/




























































































































































































































































































































































































































































































































































Author: Красовский А.А.
Tags: регулирование и управление машинами, процессами летательные аппараты системы управления
Year: 1973




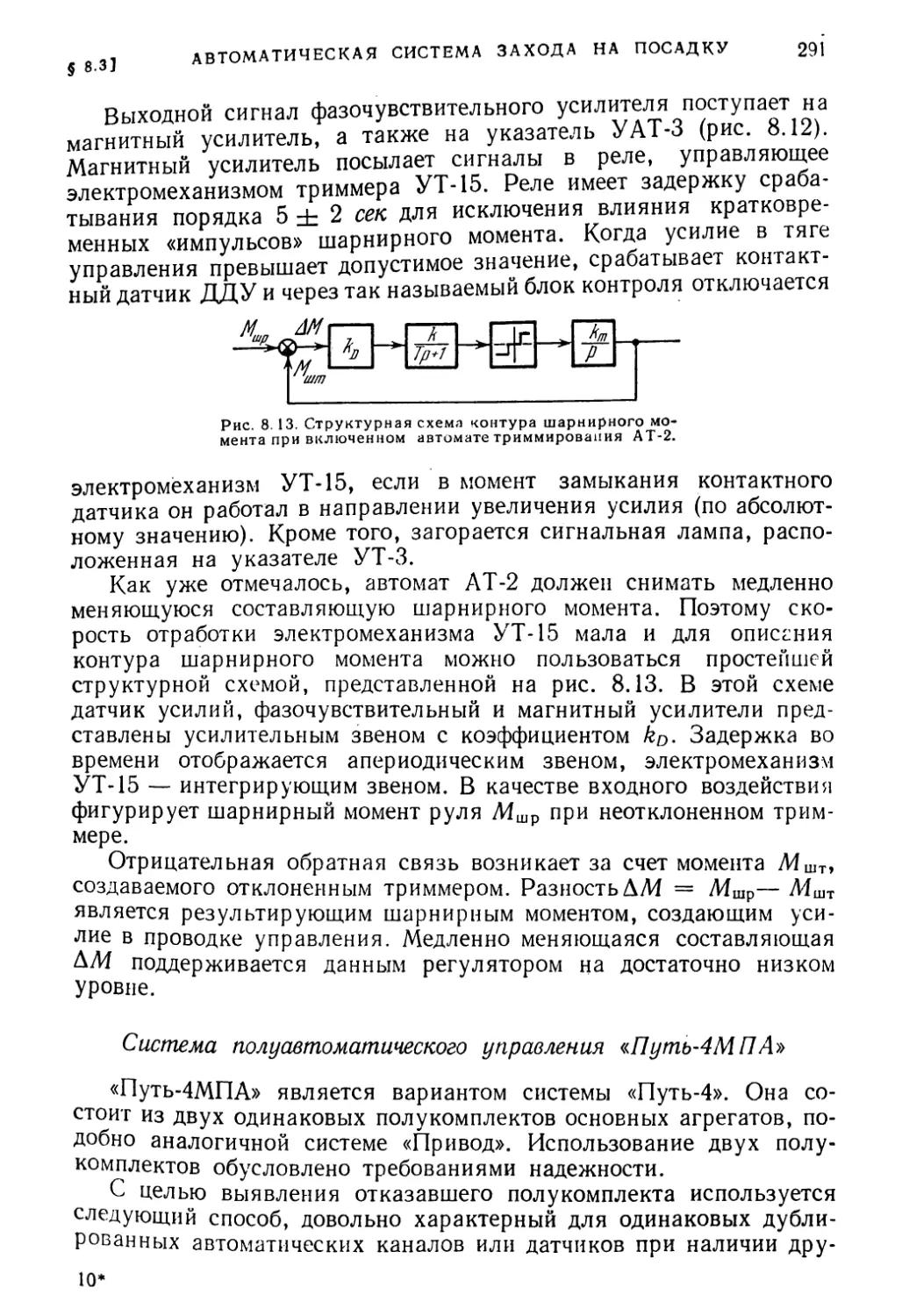
Text
А. А. КРАСОВСКИЙ
СИСТЕМЫ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
ПОЛЕТОМ
И ИХ АНАЛИТИЧЕСКОЕ
КОНСТРУИРОВАНИЕ
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 19 7 3
6 Ф 6.5
К 78
УДК 62-50
Системы автоматического управления полетом и их
аналитическое конструирование, А. А. Красов¬
ский, Главная редакция физико-математической ли¬
тературы изд-ва «Наука», М., 1973, 560 стр.
Книга содержит систематическое изложение назна¬
чения, принципов построения и функционирования
ряда типовых систем управления самолетов и вертоле¬
тов и анализ процессов в контурах управления этими
летательными аппаратами.
Освещаются вопросы, связанные с широкими диа¬
пазонами изменения параметров полета, аэроупру¬
гостью, турбулентностью атмосферы, безопасностью
и другими проблемами, возникающими при создании
систем автоматического управления современных ле¬
тательных аппаратов. Главное место отводится новому
методу аналитического конструирования систем управ¬
ления. Рассматривается большое число конкретных
применений метода для синтеза контуров управления
и отдельных узлов систем управления.
Книга предназначена для инженеров и научных ра¬
ботников, а также студентов, специализирующихся в
области систем автоматического управления полетом.
Табл. 6. Илл. 142. Библ. 191 назв.
GJ Издательство «Наука», 1973
К
3186— 1814
042 (02)-73
158-73
ОГЛАВЛЕНИЕ
Предисловие •
Введение 9
Г лава 1
Математические модели самолета
как объекта управления
§1.1. сравнения пространственного движения самолета как твердого тела 18
§ 1.2. Линейные модели продольного и бокового движений самолета в спо¬
койной атмосфере и их характеристики 30
§ 1.3. Модели движения самолета в турбулентной атмосфере 51
§ 1.4. Математические модели самолета как объекта управления с учетом
аэроупругих колебаний 59
§ 1.5. Математические модели объектов для целей аналитического кон¬
струирования систем управления 71
Г лава II
Автоматы передаточных чисел, демпферы,
автоматы устойчивости
§ 2.1. Автоматы регулирования усилий на рычагах управления и переда¬
точных чисел к рулям 75
§ 2.2. Самолетные демпферы 87
§ 2.3. Автоматы устойчивости 98
Глава III
Аналитическое конструирование
систем ручного управления
§ 3.1. Общая постановка задачи аналитического конструирования системы
ручного управления летательного аппарата . 103
§ 3.2. Аналитическое конструирование систем ручного управления про¬
дольным и боковым движениями самолета ПО
§ 3.3. Аналитическое конструирование систем ручного управления про¬
странственным движением самолета 129
1*
4
ОГЛАВЛЕНИЕ
Глава IV
Аналитическое конструирование
систем демпфирования аэроупругих колебаний
§ 4.1. Аналитическое конструирование систем демпфирования упругих ко¬
лебаний 137
§ 4.2. Аналитическое конструирование систем демпфирования аэроупру¬
гих колебаний 153
§ 4.3. Вопросы осуществления систем демпфирования аэроупругих коле¬
баний 162
Глава V
Автопилоты и контуры угловой
стабилизации самолетов
§6.1. Простейшие структуры и законы стабилизации автопилотов .... 173
§ 5.2. Простейшие контуры угловой стабилизации самолетов 178
§ 5.3. Некоторые схемы конкретных автопилотов 189
Глава VI
Аналитическое конструирование автопилотов
§6.1. Режим стабилизации 204
§ 6.2. Режим управления. Вопросы адаптации автопилотов 219
§ 6.3. Режим приведения в горизонтальное положение 228
§ 6.4. О синтезе автоматов безопасности 235
Глава VII
Стационарные контуры стабилизации траектории
и их аналитическое конструирование
§ 7.1. Простейшие контуры стабилизации высоты полета самолета . . . 238
§ 7.2. Простейшие контуры боковой стабилизации относительно заданной
линии пути . . 246
§ 7.3. Аналитическое конструирование стационарных контуров стабилиза¬
ции траектории 259
Глава VIII
Системы обеспечения посадки самолетов
§ 8.1. Требования к системам посадки. Навигационные средства обеспечения
посадки 268
§ 8.2. Полуавтоматическая система захода на посадку и самолетовождения
в районе аэродрома 276
§ 8.3. Автоматическая система захода на посадку и самолетовождения в
районе аэродрома . 288
ОГЛАВЛЕНИЕ
5
Глава IX
Аналитическое конструирование
систем управления посадкой
§ 9.1. Постановка задачи аналитического конструирования контуров
управления посадкой 294
§ 9.2. Аналитическое конструирование систем захода на посадку 304
§ 9.3. Аналитическое конструирование систем посадки (приземления) . . . 315
Глава X
Контуры наведения самолетов на воздушные
и наземные цели и их аналитическое конструирование
§ 10.1. Простейшие контуры наведения на воздушные цели 321
§ 10.2. Простейшие контуры наведения на наземные цели 335
§ 10.3. Аналитическое конструирование контуров самонаведения .... 340
Глава XI
Системы автоматического управления вертолетов
и их аналитическое конструирование
§ 11.1. Математические модели вертолета как объекта управления1 .... 363
§ 11.2. Автопилот вертолета. Простейшие структуры контуров стабили¬
зации и управления 373
§ 11.3. Аналитическое конструирование системы управления вертолета 381
Глава XII
Аналитическое конструирование
систем управления космическими аппаратами
§ 12.1. Аналитическое конструирование систем ориентации 388
§ 12.2. Аналитическое конструирование контуров стабилизации вращаю¬
щихся искусственных спутников 404
§ 12.3. Аналитическое конструирование систем сближения 411
Глава XIII
Аналитическое конструирование
пилотажно-навигационных комплексов
§ 13.1. Общая постановка задачи аналитического конструирования пило¬
тажно-навигационных комплексов 422
§ 13.2. Аналитическое конструирование ПНК при линейной математиче-
ской модели обобщенного объекта 434
Синтез ПНК при нелинейной математической модели объекта с ана¬
литическими характеристиками
6
ОГЛАВЛЕНИЕ
Приложение
§ П.1. Краткий очерк развития методов аналитического конструирования
систем управления 465
§ П.2. Основная теорема. Достоинства метода аналитического конструиро¬
вания по критерию обобщенной работы 470
§П.З. Терминальные и нетерминальные управления. Особенности анали¬
тического конструирования управлений для неустойчивого объекта 483
§ П.4. Оптимальные управления для линейного объекта . . • 493
§ П.5. Оптимальные управления для нелинейного объекта с аналитическими
характеристиками 507
§ П.6. Оптимальные управления для объекта с кусочно-линейными харак¬
теристиками 517
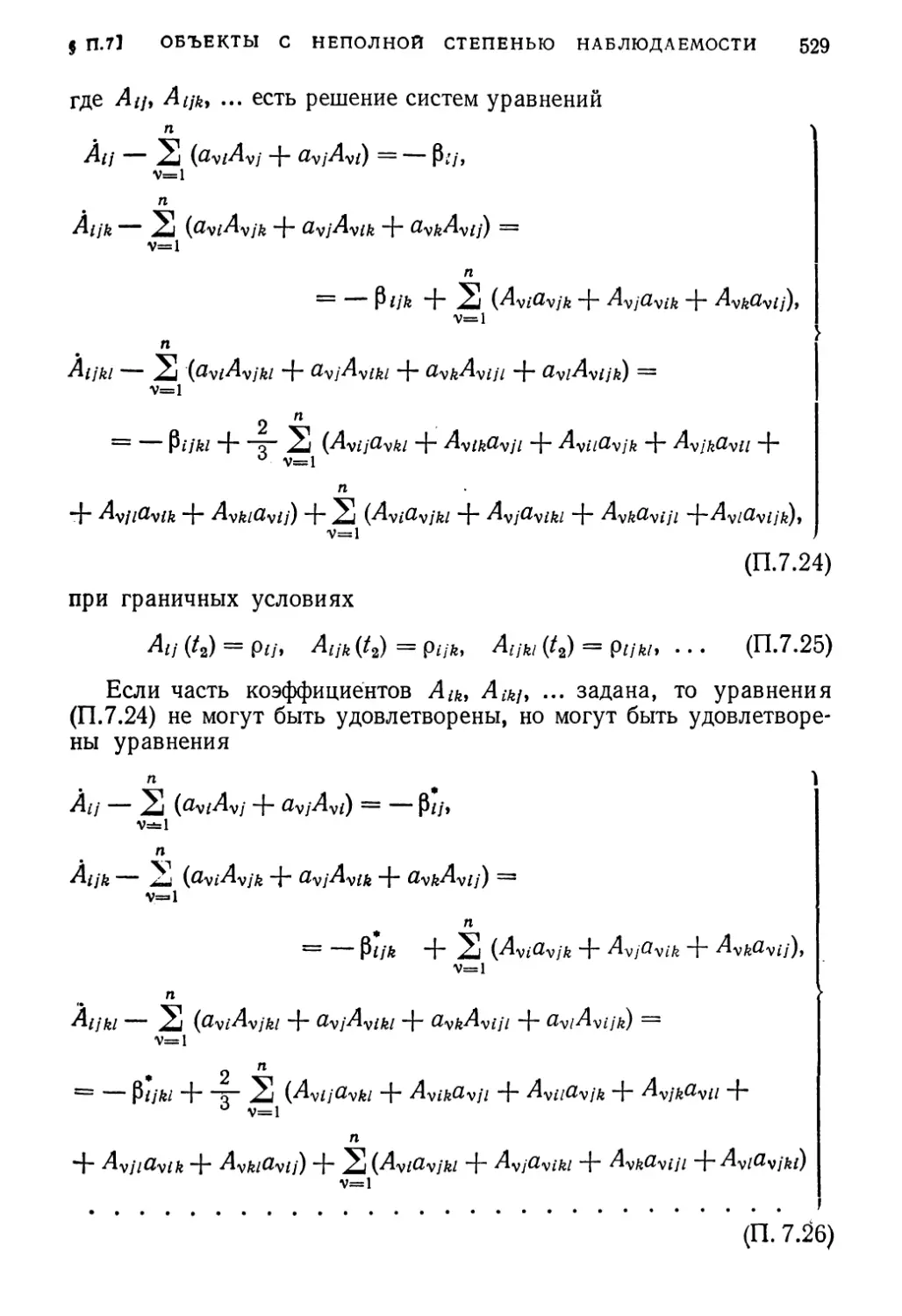
§ П.7. Аналитическое конструирование оптимальных управлений для объ¬
ектов с неполной степенью наблюдаемости 521
§ П.8. Статистическое исследование динамических систем 532
§ П.9. Значения коэффициентов линейных моделей продольного и бокового
движений самолета 540
Литература
Предметный указатель
542
553
ПРЕДИСЛОВИЕ
Системы автоматического и полуавтоматического управления
полетом относятся в настоящее время к числу наиболее важных и
стремительно развивающихся систем летательных аппаратов. Си¬
стемы управления самолетов, вертолетов и других пилотируемых
летательных аппаратов все в большей мере становятся комплекс¬
ными, обеспечивающими все основные этапы полета. Эти системы
в процессе функционирования объединяют многочисленные под¬
системы, используют информацию разнообразных датчиков. Задачи
рационального построения систем управления, обеспечения на¬
дежности и безопасности полета, необходимой точности управления
являются сложными и требуют привлечения эффективных на¬
учных методов. Между тем отечественная и зарубежная литература
по системам управления пилотируемых летательных аппаратов в
основной своей массе не вполне отвечает современным проблемам
и состоянию этой быстро прогрессирующей области техники.
Одной из задач данной книги являются изложение назначения,
принципов построения и функционирования ряда существующих
систем управления самолетов и вертолетов и анализ процессов
управления. Другой, и притом главной, целью работы является
систематическое изложение теории и применения относительно
нового метода синтеза (аналитического конструирования) систем
управления. В сравнении с предшествующими работами автора
в этой области, где, в частности, рассматривались некоторые при¬
менения упомянутого метода к синтезу систем управления поле¬
том, данная книга содержит существенное развитие теории и кон¬
кретных приложений метода. Как правило, задачи или решаются
до ко^нца, или их решение доводится до конкретной методики вычис¬
лений на электронных вычислительных машинах. Ряд полученных
здесь оптимальных решений является не только иллюстрацией мето¬
да, но и имеет самостоятельное значение. Изложение самого форма¬
лизма аналитического конструирования вынесено в Приложение.
Различные разделы книги требуют различных уровней пред¬
варительной подготовки читателя. Разделы, посвященные анализу
существующих систем и контуров управления, в основном соот¬
ветствуют уровню подобных курсов высших технических учебных
8
ПРЕДИСЛОВИЕ
заведений. Разделы, посвященные аналитическому конструирова¬
нию, содержат больший объем математических преобразований
и вычислений, хотя используемый математический аппарат,
как правило, не выходит за рамки программы технического вуза.
Таким образом, книга может быть полезной как для инженеров
и научных работников, так и студентов, специализирующихся
в области систем управления полетом.
Конечно, излагаемый метод аналитического конструирования
может использоваться в любых областях применения непрерыв¬
ного автоматического регулирования. Хотя все изложение при¬
кладной части работы нацелено на синтез систем управления поле¬
том, книга может использоваться специалистами по автоматиче¬
скому управлению в других областях техники.
Что касается практической эффективности рекомендуемого ме¬
тода синтеза, то она различна для объектов и задач разного уровня
сложности. Наибольший эффект рассматриваемый метод дает в
применении к сложным нестационарным и нелинейным объектам,
где другие методы синтеза часто оказываются малоэффективными.
Аналитическое конструирование для ряда важных задач показало
оптимальность нестационарных управлений стационарными объек¬
тами. Этот результат может найти применение в практике созда¬
ния перспективных систем управления полетом.
В целом автор убежден, что при достаточной оснащенности
электронной вычислительной техникой и наличии специалистов
соответствующей квалификации внедрение метода аналитического
конструирования в практику проектирования систем управления
полетом может дать значительный положительный эффект.
Автор выражает благодарность профессору доктору физико-
математических наук Я. Н. Ройтенбергу, взявшему на себя труд
по рецензированию данной книги.
А. Красовский
ВВЕДЕНИЕ
Стремление к созданию средств автоматизации управления поле¬
том возникло вместе с зарождением авиации. Многие образцы само¬
летов раннего этапа развития авиации снабжались регуляторами
прямого действия в виде маятников или флюгеров, воздействующих
на руль высоты или другой орган управления продольным движе¬
нием. Это было обусловлено плохой устойчивостью и управляемос¬
тью первых самолетов. Полет на этих аппаратах часто требовал
виртуозной техники пилотирования и был опасным. Простейшие
автоматы имели целью восполнить недостатки устойчивости и
управляемости первых летательных аппаратов. Попытки созда¬
ния средств автоматизации управления полетом в начальный пе¬
риод не сопровождались достаточным анализом и расчетами и
чаще всего были неудачными.
Вскоре был накоплен опыт конструирования самолетов с хоро¬
шими характеристиками устойчивости и управляемости и интерес
к автоматизации пилотирования почти исчез.
Однако развитие авиации шло непрерывно. Увеличивались
дальность и продолжительность полета, усложнялись метеороло¬
гические условия полетов, возрастала утомляемость экипажа.
Разрабатывались беспилотные летательные аппараты. В связи
с этим во второй половине двадцатых — первой половине тридца¬
тых годов вновь возрастает интерес к автоматизации управления
полетом и прежде всего к созданию систем стабилизации углового
положения — автопилотов. В конце тридцатых годов значительный
процент маршрутных полетов самолетов совершался с включенным
автопилотом. На боевых самолетах периода Второй мировой вой-
ный также широко использовались автопилоты. Однако еще дли¬
тельное время автопилот на пилотируемом летательном аппарате
оставался вспомогательной системой, включаемой на отдельных
этапах полета, главным образом в установившемся маршрутном
полете. В дальнейшем положение коренным образом изменилось.
Расширение диапазонов изменения параметров полета, увеличе¬
ние скорости и максимальной высоты, невозможность достижения
приемлемых летно-технических характеристик только за счет соб¬
ственно конструкций современных летательных аппаратов, много¬
функциональность и всережимность, неуклонное повышение тре¬
бований к точности управления создали условия, при которые
10
ВВЕДЕНИЕ
современные и перспективные пилотируемые летательные аппараты
немыслимы без высокосовершенных систем автоматического и полу¬
автоматического управления. Автоматизируется управление всеми
этапами полета, начиная от взлета и кончая приземлением, автома¬
тизируется выполнение определенных последовательностей опе¬
раций, определенных программ. За человеком остаются функции
контроля, опознавания, принятия решений на включение той или
иной программы, функции «горячего» резерва. Расширение функцио¬
нального назначения систем автоматического управления полетом
сопровождается резким усложнением этих систем. Современные
и перспективные системы управления пилотируемых летательных
аппаратов, как правило, являются многоканальными и многокон¬
турными, реализуют большое число алгоритмов или законов управ¬
ления, выполняют логические функции, обладают в той или иной
мере самонастройкой или адаптивностью. Эти системы включают
аналоговые или цифровые вычислительные устройства, все шире
используются бортовые цифровые вычислительные машины (БЦВМ).
Собственно система управления сопрягается с многочисленными
подсистемами, датчиками информации и устройствами индикации.
Возникают комплексы, которые нередко называются пилотажно¬
навигационными комплексами. На современные и особенно перс-,
пективные системы управления возлагаются функции управления
не только в номинальных режимах, но и определенных аварийных
ситуациях. Системы, как правило, должны осуществлять самокон¬
троль, автоматическое отключение отказавших звеньев и обеспе¬
чивать высокий уровень надежности и безопасности.
Свойства пилотируемых летательных аппаратов как объектов
автоматического управления также усложняются. Это вызвано воз¬
растанием нестационарное™ характеристик, влиянием аэроупру¬
гости, жидкого топлива и рядом других факторов, проявляющих¬
ся наиболее сильно в перспективных конструкциях летательных
аппаратов.
Все это сделало проектирование современных систем управле¬
ния летательных аппаратов сложной и трудоемкой задачей. Надо
заметить, что на всех этапах развития систем управления полетом
для их проектирования привлекались последние достижения тео¬
рии регулирования, вычислительной техники. Широко внедрены
в практику проектирования бортовых систем управления структур¬
ный анализ и метод частотных характеристик, математическое и
полунатурное моделирование. Однако все это уже не вполне отве¬
чает возросшим задачам. Необходима автоматизация проектиро¬
вания систем управления полетом.
Автоматизация проектирования — понятие широкое. Оно мо¬
жет включать различные операции и процессы. Одной из составных
частей автоматического проектирования может служить автомати¬
ческий поиск оптимальных значений параметров и структур с по¬
ВВЕДЕНИЕ
И
мощью электронных вычислительных машин с соответствующей
программой моделирования и поиска. Другой задачей автоматиче¬
ского проектирования может служить автоматический синтез логи¬
ческих схем (конечных автоматов), занимающих видное место в
современных системах управления полетом. Но, по-видимому,
наиболее актуальной задачей является внедрение методов теории
оптимального управления в проектирование систем автоматического
управления полетом. Этому посвящена основная часть данной
книги. В ней рассматривается применение методов аналитического
конструирования *) для решения задач синтеза систем управления
полетом.
При аналитическом конструировании критерием качества управ¬
ления объектом служит некоторый функционал фазовых коорди¬
нат объекта х{ и синтезируемых управлений (управляющих воздей¬
ствий) Uj. При методе аналитического конструирования Летова —
Калмана в его обобщенной форме (см. §П. 1)для объекта, описывае¬
мого дифференциальными уравнениями вида
fl С^1» • • • > t) = ^2 ф// (xlf . . . , Хп, t) Uj (0.1)
(Z = 1, 2, .. . , n),
назначается функционал
(0.2)
функ-
I=V3 , хп О + j Q (Х1, .... Хп, t)dt +
tt
Здесь V3 заданная, обычно положительно определенная,
ция значении фазовых координат в конечный момент времени
п Ln называемая терминальная составляющая функионала):
Q- заданная положительно определенная функция текущих
фазовых координат и времени (случай нестационарного фунщно"
»ала); 1 > 1 ~ задаиное Действительное число такое что zq —
витсяЯзалаНчКяЦИЯ k' ~ заданные Действительные величины. Ста-
ится задача нахождения управлений и,; = и-(х г f\ мгНИ
м"лиь,”Н'"ХНФах"„КЦ"°"“ (02)' Э™ упр>“е™»‘'име’нуютфя оти.'
ждение оптимальных управлений сводится к
А. М. Летовым в 1960 г л ля конструирование регуляторов» был введен
тимального управления ’1<пятиР”ШеНИЯ одного класса вариационных задач оп-
стРУирования систем уппяЛРаТКИИ очерк Развития методов аналитического цон-
р/ р ания систем управления приведен в Приложении (§П.1).
12
ВВЕДЕНИЕ
решению нелинейного уравнения в частных производных
(о-з)
при граничном условии Vt=tt = V3. Здесь + ~ = 1- Для не¬
линейных объектов (ft — нелинейные функции фазовых коорди¬
нат) пока не существует удобных способов решения уравнения
(0.3). Для линейных объектов _ (/;• — линейные формы фазовых
координат) при квадратичном функционале (V3, Q — квадратич¬
ные формы, р = q «= 2) решение уравнения (0.3) сводится к
интегрированию системы обыкновенных дифференциальных урав¬
нений типа Риккати. Однако и здесь для объектов высокой размер¬
ности (большое п) возникают вычислительные трудности. В связи
с этим автором было предложено видоизменение метода анали¬
тического конструирования, которое заключается, прежде всего,
в видоизменении критерия (минимизируемого функционала).
Функционал для того же объекта (0.1) задается в виде
l = • • •. + j Q(*i> ...,xn,t)dt +
где V — решение линейного уравнения в частных производных
(0.5)
при граничном условии Vt=t2 = V3. Оптимальные управления, ми¬
нимизирующие функционал (0.4), выражаются через решение урав¬
нения (0.5), а именно
• (0-6)
Линейность уравнения (0.5) для функции V коренным образом
упрощает задачу и позволяет указать удобные в вычислительном
отношении способы синтеза оптимальных управлений как для ли¬
нейных, так и для некоторых достаточно общих классов нелиней¬
ных объектов высокой размерности. Однако при первом знакомстве
с данным методом у инженера, а тем более теоретика, обычно
ВВЕДЕНИЕ
13
соазу возникает вопрос о правомочности постановки задачи мини¬
мизации функционала (0.4). Действительно, в этом функционале
заранее назначаются только функции V3, Q. Подынтегральное
выражение последнего члена функционала как функция фазовых
координат определяется только после решения уравнения (0.5),
т е осуществления синтеза, Функционал (0.4) является полуопре-
деленным. Только три члена этого функционала выражают зара-
принципе это положение справедливо, необходимо отме-
следующее. Так как по условию z четная функция z, то
д
zg-\ также четная функция z. Величина
т / п \Р
нее назначенную цель управления.
Хотя в 1
тить
zp =
есть неотрицательная функция фазовых координат. Последний
член функционала (0.4)
it т ( п
р /=1 \ *=1
имеет довольно отчетливую физическую интерпретацию как оценка
или обобщенная работа сигналов управления на входах безынер¬
ционных исполнительных устройств в оптимальной замкнутой
системе (см. §. П. 1). Таким образом, полуопределенный функцио¬
нал (0.4) может иметь конкретный физический смысл. Как всегда
в вариационных задачах, минимизация сложного функционала
эквивалентна минимизации «укороченного» функционала при до¬
полнительном ограничивающем условии в виде равенства сокра¬
щенной части функционала постоянной (изопериметрическая за¬
дача). Поэтому управление (0.6), кроме минимизации функционала
(0.4), минимизирует также
а) функцию I = V3 [хх (/2), .... хп (Q] при условии
б) функционал I = V3 (f2), ...,Xn(Q]+ ^Qdt при усло-
ti
ВИИ
14
ВВЕДЕНИЕ
в) функционал f
f2 m
I = Уз ki ■■■<*„ (^)l + \ Q di + 4- ( S hH dt
tt 4 1
при условии
m / n \P
S (*' S 4>k! Sr) dt = const-
В конкретных случаях все эти варианты могут иметь физиче¬
скую интерпретацию. Уместно здесь привести также следующее
замечание общего характера. Не следует смотреть на методы ана¬
литического конструирования как на целиком формализованные
автоматические методы. Правильнее рассматривать эти методы
как рационализацию поиска оптимальной структуры и параметров
системы управления. Лишь в отдельных случаях удачного подбора
формы и коэффициентов функционала первое полученное решение
удовлетворяет всем многочисленным, иногда трудно формализу¬
емым, требованиям практики. Чаще всего после получения пер¬
вого решения и его проверки приходится вносить корректировку
в минимизируемый функционал и вновь находить решение. Эта
процедура может повторяться несколько раз. Чем проще однократ¬
ное решение задачи, тем успешнее осуществляется подобный ите¬
рационный процесс. Рекомендуемый метод облегчает подобное
последовательное приближение к оптимальной в практическом
смысле слова системе.
Часто в качестве общего недостатка методов аналитического
конструирования указывают трудность обоснованного задания
коэффициентов минимизируемого функционала. При этом стремят¬
ся установить связь между коэффициентами функционала и при¬
вычными характерными величинами, например корнями характе¬
ристического уравнения замкнутой системы (для линейных
стационарных систем). Хотя выявление любых закономерностей
подобного типа облегчает обоснованное назначение коэффициентов
функционала, необходимо отметить следующее. Функционалы
указанных типов и их обобщения для стохастических задач в прин¬
ципе позволяют значительно полнее отразить технические требо¬
вания к системе, чем частные показатели качества переходных про¬
цессов. Трудности здесь обусловлены главным образом ограничен¬
ным опытом применения этих методов. Накопление опыта решения
однотипных задач позволит разработать библиотеку типовых функ¬
ционалов. Кроме этого, указанный итерационный подход в за¬
дачах аналитического конструирования при простоте однократного
решения задачи в значительной мере устраняет трудности задания
коэффициентов функционала. Опыт применения рекомендуемого
метода аналитического конструирования систем управления поле¬
ВВЕДЕНИЕ
15
ТОМ изложенный в данной книге, свидетельствует о достаточно
высокой практической эффективности метода. Особенно значитель¬
ный эффект получается для сложных задач управления нестационар¬
ными и нелинейными объектами высокой размерности, а также
так называемых терминальных задач. Дело в том, что для линей¬
ных стационарных объектов оптимальные нетерминальные управ¬
ления также являются линейными стационарными и их определение
сводится к нахождению некоторого числа коэффициентов. Поиск
в пространстве коэффициентов сравнительно легко выполняется
путем моделирования замкнутой системы на электронных вычисли-
тельных машинах. Таким образом, для решения подобных задач
аналитическое конструирование не является принципиально необ¬
ходимым и может с успехом заменяться тем или иным способом под¬
бора (поиска) путем моделирования.
Для нестационарных линейных объектов, а также для стацио¬
нарных линейных объектов при терминальном управлении опти¬
мальные управления получаются нестационарными. Здесь, если
действовать методом подбора при моделировании, необходимо осу¬
ществлять поиск в функциональном пространстве, что крайне
затруднительно. Аналогичное положение имеет место при синтезе
нелинейных оптимальных управлений для нелинейных объектов.
Эффект применения методов аналитического конструирования здесь
наибольший. Аналитическое конструирование позволяет обна¬
ружить такие классы нестационарных нелинейных управлений,
которые ранее не были известны.
Структура данной книги следующая. В главе I рассматриваются
математические модели самолета как объекта управления. Наряду
с простейшими моделями продольного и бокового движений при¬
водятся более сложные модели, включая модель пространственного
движения с учетом аэроупругости конструкции самолета.
Далее изложение строится от внутренних контуров к внешним,
от низших звеньев управления к высшим. Сначала рассматривают¬
ся системы ручного управления или системы устойчивости и управ¬
ляемости самолетов. К этим системам относятся демпферы, авто¬
маты устойчивости, автоматы передаточных чисел. Здесь, как и
во всех других разделах, сначала рассматриваются назначение
примеры существующих устройств и элементарный анализ соот¬
ветствующих контуров, а затем формулируется задача аналити¬
ческого конструирования данных систем и рассматриваются при¬
емы ее решения. г г н
гтА1РТ^еЛЬж0 РассматРивается аналитическое конструирование си¬
стем демпфирования аэроупругих колебаний.
сипа BJonHJIOTbI» контуры угловой стабилизации и их аналитиче-
ваютга пСТРУИр°ВаНИе излага1°тся в главах V, VI. Здесь затрат¬
ное пгл ОПРОСЫ синтеза систем приведения самолета в горизонталь-
ложение и автоматов безопасности. Глава VII посвящена
16
ВВЕДЕНИЕ
стационарным контурам стабилизации траектории и их аналити¬
ческому конструированию.
Некоторые существующие системы обеспечения посадки опи¬
саны в главе VIII. Следующая глава посвящена аналитическому
конструированию как контуров захода на посадку, так и контуров
автоматического приземления самолетов.
В главе X рассматриваются контуры наведения самолетов на
воздушные и наземные цели и их аналитическое конструирование.
В главе XI освещаются системы управления вертолетов и некоторые
задачи их аналитического конструирования.
Вопросам синтеза контуров ориентации, сближения и причали¬
вания космических аппаратов посвящена глава XII книги. Здесь
также затрагиваются вопросы синтеза контуров стабилизации
вращающихся искусственных спутников.
В заключительной главе XIII рассматриваются вопросы синтеза
пилотажно-навигационных комплексов, включающих как системы
обработки пилотажной и навигационной информации, так и собст¬
венно системы управления.
Глава /
МАТЕМАТИЧЕСКИЕ МОДЕЛИ САМОЛЕТА
КАК ОБЪЕКТА УПРАВЛЕНИЯ
Математическая модель объекта управления является основой
описания и исследования процессов в контурах управления и осно-
вой синтеза этих контуров. Математическая модель строится для
описания определенной группы свойств реального неограниченно
сложного объекта управления. Поэтому один и тот же летательный
аппарат как объект управления может быть представлен различ¬
ными математическими моделями в зависимости от того, каковы
цель исследования и режим полета, каковы диапазоны изменений
координат, насколько широки частотные спектры возмущающих
воздействий и сигналов управления в рассматриваемых контурах
и т. д.
В современный период развития летательных аппаратов при
решении многих задач управления приходится использовать слож¬
ные математические модели управляемых объектов. Это связано
как с развитием конструкции и летно-технических данных самоле¬
тов (широкие диапазоны изменения скорости и высоты полета,
возрастающее значение неустановившихся режимов полета, боль¬
шие удельные и абсолютные нагрузки, большая тяговооруженность,
новые конструктивные схемы и органы управления, влияние упру¬
гих деформаций корпуса и влияние жидкого топлива и др.), так и
с расширением задач управления (автоматическое управление на
всех режимах полета, обеспечение безопасности средствами авто¬
матики).
Как уже отмечалось во введении, сложность математических
моделей объектов управления и сложность решаемых ими задач
требуют соответствующих средств и методов исследования и проек¬
тирования систем управления — автоматизации проектирования
этих систем. Вычислительные машины в сочетании с методами ана¬
литического конструирования и другими методами автоматизации
проектирования позволяют обеспечить синтез систем управления
сложными объектами. Несмотря на это, простейшие модели объек¬
тов управления сохраняют большое значение. Простейшие модели
позволяют наглядно, хотя и грубо, представить самые основные
закономерности или свойства объекта управления. Синтез на основе
простейших моделей дает простые структуры систем управления.
В соответствии с двумя основными аспектами книги далее
рассматриваются как относительно сложные, так и простейшие
18
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
математические модели летательных аппаратов. Сложные модели
используются для аналитического конструирования комплексов и
для обоснования простейших моделей. Простейшие модели использу¬
ются в основном для анализа процессов при простых, выработан¬
ных практикой, алгоритмах управления.
Сложные модели описываются системами дифференциальных
уравнений. Для линейных сложных моделей объектов управления
ниже рассматриваются также системы весовых функций (фунда¬
ментальные решения линейных дифференциальных уравнений).
Для описания простейших линейных моделей наряду с дифферен¬
циальными уравнениями применяются передаточные функции,
обычные и логарифмические частотные характеристики, времен¬
ные характеристики, т. е. весь набор способов описания, применя¬
емый обычно в теории автоматического регулирования.
В данной главе рассматриваются математические модели само¬
лета как объекта управления.
§ 1.1. Уравнения пространственного движения
самолета как твердого тела
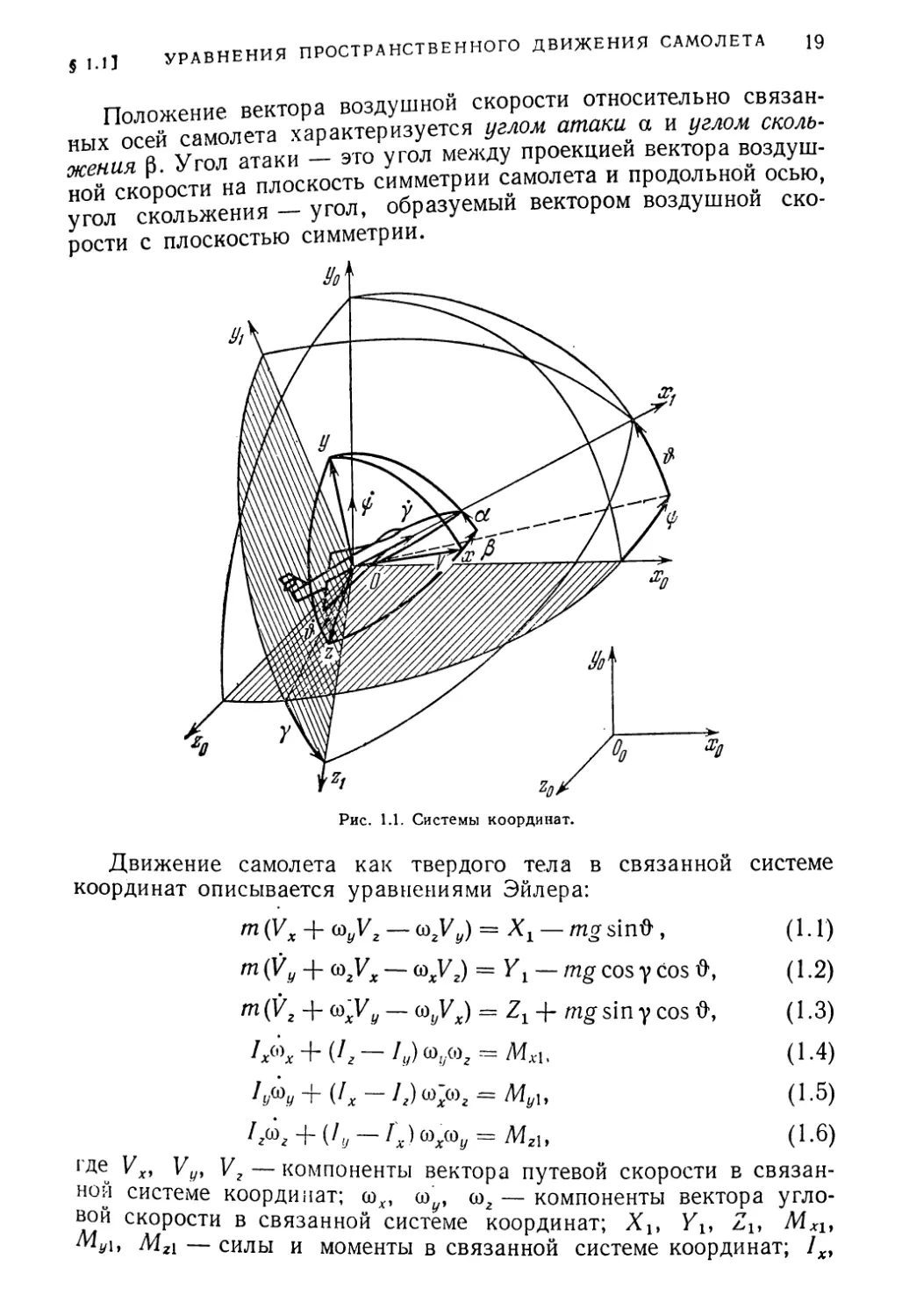
В аэродинамике самолета приняты следующие прямоугольные
правые системы координат (рис. 1.1). Земная система координат
00Хо^/ого» ось O0yQ которой направлена вертикально, оси О0х0, O0z0
имеют неизменную в горизонтальной плоскости ориентацию. Для
обычных задач управления полетом самолетов влиянием вращения
Земли на динамику движения можно пренебречь и считать систему
координат OQx0yQz0 инерциальной.
Промежуточная (земная центральная) система координат Ox0yQzQ
с осями, параллельными осям земной системы, и центром О, совме¬
щенным с центром массы самолета.
Связанная система координат Ox^z^ Оси этой системы коорди¬
нат обычно совпадают с главными центральными осями инерции
самолета. Ось Ох± совпадает с продольной главной осью инерции,
ось Оу! лежит в плоскости симметрии, ось 0z± близка к плоскости
крыла или совпадает с ней.
Скоростная система координат Oxyz. Ось Ох этой системы ориен¬
тирована по вектору воздушной скорости самолета, ось Оу лежит
в плоскости симметрии самолета (ось подъемной силы).
Угол -0, образуемый продольной осью самолета с горизонталь¬
ной плоскостью, носит название угла тангажа. Угол ф между
проекцией продольной оси на горизонтальную плоскость и задан¬
ным направлением Ох0 называется углом рысканья, курсом или
путевым углом. Угол у, соответствующий повороту самолета вокруг
продольной оси Охг относительно положения, при котором попе¬
речная ось 0zx горизонтальна, именуется углом крена.
$ 1.1]
УРАВНЕНИЯ
ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ САМОЛЕТА 19
Положение вектора воздушной скорости относительно связан¬
ных осей самолета характеризуется углом атаки а и углом сколь¬
ких осей самил между проекциеи веКтора воздуш-
той скорости на плоскость симметрии самолета и продольной осью,
™л скольжения - - угол, образуемый вектором воздушной еко-
роста с плоскостью симметрии.
Движение самолета как твердого тела в связанной системе
координат описывается уравнениями Эйлера:
m(Vx + ayVz — (0^) = Xr — zngfsinfl, (1.1)
m (Vy + — ®X) = У1 — mg cos у Cos fl', (1.2)
m (Vz + <i>xVy — (byVx) = Zi -f- mg sin у cos fl, (1.3)
X0)* + (Л Л/) ©I/®; = Мд ], (1.4)
ly^y + Ux — Л) ш‘о)г = My\, (1.5)
+ (I у — ЛЗМ/0!/ = МгЬ (1-6)
где Vx, Vy, Vz — компоненты вектора путевой скорости в связан¬
ной системе координат; <ох, шу, — компоненты вектора угло¬
вой скорости в связанной системе координат; У\, Zj, Мх1,
— силы и моменты в связанной системе координат; 1Х,
20
’МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
/у, Iz — моменты инерции относительно главных осей, т. е. осей
О%1, Оу±, Oz±\ tn — масса, g — ускорение силы тяжести. Математи¬
ческая модель, представленная уравнениями (1.1) — (1-6), соответ¬
ствует любому твердому телу с шестью степенями свободы и приме¬
нительно к самолету требует дальнейшего раскрытия и допол¬
нения.
