой ЛА задачи,
23
оговоренной в ТЗ на проект, определяется в первом приближении взлет-
ная масса самолета, которая (см. гл. 9) может служить (при прочих
равных условиях) критерием эффективности при выборе проектного
решения.
Создание проекта ЛА - это сложный, многоступенчатый процесс.
Выполняются несколько итераций (от лат. iteratio - повторение) -
циклических проработок проекта с возрастающими детализацией и
точностью, в результате которых с системных позиций согласованно
решаются все вопросы и создается техническая документация, регламен-
тирующая все этапы жизненного цикла ЛА.
В основе проектирования с системных позиций лежит предположение
о возможности расчленения системы на составляющие ее относительно
самостоятельные подсистемы - системы нижнего уровня. В качестве
таких систем при проектировании самолета обычно выделяют системы,
приведенные на рис, 1.4. Здесь же показана функциональная связь систем
самолета с требованиями ТЗ и характерными массами самолета.
Характерными массами обычно являются: т0- взлетная масса самолета;
тк- масса конструкции самолета', тп н - масса полезной (коммерческой)
нагрузки; тсн-масса снаряжения и оборудования, которое обеспечивает
определенные условия комфорта для полезной нагрузки на борту; т0 у -
масса оборудования управления, которое обеспечивает эксплуатацию
самолета в заданных условиях; тсу - масса силовой установки,
обеспечивающей необходимую скорость полета для доставки полезной
нагрузки за время Уна расстояние L; тг- масса топлива на борту.
Показанные на рис. 1,4 в одном масштабе два пассажирских само-
лета - Ил-18 и Ил-86 - иллюстрируют изменение облика и размеров
самолетов в процессе развития авиационной техники. Облик и компонов-
ку самолета в основном определяют:
планер самолета - крыло с рулевыми поверхностями (элеронами),
фюзеляж (франц, fuselage от fusele - веретенообразный, fuseau -
веретено), горизонтальное оперение с рулями высоты, вертикальное
оперение с рулями направления;
система управления самолетом;
взлетно-посадочные устройства - шасси, взлетно-посадочная
механизация крыла (закрылки и предкрылки).
Планер самолета, система управления, взлетно-посадочные устройства
и силовая установка (двигатель и топливная система) образуют
собственно самолет, т.е. транспортную (несущую) систему.
Остальные системы, показанные На рис. 1.4, определяют специфику
(тип) самолета, т.е. обеспечивают выполнение самолетом основной
задачи, сформулированной в ТЗ на проектирование. Пассажирское
бортовое или специальное оборудование и системы кондиционирования и
индивидуального жизнеобеспечения создают необходимые условия ком-
24
Показатель
J [^эффективности,
I ТЕХНИЧЕСКОЕ
ЗАДАНИЕ
САМОЛЕТ
Nr
Условия
эксплуатации
и применения Y?
Заданная
дальность
доставки L
Параметры и
характеристики
полезной нагрузки
Условия комфорта
и обслуживания К,
Заданное время
доставки полезно
нагрузки Т
Планер самолета |
Силовая установка
Энергетическое к
оборудование |
Система
управления
Пилотажно-
навигационное
оборудование
Взлетно-
посадочные
устройства
Системы
спасения и
десантирования
Радиотехническое
оборудование
Системы конди-
ционирования и
индивидуального
жизнеобеспече-
ния
Пассажирское
бортовое или
специальное
оборудование
Системы j
защиты |
S3
gs
Зй
J ш
>5
О
s
=г
ф
ф
3
г
ф S
(X т
С Я
°-’5
Е О
О s
. ф
и
X о
о
s 3
о ш
Рис. 1.4. Функциональная связь систем и характерных масс самолета с требованиями ТЗ
форта и обслуживания полезной нагрузки. Системы спасения и
десантирования и системы защиты (противопожарная, антиобледени-
тельная) обеспечивают выживаемость полезной нагрузки и самолета в
целом в аварийной ситуации. Пилотажно-навигационное и радиотехни-
ческое оборудование обеспечивает навигацию и пилотирование самоле-
та в заданных условиях эксплуатации. Энергетическое оборудование
25
O'.
Рис. 15. Общий вид и укрупненная компоновочная схема самолета Ил-114
(электрические, гидравличес-
кие и газовые системы) обеспе-
чивает функционирование
основных систем самолета.
В самолете, как и в любой
другой сжгеме,негрезкихфункционапь
ных границ между подсистема-
ми (системами нижнего уров-
ня). Взаимосвязи между под-
системами достаточносложны,
поэтому границы между ними
размыты. Одна из основных
задач при проектировании -
максимально точно и объек-
тивно определить роль каждой
системы и описать взаимосвязи
этой системы с другими систе-
мами в процессе функциониро-
вания. Проследим некоторые
группы связей между система-
ми самолета.
1. Тяга двигателя, входяще-
го в состав силовой установки,
передается на конструкцию
планера самолета. Двигатель получает воздух от воздухозаборников по
воздуховодным каналам, атопливо-из баков-отсеков. Воздухозаборни-
ки, воздуховодные каналы и баки-отсеки органически входят в силовую
конструкцию планера самолета.
2. С вала двигателя снимается мощность для привода генераторов
электроэнергии. От компрессора двигателя отбирается горячий воздух
для подачи его в кабину и приборные отсеки (система кондиционирова-
ния) и для борьбы с обледенением конструкции (система защиты).
3. Электротехническое оборудование вырабатывает электроэнергию
для работы практически всех систем самолета (например, радиостанций,
системы освещения пассажирских салонов, привода подкачивающих
насосов в топливных баках, электромеханизмов в системе управления).
4. Пилотажно-навигационное оборудование выдает информацию
практически для всех систем самолета (например, для системы управле-
ния работой силовой установки и управления рулевыми поверхностями
при автоматическом пилотировании самолета).
В качестве примера на рис. 1.5 приведены общий вид и укрупненная
компоновочная схема самолета Ил-114 (ОКБ им, С.В. Ильюшина).
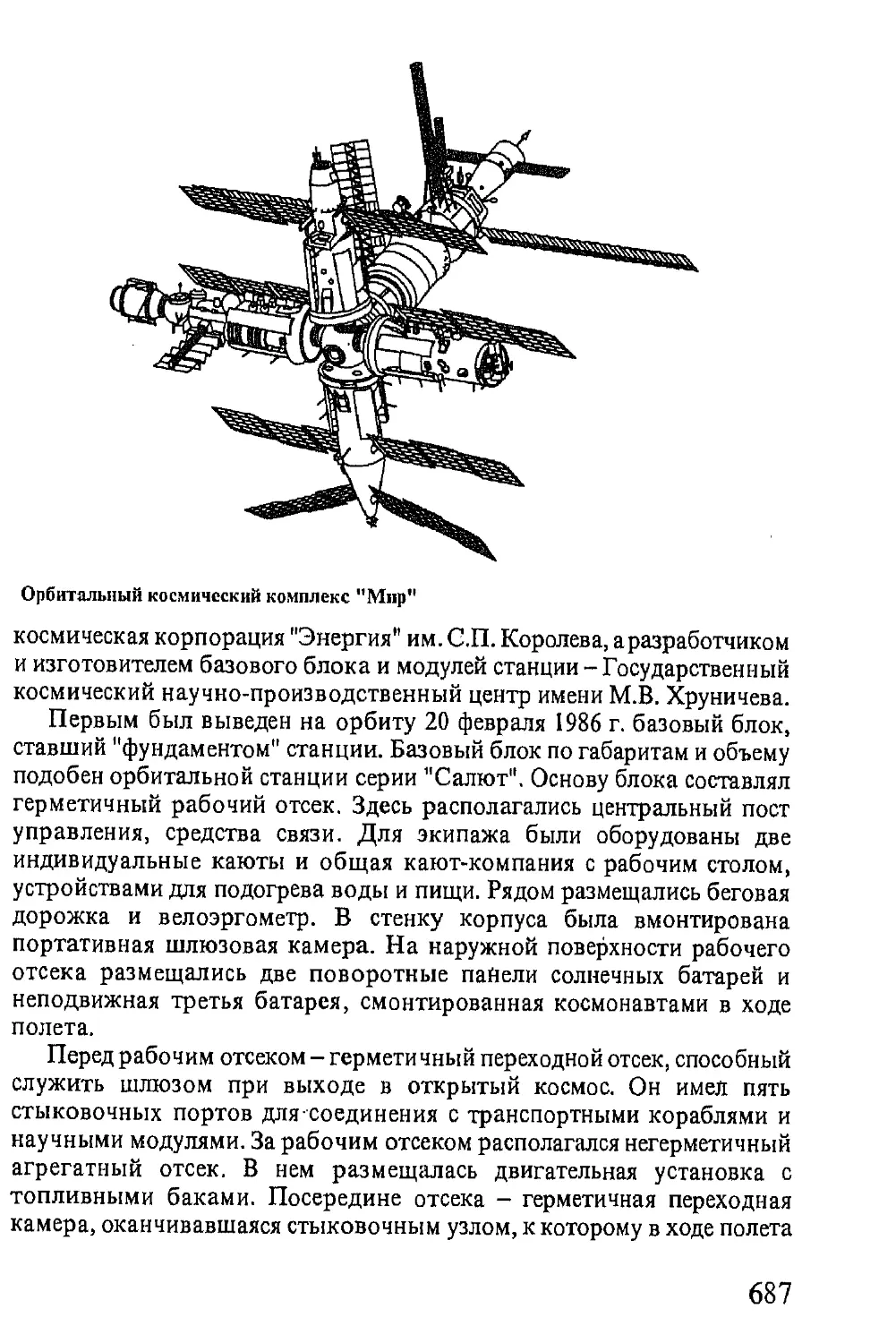
Другой пример - показанная на рис. 1.6 укрупненная компоновочная
схема орбитального космического комплекса на базе орбитальной
27
станции "Мир" (базовый модуль) 3, дооснащенной состыковавшимися
с ним на орбите технологическими и исследовательскими модулями
"Кристалл" 7, "Природа" 5, "Квант" 2, "Квант-2" 4, "Спектр", который
на рисунке не виден (его загораживают панели солнечных батарей 6
базового модуля "Мир").
Связь орбитального комплекса "Мир" с Землей осуществлялась с
помощью одноразовых транспортных кораблей "Союз ТМ" 1 для
доставки на орбиту и возвращения на Землю экипажей и грузов и
"Прогресс" для доставки грузов, а также американского многоразового
орбитального корабля "Спейс шаттл" (Space Shuttle) 9, стыкующегося
с комплексом через универсальный стыковочный узел#.
Даже первое знакомство с этими летательными аппаратами дает
представление о сложности проблем, которые приходится решать
специалистам, работающим в ОКБ, НИИ и авиакосмической промыш-
ленности.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• авиация; воздухоплавание; космонавтика;
• проектирование; жизненный цикл ЛА; заказчик; разработчик; техническое
задание; метод моделирования; системный подход; система; иерархия систем;
показатель эффективность - стоимость; системное проектирование; комплекс;
концепция ЛА;
• авиационный комплекс; парк самолетов; вспомогательные средства
авиационного комплекса; подготовительные средства авиационного комплекса;
ракетно-космический комплекс;
• облик ЛА; компоновкаЛА; модификация;
отказ; резервирование; дублирование;
• самолет; планер самолета; система управления самолетом; взлетно-
посадочные устройства; силовая установка;
• бортовое оборудование; специальное оборудование; система кондиционирова-
ния; система индивидуального жизнеобеспечения; система спасения; система
десантирования; система защиты; пилотажно-навигационное оборудование;
радиотехническое оборудование; электротехническое оборудование; энергетичес-
кое оборудование.
28
Глава 2
ИНЖЕНЕРНОЕ ОБЕСПЕЧЕНИЕ
ПРОЕКТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Целью проектирования авиационного или любого другого техничес-
кого комплекса являются разработка и создание новых, ранее не
существовавших объектов, взаимодействие которых в процессе их
эксплуатации приведет к желаемому результату.
В самом общем виде системное проектирование предполагает, что
объект проектирования (авиационный комплекс или любой его
компонент), его модель (представление проектировщика об этом
объекте), собственно процесс проектирования и результатэтого процесса
(техническая документация, обеспечивающая организацию и осущест-
вление всех этапов жизненного цикла ЛА) формируются как системы,
т.е. обладают системными свойствами.
Организация процесса проектирования предполагает создание
совокупности методологических средств и мероприятий для подготовки
и обоснования решений по определенной сложной проблеме, которые
оформляются в виде программы разработки. Совокупность этих средств
и мероприятий, разграничение их между собой определяются, с одной
стороны, объективно существующей их относительной самостоятельнос-
тью, а с другой стороны, исследовательскими возможностями исполните-
лей программы разработки - проектировщиков, их целями, позициями,
представлениями об объекте проектирования.
Усложнение задач, которые должны решаться с помощью современ-
ных ЛА, расширяет номенклатуру и повышает уровень требований ТЗ,
предъявляемых к ЛА, приводит к необходимости применения в
проектировании, конструировании, производстве и эксплуатации ЛА
новейших достижений как непосредственно авиационных направлений
науки и техники, так и смежных.
Зачастую выполнение поставленного ТЗ возможно только в
результате использования решений, находящихся на уровне изобретений
как в целом по ЛА, так и по отдельным его компонентам, системам.
Работа в этих условиях выдвигает ставшие уже традиционными
высокие требования к общетеоретической и специальной инженерно-
технической подготовке специалистов для конструкторских бюро и НИИ
авиационно-космического профиля.
29
Мастерство специалиста приходит с опытом работы, а комплекс
знаний, необходимый для начала этой творческой, созидательной
работы, будущие инженеры получают в специальных высших инженерно-
технических заведениях.
Слово "инженер"произошло от французского ingenieur, а оно от латинского
ingenium - ум, изобретательность. Слово ingenious впервые было применено к
некоторым военным машинам во II в. Человека, который мог создавать такие
машины, стали называть ingeniator - изобретатель.
Уровень инженерной подготовки проектировщика определяет и его
цели, позиции, представления об объекте проектирования, и его
исследовательские возможности.
2.1. ОСНОВНЫЕ ЭТАПЫ ПРОЕКТИРОВАНИЯ
АВИАЦИОННОГО КОМПЛЕКСА
Безусловно, было бы крайне желательно построить процесс создания
АК как непрерывный, т.е. поставить цель, спроектировать средства для
ее достижения, изготовить их малой серией, провести их опытную
(пробную) эксплуатацию, оценить эффективность этих средств при
достижении цели, а потом уже решить вопрос о широкомасштабном их
использовании. Так, собственно, и строился процесс проектирования на
начальных этапах развития авиации. Однако в настоящее время такая
организация процесса проектирования совершенно неприемлема не
столько из-за большой стоимости и длительности такого процесса (хотя
и это весьма существенно), сколько из-за того, что даже опытная
эксплуатация малой серии не позволит выявить множественный и
сложный характер тех изменений, которые внесет во внешнюю среду
длительная эксплуатация создаваемого технического объекта.
Сложившаяся в настоящее время практика проектирования предпола-
гает разделение процесса проектирования на несколько последователь-
ных взаимосвязанных и соподчиненных этапов, основные из которых:
• "внешнее" проектирование, завершающееся разработкой ТЗ на весь
комплекс средств, обеспечивающих выполнение поставленной задачи;
• "внутреннее" проектирование, завершающееся разработкой кон-
кретных объектов - отдельных компонентов комплекса, в том числе ЛА
и его систем.
На этапе "внешнего" проектирования основной упор делается не на
разработку конкретных объектов и изделий, а на исследование и анализ
тех изменений, которые вызовет во всех сферах жизни общества создание
предполагаемой технической системы. Здесь моделируются процессы
функционирования комплекса, обладающего некоторыми характеристи-
ками, при выполнении определенной задачи, например при перевозке
пассажиров с использованием некоторой (реально существующей или
30
планируемой) сети аэродромов или при проведении предполагаемой
боевой операции. Реальные компоновка и конструкция ЛА, входящего
в состав комплекса, рассматриваются на этом этапе в самом общем виде
на уровне возможных (прогнозируемых) летно-технических, эксплуатаций
онных и стоимостных характеристик. Тем не менее на этом этапе должны
быть найдены наиболее рациональные сочетания требований, определяю-
щие технические возможности комплекса; стоимость его создания и
эксплуатации; сроки разработки, производства и поставки заказчику.
Для решения этой проблемы рассматривается возможно большее
число альтернативных вариантов комплекса, для каждого из которых
оценивается также степень технического и экономического риска,
определяемого возможными изменениями обстановки в будущем,
располагаемыми и потенциально возможными уровнями техники и
технологии, организационными и техническими возможностями
предполагаемых разработчиков комплекса.
Естественно, что большинство моделей, описывающих на этом этапе
проектирования функционирование комплекса и его взаимодействие с
внешней средой, имеют вероятностно-статистический, эмпирический
(от греч. empeiria - опыт) характер, т.е. отражают предыдущий (часто
субъективный) опыт разработчиков ТЗ, построены на основе неполной
или недостаточно верной информации и не дают возможности оценить
события с достаточной степенью достоверности (вероятности). В такой
ситуации решения принимаются на основе неоптимального компромисса
(от лат. compromissum - соглашение на основе взаимных уступок),
Несмотря на то что разработанное таким образом ТЗ должно в
последующем уточняться, этап "внешнего" проектирования является
весьма ответственным, необходимым и обязательным, поскольку дает
исходные данные для углубленной проработки ЛА на следующих этапах
проектирования.
Этап "внутреннего" проектирования (или собственно проектирование)
условно разделяется на последовательно выполняемые этапы предвари-
тельного, эскизного и рабочего проектирования. Условность такого
разделения определяется глубиной проработки (степенью детализации)
всех систем ЛА. На этапе предварительного проектирования прорабаты-
ваются несколько концепций ЛА со степенью детализации, достаточной
для того, чтобы объективно оценить преимущества и недостатки каждой
из них при условии выполнения поставленного перед разработчиком ТЗ,
выбрать наиболее приемлемую концепцию. При этом компромисс между
весьма противоречивыми требованиями ТЗ достигается на основании
более объективных результатов моделирования ЛА, его летно-техничес-
ких, эксплуатационных, экономических характеристик.
31
Параллельно такая же работа ведется в организациях, разрабатываю-
щих другие компоненты вновь создаваемого комплекса. Результаты
этой работы позволяют вернуться к этапу "внешнего" проектирования
и более точно и объективно промоделировать процесс функционирова-
ния комплекса, уточнить и конкретизировать ТЗ на разработку ЛА и
других компонентов комплекса. В итоге формируются окончательный
вариант ТЗ и техническое предложение (ТП), т.е. предварительный
проект - аванпроект комплекса, объективно обосновывающий
важнейшие проектно-конструкторские решения, которые останутся
практически неизменными на последующих этапах разработки проекта.
Это позволяет говорить, что в результате разработки ТП "устоялась"
("заморозилась") схема комплекса и ЛА. Эта работа требует огромных
трудозатрат, иногда уходят месяцы и годы на разработку окончательно-
го варианта ТЗ, позволяющего разработчику приступить к дальнейшей
работе над проектом, если на основании материалов предварительного
проекта заказчик примет решение о его целесообразности. Более
подробно содержание остальных этапов "внутреннего" проектирования
(эскизного и рабочего проектирования) будет рассмотрено в гл. 18.
Здесь уместно еще раз подчеркнуть, что проектирование - многосту-
пенчатый итерационный процесс с возрастающими детализаций и
точностью проработок, связанный с получением достоверной и полной
информации и позволяющий принимать решения на основе оптимальных
компромиссов с минимальным техническим и экономическим риском.
Естественно, что создание современного ЛА требует не только
применения современной методологии проектирования, но и привлечения
к коллективной разработке проекта большого числа высококвалифици-
рованных специалистов различных специальностей.
2.2. ИЕРАРХИЯ СИСТЕМ ЛЕТАТЕЛЬНОГО АППАРАТА.
СПЕЦИАЛИЗАЦИЯ ИНЖЕНЕРОВ, СОЗДАЮЩИХ СИСТЕМЫ
' Первый полет нового ЛА - событие неординарное, С момента
выработки окончательного ТЗ до первого полета ЛА проходит 5... 10 лет,
эксплуатация боевых самолетов продолжается еще 5... 10 лет и дольше,
самолетов гражданской авиации - 15...20 лет. За это время техника и
технология уходят далеко вперед, ЛА морально стареет, становится
неконкурентоспособным по отношению к вновь созданным ЛА. Кроме
того, на такой длительный срок практически невозможно прогнозиро-
вать изменение политической, экономической ситуации и появление
новых технических решений, приводящих к резкому, скачкообразному
развитию техники. Поэтому процесс разработки технических требова-
ний к будущим проектам идет непрерывно. Это позволяет не только
32
своевременно начать новую разработку, скорректировать или прекратить
работу над уже начатыми проектами, но и для поддержания конкуренто-
способности находящейся в эксплуатации техники или вести ее
непрерывную модернизацию (франц, modernisation от moderne- новейший,
современный), т.е. изменение отдельных элементов конструкции и систем
без принципиального их преобразования, или проводить ее модифика-
цию (см. подразд. 1.2).
Работа специалистов по формированию предварительного ТЗ на
проект может быть определена как исследование, анализ того, какие
изменения произойдут с известной им системой (обществом, природой)
в результате воздействия на нее вновь создаваемой системы (АК и РКК)
и насколько это соответствует поставленным целям. Этой работой занята
сравнительно небольшая часть специалистов ОКБ (специалисты по
системному анализу, боевой или транспортной эффективности),
привлекающих к ней в качестве консультантов специалистов-проектиров-
щиков.
Современные ОКБ заняты не только перспективными разработками.
Работа над проектом ЛА на стадиях эскизного и рабочего проектирова-
ния, обеспечение работы серийных заводов, модернизация или
модификация ЛА, находящихся в эксплуатации, - этим заняты в
основном проектировщики всех специальностей.
Работа специалистов-проектировщиков может быть определена как
синтез (от греч. synthesis - соединение) новой системы (технического
комплекса), воздействие которой на известную проектировщику
внешнюю среду произведет в ней запланированные проектировщиком
изменения. Такой подход коренным образом отличается от исследования
и анализа и вырабатывает у проектировщика совершенно иные навыки
мышления, чем у исследователя. Синтез - это процесс поиска такого
технического решения, анализ которого исследователем должен показать,
что это решение не только отвечает требованиям, но и является
наилучшим (оптимальным) вариантом из всех альтернатив, способных
удовлетворить ТЗ.
В силу противоречивости требований ТЗ и множества возможных
способов их удовлетворения оптимальное техническое решение всегда
является компромиссом решений, предлагаемых участвующими в ра-
боте проектировщиками различных специальностей. Причем это
свойственно не только проекту комплекса в целом, но и любому его
компоненту, вплоть до простейшей детали.
Естественно, что соображения любого специалиста, участвующего
в синтезе проекта, играют важную роль в поиске оптимального решения.
Естественно и то, что каждый специалист склонен считать требования
своей дисциплины важнейшими. Более того, в междисциплинарных
2 7425
33
работах человеческий фактор оказывает огромное влияние и на
разработку методологии принятия решений, и на сам процесс проектиро-
вания, Коллектив специалистов, представляющих различные дисципли-
ны, должен выработать стратегию принятия решения, определить
"правила компромисса". Причем для каждого ЛА эти правила существен-
но различны, как и различны критерии эффективности. С одной стороны,
малая масса, малое аэродинамическое сопротивление, которое испытыва-
ет ЛА в полете, высокая надежность всегда желательны, но получены они
могут быть только за счет каких-либо других характеристик ЛА. С
другой стороны, малая масса более важна для космического аппарата,
чем для пассажирского самолета; малое аэродинамическое сопротивление
более важно для сверхзвукового истребителя, чем для вертолета; высокая
надежность при длительном сроке службы более важна для межпланетно-
го ЛА, чем для одноразовой летающей мишени.
С 1930-х гг., когда началась специализация проектировщиков
(появились узкие специалисты - аэродинамики, прочнисты, технологи
и т.д. и организационно оформились соответствующие бригады), в
специальной литературе по проектированию регулярно приводятся
возможные результаты проектирования, при котором требования одних
специалистов подавляют требования других (рис. 2.1). Чтобы избежать
этого, в ОКБ организационно складывается иерархическая структура
подразделений и специалистов, руководящих проектированием и
ведущих непосредственные разработки ЛА в целом и отдельных его
систем, определяющая характер и разделение труда специалистов. Успех
большого коллектива различных специалистов в решении сложных и
взаимосвязанных задач проектирования зависит прежде всего от
инженера-конструктора. В создании ЛА участвуют группы конструкто-
ров различных специальностей, разрабатывающих планер, системы
управления, взлетно-посадочные устройства, силовую установку,
пассажирское или специальное оборудование, системы жизнеобеспечения,
пилотажно-навигационное, радиотехническое, электротехническое,
энергетическое и другое оборудование.
От квалификации конструктора зависит результат работы предприя-
тий, проектирующих, изготавливающих и эксплуатирующих ЛА, потому
что в конечном итоге именно по чертежам конструктора воплощаются
в металле идеи всех специалистов, участвующих в работе над проектом.
Все специалисты ОКБ так или иначе работают на конструктора:
вырабатывают исходные данные для конструирования или анализируют
(моделированием или в процессе натурных испытаний) работу конструк-
тора, оценивая ее эффективность.
К сожалению, ведущая роль конструктора в создании конечного
продукта проектирования (летательного аппарата) в отечественной
34
Рис, 2,1. Самолеты, спроектированные узкими специалистами следующих бригад;
1 - наземного обслуживания (одно из основных требований - максимально удобные подходы
ко всем системам и агрегатам при обслуживании); 2 - двигателя; 3 - фюзеляжа; 4 - крыла;
5 - оперения; 6 - вооружения; 7 - радиоэлектронного оборудования; 8 - жизнеобеспечения
и спасения; 9-технологии производства (здесь одно из основных требований - максимально
возможная простота изготовления); 10 - прочности (одно нз основных требований -
максимально надежные и простые для расчетов элементы конструкции); 11 - аэродинамики
(одно из основных требований - максимально удобообтекаемые формы); 12 - плазов (от
франц, place - место) - эта бригада занимается вычерчиванием с высокой точностью
теоретических чертежей самолета в натуральную величину, изготовлением чертежей
шаблонов и макетов, в основном деревянных
практике незаслуженно принижена, часто недооценивается не только
другими инженерно-техническими работниками ОКБ, но и специалиста-
ми, финансирующими и планирующими работу предприятий.
Психологически любому специалисту трудно согласиться с ведущей
ролью какой-либо другой специальности, считать свою дисциплину
2*
35
ведомой, т.е. сознательно поставить ее на более низкую (по отношению
к ведущей) ступень иерархической структуры. Практически невозможно
с помощью только передовой методологии и организации работы
проектировщиков преодолеть невидимые и сложные барьеры между
представителями различных профессий и специальностей.
Каждый специалист, вступающий в процессе проектирования в
междисциплинарное сотрудничество, должен четко и ясно осознавать
не только свое место и роль в этой работе, но, что не менее важно,
понимать цели, позиции и критерии, которыми руководствуются другие
специалисты, участвующие в выполнении ТЗ.
Проверьте, как Вы усвоили материал
Предложите техническое задание на самолет определенного назначения, в
котором, по Вашему мнению, потребность общества в настоящее время наиболее
высока.
Проиллюстрируйте графически облик такого самолета.
36
Глава 3
СРЕДА, В КОТОРОЙ СУЩЕСТВУЕТ И
ФУНКЦИОНИРУЕТ ЛЕТАТЕЛЬНЫЙ АППАРАТ
Каждый специалист, участвующий в создании ЛА, должен понимать,
что принять определенное техническое решение на основе оптимального
компромисса можно только в результате оценки всей совокупности
факторов (от лат. factor - делающий, производящий), т.е. причин,
движущих сил, влияющих на потребные качества и определяющих
функциональные возможности и облик ЛА.
3.1. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ФУНКЦИОНАЛЬНЫЕ
ВОЗМОЖНОСТИ И ОБЛИК ЛЕТАТЕЛЬНОГО АППАРАТА
Факторы, которые следует учитывать на всех этапах проектирования,
изготовления и эксплуатации ЛА, также обладают системными
свойствами, они взаимосвязаны и взаимообусловлены, и их можно
разместить по иерархическим уровням.
Цели, поставленные перед проектировщиком, позволяют ему
сформировать группу факторов, включающую в себя требования ТЗ,
различные технические условия, нормы, правила и инструкции, которые
отражают опытразвития авиационной техники. Эти факторы в процессе
развития техники изменялись, обеспечивая повышение безопасности
полета, расширение возможностей использования ЛА, улучшение его
эксп лу атаци о и н ых характеристик.
Средства, которыми располагает проектировщик для достижения
поставленных перед ним целей, определяют группу факторов, включаю-
щую в себя организационные мероприятия, обеспечивающие работу
проектировщика, и научно-технический, производственный и экономи-
ческий потенциал, который может быть использован при проектирова-
нии и изготовлении ЛА. Эти факторы в процессе развития теории и
практики проектирования ЛА изменялись, обеспечивая специализацию
и интеграцию организаций, создающих ЛА, использование передовых
достижений науки и техники при создании ЛА.
Рассматривая ЛА, любую его систему как объект, взаимодействующий
с внешней по отношению к нему средой, можно выделить группу
37
Рис. 3.1. Один из первых самолетов, произве-
денных в Советской России, - спортивный
моноплан АНТ-1 (1923 г.) конструкции
А.Н. Туполева
Рис. 3.2. Первый в мире самолет-биплан
”Флайер-1" (1903 г.) американских кон-
структоров братьев Райт
факторов, определяемую непосредственным взаимодействием объекта
с внешней средой - "внешние" факторы, а также группу факторов,
определяемую взаимодействием компонентов самого объекта - "внутрен-
ние" факторы.
Рассмотрим следующий пример. Для обеспечения высокой скорости
полета ("внешний" фактор) целесообразно строить моноплан (от греч.
monos - единственный и лат. planum - плоскость) - самолет с одним
крылом (рис. 3.1). Однако длительное время вследствие низких
характеристик конструкционных материалов, используемых в самолето-
строении, отсутствия конструкторского опыта и надежных методов
расчета на прочность только схема биплан (от лат. bis -дважды) - самолет
с двумя крыльями, расположенными одно над другим (рис. 3.2), -
обеспечивала необходимые прочность и жесткость конструкции
("внутренний" фактор) за счет соединения верхнего 1 и нижнего 2
крыльев системой стоек 3 и расчалок 4. Естественно, что биплан при
прочих равных условиях имеет значительно большее, чем моноплан,
лобовое сопротивление (сопротивление воздуха при движении).
Таким образом, цель, поставленная проектировщиком, и методы,
средства проектирования и производства, находящиеся в его распоряже-
нии, определяют результат его работы - облик и функциональные
возможности (характеристики) ЛА.
В процессе разработки ЛА в первую очередь необходимо учитывать
все возможные случаи взаимодействия его с окружающей средой. Мы
ранее условились считать, что внешняя среда, в которой функционирует
ЛА, состоит из естественной и искусственной (технической, созданной
руками человека) среды.
38
3.2. ЕСТЕСТВЕННАЯ ВНЕШНЯЯ СРЕДА - АТМОСФЕРА ЗЕМ-
ЛИ И ОКОЛОЗЕМНОЕ ПРОСТРАНСТВО
Естественной внешней средой для современных ЛА является атмо-
сфера Земли (от греч. atmos - пар и сфера) и околоземное космическое про-
странство. Атмосферой принято считать область вокруг Земли, в
которой газовая (воздушная) среда вращается вместе с Землей как единое
целое.
Атмосфера состоит из воздуха, представляющего собой смесь газов.
Воздух - среда очень неустойчивая, непостоянная. Изменение основных
параметров воздуха (давления, плотности, температуры) по высоте,
неодинаковое распределение солнечной радиации на земном шаре,
изменяющееся и по времени года, и в течение суток, вертикальное
движение воздуха приводят к тому, что химический состав воздуха и его
электрические характеристики в значительной степени зависят от высоты
над Землей, географического места и других факторов.
Многолетние исследования атмосферы Земли с помощью приборов,
поднимаемых на различные высоты с помощью стратостатов, шаров-
зондов, самолетов, геофизических ракет и искусственных спутников
Земли, позволили установить, что до высот около 80 км с достаточной
для практических расчетов степенью точности можно принять следую-
щий объемный состав сухого воздуха: азот - 78 %, кислород - 21 %,
углекислый газ и прочие газы - 1 %.
Любопытно отметить, что первая "аэродромическая машинка" - прообраз
современного вертолета, построенная в 1774 г. М.В. Ломоносовым, предназнача-
лась именно для подъема на высоту приборов, регистрирующих параметры
воздуха.
Слой атмосферы до высот 80...100 км, в котором химический состав
воздуха не изменяется с высотой, называется гомосферой (от греч. homos-
равный, одинаковый). Выше, в гетеросфере (от греч. heteros - другой),
с ростом высоты химический состав атмосферы изменяется. До высоты
400...600 км сохраняется азотно-кислородный состав атмосферы, однако
начиная с высот 110... 120 км практически весь кислород находится в
атомарном состоянии, появляется также атомарный азот. Далее, до
высоты около 1600 км, в атмосфере преобладает гелий, а с высот около
3000 км - водород. Так постепенно атмосфера Земли переходит в
межзвездный газ, состоящий по массе из примерно 76 % водорода и 23 %
гелия. Изменения в химическом составе атмосферы вызваны процессами
диссоциации и ионизации, обусловленными действием космической
радиации и солнечного излучения.
По электрическим характеристикам в атмосфере выделяют нейтросфе-
ру, простирающуюся до высоты около 60 км, в которой частицы воздуха
практически не имеют электрического заряда (нейтральны), и ионосферу,
39
Рис. 3.3. Магнитосфера и радиационные пояса Земли.
В плоскости рисунка показаны Солнце и полюса
Земли N и S
в которой газы находятся в
ионизированном состоянии
(содержат свободные элек-
троны и положительно за-
ряженные ионы) и которая
простирается до границы
магнитосферы 2 Земли
(рис. 3.3), определяемой
равенством давления маг-
нитного поля Земли (гео-
магнитного поля) и дина-
мического давления солнеч-
ного ветра 1 (ионизирован-
ного газа, вытекающего из
Солнца).
Магнитосфера включает
внутреннюю замкнутую дипольную область геомагнитного поля 8,
действующую как ловушказаряженныхкосмических частиц, и внешнюю
область 7, состоящую из магнитных силовых линий, "заметаемых"
солнечным ветром с дневной стороны Земли на ночную и образующих
на ночной стороне, магнитный шлейф Земли б. Захваченные геомагнитным
полем заряженные частицы (протоны, электроны, а-частицы) образуют
радиационный пояс Земли. Условно, в зависимости от распределения
захваченных частиц по энергиям, радиационный пояс-зону квазизахвата
3 (от лат. quasi-как бы, наподобие) частиц солнечного ветра - разделяют
на внутренний пояс и внешний пояс. Внутренний пояс 5, начинающийся
на высотах 300... 1500 км и простирающийся до высоты около 10 000 км,
в котором преобладают протоны высоких энергий, представляет
опасность для экипажей ЛА. Во внешнем поясе 4, простирающемся до
высоты около 50 000 км, преобладают электроны и протоны малых
энергий.
Естественно, что границы, по которым разделяют атмосферу в
зависимости от ее химических, электрических, радиационных парамет-
ров, являются размытыми: эти параметры так же существенно зависят
от времени года, уровня солнечной активности и других факторов, как
и основные параметры воздуха в атмосфере.
3.2,1. ОСНОВНЫЕ ПАРАМЕТРЫ И СВОЙСТВА ВОЗДУХА В АТМОСФЕРЕ
Давление р характеризует интенсивность силового воздействия
окружающей среды в данной точке:
40
р = dFIdS,
где р - давление, Па (1 Па = 1 Н/м2); F - сила, перпендикулярная к
поверхности элементарной площадки, Н; S - площадь поверхности
элементарной площадки, м2.
Плотность р характеризует массу воздуха, содержащегося в единице
объема:
р = m!W,
где р - плотность, кг/м3; т - масса воздуха, кг; W- объем, занимаемый
воздухом, м3.
Относительная плотность Д характеризует изменение плотности в
зависимости от высоты:
Л = Рд/Ро.
где рн и р0- соответственно плотности на заданной высоте Я и на уровне
Мирового океана.
Температура характеризует состояниетепловогоравновесия системы
и является мерой кинетической энергии молекул. Абсолютная температу-
ра Т, измеряемая по шкале Кельвина, связана с температурой t,
измеряемой по шкале Цельсия, соотношением
Т = 273 + t.
Шкала Кельвина названа в честь английского физика У. Томсона,
получившего за научные заслуги титул барона Кельвина, шкала Цель-
сия - в честь шведского физика А. Цельсия.
Известные из элементарной физики законы для идеального газа
хорошо описывают свойства воздуха в атмосфере, поэтому мы можем
связать параметры воздуха уравнением состояния газа
pW = —RT,
М
гдер - давление; W-объем воздуха; m - масса воздуха; М - молярная
масса воздуха (масса воздуха, взятого в количестве один моль); R -
универсальная газовая постоянная, R = 8,31 Дж/(молыК); Т-абсолютная
температура.
Приведенное уравнение состояния газа названо уравнением
Менделеева - Клапейрона в честь русского химика Д.И. Менделеева и
41
французского физика и инженера Б. Клапейрона.
Универсальная газовая постоянная может быть выражена через
удельные теплоемкости воздуха:
Я = - cv = cv(k - 1),
где с - удельная теплоемкость при постоянном давлении, для воздуха
с = 1000Дж/(кг-К);су -удельная теплоемкость при постоянном объеме,
для воздуха cv ~ 716 Дж/(кг-К); к - отношение теплоемкостей cp/cv, для
воздуха к = 1,41.
Напомним, что теплоемкость определяется количеством теплоты,
которое нужно подвести к заданному объему воздуха (или отвести от
него) для того, чтобы повысить (или понизить) его температуру на 1 К.
Сжимаемость характеризует свойство воздуха изменять свой объем
и плотность при изменении давления и температуры.
Упругость характеризует свойство воздуха возвращаться в исходное
состояние после прекращения действия сил, вызвавших его дефор мацию.
Естественно, что для воздуха такой деформацией может быть только
деформация его объема при всестороннем сжатии.
Свойства сжимаемости и упругости воздуха проявляются в том, что
всякое возмущение в нем, т.е. местное сжатие (местное повышение
давления и плотности воздуха), распространяется в виде очень малых
возмущений - колебаний давления и плотности. Эти колебания
происходят со звуковыми частотами и распространяются в виде волн со
скоростью звука. Таким образом, скорость звука а (скорость распростра-
нения звуковой волны в воздухе) характеризует упругость и сжимаемость
воздуха.
Скорость движения волны можно определить из соотношения
а2 = dpi dp,
гдер - давление воздуха в волне; р - плотность воздуха в распространяю-
щейся волне.
Приближенно процесс распространения звуковой волны может
рассматриваться как адиабатический, т.е. такой, при котором распрос-
траняющаяся волна газа не получает теплоты извне и не отдает ее
окружающей среде. В этом случае = к£ и скорость звука выразится
«Р Р
соотношением а = > к£.
N Р
42
Определив из уравнения состояния газа давление через плотность и
подставив значения параметров воздуха в уравнение для скорости звука,
получим
а « 207т,
где а - скорость звука, м/с; Т-температура воздуха, К.
Число М (число Маха, названо в честь австрийского ученого
Э. Маха) - характеристика потока воздуха (газа), равная отношению
скорости V воздушного потока (скорости движения тела в воздухе) к
скорости звука а в данной точке потока:
а
Вязкость (или внутреннее трение) характеризует свойство воздуха
оказывать сопротивление относительному перемещению своих частиц,
а также перемещению в воздухе твердого тела. Причина вязкости -
взаимодействие молекул при их хаотическом движении.
Вязкость проявляется в том, что при сдвиге соседних слоев воздуха
возникает сила F (сила трения), противодействующая сдвигу. Она
определяется уравнением
F = р—5,
dy
где ц - коэффициент пропорциональности, называемый динамической
вязкостью, Н'с/м2 (Пах); — - гради-
ру
ент изменения скорости слоя в
направлении, перпендикулярном к
скорости движения воздуха, 1/с; S -
площадь слоя, для которого рассчи-
тывается сила трения, м .
Представим себе две пластинки,
между которыми находится слой
вязкого воздуха (рис. 3.4). Если одна
из пластинок начнет двигаться со
скоростью Vo, то этой же скоростью
будет обладать и слой воздуха, непос-
редственно прилегающий к пластин-
ке. Каждый следующий слой в ре-
Пластинка, движущаяся со
скоростью Ио
Неподвижная пластинка
Рис. 3.4. Схема к объяснению понятия
вязкости воздуха
43
зультатевязкости (трения между слоями) приобретет меньшую скорость.
Слой, прилегающий к неподвижной пластинке, останется неподвижным.
В этом случае сила F, которую необходимо приложить к пластинке,
чтобы заставить ее двигаться со скоростью Ео, определяется как F =
= ц(К0//)5, где У0Н- градиент изменения скорости слоя.
Кинематическая вязкость v - отношение динамической вязкости к
плотности среды: v = р/р.
3.2.2. МЕЖДУНАРОДНАЯ СТАНДАРТНАЯ АТМОСФЕРА (MCA)
Необходимость сравнения результатов летных испытаний ЛА,
проводимых в различных условиях, привела к созданию математической
модели условной атмосферы. В соответствии с этой моделью по высоте
атмосфера делится на несколько слоев, в пределах которых температура
изменяется по определенным законам, довольно близко совпадающим
с законами изменения по высоте среднегодовых значений температуры
на средних широтах в летнее время (рис. 3.5). Эти слои называются
тропосфера (от греч. tropos - поворот, изменение), стратосфера (от лат.
stratum - слой), мезосфера (от греч. mesos - средний, промежуточный),
термосфера (от греч. terme- теплота, жар), экосфера (от греч. ехб- вне,
наружу). Сравнительно тонкие
слои атмосферы, толщина ко-
торых измеряется десятками и
сотнями метров, отделяющие
друг от друга основные слои
атмосферы, называются соот-
ветственно тропопаузой, стра-
топаузой, мезопаузой.
, к Высота, км
Плотность, г/м3
Термосфера-
Мезопауза
Мезосфера
SO-
40-
Стратопауза
Стратосфера
------Н^ТРололауза
-ТропосфераГ\. 11
] 180 200 220'240'2601280' К 1
(-100’с) Температура (о^С)
-1000
J—>
Рис. 3.5. Параметры MCA
Единая для всех государств
международная стандартная
атмосфера - условная атмос-
фера (модель), в которой рас-
пределение давления по высоте
в поле силы тяжести получает-
ся из дифференциального урав-
нения гидростатики dp = -pgdh
при определенных предположе-
ниях о распределении темпера-
туры по вертикали. В этом
уравнении dp - дифференциал
давления, Па; р - плотность
воздуха, кг/м , g - ускорение
44
свободного падения, м/с2; dh - дифференциал высоты, м. Так как воздух
сжимаем, его плотность зависит от давления и температуры в соотве-
тствии с уравнением состояния (Клапейрона - Менделеева)
Р =
где Т- абсолютная температура, К; R - газовая постоянная, для воздуха
R = 287,05 Дж/(кг-К).
С учетом приведенной зависимости дифференциальное уравнение
гидростатики можно проинтегрировать, если известен характер
изменения температуры с изменением высоты. В MCA, как видно из
рис. 3.5, принята кусочно-линейная аппроксимация изменения температу-
ры, т.е. в пределах каждого фрагмента градиент изменения температуры
с высотой предполагается постоянным. При этом условии результат
интегрирования дифференциального уравнения гидростатики получается
в виде формулы
Р=М + Л_(й-А,)
где h, - высота, с которой начинается рассматриваемый слой; р„ Tt -
давление и температура на этой высоте; а - градиент изменения
температуры с изменением высоты со своим знаком (минус, если
температура с увеличением высоты убывает, и плюс, если температура
с увеличением высоты возрастает).
Для случая а = 0 (когда температура с изменением высоты не
изменяется, как, например, на начальном участке стратосферы)
интегрирование уравнения гидростатики дает другую зависимость:
«к
Р = Р.е * .
В MCA за начало отсчета высоты принят уровень Мирового океана
при следующих нормальных условиях: ускорение свободного падения =
= 9,807 м/с2; давлениер0 = 101 325 Па (760 мм рт. ст.); температура Го =
= 288,15 К (t = 15 °C); плотность воздуха (вычисляется по температуре
и давлению) р0 = 1,225 кг/м3; скорость звука (вычисляется по температу-
ре) а0 = 340 м/с.
45
Для тропосферы (Л = 0...11 000 м) принимают
Th = 288,15 - 0.0065Й; ph = р0 1
h "I
44331 )
5.256
, \ 4,256
;о* = м^
В стратосфере (до высоты 20 000 м)
Л-11000
Th = 216,65 = -56,5 °C; ph = рце 6342 ;
Л-11 000
Рл = Рце 6342 > ah = 295,1 м/с,
гдери = 22,6 кПа = 170 мм рт. ст.; ри = 0,364 кг/м3.
Подробные таблицы параметров
°601 ^03004^0540 6®07в0
Давление, мм рт. ст.
Рис. 3.6. Параметры MCA для малых
высот
стандартной атмосферы приводятся
в литературе. В специальном матема-
тическом обеспечении ЭВМ есть
стандартные программы, позволяю-
щие рассчитывать параметры MCA.
Параметры MCA (изменение
температуры и давления воздуха) для
малых высот, на которых летают
самолеты и вертолеты, приведены на
рис. 3.6. Здесь же приведены данные
о распределении среднегодовых зна-
чений температуры г(й)тах и f(A)min.
Все расчеты при проектировании
ЛА проводятся для условий MCA,
что позволяет сравнить результаты
расчетов и летных испытаний не-
скольких ЛА, проводимых в различ-
ных климатических поясах. Результа-
ты испытаний пересчитываются на
параметры международной стандар-
тной атмосферы, таким образом все
ЛА "помещаются" в одинаковые
условия - условия MCA.
46
3.2.3. РЕШЕНИЕ ПРОЕКТНО-КОНСТРУКТОРСКИХ ЗАДАЧ
И НЕОПРЕДЕЛЕННОСТЬ ПО ПАРАМЕТРАМ
ЕСТЕСТВЕННОЙ ВНЕШНЕЙ СРЕДЫ
Как уже отмечалось, при проектировании ЛА для выработки
правильного решения необходимо моделировать ЛА, внешнюю среду
и процессы их взаимодействия. Модель MCA, включенная в общую
модель проектирования ЛА, позволяет оценить его летно-технические
характеристики (ЛТХ) в полных диапазонах высот и скоростей,
оговоренных в ТЗ на проектирование. Однако реальные условия полета
могут существенно отличаться от расчетных в силу того, что сложные
атмосферные явления до конца не изучены и существует некоторая
неопределенность по параметрам естественной внешней среды, в которой
функционирует ЛА. Если в процессе проектирования выбирать
параметры ЛА с учетом известных проектировщику самых неблагоприят-
ных и исключительно редко встречающихся явлений, которые могут
воздействовать на ЛА в процессе его функционирования, то проектиро-
вание ЛА может окончиться неудачей - ЛА, способный противостоять
абсолютно всем неблагоприятным воздействиям внешней среды, может
оказаться неспособным к полету. Проектировщик вынужден идти на
определенный технический риск для выполнения поставленной перед ним
задачи, т.е. проектировать самолет в расчете не на экстремальные, а на
наиболее вероятные уровни неблагоприятного воздействия. Тем не
менее проектировщик должен знать, какой уровень неблагоприятных
факторов приведет к катастрофическим последствиям. Естественно, что
для снижения степени риска должны быть применены все доступные
проектировщику средства.
Рассмотрим некоторые неблагоприятные факторы, влияющие на
самолет.
Ветер. Действительное распределение давления в атмосфере
отличается от предполагаемого (постоянного для данной высоты)
распределения, принятого в неподвижной атмосфере, описываемой MCA.
Различие давлений в отдельных точках вызывает движение воздуха -
ветер. Движение атмосферы поддерживается неравномерным ее наг-
ревом солнечным излучением. Оно имеет случайный характер. В тропо-
сфере происходит очень интенсивное вертикальное перемешивание
воздуха. Вертикальные скорости достигают до 15 м/с в облаках и до
50 м/с в грозовом фронте. На высотах 8... 10 км, где обычно пролегают
трассы полетов пассажирских самолетов, возникают струйные течения
со скоростями 10...30 м/с - ураганный ветер. Таким образом, полет
проходит в турбулентной (от лат. turbulentus - бурный, беспорядочный),
неспокойной атмосфере.
47
В стратосфере также происходит интенсивная циркуляция (от лат.
circulatio - круговращение) воздуха с резкими ветрами, образуются
горизонтальные струйные течения со скоростями 50... 150 м/с шириной
в сотни километров.
Полет в турбулентной атмосфере обусловливает колебательный
характер траектории самолета (от позднелат. trajectorius -относящийся
к перемещению) - линии, описываемой в пространстве центром масс
самолета, - колебания центра масс самолета, и угловые колебания
самолета относительно центра масс - болтанку. При попадании самолета
из нисходящего потокав восходящий, где вертикальная скорость воздуха
превышает 20...30 м/с, возможен резкий заброс самолета вверх на
1000...2000 м. Это приводит к резкому увеличению нагрузок, действую-
щих на конструкцию самолета. В исключительных случаях самолет может
разрушиться.
Болтанка вызывает в конструкции самолета постоянно действующие
знакопеременные нагрузки. При полете самолета в болтанку отдельные
элементы конструкции растягиваются, сжимаются, изгибаются. В
результате материал конструкции "устает", в элементах конструкции
возникают микротрещины, которые растут от полета к полету и в
конечном итоге могут привести к так называемому усталостному
разрушению конструкции. Полет в болтанку утомляет пассажиров и
экипаж, болтанка мешает точно пилотировать самолет, возникает
опасность потери управляемости. Болтанка нарушает спектр потока
воздуха, подходящегоквоздухозаборникам двигателей, создается угроза
самовыключения двигателей. При разработке компоновки и конструкции
самолета необходимо учитывать это явление: предусматривать
различные меры, повышающие усталостную прочность конструкции;
создавать безопасно повреждаемые конструкции, в которых разрушение
одного или нескольких элементов не ведет к катастрофическим
последствиям; обеспечивать возможность надежного визуального или
инструментального контроля состояния конструкции, позволяющего
обнаружить трещины при предполетном осмотре. Однако все эти меры
в большинстве случаев ведут к увеличению массы конструкции и, как
следствие, к снижению эффективности самолета.
Надежное прогнозирование погоды и струйных течений по трассе
полета, создание бортовых систем обнаружения турбулентности не
только в облачности, но и при ясной погоде позволяют значительно
уменьшить вероятность попадания самолета в экстремальные ситуации.
Радикально проблема обеспечения безопасности полета в турбулентной
атмосфере может быть решена созданием самолетов, геометрия крыла
которых изменяется в полете активной системой управления (АСУ). По
командам от датчиков параметров движения АСУ автоматически
48
отклоняет различные аэродинамические поверхности самолета для
перераспределения, уменьшения или увеличения аэродинамических сил,
т.е. непосредственно управляет ими с целью ослабления воздействия
турбулентности, улучшения аэродинамических и эксплуатационных
характеристик самолета и повышения эффективности его конструкции.
Солнечное излучение и радиационные пояса Земли. Атмосфера Земли
подвержена постоянному воздействию излучения Солнца и магнитного
поля Земли. Солнечное излучение характеризуется качественными и
количественными характеристиками отдельных областей его спектра:
рентгеновской, ультрафиолетовой, видимой, инфракрасной, радиоизлуче-
ния.
Воздействие солнечного излучения существенным образом влияет на
физико-механические характеристики материалов, из которых изготов-
лен самолет: растрескиваются лакокрасочные покрытия, защищающие
конструкцию от коррозии; теряет упругие свойства резина в различных
уплотнениях; ухудшается прозрачность иллюминаторов.
Процессы, происходящие в ионосфере Земли под воздействием
ультрафиолетового излучения Солнца, рентгеновского излучения
солнечной короны, солнечных корпускулярных потоков и космических
лучей, определяют качество радиосвязи. С увеличением высоты полета
ЛА возрастает уровень неблагоприятного воздействия этих факторов
на экипаж, конструкцию и системы радиоэлектронного оборудования
ЛА.
Полет ЛА и в пределах радиационных поясов Земли, и в космическом
пространстве требует специальной радиационной защиты экипажа и
элементов оборудования. И поскольку существует некоторая неопреде-
ленность по параметрам этих неблагоприятных факторов, случайность
в их проявлениях (например, при всплесках солнечной активности,
которые недостаточно хорошо прогнозируются), степень риска, на
который идет проектировщик, существенно возрастает.
Влажность и химический состав воздуха. Пары воды, находящиеся
в воздухе, осадки в виде дождя и снега содержат соли, кислоты и щелочи,
которые вызывают коррозию элементов конструкции самолета. В
результате коррозии тонкостенные элементы конструкции могут быть
значительно повреждены, ослаблены и вследствие этого могут разру-
шиться под воздействием нагрузки.
Применение в конструкции самолета различных металлов требует
специальных эффективных мер защиты от коррозии - нанесения на
конструкцию защитных металлических и лакокрасочных пленок. Весьма
сложной проблемой является защита от коррозии конструкций
гидросамолетов, базирующихся на морских акваториях. Влага, попадая
внутрь конструкции самолета, может скапливаться в различных местах,
49
Варианты конструкции места I
Место на стыке обшивки,
а
Рис. 3.7. Конструкции стыка обшивки фюзеляжа, неблагоприятные и благоприятные для
возиикиовеиия коррозии
вызывая коррозию конструкции изнутри. Поэтому конструктор должен
предусматривать различные мероприятия, препятствующие скоплению
влаги внутри конструкции и облегчающие ее удаление из конструкции
самолета. Так, например, конструкция фюзеляжа а, показанная на
рис. 3.7, способствует коррозии, в то время как конструкция б, изобра-
женная здесь же, является в этом отношении более приемлемой.
Озон, образующийся в стратосфере под действием ультрафиолетовой
солнечной радиации, является очень сильным окислителем, оказываю-
щим неблагоприятное воздействие на металлические и неметаллические
конструкционные материалы. При длительных полетах ЛА в стратосфере
необходимо решать проблемы обеспечения безопасности экипажа и
пассажиров в кабинах, вентилируемых воздухом непосредственно из
окружающей среды, так как озон относится к числу веществ, чрезвычай-
но токсичных для человеческого организма.
Обледенение. При полете самолета в тропосфере и нижних слоях
стратосферы, т.е. в слоях с низкой температурой окружающего воздуха,
50
в условиях повышенной влажности на поверхности самолета образуется
слой льда - происходит обледенение. Особенно интенсивно лед
образуется на передних кромках крыла, оперения, воздухозаборниках
двигателей, остеклении кабин. Если не бороться с этим явлением, слой
льда быстро нарастает и на передних кромках крыла и оперения толщина
льда может достигнуть 5... 10 см. Отложения льда не только увеличивают
массу самолета, но и резко ухудшают обтекание его воздушным потоком,
полет становится невозможным. Поэтому в конструкции всех современ-
ных самолетов предусмотрены противообледенительные системы,
обеспечивающие защиту элементов конструкции от образования льда.
Более подробно этот вопрос рассмотрен в подразд. 15.3.
Электрические явления в атмосфере. При полете в результате трения
о поверхность самолета воздуха, капель воды, пыли отдельные части
самолета заряжаются статическим электричеством. Разность электричес-
ких потенциалов между отдельными частями самолета может достигать
нескольких тысяч вольт. Если не принять специальных мер, возможны
электрический разряд между элементами конструкции и, как следствие,
пожар на борту самолета. Кроме того, разность потенциалов отдельных
частей приводит к электрохимической коррозии, создает помехи в работе
пилотажно-навигационного оборудования. На стоянке самолета и в
полете возможно также попадание в него молнии. Проектировщик
обязан предусмотреть и эти явления и принять соответствующие меры,
обеспечивающие надежную работу конструкции и оборудования.
Биосфера. Проектировщику приходится учитывать и взаимодействие
самолета с живыми организмами, населяющими нижнюю часть
атмосферы. Микробы, бактерии, насекомые могут наносить существен-
ные повреждения деталям самолета, выполненным из неметаллических
материалов. Чаще всего эта проблема решается правильным выбором
материалов с учетом климатических условий, в которых будет эксплуати-
роваться самолет.
Однако есть проблема, которая требует специальных конструкторских
мероприятий. Это встреча летящего самолета с птицей. Ежегодно в мире
происходят до 2000 столкновений самолетов с птицами. При высокой
скорости полета столкновение с птицей может быть эквивалентно удару
орудийного снаряда. Форма, конструкция каркаса остеклений, само
остекление кабины экипажа помимо прочих требований должны
удовлетворять и требованию "птицестойкости", т.е. способности
самолета выдержать столкновение с птицей без катастрофических
повреждений. Необходимо также обеспечивать защиту двигателя
самолета от разрушения в случае попадания птицы в воздухозаборник.
В зоне аэродрома могут быть предприняты меры для отпугивания птиц.
Вне зоны аэродрома вероятность столкновения с птицей достаточно
51
велика. И здесь проектировщик также должен принимать решение в
условиях неопределенности: результаты столкновения самолета с
ласточкой или орлом будут совершенно различны.
Таким образом, проектировщик должен уметь учитывать множество
таких явлений, которые часто очень трудно формализовать (выразить
их в виде каких-либо математических зависимостей). Опыт и инженерная
интуиция проектировщика, грамотно и тонко проведенный эксперимент
позволяют обеспечить надежную работу ЛА в неблагоприятных для него
условиях естественной внешней среды.
3.3. ИСКУССТВЕННАЯ ВНЕШНЯЯ СРЕДА
Высокая эффективность АК и РКК, надежность и безопасность
полетов ЛА во многом определяются уровнем технического совершен-
ства, характеристиками созданной руками человека искусственной
(технической) внешней среды - вспомогательных и подготовительных
средств обеспечения полета. Это предопределяет комплексный характер
практически одновременного проектирования и собственно ЛА, и
наземных средств обеспечения его полета. Тем не менее не исключается
такой подход к проектированию комплекса, при котором проектирова-
ние ЛА ведется при "замороженных" характеристиках и параметрах
искусственной внешней среды, например проектирование самолета или
нескольких типов самолетов под имеющиеся службы управления
воздушным движением и сеть аэропортов.
3.3.1. АЭРОПОРТ. ВЗЛЕТНО-ПОСАДОЧНАЯ ПОЛОСА
Аэропорт как элемент авиатранспортной системы страны -
предприятие, осуществляющее регулярный прием и отправление
пассажиров, грузов, почты и обеспечивающее организацию полетов и
обслуживание самолетов. Аэродром (от греч. аёг - воздух и drdmos - бег,
место для бега) - главный элемент аэропорта, это специально подготов-
ленный земельный участок, имеющий комплекс сооружений и оборудова-
ния, обеспечивающий полеты, хранение и обслуживание самолетов.
Основным элементом аэродрома (рис. 3.8) является летная полоса
(ЛП). Число летных полос, их расположение на аэродроме зависят от
интенсивности движения, особенностей рельефа местности и режима
преобладающих ветров в зоне аэродрома.
По нормам Международной организации гражданской авиации
(ИКАО, ICAO - International Civil Aviation Organization), членом
которой является наша страна, класс аэродрома определяется длиной
Авпп, шириной 5ВПП и прочностью искусственного (бетон) или
52
Рис. 3.8. Аэродром
естественного (уплотненный грунт) покрытия взлетно-посадочной полосы
(ВПП) 1. Таким образом, ВПП является основной частью ЛП.
Боковая полоса безопасности (БПБ) 2 (обычно грунтовая) служит для
экстренной уборки с ВПП потерпевшего аварию самолета, для аварийной
посадки самолета с невыпущенными взлетно-посадочными устройства-
ми (шасси), а также для уборки с ВПП снега.
Концевая полоса безопасности (КПБ) - часть ЛП, расположенная
непосредственно за кромкой ВПП, - обеспечивает завершение пробега
самолета при прерванном взлете (прекращении взлета в случае
возникновения аварийной ситуации), а также при посадке с отказавшим
двигателем или тормозной системой.
Рулежные дорожки (РД) 3 служат для движения самолета по
территории аэродрома.
Описание позиций #.,.брис. 3.8 приведено в подразд. 3.3.3.
При проектировании самолета заданный класс аэродром а существен-
ным образом влияет на выбор схемы шасси, размеров колес, взлетно-
посадочную механизацию крыла, на решение вопроса о необходимости
реверса (англ, reverse от лат. revertor - поворачиваю назад), т.е. изменения
53
обычного направления тяги винтов или реактивного двигателя на
противоположное.
3.3.2. НАЗЕМНЫЕ СИСТЕМЫ ОБСЛУЖИВАНИЯ И ПОДГОТОВКИ
САМОЛЕТА К ПОЛЕТУ
Самолет считается подготовленным к полету, если:
• он имеет достаточный для выполнения полета ресурс, т.е. такую
суммарную продолжительность функционирования перед данным
полетом (наработку) конструкции и всех систем, выраженную в летных
часах или числом взлетов-посадок, которая гарантирует завершение
предстоящего полета без катастрофических последствий;
• устранены выявленные в предыдущем полете отказы и дефекты,
обнаруженные в процессе послеполетного технического обслуживания
(ТО) самолета на земле;
• самолет укомплектован всеми расходуемыми в полете материалами
(топливом, рабочими жидкостями и газами, продуктами питания и
предметами для обслуживания пассажиров).
Общая трудоемкость работ, выполняемых различными специалистами
по подготовке самолета к полету, составляет несколько десятков
человеко-часов. Существенно уменьшить время подготовки самолета к
повторному вылету позволяет применение высокопроизводительных
средств механизации работ по ТО. Средства, обеспечивающие ТО, могут
быть стационарными или передвижными (смонтированными на
специальных машинах). В их состав входят:
• средства буксировки самолетак месту стоянки и крепления самолета
на стоянке;
• моечные и уборочные машины для удаления пыли, снега, льда с
поверхности самолета, для уборки кабин и промывки санитарных узлов
самолета;
• средства защиты и хранения самолета на стоянке (чехлы и заглушки
для изоляции от внешней среды), установки для промывки и консервации
(от лат. conservatio - сохранение) систем, т.е. заполнения их специальны-
ми составами, предотвращающими коррозию при длительном хранении;
• средства, обеспечивающие доступ к различным зонам и агрегатам
самолета в процессе обслуживания (подъемники, трапы, стремянки и др.);
• контрольно-диагностические средства для контроля состояния и
испытания планера, двигателя и систем самолета;
• ремонтные средства для оперативного устранения неисправностей
в процессе ТО;
• монтажные и подъемно-транспортные средства (подъемники,
домкраты и другое оборудование) для демонтажа и монтажа отдельных
агрегатов и оборудования;
54
Рис. 3.9. Наземные средства подготовки самоле-
та к полету
• средства заправки систем
рабочими жидкостями, газами и
горюче-смазочными материала-
ми (ГСМ);
• теплотехнические средства,
обеспечивающие подогрев авиа-
двигателей и кондиционирова-
ние кабин самолетов;
• источники энергии, обеспе-
чивающие в процессе контроля
и испытаний работу систем са-
молета и запуск двигателя.
Набор средств, используемых
при ТО, определяется объемом
работ, которые необходимо в
данный момент провести на
самолете и его системах для под-
держания надежности самолета
и обеспечения очередного поле-
та.
Заправка самолета расходуе-
мыми материалами производит-
ся чаще всего с помощью различ-
ных специализированных машин
аэродромного обслуживания.
Поэтому необходимо предусмот-
реть такое расположение эксплу-
атационных люков, точек за-
правки и подключения наземных
средств технического обслуживания на самолете, чтобы обеспечить
одновременное обслуживание самолета при подготовке его к повторному
вылету (рис. 3.9) топливозаправщиком 7; машиной 2 для слива отходов
из сливного бака санузла, его промывки и заправки химжидкостью;
электроагрегатом 3 питания бортовых электросетей постоянного и
переменного тока; агрегатом 4 запуска двигателей; машиной 5 заправки
маслом маслобаков двигателей; машиной 6, обеспечивающей проверку
и заправку гидросистемы; воздушным подогревателем двигателей 7;
машиной 8, обеспечивающей мойку самолета, заправку водой и
кондиционирование кабины. Машины должны располагаться вне
опасной для обслуживающего персонала зоны высокочастотного
облучения 9 при наземном опробовании радиолокационной станции (РЛС)
самолета.
55
3.3.3. ОБЕСПЕЧЕНИЕ РЕГУЛЯРНОСТИ И БЕЗОПАСНОСТИ ПОЛЕТОВ
ПАССАЖИРСКИХ САМОЛЕТОВ
Статистика показывает, что авиационный транспорт является самым
безопасным видом транспорта (в настоящее время фиксируется в среднем
гибель одного человека на объеме перевозок 109пассажиро-километров).
Тем не менее обеспечение регулярности и безопасности полетов является
одной из основных задач, постоянно стоящих перед коллективом
проектировщиков.
Большинство аварий с самолетами происходит в районе аэропорта.
Это объясняется сложностью пилотирования на режимах взлета и
посадки,большойинтенсивностью воздушного движения и возможными
неблагоприятными погодными условиями в районе аэропорта.
Для работы на аэродромах, для управления полетами ночью и в
сложных метеорологических условиях аэропорты оборудованы
радиотехническими и светотехническими средствами (см. рис. 3.8).
Система цветных посадочных огней 4, снабженная мощными
светильниками, позволяет летчику хорошо ориентироваться на
заключительном этапе посадки и при взлете.
Точность захода на посадку обеспечивается взаимодействием
бортового радиотехнического и пилотажно-навигационного оборудова-
ния с наземными радиотехническими средствами, Пересечение узконап-
равленных зон излучения 5кб курсового и глиссадного радиомаяков
формирует необходимую траекторию снижения при посадке - глиссаду
(франц, glissade - скольжение). Дальний и ближний приводные радиомаяки
(ДПРМ и БПРМ) создают узконаправленные зоны излучения в
вертикальной плоскости и совместно с курсовым и глиссадным
радиомаяками позволяют точно выйти на ось ВПП и проконтролировать
точность выдерживания высоты при снижении по глиссаде.
Комплекс наземной и бортовой аппаратуры, обеспечивающий летчика
или бортовую систему автоматизированного управления информацией,
необходимой для управления самолетом на этапе посадки, называется
системой всепогодной посадки (СВП) или оборудованием слепой посадки
(ОСП).
Функционально объединяя бортовую аппаратуру СВП с органами
управления самолета, можно обеспечить автоматическую посадку -
пилотирование самолета по глиссаде до определенной высоты без
участия летчика. В зависимости от высоты, на которой управление
передается летчику, системы автоматической посадки подразделяются
на категории I, П, ША, ШВ, ШС в порядке возрастания возможностей
системы. Система категории I позволяет безопасно осуществлять полеты
при высоте облаков 60 м и горизонтальной видимости в районе
56
аэропорта более 800 м, категории ША - при высоте облаков около 15 м
и горизонтальной видимости не менее 200 м, что позволяет обеспечить
безопасные и регулярные полеты по расписанию примерно для 98 %
рейсов.
Многообразие задач, решаемых с помощью авиации, привело к тому,
что в воздушном пространстве одновременно находится множество ЛА,
принадлежащих различным ведомствам. Это значительно осложняет
обстановку не только в районе аэропорта, но и по всей трассе движения.
В организационном плане безопасность на всех этапах полета
обеспечивается вневедомственной службой управления воздушным
движением (УВД), которая планирует, координирует, непосредственно
управляет воздушным движением и контролирует его.
В техническом плане безопасность полетов обеспечивается эшелониро-
ванием (от франц, echelon-ступенька; объект или группа, расположенная
в глубину или уступом по отношению к предыдущей) - вертикальным,
продольным и боковым распределением ЛА в воздушном пространстве.
Множество одновременно летящих ЛА-это сложная динамическая
система, управление которой возможно только при наличии информации
о всех компонентах этой системы и оперативном обмене этой информаци-
ей между наземными службами УВД и экипажами ЛА. Наземное и
бортовое радионавигационное, радиолокационное и радиосвязное
оборудование с необходимыми средствами отображения информации
и ее обработки позволяет на земле и на борту ЛА получать информацию
о метеорологической обстановке и воздушном движении, предупреждать
экипаж о наличии опасных метеообразований и встречных ЛА по курсу
движения и предпринимать меры, обеспечивающие высокий уровень
регулярности и безопасности полетов. Естественно, что это требует
установки на борту ЛА тяжелого, крупногабаритного, сложного,
энергоемкого и дорогого оборудования.
Проектировщик, формируя состав оборудования на борту пассажир-
ского самолета, должен выбрать оптимальное соотношение между
планируемой частотой,т.е. регулярностью,рейсов (доходами авиакомпа-
нии) и составом пилотажно-навигационного оборудования (затратами
на него) при условии обеспечения безопасности полета.
3.3.4. СТАРТОВЫЙ РАКЕТНЫЙ КОМПЛЕКС
Особенностью обеспечения полетов ЛА с помощью ракет-носителей
(PH) является то, что на стартовый ракетный комплекс космодрома
(рис. 3.10) с завода-изготовителя ракета-носитель доставляется
отдельными блоками (модулями), поскольку полностью собранную PH
доставить к месту старта невозможно ни одним из существующих видов
57
Рис. 3.10. Стартовый ракетный комплекс (пример)
транспорта. Поэтому в отличие от аэродрома, где ведется фактически
только предполетное обслуживание самолетов, стартовый ракетный
комплекс должен обеспечивать следующие виды работ по подготовке
к старту:
• проведение в монтажно-испытательном корпусе (МИК) сборки,
монтажа, регулировки PH и ЛА и контрольно-проверочных работ по
каждому из объектов, стыковки PH и ЛА и контрольно-проверочных
работ на состыкованном комплексе PH - ЛА. Возможны горизонтальная
(МИК 5) и вертикальная сборка (МИК 6, который, естественно, имеет
существенно ббльшую, чем у МИК 5, высоту);
• доставку по железнодорожным (или бетонированным автодорож-
ным) подъездным путям 4 с помощью транспортера-установщика
комплекса PH - ЛА 13 на стартовую позицию 1 и его установку в
вертикальном положении на пусковом столе 12 стартового комплекса,
под которым для отвода газов после включения двигательных установок
ракеты находится газоотводный канал (лоток) 14 с газоотражателем
15. Вертикальная сборка может производиться в МИКе на передвижном
пусковом столе либо непосредственно на стартовой позиции;
• предполетное обслуживание комплекса, выполняемое с рабочих
площадок башни обслуживания /7, установленной вплотную ккомплексу
58
PH - ЛА на пусковом столе и обеспечивающей доступ практически к
любому узлу комплекса;
• подсоединение разъемов электрожгутов подачи электроэнергии,
наземных систем автоматизированного контроля и управления стартом
к бортовым разъемам комплекса PH - ЛА с помощью специальных
кабелъ-мачт 16, которые автоматически отсоединяются перед стартом;
• заправку комплекса топливом (горючим и окислителем) с помощью
заправочных кабелъ-мачт 17. При использовании криогенного (от греч.
kryos - холод, мороз, лед и genes - рождающий, рожденный) топлива -
жидкого водорода и жидкого кислорода - на стартовом ракетном
комплексе необходим завод 2 по производству этих компонентов.
Подземные коммуникации, системы заправки и хранения компонентов
топлива 10 обеспечивают их подачу на стартовую позицию;
• с помощью системы единого времени, связывающей все службы
стартового ракетного комплекса, обеспечивать синхронизацию всех
работ, необходимую для успешного старта;
• с помощью радиолокационных и других наземных систем слежения
и управления полетом 7, 8, 9 с командного пункта 3 осуществлять
контроль и корректировку параметров комплекса на начальном
(активном) участке полета.
Для обеспечения полетов многоразовых воздушно-космических
самолетов стартовый комплекс должен иметь аэродром, оборудованный
всеми необходимыми системами.
Четкое и качественное проведение работ на стартовом ракетном
комплексе является залогом успешного выполнения полета,
3.3.5. РЕШЕНИЕ ПРОЕКТНО-КОНСТРУКТОРСКИХ ЗАДАЧ
И НЕОПРЕДЕЛЕННОСТЬ ПО ПАРАМЕТРАМ ИСКУССТВЕННОЙ
ВНЕШНЕЙ СРВДЫ
Проектируя ЛА на длительный период эксплуатации, необходимо,
как уже отмечалось, прогнозировать изменения внешней среды. Однако
попытки их прогнозирования даже на десятилетие вперед сталкиваются
с многочисленными неопределенностями, порождаемыми непрерывным
изменением политической, военной, экономической обстановки, рез-
кими скачками развития авиационной техники, что, естественно,
отражается на эффективности разрабатываемого ЛА.
Неопределенность при проектировании проявляется как незнание
некоторых количественных параметров искусственной внешней среды,
однако неопределенность такого рода может быть раскрыта в процессе
проектирования. Так, оценивая эффективность пассажирского самолета,
59
можно увязать предполагаемую регулярность рейсов с долгосрочными
планами строительства новых аэродромов и оснащения существующих
аэродромов системами всепогодной посадки. Это обстоятельство
ориентирует проектировщиков на создание устойчиво эффективных ЛА,
т.е. таких, которые в значительной мере инвариантны (от лат. invariantos-
неизменяющийся) по отношению к изменяющимся в определенном
диапазоне параметрам искусственной среды.
Проявлением неопределенности другого рода является незнание
важнейших качественных характеристик внешней среды, в которой
приходится выполнять задачу. Смысл такой задачи может быть
сформулирован в самых общих чертах, например как "завоевание
превосходства в воздухе". Особенно ярко неопределенность такого рода
проявляется при проектировании военных самолетов, когда можно
только предполагать, какому, например, уровню развития боевой
техники, стратегии или какой тактике предполагаемого противника
придется противостоять в будущем. Это обстоятельство ориентирует
проектировщиков на принятие концепций и конструктивно-компоно-
вочных решений, позволяющих при необходимости расширить целевую
направленность ЛА, обеспечить гибкое реагирование на изменение
внешней искусственной среды в целях поддержания высокой эффектив-
ности ЛА в течение длительного периода эксплуатации.
Успешному решению проектно-конструкторских задач в условиях
неопределенности по параметрам искусственной внешней среды
способствуют следующие мероприятия.
При разработке ТЗ необходимо, насколько это возможно, учитывать
изменения обстановки в будущем и возможность расширения роли ЛА
в процессе эксплуатации, например предусмотреть использование
пассажирского самолета в транспортном, санитарном вариантах и т.д.
ТЗ должно давать проектировщикам "свободу выбора", в противном
случае будет создан ЛА, оптимизированный для слишком узкой роли.
При создании ЛА должны быть по возможности использованы
новейшие достижения науки и техники, благодаря чему несколько
отдаляется моральное старение ЛА.
В процессе проектирования необходимо обеспечить запас возможнос-
тей основной конструкции и "податливость" ее по отношению к
модернизации путем изменения конструкции планера, увеличения
мощности двигателей или их замены, применения нового оборудования.
Опыт развития авиации показывает, что этот запас обязательно
расходуется в процессе эксплуатации, что позволяет "отслеживать"
изменения внешней среды.
Система проектирования, ориентированная на совместную (парал-
лельную) разработку планера, двигателя, систем ЛА, приводит к
60
созданию авиационного комплекса, оптимального для выполнения
какого-либо конкретного задания, которое может измениться еще в
процессе производства или в начальный период эксплуатации ЛА.
Поскольку циклы проектирования ЛА, двигателя, различных систем не
совпадают, разработку всех перспективных компонентов ЛА можно
вести в виде относительно автономных конструктивно законченных
блоков (модулей) по собственным программам, а не в качестве элементов
конкретного проекта. Создание широкого спектра таких компонентов
(двигателей, элементов оборудования и систем), которые могут быть
использованы в ЛА различного назначения, позволит проектировщикам,
ведущим разработку ЛА, внедрить в практику проектирования
модульный принцип построения такой сложной технической системы,
какой является ЛА. Смена модулей ЛА, замена устаревших более
совершенными, позволит четко реагировать на непредвиденные
изменения внешней среды и длительное время поддерживать в соотве-
тствии с текущими требованиями высокую эффективность авиационного
комплекса. Естественно, что в такой ситуации все возрастающее значение
приобретает взаимодействие различных специалистов, участвующих в
разработке ЛА.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• факторы, определяющие облик ЛА; "внешние" и "внутренние"
факторы, определяющие облик ЛА; неопределенность при проектировании;
• внешняя естественная среда; атмосфера Земли; околоземное
космическое пространство; международная стандартная атмосфера;
♦ внешняя искусственная среда; класс аэродрома; взлетно-посадочная
полоса; полоса безопасности; рулежная дорожка; радиомаяки; система
всепогодной посадки; служба УВД; ракетный стартовый комплекс;
• параметры и свойства воздуха; число М; турбулентная атмосфера;
• траектория; эшелонирование; прерванный взлет;
• ресурс; наработка самолета; усталостное разрушение конструкции;
"птицестойкость "; обледенение;
• моноплан; биплан; активная система управления; реверс тяги.
61
РАЗДЕЛ II
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
АВИАЦИОННОЙ ТЕХНИКИ
Глава 4
ПРИНЦИПЫ ПОЛЕТА И КЛАССИФИКАЦИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
4.1. КЛАССИФИКАЦИЯ ПРИНЦИПОВ ПОЛЕТА
В основе полета лежит преодоление гравитационной силы - силы
тяжести, которая определяется уравнением
G = mg,
где G - сила тяжести, Н; т - масса летящего тела, кг; g - ускорение
свободного падения, м/с2.
Сила, преодолевающая силу тяжести, называется подъемной силой. В
равномерном горизонтальном установившемся полете подъемная сила Y
уравновешивает силу тяжести (У = -G ),
Принцип полета определяется тем, каким образом и за счет чего
создается подъемная сила. В настоящее время техническое значение
имеют следующие принципы полета:
• баллистический-сила Y определяется сйлой инерции тела, летящего
за счет начальногозапаса скорости иливысоты, поэтому баллистический
полет называют также пассивным;
• ракетодинамический - сила Y определяется реактивной силой,
возникающей в результате отбрасывания части массы летящего тела. В
соответствии с законом сохранения импульса системы при отделении от
ее массы с какой-либо скоростью некоторой части возникает движение;
• аэростатический-сила Y определяется архимедовой силой, равной
силе тяжести вытесненного телом воздуха;
62
ЛЕТАТЕЛЬНЫЕ
АППАРАТЫ
РАКЕТА
САМОЛЕТ,
ПЛАНЕР,
ВЕРТОЛЕТ
АЭРОСТАТ,
СТРАТОСТАТ,
ДИРИЖАБЛЬ
СПУТНИК
ЗЕМЛИ,
МЕЖПЛА-
НЕТНЫЙ
КОРАБЛЬ
□
ЦПВА
гти-| ГРаквТ0ДИ‘1 РэРостати“| |Аэродина-|
й И 1намический1 I ческий 8 I мический I
Баллисти-
ческий
ПРИНЦИП ПОЛЕТА
(КЛАССИФИКАЦИОННЫЙ ПРИЗНАК)
Рис. 4.1. Классификация летательных аппаратов по принципу полета
• аэродинамический - сила У определяется реактивной силой,
возникающей в результате отбрасывания вниз части воздуха, обтекающе-
го тело при его движении, т.е. силовым воздействием воздуха на
движущееся тело.
Классификация летательных аппаратов по принципу полета - способу
создания подъемной силы - приведена на рис. 4.1.
При полете в атмосфере кроме силы тяжести летательному аппарату
приходится преодолевать силу сопротивления внешней среды. Силу,
преодолевающую силу сопротивления внешней среды X, называют тягой
Р. В равномерном горизонтальном установившемся полете тяга Р
63
уравновешивает силу сопротивления среды (Р = -X). Тягу, как и
подъемную силу, можно создавать различными способами.
4.2. РЕАЛИЗАЦИЯ РАКЕТОДИНАМИЧЕСКОГО
И БАЛЛИСТИЧЕСКОГО ПРИНЦИПОВ ПОЛЕТА
По решению ООН во всем мире 12 апреля отмечается как День
космонавтики. 12 апреля 1961 г. ракета-носитель "Восток" вывела на
орбиту искусственного спутника Земли первый в мире космический
корабль "Восток" с человеком на борту - гражданином СССР Ю.А. Г ага-
Рис. 4.2. Схема к объяснению принципа
полета ракеты и спутника Земли
риным. Стартовая масса трех ступен-
чатой ракетно-космической системы
"Восток" (рис. 4.2) 287 000 кг. Масса
полезной нагрузки - космического
корабля тп н = 4725 кг. Жидкостные
ракетные двигатели (ЖРД) боковых
блоков первой ступени 1 совместно с
ЖРД второй ступени 2 создавали
стартовую тягу 4000 кН. Полная
длина системы на старте - 38;360 м.
Третья ступень системы 3 соедине-
на с ракетой-носителем переходной
фермой 10. Двигательный отсек тре-
тьей ступени включает в себя ЖРД 9,
двигатели системы ориентации 8, бак
горючего (керосин) 7 и бак окислите-
ля (жидкий кислород) 6. Установлен-
ный в верхней части комплекса кос-
мический корабль "Восток" 5 при
полете в плотных слоях атмосферы
предохраняется от воздействия набе-
гающего потока воздуха головным
обтекателем 4.
При запуске ЖРД ракетно-косми-
ческой системы, стоящей на старто-
вой позиции 11, газы, вытекающие из
реактивного сопла ЖРД с большой
скоростью, создают тягу двигателя.
Для ее определения используют урав-
нение
64
P = ^Wc+fc(pc-p0),
где P - тяга, H; тпсек. - расход массы топлива (горючего и окислителя) в
течение секунды, кг/с; JVC- скорость истечения газов из сопла, м/с;/с -
площадь выходного отверстия (среза) сопла, м2;рс-давление истекаю-
щих газов на срезе сопла, Па; р0 - давление окружающей среды, Па.
При достижении тягой значения, равного силе тяжести, ракета
"отрывается" от земли; при дальнейшем увеличении тяги ракета начинает
подъем с ускорением. Таким образом реализуется ракетодинамический
принцип полета.
После выработки топлива из баков первой ступени ее блоки
отделяются (72) и ракета продолжает набирать высоту с ускорением.
Далее производятся сброс (73) головного обтекателя, включение
двигателя третьей ступени и отделение ее (14) от второй ступени ракеты-
носителя. После достижения первой космической скорости отделяется
двигательный отсек третьей ступени,’ космический корабль выходит на
орбиту искусственного спутника Земли (15) и движется по баллистическо-
му принципу только под действием сил всемирного тяготения в
состоянии невесомости.
Состояние невесомости не означает отсутствия веса. Этот вес
(центростремительную силу) уравновешивает центробежная сила
инерции движущегося по круговой орбите тела. Космонавт только не
ощущает привычного веса (силы, с которой вследствие тяготения к Земле
тело действует на опору, удерживающую его от свободного падения).
На Земле ощущение веса возникает именно за счет реакции опоры (земли,
пола, стула и т.д.).
Возвращение космического корабля "Восток" и космонавта на Землю
происходило после включения (16) тормозной двигательной установки
корабля, корабль начинал двигаться к Земле по траектории баллистичес-
кого спуска (77) с торможением в атмосфере. На высоте около 7 км
отделялась (отстреливалась) крышка люка возвращаемого аппарата,
через 2 с космонавт катапультировался (18), и далее происходил
раздельный спуск возвращаемого аппарата и космонавта с последова-
тельным вводом в поток воздуха сначала тормозных, а затем основных
парашютов.
Нетрудно заметить, что весовая отдача ракетно-космических систем
(отношение массы полезной нагрузки к стартовой массе аппарата) очень
мала. Это вызвано колоссальными расходами топлива для создания
подъемной силы. Ракетодинамический принцип весьма неэкономичен
для обеспечения полетов в атмосфере Земли, но он является единственно
возможным для выведения ЛА на орбиту, хотя в плотных слоях
3 7425
65
атмосферы возможен полет аппарата, реализующего и ракетодинамичес-
кий, и баллистический принципы полета.
Здесь следует отметить, что движение аппаратов в космическом
пространстве возможно не только по ракетодинамическому и баллисти-
ческому (под действием сил всемирного тяготения) принципам полета.
Реально использование "солнечного паруса" - устройства (например, в
виде металлизированной пленки-паруса), обеспечивающего перемеще-
ние космического аппарата под действием светового давления солнеч-
ных лучей (солнечного ветра).
4.3. РЕАЛИЗАЦИЯ АЭРОСТАТИЧЕСКОГО ПРИНЦИПА
ПОЛЕТА
6 мая 1937 г. после трехсуточного трансатлантического перелета на
летном поле в Лейкхорсте под Нью-Йорком потерпел катастрофу
германский дирижабль "Гинденбург" - гигантский воздушный корабль
длиной около 250 м, объемом 190 000 м3 с четырьмя дизельными
двигателями мощностью по 810 кВт, с 25 каютами, ресторанами,
салонами и библиотекой на борту. Около 100 пассажиров и членов
экипажа погибли во время катастрофы в результате возгорания, а затем
взрыва водорода, которым была наполнена оболочка дирижабля.
Практически во всем мире после этой катастрофы были прекращены
попытки применить дирижабль (от франц, dirigeable - управляемый) в
качестве пассажирского воздушного транспорта (так называемый
«синдром "Гинденбурга"»). На долгие годы был "сдан в архив" самый
экономичный в энергетическом смысле способ создания подъемной силы Y
в атмосфере - за счет реализации аэростатического принципа.
При полете дирижабля (рис. 4.3) аэростатическая подъемная сила Y
уравновешиваетсилу тяжести дирижабля G, а тяга двигателей Р - силу
лобового сопротивления X (и силу
инерции при полете дирижабля с
ускорением).
Подъемная (выталкивающая) сила
аэростатических ЛА, которые приня-
то называть аппаратами легче возду-
ха, в соответствии сзаконом Архиме-
да определяется выражением
У = Л>8£,
Направление полета
со скоростью
Рис. 43. Схема к объяснению аэростати-
ческого принципа полета
66
где W-объем наполненной газом оболочки аппарата, м3; ра-плотность
воздуха, вытесняемого дирижаблем, кг/м3; g - ускорение свободного
падения, м/с2.
Запишем уравнение для силы тяжести дирижабля в виде
G = mog = (wa + WpT)g,
где т0 - взлетная масса дирижабля; та - масса аппарата, определяемая
как сумма масс полезной нагрузки, различного оборудования, силовой
установки, топлива, конструкции (в том числе и наполняемой газом
оболочки объемом W); Wpr - масса заполняющего оболочку газа,
имеющего плотность рг.
Необходимая для уравновешивания силы тяжести дирижабля
подъемная сила
Г = 1Урвя = (wa + 1Ург)£.
Отсюда
(Рв ~ РГЖ = "V
То есть для того, чтобы дирижабль с массой та смог совершать полет,
необходимо, чтобы плотность газа, заполняющего оболочку, была
меньше плотности воздуха. Необходимый для полета объем наполненной
газом оболочки
Рв " Рг
Напомним, что плотность воздуха (на уровне моря при температуре
О °C) рв = 1,29 кг/м3. Для заполнения оболочки обычно используется
водород (рг = 0,09 кг/м3) или гелий (рг = 0,179 кг/м3). Можно также
заполнить оболочку подогретым воздухом, плотность которого будет
меньше плотности воздуха, окружающего ЛА.
В период второй мировой войны в США возникла потребность
долговременного патрулирования океанских акваторий с целью
организации противолодочной обороны, и эту задачу с успехом решали
дирижабли, которые входили в состав военно-морских сил США до
1961 г.
Быстрое истощение запасов углеводородного топлива на нашей
планете и появление принципиально новых транспортных задач
3*
67
побудили проектировщиков с начала 1970-х гг. вновь обратиться к
использованию аэростатического принципа полета.
4.4. РЕАЛИЗАЦИЯ АЭРОДИНАМИЧЕСКОГО ПРИНЦИПА
ПОЛЕТА
Аэродинамический принцип создания подъемной силы можно
технически реализовать либо, используя движение всего аппарата,
снабженного неподвижной несущей поверхностью (крыло), либо
используя движение отдельных несущих частей аппарата (несущий винт,
вентилятор и т.д.) относительно воздушной среды. И в том, и в другом
случае образование подъемной силы основано на законе механики о
количестве движения (второй закон Ньютона, названный в честь
английского математика, механика, астронома и физика И. Ньютона)
m(V2 - F,) = Pt,
где т - масса тела (в данном случае это масса отбрасываемого воздуха),
кг; V2 - Г] - изменение скорости тела (в данном случае вертикальная
скорость отбрасываемого несущей поверхностью воздуха), м/с; Р-
сила, приложенная к воздуху и направленная вниз, Н; t - время действия
силы, с.
Отсюда следует, что
Р = m(V2 - V^/t.
В соответствии с третьим законом Ньютона подъемная сила Y будет
приложена к несущей поверхности, равна по величине силе Р и
направлена вверх (будет действовать против силы Р, приложенной к
воздуху и направленной вниз):
Y = -Р.
В дальнейшем при обозначении сил, имеющих аэродинамическую
природу, будем применять индекс "<я" (Уа, Ха и т.д.).
Подробно механизм возникновения аэродинамической подъемной
силы будет рассмотрен в подразд. 5.2.
Еще раз подчеркнем, что движущаяся в воздухе несущая поверхность,
создающая подъемную силу Ya, совершает работу по преодолению
действующей на нее силы лобового сопротивления Ха. Поэтому для
создания подъемной силы необходимо затрачивать энергию. Очевидно,
68
что энергетические затраты ЛА,
использующего аэродинамический
принцип полета, будут тем меньше,
чем меньше будет сила лобового
сопротивления Ха, возникающая при
создании необходимой для полета
подъемной силы Ya, т.е. чем больше
будет значение аэродинамического
качества ЛА Ка, определяемого отно-
шением подъемной силы к силе лобо-
вого сопротивления:
Ка = Ya/Xa.
Рис. 4.4. Схема к объяснению планирую-
щего полета
Далее будет показано, что аэродинамическое качество является
свойством ЛА, определяемым в основном его геометрическими
параметрами.
Среди ЛА, реализующих аэродинамический принцип полета,
наибольшее распространение получили планеры (франц, planeur от
planer - парить), самолеты и вертолеты.
Планер не имеет силовой установки, поэтому его полет (рис. 4.4) в
спокойной атмосфере возможен только с постоянным снижением под
некоторым углом 0 к горизонту со скоростью планирования V, которая
может быть представлена векторной суммой скорости снижения V и
горизонтальной скорости полета Vx. Движение планера вперед
происходит под действием составляющей G sin0 силы тяжести G,
которая уравновешивает силу лобового сопротивления Ха> возникающую
вместе с подъемной силой крыла Ya, уравновешивающей составляю-
щую G cos0 силы тяжести. Таким образом, при полете планера на
создание подъемной силы и преодоление силы лобового сопротивления
с потерей высоты расходуется потенциальная энергия, которой обладал
планер, доставленный на высоту начала планирования с помощью
наземной лебедки или самолета-буксировщика. Увеличить запас энергии
для полета планер может, набирая высоту за счет энергии "терминов" -
восходящих потоков теплого воздуха.
Рассматривая схему сил, действующих на планер при планировании
(см. рис. 4.4), запишем:
69
У. = Gcos0; Y = Gsin0.
a 3 a
Отсюда tg® = XJYa = 1 /Ка, т.е. планер, имеющий большее аэродина-
мическое качество, будет планировать по более пологой траектории и
дальность его полета при прочих равных условиях будет больше,
Следовательно, он более эффективно использует начальный запас
энергии. Для современных планеров аэродинамическое качество Ка =
= 40...50.
Самолет совершает полет в атмосфере за счет тяги, создаваемой
силовой установкой, и подъемной силы, создаваемой неподвижным
относительно других частей самолета крылом.
Двигатель самолета создает тягу воздушным винтом или реакцией
струи выхлопных газов, расходуя при этом химическую энергию топлива,
находящегося в топливных баках, на совершение работы по преодолению
аэродинамического сопротивления или сопротивления трения при
разбеге самолета по ВПП на взлете.
При полете самолета со скоростью V(рис. 4.5) возникает подъемная
сила Ув, противостоящая гравитационной силе (силе тяжести) G; вместе
с тем возникает и сила, оказывающая сопротивление движению самолета,
Ха, которая преодолевается тягой двигателя Р .
Таким образом, для совершения горизонтального полета самолета
необходимо выполнить условия
G = Ya- Р- Ха.
Отсюда тяга двигателя, потребная для совершения горизонтального
полета,
Лиир = GXalYa = G!Ka = mg!Ka.
Рис. 4.5. Силы, действующие на самолет
в горизонтальном полете
Очевидно, что энергетические
затраты ЛА, реализующего аэродина-
мический принцип полета, на преодо-
ление силы земного тяготения сущес-
твенно меньше затрат ЛА, реализую-
щего ракетодинамический принцип
полета, для которого .Рпотр = mg. У
современных дозвуковых самолетов
аэродинамическое качество Ка =
- 15... 18, у сверхзвуковых самолетов
Xfl = 8...12.
70
Рис. 4.6. Схема к объяснению принципа полета вертолета
Однако самолет (в традиционной конфигурации) не способен
совершать вертикальный взлет и посадку, поскольку неподвижное крыло
создает подъемную силу только при поступательном движении самолета.
Вертолет, устаревшее название - геликоптер (от греч. helix (helikos) -
спираль, винт и pteron - крыло), совершает полет за счет подъемной силы
и тяги, создаваемых одним или несколькими несущими винтами,
способными создавать подъемную силу без поступательного движения
ЛА.
Несущий винт 1 вертолета (рис. 4.6, а) состоит из нескольких
лопастей, которые представляют собой крылья, приводимые во вращение
двигателем. В результате вращения лопастей возникает аэродинамичес-
кая подъемная сила (тяга винта) Та, которая в режиме висения уравнове-
шивает силу тяжести G:
Л = G.
На рис. 4.6, б показана схема сил, действующих на вертолет в
горизонтальном полете. Несущий винт 1 при помощи специального
устройства наклонен относительно фюзеляжа вертолета 2 вперед.
Составляющая Уа тяги винта Та уравновешивает силу тяжести G (Ya =
= G), т.е. является подъемной силой вертолета; проекция Ра силы Та на
горизонтальную ось обеспечивает поступательное движение вертолета,
71
уравновешивая возникающую при этом силу лобового сопротивления Ха
(Ра = т.е. является тягой вертолета в горизонтальном полете.
Аэродинамическое качество современных вертолетов Ка = 4...5.
Практика показывает, что энергетические затраты на полет вертолета
существенно больше, чем энергетические затраты на полет самолета при
одинаковых взлетных массах и скорости полета. Однако вертолет
обладает существенным свойством, которого не имеют самолеты
традиционных схем, - он способен совершать вертикальный взлет и
посадку, а также находиться в режиме висения.
4.5. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ, РЕАЛИЗУЮЩИЕ
НЕСКОЛЬКО ПРИНЦИПОВ ПОЛЕТА
Классификация летательных аппаратов по принципам полета,
приведенная выше, весьма условна. Так, ракета, выводящая спутник на
околоземную орбиту, сочетает ракетодинамический принцип полета на
начальном (активном) участке с баллистическим принципом на
пассивном участке. Самолет-лаборатория, двигаясь по баллистической
траектории, обеспечивает кратковременную (30...40 с) невесомость для
тренировки космонавтов. Большое внимание уделяется созданию
самолетов, базирующихся на малоразмерных ВПП. Самолеты вертикаль-
ного взлета и посадки (СВВП) используют направленную вертикально
тягу воздушных винтов или реализуют ракетодинамический принцип
(используют тягу реактивных двигателей) на режимах вертикального
взлета и посадки, а на крейсерских режимах - аэродинамический
принцип. Самолеты короткого (СКВП) мт. укороченного (СУВП) взлета
и посадки на взлетно-посадочных режимах преодолевают силу тяжести
за счет подъемной силы крыла и вертикальной тяги двигателей, реализуя
одновременно аэродинамический и ракетодинамический принципы
полета.
В связи с новыми достижениями науки и технологии появилась
Рис. 4.7. Проект комбинированного
летательного аппарата "Эйрон-340"
возможность создания самолетов,
сочетающих аэродинамический и
аэростатический принципы полета.
ЛА "Эйрон-340" (рис. 4.7), проект
которого разрабатывался в США,
представляет собой горизонтально
взлетающий аппарат, корпус которо-
го способен создать аэродинамичес-
кую подъемную силу при движении в
атмосфере. За счет использования
72
гелия, заполняющего часть корпуса, создается аэростатическая
подъемная сила, компенсирующая вес конструкции. Аппарат рассчитан
на перевозку груза массой 125 000 кг на расстояние 4000 км с крейсерской
скоростью 240 км/ч на высоте 3600 м. Общая мощность четырех
турбовинтовых двигателей 16 200 кВт.
Многоразовые воздушно-космические аппараты (МВКА) типа "Спейс
шаттл" (США) и "Буран" (СССР), выводимые в космическое простра-
нство с помощью ракет-носителей, в полете по орбите искусственного
спутника Земли (ОИСЗ) реализуют баллистический принцип полета, при
маневрировании на орбите с помощью ракетных двигателей - ракетоди-
намический принцип, при снижении с ОИСЗ в верхних слоях атмосферы -
баллистический, а в нижних, плотных слоях атмосферы - аэродинамичес-
кий принципы полета.
4.6. КРЫЛАТЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В КОСМИЧЕС-
КОМ ПРОСТРАНСТВЕ
Надежда на положительное решение человечеством вопроса об
исключительно мирном использовании космического пространства
позволяет нам не касаться военных аспектов использования космических
ЛА, хотя во многих технически развитых странах в этом направлении
ведутся широкомасштабные работы. В то же время непрерывно
расширяется сфера использования космических ЛА для решения сугубо
земных проблем, в число которых входят:
• создание глобальной системы спутниковой радио- и телевизионной
связи с непосредственным вещанием на индивидуальные антенны;
• проведение метеорологических, геодезических, картографических
работ и исследование природных ресурсов;
• создание спутниковых систем навигации морского и воздушного
транспорта и поиска терпящих бедствие;
• производство в условиях невесомости уникальных по свойствам
неорганических и органических материалов и веществ.
Информация, получаемая из космоса, способствует интенсивному
развитию производительных сил, контролю за состоянием природной
среды и ее охране, она активно используется для нужд сельского,
лесного, водного и рыбного хозяйства, океанографии, мелиорации,
промышленного и гражданского строительства. Расширение этих работ
требует увеличения грузопотока, направляемого на околоземные орбиты.
Возникли и новые задачи, связанные с возвращением с орбиты на Землю
крупногабаритных и тяжелых грузов.
Доставка с околоземной орбиты полезной нагрузки (экипажей,
оборудования и т.п.) осуществляется спускаемыми аппаратами (СА)
космических кораблей.
73
Рис. 4.8. Влияние формы спускаемого
аппарата иа аэродинамическое качество
и относительную массу полезной нагруз-
ки
Спускаемые аппараты (рис. 4.8)
типа "Восток" 1 возвращались с орби-
ты по баллистической траектории,
поскольку их корпус сферической
формы практически не создает подъ-
емную силу и их аэродинамическое
качество близко к нулю.
СА типа "Союз" и "Аполлон"
(США) 2, имеющие форму "фары",
при входе в плотные слои атмосферы
с аэродинамическим качеством Ка =
= 0,1...0,3 осуществляют скользящий
спуск на режимах интенсивного тор-
можения. Это позволяет достаточно
точно привести их в заданную точку
приземления, лежащую в плоскости
орбиты ИСЗ, или достаточно близ-
кую к ней.
Применение СА с несущим корпу-
сом 3 (Ка = 0,3...0,6) и крылатых ЛА
4 (Ка = 1,7...2,5) существенно увеличи-
вает эксплуатационные возм ожности
по транспортировке грузов, посколь-
ку такие аппараты обладают способ-
ностью маневрировать вне плоскости
орбиты при планирующем спуске в атмосфере, что позволяет расширить
географию мест их возможной посадки.
При планирующем спуске примерно вдвое по сравнению со
скользящим спуском снижается силовое воздействие на спускаемый
аппарат воздушного потока и настолько уменьшается интенсивность
омывающих аппарат высокотемпературных потоков воздуха, что это
позволяет при использовании тепловой защиты многократно применять
крылатый ЛА для операций в космическом пространстве. Однако
относительная масса полезной нагрузки тп н (отношение массы полезной
нагрузки к массе аппарата) планирующих ЛА существенно меньше, чем
у СА скользящего спуска вследствие увеличения массы конструкции за
счет наличия крыла и оперения и существенно большей площади (и
массы) теплозащитного покрытия. Так, на МВКА "Буран" площадь
теплозащитного покрытия превышает 1000 м2, что почти в 100 раз
больше, чем на СА "Союз".
Технико-экономические расчеты показывают, что при решении
широкого комплекса задач по доставке грузов на орбиту ИСЗ и с орбиты
74
на Землю рентабельными
могут быть как способы,
ставшие уже традиционны-
ми (использование однора-
зовых ракет-носителей и
СА), так и способы, осно-
ванные на применении мно-
горазовых ЛА, имеющих
частично или полностью
сохраняемые компоненты
(элементы ЛА), пригодные
для использования их в по-
следующих полетах.
В общем случае МВКА
(или МТКК - многоразовый
транспортный космический
корабль) можно представить
как ЛА, состоящий из раз-
гонной ступени и воздушно-
Рис. 4.9. МВКА первого поколения
космического самолета
(ВКС). Разгонная ступень
(например, ракета-носитель) обеспечивает вывод ВКС на орбиту ИСЗ.
ВКС (орбитальная ступень) производит все необходимые операции в
космосе и возвращается на Землю по-самолетному.
Первыми в этом классе ЛА стали "Спейс шаттл" (космический челнок,
США) и комплекс "Энергия" - "Буран" (СССР) (рис. 4.9). Почти
одинаковые параметры ТЗ на проектирование орбитальных ступеней
(масса и объем полезной нагрузки), одинаковые условия возвращения
с ОИСЗ с гиперзвуковой (от греч. hyper - над, сверх) скоростью,
соответствующей числам М = 5...25, и условия посадки - на ВПП
объективно привели к выбору практически одинаковых компоновочных
решений и геометрических параметров ВКС (ракетопланов) "Спейс
шаттл" 1 и "Буран" 4. Однако для комплексов в целом приняты
принципиально различные технические концепции.
МВКА "Спейс шаттл" - это, фактически, снабженный ускорителями
орбитальный самолет. Космический корабль 1, имеющий три маршевых
кислородно-водородных ЖРД, крепится к внешнему топливному баку
3, содержащему запасы жидкого водорода (горючее) и жидкого
кислорода (окислитель). На внешний топливный бак крепятся также два
разгонных ракетных двигателя твердого топлива (РДТТ) 2, в корпусах
РДТГ размещен твердый топливный заряд, горение которого обеспечива-
ет создание тяги.
75
При вертикальном старте МВКА "Спейс шаттл" необходимая для
преодоления силы земного тяготения тяга создается одновременной
работой РДТТ и маршевых ЖРД корабля, расходующих топливо из
внешнего топливного бака. После выгорания топлива разгонные РДТТ
отделяются от внешнего топливного бака и с помощью парашютной
спасательной системы, установленной под носовым обтекателем
разгонной ступени, совершают мягкое приводнение. Маршевые
двигатели корабля продолжают работу до выработки топлива из
внешнего бака, после чего происходит разделение корабля и бака. Бак,
двигаясь по баллистической траектории, падает в определенном районе
Атлантического океана. Специальная двигательная установка орбиталь-
ного маневрирования корабля "Спейс шаттл", состоящая из двух ЖРД,
работающих на самовоспламеняющихся компонентах топлива,
размещенного в баках корабля (горючее - монометилгидразин,
окислитель - четырехокись азота), завершает вывод корабля на орбиту.
Таким образом, МВКА "Спейс шаттл" (первый пилотируемый запуск
корабля, названного "Колумбия", состоялся 12 апреля 1981 г.) имеет два
компонента многоразового применения - собственно орбитальный
корабль и разгонные РДТТ.
Вертикальный старт "Бурана" обеспечивает универсальная двухсту-
пенчатая ракета-носитель "Энергия", первая ступень которой состоит
из четырех ракетных блоков 5, каждый из которых оснащен кислородно-
керосиновым ЖРД. Вторая ступень 6 "Энергии" - оснащенный четырьмя
кислородно-водородными ЖРД центральный блок, на который
устанавливаются блоки первой ступени и ВКС.
Старт комплекса производится при работающих двигателях первой
и второй ступеней. После выработки топлива из блоков первой ступени
они попарно отделяются, затем происходит их разделение, блоки
стабилизируются и осуществляют управляемый спуск в атмосфере.
Отделение "Бурана" от второй ступени происходит, когда в расчетной
точке промежуточной орбиты (суборбиты) достигается заданная
скорость. Включая на суборбите маршевый двигатель, "Буран" сначала
поднимается на промежуточную, а затем на круговую опорную орбиту,
а вторая ступень PH "Энергия", продолжая пассивный (баллистический)
полет, падает в определенном районе Тихого океана.
Таким образом, на момент первого запуска (15 ноября 1988 г.) система
"Энергия" - "Буран" имела только один компонент многоразового
применения - собственно орбитальный корабль.
Блоки первой ступени PH "Энергия" могут оснащаться парашютно-
ракетной системой спасения. Отработка этой системы в последующих
запусках и оснащение аналогичной системой второй ступени -
возможный .путь превращения комплекса "Энергия" - "Буран" в
полностью многоразовую систему.
76
Рис. 4.10. Концепция МВКА с дозвуковым
разгонщиком
Рис. 4.11. Концепция МВКА с гиперзвуковым
разгонщиком
Осуществление таких проектов МВКА, как "Спейс шаттл" и "Буран",
потребовало, безусловно, огромных материальных затрат. Окупиться
эти затраты могут лишь в процессе длительной эксплуатации таких
систем. Однако разработка, испытания и опыт их эксплуатации
открывают пути для поиска новых, более экономичных разработок
многоразовых космических ЛА. Очевидно, что парашютный способ
спасения отдельных компонентов МВКА достаточно сложен и не
обеспечивает возвращения спасаемых компонентов непосредственно на
стартовую площадку, а это значит, что для подготовки к повторному
полету потребуются значительные затраты средств и времени. Очевидно
также, что повторное использование всех компонентов космической
транспортной системы резко увеличивает ее экономическую эффектив-
ность. Резко увеличить экономическую эффективность можно также,
отказавшись от дорогостоящих сооружений стартового комплекса,
обеспечивающего вертикальный старт.
Использование крылатого ЛА в качестве разгонной ступени,
выводящей на орбиту ИСЗ крылатый возвращаемый аппарат, может
быть достаточно серьезной альтернативой другим проектным проработ-
кам МВКА.
Возможные проектные концепции таких МВКА проиллюстрированы
рис. 4.10 и 4.11.
Пилотируемые или автоматически управляемые двухступенчатые
ЛА, состоящие из дозвукового (рис. 4.10) или гиперзвукового (рис. 4.11)
самолета-разгонщика (носителя) 1, доставляют орбитальный ЛА 2 в
расчетную точку старта с заданными высотой и скоростью полета.
Аппараты проектируются под горизонтальный взлет аэрокосмического
комплекса и горизонтальную посадку самолета-разгонщика на обычный
аэродром, что значительно снижает расходы на его эксплуатацию.
Орбитальная ступень 2, отделяясь от самолета-разгонщика, выходит на
орбиту ИСЗ и после выполнения полетного задания возвращается на
аэродром старта, совершая посадку по-самолетному. В качестве
77
дозвукового самолета-носителя для таких перспективных многоразовых
аэрокосмических систем может быть использован самолет Ан-225
"Мрия", основные технические характеристики которого приведены в
гл. 20. Разработка гиперзвукового разгонщика, как и разработка
орбитальных ступеней МВКА следующего поколения, связана с
решением множества проблем. Среди них - проблема создания таких
аэродинамических форм, которые при приемлемом аэродинамическом
нагреве будут обладать гиперзвуковым аэродинамическим качеством
(Ка ~ 4), что позволит при возвращении орбитальной ступени с
экваториальной орбиты совершать посадку на аэродромы Европейского
континента.
Высокая эффективность гиперзвуковых самолетов-разгонщиков
может быть обеспечена созданием комбинированных силовых установок,
работающих в режиме воздушно-реактивных двигателей (их устройство
подробно рассмотрено в гл. 14) при полете в атмосфере со скоростями,
соответствующими числам М £ 5, а за пределами атмосферы - в режиме
ЖРД. Проектировщики, работающие над проектами МВКА следующего
поколения, возлагают большие надежды на силовую установку,
работающую при выведении МВКА на орбиту искусственного спутника
Земли в плотных слоях атмосферы с ожижением атмосферного воздуха,
т.е. с наполнением в процессе полета баков МВКА жидким кислородом,
что позволяет существенно снизить стартовую массу МВКА.
Гиперзвуковой разгонщик, совершающий полет со скоростями,
соответствующими М= 10... 12, может быть использован как одноступен-
чатый пассажирский ВКС, способный совершать полеты на высотах
между границами атмосферы и ближнего космоса. Перелет на таком
самолете из Лондона в Сидней (Австралия) займет 45 мин, а полное время
от старта до посадки, включая ожидание в воздухе при подходе к
аэродрому посадки, не превысит 70 мин, в то время как продолжитель-
ность полета по этому маршруту на современном дозвуковом пассажир-
ском самолете составляет 24 ч.
Создание крылатых ЛА, работающих в околоземном космическом
пространстве и в верхних слоях атмосферы с гиперзвуковыми скоростями
полета, позволит существенно повысить экономическую эффективность
полетов, однако для реализации этих возможностей требуется проведение
широкого комплекса научных и проектно-конструкторских исследова-
ний, направленных на обеспечение оптимального взаимодействия ЛА
с атмосферой при гиперзвуковых скоростях полета.
* * *
78
Мы уже отмечали, что малая масса ЛА, малое аэродинамическое
сопротивление, которое он испытывает в полете, высокая надежность
всегда желательны, но получены они могут быть только за счет каких-
либо других характеристик ЛА; однако при прочих равных условиях
взлетная масса ЛА может служить критерием эффективности при выборе
проектного решения.
Поскольку полет основан на преодолении гравитационной силы (силы
тяжести), уменьшение массы любой детали, агрегата, системы, ЛА в
целом - одна из основных задач, которую решают все специалисты,
участвующие в разработке ЛА.
В то же время созданы гигантские ЛА, реализующие различные
принципы полета.
Ракетно-космическая система "Сатурн" - "Аполлон", обеспечившая
в 1969-1972 гг. полеты американских астронавтов на Луну, является
самой большой в мире. Трехступенчатая ракета-носитель "Сатурн-5"
выводила на окололунную орбиту КК "Аполлон" (масса до 47 000 кг),
лунная кабина которого (масса 14 700 кг) с двумя астронавтами на борту
совершала посадку на Луну. Стартовая масса системы "Сатурн" -
"Аполлон" до 2950 000 кг, "сухая" масса (масса без топлива) 180 000 кг,
высота системы на старте 110,7 м, диаметр 10,1 м (по лопастям стабилиза-
торов 19,2 м).
Самым большим жестким дирижаблем было германское пассажирское
воздушное судно LZ-130 "Граф Цеппелин П" (1938 г.) с четырьмя
дизельными двигателями общей мощностью 3090 кВт. Длина дирижабля
245,1 м, диаметр 41,1 м, объем 199 981 м3, масса конструкции 116 000 кг,
аэростатическая подъемная сила 2 119 000 Н, полезная аэростатическая
подъемная сила 912 300 Н.
Гигантский транспортный планер "Мессершмитт" Me 321 (Германия,
1941 г.) с крылом размахом 55,24 м имел грузовой отсек (длина 11 м,
высота 3,3 м, ширина 3,15 м), способный вместить до 200 экипированных
солдат. Взлетная масса 35 000 кг.
Самый большой самолет в мире - Ан-225 "Мрия", разработанный в
ОКБ им. О.К. Антонова в 1988 г., является также первым самолетом,
рассчитанным на полеты при общей массе, превышающей 600 000 кг. В
течение года после первого полета на этом самолете было установлено
более 100 мировых рекордов грузоподъемности, скорости, высоты и
дальности полета.
Экспериментальный двухвинтовой вертолет (1967 г.) поперечной
схем ы Ми-12 (В-12) ОКБ генерального конструктора М.Л. Миля - самый
большой в мире. Полный размах лопастей двух несущих винтов 67 м,
длина фюзеляжа 37 м, мощность каждого из четырех двигателей 4800 кВт.
79
Нормальная взлетная масса вертолета 97 000 кг (максимальная -
105 000 кг), полезная (коммерческая) нагрузка до 40 000 кг.
Приведенные данные, с одной стороны, характеризуют сложность
проблем, поставленных в техническом задании на проектирование, а с
другой - высокий научно-технический потенциал проектировщиков,
сумевших преодолеть огромные гравитационные силы.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• принцип полета; баллистический полет; ракетодинамический полет;
аэростатический полет; аэродинамический полет;
• установившийся равномерный горизонтальный полет;
• гиперзвуковая скорость;
• подъемная сила; аэростатическая (архимедова) подъемная сила; сила
сопротивления внешней среды; аэродинамическое качество; тяга; тяга винта;
невесомость;
• планер; самолет; самолет вертикального взлета и посадки; самолет
укороченного взлета и посадки; самолет-буксировщик; дирижабль; вертолет;
ракетно-космическая система;ракета-носитель; самолет-разгонщик; спускаемый
аппарат; орбитальный самолет; воздушно-космический многоразовый аппарат;
многоразовый транспортный космический корабль; ракетоплан;
• весовая отдача;
• жидкостный ракетный двигатель; ракетный двигатель твердого топлива;
реактивное сопло; горючее; окислитель;
• несущая поверхность; несущий винт; лопасть винта.
80
Глава 5
ОСНОВЫ АЭРОДИНАМИКИ
Аэродинамика - раздел механики, в котором изучаются законы
движения газообразной среды (например, воздуха) и ее взаимодействие
с движущимися в ней обтекаемыми твердыми телами.
Несомненен приоритет нашей страны в ряде крупнейших открытий
в области аэродинамики. Члены Российской академии наук Л. Эйлер и
Д. Бернулли заложили основы науки о движении тел в воздушном
пространстве. Русские ученые-механики Н.Е. Жуковский и С.А. Чаплы-
гин - авторы фундаментальных работ в области аэродинамики.
И.В. Мещерский - видный ученый в области теоретической и прикладной
механики - разработал основы механики тел переменной массы, на
основании его теорем построены уравнения движения самолета. Метод
теоретического определения летных характеристик самолета создал
Н.Е. Жуковский. Современная теория устойчивости движения самолета
базируется на исследованиях А.М. Ляпунова - русского математика и
механика.
5.1. ВЗАИМОДЕЙСТВИЕ СРЕДЫ И ДВИЖУЩЕГОСЯ ТЕЛА.
КЛАССИФИКАЦИЯ СКОРОСТЕЙ ПОЛЕТА
Характер взаимодействия внешней газовой среды (атмосферы) и
движущегося в ней тела (ЛА) существенным образом зависит от скорости
полета ЛА и от высоты полета, поскольку с высотой изменяются
параметры атмосферы.
При небольших скоростях движения происходит в основном силовое
взаимодействие, т.е. в результате движения возникают силы, которые
оказывают сопротивление движению тела в газовой среде. С ростом
скорости силовое взаимодействие сопровождается тепловым взаимо-
действием, т.е. нагревом поверхности обтекаемого тела вследствие
теплопередачи от газа к телу. При очень больших скоростях полета
аэродинамический нагрев становится настолько сильным, что может
разрушить материал конструкции ЛА путем его оплавления или
сублимации (от лат. sublimo - возношу), т.е. непосредственного перехода
материала ЛА из твердого в газообразное состояние и, как следствие,
уноса разрушенной части материала. Аэродинамический нагрев может
привести к химическому взаимодействию между газовой средой и
81
материалом конструкции ЛА, в результате чего также возникает эффект
уноса части материала. На больших скоростях полета вследствие
механического воздействия может возникнуть эрозия (от лат. erosio -
разъедание) материала конструкции, что также сопровождается
эффектом уноса массы, или абляцией (позднелат. ablatio - отнятие).
Естественно, что в первую очередь проектировщика интересует
силовое взаимодействие ЛА и внешней газовой среды, поскольку в
результате этого взаимодействия возникают силы, обеспечивающие полет
ЛА.
. Движение ЛА, раздвигающего воздух, вызывает возмущения
воздушной среды, которые, как уже отмечалось в подразд. 3.2.1,
распространяются во все стороны со скоростью звука в виде колебаний
давления и плотности воздуха. При малых скоростях полета эти
возмущения значительно опережают ЛА и воздушный поток, еще даже
не приблизившись к нему, изменяет свое направление^ раздвигаясь и
"приспосабливаясь" к обтеканию частей ЛА. Сжатие воздуха при этом
незначительно.
С ростом скорости полета ЛА и приближением ее к скорости звука
(скорости распространения возмущений) созданные ЛА возмущения не
могут значительно опередить его. Взаимодействие ЛА с невозмущенной
("не подготовленной" к обтеканию ЛА) внешней средой вызывает
сильное сжатие воздуха, повышение его давления и, как следствие,
увеличение сил, действующих на ЛА. Таким образом, критерием,
позволяющим оценить силовое взаимодействие ЛА и воздушной среды, -
критерием сжимаемости потока воздуха может служить число М. Чем
больше число М, тем сильнее проявляется в полете эффект сжимаемости
воздуха. На основании этого критерия принята следующая классифика-
ция скоростей полета ЛА:
• малые дозвуковые скорости, соответствующие числам М <: 0,4.,.0,6,
при которых сжимаемость воздуха практически мало влияет на силовое
взаимодействие ЛА и окружающей среды;
• большие дозвуковые скорости, соответствующие числам М ~ 0,6...0,9,
при которых влияние сжимаемости на силовое взаимодействие весьма
существенно, однако тепловое взаимодействие практически отсутствует
и его можно не рассматривать;
• околозвуковые (трансзвуковые, от лат. trans- через, за, за пределами)
корости, соответствующие числам М = 1;
• сверхзвуковые скорости (М > 1), при которых проектировщики
обязаны учитывать не только силовое, но и тепловое взаимодействие ЛА
и окружающей среды;
• гиперзвуковые скорости, соответствующие числам М * 5, при
которых силовое и тепловое взаимодействия ЛА и окружающей среды
82
настолько интенсивны, что могут сопровождаться химическим и
механическим взаимодействиями и чреваты возможностью эрозии и
уноса материала конструкции.
При проектировании ЛА для определения его летных характеристик,
разработки конструкции агрегатов и систем необходимы данные по
интенсивности всех видов взаимодействия ЛА с воздушным потоком.
Специфика взаимодействия на различных скоростях полета требует
применения различных математических моделей, учитывающих эту
специфику и базирующихся на различной математической основе.
Теоретическое определение величин, характеризующих это взаимодей-
ствие, практическое измерение их в полете весьма сложно. С достаточной
для инженерных работ точностью выполнить эту задачу позволяет
аэродинамический эксперимент.
5.2. АЭРОДИНАМИЧЕСКИЙ ЭКСПЕРИМЕНТ
В аэродинамике используется сформулированный на основании
принципа относительности классической механики принцип обратимос-
ти: величина, направление и точка приложения аэродинамических сил
не зависят от того, обтекается ли тело потоком воздуха или же оно
движется в неподвижном воздухе, и определяются только величиной и
направлением относительной скорости тела и потока. Принцип
обратимости позволяет вместо сил, действующих на реальный ЛА при
его движении, рассмотреть силы, действующие на неподвижную модель
ЛА, обтекаемую потоком воздуха (рис. 5.1). Если модель самолета 1
закрепить на системе динамометров и направить на неподвижную модель
поток воздуха со скоростью йм, то динамометр 2 покажет подъемную
силу Уя м, а динамометр 3 - силу сопротивления модели Ха м.
Система устройств, позволяющих
измерять действующие на модель
силы, называется аэродинамическими
весами. Измерив силы, действующие
на модель, можно рассчитать силы,
которые будут действовать на реаль-
ный (натурный) ЛА, если в процессе
эксперимента было обеспечено гео-
метрическое подобие модели натур-
ному ЛА, а также кинематическое и
динамическое подобие скоростей
потока, обтекающего натурный ЛА
и его модель. Для этого необходимо
обеспечить равенство для модели и
Рис. 5.1. Измерение аэродинамических
сил на модели
83
8
Рис. 5.2. Принципиальная схема аэродинамической трубы
натурного ЛА некоторых безразмерных параметров, составленных из
физических и геометрических величин, характеризующих модель и
натурный ЛА, - так называемых определяющих критериев подобия.
Такими параметрами, например, являются:
число Маха М - один из основных критериев механического подобия
в аэродинамике, влияние которого существенно в тех случаях, когда
нельзя пренебрегать сжимаемостью газа;
число Рейнольдса Re, названное так в честь английского физика и
инженера О. Рейнольдса, - критерий подобия для течения вязких
жидкостей и газов, характеризующий отношение сил инерции к силам
вязкости.
Для создания потока воздуха, отвечающего определенному критерию
подобия, при испытании моделей используются специальные установки -
аэродинамические трубы. На рис. 5.2 показана принципиальная схема
аэродинамической трубы.
Аэродинамическая труба представляет собой замкнутый воздушный
канал. В рабочей части трубы 1 на аэродинамических весах 2 устанавли-
вается испытываемая модель 3. По замкнутому воздушному каналу
вентилятор 6, приводимый в действие электромотором 7, прогоняет
воздух. Пройдя через спрямляющую решетку 9, которая служит для
создания равномерного поля скоростей по всему сечению трубы, и
сужающуюся часть трубы (конфузор) 10, в которой воздух разгоняется
до необходимой скорости, воздушный поток входит в рабочую часть
84
трубы, Пройдя рабочую часть трубы, воздушный поток попадает в
расширяющуюся часть трубы (диффузор) 4, где плавно тормозится, что
снижает сопротивление движению воздуха по каналу и в поворотных
лопатках 8 и увеличивает КПД вентилятора. Лопасти вентилятора
защищены прочной сеткой 5 от повреждений на случай возможного
разрушения испытываемой модели. Система поворотных лопаток 8
обеспечивает плавное течение воздушного потока по каналу трубы. Для
создания равномерного поля скоростей в рабочей части трубы ее
поперечное сечение имеет обычно форму круга или эллипса.
Мы рассмотрели простейшие принципиальные схемы аэродинами-
ческих весов и аэродинамической трубы. В реальности это сложные
инженерные сооружения, построенные специально для проведения
определенного вида аэродинамических экспериментов. ЦАГИ располага-
ет большим числом различных аэродинамических труб, позволяющих
испытывать натурную авиационную технику и модели в широком спектре
скоростей потока воздуха (от малых, около нескольких метров в секунду,
до больших, в несколько раз превышающих скорость звука).
Кроме количественных характеристик (значений сил, действующих
на обтекаемое потоком тело) всегда важно знать качественную картину
обтекания, видеть, насколько плавно обтекается тело потоком воздуха.
Существуют различные методы, позволяющие визуализировать (сделать
видимой) картину обтекания. Видимая картина обтекания тела потоком
называется аэродинамическим спектром (спектром обтекания). Так, если
на поверхность модели (или реального самолета) наклеить одним концом
шелковые нити длиной 50... 100 мм, то, перемещаясь под действием
потока воздуха, свободные концы шелковинок позволят представить
картину обтекания - направления струй потока, обтекающих тело.
Располагая шелковинки на специальных державках перед обтекаемым
телом и за ним, мы можем представить полную картину обтекания тела.
Схематизированная картина обтека-
ния крыла самолета воздушным
потоком представлена на рис. 5.3.
При обтекании крыла 1 струйка 2
(условно выделенный движущийся
объем воздуха) разделяется на две
части, одна из которых (5) обтекает
крыло сверху, а другая (б) - снизу.
Струйки 5, обтекающие крыло свер-
ху, отклоняются в сторону фюзеляжа
5, а струйки 6, обтекающие крыло
снизу, отклоняются к концу крыла
вследствие перетекания воздуха с
8
Рис. 5.3. Схематизированная картина
обтекания крыла
85
Рис. 5.5. Части самолета в спутной струе
крыла
нижней поверхности на вер-
^аи^^'а^онцевь|е вих**и за К₽Ь1ЛОМ летя1цего хнюю через концевую кромку
крыла. Струйки 8, перетекая с
нижней поверхности, захватыва-
ют часть струек 7 с верхней поверхности и образуют стекающий с конца
крыла мощный концевой вихрь 9. Встречаясь на задней кромке, струйки,
стекающие с верхней и нижней поверхностей крыла под разными углами,
закручивают воздух и образуют непрерывную вихревую пелену, которая
уносится потоком воздуха назад.
Таким образом, за крылом летящего самолета образуется мощная
вихревая пелена - спутная струя, вихревой след (рис. 5.4). Она сохраняет-
ся достаточно долго после пролета самолета и представляет серьезную
опасность для летящих следом самолетов. Попадание самолетов в
спутную струю равноценно полету в турбулентной атмосфере с
восходящими и нисходящими потоками большой интенсивности,
Наличие зоны турбулентности после пролета тяжелого самолета,
совершающего взлет или посадку, приводит к необходимости увеличи-
вать временной интервал перед пролетом следующего самолета
(особенно легкого) и фактически может регламентировать интенсивность
полетов в районе аэродрома.
В спутную струю от крыла могут попадать части самолета, находящи-
еся за крылом (рис. 5.5), что влияет на их аэродинамические характерис-
тики. Это заставляет проектировщиков учитывать наличие спутной струи
при разработке проекта.
Рассмотрим более подробно картину обтекания крыла в его сечении,
образованном плоскостью, параллельной вектору скорости набегающего
потока (плоскость 4 на рис. 5.3). Чтобы проследить траектории струй
воздуха (рис. 5.6), выпустим в поток воздуха 1 дым 2 от специального
дымаря через отверстия в трубке 5.
Струйки дыма 4 дадут нам спектр обтекания. В спектре обтекания
можно выделить некоторые характерные участки. Часть потока 5 перед
телом, в которой струйки не деформированы присутствующим в потоке
телом и текут прямолинейно с одинаковой скоростью, называется
86
Рис. 5.6. Аэродинамический спектр обтекания крыла
невозмущенным потоком. Скорость невозмущенного потока в дальней-
шем будем обозначать символом Часть потока б, в которой струйки
деформированы присутствующим в потоке телом, называется возмущен-
ным потоком. Под влиянием вязкости (внутреннего трения) на поверхнос-
ти тела 7 скорость воздуха становится равной нулю. По мере удаления
от тела в направлении, перпендикулярном к его поверхности, скорость
течения увеличивается и на некотором расстоянии от поверхности тела,
очерченном границей 8, достигает скорости, которая по мере удаления
от тела практически не меняется. Слой воздуха, в котором происходят
изменения местной скорости обтекания тела, называется пограничным
слоем 9а, 96, 9в. В пограничном слое вначале струйки воздуха будут
двигаться плавно, слоисто, не перемешиваясь между собой. Эта часть (9а)
пограничного слоя называется ламинарным (от лат. lamina - лист,
пластинка, полоска) пограничным слоем. Затем вследствие шероховатости
поверхности тела и вязкости воздуха поток начнет завихряться, частицы
воздуха будут двигаться по произвольным криволинейным траекториям.
Эта часть (Ре) пограничного слоя называется турбулентным погранич-
ным слоем. Часть 96 пограничного слоя между ламинарным и турбулен-
тным пограничными слоями называется переходным пограничным слоем.
Режим течения характеризуется числом Re. Для каждого вида течения
существует критическое число Рейнольдса ReKpHT. Если характеризующее
поток число Re < Re^n,., то течение всегда ламинарное, при Re > ReK₽HT
течение обычно турбулентное.
Силы, возникающие при движении тела в воздухе, существенным
образом зависят от процессов, происходящих в пограничном слое. Сила
трения потока воздуха о тело, составляющая значительную долю силы
87
Рнс. 5.7. Эпюры скоростей в пограничном слое
сопротивления движению тела в воздухе, реализуется полностью в
пограничном слое. Сбегающий с обтекаемого тела пограничный слой
образует спутную струю 11, которая представляет собой поток
завихренного воздуха. Часть потока 10, находящаяся вне пограничного
слоя, в которой вязкость (силы трения между отдельными слоями
воздуха) практически не проявляется, называется свободным, потоком
(потенциальным слоем).
Эпюры (франц, ёриге - чертеж) скоростей в пограничном слое
представлены на рис. 5.7. Видно, что в концевой части профиля (см.
сечения VI-VI и VII-VII) в пограничном слое начинается течение воздуха
против основного потока, образуются крупные вихри, которые
периодически срываются с поверхности крыла. Начинается так
называемый срыв потока. В свободном потоке скорость в струе вначале
возрастает от скорости невозмущенного потока Ую до максимальной
местной скорости Ущ в наиболее узком сечении струи, а затем
уменьшается по мере расширения струи (KIV < Уш), и на определенном
расстоянии от обтекаемого тела местная скорость в струе снова
становится равной скорости невозмущенного потока. На передней
кромке существует точка 1, к которой струйка подходит под прямым
углом и в которой она при ударе о тело полностью тормозится. Эта точка
называется критической точкой или точкой полного торможения
потока.
В процессе эксперимента можно измерить давление в различных
точках обтекаемого тела. Построив перпендикулярно к контуру профиля
векторы, величины которых равны значениям давлений, измеренным в
соответствующих точках, получим эпюру (распределение) давления по
профилю крыла (рис. 5.8), рассмотренному выше. Измерения показыва-
ют, что на носике профиля образуется зона повышенного давления,
отмеченная на эпюре знаком "плюс", а на верхней и нижней поверхнос-
тях профиля - зоны пониженного давления, которые отмечены на эпюре
88
Рис. 5.8. Эпюра (распределение) давления Рис. 5.9. Полная аэродинамическая сила
по профилю крыла
знаком "минус". Таким образом, в результате аэродинамических
экспериментов установлено, что причинами возникновения сил, дей-
ствующих на обтекаемое потоком воздуха тело, являются трение воздуха
в пограничном слое и давление воздушного потока на обтекаемое тело,
5.3. АЭРОДИНАМИЧЕСКИЕ СИЛЫ
Сумма всех сил (сил давления и сил трения), возникающих при
обтекании тела, называется полной аэродинамической силой Ra (рис. 5.9).
Точка приложения полной аэродинамической силы Ra называется
центром давления (ц.д.). Часть полной аэродинамической силы,
перпендикулярная к направлению полета (н.п.), точнее, к вектору
скорости набегающего потока, является подъемной силой Уа. Часть
полной аэродинамической силы Ха, параллельная вектору скорости
набегающего потока, является силой лобового сопротивления.
На аэродинамические силы влияют различные факторы. Как мы уже
отмечали, сила трения воздуха о тело реализуется полностью в
пограничном слое. И чем меньше будет шероховатость обтекаемого тела,
тем дальше по поверхности тела будет сохраняться ламинарный
пограничный слой и меньше будет сила сопротивления трения, поскольку
меньше энергии будет расходоваться на перемешивание потока в
пограничном слое. Конструктор всегда должен думать о состоянии
поверхности частей самолета, выступающих в поток, в частности о
конструкции стыка листов обшивки, образующих внешние обводы
89
Рис. 5.10. Стык листов обшивки Рис. 5.11. Влияние формы тела на полную
аэродинамическую силу
самолета. Так, стык листов обшивки 7 и 2, представленный на рис. 5.10, а,
с точки зрения аэродинамики менее предпочтителен, чем стык,
изображенный на рис. 5.10, б, поскольку уступ, образованный листами,
и закладная головка заклепки 3 выступают в поток и способствуют
турбулизации пограничного слоя. Однако стык, показанный на
рис. 5.10, б, технологически сложнее, так как требуется обработка гнезд
под потайные закладные головки заклепок 4, тяжелее, поскольку
дополнительно используется подкладная деталь 5, и, естественно, дороже.
На аэродинамические силы существенно влияет и форма обтекаемого
тела. Обозначим полную аэродинамическую силу установленной в
потоке пластинки (рис. 5.11, a) Ra (а); пластинки с носовым обтекателем
(рис. 5.11, б) Ra (б)-, пластинки с хвостовым обтекателем (рис. 5.11, в)
Ra (в); пластинки с носовым и хвостовым обтекателями - удобообтекае-
мого (каплевидного, веретенообразного) тела (рис. 5.11, г) Ra (г). В дан-
ном случае полная аэродинамическая сила - это, естественно, сила
лобового сопротивления. Ra (б) « 0,25 Ra (а), так как носовой обтекатель
обеспечивает постепенную деформацию струй в процессе обтекания;
Ra(e) ~ 0,75 Ra (а), так как хвостовой обтекатель способствует плавному
расширению потока, завихренная спутная струя становится меньше и
7?а (г) « 0,05 7?я (а).
Установлено также, что если увеличить в п раз площадь максимально-
го поперечного сечения (миделя, от голл. middel-средний) /'’обтекаемого
тела (рис. 5.12) - площадь миделя, сохранив подобие тел, то в п раз
увеличится и полная аэродинамическая сила, т.е. при F2 = имеем
Аа2~ и/?а1.
Рассмотрим, как влияет на полную аэродинамическую силу положение
обтекаемого тела относительно набегающего потока воздуха. Угол а
90
Рис. 5.12. Влияние площади миделя на по-
лную аэродинамическую силу
Рис. 5.13. Зависимость аэродинамических сил
от угла атаки
между направлением вектора
скорости набегающего потока и
характерной осью обтекаемого
тела называется углом атаки. На
рис. 5.13 представлены графики
зависимости составляющих по-
лной аэродинамической силы от
угла атаки для профиля крыла.
Для профилей различной формы
можно найти некоторый угол
атаки (рис. 5.13, а), при котором распределение давления на поверхности
профиля таково, что подъемная сила Ya отсутствует, и угол атаки, при
котором сила лобового сопротивления Ха минимальна.
С увеличением угла атаки до некоторого значения (рис. 5.13, б и в)
профиль обтекается плавно, увеличивается разрежение на верхней
поверхности, зона повышенного давления распространяется от точки
полного торможения на всю нижнюю поверхность профиля. Подъемная
сила растет.
С ростом подъемной силы Ya, которая определяется разностью
давлений под профилем и над ним, растет и сила лобового сопротивления
Ха, которая определяется силой трения в пограничном слое Ха тр и силой
давления ХаД, образующейся вследствие разности давлений перед про-
филем и за ним. Поток, обтекающий профиль, отклоняется вниз.
Отклонение потока тем больше, чем больше угол атаки (или, что то же
самое, больше подъемная сила). При обтекании крыла за счет перетека-
ния потока через кромку (см. рис. 5.3) и образования концевого вихря
поток также отклоняется вниз. Явление отклонения потока вниз при
обтекании называется скосом потока. Скос потока вызывает (индуциру-
ет) дополнительную силу лобового сопротивления, которая называется
91
силой индуктивного сопротивления Ха Установлено, что сила индуктив-
ного сопротивления пропорциональна квадрату подъемной силы:
*а(- Уо2.
Таким образом, Ха = Ха тр + Ха д + Ха f.
При увеличении угла атаки растет и турбулизируется пограничный
слой, начинается срыв потока с верхней поверхности крыла. Подъемная
сила начинает уменьшаться, азатем резко падает вследствие интенсивно-
го срыва потока (рис. 5.13, д).
Угол атаки, при котором подъемная сила достигает максимального
значения, называется критическим углом атаки акр (рис. 5.13, г).
Обтекание крыла самолета практически никогда не бывает симметрич-
ным, срыв потока и уменьшение подъемной силы на одной из консолей
крыла (франц, console-конструкция, жестко закрепленная одним концом
при свободном другом) приводит к сваливанию самолета в штопор -
пространственному вращательному движению самолета с потерей
высоты. По мере приближения к критическому углу атаки из-за
начинающегося срыва потока ускоряется рост лобового сопротивления.
С изменением угла атаки изменяется и положение точки приложения
полной аэродинамической силы (положение центра давления).
При создании современных самолетов проводится большой объем
аэродинамических ("трубных") экспериментов, их время составляет
10 000...15 000 ч. Цель этих экспериментов - выявление "локальных"
характеристик,т.е. оценкавлияния на аэродинамику самолета отдельных
его конструктивных параметров, которое трудно или невозможно
оценить р асчетами, а также экспериментальное подтверждение основн ых
("глобальных") характеристик, полученных в результате проектных
расчетов, методика которых базируется на основных законах аэродина-
мики.
5.4. ОСНОВНЫЕ ЗАКОНЫ АЭРОДИНАМИКИ
При реальном полете самолета непрерывно изменяются скорость и
другие параметры воздушного потока, обтекающего самолет. Соотве-
тственно изменяются и спектры обтекания, и эпюры (распределения)
давления по поверхности самолета. Такое движение называется
неустановившимся. Для создания теоретической модели явления введем
упрощения, которые позволят нам выяснить основные закономерности,
упростят выводы, не снижая, однако, их практического, инженерного
значения.
Упрощение первое. Будем рассматривать только установившееся
движение - такое движение воздушного потока, в каждой точке которого
92
Рис. 5.14. Схема к выводу основных урав-
нений аэродинамики
параметры (V- скорость, р - давле-
ние, р - плотность) не меняются с
течением времени.
Упрощение второе. Примем так
называемую гипотезу сплошности,
или неразрывности, среды. Не будем
учитывать молекулярные движения
воздуха и межмолекулярные проме-
жутки, т.е. будем рассматривать
воздух как сплошную, неразрывную
среду с определенной плотностью р,
которая, однако, может изменяться
за счет изменения "плотности упа-
ковки" молекул воздуха, имеющих ничтожно малый объем.
Упрощение третье. Будем считать, что вязкость воздуха равна нулю,
т.е. нет сил внутреннего трения. Это значит, что из спектра обтекания
тела мы удалили пограничный слой, пренебрегли силой лобового
сопротивления, обусловленного трением воздуха о поверхность самолета.
В дальнейшем, при описании аэродинамических характеристик самолета,
учесть эти силы нам позволит специальный раздел аэродинамики -
теория пограничного слоя.
В соответствии с принятыми упрощениями рассмотрим движение
струйки неразрывной невязкой среды - идеального сжимаемого газа -
внутри трубки тока (рис. 5.14), образованной неизменными во времени
траекториями частиц воздуха, проходящими по границе струи.
Уравнение неразрывности является математическим описанием закона
сохранения материи для струйки идеального сжимаемого газа.
Рассмотрим течение струйки в соответствии со схемой, приведенной
на рис. 5.14. Через сечение струйки I-I внутрь трубки тока за время dt
войдет столбик газа объемом
F^dt,
где Fj - бесконечно малая площадь столбика газа (площадь поперечного
сечения струйки), м2; К] - скорость потока газа в сечении, м/с; V\dt -
длина столбика газа, м.
За одну секунду через сечение I-I струйки пройдет газ массой
™1сек = Pi^i^p
где тм] сек - секундный массовый расход газа, кг/с; р[ - плотность газа,
кг/м3; Fp Kj - секундный объемный расход газа, м3/^
93
В соответствии с гипотезой неразрывности через сечение струйки П-П
из трубки тока за одну секунду выйдет газ массой т2 сек = р2£2 Равной
массе т\ сек газа, вошедшего в трубку тока через сечение I-I. Таким
образом, секундный массовый расход газа через любое сечение струйки
есть величина постоянная:
pFV = const.
Это соотношение называется уравнением неразрывности или
уравнением постоянства расхода. При движении самолета с малыми
дозвуковыми скоростями V, соответствующими числам М s 0,4...0,6
(конкретное, местное, значение М зависит от формы обтекаемого тела),
сжимаемость воздуха практически не проявляется, т.е. можно считать,
что плотность воздуха постоянна (р = const). В этом случае для
рассматриваемой струйки рj = р2 и уравнение неразрывности примет вид
VF = const.
Отсюда следует, что для несжимаемого идеального газа скорость в
струйке V тем больше, чем меньше площадь сечения струйки F, и
наоборот.
Уравнение Бернулли является математическим описанием закона
сохранения энергии £ для струйки идеального сжимаемого газа, который
записывается в виде
Et = const,
т.е. внутри трубки тока, когда нет обмена массой и энергией между
струйкой и окружающей ее средой (соседними струйками), сумма всех
видов энергии в любом сечении i струйки постоянна.
Учитывая только кинетическую энергию и энергию силы давления
в струйке, для любого сечения струйки можно записать
где £;• - полная энергия в i-м сечении струйки, Дж; Ек - кинетическая
энергия движущегося через сечение газа; Е - энергия силы давления газа.
Кинетическая энергия характеризует способность движущегося газа
производить работу:
94
_ m^V2dt
£- - —T—
Энергия силы давления характеризует способность газа производить
работу силой давления, проталкивающей газ через сечение струйки:
Ер = PL,
где Р = pF-сила давления, Н; р - давление газа в сечении струйки, Па;
F- площадь поперечного сечения струйки, м2; L - перемещение данного
объема газа со скоростью Vза промежуток времени dt, L = Vdt, м.
Отсюда
р р
С учетом этих выражений запишем уравнение Бернулли в виде
/п У2Л mpdt
_£2----. + . .. = const.
2 р
В соответствии с уравнением неразрывности массовый расход
7исек dt = const. Для идеального несжимаемого газа р = const. Поэтому
для идеального несжимаемого газа уравнение Бернулли запишем в виде
рИ2
----+ р ~ const,
2
р JZ2 /А Л \ ГТ
где — скоростной напор (динамическое давление), Па;р -статическое
давление, Па.
Для идеального несжимаемого газа сумма скоростного напора и
статического давления в струйке есть величина постоянная, т.е. с
увеличением скорости Vдавление в струйкер падает, и наоборот.
Знание основных законов аэродинамики позволяет построить
математическую модель картины обтекания тела свободным потоком
(без учета пограничного слоя) и определить значения аэродинамических
сил, зависящих от распределения давления по поверхности тела. Если
рассмотреть движение частиц газа 1,2, Зъ различных струйках потока,
обтекающего тело (рис. 5.15), то в силу гипотезы неразрывности эти
частицы в любой заданный момент времени должны проходить через
95
Р,
II. Pl
III
II к3=кда ш
Рз=Р«
I Vi
Рз
Рис. 5.15. Схема к построению математической
модели картины обтекания
различные сечения потока (се-
чения I-I, П-П, Ш-Ш) одно-
временно. Частица 3 движется
в струйке, на которой не сказы-
вается присутствие в потоке
тела, поэтому в любом сечении
ее скорость К3 и давление в
струйкер3 будут равны скорос-
ти и давлению в струйке р„
невозмущенного потока.
Частицы 7 и 2, движущиеся
в искривленных струйках по
криволинейным траекториям,
должны преодолевать более
длинный путь, чем частица 3, и, следовательно, двигаться с бблыпими
скоростями - местными скоростями обтекания, т.е. > Vj, V2> V„.
В соответствии с уравнением Бернулли увеличение местных скоростей
обтекания приведет к снижению давления в струйке, г.е.р} <рх,ир2<
<Рт-
Зная форму обтекаемого тела, можно рассчитать траектории
движения частиц, определить изменение площади струек вдоль тела. По
уравнению неразрывности вычисляются местные скорости обтекания,
а по уравнению Бернулли-распределение давления по поверхности тела,
Расчетные методики, построенные на базе основных законов
аэродинамики, позволяют достаточно точно описать картины обтекания
тел, полученные в результате эксперимента. Очевидно, что для
симметричного профиля, обтекаемого потоком воздуха под нулевым
углом атаки, характер течения струй, их площади и местные скорости
обтекания в г-х сечениях на верхней поверхности и на нижней
поверхности убудут одинаковы. В этом случае для параметров потока
(Кир) в соответствии с уравнением Бернулли справедливы соотношения,
представленные на рис. 5.16. При несимметричном обтекании на малых
углах атаки на основании уравнения Бернулли получим соотношения,
представленные на рис. 5.17.
Для каждого z-го сечения уравнения для местных скоростей обтекания
профиля V{ можно записать в виде
Г( = К. + ЛК(>
96
Рис. 5.16. Соотношения, полученные из
уравнения Бернулли при симметричном
обтекании
Рис. 5.17. Соотношения, полученные из
уравнения Бернулли при несимметричном
обтекании
где И. - скорость набегающего потока; ДИ, - приращение скорости,
зависящее от формы траектории движения частиц воздуха вдоль
профиля и, следовательно, обусловленное его формой.
Распределение скоростей Д7( при несимметричном обтекании
профиля (рис. 5.18) сходно с распределением скоростей при вихревом
движении. Н.Е. Жуковский, разработавший в 1906 г. теорию
подъемной силы крыла, предложил моделировать крыло вихрем, при
взаимодействии которого с плоскопараллельным набегающим по-
током скорости их суммируются. На верхней поверхности вихря
скорость частиц увеличивается (И(= И_ +ДИ(), на нижней уменьшает-
ся (И,= И_-ДИ(). Значение возникающей при этом подъемной силы
зависит от интенсивности вихря, которая измеряется так называемой
циркуляцией скорости Г профиля крыла, определяемой уравнением
Г =
где ds - элементарная длина соотве-
тствующего участка контура.
Н.Е. Жуковский вывел теоретичес-
кую формулу для определения подъ-
емной силы для части длиной I крыла
бесконечного размаха
Рис. 5.18. Распределение местных скорос-
тей (вихревое движение) при несиммет-
ричном обтекании профиля
Ya = РК./Г,
4 7425
97
где Ya - подъемная сила, Н;
р - плотность воздуха, кг/м3;
V„ - скорость потока, м/с; / -
длина части крыла, м; Г - цир-
куляция скорости профиля
крыла, м2/с.
Н.Е. Жуковский и С.А.
Чаплыгин первыми теорети-
Рис. 5.19. Вихревая поверхность, моделирующая «СК И установили СВЯЗЬ МеЖДУ
крыло формой профиля, углом атаки
и возникающей вокруг профи-
ля циркуляцией.
Таким образом, простейшие математические модели, описывающие
обтекание тела идеальным газом, позволяют рассчитать составляющую
полной аэродинамической силы - силу давления Рл, возникающую в
результате преобразования кинетической энергии потока (скоростного
напора р72/2) в энергию давления (статическое давление р).
В инженерных аэродинамических расчетах принято выражать полную
аэродинамическую силу формулой
Я = CR ^-S,
“ R> 2
где Ra - полная аэродинамическая сила, Н; CR - безразмерный
коэффициент полной аэродинамической силы; р 72/2- скоростной напор,
Па; 5 - характерная площадь обтекаемого тела, м2.
Полная аэродинамическая сила прямо пропорциональна кинетичес-
кой энергии потока, которая при обтекании тела трансформируется в
энергию трения в пограничном слое и в потенциальную энергию
давления. Этот фактор учитывается в фор муле величиной р У2/2. Влияние
размеров обтекаемого тела учитывается характерной площадью S,
причем в качестве характерной площади может быть принята либо
площадь миделя фюзеляжа самолета, либо площадь крыла. Безразмерный
коэффициент полной аэродинамической силы Ся определяется опытным
путем в процессе аэродинамических экспериментов или теоретическими
расчетами. Он учитывает влияние на величину Ra формы обтекаемого
тела, состояния его поверхности и положения обтекаемого тела
относительно набегающего потока воздуха.
Современные расчетные методы, в которых используется моделирова-
ние крыла 1 системой (до нескольких сотен) П-образных вихрей 2
(рис. 5.19), позволяют в результате решения на ЭВМ системы уравнений,
98
описывающих взаимодействие вихрей, рассчитать циркуляцию и
достаточно точно определить значения аэродинамических сил и их
распределение по несущей поверхности.
5.5. ЭЛЕМЕНТЫ АЭРОДИНАМИКИ БОЛЬШИХ СКОРОСТЕЙ
Ранее рассматривалось обтекание тел потоком воздуха при скоростях
(числах М), на которых сжимаемость воздуха практически не проявляет-
ся. С увеличением скоростей полета (чисел М) сжимаемость воздуха
существенно изменяет картину обтекания. Это связано с особенностями
распространения возмущений при сверхзвуковых течениях.
Если самолет, каждая точка которого является источником слабых
возмущений, распространяющихся во все стороны со скоростью звука в
виде колебаний давления и плотности воздуха, летит с дозвуковой
скоростью (рис. 5.20, а), сферические волны возмущений опережают
самолет, т.е. все пространство вокруг летящего самолета является
возмущенным.
При полете самолета со скоростью, равной скорости звука (рис. 5.20,
б), созданные самолетом сферические волны возмущений, имеющие также
скорость звука, не могут оторваться
от источника возмущений и уйти
вперед. Они будут накладываться
одна на другую и, имея с самолетом
общую точку касания, создадут перед
ним плоскую поверхность, на кото-
рой все звуковые волны находятся в
одной фазе колебаний - фазе уплот-
нения. Эта поверхность разделяет
пространство на две области - невоз-
мущенную перед самолетом и возму-
щенную за ним.
При сверхзвуковой скорости поле-
та самолета (рис. 5.20, в) сферические
волны возмущений будут отставать
от источника, граница возмущений
будет проходить по конической по-
верхности, называемой конусом воз-
мущений или волной Маха. Угол меж-
ду образующей этого конуса (линией
Маха) и направлением скорости
полета называется углом Маха. Его
значение определяется отношением
Рис. 5.20. Мгновенная картина сферичес-
ких воли возмущений
4*
99
Рис. 5.21. Формы головных скачков уплотнения
пути s, пройденного волной возмущений со скоростью звука а за
определенный промежуток времени t (s = at), к пути L, пройденному за
это же время самолетом, летящим со скоростью V (L = Vt):
j
snip = — =
at_ _ я 1 .
Vt~ V M’
u = arcsin—.
M
На поверхности конуса Маха будет происходить наложение волн
возмущений, находящихся в фазе уплотнения. Поверхность конуса Маха
разделяет пространство вокруг летящего самолета на две области -
возмущенную внутри конуса и невозмущенную вне его.
Отличительной особенностью сверхзвуковых потоков является то,
что в сверхзвуковом потоке конусы возмущений (слабые возмущения от
множества точечных источников возмущений) накладываются друг на
друга и, суммируясь, создают более сильное возмущение среды-ударную
волну. Ударная волна, перемещаясь во все стороны, как бы останавлива-
ется набегающим потоком, и скорость ее распространения становится
равна скорости набегающего сверхзвукового потока. Такая "остановлен-
ная" набегающим сверхзвуковым потоком ударная волна называется
скачком уплотнения.
Таким образом, в непосредственной близости от обтекаемого потоком
тела скачок уплотнения, возникший на передних кромках обтекаемого
тела (самолета), является границей возмущений, вызванных телом. По
мере удаления от тела скачок уплотнения переходит в волну Маха.
В зависимости от значения сверхзвуковой скорости полета и формы
головной части тела скачок уплотнения, возникший на передних
кромках, может иметь различную форму (рис. 5.21). В общем случае он
имеет криволинейную форму. При обтекании заостренного тела
100
образуется присоединенный криволинейный скачок (рис. 5.21, а). При
обтекании затупленного тела образуется отсоединенный криволинейный
скачок (рис. 5.21, б), который в своей передней части с достаточным
приближением может рассматриваться как прямой скачок (0 = л/2). По
мере удаления от тела он переходит в косой скачок (0 < л/2), а затем в
волну Маха. Заметим, что угол наклона скачка уплотнения 0 несколько
больше угла наклона линии Маха р. При сверхзвуковом обтекании
заостренного тела с прямолинейными образующими может возникнуть
присоединенный прямолинейный скачок уплотнения (рис. 5.21, в).
Скачок уплотнения (рис. 5.22) можно рассматривать как слой весьма
малой толщины 6 (б = 10“5... 10-6 см, т.е. порядка длины свободного
пробега молекул), "натолкнувшись" на который, сверхзвуковой поток
теряет часть своей кинетической энергии в результате преобразования
ее в энергию давления и тепловую энергию. Одновременно с резким
уменьшением скорости от до И2 в скачке происходит резкое
(скачкообразное) повышение давления (р2 > р^, плотности (р2 > р]) и
температуры (Т2 > Т\).
Установлено, что переходотсверхзвуковойскорости Р) кдозвуковой
V2 всегда происходит только в прямом скачке уплотнения (рис. 5.22, а).
В косом скачке (рис. 5.22, б) качественно параметры потока изменяются
так же, как в прямом, но интенсивность их изменения меньше, и за косым
скачком вектор скорости потока изменяет направление (ip * 0), а скорость
V2 может оставаться сверхзвуковой. Про-
цессы, происходящие в скачках, необрати-
мы, так как часть теплоты, выделяющаяся
при нагревании воздуха в скачке, рассеи-
вается в окружающем пространстве. По-
скольку интенсивность косых скачков
уплотнения меньше, чем прямых, потери
энергии в косом скачке меньше. Потери
энергии в скачке уплотнения являются
дополнительным источником сопротивле-
ния.
Явления, связанные с возникновением
ударных волн и скачков уплотнения,
называются волновым кризисом.
Свойство сжимаемости воздуха на
больших скоростях полета приводит к
тому, что изменение параметров сверх-
звукового потока (скорости V и давле-
ния р) в струйке коренным образом
отличается от изменения соответствую-
Рис. 5.22. Изменение параметров
потока в скачке уплотнения
101
Форма
струйки
Скорость потока
в струйке
соответствует
М<1 I м>7
щих параметров дозвукового потока
(рис. 5.23). Так, при движении потока
сжимаемого газа со сверхзвуковой
скоростью в суживающемся канале
скорость потока убывает (71), а
давление растет (pl). Это никоим
образом не противоречит выводам,
сделанным ранее на основании урав-
нения неразрывности и уравнения
Бернулли. Если не упрощать модель
течения, как мы сделали это ранее,
Рис. 5.23. Изменение параметров потока
в струйке в зависимости от ее формы и
числам
приняв плотность газа постоянной,
мы из этих уравнений получим ре-
зультаты, отраженные на рис. 5.23.
Явления волнового кризиса прояв-
ляются уже на больших дозвуковых
скоростях полета. На поверхности обтекаемого тела местная скорость
потока 7М, увеличиваясь с ростом скорости полета (MJ, может
достигнуть местной скорости звука в потоке ам. На поверхности
самолета, летящего с дозвуковой скоростью (Mw < 1), возникают зоны
потока с местными скоростями Ум (Мм), равными скорости звука и
превышающими ее (Мм а 1).
Скорость полета самолета 7„ (MJ, при которой где-либо на
поверхности самолета местная скорость обтекания становится рав-
ной местной скорости звука, называется критической скоростью 7крит
(Мд)ИТ). Естественно, что Мкрит < 1.
В струйке, обтекающей профиль крыла (рис. 5.24), площади
поперечных сечений по потоку сначала уменьшаются (от сечения I-I до
сечения П-П), азатем увеличи-
ваются. При критической ско-
рости полета в критическом
(наименьшем) сечении П-П
достигается местная скорость
7М, равная местной скорости
звука ам, и далее вниз по пото-
ку в расширяющейся струйке
скорость потока продолжает
нарастать. На поверхности
профиля появляется местная
Рис. 5.24. Схема к объяснению возникновения
волнового кризиса
сверхзвуковая зона (между
сечениями П-П и III—III), кото-
рая в сечении Ш-Ш замыкает-
102
ся местным прямым скачком уплотне-
ния. Скорость потока за скачком
становится дозвуковой и далее по
потоку уменьшается, сравниваясь за
крылом (в сечении IV-IV) с дозвуко-
вой скоростью набегающего потока
Таким образом, в общем дозвуко-
вом потоке, обтекающем самолет,
появляются зоны сверхзвуковых
течений и возникают явления волно-
Рис. 5.25. Эпюры (распределения) давле-
ния:
/ - при докритических скоростях полета;
2 - при закритических скоростях полета
вого кризиса.
При достижении критических
скоростей полета изменяется спектр
обтекания, на эпюре давлений
(рис. 5.25) появляется резкое скачко-
образное повышение давления (ска-
чок уплотнения), возникает срыв потока из-под скачка (волновой срыв),
ухудшаются несущие способности крыла, центр давления смещается
назад по потоку, появляется дополнительное лобовое сопротивление,
связанное с необратимыми потерями энергии в скачке. Это дополнитель-
ное лобовое сопротивление называют волновым сопротивлением.
С увеличением скорости полета скачки уплотнения появляются и на
нижней поверхности крыла, далее они сдвигаются к задней кромке, при
достижении сверхзвуковой скорости скачки "садятся" на передние кромки
несущих и ненесущих поверхностей. На передних кромках в точках
полного торможения потока (критических точках), где вся кинетическая
энергия превращается в потенциальную энергию давления потока
(скоростной напор р И2/2 трансформируется в статическое давлениер),
давление и температура будут наибольшими.
Температуру торможения ТТ и давление рт в критической точке
можно рассчитать по формулам
= ^(1
Тт* тн
1+0,2 —
4)
М2>|
5 J
Рт
Pn +
РнУ2(
2 I
н
1 +
М2^
4 ) ’
где Тт-температура воздуха в точке торможения, К; Тн - температура
воздуха на данной высоте, К; Г- скорость полета, м/с; ан - скорость
звука на данной высоте, м/с; рн- плотность воздуха на данной высоте,
кг/м3; рт - давление воздуха в точке торможения, Па; рн - давление
воздуха на данной высоте, Па.
103
Рис. 5.26. Зависимость параметров потока
в точке торможения от числа М
Зависимость параметров потока в
точке торможения от числа М
полета самолета для высот Н а
г 11 000 м представлена на рис. 5.26.
Повышение температуры воздуха
вследствие торможения, а также
трения в пограничном слое приводит
к сильному кинетическому нагреву
конструкции самолета, что требует от
конструктора проведения мероприя-
тий по обеспечению нормальных
условий для экипажа и пассажиров.
Так, при полете в стратосфере со
скоростями, превышающими ско-
рость звука (М > 1), требуется охлаждение кабины, в то время как полет
с дозвуковыми скоростями требует обогрева кабины. Кинетический
нагрев усложняет работу силовой установки самолета и различных
систем, влияет на прочность конструкции. Высокое давление на носовых
частях обтекаемых поверхностей обусловливает особые требования к
прочности этих частей.
При гиперзвуковых скоростях полета головной скачок уплотнения
почти прижат к обтекаемой поверхности. Его взаимодействие с
пограничным слоем вызывает значительный рост температуры,
изменение физических и химических свойств воздуха.
5.6. СИСТЕМЫ КООРДИНАТ
Рис. 5.27. Нормальная земная система
координат
При определении сил и моментов, действующих на самолет в полете,
при исследовании траекторий движения самолета, при решении многих
других вопросов в процессе проектирования используют несколько
прямоугольных (ортогональных)
декартовых правых систем коорди-
нат.
Положение самолета относитель-
но Земли определяется углами между
осями связанной OXYZ и нормальной
земной OXgYgZg системами коорди-
нат.
Взаимно перпендикулярные оси
нормальной земной системы осей
координат (рис. 5.27) OXg и OZ
лежат на поверхности Земли, ось О Y
104
Рис. 5.28. Связанная система координат
Рис. 5.29. Положение самолет» относительно
Земли
направлена по местной вертикали
вверх. Начало системы координат
и направление осей OXg и OZg
выбираются в соответствии с ре-
шаемой задачей. Так, при исследо-
вании траекторий взлета самолета
оказывается удобно поместить
начало координат в точке старта
самолета, а горизонтальную ось
ОХ совместить с осью ВПП.
Начало О связанной системы
координат (рис. 5.28) помещено в центр масс (ц.м.) самолета, ось ОХ
направлена от хвостовой к носовой части самолета, ось OYперпендику-
лярна к оси ОХ и направлена вверх в плоскости симметрии, ось OZ
перпендикулярна к плоскости симметрии самолета и направлена в
сторону правой консоли крыла.
Таким образом, положение само-
лета относительно Земли определяет-
ся положением системы OXYZ отно-
сительно системы OXgYgZp т.е. углом
тангажа 0, углом крена у и углом
рыскания ф (рис. 5. 29).
В общем случае движения самоле-
та в пространстве вектор скорости
самолета (или в соответствии с зако-
ном обратимости движения вектор
скорости набегающего потока) не
Рис. 5.30. Положение самолета относи-
тельно вектора скорости
совпадает со связанной продольной
осью самолета ОХ.
105
Положение самолета относительно вектора скорости определяется
углами между осями связанной OXYZ и скоростной OXaYaZa систем
координат,
Начало О скоростной системы (рис. 5.30) координат помещено в
центр масс самолета, ось ОХа совпадает по направлению с вектором
скорости самолета, ось OYa направлена к верхней части самолета в
плоскости его симметрии, ось OZa перпендикулярна к плоскости OXaYa.
Положение самолета относительно вектора скорости набегающего
потока определяется углом атаки а и углом скольжения 0.
5.7. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ САМОЛЕТА
В общем случае при полете самолета (при наличии угла атаки а и угла
скольжения 0) вектор полной аэродинамической силы самолета Ra
ориентирован в пространстве произвольным образом. В соответствии
с записанным ранее выражением для полной аэродинамической силы ее
проекции на оси скоростной системы координат можно записать в
следующем виде:
П = cya~s- Ъ = Cxa^~s-, za = cie Pps,
где Уа-подъемная сила самолета, Н; Ха - сила лобового сопротивления
.(составляющая силы по оси ОХа скоростной системы координат,
взятая с обратным знаком), Н; Za - боковая сила, Н; Суа, Сха, Сга -
безразмерные коэффициенты подъемной силы, силы лобового сопротив-
ления и боковой силы соответственно; А - площадь крыла самолета, м2;
р№/2 - скоростной напор, Па.
Таким образом
с«. =
Физический смысл коэффициентов Сха, С^, Сга аналогичен
физическомусмыслу коэффициента полной аэродинамической силы CRa.
Составляющие Сха, Суа, С1а безразмерного коэффициента полной
аэродинамической силы CRa и положение точки ее приложения (центр
давления) полностью описывают аэродинамические характеристики
самолета.
В установившемся полете без скольжения (0 = 0) боковая сила
отсутствует, поэтому, естественно,
106
о 8 16 а,’
Рис. 5.31. Зависимость аэродинамических
коэффициентов от угла атаки (пример)
ка =
Принято представлять аэродинамические характеристики самолета
в виде зависимостей составляющих коэффициента полной аэродинами-
ческой силы (Суа и Сха) от полетных углов (а и р). Примерные зависимос-
ти Суа(а) и Сха (а) приведены на рис. 5.31. При достижении критического
угла атаки акрит на крыле начинается срыв потока, подъемная сила
резко падает. Срыв на левой и правой консолях крыла обычно
начинается не одновременно. Это происходит вследствие наличия
скольжения, технологических неточностей при изготовлении самолета.
Возможна "валежка"- резкое кренение самолета. Поэтому в эксплуата-
ции ограничивают диапазон летных углов атаки самолета предельно
допустимым углом адоп, который меньше акрит на 2...5°.
Одной из форм представления аэродинамических характеристик
самолета является поляра - взаимозависимость коэффициентов Суа и Сха
(рис. 5.32). Каждая точка на поляре соответствует определенному углу
атаки а.
При построении поляры принято масштаб для Сха брать крупнее, чем
для Суа. Если построить поляру в одинаковых масштабах для Суа и Сха
(рис. 5.33), то ее можно рассматривать как полярную диаграмму в
107
Рис. 5.33. Характерные точки поляры
координатах CRa и (р, где (р - угол
наклона полной аэродинамической
силы к направлению потока В
этом случае поляра является геомет-
рическим местом концов вектора
коэффициента полной аэродинами-
ческой силы CRa. Характерными
точками поляры являются:
угол а0 нулевой подъемной силы
(Суа ~ О’ ^ха “ ^хаО “ ^ха min)’
наивыгоднейший угол атаки анв,
соответствующий максимальному
аэродинамическому качеству самоле-
та, определенному нами ранее как
отношение подъемной силы самолета
к силе лобового сопротивления.
При фиксированном угле атаки аг,
соответствующем определенному
режиму полета, Ка = YJXa - Суа/Сха,
т.е. аэродинамическое качество опре-
деляется безразмерными коэффициентами аэродинамических сил,
учитывающими форму обтекаемого тела, состояние его поверхности и
его положение относительно набегающего потока воздуха при заданной
скорости полета (М = const). Из рис, 5.33 видно, что аэродинамическое
качество определяется как
Ка = Ytt/Xa = tg<p.
Максимальному качеству Ка тах будет соответствовать угол атаки
анв, полученный как точка касания поляры и прямой, проведенной из
начала координат.
Критическому углу атаки «крит соответствует максимальный
коэффициент подъемной силы Суа тах.
Углу атаки авоп соответствует предельно допустимый коэффициент
подъемной силы Суа доп.
Ранее отмечалось, что сила индуктивного сопротивления Хв1 - У2, в
соответствии с этим выражение для коэффициента индуктивного
сопротивления запишем в виде
Схй, = АСув,
108
где А - коэффициент, характеризующий
сопротивление, обусловленное подъем-
ной силой, учитывающий влияние фор-
мы крыла самолета на скос потока.
Естественно, что, чем длиннее крыло, тем
меньше будет влияние перетекания
потока с нижней поверхности крыла на
верхнюю, тем меньше будет скос потока
и меньше Cxai.
Принимая во внимание приведенное
выражение, в диапазоне летных углов
атаки можно аппроксимировать поляру
самолета квадратичной параболой:
^ха = СхаО+ АСуа.
Рис. 5.34. Зависимость аэродинами-
ческого качества от угла атаки (при-
мер)
Коэффициент А называют иногда коэффициентом отвала поляры или
просто отвалом поляры.
На основании поляры самолета можно построить зависимость
аэродинамического качества от угла атаки (рис. 5.34).
Значения аэродинамических коэффициентов существенным образом
зависят от скорости (числа М) полета. Для скоростей полета, соответ-
ствующих Мю < Мкрит, коэффициент лобового сопротивления Сха0
определяется только силами сопротивления трения и сопротивления
давления. Для скоростей полета, соответствующих М„ к Мк , к этому
сопротивлению добавляется волновое сопротивление. В общем виде
= Схатр + ^хад + ^хав >
где Сха тр - коэффициент лобового сопротивления сил трения; Сха д -
коэффициент лобового сопротивления сил давления; Сха в - коэффициент
волнового сопротивления.
Таким образом, аэродинамические характеристики самолета должны
определяться не только в диапазоне летных углов атаки, но и во всем
диапазоне скоростей (чисел М) полета, Примерная зависимость
аэродинамических коэффициентов для прямого крыла от числа М
приведена на рис. 5.35. Здесь коэффициент Суа - производная коэффици-
ента подъемной силы Суа по углу атаки а, 1/рад; СД » Суа/(а-а^.
Для чисел М s 0,4 значения всех аэродинамических коэффициентов
практически постоянны, так как сжимаемость воздуха в потоке не
проявляется.
109
С ростом скорости до
соответствующей Мкрит
происходит увеличение
коэффициента С‘а из-за
проявления сжимаемос-
ти и увеличения зоны
разрежения над крылом;
коэффициент Схай мед-
ленно растет из-за уве-
личения зоны повышен-
ного давления перед
крылом.
В диапазоне от Мкрит
до М = 1 увеличение С*„
Рис. 535, Зависимость аэродинамических коэффициентов вначале замедляется ИЗ-
прямого крыла от числа м (пример) за образования местной
сверхзвуковой зоны и
прямого скачка уплотне-
ния над крылом. Коэффициент достигает максимума к моменту
появления местной сверхзвуковой зоны и скачка уплотнения под крылом.
С дальнейшим ростом скорости (в интервале от Мкрит до М = 1) С*„
сначала уменьшается до минимума, азатем опять увеличивается, так как
смещаются к задней кромке скачки уплотнения сначала на нижней, а
затем наверхней поверхности крыла, что сопровождается соответствую-
щим увеличением зон разрежения на этих поверхностях. Увеличение
коэффициента СД прекращается с появлением головного прямого
отсоединения скачка при М = 1.
Одновременно резко увеличивается коэффициентлобового сопротив-
ления в связи с развитием волнового кризиса; коэффициент Сха0
достигает максимального значения при М = 1 вследствие появления
головного прямого отсоединенного скачка.
При М > 1 с ростом сверхзвуковой скорости головной скачок
уплотнения приближается к передней кромке, приобретая форму косого
скачка, затем становится присоединенным, углы наклона скачков
уменьшаются, соответственно уменьшаются зоны возмущений на верхней
и нижней поверхностях профиля, что приводит к уменьшению коэффици-
ентов с;а и С^.
Резкое увеличение лобового сопротивления (см. рис. 5.35,5.37) и, со-
ответственно, уменьшение качества самолета (рис. 5.36) требуют для
ПО
Рис. 5.37. Зависимость коэффициента лобово-
Рис. 5.36. Зависимость максимального аэро- го сопротивления от числа М и конфигурации
динамического качества от числа М и конфи- самолета (пример)
гурации самолета (пример)
полета со скоростями, соответствующими М > Мкрит, значительного
увеличения тяги двигателя Р (для преодоления так называемого звукового
барьера).
Напомним, что для совершения горизонтального полета необходимо
выполнить условия
G = У = С Р = X = С
а уа 2 ’ а ха 2
Отсюда потребная для горизонтального полета тяга двигателя
р - ®Сха = J2.
Суа ' Ка'
Самолеты с прямым крылом и поршневыми двигателями с воздушны-
ми винтами не могли не только достигнуть скоростей полета, соотве-
тствующих Mi 1, но даже и приблизиться к таким скоростям.
Рис. 5.36 и 5.37 достаточно наглядно показывают, что выбор
соответствующих форм самолета позволяет существенным образом
снизить неблагоприятное влияние сжимаемости при полете на высоких
скоростях. Приблизиться к звуковому барьеру, а затем и преодолеть его
стало возможным в связи с созданием реактивных двигателей и
разработкой аэродинамиками и конструкторами новых форм самолета.
111
Проверьте, как Вы усвоили материал
1, Назовите и охарактеризуйте
части 1... 7 спектра обтекания про-
филя.
2. Охарактеризуйте соотношения
параметров потока V и р.
Графически изобразите распреде-
ление давления по профилю.
3. Графически изобразите харак-
тер обтекания профиля и распределе-
ние давления по профилю, соотве-
тствующие точкам
\ А
112
4. Графически изобразите харак-
тер обтекания профиля и распределе-
ние давления по профилю, соотве-
тствующие точкам 1...4.
Назовите характерные углы ата-
ки, соответствующие точкам 3 и 4.
Интерпретируйте следующие основные понятия:
• аэродинамика; силовое, тепловое и химическое взаимодействия;
• дозвуковые, околозвуковые, трансзвуковые, сверхзвуковые, гиперзвуковые
скорости;
• аэродинамический эксперимент; принцип обратимости; аэродинамические
весы; критерии подобия; аэродинамическая труба; аэродинамический спектр;
• невозмущенный поток; возмущенный поток; ламинарный пограничный слой;
турбулентный пограничный слой; спутная струя; свободный поток; эпюра
скоростей; срыв потока; эпюра давления; мидель;
• полная аэродинамическая сила; центр давления; подъемная сила; сила лобового
сопротивления; сила индуктивного сопротивления; боковая сила;
• неустановившееся движение; гипотеза неразрывности среды; идеальный
сжимаемый газ; идеальный несжимаемый газ;
• уравнение неразрывности; трубка тока; секундный массовый расход газа;
уравнение Бернулли; скоростной напор; статическое давление; циркуляция
скорости; П-образный вихрь;
• системы координат; характерные углы атаки; углы тангажа, крена,
рыскания, скольжения;
* безразмерные коэффициенты аэродинамических сил; поляра; отвал поляры;
диапазон летных углов атаки;
• слабые возмущения; ударная волна; скачок уплотнения; волновое сопротивле~
ние; звуковой барьер; кинетический нагрев.
ИЗ
Глава 6
ОСНОВЫ ДИНАМИКИ ПОЛЕТА САМОЛЕТА
6.1. ТРАЕКТОРИИ ДВИЖЕНИЯ
Динамика полета как раздел аэромеханики рассматривает вопросы,
связанные с реализацией различных траекторий полета самолета,
которые определяются техническим заданием на проектирование.
Наиболее сложные траектории реализуют самолеты, спроектированные
и построенные специально для занятий авиационным спортом, -
самолеты для "воздушной акробатики".
На рис. 6.1 показана траектория полета акробатического самолета
(такого, например, как изображенный на рис. 20.49). Она представляет
собой комплекс фигур высшего пилотажа, в состав которого входят:
управляемая горизонтальная бочка 7; три четверти петли с полуоборотом
Рис. 6.1. Комплекс фигур высшего пилотажа
114
на нисходящей под углом 45° прямой 2; переворот на горке 5; петля
Нестерова 4\ полупетля 5; один виток штопора <5; восьмерка с полуоборо-
тами на нисходящих под углом 45° линиях 7; поворот на вертикали
восходящая под углом 45° управляемая бочка 9; переворот 70; восьмерка
с полубочкой на восходящих под углом 45° линиях 77; полубочка на
восходящей вертикальной линии 72; фиксированная бочка на горизон-
тальной линии 13’, одна четверть бочки на восходящей и нисходящей
вертикальных линиях 14.
В ТЗ для самолетов различного назначения различна и так называемая
номенклатура режимов полета, однако для всех самолетов общими
являются режимы взлета и посадки. Рассмотрим взлет и посадку
обычного самолета.
Собственно взлет (рис. 6.2) - ускоренное движение самолета ,с
момента страгивания на линии старта до момента одновременного
достижения регламентируемых в ТЗ высоты Нлзл и безопасной скорости
взлета /без, обеспечивающих безопасность полета на участке начального
набора высоты.
В конце разбега самолет достигает скорости отрыва /01р, при которой
можно безопасно оторвать самолет от земли и продолжать взлет. В
момент отрыва
о V1
Gn = Y = С T°-SP5,
где (70 - вес самолета; р0 - плотность воздуха на уровне земли.
На высоте Н = 400 м уже должны быть убраны шасси, взлетно-
посадочная механизация, двигатели переведены на режим крейсерского
полета и самолет начинает полет по маршруту.
Заход на посадку (рис. 6.3) начинается с входа на высоте Н = 400 м в
глиссаду.
Снижение по глиссаде (участок 1 на траектории) идет со скоростью
захода на посадку УЗ П.
На участке выравнивания 2 наклон траектории полета уменьшается
с таким расчетом, чтобы в конце этого участка она стала горизонтальной
и колеса шасси находились на высоте около 1 м над поверхностью ВПП.
В процессе выравнивания и далее на горизонтальном участке
выдерживания 3 скорость самолета уменьшается, подъемная сила
становится несколько меньше силы тяжести самолета при посадке Gnoc,
и в момент посадки самолет плавно или с небольшим "проваливанием"
по высоте - парашютированием (от франц, parachute, от греч. para -
115
сл
Рис. 6.2. Траектории взлета
Рис. 6.3. Траектория посадки
против и франц, chute - падение) 4 касается ВПП с посадочной скоростью
Упос. В момент касания ВПП
о V2
л - V — И7 ^0 пос q
^пос * *а ^уапос ’
Пробег 5 по ВПП с торможением заканчивается остановкой
самолета.
6.2. СИЛЫ, ДЕЙСТВУЮЩИЕ НА САМОЛЕТ В ПОЛЕТЕ
Пространственное движение самолета, характеризующееся
изменением положения самолета в пространстве, изменением скорости
и направления полета, называется маневром, а способность совершать
маневр -маневренностью самолета (франц, manoeuvrer - приводить в
движение, управлять, маневрировать, от лат. тапи орегег - работаю
руками).
Все силы, действующие на самолет в полете, могут быть сведены к
трем: полной аэродинамической силе Яа, силе тяжести G и тяге двигателя
Р . Эти силы, в свою очередь, можно привести к равнодействующей силе
F , приложенной в центре масс самолета, и моменту М относительно
центра масс (рис. 6.4):
F = Ra + G + Р- М = SP/,,
где Р, - составляющие силы F',rt-
плечо силы Pt относительно центра
масс.
В общем случае сила F и момент
М , действующие на самолет,
отличны от нуля и самолет движется
поступательно вдоль вектора силы F
с ускорением J = F/m и вращается
относительно оси, направленной
Рис. 6.4. Силы, действующие па самолет
в криволинейном полете
117
вдоль вектора М с угловым ускорением е = M/Jm. Здесь J - линейное
ускорение центра масс самолета, м/с2; F~ действующая на самолет сила,
Н; т - масса самолета, кг; е - угловое ускорение самолета, рад/с2; М -
действующий на самолет момент сил, Н-м; Jm - момент инерции самолета
относительно центра масс, кг-м2.
Момент инерции самолета относительно центра масс
» ,
4 s Е ,
Г»1
где - масса /-го агрегата самолета (например, масса двигателя); г, -
расстояние от центра масс /-го агрегата до оси вращения самолета,
проходящей через центр масс, т.е. до вектора момента М .
При ускоренном поступательном и вращательном движении самолета
на каждый агрегат или размещенный на самолете груз действуют
инерционные силы Д = где w(- - масса /-го агрегата самолета; у, -
линейное ускорение /-го агрегата, В этом случае линейное ускорение
каждого агрегата вследствие вращательного движения самолета будет
отличаться от линейного ускорения центра масс самолета тем больше,
чем дальше от центра масс самолета находится агрегат.
Движущийся в криволинейном пространственном полете самолет
можно рассматривать как находящийся в равновесии, если по принципу
Д'Аламбера (в честь французского математика, механика и философа
Ж.Л. Д'Аламбера) включить в число действующих на него сил силу
инерции Рр равную сумме инерционных сил, действующих на каждый
агрегат самолета:
ч Л
pjs Е
j=i
Таким образом, можно записать
F + = 0, т.е. Ra + G + Р + Pj = 0.
Все силы, действующие на самолет в полете, удобно объединить в две
группы:
118
• поверхностные силы Rn - силы, не связанные с массой самолета
(полная аэродинамическая сила Ra и тяга двигателя Р), которые,
собственно, и определяют полет; Rn = Ra + Р ;
• массовые силы Ru -силы, связанные с массой самолета (сила тяжести
G и инерционная сила Ру), которые необходимо преодолеть для
совершения полета; Ru = G + Pj.
Здесь уместно еще раз отметить, что сила лобового сопротивления
Ха, которую приходится преодолевать тягой двигателя Р , возникает как
неизбежное следствие получения подъемной силы Ya, неразрывно связана
с ней, поэтому силу лобового сопротивления, как и подъемную силу, с
полным основанием можно отнести к группе сил Лп.
Таким образом, можно рассматривать равновесие самолета в любом
пространственном движении под действием сил Rn и Ли, т.е.
F = Rn + Ru = 0; М = Ма + Ми = 0.
Изменение силы F и момента М (появление приращений ДГ и ДМ
при изменении полной аэродинамической силы Ra, тяги двигателя Р или
силы тяжести G) приводит к изменению параметров пространственного
движения самолета. Движение самолета неуправляемое, если приращения
(возмущения) силы ДТ и момента ДМ не обусловлены действиями
летчика, а вызваны какими-либо не зависящими от него обстоятельства-
ми (например, порывом ветра в турбулентной атмосфере). Движение
самолета управляемое, если приращения силы Д^ и момента ДМ
обусловлены действиями летчика. В этом случае Д^ и ДМ называются
управляющими воздействиями. Летчик может изменить значение и
ориентацию в пространстве полной аэродинамической силы, значение
119
и направление тяги двигателя. Целенаправленное изменение этих сил
обеспечивает формирование потребной траектории полета самолета.
При решении многих задач, связанных с полетом самолета (расчет
траекторий, определение прочностных характеристик и т.д.), использует-
ся понятие перегрузки. Перегрузка п - отношение суммы векторов
полной аэродинамической силы и тяги к силе тяжести:
mg
Поскольку Rn = Ra + Р и Ra = -Лм, то
и = —- или и = —-.
mg mg
Вектор перегрузки характеризует маневренность самолета, так как
учитывает величину и направлен ие сил, изменяя которые можно управлять
траекторией движения самолета. Перегрузка показывает, во сколько
раз силы, определяющие траекторию движения, больше или меньше силы
тяжести самолета, или (что то же самое) во сколько раз ускорение
движения самолета, в каком-либо направлении больше или меньше
ускорения земного тяготения. Для каждого отдельно взятого агрегата
самолета или любого груза, находящегося на самолете, перегрузка
показывает, во сколько раз действующая на него сила больше или
меньше силы тяжести агрегата или груза.
Выражение для перегрузки, действующей на самолет, может быть
записано через ее проекции пх, пу, п2 на оси координат в виде
п = уих + пу + и2,
где пх = —- продольная (тангенциальная) перегрузка; п = —-
mg у mg
RKI ,
нормальная перегрузка', пг = — - боковая перегрузка; Rnx, Rny, Rni -
проекции силы /?я на оси координат.
120
6.3. ПРОСТРАНСТВЕННОЕ ДВИЖЕНИЕ САМОЛЕТА
Рассмотрим простейшие случаи движения самолета.
В первом приближении можно считать, что криволинейный маневр в
вертикальной плоскости Егорка") (рис. 6.5, а) происходит по дуге
окружности радиусом R за счет центростремительной силы Ya, которая
численно равна сумме проекции силы тяжести G на ось Yи инерционной
центробежной силы Pj, стремящейся сохранить прямолинейное движение
самолета.
Используя схему, приведенную на рис. 6.5, б, можно записать условие
равновесия (суммы проекций всех сил на оси ОУ и ОХ равны нулю):
Ya - GcosQ -
^ = 0;
gR
Р + Gsin0 - = 0.
Рис. 6.5. Маневр в вертикальной плоскости
121
Рис. 6.6. Маневр в горизонтальной плоскости
При скорости полета Vи радиусе кривизны траектории R центробеж-
ная сила
V2
Р, = mj = т—,
1 R
yrs т = G/g - масса самолета, кг.
Тогда
Y = GcosG + ----.
gR
Разделив это выражение на силу тяжести, получим
Отсюда
g(ny - cos0)
Маневр в горизонтальной плоскости (рис. 6.6, б) требует создания
центростремительной силы, направленной к центру кривизны траектории
и равной по модулю центробежной силе. Создание такой силы возможно
за счет накренения самолета на угол у (рис. 6.6, а). В этом случае
122
вертикальная составляющая подъемной силы Удсозу уравновешивает
силу тяжести, а горизонтальная составляющая Rn = Y^iny - центробеж-
GV2
ную силу Р> =----, и условия равновесия имеют вид
7 gR
GV2
Yacosy - G = 0; - Yasiny +--= 0.
gR
Под действием этих сил самолет будет осуществлять установившийся
разворот - правильный вираж (франц, virage от virer - поворачивать) со
скоростью V по дуге окружности радиусом R.
Y
Отсюда G = Yacosy, и перегрузка в вертикальной плоскости пу = -£ =
= —1—, т.е. чем больше угол крена на вираже, тем больше перегрузка пv.
cosy 7
Радиус виража 7?вир может быть определен по формуле
R 1/2 =
ир g Pasmy g tgy
g
V2
1 - cos2у
V2
\ cos2 у
Впервые в мире разворот на самолете в горизонтальной плоскости
с креном (вираж) и полет по замкнуто кривой в вертикальной плоскости
("мертвую петлю") выполнил в 1913 г. замечательный русский летчик
П.Н. Нестеров, доказав тем самым возможность безопасно совершать
на самолете любые эволюции в воздухе и положив начало высшему
пилотажу.
Легко видеть, что чем большую перегрузку можно создать на самолете,
тем меньше будет радиус кривизны траектории, т.е. тем энергичнее будет
маневр.
Маневренные характеристики пилотируемых ЛА ограничиваются
возможностью людей, находящихся на его борту, переносить перегрузки.
В зависимости от направления центростремительного ускорения
субъективная сила тяжести человеческого тела (его вес) может быть
больше нормальной (положительная перегрузка), обращаться в нуль
(невесомость) и принимать отрицательные значения (отрицательная
перегрузка).
При выходе самолета из пикирования, когда инерционная сила
направлена вниз, летчика прижимает к сиденью, на него действует
положительная перегрузка в направлении голова - таз. При входе
123
Рис. 6.7. Предельные перегрузки, переносимые
человеком
мозгового кровообращения).
самолета в пикирование, когда
инерционная сила направлена
вверх, летчика отрывает от си-
денья, на него действует отрица-
тельная перегрузка в направлении
таз - голова.
На рис. 6.7 показаны предель-
ные перегрузки п в различных
направлениях,переносимые чело-
веком в зависимости от продол-
жительности их действия I. Пе-
реносимость перегрузки связана
с механическим воздействием
опоры (кресла, сиденья, ложемен-
та) на тело человека, с приливами
и отливами крови (с нарушением
Из зависимостей, приведенных на рис. 6.7, становится понятно, поче-
му космонавты возвращаются на Землю в летательных аппаратах с
низким аэродинамическим качеством (т.е. по баллистическим траектори-
ям), лежа в специальных креслах спиной к направлению полета - при
таком положении тела легче всего переносить перегрузки.
Тренированные люди в специальных противоперегрузочных костюмах
(см. гл. 15) способны переносить достаточно высокие перегрузки в
течение длительного времени. Поэтому у маневренных самолетов
(например, перехватчиков) эксплуатационные перегрузки могут достигать
10...13.
Для неманевренных самолетов (пассажирских, транспортных)
эксплуатационные перегрузки не превышают 2.
Основным режимом для неманевренных самолетов является
горизонтальный полет. Используя схему сил, действующих на самолет
в горизонтальном полете (рис. 6.8), запишем уравнения для проекций
вектора перегрузки на оси координат
ПУ
= 1;
Отсюда п -
+ п} = 1
п
X
= 0.
124
Рис. 6.8. Силы, действующие на самолет в Рис. 6.9. Силы, действующие па самолет при
горизонтальном полете наборе высоты
Для режима набора высоты с постоянной скоростью (рис. 6.9)
Ya = GcosQ;
Р = Ха + Gsin0,
где 0 - угол наклона траектории.
Видно, что подъемная сила самолета уравновешивает только часть
силы тяжести GcosO. Следовательно, набор высоты происходит за счет
избытка тяги двигателя Д.Р = Gsin0.
Скороподъемность - вертикальную скорость при наборе высоты -
определим из соотношения
V = Ksin0 = ALK.
у G
Проекции вектора перегрузки на оси координат
Г. А Р " V * * * * Х« М ’ А
и = — = cosO; nY = --------- = — = sin0.
у G х G G
Отсюда
Г2~ 2 1
и = dm + л = 1.
V * Л
125
Рис. б.Ю.Силы, действующие па самолет
при снижении
Следует отметить, что на режиме
набора высоты 0 > 0 и пх > 0.
Для режима снижения (рис. 6.10)
Ya = Gcos0;
Р = Ха - Gsin0.
Видно, что снижение происходит
за счет недостатка тяги двигателя
&Р - Csin0.
Для проекций вектора перегрузки
запишем
и = cos0; nr = sin0.
У х
Отметим, что на режиме снижения 0 < 0 и пх < 0, однако
И = \/пх + Пу = 1.
Таким образом, на основных режимах полета пассажирского
самолета-в горизонтальном полете, при наборе высоты и снижении-
перегрузка л = + п* = 1.
6.4. ПОНЯТИЕ ОБ АЭРОДИНАМИЧЕСКОМ РАСЧЕТЕ
Методы динамики полета позволяют выработать рекомендации по
технике пилотирования самолета, подобрать наивыгоднейшие режимы
полета, рассчитать летно-технические характеристики (ЛТХ) самолета,
Определение основных ЛТХ самолета принято называть аэродинамичес-
ким расчетом.
Н.Е. Жуковский предложил для определения ЛТХ метод тяг (метод
Н.Е. Жуковского), основанный на сопоставлении потребной для полета
тяги РпсрасполагаемойтягойРр двигателей,установленных на самолете
(рис. 6.11). Кривая располагаемых тяг Рр определяется характеристиками
двигателя, Кривая потребных тяг получается расчетом в диапазоне
летных углов атаки для каждого угла атаки а, и высоты полета (pz) по
алгоритму
126
Рис. 6.12. Диапазоны летных высот и скорос-
тей полета
Рис. 6.11. Кривые потребных и располагае-
мых тяг
„ .. г С - ^yai - Р = т% - V =
al ''xab ^yal ~ rnl v \ c.r
Cxai Kat N ‘’PlS
2mg
’l^yal
По результатам сравнения кривой потребных и располагаемых
тяг определяются диапазоны высот и скоростей полета для проектируе-
мого самолета (рис. 6.12).
Зона 1 реализуемых самолетом высот и скоростей полета — область
возможных полетов — ограничена минимально допустимыми 2 и
максимально допустимыми 3 скоростями полета,
Граница 2 минимальной скорости полета определяется из уравнения
горизонтального полета Ya = G:
Ига1п
2-Р
Ри^уа max
где Kmin - минимальная скорость полета, м/с; р = mg/S - удельная
нагрузка на крыло самолета с полетной массой т и площадью крыла 5,
Па; рн — плотность воздуха на высоте Н, кг/м3; — максимально
допустимый в полете коэффициент подъемной силы самолета (см.
подразд. 5.7).
127
Граница 3 максимальной скорости полета /тах определяется
максимальной тягой двигателя из уравнения горизонтального полета
Ха = Р как
V = max
’max “ А Л »
У PtfGx,min
- р
где Р = — —удельная тяговооруженность самолета с полетной массой
mg
Р
т и тягой двигателей Р; Рга„ = —— максимальная удельная тяговоору-
mg
женность;р — удельная нагрузка на крыло, Па; CMmin - минимальный
коэффициент лобового сопротивления при полете на данной высоте.
Наивыгоднейшая скорость полета Инв (кривая 4 на рис. 6.12)
соответствует максимальному аэродинамическому качеству самолета
Ктмп, следовательно, минимально потребной для полета тяговооружен-
ности, поскольку Р = \1Ка.
Наивыгоднейшей скорости полета соответствует и максимальная
скороподъемность V, определяемая избытком тяги двигателя, которую
можно использовать для набора высоты.
Пересечение границ 2 и 3 определяет теоретический потолок самолета
НТ, на котором Утах = 7min, т.е. возможен полет с единственной
скоростью, разгон самолета невозможен и, следовательно, Уу = 0.
Практический потолок самолета Нп определяется высотой, на
которой вертикальная скорость соответствует какой-либо заранее
установленной величине, например V = 0,5 м/с.
Динамический потолок самолета—высота, которой достигает самолет
в результате энергичного вертикального маневра (горки) после разгона
до большой горизонтальной скорости, используя для набора высоты не
только тягу двигателей, но и кинетическую энергию, накопленную при
разгоне.
Полет в болтанку, когда на человека действуют значительные
знакопеременные нагрузки, вызванные порывами ветра, заставляет
ограничивать диапазоны скоростей и высот полета. На рис. 6.12 граница
5 обусловлена переносимостью человеком перегрузок при полете в
турбулентной атмосфере.
В первом приближении продолжительность Тн дальность L полета
определяются по формулам
г - ТУ - ттК-7
СрРп GCp’ GCp ’
128
где Т — продолжительность полета, ч; тт — запас топлива на борту
самолета, кг; Ср — удельный расход топлива (количество топлива в
килограммах, потребное для создания двигателем тяги в 1 Н в течение
1 ч полета, кг/(Н-ч); Рп— потребная тяга двигателей, Н; Ка — аэродинами-
ческое качество самолета; G — сила тяжести (вес) самолета (G = mg), Н;
т — полетная масса самолета, кг; g—ускорение свободного падения, м/с2;
L — дальность полета, км; V— скорость полета, км/ч.
В реальном полете ЛА совершают сложные, неустановившиеся
движения, когда параметры движения изменяются во времени. Поэтому
при проектировании необходимо рассматривать пространственные
траектории ЛА с учетом переменных во времени управляющих и
возмущающих воздействий. Естественно, что решение подобных задач
требует применения значительно более сложного математического
аппарата, чем тот, которым мы воспользовались при рассмотрении сил,
действующих на самолет, и расчете его ЛТХ.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• динамика полета; режим взлета; режим посадки; взлет; разбег; заход на
посадку; снижение по глиссаде; выравнивание; выдерживание; парашютирование;
касание ВПП; пробег;
• поверхностные силы; массовые силы; инерционная сила; сила инерции; момент
инерции самолета; принцип Д'Аламбера;
• неуправляемое движение; управляемое движение; управляющее воздействие;
маневр; маневренность; маневренный самолет; неманевренный самолет;
• маневр в вертикальной плоскости; маневр в горизонтальной плоскости;
установившийся разворот; вираж; горизонтальный полет; набор высоты;
снижение;
• перегрузка; продольная перегрузка (тангенциальная); нормальная перегрузка;
боковая перегрузка; эксплуатационная перегрузка;
• летно-технические характеристики; метод тяг; потребная тяга;
располагаемая тяга; избыток тяги двигателя; недостаток тяги двигателя;
удельная тяговооруженность самолета; удельная нагрузка на крыло;
• область возможных полетов; минимально допустимая скорость; максимально
допустимая скорость; безопасная скорость взлета; скорость отрыва; скорость
захода на посадку; посадочная скорость; наивыгоднейшая скорость полета;
скороподъемность; максимальная скороподъемность; теоретический потолок
самолета; практический потолок самолета; динамический потолок самолета;
продолжительность полета; дальность полета.
5 7425
129
Глава 7
АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
7.1. ГЕОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ОБТЕКАЕМЫХ ТЕЛ
Летно-технические характеристики ЛА во многом определяются его
аэродинамической компоновкой.
Аэродинамическая компоновка как процесс - это выбор схемы
взаимного расположения и геометрических параметров основных частей
ЛА, обтекаемых воздухом в процессе полета, увязка их между собой с
целью получения таких аэродинамических характеристик ЛА
(С>в, С„, Ка и др.), которые позволили бы проектируемому ЛА
выполнить поставленные задачи.
Аэродинамическая компоновка (аэродинамическое проектирование)
ЛАтесно связана с проектированием конструкции, выбором параметров
силовой установки ЛА и т.д. Например, очевидно, что самолет с
убирающимся в полете шасси будет иметь меньшее лобовое сопротивле-
ние на основных режимах полета, чем самолет с неубирающимся шасси.
Однако масса самолета с убирающимся шасси при прочих равных
условиях будет больше массы самолета с неубирающимся шасси за счет
системы уборки, ниш для уборки шасси, более сложной конструкции
стоек шасси. Это потребует увеличения мощности двигателя, соотве-
тственно, увеличения расхода топлива и т.д. И для легких нескоростных
самолетов может оказаться более выгодным не убирающееся в полете
шасси. Таким образом, при выборе форм, геометрических параметров
частей легкого сравнительно нескоростного самолета приходится
рассматривать как минимум два варианта возможных решений
(самолеты с убиращимся и неубирающимся шасси), учитывая при этом
не только изменения аэродинамических характеристик, но и изменения
массы самолета, потребной тяги двигателя и др. Следовательно,
аэродинамическое проектирование является неотъемлемой частью
проектирования ЛА в целом.
Аэродинамическая компоновка как результат аэродинамического
проектирования - это облик ЛА, формы, размеры и взаимное расположе-
ние его обтекаемых частей.
130
Рассмотрим основные геометри-
ческие параметры частей самолета,
обтекаемых потоком в полете
(рис. 7.1).
Несущими частями самолета (в
аэродинамическом аспекте) называ-
ются обтекаемые потоком части
самолета, создающие подъемную силу
и силы, обеспечивающие устойчи-
вость движения и управляемость
самолета. Это крыло 1, горизонталь-
ное оперение 2 и вертикальное оперение
3 самолета.
Рис. 7.1. Основные части самолета (на
примере самолета Ан-14 ОКБ
им. О.К. Антонова)
Ненесущими частями самолета называются обтекаемые потоком части
самолета, доля подъемной силы которых пренебрежимо мала по
сравнению с подъемной силой несущих частей. Это фюзеляж (корпус)
4 и гондолы двигателей 5.
7.1.1. ГЕОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ НЕСУЩЕЙ ПОВЕРХНОСТИ (КРЫЛА)
Форма горизонтального и вертикального оперения самолета
описывается теми же параметрами, что и форма крыла.
Форма крыла в плане появляется в результате компромисса между
требованиями аэродинамики, прочности, технологии и т.п. и описывается
Рис. 7.2. Различные формы в плане несущих поверхностей самолетов:
а - АНТ-5; б - По-2; в - БИЧ-3; г - Як-40; д - Су-37 "Беркут"; е - К-2; ж - Ту-144; з - Ан-28;
и - Ил-62
5*
131
Рнс. 7.3. Простые формы крыла в плане:
а - прямоугольное; б - трапециевидное;
в - треугольное; г - стреловидное; д -
ромбовидное
отрезками прямых, кривых (второго
и более высоких порядков) или их
комбинацией. Формы крыльев само-
летов показаны на рис. 7.2 (масштабы
самолетов - разные).
Крыльям, форма в плане которых
определяется простейшими кривыми
второго порядка, иногда дают назва-
ния по названию соответствующей
кривой: эллиптическое (эллипсовид-
ное) крыло (рис. 7.2, е); параболичес-
кое крыло с прямой задней кромкой
(рис. 7.2, в). Крыльям более сложных
очертаний иногда дают специальные
названия: серповидное (форма крыла
напоминает очертания серпа), ожи-
вальное (готическое) (рис. 7.2, ж).
Для крыльев простых очертаний (рис. 7.3) основными являются
геометрические параметры, представленные на рис. 7.4.
Хорда (от греч. chords- струна) - длина отрезка линии, ограниченного
носиком и хвостиком сечения крыла вертикальной плоскостью в
направлении полета. Обычно концевая хорда Ьк крыла самолета меньше
корневой b(j.
В практических расчетах по аэродинамике и динамике полета
самолета пользуются средней аэродинамической хордой (САХ) крыла £>А.
Для крыла произвольной
формы в плане средняя аэ-
родинамическая хорда оп-
ределяется по формуле
ЬА = — f b2dz,
sJo
где S - площадь крыла, м2;
I - размах крыла, м; Ъ - те-
кущая хорда крыла, м.
Поперечный угол крыла
фкр, или так называемый
угол поперечного V крыла,
Рнс. 7.4. Основные геометрические параметры крыла
132
Рне. 7.5. Угол поперечного V крыла:
а - Ил-86; б - Ту-114
характеризует вид крыла спереди (рис. 7.5). Для современных самолетов
значения угла фкр лежат в пределах от-5 до +5°.
Сужение крыла г) показывает степень трапециевидное™ крыла, ц =
-Ьй!Ьк. Очевидно, что для прямоугольного крыла (см. рис. 7.3, а) q = 1,
для треугольного (см. рис. 7.3, в) и ромбовидного (см. рис. 7.3, d) ц = <».
Удлинение крыла Л характеризует соотношение размаха крыла и
средней хорды и определяется выражением Л = /2/S.
Условно различают крылья малого и большого удлинений. Крыло
малого удлинения (Л = 2...3) - короткое, с относительно большими
хордами, применяется на сверхзвуковых самолетах; крыло большого
удлинения (Л = 6... 12) - длинное, с относительно малыми хордами,
применяется на дозвуковых пассажирских (транспортных) самолетах.
Угол стреловидности % - угол между плоскостью, перпендикулярной
к центральной (корневой) хорде, й касательной к линии 1/4 хорд (хц4)'
или к передней (%п к) или задней (%з к) кромкам крыла. У крыльев
скоростных дозвуковых пассажирских самолетов угол стреловидности
Х|/4 = 20...35°, у крыльев самолетов, летающих на сверхзвуковых
скоростях, хп.к = 20...70°,
У крыла прямой стреловидности (см. рис. 7.2, и) концевая хорда
смещена назад по потоку относительно корневой хорды крыла. У крыла
обратной стреловидности (см. рис. 7.2, д') концевая хорда находится
впереди по потоку относительно корневой хорды.
Профиль несущей поверхности - это сечение крыла плоскостью,
параллельной плоскости симметрии самолета. Профиль крыла в
основном определяет характер обтекания несущей поверхности
воздушным потоком, спектр скоростей и, соответственно, эпюру
давлений. Таким образом, аэродинамические характеристики крыла во
многом зависят от профиля. В распоряжении проектировщиков имеются
многотомные "Атласы профилей", в которых наряду с геометрическими
параметрами профилей приведены их аэродинамические характеристаки.
Выбирая определенную серию профилей (симметричный или несимметрич-
ный профиль, с плоскими или криволинейными образующими и т.д.)
133
крыла, проектировщик обеспе-
чивает получение требуемых
аэродинамических характе-
ристик проектируемого само-
лета.
Некоторые формы профи-
лей представлены на рис. 7.6.
Помимо хорды Ъ характер-
ными линейными размерами
профиля являются его макси-
мальная толщина с и положе-
ние максимальной толщины по
хорде, а также максимальная
вогнутость профиляf (расстоя-
ние от хорды до средней ли-
нии - геометрического места
точек середин толщин профи-
ля). Естественно, у симметрич-
ных профилей средняя линия
совпадает с хордой. Обычно
для характеристики профиля
используются относительные
величины:
Ж относительная толщина
с = —• 100 %;
Рис. 7.6. Некоторые формы (серии) профилей: b
а -симметричный двояковыпуклый; б - несим- относительная кривизна
метричный двояковыпуклый; в - несимметрич- _ f
ный плосковыпуклый; г - клиновидный; д - f = =£-100 %.
ромбовидный; е - S-образный; ж - выпукло- Ъ
вогнутый Профили одной серии (на-
пример, несимметричные двоя-
ковыпуклые) отличаются друг от друга значениями си/. Относительная
толщина современных профилей изменяется в очень широком диапазоне:
с = 3...8 % - тонкие профили для крыльев сверхзвуковых самолетов;
с = 8...12 % - профили средней толщины для скоростных дозвуковых
самолетов;
с = 12...18 % - толстые профили для нескоростных самолетов.
Относительная кривизна современных профилей / = 0...3 %.
В настоящее время большое внимание уделяется поиску форм
профилей, обеспечивающих в спектре обтекания профиля наличие
134
Рис. 7.8. Сверхзвуковой пассажирский самолет
Ту-144 и его аналог в полете
Рис. 7.7. Геометрическая крутка крыла
достаточно протяженной зоны с ламинарным течением потока в
пограничном слое (ламинарные, или ламинаризированные, профили), что
позволяет снизить лобовое сопротивление несущих поверхностей.
Суперкритические профили, имеющие относительно плоский контур
верхней поверхности, позволяют увеличить критическое число М
полета дозвукового самолета, т.е. отодвинуть эффект волнового кризиса
и, увеличив таким образом крейсерскую скорость, повысить транспор-
тную эффективность самолета.
На улучшение аэродинамических характеристик несущей поверхности
(крыла) направлены и такие конструктивные решения, как геометричес-
кая или аэродинамическая крутка крыла или их комбинация. Геометри-
ческая крутка образуется на крыле, поперечные сечения которого
набраны из профилей одной серии (с постоянными по размаху крыла
значениями с и /), установленных с различными углами <р по размаху
(рис. 7.7) так, что поверхность, образованная хордами профилей,
оказывается неплоской. Аэродинамическая крутка образуется, когда
вдоль размаха крыла на плоской серединной поверхности, образованной
линиями хорд, в поперечных сечениях набраны профили различных серий
(с переменными по размаху крыла значениями с и /).
Нетрудно заметить, что если крылья двух разных_ самолетов
составлены из одинаковых профилей (одной серии, = с2 и= Z) и при
этом равны их стреловидности по передней кромке и сужения (%nijl =
= хп к2; Л1 = т]2), то при соблюдении условия \ крылья подобны
(конгруэнтны). Таким образом, удлинение А. характеризует подобие
крыльев.
Как мы отмечали выше, геометрическое подобие обтекаемых тел
позволяет по модели (аналогу) получить аэродинамические характерис-
тики проектируемого самолета. Так, при проектировании сверхзвукового
пассажирского самолета Ту-144 на базе легкого сверхзвукового
истребителя МиГ-21 был построен самолет-аналог (рис. 7.8) с крылом
сложных формы и профилировки, подобным крылу проектируемого
135
самолета. Это позволило не только смоделировать в реальном полете
аэродинамику будущего Ту-144, но и решить другие проблемы.
Если в дополнение к записанным выше условиям геометрического
подобия двух крыльев еще и выполняется равенство St = S2, то крылья
одинаковы.
Следует отметить, что аналогия летных характеристик различных
самолетов при одинаковых числах М полета определяется не только
геометрическим подобием их агрегатов (частей), но и значениями
тяговооруженности Р и удельной нагрузки на крылор, которые, таким
образом, также являются критериями при сравнении различных
самолетов.
7.1.2. ГЕОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ НЕНЕСУЩИХ ЧАСТЕЙ
САМОЛЕТА (ФЮЗЕЛЯЖА)
Очевидно, что для фюзеляжа как части самолета, не создающей в
традиционной компоновке подъемной силы, оптимальной с точки зрения
аэродинамики будет форма удобообтекаемого тела минимального
лобового сопротивления, подобного изображенному на рис. 5.11, г. На
рис. 7.9 показаны применяемые формы фюзеляжей самолетов (масштабы
самолетов разные). Видно, что они сильно отличаются от аэродинамичес-
ки целесообразных. Некоторые причины этого рассмотрены в
подразд. 7.5.
Рис. 7.9. Формы фюзеляжей самолетов:
а-Ту-144; й-Ту-104; в - Як-18; г - Ан-14; д - SN-600 (Франция); г - Mini Guppy (США);
.nc-DC-З (США); з-Ил-76; u-Argosy (Англия); к - "Илья Муромец"
136
Фюзеляж по длине условно
делят на три основные части:
носовую (переднюю, головную),
цилиндрическую (центральную),
кормовую (хвостовую, донную)
с длинами /н, /ц, 1К соответствен-
но (рис, 7.10).
Геометрия фюзеляжа строит-
ся относительно условно вы-
бранной базовой линии, кото-
рую называют строительной
горизонталью фюзеляжа (СГФ).
В качестве параметра для
установления некоторого (не-
полного) подобия фюзеляжей
принимают удлинение фюзеляжа
Рис. 7.10. Основные геометрические параметры
фюзеляжа
- Ч + \ + \
Здесь Ан, Ац, Лк- соответственно удлинения носовой, цилиндрической
и кормовой частей фюзеляжа, определяемые соотношениями *1 ~ ;
4ф - эквивалентный диаметр фюзеляжа, определяемый как диаметр круга,
площадь которого равна площади миделевого сечения фюзеляжа 5М ф:
dt
^и.ф
к
Для современных околозвуковых самолетов (с крейсерскими
скоростями, соответствующими М = 0,8.,.0,9) Хл = 8...13 (Ан = 1,7...2,5;
А.к = 3...4); для сверхзвуковых самолетов 1ф = 10../22 (1Н = 4...6; Хк = 5...7).
Отметим, что деление на несущие и ненесущие части правомерно
только для самолетов традиционных аэродинамических компоновок и
весьма условно для самолетов перспективных аэродинамических
компоновок со специально профилированным, несущим корпусом
(фюзеляжем) - так называемых интегральных аэродинамических схем.
7.2. ПОЛЕТНАЯ КОНФИГУРАЦИЯ САМОЛЕТА
В установившемся горизонтальном полете подъемная сила Y
уравновешивает силу тяжести G и сумма моментов всех сил относительно
центра масс (ц.м.) равна нулю (£А/ = 0). Однако с изменением скорости
137
Рис. 7.12. Схема, поясниющая образование
кабрирующего момента
Рис. 7.11. Схема, поясняющая образование
пикирующего момента
полета меняется положение центра давления (ц.д.) крыла, в котором
приложена его подъемная сила У^,. Выгорание топлива в процессе
полета, перемещение пассажиров в кабине приводят к смещению ц.м. При
положении ц.д. позади ц.м. (рис. 7.11) относительно ц.м. (оси самолета
OZ) создается момент М2 < 0, называемый пикирующим моментом или
моментом на пикирование (от франц, piquer (ипе tete) - падать вниз
головой). В случае, показанном на рис. 7.12, создается момент М2 > О,
называемый кабрирующим моментом или моментом на кабрирование
(франц, cabrage от cabrer, букв. - поднять на дыбы). Для моментов сил
относительно оси самолета OZ принято следующее правило знаков:
положительный момент М2 стремится поднять нос самолета вверх,
отрицательный момент М2 - опустить нос самолета.
Обеспечить продольную балансировку (балансировку по тангажу)
самолета (£Л/г = 0) можно с помощью горизонтального оперения (ГО) -
дополнительных горизонтально расположенных несущих поверхностей,
разместив их на определенном расстоянии от ц.м. На ГО создается сила,
парирующая момент М2, возникающий при взаимном смещении ц.м. и
ц.д. или при изменении значений сил Укр и G. Конструктивно горизон-
тальное оперение (рис. 7.13) может быть выполнено в виде неподвижно
закрепленного на фюзеляже 1 стабилизатора 2, концевую часть
которого-руль высоты 3 летчик может поворачивать относительно оси
4, изменяя таким образом кривизну профиля ГО и, следовательно, его
подъемную силу УГ(/
Другой возможной конструктивной реализацией ГО является
цельноповоротное горизонтальное оперение (ЦПГО) (рис. 7.14)- несущая
поверхность 2, которая может поворачиваться относительно фюзеляжа
138
Рис. 7.13. Горизонтальное оперение
Рис. 7.14. Цельноповоротное горизонтальное
оперение
3 вокруг оси 7. В этом случае Угоизменяется за счет изменения угла атаки
ГО.
7.2.1. АЭРОДИНАМИЧЕСКИЕ СХЕМЫ САМОЛЕТОВ. ПРОДОЛЬНАЯ
БАЛАНСИРОВКА, УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
Аэродинамическая схема самолета, у которого продольная баланси-
ровка обеспечивается горизонтальным оперением, расположенным за
крылом, называется нормальной или классической схемой (рис. 7.15).
Пикирующий момент крыла (М, кр < 0) парируется кабрирующим
моментом (М2 г 0 > 0), создаваемым подъемной силой горизонтального
оперения Уг о.
Схема самолета, у которого продольная балансировка обеспечивается
ГО, расположенным перед крылом, называется "утка" (рис. 7.16).
Рнс. 7.15. Балансировка самолета нор-
мальной схемы
Рнс. 7.16. Балансировка самолета схемы
"утка"
139
Рис. 7.17. Элевоны на самолете схемы "бес- Р||с> 7.18. Балансировка самолета схемы
хвостка" "бесхвостка"
Возможна также продольная балансировка самолета без горизонталь-
ного оперения - схемы "бесхвостка" - за счет отклонения элевонов,
расположенных на крыле (рис. 7.17). Схема сил при балансировке
"бесхвостки" за счет подъемной силы элевонов Уэя представлена на
рис. 7.18.
Все первые самолеты, созданные в России и Советском Союзе,
начиная с самолета И.И. Сикорского "Илья Муромец", были построены
по нормальной схеме; самолет братьев Райт был построен по схеме
"утка". Впервые в нашей стране самолет по схеме "бесхвостка" создал
Б.И. Черановский (БИЧ-3). Фюзеляж этого самолета практически
вписывался в крыло толстого профиля.
Схема "бесхвостка", не имеющая явно выраженного фюзеляжа,
называется "летающее крыло".
Классификация самолетов по аэродинамическим схемам (по способу
обеспечения продольной балансировки) представлена на рис. 7.19. Здесь
и далее на рисунках вопросительный знак означает, что представленные
примеры не исчерпывают весь спектр технических решений, которые уже
найдены или будут найдены проектировщиками.
Выбор схемы - один из сложнейших вопросов, решаемых при
проектировании. Самолет Ту-144 в крейсерском полете (см. рис. 7.8) -
"бесхвостка", на режимах взлета и посадки (см. рис. 20.35) - "утка",
самолет "Тандем-МАИ" (см. рис. 19.27) имел два крыла, расположенные
тандемно. Таким образом, при проектировании самолета в зависимости
от стоящих перед ним задач могут комбинироваться известные и
появляться новые схемы, обеспечивающие необходимые устойчивость
и управляемость самолета в полете.
140
Рис. 7.19. Классификация самолетов по аэродинамическим схемам
Устойчивость - способность самолета противостоять внешним силам,
стремящимся отклонить его от заданного (установившегося) режима
полета. Устойчивый самолет самостоятельно, без участия летчика,
сохраняет заданный (установившийся) режим полета и за конечный
промежуток времени возвращается к исходному режиму после непроиз-
вольного отклонения от него под действием кратковременных малых
внешних возмущений (например, порыва ветра, восходящего потока
воздуха, случайного перебоя в работе двигателя или отклонения рулевой
поверхности и т.п.).
При изменении полетных углов атаки (так же, как и при изменении
скорости полета) происходит значительное изменение положений
центров давления крыла и горизонтального оперения. Следовательно,
изменяются моменты аэродинамических сил, действующих на самолет.
При оценке дополнительных моментов относительно оси OZ,
возникающих на самолете при изменении угла атаки, в методическом
плане более удобным, чем понятие "центр давления", является понятие
"аэродинамический фокус самолета" (или крыла, если рассматривается
изолированное крыло).
Можно считать, что при изменении угла атаки Да положение ц.д. не
изменяется, а приращение подъемной силы Д Y приложено в некоторой
точке, выбранной таким образом, что получающееся за счет смещения
ц.д. изменение момента самолета ДМг соответствует реальному.
Точка приложения приращения подъемной силы при изменении угла
атаки называется аэродинамическим фокусом.
141
Фазы полета
Рис. 7,20. Схемы к объяснению продольной устойчивости самолета
Положение аэродинамического фокуса относительно носка средней
аэродинамической хорды крыла определяется относительной величиной
(в долях САХ) xr = Xplbk.
Положение центра масс самолета (совпадающее с положением центра
приложения силы тяжести хт) относительно носка САХ крыла,
определяемое относительной величиной хци = хт = хци/ЬА, называется
центровкой самолета. Центровку, как и положение фокуса, часто
выражаютв процентах САХ. Так, выражение "центровка самолета 20 %"
означает, что расстояние от центра масс самолета до носка САХ
составляет 20 % длины САХ.
Продольная устойчивость (устойчивость по тангажу) обеспечивается
определенным положением фокуса самолета относительно центра масс.
Если фокус самолета расположен за центром масс, то при увеличении
угла атаки Да, например за счет вертикального порыва ветра, возникает
приращение подъемной силы ДУ (рис. 7.20, а), которое создаст
относительно ц.м. самолета пикирующий момент АЛЛ,. Под действием
этого момента самолет, вращаясь относительно ц.м. с угловой скоростью
wz, возвратится к исходному режиму полета. Схема сил при случайном
уменьшении угла атаки приведена на рис. 7.20, б.
142
Рнс. 7.21. Изменение коэффицне1гга продольного момента mz самолета в зависимости от Су
(угла а)
При рассмотренном взаимном расположении ц.м. и фокуса самолет
устойчив по тангажу.
Нетрудно видеть, что если ц.м. находится за фокусом, при действии
внешних возмущений самолет не возвращается к исходному положению,
т.е. самолет неустойчив. Пилотирование неустойчивого самолета
возможно только с применением средств автоматического управления.
Таким образом, взаимное положение центра масс хц м = хТ и фокуса xF
определяет знак и величину момента ДМг, возникающего при действии
возмущений, и, следовательно, степень устойчивости самолета.
В инженерных расчетах принято выражать аэродинамический момент,
действующий на самолет, формулой
М = mqSbK,
где q - скоростной напор, q = р №/2; S - площадь крыла; 6А - длина САХ
крыла; т - безразмерный коэффициент момента, зависящий от
143
компоновки, геометрических параметров и числа М полета самолета.
Продольная устойчивость самолета оценивается производной
mfr = ^£-производнойкоэффициентапродольного(относительнооси
дСУ
OZ) момента mz по коэффициенту подъемной силы Су.
Если для самолета, сбалансированного на угле атаки а6 (М2 = 0; т. =
= 0), случайное увеличение угла атаки Да и, соответственно, коэффициен-
та подъемной силы АСу вызовет появление момента на пикирование
(Дл12 < 0), то самолет является устойчивым в продольном движении. На
рис. 7.21 такой самолет характеризует кривая 1 зависимости mz = f(Cy),
для которой т2' < 0.
Кривая 3 характеризует неустойчивый в продольном движении самолет,
для которого положительное приращение ДС^, (увеличение угла атаки
Да) вызывает появление кабрирующего момента (Дл?2 > 0 и, соответствен-
но, т, ’ > 0). Кривая 2 характеризует нейтральный (безразличный) в
области балансировочного угла атаки аб самолет (т2’ = 0), для
которого случайное малое изменение угла атаки не вызывает нарушения
балансировки.
Таким образом, коэффициент у ' характеризует степень нарастания
восстанавливающего (или дестабилизирующего для неустойчивого
самолета) аэродинамического момента самолета в горизонтальном
полете с постоянной скоростью при случайном изменении угла атаки
(например, при мгновенном воздействии на самолет вертикального
порыва ветра).
Можно показать, что коэффициент у ', называемый степенью или
запасом продольной устойчивости, численно равен разности относитель-
ных координат ц.м. и фокуса самолета:
с _
тх = *ц.м - хг-
Выражение "степень продольной устойчивости минус 8 %" означает,
что ц.м. находится впереди фокуса по полету; расстояние от ц.м. до
фокуса составляет 8 % длины САХ; тгс> = хцм - хг = -0,08; самолет
устойчив. Выражение "запас продольной устойчивости равен нулю"
означает, что положение фокуса совпадает с положением ц.м. и самолет
нейтрален в продольном движении,
Положение фокуса определяется аэродинамической компоновкой
самолета (взаимным расположением и геометрическими параметрами
144
несущих и ненесущих частей) и при заданной, например, крейсерской
скорости полета остается практически неизменным. Положение ц.м.
(центровка), таким образом, является основным фактором, определяю-
щим устойчивость самолета. Если у устойчивого самолета ц.м. смещается
назад, то расстояние между ним и фокусом уменьшается, уменьшается
и степень продольной устойчивости самолета.
Предельно задняя центровка определяет минимально допустимый
„ с.
запас устойчивости mz s, при котором возможные возмущающие
воздействиянасамолетнеприводяткнедопустимо большим изменениям
угла атаки и перегрузки, при которых возможна раскачка самолета.
Обычно = -0,05...-0,10, т.е. ц.м. находится перед фокусом на
расстоянии 5... 10 % САХ.
Предельно передняя центровка характеризует максимальную
устойчивость самолета и определяется возможностью сбалансировать
самолет на необходимых значениях Су при предельно возможных
отклонениях руля высоты.
Разбег центровок (эксплуатационный диапазон центровок) - раз-
ность между предельно задней и предельно передней центровками.
Устойчивость самолета проявляется в динамике движения, т.е. в
характере протекания возмущенного движения самолета, обусловленного
как воздействием на него внешних факторов (например, турбулентной
атмосферы), так и действиями летчика, управляющего самолетом. На
это движение оказывают влияние не только аэродинамические моменты
устойчивости, т.е. моменты, обусловленные взаимным положением ц.м.
и фокуса, но и моменты, обусловленные вращением самолета относитель-
но ц.м. в процессе возмущенного движения, Это прежде всего инерцион-
ные моменты, т.е. моменты, обусловленные силами инерции, действую-
щими на каждый агрегат самолета при его вращении относительно ц.м.,
зависящие от распределения масс агрегатов и грузов по длине самолета,
а также демпфирующие (от нем. dampfen - заглушать) моменты,
обусловленные аэродинамическими силами, возникающими при
вращении самолета относительно ц.м. в плотной воздушной среде и
препятствующими этому вращению.
Характер протекания по времени t возмущенного движения самолета
(например, изменения угла атаки а), выведенного случайным воздействи-
ем из исходного равновесного положения А (состояния балансировки)
в положение Б, в зависимости от степени устойчивости проиллюстриро-
ван рис. 7.22.
Устойчивый самолет (рис. 7.22, а) в процессе затухающего апериоди-
ческого 1 или затухающего колебательного 2 движения со временем
возвращается к исходному состоянию балансировки.
145
Неустойчивому самолету
(рис. 7.22,6} свойственно нарас-
тающее апериодическое откло-
нение 1 от исходного равновес-
ного положения или незатухаю-
щие колебания 2 с возрастающей
амплитудой, не обеспечивающие
возврат самолета к исходному
состоянию балансировки.
Нейтральный самолет (рис.
7.22, в) в возмущенном движении
будет совершать незатухающие
колебательные движения посто-
янной амплитуды относительно
исходного равновесного положе-
ния.
Естественно, что характерис-
тики устойчивости самолета
определяют его управляемость.
Управляемость-способность
самолета в ответ на действия
летчика выполнять любой ма-
невр, предусмотренный условия-
ми летной эксплуатации. Разу-
меется, надо стремиться к тому,
чтобы это происходило наиболее просто, с наименьшими затратами
энергии и времени летчика. Управление движением самолета в вертикаль-
ной плоскости летчик осуществляет, отклоняя руль высоты, расположен-
ный на ГО, либо ЦПГО, либо элевоны (у самолета-"бесхвостки") на
определенный угол Дб. При отклонении руля высоты на угол Дб на ГО
возникает дополнительная сила Д YTlf создающая момент ДАТ, относи-
тельно центра масс. Самолет, вращаясь относительно ц.м. с угловой
скоростью Дыг, изменяет угол атаки Да, что приводит к изменению
подъемной силы самолета на ДГмм=ДУЧ1+ДУгд, Возникает приращение
перегрузки Кпу, и самолет начинает двигаться по криволинейной
траектории в вертикальной плоскости. Таким образом, процесс
управления может быть описан алгоритмом
146
Дб - ДУГО - ДА/, - Дсо, - Да - ДКа11 - Ди„.
1 «ы Z Z UaM Д'
Следовательно, рули высоты и элевоны (у самолета-"бесхвостки")
являются не только органами балансировки, но и органами управления
самолетом при его движении в вертикальной плоскости.
Естественно, что чем более устойчив самолет, тем труднее вывести
его из состояния равновесия и, следовательно, тем хуже его управляе-
мость. При проектировании самолета необходимо обеспечить рациональ-
ный компромисс между его устойчивостью и управляемостью.
Для самолетов, спроектированных для полета на малых дозвуковых
с, -
скоростях, запас устойчивости тг', выбранный при проектировании,
изменяется весьма незначительно, только в пределах, обусловленных
эксплуатационным разбегом центровок, поскольку положение фокуса
самолета остается практически неизменным в достаточно широком
диапазоне дозвуковых скоростей полета. В связи с этим незначительно
изменяются углы отклонения рулей высоты (ЦПГО или элевонов),
необходимые для балансировки самолета на всех режимах полета, и, как
следствие, незначительны потери аэродинамического качества самолета
на балансировку, которые определяются как уменьшение (по сравнению
с максимально возможным) аэродинамического качества самолета за счет
увеличения лобового сопротивления, вызванного необходимостью
балансировки не неоптимальных
углах атаки.
Для самолетов, спроектирован-
ных для полета на больших дозву-
ковых скоростях (М = 0,80...0,85),
обеспечить хорошие характерис-
тики устойчивости и управляе-
мости на всех эксплуатационных
режимах полета одними аэродина-
мическими средствами практичес-
ки невозможно.
При переходе к сверхзвуковым
скоростям полета за счет перерас-
пределения давлений по несущим
поверхностям фокус самолета
значительно смещается назад
(рис. 7.23), что, с одной стороны,
резко увеличивает потери на ба-
Рнс. 7.23. Изменение запаса продольной
устойчивости самолета в зависимости от
скорости полета
147
лансировку, а с другой - приводит к существенному возрастанию степени
продольной устойчивости и, как следствие, к заметному ухудшению
продольной управляемости при сверхзвуковых скоростях.
Тщательная отработка традиционных схем самолетов, поиск новых,
нетрадиционных конфигураций, широкое применение автоматики в
системах управления позволяют создавать высокоэффективные самолеты
для решения различных сложных задач.
7.2.2. БОКОВАЯ БАЛАНСИРОВКА,
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА
Боковая балансировка предполагает наличие массовой, геометрической
и аэродинамической симметрии самолета относительно плоскости OXY.
Условия боковой балансировки
£Мя = 0; 1Му = 0.
В случае нарушения массовой симметрии, например когда в
результате отказа насосов не вырабатывается топливо из топливных
баков правой консоли крыла (рис. 7.24), под действием силы Д(?
появляется момент крена Мх, самолет начинает крениться вправо.
Одновременно с креном появляется момент рыскания Му, и самолет
начинает скользить в сторону опущенной консоли крыла под действием
силы Z (рис. 7.25), равной по модулю Ysiny.
Рис. 7.24. Схема к объяснению возникновения
крепа
Рис. 7.25. Схема к объяснению
возникновения скольжения при
крене
148
Рис. 7.26. Схема к объяснению возникнове-
ния рыскания
Рнс. 7.27. Силы, возникающие при отклоне-
нии элеронов и руля направления
В случае нарушения силовой симметрии, например в результате отказа
двигателей на правой консоли крыла (рис. 7.26), за счет тяги Р двигателя
на левой консоли и силы дополнительного сопротивления ДУ на правой
появляется момент рыскания Му, самолет начинает скользить с углом
0 и крениться.
Парировать крен можно при помощи элеронов (франц, aileron,
уменшит. от aile - крыло) 1 и 2 (рис. 7.27) - поворотных поверхностей
на задних кромках концевых частей крыла.
Дифференциальное отклонение элеронов (один элерон - вверх, другой -
вниз) создает момент Мх, которым можно парировать крен и создавать
крен, управляя движением самолета в горизонтальной плоскости:
Дбэ - ДУЭ - ДЛ/Х - Дых - Ду - Z = УяшДу,
где Д6Э - изменение угла отклонения элеронов.
Поворачивая руль направления 3, закрепленный на киле 4, летчик
создает боковую силу AZp н, которая парирует скольжение самолета,
возникающее в процессе балансировки и управления самолетом в
горизонтальной плоскости.
Таким образом, элероны и руль направления являются не только
органами балансировки, но и органами управления самолетом при его
движении в горизонтальной плоскости. У самолета-"бесхвостки" элевоны
совмещают функции рулей высоты и элеронов.
149
Рис. 7.28. Схема к объяснению путевой
устойчивости самолета
Путевая устойчивость (по рыс-
канию 7 обеспечивается вертикальным
оперением (летчик при этом не пово-
рачивает руль направления). При
случайно возникшем (например, за
счет бокового ветра) скольжении
(рис. 7.28) на вертикальном оперении,
имеющем симметричный профиль, за
счет боковой обдувки с углом р воз-
никает сила AZ (Р), которая относи-
тельно ц.м. создает момент ЬМу,
возвращающий самолет в исходное
положение. В создании стабилизиру-
ющего момента &Му участвует и
боковая поверхность фюзеляжа,
находящаяся за ц.м. самолета.
Самолет обладает путевой, или
флюгерной, устойчивостью, если при
скольжении возникает аэродинами-
ческий момент рыскания ЬМу, стре-
мящийся уменьшить угол скольжения.
Путевая устойчивость самолета оце-
нивается значением производной
коэффициента аэродинамического момента рыскания ту по углу
скольжения Р (в точке р = 0). Производная ту называется
коэффициентом путевой устойчивости (флюгерной устойчивости,
устойчивости пути). Рис. 7.29 иллюстрирует взаимодействие скольже-
ния и рыскания для устойчивого (т? < 0) и неустойчивого (т? > 0)
самолетов при определенной скорости полета.
Поперечная устойчивость (по крену) конструктивно обеспечивается
определенным соотношением между площадью вертикального оперения
и углом поперечного V крыла. Самолет обладает поперечной устойчивос-
тью, если при скольжении возникает аэродинамический момент крена
&МХ, действующий в сторону, противоположную скольжению (например,
при скольжении вправо стремится накренить самолет влево). Попереч-
ная устойчивость самолета оценивается производной коэффициента
аэродинамического момента крена }пх по углу скольжения т* = (в
150
Рис. 7.29. Зависимость коэффициента момента рыскания самолета от угла скольжения
Рис. 7.30. Зависимость коэффициента момента крепа самолета от угла скольжения
151
точке р = 0). Производная т* называется коэффициентом поперечной
устойчивости самолета. Рис. 7.30 иллюстрирует взаимодействие
скольжения и крена для устойчивого ( < 0) и неустойчивого ( w* >
> 0) самолетов.
Боковая устойчивость самолета обеспечивается определенным
соотношением путевой и поперечной устойчивости.
Боковая устойчивость, как и продольная, определяет динамику
движения самолета при внешних возмущениях и в управляемом полете.
7.2.3. СОСТАВ СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТОМ
Самолет как система представляет собой совокупность взаимосвязан-
ных управляемых подсистем. Совокупность бортовых устройств,
обеспечивающих управление системами и агрегатами самолета, а также
управление самолетом в целом, называют системой управления самоле-
том.
Обычно в системе управления выделяют относительно самостоятель-
ные подсистемы: управления рулевыми поверхностями, управления
двигателем, управления шасси, управления механизацией крыла и т.д.
Комплекс бортовых систем и устройств, обеспечивающих балансиров-
ку самолета в установившемся полете и маневрирование (реализацию
различных траекторий, определенных в ТЗ), называют основным
управлением или просто управлением. Остальную часть системы
называют вспомогательным управлением.
Для обеспечения балансировки в установившемся полете и маневриро-
вания самолета летчику необходимо отклонять рулевые поверхности
(рули высоты и направления, элероны).
Простейшая система управления рулевыми поверхностями самолета
показана на рис. 7.31.
Летчик отклоняет рулевые поверхности (органы управления) с
помощью ручного управления - ручки (или штурвала для тяжелых
самолетов) и ножного управления - педалей, размещенных в кабине
экипажа. Ручное управление служит для отклонения рулей высоты и
элеронов, ножное - для отклонения руля направления.
Командный пост управления самолетом (ручка или штурвал и педали)
соединен с рулевыми поверхностями таким образом, чтобы движение
самолета при отклонении командных рычагов (ручки и педалей)
соответствовало естественным рефлекторным движениям летчика при
сохранении равновесия и маневрировании.
При отклонении ручки на себя увеличивается угол атаки самолета за
счет отклонения рулей высоты (алгоритм процесса управления при
152
Рис. 7.31. Простейшая система управления рулевыми поверхностями самолета (пример)
отклонении рулевых поверхностей приведен в подразд. 7.2.1 и 7.2.2). При
отклонении ручки от себя угол атаки уменьшается.
При отклонении ручки влево за счет отклонения элеронов самолет
кренится на левую консоль крыла, и наоборот, при отклонении ручки
вправо самолет кренится на правую консоль крыла.
При движении вперед левой педали (при "даче левой ноги") за счет
отклонения руля направления самолет начинает движение влево, и
наоборот, при "даче правой ноги" самолет начинает движение вправо.
Проводка управления обеспечивает связь командных рычагов с
органами управления и в простейшей системе управления включает в себя
тяги, тросы, качалки, секторы, направляющие, ролики и другие элементы.
Система управления современного самолета (элементы ее конструкции
рассматриваются в гл. 12) - это сложнейший комплекс электромеханичес-
ких и гидравлических устройств, электроники и автоматики.
7.2.4. ПОКАЗАТЕЛИ УПРАВЛЯЕМОСТИ САМОЛЕТА
Для надежной, устойчивой работы любой управляемой технической
системы (рис. 7.32) требуется наличие обратных связей, которые
позволяют корректировать управляющее воздействие на систему по
промежуточному или конечному результату управления.
Обратная связь - это фактически информация о реакции системы на
входной сигнал, на основании которой вырабатывается управляющее
воздействие. Необходимость обратной связи вызвана тем, что на
управляемую систему действуют внешние возмущения (помехи), носящие
153
Внешние возмущения
] Входной сигнал
। (управляющее
1 воздействие)
Управляемая
система
1 Выходной сигнал [
>[ (реакция системы i
«на входной сигнал)[
Обратная связь |—
Рис. 7.32. Принципиальная блок-схема управляемой системы
в общем случайный характер. Кроме того, имеются определенные
отклонения параметров управляемой системы и входного сигнала.
Укрупненная блок-схема управления самолетом представлена на
рис. 7.33. Летчик через систему управления воздействует на самолет для
получения определенных параметров траектории движения в соответ-
ствии с потребной программой полета. Движение командных рычагов
(ручки или штурвала и педалей) летчик задает и корректирует в
соответствии с той информацией о реальных параметрах траектории
движения, которую он йолучает. Такой информацией (обратная связь
Б) является визуальная информация о положении самолета в про-
странстве и информация, выдаваемая на приборную доску летчика
пилотажно-навигационной системой (скорость, высота, курс, линия
горизонта и т.д.).
Существенную роль в управлении самолетом играют перегрузки,
ощущаемые летчиком при движении самолета (обратная связь Б), а также
усилия на командных рычагах управления (обратная связь А).
Таким образом, понятие управляемости самолета связано с его
реакцией на действия летчика, и показатели управляемости самолета
можно представить в следующем виде:
Показатель _ Величина, характеризующая действия летчика
управляемости Величина, характеризующая реакцию
самолета на действия летчика
Рис. 7.33. Укрупненная блок-схема управления самолетом
154
В качестве показателей управляемости при движении самолета в
вертикальной плоскости (продольной управляемости) можно указать,
например градиент усилий на ручке (штурвале) по перегрузке Р" и
градиент хода ручки по перегрузке хР:
Рп = dPIdn', хп = dxldn,
где ,dP - изменение усилий на ручке, необходимое для изменения
перегрузки dn\ dx - изменение хода (перемещения) ручки, необходимое
для изменения перегрузки dn.
Важными показателями управляемости являются также максимальные
перемещения рычагов управления и усилия на них, требуемые для
выполнения предельно допустимых маневров.
Обеспечение при проектировании самолета и системы управления
определенных показателей управляемости позволяет дать летчику
"чувство управления", когда он по перемещениям рычагов управления
и усилиям на них может судить об интенсивности маневра самолета. Это
создает летчику приемлемые условия для достижения необходимой
"плотности хода" самолета и его способности "ходить за рычагами" в
процессе пилотирования.
7.2.5. НЕКОТОРЫЕ МЕРОПРИЯТИЯ ПО УВЕЛИЧЕНИЮ ЭФФЕКТИВНОСТИ
АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ
В полетной (крейсерской) конфигурации самолет представляет собой
устойчивую в полете и управляемую сложную техническую систему,
включающую в себя в традиционных компоновочных решениях крыло,
горизонтальное и вертикальное оперение, фюзеляж и гондолы
двигателей. Основная задача проектировщика при формировании
крейсерской конфигурации заключается в создании самолета, обладаю-
щего на крейсерских (основных) режимах полета максимально возмож-
ным аэродинамическим качеством К- Y/X.
У = *7₽ ± *7.0+ п + *7.да ±
где Укр> Хкр - подъемная сила и сила лобового сопротивления крыла
соответственно; Уг 0, Хг 0 - подъемная сила и сила лобового сопротивле-
ния горизонтального оперения; Хъ 0 - сила лобового сопротивления
вертикального оперения; Уф, - подъемная сила и сила лобового
сопротивления фюзеляжа; Уг дв, Хг - подъемная сила и сила лобового
155
сопротивления гондол двигателей; Уинт, Уинт - дополнительные
подъемная сила и сила лобового сопротивления от взаимного влияния
(интерференции) частей самолета.
Как это ни парадоксально, но общая сила лобового сопротивления
самолета может быть меньше суммы сил сопротивления его отдельных
частей (полученных в результате расчетов или продувки в аэродинами-
ческих трубах), а подъемная сила - больше за счет удачной взаимной
увязки агрегатов, создания зализов - плавных переходов в местах
стыковки агрегатов и т.д. Необходимо рассматривать все возможные
пути обеспечения высокого аэродинамического совершенства проектиру-
емого самолета.
Противоречивость многих требований, предъявляемых к аэродинами-
ческой компоновке ЛА, не позволяет выработать однозначный критерий
оценки ее совершенства. Тем не мене достижения теоретической и
экспериментальной аэродинамики, развитие методов аэродинамичес-
кого расчета и обработки результатов эксперимента дают возможность
разрабатывать рациональные формы ЛА в зависимости от его назначе-
ния и режимов полета.
Для грузопассажирских самолетов, у которых основным (крейсерским)
режимом является длительный горизонтальный установившийся полет,
увеличение скорости или аэродинамического качества позволяет
увеличить дальность полета (см. подразд. 6.4) и, следовательно,
производительность при сохранении неизменными других параметров
Рис. 734. Влияние стреловидности на
аэродинамику крыла
(полетной массы, параметров силовой
установки и запасов топлива).
Главным препятствием к увеличению
скорости полета является наступление
волнового кризиса на несущих повер-
хностях самолета.
Несущая поверхность стреловидной
формы в плане позволяет отодвинуть
начало волнового кризиса до скорос-
тей, соответствующих числам Мкрит =
= 0,8...0,95 (при условии выбора соответ-
ствующих профилей), за счет того, что в
отличие от прямого крыла обтекание
стреловидного крыла имеет простран-
ственный характер.
Стреловидное крыло с углом стрело-
видности х по передней кромке
(рис. 7.34) можно рассматривать как
составленное из профилей 1 прямое
156
крыло, передняя кромка которого расположена под углом скольжения
Р = -5- -% к направлению невозмущенного потока. При обтекании такого
крыла невозмущенный поток, имеющий скорость V„, можно разложить
на две составляющие: поток, текущий по нормали к передней кромке со
скоростью Vn = K„cosx, и поток, текущий вдоль размаха крыла со
скоростью Vx = /„sinx. Поток, движущийся со скоростью /т, которая
не изменяется вдоль размаха, не будет влиять на распределение давления
по крылу и вызовет только поверхностное трение.
Поток, движущийся со скоростью Кп, которая будет изменяться вслед-
ствие торможения и разгона при обтекании профиля, будет определять
и поверхностное трение, и распределение давления по сечению крыла,
т.е. несущую способность стреловидного крыла. Так как скорость этого
потока Vn всегда меньше скорости набегающего потока Vx) то волновое
сопротивление у стреловидного крыла появится на больших скоростях
набегающего потока V„, чем у прямого. Однако несущая способность
стреловидного крыла меньше, чем у прямого, поскольку в создании
подъемной силы у стреловидного крыла участвует только составляющая
потока, направленная по нормали к передней кромке.
Кроме того, специфика пространственного обтекания стреловидного
крыла на больших околозвуковых скоростях полета, свойственное ему
стекание пограничного слоя вдоль размаха к концевым сечениям крыла
и срыв потока на концах крыла - концевой срыв - приводят к росту
лобового сопротивления и, как следствие, к снижению аэродинамическо-
го качества, а также оказывают неблагоприятное влияние на устойчи-
вость и управляемость самолета. Для снижения этих неблагоприятных
явлений на стреловидных крыльях применяется геометрическая и
аэродинамическая крутка.
Тонкая аэродинамическая перегородка 1 на верхней поверхности крыла
(рис. 7.35, а) или генераторы вихрей на передней кромке (выступ, или
"зуб", 1 на рис. 7.35, б или "запил" 1 на рис. 7.35, в) формируют постоян-
Рнс. 7.35. Аэродинамические перегородки и генераторы вихрей
157
ный вихревой шнур 2 на поверхности крыла. Пограничный слой
"наматывается" на вихревой жгут и стекаетвместе с ним, не накапливаясь
на концевых участках крыла, что снижает тенденцию к концевому срыву.
Концевые крылышки (рис. 7.36) разнообразной формы (крылышки, или
законцовки Уиткомба, названные так в честь американского аэродинами-
ка Р. Уиткомба), представляющие собой разновидность концевых
аэродинамических шайб, устанавливаются на концах стреловидных
крыльев и увеличивают эффективное удлинение крыла, препятствуя
перетеканию потока и выравниванию давлений на нижней и верхней
поверхностях крыла, т.е. увеличивают его несущую способность.
Установленные под определенным углом к вектору скорости набегающе-
го потока, они создают тянущую силу (подобно парусу, позволяющему
яхте двигаться против ветра), т.е. уменьшают силу лобового сопротивле-
ния. Кроме того, они ослабляют мощный концевой вихрь, разбивая его
на несколько вихрей меньшей интенсивности и снижая таким образом
индуктивное сопротивление, что увеличивает аэродинамическое
качество.
К повышению критического числа М полета и уменьшению
сопротивления интерференции приводит проектирование дозвукового
самолета с использованием правила площадей. Для трансзвуковых
(близких к скорости звука) скоростей полета это правило может быть
сформулировано следующим образом: чтобы обеспечить минимальное
сопротивление, эпюра 1 площадей поперечных сечений £Sj всех элементов
самолета (рис. 7.37) по длине самолета должна соответствовать эпюре
поперечных площадей эквивалентного тела вращения наименьшего
сопротивления (сигарообразного тела большого удлинения). Практичес-
кая реализация правила площадей сводится к тому, что в зонах
присоединения к фюзеляжу крыла, гондол двигателей, оперения площадь
Рис. 7.37. Схема к объяснению правила
площадей
Рис. 7.36. Концевые крылышки
158
поперечного сечения фюзеляжа уменьшается на величину, равную сумме
площадей агрегатов, расположенных в том же сечении. В результате в
зоне крепления крыла фюзеляж имеет довольно сильное "поджатие"
("осиную талию").
Для сверхзвукового самолета наиболее рациональным по критерию
максимального аэродинамического качества Ка тах крылом (форма в
плане) является близкое к треугольному крыло малого удлинения с
большим. углом стреловидности по передней кромке (рис. 7.38).
Обтекание такого крыла имеет существенно пространственный характер
и характеризуется интенсивным перетеканием воздуха с нижней
поверхности на верхнюю через передние кромки. В вихревых жгутах
(рис. 7.39), образующихся при этом, давление по сравнению с атмосфер-
ным понижено, что создает дополнительную подъемную силу. Треуголь-
ное крыло, рациональное для сверхзвуковых режимов полета, существен-
но уступает по Ка тах в околозвуковом и, особенно, дозвуковом
диапазонах скоростей стреловидному и прямому крыльям.
При выборе аэродинамической компоновки сверхзвукового
самолета в зависимости от конкретных параметров технического задания
на проектирование приходится решать вопрос, какому из режимов
полета, оговоренных ТЗ (дозвуковому или сверхзвуковому), отдать
предпочтение. Облик сверхзвукового пассажирского самолета, для
которого крейсерский полет на сверхзвуковой скорости является
определяющим, существенно отличается от облика боевых высокоманев-
ренных самолетов, которые должны обладать высокой эффективностью
в широких диапазонах чисел М и углов атаки.
Использование сложной профилировки несущих поверхностей,
корневых наплывов крыла, проектирование самолета с учетом
Рис. 738. Зависимость максимального аэро-
динамического качества от числа М для
различных форм крыла в плайе
Рис. 7.39. Вихревые жгуты при обтекании
треугольного крыла
159
Рис. 7.40. Управление пограничным
слоем
сверхзвукового, дифференциаль-
ного правила площадей, когда
площади поперечных сечений
изменяются по определенному
закону не только по длине, но
и по высоте самолета, переход
к интегральным компоновкам -
эти и другие конструктивно-
компоновочные мероприятия
позволяют уменьшить небла-
гоприятные изменения аэроди-
намических характеристик и
характеристик устойчивости и
управляемости при полете на сверхзвуковых скоростях.
Самолеты, в аэродинамической компоновке которых использованы
рассмотренные конструктивно-компоновочные решения, приведены в
подразд. 20.2
Весьма эффективным средством получения потребных ЛТХ самолетов
может оказаться пртлтежяъэнергетпическихметодов непосредственного
воздействия на характер обтекания (например, несущих поверхностей)
с помощью газовых струй, дополнительно создаваемых на обтекаемых
поверхностях. Так, сдувание (сдув) или отсос пограничного слоя (рис. 7.40)
через щели (или перфорацию) 1 в обшивке интенсифицирует течение в
пограничном слое и позволяет сохранить ламинарное течение на
значительной части поверхности крыла. Управление пограничным слоем
(УПС) или управление ламинарным обтеканием (УЛО) позволяет
существенно снизить сопротивление трения, затянуть срыв потока на
большие углы атаки, повысить аэродинамическое качество несущей
поверхности.
Соответствующим выбором положения щелей на поверхности и
количества выдуваемого (или отсасываемого) воздуха можно обеспечить
такое взаимодействие газовых струй 2 с основным потоком 3, которое
приведет к образованию суперциркуляции (дополнительной циркуляции
потока), сущность которой состоит в дополнительном разгоне (или
торможении) потока и, соответственно, уменьшении (или увеличении)
давления на отдельных участках несущей поверхности с целью получения
приращения подъемной силы.
160
Рис. 7.41. Выдув струи вдоль размаха
крыла
Поперечный выдув струи 1
вдоль размаха (рис. 7.41) на
крыльях малого удлинения 3,
например на верхней повер-
хности, формирует устойчивый
вихрь 2 вдоль передней кром-
ки, что приводит к значитель-
ному возрастанию разрежения
над крылом.
Следует отметить, что эффективность энергетических методов резко
падает при увеличении скорости полета.
Естественно, что реализация энергетических методов повышения
аэродинамических характеристик требует отбора энергии от основных
двигателей или наличия дополнительной силовой установки для создания
газовых струй, усложняет и утяжеляет конструкцию несущих поверхнос-
тей, затрудняет техническое обслуживание таких систем. Кроме того,
повышение несущей способности энергетическими методами заметно
изменяет момент тангажа, что требует дополнительных мер по
обеспечению продольной балансировки (увеличения размеров горизон-
тального оперения или использования на нем таких же эффективных
энергетических методов управления циркуляцией).
Существенное влияние на полетную конфигурацию и общую
компоновку самолета оказывает выбор типа и числа двигателей,
обеспечивающих потребную для полета тяговооруженность и, как
следствие, основные летно-технические характеристики самолета.
Расположение двигателей, форма и расположение воздухозаборников,
размещение потребного запаса топлива влияют на распределение
площадей поперечных сечений и, как следствие, на аэродинамические
характеристики самолета.
Таким образом, процесс аэродинамической компоновки неразрывно
связан с оценкой не только летных, но и других (весовых, технологичес-
ких, эксплуатационных) технических характеристик проектируемого
самолета. Поскольку существуют объективные законы взаимодействия
самолета с потоком воздуха, самолеты, проектируемые по сходным ТЗ,
будут иметь практически одинаковые компоновочные признаки
(аэродинамическую схему, геометрические параметры основных
агрегатов и их взаимную увязку). Самолеты, спроектированные по
6 7425
161
Рис. 7.42. Классификация самолетов по взаимному расположению крыла и фюзеляжа
Рис. 7.43. Классификация самолетов по расположению двигателей
162
ВЗАИМНОЕ РАСПОЛОЖЕНИЕ
ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО
ОПЕРЕНИЯ
(классификационный признак)
Рис. 7.44. Классификация самолетов по взаимному расположению горизонтального и
вертикального оперения
различным ТЗ, будут существенно различаться, что позволяет классифи-
цировать их по отдельным компоновочным признакам (рис. 7.42,7.43,
7.44).
7.3. ВЛИЯНИЕ НА АЭРОДИНАМИЧЕСКУЮ КОМПОНОВКУ
УСЛОВИЙ БАЗИРОВАНИЯ И ЭКСПЛУАТАЦИИ САМОЛЕТА
Базирование самолета на аэродроме требует наличия у самолета шасси
(франц, chassis от лат. сарса - ящик, вместилище) - системы опор
самолета, обеспечивающих его устойчивую стоянку и движение при
маневрировании по аэродрому, разбеге при взлете и пробеге при посадке.
Для обеспечения устойчивости при стоянке вертикаль, проведенная
из центра масс самолета, должна находиться внутри контура 3,
ограниченного опорами (рис. 7.45).
ь*
163
Рис. 7.45. Система опор иа самолете
Опоры 1, на которые прихо-
дится бблыпая часть силы тя-
жести G самолета при стоянке,
называются основными опорами
шасси. Опоры 2, на которые
приходится меньшая часть
силы тяжести, называются
вспомогательными опорами
шасси. Таким образом,
G = nRB + m/?0; nRa < mR0,
где Ra, Ro - реакции вспомогательных и основных опор шасси со-
ответственно; п, т - числа вспомогательных и основных опор соот-
ветственно.
Взаимное расположение опор шасси на самолете определяет схему
шасси (рис. 7.46), В качестве элемента, передающего на землю силу
тяжести самолета и обеспечивающего продвижение самолета по
аэродрому, могут применяться колесо или (в зависимости от массы
самолета) колесная тележка, лыжа и другие опорные устройства
(рис. 7.47).
При посадке самолет касается земли, обладая достаточно большими
вертикальной (до 3 м/с) и горизонтальной (до 70 м/с) скоростями.
Поэтому колесо (лыжа и т.д,) соединяется с конструкцией самолета через
амортизатор (от франц, amortir - ослаблять, смягчать) - устройство,
способное поглощать и рассеивать в виде тепловой энергии энергию
ударов при посадке и при движении по неровной ВПП. Опора с
амортизационной стойкой (стойкой с амортизатором) представляет
собой довольно громоздкое сооружение, которое даже при очень
сложной кинематике уборки не всегда удается вписать в оптимальные
с точки зрения аэродинамики обводы самолета. Приходится для уборки
шасси применять гондолы, устанавливаемые на крыле (рис. 7.48) и
фюзеляже (рис. 7.49), которые существенно ухудшают аэродинамические
характеристики самолета.
Форма носовой части фюзеляжа (рис. 7.50) выбирается в результате
компромисса между требованиями аэродинамики и необходимостью
164
Рис. 7.46. Классификация схем шасси
ТИП ОПОРЫ ШАССИ
(классификационный признак)
Рис. 7.47. Классификация шасси по типу опорных устройств
165
Рис. 7.48. Гондола для уборки основной
опоры шасси, установленная па крыле
Рис. 7.49. Гондолы для уборки основных опор
шасси, установленные иа фюзеляже
обеспечить хороший обзор из кабины пилотов и оптимальные с точки
зрения прохождения радиоволн очертания обтекателя, закрывающего
антенну бортовой радиолокационной станции (РЛС).
Оптимальная с точки зрения аэродинамики и прочности форма
поперечного сечения фюзеляжа в виде круга нерациональна с точки
зрения использования внутренних объемов при компоновке полезной
нагрузки и агрегатов самолета. Поэтому при выборе формы поперечного
сечения фюзеляжа (рис. 7.51) проектировщикам также приходится идти
на компромисс.
Форма хвостовой части фюзеляжа (рис. 7.52) часто выбирается из
соображений удобства эксплуатации самолета на земле и обеспечения
необходимого зазора между землей и фюзеляжем при разбеге на
основных опорах шасси на взлете и при пробеге на посадке.
Взлетно-посадочная механизация.
Взлет и особенно посадка являются
наиболее сложными и потенциально
опасными режимами полета самолета.
Это объясняется многими причинами, и
Рис.750.Форма иосовойчастифюзе- Рис. 7.51. Формы поперечного сечения фюзе-
ляжа ляжа
166
Рис. 7.52. Форма хвостовой части фюзеляжа
в том числе тем, что проектно-кон-
структорские решения, обеспечиваю-
щие выполнение основных (крейсер-
ских) режимов полета, находятся
в явном противоречии с решения-
ми, обеспечивающими потребные
взлети о-посадочныехарактеристики.
С одной стороны, желательно,
чтобы на воздушных этапах взлета и
посадки, а также при движении по
земле самолет имел малые скорости. Это позволяет летчику хорошо
контролировать ситуацию, поскольку чем меньше скорость, тем больше
резерв времени для принятия решения и его выполнения. Кроме того, как
уже отмечалось, при меньших скоростях движения по земле существенно
снижаются при наезде на неровности ВПП ударные нагрузки на шасси
и, соответственно, на конструкцию самолета, уменьшается износ
пневматиков колес.
С другой стороны, полет на весьма малых высотах вблизи земли и
необходимость совершения достаточно сложных маневров на воздушных
этапах взлета и особенно посадки требует высокой эффективности
аэродинамических органов управления (рулей), которая тем меньше, чем
меньше скорость движения.
Скорость при отрыве или посадке определяется полученным из
уравнения Y = G соотношением
Ро CyS
где т - масса самолета при отрыве или посадке.
Снизить взлетно-посадочные скорости можно за счет увеличения
несущей способности крыла CyS.
С целью снижения силы лобового сопротивления самолета, уменьше-
ния потребной тяговооруженности желательно было бы выбрать
площадь крыла из условий полета с крейсерской скоростью на наивыгод-
нейшем угле атаки анв (рис. 7.53). Однако при посадке самолета с такой
площадью крыла даже на допустимом угле атаки адоп невозможно
обеспечить приемлемую посадочную скорость (как и скорость отрыва
при взлете).
167
Рис. 7.53. Зависимость коэффициента
подъемной силы от угла атаки для крыла
с механизацией (пример)
Рис. 7.54. Щиток
Для повышения несущей способнос-
ти крыла на взлетно-посадочных
режимах применяется взлетно-поса-
дочная механизация крыла.
Щитки (рис. 7.54) - наиболее
простой вид механизации крыла. Они
представляют собой отклоняемые
вниз части нижней поверхности кры-
ла, расположенные у задней кромки.
Увеличение подъемной силы при
отклонении щитка происходит за счет
увеличения эффективной кривизны профиля крыла, в результате
которого повышаются давление под крылом и разрежение над крылом.
Наиболее распространенным видом механизации задней кромки
крыла в настоящее время являются выдвижные многощелевые закрылки.
На рис. 7.55 показан двухщелевой закрылок, применение которого
повышает несущую способность крыла за счет увеличения кривизны
профиля, площади крыла и более плавного обтекания крыла, что
обусловлено перетеканием воздушного потока через щели между крылом,
дефлектором (от лат. deflecto ~ отклоняю, отвожу) и собственно
закрылком.
Для обеспечения возможности полета на больших углах атаки
Рис. 7.55. Двухщелевой закрылок
применяется механизация передней
кромки крыла, например предкрылок -
выдвигающийся вперед профилиро-
ванный носок крыла. Благодаря
перетеканию потока с нижней
поверхности крыла через щель за
предкрылком (рис. 7.56) ускоряется
поток, обтекающий верхнюю поверх-
ность крыла, и его срыв затягива-
ется до ббльших углов атаки (см.
рис. 7.53).
168
Предкрылок
Рис. 7.56. Предкрылок
Интерцептор
Рис. 7.57. Интерцептор
Естественно, что отклонение взлетно-посадочной механизации
увеличивает и лобовое сопротивление самолета.
Для сокращения длины пробега при посадке помимо реверса тяги
двигателя применяют интерцепторы, или спойлеры (рис. 7.57).
Интерцепторы (лат interceptor, от intercipio - перехватываю, отбиваю,
пересекаю) - плоские пластины, расположенные на верхней поверхности
крыла, в нерабочем положении утоплены заподлицо с поверхностью
крыла. При отклонении интерцепторов в момент касания поверхности
ВПП главными опорами шасси на посадке за счет срыва потока с верхней
поверхности крыла возникает дополнительное сопротивление и резко
уменьшается подъемная сила. Уменьшение подъемной силы увеличивает
нагрузку на опоры шасси и, следовательно, эффективность торможения
колес.
При отклонении в полете интерцептора на одной консоли крыла
происходит уменьшение подъемной силы и возникает крен в сторону этой
консоли. Следовательно, интерцептор может использоваться как орган
управления самолетом по крену.
В процессе проектирования необходимо оценить и энергетические
методы обеспечения заданных в ТЗ взлетно-посадочных характеристик
самолета. Обыкновенные предкрылки и щелевые закрылки создают
эффект дополнительной обдувки. Использование средств взлетно-
посадочной механизации с принудительным выдувом - струйной
механизации - позволяет обеспечить выполнение весьма жестких
требований ТЗ по взлетно-посадочным характеристикам. В качестве
примера таких средств рассмотрим выдув струй (рис. 7.58), направленных
по касательной к поверхности крыла при отклоненных носке 7 и
закрылке 2. Сжатый воздух, отбираемый от компрессора двигателя, по
воздушным каналам подается в каналы 3 и 4, идущие вдоль размаха
крыла и имеющие щелевые сопла 5, обеспечивающие выдув воздуха и
увеличение кинетической энергии потока, обтекающего крыло.
169
,5
Рис. 7.59. Струйный закрылок
Рис. 7.58. Струйная механизация пере-
дней и задней кромок крыла
К струйной механизации относится и струйный (реактивный)
закрылок (рис. 7.59) - это плоская струя 1 сжатых газов, вытекающих с
большой скоростью из узкой щели 2, расположенной вдоль задней
кромки крыла. Струя затрудняет обтекание крыла снизу, в результате
чего под крылом повышается давление. В то же время за счет подсасыва-
ющего влияния струи скорость потока над крылом увеличивается, а
давление уменьшается, как и при отклонении обычного закрылка. Кроме
того, за счет, реакции вытекающих газов струйный закрылок создает
дополнительную силу ДЯ, составляющая ДУ которой увеличивает
подъемную силу крыла, а составляющая ДР является дополнительной
силой для преодоления силы лобового сопротивления.
Теоретически энергетические методы механизации позволяют
реализовать на взлетно-посадочных режимах коэффициент подъемной
силы Су = 10...15, однако из-за отмеченных выше сложностей и проблем
при создании таких систем (главная из которых - невозможность
сбалансировать пикирующий момент) они пока не получили широкого
распространения.
Компоновочными мероприятиями можно обеспечить обдув части
верхней (рис. 7.60, а) или нижней (рис. 7.60,6) поверхности крыла струями
реактивных двигателей. Прирост подъемной силы крыла создается за
счет отклонения струи вниз при отклонении закрылков и интенсифика-
ции обтекания закрылков. В случае, показанном на рис. 7.60, а,
реализуется так называемый эффект Коанда (назван в честь румынского
ученого и изобретателя) - прилипание струи к искривленной поверхности
крыла.
170
Рис. 7.60. Обдув крыла струей реактивного двигателя
Таким образом, заданные условия базирования и эксплуатации
существенно влияют на облик самолета.
7.4. ЛЕТАТЕЛЬНЫЕ АППАРАТЫ КОРОТКОГО
И ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ
В качестве частного критерия эффективности ЛА, выполняющего
транспортную операцию, можно рассматривать себестоимость перевозок,
определяемую формулой
а = А/Р,
где а - себестоимость перевозок, т.е. стоимость (в рублях) перевозки 1 т
груза на расстояние в 1 км, руб./(ткм); А - расходы на эксплуатацию ЛА
в течение одного летного часа (себестоимость одного летного часа),
руб./ч; Р - плановая производительность ЛА, т.е. количество грузов (в
тоннах), доставленное на определенное расстояние (в километрах) в
течение одного летного часа, т-км/ч.
Расходы на эксплуатацию
А = ПЭР + КР,
где ПЭР - прямые эксплуатационные расходы, включающие в себя
погашение стоимости (амортизацию) ЛА, затраты на текущий ремонт
и техническое обслуживание ЛА, стоимость затраченного на полет
топлива, зарплату летного состава и расходы на страхование жизни
пассажиров и сохранности грузов; КР - косвенные расходы, включающие
в себя оплату за пользование аэродромами (расходы на аэропорты),
расходы на наземные службы и административный аппарат авиакомпа-
ний.
171
Косвенные расходы составляют примерно 50 % прямых эксплуатаци-
онных расходов. Одним из возможных путей повышения эффективности
ЛА является снижение расходов на аэропорты, т.е. использование ЛА
вертикального взлета и посадки, площадки для базирования которых
соизмеримы с габаритами ЛА. Это позволит не занимать под аэродромы
вблизи городов большие площади, пригодные для сельскохозяйственной
деятельности. Кроме того, ЛА вертикального взлета и посадки (ВВП)
способны доставлять грузы практически к конечному месту назначения
и использовать для взлета и посадки неподготовленные площадки, что
очень важно в экстремальных ситуациях (стихийные бедствия, боевые
операции).
По сравнению с обычными самолетами ЛА короткого взлета и
посадки (КВП) имеют существенно большую кривизну траектории при
взлете и посадке, могут взлетать и садиться практически в любом
направлении, что позволяет существенно уменьшить зону с повышенным
шумом в районе их базирования.
7.4.1. ВЕРТОЛЕТЫ
Как уже отмечалось (см. подразд. 4.4), движителем вертолета
(устройством, преобразующим работу двигателя в работу, обеспечиваю-
щую движение) является воздушный винт.
Воздушный винт - пропеллер (англ, propeller от лат. propello - гоню,
толкаю вперед) - создает при вращении аэродинамическую силу Та
(рис. 7.61, а), которая является тягой самолета с винтомоторной силовой
установкой или подъемной силой и тягой у вертолета. Лопасть винта
можно рассматривать как крыло, совершающее вращательное (относи-
тельно оси втулки винта) и поступательное (в направлении, перпендику-
лярном к плоскости вращения) движения. На любой элементарный
участок лопасти длиной dr (спрофилированный аналогично профилю
крыла) будет набегать воздушный поток с истинной скоростью W
(рис. 7.61, б), определяемой как геометрическая сумма окружной скорости
вращения U = шг = 2-пгп и скорости потока Vвдоль оси винта. Здесь
используются следующие обозначения: ы - угловая скорость вращения
винта, рад/с; п - частота вращения (число оборотов винта в секунду), с-1;
V - скорость потока, проходящего через плоскость вращения винта
(скорость полета в направлении оси винта), м/с.
При работе винта на месте (в режиме вентилятора) И- это скорость
подсасывания струи винтом. Таким образом, поток обтекает элемент
лопасти под углом атаки а, отличающимся от угла установки (установоч-
ного угла сечения винта) <р на угол р, называемый углом притекания
т
Рис. 7.61. Схема к объяснению принци-
па работы винта
струи. Естественно, что при
работе винта на месте а = <р. На
каждом элементе лопасти вин-
та возникает элементарная
аэродинамическая сила, выра-
жение для которой по анало-
гии с аэродинамической силой
крыла можно записать в виде
dR = CR £^dS,
а R‘ 2
где CR' - коэффициент полной
аэродинамической силы эле-
мента лопасти; dS - площадь
элемента лопасти в плане.
Проекция этой силы на
направление полета dTa назы-
вается элементарной тягой.
Проекция на плоскость враще-
ния винта dXa, препятствую-
щая его вращению, называется
элементарной силой сопротив-
ления вращению. Система эле-
ментарных сил приводится к
равнодействующим силам: Та,
которая является тягой винта,
и паре сил Ха, момент которых относительно оси винта препятствует его
вращению и называется моментом торможения или моментом
сопротивления вращению винта. Для преодоления этого момента к валу
винта должен быть приложен крутящий момент от двигателя. Так же,
как и аэродинамические силы крыла, тяга винта зависит от его
геометрических параметров: формы профилей, из которых набрана
лопасть, и распределения угла их установки по размаху лопасти (крутки
лопасти); формы в плане и размеров лопасти (длины САХ лопасти,
173
диаметра винта и, соответственно, площади, ометаемой винтом); числа
лопастей винта.
Изменять тягу винта можно изменением частоты вращения винта и
угла установки лопасти ip. При увеличении частоты вращения увеличива-
ется не только истинная скорость обтекания лопасти W за счет
увеличения окружной скорости U (см. рис. 7.61, б), но и угол атаки
лопасти а.
К увеличению угла атаки лопасти приводит и увеличение угла
установки лопасти <р или, как принято говорить, увеличение шага винта
Я (см. рис. 7.61, а).
Теоретический (геометрический) шаг винта Я- путь, который прошел
бы в осевом направлении винт за один оборот, если бы он ввинчивался
в воздух, как в гайку. Из развертки пути, пройденного за один оборот
концом лопасти при постоянном по размаху лопасти угле установки,
получим
tg<p = H/(2itR),
откуда
Н = 2л R tg<p.
Лопасти винтов имеют переменный по размаху угол <р, т.е. аэродина-
мическую и геометрическую крутку. Поэтому условно шагом винта
называют шаг расчетного сечения лопасти, отстоящего от оси вращения
на расстояние, равное 75 % размаха лопасти. Специальные механизмы,
Рис. 7.62. Винт изменяемого шага
применяемые в винтах изменяемо-
го шага (ВИШ) (рис. 7.62) позволя-
ют изменять шаг винта (угол уста-
новки лопастей <р), поворачивая
относительно продольной оси
комель лопасти - ее корневую
часть 1, шарнирно закрепленную
во втулке винта 2.
Несущий винт (НВ) вертоле-
та. Выше мы рассмотрели работу
воздушного винта в условиях
осевой обдувки (скорость набегаю-
щего потока перпендикулярна к
плоскости вращения винта). В
этих условиях НВ вертолета рабо-
тает только на режимах висения и
вертикального взлета и посадки.
174
Рнс. 7.63. Распределение скоростей па лопастях несущего винта
На всех остальных режимах полета НВ вертолета работает в условиях
косой обдувки, когда характер обтекания лопастей несущего винта
периодически изменяется. Так, в горизонтальном полете скорости
воздушного потока, набегающего на лопасти четырехлопастного
несущего винта (рис. 7.63), изменяются в зависимости от азимута (араб.
ас-сумут, мн. число от ас-самт - путь, направление) - углового
положения лопасти относительно вектора скорости набегающего потока
(направления полета).
Для произвольного азимутального положения лопасти, определяемого
углом ф, скорость обтекания концевого сечения лопасти, определяющая
действующие в сечении аэродинамические силы,
Жф = U + V = (3>R + Ksinip,
где ы - угловая скорость вращения винта; U - окружная скорость
концевого сечения; Ksim|r - составляющая скорости воздушного потока
от поступательного движения лопасти вместе с вертолетом.
Составляющая Kcosip направлена вдоль плоскости лопасти и не
участвует в создании аэродинамической подъемной силы.
На рис. 7.63 показаны эпюры скоростей обтекания по размаху
лопастей и указаны суммарные скорости концевых сечений лопастей в
характерных азимутальных положениях.
175
1 2 3 .4 5
1 3 5 4 5
ческие и инерционные силы i
Рнс. 7.64. Шарнирное крепление лопасти несу-
щего винта
Периодичность аэродинамических
сил и, соответственно, моментов этих
сил на втулке винта при жестком
креплении лопасти к втулке винта
приводит к вибрации и тряске. Для
уменьшения этих неблагоприятных
явлений применяют различные
способы крепления лопастей к втул-
ке, через которую при механическом
приводе передается крутящий мо-
мент от двигателя и которая передает
на фюзеляж вертолета аэродинами-
моменты, возникающие на лопастях
несущего винта.
Широко распространен шарнирный способ (рис. 7.64) крепления
лопасти 1 несущего винта к втулке 5. Для крепления применяются осевой
шарнир (ОШ) 2, который с помощью рычага изменения шага лопасти 6
позволяет изменять угол ее установки Д<р; вертикальный (ВШ) 3 и
горизонтальный (ГШ) 4 шарниры.
В режимах осевой обдувки несущего винта (висение, вертикальный
подъем и спуск вертолета) (рис. 7.65) при шарнирном креплении лопастей
под действием силы тяжести лопасти бл, аэродинамических сил (тяги
лопасти Yan и силы лобового сопротивления Ха л) и центробежной силы
F (которая значительно больше остальных сил) лопасть сама находит
равновесное положение, при котором сумма моментов сил, действующих
на лопасть, относительно шарниров равна нулю. Таким образом, силовое
воздействие лопасти на втулку уменьшается по сравнению с воздействием
при жестком креплении лопастей к втулке. Лопасти при этом отклоняют-
ся относительно ВШ в горизонтальной плоскости на угол 5 - угол
отставания лопасти и относительно ГШ на угол р в вертикальной
плоскости, в результате чего движение лопастей происходит по
поверхности конуса. Поэтому угол р называется углом конусности или
углом взмаха. Он тем больше, чем больше тяга винта (подъемная сила
Уд) при неизменной частоте вращения.
Шарнирная втулка несущего винта - один из сложнейших агрегатов
вертолета, поэтому при ее проектировании конструкторы, как правило,
ищут новые решения. Появились втулки НВ с совмещенными горизон-
176
Рис, 7.6S. Схемы к объяснению дей-
ствия шарниров крепления лопасти
тальным и вертикальным
шарнирами и втулки со сфе-
рическими эластомерными
подшипниками (от греч. elas-
las - гибкий, тягучий), кото-
рые за счет эластичности
полимерных элементов кон-
струкции обеспечивают необ-
ходимые углы установки ло-
пастей НВ.
Перемещение вертолета в
вертикальном направлении
происходит под действием
тяги (подъемной силы) несу-
щего винта. Увеличивать или
уменьшать эту силу можно
изменением мощности двига-
теля и одновременным изме-
нением угла установки всех
лопастей несущего вин-
та — изменением общего шага
винта.
Для перемещения вертоле-
та в горизонтальной плоскос-
ти необходимо наклонить
ось конуса, по поверхности которого происходит движение лопастей
несущего винта, в направлении движения. В этой ситуации при косой
обдувке лопасти несущего винта в процессе вращения обтекаются
потоком с различными скоростями (см. рис. 7.63) и, следовательно, на
них действуют изменяющиеся в зависимости от азимутального
положения лопасти аэродинамические силы. При этом возникает маховое
движение лопасти в вертикальной плоскости относительно горизонталь-
ного шарнира, причем амплитуда маховых движений лопастей возрастает
с увеличением скорости полета.
Колебательные движения лопастей относительно горизонтального
шарнира приводят к появлению в плоскости вращения лопасти
(горизонтальной плоскости) сил, стремящихся в зависимости от
177
направления махового движения лопасти (вверх или вниз) ускорить или
замедлить вращение лопасти, так называемых кориолисовых сил,
которые совместно с переменными по азимуту силами сопротивления
вызывают колебательные движения лопасти в горизонтальной плоскости
относительно вертикального шарнира.
Наличие горизонтального и вертикального шарниров позволяет за
счет махового и колебательного движений лопасти значительно
уменьшить неравномерность силового воздействия лопасти на втулку
при поступательном движении вертолета и уменьшить вибрации и
тряску.
Изменение значений аэродинамических сил на лопастях несущего
винта в зависимости от их азимутального положения можно уменьшить,
и изменяя угол установки лопасти в зависимости от ее азимутального
положения - изменяя циклический шаг несущего винта. В этом случае угол
установки лопасти автоматически увеличивается (поворотом лопасти
в осевом шарнире), когда результирующая скорость движения лопасти
уменьшается; при увеличении результирующей скорости лопасти угол
ее установки уменьшается.
Управляя циклическим шагом несущего винта таким образом, чтобы
для лопасти, направленной в сторону желаемого горизонтального
перемещения вертолета, уменьшался угол установки, а для лопасти,
направленной в обратную сторону, угол ее установки увеличивался, мы
соответственно изменим подъемные силы лопастей, и ось конуса винта
(и, соответственно, тяга) отклонится в необходимом направлении.
Изменение общего и циклического шагов несущего винта вертолета
с шарнирным креплением лопастей производится при помощи автомата
перекоса, принципиальная схема которого представлена на рис. 7.66, а.
Автомат перекоса расположен на валу (оси вращения) 5 несущего
винта непосредственно под его втулкой 4 и представляет собой
универсальный шарнир, внешнее вращающееся кольцо ^которого может
перемещаться вверх и вниз вдоль оси вращения несущего винта и
наклоняться относительно любой оси, лежащей в плоскости, перпендику-
лярной к оси вращения 5.
Внешнее кольцо 6 является обоймой шарикоподшипника и вращается
одновременно с валом 5 несущего винта за счет поводков - тяг 12,
соединяющих кольцо с рычагами управления шагом 2 лопастей 1 винта.
Кольцо 7, являющееся внутренней обоймой шарикоподшипника,
неподвижно в плоскости вращения внешнего кольца, однако эта
плоскость может изменять свое положение в пространстве, поворачива-
ясь с помощью сферического шарнира 8, которым внутреннее кольцо 7
подвижно соединяется с ползуном 9, способным перемещаться вдоль
вала 5.
178
Рнс. 7.66. Схемы к объяснению действия автомата
перекоса
При перемещении ползуна
с помощью тяги 10 за счет
одновременного перемещения
поводками 12 рычагов 2 управ-
ления шагом все лопасти несу-
щего винта поворачиваются в
осевых шарнирах 3 на одина-
ковые углы, которые при гори-
зонтальном положении плос-
кости внешнего кольца не из-
меняются по азимуту в процес-
се вращения несущего винта.
Так осуществляется управле-
ние общим шагом винта
(рис. 7.66, б), которое одновре-
менно с изменением мощности
двигателя изменяет тягу несу-
щего винта и обеспечивает
режимы висения, вертикально-
го взлета, набора высоты и
посадки.
При отказе двигателя он
специальной муфтой свободно-
го хода автоматически отклю-
чается от несущего винта, а
общий шаг несущего винта
устанавливается таким обра-
зом, чтобы обеспечить безопас-
ное вертикальное снижение и
посадку на режиме авторота-
ции (самовращения) несущего
винта. Объединенное управле-
ние системой "общий шаг несу-
щего винта - двигатель " лет-
чик осуществляет рычагом
"шаг-газ”, который связан
проводкой управления с пол-
зуном автомата перекоса и
регулятором насоса подачи
топлива в двигатель.
179
Внешнее кольцо 6 автомата перекоса (см. рис. 7.66, а) с помощью тяги
11 можно наклонить относительно оси Z-Z, а с помощью тяги 13 -
относительно оси Х-Х. В этом случае поводки 12, связывающие внешнее
вращающееся кольцо 6 с рычагами 2 управления шагом, в процессе
вращения винта будут циклически (рис. 7.66, в) изменять по азимуту шаг
лопастей от <р j = <pmin в направлении полета до <р2 = <ртах в противополож-
ном направлении.
Управление циклическим шагом летчик осуществляет с помощью ручки
продольно-путевого управления, движение которой вперед-назад или вбок
приводит к аналогичному перемещению вертолета.
Необходимо отметить, что автомат перекоса, который является важнейшим
агрегатом каждого вертолета, изобрел в 1911 г. Б.Н. Юрьев, бывший в то время
студентом и работавший под руководством Н.Е. Жуковского в Воздухоплава-
тельном кружке Московского технического училища (впоследствии - МВТУ).
Несущий винт 1 вертолета (рис. 7.67), управление которым произво-
дится с помощью автомата перекоса 3, приводится в действие двигателем
5 через главный редуктор 4 (от лат. reduktor - отводящий назад,
приводящий обратно). Редуктор служит для уменьшения частоты
вращения несущего винта по сравнению с частотой вращения вала
двигателя и, следовательно, увеличения крутящего момента на валу
несущего винта, чтобы преодолеть момент сил сопротивления несущему
винту. При передаче крутящего момента Л/кр несущему винту на
фюзеляж вертолета 2 действует реактивный крутящий момент Л/реакт,
который стремится развернуть фюзеляж в сторону, противоположную
направлению вращения несущего винта. Рулевой винт 8, установленный
на хвостовой балке 7, приводится во вращение от двигателя через
трансмиссию (от лат. transmissio - передача) 6. При вращении рулевого
винта возникает аэродинамическая сила Р , которая уравновешивает
реактивный крутящий момент. Летчик с помощью ножного управления
воздействует на механизм изменения шага рулевого винта, изменяет
Рнс. 7.67. Вертолет одновинтовой схемы с
рулевым винтом
значение силы Р и разворачива-
ет вертолет относительно верти-
кальной оси, осуществляя путевое
управление.
Проблема парирования реак-
тивного момента от движителя-
винта возникает и на самолетах с
винтомоторной силовой установ-
кой. Однако при одинаковой мощ-
ности двигателя W крутящий
180
момент на валу Л7кр и, соответственно, реактивный момент (Л7реакт =
= Wlw) у вертолета значительно больше, чем у самолета, поскольку
частота w вращения винта самолета около 2000...3000 мин-1, а у
вертолета- 200...500 мин”1. Поэтому эта проблема даже для одномотор-
ных винтовых самолетов решается достаточно просто, например за счет
практически незаметной аэродинамической асимметрии крыльев,
создающих постоянный кренящий момент, обратный реактивному
моменту винта.
Компенсация возникающего от работы несущего винта вертолета
большого реактивного момента (т.е. балансировка вертолета относитель-
но оси OY) требует специальных технических решений, и эти решения
фактически определяют облик - аэродинамическую схему вертолета
(рис. 7.68).
У вертолетов двухвинтовой схемы реактивные моменты от несущих
винтов компенсируются за счет противоположного направления их
вращения.
Рис. 7.68. Классификация вертолетов по способу компенсации реактивного момента несущего
винта
181
При реактивном приводе несущего винта момент от сил сопротивления
лопастей (момент сопротивления вращению) преодолевается моментом
тяги реактивных двигателей, установленных на концах лопастей. Это
могут быть реактивные двигатели, к которым через втулку и лопасти
несущего винта подаются топливо и сжатый воздух (горячий цикл). Это
могут быть и просто сопла, к которым подается сжатый воздух
(холодный цикл).
Поскольку в этих случаях несущий винт свободно подвешен на валу,
то на корпус вертолета передается только относительно небольшой
момент сил трения в подвеске несущего винта.
Максимальная скорость современных вертолетов, выполненных по
чисто вертолетной схеме, ограничена возникновением срыва потока на
лопастях несущего винта, в том числе и волнового срыва при достижении
концевыми сечениями лопастей скоростей, соответствующих критическо-
му числу М. Поэтому она не превышает 330...350 км/ч.
Отодвинуть появление срыва потока на лопастях, до скоростей
350...400 км/ч и, соответственно, увеличить скорость вертолета можно,
если применить на вертолете крыло самолетного типа, которое в
горизонтальном полете создает 30...40 % необходимой подъемной силы
и разгружает таким образом несущий винт, позволяя лопастям несущего
винта работать на меньших углах атаки.
Увеличить скорость ЛА с несущим винтом и крылом до 400...500 км/ч
можно, если на режимах горизонтального полета передать функцию
движителя от несущего винта к специальным тянущим (или толкающим)
винтам или реактивным двигателям. В этом случае можно использовать
увеличенную скорость полета для самовращения несущего винта и без
подвода мощности к нему создавать с его помощью дополнительную
подъемную силу. Такие ЛА называются винтокрылами. По дальности
и скорости полета они приближаются к транспортным турбовинтовым
самолетам, уступая им, однако, по себестоимости перевозок. Тем не менее
уникальные характеристики вертолетов и винтокрылых ЛА обусловили
их широкое применение и интенсивные научно-исследовательские и
проектно-конструкторские работы по разработке ЛА этого типа.
Так же интенсивно ведутся работы по разработке ЛА вертикального
(укороченного) взлета и посадки невертолетного типа.
7.4.2. САМОЛЕТЫ ВЕРТИКАЛЬНОГО (УКОРОЧЕННОГО)
ВЗЛЕТА И ПОСАДКИ
Самолеты вертикального взлета и посадки, летающие на крейсерских
(горизонтальных) режимах полета как обычные самолеты, способны, как
вертолеты, висеть в воздухе, а также взлетать и садиться вертикально.
182
Для обеспечения режимов ВВП (вертикального взлета и посадки) на
таком самолете необходимо иметь специальную силовую установку,
обеспечивающую создание подъемной силы, превышающей вес
самолета.
Стартовая вертикальная тяговооруженность (отношение подъемной
силы, создаваемой двигателями, к весу самолета) современных СВВП
находится в пределах 1,05...1,45.
В зависимости оттого, каким образом создается подъемная сила на
режимах ВВП и тяга на маршевых (крейсерских) режимах, можно
провести классификацию СВВП (рис. 7.69).
Единая силовая установка (СУ) имеет в своем составе один или
несколько подъемно-маршевых двигателей, которые на режимах ВВП
создают вертикальную тягу, а на обычных режимах - маршевую тягу.
Тяга создается либо воздушным винтом, либо струей газов реактивного
двигателя. Изменение направления вектора тяги подъемно-маршевых
двигателей может быть конструктивно обеспечено либо поворотом
двигателей в нужном направлении, например относительно крыла или
Рис. 7.69. Классификация СВВП по типу силовой установки
183
Рис. 7.70. Выхлопное устройство подъемного
двигателя со скользящим козырьком
вместе с крылом, на котором они закреплены, либо за счет изменения
направления струй (и векторов тяги) реактивных двигателей.
Принципиальная схема одного из возможных устройств, обеспечиваю-
щих изменение направления вектора тяги Р с помощью скользящего
козырька 7, показана на рис. 7.70.
Составная СУ включает в себя две группы двигателей: одна из них
для создания вертикальной тяги на режимах ~ВВП.~ подъемные двигатели,
другая для создания маршевой тяги - маршевые двигатели.
Комбинированная СУ также состоит из двух групп двигателей:
Рис. 7.71. СВВП с составной силовой установкой
и газовоздушные потоки вблизи экрана
подъемно-разгонных и подъ-
емно-маршевых, которые (в
большей или меньшей мере)
участвуют в создании и верти-
кальной, и маршевой тяги.
Выбор типа силовой уста-
новки существенным образом
влияет на возможность реше-
ния специфических проблем,
возникающих при проектиро-
вании СВВП, и определяет
фактически его концепцию,
аэродинамическую и конструк-
тивно-силовую компоновку.
Двигатели 1 (рис. 7.71) со-
здают подъемную силу Р - GI2,
уравновешивающую силу тя-
жести G самолета. На режимах
работы вблизи экрана 2 (по-
верхности ВПП) струи двигате-
лей 3 создают вокруг самолета
сложные течения, обусловлен-
ные взаимодействием отра-
женных от экрана газовых
184
струй 4 с воздушными потоками 5, текущими в воздухозаборники
двигателей. Форма и интенсивность этих течений на режимах висения
вблизи экрана, взаимодействие этих течений с набегающим потоком на
режимах ВВП и переходных режимах (от вертикального к горизонтально-
му движению) зависят от мощности, числа и расположения двигателей
(т.е. компоновки СВВП), что существенным образом влияет на
аэродинамические и моментные характеристики СВВП, т.е. определяет
его компоновку.
Воздействие газовых струй двигателей вызывает эрозию поверхности
аэродрома, степень которой зависит и от типа двигателей, создающих
подъемную силу, и от их расположения. Частицы покрытия аэродрома,
вымываемые газовыми струями, вместе с высокотемпературными
восходящими вверх течениями воздействуют на конструкцию СВВП и,
попадая в воздухозаборники двигателей, снижают надежность их работы,
ресурс и тяговые характеристики. С целью уменьшения влияния струй
на поверхность аэродрома и на самолет часто применяется методика
эксплуатации СВВП в режиме укороченного взлета и посадки (УВП),
когда дистанции разбега и пробега составляют всего несколько
десятков метров. Это позволяет также увеличить весовую отдачу СВВП
за счет существенно меньших расходов топлива на режимах взлета и
посадки.
Одной из основных проблем, возникающих при разработке СВВП,
является обеспечение их балансировки, устойчивости и управляемости
на режимах ВВП и переходных режимах, когда поступательная скорость
равна нулю либо недостаточно велика для эффективной работы
аэродинамических поверхностей, создающих балансирующие и
управляющие силы и моменты.
Балансировка, устойчивость и управляемость СВВП на этих режимах
обеспечивается либо рассогласованием (модуляцией) тяг двигателей, т.е.
увеличением или уменьшением
тяги одного двигателя по срав-
нению с тягой другого, либо с
помощью системы струйных
рулей, либо комбинацией этих
способов.
Рассогласование ДР тяг
(рис. 7.72) маршевых двигате-
лей 3 приводит к возникнове-
нию момента рыскания &Му,
рассогласование первой
группы подъемных двигателей
1 приводит к возникновению
момента крена ДЛ/Х. Рассогла-
Рие. 7.72. У правление СВВП с помощью рассогла-
сования тяг двигателей
185
Рис. 7.73. Управление СВВП с комбини-
рованной силовой установкой с по-
мощью системы струйных рулей
сование тяг ДР, и ДР2 первой
и второй 2 групп подъемных
двигателей приводит к возник-
новению момента тангажа
ДМ
Струйная система управле-
ния СВВП (рис. 7.73) включает
в себя несколько удаленных от
центра масс самолета на макси-
мально возможное расстояние
реактивных сопел 1, 5, б, к ко-
торым с помощью трубопроводов 4 подводится сжатый воздух от
компрессора подъемно-маршевого двигателя 3. Конструкция сопла 1
позволяет регулировать расход воздуха и, следовательно, тягу.
Конструкция сопел 5 и б позволяет изменять не только величину, но и
направление тяги на противоположное (реверсировать тягу сопла).
При сбалансированном по тангажу (относительно оси Z) самолете
(сумма моментов тяг сопла 1, подъемного 2 и подъемно-маршевого 3
двигателей относительно центра масс равна нулю) увеличение тяги сопла
1 вызывает кабрирующий момент, уменьшение - пикирующий.
Показанное на рис. 7.73 направление истечения струй из сопел 5 и б
приводит к кренению самолета на левую консоль крыла и развороту
влево.
Управление режимом работы двигателей и струйными рулями для
изменения действующих на самолет сил и моментов на режимах ВВП и
переходных режимах летчик осуществляет такими же рычагами
управления, как и на обычном самолете, т.е. одновременно с созданием
управляющих реактивных сил соответствующим образом отклоняются
и аэродинамические рулевые поверхности (руль высоты, элероны и руль
направления), которые, однако, не создают управляющих сил при малых
(доэволютивных) скоростях поступательного движения самолета. С
ростом скорости поступательного движения растут и силы на рулевых
поверхностях и с помощью автоматики постепенно выключаются из
работы системы струйного управления.
Необходимо отметить, что на малых (доэволютивных) скоростях
СВВП не обладает собственной устойчивостью, так как малы аэродина-
мические силы, способные возвратить его в исходное положение при
186
случайных внешних воздействиях. Поэтому устойчивость СВВП на этих
режимах (его стабилизация и поддержание состояния балансировки)
обеспечивается включенными в систему управления средствами
автоматики, которые, реагируя на угловые перемещения самолета при
возмущениях, без вмешательства летчика с помощью струйных рулей
возвращают самолет в исходное положение балансировки.
Мы перечислили здесь лишь некоторые проблемы формирования
облика СВВП, решение которых уже на ранних стадиях проектирования
требует взаимодействия проектировщиков различных специализаций.
К настоящему моменту в мире спроектировано, построено и испытано
более 50 типов самолетов вертикального (укороченного) взлета и
посадки. В большинстве проектов этих самолетов в основу были
положены требования военного применения.
Первый отечественный боевой СВВП был создан в ОКБ им.
А.С. Яковлева (см. подразд. 20.2).
Преимущества СВВП, о которых мы упоминали в начале подразд. 7.4,
несомненно приведут к созданию СВВП, способных конкурировать с
обычными самолетами при перевозках пассажиров и грузов на короткие
и средние расстояния,
7.5. ГИДРОАВИАЦИЯ
Работы по созданию самолетов, приспособленных для взлета с водной
поверхности и посадки на нее, начались практически одновременно с
работами по созданию самолетов, базирующихся на земле.
28 марта 1910г. первый полет на гидросамолете (от греч. hydor - вода)
собственной конструкции совершил француз А. Фабр.
Исторически сложилось так, что у истоков отечественного воздухо-
плавания и авиации стояли офицеры военно-морского флота России. Они
первыми в мире разработали тактику морской авиации, осуществили с
воздуха бомбардировку вражеского корабля, создали проект авианосца,
первыми пролетели в небе Арктики.
Необходимость создания морского самолетостроения в нашей стране
была обусловлена географическими и стратегическими особенностями
театров военных действий того времени, протяженными морскими
границами на Балтийском и Черном морях, отсутствием специально
оборудованных аэродромов для эксплуатации сухопутных самолетов и
в то же время обилием крупных рек, озер, свободных морских про-
странств.
Развитие гидроавиации началось с постановки сухопутного самолета
на поплавки. Первые поплавковые гидросамолеты (рис. 7.74) имели два
187
Рис. 7.74. Схема трехпоплавкового гидросамо-
лета (с хвостовым поплавком)
основных поплавка 1 и вспомогатель-
ный поплавок 2 в хвостовой или
носовой части.
Классификацию гидросамолетов
(рис. 7.75) можно провести в зависи-
мости оттого, каким способом обеспечивается базирование и эксплуата-
ция самолета с поверхности акваторий (от лат. aqua - вода) - гидродро-
мов.
В настоящее время поплавковые схемы применяются для легких
самолетов, хотя уже в 1914 г. совершил первый полет четырехмоторный
тяжелый самолет "Илья Муромец" (см. рис. 19.1), поставленный на
поплавки по трехпоплавковой схеме с хвостовым поплавком. В 1929 г.
в перелете по маршруту Москва- Нью-Йорк самолета "Страна Советов"
ГИДРОСАМОЛЕТЫ
Рис. 7.75. Классификация гидросамолетов по способу обеспечения базирования па воде
188
(см. рис. 19.7) 7950 км - от Хабаровска до Сиэтла - самолет летел над
водой, и на этом участке сухопутное шасси заменялось поплавковым по
двухпоплавковой схеме.
Ростразмеров и масс гидросамолетов и, как следствие, рост размеров
поплавков позволил размещать в них экипаж и оборудование, что
привело к созданию гидросамолетов типа "летающая лодка"однолодочной
схемы и двухлодочной схемы - катамаран (от тамильского каттумарам,
буквально - связанные бревна).
Для тяжелых многоцелевых океанских гидросамолетов наиболее
целесообразна интегральная схема. Частично погруженное в воду крыло
позволяет уменьшить размеры лодки и повысить аэрогидродинамическое
совершенство гидросамолета.
Самолет-амфибия (от греч. amphibios- ведущий двойной образ жизни)
приспособлен для взлета с земли и воды и посадки на них.
Таким образом, технические решения, обеспечивающие базирование
и эксплуатацию самолета с водной поверхности, фактически определяют
облик (аэродинамическую схему) гидросамолета.
Сложность и число проблем, которые должны решить проектировщи-
ки при создании гидросамолета, существенно возрастают, поскольку
помимо высоких аэродинамических и взлетно-посадочных характеристик
обычного самолета должны быть обеспечены заданные ТЗ мореходные
качества.
Оценить мореходные качества гидросамолета позволяют методы
научной дисциплины "Гидромеханика", изучающей движение и
равновесие жидкостей, а также взаимодействие между жидкостями и
твердыми телами, полностью или частично погруженными в жидкость.
Мореходные качества (мореходность) гидросамолета характеризуют
возможность его эксплуатации в акваториях с определенными гидромете-
орологическими условиями - скоростью и направлением ветра,
направлением, скоростью движения, формой, высотой и длиной волн
воды.
Мореходность гидросамолета оценивается предельным волнением
акватории, при котором возможна безопасная эксплуатация. Аналогично
тому, как для оценки летных характеристик самолета (см. подразд. 3.2.2)
применяется международная стандартная атмосфера (MCA), для оценки
волнения акватории используется определенная шкала (математическая
модель), устанавливающая связь между словесной характеристикой
волнения, высотой волны и баллом (от 0 до IX) - степенью волнения. В
соответствии с этой шкалой, например, слабое волнение (высота волны
до 0,25 м) оценивается баллом I, значительное волнение (высота волны
0,75...1,25 м) оценивается баллом III, сильное волнение (высота волны
2,0...3,5 м) оценивается баллом V, исключительное волнение (высота
волны 11 м) оценивается баллом IX.
189
Мореходные качества (мореходность) гидросамолета включают в себя
такие его характеристики, как плавучесть, остойчивость, управляемость,
непотопляемость и т.п. Эти качества определяются формой и размерами
находящейся под водой водоизмещающей части (лодки или поплавка)
гидросамолета, распределением масс гидросамолета по длине и высоте.
В дальнейшем при рассмотрении мореходных характеристик
гидросамолета, если их без особой оговорки в равной мере можно
отнести к лодке и поплавку, будем использовать термин "лодка".
Плавучесть - способность гидросамолета плавать в заданном
положении относительно водной поверхности.
Гидросамолет, как и любое другое плавающее тело, например судно,
поддерживается на плаву архимедовой силой
Р = Wp9g = G,
где W - объем воды, вытесняемой лодкой, - объемное водоизмещение
лодки, м3; рв - плотность воды, вытесняемой лодкой, кг/м3; JTpB - масса
воды, вытесняемой лодкой, - массовое водоизмещение лодки, кг; g -
ускорение свободного падения, м/с2; G - сила тяжести гидросамоле-
та, Н.
Сила тяжести гидросамолета G приложена в его центре масс (ц.м.),
сила поддержания (архимедова сила - сила воздействия вытесненной
жидкости на лодку гидросамолета) Р приложена в центре масс вытеснен-
ного лодкой объема воды, или, по корабельной терминологии (которой
широко пользуются проектировщики гидросамолетов), в центре
величины (ц.в.).
Очевидно, что для обеспечения равновесия самолета на плаву
(рис. 7.76) силы G и Р должны лежать на прямой, соединяющей ц.м. и ц.в.,
в вертикальной продольной плоскости симметрии гидросамолета -
диаметральной плоскости лодки (ДП). Очевидно также, что основная
плоскость лодки (ОП) - горизонтальная плоскость, проходящая через
нижнюю точку поверхности лодки перпендикулярно к диаметральной
плоскости, и, соответственно, нижняя строительная горизонталь лодки
(НСГ), строительная горизонталь самолета (СГС) и палуба 1 - верхняя
поверхность лодки - в общем случае не параллельны плоскости водной
поверхности и линии соприкосновения поверхности воды с корпусом
лодки гидросамолета JK0L0.
Линия соприкосновения спокойной поверхности воды с корпусом
лодки гидросамолета ЛфГ0 при полной взлетной массе и выключенных
двигателях называется грузовой ватерлинией (от голл. water - вода и lijn ~
линия): Грузовая ватерлиния (ГВЛ) при плавании в пресной воде не
совпадает с ГВЛ при плавании в морской воде, поскольку плотность
190
Рис. 7.76. Гидросамолет на плаву
пресной речной или озерной воды рв = 1000 кг/м3, а для морской воды
рв = 1025 кг/м3.
Соответственно, осадка Т- расстояние от ГВЛ до самой нижней части
лодки, характеризующее погружение лодки ниже уровня воды - при
одинаковой взлетной массе гидросамолета в пресной воде будет больше,
чем в морской.
Угол между СГС и поверхностью воды определяет дифферент лодки
(от лат. differens (differetis) - разница) - наклон ее в продольной
плоскости, который измеряется углом дифферента <р0. Если угол <р0 = О,
говорят, что лодка "сидит на ровном киле"; если осадка кормы больше
осадки носа - лодка "сидит с дифферентом на корму" (как показано на
рис. 7.76), если меньше - лодка "сидит с дифферентом на нос".
Остойчивость (аналог термина "устойчивость" в морской терминоло-
гии) при плавании - способность гидросамолета, отклоненного
внешними возмущающими силами от положения равновесия, возвра-
щаться в исходное положение после прекращения действия этих сил.
Очевидно, что при плавании частично или полностью погруженного
в воду тела нет никаких других сил для возвращения его в положение
равновесия, кроме силы тяжести G и равной ей силы поддержания Р.
Следовательно, только взаимное положение этих сил определяет
остойчивость или неостойчивость плавающего тела, что иллюстрирует
рис. 7.77.
Если центр масс тела расположен ниже центра величины (рис. 7.77, а),
при отклонении от положения равновесия возникает стабилизирующий
момент ДА/ = GI, возвращающий тело в исходное положение остойчивого
равновесия.
Если центр масс тела расположен выше центра величины (рис. 7.77, в),
при отклонении от положения равновесия возникает дестабилизирующий
191
Рис. 7.77. Схемы к объяснению остойчивости плавающего тела
момент ДА/ = GI, и тело не может самостоятельно возвратиться в
исходное положение неостойчивого равновесия.
Если положение центра масс тела совпадает с положением центра
величины (рис. 7.77, б), тело находится в безразличном равновесии.
Следует отметить, что положение центра величины существенным
образом зависит от формы погруженной в воду части тела и угла
отклонения его от исходного положения равновесия.
Остойчивость гидросамолета (как и остойчивость судна) принято
определять взаимным положением центра масс и метацентра (от греч.
meta-между, после, через - составной части сложных слов, означающей
промежуточность, следование за чем-либо, переход к чему-либо другому,
перемену состояния, превращение и лат. centrum - средоточие, центр) -
центра кривизны линии, по которой смещается центр величины
водоизмещяющего тела при выведении его из равновесия.
Различают поперечную и продольную остойчивость гидросамолета
(при наклонении самолета соответственно в поперечной и продольной
плоскостях).
Поперечная остойчивость. Рассмотрим случай поперечного
наклонения - отклонение диаметральной плоскости лодки от вертикали,
например под воздействием порыва ветра.
На рис. 7.78, а показана схема гидросамолета, находящегося на плаву
в состоянии равновесия. Сила тяжести G и сила поддержания Р равны,
лежат в диаметральной плоскости, размер а определяет возвышение
центра масс над центром величины. При порыве ветра от его боковой
составляющей Ув (рис. 7.78, б) возникнет кренящий момент Л/крв,
зависящий от скоростного напора, площади и размаха наветренной
(обращенной в ту сторону, откуда дует ветер) консоли крыла, площади
боковой проекции гидросамолета. Под действием этого момента самолет
накренится на некоторый малый (будем считать - бесконечно малый)
угол у. Новое положение лодки определит новую грузовую ватерлинию
192
Рис. 7.78. Неостойчивая лодка
WiLls плоскость которой наклонена на угол у по отношению к исходной
ватерлинии )T0L0.
Форма подводной (водоизмещающей) части лодки изменится: объем,
соответствующий области 7 поперечного сечения лодки 7, выйдет из-под
воды, а равный ему объем, соответствующий области 2, уйдет под воду.
Таким образом, величина поддерживающей силы не изменится (Р =
= Wj»? = G)> однако центр величины сместится из исходного положения
Со в точку С). Точка MQ пересечения двух линий действия архимедовых
сил при бесконечно малом угле у между ними и является начальным
метацентром.
Метацентрический радиус р0 определяет начальную кривизну линии
смещения центра величины лодки при крене.
Мерой поперечной остойчивости гидросамолета является значение
метацентрической высоты hQ = р0 - а:
если hQ > 0, лодка остойчива;
если /г0 = 0, равновесие безразличное;
если hQ < 0, лодка неостойчива.
В рассмотренном примере й0< 0. Нетрудно видеть, что перпендику-
лярные к поверхности воды и равные силы Р и G будут составлять пару
с плечом I, причем момент этой пары Л/Кр G= Gl совпадает по направле-
нию с возмущающим моментом Л/кр в и увеличивает угол крена. Таким
образом, гидросамолет, показанный на рис. 7.78, б, при действии
внешних возмущений не возвращается к исходному положению, т.е. не
обладает поперечной остойчивостью.
7 - 7425
193
Очевидно, что для обеспечения поперечной остойчивости центр масс
должен находиться ниже самого низкого положения метацентра.
Большинство современных гидросамолетов выполнено по классичес-
кой аэродинамической схеме с фюзеляжем - лодкой, которой придаются
соответствующие формы для выполнения взлета с воды и посадки на
воду, высокорасположенным крылом, двигателями, установленными на
крыле или на лодке таким образом, чтобы удалить их от водной
поверхности. Такая компоновка позволяет исключить при движении по
воде заливание крыла водой и попадание ее в двигатели и на винты
самолетов с винтомоторной силовой установкой, но при этом в
большинстве случаев центр масс самолета оказывается выше метацентра
(как на рис. 7.78, б). Таким образом, однолодочный гидросамолет, как
правило, в поперечном отношении неостойчив.
Проблемы поперечной остойчивости гидросамолета однопоплавко-
вой или однолодочной схемы могут быть решены применением
подкрыльных поплавков (рис. 7.79).
Подкрыльный поплавок 1 устанавливают на пилоне 2 по возможности
ближе к концу крыла 3. Опорные (поддерживающие) подкрыльные
поплавки не касаются воды при движении гидросамолета на ровной воде
4 и обеспечивают остойчивое положение гидросамолета с углами крена
2...3° при стоянке, несущие подкрыльные поплавки частично погружены
в воду и обеспечивают стоянку без крена.
Водоизмещение поплавка выбирается таким образом, чтобы под
воздействием ветра с определенной скоростью Уя гидросамолет,
Рис. 7.79. Подкрыльный поплавок
194
Рис. 7.80. Схема к объяснению продоль-
ной остойчивости
находящийся на скате волны 5,
соответствующей предельному
волнению акватории, заданно-
му в ТЗ на проектирование,
накренился на определенный
угол у. В этом случае восстанавливающий момент поплавка Мп,
определяемый поддерживающей силой поплавка Ри и расстоянием Ьп от
диаметральной плоскости поплавка до диаметральной плоскости лодки
(Мп = Р„ЬП), должен парировать (уравновесить) кренящие моменты Мкр в
от ветра и Л/кр G неостойчивой лодки.
Продольная остойчивость определяется такими же условиями, как и
поперечная. Если под действием какого-либо внешнего возмущения
произойдет продольное наклонение гидросамолета (рис. 7.80) от
исходного положения, определяемого ватерлинией W0L0, например
увеличение на угол Дф дифферента на нос, это определит новую грузовую
ватерлинию
Объем лодки, соответствующий области 1, выйдет из-под воды, а
равный ему объем, соответствующий области 2, уйдет под воду, при этом
значение поддерживающей силы не изменится (Р = Жрв£ = G), однако
центр величины сместится из исходного положения Со в точку С|. Точка М0‘
пересечения двух линий действия поддерживающих сил при бесконечно
малом угле Дф между ними определит положение начального продольного
метацентра.
Мера продольной остойчивости гидросамолета - продольная
метацентрическая высота HQ = Ро - а.
Обеспечить продольную остойчивость гидросамолета проще, чем
поперечную. Сильно развитая в длину лодка почти всегда обладает
естественной продольной остойчивостью (Нй > 0).
Отметим, что пикирующий момент от тяги двигателя, линия действия
которой обычно проходит выше центра масс самолета, заглубляет
носовую часть лодки, уменьшает угол начального дифферента, т.е,
заставляет лодку принять некоторый дифферент на нос, что определяет
новую грузовую ватерлинию, которая называется "упорной".
Гидростатические силы (силы поддержания), обеспечивающие
плавучесть и остойчивость лодки в состоянии покоя, естественно,
7*
195
в большей или меньшей мере проявляются и в процессе движения
по воде.
Весьма важной характеристикой гидросамолета, определяющей его
мореходность, является способность преодолевать сопротивление воды
и развивать необходимую скорость движения по воде при минимальных
затратах мощности.
Гидродинамическая сила сопротивления воды движению лодки в режиме
плавания определяется трением воды в пограничном слое (сопротивление
трения) и распределением гидродинамического давления потока воды на
лодку (сопротивление формы, связанное с образованием вихревых
течений - его иногда называют водоворотным сопротивлением) и
зависит от скорости движения (скоростного напора рв И2/2), формы и
состояния поверхности лодки. Здесь уместно напомнить, что плотность
воды рв больше плотности воздуха на уровне моря примерно в 800 раз!
К этому сопротивлению добавляется волновое сопротивление, которое
в отличие от волнового сопротивления, связанного с необратимыми
потерями энергии в скачке уплотнения при полете с закритическими
скоростями (см. подразд. 5.5), возникает при движении тела вблизи
свободной поверхности жидкости (поверхности раздела воды и
воздуха).
Волновое сопротивление - часть гидродинамического сопротивления,
характеризующая затрату энергии на образование волн. Волновое
сопротивление в воде (тяжелой жидкости) возникает при движении
погруженного или полупогруженного тела (поплавка, лодки) вблизи
свободной поверхности жидкости (т.е. границы между водой и воздухом).
Движущееся тело оказывает добавочное давление на свободную
поверхность жидкости, которая под влиянием собственной силы тяжести
будет стремиться вернуться к исходному положению и придет в
колебательное (волновое) движение. Носовая и кормовая части лодки
образуют взаимодействующие системы волн, оказывающие существенное
влияние на сопротивление.
В режиме плавания равнодействующая сил гидродинамического
сопротивления практически горизонтальна.
Форма водоизмещающей части гидросамолета (как и форма судна)
должна обеспечить способность движения по воде с минимальным
сопротивлением и, как следствие, с минимальными затратами мощности
(ходкость судна, по морской терминологии).
При проектировании гидросамолетов (как и судов) для выбора форм
и оценки гидродинамических характеристик используются результаты
испытаний путем буксировки ("протаски") динамически подобных
моделей в специальных бассейнах - гидроканалах или в открытых
акваториях.
196
Комплекс характеристик мореходности гидросамолета значительно
шире, чем у судна. Основной характеристикой является способность
гидросамолета производить безопасные взлеты и посадки на взволнован-
ной водной поверхности с определенной высотой волны. При этом
необходимо иметь в виду, что скорости хода по воде гидросамолетов во
много раз превышают скорости морских судов.
Благодаря особой форме днища лодки гидросамолета возникают
гидродинамические силы, поднимающие носовую часть и вызывающие
значительное общее всплытие лодки.
Следовательно, движение гидросамолета в отличие от судна
происходит при переменных водоизмещении и угле дифферента лодки,
который фактически является углом набегания водного потока на днище,
аналогичным углу атаки крыла. Наскоростях движения по воде, близких
к скорости отрыва при взлете, водоизмещение практически равно нулю -
гидросамолет идет в режиме глиссирования {от франц, glisser - сколь-
зить) - скольжения по поверхности воды. Характерная особенность
режима глиссирования заключается в том, что равнодействующая сил
гидродинамического сопротивления воды имеет настолько большую
вертикальную составляющую (гидродинамическую силу поддержания),
что большая часть водоизмещающего объема лодки выходит из воды и
лодка скользит по ее поверхности. Поэтому обводы (очертания наружной
поверхности) лодки гидросамолета (рис. 7.81) существенно отличаются
от обводов судна.
Основное отличие состоит в том, что днище (нижняя поверхность
лодки, которая является основной
опорной поверхностью при движе-
нии гидросамолета по воде) имеет
один или несколько реданов
(франц, redan - уступ), первый из
которых, как правило, располага-
ется вблизи центра масс гидроса-
молета, а второй - в кормовой
части. Прямые в плане реданы
(рис. 7.81, а) создают в полете
значительно большее сопротивле-
ние, чем заостренные (стрело-
видные, оживальные) реданы
(рис. 7.81, б), гидродинамическое
сопротивление и брызгообразова-
ние которых также существенно
меньше. С развитием гидроавиа-
ции ширина второго редана посте-
Рис. 7.81. Лодка гидросамолета:
/-Нос лодки; 2-днище; 3-борт; 4~ скула;
5 - киль; б-первый редан; 7 - межреданная
часть днища; 8 - второй редан; 9 - корма
197
Рнс. 7.82. Формы поперечного сечения
лодки
пенно уменьшалась, межредан-
ная часть днища стала сходить-
ся в одной точке (рис. 7.81, в)
на корме лодки.
В процессе развития гид-
роавиации изменялась и фор-
ма поперечного сечения лод-
ки (рис. 7.82). Лодки с плос-
ким днищем (рис. 7.82, а) и с
продольными реданами
(рис. 7.82, б), слабокилеватые, т.е. с небольшим наклоном участков днища
от центральной килевой линии к бортам (рис. 7.82, в) и с вогнутым
днищем (рис. 7.82, г) постепенно уступали место килеватым лодкам с
плоскокилеватым днищем (рис. 7.82, д) или с более сложным (в частности,
криволинейным) профилем килеватости (рис. 7.82, е).
Следует отметить, что гидросамолеты не имеют амортизаторов (см.
подразд. 7.3), способных поглощать и рассеивать энергию ударов при
посадке на воду. Поскольку вода - практически несжимаемая жидкость,
то сила удара о воду соизмерима с силой удара о землю. Основное
назначение килеватости - заменить амортизатор: при постепенном
погружении в воду клиновидной (килеватой) поверхности при посадке
смягчить посадочный удар, а также удары воды о днище лодки при
движении по взволнованной поверхности воды.
Характерные обводы лодки современного гидросамолета пред-
ставлены на рис. 7.83. Лодка имеет поперечную и продольную килева-
тость днища.
Поперечная килеватость лодки (или угол, образуемый килем и
скулами) выбирается исходя из условий обеспечения приемлемых
перегрузок на взлетно-посадочных режимах и обеспечения динамичес-
кой путевой остойчивости.
Угол поперечной килеватости носовой части лодки начиная от
первого редана Ррн плавно увеличивается к носу лодки (на виде
спереди А- наложенные сечения носовой части лодки) таким образом,
что формируется волнорез в носовой части лодки, "разваливающий"
встречную волну и уменьшающий водно- и брызгообразование.
Скула (линия пересечения днища и борта лодки) препятствует
прилипанию воды к бортам. Для обеспечения приемлемых волно- и
брызгообразования применяют выгиб носовых скул, т.е. профилировку
198
Носовая часть лодки
Межреданная часть лодки
Рис. 7.83. Характерные обводы лодки гидросамолета:
1 - нос лодки; 2 - борт; 3 - палуба; 4 - корма; 5 - днище носовой части; б - киль; 7 - скула
носовой части; 8-первый редан; 9-скула зареданной части; 10-межреданная часть днища;
11 -второй редан
днища носовой части лодки по сложным криволинейным поверхностям.
Днище межреданной части лодки (на виде сзади Б - наложенные
сечения кормовой части лодки) обычно плоскокилеватое-значение угла
Рр м постоянно. Углы поперечной килеватости на редане обычно 15...30°.
Продольная килеватость лодки ул = ун + ум определяется углами
продольной килеватости носовой части ун и межреданной части ум.
Длина, форма и продольная килеватость носовой части (ун « О...3°),
влияющие на продольную остойчивость и угол начального дифферента,
выбираются такими, чтобы исключить зарывание носом и заливание
палубы водой при высоких скоростях хода.
Продольная килеватость межреданной части (ум « 6...9°) выбирается
так, чтобы обеспечить устойчивое глиссирование, посадку на сушу при
максимально допустимом угле атаки и для самолета-амфибии сход на
воду по существующим слипам (англ, slip - скольжение) - уходящим в
воду наклонным береговым площадкам для схода амфибии на воду и
выхода на берег.
При достаточной продольной килеватости межреданной части
199
отрыв при взлете с воды может происходить "с подрывом" (увеличением
угла атаки) при максимально допустимом коэффициенте подъемной
силы.
Отрыв своды при взлете осложнен тем, что кроме сил сопротивления
воды движению лодки, рассмотренных выше, между днищем лодки и
водой действуют силы сцепления (подсасывания), особенно в задней
части лодки. Назначение редана - уничтожить подсасывающее действие
воды (подсос) при разбеге, уменьшить этим сопротивление воды, дать
возможность лодке "отлипнуть" отводы.
Редан, нарушая плавность обводов лодки, естественно, способствует
вихреобразованию. При увеличении скорости хода по воде интенсив-
ность вихреобразования возрастает, начинается срыв водяных струй с
редана и, как следствие, кавитация (от лат. cavitas- пустота) - нарушение
сплошности внутри жидкости с образованием полостей, заполненных
воздухом (кавитационных пузырьков). Эта воздушная прослойка
способствует отрыву воды от зареданного участка днища, что приводит
к значительному общему всплытию лодки - начинается режим
глиссирования (гидропланирования), или режим "бега на редане", наиболее
выгодный по значению гидродинамического сопротивления.
Перед выходом на режим глиссирования за счет взаимодействия
носовой и кормовой волн, создаваемых лодкой на поверхности воды,
происходит увеличение дифферента на корму, изменяется картина
обтекания, днище начинает испытывать большие нормальные давления,
увеличивается и отклоняется от начального горизонтального положения
равнодействующая сил гидродинамического сопротивления - появля-
ется вертикальная составляющая (гидродинамическая сила поддержания),
которая выталкивает лодку из воды, что уменьшает смоченную
(контактирующую с водой) поверхность днища и бортов.
Таким образом, гидросамолет при взлете должен выходить на редан,
сохранять достаточную продольную устойчивость при глиссировании
и легко отрываться от воды.
В режиме глиссирования (рис. 7.84) гидросамолет движется на
относительно малой поверхности, контактирующей с водой, представля-
ющей собой треугольник в районе первого редана 1, при этом резко
уменьшается горизонтальная составляющая Угид равнодействующей сил
гидродинамического сопротивления 7?гид и возрастает скорость хода.
Второй редан (корма лодки) улучшает продольную устойчивость при
"беге на первом редане".
Сила тяжести самолета G уравновешивается частично гидродинами-
ческой силой поддержания Ргнд контактной поверхности днища, а
частично подъемной силой самолета У„,,., = У„ - Уг„.
GaM Кр 1 , О
200
Рис. 7.84. Гидросамолет в режиме
глиссирования
Тяга двигателей Р больше суммы сил аэродинамического X и
гидродинамического лгид сопротивления - гидросамолет в режиме
глиссирования движется с ускорением, увеличивая скорость движения
до скорости отрыва.
Характер изменения основных параметров движения гидросамолета
при взлете в зависимости от относительной скорости разбега V= V/Vorp
(Котр ~ скорость отрыва гидросамолета от воды) показан на рис. 7.85.
В режиме плавания при скоростях V = (0...0,25)FOTp сила тяжести
гидросамолета практически полностью уравновешивается силой
гидростатического поддержания, роль аэродинамической подъемной
силы в общем балансе сил невелика. Сила гидродинамического
сопротивления определяется в основном сопротивлением поверхностного
трения Ут и волнообразования Ув (за счет резких уступов на водоизмеща-
ющей части лодки - скул и редана). Примерно с середины режима
плавания начинает увеличиваться угол дифферента ср, появляется срыв
струй воды с редана, возникает
весьма незначительная гидро-
динамическая сила поддержа-
ния и соответствующая ей сила
сопротивления глиссирования
*гл‘
На переходном режиме при
скоростях V (0,25...0,5)Иотр
интенсивно растут угол диффе-
рента, сила гидростатического
поддержания и соответствую-
щая ей сила сопротивления
глиссирования Угл. Лодка рез-
ко всплывает, борта выходят
из воды, соответственно умень-
Рис. 7.85. Зависимость параметров движения
гидросамолета при взлете от относительной
скорости разбега
шаются силы сопротивления
поверхностного трения ХТ и
волнообразования Хв, тем не
201
менее на этом режиме сила гидродинамического сопротивления
достигает максимального значения ("горб" на кривой гидродинамическо-
го сопротивления). Роль аэродинамических сил в общем балансе сил
относительно невелика.
На режиме глиссирования при скоростях V * (0,5...1,0)Готр угол
дифферента постепенно уменьшается, соответственно уменьшаются
силы гидростатического поддержания и сопротивления глиссирования,
поскольку с ростом скорости движения на редане возрастает аэродинами-
ческая подъемная сила, полностью уравновешивающая силу тяжести
гидросамолета при скорости отрыва.
Отметим еще раз, что для обеспечения взлета гидросамолета тяга
двигателей должна быть больше максимального значения суммы сил
аэродинамического и гидродинамического сопротивления (в районе
"горба" на кривой гидродинамического сопротивления).
Характер изменения основных параметров движения гидросамолета
при посадке (точнее- при послепосадочном пробеге, от момента касания
реданом воды на посадочной скорости до полной остановки) в
зависимости от относительной скорости пробега V - У/Упос является,
по существу, зеркальным отражением рис. 7.85. Следует отметить только,
что значения гидродинамического сопротивления при пробеге будут
отличаться от значений при посадке вследствие того, что нагрузка на
воду будет меньше (посадка совершается самолетом с массой, меньшей
чем взлетная) и практически отсутствует при изменении угла дифферента
вертикальная составляющая тяги двигателей, поскольку пробег
совершается с двигателями, работающими на режиме "малого газа", т.е.
при незначительной тяге.
Гидродинамическое совершенство гидросамолета характеризуется
минимальным значением гидродинамического качества
К = А/Х^,
где А - нагрузка на воду, или сила тяжести гидросамолета, передающаяся
на воду и при любой определенной скорости равная разности между
полной силой тяжести и подъемной силой самолета в данный момент,
A =G- Усам; Угид - сила гидродинамического сопротивления самолета
в данный момент.
Минимальное К составляет 4,5...6,0 для лодок и 3,5...4,5 для поплав-
ков.
Для обеспечения безопасности при взлете и посадке необходимо,
чтобы гидросамолет не зарывался носом при движении, особенно на
взволнованной поверхности; плавно выходил на глиссирование; обладал
202
остойчивостью и устойчивостью по всем трем осям координат в режиме
плавания и глиссирования, т.е. не имел тенденции к самопроизвольной
продольной раскачке с возрастающей амплитудой, к самопроизвольным
рысканию и крену.
Режим глиссирования является наиболее сложным с точки зрения
продольной устойчивости движения. При глиссировании межреданная
часть днища заливается брызговой струей от первого редана. Пульсации
давления в струе могут вызвать самопроизвольные угловые и вертикаль-
ные колебания лодки даже при совершенно гладкой поверхности воды.
Устойчивое глиссирование возможно при определенных сочетаниях
угла дифферента и скорости движения для заданной формы поверхности
глиссирования. Устойчивость глиссирования обеспечивается выбором
рациональных обводов лодки и отрабатывается на динамически
подобных моделях.
Гидросамолет должен обеспечивать также и весьма специфические
требования к устойчивости: устойчиво двигаться на буксире в ветренную
погоду и разворачиваться носом против ветра ("приводиться к ветру")
при дрейфе (от голл. drijven - плавать, гнать) - смещении с заданного
курса при неработающем двигателе под воздействием ветра и волн.
Управляемость - способность выполнять развороты на плаву при
наличии ветра. Управляемость гидросамолета по курсу на режиме
плавания обычно обеспечивается водяным рулем (водорулем, гидрору-
лем), устанавливаемым, как правило, в корме лодки (второй редан), или
с помощью разнотяговости двигателей (для двухдвигательного
самолета) - разного изменения тяг двигателей правого и левого борта.
На режиме глиссирования уже возможно управлять гидросамолетом по
курсу и углу дифферента с помощью аэродинамических рулей.
Приемлемое брызгообразование (чистота бега), при котором можно
защитить от попадания воды воздухозаборники двигателей, воздушные
винты, закрылки и другие жизненно важные агрегаты, - одна из
важнейшиххарактеристик, определяющих мореходность гидросамолета.
Как уже отмечалось, движущаяся лодка оказывает добавочное
давление на свободную поверхность воды. Пиковое (ударное) давление
в области контакта точек носовой части лодки с водой выбивает с
поверхности воды капли, разлетающиеся от удара в виде брызговых
струй. Интенсивное брызгообразование может происходить уже на
малых скоростях хода, особенно на взволнованной поверхности воды.
Форма поперечного сечения лодки существенно влияет на характер
брызгообразования. При плоскокилеватом днище (рис. 7.86, а)
брызговые струи поднимаются на большую высоту, днища с более
сложным (в частности, криволинейным) профилем килеватости
(рис. 7.86, б) также не всегда позволяют уменьшить брызгообразование.
203
Рис. 7.86. Форма дннща и характер брызгообразованин
Эффективным средством уменьшения брызгообразования являются
брызгоотражатели - брызгоотражающие щитки (рис. 7.86, в), установ-
ленные в плоскости борта.
На режиме глиссирования (рис. 7.87) от передней линии контактной
площадки 7 разворачиваются брызговые струи сложной пространствен-
ной формы. Относительно слабые прямолинейные струи 2, "ленточные"
или скоростные, стелются под малым углом к поверхности воды.
Мощные и тяжелые купольные, или блистерные (от англ, blister - пузырь),
струи 3 выбрасываются вверх и назад. Высота подъема этих струй
определяет положение крыла, двигателей и оперения гидросамолета.
Непотопляемость - одна из характеристик мореходности, означаю-
щая, что гидросамолет сохраняет плавучесть и остойчивость при
частичном повреждении и затоплении подводной части лодки или
поплавков. Для того чтобы обеспечить соответствующий запас
плавучести при повреждениях, объем водонепроницаемой части лодки
(поплавка) делают в 1,2...3,5 раза больше, чем потребный объем,
соответствующий взлетной массе гидросамолета.
204
Подводную часть лодки разделяют водонепроницаемыми (герметич-
ными) перегородками на отсеки таким образом, чтобы затопление
двух соседних отсеков не приводило к потере продольной остойчивости
или к появлению недопустимых углов дифферента и крена, затрудняю-
щих буксировку аварийного гидросамолета, и тем более к затоплению
лодки.
Чтобы повреждение или отрыв подкрыльного поплавка не привели
к потере поперечной остойчивости и опрокидыванию гидросамолета,
концевые части крыла выполняют в виде водонепроницаемых
(водоизмещающих) отсеков.
Таким образом, обеспечение мореходности влияет на аэродинамичес-
кую компоновку, точнее, аэрогидродинамическую компоновку -
настолько сильно требования мореходности сказываются на выборе
формы, размеров и взаимного расположения основных агрегатов
гидросамолета.
В процессе развития гидроавиации только в нашей стране было
создано около 10 летательных аппаратов, способных использовать в
качестве аэродрома водную поверхность.
Назовем еще одно транспортное средство, которое с полным правом
можно рассматривать как летательный аппарат.
Экраноплан - крылатый летательный аппарат, совершающий
крейсерский полет в непосредственной близости от поверхности экрана
-земли или воды.
В авиации с проявлением влияния экрана на самолет встретились в
1920-х гг.: при взлете и посадке в непосредственной близости от земли
вопреки всем законам классической аэродинамики возникала дополни-
тельная подъемная сила, что резко увеличивало длину посадочной
дистанции. Для компенсации этого эффекта при посадке стали применять
интерцепторы (см. рис. 7.57), которые при использовании в таком
качестве чаще называют спойлерами (от англ, spoil - портить).
Экранный эффект - увеличение аэродинамической подъемной силы
и уменьшение силы лобового сопротивления крыла, движущегося над
экраном. Прирост подъемной силы крыла вблизи экрана вызывается
повышением давления на его нижней поверхности (динамическая
воздушная подушка), а снижение сопротивления обусловлено уменьшени-
ем индуктивных скосов потока (см. подразд. 5.3) за счет экрана. В полной
мере экранный эффект проявляется на высоте от земли или воды, равной
примерно 0,1.„0,2 длины САХ крыла, хотя влияние экрана сказывается
до высоты полета, равной примерно длине САХ крыла.
Аэродинамическое качество крыла вблизи экрана {К - 30...40)
существенно выше достигнутого на крыле современных самолетов (К =
= 18...20). Однако аэродинамическое качество аппарата в целом
205
существенно ниже за счет сопротивления ненесущих частей и потерь
качества на балансировку. Для построенных экранопланов К - 13... 16.
В настоящее время реализовано более 70 проектов экранопланов и
экранолетов - летательных аппаратов, движущихся как над опорной
поверхностью на высотах, на которых реализуется экранный эффект, так
и вдали от экрана (самолетный режим). Основную их массу составляют
небольшие экспериментальные аппараты.
Большой вклад в популяризацию идеи экраноплана, разработку
схемных решений и проведение экспериментальных исследований
моделей в аэродинамических трубах внес в 1970-х гг. известный
авиаконструктор Р.Л. Бартини, работает ий совм естно со специалистами
ОКБ Г.М. Бериева.
Созданием аппаратов такого типа занимается ряд фирм во всем мире,
однако современный уровень развития экранопланов всецело определяет-
ся обширной программой исследовательских, проектных работ и
строительства крупных экранопланов, реализация которой осуществля-
лась в нашей стране начиная с 1950-х гг. Инициатором и организатором
этой программы был Р.Е. Алексеев, возглавлявший Центральное
конструкторское бюро по судам на подводных крыльях в г. Горьком
(сейчас - ЦКБ по СПК им. Р.Е. Алексеева). В реализации программы
активное участие приняли специалисты ЦНИИ им. академика А.Н. Кры-
лова, ЦАГИ им. профессора Н.Е. Жуковского, ЛИИ им. М.М. Громова
и других исследовательских и учебных институтов.
Экранопланы большой массы (более 100 т) были построены только
в СССР под руководством Р.Е. Алексеева. Самый большой из них - "КМ"
(корабль-макет), или "Каспийский монстр" (рис. 7.88) - так назвали его
иностранные специалисты.
Экраноплан "КМ", испытания и опытная эксплуатация которого
проводились на Каспийском море с 1966 по 1980 г., имел длину более
100 м, высоту более 20 м, размах крыла около 40 м. Взлетная масса в
рекордном полете - 544 000 кг, что было в то время для летательных
аппаратов неофициальным мировым рекордом, который был побит
только с созданием самолета Ан-225 "Мрия". Полеты проводились на
высотах от 3 до 14 м при ско-
ростях 400...450 км/ч.
Рис. 7.88. Экраноплан "КМ"
Из режима плавания на
режим полета вблизи экрана
"КМ" выходил за счет поддува
воздуха под крыло от восьми
турбореактивных двигателей,
206
размещенных впереди на пилонах. Крейсерский режим полета обеспечи-
вали два таких же двигателя, размещенные на киле.
Опыт, полученный при разработке и испытаниях "КМ", дал
возможность создать теорию и методологию проектирования и
строительства экранопланов, что позволило ЦКБ по СПК им.
Р.Е. Алексеева создать впоследствии целую гамму различных экранопла-
нов морского базирования.
Естественно, практически невозможно удовлетворить все требования
мореходности, не проигрывая при этом в аэродинамических и летных
характеристиках, поэтому при проектировании гидросамолетов
принимаются компромиссные решения вопросов аэродинамики и
мореходности. Перечисленные выше некоторые аспекты обеспечения
мореходности увеличивают сложность и число проблем, решаемых
проектировщиками при создании гидросамолета.
В настоящее время разработкой гидросамолетов занимаются во всем
мире множество мелких и только три крупные авиационные фирмы -
канадская "Канадэр" (Canadair), японская "Шин Мейва" (Shin Meiwa)
и Таганрогский авиационный научно-технический комплекс им. Г.М. Бе-
риева, имеющий многолетний опыт создания гидросамолетов и
заслуженно занимающий лидирующее положение в мировой гидро-
авиации.
Характерный для всей гидроавиации спад после второй мировой
войны и особенно при переходе к реактивной авиации можно объяснить
многими причинами, но не уменьшением потребности в гидроавиа-
ции.
Гидросамолеты военного применения с маркой "Бе", созданные в
1950-х гг., до сих пор состоят на вооружении и эффективно решают
задачи, которые могут быть решены только самолетами морского
базирования.
Разработки этой фирмы (см. рис. 20.44, 20.68, 20.69) привлекают
внимание во многих странах. С одной стороны, это объясняется высоким
инженерным уровнем разработок. Так, на самолете-амфибии А-40
реализовано максимальное аэродинамическое качество Xmax = 16... 17,
что практически соответствует Хтах сухопутных самолетов, а также
высокие гидродинамические характеристики (A^in = 4,8), что позволяет
эксплуатировать самолет на морских акваториях при ветровой волне до
2 м. С другой стороны, растет понимание того, что самолеты-амфибии
могут решать многие актуальные в настоящее время задачи с эффектив-
ностью, практически недоступной сухопутным самолетам.
Перечислим некоторые из этих задач:
• противолодочная оборона, патрулирование двухсотмильной
экономической зоны с дежурством на плаву, а также проведение
207
аварийно-спасательных операций в кратчайшие сроки и на больших
удалениях от берега;
• экологический контроль акваторий с забором проб воды и донных
отложений на плаву;
• тушение лесных пожаров с забором воды на близлежащих водоемах
в режиме глиссирования;
• защита водных поверхностей от загрязнения разлившейся нефтью
с оперативной локализацией разлива;
• освоение и обслуживание территорий с неразвитой сетью наземных
автомобильных и железнодорожных магистралей с взлетом и посадкой
в любом месте, где есть достаточное водное пространство (которое к
тому же не нужно специально строить и поддерживать в рабочем
состоянии).
Большиетранспортныевозможности гидроавиации объясняются еще
и тем, что 3/4 поверхности земного шара покрыты водой. Это обстоя-
тельство обеспечивает предпосылки развития и эффективного использо-
вания гидроавиации в прибрежной зоне морей и океанов, в акваториях
озер, водохранилищ и крупных рек.
7.6. САМОЛЕТЫ ИЗМЕНЯЕМОЙ ГЕОМЕТРИИ
На начальном этапе развития авиации полетная конфигурация
самолета не отличалась от взлетно-посадочной конфигурации.
Стремление обеспечить высокую транспортную и боевую эффектив-
ность самолета привело к тому, что определяемая ТЗ на проектирование
крейсерская (или максимальная) скорость полета современных самолетов
в 5... 15 раз превышает взлетно-посадочные скорости, позволяющие
самолету базироваться на оговоренных ТЗ аэродромах.