Эта конкретизация модели заключается, прежде всего, в раскры¬
тии зависимостей сил и моментов от аэродинамических и иных пара¬
метров движения (координат), отклонений органов управления
и возмущающих воздействий, что составляет предмет аэродинамики
самолетов. Аэродинамике летательных аппаратов посвящена об¬
ширная литература, в частности, книги [1.1] — [1.11]. В рамках
стационарной аэродинамики силы и моменты, действующие на ле¬
тательный аппарат, выражаются функциями параметров полета и
отклонений органов управления. Например, момент МУ1 выража¬
ется функцией угловой скорости рысканья (Оу, угла скольжения
Р, угловой скорости крена сох, отклонения руля направления
6Н, отклонения элеронов бэ, скоростного напора ^ = ypV2(p —
плотность воздуха, V — воздушная скорость, при отсутствии ветра
совпадающая с путевой скоростью), числа Маха М. При более де¬
тальном рассмотрении (большие углы атаки, Р =/= 0) момент Му\
оказывается зависящим также от угла атаки а:
МУ1 = Му1 ((оу, р, сох, бн, 6Э, q, М, а). (1.7)
Согласно нестационарной аэродинамике [1.12] — [1.16] силы и
моменты являются не функциями, а операторами параметров поле¬
та. Однако время «памяти» или инерционность соответствующих
операторов сопоставимы с временем движения частиц воздуха отно¬
сительно поверхности, создающей силу или момент, и малы. По¬
этому нестационарность аэродинамики в большинстве случаев
приближенно можно учесть путем введения первых временных
производных. Так, момент относительно поперечной оси с учетом
запаздывания скоса потока на стабилизаторе принимается функцией
не только угла атаки, но и производной угла атаки
М2! = М21 (а, со2, а, 6В, q, М), (1.8)
где 6В — отклонение руля высоты или стабилизатора. Детальный
учет нестационарной аэродинамики необходим при рассмотрении
некоторых явлений аэроупругости, в частности многих видов флат¬
тера [1.17]. В дальнейшем рассмотрение будет осуществляться в
основном в рамках стационарной аэродинамики.
Основным путем экспериментального определения характеристик
типа (1.7), (1.8) являются продувки в аэродинамических тру¬
бах. При этом пока преобладают статические измерения, заключаю¬
щиеся в определении с помощью аэродинамических весов сил и
$ 1.1]
УРАВНЕНИЯ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ САМОЛЕТА 21
моментов, действующих на модель при заданных постоянных зна¬
чениях параметров. Результаты представляются в виде параметри¬
ческих семейств характеристик, отображающих функции несколь¬
ких переменных.
Определение характеристик аэродинамических объектов можно
рассматривать как задачу идентификации [1.18] — [1.24]. Хотя в
проблеме идентификации соответствующая область является част¬
ной она имеет исключительно богатый опыт, масштаб применения
и экспериментальную базу.
Если рассматриваемые диапазоны изменения параметров полета
невелики, то силы и моменты хорошо аппроксимируются просты¬
ми функциями, в частности линейными. Классические способы
идентификации аэродинамических объектов путем определения
семейств статических характеристик в этих условиях вполне при¬
емлемы. Однако задачи управления летательными аппаратами в ши¬
роких диапазонах изменения углов атакии скольжения, а, (3, угло¬
вых скоростей сох, со^, со2 и т. д. требуют идентификации в широких
диапазонах. В этих диапазонах (областях) аэродинамические силы
и моменты являются сложными функциями значительного числа
переменных и не допускают единой для всей области простой ап¬
проксимации.
Очевидно, что определение многопараметрических семейств
характеристик, отображающих функции значительного числа пере¬
менных в широкой области изменения аргументов, является очень
трудоемкой операцией, если ее выполнять посредством статических
измерений. Таким образом, ноЕые задачи обеспечения управления
при широких диапазонах изменения параметров (координат) и
задачи синтеза систем управления для этих условий вызывают
потребность в разработке новых методов идентификации аэродина¬
мических объектов при продувках и в натурном полете.
При изыскании целесообразных методов идентификации очень
важным является форма представления характеристик, определя¬
емая целями использования в дальнейшем. В последующем изложе¬
нии рассматриваются три формы представления характеристик
нелинейного объекта: линейная, кусочно-линейная и полиноми¬
альная.
Для аналитических (представляемых степенными рядами) ис¬
ходных характеристик линейная форма требует определения пер¬
вых частных производных в точке, соответствующей невозмущен¬
ному движению (состоянию). Рассматриваемая кусочно-линейная
форма представления аналитических функций требует определения
ервых частных производных в заранее выбранном конечном мно-
естве точек. Полиномиальное представление характеристик мо¬
ет осуществляться путем определения в точке невозмущенного
стояния как первых, так и старших частных производных до
некоторого порядка N > 1 включительно.
22
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
1Гл. I
Эти представления в общей форме записаны ниже (§ 1.5). Здесь
же обратим внимание на то, что одним из возможных путей иден¬
тификации аэродинамических объектов при таких формах представ¬
ления является метод синхронного детектирования [3.25], который
служит частным видом корреляционного метода. Пусть, например,
ставится задача идентификации моментных характеристик при задан¬
ной скорости, плотности воздуха и числе М. В этом случае в
общем виде
Mxl = Мх1 (а, р, сох, со2, бн, бэ, бв),
= Myi (а, р, со2, бн, бэ, бв),
= м2\ (а, Р, сох, \йу, со2, бн, бэ, бв),
(1.9)
где некоторые из указанных зависимостей могут быть пренебрежи¬
мо слабыми, а моменты от тяги двигателей не учитываются. В пер¬
вом варианте задачи требуется определить первые частные произ¬
водные по всем указанным параметрам в процессе продувок в аэро¬
динамической трубе.
Невозмущенный режим задан:
а = а0, р = ро, • • • . бв = 6ВО, (1-10)
где а0, Ро, .... 6в0 могут быть не только постоянными, но и заданны-
ми функциями времени. Продуваемой физической модели обеспе-<
чивается движение или положение (1.10) плюс малые колебания по
всем рассматриваемым координатам (параметрам):
а = а0 + &z, Р = Ро + “х = ®хо + Sc°x. • • • . 6В = 5во + Не¬
колебания 6а = 6а (/), бр = бр (/), 66в (/) могут быть как
регулярными, так и случайными, но достаточно высокочастотными,
чтобы обеспечить большую информационную производительность
измерений. Частоты этих «пробных» колебаний, однако, ограничены
сверху энергетическими условиями, инерционностью используе¬
мых для их контроля датчиков и влиянием эффектов нестационар¬
ной аэродинамики. Верхние границы частот пробных колебаний
могут измеряться единицами и десятками герц. Пробные колебания
могут создаваться как вынужденные колебания посредством органов
управления аэродинамической модели, имеющей упругий подвес.
Удобными с вычислительной точки зрения являются ортого¬
нальные пробные колебания (в данном варианте имеется в виду
так называемая ортогональность первого порядка [3.25]). Средние
по некоторому интервалу времени значения произведений ортого¬
нальных колебаний равны нулю:
бабр = 0, бабсо* = 0, ...
Для случайных пробных колебаний условия ортогональности
уступают место условиям обращения в нуль соответствующих вза¬
имных моментов. Если условие ортогональности всех пробных коле-
§ 1.1]
УРАВНЕНИЯ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ САМОЛЕТА
23
баний не выполняется, то должно по крайней мере выполняться
условие
ба2
брба .
.. ббвба
бабр
бр2 .
.. ад
баббв
брббв .
.. ёб%
=#0.
(1.11)
' Если ни одна из функций ба, 6£, ..., ббв не равна тождественно
нулю и эти функции линейно независимы, то условие (1.11) всегда
выполняется. Действительно, функция некоторых аргументов уа,
...» У&в* сконструированная следующим образом:
(баг/а + 4~ • • • + ббвг/§в)2,
положительна при любых уа, у$, ...,Уъв, кроме уа• = № .= ... =
= Уъв = 0, т- е- является положительно определенной квадратич¬
ной формой величин уа, у^ ...» Уъв- Согласно критерию Сильвестра
[1.27] определитель (1.11) при этом положителен.
Пульсации моментов сил, действующих на аэродинамическую
модель и вызванных пробными колебаниями, контролируются
специальными датчиками. При этом измеряются или учитываются
как моменты противодействия упругих подвесов, так и моменты
инерционных сил. Ввиду малости пробных колебаний пульсации
моментов, вызванных этими колебаниями, могут быть представлены
в виде
где часть частных производных обычно пренебрежимо мала или
равна нулю, но записывается в интересах общности. Сигналы, про¬
порциональные пульсациям моментов, умножаются на сигналы проб¬
ных колебаний и усредняются. В результате получаются величины
24
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
и аналогичные величины бТИ^ба, ... , 6A4^]66B, бТИ21ба,... бТИ21ббв.
Выражения (1.12) соответствуют случаю, когда в невозмущенном
состоянии параметры а, р,..., бв неизменны, частные производные по¬
стоянны во времени и выходят за знак усреднения. Для случая, ког¬
да а0, ро, бв0 являются функциями времени, медленно меняющи¬
мися в сравнении с пробными колебаниями, соотношения (1.12)
сохраняют силу приближенных соотношений.
Соотношения (1.12) и им аналогичные являются линейными
1дМх1\
уравнениями относительно искомых частных производных 1-^-) ,
(дМхл °
••• Вследствие условия (1.11) эти уравнения имеют един¬
ственное решение. Вычисление по' сигналам датчиков величин
б/ИХ1ба, бЛ1Х1бр, ..., бЛ4Х1ббв, ба2, ..., ббв может выполняться
как аналоговыми, так и цифровыми вычислителями. Для решения
уравнений вида (1.12) целесообразно использовать цифровые вы¬
числительные машины (ЦВМ).
Таким образом, путем создания малых пробных колебаний,
контроля этих колебаний и вызываемых ими пульсаций сил и мо¬
ментов в сочетании с одновременной обработкой информации на
ЦВМ можно осуществить высокопроизводительный контроль пер¬
вых аэродинамических производных.
Измерение производных указанным способом может произво¬
диться как в одной точке невозмущенного состояния (для построе¬
ния линейной модели объекта), так и в любом заданном конечном
множестве точек (для построения кусочно-линейной модели
объекта).
При определенном развитии метода в части вычислительных
операций он может применяться и для контроля старших производ¬
ных — коэффициентов полиномиального представления характе¬
ристик, хотя измерение старших производных в целом представ¬
ляет немалые трудности.
С целью сокращения записи изложим методику измерения стар¬
ших частных производных в общем виде. Пусть в точке невозмущен¬
ного состояния объекта хх = х?, ..., хп = х„ требуется измерить
частные производные или коэффициенты характеристики объекта,
выражаемой полиномом:
F(xlt .... х„) =5 а/ (х} — х •) + 5 aik (xt- — х°) (xk — x°k) +
i,k=\
+ . 2 atkl (xj — x°) (xA — х°) (xt — x°) + • • •
n
•••+ 2 a/k...g(xl — x°)(x/t~Xk)...(xll — x0o).
§ 1.1]
УРАВНЕНИЯ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ САМОЛЕТА
25
Старшая степень полинома равна N. Если не принимать во внима¬
ние симметрию, в силу которой a/к = а*/, а;ы, ... не меняются
при перестановках индексов, то здесь имеется п неизвестных коэф¬
фициентов а/, п2 неизвестных коэффициентов а-к и т. д., всего
п nN — L неизвестных. Координатам сообщаются контролируемые
пробные колебания относительно значений, соответствующих не¬
возмущенному состоянию:
*1 = X? + бхп .... Хп = Х°п + 6хп.
Пульсации F, вызванные пробными колебаниями, равны
8F = 2 Д/бх, + 2 aifixfixk + • • •
/=1 j,k=i
п
• • • + S ajk...q^xfixk ... 5xq.
jtk <7=1
Эта функция измеряется и образуются произведения 8F6xei
bFdxfix^ ..., б^бХебх^ ... бхл.
'n
Усреднение по некоторому интервалу времени дает
п п
ЬР8хе = 2 #/бхубх8 2 a jfix fix/fix & -[“•••
/=1 i,k=i
п
* * * 4” & jk...q^xfix. бх^бхе ,
i,k (7=1
n _ n
8F8xedxr] = 2 aj8xj8xs6x^ + У, албх;бхАбхебхч + • • ♦
/=1 jtk=\
n
* I djk...q ^xfix^ ... бх^бх8бХу],
j.k q=\
(М3)
ЬРбх&Сц • • • бхл = 2 й/бХ/бХе ... бх„ 4- ...
/=1
п
+ ^jk...q 8xfixk ... бхл.
j,k,...tq=\
Здесь число уравнений равно п т. е. совпадает с числом
^сгных. Если пробные колебания заданы так, что уравнения
• ) линейно независимы, то они имеют единственное решение
позволяют выразить искомые коэффициенты ah ajk, aiki. ... ,
26
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
через контролируемые и вычисляемые величины 6F6%8, 8F6xe6x^ ...
...» 6хубхс, bXj8xk8x£y ...
В заключение рассмотрения данного метода идентификации
заметим, что он может быть применен не только при продувках
моделей в аэродинамических трубах, но и в условиях летних испы¬
таний и обычных полетов летательного аппарата. На некоторые
относящиеся сюда вопросы будет обращено внимание в дальнейшем.
Система уравнений (1.1) — (1.6) даже при отсутствии отклонений
органов управления не является замкнутой системой. Направляю¬
щие косинусы связанной системы координат относительно земной
выражаются через углы у, гр, ft согласно формулам, приведенным
в таблице 1.1.
Таблица 1.1
У\
eu = cos гр cos О
е12 =п sin у sin гр —
— cos у cos гр sin О
Big = cos у sin гр +
+ sin у cos гр sin ft
Уо
е21 = sin -O'
е22 = cos у cos 6*
e23 = — sin у cos ft
го
е31 = — sin гр cos ft
е32 = sin у cos гр +
+ cos у sin гр sin ft
e33 = cos у cos гр —
— sin у sin ip sin ft
Направляющие косинусы углов между скоростными и связан¬
ными осями приведены в таблице 1.2.
Таблица 1.2
X
У
z
cos a cos P
sin a
— cos a sin P
У1
— sin a cos P
cos a
sin a sin p
21
sin P
0
cos p
Компоненты скорости в земной системе координат через направ¬
ляющие косинусы таблицы 1.1 связаны с величинами Vx, Vy, Vz:
*о ~ + ^е12 -|- Кге13,
У О = Кс821 + уг22 + ^ге23»
4 = Кс831 + ^832 + ^г833-
(1-14)
С другой стороны, согласно данным таблицы 1.2 компоненты путе¬
вой скорости в связанных осях при отсутствии ветра связаны с
§ 1.1]
УРАВНЕНИЯ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ САМОЛЕТА
27
атаки и углом скольжения формулами
VX = V cos a cos р, Vy =-- — V sin a cos Р,
V2 = Vsinp.
(1.15)
Производные углов тангажа, крена и рысканья описываются
выражениями
й = в)у sin у 4- со2 cos у,
у = сох — tg 0 (со^ cos у —со2 sin у),
/к _ cos V — coz sin у
(1.16)
Система уравнений (1.1)—(1.6), (1.14), (1.15), (1.16) при раскрытых
зависимостях сил и моментов от параметров полета становится
полностью замкнутой системой уравнений летательного аппарата
как объекта управления, если известна зависимость плотности
воздуха р и скорости звука а (или температуры) от высоты Н =
= £/0, т. е. известна модель атмосферы. Замкнутость системы урав¬
нений объекта означает, что его движение при заданных отклоне¬
ниях органов управления полностью определяется этой системой
уравнений.
Математическая модель пространственного движения летатель¬
ного аппарата как твердого тела, представленная уравнениями
(1.1) — (1.6), (1.14), (1.15), (1.16) и моделью атмосферы, несимметрична
и довольно громоздка. Однако эта модель является традиционной,
по крайней мере как ступень перехода к более простым моделям.
Широкое распространение данной модели обусловлено, прежде
всего тем, что она основана на стандартных угловых координа¬
тах: углах крена, рысканья, тангажа, скольжения и атаки. Для
контроля этих координат в полете имеются соответствующие изме¬
рительные системы.
Если воспользоваться в качестве координат углового положе¬
ния непосредственно направляющими косинусами е£-7- и выразить
аэродинамические силы и моменты и тягу двигателя в виде функ¬
ций проекций воздушной скорости на связанные оси и других
параметров, то система уравнений пространственного движения
летательного аппарата принимает более симметричный вид:
т (Кс + z —у) =
= Х1 (Ух> гг, 6Н, бЭ) 6В, 6Т) у„) — mgs21,
т(У:,+^гУх-^хуг) =
= Y1 Гу, V2, 6Н) 6Э, 6В> 6Т, y0) — mge22,
т(Уг+соХ-®1Л) =
= Z1{VX, Vу, V2, 6Н, 6Э, 6В> 6Т, y„) — mge23t
7 А + (Л — =
= Mxi (Vx, Vy, V2, Ых, az, 6H) 6Э, 6e> 6V £/0),
28
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
Iy®y + (Jx — =
= Му\ (Vx, Vу, Vz, сох, со
^2 + (1у — Ц)®х®у =
= Mzl(Vx, Vyt vz,
еи + ^i/813 Wz812 — О,
wx8i3 = 0,
е13 4“ °\812 Vll = 0»
®31 4“ ^f/833 ^z832 =
832 4“ Wz831 Wx833 = 0»
833 4“ (0x832 <^31 =
(/, ®Z’ ^н» ®Э> ^в’ ^T» /A))’
G>x, toy, (02, 6H, 6Э, 6B, 6T, f/0),
e2i 4“ toyE23 co2e22 = 0,
e22 4" to282i tox&23 = 0,
e23 4" tox&22 toy&21 = 0,
Уо = X621 4" ^I/622 4" Vze23*
(1.17)
Здесь 6T — величина, характеризующая управление тягой дви¬
гателей. При пренебрежении инерционностью управления тягой
(неограниченная приемистость двигателя) величина 6Т совпадает
с отклонением ручки управления двигателем (двигателями). Конеч¬
но, целый ряд зависимостей или связей, указанных здесь в выраже¬
ниях сил и моментов, могут быть пренебрежимо слабыми для всех
нормальных режимов полета. Однако для особых режимов и ава¬
рийных ситуаций эти зависимости или связи могут оказаться
существенными. Поэтому, а также в интересах симметрии записи,
эти связи указаны. С другой стороны, в специальных случаях мо¬
гут быть существенными и другие, не указанные зависимости. Это
относится, прежде всего, к воздействию специальных органов управ¬
ления, таких как закрылки, управляемые кили и стабилизаторы
совместно с рулями направления и высоты и др. В этих специаль¬
ных случаях в выражениях моментов и сил просто добавляются
соответствующие аргументы.
Учет ветра также осуществляется достаточно просто. При на¬
личии ветра в выражениях сил и моментов Х19 Ух, Zx, 7ИХ1, Му\9
М2\ вместо компонент путевой скорости Vx, Vy, Vz фигурируют
компоненты воздушной скорости Vx — Ux, Vy — Uy, Vz — Uz, где
t/x, Uy, Uz — проекции вектора скорости ветра U на оси связан¬
ной системы координат. В математической модели (1.17) для
девяти направляющих косинусов записано девять дифференциаль¬
ных уравнений первого порядка. Любые шесть из этих дифферен¬
циальных уравнений могут быть заменены шестью алгебраическими
соотношениями, которым подчиняются направляющие косинусы:
з | 1 при k = i
/“i | 0 при k^i,
(i = 1,2, 3).
(148)
Рассмотренные сложные модели пространственного движения
летательного аппарата будут использоваться в дальнейшем при
УРАВНЕНИЯ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ САМОЛЕТА
29
,1.0
пешении некоторых задач аналитического конструирования систем
управления, а также для обоснования более простых моделей,
отражающих частные виды движения.
Обычно различают продольное и боковое движения. К продоль¬
ному движению относят вращательное движение относительно
поперечной оси Ozx и поступательное движение в направлении про¬
дольной и нормальной осей 0^, Оуг\ этому движению можно сопо¬
ставить уравнения (1.1), (1.2), (1.6). Боковое движение включает
вращение относительно осей Охх, Оуг и поступательное движение
в направлении оси Ozr.
Непосредственно из уравнений пространственного движения
(1,1)— (1.6) или (1.17) следует, что продольное и боковое движение
взаимосвязаны. При этом взаимосвязь продольного и бокового
движений проявляется сильнее для современных сверхзвуковых
самолетов, чем для дозвуковых самолетов предшествующих поко¬
лений [1.28], [1.51 ].
Существует несколько физических факторов, обусловливающих
связь продольного и бокового движений. Аэродинамические связи
продольного и бокового движений выражаются в том, что аэроди¬
намические силы и моменты, входящие в уравнения бокового дви¬
жения, зависят не только от параметров (координат) этого движе¬
ния, но и параметров продольного движения и наоборот. Наиболее
отчетливо это отражено в уравнениях вида (1.17). Аэродинамиче¬
ские перекрестные связи проявляются наиболее сильно при боль¬
ших значениях угла атаки и скольжения.
Другая группа связей обусловлена инерционными силами,
точнее, кориолисовыми силами. Эти связи могут возникать за счет
гироскопического момента авиадвигателей, а также за счет моментов
кориолисовых сил самого летательного аппарата. Последние мо¬
менты в связанных осях представлены в явном виде в
нениях Эйлера членами (/у — 1Х) о)хсо^, (/2 — Iy) toy(i)z,
—/г) сохсо2.
Для современных сверхзвуковых самолетов моменты (1у —
—Ох — играют значительную роль [1.28], [Г.51].
Обусловлено это двумя причинами. Во-первых, сверхзвуко¬
вые самолеты имеют большое удлинение, малую толщину и размах
крыла. Поэтому для них 1Х /2, 1Х 1у. Кроме того, для сверх¬
звуковых истребителей характерны высокие угловые скорости кре¬
на сог. Связи, обусловленные указанными моментами инерционных
сил, должны учитываться при ручном и автоматическом пилотиро¬
вании с высокими угловыми скоростями крена.
Несмотря на возрастающую роль полных моделей простран¬
ственного движения самолета, упрощенные модели, как уже упо¬
миналось, имеют большое значение. Это в первую очередь отно¬
сится к линейным моделям, описывающим процессы изменения
малых отклонений от невозмущенного движения.
урав-
(/х-
30
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
§ 1.2. Линейные модели продольного и бокового движений
самолета в спокойной атмосфере и их характеристики
Многие задачи управляемого и неуправляемого полета могут
быть решены на основе линейных моделей движения, справедли¬
вых для небольших отклонений возмущенного движения от невоз¬
мущенного. Методика получения соответствующих линейных уравне¬
ний из исходных нелинейных уравнений с дифференцируемыми
функциями общеизвестна.
Пусть исходная система уравнений имеет вид
%i f i • • • > Uv . . . , Umi ... , £r) = 0 (1.19)
(i = 1, 2, ... , n),
где x19 ..., xn — координаты, ult ..., um — управляющие воздей¬
ствия, £x, ...,g2 — возмущающие воздействия. В векторной форме
уравнения (1.19) записываются в виде
х + «Л) = 0, (1-20)
где х, и, £ — векторы, / — векторая функция. Невозмущенное
движение
х° = х°(Д u° = u°(/)
должно удовлетворять уравнению (1.20) при £ ■= 0:
x° + f(x°, и°, 0) = 0.
Возмущенное движение, представляемое в виде
х = х° 4- Дх, и = и° 4- Ди,
также удовлетворяет уравнению (1.20), причем*) £ =/= 0,
х° 4- Дх 4- / (х° 4- Дх, и° 4- Ди, £) = 0.
Таким образом,
Дх 4- f (х° 4- &х, и° 4- Ди, g) — f (х°, и0, 0) = 0. (1.21)
Уравнение первого или линейного приближения имеет вид
+ <L22>
*) Для производной по времени от приращения нами везде используется
обозначение
(Дх) = Дх.
at
Поскольку приращение производной равно производной приращения, это не мо¬
жет вызвать недоразумений.
§ 1.21
где
МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ
31
(1-23)
— матрицы первых частных производных, взятых в точке невоз¬
мущенного движения или состояния. Запишем уравнения первого
приближения для системы (1.1) — (1.6). В качестве невозмущенного
движения примем прямолинейный горизонтальный полет с посто¬
янной скоростью, в котором
со® = coj = со® = О, у0 = Ф° = О, У2 = У0, У® = У® = 0. (1.24)
Учтем следующие зависимости сил и моментов от параметров полета
в рамках определенной (стандартной) модели атмосферы:
Х1 = Х1(У,а,Я,бт), У^У^а, У,Я,бв), Z, =
Mxi = Mxi (а>х, (й'у, p, 6Э, 6H),
Л1р1 = му1 (сох, соу, р, бэ, б,,),
мг{ = M2l (со2, а, а, V, Н, бв).
В соответствии с (1.22) из (1.1)—(1.6), (1.24), (1.25) получаем
ДУ,. + avxlДVxl + а?,Да + ах1ЛН + а^Д^ = Дбт,
+ У0Д(02 + а“]Да а^ДУ 4~ = а^Дб,,,
+ <2mzA<D2 -f- а“2Да 4- а^гДа + а™2ДУ + йтг^-Н = атгДбв,
ДУ2| - УоДсох + 4др + с^Ду = о,
Д<»х + атх\<лх 4- а^До)у 4- ЯтхДР = атХДбэ 4- а™хДбн,
Д(о" + а^Д®х 4- а^ДсОу 4- а^Др = а^Д6э 4- Д6Н,
(1.25)
(1.26)
(1-27)
32
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
где коэффициенты пропорциональны соответствующим частным
производным:
Уравнения (1.26) совместно с соотношениями
д1Лд = — Уода, Дсо2 = Д#, Д// = Уо (ДФ — Да)
составляют систему линейных уравнений продольного движения.
Уравнения (1.27) и соотношения
АК1 = УОДР> = ДТ
образуют систему линейных уравнений бокового движения. Эти
модели продольного и бокового движений автономны и могут
рассматриваться раздельно. Рассмотрим подробнее сначала модели
продольного движения.
Модели продольного движения самолета
Уравнения продольного движения часто записывают не в свя¬
занной, а в скоростной системе координат. Уравнения проекций
сил на касательную и нормаль к траектории и уравнения моментов
Рис. 1.2. Координаты продольного дви-
женин.
относительно поперечной оси при
движении самолета с нулевым кре¬
ном в неподвижной вертикальной
плоскости имеют вид (рис. 1.2)
mV = Р cos а — X — mg sin 0,
mVQ = V + Psina — mg cos 9, •
1гаг = Мг1,
(1-28)
где 0 = Ф — a — угол наклона траектории, Р — сила тяги дви¬
гателей, X — лобовое сопротивление, Y — подъемная сила. Пола¬
гая в рамках стандартной атмосферы
Р = Р(У,Н,ЬТ), X = X(V,a,H),
Y = Y(V, а, Н, 6В), M2i = МЛ (a, со2, а, V, Н, 6В),
уравнения продольного движения записываем в виде
mV = Р (V, Н, 6r) cos a — X (V, a, Н) — mg sin 9,
mVQ = Y (V, a, H, 6B) Ц- P (V, H) sin a — mg cos 9,
Z/o2 = Mzl (a, <o2, a, V, H, 6B),
H = V sin 9, = co2, О = 9 4- a.
(1.29)
I 2] МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 33
Зависимостью Р от 6., в уравнении проекций сил на нормаль к тра¬
ектории пренебрегаем ввиду малости соответствующей составля¬
ющей. Модель продольного движения самолета (1.29) будет исполь¬
зоваться неоднократно в дальнейшем. Для получения линейной
модели используем стандартную методику. Задавшись невозмущен¬
ным движением общего вида
V = P, Н = Н°, 6В = 6°, 6Т = 6?, а = а°, 0 = 0°,
в соответствии с (1.22), (1.29) получаем
ДЙ + Ox&V + а?Да -)- а® ДО 4- а* АН — а*тДЗт,
ДО + ау\ V + а“Да + а®Д0 + ау\Н = а£вД6в,
Д(1)г 4" йт^ДК 4“ ЯтгД1^ 4* ^тгД® 4* ^тгД®2 4“ — С1тг&&в>
кН — sin 0°ДV — cos 0ОУ°Д9 = 0, Д4 = Дсо2, ДО1 = Д0 -{- Да.
(1.30)
Коэффициенты этих уравнений равны
Отклонения (вариации) массы и момента инерции здесь не учиты¬
ваются, так как изменение этих параметров происходит медленно
и может рассматриваться как программное (невозмущенное).
2 А. А. Красовский
34 .
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
Модель (1.30) будем называть полной линейной моделью про¬
дольного движения. В ней учтены как сильные, так и относительно
слабые связи. Общее понятие слабых связей в линейной системе
может быть пояснено следующим образом. Пусть имеется линейная
система, уравнение которой в матричной форме представлено в виде
х-\-ах = Ьи. (1.32)
~ Эта система состоит из двух взаимосвязанных подсистем, кото¬
рым соответствуют векторы (матрицы-столбцы) координат xlf х2.
Представим квадратные матрицы, а, b и матрицы-столбцы х, и
в виде блочных матриц
^22
II “1
, х =
, и=\\
Il U2
где Лп соответствует собственно первой подсистеме, А22 — второй
подсистеме, А12 отражает связи первой подсистемы со второй, Д21
соответствует связям второй подсистемы с первой. Уравнение (1.32)
в раскрытой до матриц-блоков форме имеет вид
4~ А1]Х1 -|- Д12-^2 = ^11^1 + ^12^2>
(1.33)
Х2 + ^21Л1 "Ь ^22^2 = ^21^1 "Ь ^22^2*
Подсистемы считаются автономными *), если
Д12 = Л21 = 0,
т. е. связи по координатам между системами отсутствуют. Если
ДХ2 = 0, то отсутствует влияние второй подсистемы на первую,
если Д21 = 0, то первая подсистема не влияет на вторую. Если
Д12 =/= 0, но элементы этой матрицы связей настолько малы, что
движение практически не отличается от движения для случая
Д12 = 0, то связи первой подсистемы со второй считаются пренебре¬
жимо слабыми. Аналогично связи второй подсистемы с первой пре¬
небрежимо слабые, если движение близко к движению в случае
Д21 = 0. Конечно, для строгого определения этих понятий необхо¬
димо определение меры близости движений. Однако здесь нет
необходимости углубляться в этот вопрос.
В полной линейной модели продольного движения самолета
(1.30) самыми слабыми связями являются связи по высоте полета,
представленные членами а* кН, а”кН, amzkH. Эти связи обуслов¬
лены изменением плотности воздуха с высотой и вызванными этим
изменениями сил и моментов. Отклонения по высоте на 30 м вызы-
*) В теории устойчивости движения термин автономная система нередко
обозначает систему, параметры которой явным образом не зависят от времени.
Такие системы мы будем называть стационарными, а наименование «автоном¬
ные» будем применять к замкнутым по координатам системам.
МОПЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 35
§ 1.2]
«яют продольные ускорения ахЬН и нормальные ускорения Va^bH,
пр превышающие O.Olg, и продольный момент, эквивалентный
отклонению руля высоты не более чем на 1' 4- 2'. Поэтому при
рассмотрении управляемого движения связями по высоте в модели
(1 30) вполне можно пренебречь. При этом уравнение вертикальной
скорости становится автономным и модель продольного движения
принимает вид
ДУ avx\V + ахКа + ах№ = 0хТДбт,
ДО ciy^V 4~ аУ Да 4" я^ДО = а у Д6В>
Дсо2 Cltnz^V + drnz&& 4" 4“ Ят2Дй)2 =
дд = Дсо2, ДА* = ДО 4~ Да.
(1-34)
Если невозмущенное движение прямолинейное горизонтальное рав¬
номерное или если оно криволинейное, но с достаточной малой кри¬
визной, медленно меняющейся скоростью и высотой полета, то
коэффициенты уравнений первого приближения (1.30), (1.34)
постоянны или почти постоянны. Линейные модели продольного
движения при этом стационарны или квазистационарны. Квази-
стационарной линейной системой называется система, коэффици¬
енты которой меняются медленно в сравнении с собственным дви¬
жением этой системы.
Для стационарного случая и нулевых начальных условий пре¬
образование Лапласа уравнений (1.34) имеет вид
(р + ах) ДУ (р) + а?Да (р) + а®Д0 (р) = а«тД6т (р), 1
aVy^V (р) + а“Да (р) + (р + й°) Д0 (р) = ^ВД6В (р),
(р) + (а^ + а“гр) Да (р) + (р* + а™р) Дй (р) = а%гЬ8в (р),
Да (р) + ДО (р) — ДО (р) = 0.
(1.35)
Здесь за преобразованием Лапласа сохранено обозначение ориги¬
нала с указанием зависимости от р — параметра преобразования
Характеристическое уравнение, соответствующее (1.34), (1 35) имеет
четвертый порядок: /»\ • /»
Д(р) =
Р + #х а?
“у а*
&тг йтгр -f-
0 1
а® 0
Р + 0
0 р2 + а'тгР
1 —1
2*
~ Р4 + «зР3 + «2Р2 + О1Р + а0 = 0.
(1.36)
36
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. Г
Кроме того, существует один нулевой корень, соответствующий
автономному уравнению вертикальной скорости. Если не пренебре¬
гать слабыми связями по высоте, то характеристическое уравнение
линейной модели продольного движения имеет пятый порядок
(см. (1.30)).
Широко известно, что уравнение (1.36) для самолетов практи¬
чески всех компоновок и типов и большинства режимов полета
имеет пару малых и пару больших корней [1.1] — [1.10]. Большие
корни зависят в основном от коэффициентов а2, а3, а малые корни
определяются главным образом величинами a-Ja2. Коэффи¬
циенты а2, аз выражаются формулами
а 0 coz | V az I 0 coz . V 0 I
6Z2 = ^тг CLifltnz 4“ UxUmz 4" йу^тя 4~ ^xUy 4”
, V а , V 0 V а
+ ауах + ауах — ахау,
аг , а . V | 0 а
U3 = CLmz 4“ ^т2 4" а* 4" &у — &у
(1-37)
и в основном определяются коэффициентами сильных связей ау
amz, d%z- Итак, большие корни характеристического уравнения
свободного движения самолета приближенно удовлетворяют урав¬
нению
р2 4- а3р 4- а2 = 0,
где
а иг а coz а
U 2 —Um2 U’tnzU'y , u3 tZ/nz Uy •
Это, как правило, комплексные корни. Они определяют те состав¬
ляющие свободного продольного движения, которые носят назва¬
ние короткопериодических колебаний. Вторая пара корней уравне¬
ния (1.36) соответствует длиннопериодическому (или фугоидному)
свободному продольному движению самолета. Эти малые корни
приближенно удовлетворяют уравнению
а2р2 + ауз + а0 = 0,
где коэффициенты а0, ах зависят от слабых связей, обусловленных
изменением скорости:
— CLydxam2 &х — dx^yOmz — Qydxdmzt
= dmz (avxc% + aVyax — а%аву — ayai) -j-
~\~их aya^z dxUmz UyCLxUmz 4" 4“ CLyCLmz'
(1.38)
Длиннопериодические колебания вызваны наличием замкнутого
контура для приращений скорости в самой модели собственного про¬
дольного движения самолета: изменение скорости вызывает изме¬
нение наклона траектории, а последнее в свою очередь влияет на
изменение скорости полета.
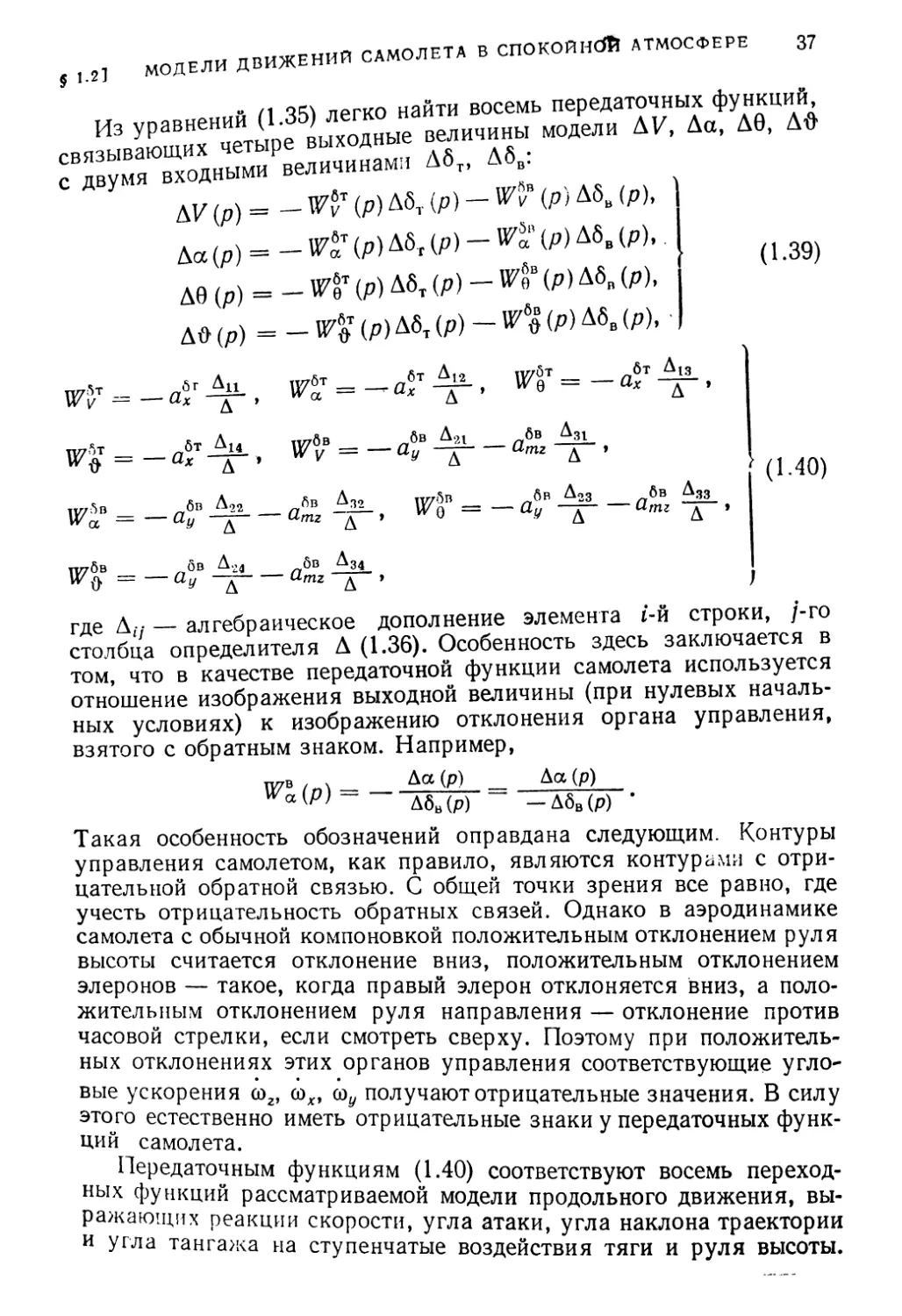
} ,.2] МОДЕЛИ ДВИЖЕНИИ САМОЛЕТА В СПОКОИНбй АТМОСФЕРЕ 37
- /1 легко найти восемь передаточных Функций
i’pe =Ыхолнь,е .е«Ч™ь, »«» ДГ. Да. АС. Д»
с Гвумя входными величинами А6Т, А6
ду (р) = __ г°т (р) Абт (р) — Дб» (Р)>
да (д) = _ ГаТ (р) А\ (Р) — Г“ (/?) Дб° (р)’
д0 (р) = _ №ет (р) А6Т (р) — №ов (р) А6„ (р),
Ц7уТ = — dx
(1.39)
A33
A
■ (1.40)
»
ттубв бв Д24 бв А_з_4_
= — ау -д amz д » j
где д.. — алгебраическое дополнение элемента i-й строки, /-го
столбца определителя Д (1.36). Особенность здесь заключается в
том, что в качестве передаточной функции самолета используется
отношение изображения выходной величины (при нулевых началь¬
ных условиях) к изображению отклонения органа управления,
взятого с обратным знаком. Например,
TV7B z„x Да(Р) _ Аа (Р)
Wa(P)-— дбв(р) “ _Дбв(р) ’
Такая особенность обозначений оправдана следующим. Контуры
управления самолетом, как правило, являются контурами с отри¬
цательной обратной связью. С общей точки зрения все равно, где
учесть отрицательность обратных связей. Однако в аэродинамике
самолета с обычной компоновкой положительным отклонением руля
высоты считается отклонение вниз, положительным отклонением
элеронов — такое, когда правый элерон отклоняется вниз, а поло¬
жительным отклонением руля направления — отклонение против
часовой стрелки, если смотреть сверху. Поэтому при положитель¬
ных отклонениях этих органов управления соответствующие угло¬
вые ускорения со2, о)х, Му получают отрицательные значения. В силу
этого естественно иметь отрицательные знаки у передаточных функ¬
ций самолета.
Передаточным функциям (1.40) соответствуют восемь переход¬
ных функций рассматриваемой модели продольного движения, вы¬
ражающих реакции скорости, угла атаки, угла наклона траектории
и угла тангажа на ступенчатые воздействия тяги и руля высоты.
38
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
ГГл. I
Обозначения этих переходных функций следующие:
.... /$(/), №(t) h^t).
Типичный вид переходных функций рассматриваемой модели
продольного движения самолета при а6у* = 0 представлен на
рис. 1.3. В первый период после отклонения руля высоты на кривых
(0, ha (0 заметны короткопериодические колебания, далее
следуют длиннопериодические колебания.
Рис. 1.3. Переходные функции полной модели продольного движения самолета.
Ниже различными путями будет показано, что в управляемом
полете длиннопериодические или фугоидные колебания «не успе¬
вают развиться» и роль слабых связей по скорости, как правило,
невелика. Тем не менее для решения некоторых задач синтеза не¬
обходимо учитывать эти связи. В развиваемых ниже методах ана¬
литического конструирования систем управления широко исполь¬
зуются весовые функции управляемого объекта. Весовыми или
импульсными переходными функциями называются реакции на
импульсивные воздействия. Весовые функции соответствуют также
свободному движению при определенных начальных условиях.
В теории аналитического конструирования используется фунда¬
ментальная система весовых функций, совпадающая с фундамен¬
тальным решением однородной системы дифференциальных урав¬
нений.
Для n-мерного в общем случае нестационарного линейного
объекта
х + ах =-= Ьи
фундаментальная система весовых функций содержит п2 функ¬
ций wik (t, /0), матрица которых w = ||иу^|| удовлетворяет
f 12J
МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 39
уравнению
и/ + aw = О
(1.41)
при начальном условии
(1.42)
10 (^0’ Q 1 *
где 1-единичная матрица. Запишем уравнения (1.34) продоль¬
ного движения самолета в виде
ду + a^V + (а® - <£) А9 + = а^Абт> 1
Д0 + av^V + (а® — а*) А0 + а“Дд = а®ВДб»’
• л 1(1-43)
Д0 — Да>2 = 0,
+ (aL + д^ + f +
+ (а»2 + О“) + (а™+ Дй)* = + а^а&^ Лбв‘
Уравнение фундаментальной матрицы весовых функций (1.41)
пттттгла* гнпрпжит мятоину коэффициентов вида
в данном случае содержит матрицу коэффициентов
а
О'Х
а
&У
о
а 1 гЛ а
0>mz Т атгаУ
ах
aVy
0
V . а V
Quiz “Г ^mz^y
0 а
dx ах
0
ау ау
о
а / 0 jx
Q'tnz \Яу — ау) — amz
о
о
— 1
©2 | а
u/nz “Г и^2
(1.44)
а =
Фундаментальная система весовых функций линейной модели
объекта (уравнений первого приближения) позволяет синтезировать
оптимальные управления не только для этой модели, но и для
нелинейной модели с известными полиномиальными или аналити¬
ческими характеристиками. Соответствующая методика [П.22],
[П.25] изложена в Приложении (см. §§ П.4, П.5).