При проектировании самолета основным, уже традиционным
проектным противоречием считается несогласованность потребных
параметров и характеристик самолета, обеспечивающих заданные ЛТХ
на наиболее напряженном ("крейсерском") режиме полета и на режимах
взлета-посадки. Здесь несоответствие потребных полетной и взлетно-
посадочной конфигураций самолета очевидно. Разрешение этого
проектного противоречия изменением геометрии самолета за счет
уборки-выпуска шасси и взлетно-посадочной механизации уже давно
используется в авиации. Таким образом, принцип изменяемой геометрии
самолета не является новым.
По мере расширения требований к самолету не только по ЛТХ, но
и по удобству обслуживания на земле появились новые элементы,
изменяющие геометрию самолета.
208
Не просто большие люки, а отклоняемые вверх или вбок носовые и
хвостовые части транспортных самолетов увеличивают производитель-
ность погрузочно-разгрузочных работ.
Изменяемая в полете геометрия носовой части сверхзвукового
пассажирского самолета (СПС) обеспечивает экипажу приемлемый обзор
на взлетно-посадочных режимах (рис. 7.89, а) и не создает дополнитель-
ного сопротивления на сверхзвуковых скоростях полета (рис. 7.89, б).
Тормозные щитки (воздушные тормоза), отклоняемые перпендикуляр-
но к направлению скорости полета, резко увеличивают сопротивление,
улучшая таким образом характеристики маневренности в воздушном
бою.
Необходимо отметить, что замечательный русский летчик П.Н. Нестеров,
в разносторонней деятельности которого определенное место занимает и
проектирование в области самолетостроения, еще в 1911 г. в своем проекте
самолета использовал управляемые воздушные тормоза.
Концы крыла (рис. 7.90), отклоняемые вниз на сверхзвуковых
скоростях, уменьшают сдвиг фокуса крыла назад и, как следствие,
снижают потери аэродинамического качества на балансировку. Кроме
того, работая как кили, они обеспечивают дополнительную путевую
устойчивось, которая значительно уменьшается на больших скоростях.
Поворотные двигатели и крылья для СВВП (см. подразд. 7.4.2)
настолько существенно изменяют геометрию самолета, что это позволяет
говорить о конвертируемом (от лат. converto - изменяю, превращаю), или
адаптивном (адаптируемом) (от позднелат. adaptio - приспособление),
самолете, т.е.ю такой аэродинамической компоновке, которая изменяется
в соответствии с режимами полета самолета.
Строго говоря, каждому режиму полета (числу М) соответствует своя
оптимальная конфигурация, обеспечивающая на этом режиме наилучшие
Рис. 7.89. Носовая часть фюзеля-
жа СПС изменяемой геометрии
Рис. 7.90. Отклоняемые вниз концы крыла
209
вающую оптимальные или близкие к
Рис. 7.91. Самолет с крылом изменяе-
мой геометрии
несущие свойства и характе-
ристики устойчивости и управ-
ляемости самолета.
Без изменяемой геометрии
основных частей самолета, и
особенно его несущей системы,
невозможно синтезировать
универсальную аэродинами-
ческую компоновку, обеспечи-
ним характеристики на всех
режимах полета.
Самолетскрыломизменяемойстреловидности (геометрии) (рис.7.91)
позволяет в какой-то мере приблизиться к оптимальной аэродинамичес-
кой компоновке. В зависимости от режима полета консоли крыла 1,
поворачиваясь относительно шарниров 2, устанавливаются таким
образом, что обеспечивается полет самолета с аэродинамическими
характеристиками, приближающимися к наиболее рациональным во всем
диапазоне скоростей (чисел М) полета. Аэродинамические характеристи-
ки самолета с крылом изменяемой геометрии как бы огибают кривые
зависимостей максимального аэродинамического качества АГтах от числа
М (см. рис. 7.38). На взлетно-посадочных и дозвуковых режимах полета
при минимальном угле стреловидности крыла такой самолет обеспечива-
ет короткий разбег на взлете и пробег при посадке, большие дальность
и продолжительность полета. При умеренных углах стреловидности
крыла обеспечивается сверхзвуковой полет на большой высоте. При
больших углах стреловидности крыло практически "сливается" с
горизонтальным оперением, образуя несущую систему, аналогичную
треугольному крылу малого удлинения, наиболее рациональную для
полета с большими сверхзвуковыми скоростями.
Следует заметить, что изменение стреловидности при повороте
консоли относительно шарнира изменяет и размах, и длины хорд крыла
по потоку, т.е. основные параметры крыла (удлинение, относительную
толщину и сужение), поэтому поворот консоли относительно шарнира
приводит не только к изменению стреловидности, но и к более общему
изменению геометрии несущей системы.
Естественно, что изменение геометрии, особенно изменение
стреловидности крыла в полете, связанное с необходимостью перемещать
210
Рис. 7.92. Схемы самолетов с асимметричным крылом
высоконагруженные части самолета (крыло) в полете, приводит к
увеличению массы самолета и вследствие увеличения массы крыла с
шарниром, и вследствие увеличения массы приводов и энергосистем.
Поэтому при определенных требованиях ТЗ на проектирование самолет
с крылом изменяемой геометрии может оказаться менее рациональным,
чем самолет с крылом фиксированной (неизменяемой) геометрии.
В то же время в результате применения оригинальных конструктивно-
компоновочных решений, например асимметричного крыла изменяемой
геометрии в однофюзеляжной (рис. 7.92, а) или двухфюзеляжной
(рис. 7.92,6) схемах, при которых шарнир менее нагружен, увеличение
массы может оказаться не таким значительным. Однако в этой ситуации
возникают проблемы с обеспечением устойчивости таких самолетов в
условиях косой обдувки (при полете со скольжением).
При некоторых требованиях ТЗ более рациональным может оказаться
крыло с неизменной стреловиднос-
тью, но с изменяемой в зависимости
от режимов полета профилировкой
крыла - так называемое адаптивное
крыло (рис. 7.93). Конструкция такого
крыла позволяет плавно (практически
без нарушения гладкости контура)
отклонять носовую и хвостовую
части крыла, изменяя таким образом
его кривизну вдоль размаха в зависи-
мости от высоты, числа М полета и
перегрузки. Конфигурация профиля
1 обеспечивает оптимальныехаракте-
ристики при полете на больших чис-
лах М, конфигурация 2 - при крейсер-
ском полете на умеренных скоростях,
конфигурация 3 - при маневре с
большими перегрузками. В результа-
те поляра 4 самолета с адаптивным
Рнс. 7.93. Адаптивное крыло и поляра
самолета с таким крылом
211
крылом представляет собой огибающую поляр, соответствующих
различным конфигурациям крыла. Изменяемая профилировка в
сочетании с изменяемой стреловидностью крыла позволяет получить
оптимальную в широком диапазоне режимов полета несущую систему.
Необходимо отметить, что на заре развития авиации применялось изменение
формы профиля (так называемое гоширование) для весьма нежестких и
малонагруженных крыльев с полотняной обшивкой.
В современных условиях создание адаптивного крыла для самолета,
работающего в широких диапазонах скоростей и перегрузок, представля-
ет сложнейшую проблему для конструкторов. Кроме того, изменение
геометрии самолета, обеспечивающее оптимальные параметры для
каждого режима полета, невозможно без широкого применения
автоматики в системах управления.
7.7. СРЕДСТВА ОБНАРУЖЕНИЯ
И АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА
Исход любой боевой операции зависит не только от эффективности
средств поражения нападающей стороны (т.е. от возможности поразить
цель), но и от эффективности противодействия обороняющейся стороны
(от возможности защититься). Военный самолет в ходе боевой операции
является одновременно и нападающей, и обороняющейся стороной. Его
эффективность существенно зависит от возможности обнаружить цель
и не быть обнаруженным противником.
В начальный период использования авиации в боевых действиях
самолет противника обнаруживали с земли "на слух" по звуку работаю-
щего мотора и визуально. Затем появились акустические (от греч.
akustikds - слуховой) приборы, позволявшие увеличить дальность
обнаружения.
Установка глушителей на моторы оказалась неэффективной,
поскольку при этом уменьшалась не только шумность мотора, но и его
мощность, что отрицательно сказывалось на летно-технических и
маневренных характеристиках самолета.
Предпринимались попытки создать визуально малозаметные самолеты
с прозрачной обшивкой из органического стекла и деталями каркаса,
окрашенными серебристо-белой краской и отлакированными для
отражения света от непрозрачных поверхностей. Такие самолеты в
воздухе быстро становились незаметными для наземных наблюдателей,
но прозрачная обшивкабыстро старела,тускнела и теряла прозрачность.
Довольно эффективным методом снижения визуальной заметности
самолета стал камуфляж (франц, camouflage) - способ маскировки, при
212
котором на поверхность самолета наносят пятна и полосы различных
формы и цвета, что изменяет его внешний вид и зрительно искажает
контуры.
Для нападения на объекты с сильной системой противовоздушной
обороны (ПВО) начали применять тактику ночных налетов.
С появлением РЛС встала задача сначала для наземных систем ПВО,
а впоследствии и для самолетов (бортовых РЛС - БРЛС) уменьшить
возможность обнаружения самолета с помощью РЛС, стала актуальной
и задача уничтожения РЛС противника.
Самолет 2 (рис. 7.94), летящий на большой высоте по траектории 3
к цели 8, будет обнаружен в точке 4 лучом 5 антенны РЛС 9 системы ПВО
надостаточно большом удалении от объекта 8. Более раннему обнаруже-
нию самолета препятствуют неровности рельефа местности (возвышен-
ности, горы) 10, которые луч РЛС не может обогнуть. Мощность
(дальность) РЛС самолета 2 не позволяет ему в точке 4 обнаружить цель
8, однако бортовые системы самолета, зафиксировав его облучение РЛС
системы ПВО, могут, используя расчетные методы, обнаружить
положение РЛС системы ПВО.
Для нападения на объекты с сильной системой ПВО начали применять
тактику уничтожения РЛС системы ПВО специальными ракетами, запуск
которых с борта самолета 2 возможен в точке траектории 4, если
достаточна дальность действия ракеты. Начали также применять тактику
полета самолета 14 к цели на малой высоте по траектории 12 с огибанием
рельефа местности. В этом случае самолет 14 будет обнаружен в точке
11 траектории, т.е. на значительно меньшем удалении от цели, что резко
повышает вероятность ее поражения.
Стремление обнаружить самолет противника на большом удалении
от цели привело к созданию специальных самолетов дальнего радиолока-
ционного обнаружения (ДРЛО). Такой самолет 7, патрулирующий на
большой высоте в зоне охраняемого объекта, лучом б мощной бортовой
213
РЛС может обнаружить самолет противника 2 в точке 1, а низколетящий
самолет 14 - в точке 13, что резко повышает вероятность поражения
самолета противника.
Самолет ДРЛО обеспечивает получение, обработку и передачу
информации о воздушной обстановке на наземные, корабельные,
самолетные командные пункты; обнаружение наземных (надводных)
целей, наведение на них ударных самолетов (кораблей); наведение
истребителей-перехватчиков на воздушные цели. Такой самолет может
использоваться и в сугубо мирных целях: для экстренного восстановления
связи в районах природных или техногенных катастроф, сбора и
обработки информации для экологического мониторинга (от лат.
monitor - напоминающий, надзирающий) и т.п.
Самолеты ДРЛО создаются чаще всего на базе серийных пассажир-
ских или транспортных самолетов. Основные особенности аэродинами-
ческой компоновки таких самолетов связаны с необходимостью
размещения крупногабаритных радиолокационных антенн кругового
обзора и обеспечения большой продолжительности полета (до 24 ч).
Одна из возможных схем самолета ДРЛО представлена на рис. 7.95.
Внутри установленного на пилонах 1 радиопрозрачного обтекателя 2
размещены антенны 3 РЛС и систем опознавания и связи. Вместительный
фюзеляж пассажирского или транспортного самолета-прототипа
позволяет разместить в нем сложное, тяжелое и крупногабаритное
специальное радиоэлектронное оборудование, оборудование обработки
(ЭВМ) и передачи информации, дополнительные топливные баки,
рабочие места и места отдыха летного экипажа и операторов систем
специального оборудования.
По сравнению с наземными и корабельными средствами радиолокаци-
онного обнаружения самолет ДРЛО в боевой обстановке обладает
следующими преимуществами: практическим отсутствием ограничений
для обнаружения по высоте полета воздушных целей, высокой мобиль-
ностью и, как следствие, меньшей уязвимостью для различных средств
поражения.
Рис. 7.95. Самолет ДРЛО
Естественно, что размеще-
ние на самолете вынесенных в
воздушный поток крупногаба-
ритных обтекателей антенн и
пилонов их крепления оказы-
вает существенное влияние на
аэродинамические характерис-
тики самолета, его устойчи-
вость и управляемость.
214
Создание космических, так же как и самолетных, средств ДРЛО,
уверенно селектирующих (от лат. selectio - выбор, отбор) и сопровождаю-
щих низколетящие цели на фоне подстилающей поверхности (земли,
воды), разработка средств обнаружения целей по инфракрасному
(тепловому) излучению поставили задачу разработки средств и методов
уменьшения радиолокационной (РЛ) и инфракрасной (ИК) заметности
самолетов.
Радиолокационную заметность, характеризующую способность
самолета отражать электромагнитныеимпульсы, излучаемые наземными
или самолетными РЛС противника, принято выражать через эффектив-
ную поверхность рассеяния (ЭПР), или эффективную отражающую по-
верхность (ЭОП), которая определяется как площадь пластины,
установленной под прямым углом к направлению сигналарадиолокатора
и полностью отражающей его.
Дальность и устойчивость обнаружения самолета противника при
облучении РЛС и успешное проведение атаки зависят от интенсивности
отражаемого им сигнала.
Следует отметить, что ЭОП играет значительную роль при выполне-
нии слепых посадок с помощью наземных радиосредств и при работе
бортовых ответчиков на пассажирских линиях.
Однако не только размеры самолета (площади сечений, перпендику-
лярных направлению луча РЛС) определяют мощность отраженного
сигнала. Хорошо отражают излучаемую РЛС энергию наружные
подвески любого рода (ракеты, подвесные топливные баки и т.п.),
экраны самолетных РЛС, плоские вертикальные поверхности (киль и
боковые стенки фюзеляжа), резкие изломы и перегибы в местах угловых
стыков частей самолета, первые ступени компрессоров и вентиляторов
двухконтурных турбореактивных двигателей (см. гл. 14); каналы
воздухозаборников могут концентрировать и фокусировать отражен-
ный радиолокационный луч. Кроме того, любая радиоэлектронная
аппаратура самолета излучает электромагнитную энергию, которая
может быть зафиксирована РЛС противника.
Сделать самолет малозаметным для РЛС противника можно, придав
ему малоотражающие формы, т.е. скомпоновав его так, чтобы он
отражал электромагнитные волны в сторону от локатора.
Существенно уменьшает ЭПР применение на самолете радиопоглоща-
ющих конструкций (например, на основе углепластиковых ком-
позиционных материалов) и противорадиолокационной окраски,
которая не поглощает радиолокационные волны, но ослабляет
интенсивность отражения от "горячих электромагнитных точек" на
поверхности самолета, т.е. от зон с максимальным радиолокационным
отражением.
215
Основными источниками ИК-излучения на самолете являются
работающий двигатель, горячие газы реактивной (выхлопной) струи
двигателя, бортовые агрегаты и приборы, конструкция самолета,
подвергающаяся аэродинамическому нагреву при полете на больших
скоростях.
Сделать самолет малозаметным для ИК-средств обнаружения
противника можно, применяя различные тепловые экраны, теплоизоля-
ционные материалы, отводя горячие выхлопные газы двигателей на
верхнюю поверхность самолета (т.е. экранируя их крылом или фюзеля-
жем и уменьшая их ИК-заметность для наземных средств обнаружения)
или смешивая их с внешним холодным воздухом, а также применяя
плоские сопла (т.е. уменьшая сектор обзора внутреннего канала
двигателя с задней полусферы) и т.п.
Комплексное использование методов снижения РЛ- и ИК-заметности
самолетов за рубежом принято обозначать термином "стеле" (от англ.
stealth - украдкой, втихомолку, тайком) или технология (техника) "стеле".
В мире серийно строятся только два самолета, для которых техноло-
гия "стеле" определяет концепцию боевого применения (прорыв системы
ПВО) и, как следствие, аэродинамическую схему и компоновку.
В июне 1981 г. совершил первый полет F-117A (поступил на
вооружение в 1990 г.) - одноместный дозвуковой тактический (ударный)
истребитель (рис. 7.96) американской фирмы "Локхид" (Lockheed),
Рис. 7.96. Самолет F-117A-
216
предназначенный для скрытого проникновения на малых высотах через
систему ПВО противника и атак стратегически важных наземных
объектов военной инфраструктуры (ракетные базы, аэродромы, центры
управления и связи и т.п.), для поиска и уничтожения несущих боевое
дежурство в воздухе самолетов ДРЛО. Самолет построен по схеме
"бесхвостка" с V-образным вертикальным оперением. Совершенно не
характерные для дозвуковых самолетов крыло большой стреловидности
(67,5°) с острой передней кромкой, очерченный прямыми линиями
профиль крыла, граненый фюзеляж, образованный плоскими панелями,
расположены таким образом друг относительно друга, чтобы отражать
электромагнитные волны в сторону от РЛС противника. Такая форма
самолета, построенного по концепции "плоскостей-отражателей",
получила название "фасеточной" (от франц./acezze - грань).
Интересно отметить, что применение граненой конструкции позволяет
сделать объект и максимально заметным. На первом самоходном аппарате
"Луноход-1", предназначенном для комплекса научных исследований на
поверхности Луны, был установлен лазерный уголковый отражатель -
оптическое устройство, отражающее падающее на него лазерное излучение
строго в обратном направлении, что позволяло с высокой точностью измерять
расстояние до Луны. "Луноход-1" был доставлен на Луну КА "Луна-17" и
проработал на ее поверхности почти год (с 17.11.1970 по 4.10.1971). Перед
прекращением работы, вызванным выработкой ресурса изотопного источника
энергии, "Луиоход-l" был поставлен на практически горизонтальной площадке
в такое положение, при котором уголковый отражатель обеспечил многолетнее
проведение лазерной локации его с Земли.
Предприняты и другие меры для снижения радиолокационной,
тепловой и акустической заметности самолета. Расположенные над
крылом с обеих сторон фюзеляжа плоские воздухозаборники имеют
продольные перегородки из радиопоглощающих материалов. Часть
потока холодного воздуха отделяется на входе в воздухозаборники и,
минуя двигатели, попадает в экранируемые крылом плоские сопла,
нижние панели которых покрыты теплопоглощающими керамическими
плитками, что снижает ИК-заметность самолета.
Самолет не имеет внешних подвесок, все вооружение размещено
внутри фюзеляжа.
Контуры щелей, образующихся в местах соединения фонаря кабины
с фюзеляжем, створки отсеков шасси и вооружения имеют пилообразную
форму, что также обеспечивает эффективное рассеяние электромагнитной
энергии и предотвращает ее прямое отражение в направлении приемопе-
редающей антенны РЛС противника.
В конструкции самолета широко применены радиопоглощающие и
радиоотражающие материалы.
217
В результате этих мер ЭПР самолета при облучении его локатором
спереди и сзади составляет около 0,01 м, а при облучении с других
ракурсов - до 0,025 м2, что на несколько порядков меньше, чем ЭПР
обычных самолетов.
Естественно, что граненая форма фюзеляжа и необычный профиль
крыла резко ухудшают аэродинамические характеристики самолета. В
процессе проектирования был достигнут компромисс, при котором
требования малой радиолокационной заметности возобладали над
требованиями аэродинамики - аэродинамическое качество самолета
примерно вдвое меньше, чем у обычных самолетов-"бесхвосток", что
ограничивает радиус действия самолета и уменьшает боевую нагрузку.
В июле 1989 г. совершил первый полет В-2, самый дорогой самолет
в истории авиации - цена одного экземпляра превышает 2 млрд дол.
Дозвуковой стратегический бомбардировщик США создавался
фирмой "Нортроп" (Nortrop) с применением новейших разработок в
области вычислительной техники, что позволило найти оптимальный
компромисс между требованиями аэродинамики и малой радиолокацион-
ной заметности.
Самолет В-2 (рис. 7.97) построен по схеме "летающее крыло" без
вертикальных поверхностей управления, что изначально уменьшаетЭПР.
Традиционные для дозвуковых скоростей полета поверхности крыла
были рассчитаны так, чтобы использовать обшивку двойной кривизны,
обеспечивающую не только потребные с точки зрения малой радиолока-
ционной заметности углы отражения сигнала РЛС, но и высокие
аэродинамические характеристики.
Умеренно стреловидное по передней кромке крыло (33°) большого
удлинения, зигзагообразная (пилообразная) задняя кромка, углы
стреловидности которой (прямые и обратные) равны углам стреловид-
ности передней кромки, плавные очертания профиля крыла позволили
получить почти такое же аэродинамическое качество, как у дозвуковых
стратегических бомбардировщиков традиционных схем.
Для управления самолетом используются трехсекционные элевоны
и расщепляющиеся щитки-рули на концах крыла. Устойчивость и
управляемость самолета обеспечиваются автоматическими системами
управления (см. подразд. 7.8).
Сравнительно небольшая удельная нагрузка на крыло и мощная
воздушная подушка, образующаяся под самолетом при приземлении,
обеспечивают умеренную посадочную скорость самолета, не имеющего
взлетно-посадочной механизации.
ЭПР стратегического бомбардировщика В-2 с передней полусферы
составляет около 0,01 м2, что в 100 раз меньше, чем у стратегического
бомбардировщика В-1В, в 4000 раз меньше, чем у стратегического
218
Рис. 7.97. Самолет В-2
бомбардировщика В-52, и примерно равно ЭПР тактического истребите-
ля F-117A.
Если учесть, что В-2 и F-l 17А существенно различаются по макси-
мальной взлетной массе (180 000 и 20 000 кг соответственно) и по
размерам (размах крыла 52,4 и 13,2 м соответственно), то можно сделать
следующий вывод: использование при проектировании передовых
разработок в области вычислительной техники позволяет решать
нетривиальные задачи по выбору оптимальных аэродинамических схем
самолетов с учетом многих противоречивых требований технического
задания на проектирование.
В заключение следует заметить, что эти самолеты-невидимки не
являются "невидимыми" в любом диапазоне волн, однако уменьшение
РЛ- и ИК-заметности существенно повышает боевую эффективность
самолета и создает определенные проблемы для средств ПВО. Поэтому
боевые самолеты последних поколений в большей или меньшей мере
имеют в своей компоновке и конструкции элементы техники малозамет-
ного самолета. Специалисты в области радиотехники утверждают, что
219
с помощью активного бортового радиоэлектронного оборудования
самолет любой конфигурации можно сделать малозаметным.
7.8. АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА
И АКТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
В настоящее время проектировщики практически исчерпали все
возможности повышения эффективности самолета за счет выбора
оптимальных параметров схемы (аэродинамической компоновки).
Применение активных систем управления или техники активного
управления открывает большие возможности для успешного выполнения
сложных ТЗ на проектирование. Техника активного управления
предполагает, что в процессе полета часть управляющих воздействий на
самолет не зависит от действий летчика, а определяется автоматической
системой управления (АСУ), обладающей значительно бдльшими, чем
летчик, быстродействием и точностью дозирования управляющих
сигналов.
Традиционный контур системы управления самолетом (см. рис. 7.33)
дополняется обеспечивающими технику активного управления уст-
ройствами, взаимодействие которых с традиционной системой
иллюстрируется рис. 7.98.
Летчик управляет самолетом, отклоняя рулевые поверхности с
помощью гидравлических рулевых приводов. Независимо от летчика на
приводы рулевых поверхностей и, соответственно, на рулевые поверхнос-
ти подаются управляющие сигналы, сформированные бортовым
комплексом цифровых вычислительных и аналоговых машин.
Бортовые цифровые вычислительные машины (БЦВМ), имеющие
мощное программное обеспечение, вырабатывают управляющие сигналы
на основе информации о потребной программе полета и действиях
летчика, а также о реальных параметрах движения самолета, выдаваемых
набором датчиков.
Рнс. 7.98. Укрупненная блок-схема управления самолетом с АСУ
220
Информацию о скорости полета выдают приемники воздушного
давления, о высоте полета - высотомеры. Работающие как флюгеры в
потоке обтекающего самолет воздуха датчики углов атаки и скольжения
(ДУАС) выдают информацию о положении самолета относительно
вектора скорости набегающего потока. Акселерометры (от лат. accelero -
ускоряю и греч. metreo - измеряю) измеряют ускорение самолета в
продольном, поперечном и вертикальном направлениях. Гироскопы (от
греч. gyros - круг, gyreud - вращаюсь и skopeo - смотрю) выдают
информацию об углах тангажа, крена, рыскания и угловых скоростях
вращения относительно всех трех осей координат.
Программное обеспечение БЦВМ может обеспечивать реализацию
различных концепций техники активного управления.
Наиболее существенное влияние на эффективность самолета и его
аэродинамическую компоновку может оказать концепция обеспечения
"искусственной"устойчивости самолета. В этом случае размеры оперения
выбираются таким образом, чтобы самолет имел минимальный запас
"естественной" устойчивости или был неустойчивым. Это позволяет
уменьшить размеры оперения и, как следствие, массу самолета, размеры
крыла, лобовое сопротивление. При любых отклонениях самолета от
положения балансировки АСУ отклоняет соответствующие рулевые
поверхности, корректируя положение самолета, и самолет без участия
летчика, который даже не успевает заметить это, возвращается в
исходное положение.
Для того чтобы обеспечить необходимое быстродействие АСУ (до
40...50 коррекций в секунду), приходится отказываться от традиционных
проводок управления и переходить на проводные (электродистанцион-
ные или волоконно-оптические) системы, связывающие все элементы
АСУ. Чтобы обеспечить надежность и безотказность таких систем на
уровне традиционных механических систем, осуществляется трех-,
четырехкратное резервирование всех элементов системы.
АСУ с помощью традиционных органов управления (рули высоты,
элероны, руль направления), средств механизации крыла (предкрылки,
закрылки) и новых поверхностей оперения (рис. 7.99) - дополнительного
переднего (носового) вертикального 1 и горизонтального 2 оперения
позволяет реализовать концепции непосредственного управления
подъемной силой (НУПС) и непосредственного управления боковой силой
(НУБС). Совместное отклонение традиционных и новых поверхностей
управления позволяет изменить угловое положение самолета в прост-
ранстве без изменения траектории или изменить траекторию без
изменения углового положения самолета, т.е. независимо изменять
положение самолета по трем угловым и трем линейным координа-
там.
Естественно, что анализ и выбор концепций техники активного
управления, которые в заданных условиях позволят улучшить ЛТХ или
221
Рис. 7.99. Самолет с НУПС и НУБС
экономические характеристики
проектируемого самолета, дол-
жны производиться на самых
ранних этапах проектирования,
поскольку это оказывает сущест-
венное влияние на конфигура-
цию и параметры аэродинами-
ческой схемы самолета.
В конечном итоге разрешение
проектных противоречий, воз-
никающих при проектировании
самолета по все усложняющимся
ТЗ, возможно не за счет выбора
оптимальных проектных параметров самолета традиционной концепции,
а за счет выбора какой-либо новой нетривиальной концепции,
сформированной с учетом широкого применения новейших достижений,
в том числе и техники активного управления.
Активные системы управления не только повышают ЛТХ, но и
существенно улучшают условия работы высоконагруженной конструкции
ЛА.
Проверьте. как Вы усвоили материал
1. Назовите схему самолета.
Каким образом летчик может пари-
ровать моменты М] и М2, действую-
щие на самолет?
Как называются эти моменты?
Объясните назначение частей само-
лета (позиции 1...5).
Охарактеризуйте схему самолета с
точки зрения взаимного расположения
крыла и фюзеляжа.
2. Назовите схему самолета.
Объясните назначение частей само-
лета 1 и 2.
Охарактеризуйте стреловидность
несущих частей самолета.
Сравните сужение и удлинение
частей самолета 1 и 2.
Каким образом летчик может пари-
ровать момент М, действующий на
самолет?
222
3. Назовите схему самолета.
Каким образом летчик можетпари-
ровать момент М, действующий на
самолет?
Как называется момент Ml
Как называется угол ф?
Как называется такое оперение?
Охарактеризуйте схему самолета с
точки зрения взаимного расположения
крыла и фюзеляжа.
4. Охарактеризуйте устойчивость
самолетов 1 и 2, имеющих такой харак-
тер движения после воздействия поры-
ва ветра.
5. Охарактеризуйте схему самолета с
точки зрения аэродинамики, гидроди-
намики, взаимного расположения
крыла и фюзеляжа.
6. Назовите элементы крыла 1...6 и объясните их назначение.
7. Отклонение какого элемента механи-
зации крыла обусловит переход от
зависимости 1 к зависимости 2 в случа-
ях а и 61
223
Интерпретируйте следующие основные понятия:
• аэродинамическое проектирование; аэродинамическая компоновка;
интегральная компоновка; полетная конфигурация самолета; аэродинамическая
схема самолета; нормальная схема; "классическая" схема; схема "утка”; схема
"бесхвостка"; схема "летающее крыло"; интегральная аэродинамическая схема;
правило площадей; дифференциальное правило площадей;
• несущие части самолета; ненесущие части самолета; стреловидное крыло;
горизонтальное оперение; стабилизатор; руль высоты; горизонтальное
цельноповоротное оперение; вертикальное оперение; киль;руль направления; элевон;
элерон; фюзеляж; гондола двигателя;
• форма крыла в плане; хорда; средняя аэродинамическая хорда; поперечный
угол крыла; угол поперечного Vкрыла; сужение крыла; удлинение крыла; крыло
малого удлинения; крыло большого удлинения; прямая стреловидность; обратная
стреловидность; угол стреловидности;
• профиль крыла; толщина профиля; вогнутость профиля; относительная
толщина профиля; относительная кривизна профиля; серия профиля; ламинарный
профиль; ламинаризированный профиль; суперкритический профиль; геометричес-
кая крутка; аэродинамическая крутка; строительная горизонталь фюзеляжа;
удлинение фюзеляжа; эквивалентный диаметр фюзеляжа;
• продольная балансировка; балансировка по тангажу; боковая балансировка;
потери аэродинамического качества на балансировку; пикирующий момент;
кабрирующий момент; момент крена; момент рыскания; инерционный момент;
демпфирующий момент;
• устойчивость; устойчивый самолет; самолет, неустойчивый в продольном
движении; нейтральный самолет; аэродинамический фокус; продольная
устойчивость; устойчивость по тангажу; степень продольной устойчивости;
запаспродолънойустойчивости; боковаяустойчивость;флюгернаяустойчивостъ;
коэффициент устойчивости пути; устойчивость по крену; поперечная
устойчивость; коэффициент поперечной устойчивости;
• центровка самолета; предельно задняя центровка; предельно передняя
центровка; разбег центровок;
• управляемость; обратная связь; продольная управляемость; боковая
управляемость; показатель управляемости; градиент усилий на ручке по
перегрузке; градиент хода ручки по перегрузке;
• система управления самолетом; основное управление; вспомогательное
управление; органы управления самолетом; командный поступравления; командные
рычаги; ручное управление; ножное управление; ручкауправления; штурвал; педали;
проводка управления;
• концевой срыв; вихревой жгут; аэродинамическая перегородка; генератор
вихрей; концевые крылышки; законцовки Уиткомба; энергетические методы
воздействия на характер обтекания; сдув пограничного слоя; поперечный выдув
струи; отсос пограничного слоя; управление пограничным слоем; управление
ламинарным обтеканием; суперциркуляция;
224
• шасси; система опор самолета; основные опоры шасси; вспомогательные
опоры шасси; амортизатор; амортизационная стойка;
• взлетно-посадочная механизация; несущая способность крыла; щиток;
механизация задней кромки; выдвижной многощелевой закрылок; двухщелевой
закрылок; дефлектор; механизация передней кромки крыла; предкрылок;
интерцептор; спойлер;
• энергетические методы обеспечения взлетно-посадочных характеристик;
струйная механизация; реактивный закрылок; струйный закрылок; обдув
поверхностей крыла; эффект Коанда;
• себестоимость перевозок; прямые эксплуатационные расходы; косвенные
расходы;
• вертолет; вертолет двухвинтовой схемы; винтокрыл;
• воздушный винт; пропеллер; винт изменяемого шага; несущий винт; рулевой
винт вертолета; теоретический шаг винта; геометрический шаг винта; общий
шаг винта; циклический шаг винта; азимут лопасти; азимутальное положение
лопасти; комель лопасти;
• угол установки сечения винта; угол притекания струи; угол отставания
лопавти; угол конусности; угол взмаха; угол установки лопасти;
• осевая обдувка; косая обдувка; момент торможения; момент сопротивления
вращению винта; режим авторотации;
• автомат перекоса; осевой шарнир; вертикальный шарнир; горизонтальный
шарнир; управление общим шагом винта; рычаг "шаг-газ"; колонка продольно-
путевого управления; хвостовая балка вертолета; трансмиссия; реактивный
привод несущего винта;
• самолет ВВП; самолет УВП; переходный режим СВВП; режим укороченного
взлета и посадки; единая силовая установка; составная силовая установка;
комбинированная силовая установка; подъемно-маршевый двигатель; подъемный
двигатель; маршевый двигатель; подъемно-разгонный двигатель; эрозия
поверхности аэродрома; струйная система управления; струйный руль;
• гидроавиация; поплавковый гидросамолет; двухпоплавковая схема гидросамо-
лета; летающая лодка; летающая лодка схемы катамаран; летающая лодка
интегральной схемы; самолет-амфибия; подкрыльный поплавок; килеватая лодка;
редан; скула; водяной руль;
• акватория; гидродром; мореходность гидросамолета; плавучесть;
непотопляемость; центр величины; ватерлиния; осадка лодки; дифферент;
поперечная остойчивость; продольная остойчивость; метацентр; метацентри-
ческая высота;
гидростатические силы; гидродинамические силы; волновое сопротивление;
режим глиссирования; "горб"гидродинамического сопротивления; гидродинамичес-
кое совершенство; гидродинамическое качество; чистота бега; приемлемое
брызгообразование; брызговая струя;
• экранный эффект; экраноплан; экранолет;
• самолет изменяемой геометрии; конвертируемый самолет; адаптивный
самолет; адаптируемый самолет; однофюзеляжная схема самолета; двухфюзе-
ляжная схема самолета; крыло изменяемой стреловидности; асимметричное крыло
изменяемой геометрии; адаптивное крыло; воздушные тормоза;
8 7425
225
• самолет, визуально малозаметный; радиолокационная заметность самолета;
инфракрасная заметность самолета; камуфляж; огибание рельефа местности;
дальнее радиолокационное обнаружение; самолет ДРЛО; эффективная
поверхность рассеяния; эффективная отражающая поверхность; технология
"стеле"; малоотражающая форма самолета; "фасеточная"форма самолета;
• техника активного управления; концепция "искусственной"устойчивости
самолета; концепция непосредственного управления подъемной силой; концепция
непосредственного управления боковой силой; автоматическая система
управления; проводная система управления; Электродистанционная система
управления;
• приемник воздушного давления; датчик углов атаки и скольжения;
акселерометр; гироскоп.
226
Глава 8
ОСНОВЫ ПРОЧНОСТИ И ЖЕСТКОСТИ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Под прочностью конструкции ЛА в целом и отдельных его агрегатов
понимают их способность выдерживать действующие нагрузки без
остаточных деформаций и разрушения, а под жесткостью - способность
в заданных пределах сохранять под действием нагрузки исходную
геометрическую форму.
Перед проектировщиками ЛА стоит задача создать безусловно
прочную и достаточно жесткую конструкцию с минимально возможной
массой. Ни в одном сооружении или машине масса конструкции не
играет такой большой роли, как в ЛА, где она существенным образом
влияет на его ЛТХ и эффективность. В связи с этим комплекс задач,
которые приходится решать для обеспечения прочности ЛА, и,
соответственно, методы их решения резко отличаются от задач и методов
их решения при обеспечении прочности других машин.
Современная наука о прочности ЛА в значительной степени опирается
на работы отечественных ученых: А.Н. Крылова, Д.И. Журавского,
И.Г. Бубнова, Б.Г. Галеркина, М.В. Келдыша, А.И. Макаревского,
А.М. Черемухина и др.
Для обеспечения заданных в ТЗ на проектирование надежности и
ресурса ЛА разрабатываются теоретические и экспериментальные
методы решения следующих основных задач:
• определение нагрузок, действующих на ЛА во всех условиях его
эксплуатации; обоснование требований к прочности и жесткости
конструкции ЛА; создание норм летной годности, которым должен
отвечать каждый вновь разрабатываемый ЛА;
• определение напряженного и деформированного состояния и
оценка реальной прочности и жесткости элементов конструкции и ЛА
в целом под действием нагрузок.
Естественно, что ЛА в зависимости от их назначения и условий
эксплуатации различаются не только аэродинамической компоновкой,
но и характером действующих на них нагрузок. Так, на ракеты-носители
действуют преимущественно продольные нагрузки (направленные вдоль
оси ОХ ракеты-носителя силы тяжести, силы инерции и тяга двигателей),
а на самолеты - преимущественно поперечные нагрузки (направленные
перпендикулярно к плоскости OXZ связанной системы координат).
8*
227
8.1. НАГРУЖЕНИЕ АГРЕГАТОВ САМОЛЕТА
И ИХ ДЕФОРМАЦИЯ ПОД НАГРУЗКОЙ
В общем случае на конструкцию самолета действуют сложные,
изменяющиеся во времени нагрузки.
Под действием воздушной нагрузки Д У( (разрежения над крылом и
повышенного давления под крылом, создающих подъемную силу) крыло
изгибается вверх (рис. 8.1). При этом верхняя поверхность крыла
сжимается, а нижняя растягивается.
В любом сечении прямого крыла, т.е. крыла, продольная ось которого
(ось, идущая вдоль размаха крыла) перпендикулярна к продольной оси
ОХ самолета, можно найти точку, характеризующуюся тем, что сила,
приложенная к крылу в этой точке, будет вызывать только изгиб крыла
без его закручивания. Эта точка называется центром жесткости (ц.ж.)
сечения крыла. Линия, соединяющая ц.ж. сечений, называется линией
центров жесткости. Следовательно, деформация крыла, показанная на
рис. 8.1, будет иметь место только в случае, когда линия центров
жесткости будет совпадать с линией центров давления (линией, соединяю-
щей точки ц.д. сечений крыла).
Положение центра жесткости определяется только свойствами самой
конструкции и не зависит от характера нагружения крыла. Нагрузка
может быть различной. Положение центра давления аэродинамической
нагрузки зависит от режима полета. Кроме подъемной силы на крыло
действует также сила тяжести конструкции, приложенная в центрах масс
сечений крыла.
В общем случае центр давления, центр жесткости и центр масс крыла
не совпадают и крыло не только изгибается, но и закручивается (рис. 8.2).
Силы, вызывающие изгиб и кручение крыла, стремятся также
сдвинуть одно сечение крыла относительно другого - "перерезать" крыло.
крыла совпадает с линией
центров жесткости сечений
Рис. 8.1. Изгиб крыла
228
Рис. 8.2. Изгиб и кручение крыла
Рис. 8.3. Деформация крыла под действием
силы тяжести и тяги двигателя
Рис. 8.4. Изгиб фюзеляжа
Аналогичным образом нагружаются и деформируются под действием
аэродинамических сил, сил тяжести и инерционных сил от вращения
лопасти несущего винта вертолета.
Под действием силы тяжести двигателя Gm, подвешенного на пилоне
ДВ
(от греч. pylon - ворота, вход) под крылом, крыло изгибается вниз (из
плоскости крыла) и закручивается против хода часовой стрелки (рис. 8.3,
а); под действием тяги двигателя Р крыло изгибается вперед (в
плоскости крыла), по направлению полета и закручивается по ходу
часовой стрелки (рис. 8.3, б).
Из рис. 8.2 и 8.3 видно, что, выбирая соответствующие положения
центра масс и центра жесткости агрегатов, конструктор может существен-
но уменьшить деформации конструкции под действием нагрузки.
Аналогично деформируется и фюзеляж самолета. Сосредоточенная
сила Уго (балансировочная сила горизонтального оперения в полете) и
распределенная нагрузка ДО, (массовая сила конструкции фюзеляжа и
грузов в нем) вызывают изгиб фюзе-
ляжа в вертикальной плоскости
(рис. 8.4), Отклонение руля направле-
ния и, соответственно, отклонение
элеронов вызывают изгиб фюзеляжа
моментом Л/изг и кручение фюзеляжа
вокруг его продольной оси моментом
Мк (рис. 8.5).
В самом первом приближении
работу конструкции под нагрузкой
можно рассматривать на упрощенных
моделях предельно схематизирован-
ных конструкций, как это делается в
Рис. 8.5. Изгиб и кручение фюзеляжа
229
Рис. 8.6. Упрощенная расчетная схема
нагружения хвостовой части фюзеляжа
общемашиностроительной дисцип-
лине "Сопротивление материалов".
Так, хвостовую часть фюзеляжа,
нагруженную силой ZB0, можно
схематично представить в виде
Г-образной рамы (рис. 8.6, а), жес-
тко закрепленной (заделанной) на
носовой части фюзеляжа; нагруже-
ние хвостовой части фюзеляжа си-
лой Кго - в виде Т-образной рамы
(рис. 8.6, б).
Крыло, нагруженное в полете,
можно представить в виде балки
(рис. 8.7), заделанной в фюзеляже и
находящейся в равновесии под дей-
ствием равномерно распределенной по крылу воздушной нагрузки </вмд,
распределенной массовой нагрузки <?мас и силы тяжести двигателя G
Крыло самолета на стоянке можно представить в виде балки (рис. 8.8),
нагруженной распределенной массовой нагрузкой <7мас и силой реакции
шасси Аш.
Естественно, в приведенных примерах степень схематизации весьма
высока. Так, воздушная нагрузка <7ВОЗД на реальном крыле распределена
по размаху неравномерно (как мы уже отмечали, ее распределение
зависит от формы крыла в плане, его аэродинамической и геометричес-
кой крутки); сила тяжести двигателя GflB передается на крыло в
нескольких точках (узлах навески пилона двигателя). Кроме того,
жесткость крыла, т.е. его способность сопротивляться деформированию
под действием нагрузок, зависит от материала и конструкции крыла и,
как правило, также переменна по размаху, что влияет на величины
Рис. 8.7. Упрощенная расчетная схема
нагружения крыла в полете
Рис. 8.8. Упрощенная расчетная схема
нагружения крыла на стоянке
230
деформаций. Тем не менее даже такие простейшие модели (схемы)
нагружения агрегатов самолета позволяют оценить форму деформаций
агрегатов (изгибные, крутильные деформации, деформации сдвига,
растяжения или сжатия) и направление этих деформаций и дают
основания выдвинуть предложения о возможных конструктивных
решениях агрегатов.
8.2. СТАТИЧЕСКОЕ И ДИНАМИЧЕСКОЕ НАГРУЖЕНИЕ
ЧАСТЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Оценить работу под нагрузкой реальных конструкций самолета с
учетом всех конструктивных особенностей в условиях так называемого
статического нагружения конструкции позволяют методы научной
дисциплины "Строительная механика ЛА".
Статическими нагрузками принято условно считать такие нагрузки,
которые действуют достаточно продолжительное время и скорость
изменения (нарастания или убывания) которых значительно меньше
скорости распространения деформаций в конструкции.
Воздушную нагрузку на самолет в горизонтальном и криволинейном
установившемся полете обычно рассматривают как статическую.
Деформация упругой конструкции ЛА в полетев свою очередь влияет
на значения и распределение аэродинамических сил.
Рост скоростей полета современных ЛА, повышение напряженности
их конструкций, сопровождающееся увеличением деформаций, привели
к необходимости учитывать не только значения нагрузок и их распреде-
ление, но и зависимость значений и распределения нагрузок от времени,
т.е. рассматривать динамический характер нагружения конструкции.
Динамическими нагрузками принято считать такие нагрузки, скорость
изменения которых соизмерима со скоростью распространения
деформации в конструкции. Динамическое нагружение конструкции
самолета происходит, например, в момент его касания ВПП при посадке,
при движении по слабоподготовленным (неровным) ВПП, при полете
в турбулентной атмосфере. При динамическом приложении нагрузки
вследствие больших ускорений, возникающих при деформации
конструкции, появляются дополнительные инерционные силы, которые
необходимо учитывать.
Оценить взаимодействие аэродинамических сил с силами упругости
и инерционными силами, возникающими в процессе изгибных и
крутильных деформаций конструкции, позволяют методы научной
дисциплины "Аэроупругость".
Взаимодействие указанных сил порождает аэроупругие явления,
которые условно подразделяют на статические и динамические. Из
231
Рис. 8.9. Схема к объяснению явления дивер-
генции
статических аэроупругих явлений,
характеризующихся взаимодей-
ствием только аэродинамических
и упругих сил, отметим явления
дивергенции несущих поверхнос-
тей и реверса рулевых поверхнос-
тей (элеронов, рулей высоты и
направления).
Дивергенция (от позднелат.
divergentia - расхождение) - это
явление, когда под действием
аэродинамических сил несущая
поверхность (крыло, оперение)
или пилон навески двигателя за-
кручивается вплоть до разруше-
ния. Природа этого явления тако-
ва. Находящееся в воздушном потоке со скоростью под углом атаки
крыло (рис. 8.9) создает подъемную силу Га = СД(р Г.2/2) S’, под действием
которой крыло изгибается и закручивается. Если центр давления крыла
находится перед центром жесткости, то создаваемый подъемной силой
момент Ма = Ya а закручивает крыло, увеличивая угол атаки а на
величину Да, что в свою очередь приводит к появлению дополнительной
подъемной силы Д Ya, увеличивающей момент Ма. Закручивание крыла
будет происходить до тех пор, пока момент аэродинамических сил Ма
не уравновесится моментом сил упругости А/упрконструкции крыла. С
увеличением скорости полета и, соответственно, силы Ya и момента Ма
наступает такое состояние, когда приращение за счет Да момента Ма
внешних сил начинает превышать приращение препятствующего
закручиванию момента упругих сил А/упр конструкции, в результате чего
Да непрерывно возрастает.
Скорость полета ЛА, при которой Ма = Л/упр, называется критической
скоростью дивергенции. При превышении этой скорости происходит
разрушение крыла.
Следует отметить, что проблема борьбы с дивергенцией особенно
остро стоит для крыльев обратной стреловидности.
Реверс рулевой поверхности - это явление, когда происходит потеря
эффективности рулевой поверхности под действием аэродинамических
сил из-за закручивания несущей поверхности. Под эффективностью
рулевой поверхности понимают реакцию самолета на ее отклонение.
Количественно эффективность рулевой поверхности оценивается
максимальной угловой скоростью вращения самолета относительно
232
соответствующей оси при полном
отклонении руля. Так, эффектив-
ность руля высоты будет оценивать-
ся угловой скоростью о)г или ее
производной по углу отклонения 5
руля высоты ы’; эффективность
руля направления - величиной или
ю’, где & - угол отклонения руля
направления; эффективность элеро-
нов - величиной или ш’, где & -
угол отклонения элеронов. Потреб-
Рис. 8.10. Схема к объяснению явления
реверса рулевых поверхностей
ные значения максимальных угло-
вых скоростей задаются ТЗ на про-
ектирование и должны быть обеспечены в процессе проектирования.
Рассмотрим явление реверса рулевой поверхности на примере элерона.
Как мы уже отмечали (см. подразд. 7.2.2, рис. 7.27), при отклонении эле-
ронов на угол Д&э на участках крыла, занятых элеронами, возникает
дополнительная подъемная сила ДУЭ. Если отклонить элерон 7 (рис. 8.10),
то возникшая непосредственно на элероне потребная ("полезная") сила
ДУЭ будет изгибать крыло вверх и закручивать его относительно ц.ж.
моментом Мэ = Д У, Ь. Закручивание крыла приведет к уменьшению на
величину Да угла атаки сечения, в котором расположен элерон, что
вызовет уменьшение подъемной силы на величину ДУДа, которая также
будет стремиться закручивать крыло моментом Мк = ДУДа а.
Приращение подъемной силы ДУупр = ДУЭ - ДУДа при отклонении
элерона на упругом крыле, естественно, меньше, чем получилось бы при
том же угле отклонения элерона на абсолютно жестком крыле.
Закручивание крыла моментом = Мк + Мэ будет происходить до
тех пор, пока момент аэродинамических сил не уравновесится
моментом сил упругости Л/упр конструкции крыла.
С увеличением скорости полета "потеря" подъемной силы Д УДа может
сравняться с "приобретением" возникшей непосредственно на элероне
силы Д Уэ и суммарное приращение Д Уупр, получаемое за счет отклонения
элерона, исчезнет. Элероны при этом станут полностью неэффективными.
Скорость полета ЛА, при которой происходит полная потеря
эффективности рулевой поверхности, называется критической ско-
ростью реверса (в рассмотренном примере - критической скоростью
реверса элеронов).
При отклонении рулевых поверхностей на скоростях, больших
критической скорости реверса, получим обратную (противоположную
233
желаемой) реакцию ЛА на отклонение рулевой поверхности (реверс
рулевой поверхности).
Естественно, что в процессе проектирования ЛА должна быть
обеспечена такая жесткость конструкции несущих поверхностей, которая
исключала бы явления дивергенции и реверса во всем диапазоне режимов
полета, оговоренных ТЗ.
Среди динамических аэроупругих явлений, характеризующихся
взаимодействием аэродинамических, упругих и инерционных сил и
проявляющихся в виде опасных колебаний и вибраций конструкции,
отметим колебания частей самолета, вызванные порывами ветра в
турбулентной атмосфере, имеющими зачастую циклический характер,
а также явления, носящие название "бафтинг" и "флаттер".
Бафтинг (умел. buffeting-^HCWK.. соударение)-вибрация какой-либо
части ЛА (чаще всего - хвостового оперения) под воздействием
периодически изменяющихся аэродинамических сил, возникающих при
обтекании этой части ЛА потоком, который завихряется срывами с
находящегося впереди крыла, различных надстроек на фюзеляже, с
выпущенных опор шасси, открытых тормозных щитков и створок
грузовых люков. Бафтинг оперения возникает из-за периодических
ударов по нему спутной струи за крылом и проявляется в виде "раскач-
ки", т.е. увеличения амплитуды колебаний оперения. Если в процессе
компоновки не удалось вынести оперение из спутной струи, то для
обеспечения прочности ЛА при бафтинге приходится увеличивать
изгибную жесткость фюзеляжа и оперения, что неизбежно связано с
увеличением массы конструкции.
Колебания конструкции при воздействии циклических порывов
турбулентной атмосферы и бафтинг возникают и поддерживаются за счет
внешней периодически измеряющейся возбуждающей силы,т.е. являются
вынужденными колебаниями.
Флаттер (англ, flutter - вибрация) - самовозбуждающиеся при
определенной скорости полета, называемой критической скоростью
флаттера, незатухающие колебания конструкции. Для возникновения
и развития этих колебаний не требуется воздействия на конструкцию
периодических возбуждающих сил.
Флаттер крыла (рис. 8.11) может возникнуть под воздействием какой-
либо силы (при отклонении элерона, порыве ветра), вызвавшей
отклонение крыла за счет его изгиба из исходного (нейтрального)
положения 1 (из плоскости OXZ), например, вверх. Стремясь под
действием сил упругости вернуться в исходное положение, крыло начнет
двигаться вниз (фаза 2) не плоскопараллельно, а с закручиванием из-за
несовпадения положений центра давления (в котором приложена
подъемная сила) и центра масс (в котором приложены инерционные и
234
движения
Рис. 8.11. Иллюстрации явления флаттера
массовые силы) с центром жесткости (относительно которого происходит
закручивание крыла). Пройдя по инерции нейтральное положение, крыло
отклонится вниз (фазы 3, 4), и картина повторится с изменением на
противоположные знаков всех сил и моментов. На рис. 8.11 показаны
фазы этого движения и соответствующие им изгибно-крутильные (Лу -
изгибные и Д(р-крутильные) деформации крыла за один цикл колебаний
относительно исходного положения - плоскости OXZ.
При скорости полета ЛА, соответствующей критической скорости
флаттера, приток энергии, поддерживающей эти колебания и передавае-
мой от воздушного потока к конструкции крыла, начинает превышать
рассеивание энергии в колеблющейся конструкции. В результате частота
и амплитуда колебаний резко возрастают и происходит мгновенное,
взрывообразное разрушение конструкции.
Виды флаттера весьма разнообразны и связаны с деформациями и
отклонениями практически всех несущих и управляющих поверхностей
ЛА. В зависимости от сочетания возможных перемещений конструкции
(степеней свободы) упругого ЛА различают изгибно-крутильный,
изгибно-элеронный, крутильно-элеронный флаттер крыла; изгибно-
рулевой флаттер горизонтального оперения, характеризующийся
изгибом фюзеляжа и симметричным отклонением рулей высоты, и др.
Рис. 8.11 иллюстрирует изгибно-крутильный флаттер крыла.
235
Рис. 8.12. Иллюстрация явления шимми
Явление, аналогичное флаттеру по физическому смыслу и характеру
протекания, может возникать на шасси при движении самолета по ВПП.
Деформация стоек под действием нагрузки, наличие многочисленных
подвижных соединений в стойке (и, соответственно, большое число
степеней свободы), упругость и малая жесткость пневматиков колес
могут привести к возникновению самовозбуждающихся колебаний
шасси-так называемому шимми (англ, shimmy - быстрый танец).
При большой скорости движения самолета по ВПП начинаются
колебания колеса в направлении, перпендикулярном к направлению
движения (н.д.) самолета. Колесо (рис. 8.12) при движении описывает
синусоидальную кривую по поверхности ВПП (плоскость OXZ). При
этом боковое (Az) отклонение контактной площади колеса от плоскости
OXYсопровождается поворотом плоскости колеса на углы Ду и Д6, т.е.
изгибом и закручиванием как стойки, так и самого пневматика, что
вызывает боковые (Az) и вертикальные (Ду) колебания всего самолета.
Колебания типа шимми возбуждаются силами трения колес о
поверхность ВПП и поддерживаются за счет кинетической энергии
236
поступательного движения самолета. При некоторой скорости движения,
называемой критической скоростью шимми, амплитуда и частота этих
колебаний резко нарастают, растет их энергия, передающаяся через
стойку на конструкцию планера самолета, что может вызвать разрушение
как пневматика и стойки, так и конструкции планера самолета.
Причиной вынужденных колебаний (вибраций) ЛА в целом и
отдельных его частей (панелей обшивки, тяг управления, различных
трубопроводов, приборного оборудования и т.п.) могут быть также дви-
жение ЛА по слабоподготовленным грунтовым ВПП и механические
вибрации двигателей и воздушных винтов.
С возрастанием мощности двигателей и увеличением скорости полета
растет уровень шума (знакопеременного звукового давления), источника-
ми которого являются реактивная струя двигателя, воздушный винт,
турбулентный пограничный слой. Акустические нагрузки (шум) в зонах
наиболее интенсивных воздействий порождаютвынужденные колебания
(вибрации) обшивки различных частей ЛА. Даже при сравнительно
невысоких уровнях силового воздействия число циклов знакопеременных
нагрузок такого рода за время эксплуатации ЛА настолько велико, что
может привести к усталостному разрушению конструкции.
Усталость характеризуется накоплением под воздействием цикли-
ческих нагрузок необратимых изменений в структуре материала и
возникновением микротрещин с последующим образованием магистраль-
ной макротрещины, приводящей к разрушению конструкции.
Существенное влияние на прочность оказывает и тепловое нагру-
жение ЛА.
Внутренние источники
теплоты (двигатели, генера-
торы электроэнергии, тор-
моза и т.д.) определяют мес-
тный нагрев конструкции.
Внешние источники (аэроди-
намический нагрев и солнеч-
ная радиация) определяют
нагрев конструкции ЛА в
целом. На рис. 8.13 приведе-
ны расчетные установив-
шиеся температуры поверх-
ности сверхзвукового пасса-
жирского самолета при раз-
личных числах М полета в
условиях MCA на высоте
21 000 м. Разные температу-
рке. 8.13. Температуры на поверхности СПС
237
ры в отдельных точках конструкции, отсутствие для большинства
элементов конструкции возможности свободно удлиняться и укорачи-
ваться при повышении и понижении температуры приводят к возникно-
вению температурных напряжений. Поэтому тепловое воздействие
может существенно снизить прочность конструкции. Тепловые нагрузки
иногда также следует рассматривать как динамические (изменяющиеся
во времени), что связано и с режимами работы внутренних источников
теплоты, и с режимами полета самолета. Так, в процессе разгона и
торможения СПС за счет теплового воздействия в конструкции могут
возникнуть знакопеременные циклы напряжений большой амплитуды.
Это определяет термическую усталость конструкции, т.е. возможность
ее разрушения в результате многократных периодических изменений
температуры.
Все возможные случаи нагружения ЛА, имеющие место в процессе его
эксплуатации, часть из которых рассмотрена выше, должны быть учтены
и оценены при проектировании ЛА.
8.3. НОРМЫ ПРОЧНОСТИ - ЗАКОН ПРИ СОЗДАНИИ
КОНСТРУКЦИИ САМОЛЕТА
Как уже отмечалось (см. подразд. 3.1), ЛА должен удовлетворять
требованиям ТЗ, а также различным техническим условиям, нормам,
правилам и инструкциям, которые отражают опыт развития авиацион-
ной техники и которые в процессе развития техники изменялись в
направлении повышения безопасности полета, расширения возможностей
использования ЛА, улучшения его эксплуатационных характеристик.
Для гражданских самолетов в СССР были последовательно
разработаны несколько редакций Норм летной годности гражданских
самолетов (НЛГС), которые являлись государственным стандартом,
соответствующим требованиям ИКАО, и устанавливали предельный
минимум свойств и характеристик, которыми должен обладать каждый
вновь проектируемый самолет с точки зрения обеспечения безопасности
и надежности полетов. Затем эти Нормы трансформировались в Единые
нормылетной годности гражданских самолетов (ЕНЛГС), обязательные
к выполнению в странах социалистического содружества.
В настоящее время Межгосударственный авиационный комитет
(МАК), основной задачей которого является обеспечение безопасности
полетов самолетов гражданской авиации, разработал обязательные к
выполнению Авиационные правила (АП), которые, с одной стороны,
являются логическим развитием НЛГС и ЕНЛГС, а с другой стороны,
приведены в соответствие аналогичным правилам в других странах мира,
например государственным требованиям США к гражданским самолетам
FAR (Federal Aviation Regulations).
238
Нормы прочности являются частью этих правил и регламентируют
характер и значения нагрузок, которые должны быть учтены при
расчетах самолета на прочность, а также методику проведения
прочностных испытаний самолета.
Чтобы обеспечить прочность самолета во всех возможных ситуациях
эксплуатации, в Нормах прочности устанавливается ряд расчетных
случаев. Расчетные случаи соответствуют такой ситуации при эксплуата-
ции самолета, при которой возникают наиболее тяжелые условия
нагружения. Для каждого расчетного случая задается характер
распределения внешних нагрузок, устанавливаются значение экспуата-
ционной перегрузки , вероятность превышения которого в процессе
эксплуатации ничтожно мала, и значение коэффициента безопасности
/. Расчетные нагрузки Рр связаны с эксплуатационными нагрузками Р3
соотношением Рр = Р3/. Таким образом, коэффициент безопасности
показывает, во сколько раз расчетная нагрузка больше эксплуатацион-
ной. Основное назначение этого коэффициента состоит в том, чтобы
обеспечить достаточную прочность и отсутствие остаточных деформаций
конструкции в процессе эксплуатации.
Для самолетных конструкций f = 1,5...2.
Случаинагружения (расчетные случаи) устанавливаются для самолета
в целом и его основных агрегатов (крыло, оперение, фюзеляж, шасси,
управление и т.д.) исходя из всех возможных эксплуатационных
ситуаций. Каждый расчетный случай имеет буквенное обозначение.
Регламентируются нагрузка на крыло при выходе из пикирования и при
полете в болтанку с большой скоростью (случай А'); нагрузка на шасси
при посадке с передним ударом в основные опоры шасси (случай Ош);
нагрузка на фюзеляж при вынужденной посадке самолета на воду (случай
Мф) и т.д.
Нормы прочности регламентируют требования к температурной
прочности, к жесткости конструкции и к обеспечению безопасности от
флаттера, дивергенции, реверса и аэроупругих колебаний системы
"самолет - система автоматического управления". Требования Норм
прочности - непреложный закон при создании конструкции.
Наука о прочности ЛА непрерывно развивается, методы проектирова-
ния конструкций, о которых пойдет речь в следующем подразделе,
позволяют корректировать требования Норм прочности, в частности
уменьшать коэффициенты безопасности и, как следствие, массу
конструкции при сохранении необходимых прочности и жесткости.
В последние годы появились работы, обосновывающие целесообраз-
ность использования режимов полета с нагрузками, превышающими
установленные максимальные эксплуатационные нагрузки. Так, для
239
крыла истребителя, спроектированного на эксплуатационную пере-
грузку 8 и испытанного на максимальную (расчетную, с учетом
коэффициента безопасности) перегрузку 12, возможно кратковременное
нагружение с перегрузкой 9... 10. Естественно, это улучшает маневренные
характеристики истребителя и повышает его боевую эффективность,
Разумеется, в такой ситуации требуется тщательный контроль техничес-
кого состояния конструкции.
Рассмотренный принцип не только обоснован в теоретических
работах, но и подтвержден стендовыми и летными испытаниями
применительно к гидросистемам управления ЛА. Использование этого
принципа при проектировании силовых гидросистем, которые много-
кратно (2,..4 раза) резервируются, позволяет существенно уменьшить их
массу, объем, потребляемые и выходные (установочные) мощности.
Поэтому утверждение "требования Норм прочности - непреложный
закон при создании конструкции" следует понимать только в том смысле,
что прочность конструкции должна быть обоснована документами,
действующими на момент предъявления ЛА заказчику (см. подразд. 18.6).
Таким образом, стоящая перед проектировщиками задача создания
конструкции минимально возможной массы должна решаться с учетом
требований прочности и жесткости конструкции, влияющих не только
на массу ЛА, но и на его ЛТХ, поскольку недостаточная жесткость
конструкции приводит к искажению обводов ЛА, снижению аэродинами-
ческих характеристик, ухудшению устойчивости и управляемости.
8.4. ПРЕДВАРИТЕЛЬНАЯ ДИНАМИЧЕСКАЯ КОМПОНОВКА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Известно немало случаев, когда недостаточная проработка вопросов
аэроупругости обнаруживалась слишком поздно-уже в процессе летных
испытаний, что отрицательно сказалось на судьбе создававшихся ЛА.
Чтобы значительно уменьшить степень технического риска, т.е.
разрабатывать ЛА, в процессе эксплуатации которого аэроупругие
явления не будут являться ограничениями для обеспечения потребных
ЛТХ, необходимо уже на ранних этапах проектирования оценивать
влияние упругости на массу ЛА и его ЛТХ.
Современные методы проектирования обеспечивают формирование
математической модели динамический компоновки, позволяющей
оценивать размещение сосредоточенных и распределенных масс на ЛА,
атакже изгибные и крутильныежесткости основных частей ЛА. Понятие
динамической компоновки связано, таким образом, с выбором
упругомассовой модели ЛА. Исследование такой модели совместно с
моделями для оценки аэродинамики, устойчивости и управляемости ЛА
240
дает возможность определять действующие на ЛА нагрузки, рассчиты-
вать напряженно-деформированное состояние несущих и ненесущих
частей ЛА. Последовательное, шаг за шагом, решение с помощью таких
моделей задачи определения взаимодействия ЛА с воздушным потоком
позволит оценить развитие процесса деформации конструкции ЛА во
времени, т.е. динамику взаимодействия ЛА с внешней средой, и в
конечном итоге оценить влияние аэроупругих явлений на ЛТХ и выявить
критические скорости наиболее опасных явлений (флаттера, дивер-
генции и др.).
Развитие таких моделей позволяет в процессе исследований широко
варьировать не только распределения масс и жесткостей, но и геометри-
ческие параметры ЛА (формы и размеры несущих поверхностей, их
взаимное расположение, размещение двигателей и т.д.). Это дает
возможность исследовать различные компоновки упругого ЛА с целью
выявления наиболее рационального распределения жесткостных
характеристик силовой конструкции (при соблюдении лимита на ее
массу) и найти такое распределение масс агрегатов, которое обеспечивает
минимизацию внешних нагрузок, действующих на ЛА. То есть в итоге
можно сформировать концепцию (облик и компоновку) ЛА, обеспечива-
ющего безусловное выполнениеТЗ с максимально возможной эффектив-
ностью.
Естественно, что при оценке прочности ЛА с помощью математиче-
ской модели его динамической компоновки первым шагом является
оценка статической прочности жесткого (недеформируемого) ЛА, т.е.
поиск такого распределения материала в конструкции (распределения
потребных жесткостей при изгибе и кручении и, соответственно, масс
конструктивных элементов), которое обеспечивало бы сопротивляе-
мость (неразрушаемость) конструкции при действии статических
нагрузок, оговоренных Нормами прочности для всех случаев нагружения.
Одним из возможных методов решения этой задачи вначале для
жесткой, а при последующих итерациях и для упругой конструкции
является метод конечных элементов (МКЭ). Сущность этого метода
состоите том, что реальная (проектируемая) конструкция моделируется
набором связанных друг с другом в узлах простейших элементов в виде
стержней и пластин, имитирующих работу под нагрузкой элементов
реальной конструкции. Такая модель для крыла приведена на рис. 8.14.
Стержни 2 и 3 имитируют работу под нагрузкой продольных элементов
конструкции крыла, испытывающих при изгибе крыла вверх сжатие
(стержни 2) и растяжение (стержни 3). Пластины 4 имитируют работу
продольных стенок, препятствующих сдвигу, пластины 5 - верхнюю и
нижнюю обшивки крыла, на которые действует в полете воздушная
нагрузка, прилагаемая к конечндэлементной модели конструкции крыла
в виде сил Pi в узлах 1.
241
Рис. 8.14. Иллюстрация МКЭ
Стержни 6 имитируют работу
на растяжение-сжатие попереч-
ных конструктивных элементов
крыла, которые вместе со стен-
кой, имитируемой пластиной 7,
обеспечивают форму поперечного
сечения (профиля) крыла.
Стержни 8 имитируют кон-
структивные элементы, связыва-
ющие продольные 4 и поперечные
7 стенки для увеличения жесткос-
ти конструкции.
В процессе расчета на стати-
ческую прочность определяются
размеры (площади поперечных
сечений стержней и толщины
пластин) конструктивно-силовых
элементов, обеспечивающих про-
чность конструкции при статичес-
ком нагружении, и находятся
деформации конструкции. Те из
стержней, потребная площадь
поперечных сечений которых
пренебрежимо мала, исключают-
ся из расчетной модели, и расчет повторяется снова. На следующем этапе
нагрузки рассчитываются уже для обтекания деформированного крыла.
Это делается, например, с помощью методик, моделирующих крыло
вихревой поверхностью (см. подразд. 5.4, рис. 5.19). Весь комплекс этих
расчетов проводится в замкнутом итерационном цикле.
В результате формируется конструктивно-силовая схема крыла -
расположение и потребные площади (и, соответственно, жесткости)
основных конструктивных элементов, обеспечивающих прочность
упругой деформируемой конструкции при минимально возможной ее
массе и необходимые для выполнения ТЗ летно-технические характерис-
тики ЛА.
Естественно, что результаты прочностного расчета, выполненного
в процессе проектирования, проверяются прочностным экспериментом
на реальной конструкции.
242
8.5. ПРОЧНОСТНОЙ ЭКСПЕРИМЕНТ
В прочностных экспериментах оцениваются несущая способность и
особенности работы конструкции под нагрузкой. Испытаниям
подвергаются отдельные части и ЛА в целом. В процессе испытаний
моделируются условия нагружения, которым подвергается ЛА при
эксплуатации.
В процессе статических испытаний проверяются результаты расчета
на прочность. В специально оборудованном зале статических испытаний
(рис. 8.15) крыло 1, закрепленное на колонне 2 на узлах, которыми оно
крепится к фюзеляжу, нагружается примерно такими же нагрузками,
какие были приняты при расчете. Неполное соответствие распределения
нагрузки по конструкции условиям нагружения в полете обусловлено
способом приложения нагрузки в процессе испытаний.
Сила Ув, имитирующая воздушную нагрузку на верхнюю поверхность
крыла, создается гидравлическим силовозбудителем 3, закрепленным на
силовом потолке 4 зала статических испытаний. С помощью системы
рычагов 5 и тяг нагрузка распределяется и прикладывается к верхней
обшивке крыла через приклеенные к ней парусиновые лямки или
резиновые прокладки. Аналогично, с помощью силовозбудителя,
закрепленного на силовом полу, нижняя поверхность крыла нагружается
силой Ун.
При статических испытаниях
самолета в целом он подвешивает-
ся между потолком и полом с
помощью аналогичных рычажных
систем, через которые на самолет
передаются взаимно уравновешен-
ные нагрузки, имитирующие по-
верхностные и массовые силы (см.
подразд. 6.2), что позволяет прове-
рить на прочность конструкцию
самолета для всех полетных случа-
ев нагружения (во всем диапазоне
полетных перегрузок).
Правильность прочностных
расчетов оценивают, сопоставляя
напряжения, полученные теорети-
чески с помощью расчетных моде-
лей, с напряжениями, возникаю-
щими в реальной конструкции в
процессе статических испытаний.
Рис. 8.15. Схема статических испытаний
крыла
243
В процессе испытаний напряжения
измеряют с помощью тензометри-
ческих (от лат. tensus - напряжен-
ный, натянутый) датчиков, накле-
енных на испытываемый элемент
конструкции.
При статических испытаниях
один экземпляр ЛА доводят до
полного разрушения с целью вы-
явления предельных нагрузок,
которые конструкция способна
выдержать в полете.
Увеличение расчетного срока
службы многоразовых ЛА, увеличение динамических нагрузок в
полетных и на взлетно-посадочных режимах, циклическое нагружение
фюзеляжа при наддуве гермокабины, возросшие циклические, акустичес-
кие и тепловые нагрузки обусловили возникновение проблем усталос-
тной прочности. Усталостные разрушения стали одной из наиболее часто
встречающихся причин аварий ЛА.
Испытание самолета на усталостную прочность проводится на
специальных стендах. Управляемая с помощью ЭВМ система загрузки
позволяет имитировать полный цикл нагружения самолета знакоперемен-
ными нагрузками в течение полета: нагрузками от шасси при взлете и
посадке с учетом динамических нагрузок от крыла; нагрузками от
изменения давления в кабине при наборе высоты (увеличение давления)
и при снижении (уменьшение перепада давлений до нуля); нагрузками
на крыло, фюзеляж и оперение, имитирующими встречу самолета с
предполагаемым числом вертикальных воздушных порывов. Такие
стенды позволяют имитировать трехчасовой полет самолета в течение
3...5 мин нагружения.
Для испытаний на флаттер применяется исследование в аэродинами-
ческих трубах динамически подобных моделей (рис.8.16). Аэродинамичес-
кие свойства исследуемого ЛА моделируются с помощью соответствую-
щих натурному аппарату обводов жестких отсеков I, закрепленных на
балках 2...6, имитирующих силовую конструкцию соответственно
горизонтального оперения, вертикального оперения, фюзеляжа, крыла,
пилона с системой подвески двигателя. Изгибная и крутильная жесткости
этих балок в масштабе модели соответствуют жесткостям реальных (или
проектируемых) конструкций, что позволяет моделировать их упругость.
Инерционные свойства конструкции моделируются системой грузов 7,
закрепленных на балках.
244
При возникновении флаттера в процессе испытаний такая модель
допускает колебания большой амплитуды без разрушения и остаточных
деформаций, что позволяет проводить на ней разнообразные исследова-
ния по доводке параметров ЛА, включая перестановку и замену
агрегатов.
Тепловая и акустическая прочность, а также вибропрочность
конструкции исследуются на специальных стендах.
Для регистрации параметров в процессе прочностных экспериментов
применяются информационно-вычислительные системы, позволяющие
оценивать в реальном масштабе времени состояние конструкции и
управлять экспериментом.
С началом эксплуатации серии самолетов самое тщательное
наблюдение ведется за состоянием конструкции и систем самолета-
лидера, налет которого значительно опережает налет всех остальных
серийных самолетов. Оценка технического состояния самолета-лидера
позволяет производить в случае необходимости доработку конструкции
и систем находящихся в эксплуатации самолетов для поддержания
необходимой прочности высоконагруженных конструкций самолета.
8.6. ПРИМЕНЕНИЕ АКТИВНЫХ СИСТЕМ УПРАВЛЕНИЯ
ДЛЯ СНИЖЕНИЯ УРОВНЯ НАГРУЗОК НА САМОЛЕТ
Применение активных систем управления позволяет снизить уровень
действующих на самолет нагрузок и, как следствие, уменьшить массу
проектируемого самолета.
Концепция уменьшения маневренных нагрузок заключается в том, что
АСУ отклоняет элероны или интерцепторы в ответ на перегрузку при
маневре, перестраивая распреде-
ление воздушной нагрузки по
размаху крыла (рис. 8.17) таким
образом, что по размаху и в кор-
невом сечении крыла, создающего
необходимую для маневра подъем-
ную силу, действует значительно
меньший изгибающий момент
А/изг, чем на самолете без АСУ.
Это позволяет уменьшить потреб-
ные площади поперечных сечений
элементов крыла, работающих на
изгиб, и, как следствие, уменьшить
массу крыла.
Рис. 8.17. Распределение воздушной нагрузки
и изгибающего момента по размаху крыла
245
При концепции уменьшения нагрузок от порывов ветра принцип работы
АСУ состоит в том, что в каждый момент времени подъемная сила,
создаваемая отклонением управляемых АСУ поверхностей на передней
и задней кромках крыла, направлена против нагрузки от порыва ветра.
Аналогичную систему можно организовать на фюзеляже с помощью
горизонтального оперения и дополнительного горизонтального оперения
в носовой части фюзеляжа.
Практически мгновенная реакция АСУ на знакопеременные
воздушные порывы ("болтанку") позволяет не только повысить уровень
комфорта пассажиров и экипажа и улучшить управляемость самолета
в турбулентной атмосфере, но и уменьшить уровень циклических
нагрузок на конструкцию, увеличив ее ресурс по условиям усталости при
определенной массе конструкции или снизив массу при заданном ресурсе
конструкции.
При концепции активного предотвращения флаттера АСУ отклоняет
механизацию передней и задней кромок крыла в зависимости от
величины и скорости нарастания изгибных и крутильных деформаций.
Это позволяет отодвинуть возникновение флаттера до скоростей,
значительно больших, чем оговоренные в ТЗ скорости полета самолета,
не увеличивая массу конструкции для повышения ее жесткости при изгибе
и кручении.
Естественно, что для реализации этих возможностей требуется
разработка надежных и чувствительных датчиков, позволяющих
обнаружить и оценить турбулен-
тность воздуха за летящим самоле-
том; датчиков, фиксирующих не
только величину, но и скорость на-
растания деформации элементов
конструкции; мощных быстродей-
ствующих силовых приводов.
Следует отметить, что учет в про-
цессе проектирования требований
прочности и жесткости конструкции,
а также других условий может нало-
жить дополнительные ограничения на
диапазоны возможных скоростей и
высот полета, показанные на
рис. 8,18.
Здесь 1 и 2 - ограничения по Emin
и Кгаах, описанные в подразд. 6.4; 3 -
ограничения по переносимости чело-
веком перегрузок при полете в турбу-
Рис, 8.18. Диапазоны возможных высот
и скоростей полета с учетом ограничений
по прочности и жесткости конструкции
246
лентной атмосфере; 4 - ограничения по прочности конструкции при
знакопеременных нагрузках в турбулентной атмосфере; 5 - ограничения
по максимально допустимому скоростному напору, которые могут
определяться местной прочностью конструкции, критическими
скоростями дивергенции, реверса, флаттера, скоростью, при которой
возникает бафтинг; 6 - ограничения по максимально допустимому
кинетическому нагреву конструкции.
Весь комплекс мероприятий по обеспечению прочности конструкции
направлен на получение в процессе эксплуатации оговоренных в ТЗ
диапазонов ЛТХ, установленного ресурса самолета, на поддержание
высокой надежности и безопасности полетов всего парка самолетов.
8.7. ПОНЯТИЯ НАДЕЖНОСТИ И ЖИВУЧЕСТИ
ЛЕТАТЕЛЬНОГО АППАРАТА
Надежность - это свойство ЛА, характеризующее его способность
выполнять заданные функции, сохраняя свои основные характеристики
в установленных пределах при определенных условиях эксплуатации.
Эксплуатация ЛА, как и любого другого технического устройства,
всегда сопровождается поломками отдельныхдеталей, выходом из строя
приборов и целых систем - отказами в работе, И если не принимать
специальных мер, то отказы на ЛА могут заканчиваться катастрофами.
В настоящее время безотказность, т.е. способность ЛА в целом и всех
его систем сохранять работоспособность, приобретает особо важное
значение. Современный пассажирский самолет рассчитывается на
40 000...60 000 летных часов эксплуатации. Естественно, что с увеличени-
ем срока службы самолета растет и вероятность отказов.
Живучесть - это свойство ЛА, характеризующее его способность
завершить полет в случае отказов или боевых повреждений. Живучесть
оборудования и систем ЛА обеспечивается их резервированием -
установкой дублирующих систем и элементов оборудования, способных
выполнить функции основных систем в случае их отказа.
Так, число двигателей на самолете и тяговооруженность выбираются
с учетом возможного отказа одного двигателя на взлете. Трех- и
четырехкратное резервирование имеют системы управления самолетом
и жизнеобеспечения пассажиров и экипажа на борту. Многократно
резервируются элементы бортовых радиотехнических систем. Надеж-
ность работы этих систем должна быть такова, чтобы вероятность их
отказа с опасными последствиями была практически равна нулю в
течение всего срока службы самолета.
247
Напомним, что ресурс - это наработка ЛА в летных часах до
предельного технического состояния, при котором эксплуатация ЛА не
допускается.
Как свойства ЛА надежность, безотказность и живучесть проявляются
в процессе его эксплуатации и зависят не только от прочности конструк-
ции, но и от интенсивности нерасчетных воздействий на ЛА естественной
и искусственной внешней среды.
Задача коллектива проектировщиков состоит в том, чтобы опираясь
на последние достижения теории и практики, используя весь опыт
авиастроения и инженерную интуицию, в оптимальной степени наделить
этими свойствами вновь создаваемый ЛА.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• прочность конструкции; жесткость конструкции; нагружение агрегатов
самолета; деформация агрегатов самолета; сдвиг;
• центр жесткости; линия центров жесткости; линия центров давления;
• статическая прочность; усталостная прочность; статическое нагружение;
статическая нагрузка; динамическая нагрузка; упругие силы; инерционные силы;
• аэроупругие явления; статические аэроупругие явления; динамические
аэроупругие явления; дивергенция;
• критическая скорость дивергенции; критическая скорость реверса;
критическая скорость флаттера; критическая скорость шимми;
• эффективность рулевой поверхности; реверс рулевой поверхности; бафтинг;
флаттер; шимми;
• вынужденные колебания; самовозбуждающиеся незатухающие колебания;
• усталость; усталостное разрушение конструкции; тепловое нагружение;
температурные напряжения; термическая усталость конструкции; акусти-
ческая нагрузка;
• Нормы летной годности; Авиационные правила; Нормы прочности;
эксплуатационные нагрузки; расчетные нагрузки; случаи нагружения; расчетные
случаи;
• динамическая компоновка; упругомассовая модель; метод конечных
элементов; конечноэлементная модель; конструктивно-силовая схема; динами-
чески подобная модель;
• прочностной эксперимент; статические испытания; зал статических
испытаний; силовозбудитель; тензометрический датчик;
• самолет-лидер; концепция уменьшения маневренных нагрузок; концепция
уменьшения нагрузок от порывов ветра; концепция активного предотвращения
флаттера;
• надежность; безотказность; живучесть; резервирование; дублирование.
248
P A 3 Д Е Л III
ИНЖЕНЕРНЫЕ ОСНОВЫ АВИАЦИОННОЙ
ТЕХНИКИ
Глава 9
ВЗЛЕТНАЯ МАССА САМОЛЕТА
Определить, какой из множества возможных вариантов проектных
решений, синтезируемых проектировщиками в процессе проектирова-
ния, является наиболее эффективным, обеспечивающим безусловное
выполнение ТЗ, можно с помощью критерия выбора.
Следует заметить, что критерий выбора, например эффективность -
стоимость, - сложный критерий, включающий в себя множество
категорий оценки, описывающих количественно или качественно
совокупность всех свойств ЛА.
Разработка обоснованного ТЗ на проектирование и, особенно, выбор
критерия для оценки эффективности во многом определяют успешное
выполнение проектировщиками стоящей перед ними задачи, поскольку
ошибкав выборе и использовании критерия эффективности практически
не может быть исправлена при непосредственном проектировании и
эксплуатации ЛА без существенной переработки принятых проектных
и конструктивных решений и приводит к резкому удорожанию изделия
и невыполнению ТЗ по срокам ввода ЛА в эксплуатацию.
Обеспечивая высокий уровень безопасности, комфорта и регулярности
полетов по расписанию, разработчик пассажирского самолета стремится
получить максимальный экономический эффект от перевозок.
Для пассажирских самолетов длительное время в качестве критерия
эффективности служила себестоимость пассажиро-километра (стоимость
перевозки одного пассажира на один километр).
В период так называемого энергетического кризиса (резкого
возрастания на мировом рынке цен на нефть и нефтепродукты в середине
1970-х гг.) доля затрат на топливо увеличилась с 30...35 % до 60...65 %
от общей суммы затрат на эксплуатацию пассажирских самолетов.
Эффективность находящихся в эксплуатации пассажирских самолетов
резко упала: при неизменной производительности выросли расходы на
249
авиатопливо, увеличились цены на билеты, что уменьшило пассажиропо-
ток и снизило доходы авиакомпаний.
В этой ситуации критерием эффективности для вновь разрабатывае-
мых самолетов стал критерий, оценивающий затраты топлива на
выполнение транспортной операции, - коэффициент топливной
эффективности (затраты топлива в граммах на один пассажиро-
километр).
9.1. ВЗЛЕТНАЯ МАССА КАК КРИТЕРИЙ ВЫБОРА
ПРОЕКТНОГО РЕШЕНИЯ
В любой ситуации масса ЛА является стабильным критерием,
характеризующим техническое совершенство ЛА. Оценка проектных
вариантов категориями массы не является корректной, так как стоимость
отдельных компонентов ЛА (планера, двигателя, оборудования) не
пропорциональна их массе. Тем не менее масса ЛА и отдельных его
компонентов, рассматриваемая в качестве критерия, не противоречит
обобщенному критерию эффективность - стоимость. Как уже отмечалось,
увеличение массы ЛА уменьшает полезную нагрузку, ухудшает ЛТХ и,
следовательно, снижает эффективность ЛА.
Так, чем больше масса самолета т, тем при определенном аэродина-
мическом совершенстве (качестве К) самолета больше потребная для
горизонтального полета тяга двигателей Р = mgIK и, следовательно, их
масса, расход (и стоимость) топлива.
Расходы на строительство и эксплуатацию аэродромов (и, как
следствие, расходы на эксплуатацию самолетов) тем меньше, чем меньше
ВПП, потребная длина которой определяется посадочной скоростью
самолета Гпос=у2те^/(р^5С^З, которая тем меньше, чем меньше масса
самолета. С другой стороны, увеличение коэффициента подъемной силы
на посадке Српос требует более мощной механизации крыла и, следова-
тельно, увеличения его массы и массы самолета.
Можно более корректно показать, что каждая из составляющих
полной (взлетной) массы самолета т0 определенным образом отражает
выполнение соответствующих требований ТЗ на проект. Можно показать
также, что в первом приближении при соответствующих ограничениях
полная (взлетная) масса самолета т0, способного выполнить определен-
ную транспортную операцию, может служить критерием оценки
проекта и построенного самолета.
Естественно, чем меньше масса самолета, способного выполнить
определенную транспортную операцию, тем меньше материалов и
овеществленного человеческого труда затрачено на его изготовление,
250
тем выше экономическая отдача такого самолета при его эксплуатации.
Если по одному ТЗ выполнено несколько вариантов проекта самолета,
то более эффективным будет тот самолет, у которого меньше взлетная
масса, или, что то же самое, у которого больше отдача по полезной
нагрузке {относительная масса полезной нагрузки) тП И:
тп.н = ти.п/то>
где тп н - заданная в ТЗ масса полезной нагрузки; т0 - взлетная масса
самолета.
Чем больше этот показатель, тем меньшей массой самолета "обраста-
ет" масса полезной нагрузки, тем совершеннее проектный вариант
самолета.
В зависимости от типа ЛА, параметров, указанных в ТЗ (высота,
скорость, дальность полета), тйпн составляет от 2 % (для ракетно-
космических систем) до 30 % (для дозвуковых пассажирских самолетов),
оставаясь достаточно стабильной величиной для определенного типа ЛА
в пределах сходных (достаточно близких) параметров, указанных в ТЗ.
Расчет массы самолета является основной составной частью
предварительного проектирования, поскольку позволяет оценить не
только его ЛТХ, стоимость и, следовательно, эффективность выполнения
ТЗ, но и в некоторых случаях саму возможность или невозможность
выполнения ТЗ на современном уровне развития техники.
9.2. УРАВНЕНИЕ СУЩЕСТВО-
ВАНИЯ САМОЛЕТА
Связь взлетной массы самолета с
требованиями ТЗ схематично пред-
ставлена на рис. 9.1.
Полную взлетную массу самолета
можно выразить в виде
то = тп.н + отсн + то.у + теу + тТ + тк.
Здесь (рассматривается пассажир-
ский самолет): тп н - масса полезной
(коммерческой) нагрузки (пассажиров,
их багажа, грузов и почты), которую
самолет доставляет в место назначе-
ния; тт-масса снаряжения и обору-
дования, которое обеспечивает опре-
Показатель
J (^эффективности
1 ТЕХНИЧЕСКОЕ
ЗАДАНИЕ
Параметры и
характеристики
полезной нагрузки
Условия комфорта
и обслуживания
Условия
эксплуатации
и применения УЕ
Заданное время
цоставки полезной
нагрузки Т
Заданная
дальность
' доставки L
III л
m
m
Рис. 9.1. Связь взлетной массы самолета
с требованиями ТЗ
251
деленные условия комфорта для полезной нагрузки на борту. Массу
снаряжения составляет нетолько оборудование (кресла, кухни и питание,
системы кондиционирования и т.д.), но и масса экипажа и летно-
подъемного состава (бортпроводников), которые обслуживают
пассажиров. Следует отметить, что шсн существенно зависит отзаданных
в ТЗ условий эксплуатации и применения. Если предполагается
эксплуатация самолета с малооборудованных аэродромов, в состав
оборудования должны быть включены встроенные трапы и вспомога-
тельная силовая установка, обеспечивающая работу системы кондицио-
нирования во время стоянки самолета и подготовки его к полету. Это
также необходимо, если требуется обеспечить независимость самолета
от аэродромных средств обслуживания даже в высококлассных
аэропортах; mQy-масса оборудования управления, которое обеспечивает
эксплуатацию самолета в заданных условиях (пилотажно-навигационное
оборудование, система самолетововдения и энергетическое оборудование
для работы всех систем). Состав и масса оборудования управления также
существенно зависят от условий эксплуатации и применения самолета,
состава и возможностей наземного оборудования, обеспечивающего
навигацию в районе аэропорта назначения и по всей трассе полета; тс у -
масса силовой установки (двигателя, топливных систем), обеспечиваю-
щей необходимую скорость полета для доставки полезной нагрузки за
время Т на расстояние Ц тт - масса топлива на борту, тк - масса
конструкции самолета (фюзеляжа, крыла, оперения, шасси, системы
управления рулями и элеронами).
Конструкция самолета является основным компонентом, объединяю-
щим все системы в единый комплекс, определяющий облик самолета.
Характерные массы самолета показаны на рис. 9.2.
ПОЛНАЯ (ВЗЛЕТНАЯ) МАССА
МАССА ПУСТОГО
САМОЛЕТА
МАССА ПОЛНОЙ
НАГРУЗКИ
^ИАГТ
МАССА ПУСТОГО СНАРЯЖЕННОГО САМОЛЕТА тп.С1|
Рис. 9.2. Характерные массы самолета
252
Как мы уже отмечали, для придания самолету каких-либо свойств
(качеств), необходимых для выполнения ТЗ, следует затратить ("вложить"
в самолет) некоторую массу. Записанное для т0 уравнение фактически
отражает связь взлетной массы самолета с его ЛТХ, эксплуатационными
и производственными характеристиками, поэтому его называют
уравнением существования самолета (уравнением весового баланса').
Действительно, крыло с определенными параметрами, масса которого
входит составляющей в массу конструкции, обеспечивает создание
подъемной силы Y. Если во всем диапазоне потребных ЛТХ удовлетворя-
ется соотношение (баланс сил) Y = n3mg между подъемной силой и
инерционной силой (силой тяжести проектируемого самолета n3mg с
учетом эксплуатационной перегрузки п3), то самолет способен выполнить
основные требования ТЗ по летно-техническим характеристикам.
Следует отметить, что практически все входящие в уравнение
существования массы зависят от взлетной массы самолета т0. Так,
существует весьма сильная и сложная зависимость между тк и т0. Чем
больше взлетная масса самолета, тем, очевидно, придется затратить
больше материала для обеспечения прочности и жесткости его конструк-
ции, т.е. утяжелить ее, и, соответственно, утяжеляя конструкцию, мы
увеличиваем взлетную массу самолета.
Таким образом, уравнение существования невозможно решить '
относительно т0 в явном (конечном) виде. В практике проектирования
определение т0 ведется методом последовательных приближений с
использованием относительных масс:
incy = mCylmQ-, inr = mJmQ\ in* = m*/ma и т.д.
В этом случае уравнение существования записывается в виде
1 = in + in + in + in + in + in .
П.Н СП о.у *с.у
При заданных в ТЗ тп н, тсн, тоу, т.е. при известном составе
оборудования, обеспечивающего комфорт пассажиров на борту и
эксплуатацию самолета в заданных условиях, в первом приближении
массу самолета можно определить как
____тп.н + "’си + т0.у
то -------=----=----- >
1-(mcy + mT + mK)
где тйсу, /йт, in* - известные из практики проектирования (статистики)
довольно стабильные для определенного типа самолетов и уровня их
253
технического совершенства значения относительных масс, показываю-
щие, какую долю взлетной массы самолета они составляют.
Так, для дальних магистральных пассажирских самолетов
тсу = 0,08.-0,10; тт = 0,35...0,45; /йк = 0,23...0,28.
Нетрудно заметить, что если
т + т + т а 1,
то т0 < 0 или т0 = «, т.е. избранная проектировщиками комбинация
параметров не может быть реализована и невозможно разработать
самолет, обеспечивающий выполнение поставленного ТЗ.
Поэтому уравнение существования является одним из основных
соотношений, определяющих теорию и практику проектирования
самолетов.
Естественно, что при последующих итерациях (более детальной
проработке проекта) значения взлетной массы и ее составляющих будут
непрерывно уточняться в процессе объемно-весовой компоновки, когда на
основе выбранных при аэродинамической компоновке форм и размеров
самолета с учетом необходимого эксплуатационного разбега центровок
определяются объемы и взаимное расположение отсеков для размещения
полезной нагрузки и всех систем самолета.
В заключение отметим, что инженер любой специализации, работаю-
щий в авиакосмической промышленности, всегда должен стремиться к
поиску решений, обеспечивающих минимально возможную массу
создаваемого аппарата, агрегата, узла, детали.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия;
• критерий эффективность - стоимость; себестоимость пассажиро-
километра; коэффициент топливной эффективности; отдача по полезной
нагрузке;
• уравнение существования самолета; уравнение весового баланса; относитель-
ная масса; относительная масса полезной нагрузки;
• полная масса; взлетная масса; масса полезной нагрузки; масса коммерческой
нагрузки; масса снаряженияи оборудования; масса оборудования управления; масса
силовой установки; масса топлива на борту; масса конструкции;
• объемно-весовая компоновка;
• характерные массы самолета; масса пустого самолета; масса полной
нагрузки; масса пустого снаряженного самолета.
254
Глава 10
ОСНОВНЫЕ ЭЛЕМЕНТЫ КОНСТРУКЦИИ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Создание современной авиакосмической техники характеризуется
необычайным прогрессом в области конструирования. Применение
новых материалов и технологических методов, более точных методик
прочностных расчетов позволяет создавать конструкции, не имеющие
аналогов в практике конструирования. При этом находит самое широкое
применение не только собственный опыт ОКБ, но и опыт, накопленный
в других отраслях транспортного машиностроения, Возможность
создания конструкции минимальной массы, обладающей необходимыми
прочностью и жесткостью, во многом зависит от характеристик
применяемых материалов.
10.1. ОСНОВНЫЕ КОНСТРУКЦИОННЫЕ МАТЕРИАЛЫ
Материалы, используемые в конструкции ЛА, должны обладать:
• высокими физико-механическими Прочностными) характеристиками,
которые должны сохраняться как в широком диапазоне температур
(низкие, отрицательные - при дозвуковом полете в стратосфере,
высокие - при сверхзвуковом полете в условиях кинетического нагрева
конструкции), так и при неблагоприятном воздействии внешней среды
(см. подразд. 3.2.3);
• возможно меньшей плотностью;
• хорошими технологическими свойствами (способностью поддаваться
различным видам обработки в процессе производства).
Важными характеристиками материалов являются стоимость их
поставки (стоимость заготовок) и затраты на обработку. Они должны
быть минимальными.
Характеристики и свойства материалов определяют не только
качество деталей, но и саму возможность достаточно экономичного
получения для них заготовок (листов, профилей, отливок, штамповок,
поковок и Т.Д.).
Технологические процессы изготовления деталей (литье, ковка,
штамповка, механическая обработка резанием, термическая и химическая
обработка) определяются свойствами металлов и, в свою очередь, влияют
на них.
255
В настоящее время основными материалами для изготовления
агрегатов планера ЛА (крыла, фюзеляжа, оперения) и элементов системы
управления являются алюминиевые сплавы. Для наиболее нагруженных
и ответственных деталей применяются высокопрочные высоколегирован-
ные стали, титановые и другие сплавы. Широко используются и
неметаллические материалы - стеклопластики, углепластики, полимер-
ные заполнители, клеи, органическое стекло и др.
Одной из важнейших характеристик конструкционных материалов
является их удельная прочность - отношение максимально допустимых
напряжений, которые способен выдержать материал без разрушения, к
плотности материала.
Рациональность использования материала при преобразовании
заготовки в готовую деталь может быть оценена коэффициентом
использования материала (КИМ) - отношением массы детали к массе
заготовки, из которой она получена. Чем меньше материала идет в
отходы, тем выше КИМ.
Все более широкое применение в конструкции ЛА находят композици-
онные материалы (КМ), в которых высокопрочные углеродные,
органические, борные или другие армирующие волокна связаны в монолит
(отгреч. monos- единый и lithos - камень), в единое целое, податливой
полимерной или металлической матрицей (связующим), заполняющей
межволоконное пространство.
Основной особенностью КМ является то, что он проектируется
одновременно с проектированием элементов конструкции. Располагая
соответствующим образом (ориентируя) армирующие волокна (которые
будут воспринимать нагрузки, действующие на конструкцию, и
придавать ей жесткость и прочность), организуя технологический
процесс заполнения межволоконного пространства матрицей (обеспечи-
вающей совместную работу армирующих волокон), конструктор сразу,
практически без отходов материалов, создает необходимый элемент
конструкции, обладающий свойствами, строго соответствующими его
назначению. Это позволяет в некоторых случаях достичь такого уровня
совершенства конструкции, который недостижим при использовании
традиционных материалов.
В каждом конкретном случае выбор того или иного материала
определяется конструктивными требованиями (по удельной прочности,
теплопрочности, коррозионной стойкости, чувствительности к
знакопеременным нагрузкам и т.д.), а также требованиями по технологи-
ческим свойствам и стоимости.
256
10.2. ВНЕШНИЕ НАГРУЗКИ И РЕАКЦИИ ОПОР
Как уже отмечалось, элементы конструкции испытывают воздействие
внешних нагрузок и деформируются. Рассмотрим, как происходит
нагружение конструкции.
Напомним один из основных законов природы - третий закон
Ньютона, сформулированный следующим образом: силы, с которыми
два тела действуют друг на друга, направлены по одной прямой, равны
по модулю, но противоположны по направлению. Иными словами,
всегда в любой точке конструкции каждая сила должна быть уравновеше-
на другой, равной ей по величине, но противоположной по направлению.
И вообще, любое внешнее силовое воздействие на конструкцию,
независимо от физической природы сил, должно быть уравновешено
эквивалентным силовым противодействием. Обычно принято одну из
взаимоуравновешенных сил, действующих на самолет или на любой его
элемент, называть активной или внешней силой (внешним силовым
воздействием), а другую силу - уравновешивающей силой или силой
реакции опоры (опорнойреакцией). Хотя эти понятия довольно условны.
Допустим в первом приближении, что вся подъемная сила самолета
Y создается только его крылом, а сила тяжести G действует только на
фюзеляж. В этом примере характер сил У и G можно рассматривать
двояко:
1. Внешней силой, приложенной к самолету, является подъемная сила
крыла. Опорой для крыла является фюзеляж. Крыло стремится "улететь
вверх", а фюзеляж удерживает его.
2. Внешней силой, приложенной к самолету, является сила тяжести
фюзеляжа. Опорой для фюзеляжа является крыло. Фюзеляж стремится
"упасть на землю", а крыло удерживает его.
Уравновешивание сил У и G
возможно, если крыло каким-либо
образом связано с фюзеляжем.
Предположим, что крыло 1
(рис. 10.1) соединено с фюзеляжем
2 болтовым соединением,состоя-
щим из единственного болта 3,
шайбы 4 и гайки 5. Естественно,
что соединение неподвижно, его
элементы находятся в статичес-
ком равновесии: У = -G.
Можно проследить пути, по
которым силы проходят до урав-
новешивания, рассматривая эти
Рис. 10.1. Активные силы и опорные реакции
9 7425
257
Рис. 10.2. Пути уравновешивания сил
пути либо со стороны внешней нагрузки, либо со стороны реакции опор,
либо с обеих сторон - до встречи этих сил друг с другом в любой
произвольнойточке конструкции. Нарис. 10.2 показаны различные пути
уравновешивания сил в элементах болтового соединения:
сила G приложена к стержню, а сила У- к головке болта (рис. 10.2, д);
сила У приложена к стержню, а сила С? - к верхней поверхности
шайбы (рис. 10.2, б);
сила G приложена к верхней поверхности, а сила У - к нижней
поверхности шайбы (рис. 10.2, в);
сила У приложена к верхней поверхности витков резьбы болта, а сила
G- к нижней поверхности витков резьбы гайки (рис. 10.2, г).
Анализируя работу под нагрузкой любого элемента конструкции,
независимо от его сложности или размеров, мы должны установить:
а) какая внешняя нагрузка действует на конструкцию и каким образом
она приложена к конструкции;
б) что является опорой для конструкции и каким образом нагрузка
передается с конструкции на опору;
в) что происходит внутри конструкции при ее нагружении.
10.3. ПРОСТЕЙШИЕ ВИДЫ НАГРУЖЕНИЯ
И ПРОСТЕЙШИЕ КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ
Для отдельно взятого элемента конструкции взаимоуравновешенные
активная сила и сила реакции опоры являются внешними силами.
Рассмотрим, каким образом конструкция оказывает сопротивление
внешней нагрузке, за счет чего происходит изменение формы и размеров
конструкции - деформирование (от лат, deformatio - искажение).
258
10.3.1. РАСТЯЖЕНИЕ
Рассмотрим растяжение элемента конструкции, схема нагружения
которого показана на рис. 10.3, а, не обращая внимание на то, каким
образом с точки зрения конструктивного решения приложены внешние
силы Р. На рис. 10.3 также показана упрощенная модель межатомных
связей в твердом теле. Прочные межатомные связи, соединяющие атомы
недеформированного тела (рис. 10.3, б), при растяжении (рис. 10.3, в)
создают большие внутренние силы противодействия внешней нагрузке,
стремящиеся сохранить тело как единое целое.
Под действием внешних сил частицы (атомы) материала, из которого
сделана конструкция, будут перемещаться. Это перемещение будет
продолжаться до тех пор, пока между внешними и внутренними силами
не установится равновесие. Такое состояние называется деформированным
состоянием тела.
Мерой воздействия внешних сил на атомы вещества, которые
удаляются друг от друга (при растяжении) или сближаются (при сжатии),
а следовательно, и мерой противодействия материала конструкции
внешнему силовому воздействию, мерой внутренних сил в материале
является напряжение. Напряжением называется внутренняя сила
(возникающая при воздействии внешней нагрузки), приходящаяся на
единицу площади в окрестности данной точки рассматриваемого
сечения тела:
а = PIF,
где а - напряжение, Па (1 Па =
= 1 Н/м2); Р - суммарная сила, Н;
F- площадь сечения конструкции,
перпендикулярного к направле-
нию действующей силы Р, м2.
В инженерной практике напря-
жения иногда измеряют в даН/мм2
(1 даН = 10 Н).
Напряжение, таким образом,
показывает интенсивность
противодействия внутренних сил
воздействию внешней нагрузки на
межатомные связи материала
конструкции, или, что то же са-
мое, интенсивность воздействия
внешней нагрузки на межатомные
связи.
Рис. 10.3. Упрощенна» модель деформации
при растяжении
9*
259
Если рассмотреть деформиро-
ванное состояние стержня (бруса)
(рис. 10.4) при растяжении внеш-
ними силами Р (показаны на ри-
сунке черными стрелками), то в
любом произвольно взятом попе-
речном сечении (например, плос-
костью А) распределение нормаль-
ных напряжений о = P/F будет
равномерным.
Равнодействующая сила напря-
жений о - внутренняя сила Р = Fa
(на рис. 10.4 показана светлой
стрелкой) - проходит через центр
Рис. 10.4. Деформированное состояние бруса тяжести поперечного сечения
вдоль линии действия внешней
силы и равна ей.
Под действием растягиваю-
щих сил Р длина стержня / увеличивается на величину А/, называемую
абсолютным удлинением. Растяжение сопровождается также уменьшением
размеров поперечного сечения. Это явление носит название "эффект
Пуассона" (в честь французского ученого и механика С. Пуассона),
Абсолютное поперечное сужение стержня при растяжении определяется
величинами Д6 =b -bf, &с = с -С[.
Именно за счет изменения формы и размеров любая конструкция
сопротивляется (создает силы противодействия) внешним нагрузкам.
В инженерной практике деформированное состояние принято
оценивать не только абсолютными величинами изменения формы -
перемещениями, но и относительными безразмерными величинами -
деформациями, определяемыми соотношениями
е = AZ/Z; е' = ёьЫЪ = Ьс/с,
где е - относительное удлинение при растяжении', г' - относительные
поперечные деформации.
При достаточно больших внешних нагрузках и, как следствие,
больших внутренних напряжениях межатомные связи материала могут
быть разорваны, что приведет к разрушению конструкции.
Конструкция должна быть спроектирована так, чтобы она не
разрушилась под нагрузкой. Деформации (перемещения), которые
неизбежно возникают в конструкции, находящейся под действием
нагрузки, должны быть вполне определенными и достаточно малыми,
260
поскольку выбранные размеры и
форма элементов конструкции
обеспечивают определенное ка-
чество ее функционирования.
Так, изменение под действи-
ем нагрузки размеров и формы
элементов конструкции самоле-
та, обтекаемых потоком воздуха,
существенным образом влияет на
аэродинамические характерис-
тики и, как следствие, на летно-
технические характеристики
самолета.
Характер работы конструк-
ции под нагрузкой во многом
определяется выбором конструк-
ционных материалов. Одной из
основных характеристик мате-
Рис. 10.5. Диаграмма растяжения:
1 - высокопрочные алюминиевые сплавы;
2 - пластичные алюминиевые сплавы; 3 -
высокопрочные легированные стали; 4 -
малоуглеродистые стали
риала конструкции является
диаграмма растяжения {кривая деформирования) - взаимозависимость
напряжений и деформаций удлинения, получаемая в результате
испытаний образцов материалов на растяжение. На рис. 10.5 показан
типичный характер диаграмм растяжения для некоторых конструкцион-
ных материалов, применяемых в самолетостроении.
Прямолинейные участки диаграммы 0-А, 0-АВ характеризуют
такую стадию деформирования образца, когда при увеличении нагрузки
деформации пропорциональны напряжениям и при снятии нагрузки
исчезают, т.е. образец за счет межатомных связей (сил упругости)
возвращается в исходное, недеформированное состояние. На этом участке
материал "подчиняется" закону Гука (назван в честь английского
естествоиспытателя Р. Гука)
а = Ее,
где о - напряжение, Па; Е - модуль упругости материала, или модуль
Юнга (назван в честь английского ученого Т. Юнга), Па; е - относитель-
ное удлинение.
Модуль упругости Е, определяющий наклон кривой деформирования
в зоне упругости 0-А (0-АВ) диаграммы (Е = tg а) является мерой
упругости (жесткости) и характеризует податливость (способность к
деформированию) материала под нагрузкой. Отметим, что сталь - более
жесткий, менее податливый материал, чем алюминиевый сплав.
261
Точка Л (АВ) на диаграммах характеризует наибольшую нагрузку
Р и, соответственно, напряжения предела пропорциональности опц, при
которых еще соблюдается линейная зависимость о от е.
Дальше, за точкой А (АВ), линейный характер зависимости о-е
нарушается, материал деформируется ("течет") под действием нагрузки
и при снятии нагрузки не возвращается к исходному состоянию, в нем
появляются остаточные пластические деформации за счет того, что часть
межатомных связей разрушается. Точка В на диаграммах характеризует
нагрузку Рт и, соответственно, напряжения предела текучести от, при
которых материал деформируется ("течет") без увеличения нагрузки.
Некоторые материалы (например, 4 на рис. 10.5) имеют явно выражен-
ную площадку текучести A-В, где деформации существенно увеличива-
ются без увеличения внешней нагрузки. Для других материалов (1, 2, 3)
площадки текучести отсутствуют, в этом случае точки А и В на
диаграмме практически совпадают.
Зона5-С диаграммы называется зоной упрочнения. Здесь после стадии
текучести материал снова приобретает способность увеличивать
сопротивление дальнейшей деформации, однако для удлинения образца
в этой зоне требуется в сотни раз более медленное нарастание нагрузки,
чем в зоне упругих деформаций.
Точка С диаграммы характеризует максимальную (предельную)
нагрузку Ртах и, соответственно, напряжения предела прочности, или
напряжения временного сопротивления ов, при которых еще сохраняется
целостность элемента конструкции, нагруженного растяжением.
За точкой С диаграммы без увеличения внешней нагрузки идет
лавинообразное разрушение межатомных связей материала.
Таким образом, напряжение ив характеризует прочность материала
на разрыв.
Точка D диаграммы характеризует разрушение (разрыв) образца.
Нисходящая ветвь диаграммы С-D имеет условный характер, поскольку
напряжения рассчитываются для площади поперечного сечения
Рнс. 10.6. Диаграмма напряжений
исходного образца. Реально на-
пряжения растут, что показывает
диаграмма истинных напряжений
(рис. 10.6 - пунктирная линия), в
которой напряжения рассчитыва-
ются для истинной площади попе-
речного сечения образца. В интер-
вале О-A рост напряжения идет
без разрушения межатомных свя-
зей, после снятия нагрузки обра-
зец возвращается к исходному
262
состоянию. В интервале А-D рост напряжения происходит за счет
разрушения межатомных связей и значительного местного утонения
образца - образования шейки 1. В момент разрушения (точка D
диаграммы) площадь поперечного сечения пластически деформированно-
го образца меньше исходной.
Прочность конструкции, естественно, зависит от прочности
материала, из которого она изготовлена. Прочность (несущая способ-
ность) конструкции - это способность конструкции в определенных
условиях воспринимать (выдерживать) без разрушения внешние
нагрузки. Нагрузка, при которой происходит разрушение конструкции,
называется разрушающей.
Несущая способность во многом зависит от пластичности материала.
Пластичность - способность материала получать большие остаточные
деформации, не разрушаясь. Свойство, противоположное пластичнос-
ти, - хрупкость - это способность материала разрушаться без заметной
пластической деформации.
Жесткость - способность конструкции сопротивляться действию
внешних нагрузок с допустимыми в эксплуатации деформациями, не
нарушающими ее работоспособность.
Наличие в материале конструкции микротрещин, вкраплений
инородных материалов, нарушающих постоянство напряжений, резко
снижает несущую способность конструкции.
Местные резкие изменения однородности (формы и, следовательно,
жесткости) конструкции, приводящие к резкому местному (локальному)
повышению напряжений в конструкции, называются концентраторами
напряжений.
На рис. 10.7 показано действие растягивающей внешней нагрузки,
равномерно распределенной по краям простейших конструктивных
элементов - листов. Пунктирные линии представляют собой так
называемые траектории напряжений, вдоль которых напряжение
передается от молекулы к молекуле. Для гладкого листа эти линии
параллельны, напряжения в лю-
бом сечении листа одинаковы.
В листах с концентраторами
напряжений (надрез в кромке
листа, отверстие в центре листа)
траектории напряжений обходят
разрыв в материале. Плотность
траекторий напряжений увеличи-
вается, и локальные напряжения о
у края концентратора возрастают
(иногда многократно). В этих
Рис. 10.7. Траектории напряжений
263
Рис. 10.8. Передача нагрузки в соединении
местах может произойти наруше-
ние (разрыв) межатомных связей,
возникнут микротрещины, рас-
пространение которых ведет к
разрушению конструкции.
Распределение напряжений в
законцовках (местах соединения
деталей) обычно является особен-
но сложным, в них обязательно
появляются концентрации напря-
жений - местное повышение на-
пряжений.
В месте соединения (рис. 10.8)
листов 1 и 3 с помощью заклепок
(или сварных точек) 2 передача
нагрузки будет происходить толь-
ко через точки крепления. Заштри-
хованная область листов практически выключена из работы и не
испытывает напряжений. При этом напряжения в соответствующих этой
области поперечных сечениях листов распределены неравномерно,
причем иА_А > аБ_в > ав_в. Листы полностью включатся в работу на
достаточно большом удалении от места соединения.
Конструктор должен уделять особое внимание выбору формы деталей,
работающих на растяжение, и особенно их законцовок, чтобы уменьшить
возможные концентрации напряжений.
10.3.2. СЖАТИЕ
Механизмы разрушения (потери несущей способности) сжатых
элементов существенно отличаются от механизмов разрушения
растянутых элементов. При сжатии межатомные расстояния под
действием нагрузки уменьшаются, межатомные силы отталкивания
растут и конструкция стремится освободиться от запасенной энергии,
переведя ее в работу "выскальзывания" атомов из-под нагрузки в
боковом направлении. Разрушение различных конструктивных элементов
происходит по-разному, что определяется материалом конструкции и,
главное, формой и пропорциями конструктивных элементов.
Короткие и "толстые" стержни (рис. 10.9) из пластичного материала
при сжатии принимают бочкообразную форму ("сплющиваются").
Стержни из более упругого (хрупкого) материала (рис. 10.10) разрушают-
ся с образованием трещины поперек стержня, и обе его части проскальзы-
вают друг относительно друга.
264
Рис. 10.9. Упрощенная модель деформации
при сжатии образца из пластичного матери-
ала
Рис. 10.10, Упрощенная модель деформа-
ции при сжатии образца из хрупкого мате-
риала
Совершенно иначе теряют несущую способность при нагружении
сжатием вдоль оси длинные и тонкие элементы конструкции, широко
распространенные в самолетостроении.
При сжатии упругое тело (длинный стержень, тонкая пластина, панель
и т.п.) сохраняет начальную (неизогнутую) форму равновесия до
некоторого значения сжимающей силы называемой критической (или
эйлеровой, так как Л. Эйлер был первым, кто предложил способ
вычисления этой силы).
При небольшом превышении значения критической силы (и,
соответственно, критических напряжений окр) возникают значительные
деформации стержня (рис. 10.11), который не разрушается, а только
упруго изгибается и переходит к другой (изогнутой) форме упругого
равновесия. Если при этом не был достигнут предел упругости, т.е.
напряжения в стержне меньше напряжений предела пропорциональности,
то при снятии нагрузки стержень возвращается в исходное состояние.
Л. Эйлер показал, что нагрузка, при которой стержень данных длины
и площади поперечного сечения теряет устойчивость, не зависит от
предела прочности материала, а зависит только от формы поперечного
сечения, модуля упругости (жесткости) материала и условий закрепления
Рис. 10.12. Местная потеря устойчивости
тонкими стенками
265
Рис. 10.13. Различные формы стержней,
работающих па сжатие
Рис. 10.14. Продольное подкрепление тонких
стенок
При дальнейшем увеличении нагрузки изогнутый стержень
разрушается. Такой вид потери несущей способности называется общей
потерей устойчивости.
При отсутствии общей потери устойчивости (ось тонкостенного
элемента конструкции прямолинейна, не деформирована) нагруженная
сжатием конструкция может выйти из строя из-за местных деформаций
отдельных участков. Такой вид потери несущей способности называется
местной потерей устойчивости (рис. 10.12).
Эффективный способ повышения несущей способности тонкостен-
ных конструкций при сжатии - придание им формы, увеличивающей
критические напряжения общей потери устойчивости. Криволинейный
и гофрированный листы (рис. 10.13) за счет увеличения изгибной
жесткости обладают при сжатии большей несущей способностью, чем
плоский лист, при одинаковых площадях поперечного сечения. Профиль
замкнутого сечения или профиль с местным утолщением - бульбом (от
лат. bulbus - луковица) - эффективнее при сжатии, чем уголок.
Увеличение несущей способности плоских или слабоизогнутых
стенок обеспечивается подкреплением их ребрами жесткости в
продольном-вдоль направления действия сжимающих сил (рис. 10.14) -
и поперечном направлениях. Такое подкрепление стенки обеспечивает
ей высокие критические напряжения как общей, так и местной потери
устойчивости.
10.3.3. сдвиг
Примером сдвига, или среза, может служить деформация в плоскости
А заклепки, соединяющей два листа, находящихся в состоянии растяже-
ния (рис. 10.15). При таком нагружении листы, как лезвия ножниц,
стремятся перерезать заклепку. Напряжения сдвига т, возникающие в
плоскости А в теле заклепки, называются касательными напряжениями.
266
Рис. 10.15. Сдаиг (срез) заклепки
Рис. 10.16. Упрощенные модели деформа-
ции при растяжении (а) и сдайте (б)
Таким образом, сдвиг возникает тогда, когда внешние силы смещают
два параллельных плоских сечения элемента конструкции одно
относительного другого при неизменном расстоянии между ними, и
напряжения сдвига служат мерой сопротивления сдвигу (тенденции к
скольжению) одной части твердого тела относительно другой.
Если при растяжении (рис. 10.16, а) или сжатии внешней нагрузке
противостоят и прямые, и диагональные межатомные связи, работающие
на растяжение или сжатие, то при сдвиге (рис. 10.16, б) внешней нагрузке
противостоят практически только диагональные связи, работающие на
растяжение и сжатие. Поэтому напряжения сдвига, при которых
происходит разрушение сдвигом, та = (0,55...0,65) ов.
Нагружение тонкого листа (рис. 10.17, а) сдвигающими усилиями по
вертикальным кромкам требует для обеспечения статического равновесия
возникновения соответствующих сдвиговых реакции по горизонталь-
ным кромкам. Касательные напряжения по краям листа вызывают его
деформацию (рис. 10.17, б). При этом вдоль диагонали с-с лист
растягивается, а вдоль диагонали d-d сжимается. Следовательно,
напряжения сдвига приводят к образованию напряжений растяжения и
сжатия под углом ±45° к направлению сдвига.
В результате при достижении
критических напряжений сдвига
может произойти потеря устойчи-
вости при сдвиге - гофрирование
(от франц, gaufrer - прессовать
складки) тонкого листа - образо-
вание гофра 1 поперек диагонали
d-d.
Деформация чистого сдвига
заключается в изменении прямых
углов. Касательные напряжения т
связаны с угловыми деформация-
ми у соотношением
Рис. 10.17. Сдвиг топкого листа
267
т = Gy,
где т - касательные напряжения, Па; G - модуль сдвига, зависящий от
механических свойств материала, Па, G =--; Е-модуль упругости,
2(1 + р)
Па; ц - безразмерный коэффициент Пуассона; у - относительный сдвиг,
определяющий искажение прямоугольного элементами, рис. 10.17) при
сдвиге и численно равный углу у, в силу малости которого его можно
принять равным отношению горизонтального сдвига нижней грани
относительно верхней к расстоянию между этими гранями.
Приведенные выше объяснения работы конструкции под нагрузкой
и ее разрушения носят сугубо иллюстративный характер. В действитель-
ности механизмы разрушения значительно сложнее.
Причиной разрушения конструкции являются появляющиеся и
развивающиеся в процессе эксплуатации трещины, возникновение
которых наиболее полно объясняется представлением о дислокациях (от
позднелат. dislokatio - смещение, перемещение) - несовершенствах
(искажениях) атомно-кристаллических пространственных решеток
реального материала конструкций, за счет движения, взаимодействия
и развития которых (при приложении внешних нагрузок или под воздей-
ствием изменения температуры) возможен сдвиг кристаллических
решеток вдоль направления действия сипы.
Тем не менее модели деформации, проиллюстрированные рис. 10.3,
10.9, 10.10, 10.16, дают достаточно точное представление о характере
разрушения при простейших случаях нагружения.
10.3.4. КРУЧЕНИЕ
Схема нагружения кручением показана на рис. 10.18, б. Внешние силы,
образующие момент относительно оси элемента конструкции, вызывают
его деформацию, которая заключа-
ется в плоском повороте попереч-
ных сечений друг относительно
друга. Продольная линия, нанесен-
ная на поверхность элемента кон-
струкции, нагруженного кручением
(рис. 10.18, а), принимает форму
винтовой линии.
В любом поперечном сечении
круглого стержня (рис. 10.19, а) при
скручивании точка А на его повер-
хности стремится занять положение,
268
Рис. 10.19. Напряжения при кручении
Рис. 10.20. Кручение тоикостешюй
оболочки
отмеченное точкой А', а точка 2» - положение/»'. Этому перемещению
будут препятствовать внутренние силы - касательные напряжения
(напряжения сдвига) т, направленные вдоль кольцевых линий. Очевидно,
что напряжения по сечению распределятся неравномерно (рис. 10.19, б),
Они максимальны в крайних точках и снижаются до нуля на осевой
линии. Несущая способность сплошного стержня используется
неполностью, в центре материал недогружен.
Наиболеерациональным конструктивным элементом, предназначен-
ным для восприятия кручения, является тонкостенная оболочка, по
толщине которой (рис. 10.19, в) напряжения т распределены практически
равномерно.
Однако нагружение кручением тонкостенной оболочки (рис. 10.20, а)
может привести к потере устойчивости с образованием равномерно
расположенных в окружном направлении вмятин, идущих от одного
торца к другому по винтовым линиям 7. (Сравните схему работы
заштрихованного элемента 2 на рис. 10.20, а со схемой, изображенной
на рис. 10.17.)
Для повышения несущей способности такой оболочки ее необходимо
подкреплятьв направлении возможной потери устойчивости (подкрепле-
ние геодезического типа, показанное на рис. 10.20, б). Из технологических
соображений подкрепление чаще ведется в продольном (см. рис. 10.14)
и поперечном направлениях, т.е. окантовывается клетка 2 (см.
рис. 10.20, а), подверженная сдвигу при кручении.
10.3.5. ИЗГИБ
Схема нагружения изгибом показана на рис. 10.21, а. Внешние силы,
образующие момент относительно оси с-с, перпендикулярной к
продольной оси балки, вызывают деформации, которые заключаются
в искривлении продольной оси балки. Такой вид деформированного
состояния называют чистым изгибом.
269
Рис. 10.21. Изгиб балки прямоугольного сечения
В технике широко распрос-
транен изгиб элементов кон-
струкции, вызванный прило-
жением к ним сосредоточен-
ной силы или распределенной
нагрузки (см. подразд. 8.1,
рис. 8.1...8.8).
Для простейшей балки
прямоугольного сечения
(рис. 10.21, б), нагруженной
сосредоточенной силой, дефор-
мированное состояние характе-
ризуется наличием нормальных
о и касательных т напряжений
в любом поперечном сечении.
Выпуклая сторона балки растя-
нута, вогнутая - сжата. Зоны растяжения и сжатия разделены нейтраль-
ным слоем, длина которого при изгибе остается неизменной и в котором
отсутствуют нормальные напряжения.
Статическое равновесие балки под поперечной нагрузкой обеспе-
чивают нормальные напряжения а, создающие уравновешивающий
момент М, и касательные напряжения т, создающие уравновешивающую
перерезывающую силу Q. Это можно проследить, рассматривая равновесие
по сечению А-А (рис. 10.22) консольной балки 1, заделанной в опоре 2.
Как и в случае с кручением (см. рис. 10.19, <?), применять сплошное
поперечное сечение для конструктивного элемента, работающего на
изгиб, нерационально, так как вблизи нейтрального слоя материал
недогружен. Наиболее рациональным будет сечение, в котором основная
Рнс. 10.22. Уравновешивание балки при
поперечной нагрузке
Рнс. 10.23. Рациональное сечение тонко-
стенной балки
270
Рис. 10.24. Схема нагрузок, действующих на
крыло
масса материала сосредоточена в
зонах, максимально удаленных от
нейтральной оси (рис. 10.23), - в
поясах 1 и 4, которые, работая на
растяжение (пояс Г) и сжатие (пояс
4), создают уравновешивающий
изгибающий момент МтГ Тонкая
стенка 2, соединяющая пояса и
подкрепленная стойками 3, рабо-
тая на сдвиг, создает уравновеши-
вающую перерезывающую силу Р.
Различные внешние нагрузки,
которые одновременно действуют
на ЛА, стремясь деформировать и,
в пределе, разрушить конструк-
цию, создают в ней весь спектр
внутренних сил. Так, под дей-
ствием распределенных воздуш-
ной <7возд и массовой <?Mac нагрузок
и сосредоточенных сил: тяги Рдв и
веса бдв двигателя в любом произ-
вольно взятом сечении крыла
(например, плоскостью А) возник-
нут внутренние силовые факторы (рис. 10.24): перерезывающая сила Q,
изгибающий Мизг и крутящий Мк моменты, которые будут уравновеши-
вать условно отсеченную концевую часть крыла 1. Равные им, но
противоположные по направлению силовые факторы для оставшейся
внутренней части крыла 2 будут являться внешними нагрузками, заменяя
действие отсеченной части крыла.
В первом приближении можно не учитывать напряженно-деформиро-
ванное состояние крыла, возникающее под действием силы лобового
сопротивления X и тяги двигателя Рдв, стремящихся изогнуть конструк-
цию крыла в плоскости хорд, поскольку очевидно, что жесткость на
изгиб крыла в этом направлении значительно больше, чем жесткость на
изгиб "из плоскости" (в вертикальном направлении). Кроме того, силы,
действующие на крыло в горизонтальной плоскости, значительно
меньше.
Напомним, что в горизонтальном установившемся полете
X = YIK и Рда = G/fKnJ = Y/(KnJ,
где К-аэродинамическое качество самолета; ндв - число двигателей, в
данном случае - два.
271
Однако, как мы уже отмечали, при разработке конструкции ее
работоспособность должна быть гарантирована для всех предусмотрен-
ных Нормами прочности случаев нагружения.
10.4. ПОДКРЕПЛЕННЫЕ ТОНКОСТЕННЫЕ ОБОЛОЧКИ-
ОСНОВА КОНСТРУКЦИИ ПЛАНЕРА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Характерной особенностью конструкции планера современного ЛА
является применение подкрепленных тонкостенных оболочек, подвержен-
ных действию разнообразных внешних нагрузок и уравновешенных
внутренними перерезывающими силами, изгибающими и крутящими
моментами. Применение пустотелых конструкций, тонкостенных
оболочек, подкрепленных продольным и поперечным набором, дает
возможность целесообразно использовать компоновочные объемы,
обеспечивает высокие несущие свойства (прочность и жесткость)
конструкции при минимально возможной массе.
Разрежение Др на поверхности крыла (рис. 10.25) стремится деформи-
ровать обшивку крыла, а избыточное давление Др в кабине (рис. 10.26)-
обшивку фюзеляжа. Искажение формы (особенно несущих частей ЛА)
крайне неблагоприятно отражается на аэродинамических, летно-
технических характеристиках и характеристиках устойчивости и
управляемости ЛА.
Основными формообразующими элементами для тонкостенных
оболочек 1 (рис. 10.27) являются поперечные тонкостенные элементы 3.
В несущих частях ЛА это нервюры (франц, nervure, от лат. nervus - жила,
сухожилие), в ненесущих частях - шпангоуты (гол. spanthout, от spant -
балка и hout - дерево).
Продольными элементами 2, подкрепляющими сравнительно
слабоизогнутую обшивку несущих и ненесущих частей ЛА (см. также
Деформированная обшивка
Рис. 10.25. Деформация обшивки крыла
272
Рис. 10.26. Деформация обшивки фюзеляжа
Рис. 10.27, Подкрепленные тонкостенные оболочки
рис. 10.14) являются стрингеры (англ, stringer от string - привязывать,
скреплять).
Обладая минимальной массой по сравнению со всеми возможными
конструкциями, нагружаемыми крутящим моментом Mv под-
крепленные продольным и поперечным силовыми наборами замкнутые
тонкостенные оболочки, имеющие один (рис. 10.28) или несколько
(рис. 10.29) замкнутых контуров со(-, обеспечивают высокую прочность
и жесткость конструкции. Воспринимая кручение, такая оболочка
хорошо работает на изгиб и сдвиг от поперечных нагрузок и может
рассматриваться как пустотелая коробчатая балка -кессон (от франц.
caisson — ящик).
При нагружении перерезывающей силой Р и изгибающим моментом
Л/изг удаленные от нейтральной оси верхний и нижний своды кессона
(рис. 10.30), представляющие собой слабоизогнутые листы обшивки,
подкрепленные стрингерами, работают (как и в балке, см. рис. 10.23) на
растяжение и сжатие. Продольные боковые стенки кессона от перерезы-
вающей силы работают на сдвиг.
Конструкция типа кессон с работающей на растяжение-сжатие
(воспринимающей изгиб) обшивкой в конкретных условиях нагружения
Рис. 10.28. Тонкостенная оболочка с
одним замкнутым контуром
Рис. 10.29. Тонкостенная оболочка с тремя
замкнутыми контурами
273
Рис. 10.30. Нагружение крыла перерезывающей
силой и изгибающим моментом
может оказаться более рацио-
нальной, чем конструкция с
так называемойнеработттаюи/ей
обшивкой - обшивкой, не вос-
принимающей изгибающий
момент, а работающей только
на сдвиг при кручении.
В конструкции с нерабо-
тающей обшивкой изгибаю-
щий момент воспринимают
продольные силовые элементы
-лонжероны (франц, longeron
от longer - идти вдоль), которые представляют собой либо балку
(рис. 10.31, а), либо плоскую ферму (рис. 10.31, б), все конструктивные
элементы которой - пояса 1 и 2, стойки 3 и подкосы 4 - при нагружении
изгибом и сдвигом работают только на растяжение-сжатие, обеспечивая
необходимые прочность и жесткость ферменной конструкции. Как и
лонжероны, поперечные подкрепляющие тонкостенную оболочку
элементы - нервюры и шпангоуты - могут представлять собой
конструкции балочного или ферменного типа.
Подбором различных комбинаций подкрепляющих оболочку
элементов конструкции - стрингеров, лонжеронов, нервюр, шпангоутов —
формируется наиболее рациональная конструктивно-силовая схема
(продольный и поперечный силовой набор) проектируемого агрегата ЛА,
обеспечивающая минимально возможную массу агрегата при необходи-
мых прочности и изгибно-крутильной жесткости.
Рис. 10.31. Лонжероны:
а - балочный; б - ферменный
274
Проверьте, как Вы усвоили материал
1. Пример с болтовым соединением, работающим на растяжение, приведенный
на рис. 10.2, хорошо иллюстрирует уравновешивание сил, но явно неудачен
как конструктивное решение. Попробуйте объяснить это, проработав
подразд. 10.3.
2. Балки а и б изготовлены из одинаковых
материалов, имеют одинаковые линейные
размеры, форму и площади поперечного сечения.
В каком месте произойдет разрушение балок
при увеличении силы П
3. Необходимо передать силу Р из точки А на
опору Б. В случае б необходимо "обойти" пре-
пятствие В.
Предложите варианты конструкторских
решений. Оцените их сточки зрения напряженно-
го состояния и массы.
4. Тонкие и длинные элементы ферм а и б изго-
товлены из одного материала, имеют одинако-
вые линейные размеры, форму и площади попе-
речного сечения.
Какая из ферм выдержит большую нагрузку:
Рд>РбилиРб>Рд?
Как нужно изменить площади поперечных
сечений, чтобы фермы выдержали без разруше-
ния одинаковую нагрузку?
Какая из ферм будет легче? Объясните
почему.
275
5. В каком направлении (вдоль оси У или вдоль
оси Z) искривится стержень при потере общей
устойчивости под действием силы Р?
Какой элемент стержня может получить
местные деформации под действием силы Р?
Интерпретируйте следующие основные понятия:
• конструктивные материалы; характеристики материалов;
• технологические свойства; технологический процесс;
• внешние нагрузки; реакции опор; внутренние силовые факторы;
• деформированное состояние тела; напряжение; перемещение; деформация;
диаграмма напряжений; модуль упругости;
• прочность конструкции;разрушающая нагрузка; пластичность; хрупкость;
жесткость; концентратор напряжений; дислокация;
• растяжение; сжатие; кручение; изгиб; сдвиг; срез; нормальные напряжения;
касательные напряжения; потеря устойчивости;
• конструктивно-силовая схема; конструкция балочного типа; конструкция
ферменного типа; тонкостенная подкрепленная оболочка; кессон; подкрепление
геодезического типа; подкрепление в продольном и поперечном направлениях;
работающая обшивка; неработающая обшивка; лонжерон; нервюра; шпангоут;
стрингер; пояс лонжерона; стенка.
276
Глава 11
ЭЛЕМЕНТЫ КОНСТРУКЦИИ ПЛАНЕРА
САМОЛЕТА
Масса планера составляет основную часть массы конструкции
самолета и, следовательно, существенным образом влияет на эффектив-
ность самолета. Очевидно, что масса планера самолета зависит от его
назначения и летно-технических характеристик, и ее доля во взлетной
массе самолета составляет:
25...32 % для дозвуковых пассажирских магистральных самолетов;
29...31 % для дозвуковых пассажирских самолетов местных авиалиний;
32...34 % для спортивно-пилотажных самолетов;
18...28 % для бомбардировщиков;
28...32 % для истребителей.
При определенных геометрических параметрах планера и уровне
внешних нагрузок масса его конструкции определяется в основном
уровнем конструкторской проработки.
Выбор рациональных конструктивно-силовых схем агрегатов, форм
поперечных сечений элементов конструкции и материалов при макси-
мальном использовании их физико-механических свойств в сочетании
с эффективными технологическими процессами позволяет создать в
процессе разработки и производства конструкцию, масса которой не
превосходит лимитную (франц, limite, от лат. limes - граница, предел),
т.е. массу конструкции, определенную наначальных этапах проектирова-
ния в соответствии с уравнением весового баланса.
11.1. ПРИМЕРЫ КОНСТРУКТИВНО-ТЕХНОЛОГИЧЕСКИХ
РЕШЕНИЙ
Несущие части самолета (крыло, горизонтальное и вертикальное
оперение) в конструктивно-силовом отношении представляют собой
тонкостенную пространственную балку, способную воспринимать
действующие на нее внешние нагрузки: местную воздушную нагрузку,
распределенные и сосредоточенные массовые силы - и передавать их на
опору (фюзеляж) посредством внутренних силовых факторов: перерезы-
вающих сил, изгибающих и крутящих моментов. Отметим, что в отличие
от внутренней перерезывающей силы соответствующая ей внешняя сила
называется поперечной.
277
Рис. 11.1. Простейшая конструкция крыла (пример)
Следовательно, в конструкции несущих частей самолета обязательно
должны быть следующие силовые элементы:
• обшивка, подкрепленная набором продольных и поперечных
элементов, воспринимающая местную воздушную нагрузку;
• балка с мощными поясами и тонкими стенками, подкрепленными
стойками, передающая перерезывающую силу и изгибающий момент;
• тонкостенный замкнутый контур, передающий крутящий момент;
• узлы крепления, передающие эти усилия с крыла (горизонтального
и вертикального оперения) на опору (фюзеляж).
Относительная масса крыла = т^/т^ в среднем равна 0,08...0,14,
что составляет 30...50 % массы конструкции планера самолета.
Относительная масса оперения in0B = moJma в среднем равна
0,015...0,025.
Рассмотрим конструкцию несущих поверхностей на примере
простейшей конструкции крыла (рис. 11.1).
Тонкая обшивка 1 крыла подкреплена продольными элементами -
стрингерами 6 и поперечными элементами - нервюрами 4. Нервюры
являются основными элементами, обеспечивающими форму крыла
заданного профиля.
В местах узлов навески элерона и закрылка установлены усиленные
(силовые) нервюры. Усиленные нервюры располагаются также в местах
установки на крыле стоек шасси, пилонов двигателей и т.д. Назначение
278
силовых нервюр - передать (рас-
пределить) на тонкостенные элементы
крыла, и прежде всего на обшивку
и продольные стенки, большие
сосредоточенные силы, приклады-
ваемые к нервюрам в узлах навески
закрылков, элеронов и других агре-
гатов.
Усиленные нервюры, как и обыч-
ные (нормальные) нервюры, работа-
ют на изгиб в своей плоскости.
Рис. 11.2. Схема передачи сил и моментов
с крыла на фюзеляж
Конструктивно они могут быть
выполнены как балки - с поясами,
работающими на растяжение-сжа-
тие (на нормальные напряжения), и
стенкой, работающей на сдвиг, - или как фермы.
Лонжерон 9 воспринимает поперечную силу стенкой 3, работающей
на сдвиг (от внутренней перерезывающей силы), и изгибающий момент
поясами (полками) 2, работающими на растяжение-сжатие.
Замкнутый контур, воспринимающий кручение, образован обшивкой
на носке крыла 5 и стенкой лонжерона 3 (первый контур), стенкой
лонжерона 3, верхней обшивкой 13, специальной задней стенкой 12 и
нижней обшивкой 10 (второй контур).
Стенка 12, не имеющая мощных поясов, работает на сдвиг и способна
передавать часть перерезывающей силы, действующей на крыло.
Для передачи нагрузок с крыла на фюзеляж служит моментный узел
8 на лонжероне 9 и шарнирный (безмоментный) узел 11 на стенке 12.
Усиленная бортовая нервюра 7 "снимает" крутящий момент с
замкнутого тонкостенного контура и через узлы 8 и 11 передает на
фюзеляж.
Таким образом, внутренние силовые факторы, действующие в
крыле, - перерезывающая сила Q, изгибающий момент Л/113ги крутящий
момент Мк передаются на опору (фюзеляж) через стыковые узлы
(моментные и безмоментные). Схема передачи сил и моментов в
стыковых узлах представлена на рис. 11.2:
Л + Р2 = б; NH = Л/юг; Р3В = Мк.
Помня об условности понятий "внешняя нагрузка" и "опорная
реакция", можно рассматривать силы Р1? Р2 и Р3 как нагружающие крыло
(см. рис. 11.1) сосредоточенные силы, которые с помощью усиленной
бортовой нервюры 7, лонжерона 9, стенки 12 и далее с помощью
279
Рис. 11.3. Простейшая конструкция фюзеля-
жа (пример)
стрингеров и нормальных нервюр
распределяются по обшивке и
уравновешиваются распределен-
ными аэродинамической и массо-
вой нагрузками.
Конструкция других несущих
поверхностей строится по тем же
принципам, что и конструкция
крыла.
Ненесущие части самолета
(фюзеляж, гондолы двигателей) в
конструктивно-силовом отноше-
нии аналогичны крылу. Это тон-
костенные пространственные
оболочки, нагруженные внешней
местной нагрузкой на обшивку
(аэродинамические нагрузки, избыточное давление в гермокабине,
массовые нагрузки от конструкции), которые воспринимают и передают
(уравновешивают) внешнюю нагрузку перерезывающими силами,
изгибающими и крутящими моментами.
Следовательно, конструкция фюзеляжа формируется из силовых
элементов, аналогичных силовым элементам крыла.
Относительная масса фюзеляжа тф = тф/т0 в среднем равна
0,08...0,12, что составляет 30...40 % массы конструкции планера самолета.
Пример простейшей конструкции фюзеляжа приведен на рис. 11.3.
Стрингеры 2 подкрепляют обшивку фюзеляжа в продольном, а
обычные (нормальные) шпангоуты 4 - в поперечном направлении,
обеспечивая необходимую форму его обводов.
Усиленные (силовые) шпангоуты устанавливаются в конструкции
фюзеляжа в местах стыковки с фюзеляжем крыла (шпангоуты 1 и 3),
горизонтального оперения, вертикального оперения, а также в других
местах, где к конструкции фюзеляжа прикладываются большие
сосредоточенные силы (от оборудования, контейнеров с грузами, шасси,
двигателей и т.д,).
На силовых шпангоутах имеются узлы, к которым прикладываются
сосредоточенные силы.
Усиленные шпангоуты, как и обычные (нормальные) шпангоуты, в
силовом отношении представляют плоскую раму, работающую в своей
плоскости на изгиб, сдвиг, растяжение и сжатие.
Конфигурация и размеры поясов и стенок шпангоутов (рис. 11.4)
выбираются в соответствии с действующими нагрузками для обеспечения
необходимых прочности и жесткости. Так, размеры поясов и стенок
280
Рис. 11.4. Шпангоуты в хвостовой части
фюзеляжа
Продольные элементы
(лонжероны, балки)
Рис. 11.5. Иллюстрация силовой схемы
фюзеляжа
нормальных кольцевых шпангоутов 1 и 4 будут меньше, чем соответству-
ющие размеры силового кольцевого шпангоута 3, к которому крепится
лонжерон киля. При прочих равных условиях жесткость глухого
шпангоута 2 (шпангоута со сплошной стенкой) будет, естественно,
больше, чем жесткость кольцевого шпангоута. Однако по условиям
компоновки установка глухих шпангоутов во многих случаях невозмож-
на.
Поперечные нагрузки на фюзеляж передаются сводами обшивки
(рис. 11.5), в которой возникают касательные (сдвиговые) напряжения,
"текущие" по контуру сечения обшивки и своими проекциями на
соответствующие направления формирующие перерезывающие силы в
поперечных сечениях фюзеляжа. Так, в верхнем и нижнем сводах
обшивки возникают перерезывающие силы от внешних нагрузок на
фюзеляж, действующих в горизонтальной плоскости, например от сил
на вертикальном оперении самолета. В боковых сводах обшивки
возникают перерезывающие силы от внешних нагрузок, действующих
на фюзеляж в вертикальной плоскости, например от сил на горизонталь-
ном оперении самолета.
Мощные продольные элементы (лонжероны, балки) фюзеляжа
совместно со сводами обшивки образуют балку, способную восприни-
мать изгибающий момент. Мощные продольные элементы, являясь в
281
этом случае поясами, работают на растяжение-сжатие. Своды обшивки,
выполняющие в этом случае роль стенки балки, работают на сдвиг.
Крутящий момент воспринимается замкнутым контуром обшивки
фюзеляжа.
Конструкция гондол двигателей, гондол для уборки шасси на крыле
и других ненесущих частей самолета аналогична конструкции фюзеляжа.
Промышленность предоставляет конструкторам широкий спектр
полуфабрикатов и технологических процессов, позволяющих создавать
тонкостенные конструкции.
Из плоских листовых заготовок методами гибки, прокатки,
штамповки, обтяжки без нагрева (холодная обработка) или с нагревом
(горячая обработка) ведется формообразование обшивок, стрингеров
(гнутые стрингеры), стенок лонжеронов, стенок усиленных нервюр и
шпангоутов или целиком нормальных нервюр и шпангоутов.
Прессованные профили различного поперечного сечения используются
для изготовления стрингеров, полок (поясов) лонжеронов, нервюр и
шпангоутов.
Механическая обработка (резка, фрезерование и т.д.), химическая
обработка (например, размерное травление или химическое фрезерова-
ние, т.е. снятие с заготовки части металла с помощью химической
реакции), электрохимическая, ультразвуковая и плазменная резка
позволяют в процессе производства получать заданные в чертежах
конструкции сложной формы с рациональным распределением
материала.
Различными методами точного литья и горячей штамповки получают
не только отдельные простые монолитные элементы конструкции типа
узлов навески рулей, стыковых узлов, но и крупногабаритные сложнофа-
сонные объемные элементы типа каркасов остекления кабины экипажа,
силовых нервюр.
Рис. 11.6. Монолитная нервюра
Монолитная (цельноштампо-
ванная) центральная часть (находя-
щаяся между лонжероном и зад-
ней стенкой) силовой нервюры
(рис. 11.6) наряду с мощными поя-
сами 1 имеет тонкую стенку 2 с
окантованными отверстиями облег-
чения 3 и высокие тонкие ребра
жесткости (стойки) 4. При ее изго-
товлении после штамповки требует-
ся минимальная механическая обра-
ботка только по поверхностям
стыковки с обшивкой, стенкой
лонжерона и задней стенкой.
282
Рис. П.7. Прессованная панель
Рнс. П.8. Панель с сотовым заполнителем
Монолитные прессованные панели (рис. 11.7) с продольными
подкрепляющими элементами (стрингерами) различной конфигурации
при прочих равных условиях имеют ббльшую жесткость, чем сборные
панели, и позволяют резко уменьшить число соединяемых деталей.
Применение различных процессов формообразования в сочетании с
термической, термохимической, термомеханической обработкой и
образованием на поверхности элементов конструкции защитных
покрытий позволяет получить необходимые физико-механические
свойства материала конструкции и защитить ее от неблагоприятных
воздействий внешней среды.
Процессы деформирования поверхностных слоев материала элементов
конструкции (например, с помощью дробеструйной обработки -
бомбардировки поверхности детали потоком дробинок, летящих с
большой скоростью) за счет воздействия на распределение дислокаций
в материале обеспечивают повышение усталостной прочности отдельных
элементов конструкции, например монолитных панелей крыла.
Для соединения отдельных элементов конструкции при сборке
применяются заклепки, болтовые соединения (механический крепеж),
сварка, пайка, склейка или их комбинации.
Использование клеесварных или клееклепаных швов позволяет
значительно упростить герметизацию конструкции.
С помощью сварки, пайки, склейки получают также многослойные,
чаще трехслойные панели ("сандвичи", англ, sandwich - бутерброд), в
которых два разнесенных слоя силовой обшивки связаны легким
заполнителем (рис. 11.8). Заполнителем служат пористые пенопласты или,
чаще, соты, выполненные из металлической или неметаллической фольги
толщиной 30... 100 мкм. Сотовые заполнители имеют, как правило,
шестигранные соты с размером ячейки 3...6 мм.
Соты резко увеличивают несущую способность тонких обшивок при
сжатии, предотвращая местную и общую потерю устойчивости, что
283
позволяет сократить число продольных и поперечных подкрепляющих
элементов.
Таким образом, выбор тех или иных конструктивно-технологических
решений, с одной стороны, зависит от конструктивно-силовой схемы
агрегата, определяющей, в основном, его прочность и жесткость, а с
другой - оказывает существенное влияние на выбор конструктивно-
силовой схемы.
11.2. КОНСТРУКТИВНО-СИЛОВЫЕ СХЕМЫ АГРЕГАТОВ
ПЛАНЕРА САМОЛЕТА
Как уже отмечалось, состав конструктивно-силовых элементов,
обеспечивающих требуемые прочность и жесткость конструкции, схему
их расположения и взаимосвязи, принято называть конструктивно-
силовой схемой (КСС) агрегата.
Основные силовые элементы конструкции (обшивка, стрингеры,
лонжероны, стенки, нервюры, шпангоуты) обеспечивают прочность и
жесткость конструкции агрегатов планера самолета при действии
силовых факторов - изгиба, сдвига, кручения.
Вспомогательные (неосновные) силовые элементы служат для
соединения, стыковки и местного усиления основных элементов и
передачи на них местных нагрузок. К ним относятся узлы стыка,
кронштейны навески рулевых поверхностей, приборные рамы,
соединительные детали установки оборудования и грузов - фитинги
(англ, fitting от fiit - прилаживать, монтировать, собирать) и т.д.
КСС агрегатов планера принято классифицировать (рис. 11.9) по типу
силовых элементов, воспринимающих изгибающий момент, который
является определяющим среди силовых факторов. Масса конструктивных
элементов, участвующих в работе на изгиб, составляет основную часть
массы силовой конструкции.
В ферменных КСС продольные и поперечные силовые элементы
- плоские фермы - в соединении образуют пространственную ферму,
воспринимающую все силовые факторы, в том числе и изгибающий, и
крутящий моменты. Элементы фермы работают на растяжение-сжатие.
В конструкциях с ферменной КСС обшивка чаще всего несиловая, т.е. не
участвует в работе на изгиб и кручение, а служиттолько для формирова-
ния обводов агрегата и передачи на ферму распределенной аэродинами-
ческой нагрузки.
В балочных КСС конструктивным элементом, воспринимающим
изгиб, является плоская (лонжерон) или пространственная пустотелая
(кессон) балка.
284
ТИПЫ СИЛОВЫХ ЭЛЕМЕНТОВ,ВОСПРИНИМАЮЩИХ^
(классификационный признак)
Рис. 11.9. Классификация КСС агрегатов планера
В моноблочном крыле (оперении) мощная силовая обшивка является
основным силовым элементом, воспринимающим все виды нагрузок.
Работая на растяжение-сжатие, обшивкавоспринимаетвесь изгибающий
момент. Конструктивно обшивка несущих поверхностей выполняется,
как правило, однослойной - в виде гладкого (не подкрепленного
285
стрингерами) листа или с достаточно частым продольным подкреплени-
ем. Она может быть и многослойной.
Конструкция фюзеляжа типа монокок (франц, monocoque - от греч.
monos- один, единый и франц, coque - скорлупа), или балочно-обшивочная
(скорлупно-балочная), в силовом отношении аналогична конструкции
моноблочного крыла. Обшивка обычно гладкая, и стрингеры устанавли-
ваются только для соединения отдельных листов обшивки фюзеляжа.
Имея достаточно большую собственную жесткость, обшивки в
моноблочном крыле и фюзеляже типа монокок практически не требуют
поперечного подкрепления, поэтому в таких конструкциях нервюры и
шпангоуты устнавливаются только в местах приложения сосредоточен-
ных нагрузок.
В фюзеляжах типа полумонокок восприятие внешних силовых
факторов обеспечивается совместной работой продольных элементов
и обшивки.
В стрингерно-балочном фюзеляже (стрингерный полумонокок)
изгибающий момент воспринимается растяжением-сжатием сводов
несущей обшивки, подкрепленной стрингерами.
В лонжеронно-балочном фюзеляже (лонжеронный полумонокок)
обшивка, подкрепленная стрингерами, работает только на сдвиг,
воспринимая крутящий момент и перерезывающую силу. Изгибающий
момент воспринимают продольные балки. Работу такой конструкции
под нагрузкой мы рассмотрели ранее (см. подразд. 11.1, рис. 11.5).
Работа под нагрузкой кессонного крыла аналогична работе
стрингерно-балочного фюзеляжа и моноблочного крыла. От моноблоч-
ного кессонное крыло отличается наличием лонжеронов, на которые
опираются своды подкрепленной стрингерами несущей обшивки,
играющей основную роль в восприятии изгибающего момента.
В несущих поверхностях кессонного типа лонжероны, работая на изгиб,
воспринимают20...40%действующего изгибающего момента,остальное
воспринимает обшивка.
В несущих поверхностях лонжеронной (лонжеронно-балочной)
конструктивно-силовой схемы весь действующий на конструкцию
изгибающий момент воспринимается лонжеронами. Подкрепленная
стрингерами обшивка вместе со стенками лонжеронов образует
замкнутый контур, работающий на сдвиг и кручение.
В зависимости от числа и расположения продольных элементов в
конструкции несущих поверхностей приняты следующие КСС:
однолонжеронное крыло с задней стенкой (работу такой конструкции
мы рассмотрели в подразд. 11.1, рис. 11.1,11.2); двухлонжеронное крыло
с передней стенкой; трехлонжеронный кессон; многостеночное моноблоч-
ное крыло и т.д. .
286
1
2
Рис. 11,10. Стыковка лонжеронного крыла с
фюзеляжем
Рис. 11.11. Центроплан в конструкции кессон-
ных и моноблочных крыльев и схема переда-
чи сил и моментов с крыла на фюзеляж
3
Здесь еще раз отметим, что клас-
сификация КСС является весьма
условной. Так, моноблочное и
кессонное крылья достаточно близки по схеме восприятия и передачи
нагрузок,здесь всезависитотраспределения материала между обшивкой
и продольными элементами, их конструктивного оформления и условий
закрепления на опоре (фюзеляже).
Условия стыковки крыла с фюзеляжем, собственно, и определяют КСС
крыла. Жесткая обшивка и подкрепляющие ее стрингеры способны
воспринимать сжимающие и растягивающие нагрузки и в любой
конструкции крыла вдали от заделки участвуют (в меру своей несущей
способности) в работе крыла на изгиб.
При креплении крыла, показанном на рис. 11.10, только по лонжеро-
нам (моментными узлами) и стенкам (шарнирными узлами) на силовые
шпангоуты 1 фюзеляжа обшивка и стрингеры прерываются у борта
фюзеляжа на усиленной бортовой нервюре 2 и, не имея опоры в
межлонжеронном пространстве, практически выключаются из работы
крыла на изгиб в зоне А, т.е. потоки усилий с обшивки и стрингеров
перераспределяются на пояса лонжеронов 3 на расстоянии по размаху,
примерно равном межлонжеронному расстоянию, (Сравните схему
работы зоны А со схемой, изображенной на рис. 10.8.)
Кессонные и моноблочные крылья обязательно имеют центроплан
1 (рис. 11.11) - расположенную внутри фюзеляжа пустотелую балку
287
(кессон), соединяющую в единую конструкцию левую 2 и правую 3
консоли крыла. На центроплане, силовой набор которого аналогичен
силовому набору консолей, силами N, сжимающими верхнюю и
растягивающими нижнюю панель центроплана, взаимно уравновешива-
ются изгибающие моменты, действующие на консоли крыла, Л/изг = NH.
На силовые шпангоуты фюзеляжа с крыла через шарнирные узлы
крепления передаются только перерезывающая сила Q в виде сил Р\ и
Р2 и крутящий момент Мк в виде пары сил Р3:
Q = Pl + Р2-, М* = Р3В.
Возможны различные конструктивно-технологические решения
взаимной увязки (соединения) таких крыльев с фюзеляжем, например:
центроплан и консоли выполняются как единое целое и вставляются
в ниш)'(проем, ъырез) фюзеляжа для стыковки ссиловыми шпангоутами;
центроплан "врезан" в конструкцию фюзеляжа, а консоли стыкуются
с центропланом в зоне бортовой нервюры разъемным или неразъемным
контурным, стыком, связывающим по контуру нервюры все силовые
элементы консоли (обшивку, стрингер, пояса и стенки лонжеронов) с
аналогичными силовыми элементами центроплана.
Влюбом случае центроплан "перерезает" основные силовые элементы
фюзеляжа, нарушая регулярность его конструктивно-силовой схемы, что
требует введения в нее дополнительных силовых элементов - продольных
и поперечных бимсов (англ, beams - множ, число от beam - балка,
перекладина), силовых рам и шпангоутов, окантовывающих вырез в
продольном и поперечном направлениях и увязанных с основной
(регулярной) КСС фюзеляжа.
Ниши для уборки шасси, грузовые люки, иллюминаторы, люки для
монтажа и обслуживания оборудования оказывают существенное, а в
некоторых случаях определяющее влияние на КСС несущих и ненесущих
частей самолета.
Форма в плане несущих поверхностей также во многом определяет их
КСС. Приведем в качестве примера некоторые КСС лонжеронных
стреловидных и треугольных крыльев:
стреловидное крыло двухлонжеронной схемы (рис. 11.12, а). Лонжероны
расположены по образующим (вдоль размаха) крыла по линиям
равных процентов хорд (например, передний - на 20 %, задний - на 65 %)
и крепятся к силовым шпангоутам фюзеляжа моментными узлами.
В корневой части такого крыла требуется установка мощных силовых
бортовой 1 и корневой 2 нервюр, поскольку плоскости стенок лонжеро-
нов не лежат в плоскостях стенок силовых шпангоутов фюзеляжа и это
затрудняет передачу на борт фюзеляжа изгибающего момента с крыла;
288
Рис. 11.12. КСС стреловидных и треугольных крыльев
однолонжеронное стреловидное крыло с подкосной балкой (внутренним
подкосом) и задней стенкой 3 (рис. 11.12, б). Лонжерон 1 крепится к
силовому шпангоуту фюзеляжа шарнирным узлом и не передает на
фюзеляж изгибающий момент. Внутренний подкос 2 -это фактически
лонжерон, установленный в плоскости силового шпангоута, к которому
он крепится моментным узлом, передавая изгибающий момент
кратчайшим путем. В такой КСС можно обойтись без установки силовых
нервюр в корневой части крыла, что позволяет организовать между
лонжероном и подкосом большой вырез (нишу), например на нижней
поверхности крыла, для уборки основной опоры шасси;
многолонжеронное треугольное крыло (рис. 11.12, в) с лонжеронами,
идущими по линиям равных процентов хорд (сходящимися к концу
крыла);
многолонжеронное крыло с переломом осей лонжеронов (рис. 11.12, г)
на силовой нервюре 1, позволяющим передать на борт фюзеляжа
изгибающий момент кратчайшим путем.
Необходимость поворота несущих поверхностей (крыло изменяемой
стреловидности, цельноповоротное оперение) привела к разработке
разнообразных специфических КСС этих агрегатов.
Из всего многообразия возможных КСС и конструктивно-технологи-
ческих решений в процессе проектирования должны быть выбраны те,
которые наилучшим образом удовлетворяют всему комплексу требова-
ний, предъявляемых к конструкции ЛА.
10 - 7425
289
11.3. РЕАЛИЗАЦИЯ ТРЕБОВАНИЙ ТЗ В ПРОЦЕССЕ
РАЗРАБОТКИ КОНСТРУКЦИИ
Заказчику в принципе безразлично, какими средствами проектиров-
щик выполнит поставленное ТЗ на проектирование. Ему необходимо,
чтобы спроектированный ЛА до истечения запланированного срока
службы обладал такими летно-техническими и эксплуатационными
характеристиками, которые позволяют выполнять определенный круг
задач при минимальных затратах. Эти достаточно общие критерии,
которыми руководствуется заказчик, трансформируются в процессе
проектирования (принятия конкретных инженерных решений) в ряд
требований (частных критериев), которым должен отвечать каждый
элемент создаваемой технической системы при лимитированной на
начальных этапах разработки массе или стоимости.
Требования аэродинамики. Необходимый уровень ЛТХ при расчетной
(лимитной) массе самолета обеспечивается выбором наиболее рациональ-
ной аэродинамической компоновки, определяющей аэродинамические
характеристики, потребную тяговооруженность и, в конечном счете,
геометрические размеры самолета.
Естественно желание проектировщиков получить высокие аэродина-
мические характеристики за счет использования сложных форм несущих
поверхностей в плане и их профилировки (аэродинамической и
геометрической крутки). Однако это усложняет конструкцию, техноло-
гию ее изготовления и, как следствие, увеличивает стоимость самолета.
Неблагоприятное воздействие внешней среды обусловливает
ухудшение качества поверхности частей самолета, обтекаемых потоком
воздуха, например происходит коррозия. Возникает проблема обеспече-
ния потребных ЛТХ в процессе всего срока эксплуатации самолета.
Применение высококачественных конструкционных материалов,
улучшенная обработка наружных поверхностей (например, полирование
в сочетании с нанесением высокостойких лакокрасочных покрытий), с
одной стороны, позволяет решить эту проблему, а также уменьшить
расходы на поддержание требуемого качества поверхности при
эксплуатации, но, с другой стороны, усложняет и удорожает технологи-
ческие процессы и, как следствие, увеличивает стоимость планера
самолета.
Аэродинамическая компоновка определяет характер и уровень
действующих на самолет нагрузок. Как уже отмечалось, деформация
планера под действием нагрузки ухудшает аэродинамические характерис-
тики, характеристики устойчивости и управляемости самолета, поэтому
уже в процессе формирования аэродинамической компоновки должны
290
быть определены допустимые уровни деформации конструкции, что
определит и требования к ее прочности.
Требования прочности. В процессе формирования концепции
расчетная (лимитная) масса самолета определяется с учетом уровня
действующих на него нагрузок, которые, как уже отмечалось в
подразд. 8.6, могут быть снижены благодаря применению активных
систем управления. Следует, однако, помнить, что применение таких
сложных и дорогостоящих систем, позволяющих снизить массу (и
стоимость) конструкции планера самолета, увеличивает стоимость
самолета. В любой ситуации при определенном (заданном) уровне
нагружения безусловное выполнение требований Норм прочности,
определяемых Авиационными правилами, связано с поиском компромис-
сных решений в процессе разработки конструкции.
Естественно, что в каждой новой разработке конструктор стремится
использовать конструктивно-силовые схемы и конструктивные решения,
хорошо зарекомендовавшие себя в предыдущих разработках. Однако
если их применение не позволяет уложиться в лимитную массу, то
проектирование новой конструкции с приемлемым уровнем технического
риска ставит перед конструктором проблему: или увеличивать коэф-
фициент безопасности при расчете конструкции на прочность (т.е.
уменьшать уровень напряжений, действующих в конструкции в процессе
эксплуатации), что почти неизбежно приведет к превышению лимитной
массы, или провести широкий комплекс экспериментальных работ по
отработке прочности новой конструкции с целью уменьшения коэффици-
ента безопасности, что неизбежно увеличит сроки и стоимость разработ-
ки.
Конструктор может принять меньшие коэффициенты безопасности
для вновь разрабатываемой конструкции, т.е. увеличить действующие
в ней напряжения, если предполагается изготовление конструкции на
предприятиях с высоким техническим уровнем производства (строгая
технологическая дисциплина, тщательный контроль качества и т.д.), что
позволит получить лимитную массу конструкции, однако увеличит ее
стоимость.
Характер и уровень действующих в конструкции напряжений (см.
подразд. 8.2) предопределяет характер ее разрушения и сроки работы до
отказа. Таким образом, надежность работы конструкции во многом
определяется ее прочностью.
Требования надежности и живучести конструкции. Увеличение
прочности и жесткости конструкции за счет обеспечения низкого уровня
действующих в ней напряжений (высоких коэффициентов безопасности),
естественно, увеличивает ее надежность и практически исключает отказы
в эксплуатации в течение установленного заказчиком ресурса. Однако
этот путь обеспечения надежности ведет к увеличению массы конст-
ю*
291
Рис. 11.13. Безопасно повреждаемая конструк-
ция лонжерона крыла (пример)
рукции и (при выполнении тре-
бований ТЗ по ЛТХ) к снижению
отдачи по полезной нагрузке, что
при современном уровне требова-
ний к авиационной технике прак-
тически не позволяет создать
конкурентоспособный ЛА.
Обеспечить высокую эффектив-
ность ЛА в течение установленно-
го заказчиком ресурса позволяет
осуществление эксплуатации в
условиях "безопасного повреж-
дения" конструкции.
Принцип безопасного повреж-
дения конструкции закладывается
в конструкцию при ее проектиро-
вании и расчете на прочность и
предполагает, что конструкция,
спроектированная по этому прин-
ципу, гарантирована от катастро-
фических разрушений (устало-
стных или каких-либо других)
даже при появлении повреждений
в наиболее ответственных элементах, т.е. обеспечивается ее живучесть.
Так, при использовании многолонжеронных КСС крыла (см.
рис. 11.12, в, г) разрушение одного из лонжеронов не приводит неизбежно
к потере несущей способности крыла.
Принцип безопасно повреждаемой конструкции обеспечивается не
только резервированием основных силовых элементов КСС агрегата,
но и с помощью специальных конструктивных решений, позволяющих
уменьшить скорость распространения повреждений в конструкции.
Так, например, в стенке лонжерона 2 крыла (рис. 11,13, а) возможно
появление усталостной трещины 1. Накладка 1 (рис. 11.13, б), установлен-
ная на стенку, является ограничителем распространения трещины
("стоппером", от англ, stop - задержка, остановка), которая в такой
конструкции развивается значительно медленнее. Стойка2, подкрепляю-
щая стенку, также является ограничителем распространения трещины.
Ограничитель 3 распространения трещин является дополнительным
поясом лонжерона, обеспечивающим работоспособность конструкции
в случае разрушения нижнего пояса 4 лонжерона.
Таким образом, безопасно повреждаемая конструкция может
выдерживать нормальные эксплуатационные нагрузки в течение
определенного времени после повреждения без полного разрушения.
292
Естественно, что такие конструктивные решения требуют затрат
дополнительной массы материала, однако этот путь решения проблемы
более эффективен, чем снижение действующих в конструкции напряже-
ний. Естественно и то, что проектирование таких конструкций имеет
смысл только в том случае, если их изготовление будет вестись на
предприятиях с высоким техническим уровнем производства и, что самое
главное, если в процессе эксплуатации можно будет обнаружить
первоначальное повреждение и держать под контролем процесс
дальнейшего развития этого повреждения.
Следовательно, безопасная повреждаемость определяется не только
конструктивно-технологическими решениями, предотвращающими
возникновение или развитие повреждений, но и возможностью надежно
контролировать возникновение и развитие повреждений, а также
производить местный (локальный) ремонт, когда развитие повреждения
подходит к недопустимому пределу.
Таким образом, требования надежности и живучести связаны с
требованиями, обусловленными производством, эксплуатацией и
ремонтом конструкции. Некоторые аспекты этих процессов рассмотре-
ны в гл. 16 и 17.
Перечисленные выше некоторые требования к конструкции,
органически связанные с ТЗ и критериями эффективности проектируемо-
го ЛА, находятся в сложной взаимосвязи, дополняя (требования
прочности и надежности) или взаимоисключая (требования аэродинами-
ки и простоты изготовления) друг друга. Однако все они противоречат
основному требованию ТЗ - получить высокоэффективный ЛА при
минимальной массе или стоимости.
Комплексный учет всех требований представляет основную сложность
при разработке конструкции. Поиск новых, нетрадиционных
конструктивно-технологических решений, позволяющих выполнить
требования ТЗ при минимальной массе (стоимости) конструкции, -
основное направление теории и практики проектирования самолетов.
Некоторые проектировщики связывают обеспечение существенного
прогресса в этой области с проектированием конструкции самолета из
композиционных материалов. По оценкам специалистов, полная замена
традиционных алюминиевых сплавов композиционными материалами
позволит снизить массу конструкции транспортного самолета на 30 %.
При этом уменьшаются размеры крыла, оперения и при неизменных
размерах фюзеляжа, обеспечивающих потребные габариты пассажирской
кабины (рис. 11.14), уменьшаются масса самолета, потребная тяга и
размеры двигателей, расход топлива при заданных полезной нагрузке,
дальности и скорости полета, улучшаются динамическиехарактеристики
самолета и его реакция на управление.
Однако на пути широкого использования КМ в конструкции самолета
стоит множество проблем: обеспечение их стабильных прочностных
293
Рис. 11.14. Транспортные самолеты с кон-
струкцией из алюминиевых сплавов (7) и из
композиционных материалов (2)
характеристик, существенное
снижение стоимости, разработка
экологически чистых и простых
технологических процессов созда-
ния и ремонта, а главное, утилиза-
ции отработавших свой срок эле-
ментов конструкции, необходи-
мость проведения широкого спек-
тра испытаний конструкций из
КМ в реальных условиях эксплуа-
тации. Решение этих проблем
позволит уменьшить технический
риск применения КМ до приемле-
мого уровня.
Приведенный пример показы-
вает, что выбор определенных
конструктивно-технологических решений существенно влияет на
компоновку самолета.
Напомним (см. подразд. 1.3 и 1.4), что компоновка самолета - это
взаимноерасположение различных элементов (систем), устанавливаемое
на основании объективных законов аэродинамики, устойчивости и
управляемости, прочности, проектирования конструкции, технологии
изготовления и эксплуатации, эргономики, экономики и т.д.
Таким образом, конструктивно-силовая компоновка самолета
(взаимная увязка КСС основных агрегатов, эксплуатационных и
технологических разъемов и люков, выбор основных конструктивно-
технологических решений) неотделима от его аэродинамической
компоновки (выбора форм и размеров самолета, характеризующих его
облик и, следовательно, аэродинамические характеристики) и объемно-
весовой компоновки (определения объемов и взаимного расположения
отсеков для размещения полезной нагрузки и всех систем с учетом
необходимого эксплуатационного разбега центровок самолета).
Компоновка самолета как рабочий процесс предполагает предваритель-
ный синтез проекта самолета на стадии разработки технического
предложения (аванпроекта) и окончательное уточнение его на стадии
разработки эскизного проекта. Именно в результате системного подхода
к разрешению множества противоречий в процессе совместной работы
различных специалистов принимается окончательный вариант
компоновки.
В качестве примеров результатов этой работы представлены общий
вид и компоновочная схема самолета Ил-114 (см. рис. 1.5), администра-
тивного самолета (рис. 11.15) и укрупненная компоновочная схема
легкого многоцелевого самолета (см. рис. 15.1).
294
to
VO
Lzi
----Стабилизатор
— Руль высоты
Передняя опора шасси
Основная опора шасси
Предкрылок ---------
Усиленные шпангоуты
крепления крыла
Рис. 11.15. Общий вид и компоновочная схема административного самолета (показаны размеры, устанавливаемые на общем виде)
Салон пассажиров
Буфет-----------
Входная дверь —
Кабина экипажа—
Пилотажно-навига-
ционное --------
оборудование /
F Элерон
Интерцептор
Гондола двигателя
Задний лонжерон
стабилизатора
Передний
лонжерон
стабилизатора
Киль
Руль
направления
Усиленная
нервюра
навески
руля
высоты
Передний лонжерон киля
Задний лонжерон киля
Усиленные шпангоуты
крепления киля
Туалет
Гардероб
Левый двигатель
Закрылок
Гондола шасси
Топливный бак-кессон
Передний лонжерон крыла
Задний лонжерон крыла
Усиленная нервюра
навески элерона
На этапах рабочего проектирования ведется подробная конструк-
тивно-технологическая проработка всех систем, силовой установки,
планера, системы управления и взлетно-посадочных устройств самолета.
Проверьте, как Вы усвоили материал
1. Как уравновешивается сила Z?
Какие деформации испытывают
элементы планера самолета от дей-
ствия силы Z?
2. Определите КСС вертикального
оперения.
Правильно или неправильно увяза-
на КСС оперения с КСС фюзеляжа?
Объясните почему.
3. Объясните работу крыльев под
действием воздушной нагрузки.
4. Определите КСС крыла и фюзе-
ляжа.
Назовите основные агрегаты и
элементы конструкции и объясните их
назначение.
296
Интерпретируйте следующие основные понятия:
• требования к конструкции; прочность конструкции; усталостная проч-
ность; безопасно повреждаемая конструкция; лимитная масса;
• внешние нагрузки; внутренние силовые факторы; действующие напряжения;
допустимый уровень деформации; коэффициент безопасности;
• силовые элементы; балка; ферма; рама; свод обшивки; безмоментный узел;
моментный узел; контурный стык;
• конструктивно-силовая компоновка; конструктивно-силовая схема; основ-
ные силовые элементы; вспомогательные силовые элементы;
• крыло лонжеронной КСС; моноблочное крыло; кессонное крыло; центроплан;
стреловидное однолонжеронное крыло с подкосной балкой; многолонжеронное
крыло с переломом осей лонжеронов;
• монокок; стрингерный полумонокок;лонжеронный полумонокок;лонжеронно-
балочный фюзеляж; ниша фюзеляжа;
• несиловая обшивка; силовая обшивка; лонжерон; внутренний подкос; бимс;
стрингер; нервюра; отверстия облегчения; шпангоут; фитинг; ограничитель
распространения трещины;
• заготовка; гнутый стрингер; прессованный профиль; монолитный элемент;
прессованная панель; многослойная панель; заполнитель.
297
Глава 12
ЭЛЕМЕНТЫ КОНСТРУКЦИИ СИСТЕМ
УПРАВЛЕНИЯ
Количество, расположение, параметры аэродинамических или других,
например струйных, рулей и, как следствие, состав системы управления
ЛА (см. подразд. 7.2.3) определяются в процессе компоновки с целью
обеспечения балансировки, устойчивости и управляемости с соот-
ветствующими показателями (см. подразд. 7.2.4) во всем диапазоне
режимов полета, оговоренных в ТЗ.
Потребные ЛТХ и общая компоновка ЛА определяют компоновку
и конструкцию систем управления.
12.1. СИСТЕМЫ ПРЯМОГО УПРАВЛЕНИЯ САМОЛЕТОМ
В системах прямого (непосредственного) управления самолетом
командные рычаги непосредственно связаны с рулевыми поверхностями
через проводку управления.
На рис. 12.1 показана принципиальная схема системы прямого
управления рулем направления при помощи жесткой проводки управления.
Летчик усилием ноги перемещает педали 1 ножного управления и через
систему жестких тяг 2 при помощи рычага ("кабанчика") 3, неподвижно
соединенного с рулем направления 4, поворачивает руль относительно
оси 5. Под держивающие (опорные) качалки 6 обеспечивают прямолиней-
ность трассы управления. При помощи рычажных качалок 8 различной
конфигурации производится прокладка трассы управления в наиболее
удобных местах по соображениям компоновки системы управления на
самолете. За счет разных плеч качалок 8 изменяются направления
движения тяг и усилия в проводке управления. Все качалки опи-
раются на конструкцию планера самолета при помощи кронштейнов 7.
На рис. 12.2 показана принципиальная схема системы прямого уп-
равления элеронами при помощи тросовой (гибкой) проводки управления.
Поворот по стрелке (вправо по полету) штурвала 1, связанного осью 2
с зубчатым колесом 19, вызывает поступательное движение (по
298
Рис. 12.1. Система прямого управления рулем направления
чертежу - вверх для левой по полету половины) многопластинчатой цепи
(цепи Галля) 18 и связанного с ней троса 17. Огибая ролики 5, трос
выходит из корпуса штурвальной колонки 15, которая при помощи
кронштейнов 14 крепится в кабине экипажа. Далее тросовая проводка
проходит в конструкции планера самолета к элерону. Необходимое
направление трассы управления задается роликами 13, которые, кроме
того, удерживают трос от провисания на прямолинейных участках
трассы, Натянувшись, трос повернет сектор 10 и соединенную с ним
неподвижно качалку 9, что приведет к поступательному движению тяги
Рис. 12.2. Система прямого управления элеронами
299
8, поворачивающей элерон 5
вокруг оси 6 при помощи ры-
чага 7. Поворот сектора 10
вызовет натяжение троса 11,
что приведет к отклонению
другого элерона (в данном
случае правого по полету).
Регулировку системы и натяж-
ку тросов при техническом
обслуживании самолета на
земле производят с помощью
тандера 4.
Движение штурвала 1
Рис. 12.3. Ручка управления маневренным само- вперед-назад ПО Полету ВЫЗЫ-
летом ваег поворот штурвальной
колонки 75 в подшипниках
кронштейнов 14 относительно поперечной оси 12. При этом жесткая
проводка управления, идущая от рычага 16 штурвальной колонки,
осуществляет поворот руля высоты.
При движении штурвала вперед-назад тросы 17 и 11 гибкой проводки
управления остаются неподвижными за счет того, что они выходят из
корпуса штурвальной колонки точно по оси поворота 12. Это обеспечи-
вает независимость управления рулями высоты и элеронами с помощью
штурвальной колонки.
Независимость управления рулями высоты и элеронами с помощью
ручки управления маневренными самолетами проиллюстрирована на
рис. 12.3. Ручка 1 при отклонении вперед-назад вращается в подшипниках
вокруг оси а-а, закрепленной неподвижно на оси-кронштейне 2.
Поступательное движение тяги 3 через поддерживающую качалку 4 и
далее по трассе управления передастся на руль высоты. Отклонение ручки
вбок (влево-вправо по полету) вызовет поворот оси-кронштейна 2 вокруг
оси Ъ-Ь. Поворот рычага 5, неподвижно закрепленного на оси-кронштей-
не, приведет к поступательному движению тяги 6, идущей к элеронам,
При этом тяга 3, идущая к рулям высоты, движется по конической
поверхности с вершиной в точке d, направляющей которой является дуга
окружности, описываемая точкой с ручки управления. Точка d, лежащая
на оси Ъ-Ь, неподвижна. Следовательно, при отклонении элеронов руль
высоты неподвижен, и наоборот.
Любое другое положение точки d (не на оси Ъ-Б) приведет к тому, что
при отклонении элеронов будут отклоняться и рули высоты, т.е. условия
независимости управления на ручке не будут выполнены.
300
12.2. УСИЛИЯ НА РЫЧАГАХ УПРАВЛЕНИЯ
Усилия на рычагах управления в системах прямого управления
зависят от аэродинамических сил на рулевых поверхностях. Так, в
горизонтальном сбалансированном полете (рис. 12.4) летчик должен
приложить к ручке 1 усилие Рл, чтобы удержать в определенном
положении руль высоты 2, стремящийся под действием аэродинамичес-
кой нагрузки, равнодействующая которой /?р приложена в центре
давления руля, повернуться относительно оси 3 вращения руля.
Соотношение сил Рл и /?р будет зависеть от соотношения плеч рычагов
и качалок в трассе управления.
Момент Мш = Rpa аэродинамических сил руля относительно оси
вращения называется шарнирным моментом руля.
В общем случае условие равенства работы летчика, затраченной на
перемещение рычага управления, и работы аэродинамических сил при
повороте рулевой поверхности на угол можно записать следующим
образом:
P^dx = Mmd&.
Отсюда находим
Рл = К,-? = Мшкш,
ах
где кш = dd/dx - коэффициент кинематической передачи от руля к
командному рычагу, характе-
ризующий соотношение между
элементарными угловыми пе-
ремещениями руля dt> и потреб-
ными для этого элементарны-
ми линейными перемещениями
ручки dx.
Таким образом, значение кш
определяется соотношением
плеч рычагов и качалок в трас-
се управления. Оно нормирует-
ся Авиационными правилами,
поскольку возможные переме-
щения ручки(или штурвала)и
педалей, а также усилия на них
определяются физиологиче-
скими возможностями летчика.
Рис. 12.4. Схема усилий на рулевых поверхностях
и рычагах управления
301
Рис. 12.5. Влияние положения оси вращения
руля на шарнирный момент
Из приведенной формулы ясно,
что усилия на рычагах управления
будут зависеть от аэродинамичес-
ких сил на рулевой поверхности,
т.е. будут связаны с изменением
Рпс. 12.6. Аэродинамическая компенсация
рулей
скорости, высоты полета и перегрузки, поскольку определенному
отклонению руля (и, как следствие, определенной силе на рулевой
поверхности) будет соответствовать определенная перегрузка (см.
подразд. 7.2.1).
При проектировании системы управления для обеспечения приемле-
мых для летчика перемещений и усилий на рычагах управления можно
изменять шарнирный момент руля за счет выбора положения оси
вращения руля относительно центра давления руля (рис. 12.5). Так, если
ось вращения руля проходит через точку 1 перед центром давления руля
2, в котором приложена аэродинамическая сила 7?р, то это потребует от
летчика усилий на преодоление возникающего на руле шарнирного
момента, что соответствует подсознательным, рефлекторным действиям
при пилотировании. Летчик в этом случае своими усилиями на рычагах
управления преодолевает инерцию самолета при совершении маневра.
Если ось вращения руля проходит через центр давления (точка 2), а тем
более за центром давления (через точку 3), то это совершенно недопусти-
мо в системах прямого управления. В первом случае летчик не будет
ощущать никаких усилий при перемещении рычагов управления, кроме
сил трения в проводке. Во втором случае на рычагах управления
возникают усилия обратного знака (самолет как бы сам ведет рычаги
в направлении, необходимом для маневра), что нарушает привычные
представления летчика о режиме полета и делает управление самолетом
практически невозможным. Таким образом, выбором положения оси
вращения рулевой поверхности можно получить необходимое значение
шарнирного момента руля.
Часть рулевой поверхности (на рис. 12.6 заштрихована), находящуюся
перед осью вращения рулевой поверхности, принято называть аэродина-
302
1 УС 3
Рис. 12.7. Иллюстрация принципа работы
триммера
мическим компенсатором, посколь-
ку аэродинамические силы на этой
части руля создают относительно
оси вращения руля момент, кото-
рый уменьшает (компенсирует)
общий шарнирный момент Мш
рулевой поверхности.
Для облегчения работы летчи-
ка (уменьшения усилий на рыча-
гах управления в длительном уста-
новившемся полете) применяется
расположенная на рулевой поверхности 1 (рис. 12.7) специальная
аэродинамическая поверхность 2-триммер (англ, trimmer-приводящий
в порядок). Нажатием кнопки триммирования на ручке (штурвале) уп-
равления летчик подает управляющий сигнал (УС) на электрический
механизм 3, который сообщает поступательное движение тяге 4 и
отклоняет триммер 2. Небольшая аэродинамическая сила триммера 7?т,
не уменьшая практически силу рулевой поверхности 7?р, потребную для
балансировки, позволяет существенно (практически до нуля) уменьшить
шарнирный момент Мш = Rpa - RTb = 0 и соответственно усилия на
рычагах управления. Если при Мш = 0 самолет сбалансирован, летчик
может "бросить управление", поскольку усилия на рычагах управления
также равны нулю. Самолет совершает устойчивый полет "при
свободных рычагах управления".
Для дозвуковых самолетов выбором положения оси вращения
рулевых поверхностей и, как следствие, шарнирного момента Мш, а
также плеч рычагов и качалок (т.е. коэффициента кинематической
передачи кщ в соответствии с требованиями) удается добиться приемле-
мых для летчика показателей управляемости по всем каналам управле-
ния.
Принципиально возможно создание систем управления без непосред-
ственной связи летчика с органами управления. На дозвуковых самолетах
для этой цели используют серворули (от лат. servus - раб, слуга).
Серворуль 1 (рис. 12.8) представляет собой аэродинамическую повер-
хность, аналогичную триммеру, однако серворуль устанавливается на
свободно подвешенной рулевой поверхности 2. В этом случае отсутству-
ют тяги управления (или гибкая проводка), отклоняющие рулевую
поверхность.
Подача управляющего сигнала на электромеханизм сервоуправления
3 приводит к отклонению на угол 5С серворуля 1 (рис. 12.8, а). Под
действием набегающего потока на серворуле возникает сила Rc, которая
имея плечо, равное Ь, создает момент Мс, поворачивающий свободнопод-
303
Рис. 12.8. Иллюстрация принципа работы
серворуля
вешенный руль 2 относительно оси
4. Поворот рулевой поверхности
(рис. 12.8, 6) приведет к изменению
кривизны несущей поверхности и
возникновению на ней управляю-
щей силы Я2.
Повернувшись относительно оси
4 на угол 5р, рулевая поверхность
остановится.
При этом
Чя = Лра - Къ = °-
Таким образом,отклоняя серво-
руль на определенный угол, летчик
может создавать балансирующие и
управляющие силы на рулях. Одна-
ко в этом случае нет обратной связи
по усилиям на рулевых поверхнос-
тях и усилиям на рычагах управления, поэтому летчик "не чувствует
самолет". Эту обратную связь по усилиям приходится формировать
искусственно.
12.3. СИСТЕМА НЕПРЯМОГО (БУСТЕРНОГО) УПРАВЛЕНИЯ
Для скоростных самолетов большая разница между максимальными
и минимальными скоростями полета затрудняет создание системы
управления, эффективной на всех режимах полета. При приближении к
скоростям полета, соответствующим скорости звука, резко уменьшается
эффективность рулей.
На рис. 12.9, а показано изменение распределения аэродинамической
нагрузки по хорде стабилизатора при отклонении руля высоты на угол
5р при дозвуковой скорости полета. Видно, что отклонение руля высоты
приводит к увеличению полной аэродинамической силы не только на
руле, но и на стабилизаторе, и полная сила на горизонтальном оперении
304
Без отклонения
Я = Яст + Яр при отклонении
руля существенно возрастает.
Увеличение скорости по-
лета (рис. 12.9, б) приводит к
появлению местных скорос-
тей обтекания, равных ско-
рости звука. В зоне передней
кромки руля развивается
местная сверхзвуковая зона
течения, заканчивающаяся
скачком уплотнения 1.
Левый столбец рисунков
иллюстрирует обтекание,
когда рулевая поверхность
находится в нейтральном
положении, правый - при
отклоненной рулевой повер-
хности.
При наличии скачка аэро-
динамические силы Яр, вы-
званные отклонением руля,
изменяются на рулевой по-
верхности, но не изменяют
распределение и значение
аэродинамической силы на
расположенной впереди ру-
ля поверхности стабилиза-
тора, и полная сила на го-
ризонтальном оперении
R = + Яр имеет существенно меньшее значение, чем в случае чисто
дозвукового обтекания (см. рис. 12.9, а).
На сверхзвуковой скорости полета (рис. 12.9, в) при наличии скачков
уплотнения на передней и задней кромках профиля стабилизатора из-за
развивающихся срывов потока на обтекаемой поверхности эпюра
распределения давления по хорде близка к прямоугольнику. Полная
аэродинамическая сила на горизонтальном оперении R = Rn + Яр
уменьшается по сравнению с дозвуковым режимом полета. В этом случае
отклонение руля высоты также не изменяет аэродинамическую силу на
расположенной впереди руля поверхности обтекания. Эффективность
305
рулевой поверхности резко умень-
шается.
Получить необходимые для
маневра управляющие силы
Лцпго (рис. 12-9. г) на сверх-
звуковых режимах полета поз-
воляет применение цельнопово-
ротного горизонтального оперения
(ЦПГО).
Однако применение ЦПГО
приводит к изменению усилий на
ручке управления в таких широ-
ких пределах, что непосредствен-
ное управление ЦПГО становится
невозможным.
Так, если поместить ось вращения ЦПГО в точке 1 (рис. 12.10),
являющейся центром давления ЦПГО на дозвуковых режимах полета,
то в этом случае летчик не будет ощущать усилий на ручке, в то время
как на сверхзвуковых режимах полета (центр давления ЦПГО находится
в точке 3) усилия будут непомерно велики.
Точно так же нецелесообразно размещать ось вращения ЦПГО в точке
3. В этом случае летчик не будет ощущать усилий на ручке на сверхзвуко-
вых режимах полета, в то время как на дозвуковых режимах полета на
рычагах управления возникают усилия обратного знака (самолет как бы
сам "ведет" рычаги в направлении, потребном для маневра), что делает
управление самолетом практически невозможным.
Размещение оси вращения ЦПГО в точке 2 требует одинаковых
усилий при управлении на дозвуковых и сверхзвуковых режимах полета,
но это приводит к перемене знака усилий на ручке управления при
переходе от дозвукового к сверхзвуковому полету, что совершенно
недопустимо с точки зрения летчика.
Следовательно, для сверхзвуковых самолетов необходимо создать
такую систему управления, которая способна преодолеть большой
шарнирный момент и быть нечувствительной к изменению его знака.
Преодолеть большие усилия, возникающие при управлении ЦПГО,
можно с помощью дополнительного источника энергии. В настоящее
время чаще всего в качестве такого источника энергии используется
гидравлическая система, которая питает вспомогательное устройство
для привода ЦПГО - гидроусилитель, или бустер (англ, booster, от boost -
поднимать, повышать давление, напряжение).
Гидроусилитель (рис. 12.11) представляет собой силовой цилиндр,
корпус 1 которого неподвижно закреплен на элементе конструкции
306
3 8 7 5 I 6
Рис. 12.11. Устройство гидроусилителя
планера самолета 2 (балке,
силовом шпангоуте, силовой
нервюре и т.д.). При нейтраль-
ном положении (рис. 12.11, а)
управляющего штока гидроу-
силителя (золотника) 3 цилин-
дрические пояски 4 золотника
перекрываютканалы, соединя-
ющие полости А и Б силового
цилиндра (разделенные по-
ршнем 5 исполнительного што-
ка 6 гидроцилиндра) с полостя-
ми с и dзолотниковой камеры.
Полость d золотниковой
камеры соединена с напорной
(питающей) магистралью 7, а
полости с - со сливной магист-
ралью 8 гидросистемы самоле-
та. В таком положении шток
гидроусилителя 6 неподвижен
и надежно зафиксирован не-
сжимаемой рабочей жидкостью
гидросистемы, запертой золот-
ником в полостях А и Б сило-
вого цилиндра.
Сила Р, действующая на
шток 6 гидроцилиндра со стороны ЦПГО самолета, воспринимается
силовым элементом 2 конструкции самолета. При перемещении
(рис. 12.11,6) золотника 3 вправо на расстояние А/ полость А силового
цилиндра сообщается с напорной магистралью 7, а полость Б - со
сливной магистралью 8 гидросистемы, и из-за разности давлений,
действующих на поршень 5, исполнительный шток 6 гидроцилиндра
начнет двигаться вправо.
При движении исполнительного штока относительно неподвижного
корпуса 1 и золотника 3 произойдет (рис. 12.11, в) перекрытие каналов,
соединяющих полости А и Б с полостями cud золотниковой камеры и
соответственно магистралями гидросистемы. Исполнительный шток 6
гидроусилителя остановится, переместившись вправо на расстояние А/,
и золотник 3 снова окажется в нейтральном положении.
Поскольку рабочий ход золотника, необходимый для перепуска
жидкости, измеряется несколькими миллиметрами, исполнительный шток
307
Рис. 12.12. Установка гидроусилителя для приво-
да ЦПГО
гидроусилителя перемещается
практически одновременно с
перемещением золотника ("от-
слеживает" его движение).
Таким образом, гидроуси-
литель является следящей сис-
темой, на вход которой (на
золотник) подаются незначи-
тельные усилия (несколько
ньютонов), необходимые для
преодоления сил трения в про-
водке управления и в золотни-
ковой камере, в то время как
на выходе (при движении ис-
полнительного штока) можно
получить большие значения
силы Р = Fp, потребные для
преодоления шарнирного мо-
мента ЦПГО (F - площадь
поршня,р -давление в гидросистеме самолета).
Здесь так же, как и при объяснении работы гидроусилителя под
нагрузкой, мы воспользовались упрощенной схемой уравновешивания,
имеющей сугубо иллюстративный характер. В действительности
механизм уравновешивания значительно сложнее-весь силовой "баланс"
происходит на малых (микрометровых) ходах золотника, когда даже при
остановке бустера под нагрузкой и нейтральном положении золотника
(см. рис. 12.11, а) есть перетекание жидкости из напорной в сливную
магистраль гидросистемы через полости с и dзолотниковой камеры и,
следовательно, схема уравновешивания значительно сложнее.
Тем не менее рис. 12.11 дает достаточно точное представление о
принципе работы гидроусилителя как следящей системы.
С помощью гидроусилителя 1 (рис. 12.12), установленного на силовой
продольной балке 2 фюзеляжа, осуществляется привод (управление)
ЦПГО. Рычаг ("кабанчик") управления 3 соединен с общей осью 4
консолей 5 ЦПГО, вращающейся в подшипниках б, установленных на
усиленном шпангоуте 7фюзеляжа. Шарнирный момент Мш ЦПГО через
рычаг 3 воздействует на исполнительный шток 8 гидроусилителя (Р =
= Мш1а) и уравновешивается в узле установки гидроусилителя.
Для управления ЦПГО достаточно незначительных усилий на ручке
и в проводке управления, соединенной с управляющим штоком
(золотником) 9 гидроусилителя. В этом случае величина и знак
308
(направление) шарнирного
момента управляемой повер-
хности не оказывают никакого
влияния на усилия в проводке
и на ручке управления, по-
скольку при наличии обратной
связи по перемещениям между
отклонением ручки и угловым
отклонением ЦПГО отсутству-
ет обратная связь по усилиям
на исполнительном и управля-
ющем штоках гидроусилителя.
Система управления, в кото-
рой гидроусилитель установлен
без обратной связи по усилиям,
называется необратимой.
Однако наличие обратной
связи по усилиям является не-
обходимым условием обеспече-
ния приемлемых для летчика
показателей управляемости.
Поэтому обратную связь по
усилиям приходится создавать
искусственно, вводя в необра-
тимую систему механизмы за-
грузки (М3).
Простейший механизм за-
грузки (рис. 12.13) представля-
ет собой пружину, которую
Рнс. 12.13. Устройство механизма загрузки
летчик сжимает при отклоне-
нии ручки управления. Нейтральное (ненагруженное) состояние
механизма загрузки отмечено на чертеже точкой 0. При перемещении
штока 1 справа налево законцовка штока перемещается из точки 0 в
точку А, упор 2 выходит из контакта с шайбой 3, которая оперта на
корпус 4. Упор 5 сдвигает шайбу 6влево. Происходит сжатие пружины
7.
Для перемещения штока требуется приложить силу Р, значение
которой зависит от жесткости пружины и перемещения штока &Х.
Большему отклонению ручки (ходу проводки управления .Д') соответству-
ет большее усилие в проводке управления (усилие сжатия Р пружины
309
а б
Рис. 12.14. Устройство автомата регулирования
управления
механизма загрузки), что соот-
ветствует характеру усилий в
системе прямого (непосред-
ственного) управления рулевы-
ми поверхностями.
Такой вид загрузки тем не
менее не может удовлетворить
летчика, поскольку усилия на
ручке управления должны из-
меняться с изменением высоты
и скорости полета- увеличи-
ваться с ростом скорости и
уменьшением высоты и наобо-
рот.
В то же время для получе-
ния одной и той же перегрузки
на различных скоростях и вы-
сотах полета требуются разные
отклонения рулевой повер-
хности (меньшие на больших
большие на малых скоростях и
скоростях и малых высотах полета и
больших высотах полета).
Напомним, что аэродинамические силы Ra = CRSpV2/2 растут как с
увеличением скорости полета V, так и с уменьшением высоты полета (т.е.
с увеличением плотности воздуха р). Следовательно, в системах
управления, где усилия на рычагах управления имитируются с помощью
механизма загрузки, необходимо в соответствии с режимом полета
изменить не только усилие пружин М3, но и коэффициент кинематичес-
кой передачи, т.е. плечи рычагов и качалок в проводке управления.
Для обеспечения желаемых характеристик управляемости, т.е.
согласования усилий на рычагах управления и потребных отклонений
рулевых поверхностей с высотой и скоростью полета, в необратимую
бустерную систему управления вводят автомат регулирования управле-
ния (АРУ).
Простейший автомат регулирования управления (рис. 12.14)
представляет собой качалку, длина плечей которой автоматически
изменяется при изменении режима полета.
ИсполнительныймеханизмАРУпредставляетсобойтелескопическую
качалку, корпус 1 которой шарнирно крепится к кронштейну 2,
установленному на усиленном элементе конструкции планера самолета.
Внутри корпуса 1 передвигается шток 3, опираясь на пояски 4. Привод
310
(перемещениевверх или вниз штока 3) осуществляет шток 5 электромеха-
нического устройства 6, связанный со штоком 3 при помощи кронштей-
на 7.
В электромеханическом устройстве 6 в зависимости от электрического
управляющего сигнала (УС) вращательное движение электродвигателя
при помощи встроенного редуктора преобразуется в поступательное
(вверх-вниз) движение штока 5. Через точку А на шток 3 передается
усилие Р3 механизма загрузки. В точке В этого штока шарнирно крепится
тяга управления 8, идущая к управляющему штоку гидроусилителя.
К корпусу 1 в точке Б шарнирно крепится тяга 9, идущая к рычагу
управления в кабине летчика.
В зависимости от режима полета автоматические бортовые устройства
вырабатывают определенный управляющий сигнал f(V, Н), который в
виде электрического сигнала поступает в электромеханизм 6.
При больших скоростях полета (и соответственно небольших
потребных для маневра отклонениях рулевой поверхности) автоматичес-
ки устанавливается малое плечо /п (рис. 12.14, а). В этом случае малому
перемещению тяги 9, идущей от рычага управления, соответствует малое
перемещение тяги 8 и, как следствие, малое отклонение рулевой
поверхности. В то же время на рычаг управления действуют большие
усилия Рп от механизма загрузки. Их величина зависит от значений силы
Р3 механизма загрузки и плеча /3.
При малых скоростях полета (и соответственно больших потребных
для маневра отклонениях рулевой поверхности) автоматически
устанавливаются большее плечо /п (рис. 12.14, б) и соответственно
меньшее плечо 1у Возрастают перемещения тяги 8 и углы отклонения
рулевой поверхности и уменьшаются усилия на рычаге управления Рп.
Точно так же автомат регулирования управления отслеживает
изменение высоты полета. Таким образом, в необратимой бустерной
системе управления обеспечивается характер управления, аналогичный
управлению самолётом с системами прямого (непосредственного)
управления.
Чтобы обеспечить возможность триммирования усилий на рычагах
управления в длительном установившемся полете, в необратимую
бустерную систему управления вводят механизм триммерного эффекта
(МТЭ).
Простейший механизм триммерного эффекта (рис. 12.15) представляет
собой электромеханическое устройство, аналогичное применяемому в
автомате регулирования управления, которое позволяет летчику
нажатием кнопки на ручке (штурвале) управления (как и в системе
прямого управления) подать электрический управляющий сигнал
триммирования на электромотор МТЭ. За счет перемещения штока 1
311
Рис. 12.15. Устройство механизма триммер*
ното эффекта
Рнс. 12.16. Принципиальная схема необрати-
мой бустерной системы управления
механизма триммерного эффекта перемещается корпус 3 при неподвиж-
ном штоке 4 и ослабляется пружина 2 механизма загрузки. Таким
способом уменьшаются усилия на рычагах управления.
Принципиальная схема необратимой бустерной системы управления
цельноповоротным горизонтальным оперением показана на рис. 12.16.
Включенная в состав системы управления раздвижная тяга -
устройство, аналогичное МТЭ, - позволяет непосредственно, без участия
летчика воздействовать на управляющий золотник гидроусилителя в
соответствии с управляющими сигналами, сформированными бортовым
комплексом цифровых вычислительных и аналоговых машин с целью
автоматического пилотирования или реализации в полете различных
концепций техники активного управления (см. подразд. 7.8,8.6).
Как уже упоминалось, для передачи управляющих сигналов в системах
автоматизированного управления используется электро- или волоконно-
оптическая проводка. Ее использование взамен механической проводки
для передачи управляющих сигналов от рычагов на органы управления
позволяет значительно уменьшить массу и облегчить компоновку
проводки в насыщенном компоновочном пространстве современного
самолета. В этом случае механические перемещения командного рычага
(педалей, рукоятки или штурвала) преобразуются в электрические или
световые сигналы, передаваемые по проводам на раздвижную тягу, где
они преобразуются в механическое перемещение золотника гидроусили-
теля, отклоняющего орган управления. Для обеспечения обратных связей
по перемещениям и усилиям загрузка командных рычагов осуществляется
так же, как описано выше.
Аналогично рассмотренному здесь каналу тангажа формируются
бустерные системы управления в каналах крена и рыскания.
312
Необратимые бустерные системы управления применяются в
настоящее время и на дозвуковых самолетах, поскольку можно
провести полную отработку таких систем в наземных условиях с
помощью полноразмерных стендов, позволяющих производить
полунатурное моделирование реального полета с введением нештат-
ных ситуаций (отказов и т.п.)) и пилотажно-динамических стендов с
участием летчика.
Это дает возможность выбрать необходимое резервирование
элементов системы и учесть все пожелания летчика для формирования
надежной системы управления с оптимальными показателями управляе-
мости на всех режимах полета.
Проверьте, как Вы усвоили материал
1. Интерпретируйте следующие основные понятия:
• система прямого управления; командные рычаги; независимость управления
с помощью штурвальной колонки; независимость управления с помощью ручки
управления;
• система бустерного управления; необратимая система управления;
гидроусилитель; обратная связь в гидроусилителе; управляющий шток гидроусили-
теля; исполнительный шток гидроусилителя; механизм загрузки; автомат
регулирования управления; механизм триммерного эффекта; раздвижная тяга;
• поверхность рулевая; проводка управления жесткая; проводка управления
гибкая; триммер; серворуль;
• усилия на рычагах управления; момент руля шарнирный; аэродинамический
компенсатор; усилия в проводке управления; коэффициент кинематической
передачи;
• штурвальная колонка; ручка управления; качалка поддерживающая; качалка
опорная; качалка рычажная; кронштейн; сектор; тандер; тяга.
2. На рис. 12.2 показана принципиальная схема системы прямого управления
элеронами при помощи тросовой проводки управления. Опишите работу системы
при повороте штурвала влево.
3. Опишите работу бустера при перемещении золотника 3 (см. рис. 12.11)
влево.
4. Опишите работу механизма загрузки при перемещении законцовки штока
в точку Б на рис. 12.13.
313
5. Какой тип проводки управления
приведен на рисунке.
Назовите и объясните назначение
элементов 1—8.
Поясните принцип действия эле-
мента 1. Нарисуйте эскиз.
6. К какому органу управления идет
тягаЛ?
Какое положение тяги (2, 2 или 5)
обеспечивает независимость управле-
ния?
7. Правильно или неправильно
подключены к ручке управления 1:
руль высоты 2 в самолете нормальной
схемы (рис. а) и ЦПГО 2 в самолете
схемы "утка" (рис. б)?
8. К каким органам управления
идут тяги 1 и 2?
Обеспечена или не обеспечена
независимость управления по тангажу
и крену? Почему?
9. Сбалансируйте самолет.
314
Глава 13
ЭЛЕМЕНТЫ КОНСТРУКЦИИ ШАССИ
Из множества возможных конструктивно-компоновочных решений,
обеспечивающих заданные ТЗ условия базирования, наиболее широкое
применение на самолетах различных типов получило колесное трехопор-
ное шасси с носовой вспомогательной опорой (см. подразд. 7.3, рис. 7.45,
7.46).
Шасси современного самолета - сложное устройство, масса шасси
достигает 3...5 % взлетной массы самолета. Конструкция шасси,
предназначенного для работы в тяжелых условиях нагружения при
движении по аэродрому, оказывает заметное влияние на конструкцию
самолета в целом.
13.1. ДВИЖЕНИЕ САМОЛЕТА ПО АЭРОДРОМУ
Рассчитываемый на ресурс 60 тыс. летных часов пассажирский
самолет за время эксплуатации совершит 20 тыс. рейсов продолжитель-
ностью 3 ч каждый. При разбеге на взлете самолет пробегает по ВПП
примерно 1500 м, при пробеге на посадке- примерно 1500 м, в процессе
выруливания со стоянки перед полетом и при заруливании на стоянку
после полета еще не менее 2000 м. Следовательно, за время эксплуатации
самолет пробегает по аэродрому примерно 100 тыс. км с достаточно
высокой скоростью (в условиях интенсивной эксплуатации аэропортов
движение по рулежным дорожкам происходит на скоростях до 70 км/ч).
Нагружение циклическими нагрузками при движении по неровным
поверхностям аэродрома оказывает существенное влияние на устало-
стную прочность шасси и самолета в целом. Высока и динамическая
нагрузка в момент касания при посадке. Даже обладающие мощной
взлетно-посадочной механизацией крыла современные самолеты при
посадке в момент касания земли имеют большие значения вертикальной
Vy и горизонтальной Vx составляющих скорости и соответственно
большую кинетическую энергию Е = mV2l2, где т - масса самолета при
посадке, V = Jv* + Р?.
Горизонтальная составляющая кинетической энергии самолета Ех =
= т К*/2 определяет работу Ах, которую должны совершить тормозные
315
устройства самолета для его остановки при пробеге. Тормозные
устройства в основном за счет работы сил трения превращают
кинетическую энергию в тепловую и, охлаждаясь, рассеивают ее в
окружающем пространстве при послепосадочном пробеге и стоянке
самолета. В качестве тормозных устройств применяются воздушные
тормоза (аэродинамические тормозные щитки), тормозные парашюты,
реверсеры двигателей. Однако основная доля горизонтальной составляю-
щей кинетической энергии самолета Ех превращается в тепловую энергию
и рассеивается в окружающем пространстве при помощи тормозов
колес.
В общем случае
= Ех = FLr\,
где F- максимальная сила, развиваемая тормозным устройством; L -
дистанция пробега от начала торможения до полной остановки
самолета; г) - КПД тормозного устройства, учитывающий изменение
силы Fв процессе торможения.
Аэродинамическая сила воздушных тормозов уменьшается с
уменьшением скорости самолета при пробеге. При пробеге изменяется
также и сила сцепления колес с поверхностью ВПП (тормозная сила
трения)
= 4*.
где R - вертикальная нагрузка на тормозное колесо;/^ - коэффициент
трения колеса о поверхность ВПП.
Нулевая в момент касания сила R увеличивается с уменьшением
скорости при пробеге, поскольку уменьшается подъемная сила крыла и
сила тяжести самолета прижимает колеса к ВПП. Коэффициент трения
/тр зависит от состояния поверхности ВПП и от характера движения
колеса. При торможении должно обеспечиваться движение колес без
проскальзывания, что повышает тормозную силу колес.
Устройство тормозного колеса с дисковым тормозом приведено на
рис. 13.1.
Бескамерный пневматик I надевается на барабан 2 между неподвиж-
ной ребордой 3 и быстросъемной ребордой 4, облегчающей монтаж
пневматика. В ступицу (утолщенную центральную часть барабана)
запрессованы подшипники 5, на которых барабан 2 свободно вращается
относительно оси 6. Эта ось неподвижно крепится к стойке шасси 7.
К оси 6 неподвижно крепится корпус тормоза 8. В корпусе тормоза
316
расположен пакет дисков 9 и
10, представляющий собой
набор биметаллических и ме-
таллокерамических колец с
высоким коэффициентом тре-
ния.
Диски 9 своими выступами
на внутренней поверхности
кольца входят в пазы корпуса
тормоза 8, проточенные вдоль
оси вращения колеса. Таким
образом, эти диски могут пере-
мещаться вдоль оси 6, но не
могут вращаться относительно
нее. Диски 10, размещенные
между дисками 9, не связаны с
корпусом тормоза 8. При уста-
новке барабана колеса 2 на ось
корпус тормоза 8 вместе t па-
кетом дисков 9 и 10 свободно
входит во внутреннюю кольце-
вую камеру барабана. При
этом диски 10своими выступа-
ми на внешней поверхности
кольца входят в продольные
пазы, проточенные на повер-
хности кольцевой камеры ба-
рабана 2. При вращении коле-
са диски 10 вращаются вместе
Рис. 13.1. Тормозное колесо
с барабаном 2 в зазорах между неподвижными дисками 9 тормоза, не
касаясь их.
Если подать под давлением газ (или жидкость) в силовой цилиндр 11,
неподвижно закрепленный на корпусе тормоза 8, то поршень 12, выбрав
зазоры между дисками 9 и 10, прижмет их друг к другу. За счет сил трения
между неподвижными дисками 9 и вращающимися вместе с колесом
дисками 10 будет происходить торможение с выделением теплоты.
Обычно на самолете тормозные колеса устанавливают на основных
опорах шасси, а нетормозные - на вспомогательных опорах шасси.
Рулежка (маневрирование) самолета, движущегося по аэродрому за
счет силы тяги двигателя, осуществляется раздельным торможением и
растормаживанием колес основных стоек шасси. "Дача ноги" обеспечива-
ет поворот руля направления и торможение колеса соответствующей
317
Рис. 13.2. Разворот самолета при рулежке
основной стойки шасси. При
рулежке (рис. 13.2) разворот
2 самолета происходит относи-
тельно центра контактной пло-
щадки с ВПП заторможенного
колеса 7. Вектор скорости 70
7 поступательного движения коле-
са 2 другой основной стойки
перпендикулярен радиусу пово-
рота R, поэтому колесо 2 движет-
ся без юза.
Юз - явление, при котором
колесо не вращается, несмотря на его поступательное движение.
Чтобы колесо 3 передней стойки при рулежке двигалось без юза,
необходимо обеспечить его самоориентацию или принудительную
ориентацию вдоль вектора скорости. Ун его поступательного движения.
Юз может возникнуть на колесе одной из основных опор шасси при
торможении в процессе движения самолета особенно по скользкой
(заснеженной или покрытой водой) ВПП. Вследствие юза возможен
непреднамеренный разворот и сход самолета с ВПП или рулежной
дорожки. Кроме того, резко уменьшается срок службы шин, возможно
их полное разрушение в процессе движения по земле.
Для эффективного и безопасного торможения сила сцепления шины
с поверхностью ВПП должна быть максимально возможной и постоян-
ной при любом состоянии ВПП и скорости движения самолета.
Вследствие кратковременности процесса посадки и высоких скоростей
движения по ВПП и рулежным дорожкам летчик не в состоянии
обеспечить эти условия. Поэтому на современных самолетах в систему
управления тормозами входит тормозной автомат (антиюзовая
автоматика), реагирующий на проскальзывание колеса (начало юза) и
уменьшающий тормозной момент (растормаживающий колесо). После
того как угловая скорость расторможенного колеса увеличится, сигнал
на растормаживание снимается и начинается процесс нарастания
тормозного момента колеса. Таким образом, обеспечивается эффектив-
ное и безопасное движение самолета на земле.
13.2. АМОРТИЗАЦИОННАЯ СИСТЕМА САМОЛЕТА
Вертикальная составляющая кинетической энергии самолета Еу =
= т К*/2 в момент касания земли при посадке определяет работу Ау
амортизационной системы самолета. По закону сохранения энергии при
318
Рис. 13.3. Деформация пневматика при Рис. 13.4. Схема гидравлического демпфера
обжатии
ударе самолета о землю совершается работа
Ау = Еу = Луть
где Р - максимальная сила удара самолета при посадке;- перемещение,
на котором эта сила действует; q - КПД системы, учитывающий
изменение силы при уменьшении (гашении) вертикальной скорости
самолета до нуля.
Если не принять специальных мер, кинетическая энергия самолета
трансформируется в работу, совершенную при деформации ВПП и
конструкции самолета. Поскольку эти деформации весьма малы, то сила
Р будет непомерно велика и разрушит конструкцию самолета.
При ударе колес о поверхность ВПП происходит обжатие пневматика
(рис. 13.3) и совершается работа, идущая на упругую деформацию
покрышки колеса (резины и корда) и незначительное сжатие воздуха в
пневматике. Температура пневматика и содержащегося в нем воздуха
повышается, и за счет этого происходит рассеивание части энергии в
окружающем пространстве.
Превращение части механической (кинетической) энергии в тепловую
и рассеивание ее в пространстве называется гистерезисом (от греч.
hysteresis - отставание, запаздывание). Однако гистерезис пневматика
очень мал. Основная часть энергии, накопленная пневматикой в виде
потенциальной энергии сжатого воздуха и энергии упругой деформации
покрышки, возвращается самолету, который после удара о землю может
подпрыгивать ("козлить").
Следовательно, кроме колеса с пневматикой необходимо дополни-
тельное устройство, обладающее большим, чем колесо, гистерезисом.
Таковым является, например, гидравлическое демпфирующее устрой-
ство- демпфер, схема которого показана на рис. 13.4. Сила Р, приложен-
319
ная к штоку 1, вызывает поступательное движение поршня 2 внутри
гидроцилиндра 3, заполненного рабочей жидкостью и закрепленного на
опоре 4. При этом рабочая жидкость вытесняется поршнем 2 из полости
5 цилиндра и, проходя через калиброванные отверстия 6 в поршне 2,
поступает в полость 7 гидроцилиндра. Работа силы Р, совершаемая при
перемещении штока, расходуется на преодоление сил трения подвижных
частей и в основном на проталкивание рабочей жидкости через
калиброванные отверстия, т.е. на преодоление сил гидравлического
сопротивления при перетекании жидкости. Это сопротивление тем
больше, чем больше скорость движения штока (и соответственно
скорость течения жидкости через отверстия в поршне) и чем меньше
диаметр (калибр) отверстий.
За счет трения частиц жидкости друг о друга и о стенки отверстия
повышается температура жидкости и демпфера. При этом вся энергия,
приложенная к штоку демпфера, рассеивается в окружающее про-
странство через стенки демпфера. Однако если такое устройство будет
использовано для поглощения кинетической энергии Ау самолета при
посадке, то, поглотив всю энергию, демпфер превратится в жесткую
конструкцию (шток встанет на упор). Удары колеса о неровности ВПП
при пробеге и рулежке будут в этом случае передаваться на конструкцию
самолета, что недопустимо. Поэтому после восприятия удара необходимо
возвращать демпфирующий элемент в исходное положение. Это можно
осуществить "запасая" часть энергии в упругом элементе и расходуя ее
после удара на возвращение демпфирующего элемента в исходное
положение.
Амортизатор шасси (независимо от конструктивного выполне-
ния) - устройство, совмещающее в себе демпфирующий и упругий
элементы и предназначенное для снижения нагрузок на конструкцию
самолета за счет поглощения и рассеивания энергии ударов, которые
испытывает самолет при посадке и движении по ВПП.
Упругим элементом амортизатора может быть, например, пружина.
На рис. 13.5 показана схема жидкостно-пружинного амортизатора.
После контакта колеса с ВПП в момент посадки (рис. 13.5, а) сила от
колеса передается на шток амортизатора 7. Центр масс снижающегося
самолета и корпус (цилиндр) 2 амортизатора, неподвижно закрепленный
на конструкции планера самолета-/, движутся вниз (прямой ход). При
этом часть энергии самолета рассеивается за счет перетекания жидкости
в демпфирующем элементе амортизатора и расходуется на трение
подвижных частей амортизатора. Оставшаяся энергия запасается
амортизатором в виде энергии упругой деформации пружины 3.
Напомним, что весьма незначительная часть энергии самолета трансфор-
мируется в тепловую и упругую энергию пневматиком колеса.
320
Рис. 13.5. Схема жидкостно-пружиппого
амортизатора:
а - прямой ход; б - обратный ход
Рис. 13.6. Работа клапана торможения на
прямом (а) и обратном (б) ходах
После окончания прямого хода
(когда вся энергия самолета полнос-
тью передана амортизатору и амор-
тизатор полностью обжат) за счет
распрямления пружины 3 начинает-
ся обратный ход (рис. 13.5, б). При
этом центр масс самолета поднимается вверх за счет энергии, запасенной
упругим элементом амортизатора (в данном случае пружины).
Однако не вся упругая энергия превращается в потенциальную
энергию положения самолета относительно поверхности ВПП. Часть
ее на обратном ходе также рассеивается в окружающее пространство
вследствие выделения теплоты при перетекании жидкости в демпфирую-
щем элементе амортизатора. Таким образом, происходит торможение
(уменьшение кинетической энергии Еу = mV^I2 и, следовательно,
уменьшение Vy) на прямом и обратном ходах.
Энергия, запасаемая упругим элементом амортизатора, достаточно
велика, и обратный ход амортизатора происходит весьма интенсивно,
что может вызвать "козление" самолета. Чтобы избежать этого явления
и получить более "мягкий" амортизатор, нужно увеличить количество
энергии, рассеиваемой на обратном ходе.
Это осуществляют, вводя в конструкцию амортизатора клапан тор-
можения на обратном ходе (рис. 13.6). Клапан торможения 5 пред-
ставляет собой цилиндрический стакан, который может свободно
11 - 7425
321
Рис. 13.7. Схема жидкостно-газового амортизатора:
а-прямой ход; 6-обратный ход
перемещаться ("плавать") по
штоку 7 амортизатора меж-
ду упором 6 на штоке и бук
сой (поршнем) 3, подпружи-
ненной в корпусе 8 пружи-
ной 1.
При прямом ходе аморти-
затора (рис. 13.6, а) рабочая
жидкость перетекает из вер-
хней полости цилиндра в ни-
жнюю через калиброванные
отверстия 2 в поршне (буксе)
3. Так как калиброванные
отверстия 4 в клапане тормо-
жения меньше отверстий в
буксе, клапан потоком жид-
кости отжимается вниз до
упора на штоке, и основной
поток жидкости из верхней
полости перетекает в ни-
жнюю, минуя клапан тормо-
жения.
При обратном ходе
(рис. 13.6, б) клапан 5 пото-
ком жидкости прижимается к
поршню (буксе) 3, и жидкость
из нижней полости перетекает
в верхнюю через малые отвер-
стия клапана с большим со-
противлением и соответственно с большим, чем на прямом ходе,
преобразованием кинетической энергии в тепловую (торможением).
Сила, которая передается с амортизатора на конструкцию планера
самолета, зависит от хода амортизатора и способности его поглощать
и рассеивать энергию. В настоящее время наибольшее распространение
получили жидкостно-газовые амортизаторы (рис. 13.7), в которых в
качестве упругого элемента используется сжатый газ.
Амортизатор состоит из цилиндра (корпуса) 11 и штока (поршня) 10.
Цилиндр крепится к конструкции планера самолета, а к штоку
322
присоединяется опорное устройство (например, колесо). Движение штока
в цилиндре направляется верхней буксой 6 и нижней буксой 13. Внутри
цилиндра 11 укреплен цилиндрический плунжер 2 с отверстиями 1 в
стенке. В донышке 4 плунжера 2 имеется калиброванное отверстие 3.
В верхней буксе 6, неподвижно связанной со штоком, также имеются
калиброванные отверстия 7. На упоре 9 штока установлен свободнопла-
вающий клапан торможения обратного хода 8. В амортизатор заливают
определенное количество рабочей жидкости и заряжают его сжатым
газом. Упоры 12 неподвижно закреплены на штоке 10. Опираясь на
нижнюю буксу 13, они не позволяют сжатому газу вытеснить шток 10
из полости цилиндра при отсутствии внешней нагрузки на шток.
Герметичностьтелескопического (подвижного в осевом направлении)
соединения штока 10 с нижней буксой 13 обеспечивают уплотнительные
манжеты 7<Уплотнение5обеспечивает герметичность телескопического
соединения плунжера 2 и штока 10.
На схеме прямой и обратный ходы штока показаны при условно
неподвижном корпусе амортизатора. Стрелками обозначено движение
жидкости. Стрелки на плоскости раздела жидкости и газа показывают
давление в газовой полости амортизатора.
При достаточно большом ходе амортизатора s удается получить
приемлемые нагрузки Р = Еу /$т| на конструкцию планера самолета.
Итак,амортизационная система самолета-это система амортизаци-
онных стоек (амортстоек шасси, стоекшасси), состоящих из колеса (или
другого опорного устройства) и собственно амортизатора, имеющего
демпфирующий и упругий элементы.
13.3. КОНСТРУКТИВНЫЕ СХЕМЫ АМОРТИЗАЦИОННЫХ
СТОЕК ШАССИ
Конструктивно амортизатор является связующим звеном между
опорой (например, колесом) и конструкцией планера самолета.
В амортизационной стойке телескопической схемы (рис. 13.8) колесо
1 вращается на оси 2, закрепленной на штоке 3 амортизатора 4
непосредственно (рис. 13.8, а), с помощью полувилки 5 (рис. 13.8, б) или
с помощью вилки 6 (рис. 13.8, в). Стрелкой показано направление
движения (н.д.) самолета по земле.
В амортизационной стойке телескопической схемы должны быть
приняты специальные конструктивные меры для предотвращения
разворота колеса под действием сил, возникающих на контактной
площадке 7 колеса при движении самолета.
11*
323
а б в
Рис. 13.8. Амортизационная стойка телескопичес-
кой схемы
Рис. 13.9. Плечо устойчивости и само-
ориеитация колеса
Так, сила Т трения коле-
са о поверхность ВПП (см.
рис. 13.8, а) вызовет разворот
колеса, поскольку шток 3 мо-
жет свободно поворачиваться
в цилиндре амортизатора 4
относительно оси а-а. Даже
при симметричной установке
(рис. 13.8, б, в) колеса или ко-
лесной тележки относительно
оси а-а нет гарантии, что при движении по неровной поверхности ВПП
сила Убудет проходить точно через центр контактной площадки 7. Точно
так же и горизонтальные боковые силы R в плоскости контактной
площадки, возникающие при рулежке самолета или при посадке со
сносом или креном, могут вызвать непреднамеренный разворот колеса
относительно оси а-а амортстойки.
Вынос оси вращения колеса (рис. 13.9) относительно оси стойки назад
по направлению движения (н.д.) на определенное расстояние I (так
называемое плечо устойчивости) исключает непреднамеренный разворот
колеса. Начавшийся случайный (например, под действием боковых сил)
разворот колеса на угол <р относительно направления движения
парируется силами трения Т, восстанавливающий момент которых М -
= Та относительно оси стойки возвращает колесо в исходное положение
по направлению движения. Так происходит самоориентация колеса.
Если самоориентации колеса не требуется, можно удержать колесо
от непреднамеренного разворота за счет шлицевого соединения штока
с корпусом амортизатора (шлиц-шарнира), показанного на рис. 13.10.
Шлицы, образованные на штоке 7 и в отверстии нижней буксы 2
амортизатора, допускают обжатие амортизатора, но препятствуют
развороту колеса моментом внешних сил М.
324
Рис. 13.10. Шлиц-шарннр
Можно также удержать колесо
от непреднамеренного разво-
рота и передать на конструк-
цию планера самолета момент,
стремящийся развернуть колесо,
при помощи двухзвенника
(рис. 13.11). Верхнее звено 3 двух-
звенника при помощи болта 2
соединено с корпусом амортиза-
тора 1 подвижным соединением,
допускающим поворот звена 3
относительно оси а-а. Нижнее
Рис. 13.11. Принцип работы двухзвенника
звено 6 аналогично соединено
болтом 7 с законцовкой 8 штока
4, что допускает поворот звена 6 относительно оси в-в. Болт 5,
соединяющий между собой звенья 3 и 6 двухзвенника, допускает их
взаимный поворот относительно оси б-б.
Двухзвенник не препятствует обжатию амортизатора, и в то же время
момент М, стремящийся развернуть колесо, передается через звенья 3 и
6 с законцовки 8 штока на корпус амортизатора 1, поскольку болт 5 не
допускает перемещения звеньев 3 и 6 вдоль оси б-б.
Верхняя, развитая в поперечном относительно оси стойки направле-
нии часть стойки, называемая траверсой (от лат. transversus - попереч-
ный), служит для крепления стойки к конструкции планера самолета и
для передачи на конструкцию внешних нагрузок. Траверса 1
(рис. 13.12, а) своими законцовками - цапфами 2 - опирается на
подшипники, закрепленные на силовом шпангоуте 3. Внешняя нагрузка
(реакция грунта ВПП) F, приложенная к колесу в контактной площадке,
через траверсу 1 передается на конструкцию планера самолета как на
325
Рис. 13.12. Уравновешивание и деформации амортстойки под нагрузкой
опору. В этой схеме гидроцилиндр уборки-выпуска (подъемник) 4также
участвует в передаче на опору внешней нагрузки.
Рассматривая стойку шасси как Т-образную раму (рис. 13.12, 6),
отметим, что вертикальная составляющая Р внешней нагрузки F изгибает
траверсу в вертикальной плоскости OYZ.
Лобовая составляющая 7 (рис. 13.12, в) изгибает стойку в плоскости
OXY, а траверсу - в плоскости OXZ, причем цилиндр уборки-выпуска
нагружается сжатием, препятствуя повороту стойки в цапфах.
Боковая составляющая R (рис. 13.12, г) изгибает стойку и траверсу
в плоскости OYZ.
Для увеличения жесткости стойки (уменьшения изгибных деформа-
ций) в конструкцию стойки вводят подкосы (рис. 13.13) - систему
стержней, которые, являясь дополнительными опорами для стойки,
уменьшают действующие в ней изгибающие моменты (разгружают
стойку).
Боковые подкосы 2, работая на растяжение-сжатие, уменьшают изгиб
стойки 1 и траверсы 3 боковыми силами в плоскости OYZ.
Передний складывающийся ("ломающийся") подкос 4, работая на
растяжение, разгружает стойку и цилиндр уборки-выпуска 5 от действия
лобовой силы, стремящейся изогнуть стойку в плоскости OXY.
326
4 3 2
Т
Рис. 13.14. Изгиб штока амортизатора
Рис. 13.13. Подкосы в конструкции амортстойки
В амортизационной стойке
телескопической схемы
(рис. 13.14) шток 3 амортиза-
тора под действием попереч-
ных нагрузок (лобовой и боко-
вой сил) так же, как и корпус 7
амортизатора, изгибается. Шток с силой 2?6 прижимается к нижней буксе
4, неподвижно закрепленной в корпусе 1 амортизатора. Верхняя букса
2 (поршень штока) прижимается с силой Rn к внутренней стенке
цилиндра. Изгиб штока увеличивает силы трения в буксах и
несимметрично нагружает уплотнительную манжету 5, что приводит
к быстрому износу уплотнения и ограничивает значение давления
зарядки амортизатора. Кроме того, телескопические амортизационные
стойки не амортизируют лобовые удары, что позволяет применять их
только на самолетах, базирующихся на хорошо подготовленных ВПП.
Необходимость базирования самолета на элементарно подготовлен-
ных ВПП и, как следствие, обеспечения перекатывания колеса через
неровности ВПП привела к созданию амортизационных стоек, способных
амортизировать лобовые нагрузки, - стоек рычажного типа.
Рычажная стойка с вынесенным амортизатором (рис. 13.15) пред-
ставляет собой пустотелую силовую балку (стойку) 6, закрепленную на
конструкции планера самолета траверсой 1 и цилиндром уборки-выпуска
стойки 7. Рычаг 4 при помощи болта присоединяется к разнесенным
проушинам 5 (моментному узлу) в нижней части стойки 6 подвижным
соединением, допускающим поворот рычага относительно оси в-в.
327
Рис. 13.15. Рычажная стойка с вынесенным
амортизатором
кручением.
Амортизатор 2, вынесенный за
пределы стойки, присоединяется
к стойке подвижным болтовым
соединением, допускающим пово-
рот относительно оси а-а, а к
рычагу 4 - подвижным болтовым
соединением, допускающим пово-
рот штока 3 относительно оси б-б.
Силы - вертикальная Р и лобовая
Т, - действующие на колесо, пово-
рачивают рычаг 4 относительно
оси е-е, сжимая амортизатор.
Таким образом, обеспечивается
амортизация не только вертикаль-
ных, но и лобовых нагрузок.
Часть лобовой нагрузки, не воспринятая амортизатором, через рычаг
4 передается на стойку 6, нагружая ее изгибом.
Боковая сила через разнесенные проушины рычага 4 передается на
разнесенные проушины 5 в нижней части стойки 6, нагружая ее
Амортизатор присоединяется к стойке (рис. 13.16) и рычагу при
помощи карданных узлов, или карданов (по имени итальянского
математика, философа и врача
Д. Кардано, предложившего
подвес - прообраз карданного
механизма).
Сухарик (или крестовина
кардана) 3 связывает подвиж-
ным соединением при помощи
болтов 2 и 4 с взаимно перпен-
дикулярными (перекрещенны-
ми) осями вилку (двойную про-
ушину) стойки 1 с вилкой кор-
пуса амортизатора 5. За счет
самоориентации крестовин 3
кардана относительно осей а-а
и б-б обеспечивается нагруже-
ние амортизатора строго
вдоль его оси при всех возмож-
ных деформациях рычага и
стойки. Аналогично при по-
мощи кардана в рычажной
Рнс. 13.16. Карданный узел
328
Рис. 13.17. Рычажная стоика со встроенным
амортизатором
стойке с вынесенным амортиза-
тором (см. рис. 13.15) шток амор-
тизатора-3 соединен с рычагом 4.
Это обеспечивает лучшие условия
для работы уплотнений амортиза-
тора, так как шток не прижимает-
ся к буксам амортизатора, что
позволяет увеличить значение
давления зарядки и уменьшить
габаритные размеры амортизато-
ра.
Однако габаритные размеры
рычажной стойки с вынесенным
амортизатором больше, чем те-
лескопической стойки. Необходи-
мость иметь более компактную
стойку привела к созданию ры-
чажных стоек со встроенными амортизаторами.
Рычажная стойка со встроенным амортизатором (рис. 13.17) состоит
из корпуса (цилиндра) 3 стойки, закрепленной при помощи траверсы 1
и подъемника 2 на конструкции планера самолета. Внутренняя полость
корпуса 3 является амортизатором, к штоку 5 которого через серьгу
(шатун) 6 присоединяется рычаг 7, на котором установлены колеса.
Другой конец рычага при помощи болта подвижным соединением
крепится к неподвижному клыку ("рогу") 4 цилиндра стойки.
Силы - вертикальная Р и лобовая Т, действующие на колеса,
поворачивают рычаг 7 относительно оси а-а, сжимая амортизатор и
обеспечивая амортизацию этих нагрузок.
Серьга 6 (как промежуточное звено), соединенная с рычагом 7 и
штоком 5 карданными узлами, позволяет обеспечить движение штока
практически без изгиба. Горизонтальная составляющая Т почти
полностью передается через рычаг 7 и клык 4 на корпус 3, нагружая его
изгибом. Боковые нагрузки также через рычаг 7 и клык 4 передаются на
корпус 3, нагружая его кручением.
Стойка, схема которой показана на рис. 13.18, получила название
полурычажной стойки со встроенным амортизатором. Здесь рычаг 7, на
одном конце которого установлено колесо, крепится подвижным
соединением к штоку 2 встроенного амортизатора без промежуточного
звена. Другой конец рычага 4 крепится к корпусу 1 через подвижное
промежуточное звено - серьгу 3. Выбор размеров серьги и плеч рычага
позволяет в значительной мере разгрузить шток амортизатора от изгиба
лобовыми силами.
329
Рис. 13.18. Полурычажная стойка со встро-
енным амортизатором
Для предотвращения шим-
ми (см. подразд. 8.2) на стойках
устанавливают гидравличес-
кий демпфер, принцип работы _
т г г Рис. 13.19. Установка демпфера шимми на рычаж-
которого рассмотрен ранее. цой CTOjjKe со встроенным амортизатором
Корпус 3 демпфера шимми
(рис. 13.19) с помощью цапф 2
закреплен на цилиндре 1 амортизационной стойки таким образом, что
обеспечивается возможность его поворота относительно оси а-а,
параллельной оси цилиндра 1 амортстойки.
Клык8рычажной стойки со встроенным амортизатором (или верхнее
звено двухзвенника стойки телескопической схемы, или серьга полуры-
чажной стойки) крепится к поворотному хомуту (стакану) 7, свободно
посаженному на цилиндр, что обеспечивает свободный поворот
(самоориентацию) колес.
Шток 4 демпфера шимми через шкворень 5 связан с вилкой 6,
закрепленной на поворотном хомуте 7.
Поворот колес и, следовательно, хомута относительно оси цилиндра
амортизатора приведет к перемещению штока 4 внутри корпуса 3
демпфера. С этим связано рассеивание энергии, вызвавшей колебания.
Демпфер гаситтолько высокочастотные колебания (повороты колеса
относительно оси стойки с большой угловой скоростью) и, следователь-
но, препятствует возникновению шимми. При относительно небольшой
330
скорости поворота колес во время рулежки демпфер не препятствует их
самоориентации.
Увеличение потребной скорости рулежки требует быстрого разворота
колеса и, следовательно, принудительной ориентации колес. Для этого
также может быть использован механизм, рассмотренный выше. В этом
случае по команде летчика (например, через педали) рабочая жидкость
под давлением подается в соответствующую полость (при этом другая
полость соединяется со сливом) демпфера, который выполняет роль
силового гидроцилиндра для управляемого поворота (принудительной
ориентации) колес.
Конструкция современных амортизационных стоек позволяет
обеспечить надежную эксплуатацию самолетов даже при их базировании
на элементарно подготовленных взлетно-посадочных полосах.
Проверьте, как Вы усвоили материал
1. Опишите работу амортизатора на прямом и обратном ходах.
2. Сравните закрепление рычага на стойке с закреплением верхнего звена
двухзвенника на стойке телескопического типа (см. рис. 13.11).
3. Принципиальные схемы каких
стоек шасси показаны на рисунках а и
б?
Назовите основные элементы кон-
струкции и объясните их назначение.
4. Назовите схему амортизатора,
представленного на рисунке.
Перечислите основные элементы
конструкции и объясните их назначе-
ние.
Какой ход совершает амортизатор,
представленный на рисунке?
331
5. Правильно или неправильно
спроектирована стойка, представлен-
ная на рисунке? Объясните почему.
Назовите основные элементы кон-
струкции и объясните их назначение.
Нарисуйте принципиальную кине-
матическую схему уборки-выпуска
стойки.
6. По какой схеме выполнена стой-
ка шасси, представленная на рисунке?
Назовите основные элементы кон-
струкции и объясните их назначение.
Нарисуйте принципиальную кине-
матическую схему уборки-выпуска
стойки.
7. Интерпретируйте следующие основные понятия:
• трехопорное шасси с носовой опорой; основная опора шасси; вспомогательная
опора шасси;
• амортизационная система самолета; гистерезис амортизационной системы;
амортизационная стойка; схема стойки шасси; стойка телескопической схемы;
стойка рычажная с вынесенным амортизатором; стойка рычажная со
встроенным амортизатором; стойка полурычажная со встроенным амортизато-
ром;
• контактная площадка колеса; самоориентация колеса; рулежка; юз;
принудительная ориентация колеса; вынос колеса; шимми; демпфер шимми;
• амортизатор шасси; упругий элемент амортизатора; демпфирующий
элемент амортизатора; амортизатор жидкостно-пружинный; амортизатор
жидкостно-газовый; прямом ход амортизатора; обратный ход амортизатора;
торможение на прямом и обратном ходе;
• тормозные устройства; тормозное колесо; бескамерный пневматик; дисковый
тормоз.
332
Глава 14
ОСНОВЫ УСТРОЙСТВА СИЛОВЫХ УСТАНОВОК
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Двигатели с агрегатами и системами, обеспечивающими их работоспо-
собность (системы регулирования подачи топлива, запуска, управления
и контроля работы, смазки, противопожарной защиты двигателя),
воздухозаборники и выхлопные устройства (сопла), топливная система
ЛА составляют его силовую установку. В зависимости от назначения и
потребных ЛТХ самолета масса силовой установки составляет 8...22 %
взлетной массы самолета.
Двигатель, преобразующий химическую энергию находящегося на
борту ЛА топлива в тепловую и механическую, можно считать
первичным источником энергии. Основная ее часть расходуется на
создание тяги, кроме того, значительная часть энергии затрачивается на
работу различных бортовых систем.
Двигатель должен обеспечивать потребные взлетно-посадочные и
маневренныехарактеристики ЛА, необходимыедальность,скороподъем-
ность и высоту полета. В широком диапазоне высот и скоростей полета
должен быть обеспечен экономный расход топлива. При этом двигатель
должен надежно, устойчиво работать, быть безопасным в пожарном
отношении, иметь достаточно большой ресурс работы без ремонта. Все
эти сложные и противоречивые требования приводят к созданию
различных типов двигателей (работающих по различным газодинамичес-
ким схемам).
14.1. ДВИГАТЕЛИ, ПРИМЕНЯЕМЫЕ НА ЛЕТАТЕЛЬНЫХ
АППАРАТАХ
По способу создания силы тяги двигатели, применяемые на ЛА,
подразделяются на винтовые и реактивные.
Винтовые двигатели создают потребную для полета ЛА силу тяги за
счет движителя - воздушного винта (см. подразд. 7.4.1).
Создание поршневого двигателя (ПД) внутреннего сгорания, который
был использован для привода воздушного винта, обусловило начальный
этап развития авиации, а непрерывное совершенствование винтомотор-
ной силовой установки с ПД обеспечивало высокую эффективность
333
авиационной техники при непрерывно возрастающих потребных
скоростях и высотах полета.
Мощность Ne, передаваемая коленчатым валом поршневого двигателя
валу воздушного винта, практически не зависит от скорости полета.
Однако мощность, передаваемая винтом летательному аппарату и
определяющая тягу, зависит от эффективности работы винта (КПД винта
т|в) и называется тяговой мощностью
= Уепв.
Воздушный винт работает с высокой эффективностью до скоростей
полета, соответствующих числу М = 0,5...0,6. При увеличении скорости
полета явления сжимаемости воздуха на концах лопастей винта приводят
к значительной потере его эффективности.
Уже в начале 1950-х гг. в связи с увеличением потребной скорости и
высоты полета проектировщики ПД подошли к барьеру по тяговой
мощности,т.е. практически исчерпали все возможности совершенствова-
ния этого типа двигателей. Дальнейшее повышение скорости и высоты
полета ЛА за счет повышения мощности и высотности (обеспечения
необходимой мощности с ростом высоты полета) ПД стало уже
невозможным, поскольку это приводило к недопустимому увеличению
массы и габаритных размеров ПД.
В настоящее время ПД широко применяются в легких и нескоростных
самолетах и вертолетах, однако развитие авиакосмической техники с
начала 1950-х гг. характеризуется широким применением реактивных
двигателей, тяговая мощность которых не уменьшается с увеличением
скорости полета.
Реактивные двигатели, создающие тягу за счет прямой реакции струи
выхлопных газов, подразделяются на ракетные (РД) и воздушно-
реактивные (ВРД).
Ракетные двигатели (ЖРД и РДТТ) выделяются из всего
семейства двигателей, используемых на ЛА, уникальными свойствами:
практически неизменной тяговой мощностью в широком диапазоне
скоростей;
возможностью работы на больших высотах полета, включая
безвоздушное космическое пространство, причем с увеличением высоты
полета тяга ракетных двигателей растет;
относительной (по сравнению с другими типами двигателей)
простотой конструкции;
исключительной возможностью получения больших мощностей в
одном агрегате при сравнительно малой его массе и габаритных
размерах.
334
1 2 3 4 5 6 7 8 9 JO
Рис. 14.1. Турбореактивный двигатель
Все это делает РД незаменимыми для ЛА, предназначенных для полета
в космическом пространстве.
Недостатком являются большие расходы топлива, практическая
невозможность регулирования тяги по произвольному закону в широких
диапазонах, невозможность снабжения бортовых систем ЛА энергией
от маршевых двигателей, что требует наличия на борту ЛА дополнитель-
ных источников энергопитания. Кроме того, необходимость иметь на
борту ЛА запас не только горючего, но и окислителя существенно
снижает весовую отдачу ЛА с ракетным двигателем, практически
исключая возможность использования РД в силовых установках
многоразовых транспортных ЛА, совершающих полеты в пределах
атмосферы.
РД иногда применяются на высокоскоростных маневренных
самолетах в качестве дополнительной силовой установки, позволяющей
кратковременно увеличивать скорость или высоту полета, и в качестве
стартовых ускорителей, существенно сокращающих потребную для
взлета длину ВПП.
Воздушно-реактивныедвигатели используют в качестве
горючего керосин, находящийся в топливных баках ЛА, а в качестве
окислителя - кислород воздуха. Наибольшее распространение в авиации
получил турбореактивный двигатель (ТРД) (рис. 14.1), являющийся базой
для создания целого семейства двигателей, объединенных под общим
названием газотурбинных двигателей (ГТД).
ТРД - газотурбинный двигатель, тяга которого Рдасоздается за счет
превращения тепловой энергии, выделяющейся при сгорании топлива,
в кинетическую энергию потока газа, а возникающая при этом реакция
используется как движущая сила:
335
Р№ = ^секС^с " И +Л(РС -Ро)>
где ?дв - сила тяги двигателя, Н; тсек - секундный расход воздуха и
горючего (керосина) через двигатель, кг/с; Wc-скорость истечения газов
из сопла, м/с; V- скорость полета, м/с;/с- площадь среза сопла, м2;рс -
давление на срезе сопла, Па; р0 - давление окружающей среды, Па.
Поток воздуха, попадающего в двигатель, тормозится во входном
устройстве 1 (см. рис. 14.1), в результате чего давление воздуха перед
осевым компрессором 2 повышается.
Ротор (вращающаяся часть) объединяет ряд рабочих колес компрессо-
ра 3, представляющих собой диски с закрепленными на них рабочими
лопатками. При вращении ротор, подобно вентилятору, воздействует
на воздушный поток и заставляет его двигаться вдоль оси двигателя через
ряд неподвижно закрепленных по окружности на корпусе двигателя
спрямляющих лопаток 4. Каждый ряд таких лопаток располагается за
соответствующим рабочим колесом, образуя статор (неподвижную
часть компрессора). Ряд неподвижных лопаток, называемых спрямляю-
щим аппаратом, в совокупности с рядом рабочих лопаток рабочего
колеса называется ступенью компрессора. Проходя через многоступенча-
тый осевой компрессор, воздух сжимается, его давление многократно (в
10-40 раз) повышается. Отношение давления воздуха на выходе из
компрессора р2 к давлению на входе р j называется степенью повышения
давления:
= Р21Р\
Сжатый воздух из компрессора попадает в камеру сгорания,
образованную несколькими расположенными по периметру корпуса
жаровыми трубами 7(или одной кольцевой трубой). Примерно 25...35 %
общего потока воздуха направляется непосредственно в жаровые трубы,
где происходит основной процесс сгорания керосина, поступающего в
распыленном состоянии через форсунки 5.
Другая часть воздуха обтекает наружные поверхности жаровых труб,
охлаждая их, и на выходе из камеры сгорания смешивается с продуктами
сгорания для их охлаждения. Это позволяет поддерживать температуру
газовоздушной смеси в камере сгорания на уровне 1400...1900 К,
определяемом допустимой теплопрочностью стенок камеры сгорания,
лопаток 8 ротора и лопаток 9 спрямляющего аппарата турбины, на
которую образовавшийся в камере сгорания и имеющий высокие
температуру и давление газовый поток устремляется через суживающийся
сопловой аппарат камеры сгорания.
336
4
5
Рис. 14.2. Принципиальная схема ТРД
Рис. 14.3. Схема ТРДФ
Часть потенциальной энергии газовоздушной смеси, полученной при
сжатии воздуха в компрессоре и нагреве его в камере сгорания,
преобразуется ротором газовой турбины (ее устройство аналогично
устройству компрессора) в механическую работу вращения ротора
компрессора, соединенного общим валом 6 с ротором турбины. Кроме
того, часть механической мощности отбирается от вала 6 для привода
агрегатов двигателя (топливных подкачивающих насосов, масляных
насосов и т.п.) и привода электрогенераторов, обеспечивающих энергией
различные бортовые системы. От компрессора также забирается часть
сжатого воздуха для различных бортовых систем.
Основная часть энергии продуктов сгорания идет иа ускорение
газового потока в выходном устройстве ТРД (реактивное сопло 10), т.е.
на создание реактивной тяги.
Стартовая закрутка вала осуществляется стартером, приводимым
при запуске двигателя от наземного или бортового электроагрегата; при
дальнейшей работе двигателя вращение вала (и ротора компрессора)
поддерживается вращением ротора турбины.
При запуске двигателя топливовоздушная смесь в камере сгорания
зажигается специальным запальным устройством, при дальнейшей работе
двигателя горение поддерживается уже имеющимся факелом пламени.
Принципиальная схема ТРД приведена на рис. 14.2, где отмечены
агрегаты, служащие основой создания других типов ГТД: 1 - входное
устройство; 2 - осевой компрессор; 3 - камера сгорания; 4-турбина; 5 -
сопло.
Турбореактивный двигатель с форсажной камерой (ТРДФ) (рис. 14.3)
широко применяется на скоростных боевых самолетах. Как и в ТРД,
основой внутреннего контура ТРДФ является турбокомпрессор
(газогенератор) 1, состоящий из компрессора, камеры сгорания и
турбины. Между турбокомпрессором и соплом 3 (обычно регулируемым,
т.е. с изменяемой площадью потока) установлена форсажная камера 2,
в которой сжигается дополнительное горючее (керосин), подаваемое
337
Рис. 14.4. Схема ТВД
Рис. 14.5. Схема ТРДЦ
через форсунки форсажной камеры 4. Стабилизаторы пламени 5
обеспечивают устойчивое горение обедненной кислородом топливной
смеси (часть кислорода воздуха использована при горении керосина
в камере сгорания турбокомпрессора). За счет сжигания дополнительного
топлива происходит увеличение тяги (форсирование, форсаж - франц.
forcage, от forcer - вынуждать, чрезмерно напрягать) на 50 % и более, что
связано, однако, с резким повышением расхода топлива. Поэтому
форсажный режим используется кратковременно на взлете для сокраще-
ния длины разбега и в воздушном бою для увеличения скороподъемности
и скорости полета.
Турбовинтовой двигатель (ТВД) (рис. 14.4) основное тяговое усилие
(85...90 %) создает за счет воздушного винта 7, вращение которого
обеспечивает турбокомпрессор 3 через понижающий частоту вращения
редуктор 2.
Получение мощности, необходимой для вращения ротора компрессо-
ра и воздушного винта, обеспечивается турбиной с увеличенным числом
ступеней. Поэтому расширение газа в турбине происходит почти
полностью и реактивная тяга, получаемая за счет реакции газовой струи,
вытекающей из двигателя, составляет только 10...15 % суммарной тяги.
ТВД сочетают в себе преимущества ТРД на больших скоростях полета
(способность создавать большую тягу при относительно небольших массе
и габаритных размерах двигателя) и ПД на малых скоростях (низкие
расходы топлива). Обладая высокой топливной эффективностью, они
широко применяются в силовых установках имеющих большую
грузоподъемность и дальность полета самолетов (летающих на скоростях
600...800 км/ч) и вертолетов. ГТД, работающие с передачей мощности
на несущий винт вертолета, принято называть турбовалъными двига-
телями.
Дальнейшее повышение топливной эффективности самолетов
различного назначения связано с применением турбореактивных
двухконтурных двигателей (ТРДД) (рис. 14.5), или двухконтурных
турбореактивных двигателей (ДТРД), в которых избыточная мощность
338
турбины турбокомпрессора 2.
передается компрессору низкого
давления 1 так называемого вто-
рого (внешнего) контура двигате-
ля (а не винту, как в ТВД).
Воздушный поток, поступаю-
щий в ТРДД, сжимается в ком-
прессоре I, а за ним часть потока
3 идет через турбокомпрессор 2
(внутренний контур двигателя,
контур высокого давления), где
рабочий процесс аналогичен рабо-
Рис. 14.6. Схема ТВлД
чему процессу ТРД. Другая (холодная) часть потока 4 проходит через
внешний контур низкого давления и на выходе из контура смешивается
с горячим потоком 3. Увеличение массового расхода воздуха, а также
уменьшенные по сравнению с ТРД температура и скорость выхлопной
струи ТРДД снижают расход топлива и уменьшают шум двигателя.
Для маневренных многорежимных сверхзвуковых самолетов
применяются ТРДДФ - турбореактивные двухконтурные двигатели с
форсажной камерой (обычно во внешнем контуре).
Важнейшим параметром, определяющим тяговые, массовые и
экономические характеристики ТРДД, является степень двухконтурности
т = G-JGz,
где G| - массовый расход воздуха через внешний контур двигателя; -
массовый расход воздуха через внутренний контур двигателя. Очевидно,
что для обычного ТРД степень двухконтурности т = 0.
ТРДД с низкой степенью двухконтурности (т < 2) применяются для
сверхзвуковых самолетов, с высокой степенью двухконтурности (т > 2) -
для транспортных самолетов. С увеличением степени двухконтурности
(а у современных двигателей т = б...8) компрессор низкого давления
трансформируется в вентилятор, и изменяется конфигурация двигателя.
Двухконтурный двигатель с высокой степенью двухконтурности
принято называть турбовентиляторным двигателем (ТВлД) (рис. 14.6)
или турбовентиляторным реактивным двигателем (ТВРД), Здесь
вентилятор 1, приводимый в движение турбокомпрессором 3, закапоти-
рован сравнительно коротким кольцевым обтекателем 2, и горячая струя
5 внутреннего контура практически не смешивается с холодной
струей 4.
Дальнейшим развитием ТРДД с большой степенью двухконтурности
является винтовентиляторный двигатель (ВВлД) (рис. 14.7), или
турбовинтовентиляторный двигатель (ТВВД).
339
Рис. 14.7. Схема ВВлД с открытым (а) и закрытым (б) вицтовентил«тором
В отличие от воздушного винта ТВД движитель ВВлД - это
многолопастный (8-20 лопастей) винт 1 с саблевидной формой лопасти
(с переменной по размаху лопасти стреловидностью передней и задней
кромок) и специальной ее профилировкой, получивший название
винтовентилятор.
Движитель однорядной, или соосной, схемы, когда на одном валу
находятся два винтовентилятора с противоположным направлением
вращения - открытый (рис. 14.7, а) или закапотированный кольцевым
обтекателем 4 (рис. 14.7, б), - приводится во вращение турбокомпрессо-
ром 3 через редуктор 2. Винтовентилятор может располагаться перед
турбокомпрессором или за ним (см., например, рис. 20.48).
Такие двигатели со сверхвысокой степенью двухконтурности (до 90
для открытого винтовентилятора и до 40 для закапотированного)
позволяют существенно снизить расходы топлива при скоростях полета
800...900 км/ч.
Разработка ВВлД требует решения ряда проблем, связанных с
конструкцией самого двигателя (сложность конструкции, получение
приемлемой массы винтовентилятора, шумоглушение), и проблем
компоновочного характера, связанных с размещением такого крупно-
габаритного двигателя на самолете.
В любом случае, если д ля проектируемого ЛА разрабатывается новый
двигатель, в процессе эскизного проектирования ведется согласование
характеристик планера и силовой установки, разрабатывается ТЗ на
проектирование двигателя и устанавливаются его потребные характерис-
тики.
Основными характеристиками двигателя любого типа являются
следующие:
340
Рис. 14.8. Высотно-скоростные характеристики ГТД:
а - тяговые характеристики; б - расходные характеристики
масса двигателя шдв и его габаритные размеры;
стартовая тяга двигателя Рдв0;
удельная масса двигателя удв = тдв/Рдв0, кг/Н;
удельный расход двигателя Ср, показывающий расход массы топлива
на создание 1 Н тяги в час, кг/(Н-ч);
высотно-скоростные характеристики Р =f(H, V) и Ср = /(Я, У);
ресурс двигателя.
Качественный характер высотно-скоростных характеристик ГТД
иллюстрирует рис. 14.8. Для ГТД эти характеристики определяются
главным образом степенью повышения давления в компрессоре, степенью
двухконтурности и температурой газа перед турбиной.
Потребная для определенных условий полета тяга (мощность)
обеспечивается выбором соответствующего режима работы силовой
341
Рис. 14.9. Размещение звукопоглощающих
конструкций в ТРДД
установки. Летчик управляет ре-
жимом работы двигателя с по-
мощью рычага управления двига-
телем (РУД), перемещение которо-
го регулирует, т.е. увеличивает
или уменьшает - дросселирует (от
нем. drossein - душить, сокра-
щать) - расход топлива.
Большинство современных
пассажирских самолетов оборудо-
ваны вспомогательной силовой
установкой (ВСУ) - небольшим
ГТД, вся мощность которого ис-
пользуется не для создания тяги, а
для снабжения энергией бортовых систем самолета. При стоянке на земле
ВСУ обеспечивает работу электросистем, радиооборудования, системы
кондиционирования самолета, техническое обслуживание самолета и его
систем, запуск основных двигателей, что делает самолет независимым
от аэродромных источников энергии. ВСУ может применяться и как
источник энергии в аварийных ситуациях в полете.
Двигатель является основным источником шума в кабине самолета
и на местности. Для удовлетворения требований по уровню допустимого
шума в конструкции самолета используют материалы и устройства,
изолирующие источник шума или поглощающие шум.
Звукоизоляционные прокладочные материалы ограждают источник
шума и ослабляют звук при его проникновении через ограждение.
Свойства звукопоглощающих материалов и устройств основаны на
многократном отражении звуковых волн от большого числа стенок
открытых сообщающихся между собой пор, выполненных, например,
в виде многослойных панелей из неметаллических перфорированных
обшивок с сотовым заполнителем.
Пример размещения звукопоглощающих конструкций в ТРДД с
высокой степенью двухконтурности приведен на рис. 14.9.
Выбор типа двигателя, тяговооруженности, числа двигателей и места
их расположения на самолете (см. рис. 7.43) является одним из важнейших
вопросов при проектировании. Размещение двигателя, конструкция
входных и выхлопных устройств оказывают существенное влияние на
его характеристики.
342
14.2. ВОЗДУХОЗАБОРНИКИ И СОПЛА ДВИГАТЕЛЕЙ
САМОЛЕТА
Для подвода необходимого количества воздуха и поддержания
устойчивости работы газотурбинного двигателя на всех режимах полета
служат воздухозаборники. Воздухозаборники обеспечивают торможение
потока воздуха, повышая его давление перед входом в компрессор.
На самолетах с дозвуковыми режимами и при полетах со скоростями,
соответствующими числам М = 1,2...1,5, применяются воздухозаборники
с нерегулируемой геометрией.
При дозвуковых скоростях полета степень повышения давления в
воздухозаборнике незначительна по сравнению с повышением давления
в компрессоре ГТД; при скоростях полета, соответствующих числам М =
= 1,2... 1,5, воздухозаборник и компрессор практически в одинаковой
степени сжимают воздушный поток. При больших сверхзвуковых
скоростях полета (М > 3) степень сжатия воздуха в воздухозаборнике
превышает степень сжатия в компрессоре и становится возможным
создание реактивной тяги двигателем, не имеющим компрессора (и, как
следствие, турбины) - так называемым прямоточным воздушно-
реактивным двигателем (ПВРД). Газодинамический тракт ПВРД
аналогичен тракту форсажной камеры ТРДФ (см. рис. 14.3). Естественно,
что ПВРД не создает тягу на старте (М = 0) и может быть использован
на ЛА только в комбинации с другими типами двигателей.
Применение на сверхзвуковых самолетах регулируемых воздухозабор-
ников, безусловно, усложняет конструкцию входных устройств,
увеличивает их массу и стоимость, однако позволяет обеспечить более
надежную и экономичную работу двигателей в широком диапазоне
скоростей и высот полета. На рис. 14.10 показана схема гондолы
двигателя СПС.
Щель 1 между фюзеляжем и
гондолой служит для слива погра-
ничного слоя. Накопившийся по
длине фюзеляжа турбулентный
пограничный слой не попадает,
таким образом, в тракт двигателя,
что улучшает режим работы лопа-
ток компрессора.
Обеспечение на всех режимах
полета оптимальных параметров
воздушного потока, подходящего
к двигателю, осуществляется за
счет автоматического регулирова-
1 2 3
Рис. 14.10. Схема гондолы двигателя СПС
343
Рис. 14.11. Принцип действия реверсера
Рис. 14.12. Глушители шума
ния геометрии воздухозаборника подвижной рампой 2 (со щелями 3 для
слива пограничного слоя с плоскости рампы) и створками перепуска
воздуха 4 и 5. При изменении положения рампы изменяется не только
площадь входа воздушного потока в тракт двигателя, но и система
скачков уплотнения, возникающих при сверхзвуковых скоростях на
передних кромках воздухозаборника и на отдельных участках подвижной
рампы.
Напомним, что при переходе воздушного потока через скачки уплот-
нения (см. подразд. 5.5) в зависимости от угла наклона скачка меняются
скорость, давление, плотность и температура потока, что используется
в сверхзвуковых регулируемых воздухозаборниках для обеспечения
необходимой степени сжатия воздушного потока. В этом случае
регулируемый воздухозаборник фактически выполняет роль регулируе-
мого компрессора двигателя.
Одновременно с регулированием воздухозаборника осуществляется
регулирование сопла 7. Ревер-
сер 6 позволяет сократить длину
пробега при посадке.
Принцип действия реверсера,
отклоняющего струю двигателя
вперед, проиллюстрирован на
рис. 14,11.
Иногда на выходе из гондолы
двигателя устанавливают глуши-
тели шума (рис. 14.12), которые за
счет "дробления" струи газа, выхо-
дящего из двигателя, снижают
шум от взлетающих и садящихся
Рис. 14.13. Плоское сопло с управлением
вектором тяги
344
самолетов в районе аэродрома. Естественно, что это уменьшает тягу
двигателей.
Существенное влияние на ЛТХ сверхзвуковых маневренных самолетов
интегральной компоновки могут оказать круглые или плоские (с
прямоугольным поперечным сечением) сопла, позволяющие осуще-
ствлять поворот вектора тяги в любом направлении для повышения
маневренных характеристик самолета и обеспечить эффект супер циркуля-
ции на несущем фюзеляже. Плоское сопло с управлением вектором тяги
(УВТ)(рис. 14.13) обеспечивает отклонение вектора тяги (а) в плоскости
симметрии самолета и реверсирование (б).
14.3. ТОПЛИВНАЯ СИСТЕМА САМОЛЕТА
Топливная система обеспечивает размещение запаса топлива,
необходимого для выполнения полета, и бесперебойную подачу его
двигателям (и ВСУ, если она имеется на самолете) на всех режимах
полета, предусмотренных ТЗ.
На некоторых самолетах топливная система выполняет дополнитель-
ные функции, например обеспечивает балансировку и поддерживает
оптимальную центровку самолета за счет перекачки топлива из одних
баков в другие; то пливо может использоваться в качестве хладагента для
охлаждения бортовых систем в технических отсеках.
Топливную систему можно условно разделить на следующие
взаимосвязанные подсистемы:
топливные емкости (топливные баки, дренаж баков);
систему распределения топлива (системы заправки и подачи топлива
к двигателям, система перекачки топлива);
устройство слива топлива (аварийный слив в полете, слив на земле,
слив конденсата);
приборы и устройства контроля работы топливной системы.
В зависимости от назначения и потребных ЛТХ самолета масса
топлива составляет 10...60 % взлетной массы самолета, поэтому
размещение топлива на его борту является сложной компоновочной и
конструктивной проблемой.
Схема компоновки топливных баков на самолете-истребителе
представлена на рис. 14.14. Из-за малых объемов конструкции крыльев
основная масса топлива размещена в фюзеляжных мягких (с внутренним
резиновым и наружным, создающим каркас бака, резинотканевым слоем)
баках 3, размещенных сбоку от воздушных каналов 1 под обшивкой
фюзеляжа. Жесткий топливный бак 6, сваренный из тонких листов
алюминиево-марганцевого сплава, закреплен на конструкции в
хвостовой части фюзеляжа под двигателем 4 и его выхлопной трубой 5.
345
Крыльевые баки-отсеки 7
и все фюзеляжные баки сое-
динены трубопроводами с
расходным баком-отсеком 2,
из которого топливо подает-
ся к двигателю. В баке 2 раз-
мещен отсек отрицательных
перегрузок, конструкция и
Рис. 14.14. Схема компоновки топливных баков на топливная аппаратура кото-
самолете-истребителе рого позволяют подавать
топливо к двигателю при
любых маневрах самолета, в том числе и при перевернутом полете.
Герметичность (по имени легендарного египетского мудреца Гермеса
Триждывеличайшего, которому, в частности, приписывалось искусство
прочной закупорки сосудов) баков-отсеков обеспечивается плотной
постановкой заклепок в заклепочных швах, а также тепло-, морозо- и
керосиностойкими герметиками (полимерными композициями,
обеспечивающими непроницаемость швов) в местах соединения
отдельных элементов конструкции.
Для увеличения дальности полета под крылом установлены подвесные
топливные баки 8, топливо из которых вырабатывается на начальных
участках полета. Перед выполнением боевой операции баки сбрасывают-
ся, так как они ухудшают маневренность и разгонные характеристики
самолета. На военных самолетах широко применяется дозаправка
топливом в полете путем перекачки топлива из баков самолета-
заправщика.
Выбранные при компоновке самолета расположение, конфигурация
и объемы топливных баков определяют порядок расходования топлива
в полете, а также построение схемы топливной системы самолета.
Принципиальная схема топливной системы двухдвигательного
пассажирского самолета проиллюстрирована на рис. 14.15. Топливная
система самолета представляет собой две автономные, аналогичные по
конструкции системы: правую и левую, каждая из них подает топливо
к соответствующему двигателю.
В каждой половине (консоли) крыла передний и задний лонжероны
совместно с верхней и нижней панелями крыла и герметическими
нервюрами образуют три кессон-бака 1, 2 и 3. Кессон-баки каждой
консоли связаны трубопроводом 17, в котором установлен кран
кольцевания (кран перекрестного питания) 72, обеспечивающий подачу
топлива из левой группы баков в правую и наоборот. Трубопроводы
топливной системы (топливопроводы) выполняются из алюминиевых
и стальных труб.
346
Топливо из кессон-баков по
трубопроводам 4,5 и б с помощью
спаренных (дублирующих друг
друга) перекачивающих насо-
сов 7 в определенном порядке
перекачивается в размещенный
внутри кессон-бака 1 расход-
ный отсек 8. Из него с по-
мощью спаренных подкачива-
ющих насосов 9 под определен-
ным давлением оно подается
по трубопроводу /Очерез пере-
крывной (противопожарный)
кран 13 к агрегатам топливной
системы на двигателе (подка-
чивающий насос 14, датчик
расходомера 15, топливомасля-
ный радиатор 16, топливный
фильтр 17, насос-регулятор 18,
после которого под высоким
давлением через коллектор
топливо подается к форсункам
камеры сгорания).
На современных самолетах
топливо централизованно под
давлением (через одну или
Рис. 14.15. Принципиальная схема топливной
системы пассажирского самолета
несколько заправочных горло-
вин) заливается в топливные
баки. Топливные фильтры обеспечивают освобождение топлива от
случайных механических примесей. Система клапанов и кранов
автоматически обеспечивает определенный порядок заправки баков,
выработки топлива из баков-отсеков, чтобы центровка самолета в
процессе выработки топлива не выходила из заданных пределов. Кроме
того, с ее помощью производится слив топлива из баков в полете перед
вынужденной (аварийной) посадкой.
Надежность работы топливной системы зависит от давления смеси
воздуха и паров топлива в надтопливном пространстве баков. Разреже-
ние (пониженное давление) может вызвать сплющивание баков,
кавитацию топлива на входе в насосы и в трубопроводах, т.е. образова-
ние в топливе полостей, заполненных воздухом, парами топлива или их
смесью, и, как следствие, нарушение работы перекачивающих насосов
и двигателей. Разрежение в надтопливном пространстве может
347
возникнуть в процессе выработки топлива или аварийного слива,
повышенное давление - в процессе централизованной заправки топливом
под давлением.
Повышенное давление в надтопливном пространстве может вызвать
остаточные деформации конструкции: вздутие встроенных топливных
баков и даже деформации баков-отсеков крыла.
Дренажная (от англ, drain - осушать) система обеспечивает
поддержание необходимой разницы давлений в надгопливном простран-
стве баков и окружающей атмосфере и уменьшение концентрации
взрывоопасных паров керосина путем наддува (и вентиляции) баков
воздухом через трубопроводы, выходящие к верхним точкам баков, за
счет скоростного напора, воздухом от компрессоров двигателей или из
бортовых баллонов, нейтральными газами из бортовых иди специальных
систем. Система наддува баков нейтральными газами повышает пожаро-
и взрывобезопасность ЛА.
Итак, планер, система управления, шасси и силовая установка
определяют облик самолета, обеспечивают его качественную определен-
ность и являются той основой, на которой компонуются остальные
системы, обеспечивающие специфику выполняемой самолетом задачи.
Проверьте, как Вы усвоили материал
1. Назовите тип двигателя и его основ-
ные элементы конструкции 1-5. Объяс-
ните их назначение.
Охарактеризуйте обозначенные на
рисунке стрелками потоки газа.
2. Назовите тип двигателя и его основ-
ные элементы конструкции 1-8. Объяс-
ните их назначение.
3. Интерпретируйте следующие основные понятия:
• первичный источник энергии;вспомогательная силовая установка;
• двигатели: поршневой, реактивный, ракетный, турбореактивный,
турбореактивный с форсажной камерой, турбовинтовой, турбореактивный
двухконтурный с форсажной камерой, турбовентиляторный, винтовентилятор-
348
ный, турбовинтовентиляторный, воздушно-реактивный прямоточный;
‘турбокомпрессор; газогенератор;
• степень двухконтурности двигателя; внешний контур двигателя; внутренний
контур двигателя; контур высокого давления; .
• движитель; тяговая мощность; движитель однорядной схемы; движитель
соосной схемы; открытый винтовентилятор; винтовентилятор закапотирован-
ный; лопасть саблевидной формы;
• входное устройство двигателя; воздухозаборник с нерегулируемой геомет-
рией; воздухозаборник дозвуковой; воздухозаборник регулируемый; рампа
регулирования геометрии воздухозаборника; створка перепуска воздуха;
• компрессор осевой; ротор компрессора; статор компрессора; спрямляющий
аппарат компрессора; степень повышения давления;
• камера сгорания; форсунка камеры сгорания; форсажная камера;реактивное
сопло; реверсер; глушитель шума; управление вектором тяги;
• топливная система самолета; мягкий топливный бак; кессон-бак; подвесной
топливный бак; отсек отрицательных перегрузок; дренажная система.
Глава 15
БОРТОВЫЕ СИСТЕМЫ И ОБОРУДОВАНИЕ
САМОЛЕТА
Современные авиационные комплексы предназначены для выполне-
ния широкого круга задач - транспортных, поисково-спасательных,
исследовательских, сельскохозяйственных, военных и др. Естественно,
что функциональные возможности и состав бортовых систем ЛА
существенным образом зависят от специфики выполняемой с помощью
ЛА задачи и условий, в которых выполняется эта задача.
В гл. 1 отмечалось, что взаимосвязи между отдельными системами
самолета достаточно сложны, границы между ними размыты. Тем не
менее, рассматривая в самом общем виде техническое задание на
проектирование самолета, можно выделить укрупненные блоки систем
и оборудования (см. рис. 1.4), обеспечивающих выполнение определен-
ных требований ТЗ на проектирование:
• пассажирское бортовое или специальное оборудование и системы
кондиционирования и индивидуального жизнеобеспечения. Обеспечива-
ют необходимые условия комфорта и предназначены для обслуживания
полезной нагрузки;
• системы защиты в особых условиях (противопожарная, антиобледе-
нительная) и системы спасения и десантирования. Обеспечивают
выживаемость полезной нагрузки и самолета в целом в аварийной
ситуации;
• пилотажно-навигационное и радиотехническое оборудование.
Обеспечивает навигацию и пилотирование самолета в заданных условиях
эксплуатации;
• бортовые энергетические системы - электротехническое, гидравли-
ческое и газовое оборудование. Предназначены для питания энергией
основных функциональных систем и бортового оборудования самолета.
15.1. ПАССАЖИРСКОЕ БОРТОВОЕ И СПЕЦИАЛЬНОЕ
ОБОРУДОВАНИЕ
Одна из основных задач проектировщика - создать на борту
пассажирского самолета среду обитания, максимально приближенную
к привычным для человека земным, домашним условиям комфорта по
климату и уровню шума, общему эстетическому впечатлению от
350
интерьера пассажирской кабины (салона) самолета и обслуживания в
полете, удобству размещения пассажиров.
Практически 95...96 % времени на борту самолета пассажир проводит,
находясь в кресле, поэтому пассажирское кресло является важнейшим
элементом оборудования салона самолета, и от того, насколько оно
удобно и как вокруг него скомпонованы другие элементы оборудования,
обеспечивающие комфорт и обслуживание в полете, зависит оценка
пассажиром условий полета, выбор им самолета определенной
авиакомпании и, в конечном счете, ее прибыль.
В практике воздушных перевозок применяют различные классы
кабин,различающихся уровнем обслуживания иразмещения пассажиров
в полете, существует широкий ассортимент пассажирских кресел,
удобных и вместе с тем обеспечивающих безопасность при аварийной
обстановке.
Кресла проектируются с учетом антропологических данных человека,
изготавливаются из высокопрочных материалов, отвечающих требовани-
ям пожаробезопасности, и при небольшой массе (для трехместного блока
кресел - 22...25 кг, для двухместного - 14...17 кг) обладают высокими
прочностными характеристиками. Эти качества наряду с оснащением
кресла привязными ремнями обеспечивают выживаемость пассажира при
аварийной посадке самолета с расчетной перегрузкой до 16. Таким
образом, кресло является не только частью пассажирского бортового
оборудования, но и элементом системы спасения.
Кресла, обеспечивающие минимальные требования по комфорту,
оборудуются отклоняемой спинкой с фиксацией ее в любом положении
для отдыха пассажиров, отклоняемыми до вертикального положения
сиденьями и подлокотниками для удобства прохода пассажиров и
уборки салона при техническом обслуживании самолета в аэропортах.
В конструкции кресел размещаются мусоросборники (пепельницы),
спасательные жилеты в чехлах, на спинке кресла сзади - индивидуальный
столик для пассажира следующего ряда.
Пассажирские кресла устанавливаются на направляющих рельсах,
утопленных в полу, что позволяет изменять расстояние между ними в
ряду ("шаг кресел") и производить перекомпоновку салона в соответ-
ствии с классом кабины.
Кресла для кабин более высокого класса, например бизнес-класса
(VIP-салона), обеспечивают условия как для отдыха, включая сон, так
и для эффективной работы в полете. Они имеют увеличенную ширину
подушек и подлокотников, а также большие (до 65°) углы отклонения
спинки, оснащены выдвижной подставкой для ног, оборудуются
передним столиком, монтируемым на подлокотнике, кнопкой для вызова
бортпроводника (стюардессы), индивидуальным освещением, вентилято-
351
ром, блоком разъемов для подключения наушников аудиотрансляции
и аппаратов радиотелефонной связи.
Сиденья членов экипажа пассажирских самолетов также принято
относить к пассажирскому бортовому оборудованию. Чтобы обеспечить
удобное положение летчика относительно рычагов управления, приборов
и остекления кабины, сиденья летчиков имеют регулировку в горизон-
тальном и вертикальном направлениях, а также по углу наклона спинки.
Иногда направляющие рельсы позволяют сместить сиденья летчиков
назад и вбок для удобства посадки и выхода, а также для приближения
к удаленным панелям приборов.
К пассажирскому бортовому оборудованию относятся средства и
оборудование для развлечения в полете (например, видеотрансляция),
гардеробы и багажники, кухни и буфеты, туалеты. Их размеры, а также
размеры и величина шага кресел, число и ширина проходов между
рядами кресел существенно влияют на компоновку фюзеляжа и его
размеры. С повышением уровня комфорта на борту увеличиваются масса
самолета и эксплуатационные расходы. Однако повышение уровня
комфорта на магистральных широкофюзеляжных самолетах (где в ряду
размещается 8-10 кресел с двумя-тремя центральными проходами между
ними) способствует увеличению притока пассажиров на высококомфор-
табельные самолеты и, следовательно, росту доходов эксплуатирующих
их авиакомпаний. Это неизбежно должно привести к повышению уровня
комфорта на легких самолетах коротких авиалиний.
Повышение экономической эффективности пассажирских самолетов
возможно и за счет использования их для решения других специальных
транспортных задач.
На рис. 15.1 представлена укрупненная компоновочная схема
основного (базового) варианта легкого многоцелевого самолета общего
назначения, проект которого разработан в ОКБ "Аэрокар" Московского
государственного авиационного института (технического университета)
в 1993 г.
Базовый вариант самолета предназначен для коммерческих перевозок
12 пассажиров и багажа на коротких региональных линиях протяженно-
стью до 1200 км. Двухместные блоки кресел, размещенные по четыре
кресла в ряд, разделены широким проходом, обеспечивающим доступ
к ручному багажу, размещаемому за последним рядом кресел, и к
багажному отсеку в хвостовой части фюзеляжа, отделенному от
пассажирского салона перегородкой со сдвижной дверцей. Слева от
входной двери размещен передний багажник, по правому борту в
передней части салона - туалет и гардероб.
Отличительными особенностями самолета являются удобные для
перекомпоновки салона обводы и внутренние размеры отсека полезной
352
Рис. 15.1. Компоновка легкого многоцелевого самолета (базовый вариант)
нагрузки фюзеляжа, который при малых общих габаритных размерах
самолета предоставляет широкие возможности для трансформации и
позволяет использовать самолет в вариантах применения, не свойствен-
ных самолетам такого класса.
На рис. 15.2 приведена одна из возможных компоновок салона бизнес-
класса делового варианта самолета. В этом варианте в салоне устанавли-
ваются шесть высококомфортабельных кресел. Они располагаются двумя
блоками (на два и четыре пассажира), оборудованными раскладными
столами. Кроме того, переднее кресло левого борта вращается вокруг
своей оси. При изменении компоновки салона могут быть оборудованы
и полноценные спальные места.
Во входном тамбуре, образо-
ванном перегородкой со сдвижной
дверью, по левому борту размеща-
ется входная дверь-трап; рядом с
ней справа на торцевой стенке
перегородки есть откидное си-
денье для стюардессы, а напротив,
слева от входной двери, - буфет с
холодильником, блоком подогре-
ва пищи, кофеваркой и мойкой
для посуды. По правому борту за
кабиной экипажа размещается
туалет с умывальником и душем,
рядом с туалетом - гардероб.
Рис. 15.2. Компоновка салона бизнес-класса
делового варианта самолета
12 7425
353
Рнс. 15.3. Компоновка грузового варианта
самолета
Рнс. 15.4. Патрульно-разведывательный и
аэрофотосъемочный вариант самолета
Комплекс связного оборудования, увязанный с пилотажно-навигаци-
онным комплексом, обеспечивает на борту через спутниковые системы
двухстороннюю радиотелефонную,телевизионную, факсимильную связь
с любым абонентом на земле и на других самолетах с аналогичными
системами связи.
Состав специального оборудования рассмотрим на других вариантах
легкого многоцелевого самолета, который может быть использован не
только для выполнения пассажирских перевозок.
Большая дверь, образующаяся при открытой вперед по потоку
дополнительной створке, находящейся слева от входной двери-трапа,
просторный салон с ровным полом дают возможность широкого
использования самолета в качестве грузового (рис. 15.3) с грузоподъем-
ностью 1200... 1500 кг. С целью облегчения погрузочно-разгрузочных
работ на самолете устанавливается специальное оборудование -
легкосъемная кран-балкагрузоподъемностью 500 кг с электрическим или
ручным приводом. В полу и на бортах размещены швартовочные узлы
для крепления грузов.
Конструктивно-силовая схема фюзеляжа позволяет в случае
необходимости разместить в полу десантный люк размером 1,5х 1,5 м,
обеспечивающий сброс груза в полете с помощью парашютной системы.
Патрульно-разведывательный и аэрофотосъемочный вариант самолета
(рис. 15.4) предназначен для выполнения широкого круга задач,
связанных с получением и документированием информации о состоянии
поверхности Земли в интересах хозяйственной деятельности.
Бортовойпилотажно-навигационныйкомплекссамолетаобеспечива-
ет точную привязку к местности и полет с параметрами заданной
точности высоты и скорости для проведения аэроразведывательных
работ.
354
Рис. 15.5. Санитарный вариант самолета Рис. 15.6. Реанимационно-эвакуационный
вариант самолета
Конструктивно-силовая схема фюзеляжа самолета позволяет
разместить вблизи центра масс значительные по размерам оптически
прозрачные люки для установки фото- и кинокамер, многоспектральных
сканеров видимого и инфракрасного диапазонов, радиолокаторов и
другой аппаратуры для получения и обработки информации о состоянии
растительности, геологических особенностях поверхности Земли,
акваторий, шельфа.
Санитарный вариант самолета (рис. 15.5) предназначен для
комфортабельной транспортировки тяжелобольных в стационарные
медицинские пункты с проведением в полете жизнеобеспечивающих
мероприятий.
В медицинском салоне размещаются восемь носилок с лежачими
больными, два сиденья для сопровождающих медицинских работников
и медико-техническое оборудование широкой номенклатуры.
Рядом с входной дверью - откидное сиденье для сопровождающего
медицинского сотрудника. Далее по бортам установлены стойки-
подвески для шести носилок с лежачими больными, оборудованные
держателями для аппаратуры, капельниц, системы переливания крови
и т.п.
Под нижними носилками расположены ящики-укладки с наборами
для скорой медицинской помощи и другое медицинское оборудование.
По бортам размещаются еще двое носилок для лежачих больных и между
ними-складноекресло для сопровождающего медицинского работника.
За креслом устанавливаются держатели для кислородных баллонов.
Салон самолета имеет плафоны общего и местного освещения.
Система кондиционирования поддерживает нормальное физико-
химическое состояние воздушной среды в салоне как в полете, так и на
земле.
Реанимационно-эвакуационный вариант самолета (рис. 15.6) предназна-
чен для оказания скорой и неотложной квалифицированной медицинской
12*
355
помощи на борту самолета как в полете, так и на стоянке, а также для
транспортировки тяжелобольных в стационарные медицинские пункты
с проведением в полете жизнеобеспечивающих мероприятий.
Наличие достаточно мощного источника энергии и медико-техничес-
кое оборудование широкой номенклатуры (в частности, наркозно-
дыхательной аппаратуры, электрокардиостимулятора, дефибриллято-
ра) дает возможность осуществлять реанимацию, вывод из шокового
состояния, хирургические операции, ожоговую терапию и другие
медицинские мероприятия.
По левому борту рядом с входной дверью имеется откидное
сиденье для медицинского сотрудника. Основной салон-операционная
отделен от входной двери раздвижной перегородкой, образующей
тамбур. В тамбуре размещаются холодильники справа от входной двери
стеллаж с медико-техническим оборудованием.
По правому борту салона есть еще три откидных кресла для
медицинской бригады. При необходимости здесь могут быть установле-
ны стойки для размещения трех носилок с лежачими больными.
По левому борту располагается блок из двух откидных к бортам
кресел для сидячих больных.
В центре салона размещается операционный стол, над которым
установлен светильник для освещения операционного поля. Стол может
перемещаться по направляющим в хвостовую часть салона и регулиро-
ваться по высоте и наклону. Во время полета операционный стол, если
он не используется, сдвигается в хвостовую часть салона и закрепляется.
Далее по левому и правому бортам размещены упаковки с медицин-
ским оборудованием и стеллажи с аппаратурой.
При работе на земле питание энергопотребителей самолета и медико-
технического оборудования осуществляется с помощью вспомогательной
силовой установки, расположенной в носовой части самолета под полом
кабины экипажа.
Целевой (полезной) нагрузкой военных самолетов является вооруже-
ние. Специальным оборудованием военных самолетов являются:
стрелково-пушечные установки (СПУ - пулеметы и пушки без
боекомплекта с элементами установки на самолете);
агрегаты и детали установки и оборудования ракетного и бомбового
вооружения.
15.2. СИСТЕМЫ КОНДИЦИОНИРОВАНИЯ
И ИНДИВИДУАЛЬНОГО ЖИЗНЕОБЕСПЕЧЕНИЯ
15.2.1. ВЛИЯНИЕ УСЛОВИЙ ПОЛЕТА НА ОРГАНИЗМ ЧЕЛОВЕКА
Организм человека функционирует нормально при определенных
параметрах окружающей среды.
356
В полете на экипаж и пассажиров, находящихся на борту ЛА, могут
воздействовать неблагоприятные и физиологически опасные факторы.
Эти факторы определяются в основном параметрами атмосферы в кабине
(давлением, температурой, составом газовой смеси, которой дышит
человек, влажностью), уровнем шума и динамикой полета ЛА.
С подъемом на высоту давление воздуха и его температура в
атмосфере Земли снижаются. До высоты порядка 2400 м человек
чувствует себя нормально, однако на больших высотах самочувствие
человека ухудшается, проявляется целый ряд функциональных рас-
стройств, объединенных под общим названием: высотная болезнь. Это
связано в первую очередь с уменьшением снабжения организма человека
кислородом в процессе дыхания, хотя, как уже отмечалось (см. подразд.
3.2), до высот 70...90 км объемное содержание кислорода в атмосфере
(-21 %) практически не меняется.
Основным фактором, определяющим насыщение гемоглобина крови
кислородом и удаление в выдыхаемый воздух углекислого газа, является
соотношение парциального давления кислорода и углекислого газа в
легочных альвеолах (от лат. alveolus - ячейка, углубление, пузырек).
Альвеолы - это пузырьковидные образования в легких человека, густо
оплетенные сетью мельчайших кровеносных сосудов, через очень тонкие
стенки которых, как через полупроницаемые мембраны (от лат.
membrana - кожица, перепонка), происходит насыщение крови и тканей
организма кислородом и удаление из них в выдыхаемый воздух
углекислого газа. Парциальное давление (от ср.-век. лат. partialis -
частичный) - это давление газа, входящего в состав идеальной газовой
смеси, которое он оказывал бы, занимая один весь объем газовой смеси и
находясь при температуре смеси.
Воздух является смесью газов, и его полное давление является суммой
парциальных давлений его компонентов. На основании физиологических
исследований установлена взаимосвязь между парциальным давлением
кислорода в альвеолах легких и давлением воздуха, содержанием в нем
кислорода, углекислого газа и водяных паров. С увеличением высоты
пропорционально уменьшению общего атмосферного давления
уменьшается парциальное давление кислорода Р0) в атмосферном
воздухе (рис. 15.7) и вместе с ним парциальное давление кислорода в
альвеолах.
На высоте порядка 3000 м оно достигает среднего физиологически
допустимого уровня, насыщение крови кислородом становится
недостаточным, начинается гипоксия (от греч. hypo - под, внизу и лат.
oxigenium - кислород) - кислородное голодание, особенно опасное тем,
что субъективно человек не осознает своего состояния и, несмотря на
357
Рис. 15.7. Зависимость парциального давле-
ния кислорода j>0] в атмосферном воздухе от
высоты полета Н
кажущееся хорошее самочувствие,
может внезапно потерять созна-
ние. При дальнейшем увеличении
высоты явления кислородного
голодания интенсивно развивают-
ся вплоть до полной потери рабо-
тоспособности и потери сознания.
У подавляющего большинства
людей это происходит на высоте
6000...7000 м, а на высоте около
8000 м возникают смертельно
опасные явления. Причем интен-
сивность кислородного голодания
возрастает при выполнении чело-
веком какой-либо работы.
Воздействие пониженного
давления на организм человека не
ограничивается только явлениями
кислородного голодания. При
подъеме на высоту расширяются газы в пищеварительном тракте -
высотный метеоризм (от греч. metedrismos - поднятие вверх), что
приводит к вздутию живота, сопровождающемуся схваткообразными
болями, подъему диафрагмы, уменьшению емкости легких и другим
расстройствам.
На высотах 8000... 13 000 м при пониженном давлении азот, растворен-
ный при нормальном давлении в крови и тканях человека, выделяется
в виде пузырьков свободного газа, которые, оказывая механическое
давление на нервные окончания, вызывают боли в мышцах и суставах.
Это явление называется аэроэмболией (от греч. аег - воздух и embole
вбрасывание), или декомпрессионной болезнью.
На высоте более 19 000 м возникает высотная эмфизема (греч.
emphysema - наполнение воздухом, вздутие). На этой высоте вода,
составляющая около 70 % массы тела человека, закипает при температуре
человеческого тела, что может привести к смертельному исходу.
Для обеспечения максимальной дальности и экономичности
магистральные пассажирские самолеты летают на высотах, близких к
практическому потоку (для дозвуковых самолетов 9000... 1 1 000 м, а для
сверхзвуковых 18 000...20 000 м). Температура воздуха на высотах более
11 000 м снижается почти до -60 °C. Если не принимать специальных мер,
то при длительном полетекабина постепенно охладится до температуры,
близкой к температуре наружного воздуха. Вместе с тем при полете
сверхзвуковых самолетов температура их конструкции повышается в
358
i
зависимости от скорости полета
до +130...+250 °C вследствие кине-
тического нагрева и, следователь-
но, повышается температура в
кабине. Самочувствие человека,
его работоспособность существен-
ным образом зависят от темпера-
туры окружающего воздуха, его
влажности, а также от масс и ско-
рости движения воздушных пото-
ков внутри помещения. Так, при
повышенных физической и эмоци-
ональной нагрузках для обеспече-
ния комфортных условий жела-
тельна пониженная температура.
При отклонении температуры от
комфортных значений человек
испытывает неприятные ощуще-
ния.
Рис. 15.8. Зависимость потребного процентно-
го содержания кислорода а0 в дыхательной
смеси от высоты полета Н
Таким образом, в полете на экипаж и пассажиров, находящихся на
борту ЛА, действует комплекс неблагоприятных и физиологически
опасных факторов - уменьшение с подъемом на высоту общего
атмосферного давления, уменьшение парциального давления кислорода
в атмосферном воздухе и, как следствие, парциального давления
кислорода в альвеолярном воздухе и др.
Нормальная жизнедеятельность человека может быть обеспечена
поддержанием парциального давления кислорода во вдыхаемом воздухе
на определенном уровне.
Экспериментально установлено, что при подъеме на высоту в
атмосфере Земли (и соответственно при уменьшении атмосферного
давления) необходимо увеличивать процентное содержание кислорода <х0
во вдыхаемом воздухе (дыхательной смеси) (рис. 15.8). На высоте 10 000 м
для дыхания требуется уже чистый кислород, а на высоте 12 000 м
кислород для дыхания необходимо подавать под повышенным
давлением, обеспечивающим постоянство парциального давления
кислорода в легких независимо от высоты. Технически эту задачу можно
решить повышением давления вдыхаемого воздуха (применение
гермокабин) или повышением процентного содержания кислорода в
дыхательной смеси (применение кислородных приборов).
Для обеспечения нормальной жизнедеятельности и комфорта
пассажиров и экипажа в самолетах, совершающих полеты на высотах
359
более 3000 м, применяются герметичные кабины с системами кондицио-
нирования (от лат. conditio - условие, состояние), где на всех режимах
полета "высота в кабине" не превышает 2400 м. Это значит, что давление
в кабине не меньше давления атмосферного воздуха на высоте 2400 м,
а температура равна +17...+25 “С. При таких давлении и температуре
количество кислорода, необходимоедля обеспечения жизнедеятельности
человека, содержится в сравнительно небольшом количестве свежего
воздуха: за одну минуту в покое человек вдыхает и выдыхает 6...9 л
воздуха (при физической нагрузке-80...90 л, иногда до 170 л).
Однако в условиях ограниченного пространства основным параме-
тром при определении необходимого количества воздуха, подаваемо-
го в гермокабину, является допустимая концентрация вредных примесей
(углекислого газа, выделяемого при дыхании, запахов, обусловленных
жизнедеятельностью человека, паров топлива, которые могут попасть
в гермокабину, и т.п.), температура и влажность. На современных
пассажирских самолетах значение подачи свежего воздуха в гермокабину
на одного пассажира составляет 24...40 кг/ч.
Как уже отмечалось, проблема шума внутри кабин обострилась с
появлением в эксплуатации реактивных самолетов. Шум, создаваемый
двигателями, воздушными винтами, пограничным слоем воздуха,
обтекающего фюзеляж, настолько велик, что значительно превышает
предел переносимости, под которым понимается максимально допусти-
мое значение общего звукового давления, объединяющего всю совокуп-
ность звуков в отдельных частотных интервалах спектра звуковых частот
(высокие, средние и низкие звуковые частоты), которое физиологически
переносимо человеком. Значительный шум в кабину вносит система
кондиционирования (наддува и вентиляции кабин), в которой источни-
ком шума является воздух, движущийся по трубопроводам и истекающий
через отверстия (сопла) трубопроводов внутрь кабины. Источниками
дополнительных шумов в кабине служат элементы оборудования
(электро- и гидромоторы, преобразователи постоянного тока и т.п.),
установленные вблизи от кабины.
Снижение уровня шума до допустимого предела обеспечивается
компоновочными и конструктивными мероприятиями. Так, не следует
устанавливать кресла пассажиров в плоскости воздушных винтов ТВД
или в зонах влияния выхлопных струй газов ТРД на фюзеляж. Установки
и оборудование, создающие шум, по возможности размещают за
пределами кабины или в звукоизолирующих отсеках. Трубопроводы для
подвода и раздачи воздуха в кабинах покрывают звукоизолирующими
покрытиями. Кабина изнутри отделывается теплозвукоизолирующи-
ми покрытиями, причем толщина покрытйя увеличивается в местах
360
источников внешних шумов и к концу кабины по мере роста толщины
пограничного слоя и, соответственно, создаваемого им шума.
Среди факторов, обусловленных динамикой полета, прежде всего
следует отметить перегрузки. Как уже отмечалось (см. рис. 6.7), наиболее
опасноефизиологическоевоздействиеоказываютперегрузки, направлен-
ные вдоль тела человека. При больших положительных перегрузках
происходит отлив крови от головы к ногам и возможна потеря сознания.
Для компенсации таких перегрузок экипажи маневренных ЛА применяют
противоперегрузочные костюмы.
С динамикой полета при снижении и наборе высоты связана скорость
изменения давления в кабине самолета, при больших значениях которой
человек ощущает боль в полузамкнутых полостях организма (полости
среднего уха и придаточной пазухи носа). Установлена физиологически
допустимая норма скорости изменения давления в кабине. Скорости
изменения давления в гермокабине при снижении и наборе высоты
ограничивают регуляторы давления.
Комплекс технических средств, обеспечивающих нормальную
жизнедеятельность пассажиров и работоспособность экипажей на всех
режимах полета и в экстремальных ситуациях, называют системами
обеспечения жизнедеятельности. В состав этих систем входят системы
кондиционирования воздуха в гермокабинах, системы кислородного
питания, высотное (защитное) снаряжение экипажей боевых самолетов.
15,2.2. СИСТЕМЫ КОНДИЦИОНИРОВАНИЯ ВОЗДУХА В ГЕРМОКАБИНАХ
Гермокабины (ГК) являются элементом силовой конструкции планера
самолета и воспринимают нагрузку от аэродинамических и массовых сил
и от внутреннего избыточного давления (см, подразд, 10.4).
Системы кондиционирования воздуха (СКВ) обеспечивают наддув -
превышение давления в кабине над атмосферным давлением, -
вентиляцию, отопление, охлаждение герметичных кабин (кабины
экипажа, кабины пассажиров и грузовых отсеков), очистку подаваемого
в герметичные отсеки воздуха от аэрозольного (состоящего из газовой
смеси, в которой взвешены твердые или жидкие частицы), химического
и других загрязнений, дезодорацию (от франц, dus - приставка,
означающая отрицание, уничтожение, удаление или отсутствие чего-
либо, и лат. odoratio - запах) и ионизацию воздуха в кабине при полете
и на земле. Кроме того, эти системы обеспечивают защиту стекол фонаря
пилотов отзапотевания, обдув (охлаждение) электронного и электрообо-
рудования, а иногда и подачу горячего воздуха в систему воздушно-
тепловых противообледенителей (антиобледенителей) передних кромок
крыла и оперения (см. подразд. 15.3). Большинство современных
361
Рис. 15.9. Принципиальная схема системы коцдициоиироваиия гермокабины
самолетов имеют атмосферные (неавтономные) ГК, которые вентилиру-
ются воздухом из окружающей среды, в отличие от автономных ГК, для
которых запас кислорода находится на борту ЛА.
Одна из возможных принципиальных схем системы кондиционирова-
ния гермокабины пассажирского самолета представлена на рис. 15.9.
Воздух отбирается от компрессоров двигателей 1 с температурой до
500 °C и давлением до 1,6 МПа (16 кгс/см2), объединяется в общий поток
и, проходя по трубопроводу 3, разделяется на два потока. Поток горячего
воздуха 5 проходит через основную б (а в случае отказа через дублирую-
щую 2) систему охлаждения воздуха. Для охлаждения воздуха используют
воздушно-воздушные, топливно-воздушные теплообменники и
турбохолодильники.
Поток горячего воздуха 8 поступает прямо в смеситель 10, где
смешивается с охлажденным потоком 7. Поступление холодного воздуха
в смеситель регулируется с помощью крана 9, а подача воздуха в
гермокабину - с помощью ограничителя температуры 11 по сигналу
регулятора температуры 4 в гермокабине. Пройдя через увлажнитель 12,
в котором по сигналу датчика влажности воздуха в кабине 16 распыляет-
ся вода из бака 17, воздух с необходимыми параметрами температуры
и влажности подается по системе трубопроводов 13 в гермокабину.
Управление клапаном 15 выпуска кабинного воздуха в атмосферу
осуществляется с помощью автоматического регулятора давления 14.
362
Системы кондиционирования используются для поддержания
определенной влажности воздуха в гермокабинах. Влага, содержащаяся
в воздухе в парообразном состоянии, может конденсироваться (от
позднелат. condensatio - уплотнение, сгущение) и оседать в виде капель
на стенках кабины, трубопроводах и особенно в теплозвукоизоляции.
Скапливаясь, эта влага может существенно увеличить массу пассажирско-
го самолета и даже нарушить его центровку. Для удаления влаги из
теплозвукоизоляции принимаются специальные меры при наземном
обслуживании самолета.
Наиболее благоприятным с физиологической точки зрения является
давление в кабине, равное атмосферному давлению воздуха на уровне
моря. Однако в этом случае на больших высотах будет возникать
значительный перепад давления между кабиной и атмосферой, что, с
одной стороны, потребует увеличения толщины обшивки кабины для
обеспечения ее прочности и, следовательно, увеличения массы самолета,
а с другой стороны, при внезапной разгерметизации ГК перепад давлений
между кабиной и атмосферой будет очень большим и падение давления
в ГК до атмосферного будет происходить очень быстро. Это явление
принято называть взрывной декомпрессией.
С одной стороны, в процессе декомпрессии может произойти
лавинообразное разрушение конструкции гермокабины от микроразру-
шений, вызвавших разгерметизацию, до макроразрушений основных
силовых элементов фюзеляжа. С другой стороны, давление в легких
человека не может уменьшаться так же быстро, как уменьшается давление
в кабине при разгерметизации, и возможны несовместимые с жизнью
человека баротравмы (от греч. baros - тяжесть) - механические
повреждения легких и других органов расширяющимся газом, - разрывы,
внутренние кровоизлияния, падение кровяного давления, замедление
ритма сердца вплоть до остановки. Кроме того, происходит внезапный
"перенос" пассажиров и экипажа в условия острой кислородной
недостаточности. В результате развивающихся явлений острой
гипоксии и аэроэмболизма человек теряет сознание и наступает смерть.
Происходит также обмораживание вследствие постепенного пони-
жения температуры в кабине до температуры наружного воздуха (поряд-
ка-60 °C).
С учетом всех этих условий выбираются программы регулирования
давления в гермокабинах самолетов. Наиболее благоприятна для
пассажиров программа регулирования давления в гермокабине в
зависимости от высоты полета (рис. 15.10):
Р = Рн'Ро*
363
Рис. 15.10. Программа регулирования давления в
гермокабине пассажирского самолета по высоте
полета
где р - относительное атмос-
ферное давление; рн - атмос-
ферное давление на соответ-
ствующей высоте; р0 - атмос-
ферное давление на уровне
моря. На рис. 15.10 кривая 1
показывает изменение атмос-
ферного давления в зависимос-
ти от высоты полета (по
MCA), а кривая 2 - изменение
давления в гермокабине в зави-
симости от Н.
Для максимальной расчет-
ной высоты полета Нтах (на-
пример, 14 000 м) устанавли-
вается максимальное избыточ-
ное давление (в нашем примере Др“^ = 0,61 р0), которое дополняет
атмосферное давление на максимальной расчетной высоте полета (точка
D на кривой 7) до минимально возможного давления (точка С на кривой
2), соответствующего максимально допустимой "высоте в кабине", т.е.
до значения 0,75 атмосферного давления на уровне моря, соответствую-
щего высоте 2400 м.
На высотах полета от Я] (точка В на кривой 2) до Ятах в кабине
поддерживается постоянное избыточное давление Др^ = 0,61 р0
относительно атмосферного (кривая 2 на этом участке эквидистантна
кривой 7).
При стоянке на земле (точка Л на кривой 2) и в полете до высоты
(в нашем примере Н1 = 7 200 м) система кондиционирования воздуха
поддерживает в кабине постоянное давление, равное атмосферному
давлению на уровне моря.
При крейсерской высоте полета порядка 10 000...14 000 м при
разгерметизации кабины экипаж самолета имеет возможность в режиме
экстренного (аварийного) снижения вывести самолет на относительно
безопасные высоты порядка 3000...4000 м за время, соответствующее так
называемому резервному, или активному времени, в течение которого при
остром кислородном голодании (без аварийного питания пассажиров
кислородом) не происходят необратимые изменения в деятельности
головного мозга человека. Тем не менее пассажирские самолеты имеют
систему аварийного питания пассажиров кислородом и систему
непрерывного питания кислородом летчиков в течение всего полета.
364
Для боевых самолетов, летающих на высотах порядка
20 000...25 000 м, время экстренного снижения в случае разгерметизации
гермокабины до безопасной высоты значительно превышает резервное
(активное) время. Кроме того, вероятность разгерметизации гермокаби-
ны боевого самолета вследствие боевого повреждения значительно выше
вероятности разгерметизации гермокабины пассажирского самолета
вследствие недостаточной прочности или повреждения конструкции
гермокабины извне при разрушении дисков и лопаток турбин реактив-
ных двигателей, воздушных винтов, при попадании в самолет ударов
молнии или птиц, при столкновении с другими самолетами. Поэтому на
военных самолетах стремятся к максимально возможному снижению
перепада давления между гермокабиной и атмосферой. В связи с тем, что
летный состав имеет специальную тренировку и все члены экипажа
снабжены индивидуальными системами обеспечения жизнедеятельности,
максимальное избыточное давление в гермокабине при полете на
максимальной высоте примерно вдвое меньше (Дд“^ “ 0,30 р0), чем в
гермокабине пассажирского самолета.
Программы регулирования давления в гермокабинах военных
самолетов более сложные и выбираются с учетом специфики режимов
полета и маневрирования при выполнении боевой задачи. В частности,
применение таких программ позволяет уменьшить скорость изменения
давления в гермокабине при вертикальных маневрах.
В этой ситуации при полетах на больших высотах "высота в кабине"
военных самолетов не превышает 7000...8000 м и физические условия
среды в кабине не соответствуют требованиям организма человека,
поэтому необходимо применение систем индивидуального жизнеобеспе-
чения экипажей боевых самолетов.
15.2.3. СИСТЕМЫ ИНДИВИДУАЛЬНОГО ЖИЗНЕОБЕСПЕЧЕНИЯ
Индивидуальные системы обеспечения жизнедеятельности (ИСОЖ)
комплектуются в зависимости от назначения и условий применения
самолетов. Для пассажирского самолета это в основном кислородные
системы. Кислородная система (система питания кислородом) экипажа
пассажирского самолета используется как штатная: либо первый, либо
второй пилот в течение всего полета дышит обогащенной кислородом
воздушной смесью или чистым кислородом через кислородную маску,
чтобы в случае разгерметизации перевести самолет в режим экстренного
снижения. В то же время эта система обеспечивает экипаж кислородом
в случае аварийной ситуации (разгерметизация кабины, отказ системы
кондиционирования, появление дыма в кабине и т.п.). Система питания
кислородом пассажиров не зависит от таковой, предназначенной для
365
экипажа и. является аварийным
средством жизнеобеспечения: с ее
помощью кислород через гибкие
шланги I подается в индивидуаль-
ные кислородные маски 2, кото-
рые размещаются наверху в ба-
гажных полках (рис. 15.11) либо в
спинках впередистоящих сидений
Рис. 15.11. Размещение индивидуальных и падают перед пассажирами в
кислородных масок для пассажиров случае разгерметизации кабины.
ИСОЖ на боевом самолете
включают в себя защитное (высотное)
снаряжение и системы, обеспечивающие его работоспособность.
Защитное (высотное) снаряжение, предназначенное для обеспечения
жизнедеятельности человека, в зависимости от условий выполнения
боевой операции (высота полета и время пребывания на этой высоте,
максимальные скорость и перегрузка) и предполагаемых условий в месте
приземления при аварийном покидании самолета включает комбинацию
следующих элементов: кислородная маска, защитный или герметический
шлем, компенсирующая одежда, противоперегрузочный костюм,
вентилирующий костюм, скафандр, морской спасательный костюм.
Системы, обеспечивающие работоспособность защитного (высотного)
снаряжения, включают системы кислородного питания, системы
вентиляции снаряжения, системы наддува камер противоперегрузочных
костюмов.
ИСОЖ работают не только в аварийных режимах, но и в штатном
режиме, обеспечивая экипажу необходимые для жизнедеятельности
условия совместно с бортовыми системами жизнеобеспечения.
Прежде всего, это система кислородного питания (СКП) боевого
самолета (рис. 15.12). Основной (штатный) запас кислорода на борту
может храниться в газообразном состоянии в баллонах высокого
давления (наиболее распространенный в настоящее время способ
хранения), в криогенном состоянии в термостатированных (т.е.
способных сохранять постоянную температуру) сосудах-газификаторах
под небольшим избыточным давлением, вырабатываться в химических
генераторах из кислородсодержащих веществ путем различного вида
реакций или выделяться из атмосферного воздуха прямо на борту.
От штатного источника кислорода 1 через кислородный редуктор 2,
который стабилизирует давление, кислород поступает в регулятор
непрерывной подачи кислорода 3, а от него по трубопроводу на
бортовую (закрепленную на борту самолета) колодку 45 объединенного
разъема коммуникаций 4. Через объединенный разъем коммуникаций
366
Рнс. 15.12. Структурная схема системы кислородного питания боевого самолета
(ОРК), состоящий из двух колодок, идет связь с системами самолета всей
аппаратуры, закрепленной на снаряжении летчика, например нашлемно-
го целеуказателя - с прицельными системами, ларингофона (это
микрофон специальной конструкции, прикладываемый к гортани) - с
системой радиосвязи.
От другой колодки 4С ОРК, закрепленной на снаряжении летчика,
которая при катапультировании вместе с креслом покидает самолет,
разъединяя все связи, трубопровод кислородной системы идет на
кислородный прибор 5 и далее к снаряжению летчика 7. Через эту же
колодку ОРК к снаряжению летчика присоединяется парашютный
кислородный прибор 6, содержащий аварийный запас кислорода.
Основными режимами работы СКП являются:
I - в загерметизированной кабине;
II - в разгерметизированной кабине на высоте более 12 000 м;
III - при аварийном покидании самолета экипажем.
При работе в загерметизированной кабине (I режим) до "высоты в
кабине" 2000 м летчик дышит воздухом, поступающим из гермокабины,
имеющей систему кондиционирования, через кислородный прибор 5,
куда входят автомат подсоса воздуха и легочный автомат.
На "высоте в кабине" 2000... 10 000 м регулятор непрерывной подачи
кислорода и автомат подсоса воздуха обеспечивают увеличение
процентного содержания кислорода во вдыхаемой смеси за счет
увеличения подачи кислорода регулятором непрерывной подачи и
уменьшения подсоса воздуха из гермокабины. Предусмотрен резервный
режим подачи кислорода, который включает летчик, при этом для
дыхания подается только кислород. На случай выхода из строя
367
регулятора непрерывной подачи кислорода предусмотрен аварийный
режим: при включении аварийного крана кислород подается для
дыхания, минуя основные элементы комплекта.
Легочный автомат обеспечивает прерывную подачу дыхательной
смеси: она осуществляется только при вдохе, а при выдохе прекращается.
В этом случае существенно уменьшается потребный запас кислорода на
борту. При использовании легочного автомата в снаряжение летчика
обязательно должна входить герметичная кислородная маска или
гермошлем.
При полетах на больших высотах "высота в кабине" не превышает
7000...8000 м, и герметичная кислородная маска может обеспечить подачу
необходимого для дыхания кислорода при полете в гермокабине
практически на любых высотах. Однако система кислородного питания
одна, без дополнительного снаряжения, при разгерметизации кабины
на высотах полета только до 12 000 м обеспечивает экипажу резервное
время для снижения до безопасной высоты. При высотах 12000 ми
более кислород для дыхания необходимо подавать под повышенным
давлением (тем большим, чем больше высота), обеспечивающим
постоянство парциального давления вдыхаемого кислорода независимо
от высоты.
При дыхании воздухом (или кислородом) с повышенным (по
сравнению с привычным атмосферным) давлением затруднен выдох.
Обеспечивающие выдох мышцы организма человека быстро устают,
расстраивается дыхание, резко падает работоспособность.
При избыточном давлении вдыхаемого кислорода, необходимом для
обеспечения жизнедеятельности на высотах 12000...14000 м,нарушается
не только дыхание, но и кровообращение: кровеносные сосуды не могут
противостоять повышению давления крови и расширяются, нарушается
процесс поглощения кислорода и удаления углекислого газа, ухудшается
кровоснабжение конечностей и головного мозга.
Чтобы предотвратить эти явления, необходимо создать внешнее
противодавление на тело человека. Это достигается тремя способами:
механическим обжатием тела с помощью высотно-компенсирующего
костюма (ВКК);
пневматическим обжатием тела (скафандр, гермошлем);
комбинированным способом (пневматическим обжатием совместно
с механическим).
При разгерметизации кабины на высоте более 12 000 м во избежание
баротравм легких необходимо сначала создать противодавление натело,
а затем с задержкой 1...2 с для свободного выхода расширяющихся в
легких газов создавать избыточное давление кислорода в такте дыхания.
Таким образом, для обеспечения правильной физиологии дыхания
при разгерметизации кабины на высотах более 12 000 м необходимо
368
совместное использование кислородного питания и высотного
снаряжения.
При разгерметизации кабины на высотах более 12 000 м (II режим
работы СКП) через регулятор подачи кислорода 3 (см. рис. 15.12)
кислород под повышенным давлением будет поступать в легочный
автомат кислородного прибора 5 и далее в трубопровод линии высотно-
компенсирующего костюма. Наполняясь, камеры натяжного устройства
ВКК будут создавать противодавление на тело.
Легочный автомат увеличивает также давление в линии прерывной
подачи кислорода в кислородную маску (или гермошлем) и обеспечивает
задержку формирования избыточного давления в маске для свободного
выхода расширяющихся в легких газов.
Автоматика регулятора подачи кислорода и кислородного прибора'
построена на системе пружинных клапанов, мембран - гибких пластин,
разделяющих полости с разными давлениями, -и анероидов (от греч. а -
отрицательная частица и neros - вода, т.е. действующий без помощи
жидкости) - приборов для измерения атмосферного давления.
При катапультировании (III режим), когда вместе с креслом самолет
покидают колодки объединенного разъема коммуникаций, обратные
клапаны разъема закрываются, препятствуя выходу кислорода в
атмосферу. Кислородиз одного баллончика парашютного кислородного
прибора 6 (см. рис. 15.12) через редуктор и кислородный прибор 5,
работа которого при катапультировании аналогична работе при
разгерметизации гермокабины,
поступает в кислородную мас-
ку, а из другого баллончика
через запорно-пусковое уст-
ройство и клапан костюм-
ной линии кислородного при-
бора 5 - в высотно-компенси-
рующий костюм.
Устройство герметичной
кислородной маски (КМ) и за-
щитного шлема (ЗШ) показано
на рис. 15.13. В жесткий каркас
маски 3 с гибким резиновым
обтюратором (франц. оЫиг-
ateur, от лат. obturo - закры-
ваю) 4, плотно прилегающим к
лицу человека, через гибкий
шланг 1 с клапаном вдоха 2
подается дыхательная смесь.
Рис. 15.13. Устройство кислородной маски и
защитного шлема
369
Рис. 15.14. Высотно-компеисирующий костюм
Трубка 13 с клапаном выдоха 12 связана с линией легочного автомата
кислородного прибора, обеспечивающего задержку формирования
избыточного давления в маске для выдоха. Маска замком 10 крепится
к защитному шлему 5. Кислород под избыточным давлением, подающий-
ся через трубку 8 из-под маски в пневмокамеру 7, надувает ее и
притягивает маску к лицу, обеспечивая герметичность.
Защитный шлем в том диапазоне высот полета, где не требуется
гермошлем, обеспечивает защиту головы летчика от травмирования в
аварийной ситуации, а также защиту от скоростного напора при
катапультировании и, за счет сдвижного светофильтра б, от ослепления
яркими солнечными лучами. Защитный шлем снабжен ларингофоном
И и противошумом 9 с телефоном.
Высотно-компенсирующий костюм (рис. 15.14) представляет собой
комбинезон 1 с перчатками и носками, который плотно подгоняется по
фигуре летчика шнуровкой 4, надевается и снимается с помощью
застежек типа "молния" 2 и изготавливается из малорастяжимой
газопроницаемой (для улучшения естественной вентиляции костюма)
ткани. Равномерное, равное давлению кислорода в легких, давление на
всю поверхность тела человека обеспечивается подачей кислорода под
давлением в натяжные устройства - пневмотрубки 3, идущие по бокам
рукавов, штанин и по спинке ВКК, - и в дыхательно-компенсирующую
камеру (так называемый брюшной компенсатор, размещенный под
оболочкой комбинезона в области грудной клетки и живота и соединен-
ный с системой дыхания). Пневмотрубки 3 увеличиваются в диаметре
при подаче в них давления, натягивают тесемки 5, которые стягивают
оболочку комбинезона 1 и создают механическое давление на тело.
370
ВВК, естественно, не создает противодавления на глаза и уши,
поэтому необходимость увеличивать давление кислорода в легких может
привести к расстройствам зрения и слуха. Чтобы обеспечить дыхание
практически на любой высоте после разгерметизации кабины, вместе с
ВКК применяют гермошлем (ГШ).
Высотный скафандр представляет собой газонепроницаемый
комбинезон, соединенный с гермошлемом, гермоперчатками и обувью.
В таком скафандре человек полностью изолирован от внешней среды.
При этом с помощью системы кислородного питания и системы
вентиляции снаряжения, которая защищает человека от переохлаждения
при низкой температуре и отперегрева при высокой температуре, внутри
скафандра создается микроклимат, обеспечивающий безопасность при
разгерметизации на любой высоте.
Противоперегрузочный костюм (ППК) представляет собой плотно
подгоняемые по фигуре летчика штаны из малорастяжимой газопроница-
емой ткани, которые создают с помощью системы наддува камер
противоперегрузочных костюмов (устройств, аналогичных устройствам
ВКК) обжатие нижней части тела человека, пропорциональное
положительной перегрузке (в направлении голова - таз).
Это обжатие фиксирует положение внутренних органов, не допускает
их смещения и растяжения, а также препятствует инерционному
смещению крови в сосуды нижней части тела, что обеспечивает лучшее
кровоснабжение головного мозга и позволяет летчику лучше переносить
положительные перегрузки. Летчик в противоперегрузочном костюме
физиологически ощущает перегрузку, на 2,5-3,0 единицы меньшую, чем
та, с которой маневрирует самолет.
Таким образом, системы кондиционирования и индивидуального
жизнеобеспечения позволяют сохранять нормальную работоспособность
экипажей и жизнедеятельность пассажиров на всех режимах полета и в
экстремальных ситуациях.
15.3. СИСТЕМЫ ЗАЩИТЫ В ОСОБЫХ УСЛОВИЯХ
Системы защиты обеспечивают выживаемость полезной нагрузки и
самолета в целом в особых условиях функционирования ЛА: при
обледенении, пожаре, прерванном взлете, аварийной посадке на
аэродром, неподготовленную площадку, воду и т.д.
К системам защиты (оборонительным средствам) военных самолетов
относятся средства активной защиты (оборонительные
стрелково-пушечные установки и высокоманевренные ракеты ближнего
боя) и пассивной защиты: бронезащита экипажа и бортового
оборудования, комплекс радиоэлектронной разведки, опознавания,
371
подавления и поражения наземных РЛС противника, средства постанов-
ки помех ракетам противника с инфракрасными (ИК) и радиолокацион-
ными (РЛ) головками самонаведения (ТСН) - контейнеры с ИК-ловуш-
ками и дипольными отражателями, бортовые генераторы помех.
Здесь рассмотрим лишь два типа систем защиты ЛА в особых
условиях - противообледенительные и противопожарные системы.
15.3.1. ПРОТИВООБЛЕДЕНИТЕЛЬНЫЕ СИСТЕМЫ
Обледенение - это процесс образования льда на поверхностях
агрегатов ЛА. В большинстве случаев обледенение ЛА происходит при
полетев атмосфере, содержащей переохлажденные капли воды (т.е. воды
в жидкой фазе при отрицательной температуре). При столкновении с
лобовыми поверхностями агрегатов ЛА переохлажденные капли воды
быстро кристаллизуются, образуя ледяные наросты различной формы
и размеров.
Опыт эксплуатации авиационной техники показывает, что обледене-
ние наряду с турбулентностью атмосферы, электрическими разрядами,
возможностью столкновения с птицами является одним из наиболее
опасных воздействий естественной внешней среды, которое существенно
влияет на безопасность полета.
В условиях обледенения лед образуется на лобовых поверхностях
крыльев, рулей высоты и направления, на воздушных винтах, воздухоза-
борниках, остеклении фонарей, на находящихся в потоке датчиках
пилотажно-навигационных приборов и обтекателях антенн.
Статистические данные о частоте случаев обледенения ЛА для
различных географических районов Земли показывают, что наибольшая
вероятность обледенения существует при полетах в диапазоне температур
О...-15°С. Зафиксированы случаи обледенения при температуре воздуха
от-50 °C и ниже.
Входные устройства и каналы воздухозаборников двигателей ЛА
могут подвергаться обледенению и при положительных (до +10 °C)
температурах. Это объясняется тем, что движущийся в каналах
воздухозаборников воздух охлаждается при адиабатическом расширении
и влага, находящаяся в нем, конденсируется и замерзает. Известны случаи
обледенения сверхзвуковых воздухозаборников.
Нарис. 15.15 приведены наиболее характерные формы льдообразова-
ний (ледяных наростов) на лобовых поверхностях: а - клинообразная;
б-желобообразная (корытообразная); в - рогообразная; г - промежуточ-
ная. Если не предпринимать меры по защите от образования льда,
ледяные наросты быстро растут, развиваясь по направлению потока
воздуха, что существенно увеличивает полетную массу ЛА.
372
Обледенение несущих поверх-
ностей приводит к искажению фор-
мы профиля и резкому ухудшению
аэродинамических характеристик.
На рис. 15.16 показано, насколько
существенно, иногда в 1,5-2 раза,
уменьшаются в условиях обледене-
ния значения основных аэродина-
мических характеристик крыла
(аэродинамического качества К,
коэффициента подъемной силы Су,
критического угла атаки акр) и, как
следствие, ЛА в целом. Срыв пото-
ка с крыла и сильная турбулизация
Рис. 15.15. Формы льдообразований на
лобовых поверхностях
потока за крылом в условиях обледенения происходят значительно
раньше, чем на чистом крыле, что может привести к тряске самолета,
нарушению продольной балансировки, потере устойчивости и свалива-
нию самолета. Лед, сброшенный с крыла набегающим потоком, мо-
жет поражать хвостовое оперение и лопатки компрессоров двигателей,
расположенных в хвостовой части фюзеляжа.
Обледенение передних кромок рулевых поверхностей может привести
к потере управляемости.
Обледенение воздушных винтов, начинаясь с передних кромок,
захватывает до 20-25 % хорды лопасти. На крейсерских режимах концы
лопастей не обледеневают из-за благоприятного влияния аэродинамиче-
ского нагрева. При накоплении значительных масс льда (при толщинах
Рис. 15.16. Изменение аэродинамических характеристик крыла в условиях
обледенения
373
Рис. 15.17. Зоны защиты от обледенения на
современном пассажирском самолете
5 мм и более) под воздействием
центробежных сил про исходит его
сброс, сопровождающийся нару-
шением балансировки винта, виб-
рациями силовой установки. При
этом создается опасность пораже-
ния обшивки фюзеляжа.
Обледенение несущих и хвосто-
вых винтов вертолетов имеет не-
которые особенности, обусловлен-
ные режимами их работы (распо-
ложением относительно потока
набегающего воздуха), различны-
ми диаметрами винтов и, как сле-
дствие, существенно различающимися скоростями вращения. Так,
несущие винты могут обледеневать не только с передней, но и с задней
кромки (при движении лопастей против вектора скорости полета), а
сброс льда с хвостовых винтов может поражать не только фюзеляж, но
и лопасти несущего винта.
Обледенениевходных кромок воздухозаборников силовых установок
нарушает течение потока воздуха, увеличивает неравномерность поля
скоростей перед компрессором. Это может вызвать помпаж (франц.
pompage - откачка) - одну из форм автоколебаний, выражающуюся в
пульсации подачи воздуха и, следовательно, вибрации лопаток
компрессора и всего двигателя, что может вызвать его разрушение. Сброс
льда в каналах воздухозаборников приводит к повреждению лопаток
компрессоров.
Обледенение лобовых стекол фонарей может резко ухудшить
возможность визуального управления ЛА, а обледенение датчиков
приборов систем навигации и управления является причиной их
неправильной работы или отказа, что усложняет пилотирование.
Безопасность полетов в условиях возможного обледенения обеспечи-
вают противообледенительные (антиобледенительные) системы (ПОС),
защищающие ЛА от обледенения в широком диапазоне погодных
условий.
Зоны защиты от обледенения на современном пассажирском самолете
показаны на рис. 15.17. Это лобовые стекла фонаря кабины экипажа 7
и форточки, которые защищаются от запотевания, датчики углов
скольжения 2 и датчик полного (статического и динамического) давления
3, носки предкрылков 4, воздухозаборники, входные направляющие
аппараты и коки двигателей 5, носки хвостового оперения 6.
374
Для визуального контроля через окна в кабине пилотов и в пассажир-
ских салонах в ночное время за состоянием защищаемых зон установлены
специальные осветительные фары 7 и 8.
Для эффективной работы ПОС особую важность имеет своевременная
сигнализация о начале обледенения. Информацию о входе самолета в
зону обледенения и выходе из нее, а также об интенсивности обледенения
самолетаполучают от сигнализаторов обледенения на каждом двигателе
9 и сигнализатора обледенения планера самолета 10.
Сигнализаторы обледенения делятся на две группы: косвенного и
прямого действия.
Принципы действия сигнализаторов первой группы основаны на
изменении характеристик теплоотдачи, электропроводности или
электросопротивления чувствительных элементов при наличии в
атмосфере переохлажденных капель воды.
Сигнализаторы второй группы реагируют непосредственно на слой
льда, образовавшегося на чувствительном элементе датчика, находящем-
ся в потоке. Широко применяются вибрационные и радиоизотопные
сигнализаторы обледенения.
Вибрационный сигнализатор регистрирует изменение
собственной частоты колебаний чувствительного элемента при
увеличении его массы за счет наращения на нем слоя льда и, значит,
интенсивность обледенения.
Радиоизотопный сигнализатор регистрирует уменьше-
ние p-излучения за счет экранирования нарастающим слоем льда
источника слабого радиоактивного излучения.
Возможны следующие способы борьбы с обледенением ЛА:
механический, при котором образовавшийся лед разрушается в
результате силового воздействия на него и его обломки удаляются
набегающим потоком;
физико-химический (жидкостно-химический). В этом случае
используются специальные жидкости, понижающие температуру
замерзания переохлажденных капель воды или уменьшающие силу
сцепления льда с обшивкой;
тепловой, при котором используется нагрев защищаемой поверхности
до температуры таяния льда.
Механические ПОС обычно работают в циклическом режиме: система
не реагирует на образование льда допустимой толщины (4...5 мм), затем
лед разрушается и удаляется под воздействием набегающего потока.
Пневматическая ПОС, разработанная в начале 1930-х гг. в
США, является исторически первой механической системой защиты от
обледенения. Принцип ее действия понятен из рис. 15.18. На защищаемой
поверхности закрепляется протектор (от лат. protector - прикрывающий,
375
н.п.
Фазы сброса льда
Рис. 15.18. Принцип действия пневматической ПОС
защищающий) из эластомерного материала с пневмокамерами, внутрь
которых в определенном порядке подается под давлением воздух,
отбираемый от компрессора реактивного двигателя или специального
компрессора, установленного на поршневом двигателе. При подаче
воздуха камеры раздуваются, отрывают и раскалывают лед, который
уносится набегающим потоком с защищаемой поверхности.
Конструкция пневматической ПОС увеличивает профильное
сопротивление крыла на 5...6 % в нерабочем состоянии и на 80...100 %
в рабочем состоянии (при раздутых камерах). Пневматические ПОС
имеют относительно небольшую массу и энергоемкость и поэтому
широко применяются на малых нескоростных самолетах.
Электроимпульсная ПОС (ЭИПОС) разработана в начале
1960-х гг. в нашей стране инженером И.А. Левиным. Новый способ
удаления льда с обшивки, который реализует ЭИПОС (рис. 15.19) для
защиты крыла (предкрылков) 1 и оперения 2, заключается в создании в
защищаемой обшивке и находящемся на ней слое льда импульсных
деформаций. При этом возникающие в слое льда механические
напряжения достаточны для его разрушения, но в обшивке напряжения
меньше предела усталости или предела циклической прочности.
Деформации создаются индук-
торами (лат. inductor, от induco —
ввожу, навожу, побуждаю) 3 -
электромагнитными катушками
без сердечника, закрепленными с
некоторым зазором 6 относитель-
но внутренней стороны обшивки
5 вдоль передней кромки защища-
емой поверхности. Каждый индук-
тор защищает определенную зону
обшивки. При подаче импульса
тока высокого напряжения U в
Рис. 15.19. Принцип действия электроим-
пульсной ПОС
376
индукторе возникает кольцевой ток и возбуждается электромагнитное
поле, в обшивке (по закону электромагнитной индукции Ленца,
названному в честь русского физика и электротехника Э.Х. Ленца)
возбуждаются кольцевые токи и возникает свое электромагнитное поле.
Результатом взаимодействия этих полей будет отталкивание гибкой
обшивки 5 от закрепленного на жестком каркасе 4 индуктора 3.
Отклонение обшивки до ее деформированного состояния 6 будет
способствовать разрушению льда. Из физики процесса удаления льда
с помощью ЭИПОС ясно, что с возрастанием жесткости конструкции
требуется увеличение мощности импульса.
Практика показала эффективность установленной на самолете Ил-86
штатной системы ЭИПОС: серии из трех последовательных импульсов
продолжительностью около 10~4 с и периодом их следования 1...2 с
достаточно для эффективного удаления льда. Электроимпульсная ПОС
имеет значительно меньшую установочную массу и энергозатраты, чем
наиболее распространенные на современных самолетах тепловые
противообледенительные системы.
Тепловые ПОС работают в постоянном или в циклическом режимах
и подразделяются на воздушно-тепловые и электр отепловые.
Воздушно-тепловые ПОС используют горячий воздух от
компрессоров ТРД или теплообменников, обогреваемых выхлопными
газами поршневых двигателей.
На рис. 15.20 представлена укрупненная компоновочная схема
тепловой ПОС двухдвигательного самолета. Как видно, горячий воздух
для обогрева носков крыла и киля отбирается от компрессоров левого
и правого двигателей (одновременно или выборочно). Заслонки и
клапаны регулятора воздуха в трубопроводах позволяют поддерживать
температуру отбираемого воздуха в диапазоне 180...200 °C (для кон-
струкций из алюминиевых сплавов).
Выносные элементы I и II (рис. 15.20) показывают подвод горячего
воздуха по продольному каналу в носки консолей крыла с последующим
перераспределением его по поперечным каналам (между обшивкой и
гофрированными панелями) и выход воздуха в атмосферу через жабры
концевых обтекателей крыла. Аналогично построена ПОС носка киля.
Выносные элементы III и IV рис. 15.20, а также виды А и Б показывают
противообледенитель воздухозаборников двигателей.
ПОС горизонтального оперения (выносной элементУ) и остекления
кабины экипажа самолета (сечение В-В) - электротепловая.
Поскольку отбор воздуха от компрессора двигателя ухудшает его
тяговые характеристики, для ПОС и СКВ от компрессора ТРД может
быть отобрано не более 12 %, а от ТВД - до 7 % общего расхода воздуха
через двигатель, что приводит к потере мощности (тяги) на 10... 15 %.
377
Рис. 15.20. Укрупненная компоновочная схема тепловой ПОС двухдвигательного самолета
Рис. 15.21. Интегрированная система УПС н ПОС на самолете
Наиболее опасным является обледенение крыла и оперения на
взлетно-посадочных режимах полета. Поэтому проектировщики
обратили внимание накомбинацию воздушно-тепловой ПОС с системой
управления пограничным слоем (УПС). При наличии последней взлет
и посадка обычно совершаются с работающей системой УПС и
автоматически может быть обеспечена защита от обледенения.
Компоновка такой интегрированной системы с выдувом горячего
воздуха в носке крыла и стабилизатора (УПС и ПОС) и в хвостовой
части крыла(УПС закрылков и элеронов) показана нарис. 15.21. Однако
эта схема (см. подразд. 7.2.5 и 7.3) не нашла пока практического
применения.
Электротепловые ПОС чаще всего применяются в тех случаях,
когда двигатели чувствительны к отбору воздуха или когда затруднена
прокладка трубопроводов горячего воздуха к защищаемым поверхнос-
тям. Источником энергии электротепловых ПОС, работающих чаще
всего в циклическом режиме, является бортовая электросеть переменного
тока высокого напряжения (115 В/208 В).
Электрическая энергия преобразуется в тепловую с помощью
нагревательного элемента (проволоки с высоким удельным сопротивле-
нием, фольги, сетки, токопроводящей пленки), который имеет два слоя
изоляции: внешний (прилегающий изнутри к защищаемой поверхности) -
379
Рис. 15.22. Элсктрообогреваемое стекло кабины
экипажа
электроизоляционный с высо-
ким коэффициентом теплопро-
водности и внутренний -
электро- и теплоизоляцион-
ный.
Например, постоянно обо-
греваемое остекление кабины
экипажа пассажирского само-
лета (рис. 15.22) представляет
собой многослойную кон-
струкцию: наружное высоко-
прочное силикатное (кварце-
вое) стекло 1, на внутреннюю
поверхность которого методом плазменного напыления нанесена
токопроводящая пленка 2 - элемент ПОС, промежуточное силикатное
или органическое стекло 5, внутреннее органическое стекло 4, склеенные
между собой эластичными прослойками 3, которые повышают ударную
прочность стекла и служат теплоизоляцией.
ПОС остекления кабины экипажа - комплексные. Как правило, они
включают воздушно-тепловые ПОС (обдув теплым воздухом внутрен-
них поверхностей для борьбы с запотеванием) и физико-химические
(подача на внешнюю поверхность стекла в условиях дождя и снегопада
противообледенительной жидкости 6) в сочетании с механическими
("дворники" 7, аналогичные автомобильным).
Выбор типа ПОС - сложная инженерная задача, при решении которой
необходимо учитывать множество факторов для обеспечения безопаснос-
ти полетов в условиях возможного обледенения.
15.3.2. ПРОТИВОПОЖАРНЫЕ СИСТЕМЫ
Горение - это сложное, быстропротекающее самоускоряющееся
физико-химическое превращение, сопровождающееся выделением
тепловой энергии и света. Основой горения является комплекс
окислительно-восстановительных реакций горючих веществ с окислите-
лем. При взрыве в ограниченном (замкнутом) объеме за короткий
промежуток времени освобождается большое количество энергии, в
результате чего вещество, заполняющее объем, превращается в сильно
нагретый газ с очень высоким давлением, значение которого превышает
предел прочности конструкции. Для возникновения пожара или взрыва
необходимо наличие горючего вещества, окислителя и источника
воспламенения.
Пожар (или взрыв) на борту ЛА может возникнуть в результате
утечки и попадания на нагретые элементы конструкции горючих
380
жидкостей из топливной, масляной и гидравлической систем, разрушения
двигателя, разрядов статического электричества внутри топливных баков
и поражения молнией, боевого поражения ЛА. По физико-химическим
условиям процесса горения вероятность возникновения пожара на борту
ЛА наиболее высока на взлетно-посадочных режимах и при полете на
малых высотах.
Пожар на борту в полете очень скоротечен за счет интенсивного
поступления кислорода из обтекающего самолет потока воздуха.
Авиационные топлива самовоспламеняются при температуре 230...240 °C.
Температура горения топлива достигает 1100 °C, температура
плавления алюминиевых сплавов 650 °C, сталей 1500 °C, и в усло-
виях пожара живучесть элементов конструкции не превышает 1 ...5 мин.
Тушение пожара на борту осложняется тем, что прямой доступ
человека в зону пожара во многих случаях невозможен. Поэтому
комплекс средств притивопожарной защиты самолета включает
пассивные средства (конструктивные мероприятия) и активные средства -
собственно противопожарные системы (ППС).
Конструктивно-компоновочные мероприятия способствуют предотвра-
щению условий, при которых может возникнуть пожар или взрыв, и
локализации зоны пожара для облегчения борьбы с ним.
Агрегаты и коммуникации (трубопроводы пожароопасных систем
и электропроводка) компонуются таким образом, чтобы исключить
возможность воспламенения горючих жидкостей. Наиболее пожароопас-
ные отсеки отделяются от остальной конструкции огнестойкими
противопожарными перегородками, обеспечивается охлаждение и
теплоизоляция горячих частей самолета, вентиляция отсеков и дрениро-
вание мест возможного скопления горючих жидкостей при утечке их из
систем. В конструкции применяются огнестойкие, трудновоспламеняемые
и негорючие материалы.
На боевых самолетах применяется протектирование внутренних
стенок топливных баков пенопластом, поры которого заполнены
коагулятором (от лат. coagulatio - свертывание, сгущение), твердеющим
при контакте с воздухом при возникновении пробоины в результате
боевого повреждения или удара молнии. Коагулятор, вытекая из пор
пенопласта в пробоину, заполняет ее, затвердевает и предотвращает
вытекание топлива. Внутренние объемы баков заполняют легким
полиуретановым поропластом, имеющим сетчатую (губчатую, пористую)
структуру, который обеспечивает самозатухание процесса горения
независимо от причины его возникновения. Это существенно увеличивает
пожаровзрывобезопасность, повышает боевую живучесть самолета,
естественно, при определенных затратах полезного объема топливных
баков и массы.
381
Специальная обработка топлива перед заправкой позволяет снизить
его испаряемость и выделение растворенного в нем кислорода, что
уменьшает вероятность возникновения взрыва.
Охлаждение топлива не только снижает его испаряемость,
уменьшает концентрацию взрывоопасных паров керосина в надтоплив-
ном пространстве баков, но и повышает плотность топлива, что
позволяет при имеющихся на борту объемах топливных баков увеличить
запас топлива.
Десатурация (от лат. de - приставка, означающая отделение,
и лат. saluro - насыщаю, наполняю) - выдерживание топлива в
специальных емкостях с пониженным давлением - и азотирова-
ние ("промывание" топлива жидким газом) топлива перед заправкой
позволяют удалить растворенный в нем кислород.
Желатинизация (от лат. gelatus - замерзший, застывший) топ-
лив а-добавление в него специальных присадок, придающих топливу
псевдокристаллическую (студнеобразную) структуру, - и эмульги-
рование топлива, т.е. приготовление из топлива со специальными
присадками устойчивой высокодисперсной эмульсии (новолат. emulsio,
от лат. emulgeo-дою, выдаиваю; одной из первых изученных эмульсий
было молоко), делают топливо менее подверженным воспламенению и
взрыву, поскольку такие топлива обладают меньшей скоростью
испарения и скоростью распространения пламени. Однако для использо-
вания желатинизированных и эмульгированных топлив необходима
существенная доработка топливных систем.
Естественно, что эти пассивные меры защиты от пожара и взрыва
требуют специального наземного оборудования для подготовки топлива
на всех аэродромах, где предполагается базирование ЛА. Дренаж
топливных баков и наддув нейтральными газами (см. подразд. 14.3)
также относятся к пассивным средствам защиты от пожара.
Топливные баки в кессонах крыла располагают на некотором
расстоянии от его законцовки, что снижает вероятность поражения бака
молнией.
Во избежание искрового разряда на борту проводится металлизация,
т.е. соединение токопроводящими перемычками (перемычками
металлизации) для выравнивания электрических потенциалов всех частей
и агрегатов самолета. Накопленный заряд "стекает" в атмосферу через
разрядники статического электричества, установленные на законцовках
крыла и хвостового оперения, или в землю при посадке через зарядосъем-
ники, установленные на шасси. Металлизация уменьшает помехи
радиоприему и дает возможность использовать корпус самолета в
качестве второго провода бортовой электросети.