Относительно полные линейные модели продольного движения
(1.34), (1.43) и соответствующие им характеристики имеет смысл
использовать при синтезе внешних контуров управления полетом,
таких как контуры стабилизации высоты и скорости полета. При
синтезе внутренних контуров (контур демпфирования, контур
перегрузки, контур угла тангажа), а в ряде случаев и внешних
контуров часто используют упрощенные модели продольного дви¬
жения. В этих моделях пренебрегают не только слабыми связями
по высоте, но и относительно слабыми связями по скорости и углу
наклона траектории. Обоснованием этого служит то, что в управля¬
емом полете влияние слабых связей в значительной мере подавля¬
ется искусственными сильными связями, вносимыми управлением.
40
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
Полагая в уравнениях (1.34) (iy = 0, = 0, = 0, а также
пренебрегая влиянием запаздывания скоса потока и подъемной
силой руля высоты (стабилизатора), т. е. полагая а^2 = 0, аув =0,
получаем простейшую модель продольного углового (включая по¬
ворот вектора скорости) движения самолета:
ДО + а“Да = 0,
Дй)2 -|- Cljnz\(i)z
ДО* = Д<о2, ДО = Д9 + Да.
(1.45)
Эта модель отражает короткопериодическое продольное движение
самолета. Для невозмущенного движения, при котором коэффици¬
енты ау, dL cfinz могут считаться постоянными, модели (1.45)
соответствуют следующие передаточные функции:
где
^в(р) =
п^в(р) =
Пв(р) =
Да (р)
й6всо2
Дбв(р)
Р2 + 2^®„р + <о2
>
ДО (р)
1
Д6В (р)
рг + 2^®^ + и2
р ’
Дсо2 (р)
*>2а(Тер+1)
Д6в(р)
Р2 + 2?а®аР + “а
>
Д0(р)
£6всй2
^wz^a
1
Д<5В (р)
Р2 + 2U°<zP + “а
р’,
(1-46)
(1-47)
Если не считать коэффициент эффективности руля то простей¬
шая модель продольного движения полностью определяется только
тремя параметрами: соа = ]/а^г — a^z а% — величиной, которая
в наиболее типичном случае — a'nZay > 0 является частотой
собственных (недемпфированных) короткопериодических колебаний;
— декрементом или степенью затухания; Те — величиной, име¬
ющей размерность времени и характеризующей маневренность лета-
МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 4]
§ 1*2]
ельного аппарата. Развернутые выражения для этих параметров
следующие:
(1.48)
\ ^P^ + ^cos- /о
где _1 рУ2 — скоростной напор, S — площадь крыла, с* — произ¬
водная коэффициента подъемной силы по углу атаки. Первое сла¬
гаемое под радикалом всегда положительно, однако определяющее
значение имеет второе слагаемое
1 [ дМг\
I2 \ /о’
пропорциональное коэффициенту статической устойчивости —
’ Если > 0, то самолет именуется статически устойчи¬
вым по перегрузке, если = 0 — нейтральным, а при соа < 0 —
статически неустойчивым по перегрузке. Привлечение понятия
перегрузки здесь связано с тем, что ускорение вдоль нормальной
оси (без учета силы тяжести) определяется углом атаки
\jy = V°A0 = Да. (1.49)
Таким образом, согласно простейшей модели продольного дви¬
жения приращение нормального кажущегося ускорения самолета
связано с отклонением руля или стабилизатора передаточной функ¬
цией колебательного звена
№.бв (р) =
Р2 + 2^аР +
(1.50)
Здесь
(1.51)
№ =
дМ2 / дМ2 \
д6в / да /о
коэффициент усиления по ускорению или перегрузке
игп!7 ЭТ°Т К0ЭФФициент усиления или передаточное отношение
скпгГ Важную роль в пР01*ессах как ручного, так и автоматиче¬
ского управления.
ненирм4 п^еЛЬНЫе изменения этого коэффициента, вызванные изме-
сильнп РаметР°в «среды» (высоты, скорости полета, числа М)
У ложняют пилотирование. Поэтому на многих самолетах
42
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
предусмотрены специальные автоматы регулировки передаточных
чисел от ручки управления к рулю или автоматы устойчивости,
уменьшающие неблагоприятное влияние изменения k^B (см. главу II).
При изменении режима полета в широком диапазоне изменяется
также величина Те, обратное значение которой равно приращению
скорости поворота вектора скорости ДО при единичном приращении
угла атаки. На средних и малых высотах Те с достаточной точ¬
ностью может быть выражено формулой
гр 0,т
Величина Те возрастает с увеличением высоты полета и массы,
приходящейся на единицу площади крыла. Для современных само¬
летов величина Те может изменяться от значений порядка долей
секунды до десятков секунд. В широком диапазоне изменяются
также коэффициент демпфирования короткопериодических коле¬
баний и декремент затухания £а. Как правило, для совре¬
менных самолетов, особенно при полете на большой высоте, естест¬
венное демпфирование, характеризуемое указанными величинами,
слишком мало. В связи с этим самолеты снабжаются демпферами
(см. главу II).
Логарифмические частотные характеристики простейшей модели
продольного углового движения, соответствующие передаточным
функциям (1.46), представлены на рис. 1.4. Характеристики L«B (со),
(со), выражающие зависимость амплитуды и фазы колебаний
угла атаки от частоты, соответствуют характеристикам колебатель¬
ного звена. Для £а 1 звено второго порядка вырождается в по¬
следовательное соединение двух апериодических звеньев. Для крат¬
кости везде в подобных случаях будем также говорить о колеба¬
тельном звене. Кстати сказать, как только что отмечалось, для
современных самолетов обычно £«<1. На графиках рис. 1.4
коэффициент усиления принят равным 1.
Характеристики (со), ф«1 (со) соответствуют последователь¬
ному соединению идеального форсирующего звена (передаточная
функция Тер + 1) и колебательного звена. Здесь фазовый сдвиг
ср©® в диапазоне частот от 0 до (приблизительно) соа положителен.
Это несколько облегчает построение контуров демпфирования.
Характеристики Lqb (со), фев (со) соответствуют последователь¬
ному соединению колебательного и интегрирующего звеньев. Фазо¬
вый сдвиг на частоте со = соа здесь равен — 180°.
Характеристики (со), ф^ (со) совпадают с характеристиками
последовательного соединения колебательного, идеального форси¬
рующего и интегрирующего звеньев.
$ 1.2]
МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 43
частотные характеристики простейшей
Эти логаРиф^рПеСуИглового движения самолета неоднократно
дальнейшем.
/80
, 80 at h<t>z'
0,1 0,2020,60,60,81
0,1 0,2020,6 0,60,81.
>ct
20
10
О
'10
20
10
О
-10
Рис. 1.4. «Логарифмические частотные характеристики простейшей модели про¬
дольного движения.
Переходные функции данной модели получаются путем простей¬
ших преобразований переходной функции колебательного звена*
44
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
Действительно, Л«в (/) согласно (1.46) совпадает с переходной
функцией колебательного звена, переходные функции h^Zt /ie\
согласно тем же формулам равны
Переходные функции простейшей модели продольного движения
практически совпадают с начальными участками переходных функ¬
ций полной модели (см. рис. 1.3).
Линейные модели бокового движения самолета
Линейные уравнения бокового движения были ранее записаны
в виде (1.27). Учитывая соотношение
av21 = voa₽, =
преобразуем эти уравнения к виду
Д<4 + а^Дсо, + + а^ДР = <&Д6Э + а^А6н,
Дй\ + йт^Д®* -|- йпгуД®^ 4- tZnic/ДР = Я/едД^э 4~ #едД6н,
Д0 — Д®у + Az ДР + «Z д? = о,
Ду — Д®х = 0.
Здесь
(1-52)
1 ( dZ, \ V 0
mV0 I /о’ аг~ Vo ’
_ 1 ( dMxi ) ед 1 ( дМх1
1х \ д<0х /о’ йтх lx \ d<i)y )о
1 ( дМх1 ] &э 1 ( дМх1
1х \ )о’а,пх 1х \ дЬэ /о’
(1.53)
j_fдМ^ \
lx к д6а /о’
1 (дМуХ
ly \ dtoy
1
‘у
WX 1 ( дМу{ \
'ту "V /о’
Коэффициент Ат» носит название коэффициента статической пу¬
тевой устойчивости. При а$ту > 0 самолет именуется статически
устойчивым в путевом отношении. При </ту <_ 0 самолет статически
(1.54)
2] МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 45
^ив в путевом отношении. Существенную роль играют коэф-
неустоичив у ° е значения которых
фидиенты а,»х, ату, Р j t
7\ = ->Г’ Т* = -^Г’ Т₽_ а₽
атх ату z
пгть всемени. В качестве выходных величин модели
имеют Размер“°Хются отклонения угловых скоростей крена и
(1.52) рассматриваю™^^*, с^льжения и крена Др, Ду.
рысканья Д®х, 3 с двумя входными воздействиями (°™оне-
„яэГероХ и Руля направления Д69, Д6Н) восемью передаточ-
ными функциями.
Д(Ог (р) бэ ^11 — П6э ■ ^211 ,
1С(Р) = --дбЖ'__ ту D(p}
д Д<Вх (Р) _ z,6h ри(р) — а6н °‘л (р— ,
W6M = Ь^~ тх Dip) Dip)
Дю» (о) бэ £>12 ip) Ргг .
Dip)
Am., (o’* 6н D12ip) _ п6п -
Т«7й ~ “-"-ойТ а’"‘
АВГоЧ ,6э £>1з(₽) _„6э .^(PL
Р ~ = — ^тх—пСпГ йт« Dip) '
6н £>23 (р)
Umy
^(р) =
W^(p) =
<(/>) =
A6s iP) D
др ip) AH P13 ip)
~~Ts—FT = amx
Д6Н ip)
К" (p) =
(p) = w^/p, r6vH (p) = W*/p.
Dip)
Dip) ’
Здесь
Щр) =
. сох
р + ^тх
сох
Оту
О
— 1
Р + CLmy
— 1
О
Ятх
Р
# ту
Р + а*
о
о
о
al
Р
(1.55)
(1.56)
>
a Dik (р) — алгебраическое дополнение элемента i-й строки, fe-ro
столбца этого определителя. Одна из структурных схем, соответст¬
вующих рассматриваемой полной линейной модели бокового дви¬
жения, представлена на рис. 1.5. Кроме ранее отмеченных выход¬
ных величин, в этой модели фигурирует угол наклона траектории
в горизонтальной плоскости 0Г, приращение которого равно
Д0Г = Дф — др.
В канале рысканья имеется запаздывающая (с оператором апе¬
риодического звена) обратная связь по угловой скорости, возника¬
ющая за счет скольжения. Эта обратная связь отрицательна для
46
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
статически устойчивого в путевом отношении самолета. В канале
крена также имеется запаздывающая обратная связь, обусловлен¬
ная скольжением. Кроме того, между каналами крена и рысканья
имеется пара перекрестных связей, создаваемых спиральными
моментами а^Дсох, Угол рысканья Дф получается на
выходе интегрирующего звена, не охваченного обратной связью.
Рис. 1.5. Структурная схема полной линейной модели боко¬
вого движения самолета.
Таким образом, любой самолет нейтрален (или неустойчив) в отно¬
шении курса.
Полная структурная схема бокового, как и продольного, движе¬
ния содержит сильные и слабые связи. К числу сильных связей
у любого самолета, кроме нейтрального (а?ту = 0), относится связь,
порождаемая флюгерной (путевой статической) устойчивостью или
неустойчивостью. Соответствующий контур, как видно из схемы
рис. 1.5, содержит два апериодических звена. Он является главной
причиной существования у характеристического уравнения боко¬
вого движения
D(p) = 0 (1.57)
пары больших комплексных сопряженных корней и отвечающей
этим корням короткопериодической составляющей движения. Сла¬
быми являются перекрестные связи, создаваемые спиральными
моментами. Замкнутый контур, образуемый этими перекрестными
связями и звеньями основных контуров, слабо влияет на относи¬
тельно высокочастотные составляющие движения. Поэтому звено
с постоянной времени Ту порождает большой отрицательный корень
характеристического уравнения (1.57).
Еще одна обратная связь, возникающая за счет влияния сколь¬
жения на угол крена и обратного влияния крена на угол скольже-
МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 47
§ 1*2]
л может считаться слабой. Свободное движение в соот-
ния, такж OHTVpe замыкающемся через усилительные звенья
вегствующем кон ур относительно
С передаточным экспоненциальному. Данный контур является
Мл^нКичиной существования у уравнения (1.57) малого веще¬
ственного к°р*я- ставЛены три характерных распределения кор-
ней Характеристического уравнения (1.57) (полюсов передаточных
-х-
X
*
X
X
Рис. 1.6. Варианты распределения корней характеристического урав¬
нения полной линейной модели бокового движения.
функций). Случай, представленный на рис. J.6, а, соответствует
устойчивому короткопериодическому и устойчивому медленному
(или «длиннопериодическому», хотя это движение носит апериоди¬
ческий характер) движениям. Вариант, изображенный на рис. 1.6, б,
соответствует одному малому положительному вещественному кор¬
ню и остальным корням с отрицательными действительными час¬
тями. Это — случай так называемой спиральной неустойчивости.
При малости положительного корня, т. е. медленности расходя¬
щейся составляющей свободного движения, подобная неустойчи¬
вость не сильно сказывается на технике пилотирования и в реаль¬
ном управляемом полете часто оказывается незаметной.
Существенно более неблагоприятное воздействие, имеет колеба¬
тельная неустойчивость, для которой распределение корней пред¬
ставлено на рис. 1.6, в. Здесь расходящимся является короткопе¬
риодическое колебательное движение — два больших комплексных
сопряженных корня находятся в правой полуплоскости. Ручное
пилотирование самолетом с подобной колебательной неустойчивос¬
тью практически невозможно, так как летчик не в состоянии вно¬
сить демпфирующее (гасящее) воздействие в относительно высоко¬
частотный процесс. Применяя критерий Гурвица к характеристи¬
ческому уравнению (1.57), можно записать аналитические условия
устойчивости, которые, конечно, включают и условия отсутствия
48
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
колебательной неустойчивости. Однако записанные в коэффициентах
уравнений бокового движения эти условия довольно громоздки.
Между тем из одного того факта, что короткопериодическое движе¬
ние определяется в основном сильными связями в схеме рис. 1.5,
можно сделать ряд практических выводов о путях устранения коле¬
бательной неустойчивости.
Действительно, из структуры контуров со звеньями &тх
видно, что устранению колебательной неустойчивости должно
Рис. 1.7. Переходные функции полной линейной модели бокового движения
самолета.
способствовать уменьшение 7\, Т^, Тр, а также величины а^х
(коэффициент поперечной устойчивости). Так, при а^х = 0 или
Ту = 0 замкнутый контур короткопериодического движения ста¬
новится автономным, заведомо устойчивым при а„1у > 0. Постоян¬
ные времени Ту, Т^ могут быть уменьшены с помощью демпферов
крена и рысканья, точнее, с помощью идеальных демпферов крена
и рысканья. Таким образом, одним из путей устранения колеба¬
тельной неустойчивости в боковом движении является применение
демпферов крена и рысканья.
Передаточным функциям (1.55) соответствуют восемь переход¬
ных функций h^x (/), ..., hy" (t), выражающих реакции выходных
координат на ступенчатые отклонения элеронов и руля направ¬
ления.
Характер переходных функций h^y, /г|н, куЭ, 1г$э для случая
устойчивого бокового движения (распределение корней как на
рис. 1.6, а) представлен на рис. 1.7.
$ 1,2] МОДЕЛИ ДВИЖЕНИЙ САМОЛЕТА В СПОКОЙНОЙ АТМОСФЕРЕ 49
Колебательные процессы по угловой скорости рысканья и углу
скольжения, возбуждаемые отклонениями руля направления, по
мере затухания колебаний как бы стремятся к одним уровням,
а затем (после развития процессов крена) стремятся к новым уров¬
ням (рис. 1.7, а). При внезапном отклонении элеронов крен сна¬
чала нарастает по закону, близкому к линейному (величина Ту
считается малой), а затем, по истечении достаточно большого интер¬
вала времени, стремится к установившемуся значению.
Для различных режимов полета установившиеся значения вы¬
ходных координат линейной модели бокового движений различны,
Рис. 1.8. Переходные процессы полной модели бокового движения: а) Дби = 0,005е
б) Дбэ = 0,005°.
причем начальные и установившиеся отклонения могут иметь даже
разные знаки. В отношении Д0 это иллюстрирует рис. 1.8. Здесь
необходимо подчеркнуть, что установившиеся значения и неначаль¬
ные участки переходных функций в определенной мере соответ¬
ствуют реальному движению лишь при очень малых отклонениях
органов управления. При значительных отклонениях элеронов уста¬
новившееся значение крена, определяемое по формуле IF^3 (0) Д6Э,
весьма велико. Это означает, что полная линейная модель сво¬
бодного бокового движения имеет силу только для весьма малых
отклонений элеронов. Однако та же модель как звено контуров
Управления может применяться в значительно более широком диа¬
пазоне отклонений органов управления.
Как уже отмечалось, для решения многих задач аналитического
конструирования желательно иметь фундаментальную систему
Весовых функций объекта. Фундаментальная матрица весовых
50
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
Сгл. I
функций линейной модели объекта удовлетворяет уравнению
aw = 0, w (/0. /0) — 1,
где для бокового движения согласно (1.52)
а™
(0^
итх
р
й'ГПХ
0
(ИХ
а ту
аыу
и ту
и ту
0
— 1
0
в
az
aZ
- 1
0
0
0
(1.58)
В § 9 Приложения приведена таблица коэффициентов линей¬
ной модели бокового движения гипотетического самолета на не¬
скольких режимах полета.
Рис. 1.9. Переходная функция прос- Рис. 1.10. Структурная схема канала рысканья в
тейшей модели канала крена само- режиме плоского разворота (Ду = 0).
лета.
В заключение рассмотрения моделей бокового движения заме¬
тим, что для решения многих задач управления применяются
простейшие модели, не учитывающие слабые связи. Одна из та¬
ких моделей основана на предположении об идеальной координа¬
ции разворотов, т. е. на предположении об отсутствии скольжения.
В действительности в большинстве режимов полета современных
самолетов руль направления используется для устранения сколь¬
жения. В частности, даже при ручном управлении, когда летчик
использует информацию указателя скольжения, образуется зам¬
кнутый контур ликвидации скольжения (на рис. 1.5 часть этого
контура нанесена пунктиром). При малом скольжении воздейст¬
вием момента боковой устойчивости, передающимся через звено
с коэффициентом усиления а™ (рис. 1.5), можно пренебречь.
Пренебрегая также спиральными моментами, получаем для канала
крена простейшую модель в виде последовательного соединения
апериодического звена с постоянной времени Ту и интегрирую¬
щего звена. Передаточная функция данной простейшей модели
(1.59)
МОДЕЛИ ДВИЖЕНИЯ САМОЛЕТА В ТУРБУЛЕНТНОЙ АТМОСФЕРЕ 51
§ ь31
^бэ __ атхТу Переходная функция И%э (t) простейшей моде-
ГД6 (оис 1-9) близка к начальному участку соответствующей пере-
лИ ой функции полной линейной модели (рис. 1.7, 1.8). Если сде-
Х0ДьН аналогичные допущения в отношении канала рысканья, т. е.
ЛЗрнебречь скольжением и влиянием перекрестной связи, то, как
ИР из рис. 1.5, получается простейшая модель канала рысканья,
структурно аналогичная указанной простейшей модели канала
КР6рассмотренные простейшие модели имеют место в режиме коор¬
динированных разворотов, когда скольжение близко' к нулю.
Однако иногда используется режим плоского разворота, когда
крен близок к нулю. При Ду = 0 влияние канала крена на канал
рысканья отсутствует и структурная схема канала рысканья при¬
нимает ""
канала
вид, представленный на рис. 1.10. Передаточная функция
рысканья самолета в этом случае имеет вид
^фР + 1
дбИ
^Н(Р) =
(1.60)
где
Clmy Н угу > — — 1 —— .
7 ф 1 ф 1 [3
Таким образом, структура модели канала рысканья в режиме плос¬
кого разворота аналогична структуре простейшей модели канала
тангажа. Аналогичен и вид соответствующих характеристик (см.
рис. 1.4). Отличия заключаются лишь в числовых значениях пара¬
метров. г
§ 1.3. Модели движения самолета в турбулентной атмосфере
нирВм!еРп тУРбулентность атмосферы оказывают значительное влия-
учитывят^га ^НИе летательных аппаратов. Поэтому оно должно
тов пясиртр J* ПРИ пРоектиРовании самих летательных аппара-
управлемия Р°ЧНОСТНЬ1Х характеристик, так и при синтезе систем
атмосферного nnfnJHX вндов бортового оборудования. Движение
случайный хяпя^УХап°ТН°СИТелЬ1ю земли носит, вообще говоря,
ве и времени ^уществуютапоч?иЯпебШИРИЬ1Х областей в пРостРанст-
составляюший Ую; почти регулярные или почти постоянные
течениях. Р ’ 0С0^е1|[Ю значительные в высотных струнных
52 МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ [Гл. i
Характеристики турбулентности атмосферы
Скорость ветра U является векторной случайной функцией
векторного аргумента, состоящего из координат точки атмосферы
и времени:
U = U (х0, z/q, z0, t),
т. e. является векторным случайным полем. Величина U может быть
представлена в виде суммы среднего вектора ветра U и центриро¬
ванной составляющей 6/сл:
и = и + и(х0, д0, z0, t). (1.61)
Под U понимается среднее по некоторому интервалу времени зна-
чение вектора ветра в рассматриваемой точке. Наличие случайной
составляющей 6/сл означает турбулентность атмосферы. Вообще го¬
воря, колебания или вариации скорости ветра в атмосфере Земли
имеют очень широкий спектр, начиная от годовых, месячных, суточ¬
ных изменений и кончая пульсациями с частотой в десятки и даже
сотни герц, вызванных самыми мелкими вихрями вблизи поверх¬
ности земли или самого летательного аппарата. Однако для задач
управления движением весьма низкочастотные вариации не имеют
значения и усреднение в формуле (1.61) может осуществляться
по интервалу, измеряемому минутами.
Для описания и исследования случайных полей турбулентности
разработаны специальный аппарат и теория, изложенные в об¬
ширной литературе. Соответствующая библиография имеется в
фундаментальной монографии А. С. Монина и А. М. Яглома
[1.29], [1.30]. Для наших целей достаточны самые упрощенные
представления в духе работ [1.31], [1.32].
Если все статистические характеристики случайной функции
U, вычисляемые для произвольной точки х0, у0, z0, не зависят от
этой точки, т. е. одинаковы для рассматриваемого пространства,
то турбулентность называется однородной. Некоторые статистические
характеристики, такие как корреляционные функции или законы
совместного распределения вероятностей, вычисляются для двух
или большего числа точек рассматриваемого пространства. Если эти
статистические характеристики не меняются при параллельных
переносах, вращениях и зеркальных отражениях этой системы
точек, то турбулентность называется изотропной. Проще говоря,
поле турбулентности изотропно, если в нем нельзя выделить ника¬
кого преимущественного направления.
Считают, что анизотропность турбулентности атмосферы вызы¬
вается в основном рельефом местности. Для высот, больших 1000 м,
турбулентность атмосферы чаще всего считают изотропной. По край¬
ней мере при рассмотрении движения жесткого самолета скорость
МОДЕЛИ ДВИЖЕНИЯ САМОЛЕТА В ТУРБУЛЕНТНОЙ АТМОСФЕРЕ 53
§ !-3]
оздуха можно считать случайной функцией не трех, а только
одной пространственной координаты х, отсчитываемой вдоль тра¬
ектории полета
Uсл —’ t)»
(1-62)
Объясняется это тем, что на движение самолета как твердого тела
слабо влияют высокочастотные составляющие, создаваемые вихря¬
ми меньшими размеров самолета. Поэтому скорость ветра в пре¬
делах контуров самолета приближенно можно считать одинаковой.
Такое допущение имеет тем большее основание, чем меньше размеры
летательного аппарата и выше скорость полета. Для аэроупругого
летательного аппарата обычно необходимо учитывать более вы¬
сокочастотные составляющие воздействий турбулентной атмосфе¬
ры и гипотеза одномерности (1.62) не всегда является прием¬
лемой.
При равномерном движении самолета х = Vt и выражение для
случайной функции (1.62) можно записать в виде
£/сл=£/сл(И,0.
При достаточно высокой скорости самолета вторым аргументом
здесь можно пренебречь, полагая
fMW)-
Это означает, что распределение ветра в пространстве считается
как бы «замороженным» и зависимость от времени получается за
счет того, что самолет пронизывает это распределение. Данное
допущение носит название гипотезы Тэйлора [1.30]. Гипотеза Тэй¬
лора подвергалась экспериментальной проверке неоднократно, в
частности в работах [1.33]— [1.37]. Противоречащих этой гипотезе
результатов получено не было.
Для оценки влияния изотропной турбулентности атмосферы
достаточно использовать статические характеристики двух ком¬
понент случайной скорости ветра: составляющей, направленной
подкасательной к траектории полета, и составляющей, нормаль¬
ной к этой траектории. Для составляюшей направленной
Для некоторых моделей пространственного движения удобно
с_ссматРивать проекции скорости ветра не на скоростные, а на
Угл1аННЫе К00Рдинатные оси- Для всех обычных режимов полета
пн. 2 между связанными и поточными осями невелики и в качестве
ппиб п нохмчпыми исями невелики и в качестве
ветпя1ИЖеННЫ о статистических характеристик проекций скорости
□акт На связаннь1е оси можно использовать соответствующие ха-
ристики компонент С7ХСл, иусл. Для случаев больших углов
64
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. I
атаки и скольжения с помощью направляющих косинусов осущест¬
вляется преобразование компонент скорости ветра из поточной к
связанной системе координат. При этом исходные ветровые воз¬
мущающие воздействия претерпевают линейное преобразование с
коэффициентами, зависящими от значений аир при отсутствии
ветра.
Итак, при указанных допущениях для изучения воздействия
изотропной атмосферы на быстролетящий самолёт достаточно ис¬
пользовать статистические характеристики двух случайных функ¬
ций
t/хсл = (W), U усл = иусл (VI). (1.63)
Эти случайные функции обычно считаются стационарными.
Основанием к такому допущению служит то, что области с практи¬
чески одинаковыми характеристиками турбулентности имеют до¬
вольно значительную протяженность (например, десятки кило¬
метров), так что изменение статистических характеристик ветра
в полете происходит относительно медленно. Корреляционные
функции случайных скоростей (1.63) могут быть представлены либо
как функции расстояния, либо как функции временного интервала:
(Дх) = М [t/^сл (X + Дх) Uуел (х)] =
= м \Uyсл (VI + КДт) иусл (W)] = R, (УДт),
R2 (Дх) = М [f/хсл (х + Дх) ихсл (х)] =
= М[(/ хсл (Vt +УДт)[/ хсл (W)] = Т?2(УДт).
Здесь М — символ математического ожидания. Естественно, осно¬
вой определения корреляционных функций или спектральных ха¬
рактеристик атмосферной турбулентности служат эксперименты,
проводимые в полете и в наземных условиях. Задача определения
статистических характеристик атмосферной турбулентности очень
сложна, так как метеоусловия отличаются исключительным разно¬
образием и реальная атмосфера нестационарна (является неста¬
ционарным случайным полем). Поэтому, несмотря на значительное
количество экспериментальных работ, сведения о статистических
характеристиках турбулентной атмосферы являются далеко не
полными.
Экспериментальные данные аппроксимируются различными эм¬
пирическими формулами. С точки зрения анализа и синтеза динами¬
ческих систем, находящихся под действием ветровых возмущений,
наиболее удобна такая аппроксимация экспериментальных статис¬
тических характеристик, при которой спектральные плотности явля¬
ются дробно-рациональными функциями частоты. В этом случае
ветровые возмущающие воздействия могут быть представлены в виде
1.3]
МОДЕЛИ ДВИЖЕНИЯ САМОЛЕТА В ТУРБУЛЕНТНОЙ АТМОСФЕРЕ 55
6 лого шума, прошедшего линейные формирующие фильтры обыч¬
ай структуры. Наиболее простым представлением, удовлетворя¬
ющим этому условию, являются эмпирические формулы следующего
вида:
2 Л I Дх| \ ( | Дх| \
£1(Ax)=<m 2L/exP =
2 Л VI Ат | \ I VI Ат|Д
= ) ех₽ I L )’ <L64>
R2 (Ах) = al exp ( Ц^ = а„ехр( 1) ■ (1.65)
Здесь a2 — дисперсия скорости случайной составляющей ветра,
£ — Так называемый масштаб турбулентности. Выражения
(1.64), (1.65) предложены в работе [1.38] и используются во многих
последующих трудах. Случайный процесс иусл (V7), корреляцион¬
ная функция которого имеет вид (1.64), может быть представлен
посредством белого шума и формирующего фильтр а из трех звеньев:
двух одинаковых апериодических звеньев с постоянной времени
L/V и форсирующего звена с постоянной ]ЛЗ L/У. Случайный про¬
цесс UXCJ] (V/), корреляционная функция которого имеет вид (1.65),
эквивалентен белому шуму, профильтрованному апериодическим
звеном с постоянной времени L/V. Соответствующие спектральные
плотности имеют вид
51 (со) = j ₽! (VAt) exp (— /соАт) с/Ат = -^-а2и — ,
(1.66)
52 (<о) = 2 ст2 1—_. (1.67)
1 + “2 “р2"
Дисперсия скорости ветра о2 и масштаб турбулентности L
ависят от метеоусловий и изменяются в широких пределах. Ат-
осфера считается практически спокойной, если ои < 0,5 м/сек,
сильно возмущенной, если ои > 2,5 м/сек. Для L обычно рас¬
сматриваются значения от 100 до 1000 м.
то фи аналитическом конструировании систем управления с уче-
в в сл^ча^НЬ1х воздействий эти воздействия удобно представлять
г>еЛЬ1Х ШУМОВ и уравнений формирующих фильтров в форме
и. В соответствии с (1.64), (1.65) или (1.66), (1.67) упомянутые
56
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл J
уравнения можно записать в форме
(1.68)
(1.69)
где £х = £х (0» ~ %у (0 — белые шумы. Выражения (1.68),
(1.69) неоднократно будут использоваться в дальнейшем.
Учет влияния ветра в уравнениях движения самолета
Относительно учета влияния ветра в симметричных уравнениях
пространственного движения (1.17) уже говорилось выше. Это сво¬
дится к добавлению составляющих скорости ветра к компонентам
путевой скорости в выражениях сил и моментов в правых частях
уравнений (1.17). В несимметричной форме уравнений простран¬
ственного движения (1.1) — (1.6), (1.14) — (1.16) аргументами сил
и моментов наряду с другими параметрами служат воздушная ско¬
рость, угол атаки и угол скольжения. Для учета влияния ветра
в этих уравнениях необходимо указать влияние ветра на отмечен¬
ные три параметра.
Вектор воздушной скорости УВоз получается из вектора путевой
скорости V путем вычитания скорости ветра U: VB03 = V — U.
Отсюда определяются вызванные ветром изменения воздушной
скорости Гвоз, изменения угла атаки ав и изменения угла сколь¬
жения рв. Важно, чтобы эти изменения были выражены через
компоненты скорости ветра в поточной системе координат, так как
приведенные выше статистические характеристики относятся к
случайным составляющим ветра в поточной системе координат.
Для большинства случаев скорость самолета существенно выше
скорости ветра. Исключение составляют, пожалуй, только режи¬
мы вертикального взлета и посадки самолетов специальной конст¬
рукции.
Для относительно малых скоростей ветра приращения воздуш¬
ной скорости, угла атаки и угла скольжения, вызванные ветром,
можно считать равными — [/х, Uy!V, UJV, где Uх, Uy, Uz — со¬
ставляющие скорости ветра в поточной системе координат. Подста¬
новка измененных аргументов в выражениях сил и моментов урав¬
нений (1.1) — (1.6), (1.14)— (1.16) дает несимметричные уравнения
пространственного движения самолета как твердого тела с учетом
ветра. Все кинематические соотношения, входящие в замкнутую
систему уравнений, при этом остаются без изменения. Неудобство
1 31 МОДЕЛИ ДВИЖЕНИЯ САМОЛЕТА В ТУРБУЛЕНТНОЙ АТМОСФЕРЕ 57
такого подхода (впрочем, чисто формальное) заключается в том,
чТо после отделения возмущающих воздействий в уравнениях
(ЬигурирУют величины, имеющие смысл «путевого угла атаки»,
«путевого угла скольжения», т. е. угловых координат вектора
путевой скорости. Эти величины не характеризуют обтекание
самолета потоком и поэтому лишены существенного физического
содержания.
Другой прием заключается в том, что в выражениях сил и мо¬
ментов сохраняют аргументы в виде истинных углов атаки, сколь¬
жения и воздушной скорос¬
ти, а ветер учитывают в ки¬
нематических соотношени¬
ях. Системы уравнений,
получаемые при первом и
втором подходах, эквива¬
лентны и могут получаться
одна из другой. Поясним
оба способа на линейных
моделях продольного и бо¬
кового движений.
Линейные уравнения продольного движения (1.34) с учетом
приращений воздушной скорости Д £7х и угла атаки Дав = MJylV,
вызванных ветром, уступают место следующим уравнениям:
Рис. 1.11. Координаты продольного движения
с учетом ветра.
ДУ + avx (ДУ + \UX) + а? (Дап + Дав) + а°Д0 = <4ТД6Т, 1
Д0 + 4 (ДУ + \UX) + а“Дап + а“'Дав + а°М = а®вД6в,
Д<»г 4* Л/nz (ДУ + Д^ж) + Отг (Дап 4" Дав) + amz (Д«п + Дав) + '
+ а^Д(0г = а^Д6в,
Дй = Дфг, до = Д0 + дап>
(1-70)
Здесь Дап — приращение «путевого угла атаки» — угла между
вектором путевой скорости и продольной осью (рис. 1.11), а
cos а0
mV0
а
У
Уравнения (1.70) можно рассматривать как полную линейную
атематическую модель продольного движения самолета при пер-
м способе учета ветра. Если в уравнениях (1.70) использовать
Учрт?аЩ,еНИЯ обь1ЧН°г° угла атаки Да = Дап + Дав, то получим
У влияния ветра по второму способу. Если при этом полагать
58
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
ау = аау, то уравнения принимают вид
ДУ + а* ДУ + а? Да + а9Д6 = а®тД6т — ах kUx,
Де + ау ДУ + а“Да + а9Д6 = а9вДбв — avyMJx,
Д®2 + а^гДУ 4- а^Да + а„2Да -|- а£2Дсо2 =
= а6тв2Д6в - avmAUx,
ДО = Дсо2, ДО = ДО 4- Да — Дав.
(1.71)
Для целей аналитического конструирования нередко будут ис¬
пользоваться уравнения самолета, из которых исключен угол
атаки Да. При отсутствии ветра в этом случае мы имели уравнения
(1.43). С учетом ветра согласно (1.70) получаем
ДУ + а* ДУ + (а9 - а?) ДО + а?Д4 = аб/Дбт - а?Дав - avx\Ux, ]
Дё + ауДУ + (а9 — а“) ДО + а“Д4 = а9вД6в - а“'Дав - ay\Ux,
Д®г+ (а«2 + a^zaVy) ДУ + [а“2 (а9 — а“) — о«] ДО 4-
4* (атг + йтгву) Д^ + (a^z 4* am2) Д®2 = (amz 4- ci'mzdy ) A5B
— (@mz 4- OmzQy) x — (fltnz 4" ChnzQy ) Дав (1тгДмь,
ДО — Дсо2 = 0.
(1.72)
Простейшая модель углового продольного движения с учетом
ветра, как и модели (1.45), получается путем пренебрежения связя¬
ми по скорости, углу наклона траектории, а также влиянием запаз¬
дывания скоса потока и подъемной силы стабилизатора или руля
высоты (ау = 0, = 0, avmz = 0, a^z = 0, аув = 0). Таким путем
из (1.71) находим
Дё + ау\а = 0,
ДСО2 -|“ Я/пгДа + Cl^iz^z = ^2Дбв,
Дё* = Д(о2, ДО = Д0 4- Да — Дав.
(1.73)
Вводя возмущающие воздействия ветра согласно первому спо¬
собу в линейные уравнения бокового движения (1.52), получаем
До\ 4- а£хДо\ 4- агпх^у 4- а^Д₽п = а^Дбэ 4- а^Д6н —
Дсоу 4- 4" CLrny^y 4“ #Snt/APn = Я^Д^Э 4* #/ш/Д$н —
ДРП — Иму 4- а2 дрп 4- а^Ду = — af Дрв,
Ду — Дсп = 0, ’
(1.74)
МОДЕЛИ G
УЧЕТОМ АЭРОУПРУГИХ КОЛЕБАНИЙ
59
$ 1.41
е ДР = ДР — дРв = ДР — -V2- — путевой угол скольжения,
ГДС угол между вектором путевой скорости и продольной осью
6 Лжем случае — плоскостью симметрии) самолета. Переходя к
«иному углу скольжения, находим вторую форму линейной
модели бокового движения с учетом ветра
ДЙЖ + йтлгДсйл: + атхД®1/ + = атхДбэ + ЯтлД^н,
ЛЫд + Оту Д®* + Оту^у + а«!/ДР = й.ту^>э + Птг/Д8н,
Д0 — Д®^ + ДР + а?Д? = ДРв»
Ду — Д®х = 0.
(1.75)
Здесь возмущающее воздействие от ветра непосредственно присут¬
ствует в правой части только одного уравнения.
§ 1.4. Математические модели самолета как объекта
управления с учетом аэроупругих колебаний
В предыдущем изложении самолет рассматривался как твердое
тело, т. е. считался идеально жестким. Между тем отличия свойств
многих современных крупных летательных аппаратов от свойств
твердого тела проявляются весьма ощутимо. Две основные причины
вызывают отличия характеристик летательного аппарата в сравне¬
нии с характеристиками «твердой» модели: наличие на борту зна¬
чительного количества жидкого топлива и упругие деформации
конструкции.
Влияние жидкости, полностью или частично заполняющей полос¬
ти твердого тела, на движение этого тела рассматривалось в целом
ряде работ, начиная с классической работы Н. Е. Жуковского
[1.39] — [1.50]. Часть этих исследований непосредственно отно¬
сится к задачам получения удобных моделей движения летательных
аппаратов с жидким топливом. Однако влияние топлива в баках
на характеристики устойчивости и управляемости существенно
снижается за счет конструктивных мер (наличие перегородок в ба-
ах и др.), не ухудшающих значительно общие летно-технические
д иные летательного аппарата. Простейшая форма учета в виде
на ивалентнь1х моментов инерции и массы очевидна. Поэтому
в ба°ДеЛЯХ летательнь1х аппаратов, отражающих влияние топлива
в кииЗХ’ останавливаться не будем. В принципе все излагаемые
могутГе.МеТОДЫ аналитического конструирования систем управления
щим йпЫТЬ пРименимы к моделям объекта управления, отражаю-
(Ьопмр ияние жидкого топлива, если эти модели представлены в
В птИСТеМ °^ыкновенных дифференциальных уравнений. |
Уве.пии^и^еНИИ аэР°УпРУг°сти необходимо отметить следующее,
скорости полета ц связанное с ним возрастание
60 МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ [Гл. I
скоростных напоров, увеличение удлинения фюзеляжа и уменьшение
толщины крыла, возрастание стартового веса тяжелых самолетов
и ракетных систем, снижение запасов прочности, увеличение дина¬
мической напряженности процессов управления вызывают возрас¬
тание роли аэроупругости. Аэроупругость, как подчеркнуто в самом
названии, явление сложное. Оно связано с воздействием аэро¬
динамических сил на упруго деформируемые конструкции, обла¬
дающие определенным множеством собственных движений — коле¬
баний. Флаттер — типичное проявление аэроупругости.
При изучении влияния аэроупругости на самолет как объект
управления можно различать влияние упругих колебаний и влия¬
ние собственно аэроупругости. Упругие колебания фюзеляжа,
крыльев и других элементов конструкции как упругой системы
могут существовать вне связи со скоростным напором (при
практически нулевых скоростных напорах). При отключенных си¬
стемах управления колебания затухают в основном за счет потерь
энергии в конструкции (внутреннего или конструкционного тре¬
ния) и естественного аэродинамического демпфирования (при зна¬
чительных скоростных напорах). Естественное затухание свободных
упругих колебаний происходит относительно медленно: возбужден¬
ное собственное движение затухает за десятки циклов (периодов).
Аэроупругие колебания появляются тогда, когда изгибные коле¬
бания создают силы и моменты, вновь воздействующие на эти коле¬
бания, т. е. когда возникают обратные связи в системе: нежесткое
тело — поток воздуха. Аэроупругие колебания заимствуют энер¬
гию из набегающего потока. Поэтому возникновение аэроупругих
колебаний сопровождается увеличением лобового сопротивления.
Аэроупругие колебания даже в неуправляемом полете могут при¬
водить к нежелательным, а иногда и катастрофическим последст¬
виям, вплоть до разрушения летательного аппарата. В управляе¬
мом полете как при действии аэроупругости, так и при действии
частного вида аэроупругости — упругих колебаний — возможность
возникновения незатухающих колебаний остается и без принятия
специальных мер даже возрастает.
Действительно, упругие колебания воздействуют на датчики
системы управления, последние посылают сигналы в исполнитель¬
ные устройства органов управления. В образующихся замкнутых
контурах могут возникать расходящиеся процессы и автоколебания.
Вместе с тем наличие органов управления и достаточно быстродей¬
ствующего привода позволяет вести борьбу с аэроупругими коле¬
баниями, обеспечивая их гашение активным воздействием. Други¬
ми словами, упругие и аэроупругие колебания могут подав¬
ляться быстродействующей рационально построенной системой
управления.
Область, объединяющая аэроупругость с автоматическим управ¬
лением, иногда называется автоаэроу пру гостью. В широком плане
МОДЕЛИ G УЧЕТОМ АЭРОУПРУГИХ КОЛЕБАНИЙ
61
§ I-41
оаэроупругость занимается не только подавлением аэроупру-
аВТ колебаний, но и оптимальным управлением аэроупругими объек-
ГИми вообще. Ввиду того, что при рассмотрении аэроупругости,
13 бенно таких ее явлений как флаттер, приходится иметь дело
0С° тсокочастотными механическими колебаниями, важное значение
Слесь имеет нестационарная аэродинамика [1.12] — [1.17].
ЗД Совокупность опубликованных работ, посвященных изгибным
лебаниям, аэроупругости и автоаэроупругости летательных аппа¬
ратов довольно обширна (см., например, [1.16], [1.46], [1.521 —
[1 581). Однако эта область является сложной и многие задачи
автоаэроупругости еще ждут своего решения.
Для описания аэроупругих объектов управления можно исполь¬
зовать различные математические модели.
Модель с сосредоточенными массами
В отношении описания изгибных колебаний этот способ ничем
не отличается от обычно применяемого в механике и теории коле¬
баний способа описания движения сложных упругих систем с со¬
средоточенными массами. Обобщенными координатами уравнений
Лагранжа второго рода здесь служат координаты сосредоточен¬
ных масс в реальном пространстве (трехмерном, двумерном или
одномерном, в зависимости от используемой механической модели
объекта).
Основная трудность здесь заключается в разработке удачной
механической модели с дискретными массами, соединенными упру¬
гими невесомыми (с нулевой массой) связями. Эта модель должна с
необходимой степенью приближения воспроизводить колебательные
свойства реального летательного аппарата, представляющего собой
систему с распределенными параметрами. Относительные коорди¬
наты q2i qn сосредоточенных масс отсчитываются в опорной
системе координат. В качестве опорной системы координат часто
используется связанная система координат воображаемого абсо¬
лютно жесткого летательного аппарата.
В качестве опорной системы координат мы чаще всего будем
использовать мгновенные связанные оси реального летательного
аппарата. Мгновенные связанные оси ориентированы по мгновен¬
ным главным осям инерции. Мгновенные главные оси инерции
иределяются для летательного аппарата как твердого тела, полу-
ающегося путем «замораживания» состояния — воображаемого
«мо.КРаШ,еНИЯ ВСех относительных движений в рассматриваемый
1 мент времени». Указанная опорная система координат является
*тРальнои» т. е. ее начало совпадает с мгновенным центром
сы реального летательного аппарата.
ных е^ЛЬН?1е УнРУгие деформации малы, поэтому описание изгиб-
олеоании обычно можно вести в рамках линейной теории.
62 МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ [Гл. ]
При этом кинетическая энергия движения сосредоточенных масс
относительно опорной системы координат выражается квадратичной
формой
1 п . . J .
т = -о- 3 mikqtqk= qTmq,
1 l,k=\ z
где q = || qr... ^n||T — вектор (матрица-столбец) относительных ско¬
ростей сосредоточенных масс; m = пг = ||т^||— матрица масс (типа
п X п), в частном случае диагональная; индекс «Т» обозначает тран¬
спонированную матрицу. Потенциальная энергия упругих дефор¬
маций выражается квадратичной формой деформаций
ГТ 1 V 1т
11 = — clkqtqk = —qcq,
£ i,k=\ z
где с = ст = ||^|| — матрица (n х п) коэффициентов жесткости.
Расход энергии на внутреннее трение характеризуется диссипатив¬
ной функцией
D = -о- s rikqi'qk = — qTrq,
z i,k=\ z
где г = rT = || rik\\ — матрица (n x n) коэффициентов вязкого
трения. Уравнения Лагранжа второго рода
преобразуются в матричное уравнение
mq + rq + cq = f, (1.76)
где f = \\f\ ... /J|T — вектор дополнительных сил, действующих на
сосредоточенные массы механической модели летательного аппарата.
Эти силы создаются гравитационным полем, движением опорной
системы координат (инерционные силы), аэродинамическими воздей¬
ствиями и управляющими воздействиями, также обычно аэродина¬
мической природы. Таким образом, можно принять
/ = /и + /а + /у»
где — вектор инерционных и гравитационных сил, fa — вектор
аэродинамических сил, /у — вектор управляющих сил. Разработка
механической модели летательного аппарата как упругой системы
позволяет определить матрицы т, с, г. Определение /и осуществля¬
ется обычно весьма просто. Определение аэродинамических сил
/а в рамках чисто механической модели невозможно и требует раз¬
работки определенной аэромеханической модели. Речь идет о том,
чтобы по смещениям дискретных точек (сосредоточенных масс)
механической модели приближенно определить изменение аэроди-
5
1.4]
МОДЕЛИ 0 УЧЕТОМ АЭРОУПРУГИХ КОЛЕБАНИЙ
63
мического давления на поверхностях летательного аппарата и
наВИвалентные сосредоточенные силы в этой модели. Задача эта
Э1пе более трудоемкая, чем разработка удачной механической
еШдели Однако в общем рассмотрении, даже при приближенном
учете нестационарное™ аэродинамики, можно считать, что аэроди¬
намические силы /а являются линейными функциями малых дефор¬
маций q и скоростей q. Кроме того, эти силы можно считать линей¬
ными функциями скорости ветра в рассматриваемых точках.
В соответствии с этим
f a = ^aQ ?аЯ 4“ 4” f аж»
где са, га, съ — квадратные матрицы коэффициентов, — мат¬
рица-столбец составляющих скорости ветра в рассматриваемых
точках пространства, /аж —аэродинамические силы, действующие
на абсолютно жесткий летательный аппарат. Итак, математическая
модель аэроупругих колебаний принимает вид
+ (Г + Га) <7 + (С + Са) У = /у + /и + /аж 4“ (1 •??)
Модель аэроупругих деформаций должна, вообще говоря, рас¬
сматриваться совместно с моделью движения опорной системы ко¬
ординат, так как это движение порождает воздействие /и на дефор¬
мации q и, обратно, деформации q влияют на силы и моменты, опре¬
деляющие движение опорной системы координат. Заметим, что для
движения опорной системы координат уравнения Эйлера, строго
говоря, не справедливы, так как система материальных точек или
тел, с которой связаны опорные координаты, не является абсолютно
жесткой, т. е. не является твердым телом. Необходимо вводить в
уравнения дополнительные члены, зависящие от деформаций и
их производных по времени.
Приведем вывод соответствующих уравнений вращательного
и поступательного движения опорной системы координат. Для этого
сначала получим выражение для момента количества движения си¬
стемы материальных точек с массами mv и радиусами-векторами
относительно мгновенного центра массы rv. Материальные точки
участвуют в переносном движении в виде вращения системы точек
как твердого тела с угловой скоростью со и в относительных движе¬
ниях со скоростями AVv.
Прямоугольная система координат ox1y1z1 имеет начало в мгно-
выпя°М ЦентРе массы- Орты этих координат обозначим f, /, k. Тогда
_ Р жение вект°ра момента количества движения данной системы
точек имеет вид
Д' = 2 ШчГу х (со х rv + Д Vv) =
1 1х!р>у ~ /хгаг) + j+
64
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл. J
где
Iх — S (Уу + Zv),
V
/2 = 2 mv (*v 4" //v),
V
JX2 = 2 mvXvZv,
V
IУ = 5 Шу (Xy + Zy),
V
' Ixy = 2 rnvxvyv,
V
Iyz ~
V
(1-78)
— мгновенные моменты инерции: моменты инерции твердого тела,
получающегося «замораживанием» относительных движений. Есте¬
ственно, что при A = ixv + jyv + kzv = 0 выражение (1.78)
превращается в обычное выражение кинетического момента твер¬
дого тела. По условию опорная система координат ориентирована
по главным мгновенным осяхм инерции. Поэтому 1ху = 1хг =
= Iyz = о. Учитывая это, а также вводя обозначения
Ixy = S /ПуХу1/у, 1xtj = Ixz — HlyXyZy,
V V V
(1 79)
Ixz = //ZyZyXy, = S tTLxUvZvi Iyz = S tTLyZyUy
V v V
— производные по времени центробежных моментов инерции с
«полузамороженными» координатами, выражение (1.78) записы¬
ваем в виде
= ИХЫХ 4- jlу(йу klz^z + i (Iyz — iyz) + l(l'xz — ixz) + k(lxy — ix~y)»
Подставляя это выражение в уравнение закона сохранения мо¬
мента количества движения
получаем уравнения вращательного движения:
1х®х + i х'Ух + (Л 1у)^у®2 + (Ixy — ix~y)^y + (ixz ixz)^z = Мх\,
IyCiyy + //°{/ + (Ix — D ^x^z + (Jyz — iyz) C0z + (ixy — ixy) = M/1, .
//02 + 12(02 4" (Iу — Ix) C0/0^ 4- (/X2 — Ixz) ^x + (iyz — hz) ®y — Ml-
(1.80)
Если относительные движения отсутствуют, моменты инерции по¬
стоянны (/х = /у = /2 = Iху = Ixy = i~X2 = Ixz = iyz ~ Iуг 0), ТО
1.41
МОДЕЛИ G УЧЕТОМ АЭРОУПРУГИХ КОЛЕБАНИЙ
65
уравнения (1.80) превращаются в обычные уравнения Эйлера
вращательного движения твердого тела. „
Связь вращательного движения опорной системы с изгибными
колебаниями осуществляется согласно (1.80) через производные
моменты инерции, которые для малых изгибных колебаний зависят
от а Кроме того, связь движения опорной системы с изгибными
колебаниями осуществляется через аэродинамические моменты
М Ми\, Mzi, зависящие от q и q. Ввиду того, что начало опорной
системы координат совмещено с мгновенным центром массы лета¬
тельного аппарата, изгибные колебания не сказываются на форме
уравнений поступательного движения, но оказывают влияние на
аэродинамические силы, а также направление вектора тяги двига¬
телей. При приближенном учете нестационарности аэродинамики
можно считать, что аэродинамические силы зависят не только от
деформаций q, но и их производных q.
На основе изложенного симметричные уравнения пространствен¬
ного движения самолета с учетом аэроупругости и ветра в скалярно¬
векторной форме представим в виде
тс (Ух + - (AzVy) = (Vx -ux,vy- Uy, Vz - Uz, SH) 6„
6B> 6T, y0, q, q) — mcgs21,
tnz (Vy 4- (azVx - (oX) = Л (Vx - Ux, Vy - U'y, Vz - Uz, 6H( 6Э>
^в’ ®t> q* q)
mc (V г 4- <УХ - их, Vy - Uy, vz - uz, 6„, 63,
^в> ^т> Уо’ q> q)
h^x + (/2 ly) 4- ix(Ax 4- (iXy — ix~) <£)y (/-z — Д-) =
= Mxl (Vx — ux, Vy — Uy, Vz — Uz, b)x, (Ay, (Az, 6H, S3,6B, 6T,
y0> q< q),
+ Ux - Iz) (Ax(Az 4- ly(Ay 4- (/-2 - 4") (Аг 4- (jxy - I-xy) (Ax =
= (Vx — Ux, vy _ uy, Vz — Uz, <AX, (Ay, (Az, SH, бЭ( 6B, 6T,
y0> <7. q),
«Ч + (г4-га)9 4-(с + Са)7 = /у + /и + /аж + сЛ)
1 + Vu — ®2e12 = o, e21 4- o^e23 — = 0,
3 А. А. Красовский
66
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
(Гл. I
812 + ^11—(0xei3== О,
ё1з + ^е12 —wAi = °,
^31 4" ®z®32 = О»
£32 + W2831 (Ох833 = О,
Б33 4” ю*е32 ’ ®{/®31 =
822 + С02821 0)х823 — 0, |
®23 4" <4c822 Wt/821 = I
}0-81)
?о = Ке8з1 + ^ae32 + V2S33‘
Здесь q, fy, f„, fax, £в — матрицы-столбцы, т, г Ч-га, с + са,св —
квадратные матрицы, остальное — скалярные величины, тс— масса
летательного аппарата. Запись уравнений в скалярно-матричной
(векторной) форме (1.81) условна, но позволяет несколько сократить
громоздкое изображение уравнений.
Более полный, чем в рассмотренном случае, учет эффектов
нестационарной аэродинамики можно получить, вводя в рассмотре¬
ние аэродинамические давления в заданном множестве точек по¬
верхности летательного аппарата. Заметим, что эти давления
поддаются измерению и могут контролироваться в полете с помощью
специальных датчиков. Число и расположение точек давления
должны выбираться из теоретических и конструктивных соображе¬
ний. По существу, это — задача приближенного представления
распределенного аэродинамического континуума с помощью дис¬
кретной модели. Вектор р (матрица-столбец) давлений в заданном
множестве точек зависит от вектора отклонений органов управле¬
ния 8, вектора деформаций q и его производной q. Вследствие эф¬
фектов нестационарной аэродинамики зависимость эта динамиче¬
ская. В рамках линейной модели с сосредоточенными параметрами
эта зависимость может быть описана уравнением вида
р + аррр + aqpq + aqpq = ар8,
где рр, ар, ар, ар — матрицы коэффициентов. При введении аэро¬
динамических давлений в качестве дополнительных координат
модели аэроупругого летательного аппарата уравнение деформа¬
ций (1.76) целесообразно преобразовать. Вектор аэродинамиче¬
ских сил /а при этом рассматривается как линейная функция
вектора давлений и вектора отклонений органов управления:
fa = —аРдр+ад8 + с£в,
где cfq, a6q — матрицы коэффициентов, св и £в имеют прежние зна-
чения. Таким образом, уравнение (1.77) в данной модели уступает
место следующему соотношению:
mq + rq + cq + apqp = й®6 + /и + св£в.
Идентификация летательного аппарата в классе рассматривае¬
мых моделей с сосредоточенными параметрами может быть осущест¬
влена на основе описанной выше методики.
МОДЕЛИ С УЧЕТОМ АЭРОУПРУГИХ КОЛЕБАНИЙ
Модель о распределенными параметрами
67
ПРпвоначальное описание деформаций аэроупругого летатель-
пгп яппапата как системы с распределенными параметрами может
пХествляться посредством уравнений в частных производных и
пппепеленных граничных условий. Совокупность уравнении теории
vnnvrocTH аэродинамики в сочетании с заданными геометрически¬
ми Формами и конструкцией летательного аппарата дают очень
полное но и очень сложное описание аэроупругого объекта. Как
правило реальную конструкцию заменяют сравнительно простой
совокупностью балок и поверхностей 11,17]. Для каждой из
подобных частей конструкции известны уравнения в частных про¬
изводных, приближенно описывающие деформации, а условия
сочленения частей дают необходимые граничные условия. Обычно
и такое описание уравнениями в частных производных, по существу,
используется как промежуточное.
Между тем в принципе возможно аналитическое конструирова¬
ние оптимальных управлений, опирающееся только на описание
объекта уравнениями в частных производных (без их «решения»).
При таком синтезе оптимальные управления получаются распре¬
деленными и удовлетворяют некоторым интегральным или интегро-
дифференциальным уравнениям. Для изгибных и крутильных коле¬
баний самолета, рассматриваемого как совокупность крыла, фюзе¬
ляжа и стабилизатора, система уравнений в частных производных
и граничные условия приведены, в частности, в [1.46].
Простейшим уравнением колебаний фюзеляжа в плоскости х1у1
служит уравнение тонкой балки переменного сечения. Полагают,
что подобное уравнение достаточно хорошо описывает указанный
вид колебаний фюзеляжа уже при относительных удлинениях,
больших четырех [1.46]. Без учета внутреннего трения уравнение
имеет вид
+ (t.82)
~ погонная масса и внешняя сила, В (хх) —
тгтло пРогиб В направлении оси Оу1. Граничные усло-
ментов ня rf равенстве нулю поперечных сил и изгибающих мо¬
ментов на свободных концах фюзеляжа:
—а . [в (Х \ ^1(^1. 0 1 _ п 1
dxx <32X1 ] — 0,
рами типа И(1 В^можно^а?^ модели с Распределенными парамет¬
рами типа (1.82) можно перейти к дискретной в пространственном
при хх = 0, хх = I,
3*
68
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
[Гл.
отношении модели простой заменой частных производных конеч¬
ными разностями. Так, если продольную ось фюзеляжа разбить на
п равных отрезков длиной Дх, значения у (хх,/), В (хх), т (хх),
fy (хх, t) в конце f-ro отрезка обозначить yit Bit ml9 fyl, частную
производную в рассматриваемой точке заменить первой разностью
согласно выражению
dz _ zi — zt—\
дхх Дх ’
то уравнение (1.82) уступает место следующей системе уравнений:
п
Ум + 2 а{куи = и{.
(1.83)
Здесь
1
аи —
Bl
тДх* 9
Bi + + в{_2
9
/пхДх4
__ ^i—2
аи~* ~ mt^xi ’
azz_3 = —2
uz = -^-.
‘ mi
(1-84)
2 =
»
От уравнений в частных производных осуществляют переход
также к уравнениям метода форм или собственных функций.
Метод собственных форм или собственных функций
Согласно методу собственных функций мгновенный прогиб
для одномерной (в физическом пространстве) модели фюзеляжа
представляют в виде
У1 С^1> 0 = 2 Tf (^1) ?Фг (О»
I
а для двумерной («плоской») модели самолета — в виде
Г/1 (Хх, Zlt 0 = 2 Ti (%V ^1) ?Ф* (0>
I
(1.85)
где с учетом внутреннего трения определяются уравнениями
2 ^ф//г<7ф/г + 2 ГVikqyk + 2 ^Ф//г^Ф/г = /ф/-
k k k
(1.86)
Суммирование ведется по некоторому, в практических задачах
всегда ограниченному, количеству собственных функций или «то¬
нов колебаний» /, k = 1,2, ...,я. Коэффициенты т^ c^k вычис¬
ляются путем определения собственных функций или функций
форм Действительно, кинетическая и потенциальная энергии
МОДЕЛИ
в УЧЕТОМ
АЭРОУПРУГИХ КОЛЕБАНИЙ
69
§ Ml
деформаций равны
т=4- j 5 m (xi. zi) [S ф* dXidZi “
= _L 2 Мч>к т (х1< г1) Ф« (Х1> dX1 dZy
п = J_ J J 2 ф< (х1«Ис 21 п) х
2 s 1 5
X 2 Фй (|> л) Ф₽л^хх dzlt d£ dr| =
k
= 4-2 J J ф< (х1> 21) Иc г1’ Ь ч)& n) dX1 dZ1 dn'
2 l,k S s
Qna„. m (y c(x z, E, ri)— удельная масса и взаимная жесткость,
интегрированиеЙетея по всему контуру летательного аппарата
в плоскости хх, гх. Уравнения (1.86) получаются из уравнени
Лагранжа второго рода для обобщенных К00₽д™ ^ ПЯИ йоэ-
выражениях потенциальной и кинетической энергии. 11о
занных
тому
m^ik = j j m (xx, Zj) <p( (xx, zx) <pfc (xx, zx) dxx dzv
c<rik = П Ф< (xi> zi) Л c 2р & d^ dX1 dZ1’
s <S
Обобщенная сила имеет выражение
f<Pi = И гр ф/(хх, zx)dxxdzx,
S
(1.87)
(1.88)
где f (хх, zx, 0 — удельная сила, точнее, разность сил,^действую-
щих на единицу площади верхней и нижней поверхностей летатель¬
ного аппарата. Основная трудность при применении метода форм
заключается в определении собственных функций или функций
форм ср, (хх, zj. Если основываться на исходных уравнениях в
частных производных, то для этого необходимо решить соответст¬
вующие краевые задачи. Несмотря на эти трудности, метод форм
широко используется при анализе вопросов аэроупругости и авто¬
аэроупругости традиционными приемами теории автоматического
регулирования.
Можно привести несколько доводов в пользу этого метода.
Хотя математическая модель (1.86), (1.85) упругой системы, так
же как в методе сосредоточенных масс, получается, вообще говоря,
многомерной и многосвязной, ее размерность при равной точности
описания обычно ниже размерности модели с сосредоточенными
70
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
ГГл. I
массами. Если собственные функции <р^ ортогональны в определен¬
ном смысле, то происходит расщепление модели (1.86) на автоном¬
ные каналы. Впрочем, это имеет место обычно лишь для наиболее
простых одномерных (в физическом пространстве) исходных моде¬
лей типа тонкой балки. К числу достоинств метода относится также
то, что после определения собственных функций cpt- сразу определя¬
ется форма непрерывной поверхности самолета при колебаниях
определенного тона. Это облегчает строгое решение аэродинамиче¬
ской задачи аэроупругости.
Однако у метода форм имеются и негативные стороны. Помимо
упоминавшихся трудностей определения собственных функций
для целей аналитического конструирования немаловажное значение
имеет степень наблюдаемости обобщенных координат. Под степенью
наблюдаемости в аналитическом конструировании [П. 17]— [П.27]
понимается отношение числа фазовых координат, доступных для
непосредственного измерения и использования в управлении,
к общему числу фазовых координат системы.
Степень наблюдаемости (fok нулевая, так как эти обобщен¬
ные координаты не имеют прямого физического смысла и не под¬
даются непосредственному контролю. Для непосредственного конт¬
роля доступен прогиб у, его производные по времени, например,
ускорение упругих деформаций у± = а также угловые
деформации и их производные по времени g^1-, «
Величины контролируются позиционными гиродатчика¬
ми совместно с угловыми движениями опорной системы координат.
Аналогично датчики угловых скоростей (ДУС) реагируют на - >
d2r/i « 1 »
в совокупности с составляющими угловой скорости опорной
системы координат. Прогиб может измеряться тензодатчиками или
другими устройствами.
Ускорение -^1-может контролироваться совместно с ускорением
опорной системы координат акселерометром или определяться путем
двойного дифференцирования прогиба. Величина может кон¬
тролироваться путем дифференцирования сигнала измерителя про¬
гиба или интегрирования сигнала акселерометра.
В любом случае для косвенного полного контроля п тонов коле¬
баний необходимо 2п датчиков *), размещенных в различных точках
*) Возможность использования комбинированных датчиков, контролирую¬
щих одновременно две или несколько компонент, здесь не рассматривается.
. _,гтгхи РГ. КОЕ
КОНСТРУИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ 71
д=1У1 (*11> гИ’ У ^12’ Zla’ ” U (Xln' Zw ’
где
т<р = Ц/Пф/Д *Ф = II r«Wft И» Сф —||c<PZfe||
матрицы (л X п). Исключая <7Ф, находим
mq + rq + eg = fq>, 0 •
(1.89)
где т = /Пфф-1, г = мГ1, с = сФ<р *. Таким образом, уравнения
объекта, составленные по способу форм, приведены к виду, анало¬
гичному уравнениям объекта с сосредоточенными массами.
Хотя пути получения моделей (1.76), (1.89) различны, по форме
они аналогичны и могут одинаковым образом использоваться при
синтезе систем демпфирования аэроупругих колебаний или синтезе
систем управления аэроупругим летательным аппаратом вообще.
§ 1.5. Математические модели объектов
для целей аналитического конструирования
систем управления
В соответствии с теорией аналитического конструирования си¬
стем управления, изложенной в Приложении, почти все описанные
математические модели движения летательного аппарата могут
быть использованы для решения тех или иных задач синтеза.
Ввиду этого данный параграф может показаться излишним. Однако
есть ряд общих вопросов, касающихся описания нелинейных
объектов, которые целесообразно здесь изложить. Для объекта,
описываемого уравнениями
п
xi + fi (xi> • • • » хп, t) = 2 Ф/а , хп, i) ик (1.90)
k=\
(*=1,2, ... , n),
где fh <pzfe заданные функции, uk — управления, рассмотрим два
способа представления характеристик ft = ft (хь %ПУ /).
Первым является способ степенных рядов или полиномов,
ри этом способе функции ft считаются аналитическими и
72
МОДЕЛИ САМОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
trn. 1
представляются бесконечными или конечными степенными рядами
п п п
2 O'ik^k + ^lkl^kXl + S a klmXkXlXtn + **’ (1-91)
’ k=l k,l=\
(£=1,2, ...» n).
Коэффициенты aik. ana, dikim, ... здесь в общем случае зависят
от времени t и являются симметричными относительно всех индек¬
сов, исключая первый:
Clikl = Clllkt aiklm = ciilktn = Clllmk == • • •
Определение коэффициентов некоторых нелинейных членов
уравнений движения летательного аппарата, например, нелиней¬
ных составляющих в уравнениях Эйлера свободного движения
твердого тела, не составляет труда. Определение коэффициентов
нелинейных членов аэродинамических сил и моментов при обыч¬
ных методиках аэродинамических экспериментов является весь¬
ма трудоемким. Даже для таких простых функций, как
тх = /Их₽ + mz = т%а + /п?р,а02, су = суа + с^2ар2,
(1.92)
которыми аппроксимируются коэффициенты поперечного, про¬
дольного моментов и коэффициент подъемной силы при значитель¬
ных углах скольжения [1.28], нахождениес^г по стати¬
ческим характеристикам требует немалого экспериментального
материала. Поэтому существенное значение имеют возможности
автоматизации определения «аэродинамических производных», осо¬
бенно старших производных. Одна из этих возможностей рассматри¬
валась в § 1.1.
Представление характеристик объекта в виде полиномов или
бесконечных степенных рядов порождает соответствующий метод
аналитического конструирования, при котором оптимальные управ¬
ления получаются также в форме степенных рядов (см. § П. 5).
Разумеется, на практике всегда приходится ограничиваться конеч¬
ным числом членов степенных рядов, но и реализация полиноми¬
альных управлений не всегда бывает удобной, особенно посредством
аналоговых устройств. Поэтому заслуживает внимания второй ос¬
новной способ представления характеристик нелинейного объекта —
способ кусочно-линейной аппроксимации.
В фазовом пространстве рассматривается область G всех воз¬
можных состояний объекта. Эта область делится на N неперекры-
вающихся областей Gv (v = 1, 2, ..., 2V). Области Gv в совокуп¬
ности составляют область G. Одна из областей, как правило, со-
§ 1-5]
аналитическое конструирование систем управления
73
прожит начало координат х2 • •• хп отображающее
возмущенное состояние объекта. Эту область назовем централь¬
ной и будем обозначать GP В каждой из областей Gv характерис¬
тики /• (*i ..., х/7, О нелинейного объекта (1.90) аппроксимируются
линейными функциями
ft = aZo + 2 а^хь- (1 -93)
k=i
Здесь aZo, — коэффициенты, являющиеся для нестационарного
объекта функциями времени, а для стационарного объекта — по¬
стоянными вещественными величинами.
Способ кусочно-линейной аппроксимации, т. е. способ определе¬
ния коэффициентов aiQy aik по исходным характеристикам объекта
здесь не рассматриваем, так как он может быть различным для
различных конкретных объектов. В частности, для дифференцируе¬
мых функций fi коэффициенты кусочно-линейной аппроксимации
могут определяться по формулам
= h (4, ..., xl
(1-94)
где (4, ...,_4) — некоторая точка в области Gv. Уравнения объек¬
та (1.90) при кусочно-линейной аппроксимации уступают место N
системам уравнений:
п т
Х; 4" 21 ^ikxk + 4о = .2
Z=I k=\
(z = 1, 2, .... n).
(1.95)
Каждая из этих систем уравнений имеет силу только в соот¬
ветствующей области Gv. В матричной форме уравнения (1.95)
имеют вид '
X + avx + ао = q>u, (1.96)
где а = || alk ||, ф = || || — матрицы (п X п), х, ао, и — векто¬
ры (матрицы-столбцы). Для краткости уравнения (1.95) или (1 96)
обпяет ”33гВаТЬ °Убобъекталш- Число субобъектов равно числу
ньГобт^’ Т‘ С- РЗВН0 N- ТакИМ обРазом’ «сходный нелиней^
шении пРеДставляется в „виде совокупности линейных в отно-
из котопктуТВеННЫХ движений (при « = 0) субобъектов, каждый
пространства существует лишь в определенной области фазового
гих^бъо<^'ЛИ^?аная аппроксимация является удобной для мно-
ный ofinan°B’ 110ЭТ0Му данный способ описания, как приближен¬
ии, обладает большой общностью.
Глава II
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ,
АВТОМАТЫ УСТОЙЧИВОСТИ
Ручное управление в современный период остается самым важ¬
ным видом управления пилотируемыми летательными аппаратами.
Это обусловлено несколькими факторами. Ручное управление играет
роль основного аварийного управления, т. е. является резервом,
используемым при отказах автоматического или полуавтоматиче¬
ского контуров управления. Ручное управление используется в та¬
ких режимах полета, включая критические режимы, сложные ситу¬
ации, в которых применение существующих автоматических си¬
стем не рекомендуется или запрещено.
Существуют многочисленные способы применения пилотируе¬
мых летательных аппаратов, требующие управления по данным
визуального контроля. Типичным примером является атака слабо¬
контрастной малоразмерной наземной цели. Во всех этих случаях
требуется ручное управление. Однако в силу ограниченных возмож¬
ностей человека по быстродействию, количеству перерабатывае¬
мой информации, ручное управление возможно лишь для объектов,
характеристики которых удовлетворяют определенным требова¬
ниям.
Система летчик — самолет является классическим примером си¬
стемы человек — машина, и методы инженерной психологии полу¬
чили начальное развитие в авиационной практике, авиационной
медицине [2.1] — [2.4]. Характеристики устойчивости и управляе¬
мости современных самолетов являются неблагоприятными и имеют
тенденцию к дальнейшему ухудшению. Современный самолет чаще
всего невозможно сделать удобным в ручном управлении только за
счет конструкции или компоновки. Какие бы компоновка и конструк¬
ция ни использовались (в пределах ограничений, накладываемых
требованиями к другим летно-техническим характеристикам), сверх¬
звуковой самолет на многих режимах будет иметь недостаточное
демпфирование короткопериодических колебаний, сильное изме¬
нение устойчивости и управляемости в процессе полета, неблаго¬
приятный характер обратного воздействия на летчика со стороны
рычагов управления и др.
Неблагоприятные собственные характеристики устойчивости и
управляемости современных пилотируемых летательных аппаратов
восполняются средствами автоматики. Специальные автоматические
устройства придают летательному аппарату как автоматизирован-
автоматы передаточных чисел
75
§ 2.1 J
V объекту управления новые качества. Характеристики устой-
Н°вости и управляемости при функционирующих автоматах резко
лучшаются. Основное значение это имеет, конечно, при ручном
У давлении, при котором без вспомогательных автоматов пилоти¬
рование часто вообще невозможно.
Н Автоматы, о которых здесь идет речь, довольно разнообразны.
Это демпферы и автоматы устойчивости, реализующие обратные
связи по составляющим угловой скорости и линейного ускорения
самолета. Это автоматы передаточных чисел от рычагов управления
к органам управления. Это автоматы загрузки, обеспечивающие
нарастание усилий на рычагах управления по мере их отклонения.
К этому же классу можно отнести некоторые автоматы безопаснос¬
ти, предупреждающие выход на опасные режимы полета путем
механического воздействия на рычаги управления. Для краткости
все эти автоматы будем называть средствами частичной автомати¬
зации. В совокупности эти средства образуют систему ручного
управления или систему устойчивости и управляемости.
§ 2.1. Автоматы регулирования усилий
на рычагах управления и передаточных чисел к рулям
Для управления продольным угловым движением самолета
существенное значение имеет коэффициент усиления или передаточ¬
ное число по перегрузке. Обозначим усилие на ручке в продольном
направлении Арв, а перемещение ручки в этом направлении хрв.
Тогда коэффициент (градиент) перегрузки по усилию и коэффициент
(градиент) перегрузки по перемещению ручки выразятся соответст¬
венно формулами
А/ А/
д^рв ’ k> - -Д^7 • (2.1)
Здесь А/ — установившееся (статическое) приращение нормальной
перегрузки или нормального кажущегося (т. е. создаваемого
негравитационными силами) ускорения, соответствующее в первом
случае (k, ) достаточно малому приращению усилия на ручке
ки Ах В° ВТОрОМ случае — Достаточно малому перемещению руч-
нм-Рпапоп Я1\°М УпРавлении (без гидроусилителей или дистанцион-
зг1 отетРшаониКеп ВЫС°ТЫ усилие »а РУчке Уравновешивается
усилия rP чтпм Г момента РУЛЯ- Постоянная составляющая этого
средством НР^пСЛУЧае свимается триммером. При управлении по-
момен ’не ХЛ бустеров (гидР°Усилителей) шарнирный
связь по усилию тТСЯ На ручку УпРавления. Между тем обратная
КИ, необхолимя п 6 наРастание усилия по мере отклонения руч-
личии такой таДЛЯ Н0Рмальн0Г0 пилотирования. Только при на-
зи летчик в достаточной мере ощущает создаваемое
76
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл. Ц
Рис. 2.1. I — область нормальной адапта¬
ции, II — область затрудненного пилотиро¬
вания, III — область, где ручное управле¬
ние практически невозможно.
управляющее воздействие. Поэтому на летательных аппаратах
с бустерным управлением устанавливаются механизмы или авто¬
маты загрузки, усилия которых зависят от отклонений рычагов
управления. Постоянные составляющие усилий механизма загрузки
снимаются с помощью так называемых механизмов или устройств
триммерного эффекта.
Итак, для самолета с бустерным управлением в канале руля
высоты или стабилизатора усилие FPB, создаваемое летчиком,
уравновешивается механизмом
загрузки с устройством триммер¬
ного эффекта. Наилучшие усло¬
вия для ручного управления
создаются при определенных зна¬
чениях, точнее, областях значе¬
ний, передаточных чисел &fB, k*B.
В чисто качественном отношении
это иллюстрирует рис. 2.1. Здесь
на плоскости передаточных чисел
&*в нанесены область / наи¬
лучших условий управления,
область II затрудненного управления и область III, где ручное упра¬
вление крайне затруднено или практически невозможно. Практически
подобные диаграммы строятся на основании трудоемких испыта¬
ний на тренажерах или в натурных условиях. Для области I лет¬
чики дают хорошую оценку условий пилотирования, для области
II — посредственную, а для области III — неудовлетворительную
оценку условий пилотирования. Области различны для маневрен¬
ных и неманевренных самолетов и довольно широки и «расплыв¬
чаты», что указывает на развитые способности адаптации человека
и индивидуальные особенности.
Несмотря на упомянутые способности адаптации человека,
естественные диапазоны изменения fefB, kXB для многих современ¬
ных самолетов выходят далеко за переделы допустимой области I
и области II. Поэтому самолеты оснащаются автоматами переда¬
точных чисел. Передаточное число, или коэффициент усиления,
kFB можно представить в виде произведения трех коэффициентов
Коэффициент
Дхв
Д/?рв
(2.2)
определяется механизмом загрузки. Коэффициент
Дбв
Дхв
автоматы передаточных чисел
77
S 2.П
,ОРКПЙ проводки управления представляет собой кине-
Для механически HQe отношение. Передаточное число бустера,
“а7перХоП,ерав»о единице. Коэффициент
ка р = = №?в(0)
, «оипиялся коэффициентом усиления самолета по пере-
в главе формуле (1.51) этот коэффициент приближенно
Рстественное изменение передаточных чисел от усилия к перегрузке
(2 2) и от перемещения к перегрузке
^в = ^/в (2-4)
изменением именно коэффициента усиления самолета по
скорости полета,
Рис. 2.2. Графики зависимости коэф¬
фициента усиления самолета по пе¬
регрузке (kj ) и обратной величины
6в
этого коэффициента (1/fey ) от ско¬
ростного напора и высоты полета.
вызвано — * -
перегрузке k}B. Коэффициент зависит от
плотности воздуха, числа М, центров¬
ки самолета. В рамках стандартной
атмосферы и в пренебрежении зависи¬
мостью от центровки самолета величи¬
ну &/в считают функцией двух пара¬
метров: высоты полета Н и скоростного
напора q. Зависимость (7, Н) ин¬
дивидуальна для каждого типа само¬
лета и определяется по данным аэро¬
динамических экспериментов. В ка¬
честве примера на рис. 2.2 изображено
семейство кривых, отображающих ха¬
рактер зависимости k^3 (сплошные
кривые) и обратной величины l/fe/B
(пунктирные кривые) от q и Н для
сверхзвукового самолета.
При переходе через трансзвуковую
область коэффициент усиления само¬
лета по перегрузке обычно падает за
счет возрастания статической устой¬
чивости и уменьшения эффективности
руля высоты (стабилизатора).
Постоянства общего передаточного числа k^B от усилия на ручке
к перегрузке согласно (2.2) можно достигнуть как путем измене-
ния одного из передаточных чисел kFxt, k™B, так и путем совмест¬
ного изменения этих чисел. С первого взгляда кажется, что наилуч¬
шее решение заключается в изменении kfB обратно пропорционально
78
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
СГл. П
ибо при этом одновременно обеспечивается постоянство
как так и k*B (см. (2.2), (2.4)). Однако такое решение обычно
оказывается неприемлемым в силу по крайней мере двух обстоя¬
тельств. Во-первых, постоянство коэффициента пропорциональ¬
ности между приращением усилия на ручке и отклонением
ручки, которое предполагается данным решением, не дает летчику
возможности чувствовать «тяжесть» управления при больших ско¬
ростных напорах. Во-вторых, сохранение постоянства общего
передаточного числа за счет изменения только одного кинематиче¬
ского передаточного отношения требует широкого диапазона
изменения этого отношения. Изменение передаточного отношения
в механической проводке управления осуществляется за счет
механизма, приводимого в действие тем или иным исполнительным
двигателем. При отказе двигателя в крайних положениях, т. е.
при минимальном или максимальном значении ручное управ¬
ление самолетом крайне затрудняется или становится невозможным.
Таким образом, вопросы безопасности при ограниченной надежнос¬
ти исполнительных устройств диктуют необходимость ограничения
диапазона изменения k&l.
Для того чтобы обеспечить хотя бы приблизительное постоянст¬
во kFB при широком диапазоне изменения й/в и ограниченном
диапазоне изменения £/в, а также создать у летчика некоторое
ощущение «тяжести» управления, приходится одновременно с изме¬
нением kf* менять kFXBi т. е. менять «жесткость» загрузочного ме¬
ханизма.
Такое решение принято, в частности, в автомате передаточных
чисел АРУ-ЗВ. Этот автомат осуществляет изменение передаточ¬
ных чисел kxP, &бв в функции скоростного напора и барометриче¬
ской высоты полета. Точная реализация функциональной зависи¬
мости
&
хв
бв
const
^В(<7.Я)
(2.5)
представленной, в частности, пунктирными линиями на рис. 2.2,
встречает некоторые трудности, особенно при аналоговой аппара¬
туре. Кроме того, вследствие наличия области нормальной адапта¬
ции (рис. 2.1) точное воспроизведение 1/й/в не требуется. Поэтому
в АРУ-ЗВ принята очень простая программа изменения передаточ¬
ных чисел. Эта программа для передаточного отношения $1 изоб¬
ражена на рис. 2.3. Почти по такой же программе изменяется пере¬
даточное отношение kF%. Произведение этих функций
^ВВ(<7,Я)^В(?,/7) = ^В(<7,Я)
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ
79
Рис. 2.3. Программа изменения пе¬
редаточного отношения в АРУ-ЗВ.
9 2-П
изменяется по программе, в некоторой мере близкой к обратной вели¬
чине^9 (q, Н) (пунктирные кривые на рис. 2.2), что и требуется для
приблизительного постоянства На рис. 2.4 представлена блок-
схема АРУ-ЗВ. Скоростной напор, точнее, разность между давле¬
нием полного торможения и статическим давлением, подается в так
называемый малогабаритный реостат¬
ный датчик МРД-106, представляющий
собой прибор манометрического типа
с потенциометром на выходе. Стати¬
ческое давление подается в датчик
МРД-126 аналогичной конструкции,
но анероидного типа.
Потенциометр датчика МРД-106 и
потенциометр обратной связи испол-
' нительного механизма соединены в
мостовую схему. Это обеспечивает
вычитание сигналов датчиков, кото¬
рое на данной схеме представлено уз¬
лом 1. За счет другой мостовой схемы
соединения потенциометров происходит также вычитание сигнала uq
МРД-106 и сигнала ир МРД-126, отображенное узлом 2. Вследствие
этого сигнал в точке а пропорционален разности uq — ир. Если
эта величина положительна, т. е. uq > иР, то она через диод
Рис- 2.4. Блок-схема АРУ-ЗВ.
точке б имеем
иб =
точкГл” ?»2°4.ку (узел) 3> где вычитается из щ. В результате в
| ия ~ (uq — Up) = Up ПрИ Uq > Up>
I Uq При Uq
на рис^^^^мльно^1 ИГЗЗЦИЮ программы, представленной на
Р Ь реальной системе суммирование сигналов, кроме
80
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
. ГГл. п
мостовых схем, осуществляется на многообмоточном трехпозицион-
ном поляризованном реле РСП-5. Это реле охвачено положитель¬
ной обратной связью, для которой используется одна из обмоток.
Назначение данной внутренней жесткой обратной связи заклю¬
чается в увеличении контактного давления, исключения дребезга
и, как следствие, повышении надежности контакта. Кроме того,
внутренняя жесткая обратная связь несколько деформирует ста¬
тическую характеристику всего релейного звена, сохраняя общий
вид характеристики трехпозиционного реле. Коэффициент внутрен¬
ней положительной обратной связи и «зона нечувствительности»
подобраны так, что в отдельно взятом реле с обратной связью авто¬
колебаний не возникает.
Поляризованное реле РСП-5 управляет парой электромагнит¬
ных реле РС-3, которые в свою очередь управляют токами в обмот¬
ках электродвигателя постоянного тока последовательного возбуж¬
дения (ЭД). Данный электродвигатель является составной частью
электромеханизма МП-ЮОМА, который в свою очередь является
составной частью исполнительного механизма АРУ-ЗВ. Электро¬
механизм содержит электромагнитную тормозную муфту ТМ (для
уменьшения выбега), редуктор Р и роликовую винтовую пару (для
преобразования вращательного движения в поступательное), кон¬
цевые выключатели (для размыкания цепи питания двигателя и
подачи сигнала крайнего положения механизма) и датчик обратной
связи Д. Один конец штока исполнительного механизма соединен
с пружиной загрузки, а второй конец — с тягой, идущей к бусте¬
ру. Другой конец пружины загрузки соединен с механизмом трим-
мерного эффекта, не показанным на рис. 2.4. Корпус исполнитель¬
ного механизма качается под действием тяги, соединенной с руч¬
кой управления.
При полностью выпущенном штоке исполнительного механизма
передаточное число k&l от ручки управления к рулю максимально
и максимально передаточное отношение kFXB от усилия на ручке к
перемещению ручки.
Кроме указанных элементов система содержит указатель поло¬
жения исполнительного механизма У и нажимной переключатель
П ручного управления передаточным числом. Эти элементы исполь¬
зуются как резервные в случае отказа блока автоматического управ¬
ления. Итак, АРУ-ЗВ представляет собой простейшую релейную
следящую систему, изменяющую передаточные числа k™B, kFxl
по сигналам функционального преобразователя в соответствии с
изменением скоростного напора и высоты полета. Эта следящая
система работает в режиме медленного изменения задающего воздей¬
ствия (/Шт)з (заданное положение штока исполнительного меха¬
низма). Полный ход штока отрабатывается в нормальном режиме
за 60—90 сек.
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ
81
§2.13
При приближенном рассмотрении подобных медленных процес-
в временем срабатывания реле, временем разгона и торможения
С°ектродвигателя можно пренебречь. Оказывается пригодной про-
стейшая модель следящей системы АРУ-ЗВ, состоящая из релей¬
ного и интегрирующего звена, охваченных обратной связью. Урав¬
нение данной модели следящей системы
имеет вид
1шт = F [(/шт)з — /шт],
где /шт — скорость перемещения штока, F—
характеристика, вид которой представлен
на рис. 2.5. Вводя обозначение для рассо¬
гласования
А = (/шт)з /шт>
получаем
. . Рис. 2.5. Характеристики ре-
Д = — F (Д) 4- (/шт)з> лейного элемента.
где (/шт)з = -37- (/шт)з — скорость изменения задающего воздействия.
Хотя данная модель является одномерной, процессы в ней
при постоянной скорости изменения задающего воздействия удоб¬
но анализировать на фазовой плоскости. Соответствующие графики
приведены на рис. 2.6, Если задающее воздействие постоянно
(/*шт)3 = 0, то автоколебаний в следящей системе не возникает
(рис. 2.6, а). В этом случае при значительном положительном рассо¬
гласовании происходит уменьшение этого рассогласования с пре¬
дельной постоянной скоростью отработки, пока не будет достигнуто
значение Д = Дн (Дн — ширина зоны нечувствительности харак¬
теристики релейного элемента). При Д = Дн происходит отпуска¬
ние реле и система останавливается в данном положении. Анало¬
гично при отрицательном начальном рассогласовании происходит
отработка с максимальной скоростью до достижения границы зо¬
ны нечувствительности.
При (/шт)3 > 0 или (/шт)з < 0 после ликвидации значитель¬
ных начальных рассогласований (если такие имеются) устанавли¬
ваются пилообразные автоколебания с «амплитудой», равной шири¬
не зоны гистерезиса Дг. Это вытекает из формы фазовых траекто¬
рий на рис. 2.6, б, в.