Противопожарные системы обеспечивают выявление очага пожара
и его подавление.
382
Выявление очага пожара, подача светового и звукового сигналов
экипажу и автоматическое включение средств пожаротушения- функции
системы сигнализации о пожаре, датчики которой устанавливаются в
наиболее пожароопасных отсеках. На современных ЛА это, как правило,
отсеки основных и вспомогательных силовых установок.
Тепловые датчики ППС реагируют на повышение или
превышение некоторого предельного значения температуры в контроли-
руемом отсеке. Ионизационные датчики реагируют на
повышение ионизации воздуха при появлении пламени. Радиа-
ционные (световые) датчики срабатывают при появлении
пламени или дыма, реагируя на излучение пламени в инфракрасной части
спектра или на рассеяние появившимся дымом света сигнальных ламп.
Физика процессов горения определяет способы борьбы с пожаром:
снижение концентрации кислорода в очаге горения применением
нейтральных газов (обезвоженной углекислоты, азота и др.), отвод тепла
от очага горения путем применения веществ, вступающих в химические
реакции с продуктами горения со значительным поглощением тепла,
существенно понижающих температуру и ухудшающих условия горения.
Это фреоны или хладоны-галогенсодержащие органические соединения
на основе фтора, брома.
Средства пожаротушения ППС обеспечивают хранение и подачу
огнегасящего состава в зону пожара, а также служат для его предупреж-
дения в случае аварийной посадки ЛА с убранными шасси.
ППС гражданских самолетов и вертолетов имеет не менее двух-трех
очередей подачи огнегасящего состава в пожароопасные зоны. При этом
первая очередь подачи огнегасящего состава включается автоматически.
Включение последующих очередей осуществляется только лично членом
экипажа.
На боевых маневренных самолетах обычно используются полностью
автоматические ППС, состоящие из одной очереди подачи, что, с одной
стороны, объясняется жестким лимитом массы, которую на боевом
самолете целесообразнее использовать на системы наступательного и
оборонительного вооружения, а с другой - возможностью экипажа
покинуть аварийную машину.
Наиболее широко применяются баллонные ППС, когда запас
огнегасящего состава в жидком или газообразном состоянии хранится
в баллонах (огнетушителях) высокого давления.
Компоновочная схема защиты от пожара и взрыва среднемагистраль-
ного пассажирского самолета приведена на рис. 15.23. Для тушения
пожара в гермокабине имеются ручные переносные углекислотные
огнетушители 2. Они устанавливаются в кабине экипажа и в разных
концах пассажирской кабины.
383
Рис. 15.23. Компоновочная схема ППС пассажирского самолета
Система тушения пожара в гондолах двигателей состоит из шести
огнетушителей 6 с пиротехническим пусковым устройством, которые
разряжаются в три очереди (по два огнетушителя в каждой очереди).
Выносной элемент рисунка показывает размещение огнетушителей 6 под
полом пассажирской кабины.
Блоки электромагнитных кранов 8 (правый по полету - основной,
левый - аварийный) распределяют огнегасящий состав между правой и
левой гондолами двигателей.
Распылительные коллекторы 12 из стальных труб сраспыливающими
отверстиями установлены на двигателе, а коллекторы 13- на передней
противопожарной перегородке гондолы и в пилоне.
Датчики системы сигнализации 10 установлены в разных частях
гондолы. При увеличении температуры внутри гондолы со скоростью
не менее 2 °C в секунду и одновременном нагреве датчиков до температу-
ры 150 °C они подают управляющий сигнал на исполнительный блок
И, который автоматически включает в работу первую очередь
огнетушителей.
Аналогично работает система тушения пожара внутри двигателей от
двух огнетушителей 7 с пиротехническим пусковым устройством,
которые разряжаются в две очереди через блоки электромагнитных
кранов 8, которыми управляет экипаж по сигналам датчиков 9 о пожаре
в двигателе.
Для предотвращения возникновения пожара в гондолах двигателей
при посадке с убранным шасси или при поломке одной из опор шасси
384
ударные механизмы 1, установленные в носовой части фюзеляжа, на
амортизационных стойках основных опор шасси и на консолях крыла,
подают сигнал на пиропатроны огнетушителей. Все шесть огнетушителей
разряжаются в гондолы двигателей, создавая там среду, предотвращаю-
щую горение.
Центральный топливный бак 3 оборудован системой предотвращения
взрыва, обеспечивающей подачу хладона в надтопливное пространство
через распылительный коллектор 4 от огнетушителей 5. Система
предотвращения взрыва включается вручную из кабины экипажа при
возникновении пожара в отсеке шасси, расположенном за центральным
баком, или перед посадкой с убранным шасси. Если экипаж ошибочно
не включил систему, она включается автоматически по сигналам ударных
механизмов 1.
Хладоновые системы защиты топливных баков от взрыва
постоянного действия подают хладон в надтопливное пространство всех
баков, где он смешивается с воздухом, поступающим от системы
кондиционирования воздуха. На протяжении всего полета поддерживают
заданную концентрацию этой смеси в зависимости от условий полета
и расхода топлива.
Экспериментально отработана автоматическая система
подавления взрыва, которая на протяжении всего полета должна
находиться в дежурном состоянии, но реагирует на начало взрыва и
подавляет его. Свет от зарождающегося взрыва воспринимается
датчиком, который передает сигнал на пирогидравлическую пушку,
впрыскивающую в защищаемый объем распыленный факел хладона.
Высокое быстродействие всей системы обеспечивает нейтрализацию
хладоном топливовоздушной смеси в баке, предотвращая развитие
процесса взрыва.
Комплекс методов и бортовых средств защиты от пожара и взрыва
определяется на самых ранних стадиях проектирования ЛА с учетом
эффективности, надежности, массы всех элементов системы.
15.4. СИСТЕМЫ СПАСЕНИЯ И ДЕСАНТИРОВАНИЯ
Проблемы спасения человека при аварии ЛА возникли на ранних
этапах развития авиации, когда появились первые жертвы среди
летчиков. Уже в начале XX в. увеличение числа самолетов, продолжи-
тельности и дальности их полета, первые успешные опыты применения
самолета в боевых операциях, начало грузовых и пассажирских
перевозок привели к росту числа авиационных происшествий с
самолетами, которые в то время были очень ненадежным транспортным
средством.
13 - 7425
385
Эти проблемы решались двумя путями: повышением надежности и
живучести самолета и его систем и созданием оборудования, уменьшаю-
щего вероятность смертельного исхода при катастрофах и увеличиваю-
щего шансы на покидание самолета и спасение.
Идея парашюта как средства аварийного покидания ЛА была
предложена еще в XV в. Леонардо да Винчи, парашюты применяли в
XIX в. дая покидания аэростатов, однако первым по-настоящему
эффективным средством аварийного спасения стал изобретенный в
1911 г. Г.Е. Котельниковым ранцевый парашют, купол которого,
связанный системой строп (голл. strop, букв. - петля) с привязной
системой летчика, и вытяжное устройство (чаще всего это небольшой
вытяжной парашют) в сложенном виде укладываются в мягкий ранец,
закрепляемый на летчике.
Достаточно скоро стала очевидной неприемлемость персональных
парашютов для пассажиров на гражданских самолетах, поскольку у
пассажиров нет психологической, физической и специальной парашют-
ной подготовки по использованию средств спасения в отличие от
экипажей боевых самолетов и летчиков-испытателей, использующих
парашют при проведении испытаний и доводки боевой и гражданской
авиационной техники. Впервые в мире в 1923 г. Г.Е. Котельников
запатентовал "способ коллективного спасения" путем отделения от
гибнущего самолета кабины с людьми, спускающейся затем на парашюте.
Однако это предложение было реализовано значительно позднее при
разработке отделяемых кабин боевых самолетов.
15.4.1. СРЕДСТВА СПАСЕНИЯ НА ПАССАЖИРСКИХ САМОЛЕТАХ
Высокая надежность и живучесть современных пассажирских
самолетов и их систем, средства навигации и управления воздушным
движением позволяют предупредить многие летные происшествия.
Однако их полное устранение - вне пределов человеческих возможностей.
Как известно (см. подразд. 15.2.2,15.2.3), в случае разгерметизации
кабины у экипажа пассажирского самолета есть возможность и резерв
времени для снижения самолета на безопасные высоты, кроме того,
пассажирские самолеты имеют систему аварийного питания пассажиров
кислородом.
По данным статистики, 70...80 % летных происшествий в гражданской
авиации происходит на взлете и при аварийной посадке у земли (воды).
Конструкция пассажирского самолета построена таким образом, чтобы
снизить до переносимого уровня перегрузки на пассажиров и экипаж в
момент удара о землю (воду) за счет пластического деформирования
нижней части фюзеляжа, на что расходуется значительная часть
386
кинетической энергии самолета в момент удара. Кроме того (см.
подразд. 15.1), кресла являются элементами системы спасения.
Результаты расследований аварий и катастроф пассажирских
самолетов показывают, что большинство пассажиров выдерживали удар
при аварии, но погибали от удушья при возникавшем пожаре, так как
не могли своевременно покинуть самолет. Поэтому основным способом
спасения пассажиров и экипажа является их экстренная эвакуация из
самолета при аварийной посадке.
Современные технические требования к системам аварийной эвакуации
пассажиров предписывают:
эвакуация пассажиров из самолета на землю должна производиться
не более чем за 90 с при использовании всех выходов с одной стороны
фюзеляжа или только 50 % всех выходов из самолета, обеспечивающих,
однако, скорость эвакуации пассажиров, по крайней мере равную
скорости эвакуации с одной стороны фюзеляжа;
для каждого аварийного выхода вспомогательное устройство, с
помощью которого пассажир спускается на землю, должно представлять
собой надувной трап, который может автоматически или полуавтомати-
чески принимать рабочее положение не более чем за 10 с, считая с
момента начала открывания аварийного выхода, и выдвигаться на такую
длину, чтобы нижний конец трапа мог самостоятельно поддерживаться
на земле после повреждения одной или нескольких стоек шасси;
в любых положениях самолета, которые он может принять в
результате поломки одной или более опор шасси, должно быть два
работоспособных (не перекрытых поверхностью земли и незаклиненных
за счет деформации конструкции) выхода на каждые 100 пассажиров,
устройства открытия выходов должны быть простыми и не требовать
приложения усилий свыше 150 Н.
Для обеспечения безопасности эксплуатации пассажирских самолетов
большое значение имеет размещение аварийных выходов, через которые
пассажиры и экипаж покидают самолет в случае вынужденной посадки.
Эти выходы обязательно располагаются на обоих бортах самолета и,
желательно, в начале и конце пассажирской кабины. Каждая входная
дверь для пассажиров, которая открывается наружу и не имеет порога,
считается и аварийным выходом, если ее размеры соответствуют
определенным требованиям ИКАО к дополнительным аварийным
выходам. Обычно входные двери располагаются на левом борту
самолета, широкофюзеляжные самолеты (с числом пассажирских мест
более 250) имеют входные двери, расположенные по обоим бортам.
Организация аварийной эвакуации пассажиров - одна из сложнейших
задач, методы и средства решения которой зависят не только от
требований обеспечения экстренной эвакуации, но и от общей компонов-
13*
387
Рис. 15.24. Аварийно-спасательное оборудование самолета Ту-154
ки и конструктивно-силовых схем агрегатов самолета. Эти решения
определяются на начальных этапах проектирования и практически
индивидуальны для каждого самолета.
На рис. 15.24 представлено размещение аварийно-спасательного
оборудования на пассажирском самолете Ту-154, главным конструктором
которого был С.М. Егер.
Помимо основных входов в пассажирскую кабину 7, которые служат
и аварийными выходами, над крылом находятся аварийные выходы 2.
Шаг кресел у каждого выхода увеличен, и с каждой стороны прохода к
аварийному выходу предусмотрены места для того, чтобы члены экипажа
могли оказать помощь при эвакуации пассажиров.
Если аварийная посадка самолета совершена с выпущенным шасси, то
для того чтобы спуститься с крыла на землю, служат спасательные
канаты 3. Последним через форточку кабины экипажа, пользуясь
спасательным канатом, покидает терпящий бедствие самолет командир
экипажа (левый летчик). В кабине экипажа размещаются аварийные
топоры 4, которыми вырубаются в специальных местах выходы в
388
обшивке фюзеляжа в случае заклинивания аварийных выходов.
Переносные ручные огнетушители 5 служат для ликвидации возникшего
в пассажирской кабине пожара. Пассажиры спускаются на землю по
надувным трапам 6 и матерчатому желобу 7.
При аварийной посадке на воду пассажирский самолет держится на
плаву до нескольких десятков минут, причем плавучесть самолета
значительно увеличивается при аварийном сливе топлива перед
посадкой, так как водоизмещение топливных баков почти равно массе
самолета без топлива. За это время пассажиры и экипаж размещаются
на спасательных плотах 8, рядом с которыми в кабине (или в них)
хранится НАЗ -неприкосновенный аварийный запас, включающий средства
обнаружения и обеспечения выживания потерпевших бедствие пассажи-
ров и экипажа (радиомаяки, фонари, аптечки, запас питания, опресните-
ли морской воды и т.д.).
Современные трапы, контейнеры с аварийным оборудованием и
плоты с большими рабочими объемами (до 10 м3) в сложенном состоянии
имеют очень небольшие размеры и могут размещаться в зависимости от
конструкции и размеров у выходов на потолке, на полу кабины или на
двери, через которую ведется эвакуация пассажиров. Изготовленный из
газонепроницаемых эластичных материалов трап наполняется сжатым
газом автоматически при открывании двери. Трап в рабочем состоянии
представляет одно-, двух- или трехдорожечный желоб, одним концом
закрепленный на борту самолета, а другим свободно опертый на землю
частью своей поверхности. Такая конструкция и выбираемое оптималь-
ное значение угла наклона трапа обеспечивают быструю эвакуацию и
уменьшают вероятность травмирования спускающихся пассажиров
независимо от их массы и физических данных.
В руководствах по летной эксплуатации пассажирских самолетов
содержатся указания и рекомендации, определяющие конкретные
правила летной эксплуатации, технику и методику выполнения каждым
членом экипажа всех этапов подготовки к полету и пилотирования
самолета на различных режимах полета, в том числе и в аварийных
ситуациях. В соответствии с международными правилами перед началом
полета пассажиров знакомят с правилами поведения при аварии и
использования аварийно-спасательного оборудования.
В гражданской авиации, чтобы не уменьшать платную нагрузку за
счет тяжелого аварийно-спасательного оборудования, используют все
достижения, применяемые на военных самолетах, где ограничено место
в кабине и спасательное оборудование предельно компактно.
389
15.4.2. СРЕДСТВА СПАСЕНИЯ НА ВОЕННЫХ САМОЛЕТАХ
Наиболее простой способ покидания боевого самолета через борт
кабины позволял решать проблему спасения при скоростях полета
самолета до 400...500 км/ч. С увеличением скоростей полета Кс до
500...600 км/ч мускульной силы летчика, вылезающего из кабины, стало
недостаточно для преодоления действующих на него высоких аэродина-
мических нагрузок, и покидание самолета оказалось практически
невозможным. Сростом скорости полета самолета траектория движения
тела летчика при покидании им машины становится более пологой и
появляется реальная опасность столкновения летчика с хвостовым
оперением самолета.
На рис. 15.25 представлены относительные траектории движения тела
летчика при покидании кабины самолета (траектории движения центра
масс летчика относительно условно неподвижного центра масс самолета).
Статистика авиационных происшествий в мире показывает, что в
начале второй мировой войны до 40 % прыжков с самолета через борт
на скорости 400...500 км/ч заканчивались смертельным исходом или
тяжелыми травмами. Росли скорости полета, совершенствовались
парашюты и кабины, чтобы облегчить покидание самолета, тем не менее
в 1942 г. примерно 12 % аварийных прыжков со всех военных самолетов
закончились гибелью летчиков, а в 45 % случаев летчики получили
повреждения. В 1944 г. число случаев гибели увеличилось до 15 %, а
случаев получения травм-до 47 %, причем причиной большинства таких
случаев было столкновение летчика с конструкцией самолета.
Еще в конце 1920-х - начале 1930-х гг. разрабатывались системы
принудительного выброса летчика из самолета в аварийных ситуациях,
но только в период второй мировой войны эти работы получили
практическое воплощение. К 1945 г. в германских ВВС имелся опыт 60
покиданий (катапультирований) летчиками самолета с помощью
катапультного кресла (от лат. catapulta, от греч. katapeltёз, от kata -
сверху вниз, вниз на и рйПд-
бросаю, швыряю).
Катапультное (катапуль-
тируемое) кресло (КК) пред-
ставляет собой кресло (си-
денье) летчика, которое выбра-
сывается из ЛА с помощью
энергодатчика - устройства,
способного разогнать КК до
скорости, необходимой для
безопасного покидания само-
Рис. 15.25. Относительные траектории движения
тела летчика при покидании кабины самолета
390
лета. Наиболее широко использу-
ются пиротехнические (от греч.
руг - огонь) устройства, которые
выбрасывают КК с летчиком из
кабины самолета посредством ис-
пользования силы давления газов
сгорающего порохового заряда
(стреляющие механизмы, ракетные
двигатели).
Принципиальная схемапростей-
шего стреляющего механизма (СМ)
представлена на рис. 15.26. Стреля-
ющий механизм 6 состоит из наруж-
Рис. 15.26. Принципиальная схема стреляю-
щего механизма
ной трубы 4, внутри которой может
передвигаться в осевом направле-
нии внутренняя труба 5. Внутрен-
няя труба 5 СМ связана гайкой 8
через упорный кронштейн кресла 7с катапультным креслом 3. Наружная
труба 4 стреляющего механизма связана пятой 1 с конструкцией самолета
2.
Пиропатрон 9 помещен внутри трубы 5. При выстреле пороховые
газы заполняют сначала внутреннее пространство трубы 5, а затем через
отверстие в дне этой трубы и внутреннее пространство трубы 4,
являющейся стволом СМ, из которого под действием пороховых газов
начинает ускоренно перемещаться, как снаряд, внутренняя труба 5 вместе
с закрепленным на ней креслом 3, выбрасывая кресло вместе с летчиком
из кабины. Кресло при этом движется в направляющих рельсах,
закрепленных на стенке кабины.
Действие пороховых газов на внутреннюю трубу 5 прекращается
практически в момент выхода нижнего среза этой трубы из наружной
трубы 4. К моменту разделения стреляющего механизма КК будет
двигаться с начальной скоростью катапультирования Ее приближен-
ное значение можно получить, приравняв выражение для работы,
необходимой для ускорения ККдо скорости к работе, совершаемой
СМ:
тКкк
-р- = Lmgn™ г\,
где т - масса катапультного кресла, кг; - начальная скорость
катапультирования, м/с; L - ход стреляющего механизма, м; g - ускорение
391
свободного падения, м/с2; и““ -предельно допустимая по физиологичес-
ким нормам перегрузка (n““ s 20); ц - коэффициент полноты диаграммы
СМ, т.е. коэффициент полезного действия СМ, учитывающий тот факт,
что перегрузка при катапультировании изменяется по ходу стреляющего
механизма. Видно, что увеличить начальную скорость катапультирова-
ния , необходимую для безопасного покидания ЛА, при ограничении
на предельно допустимую перегрузку при катапультировании можно
только за счет увеличения длины активного участка катапультирования,
т.е. фактически времени воздействия импульса силы, выталкивающей
кресло из кабины. Технически это возможно осуществить, применяя
телескопический стреляющий механизм (ТСМ) или ракетный двигатель
(РД)-
ТСМ состоит из трех-четырех вложенных друг в друга труб,
раздвигающихся при выстреле. Однако с увеличением числа труб
коэффициент полноты диаграммы уменьшается из-за потерь давления
в местах соединения труб. Кроме того, искривление ТСМ в результате
воздействия воздушного потока на кресло может вызвать его заклинива-
ние. Поэтому общая длина ТСМ обычно не превышает 2,5 м.
С помощью ТСМ длиной 2,5 м можно разогнать КК до скорости
Иге = 22...24 м/с, что в ряде случаев обеспечивает безопасный перелет
через киль самолета при скорости полета до 1200 км/ч.
Включениеракетного двигателя непосредственно вкабине ЛА опасно
из-за возможности ожога летчика, повреждения его снаряжения или
оборудования кресла факелом РД, отражающимся от стенок кабины.
Поэтому необходимо предварительно катапультировать кресло из ЛА.
Для этого служит комбинированный стреляющий механизм (КСМ),
состоящий из СМ и порохового РД, который включается в действие
после выхода кресла из кабины и осуществляет его разгон до скорости
30 м/с и более от начальной (12... 14 м/с), обеспеченной стреляющим
механизмом. Этой скорости вполне достаточно для безопасного перелета
через киль современного самолета при скоростях полета до 1300 км/ч и
более.
При создании систем спасения экипажа необходимо учитывать ряд
предельно допустимыхдля человека специфических факторов, возникаю-
щих при покидании ЛА: линейных ускорений (перегрузок), угловых
ускорений и скоростей, скоростного напора, возможных ударов о
конструкцию.
Основными факторами, определяющими переносимость перегрузок
человеком (см. подразд. 6.3, рис. 6.7), являются: скорость нарастания
перегрузки во времени, время ее действия, максимальное значение и
392
направление действия перегрузки. Перегрузки ударного характера,
возникающие при катапультировании, действуют кратковременно (доли
секунды). Как и при действии длительных перегрузок, переносимость
человеком ударных перегрузок зависит от направления их действия.
Выбор направления катапультирования, правильная поза человека
и фиксация его тела в кресле обеспечивают безопасность воздействия
перегрузок при катапультировании.
В зависимости от общей компоновки самолета, числа и расположения
на самолете членов экипажа известны следующие направления
катапультирования: вверх, лицом к потоку; вверх, спиной к потоку; вниз,
лицом к потоку; вниз, спиной к потоку. Катапультирование вверх
используется чаще, так как при этом обеспечивается спасение экипажа
при покидании ЛА на малой высоте полета.
Применение в катапультных устройствах РД позволяет решить задачу
спасения экипажа на режимах взлета и посадки и при полетах "с
огибанием рельефа местности" на предельно малых (околонулевых)
высотах полета. Естественно, что для успешного катапультирования из
ЛА, находящегося на малой высоте, требуется больший импульс, чем для
перелета кресла через киль самолета на большой скорости, так как в этой
ситуации необходимо поднять летчика вместе с креслом на высоту
60... 120 м, достаточную для раскрытия и наполнения купола парашюта,
что позволит уменьшить до допустимого значения скорость падения
летчика при приземлении.
В начальный момент после покидания самолета, совершающего
горизонтальный установившийся полет, на систему летчик - катапу-
льтноекресло, движущуюся по криволинейной траектории относительно
земной системы координат, будут действовать следующие силы
(рис. 15.27): G - сила тяжести катапультного кресла с летчиком; Y -
составляющая полной аэродинамический силы системы летчик -
катапультное кресло, направленная перпендикулярно вектору скорости
^(подъемная сила системы летчик - катапультное кресло); X - сила
лобового сопротивления системы летчик-катапультноекресло; R-сила
тяги порохового РД (если применяется КСМ).
Система летчик - катапультное кресло движется вперед по направле-
нию движения самолета за счет силы инерции и составляющей Rx силы
тяги порохового РД комбинированного стреляющего механизма.
Система летчик - катапультное кресло движется вверх по инерции за счет
импульса силы, сообщенного системе стреляющим механизмом КК, и
за счет составляющей R силы тяги КСМ.
В фазе движения 2 (см. рис. 15.27), через некоторый промежуток
времени после катапультирования (фаза 7), система летчик - катапу-
льтное кресло отстает от самолета, так как является плохо обтекаемым
393
Рис. 15.27. Силы, действующие иа систему летчик-катапультиое кресло после покидания
кабины самолета
телом. По этой же причине отстает от системы летчик - катапультное
кресло фонарь кабины, сброшенный перед катапультированием.
В общем случае силы, действующие на систему летчик - катапультное
кресло, не проходят через центр инерции (центр масс) этой системы и она
начинает вращаться. Обычно центр давления системы расположен ниже
центра масс, поэтому система стремится вращаться в направлении голова
летчика впереди. В этом же направлении вращает систему импульс силы,
сообщенный стреляющим механизмом. При вращении человек ощущает
головокружение, тошноту и может потерять сознание. В любом случае
вращение системы в свободном полете увеличивает действующие на
летчика перегрузки.
После катапультирования вращение системы предотвращают
аэродинамические средства стабилизации-закрепленные на заголовнике
кресла складные горизонтальные (У) и вертикальные (2) щитки
(рис. 15.28, а) или стабилизирующие парашюты, размещаемые на
телескопических штангах, позволяющих вывести их из зоны аэродинами-
ческого затенения кресла (рис. 15.28, б), которые раскрываются при
выходе кресла в поток. Наиболее распространены парашютные системы
стабилизации.
Использование РД с системой управления вектором тяг позволяет не
только обеспечивать стабилизацию системы летчик - катапультное
394
Рис. 15.28. Аэродинамические средства стабилизации катапультного кресла
кресло, но и решать еще более сложную задачу коррекции траектории
движения системы при аварийном спасении экипажа в особо сложных
условиях, например при полете на малой высоте с большим углом
пикирования или при вращении по крену на высоте 20„.30 м.
Горизонтальная составляющая тяги РД благоприятно влияет на
процесс катапультирования, уменьшая перегрузку торможения пх =
= (У - RX)IG, которая при скорости полета свыше 1100 км/ч может
достигать предельно переносимых человеком значений (40...50),
Известно (см. рис. 6.7), что человек неплохо переносит перегрузки (в
том числе и ударные), ощущаемые им как действующие на него в
противоположном ускорению направлении инерционные силы, в
направлениях голова - таз, грудь - спина или спина - грудь.
В связи с этим возможные положения при выводе в поток (катапульти-
ровании) системы летчик - катапультное кресло и (или) стабилизации
ее в потоке показаны на рис. 15.29.
При катапультировании вверх в положении, показанном на
рис. 15.29,а, перегрузка от силы Р энергодатчика действует в направлении
голова -таз, при стабилизации в потоке системы летчик - катапультное
Рис. 15.29. Возможные положения при катапультировании и(или) стабилизации в потоке
системы летчик-катапультное кресло
395
кресло в таком же положении перегрузка торможения - перегрузка от
силы лобового сопротивления X, вызванной воздействием скоростного
напора q, действует в направлении спина - грудь. Можно после
выведения в поток стабилизировать систему в положении, показанном
на рис. 15.29,6 (как бы положить кресло вдоль воздушного потока).
В таком положении перегрузка торможения действует в направлении
голова - таз. При катапультировании вверх в положении, показанном
на рис. 15.29, б, перегрузка от силы Р энергодатчика действует в
направлении грудь - спина.
При выходе системы из кабины при катапультировании человек
подвергается ударному действию воздушного потока. При наличии
кислородной маски летчику до скоростей покидания ЛА порядка
700...750 км/ч не требуется дополнительных средств защиты от скоростно-
го напора. С ростом скорости недостаточная фиксация кислородной
маски на шлеме может привести к ее срыву скоростным напором и
возникновению вследствие этого травм лица, заполнению через
открытый рот и нос легких и желудка воздухом с избыточным давлением
и травмированию внутренних органов. Незафиксированные части тела
летчика (голова, конечности) подвергаются силовому воздействию,
превышающему мускульный контроль. Возможен разброс рук и ног
набегающим потоком и, как следствие, вывихи и переломы конеч-
ностей.
Чтобы исключить срыв маски и шлема и обеспечить защиту лица от
скоростного напора, применялись складные жесткие или мягкие шторки
КК, выпускавшиеся из заголовника кресла. Кроме того, шторка
исключала «кивок» головы в момент катапультирования и улучшала за
счет «выключения» зрения переносимость перегрузок в случае раскачки
или вращения кресла.
До скоростей покидания ЛА порядка 950... 1200 км/ч специальная
система фиксации летчика (привязная система и ограничители разброса
конечностей), предотвращающая разброс рук и ног летчика и возможные
удары о конструкцию кресла, в сочетании с защитой от воздушного
потока (высотно-компенсирующим костюмом совместно с гермошлемом
или скафандром) обеспечивают надежную защиту летчика от скоростно-
го напора при катапультировании.
В процессе развития средств спасения было разработано множество
различных систем защиты от скоростного напора и спасения эки-
пажа. Так, на первых сериях самолета МиГ-21 (ОКБ А.И. Микояна и
М.И. Гуревича) при катапультировании летчик защищался от действия
скоростного напора крышкой фонаря (рис. 15.30), образующей вместе
с катапультным креслом своеобразную капсулу. Затем фонарь отделялся
от кресла, и летчик спускался на парашюте.
396
Рис. 15.30. Защита катапультного кресла фонарем
Спасательная капсула для катапультирования экипажа на скоростях
более 1300 км/ч была разработана, например, для экспериментального
самолета ХВ-70 (США). Открытая в герметичной кабине самолета при
полете (рис. 15.31, а), капсула герметично закрывалась перед катапульти-
рованием (рис. 15.31, б). Силовая установка капсулы обеспечивала ее
выброс на высоту 85 м. Стабилизация капсулы осуществлялась
стабилизирующими парашютами, приземление (приводнение) производи-
лось с помощью амортизатора в виде резиновой подушки.
Еще более сложной системой аварийного спасения - отделяемой
кабиной-был. оборудован многоцелевой истребитель-бомбардировщик
Рис. 15.31. Спасательная капсула
397
F-111 (США). В аварийной ситуации 2-местная кабина пилотов
(рис. 15.32) с системой кондиционирования отделялась от остальной
части фюзеляжа и с помощью твердотопливного ракетного двигателя
отводилась от аварийного самолета на высоту 100...600 м, в зависимости
от скорости и высоты полета. Стабилизация кабины с работающим
двигателем осуществлялась специально профилированной хвостовой
частью кабины (стабилизатором), на участке снижения - стабилизирую-
щим парашютом до ввода в действие основного парашюта. Амортизация
при посадке обеспечивалась расположенными под кабиной и стабилиза-
тором надувными резиновыми подушками. При посадке на воду
дополнительно надувались два поплавка на верхней части кабины,
предотвращающие ее переворот при волнении моря.
Отделяемая кабина для группового спасения экипажа на больших
скоростях и малых высотах полета позволяет упростить индивидуальное
высотное снаряжение, улучшить физиологические и психологические
условия выживания после аварийной посадки, облегчить работу
наземных поисковых служб спасения.
Однако высокая вероятность боевого поражения непосредственно
кабины, сложность, большая масса конструкции и меньшая по сравнению
398
Рис. 15.33. Спектры обтекания сверхзвуковым потоком системы летчик-катанультное
кресло
с КК надежность определяют преимущественное использование КК в
качестве средства спасения экипажа боевых самолетов.
Дополнительную защиту летчика (помимо скафандра или высот-
но-компенсирующего костюма с гермошлемом) от действия скоростного
напора обеспечивает дефлектор -выдвигаемый в поток при катапульти-
ровании из конструкции КК щиток, который изменяет характер
обтекания системы летчик - катапультное кресло набегающим потоком.
Спектр обтекания (видимая картина течения и система скачков
уплотнения) сверхзвуковым потоком (М = 2) системы летчик, -
катапультное кресло без дефлектора показан на рис. 15.33, а. Обтекание
системы летчик-катапультное кресло с дефлектором (рис. 15.33,6) более
благоприятно для летчика с точки зрения изменения параметров потока
(см. подразд. 5.5) в системе скачков, формируемых дефлектором, -
уменьшаются силовое воздействие воздушного потока на тело летчика
и перегрузка торможения. Дефлектор существенно повышает допустимую
скорость полета самолета, при которой обеспечивается безопасное
катапультирование.
После катапультирования спуск летчика на землю осуществляет
парашютная система - комплекс парашютов, последовательно вводимых
в действие.
Современные КК снабжаются двухкаскадной (стабилизирующий и
основной парашюты) или трехкаскадной (1-й стабилизирующий, 2-й
стабилизирующий (тормозной) и основной парашюты) парашютными
системами, размещаемыми в спинке или в заголовнике катапультного
кресла.
399
Катапультные кресла, как и другие системы самолета, непрерывно
совершенствовались в процессе развития боевых самолетов. Вначале
самолетные ОКБ и фирмы проектировали КК только для каждого из
своих самолетов, позже появились специализированные фирмы.
Наиболее известные среди них - английская специализированная фирма
Мартин-Бейкер (Martin-Вакег), катапультными креслами которой
оснащались большинство зарубежных самолетов, и отечественное На-
учно-производственноепредприятие«3везда»(генеральныйконструктор
Г.И. Северин), специализирующееся на разработке систем жизнеобеспече-
ния и спасения экипажей всех видов ЛА. По оценкам коллег из-за
рубежа, унифицированное катапультное кресло К-36, созданное спе-
циалистами "Звезды", может спасать летчика на всех высотах при
скоростях до 1400 км/ч и в настоящее время является лучшим средством
спасения в мире.
Система аварийного спасения (САС) современного боевого самолета
представляет собой комплекс сложных агрегатов и отдельных самостоя-
тельных систем. Туда входят:
средства обнаружения неисправностей и выдачи сигнала о необходи-
мости катапультирования;
система открытия аварийного выхода;
система аварийного покидания, обеспечивающая экипажу возмож-
ность покинуть ЛА при его аварии;
средства, обеспечивающие защиту экипажа от ударов и высотных
факторов;
средства, обеспечивающие выживание экипажа после приземления
(приводнения).
Сигнал о необходимости катапультирования (воздействие на привод
управления катапультированием) подает летчик на основании визуаль-
ной и (или) инструментальной (приборной) информации о параметрах
движения самолета и работоспособности всех его систем. Сигнал о
принудительном катапультировании может поступить и без участия
летчика от бортовой автоматической системы управления, если
какие-либо параметры самолета и его систем изменяются с недопустимой
скоростью в неблагоприятном направлении (например, угловые скорости
вращения СВВП на режимах взлета и посадки, когда летчик чисто
физически не успевает принять и реализовать решение о катапультирова-
нии).
После воздействия на привод управления катапультированием все
элементы системы аварийного спасения срабатывают автоматически от
пиро механизмов и процесс спасения идет по следующей схеме (рис. 15.34).
1. Подготовка к катапультированию:
400
Рис. 15.34. Схема процесса спасения при катапультировании
401
срабатывают пиромеханизмы плечевого и поясного притяга летчика,
обеспечивая правильную исходную для катапультирования позу летчика
вКК;
пиротехническая система обеспечивает сброс фонаря 1 (или крышки
люка) вверх и назад, в случае отказа системы сброса или заклинивания
фонаря летчик может катапультироваться через его остекление;
срабатывают ограничители разброса рук 3, фиксаторы ног 4,
предотвращающие повреждение конечностей воздушным потоком,
голова фиксируется в ложементе заголовника 2;
разблокируется и включается энергодатчик 5.
2. Движение системы летчик - катапультное кресло в направляющих
рельсах:
под действием газов стреляющего механизма (1-й ступени энергодат-
чика-КСМ 5) кресло с ускорением начинает двигаться в направляющих
рельсах кабины;
при движении КК по направляющим рельсам до момента выхода его
из кабины вводятся в действие агрегаты автоматики кресла, обеспечива-
ющие работу всех его систем;
расстыковываются разъемы объединенного разъема коммуникаций:
прекращается питание электрооборудования кресла от бортовой сети
самолета, коммуникации бортового оборудования самолета отсоединя-
ются от высотного снаряжения летчика, включается подача кислорода
летчику от кислородного баллона кресла, обеспечивающего дыхание
летчика до снижения на безопасную высоту;
в зависимости от скорости полета вводится (или не вводится) в поток
закрепленный на конструкции кресла дефлектор 6, обеспечивающий
дополнительную защиту летчика от действия скоростного напора;
включается пиромеханизм системы стабилизации, вводящий в поток
телескопические штанги 7 с закрепленными на них стабилизирующими
парашютами S;
разъединяются трубы стреляющего механизма (1-й ступени КСМ),
пиромеханизм-воспламенитель включает пороховой заряд ракетного
двигателя (2-й ступени КСМ), кресло сходит с направляющих рельсов
и совершает полет по траектории.
3. Полет системы летчик - катапультное кресло по траектории на
начальном «активном» участке.
Происходит с работающим ракетным двигателем. Траектория полета
и угловое положение кресла на траектории зависят от высоты, положения
и скорости полета самолета, при которых произошло катапультирование,
а также от того, каким образом осуществляется стабилизация кресла.
4. Ввод спасательного парашюта и разделение системы летчик -
катапультное кресло.
402
Основной (спасательный) парашют может быть введен на определен-
ной скорости движения системы (допустимой скорости ввода парашюта,
определяемой возможностью наполнения купола парашюта и прочнос-
тью купола и строп). Торможение и снижение системы летчик -
катапультное кресло до допустимой скорости и высоты ввода парашюта
можно обеспечить последовательным вводом стабилизирующих и
тормозных парашютов двухкаскадной или трехкаскадной парашютных
систем.
В рассматриваемом примере (см. рис. 15.34) для интенсивного ввода
основного парашюта и надежного разделения кресла и летчика
используется пиромеханизм ввода парашюта, который под действием
газов сработавшего пиропатрона отстреливается вместе с заголовником
от кресла. При отстреле заголовника резаки (гильотины - франц.
guillotine) перерезают ремни притяга плеч, освобождая плечи летчика от
связи с креслом; раскрывается находящаяся в заголовнике 2 камера
парашюта, спасательный парашют 10 высвобождается из камеры и
чехла 9; срабатывают резаки ремней притяга пояса и ног, освобождая
летчика от связи с креслом, ограничители разброса рук освобождают
руки летчика, разделяется разъем коммуникаций, связывающий высотное
снаряжение летчика с кислородным прибором кресла; сила отдачи,
возникающая при отстреле заголовника, отбрасывает кресло от летчика
вниз; наполняющийся купол парашюта тормозит движение летчика, и
летчик вместе с носимым аварийным запасом (НАЗ), размещенным
в ранце 12 с жесткой крышкой-сиденьем И в нижней части привязной
системы, связывающей летчика со стропами парашюта, спускается на
наполненном куполе.
5. Спуск летчика на спасательном парашюте.
После разделения системы летчик - катапультное кресло срабатыва-
ют пирорезаки и ранец НАЗ 12, в котором уложены продуктовый запас,
лагерное снаряжение, средства сигнализации и медицинская аптечка,
отделяется от крышки 11, удерживаясь на ней с помощью фала (голл.
та/-трос) 13, выходит плавучий автоматический радиомаяк 14, который
включается в работу и подает аварийные сигналы при спуске летчика
на парашюте и при приземлении (приводнении). При спуске на воду по
сигналу летчика из крышки выходит и автоматически наполняется
надувная спасательная лодка 15.
Такая система обеспечивает высокую вероятность спасения экипажа
военного самолета в широком диапазоне скоростей и высот полета.
При катапультировании на стоянке или на малой скорости при
рулежке, взлете и послепосадочном пробеге подъем по траектории
осуществляется в нестабилизированном положении, а ввод спасательного
403
парашюта производится при приближении системы летчик - катапу-
льтное кресло к вершине активного участка траектории.
При катапультировании на высоте до 5000 м система летчик -
катапультное кресло поднимается по траектории в стабилизированном,
устойчивом положении, проходит над килем самолета, спасательный
парашют вводится в начальный момент снижения системы летчик -
катапультное кресло.
При катапультировании на высоте более 5000 м и высокой скорости
полета система летчик - катапультное кресло поднимается по траектории
в стабилизированном, устойчивом положении, проходит высшую точку
траектории и далее снижается, спасательный парашют вводится на
высоте, не превышающей 5000 м.
Носимый аварийный запас облегчает наземным службам процесс
поиска и поддерживает жизнедеятельность летчика (и других членов
экипажа) военного самолета, катапультировавшегося и совершившего
вынужденную посадку с парашютом.
15.4.3. СИСТЕМЫ ДЕСАНТИРОВАНИЯ
Совершенствование конструкци парашютов позволило широко
использовать их в авиационной технике: размещаемые в хвостовой части
самолета тормозные парашюты уменьшают длину пробега самолета при
посадке, противоштопорные парашюты помогают летчику вывести
самолет из штопора. При очень малых значениях относительной массы
и объема в уложенном состоянии парашют способен создавать
значительные аэродинамические силы для торможения и перемещения
различных объектов.
Вначале парашют применялся для воздушного десанта - выброски
с воздуха в тыл противника бойцов с личным оружием для выполнения
боевых задач. По мере развития парашютной техники появилась
возможность десантирования тяжелой боевой техники. В настоящее
время многокупольные парашютные системы (рис. 15.35), имеющие от
двух до десяти куполов 1 общей площадью 6000...8000 м2, применяются
не только в военных целях, но и для приземления объектов, возвращае-
мых с орбиты искусственного спутника Земли, для доставки в труднодос-
тупные районы крупногабаритных и тяжелых хозяйственных грузов
массой до нескольких десятков тонн.
Уменьшить скорость приземления позволяют твердотопливные
РД 2, включающиеся автоматически на определенной высоте в момент
касания земли щупом 4, размещенным под платформой 3, на которой
закреплен десантируемый объект.
404
Сброс таких грузов осущест-
вляется с тяжелых транспортных
самолетов (рис. 15.36) обычно
через задний люк с рампой 3 с
помощью вводимого в поток
вытяжного парашюта 4, кото-
рый вытягивает из самолета
груз, движущийся по рольгангам
1 (нем. rollgang, от rolle - ро-
лик, каток и gang - ход) - роли-
ковым конвейерам,установлен-
ным на силовом полу грузовой
кабины самолета. Затем тормоз-
ной парашют вводит в действие
стабилизирующие и основные
парашюты системы, находящие-
ся в упаковке 2, закрепленной на
платформе со сбрасываемым
грузом.
Создание парашюта-крыла
(рис. 15.37) позволило сущест-
венно повысить точность при-
земления десантируемых грузов.
Парашют-крыло (планирующий
парашют) за счет формы купола
1 обладает достаточно высо-
Рис. 15.35. Многокупольпая парашютная
система
ким аэродинамическим качест-
вом (К = 2,5...3,0). Натяжением
стропов 2 можно изменять углы ai
купола потоком воздуха и таким
спускаемого объекта по тангажу,
крену и рысканию. Изменение
натяжения стропов может осуще-
ствляться электромеханическими
или гидравлическими приводами
3 по радиокомандам с земли или
с самолета, сбросившего груз.
Повышениегрузоподьемнос-
ти парашюта, уменьшение его
массы и объема за счет примене-
ния новых материалов, отработ-
ка пиротехнических средств
1ки и скольжения при обтекании
образом управлять положением
Рис. 15.36. Сброс груза с транспортного само-
лета
405
1
Рис. 15.37. Парашют-крыло
Рис. 15.38. Спасение мотодельтапла-
на с экипажем
ввода парашюта позволили создать малогабаритные и легкие системы
спасения экипажа и пассажиров вместе с легкими (с полетной массой до
2000 кг) и сверхлегкими летательными аппаратами, такими, например,
как дельтапланы (сверхлегкие планирующие ЛА с крылом треугольной
формы, напоминающие своими очертаниями букву Д греческого
алфавита) и мотодельтапланы (дельтапланы с двигателем) (рис. 15.38).
Системы спасения повышают вероятность сохранения жизни людей
в аварийной ситуации.
Основанные на использовании парашюта системы десантирования
позволяют решать сложные военные и хозяйственные задачи.
15.5. ПИЛОТАЖНО-НАВИГАЦИОННОЕ
И РАДИОТЕХНИЧЕСКОЕ ОБОРУДОВАНИЕ
В подразд. 1.2 отмечалось, что самолет как системный объект -
управляемая система. В процессе полета летчик (или автоматическая
система управления) управляет движением самолета в соответствии с
указаниями службы управления воздушным движением (см. подразд.
3.3.3) на основании информации о положении самолета в пространстве,
состоянии внешней среды и всех бортовых систем.
406
Впервые бортовое самолетное оборудование, выдающее летчику
необходимую информацию, появилось в 1920 г. До этого летчик
пользовался примитивными приборами, такими как наручный компас,
вертушка-анемометр для измерения скорости потока воздуха, обтекаю-
щего самолет. Частота вращения двигателя определялась по частоте
падения капель масла в прозрачной капельнице, вмонтированной в
масляную систему. Самолеты летали только при хорошей погоде,
поэтому потребности в другом оборудовании не возникало.
В настоящее время, когда полет происходит в основном вне видимости
земной поверхности, скорости достигают 3000 км/ч, высоты - 30 км,
продолжительность - нескольких часов, а дальность - десятков тысяч
километров, полет невозможен без постоянного обеспечения летчика
непрерывно и быстро меняющейся информацией о навигационной и
метеорологической обстановке, о состоянии всех систем самолета.
Бортовое оборудование современного ЛА - это совокупность
большого числа сложнейших приборов и устройств самого различного
назначения и принципов действия, связанных между собой многочислен-
ными коммуникациями.
Вначале применялись приборы (см. подразд. 6.7), базирующиеся на
барометрическом (приемники воздушного давления), аэродинамическом
(датчики углов атаки и скольжения), гироскопическом (датчики углов
тангажа, крена, рыскания и угловых скоростей относительно всех трех
осей) и инерционном (акселерометры) методах определения параметров
полета. Во время и после второй мировой войны началось интенсивное
развитие радиотехнических средств получения информации и управления
полетом, которые на современных ЛА составляют большую часть
навигационного оборудования
Антенно-фидерные устройства (АФУ) радиотехнических средств
излучают электромагнитные колебания, которые, распространяясь в
пространстве, отражаются от встречных объектов и принимаются АФУ.
Антенна (от лат. antenna — мачта, рей) - устройство для непо-
средственного излучения и (или) приема радиоволн. Фидер (англ,,feeder,
от feed - питать) - проводная линия для передачи электрических
колебаний радиочастоты.
В радиотехнических средствах используют основные свойства
электромагнитныхполей-.высокуюскоростьраспространениярадиоволн
(примерно 3-108 м/с), отражение радиоволн от объектов, прямолинейное
распространение фронта волны в однородной среде, возможность
направленного излучения и приема радиоволн, эффект Доплера (по
имени австрийского физика и астронома К. Доплера) - изменение
частоты электромагнитных волн, регистрируемое наблюдателем, в
407
зависимости от направления и значения скорости относительного
движения наблюдателя и источника волн.
Дальность до объекта определяют измерением временного сдвига
зондирующего (излучаемого) и принимаемого отраженного сигналов.
Угловую координату определяют по наземным радиомаякам, используя
свойства направленной антенны. Информация об облучаемом объекте
и его координатах содержится в амплитуде, фазе и частоте сигнала.
Использование направленных антенных систем, специальных форм
зондирующих сигналов, в том числе импульсных, значительно повышает
точность и дальность действия радиотехнических средств.
Специфика выполняемой задачи и условия эксплуатации определяют
функциональные возможности и состав авионики (авиационной
электроники). Авионику- обеспечивающее навигацию и пилотирование
самолета бортовое радиоэлектронное оборудование (БРЭО) - можно
разделить на пилотажно-навигационное оборудование (ПНО) и
радиотехническое оборудование (радиосистемы связи). Такоеразделение
весьма условно, так как информация, поступающая к экипажу по
радиоканалам связи, также используется для решения навигационных
задач.
В состав БРЭО входят разнообразные приборы и системы, предназна-
ченные для получения информации, переработки и выдачи ее на
пилотажно-навигационные приборы (индикаторы) в кабине экипажа и
в системы автоматического управления.
15.5.1. ПИЛОТАЖНО-НАВИГАЦИОННОЕ ОБОРУДОВАНИЕ
Пилотажно-навигационное оборудование обеспечивает определение
географического положения ЛА, измерение и индикацию параметров
полета, определение местоположения ЛА в воздушном пространстве,
стабилизацию и автоматическое управление полетом. К этому оборудо-
ванию относятся:
приборы и системы для определения высотно-скоростных параметров
полета, углов атаки и скольжения, а также углов тангажа и крена. Они
выдают информацию об ориентации ЛА относительно вертикали на один
из важнейших навигационных приборов - авиагоризонт",
приборы и системы для определения угловых скоростей и ускорений
(перегрузок) ЛА;
магнитные компасы, реагирующие на магнитное поле Земли, для
определения курса;
гироскопические приборы для определения курса с магнитной
коррекцией погрешности, которая накапливается в длительном полете
и при маневрах ЛА в связи с "уходами" гироскопов;
408
астрономические курсовые системы, фиксирующие направление
(угловую координату) ЛА относительно какой-либо звезды или
значительно удаленной планеты с помощью астродатчиков (от греч.
astron - звезда, секстант - от лат. sextans - шестой) либо фотоэлектриче-
ских секстантов. Лимб секстанта составляет около 1/6 части окружности;
лимб (от лат. limbus - кайма, пояс) - указатель, разделенный штрихами
на градусы, минуты.
К радиоэлектронным устройствам пилотажно-навигационного
оборудования относятся:
автоматические радиокомпасы - следящие радиотехнические системы,
непрерывно определяющие курсовой угол наземной приводной или
широковещательной радиостанции и позволяющие автоматизировать
полет на радиостанцию и от нее;
радиосекстанты, в которых используется пеленгация Солнца и светил
по их радиоизлучению. Пеленгация (от голл. peiling - пеленг - направле-
ние на какой-либо объект от наблюдателя) - измерение угла между
плоскостью меридиана и вертикальной плоскостью, проходящей через
место наблюдателя и наблюдаемый объект;
радиовысотомеры больших и малых высот, выдающие информацию
экипажу и в бортовые системы о текущей истинной высоте полета
независимо от характера местности и метеорологических условий. По
сути, это автономные следящие измерители, обеспечивающие также и
сигнализацию о заданной высоте полета;
радиодальномеры и дальномерные радиотехнические системы,
опознающие наземные радиомаяки и измеряющие наклонную дальность
ЛА относительно радиомаяков;
доплеровские измерители скорости и угла сноса - автономные
радиолокаторы, обеспечивающие непрерывное определение путевой
скорости, угла сноса ЛА под влиянием ветра от первоначального
направления полета и расстояния до конечного или промежуточного
пункта маршрута;
радиосистемы дальней навигации. Объединяя возможности бортового
пилотажно-навигационного оборудования, они обеспечивают взаимо-
действие с наземными службами и радиотехническим оборудованием
управления движением для контроля пути и вывода самолета в заданный
район;
угломерно-дальномерные радиосистемы ближней навигации,
работающие совместно с наземным оборудованием и непрерывно
измеряющие навигационные координаты (наклонную дальность и азимут
относительно наземных маяков). С помощью этих систем возможно
вывести самолет в зону действия наземных систем посадки и определять
угловые отклонения от оси равносигнальных зон курсового и глиссадно-
409
го посадочных маяков. Эти сигналы поступают в бортовую систему
управления, используются для коррекции навигационного вычислителя,
позволяют опознавать самолет на наземных индикаторах кругового
обзора;
аппаратура радиосистем посадки, позволяющая пилотировать
самолеты по сигналам радиомаяков, выполнять предпосадочные
маневры, заход на посадку. Аппаратура позволяет получать информацию
об угловом отклонении самолета в горизонтальной плоскости относи-
тельно оси взлетно-посадочной полосы и угловом отклонении самолета
относительно плоскости, определяющей угол глиссады снижения (т. е.
положение самолета в вертикальной плоскости), а также о моменте
пролета маркерных радиомаяков, т. е. о расстоянии до ВПП;
радиолокационные станции (РЛС), в зависимости от назначения
самолета выполняющие различные функции. Навигационные РЛС
пассажирских самолетов позволяют получить на экране индикатора в
кабине экипажа радиолокационное изображение местности, обеспечива-
ющее визуальную ориентировку в отсутствие прямой видимости,
обнаруживать облачность с активной турбулентной деятельностью,
выявлять впереди по курсу опасные грозовые очаги и встречные
самолеты, определять их угловое положение и удаленность. РЛС боевых
самолетов решают эти задачи, но их главное назначение - обнаружение
целей (объектов противника) и управление наведением на них, обеспече-
ние маловысотного полета, предупреждение экипажа о нападении (об
облучении самолета радиолокационной станцией противника), защита
задней полусферы, проведение разведки и радиопротиводействия и т. д.;
самолетные ответчики обеспечивают взаимодействие с наземным
диспетчерским и посадочным радиолокаторами отечественных и
зарубежных систем УВД, автоматически передавая (в ответ на запрос
наземной системы) закодированную информацию о координатах,
бортовом номере самолета, государственной принадлежности самолета,
высоте полета, запасе топлива на борту. Запрос и ответ осуществляются
на разных частотах, что увеличивает помехозащищенность системы.
Необходимая информация от радиоэлектронных устройств
пилотажно-навигационного оборудования визуально воспроизводится
для экипажа и поступаете бортовой пилотажно-навигационный комп-
лекс.
15.5.2. РАДИОТЕХНИЧЕСКОЕ ОБОРУДОВАНИЕ
Радиотехническое оборудование (радиосистемы связи) обеспечивает
телефонную, телеграфную и другие виды связи между различными ЛА,
между ЛА и землей, внутри ЛА.
410
Приемопередающие командные радиостанции обеспечивают бесп ©иско-
вую и бесподстроечную (с дискретной перестройкой каналов) симплек-
сную или дуплексную связь экипажей ЛА с наземными командно-
диспетчерскими пунктами и экипажами других ЛА. Симплексная
(от лат. simplex - простой) связь- система связи между абонентами,
при которой в каждом из пунктов связи прием и передача сообщений
производятся поочередно. Дуплексная (от лат. duplex - двойной)
связь- система связи, при которой прием и передача сообщений по
одному каналу производятся одновременно в обоих направлениях.
Радиосистемы дальней связи работают в коротковолновом (КВ)
диапазоне частот 2...30 МГц. В этом диапазоне используется луч с
многократным отражением между ионизированным слоем воздуха на
высотах 100... 150 км и земной поверхностью, вследствие чего устойчи-
вость связи зависит не только от мощности и характеристик радиосисте-
мы, но и от времени суток, солнечной активности, географического
положения приемника и передатчика. Тем не менее дальность связи
самолета с землей может достигать 5000...6000 км.
Радиосистемы ближней связи работают в ультракоротковолновом
(УКВ) диапазоне частот 118... 136 МГц. В этом диапазоне используется
«прямой луч», обеспечивая связь в пределах прямой видимости (полет
по маршруту, взлет, посадка, рулежка, стоянка). При высоте полета
порядка 10 000 м с учетом кривизны Земли радиостанции такого типа
обеспечивают уверенную связь на расстояниях 350...400 км.
Внутрисамолетные радиосистемы (самолетные переговорные
устройства) обеспечивают связь между членами экипажа, прием речевой
информации от автоматических систем управления, при этом сохраняется
возможность внешней связи. На пассажирских самолетах устанавливают-
ся радиосистемы оповещения и развлечения пассажиров для передачи
различной информации, аудио- и видеопрограмм в пассажирские
салоны.
Кроме того, на самолетах имеются переносные автономные аварий-
но-спасательные коротковолновые и УКВ-радиостанции для двухсторон-
ней симплексной связи экипажа самолета, потерпевшего аварию или
совершившего вынужденную посадку, с базами и ЛА спасательной
службы в телефонном и телеграфном режимах и для автоматической
передачи сигнала бедствия. УКВ-радиостанции используются в качестве
радиомаяков для ЛА и судов спасательной службы.
На каждом ЛА устанавливается магнитная система регистрации
полета (МСРП), обеспечивающая непрерывную синхронную запись с
регистрацией времени на специальные магнитофоны от бортовых средств
контроля параметров, характеризующих движение самолета, положение
органов управления, состояние основных элементов конструкции,
411
силовой установки и всех систем самолета, а также всех переговоров
экипажа с наземными службами и между собой.
Запись производится на ленту магнитофона (накопителя информации)
с непрерывным стиранием ранее записанной информации и сохранением
информации о последних нескольких часах (или минутах, в зависимости
от емкости накопителей информации) полета.
Применение МСРП позволяет контролировать действия членов
экипажа в условиях обычной эксплуатации и при обучении летного
состава, контролировать состояние и режимы работы основных
элементов конструкции, силовой установки, самолетных систем,
оборудования и агрегатов самолета, определить обстоятельства и
причины летного происшествия или предпосылки к летному происше-
ствию.
15.5.3. КОМПЛЕКСЫ БОРТОВОГО
РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ
Полет современного самолета обеспечивают иногда свыше десяти
различных подсистем БРЭО. Многие из них дублируются целиком или
по отдельным блокам, поэтому общее число радиоэлектронных блоков
на борту доходит до нескольких десятков.
Антенные устройства радиоэлектронных систем весьма разнообразны
по форме и конструкции, число их на борту достаточно велико, выбор
места и направления их размещения на самолете определяет простран-
ственные характеристики направленности их излучения, их электромаг-
нитную совместимость - степень отрицательного взаимовлияния (т. е.
попадания излучения антенны на антенны соседних приемопередающих
устройств), качество и точность работы соответствующей подсистемы
БРЭО.
С целью уменьшения затухания и искажения сигнала приемники и
передатчики стремятся размещать возможно ближе к антенне, поэтому
размещение антенн на самолете в какой-то мере определяет размещение
других блоков БРЭО. Увеличение дальности действия работающих в
сантиметровом диапазоне волн бортовых РЛС требует увеличения
диаметра зеркала антенны, и это влияет на форму, размеры и компоновку
носовой части фюзеляжа маневренных боевых самолетов. Многие блоки
аппаратуры, обеспечивающей навигацию, должны занимать определен-
ное положение относительно центра масс ЛА.
Повышение потребляемой мощности приводит к нагреву блоков
БРЭО, что ухудшает их работу и требует размещения некоторых из них
в вентилируемых герметичных отсеках, обеспечивающих термостатиро-
вание оборудования. Блоки радиоэлектронной аппаратуры очень
412
Рис. 15.39. Размещение радиоэлектронного оборудования и антенн па самолете-истребителе
чувствительны к воздействию вибрационных нагрузок, поэтому их
устанавливают на специальных амортизаторах. Для обеспечения
возможности подстройки, регулировки и контроля аппаратуры
необходимо предусмотреть удобные подходы к ней.
Эти и другие факторы оказывают существенное влияние на компо-
новку самолета. Размещение радиоэлектронного оборудования и антенн
(указаны стрелками) различных приемопередающих радиостанций на
самолете-истребителе показано на рис. 15.39.
С развитием БРЭО и другого бортового оборудования возросли
потоки информации, поступающей к экипажу от бортовых систем.
Одновременно с этим при увеличении скорости полета время принятия
решения постоянно сокращалось, и психофизиологические возможности
летчика приблизились к пределу, когда летчик уже не успевал восприни-
мать и анализировать поступающую к нему информацию.
Стремление облегчить работу экипажа привело к постепенному
объединению приборов и устройств во взаимосвязанные группы
(комплексы), предназначенные для решения всего множества полетных
задач. При этом значительно увеличилось количество взаимосвязей
между отдельными устройствами и системами, перекрытие и дублирова-
ние задач, решаемых различными устройствами. Так, курсовая система
современного самолета позволяет экипажу отсчитывать гироскопический
курс, гиромагнитный курс, гироскопический курс с астрономической
коррекцией, курс по пеленгам наземных радиостанций.
В связи с избыточностью информации появилась необходимость
автоматизации процесса обработки информации и управления самолетом
и его системами на всех этапах полета в любых метеоусловиях при
отсутствии видимости земли. Впервые системы автоматического
управления (САУ) использовались в виде одноканального автопилота,
обеспечивающего стабилизацию самолета по тангажу во время
маршрутного полета. Современные САУ позволяют автоматизировать
полет самолета от взлета до посадки, решают множество других задач
(см. подразд. 7.8 и 8.6). Такая автоматизация стала возможной в
413
результате создания малогабаритных и надежных вычислительных
устройств с высоким быстродействием и большим объемом памяти.
В связи с комплексированием оборудования возросло число различ-
ных бортовых вычислителей, стали устанавливаться бортовые ЭВМ,
появилось и непрерывно совершенствуется специальное программное
обеспечение. Так, на тяжелых бомбардировщиках устанавливается до
4-6 универсальных бортовых ЭВМ и до 30 специализированных
периферийных вычислителей, которые обеспечивают информационное
и алгоритмическое взаимодействие систем высокоточной навигации,
управления полетом и вооружением. На борту магистральных пассажир-
ских самолетов имеется по 300 - 400 мини- и микроЭВМ, большинство
из которых используется в режиме резервирования.
Сложность и чувствительность к дестабилизирующим факторам
(температуре, вибрациям, магнитным и электрическим полям и т. п.)
БРЭО и ЭВМ приводит к снижению их надежности по сравнению с
другими видами оборудования, причем большинство неисправностей
не может быть выявлено простейшей проверкой или осмотром. Для их
обнаружения требуются специальные методы контроля и соответствую-
щая аппаратура. На борту ЛА появились автоматизированные системы
оперативного контроля, диагностики неисправностей, прогнозирования
надежности радиоэлектронного и другого оборудования и автоматичес-
кого управления оборудованием (выбор состава работающего в данный
момент оборудования, переключение режимов его работы, включение
резерва и т. д.).
Основные направления развития этого оборудования - замена
дискретной информации, считываемой экипажем с различных приборов,
автоматически обрабатываемой непрерывной информацией, микромини-
атюризация и достижение минимальной массы, комплексирование,
многократное резервирование, стандартизация и унификация.
Создание таких комплексов позволяет выполнить требования по
эффективности и надежности ЛА, сократить число членов экипажа и
облегчить его работу.
Интеграция пилотажно-навигационного комплекса и систем
управления оружием обеспечивает современному боевому самолету
многофункциональность (т. е. высокую эффективность при поражении
воздушных, наземных, надводных и подводных целей) и способность
вести многоканальную (т.е. по нескольким целям одновременно) стрельбу
с использованием принципа «пустил-забыл» при применении всех видов
управляемого оружия, позволяет совершать автоматизированный
маловысотный полет с огибанием рельефа местности.
Средства радиопротиводействия своевременно предупреждают
летчика о попадании в зону действия радиолокационной станции
414
противника и создают эффективные помехи средствам противника,
чтобы сорвать возможность атаки и поражения самолета.
15.5.4. БОРТОВОЕ ОБОРУДОВАНИЕ И КАБИНА ЭКИПАЖА
Одной из главных на современном магистральном пассажирском
самолете является автоматическая цифровая система управления (АЦСУ)
полетом, куда входят:
вычислитель сигналов управления полетом;
вычислитель управления тягой двигателя;
сдвоенный вычислитель системы улучшения управляемости;
пульт выбора режимов;
пульт технического обслуживания.
Система управления полетом имеет два режима - автопилота и
ручного, директорного (лат. director - направляющий, от dirigo -
направляю) управления. Это предотвращает выход за границы допус-
тимых режимов работы на всех этапах полетов. Обеспечивается
выполнение координированных разворотов и демпфирование колебаний.
Автоматически стабилизируется воздушная скорость. Система обес-
печивает движение самолета по оптимальным траекториям в трехмерном
пространстве.
Вычислитель управления тягой двигателя непрерывно рассчитывает
частоту вращения роторов двигателей, степень повышения давления.
Специальная система оптимизации режимов полета позволяет
выбрать профили полета, оптимальные по расходу топлива, стоимости
или времени.
Вычислитель сигналов управления полетом, функционирующий как
автопилот, имеет следующие режимы работы:
стабилизация углов тангажа и крена;
стабилизация высоты;
выход на заданную высоту;
смена эшелона;
стабилизация вертикальной скорости;
выход на заданный курс;
полет на радиомаяк;
стабилизация курса взлета и ухода на второй круг.
Система управления полетом получает информацию от инерциальной
навигационной системы и системы воздушных сигналов, системы
сигнализации опасной скорости сближения с землей, системы измерения
полной энергии самолета, вычислителя сдвига ветра и цифровых
навигационных радиоэлектронных систем (автоматический радиокомпас,
два радиовысотомера, два приемоответчика системы УВД, два
415
приемника всенаправленных радиомаяков, метеорадиолокатор, две
системы посадки по приборам и т. д.).
Инерциальная навигационная система путем использования лазерных
гироскопов (точность определения координат местоположения порядка
1,0 км за 1 ч полета) и системы воздушных сигналов обеспечивает
потребителей информацией о пространственном положении самолета,
курсе, угле сноса, путевом угле, угле наклона траектории, путевой
скорости, вертикальной скорости, скорости ветра, угловых скоростях
и линейных ускорениях.
Система воздушных сигналов (СВС) измеряет, вычисляет и выдает
потребителям информацию о текущих значениях высотно-скоростных
параметров. В ее состав входят:
два цифровых вычислителя сигналов датчиков давления, что
позволяет с высокой точностью измерять высоту полета (погрешность
±4,6 м), вертикальную скорость (погрешность ±0,15 м/с), приборную
скорость (погрешность ±1,85 км/ч), истинную воздушную скорость
(погрешность ±7,4 км/ч);
два высотомера;
два вариометра (от лат. vario - изменяю и ...метр), измеряющие
скорость набора высоты и снижения (диапазон 30 м/с, погрешность
±2%).
Система сигнализации опасной скорости сближения с землей
вырабатывает сигналы для светового, звукового и речевого оповещения
летчиков об опасной скорости сближения с землей при нахождении
самолета ниже пределов безопасности, снижении с недопустимой
скоростью или отклонении от глиссады ниже установленных пределов.
Система измерения полной энергии в сочетании с автоматом тяги
двигателей обеспечивает выход самолета на заданный режим полета и
его выдерживание при наиболее экономичных режимах работы
(экономия топлива) и снижение шума. Система управляет скоростью
выпуска закрылков при заходе на посадку и рассчитывает избыточную
тягу при взлете.
Вычислитель сдвига ветра определяет горизонтальную и вертикаль-
ную составляющие сдвига ветра. Звуковая сигнализация информирует
летчика о горизонтальной составляющей сдвига ветра, превышающей
1,5 м/с, и об угле скоса нисходящего потока более 0,15 рад. Информация
о сдвиге ветра поступает в систему-управления тягой и в систему
управления.
С использованием спутниковых систем навигации ошибка определе-
ния местоположения современного магистрального пассажирского
самолетасавтоматической цифровой системой управления за четырехча-
совой полет составляет примерно 200 м, точность выдерживания
времени ±2 с.
416
На большинстве современных и перспективных пассажирских
самолетов состав систем оборудования позволяет пилотировать самолет
экипажу из двух человек: левый по направлению полета летчик -
командир воздушного судна, правый летчик - второй пилот (старший
офицер). Существует четкое распределение обязанностей между членами
экипажа, тем не менее должна быть обеспечена возможность полной
взаимозаменяемости командира и второго пилота.
Это обстоятельство определяет в значительной мере компоновку
кабины экипажа, которая является одним из наиболее важных отсеков
современного самолета. В кабине экипажа (рис. 15.40) размещены рычаги
управления рулевыми поверхностями (штурвальная колонка 1 и педали
2 ) на каждом рабочем месте и рычаги управления двигателями 3 на
центральном пульте 4.
На центральном пульте, боковых пультах 5 левого и правого пилотов,
основной приборной панели 6, потолочной панели 7 размещены
управляющие элементы (рычаги, переключатели, клавиатуры ввода
информации в АЦСУ и др.) всех систем самолета, приборы, выдающие
экипажу информацию о необходимых управляющих воздействиях
(входных сигналах), и приборы, информирующие экипаж о положении
самолета в пространстве и работе всех его систем (обратные связи, см.
подразд. 7.2.4). Стойки каркаса 8 остекления 9 кабины размещены таким
образом, чтобы обеспечить экипажу обзор (визуальная информация) в
соответствии с требованиями Авиационных правил к диаграмме обзора.
В кабине пассажирского самолета, пилотируемого двумя летчиками
(рис. 15.41), могут быть установлены кресла 3 и 4 для дополнительных
членов экипажа (инспекторов, инструкторов). Кресла командира
Рис. 15.40. Кабина экипажа пассажирского
самолета
Рис. 15.41. Размещение экипажа в кабине
14 — 7425
417
воздушного судна 1 и второго пилота 2 размещены так, чтобы обеспечить
досягаемость и обзор расположенных на центральном пульте управления,
потолочной панели и основной приборной панели всех средств
управления и контроля, без которых нормальное пилотирование
самолета невозможно.
Основу приборного оборудования современных самолетов составляют
приборы «обобщенной индикации», в которых на экранах цветных элек-
тронно-лучевых трубок (ЭЛТ) создается изображение, несущее
информацию от многих приборов, что позволяет сосредоточить на одном
индикаторе максимальное количество информации различного
назначения.
Традиционные директорно-пилотажные приборы (авиагоризонты,
вариометры, высотомеры и т. д.) служат в качестве резервных (дублирую-
щих).
Пример компоновки приборов на основной приборной панели
приведен на рис. 15.42. На панели доминируют шесть одинаковых по
размерам экранов ЭЛТ. Отметим, что левая и правая части панели
относятся к пилотажно-навигационной системе и практически дублируют
друг друга.
Верхние экраны ЭЛТ 1 (для каждого из летчиков) - командно-пи-
лотажные индикаторы обстановки в вертикальной плоскости (командные
авиагоризонты); они воспроизводят классические пилотажные
параметры (высоту полета, вертикальную скорость, угол крена, угол
наклона траектории и т. д.).
Нижние экраны ЭЛТ 2 - командно-пилотажные индикаторы
обстановки в горизонтальной плоскости (автоштурманы или плановые
индикаторы навигационной обстановки); они непрерывно выдают
Рис. 15.42. Компоновка приборов иа основной
приборной панели
экипажу информацию о теку-
щем местоположении самолета
на фоне географической карты.
На картографическую инфор-
мацию накладывается метеоро-
логическая обстановка.
Два средних экрана ЭЛТ на
основной приборной панели
кабины экипажа являются ин-
дикаторами,предупреждающи-
ми об отказах и отображающи-
ми схемы бортовых систем. На
левый средний экран выводит-
ся информация об отказах и
действиях, которые необходи-
418
мо предпринять экипажу, дается оценка эксплуатационных после-
дствий отказов. Одновременно на правом экране появляется схема
отказавшей системы, иллюстрирующая ее состояние с выделением
области отказа.
Эта информация резервируется с помощью обычной (аналоговой)
системы сигнализации, размещенной на потолочном пульте, где
загорается соответствующая лампа-клавиша, указывая место управляю-
щего воздействия.
Рассмотрим взаимодействие пилота с автоматической системой
управления на всех этапах полета.
Предполетная подготовка. С помощью расположенной на централь-
ном пульте управления клавиатуры автоматической системы управления
полетом (или с подготовленной заранее дискеты) летчики вводят
информацию о предстоящем полете:
координаты аэродрома, курс, магнитное склонение, дату вылета,
время, прогнозируемые параметры атмосферы, состояние ВПП;
взлетную массу, массу топлива, массу аэронавигационного запаса
топлива, дистанции разбега, взлета, прерванного взлета.
С помощью индикаторов предупреждения об отказах и отображения
схем бортовых систем, панелей систематизации отказов и управления
экипажоцениваеттехническоесостояниевсех бортовых систем, проверка
которых необходима перед каждым вылетом.
Руление на старт. При рулении летчики могут дополнительно к
визуальной информации получать (в случае сложной метеообстановки)
изображение рулежной дорожки и ВПП на экране системы электронной
индикации.
Взлет. Штатный взлет выполняется в режиме директорного
управления в боковом и продольном каналах после отрыва от ВПП.
Взлетная тяга стабилизируется автоматически с помощью вычислителя
сигналов управления тягой двигателя. Разбег на полосе контролируется
системой предупреждения критических режимов. При взлете экипаж
может выбрать режим максимальной скороподъемности или максималь-
ного тангажа.
Полет по маршруту вылета начинается с высот 200...400 м. Происхо-
дит автоматический полет по заданной траектории.
Набор высоты начинается по команде экипажа. На экранах
командно-пилотажных индикаторов автоматической системы управления
полетом при этом дается информация о скорости полета, времени
окончания набора, дальности, степени дросселирования двигателя.
Крейсерский полет, как правило, выполняется в режиме автоматиче-
ского управления. Все пилотажно-навигационные и радиоэлектронные
14*
419
системы работают совместно. Экипаж может осуществлять следующие
режимы полета: стабилизацию высоты, выход на заданный эшелон
полета, стабилизацию скорости полета, стабилизацию вертикальной
скорости.
Контроль за обстановкой в воздухе и предупреждение столкновений
осуществляются как бортовыми системами, так и наземными службами
УВД, подтверждающими возможность выполнения всех необходимых
маневров.
Снижение. Во время полета вычислитель сигналов управления
системы навигации рассчитывает точку начала снижения и информирует
о ней пилота, по команде которого начинается режим снижения.
Полет в зоне аэродрома пункта прибытия. Переход на этот режим
полета экипаж осуществляет по сигналу служб УВД. В это время экипаж
получает с земли метеорологические данные и данные о состоянии ВПП,
контролирует ввод их в вычислитель сигналов управления и выбирает
тип радиосредства, обеспечивающего посадку.
Заход на посадку и посадка. Заход на посадку начинается с разворота
для выхода на посадочную прямую. После получения сигналов
отклонений от зон курса и глиссады система управления автоматически
выдерживает самолет на глиссаде снижения. Экипаж непрерывно
информируется об отказах систем или приближении значений парамет-
ров полета к критическим.
В режиме автоматической посадки по категории ШВ после приземле-
ния даже пробег самолета по ВПП (выдерживание курса и управление
торможением) проходит без вмешательства летчика.
Таким образом, применение современных средств навигации и
управления позволяют летчику выполнять роль оператора и контролера
и только в случае необходимости принимать непосредственное участие
в операциях управления.
Однако если летчик в течение многочисленных длительных полетов
практически не принимает участия в непосредственном управлении
самолетом, он теряет квалификацию именно как пилот, что может
привести к нежелательным последствиям в экстремальных ситуациях.
Эта проблема может быть решена за счет использования автоматичес-
кой цифровой системы управления в режиме тренажера, когда летчик
«управляет» самолетом вручную, отрабатывая наиболее ответственные
этапы полета (взлет и посадку), при этом на рычагах управления
имитируются усилия и перемещения, на командно-пилотажных
индикаторах обстановки воспроизводятся параметры соответствующих
этапов полета, а самолет производит крейсерский полет в режиме
автоматического управления.
420
15.6. БОРТОВЫЕ ЭНЕРГЕТИЧЕСКИЕ СИСТЕМЫ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Бортовые энергетические системы обеспечивают работоспособность
основных функциональных систем ЛА, силовой установки и бортового
оборудования, различающихся по принципу действия и потребляющих
различные виды энергии. Для функционирования человека на борту ЛА
в основном необходимы тепло и свет.
Закрытая остекленная кабина пассажирского варианта самолета
«Илья Муромец» (см. подразд. 19.1, рис. 19.1), построенного в 1914 г.,
уже имела электрическое освещение и отапливалась отработанными
газами моторов. Кабина пилотов была оборудована пилотажными
приборами (магнитными компасами, креномерами, указателями высоты
и скорости полета), указателями контроля параметров двигателей,
фотоаппаратами, которые не требовали для своей работы дополнитель-
ных источников энергии.
Современные самолеты имеют не только внутреннее освещение
пассажирских кабин, рабочих мест экипажа, различных пультов,
приборных досок и т. п., но и наружное освещение.
Наружное освещение осуществляется специальными фарами и служит
для различных целей: освещение знака государственной принадлежности
на киле; освещение взлетно-посадочной полосы и рулежных дорожек;
подсветка передних кромок несущих поверхностей и воздухозаборников
для визуального контроля за обледенением и т. п.
Любой самолет оборудуется бортовыми габаритными и аэронавигаци-
онными огнями (БАНО, АНО), импульсными (мигающими) огнями,
помогающими предотвратить столкновение самолетов, особенно в зоне
аэропортов, за счет чередующихся далеко видимых вспышек света. Эти
огни устанавливаются в соответствии с международными нормами и
должны быть видны из любой
точки сферы, центром которой
является самолет. В то же время
на пассажирских самолетах ста-
раются размещать импульсные
огни так, чтобы уменьшить от-
ражение от вспышек света на
крыльях, создающее у пассажи-
ров впечатление пожара.
На рис. 15.43 приведен при-
мер наружного освещения
самолета-истребителя. Фара 7
Рис. 15.43. Пример наружного освещения
самолета-истребителя
421
подсвечивает заправочную штангу-топливоприемник и конус самоле-
та-заправщика при дозаправке топливом в воздухе, фары 2 освещают
в условиях плохой видимости ВПП и рулежную дорожку, аэронавигаци-
онные огни 5 (красный на конце левого крыла, зеленый на конце правого
крыла, белый в хвостовой части самолета) обозначают габаритные
размеры самолета и так же, как проблесковые огни 4, помогают
предотвратить столкновение самолетов, огни 5, расположенные в форме
аэродромного знака «Т», облегчают полет самолетов строем.
Работа освещения обеспечивается в нормальном и аварийном
режимах.
Появление на борту самолета радиосвязного оборудования, развитие
средств навигации, автоматизированного пилотирования, радиолокации,
использующих для работы электрическую энергию, привело к оснащению
ЛА системами электроэнергетики. Мощность электротехнического
оборудования современных самолетов, вырабатывающего электроэнер-
гию для работы практически всех систем, достигает нескольких сотен
киловатт.
Масса электросистем составляет 0,5... 1,5 % взлетной массы современ-
ных тяжелых самолетов и 4...8% взлетной массы сверхзвуковых
маневренных самолетов.
Дополнительные источники энергии для выполнения операций
управления на самолетах впервые были применены в 1930-е гг. для
уборки-выпуска шасси и торможения колес на пробеге, а затем для
привода элементов механизации крыла. В 1940-1950-х гг. сначала
сверхзвуковые маневренные, а затем и дозвуковые самолеты были
оборудованы по всем трем каналам электрогидромеханическими
системами управления. С их помощью летчик мог преодолеть большие
усилия, возникающие при отклонении рулевых поверхностей.
На современных самолетах энергетические системы обеспечивают
энергией силовые приводы, с помощью которых выполняется более
двадцати операций управления в процессе полета. Это не только
отклонение рулевых поверхностей гидроусилителями при директорном
(ручном) и автоматическом (с помощью рулевых машин САУ) управле-
нии, но и уборка и выпуск взлетно-посадочной механизации и шасси,
торможение колес и разворот передней опоры шасси при рулежке,
управление положением створок воздухозаборников, изменение
стреловидности крыла, управление входными и грузовыми дверьми,
различными створками, разворот антенны РЛС и т. п.
Для выполнения этих операций требуются следующие силовые
приводы:
двухпозиционные (шасси: убрано - выпущено);
422
трехпозиционные (элементы механизации крыла: убрано - выпущено
во взлетное положение - выпущено в посадочное положение);
с числом позиций более трех;
резервированные следящие приводы систем управления с очень
высокими динамическими характеристиками (угловые скорости
отклонения рулевых поверхностей составляют 0,02...3,14 рад/с);
вращательные приводы (топливные насосы, вентиляторы).
Суммарная энергоемкость силовых приводов, устанавливаемых на
современных самолетах, достигает сотен и тысяч киловатт, количество
агрегатов в системах силовых приводов до 1000 единиц.
Следует обратить внимание, что отказы во многих системах силовых
приводов могут создать предпосылки к авариям и катастрофам, поэтому
степень их резервирования определяется опасностью последствий отказа.
Выбор рациональных видов энергии, способов преобразования и
передачи энергии определяется в первую очередь свойствами и
параметрами потребителя (принципом его действия и видом потребляе-
мой энергии).
Как известно, существуют пневматические (от греч. pneumatikos -
воздушный) и гидравлические вычислительные устройства, в которых
для передачи сигналов используется сжатый воздух или находящаяся под
давлением жидкость. Однако быстродействие таких вычислительных
машин на несколько порядков ниже, чем быстродействие ЭВМ. Тем не
менее пневматические и гидравлические вычислительные устройства
используются в некоторых системах управления в агрегатах самолетов
и двигателей.
Принципиально задачи управления с помощью силовых приводов
также могут решаться только электротехническими средствами, а во всем
мире время от времени дискутируется вопрос о создании «чисто
электрического» самолета (без гидравлических и газовых систем). Однако
все эксплуатирующиеся в настоящее время самолеты и вертолеты имеют
силовые приводы, использующие только гидравлическую энергию
(энергию жидкости, находящейся под давлением), электрические приводы
изредка применяются как аварийные.
Масса гидросистем составляет 1...2% взлетной массы современных
тяжелых самолетов и 4...5% взлетной массы сверхзвуковых маневренных
самолетов.
По оценкам специалистов, для сверхзвуковых маневренных самолетов
масса альтернативной электросистемы составляла бы 10...20% от
взлетной массы, что вообще исключает возможность создания «чисто
электрического» сверхзвукового маневренного самолета (масса полезной
нагрузки на этом типе ЛА составляет 10... 15% от взлетной массы).
Именно поэтому в современных самолетах и вертолетах гидравлические
423
силовые следящие приводы занимают доминирующее положение. Кроме
того, гидравлические силовые приводы при передаче больших мощностей
с выходными скоростями, потребными для привода рулевых поверхно-
стей, конструктивно значительно проще электромеханических.
Гидропривод (без у четатру бопроводов) имеет интенсивность отказов
в 2 - 10 раз меньшую, чем электропривод, поскольку показатели
интенсивности отказов можно считать обратно пропорциональными
сложности и числу элементов в агрегате или системе. Гидропривод вне
конкуренции и по массогабаритным характеристикам, особенно для
резервированных гидроприводов в системе управления, так как
резервирование обеспечивается установкой двух, трех или четырех
гидроприводов, работающих совместно.
Для электропривода с двухкратным резервированием необходимы
редукторы, сумматоры момента, стопоры отказавшего двигателя, пара
«винт-гайка», что увеличивает их массу в 3 - 5 раз.
Таким образом, основным типом силовых систем управления на ЛА
будут оставаться гидравлические системы, превосходящие электромеха-
нические по массовой отдаче и надежности, а газовые - по точности
управляющего воздействия (из-за сжимаемости воздуха). Естественно,
что информационная часть таких систем-электронная (или оптическая).
В качестве аварийных возможно применение электромеханических
и пневматических (баллонных или пиротехнических газовых) систем.
Структуры всех энергетических систем аналогичны (рис. 15.44).
Первичным источником энергии на самолете (см. гл. 14) можно
считать двигатель, преобразующий химическую энергию находящегося
на борту топлива в тепловую и механическую (вращение турбины и
компрессора ТРД).
Отбирая с помощью механической трансмиссии часть энергии от
турбины на генератор и гидронасос, получают электрическую и
гидравлическую энергию. Пневматическую энергию (энергию сжатого
газа) получают, отбирая часть воздуха от компрессора двигателя или
от специальных устройств.
Источниками энергии для работы систем самолета при отказе
двигателей могут служить вспомогательная силовая установка,
ветродвигатели, работающие от набегающего потока, панели солнечных
Рис. 15.44. Структура энергетической системы
424
батарей, всевозможные аккумуляторы энергии (электрические, гидро-
и пневмоаккумуляторы, инерционные - например, массивный вращаю-
щийся маховик).
При проектировании разветвленных энергетических систем самолета
необходимо проанализировать все возможные источники энергии,
способы (пути) передачи энергии к потребителям, выбор которых также
достаточно широк.
Рассмотрим одну из возможных ветвей энергосистемы для обеспече-
ния аварийной радиосвязи самолета с землей при отказе основного
электрогенератора. Заранее оговоримся, что приведенное ниже
построение системы нерационально, однако позволяет проиллюстриро-
вать возможности получения и преобразования энергии на борту
самолета.
Химическая энергия топлива при работе ТРД преобразуется в
механическую (вращение вала компрессора и турбины); с помощью
механической трансмиссии (редуктора и вращающегося валика) с вала
двигателя механическая энергия передается на якорь (ротор) генератора,
вырабатывающего электроэнергию; с обмотки статора генератора
электроэнергия передается на трансформатор для преобразования
напряжения и далее - на обмотку статора электродвигателя; с ротора
электродвигателя механическая энергия передается на ротор гидронасоса,
который преобразует механическую энергию в энергию давления
движущейся жидкости (гидроэнергию); по гидротрубопроводу эта
энергия передается на гидромотор, преобразующий гидроэнергию в
механическую (вращение вала гидромотора); механическая энергия
гидромотора передается на вал пневмокомпрессора, от которого по
пневмотрубопроводам сжатый воздух подается в газовый баллон
высокого давления. В случае отказа основного генератора электроэнер-
гии на самолете с помощью пневмоцилиндра, преобразующего энергию
сжатого воздуха, находящегося в газовом баллоне, в поступательное
движение штока, выводится в набегающий поток воздуха ветродвигатель
(воздушный винт), на валу которого закреплен генератор, обеспечиваю-
щий электроэнергией систему аварийной радиосвязи.
Поскольку количество возможных структур энергосистемы достаточ-
но велико, выбор наиболее рациональной (оптимальной) производится
по какому-либо критерию эффективности. Очевидно также, что
структуры и состав систем будут различными, если система должна иметь
или минимальную массу, или минимальную стоимость, или определен-
ный уровень надежности.
Рассмотрим на примерах основные энергетические системы самолета.
Электросистема постоянного тока исторически была первой на борту
самолета. Системы постоянного тока выполняются однопроводными.
425
Панель аэродромною питания
Аварийная аккумуляторная
батарея
Распределительные устройства
постоянного и переменного
токов
Аккумуляторные батареи
Понижающие
трансформаторы
Выпрямительные
устройства
Резервный
генератор
переменного
трехфазного тока
Рис. 15.4S. Пример размещения основных агрегатов системы электроснабжения па
пассажирском самолете
Статический
преобразователь
однофазного
тока
Статический-----.
преобразователь
постоянного
тока
Блоки
регулирования
Основной
генератор
переменного
трехфазного тока
Металлизация всех частей самолета дает возможность использовать
корпус самолета в качестве второго провода, что снижает массу
электропроводки вдвое.
Появление многочисленных потребителей переменного тока -
радиосвязного оборудования, средств навигации, автоматизированного
пилотирования, радиолокации и других, - рост высот полета и, как
следствие, осложнение работы щеточно-коллекторных узлов и коммута-
торов в системах постоянного тока способствовали переходу на системы
переменного тока.
Системы постоянного и переменного токов имеют свои преимущества
и недостатки, которые, естественно, учитывают проектировщики при
разработке электросистем самолета.
Систему электроснабжения (рис. 15.45) рассмотрим на примере такой
системы для легкого пассажирского самолета. Для питания потребителей
электроэнергии на самолете имеются:
основная система переменного трехфазного тока напряжением
200/115 В с постоянной частотой 400 Гц;
система переменного трехфазного тока напряжением 36 В с постоян-
ной частотой 400 Гц;
система постоянного тока напряжением 27 В.
Основными источниками электроэнергии являются два бесщеточных
генератора переменного трехфазного тока напряжением 200/115 В с
426
заземленной силовой нейтралью. Генераторы могут работать раздельно,
но основным режимом работы является попарно-параллельная работа
генераторов каждого борта, образующих автономные подсистемы левого
и правого борта. В этом режиме обеспечиваются лучшее резервирование
и высокая надежность питания потребителей.
Для повышения надежности работы питание главных систем и
приборов пилотажно-навигационного оборудования осуществляется от
отдельной шины (электропровода) в подсистеме каждого борта, при
отклонениях напряжения или частоты тока от нормы автоматически
переключающейся на питание от подсистемы другого борта.
Постоянная частота вращения ротора генератора (т. е. постоянная
частота генерируемого тока) обеспечивается приводом постоянных
оборотов.
Резервным источником питания бортовой сети переменного
трехфазного тока служат установленный на ВСУ бесщеточный генератор
переменного трехфазного тока напряжением 200/115 В и статический
преобразователь однофазного тока. Установленный на ВСУ генератор
используется как в полете (при отказе одного или всех основных
генераторов), так и на земле (при техническом обслуживании самолета)
и обеспечивает питание любого потребителя.
Статический преобразователь однофазного тока работает от
бортовых аккумуляторных батарей и используется для питания
переменным однофазным током Н5 В, 400 Гц и 36 В, 400 Гц (через
понижающие трансформаторы) наиболее важных потребителей в полете
в случае отказа основной системы, до запуска ВСУ и при отказе
понижающего трансформатора системы переменного трехфазного тока,
которая получает питание от основной системы переменного трехфазно-
го тока через два понижающих трансформатора.
Основные и резервный генераторы системы переменного тока
работают в комплекте с блоками регулирования, автоматически
включающими генераторы в работу, поддерживающими постоянными
напряжение и частоту, обеспечивающими равномерную загрузку
генераторов при параллельной работе. Блоки автоматически выключают
неисправный генератор, отключая его сначала от параллельной работы,
а затем от бортовой сети. Потребители при этом автоматически
подключаются к шинам исправного генератора.
Система переменного трехфазного тока напряжением 36 В с
постоянной частотой от 400 Гц получает питание от основной системы
переменного трехфазного тока через два понижающих трансформатора.
Автономное питание переменным трех фазным током стабилизирован-
ного напряжения 36 В с постоянной частотой от 400 Гц таких наиболее
важных потребителей, как резервный авиагоризонт, датчики системы
427
МСРП, осуществляется от аварийной системы постоянного тока через
статический преобразователь постоянного тока, который вырабатывает
переменный ток напряжением 36 В с постоянной частотой 400 Гц.
Система электроснабжения постоянным током напряжения 27 В
является вторичной и получает питание от основной системы переменно-
го трехфазного тока напряженнием 36 В с постоянной частотой 400 Гц
через выпрямительные устройства. Система состоит из двух автономных
подсистем - левой (левого борта) и правой (правого борта), чем
обеспечивается высокая надежность питания потребителей. Каждая
подсистема питается от двух блоков выпрямительных устройств,
работающих параллельно друг с другом и с двумя аккумуляторными
батареями.
Резервными и аварийными источниками системы постоянного тока
служат две аккумуляторные батареи. От аккумуляторных батарей в
случае отказа основных генераторов осуществляются запуск ВСУ и
питание наиболее важных потребителей до запуска ВСУ (статических
преобразователей однофазного тока, статических преобразователей
постоянного тока, агрегатов управления самолетом, основных приборов
контроля работы двигателей и радиосредств, противопожарной системы
и др.). При необходимости запуск ВСУ на земле производится также от
аккумуляторных батарей.
На самолете установлена отдельно аккумуляторная батарея
аварийного питания, от которой обеспечивается питание аварийного
освещения в случае аварийной посадки (для эвакуации пассажиров) и
дежурного освещения при отключении электропитания бортовой сети
самолета.
Все основные агрегаты электросистемы размещены в непосредствен-
ной близости от двигателей и ВСУ, на которых установлены генераторы,
в изолированном отсеке за гермоднищем пассажирской кабины, что
повышает пожаробезопасность и облегчает обслуживание на земле.
Распределительная сеть систем переменного и постоянного токов за
счет резервирования проводов, каналов генерирования, автоматов
защиты и объединения подсистем левого и правого бортов позволяет
осуществлять питание потребителей электроэнергии вплоть до выхода
из строя последнего источника тока.
Гидросистема на борту современного самолета обеспечивает работу
многих подсистем и является одной из наиболее разветвленных и
сложных систем. В настоящее время номинальное рабочее давление в
гидросистемах составляет от 10 до 21...28 МПа.
В качестве примера рассмотрим систему гидропитания учебно-
тренировочного самолета с электр оди станционной системой
428
управления. Операции управления с помощью гидросистемы и
назначение основных агрегатов понятны из схемы системы (рис. 15.46).
Гидравлическую систему самолета составляет две самостоятельные
и независимые друг от друга системы, которые не имеют общих агрегатов
(источников высокого давления, баков для рабочей жидкости, систем
их наддува и дренажа, аппаратуры регулирования и управления):
независимая бустерная система (левый борт) с питанием от гидронасо-
са, установленного на левом двигателе;
независимая общая система (правый борт) с питанием от гидронасоса,
установленного на правом двигателе.
Рабочее давление в независимых гидросистемах создается посредством
плунжерных гидронасосов переменной производительности с саморегу-
лированием по давлению в гидросистеме, установленных на левом и
правом двигателях.
В каждой гидросистеме для охлаждения и смазки трущихся частей
насосов при нулевой производительности поддерживается постоянный
расход на каждый гидронасос через дроссель постоянного расхода и
теплообменник.
В каждой гидросистеме имеются два гидроаккумулятора. Один из них
повышает энергоемкость гидросистемы, другой служит для аварийного
выпуска закрылков, шасси и аварийного торможения.
Номинальное рабочее давление в гидросистеме 21 МПа. В качестве
рабочей жидкости применяется взрывопожаробезопасная жидкость
НГЖ-4.
Резервирование по гидропитанию обеспечивается параллельным
питанием двухкамерных электрогидравлических приводов (бустеров)
органов управления самолетом (рис. 15.47). Бустерная система обслужи-
вает первую камеру 1 электрогидравлических приводов. Общая система
обслуживает вторую камеру 2 электрогидравлических приводов и
гидроприводы самолетных систем (шасси, закрылков, предкрылков,
тормозных щитков).
В систему гидропитания входят также следующие подсистемы:
система аварийного выпуска шасси, закрылков, аварийного
торможения с питанием от гидроаккумуляторов аварийной системы;
линия подзарядки гидроаккумуляторов при наземном обслуживании
от бортового насоса с ручным приводом для проверки работы потребите-
лей на земле при неработающих двигателях;
дополнительная линия питания бустерной системы от аварийной
насосной станции.
Трубопроводы соединяют агрегаты гидросистемы.
Резервирование гидросистем и наличие аварийной гидросистемы
существенным образом повышают надежность, парируя возможные
429
430
Панель заправки-------
Фильтр ------------1
гидравлический |
Ручной гидронасос —i I
Теплообменник------: • | ।
Гидроцилиндр
Гидроцилиндр
уборки-выпуска
предкрылка
Эпектрогидравлический
привод управления
элероном
уборки-выпуска/ Гидроцилиндр-21
закрылков / уборки-выпуска
Фильтр—_____/ основной стойки
гидравлический шасси
---Гидронасос
Гидробак
Рис. 15.46. Основные агрегаты системы гидропитания
Электрогидравпический
привод управления
элероном
Гидроцилиндр -
уборки-выпуска
предкрылка
Гидроцилиндр -
уборки-выпуска
основной стойки
шасси
Гидроцилиндр -
уборки-выпуска
створок шасси
Гидроцилиндр -
уборки-выпуска
передней стойки
шасси
Эпектрогидравлический
привод управления
рулем высоты
Эпектрогидравлический
привод управления
рулем направления
Гидроцилиндр
уборки-выпуска
тормозных щитков
Г идроаккумуляторы
Гидронасос
Аварийная насосная
станция
Теплообменник
Рис.15.47. Двухкамерный электрогидравлический привод:
1 - первая камера приводов; 2 - вторая камера приводов;
3 - исполнительный шток привода; 4- рулевая повер-
хность; 5 - датчик обратной связи (электрический); 6 -
обратная электрическая связь в элекгродистанционной
системе управления; 7 - питание золотника второй
камеры от общей гидросистемы; 8 - питание золотника
первой камеры отбустерной гидросистемы; 9-управляю-
щий электрический сигнал в электродистанционной
системе управления
катастрофе, то должен быть обеспечен так
отказы в работе сило-
вых приводов и системы
управления учебно-тре-
нировочным самолетом
в целом.
В общем случае все
силовые приводы (по-
требители гидроэнер-
гии) на самолете могут
быть распределены (по
последствиям отказа) по
трем группам, резерви-
руемым совершенно раз-
личными способами.
1. Если отказ силово-
го привода (например,
гидроусилителя в к анале
тангажа) даже при пра-
вильных действиях лет-
чика может привести к
называемый подключенный резерв: привод должен быть параллельно
подключен к двум одновременно работающим автономным системам
и необходимо дублирование исполнительных и распределительных
устройств системы питания.
2. Если отказ силового привода (например, привода тормозов колес)
даже при правильных действиях летчика может привести к аварии, то
должно быть обеспечено так называемое резервирование замещением
(только по питанию): последовательное подключение к основной и при
отказе основной к резервной системам питания.
3. Если отказ силового привода (например, привода антенны РЛС)
при правильных действиях летчика не приводит к катастрофе или аварии,
т. е. если при отказе возможно возвращение на аэродром и безопасная
посадка (что равнозначно невыполнению полетного задания), то для
таких приводов резервирование не предусмотрено.
В рассмотренном примере даже в случае возникновения аварийной
(катастрофической) ситуации на борту учебно-тренировочного самолета
экипаж имеет возможность покинуть в воздухе самолет катапультирова-
нием точно так же, как экипаж боевого самолета. Для экипажа и
пассажиров гражданских самолетов такой возможности нет, поэтому на
таких самолетах принимаются более радикальные меры обеспечения
надежности всего оборудования, в том числе и гидросистем.
Отечественные и зарубежные нормы по обеспечению безопасности
полетов тяжелых пассажирских самолетов предусматривают возмож-
431
Рис. 15.48. Пример резервирования в системе управления тяжелого пассажирского самолета
ность продолжать полет и после двух последовательных отказов.
Поэтому самолеты такого класса имеют три или четыре самостоятель-
ные, независимые друг от друга гидросистемы, и потребители (силовые
приводы), отказ которых даже при правильных действиях летчика может
привести к катастрофе, резервируются три или четыре раза.
Резервирование функциональных подсистем осуществляется либо их
одновременным подключением ко всем системам (горячее резервирова-
ние), либо переключением с отказавшей системы на исправную (холодное
резервирование) .И то и другое схемное решение допускает возможность
появления в одном полете двух независимых отказов без возникновения
аварийной или катастрофической ситуации.
Рис. 15.48. иллюстрирует резервирование в системе управления
тяжелого пассажирского самолета. Все рулевые поверхности и элементы
механизации крыла секционированы, причем каждая секция приводится
в действие резервированным силовым приводом. Здесь же показана
принципиальная схема многоканального гидромеханического привода
с суммированием усилий каналов (бустеров) 1, к золотникам которых
через входное звено 2 подается управляющий сигнал на отклонение
секции руля 5. Тяга 4 через сравнивающее устройство (качалку) 3
передает обратную связь к золотникам.
В такой системе парируются не только отказы силовых приводов, но
и отказы (например, разрушение отдельной секции) рулевых поверхнос-
тей и элементов механизации крыла.
Увеличение числа функциональных подсистем управления на
самолете, рост потребляемых ими мощностей и необходимость
повышения их надежности и отказобезопасности определяют необходи-
мость постоянного совершенствования энергетических систем.
432
Перспективы развития электроэнергетики и электромеханики связаны
с созданием бортовых систем постоянного тока напряжением
270...300 В, для подсистем переменного тока осуществляется переход к
трехфазным системам переменного тока напряжением 208/120 Вис
повышенной частотой (400...2000 Гц).
Применение мощных редкоземельных постоянных магнитов
(магнитная индукция у которых на порядок больше, чем у обычных
магнитов), повышение напряжения, внедрение полупроводниковых
коммутаторов и микропроцессоров управления позволят реализовать
более компактные и надежные электроэнергетические установки и
электромеханические приводы (с улучшенной в 2 - 3 раза массовой
отдачей и в 4 - 6 раз большим быстродействием), которые смогут
конкурировать с гидравлическими при значительно больших мощностях,
чем в настоящее время.
Применение редкоземельных магнитов будет способствовать
созданию высокомоментных длинноходовых электромеханических
преобразователей, которые позволят исключить электрогидравлические
промежуточные приводы в системах управления, а также уменьшить
массу и объем многих устройств управления давлением, расходом,
потоками рабочего тела.
Основным путем улучшения массовых и объемных характеристик
гидросистем является переход на повышенные уровни рабочих давлений.
Существуют оптимальные уровни рабочих давлений, при которых
минимизируются массы и объем агрегатов гидросистем. Эти уровни для
конструкционных материалов с повышенными характеристиками
находятся в пределах 40...50 МПа при минимизации массы и 40...80 МПа
при минимизации объемов. Именно на такие уровни номинального
рабочего давления проектируются перспективные гидросистемы. Они
будут работать на переменном рабочем давлении, соответствующем
требуемому (как максимально потребному для одного из приводов).
Известно (см. гл. 8), что стендовыми и летными испытаниями
гидросистем управления ЛА подтвержден принцип целесообразности
использования перегрузочных режимов работы силовых приводов на
повышенных (по сравнению с установленными максимальными
эксплуатационными уровнями) рабочих давлениях. Широкое внедрение
этого принципа в практику проектирования гидросистем позволит
существенно уменьшить их массу, объем, потребляемые и выходные
мощности.
Создание ряда новых гидроприводов (вращательного типа) с учетом
особенностей их компоновки (необходимость вписаться в объем крыла,
располагая привод по оси поворота рулевой поверхности) позволяет
превзойти наиболее распространенные приводы линейного возвратно-
433
поступательного типа (цилиндр) по массогабаритным характеристи-
кам.
Использование микропроцессоров для управления режимами работы
как гидронасосов, так и гидроприводов позволяет оптимизировать их
работу, а также уменьшить их массу, объем, потребляемые и выходные
мощности.
Как отмечалось, гидропривод (без учета трубопроводов) имеет весьма
низкую интенсивность отказов. Интенсивность отказов именно
трубопроводов достаточно высока и с увеличением рабочего давления,
естественно, возрастет. В связи с повышением номинального рабочего
давления в проектируемых гидросистемах весьма перспективным
является создание силовых гидроприводов, в которых силовой
гидроцилиндр имеет собственный встроенный гидробак, гидронасос и
гидроаккумулятор. Такой гидропривод полностью автономен, получает
энергию от электросети самолета, что позволяет отказаться от централи-
зованной силовой гидравлической системы и передачи жидкости под
высоким давлением по трубопроводам.
Знакопеременный характер нагрузок на аэродинамические управ-
ляющие поверхности определяет целесообразность установки рекупера-
торов энергии (от лат. recuperator - снова получающий, возвращающий)
в электромеханических и гидромеханических силовых приводах.
Устройства рекуперации энергии предусмотрены в создаваемых
электромеханических приводах. Существующие гидроприводы могут
работать в режимах рекуперации энергии в гидрогазовых аккумуляторах
при оснащении их дополнительными устройствами управления.
Итак, каждое новое техническое решение в электромеханических
системах Л А может иметь или уже имеет свой аналог в гидросистемах.
Поэтому вопрос о выборе комплекса бортовых энергетических систем
решается с учетом конкретных условий применения летательного
аппарата.
Оборудование всех систем самолета должно быть размещено так,
чтобы был обеспечен свободный подход к нему для осмотра и монтажа-
демонтажа при замене блоков и агрегатов. Объемно-пространственная
компоновка различных систем, устанавливаемых на самолете, чрезвычай-
но сложна, поэтому все вопросы, связанные с компоновкой оборудования
и систем самолета, отработкой интерьера кабины экипажа и пассажиров,
решаются в процессе проектирования на макете самолета в натуральную
величину. Широкое внедрение в процесс проектирования (см. гл. 18)
ЭВМ и особенно систем машинной графики позволяет существенно
снизить трудоемкость этих работ, повысить точность и качество
конструктивно-компоновочных решений, обеспечить высокое качество
ЛА в процессе производства.
434
Проверьте, как Вы усвоили материал
1. Предложите конструкцию пневматической ПОС, которая в рабочем
состоянии в меньшей степени увеличивает сопротивление крыла, чем
ПОС, представленная на рис. 15.18.
2. Объясните, что происходит с балансировкой самолета в процессе
движения груза по рольгангам и сброса его с рампы (см. рис. 15.36).
3. Предложите возможные пути передачи энергии на самолете к
какому-либо потребителю.
4. Интерпретируйте следующие основные понятия:
• самолеты: деловой, патрулъно разведывательный, аэрофотосъемоч-
ный, санитарный, реанимационно-эвакуационный, широкофюзеляжный;
дельтаплан; мотодельтаплан;
• пассажирское бортовое оборудование; специальное оборудование;
салон бизнес-класса; десантный люк; сиденье летчика; пассажирское
кресло;
• системы обеспечения жизнедеятельности; система кондиционирова-
ния воздуха; системы индивидуального жизнеобеспечения; кислородная
система;
• физиологически опасные факторы; высотная болезнь; гипоксия;
кислородное голодание; высотный метеоризм; аэроэмболия; декомпрессион-
ная болезнь; эмфизема высотная; баротравма;
• гермокабина: атмосферная, неавтономная, автономная; высота в
кабине;
• давление парциальное; наддув; загрязнение: аэрозольное, химическое,
дезодорация; покрытия теплозвукоизолирующие;
• декомпрессия взрывная; снижение: экстренное, аварийное; резервное,
активное время;
• снаряжение: защитное, высотное; высотно-компенсирующий костюм;
противоперегрузочный костюм; кислородная маска; гермошлем;
• кислородный парашютный прибор; легочный автомат; объединенный
разъем коммуникаций; ларингофон; анероид; обтюратор;
• особые условия функционирования ЛА; системы защиты; средства
защиты: активной, пассивной;
обледенение; форма льдообразования; сигнализаторы обледенения;
способы борьбы с обледенением; системы противообледенительные;
• горение; взрыв; пожаровзрывобезопасность; система противопожар-
ная; система подавления взрыва автоматическая; система сигнализации
о пожаре; датчики ППС; средства противопожарной защиты;
специальная обработка топлива; металлизация; разрядник статического
электричества;
• системы спасения; системы десантирования;
435
»аварийная посадка; аварийная посадка на воду; системы аварийной
эвакуации; аварийный выход; надувной трап; спасательный плот;
аварийный неприкосновенный запас;
• катапультирование; начальная скорость катапультирования;
траектория: абсолютная, относительная; перегрузка торможения;
• катапультное кресло; энергодатчик КК; стреляющий механизм;
аэродинамические средства стабилизации КК; система управления
вектором тяги;
• защита от действия скоростного напора; система фиксации летчика;
• парашютная система; система парашютная многокупольная; пара-
шют вытяжной, тормозной, противоштопорный, планирующиий
парашют-крыло; допустимая скорость ввода парашюта;
•авионика;пилотажно-навигационноеоборудование;радиотехническое
оборудование; радиосистемы связи; система воздушных сигналов;
автоматическая цифровая система управления; управление директорное;
• анемометр; вариометр; астродатчик; секстант фотоэлектрический;
магнитный компас; гироскопический прибор; доплеровский измеритель;
• антенно-фидерные устройства, электромагнитная совместимость;
• радиосистема: навигации, угломерно-дальномерная, посадки;
внутрисамолетная; ответчик самолетный; симплексная связь; дуплексная
связь; магнитная система регистрации полета; автоматический
радиокомпас; радиосекстант; радиовысотомер; радиодальномер;
пеленгация; пеленг; полет «с огибанием рельефа местности»;
• принцип «пустил -забыл»;
• бортовые энергетические системы; гидравлическая система; газовая
система; электрическая система;
• электросистема; система электроснабжения; гидросистема; система
гидропитания; самолет «чисто электрический»;
• источник энергии дополнительный; энергия гидравлическая; аккумуля-
тор энергии; рекуператор;
• система управления электродистанционная; привод электрогидравли-
ческий двухкамерный; силовой привод, привод силовой двухпозиционный;
гидропривод; электропривод;
• освещение: внутреннее, наружное; огни: габаритные, аэронавигацион-
ные, импульсные;
• подключенный резерв; резервирование: замещением, горячее, холодное,
по гидропитанию.
436
Глава 16
ОСНОВЫ ПРОИЗВОДСТВА
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Проектирование опытного образца ЛА ведется в ОКБ, а его
изготовление- на опытном заводе. ЛА запускается в серийное производ-
ство после целого комплекса прочностных и летных испытаний.
Производство ЛА, одно из наиболее сложных и дорогостоящих,
обладает следующими специфическими особенностями.
• Объект производства (ЛА) - сложная техническая система. Число
выполненных в ходе различных технологических процессов деталей из
разнообразных материалов в конструкции планера современного ЛА
(не считая крепежных деталей) составляет сотни тысяч. Так, в конструк-
ции планера самолета Ил-86 только из металлических материалов
методом отливки изготавливается около 5000 деталей, около 12 500
деталей получены из горячештампованных заготовок, более 59 600
деталей из профилей и 2400 деталей из труб изготовлены методами
холодной штамповки. Более 1 млн 480 тыс. заклепок различного типа
и около 153 тыс. болтов соединяют эти детали. Современный ЛА
насыщен различными приборами, механизмами, бортовыми системами,
представляющими собой сложные технические комплексы автоматичес-
кого и полуавтоматического действия, которые также являются весьма
сложными объектами производства. Так, электросеть самолета Ил-86
состоит из более 1800 электрических соединителей, более 450 электрожгу-
тов с общей длиной проводов около 800 км.
• Создание высокоэффективного ЛА требует освоения и применения
широкой номенклатуры дорогостоящих и труднообрабатываемых
материалов.
• Сложностью пространственных форм ЛА, высокими требованиями,
предъявляемыми к обводам ЛА, наличием многообразия систем,
работающих на различных физических принципах, обусловлены
применение огромного (до нескольких тысяч) количества разнообразных
технологических процессов, оснащение производства очень точным и
дорогостоящим оборудованием, привлечение к производству ЛА
большого количества высококвалифицированных специалистов
различных специальностей.
• Широко развитая кооперация предприятий (их число достигает
десятков тысяч), связанных с конечным объектом производства - ЛА,
437
предполагает применение прогрессивных форм управления производ-
ством с использованием вычислительной техники.
16.1. ОСНОВНЫЕ ЭТАПЫ ИЗГОТОВЛЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В процессе проектирования и изготовления ЛА все его агрегаты и
системы делят на законченные в конструктивном и технологическом
смысле части. Принципиальная схема изготовления планера самолета
представлена на рис. 16.1.
Деталь - первичная монолитная часть самолета - получается из
исходных материалов, полуфабрикатов и заготовок в результате
различных технологических процессов.
Узел - часть отсека агрегата или самолета - получается в результате
сборки (клепки, сварки, склейки и т.д.) из деталей при помощи различных
крепежных изделий (болты, заклепки, припои, клеи и т. д.).
Агрегат - наиболее крупная часть планера самолета (фюзеляж, крыло,
стойка шасси и т. д.), законченная в конструктивном и технологическом
отношении.
Рис. 16.1. Принципиальная схема изготовления планера самолета
438
Отсек - наиболее крупная часть агрегата (носовая, центральная,
хвостовая часть крыла, фюзеляжа и т. д.).
Метод деления планера ЛА на части определяет и деление общего
процесса изготовления ЛА на относительно самостоятельные технологи-
ческие процессы. Так, процесс изготовления агрегата можно рассматри-
вать как самостоятельный, включающий процессы изготовления
составляющих его деталей и узлов и процессы сборки, монтажа,
регулировки и испытания агрегата.
Бортовые системы (аналогично конструкции планера ЛА) разделяют
в процессе производства на отдельные самостоятельные конструктив-
но-технологические единицы.
Таким образом, технологический процесс изготовления ЛА
представляет собой сложный комплекс взаимодействий исполнителей
и оборудования по преобразованию исходных материалов в ЛА,
включающий процессы (этапы) изготовления деталей, их сборки и
монтажа, испытания и регулирования. Принципиальная схема (см.
рис. 16.1) отражает не только процесс изготовления планера, но и процесс
изготовления любой системы и самолета в целом.
На этапе общей сборки стыкуются агрегаты планера ЛА, ведется
монтаж силовых установок, отдельных функциональных систем и
коммуникаций, соединяющих системы между собой. Изготовление ЛА
завершается комплексом регулировочно-испытательных работ,
отработкой всех систем ЛА на функционирование с целью получения
соответствующих ТЗ выходных параметров ЛА в целом и всех его систем.
Регулировочно-испытательныеработы проводятся в цехе окончательной
сборки ЛА, или на специально оборудованной контроль-
но-испытательной станции (КИС). По окончании этих работ производит-
ся приемка-сдача ЛА с соответствующим оформлением документов.
Для многоразовых ЛА (самолетов, вертолетов) перед приемкой-сдачей
серийного ЛА проводятся регулировочно-испытательные работы на
летно-испытательной станции (ЛИС), включающие испытательный полет
ЛА с заводским экипажем и полет с экипажем заказчика.
16.2. ПРОИЗВОДСТВО АВИАЦИОННОГО
ПРЕДПРИЯТИЯ И СУБПОДРЯДЧИКИ
Сложность современного ЛА, исключительное многообразие
материалов, полуфабрикатов, заготовок, технологических процессов их
переработки, большое количество приборов и агрегатов для различных
систем ЛА, повышенные требования к надежности не только планера и
силовой установки ЛА, но и всех компонентов бортового оборудования
обусловили необходимость специализации предприятий.
439
Специализация, т. е. сосредоточение на отдельном предприятии
производства однородной по номенклатуре или по технологическим
процессам продукции, позволяет существенно повысить качество
продукции за счет высокого уровня механизации и автоматизации
производства, применения специализированной технологической
оснастки иоборудования.Специализированныепр ед приятия,располага-
ющие высококвалифицированными инженерными и рабочими кадрами,
имеют большие возможности для разработки и внедрения в производство
новых высокоэффективных технологических процессов и оборудования
- многономенклатурных переналаживаемых автоматических линий с
управляемыми ЭВМ производственными автоматами. Гибкость
специализированного производства позволяет эффективно и в короткий
срок обеспечить выпуск необходимой партии отличающихся друг от
друга изделий и таким образом вести модернизацию объекта произво-
дства в соответствии с требованиями заказчика.
Современное предприятие, производящее ЛА, кооперируется с
множеством субподрядчиков (предприятий-смежников), поставляющих
ему стандартные крепежные детали, отливки, поковки, прокат для
производства планера ЛА, двигатели, приборы и агрегаты для пилотаж-
но-навигационных, электрических, гидравлических и других систем.
Естественным результатом развития авиационного предприятия
является превращение его в специализированный сборочный комплекс'
(головное, ведущее предприятие), производящий общую сборку ЛА из
крупных блоков (отсеков, агрегатов), выполненных с большой степенью
готовности на субподрядных (ведомых) предприятиях, специализирую-
щихся на производстве (сборке) отсеков (например, крыла самолета) с
проведением всего комплекса работ по монтажу, регулировке и
испытаниям отсека. В этом случае на головное предприятие крыло
поступает в полностью собранном виде: на силовой части крыла
установлены рулевые поверхности, элементы взлетно-посадочной
механизации с приводами и т. д.; проведен монтаж гидросистем,
электрических жгутов, системы наддува топливных баков-отсеков
инертным газом и т. д.; на КИС субподрядчика проведен полный
комплекс регулировочных и испытательных работ.
При такой организации авиационного производства, направленной
на повышение эффективности ЛА, особое значение приобретает
технологическая подготовка производства (ТПП) - комплекс конструк-
торских, технологических и организационно-экономических мероприя-
тий, обеспечивающий полную готовность предприятия к производству
изделия в соответствии с выбранными в процессе проектирования
технико-экономическими показателями.
440
Возможность применения в производстве прогрессивных технологи-
ческих процессов и методов ТПП полностью определяется уровнем
конструкторских разработок, однако по мере повышения требований
к конструкции ЛА роль технологических способов изготовления, сборки
и испытаний значительно возрастает. В этой ситуации большое внимание
следует уделять повышению уровня технической оснащенности, выбору
наиболее рациональных форм организации производства, координации
работ всех предприятий, участвующих в проектировании и производстве
ЛА.
16.3. СТАНДАРТИЗАЦИЯ И УНИФИКАЦИЯ
В АВИАЦИОННОМ ПРОИЗВОДСТВЕ
Одним из основных путей, позволяющих обеспечить высокую
эффективность ЛА, является использование на всех этапах его создания
всего лучшего, что было достигнуто в предыдущих ЛА. Это касается не
только методов проектирования и производства, но и отдельных
конструктивно-технологических решений. Первый шаг в этом направле-
нии - конструктивная и технологическая преемственность, т. е. наделение
нового изделия такими свойствами, которые определяют возможность
применения в нем составных частей (деталей, узлов, агрегатов и т. д.) и
технологических процессов, показавших высокие качества в ранее
разработанных изделиях. Следующий шаг- обязательное применение
в новом изделии определенных конструктивно-технологических решений,
т. е. их стандартизация (от: англ, standard - норма, образец, мерило),
и, наконец, унификация (от лат. units - один и facto - делаю) - рациональ-
ное сокращение в изделии числа объектов одинакового функционального
назначения.
Вначале стандартизации и унификации подвергались простейшие
болты, заклепки, подшипники и т. п., а затем по мере развития техники
все более сложные элементы конструкции (элементы трубопроводов,
электрожгутов и т. п.) В настоящее время объектами стандартизации и
унификации являются целые агрегаты (например, катапультные кресла)
и системы. Нормализуются компоновочные решения (например, кабина
экипажа), методы изготовления и испытания систем, наземная техника
ит. д.
Стандартизация и унификация в производстве позволяюткомплексно
управлять качеством продукции на всех стадиях ее разработки,
изготовления и эксплуатации, ускорять разработку новой техники.
Однако требования конструктивной и технологической преемствен-
ности, стандартизации и унификации, а также имеющиеся на предприяти-
ях справочники по разработанным ранее конструкциям, в которых для
441
новых изделий рекомендуются типовые конструкторские решения (ТКР),
в определенной мере являются психологическим фактором, сдерживаю-
щим поиск новых конструктивно-компоновочных решений.
16.4. НЕКОТОРЫЕ ТЕХНОЛОГИЧЕСКИЕ АСПЕКТЫ
ПРОЕКТИРОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
При оценке проектной эффективности ЛА на ранних стадиях
проектирования ведется анализ продолжительности цикла изготовления
ЛА, издержек производства, а также объема выпуска (серийности).
Проектировщик должен найти разумный компромисс между про-
ектно-конструкторскими решениями, основанными на использовании
новейших материалов и технологических процессов (требующих
значительных временных и материальных затрат при технологической
подготовке производства, но дающих увеличение эффективности ЛА),
и решениями, базирующимися на использовании ранее освоенных в серии
материалов и процессов, т. е. определить степень технологической
преемственности конструкции.
Рациональное конструктивно-технологическое членение самолета
(разделение его в процессе проектирования и изготовления конструкции
на агрегаты, рис. 16.2, а) и схема технологических разъемов агрегатов на
узлы и детали (рис. 16.2, б) определяются на основе технико-экономи-
ческого расчета с учетом условий производства. Они существенным
образом влияют на издержки производства и эффективность самолета
Рис. 16.2. Конструктивно-технологическое членение (а) и схема технологических разъемов
(б) самолета L1011 (США)
442
в процессе эксплуатации, поскольку каждый конструктивно-техно-
логический и технологическийразъем, с одной стороны, увеличивает массу
самолета, а с другой - повышает производственную технологичность
изделия.
Производственная технологичность - совокупность свойств ЛА,
определяющих его приспособленность к конкретным условиям
производства и позволяющих получить потребную эффективность
(качество) ЛА при минимальных временных и материальных затратах.
Таким образом, уже на начальных стадиях внутреннего проектирова-
ния необходимо учитывать производственно-технологические возмож-
ности разнообразного сложного и дорогого оборудования на опытном
и серийном заводах и заводах-субподрядчиках.
По мере детализации проекта ЛА в процессе проектирования
совместными усилиями работников ОКБ, НИИ и заводов прорабатыва-
ются мероприятия, направленные на повышение производственной
технологичности всех агрегатов, систем, узлов и деталей ЛА, что
позволяет подтвердить заложенные в проект параметры и характеристи-
ки при эксплуатации ЛА.
Проверьте, как Вь!.у£Дйили.маг€р.иал
Интерпретируйте следующие основные понятия:
• специализация производства; субподрядчик; кооперация;
• серийность; конструктивно-технологическое членение; схема
технологических разъемов; конструктивно-технологический разъем;
технологический разъем; технологическая подготовка производства;
производственная технологичность;
• конструктивная преемственность; технологическая преемствен-
ность;
• стандартизация; унификация; типовые конструкторские решения;
• контрольно-испытательная станция; летно-испытательная стан-
ция;
• деталь; узел; агрегат; отсек.
443
Глава 17
ОСНОВЫ ЭКСПЛУАТАЦИИ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Указанные в ТЗ требования эффективности многоразового ЛА могут
быть выполнены только при условии, что ему будет обеспечен определен-
ный безаварийный в течение всего срока эксплуатации налет (в часах).
Так, дорогостоящий пассажирский самолет окупается и приносит
прибыль в процессе эксплуатации только в том случае, если он имеет
достаточно большой ресурс.
17.1. ОСНОВНЫЕ ФАЗЫ СУЩЕСТВОВАНИЯ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ В ЭКСПЛУАТАЦИИ
При длительном сроке эксплуатации растет вероятность отказов,
поэтому в процессе эксплуатации необходимо поддерживать уровень
надежности ЛА, заложенный при его проектировании. Таким образом,
процесс эксплуатации ЛА не ограничивается непосредственно полетом,
а включает и наземные операции.
Можно выделить следующие фазы (определенные периоды)
существования ЛА в процессе эксплуатации:
подготовка ЛА к полету, в том числе контроль технического
состояния ЛА и всех его систем, а также зарядка и снаряжение ЛА
расходуемыми в полете материалами (жидкостями, газами, боекомплек-
том для военных самолетов, продуктами питания и т, д.), необходимыми
для выполнения полетного задания;
выполнение полетного задания;
периодическое техническое обслуживание, направленное на
предупреждение неисправностей и отказов, в том числе регулировка
агрегатов, смазка, замена агрегатов, находящихся в предотказном
состоянии (по данным объективного контроля технического состояния),
с целью поддержания запланированной надежности ЛА;
текущий ремонт, направленный на устранение внезапно возникших
отказов и неисправностей, не приведших к катастрофическим последстви-
ям, с целью восстановления запланированной надежности;
модернизация (доработка) ЛА и его систем, направленная на
улучшение его параметров и характеристик путем замены морально
устаревших агрегатов и систем, с целью поддержания конкурентоспособ-
ности по отношению к вновь создаваемым ЛА.
444
17.2. НЕКОТОРЫЕ АСПЕКТЫ
ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ АГРЕГАТОВ
И СИСТЕМ САМОЛЕТА
В процессе эксплуатации проявляются такие свойства самолета, как
надежность, безотказность и живучесть (см. подразд. 8.7).
Моральный и материальный ущерб от отказов наиболее остро
проявляется при авариях и катастрофах самолетов. Ущерб от недостаточ-
ной надежности проявляется и в неготовности самолетов к полету.
Задержка или отмена вылета из-за неисправности военных самолетов
приводит к невыполнению запланированной боевой операции,
неготовность к полету по расписанию пассажирских самолетов наносит
большой финансовый ущерб авиакомпаниям.
Условия готовности и набор наземных средств для подготовки
самолета к полету рассмотрены в подразд 3.3.2.
Для выявления неисправностей, влияющих на эксплуатацию, их устра-
нения и допуска самолетов к дальнейшей эксплуатации перед каждым
полетом выполняется
визуальный осмотр, ко-
торый проводится по
определенному маршру-
ту (рис. 17.1): передняя
часть фюзеляжа, пере-
дняя опора шасси и ее
ниша, средняя часть фю-
зеляжа снизу, правая
опора шасси и ее ниша,
правая половина крыла
снизу, правый борт фю-
зеляжа, гондола правого
двигателя, хвостовая
часть фюзеляжа, хвосто-
вое оперение, левая сто-
рона самолета (осматри-
вается аналогично пра-
вой), верх фюзеляжа и
крыла.
При осмотре оцени-
вается техническое сос-
тояние конструкции са-
молета, его агрегатов и
систем: обшивки, узлов
навески рулей, трим-
Рис. 17.1. Схема маршрута предполетного осмотра
пассажирского самолета
445
Заправка топливом самотеком----
Заправка топливом под давлением
Заправка маслом —
двигателя
Заправка маслом-----
коробки агрегатов
Заправка и спив воды
Подключение -------
наземного ,
агрегата /
электропитания /
Обслуживание^ /
туалетов
Заправка
гидроаккумуляторов
сжатым воздухом
Обслуживание
туалетов
Подключение наземного
агрегата гидропитания
Заправка гидробаков и
подключение наземного
агрегата гидропитания
Заправка топливом самотеком
Заправка
маслом
двигателя
Заправка маслом
коробки агрегатов
Промывка и
^Зарядка кислородом
бортовой системы
Низкое давление
предварительного
кондиционирования
Высокое давление
предварительного
кондиционирования
и пневмостартер
двигателя
Зарядка кислородом
бортовой системы
Обслуживание
туалетов
Промывка и
спив воды
Обслуживание
\туалетов
Заправка
маслом
двигателя
Рис. 17.2. Схема расположения эксплуатационных люков пассажирского самолета
Подключение
наземного
агрегата
электропитания
Заправка маслом
коробки агрегатов
слив воды
Наддув гидробаков и
подключение наземного
агрегата гидропитания
Заправка
маслом ВСУ
Промывка и
слив воды
446
меров и взлетно-посадочной механизации, амортизаторов и пневматиков
шасси, крышек грузовых отсеков, конструкции гондол двигателей,
системы крепления двигателей, выхлопных систем двигателей, отсека
ВСУ, эксплуатационных люков, входных дверей и аварийных люков,
остекления кабины, защитных стекол проблесковых маяков и аэронави-
гационных огней, отсутствие течей из топливной системы и из
баков-отсеков, гидросистемы, масляной системы и т. д.
Через эксплуатационные люки и изнутри кабины осматриваются
агрегаты, механизмы и элементы конструкции системы управления,
гидравлической и пневматической систем, электротехнического и
радиоэлектронного оборудования, жгуты, кабели, пульты управления,
электрощитки, состояние монтажа, монтажных деталей и т. д.
Схема расположения эксплуатационных люков пассажирского
самолета приведена на рис. 17.2.
Уровень надежности самолета, запланированный при проектирова-
нии, в процессе эксплуатации можно обеспечить за счет наземного
обслуживания двумя принципиально различными методами технического
обслуживания и ремонта (ТОиР):
• по наработке (по ресурсу);
• по фактическому состоянию.
Стратегии ТОиР по наработке (стратегии по наработке или по
ресурсу) существенно отличаются от стратегий ТОиР по состоянию
(стратегий по состоянию). Эти отличия заключаются не только в самом
характере технологических процессов ТОиР, но и в распределении
ресурсов, потребных на развитие производственно-технической базы,
соответствующей требованиям той или иной стратегии.
При техническом обслуживании по наработке (ресурсу) перечень и
периодичность выполнения операций ТО определяются значением
наработки изделия с начала эксплуатации или после капитального
(среднего) ремонта.
При проведении ремонта по наработке объем разборки изделия и
дефектации его составных частей назначается единым для парка
однотипных изделий в зависимости от наработки с начала эксплуатации
и (или) после капитального (среднего) ремонта, а перечень операций
восстановления определяется с учетом результатов дефектации составных
частей изделия.
Таким образом, метод ТОиР по наработке (ресурсу) предполагает
проведение через заранее запланированные интервалы наработки
(налета) самолета заранее заданных работ по ремонту или замене
агрегатов и систем вне зависимости от их фактического состояния.
Предполагается при этом, что в пределах установленного заранее
447
времени эксплуатации гарантирована безотказная работа агрегатов и
систем и необходимый уровень их выходных параметров. Ресурс в этом
случае устанавливается из опыта эксплуатации аналогичных самолетов
и на основании специальных ресурсных испытаний создаваемого
самолета, его агрегатов и систем в естественных и лабораторных
условиях. Разработанные ускоренные методы наземных ресурсных
испытаний тем не менее требовали подтверждения в процессе летных
испытаний.
Работапарка новых самолетов на полную проектную производитель-
ность с первых дней эксплуатации сдерживалась возможностями
подтверждения надежности в полетах самолетов-лидеров, имеющих
опережающий налет, т. е. больший, чем у любого самолета, находящегося
в эксплуатации. Однако и в этом случае практически не представляется
возможным достаточно надежно назначить ресурс, поскольку для
большинства агрегатов и систем самолета распределение отказов по
наработке имеет случайный характер и невозможно установить четкие
зависимости интенсивности отказов по наработке.
Следовательно, стратегия ТОиР по наработке предполагает развитие
экспериментальной базы предприятий промышленности и обеспечение
на этой основе обоснованных ресурсов до ремонта для каждой
совокупности однотипных объектов.
Метод обслуживания по ресурсу широко применяется в авиации,
поскольку только сравнительно недавно начали появляться технические
возможности надежного контроля фактического состояния агрегатов и
систем самолета в процессе эксплуатации.
При техническом обслуживании по состоянию перечень и периодич-
ность выполнения операцийТО определяются фактическим техническим
состоянием изделия в момент начала ТО.
При проведении ремонта по состоянию перечень операций, в том
числе разборки, определяется по результатам диагностирования изделия
в момент начала ремонта, а также по данным о надежности этого изделия
и однотипных изделий.
Таким образом, метод ТОиР по состоянию предполагает проведение
работ по ремонту или замене агрегатов и систем в соответствии с их
фактическим техническим состоянием на данный момент эксплуатации
по результатам непрерывного или периодического контроля параметров
на предмет выявления предотказного состояния агрегатов и систем с
учетом статистических данных по всему парку самолетов об отказах
агрегатов и узлов, не влияющих на безопасность полета, Это позволяет
с самого начала эксплуатации обеспечивать расчетную производитель-
ность самолета, непрерывно поддерживая в процессе эксплуатации
запланированный ресурс. Естественно, что при таком методе основной
448
проблемой, решение которой позволит эксплуатировать самолет до
предотказного состояния, является контроль для выявления ранних
признаков опасных отказов, создающих аварийную или катастрофичес-
кую ситуацию.
Следовательно, стратегия ТОиР по состоянию предполагает
обеспечение высокого уровня эксплуатационно-ремонтной технологич-
ности конструкций, создание в достаточных объемах эффективных
средств диагностирования и неразрушающего контроля, развитие
производственно-технической и экспериментальной базы эксплуатацион-
ных и ремонтных предприятий.
Выбор метода технической эксплуатации должен производиться на
самых ранних стадиях проектирования самолета, поскольку это
оказывает серьезное влияние на параметры агрегатов и систем самолета,
от которых в конечном счете зависит эксплуатационная технологичность
- совокупность свойств самолета, определяющих его приспособленность
к выполнению всех видов работ по эксплуатации, техническому
обслуживанию и ремонту. В условиях интенсивной эксплуатации
самолета в качестве показателя эксплуатационной технологичности
выступает время подготовки к повторному вылету (при заданном уровне
материальных затрат на эту подготовку), поскольку увеличение доли
самолетов, не готовых к вылету в данный момент времени, снижает
боевую или экономическую эффективность парка самолетов, определен-
ную в процессе проектирования.
17.3. НЕКОТОРЫЕ ЭКСПЛУАТАЦИОННЫЕ АСПЕКТЫ
ПРОЕКТИРОВАНИЯ
Заданные в процессе проектирования летно-технические и другие
характеристики самолета проявляются (и подтверждаются) только при
его эксплуатации.
В процессе эксплуатации ведется техническая документация на
каждый самолет, в которой учитываются:
налет самолета и число посадок с начала эксплуатации;
изменения в составе оборудования за время эксплуатации и причины
замены;
причины неисправностей и отказов по самолету в целом, его
оборудованию и системам, выявленные в процессе эксплуатации и при
выполнении регламентных работ, проводившихся на базе эксплуатирую-
щих организаций;
перечни доработок и ремонтных работ, выполненных на самолете за
время эксплуатации.
15 — 7425
449
Знание технического состояния парка самолетов в каждый конкрет-
ный период эксплуатации позволяет не только привести в соответствие
этому состоянию назначаемые для каждого эксплуатируемого самолета
объемы и периодичность ТОиР, но и учесть эту информацию при
разработке новых самолетов.
Поэтому все фазы существования самолета в эксплуатации подверга-
ются системному анализу и синтезу с целью выбора необходимого уровня
эксплуатационной технологичности. Уже на стадии внешнего проектиро-
вания в моделях функционирования самолета (исследования операций)
варьируемым параметром является время подготовки к повторному
вылету, которое затем входит в ТЗ на проектирование. В процессе
проектирования выбирается метод обслуживания, определяется состав
работ по технической эксплуатации и, наконец, вырабатывается
комплект эксплуатационной документации, регламентирующей летную
и наземную эксплуатацию самолета.
По-видимому, системы технического обслуживания и ремонта будут
базироваться на сочетании методов, когда часть агрегатов и систем
самолета, влияющая на безопасность, но не имеющая резервирования,
будет эксплуатироваться по ресурсу, т. е. независимо от их фактического
состояния, другая часть таких агрегатов и систем будет эксплуатировать-
ся до предотказного состояния. Часть агрегатов и систем, отказ которых
непосредственно для завершения полета не опасен, но к следующему
полету должен быть устранен, будет эксплуатироваться фактически до
отказа.
В любом случае в процессе проектирования должны быть найдены
конструктивно-компоновочные решения, обеспечивающие высокую
эксплуатационнуютехнологичность самолета. Возможность применения
конструктивных решений, обеспечивающих эксплуатацию по ресурсу,
должна быть подтверждена широким спектром ресурсных испытаний
в процессе проектирования новых конструкций.
Должно быть выбрано оптимальное резервирование деталей, узлов,
агрегатов и систем самолета, поскольку резервирование неизбежно
связано с увеличением массы и стоимости самолета, но повышает его
важнейшие эксплуатационные характеристики - надежность и живучесть.
Существенным резервом повышения надежности и ресурсных показате-
лей систем самолета является повышение надежности готовых изделий,
при этом необходимо максимально увеличивать количество устанавлива-
емых на самолеты готовых изделий, гарантийный ресурс и срок службы
которых соответствуют гарантийному ресурсу и сроку службы самолета.
Для всех агрегатов и систем необходимо решить вопрос о методах
неразрушающиего контроля (визуального или инструментального) за их
состоянием и распределить задачи инструментального контроля между
450
наземными и встроенными бортовыми системами автоматизированного
контроля. Очевидно, что инструментальный контроль технического
состояния элементов конструкции самолета даст объективную информа-
цию для формирования стратегии ТОиР.
В процессе проектирования должен быть найден оптимальный
компромисс между массой конструкции и ее эксплуатационной
технологичностью, поскольку для проведения обслуживания, контроля
иустранения неисправностей путем замены взаимозаменяемых агрегатов
или их ремонта необходимы люки, площадь и расположение которых
влияют на прочность и, как следствие, на массу конструкции.
По мере углубления проработки проекта в процессе внутреннего
проектирования вопросы эксплуатационной технологичности взаимоувя-
зываются с технологическими и другими аспектами проектирования и
решаются с возрастающей степенью детализации.
При проектировании должны быть решены вопросы обеспечения
ремонта техники и ее утилизации после отработки установленных
сроков.
Только комплексный подход к проблемам эксплуатации в процессе
проектирования самолета обеспечит его высокую эффективность и
конкурентоспособность.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• фазы существования ЛА в процессе эксплуатации; эксплуатационная
технологичность; техническое обслуживание и ремонт; методы
технического обслуживания и ремонта;
• стратегия ТОиР по наработке; ТОиР по наработке; ТОиР по
ресурсу; техническое обслуживание по наработке; техническое обслужи-
вание по ресурсу; ремонт по наработке;
• стратегия ТОиР по состоянию; ТОиР по фактическому состоянию;
техническое обслуживание по состоянию; налет опережающий; ремонт
по состоянию;
• методы неразрушающего контроля; время подготовки к повторному
вылету.
15*
451
Глава 18
ОСНОВЫ ПРОЕКТИРОВАНИЯ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
Цель проектирования - создание ЛА, способного в процессе
эксплуатации выполнить поставленную заказчиком задачу с максималь-
но возможной эффективностью.
Именно с учетом этого критерия оценки вырабатывается общая
концепция проекта нового ЛА, его облик, выбираются размеры и
основные технические данные. Выполнение поставленной задачи, как
правило, невозможно без высокого аэродинамического, прочностного
и весового совершенства ЛА. В соответствии с этим проектирование
условно подразделяется на отдельные виды: аэродинамическое, конструк-
тивно-силовое, объемно-весовое, технологическое и т. д. Однако вопросы
аэродинамики, прочности, эксплуатации и другие взаимосвязаны и при
проектировании решаются одновременно, поэтому отдельные виды
проектирования тесно связаны друг с другом.
18.1. СОДЕРЖАНИЕ ПРОЦЕССА И ОСНОВНЫЕ ЭТАПЫ
ПРОЕКТИРОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Рассмотрение взаимосвязей и взаимообусловленности отдельных
видов проектирования, поиск оптимального решения на основе
компромисса между противоречивыми требованиями аэродинамики,
прочности, снижения массы ЛА, уменьшения сложности и стоимости
изготовления конструкции и систем составляют содержание процесса
проектирования.
Под проектированием ЛА обычно понимают процесс разработки
технических материалов (документации), обеспечивающих организацию
и осуществление всех этапов жизненного цикла ЛА.
На современном этапе развития теории и практики проектирования
использование методологии комплексного проектирования ЛА с
широким применением быстродействующей вычислительной и
моделирующей техники позволяет решать сложные задачи, стоящие перед
коллективом проектировщиков. Существенную роль в решении этих
задач играет научная организация труда, строгая регламентация
последовательности и содержания этапов проектирования, предусмотрен-
452
t к Уровень принятых решений и затрат на проект
80%
40%
Решения
Затраты
Анализ ТЗ и
Время разработки проекта
выбор концепции У
Техническое предложе- \
ние ("аванпроект") /
Эскизный проект, \
постройка макета_________2__________
Технический (рабочий)проект )
Постройка наземных испытательных стендов,
________опытный экземпляр самолета_________
Летные испытания, стендовые отработки
Рис. 18.1. Основные этапы процесса внутреннего проектирования самолета
ная в нашей стране Единой системой конструкторской документации
(ЕСКД).
Основные этапы процесса внутреннего проектирования самолета после
получения ТЗ проиллюстрированы рис. 18.1.
Примерно 80% решений, определяющих эффективность создаваемого
самолета, принимаются на этапе выбора концепции и в процессе
разработки эскизного проекта самолета, куда входят чертежи общего
вида и компоновки самолета, сокращенные разработки конструкции
важнейших агрегатов, систем оборудования с расчетом их на прочность,
определение массы самолета и диапазона центровок, аэродинамические
расчеты и расчет устойчивости и управляемости самолета.
Основная доля финансовых затрат на разработку проекта приходится,
однако, на создание технического (рабочего) проекта (когда создается
вся техническая документация для производства самолета), на разработку
и постройку многочисленных и сложных испытательных стендов,
производство опытного экземпляра самолета и проведение стендовых
и летных испытаний.
18.2. НЕКОТОРЫЕ ЭКОНОМИЧЕСКИЕ АСПЕКТЫ
ПРОЕКТИРОВАНИЯ
Потребность в новом летательном аппарате объективно возникает
в результате развития общества (см.гл.1) и диктуется изменением (или
453
необходимостью изменения) социальных, экономических, экологических,
технических и других условий. Так, новый тип самолета может
потребоваться для замены устаревших с моральной, технической,
экономической точек зрения самолетов, выполняющих установившийся
круг задач; для обеспечения перевозок возросших объемов грузопасса-
жирских потоков; при интенсивном развитии сети аэродромов; для
решения транспортных задач в регионах, имеющих слабо развитую
инфраструктуру наземного транспорта; для изучения и эксперименталь-
ной проверки новых концепций и технических решений и т. д.
Современный самолет-сложная техническая система, затраты на его
проектирование и изготовление настолько велики, что в некоторых
случаях только объединенными усилиями нескольких ОКБ (фирм) при
государственной финансовой поддержке удается решить поставленные
задачи. Это относится и к пассажирским, и к боевым самолетам.
Поэтому уже на этапах выбора концепции самолета и разработки
технического предложения обобщенный критерий «эффективность -
стоимость» должен быть развернут в систему экономических критериев,
позволяющих проектировщикам оценить затраты на все этапы
жизненного цикла самолета, сравнить экономику конкурирующих
(альтернативных) проектов и находящихся в эксплуатации самолетов
и выбрать рациональные решения не только по самолету в целом, но и
по отдельным его компонентам.
Огромное значение при проектировании имеет оценка рынка сбыта.
Весьма вероятна ситуация, когда перспективный по своим техническим
решениям самолет долгое время не будет иметь спроса, что приведет к
финансовым потерям. Поэтому важно планировать поставку самолета
на рынок. Если самолет появляется на рынке слишком рано,
интенсивность его поставки будет невелика, что приведет к снижению
доходов от капитальных вложений в проект. Задержка с поставкой
может привести к насыщению рынка самолетами конкурентов или
потребует больших капиталовложений на быстрое развертывание про-
изводства.
Найденное в процессе разработки новое техническое решение может
оказаться экономически нецелесообразным именно для этого конкретно-
го самолета, но будет весьма перспективным товаром на рынке ноу-хау
(от англ, know-how, букв. - знаю как).
Как правило, на начальных этапах разработка экспериментального
самолета ведет к финансовым потерям, однако в перспективе разработ-
чик может оказаться монопольным обладателем продукции, пользую-
щейся повышенным спросом. Поэтому очень важным является финанси-
рование таких работ и наличие методик, позволяющих оценить степень
риска при их финансировании.
454
Наличие в распоряжении проектировщиков надежного инструмента
достоверной экономической оценки самолетов при проектировании,
серийном производстве и эксплуатации, включая наземное техническое
обслуживание и ремонт, позволяет создавать высокоэффективные
конкурентоспособные самолеты,
18.3. НЕКОТОРЫЕ ЭРГОНОМИЧЕСКИЕ
И ЭКОЛОГИЧЕСКИЕ АСПЕКТЫ ПРОЕКТИРОВАНИЯ
Эргономика (от греч. ergon - работа и nomos - закон) - наука,
изучающая функциональные возможности человека в трудовых
процессах, В более широком плане эргономика рассматривает любые
взаимодействия человека с машиной: в процессе производства,
подготовки к полету, а для пилотируемых ЛА и в процессе полета.
Эффективность этого взаимодействия существенным образом влияет на
эффективность ЛА, Для обеспечения высокой эффективности системы
человек - машина (рабочий - станок, летчик - самолет, оператор -
система УВД) необходимо выполнение требований гигиены и физиоло-
гии, учет антропологических, биомеханических и психологических
параметров человека и согласование с ними параметров машины.
На самых ранних стадиях проектирования пассажирских самолетов
формируются объемы для рабочих мест экипажа и размещения
пассажиров. Габаритные размеры и размещение кресел членов экипажа,
органов управления, приборных досок, пультов, средств отображения
информации, их конструктивное решение и функциональные возможнос-
ти должны в условиях строгого дефицита компоновочного пространства
обеспечить членам экипажа оптимальные условия для работы, позволяю-
щие в процессе полета в полной мере реализовать проектные характерис-
тики самолета. Пассажиры гораздо меньше заинтересованы в техничес-
ких достоинствах самолета, чем в собственном комфорте. Обеспечение
конкурентоспособности создаваемого самолета вызывает необходи-
мость учета всех требований потенциальных пассажиров и, следователь-
но, формирования на борту особой среды жизнедеятельности, разрабаты-
ваемой с учетом физиологических особенностей пассажира, характера
его поведения на борту и психологического состояния.
Получение высокой производственной и эксплуатационной
технологичности ЛА невозможно также без учета в процессе проектиро-
вания человеческих факторов.
Работа коллектива проектировщиков (в том числе специалистов по
авиационной медицине, инженерной психологии, дизайнеров) направлена
на то, чтобы не человек приспосабливался к технической системе, аэта
система как средство развития и усиления человеческих способностей
приспосабливалась человеком к его возможностям и потребностям,
455
Среди проблем, которые приходится решать создателям новых
самолетов, особо выделяются экологические (от греч. oikos-дом, жилище
и logos - слово, учение) проблемы, связанные с воздействием авиацион-
ной техники на окружающую среду.
Первая экологическая проблема обусловлена тем, что современные
аэродромы с длинными ВПП занимают площадь в сотни гектаров ровной
земной поверхности. Эти участки земли крайне нужны для сельского
хозяйства, тем более что они расположены в непосредственной близости
от городов и крупных населенных пунктов. Отсюда вытекает задача
создания в будущем пассажирских самолетов с укороченным и коротким
взлетом и посадкой, способных использовать ВПП длиной не более
500 м. Это позволит в десятки раз сократить площади земель, отводимых
для гражданских аэропортов.
Вторая проблема связана с шумом самолетов при взлете и посадке,
нарушающим нормальные условия жизни людей в зоне аэропорта. Встает
задача создания малошумных пассажирских самолетов.
Наконец, весьма существенную экологическую проблему создает
эмиссия двигателей (от лат. emissio - выпуск), т. е. загрязнение атмосферы
продуктами сгорания углеводородного топлива (керосина) в двигателях
современных самолетов. Применение жидкого водорода в качестве
топлива для двигателей перспективных самолетов позволит решить эту
проблему, так как продуктом сгорания в этом случае будет водяной пар.
Гармонизация отношений человека с естественной и искусственной
внешней средой - основная задача коллектива проектировщиков.
18.4. ФОРМАЛЬНЫЕ И НЕФОРМАЛЬНЫЕ АСПЕКТЫ
ПРОЕКТИРОВАНИЯ
Для формального решения задачи проектирования необходимо иметь
формализованное описание проектируемого ЛА, т. е. математическую
модель, описывающую спомощью взаимосвязанной последовательности
математических формул связь конструктивных параметров ЛА с
возможными конструктивно-компоновочными решениями. Такой
(формальный) подход к решению задачи оптимального проектирования
практически невозможен в силу того, что минимальный набор конструк-
тивных параметров, определяющий форму, размеры, массу и, следова-
тельно, летно-технические характеристики ЛА, чрезвычайно велик и
позволяетполучитьмножествоконструктивно-компоновочныхрешений,
приводящих к реализации ЛА, удовлетворяющего требованиям ТЗ.
Кроме того, ТЗ на проектирование значительно шире, чем представ-
ленное в общем виде в подразд. 1.1, а требования к эффективности ЛА
456
чаще всего определяются
качественно. Это не позво-
ляет формализовать ни
обобщенный критерий эф-
фективности, ни алгоритм
его вычисления, а значит,
не дает возможности по-
строить формализованный
процесс проектирования.
Таким образом, процесс
поиска технического реше-
ния, удовлетворяющего
требованиям ТЗ, носит, без-
условно, неформальный,
творческий характер. Здесь
огромное значение имеют
опыт, эрудиция и интуиция
проектировщика. Это отно-
сится к проектированию
ЛА в целом, а также всех
его компонентов, вплоть до
простейших деталей. Об-
щих рекомендаций по реше-
нию творческих задач нет и
быть не может. Тем не ме-
нее некоторые закономер-
ности поиска технического
решения можно формали-
зовать (рис. 18.2).
На первом этапе работы
проектировщик оценивает
возможность выполнения
поставленной задачи за счет
одного из известных ему
решений - аналога или про-
тотипа, выбирая его из так
называемого банка (базы)
данных.
Банк данных (в более
широком понимании - база
ТЕХНИЧЕСКОЕ ЗАДАНИе}»
I
Критерий
оценки
Банк
данных
Выбор аналога из банка
данных (селекция)
ф
а
ф
.........._____________
Доработка аналога
в соответствии
с техническим заданием
Да
ет
£
о>
ешение
удовлетворяет
Решение
удовлетворяет
итерию?
Нет
Синтез проекта из
элементов известных
решений (комбинаторика)
Да
критерию?
Да
Синтез проекта решением
[Изобретательской задачи
Нет
ешение
удовлетворяет
Рнс. 18.2. Алгоритм поиска нового технического
решения
критерию?
знаний) - это есть опыт и эрудиция проектировщика, т. е. знание всех
сведений о специфике и закономерностях того, что было сделано ранее,
457
и не только в узкоспециализированной области. Эти знания хранятся в
памяти человека, а также на бумажных (книги, описания, чертежи) и
машинных носителях информации (магнитные диски ЭВМ) и т. д.
Если на первом этапе работы, т. е. при проектировании «от прототи-
па», решение не найдено, на следующем этапе проектировщик синтезиру-
ет проект за счет комбинации (соединения) отдельных элементов
известных ему решений. Естественно, чем богаче банк данных, тем
больше вероятность решения проблемы.
Если решение не найдено и таким методом, значит, перед проектиров-
щиком поставлена задача, требующая решения на уровне изобретения.
Не обсуждая здесь, каким образом решается изобретательская задача,
отметим, что и в этом случае огромную помощь проектировщику
оказывает банк данных.
Опыт и инженерная интуиция проектировщика, особенно незамени-
мые в процессе формирования концепции, облика ЛА, незаменимы и при
принятии решения в ситуации, когда из множества возможных
эффективных вариантов решения задачи необходимо выбрать один (или
ограниченное число) для дальнейшей углубленной проработки.
Таким образом, нельзя утверждать, что процесс проектирования не
поддается формализации. Отдельные, весьма существенные итрудоемкие
компоненты этого процесса (например, определение массы ЛА, его
летно-технических характеристик и др.) уже формализованы, т. е.
выполняются расчетным путем. Однако полная формализация процесса
проектирования вряд ли возможна.
18.5. ПРОЕКТИРОВАНИЕ САМОЛЕТА И ЭВМ
Создание проекта самолета требует достаточно глубокой (на уровне
содержания эскизного проекта) проработки нескольких вариантов
проектас целью принятия единственного решения, которое с максималь-
ной достоверностью гарантирует получение уровня технического
совершенства и характеристик самолета, близких к оптимальным.
Увеличение числа факторов, которые необходимо учесть при проектиро-
вании самолета, потребовало привлечения к процессу проектирования
большого количества различных специалистов, что существенно
осложнило процесс обмена информацией между ними. Углубленная
проработка каждого варианта проекта с целью принятия верного
решения требует применения уже на ранних этапах проектирования более
точных и более сложных расчетов.
Даже разработка одного из вариантов проекта (возможной концеп-
ции) самолета требует нескольких итераций - многократного применения
определенной последовательности действий, - во-первых, для того, чтобы
458
объединить требования многих специалистов, представляющих разные
технические дисциплины, и, во-вторых, для того, чтобы оптимизировать
проектныепараметры. Естественно, что чем больше итеративных циклов
выполнено, тем выше уровень технического совершенства проекта,
однако это требует огромных трудозатрат, времени и средств.
Появление в арсенале проектировщиков такого мощного орудия
труда, как ЭВМ, позволило создать множество частных прикладных
программ, позволяющих с большой скоростью и безошибочно вести
расчеты по математическим моделям отдельных видов проектирования,
поддающихся достаточно точной формализации (например, расчеты
аэродинамических характеристик, траекторные расчеты).
Развитие средств вычислительной техники, увеличение быстродей-
ствия ЭВМ, появление математического обеспечения ЭВМ и устройств,
позволяющих автоматизировать не только расчетные, но и графические
работы (системы машинной графики), осуществлять общение проекти-
ровщика с ЭВМ в интерактивном (диалого-ориентированном, т. е.
приближенном по форме к общению человека с человеком) режиме
работы, обеспечило возможность автоматизации значительного объема
проектно-конструкторских работ, привело к созданию различных систем
автоматизированного проектирования (САПР), позволяющих с различной
степенью детализации моделировать процесс проектирования.
При разработке ТЗ на проект на этапе внешнего проектирования ЛА
(см.подразд. 2.1) можно с достаточной для инженерной практики
точностью описать аналитическими м етодами процессы функционирова-
ния парка самолетов с определенными ЛТХ при перевозке пассажиров
на некоторой сети аэродромов или при проведении определенной боевой
операции.
Процесс разработки технического предложения на предварительном
этапе внутреннего проектирования также достаточно хорошо поддается
аналитическому описанию.
Задача аналитического проектирования ЛА в общем случае требует
построения математической модели проекта, которая характеризуется:
совокупностью определяющих проект требований у . .ут (внешние
параметры). Это могут быть, например, требования ТЗ на проект
самолета: масса и другие параметры полезной нагрузки; потребная
дальность полета; крейсерская скорость; класс аэродрома базирования
и соответственно длина и ширина ВПП, ее прочность; категория и
параметры системы автоматической посадки на аэродроме базирования
ит. д.;
совокупностью параметров х;,х2,...хп, определяющих проект
(внутренние параметры). Это те параметры самолета, которые должны
быть определены в процессе решения задачи: прежде всего взлетная
459
масса, удельная нагрузка на крыло, стартовая тяговооруженность,
аэродинамические характеристики, размеры самолета и его агрегатов,
состав и параметры систем и т. д.;
целевой функцией (критерием или критериями эффективности),
позволяющей выбрать среди альтернативных проектов лучший,
обеспечивающий экстремальное значение целевой функции (например,
себестоимость пассажиро-килом етра).
Рассмотрим формирование математической модели проекта.
1. Получим уравнения связи внешних и внутренних параметров:
Ут~/п&\> X2,...s Х^).
Это, например, уравнение, которое позволяет рассчитать потребную
длину ВПП в зависимости от взлетной массы самолета, удельной
нагрузки накрыло, стартовой тяговооруженности, аэродинамических
характеристик самолета и т. д.
2. Наложим ограничения на значения внешних параметров, т. е. учтем
требования
<Pi=Oi. У2 УпУ. {*.=. *} Oil;
«P2=Oi.У2 упу, 0J;
Эти ограничения могут быть сформулированы, например, следующим
образом:
потребная длина ВПП (при фиксированных прочих параметрах
T3)LBnn s 1800 м либо Авпп= 1800 м ;
потребная дальность полета (при фиксированных прочих параметрах
ТЗ) L=10 ООО км либо Ьг 10 000 км.
3. Наложим ограничения на значения внутренних параметров:
Т|= (хх,х2,...,ху, {£,=,г} [х,];
Т2= (х},х2,...,х^\ {s, =, 21} [xj;
(*i, х2.х„); {5,=, 21} [х„].
Ограничения на значения внутренних параметров могут быть
сформулированы аналогично: например, из условий базирования на
аэродроме заданного класса линейные размеры самолета (длина и размах
крыла) I s 80 м либо I = 80 м.
Отметим некоторые особенности такой математической модели. В
общем случае число внешних и внутренних параметров и количество
ограничений на них не связаны между собой.
460
Если ограничения на значения внешних параметров несовместимы
(противоречивы), то задача не имеет решения. Если они совместимы, а
определяемая ими область внутренних параметров не имеет ограничений,
то оптимизация проекта не всегда возможна. Если же ограничения на
значения внешних параметров совместимы и есть ограничения на
определяемую ими область внутренних параметров, то возможна
оптимизация проекта.
Поставленная задача может быть и неразрешимой, что означает
невозможность создания проекта, отвечающего поставленным требова-
ниям (ограничениям на значения внешних параметров) при заданных
ограничениях на значения внутренних параметров в рамках принятой
математической модели (системе уравнений связи внешних и внутренних
параметров).
Особо отметим следующее обстоятельство. В каждом из внешних и
внутренних ограничений может быть поставлено любое из условий
(соответствующее знакам , =, :>). Это оказывает определяющее влияние
на результаты аналитического проектирования. Если в ограничениях на
значения внутренних параметров стоит знак равенства, то это означает
лишь резкое сокращение числа альтернативных вариантов проектов,
которые могут быть реализованы. В тоже время знак равенства в
ограничениях на значения внешних параметров указывает на невозмож-
ность получения области внутренних параметров, которые обеспечили
бы существование проекта. В результате будет получено единственное
решение, которое при любых изменениях условий применения ЛА может
оказаться нежизнеспособным.
Техническое задание (см .разд. 3.3.5) должно давать проектировщикам
свободу выбора.
При аналитическом проектировании с использованием ЭВМ и
применением такой математической модели появляется возможность не
только увеличить количество исследуемых параметров, определяющих
проект, построить область существования проекта для возможно более
широких диапазонов изменения этих параметров и выбрать конкретные
значения искомых параметров по некоторой целевой функции. Основным
достоинством аналитического проектирования является возможность
оперативно оценить условия существования проекта, т. е. не только
качественно, нои количественно оценить, как любые изменения внешних
параметров (при фиксированной целевой функции) влияют на внутрен-
ние (искомые) параметры и, наоборот, как изменения внутренних
параметров (при фиксированных внешних параметрах) изменяют
количественно целевую функцию, и т. д. Это существенно расширяет
свободу выбора проектировщика, помогает ему в поиске нетрадицион-
ных, оригинальных решений,
461
a
Рис. 18.3. Представление многомерной информации
В этой ситуации большой проблемой становится возможность оценки
человеком полученной информации, поскольку задачи проектирования
являются многопараметрическими. САПР предоставляют проектировщи-
ку возможность быстрого получения любых двух-трехмерных привычно
обозримых человеком областей существования проекта из многомерного
пространства.
Существенно облегчает восприятие многомерной информации
представление ее в виде, показанном на рис. 18.3.
Рис. 18.3, а можно рассматривать как результат сравнения по
транспортным возможностям проекта самолета 1 (сплошная линия) с
наиболее близким к нему самолетом-прототипом 2 (пунктирная линия).
При одинаковой коммерческой нагрузке самолет 1 превосходит самолет
2 по основным транспортным возможностям, уступая только по
перевозимой коммерческой нагрузке с максимальным запасом топлива.
Рис. 18.3, б иллюстрирует изменения основных летных характеристик
(внешних Параметров) проектируемого самолета-истребителя 1
(пунктирная линия) в результате изменения некоторых компоновочных
решений (внутренних параметров). Самолет 2 (сплошная линия) с
измененной компоновкой, имея одинаковую с самолетом 1 максималь-
ную скорость на высоте, превосходит его по максимальной скорости у
земли, максимальной эксплуатационной перегрузке, угловым скоростям,
потребной длине ВПП и высоте практического потолка, уступая только
по радиусу виража.
На рис. 18.4 представлены рабочие модели трехмерной компоновки
дозвукового пассажирского самолета большой пассажировместимости
462
Рис. 18.4. Пример использования систем машинной графики в процессе компоновки
и палубного сверхзвукового самолета вертикального взлета и посадки,
проекты которых разработаны в МАИ в 1996 - 1997 гг. Рисунок
достаточно наглядно иллюстрирует некоторые новые возможности,
предоставляемые проектировщикам системами проектирования с
использованием ЭВМ, в частности системами машинной графики.
Моделирование процесса проектирования на быстродействующих
ЭВМ с выводом результатов расчетов в виде таблиц и графиков
характеристик самолета, чертежей общих видов, компоновочных
чертежей и т. д. позволяет значительно ускорить процесс проектирова-
ния, рассмотреть большее число вариантов проекта и за счет большого
числа итераций приблизиться к оптимальному уровню технического
совершенства самолета.
По мере углубления проработки проекта все большее число задач,
которые приходится решать проектировщикам, практически невозможно
описать аналитическими методами, тем не менее использование ЭВМ
оказывает существенную помощь проектировщикам при разработке
эскизного и технического (рабочего) проекта ЛА.
463
Рис. 18.5. Применение ЭВМ при проектировании самолета
Рис. 18.5 иллюстрирует тот факт, что применение ЭВМ при проекти-
ровании даег выигрыш во времени для достижения определенного уровня
технического совершенства проекта или, что особенно важно, выигрыш
в качестве, совершенстве проекта при заданном техническим заданием
времени разработки проекта.
Естественно, что разработка проекта нового самолета начинается не
на пустом месте. Опытное конструкторское бюро обычно специализиру-
ется на создании самолетов определенного типа, участвует в разработке
ТЗ на проект. Поэтому к моменту получения ТЗ в ОКБ уже есть исходный
(опорный) вариант проекта, начальный уровень совершенства которого
определяется опытом ОКБ, а также опытом, накопленным самолетостро-
ением в процессе его развития.
Использование ЭВМ в проектировании предоставляет уникальные
возможности обращения к этому опыту за счет автоматизированных
систем баз знаний (экспертных систем), которые позволяют проектиров-
щику найти все необходимые данные не только о результатах решения
какой-либо проектной задачи, но и об алгоритме решения и о том, как
и почему это решение получено, в том числе и о результатах неверных
решений и их последствиях.
Возможности, предоставляемые ЭВМ проектировщику по организа-
ции больших междисциплинарных потоков информации, стимулируют
развитие методологии проектирования в направлении формализации
синтеза новых проектных решений и создания интегрированных систем
проектно-конструкторских работ, технологической подготовки
производства и управления производством и непосредственно произ-
водства.
464
Широкое применение ЭВМ в проектировании и производстве,
естественно, способствует созданию эффективных ЛА. ЭВМ не может
устранить многочисленные технические неопределенности, однако,
освобождая проектировщика от рутинной, нетворческой работы,
позволяет ему сосредоточить свои усилия на рассмотрении общих
концептуальных проблем, принятии решений в компромиссных
ситуациях и раскрытии этих неопределенностей.
За счет широкого применения ЭВМ снижаются затраты на разработку
проекта по конкретному ТЗ, а высвобождаемые средства идут на
создание в ОКБ опытных и экспериментальных самолетов для наземных
и летных экспериментов, что способствует выявлению и раскрытию
технических неопределенностей и уменьшает риск при использовании
новых концепций и конструктивно-технологических решений.
18.6. СЕРТИФИКАЦИЯ САМОЛЕТОВ
ГРАЖДАНСКОЙ АВИАЦИИ
Безопасность жизни современного человека во многом зависит от
качества окружающего его мира техники. Критерий (показатель)
«качество» представляет собой совокупность свойств объекта техники
(например, самолета), которые во всем цикле использования удовлетво-
ряют потребителя (пассажира). Качество, так же как и объект техники,
обладает системными свойствами и включает в себя множество
компонентов.
Качество воздушного судна - это прежде всего безопасность полета.
Кроме того, качество пассажирского самолета (воздушного судна)
подразумевает приемлемую стоимость билетов и удобство их приобрете-
ния, удобство и комфорт пассажира на пути в аэропорт и на борту
воздушного судна, высокий уровень системы обслуживания и питания
в полете и т.д.
Безопасность полета может характеризоваться отсутствием в процессе
длительной эксплуатации ВС наиболее тяжелых по последствиям особых
ситуаций-аварии (авиационного происшествия, не приведшего к гибели
пассажиров и членов экипажа, однако такого, после которого нарушает-
ся прочность конструкции и (или) требуется крупный ремонт ВС) или
катастрофы (авиационного происшествия, которое привело к гибели
хотя бы одного пассажира или члена экипажа при полном или частичном
разрушении самолета). Особые ситуации имеют случайный характер: в
одном случае особая ситуация возникла сразу после взлета, в другом -
через несколько часов полета, а в большинстве полетов таких ситуаций
вообще не было.
465
Вероятность — числовая характеристика степени возможности
появления какого-либо случайного события при тех или иных определенных,
могущих повторяться неограниченное число раз условиях. Вычисляется
как отношение числа интересующих нас событий к общему числу
событий. Например, суммарный налет самолетов всего парка ВС в
процессе длительной эксплуатации составил 10 000 000 ч. В течение этого
времени произошла одна авария. В этих условиях вероятность возникно-
вения аварии может быть оценена как Qa = 1/10 000 000 = 10-7.
По современным отечественным и зарубежным нормам установлены
следующие количественные диапазоны для вероятностей особых
ситуаций:
• катастрофическая ситуация QK < КГ9;
• аварийная ситуация Qa = 1О"7...1О"9.
Интересно отметить, что человек, родившийся на борту самолета и
проживший на нем сто лет (100-364-24 = 873 600 ч < 10б), может попасть
в аварийную ситуацию с вероятностью всего 0,1...0,01.
Чрезвычайно высокие требования к безопасности полета (Q& =
= 1О’7...1О’9) при объективно существующей надежности агрегатов
(интенсивность отказов которых в единицу времени составляет
10"3...10‘б 1/ч, т.е. один отказ на 1О3...1Об часов полета) и систем
вызывают необходимость резервировать наиболее ответственные
системы два, три и даже четыре раза. Многие из агрегатов самолета
необходимо за время его ресурса многократно заменять - только так
можно обеспечить высокую безопасность полетов.
В подразд. 8.3 отмечалось, что ВС должны удовлетворять требовани-
ям ТЗ, а также разработанным Межгосударственным авиационным
комитетом (МАК) Авиационным правилам (АП). Эти правила,
Руководства по эксплуатации ВС, другие нормы, правила и инструкции
являются государственными документами, выполнение требований
которых обеспечивает повышение безопасности полета, расширение
возможностей использования ВС, улучшение его эксплуатационных
характеристик.
Контроль за выполнением требований этих документов на всех этапах
жизненного цикла ВС (проектирование, изготовление, эксплуатация)
осуществляют Авиационный регистр МАК (Авиарегистр, АР) и орган
государственного регулирования гражданской авиации (авиационная
администрация).