^При (/шт)3 > 0 ступенчатая неоднозначная траектория на фазо¬
вой плоскости сдвинута вверх вдоль оси Д (рис. 2.6, б). Как при
положительном, так и отрицательном больших начальных откло¬
нениях изображающая точка проходит в положение а, после чего
начинается периодическое движение по петле гистерезиса. При
малой скорости изменения задающего воздействия изображающая
точка медленно движется вправо по верхней горизонтальной части
82 АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ. ДЕМПФЕРЫ [Гл ,
петли. При рассогласовании Д = Дн + Дг точка мгновенно пере-
ходит на нижний горизонтальный участок петли, по которой дни-
жется влево почти с предельной скоростью. Далее вновь срабаты¬
вает реле и цикл повторяется. Аналогичная картина имеет место
при отрицательной скорости изменения задающего воздействия,
Рис. 2.6. Процессы в релейной следящей системе.
но здесь гистерезисная кривая на фазовой плоскости смещается
вниз и предельный цикл образует левая петля характеристики.
Период автоколебаний выражается формулой
т. = —Л + —,
(/юь (/ит)м-(/шт)э
автоматы передаточных чисел
63
2.И
, > —максимальная скорость отработки. Время отработки
где (/шт)м с0 средНей скоростью (/Шт)3 равно Т =
полного хода
Рис. 2.7. Процессы отработки следящей систе¬
мой АРУ-ЗВ задающих воздействий, изменяю¬
щихся с постоянной скоростью.]
и' 1(1 . Отношение
= ('шт)м' р •-1
(^шт^м 1 УЩтЬ I (/щт)м
N = ~т7 = дг L — ('шт)м J Дг
„V колебаний за время полного хода штока. По техниче-
равно числу kw дру.зв числ0 колебаний W должно находиться в
ским условиям ан*
ПрепТЛ^есы"отработки данной следящей системой задающих воз-
дейсК изменяющихся с постоянной скоростью, представлены на
рис. 2.7.’Дискретный харак¬
тер отработки создает некото-
рую помеху в канале руля
высоты (стабилизатора). Дейст¬
вительно, если ручка находит¬
ся в отклоненном положении,
то «квантованное» изменение
плеча в проводке управления
сопровождается малыми «кван¬
тованными» отклонениями ру¬
ля. Поэтому величина «кванта
хода» исполнительного меха¬
низма не должна превышать
указанного значения (20—50 «квантов» за полный ход). Эта величина
контролируется и регулируется при настройке АРУ-ЗВ путем измене¬
ния ширины зоны гистерезиса Дг. Последняя изменяется при измене¬
нии коэффициента внутренней обратной связи, охватывающей поляри¬
зованное реле РСП-5. Контуры управления с автоматами передаточных
чисел по назначению и принципу функционирования относятся
к адаптивным или самонастраивающимся системам. То, что настра¬
иваемый контур в режиме ручного управления не является автома¬
тическим, не имеет принципиального значения.
Рассмотренный автомат передаточных чисел может быть отне¬
сен к тому классу параметрических адаптивных систем, которые
называются системами с настройкой в функции параметров среды
или системами с разомкнутым контуром самонастройки [2.6].
11звестно,^ что наряду с такими достоинствами, как быстрота настрой¬
ки, устойчивость разомкнутого контура настройки, адаптивным
системам данного класса свойственны существенные недостатки.
Главные из этих недостатков связаны с большим объемом необхо¬
димой априорной и рабочей информации. Необходимо знать влия¬
ние параметров среды на характеристики объекта и контролировать
текущие значения этих параметров. Контроль текущих значений
параметров среды, выполняемый для решения многих задач,
84
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл. и
Рис. 2.8. Схема системы настройки передаточного
F в
числа kj путем контроля текущего значения этой
величины.
расширяется на современных летательных аппаратах. В этом отно¬
шении база использования принципа самонастройки в функции пара¬
метров среды не только не сужается, но расширяется. Впрочем,
трудности контроля таких параметров, как центровка летательного
аппарата, сохраняются.
Что касается априорной информации, например, типа информа¬
ции, представленной на рис. 2.2, то ее получение всегда сопряжено
с определенными затратами и трудностями. Поэтому возникает
мысль об использовании
для настройки передаточ¬
ных чисел системы ручного
управления других принци¬
пов самонастраивающихся
систем. К числу таких прин¬
ципов относится настройка
по результатам контроля
(текущей идентификации)
характеристик объекта в
полете, самооптимизация и
др. [2.6] -12.11], [3.25] -
[3.27].
Рассмотрим возможность
применения текущей иден¬
тификации для цели наст¬
ройки системы ручного уп¬
равления. Контролю могут
подвергаться как статиче¬
ские, так и динамические характеристики объекта и контура. Для
цели настройки коэффициента усиления контура по перегрузке
должен подвергаться контролю именно этот коэффициент.
Контроль коэффициента усиления контура ручного управления
можно осуществлять путем использования естественного пробного
сигнала в виде перемещений ручки, создаваемых летчиком в обыч¬
ном процессе пилотирования. Спектр такого сигнала сравнительно
широк. Для целей контроля «статического» передаточного числа
целесообразно использовать те составляющие сигналы, частоты
которых ниже собственных частот объекта, но выше частот измене¬
ния параметров среды, влияющих на рассматриваемые передаточ¬
ные отношения.
Выделение соответствующих составляющих сигналов может
осуществляться с помощью инфранизкочастотных полосовых фильт¬
ров. Схема, иллюстрирующая принцип настройки передаточного
числа kF^ путем контроля текущего значения этой величины,
изображена на рис. 2.8. Усилие на ручке F?B контролируется дат¬
чиком Д, а кажущееся ускорение (перегрузка) — акселерометром
А к. Посредством полосовых инфранизкочастотных фильтров Ф вы-
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ
85
- ADlVlViniUl 1 VTIIDIA Л л A v—» Л—* v A QQ
§ 2.H
на ручке
цента сигнала у^лирспил vy, nuiupoit имеют частоты ниже собствен-
ой частоты й)а продольного движения и не содержат постоянных
составляющих. Сигнал 6FpB умножается на заданное значение пере-
даточного числа k^o и вычитается из сигнала б/. Полученная раз¬
ность умножается на SFpB. Таким образом формируется сигнал
Он = б^рв(6/-^оЖв)-
(2.6)
Этот сиI нал усредняется (сглаживается) фильтром низших частот
фр усиливается усилителем У и подается на исполнительный меха¬
низм ИМ. Конструкция исполнительного механизма может быть
аналогичной описанной выше для АРУ. Ввиду того, что сигнал
б^рв является относительно низкочастотным, реакцию 6/ ускоре¬
ния самолета на этот сигнал представим в виде
б/ = k^6FpB.
Из соотношений (2.6), (2.7) следует
vH = (#B-#0B)6^B.
(2-7)
(2-8)
Таким образом, сигнал рн при указанных условиях пропорционален
отклонению текущего значения передаточного отношения от
заданного значения &f0B. Коэффициентом пропорциональности слу¬
жит положительная, но, вообще говоря, случайная величина б/7^.
Для уменьшения неблагоприятного влияния случайных пульсаций
величины SFpe на процессы настройки используется накопление
в фильтре низших частот Фх или, если этот фильтр отсутствует,—
непосредственно в самом контуре настройки.
Хорошие, или «правильные», процессы в подобных системах
всегда получаются в квазистационарном режиме настройки [3.25],
т. е. режиме, при котором процесс настройки происходит медленно
в сравнении с процессами в основном настраиваемом контуре.
данном конкретном случае квазистационарный режим означает
медленное изменение передаточных чисел в сравнении с сигналом
Рв. 1олько в квазистационарном режиме возможно упомянутое
накопление сигнала и„.
(2.Ю)
86
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
(Гл. и
где коэффициент ан зависит от коэффициента усиления усилите¬
ля У. Из соотношений (2.8)—(2.9) вытекает
Lkj + a^F^Lkj = (2-11)
где Afey = — kFjo — отклонение передаточного числа от номи-
нального значения. Уравнение (2.11) является уравнением процесса
самонастройки. Это уравнение имеет случайный коэффициент SFpB,
являющийся случайной функцией времени. Эта случайная функция
принимает положительные и нулевые значения. Однако в квази-
стационарном режиме важно не мгновенное значение коэффициента
6FpB, а некоторое среднее его значение. В этом легко убедиться,
записывая решение линейного неоднородного уравнения с перемен¬
ными коэффициентами (2.11).
Усредненное значение SfpB меняется в полете в сравнительно
узких пределах. Однако в широких пределах, хотя и медленно,
изменяется коэффициент усиления самолета по перегрузке
Для сохранения определенной стабильности процессов самонастрой¬
ки необходимо изменять коэффициент ан так, чтобы величина ajtf
оставалась приблизительно постоянной. Это можно осуществить,
изменяя коэффициент усиления усилителя У пропорционально
регулируемому передаточному числу &fBB. Действительно, согласно
самому назначению устройства самонастройки величина kFtk^ =
= kF* при функционирующем контуре самонастройки остается
приблизительно постоянной. Для подобного изменения коэффи¬
циента аи должна осуществляться связь, указанная на рис. 2.8
пунктиром.
Регулирование передаточных чисел в системах ручного управ¬
ления для самолетов с широкими диапазонами изменения эффек¬
тивности органов управления должно осуществляться не только в
канале руля высоты, нои в каналах элеронов и руля направления.
Для канала элеронов целесообразна стабилизация передаточного
числа от усилия на ручке в боковом направлении к угловой ско¬
рости крена kF9x, а также ограничение диапазона изменения переда¬
точного числа от отклонения ручки в боковом направлении к уг¬
ловой скорости крена kxJx. Для канала руля направления может
стабилизироваться передаточное число от усилия на педалях к бо¬
ковой перегрузке й/2н. Во всех каналах может использоваться
как принцип настройки в функции параметров среды, так и прин¬
цип настройки с контролем передаточных чисел контуров управ¬
ления.
В заключение приведем замечание относительно автоматов пере¬
даточных чисел при дистанционном управлении рулевыми орга¬
нами. Увеличение размеров тяжелых самолетов, влияние упругих
87
САМОЛЕТНЫЕ ДЕМПФЕРЫ
$ 2.2З
Формаций летательного аппарата и самой проводки управления,
сышенность самолетов оборудованием делают актуальным при-
Ненение дистанционного управления рулевыми органами. При
М ком управлении рычаги управления не имеют механической свя-
Ти с рулями или бустерами. На рычагах располагаются лишь дат¬
чики, связанные электропроводкой с исполнительными устройства¬
ми _2 рулевыми агрегатами. Для обеспечения требуемого весьма
высокого уровня надежности в подобных системах диета нционного
управления датчики, электропроводка, рулевые агрегаты, а иногда
и сами рулевые поверхности (секционной конструкции)многократно
резервируются.
При дистанционном управлении автоматы передаточных чисел
от перемещений рычагов к отклонению рулей выполняются в виде
электрических устройств. В виде механических (электромеханиче¬
ских) систем остаются автоматы загрузки, создающие обратные связи
по усилиям на рычагах управления. С принципиальной точки зре¬
ния возможные решения задачи стабилизации передаточных
при дистанционном управлении аналогичны изложенным
чисел
выше.
гаше-
§ 2.2. Самолетные демпферы
Основным назначением самолетных демпферов является
ние короткопериодических колебаний путем реализации обратных
связей по угловой скорости самолета.
Исполнительное устройство демпфера выполняется в виде по¬
следовательного или «дифференциального» рулевого агрегата управ¬
ления (РАУ). Этот агрегат включен последовательно в проводку
управления, так что общее перемещение слагается из перемещения,
создаваемого летчиком, и перемещения, создаваемого РАУ. Подоб¬
ные последовательные рулевые агрегаты часто называются раздвиж¬
ными тягами. Чаще всего РАУ устанавливается перед гидроусили¬
телем (бустером).
Рассмотрим сначала назначение демпфера тангажа, т. е. демп¬
фера, включенного в канал руля высоты или стабилизатора. Про¬
стейшая модель продольного углового движения самолета описы¬
вается передаточными функциями (1.46), основными параметрами
оторых служат частота собственных короткопериодических коле-
ании соа и степень (декремент) затухания £а. Многочисленными
ытаниями на тренажерах и в полете установлено, что существует
ппп|СТЬ ЗНачений этих параметров, для которой техника пилоти-
или НИЯ наиб°лее проста [2.5]. Эта область нормальной адаптации
на nX°PoIQHX оцен°к самолета как объекта управления обозначена
ние qC* Римской цифрой /. Для области II ручное пилотирова-
воети аТРУАНеН° И летчики Дают посредственную оценку устойчи-
обпягт*1 У?Равляемости самолета в продольном движении. Для
и Hi ручное пилотирование практически невозможно ц
88
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл. ц
оценка устойчивости и управляемости неудовлетворительная.
Естественные диапазоны изменения ga, coa для многих современ¬
ных самолетов выходят за пределы областей I и II.
Демпфер тангажа обеспечивает определенную степень постоянст¬
ва затухания короткопериодических колебаний. Идеальный демп¬
фер тангажа изменяет эквивалентное значение £а. Действительно,
обозначим передаточную функцию прямого канала (бустер — ста¬
билизатор — самолет) через (р). Эта передаточная функция ха-
рактеризует объект при отключенном
демпфере. Передаточную функцию демп¬
фера, играющую роль передаточной функ¬
ции обратной связи по угловой скорости,
обозначим &дем 1^2 (р), гДе ^2 (0) = 1.
Передаточная функция самолета с вклю¬
ченным демпфером
Wea (р) = 1 + k^W^pjW^p) • (2-12)
Здесь Wx&2 — передаточная функция от
перемещения ручки, точнее тяги, соз¬
даваемого летчиком, к угловой скорости
тангажа. Для идеального (безынерцион¬
ного) демпфера
^2(Р)=Ь
РАУ просто пропорционально угловой
при безынерционном бустере
(Л)Р + 1)
Рис. 2.9. I — область нормальной
адаптации, II — область затруд¬
ненного пилотирования, III —
область невозможности пилоти-
ро ания.
в
т. е. перемещение штока
скорости. Согласно (1.46)
1^1= 5- .
Р2 +
При включенном идеальном демпфере
wx\ = СХ(геР+1) = СХд(Г9р+ I)
Р2 + 2?ашаР + ®а + к<£>а р+ О Р2 + ад®адР + “ад
Здесь k = йдеМ k™z — общий коэффициент усиления контура демп¬
фирования; <вад = <оа]/ 1 + k —собственная частота контура демп¬
фирования;
= + (2'13)
— степень затухания при включенном демпфере;
^ХВ (02
~ T+k
— коэффициент усиления (передаточное число) при включенном
демпфере. Из этих формул видно, что безынерционный демпфер
САМОЛЕТНЫЕ ДЕМПФЕРЫ
89
ЛГТЬНЯЯ ЬСЛНЧШШ, ГЪ , pFV.vJxx'-r J UVV1I1 muwvi V1V11VH1> <j« . J <>. utmi
Толебаний (£ад существенно больше £а при типовых значениях
параметров) и снижает коэффициент усиления по угловой скорости
^периодических колебаний при включении демпфера вытекает из
того обстоятельства, что для современных самолетов на многих
режимах MoTq существенно выше 1, а £а значительно меньше 1.
На этих режимах даже при относительно небольших коэффициен¬
тах усиления контура демпфирования (k < 1) £ад существенно выше
£а> Это самый важный эффект, обеспечиваемый демпфером.
В сочетании с увеличением демпфирования положительную роль
играет и повышение «эквивалентной продольной статической устой¬
чивости». В частности, включение демпфера может обеспечить устой¬
чивость даже неустойчивого по перегрузке самолета. Это будет
2 _ гу 2 | 1 2 2 I * * хв 2 2
ИМеТЬ меСТО при СО<х О, СОа “т“ КСйа == "Т" =
ахв
— йдем-^->0 (величина aXmZ, как и а^г, отрицательна).
* о
Влияние демпфера в канале руля направления (демпфера ры¬
сканья) на угловую скорость рысканья в целом напоминает влияние
демпфера тангажа на продольное движение. Согласно простейшим
передаточным функциям (1.60), (1.46) аналогия для плоского раз¬
ворота (у = 0) в качественном отношении полная. Таким образом,
идеальный демпфер рысканья увеличивает путевую устойчивость,
резко увеличивает затухание короткопериодических колебаний рыс¬
канья и увеличивает «расход» перемещения педалей.
Роль демпфера крена несколько отлична от роли демпферов
тангажа и рысканья. При отсутствии скольжения и малости спираль¬
ного момента а^х^у угловая скорость крена связана с отклонением
элеронов передаточной функцией апериодического звена. Таким
образом, для прямого канала в этих условиях
(инерционностью бустеров элеронов пренебрегаем). При идеальном
демпфере крена Ц72 = 1 и передаточная функция при включенном
Демпфере равна
1 + «дем Т„р + !
(2-15)
90
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл. ц
где
Т k*3
Т — v k — kkX3 k™ — ®х -
1 ТД — | | k > к — «демосах» ^сохд — j •
идеальный демпфер крена в одинаковой мере
уменьшает
передаточ-
Итак,
(k > 0) постоянную времени угловой скорости крена и
ное отношение от перемещения ручки в боковом направлении к
угловой скорости крена. Все сказанное выше относится к воздей¬
ствию идеальных демпферов на простейшие модели движения са¬
молета.
Отличия реальных демпферов от идеальных весьма существен¬
ны. Для иллюстрации этого утверждения дадим краткую характери¬
стику элементов типового электромеханического демпфера. Чувст¬
вительным элементом демпфера служит датчик угловой скорости
(ДУС), компенсационного или некомпенсационного (с прямым пре¬
образованием отклонения в выходной сигнал) типа, сухого или
поплавкового исполнения. Обычный диапазон измерения — от ты¬
сячных долей рад/сек до десятых долей или единиц рад/сек. Часто
употребляемой линейной динамической моделью ДУС является
колебательное звено с передаточной функцией
Гдус (Р) = J-
Р2 + 2СдусюдусР + тдус
(2.16)
Следует заметить, что эта передаточная функция не отражает
перекрестной связи, имеющейся в полной модели ДУС практиче¬
ски любого типа. Эта перекрестная связь обусловлена моментом сил
инерции относительно оси рамки гироскопа. Она проявляется в
том, что ДУС воспринимает не только угловую скорость вращения
относительно измерительной оси, но и угловое ускорение вращения
относительно оси, перпендикулярной к измерительной. Собствен¬
ная частота недемпфированных колебаний (одус составляет 6 4-
4- Ю гц. а в перспективе — десятки гц.
Значительно хуже динамические свойства исполнительной час¬
ти электромеханических самолетных демпферов. На рис. 2.10
представлена схема усилительно-исполнительной части электроме¬
ханического самолетного демпфера. Она состоит из схемы релейно¬
усилительного блока РУБ и схемы рулевого агрегата управления
РАУ типа раздвижной тяги. На вход РУБ поступает разность сиг¬
налов ДУС и датчика обратной связи ДОС. С помощью ДОС реа¬
лизуется жесткая обратная связь в демпфере, не отображенная на
рис. 2.10. РУБ содержит три каскада усиления. Первый каскад
образует дифференциальный магнитный усилитель МУ. Второй
каскад выполнен на поляризованном реле РПС, а третий — на
электромагнитных реле PC.
Помимо основной управляющей обмотки реле, РПС имеет об¬
мотку обратных связей по току и напряжению. Напряжение обрат-
САМОЛЕТНЫЕ ДЕМПФЕРЫ
91
0 2.2]
й связи по току снимается с сопротивления /?, включенного
^следовательно с якорем исполнительного двигателя постоянного
п а независимого возбуждения. Обратная связь по току положи¬
тельная. Напряжение обратной связи по напряжению снимается
со щеток якоря и регулируется с помощью потенциометра Rp.
Обратная связь по напряжению отрицательная.
Обратные связи по току и напряжению служат для обеспечения
автоколебательного режима работы релейного усилителя (вибра¬
ционной линеаризации за счет автоколебаний) [2.6], обеспечения
Рис. 2.10. Упрощенная схема усилительно-исполнительного устройства электроме¬
ханического демпфера.
требуемого качества переходных процессов в релейной следящей
системе и требуемого вида статической характеристики.
Для пояснения приведем следующие соотношения. Пренебре¬
гая индуктивностью обмоток реле и якоря, суммарные ампер-вит¬
ки обмоток обратных связей представляем в виде
ki^i — k2u2 = krRin — k2 (R^ + ай), (2.17)
гДе ult u2 — напряжения на обмотках обратных связей по току и
напряжению, 1я — ТОк якоря, Й — скорость вращения якоря,
я сопротивление якоря, а ой — противо-э. д. с. Коэффициент
2 можно изменять с помощью потенциометра RD. Принимая во
внимание уравнение моментов
/яй + Мн = &/я, (2.18)
приведенный момент инерции якоря, Мн — приведенный
нт нагрузки на оси якоря, b = const, получаем
92
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл. ц
Здесь
ka = k2a, =-j- (kjR — k2Rs), £„ = (kiR — k2R„).
Таким образом, совокупность обратных связей по току и напряже¬
нию в цепи якоря эквивалентна совокупности обратных связей по
угловой скорости и угловому ускорению, а также создает дополни¬
тельное влияние нагрузочного момента. Нагрузочный момент влияет
Рис. 2.11. Структурная схема внутреннего контура демпфера.
также непосредственно на угловое ускорение и скорость вращения,
так как этот момент может быть приведен к напряжению на щетках
якоря. В соответствии с этим структурная схема внутреннего кон¬
тура рассматриваемого электромеханического демпфера может быть
представлена как на рис. 2.11. Здесь поляризованное реле счита¬
ется двухпозиционным и в совокупности с неполяризованными реле
представляется в виде последователь¬
ного соединения звена с чистым запаз¬
дыванием и безынерционного релей¬
ного элемента с петлеобразной харак¬
теристикой.
В таком контуре возникают относи¬
тельно высокочастотные автоколеба¬
ния, почти не проникающие в следую¬
щий контур, замыкающийся посред¬
ством датчика обратной связи ДОС,
не говоря уже о контуре демпфирова¬
ния в целом. Момент нагрузки Мн соз¬
дается в основном трением в редук¬
торе и винтовом преобразователе вра¬
щательного движения в поступательное.
Этот момент зависит, таким образом, от выходной величины — угловой
скорости Q, и схема рис. 2.11 может быть дополнена соответствующи¬
ми связями. Если коэффициент k2 выбран так, что kM = 0 (£q также
равно нулю), то момент трения приложен в одной точке структурной
схемы. В этом случае этот момент вызывает «зону нечувствительности»
статической характеристики вибрационно линеаризованного релей¬
ного усилителя и РАУ (кривая 1 на рис. 2.12). Путем изменения
k2 можно уменьшить или даже ликвидировать зону нечувствитель-
93
САМОЛЕТНЫЕ ДЕМПФЕРЫ
f г.г]
создаваемую трением. Это видно из того, что при постоянном
н0СТ ’ТР /И общее возмущающее воздействие от этого момента,
"SeBKoS к точке а (рис. 2.11), равно
И обращается в нуль при
ka = ka-^.
При выполнении этого условия статическая характеристика
вибрационно линеаризованного контура приближается к кривой 2
(рис. 2.12). Ход штока РАУ обычно 7
ограничен сравнительно узкими
пределами, соответствующими 20—
А
I
<—
Рис. 2.13. Структурная схема усилительно-исполнительного устройства электромехани¬
ческого демпфера.
25% максимального отклонения рулевого органа. Это обусловлено ус¬
ловиями безопасности при достигнутом уровне надежности электро¬
механических исполнительных устройств. Дело в том, что максималь¬
ная скорость отработки РА У, определяемая основным назначением—
демпфированием короткопериодических колебаний, относительно вы¬
сока. При такой скорости отработки и отсутствии ограничения отказ
типа «максимальный сигнал» вызывает перекладку руля на максималь¬
ный угол за время, меньшее 1 сек. Летчик за такой промежуток вре¬
мени не успевает отреагировать и выключить демпфер. Поэтому
вводится указанное ограничение хода штока РАУ. Ограничение
осуществляется за счет концевых выключателей КВ (рис. 2.10).
лроме того, имеются механические упоры.
Относительно полная структурная схема усилительно-исполни¬
тельного устройства электромеханического демпфера с учетом огра¬
ничения посредством концевых выключателей представлена на
рис. 2.13. Ограничение представлено элементом 1 с П-образной харак-
нах СТИК°й и множительным звеном 2. Пока ход штока РАУ храу
тельДИТСЯ В заданных пределах, коэффициент усиления множи-
нии Н0Г° Звена Равен 1 и ограничение не проявляется. Придостиже-
звеняГРаНИЦЫ огРаничения коэффициент усиления множительного
усилм становится равным нулю и контур разрывается. Магнитный
мени 7^b пРедставлен апериодическим звеном с постоянной вре-
94
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
п
Для целей приближенного анализа процессов в контуредемпфи.
рования изображенная структурная схема чрезмерно сложна.
На рис. 2.14 представлены экспериментальные частотные характе¬
ристики усилительно-исполнительной " -
Рис. 2.14. Экспериментальные частотные характе¬
ристики исполнительного устройства.
части электромеханическо¬
го демпфера, снятые по
обычной методике при по¬
стоянной амплитуде вход¬
ного сигнала и амплитуде
колебаний выходного што¬
ка, меньшей зоны ограниче¬
ния. Из этих характеристик
видно, что с некоторым
приближением усилитель¬
но-исполнительное уст¬
ройство может быть пред¬
ставлено 1
звеном:
колебательным
Р2 + 2£и(0иР 4- 0)2; ’
Величины сои, £и зависят от
настройки РУБ и РАУ,
т. е. коэффициентов обрат¬
ных связей по напряжению
и перемещению. Для рас¬
смотренной схемы электро¬
механического демпфера сои не превышает 2 2,5 гц. Блок-схема
контура демпфирования изображена на рис. 2.15. РАУ включен по¬
следовательно в проводку управления и воздействует на шток гид¬
роусилителя ГУ (бустера). Угловая скорость самолета контроли-
п руется ДУ С. Блок передаточного отношения Б ПО слу-
г ’ . жит для настройки коэффициента усиления контура демп¬
фирования. Вопрос о способах настройки контуров демп¬
фирования в полете будет рассмотрен ниже. Структурная
АРУ
ГУ
Самолет
> k 1
!
РУБ
«С
БГМ
<—
ж
<—
I
Рис. 2.15. Блок-схема контура демпфирования.
схема контура демпфирования тангажа представлена на рис. 2.16-
Бустер здесь представлен апериодическим звеном, ДУ С — коле¬
бательным звеном, РАУ и РУБ — колебательным звеном и звеном
95
САМОЛЕТНЫЕ ДЕМПФЕРЫ
g 2.2]
асыщением, отображающим ограничения хода РА У. Другие не¬
линейности не учитываются.
л ппимер логарифмических частотных характеристик разомкну¬
того контура демпфирования (без учета ограничения хода РАУ)
Рис 2.16. Структурная схема контура демпфирования продольного
углового движения.
представлен на рис. 2.17. Здесь величина 1/Т0 составляет 0,4 соа,
а со в два раза превышает <оа, содус = 8соа, бустер считается
безынерционным, = 0,2, Си = 0,5. Из характеристик видно,
что при коэффициенте усиления контура — 5 дб, что в абсолютных
величинах составляет 0,178, за¬
пас фазы равен всего 40°. Это
указывает на то, что при сближе¬
нии собственной частоты само¬
лета соа с собственной частотой
исполнительного устройства сои
получение достаточного демпфи¬
рования короткопериодических
колебаний затруднено.
Постановка корректирующих
устройств ввиду ограничений в
РАУ по скорости, ускорению и
перемещению может лишь час¬
тично улучшить положение.
Между тем для многих современ¬
ных самолетов в некоторых ре¬
жимах полета соа вплотную при¬
ближается к сои описанных ти¬
повых электромеханических ис¬
полнительных устройств.
Итак, для обеспечения эффек¬
тивного демпфирования на всех
режимах полета короткопериоди¬
ческих продольных колебаний
современных самолетов необхо¬
димо повышение быстродействия
исполнительных устройств. Уве-
!/Тв
/
ус
\
\
0,1 0,2 0,4 0,00,81 2 4 в 810
0,2 0,4 0,60,81 2 4 6 810(1)/^
чи
0
-40
-80
420
460
-200
-240
\
\
\
\
\
i
\
\
Рис. 2.17. Логарифмические частотные ха¬
рактеристики разомкнутого контура демп¬
фирования тангажа.
элрктппгт2Ь1СТРОДе^ствия может быть достигнуто путем применения
Р ривода повышенного быстродействия (электродвигатели с
96
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл.
II
печатными обмотками и др.), а также посредством использования
электрогидравлического или электропневматического привода. Об¬
щеизвестно, что гидравлический и пневматический приводы позволя¬
ют получить наибольшее быстродействие.
Гидравлический привод в наибольшей мере соответствует зада¬
чам точного управления положением массивных деталей при боль¬
ших силах или моментах (например, гидропривод управляемого
стабилизатора). Однако для исполнительного устройства демпфера
нагрузкой обычно является входной шток бустера, не требующий
больших усилий и обладающий малой массой. В этих условиях
предпочтение следует отдать электропневматическому приводу,
особенно приводу с промежуточными пневматическими каскадами
усиления. Наличие промежуточных пневмокаскадов усиления поз¬
воляет иметь весьма малые перемещения во входном электромехани¬
ческом преобразователе, что делает этот преобразователь практи¬
чески безынерционным. Высокий уровень надежности может быть
достигнут за счет применения пониженного давления, питания от
компрессоров турбореактивных двигателей и резервирования.
В заключение кратко рассмотрим вопросы автоматической на¬
стройки контуров демпфирования в полете. Вследствие широких
диапазонов изменения коэффициентов самолета в полете невозмож¬
но сохранить приемлемое качество процессов демпфирования при
постоянной настройке контуров демпфирования. Автоматическая
настройка коэффициента усиления демпфера пока осуществляется
в функции параметров среды, а именно, скоростного напора и высо¬
ты полета. Кроме того, зачастую имеется ручная регулировка, по¬
зволяющая осуществлять в принципе оптимальную в том или ином
смысле настройку, но загружающая летчика. Вследствие отсутствия
у летчика достаточного резерва времени об оптимальности ручной
настройке демпфирования в полете говорить не приходится. Задача
настройки контура демпфирования может быть облегчена постанов¬
кой раздвижной тяги (РАУ) между рычагом управления и автома¬
том передаточных чисел АРУ. Проиллюстрируем это на примере
безынерционного демпфера тангажа.
Согласно выражению (2.13) постоянство декремента затухания
короткопериодических колебаний при включенном безынерционном
демпфере имеет место при условии
где
Ссс Ч—2~ Q = const 1 “Г &,
— коэффициент усиления контура демпфирования (см. выражения
(1.47), (1.51)). Величина a)aTQ обычно не принимает значений, мень¬
ших 2—3. Поэтому даже для идеального демпфера коэффициент уси-
САМОЛЕТНЫЕ ДЕМПФЕРЫ
97
5 2.2]
k не должен превышать 0,5 (£ад в выражении (2.13) целесооб-
п!чно задавать в пределах 0,5 4- 0,7). Учитывая это и предпола¬
гая U малым, получаем условие настройки в виде
&оаГе = = const.
Величина меняется при изменении режимов полета в срав¬
нительно узких пределах. Таким образом, если будет выполнено
условие £Де>Л/в = const, то приблизительное постоянство затуха¬
ния короткопериодических колебаний будет обеспечено. Автомат
передаточных чисел АРУ, как описано выше, стабилизирует kXB,
точнее, уменьшает диапазон изменения kj = k&Bkj • Поэтому
при включении раздвижной тяги демпфера до АРУ коэффициент
усиления самого демпфера £дем может изменяться в меньших
пределах, чем при включении РАУ после АРУ (между АРУ и
гидроусилителем). Однако при установке раздвижной тяги до АРУ
увеличивается обратное воздействие на ручку управления. Это
воздействие возникает при работе РАУ за счет инерции и трения
входного штока гидроусилителя, проводки управления и АРУ.
Достаточно эффективная настройка коэффициента усиления кон¬
тура демпфирования в функции параметров среды требует значи¬
тельного объема априорной информации.
Перспективной является самонастройка контуров демпфирова¬
ния, основанная на контроле свойств замкнутых контуров или дру¬
гих принципах, используемых в самонастраивающихся автопило¬
тах. Одним из наиболее важных вопросов здесь является выбор кри¬
терия или показателя настройки контура демпфирования. Ввиду
того, что основным назначением контуров демпфирования является
гашение короткопериодических колебаний, довольно естественной
является стабилизация запаса фазы. Подобная стабилизация мо¬
жет быть осуществлена посредством схемы, представленной на
рис. 2.18. Здесь дополнительно к обычной блок-схеме контура демп¬
фирования изображена схема контура самонастройки.
Датчик Д преобразует перемещение входного штока гидроуси¬
лителя в электрический сигнал. Этот сигнал пропускается через
фильтр Ф. Фильтр Ф не обязательно должен быть резонансным,
допустимо и даже желательно применение полосового фильтра с
тупяС°п пРозРачности> содержащей частоту среза замкнутого кон-
nnnRQv Р™енение п°лосового фильтра увеличивает мощность ис-
естегтп1М°И ?оставляюш’еп пробного сигнала, которым здесь служит
лпгмиптт^Н11И сигнал рассогласования контура демпфирования. Ана-
PAV / ФИЛЬТР Ф устанавливается в цепи сигнала обратной связи
нения Р°поРционального перемещению штока РАУ. Для устра-
лияния нестабильности амплитуды пробного сигнала
4 А- А. Красовский
98
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
СГл. и
выходные величины фильтров Ф пропускаются через релейные эле¬
менты. Выходные сигналы релейных элементов перемножаются.
При синусоидальном пробном сигнале постоянная составляющая
на выходе множительного звена, т. е. постоянная составляющая
величины
sign [sin (со/ + qp)] sign [sin (со/ + ф + Дф)]
линейно зависит от фазового сдвига Дф. Выходной сигнал множи¬
тельного элемента суммируется с сигналом заданной величины
Рис. 2.18 Блок-схема контура демпфирования с самонастройкой по принципу ста¬
билизации запаса фазы.
фазового сдвига. Результирующий сигнал поступает на интегриру¬
ющее звено, управляющее блоком передаточного отношения БПО.
Контур самонастройки поддерживает такой коэффициент усиления
демпфера, при котором запас фазы на частотах фильтров Ф соответ¬
ствует заданному.
Более общие принципы построения и адаптации контуров демп¬
фирования будут изложены в последующих двух главах.
§ 2.3. Автоматы устойчивости
Автоматами устойчивости обычно называют устройства, пред¬
назначенные для улучшения устойчивости и управляемости посред¬
ством обратных связей по кажущимся ускорениям (перегрузкам).
Для самолетов автоматы устойчивости могут применяться в
канале руля высоты (стабилизатора) и в канале руля направ¬
ления.
автоматы УСТОЙЧИВО©™
99
§ 2.31
ттЖппмяпии в автомате устойчивости служит акселе-
датчиком информац |ИЙ _ дЛУ) пилотажного типа,
рометр UaT4HKo„S точностью, но широкой полосой пропускания
т. е. с ограничении зоном изменения измеряемой величины,
и достаточно широко А ак ометра ддя автомата продольной
°СЬ гЧивостиТеориентируется по нормальной оси самолета 0ух, а
Рис. 2.19. Блок-cxena контура автомата устойчивости.
для автомата путевой устойчивости — вдоль поперечной оси само¬
лета 0zx. Конечно, в принципе возможно использование в автома¬
тах устойчивости информации «навигационных» акселерометров инер¬
циальных систем. Однако по условиям надежности и универсаль¬
ности (в смысле использования на самолетах, не оборудованных
инерциальными навигационными системами) это обычно оказыва¬
ется неприемлемым. Ускорение, воспринимаемое акселерометром,
установленным на расстоянии I впереди центра массы самолета на
продольной оси и ориентированным по нормальной оси, равно
(2.19)
где Yx — составляющая главного вектора всех сил (за исключени¬
ем силы тяжести) по оси Оух, — ускорение, создаваемое аэро-
упругими колебаниями и вибрациями. Величину A/zi можно рас¬
сматривать как помеху для автомата устойчивости. Относительно
высокий уровень высокочастотных помех в контуре ускорения (пере¬
грузки) должен учитываться при создании этого контура.
Реализация эффективного автомата устойчивости требует доста¬
точно быстродействующего исполнительного устройства. Требова¬
ния к быстродействию здесь не менее, а даже более жесткие, чем
в контурах демпфирования. На рис. 2.19 представлена одна из
возможных блок-схем контура автомата устойчивости. Здесь обозна¬
чены также автомат загрузки и автомат кинематического передаточ¬
ного отношения АПО. Сигнал датчика ускорения ДЛУ после
4*
100
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
[Гл. ц
усиления и преобразования в корректирующем устройстве КУ по¬
ступает через блок передаточного отношения Б ПО на исполнитель¬
ное устройство — РАУ, Сигнал ускорения используется также в
автомате загрузки АЗ для создания на рычаге управления усилия,
пропорционального перегрузке. Корректирующее устройство, пред¬
назначено для обеспечения необходимого запаса устойчивости зам¬
кнутого контура.
Для линейной модели автомата устойчивости передаточная
функция замкнутого контура перегрузки равна
1 + ^длу^ку^бус^/ ’
(2.20)
где 1Гдлу, FKy, №бус, — передаточные функции ДЛУ. кор¬
ректирующего устройства совместно с БПО, исполнительного меха¬
низма, гидроусилителя и самолета. При безынерционном автомате
устойчивости и безынерционном гидроусилителе
^длу^ку^и = &ау = const, №бус = 1.
(2.21)
Для продольного движения в соответствии с (1.46), (2.20), (2.21)
Р2 + 2U“aP + “а + ^ау*/®а
Подобный безынерционный автомат устойчивости, эквивалент¬
ный жесткой обратной связи по ускорению, обеспечивает:
а) устойчивость статически неустойчивого (соа < 0) самолета
при | k^ykj | 1’, ^ау^/^а ^-> 0,
б) повышение частоты собственных колебаний статически устой¬
чивого самолета
(2.22)
в) уменьшение диапазона изменения коэффициента усиления
по перегрузке, так как величина
(2.23)
при &ау = const >0, k* > 0 изменяется в меньшее число раз, чем
величина &/;
г) уменьшение декремента затухания
(2.24)
Для увеличения, а не уменьшения декремента затухания можно
вводить воздействие по производной ускорения, при котором
^ку = Т\ур -f- 1.
(2.25)
АВТОМАТЫ УСТОЙЧИВОСТИ
101
2.31
В этом случае
и декремент затухания при включенном идеальном автомате устой¬
чивости может существенно превышать естественный декремент
затухания. Для реального автомата устойчивости, обладающего
ограниченной полосой пропускания исполнительного устройства и
других элементов, наличие корректирующего устройства еще более
необходимо. Правда, можно вместо дифференцирования сигнала дат¬
чика ускорения использовать сигнал датчика угловой скорости.
В этом случае автомат устойчивости как бы совмещается (сопряга¬
ется) с демпфером, причем исполнительное устройство (РАУ) может
быть как общим, так и индивидуальным для контура перегрузки
и контура угловой скорости.
С учетом инерционности исполнительного устройства и датчика
при применении корректирующего устройства типа идеального фор¬
сирующего звена (2.25) частотные характеристики разомкнутого кон¬
тура перегрузки подобны представленным на рис. 2.17 для конту¬
ра демпфирования. Здесь следует только заменить Tq на Тку и coAyc
на (оДЛу (датчик линейных ускорений, как и ДУС, с достаточной
точностью описывается уравнением колебательного звена). Все это
относится, конечно, к случаю статически устойчивого по перегруз¬
ке самолета. Из этих характеристик следует, что при собственной ча¬
стоте исполнительного устройства сои, лишь немного превышающей
частоту самолета соа, требуемый запас фазы либо вообще не может
быть обеспечен, либо получается при низком коэффициенте усиле¬
ния контура. В обоих случаях эффективность автомата устойчивос¬
ти низка.
Таким образом, для автоматов устойчивости необходимы доста¬
точно быстродействующие исполнительные устройства. Это относит¬
ся в еще большей мере к случаю статически неустойчивого по пере¬
грузке самолета. Амплитудно-фазовая характеристика
= —
~ 0)2 — 24(Da(D
статически неустойчивого по перегрузке самолета (^ < 0) имеет
ВИ Г изображенный на рис.2.20 пунктиром (при > 0, 2С<-Ъ >
толюс Ее=ой НччЛУНКЦИЯ W' (Р) В ЭТ0М СЛУчае имеет
рию Найквиетя ? комплексной плоскости. Согласно крите-
чив, если вектор 1 И ” Подобных Условиях устой-
теристика Rcern ~ амплитУДно-фазовая харак-
поворачиваегся на контУРа) ПРИ изменении о) от 0 до оо
Устойчивости а\ш11пи"^ПД^ГСЮЛа вытекает> что для обеспечения
уд о-фазовая характеристика разомкнутого
102
АВТОМАТЫ ПЕРЕДАТОЧНЫХ ЧИСЕЛ, ДЕМПФЕРЫ
' [Гл. II
Рис. 2.20. Амплитудно-фазовые характеристики
статически* неустойчивого по перегрузке само¬
лета и разомкнутого контура перегрузки.
контура перегрузки статически неустойчивого самолета должна
иметь вид, подобный изображенному на рис. 2.20 сплошной линией.
На частоте среза (oCF, при которой | W (/(оср) | = 1, фазовый сдвиг
в самом автомате устойчивости не должен превышать определенной
величины. Коэффициент усиления контура перегрузки W (0) для
обеспечения устойчивости при статически неустойчивом самолете
должен быть больше единицы. Аналогичное условие согласно пре¬
дыдущему имеет место для
безынерционного автомата
устойчивости.
Итак, реализация эффек¬
тивных автоматов устойчивос¬
ти требует достаточно быстро¬
действующих исполнительных
устройств, способных рабо¬
тать при относительно высоком
уровне помех в контурах пе¬
регрузки. Быстродействующие
раздвижные тяги создают,
вообще говоря, повышенные
обратные воздействия на рыча¬
ги управления — повышенную
«отдачу». Это происходит за
счет трения и инерции входных
штоков бустеров. Между тем
«отдача» на рычаги управления не должна превышать определенных
сравнительно узких границ (например, порядка 1 мм на свободной руч¬
ке управления). Иногда это рассматривается как серьезное ограниче¬
ние допустимого быстродействия последовательно включенных испол¬
нительных устройств — раздвижных тяг. Однако правильное решение
вопроса заключается в устранении или компенсации «отдачи» на
рычаги управления при повышении быстродействия исполнитель¬
ных устройств до уровня, допускаемого энергетикой, помехами и
обеспечивающего нужное качество контуров демпфирования и пе¬
регрузки. Самонастройка или адаптация автоматов устойчивости
может осуществляться на основе тех же принципов, что и само¬
настройка демпферов.
Глава III
аналитическое КОНСТРУИРОВАНИЕ систем
РУЧНОГО УПРАВЛЕНИЯ
Под системой ручного управления или системой устойчивости и
управляемости здесь понимается совокупность устройств, обеспе-
чиваюгцих управление полетом летательного аппарата при воздеи-
с или! летчика на рычаги управления. Автоматы загрузки, автоматы
передаточных чисел, демпферы, автоматы устойчивости относятся
к системе ручного управления.
С точки зрения процессов управления существенное значение
имеет информация, используемая летчиком при формировании ко¬
мандных воздействий. Если это информация визуального восприя¬
тия окружающего пространства и показаний обычных приборов,
то имеет место собственно ручное управление. Если при воздействии
на ту же систему ручного управления летчик использует информа¬
цию командных (директорных) приборов, то управление принято
называть полуавтоматическим.
Здесь, однако, мы будем отвлекаться от внешних контуров цир¬
куляции информации и сосредоточим внимание на внутренних конту¬
рах, реализуемых с помощью системы ручного управления. В пре¬
дыдущей главе были рассмотрены простейшие структуры систем
ручного управления и осуществлен элементарный анализ соответст¬
вующих внутренних контуров. Теперь попытаемся осуществить бо¬
лее общий подход в задаче синтеза системы ручного управления и
отдельных ее частей.
§ 3.1. Общая постановка задачи аналитического
конструирования системы ручного управления
летательного аппарата
ипг^ДНИМ И3 возможных путей решения задачи синтеза систем руч¬
ного управления является разработка моделей летчика как звеня
ПУТЬ а очень™ ,н™„ ?руда
должна™nSnR° ССЛИ СИНтезиРУемая система ручного управления
здесь заключат™ В° МН°ГИХ РазноР°ДНЬ1Х режимах. Трудность
летчика в т™ пРежде всего в формализации функционирования
вольно многоХТ достаточно эффективных моделей летчика. До-
конуре“Н„Хе”™13Ю1|-ПНТКчГ Ра3раб°™ «ей ковена в
одномерного ипи nnv 13.5] относятся к простейшим режимам
ерного или двумерного слежения. Дискретность, многосвяз-
104 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. 1ц
ность, нелинейность и адаптивность ручного управления самоле¬
том не отражаются подобными моделями в достаточной мере.
Другой путь не требует использования моделей летчика как зве¬
на контуров управления. Он базируется на приближении пилотаж¬
ных характеристик летательного аппарата с системой ручного уп¬
равления к некоторым желаемым или эталонным характеристикам.
Конечно, и здесь требуются некоторые допущения или данные о
работе летчика. Дело в том, что осуществляется приближение не
только статических, но и динамических характеристик летательного
аппарата как объекта управления. Для обоснованного приближе¬
ния динамических характеристик летательного аппарата с системой
ручного управления необходимы сведения о спектре входных задаю¬
щих воздействий, формируемых летчиком. Однако здесь допустимы
приближенные представления спектра и объем необходимой инфор¬
мации о работе летчика мал в сравнении с объемом информации,
необходимой для построения эффективной модели летчика как зве¬
на внешних контуров управления. Именно этот второй путь синте¬
за систем ручного управления будет рассматриваться далее.
Задающие воздействия, вырабатываемые летчиком в процессе
пилотирования летательного аппарата, обозначим через хм а =
= 1, 2, ..., v). Для типовой системы ручного пилотирования само¬
лета этих воздействий четыре: продольное и боковое отклонения
ручки, отклонение педалей и отклонение ручки управления двига¬
телем. За входные задающие воздействия можно также принимать
не отклонения рычагов управления, а усилия на этих рычагах. Для
некоторых летательных аппаратов и режимов движения в число за¬
дающих пилотажных воздействий можно включать управления тор¬
мозами, углом стреловидности крыла и др. Поэтому в общей поста¬
новке задачи число задающих воздействий летчика не будем огра¬
ничивать четырьмя. Кроме того, через х}-л (J = v + 1, ..., р) будем
обозначать искусственно вводимые для описания задающих воздей¬
ствий летчика промежуточные переменные.
Считая, что величины х/л отсчитываются от значений соответ¬
ствующих математических ожиданий, полагаем случайные функции
Х/л (/) центрированными. Полагаем также, что случайные процессы
х/л могут быть получены посредством линейных или нелинейных
стационарных или нестационарных формирующих фильтров из бе¬
лых шумов g/ (/):
Х/л “F F !л(Х\л, • • • , Хцл> 0 — 5/ (0 (3.1)
(/ = 1,2, ... , и).
Под «белыми шумами» здесь понимается определенная модель
шумов с равномерными спектрами, а именно, последовательности
случайных по «площади» независимых 6-импульсов, разделенных
сколь угодно малыми, но конечными интервалами времени. Все эти
105
§ 3.1]
слабые, так как ипп
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
й для которых должно быть осуществлено приближение лета¬
тельного аппарата с системой ручного управления к желаемому эта-
Уравнения формирующего фильтра (3.1) получаются путем
Лбоаботки экспериментальных записей перемещений рычагов упра¬
вления в полете. Как правило, достаточно использования линей¬
ного стационарного или квазистационарного (с медленно меняю¬
щимися параметрами) формирующего фильтра и подбора его пара¬
метров на основе определения спектральной плотности. Вопросы
определения формирующих фильтров по реализациям случайных
функций достаточно подробно рассмотрены в теории случайных
процессов [3.61 — [3.111.
Следует отметить еще одно обстоятельство, существенное для
конструирования систем ручного управления. Задающие воздейст¬
вия х/л, формируемые летчиком с помощью рычагов управления,
являются наблюдаемыми (измеримыми) величинами. Эти величины,
а также их производные и интегралы могут контролироваться, вы¬
числяться и использоваться для управления. Поэтому задачу ана¬
литического конструирования системы ручного управления це¬
лесообразно ставить как задачу с полной степенью наблюдаемости
1П.27]. Ограничения допустимых уровней шумов в различных
точках контуров и соответствующие энергетические ограничения
могут быть учтены при выборе исходной модели объекта или
минимизируемого функционала.
Уравнения летательного аппарата как объекта ручного управ¬
ления запишем в общей форме:
xic + Ftz (.Vic, . .. , Ххс, Х1л, . . . , ХУЛ, Х1и, .... Ххи, t) = 0 (3.2)
(1 = 1,2, .. . , х),
где xic координаты летательного аппарата, такие как угловые
скорости и скорости поступательного движения в связанных осях,
А'1л, ..., Хул —задающие воздействия летчика. х,„ х„„ —rm!
106 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. щ
инерционности до пренебрежимо малых пределов далеко не всегда
возможно. Поэтому при синтезе систем ручного управления целе¬
сообразно исполнительные устройства считать заданными. Соответ¬
ствующую систему уравнений запишем в виде
%kn + Fkn (X 1и> • • • , Хеи) = (^-3)
(^ = 1, 2, . . . , 8 %),
где uk—синтезируемые управления. Остается теперь записать
уравнения эталона и критерий приближения. Эталон или желаемая
модель устойчивости и управляемости летательного аппарата мо¬
жет быть задана различным образом. Можно задать эталон в виде
совокупности простейших моделей продольного и бокового движе¬
ний. Значения параметров этих простейших моделей определяют¬
ся статистикой испытаний на тренажерах и в натурных полетах.
Другой подход заключается в том, что в качестве эталона выби¬
рается достаточно полная математическая модель самолета с хоро¬
шими характеристиками устойчивости и управляемости, т. е. самоле¬
та, получившего высокую оценку по пилотажным качествам со сто¬
роны летчиков.
В обоих указанных случаях эталон описывается системой урав¬
нений
Х/э [Э(Х{$, • • • , «^хэ» • • • » Хул> /) = 0 (3.4)
(/=1,2, ... , х),
где выходные координаты являются аналогами координат х{с лета¬
тельного аппарата. В уравнения (3.2), (3.4) входят одинаковые за¬
дающие воздействия летчика Х1Л, ..., xVJ}. Гидроусилители (бусте¬
ры) здесь либо считаются идеальными, либо их уравнения включа¬
ются в число уравнений формирующих фильтров (3.1). Задача син¬
теза системы ручного управления состоит в конструировании таких
управлений uki при которых реакции летательного аппарата с син¬
тезируемой системой на задающие воздействия и реакции эталона
на эти же воздействия отличались бы в определенном смысле наи¬
меньшим образом.
Из самой постановки задачи следует, что основная часть функ¬
ционала должна содержать норму разности ьекторов хс (х^, .., ххс)»
хэ (%1э, ...» хкэ), точнее, положительно определенную функцию от¬
клонений хи — Х1э, ...» хкс — хнэ:
Q = Q (Х1с Х1э, • • • » Ххс Ххэ, /)• (3*5)
Как указано, функция Q может также зависеть от времени t. Зави¬
симость от t предусмотрена для случая неустойчивого объекта,
когда при синтезе так называемых нетерминальных управлений без
граничного условия необходимо применение нестационарного функ¬
ционала (см. Приложение). Остальные члены минимизируемого
функционала определяются формулировкой основной теоремы
общая постановка задачи
107
dt +
53,11
п ол Ппя задачи синтеза нетерминальных управлений без гра¬
ничного условия управления ик должны соответствовать минимуму
функционала tt
] = м J +.(м 1Q1 d/ + Т £ J м .
я—‘1 ‘1
(3-6)
k=l G
где М — символ математического ожидания, р, q — положительные
числа, удовлетворяющие соотношению - + - = 1 и такие, что
2₽) г, _ чеТные функции г; kk — заданные вещественные числа;
У (х1л, • • • . • • • ’ Хнс’ Х1и’ • • • ’ Хы" Х1э’ '' ’ ’ Хкэ'
— решение уравнения
дУ V Р
dt £ dxi* М П дХ‘
дх)Л
(3.7)
Приведем некоторые пояснения функционала (3.6). Первый член
функционала выбран в виде М [K=/J, а не М [(У3)/=/2ь где V3-—
некоторая заданная функция фазовых координат, отличная от V.
Как следует из общей теории (см. Приложение), это позволяет ис¬
пользовать для построения оптимальных управлений только вы¬
нужденное решение уравнения (3.7), не зависящее от каких-либо
начальных или граничных условий. Достаточно очевидно, что в
системе ручного управления могут быть реализованы только такие
законы управления, которые не зависят от начального и конечного
моментов времени рассматриваемого интервала, т. е. являются не¬
терминальными и стационарными при постоянных параметрах сре¬
ды (стационарном объекте управления). Поэтому использование
способов синтеза без граничного условия (V3 = V) или со скользя¬
щим граничным условием (см. § П.З) в данной задаче является обя¬
зательным. Два последних члена функционала имеют обычный
смысл, а именно, величина
е _
q { L
di
является оценкой синтезируемых управлений, а величина
108 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. III
— оценкой сигналов управления в оптимальной системе. Соглас¬
но общей теории решение указанной задачи аналитического кон¬
струирования системы ручного управления при полной степени на¬
блюдаемости имеет вид
Uh = - & (^y₽_1 (k = 1, 2, ... , е). (3.8)
При р = q = 2
“*=- й • (3'9)
Управления (3.8) и их частный вид (3.9) минимизируют функционал
(3.6) для объекта (3.1) — (3.4). Заметим, что выражения (3.8), (3.9)
не только определяют структуру и параметры (с точностью до коэф¬
фициентов усиления каналов $) оптимальной системы, ручного уп¬
равления, но и указывают алгоритмы настройки этой системы в
функции параметров среды. Для определения этих алгоритмов, ко¬
нечно, необходимо знание зависимости характеристик (параметров)
летательного аппарата от параметров среды.
Пусть параметры среды, такие как высота полета, скоростной
напор, центровка самолета и др., обозначены через yt. Будем счи-
нать, что ни один из этих параметров среды не совпадает ни с од-
той из выходных величин xic математической модели (3.2) лета¬
тельного аппарата как объекта ручного управления. Между величи¬
нами yh х1с могут быть некоторые связи, но слабые с точки зрения
влияния на ручное управление. Поэтому величины у{ будем рассмат¬
ривать именно как параметры и уравнения объекта ручного управ¬
ления с учетом этих параметров будем записывать в виде
Х/с *4“ F ic 1с, • • • , -^1л, • • • , ^л, • • • , •Я’хи» У1> • • • , Ут)
(3.10)
Таким образом, при учете влияния параметров среды функции А1С
зависят не только от фазовых координат, но и от указанных пара¬
метров. Ясно, что и решение уравнения (3.7) в этом случае зависит,
не только от фазовых координат, но и от параметров среды:
V = V (хЛУ хс, хи, хэ, z/), (3.11)
где хл, хс, хи, хэ, у — векторы задающих воздействий, координат
летательного аппарата, исполнительных устройств системы ручного
управления, эталона и параметров среды соответственно. Зависи¬
мость вектора оптимальных управлений и от у, получаемая вслед¬
ствие соотношений (3.8), (3.11), и является алгоритмом настройки
системы ручного управления в функции параметров среды.
Приведем еще одно замечание. Согласно общей теории управле¬
ния, минимизирующие математическое ожидание функционала, при
случайных воздействиях (3.1) доставляют также минимум функцио-
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
109
пшбых детерминированных воздействиях х/л (0, яв-
налу ПРИ ^венными движениями формирующих фильтров,
ЛЯеШрешениями системы однородных дифференциальных урав-
нениЙ х/л + ^л(х1л, .... 0 = 0
nu«wx начальных условиях. Таким образом, полученное
при пР0ИЗВ0^ется оптимальным как в статистическом, так и ука-
решение явля чесК0м смысле. Система уравнении (3.1), (3.10),
(ЗЗЩЗ^ (3 8), (З.П) отображает общую структуру оптимальной
Рис. 3,1 Общая структура оптимальной системы ручного управления летательным
аппаратом.
системы ручного управления летательным аппаратом. Эта струк¬
тура представлена на рис. 3.1. Векторные (многомерные) воздей¬
ствия здесь изображены двойными стрелками. Вследствие этого
схему рис. 3.1 можно относить не к одному из каналов системы
ручного управления, а рассматривать как условное изображение
совокупности всех (для самолета — четырех) каналов этой си¬
стемы.
Формирующий фильтр является воображаемой частью струк¬
туры, он, естественно, в систему ручного управления не входит.
Формирующий фильтр преобразует вектор белого шума £ в вектор
задающих воздействий летчика хл (хл вместе с остальными «внутрен¬
ними» координатами формирующего фильтра образуют вектор хл).
Воздействие хл через привод органов управления передается на ор¬
ганы управления и летательный аппарат. Эта часть схемы соответ¬
ствует уравнениям (3.10).
110АНАЛИТИЧЕСКОЕ конструирование РУЧНОГО УПРАВЛЕНИЯ [Гл. III
Вектор хл воздействует также на вход эталона или модели. Эта¬
лон или модель соответствует уравнениям (3.4) и реализует ту
динамическую систему, приближение к свойствам которой является
назначением данной системы ручного управления.
Выходная векторная величина модели хэ подается в вычисли¬
тель. В вычислитель поступает также выходная величина преобра¬
зователя хл. Преобразователь служит для восстановления по за¬
дающим воздействиям летчика хл и априорной информации о фор¬
мирующем фильтре «внутренних» координат этого фильтра, т. е.
воспроизведения полного вектора хл. Вычислитель управляет испол¬
нительными устройствами системы ручного управления, которым
соответствуют уравнения (3.3). Выходной вектор хи этих устройств,
помимо привода органов управления, оказывает обратное воздей¬
ствие на вычислитель.
Кроме векторных величин хэ, хл, хи, в вычислитель подаются
сигналы датчиков информации, соответствующие вектору текущих
координат летательного аппарата хс. Согласно общей методике урав¬
нения датчиков, обладающих заметной инерционностью, рассмат¬
риваются в совокупности с уравнениями собственно летательного
аппарата как единый объект управления (3.10). В вычислитель от
специальных датчиков параметров среды поступают также сигналы,
соответствующие вектору у. Вычислитель реализует оптимальные
управления согласно выражениям (3.8) или (3.9).
Непосредственно из схемы рис. 3.1 и уравнений, на основе ко¬
торых эта схема построена, вытекает, что оптимальная система руч¬
ного управления является системой комбинированной, использую¬
щей регулирование как по отклонениям, так и по возмущениям, и
системой с моделью. Даже один этот результат качественного ха¬
рактера, полученный аналитическим путем, указывает на практи¬
ческую эффективность аналитического конструирования систем
управления.
Для получения конкретной структуры и значений параметров
оптимальной системы ручного управления необходимо конкретизи¬
ровать уравнения летательного аппарата, эталона, формирующих
фильтров, исполнительных устройств и вид функционала.
§ 3.2. Аналитическое конструирование систем
ручного управления продольным и боковым
движениями самолета
Весьма распространенным режимом ручного управления явля¬
ется стабилизация некоторого невозмущенного движения, задавае¬
мого посредством приборов или мысленно назначаемого летчи¬
ком. В подобном режиме отклонения от невозмущенного движе¬
ния невелики и можно пользоваться линейными уравнениями
объекта.
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
111
$ 3.21
Синтез системы ручного управления продольным движением
самолета для режима малых отклонений
Для режима малых отклонений в качестве уравнений продоль-
го движения самолета естественно использовать линейные уравне¬
ния типа (1.34). Исключая из этих уравнений Д0 = ДтЭ* — Да и
пренебрегая запаздыванием скоса потока = 0), записываем
д]7 4~ a*“Ь Д^т = 0,
Да —• avybV 4“ (аУ ау) ау&& Дсо2 4~ ау Дхлв Uy Д^ив = 0>
Дс024" UmzbV 4“ Um^ 4“ Umz&&z Umz&%nB атг&Хпв = 0>
ДФ — Д(02 = 0. )
(3.12)
Здесь исполнительное устройство системы ручного управления счи¬
тается выполненным в виде раздвижной тяги или подсоединенным к
проводке управления через суммирующий механизм, так что пере¬
мещение Дхлв, создаваемое летчиком, и перемещение Дхив, вы¬
зываемое исполнительным устройством, складываются. Инерцион¬
ностью бустера пренебрегаем. В качестве простейшей модели дви¬
гателя используем апериодическое звено
Д6Т + А6Т = А- (Дхлд + Дхид), (3.13)
где Дхлд — перемещение ручки управления двигателем, создаваемое
летчиком, Дхид — перемещение ручки управления двигателем, вы¬
зываемое соответствующим исполнительным устройством. Уравне¬
ния эталона записываются в виде, аналогичном (3.12), (3.13), но,
конечно, без воздействий ДхИв, Дхид:
Д\э + Д6ТЭ — Дхлд = о,
ДЭ 1 ДЭ
+ аГэДУэ + (й“ _ авхэ) Даэ + а°эД^э - «®1Д6ТЭ = 0,
Даэ — а^эД^э 4- (а®э __ а“) д«э _ а®эД4э — Дшгэ 4- йуэДхлв = 0,
+ а^эДУэ 4- а^эДаэ + а^9Д«>г9 - а£эДхлв = 0,
— Дсо2э = о.
Таким (ЗЛ4)
Управляемости?’ В качестве эталона (или образца устойчивости и
пая молепк а-г2т.В ПРОДОЛЬНОМ движении принимается полная линей-
ются равными и-Лл^кИЖенИЯ* Коэффициенты эталона (3.14) выбира-
ку устойчивости ФФициентам самолета, получившего отличную оцен-
управляемости со стороны летчиков в натурных
112 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. 1ц
полетах или на тренажерах. Минимизируемый при аналитическом
конструировании системы ручного управления критерий или функ¬
ционал содержит разности выходных координат самолета и эталона:
ДбТот = Д6Т — Д6ТЭ, ДУот = Д V — Д Дссот = Да — Даэ,
Д'О'от = ДО — Дфэ, Д(02От = Д<02 — Д(Огэ-
Поэтому уравнения (3.14) целесообразно заменить на получаемые
из (3.14) и (3.12) уравнения для указанных отклонений:
\y О
МЛиД — V,
1 д
ДУот 4" ЯхэД^от + (<2хэ — Яхэ) Даот 4" ЯхэД^от 4" (ах — Яхэ) ДУ 4"
+ (а* — £ + Охэ — #хэ) Да 4“ (^х — #хэ) ДФ 4" 0хэ — ах ) Дбт = О,
Даот ^t/эДУот 4“ (^г/э ^r/э) Даот ауэ&О'от Д^гот 4-
4" (ауэ — а,у) ДУ 4" (ау — ау 4" ауэ — ^э) Да 4" (^э — ^) ДФ 4“
4” (^г/ йуэ) Д-^лв 4" Uy Д-^ив = 0, ;
Дс02от 4“ ^АпгэДУот 4” ^пггэДаот 4“ ^тгэД^ гот 4“ (p'tnz ^тгэ) ДУ +
4“ (fltnz йтга) Да 4” (^тг й/пга) Д^г 4" (flmzs Qmz) &%лв —
Д^от Д^гот == 0.
(3.15)
Согласно изложенной выше общей методике задающие воздействия
летчика хлв, *лд считаются центрированными случайными функция¬
ми, получаемыми посредством преобразования белых шумов фор¬
мирующими фильтрами. Предположим, что формирующие фильтры
как для воздействия хлв, так и для воздействия хлд могут быть
представлены в виде последовательного соединения двух апериоди¬
ческих звеньев:
Д-^лв 4~
1
^фв1
ДхЛв
1
■^фв1
Дл:Лв — 6,
Д^лв '
1
Т
Дх’
£АЛЛВ
= ?в»
1 фв2
Д*лд +
1
Т
Д4д
~ ?д>
1 фц2
Д-^лд 4-
1
Д*лд
1
Т
' Д-^лд — 0,
1 фд!
1 Фд1
)
(3.16)
$ 3.21
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
113
где белые шУмы, 7фВ1, ?фв2, 7фд1, 7фд2 — постоянные,
определяемые по экспериментальным данным. Остается записать
уравнения исполнительных устройств (датчики считаем безынерцион¬
ными). Для рассматриваемого режима малых отклонений исполь¬
зуем линейные математические модели исполнительных устройств
в виде колебательных звеньев:
ДХив ДХив ==
А-^ив 2£исоиДхив -f- соиДхив = мв,
А-^иД 2£и(0иДхид -(- СОиДЛ'Ид — Uri
ДХид = Д
(3.17)
Здесь мв, «д — синтезируемые управления, £и, сои — постоянные.
Система уравнений (3.12), (3.13), (3.15), (3.16), (3.17) восемнадца¬
того порядка представляет собой в данной задаче уравнения обоб¬
щенного объекта. Введем обозначения
= Д6Т, х2 ~ AV,
Х6 = Д6Тот, Х7 = Д V от,
Хц = Д%лв, Х12 = А-^лд,
Х15 = ДхИв, = Дхид,
х3 = Да, х4 = Дсо2, х5 = ДО,
х8 — Даст, Хд = До^от, Хю = ДОот,
■^13 = А-^лв, ^14 = Д^лд>
(3.18)
Тогда в матричной форме уравнения обобщенного объекта имеют
ВИД
х ф ах = и + &
(3-19)
где а — матрица (18 х 18),
О
О
Xi
*18
О
«в
о
О
114 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. щ
Будем считать невозмущенное продольное движение самолета
устойчивым. Очевидно, что весь обобщенный объект (3.19) в этом
случае следует полагать устойчивым. Обобщение на случай неустой¬
чивого самолета, а значит, и неустойчивого объекта (3.19), может
быть осуществлено стандартным способом.
Основным назначением синтезируемой системы ручного управ¬
ления является приближение динамических свойств самолета с дан¬
ной системой управления к свойствам эталона. В качестве функции
Q минимизируемого функционала используем каноническую
квадратичную форму разностей выходных координат самолета и
эталона:
Q = РббА4“ ОТ + Рв8^аот + РвэА^гот —
== Рб6Х6 + Р77Х7 + Рв8%8 + Р»Д
(3.20)
Разность углов тангажа самолета и модели не включена в функцио¬
нал. так как для синтеза системы ручного управления считается до¬
статочным приближение по угловой скорости тангажа. Все коорди¬
наты обобщенного объекта, т. е. все величины (3.18), в принципе
могут быть измерены. Поэтому рассматриваем случай полной сте¬
пени наблюдаемости. Ввиду высокого порядка системы уравнений
обобщенного объекта (восемнадцатый порядок) наиболее удобно
выражать коэффициенты оптимальных управлений через интеграль¬
ные квадратичные оценки весовых функций объекта (см. § П.4).
Рассматривается синтез нетерминальных управлений без гра¬
ничного условия. Общая для случая стационарного объекта форму¬
ла
для рассматриваемой задачи принимает вид
оо оо
^17,k = Рбб J ^6,17^6* dt + Р77 j W7,l7W7k dt +
0 0
00 00
0 0
00 00
(3.21)
Л18.4 = Pee J ^6,18^64 di + P„ J ^7,18^7* di 4-
0 0
OQ 00
ПРОДОЛЬНОЕ
И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
115
$ 3.2]
Оптимальные управления выражаются формулами
и = U11 = — k2X7 5 A^-kXk = — *17 И 17,1 Абт + A?,2AV +
+ Л,7 зАа + Л17.4А0)г + 417,5де + 417>6А6ТОТ + 417>7AVOT +
+ Лп’зАаот + 417,эА®2от + 417,ioA»ot + 417>11Дхлв + 417>12Дхлд +
+ 4|7Дз (Ах л в + ТФв1А^в) + 417Л4 (Ахлд + Тфд1Ахлд) +
+ Л17,15АХив + 417,1бАхИв + 417,17Ахид + 417.18Ахид],
Ид = и18 = - к\ъ i 418,№ = - *18 [418,1 AST + 418>2AV + 418>3Aa +
4- Л1МА<ог + 418, sAft + 418,6А6тот + 418>7AVot + 4l8,sAaOT +
+ 4|81эДю2от + 418,юАб'от + 418,цАхЛВ + 418,12АХлД +
+ 418,1з(АХлв + 7фв1АхЛв) + 418,14 (АХлд + 7фд1АХлд) +
+ Л18,15АхИв + 418,1бАхИв + 418,17Ахид 4- 418,18АхИД]-
Соответствующая структурная схема контуров системы ручного
управления представлена на рис. 3.2. Как из законов управления
(3.22), так и из структурной схемы видно, что оптимальная система
в полном соответствии с общим выводом предшествующего парагра¬
фа является комбинированной (управление по отклонениям и воз¬
мущениям) с эталоном (моделью).
В сравнении с простейшей системой, реализующей контур демп¬
фирования, контур перегрузки (угла атаки) и, быть может, контур
скорости (автомат тяги), данная оптимальная система ручного управ¬
ления является сложной. Она содержит многие обратные и пе¬
рекрестные связи. Это вызвано прежде всего тем, что при синтезе
использована сравнительно сложная линейная модель пятого по¬
рядка продольного движения самолета и соответствующий эталон.
Реализация систем подобного уровня сложности *) как в аналого¬
вом, так и цифровом варианте на современном этапе сопряжена с
определенными затруднениями. Однако система может быть суще¬
ственно упрощена без значительных потерь в качестве управле¬
ния, т. е. в характеристиках устойчивости и управляемости само¬
лета с системой ручного управления.
Существует несколько путей такого упрощения полной опти¬
мальной системы. Первый путь заключается в простом отбрасывании
кп пппп едует напомнить> что на рис. 3.2 изображена структура каналов толь-
мал! °ЛЬН0Г0 управления в режиме малых отклонений. Общая полная опти¬
система, как видно из последующего, значительно сложнее.
116 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. щ
слабых связей. Ряд связей, представленных в полных оптималь-
ных управлениях (3.22) и соответствующей структурной схеме,
являются слабыми при типовых значениях параметров. Так, на¬
пример, связь по углу тангажа в управлении рулем высоты, обу¬
словленная в режиме ручного управления только влиянием силы тя¬
жести на угловое продольное движение, обычно является слабой.
Рис. 3.2. Структура оптимальной системы ручного управления продольным движением
самолета в режиме малых отклонений.
Слабыми являются перекрестные связи по перемещению и скоро¬
сти перемещения выходных штоков исполнительных устройств, а
неперекрестные обратные связи по этим координатам только из¬
меняют частоту и степень затухания эквивалентных колебательных
звеньев исполнительных устройств. Любая оптимальная система
отличается грубостью [3.12] или слабой чувствительностью [3.12] —
[3.16] по отношению к изменению тех параметров, по которым она
оптимизируется. Отбрасывание слабых связей можно трактовать
как малое изменение соответствующих параметров. Таким образом,
можно отбрасывать слабые связи без существенного увеличения
функционала.
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
117
$ 3.2)
п vrofl путь упрощения синтезируемой системы заключается в
тении задачи с заранее выбранной неполной степенью наблюда-
eM°Fine один способ состоит в упрощении исходной математической
объекта. Применительно к продольному угловому движе-
М0ДС в режиме малых отклонений в качестве упрощенной математи-
ни1°кой модели объекта естественно использовать модель типа (1.45),
которая после исключения Д0 принимает вид
Да + -4- Да — Д^2 = О,
1 в
Дй)2 4“ O'tnz^^z ^тпгДа (2т2Д%лв (7т2Дхив = 0.
(3.23)
В аналогичной форме записываем уравнения эталона продольного
углового движения:
Даэ + 4—Даэ — До)2Э = 0,
У0э
ДсОгэ 4“ dinzэДфгэ 4“ ^/л?эДаэ ^тгэД-^лв = 0. t
(3.24)
Как и выше, удобно использовать отклонения выходных координат
самолета и эталона
Даот = Да — Даэ, Дсо20Т = Дсо2 — Дсогэ-
В соответствии с (3.24), (3.23)
Лаот + Даот 4- ( =J—Да — Дюгот = 0,
1 0э \ 10 ' 0Э ■'
Att>Z0T 4~ ат2эДигот 4~ fl/n>-,Ao.JT -|- (Ятг — #тгэ) А®г 4*
+ (атг атгэ) Да 4“ (Ятгэ —йтг) А.ГЛВ— ПтгАХив = 0.
(3.25)
Уравнения формирующего фильтра для продольного отклонения
от.™ Управления и уравнения исполнительного устройства при¬
нимаем в прежней форме:
А^ив — Д.кив = 0,
Ахив 4- 2£иииДхив 4- ®иАхив = ив.
(3.26)
(3.27)
118 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. щ
Если обозначить
Да = xv
А(Огот = *4,
Ай)^ — -^2» AoCqt — Хд,
0
0
*1
•
•
•
> £ —
0
, и =
•
£в
0
х8
0
«в
0
то уравнения (3.23), (3.25), (3.26), (3.27) обобщенного объекта мож¬
но записать в типовой матричной форме
х -|" ах — и 4” (3.28)
где а — матрица (8x8). Как и в общем случае, неустойчивость
обобщенного объекта (3.28) может возникнуть только из-за неустой¬
чивости самолета, так как остальные звенья выполняются устойчи¬
выми. Рассматривая случай устойчивого самолета, функцию Q ми¬
нимизируемого функционала назначаем в виде
Q = РззАо&от 4“ PadA^zoT = Рзз^З 4~ ?44Х4* (3.29)
В соответствии с общей теорией для нетерминального оптимального
управления без граничного условия коэффициенты выражаются
формулой
ОО OQ
= Рзз ' ^38^3* dt + ₽44 j ®48^4А dt, (3-30)
О 6
где wik — весовые функции объекта (3.28), матрица которых удо¬
влетворяет уравнению
^4-^ = 0, w (0) = 1
(1 — единичная матрица). Оптимальное управление
UB = — ^8 Mei Act 4“ 4" ^83^аот 4" ^SdA^zoT 4-
+ ^86^* лв + Ав(Дх ЛВ 4“ ТфВ1Дх лв ) + Л87Дх ив 4" ^88^* ив]« (3.31)
Соответствующая структура оптимальной системы ручного упра¬
вления продольным угловым движением самолета представлена
на рис. 3.3. Звенья ДУА и ДУС означают датчик угла атаки и дат¬
чик угловой скорости соответственно. На рис. 3.2 датчики не обозна¬
чались, чтобы не загромождать и без этого сложную схему. На
рис. 3.3 приведена структурная схема эталона, эквивалентная уран-
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
119
$ 3.2]
ям (3.24) и передаточным функциям типа (1.46) для эталона.
ненй цис 3.3 достаточно проста и может быть реализована как в
Йялоговом, так и цифровом выполнении.
Согласно общей теории система является оптимальной как
при случайных воздействиях летчика, подчиняющихся уравнениям
(Рис. 3.3. Структура оптимальной системы ручного управления продольным угло¬
вым движением самолета в режиме малых отклонений, синтезированной на основе
уравнений короткопериодического движения объекта.
(3.26), так и при детерминированных воздействиях, удовлетворяю¬
щих однородным уравнениям
А-Хдв Ч у? АХлв 7^ АХдв = О,
1 фв1 1 фв1
АхЛв Ч—Ур Ахл в = О
1 фв2
при произвольных начальных условиях. С целью проверки резуль¬
татов аналитического конструирования системы ручного управле¬
ния продольным угловым движением самолета в режиме малых от-
онении были выполнены вычисления и моделирование *) для ги-
В тетического самолета, коэффициенты которого указаны в § П.9,
чен^и Че£Тве параметров формирующего фильтра были приняты зна-
R пп Уфв1 0’5 сек> ^Фв2 = 1 сек. Для исполнительного устройст-
вя поРппималоеь £и = о,71, сои = 17,9 сект'. Эталон характеризо-
я следующими параметрами:
g^Z3 == io сек~\ 4,38 сек~\ а™э = —14,4секГ2.
) Вычисления и моделирование выполнены А. В. Устиновым,
^АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. щ
Отношение р44/рзз задавалось равным 0,16 сек2. На рис. 3.4 представ¬
лены графики переходной функции h™ (/) для исходного самолета
на различных режимах полета. На рис. 3.5 для тех же режимов
/Н=5км, М=о,8е
М=о,9
/Н=1км,М=0,41
^-^Н=Окм,М=о.к
Н=18км, М=и
О=18'км,М=1,7
0=12км, М=1,95
"Н=5км, M=W
—I 1
10 I, сек
Рис. 3.4. Графики переходной функции й*в (/) для исходного самолета при различных ре«
жимах полета.
Зяплон
9 Si, сек
Рис. 3.5. Графики переходных функций самолета с синтезированной си¬
стемой ручного управления.
изображены графики переходной функции самолета с синтезиро¬
ванной системой управления. Видно, что синтезированная система
обеспечивает хорошую устойчивость и управляемость на всех рас¬
сматриваемых режимах.
, ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА 121
§ 3.2J
Синтез системы ручного управления боковым движением
самолета для режима малых отклонений.
(3.33)
Для режима малых отклонений в качестве уравнений бокового
жения самолета естественно использовать уравнения типа (1.52).
ДВ1 Считая, как и раньше, что система ручного управления содер¬
жит раздвижные тяги, и пренебрегая инерционностью бустеров,
записываем
4" атх^х + 4~ атхЛ(} атх^Хл3 а/Пх^Хиэ
ХН д ХН Д 2 Q
^ШХ^-^ЛН afnxlXXuti
Дй), 4“ Umy^^x 4“ ^mr/ДоЗ, 4“ ^Тш/ДР ату\Хд3 ату&ХИЗ . 32)
атуАХцц = О,
др — \<Оу 4- а^ДР + а?Ду = О,
Ду — Дозх = 0. ’
Уравнения эталона принимаем в аналогичной форме, но без пере¬
крестных управляющих воздействий и воздействий Дхэи, Д*ни:
ДоЗхэ 4- ^тхэД^х> 4" ^тхэДоЗ,э 4“ ^/пхэДРэ ^/ихД-^лэ == 0>
Д03,э 4” ^туэ^^х 4“ Utnys^fJ^y 4- <2/п,эДРэ ^/nz/Д-^лн = 0,
Дрэ ДоЗ,э 4“ ^гэДРэ 4“ ^гэДуэ =
Дуэ — ДсОхэ = 0.
Как обычно, вводим обозначения для разностей выходных величин
самолета и эталона:
Д^ХОТ = Д03х Д^ХЭ» Д^Г/ОТ = ДОЗ, Д03,э, 1
ДРот = Др — ДРэ, Д?оТ = Ду — Дуэ. /
Из (3.32) — (3.34) вытекает
Д^ХОТ 4~ ОщхэДсОхот 4" ^/пхЭД03,от 4" яДхэДРот 4“ (атх — а^хэ) ДоЗх 4"
4- (« - аХ) Доз, + (aL - а^сэ) Др - <Д%ИЭ -
^тхД^ЛН ^лпхД-^ин =
Доз,от 4* &гщ/эДоЗхот -{- &т^эДоЗ,от 4" ^т^эДРот 4"
4- (а®х — а„ХуЭ) Дсох 4- (а^у — а^уз) Дев, 4- (аД, — а^туз) Др —
^шг/Д-^иэ ату&Хлп ату^хцп = 0,
АР'/г Att>(/OT 4- ЯгэДРот -f- а^эДу п 4~ (а% — агэ) др +
. +(вг — йгэ) Ду = о,
Дуэт — До)хот = 0.
(3.34)
ИН
(3.35)
122 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. щ
С целью некоторого упрощения решения задачи синтеза формирую,
щие фильтры для воздействий летчика в канале элеронов и канале
руля направления принимаем в виде апериодических фильтров пер.
вого порядка:
Д-^ЛЭ 4“ гр~~ Д^ЛЭ == £э> Д-^лн ~Н гр Д-^ЛН (3.36)
1 фэ 1 фн ' '
где 5э, £н — белые шумы, Тфэ, 7фн — постоянные времени. Для
исполнительных устройств также используем модели первого по-
рядка
Д-^ИЭ 4 Д-^ИЭ = ^э> А-^ИН “Ь Д^ИН = ^Н* (3.37)
Уравнения (3.32), (3.35), (3.36), (3.37) составляют в рассматри¬
ваемом случае систему уравнений обобщенного объекта двенадца¬
того порядка. Вводя обозначения
хх = Д<ох, х2 = Дш^, х3 = Др, х4 = Ду,
= Д(0Хот> = Д^Ь/от» Ху = ДРот» = Ду от»
Хд = Д%лэ» •Я'Ю ~ Д-^ЛН» ^11 = Д-^ИЭ» -^12 = Д-^ИН,
можно записать уравнения обобщенного объекта в обычной матрич¬
ной форме
(3.38)
х + ах = и + g,
где
О
цэ
1= о
о
о
Самолет в боковом движении и, как следствие, весь объект (3.38)
считаем устойчивым (устойчиво невозмущенное состояние х = 0).
Обобщение на случай неустойчивого объекта осуществляется обыч¬
ным образом. Функцию Q минимизируемого функционала, как и
выше, задаем в виде канонической квадратичной формы разностей
выходных координат самолета и модели
Q ~ Рбб^^от 4" РвбА^°т 4“ Р77АР0Т 4“ Рэв^Тот —
= РббХ5 + Рвб-^б 4- Р77х7 4- р88%8«
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
123
3.2J
оответствии с общей теорией оптимальные управления получают¬
ся В ВИДе 12 1
.. _-//_ = — &ii 2 Awk%k = — ^ii + АьгД^ +
~~ э k=\
I 3Д(3 + А ц,4Ду + А1.5 (Де\ — Аюхэ) + А\it6 (Д©^ — Дсо^э) +
| Дп 7 (ДР — ДРэ) + А1.8 (Д? — Д?э) + А1,эД*лэ + А1, '.оД*лн +
+ А1,11Д*иэ + А1,12ДХин]>
12
= и = — Л12 2 ^12№ = — ^12 И12,1 Дй\ + А^Д^ +
и12 н 1
+ Д2,зДР + АгдДу + Аг,5 (Д^х —Д^хэ) + Л12.6 (Д^у — Д^э) +
+ А 12,7 (ДР — ДРэ) + Аг,8 (Ду — Дуэ) + Аг.эД^лэ + Аг.юД^лн +
+ Д12,цД^иэ + АгдгДЯин]» '
(3.39)
где
(3.40)
Соответствующая структурная схема оптимальной системы руч¬
ного управления боковым движением самолета в режиме малых от¬
клонений представлена на рис. 3.6. Как и должно быть согласно
доказанному выше общему положению, система является комбини¬
рованной (управление по задающим возмущениям и отклонениям)
и содержит модель (эталон). Как по задающим воздействиям, так
и по угловым скоростям и другим координатам в системе управле¬
ния реализуются перекрестные связи. Поэтому кроме обычных для
ростеиших систем ручного управления боковым движением обрат-
ых связей по угловой скорости крена и рысканья, углу скольже-
я имеется значительное число других связей. Коэффициенты всех
их связей определяются формулами (3.40).
сыв екотоРЬ1е из этих связей могут быть слабыми и могут отбра-
связаТЬСЯ ПРИ Реализации системы. Это относится, в частности, к
р ™ По УГЛУ крена. Появление этих связей в процессе рассмат-
емогосилтеза объясняется следхющлм. Полная модель бокового
124 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ
[Гл. Ul
движения самолета в режиме малых отклонений устойчива По
крену и каждому положению органов управления соответствуй
определенное значение крена. Линейная модель — эталон, естест-
венно, выбирается также устойчивой по крену и в функционал вво¬
дится член р22Луот, характеризующий разность реакций по крену
Рис. 3.6. Структура оптимальной системы ручного управления боковым движением в ре¬
жиме малых отклонений.
самолета и эталона. В результате получаются рассматриваемые свя¬
зи гю крену в оптимальной системе управления. Однако естествен¬
ная устойчивость самолета по крену очень слабая (очень малым от¬
клонениям органов управления соответствует значительный уста¬
новившийся крен, см. главу I).
Эта устойчивость почти не проявляется при управлении коротко¬
периодическим боковым движением. Летчик, пилотируя самолет
при выключенном автопилоте (или автопилоте в режиме демпфера)»
привыкает к тому, что определенному положению элеронов соответ¬
ствует определенная установившаяся угловая скорость (а не угол)
крена. Эти навыки пилотирования целесообразно сохранить и при
наличии рассматриваемой оптимальной системы ручного управле¬
ния. Последнее обеспечивается, вообще говоря, естественным обра'
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
125
5 3-21
так как коэффициенты Дц^, А12,4, Дц,8> ^12,8 в силу указан-
з0^’ обстоятельств получаются малыми.
НЫ Как отмечалось выше, соответствующие связи при реализации
системы часто воообще могут быть отброшены.
Об адаптивных оптимальных системах ручного управления
Пои неполной информации о коэффициентах самолета, зависи-
осги этих коэффициентов от неконтролируемых параметров вместо
или наряду с настройкой в функции параметров среды необходимо
применять самонастройку. Наличие в синтезированных системах
ручного управления эталонов — моделей в некоторой мере опре¬
деляет рациональную структуру системы самонастройки. Доста¬
точно очевидно, что целесообразно использовать принципы само¬
настройки с эталонной моделью. Эти принципы разработаны как в
поисковых, так и беспоисковых вариантах и имеют довольно об¬
ширную литературу (см., например, [3.17] — [3.34]).
При малых отличиях самолета с системой ручного управления
от эталона возможно применение так называемого метода вспомога¬
тельного оператора [3.28] — [3.31] и построение беспоисковой си¬
стемы адаптации. Такая система использует только пробный сиг¬
нал, в качестве которого может служить естественное воздействие
летчика на рычаги управления. Сам метод вспомогательного опера¬
тора применяется для построения механизма или алгоритма настрой¬
ки, связывающего параметры настройки Aik (точнее, скорости из¬
менения этих параметров Aik) с разностями координат самолета и
эталона. Задача определения алгоритма самонастройки именуется
также задачей синтеза контуров или систем самонастройки. Беспо-
исковые алгоритмы самонастройки или адаптации получаются так¬
же и при некоторых других подходах, в частности, при исполь-
??ВЧ91ИИ ГФУНКЦ™ Ляпунова для синтеза подобных алгоритмов
13.32] — [3.34]. Для синтеза беспоисковых самонастраивающихся
систем с моделью с успехом может быть применен метод аналити¬
ческого конструирования. В этом случае настраиваемые параметры
,' сматРиваются как дополнительные фазовые координаты обобщен¬
ного нелинейного объекта.
они еспоисковые системы самонастройки привлекательны тем, что
РЬ1 По ™ Н6 вносят Дополнительных возмущений в основные конту-
самонасеДП°“ЛаГаеТСЯ также возможность получения малого времени
ции некТР°ИКИ' ^сли Добавить относительную простоту реализа-
нение 0Т0РЬ1Х беспоисковых алгоритмов настройки, то их приме-
беспоисип ТСЯ заМанчивь1М- Следует, однако, иметь в виду, что
мации nfiBbIA алгоРИГМЬ1 требуют более полной априорной инфор-
болыпиу 00ъекте управления, чем алгоритмы с поиском. При
неизвестных отличиях объекта управления от эталона
126 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл4
III
наиболее эффективной является самонастройка с поиском, в частно¬
сти, так называемая экстремальная самонастройка [3.17] — [3.27].