Прежде всего, ОКБ (разработчик ВС), серийный завод (изготовитель,
или производитель, ВС) и авиакомпания (эксплуатантВС) должны иметь
право на производство соответствующих работ по определенному типу
ВС, подтвержденное сертификатом (франц, certifical - документ,
удостоверяющий качество товара), который выдает АР по результатам
сертификации.
466
Сертификация - оценка независимой инспекцией возможности
организации обеспечить качественное проведение проектирования
(изготовления, эксплуатации) благодаря правильной структуре
организации, квалификации ее персонала, наличию и качеству
необходимого оборудования, средств контроля качества выполняемых
работ и т.д.
Авиационный регистр или уполномоченная им независимая
организация осуществляет также постоянный контроль сертифицирован-
ной организации с целью выявления любых изменений во всех компонен-
тах проектирования (изготовления, эксплуатации), которые могут
повлиять на соответствие воздушного судна Авиационным правилам,
на систему обеспечения его качества или его летную годность.
Таким образом, на всех этапах жизненного цикла ВС осуществляется
жесткий постоянный контроль выполнения требований соответствующих
Авиационных правил, позволяющий обеспечивать надежность ВС и
безопасность его эксплуатации. При проектировании ВС по определенно-
му ТЗ необходимость выполнения этих требований может оказать
большое влияние на концепцию, схему, силовую установку, конструкцию
систем и агрегатов самолета, и, как следствие, на его ЛТХ и экономичес-
кие показатели.
Поэтому в самом начале проектирования разрабатывается и
согласовывается с АР сертификационный базис проектируемого самолета,
т.е. полный перечень требований к летной годности, обеспечение
соответствия которым является необходимым и достаточным условием
получения сертификата типа на этот конкретный самолет.
В соответствии с требованием Авиационных правил АП-21,
определяющих общие правила сертификации, сертификационный базис
состоит из следующих разделов:
действующих АП, требования которых распространяются на данный
тип самолета;
специальных технических условий к нормам летной годности данного
типа самолета, которые предъявляет к нему проектировщик;
требований по защите окружающей среды.
Так, в зависимости от требований ТЗ на ВС (назначение самолета,
число пассажиров, летно-технические характеристики) и определенных
проектных параметров (число членов экипажа, взлетная масса и т.д.)
основой для разработки сертификационного базиса могут быть Нормы
летной годности АП-23 или АП-25.
В соответствии с требованиями Норм летной годности, сформулиро-
ванными в конкретных АП, сертифицируются маршевые двигатели,
воздушные винты, бортовое оборудование отечественного или
зарубежного производства и все другие компоненты будущего самолета.
467
1. Что нужно заказчику
на самом деле
2. Требования заказчика, 3. Вариант НИИ
изложенные в ТЗ
Рис. 18.6. Эволюция проектной разработки
В соответствии с определенными АП самолет сертифицируется по
уровню шума на местности и по эмиссии двигателей, т.е. по загрязнению
атмосферы.
Авиарегистр выдает разработчику ВС сертификат типа - документ,
удостоверяющий соответствие разработанного образца авиационной
техники требованиям сертификационного базиса, на основании
доказательной документации, которая содержит результаты проверок,
испытаний и оценок летной годности (сертификационных работ) и
выводы о соответствии воздушного судна и его компонентов требовани-
ям сертификационного базиса.
Сертификационные работы проводятся для установления соответствия
ВС и каждой его системы, подсистемы, характеристики (прочности, ЛТХ
и т.п.) требованиям сертификационного базиса. При этом используются
следующие методы определения соответствия:
инженерные оценки: рассмотрение конструкции; анализ описаний,
чертежей, расчетных записок и т.п.; оценка отказобезопасности;
испытания: стендовые, лабораторные, моделирование на моделирую-
щих стендах, испытания комплектующих изделий до установки их на ВС,
наземные и летные испытания ВС;
анализ и обобщение опыта эксплуатации образца авиационной
техники или его прототипов.
468
Таким образом, уже на ранних стадиях проектирования проектиров-
щик работаете тесном контакте с большой группой узких специалистов:
аэродинамиками, двигателистами, Специалистами по системам самолета,
прочнистами, технологами, эксплуатационниками, экономистами.
В данном случае уместно еще раз обратить внимание читателей на
представленный в гл. 2 материал, поместив здесь рисунок неизвестного
автора, который наглядно отражает сложности междисциплинарного
и межведомственного общения (рис. 18.6).
Только взаимопонимание различных специалистов позволит глубоко
оценить все аспекты проектирования и в конечном счете создать
конкурентоспособный самолет.
Проверьте, как Вы усвоили материал
Интерпретируйте следующие основные понятия:
• проектирование; цель и содержание процесса проектирования;
• аспекты проектирования: экономические, эргономические, экологичес-
кие, формальные, неформальные; САПР; экспертная система;
• проектирование: аэродинамическое, конструктивно-силовое, объемно-
весовое, технологическое;
• проект: эскизный, технический, рабочий; прототип;
• качество проекта; критерии экономические; ноу-хау;
• сертификация; сертифицированная организация; сертификационный
базис; сертификат типа; сертификационные работы.
469
РАЗДЕЛ IV
КРАТКИЙ ОБЗОР
РАЗВИТИЯ ОТЕЧЕСТВЕННОЙ
АВИАЦИОННОЙ ТЕХНИКИ
Глава 19
САМОЛЕТОСТРОЕНИЕ
В ДОВОЕННЫЙ ПЕРИОД
И В ГОДЫ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ
Любое техническое решение базируется на законах естествознания
(совокупности наук о природе), возможности техники зависят от степени
познания человеком законов природы.
В технике материализованы знания и производственный опыт,
накопленные человечеством, поэтому техника в определенной мере
автономна от политики, однако именно общественные условия и
экономические законы общественного строя определяют направления
и темпы развития техники и, следовательно, конечные результаты этого
развития. Весь спектр объективных и субъективных моментов в развитии
техники, как бы это ни было связано с деятельностью отдельных
изобретателей, проектировщиков, ОКБ, подчинен закономерностям
развития общества. И развитие техники не прекращается при смене одной
общественной формации другой.
Субъективно цели, которыми руководствуются в своей деятельности
изобретатели, проектировщики, ОКБ, могутбыть совершенно различны-
ми. Однако в авиационно-космической технике, которая, с одной
стороны, определяет могущество и авторитет государства на междуна-
родной арене, а с другой стороны, является, по крайней мере на
начальных этапах создания нового ЛА, затратной отраслью деятельнос-
ти, требующей значительного финансирования со стороны государства,
приоритет социально-экономических критериев при выборе путей
развития несомненен.
Современная техника, по словам "отца" кибернетики американского
ученого Н. Винера, обладает неограниченными возможностями как для
добра, так и для зла. Поэтому вопрос о том, в каком направлении должна
470
развиваться авиационно-космическая техника, обладающая в потенциале
огромной созидательной и разрушительной силой, решается с учетом
межгосударственных отношений.
В великих открытиях современной науки и техники есть доля труда
народов всех стран мира. Представители многих наций в зависимости
от конкретных исторических условий вносили свой вклад в развитие
мировой авиационно-космической науки и техники. В историю
авиационной науки и техники вошли имена немецкого инженера
О. Лилиенталя, американских конструкторов братьев Райт, французского
авиаконструктора и летчика Л. Блерио и многих других изобретателей,
авиаконструкторов, ученых. Тем не менее здесь пойдет речь только о
роли отечественных конструкторов в деле развития авиационной
техники.
Естественно, что в кратком очерке невозможно упомянуть все
созданные аэродинамические ЛА, многие из которых отличались
уникальными проектно-конструкторскими решениями, и их разработчи-
ков. Это только попытка отметить наиболее интересные, на наш взгляд
самолеты, оказавшие определенное влияние на развитие отечественной
авиационной техники.
19.1. НАЧАЛО ПУТИ
До первой мировой войны были сделаны лишь начальные шаги в
развитии авиации, хотя во многих странах, в том числе и в России,
развивались теоретические и экспериментальные работы в авиационных
областях науки и техники. Число самолетов, строившихся в Европе и
Америке, росло с каждым годом. В тех странах, где строились первые
самолеты, интерес к ним проявляли прежде всего военные ведомства,
которые в основном и финансировали эти работы.
К концу первого десятилетия XX века самолет был признан в качестве
средства для полета человека, были разработаны методики подготовки
и аттестации пилотов. Производством самолетов в России занималось
около полутора десятков заводов и мастерских в Москве, Петрограде,
Симферополе, Таганроге, Рыбинске, Одессе и Риге. Строили в основном
самолеты иностранных марок по чертежам западных фирм или собирали
их из готовых деталей, закупаемых за границей. К началу первой
мировой войны в России в строю было 244 военных самолета, в
Германии - 232, во Франции - 156, в Англии и США - по 30.
Тогдажепоявились и самолеты отечественной конструкции. В России
только за 1909-1910 гг. были построены и испытаны почти 40 новых
оригинальных самолетов различных схем. На Русско-Балтийском
вагоностроительном заводе в 1913г. подруководствомИ.И. Сикорского
471
Рис. 19.2. Летающая лодка М-9
Д.П. Григоровича
Рис. 19.1. Самолет "Илья Муромец"
был построен, а затем выпускался серийно в нескольких модификациях
четырехмоторный тяжелый самолет "Илья Муромец" (рис. 19.1) -
выдающееся достижение русской технической мысли. Ничего подобного
на Западе в то время не было. Этот самолет участвовал в боевых
операциях в составе первого в мире соединения тяжелых бомбардиров-
щиков.
В1914-1917 гг. под руководством Д.П. Григоровича было построено
несколько типов летающих лодок (гидросамолетов). Из них наиболее
известны М-5 и М-9 (рис. 19.2), которые выпускались серийно и долгое
время служили Военно-Морскому Флоту России.
Малочисленная мировая авиация, которая в начале войны использо-
валась только для разведки (самолеты-разведчики) и корректировки
артиллерийского огня (самолеты-корректировщики), к концу войны
превратилась в мощную боевую силу. Появились бомбардировщики для
нанесения бомбовых ударов по наземным и надводным целям, истреби-
тели для уничтожения самолетов противника в воздухе, штурмовики для
проведения штурмовых ударных действий против наземных войск и
морского флота при комплексном применении различного вооружения.
Промышленность воюющих стран за время войны выпустила почти
182 000 военных самолетов. Россия не смогла в той же мере, как
остальные, наращивать промышленный потенциал, быстро уступила
первенство в производстве боевых самолетов и в 1916 -1917 it. оказалась
в этой области на последнем месте в мире.
В связи с изменением социально-экономической ситуации в России
после победы Великой Октябрьской социалистической революции, а
также гражданской войной и иностранной интервенцией перед молодой
Советской республикой возникли задачи сохранения и закрепления
революционных преобразований. Буквально в первые дни существования
советской власти Народный комиссариат по военным делам создал
472
Коллегию воздушного флота. Ей предстояло прежде всего собрать
разбросанные по фронтам остатки самолетных парков, двигатели и
запасные части.
К началу мая 1918 г. в распоряжении России оказалось всего около
1000 самолетов, в большинстве своем иностранных марок, из них в строю
находилось 300 самолетов. В этом же году были национализированы
авиационные заводы, начала создаваться государственная авиационная
промышленность. За годы гражданской войны было отремонтировано
1574 самолета и 1740 двигателей, построено заново 669 самолетов и 270
двигателей.
В 1918 г. решением ВСНХ - Высшего совета народного хозяйства-
при поддержке председателя Совета народных комиссаров В.И. Ленина
был основан ЦАГИ - Центральный аэрогидродинамический институт.
В 1919 г. по инициативе Н.Е. Жуковского был учрежден Московский
авиационный техникум, позднее реорганизованный в Институт
инженеров Красного Воздушного Флота им. Н.Е. Жуковского,
впоследствии Военно-воздушная инженерная академия, ныне - Военный
авиационно-технический университет (ВАТУ). Механический факультет
Московского высшего технического училища (МВТУ) приобрел еще и
аэродинамическую специализацию.
В этот же период была создана Комиссия по тяжелой авиации
(КОМТА), в которую вошли видные ученые и инженеры Н.Е. Жуковский,
В.П. Ветчинкин, Б.Н. Юрьев, А.А. Архангельский, В.Л. Моисеенко,
В. Л. Александров, А.А. Байков, М.В. Носов, А.М. Черемухин, К.К. Бау-
лин и А.Н, Туполев (практически не работавший в КОМТА). Под
руководством этой комиссии был спроектирован, построен и прошел
летные испытания единственный в Советской стране тяжелый самолет-
триплан "КОМТА" (рис. 19.3). Первоначальные, не очень чисто
проведенные продувки модели самолета дали хорошие результаты,
однако в процессе летных испытаний выяснилась принципиальная
непригодность трипланной схемы с крылом малого удлинения и
невозможность получить удовлетворительные ЛТХ,
В 1920-е годы были организованы отечественные конструкторские
бюро по самолетостроению: при ЦАГИ под руководством А.Н. Туполева
и на заводе "Дуке" под руководством Н.Н. Поликарпова и Д.П. Григоро-
вича. Самые первые самолеты советского производства - спортивный
моноплан АНТ-1 (см. рис. 3.1) конструкции А.Н. Туполева и четырех-
местный пассажирский самолет АК-1 В.Л. Александрова и В.В. Калинина
(рис. 19.4) - построены в ЦАГИ, Н.Н. Поликарпов создал одноместный
истребитель-моноплан И-1, а в 1924 г. начались летные испытания
473
Рис. 19.3. Экспериментальный самолет- рИс. 19.4. Пассажирский самолет АК-1
триплан "КОМТА"
одноместного истребителя-биплана И-2, сконструированного под
руководством Д.П. Григоровича.
Основными материалами, которые в то время применялись для
постройки самолетов, были сосна, авиационная фанера и полотно.
В середине 1920-х гг. началось производство металлических конструкций.
По инициативе А.Н. Туполева и профессора И.И. Сидорина на
Кольчугинском заводе было налажено производство отечественного
легкого металла - кольчугалюминия - и разнообразного проката из него
для нужд самолетостроения.
Первым советским цельнометаллическим самолетом был небольшой
трехместный моноплан АНТ-2 (рис. 19.5). Весной 1926 г. прошел
государственные испытания цельнометаллический двухместный
разведчик-биплан АНТ-3 (Р-3) (рис. 19.6), запущенный в серию с
отечественным двигателем М-5 мощностью 295 кВт. На АНТ-3 в
1926-1927 гг. были выполнены выдающиеся по тому времени перелеты
по маршрутам Москва - Кенигсберг - Берлин - Париж - Рим - Вена -
Варшава - Москва и Москва-Токио-Москва.
В 1925 г. вышел на летные испытания АНТ-4 (ТБ-1) (рис. 19.7) -
первенец советской тяжелой бомбардировочной авиации и один из самых
больших самолетов 1920-х гг. Это был цельнометаллический моноплан
с двумя двигателями М-17, установленными на крыле. Главным
Рис. 19.5. Первый советский цельнометал-
лический самолет АНТ-2 Рис. 19.6. Самолет-разведчик АНТ-3 (Р-3)
474
новшеством было свободноне-
сущее пятилонжеронное крыло
с гофрированной дюралевой
обшивкой и толстым профи-
лем. Превосходные летные и
эксплуатационные качества
самолета АНТ-4 были проде-
монстрированы в 1929г. в пе- Рис. 19.7. Самолет-бомбардироищик АНТ-4
релете самолета "Страна Сове- (ТБ-1)
тов" (серийный ТБ-1 со снятым
вооружением) по маршруту
Москва - Омск - Хабаровск - Петропавловск-Камчатский - остров
Атту - Сиэттл - Сан-Франциско - Нью-Йорк (общая протяженность
21 242 км).
В связи с ростом интереса к воздушному спорту и в целях подготовки
кадров для военного и гражданского флота началось бурное развитие
легкомоторной авиации и строительство планеров. В 1926 г. был
построен двухместный биплан АИР-1 конструкции А.С. Яковлева, в
1927 г. самолет "Буревестник" С-4 конструкции В.П. Невдачина.
В последующие годы было построено еще несколько самолетов в Москве,
Ленинграде, Киеве, Харькове конструкторами И.Н. Виноградовым,
В.К. Грибовским, С.П. Королевым (будущим генеральным конструкто-
ром ракетно-космических комплексов), А.С. Москалевым, И.П. Толстых
и др.
Советские республики, возникшие после революции на большей части
территории бывшей Российской империи, объединились 30 декабря
1922 г. в Союз Советских Социалистических Республик, площадь
которого составляла одну шестую часть всей суши земного шара. Четыре
с половиной тысячи километров - таково расстояние между крайней
северной материковой точкой СССР - мысом Челюскина - и крайней
южной точкой в районе города Кушка, около одиннадцати тысяч
километров между крайними точками на западе - в районе города
Балтийска - и на востоке - мысом Дежнева, оконечностью Чукотского
полуострова. В этих условиях исключительно важное значение для
обеспечения быстрой перевозки пассажиров и грузов имеет воздушный
транспорт.
В 1923 г. вступила в действие первая регулярная пассажирская
воздушная линия Москва - Нижний Новгород.
Для работы на линиях учрежденного в 1923 г. общества "Добролет" -
будущего Министерства гражданской авиации СССР - был создан
пассажирский самолет К-1 конструкции К.А. Калинина.
475
19.2. САМОЛЕТЫ 1930-Х ГОДОВ
С цепью подготовки квалифицированных специалистов для
развивающейся авиации в 1930 г. были организованы высшие авиацион-
ные учебные заведения - Московский (МАИ) и Харьковский (ХАИ)
авиационные институты. К середине 1930-х гг. окрепли, стали самостоя-
тельными организациями оба крупных конструкторских центра страны,
руководимые А.Н. Туполевым и Н.Н. Поликарповым. Наряду с ними
существовали и КБ меньшего масштаба.
В эти годы были созданы блестящие образцы боевых самолетов:
истребители И-3 и И-5 (рис. 19.8), разведчик-биплан Р-5 (рис. 19.9) и
учебный самолет У-2 (По-2) конструкции Н.Н. Поликарпова
(рис. 19.10);
тяжелый двухмоторный разведчик Р-6 (АНТ-7) и тяжелый четырехмо-
торный бомбардировщик ТБ-3 (АНТ-6) (рис. 19.11).
Серийный выпуск этих самолетов способствовал укреплению мощи
советского Военно-Воздушного Флота. В предвоенное десятилетие на
вооружении советской бомбардировочной авиации состояло 216
самолетов ТБ-1 и 818 самолетов ТБ-3.
В середине 1930-х гг. на основе достижений аэродинамики, строитель-
ной механики, разработки точных методов расчета на прочность,
внедрения новых высокопрочных материалов, а также благодаря
прогрессу в двигателестроении начался новый этап в развитии самолето-
строения. Этот этап характеризовался постепенным переходом на схему
моноплан со свободнонесущим крылом для самолетов всех типов;
увеличением удельной нагрузки на крыло до 1400...1700 Па против
700... 1000 Па у самолетов начала 1930-х гг.; уменьшением относительной
толщины крыла и применением двояковыпуклых профилей, что
позволило уменьшить аэродинамическое сопротивление; переходом к
Рис. 19.8. Истребитель И-5
Рис. 19.9. Самолет Р-5
476
Рис. 19.11. Первый в мире цельнометалличес-
кий свободнонесущий моиоплан-бомбардиров-
щик ТБ-3 (АНТ-6)
Рис. 19.10. Самолет У-2 (По-2)
фюзеляжам обтекаемой формы с круглым, эллиптическим или овальным
поперечным сечением; широким применением "зализов" между
фюзеляжем и крылом; применением гладкой жесткой работающей
обшивки крыла; уборкой шасси в полете и уменьшением тем самым на
20...25 % сопротивления самолета; закрытием двигателей и радиаторов
капотами; установкой металлических воздушных винтов с изменяемым
шагом лопастей; созданием новых двигателей мощностью до 1500 кВт.
Все эти достижения в области авиационной науки и техники открыли
большие возможности повышения скорости, потолка, увеличения
дальности полета наших самолетов.
В 1933-1934 гг. под руководством Н.Н. Поликарпова были созданы
маневренный истребитель-биплан И-15, имеющий максимальную
скорость 360 км/ч, и истребитель-моноплан И-16 (рис. 19.12) с убираю-
щимся шасси, имеющий скорость 454 км/ч.
Первым отечественным серийным фронтовым бомбардировщиком
был созданный под руководством А.Н. Туполева в 1933-1934 гг,
цельнометаллический с гладкой обшивкой самолет СБ (АНТ-40)
(рис. 19.13). При дальности 1000 км с бомбовой нагрузкой 500 кг он имел
скорость 420 км/ч с двумя установленными двигателями М-100 и 520 км/ч
с двигателями М-105. Всего было построено 6656 таких самолетов.
Рис. 19.12. Истребитель И-16 Рис. 19.13. Самолет-бомбардировщик СБ
(АНТ- 40)
477
Рис. 19.14. Самолет Ил-4 ^ис' 1®-15- Самолет АНТ-25 (РД)
Вслед за СБ в 1935 г. вышел на аэродром ДБ-3 - скоростной дальний
бомбардировщик конструкции С.В. Ильюшина. ДБ-3 стал основным
советским дальним бомбардировщиком и успешно действовал в период
Великой Отечественной войны под маркой Ил-4. Самолет Ил-4
(рис. 19.14) с двумя двигателями М-885 мощностью по 810 кВт имел
скорость 445 км/ч и дальность 4000 км с бомбовой нагрузкой 1000 кг.
Было построено 6784 самолета ДБ-3 и Ил-4.
В 1932 г. в конструкторском бюро А.Н. Туполева руководителем
бригады по проектированию и постройке самолета АНТ-25 (РД)
(рис. 19.15) - цельнометаллического моноплана с крылом большого
размаха и одним двигателем М-34 - назначают П.О. Сухого. Летом
1937 г. на этом самолете экипаж под командованием В.П. Чкалова
совершил беспосадочный перелет Москва-США протяженностью более
9000 км, а на другом экземпляре этого самолета экипаж М.М. Громова
почти по такому же маршруту совершил перелет протяженностью более
11 000 км. Эти перелеты принесли мировую славу и самолету, и
советскому самолетостроению.
В период с 1930 по 1938 г. были спроектированы и построены тяжелые
многомоторные самолеты АНТ-14, АНТ-16, АНТ-20, которые, однако,
в серию не пошли. Наиболее ярким воплощением этого направления в
отечественном самолетостроении был восьмимоторный самолет-гигант
АНТ-20 "Максим Горький", который брал на борт 80 пассажиров, имел
максимальную скорость 280 км/ч и дальность полета 2000 км. Тогда это
был самый большой сухопутный самолет в мире.
Наряду с сухопутными в Советском Союзе в 1930-х гг. строились и
испытывались гидросамолеты. В 1932 г. в серию был запущен легкий
самолет-амфибия Ш-2 В.Б. Шаврова (рис. 19.16). Кроме того, выпуска-
лись серийно более крупный самолет - летающая лодка МБР-2
(рис. 19.17) и корабельные разведчики КОР-1 и КОР-2 Г.М. Бериева.
В конструкторском бюро А.Н. Туполева были сконструированы большие
военные гидросамолеты - летающие лодки МДР-2 (АНТ-8) (рис. 19.18),
478
Рис. 19.16. Самолет-амфибия Ш-2 В.Б. Шав- Рис. 19.17. Самолет МБР-2
рова
двухлодочный катамаран МК-1 (АНТ-22) (рис. 19.19) и морской тяжелый
бомбардировщик МТБ-2. Под руководством И.В. Четверикова были
построены гидросамолеты АРК-3 и МДР-6 (Че-2). Для освоения
Северного морского пути группой ленинградских конструкторов в
системе Гражданского Воздушного Флота (ГВФ) был спроектирован
гидросамолет АСК (амфибия северного края), группой конструкторов
в НИИ ГВФ под руководством Р. Л. Бартини - гидросамолет ДАР (даль-
ний арктический разведчик).
В 1930-е гг. бурно развивалась и гражданская авиация. Сеть
воздушных линий союзного значения к началу 1933 г. уже составляла
36 255 км (против 10 700 в 1928 г.), что было по тому времени значитель-
ным достижением.
Для обслуживания этих линий в конструкторском бюро К.А. Калини-
на на Харьковском авиационном заводе был создан самолет К-5,
который брал на борт 6...8 пассажиров или 500...540 кг груза (было
построено более 200 самолетов). Конструкторским бюро А.Н. Туполева
был создан десятиместный пассажирский самолет АНТ-9 (рис. 19.20),
который тоже строился серийно.
Коллективом, возглавляемым А.И. Путиловым, были сконструирова-
ны и построены пассажирские самолеты шестиместный "Сталь-2" и
восьмиместный "Сталь-3". Основным конструкционным материалом для
этих самолетов послужила
Рис. 19.18. Самолет МДР-2 (АНТ-8) Рис. 19.19. Самолет МК-1 (АНТ-22)
479
Рнс. 19.20. Пассажирский самолет АНТ-9 Рнс. 19.21. Пассажирский самолет ХАИ-1
И.Г. Немана
В октябре 1932 г. в воздух поднялся самолет ХАИ-1 (рис. 19.21),
созданный в конструкторском бюро ХАИ под руководством И.Г. Нема-
на. Этот семиместный низкоплан первый в стране имел убирающееся
шасси и был одним из наиболее скоростных пассажирских самолетов в
мире. Было построено 43 машины.
В августе 1936 г. начал летные испытания пассажирский самолет
АНТ-35 (рис. 19.22), созданный на базе бомбардировщика СБ (АНТ-40).
С коммерческой нагрузкой 840 кг (десять пассажиров и их багаж) самолет
развивал крейсерскую скорость около 350 км/ч. Самолет строился
серийно.
Удельный вес отечественных самолетов в парке гражданской авиации
в 1929 г. составлял 39 %, в 1933 г. он вырос до 87,5 %. С 1935 г. на
воздушных линиях страны стали летать только отечественные самолеты.
Легкомоторная и спортивная авиация в 1930-е гг. была представлена
замечательными самолетами А.С. Яковлева-трехместным лимузином
АИР-6 (рис. 19.23) и учебно-тренировочными самолетами УТ-1 и УТ-2
(рис. 19.24) (построено 7243 экземпляра).
В предвоенные годы было построено много экспериментальных
самолетов. Это самолеты БИЧ-3, БИЧ-7 А (рис. 19.25), БИЧ-14, БИЧ-20,
Рис. 19.22. Пассажирский самолет АНТ-35 Рис. 19.23. Самолет АИР-6
480
Рис. 19.24. Учебный самолет УТ-2 А.С. Яков- Рис. 19.25. Самолет БИЧ-7 А
лева Б.И. Черановского
БИЧ-21 конструкции Б.И. Черановского - самолеты-бесхвостки, или
"летающие крылья", имеющие в плане форму параболы. Это самолет
"Сталь-6" конструкции Р.Л. Бартини, имевший одноколесное шасси и
паровое (испарительное) охлаждение двигателя вместо обычного
радиатора. За счет этого самолет еще в 1933 г. развивал скорость до
420 км/ч.
К числу экспериментальных самолетов относятся бесхвостые
самолеты БОК-5 (рис. 19.26) (конструктор В.А. Чижевский), К-12
(конструктор К.А. Калинин), ХАИ-Авиавнито-3 (конструктор
А.А. Лазарев), самолет "Сталь-МАИ", самолет-тандем "Тандем-МАИ"
конструкции П.Д. Грушина (рис. 19.27), "ЭМАИ-1" - первый в мире
самолет из магниевого сплава "электрон". Самолеты "Сталь-МАИ",
"Тандем-МАИ" и "ЭМАИ-1" разработаны и построены в Московском
авиационном институте.
Рис. 19.26. Экспериментальный самолет
БОК-5 В.А. Чижевского
Рис. 19.27. Экспериментальный самолет
"Тандем-МАИ" П.Д. Грушина
16 - 7425
481
19.3. САМОЛЕТЫ ПРЕДВОЕННЫХ ЛЕТ И В ГОДЫ
ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ
В предвоенное десятилетие в стране работало более двадцати ОКБ
по самолетостроению, авиационные заводы обеспечивали массовый
выпуск самолетов, моторов, приборов. Один за другим устанавливались
рекорды грузоподъемности, дальности, высоты полета. Однако уже в
1937 г. мировой рекорд скорости был установлен немецким Мессершмит-
том-109Е.
В реальной боевой обстановке впервые наши самолеты встретились
с немецкими в 1936 г. в небе Испании. Выяснилось, что наши истребители
несколько уступают новейшим немецким истребителям, весьма
перспективным в тактическом отношении. Опыт боевых действий
авиации против японских войск в 1938 г. на озере Хасан и в 1939 г. в
районе Халхин-Гола также подтвердил отставание нашей авиационной
техники в скорости (горизонтальной и вертикальной) и вооруже-
нии. В 1939 г. на правительственном уровне были намечены срочные
меры для ликвидации этого отставания. Были начаты строительство
новых и реконструкция старых авиационных заводов, созданы новые
ОКБ и НИИ.
Следующий этап в развитии советского самолетостроения характери-
зуется резким скачком скорости полета, увеличением потолка и
дальности, усилением вооружения, увеличением боевой живучести и
улучшением ремонтопригодности боевых самолетов.
В 1939-1940 тт. появились новые скоростные истребители Як-1
(рис. 19.28) и Як-7 конструкции А.С. Яковлева и ЛаГГ-3 конструкции
С. А. Лавочкина, В.П. Горбунова и М.И. Гудкова, вооруженные 20-мм
пушками и пулеметами. Появились высотные истребители МиГ-1 и
МиГ-3 (рис. 19.29) конструкции А.И. Микояна и М.И. Гуревича.
Самолеты развивали скорость до 640 км/ч.
В конструкторском бюро С.В. Ильюшина был создан бронированный
штурмовик Ил-2 (рис. 19.30). Он
имел небольшую по тому времени
скорость - 420 км/ч, но о его боевой
эффективности в годы Великой
Отечественной войны ходили леген-
Рис. 19.28. Истребитель Як-1
Рис. 19.29. Истребитель МиГ-3
482
Рис. 19.30. Штурмовик Ил-2
ды. Враги называли его "черной смертью". За годы войны было
построено более 36 тысяч машин этого типа.
В 1940 г. начал серийно строиться пикирующий бомбардировщик
В.М. Петлякова Пе-2 (рис. 19.31). По скорости (540 км/ч) он почти не
уступал немецким истребителям Мессершмитт-109Е. Пе-2 мог нести
600 кг бомб на расстояние 1200 км, а в перегрузочном варианте - 1500 кг.
Этот самолет стал нашим основным ближним бомбардировщиком и
разведчиком в годы Великой Отечественной войны. Заводы выпустили
около 15 тысяч самолетов Пе-2 и его вариантов.
В предвоенные годы коллективом, возглавляемым В.Г. Ермолаевым,
был разработан на базе пассажирского самолета "Сталь-7" конструкции
Р.Л. Бартини и строился серийно бомбардировщик Ер-2 (ДБ-240) с
дизельными двигателями АЧ-ЗОБ. Этот самолет с 1000 кг бомбовой
нагрузки имел дальность полета 5000 км. Конструкторским бюро
П.О. Сухого был создан разведчик-бомбардировщик Су-2 (рис. 19.32).
Эти новые самолеты применялись уже в начальный период Великой
Отечественной войны, однако их было слишком мало.
В первый же день войны советские Военно-Воздушные Силы (ВВС)
понесли огромные потери. Немецкая авиация напала на 66 аэродромов
наших пограничных округов. К полудню 22 июня 1941 г. было потеряно
300 самолетов в воздушных боях и 900 на аэродромах. Однако даже после
таких больших потерь, сражаясь
на самолетах устаревших типов,
советские летчики наносили врагу
серьезный ущерб. Только в пери-
од с 22 июня по 19 июля 1941 г.
авиация противника потеряла в
воздушных боях около 1300 само-
летов.
Наша промышленность не
смогла быстро возместить поте-
Рис. 19.32. Многоцелевой самолет Су-2
16*
483
Рис. 19.34. Фронтовой бомбардировщик Ту-2
Рис. 19.33. Истребитель Ла-5
ри, понесенные в первые дни войны. Кроме того, из-за продвижения
фашистских войск в глубь страны один за другим останавливались,
демонтировались и эвакуировались на восток авиационные заводы,
расположенные в Европейской части СССР западнее Волги. Несмотря
на все трудности, в январе - феврале 1942 г. эвакуация была в основном
закончена. На эвакуированных предприятиях быстро налаживалось
серийное производство моторов и самолетов. Уже к марту 1942 г. возрос
выпуск самолетов, увеличилось поступление их на фронт.
В ходе Сталинградской битвы (17.7.1942-2.2.1943) определился
поворот в пользу нашей авиации. Производство истребителей в течение
1942 г. неуклонно увеличивалось, и уже весной 1943 г. наши летчики
начали завоевывать господство в воздухе. В 1943 г. авиационная
промышленность произвела около 35 тысяч самолетов, почти на 40 %
больше, чем в 1942 г.
1943 год прошел под знаком борьбы за повышение качества и
улучшение летно-тактических данных самолетов. ВВС стали получать
истребители Ла-5 (рис. 19.33) конструкции С.А. Лавочкина, имеющие
скорость 650 км/ч и мощное вооружение. На фронте появились самолеты
Як-9 и Як-3 - самый легкий и маневренный истребитель второй мировой
войны.
На базе самолета Ил-2 был создан новый цельнометаллический
двухместный штурмовик Ил-10 с усиленным бронированием и скоростью
полета 550 км/ч.
Весной 1943 г. началось серийное производство фронтового
бомбардировщика Ту-2 (рис. 19.34) конструкции А.Н. Туполева. Он
развивал скорость 547 км/ч и мог нести 1000 кг бомб, а в перегрузочном
варианте до 3000 кг бомб. Установленное на Ту-2 оборудование
позволяло вести прицельное бомбометание как с горизонтального
полета, так и с пикирования. На самолете имелись две пушки калибра
20 мм и три оборонительных пулемета калибра 12,7 мм. Экипаж Ту-2
обычно состоял из четырех человек.
484
С каждым днем наша боевая авиация становилась мощнее авиации
противника как по количеству, так и по качеству, В завершающей
битве за Берлин гитлеровская авиация была практически полностью
уничтожена.
Проверьте, как Вы усвоили материал
I. Интерпретируйте следующие основные понятия:
• самолет-разведчик; самолет-корректировщик; бомбардировщик;
истребитель; штурмовик; летающая лодка; гидросамолет;
• самолет-триплан; трипланная схема.
2. Дайте характеристику основным этапам развития отечественной
авиации.
485
Глава 20
ОТЕЧЕСТВЕННАЯ АВИАЦИЯ В ПОСЛЕВОЕННЫЙ
ПЕРИОД
После окончания Великой Отечественной войны начался новый этап
развития авиационной техники, характеризующийся появлением
реактивных двигателей, позволивших существенно увеличить скорости
полета самолетов.
При решении сложнейших проблем создания самолетов с ОКБ рабо-
тали следующие коллективы: Центральный аэрогидродинамический
институт им. проф. Н.Е. Жуковского (ЦАРИ), Центральный институт
авиационного моторостроения им. П.И. Баранова (ЦИАМ), Летно-
исследовательский институт (впоследствии ЛИИ им. М.М. Громова),
Научно-исследовательский институт авиационных систем (НИИАС),
Научно-исследовательский институт авиационной технологии и
организации производства (НИАТ), Всесоюзные научно-исследователь-
ские институты авиационных материалов (ВИАМ) и легких сплавов
(ВИЛС) и многие другие.
Фундаментальные поисковые работы в области аэродинамики,
динамики полета, прочности и аэроупругости, разработки силовых
установок, летных испытаний, технологии, материаловедения и
конкретные проектные разработки привели вначале к освоению больших
дозвуковых, азатем и сверхзвуковых скоростей полета.
20.1. ОСВОЕНИЕ БОЛЬШИХ ДОЗВУКОВЫХ
СКОРОСТЕЙ ПОЛЕТА
29 апреля 1946 г. в воздух поднялись первые советские реактивные
самолеты Як-15 (рис. 20.1) и МиГ-9 (рис. 20.2). На испытаниях эти
самолеты показали скорости соответственно около 800 км/ч и свыше
900 км/ч. Таким образом, скорость полета истребителей увеличилась
почти в 1,5 раза! Испытания первых реактивных самолетов позволили
приступить к проектированию и постройке боевых самолетов различного
назначения, тем более что к тому времени были серийно освоены
отечественные реактивные двигатели конструкции В.Я. Климова,
А.М. Люлька и А.А. Микулина.
3 июля 1947 г. поднялся в воздух первый экземпляр дальнего тяжелого
бомбардировщикаТу-4, который в возможных пределах копировал один
486
Рис. 20.2. Истребитель МиГ-9
Рис. 20.1. Истребитель Як-15
из наиболее совершенных самолетов того времени - четырехмоторный
бомбардировщик Боинг В-29, базировавшийся на одном из тихоокеан-
ских островов и совершивший весной 1945 г. вынужденную посадку на
советской территории. Решение правительства, поручившего эту работу
коллективу под руководством А.Н. Туполева, было вызвано тем, что
технический уровень самолета В-29, его конструкции, материалов,
агрегатов, систем и их элементной базы далеко опережал уровень нашего
отечественного самолетостроения, не имевшего возможности проводить
исследовательские работы в годы войны.
Постройка Ту-4, серийное производство (было построено более 400
самолетов), последующая эксплуатация произвели настоящую револю-
цию в технологии авиационной промышленности и смежных с ней
отраслей.
В 1947-1949 гг. появились реактивные истребители МиГ-15, Ла-15 и
Як-23 и фронтовые бомбардировщики Ил-28 и Ту-14 (применявшийся,
в основном, в качестве торпедоносца в авиации Военно-Морского
Флота).
Из реактивных истребителей в массовой серии строился МиГ-15
А.И. Микояна и М.И. Гуревича (рис. 20.3). Этот самолет имел крыло со
стреловидностью 35°, трехопорное шасси с носовым колесом, герметич-
ную кабину, оборудованную новой аппаратурой. Для аварийного
покидания машины были разработаны новое катапультное кресло
Рнс. 20.3. Реактивный истребитель массовой
постройки МиГ-15
Рис. 20.4. Бомбардировщик Ил-28
487
Рис. 20.5. Дальний бомбардировщик Ту-16 Рис. 20.6. Истребитель Як-25
летчика и фонарь, автоматически сбрасываемый перед катапультирова-
нием. Вооружение - одна пушка калибра 37 мм и две - калибра
23 мм. Взлетная масса-около 4800 кг, скорость-до 1050 км/ч, потолок-
15 200 м, дальность полета - 1400 км, а с подвесными баками - свыше
1900 км. Самолеты МиГ-15 получили боевое крещение во время войны
в Корее (1950 -1953 гг.), где показали свое превосходство над американ-
скими истребителями такого же класса F-86 "Сейбр".
Максимальная скорость фронтового бомбардировщика Ил-28
(рис. 20,4) С.В. Ильюшина-900 км/ч, наибольшая дальность полета
(с бомбовой нагрузкой 1000 кг) - 2400 км. Стрелковое вооружение - 4
пушки калибра 23 мм. Самолет отличался простой технологической
компоновкой и был легок в пилотировании. Аэронавигационное и
радиооборудование самолета обеспечивало полет ночью и в сложных
метеоусловиях. Модификации - разведчик, торпедоносец, учебно-
тренировочный самолет (УТС). Ил-28, явившись достойным преемником
поршневых бомбардировщиков Пе-2 и Ту-2, стал основным фронтовым
бомбардировщиком наших ВВС.
В 1952 г. был создан и запущен в серийное производство дальний
бомбардировщик А.Н. Туполева Ту-16 (рис. 20.5), оснащенный двумя
ТРД АМ-3, установленными по бокам в стыке крыла с фюзеляжем, и
способный нести 3000 кг боевой нагрузки на дальность 5800 км.
Максимальная скорость Ту-16 на высоте - 1050 км/ч. Экипаж, состояв-
ший из шести человек, располагал мощным наступательным (ядерным
и ракетно-бомбовым) и оборонительным (семью пушками калибра 23 мм)
вооружением. Ту-16, первоклассный бомбардировщик послевоенного
времени, имевший множество модификаций, был способен уничтожать
наземные и надводные цели, не входя в зону ПВО противника.
В 1952 г. начал летные испытания и был принят в серийное производ-
ство самолет Як-25 А.С. Яковлева (рис. 20.6). Это двухместный
всепогодный барражирующий (от франц, barrage - заграждение)
истребитель-перехватчик, предназначенный д ля воздушного патрулиро-
488
вания на дальних подступах к
обороняемому объекту, с даль-
ностью полета до 3000 км (с под-
весными топливными баками) и
рекордной для реактивных истре-
бителей того времени продолжи-
тельностью полета - 2,5 ч. Воз-
Рис. 20.7. Стратегический бомбардировщик
М-4 В.М. Мисищева
можность применения этого само-
лета днем, ночью и в сложных
метеоусловиях обеспечивалась
мощным радиолокационным и радиотехническим оборудованием.
Наличие второго члена экипажа значительно облегчало боевые
операции. Як-25 имел две 37-мм пушки и достигал скорости 1090 км/ч.
В ноябре 1952 г. состоялся первый полетТу-95-единственногов мире
стратегического бомбардировщика с ТВД и стреловидным крылом. На
его основе было создано много модификаций боевых самолетов, а также
пассажирский самолет Ту-114.
В январе 1953 г. совершил первый полет стратегический бомбардиров-
щик М-4 (103М) (рис. 20.7), разработанный коллективом ОКБ под
руководством В.М. Мясищева. Этот самолет, как и созданный на его
основе бомбардировщи к ЗМ (201М), совершивший первый полетв марте
1956 г., не имел себе равных в мировой практике и обладал великолепным
сочетанием грузоподъемности, скорости и дальности полета. Максималь-
ная скорость бомбардировщика ЗМ на высоте - 940 км/ч, крейсерская
скорость - 800 км/ч, практический потолок -12 150 м. Бомбардировщик
ЗМ мог нести 5000 кг боевой нагрузки на дальность 1 1 850 км.
Уникальные характеристики межконтинентального стратегического
бомбардировщика ЗМ подтвердили 19 мировых рекордов. На этих
самолетах впервые применены многие технические решения (дистанцион-
ное управление вооружением, гидроусилители в системе управления,
оригинальные схемы велосипедного шасси, система заправки в воздухе,
монолитные панели, герметичные баки-кессоны и др.).
Высокие летно-технические и тактико-технические характеристики
обеспечили самолетам Ту-95 и ЗМ поразительное долголетие. Создание'
этих боевых реактивных самолетов, составлявших основу ВВС до конца
1950-х гг., обеспечило высокую обороноспособность нашей страны и ее
союзников.
Продолжая традиции гидроавиации, конструкторский коллектив,
возглавляемый Г.М. Бериевым, создал первую в мире летающую лодку
Р-1 (рис. 20.8) с реактивными двигателями, первый полет которой
состоялся 30 мая 1952 г. По схеме Р-1 - лодочный моноплан с прямым
крылом, на концах которого расположены поплавки для обеспечения
489
боковой остойчивости на воде.
Экспериментальный гидросамолет
Р-1, имея взлетную массу 20 000 кг
и трех членов экипажа, показал
высокие летно-технические данные:
_ , скорость полета у воды - 760 км/ч,
Рис 20 8. Летающая лодка г-1 «
rm. « скорость полета на высоте 7 км -
800 км/ч, потолок -11 500 м и даль-
ность полета до 2000 км. Отработка
в процессе летных испытаний этого самолета вопросов гидродинамики
на больших взлетно-посадочных скоростях и аэродинамики на
околозвуковых скоростях полета позволила в дальнейшем разработать
целое семейство летающих лодок с турбореактивными и турбовинтовыми
двигателями.
Следует отметить, что отечественные реактивные двигатели
перечисленных самолетов как по конструктивным схемам, так и по
развиваемым тягам не имели себе равных среди зарубежных двигателей.
20.2. СВЕРХЗВУКОВАЯ БОЕВАЯ АВИАЦИЯ
К началу 1950-х гг. были прочно освоены околозвуковые скорости
полета. В феврале 1950 г. летчик И.Т. Иващенко первым в мире на
серийном истребителе МиГ-17 в горизонтальном полете превысил
скорость звука. Началась эра сверхзвуковой авиации.
В 1954 г. конструкторским бюро А.И. Микояна и М.И. Гуревича был
создан истребитель МиГ-19 (рис. 20.9), который имел скорость полета
1450 км/ч, т.е. намного превышающую скорость звука на высотах более
11 км (дц = 1065 км/ч).
В процессе развития реактивной боевой авиации сменилось несколько
поколений самолетов фронтовой (тактической) авиации и авиации
противовоздушной обороны (ПВО).
Самолет МиГ-19, ставший базовым для создания многих опытных
и экспериментальных самолетов, завершает ряд самолетов первого
поколения, заложивших основу
дальнейшего развития сверхзвуко-
вой боевой авиации.
В 1955 г. конструкторским бюро
П.О. Сухого был создан одноме-
стный фронтовой истребитель Су-7,
на котором впервые в СССР была
получена скорость, в два раза пре-
вышающая скорость звука.
Рис. 20.9. Истребитель МиГ-19
490
Рис. 20.10. Сверхзвуковой истребитель
МиГ-21
С 1958 г. серийно выпускался
легкий маневренный сверх-
звуковой фронтовой истребитель
МиГ-21 (рис. 20.10), имеющий
максимальную скорость 2200 км/ч.
Эти машины, являющиеся наиболее характерными представителями
второго поколения сверхзвуковой боевой авиации, имели мощное
пушечное вооружение, могли нести на борту управляемые (УРС)
и неуправляемые (НУРС) реактивные снаряды и бомбы. Благодаря
радиолокационным станциям самолеты второго поколения стали
всепогодными.
Цельноповоротное горизонтальное оперение, автоматическое
регулирование воздухозаборника со створками перепуска воздуха,
тормозные щитки, автоматизированная система управления с гидроуси-
лителями - наиболее характерные конструктивно-компоновочные
особенности этих самолетов, позволявшие им выполнять маневры с
эксплуатационной перегрузкой пу= 8. Высокий технический и технологи-
ческий уровень поставил эти самолеты в ряд лучших истребителей мира.
Они длительное время выпускались серийно и до сих пор находятся на
вооружении ряда стран.
Удачно найденные при проектировании этих самолетов проектно-
конструкторские решения дали возможность создать многочисленные
модификации самолетов Су-7 и МиГ-21.
Следует отметить, что классификация самолетов по поколениям
весьма условна, поскольку часть модификаций самолетов любого
поколения по своему техническому уровню не уступает самолетам
следующего поколения. Основанием для такой классификации служат
какие-либо новые технические решения, применение которых радикально
отличает самолет данного поколения от предшествующих.
К третьему поколению самолетов-истребителей относится МиГ-25
(рис. 20.11), первый полет которого состоялся в марте 1964 г. Одномест-
ный двухдвигательный высотный сверхзвуковой истребитель МиГ-25
способен летать на скоростях, трехкратно превышающих скорость звука,
и энергично маневрировать (с перегрузкой пу - 4,5) в диапазоне
491
2^7 скоростей 2500...3000 км/ч. Прак-
Г/sr тический потолок - 22 000...
...24 000 м, динамический пото-
лок - более 37 000 м. Аэродинами-
ческая компоновкаМиГ-25 сущес-
твенно отличается от компоновок
Х«Уу самолетов второго поколения:
^г®^*®****^ крыло умеренной стреловидности
Z^****^ и малой относительной толщины,
"несущие" плоски е боковые возду-
Рис. 20.12. Истребитель МиГ-23 с изменяемой хозаборники нашироком несущем
в полете стреловидностью крыла фюзеляже, двухкилевая схема
вертикального оперения. Впервые
освоенный диапазон режимов полета и связанный с ним кинетический
нагрев обусловили широкое применение в конструкции планера
самолета МиГ-25 жаропрочных сталей и титановых сплавов. Установ-
ленная на самолете система автоматического управления обеспечивает
полет без вмешательства летчика на этапах боевого применения,
привода на аэродром и захода на посадку. Самолет выпускался в
вариантах истребителя-перехватчика, ударного самолета и высотного
разведчика.
На базе МиГ-25, обладающего уникальными ЛТХ, были созданы
различные летающие лаборатории, обеспечивавшие решение проблем,
связанных с созданием перспективных самолетов, в том числе для
отработки снижения и захода на посадку МВКА "Буран” и сопровожде-
ния его на этапе снижения и посадки.
Наиболеехарактерной особенностью тактических самолетов третьего
поколения является многорежимность и улучшение взлетно-посадочных
характеристик за счет крыла изменяемой геометрии.
В 1967 г. в ОКБ А.И. Микояна и М.И. Гуревича был построен легкий
одноместный многоцелевой всепогодный фронтовой истребитель МиГ-23
(рис. 20.12) с изменяемой в полете стреловидностью крыла. Консоли
крыла могут фиксироваться в различных положениях, обеспечивающих
оптимальные аэродинамические характеристики на взлете, посадке, при
барражировании (угол стреловидности 16°); при ведении маневренного
воздушного боя (угол 45°); при перехвате целей на сверхзвуковых
скоростях и в низковысотном полете (угол 72°). Максимальная скорость
у земли - 1350 км/ч, на высоте - 2445 км/ч (М = 2,35), потолок - 18 500 м,
дальность полета с подвесными топливными баками - 2250 км,
эксплуатационная перегрузка - пу = 8,5. Мощное пушечное и ракетное
вооружение, бортовая радиолокационная станция и теплопеленгатор
позволяют обеспечить всеракурсный перехват высотных и низколетящих
492
Рис. 20.13. Истребитель-бомбардировщик рИс. 20.14. Самолет Су-24М
Су-17М4 с крылом изменяемой в полете
стреловидности
воздушных целей и использовать МиГ-23, оснащенный бомбами и
ракетами "воздух - земля", как фронтовой бомбардировщик.
В 1979 г. состоялся первый полет фронтового одноместного сверх-
звукового истребителя-бомбардировщика с крылом изменяемой
геометрии Су-17М4 (рис. 20.13), созданного в ОКБ им. П.О. Сухого. Этот
самолет предназначен для поражения наземных, надводных и в озду шных
целей, а также для ведения комплексной воздушной разведки. Высокие
летные характеристики, прицельный комплекс с лазерным дальномером-
целеуказателем, пилотажно-навигационное оборудование, позволяющее
выполнять сверхзвуковой автоматизированный полет в район заданных
целей на малых высотах, широкая номенклатура подвесного вооружения
с максимальной массой 4250 кг, размещаемого на 10 точках подвески,
обеспечивают высокую боевую эффективность самолета. При нормаль-
ной взлетной массе 16 400 кг максимальная взлетная масса самолета
Су-17М4 составляет 19 500 кг.
Двухместный сверхзвуковой двухдвигательный фронтовой бом-
бардировщик Су-24М (рис. 20.14) с крылом изменяемой геометрии при
максимальной взлетной массе 39 700 кг способен нести разнообразную
боевую нагрузку массой 8000 кг. Обладающий максимальной скоростью
полета у земли 1400 км/ч самолет предназначен для ведения боевых
действий в простых и сложных метеоусловиях, днем и ночью, в том числе
на малых высотах и с прицельным поражением наземных и надводных
целей при ручном и автоматическом управлении и имеет хорошие
характеристики по показателю "боевая нагрузка - радиус действия".
По мере развития тактической авиации все острее вставала проблема
улучшения взлетно-посадочных характеристик самолетов. Онарешалась
путем применения мощной взлетно-посадочной механизации, закрылков
с системой сдува пограничного слоя, крыла изменяемой геометрии.
493
Рис. 20.15. Палубный истребитель ВВП Рис. 20.16. Самолет Як-141
Як-38
Новые тактико-технические требования к таким самолетам породили
технические решения, радикально отличающиеся от предшествующих.
В начале I! 960-х гг. во многих странах мира начались работы по созданию
реактивных самолетов короткого (КВН) и вертикального (ВВП) взлета
и посадки.
На воздушном параде в Домодедове под Москвой в 1967 г. были
показаны разные типы экспериментальных самолетов укороченного и
вертикального взлета и посадки с дополнительными подъемными
двигателями, разработанных в ОКБ А.С. Яковлева, А.И. Микояна и
М.И. Гуревича, П.О. Сухого. В дальнейшем этой тематикой занималось
только ОКБ А.С. Яковлева.
С 1974 г. начался серийный выпуск палубного истребителя ВВП Як-38
(рис. 20.15) с двумя подъемными ТРД, расположенными вертикально в
передней части фюзеляжа, и подъемно-маршевым ТРД с двумя поворот-
ными (на 90°) соплами. Для обеспечения устойчивости и управляемости
на доэволютивных скоростях полета на самолете имеются газовые рули.
Самолет предназначен для защиты морских конвоев в качестве
истребителя-перехватчика и штурмовика с базированием на палубах
авианесущих кораблей.
Для модификации Як-38М (1983 г.) максимальная взлетная масса
самолета - 11 700 кг, максимальная скорость - 1095 км/ч (М = 0,95),
практический потолок - 12 000 м, боевой радиус действия с полной
боевой нагрузкой при патрулировании в течение 75 мин - 185 км,
максимальная продолжительность полета - 1,5 ч.
В развитие этой тематики ОКБ им. А.С. Яковлева создало первый в
мире сверхзвуковой СВВП - истребитель-бомбардировщик Як-141,
первый полет которого состоялся в марте 1987 г.
Як-141 (рис. 20.16) предназначен для перехвата воздушных целей и
ведения ближнего маневренного боя, для нанесения ударов по наземным
494
Рис. 20.17. Истребитель МиГ-29
Рис. 20.18. Истребитель Су-27
и надводным целям. Максимальная взлетная масса самолета при
вертикальном взлете - 15 800 кг, максимальная скорость на высоте -
1800 км/ч, у земли - 1250 км/ч, практический потолок - 15 000 м, боевой
радиус действия при разбеге 120 м с боевой нагрузкой 2000 кг - 690 км,
максимальная эксплуатационная перегрузка при 50 %-м запасе топлива
= 7.
Четвертое поколение сверхзвуковых тактических самолетов
характеризуется резким улучшением маневренности истребителей и
высокой степенью интеграции всех агрегатов и систем.
Интегральная аэродинамическая схема (когда подъемную силу создает
не только крыло, но и фюзеляж, центроплан, наплывы крыла) и
автоматическое отклонение механизации передней и задней кромок
крыла обеспечивают полет по "огибающей поляр".
Высокая стартовая тяговооруженность (порядка 1,1) самолетов
четвертого поколения обеспечивается двухконтурными ТРД с форсажной
камерой, обладающими высокими термогазодинамическими параметра-
ми и удельной тягой (отношение тяги к весу двигателя порядка 8...9) и
надежно работающими в экстремальных условиях.
Широкое применение автоматизированных систем управления
оптимально "неустойчивым" самолетом в сочетании с электродистан-
ционными системами управления конфигурацией крыла, оперения,
воздухозаборников обеспечивает маневрирование самолета с эксплуата-
ционной перегрузкой пу = 9, высокие характеристики разгона, скоро-
подъемности, малые радиусы виражей, большие угловые скорости
разворота.
Интегрированные конструктивно-силовые схемы самолетов,
применение высокопрочных сталей, титановых и алюминиево-литиевых
сплавов обеспечивают высокую весовую отдачу самолетов и позволяют
иметь на борту мощное ракетно-пушечное вооружение. Эффективность
применения оружия обеспечивается интегрированной в единый комплекс
пилотажно-навигационной системой и системой управления оружием
с нашлемной системой целеуказания.
Созданный под руководством генерального конструктора Р.А. Беля-
кова фронтовой истребитель МиГ-29(рис. 20.17) совершил первый полет
495
6 октября 1977 г. Взлетная масса - 15 000 кг (максимальная - 18 000 кг),
максимальная скорость полета соответствует числу М = 2,35, пото-
лок - 17 000 м, дальность полета с подвесным топливным баком на
оптимальном режиме - 2100 км.
Работы по созданию истребителя-перехватчика/фронтового
истребителя Су-27 были начаты под руководством П.О. Сухого в 1969 г.
Первый полет экспериментального образца нынешнего Су-27 (рис. 20.18),
разработанного коллективом ОКБ Сухого, состоялся 20 мая 1977 г., а
серийный образец совершил свой первый полет 20 марта 1981 г. Взлетная
масса самолета Су-27 составляет 22 000 кг (максимальная - 30 000 кг),
максимальная скорость соответствует числу М = 2,35, практический
потолок - 18 500 м, максимальная дальность полета - 3680 км.
Самолеты четвертого поколения МиГ-29 и Су-27, созданные на основе
передовых достижений науки и техники, превосходят все находящиеся
на вооружении зарубежные самолеты аналогичного класса.
Су-27 сталродоначальником семейств а уникальных высокоманеврен-
ных многоцелевых истребителей. В этом семействе каждый последующий
самолет приобретал новые свойства, увеличивающие его боевую
эффективность. Наращивание боевых возможностей шло по пути
глубоких модификаций. Иногда изменения в компоновке и конструкции
машины были настолько существенны, что появлялся фактически
совершенно новый самолет.
В 1985 г. начались летные испытания, а затем и серийное произ-
водство двухместного учебно-боевого истребителя Су-27УБ, который
обладает всеми боевыми возможностями истребителя-перехватчика
Су-27. В 1988 г. на этом самолете был совершен с четырьмя дозаправками
топливом в воздухе беспосадочный перелет по маршруту Москва -
Комсомольск-на-Амуре - Москва протяженностью 13 440 км! Су-27УБ
и его модификация - многофункциональный истребитель Су-ЗОМ -
состоят на вооружении многих стран.
Первый отечественный палубный истребитель горизонтального взлета
и посадки Су-27К поднял в воздух в августе 1987 г. летчик-испытатель
В.Г. Пугачев. В ноябре 1990 г. В.Г. Пугачев впервые в нашей стране
посадил по-самолетному Су-27К (Су-33) на палубу авианесущего
крейсера "Адмирал флота Н.Г. Кузнецов" и осуществил взлет с палубы
корабля, заканчивающейся трамплином. На этом самолете В.Г. Пугачев
впервые в мире выполнил маневр динамического торможения (в его честь
эта фигура высшего пилотажа была названа "кобра Пугачева"),
демонстрирующий уникальные маневренные возможности тактических
самолетов четвертого поколения.
Су-27К (рис. 20.19) - первый в мире серийный самолет интегральной
аэродинамической компоновки, выполненной по схеме "триплан" с
передним горизонтальным оперением (ПГО) 7, которое совместно с
цельноповоротным горизонтальным оперением 2 значительно расширяет
496
Рнс. 20.19. Палубный истребитель горизонтального взлета и посадки Су-27К (Су-33)
маневренные возможности самолета, особенно на больших углах атаки.
Консоли крыла и ЦПГО складываются для уменьшения пространства,
занимаемого самолетом на палубе и в лифтах, перемещающих самолет
на нижние палубы. Тормозной гак 3 (от голл. haak - крюк) обеспечивает
посадку на палубу авианесущего крейсера с помощью натянутых поперек
палубы 5 тросов 4 корабельного аэрофинишера.
Обратите внимание, как изменилось со временем значение термина
"триплан" (см. рис. 19.3, самолет-триплан "КОМТА"). В литературе для
описания аэродинамических компоновок, аналогичных компоновке
самолета Су-27К, встречается термин "современный триплан".
Первый полет опытного экземпляра многоцелевого фронтового
истребителя Су-35 (известного также как Су-27М) состоялся в мае 1985 г.
Максимальная взлетная масса самолета - 34 000 кг, масса боевой
нагрузки - 8200 кг, максимальная скорость на высоте - 2440 км/ч,
практический потолок - 18 000 м, дальность полета - 4000 км (с одной
дозаправкой в воздухе - 6500 км).
Максимальная эксплуатационная
перегрузка пу = 10. Самолет выпол-
нен по схеме "триплан" с ПГО.
Высокая боевая эффективность
может быть обеспечена не только
сверхзвуковыми самолетами. Как уже
отмечалось, потребный комплекс
ЛТХ определяется моделированием
боевой операции и, например, для Рис. 20.20. Штурмовик Су-25
497
Рис. 20.21. Экспериментальный бомбарди-
ровщик М-50
Рнс. 20.22. Самолет "100" (Т- 4), созданный
в ОКБ Сухого
двухдвигательного штурмовика
непосредственной поддержки сухо-
путных войск на поле боя оказалось
целесообразным создать дозвуко-
вой боевой самолет.
Первый вылет одноместного
Су-25 (рис. 20.20), созданного в ОКБ Сухого, состоялся в 1975 г.
Максимальная скорость полета самолета у земли - 970 км/ч, дальность
полета у земли с максимальной боевой нагрузкой 4400 кг и двумя
подвесными топливными баками - 750 км, нормальная взлетная масса
самолета - 14 600 кг (максимальная - 17 600 кг).
Простотапилотирования, высокая маневренность (пу=6,5), комплекс
конструктивно-компоновочных мероприятий, обеспечивающих
выживаемость самолета при атаке хорошо защищенных наземных целей,
эффективная система управления оружием и широкая номенклатура
подвесного вооружения позволяют самолету Су-25 до сих пор оставаться
в числе лучших машин, используемых для поддержки войск на поле боя.
Развитие авиации стратегического назначения шло в направлении
увеличения скорости и дальности полета.
Еще 27 октября 1959 г. состоялся первый полет опытного сверхзвуко-
вого стратегического ракетоносца М-50 (рис. 20.21), разработанного
конструкторским коллективом, возглавляемым В.М. Мясищевым. Это
был уникальный самолет, который и по общему замыслу, и по комплексу
конструктивно-компоновочных решений не имел себе равных в мире.
Тяжелым (максимальная взлетная масса 200 000 кг) самолетом управлял
экипаж из двух человек с помощью полностью автоматизированной
системы балансировки за счет перекачки топлива, обеспечения
устойчивости, управления, навигации и прицеливания. Максимальная
расчетная скорость - 1950 км/ч, крейсерское число М > 1, практический
потолок 16 500 м, расчетная дальность полета - 7400 км.
В 1960 г. был построен, но не летал опытный самолет М-52,
отличавшийся от опытного М-50 размещением двигателей, формой
носовой части фюзеляжа и крыла, вооружением.
22 августа 1972г. совершил первый полет сверхзвуковой стратегичес-
кий бомбардировщикТ-4 (разведывательно-ударный самолет, известный
впоследствии как "100"), созданный в ОКБ Сухого.
Самолет "100" (рис. 20.22) предназначался для доставки оружия с
большой (М > 3) сверхзвуковой скоростью для нанесения ударов по
498
крупным морским целям. Схема
"бесхвостка" с дестабилизатором
(небольшим неуправляемым гори-
зонтальным оперением) в носовой
части фюзеляжа позволяла мини-
мизировать потери качества на
балансировку. Экипаж самоле-
та-два человека. Впервые приме-
Рис. 20.23. Бомбардировщик Ту-160 с крылом
изменяемой геометрии
ненаэлектродистанционная систе-
ма управления на самолете, нейтральном в продольном канале и
неустойчивом в путевом канале. Силовая установка с воздухозаборником
смешанного сжатия и многорежимным управляемым сверхзвуковым
соплом. Планер самолета - цельносварной из титановых сплавов.
Нормальная взлетная масса - 114 000 кг, расчетная практическая
дальность полета - 6000 км.
При создании этого уникального самолета был выполнен большой
комплекс фундаментальных расчетных и экспериментальных работ, в
том числе и в процессе десяти испытательных полетов. Результаты
решения в процессе создания самолетов М-50 и "100" сложнейших
научных, технических, технологических задач послужили базой для
новых перспективных разработок самолетов различного назначения.
Однако в силу ряда причин работы над этими самолетами были
прекращены, и дальняя (стратегическая) авиация нашей страны
длительное время была дозвуковой.
С 1962 г. на вооружение ВВС начали поступать различные модифика-
ции созданного в ОКБ им. А.Н. Туполева самолетаТу-22 со стреловид-
ным крылом и двумя ТРДФ, расположенными над хвостовой частью
фюзеляжа, обводы которого выполнены по правилу площадей. Взлетная
масса самолета (в зависимости от модификации) - 84 000...92 000 кг,
максимальная скорость на высоте - 1510... 1610 км/ч, практический
потолок с боевой нагрузкой - 13 300... 14 700 м, дальность полета с одной
дозаправкой топливом в полете - 7150 км, практический радиус действия
(в зависимости от профиля полета и боевой нагрузки) - 1300...2200 км.
В 1973 г. началось серийное производство тяжелого многорежимного
бомбардировщика Ту-22М с крылом изменяемой геометрии и двумя
ТРДДФ. Взлетная масса самолета (в зависимости от модификации) -
121 000... 124 000 кг, максимальная скорость на высоте- 1530...2300 км/ч,
практический потолок - 13 000...14 000 м (при М = 1,3), практическая
дальность полета - 4100...5100 км. Самолет может быть оборудован
системой дозаправки топливом в полете.
В 1987 г. дальняя авиация ВВС получила стратегический многорежим-
ный бомбардировщик Ту-160 (рис. 20.23) с крылом изменяемой
геометрии. Экипаж самолета- четыре человека. Максимальная скорость
на большой высоте - 2200 км/ч, практический потолок - 15 000 м,
499
максимальная дальность полета при взлетной массе 275 000 кг -
12 300 км.
Оснащенные высокоэффективными боевыми самолетами Военно-
Воздушные Силы нашей страны способны поддерживать обороноспособ-
ность на необходимом и достаточном уровне.
20.3. РАЗВИТИЕ ГРАЖДАНСКОЙ АВИАЦИИ
Несмотря на то, что в довоенные годы в Советском Союзе были
созданы выдающиеся по своим характеристикам пассажирские самолеты,
гражданская авиация не смогла в то время занять сколько-нибудь
значительное место в транспортной системе страны. Послевоенный
период характеризовался бурным развитием гражданской авиации, в
результате чего она стала важной отраслью хозяйственной деятельности.
В развитии воздушного транспорта определяющую роль сыграло
производство пассажирских и транспортных самолётов и вертолетов на
базе новых турбореактивных двигателей, разработанных в конструктор-
ских бюро А.Г. Ивченко, Н.Д. Кузнецова, П.А. Соловьева.
Первенцами послевоенного пассажирского самолетостроения стали
двухмоторный самолет С.В. Ильюшина Ил-12 и его модификация Ил-14
(рис. 20.24). Первый полет самолет Ил-12 совершил 7 января 1946 г.,
Ил-14 - в сентябре 1950 г. Эти самолеты для своего времени обладали
хорошими летными качествами. Максимальная скорость полета на
высоте 2000...2400 м достигала 400...430 км/ч, крейсерская скорость -
320...350 км/ч, дальность полета - 1750...1900 км. Пассажирская кабина
самолета Ил-12 вмещала 21...27 пассажиров, самолета Ил-14 - до 36
пассажиров. Разбег при взлете не превышал 500 м, а пробег после
посадки - 700 м. Ил-12 и Ил-14 широко эксплуатировались во всех
климатических зонах, включая Арктику и Антарктиду.
В июне 1955 г. первый полет совершил первый реактивный пассажир-
ский самолет Ту-104 (рис. 20.25) с двумя двигателями АМ-3 конструкции
А.А. Микулина с взлетной тягой по 97 кН, созданный на базе серийного
бомбардировщика Ту-16, хорошо проверенного в эксплуатации в
Рис. 20.24. Самолет Ил-14
Рис. 20.25. Первый реактивный пассажир-
ский самолет Ту-104
500
Рис. 20.27. Самолет Ан-2
Рис. 20.26. Самолет Ил-18
воинских частях 15 сентября 1956 г. самолет Ту-104 начал эксплуатиро-
ваться на линии Москва - Иркутск. Он имел крейсерскую скорость
полета 800...850 км/ч. Причем в отличие от Ил-14, совершавшего
перелет из Москвы в Иркутск за 18...20 часов, самолету Ту-104 требова-
лось на это всего 7 часов. В течение нескольких лет самолет Ту-104
и его варианты были основными пассажирскими машинами на
авиамагистралях страны. В ходе серийного производства конструктор-
ское бюро А.Н. Туполева постоянно совершенствовало самолет. Первые
Ту-104 были рассчитаны на 50 пассажиров, с середины 1957 г. стал
выпускаться самолет Ту-104А на 70 пассажиров, а с 1959 г. на линии ГВФ
начал поступать самолет Ту-104Б, вмещающий 100 пассажиров.
. В 1958 г. на линиях ГВФ появился новый пассажирский самолет
С.В. Ильюшина Ил-18 (рис. 20.26) с четырьмя турбовинтовыми
двигателями АИ-20М конструкции А.Г. Ивченко мощностью 3125 кВт
каждый. Вскоре этот самолет стал одним из самых популярных в стране.
Он обладал крейсерской скоростью 650 км/ч и имел дальность полета
до 3700 км (с коммерческой нагрузкой 13 500 кг), а в дальнем вариан-
те - около 6500 км. Самолет Ил-18 имел хорошие взлетно-посадочные
характеристики и мог перевозить 100 пассажиров, а в некоторых
вариантах-до 120.
Конструкторское бюро О.К. Антонова в послевоенные годы создало
ряд пассажирских и транспортных самолетов, сыгравших большую роль
в развитии воздушного транспорта. С марта 1948 г. подразделения ГВФ
стали получать одномоторный пассажирский сам о лет-биплан Ан-2
(рис. 20.27), способный взлетать с полосы длиной 120...200 м.
Этот самолет нашел широкое применение как самолет общего
назначения. Он используется и сегодня для пассажирских и грузовых
перевозок, обслуживания нужд сельского хозяйства, а также как
санитарный, для борьбы с лесными пожарами, метеорологических и
геофизических наблюдений, разведки рыбы, в аэроклубах для тренировки
парашютистов.
В конструкторском бюро О.К. Антонова были созданы транспортные
самолеты: двухмоторный Ан-8 и четырехмоторный Ан-12. Эти самолеты
обеспечивали перевозку тяжелых грузов. Для удобства загрузки и
501
Рис. 20.28. Пассажирский самолет Ан-10 Рис. 20.29. Самолет Ан-22 "Антей"
выгрузки кабины этих самолетов впервые в нашей стране были
спроектированы с двумя дверьми-створками и площадкой-трапом. При
крейсерской скорости полета до 585...600 км/ч эти самолеты могли
взлетать и садиться на грунтовые аэродромы с длиной ВПП 1000... 1200 м.
На базе самолета Ан-12 был создан 84-местный пассажирский самолет
Ан-10 (рис. 20.28). Самолеты Ан-8, Ан-10 и Ан-12 имели турбовинтовые
двигатели АИ-20.
Развивая направление по созданию транспортных самолетов боль-
шой грузоподъемности, конструкторское бюро под руководством
О.К. Антонова, в 1965 г. создало в то время самый большой в мире
самолет Ан-22 "Антей" (рис. 20.29). Этот самолет имеет огромный
фюзеляж (длина грузовой кабины - 33 м, ширина - 4,4 м, высота - 4,5 м),
12-колесное основное шасси, четыре турбовинтовых двигателя НК-12
конструкции Н.Д. Кузнецова мощностью по 11 000 кВт каждый. Он
предназначен для перевозки грузов общей массой до 80 000 кг, при
соответствующем переоборудовании фюзеляжа самолет сможет взять
на борт до 700 пассажиров. Максимальная скорость полета - 740 км/ч,
дальность-до 10 000 км, длина разбега не превышает 1300 м.
Осенью 1957 г. начались летные испытания самого большого в мире
турбовинтового самолета Ту-114 (рис. 20.30) А.Н. Туполева. На этом
самолете были установлены че-
тыре двигателя НК-12МВ кон-
струкции Н.Д. Кузнецова мощ-
ностью по 11 МВт каждый. Са-
молет Ту-114 мог перевозить
180...200 пассажиров на расстоя-
ние 7000 км, с уменьшенной на-
грузкой он мог пролететь до
9000 км. Крейсерская скорость
полета Ту-114 была 750...
.. .770 км/ч - такой скоростью не
обладал ни один турбовинтовой
самолет в мире.
Рис. 20.30. Турбовинтовой самолет Ту-114
А.Н. Туполева
502
Рис. 20.31. Самолет Ил-62
Рис. 20.32. Самолет Ту-134
Самолеты Ту-114 более четверти века обслуживали дальние линии
ГВФ, пока им на смену не пришли самолеты Ил-62, созданные в
конструкторском бюро С.В. Ильюшина.
Первый полет самолета Ил-62 (рис. 20.31) был совершен в начале
1963 г. В герметической кабине самолета Ил-62 размещалось до 186
пассажиров. Самолет имел крейсерскую скорость полета 850...900 км/ч,
максимальную - 950 км/ч. На этом самолете на хвостовой части
фюзеляжа были установлены четыре двухконтурных турбореактивных
двигателя НК-8 конструкции Н.Д. Кузнецова с тягой по 105 кН
каждый, максимальная дальность полета с нагрузкой 10 000 кг сос-
тавляла 9200 км.
В 1972 г. была создана модификация самолета Ил-62 - 200-местный
самолет Ил-62М с четырьмя более экономичными двухконтурными ТРД
конструкции П.А. Соловьева с тягой по 120 кН. Дальность полета
самолета Ил-62М была доведена до 10 300 км.
Для обслуживания линий малой и средней протяженности конструк-
торским бюро А.Н. Туполева были созданы:
• в 1960 г. - двухдвигательный самолет Ту-124, представляющий собой
уменьшенную копию самолета Ту-104 и рассчитанный на перевозку
44...56 пассажиров на дальность 1600...2100 км;
• в 1963 г. - двухдвигательный самолет Ту-134 (Ту-134А) (рис. 20.32)
с двигателями Д-30 конструкции
фюзеляжа. Самолет имеет ско-
рость полета 850...900 км/ч и
может перевозить 72...80 пасса-
жиров на дальность 2400...'
...3200 км (в зависимости от
массы нагрузки).
В 1967 г. в ОКБ А.С. Яков-
лева был создан реактивный
комфортабельный пассажирский
самолет для обслуживания ко-
П.А. Соловьева на хвостовой части
Рис. 20.33. Реактивный самолет Як-40 для
обслуживания копотких воздушных линий
503
Рис. 20.34, Реактивный пассажирский Рис. 20.35. Сверхзвуковой самолетТу-144
самолет Ту-154
ротких воздушных линий Як-40 (рис. 20.33) с тремя двухконтурными
двигателями АИ-25 конструкции В.А. Лотарева с взлетной тягой по
15 кН. Этот самолет способен перевозить 24...32 пассажира со скоростью
550 км/ч на дальность 1200...1500 км. Благодаря возможности сочетать
короткий (всего 320...360 м) разбег самолета при взлете и пробег после
посадки с большой крейсерской скоростью и высотой полета (потолок -
12 000 м) самолет Як-40 произвел подлинную революцию в обслужива-
нии местных авиалиний, составляющих очень большую долю в общей
протяженности воздушных линий нашей страны.
Для замены устаревших морально и технически пассажирских
самолетов Ту-104, Ил-18 и Ан-10 конструкторским бюро А.Н. Туполева
в 1968 г. был создан реактивный пассажирский самолет Ту-154 (рис. 20.34)
с тремя двигателями НК-8-2 с взлетной тягой по 95 кН. Этот самолет
рассчитан на перевозку 152...164 пассажиров на расстояние до 3500 км
(с уменьшенной нагрузкой - до 5000 км, в варианте Ту-154Б) при
крейсерской скорости полета 900...950 км/ч. По мере снятия с эксплуата-
ции самолета Ан-10, азатем Ил-18 и Ту-104, самолетТу-154 становился
одним из основных самолетов ГВФ.
Отдельно в ряду пассажирских самолетов, созданных в это время,
стоит сверхзвуковой пассажирский самолет Ту-144 (рис. 20.35), первый
полет которого состоялся 31 декабря 1968 г. Выполненный по схеме
"бесхвостка" самолет рассчитан на 140 пассажиров и имеет крейсерскую
скорость 2200...2500 км/ч. И хотя эксплуатация этого самолета была
весьма непродолжительной, при проектировании, летных испытаниях
и эксплуатации Ту-144 ОКБ А.Н. Туполева и различные НИИ решили
сложнейшие научные, технические, технологические. задачи, что,
безусловно, оказало благотворное влияние на развитие авиационной
техники.
504
Рис. 20.37. Широкофюзеляжный самолет
Ил-86
Рис. 20.36. Самолет Ил-76
В 1971г. ОКБ им. С.В. Ильюшина (генеральный конструктор
Г.В. Новожилов) был выпущен скоростной реактивный транспортный
самолет Ил-76 (рис. 20.36) с четырьмя ДТРД Д-30КП. Самолет способен
перевозить 40 т груза на дальность до 5000 км со скоростью 850 км/ч.
С 1976 г. началась регулярная эксплуатация этого самолета.
Таким образом, по мере возрастания потребностей в пассажирских
и особенно грузовых перевозках происходит непрерывное совершенство-
вание самолетного парка и смена поколений различных по классу и
назначению самолетов. Эксплуатация пассажирских реактивных
самолетов первого поколения (Ту-104, Ил-18, Ан-10) показала, что авиация
может успешно конкурировать с другими видами транспорта в дальних
перевозках пассажиров. Второе поколение пассажирских и транспортных
самолетов (Ил-62, Ту-134, Ту-154, Як-40 и др.), более комфортабельных
и экономичных, позволило увеличить рентабельность дальних перевозок,
увеличить пассажире- и грузопотоки на средних и коротких авиалиниях.
Были созданы новые и реконструированы многие действующие
аэропорты, улучшилось их оснащение радиотехническими средствами
управления воздушным движением и средствами погрузочно-разгрузоч-
ных работ и работ по подготовке самолетов к полету.
В конце 1970-х г. начались работы по созданию пассажирских и
транспортных самолетов третьего поколения.
В 1976 г. ОКБ им. С.В. Ильюшина создало самый большой реактив-
ный пассажирский самолет в нашей стране - широкофюзеляжный
самолет Ил-86 (рис. 20.37). Этот самолет с четырьмя двухконтурными
двигателями НК-86, созданными на базе двигателя НК-8-2, с тягой по
130 кН способен перевозить 350 пассажиров на дальность 3300 км
(5250 км с уменьшенной нагрузкой) со скоростью 950 км/ч.
Конструкторское бюро А.С. Яковлева в 1975 г. длязамены самолетов
Як-40, Ту-124 и Ту-134 создало самолет Як-42 (рис. 20.38) с тремя
двигателями Д-36, разработанными в ОКБ В.А. Лотарева. Як-42 может
перевозить 100...120 пассажиров на расстояние в 1000...1850 км со
скоростью 800...820 км/ч. В декабре 1980 г. началась регулярная
эксплуатация этих самолетов.
505
Рис. 20.38. Самолет Як-42
Пассажирские самолеты треть-
его поколения характеризуются
повышенным комфортом для пасса-
жиров, более экономичными двух-
Рис. 20.39. Самолет ЗМ-Т
контурными двигателями с низким уровнем шума, увеличенным ресурсом
планера, двигателя и всех систем, что повышает их транспортную
эффективность. Новейшие системы автоматического управления и
навигации позволяют совершать полеты в сложных метеоусловиях в
любое время суток точно по расписанию, способствуют увеличению
безопасности полета, чтотакже повышает транспортную эффективность.
Высокая эффективность самолетов при перевозке различных грузов,
в том числе таких, доставка которых невозможна никакими другими
видами транспорта, привела к созданию широкого спектра транспортных
самолетов.
Экспериментальным машиностроительным заводом им. В.М. Мя-
сищева на базе самолета ЗМ создан самолет ЗМ-Т "Атлант" (рис. 20.39),
предназначенный для транспортировки на внешней подвеске крупногаба-
ритных грузов массой до 50 т. На нем осуществлялась доставка отсеков
PH "Энергия" (длиной 44 м и диаметром 8 м) и планера МВКА "Буран"
с завода-изготовителя на космодром Байконур.
Особую роль в создании самолетов для транспортировки боевой
техники и гражданских грузов сыграло ОКБ, руководимое О.К. Антоно-
вым (с 1988 г. - ОКБ им. О.К. Антонова),
Легкий многоцелевой самолет Ан-28 (рис. 20.40) сдвумя турбовинто-
выми двигателями создан на смену самолету Ан-2 и предназначен для
выполнения более обширного спектра работ. Комфорте салоне для 17
пассажиров соответствует стандартам магистральных самолетов.
Рис. 20.40. Многоцелевой самолет Аи-28
Самолет быстро переоборудуется
в грузовой. Большие размеры
грузового люка и бортовое грузо-
подъемное устройство позволяют
производить быструю погрузку и
выгрузку различных грузов и
устанавливать в кабине оборудо-
506
Рис. 20.41. Транспортный самолет Ан-32 Рис. 20.42. Транспортный самолет Аи-72
вание для аэрофотосъемки, геологической, ледовой, рыбной разведок
и др. Максимальная взлетная масса самолета - 6500 кг, крейсерская
скорость - 335 км/ч.
Транспортный самолет Ан-32 (рис. 20.41) с двумя турбовинтовыми
двигателями АИ-20М при максимальной взлетной массе 26 т перевозит
6000 кг коммерческой нагрузки (или 39 пассажиров) с крейсерской
скоростью 510 км/ч. Характерной особенностью самолетов марки "Ан"
является наличие в хвостовой части фюзеляжа большого грузового люка
с рампой и грузоподъемных устройств, а также шасси с пневматиками
низкого давления, что обеспечивает их базирование на грунтовых
аэродромах. Наличие на борту ВСУ, вырабатывающей энергию для
производства погрузочно-разгрузочных работ, кондиционирования
кабины на стоянке и автономного запуска двигателей, позволяет
самолетам марки "Ан" эксплуатироваться с аэродромов, недостаточно
оснащенных средствами технического обслуживания.
Транспортный самолет Ан-72 (рис. 20.42), совершивший свой первый
полет в 1977 г., положил начало новому поколению транспортных
самолетов - самолетов с турбовентиляторными двигателями большой
степени двухконтурности. Двигатели Д-36 с тягой 65 кН, созданные в
ОКБ В.А. Лотарева, установлены на крыльях самолета Ан-72 сверху, что
защищает их от всасывания мощными вентиляторами песка, пыли, льда
с поверхности ВПП. Обдув струей двигателя крыла с отклоненной
механизацией создает дополнительную подъемную силу. Это делает
Ан-72 максимально неприхотливым в условиях взлета и посадки на
грунтовых и ледовых аэродромах. При максимальной взлетной массе
33 т и крейсерской скорости 550 км/ч длина разбега самолета 800 м, а
длина пробега (при массе 30 380 кг) 450 м. В большой грузовой кабине
самолета (длина 10,5 м, ширина 2,15 м, высота 2,20 м) размещается
полезная нагрузка массой 10 т, или 68 пассажиров в пассажирском
варианте, или 36 больных в санитарном варианте.
За самолетом Ан-72 последовал Ан-124 "Руслан" (первый полет
опытного самолета состоялся 26 декабря 1982 г.) с четырьмя ДТРД Д18-Т
(взлетная тяга двигателя 234 кН), а в 1988 г. - разработанный под
руководством П.В. Балабуева Ан-225 "Мрия" (рис. 20.43) с шестью
507
Рис. 20.43. Самолет Ан-225 "Мрия", транс-
портирующий МВКА "Буран"
Рис. 20.44. Самолет-амфибия А-40 ("Альбат-
рос-40")
двигателями Д18-Т. Этот самый большой в мире самолет способен
доставлять со скоростью 800 км/ч на расстояние более 4000 км на
внешней подвеске и в грузовом отсеке грузы общей массой 250 т,
габаритные размеры которых существенно превышают возможности
существующих транспортных средств. Ан-225 осуществлял доставку на
внешней подвеске в труднодоступные районы газодобычи полностью
собранные и отлаженные ректификационные колонны д линой около 70 м
и диаметром 10 м. В 1989 г. на нем был доставлен на авиасалон в Ле
Бурже (Франция) полностью снаряженный МВКА "Буран".
В конструкторском коллективе, которым ранее руководил непревзой-
денный конструктор летающих лодок Г.М. Бериев, создан многоцелевой
самолет-амфибия А-40 ("Альбатрос-40"), совершивший первый полет в
декабре 1986 г. (рис. 20.44). Разработанный под руководством главного
конструктора А.К. Константинова самый большой в мире самолет-
амфибия А-40 предназначен для проведения дальних боевых операций
против подводных лодок с возможностью создания различных
гражданских модификаций: для ведения поисково-спасательных работ
и оказания помощи экипажам и пассажирам воздушных и морских судов,
потерпевшим бедствие в океане, для тушения пожаров с забором воды
на борт без приводнения - в режиме глиссирования при пробеге по воде.
В 1980-х гг. начались работы по созданию пассажирских самолетов
четвертого поколения.
Широкофюзеляжный самолет Ил-96-300 (рис. 20.45), созданный в
ОКБ им. С.В. Ильюшина, предназ-
Х7 начен для перевозки 300 пассажи-
/и Ров на линиях протяженностью
Л 4000...9000 км с крейсерской скоро-
стью 850...900км/ч. Взлетная масса
самолета - 216 000 кг. Экипаж - 3
человека. На самолете установлены
Рис. 20.45. Шнрокофюзеляжный самолет
Ил-96-300
508
Рис, 20.46. Самолет Ту-204 tC_J V,
четыретурбовентиляторных двига-
теля с большой степенью двухкон-
турности ПС-90А с тягой 160 кН.
Первый полет дальнего маги- Рис. 20.47. Самолет Ту-334
стрального аэробуса Ил-96-300
состоялся в сентябре 1988 г.
Самолет Ту-204 (рис. 20.46),
созданный в ОКБ им. А.Н. Туполева под руководством А.А. Туполева,
предназначен для перевозки 214 пассажиров на линиях протяженностью
до 3500 км с крейсерской скоростью до 850 км/ч. Взлетная масса
самолета - 93 500 кг. Экипаж - 2 человека. На самолете установлены два
двигателя ПС-90А. Первый полет среднего магистрального самолета
Ту-204 состоялся в январе 1989 г.
Самолет Ил-114 (см. рис. 1.5) предназначен для перевозки 60
пассажиров на дальность до 1000 км с крейсерской скоростью 500 км/ч.
Взлетная масса самолета - 21 000 кг. Экипаж - 2 человека. На самолете
установлены дватурбовинтовыхдвигателяТВ7-117 мощностью 1850 кВт
каждый с малошумными многолопастными винтами, Первый опытный
образец самолета местных авиалиний Ил-114 поднялся в воздух в марте
1990 г.
В 1989 г. в ОКБ им. А.Н. Туполева начаты работы над ближнема-
гистральным самолетом Ту-334 (рис. 20.47), предназначенным для
перевозки 102 пассажиров на дальность до 2000 км с крейсерской
скоростью 800...820 км/ч. Взлетная масса самолета - 41 500 кг. Экипаж -
2 человека. На самолете установлены два турбовентиляторных двигателя
Д-436Т с тягой 73,6 кН каждый.
Одна из возможных проектных модификаций предусматривает
вариант Ту-334 (рис. 20.48) с увеличенной длиной фюзеляжа, с более
экономичными винтовентиляторными двигателями (ВВлД) с тягой
78,5...88,3 кН. При том же запасе топлива на борту этот вариант само-
лета будет перевозить 126 пассажиров на трассах протяженностью до
3450 км. Взлетная масса самолета - 47 400 кг.
Для пассажирских самолетов четвертого поколения характерны:
одинаковый уровень комфорта для самолетов любого класса;
улучшенная аэродинамика;
509
применение высокоэконо-
мичных двигателей с низким
уровнем шума;
разработка еще на стадии
проектирования "базового"
самолета, который за счет мо-
дификаций позволяет создать
семейство самолетов различно-
го назначения;
широкое использование в
конструкции новых материа-
лов, включая композиционные,
и новых технологических про-
цессов, что повышает весовую
эффективность конструкции и
увеличивает расчетный ресурс планера до 60 000 и более летных часов.
Устанавливаемый на самолетах четвертого поколения пилотажно-
навигационный комплекс обеспечивает полную автоматизацию
самолетовождения, что позволяет выполнить посадку в условиях
III категории ИКАО и уменьшить число членов экипажа без снижения
безопасности полета.
Программы технического обслуживания самолетов разработаны с
учетом прогрессивных методов, включая эксплуатацию по техническому
состоянию.
Все эти мероприятия позволяют увеличить экономическую эффектив-
ность самолетов четвертого поколения.
Легкомоториая авиация развивалась в основном в направлении
создания учебно-тренировочных самолетов, самолетов для первоначаль-
ного обучения летчиков и спортивно-пилотажных самолетов
С постройки в 1932 г. трехместного самолета конструкции
А.С. Яковлева АИР-6, нашедшего широкое применение в хозяйственной
деятельности, практически все легкомоторные самолеты создает
конструкторский коллектив ОКБ А.С. Яковлева, удостоенный в 1966 г.
Большой золотой медали Международной авиационной федерации
(ФАИ) за создание самолетов для авиационного спорта. Пожалуй, самый
известный из них - учебно-тренировочный самолет Як-18 (рис. 20.49).
Начиная с 1979 г. ОКБ О.К. Антонова приступило к серийному
выпуску учебно-тренировочных и спортивных дельтапланов и мотодель-
тапланов.
В 1986 г. в ОКБ Сухого создан спортивно-пилотажный самолет для
выполнения наиболее сложных комплексов фигур высшего пилотажа
510
Рис. 20.49. Учебно-тренировочный самолет рнс. 20.50. Самолет Су-26М
Як-18
Су-26М (рис. 20.50), в конструкции которого нашли широкое применение
новейшие композиционные материалы и технологии. Конструктивно-
компоновочные решения, заложенные в этом самолете, позволили
впервые в мировой практике расширить для спортивно-пилотажных
самолетов пределы положительных перегрузок с +9 до +12, а отрицатель-
ных с-3 до -10. Самолет отлично зарекомендовал себя на чемпионатах
мира и Европы. Наши спортсмены завоевали на нем более 90 золотых
медалей.
Созданию легкомоторной авиации, предназначенной для обслужива-
ния сельского, лесного хозяйства и других отраслей хозяйственной
деятельности, практически не уделялось внимания, в то время как
потребность в самолетах этого типа крайне велика. Проектирование
подобных машин, в процессе которого проектировщику приходится
решать не менее сложные задачи, чем при создании больших самолетов,
оказалось по силам самодеятельным коллективам энтузиастов,
создавшим много легкомоторных самолетов, вполне достойных
серийного выпуска. Начиная с 1983 г. регулярно проводятся слеты
авиаконструкторов-любителей, учреждена Федерация конструкторов и
пилотов-любителей, призванная способствовать развитию самодеятель-
ного проектирования легких самолетов.
20.4. ГРАЖДАНСКИЕ И БОЕВЫЕ ВЕРТОЛЕТЫ
В середине 1920-х гг. в ЦАГИ под общим руководством Б.Н. Юрьева
начались работы по созданию вертолетов. В 1930-1932-х гг. проводились
летные испытания первого советского вертолета ЦАГИ 1-ЭА, который
пилотировал А.М. Черемухин. В 1940 г. в МАИ было организовано
конструкторское бюро, которым руководил вначале Б.Н. Юрьев, а затем
И.П. Братухин. Были созданы вертолеты "Омега-П", Г-3 и Г-4. Началась
эра вертолетостроения, однако только после Великой Отечественной
511
Рие. 20.51. Вертолет Ми-1
Рис. 20.52. Вертолет Як-24
войны был начат широкий промышленный выпуск боевых и гражданских
вертолетов.
Над вертолетной тематикой в этот период работали специальные
вертолетные ОКБ генерального конструктора М.Л. Миля и главного
конструктора Н.И. Камова, а также частично ОКБ А.С. Яковлева.
Созданный в ОКБ М.Л. Миля в 1948 г. трехместный одновинтовой
вертолет с рулевым винтом Ми-1 (рис. 20,51) более 30 лет был одним из
наиболее распространенных в нашей стране и широко применялся для
связи, санитарной помощи, охраны лесов и т.п. На вертолете установлен
семицилиндровый поршневой двигатель с принудительным воздушным
охлаждением АИ-26В мощностью 420 кВт конструкции А.Г. Ивченко.
Взлетная масса вертолета - 2500 кг, дальность полета - 615 км,
максимальная скорость - 190 км/ч.
3 июля 1952 г. совершил первый полет двухвинтовой вертолет
продольной схемы Як-24 (рис. 20.52). На вертолете установлены два
поршневых двигателя АШ-82В мощностью по 1050 кВт конструкции
А.Д. Швецова. Экипаж - 2 человека. Самый большой для своего времени
вертолет в мире Як-24 мог поднять 40 человек или до 4000 кг груза, в том
числе на внешней подвеске, и впервые применялся в качестве летающего
крана в строительстве.
В 1953 г. в ОКБ Н.И. Камова был построен многоцелевой вертолет
двухвинтовой соосной схемы Ка-15М (рис. 20.53) с девятицилиндро-
вым двигателем АИ-14В мощностью 165 кВт. Максимальная скорость
полета - 150 км/ч, максимальная дальность полета - 250...310 км.
В почтово-пассажирском варианте Ка-15М был рассчитан на перевозку
одного пассажира и грузов. В санитарном варианте для перевозки
больных использовались специальные гондолы, закрепленные с обеих
сторон фюзеляжа.
В 1957 г. в ОКБ М.Л. Миля был создан вертолет Ми-6 (рис. 20.54),
который по своим размерам, мощности двигателя и ЛТХ намного
превосходил все отечественные и зарубежные вертолеты того времени.
Это был первый в мире вертолет с двумя газотурбинными двигателями
512
Рис. 20.54. Вертолет Ми-6
Д-25В мощностью по 4050 кВт конструкции П.А. Соловьева. Для
разгрузки несущего винта при больших скоростях полета на вертолете
установлено крыло, создающее до 25 % потребной подъемной силы. При
нормальной взлетной массе 40500 кг вертолет предназначен для
перевозки крупногабаритных коммерческих грузов массой до 12 000 кг.
Крейсерская скорость - 250 км/ч (максимальная - 300 км/ч). Дальность
полета при нормальной взлетной массе с коммерческим грузом
12 000 кг - 300 км, максимальная дальность с дополнительными
топливными баками - 1200 км. Наличие внешней подвески большой
грузоподъемности позволило использовать Ми-6 в качестве летающего
крана на строительно-монтажных работах.
На базе динамической системы Ми-6 в 1961 г. был создан вертолет-
кран Ми-10 (рис. 20.55), предназначенный для транспортировки
крупногабаритных грузов массой до 12 000 кг вне грузовой кабины. Груз
жестко крепился с помощью гидрозахватов, или устанавливался на
специальных сменных платформах в подфюзеляжном пространстве между
стойками шасси, или свободно закреплялся на внешней тросовой
подвеске. Взлетная масса вертолета Ми-10 - 43 450 кг. Экипаж состоит
из двух летчиков и бортмеханика. На базе Ми-10 в 1965 г. была создана
новая модификация Ми-ЮК. С помощью этих вертолетов проводятся
уникальные строительно-монтажные работы.
В 1961 г. совершил первый полет опытный экземпляр вертолета Ми-2,
серийное производство началось в 1965 г., модернизированный вариант
Ми-2М поднялся в воздух в июле 1974 г., серийное производство завер-
шилось в 1992 г. после постройки более 5250 вертолетов Ми-2 и Ми-2М,
которые выпускались в пассажирском, транспортно-грузовом, санитар-
ном, сельскохозяйственном, аэрофотосьемочном, учебно-тренировочном
и спортивном вариантах, в варианте для контроля окружающей среды,
в военных вариантах - вооруженный разведчик, противотанковый
вертолет, вертолет огневой поддержки.
17 — 7425
513
Рис. 20.55. Вертолет-крап Ми-10
Рис. 20.56. Вертолет Ми-8
Вертолет Ми-2 внешне похож на Ми-1, у них примерно одинаковые
размеры, но благодаря малогабаритным, легким и в то же время мощным
газотурбинным двигателям основные характеристики вертолетов Ми-2
(скорость, грузоподъемность, производительность, экономичность,
безопасность полета) значительно лучше, чем у его предшественника.
В сентябре 1962 г. состоялся первый полет, а в конце 1965 г. было
начато серийное производство многоцелевого вертолета Ми-8
(рис. 20.56), весьма схожего с его предшественником Ми-4, удостоенным
в 1958 г. на Всемирной выставке в Брюсселе золотой медали.
Вертолет Ми-8 (с двумя турбовинтовыми двигателями ТВ2-117
мощностью по 1100 кВт конструкции С.П. Изотова) предназначен для
перевозки 28 пассажиров или транспортировки грузов массой до 2000 кг
при нормальной взлетной массе вертолета 11 100 кг. Максимальная
взлетная масса - 12 т, максимальная коммерческая нагрузка - до 4 т.
Крейсерская скорость - 220 км/ч, максимальная скорость - 250 км/ч.
Ми-8 выпускался во множестве модификаций для гражданских и
военных целей: "салон" повышенной комфортности, десантно-транспорт-
ный, постановщик активных помех средствам связи, для ведения
радиоэлектронной борьбы (РЭБ) и т.д. В военном варианте кабина
экипажа бронирована, устанавливаются пулеметы в носовой подвижной
установке, пулеметные контейнеры, в блистерах кабины для десантни-
ков - пулеметы и гранатометы, на внешних подвесках - пушки,
гранатометы, управляемые и неуправляемые ракеты. На основе Ми-8 в
1980 г. разработан многоцелевой вертолет Ми-17. Вертолет Ми-8
различных модификаций эксплуатируется примерно в 40 странах мира.
В 1967 г. был построен экспериментальный двухвинтовой вертолет
поперечной схемы Ми-12 (В-12) (рис. 20.57). Силовая установка вертолета
состоит из четырех двигателей Д-25-ВФ мощностью по 4800 кВт
конструкции П.А. Соловьева.
514
Рис. 20.57. Экспериментальный вертолет Рис. 20.58. Вертолет Ми-26
Ми-12 поперечной схемы
Нормальная взлетная масса вертолета - 97 т (максимальная -105 т),
полезная (коммерческая) нагрузка - до 40 т, крейсерская скорость -
240 км/ч (максимальная - 260 км/ч), дальность полета - 500 км. До сих
пор в практике мирового вертолетостроения нет винтокрылого аппарата,
равного Ми-12.
В процессе проектирования, постройки и летных испытаний (было
выполнено более 100 полетов) вертолета Ми-12 получены уникальные
материалы, охватывающие все аспекты разработки тяжелых вертолетов.
В 1977 г. коллективом Московского вертолетного завода им.
М.Л. Миля создан тяжелый многоцелевой вертолет нового поколения
для хозяйственной деятельности Ми-26 (рис. 20.58) с двумя самыми
мощными в мире (8400 кВт) турбовальными двигателями Д-136
конструкции В.А. Лотарева. Благодаря богатому опыту создания
тяжелых вертолетов, использованию новых достижений авиационной
науки, техники и технологии вертолет Ми-26, имея практически
одинаковые габаритные размеры с вертолетом Ми-6, обладает вдвое
большей грузоподъемностью и размерами грузовой кабины. Оснащен-
ный современным комплексом пилотажно-навигационного оборудова-
ния, способный нести в грузовой кабине и на внешней подвеске до 28 т
грузов, вертолет Ми-26, серийное производство которого началось в
1984 г., не имеет равных в мире среди серийных вертолетов.
ОКБ Н.И. Камова известно как разработчик вертолетов легкого
класса двухвинтовой соосной схемы.
В 1961 г. это ОКБ разработало вертолет комбинированной схемы -
экспериментальный винтокрыл Ка-22 (рис. 20.59). Два турбовинтовых
двигателя приводили в режиме висения два несущих винта (расположен-
ные по поперечной оси аппарата), а в режиме горизонтального полета -
два тянущих винта, которые потребляли при этом основную мощность
двигателей. Винтокрыл Ка-22 достиг максимальной скорости 356,3 км/ч.
17*
515
: d •;
Рис. 20.59. Винтокрыл Ка-22
Рис. 20.60. Вертолет Кя-26
В 1965 г. ОКБ Н.И. Камова спроектировало и построило многоцеле-
вой вертолет двухвинтовой соосной схемы для хозяйственной деятельно-
сти Ка-26 (рис. 20.60) с двумя поршневыми звездообразными двигателями
М-14В-26 мощностью по 240 кВт каждый. Компоновочно Ка-26
представляет "летающее шассы"(кабина пилота, двухбалочный фюзеляж,
двигатели и несущий винт, шасси), т.е. вертолет-носитель, на который
взависимости отназначения устанавливается грузопассажирская кабина
(именно в этой конфигурации Ка-26 изображен на рис. 20.60), транспор-
тная платформа, крюк для доставки грузов на подвеске, аппаратура для
сельхозработ и т.д. При взлетной массе 3250 кг и крейсерской скорости
полета 135 км/ч практическая дальность полета - 400 км.
Из последних разработок ОКБ им. Н.И. Камова следует отметить
вертолеты Ка-32 и Ка-126, спроектированные и построенные под ру-
ководством генерального конструктора С.В. Михеева.
Всепогодный многоцелевой вертолет нового поколения Ка-32
(рис. 20.61) с двумя турбовальными двигателями ТВЗ-117 мощностью по
1620 кВт выпускается серийно с
1986 г. в транспортном, судовом
вариантах и в варианте вертолета-
крана.
Транспортный вариант предназ-
начен для перевозки грузов массой
4000 кг внутри кабины и на внеш-
ней подвеске (до 5000 кг), выполне-
ния строительно-монтажных работ,
проведения спасательных операций
и перевозки больных.
Судовой вариант предназначен
для ведения ледовой разведки и
проводки караванов судов, выпол-
нения аварийно-спасательных ра-
Рис. 20.61. Вертолет Ка-32
516
бот на море, разгрузки судов без их
остановки способом "трюм-берег".
Нормальная взлетная масса верто-
лета Ка-26 -Пт (максимальная с
грузом на внешней подвеске -
12 600 кг), крейсерская скорость
полета - 230 км/ч (максимальная -
250 км/ч), максимальные дальность
и продолжительность полета - Рис. 20.62. Вертолет Ка-126
соответственно 800 км и 4,5 ч.
Многоцелевой вертолет Ка-126
(рис. 20.62), первый опытный образец которого поднялся в воздух в
1986 г., сохраняя хорошо зарекомендовавшую себя концепцию вертолета
Ка-26, выполнен на современном техническом уровне по улучшенной
аэродинамической схеме с новыми турбовальными двигателями ТВ-0-100
мощностью 530 кВт.
Гражданские вертолеты нового поколения характеризуются при-
менением совершенных высокоэкономичных газотурбинных двигателей
с большим запасом мощности, широким использованием новых
материалов, в том числе и композиционных, особенно для конструкции
лопастей несущего винта, новыми оригинальными конструкторскими
решениями особо ответственных агрегатов и систем.
Состав пилотажно-навигационного оборудования, включая ЭВМ,
обеспечивает высокую степень автоматизации полета гражданских
вертолетов нового поколения.
Использование многоцелевых вертолетов в боевых операциях
показало целесообразность создания специализированного боевого
вертолета для непосредственной поддержки войск на поле боя. Новым
для нашей страны ЛА такого типа является армейский транспортно-
боевой вертолет Ми-24 ОКБ им. М.Л. Миля, впервые поднявшийся в
воздух в 1969 г. В 1971 г. серийные вертолеты начали поступать в части.
Борьба станками, огневая поддержка сухопутных войск, сопровождение
десантных вертолетов, борьба с вертолетами противника - вот далеко
не полный перечень задач, которые способен решать Ми-24, один из
самых долговечных и массовых боевых вертолетов в мире. В различных
модификациях вертолет состоит на вооружении нашей страны и многих
стран мира. Отличительной особенностью всех модификаций Ми-24
является расположенная за кабиной экипажа грузовая кабина, в которой
можно перевозить шесть десантников.
Следующее поколение армейских вертолетов отличается тем, что они
чисто боевые, т.е. на них нет грузовой кабины. Это позволило
проектировщикам резко увеличить боевую нагрузку и улучшить ЛТХ.
517
Рис. 20.63. Вертолет Мн-28
Рис. 20.64. Вертолет Ка-50 "Черная акула1
Мощный комплекс вооружения (встроенное подвижное стрелково-
пушечное оружие, неуправляемые и высокоточные управляемые
противотанковые ракеты и ракеты воздушного боя, бомбы, пушечные,
пулеметные и гранатометные подвесные контейнеры), интегрированное
пилотажно-навигационное и прицельное оборудование, обеспечивающее
всепогодное боевое применение в любое время суток, высокая маневрен-
ность, повышенная за счет компоновочных решений и бронирования
жизненно важных элементов конструкции боевая живучесть, минимизи-
рованный объем технического обслуживания на земле и подготовки к
повторному вылету, возможность быстрой транспортировки в удаленные
районы боевых действий военно-транспортными самолетами - эти
противоречивые требования совместили разработчики новых боевых
вертолетов Ми-28 (рис. 20.63) ОКБ им. М.Л. Миля (1982 г.) и Ка-50
(рис. 20.64) ОКБ им. Н.И. Камова (1982 г.). Последний по критерию
"эффективность - стоимость" не имеет себе равных в мире в этом классе
машин.
Высокие летно-технические характеристики, всепогодность примене-
ния, большой ресурс и простота технического обслуживания обеспечива-
ют высокую экономическую и боевую эффективность современных
гражданских и боевых вертолетов.
20.5. АВИАЦИЯ РОССИИ В 1990-Е ГОДЫ
Развивающаяся и перспективная область авиационно-космической
науки и техники в СССР была престижной, а наша страна считалась в
ней признанным лидером. На 1 января 1990 г. из 1005 регистрируемых
мировых рекордов для самолетов 563 принадлежали СССР, 308 —
Соединенным Штатам Америки, 134 - другим странам мира, из 122
регистрируемых мировых рекордов для вертолетов 47 принадлежали
СССР, 49 - Соединенным Штатам Америки, 26 - другим странам.
Руководство СССР в 1985 г. объявило о перестройке существовавшей
много лет политико-экономической системы страны.
518
Мы уже неоднократно отмечали, что даже при проектировании ЛА
долгосрочный прогноз весьма ненадежен, особенно его социально-
политические и экономические аспекты.
Далее последовал распад СССР как государства, образование на его
бывшей территории нескольких независимых государств, в том числе
Российской Федерации (России).
Реальность такова, что с начала 1990-х гг. сократились бюджетные
ассигнования, и остро встали проблемы финансирования авиационно-
космической науки и техники в России, особенно фундаментальных
исследований, результаты которых используются при разработке
гражданских и военных объектов. Отсутствие научного заделав них уже
через несколько лет может привести к отставанию всей отрасли.
Ослабление международной напряженности, заключение ряда соглаше-
ний по ограничению вооружений также очень сильно повлияло на
приоритеты государства, потребовало конверсии (от лат. conversio -
изменение, превращение) оборонных отраслей техники.
Авиационно-космические фирмы зарубежных стран, как правило,
создают и авиационную боевую технику, и космические объекты, и
пассажирские самолеты, и бытовую технику, они имеют большой опыт
рыночной экономики и в зависимости от конъюнктуры перераспределя-
ют удельный вес той или иной продукции в общем объеме своей
деятельности.
У России такого опыта не было. Создание предприятий, аналогичных
зарубежным авиационно-космическим фирмам, которые объединяют
разработчиков, производителей и, возможно, эксплуатантов и экспорте-
ров техники, может позволить России на равных работать в сотрудниче-
стве и острой конкуренции с иностранными фирмами в условиях
увеличения пассажирских и грузовых перевозок, мирного использования
авиационно-космической науки и техники, создания новейших боевых
самолетов.
ОАО "Туполев", ОАО "Ил", ОАО "ОКБ им. А.С. Яковлева",
Российская самолетостроительная корпорация (РСК) "МиГ", АООТ
"ОКБ Сухого", Таганрогский АНТК им. Г.М. Бериева (ТАИТК),
Экспериментальный машиностроительный завод им. В.М. Мясищева
(ЭМЗ), Московский вертолетный завод им. М.Л. Миля (МВЗ), ОАО
"Камов" работают в тесной кооперации друг с другом, с АНТК
"Антонов" (Украина), с Ташкентским производственным объединением
им. В.П. Чкалова (Узбекистан) и другими предприятиями ближнего
зарубежья.
Кроме широко известных и давно существующих фирм в России
образовались новые конструкторские фирмы, разработавшие и
построившие много интересных самолетов различного назначения,
519
Рис. 20.65. Самолет "Авиатика-890"
большинство из которых в силу
финансовых трудностей не про-
двинулись дальше опытных об-
разцов.
В то же время акционерным
обществом "Авиатика" в 1991 г.
организован серийный выпуск
сверхлегкого многоцелевого са-
молета "Авиатика-890"
(рис. 20.65), более 100 экземпля-
ров которого было продано за границу. "Авиатика-890" - развитие
самолета "МАИ-890" (первый полет в 1990 г.), разработанного в
экспериментальном студенческом конструкторском бюро МАИ под
руководством главного конструктора К.М. Жидовецкого.
"Авиатика-890" (максимальная взлетная масса 450 кг) - исходный
одноместный самолет общего назначения для спортивных, тренировоч-
ных, патрульных полетов, буксировки планеров, аэрофотосъемки,
сельскохозяйственных работ. Существуют варианты самолета:
двухместный, планер - бездвигательный вариант схемы моноплан - и
автожир - вариант с несущим винтом вместо бипланной коробки
крыльев.
В последние годы отечественная авиационно-космическая наука и
техники стала "открытой", упростились международные контакты.
Россия принимает участие в авиасалонах в Англии, Франции, США и
других странах, демонстрируя достижения в развитии гражданской и
боевой авиации. Наши самолеты и вертолеты широко экспортируются
во многие страны мира. Зарубежные авиационные фирмы, зная высокий
научный и инженерный потенциал России, сотрудничают с нами по
вопросам не только эксплуатации, но и проектирования новых образ-
цов авиационной техники.
ОАО "Туполев" уже в новых условиях разработало модификации
самолета Ту-204. Еще на стадии проектирования этой машины была
предусмотрена возможность увеличения ее массы с целью разработки
семейства самолетов различного назначения, широкого диапазона
вместимости и дальности. Модификация самолета Ту-204-120 получила
российский сертификат типа без ограничений в феврале 1998 г.
8 февраля 1999 г. совершил первый полет ближнемагистральный
самолет Ту-334.
Ведутся работы над исследовательскими проектами СПС второго
поколения, самолета сверхбольшой пассажировместимости, эксперимен-
тального воздушно-космического самолета.
520
ОАО "Ил". Летом 1990 г. Авиационный комплекс им. С.В. Ильюшина
провел первую проверку в условиях реальных таежных пожаров
противопожарного варианта Ил-76.
В декабре 1992 г. Авиарегистр МАК выдал сертификат на самолет
Ил-96-300 с двигателями ПС-90.
В марте 1993 г. из сборочного цеха выкатили опытный образец
дальнемагистрального пассажирского самолета Ил-96М, проектирование
которого началось в 1990 г. на основе Ил-96-300 с целью увеличения
пассажировместимости и дальности полета для трасс протяженностью
до 12 000 км.
В 1994 г. состоялся первый полет легкого учебно-тренировочного и
делового самолета Ил-103, который в 1999 г. первым из отечественных
самолетов получил еще и американский сертификат летной годности.
В июле 1999 г. Федеральная авиационная служба США выдала
сертификат типа на транспортный самолет Ил-96Т.
В сентябре 1996 г. совершил первый полет транспортный самолет
ИЛ-114Т.
Ведется работа над проектами оперативно-стратегического военно-
транспортного самолета и административно-служебного самолета.
ОАО "ОКБ им. А.С. Яковлева" проводит летные испытания шести-
местного самолета общего назначения Як-58 и учебно-тренировочного
самолета Як-130.
В стадии разработки деловой/пассажирский самолет местных
воздушных линий, ближнемагистральный пассажирский самолет.
РСК "МиГ". В мае 1995 г. совершил первый полет тактический
самолет МиГ-21-93, способный выполнять современные многофункцио-
нальные задачи. Эта машина - результат глубокой модификации путем
замены вооружения и авионики одного из самых известных и эффектив-
ных в прошлом самолетов второго поколения МиГ-21, который до сих
пор находится в строю во многих странах мира.
Разработан, построен и находится в стадии летных испытаний учебно-
тренировочный/учебно-боевой МиГ-AT (МиГ-УТС), первый полет
которого состоялся в марте 1996 г.
Взавершающей стадии разработки находится многофункциональный
истребитель пятого поколения, опытный образец которого в декабре
1998 г. был показан специалистам и представителям средств массовой
информации на летной базе РСК "МиГ".
Ведутся проектные исследования четырехместного многоцелевого
самолета общего назначения безаэродромного базирования.
АООТ "ОКБ Сухого" в 1990 г. начало заводские испытания опытного
экземпляра, а в 1993 г. - испытания первого двухместного ударного
самолета (истребителя-бомбардировщика) Су-34 из опытной серии.
521
Рис. 20.66. Самолет Су-37
Самолет предназначен для пораже-
ния точечных сильнозащищенных
целей днем и ночью в любых погод-
ных условиях и способен совершать
полет в режиме следования рельефу
местности. Бомбардировщик Су-34
(выполнен по схеме "триплан" с
цельноповоротным ПГО),который
отечественные и зарубежные специ-
алисты относят к поколению "четы-
ре плюс" и даже к пятому поколению
тактических самолетов, должен
заменить эксплуатирующиеся почти
двадцать лет тактические самолеты третьего поколения - сверхзвуковые
бомбардировщики Су-24М с крылом изменяемой геометрии.
В апреле 1996 г. совершил первый полет прототип многоцелевого
сверхманевренного истребителя пятого поколения Су-37 (рис. 20.66),
который может действовать как по воздушным, так и по наземным
целям.
Аэродинамическая схема самолета - "неустойчивый интегральный
триплан", хорошо отработанная на Су-27К и Су-35.
Компоновка Су-37 создана на основе штатной компоновки многоце-
левого истребителя Су-35, однако основной отличительной особенностью
Су-37 является установка на нем двигателей АЛ-37ФУ АООТ "А. Люль-
ка- Сатурн" с круглыми поворотными соплами, отклоняющимися на
±15° "вверх - вниз" с целью управления вектором тяги (УВТ).
Даже небольшое отклонение сопла создает значительный момент
тангажа без существенных потерь в осевой составляющей тяги двига-
теля. Раздельное отклонение сопел двухдвигательной силовой установки
используется для управления по крену и рысканию. УВТ позволяет
реализовать уникальную маневренность на предельно малых, иногда
даже нулевых скоростях, когда обычные рули становятся неэффективны-
ми. Так, "мертвую петлю" машина выполняет с радиусом, который
доступен только таким маленьким самолетам, как "Авиатика-890".
Возможность интенсивных разворотов с большими угловыми
скоростями и малыми радиусами траекторий во всех плоскостях резко
повышает боевую эффективность самолета. Для ослабления неблагопри-
ятного действия на летчика продолжительных (десятки секунд)
перегрузок (до 10 единиц) катапультное кресло установлено с увеличен-
ным углом наклона спинки - 30°, применяется новый противоперегрузоч-
ный костюм.
522
Рис. 20.68. Самолет Бе-103
Рис. 20.67. Самолет С-37 "Беркут"
Система управления полетом (СУП), основанная на цифровой технике
с элементами искусственного интеллекта с многократным резервировани-
ем в продольном и боковом каналах, объединяет управление самолетом
и двигателем, в том числе и соплом, оптимизирует управляющие сигналы
исходя из необходимого режима полета (скорости и высоты) и простран-
ственного положения самолета и выдает команды на все аэродинамиче-
ские органы управления самолетом, на топливную автоматику двигателя
иУВТ.
Су-37 оснащен БРЛС, обеспечивающей одновременно обзор
воздушного пространства и земной поверхности, в том числе обзор и
целеуказание в задней полусфере, высокоточной лазерно-инерциальной
спутниковой навигационной системой с точностью определения
координат до одного метра, комплексом современного многофункцио-
нального вооружения (встроенная 30 мм пушка, 12 узлов внешней
подвески для размещения ракетного оружия "воздух - воздух" и "воздух -
поверхность").
Эти и другие системы позволяют самолету Су-37, противодействуя
радиоэлектронным и оптико-электронным средствам противника,
совершать малозаметный полет, включая полетв автоматическом режиме
на малой высоте с огибанием рельефа местности, наносить упреждающий
удар по любому воздушному противнику, атаковать наземные цели без
входа в зону ПВО противника, эффективно вести групповые действия
по воздушным и наземным целям с автоматизацией всех этапов полета
и боевого применения.
Су-37 произвел сенсацию на авиасалоне Фарнборо-96. В сентябре
1997 г. - новая сенсация: совершил первый полет прототип многоцелево-
го сверхманевренного истребителя С-37 "Беркут" (рис. 20.67), выполнен-
ный по схеме "утка" в интегральной компоновке с крылом обратной
стреловидности и управляемым вектором тяги. Как и все последние
самолеты "ОКБ Сухого", С-37 "Беркут" может действовать по воздуш-
ным и наземным целям с высокой боевой эффективностью.
В АООТ "ОКБ Сухого" проводится широкий круг исследовательских
и проектных работ в области гражданского самолетостроения.
ТАНТК им. Г.М. Бериева завершает комплекс летных испытаний
легкого самолета-амфибии общего назначения Бе-103 (рис. 20.68),
523
’3=»на=». амфибийные качества которого
f6—“Л // позволяют ему быть вне конкурен-
ции в районах, имеющих большое
_—-—- _ количество рек, озер, маленьких
/•*** В ,".‘21L-z—островов, труднодоступных для
других видов транспорта, особен-
Рнс. 20.69. Многоцелевой самолет-амфибия но там> гДе строительство ВПП
Бе-200 невозможно или слишком дорого.
24 сентября 1998 г. состоялся
первый испытательный полет
многоцелевого самолета-амфи-
бии Бе-200 (рис. 20.69),который по аэрогидродинамической компоновке,
лучшим конструкторским и технологическим решениям является
преемником широко известного самолета-амфибии А-40, установившего
140 зарегистрированных мировых рекордов в своем классе. Крейсерская
скорость самолета Бе-200 - 600...700 км/ч, максимальная дальность
полета с резервом топлива на 1 ч - 3600 км, взлетная масса - 37 000 кг.
Самолет может эксплуатироваться с воды при высоте волны до 1,2 м.
В варианте, предназначенном для борьбы с лесными пожарами, самолет
способен на режиме глиссирования забирать на борт до 12 т воды, и на
удалении 200 км от аэродрома базирования до водоема и расстоянии
10 км от водоема до очага пожара Бе-200 за одну заправку топливом
сможет сбросить до 320 т огнегасящей жидкости. Такой производитель-
ностью не обладает ни один из существующих противопожарных
самолетов.
Ведутся разработки ряда других аппаратов, среди которых экранопла-
ны и экранолеты.
ЭМЗ им. В.М. Мясищева завершил работы над легким многоцелевым
самолетом общего назначения М-101 "Гжель" (первый полет - 31 марта
1995 г.), разработка которого началась в 1990 г.
В стадии разработки самолет бизнес-класса и самолет общего
назначения.
МВЗ им.М.Л.Миля подготовил к производству легкий одноместный
многоцелевой вертолет общего назначения Ми-34.
14 ноября 1996 г. состоялся первый полет вертолета Ми-28Н (раз-
работанного на базе Ми-28), который в полной мере удовлетворяет
большинству требований к боевому вертолету XXI века.
Ведутся проектные работы по вертолетам всех классов грузоподъем-
ности гражданского и военного назначения, разрабатывается вертолет
на криогенном топливе, проектируется самолет вертикального взлета
и посадки.
524
ОАО "Камов". В 1992 г. совершил первый полет вертолет-кран
Ка-32К - специализированный вертолет для выполнения особо точных
краново-монтажных работ.
В завершающей стадии находятся работы по многоцелевому
скоростному гражданскому вертолету Ка-62 (в подклассе винтокрылых
аппаратов с массой 6000...6500 кг) и легкому многоцелевому вертолету
Ка-226.
25 июня 1997 г. состоялся первый полет многоцелевого всепогодного
боевого вертолета Ка-52 "Аллигатор", который является двухместной
модификацией Ка-50 "Черная акула".
Ведутся разработки проектов легких многоцелевых пилотируемых
и дистанционно управляемых (беспилотных) вертолетов.
* * *
В реализации этих и многих других не упомянутых здесь проектов
принимают участие российские и зарубежные компании и фирмы.
Создание в это трудное для нашей страны время новых, не имеющих
аналогов в мире самолетов и вертолетов, лишний раз свидетельствует
о громадном потенциале авиастроения России.
По складу ума, природе мышления проектировщики, как правило,
оптимисты, и сейчас они разрабатывают новые уникальные машины,
надеясь на возрождение и расцвет авиационно-космической науки и
техники в России.
Проверьте, как Вы усвоили материал
1. Интерпретируйте следующие основные понятия:
• самолет-разведчик; самолет-торпедоносец; учебно-тренировочный самолет;
барражирующий перехватчик; палубный истребитель; самолет общего назначения;
винтокрыл; "летающее шасси";
• система управления полетом; радиоэлектронная борьба;
• схема "триплан"; триплан интегральный неустойчивый;
• переднее горизонтальное оперение; дестабилизатор; тормозной гак;
корабельный аэрофинишер.
2. Дайте характеристику основным поколениям самолетов:
а) боевой авиации;
б) гражданской авиации.
525
Глава 21
ВОЗМОЖНЫЕ ПУТИ РАЗВИТИЯ ГРАЖДАНСКОЙ
АВИАЦИИ И ЗАДАЧИ, СТОЯЩИЕ ПЕРЕД
САМОЛЕТОСТРОЕНИЕМ
Одной из характерных черт научно-технической революции,
начавшейся во второй половине XX века, является бурное развитие
воздушного транспорта как важной отрасли мировой экономики, в том
числе его материальной базы - авиастроения. Этот процесс может быть
охарактеризован следующими данными:
пассажировместимость магистральных пассажирских самолетов за
послевоенные годы выросла в 10-15 раз;
взлетная масса магистральных пассажирских самолетов за этот период
увеличилась в 30-40 раз, а скорость их полета с 300...400 до 900...950 км/ч;
стоимость магистральных пассажирских самолетов за последние 30
лет возросла более чем в 100 раз.
Задачи, стоящие перед авиацией, непрерывно изменяются, и путем
использования самолетов, находящихся в эксплуатации, решить эти
задачи не всегда возможно, или это решение является неэффективным,
с большими затратами денежных средств.
Новые подходы, неизвестные
ранее проектировщикам и став-
Рис. 21.1. Экстраполяция размеров самолета
братьев Райт по массе до максимальной
взлетной массы самолета С-5А
шие достоянием в результате
развития методологии проектиро-
вания, прогресса в технологии,
материаловедении и других при-
кладных инженерных науках,
позволяют решить эти задачи
наиболее эффективным способом.
Весьма показательны в этом
смысле результаты расчетов аме-
риканских инженеров, экстрапо-
лировавших размеры самолета
братьев Райт (взлетная масса
340 кг) по массе до максимальной
526
взлетной массы самолета Локхид С-5А (362 т). Фактически решалась
следующая задача: как выглядел бы самолет 1, решающий задачи 1970-х -
1980-х гг., если бы он был спроектирован на уровне технических
достижений начала века, в сравнении с самолетом 2, построенным на
уровне современных технических возможностей (рис. 21.1).
21.1. ОБЩИЕ ЗАКОНОМЕРНОСТИ РАЗВИТИЯ
ГРАЖДАНСКОГО САМОЛЕТОСТРОЕНИЯ
Основ ной движущей силойразвития гражданского самолетостроения
является необходимость непрерывного снижения себестоимости
воздушных перевозок. Эксплуатация гражданского самолета должна
приносить прибыль, которая равна разности между тарифами на
авиаперевозки и себестоимостью этих перевозок:
Я = Д-а, (21.1)
где77- получаемая прибыль; Д-тариф; а - себестоимость перевозок.
Существует несколько методик определения себестоимости перевозок,
однако в их основе лежит одна и та же закономерность, выражаемая
формулой
где а - себестоимость перевозок, р./(т-км); А - расходы на эксплуатацию
самолета в течение одного летного часа, р./ч; ккн - коэффициент
коммерческой нагрузки (коэффициент загрузки самолета), учитывающий
возможность неполной загрузки самолетавзависимости от времени года
(сезонности перевозок) и направления полета по разным маршрутам;
шкн- масса коммерческой нагрузки самолета, т; Кр - рейсовая скорость
полета самолета (средняя скорость полета с момента старта на ВПП
аэродрома взлета до конца пробега по ВПП аэродрома прибытия), км/ч.
Выражение (21.2) показывает зависимость себестоимости от четырех
составляющих, каждая из которых определяет пути развития гражданско-
го самолетостроения:
увеличение массы коммерческой нагрузки или пассажировместимости,
если иметь в виду только пассажирские перевозки;
увеличение рейсовой или крейсерской скорости полета, если
учитывать, что основная часть полета происходите крейсерском режиме
на горизонтальном участке маршрута;
527
увеличение коэффициента коммерческой нагрузки;
уменьшение расходов на эксплуатацию самолета в течение одного
летного часа.
21.2. УВЕЛИЧЕНИЕ КОММЕРЧЕСКОЙ НАГРУЗКИ
Чем больше пассажиров размещено на самолете, тем экономичнее этот
самолет. Развитие гражданского самолетостроения по этому пути
привело к появлению в эксплуатации на авиалиниях самолетов,
вмещающих 350...550 пассажиров (БоингВ-747, В-747-200, Ил-86, Ил-96,
ЛокхидЬ-К)!1,ДугласСС-10). Началась эра эксплуатации широкофюзе-
ляжных реактивных пассажирских самолетов. Анализ формулы (21.2)
показывает, что и дальнейшее развитие гражданского самолетостроения
пойдет по пути увеличения пассажировместимости.
Однако опыт эксплуатации самолетов с большой пассажировмести-
мостью показал, что их выгодно использовать только на дальних линиях
с очень большим пассажиропотоком. В то же время объем воздушных
перевозок в значительной мере возрастает за счет увеличения перевозок
на средние дальности (до 1500...2000 км) и открытия новых линий малой
протяженности, вовлекающих в общую систему авиаперевозок новые
населенные пункты (города, поселки). Пассажирские потоки на таких
линиях обычно невелики.
Эксплуатация многоместных магистральных пассажирских самолетов
на линиях средней и малой протяженности приводит к тому, что большие
самолеты уходят в рейс с неполной нагрузкой (мал коэффициент
коммерческой нагрузки) либо ограничивается число рейсов, хотя для
пассажиров удобнее наличие нескольких рейсов в сутки, иначе становится
предпочтительным другой вид транспорта, в результате чего также
снижается коэффициент коммерческой нагрузки. Эти обстоятельства
неизбежно привели к появлению в эксплуатации новых самолетов
средней дальности и средней пассажировместимости (150...200 мест), а
также самолетов для местных воздушных линий с числом пассажирских
мест 100 и менее.
Таким образом, пассажировместимость самолета и его фактическая
коммерческая нагрузка оказываются взаимосвязанными величинами и
зависят от условий эксплуатации самолета. Кроме того, коэффициент
коммерческой нагрузки увеличивается при снижении тарифов на
авиаперевозки, повышении регулярности полетов, улучшении комфорта
авиаперевозок, а также комфорта на борту самолета и при обслуживании
пассажиров на аэровокзалах.
Устранить влияние сезонности авиаперевозок и различие в напряжен-
ности пассажиропотоков по отдельным авиалиниям невозможно, и
поэтому только с помощью указанных мероприятий нельзя значительно
увеличить коэффициент коммерческой нагрузки.
528
Частично эта проблема решается путем использования грузовых
(багажных) отсеков пассажирских самолетов, В этом случае недогруз
самолета пассажирами и их багажом может быть компенсирован
оперативным размещением коммерческих грузов на борту самолета при
соответствующем оборудовании багажно-грузовых отсеков. Это требует
также создания оперативно действующей багажно-грузовой службы в
аэропортах.
Несмотря на то, что появление большого количества самолетов
средней и малой пассажировместимости сдерживает темпы роста
пассажировместимости самолетов, среднее число пассажирских мест для
всех типов магистральных самолетов непрерывно растет.
Развитие гражданского самолетостроения по пути роста коммерчес-
кой нагрузки обусловлено еще одним фактором. Уже в настоящее время
имеются аэропорты, в которых взлеты и посадки самолетов следуют друг
за другом с интервалом в I мин, а в 100-километровом воздушном
пространстве вокруг аэропорта находится более 100 самолетов.
Увеличение числа пассажирских рейсов в таких условиях связано с
резким уменьшением безопасности полета.
Совершенно очевидно, что сростом объема пассажирских перевозок
при ограничении числа рейсов должно увеличиваться число пассажиров
в каждом рейсе. Однако создание самолетов большой пассажировмести-
мости связано с серьезными трудностями.
Прежде всего, это обеспечение высокой надежности, высокой
безопасности полетов. Автоматизация управления самолетами на всех
этапах полета от взлета до посадки, совершенствование и многократное
резервирование систем управления, совершенствование энергетических
систем и оборудования, систем обеспечения полетов, обеспечение
высокой усталостной прочности и живучести силовой конструкции - это
только часть проблем, которые решаются при создании таких самолетов.
Кроме того, увеличение размеров самолета приводит к увеличению
относительной массы конструкции и, следовательно, уменьшению
относительной массы полезной нагрузки. Применение в конструкции
более легких и прочных материалов, новых технологических приемов
изготовления элементов конструкции и их сборки, использование более
точных методов расчета конструкции на все случаи статических,
динамических и усталостных нагружений позволяет повысить эффектив-
ность самолета. Однако увеличение объема пассажирских перевозок,
которое неизбежно происходит от года к году, потребует создания
самолетов с еще большей пассажировместимостью, для которых все эти
проблемы будут еще острее.
529
21.3. УВЕЛИЧЕНИЕ РЕЙСОВОЙ СКОРОСТИ
Развитие реактивных пассажирских самолетов привело к тому, что
у подавляющего большинства из них значение максимальной крейсер-
ской скорости лежит в пределах 880...940 км/ч, что соответствует числу
М = 0,84...0,88 при высоте полета более 11 000 м. Таким образом,
дозвуковые скорости полета освоены пассажирскими самолетами.
Для достижения максимальной дальности полета крейсерские
скорости обычно снижаются до 800..,880 км/ч. Следует иметь в виду, что
соотношение рейсовой и крейсерской скоростей полета в значительной
степени зависит от дальности полета. Так, при крейсерской скорости 900
км/ч и дальности полета 1000 км рейсовая скорость равна приблизитель-
но 690 км/ч, а при дальности полета 10 000 км-875 км/ч (в обоих случаях
принимается, что время полета увеличивается на 20 мин за счет ожидания
посадки в аэропорту назначения).
Анализ формулы (21.1) показывает, что появление сверхзвуковых
пассажирских самолетов неизбежно. Первое поколение таких самолетов
уже создано - это российский самолет Ту-144 и англо-французский
самолет "Конкорд". Эксплуатация этих самолетов не дала ожидаемых
результатов в отношении снижения себестоимости перевозок вследствие
низкой топливной эффективности (см. подразд. 21.4), а также из-за
нерешенной проблемы снижения уровня шума на местности при
сверхзвуковом полете. Исследования, направленные на решение этих и
других проблем, которые не были полностью разрешены на СПС первого
поколения, проводятся ведущими авиационными державами, и следует
ожидать появления СПС второго поколения (СПС-2) со скоростью
полета, соответствующей крейсерскому числу М = 2,2...2,5, повышенным
на 40...50 % аэродинамическим качеством по сравнению с СПС первого
поколения, уменьшенной на 15...20 % массой пустого самолета и
увеличенной в 1,5-2 раза топливной эффективностью.
По прогнозам специалистов, уже в 2015 г. для обеспечения растущего
объема мировых авиаперевозок может потребоваться до 700 самолетов
типа СПС-2.
Россия и США в 1993 г. заключили соглашение о программе
совместных авиационных исследований по разработке СПС-2. АНТК
им. А.Н. Туполева в 1996 г. на базе СПС Ту-144, имеющего уникальные
аэродинамические характеристики, за счет многочисленных усовершен-
ствований и модификаций (включая замену двигателей более мощными,
применяемыми на бомбардировщике Ту-160) создал Ту-144ЛЛ (ЛЛ -
летающая лаборатория) для проведения исследований на сверхзвуковых
скоростях.
530
Один из возможных обли- JR
ков административного СПС ______
второго поколения "ОКБ Сухого"
и американской фирмы "Гольфст-
рим Аэроспейс" иллюстрирует
рис. 21.2.
Разработка газотурбинного Рис. 21.2. Административный СПС второго
х поколения (проект)
прямоточного двигателя изменяв- г
мого цикла, который как минимум
на 20 % экономичнее существующих двигателей, обеспечивающих
сверхзвуковой полет, позволяет рассматривать концепции СПС второго
поколения со скоростями, соответствующими числу М = 4,5, и с
межконтинентальной дальностью полета.
21.4. УМЕНЬШЕНИЕ РАСХОДОВ НА ЭКСПЛУАТАЦИЮ
Расходы на эксплуатацию самолета (см. подразд. 7.4) в течение одного
летного часа состоят из расходов на амортизацию (оплату стоимости)
самолета, включая двигатели и все системы самолета, расходов на
текущий ремонт и обслуживание самолета, стоимости расходуемого
•топлива, расходов на заработную плату экипажа, а также расходов на
содержание аэропортов и административно-технических служб
авиакомпаний.
Рассмотрим только те статьи расходов, на содержание которых может
существенным образом повлиять коллектив проектировщиков в процессе
создания самолета. Как известно, масса самолета и затраты топлива на
выполнение полета могутявляться критериями эффективности самолета.
Действительно, чем меньше взлетная масса самолета т0, тем меньше
материалов, энергии и человеческого труда затрачивается на его
производство, и тем ниже будет при прочных равных условиях стоимость
самолета. Чем меньше масса самолета, тем меньше тяга двигателей,
потребная для горизонтального крейсерского полета (Р = т$!К, где К-
аэродинамическое качество самолета), тем, очевидно, меньше масса
двигателя и его стоимость.
Расход топлива на один час полета самолета определяется как
7’=1000PCp (г/ч); часовая производительность самолета F=-NVp
(пасс.-км/ч). Тогда
Т _ ^о£с 1000
F ~ К р NVp'
(21.3)
где b - коэффициент топливной эффективности, показывающий затраты
топлива в граммах на один пасс.-км; т$ - вес самолета, Н; К -
531
аэродинамическое качество самолета; Ср - удельный расход топлива,
кг/(Н-ч); N- число пассажиров самолета; Vp - рейсовая скорость, км/ч.
Следовательно, помимо рассмотренных путейразвитиягражданско-
го самолетостроения (увеличение коммерческой нагрузки и рейсовой
скорости), на основе выражения для коэффициента топливной эффектив-
ности (21.3) можно определить следующие направления развития
гражданских самолетов:
уменьшение взлетной массы самолета т0; увеличение аэродинамичес-
кого качества К\ уменьшение удельного расхода топлива Ср двигателей,
установленных на самолете.
21.5. УМЕНЬШЕНИЕ МАССЫ САМОЛЕТА
Оценим уменьшение потребной массы топлива Атт для полета
самолета в течение 1 ч за счет снижения массы самолета Am на 1 кг.
Принимая обычные для современного самолета величины К= 18,0 и Ср =
= 0,06 г/(Н-ч), получаем (в граммах в час)
Атт = Awg.!Q°Q с = 12>§^22о,О6 = 32,67.
т К р 18,0
Снижение массы самолета приводит к уменьшению потребного запаса
топлива на борту, что в свою очередь снижает массу самолета, потребную
тягу и соответственно массу двигателя и т.д. Оценив все эти изменения
массы самолета и потребного запаса топлива, окончательно получим,
что снижение массы самолета Ат на 1 кг приводит к уменьшению расхода
топлива на один час полета Атт примерно на 40 г.
Годовой налет пассажирского самолета составляет примерно 2500 ч,
причем в эксплуатации находится не один самолет, а примерно 500
самолетов данного типа. Тогда годовая экономия топлива составит
40-2500-500 = 0,5-Ю8 г = 50 т.
Итак, уменьшение при проектировании или изготовлении массы
пустого самолета даже на 1 кг дает значительную экономию топлива при
эксплуатации самолетов.
Получение в процессе проектирования и производства минимально
возможной массы всех компонентов самолета - одна из основных задач
специалистов, создающих новый самолет. Эта задача должна решаться,
во-первых, уменьшением массы конструкции за счет выбора оптималь-
ных конструктивно-силовых схем агрегатов и применения более
совершенных методов расчета конструкции на прочность; применения
новых, более прочных материалов или материалов с большей выносли-
востью - сопротивляемостью усталостным повреждениям (например,
алюминиево-литиевых сплавов, композиционных материалов).
532
Уменьшение массы конструкции самолета возможно также за счет
применения автоматических систем управления, предназначенных для
уменьшения эксплуатационных перегрузок при воздействии вертикаль-
ных порывов воздуха и при выполнении маневров во время полета.
Во-вторых, уменьшение массы самолета достигается использованием
более легкого и совершенного оборудования. Переход к электродистан-
ционному управлению самолетом без запасной механической системы
управления, автоматической системеповышения устойчивости самолета,
позволяющей уменьшить размеры горизонтального оперения, использо-
ванию гидравлической системы с более высоким давлением, тормозов
из углеродных КМ, применению новых усиленных и облегченных
пневматиков, а также облегчение элементов интерьера пассажирских
салонов, в частности кресел, - все это в совокупности позволит
существенно уменьшить массу пустого самолета.
21.6. УВЕЛИЧЕНИЕ АЭРОДИНАМИЧЕСКОГО
КАЧЕСТВА САМОЛЕТА
Проблемы увеличения аэродинамического качества самолета могут
быть рассмотрены в трех аспектах: проектно-конструкторском,
производственно-технологическом и эксплуатационном.
Проектно-конструкторский аспект повышения аэродинамического
качества предполагает поиск путей снижения аэродинамического
сопротивления и увеличения несущей способности самолета.
Первый путь - уменьшение потерь на балансировку самолета. Для
этого требуется обеспечить полет с предельно допустимыми задними
центровками при минимальном запасе устойчивости, что достигается
применением автоматической системы управления с режимом обеспече-
ния устойчивости и применением балансировочных топливных баков,
позволяющих перекачкой в них (или из них) топлива регулировать
положение центра масс самолета. Использование схемы "утка" для
пассажирского самолета также позволяет существенно снизить потери
аэродинамического качества на балансировку.
Второй путь связан с ламинаризацией крыла и оперения, использова-
нием новых аэродинамических профилей крыла, в том числе сверхкрити-
ческих профилей, с изменением компоновки крыла (распределение
профилей и крутки крыла по размаху, форма и размеры наплывов и т.п.)
для увеличения коэффициента подъемной силы при больших скоростях
полета и уменьшения потерь на балансировку.
Третий путь - использование крыла максимально возможного
удлинения для снижения индуктивного сопротивления и использование
концевых вихрей крыла для уменьшения сопротивления крыла и
"размывания" спутного следа самолета. С этой целью на концах крыла
533
устанавливаются дополнительные вертикальные крылышки различной
формы.
Четвертый путь - создание такой внешней конфигурации самолета,
при которой было бы максимально снижено вредное влияние (интерфе-
ренция) одних частей самолета на другие и было бы возможно меньшее
число участков поверхности самолета, где создаются условия нарушения
плавного обтекания, а также улучшение местной аэродинамики за счет
лучшего обтекания выступающих элементов самолета.
Производственно-технологический аспект связан с качеством
поверхности частей самолета. Отступление от теоретических обводов,
выступание одного листа обшивки над другим, негерметичность
уплотнений в гермокабине, неплотное прилегание отклоняемых
агрегатов (предкрылков, интерцепторов и т.д.), асимметрия самолета
вызывают перерасход топлива, исчисляемый десятками и даже сотнями
тонн в год.
Эксплуатационный аспект связан с необходимостью наблюдения за
качеством окраски поверхностей самолета, чистотой этих поверхностей,
правильностью показаний приборов.
Крайне важно эксплуатировать самолеты на оптимальных режимах
полета по высоте и скорости.
21.7. УМЕНЬШЕНИЕ РАСХОДА ТОПЛИВА
Одно из важнейших направлений развития гражданских самолетов
связано с задачей уменьшения расхода топлива. Успешное решение этой
задачи определяется выбором типа двигателя и достижением максималь-
ной эффективности системы "планер - двигатель" с учетом взаимного
влияния элементов силовой установки и конструкции планера. Выбор
места расположения двигателя на самолете, учет при проектировании
влияния характеристик и геометрии входных (воздухозаборников) и
выходных (сопел) устройств на аэродинамику самолета позволяют
получить высокое аэродинамическое качество самолета и повысить его
топливную эффективность. В то же время характеристики входных и
выходных устройств существенно влияют на расходные характеристики
двигателя.
Задача уменьшения удельных расходов топлива двигателей для
перспективных гражданских самолетов должна решаться в первую
очередь за счет совершенствования широко применяемых в настоящее
время двигателей традиционных даухконтурных схем на базе перспектив-
ных конструкционных материалов, совершенствования рабочих
процессов двигателя и конструкции всех узлов и элементов силовой
установки.
534
Применениеусовершенствованных двухконтурных турбореактивных
двигателей с большой и сверхбольшой (увеличенной до 12...20) степенью
двухконтурности, увеличенной до 40...45 степенью повышения давления
и повышенной температурой газов перед турбиной позволит снизить на
10... 15 % удельный расход топлива в крейсерском полете.
Появление в эксплуатации разрабатываемых в настоящее время
турбовинтовентиляторных двигателей различных схем позволит
уменьшить удельный расход топлива еще на 15...20 %.
Необходимость существенного сокращения расхода топлива
заставила рассматривать в качестве возможного варианта возврат к
более широкому использованию турбовинтовых двигателей.
Борьбазаповышениетопливной эффективности связана с ограничен-
ными ресурсами углеводородного топлива (керосина) на Земле. Естествен-
но, встает проблема о возможности замены этого топлива другими
видами, например метаном, который в виде сжиженного природного газа
дешев и имеется в большом количестве. Однако наиболее перспективным
топливом может быть водород, запасы которого на Земле практически
неограничены. Водород имеет примерно в 2,8 раза большую удельную
теплоту сгорания, чем керосин (12-107 Дж/кг против 4,3-107 Дж/кг), но
объемная теплота сгорания даже у жидкого водорода в 4 раза меньше.
Вследствие этого при том же потребном запасе энергии объем топливных
баков на самолете должен быть в 1,5 раза больше, чем объем баков для
авиакеросина. К тому же баки должны быть рассчитаны на большое
внутреннее давление и иметь мощную теплоизоляцию, так как температу-
ра кипения водорода равна - 253 °C.
В связи с наличием водорода на борту предъявляются особо жесткие
требования к герметичности топливной системы, поскольку водород
чрезвычайно пожаро- и взрывоопасен. Все это значительно осложняет
создание пассажирских самолетов на водородном топливе. Оценки
специалистов показывают, однако, что самолет на жидком водороде
может быть на 25 % легче и на 30 % дешевле, его двигатели будут более
долговечными и надежными, чем у самолета, работающего на керосине,
при одинаковой грузоподъемности и дальности полета. Кроме того,
такой самолет обладает исключительной экологической чистотой.
Начавшиеся 15 апреля 1988 г. летные испытания экспериментального
самолета Ту-155 (рис. 21.3), использующего водород в качестве топлива,
подтвердили целесообразность разработки серийного самолета,
работающего на криогенном топливе. Размещенный в правой гондоле
экспериментальный водородный двигатель НК-88, разработанный под
руководством академика Н.Д. Кузнецова, может использовать в качестве
горючего сжиженный природный газ.
535
Рис. 21.3. Укрупненная компоновочная схема
самолета Ту-155:
1 - двигатель НК-88; 2 - герметичный отеек
экспериментального топливного комплекса; 3 -
топливный бак с жидким водородом; 4 -
контрольно-записывающая аппаратура; 5 -
рабочие места экспериментаторов
По результатам экспери-
ментов на самолете Ту-155
сделаны проработки самолета
Ту-156 с тремя двигателями
НК-89, работающими и на
сжиженном газе, и на кероси-
не. Топливные баки для сжи-
женного газа расположены
под крылом, баки для кероси-
на размещены в кессонах
крыла.
Здесь следует особо отме-
тить, что эта глава написана
Сергеем Михайловичем Еге-
ром еще в начале 1980-х гг.
Мы позволили себе внести в
нее только небольшие допол-
нения относительно совре-
менного состояния исследований СПС второго поколения и самолетов
на криогенном топливе, которые только подтверждают правильность
и актуальность прогнозов, сделанных Сергеем Михайловичем.
Успешное решение проблем, изложенных в этой главе (а они далеко
не полностью охватывают весь комплекс вопросов, которые приходится
решать проектировщикам), возможно только совместными усилиями
различных специалистов, участвующих в проектировании самолетов.
Провсрьт^ как Вы уяснили материал
Интерпретируйте основные проблемы, возникающие при проектировании
пассажирских самолетов. Укажите возможные пути их разрешения.
536
ЗАКЛЮЧЕНИЕ
Прогресс большинства отраслей техники идет настолько быстрыми
темпами и оказывает такое огромное влияние на окружающую человека
среду, что затруднительно прогнозировать эти тенденции более чем на
несколько лет вперед. Еще сложнее себе представить, как будут жить
люди в мире следующего столетия, однако с большой долей достовернос-
ти можно предполагать, что это столетие будет характеризоваться все
возрастающим использованием разнообразных летательных аппаратов
в различных транспортных операциях. Это определяет потребность
общества в непрерывном интенсивном развитии теории и практики
проектирования летательных аппаратов, появившихся, по существу,
только в начале XX века.
Однако первые инженерные разработки в области авиации (чертежи,
расчеты, эксперименты) были проведены еще в XV веке итальянцем
Леонардо да Винчи. Этот пионер авиационного проектирования был
велики м живописцем, скульптором, архитекторе м, выдающи м ся учен ым
и инженером своего времени.
Время стремительного развития науки и техники требует от
специалистов, работающих сейчасв авиакосмической промышленности,
не только досконального знания своего дела, но и широкой эрудиции.
К настоящему времени во многих передовых отраслях техники, а в
авиации особенно, сложилась парадоксальная ситуация. Самолеты,
разрабатываемые в разных странах, зачастую без малейшего обмена
информацией, оказываются очень похожими друг на друга по своему
облику и техническим характеристикам. Эта ситуация тем не менее легко
объяснима. В авиации достаточно хорошо разработаны методики
формализации процесса поиска оптимального решения. Кроме того,
функциональность в авиации проявляется чрезвычайно явно.
"Смотришь иногда на эскиз будущей машины и чувствуешь: что-то
режет глаз. И, как правило, это несоответствие, казалось бы, чисто
эстетическое, отражает существо дела, ошибку или неточность в проекте"
(генеральный конструктор О.К. Антонов, цит. по кн.: След в небе. М.:
Политиздат, 1971. С. 217).
«К авиации, вообще ко всяким летучим устройствам и их создателям
люди относятся почему-то с особенным интересом. Почему? Потому,
прежде всего, что летательный аппарат красив наивысшей в технике
537
красотой - целесообразностью. Не один лишь архиталантливый Туполев,
а и любой опытный авиатор почти безошибочно судит о самолете по
совершенно вроде бы не техническому критерию: "смотрится" машина
или "не смотрится"» (главный конструктор Р.Л. Бартини, цит. по кн.:
Чутко И. Красные самолеты. М.: Политиздат, 1978. С. 82).
В замечательной книге "Планета людей" Антуан де Сент-Экзюпери
дает удивительно емкую оценку конструкции как эстетического предмета:
"Кажется, будто все труды человека - создателя машин, все его расчеты,
все бессонные ночи над чертежами только и проявляются во внешней
простоте; словно нужен был опыт многих поколений, чтобы все стройней
и чеканней становилась колонна, киль корабля или фюзеляж самолета,
пока не приобрели наконец первозданную чистоту и плавность линии
груди или плеча. Кажется, будто работа инженеров, чертежников,
конструкторов к тому и сводится, чтобы шлифовать и сглаживать, чтобы
облегчить иупростить механизм крепления, уравновесить крыло, сделать
его незаметным - уже не крыло, прикрепленное к фюзеляжу, но некое
совершенство форм, естественно развившееся из почки, таинственно
слитное и гармоничное единство, которое сродни прекрасному
стихотворению" (цит. по кн.: Антуан де Сент-Экзюпери. Военный летчик.
М.: Художественная литература, 1977. С. 44).
Для проектировщика понимание красоты тем более важно, что,
несмотря на большие успехи в формализации процесса проектирования,
проектирование сейчас - это в равной мере и наука и искусство.
Одна из задач настоящего учебника состоит в том, чтобы ознакомить
читателя в самом первом приближении с таким сложным инженерным
объектом, как летательный аппарат, показать его целесообразность и
красоту, а также помочь в освоении профессионального языка (слэнга,
англ, slang) проектировщиков.
И если это знакомство поможет читателю в работе с литературой,
вначале с популярной и достаточно простой (список ее приведен в конце
учебника), а затем и со специальной, побудит к самостоятельной и
упорной учебе, авторы будут считать свою задачу выполненной.
538
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Авиастроение России / Под ред. А.Г. Братухина. М.: Машиностроение, 1995. - 392 с.
2. Авиация в России: Справочник / М.В. Келдыш, Г.П. Свищев, С.А. Христианович и
др. М.: Машиностроение, 1988. - 368 с.
3. Авиация общего назначения России: Каталог/Сост.: С.Н. Полянский, Н.А. Мильчин,
Д.А. Дачевский; Под ред. В.С. Присяжнюка. М., 1995. - 160 с.
4. Авиация Российского флота/Н.М. Лаврентьев, С.А. Гуляев, В.И. Минаков и др.; Под
ред. В.Г. Дейнеки. СПб.: Судостроение, 1996. - 287 с.
5. Авиация: Энциклопедия / Гл. ред. Г.П. Свищев. М.: Большая Российская энциклопе-
дия, 1994. - 736 с.
6. Агропик А.Г., Эгенбург Л.И. Развитие авиационных средств спасения. М.:
Машиностроение, 1990. - 256 с.
7. Акофф Р. Искусство решения проблем: Пер. с англ. М.: Мир, 1982. - 224 с.
8. Алексеев Г. Профессия - конструктор. М.: Молодая гвардия, 1973. - 144 с.
9. Антонов О.К. Десять раз сначала. М.: Молодая гвардия, 1969. - 143 с.
10. Антонов О.К. Планеры. Самолеты / Отв. ред. Б.Е. Патон. Киев: Наук, думка, 1990. -
504 с.
11. Арие М.Я. Дирижабли. Киев: Наук, думка, 1986. - 262 с.
12. Арлазоров М.С. Артем Микоян. М.: Молодая гвардия, 1978. - 271 с.
13. Арлазоров М.С. Фронт идет через КБ. М.: Знание, 1987. - 208 с. [О С.А. Лавочкине].
14. Асташенков П. Т. Дерзкие старты. М.: Политиздат, 1976. - 109 с. [Об авиаконструкто-
ре С.А. Лавочкине].
15. Асташенков П.Т. Конструктор легендарных илов. М.: Политиздат, 1972. - 120 с. [О
С.В. Ильюшине].
16. Бауэрс П. Летательные аппараты нетрадиционных схем: Пер. с англ. М.: Мир,
1991. - 320 с.
17. Белавин Н.И. Летающие корабли. М.: ДОСААФ, 1983. - 111 с.
18. Беляков Р.А., Мармеп Ж. Самолеты "МиГ" 1939-1995. М.: АвикоПресс, 1996. - 288 с.
19. БоргестН.М., Данилин А.И., Комаров В.А. Краткий словарь авиационных терм инов/
Под ред. В.А. Комарова. М.: Изд-во МАИ, 1992. - 224 с.
20. Бриджмен У., Азар Ж. Один в бескрайнем небе. М.: Воениздат, 1959. - 350 с.
21. Броуде Б.Г. Воздухоплавательные летательные аппараты. М.: Машиностроение,
1976,- 140 с.
22. Валуев Н., Скрынников С. Палубная авиация. М.: ИНКОМБУК, 1995. - 63 с.
23. Гай Д.И. Небесное притяжение: Жизнь выдающегося конструктора самолетов
В.М. Мясищева. М.: Московский рабочий, 1984. - 221 с.
24. Гай Д.И. Профиль крыла: Повесть о конструкторе самолетов В.М. Петлякове. М.:
Московский рабочий, 1981. - 192 с.
25. Галлай М.Л. Избранное: В 2 т. М.: Воениздат, 1990. -Т. 1. 526 с.; Т. 2. 544 с.
26. Галлай МЛ. Небо, которое объединяет. СПб.: Русско-Балтийский информ. Центр
Блиц, 1997.- 250 с.
27. Гильберг Л.А. От самолетак орбитальному комплексу. М.: Просвещение, 1992. -
287 с.
539
28. Горбенко К.С., Макаров Ю.В. Самолеты строим сами. М.: Машиностроение, 1989. -
172 с.
29. Гордон Дж. Конструкции, или почему не ломаются вещи. М.: Мир, 1980. - 390 с.
30. Гордон Дж. Почему мы не проваливаемся сквозь пол. М.: Мир, 1971.-272 с.
31. Горохов В.Г. Знать, чтобы делать: История инженерной профессии и ее роль в
современной культуре. М.: Знание, 1987. - 176 с.
32. Грнбовский К.В. Развитие транспортного планеризма. М.: Машиностроение, 1993.-
172 с.
33. Григорьев А.Б. Альбатросы. Из истории гидроавиации. М.: Машиностроение, 1989.-
267 с.
34. Григорьев А.Б. Меж двух стихий. Очерки о конструкторах. М.: Машиностроение,
1992.-254 с.
35. Грин В., Кросс Р. Реактивные самолеты мира: Пер. с англ. М.: Изд-во иностр, лит.,
1957.-284 с.
36. Громов М.М. Через всю жизнь. М.: Молодая гвардия, 1986. - 190 с.
37. Джефферис Дэвид. Полеты. Пилоты и летательные аппараты / Пер. с англ.
С.А. Микояна; Сост. серии Салариа Дэвид. М.: РОСМЭН, 1995. - 52 с.
38. Джорданов А. Ваши крылья. М.: Воеииздат, 1937. - 247 с.
39. Джоунс Д. Изобретения Дедала: Пер с англ. / Под реД. и с предисл. В.В. Патрикеева,
М.: Мир, 1985.- 232 с.
40. Дузь П.Д. История воздухоплавания и авиации в России (июль 1914 - октябрь
1917 гг.) М.: Машиностроение, 1989. - 335 с.
41. Дузь П.Д. История воздухоплавания и авиации в России (период до 1914 г.), М.:
Наука, 1995. -495 с.
42. Залесская Е.Л., Черемухин Г.А. Инженер божьей милостью / Авиац. науч.-техн,
комплекс им. А.Н. Туполева. М.: АвикоПресс, 1997.- 224 с.
43. Иванов В.П. Конструктор Н.Н. Поликарпов, - СПб.: Политехника, 1995. - 223 с.
44. Иванов Н.П. Крылья над морем. М.: Воеииздат, 1973. - 304 с.
45. Из истории советской авиации. Самолеты ОКБ им. С.В. Ильюшина / Под ред.
Г.В. Новожилова. М.: Машиностроение, 1990. - 382 с.
46. Изаксон А.М. Советское вертолетостроение. М.: Машиностроение, 1981. - 295 с.
47. Ильин В., Левин М. Современная авиация. Том 1, Истребители; Том 2. Бомбардиров-
щики. М.: Виктория, 1996; 1997.
48. КайсорХ.Д. Самолета опасности: Пер. с англ. М,: Изд-во иностр, лит., 1958. -502с.
49. Камов И.И. Винтовые летательные аппараты. М.: Оборонгиз, 1948. - 208 с.
50. Карцев В.П., Хазановскпй П.М. Стихиям не подвластен. М.: Знание, 1980, - 192 с.
51. Кербер ЛЛ. Ту - человек и самолет (Биографическая повесть о А.Н. Туполеве). М.:
Сов. Россия, 1973. - 285 с.
52. Козлов П.Я. Конструктор. М.: Маши ио строение, 1989. - 184 с.
53. Козьмин В.В., Кротов И.В. Дельтапланы. М.: ДОСААФ, 1989. - 272 с.
54. Космическаятехника: Иллюстрированная энциклопедия/Сост. К. Гэтланд. М.: Мир.
1986.-296 с.
55. Космодемьянский А.А. Николай Егорович Жуковский. 1847-1921 гг. М.: Наука,
1984,- 192 с.
56. Космонавтика СССР. М.-. Машиностроение; Планета, 1986. -496 с.
57. Космонавтика: Энциклопедия / Гл. ред. В.П. Глушко. М.‘. Сов. энциклопедия. 1985. -
528 с.
58, Костенко И.К. Летающие крылья. М.: Машиностроение, 1988. - 105 с.
59. Красильщиков А.П. Планеры СССР: Справочник. М.: Машиностроение, 1991. -
236 с.
540
60. Крик Э. Введение в инженерное дело: Пер. с англ. М.: Энергия, 1970. - 176 с.
61. Кузьмина Л.М. Генеральный конструктор Павел Сухой. Страницы жизни. М.:
Молодая гвардия, 1983. - 239 с.
62. Кузьмина Л.М. Конструктор вертолетов: Страницы жизни Н.И. Камова. М.:
Молодая гвардия, 1988. - 254 с.
63. Лазарев ЛЛ. Коснувшись неба. М.: Профиздат, 1983. - 256 с. [Об А.А. Архангель-
ском].
64. Мазурук И.П., Лебедев А.А. Летчики-испытатели Аэрофлота. М.: Машиностроение,
1991.- 191 с.
65. Макаров Ю.В. Летательные аппараты МАИ: Очерки по истории развития
конструкций и систем летательных аппаратов. М.: Изд-во МАИ, 1994. - 255 с.
66. Малая энциклопедия: Авиация - космонавтика: Краткий справочник по российским
и украинским самолетам. М.: Изд. ЦАГИ им. Н.Е. Жуковского, 1995. - 158 с.
67. Мартыненко В.Н. Самолеты взлетают с моря: Страницы истории ОКБ морского
самолетостроения. Ростов-на-Дону: Литера -Д, 1993. - 144 с.
68. Михеев В.Р. Развитие схем винтокрылых летательных аппаратов. М.: Изд-во МАИ,
1993. - 235 с.
69. Михеев В.Р. Рождение вертолета. М.: Изд-во МАИ, 1993. - 192 с.
70. Морская авиация России / Под ред. А.Г. Братухина. М.: Машиностроение, 1996. -
235 е.
71. Ордоди М. Дельтапланеризм: Пер. с венгерск. М.: Машиностроение, 1984. - 168 с.
72. Орлов Б.А. Записки летчика-испытателя. М.: АвикоПресс, 1994. - 171 с.
73. Осташов В.Г. Дельтапланеризм / Отв. Ред. Ю.Н. Тепляков. Новосибирск: Наука.
Сиб. отд-ние, 1983. - 112 с.
74. Очерки по истории конструкций и систем самолетов ОКБ им. С.В. Ильюшина:
В 3 кн. М.: Машиностроение. - Кн. 1. 1983. 296 с.; Кн. 2. 1985. 272 с.; Кн. 3. 1986. 243 с.
75. Павленко В.Ф. Корабельные самолеты. М.: Воениздат, 1990. -320 с.
76. Панатов Г.С., Удалов К.Г. Иллюстрированная энциклопедия самолетов ТАНТК
им. Г.М. Бериева. М.: АвикоПресс, 1998. - 280 с.
77. Пауэлл Г.П. Испытательный полет. М.: Изд-во иностр, лит., 1959. - 260 с.
78. Полпая энциклопедия мировой авиации: Самолеты н вертолеты XX столетия / Под
ред. Давида Дональдса. Самара: Корпорация "Федоров", 1997. - 935 с.
79. Пономарев А.Н. Советские авиационные конструкторы. М.: Воениздат, 1990. - 320 с.
80. Попович М.Л. Автограф в небе. М.: Сов. Россия, 1988.-316 с.
81. Проверено на себе: Документы, дневники, воспоминания о Юрии Гарнаеве/ Сост.
А. Меркулов. М.: Молодая гвардия, 1986. - 208 с.
82. Пышпов В.С. Основные этапы развития самолета. М.: Машиностроение, 1984. - 96 с.
83. Пьецух А.И. Крылья молодежи (практика планеризма) / Под общ. ред. В.Ф. Болот-
никова. М.: Оборонгиз, 1954. - 291 с.
84. Развитие самолетов мира/Р.И. Виноградов, А.Н. Пономарев. М.: Машиностроение,
1991.- 384 с.
85. Ружицкий Е.И. Безаэродромная авиация. М.: Оборонгиз, 1959. - 172 с.
86. Савицкая С. Вчера и сегодня. М.: Изд-во Агентства печати "Новости", 1988. - 416 с.
87. СауккеМ.Б. Неизвестный Туполев/Авиац. науч.-техн. комплекс им. А.Н. Туполева.
М.: КЦНТИ "Оригинал", 1993. - 189 с.
88. Соболев Д.А. История самолетов. Начальный период. М.: Рос. полит, энциклопедия,
1995. - 343 с.
89. Соболев Д.А. Наши соотечественники в зарубежном авиастроении. М.: Либри, 1996.-
119 с.
541
90. Соболев Д.А. Немецкий след в истории советской авиации: Об участии немецких
специалистов в развитии авиастроения в СССР. М.: РИЦ "Авиантик", 1996. - 128 с.
91. Соболев Д.А. Самолеты особых схем. М.: Машиностроение, 1989. - 172 с.
92. Соболев Д.А. Столетняя история "летающего крыла". М.: РУСАВИА, 1998. - 287 с.
93. Соколов В.В. На стыке двух стихий. М.: АвикоПресс, 1993. - 24 с.
94. Сгефановский П.М. Триста неизвестных. М.: Воениздат, 1973. - 320 с.
95. Стражева И.В. Полета вольное упорство. Страницы жизни авиаконструктора
Поликарпова. М.: Московский рабочий, 1986. — 223 с.
96. Умаиский С.П. Снаряжение космонавта. М.: Машиностроение, 1982. - 126 с.
97. Ученый и конструктор С.В. Ильюшин / Под ред. Г.В. Новожилова. М.: Наука, 1978,-
208 с.
98. Цихош Э. Сверхзвуковые самолеты: Справочное руководство: Пер. с польск. М.:
Мир, 1983. - 424 с.
99. Черненко Г.Е. Глеб Евгеньевич Котельников. 1872—1944/ Отв. ред. А.П. Мельни-
ков. -Л.: Наука, 1988, - 52 с.
100, Чутко И.Э. Красные самолеты: Об авиаконструкторе Р.Л. Бартини. М.: Политиздат,
1982,- 128 с.
101. Чутко И.Э. Мост через время. М.: Политиздат, 1989. - 335 с.
102, Шавров В.Б. История конструкций самолетов в СССР до 1938 г. М.: Машинострое-
ние, 1969. - 606 с.
103, Шавров В.Б. История конструкций самолетов в СССР 1938-1955 гг. М.:
Машиностроение, 1978.-440 с.
104. Шахурин А.И. Крылья победы. М.: Политиздат, 1990.-302 с.
105. Шелест И.И. Крылатые люди. М.: Московский рабочий, 1980. - 245 с.
106. Шелест И.И. Лечу за мечтой: Повествование, навеянное хроникой Опытного
аэродрома. М.: Молодая гвардия, 1989. - 381 с.
107. Эверест Ф.К. Человек, который летал быстрее всех, М.: Изд-во иностр, лит., 1960,-
238 с.
108. Яковлев А.С. Цель жизни: Записки авиаконструктора. М.: Наука, 1982. - 407 с.
ПЕРИОДИЧЕСКИЕ ИЗДАНИЯ
1. Авиапанорама. М.: ООО "Авиапанорама".
2. Авиастроение: Экспресс-информация ВИНИТИ.
3. Авиатранспортное обозрение: Информационный журнал по воздушному транспорту.
М.: ООО "А.Б.Е.".
4. Авиация и время: Научно-популярный авиационный журнал Украины (До 1995 г.