Экстремальная самонастройка контуров управления, предло¬
женная автором в 1958 г. [3.17], получила развитие в ряде работ
[3.18] — [3.27]. Экстремальная самонастройка органически сочета¬
ется с оптимизацией на основе априорной информации и как бы до.
полняет последнюю в условиях изменения характеристик объекта
управления. Оптимизация системы, осуществляемая на основе ап¬
риорной информации на стадии проектирования, дополняется здесь
оптимизацией в полете. При этом критерии оптимизации, осущест¬
вляемой при проектировании, и текущей оптимизации, выполняе¬
мой в полете, практически одинаковы.
Поясним принцип построения подсистемы экстремальной само¬
настройки для системы ручного управления, спроектированной ме¬
тодом аналитического конструирования. Будем предполагать, что
система ручного управления спроектирована для линейной модели
движения самолета, линейного эталона и квадратичного критерия
(функционала). Везде будем предполагать квазистационарный ре¬
жим, при котором коэффициенты летательного аппарата, а значит,
и оптимальные значения коэффициентов управлений, изменяются
достаточно медленно как в сравнении с пробным сигналом — воздей¬
ствиями летчика, так и в сравнении с поисковыми сигналами, рас¬
сматриваемыми ниже.
Если критерий-функционал при проектировании (аналитиче¬
ском конструировании) для устойчивого обобщенного объекта задан
в виде
то оптимальные управления равны
(3.42)
«i = —$ 2 Aikxk. (3.43)
k=\
Коэффициенты Aik определяются через коэффициенты обобщенного
объекта или весовые функции этого объекта. Если реальные харак¬
теристики летательного аппарата отличаются от расчетных, то
управления (3.43) не будут строго оптимальными, т. е. не будут до¬
ставлять функционалу (3.42) минимум. В этих условиях для опти¬
мизации в полете коэффициенты управлений должны подстраивать¬
ся. Представляем коэффициенты управления состоящими из двух
частей:
A{k = AQik + ДД*. (3.44)
ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЯ САМОЛЕТА
127
j 3.2]
Величины Л?/г, как и ранее, определяются на основе аналитическо-
о конструирования по функционалу (3.42) (при Alk — A°ik) и рас¬
четным характеристикам объекта. При этом может определяться и
висимость Ай от параметров среды. Поправки AAlk должны обес-
За>чиваться в полете системой экстремальной самонастройки. Эта
Ретема должна минимизировать функционал, близкий к (3.42), но
Лизически реализуемый. В качестве такого функционала можно ис¬
пользовать следующую величину:
п ~2’
= Xi +2 2"^"
L,k=\ i
(3.45)
Здесь чертой обозначены некоторые средние значения, получаемые с
помощью линейного фильтра низших частот. Аналогия между функ¬
ционалами (3.42), (3.45) становится особенно очевидной, если
учесть, что при управлениях (3.43) сумма последних двух членов
функционала (3.42) становится равной
2м[1?4й ■
Практически, как мы видели, почти всегда используются канониче¬
ские квадратичные формы
2 ^kkxi+2 2 -4- •
fe=l i Kf.
Для формирования величины
Л = 2 “тг
fe=l I *1
(3.46)
в процессе функционирования системы сигналы координат xk и
управлений ut пропускаются через квадраторы и суммируются с
определенными весами. Это показано на рис. 3.7, иллюстрирующем
структуру оптимальной системы ручного управления продольным
У ловым движением самолета с экстремальной самонастройкой.
смятпЗИСТаЦИ°11аРНОМ Режиме величина /н приближенно может рас-
чит Риваться как Функция (а не функционал) параметров Aik, а зна-
стпойкПадГТРОВ настР0ЙКИ ^ik- Для реализации параметров на-
и Aik могут использоваться множительные звенья, включен-
лап аллелыю со звеньями AQik (рис. 3.7). Система самонастройки
мально ?°дбирать такие значения ДА^, при которых /н мини-
Решаетгя*10 тяпнчная задача экстремального регулирования, и
гулипппаи0На °бычной о поисковой системой экстремального ре-
Р ия. в типовой системе с синхронным детектированием
128 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл.
параметрам настройки сообщаются поисковые изменения SAik:
ДЛ^ — ДЛ /г + 6Лг/г.
Реакция величины /н на поисковую составляющую 6A(k улавли¬
вается синхронным детектором. На первый вход множительного зве¬
на синхронного детектора подается сигнал /н, на второй вход --
опорный сигнал 6Л^. Выходная величина синхронного детекто¬
ра, приблизительно пропорциональная составляющей градиента
Рис. 3.7. Структура оптимальной системы ручного управления продольным угловым дви¬
жением с экстремальной самонастройкой.
diH/dAik1 управляет через интегрирующее звено параметром на¬
стройки.
В принципе возможно осуществление одновременной настройки
всех параметров Aik, входящих в управления. При этом прибли¬
женно реализуется метод градиента:
\Aik = — kik .
Однако при большом количестве настраиваемых парамет¬
ров осуществление одновременной настройки встречает затрудне¬
ния. Эти затруднения связаны с обеспечением независимости или
«ортогональности» поисковых сигналов, необходимости большого
129
ПРОСТРАНСТВЕННОЕ ДВИЖЕНИЕ САМОЛЕТА
§ 3.3]
рпя синхронных детекторов и др. Поэтому часто оказывается бо-
числа С^ХР Й ПООЧередная подстройка параметров.
ле“ “относится в особенности к системам, спроектированным как
оималиые и имеющим грубую подстройку в функции параметров
, , до поменяются при изменении режимов полета).
» “долю Тстре„₽алнной еамок/стройки остается
Для таких си настройка. Такая настройка вполне может
медленная <<т°ч сначала настраивается первый параметр,
потом второй и т. д., пока не будет закончен первый цикл настрой-
Затем цикл повторяется и т. д. При том же способе синхронного
Хеширования здесь приближенно реализуется метод Гаусса -
О п JT ттр ГТ СТ
Схема рис. 3.7 в большей мере относится к варианту с поочеред¬
ной настройкой параметров. За цикл настройки выход О поочеред¬
но подсоединяется ко входам 1 —8 множительных звеньев настрой¬
ки. Заметим, что кратко освещенный здесь принцип экстремальной
самонастройки обладает значительной общностью и может исполь¬
зоваться, конечно, не только в системе ручного управления, но и в
других системах. Поэтому на этот принцип мы неоднократно будем
ссылаться в л
дальнейшем.
§ 3.3. Аналитическое конструирование систем
ручного управления пространственным движением самолета
Общая методика синтеза системы ручного управления летатель¬
ным аппаратом была изложена в начале данной главы. Она была
далее конкретизирована применительно к управлению продольным
и боковым движениями самолета в режиме малых отклонений. Де¬
тализируем теперь эту методику применительно к ручному управ¬
лению произвольным пространственным движением самолета.
Для описания произвольного пространственного движения само¬
лета следует использовать уравнения общего вида, например урав¬
нения в «симметричной» форме (1.17). Однако для задачи синтеза
системы ручного управления эти уравнения целесообразно несколь¬
ко упростить и видоизменить. Прежде всего следует заметить (это
подтверждают предшествующие примеры), что учет действия силы
тяжести на самолет существенно усложняет структуру оптимальной
системы ручного управления, порождая «позиционные» обратные
связи, т. е. обратные связи по угловым координатам или направ¬
ляющим косинусом. Между тем обратные связи по угловым коорди¬
натам характерны для автопилотов — систем автоматического уп¬
равления угловым положением летательного аппарата, а не для
истем ручного управления. Это указывает на то, что при синтезе
ттРп!еМ Р/ЧН0Г° УпРавления влиянием силы тяжести на самолет
соо разно пренебречь. Целесообразно также пренебречь
5 А. А. Красовский
130 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. Щ
динамическими связями по высоте, рассматривая yQ в уравнениях
сил и моментов (1.17) как параметр. Тогда уравнения направляющих
косинусов и сами эти косинусы выпадают из уравнений объекта и
последние принимают вид
т = Хх (Vx, Vy, V2, SH, 6Э, 6B, 6Т),
т(УУ + £о#х — mxVz) = Yr(Vx, Vу, Vz, 6Н, 6Э, бв, 6Т);
т (Уг + (oxVy — a>yVx) = Zx (Vx, Vy, Vz, SH, 6Э, 6B, 6T),
АД + (Iг ~ Iv) ®y®2 = Mxl (Vx, Vy, Vz, ax, (t>y, ®2) 6H, 6Э, 6B, 6T),
1у 4” (A* ^z) ®*®z = ^4</i (Kt» V2) cox, <&y, a>z, 6H, <5Э, 6B, 6T),
^Z®Z 4~ Uy lx) = 1^21 (V,, )^yt Y z, tt)x, С0у, (0г, 6H, 6Э, бв, 6T). J
(3.47)
Пренебрегая инерционностью бустеров в режиме ручного управле¬
ния, заменяем 6Н, 6Э, 6В, 6Т соответственно на хлн + хин, хлэ-}-
+ •^ИЭ, •Я'ЛВ 4- •^ив> + *Ид. Здесь первые члены сумм соответствуют’
перемещениям рычагов управления, создаваемым летчиком, а вто¬
рые члены соответствуют перемещениям, создаваемым исполни¬
тельными устройствами системы ручного управления.
Для решения задачи синтеза, естественно, необходима дальней¬
шая конкретизация уравнений объекта (3.47) путем аппроксимации
входящих в эти уравнения функций многих переменных. Выше
упоминались два способа представления функций многих перемен¬
ных, входящих в уравнения объекта, — способ полиномов или сте¬
пенных рядов и способ кусочно-линейной аппроксимации. Для
данной задачи, по-видимому, в большей мере подходит способ по¬
линомов (рядов). Представление аэродинамических характеристик и
характеристики двигателя многомерными ((^многими аргументами)
полиномами или степенными рядами требует, как отмечалось в гла¬
ве I, либо непосредственного измерения старших аэродинамических
производных, либо очень большого числа статических характе¬
ристик. В любом случае хорошая аппроксимация характеристик в
широких диапазонах изменения параметров полета требует весьма
детального изучения аэродинамики конкретного самолета и явля¬
ется довольно трудоемкой задачей. Автоматизированный способ
идентификации аэродинамических объектов, о котором упоминалось
в главе I, существенно убыстряет процесс получения необходимой
априорной информации.
Ограничиваясь рассмотрением только углового продольного дви¬
жения (уравнение скорости Vx отбрасывается и скорость полета Vx
ПРОСТРАНСТВЕННОЕ
ДВИЖЕНИЕ САМОЛЕТА
131
рассматривается как параметр), примем
у, = У^Уу, бв) = (ЩЛ+СН')/1'+
+ (W)o^ + ®°6b’
1
’н>
Нелинейные характеристики подъемной силы и продольного мо¬
мента здесь представлены полиномами третьего порядка. Это поз¬
воляет в определенной мере учесть нелинейные эффекты, связанные
с приближением к критическим углам атаки. Учтены моменты,
которые при больших углах атаки вызывают «сваливание» самолета.
Индексы «О» означают, что частные производные берутся при ну¬
левых значениях величин со^, со2, Vg, Vz. Подъемная сила при
нулевом угле атаки считается нулевой. Обобщение на случай
(0, 0) =0= 0 не представляет труда.
5*
132 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гд. щ
Введем обозначения
(0х = Хр (Оу = Х2, == хз> V у = х4, Vг = Xg, |
Хдэ = Хб, Хиэ = Х7, Хдн = х8, Хин = Х9, Хдв = Х1о, ХИв == Х1х. |
(3.49)
Из (3.47) —(3.49) получаем
Х1 + а11Х1 + Я12Х2 4* а15Х5 4“ а16Хв + ^17Х7 + а18Х8 + #19Х9 +
4" Я123Х2Х3 + а\{ 11X1 + 6X1144X^X4 = О,
Х2 4“ ^21Х1 4“ ^22Х2 4- 6X2gXg 4“ ^2вХ6 4“ ^27Х7 4" 6Z2gXg 4" ^29Х9 =
Х3 4~ 6Z33X3 4“ 6X34X4 4“ ЯЗ,10Х10 + а3,11Хц + Д31Л + ^312ХхХ2 +
+ 6X334X3X4 + 6X3344X3X4 + 6Z3334X3X4 + 6Z3H4X[X4 = О,
Х4 + 6X43X3 6X44X4 + 6Z4,IOX1O + 6Z4,11Х1Х 6X444X4 +
4- 6Х415Х1х5 4- 6X4444X4 = О,
Xg + ^52*2 4“ 6Хб6Х5 + 6Z514*iX4 = 0.
(3.50)
Здесь
6X3,10 = 6Z3.11 =
ПРОСТРАНСТВЕННОЕ ДВИЖЕНИЕ САМОЛЕТА
133
В качестве эталона целесообразно выбрать линейную модель
движения с определенными назначаемыми коэффициентами. Дей¬
ствительно, перекрестные нелинейные связи между продольным и
боковым движениями только усложняют технику пилотирования.
Нежелательны или недопустимы критические режимы. Поэтому
целесообразно, чтобы самолет с системой ручного управления при¬
ближался по своим качествам устойчивости и управляемости к ли¬
нейному эталону. Этот эталон примем простым, без перекрестных
связей. Вводя обозначения
й)2Э — *u> Vy3 — х1б, V — х1б, (3.52)
— *12» ®уэ — *13»
записываем
*12 + £12,12*12 + £12,6*6 = 0,
*13 + <213.13*13 + £13,16*16 + £13,8*8 = 0»
*14 + «14,14*м 4- 014,15*15 + «14,10*10 = ’
*15 + «15,14*14 + «15,15*15 = 0»
*16 + «16,13*13 + ai6,16*le = 0.
летчик^пло Ф°РМИРУЮЩИХ фильтров для задающих
летчика возьмем в форме уравнений первого порядка
С учетом обозначений (3.49), записываем
4" ^вв^б в *8 4“ £вв*8 =
(3.53)
воздействий
5Н» *ЛВ
1 фв
5н> *ю + Я1о,1о*ю ** (3.54)
134 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ [Гл. Щ
где
1 - 1 _ 1
^66 — Т ’ ^88 т » ^10,10 m
1 фэ 1 фн 1 фв
Что касается исполнительных устройств (раздвижных тяг), то
для рассматриваемых режимов больших отклонений необходим учет
ограничений и нелинейностей в этих устройствах.
В рамках рассматриваемого метода аналитического конструиро¬
вания возможно использование различных форм учета нелинейно¬
стей исполнительных устройств и различных математических моде¬
лей этих устройств вообще. Можно аппроксимировать нелинейные
характеристики исполнительных устройств полиномами, подобно
тому как это осуществлено выше для характеристик самолета. Мож¬
но использовать кусочно-линейное представление нелинейностей.
Тогда нелинейный обобщенный объект будет содержать как полино¬
миальные (аналитические) нелинейности, так и кусочно-линейные
нелинейности. Это потребует соответствующей комбинации рассмат¬
риваемых методов аналитического конструирования (см. § П.7).
Однако самым простым (с точки зрения получения решения) спосо¬
бом учета насыщения в исполнительных устройствах является спо¬
соб ограниченных управлений. При этом способе исполнительные
устройства представляются линейными моделями с ограниченными
управлениями, а ограничение управлений достигается за счет вы¬
бора значений показателей р, q в обобщенном минимизируемом
функционале (§ П.2, § П.З).
Используя этот способ, принимаем
Хиэ “Ь
ХИц +
1
ХИв +
1
Тв
Хив “
ИЛИ
Х7 #77X7 = ^7, Xg -f- flggXg = fZg, Хц ЯищХц = Иц, (3.55)
где
1
_ 1
1
Д77 = гр ,
1 Э
^99 р »
^11,11 р > Щ ^9 ^н» ^11 Ц/
* в
Уравнения (3.50), (3.53), (3.54), (3.55) составляют систему уравне¬
ний обобщенного нелинейного объекта шестнадцатого порядка. Счи¬
тая невозмущенное состояние обобщенного объекта устойчивым,
функционал задаем в виде
/ = М Vt=ti
(3.56)
ПРОСТРАНСТВЕННОЕ ДВИЖЕНИЕ САМОЛЕТА
135
где i = 7, 9, 11.
2<2 = Ph (xi ~~ Х1^2 ^22 ^2 — *13)2 Р®8 (Хз ~ Хи^
+ 044 (Х4 — Х1б)2 + Рм (%6 ~ *1в)2 = ^11%‘ + + ^Х3 +
+ 044*4 + 055*5 + 012,12*12 + 013.13*Тз + 014,14^4 + 015,15*15 +
+ 016,16X16 + 01,12X1X12 + 02,13Х2Х13 + 03,14X3X14 4- 04,15Х4Х15 +
+ 05,1бХ5Х1в,
Р12>12 = Pu, 013,13 = 022» 014,14 = 033» 015,15 = 044»
Р51в = 2066, 016,16 = 055» 01,12= 20и, 02,13= 2022,
03,14 = 20зз, 04.15 = 2044,
I
(3.57)
а также V — решение уравнения
16
дУ у дУ .
dt k~i дХк 'к
(3.58)
и fk —функции уравнений (3.50), (3.53) —(3.54). Учитывая, что
необходимо учесть ограничение («насыщение») управлений ик и
что согласно общей теории оптимальные управления имеют вид
(3-59)
задаем q > 1 близким к единице, например q = 6/5. Тогда из соот¬
ношения -у -f- -i- = 1 вытекает р = 6, функционал и оптимальные
управления принимают форму
(3.60)
Согласно общей методике функцию V
ряда
ищем в форме
степенного
V 2 Ак‘х*х‘ + 4- S=I Aklmxkx]Xm 4- . •.
Ввиду того, что обобщенный объект имеет в данном случае высокую
136 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ РУЧНОГО УПРАВЛЕНИЯ (Гл. 1Ц
размерность (порядок), коэффициенты Ak[, целесообразно
выражать через весовые функции линейного приближения согласно
формулам § П.5. Отбрасывая нелинейные члены в уравнениях
обобщенного объекта, получаем уравнения линейного приближения.
Матричная форма уравнений фундаментальной системы весовых
функций, как всегда, записывается в виде
+ = иу(О) = 1, а =
Фундаментальная система весовых функций содержит в данном
случае 16 х 16 = 256 весовых функций wki (/). Определение этих
весовых функций производится по обычной методике на АВМ или
ЦВМ. Коэффициенты оптимальных управлений определяются со¬
гласно формулам (П.5.20).
Конечно, реализация оптимальных управлений с большим коли¬
чеством нелинейных членов представляет трудности, особенно при
аналоговом выполнении системы. Пользуясь низкой чувствитель¬
ностью оптимальной системы к малым изменениям параметров, мож¬
но отбрасывать слабые нелинейные связи. Таким путем часто уда¬
ется получить практически реализуемую систему, хотя и не опти¬
мальную в строгом исходном смысле, но обеспечивающую высокое
качество управления.
Развитие бортовых цифровых машин (БЦВМ), создание БЦВМ
на базе цифровой техники четвертого и последующих поколений,
сопутствующее этому повышение надежности и быстродействия от¬
кроют возможность использования БЦВМ в контурах ручного
управления. В подобных цифровых системах управления реализа¬
ция сигналов вида
= 2 Ал + S Ailmxtxm + • • •
I 1,т
не встретит особых затруднений. Следует подчеркнуть, что по са¬
мому существу задачи синтезированная указанным путем система
ручного управления может быть достаточно универсальной. При
соответствующем подборе функционала она может предотвращать
«сваливание», выход на критические режимы, а в случае попадания
в «штопор» — выход из этого режима и т. д.
Глава IV
аналитическое КОНСТРУИРОВАНИЕ систем
демпфирования аэроупругих колебаний
Синтез контуров демпфирования аэроупругих колебаний в прин¬
ципе может осуществляться обычными методами теории автомати¬
ческого регулирования, например, методом логарифмических ча¬
стотных характеристик, методом корневых годографов и другими
методами [4.1] —[4.6]. Однако достаточно детальные математиче¬
ские модели аэроупругих летательных аппаратов, как правило,
являются многомерными мтогосвязными системами. Поэтому авто¬
матизация проектирования и одно из наиболее важных направле¬
ний этой автоматизации —аналитическое конструирование —для
систем демпфирования аэроупругих колебаний весьма желательны.
«Ручное» проектирование и оптимизация этих систем нередко натал¬
киваются на большие технические трудности и занимают много
времени.
Конечно, система демпфирования аэроупругих колебаний явля¬
ется только одной из подсистем общей системы управления. Поэтому
в строгой постановке речь должна идти об автоматизации проектиро¬
вания системы в целом с учетом требований оптимального управления
аэроупругим летательным аппаратом. Однако в данном случае, как и
во многих других, оптимизация подсистемы на основе частных кри¬
териев является наиболее практическим путем проектирования, не
исключающим определенные формы оптимизации системы в целом.
Ввиду того, что основным назначением системы демпфирования
аэроупругих колебаний является гашение этих колебаний или огра¬
ничение колебательных упругих деформаций определенными уров-
еТСТВенно в качестве критерия оптимальности принять экс-
cRnf5nnuJ^HKUH°xHaJla« хаРактеризующего интенсивность затухания
пат еигт коле^ан^и в системе: аэроупругий летательный аппа¬
рат — система демпфирования.
§ 4.1. Аналитическое конструирование систем
демпфирования упругих колебаний
стеной деТфио™ аппарат как Упругая система совместно с си-
тельно слабо Lvy Я Н6 Им^ет Рез°нансных свойств и, следова-
возник’новения собственных колебаний, то вероятность
обычно мала во frJ ругих’ точкее автоаэроупругих, колебаний
° мала, во всяком случае существенно меньше, чем в остро
138
СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. IV
резонансной системе. Поэтому построение системы демпфирования
упругих колебаний в определенной мере ограничивает возможность
появления автоаэроупругих колебаний. Кроме того, при некоторых
компоновках летательных аппаратов и режимах полета воздействие
аэродинамических сил (кроме сил органов управления) на упругие
колебания просто мало. Для таких режимов полета и конструкций
летательных аппаратов системы демпфирования, построенные из
расчета гашения упругих колебаний, решают задачу полностью.
Полагая в уравнениях аэроупругих колебаний (1.77) га = О,
са = 0, /аж = 0, получаем уравнения упругих колебаний модели
со сосредоточенными массами
fnq + rq 4- cq = f. (4.1)
Здесь ? = ||9i ... —вектор обобщенных координат; f == fy +
+ /и = ИЛ ••• П — вектор управляющих и инерционных (вы-
званных движением опорной системы координат) сил; т = тт,
г = гт, с = сТ — матрицы (п х п) масс, коэффициентов трения и
жесткостей соответственно. Следует обратить внимание на то, что
матрицы т, г, с в упругой, как и в любой пассивной, системе сим¬
метричны. Это определяет особую простоту решения задач аналити¬
ческого конструирования оптимальных управлений для пассивных'
объектов [4.7]. В дальнейшем считаем, что матрицы tn, г, с невырож¬
денные, т. е. | т | у= 0, | г | =/= 0, | с | =/= 0. Невырожденность мат¬
рицы жесткостей с означает, что объект статически определим,
т. е. каждому постоянному вектору силы f соответствует единствен¬
ный вектор установившихся значений координат q = c~xf. При
указанных условиях квадратичные формы х/2 qTcq, 1/2 qTmq,
l/a выражающие потенциальную, кинетическую энергии и
диссипативную функцию, являются положительно определенными.
Для применения стандартной методики аналитического конструи¬
рования приведем уравнения объекта к форме Коши, т. е. к системе
уравнений первого порядка. Введем вспомогательные векторы раз¬
мерности 2п:
* = Н ••• ••• « = ||0(/п-7)т||т. (4.2)
Тогда уравнение (4.1) преобразуется в матричное уравнение в фор¬
ме Коши
х + ах = и, (4.3)
где
11° “1 II
а ~ I т~'с т~}г ||
— блочная матрица (2л. х 2n), 1 —единичная матрица (n х «)•
Целью управления будем считать приведение объекта в невозму-
ДЕМПФИРОВАНИЕ УПРУГИХ КОЛЕБАНИЙ
139
§ 4.1]
тпяние (х = 0) оптимальным в определенном смысле
^енное. Сппи произвольных начальных условиях. Оптимальными
управлениями будем считать управления и, минимизирующие функ-
ционал оо °° 00
j _ j_ с /рх dt+4- J dt+4- J *тл*2Лх (4Л)
2 J г 2 о о
R м — заданные (2n X 2п) матрицы (62, k~2 —диагональ-
ГДС Р’ L™v А = Ит — матрица (2п х 2п) коэффициентов оп¬
альных управлений, определяемая ниже. Смысл функционала
?4 4? ?акой же, как во всех других приложениях рассматривае¬
мого метода аналитического конструирования. Составляющая
J_JxTpxtft характеризует здесь качество переходных процессов га-
шения упругих колебаний. Составляющая -Ь J uTrt dt является
интегральной оценкой синтезируемых управляющих воздействий,
оо
Составляющая 4 f xMfeMxdZ соответствует оценке «сигналов управ-
2 о
ления» в оптимальной системе (см. §П.4).
Заметим, что интегральное ограничение при минимизации функ-
ционала I получают, собственно, не управляющие силы f, а управ¬
ляющие ускорения m—xf. Это в некоторых случаях лучше отвечает
практическим задачам, так как для управления большими массами
могут быть созданы большие силы. Впрочем, путем специального
задания k~2 легко перейти к случаю интегрального ограничения
сил, что ниже неоднократно используется.
Для решения задачи аналитического конструирования сущест¬
венным является вопрос о степени наблюдаемости. Рассмотрим сна¬
чала случай полной степени наблюдаемости.
Аналитическое конструирование при полной степени
наблюдаемости
При полной степени наблюдаемости все компоненты х, т. е. все
составляющие q, q, могут быть использованы в управлении. В самом
простом прямом случае это означает наличие 2п безынерционных
датчиков, контролирующих обобщенные относительные координа¬
ты и их производные, а также безынерционные исполнительные
устройства органы управления. Если датчики и исполнительные
у тройства являются инерционными, но описываются уравнениями
ссивных систем (с симметричными матрицами коэффициентов) и
140 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. IV
если все «внутренние» координаты этих устройств доступны для
измерения, то уравнения датчиков и исполнительных устройств рас¬
сматриваются совместно с уравнениями упругих колебаний и зада¬
ча приводится к задаче с полной степенью наблюдаемости.
Максимальная возможная степень управляемости в рассматривае¬
мом объекте (4.3) определена тем, что п компонент и тождественно
равны нулю. Таким образом, наибольшая возможная степень
управляемости здесь равна С учетом этого зададим матрицы
ft2, ft”2 в виде следующих блочных матриц:
|| 0 0II _2 || 0 0 ||
*~|о £б||’ k ~|о бгТ
(4.5)
Здесь &б —неособая матрица-блок (n х n), k62 — обратная ей мат¬
рица. Заметим, что при таком представлении обозначение k~2
условное, так как k2 —особая матрица. Матрицу р зададим также
в виде блочной матрицы
(4.6)
где рб11, рб22 —матрицы-блоки (п х п). То, что блоки на неглавной
диагонали нулевые, объясняется следующим образом. Если
Рб12 = Рб21 = ₽62i задать не нулевыми, то в квадратичной форме
появляется член
/₽б21? + 12? = (?Т₽612?) = (?Т₽621?)«
Интеграл от этого члена, входящий в функционал /, целиком опре¬
деляется начальными условиями:
J (<7т₽б21<7 7тРб127) di = Я* (0) Рб пЯ (0)
о
(оптимальная система при устойчивом объекте заведомо устойчи¬
ва). Добавление в функционал этой величины, не зависящей от
управлений и координат, очевидно, ничего не изменяет. Поэтому
полагаем рб12 = рб21 = 0. С учетом выражений (4.5), (4.6) и блоч¬
ного представления матрицы А:
л = И“"
||Лб21 ЛбггЦ
§ 4.11
Демпфирование упругих колебаний
141
Лб1) = Д*1Ь аб12 = Лб21, Лб22 = Лб22-матрицы-блоки (п х п),
функционал (4.4) принимает вид
/ = _L У /0611? + -у" У 7Т₽622<7 dt + -у- У Иб2&б 2^б2 dt +
4" -у- У (?ТЛб12 + ^ТЛб22) &б (Лб21<? + Лб22<7) (4-7)
Оптимальными управлениями, минимизирующими функционал (4.4)
для объекта (4.3), заведомо устойчивого, служат управления
(§ П.4)
ц—— kzAx, (4.8)
где а = Ат определяется матричным уравнением
Аа + а*А = ₽. (4.9)
Точно такие же оптимальные управления соответствуют минимуму
функционала
оо
У xTfix dt
О
при ограничении вида
оо оо
J xTAkzAx dt + У tfk~*u dt = const.
о о
(4.8),
При указанном блочном
(4.9) принимают вид
Il ° II |0
I «62 || И О
Лб12|||| 0 —1 ||
Лб22II || /П_1С m~' r
представлении матрицы уравнения
01| Лец Лб12Ц|<7
kl
Л621 Л622 III <7 II '
(4.Ю)
0
с/п 'ЦЦЛеп
4^612 1
РбП
0
— 1
rm~' || II Лб21
А522 И
0
Рб22
(4.Н)
Отсюда следует
А^т с сиг 'Лб21 = рбц, 1
— Лбц 4- Aw,irT'r -f- с/п~‘лб22 _ о,
Лб22ОТ 'с — Лб1| 4- гт~'Аб21 = 0,
- лб21 4- Aa22m-lr ~ Лб124- гт~' Лб22= рб22.
(4-12)
142
СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. IV
Ввиду ТОГО, ЧТО Л 621 = Л 612 И иб2 содержит ТОЛЬКО Л 621, Л622, из
уравнений (4.12) существенны два уравнения:
Лб12/и 'с 4- ст Лб21 = рб11,
Лб22^ 7 + rm 1 Лб22 = Рб22 + Лб12 + Лб21-
Дальнейшее определяется заданием матриц рб11, рб22 коэффициен¬
тов функционала. Рассмотрим четыре простых случая задания ко¬
эффициентов функционала [4.71. Каждый из этих случаев имеет про¬
зрачный физический смысл, точнее, простую энергетическую ин¬
терпретацию.
а) Назначаемая часть функционала равна
количеству тепла, выделяемого за счет
конструкционного (внутреннего) трения за
время затухания упругих колебаний. В этом
случае
Рб11 = 0, Рб22 = г,
(4.14)
оо оо со
h = 4" У ?Т₽6Н<7^ + 44 ^ТРб22<7dt = 44 frqdt.
О о о
Чем быстрее затухают колебания объекта, тем меньше /р, и наобо¬
рот. Поэтому можно ожидать, что минимизация функционала /,
содержащего /р, в данном случае приведет к интенсивному гашению
колебаний, т. е. форсированию процесса приведения в невозмущен¬
ное состояние по скорости (q = 0). Процесс приведения в нейтраль¬
ное состояние по координатам (q = 0) здесь в принципе может
быть затянутым (очень высокое демпфирование). Однако этого
всегда можно избежать подбором коэффициентов усиления кана¬
лов. К тому же на практике получить очень высокие коэффициенты
усиления, вызывающие чрезмерное демпфирование упругих коле¬
баний летательного аппарата, очень трудно.
Уравнения (4.13) при условиях (4.14) имеют решение
12 = ^621 = о, Аб22 = W-
Оптимальные управления имеют вид
«62 = — 4“ klmq,
f = —= — М-
(4.15)
где
к* = 4- mklm.
f 4.U
ДЕМПФИРОВАНИЕ УПРУГИХ КОЛЕБАНИЙ
143
Пои указанных условиях (4.15) является уравнением системы демп¬
фирования упругих колебаний, оптимальной в смысле минимума
функционала
ОО 00 СО
1 = ^-<\qtrqdt+^-\fk~xfdt+~-\qIkil/iqdt. (4.16)
1 о О о
Из этого выражения следует, что матрицу целесообразно зада¬
вать диагональной с положительными элементами, В этом случае
квадратичные формы q^q, являются просто суммами взве¬
шенных квадратов скоростей и управляющих сил, а оптимальная
система демпфирования (4.15) содержит п автономных простейших
каналов. В § 4.3 будет показано, что подобную систему можно при¬
ближенно реализовать даже посредством пассивных устройств ти¬
па элементов вязкого трения, воздействующих на упруго подвешен¬
ные органы управления. Возможность использования пассивных
устройств важна с точки зрения обеспечения высокой надежности
и быстродействия.
б) /р равно интегралу кинетической энер¬
гии упругих колебаний. В этом случае
₽би = 0, ₽б22 = т, 7₽ = 4-f (4.17)
О
Уравнения (4.13) здесь имеют решение
Ляг = ^621 = 0, Лб22 == тг~1т
и оптимальные управления
иб — 'mq,
f = — k*r~xmq.
(4.18)
Эти управления
ционала
являются оптимальными в смысле минимума функ-
1 Г -т • I?
1 = ~2~0mqdt + ~2~ J V+ 4" J 4Ttnr~xk*r~'tnqdt. (4.19)
Матрицу коэффициентов усиления каналов кл целесообпазно зала
форм обобщенных скоростей и управляющих сил.
144 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. IV
Минимизация такого функционала, как и в предыдущем случае, со¬
ответствует интенсивному гашению упругих колебаний по обоб¬
щенным скоростям.
Однако здесь, если т или г недиагональные (точнее, недиаго¬
нальной является матрица r^m), т. е. колебания исходного объек¬
та взаимосвязаны в инерционном или диссипативном отношении,
то, как видно из (4.18), при диагональной матрице k* каналы
оптимальной системы демпфирования взаимосвязаны.- Это делает си¬
стему (4.18) более сложной в сравнении с (4.15). Реализация систем
многосвязного регулирования, подобных (4.18), на пассивных эле¬
ментах затруднена и нерациональна.
в) /р, равно интегралу потенциальной
энергии упругих деформаций. В этом случае
со
Рби = Рб22 = ^3 = ~2~ J У cqdi. (4.20)
6
Решение уравнений (4.13) равно
Ляг = Д521 = 4" т> 24622 = /zzr“1/n’
оптимальные управления имеют вид
и62 = kmq kmr-}mq,
f=—k*q — k*r~}tnq.
(4.21)
Эти управления являются оптимальными в смысле минимума функ¬
ционала
со оо оо
1 = 4" S Л + 4-! dt + 4- S fa + /~1/n<7)T (Я + r~lmq)dt.
0 0 0 (4.22)
Матрицу коэффициентов k*, как и выше, целесообразно зада¬
вать диагональной положительно определенной. Тогда функционал
(4.22) представляет собой интеграл от суммы положительно опре¬
деленных квадратичных форм обобщенных координат, их произ¬
водных и управляющих сил. Действительно, q^cq — положитель¬
но определенная квадратичная форма q, yrk*y — положительно опре¬
деленная форма у = q + f-'mq. Сумма
4" Я^я + 4
может обратиться в нуль только при
<7 = 0, у = q + r~'mq = 0,
§ 4.П
ДЕМПФИРОВАНИЕ
УПРУГИХ КОЛЕБАНИЙ
145
0 а 0. Таким образом,
т. е. при q - Ч
_L qTcq + -у (<7 + г tnqf М? + г тс»
мгительно определенная квадратичная форма q, q. Мин™и-
" П°Лж икптонала (4 22) означает оптимизацию процессов прибли-
зация фу енному состоянию не только по скоростям q, но
^координатам q. Соответствующее оптимальное управление (4.21)
f = -k*(q + r~'mq)
ит от а так и от q. Если, однако, исходный объект явля-
зависит как от ?, м^ qTQ характерн0 для упругих конструк-
СТС"Я тп злеме^ы матрицы велики и данное оптимальное управ-
ЦИИ’ йпнжяется к (4 18) Если матрица г 1т недиагональная,
“ SX 'демпфирования^ реализукжая (4.21). мио-
г°“) ЭН/7' Р а в и о интегралу полной анергии
упругих деформаций. В этом случае
со
₽б11 = с, ₽б22 = tn, Ifi = ±\(qTcq + <fmq)dt.
Матрицы коэффициентов оптимальных управлений имеют вид
412 = 421 = 4 т' Абм = тг~'т
(4.23)
f = —k*(q + 2r lmq). (4-24)
Это управление оптимально в смысле минимума функционала
оо сю со
1=4 $ ^cci +4 i +4 $ rk~lf &+
об о
оо
+ 45^ + 2г_1/п<7)т 4 (<7 + 2r_1m<j) di. (4.25)
о
При обычном задании fe* функционал (4.25) содержит положитель¬
но определенную форму q, q, вырождающуюся при ^->08 полную
энергию упругих деформаций, и положительно определенную форму
управляющих сил. Оптимальные управления (4.24) отличаются от
(4.21) только коэффициентом 2 при демпфирующих воздействиях.
Необходимо отметить, что энергии (мощности) ьсех упругих ко¬
лебаний объекта входят в рассматриваемые функционалы с одина¬
ковыми весами. Эти функционалы и соответствующие им оптималь¬
ные управления в наибольшей мере отвечают задачам с «равномощ¬
ными» движениями относительно различных степеней свободы.
146 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. iy
Аналитическое конструирование при неполной степени
наблюдаемости
При неполной степени наблюдаемости не все фазовые координа¬
ты, т. е. компоненты векторов q, q, могут быть непосредственно из¬
мерены и использованы для управления. Здесь в соответствии с
общей теорией (§ П.З) следует различать два случая.
В первом случае для части фазовых координат невозможно не
только непосредственное, но и косвенное измерение. Это имеет ме¬
сто при неполной наблюдаемости по Калману [П.34] или при отсут¬
ствии достаточно полной информации о коэффициентах объекта.
В этом случае синтез системы демпфирования можно осуществлять
на основе метода, изложенного в §П.7. Конечно, нахождение коэф¬
фициентов оптимальных управлений при этом сложнее, а результа¬
ты управления хуже, чем при полной степени наблюдаемости. Этот
случай здесь не рассматриваем.
Во втором случае неполной степени наблюдаемости имеет место
полная наблюдаемость по Калману и возможно косвенное измере¬
ние всех фазовых координат, недоступных для прямого измерения.
Рассмотрим именно этот случай применительно к задаче синтеза
системы демпфирования упругих колебаний.
Пусть v компонент вектора q и п —v компонент вектора / извест¬
ны или доступны для непосредственного измерения, а остальные
п —v компонент q и v компонент f могут быть определены лишь кос¬
венно. Объединим первую группу компонент в n-мерный вектор хвх,
а вторую группу в n-мерный вектор хвых. Уравнение (4.1) можно
записать в виде
= (4.26)
где
R (р) = II mikP2 + rikp + cik ||, р = d/dt.
Для векторов хвх, хВБ1х из (4.26) получаем
М(р) •^ВЫХ АГ(р) •^вх, (4.27)
где М (р) —матрица, получающаяся из R (р) заменой столбцов,
соответствующих номерам непосредственно измеримых координат,
столбцами, в которых диагональный элемент равен — 1, осталь¬
ные — нули; N (р) —матрица, получаемая из —R (р) заменой
столбцов, соответствующих номерам непосредственно неизмеримых
координат, столбцами, диагональный элемент которых равен 1,
остальные нули. Вектор (матрицу-столбец) q представим в виде
? = ?ИЗ 4“ 9нИЗ>
где qm включает непосредственно измеримые компоненты р, осталь¬
ные п —v элементов —нули; рниз, наоборот, состоит из п — v
неизмеримых непосредственно компонент q и v нулевых элементов.
Если использовать диагональную квадратную матрицу а, у которой
ДЕМПФИРОВАНИЕ УПРУГИХ КОЛЕБАНИЙ
147
$ 4.11
v диагональных элементов равно единице, а остальные —нули,
п можно выразить через хВых следующим образом:
ТО ь/низ
Он ИЗ = ОСЕВЫХ»
С другой стороны, согласно (4.27)
Хвых = АГ1 (Р) N (/?) хвх = АГ-1 (р) W (р) (<7Из + /из),
е t —вектор, компоненты которого равны измеримым компонен¬
там /, остальные — нули. Итак, q можно представить в виде
q = <7из + “М-1 (р) N (р)(риз 4- /из). (4.28)
Подставляя в (4.24), получаем оптимальные управления для рас¬
сматриваемого случая неполной степени наблюдаемости и функцио¬
нала (4.25):
f = — k* (1 + 2r~lmp)[q„3 + aM~l (р) N (р) (<?из + /из)], (4.29)
где 1 —единичная матрица (п х п). В частном случае v = п имеем
qn3 = q, а = 0 и (4.29) вырождается в (4.24). При v = 0 имеем
q„3 = 0, /из = А а = 1, W (р) = 1 и (4.29) принимает вид
/ = - Ml + 2r_1/np) М-1 (р) /. (4.30)
В этом случае нулевой степени наблюдаемости осуществление си¬
стем с обратной связью невозможно и синтезируемое управление
вырождается в программное. Если неизмеримыми являются и на¬
чальные значения координат (начальные условия), то в данном слу¬
чае следует использовать тривиальное решение (4.30) f = 0, т. е.
оставить объект без управления.
В заключение следует сказать, что в случае произвольной степе¬
ни управляемости некоторое число (< п) компонент управляющей
силы f тождественно равно нулю. Синтез оптимальных управлений
в этом случае согласно общей теории производится без существен¬
ного изменения методики. Соответствующие элементы матрицы ко¬
эффициентов усиления каналов k* и матрицы полагают равны¬
ми нулю. При этом автоматически исчезают нереализуемые управ¬
ления, компоненты функционала, содержащего эти управления,
отвечающие им компоненты «сигналов управления».
Для функционалов типа (4.25) положительная определенность
подынтегральной квадратичной формы относительно q, q при ука¬
занном задании матриц k? сохраняется.
е С цельою синтеза системы демпфирования упругих
че мпгпеТаТеЛЬНЫИ аппарат представлен в виде п сосредото-
ния мягг i/ соединенных невесомыми упругими связями. Колеба-
X KSSzpaM"’
ппмлтпгга н ^леоаниями может осуществляться с
р нов управления, перемещаемых исполнительными
148 системы Демпфирования аэроупругих колёбаний [гл. iv
устройствами. Исполнительные устройства обладают ограничен¬
ным быстродействием (ограниченными полосами пропускания).
Для приведения задачи к заданному классу, т. е. классу пассив¬
ных объектов, органы управления совместно с исполнительными
устройствами заменяются пассивными фильтрами, например механи¬
ческими колебательными звеньями.
Положение масс летательного аппарата характеризуется век¬
тором координат qo6. Эти координаты отсчитываются в опорной си¬
стеме координат, которую для простоты считаем неподвижной. Поло¬
жения масс акселерометров и моделей исполнительных частей
характеризуются векторами относительных координат qaK, qH, от¬
считываемых от масс объекта. Кинетическая, потенциальная энер¬
гии и диссипативная функция заданной части системы равны
т = 4 ^б/поб<7 + 4 + Я об) +
+ 4" ^ак + ?об)/Пак (?ак + ?об)»
П ~ ^обСоб^об “Ь ~2~ Я1СиЯи “Ь “2" ^аАк^ак’
В 2 ^об^об^об 4" 2 + 2 ^ак^ак^ак*
(4.31)
Здесь /и0б, ^и, шак —матрицы масс объекта, моделей исполни¬
тельных органов и акселерометров соответственно. Аналогично сОб,
сп, сак> /’об, Ги, гак —матрицы жесткостей и коэффициентов вяз¬
кого трения соответствующих подсистем заданной части системы.
Bqe матрицы симметричные. Матрицы таК, ти, гак, ги, сак, си обыч¬
но диагональные. Уравнения Лагранжа принимают вид
^об?об + (?и 4" ?об) 4" ^ак (?ак 4" Я об) 4“ ^обЯоб 4* ^обЯоб — /и>
^ак^7ак 4~ ^ак^об 4~ ^"ак^ак 4“ ^акЯак
(4.32)
^и7и 4“ МиЧоб 4- ^пЯи 4" ^и?и /и*
Здесь /и —входное воздействие исполнительных устройств (синте¬
зируемое управление) при принятой модели является также векто¬
ром силы, действующей на заданную механическую часть системы.