"Аэрохобби").
5. Авиация и космонавтика вчера, сегодня, завтра...: Научно-популярный журнал
BBC/ЦАГИ (До 1997 г. "Авиация и космонавтика"). М.: РОО "Техинформ".
6. Вестник авиации и космонавтики: Всероссийский аэрокосмический журнал.
7. Военный парад. М.: ООО "Военный парад".
8. Еженедельник авиации и космической технологии / Издание на русском языке
"Aviation week & Space technology".
9. Крылья родины: Ежемесячный научно-популярный журнал. М.: ИПК "Московская
правда".
10. Крылья-Дайджест: (Справочник, обзор лучших публикаций об авиации) М.:
"АвиаКосм". М.: РОО "Техииформ".
11. Мир авиации: Авиационно-исторический журнал.
12. Общероссийский научно-технический журнал "Полет".
13. Самолеты мира: Ежемесячный научно-популярный журнал.
14. Техника и вооружение: Ежемесячный научно-технический иллюстрированный жур-
нал. М.: РОО "Техинформ".
542
14. Техническая информация/ЦАГИ, ОНТИ, Мемориальный музей им. Н.Е. Жуков-
ского.
ИНФОРМАЦИЯ В СЕТИ ИНТЕРНЕТ
1. МАИ - Московский государственный авиационный институт (технический
университет) - (http://www.mai.ru).
2. Всероссийский институт научной и технической информации (ВИНИТИ) -
(http://www.viniti.msk.su).
3. Научно-исследовательский институт экономики авиационной промышленности
(НИИЭАП) - (http://www.avias.com).
4. Институт истории естествознания и техники Российской академии наук (ИИЕиТ
РАН) - (http://www.ihst.ru).
5. Информация о музеях мира, в том числе и о научно-технических, - (http://
www.museum.ru).
6. Военный парад, журнал - (http://www.milparade.ru).
7. Полная энциклопедия мировой авиации: Самолеты и вертолеты XX столетия / Под
ред. Дэвида Дональдса. Самара: Корпорация "Федоров", 1997. - 935 с. [издание на русском
языке]. Электронная версия - (http://www.cofe.ru/avia).
8. Корпорация США Боинг (Boeing) - (http://www.boeing.com).
9. Любительский сайт "фаната" самолетов АООТ "ОКБ Сухого" - (http://www.sukhoi.ru).
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Анцелиович Л.Л. Надежность, безопасность и живучесть самолета: Учебник для
студентов вузов, обучающихся по специальности "Самолетостроение". М.: Машиностроение,
1985,- 296 с.
2. Аэропорты и воздушные трассы / В.И. Блохин, И.А. Белинский и др. М.: Транспорт,
1984.-160 с.
3. Белянин П.Н. Производство широкофюзеляжных самолетов. М.: Машиностроение,
1979. - 360 с.
4. Белоусов В.С., Панатов Г.С. История развития гидроавиации. Таганрог: Изд-во
радиотехн. ун-та, 1994.-81 с.
5. Володин В.В., Лисейцев Н.К., Максимович В.З. Особенности проектирования
реактивных самолетов вертикального взлета и посадки / Под ред. С.М. Егера. М.:
Машиностроение, 1985.-224 с.
6. Гпммельфарб АЛ. Основы конструирования в самолетостроении: Учеб, пособие для
высших авиац. учеб, заведений. М.: Машиностроение, 1980. - 367 с.
7. Глаголев А.Н., Гольдинов М.Я., Григоренко С.М. Конструкция самолетов. М.:
Машиностроение, 1975.-480 с.
8. Егер С.М. Проектирование самолетов. М.: Машиностроение, 1964. - 452 с.
9. Егер С.М., Шаталов И.А. Введение в специальность: (Для специальности "Инженер-
механик по самолетостроению" и специализации "Инженер-механик по проектированию
и конструированию самолетов") Учеб, пособие. М.; МАИ, 1983. - 184 с.
10. Житомирский Г.И. Конструкция самолетов: Учеб, для студентов авиационных
специальностей вузов. М.: Машиностроение, 1995.-416 с.
И. Зопштайи С.И. Аэродинамика и конструкция летательных аппаратов: Учеб, для
несамолетных специальностей авиационных вузов. М.: Высш, шк., 1968. - 364 с.
12. Калачев Г.С. Показатели маневренности, управляемости и устойчивости самолетов.
М,: Оборонгиз, 1958. - 132 с.
13. Каи С.Н., Свердлов И.А. Расчет самолета на прочность. М.: Машиностроение, 1966,-
519 с.
543
14. Кербер ЛЛ, Компоновка оборудования на самолетах. М.: Машиностроение, 1976. -
303 с.
15. Кондрашов Н.А. Конструирование шасси, управления и механизмов. М.: Изд-во
МАИ, 1979.-56 с.
16. Конструкция и прочность самолетов / Сост. В.Н. Зайцев, В.Л. Рудаков. Киев: Вища
шк„ 1978.-488 с.
17. Контроль технической исправности самолетов и вертолетов: Справочник / Под ред.
В.Г. Александрова. М.: Транспорт, 1976. - 360 с.
18. Косоуров К.Ф. Теоретические основы гидроавиации. М.: Воеииздат, 1961. - 596 с.
19. Основы авиационной техники и оборудование аэропортов: Учеб, для вузов /
В.И. Блохин, Е.А. Баканов, В.Т. Богатырь и др.; Под ред. В.И. Блохина. М.: Транспорт,
1985.-255 с.
20. Основы проектирования летательных аппаратов: (Транспортные системы): Учеб,
для техн, вузов / В.П. Мишин, В.К. Безвербый, Б.М. Панкратов и др.; Под ред.
В.П. Мишина. М.: Машиностроение, 1985. - 360 с.
21. Пашковский И.М. Устойчивость и управляемость самолета. М.: Машиностроение,
1975.- 328 с.
22. Политехнический словарь / Гл. ред. А.Ю. Ишлинский. 2-е изд. М.: Сов. энциклопе-
дия, 1980. - 656 с.
23. Проектирование конструкций самолетов: Учеб, для студентов вузов / Е.С. Войт,
А.И. Ендогур, З.А. Мелик-Саркисян, И.М. Алявдин. М.: Машиностроение, 1987.-416 с.
24. Проектирование самолетов: Учеб, для вузов / С.М. Егер, В.Ф. Мишин, Н.К. Лисейцев
и др.; Под ред. С.М. Егера. М.: Машиностроение, 1983.- 616 с.
25. Самсонов П.Д. Проектирование и конструкция гидросамолетов. ОНТИ НКТП,
1936.- 552 с.
26. Системы оборудования летательных аппаратов: Учеб, для студентов высш. техн. уч.
заведений / М.Г. Акопов, В.И. Бекасов, А.С. Евсеев и др.; Под ред. А.М. Матвеенко и
В.И. Бекасова. М.: Машиностроение, 1995. - 496 с.
27. Скляпский Ф.И. Динамика полета и управляемость тяжелых реактивных самолетов.
М.: Машиностроение, 1976.-208 с.
28. Технология самолетостроения. / Под общ. ред. А.Л. Абибова. М.: Машиностроение,
1982.-551 с.
29. ТоренбикЭ. Проектирование дозвуковых самолетов: Пер. с англ. Е.П. Голубкова,
М.: Машиностроение, 1983.-648 с.
30. Шаталов И.А. Элементы компоновки и конструкции самолета: Учеб, пособие. М.:
Изд-во МАИ, 1987. - 68 с.
31. Шульженко М.Н. Конструкция самолетов: Учеб, для студентов авиац. высш. учеб,
заведений. М.: Машиностроение, 1971. — 416 с.
544
ПРИЛОЖЕНИЕ
101 ВЫДАЮЩИЙСЯ ЛЕТАТЕЛЬНЫЙ АППАРАТ МИРА
В 2001 г. в издательстве МАИ вышла книга "101 выдающийся
летательный аппарат мира". Авторы этой книги профессора П.П. Афа-
насьев, А.М. Матвеенко, Ю.М. Шустров предварительно проанализиро-
вали многие книги по летательным аппаратам. Были сопоставлены
тактико-технические, конструктивные, технологические и эксплуатацион-
ные данные летательных аппаратов различных времен и стран. Была
выделена элитная группа, существенно превышавшая 100. Затем были
получены экспертные оценки многих признанных специалистов
авиационных, ракетных и космических предприятий (ОКБ, НИИ,
заводов). С помощью специалистов соответствующихкафедр МАИ была
проведена повторная экспертиза всего списка отобранных летательных
аппаратов.
Большую помощь оказала книга М. Тейлора и Д. Майдей "Книга
Гиннесса об авиации: Рекорды, факты и достижения". Перевод с
английского Г.Л. Холявского, Минск, 1997 г.
Полагаем, что даже знакомство с аннотированным списком этих
летательных аппаратов весьма полезно для будущих авиа- и ракетострои-
телей.
Перечислим все вошедшие в книгу летательные аппараты, а по
некоторым из них приведем более подробные сведения. Отбор летатель-
ных аппаратов для подробного описания носил достаточно произволь-
ный характер, но при этом хотелось, чтобы были представлены
различные по назначению летательные аппараты разных стран.
САМОЛЕТЫ
1. Многомоторный самолет "Илья Муромец" - первый серийный
четырехдвигательный бомбардировщик. Биплан. Взлетная масса 7,846 т;
скорость до 140 км/ч; бомбовая нагрузка 680 кг. Построен в 1913 г.
Руководитель проекта Игорь Иванович Сикорский(1889-1972),Россия.
2. Многоцелевой легкий самолет У-2 (По-2) - популярный самолет,
особенно у начинающих летчиков. Во время второй мировой войны
использовался в качестве ночного бомбардировщика. Биплан. Оснащен
одним поршневым двигателем. Взлетная масса до 1,1 т; скорость до
18 - 7425
545
150 км/ч. Построен в 1928 г. Руководитель проекта Николай Николаевич
Поликарпов <1892-1944)', СССР.
3. Истребитель И-16 - первый в мире истребитель-моноплан с
полностью закрытой кабиной и убирающимся шасси, поступивший на
вооружение боевых авиаподразделений. Конструктивно выполнен по
нормальной аэродинамической схеме с нижним расположением крыла.
Оснащен одним поршневым двигателем. Взлетная масса 1,345 т; скорость
до 490 км/ч. Построен в 1933 г. Руководитель проекта Николай
Николаевич Поликарпов СССР.
4. Самолет-истребитель "Мессершмитт" Bf-109 - самый известный
одноместный истребитель ВВС нацистской Германии. Самолет
нормальной аэродинамической схемы, низкоплан с одним поршневым
двигателем. Взлетная масса 2,45 т; скорость до 550 км/ч. Первый вылет
в 1935 г. Главный конструктор - Вилли Мессершмитт (1898-1978),
Германия.
546
Схема самолета У-2 (По-2)
18*
Схема самолета И-16 Тип 24
547
Схема самолета "Мессершмитт" ВГ-109Е
5. Скоростной бомбардировщик "Юнкере" Ju-88 - самый массовый
двухмоторный самолет времен второй мировой войны. Конструктивно
выполнен в виде цельнометаллического среднеплана с двумя поршневы-
ми двигателями, расположенными на крыльях. Взлетная масса 14 т;
скорость до 600 км/ч; бомбовая нагрузка 3 т. Построен в 1934 г.
Руководитель проекта Гуго Юнкере (1859-1935), Германия.
6. Пассажирский самолет DC-3 - один из самых известных пассажир-
ских самолетов. Много лет выпускался серийно в СССР под маркой Ли-2.
Выполнен по нормальной аэродинамической схеме, низкоплан. Оснащен
двумя двигателями. Взлетная масса 12,7 т; скорость до 350 км/ч;
коммерческая нагрузка 3 т. Первый вылет совершил в 1935 г., серийно
выпускался до 1947 г. Создатель - Дональд Уиле Дуглас (1892-1981),
США.
7. Истребитель Р-39 "Аэрокобра" - первый в мире одномоторный
самолете двигателем, расположенным в центральной части фюзеляжа.
Моноплан нормальной аэродинамической схемы снизкораспсложенным
крылом. Взлетная масса 3,45 т; скорость до 585 км/ч. Первый полет в
1939 г. Разработчик и производитель - фирма "Белл", США.
8. Истребитель-перехватчик Ме-262 - см. стр. 566
9. Стратегический бомбардировщик В-29 "Суперфортресс". Средне-
план нормальной аэродинамической схемы с крылом большого удли-
нения и четырьмя двигателями, расположенными в крыле. Взлетная
548
Схема самолета "Юнкере" JU-88A-4
Схема самолета DC-3
549
Схема самолета P-39Q "Лэрокобра"
Схема самолета В-29Л "Суперфортресс1
550
масса 62,37 т; скорость до 598 км/ч; бомбовая нагрузка до 8 т. Первый
вылет совершил в 1942 г. С этого самолета были сброшены атомные
бомбы на Хиросиму и Нагасаки. Руководитель проекта Уильям Эдуард
Боинг (1881-1956), США.
10. Пикирующий бомбардировщик Пе-2 - один из наиболее массовых
бомбардировщиков второй мировой войны. Цельнометаллический
двухдвигательный низкоплан с двухкилевым оперением. Взлетная масса
6,67 т; скорость до 540 км/ч; бомбовая нагрузка до 1,5 т. В серийное
производство запущен в 1941 г. Руководитель проекта - Владимир
Михайлович Петляков (1981-1942), СССР.
11. Самолет-штурмовик Ил-2 - см. стр. 568
12. Самолет-истребитель Як-3 - самый легкий и маневренный
истребитель второй мировой войны. Одноместный, одномоторный
низкоплан. Конструкция выполнена из дуралюминиевого каркаса и
фанерной и полотняной обшивки. Взлетная масса - 2,66 т; скорость до
745 км/ч. Первый вылет совершил в 1943 г. Руководитель проекта
Александр Сергеевич Яковлев (1906-1989), СССР.
13. Самолет-истребитель Ла-5 - развитие самолета ЛАГГ-3. Один из
основных истребителей Великой Отечественной войны. Одноместный
низкоплан классической аэродинамической схемы комбинированной
конструкции с одним двигателем воздушного охлаждения. Взлетная
масса 3,39 т; скорость до 686 км/ч. Строился большой серией (более
10000 экз.) с 1942 г. Руководитель проекта - Семен Алексеевич Лавочкин
(1900-1960), СССР.
14. Многоцелевой истребитель F-86 "Сейбр" - первый реактивный
истребитель со стреловидным крылом ВВС США. Одноместный
низкоплан с расположенным в фюзеляже турбореактивным двигателем.
Взлетная масса - 6,23 т; скорость до 1093 км/ч. Принят на вооружение
в начале 1948 г. Производитель - фирма "Норт Америкен", США.
15. Многоцелевой самолет Ан-2 - биплан в основном металлической
конструкции с полотняной обшивкой крыльев, рулей, закрылков и
элеронов. Оснащался одним мотором воздушного охлаждения. Взлетная
масса 5,5 т; скорость до 256 км/ч; число мест 12. Разработан в середине
1940-х гг. Руководитель проекта Олег Константинович Антонов
(1906-1984), СССР.
16. Самолет-истребитель МиГ-15 - один из самых известных
самолетов мира, долго стоявший на вооружении в различных модифика-
циях в СССР и в других странах мира. Конструктивно выполнен в виде
среднеплаиа со стреловидным крылом и оперением. Оснащался
одним турбореактивным двигателем. Взлетная масса 4,8 т; скорость до
1050 км/ч. Построен в 1947 г. Руководители проекта Артем Иванович
Микоян (1905-1970) и Михаил Иосифович Гуреви.ч (1893-1976), СССР.
551
Схема самолета Як-3
552
Схема самолета Ла-5
Схема самолета F-86 "Сейбр"
553
18176
554
17. Стратегический бомбардировщик Ту-95 - самый скоростной
винтовой самолет до настоящего времени. Выполнен по нормальной
аэродинамической схеме с высокорасположенным стреловидным крылом
большого размаха. На крыле расположены четыре турбовинтовых
двигателя. Взлетная масса 185 т; скорость 830 км/ч; бомбовая нагрузка
до 20 т. Построен в 1952 г. Руководитель проекта Андрей Николаевич
Туполев (1888-1972), СССР.
18. Стратегический бомбардировщик Боинг В-52 "Стратофор-
тресс" - самый тяжелый в мире бомбардировщик. Конструктивно
самолет представляет собой цельнометаллическиймоноплансверхнерас-
положенным крылом, выполненный по нормальной аэродинамической
схеме. Самолет оснащен восемью турбовентиляторными двигателями,
закрепленными попарно на четырех пилонах под консолями крыла.
Взлетная масса 220...230 т; крейсерская скорость 864 км/ч; бомбовая
нагрузка до 27,22 т. Построен в 1952 г. Руководитель проекта Уильям
Эдуард Боинг, США.
19. Стратегические бомбардировщики М-4 и ЗМ- первые советские
межконтинентальные стратегические бомбардировщики. Конструктив-
но ЗМ выполнен по нормальной аэродинамической схеме с высоко-
расположенным стреловидным крылом большого удлинения и
стреловидным оперением, шасси велосипедного типа. В корне крыла
установлено четыре турбореактивных двигателя, по два с каждого борта.
Взлетная масса 202 т; скорость до 940 км/ч; бомбовая нагрузка до 24 т.
М-4 построен в 1954 г., а ЗМ в 1958 г. Руководитель проекта Владимир
Михайлович Мясищев (1902-1978), СССР.
20. Военно-транспортный самолет С-130 "Геркулес" - один из ведущих
военно-транспортных самолетов ВВС США, состоит на вооружении
более 50 лет. Конструктивно представляет собой свободнонесущий
моноплан с высоким расположением крыла. На крыле установлены
четыре турбовинтовых двигателя. Взлетная масса 56,34 т; крейсерская
скорость 580 км/ч; нагрузка до 17,6 т. Построен в 1951 г. Фирма-
разработчик - "Локхид", США.
21. Экспериментальный ракетный самолет Х-15А - самолет,
установивший абсолютные рекорды скорости и высоты полета.
Выполнен по нормальной аэродинамической схеме со среднерасположен-
ным трапециевидным крылом. Единственным элементом механизации
крыла являются закрылки. На первых вариантах самолета устанавлива-
лась связка из четырех ЖРД, впоследствии использовался однокамерный
ЖРД большей мощности. Взлетная масса 23,1 т; скорость до 6870 км/ч.
Построен в 1958 г. Фирма-разработчик "Норт Америкен", США.
22. Спортивно-пилотажный самолет Як-18П - основной самолет в
аэроклубах ДОСААФ, а также в училищах военной и гражданской
авиации. Самолет представляет собой моноплан с низкорасположенным
крылом, убирающимися в полете основными стойками шасси и
неубирающимся свободноориентирующимся хвостовым колесом.
Взлетная масса 0, 944 т; скорость до 257 км/ч. Руководитель проекта
Александр Сергеевич Яковлев, СССР.
555
Схема самолета Ту-95
Схема самолета В-52Н "Стратофортрссс"
556
Схема самолета М-4
557
Схема самолета Х-15А
Схема самолета Як-18П
558
23. Истребитель-бомбардировщик Су-7Б - ударный самолет
фронтовой авиации. Конструктивно выполнен по классической схеме
со стреловидным среднерасположенным крылом. В качестве двигатель-
ной установки применен турбореактивный двигатель. Взлетная масса
13,83 т; скорость до 2120 км/ч; боевая нагрузка до 2 т. Построен в 1955 г.
Руководитель проекта Павел Осипович Сухой (1895-1975), СССР.
24. Многоцелевой истребитель F-4 "Фантом-2" - один из националь-
ных символов Америки. Наиболее массовый зарубежный реактивный
истребитель 1960-1970 гг. Конструктивно выполнен по нормальной
аэродинамической схеме с низкорасположенным стреловидным
трапециевидным крылом, имеющим складные консоли. На F-4
установлены два турбореактивных двигателя. Взлетная масса 21,4 т;
скорость до 2583 км/ч; боевая нагрузка до 7,25 т. Построен в 1958 г.
Фирма-разработчик "Макдоннелл-Дуглас", США.
25. Фронтовой истребитель МиГ-21 - долгое время составлял основу
истребительной авиации СССР и ряда других стран. Конструктивно
самолет выполнен по нормальной аэродинамической схеме с треуголь-
ным низкорасположенным крылом и стреловидным оперением. В ка-
честве двигателя применен ТРД. Взлетная масса 6,85 т; скорость до 2200
км/ч. Построен в 1957 г. Руководители проекта Артем Иванович Микоян
и Михаил Иосифович Гуревич, СССР.
26. Пассажирский самолет Ил-18 - самый массовый из первого
поколения отечественных пассажирских самолетов с газотурбинными
двигателями. Конструктивно представляет собой цельнометаллический
моноплан с низкорасположенным крылом, на котором попарно
размещены четыре турбовинтовых двигателя. Взлетная масса 59,2 т;
крейсерская скорость 650 км/ч, число пассажиров до 120. Построен в
1957 г. Руководитель проекта Сергей Владимирович Ильюшин
(1894-1977), СССР.
27. Гидросамолет Бе-12 - серийный самолет, который около 40 лет
продолжает нести службу в авиации всех российских и ряда зарубежных
флотов, установив рекорд сроков службы самолетов-амфибий.
Конструктивно представляет собой свободнонесущий высокоплан,
выполненный по нормальной аэродинамической схеме с крылом типа
"чайка", на котором размещены два турбовинтовых двигателя. Взлетная
масса 36 т; скорость до 550 км/ч; боевая нагрузка до 1,6 т. Построен в
1965 г. Руководитель проекта Георгий Михайлович Бериев (1903-1979),
СССР.
28. Самолет вертикального взлета и посадки (СВВП) "Харриер" - см.
стр. 571
29. Самолет-разведчик SR-71A - см. стр. 574
30. Сверхзвуковой пассажирский самолет "Конкорд" - первый в мире
сверхзвуковой пассажирский самолет, начавший выполнять и до сих пор
осуществляющий регулярные рейсы. Самолет построен по схеме
"бесхвостка" с оживальным, поперечно изогнутым крылом. Двигательная
559
Схема самолета F-4E "Фантом-2"
560
т о
Схема самолета Ил-18
561
Схема самолета "Конкорд"
562
установка состоит из четырех ТРД. Взлетная масса 185 т; крейсерская
скорость 2189 км/ч; число пассажиров до 144. Первый полет выполнил
в 1971 г. Фирмы-разработчики - "Аэроспасьяль" (Франция), "Бритиш
эркрафт корпорейшен" (Великобритания).
31. Широкофюзеляжный пассажирский самолет "Боинг-747" - см. стр.
577
32. Пассажирский самолет Ил-86 - первый советский широкофюзеляж-
ный среднемагистральный пассажирский самолет на 350 мест. Самолет
выполнен по нормальной аэродинамической схеме со средним располо-
жением стреловидного крыла. Четыретурбовентиляторных двухконтур-
ных двигателя установлены на пилонах под крылом. Взлетная масса
206 т; крейсерская скорость 950 км/ч; число пассажиров 350. Обладает
высокой надежностью. За время эксплуатации не было случаев
катастроф. Первый полет выполнил в 1976 г. Руководитель проекта -
Генрих Васильевич Новожилов (р. 1925), СССР.
33. Многоцелевой истребитель F-16 "Файтннг Фолкон" - самый
массовый американский истребитель четвертого поколения, составляет
основу ВВС США и девятнадцати закупивших его стран. Конструктивно
представляет собой моноплан со среднерасположенным крылом и одним
двигателем, расположенным в хвостовой части фюзеляжа. Взлетная масса
19,19 т; скорость до 2 М. Первый полет состоялся в 1976 г. Фирма-
разработчик "Дженерал дайнемик", США.
34. Истребитель-перехватчик Су-27-см. стр. 581
35. Транспортный самолет Ан-124 в своем классе самолетов выделяется
выдающимися показателями. Так, например, при стартовой массе 405 т
он способен поднять в воздух 150 т груза. Крейсерская скорость 800 км/ч;
коммерческая нагрузка 120 т. Конструктивно представляет собой
моноплан с высокорасположенным крылом, выполненный по нормаль-
ной аэродинамической схеме. Четыре турбовинтовых двигателя
установлены под крылом на пилонах. Первый полет в 1982 г. Руководи-
тель проекта-Петр Васильевич Балабуев (р. 1931), СССР.
36. Малозаметный тактический ударный самолет F-117 "Найтхок"
-см. стр. 585
37. Фронтовой истребитель МиГ-29 - один из лучших в своем классе
реактивных истребителей четвертого поколения. Конструктивно
выполнен по интегральной аэродинамической схеме с плавным
сопряжением низкорасположенного крыла и фюзеляжа. На самолете
установлено два двухконтурных двигателя. Взлетная масса 15 т; скорость
до 2400 км/ч. Первый полет совершен в 1977 г. Руководитель проекта -
Ростислав Аполлосович Беляков (р. 1919), СССР.
563
Схема самолета Ил-86
Схема самолета F-16A "Файтннг Фолкоп"
564
Схема самолета Ан-124
Схема самолета МнГ-29
565
ИСТРЕБИТЕЛЬ-ПЕРЕХВАТЧИК Ме-262
Первым самолетом с турбореактивным двигателем, стоявшим на
вооружении ВВС Германии, был истребитель Мессершмитт Ме-262А
Главный конструктор самолета Вилли Мессершмитт. Строительство
первого опытного образца началось в 1940 г. Первый пойет прототипа
Ме-262, оснащенного одним поршневым двигателем "ЮМО" мощностью
1200 л.с., состоялся в апреле 1941 г., затем были проведены летные
испытания варианта Ме-262 с комбинированной силовой установкой
(один поршневой и два турбореактивных двигателя). В июле 1942 г., как
сообщается в книге Гиннесса об авиации, совершил свой первый вылет
Ме-262 с двумя турбореактивными двигателями Юнкере 109-004А-0 со
статической тягой по 840 кгс. На серийных вариантах этого самолета
устанавливались более мощные двигатели - с тягой по 900 кгс, что
обеспечило полеты со скоростью 868 км/ч (рекордной для того времени)
на высоте 7000 м. В 1944 г. первая группа Ме-262 участвовала в боевых
действиях на Западном фронте. Это обстоятельство дает основание
предполагать, что Ме-262 был первым в мире турбореактивным
самолетом, стоявшим на вооружении и принимавшим участие в боевых
действиях.
Схема самолета Ме-262А-1
566
Компоновочная схема самолета Ме-262
Ме-262 представлял собой одноместный цельнометаллический
свободнонесущий моноплан с двумя турбореактивными двигателями,
установленными под крылом. Традиционное трехколесное шасси с
хвостовой опорой было уже на начальном этапе заменено на шасси с
носовой стойкой. Фюзеляж имел характерную форму поперечного
сечения в виде расширяющегося вниз треугольника с закругленными
вершинами. Это позволяло убирать основные стойки шасси в ниши
боковых карманов фюзеляжа и обеспечивало благоприятные с точки
зрения аэродинамики условия сопряжения крыла с фюзеляжем. Крыло
трапециевидной формы со стреловидностью по передней кромке 18°. На
задней прямой кромке располагались элероны и посадочные закрылки.
Запуск двигателей осуществлялся с помощью бензинового двухтактно-
го двигателя-стартера.
Задержка с серийным выпуском Ме-262 была связана прежде всего
с отсутствием в нужном количестве никеля и хрома, необходимых для
массового производства жаропрочных лопаток турбин двигателей.
В результате первые серийные Ме-262 появились на фронте только летом
1944 г., однако уже к концу этого года было изготовлено 452 самолета,
а за первые несколько месяцев 1945 г. -еще 380машин. Ме-262 выпускались
в вариантах истребителя-перехватчика с мощным вооружением (четыре
30-мм пушки в носовой части фюзеляжа и до 24 неуправляемых ракет),
истребителя-бомбардировщика с двумя бомбами на пилонах под крылом
и фоторазведчика.
В конце войны основные самолетостроительные заводы и аэродромы
Германии были уничтожены бомбардировками. Собранные в полукус-
567
тарных условиях Ме-262 взлетали с неподготовленных аэродромов.
В связи с острой нехваткой авиационного топлива и подготовленных
летчиков многие из построенных Ме-262 так и не поднялись в воздух.
Тем не менее несколько боевых подразделений реактивных самолетов
принимали участие в боях. Первый воздушный бой Ме-262 с самолетами
противника произошел 26 июля 1944г.,когда немецкий пилот атаковал
высотный английский разведчик "Москито". Благодаря лучшей
маневренности "Москито" сумел уйти от преследования. Позднее Ме-262
применялись группами для перехвата бомбардировщиков. Иногда
происходили схватки с истребителями сопровождения и были случаи,
когда обычному винтомоторному самолету удавалось сбить более
скоростной, но менее маневренный реактивный истребитель. Но это
происходило редко. В целом же Ме-262 продемонстрировали превосход-
ство перед обычными самолетами именно как перехватчики.
Основные характеристики. Максимальная скорость на высоте 6000 м
- 870 км/ч; практический потолок - 11450 м; дальность полета без
дополнительных баков -1050 км; максимальная взлетная масса- 6925 кг.
САМОЛЕТ-ШТУРМОВИК Ил-2
Работы над созданием бронированных штурмовиков начались в
СССР по инициативе Сергея Владимировича Ильюшина во второй
половине 1930-х гг., ав начале 1939 г. уже был выпущен первый опытный
образец такого самолета - БШ-2 (бронированный штурмовик).
С. В. Ильюшин в разработку проекта этого самолета заложил принципи-
ально новые идеи, заключающиеся в поиске оптимальных сочетаний массы
брони, запаса бомб, мощности пулеметно-пушечного вооружения,
скорости и дальности полета. Для решения этой трудной задачи впервые
бронированная часть корпуса включалась в силовую схему самолета и
заменяла многие элементы обычной конструкции, обеспечивая потребную
прочность. Реализация этой идеи потребовала от металлургов освоения
впервые в мире производства броневых листов двойной кривизны.
Самолет-штурмовик БШ:2 с двигателем АМ-35 конструкции
А.А. Микулина прошел в начале 1940 г. полный цикл заводских
испытаний и был реко мендован для испытаний в войсках. Максимальная
скорость БШ-2, которая была достигнута в процессе испытаний -
362 км/ч, дальность полета- 618 км.
Бронекоробка фюзеляжа, его передняя часть, в которой располагались
двигатель и кабина пилота, была выполнена из стальной брони
толщиной от 4 до 7 мм. Сверху двигатель закрывался листовым
дуралюмином толщиной 5 мм. Задняя часть фюзеляжа была выполнена
в виде деревянного монокока, выклеенного из березового шпона и
568
фанеры. Крыло и оперение дуралюминовые. Экипаж - из двух человек:
летчик и стрелок, располагавшийся в задней кабине. Вооружение
самолета состояло из четырех пулеметов ШКАС и 400...600 кг бомб.
Результаты испытаний позволяли сделать вывод, что самолет был
удачным и не требовал особых изменений. Однако государственная
комиссия предложила сделать самолет одноместным, что позволило
увеличить запас топлива. Необходимости защиты в задней полусфере
не придали значения (в ходе войны выяснилось, что такое решение
ошибочно). Кроме того, было предложено установить на самолет более
мощный двигатель АМ-38.
Одноместный БШ-2 с двигателем АМ-38 (мощностью в
1500...1665 л.с.) получил название Ил-2. Снятие одного члена экипажа
позволило установить дополнительный бензобак емкостью 155 кг.
Общий запас топлива благодаря этому увеличился с 315 до 470 кг.
Несколько изменилась геометрия крыла и стабилизатора, был установлен
новый фонарь кабины с задним бронестеклом толщиной 12 мм. Шасси
частично убиралось в гондолы-обтекатели под крыльями.
Вместо четырех пулеметов ШКАС установили две пушки ШВАК
калибром 20 мм, два пулемета ШКАС и восемь неуправляемых
реактивных снарядов РС-82. Бомбовая нагрузка могла составлять
400...500 кг. Пушки ШВАК уже с лета 1941 г. стали заменяться более
мощными 23-мм пушками ВЯ, имевшими значительно большую
начальную скорость снаряда (915 м/с), скорострельность (550 выстрелов
в минуту) и сам снаряд большей взрывной силы.
С новым двигателем скорость полета Ил-2 достигла 380 км/ч у земли
и 412 км/ч на высоте 2500 м. Скорость полета Ил-2 сильно зависела от
наружной подвески бомб и реактивных снарядов. При наиболее
благоприятном варианте подвески скорость могла достигать 433 км/ч.
С 1941 г. Ил-2 стали вооружаться специальными бомбами ПТАБ,
имеющими кумулятивный заряд и до 200 осколков, что давало
возможность вести успешную борьбу как с танками, так и с пехотой
противника.
Однако первые успехи боевого применения Ил-2 сопровождались и
очень большими потерями в связи с отсутствием прикрытия сзади.
С учетом многочисленных пожеланий летчиков в начале 1942 г.
произошел возврат к двухместному варианту. Двигатель форсировали
до 1720 л.с. (АМ-38Ф), что позволило перейти к двухместному варианту
без снижения боевой нагрузки. На обновленном варианте самолета,
получившего название Ил-2М, установили две скорострельные пушки
ВЯ-23, два пулемета ШКАС, восемь РС-82 или четыре РС-132, один
пулемет УБТ у стрелка и 400...600 кг бомб. С октября 1942 г. Ил-2 стали
поступать на фронт во все возрастающем количестве и применялись
569
11470
4030
Схема самолета Ил-2
Компоновочная схема самолета Ил-2
570
с большим успехом. Ил-2 стал самым, выдающимся и самым массовым
самолетом периода Великой Отечественной войны. Всего за этот период
было создано более 39 тыс. Ил-2 различных модификаций, что является
абсолютным мировым рекордом среди военных самолетов.
САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (СВВП) "ХАРРИЕР"
Проектированию СВВП "Харриер" предшествовал длительный
период исследований и испытаний на уровне экспериментальных
разработок. Еще в 1954 г. французский авиаконструктор М. Вибо
запатентовал проект вертикально взлетающего истребителя "Жирокоп-
тер" с воздушно-реактивным двигателем Бристоль "Орион". Эта же
фирма к 1957 г. создала более мощный двигатель для СВВП, которым
заинтересовалась английская фирма "Хоукер". В содружестве с другой
английской фирмой "Роллс-Ройс" и американской фирмой "Макдонелл-
Дуглас" к 1960 г. был разработан первый вариант СВВП "Кестрел",
который совершил первый подлет "на привязи" в октябре 1960 г., а 13
марта 1961 г. - 22-минутный полет с вертикальным взлетом, переходом
в горизонтальный полет и вертикальной посадкой. В процессе испытаний
была достигнута скорость, соответствующая М = 1,02, и высота полета
12000 м. 12 февраля 1962 г. совершена первая вертикальная пбсадка на
палубу авианосца.
К середине 1960-х гг. фирма "Бристоль" создала новый, более мощный
и совершенный двигатель, на основе которого разработан новый, во
многом отличающийся от СВВП "Кестрел", аппарат. Переработке
подверглись все системы, появилось дополнительное оборудование,
новые крыло, фонарь, шасси, сопла и многое другое. Чтобы отличить
эту машину от предшествующей, ей присвоили наименование "Харриер"
(Болотный лунь). После успешных испытаний в 1967 г. ВВС Великобри-
тании выдало фирме заказ на 70 СВВП "Харриер", а в 1969 г. они
поступили на вооружение королевских ВВС. В книге Гиннесса об авиации
отмечено, что "эта машина стала первым в мире боевым самолетом
вертикального взлета и посадки, принятым на вооружение. В 1971 г.
"Харриер" поступили и на вооружение корпуса морской пехоты США ".
Конструктивно СВВП "Харриер" представляет собой цельнометалли-
ческий моноплан с верхним расположением крыла. Его фюзеляж
выполнен в виде клепаной конструкции, имеющей всего два технологи-
ческих разъема. В носовой части размещена кабина летчика.
В центральной части фюзеляжа размещаются двигатель и его
агрегаты. Забор воздуха для двигателя осуществляется через два боковых
воздухозаборника. Сопла двигателя поворачиваются пневмомотором
от горизонтального положения на 98,5°, изменяя направление вектора
571
тяги от маршевого до взлетного и, далее, до тормозящего. Управление
соплами осуществляется летчиком при помощи специального рычага,
смонтированного на одном секторе с рычагом управления двигателем.
От компрессора высокого давления отходят четыре воздухопровода: два
к обтекателям шасси, где расположены сопла управления по крену, один
к носовому соплу и один - к хвостовым соплам. В хвостовой части
расположены три сопла. Одно из них предназначено для управления
совместно с носовым по тангажу и два - для управления по каналу
рыскания,
Топливо находится в семи баках, расположенных как в фюзеляже, так
и в крыле. При полной заправке общий запас топлива составляет около
2800 л. Кроме того, на внешних подвесках может быть расположено два
бака вместимостью по 455 л, а для дальних перегоночных перелетов -
даже по 1500 л.
В центральной части фюзеляжа размещены также основные
посадочные устройства - носовая и задняя стойки шасси велосипедного
типа, на концах крыла - дополнительные боковые стойки.
В задней части фюзеляжа расположен отсек оборудования. Доступ
к блокам оборудования осуществляется через большие люки на левом
и правом бортах.
572
Компоновочная схема самолета "Харриер-П"
Крыло на самолете "Харриер" выполнено неразрезным, конструкция
крыла кессонная. Под каждой консолью крыла расположено по два
пилона, предназначенных для подвески различной боевой нагрузки:
бомб, контейнеров с неуправляемыми ракетами, контейнеров с пушками
калибра 30 мм, управляемых ракет класса "воздух-воздух" и "воз-
дух-земля", баков с топливом и др. Суммарная боевая нагрузка самолета
может достигать 2500 кг, ас использованием сдвоенных держателей даже
3100 кг.
В кабине пилота установлен экран с движущейся картой и непрерыв-
ным указателем текущего положения самолета. На лобовом стекле
расположен индикатор для точного прицеливания и считывания
параметров полета без переноса взгляда летчика на приборную доску.
Число приборов сокращено до минимума применением навигационного
экрана, на котором высвечиваются необходимые данные о работе всех
систем.
К началу 1980-х гг. было принято решение о создании следующего
поколения СВВП, которому было присвоено название "Харриер-П".
Создание самолета было поручено фирмам "Макдоннелл-Дуглас" и
"Бритиш Аэроспейс". Первый полет нового самолета состоялся в ноябре
1981 г., а в январе 1984 г. первые серийные "Харриер-П" поступили на
вооружение корпуса морской пехоты США. От своего предшественника
"Харриер-1Г" отличался рядом технических усовершенствований,
направленных на улучшение его летно-тактических характеристик. В его
конструкции широко использованы композиционные материалы (до
26 %), в результате чего удалось уменьшить массу конструкции, увеличив
573
за счет этого запас топлива и боевую нагрузку. Более мощным стал и
двигатель. Наиболее существенные изменения претерпело оборудование
самолета. На приборной доске пилота был установлен многофункцио-
нальный цветной дисплей, на который выводится навигационная
информация, данные системы бомбометания, наведения ракет, сигналы
предупреждения о радиолокационном облучении, данныеоб управлении
системой вооружения. На другой цветной дисплей выводится информа-
ция о работе силовой установки и расходе топлива.
"Харриер-П" предназначен для ведения боевых действий в любых
метеоусловиях, днем и ночью, обладает высокой маневренностью,
позволяющей ему уходить от истребителей ПВО. Боевое вооружение
"Харриер-П" размещается на трех подфюзеляжных и шести подкрылье-
вых пилонах. На двух боковых пилонах размещаются контейнеры с
пушками и боекомплектом к ним. На центральном узле могут размещать-
ся бомбы или аппаратура радиопротиводействия и фоторазведки. На
подкрыльевых пилонах может быть установлено: до четырех управляе-
мых ракет класса "воздух-воздух" или "воздух-поверхность"; до 16
фугасных бомб по 227 кг; до 12 кассетных бомб; до 10 бомб с лазерной
системой наведения; до 8 зажигательных бомб; до 10 контейнеров с
неуправляемыми ракетами; два контейнера с пушками; до 10 контейнеров
с дипольными отражателями или излучателями. Общая масса боевой
нагрузки может достигать 4,7 т.
"Харриер-П" стал основой для создания различных вариантов:
ночного штурмовика, самолета-истребителя для боевых действий на
малых высотах, а также двухместного учебно-тренировочного самолета.
Самолет принимал участие в ряде локальных боевых действий, в
частности, в районе Персидского залива.
САМОЛЕТ-РАЗВЕДЧИК SR-71A
После того как 1 мая 1960 г. над территорией СССР советской ракетой
В-750 был сбит высотный самолет-разведчик U-2, фирма "Локхид"
развернула работы по созданию разведчика нового поколения, который
получил индекс SR-71 А. Конструктор этого самолета тот же, что и у U-2
(Кларенс Л. Джонсон). В 1966 г. SR-71А поступил на вооружение и начал
совершать регулярные разведывательные полеты. Всего было построено
24 (по другим сведениям 32) SR-71A, некоторые из них до сих пор
находятся в эксплуатации в качестве дозорных самолетов на авиабазах.
С разведывательной службы SR-71A были сняты в 1990 г., по всей
вероятности в связи с тем, что к тому времени в СССР были поставлены
на вооружение зенитные управляемые комплексы, способные уверенно
поражать цели такого типа.
574
Схема самолета SR-71A
Даже для сегодняшнего дня летно-технические данные SR-71A
остаются выдающимися. В книге Гиннесса об авиации сообщается, что
"самым скоростным в мире военным самолетом, принятым на вооружение,
является американский стратегический двухместный разведывательный
самолет Локхид SR-71A, совершивший первый полет 22 декабря 1964 г.
Надежную гарантию от перехвата ему обеспечивает высота и скорость
полета: SR-71A способен выполнять продолжительный полет со
скоростью, превышающей М-3 на высоте 24000 м. Разведывательные
самолеты SR-71A удерживают оба абсолютных мировых рекорда
скорости: 3869 км/ч для полетов по прямой и 3608 км/ч по замкнутому
маршруту". Практическийпотолокэтогосамолета -24,4км, максималь-
ная дальность полета около 5 тыс. км.
SR-71A представляет собой среднеплан, выполненный по аэродинами-
ческой схеме "бесхвостка". Треугольное в плане крыло имеет тонкий
профиль (относительная толщина 3,2 %). Передняя кромка крыла
выполнена со стреловидностью 60°, задняя - с отрицательной стреловид-
ностью 10°. Вдоль всей передней части фюзеляжа в продолжение крыла
расположены наплывы, предназначенные для уменьшения смещения
назад центра давления при переходе на сверхзвуковую скорость полета
и увеличения несущей способности комбинации "крыло-фюзеляж". Этому
же способствует плоская снизу форма фюзеляжа.
575
Компоновочная схема самолета SR-71A
В носовой части фюзеляжа (под кабиной экипажа) находится отсек
оборудования и четыре отсека с вооружением. Почти вся остальная
часть фюзеляжа занята топливными баками. Экипаж состоит из пилота
и оператора электронной аппаратуры. Катапультируемые кресла
экипажа расположены друг за другом. Фонари кабины индивидуальные
и открываются вверх-назад.
Шасси самолета трехстоечное; основные стойки стройными колесами
на общей оси убираются в центроплан, носовая - в переднюю часть
фюзеляжа.
Вертикальное оперение выполнено в виде двух килей, закрепленных
на гондолах двигателей. В целях улучшения устойчивости по крену кили
расположены под углом 20° по отношению к плоскости симметрии
самолета. Система продольно-поперечного управления состоит из
элеронов (расположенных на концах консолей крыла) и руля высоты
(также концевого). Других средств механизации нет. Конструкция
планера на 95 % выполнена из титановых сплавов.
SR-71A оснащен двумя двигателями J.58 фирмы "Пратт-Уитни" с
тягой (форсажной) 14,7 тс, устанавливаемыми в крыльевых гондолах.
Воздухозаборники регулируемые с коническим центральным телом.
Большая часть гондол находится под крылом, а их продольная ось
отклонена на несколько градусов относительно оси фюзеляжа. На
гондолах в области входного канала, а также в районе форсажной
камеры имеются створки для дополнительного подвода воздуха к
двигателю в условиях работы на земле или при полете на малых
скоростях. Это позволяет уменьшить требуемый диапазон регулировки
576
положения конического центрального тела относительно входной
кромки воздухозаборника.
Долгое время SR-71A был строго засекреченным самолетом. И в
настоящее время о нем многое остается неизвестным.
ШИРОКОФЮЗЕЛЯЖНЫЙ ПАССАЖИРСКИЙ САМОЛЕТ "БОИНГ-747"
В книге Гиннесса об авиации отмечено, что первым в мире широкофюзе-
ляжным гражданским самолетом стал "Боинг-747'1, впервые поднявшийся
в воздух в январе I960 г. Использование этого самолета на пассажирских
линиях началось в 1970 г., и вот уже более ЗОлет "Боинг-747" успешно
эксплуатируется на авиалиниях практически все стран. Так, к 1978 г. на
В-747 было перевезено более 200млн. пассажиров.
За годы жизни "Боинг-747"установил много мировых рекордов. Так,
непревзойденным остается мировой рекорд дальности беспосадочного
полета -16560 км. В 1976 г. "Боингом-747" установлен рекорд продолжи-
тельности кругосветного полета (с посадками), равный 22 ч, при средней
скорости полета 869,2 км/ч.
В 1991 г. при эвакуации на специально оборудованном "Боинге-747" из
Эфиопии было перевезено за один полет максимальное число людей -
1087 человек, что также является мировым рекордом.
В настоящее время выпускается несколько моделей этих самолетов
- пассажирские В-747, В-747А и В-747В; грузопассажирский вариант
В-747С, грузовой B-747F и др.
Пассажирский вариант В-747 выпускается в двух модификациях с мак-
симальной пассажировместимостью более 500 пассажиров. В наиболее
типичной конфигурации он имеет 48 мест первого и 337 туристического
класса. Пассажирский В-747В имеет экипаж 3 человека и такие же
размеры, как В-747, но запас топлива у него увеличен, а основной
вариант этого самолета имеет взлетную массу 351530 кг. Крейсерская
скорость В-747В на режиме максимальной дальности составляет 948 км/ч,
а максимальная нагрузка - 490 пассажиров и 56 т груза.
ГрузопассажирскийВ-747Сбыл построен в 1975 г., его взлетная масса
363000 кг. Этот самолет имеет боковую грузовую дверь и может
перевозить 208 пассажиров и 12 контейнеров с суммарным грузом
56700 кг. В чисто пассажирском варианте он может взять на борт до 408
пассажиров.
Пассажирский В-747R является модификацией исходного варианта,
рассчитанной на повышенную усталостную прочность и срок службы
до 10 лет, ресурс 42 тыс. летных часов и число циклов "взлет-посадка"
- 52 тыс. Предназначен для эксплуатации на укороченных авиалиниях,
а число пассажиров может составлять 493...537 человек.
19 - 7425
577
Схема самолета "Боинг-747 SP"
Пассажирский B-747SP большой дальности предназначен для
эксплуатации на авиалиниях с малоинтенсивным пассажиропотоком и
имеет минимальную взлетную массу. На B-747SP можно перевозить до
360 пассажиров, обычное число мест 288, причем 28 из них первого
класса. Именно на этом самолете был совершен беспосадочный перелет
на расстояние 16560 км с 50 пассажирами (взлетная масса 323547 кг),
причем после посадки топлива еще оставалось на 2 ч 27 мин полета. На
B-747SP можно долететь из Лондона до Сингапура за 21 ч, в то время
как на сверхзвуковом "Конкорде" с двумя посадками на этот полет
тратится 18 ч 24 мин.
Грузовой вариант B-747F, поднявшийся впервые в воздух в ноябре
1971 г., для облегчения загрузки имеет отклоняющуюся вверх носовую
часть фюзеляжа. Специальное оборудование грузовых кабин позволяет
двум операторам-такелажникам разгрузить самолет (115,5 т груза) за
30 мин. Этот вариант не имеет окон и может перевозить 90 т груза в
контейнерах или на поддонах на расстояние до 7 тыс. км. Под главной
578
Компоновочная схема самолета "Боинг-747 SP"
грузовой палубой размещены нижние грузовые отсеки, в которые через
специальные двери можно загружать грузовые или багажные контейне-
ры. Экипаж состоит из трех человек.
Фирма "Боинг" выпускает также несколько модификаций военного
назначения (воздушно-десантного командного пункта, летающего штаба,
носителя многоразового космического корабля и др.).
В разных модификациях В-747 различаются вариантами компоновки
и размещения пассажиров, площадью крыла и оперения, механизацией
крыла, запасом топлива и пр.
Конструктивно все варианты В-747 выполнены по нормальной
аэродинамической схеме с нижним расположением стреловидного крыла,
имеющим угол поперечного V, равный 7°, и угол стреловидности по
линии четвертей хорд 37°. На крыле установлены внешние и внутренние
элероны для управления по крену на больших и малых скоростях.
Сложная механизация крыла включает десять предкрылков изменяемой'
кривизны, трех секционные щитки и выдвижные закрылки, а также шесть
секций интерцепторов на каждой половине крыла. Управление
осуществляется с помощью гидроусилителей.
Фюзеляж В-747 - полумонокок, выполненный из алюминиевых
сплавов. Соединения элементов конструкции клепаные, болтовые и
клеевые. Носовая часть фюзеляжа овальной формы, средняя на большей
части длины имеет круглое поперечное сечение. Для сборки различных
модификаций самолетов фюзеляж имеет ряд поперечных технологических
разъемов.
19*
579
Оперение свободнонесущее, обычной схемы, угол установки
стабилизатора изменяемый.
В-747 имеет шасси с передней опорой. Привод шасси гидравлический.
Основное шасси включает четыре опоры (две подкрыльевые и две под
фюзеляжем), каждая из которых имеет четырехколесную тележку; носовая
опора двухколесная. Две подкрыльевые опоры убираются внутрь, а две
основные и передняя - вперед.
В разных модификациях В-747 применяются турбовентиляторные
двигатели фирм "Пратт-Уитни", "Дженерал Электрик" (США) или
"Роллс-Ройс" (Англия). Двигатели установлены под крылом на пилонах.
Топливо размещается в 13 баках (семи крыльевых и шести внутри
фюзеляжа). Суммарный запас топлива составляет в различных вариантах
от 178,7 до 194,7 тыс.л.
Система кондиционирования воздуха в пассажирских салонах
обеспечивает избыточное давление 0,61 бар. Бортовая электросеть
питается от четырех генераторов трехфазного тока напряжением
115/200 В и частотой 400 Гц. Питание постоянным током 28 В осуще-
ствляется от выпрямителей, а напряжением 24 В - от аккумуляторной
батареи.
Радиоэлектронное оборудованиеВ-747 включает двойныекомплекты
связных приемопередатчиков на сверхвысоких частотах; системы связи
на высокой частоте; системы связи через спутник Земли; автоматических
радиопеленгаторов; радиодальномерных станций; радиоответчиков
системы управления воздушным движением; радиовысотомеров малых
высот; инерциальных навигационных систем; датчиков курса, а также
систему самолетовождения и управления полетом с автоматической
стабилизацией, метеолокатор, радиомаяк и др.
Важной особенностью В-747 является высокий показатель регулярнос-
ти полетов, который определяется вероятностью вылета с задержкой по
техническим причинам не более 15 мин, в среднем равный не менее
95...96 %. Также высоким является и суточный налет одного самолета -
9,5 ч. У В-747 небольшая величина трудозатрат на техническое
обслуживание (12,5 чел.-ч на один час полета).
Основныехарактериапики. Максимальная скорость горизонтального
полета на высоте 9150 м - 958...978 км/ч; практический потолок полета
13,7 тыс. м; взлетная дистанция 2200.,.3200 м; посадочная дистанция
1200...1700 м; дальность полета при максимальном запасе топлива
9,2...10 тыс. км.
580
ИСТРЕБИТЕЛЬ-ПЕРЕХВАТЧИК Су-27
Одноместный двухдвигательный самолет Су-27 создан под руковод-
ством генерального конструктора Михаила Петровича Симонова
(р. 1929). Современная аэро динамическая компоновка, высокая тяговоору-
женностъ, большой запас топлива, широкий диапазон высот и скоростей
полета, высокоэффективный комплекс радиоэлектронного оборудования,
современное управляемое ракетное вооружение обеспечивают Су-27
высокую эффективность при перехвате воздушных целей и позволяют ему
уверенно вести ближний маневренный бой. В книге Гиннесса об авиации
отмечено, что "самьш маневренным боевъш самолетом мира невертикаль-
но го взлета и посадки многие специалисты считают русский истребитель
Су-27 "Фланкер", разработанный в КБП. Сухого".
Первый полет опытного самолета - прототипа Су-27 состоялся в мае
1977 г. С 1982 г. Су-27 стал производиться серийно и с этого же года
поставлен на вооружение ВВС.
Су-27 выпускается в вариантах одноместного истребителя-перехватчи-
ка, двухместного истребителя-бомбардировщика, корабельного
истребителя, самолета наведения и целеуказания, многоцелевого
истребителя, двухместного учебно-боевого истребителя.
Конструктивно Су-27 выполнен по нормальной аэродинамической
схеме со средним расположением крыла, имеет интегральную компоновку
с плавным сопряжением крыла и фюзеляжа, образующую единый
несущий корпус. Конструкция цельнометаллическая с широким
применением титановых сплавов.
Трапециевидноекрыло кессонной конструкции суглом стреловиднос-
ти по передней кромке 42° и углом поперечного V, равным -2,5°.
Удлиненные наплывы крыла предназначены для компенсации смещения
назад аэродинамического фокуса при переходе на сверхзвуковые
скорости, а также для создания вихрей, повышающих эффективную
поверхность стабилизации и управления. Механизация крыла состоит
из двухсекционных предкрылков и флаперонов (разновидность элеронов)
с углами отклонения +35...-20°.
Фюзеляж типа полумонокок с круглым поперечным сечением, резко
уменьшающимся за кабиной летчика. В носовой части размещаются РЛС
и оптико-электронная система прицеливания, кабина летчика, отсек
оборудования (под кабиной летчика), ниша уборки передней опоры
шасси. За кабиной летчика отсек, в котором размещен основной объем
радиоэлектронного оборудования, а также патронный ящик с боеком-
плектом для пушки. Кабина герметическая, фонарь двухсекционный,
состоит из неподвижного козырька и открывающейся вверх-назад
сбрасываемой части. Летчик располагается на катапультируемом кресле,
581
Схема самолета Су-27
обеспечивающем аварийное покидание самолета во всех условиях полета
и наземного маневрирования и пробега. Снаряжение летчика состоит
из высотно-компенсирующего костюма или высотного морского
спасательного комплекта (для корабельного варианта), защитного шлема
и кислородного оборудования.
В средней части фюзеляжа размещаются основные топливные баки-
отсеки. Хвостовая часть фюзеляжа состоит из двух отсеков двигателей,
хвостовых балок и центральной балки, которая включает в себя отсек
самолетного оборудования, задний топливный бак, контейнер тормозных
парашютов и боковые ласты. На боковых балках закреплены цельнопо-
воротные дифференциальные стабилизаторы трапециевидной формы со
стреловидностью по передней кромке 45°. Вертикальное оперение
двухкилевое с рулями направления, угол стреловидности по передней
кромке килей 40°.
Шасси трехопорное с одноколесными стойками, убирающимися
вперед по полету. В варианте корабельного истребителя в хвостовой
части установлен убирающийся тормозной гак.
На Су-27 установлены двигатели АЛ-31Ф, созданные в КБ
им. А.М. Люльки - первые в нашей стране двухконтурные двигатели,
соответствующие по параметрам в своем классе высшим мировым
достижениям. Двигатели имеют ресурс, равный ресурсу самолета.
Воздухозаборники прямоугольные, автоматически регулируемые по
582
Компоновочная схема самолета Су-27
скорости полета и углам атаки. Они размещены под наплывами крыла
и оснащены отклоняемыми сетками для защиты от попадания в
двигатели посторонних предметов. Для достижения большой дальности
беспосадочного полета на Су-27 предусмотрен большой объем баков с
топливом (12000 л), которые занимают практически все внутреннее
пространство средней части фюзеляжа, центроплана и консолей крыла.
Су-27 уже на стадии первого проектного варианта закладывался как
первый отечественный статически неустойчивый самолет с аналоговой
электродистанционной системой управления (ЭДСУ) в продольном
канале управления. Управление в поперечном и путевом каналах
оставалось традиционным. ЭДСУ в продольном канале имеет четы-
рехкратное, а в двух других - трехкратное резервирование. Система
предусматривает автоматическое ограничение ряда летных параметров
в целях недопущения выхода самолета на закритические режимы.
Гидравлическая система состоит из двух независимых систем
закрытого типа и приводов каждой от своего двигателя. Гидросистемы
обеспечивают выпуск и уборку шасси, торможение колес, привод органов
управления, управление панелями воздухозаборника и уборки его
защитных сеток. Пневматическая система используется в качестве
аварийной для выпуска шасси, а также для наддува кабины и отсеков
оборудования, закрытия-открытия и герметизации фонаря и пр.
583
Система электроснабжения имеет цепи постоянного (27 В) и пере-
менного (115 В, 400 Гц) тока. Основные источники электроэнергии - два
интегральных привод-генератора переменного тока, приводимые от
двигателей, а также преобразователи однофазного и трехфазного тока.
Резервный источник электроснабжения - две никель-кадмиевые
аккумуляторные батареи.
Система управления вооружением включает импульсно-доплеровскую
радиолокационную станцию (РЛС) и оптико-электронный локатор
(ОЛС) с нашлемной системой целеуказания. РЛС способна осуществлять
поиск и сопровождение воздушных целей в любых метеоусловиях в
свободном пространстве и на фоне земли, обеспечивает одновременное
сопровождение до 10 целей и одновременный пуск управляемых ракет
по двум целям. Дальность обнаружения целей около 240 км, дальность
сопровождения — 185 км. ОЛС выполняет поиск и сопровождение целей
в простых метеоусловиях с большей точностью при лучшей помехозащи-
щенности. Нашлемная система позволяет производить целеуказание
системам наведения ракет и сканирующему устройству ОЛС путем
поворота головы летчика в направлении той части пространства, где
ожидается появление цели.
На Су-27 установлена аппаратура, которая осуществляет вывод
истребителя на воздушную цель по командам с наземного или воздушно-
го пункта управления.
Пилотажно-навигационный комплекс включает в себя информацион-
ный блок, автоматический радиокомпас, радиовысотомер и радиотехни-
ческую систему ближней навигации. На самолете имеется система
автоматического управления, позволяющая производить стабилизацию
основных параметров траектории полета и положения самолета в
пространстве, а также управление некоторыми параметрами полета по
заданной программе.
Вся необходимая для пилота пилотажно-навигационная информация,
а также информация от РЛС и ОЛС выводится системой единой
индикации на экран пилота. Радиосвязное оборудование обеспечивает
устойчивую двустороннюю радиотелефонную связь летчика с командным
пунктом и между самолетами в воздухе. Имеется станция предупреждения
о радиолокационном облучении, станция активных помех и устройство
выброса активных помех.
Вооружение Су-27 включает в себя встроенную автоматическую
одноствольную пушку калибром 30 мм, установленную в правом наплыве
крыла. Ракетное вооружение размещается на авиационных пусковых
устройствах на 10 точках подвески: шесть под консолями крыла, два под
гондолами двигателей и два под центропланом между гондолами
двигателей. Может быть установлено до шести управляемых ракет класса
584
"воздух-воздух" средней дальности, две таких же ракеты малой
дальности. В других вариантах Су-27 может быть вооружен противолока-
ционными ракетами на узлах подвески под воздухозаборниками
двигателей, бомбами с лазерным наведением калибра 500 кг на
внутренних подкрыльных пилонах, управляемыми ракетами класса
"воздух-поверхность" с лазерным наведением на средних подкрыльевых
пилонах и пр.
Основные характеристики. Максимальная скорость полета на высоте
- 2430 км/ч, у земли - 1400 км/ч; практический потолок 18000 м;
максимальная дальность полета на высоте - 3880 км: дальность полета
с нормальным запасом топлива на высоте - 2250 км, у земли - 750 км;
длина разбега 650...700 м; длина пробега 620...700 м; максимальная
эксплуатационная перегрузка 9 единиц.
МАЛОЗАМЕТНЫЙ ТАКТИЧЕСКИЙ УДАРНЫЙ САМОЛЕТ F-117
"НАЙТХОК"
F-117 -первый в мире самолет, концепция боевого применения которого
полностью базируется на возможностях техники "стеле", основанной на
средствах и методах уменьшения радиозаметности. Несмотря на свое
обозначение, присущее истребителям, F-117 представляет собой
специализированный тактический ударный самолет, предназначенный,
прежде всего, для ночных высокоточных атак особо важных хорошо
защищенных целей в ходе автономных одиночных вылетов. Он может
также использоваться для тактической радиоэлектронной разведки
районов, прикрытых средствами ПВО противника. Таким образом, по
выполняемым задачам F-117 ближе к истребителю-бомбардировщику
или штурмовику. В то же время по средствам решения задач он существен-
но отличается от самолетов предыдущих поколений. Во-первых, обычное
ракетно-бомбовое вооружение уступило на нем место высокоточному
оружию. Во-вторых, выживаемость в зоне действия ПВО противника
обеспечивается не столько бронированием и другими традиционными
средствами повышения боевой живучести, сколько скрытностью полета,
предотвращающей преждевременное обнаружение самолета.
Самолет F-117 долго держался в тайне, поскольку на нем впервые
была применена новая малоотражающая форма и его основной секрет
- внешние обводы. Впервые официально об этом самолете было заявлено
в ноябре 1988 г., а его первая публичная демонстрация состоялась в
апреле 1990 г.
Контракт на разработку F-117 был заключен Министерством
обороны США с фирмой "Локхид" в ноябре 1978 г. Первый из пяти
предсерийных самолетов поднялся впервые в воздух в июне 1981 г., а
585
Схема самолета F-117A "Найтхок"
первая серийная машина-в январе 1982 г. Регулярные поставки F-117
в ВВС США начались в августе 1982 г. Вначале предполагалось
построить 100 серийных машин, но в дальнейшем их число было
уменьшено до 59. Цена одного самолета достигает 42,6 млн. долл., а
общая стоимость программы - 6,57 млрд, долл., из которых около
2 млрд, долл, израсходовано на НИОКР. В дальнейшем было дополни-
тельно израсходовано еще 300 млн. долл, на модернизацию оборудования
находящихся в эксплуатации самолетов.
Малая заметность позволяет самолету F-117 осуществлять полет над
территорией, прикрытой средствами ПВО противника, на повышенной
высоте. Это улучшает осведомленность летчика о тактической
обстановке, облегчает поиск целей на большой дальности и обеспечивает
более отвесную траекторию бомб, что повышает точность бомбомета-
ния и увеличивает проникающую способность боеприпаса. Возможность
полета не на предельно малых высотах повышает также эффективность
лазерной подсветки цели для управляемых бомб. Бомбометание этим
самолетом, как правило, производится с горизонтального полета,
точность бомбометания составляет, по зарубежным данным, около 1 м.
Тактические возможности F-117 ограничиваются малым радиусом
действия, вызывающим необходимость частых дозаправок в воздухе.
Конструктивно F-117 представляет собой моноплан с низкорасполо-
женным крылом большой стреловидности, V-образным оперением и
надкрыльными воздухозаборниками двигателей. Планер выполнен, в
основном, из алюминиевых сплавов, используются также титановые
586
сплавы, композиты и керамика (в сумме около 5 %). Из композитов, в
частности, выполнены створки отсека вооружения и шасси.
Дляснижениярадиолокационнойзаметностипримененымалоотража-
ющие формы с минимальным числом выступающих элементов и с
внутренним размещением двигателей и вооружения, используются
радиопоглощающие материалы, установлены пассивные обзорно-прицельные
системы и другие малоизлучающие системы. Применены также средства
уменьшения инфракрасной и акустической заметности. Широко
используются фасеточные формы, которые обеспечивают основную долю
(90 %) снижения радиозаметности. Прежде всего это относится к
фюзеляжу, имеющему необычную пирамидальную конструкцию. Обычно
наземные радиолокационные станции облучают летательные аппараты
под углами, лежащими в пределах 30° вверх и вниз от горизонтальной
плоскости. В связи с этим большинство поверхностей F-117 наклонено
под углом более 30° от вертикали для отражения радиолокационных
лучей вверх и вниз от направления на радиолокационную станцию.
В горизонтальной плоскости отражения от поверхности корпуса
образованы рядом секторов. Каждый из этих секторов настолько узок,
что отраженные от них сигналы сопоставимы с фоновым шумом. Другие
компоненты самолета сориентированы таким образом, чтобы отражение
от них происходило в заданных секторах. Предусмотрено, чтобы ни один
из секторов интенсивного отражения не был направлен непосредственно
вперед. Все места соединений (люки, технологические разъемы,
сочленение фонаря кабины и фюзеляжа, створки отсеков шасси и пр.)
имеют накладки с пилообразной кромкой, причем стороны "зубцов"
ориентируются в направлении желаемого сектора.
Крое того, многие части самолета изготовлены из радиопоглощающих
материалов и покрыты соответствующими "обмазками11. В этих целях
в конструкции самолета широко применяются композиционные
материалы (например, "фибалой"), углепластик "филкоут", радиопогло-
щающие покрытия. На внешнюю поверхность самолета нанесена
ферромагнитная краска. Открывающийся вверх фонарь кабины также
имеет фасеточную форму и выполнен в виде цельной конструкции с
многослойным остеклением, покрытым снаружи электропроводящим
золотосодержащим слоем для предотвращения радиолокационного
облучения внутрикабинного оборудования и летчика.
.В результате принятых мер эффективная поверхность рассеивания
(эффективная отражающая поверхность) F-117 снижена до 0,025...
0,1 кв.м при различных ракурсах облучения. В то же время оптимизация
внешних форм планера с позиций радиозаметности значительно ухудшила
аэродинамику самолета, особенно на посадочных режимах.
587
Компоновочная схема самолета F-117
Крыло F-117 трапециевидной формы в плане, имеет большую
стреловидность. Вихри, сходящие с передних кромок крыла и корпуса,
образуют несущую вихревую систему. Низ крыла образован двумя
плоскими поверхностями, а верх - тремя плоскостями: центральной по
всему размаху и двумя наклоненными вниз - передней и задней - в
совокупности образующими профиль крыла. Органы управления на
крыле включают зависающие элевоны (по два на каждой консоли),
служащие для управления крылом и тангажом.
Кабина одноместная с обзором только вперед. Летчик размещается
на катапультном кресле, обеспечивающем аварийное покидание самолета
в полете и на стоянке. Кабина снабжена системой кондиционирования.
Цельноповоротные консоли V-образного хвостового оперения имеют
стреловидность 65° и угол развала около 85° и служат для управления
только по направлению полета.
Шасси трехопорное с управляемой носовой опорой. Все стойки
одноколесные, убираются вперед. Тормоза колес дисковые, с углеродны-
ми дисками. Имеется автомат торможения. Сверху хвостовой части
фюзеляжа расположен отсек с тормозным парашютом. В хвостовой части
снизу установлен тормозной крюк.
На самолете установлен двигатель фирмы "Дженерал Электрик",
представляющий собой нефорсированный вариант двигателя F404,
установленного на ряде американских самолетов (например, на
истребителеР-18). Система управления двигателем полностью автомати-
зированная, цифровая. Каждый из двигателей закрыт кожухом,
588
выполненным с применением полимеров и щелевидных поглощающих
конструкций, предназначенных для уменьшения отражения радиоволн
и снижения уровня шума от двигателя. Прямоугольные воздухозаборники
с косым срезом входа расположены по бокам фюзеляжа над крылом. На
входе воздухозаборников установлены решетки из радиопоглощающих
материалов с размерами ячеек, близкими к половине длины волны
радиолокаторов, работающих в сантиметровом диапазоне. Решетки
оборудованы тепловой противообледенительной системой. Истекающие
из двигателя продукты сгорания несколько охлаждаются подачей воздуха
за турбину, что уменьшает инфракрасное излучение, снижает тепловые
нагрузки на стенки выходной трубы и уровень шума от истекающих
газов. Сопла двигателя плоские с вертикальными перегородками,
предназначенными для уменьшения инфракрасной и радиолокационной
заметности самолета. С этой же целью внутренняя поверхность нижних
панелей сопел облицована теплопоглощающими керамическими плитками.
В то же время эти меры приводят к определенным потерям тяги
двигателя. Топливо размещается в двух фюзеляжных и четырех
крыльевых баках. Имеется система заправки топливом в полете.
Система управления полетом электродистанционная цифровая с
четырехкратным резервированием. Самолет неустойчив по тангажу и
рысканию, и поэтому используется сложная система обеспечения
искусственной устойчивости. Автопилот обеспечивает полет самолета
по заранее запрограммированному маршруту в зону, позволяющую
летчику установить визуальный контакт с целью при использовании
станции инфракрасного наведения. Автомат тяги позволяет самолету
выйти на рубеж применения оружия с точностью до нескольких секунд.
Основополагающим при оснащении целевым оборудованием было
требование исключения любых источников излучения, которые могли бы
облегчить обнаружение самолета и повысить уровень демаскирующих его
признаков. За исключением лазерного целеуказателя, который использует-
ся только кратковременно непосредственно при атаке цели, навигация,
поиск цели и управление вооружением осуществляются с применением
только пассивных средств.
Установленное на самолете оборудование позволяет фиксировать
местоположение и характеристики радиолокационных станций
противника, а также осуществлять передачу полученной информации
на другие самолеты с помощью лазерной системы скрытой связи. На
борту самолета установлена ЭВМ, которая обслуживает индикаторы,
автопилот, датчики и систему управления вооружением. Активные
средстварадиоэлектронной борьбы отсутствуют. Приборное оборудова-
ние кабины создано на базе оборудования истребителя F-I8 с использова-
нием трех многофункциональных индикаторов. В центре приборной
589
доски расположен индикатор, на который выводится тепловизионное
изображение пролетаемой местности от инфракрасной станции.
Для размещения вооружения HaF-117 предусмотрен двухсекционный
отсек размером 4,7x1,75 м, в котором на выдвижных балочных
держателях возможно размещение двух бомб с лазерным наведением,
противорадиолокационных ракет, ядерных бомб, контейнеров с
суббоеприпасами, ракет класса "воздух-воздух".
F-117 впервые участвовали в боевых действиях в декабре 1989 г., во
время американской интервенции в Панаме. Два F-117 сбросили по
одной бомбе массой 907 кг с лазерным наведением на казармы панамской
национальной гвардии, причем, как выяснилось позднее, с большим
отклонением от цели из-за неблагоприятных погодных условий и ошибок
летчиков. Первые широкомасштабные операции с использованием F-117
производились во время войны с Ираком в январе-марте 1991 г.
Численность этих самолетов составляла всего 2,5 % от общего числа
самолетов, участвовавших в боевых действиях. В первый день конфликта
было задействовано 36 F-117, из которых 24 были использованы в темное
время суток, 12 - после 17 ч по местному времени. Большая часть ударов
выполнялась одиночными самолетами, и только три наземные цели были
атакованы группами из двух самолетов. За все время войны F-117
выполнили 1271 боевой вылет и сбросили более 2000 т бомб с лазерным
наведением, причем результативность бомбардировок, по американским
данным, составила 80...95 %. Ими были уничтожены три из четырех
иракских адерных реакторов, несколько цепей нефтепроводов. Имелись
случаи невыполнения задания из-за срыва лазерного наведения бомб при •
их проходе в облаках, что говорит о способности F-117 выполнять
операции только в условиях хорошей погоды. По неподтвержденным
данным, в процессе войны один F-117 был сбит иракским ЗРК "Оса".
Основные характеристики. Максимальная взлетная масса 23815 кг;
максимальная боевая нагрузка 2270 кг; полный запас топлива 5500 кг;
максимальное число М полета на высоте примерно равно 1; крейсерское
число М = 0,8...0,9; взлетная скорость при нормальной массе 306 км/ч;
посадочная скорость 278 км/ч; радиус действия с боевой нагрузкой
2270 кг без дозаправки в воздухе 1060 км; максимальная эксплуатацион-
ная перегрузка 6 единиц.
ВИНТОКРЫЛЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
38. Автожиры Хуана де ла Сиерва - см. стр. 596
39. Автожир ЦАГИ А-7 впервые в мировой практике имел защитное
вооружение. Двухместный автожир крылатого типа с трехлопаст-
ным винтом, оснащенный одним двигателем внутреннего сгорания.
590
Схема автожира ЦАГИ А-7
Схема легкого многоцелевого вертолета Белл-205 "Ирокез" UH-1D
591
Взлетная масса 2056 кг; скорость до 210 км/ч. Построен в 1934 г.
Руководитель проекта - Николай Ильич Камов (1902-1973), СССР.
40. Легкий многоцелевой вертолет Белл-205 "Ирокез" UH-1 - самый
распространенный в мире вертолет. Имеет большое число гражданских
и военных модификаций. Конструктивно выполнен по одновинтовой
схеме с рулевым винтом, одним или двумя двигателями и лыжным
шасси. Взлетная масса 4,31 т; крейсерская скорость 204 км/ч; нагрузка
до 1,76 т. Первый полет состоялся в 1957 г. Фирма-разработчик "Белл",
США.
41. Многоцелевой вертолет Ми-8 - наиболее распространенный в
мире транспортный вертолет. Конструктивно вертолет выполнен по
одновинтовой схеме с рулевым винтом, двумя газотурбинными
двигателями и трехопорным шасси. Взлетная масса 10... 13 т; крейсерская
скорость до 240 км/ч; нагрузка до 4 т. Первый полет состоялся в 1961 г.
Руководитель проекта - Михаил Леонтьевич Миль (1909-1970), СССР.
42. Вертолет "Чинук" СН-47 - основной военно-транспортный
вертолет армии США. Конструктивно выполнен по продольной схеме
с двумя несущими винтами и двумя газотурбинными двигателями.
Взлетная масса 20,865 т; крейсерская скорость 260 км/ч; нагрузка до
10,34 т. Первый полет состоялся в 1961 г. Фирма-разработчик - "Боинг
вертол", США.
43. Боевой вертолет Белл-209 "Хью Кобра" АН-IS - первый вертолет,
задуманный как вертолет боевой поддержки и принятый на вооружение
различными видами вооруженных сил. Конструктивно выполнен по
одновинтовой схеме с рулевым винтом, одним двигателем и лыжным
шасси. Взлетная масса 4,535 т; крейсерская скорость 227 км/ч. Построен
в 1965 г. Фирма-разработчик "Белл", США.
44. Транспортно-боевой вертолет Ми-24 - самый массовый боевой
вертолет в мире. Конструктивно вертолет выполнен по одновинтовой
схеме с рулевым винтом, двумя газотурбинными двигателями и
трехопорным шасси. Взлетная масса 11,5 т; крейсерская скорость
270 км/ч; нагрузка до 2,5 т. Построен в 1969 г. Руководитель проекта-
Марат Николаевич Тищенко (р. 1931), СССР.
45. Тяжелый вертолет Ми-26 - см. стр. 598
46. Многоцелевой корабельный вертолет Ка-27 - крупнейший в мире
противолодочный вертолет третьего поколения. Является основным
корабельным вертолетом ВМФ России. Конструктивно выполнен по
двухвинтовой соосной схеме с двумя газотурбинными двигателями и
четырехопорным шасси. Взлетная масса 11,5 т; крейсерская скорость
230 км/ч. Первый полет совершил в 1973 г. Руководитель проекта-
Николай Ильич Камов, СССР.
47. Конвертоплан Белл Боинг V-22 "Оспри" - см. стр. 602
48. Тяжелый десантно-транспортный вертолет СН-53Е "Супер
Стеллион" - самый большой вертолет, построенный за пределами
России.
592
593
Схема боевого вертолета Белл-209 "Хью Кобра" AH-1S
Схема транспортно-боеного вертолета Ми-24В
594
5400
Схема многоцелевого корабельного вертолете Кв-27
Схеме тяжелого десвнтно-трвнспортного вертолета СН-53Е "Супер Стеллион"
595
Конструктивно представляет собой вертолет одновинтовой схемы с
хвостовым рулевым винтом. Оснащен тремя газотурбинными двигателя-
ми. Взлетная масса 31,63 т. Начало серийного производства - 1980 г.
Фирма-разработчик - "Сикорский", США.
49. Одноместный боевой вертолет Ка-50 - см. стр. 606
АВТОЖИРЫ ХУАНА ДЕ ЛА СИЕРВА
Испанский авиаконструктор Хуан де ла Сиерва (1895-1936) разработал
идею автожира в 1919 г. Первый автожир, построенный Сиерва в 1920 г.
(С-1), имел два соосно расположенных четырехлопастных винта-ротора
с жестким креплением лопастей к втулке. Справиться с большим
опрокидывающим моментом в поперечной плоскости не удалось, и
аппарат оказался неудачным. Первым удачным автожиром, что признано
в книге Гиннеса об авиации, была модель С-4, совершившая свой первый
полет в январе 1923 г. На этом аппарате впервые применена шарнирная
подвеска лопастей к втулке ротора, позволяющая лопастям совершать
маховое движение в вертикальной плоскости.
Затем X. Сиерва построил ряд удачных автожиров. На автожире С-5
для поперечного управления были установлены элероны. На следующем
автожире С-6 использовалась принципиально новая система подвески
лопастей к втулке ротора, двухшарнирная, позволяющая лопастям
совершать маховое движение в вертикальной и горизонтальной
плоскостях. Соединения такой схемы применялись на всех автожирах
(а также вертолетах) последующих конструкций.
В 1928 г. X. Сиерва создал автожир С-8, который стал первым в мире
винтокрылым летательным аппаратом, перелетевшим Ла Маши. Сам
Автожир СМ Хуана де ла Снерва
596
a
Траектория взлета автожира С-1:
а - по самолетному принципу (с разгоном); б - с предварительной раскруткой несущего
винта ("прыгающий")
Сперва после этого переезжает в Англию, где еще в 1925 г, организовал
фирму по производству автожиров. Ряд заграничных фирм покупает у
него лицензии на постройку автожиров. Постоянно совершенствуя свои
модели, Сиерва в 1930 г. выпускает автожир С-19, у которого ротор
имеет более совершенные формы, втулка ротора снабжена тормозом,
установлено оперение с дефлектором, облегчающим раскрутку ротора
перед взлетом. В автожире С-19 впервые применен ротор со свободно
несущими лопастями, введена предполетная раскрутка ротора от
двигателя с помощью системы механического запуска.
В 1933 г. Сиерва создал очередную модель автожира. С-30 стал первым
серийным автожиром. Как сообщается в книге Гиннеса об авиации,
первыми винтокрылыми летательными аппаратами, поступившими на
вооружение ВВС Великобритании, стали двенадцать автожиров С-ЗОА,
построенных по лицензии фирмой "Авро" и получивших обозначение
"Рота" Мк. 1. Автожиры поступали в авиационные подразделения в
период 1934-1935 гг. С 1940 г. они находились на вооружении и были
в составе единственной в ВВС Великобритании эскадрильи автожиров,
сохранившейся до октября 1945 г. Гражданский вариант С-ЗОА стал
первым автожиром с механизмом предварительной раскрутки винта,
597
позволявшим совершать взлет-"подскок". Автожиры аналогичного типа
создавались и выпускались серийно многими фирмами и в других
странах.
ТЯЖЕЛЫЙ ВЕРТОЛЕТ Ми-26
В книге Гиннеса об авиации констатируется, что самый большой в мире
серийный вертолет с восьмилопастным несущим винтом - это Ми-26 "Гало" КБ
Миля.
Руководитель проекта Марат Николаевич Тищенко. Прототип этого
двухтурбинного тяжелого транспортного вертолета впервые поднялся в воздух
14 декабря 1977 г.
Объем грузового отсека Ми-26 и его полезная нагрузка (максимум — до
22000 кг) такие же, как у военно-транспортного самолета Локхид С-130
"Геркулес", а полная длина (40м) почти идентична размаху крыла "Геркулеса".
В течение трех февральских дней 1982 г. Ми-26 установил пять мировых рекордов
грузоподъемности. Так, например, 2 февраля он поднял 10000 кг полезной нагрузки
на высоту 6400м, 3 февраля - 25000 кг на высоту 4100 м, а при стартовой массе
56768,8 кг вертолет поднялся на 2000 м.
Ми-26 - первый отечественный вертолет третьего поколения. Такие
винтокрылые аппараты разрабатывались в конце 1960-х - начале
1970-х гг. многими иностранными фирмами и отличались от своих
предшественников улучшенными технико-экономическими показателями.
Параметры Ми-26 значительно превосходили как отечественные, так и
зарубежные показатели вертолетов аналогичного типа. Весовая отдача
равнялась 50 % (против 34 % у его предшественника Ми-6), топливная
эффективность - 62 кг/т-км. Практически при тех же геометрических
размерах, что и у Ми-6, новый аппарат имел вдвое большую полезную
нагрузку и значительно лучшие летно-технические характеристики.
Увеличение грузоподъемности вдвое почти не отразилось на взлетной
массе вертолета.
Аванпроект Ми-26 был одобрен в декабре 1971 г., эскизный проект
закончен к концу 1972 г. В октябре 1977 г. завершилась сборка первого
летного образца, который, как уже сообщалось, совершил первый полет
14 декабря 1977 г, В мае 1979 г. второй экземпляр вертолета поступил
на государственные испытания, которые завершились в августе 1980 г.
Первый серийный Ми-26 поднялся в воздух 25 октября 1980 г. До 1997 г.
было выпущено 276 вертолетов Ми-26.
Ми-26 успешно применяются в гражданских и военных целях как в
нашей стране, так и за рубежом. Помимо России Ми-26 уже длительное
время эксплуатируются в странах СНГ, в Северной и Южной Корее,
Малайзии, Перу. Они используются для доставки гуманитарной помощи,
эвакуации беженцев, перевозки грузов и техники, для краново-монтаж-
598
Схема тяжелого вертолета Ми-2бВ
ных работ при строительстве мостов, буровых, линий электропередач,
при разгрузке кораблей на внешнем рейде и т.д. Вертолеты нашли
применение при борьбе с пожарами и во время стихийных бедствий.
В 1986 г. Ми-26 участвовали в ликвидации последствий аварии на
Чернобыльской АЭС.
Ми-26 послужил основой для создания 16 модификаций, в том числе
гражданского варианта, топливозаправщика, вертолета радиоэлектрон-
ной борьбы, летающей лаборатории, воздушного командного пункта,
дальнего противолодочного вертолета, пограничной модификации,
краново-монтажного варианта и др.
Конструктивно Ми-26 представляет собой вертолет одновинтовой
схемы с хвостовым рулевым винтом. Он имеет классическую для
милевских транспортных вертолетов компоновку: почти все системы
силовой установки находятся под грузовой кабиной; вынесенные вперед
относительно главного редуктора двигатели и кабина экипажа
уравновешивают грузовую кабину и хвостовую часть.
Фюзеляж Ми-26 удобообтекаемой формы, цельнометаллический,
выполнен по полумонококовой схеме. В носовой части фюзеляжа
расположена кабина экипажа, оборудованная системой кондиционирова-
ния воздуха. Кабина просторная и удобная, рассчитана на экипаж из пяти
человек и четырех сопровождающих груз. По бортам кабины предусмот-
599
Вертолет Мн-26
рены люки-блистеры для аварийного покидания вертолета, а также
бронеплиты. Под полом кабин расположены отсеки навигационного и
радиосвязного оборудования, системы жизнеобеспечения и вспомогатель-
ная силовая установка для автономного запуска двигателей. Под
радиопрозрачным обтекателем в носовой части размещается навигацион-
ный радиолокатор.
Центральная часть фюзеляжа занята вместительной грузовой кабиной
длиной 12,1 м, шириной 3,2 м и высотой от 2,95 до 3,17 м. Габариты
кабины позволяют перевозить все виды существующей и перспективной
военной техники массой до 20 т. Загрузка техники осуществляется своим
ходом через грузовой люк в хвостовой части фюзеляжа, оснащенной
двумя раскрывающимися боковыми створками и опускающимся трапом.
Для механизации погрузо-разгрузочных работ грузовая кабина оснащена
двумя электролебедками и тельфером, обеспечивающим загрузку,
выгрузку и транспортировку вдоль кабины грузов массой до 5 т, а также
втягивание колесной несамоходной техники. Загрузка пассажиров или
легких грузов может производиться, кроме того, через три трапа по
бортам фюзеляжа. Применение специальных конструктивных мер и
такелажного оборудования на борту вертолета позволяет осуществлять
загрузку и выгрузку, а также наземное обслуживание без использования
специальных аэродромных средств.
В десантном варианте Ми-26 способен перевозить 82 солдата или 68
парашютистов, в санитарном варианте - 60 раненых на носилках и трех
сопровождающих. Крупногабаритные грузы массой до 20 т возможно
перевозить на внешней подвеске.
Позади грузового люка фюзеляж плавно переходит в хвостовую
балку, на которой закреплено оперение - вертикальный киль и
600
горизонтальный стабилизатор. Под грузовым полом фюзеляжа
размещены восемь основных топливных баков общей вместимостью
12000 л. В перегоночном варианте в грузовой кабине устанавливаются
еще четыре дополнительных бака общей вместимостью 14800 л. Сверху,
над грузовой кабиной, расположены отсеки двигателей, главный
редуктор и два расходных топливных бака. Воздухозаборники
двигателей снабжены противопылевыми устройствами. Расходные
топливные баки и двигатели защищены броней.
Несущий винт восьмилопастный со стальным лонжероном и
формообразующей конструкцией сложного типа. Между внутренним
слоем стеклопластика и наружной обшивкой находятся стеклопластико-
вые силовые пояса и легкий пенопласт. Сзади к наружной обшивке
приклеен хвостовой отсек со стеклопластиковой обшивкой и сотовым
заполнителем типа "номекс". Каждая лопасть оборудована пневматичес-
кой системой обнаружения сквозных микротрещин в лонжероне в стадии
их образования. Крепление лопастей к втулке традиционное, посредством
трех шарниров, однако в конструкции осевого шарнира введен торсион,
воспринимающий центробежные нагрузки. Ряд шарнирных узлов
выполнен с применением металлопластиковых подшипников. Вертикаль-
ные шарниры оснащены пружинно-гидравлическими демпферами.
Принятые конструктивные решения позволили создать восьмилопастный
несущий винт с тягой на 30 % большей и массой на 2 т меньшей, чем у
пятилопастного винта Ми-6.
Пятилопастный рулевой винт имеет направление вращения, при
котором нижняя лопасть идет навстречу потоку, Лопасти рулевого винта
цельнопластиковые, крепятся к втулке посредством горизонтального и
осевого шарниров с торсионом. Лонжероны лопастей изготавливаются
методом машинной спиральной намотки. Несмотря на увеличение тяги
рулевого винта вдвое, масса его осталась такой же, как у Ми-6. Лопасти
несущего и рулевого винтов оснащены электротепловой противообледе-
нительной системой.
Главный редуктор Ми-26 разработан в ОКБ им. М.Л. Миля, так как
двигательные фирмы не смогли создать редуктор с необходимыми
параметрами. Впервые главный редуктор был построен по многопоточ-
ной кинематической схеме, ранее не применявшейся в отечественном
машиностроении. В результате трехступенчатый главный редуктор,
превосходящий используемый на Ми-6 редуктор по передаваемой
мощности почти в два раза, а по выходному крутящему моменту - более
чем в полтора раза, имеет массу всего на 8,5 % больше, чем у Ми-6.
Шасси Ми-26 трехопорное, с передней управляемой и двумя
основными опорами, снабженными двухкамерными амортизационными
601
стойками. Под концевой балкой при загрузке устанавливается убираю-
щаяся хвостовая опора.
Управление вертолетом осуществляется с помощью ручек и педалей
через гидроусилители, включенные по необратимой схеме и выполняю-
щие также функции рулевых машин автопилота. Для автоматического
управления вертолетом, улучшения его устойчивости и управляемости
на Ми-26 установлен пилотажный комплекс, состоящий из унифициро-
ванного автопилота и центрального пульта управления. С пилотажным
комплексом сопрягаются комбинированные агрегаты управления,
гировертикали, курсовая система, корректоры-задатчики высоты и
скорости. Автопилот обеспечивает стабилизацию углового положения
вертолета по все трем осям, а также выдерживание заданных значений
скорости и высоты полета. Работу комбинированных агрегатов
управления и силовых приводов обеспечивают гидросистемы - основная,
дублирующая и вспомогательная.
Комплекс пилотажно-навигационного оборудования и система
автоматического управления позволяют эксплуатировать Ми-26 в любых
погодных, климатических и физико-географических условиях, днем и
ночью. Навигационный локатор, доплеровский измеритель скорости и
угла сноса, система индикации на карте местоположения вертолета,
автоматические радиокомпасы и авиагоризонт, речевой и световой
информаторы предупреждения аварийных ситуаций значительно
упростили пилотирование этого вертолета. Ни на одном другом
отечественном вертолете не имелось столь комфортных условий для
работы экипажа, как на Ми-26.
В качестве силовой установки на Ми-26 применены два уникальных
турбовальных двигателя Д-136 конструкции В.А. Лотарева мощностью
11400 л.с. каждый, имеющие удельный расход топлива менее 0,2 г/(л.с.-ч).
Основные характеристики. Масса пустого вертолета 28150 кг;
нормальная взлетная масса 49500 кг, максимальная - 56000 кг; нормаль-
ная масса груза 15000 кг, максимальная - 20000 кг, на внешней подвеске -
20000 кг; крейсерская скорость 255 км/ч; статический потолок с учетом
влияния земли 2900 м; динамический потолок 4600 м; практическая
дальность полета 490 км; перегоночная дальность полета 1800 км.
КОНВЕРТОПЛАН БЕЛЛ БОИНГ V-22 "ОСПРИ"
Первые попытки создания конвертопланов относятся еще к середине
1930-х гг., когда, например, в Московском авиационном институте был
создан проект аппарата "Сокол", на концах поворотного крыла которого
предполагалось установить двигатели М-100. Однако этот проект не был
602
Схема конвертоплана Белл Боинг V-22 "Оспри
реализован. В годы второй мировой войны конструкторами немецкой
фирмы "Фокке Ахгелис" разрабатывалась модель воздушного наблюда-
теля FW-262 для базирования на подводных лодках. Разгром фашисткой
Германии помешал осуществлению проекта.
По сведениям, приведенным в книге Гиннеса об авиации, первым
конвертопланом с поворотным ротором был Белл XV-3, рассчитанный на
четырех пассажиров. Ротор-пропеллер на конце консоли каждого крыла
устанавливался в необходимое положение с помощью электромоторов.
Первый полет был совершен в августе 1955 г., а 18 декабря 1958 г. впервые
состоялся переход от вертикального полета к горизонтальному. К концу
1962 г. в процессе испытаний на XV-3 удалось достичь неплохих
результатов: скорость полета 290 км/ч; потолок - 3600 м. Именно XV-3
стал родоначальником нового направления в постройке конвертопланов.
На нем появились системы управления роторами в зависимости от
режимов полета: горизонтального, вертикального и переходного. К
1966 г. произведено более 250 полетов*.
В 1961 г. серию рекордных полетов совершил советский винтокрыл Ка-22 конструкции
Н.И. Камова, о чем сообщается в книге Гиннеса об авиации. В течение октября-ноября
1961 г. иа этом аппарате зарегистрированы мировые рекорды скорости (356,3 км/ч) и вы соты
полета (2588 м).
603
Изометрическая проекция конвертоплана
V-22 "Оспрн"
Дальнейшие работы в США
продолжились на базе конвертоп-
лана XV-15S, ставшего преемни-
ком конвертоплана XV-3 и оказав-
шегося более совершенным на
переходных режимах. В 1981 г.
конвертоплан демонстрировался
на Парижской авиационной вы-
ставке. К этому времени он совер-
шил более ста испытательных
полетов. В процессе испытаний
были достигнуты следующие результаты: максимальная скорость в
самолетном режиме составила 560 км/ч; скороподъемность 20 м/с до
высоты 4000м; потолок - 7000 м; "переходной"режим преодолевался за
12 с. К1982 г. фирмы "Белл" и "Боинг" объединили свои усилия в работе над
конвертопланом, в результате чего появилась последняя его модификация-
V-22 "Оспри".
Конструктивно V-22 выполнен по схеме высокоплана с прямым
крылом, двухкилевым оперением и двумя поворотными винтами в
гондолах на концах крыла.
Фюзеляж конвертоплана полумонококового типа с прямоугольным
поперечным сечением. Конструкция на 70 % выполнена из композитных
материалов. Боковые обтекатели используются для уборки основных
опор шасси и размещения дополнительных топливных баков, а также
оборудования систем кондиционирования. В передней части фюзеляжа
расположена трехместная кабина экипажа, в которой установлены
бронированные катапультные кресла, способные выдерживать попадания
пуль калибром 12,7 мм. С правой стороны фюзеляжа в его передней части
находится входная двухсекционная дверь. В грузовой кабине могут
размещаться на сиденьях вдоль бортов 24 десантника с вооружением или
12 раненых на носилках с сопровождающими санитарами.
Крыло с небольшим углом обратной стреловидности и постоянной
по размаху хордой. Конструкция крыла почти полностью изготовлена из
графитоэпоксидных композитных материалов. Предусмотрено складыва-
ние крыла при размещении конвертоплана на авианесущем корабле.
Поворотные винты имеют по три трапециевидные лопасти, изготов-
ленные из угле- и стеклопластиков. Винты имеют системы торможения
и складывания лопастей и связаны между собой синхронизирующим
валом, проложенным внутри крыла. Поворот гондол осуществляется с
помощью гидропривода с винтовым механизмом.
604
Оперение двухкилевое, полностью выполнено из графитоэпоксидного
материала и состоит из стабилизатора и двух вертикальных килей.
Шасси трехопорное, убирающееся, со спареннымиколесами. Носовая
опора убирается назадв отсек под передней частью фюзеляжа. Основные
опоры убираются в боковые обтекатели. Колеса основных опор имеют
дисковые углеродные тормоза.
Силовая установка состоитиз двух газотурбинных двигателей фирмы
"Аллисон" мощностью по 6150 л.с. Двигатель имеет редуктор и систему
управления на всех режимах работы. Топливная система состоит из 13
баков общей вместимостью 8845 л, расположенных в боковых обтекате-
лях и кессонах крыла. Два внешних бака служат в качестве расходных.
Имеется система заправки топливом в полете. Для перегоночных полетов
возможна установка двух дополнительных баков в грузовом отсеке
вместимостью более 7000 л.
Для управления на вертикальных режимах предусмотрены сис-
темы управления общим и циклическим шагом поворотных винтов.
В крейсерском полете для поперечного управления используются два
внешних элевона, для продольного управления - односекционный руль
высоты, а для путевого - рули направления на вертикальных килях.
Привод управляющих поверхностей осуществляется с помощью
гидроусилителей и электродистанционной системы управления с
тройным резервированием.
Бортовое оборудование включает две независимые и одну запасную
гидравлическую систему. В состав электросистемы входят два генератора
переменного тока и два - постоянного тока, выпрямители, преобразова-
тели и аккумуляторная батарея.
Носки крыла и вертикальных килей оборудованы противообледени-
тельной системой с надувными протекторами. Лобовое остекление,
передние кромки воздухозаборников двигателей, лопасти и коки винтов
имеют электрообогрев.
Радиоэлектронное оборудование состоит из навигационной системы,
радиосвязного оборудования, системы опознавания и др. Информация
о работе всех систем выводится на четыре цветных дисплея. Кроме того,
имеется пятый дисплей, на котором производится отображение карты
местности. В составе бортового оборудования - радиолокационная
станция для обеспечения полетов в режиме следования рельефу
местности, две ЭВМ для обработки боевого задания, система пилотиро-
вания в ночных условиях, аппаратура предупреждения об атаке ракетами
класса "воздух - воздух".
Вооружение конвертоплана зависит отварианта машины. Возможна
установка в кабине пулеметов калибра 7,62 и 12,7 мм, под носовой
частью фюзеляжа-турели с пушками. Имеются также узлы для подвески
605
противолодочных торпед, противокорабельных управляемых ракет и
ракет класса "воздух - воздух".
Основные характеристики. Максимальная взлетная масса 27440 кг;
нормальная взлетная масса 21545 кг; максимальная нагрузка, перевози-
мая в кабине, 9070 кг, на внешней подвеске - 6805 кг; максимальная
крейсерская скорость на вертолетном режиме 185 км/ч, на самолетном
режиме - 555 км/ч; дальность полета при взлете с коротким разбегом
(полезная нагрузка 9070 кг) - 3340 км.
ОДНОМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ Ка-50
В середине 1970-х гг. в ОКБ им. Н.И. Камова под руководством
генерального конструктора Сергея Викторовича Михеева (р. 1938)
началась разработка боевого вертолета нового поколения, который по
своим характеристикам мог быть сопоставимым с разработанным в
США новым вертолетом АН-64. Рабочее проектирование вертолета было
закончено в декабре 1972 г., а первый полет опытного образца
произошел в июне 1982 г.
По своей компоновке новый вертолет, получивший индекс Ка-50,
значительно отличался от ранее разработанных в ОКБ Камова
вертолетов: фюзеляж и оперение самолетного типа, убирающееся шасси,
сравнительно большое крыло, экипаж из одного летчика. Все это
потребовало высокой степени автоматизации управления вертолетом
и его вооружением.
Реализовать идею одноместного ударного вертолета стало возможно
лишь с созданием высокоинтегрированного комплекса бортового оборудова-
ния, включающего прицельные, пилотажные, навигационные и связные
системы, обеспечивающие возможность автоматизированного пилотиро-
вания и боевого применения в различных режимах, а также автоматичес-
кого обмена разведывательной и тактической информацией между
вертолетами в группе. Большое внимание было уделено повышению боевой
живучести вертолета, что было обеспечено использованием бронированной
кабины летчика и важнейших агрегатов, применением безопасно
повреждаемых конструкций. Впервые в практике мирового вертолето-
строения на вертолете установлено катапультное кресло с тянущей
ракетной системой, обеспечивающее катапультирование летчика во всем
диапазоне высот и скоростей полета, включая нулевые. Для обеспечения
полной безопасности летчика при катапультировании предварительно
производится отстрел лопастей несущего винта.
В процессе летных испытаний Ка-50 были продемонстрированы высокая
маневренность нового вертолета и успешное выполнение различных боевых
заданий. Вертолет Ка-50 был признан победителем в конкурсе на
армейский боевой вертолет и запущен в серийное производство.
606
Схема одноместного боевого вертолета Ка-50
С 1992 г. Ка-50 неоднократно участвовал в международных
авиационных салонах, вызывая большой интерес специалистов. На
международном авиационно-космическом салоне в г. Жуковском (1995 г.)
Ка-50 продемонстрировал уникальные маневренные свойства. В част-
ности, была показана петля Нестерова, выполненная непосредственно
из режима висения, что в настоящее время недоступно ни одному
вертолету мира.
Конструкция вертолета примерно на 35 % состоит из стекло-и
углепластиковых композиционных материалов. Фюзеляж Ка-50 обла-
дает хорошими аэродинамическими формами и подобен фюзеляжу
самолета. Основным силовым элементом фюзеляжа является продольный
несущий лонжерон сечением 1x1 м, к которому крепятся все основные
элементы конструкции, включая редуктор, двигатели и опоры шасси.
В носовой части фюзеляжа размещается одноместная кабина пилота с
плоскими передним и боковыми бронестеклами. Доступ в кабину
осуществляется через открывающуюся дверь с левого борта. Кабина
имеет мощное бронирование для защиты летчика и основных агрегатов
с двухслойной стальной броней, которая может противостоять
бронебойным пулям калибра 12,7 мм и снарядам калибра 20 мм. Общая
масса брони 350 кг.
Крыло прямое, с законцовками, в которых размещаются контейнеры
с оборудованием. Под крылом установлены четыре поворотных пилона.
Оперение аналогично самолетному, с большим вертикальным килем
и прямым стабилизатором с концевыми шайбами.
607
Компоновочная схема Ка-50
Несущие винты соосные, трехлопастные, полужесткие, крепление
лопастей осуществляется с помощью пакета стальных пластин. Лопасти
прямоугольной формы в плане со стреловидными законцовками.
Силовая установка состоит из двух газотурбинных двигателей
конструкции НПО им. В.Я. Климова мощностью 2200 л.с. каждый,
установленных в отдельных гондолах по бокам фюзеляжа над крылом
и снабженных пылезащитными устройствами. Топливная система
включает основные баки общей вместимостью 3000 л, распложенные
внутри коробчатой балки. Под крылом могут подвешиваться дополни-
тельные сбрасываемые баки емкостью по 500 л.
Вооружение Ка-50 состоит из одноствольной пушки калибром 30 мм
с селективным питанием, позволяющим летчику выбирать для стрельбы
бронебойные или осколочно-фугасные снаряды. Пушка имеет некоторую
подвижность и может с помощью гидравлического привода отклоняться
на 15° по азимуту и на 30° по углу возвышения. Дополнительное
наведение пушки осуществляется отклонением всего вертолета. Ка-50
вооружен сверхзвуковыми противотанковыми ракетами с наведением
по лазерному лучу, устанавливаемыми на пилонах под крылом. Там же
можно размещать контейнеры с неуправляемыми ракетами или другим
вооружением, а также топливные баки.
Основные характеристики. Максимальная взлетная масса 10,8 т;
максимальная скорость в горизонтальном полете 310 к/ч; статический
потолок 4000 м; вертикальная скороподъемность 10 м/с; практическая
дальность полета 450 км; максимальная эксплуатационная перегрузка
3 единицы.
608
ПЛАНЕРЫ
50. Рекордные планеры А-9, А-10. При сравнительно небольшом
размахе крыла планеры обладают высоким аэродинамическим качеством
и отличными парящими свойствами. По аэродинамической схеме
представляют собой моноплан с высокорасположенным свободнонесу-
щим крылом. Взлетная масса 410 кг. Построены в 1950 г. Руководитель
проекта Олег Константинович Антонов, СССР.
51. Планер первоначального обучения БРО-11 "Пионер". Рассчитан
на первоначальную подготовку начинающих планеристов. Планеры
БРО-11 в течении многих лет применялись в планерных кружках и
школах, а некоторые из них продолжают эксплуатироваться до сих пор.
По конструктивной схеме БРО-11 представляет собой расчалочный
двухподкосный моноплан с высокорасположенным крылом. Масса
планера 58 кг. Построен в 1954 г. Конструктор Бронюс Ошкинис, СССР.
52. Двухместный учебно-тренировочный планер L-13 "Бланик"- см.
стр. 612.
53. Планер оригинальной компоновочной схемы МАК-15. Исключи-
тельная оригинальность аэродинамической схемы позволяет отнести этот
планер к числу выдающихся летательных аппаратов. МАК-15 создавался
как учебный одноместный планер сквозного обучения. Конструк-
ция деревянная с металлическими узлами. Имел оригинальное крыло
Схема рекордных планеров А-9, А-10
20 — 7425
609
Схема планера первоначального обучения БРО-11 "Пионер"
610
Схема тяжелого десантного планера Як-14
с широким, развитым по хорде и по размаху центропланом, хвостовая
часть которого завершалась стабилизатором и рулем высоты, Взлетная
масса - 135 кг. Построен в начале 1950-х гг. Руководитель проекта -
А.М. Кузаков, СССР.
54. Рекордный одноместный планер SZD-8-бис "Яскулка" - см.
стр. 614.
55. Тяжелый десантный планер Як-14 - самый тяжелый отечественный
тридцатипятиместный десантный планер. Схема планера представляет
20*
611
собой подкосный высокоплан с трехколесным шасси с носовым колесом.
Фюзеляж квадратного сечения выполнен из сварных хромансилевых труб
и обтянут полотном. Взлетная масса 6582 кг. Построен в 1948 г.
Руководитель проекта Александр Сергеевич Яковлев, СССР.
ДВУХМЕСТНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПЛАНЕР L-13 "БЛАНИК"
Первые два образца планера "Бланик" конструкции Карела Длоуги
(Чехословакия) были изготовлены в 1955 г. Планер много лет выпускался
серийно и продавался во многие страны мира. Большое число планеров этого
типа было закуплено СССР, некоторые из них и до настоящего времени
находятся в эксплуатации. Планер "Бланик" предназначался для всех
ступеней обучения, для обучения слепому полету, а в одноместном
варианте - для самостоятельных полетов, в том числе тренировок по
высшему пилотажу. В двухместном варианте сиденья летчика и курсанта
расположены одно за другим.
Конструкция планера "Бланик" цельнометаллическая, выполнена из
алюминиевых сплавов.
Крыло большого удлинения имеет обратную стреловидность, профиль
крыла ламинарный. По концам крыла расположены веретенообразные
обтекатели. Конструктивно крыло оформлено по двухлонжеронной
Схема двухместного учебно-тренировочного планера L-13 "Бланик"
612
схеме, основной лонжерон расположен на 40 % хорды; у задней кромки
крыла, перед закрылками и элеронами, находится вспомогательный
лонжерон. Обшивка из дуралюминовых листов толщиной от 1,2 до
0,8 мм. В задней части крыла расположены тормозные щитки. Обе
консоли прикреплены к короткому центроплану, образованному двумя
силовыми шпангоутами фюзеляжа. Закрылки подвешены на четырех
узлах, позволяющих сдвигать их назад и одновременно опускать.
Обтянуты закрылки полотном. Элероны по конструкции аналогичны
закрылкам. Крыло планера обладает большой крутильной жесткостью,
что практически исключает возникновение флаттера.
Фюзеляж типа полумонокок, овального поперечного сечения с
дуралюминовой обшивкой толщиной 0,8 мм. Передняя часть фюзеляжа
собрана из двух килевых балок, двух продольных лонжеронов и пяти
шпангоутов. К последним прикреплены полы, сиденья и лонжероны
центроплана с узлами подвески крыла. В носовой части расположена
кабина экипажа, закрытая откидным фонарем. За сиденьем заднего
летчика находятся два помещения для багажа и добавочного оборудова-
ния. Имеется подвеска для аккумулятора, барографа и сумки с инстру-
ментом. Задняя часть фюзеляжа состоит из двух половин, склепанных
в вертикальной плоскости и усиленных перегородками. В хвостовой
части фюзеляжа установлено оперение, состоящее из вертикального киля
с рулем направления и стабилизатора с рулями высоты. Все рули
обтянуты полотном.
В кабине экипажа по левому борту находятся рычаги управления
закрылками и тормозными щитками. Перед ними помещена ручка
управления триммерами. Управление элеронами и рулем высоты
осуществляется центральной трубой, соединенной сручками управления,
расположенными в обеих кабинах. Движения ручек передаются на
органы управления системой рычагов, тяг и тросов. В нижней дальней
части кабины расположены педали ножного управления рулем
направления. Ручки для сбрасывания буксировочного троса расположе-
ны по левую сторону в обеих кабинах.
Шасси снабжено полубаллонным колесом с механическим тормозом,
расположенным перед центром тяжести планера. Колесо в полете
убирается не полностью, что позволяет производить посадку на колесо.
Амортизация шасси масляно-пневматическая. Тяга к тормозу колеса
соединена с рычагом управления тормозными щитками. В хвостовой
части расположен костыль рессорного типа с ориентирующимся колесом,
устанавливающемся в нормальное положение с помощью пружины. На
нижней стороне передней части фюзеляжа имеется небольшая лыжа из
листовой стали, предохраняющая обшивку фюзеляжа при случайном
опрокидывании планера на нос.
613
Планер оборудован для слепого полета. На передней и задней досках
расположены указатель скорости полета, высотомер, два вариометра,
электрический указатель поворотов и компас. Можно устанавливать,
кроме того, авиагоризонт, аэронавигационные огни, подсвет приборных
досок и кислородные приборы.
Планер "Бланик" - один из самых массовых учебно-тренировочных
планеров в мире. На нем установлен ряд национальных и мировых рекордов.
Так, в книге Гиннеса об авиации сообщается, что "рекорд дальности
полета по прямой для двухместного планера с женским экипажем был
установлен еще 3 июня 1967 года Т. Павловой и Л. Филомечкиной, которые
на планере "Бланик" пролетели расстояние в 864,85 километра". Этот
рекорд держится уже более тридцати лет.
Основные характеристики. Масса пустого планера 280 кг; полетная
масса 460 кг; нагрузка на крыло 26,3 кг/м2; удлинение крыла 13,7;
минимальная скорость снижения 0,92 м/с; максимальная скорость полета
при неспокойном воздухе 100 км/ч.
РЕКОРДНЫЙ ОДНОМЕСТНЫЙ ПЛАНЕР SZD-8-БИС "ЯСКУЛКА"
Первый экземпляр планера SZD-8 "Яскулка" ("Ласточка") был
спроектирована 1951 г. Т.Костия, Польша. После некоторых улучшений
Схема рекордного одноместного планера SZD-8-бис "Яскулка"
614
Компоновочная схема планера "Яскулка":
1 - носовой кок и буксировочный замок; 2 - педали; 3- приборная доска; 4 - кислородный
прибор; 5- ручка управления планером; 6- рычаг управления закрылками и воздушными
тормозами; 7- рычаг выпуска шасси; 8- приемник давления воздуха; 9~ фонарь; 10-
сиденьс; 11 -спинкакресла; /2-рычагслива водяного балласта; 73-кишюродный баллон;
/4-багажник фюзеляжа; 15- подголовник; 16-зеркало; 17-заливная горловина баков
водяного балласта; 18- управление элеронами в крыле; 19— воздушные тормозные щитки;
20 - элерон; 21 - концевой обтекатель с аэронавигационным огнем; 22 - главный узел
крепления крыла; 23 - разъем управления; 24 - задний узел крепления крыла; 25 — зализ
крыла; 26 - обшивка фюзеляжа; 27 - шпангоуты; 28 - управление рулями; 29 -
неподвижная часть оперения; 30-рули; 31 -статическиеразрядники; 32-хвостовая лыжа;
33 - хвостовой обтекатель; 34 - шасси (колесо выпущено); 35 - главный лонжерон крыла;
36 - багажник в крыле; 37-баки водяного балласта; 38 - обшивка крыла; 39- нервюры
крыла; 40 - задняя кромка; 41 - посадочные щитки; 42 - управление воздушными
тормозными щитками; 43 - задний лонжерон крыла; 44 - управление посадочными
щитками; 45- передняя кромка крыла
его стали строить серийно на планерном заводе в г. Вельске. Начиная
с 1952 г. планер выпускают под названием SZD-8-бис "Яскулка".
Планер хорошо оборудован, снабжен приборами для слепого полета,
а также кислородной аппаратурой. Это один из лучших в мире рекордных
планеров. Напланерах "Яскулка" установлено четыре польских националь-
ных рекорда, в том числе один в 1957 г. с высотой полета 5820 м, один
английский, один болгарский и четыре мировых рекорда.
615
Конструкция планера в основном деревянная. Крыло имеет два близко
расположенных друг к другу лонжерона, образующих кессон, который
воспринимает нагрузки, действующие на крыло. В работу кессона
включен также фанерный носок крыла, подкрепленный нервюрами и
соединенный с передним лонжероном кессона. Крыло имеет угол
поперечного V, равный 4°. Вдоль всей задней кромки крыла расположе-
ны: во внешней части - разрезные элероны, во внутренней - закрылки
разрезного типа. Элероны и закрылки обшиты полотном. Перед
закрылками, на задней трети хорды крыла, размещены воздушные
тормозные щитки пластинчатого типа.
Фюзеляж овального поперечного сечения с фанерной обшивкой.
Фонарь кабины летчика сдвигается назад, имеет малое лобовое
сопротивление и обеспечивает хороший обзор. Фонарь остеклен
давленным плексигласом. В носовой части фюзеляжа установлен
буксировочный замок. Кабина летчика оборудована навигационными
приборами, обеспечивающими выполнение слепого полета, и аэронавига-
ционными огнями, снабжена кислородным оборудованием. На
приборной доске расположены следующие приборы: компас, указатель
скорости, вариометр, указатель поворотов, высотомер, кислородный
манометр и указатель расхода кислорода. Наклон спинки кресла летчика
изменяется. За спиной летчика расположен багажник.
В хвостовой части фюзеляжа закреплено оперение, состоящее из киля
с рулем направления и стабилизатора с рулями высоты. Все рули
обтянуты полотном. Горизонтальное оперение (стабилизатор) имеет
небольшой угол поперечного V и складывается вверх, чем облегчается
транспортировка планера.
Шасси одноколесное, подтягивающееся к фюзеляжу. Колесо размером
300x100 мм расположено впереди центра тяжести. В носовой части
фюзеляжа установлена предохранительная лыжа, а в хвостовой - жесткая
пята.
В 1956 г. планер был модифицирован под наименованием SZD-17X
"Яскулка-М". От своего предшественника он главным образом отличался
наличием более выраженного угла поперечного V оперения. В этом же
году планер был еще раз видоизменен - SZD-17X "Яскулка-L". Этот
планер имеет ламинарный профиль крыла и почти те же размеры, что
и серийный планер. Он оборудован баками для водяного балласта,
расположенными в носке крыла, и багажником, размещенным там же.
Вместо щелевых закрылков на нем установлены пластичные посадочные
щитки, а на концах крыла находятся обтекатели каплеобразной формы.
Оперение V-образное, как и на планере предыдущей модификации.
Основные характеристики. Длина 7,42 м; размах крыла 16,0 м;
удлинение крыла 18; полетная масса 340 кг; масса пустого планера 232 кг;
нагрузка на крыло 25 кг/м2; минимальная скорость снижения 0,76 м/с;
максимальная скорость при полете в спокойном воздухе 200 км/ч;
минимально допустимая скорость полета 47 км/ч.
616
ЛЕТАТЕЛЬНЫЕ АППАРАТЫ ЛЕГЧЕ ВОЗДУХА
56. Дирижабль полужесткого типа N-1 - один из первых дирижаблей
полужесткого типа, на котором был выполнен ряд уникальных полетов,
в том числе и полет на Северный полюс. Конструктивно представлял
собой ферму из треугольных шпангоутов и стрингерных балок,
обтянутых трехслойным прорезиненным перкалем. Оснащался тремя
двигателями. Полезная нагрузка - 8275 кг; скорость до 113 км/ч.
Построен в 1923 г. Руководитель проекта -Умберто Нобиле (1885-1978),
Италия.
57. Дирижабль жесткого типа LZ-127 "Граф Цеппелин" - см. с. 619.
58. Дирижабль жесткой конструкции ZRS-4 "Акрон" - крупнейший
американский дирижабль. В качестве несущего газа был применен гелий,
что резко снизило опасность пожара и взрыва во время полета.
Конструкция алюминиевого каркаса была выполнена по образцу
немецких дирижаблей фирмы "Цеппелин". Исключительной особеннос-
тью дирижабля "Акрон" было наличие внутри оболочки большого
ангара, в котором размещались до пяти небольших самолетов. Силовая
установка состояла из восьми двигателей водяного охлаждения. Масса
полезной нагрузки - 19 т; скорость 100 км/ч. Построен в 1938 г. США.
59. Рекордный стратостат "ОСОАВИАХИМ-1" - советский
стратостат с герметичной кабиной, предназначавшийся для подъема в
верхние слои атмосферы для проведения ее исследований и установления
рекордов. Представлял собой сферическую гондолу, обеспечивавшую
Дирижабль полужесткого типа N-1
Дирижабль жесткой конструкции ZRS-4 "Акрои"
617
необходимые условия для жизнедеятельности экипажа
на высоте, подвешенную на стропах к несущей
оболочке. Гондола была выполнена из стальных
листов, а оболочка - из прорезиненной хлопчатобу-
мажной ткани. 30 января 1930 г. достиг рекордной
высоты 22000 м. Экипаж состоял из трех человек.
СССР.
60. Дирижабль типа "К" - см. стр. 621.
61. Отечественные привязные аэростаты периода
второй мировой войны использовались как составная
часть системы ПВО, а также для наблюдения. Кон-
структивно представляли собой обтекаемую оболоч-
ку, наполненную несущим газом. Оболочка мягкая,
односекционная с одним баллонетом большого
объема. Привязной трос крепился к корпусу аэростата
стропами из стальных или синтетических тросов.
Подъем и спуск осуществлялся с помощью лебедок,
Говдола рекордного
стратостата "ОСО-
АВИАХИМ-1"
приводившихся в действие от автомобильных или электрических
двигателей. Руководитель проекта - Константин Дмитриевич Годунов
(1892-1965), СССР.
5
Отечественные привязные аэростаты периода второй мировой войны:
I - оболочка; 2 - баллонет; 3 - автоматический предохранительный клапан; 4 - аппендикс
для заправки аэростата; 5 - разрывное приспособление; 6 - стабилизаторы; 7 - рулевой
мешок; 8 - улавливатель скоростного напора; 9- главный пояс; 10 - привязной такелаж;
11 - подвесной такелаж; 12 - "гусиные лапки"; 13 - стропы
618
ДИРИЖАБЛЬ ЖЕСТКОГО ТИПА LZ-127 "ГРАФ ЦЕППЕЛИН"
Дирижабль "Граф Цеппелин" признан наиболее выдающимся
дирижаблем жесткого типа, классическим образцом для аппаратов этого
класса, что подтверждено многолетним и успешным опытом его
эксплуатации в самых различных условиях и районах земного шара.
Руководитель проекта - Фердинанд Цеппелин (1838-1917), Германия.
LZ-127 имел объем более 100 тыс. м , дайну -около 237 м, максималь-
ный диаметр 30,5 м, полезная нагрузка составляла 65 т, максимальная
скорость полета - 128 км/ч.
Наружные формы дирижабля образовывались каркасом, обтянутым
перкалем - полотном, пропитанным целоновым лаком с алюминиевым
порошком. Каркас имел типовую для цеппелинов конструкцию и
представлял собой пространственное сооружение, составленное из ряда
шпангоутов и стрингеров, связанных узлами в точках их пересечения,
и тросовых расчалок. Элементы каркаса соединялись в основном
клепкой. Шестнадцать главных шпангоутов устанавливались с
интервалом 15 м. Между главными шпангоутами с шагом около 5 м
располагались вспомогательные шпангоуты. Главные шпангоуты
подкреплялись в своей плоскости радиальными и хордовыми расчалками,
вспомогательные шпангоуты расчалок не имели. Все шпангоуты имели
форму в плане в виде правильного 28-угольника. Стрингеры (продольные
силовые элементы) также делились на главные и вспомогательные.
Шпангоуты и стрингеры имели треугольное сечение и были выполнены
из цельнотянутого алюминия. Прямоугольники, образованные
стрингерами и шпангоутами, подкреплялись системой тросов, которые
образовывали внутри прямоугольника систему ромбов и треугольников
со сторонами около 0,5 м. С внутренней стороны каркас обтягивался
сеткой, предохраняющей расположенные внутри каркаса баллоны с газом
от повреждения о силовые элементы.
Основу силовой схемы LZ-127 составляли две продольные фермы:
нижняя, или килевая, и верхняя, расположенная несколько ниже
продольной оси дирижабля. Внутри обеих ферм размещались коридоры,
предназначенные для контроля экипажем в полете за работой всех
внутренних агрегатов и систем дирижабля.
Дирижабль жесткого типа LZ-127 "Граф Цеппелин"
619
По обеим сторонам нижнего коридора располагались помещения для
экипажа: восемь двухместных кают, кают-компания, умывальные
комнаты и пр. Здесь же были установлены баки с топливом и маслом для
двигателей, балластные емкости, топливопроводы, отсеки для грузов и
др.
Отличительной особенностью LZ-127 являлось применение наряду
с жидким горючим газообразного топлива-блау-газа.
Главные шпангоуты делили корпус дирижабля на 17 отсеков, в
которых находились газовые баллоны. В отсеках со второго по
тринадцатый над верхней фермой располагались баллоны с водородом.
Ниже этой фермы находились баллоны с блау-газом. Газовые баллоны
крепились к нижней коньковой ферме.
Все газовые баллоны в нижней части имели автоматические
предохранительные газовые клапаны, стравливающие излишек газа в
случае повышения избыточного давления выше допустимого через
систему специальных газовых шахт и вытяжных устройств над верхней
поверхностью дирижабля. Кроме того, вдоль конькового шпангоута
располагались маневровые газовые клапаны, управляемые экипажем из
гондолы.
Оперение LZ-127 состояло из расположенных в кормовой части
свободнонесущих горизонтальных и вертикальных стабилизато-
ров, к которым шарнирно подвешивались рули высоты и направления.
В носовой части корпуса, где имелись специальные усиления, устанавли-
валось причальное устройство.
Непосредственно к корпусу дирижабля жестко крепилась передняя
гондола длиной 40 м, шириной 6 м и высотой 2,25 м. В передней части
гондолы размещалась рубка управления, за ней служебные и пассажир-
ские помещения.
Для причаливания и крепления дирижабля на земле имелась система
канатов по всей длине корпуса.
Управление дирижаблем осуществлялось как статическим, так и
динамическим способами. Статический способ означал использование
балластной подсистемы и подсистемы выпуска несущего газа. Динами-
ческое управление обеспечивалось соответствующим отклонением рулей
управления.
Силовая установка LZ-127 состояла из пяти двигателей внутреннего
сгорания мощностью по 530 л.с. каждый, с реверсом направления
вращения воздушных винтов. Двигатели размещались в индивидуальных
мотогондолах, в которые имелся доступ для обслуживания и ремонта
даже в полете. В основном двигатели работали на блау-газе. В аварийном
случае питание переводилось на бензин, запас которого достигал 40 т.
620
LZ-127 имел наивысшие среди дирижаблей показатели пассажирских
перевозок. За 9 лет эксплуатации он совершил 578 полетов, из них 143
раза пересек Атлантику, и перевез почти 18 тыс. пассажиров. Общее
пройденное расстояние при этом составило почти 1,7 млн км.
По комфортабельности LZ-127 успешно конкурировал с океанскими
лайнерами. Пассажиры размещались в двухместных каютах со спальны-
ми местами. В передней части пассажирского отсека находилась
просторная кают-компания, в которой одновременно помещалось 28
человек. Кухня была рассчитана на обслуживание 50 человек в течение
нескольких суток. Кроме того, имелись буфет, почта, туалетные комнаты
и пр.
В книге Гиннеса об авиации сообщается, что первый полет дирижабля
вокруг земного шара был осуществлен 8-29 августа 1929 г. немецким
воздушным судном "Граф Цеппелин". Дирижабль, которым командовал
доктор Хуго Экенер, вылетел из Лейкхерста (штат Нью-Джерси) и
отправился в путь по маршруту Фридрихсхафен - Токио-Лос-Анджелес
и вернулся в Лейкхерст через 21 день 5 часов и 1 минуту. Пройденное им
расстояние составило более чем 35200 км. Этому дирижаблю принадле-
жит и мировой рекорд дальности полета по прямой для жестких
дирижаблей, равный 6384,5 км, установленный 29 октября - 1 ноября
1928 г.
Выдающийся вклад внес LZ-127 и в освоение Северного Ледовитого
океана. В 1931 г. специально оборудованный для этой цели дирижабль
"Граф Цеппелин" с экспедицией из 43 представителей СССР, Германии,
США и Швеции совершил перелет Ленинград - Архангельск - Баренцево
море - Земля Франца-Иосифа - Северная Земля - Таймыр - Новая Земля -
Архангельск - Ленинград - Берлин общей протяженностью 13 тыс. км.
Научным руководителем перелета был советский ученый Р.Л. Самойлович,
Основные характеристики. Полный объем 110,4 тыс. м3; длина 236,5 м;
диаметр 30,5 м; масса конструкции 62,1 т; крейсерская скорость 117 км/ч;
масса груза 8 т; число пассажиров 50...70; дальность полета 14000 км.
ДИРИЖАБЛЬ ТИПА "К"
В США фирмой "Гудиер" строились мягкие дирижабли, принципиаль-
но отличавшиеся от всех других дирижаблей этой системы способом
подвески гондолы. Такую разновидность дирижаблей в технической
литературе называют полумягкими дирижаблями, или "блимпами" (от
англ, limp - мягкий). Если в обычных мягких дирижаблях гондола
подвешивалась к оболочке на тросах, то в блимпах она крепилась
заподлицо с оболочкой посредством системы внутренней и внешней
подвесок.
621
Дирижабль типа "К1
Среди блимпов наибольшее распространение получил дирижабль
типа "К", конструкция которого характерна для большинства дирижаб-
лей этой системы. Первый экземпляр такого дирижабля был построен
в 1938 г. Он имел объем 11780 м3, длину 76,2 м, максимальный диаметр
18,4 м. Несущий газ - гелий. Учитывая высокую текучесть этого газа,
оболочку изготавливали из трехслойной хлопчатобумажной ткани, на
которую с целью увеличения газонепроницаемости наносился изнутри
слой неопрена. Снаружи оболочка имела алюминированное покрытие.
Внутри оболочки в верхней части к ней пришивались четыре
меридиональных пояса, свободные кромки которых имели форму
соединенных друг с другом парабол. В эти параболические кромки
вшивались стальные тросы - катенарии, образовывавшие таким образом
на каждом поясе 18 узлов внутренней подвески. Наружные узлы всех
поясов непосредственно крепились стальными тросами к узлам гондолы,
а от внутренних узлов шли стальные спуски, объединявшиеся в стропы
подвески. Затем стропы подвески группами крепились к узлам верхнего
пояса гондолы. Кроме того, внизу с каждой стороны гондолы имелось
по девять наружных параболических катенарий, вшитых непосредственно
в оболочку, узлы которых связывались короткими стальными тросами
с узлами боковых поясов гондолы. Имевшийся зазор между гондолой
и оболочкой зашивался матерчатым обтекателем.
В носовой и кормовой частях оболочки находились два баллонета
объемом около 1560 м3 каждый, оборудованные автоматическими
выпускными клапанами. В основных объемах с подъемным газом
имелось еще два автоматических газовых клапана. Все клапаны могли
работать и в режиме ручного управления. В крейсерском полете
баллонеты наполнялись посредством воздухоулавливателей, установлен-
ных за несущими винтами. На малых скоростях полета или при стоянке
подача воздуха в баллонеты осуществлялась от электроприводного
вентилятора. Количество воздуха, подаваемого в каждый из баллонетов,
регулировалось с помощью заслонок.
Для осмотра внутреннего оборудования оболочки над гондолой
имелось два канала-лаза диаметром 430 мм. В верхней части оболочки
622
находились два разрывных полотнища, вскрывавшиеся тросами,
идущими из гондолы. Передняя часть оболочки усиливалась каркасом,
состоявшим из 24 реек, зашнурованных в матерчатые каналы и шарнирно
соединенных с носовой опорной дуралюминовой шайбой диаметром
1,8 м.
Оперение состояло из четырех крестообразно расположенных
стабилизаторов с укрепленными на них рулями направления и высоты.
Стабилизаторы представляли собой ферменные алюминиевые каркасы,
обтянутые лакированной матерчатой обшивкой.
Гондола имела жесткий каркас из стальных труб с обшивкой из
альклэда - дуралюмина, покрытого с обеих сторон тонким слоем
алюминия, защищавшего дуралюмин от коррозии. По обеим сторонам
гондолы на пилонах крепились два двигателя мощностью около 450 л.с.
каждый, приводившие в движение тянущие воздушные винты. В плос-
кости винтов нижняя часть оболочки усиливалась накладками, предот-
вращавшими ее от повреждения кусками льда, срывавшимися с лопастей
винтов при полетев условиях обледенения. Под гондолой находилось
одностоечное шасси.
Экипаж дирижабля состоял из 8... 10 человек. Полезная нагрузка
составляла 3950 кг, максимальная скорость 120 км/ч, дальность полета
до 4600 км, максимальный потолок полета 2500 м. Дирижабль пшпа "К"
был самым массовым дирижаблем. Всего было произведено 134 дирижабля
такого типа.
Дирижабли типа "К" широко применялись США в период второй
мировой войны прежде всего в целях обеспечения противолодочной
обороны. С начала 1942 г. Германия начала активную подводную войну
против США, регулярно нападая на американские военные и граж-
данские суда. Американский флот первоначально нес большие потери.
В связи с этим на борьбу с подводными лодками были направлены все
имевшиеся в то время средства. Наиболее эффективными в этой борьбе
оказались дирижабли. Возможность полета на малых высотах с
небольшой скоростью и хороший обзор давали дирижаблям существенное
преимущество по сравнению с самолетами и противолодочными судами.
Наряду с современным пилотажно-навигационным оборудованием и
средствами обнаружения, позволявшими производить поиск подводных
лодок в любое время суток и практически в любых метеоусловиях,
дирижабли имели мощное пулеметное и бомбардировочное вооружение.
После обнаружения подводной лодки с дирижабля производилась атака
ее глубинными бомбами, а если они не достигали цели, то к месту
залегания подводной лодки сбрасывался буй и вызывались противоло-
дочные суда.
Применение дирижаблей заметно сказалось на общей эффективности
борьбы с подводными лодками. Если в 1942 г. немецкие лодки потопили 454
623
американских судна, то в 1943 г. в значительной степени благодаря
использованию дирижаблей потери уменьшились почти в семь раз (65
судов), а в 1944 г. они сократились до 8 судов. Широко использовались
дирижабли для поиска и уничтожения мин. Дирижабли выполняли и еще
одну важнейшую работу - конвоирование транспортов, шедших в Южную
Америку и Европу. За время войны с этой целью было выполнено 55900
полетов общей продолжительностью 550000 ч. Кроме того, дирижабли
принимали участие в различного рода спасательных работах. Только
в 1944 г. они выполнили более 200 спасательных операций на суше и на
море.
БАЛЛИСТИЧЕСКИЕ РАКЕТЫ
62. Баллистическая ракета Фау-2 (V-2) - см. стр. 628.
63. Баллистическая ракета XSM-80 "Минитмен". Эти ракеты стали
одним из самых массовых и основных средств стратегического
наступательного вооружения США. Основная часть ракет базировалась
в шахтных установках глубиной 25 м. Ракета трехступенчатая, с
боезарядом до 1 Мт. Система управления - инерциальная. Максимальная
дальность полета - 9300 км. Построена в 1963 г. Фирма-разработчик
"Боинг", США.
64. Баллистическая ракетаУР-100-первая отечественная ампулизиро-
ванная межконтинентальная ракета. УР-100 - жидкостная, легкого класса
с моноблочной ядерной боевой частью. В составе топлива применены
высококипящие компоненты: несимметричный диметилгидразин и
азотный тетраксид. Стартовый комплекс УР-100 включает десять
рассредоточенных боевых позиций и подземный командный пункт.
Дальность - 10600 км. Разработана в 1963 г. Руководитель проекта
Владимир Николаевич Челомей (1914-1984), СССР.
65. Межконтинентальная баллистическая ракета РС-20 "Сатана" -
ракета тяжелого класса. Самая массовая и совершенная отечественная
ракета межконтинентального назначения. Все ракеты этого семейства
жидкостные, могут оснащаться несколькими типами боевых частей. Один
из вариантов предусматривает оснащение разделяющейся БЧ с боевыми
блоками индивидуального наведения (до 10 шт.). Дальнейшей модифика-
цией этой ракеты стала самая мощная в мире межконтинентальная ракета
Р-36Н. Эта ракета может нести до 20 боеголовок. Топливо-высококипя-
щие компоненты: несимметричный диметилгидразин и азотный
тетраксид. Дальность - 11000 км. Руководитель проекта Владимир
Федорович Уткин (1921-2000), СССР.
66. Межконтинентальная баллистическая ракета подводного
базирования РСМ-52 - 3-ступенчатая твердого пливная ракета, базирую-
624
6
Компоновка баллистической ракеты XSM-80 "Минитмен":
I - сопловой блок 1-й ступени; 2 - экран; 3 - блок управления поворотными соплами;
4 - сопловой патрубок; 5 - нижнее днище РДТТ; 6, 7 - обтекатели; 8 - наружное
теплозащитное покрытие; 9-корпус РДТТ; 70~теплозащитноепокрытие нижнего днища;
II - пенопластовый вкладыш; 12 - теплозащитное покрытие внутренней поверхности
РДТТ; 13 - заряд твердого топлива; 14, 15 - канал заряда твердого топлива;
16 - пиросвечи; 17 - воспламенитель; 18 - детонатор; 19 - заряд системы аварийного
подрыва; 20 - юбка; 21, 22 - поворотные сопла РДТТ 2-й ступени; 23- раструб сопла;
24 — экран переходного отсека; 25 - блок управления поворотными соплами;
26-фланцевый стык; 27-верхнее днище РДТТ; 28-нижнее днище РДТТ; 2Р-болтовое
соединение диища с обечайкой; 30-наружная теплозащита корпуса РДТТ;
31 -теплозащита внутренней поверхности РДТТ; 32-заряд твердого топлива; 35-канал
заряда; 34 - фланцевый стык; 35 - пиросвечи; 36 - детонатор; 57- заряд аварийного
подрыва; 38 - разделяющийся стык; 39 - переходник; 40, 41 - обтекатели; 42, 43 -
поворотные сопла; 44 - раструб сопла; 45 — экран переходного отсека; 46 - блок
управления поворотными соплами; 47 — наружное теплозащитное покрытие РДТТ; 48 -
корпус РДТТ; 49 - нижнее днище РДТТ; 50 - верхнее днище РДТТ; 57 - теплозащитное
покрытие внутренней поверхности РДТТ; 52 - заряд твердого топлива; 53 - воспламени-
тель; 54-канал заряда твердого топлива; 55-отсечка тяги; 56- обтекатель;
57-разделяющий стык; 58 - переходник; 59 -детонатор; 60-заряд аварийного подрыва;
61 - приборный отсек; 62 - штекерные разъемы; 63 - приборный отсек; 64 - оптический
датчик; 65 - переходник; 66 - стабилизатор, обеспечивающий поворот боевой части;
67 - боевая часть
625
Схема баллистической ракеты УР-100
Компоновка межконтинентальной баллистической ракеты РС-20
"Сатана":
1 - пороховой аккумулятор; 2 - поддон; 3 - верхнее днище
поддона; 4 - ЖРД 1-й ступени; 5 - поперечная опора; 6 - бак
горючего; 7 - трубопровод окислителя; 3 - бак окислителя; 9 -
корпусТПК; 10-сопло противотяги 1-й ступени; 77 - переходной
отсек; 12- газоход рулевого двигателя 2-й ступени; 13-камера
сгорания рулевого двигателя 2-й ступени; 14 - маршевый ЖРД
2-й ступени; 75 - бак горючего 2-й ступени; 76 - бак окислителя
2-й ступени; 77 - переходный отсек; 18- сопло противотяги 2-й
ступени; 79 - приборный отсек; 20 - переходник ТПК; 21 -
головная часть
щаяся на подводных лодках класса "Тайфун".
Комплексотличаетсявысокимихарактеристиками
живучести, боеготовности и гибкости боевого
применения. Боевые возможности комплекса
превышаютвсепредыдущиеразработки баллисти-
ческих ракет подводного базирования. Ракета
снабжена боевой головкой с десятью разделяющи-
мися частями индивидуального наведения. Систе-
ма управления автономная, астроинерциальная,
обеспечивает высокую точность попадания в цель.
Максимальная боевая нагрузка - 2550 кг. Руково-
дитель проекта - Виктор Петрович Макеев
(1924-1985), СССР.
67. Межконтинентальная баллистическая ракета
РС-12М "Тополь" - см. стр 631.
626
Р - 21 PCM - 25
PCM - 50
Схемы отечественных межконтинентальных баллистических ракет подводного бази-
рования
627
БАЛЛИСТИЧЕСКАЯ РАКЕТА ФАУ-2 (V-2)
Созданию баллистической ракеты Фау-2 (руководитель проекта
Вернер фон Браун, 1912-1977), впервые в мире примененной в массовом
порядке в военных целях, предшествовал продолжительный период
теоретических разработок, проектных и конструкторских работ,
экспериментальных исследований, которые проводились в ряде научных
и конструкторских организаций Германии. Еще в конце первой мировой
войны инженер Г. Оберт создал проект большой ракеты с двигателем
на жидком топливе. В 1920-х гг. под его руководством проводились
первые эксперименты с ракетными двигателями и создавались проекты
баллистических ракет. В 1931 г. при отделе баллистики и боеприпасов
Управления вооружения германской армии была создана группа
по исследованию двигателей на жидком топливе под руководством
В. Дорнбергера, которую через год преобразовали в лабораторию.
В октябре 1932 г. в лабораторию пришел работать Вернер фон Браун,
один из выдающихся создателей ракетных систем различного назначения.
Первые шаги В. Брауна связаны с разработкой баллистических ракет А-1
и А-2, которые не были в полной мере удачными, но позволили Брауну
и его соратникам накопить необходимый опыт для создания более
совершенных конструкций.
Следующая ракета В. Брауна А-3 была запущена в 1937 г. Предше-
ствующие годы ушли на создание нового надежного жидкостно-
реактивного двигателя с вытеснительной подачей компонентов топлива.
Проведенные четыре пуска этой ракеты завершились неудачей.
В 1936 г. В. Браун получил от командования сухопутных войск
техническое задание на разработку баллистической ракеты А-4 с
дальностью 300 км и боевым зарядом массой 1 т. К 1942 г. был создан
Схема баллистической ракеты Фау-2 (V-2)
628
первый прототип А-4, который имел следующие характеристики: длина
14 м, диаметр корпуса 1,65 м, размах стабилизаторов 3,55 м, стартовая
масса 12,9 т, расчетная дальность 275 км. Первые пуски ракеты А-4
начались весной 1942 г., но лишь в октябре этого года был произведен
первый относительно удачный пуск. Четвертая ракета А-4 пролетела
192 км и разорвалась в 4 км от намеченной цели. До июня 1943 г. удалось
осуществить 31 запуск. Спустя восемь месяцев специально созданной
комиссии были продемонстрированы пуски двух ракет, точно поразивших
условные цели, после чего было принято решение об экстренном начале
массового производства А-4.
Однако на пути массового производства ракет встала основная
проблема - их низкая надежность. К концу 1943 г. показатель успешных
пусков составлял всего 10...20 процентов. Только к марту 1944г. удалось
выяснить и устранить основные причины неудач. Другая трудность была
связана с необходимыми масштабами массового производства. По
расчетам военных специалистов, для эффективного воздействия на
противника требовалось ежемесячно производить около 3000 ракет, в
то время как в июле 1943 г. промышленность изготовила лишь 300 ракет.
Кроме того, для снаряжения производимых ракет требовалось существен-
но увеличить производство жидкого кислорода, этилового спирта,
метанола, перекиси водорода, взрывчатки и многих других компонентов
и комплектующих. Причем все это предстояло реализовать в условиях,
когда Советская Армия уже находилась в пределах Германии.
И, тем не менее, ракеты А-4, более известные под названием Фау-2, в
конце второй мировой войны сыграли заметную роль.
Компоновка ракеты Фау-2 (V-2):
1 — боевая часть; 2 - инерциальная система; 3 - бак с эталоном; 4 - бак с жидким
кислородом; 5 - турбонасосный агрегат; 6 - выпускной клапан турбины; 7 - главный
вентиль эталона; 8 - аэродинамические рули; 9 - антенна; 10 - газовые рули; 11 - камера
сгорания ЖРД; 12 - главный вентиль жидкого кислорода; 13 - парогаэогенератор; 14 -
бак с перекисью водорода
629
Ракета Фау-2 стартовала вертикально с простейшего пускового стола
(хотя были и другие варианты стартовых установок) и предназначалась
для поражения площадных целей с заранее заданными координатами.
На ракете установили жидкостно-реактивный двигатель с небывало
большой для того времени тягой (25 тс), с турбонасосной подачей
компонентов топлива (жидкий кислород и спирт). Компоненты топлива
размещались в баках подвесного типа, закрепленных на специальных
узлах подвески внутри корпуса ракеты. Турбонасосный агрегат
приводился в действие от специальной системы, состоявшей из камеры
сгорания (парогазогенератор), бака с однокомпонентным топливом
(перекись водорода) и баллонов со сжатым воздухом, обеспечивающим
подачу топлива в парогазогенератор. В целях исключения кавитацион-
ных явлений при подаче топлива насосами в баках с топливом создава-
лось некоторое избыточное давление (наддув). Баки, система подачи
топлива и двигатель располагались в средней и хвостовой части ракеты.
Камера сгорания имела внутреннюю и внешнюю оболочку, между
которыми для охлаждения камеры прокачивался один из компонентов
топлива.
На хвостовой части ракеты крепились четыре стабилизатора с
аэродинамическими рулями. За срезом сопла камеры сгорания устанавли-
вались графитовые газовые рули, работавшие синхронно с аэродинами-
ческими. Привод аэродинамических и газодинамических рулей
располагался внутри каждого стабилизатора.
Система управления Фау-2 программная с корректировкой по
радиотракту и стабилизацией по двум каналам. Вся приборная часть
системы управления размещалась в приборном отсеке. Основным
регулируемым параметром, определяющим баллистическую часть
траектории, являлась скорость в момент выключения двигателя. Эту
скорость определяли наземным радиолокатором. Команда на выключе-
ние двигателя передавалась по радиотракту на борт ракеты. Для
компенсации бокового сноса два наземных передатчика излучали
сигналы в плоскости стрельбы, которые принимались антеннами
боковых приемников, расположенных на стабилизаторах хвостового
оперения. Отклонение ракеты отзаданной плоскости вызывало разность
сигналов двух передатчиков и соответствующую корректировку
траектории со стороны системы управления. Автомат стабилизации
включал в себя гироскопические приборы "Горизонт" и "Вертикант" и
усилительно-преобразовательные блоки. Команды управления
отрабатывались действующими синхронно аэродинамическими
(воздушные рули на концах стабилизаторов) и газодинамическими
рулями с электрическим приводом.
630
Боевой заряд массой 1 т размещался в коническом головном отсеке
ракеты, в вершине которого находился импульсный взрыватель ударного
типа.
В книге Гиннесса об авиации сообщается, что первой страной в мире,
подвергшейся ударам баллистических ракет, была Франция. Утром 8
сентября 1944 г. первая ракета Фау-2 была выпущена по Парижу, а
вечером -ипоЛондону. Последняя ракета Фау-2 упала на Лондон 27 марта
1945 г. Всего за этот период немцы выпустили по Англии 1115ракет, из
которых около 500 попало в пределы Лондона. При обстрелах Англии
ракетами Фау-2 было убито 2855 человек, еще 6268 человек получили
тяжелые ранения. География целей, которых достигали ракеты Фау-2,
достаточно широка: Лондон, Южная Англия, Антверпен, Льеж, Брюссель,
Париж, Лиль, Люксембург, Ремаген, Гаага и др. Однако самое большое
число ракет было выпущено по Бельгии. Только на Антверпен упало около
1500ракет. Доля успешных пусков суммарно составила около 75 %.
Ракета Фау-2 послужила прообразом баллистических ракет, созданных
в послевоенное время в ряде стран мира (СССР, США, Франция). Так, на
базе собранной в освобожденной советскими войсками части Германии
и в Чехословакии технической документации, узлов и оборудования
ракет, обнаруженных в ракетном центре в Пенемюнде, была создана
ракета, которая после некоторых доработок получила название Р-1.
Запуск Р-1 - первой советской баллистической ракеты - был осуществлен
уже в октябре 1947 г.
Эта ракета была первым успешным шагом в деятельности научно-
конструкторского коллектива, возглавлявшегося С.П.Королевым,
который затем на протяжении многих лет обеспечивал приоритет нашей
страны в области ракетно-космической науки и техники.
МЕЖКОНТИНЕНТАЛЬНАЯ БАЛЛИСТИЧЕСКАЯ РАКЕТА РС-12М
"ТОПОЛЬ"
Постановление Правительства о разработке мобильного ракетного
комплекса "Тополь" вышло в июле 1977 г. Создание комплекса было
поручено Московскому институту теплотехники, главным конструкто-
ром разработки утвердили Александра Давидовича Надирадзе
(1914-1987). После смерти работу продолжил его преемник Борис
Николаевич Лагутин (р. 1925). В феврале 1983 г. начались летные
испытания "Тополя". Они успешно завершились в декабре 1984 г., с этого
же года началось серийное производство ракет, а с июля 1985 г. ракетные
комплексы "Тополь" были поставлены на вооружение. Как и другие
мобильные комплексы, созданные Московским институтом теплотехни-
ки, "Тополь "может стартовать как с маршрута боевого патрулирова-
631
Компоновка межконтинентальной баллистической ракеты
РС-12М "Тополь":
1 -головная часть; 2 -переходный отсек; 3 - маршевый РДТТ
3-й ступени; 4 -соединительный отсек 2-й ступени; 5 -марше-
вый РДТТ 2-й ступени; 6 - соединительный отсек 1-й ступени;
7 - маршевый РДТТ 1-й ступени; 8 - хвостовой отсек 1-й
ступени
ния, так и во время стоянки в укрытии. Боеготов-
ность комплекса составляет две минуты с момента
получения приказа до пуска.
Мобильный "Тополь" стал действенным
ответом на повышение мощности и точности
американских баллистических ракет. Стационар-
ные шахтные установки в этих условиях не обеспе-
чивали необходимого уровня живучести ракетных
комплексов. Было найдено принципиально новое
решение: обеспечить выживаемость ракет не с
помощью создания надежных укрытий, а за счет
создания у противника неопределенных представле-
ний о месте нахождения ракеты.
РС-12М "Тополь" - межконтинентальная
стратегическая ракета подвижного грунтового
базирования. Она проектировалась с учетом
требований Договора ОСВ-2 по ограничению массы
боевой части, максимального диаметра и длины
ракеты, количества ступеней и типа топлива.
Ракета "Тополь" твердотопливная, легкого
класса, выполнена по трехступенчатой схеме с
последовательным расположением маршевых и
боевой ступеней. Оснащена моноблочной голов-
ной частью с ядерным боевым зарядом.
Конструктивно первая маршевая ступень состоит из цилиндрического
корпуса с прочно скрепленным твердотопливным зарядом, стальных
днищ и хвостового отсека с размещенным в нем тормозным двигателем.
Снаружи хвостового отсека находятся аэродинамические рули и
стабилизаторы решетчатого типа.
Конструктивно схемы второй и третьей ступеней практически
аналогичны: корпуса двигателей выполнены цельнонамотанными по
типу "кокон" из композиционного материала; сопла центральные,
неподвижные, частично утопленные. Принципиальное отличие двигателя
третьей ступени - наличие сопел отсечки тяги.
632
Система управления автономная, инерциальная, построена с
использованием бортовой цифровой вычислительной машины,
микросхем с большой степенью интеграции, нового комплекса
командных приборов с поплавковыми чувствительными элементами,
Вычислительный комплекс системы управления позволяет реализовать одно
из принципиально новых качеств подвижных комплексов - автономное
боевое применение самоходной пусковой установки.
Аппаратура системы управления обеспечивает автоматическое
проведение предстартовой подготовки и пуска ракеты с любой
пригодной по рельефу точки маршрута самоходной установки,
управление полетом ракеты, заданную точность попадания и проведение
наземных проверок.
Пуск ракеты производится из транспортно-пусковово контейнера
(ТПК) с помощью порохового аккумулятора давления. Пусковая
установка смонтирована на шасси самоходного семиосного тягача-
вездехода МАЗ-7912 (позже-МАЗ-7917). Подвижной командный пункт
боевого управления размещен на базе четырехосного автомобиля
MA3-543M.
Управление ракетой на участке полета первой ступени осуществляется
аэродинамическими решетчатыми рулями и газовыми рулями, установ-
ленными в сопле маршевого двигателя. На участке полета второй и
третьей ступени управление производится вдувом газа в закритическую
часть сопла и соплами кренового устройства.
Ракетный комплекс "Тополь" обладает уникальными качествами. При
его создании применены высокие технологии, новейшие разработки
отечественной науки и техники.
В1998 г. на вооружении ракетных войск стратегического назначения
находилось 369 мобильных комплексов "Тополь ", которые несли боевое
дежурство в десяти позиционных районах. Для обеспечения скрытности
комплексов разработаны камуфляж, ложные комплексы, средства
маскировки. Мобильные грунтовые комплексы не смогла обнаружить даже
американская космическая разведка.
Основные характеристики. Максимальная дальность - межконтинен-
тальная; стартовая масса45,1 т; масса боевой головки 1 т; число ступеней
3; длина ракеты 20,5 м; наибольший диаметр 1,8 м.
АВИАЦИОННЫЕ РАКЕТЫ
68. Ракета класса «воздух - воздух» РС-4 (К-5) - первая советская
ракета этого класса. Выполнена по аэродинамической схеме «утка» с
Х-образным расположением несущих поверхностей, Система управления
командная, по радиолучу. Дальность пуска - 2,,.6 км. Масса боевой
633
Схема ракеты класса "воздух-воздух" РС-2У (К-5) и ее модификации
части - 15,2 кг. Усовершенствованный вариант ракеты РС-2УС отличался
увеличенной дальностью полета, усовершенствованным радиовзрывате-
лем и пр. Фирма-разработчик - машиностроительное КБ "Факел", СССР.
69. Ракета класса «воздух - воздух» AIM-9 «Сайдуиндер» - см.
стр. 637.
70. Ракеты класса «воздух - воздух» средней дальности Р-27 (Р, Т).
Семейство этих ракет предназначено для перехвата и уничтожения
самолетов и вертолетов всех типов на средней дальности. Ракета
выполнена по схеме, промежуточной между схемой «утка» и схемой с
поворотным крылом. Ракета компонуется из трех отсеков: головки
самонаведения, боевой части и двигательного отсека. Максимальная
дальность пуска - 4...32 км. Масса стержневой боевой части - 39 кг.
Фирма-разработчик - ГосМКБ «Вымпел», СССР.
71. Ракета класса «воздух - воздух» малой дальности Р-73 предназна-
чена для перехвата и уничтожения в ближнем воздушном бою высокома-
невренных пилотируемых и беспилотных летательных аппаратов.
Состоит на вооружении самолетов фронтовой авиации МиГ-29 и Су-27.
Ракета выполнена по аэродинамической схеме «утка» с дестабилизатора-
ми в головной части ракеты и газодинамическим управлением. В связи
с этим ракета может поражать цели, маневрирующие с перегрузкой до
12 единиц. Конструктивно ракета состоит из шести отсеков. Максималь-
ная дальность пуска - 20 км. Масса стержневой боевой части - 7,3 кг.
Руководитель проекта-Геннадий Александрович Соколовский (р. 1934),
СССР.
634
,1
3
4
5
Компоновочная схема ракеты класса "воздух-воздух" средней дальности Р-27 (Р, Т):
1 - полуактивная радиолокационная или тепловая головка самонаведения; 2, 3 - отсеки
системы управления; 4 - боевая часть; 5 - РДТТ; 6 - дестабилизаторы; 7 - радиовзрыва-
тель; 8- антенна радиовзрывателя; 9- автопилот; 70-руль; 77 -рулевой гидропривод;
72 - гидронасос; 13 - турбогенератор; 14 - газогенератор; 15 - предохранительно-
исполнительный механизм; /б-воспламенитель; 77-крыло
72. Управляемая ракета средней дальности AIM-120A AMRAAM -
одна из самых распространенных ракет класса «воздух - воздух».
Предназначена для поражения воздушных целей, в том числе и
высокоманевренных. Выполнена по классической аэродинамической
схеме со среднерасположенным крестообразным крылом. Боевая часть
осколочно-фугасного типа с направленным разлетом осколков. На ракете
Компоновочная схема ракеты класса "воздух-воздух" малой дальности Р-73:
7 - обтекатель; 2 - датчик углов атаки и скольжения; 3 - дестабилизатор; 4 - рули; 5 -
автопилотный отсек; б-тепловая головка самонаведения; 7- антенна радиовзрывателя;
8- узел подвески на самолет; 9 -боевая часть; 70-РДТТ; 77-крылья; 72-элероны; 13-
блок газодинамического управления
635
3655
Схема управляемой ракеты средней дальности AIM-120A AMRAAM
установлен РДТТ с малодымным выходом, что снижает заметность пуска
и подлета ракеты к цели. Максимальная дальность пуска - 72 км. Масса
боевой части - 22 кг. США.
73. Управляемая ракета класса «воздух - поверхность» Х-29 (Л, Т, ТЭ).
Предназначена для поражения трудноуязвимых наземных целей.
Выполнена по аэродинамической схеме «утка» сХ-образным расположе-
нием крыльев и рулей. Ракета состоит из пяти отсеков. Основными
блоками системы управления являются лазерный (телевизионный)
координатор цели и автопилот. Запуск ракеты производится с авиацион-
ного катапультного устройства вниз-назад. Максимальная дальность
пуска - 10 км. Масса боевой части - 320 кг. Руководитель проекта -
Геннадий Александрович Соколовский, СССР.
Схема управляемой ракеты класса "воздух-поверхность" Х-29 (Л, Т, ТЭ)
636
74. Управляемая ракета класса «воздух - поверхность» Х-31 (А, П) -
см. стр. 639.
РАКЕТА КЛАССА "ВОЗДУХ-ВОЗДУХ" AIM-9 "САЙДУИНДЕР"
Семейство ракет ближнего воздушного боя "Сайдуиндер" (Гремучая
змея) стало одним из первых и самых массовых в мире. Ракеты, созданные
фирмой "Локхид" (США), предназначены для поражения воздушных
маневренных целей. Создание первой из них (AIM-9A) относится к началу
1950-х гг. В течение сорока с лишним лет она претерпела более десятка
модификаций и до настоящего времени стоит на вооружении ВВС и ВМС
США и ряда других стран.
Все ракеты "Сайдуиндер" выполнены по аэродинамической схеме
"утка" с крестообразной ориентацией несущих поверхностей. Рули
треугольной формы расположены в носовой части, в хвостовой части
корпуса - стабилизаторы. Почти все ракеты семейства снабжены
пассивной инфракрасной головкой самонаведения, на некоторых
модификациях предусматривалась и полуактивная радиолокационная
головка самонаведения. На всех ракетах "Сайдуиндер" применены
ракетные двигатели твердого топлива.
Модификации ракеты "Сайдуиндер" можно разделить на две груп-
пы. К первой относятся ракеты с баллиститным топливом, временем
работы двигателя 2,2 с и средней тягой 1600 кгс. Форма заряда -
Схемы ракет класса "воздух-воздух" AIM-9 "Сайдуиндер"
637
восьмилучевая звезда. Стартовая масса этой группы ракет находится в
пределах 71...78 кг. В двигателях второй группы ракет применено
смесевое топливо на основе полибутадиена с карбоксильными концевыми
группами и перхлоратом аммония с добавлением алюминиевого
порошка. Время работы этих двигателей 5,6 с, средняя тяга 1096 кгс.
Форма заряда - шестилучевая звезда. Эта группа ракет имеет несколько
большие массу (84...91кг) и дальность пуска.
Ракета разделена на четыре отсека. В первом отсеке расположены
тепловая (инфракрасная) головка самонаведения и четыре легкосъемных
руля с сервоприводом, работающим на горячих газах. Во втором отсеке
помещен активный оптический взрыватель. В третьем отсеке размещают-
ся предохранительно-исполнительный механизм взрывателя и боевая
часть осколочного типа массой 9,3 кг. Четвертый отсек занимает
двигатель твердого топлива, корпус которого выполнен из алюминиево-
го сплава методом холодной протяжки. На хвостовой части корпуса
двигателя закреплены четыре крыла-стабилизатора с роллеронами,
обеспечивающими частичную стабилизацию ракеты по крену.
Тепловая головка самонаведения включает в себя оптическую систему,
приемник (датчик) теплового излучения, усилитель и сервопривод.
Излучаемые целью инфракрасные лучи принимаются, преломляются и
фокусируются в одной точке фотоэлектронного датчика, преобразующе-
го тепловую энергию в электрическую. Перед преобразователем тепловой
энергии расположены модулирующие диски, на поверхность которых
нанесен рисунок из прозрачных и непрозрачных зон. В случае нахожде-
ния цели на оптической оси головки самонаведения тепловое пятно от
цели фокусируется точно в центре дисков и не приводит к появлению
рассогласования. В случае отклонения цели от оптической оси тепловое
пятно смещается от центра дисков, и луч модулируется с частотой,
зависящей от вида рисунка на модулирующих дисках. Выработанный
приемником теплового излучения сигнал усиливается и поступает на
приводы рулей.
Ракеты семейства "Сайдуиндер"просты в эксплуатации и не требуют
сложного пускового оборудования, обладают высокой маневренностью и
точностью. Система управления обеспечивает значительный процент
прямого попадания.
Третьим поколением ракет "Сайдуиндер" стала ракета AIM-91 "Супер
Сайдуиндер". Основным преимуществом этой ракеты является ее
способность захватывать и сопровождать цели под любым ракурсом,
начиная от встречного курса. Это стало возможным в результате
использования в составе тепловой головки самонаведения более
638
чувствительного, по сравнению с предыдущими модификациями,
инфракрасного датчика на основе антимонида индия (вместо детектора
на основе сернистого свинца). Кроме того, датчик установлен в сосуде
Дьюара, с тем, чтобы обеспечить его тепловую изоляцию, и охлаждается
криогенным способом за счет расширения азота, воздуха или аргона,
находящегося под высоким давлением. Хладагент располагается во
втором отсеке в баллоне массой 1,6 кг. Охлаждение датчика позволяет
увеличить его чувствительность к тепловым излучениям от цели.
Ракета "Сайдуиндер"явилась прототипом одной из самых массовых
отечественных ракет 1960-х гг. К-13 (создана в ГосМКБ "Вымпел" под
руководством главного конструктора И.И. Торопова), ставшей
родоначальницей целого семейства противосамолетныхракет, до сих пор
находящихся на вооружении ВВС России.
Основные характеристики. Стартовая масса около 85 кг; длина 2,85
м; диаметр 0,127 м; размах крыла 0,63 м; максимальная скорость
соответствует М = 3; дальность стрельбы 5,5 км (на большой высоте).
УПРАВЛЯЕМАЯ РАКЕТА КЛАССА "ВОЗДУХ-ПОВЕРХНОСТЬ" Х-31 (А,П)
Управляемая ракета Х-31 создана Государственным научно-производ-
ственным центром "Звезда - Стрела" под руководством главного
конструктора Юрия Дмитриевича Новикова. Ракета выполнена в двух
вариантах: в противокорабельном Х-31 А и противорадиолокационном
Х-31П. Оба варианта различаются только типом головки самонаведения.
В противокорабельном варианте ракета оснащена активной радиолокаци-
онной головкой самонаведения, а в противорадиолокационном -пассивной
радиолокационной головкой самонаведения. Массовые и геометрические
параметры при этом практически одни и те же, в противокорабельном
варианте несколько больше размах крыла.
Противокорабельная управляемая ракета Х-31А предназначена для
поражения боевых надводных кораблей классов до эсминцев включитель-
но, а также транспортных судов. Носителями ракеты могут быть
практически все находящиеся в настоящее время на вооружении
военно-морских сил боевые самолеты.
Ракета Х-31 А выполнена по нормальной аэродинамической схеме,
с Х-образным расположением крыльев и рулей. На корпусе, в плоскости
несущих поверхностей, расположены четыре боковых круглых
воздухозаборника твердотопливного ракетно-прямоточного двигателя.
В полете на пусковом устройстве самолета-носителя и в предстартовом
положении воздухозаборники закрыты коническими заглушка-
ми-обтекателями.
639
Схема управляемой ракеты класса "воздух-поверхпость" Х-31 (А, П)
Ракета Х-31 состоит их трех отсеков. Каждый отсек представляет
собой конструктивно и функционально законченный блок. В первом отсеке
расположена головка самонаведения. Второй отсек - ракетно-прямо-
точный двигатель. В хвостовом отсеке смонтировано рулевое управление,
система электропитания и др.
Твердотопливный ракетно-прямоточный двигатель, установленный
на ракете Х-31, имеет два режима работы. Стартовый твердотопливный
заряд обеспечивает разгон ракеты до скорости, соответствующей М =
= 1,8, после чего двигатель переходит на работу в ракетно-прямоточном
режиме, при котором избыточная часть горючего дожигается в
освободившейся от стартового заряда камере в присутствии воздуха,
забираемого из атмосферы воздухозаборниками.
Пуск ракеты Х-31А возможен по цели, расположенной в пределах
курсовых углов 8°. После обнаружения цели самолет ложится на курс
в направлении цели, после чего производится подготовка ракеты к пуску
и ввод данных о положении цели в бортовой координатор цели. После
захода самолета в зону возможных пусков оператор подает с борта
сигнал "Пуск", по которому производится катапультирование одной из
ракет с авиационной катапультной установки.
Расчетная точка выхода ракеты в зону захвата цели находится на
расстоянии 7,5 км от цели на высоте 100 м. После захвата цели головкой
самонаведения и перехода на режим автосопровождения ракета
совершает маневр с набором высоты ("подскок"), исключающий
возможность ее приводнения при подлете к цели с предельно малыми
углами. Поражение цели производится путем подрыва осколочно-фугасной
боевой части ракеты после проникновения ее внутрь корабля при прямом
попадании или за счет осколочно-фугасного действия при пролете ракеты
над целью.
Ракета Х-31Ппредназначена для поражения всех существующих типов
радиолокационных станций зенитных ракетных комплексов средней и
большой дальности, радиолокационных станций управления воздушным
движением и дальнего обнаружения. Пуск ракеты может производиться
на высотах от 200 до 5000м, маршевая высота полета ракеты 3...5 м.
640
Основные характеристики. Максимальная дальность пуска 50... 100 км;
стартовая масса 610...600 кг; масса боевой части 90 кг; точность
наведения 5...8 м; средняя скорость полета 600...700 км/ч; длина ракеты
4,7 м; диаметр 0,36 м; размах крыла 1,005...0,78 м.
ЗЕНИТНЫЕ УПРАВЛЯЕМЫЕ РАКЕТЫ
75. Зенитная управляемая ракета «Вассерфаль» - см. стр. 644.
76. Зенитная управляемая ракета В-750 (1Д) предназначена для
поражения различных средств воздушного нападения в широком
диапазоне условий боевого применения. Входит в состав зенитного
ракетного комплекса С-75. Ракета - двухступенчатая, выполнена по
обычной аэродинамической схеме с дестабилизаторами в носовой части.
Управление полетом ракеты и наведение ее на цель осуществляется по
радиокомандам от наземной станции наведения. Ракеты 1Д впервые в
мире были использованы в реальных боевых условиях. Зона поражения -
7...33 км по дальности и 3...27 км по высоте. Руководитель проекта - Петр
Дмитриевич Грушин (1906— 1993), СССР.
77. Зенитная управляемая ракета «Найк-Аякс» - самая распостранен-
ная зенитная ракета за рубежом в 1950-1960-е гг. Предназначена для
поражения средств воздушного нападения (прежде всего самолетов
стратегического назначения). Ракета «Найк-Аякс» - двухступенчатая:
стартовый ракетный ускоритель твердого топлива и собственно ракета.
Ракета выполнена по схеме «утка» с Х-образным расположением крыльев
и рулей. На второй ступени установлен жидкостный ракетный двигатель
на высококипящих компонентах. Зона поражения - 40 км по дальности
и 23 км по высоте. Головной разработчик - фирма «Вестерн Электрик»,
США.
78. Переносная зенитная управляемая ракета «Ред Ай». Ракета
предназначалась для защиты войск от низколетящих самолетов и
вертолетов. Ракета одноступенчатая, выполнена по аэродинамической
схеме «утка». Управление полетом ракеты и ее наведение на цель
Схема зенитной управляемой ракеты В-750 (1Д)
21 - 7425
641
A
Схемы зенитных управляемых ракет "Найк":
а - "Найк-Аякс"; б - "Найк-Геркулес"; в - "Найк-Зевс"; г - "Найк-Геркулес" новой
модификации
642
в
Схема переносной зенитной управляемой ракеты "Ред Ай":
а - схема ракеты; б - схема переносной пусковой установки; в - компоновочная схема;
1 - тепловая головка наведения; 2, 3- система управления; 4 - боевая часть; 5 - РДТТ;
6- открывающиеся стабилизаторы
осуществляется пассивной инфракрасной головкой самонаведения. Старт
ракеты производится с плеча оператора из пускового контейнера
одноразового использования, который одновременно служит для
хранения и транспортировки ракеты. Зона поражения - до 4100 м по
дальности и 30-2500 м по высоте. Работы по созданию этого комплекса
начались в 1959 г. Фирма-разработчик - "Конвер", США.
79. Зенитная управляемая ракета ЗМ9 «Куб» предназначена для
защиты войск от средств воздушного нападения, летящих на малых и
средних высотах. Комплекс «Куб» состоит из самоходной установки
разведки и наведения и четырех самоходных пусковых установок с тремя
Компоновочная схема зенитной управляемой ракеты ЗМ9 "Куб":
1 — головка самонаведения; 2 - радиовзрыватель; 3 - .боевая часть; 4- автопилот; 5 —
воздухозаборник; б-газогенератор; 7-заглушка; <?-топливоРДТТ; 9-сопло стартового
двигателя; 10 - стабилизатор; 11 - крыло
21*
643
Схема зенитной управляемой ракеты 9М330 "Тор1
ракетами на каждой. Зенитная ракета выполнена по схеме с поворотным
крылом, что обеспечивает ей высокие маневренные свойства. В качестве
маршевого двигателя впервые в мире был применен комбинированный
ракетно-прямоточный двигатель на твердом топливе. Зона поражения -
до 6...22 км по дальности и 0,1...7 км по высоте. Летные испытания
ракеты начались в 1960 г., в январе 1967 г. комплекс "Куб" принят на
вооружение. Руководитель проекта Иван Иванович Торопов (1907-1977),
СССР.
80. Зенитная управляемая ракета 9М330 «Тор» является первым в мире
средством ПВО малой дальности, специально созданным для борьбы с
высокоточным оружием (крылатые ракеты, управляемые авиабомбы и
др.). Весь комплекс смонтирован на гусеничном шасси высокой
проходимости. Ракета выполнена по схеме «утка» с комбинированными
рулями. Двигатель ракеты твердотопливный, одноступенчатый. Ракета
размещается в четырехместном транспортно-пусковом контейнере. Зона
поражения - до 1,5... 12 км по дальности и 0,01...6 км по высоте.
Руководитель проекта - Петр Дмитриевич Грушин, СССР.
81. Зенитная управляемая ракета «Патриот» MIM-104А - см. стр. 647.
82. Зенитная управляемая ракета 5В55 и ее модификации- см. стр. 652.
ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА "ВАССЕРФАЛЬ"
Одна из первых в мире зенитных управляемых ракет "Вассерфаль"
(Водопад) разрабатывалась начиная с 1941 г. в ракетном центре в
Пенемюнде под руководством известного немецкого конструктора
ракетной техники Вернера фон Брауна. Разработка велась по контракту
с министерством авиации Германии.
Фактически зенитная ракета "Вассерфаль" создавалась на базе
знаменитой баллистической ракеты Фау-2, автором которой также был
Вернер фон Браун. Так, например, корпус ракеты "Вассерфаль"являлся
уменьшенной примерно вдвое копией корпуса ракеты Фау-2; были
644
Компоновочная схема зенитной управляемой ракеты "Вассерфаль":
1 - контактный взрыватель; 2 - боевая часть; 3 - баллон с азотом; 4, 6- пироклапаны;
5-редукционный клапан; 7-бак горючего; 8, 15,18-сильфоны; 9, 76-заборники "Г"
и "О"; 10-трубопровод наддува бака "О"; 77 - топливный трубопровод; 72-крыло; 13-
лонжсрон; 14 - бак "О’1; 77 - аппаратура управления; 19 - радиоприемник системы
управления; 20-гироскопы; 27-электропривод; 22-тяга управления газового руля; 23-
стабилизатор; 24 - газовый руль; 25 - воздушный руль; 26 - камера сгорания ЖРД
использованы многие конструктивные и технологические решения,
отработанные при создании Фау-2. В отличие от Фау-2 ракета "Вассер-
фаль" помимо стабилизаторов имела крылья с большой стреловидностью
и острыми передней и задней кромками.
Ракета "Вассерфаль" выполнена по обычной аэродинамической схеме
с Х-образным расположением крыльев и стабилизаторов, Корпус и
несущие поверхности изготавливались в основном из стали. Соединение
силового набора осуществлялось точечной сваркой.
В носовой части ракеты располагалась аппаратура неконтактного
взрывателя и взрыватель, срабатывающий по команде с земли. Во втором
отсеке располагалась боевая часть. Кроме того, на ракете имелся еще
один заряд, который предназначался для самоликвидации ракеты при
промахе. За боевой частью размещался стальной баллон диаметром 800
мм, сваренный из двух штампованных полусфер и армированный
стальной проволокой (по типу баллонов Фау-2). В баллоне находился
сжатый до 200 атмосфер азот, необходимый для наддува баков. Затем
следовали баки горючего и окислителя. Через бак окислителя проходили
основные лонжероны крыльев. За баками следовал приборный отсек с
аппаратурой управления и исполнительными механизмами. На
концевом силовом шпангоуте отсека, на специальной раме, крепился
жидкостно-реактивный двигатель, К хвостовому отсеку крепились
четыре стабилизатора, на задней кромке которых располагались
воздушные рули с аэродинамической компенсацией, позволяющей
снизить потребную мощность привода и уменьшить его массу. Управле-
645
ние ракетой на начальном участке траектории полета, когда из-за
недостатка скорости воздушные рули были малоэффективны, производи-
лось графитовыми газовыми рулями (так же, как на Фау-2), сбрасывае-
мыми вскоре после старта.
В качестве двигательной установки на ракете "Вассерфаль" использо-
вался жидкостно-реактивный двигатель. В отличие от Фау-2 в качестве
топлива были применены высококипящие компоненты (азотная кислота,
и винилизобутиловый спирт), позволяющие хранить ракету сравнительно
(с Фау-2) длительное время в заправленном состоянии.
Баки горючего и окислителя выполнялись из фосфатированной стали
толщиной 6 мм. Для защиты от агрессивного воздействия компонентов
баки изнутри имели полимерное покрытие. Однако даже при этих
условиях время хранения заправленной ракеты не превышало нескольких
суток. Система подачи топлива - вытеснительная, с помощью сжатого
азота. Высокое давление азота в баллоне понижалось в редукторе до 15
атмосфер. Компоненты топлива - самовоспламеняющиеся, поэтому не
требовалось специальной системы запуска. Горючее поступало в
форсунки камеры сгорания непосредственно, а окислитель предваритель-
но прокачивался через рубашку охлаждения двигателя. Двигатель
развивал тягу около 8000 кгс в течение 40...45 с.
На ракете "Вассерфаль" впервые для ракет такого класса применили
командную систему управления с использованием двух радиолокацион-
ных станций, одна из которых следила за целью, а другая - за ракетой.
Обе отметки (от цели и ракеты) выводились на экран одной электронно-
лучевой трубки. Оператор с помощью ручки управления стремился
совместить на экране отметки от цели и ракеты, сигналы от ручки
управления поступали в счетно-решающее устройство, где вырабатыва-
лись необходимые команды, передаваемые в зашифрованном виде по
радиотракту на ракету. На борту ракеты сигналы управления принима-
лись, дешифровывались, усиливались и направлялись на электрические
рулевые машинки. Стабилизация ракеты по крену и гашение колебаний
по поперечным осям производилась автопилотом на основе механических
гироскопических датчиков.
Основная часть бортовой аппаратуры управления располагалась в
хвостовом отсеке и закрывалась съемными лючками, что упрощало
предстартовое обслуживание (в отличие от Фау-2, где аппаратура
управления располагалась в носовой части).
Необходимо отметить, что помимо командной системы управления
для ракеты "Вассерфаль" разрабатывались два вида системы самонаведе-
ния: инфракрасная пассивная и полуактивная радиолокационная, однако
эти разработки остались на стадии предварительных исследований.
646
В конце 1944 - начале 1945 гг. начались летные испытания ракеты.
По некоторым сведениям, всего произведено 50 пусков, из которых 12
признаны успешными. В процессе летных испытаний были достигнуты
выдающиеся по тому времени результаты: максимальная высота 10 км,
горизонтальная дальность 32 км, максимальная скорость 600 км/ч. Старт
ракеты осуществлялся со стартового стола вертикально, а затем
производился ее разворот на цель. Серийное производство и постановка
на вооружение не были осуществлены в связи с окончанием войны и
капитуляцией фашистской Германии.
Однако история ракеты "Вассерфалъ" не закончилась с завершением
войны. В США после войны ракета была детально изучена, и на ее основе
фирма "Дженерал Электрик" создалаэкспериментальнуюракету "Гермес"
А-1, в основном копирующую "Вассерфалъ", но с двигателем существенно
меньшей тяги. Отечественные специалисты также изучали и испытывали
ракету "Вассерфаль", получившую наименование Р-101. В дальнейшем она
была усовершенствована и получила обозначение Р-102. Оба варианта
изготавливались и испытывались лишь в опытных экземплярах, однако
полученный при этом опыт, несомненно, способствовал дальнейшим
отечественным разработкам ракет этого класса.
Основные характеристики. Стартовая масса 3530 кг; масса боевой
части 250 кг; масса горючего 350...450 кг; масса окислителя 1500 кг;
максимальная скорость 760 м/с; максимальная высота полета 18000 м;
горизонтальная дальность 32 км; длина корпуса 7,8 м; диаметр 0,885 м;
размах стабилизаторов 2,5 м.
ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА "ПЭТРИОТ"М1М-104А
ЗРК "Патриот" разработан фирмой "Мартин Мариэтта совместно с
фирмой "Рейтеон" и предназначен для борьбы с авиационными целями
на малых, средних и больших высотах, а также для перехвата ракет
класса "воздух - поверхность" и некоторых типов баллистических ракет
ближнего действия. Создание этого ЗРК началось в 1960-е гг. с
исследований, проведенных по заказу армии США, в целях замены
устаревших к тому времени комплексов "Найк Геркулес" и "Хоук",
сложных в техническом обслуживании, слабо помехозащищенных и
имевших ограниченные возможности поражения целей. Разработка
эскизного проекта ЗРК началось в мае 1967 г. заключением контракта
между министерством обороны с фирмами "Рейтеон" и "Мартин
Мариетта". Фирма "Рейтеон" была выбрана головной по разработке
всего комплекса, а также по созданию радиолокационных средств,
устройств связи и системы наведения ракеты. Фирме "Мартин Мариетта"
поручалось разработать ракету и контейнерную пусковую установку.
647
Схема зенитной управляемой ракеты "Пэтриот" MIM-104A
Фирме "Тиокол Кемикл" была поручена разработка реактивного
двигателя твердого топлива (РДТТ).
Основными требованиями, первоначально выдвинутыми к новому
ЗРК, были:
малое время реакции для поражения нескольких высокоскоростных,
высокоманевренных, использующих средства радиоэлектронного
противодействия целей, летящих как на больших, так и на малых
высотах;
минимальное количество персонала и оборудования;
достаточная подвижность и мобильность, компактность.
ЗРК "Пэтриот" является основным элементом противовоздушной
обороны США и ряда других стран уже на протяжении около 30 лет,
производится массовой серией и претерпел ряд модификаций.
Большая скорость ракеты, соответствующая числам М = 2...5,
позволяет сократить время полета до цели. Система обладает способнос-
тью одновременного поражения нескольких целей. Конструкция ракеты
допускает выполнение в полете маневров при больших перегрузках (до
30 единиц в конце траектории).
Система наведения ракеты "Пэтриот" обеспечивает высокую
вероятность поражения целей. Она сочетает в себе преимущество
командного метода наведения с полуактивным самонаведением.
Применение этой системы позволяет осуществлять сопровождение цели
через бортовой координатор ракеты и управлять ее траекторией полета
с земли в течение всего полета. На конечном участке (за 10 с до встречи
с целью) начинает работать полуактивная головка самонаведения,
передающая на наземный командный пункт данные о точном положении
цели относительно ракеты. Таким образом, несмотря на то, что при
удалении от командного пункта точность измерения положения цели
уменьшается, на конечном участке ракета может быть возвращена на
расчетную траекторию за счет увеличения точности измерения
положения цели с помощью полуактивной головки самонаведения при
ее приближении к цели. При этом величина промаха уменьшается, что
позволяет использовать обычную осколочную боевую часть сравнитель-
но небольшой массы (75 кг).
648
Уже в начале проектирования было ясно, что обеспечить заданное
время реакции ЗРК для одновременного поражения нескольких целей
возможно лишь при использовании многофункциональной радиолокаци-
онной станции, способной решать одновременно заданное число задач
по обнаружению и сопровождению нескольких целей и наведению
соответствующего количества ЗУР, Также было очевидно, что в ЗРК,
имеющем большую скорострельность, наблюдение за сотнями отметок
целей на экране радиолокационной станции и обеспечение наведения
ракет на несколько целей нельзя осуществлять усилиями только
операторов, без помощи необходимой аппаратуры. В связи с этим ЗРК
"Патриот" оснащена электронно-вычислительными устройствами,
используемыми оператором как для принятия решений (оценка характера
угрозы, определение положения приближающихся целей и их характера
и т.д.), так и для автоматического определения неисправностей. Для
обеспечения более простого технического обслуживания, быстрого и
эффективного применения ЗРК в различных условиях система управления
комплексом сконструирована по модульному принципу, позволяющему
использовать ЗРК при изменении условий, меняя соответственно
программу ЭВМ.
Важным, свойством ЗРК "Пэтриот "является способность одновремен-
но сопровождать несколько целей и поражать некоторые из них в условиях
интенсивного радиоэлектронного противодействия.
К концу 1979 г. было произведено 48 испытательных пусков
"Пэтриот" при различных условиях (включая поражение групповых целей
на разных дальностях, на малых, средних и больших высотах, в основном
в условиях воздействия средств РЭП) и против различных типов целей,
в том числе и против ракет "Хоук" и "Найк-Геркулес". В восьми случаях
было отмечено прямое попадание, в трех случаях - поражение цели
осколками боевой части; 27 пусков были "успешными", пять "частично
успешными"; только один пуск был неудачным, четыре пуска не
засчитаны. Средний промах по всем зачетным пускам составил Юм.
ЗРК "Пэтриот" комплектуется побатарейно. Типичная батарея
состоит из нескольких элементов, скомпонованных на автотранспортных
средствах: многофункциональной РЛС, пункта управления пуском,
энергетической установки и до восьми раздельно размещенных
подвижных пусковых установок, каждая из которых оснащена четырьмя
готовыми к пуску ракетами. Батареи ЗРК "Пэтриот" поддерживают связь
друг с другом и с подвижным командным пунктом дивизиона, через
который осуществляется связь с другими системами ПВО - зенитной
артиллерией и истребительной авиацией.
Одним из основных элементов ЗРК "Пэтриот" является много-
функциональная радиолокационная станция с фазированной антенной
649
решеткой. Вся станция смонтирована на специальном полуприцепе,
буксируемом трехосным тягачом. Антенная группа станции установлена
на крыше полуприцепа. Излучающая поверхность основной антенны
диаметром 2,44 м образуется из 5161 элемента (фазовращателя).
Управление направлением пучка лучей основной антенны осуществляется
при помощи электронной аппаратуры. Скорость изменения направлен-
ности луча составляет не более 12 мкс. Кроме основной антенной
решетки поиска, сопровождения целей и наведения ракеты на цель
система линз содержит состоящую из 251 элемента антенну командного
наведения ракеты на цель с использованием данных о цели от бортового
координатора и прямоугольную антенную фазированную решетку
системы распознавания "свой - чужой". Время наработки фазовращателей
на отказ составляет более 15 тыс. часов.
Боевые действия батареи координируются пунктом управления
пуском, расположенным в стандартном фургоне на автомобильном ходу.
В этом пункте имеются два пульта управления для офицеров, управляю-
щих оружием. Большая производительность обработки данных,
необходимая для работы батареи ЗРК "Пэтриот", обеспечивается
благодаря использованию 24-разрядного высокоскоростного вычислитель-
ного устройства, созданного фирмой "Рейтеон" специально для системы
"Пэтриот". Скорость выполнения команд каждого из двух центральных
процессоров составляет 1 млн операций в секунду.
Для обеспечения боевых действий батареи имеются три группы
программ на магнитной ленте, которые в случае необходимости
загружаются в записывающее устройство ЭВМ системы управления
оружием. Первая группа приводит систему в состояние боевой готовнос-
ти. Вторая группа осуществляет централизованное управление всеми
элементами батареи в реальном масштабе времени. Третья группа
программ предназначена для быстрого определения местонахождения
неисправных компонентов и проверки устранения неисправностей в
системе.
Батарея обеспечивается электроэнергией от двух турбоэлектрогенера-
торов трехфазного тока и преобразователей, смонтированных на
автомобильном ходу.
Пусковая установка "Патриота" счетверенная, она предназначена для
пуска четырех ракет, каждая из которых помещена в контейнере.
Установка мобильная, располагается на автомобильном полуприцепе
и является полностью независимой, с собственным источником питания.
Связь с пунктом управления осуществляется по радио. При транспорти-
ровке и перезаряжании пусковые контейнеры с ракетами находятся в
горизонтальном положении, в предпусковом положении контейнеры
устанавливаются под постоянным углом 38° к горизонту. В отличие от
650
ряда существующих систем пусковая установка "Патриота" не поворачи-
вается при сопровождении цели. Однако в случае необходимости
направление пуска может корректироваться по команде с пункта
управления.
Для хранения, транспортировки и пуска ракета "Пэтриот" размещает-
ся в герметичном контейнере прямоугольного сечения. Запуск ракеты
производится непосредственно из контейнера, который с двух торцов
имеет разрывные диафрагмы. Система управления ракетой комбиниро-
ванная, сочетающая командное наведение на среднем участке траектории
и полуактивное наведение на конечном участке полета.
Ракета "Пэтриот" выполнена по бескрылой аэродинамической схеме
и состоит из пяти отсеков. Первый отсек, носовой обтекатель, выполнен
из радиопрозрачного тугоплавкого материала с толщиной стенки
16,5 мм. Наконечник обтекателя сделан из сплава кобальта. Так как при
высоких сверхзвуковых скоростях, развиваемых ракетой "Пэтриот",
аэродинамический нагрев значителен, все отсеки и рули покрыты
абляционным материалом.
Во втором отсеке размещена полуактивная радиолокационная
головка самонаведения. В передней части третьего отсека расположен
алюминиевый контейнер с аппаратурой наведения на среднем участке
траектории и бортовой цифровой вычислительной машиной. В задней
части третьего отсека расположена боевая часть осколочно-фугасного
типа массой 75 кг, радиовзрыватель и четыре его антенны,
предохранительно-исполнительный механизм, антенны командной
системы управления, инерциальная система управления на начальном
участке траектории и вспомогательное электронное оборудование.
Четвертый отсек представляет собой несущий корпус двигателя твердого
топлива. В качестве топлива использован полибутадиен с концевыми
гидроксильными группами, имеющий по сравнению с другими видами
твердого топлива более высокие механические свойства, более длитель-
ный срок хранения и меньшую стоимость. Корпус двигателя выполнен
методом холодной протяжки и не имеет продольных швов. Время работы
двигателя около 12спритяге 130 кН. В пятом хвостовом отсеке располо-
жено сопло двигателя и гидравлические рулевые машинки управления
рулями.
ЗРК "Пэтриот" -мобильная система, время ее разворачивания с марша
около 1 ч. Дивизион ЗРК "Пэтриот" обычно включает в себя шесть
батарей, каждая из которых имеет 32 ракеты. Функционально и
конструктивно ЗРК "Пэтриот " в значительной степени обеспечивает
защищенность от обнаружения его радиолокационными, оптическими и
инфракрасными средствами.
651
Основные характеристики. Дальность обнаружения целей на средних
и больших высотах 150 км; максимальная наклонная дальность
поражения целей 80 км; максимальная высота поражения целей 20...25 км;
минимальная высота поражения целей 50 м; время перехвата целей на
максимальной дальности 62...67 с; дальность захвата цели головкой
самонаведения ракеты 25 км; масса контейнера с ракетой 1969 кг; число
одновременно наблюдаемых целей -100; число одновременно сопровож-
даемых целей-8. Стартовая масса ракеты "Пэтриот" 1000 кг; максималь-
ная скорость полета 1600 м/с; средняя скорость 1200 м/с; длина ракеты
5,2 м; диаметр 0,41 м; размах рулей 0,875 м.
ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА 5В55 И ЕЕ МОДИФИКАЦИИ
Ракета 5В55 входит в состав зенитного ракетного комплекса
С-300ПМУ, предназначенного для обеспечения противовоздушной
обороны объектов наземного и корабельного базирования. Разработка
ракеты осуществлена специалистами МКБ "Факел" под руководством
генерального конструктора П.Д. Грушина. Разработка комплекса в
целом производилась ЦКБ "Алмаз" под руководством генерального
конструктора Б.В. Бункина. Начало работ относится к середине 1960-х гг.
В 1979 г. ракета 5В55 в составе системы С-300ПМУ была принята на
вооружение войск противовоздушной обороны. В этом же году на
Черном море были завершены испытания ракеты 5В55 в составе
корабельного комплекса "Риф", впервые установленного на большом
противолодочном корабле "Азов", после чего комплекс и ракета были
приняты на вооружение атомных ракетных крейсеров типа "Слава".
Зенитная управляемая ракета среднего радиуса действия 5В55
предназначена для поражения широкого круга средств воздушного
нападения: самолетов стратегической, тактической и морской авиации,
вертолетов, стратегических крылатых ракет, авиационных ракет
различного типа, тактических и оперативно-тактических баллистических
ракет и других воздушных целей в любое время суток и в любых метеоусло-
виях.
Ракетаодноступенчатая,выполненапо бескрылой аэродинамической
схеме с раскрывающимися после старта рулями, расположенными в
хвостовой части. Ракета хранится и эксплуатируется в герметичном
транспортно-пусковом контейнере, имеет гарантированный длительный
срок боевого применения и не требует проверок и регулировок в течение
всего срока службы. Стартракеты вертикальный, с помощью установлен,-
ной в контейнерекатапульты, без предварительного разворота пусковой
установки в сторону цели. После выхода ракеты из контейнера и запуска
маршевого двигателя по команде, вводимой с наземного командного
652
пункта перед стартом в зависимости от положения цели, производится
направление ракеты на цель с помощью газовых рулей.
Система управления ракеты комбинирования. На первом участке
управление осуществляется инерциальной системой с коррекцией от
наземного пункта управления, а на конечном участке траектории -
полуактивной радиолокационной головкой самонаведения. При
наведении ракеты используется принцип сопровождения цели через
ракету.
На ракете 5В55 установлен высокоэффективный двухрежимный
ракетный двигатель твердого топлива. Корпус двигателя, кроме заднего
днища, цельнотянутый, изготовлен методом холодной вытяжки.
Корпус ракеты состоит из пяти отсеков. В первом отсеке расположена
полуактивная головка самонаведения, закрытая радиопрозрачным
носовым обтекателем. Второй отсек - аппаратурный, вся аппаратура
выполнена в виде моноблока. Осколочно-фугасная часть представля-
ет собой третий отсек. Четвертый отсек - двигатель твердого топлива.
В пятом отсеке расположен сопловой блок двигателя и агрегаты
управления цельноповоротными аэродинамическими и газодинамически-
ми рулями.
Важной особенностью комплекса С-300ПМУ является его мобиль-
ность и способность разворачиваться с марша в течение нескольких
минут. В состав мобильного комплекса (ракетного дивизиона) входит
пункт управления дивизионом, комплексная многофункциональная
радиолокационная станция и четыре-шесть боевых машин с четырьмя
ракетами в транспортно-пусковых контейнерах каждая.
Ракетная система С-300ПМУ доказала свою эффективность во многих
демонстрационных пусках как в пределах нашей страны, так и за
рубежом.
Начатые в МКБ "Факел" в 1980-х гг. работы по усовершенствованию
исходного варианта ракеты были успешно продолжены в 1990-х гг. под
руководством генерального конструктора Владимира Григорьевича
Светлова (р. 1935). Дальнейшим развитием ракеты 5В55 стали ракеты
48Н6, 48Н6Е и, наконец, 48Н6Е2, входящая в современный зенитный
Схема зенитной управляемой ракеты 5В55
653
ракетный комплекс С-300ПМУ2 "Фаворит". Этот комплекс способен
бороться со всеми видами аэродинамических и баллистических целей,
летящих на высотах от 10 м до 27 км, со скоростью до 10000 км/ч, т.е. со
всеми известными на сегодня авиационными и "нестратегическими"
ракетными средствами воздушного нападения. По габаритам и массе
ракета 48Н6Е2 практически не отличается от исходного варианта, не
изменились и габариты транспортно-пускового контейнера. Однако
комплекс "Фаворит" и ракета 48Н6Е2 представляют собой совершенно
новый образец зенитного ракетного оружия, обладающего рядом
качественно новых возможностей:
значительно повышена эффективность поражения баллистических
целей с обеспечением инициирования боевого -заряда цели с помощью
принципиально нового боевого снаряжения-,
. повышена эффективность поражения аэродинамических целей (в том
числе и низколетящих) в сложной тактической и помеховой обстановке;
при сохранении габаритов и массы ракеты до 200 км увеличена дальняя
граница зоны поражения аэродинамических целей, в том числе и при
стрельбе вдогон.
Существенно улучшены и другие характеристики комплекса.
Очень важным достоинством "Фаворита" по сравнению с предшеству-
ющими системами является способность всех его компонентов находиться
длительное время на боевом дежурстве (до двух суток непрерывной
работы с последующим коротким перерывом). В составе системы
"Фаворит" могут применяться и ракеты предшествующего поколения
48Н6Е, входящие в комплекс С-300ПМУ1. Сохранена полная преемствен-
ность в использовании новой ракетой всех компонентов системы
С-300ПМУ1, в том числе транспортно-пусковых контейнеров, пусковой
установки и всего комплекса наземного обслуживания.
Основные характеристики ракеты 5В55. Зона поражения по дальности
5...75 км, по высоте 0,025...25 км; максимальная скорость целей
4300 км/ч; масса ракеты 1665 кг; масса боевой части 130 кг; длина ракеты
7,25 м; диаметр корпуса 0,508 м; размах рулей 1,124 м.
РАКЕТЫ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ
83. Неуправляемые ракеты залпового огня РС-82 и РС-132 (для
"Катюши") - см. стр. 656.
84. Противокорабельная ракета П-15 предназначена для нанесения
ударов по боевым и транспортным кораблям противника. Состояла на
вооружении ракетных катеров и берегового охранения. Выполнена по
самолетной схеме со стреловидными крылом и оперением. Старт
654
Схема противокорабельной ракеты П-15
Схема противотанковой управляемой ракеты ЗМ14 (9М14М)
"Малютка"
производится с помощью РДТТ, а маршевый полет - при помощи ЖРД.
Дальность пуска - 40 км. Масса боевой части - 500 кг. Создана в
середине 19 50-х гг. Руководитель проектаАлександр Яковлевич Березняк
(1912-1947), СССР.
85. Противотанковая управляемая ракета ЗМ14 (9М14М) "Малютка".
Эта ракета выполнена по аэродинамической схеме "бесхвостка" с
Х-образным расположением крыльев. Боевая часть - кумулятивного
действия. Толщина пробиваемой брони - 400...460 мм. Управление - по
проводам. Руководитель проекта Сергей Павлович Непобедимый
(р. 1921), СССР.
86. Крылатые ракеты BGM-109 "Томагавк" - см. стр. 659.
87. Противокорабельная сверхзвуковая ракета ЗМ-80 "Москит" -
первая в мире маловысотная противокорабельная ракета. Рассчитана
Компоновочная схема противокорабельной сверхзвуковой ракеты ЗМ-80 "Москит"
655
на поражение кораблей малого и среднего водоизмещения (до 20000 т).
Конструктивно выполнена по нормальной аэродинамической схеме с
Х-образным расположением несущих поверхностей. Оснащена ПВРД
со встроенным в него стартовым РДТТ. Используется для вооружения
кораблей и самолетов. Масса боевой части - 320 кг. Разработана и
поставлена на вооружение ВМФ СССР в конце 1970-х годов. Руководи-
тель проекта Игорь Сергеевич Селезнев (р. 1931), СССР.
НЕУПРАВЛЯЕМЫЕ РАКЕТЫ ЗАЛПОВОГО ОГНЯ М-8 и М-13 (ДЛЯ "КАТЮШИ")
Разработка первых в мире неуправляемых ракет залпового огня,
получивших впоследствии народное наименование "Катюша", началась
в 1921 г. с разработки твердотопливных ракетных двигателей в
Газодинамической лаборатории под руководством Н.И. Тихомирова
(1859- 1930). После его смерти работами руководили Георгий Эрихович
Лангемак (1898-1938), Борис Сергеевич Петропавловский (1898-1933),
Юрий Александрович Победоносцев (1907-1973) и др. Первые успешные
испытания ракет производились в 1933 г. По результатам испытаний был
сделан вывод о возможности применения реактивных снарядов для
массового огневого нападения. В этом же году Газодинамическая
лаборатория вошла в состав вновь созданного Реактивного научно-
исследовательского института (РНИИ). В этом институте при участии
многих научно-исследовательских и опытно-конструкторских организа-
ций, промышленных предприятий и военных подразделений к 1938 г. в
основном завершились работы по созданию ракет РС-82 и PC-132.
Эти ракеты в первую очередь нашли практическое применение в
авиации, где из-за сравнительно небольших дальностей стрельбы
рассеяние не имело большого значения. Еще в 1936 г. проводились
широкие полигонные испытания, в ходе которых отрабатывалась
залповая стрельба ракетами РС-82 с самолета-истребителя И-5. В конце
1937 - начале 1938 гг. завершились и войсковые испытания ракет РС-82
и РС-132. В августе 1939 г. звено из пяти самолетов И-16, вооруженных
ракетами РС-82, приняло участие в боевых действиях против японской
авиации в районе реки Халхин-Гол. В общей сложности звено сбило 17
самолетов противника -14 истребителей и три бомбардировщика. После
этого от ВВС был получен большой заказ на изготовление ракет и
пусковых устройств для них.
Одновременно с внедрением ракет в авиацию в РНИИ продолжались
работы по повышению кучности и дальности наземной стрельбы,
созданию наземных мобильных пусковых установок. В 1939 г. началось
массовое производство ракет М-13 и М-8 (новые индексы вместо РС-132
и РС-82). Уже в 1940 г. было произведено около 200 тысяч ракет этих
типов. Однако к началу Великой Отечественной войны имелось на
656
вооружении всего семь
опытных пусковых устано-
вок (боевых машин). Из
этих семи боевых машин
была сформирована бата-
рея под командованием
капитана И.Ф. Флерова,
которая впервые в истории
ракетного вооружения 14
июля 1941 г. произвела
чрезвычайно эффективный
залп по скоплению немец-
ких войск на станции Орша.
Успех первого практи-
ческого применения ракет
способствовал быстрому
развертыванию производ-
ства как ракет М-8 и М-13,
так и пусковых устройств
для них. Уже в 1941 г. было
произведено около 500 тысяч
ракет, а в 1942 г. - около
двух миллионов. К 1943 г.
выпуск боевых машин увели-
чился до нескольких тысяч в
год, а в дальнейшем насыще-
Компоиовочнаи схема неуправляемой ракеты М-13:
а - общий вид; 6 - вид в разрезе; 1 - корпус; 2 -
взрыватель; 3-РДТТ; ^-стабилизатор; 5- направ-
ляющие штифты; 6 - пиросвечи; 7 - дно головной
части; 8 - боевой заряд; 9 - детонатор; 10- сопло;
II - обтекатель; 12 - опорная решетка; 13 - заряд
твердого топлива; 14 - воспламенитель
ние войск пусковыми уста-
новкамипозволило даже несколько сократить их производство. Производ-
ство же ракет продолжало расширяться, "Катюши" стали массовым
оружием, сыгравшим большую роль во многих решающих сражениях
второй мировой войны. Так, например, в ходе Берлинской операции было
израсходовано 1920 вагонов ракет, в то время как всех остальных
боеприпасов - 9715 вагонов.
Реактивный осколочно-фугасный снаряд М-13 состоял из двух
основных частей; головной и ракетной. Головная или боевая часть
состояла из корпуса, в носовую часть которого вворачивался взрыватель,
боевого заряда массой около 5 кг, детонатора и резьбового днища.
Ракетная часть - это, по-существу, ракетный двигатель твердого
топлива с несущим корпусом. В камере сгорания были размещены шашки
твердого топлива, опиравшиеся, с одной стороны, на верхнее днище
22 - 7425
657
камеры, а с другой - на колосниковую решетку, В верхней части камеры
размещался воспламенитель, приводившийся в действие от двух
пиросвечей, срабатывающих при поступлении электрического сигнала
с пусковой установки. Задняя часть камеры заканчивалась крышкой-
соплом, соединявшейся с корпусом резьбовым соединением. На наружной
поверхности камеры сгорания имелись два направляющих штифта, с
помощью которых ракета устанавливалась на направляющие пусковые
устройства. Для придания ракете устойчивости в полете на хвостовом
обтекателе закреплялись четыре консоли стабилизаторов.
Запуск ракет М-13 производился с пускового устройства БМ-13,
Ходовая часть боевой машины представляла собой трехосное шасси
грузового автомобиля высокой проходимости и маневренности, на
котором был смонтирован пакет направляющих, имевших возможность
поворачиваться как в горизонтальной, так и в вертикальной плоскости.
Установка БМ-13 - шестнадцатизарядная, на одной машине находились
в готовности к пуску 16 ракет. Время пуска 8... 10 с. Такая высокая
скорострельность существенно повышала интенсивность и эффектив-
ность огня в боевых условиях, и, кроме того, позволяла сократить до
минимума время нахождения боевой машины на огневой позиции.
Направляющие БМ-13 были изготовлены из двутавровых балок с
приклепанными к горизонтальным полкам желобами, удерживавшими
ракеты в начальный период движения. Направляющие собраны в
плоский пакет и закреплены на трубчатой поворотной ферме. В задней
части направляющих имелись электроконтакты, через которые подавался
электрический сигнал на запуск двигателя твердого топлива, и вручную
запиравшиеся замки, удерживавшие ракеты от перемещения по
направляющим на марше.
Оборудование наведения БМ-13 состояло из механизмов наведения,
направляющих ракеты по горизонту и углу возвышения, системы
прицеливания в виде гаубичного или минометного прицела. Система
электрооборудования состояла из аккумуляторной батареи, электрокон-
тактов, через которые подается команда на запуск двигателя твердого
топлива, прибора управления огнем и электропроводки.
Реактивные снаряды устанавливались не только на автомобилях, но
и на гусеничных тракторах, танках и бронекатерах.
Основные характеристики. Максимальная дальность стрельбы 8500 м;
стартовая масса ракеты М-13 (в скобках значения для М-8) 42,5 кг
(13,3 кг); масса боевой части 21,3 кг (5,4 кг); диаметр корпуса 132 мм
(82 мм); длина ракеты 1415 мм (1098 мм).
658
КРЫЛАТЫЕ РАКЕТЫ BGM-109 "ТОМАГАВК"
Семейство крылатых ракет "Томагавк" наземного и морского
базирования создавалось первоначально для поражения ядерными
зарядами стратегических объектов, расположенных на. дальних
расстояниях. Однако позднее создатели ракет решили установить на
"Томагавки" обычные боезаряды, которые по массе и объему значитель-
но превышали аналогичные характеристики ядерных боеголовок. Это,
в свою очередь, привело к необходимости уменьшения запаса топлива
и дальности полета (примерно вдвое), что означает возможность
использования ракет семейства "Томагавк" для решения и тактических
задач.
Крылатые ракеты "Томагавк" исполняются в нескольких вариантах:
BGM-109А, или TLAM - стратегическая (с ядерным зарядом) ракета
морского базирования, запускаемая с надводных кораблей или с
подводных лодок. Предназначена для поражения портов, береговых
укреплений, районов береговых центров связи, мест сосредоточения
войск, воинских складов и пр.;
BGM-109B, или TASM - тактическая противокорабельная ракета с
дальностью действия 450 км и обычным боевым зарядом. Предназначена
для поражения одиночных и групповых надводных целей;
BGM-109C, или TLAM/C - ракета морского базирования для
поражения малоразмерных наземных целей, оснащенная обычной боевой
частью;
BGM-109D - ракета морского базирования для поражения аэродро-
мов, взлетно-посадочных полос и расположенных в зоне аэродромов
летательных аппаратов. Ракета запускается с надводных кораблей и
оснащена кассетной боевой частью;
BGM-109G, или GLCM- стратегическая ракета наземного базирова-
ния с ядерным зарядом. Предназначена для поражения стратегически
важных объектов противника различного назначения.
Генеральным разработчиком всех разновидностей крылатых ракет
"Томагавк" является фирма "Дженерал Дайнэмикс". Начало разработок
относится к 1974 г., первые испытательные пуски производились с 1976 г.
С1983 г. проводилась широкомасштабная модернизация ракет "Томагавк"
с целью повышения тактической гибкости их боевого применения с
обычными боезарядами.
Все варианты крылатых ракет "Томагавк" имеют аналогичные
аэродинамические и компоновочные схемы. Аэродинамическая компоновка
выполнена по обычной схеме. Ракета оснащена открывающимся в полете
прямым трапециевидным крылом, крестообразным и хвостовыми рулям и
и подфюзеляжным совковым воздухозаборником, который выдвигается
22*
659
Схема крылатой ракеты BGM-109 "Томагавк"
из корпуса после выхода ракеты из пускового контейнера. Два
горизонтальных руля управления по тангажу работают синхронно, два
вертикальных руля обеспечивают управление по курсу и крену, работают
дифференциально. Обе пары рулей сложены и разворачиваются после
старта. Большая часть конструкции корпуса ракеты выполнена из
алюминиевых сплавов. Корпус состоит из шести отсеков, включая
носовой обтекатель оживальной формы из графитоэпоксидного
пластика. Соединения отсеков - фланцевые, на болтах. Отсеки корпуса
изготавливаются из модулей, получаемых методом штамповки с
вытяжкой, с последующей механической обработкой и сваркой. На все
участки поверхности корпуса, за исключением внутренней поверхности
топливного бака, нанесен эпоксидно-полиамидный грунт, а затем
полиуретановое покрытие.
В первом отсеке располагается аппаратура системы наведения, второй
отсек - боевая часть с предохранительно-исполнительным механизмом.
Третий отсек представляет собой топливный бак, там же расположена
и вытеснительная система подачи топлива, четвертый отсек - аппаратур-
ный. В пятом отсеке размещена двигательная установка, в шестом
(хвостовом) - рулевое управление.
Каждая консоль крыла представляет собой фрезерованный из
алюминиевой плиты лонжерон (точнее говоря - это срединная панель,
образующая форму консоли в плане) с приклеенной к нему нитроэпок-
сидным клеем обшивкой, выполненной методом химического фрезерова-
ния. Панели рулей изготовлены из поликарбоната, упрочненного
стекловолокном. Все неразъемные соединения защищены противокорро-
зионным полисульфидным герметиком.
Всеракеты "Томагавк" наземного и морского базирования оснащены
стартовыми твердотопливнымиускорителями фирмы "АтлантикРисерч"
с тягой 3200 кгс. При пуске с наземной установки, а также с корабля или
подводной лодки в надводном положении стартовый двигатель твердого
топлива включается по команде "Пуск" и работает в течение 6...7 с до
660
полного раскрытия крыла и хвостовых рулей и подачи турбостартером
горячего газа на лопатки турбины маршевого турбореактивного
двигателя. При пуске ракеты с подводной лодки, находящейся в
подводном положении, стартовый двигатель включается после выхода
ракеты из торпедного аппарата и удаления ее от лодки на безопасное
расстояние 12 м, что обеспечивается сигналом от разрывного фала.
В этом случае стартовый двигатель обеспечивает движение ракеты в воде,
выход из воды и начальный набор высоты до раскрытия консолей крыла,
выдвижения воздухозаборника в рабочее положение и включения
маршевого двигателя.
Все ракеты "Томагавк" наземного и морского базирования оснащены
двухвальными двухкаскадными воздушно-реактивными двигателями
фирмы "Уильямс Рисерч" с тягой 272 кгс.
На большей части траектории наведение ракет "Томагавк" произво-
дится с помощью инерциальной системы управления с навигационной
ошибкой около 750 м/ч. Для устранения накопленной ошибки через
определенные временные интервалы осуществляется коррекция траектории
полета с помощью системы наведения по рельефу местности TERKOM
(кроме модификации "В", на которой применена инерциальная система
наведения в комбинации с радиолокационной головкой самонаведения).
Существо этой системы - в сопоставлении заранее заложенных в
запоминающее устройство ракеты данных о рельефе местности, над
которой проходит полет ракеты, с истинными значениями высоты
полета, измеряемыми бортовым радиовысотомером. Данные о рельефе
местности получают чаще всего при помощи разведывательных
спутников Земли. Бортовая цифровая вычислительная машина,
сопоставляя эти данные, определяет отклонение ракеты от заданной
траектории и выдает команду коррекции на автопилот, который
возвращает ракету на расчетную траекторию. По мере приближения
ракеты к цели разрешающая способность системы коррекции увеличива-
ется, что позволяет вывести ракету в зону цели с высокой точностью
(160... 200 м).
Для еще большей точности попадания ракеты в цель на конечном
участке траектории включается оптическая система самонаведения,
работающая по принципу сравнения эталонного и реального изображения
района цели. Изображение района цели получается с помощью бортовой
телевизионной камеры, жестко связанной с корпусом ракеты. Масштаб
изображения регулируется изменением фокусного расстояния объектива.
Использование этой системы позволяет довести точность попадания
ракеты до 30 м.
Ракеты "Томагавк" модификация "А" и "G" оснащены ядерными
боеголовками стротиловым эквивалентом 150 кт и массой 123 кг, ракеты
661
варианта "С" - фугасной боевой частью массой 454 кг, а противокора-
бельная ракета варианта "В" - проникающей боевой частью той же
массы. На ракеты варианта "D" установлены кассетные боевые части с
боковымразбрасыванием суббоеприпасов. Разбрасывание производится
с помощью надувных баллонов, наполняющихся от твердотопливного
газогенератора.
Крылатые ракеты "Томагавк" широко использовались американцами
в ряде военных операций. Так, зимой 1991 г. в ходе операции "Буря в
пустыне" по целям в Ираке было запущено 297ракет, из которых около
20 процентов не дошли до цели или были сбиты противовоздушными силами
Ирака. В последующие годы различные модификации ракет "Томагавк"
использовались в ходе нанесениямассированных ракетных ударов по Ираку,
Судану, Афганистану. Несколько сот ракет "Томагавк" было выпущено
по объектам Югославии в 1999 г.
Основные характеристики. Длина со стартовым ускорителем 6,4 м,
без ускорителя 5,54 м; диаметр корпуса 0,53 м; размах крыла 2,54 м;
стартовая масса 1441 кг, масса маршевой ступени 1144 кг; скорость
полета соответствует М = 7; дальность полета - от 450 до 2500 км; высота
полета 50...100 м (для варианта "В" 5...10 м).
РАКЕТЫ-НОСИТЕЛИ
88. Ракета-носитель "Союз-У" - см. стр. 663.
89. Ракета-носитель "Сатурн-V" - самая большая и самая мощная в
мире ракета-носитель. Создавалась как носитель космических кораблей
по лунной программе. Трехступенчатая ракета с жидкостно-реактивными
двигателями на всех ступенях. Полезная нагрузка, выводимая на орбиту
500 км - 120 т, на параболическую орбиту - 45 т. Фирма-разработчик -
"Боинг", США.
90. Ракета-носитель "Ариан" - см. стр. 669.
91. Транспортный космический корабль многоразового действия
"Спейс шаттл" - см. стр. 673.
92. Тяжелая ракета-носитель "Протон-К". Серия этих ракет-носителей
создана в 1968 г. на базе межконтинентальной баллистической ракеты
УР-500. Имеет трехступенчатую компоновку и может доставить на
Схема ракеты-носителя "Сатурп-V"
662
Схема тяжелой ракеты-носителя "Протои-К"
низкую орбиту груз 20,6 т, а на геостационарную орбиту - 2,3 т. Фирма-
разработчик - ОКБ Владимира Николаевича Челомея (1914-1984),
СССР.
РАКЕТА-НОСИТЕЛЬ "СОЮЗ-У"
Ракета-носитель "Союз", разработанная под руководством Сергея
Павловича Королева (1907-1966), базировалась на созданной к 1957 г.
межконтинентальной баллистической ракете Р-7 и ее модификации Р-7А.
На базе ракеты Р-7А было разработано около 20 модификаций,
однако крупных модернизаций, связанных, например, с добавлением
663
Компоновочная схема ракеты-
носителя "Союз-У":
1 - головной блок с автоматичес-
ким космическим аппаратом; 2 -
головной блок с грузовым моду-
лем; 3 - головной блок с разгон-
ным блоком "Фрегат"; 4 - голов-
ной блок с пилотируемым косми-
ческим аппаратом; 5 - бак горю-
чего блока "И"; 6 - бак окислите-
ля блока "И"; 7- шар-баллоны с
гелием; 8 - двигатель блока "И"
новых ступеней, было значительно меньше. Модификациями, наиболее
активно используемыми в качестве ракет - носителей космических
объектов, стали: "Восток" (год создания 1962, число запусков 138, из них
успешных 131); "Восход" (1964; 300; 286); "Молния-М" (1965; 272; 252);
"Союз-У" (1973; 648; 630).
Таким образом, ракета-носитель "Союз-У"является самой высокона-
дежной (процент успешных запусков 97,5) и наиболее используемой из всех
модификаций, разработанных на базе ракеты Р-7 А. Руководитель проекта
Василий Павлович Мишин (1917-2001), СССР. Первый запуск ракеты
664
"Союз-У" состоялся 18 мая 1973 г. Ракетой-носителем "Союз-У"
осуществляются все запуски пилотируемых космических кораблей "Союз"
и грузовиков "Прогресс", автоматических аппаратов типа "Ресурс",
"Фотон", "Бион", "Космос"и др.
Ракета-носитель "Союз-У" - трехступенчатая, на всех ступенях
используются жидкостные ракетные двигатели с жидким кислородом в
качестве окислителя и керосином в качестве горючего. Первая и вторая
ступени соединены по схеме "пакет", причем в качестве первой ступени
используются четыре боковых блока, а второй ступени - центральный
блок "А". Третья ступень (блок "И") соединена со второй ступенью по
схеме "тандем". На третью ступень через переходной отсек подголовным
обтекателем устанавливается космический аппарат. В зависимости от
типа аппарата обтекатель может иметь различные размеры и форму.
Стартовая масса "Союза-У" около 310 т, максимальная длина 50,67 м,
максимальный поперечный габаритный размер - 10,3 м.
При выведении ракета-носитель функционирует в такой последова-
тельности. Запуск двигательных утановок боковых и центрального
блоков осуществляется одновременно. Они выходят на промежуточную
ступень тяги. На этом режиме тяговооруженность ракеты меньше
единицы. Старт ракеты происходит в процессе выхода двигательной
установки центрального блока на главную ступень тяги, при этом
двигатели боковых блоков работают в режиме промежуточной тяги.
Выход двигательных установок боковых блоков на режим главной
ступени начинается после команды "Контакт подъема". После
израсходования компонентов топлива в боковых блоках (примерно
на 118-й секунде) они отделяются от центрального блока. В конце работы
второй ступени (примерно через 286 с после старта) происходит
разделение второй и третьей ступеней. После прохождения плотных слоев
атмосферы на 150...170-й секунде полета сбрасывается головной
обтекатель. Третья ступень работает 520...540 с, и после достижения ею
заданной скорости производится отделение космического аппарата.
В системе отделения используются пирозамки и пружинные толкатели.
После отделения космического аппарата третья ступень тормозится и
уводится с траектории за счет сброса газа наддува из бака горючего через
специальное сопло.
В случае запуска пилотируемых космических кораблей ракета
комплектуется системой аварийного спасения экипажа, которая
устанавливается на вершине головного обтекателя.
Управление полетом на этапе работы первой ступени осуществляется
с помощью поворотных рулевых камер боковых и центрального блоков,
а также за счет использования аэродинамических рулей, которые
кинематически соединены с поворотными камерами боковых блоков.
После отделения боковых блоков управление полетом обеспечивают
665
четыре поворотные рулевые камеры центрального блока. Управление
полетом третьей ступени производится с помощью четырех рулевых
сопел маршевого двигателя этой ступени.
Первая ступень образуется четырьмя одинаковыми по конструкции
боковыми блоками, которые располагаются симметрично вокруг
центрального блока и крепятся к нему двумя узлами связи - нижним и
верхним. Верхние узлы представляют собой опорные шарниры и
предназначены для передачи осевых усилий, а нижние - для восприятия
поперечных нагрузок. Таким образом, большая часть корпуса централь-
ного блокав полете не нагружается тягой боковых блоков. На стартовом
устройстве ракета закреплена в районе узлов крепления боковых
блоков, что также обеспечивает благоприятные условия нагружения
основной части центрального блока.
Конструктивно боковой блок состоит из опорного конуса, бака
окислителя, межбакового отсека, бака горючего, хвостового отсека и
двигательной установки. Опорный и переходной конусы изготавливают
из титановых сплавов. Баки окислителя и горючего - из алюминиевого
сплава АМг-6; они представляют собой обшивку переменной толщины,
подкрепленную Z-образными шпангоутами. Днища баков обработаны
методом химического фрезерования для уменьшения массы и обеспечения
равнопрочное™. Внутри бака окислителя установлены демпфирующие
перегородки, гасящие колебания топлива при маневрах ракеты. Бак
горючего перегородок не имеет, через него проходит тоннель, в котором
проложен трубопровод окислителя.
В межбаковом отсеке, образованном днищами баков и обечайкой,
расположены приборы системы управления первой ступени. Ниже бака
горючего находится негерметичный отсек, в котором расположены баки
для хранения жидкого азота и перекиси водорода. Жидкий азот
используется для наддува баков в полете, а перекись водорода - для
привода турбонасосного агрегата двигателей.
Еще ниже находится силовое кольцо, которое является основным
силовым элементом, воспринимающим тягу двигателей и, кроме того,
к нему крепятся нижние узлы стыковки боковых блоков.
В хвостовом отсеке размещена двигательная установка, состоящая
из четырех неподвижных жидкостных ракетных двигателей конструкции
В.П. Глушко и двух рулевых поворотных двигателей конструкции
М.В. Мельникова. Кроме того, в хвостовом отсеке размещены турбона-
сосные агрегаты, генераторы каталитического разложения перекиси
водорода, автоматика управления двигателями, система управления
поворотными двигателями и аэродинамическими рулями, а также часть
приборов.
Тяга каждой из рулевых камер примерно в шесть раз меньше тяги
основных двигателей. Рулевые камеры при помощи гидропривода могут
666
поворачиваться на углы до 45°. Зажигание топлива в камерах при запуске
осуществляется с помощью пиротехнических устройств, устанавливаемых
на стартовом устройстве на деревянных штативах. Регулирование тяги
двигателей производится путем изменения подачи перекиси водорода
в парогазогенератор. Соотношение компонентов топлива регулируется
дросселем горючего. Оси симметрии всех двигателей боковых блоков
параллельны оси центрального блока.
Вторая ступень ракеты (центральный блок) состоит из фермы,
отражателя, приборного отсека, бака окислителя, бака горючего,
силового кольца, торовых баков перекиси водорода и жидкого азота и
хвостового отсека, в котором расположена силовая установка.
Ферма связывает центральный блок с третьей ступенью ракеты и
обеспечивает вместе с отражателем свободный выпуск газов при запуске
его двигателя. Отражатель представляет собой клепаную куполообраз-
ную конструкцию, выполненную из титановых листов с покрытием из
асботекстолита.
Приборный отсек клепаной конструкции типа монокок выполнен из
сплава Д-16Т. Внутри корпуса к силовому набору прикреплены фанерные
перегородки, делящие пространство отсека на отдельные объемы, в
которых расположено оборудование и доступ к которому осуществляется
через люки.
Бак окислителя образован двумя оболочками, имеющими форму
усеченного конуса, и сферическими днищами. В месте стыка конических
оболочек расположен силовой шпангоут. Вся конструкция бака
выполнена из АМг-6. Конические оболочки сварены из обечаек
переменной толщины и изнутри подкреплены шпангоутами. Силовой
пояс представляет собой основной силовой элемент, воспринимающий
осевые,радиальные и крутящие усилия от боковых блоков. Конструкции
верхнего и нижнего днищ бака идентичны. С наружной стороны к
днищам приклеена теплоизоляция из стекловолокна, покрытого
капроновой тканью. Нижняя юбка бака имеет силовой набор и образует
межбаковый отсек. К нижнему стыковочному шпангоуту юбки
посредством болтового соединения крепится бак горючего. Внутри бака
установлено восемь радиальных перегородок.
Бак горючего - сварной, цилиндрической формы и состоит из
верхнего и нижнего днищ и семи обечаек, изготовленных из АМг-6. За
нижним днищем бака горючего размещен бак с перекисью водорода, а
за ним - бак с жидким азотом. Назначение этих компонентов такое же,
как и в первой ступени.
Хвостовой отсек - клепаной конструкции, состоит из цилиндрической
оболочки, подкрепленной силовым набором (шпангоутами и стрингера-
ми). Все элементы конструкции выполнены из Д-16Т. Оболочка корпуса
667
и силовой набор защищены от воздействия струй истекающих из
двигателей газов слоем асбеста или асботекстолита и стальными
хромированными полированными листами. В хвостовом отсеке
размещены четыре неподвижных и четыре рулевых поворотных камеры
жидкостного ракетного двигателя. Тяга двигателя передается на корпус
центрального блока через силовую раму, на которой закреплены также
все агрегаты систем топливоподачи и пневмосистемы двигателя и часть
приборов системы управления.
Система разделения первой и второй ступеней обеспечивает надежное
одновременное отделение четырех боковых блоков. В состав системы
разделения входят реактивные сопла баков окислителя и горючего
боковых блоков, обеспечивающие необходимые для разделения усилия
за счет истечения из них газа наддува баков, верхние и нижние узлы
механических связей боковых блоков с центральным и система
управления разделением. Сопла баков снабжены крышками, которые
имеют механизмы открытия с пиротехническим приводом. В конце
работы первой ступени по команде от бортовой системы управления
приводится в действие система разделения, в результате чего боковые
блоки сначала отсоединяются в своей нижней части, открываются
тормозные сопла бака горючего, блоки начинают разворачиваться
относительно передних шаровых узлов и одновременно тормозиться
относительно центрального блока. При этом срабатывают пиропатроны
шарикововых замков и носовые опоры освобождаются, после чего
боковые блоки выходят из механического зацепления с центральным
блоком и уходят от него в стороны, одновременно разворачиваясь
относительно продольной оси.
Третья ступень (блок "И") состоит из переходного отсека, баков
горючего и окислителя, хвостового отсека и силовой установки.
Переходной отсек связывает конструкцию ракеты с космическим
аппаратом и представляет собой клепаную конструкцию цилиндрической
формы с продольным и поперечным силовыми наборами. На верхнюю
часть отсека крепятся головной обтекатель и толкатели системы
отделения космического аппарата. В верхней части блока расположен
бак горючего, состоящий из двух полусферических днищ и соединенных
с ними цилиндрических юбок. Днища и обечайки выполнены из АМг-6.
Внутри бака расположены: датчик уровня системы синхронного
опорожнения бака, указатель наполнения, заправочная труба и
дренажно-наддувная труба. Бак окислителя выполнен аналогично баку
горючего. В межбаковом отсеке расположены приборы системы
управления. К нижнему днищу приварена коническая обечайка, к
которой крепится рама двигательной установки. В нижней части блока
установлена двигательная установка, включающая в себя четыре
668
неподвижные камеры жидкостного ракетного двигателя конструкции
С.А. Косберга и четыре рулевые камеры малой тяги. Все четыре основные
камеры питаются от одного турбонасосного агрегата. Генераторный газ
после турбины используется в рулевых соплах, с помощью которых
осуществляется управление полетом блока. Система зажигания в камерах
и газогенераторе - пиротехническая.
Отделение блока "И" от центрального блока производится по
"горячей" схеме. После отделения блока "А" через заданный промежуток
времени хвостовая часть блока "И" сбрасывается.
Основные характеристики. Масса полезной нагрузки, доставляемой
ракетой-носителем "Союз-У", 7100 кг. Общая продолжительность
подготовки ракеты на космодроме от выгрузки из железнодорожных
вагонов до пуска- около 62 ч. Из них подготовка ракеты непосредствен-
но на старте занимает около 16 ч. Пожалуй, единственным недостатком
"Союз-У" (как и всех ракет этого ряда, начиная с Р-7) являются
неудобства, связанные с использованием в качестве окислителя
интенсивно испаряющегося жидкого кислорода, что вызывает необходи-
мость непрерывно подпитывать баки окислителя вплоть до момента
старта.
РАКЕТА-НОСИТЕЛЬ "АРИАН"
В начале 1970-х гг. группа европейских аэрокосмических фирм
объединилась для создания серии ракет-носителей различной грузо-
подъемности для обслуживания европейских космических программ.
В программе приняли участие: Aerospatiale, SEP, Air Liquid и Matra
(Франция), SNIA-BRD (Италия), MBB-ERNO (Германия), Contraves
(Швейцария) и British Aerospace (Великобритания).
Первый запуск ракеты-носителя этого семейства был осуществлен
24 декабря 1979 г. Созданы четыре модификации ракет-носителей с
грузоподъемностью 4,0; 5,0; 5,8 и 9,5 т. В настоящее время семейство
ракет-носителей "Ариан”является основным космическим транспортным
средством стран Западной Европы, а с учетом новой разрабатываемой
модификации ("Ариан-V") будет таковым и в обозримом будущем.
Первая из этого семейства ракета-носитель "Ариан-I" -трехступенча-
тая ракета с тандемным соединением ступеней. На первой и второй
ступенях в качестве компонентов топлива используются четырехокись
азота и несимметричный деметилгидразин, а на третьей - кислород и
водород.
Первая ступень ракеты "Ариан-I" (стартовая масса 153 т, масса
топлива 140 т) оснащена четырьмя жидкостными ракетными двигателями
"Викинг-5" общей тягой 2440 кН (на уровне моря), вторая ступень
669
Схемы ракеты-иосителя "Ариаи"
(стартовая масса 36 т, масса топлива 33 т) - двигателями "Викинг-4"
тягой 710 кН; а третья ступень (стартовая масса 9,5 т, масса топлива 8,3 т)
-двигателем с тягой 60 кН. Отличительной особенностью двигательной
установки этой ракеты является относительно низкое давление в камерах
сгорания навсех ступенях, что упростило их конструктивное исполнение,
повысило надежность и, в конечном счете, уменьшило массу и размеры
ракеты-носителя в целом, несмотря на сравнительно невысокую
массовую отдачу (2,28 %).
Увеличение массы стационарных ИСЗ предъявило новые требования
к грузоподъемности ракеты-носителя, что привело к созданию
модификаций "Ариан-I", ракет-носителей "Ариан-П" и "Ариан-Ш".
Грузоподъемность "Ариан-П" по сравнению с исходным вариантом
увеличилась за счет увеличения удельного импульса двигателей на всех
ступенях путем повышения давления в камерах сгорания и увеличения
массы топлива третьей ступени с 8 до 10,7 т.
Повышение грузоподъемности "Ариан-Ш" по сравнению с "Ариан-П"
обеспечено дополнительной установкой на первой ступени двух
твердотопливных ускорителей. Это была первая среди европейских
ракет-носителей схема с твердотопливными ускорителями. Специально
для нее итальянской фирмой "BPD Difesa-Spazio" - ведущей в Западной
Европе в области твердотопливных двигателей - был разработан
двигатель твердого топлива, имеющий среднюю тягу на уровне моря
750 кН. Масса топлива этого двигателя составила 7300 кг, а время
горения топлива примерно 28 с. Первые запуски этих ракет-носителей
670
Варианты головных блоков PH "Ариан"
были произведены в 1984-1986 гг. К 1989 г. осуществлено 17 запусков
этих ракет, из которых два - аварийные. Следует отметить, что при
использовании "Ариан-Ш" на геостационарную орбиту могут одновре-
менно выводиться два ИСЗ. Для этих целей на ракете-носителе
предусмотрен специальный переходник, который позволяет устанавли-
вать под обтекателем два спутника один за другим вдоль продольной
оси ракеты-носителя.
Следующим шагом в развитии западноевропейских транспортных
средств доставки космических объектов стало создание ракеты-носителя
следующего поколения "Ариан-IV", в которую было внесено значительное
число изменений. Наиболее существенным из них стало увеличение запаса
компонентов топлива и, соответственно, габаритов ракеты. Кроме того,
увеличились масса и габариты твердотопливных ускорителей, предусмот-
рено использование жидкостных ракетных ускорителей, разработан, с
учетом увеличившихся габаритов головного обтекателя, новый
приборный отсек. Вторая и третья ступени остались практически без
изменения, за исключением усиления их силовых элементов в связи с
увеличением действующих нагрузок.
671
В отличие от предыдущих модификаций на первой ступени "Ари-
ан-IV" в качестве горючего используется смесь гидразина (25 %) и
несимметричного диметилгидразина (75 %). Общая масса топлива
составляет 226 т. Общая длина ступени увеличилась до 23 м. В качестве
двигателей первой ступени на ракете "Ариан-IV" установлено четыре
жидкостных ракетных двигателя "Викинг-5" с увеличенной тягой -
2700 кН (на уровне моря). Благодаря увеличению запаса топлива эти
двигатели работают на 51с больше, чем двигатели "Ариан-Ш".
Стартовые двигатели твердого топлива имеют больший запас топлива
и, следовательно, более длительное время работы (около 42 с). Их
отделение обеспечивается пружинным механизмом, который после
достижения заданной тяги осуществляет увод отработавших твердотоп-
ливных ускорителей со скоростью 5 м/с. Специально для "Ариан-IV"
разработаны новые стартовые ускорители с жидкостными ракетными
двигателями, использующие те же компоненты топлива, что и двигатели
первой ступени. Топливо массой 35 т размещается в топливном отсеке
длиной 19 м и диаметром 2 м. Ускоритель оснащен жидкостным
ракетным двигателем "Викинг-6" с тягой 750 кН и временем работы 143 с.
Для отделения ускорителей предусмотрены шесть тормозных двигателей
твердого топлива.
Вторая ступень общей длиной 11,6 м содержит 34 т топлива в отсеке
со средним совмещенным днищем и оснащена жидкостным ракетным
двигателем "Викинг-4" с тягой 798 кН и временем работы 130 с.
Разделение первой и второй ступеней производится по "холодной" схеме.
После срабатывания пирозамков на стыке первой и второй ступеней блок
первой ступени уводится назад с помощью тормозных двигателей
твердого топлива. Через 2 с запускаются четыре небольших твердотоп-
ливных двигателя, которые отрабатывают 8 с и создают условия,
необходимые для запуска ЖРД второй ступени.
Третья ступень общей длиной 11,4 м имеет запас топлива 10,5 т
(кислород и керосин) в отсеке с совмещенным днищем и оснащена
двигателем НМ-7В с тягой 63 кН и временем работы 725 с. Двигатель
крепится на карданном подвесе, благодаря чему обеспечивается
управление по каналам тангажа и рыскания. Для управления по каналу
крена используется газоструйный двигатель, работающий на газообраз-
ном водороде.
Отличительной особенностью ракеты-носителя "Ариан-IV" является
модульное построение компоновочной схемы в зависимости от
потребной грузоподъемности. В частности, имеется шесть вариантов
носителя с различной комплектацией твердотопливных и жидкостных
ракетных ускорителей. В зависимости от варианта меняются грузоподъ-
емность и общая масса системы.
672
Головные обтекатели также выполняются в нескольких вариантах
с различным конструктивным исполнением силовой конструкции в
зависимости от числа, габаритов и массы ИСЗ. Для одиночных ИСЗ
имеются три варианта обтекателей, для запуска двух ИСЗ предусмотрены
четыре варианта головных обтекателей для различных по габаритам и
объемам размещаемых в них ИСЗ.
Основные данные ракет семейства "Ариан"
Параметр Варианты "Ариан-IV"
40 42Р 44Р 42L 44LP 44L
Стартовая масса, т — 317 335 380 397 460
Масса полезной нагрузки, выводимой на низкую орбиту, т 4,6 5,0 6,8 7,2 8,3 9,4
Относительная масса полезной нагрузки, % 1,58 1,6 1,8 1,9 2,2 2,5
Общая длина, м - 53,4 - - 58,4 -
Примечание. Вариант 40 — без ускорителей; 42Р — два твердотопливных
ускорителя; 44Р-четыре твердотопливных ускорителя; 42L—два жидкостных ракетных
ускорителя; 44LP - два твердотопливных и два жидкостных ракетных ускорителя;
44L - четыре жидкостных ракетных ускорителя. ______________________________
Первый запуск "Ариан-IV" был осуществлен 15 июня 1988 г., в его
результате были выведены на пер сходную к геостационарной орбиту три
ИСЗ общей массой 3,5 т. Этим запуском был завершен очередной этап
в разработке семейства ракет-носителей "Ариан", начало которому
положено в 1982 г. В создании этой серии ракет участвовали 11
западноевропейских стран, наибольшая доля в этих работах принадлежит
Франции (61,9 %).
Ведутся работы по созданию новой ракеты-носителя этой серии,
получившей индекс "Ариан-V".
ТРАНСПОРТНЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ МНОГОРАЗОВОГО
ДЕЙСТВИЯ "СПЕЙС ШАТТЛ"
Транспортный космический корабль многоразового действия "Спейс
шаттл "начиная с 1981 г., когда был произведен его первый полет, является
основным исполнителем транспортных операций космической программы
США, включая выведение полезных нагрузок как на низкие околоземные
орбиты, так и на высокоэнергетические, в том числе и геостационарную.
613
Схема транспортного космического корабля многоразового действия "Спейс шаттл"
В случае выведения космического объекта на геостационарную орбиту
в грузовом отсеке "Шаттла" вместе с полезной нагрузкой выводится и
межорбитальный корабль, обеспечивающий перевод полезной нагрузки
с базовой орбиты на заданную рабочую.
"Спейс шаттл" выполнен по двухступенчатой схеме с параллельной
работой двигателей обеих ступеней, которые включаются на Земле.
Первая ступень представляет собой два твердотопливных ускорителя,
закрепленных по бокам подвесного топливного бака. После отделения
на высоте около 40 км ускорители с помощью парашютной системы
опускаются в океан, буксируются на плаву на стартовый комплекс и
после восстановительного ремонта и снаряжения топливом могут
использоваться повторно (расчетный ресурс - 20 полетов).
Вторая ступень (орбитальная) - пилотируемый космический корабль
многоразового использования, обеспечивающий возможность продоль-
ного и бокового маневров для посадки по-самолетному на территорию
США в широком диапазоне исходных орбит, приемлемые условия по
перегрузкам и температурам при входе в атмосферу, что достигается за
счет достаточно большого аэродинамического качества аппарата. Крыло
космического самолета имеет двойную стреловидность и обеспечивает
высокие характеристики при гиперзвуковом полете, а также требуемое
аэродинамическое качество в процессе маневрирования и посадки.
Каркас и обшивка космического корабля изготовлены из алюмийие-
вого сплава с мощной теплозащитной из композиционных материалов
674
Компоновочная схема "Спейс шаттл"
("углерод-углерод", кварцевое волокно, специальный войлочный
материал и пр.).
Силовая установка орбитальной ступени состоит из трех жидкостных
ракетных двигателей, работающих на кислороде и водороде. Максималь-
ная продолжительность непрерывной работы двигателей 8 мин, общий
ресурс двигателей (7,5 ч) рассчитан на 55 полетов. На ступени имеются
два жидкостных ракетных двигателя маневрирования, работающие на
четырехокиси азота и монометилгидразине, и 44 двигателя ориентации,
работающие на тех же компонентах.
Орбитальная ступень оснащена комплексной системой навигации,
наведения и управления, способной работать как в автоматическом, так
ив ручном режимах. В состав системы входят инерциальные измеритель-
ные блоки, акселерометры и скоростныегироскопы, несколько бортовых
цифровых машин, инфракрасные датчики горизонта, звездные датчики,
датчики воздушных параметров, радиовысотомер, аппаратура системы
автоматической посадки и др. В системе терморегулирования предусмот-
рены контур циркуляции хладагента, радиаторы, теплоизоляция и
нагреватели. В составе системы электропитания - водородно-кислород-
ные топливные элементы, аккумуляторные батареи и турбоэлектрогене-
раторы, работающие на продуктах разложения гидразина. В помещении
для экипажа создается двухгазовая (20 % кислорода и 80 % азота)
атмосфера.
Запас топлива для маршевой двигательной установки второй ступени
находится во внешнем (подвесном) топливном баке, являющемся
единственным в транспортной системе элементом одноразового
использования. Топливный бак отделяется от космической системы при
скорости, несколько меньшей орбитальной, входит в атмосферу по
баллистической траектории, где частично разрушается, и падает в океан.
В составе транспортной космической системы "Спейс шаттл" до
1986 г. использовались четыре космических корабля - "Колумбия",
675
"Челленджер", "Дискавери" и "Атлантис". На 25-м полете 28 января
1986 г. в результате прогара корпуса твердотопливного ускорителя
произошел взрыв жидкого топлива в подвесном топливном баке, что
привело к разрушению космического корабля "Челленджер" и гибели
экипажа. После этой катастрофы в полетах "Шаттла" был продолжитель-
ный перерыв, связанный с необходимостью анализа причин аварии и
внесения соответствующих изменений в его конструкцию.
Основные усилия в процессе доработки "Шаттла" после катастрофы
были направлены главным образом на повышение безопасности полета
и коснулись в первую очередь конструкции корпуса твердотопливных
ускорителей (доработка конструкции стыка и уплотнения между
секциями корпуса, обеспечение подогрева стыков секций в ходе
предстартовых операций, новая конструкция креплений ускорителей к
топливному баку).
Кроме того, внесены изменения в конструкцию космического корабля
многоразового использования: осуществлен переход на тормоза с
бериллиевыми колодками, усилены стойки шасси, доработана система
энергопитания. В системе маршевых жидкостных ракетных двигателей
произведена доработка впускных клапанов, усовершенствована
конструкция турбонасосных агрегатов, улучшены разъемные элементы
магистралей топлива. Внесены изменения в методику проведения
наземных стендовых испытаний маршевых двигателей и ускорителей.
С целью повышения безопасности полета были внесены изменения
и в программу полета "Шаттла" на его активном участке. Эти изменения
в основном связаны с необходимостью увеличения запаса высоты для
планирующего к месту аварийной посадки космического корабля в
случае отказа одного из маршевых двигателей начиная с момента
отделения ускорителей. Были подробно проработаны три варианта
горизонтальной посадки космического аппарата по самолетной схеме
на один из запасных аэродромов.
Наиболее опасным считается вариант планирующего полета с
возвращением к месту старта и посадкой на аэродром Космического
центра им. Дж. Кеннеди. Тем не менее, этот вариант является единственно
возможным, если отказ основного двигателя произойдет до 160-й
секунды полета (отделение ускорителей производится на 124-й секунде).
Начиная со 160-й секунды траектория, выбранная для космического
корабля многоразового использования с учетом набранных к этому
моменту скорости (М > 6) и высоты полета (Н > 70 км), уже обеспечивает
возможность трансатлантического планирующего перелета с посадкой
на запасном аэродроме в Гамбии.
676
Начиная со 180-й секунды возможен также альтернативный
аварийный маневр с посадкой на запасном аэродроме в Марокко.
Считается, что посадка на один из указанных аэродромов обеспечивается
практически при всех условиях, хотя ее выполнение требует от экипажа
высокого мастерства пилотирования.
Ситуация существенно упрощается после 205-й секунды полета, когда
аппарат достигает скорости, соответствующей М = 7 на высоте около
100 км, и появляется дополнительная возможность посадки на аэродром
Морон в Испании (но только до М = 8). В случае отказа одного двигателя
после 280-й секунды полета предусмотрен маневр и планирование
космического аппарата с посадкой на базе ВВС Эдвардс в Калифор-
нии.
В целях повышения безопасности полетов был осуществлен и ряд
организационных мероприятий. Так, была изменена организационная
структура служб, обеспечивающих подготовку и сопровождение полетов,
включая организацию специальной службы обеспечения надежности и
безопасности полетов транспортной космической системы. Всего было
рассмотрено свыше 1000 предложений по доработке системы и
совершенствованию организационной структуры руководства поле-
тами.
Многочисленные изменения, сопровождаемые, как правило,
увеличением массы аппарата, повлекли за собой снижение расчетной
грузоподъемности "Шаттла". Так, при выводе на орбиту высотой 200 км
потеря массы полезной нагрузки составила 8,4 %, а на орбиту 400 км -
12,7%.
После проведенных доработок и возобновления полетов (29 сентября
1988 г.) только до 1995 г. было осуществлено 75 полетов "Шаттла" - в
три раза больше, чем в 1981-1986 гг. Парк космических самолетов
пополнился еще одним аппаратом, получившим название "Эндевер”.
Новый космический корабль отличается от своих предшественников
новыми бортовыми цифровыми вычислительными машинами с
повышенной плотностью памяти; усовершенствованными быстроразъем-
ными соединениями систем между кораблем и подвесным топливным
баком; новыми тормозами из композиционного материала, обеспечиваю-
щего решение проблемы перегрева тормозов при посадке; наличием
люка для аварийного покидания космического корабля экипажем на
участке планирующего полета.
Численность экипажа - семь человек, в том числе четыре человека -
исследователи и экспериментаторы, не являющиеся профессиональными
космонавтами. Экипаж совершает полет без скафандров (за исключением
работы в открытом космосе). Перегрузка на всех участках полета не
превышает трех единиц.
677
МНОГОРАЗОВАЯ ТРАНСПОРТНАЯ КОСМИЧЕСКАЯ СИСТЕМА
"ЭНЕРГИЯ" -"БУРАН"
Начиная с 1974 г. в СССР под руководством В.П. Глушко и
Г.Е. Лозино-Лозинского разрабатывалась многоразовая транспортная
космическая система "Энергия"-"Буран". Первый запуск системы был
осуществлен 15 мая 1987 г. Основные показатели "Энергии"-"Бурана"
превышали аналогичные показатели "Спейс шаттла". Так, масса
полезной нагрузки, выводимой на опорную орбиту 200 км, у "Энер-
гии"-"Бурана" составила 30 т ("Спейс шаттл" - 25,4 т); масса полезной
нагрузки, возвращаемой с орбиты на Землю, 15...20 т (14,5 т); масса
космического самолета 105 т (114,2 т); число членов экипажа 2...10 (3...10).
Система "Энергия"-"Буран" имела ряд принципиальных преимуществ
конструктивного и проектного плана (по сравнению с "Шаттлом").
Выдающимся событием стали полет и посадка "Бурана" в автоматичес-
ком режиме 15 ноября 1988 г. Однако общий экономический кризис в России
прервал все работы по транспортной системе "Энергия"-"Буран".
Основные характеристики. Масса полезной нагрузки, выводимой на
низкую базовую орбиту (высота 185 км; наклон орбиты 28,5°), 29,5 т; при
выведении на низкую полярную орбиту - 14,5 т; стартовая масса 2000 т;
относительная масса полезной нагрузки 1,47 %; габариты грузового
отсека 18,3x4,6 м; номинальная продолжительность орбитального полета
7 суток; численность экипажа 7 человек.
КОСМИЧЕСКИЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
93. Космические пилотируемые корабли "Союз" - наследники первых
космических кораблей типа "Восток". Предназначались для полетов по
орбите вокруг Земли. С помощью этих кораблей произведены: отработка
процессов автономной навигации, управления, маневрирования;
изучение воздействия условий длительного космического полета на
человека и многое другое. Корабль состоит из трех основных отсеков:
спускаемого аппарата, орбитального отсека и приборно-агрегатного
отсека. Масса полностью укомплектованного корабля - 6,38 т, СССР.
94. Автоматический космический летательный аппарат "Луна-16" -
один из серии отечественных автоматических станций, предназначенных
для исследования поверхности Луны. Эта станция впервые в 1970 г.
совершила рейс Земля-Луна-Земля и доставила на Землю образцы
лунного грунта. Руководитель проекта-Георгий Николаевич Бабакин
(1914-1971), СССР.
95. Пилотируемый космический корабль "Аполлон" - см. стр. 681.
96. Космический летательный аппарат "Вояджер". Аппараты этого
типа предназначались для проведения исследований с пролетной
траектории около Юпитера, Сатурна, Урана, Нептуна и их
678
Компоновочная схема космического корабля "Союз-19":
« — вид сбоку; б-вид в плане; 7 - андрогинный периферийный стыковочный агрегат; 2-
антенны УКВ-радиостанпии (121,75 МГц); 3-антеннарадиотелевизионной системы; 4-
орбитальный отсек; 5 - спускаемый аппарат; б - бортовой огонь ориентации; 7 - двигатель
причаливания и ориентации; 8 - проблесковый световой маяк; 9 - датчик солнечной
ориентации; 10-приборно-агрегатный отсек; 11 - двигатели ориентации; 72- антенны
радиотелеметрической системы; 13-антенна связи сЗемлей; /7-сближающе-корректиру-
ющий двигатель; 75- датчик ионной ориентации; 16- панель солнечной батареи; 77-
антенны командной радиолинии и траекторных измерений; 7<?-визир-ориентатор; 79-
иллюминатор; 20-люк для посадки экипажа в корабль; 27 - антенна УКВ-радиостанции
679
Автоматический космический летательный аппарат "Луиа-16"
Схема космического летательного аппарата "Вояджер"
680
Исследовательский космический летательный аппарат "Вега"
спутников. Запуски "Вояджера-1" и "Вояджера-2" были произведены в
1977 г. Впервые в пределах одного длительного полета произведено
обследование четырех планет Солнечной системы. Вся программа "Во-
яджер" разрабатывалась по заказу и под контролем NASA (США).
97. Исследовательский космический летательный аппарат "Вега" -
автоматическая межпланетная станция, предназначавшаяся для изучения
поверхности и атмосферы Венеры, а также исследования кометы Галлея.
"Вега-1" была запущена с космодрома Байконур 15 августа 1984 г., а
"Вега-2" - 21 августа того же года. С помощью этих аппаратов удалось
получить уникальную информацию о строении атмосферы Венеры и
кометы Галлея. СССР.
98. Орбитальный космический комплекс "Мир" - см. стр. 686.
ПИЛОТИРУЕМЫЙ КОСМИЧЕСКИЙ КОРАБЛЬ "АПОЛЛОН"
Трехместный космический корабль "Аполлон" предназначался для
реализации программы того же названия, имевшей целью высадку на
поверхность Луны человека и проведение там многочисленных научных
исследований. Президент США Дж. Картер с целью восстановления
681
1
2
3
Компоновочная схема космического корабля "Аполлон":
1 - двигательный отсек; 2 - отсек экипажа; 3 - лунный модуль; 4 - взлетная ступень
лунной кабины
Компоновочная схема основного блока космического корабля "Аполлон":
1 - тормозной парашют; 2, 3 - двигатели управления по тангажу; 4 - хранилища; 5 -
двигатели управления креном; 6- вспомогательные двигатели; 7-топливные баки; 8-
маршевый двигатель; 9-остронаправленная антенна; 10- вспомогательные бачки для
топливных элементов; 11 - топливные элементы; 12 - бачок с питьевой водой; 13 -
двигатель управления курсом; 14 - огнетушитель; 15 - топливный бак системы
ориентации; 16-отделение для хранения пищевых продуктов; 77-командир корабля;
18 - основной парашют; 19 - пилот основного блока; 20 - пилот лунной кабины; 21 -
стыковочный агрегат
682
престижа страны в области освоения космоса (после известных успехов
советской космонавтики) объявил программу "Аполлон" национальной
задачей. На эту программу было израсходовано более 24 млрд дол.
Начало разработки относится к первой половине 1960-х гг., а последний
корабль серии "Аполлон" был запущен в 1972 г.
Космический корабль "Аполлон" состоит из основного блока и
лунной кабины.
Основной блок предназначен для доставки трех космонавтов на
селеноцентрическую орбиту и возвращения их на Землю, лунная каби-
на - для доставки двух космонавтов с селеноцентрической орбиты на
поверхность Луны, обеспечения их пребывания на Луне, возвращения
космонавтов с Луны на селеноцентрическую орбиту и пересадку их в
основной блок.
Основной блок включает в себя отсек экипажа и двигательный
(служебный) отсек. Отсек экипажа (спускаемый аппарат) имеет форму
конуса со скругленной вершиной и рассчитан на посадку на воду. Однако
предусмотрены меры и на случай посадки на сушу: с одной стороны
отсека экипажа имеются специальные выступы, которые при ударе о
Землю разрушаются и этим демпфируют ударные нагрузки. Чтобы
обеспечить посадку на выступы, стропы парашюта крепятся к отсеку
несимметрично.
Космический корабль "Аполлон" снабжен стыковочным устройством,
элементы которого расположены на отсеке экипажа и лунной кабине.
Устройство - разборное, допускает переход космонавтов из отсека
экипажа во взлетную ступень лунной кабины через переходной тоннель
диаметром 0,8 м.
Система управления и навигации основного блока автономная,
рассчитана на активное участие космонавтов в управлении полетом;
предусмотрена также возможность использования информации,
передаваемой с Земли. К основным элементам системы относятся:
бортовая цифровая вычислительная машина с пультом ввода, которая
управляет более чем двадцатью системами космического корабля;
инерциальный измерительный блок сгиростабилизированной платфор-
мой; сканирующий телескоп и секстант. В состав системы входит также
устройство для контроля ее работы на участке входа отсека экипажа в
атмосферу Земли. В случае выхода этой системы из строя имеется
возможность ручного управления спуском. Ориентация и стабилизация
корабля осуществляются специальной системой, подающей команды на
включение и выключение вспомогательных двигателей и на отключение
маршевого двигателя.
Электроснабжение основного блока производится от электрохимиче-
ской энергетической установки на водородно-кислородных топливных
683
элементах. В двигательном отсеке установлены три батареи средней
мощностью по 1,45 кВт. Помимо топливных элементов имеются
химические батареи, которые в основном используются в период
потребления максимальной мощности. После отделения двигательного
отсека оборудование и бортовые системы отсека экипажа переходят на
питание от трех размещенных в нем химических батарей (две работают
до момента посадки, третья - после посадки, до выхода космонавтов из
корабля).
В двигательном отсеке размещены маршевый жидкостный ракетный
двигатель и 16 вспомогательных двигателей управления, ориентации и
стабилизации. Тяга каждого двигателя 445 Н, топливо - четырехокись
азота и аэрозин-50 (или монометилгидразин). Отсек экипажа снабжен
12 двигателями системы ориентации тягой 414 Н каждый, работающими
на том же топливе. Маршевый двигатель служит для значительных
коррекций траектории на трассах Земля-Луна и Луна-Земля, перевода
космического корабля с траектории полета к Луне на начальную
селеноцентрическую орбиту, коррекции этой орбиты и перевода корабля
с нее на траекторию полета к Земле.
В систему спуска входят два тормозных, три вытяжных и три
основных парашюта, а также три надувных баллона, обеспечивающих
установку отсека экипажа на плаву в расчетном положении (днищем
вниз).
Связное оборудование массой 242 кг состоит из систем, работающих
в сантиметровом, метровом и коротковолновом диапазонах. Основной
блок снабжен радиолокационным приемоответчиком, работающим
совместно с радиолокационной станцией встречи, размещенной на
лунной кабине, а в качестве резервного средства обеспечения встречи
предусмотрен дальномер, работающий совместно с приемоответчиком
на лунной кабине.
Система жизнеобеспечения отсека экипажа рассчитана на работу в
течение 10,7 суток и, кроме того, на четырехсуточную работу в
аварийном режиме. На последних вариантах корабля номинальный
режим был расширен до 16 суток. Общая масса системы жизнеобеспече-
ния составляет 460 кг. Система поддерживает в отсеке экипажа
температуру 21...27 °C. При наземных испытаниях, во время старта, на
участке выведения в кабине создается атмосфера, состоящая из 60 %
кислорода и 40 % азота для уменьшения опасности пожара. После выхода
космического корабля на орбиту эта смесь стравливается, а кабина
наполняется почти чистым кислородом (98 % кислорода и 2 % азота), при
относительной влажности 40...70 %. Космонавты с момента размещения
в корабле и до выхода на орбиту дышат кислородом, используя
684
автономную систему жизнеобеспече-
ния скафандров. Система жизнеобес-
печения работает в течение двух
суток и после приводнения.
В кабине экипажа (объемом
6,1 м3), размещенной в корпусе отсека
экипажа, на специальных амортиза-
торах подвешены три регулируемых
кресла для космонавтов. На левом
кресле сидит командир, на среднем -
первый пилот (пилот основного бло-
ка), на правом - второй пилот (пилот
лунной кабины).
Лунная кабина состоит из поса-
дочной и взлетной ступеней. Поса-
дочная ступень остается на Луне. Она
снабжена шасси, к стойкам которого
Схема посадочного модуля КК "Апол-
лон"
крепятся тарельчатые опоры диамет-
ром 0,9 м. Расстояние между опорами
шасси 9,4 м. На опорах смонтированы щупы, регистрирующие контакт
с поверхностью Луны и подающие команды на выключение двигателя
посадочной ступени. На взлетной ступени размещена кабина космонав-
тов 4,5 м3. На участках спуска и взлета с Луны космонавты в кабине
находятся в подвесной системе, включающей пояс, надеваемый на бедра,
и трос, перекинутый через блок. Спят космонавты в гамаках. Кабина
взлетной ступени имеет два люка: верхний и передний. Верхний люк
служит для перехода космонавтов из отсека экипажа в лунную кабину
и обратно, а передний - для выхода космонавтов на поверхность Луны.
Система управления и навигации лунной кабины включает в себя
бортовую цифровую вычислительную машину с пультом ввода
информации, пульт управления с системой отображения информации,
инерциальный измерительный блок, перископический телескоп,
радиолокатор, обеспечивающий посадку лунной кабины на поверхность
Луны, радиолокатор встречи взлетной ступени с основным блоком на
селеноцентрической орбитеидальномер.Электропитаниена посадочной
ступени производится от четырех, а на взлетной ступени - от двух
серебряно-цинковых батарей.
Для перевода лунной кабины с круговой селеноцентрической орбиты
на эллиптическую орбиту и торможения при посадке на поверхность
Луны на посадочной ступени имеется жидкостный ракетный двигатель.
На взлетной ступени установлен жидкостный ракетный двигатель,
предназначенный для старта ступени с Луны и ее выведения на орбиту
685
встречи с основным блоком. Кроме того, на корпусе взлетной ступени
установлены четыре блока двигателей ориентации, работающих на тех
же компонентах, что и основной двигатель.
Система жизнеобеспечения лунной кабины рассчитана на продолжи-
тельность работы 36 часов (на последних вариантах - до трех суток).
Атмосфера кабины - чистый кислород. Космонавты в лунной кабине
постоянно находятся в скафандрах.
Для питья, обеспечения температурного режима в лунной кабине и
скафандрах космонавтов в лунной кабине имеются запасы воды,
размещенные в трех баках общей емкостью 210 л. При выходе на
поверхность Луны космонавты пользуются автономной ранцевой
системой жизнеобеспечения массой 53 кг (общая масса вместе со
скафандром 83 кг). Ранцевая система рассчитана на продолжительность
работы в течение 7 ч и на 1,5 ч аварийной работы. Блок связного
оборудования обеспечивает постоянную голосовую связь космонавтов
друг с другом и с Землей, атакже передачу телеметрической информации
на Землю с использованием радиокомплекса лунной кабины в качестве
ретранслятора.
На кораблях "Аполлон" устанавливалось различное оборудование
для исследования Луны и окололунного пространства. В трех последних
полетах на корабле транспортировались двухместные луноходы.
Вывод космических кораблей на околоземную орбиту производился
ракетами-носителями "Сатурн-IB" и "Сатурн-V".
Всего было произведено 17 полетов космических кораблей "Аполлон"
(в том числе 11 пилотируемых). В шести полетах производились посадки
на Луну с выходом экипажа на лунную поверхность. Первым в мире
человеком, ступившим на поверхность Луны, стал американский
астронавт Н. Армстронг, На поверхности Луны побывало 12 человек,
общая продолжительность нахождения на Луне составила 298 ч.
Основные характеристики. Масса корабля до 47 т; масса лунной
кабины 14,7 т; масса топлива у космического корабля 29,4 т; у лунной
кабины - 10,8 т; общая длина корабля 17,68 м; длина лунной кабины -
6,98 м; диаметр корпуса 4,29 м.
ОРБИТАЛЬНЫЙ КОСМИЧЕСКИЙ КОМПЛЕКС "МИР"
Станция "Мир" имела ряд принципиальных особенностей, отличав-
ших ее от предшествующих орбитальных пилотируемых комплексов.
Главным из них является принцип модульности, который относится не
только ко всему комплексу, но и к отдельным его частям и бортовым
системам. Головным разработчиком станции "Мир" была Ракетно-
686
Орбитальный космический комплекс "Мир"
космическая корпорация "Энергия" им. С.П. Королева, аразработчиком
и изготовителем базового блока и модулей станции-Государственный
космический научно-производственный центр имени М.В. Хруничева.
Первым был выведен на орбиту 20 февраля 1986 г. базовый блок,
ставший "фундаментом" станции. Базовый блок по габаритам и объему
подобен орбитальной станции серии "Салют". Основу блока составлял
герметичный рабочий отсек. Здесь располагались центральный пост
управления, средства связи. Для экипажа были оборудованы две
индивидуальные каюты и общая кают-компания с рабочим столом,
устройствами для подогрева воды и пищи. Рядом размещались беговая
дорожка и велоэргометр. В стенку корпуса была вмонтирована
портативная шлюзовая камера. На наружной поверхности рабочего
отсека размещались две поворотные пайели солнечных батарей и
неподвижная третья батарея, смонтированная космонавтами в ходе
полета.
Перед рабочим отсеком -герметичный переходной отсек, способный
служить шлюзом при выходе в открытый космос. Он имел пять
стыковочных портов для соединения с транспортными кораблями и
научными модулями. За рабочим отсеком располагался негерметичный
агрегатный отсек. В нем размещалась двигательная установка с
топливными баками. Посередине отсека - герметичная переходная
камера, оканчивавшаяся стыковочным узлом, к которому в ходе полета
687
был пристыкован научный модуль "Квант". Снаружи агрегатного отсека
на поворотной штанге устанавливалась остронаправленная антенна,
обеспечивавшая связь через спутник-ретранслятор, находящийся на
геостационарной орбите.
За годы эксплуатации в состав комплекса дополнительно к базовому
блоку были введены пять крупных модулей и специальный стыковочный
отсек с усовершенствованным стыковочным агрегатом андрогинного
типа.
Модуль "Квант" был пристыкован к базовому блоку 9 апреля 1987 г.
Конструктивно модуль представлял собой единый гермоотсек с двумя
люками, один из которых являлся рабочим портом для приема
транспортных кораблей. Вокруг него был расположен комплекс
астрофизических приборов, преимущественно для исследования
недоступных для наблюдения с Земли рентгеновских источников. На
наружной поверхности космонавтами были смонтированы два узла
крепления поворотных многоразовых солнечных батарей, а также
рабочая площадка, на которой осуществлялся монтаж крупногабаритных
ферм. На конце одной из них размещалась выносная двигательная
установка.
6 декабря 1989 г. к станции пристыковали модуль дооснащения
"Квант-2". В этом модуле было сосредоточено значительное количество
оборудования, необходимого для работы систем жизнеобеспечения
станции и создания дополнительного комфорта для ее обитателей.
Шлюзовой отсек использовался как хранилище скафандров и в качестве
ангара для автономного средства перемещения космонавта в космичес-
ком пространстве.
10 июня 1990 г. комплекс был дополнен модулем "Кристалл", в
котором было размещено преимущественно научное и технологическое
оборудование для исследования процессов получения новых материалов
в условиях невесомости (микрогравитации).
1 июня 1995 г. к станции был пристыкован модуль "Спектр",
аппаратура которого позволяла вести экологический мониторинг
атмосферы, океана, земной поверхности, медико-биологические
исследования и др. Для вынесения экспериментальных образцов на
наружную поверхность предусматривалась установка на наружную
поверхность копирующего манипулятора, работавшего совместно со
шлюзовой камерой. Там же были установлены поворотные солнечные
батареи.
15 ноября 1995 г. на станцию американским космическим кораблем
"Спейс шаттл" был доставлен небольшой стыковочный модуль,
созданный специально для стыковки корабля "Атлантис" со станцией
"Мир".
688
Вслед за этим, 26 апреля 1996 г. к орбитальному комплексу "Мир" был
пристыкован последний из блоков комплектации - "Природа", в котором
сконцентрировали приборы высокоточного наблюдения за земной
поверхностью в различных диапазонах спектра. В состав модуля было
включено также около тонны американскогооборудования для изучения
поведения человека в длительном космическом полете.
В состав комплекса входили портативные капсулы "Радуга" для спуска
на Землю 150 кг "скоропортящихся" результатов исследований.
Связь комплекса с Землей, смена экипажа, пополнение запасов
продовольствия и расходуемых материалов производились с помо-
щью пилотируемых кораблей "Союз-М" и грузовых кораблей "Прогресс".
К портам станции "Мир" могли быть пристыкованы до трех таких
кораблей одновременно. Ежегодно пять-шесть грузовых кораблей
доставляли около 2,5 т грузов каждый. Бортовые системы грузовых
кораблей аналогичны системам пилотируемых кораблей, а вместо
спускаемого аппарата на них размещается отсек для доставки топлива
на станцию.
Проработавшая 15 лет на околоземной орбите станция "Мир" - одно
из наиболее выдающихся достижений в освоении околоземного
пространства. Эффективная многолетняя эксплуатация "Мира" стала
возможной благодаря последовательному накоплению опыта полетов
отечественных орбитальных станций, совершенству конструкции
станции, высокой надежности и ремонтопригодности бортовых систем,
регулярной работе экипажей станции, направленной на поддержание ее
работоспособности. Постоянное совершенствование медико-биологи-
ческого обеспечения полетов, дополетной подготовки и послеполетной
реабилитации позволило регулярно наращивать продолжительность
полета космонавтов. На "Мире" установлен ряд абсолютных мировых
рекордов продолжительности нахождения человека в космическом
пространстве, в том числе 438 суток для мужчин и 169 - для женщин.
Несмотря на то, что величина проектного гарантированного ресурса
станции была превышена в несколько раз, эффективность ремонтно-
профилактических работ, прибытие модулей с дополнительными
солнечными батареями позволили существенно расширить рамки
допустимого времени эксплуатации станции. Работа "Мира" была
завершена 23 марта 2001 г.: по команде Центра управления полетом
станция вошла в плотные слои атмосферы и приводнилась в Тихом
океане.
ЛЕТАТЕЛЬНЫЕ АППАРАТЫ СВЕРХЛЕГКОГО ТИПА
99. Дистанционно пилотируемый летательный аппарат "Пио-
нер-1" - один из мини-ДПЛА. Создан на базе аппаратов "Скаут" и
"Мастиф", Предназначен для длительных полетов днем и ночью с целью
23 — 7425
689
Схема дистанционно пилотируемого летательного аппарата "Пиопер-1"
1000
Схема дистанционно пилотируемого летательного аппарата "Пчела-2"
690
разведки и передачи видеоинформации о противнике оператору.
Представляет собой моноплан с высокорасположенным свободнонесу-
щим крылом. Поршневой двигатель приводит во вращение толкающий
винт. Оперение расположено на балках, крепящихся к консолям крыла.
Стартовая масса 195 кг; скорось 130 км/ч; полезная нагрузка 45 кг.
Разработан фирмой МАЦЛАТ, Израиль.
100. Дистанционно пилотируемый летательный аппарат "Пчела-2"
- предназначен для наблюдения поля боя в интересах тактических
подразделений различных родов войск. Представляет собой моноплан
с прямым крылом, расположенным над фюзеляжем. Поршневой
двигатель установлен в хвостовой части и приводит во вращение
толкающий винт. ДПЛА способен длительно (до 2 ч) барражировать в
заданном районе, передавая информацию на монитор оператору.
Скорость 180 км/ч. ОКБ им. А.С. Яковлева, Россия.
101. Сверхлегкий многоцелевой самолет "Авиатика-МАИ-890" - см.
ниже.
СВЕРХЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ "АВИАТИКА-МАИ-890"
Многоцелевой самолет "Авиатика-МАИ-890" разработан отраслевым
специальным конструкторским бюро экспериментального самолетострое-
ния (ОСКБ ЭС) Московского авиационного института (главный
конструктор К.М. Жидовецкий).
Созданию семейства самолетов "Авиатика-МАИ-890" предшествовали
разработка, изготовление и испытания самолетов сверхлегкого типа
"Эльф" (первый полет в беспилотном варианте совершен в 1979 г., а в
пилотируемом - в 1985 г.) и "Юниор" (испытан в конце 1980-х гг.).
Накопленный при создании этих самолетов опыт способствовал успеху
в разработке самолетов серии "Авиатика-МАИ-890".
Первый полет прототипа самолета "Авиатика-МАИ-890" состоялся
в 1989 г. В1990 г. на нем установлен мировой рекорд скороподъемности
на высоту 3000м. С1991 г. серийно выпускается Московским авиационным
производственным объединением "МиГ"в одноместном (Авиатика-МАИ-
890), двухместном (Авиатика-МАИ-890У) и сельскохозяйственном
(Авиатика-МАИ-890СХ) вариантах. Общий выпуск всех модификаций
приближается к 300 экземплярам, самолет закуплен и эксплуатируется
в 18 странах.
Концепция проекта семейства самолетов "Авиатика-МАИ-890"
основана на трех основополагающих требованиях: возможность
серийного изготовления; безопасность эксплуатации и широкий круг
выполняемых задач.
Самолет предназначен для любых видов полетов (кроме специального
акробатического пилотажа) в светлое время суток по правилам
23*
691
01780
Схема сверхлегкого многоцелевого самолета "Авнатика-МАИ-890”
визуальных полетов (отдых; спорт; перевозки; авиахимработы и
биохимзащита растений; аэрофотосъемка; видеокартографирование;
тепловизионная съемка; патрулирование продуктопроводов, лесов,
дорог; буксировка планеров и рекламных транспарантов; обучение и
тренировка летчиков и др.).
Конструктивно самолет представляет собой одно- или двухместный
биплан нормальной аэродинамической схемы с кабиной закрытого типа,
балочным фюзеляжем, хвостовым оперением крестообразной схемы и
трехопорным неубирающимся шасси рессорного типа с управляемым
носовым колесом. Разработаны и выпускаются по желанию заказчика
варианты с лыжным или поплавковым шасси. Возможна установка
парашютной системы спасения всего самолета вместе с экипажем.
В конструкции самолета применяются только недефицитные
материалы и прогрессивные технологические процессы, которые широко
освоены авиационной промышленностью России.
Конструктивно-силовая схема самолета, конструкции агрегатов
планера формировались с учетом минимизации перечня заготовительно-
штамповочной и сборочной оснастки, необходимости снижения общего
692
числа деталей, с применением рациональных проектно-конструкторских
решений, направленных на повышение весовой эффективности и
надежности конструкции.
На самолете сзади над кабиной установлен поршневой четырехтак-
тный двигатель воздушно-жидкостного охлаждения "Rotax-912"
(Австрия) мощностью 80 или 100 л.с., работающий на автомобильном
бензине с октановым числом не менее 92, приводящий двухлопастный
толкающий воздушный винт фиксированного шага. Средний расход
бензина марки АИ-95 18 л/ч. Карбюраторы двигателя оборудованы
противообледенительной системой. По желанию заказчика на самолет
могут быть установлены и другие типы двигателей: расположение
двигателя в районе центра масс позволяет сохранять при этом в
допустимых пределах характеристики устойчивости и управляемости.
Кабина пилота - закрытого типа с двумя (левой и правой) дверями,
с остеклением из оргстекла. Спереди кабина закрыта носовым обтекате-
лем, выполненным из стеклопластика, задняя часть защищена стеклоп-
ластиковым экраном со звукоизоляцией.
Из кабины при помощи ручки и педалей осуществляется управление
самолетом по крену с помощью элеронов, по тангажу - с помощью рулей
высоты и по курсу - с помощью руля направления.
В двухместном варианте самолет имеет двойное управление.
Сельскохозяйственный вариантоснащен оборудованием дляраспыления
с воздуха жидких веществ, в состав которого входят четыре вращающих-
ся распылителя с приводом от крыльчаток, вращаемых воздушным
потоком. Время обработки одного гектара - 22 с, за один вылет самолет
обрабатывает до 35 га.
Удачная аэродинамическая компоновка обеспечивает высокую
маневренность и хорошие взлетно-посадочные характеристики. Самолет
практически не подвержен штопору; в редчайшем случае входа в штопор
он самопроизвольно из него выходит при установке органов управления в
нейтральное положение.
Бортовое оборудование включает в себя приборы, позволяющие
контролировать работу двигателя, скорость и высоту полета, простран-
ственное положение самолета, а также сигнализатор приближения
сваливания, магнитный указатель курса и указатель скольжения.
От сходных зарубежных конструкций самолеты семейства
"Авиатика-МАИ-890" отличаются более высокой безопасностью
эксплуатации, достигаемой благодаря специально подобранным характе-
ристикам устойчивости и управляемости, благоприятным срывным
характеристикам, повышенным запасам прочности, защите пилота
693
элементами конструкции (место пилота находится внутри "треугольни-
ка безопасности", образованного силовыми элементами фюзеляжа и крыла)
и пр. Выгодно отличает их и приспособленность к выполнению широкого
круга практических задач.
Для размещения разного вида целевой нагрузки на самолетах
семейства "Авиатика-МАИ-890" предусмотрены два силовых узла
подвески - один под моторамой и другой под фюзеляжем. Оба узла
находятся в районе центра масс, и поэтому изменение массы грузов не
приводит к значительному изменению центровки и, следовательно,
устойчивости и управляемости.
Самолеты серии "А виатика-МАИ-890" не требуют высокойподготов-
ки пилота и высококвалифицированных специалистов при техобслуживании
и, они рассчитаны на безангарное хранение и имеют широкие эксплуатаци-
онные границы. Максимальному упрощению проверки и оценки
технического состояния способствуют конструктивные решения, при
которых все жизненно важные узлы конструкции остаются открытыми,
что обеспечивает хороший доступ к ним в процессе эксплуатации.
Создание и практическое применение самолетов семейства "А виатика-
МАИ-890" утвердило новое направление в развитии авиации в России -
сверхлегкие и очень легкие самолеты для решения народнохозяйственных
и оборонных задач.
Указом Президента РФ Ns 1307 от 29 сентября 2000 г, за разработку
и внедрение в производство и эксплуатацию семейства сверхлегких
многоцелевых самолетов присуждена Государственная премия РФ 1999 г.
в области науки и техники: Н.П. Горюнову, В.Ю. Демину, В.М.
Фейгенбауму, заместителям главного конструктора ОСКБ ЭС МАИ;
А.М. Матвеенко, ректору МАИ; П.П. Огаджанову, директору
экспериментального опытного завода МАИ; ГМ. Немову, генеральному
директору Государственного унитарного предприятия "МАПО" МиГ";
О.П. Чуканцеву, заместителю технического директора того же
предприятия; К.М. Жидовецкому, главному конструктору ОСКБЭС МАИ
(посмертно).
Самолет "Авиатика-МАИ-890" стал первым в России и странах
ближнего зарубежья сертифицированным самолетом такого класса
(сертификат типа № СТ-176 от 17.12.1999 г. выдан Авиарегистром
Межгосударственного авиационного комитета).
Основные характеристики. Скорость горизонтального полета (для
различных модификаций) 115...125 км/ч; крейсерская скорость 90...
100 км/ч; скорость отрыва 65...75 км/ч; посадочная скорость 65...75 км/ч;
длина разбега 65...150 м; практический потолок полета 1875...4100 м;
продолжительность полета около 3 ч; масса пустого самолета 268...298 кг.
694
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ*
Абляция 82
Аванпроект 32, 294
Авиагоризонт 408
Авиационный регистр 466
Авиация 16
- легкомоторная 510
-стратегического назначения 498
Авионика 408
Автомат:
легочный
перекоса 178
подсоса воздуха 367
регулирования управления 310
тормозной 318
Автоматика антиюзовая 378
Агрегат 438
Азимут лопасти 175
Акватория 188
Аккумулятор энергии 425
Акселерометр 221
Амортизатор 164
-жидкостно-газовый 322
-жидкостно-пружинный 320
- шасси 320
Амортстойка 327
Аналог 457
Анемометр 407
Анероид 369
Антенна 407
Аппарат:
воздушно-космический многоразовый
75
летательный 8
летательный сверхлегкий 406
спрямляющий компрессора 336
спускаемый 73
Аспекты проектирования:
неформальные 456
формальные 456
* Указатель отсылает только к тем
страницам, на которых приводится опреде-
ление понятия или наиболее полная инфор-
мация о нем.
экологические 456
экономические 16
эргономические 455
Астродатчик 409
Атмосфера 39
- стандартная международная 44
- турбулентная 47
Аэродинамика 81
Аэродром 52
Аэропорт 52
Аэрофинишер корабельный 497
Аэроэмболия 358
База знаний 457
Бак топливный:
жесткий 345
мягкий 345
подвесной 346
Бак-отсек 346
Балансировка:
боковая 148
по тангажу 138
продольная 138
Балка 279
- консольная 270
- продольная 281
- пустотелая коробчатая 273
- пустотелая пространственная 284
- хвостовая вертолета 180
Баллонные противопожарные системы 383
Балочная конструктивно-силовая схема 284
Банк данных 457
Барабан колеса 316
Баротравма 363
Барьер звуковой 111
Бафтинг 234
Башня обслуживания 58
Бег на редане 200
Безотказность 247
Безопасность полета 465
Бимс 288
Биплан 38
Болезнь:
высотная 357
декомпрессионная 358
695
Болтанка 48
Бомбардировщик 472
Борьба радиоэлектронная 514
Брызгообразование приемлемое 203
Брызгоотражатель 204
Букса амортизатора 322
Бульб 266
Бустер 306
Валежка 107
Вариометр 416
Ватерлиния:
грузовая 190
упорная 195
Вертолет 71,172
- боевой 511
-гражданский 511
-двухвинтовой схемы 181
Весы аэродинамические 83
Ветер солнечный 40
Взаимодействие:
силовое 81
тепловое 81
химическое 81
Взлет 115, 419
-прерванный 53
Взрыв 380
Вид нагружения 258
Визуализация обтекания 85
Вилка 323
Винт:
воздушный 172, 333
изменяемого шага 174
несущий 71, 174
Винтовентилятор 339
- закапотированный 340
- открытый 340
Винтокрыл 182, 516
VIP-салон 351
Вираж 123
Вихрь:
концевой 86
П-образный 98
Вогнутость профиля 134
Водоизмещение:
массовое 190
объемное 190
Водород 536
Воздухозаборник двигателя 343
-дозвуковой 343
-регулируемый 343
- с нерегулируемой геометрией 343
Воздухоплавание 16
Возмущения слабые 99
Волна:
Маха 99
ударная 100
Волокно армирующее 256
Время:
активное 364
резервное 364
подготовки к повторному вылету 449
Выгиб скул носовых 198
Выдерживание 115
Выдув струи поперечный 161
Вынос колеса 324
Выравнивание 115
Высота:
в кабине 364
метацентрическая 193
метацентрическая продольная 195
Выход аварийный 387
Вязкость 43
Газ идеальный:
несжимаемый 95
сжимаемый 93
Газогенератор 337
Гак тормозной 497
Геликоптер 71
Генератор вихрей 157
Герметик 346
Герметичность 346
Гермокабина 361
- автономная 362
- атмосферная (неавтономная) 362
Гермошлем 371
Гетеросфера 39
Гидроавиация 187
Гидродром 188
Гидроканал 196
Гидропривод 423
Гидросамолет 187, 472
-поплавковый 187
Гидросистема 428
Гидроусилитель 306
Гипоксия 357
Гипотеза сплошности (неразрывности)
среды 93
Гироскоп 221
Гистерезис амортизационной системы 319
696
Глушитель шума 344
Голодание кислородное 357
Гомосфера 39
Горение 380
"Горб" сопротивления гидродинамического
202
Горизонталь строительная:
лодки иижняя 190
самолета 190
фюзеляжа 137
Горючее 64
Градиент:
усилий на ручке по перегрузке 155
хода ручки по перегрузке 155
Граница магнитосферы 40
Давление:
воздуха 40
динамическое 95
парциальное 357
статическое 95
Дальность полета 128
Датчик:
тензометрический 244
углов атаки и скольжения 221
Двигатель:
винтовентиляторный 339
винтовой 333
воздушно-реактивный 335
— прямоточный 13
газотурбинный 335
- изменяемого цикла прямоточный 531
маршевый 184
подъемно-маршевый 184
подъемно-разгонный 184
подъемный 184
поршневой 333
ракетный 334, 391
ракетный твердого топлива 75
ракетный жидкостный 64
реактивный 334
турбовентиляторный 339
турбовентиляторный реактивный 339
турбовинтовентиляторный 339
турбовинтовой 338
турбореактивный 335
турбореактивный двухконтурный 338
турбореактивный двухконтурный с
форсажной камерой 339
турбореактивный сфорсажной камерой
337
Движение неуправляемое 120
- неустановившееся 92
-управляемое 120
- установившееся 92
Движитель 333
- однорядной схемы 340
- соосной схемы 340
Двухзвенник 325
Дезодорация 361
Декомпрессия взрывная 363
Дельтаплан 406
Демпфер гидравлический 319
- шимми 330
Десант 404
Десатурация 382
Дестабилизатор 499
Деталь 438
Дефлектор 168,399
Деформация 239
- пластическая остаточная 262
- поперечная относительная 260
Деформирование 258
Диаграмма:
истинных напряжений 262
растяжения 261
Диаметр фюзеляжа эквивалентный 137
Диапазон летных углов атаки 107
Дивергенция 232
Динамика полета 114
Дирижабль 66
Диск тормоза:
биметаллический 317
металлокерамический 317
Дислокация 268, 283
Дифферент 191
Дозаправка топливом в полете 499
Документация доказательная 468
Дорожка рулежная 53, 315
Дрейф 203
Дросселирование двигателя 342
Дублирование 20, 247
Жгут вихревой 159
Желатинизация 382
Жесткость 227, 263
Живучесть 247, 291
697
Заготовка 255, 282
Загрязнение:
аэрозольное 361
химическое 361
Задание техническое 17
Заказчик 16
Законцовки 264
-Уиткомба 158
Закрылок:
выдвижной многощелевой 168
двухщелевой 168
реактивный 170
струйный 170
Зал статиспытаний 243
Заметность самолета:
инфракрасная 216
радиолокационная 215
Запас:
аварийный неприкосновенный 389
— носимый 403
продольной устойчивости 144
прочности 291
Заполнитель:
легкий 283
сотовый 283
Заход на посадку 115, 420
Защита:
от действия скоростного напора 396
от коррозии 49
Золотник гидроусилителя 307
Зона:
квазизахвата 40
упрочнения 262
Иерархия систем 19
Избыток тяги двигателя 125
Изгиб чистый 269
Изготовитель воздушного судна 467
Излучение солнечное 49
Измеритель доплеровский 409
Индуктор 376
Инженер 30
Интерцептор 169
Ионизационный датчик противопожарной
системы 383
Ионосфера 40
Испытания статические 243
Источник энергии:
-дополнительный 421
- первичный 333
Истребитель 472
Итерация в проектировании 24
Кабель-мачта 59
Кабина отделяемая 397
Кавитация топлива 200, 347
Камера:
сгорания 336
форсажная 337
Камуфляж 212
Канат спасательный 388
Капсула спасательная 397
Кардан 328
Касание взлетно-посадочной полосы 117
Катапультирование 390
Качалка:
опорная 298
поддерживающая 298
рычажная 298
Качества мореходные гидросамолета 190
Качество:
аэродинамическое 69
гидродинамическое 202
техники 465
Кессон 273, 284
Кессон-бак 346
Килеватость:
поперечная 198
продольная 199
Киль 149
Клапан торможения на обратном ходе 321
Класс аэродрома 52
Клык в конструкции амортстойки 329
Коагулятор 381
"Козление" самолета 319
Колебания конструкции:
вынужденные 234
самовозбуждающиеся незатухающие
234
колеса высокочастотные 330
Колесо:
рабочее компрессора 336
тормозное 316
Колонка продольно-путевого управления
180
Кольчугалюминий 474
Комель лопасти 174
Компас магнитный 408
Компенсатор аэродинамический 302
Комплекс:
авиационный 21
ракетно-космический 22
ракетный стартовый 22, 57
Компоновка:
аэродинамическая 130, 254, 294
динамическая 240
интегральная 160
698
конструктивно-силовая 294
летательного аппарата 23
объемно-весовая 254, 294
Компрессор:
низкого давления 339
осевой 336
Компромисс 31
Консервация 54
Консоль крыла 107
Конструкция:
балочного типа 274
безопасно повреждаемая 292
крыла 278
ферменного типа 274
фюзеляжа балочно-обшивочная 286
фюзеляжа скорлупно-балочная 286
фюзеляжа типа монокок 286
фюзеляжа типа полумонокок 286
Контур:
высокого давления 339
двигателя внешний 339
двигателя внутренний 339
двигателя второй 339
замкнутый 279
Конус возмущений 99
Конфигурация самолета полетная 137
Концентратор напряжений 263
Концепция:
активного предотвращения флаттера
246
"искусственной" устойчивости самоле-
та 221
летательного аппарата 23
непосредственного управления боковой
силой 221
непосредственного управления подъем-
ной силой 221
уменьшения маневренных нагрузок 245
уменьшения нагрузок от порывов
ветра 246
Кооперация 437
Корабль космическийтранспортный много-
разовый 75
Корпус:
монтажно-испытательный 58
тормоза 317
штурвальной колонки 299
Космонавтика 16
Костюм:
высотно-компенсирующий 370
противоперегрузочный 371
Коэффициент:
безопасности 291
безразмерный силы боковой 106
безразмерный силы лобового сопротив-
ления 106
безразмерный силы подъемной 106
безразмерный силы полной аэродина-
мической 98
волнового сопротивления 109
вязкости динамической 43
вязкости кинематической 44
использования материала 256
кинематической передачи 308
лобового сопротивления сил давления
109
лобового сопротивления сил трения 109
нагрузки коммерческой 301
отвала поляры 109
подъемной силы предельно допустимый
108
Пуассона 268
сопротивления индуктивного 108
топливной эффективности 250, 531
устойчивости поперечной 150
устойчивости пути 150
Кран:
кольцевания 346
перекрестного питания 346
перекрывной 347
противопожарный 347
Кресло:
катапультное (катапультируемое) 390
пассажирское 351
Крестовина кардана 328
Кривая деформирования 261
Кривизна профиля относительная 134
Кризис волновой 101
Критерии:
подобия определяющие 84
частные 290
экономические 453
Кронштейн 299
Крутка:
аэродинамическая 135
геометрическая 135
Кручение 268
Крыло 131
— адаптивное 211
- большого удлинения 133
- изменяемой геометрии асимметрич-
ное 211
-изменяемой стреловидности 210, 287
- кессонное 286
- лонжеронно-балочное 286
- лонжеронное 286
699
-лонжеронной конструктивно-силовой
схемы 286
- малого удлинения 133
-многолонжеронное с переломом осей
лонжеронов 289
- моноблочное 285
- стреловидное 156, 289
- стреловидное двухлонжеронной
схемы 289
-стреловидное однолонжеронное с
внутренним подкосом 289
- стреловидное однолонжеронное с
подкосной балкой 289
- треугольное 289
- треугольное многолонжеронное 289
Крылышки концевые 158
Купол парашюта 386
Ларингофон 367
Летающая лаборатория 530
"Летающее шасси" 516
Лимб 409
Линия центров:
-давления 228
- жесткости 228
Литье точное 282
Лодка:
кнлеватая 198
летающая 189, 472
летающая двухлодочной схемы 189
летающая интегральной схемы 189
летающая однолодочной схемы 189
летающая схемы катамаран 189
Ложемент заголовника катапультного
кресла 402
Лонжерон 279
- балочный 274
- ферменный 274
Лопаеть винта 71
- саблевидной формы 340
Лопатка спрямляющая компрессора 336
Люк десантный 354
Магистраль гидросистемы:
напорная 307
сливная 307
Маневр 117
- в вертикальной плоскости 121
- в горизонтальной плоскости 122
Маневренность 117
Маска кислородная 366
Масса:
взлетная 250
коммерческой нагрузки 251
конструкции 252
лимитная 277, 291
оборудования управления 252
относительная 253
полезной нагрузки 251
- относительная (отдача по полезной
нагрузке) 251
полная 250
полной нагрузки 252
пустого самолета 252
пустого снаряженного самолета 252
силовой установки 252
снаряжения и оборудования 252
топлива на борту 252
Массы самолета характерные 252
Материалы:
горючесмазочные 55
композиционные 256, 294
конструкционные 255, 261
прокладочные звукоизоляционные 342
расходуемые 54
Матрица 256
Мезопауза 44
Мезосфера 44
Металлизация 382
Метацентр 192
-продольный начальный 195
Метеоризм высотный 358
Методы:
конечных элементов 241
контроля неразрушающие 450
определения соответствия 468
технического обслуживания и ремонта
447
тяг 126
энергетическиевоздействия на характер
обтекания 160
энергетические обеспечения взлетно-
посадочных характеристик 169
Механизация:
взлетно-посадочная 166, 315
задней кромки 168
передней кромки крыла 168
струйная 169
Механизм:
загрузки 309
стреляющий 391
стреляющий комбинированный 392
стреляющий телескопический 392
триммерного эффекта 311
700
Мидель 90
Модель 17
-динамически подобная 244
-конечноэлементная 241
- упругомассовая 240
Модернизация 33
Модификация 20
Модуль упругости 261
Момент:
демпфирующий 145
изгибающий 277
инерции самолета 123
инерционный 145
кабрирующий 138
крена 148
крутящий 277
пикирующий 138
руля шарнирный 301
рыскания 148
сопротивления вращению винта 173
торможения 173
уравновешивающий 270
Монокок 286
Моноплан 38
Мореходность гидросамолета 189
Мотогондола 131
Мотодельтаплан 406
Мощность тяговая 334
Набор высоты 125, 419
Нагрев кинетический 104
Нагружение агрегатов самолета 228
-статическое 231
-тепловое 237
Нагрузки:
акустические 237
внешние 257, 277
динамические 231, 315
на воду 202
на крыло удельная 128
разрушающие 263
расчетные 239
статические 231
циклические 315
эксплуатационные 239
Наддув 361
Надежность 247, 291
Налет опережающий 448
Напор скоростной 95
Напряжения 259
-временного сопротивления 262
- действующие 291
- касательные 266, 281
- критические 265
- нормальные 281
- предела пропорциональности 262
- предела прочности 262
- предела текучести 262
- сдвига 266
- сдвига критические 267
- сдвиговые 281
- температурные 238
Наработка самолета 54
Невесомость 65
Недостаток тяги двигателя 126
Независимость управления:
с помощью ручки управления 300
с помощью штурвальной колонки 300
Нейтросфера 39
Неопределенность при проектировании 47
Непотопляемость 204
Нервюра 272, 278
- бортовая 279
- силовая 279
- усиленная 279
Ниша фюзеляжа 288
Нормы:
летной годности 238
прочности 239, 291
Носители информации:
бумажные 458
машинные 458
Обдув поверхностей крыла 170
Обдувка:
косая 175
осевая 174
Обжатие пневматика 319
Область возможных полетов 127
Обледенение 50, 372
- винтов воздушных 373
- датчиков приборов 374
—кромок воздухозаборников входных
374
- кромок передних 373
- поверхностей несущих 373
- стекол лобовых 374
Облик летательного аппарата 23
Обнаружение радиолокационное дальнее
213
Оболочка тонкостенная:
замкнутая 273
подкрепленная 273
701
Оборона противовоздушная 213
Оборудование:
бортовое радиоэлектронное 408
пассажирское бортовое 24, 350
пилотажно-навигационное 24, 350, 406,
408
посадки слепой 56
радиотехническое 24, 350, 406
специальное 24, 350, 406
электротехническое 24
энергетическое 24
Обработка:
горячая 282
дробеструйная 283
механическая 282
топлива специальная 382
химическая 282
холодная 282
Обслуживание техническое 54
Обтюратор 369
Обшивка:
неработающая 274
неснловая 284
работающая 273
силовая 285
тонкая 278
Объект системный 18
Огибание рельефа местности 213
Огнетушитель ручной 389
Огни:
аэронавигационные 421
габаритные 421
импульсные 421
Ограничители разброса конечностей на
катапультном кресле 396, 402
Ограничитель распространения трещины
292
Окислитель 64
Оперение:
вертикальное 131,150
горизонтальное 131
горизонтальное переднее 496
горизонтальное цельноповоротное 138,
289, 306
Опора шасси:
вспомогательная 164, 317
основная 164, 317
Орбита искусственного спутника Земли 73
Организация сертифицированная 467
Органы управления самолетом 147
Ориентация колеса принудительная 331
Осадка лодки 191
Освещение:
внутреннее 421
наружное 421
Остойчивость 191
-поперечная 192
-продольная 195
Ось нейтральная 271
Ось-кронштейн 300
Отвал поляры 109
Отверстие облегчения 282
Ответчик самолетный 410
Отдача:
весовая 65
по полезной нагрузке 251, 291
Отказ 20
Отклонение элеронов дифференциальное
149
Отсек 439
- отрицательных перегрузок 346
Отсос пограничного слоя 160
Охлаждение топлива 382
Палубный истребитель 496
Панель:
многослойная 283
прессованная 283
трехслойная 283
Параметры воздуха 40
Парашют:
вытяжной 386, 405
планирующий 405
противоштопорный 404
ранцевый 386
стабилизирующий 394
тормозной 316, 404
Парашют-крыло 405
Парашютирование 116
Парк самолетов 21
Парус солнечный 66
Педали 152
Пелена вихревая 86
Пеленг 409
Пеленгация 409
Перегородка аэродинамическая 157
Перегрузка 120
- боковая 121
- нормальная 121
-продольная (тангенциальная) 121
- торможения 396
- эксплуатационная 124
"Перемещение" 260
Перемычка металлизации 382
Перехватчик барражирующий 488
Пилон 229
Пиромеханизм 400
Пиропатрон 391
702
Плавучесть 190
Планер 69
- самолета 24
Пластичность 263
Плечо устойчивости 324
Плоскость лодки:
диаметральная 190
основная 190
Плот спасательный 389
Плотность воздуха 41
- воздуха относительная 41
Площадка:
контактная колеса 324
текучести 262
Площадь колеса контактная 236
Плунжер амортизатора 322
Пневматик бескамерный 316
Поверхность:
несущая 68
отражающая эффективная 215
рассеяния эффективная 215
рулевая 298
Поворот колеса управляемый 331
Поворотный хомут в конструкции аморт-
стойки 330
Повреждаемость безопасная 292
Пограничный слой 87
- ламинарный 87
- переходный 87
-турбулентный 87
Подготовка:
предполетная 419
производства технологическая 440
Подкос:
"ломающийся" 326
внутренний 289
лонжерона 274
складывающийся 326
стойки шасси 326
Подкрепление:
в продольном и поперечном направле-
ниях 269
геодезического типа 269
Пожаровзрывобезопасность 381
Позиция стартовая 58
Показатель:
управляемости 154
"эффективность-стоимость" 19
Поколение:
второе сверхзвуковой боевой авиации
491
пятое тактических самолетов 522
третье самолетов-истребителей 491
самолетов противовоздушной обороны
490
самолетов фронтовой (тактической)
авиации 490
четвертое сверхзвуковых тактических
самолетов 495
Покрытия теплозвукоизолирующие 360
Полет:
аэродинамический 63
аэростатический 62
баллистический 62
в зоне аэродрома 420
горизонтальный 124
крейсерский 419
по маршруту вылета 419
равномерный горизонтальный устано-
вившийся 62
ракетодинамический 62
"с огибанием рельефа местности" 393
Полка лонжерона 279
Положение лопасти азимутальное 175
Полоса:
безопасности боковая 53
- концевая 53
взлетно-посадочная 53
летная 52
Полувилка 323
Полумонокок 286
- лонжеронный 286
- стрингерный 286
Поляра 107
Помпаж 374
Поплавок подкрыльный 194
- несущий 194
- опорный 194
-поддерживающий 194
Посадка 420
- аварийная на воду 389
- лодки 191
Пост управления командный 152
Потери качества аэродинамического на
балансировку 147
Потеря устойчивости
- местная 266
- общая 266
- при сдвиге 267
Поток:
возмущенный 87
невозмущенный 87
703
самолета динамический 128
-практический 128
-теоретический 128
свободный 88
Пояс:
балки 271
лонжерона 274, 279
радиационный Земли 40, 49
Правила Авиационные 238, 291
Правило площадей 158
-дифференциальное 160
Предкрылок 168
Предложение техническое 32, 294
Преемственность:
конструктивная 441
конструкции технологическая 442
технологическая 441
Прибор:
гироскопический 408
кислородный 367
кислородный парашютный 367
Привод:
силовой 422
силовой двухпозиционный 422
электрогидравлический двухкамерный
429
электромеханический 311
Приемник воздушного давления 221
Принцип:
"безопасного повреждения конструк-
ции" 292
Д'Аламбера 118
обратимости 83
полета 62
"пустил-забыл" 414
Причина возникновения сил аэродинами-
ческих 89
Пробег на посадке 117,315
Проводка управления:
жесткая 298, 300
тросовая (гибкая) 298
Продолжительность полета 128
Проект:
предварительный 32
рабочий 296, 453
технический 453
эскизный 294, 453
Проектирование 16, 452
-аэродинамическое 130, 452
-"внешнее" 16, 30
-"внутреннее" 30, 453
- конструктивно-силовое 452
- объемно-весовое 452
- предварительное 31
- системное 20
- технологическое 452
Производитель воздушного судна 466
Пропеллер 172
Проскальзывание колеса 316
Пространство космическое околоземное 39
Прототип 457
Профиль:
крыла 133
ламинаризированный 135
ламинарный 135
прессованный 282
суперкритический 135
Процесс:
деформирования 283
проектирования 29
технологический 255
формообразования 283
Прочность:
конструкции 227, 263, 291
статическая 241
удельная 256
усталостная 244, 283, 315
Птицестойкость 51
Работа:
аэродинамических сил при повороте
рулевой поверхности 301
летчика на перемещение рычага управ-
ления 301
Работы сертификационные 468
Равновесие:
неостойчивое 192
остойчивое 191
Радиационный датчик противопожарной
системы 383
Радиовысотомер 409
Радиодальномер 409
Радиокомпас автоматический 409
Радиомаяк:
глиссадный 56
курсовой 56
приводной ближний 56
приводной дальний 56
Радиосекстант 409
Радиосистемы:
ближней связи 411
внутрисамолетная 411
дальней связи 411
704
навигации ближней 409
навигации дальней 409
оповещения и развлечения пассажиров
411
посадки 410
связи 410
угломерно-дальномерная 409
Радиостанция приемопередающая команд-
ная 411
Разбег:
центровок 145
на взлете 115, 315
Разворот установившийся 123
Разработчик 16, 466
Разрушение конструкции усталостное 48,
237
Разрядник электричества статического 382
Разъем:
коммуникаций объединенный 366
конструктивно-технологический 443
технологический 294, 443
эксплуатационный 294
Ракета-носитель 22, 64
Ракетоплан 75
Рама плоская 280
Рампа регулирования геометрии воздухоза-
борника 344
Растяжение 259
Расход газа секундный:
массовый 94
объемный 94
Расходы:
косвенные 171
прямые эксплуатационные 171
Реактивный привод несущего винта 182
Реакции опор 257
Реакция опорная 257
Реборда колеса 316
Реверс:
рулевой поверхности 232
тяги 53
Реверсер 344
Реверсер двигателя 316
Регулирование геометрии воздухозабор-
ника 344
Редан 197
Режим:
авторотации 179
взлета 115
гидропланирования 200
глиссирования самолета 197, 200
переходный самолета вертикального
взлета и посадки 185
посадки 115
укороченного взлета и посадки 185
Резерв подключенный 431
Резервирование 20, 247, 292
- горячее 432
- замещением 431
- по гидропитанию 431
- холодное 432
Рейсовая скорость 527
Рекуператор 434
Рельсы направляющие 391
Ремонт:
по наработке 447
по состоянию 448
Ресурс 54, 315
Решения конструкторские типовые 442
Рог в конструкции амортстойкн 392
Рольганг 405
Ротор 336
-компрессора 336
Руководство по эксплуатации летной 389
Рулевая поверхность свобо дноподвеш енная
304
Рулевой винт вертолета 180
Рулежка 317
Руление на старт 419
Руль:
водяной 203
высоты 138, 300
направления 149, 298
струйный 185
Ручка управления 152
Рычаг 294
- управления двигателем (РУД) 342
- "шаг-газ" 179
Рычаги командные 152, 298
Салон бизнес-класса 353
Самолет 15, 70
- адаптивный (адаптируемый) 209
- аэрофотосъемочный 354
-безразличный 144
-вертикального взлета и посадки 72,
182
- воздушно-космический 75
- воздушно-космический многоразо-
вый 22
-деловой 353
-дальнего радиолокационного обнару-
жения 213
- изменяемой геометрии 208
-конвертируемый 209
- короткого взлета и посадки 72
- малозаметный визуально 212
705
- маневренный 124
- нейтральный 144
- неманевренный 124
- неустойчивый 143
- неустойчивый в продольном отноше-
нии 143
- общего назначения 501
- орбитальный 75
- патрульно-разведывательный 354
- разведчик 472
- реанимационно-эвакуационный 355
- санитарный 355
- укороченного взлета и посадки 72,182
-устойчивый 141
- учебно-тренировочный 488
- широкофюзедяжный 352
- "чисто электрический" 423
Самолет-амфибия 189
Самолет-аналог 135
Самолет-буксировщик 69
Самолет-заправщик 346
Самолет-корректировщик 472
Самолет-лидер 245, 448
Самолет-разведчик 488
Самолет-разгонщик 76
Самолет-тандем 481
Самолет-торпедоносец 488
Самолет-триплан 473
Самолетостроение гражданское 500
Самолеты пассажирские реактивные:
— второго поколения 505
— первого поколения 505
— третьего поколения 505
— четвертого поколения 508
Самоориентация колеса 324
Сандвич 283
Световой датчик ППС 383
Свод обшивки 281
Свойства:
воздуха 40
технологические 255
Связующее 256
Связь:
дуплексная 411
обратная 153
обратная в гидроусилителе 309
симплексная 411
Сдвиг 228, 266
Сдув пограничного слоя 160
Себестоимость:
пассажиро-километра 249
перевозок 171, 527
Сектант фотоэлектрический 409
Сектор 299
Серворуль 304
Серийность 442
Серия профиля 134
Сертификат 466
Сертификат типа 468
Сертификационный базис 467
Сертификация 467
Серьга в конструкции амортстойки 329
Сечение потока критическое 102
Сжатие 264
Сжимаемость 42
Сигнализатор обледенения 375
- прямого действия 375
— вибрационный 375
— радиоизотопный 375
- косвенного действия 375
Сиденье летчика 352
Силовая установка 24, 333
- вспомогательная 342
- единая 183
-комбинированная 184
-составная 184
Силовозбудитель 243
Силовые элементы:
вспомогательные 284
неосновные 284
основные 284
Силы:
активные 257
архимедова 66
боковая 106
внешние 257
внутренние 259
гидродинамические 196
гидростатические 195
инерции 118
инерционные 118, 234
критические 265
массовые 119
перерезывающие 277
перерезывающие уравновешивающие
270
поверхностные 119
поддержания 190
поддержания гидродинамическая 197
подъемная 62, 89
подъемная аэростатическая 66
полная аэродинамическая 89
поперечная 277
реакции опоры 257
сопротивления внешней среды 62
706
сопротивления глиссирования 201
сопротивления индуктивного 92
сопротивления лобового 89
сосредоточенные 270, 279
трения тормозная 316
тяги 62
тяги винта 71
упругие 232
уравновешивающие 257
Синтез 33
Система 18
- автоматизированного проектирова-
ния 459
- амортизационная самолета 318
- антиобледенительная 350,374
- баз знаний автоматизированная 464
- бортовая энергетическая 350, 421
- времени единого 60
- газовая 350, 424
- гидравлическая 350, 423
- гидропитания 428
-дальномерная радиотехническая 409
-десантирования 25, 385, 404
- дренажная 348
- защиты 25, 371, 385
— индивидуального жизнеобеспечения
25, 365
- кислородная 365
- кондиционирования 25, 361
- кондиционирования и индивидуаль-
ного жизнеобеспечения 350
- обеспечения жизнедеятельности 361
- обеспечения жизнедеятельности инди-
видуальная 365
- опор самолета 163
- осей координат нормальная земная
104
- осей координат связанная 105
- осей координат скоростная 106
- парашютная 399
— многокупольиая 404
- питания кислородного 366
- пневматическая 424
- подавления взрыва автоматическая
385
- посадки автоматической 56
— всепогодной 56
- привязная катапультного кресла 396
- противовоздушной обороны 213
- противообледенительная воздушно-
тепловая 377
— противообледенительная механиче-
ская 375
- противообледенительная пневмати-
ческая 375
- противообледенительная тепловая
377
- противообледенительная электроим-
пульсная 376
- противообледенительная электротеп-
ловая 379
- противопожарная 350, 380
-ракетно-космическая 64
- регистрации полета магнитная 411
- сигнализации о пожаре 383
- сигналов воздушных 416
- следящая 308
- спасения 25, 385
-спасения аварийного 400
- спасения и десантирования 350
- топливная самолета 345
- управления автоматическая 220
-управления автоматическаяцифровая
415
- управления активная 48, 220, 291
- управления бустерного 304
- управления вектором тяги 394
- управления необратимая 309
- управления непосредственного 298
- управления непрямого 304
- управления полетом 523
- управления проаодная 221
- управления прямого 298
- управления самолетом 25, 152
- управления струйная 186
- управления электродистанционная
221,428
- фиксации летчика 396
- эвакуации аварийной 387
- экспертная 464
- электрическая 425
- электроснабжения 426
Системный подход 18
Скачок уплотнения 100
— косой 101
— отсоединенный криволинейный 100
— присоединенный криволинейный
100
— присоединенный прямолинейный
101
--прямой 101
Скафандр высотный 371
Скороподъемность 125
- максимальная 128
Скорости:
гиперзвуковые 82
дозвуковые большие 82
дозвуковые малые 82
околозвуковые 82
сверхзвуковые 82
трансзвуковые 82
707
Скорость:
ввода парашюта допустимая 403
взлета безопасная 115
гиперзвуковая 75
захода на посадку 115
катапультирования начальная 391
критическая 102
критическая дивергенции 232
критическая реверса 233
критическая флаттера 234
критическая шимми 236
максимально допустимая 127
местная 88
минимально допустимая 127
отрыва 115
полета наивыгаднейшая 128
посадочная 117
Скос потока 91
Скула 198
След вихревой 86
Слип 199
Слой:
нейтральный 270
пограничный 87
потенциальный 88
Службы управления воздушным движением
57
Случай нагружения (расчетный) 239
Снаряд реактивный неуправляемый 491
-управляемый 491
Снаряжение высотное (защитное) 366
Снижение 126, 420
- аварийное 364
- по глиссаде 115
- экстренное 364
Совершенство гидродинамическое 202
Совместимость электромагнитная 412
Содержание процесса проектирования 452
Соединение телескопическое 323
Сопло двигателя реактивное 64, 337
- - с управлением вектором тяги 344
Сопротивление волновое 103,196
Состав воздуха объемный 39
Состояние тела деформированное 259
Спектр аэродинамический (обтекания) 85
Специализация производства 440
Специалист "узкий" 34
Спойлер 169
Способы борьбы с обледенением:
жидкостно-химический 375
механический 375
тепловой 375
физико-химический 375
Способ покидания самолета боевого 390
Способность несущая:
конструкции 263
крыла 168
Сверхзвуковой пассажирский самолет
второго поколения 530
Спутник Земли искусственный 22
Среда внешняя:
- естественная 38
- искусственная 38
Средства:
астрономические курсовые 409
вспомогательные авиационного комп-
лекса 21
защиты активной 371
- пассивной 371
- противопожарной активные 381
— пассивные 381
подготовительные авиационного комп-
лекса 21
пожаротушения 383
стабилизации катапультного кресла
аэродинамические 394
Срез 266
Срыв:
волновой 103
концевой 157
потока 88
потока из-под скачка 103
Стабилизатор 138
Стакан в конструкции амортстойки 330
Стандартизация 441
Станция:
контрольно-испытательная 439
летно-испытательная 439
радиолокационная 55, 410
Статор компрессора 336
Створка перепуска воздуха 344
Стенка:
балки 270
лонжерона 279
Степень:
волнения акватории 189
двухконтурности двигателя 339
повышения давления 336
продольной устойчивости 144
708
Стойка:
амортизационная 164,3.19
телескопической схемы 319, 323
лонжерона 274
полурычажная с встроенным амортиза-
тором 329
рычажная свстроепным амортизатором
329
рычажная с вынесенным амортизато-
ром 328
рычажного типа 328
телескопического типа 328
шасси 319
Стол пусковой 58
Стопп ер 292
Стратегия:
по наработке 447
по состоянию 448
технического обслуживания и ремонта
по наработке 447
----по состоянию 448
Стратопауза 44
Стратосфера 44
Стреловидность обратная 133
-прямая 133
Стрингер 273, 278
- гнутый 282
Стропа пврашютв 386
Струи:
"ленточные" 204
блистерные 204
купольные 204
скоростные 204
Струйка 85
Струя:
брызговвя 203
спутная 86, 88
Ступень компрессора 336
Ступица колеса 316
Стык контурный 288
Сублимация 81
Субподрядчик 440
Судно воздушное 465
Сужение крыла 133
Суперциркуляция 160
Сухарик кврдана 328
Схема:
аэродинамическая интегральная 137
"бесхвостка" 140
гидросамолета поплавковая 188
-двухпоплавковая 189
-трехпоплавковая 188
"классическая" 139
конструктивно-силовая 242, 274, 284
"летающее крыло" 140
нормальная 139
разъемов технологических 442
самолета аэродинамическая 139
- однофюзеляжная 211
- двухфюзеляжная 211
стойки шасси 319
"триплан"496
трипланная 473
"утка" 139
Тандер 300
Температура торможения 103
Тепловой датчик противопожарной систе-
мы 383
Термик 69
Термостатирование412
Термосфера 44
Техника активного управления 220
Техническое обслуживание:
по наработке 447
по ресурсу 447
по состоянию 448
Технологичность:
производственная 443
эксплуатационная 449
Технология "стеле" 216
Техническое обслуживание и ремонт:
по наработке (по ресурсу) 447
по фактическому состоянию 447
Толщина профиля относительная 134
Топливо:
желатинизированное 382
криогенное 59
углеводородное 535
эм ульгированное 382
Топливопровод 347
Топор аварийный 388
Торможение на прямом и обратном ходе
321
Тормоз:
воздушный 209, 316
дисковый 316
колеса 316
709
Точка критическая (полного торможения
потока) 88, 103
Траверса 325
Траектория 48
- абсолютная 394
- напряжений 263
- относительная 390
Трансмиссия 180
Трап надувной 387
Требования:
аэродинамики 290
надежности и живучести конструкции
291
прочности 291
Трение в погранслое 89
Триммер 303
Триплан интегральный неустойчивый 522
Тропопауза 44
Тропосфера 44
Труба;
аэродинамическая 84
жаровая 336
Трубка:
тока 93
электронно-лучевая 418
Турбокомпрессор 337
Тяга 63, 298
- потребная 126
- раздвижная 312
- располагаемая 126
Тяговооруженность самолета удельная 128
Угол:
взмаха 176
конусности 176
крена 105
крыла поперечный 132
нулевой подъемной силы 108
отставания лопасти 176
поперечного V 132
притекания струи 172
рыскания 105
скольжения 106
стреловидности 132
тангажа 105
установки лопасти 177
установки сечения винта 172
Угол атаки 91
-допустимый 107
- критический 92, 108
-наивыгоднейший 108
Удлинение:
абсолютное 260
крыла 133
относительное 260
фюзеляжа 137
Узел 338
- безмоментный 279
- карданный 328
- моментный 279, 327
- шарнирный 279
Унификация 441
Унос материала 81
Управление:
вспомогательное 152
директорное415
ламинарным обтеканием 160
ножное 152
общим шагом винта 179
основное 152
пограничным слоем 160
ручное 152
вектором тяги 345
Управляемость 146
- боковая 147
- продольная 146
Управляющее воздействие 120
Упругость 42
Уравнение;
Бернулли 94
весового баланса 253
неразрывности 93
постоянства расхода 94
существования самолета 251
Уровень деформации допустимый 291
Усилия:
в проводке управления 298
на рычагах управления 301
Условия функционирования ЛА особые 371
Усталость 237
-конструкции термическая 238
Устойчивость 141
- боковая 152
- по крену 150
- по рысканию 150
- по тангажу 142
- поперечная 150
- продольная 142
- путевая 150
- флюгерная 150
Устройства;
антенно-фидерное 407
взлетно-посадочные 24
входное двигателя 336
демпфирующее 319
710
звукопоглощающее 342
пиротехническое 391
радиоэлектронные 409
тормозные 316
Фазы существования ЛА в процессе экс-
плуатации 444
Факторы:
силовые внутренние 271, 277
физиологически опасные 357
Факторы, определяющие облик ЛА;
"внешние" 38
"внутренние" 38
Ферма 279
- плоская 284
— пространственная 284
Ферменная конструктивно-силовая схема
284
Фидер 407
Фиксаторы ног на катапультном кресле 402
Фитинг 284
Флаттер 234
Фокус аэродинамический 141
Форма:
крыла в плане 131
льдообразования 372
несущей поаерхности а плане 288
самолета "фасеточная" 217
самолета малоотражающая 215
тела обтекаемого 90
Форсунка камеры сгорания 336
Фреон 383
Фюзеляж 131
-лонжеронно-балочный 286
— стрингерно-балочный 286
Характеристики:
летно-технические 126
прочностные 255
физико-механические 255
Хладон 383
Ход амортизатора:
прямой 320
обратный 321
Ходкость судна 196
Хорда 132
- средняя аэродинамическая 132
Хрупкость 263
Цапфа трааерсы 325
Цель проектирования 452
Центр:
величины 190
дааления 89
жесткости 228
управления полетом 22
Центровка:
предельно задняя 145
предельно передняя 145
самолета 142
Центроплан 287
Цикл ЛА жизненный 16
Циркуляция:
воздуха 48
скорости 97
Части самолета:
ненесущие 131, 280
несущие 131, 277
Часть:
днища межреданная 198
лодки водоизмещающая 190
Число:
Маха 43
Рейнольдса 84
Рейнольдса критическое 87
Чистота:
бега 203
экологическая 535
Членение конструктивно-технологическое
442
Шаг:
винта геометрический 174
аинта общий 177
аинта теоретический 174
винта циклический 178
Шарнир:
вертикальный 176
горизонтальный 176
осевой 176
Шасси 163
-трехопорноес носовой вспомогатель-
ной опорой 315
Шатун в конструкции амортстойки 329
Шимми 236, 330
Шкаорень в конструкции амортстойки 330
Шлейф магнитный Земли 40
Шлем защитный 369
Шлиц-шарнир 324
Шпангоут 272, 280
- глухой 281
- нормальный 280
- силовой 280
- усилиненный 280
Штампоака горячая 282
711
Шток 320
амортизатора 320
исполнительный гидроусилителя 307
управляющий гидроусилителя 307
Шторки катапультного кресла складные
396
Штурвал 152, 298
Штурмовик 472
Щитки катапультного кресла складные 394
Щиток 168
- тормозной аэродинамический 316
Экзосфера 44
Экология 456
Экранолет 206
Экраноплан 205
Эксперимент:
аэродинамический 83
прочностной 243
Эксплуатант ВС 466
Элевон 140
Электропривод 424
Электросистема 425
Элементы:
демпфирующий амортизатора 320
монолитный 282
силовые 278
тонкостенный поперечный 272
тонкостенный продольный 272
упругий амортизатора 320
Элерон 146, 299
Эмульгирование 382
Эмфизема высотная 358
Энергия гидравлическая 424
Энерго датчик катапультного кресла 390
Эпюра:
давления 88
поля скоростей 88
Эргономика 455
Эрозия 82
Эрозия поверхности аэродрома 185
Эффект:
Доплера 407
Коанда 170
уноса 82
экранный 205
Эффективность рулевой поверхности 232
"Эффективность-стоимость" 249
Эшелонирование 57
Юз 318
Явления аэроупругие 231
-динамические 231
- статические 231
712
УКАЗАТЕЛЬ ИМЕН*
Александров Владимир Леонтьевич
(1984-1962) 473
Алексеев Ростислав Евгеньевич
(1916-1980) 206
Антонов Олег Константинович
(1906-1984) 79
Архангельский Александр Александрович
(1892-1978) 473
Архимед (ок. 287-212 до н.э.) 66
Байков Александр Алексеевич 473
Балабуев Петр Васильевич
(р. 1931) 508
Баранов Петр Ионович
(1892-1933) 486
Бартини РобертЛюдвигович (Роберто Орос
Ди Бартннн) (1897-1974) 206
Баулин Константин Константинович
(1893-1948) 473
Беляков Ростислав Аполлосович
(р. 1919)496
Бериев (Бериашвили) Георгий Михайлович
(1903-1979) 206
Бернулли Даниил
(1700-1782) 81
Блерио Луи (L. Bleriot)
(1872-1936) 471
Больцман Людвиг (L. Boltsmann)
(1844-1906) 46
Братухин Иван Павлович
(1903-1985) 51 1
Бубнов Иван Григорьевич
(1872-1919) 227
Ветчинкин Владимир Петрович
(1888-1950) 473
Винер Норберт (N. Wiener)
(1894-1964) 470
Виноградов Иван Николаевич
(1893-1972)475
Гагарин Юрий Алексеевич
(1934-1968) 64
Галеркин Борне Григорьевич
(1871-1945) 227
В указателе имен дается ссылка на ту
страницу, где фамилия встречается впервые.
Галль A. (A. Galle)
(1761-1844) 300
Горбунов Владимир Петрович
(1903-1945) 482
Грибовский Владислав Константинович
(1899-1977) 475
Григорович Дмитрий Павлович
(1883-1938) 473
Громов Михаил Михайлович
(1899-1985)478
Грушин Петр Дмитриевич
(1906-1993)481
Гудков Михаил Иванович
(1904-1983)482
Гук Роберт (R. Нооке)
(1635-1703) 261
Гуревич Михаил Иосифович
(1892-1976)482
Д'Аламбер Жан Лерои (J. D'Alembert)
(1717-1783) 1 18
Дондуков Александр Николаевич
(р. 1954)495
Доплер Кристиан (Ch. Doppler)
(1803-1853) 407
Егер Сергей Михайлович
(1914-1987)3
Ермолаев Владимир Григорьевич
(1909-1944)483
Жидовецкий Казимир Михайлович
(1946-1999) 520
Жуковский Николай Егорович
(1847-1921) 81
Журавский Дмитрий Иванович
(1825-1891)227
Иващенко Иван Тимофеевич
(1905-1950) 490
Ивченко Александр Георгиевич
(1903-1968) 500
Изотов Сергей Петрович
(1917-1983) 514
Ильюшин Сергей Владимирович
(1894-1977)4
Калинин Владимир Владимирович 473
Калинин Константин Алексеевич
(1887-1938) 479
Камов Николай Ильич
(1902-1973) 512
713
Кардано Джероламо (Cardano)
(1501-1576)328
Келдыш Мстислав Всеволодович
(1911-1978) 227
Кельвин Уильям Томсон (Kelvin)
(1824-1907) 41
Клапейрон Бенуа Поль Эмиль (Clapeyron)
(1799-1864)42
Климов Владимир Яковлевич
(1892-1962) 486
Коанд Анри (A. Coanda)
(1886-1972) 170
Константинов Алексей Кириллович
(р. 1919) 508
Королев Сергей Павлович
(1906-1966) 475
Котельников Глеб Евгеньевич
(1872-1944) 386
Крылов Алексей Николаевич
(1863-1945) 206
Кузнецов Николай Дмитриевич
(1911-1994) 500
Лавочкин Семен Алексеевич
(1900-1960) 482
Лазарев Александр Алексеевич 481
Левин Игорь Анатольевич
(р. 1939) 376
Ленин Владимир Ильич
(1870-1924) 473
Ленц Эмилий Кристианович
(1804-1865) 377
Леонардо да Винчи (Leonardo da Vinci)
(1452-1519) 386
Лилиенталь Отто (О. Lilienthal)
(1848-1896)471
Ломоносов Михаил Васильевич
(171 1-1765) 39
Лотарев Владимир Алексеевич
(1914-1994) 504
Люлька Архип Михайлович
(1908-1984) 486
Ляпунов Александр Михайлович
(1857-1918) 81
Макаревский Александр Иванович
(1904-1979) 227
Мах Эрнст (Е. Mach)
(1838-1916) 43
Менделеев Дмитрий Иванович
(1834-1907) 42
Мещерский Иван Всеволодович
(1859-1935) 81
Микоян Артем Иванович
(1905-1970) 482
Микулин Александр Александрович
(1895-1985) 486
Миль Михаил Леонтьевич
(1903-1970) 79
Михеев Сергей Викторович
(р. 1938) 516
Моисеенко Виктор Леонидович 473
Москалев Александр Сергеевич
(1904-1982) 475
Мясищев Владимир Михайлович
(1902-1978) 489
Невдачин Вячеслав Павлович 475
Неман Иосиф Григорьевич
(1903-1952) 480
Нестеров Петр Николаевич
(1887-1914) 123
Новожилов Генрих Васильевич
(р. 1925) 505
Носов Михаил Васильевич 473
Ньютон Исаак (I. Newton)
(1643-1727) 68
Панатов Геннадий Сергеевич
(р. 1940) 524
Петляков Владимир Михайлович
(1891-1942) 483
Поликарпов Николай Николаевич
(1892-1944) 473
Пуассон Симеон Дени (S.D. Poisson)
(1781-1840) 260
Пугачев Виктор Георгиевич
(р. 1948) 496
Путилов Александр Иванович
(1893-1979) 479
Райт (Wright), братья: Уилбер (1867-1912)
и Орвилл (1871-1948) 38
Рейнольдс Осборн (О. Reynolds)
(1842-1912) 84
Северин Гай Ильич
(р. 1926) 400
Сент-Экзюпери Антуан де (Saint-Exupery)
(1900-1944) 538
Сидорин Иван Иванович
(1888-1982) 474
Сикорский Игорь Иванович
(1889-1972) 140
Симонов Михаил Петрович
(р. 1929) 496
Соколов Виктор Васильевич
(р. 1937-1998) 206
714
Соловьев Павел Александрович
(1917-1996)500
Сухой Павел Осипович
(1895-1975) 478
Тищенко Марат Николаевич
(р. 1931)515
Толстых Игорь Павлович
(1903-1987) 475
Туполев Алексей Андреевич
(р. 1925) 509
Туполев Андрей Николаевич
(1888-1972)3
Уиткомб Ричард (Richard. Т. Whitcomb)
(р. 1921) 158
Фабр Анри (A. Fabre)
(1882-1984) 187
Федотов Валентин Александрович
(р. 1913) 506
Цельсий Андерс (A. Celsius)
(1701-1744) 41
Чаплыгин Сергей Алексеевич
(1869-1942) 81
Чепкин Виктор Михайлович
(р. 1933) 522
Черановский Борис Иванович
(1896-1960) 140
Черемухин Алексей Михайлович
(1895-1958)227
Четвериков Игорь Вячеславович
(1909-1987)479
Чижевский Владимир Антонович
(1899-1972) 481
Чкалов Валерий Павлович
(1904-1938) 478
Шавров Вадим Борисович
(1898-1976) 478
Швецов Аркадий Дмитриевич
(1892-1953) 512
Эйлер Леонард
(1707-1783) 81
Юнг Томас (Г. Young)
(1773-1829) 261
Юрьев Борис Николаевич
(1889-1957) 180
Яковлев Александр Сергеевич
(1906-1989) 187
715
ОГЛАВЛЕНИЕ
Сергей Михайлович Егер ..................................................3
Предисловие..............................................................6
От авторов............................................................... 8
Принятые сокращения...................................................... 11
РАЗДЕЛ I
Современный летательный аппарат - сложная техническая
система................................................................. 15
Глава 1. Системный подход к проектированию летательного аппарата........ 15
1.1. Техническое задание на проектирование........................... 16
1.2. Сложные (большие) системы, их основные свойства ................ 17
1.3. Летательный аппарат- главный элемент авиационного и
ракетно-космического комплексов...................................... 21
1.4. Системы и компоновка летательного аппарата ..................... 23
Глава 2. Инженерное обеспечение проектирования летательного аппарата.... 29
2.1. Основные этапы проектирования авиационного комплекса............ 30
2.2. Иерархия систем летательного аппарата. Специализация
инженеров, создающих системы ........................................ 32
Глава 3. Среда, в которой существует и функционирует летательный аппарат. 37
3.1. Факторы, влияющие на функциональные возможности и облик
летательного аппарата ............................................... 37
3.2. Естественная внешняя среда - атмосфера Земли и
околоземное пространство............................................. 39
3.2.1. Основные параметры и свойства воздуха в атмосфере......... 40
3.2.2. Международная стандартная атмосфера (MCA)..................44
3.2.3. Решение проектно-конструкторских задач и неопределенность
по параметрам естественной внешней среды......................... 47
3.3. Искусственная внешняя среда.................................... 52
3.3.1. Аэропорт. Взлетно-посадочная полоса ...................... 52
3.3.2. Наземные системы обслуживания и подготовки самолета к полету .... 54
3.3.3. Обеспечение регулярности и безопасности полетов
пассажирских самолетов .......................................... 56
3.3.4. Стартовый ракетный комплекс............................... 57
3.3.5. Решение проектно-конструкторских задач и неопределенность
по параметрам искусственной внешней среды ....................... 59
РАЗДЕЛИ
Теоретические основы авиационной техники.................................62
Глава 4. Принципы полета и классификация летательных аппаратов ......... 62
4.1. Классификация принципов полета..................................62
4.2. Реализация ракетодинамического и баллистического принципов полета .... 64
716
4.3. Реализация аэростатического принципа полета...................... 66
4.4. Реализация аэродинамического принципа полета .................... 68
4.5. Летательные аппараты, реализующие несколько принципов полета..... 72
4.6. Крылатый летательный аппарат в космическом пространстве.......... 73
Глава 5. Основы аэродинамики.............................................. 81
5.1, Взаимодействие среды и движущегося тела. Классификация
скоростей полета...................................................... 81
5.2. Аэродинамический эксперимент..................................... 83
5.3. Аэродинамические силы ........................................... 89
5.4. Основные законы аэродинамики .................................... 92
5.5. Элементы аэродинамики больших скоростей ......................... 99
5.6. Системы координат ............................................... 104
5.7. Аэродинамические характеристики самолета......................... 106
Гпава 6. Основы динамики полета самолета.................................. 114
6.1. Траектории движения ............................................. 114
6.2. Силы, действующие иа самолет в полете............................ 117
6.3. Пространственное движение самолета............................... 121
6.4. Понятие об аэродинамическом расчете.............................. 126
Гпава 7. Аэродинамическая компоновка летательных аппаратов................ 130
7.1. Геометрические параметры обтекаемых тел.......................... 130
7.1.1. Геометрические параметры несущей поверхности (крыла) ....... 131
7.1.2. Геометрические параметры ненесущих частей самолета (фюзеляжа) .. 136.
7.2. Полетная конфигурация самолета .................................. 137.
7.2.1. Аэродинамические схемы самолетов. Продольная балансировка,
устойчивость и управляемость самолета.............................. 139
7.2.2. Боковая балансировка, устойчивость и управляемость самолета. 148.
7.2.3. Состав системы управления самолетом ........................ 152
7.2.4. Показатели управляемости самолета........................... 153
7.2.5. Некоторые мероприятия по увеличению эффективности
аэродинамической компоновки ....................................... 155
7.3. Влияние на аэродинамическую компоновку условий базирования
и эксплуатации самолета .............................................. 163
7.4. Летательные аппараты короткого и вертикального взлета и посадки.. 171
7.4.1. Вертолеты .................................................. 172
7.4.2. Самолеты вертикального (укороченного) взлета и посадки ..... 182
7.5. Гидроавиация..................................................... 187
7.6. Самолеты изменяемой геометрии.................................... 208
7.7. Средства обнаружения и аэродинамическая компоновка............... 212
7.8. Аэродинамическая компоновка и активные системы управления ....... 220
Глава 8. Основы прочности и жесткости летательных аппаратов............... 227
8.1. Нагружение агрегатов самолета и их деформация под нагрузкой ..... 228
8.2. Статическое и динамическое нагружение частей летательных аппаратов ... 231
8.3. Нормы прочности ~ закон при создании конструкции самолета ....... 238
8.4. Предварительная динамическая компоновка летательных аппаратов.... 240
8.5. Прочностной эксперимент.......................................... 243
8.6. Применение активных систем управления для снижения уровня
нагрузок на самолет .................................................. 245
8.7. Понятия надежности и живучести летательного аппарата ............ 247
717
РАЗДЕЛ Ш
Инженерные основы авиационной техники................................... 249
Глава 9. Взлетная масса самолета........................................ 249
9.1. Взлетная масса как критерий выбора проектного решения........... 250
9.2. Уравнение существования самолета................................ 251
Глава 10. Основные элементы конструкции летательных аппаратов........... 255
10.1. Основные конструкционные материалы ............................ 255
10.2. Внешние нагрузки и реакции опор............................... 257
10.3. Простейшие виды нагружения и простейшие конструктивные элементы . . 258
10.3.1. Растяжение............................................... 259
10.3.2. Сжатие................................................... 264
10.3.3. Сдвиг ................................................... 266
10.3.4. Кручение ................................................ 268
10.3.5. Изгиб ................................................... 269
10.4, Подкрепленные тонкостенные оболочки - основа конструкции
планера летательных аппаратов ....................................... 272
Глава 11. Элементы конструкции планера самолета......................... 277
11.1. Примеры конструктивно-технологических решений ................. 277
11.2. Конструктивно-силовые схемы агрегатов планера самолета ........ 284
11.3. Реализация требований ТЗ в процессе разработки конструкции .... 290
Глава 12. Элементы конструкции систем управления........................ 298
12.1. Системы прямого управления самолетом .......................... 298
12.2. Усилия на рычагах управления................................... 301
12.3. Система непрямого (бустерного) управления ..................... 304
Глава 13. Элементы конструкции шасси ................................... 315
13.1. Движение самолета по аэродрому ................................ 315
13.2. Амортизационная система самолета ............................. 318.
13.3. Конструктивные схемы амортизационных стоек шасси............... 323
Глава 14. Основы устройства силовых установок летательных аппаратов .... 333
14.1. Двигатели, применяемые на летательных аппаратах ............... 333
14.2. Воздухозаборники и сопла двигателей самолета .............. . 343
14.3. Топливная система самолета..................................... 345
Глава 15. Бортовые системы и оборудование самолета...................... 350
15.1. Пассажирское бортовое и специальное оборудование............... 350
15.2, Системы кондиционирования и индивидуального жизнеобеспечения..... 356
15.2.1. Влияние условий полета иа организм человека.............. 356
15.2.2. Системы кондиционирования воздуха в гермокабинах ........ 361
15.2.3. Системы индивидуального жизнеобеспечения ................ 365
15.3. Системы защиты в особых условиях .............................. 371
15.3.1. Противообледенительные системы........................... 372
15.3.2. Противопожарные системы.................................. 380
15.4. Системы спасения и десантирования ............................. 385
15.4.1. Средства спасения на пассажирских самолетах.............. 386
15.4.2. Средства спасения на военных самолетах .................. 390
718
15.4.3. Системы десантирования................................... 404
15.5. Пилотажно-навигационное и радиотехническое оборудование........ 406
15.5.1. Пилотажно-навигационноеоборудование...................... 408
15.5.2. Радиотехническое оборудование............................ 410
15.5.3. Комплексы бортового радиоэлектронного оборудования....... 412
15.5.4. Бортовое оборудование и кабина экипажа .................. 415
15.6. Бортовые энергетические системы летательных аппаратов.......... 421
Глава 16. Основы производства летательных аппаратов...................... 437
16.1. Основные этапы изготовления летательных аппаратов.............. 438
16.2, Производство авиационного предприятия и субподрядчики ......... 439
16.3. Стандартизация и унификация в авиационном производстве......... 441
16.4. Некоторые технологические аспекты проектирования
летательных аппаратов................................................ 442
Глава 17. Основы эксплуатации летательных аппаратов...................... 444
17.1. Основные фазы существования летательных аппаратов в эксплуатации ... 444
17.2. Некоторые аспекты технической эксплуатации агрегатов и
систем самолета...................................................... 445
17.3. Некоторые эксплуатационные аспекты проектирования.............. 449
Глава 18. Основы проектирования летательных аппаратов.................... 452
18.1. Содержание процесса и основные этапы проектирования
летательных аппаратов............................................... 452
18.2. Некоторые экономические аспекты проектирования................. 453
18.3. Некоторые эргономические и экологические аспекты проектирования .... 455
18.4. Формальные и неформальные аспекты проектирования............... 456
18.5. Проектирование самолета и ЭВМ ................................. 458
18.6. Сертификация самолетов гражданской авиации..................... 465
РАЗДЕЛIV
Краткий обзор развития отечественной авиационной техники............... 470
Глава 19. Самолетостроение в довоенный период и в годы Великой Отечественной
войны ................................................................... 470
19.1. Начало пути ................................................. 471
19.2. Самолеты 1930-х годов.......................................... 476
19.3. Самолеты предвоенных лет и в годы Великой Отечественной войны . 482
Глава 20. Отечественная авиация в послевоенный период.................... 486
20.1. Освоение больших дозвуковых скоростей полета................... 486
20.2. Сверхзвуковая боевая авиация ................................ 490
20.3. Развитие гражданской авиации................................... 500
20.4. Гражданские и боевые вертолеты................................. 511
20.5. Авиация России в 1990-е годы.................................. 518
Глава 21. Возможные пути развития гражданской авиации и задачи,
стоящие перед самолетостроением ....................................... 526
21.1 Общие закономерности развития гражданского самолетостроения .... 527
21,2. Увеличение коммерческой нагрузки............................. 528
21.3. Увеличение рейсовой скорости................................... 530
719
21.4. Уменьшение расходов на эксплуатацию ...................... 531
21.5. Уменьшение массы самолета................................. 532
21.6. Увеличение аэродинамического качества самолета............ 533
21.7. Уменьшение расхода топлива................................ 534
Заключение......................................................... 537
Рекомендуемая литература........................................... 539
Периодические издания.............................................. 542
Информация в сети Интернет......................................... 543
Использованная литература.......................................... 543
Приложение. 101 выдающийся летательный аппарат мира................ 545
Самолеты ....................................................... 545
Винтокрылые летательные аппараты ............................... 590
Планеры......................................................... 609
Летательные аппараты легче воздуха.............................. 617
Баллистические ракеты........................................... 624
Авиационные ракеты ............................................. 633
Ракеты тактического назначения.................................. 654
Ракеты-носители ................................................ 662
Космические летательные аппараты................................ 678
Летательные аппараты сверхлегкого типа.......................... 689
Предметный указатель............................................... 695
Указатель имен..................................................... 713
УЧЕБНОЕ ИЗДАНИЕ
ЕГЕР Сергей Михайлович
МАТВЕЕНКО Александр Макарович
ШАТАЛОВ Игорь Алексеевич
ОСНОВЫ АВИАЦИОННОЙ ТЕХНИКИ
Редакторы О.Г. Красильникова, И.Н, Мымр ина, Д.Я, Чернис
Художественный редактор Т.Н. Галицына
Технические редакторы Т.Н. Андреева, С.А. Жиркина
Корректор Т.Р. Колганова
Лицензия ИД № 05672 от 22.08.01 г.
Сдано в набор 10.06.02 г. Подписано в печать 16.12.02 г.
Формат 60x88 1/16 Бумага офсетная. Гарнитура Таймс.
Печать офсетная. Усл. печ. л. 44,10. Уч.-изд. л. 46,21.
Тираж 3000 экз. Заказ 7425
ФГУП "Издательство "Машиностроение",
107076, Москва, Стромынский пер., 4
Отпечатано в ГУП ППП "Типография "Наука" РАН, 121099, Москва,
Шубинский пер., 6