Для непосредственного измерения считаем доступными коор¬
динаты исполнительных органов qn, q* и выходные величины аксе¬
лерометров ^ак, <7ак. Упругие деформации объекта ^об, qQ^ для не¬
посредственного измерения считаются недоступными. Однако па¬
раметры акселерометров известны, а шумы в них не учитываются.
Поэтому возможно полное восстановление полезного входного сиг¬
нала, что при числе акселерометров, равном числе степеней свободы
ДЕМПФИРОВАНИЕ УПРУГИХ КОЛЕБАНИЙ
149
§
объекта, равносильно непосредственному измерению ^Об, 9об, т. е.
полной степени наблюдаемости. Для такого восстановления вы¬
ходную величину акселерометров ^ак следует подвергнуть дейст¬
вию операторов
- (1 + /«ГЛакР"’ + '«ГкР-2)’ - (’ + тГЛакР_1 + ^ГкР-2) Р- (4‘33)
Уравнения (4,31) можно записать в виде
mq + rq + cq = bf, (4.34)
т0(, + тп 4- так
т™
/Пи
'об
0 0
tn =.
^ак
tnaK
0
>
г
=
0
Гак 0
та
0
/Пи
0
о Ги
Соб 0 0 I
?об
1 0 0
с =
0 Сак 0
. <7 =
?ак
. f
=
0
. b
1 —
ООО
0 0 Си|
<7и
0
1 0 0
— блочные матрицы. Если число акселерометров и число органов
управления равно п, а именно этот случай рассматривается в даль¬
нейшем, то ранги всех матриц /иоб, так, ти, гоб, гак, ги, сОб, сак,
си равны п.
Уравнение заданной части системы (4.34) отличается от уравне¬
ния (4.1) только наличием матрицы —множителя Ь. Оптимальные
управления содержат в этом случае матрицу — множитель Ьт пос¬
ле матрицы коэффициентов усиления каналов (см. § П.4). Соответ¬
ствующий множитель фигурирует и в минимизируемом функцио¬
нале в выражении «сигналы управления». Таким образом, при ми¬
нимизации функционала
00 ОО ОО
1 = 4- f Q^qdt + -у j qTfn’qdt + 4" i rk7'fdt +
0 6 6
oo
+ 4" J (<? + 2r~xmq)T bkjf (q + 2r~xmq) dt (4.35)
оптимальное управление для объекта (4.34)
R f = ~ (q 4- 2r~xmq). (4.36)
поЕпСКРЫТ0М До матРиц‘блоков виде функционал и оптимальное уп¬
равление имеют вид J
ОО
7 = ~ J + ^ЛЛак + <ГаСЛ) dt + 41 dt +
ОО О
~2~ j ^бтобРоб + (<7и + <70б)т tna (qH qo6j ц.
+ бак + <70б)Т/Пак (<7ак + М Л +
150 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. jy
оо
+ 4 j 1<?об + <7и + 2r-6l (mo6qo6 + muqo6 + maKqo6 + maKqaK + ти<?н) +
+ 2T* (тЛ6 + 'Ми)]т*и [<70б + <7И + 2r^6l X
* Кб^об + тЛб + тЛ-, + + тЛ) +
+ 2г7* (т„7об + тЛ)]
= [qo6 + qu+ 2r~6' (mo6qo6 + /nH<jo6 + /пакдоб + mayqaK +
+ «Л) + 2Г-1 (muqo6 + «„<?„)].
Естественно считать массы, количества движения и энергию ак¬
селерометров и моделей исполнительных устройств малыми в срав¬
нении с массами, количествами движения и энергией летательного
аппарата как упругой системы. В этом случае выражения функцио¬
нала и оптимальных управлений упрощаются:
оо оо оо
1=4 J +41 ^б^об^об ^+41 dt+
0 0 о
+ 41 [?об + ?и + ^Хб^об + 2гй,/Пи (?об + <7И)Г Я
к кя [qo6 + <7И + 2r~lmo(iqo6 + 2г~'ти (qo6 + ?„)] dt, (4.37)
/и = — ka [<70б -Ни + 2r-6lmo6qo6 + 2r~lmu (qo6 + <?„)]. (4.38)
С учетом того, что величины qoe, ?об получаются в результате пре¬
образования сигналов акселерометров операторами (4.33), выраже¬
ние (4.38) принимает вид
/и = — ku [(1 + 2г-'та6р + 2г-1тир) (1 + m~Jravp-' +
+ тХкР-2) <7а + (1 + 2г^тар) qj. (4.39)
Если степень управляемости объекта меньше т. е. число орга¬
нов управления меньше числа степеней свободы, то соответствующие
коэффициенты усиления каналов (соответствующие элементы мат¬
рицы kH) следует положить равными нулю. Одновременно устра¬
няются соответствующие составляющие функционала.
В качестве конкретного примера рассмотрим модель полукрыла
с тремя сосредоточенными массами, простейшими упругими и дис-
ДЕМПФИРОВАНИЕ УПРУГИХ КОЛЕБАНИЙ
151
f 4.1 J
сипативными связями. В этом случае
Си
£12
0
Гц
Г12
0
С21
£*22
^23
, ^об —
Г21
>22
Г23
0
£32
С33
0
Г32
Г33
/Поб =
т1
О
О
О О
т2 О
О т3
Скалярные величины mlt т2, т3, cu, с22, с12 — c2i> с23 — с32 — с33,
rllt г22, гзэ, г12 = г21, г23 = г32 = г33 положительны. Число акселе¬
рометров и исполнительных органов полагаем равным 3, а соответ¬
ствующие матрицы — диагональными и с одинаковыми элементами:
ти = т£1, ги = г21, си = с°я1,
где тя, г®, Си — скалярные величины, 1 — единичная матрица
(3x3). Одинаковые диагональные элементы соответствуют одина¬
ковым акселерометрам и исполнительным органам трех каналов
системы демпфирования. Подставляя заданные выражения в (4.38)
и обозначая компоненты qoc через ft, q2, q3, получаем оптимальные
законы управления в скалярной форме
/и1 = — ^ (ft + <7Hi + 4" 1(г22г33 — r23) + r12r33m2q2 +
+ ri2r 1зтзЯз1 + 2 -у- 7i + 2 -у- 7И1 ,
ги ги
/И2 = — k2 [ft + qK2 4- А (г12г33т^! + rur33m2q2 +
2trl . 2m° . 1
+ rnr23m3q3) + —— q2 + —— 7и2
Ги ги j
/из = — k3 [q3 4. диз [r12r23m171 + rur23m2q2 4-
• 2/71^ . 2/tjO •
+ (/-1/22 — r212) m3q3] 4- —i q3 4- —qn3
rn ru
где
(4.40)
A = г1гг22г33 — r}2r33 — r|3ru.
мойНарИС’4Л пРеДставлены свободные колебания рассматривав¬
ши полУкРыла при следующих значениях параметров:
~ я’™2 = 400> тз = 200 1кг]; сХ1 = 107, с22 = 4 • 10е,
33 - 8 • 10 • сХ2 = 3,2- 10е, с23 = 8 • 105 [м • At-1]; ru = 104,
152 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ
Ггл. IV
г22 = 4 . 103, г33 = 8 • 102, г12 = 3,2 • 103, г23 = 8 • 102 [кгсек^]
и начальных условиях
<71 (0) = ?2 (0) = <7з (0) - 1, <7Х(О) = <?2(0) = ?3(0) = 0.
Свободные упругие колебания затухают медленно. Параметры мо¬
делей исполнительных устройств считаем равными = 10 кг.
Рис. 4.1. Свободные колебания модели полукрыла.
= 2 • 103 кгсек~'. = 3,6 • 105 н • л/-1. Быстродействие ис¬
полнительных устройств здесь принимается высоким (собственная
частота порядка 30 гц). Это обусловлено тем, что высшая частота
демпфируемых колебаний также высока — порядка 20 гц. Высокое
быстродействие исполнительных устройств достижимо при неболь¬
ших органах управления.
Колебания в оптимальной системе с управлениями (4.40) при
указанных значениях параметров и k1 = k2 = k3 = 106 н • л/"1»
полученные на АВМ, представлены на рис. 4.2. Эти процессы
ДЕМПФИРОВАНИЕ АЭРОУПРУГИХ КОЛЕБАНИЙ
153
<5
4.2]
соответствуют начальным условиям:
ft (0) = <7и2 (0) = <7з (0) = h <71(0) = ?2(0) = ?з(0) = 0.
<7их (0) = <7и2 (0) = <7из (0) = 0. ?И1 (0) = <7и2 (0) = <7Йз (0) ~ 0.
Так как предполагается возможность идеального восстановления
входных сигналов акселерометров, эти звенья из рассмотрения выпа¬
дают и синтезированная система имеет двенадцатый порядок. Гра¬
фики рис. 4.2 свидетельствуют о достаточно высокой эффективности
системы демпфирования упругих колебаний, синтезированной рас¬
сматриваемым методом.
§ 4.2. Аналитическое конструирование систем
демпфирования аэроупругих колебаний
Аэроупругий летательный аппарат в отличие от просто упругого
не является пассивным объектом. Для моделей с сосредоточенными
параметрами типа (1.77) это проявляется в том, что матрицы-коэф¬
фициенты уравнения
mq +(r + ra)q + (c + ca)q = fs (4.41)
(/2 — вектор суммы сил за вычетом аэродинамических сил, создавае¬
мых упругими деформациями), несимметричны:
(4.42)
Кроме того, невозмущенное состояние аэроупругого объекта может
быть неустойчивым, в то время как невозмущенное состояние пас¬
сивного объекта всегда устойчиво. Вследствие этого особо простые
решения задач синтеза, существующие для пассивных объектов,
для аэроупругих летательных аппаратов, вообще говоря, не приме¬
нимы. Однако здесь можно применять все методы аналитического
конструирования, разработанные для линейных объектов общего
вида.
' налипгическое конструирование систем демпфирования
Р упругих колебаний с помощью фундаментальной матрицы
весовых функций
црнш т^т/Же °™ечалось> Достаточно детальные модели с сосредото-
tphrhity РаРаметРами Упругих и аэроупругих колебаний лета-
лля я "ПараТ°В отличаются высокой размерностью. Поэтому
povnDvrnx Г°” консТ,руирования систем демпфирования аэ-
многомрпныр м НИИ наи^олее подходят способы, рассчитанные на
мноюмерные многосвязные объекты.
РОМК КОИЭ^(ЬипиРптмСПОСОбОВ можно отнести способ, при кото-
ФФ оптимальных управлений выражаются через
154 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [гл.
IV
интегралы попарных произведений элементов фундаментальной мат¬
рицы весовых функций свободного объекта (см. § П. 4). Способ приме¬
ним для случая полной степени наблюдаемости или приводимых к
нему случаев.
Запишем уравнения аэроупругих колебаний совместно, быть
может, с уравнениями датчиков и исполнительных устройств снова
в форме (4.1)
mq + rq + cq = f, (4.43)
где матрицы m, г, с в общем случае несимметричны. Матрицу по¬
лагаем неособой. Вводя вспомогательные векторы (4.2) х, и, размер¬
ности 2п, получаем уравнение в форме (4.3)
х + ах = и,
где
II ° 1
а [с т~хг
Если невозмущенное состояние объекта
х + ах = О
(4.44)
устойчиво, то оптимальными в смысле минимума функционала (4.4)
управлениями служат
и = — k2Ax, (4.45)
где
OQ
А = j wFfiwdt, (4.46)
о
w —фундаментальная матрица весовых функций, удовлетворяющая
уравнению
w-j-aw = 0, и>(0) = 1, (4.47)
al — единичная матрица (2п X 2п). Представим матрицу w в виде
блочной матрицы
“>612II
“’бза!
“’бн
“»621
(4.48)
w =
Подставляя (4.44), (4.48) в (4.47) и раскрывая матричное урав¬
нение до матриц-блоков, получаем
“’611 — ^621 = 0.
И’612 — “’622 = 0,
“>621 + tn-‘сШбп + tn-'rwM1 = 0,
“’622 4- tn-'cw61i + m-'rw6i2 = 0.
(4.49)
§ 4.2]
ДЕМПФИРОВАНИЕ АЭРОУПРУГИХ КОЛЕБАНИЙ
155
Важной является возможность экспериментального определения
фундаментальной системы весовых функций. Здесь используется
термин «экспериментальное», так как соответствующие испытания
могут выполняться не только на математической модели объекта,
но на физической модели и даже натурном объекте.
Начальные отклонения (возмущения) модели или реального
объекта могут создаваться ударными воздействиями. Однородное
уравнение матрицы весовых функций (4.47) с ненулевыми началь¬
ными условиями можно заменить неоднородным уравнением с
нулевыми начальными условиями и «6-импульсной» правой частью:
w + aw = 8 (0 1, w (— 0) = 0. (4.50)
Здесь 6(0 — скалярная 6-функция, 1 —единичная матрица
(2n X 2п). Решения уравнений (4.47), (4.50) эквивалентны при
0,т. е. в интервале +0 4- оо, где +0 — сколь угодно малая
положительная величина. Эксперимент с математической моделью
х + ах = и, соответствующий уравнению (4.50), весьма прост. Он
состоит из серии 2п испытаний, в каждом из которых на вход од¬
ного канала подается б-импульс и регистрируются реакции всех
2п выходов модели (величины wik (0, i = 1, 2, ..., 2n, k соответству¬
ет номеру входа, на который подан возбуждающий импульс). В ре¬
зультате всей серии испытаний (k = 1, 2, ..., 2п) получается ис¬
комая фундаментальная матрица весовых функций до = ||и^||.
Однако если речь идет не о математической модели, а о физи¬
ческой модели или реальном объекте, то эксперимент, прямо соот¬
ветствующий (4.50), неосуществим.
Физическая модель или натурный объект описываются (с извест¬
ными допущениями) уравнением (4.43) и имеют п входных величин —
компонент вектора силы f. Представим уравнение (4.50) в виде урав¬
нения с блочными матрицами:
621
— 1
т~хг
^бп
^621
0 II
6(01|’
“’6ia| = II6 (0 1
I 0
где 1 — единичная матрица (n х п). Отсюда следует
Й'бП— ^621 =6(/)1,
«<612 — даб22 = 0,
®б21 + т- 'сшей + т-’га>б21 = 0,
й>б22 + 4- m-'rw622 = 6 (0. 1.
Известно,
6-функциями
что преобразования дифференциальных уравнений с
можно выполнять формально так, как будто 6-функция
156 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Г>
(4.51)
л. iv
является дифференцируемой. При таком преобразовании получаем
то»б11 4- rw6n 4- cw611 = r8 (/) + тб (/),
тш>622 + rw622 4- cw62a = mb (О,
И»б12 = { “’бгз dt, w621 = i611 — S (0 = О>611.
Обозначение и4п введено для сокращения последующих фор¬
мул. Из этих уравнений видно, что матрицы весовых функций иуб11>
tote могут быть непосредственно определены при. экспериментах
на физической модели или реальном объекте. Для этого требует¬
ся воспроизвести ударные воздействия*), отображаемые членами
гб (0 + /пб (0, /иб (0.
Воспроизведение подобных воздействий затруднено по двум
причинам. Во-первых, воспроизведение б-импульсного воздействия
требует пары мощных ударов, разделенных очень малым интервалом
времени и имеющих противоположные направления. Такое воздей¬
ствие в идеальном случае должно вызывать мгновенное смещение
массы. Ясно, что реализация таких воздействий затруднена. Во-
вторых, если матрицы т, г не являются диагональными, а недиа-
гональность хотя бы одной из этих матриц является типичной,
то удары в каждом эксперименте необходимо наносить одновременно
в нескольких точках (по нескольким сосредоточенньш массам). Это
также вызывает определенные затруднения.
Самой простой является серия экспериментов, соответствующих
уравнению
та + га + са = б (0 1, (4.52)
где а — квадратная матрица координат q19 q2,..., qn в п эксперимен¬
тах. Эта серия экспериментов состоит в нахождении (регистрации)
реакций координат qu q2, qn и их производных q19 q2, ..., qn,
?i, <72, •••» Яп на нормированные удары, наносимые последователь¬
но по сосредоточенным массам физической модели, натур но го объекта
или математической модели. Время t в каждом эксперименте от¬
считывается от момента возбуждающего удара (б-импульса). В каж¬
дом эксперименте наносится удар только по одной массе. Путем со¬
поставления выражений (4.51), (4.52) находим
^би = + а/n, шб22 = ат,
w612 = шб21 = аг + ат — 6(1) = (аг + ат)'.
*) Конечно, в реальных экспериментах можно лишь приблизиться к 6-импуль-
сному и тем более 6-импульсному воздействию. Однако если длительность
реального импульсного воздействия мала в масштабе времени собственных ко¬
лебаний объекта, то реакция на такой импульс близка к реакции на идеальный
импульс.
4.2]
ДЕМПФИРОВАНИЕ АЭРОУПРУГИХ КОЛЕБАНИЙ
157
Легко проверить выполнение начальных условий
Шб11(+°)=1’ а’б22(+°)=1»
о>б12 (+ 0) = о, даб21 (+ 0) = са (+ 0) = 0.
Таким образом, искомые матрицы-блоки и фундаментальная матри¬
ца весовых функций
ar + ат ат
w = .
II (аг + ат)' ат
(4.54)
достаточно просто выражаются через матрицы реакций а, а, а, полу¬
ченных в результате описанной серии экспериментов.
Конечно, для вычисления w по указанным экспериментальным
данным необходимо знать матрицу масс т и матрицу коэффициен¬
тов собственного демпфирования г. При чисто эмпирическом изу¬
чении объекта для этого необходимо выполнить дополнительные
эксперименты или дополнительную обработку результатов экспери¬
ментов по определению а, а, а. Последний путь наиболее удобен и
его можно рекомендовать. Следует только отметить, что для на¬
хождения матриц /и, г по результатам испытаний на ударные воз¬
действия необходимо знать матрицу жесткостей с. Последняя мо¬
жет быть определена по результатам статических испытаний.
Для вывода соответствующих формул умножим уравнение (4.52)
справа последовательно на а, а и проинтегрируем по t в интер¬
вале от +0 до оо. Здесь +0 считается бесконечно малой положитель¬
ной величиной, но такой, что 6 (+0) = 0. Получаем
°о оо оо
tn \ aadt + r f aadt + с \ a?dt = 0,
-Н +о фо
(4.55)
На интервале +0 . оо матричная функция а (0 непрерывна со
а (X) = Пр0ИЗВ0д™ми- Из Условий а (+0) = 0, а (+0) = т~\
, а (оо) — о (объект по условию устойчив) находим
1naadt = «« | - ]&dt = - (rfdt,
+° +0 +0 фэ
Т °° оо оо
+° +0 +0
158 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ
[Гл. IV
В соответствии с этим уравнения (4.55) принимают вид
оо оо оо
т j a2 di 4- г § aadt = с a2di,
+0 +0 +0
ОО ОО ОО
т § aadt + г § a2dt = — с j aadt.
4-0 4-0 4-о
Зная с и определяя матрицы
(4.56)
оо
f a2 dt,
+о
J aadt,
+о
оо
a2 dt,
+о
ОО
\ aadt
+0
по результатам экспериментов, из уравнений (4.56) можно найти т
и г. Возвращаясь к решению основной задачи определения оптималь¬
ных управлений, запишем выражение (4.46) с учетом блочного пред¬
ставления (4.54) фундаментальной матрицы весовых функций ш.
При этом на основе ранее приведенных соображений матрицу 0
зададим в виде (4.6)
Рб11
о
о
₽ =
Перемножая матрицы, находим
Рб22
(4-57)
где
оо
Дбц = [(«/■ + ®/п)т ₽бн («г + «/«) di +
+о
оо
4- J (а/-4-а/п)тРб22(аг + а/п)Л,
+о
оо оо
Лб12 = J (“^ + “т)т ₽бн«/« dt -J- J (аг 4- а/и)т ₽б22а/п dt,
+0 +0
(4.58)
оо оо
Лб21 = J ттатрб11 (аг 4- am) dt 4- j /птатрб22 (аг 4- am) dt,
4-0 4-о
ОО оо
Лб22 = У tria^^am dt 4- J /птат0б22а/п dt.
4-о 4-0
Здесь штрих у скобки (аг 4- ат) опущен, так как по условию
fi (4-0) = о и
(ar + = аг + ат.
$ 4.2]
ДЕМПФИРОВАНИЕ АЭРОУПРУГИХ КОЛЕБАНИЙ
159
(4.59)
Физически реализуемым является управление
II 0 II - II ° II
U ~ I Ы2 II _ || т~Ч || ’
поэтому матрица коэффициентов усиления каналов задается в виде
ЦО 0 II
Mio М’
где кл — матрица-блок (п X п).
В соответствии с (4.45), (4.57), (4.59)
II 0
II Ы2
0 0
Am ^612
0 k6
Am As22
откуда
■ Ш f — + Д)22?)* (4.60)
Лб22 согласно (4.58) можно записать в виде
(4-61)
^622 = m Д I «т₽б11а dt) 4- тТ J атРб22«у Ш.
Подставляя эти выражения в (4.60) и вводя обозначение k* = tnk6mT,
получаем
/ = ~Л
(СО оо \ / оо
j аТ₽би« dt + j атрб22а dt) /77 + I J атрб11а dt 4-
4-o +0 / \4-o
+ I атРб22« dt \mq 4- ( | атрб11а dt 4- f атрб22а dtlmql
+0 ) \ +0 +0 ) J •
Итак, можно формулировать следующий результат. Для объекта
mq + rq + cq = f (4.62)
невозмущенное состояние которого (<7 = 0, q = 0) асимптотически
устойчиво, оптимальным управлением, минимизирующим функ¬
ционал
СО
1 = 4" .1 ^6uqdt 4-4 J <7тРб22<7 dt 4- 4 J P^'fdt 4-
0 о
оо
+ 4 S (Д«17 4- д;22д) dt. (4.63)
160 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ
[Гл. iv
является управление
f = — Иб21<7 + ^622?),
(4.64)
где
(4.65)
возму-
путем
ударами со-
оптимальных
(оо СЮ \
| ат₽бпа^ + J ат₽б22а^ ]т
+0 +0 /
(сю ОО \
j ат₽б11® dt + f атРб22а di И +
+о +о /
Qi оо \
атрб11а dt + ( атрб22а dt | т,
. з +з /
а = а (0 — матрица весовых функций, получаемых
щения объекта последовательными нормированными
гласно уравнению
та + га 4- са = 6 (/) 1.
Ранее рассмотренные варианты функционала и
управлений для пассивного объекта (упругого летательного аппа¬
рата) могут быть получены как частные случаи выражений (4.63)—
(4.65).
Полученное решение, как указывалось, относится к устойчиво¬
му объекту. Однако невозмущенное состояние аэроупругого лета¬
тельного аппарата может быть неустойчивым. Флаттер и диверген¬
ция [1.17] — характерные формы потери устойчивости невозмущен¬
ного состояния аэроупругого летательного аппарата или отдельных
его поверхностей.
Таким образом, необходимо привести решение задачи аналити¬
ческого конструирования оптимальных управлений для неустойчи¬
вого объекта. Это тем более необходимо, что борьба с флаттером по¬
средством управления является актуальной задачей. Решение для
неустойчивого аэроупругого летательного аппарата получается из
решения для устойчивого объекта описанным в § П.З способом.
Допустим, что невозмущенное состояние объекта
rriq 4- rq + cq = f
неустойчиво. Тогда свободное движение q (t) будет нарастающим.
Произведем преобразование координат
q' = 7ехр(— 10,
где ехр (—10 — скалярная величина и!>0 выбрано настолько
большим, что q' (0 -> 0 при t -> оо. В новых координатах движение
объекта описывается уравнением
mq’ + (21/n + r)q’ + (l2/n + 1г + c)q' = /ехр(— М) = f'. (4.66)
§ 4.2j
демпфирование аэроупругих колебаний
161
Невозмущенное состояние q' = 0 q' = 0 здесь устойчиво и можно
применять ранее полученное решение. Для этого назначаем функци-
онал *) типа (4.63)
ОО ОО оо
7 = ‘ J dt + 4- J q'^q’ <и + ±Д Pk-'f' dt +
О о 6
оо
+ “4" j Иб21/ + Лб22/)Т k* (Лб21/ + Лб22?') dt
О
и получаем оптимальное управление вида (4.64)
f' ~ — k* (Л 621^' + Лб22/).
В исходных координатах
оо оо
7 = -Г J ехР <- 2W) ?Т₽и<7 di + 4" j exp (— 21/) ?тр22? dt 4-
о о
+ т .[ ехР <- 2W) rkpfdt + 4 J exp (- 21/) [Awq +
0 о
+ л522 (q — Kq)]Tk* [Лб21<7 + A*622 (q —!</)] dt, (4.67)
Здесь
f — k* [Л62iq + Дб22 (q — A,^)J.
Лб22 == И а'трпа' dt + j а'тр22а' dt] m,
, -f-o /
Лб2' = Q a,Tpua' d/ + J a'Tp22aTd/j (21m 4. r) 4.
+ ( J а'Т₽ца' dt 4- У a'Tp22a' d/'j tn,
причем, очевидно, 'k+° +0 '
a' = a exp (- 1/), a' = (a - la) iXp (_ 1/),
a = (a — 21a 4- l2a) exp (— 1/).
пр°иХТяЯ10ПвнимДаННиер ВЬ1ражения в Формулы для А’б22, А'б21 и
ьи внимание соотношение
J ехр (— 21/) (атр22О, аТр^а)
*) Индекс «б» при Матрицах.блоках ра опускаем
6 А. А. Красовский
(4.68)
оо
di = 21 J exp (— 21/)aT022a dt,
о
162 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. jy
получаем
Аб22 =
оо со
j exp (— 2А/) aTPna dt 4- j exp (— 2%/) ат022а dt—
.+о +о
ОО
— ЗА,2 У ехр (— 2А:) атР22а dt
4-о
tn,
д;21 =
оо оо
У ехр (— 2А/) атрпа dt + j exp (— 2А/) ат022а Л —
.+о 4-о
ОО
— ЗА,2 j ехр (— 2А,/) атР22а dt
+о
(2A/n-J- г) +
(4.69)
+
J ехр (— 2Х/) атрп (а — Ха) dt +
.4-0
ехр (— 2Х/) (а — Аа)т (J22 (а — 2Ха + Х2а) dt
tn.
Формулы (4.69) позволяют вычислить коэффициенты оптималь¬
ных управлений с помощью матрицы экспериментальных весовых
функций а (/) неустойчивого аэроупругого летательного аппарата.
Методика экспериментального определения а (0 здесь, в общем, та
же, что и для устойчивого объекта: регистрируются реакции на нор¬
мированные удары, наносимые последовательно по п сосредоточен¬
ным массам ти. Следует, однако, заметить, что для неустойчивого
объекта подобные эксперименты в полете затруднены или невозмож¬
ны. Поэтому экспериментальное определение весовых функций аэ¬
роупругого летательного аппарата на режимах неустойчивого не¬
возмущенного состояния лучше проводить на физических аэродина¬
мических моделях. Кроме того, конечно, всегда остается возможность
использования математической модели объекта.
§ 4.3. Вопросы осуществления систем демпфирования
аэроупругих колебаний
Практическое осуществление систем демпфирования аэроупру¬
гих колебаний представляет собой нелегкую техническую задачу.
Можно выделить три основных вопроса, возникающих при создании
подобных систем: быстродействие, распределенность (многомерность)
и адаптивность. Кроме того, естественно, большое значение имеют
вопросы надежности.
Рассмотрим эти вопросы последовательно. Совершенно очевидно,
что в рассматриваемых системах органы управления должны со-
163
ОСУЩЕСТВЛЕНИЕ СИСТЕМ ДЕМПФИРОВАНИЯ
§ 4.31
атк колебания с частотами аэроупругих колебаний, т. е. высо-
веР*Астатами (в масштабах шкалы частот систем управления с
ними настоями \ мрхяническим выходом). Это налагает жест-
относительно мощны “уСтродействие привода. Особенно жесткими
кие требования на Р систем борьбы с наиболее высокочас-
эти требования колебаниями — некоторыми видами флаттера.
Т°"окое быстродействие требует, вообще говоря, значительной
мощности привода органов управления. Оценим путем элементарных
Задний потребную мощность управляющего воздействия (а
соображении н ; колебании одиночной массы
сНеугловой^астПоРтХа)и амплитудой qlm необходимо совершить работу
1 9 2
— qim-
Если подавление колебаний осуществляется за время
лг. 2л
Т = и
G)
(н — время гашения колебаний, выраженное в числе периодов),
то средняя за время Т потребная мощность управляющего воз¬
действия равна *)
1 о 2 1
tnflrqim = miqimvqitn
где qim = ^qirn— амплитуда ускорения, v = -^-— частота. Если
т. = Ю00 кг, qim = 30 м • сек,-2, v = 10 гц, х = 1, то потребная
средняя мощность управляющего воздействия составляет 1140 вт.
Для подавления аэроупругих колебаний иногда применяются пас¬
сивные, точнее, полупассивные системы демпфирования. Под этим
понимается следующее.
Из теории, изложенной в § 4.1, видно, что при определенном
критерии (назначаемая часть минимизируемого функционала —
количество тепла, выделяемого на элементах внутреннего трения) оп¬
тимальная система демпфирования состоит из автономных простей¬
ших каналов (см. выражение (4.15)). Это означает, что для довольно
эффективного демпфирования упругих колебаний достаточно иметь
автономные (зависящие только от одной координаты qt, точнее, ее
производной qt) управляющие воздействия:
fi — k*{qh (4.70)
Допустим, что в качестве обобщенных координат выбраны
относительные смещения соседних сосредоточенных масс. Тогда не¬
трудно указать конструкцию простых устройств прямого действия,
реализующих управляющие воздействия, близкие к (4.70).
йпчпАХ°еМа ЭТИХ УСТР°ЙСГВ чредставлена на рис. 4.3. Управляющие
исгвия создаются здесь за счет элементов вязкого трения 1
Ввиду малости собственного демпфирования, его не учитываем.
164 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [гл. IV
(в виде цилиндра с вязкой жидкостью и поршнем), создающих
при деформации летательного аппарата отклонения специальных
органов управления 2. Цилиндр каждого элемента трения / соединен
достаточно жесткой штангой 3 с соседней массой или прочным эле¬
ментом конструкции, удаленным на определенное расстояние.
Поршень каждого элемента 2 подвешен упруго с помощью пружины
4 и соединен тягой с органом управления 2. Органы управления 2
Рис. 4.3. Схема устройств демпфирования аэроупругих колебаний прямого
действия.
могут выполняться, например, в виде вынесенных над аэродинами¬
ческой поверхностью малых поворотных рулей с возможно лучшей
аэродинамической компенсацией (совмещением центра давления с
осью подвеса). Чем лучше скомпенсирован руль, тем меньше его
шарнирный момент и выше усиление по мощности и усилию.
Усиление органа управления по усилию равно отношению силы
fit создаваемой этим органом при некотором отклонении, к усилию,
необходимому для создания этого отклонения. Усиление по усилию
можно изменять за счет кинематики передачи движения (за счет
изменения соотношения плеч рычагов). Усиление по мощности,
определяемое как отношение мощности к мощности, затрачи¬
ваемой на отклонение органа управления, не может быть увеличено
за счет кинематики передачи движения.
Для высокой эффективности рассматриваемых систем демпфиро¬
вания прямого действия необходимо, чтобы коэффициенты усиления
органов управления по усилию и мощности имели порядок несколь-
ОСУЩЕСТВЛЕНИЕ СИСТЕМ ДЕМПФИРОВАНИЯ
165
4.3]
десятков и во всяком случае были не меньше десяти. При соот¬
ветствующей конструкции органов управления это достижимо.
Система функционирует следующим образом. В невозмущенном
состоянии аэроупругой конструкции (qt = 0, qt = 0) органы уп-
ения за счет пружины 4 находятся в нейтральных положениях
исправляющих сил не создают (рис. 4.3, а). При деформации аэ-
novnDvrofl конструкции со скоростью qt соседние сосредоточенные
массы или силовые узлы смещаются друг относительно друга. Эти
относительные смещения за счет штанг 3 и упругих подвесов порш¬
ней цилиндров преобразуются в перемещения поршней в цилиндрах.
При этом в каждом цилиндре возникает сила вязкого трения, при¬
близительно пропорциональная q^. Эти силы вызывают деформации
пружин 4 и отклонения органов управления, приблизительно
пропорциональные qt (рис. 4.3, б). Так реализуются управляющие
воздействия, близкие к (4.70). Необходимо отметить, что соответ¬
ствующая близость получается при определенных условиях. Дей¬
ствительно, более полное уравнение движения поршня и связанного
с ним органа управления можно записать в виде
^inQin “F Г inQin “Ь ^inQin =
(4.71)
где miu — приведенная масса поршня, rin — коэффициент вязкого
трения, создаваемого в основном жидкостью в цилиндре, cin — ко¬
эффициент жесткости упругого подвеса поршня. Здесь мы пренеб¬
регли сухим трением и шарнирным моментом руля. Таким образом,
вместо идеального дифференцирующего звена, которое полностью
отвечало бы соотношению (4.70), имеем согласно (4.71) последова¬
тельное соединение дифференцирующего и колебательного (или двух
апериодических) звеньев. Однако если жесткость cin достаточно ве¬
лика, так что частота согп = с1п/т1п существенно превышает наивыс¬
шую частоту демпфируемых колебаний, то можно приближенно
считать
где
п = 2^п п
minw2ln qi “to 0
1 г to
2
bn =
зя затУха„ния- Данную систему демпфирования нель-
ленир и я р пассивнои, так как в ней обязательно используется уси-
системы fiv^aHaX УпРавления за счет энергии потока. Подобные
действия йуМ называть полУ пассивными или системами прямого
получения nur положвтельными качествами является возможность
сокоТнТежнппТп быстРодейсгвия (высокие значения о/п) и вы-
и небольшим ЧИрИп;ВЫС0КаЯ надежн°сть определяется как простотой
м механических элементов, входящих в систему.
166 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. IV
отсутствием специального источника энергии, так и естествен¬
ным резервированием. Под естественным резервированием здесь по¬
нимается то, что выход из строя одного или части органов демп¬
фирования аэроупругих колебаний может не приводить к потере
устойчивости или другим катастрофическим последствиям.
Наряду с указанными достоинствами системы демпфирования аэ¬
роупругих колебаний прямого действия обладают существенными
недостатками. Осуществление более сложных, чем (4.70), законов
демпфирования в подобных чисто механических системах наталки¬
вается на большие трудности. Системы такого вида трудно сделать
адаптирующимися, т. е. изменяющимися в соответствии с изменени¬
ем условий. Не требуя специального подвода энергии, полу пассив¬
ные системы требуют «подвода перемещений» с помощью достаточ¬
но жестких штанг, рычагов и т. п., размещаемых внутри конструк¬
ций летательного аппарата.
Все это указывает на то, что системы демпфирования прямого
действия целесообразно применять только в некоторых случаях для
гашения наиболее высокочастотных аэроупругих колебаний.
Основным видом систем демпфирования аэроупругих колебаний
следует считать активные системы, использующие исполнительные
устройства (приводы органов управления). Активные системы демп¬
фирования аэроупругих колебаний, как правило, являются мно¬
гомерными, т. е. имеющими значительное число входов (датчики ин¬
формации) и выходов (приводы органов управления). Из изложен¬
ной выше теории аналитического конструирования следует, что
подобные системы целесообразно выполнять многосвязными, т. е.
с многочисленными перекрестными связями между каналами.
Очень важным в системах демпфирования аэроупругих коле¬
баний является вопрос об органах управления и приводе этих ор¬
ганов. Конечно, однозначных конструктивных решений в части ор¬
ганов управления и исполнительных устройств здесь не существует.
Могут использоваться весьма разнообразные органы управления, на¬
чиная с основных рулевых органов и секционированных (разрезных)
рулей с индивидуальным приводом каждой секции и кончая струй¬
ными органами управления пограничным слоем. Могут исполь¬
зоваться и различные исполнительные устройства электрогидрав-
лического, электропневматического или электрического типов.
Однако условия предельно высокого быстродействия делают пред¬
почтительными применение электрогидравлического привода для
точного «жесткого» управления положением сравнительно больших
органов и применение электропневмопривода для малых органов
управления.
Малые органы управления могут иметь разнообразную форму,
в частности, могут представлять собой мембраны, встроенные в
основные поверхности летательного аппарата. Мембраны закрыва¬
ют камеры, давление в которых управляется с помощью электропнез-
ОСУЩЕСТВЛЕНИЕ СИСТЕМ ДЕМПФИРОВАНИЯ
167
§ 4.3)
этических устройств. Деформация мембран под действием управ¬
ляющих давлений вызывает управляющие аэродинамические силы.
Подобные устройства могут иметь высокое быстродействие.
В заключение рассмотрим некоторые вопросы, связанные с
адаптивностью (самонастройкой) систем демпфирования аэроуп-
РУ Свойстеа^етательного аппарата как аэроупругого объекта не
остаются неизменными, а изменяются в полете. Это вызвано пере¬
распределением масс, связанным с расходом топлива и другими
факторами, а также изменением аэродинамических сил. Зависимость
от аэродинамических сил хорошо иллюстрирует флаттер крыла.
Потеря устойчивости невозмущенного состояния крыла возникает
только при достижении определенной скорости полета, именуемой
скоростью флаттера.
Изменение свойств аэроупругого объекта в полете происходит
медленно в сравнении с собственными колебаниями этого объекта.
Поэтому математические модели аэроупругих объектов, отражаю¬
щие переменность свойств этих объектов, можно рассматривать как
квазистационарные. Переменность свойств летательного аппарата
как объекта управления требует перестраиваемых, адаптивных си¬
стем управления. Это отмечается во многих работах [4.1]—[4.6] и
предлагаются различные способы самонастройки подобных систем.
Рассмотрим достаточно общий способ самонастройки систем
демпфирования аэроупругих колебаний, тесно связанный с аналити¬
ческим конструированием по экспериментальным данным. Этот спо¬
соб можно назвать корреляционным.
Выше было показано, что оптимальные управления объектом
(4.62), минимизирующие функционал (4.63), имеют коэффициенты
(4.65), выражаемые через матрицу весовых функций объекта и ее
производные а, а. При изменении свойств аэроупругого летатель¬
ного аппарата в полете матрицы т, с, г, а значит, и весовые функ¬
ции а (/), медленно изменяются. Ясно, что в таком квазистационар-
ном режиме выражения коэффициентов (4.65) практически сохраня¬
ют силу. Возникает вопрос о том, можно ли оптимальные медленно
меняющиеся значения коэффициентов матриц Л^, А*б22 опреде¬
лять непосредственно в полете по результатам каких-либо испытаний
или наблюдений. Оказывается, что при некоторых условиях это сде¬
лать можно.
Действительно, пусть на объект действуют возмущающие силы
типа некоррелированных белых шумов (вектор /ш (/)):
mq + rq + cq^^^). (4.72)
*рпaqecTBe fin (0 в принципе могут служить высокочастотные
ЮШИР Щие воздействий турбулентной атмосферы. Эти составля-
выпол нения условия некоррелированности должны иметь
168 СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. IV
пространственный радиус корреляции (масштаб турбулентности),
меньший расстояний между сосредоточенными массами в дискрет¬
ной модели. Таким образом, речь идет, по существу, об акустичес¬
кой составляющей спектра турбулентности. Однако для акустическо¬
го диапазона частот используемая математическая модель может
терять силу. Более приемлемым является создание искусственных
случайных независимых воздействий с помощью тех же органов уп¬
равления, что используются в системе демпфирования аэроупругих
колебаний. Реакцию координаты qL на все компоненты высокоча¬
стотного шума обозначим через qim. Согласно соотношению, спра¬
ведливому для любой стационарной устойчивой линейной системы,
имеем
Аналогично
о м>=1
Отсюда следует
М [<7хш (0 (01 = =
ОО оо п
I j S aZv (rj afttl (т2) М [fvm (^ — Tj)(/— т2)] drjdTg.
0 0 ^=1
Здесь М, а также черта сверху — символы математического ожида¬
ния. Но по условию
М [^ш (i тх) Дхш (t т2)]
SvS (Tj — т2) При Ц = V,
0 При р =/= V,
где Sv — спектральная плотность белого шума fviu. Таким образом,
= 5 “<v Сч) akv (Tj) sv dtj = 2 sva,v (/) afev (/) dt.
0 v=l 0 v=l
В матричной форме
оо
= j" asaTdt,
о
где
s± 0 ... 0
S= 0 S> ••• 0
0 О ... sn
ОСУЩЕСТВЛЕНИЕ СИСТЕМ ДЕМПФИРОВАНИЯ
169
4.3]
пиагональная матрица спектральных плотностей шумов /<ш (0.
^точностью ДО бесконечно малых можно записать
|1мГш11 = j asa'dt.
+о
Аналогично
OQ
iiwu= 5 as^dt'
+о
Для упругого (а не аэроупругого объекта) матрицы /л, г, с симме-
тричны и ат = а. Поэтому для такого объекта
оо °°
II QiniQkui II = У aTsad/, || c/iuflkvi II = § (zs(x,dt9
+о 4-о
оо _ оо
кш^ш|| = f arsadt, ||дгш^ш|1 = j aTsad/.
- +о
(4.73)
QiuiQkui
+0
Назначим матрицы весовых коэффициентов функционала следующим
образом:
(1-74)
где То — некоторая скалярная величина, имеющая размерность
времени. Выражения (4.74) означают, что матрица р выбирается
диагональной и весовые коэффициенты задаются пропорциональны¬
ми уровню высокочастотных шумов в точке контроля соответству¬
ющей координаты. Такой выбор весовых коэффициентов функцио¬
нала представляется довольно естественным и в то же время он
исключительно удобен с точки зрения простоты реализации опти¬
мальных управлений.
При выполнении соотношений (4.74) выражения (4.65) для ко¬
эффициентов оптимальных управлений
(4.75)
f — k* (Л 6219 + Лб22?)
можно записать в виде
+ ( ? aTsa
\+о
(4.76)
dt + П J
4-0
170
СИСТЕМЫ ДЕМПФИРОВАНИЯ АЭРОУПРУГИХ КОЛЕБАНИЙ [Гл. iy
Для упругого объекта, для которого справедливы выражения (4.73),
в соответствии с (4.75), (4.76) получаем в скалярной форме
п
fi = -— S + Ал?Д
k=\
Лц{= {(JiuiQvui 4“ T'о?/ш?¥ш) .
V=1
А'Л == X (QiujQvui 4“ 7o#m<7viii) rvk +
V=1
n _
4" 2 4“ ^vk*
v=l
(4.77)
(4.78)
Эти простые выражения еще более упрощаются для типичного слу¬
чая, когда матрица масс tn является диагональной:
ти ..
0
0 ..
• тпп
а собственное демпфирование упругих колебаний пренебрежимо ма¬
ло (г = 0). Тогда коэффициенты оптимальных управлений выра¬
жаются формулами
А’Л = ^kkQiuiQkui 4“ ^'kk^'oQiuiQkuit 1 л _Г1Ч
, —. (4.79)
Aik = ^kkQiiuQkui 4“ ш?Лш* J
Структура адаптивной системы, реализующей алгоритм управления
(4.77) и алгоритм самонастройки (4.79), может быть представлена
следующим образом. Система быстродействующих исполнительных
органов, помимо управляющих воздействий fh создает высокочастот¬
ные некоррелированные пробные возмущения flm.
Система датчиков, расположенных в узлах конструкции лета¬
тельного аппарата (точках нахождения сосредоточенных масс ма¬
тематической модели), контролирует qL и qiul, qL и qiuli qiui. Си¬
гналы этих датчиков поступают на вычислители, формирующие ко¬
эффициенты управлений (4.79) и сами управляющие сигналы (4.77).
Подобная система является адаптивной замкнутой системой.
Однако практическое осуществление подобной адаптации связано с
определенной сложностью вычислителей (особенно для многомерных
систем).
Трудности возникают также при создании некоррелированных
случайных возмущающих воздействий и контроле реакций на эти
воздействия,
« ОСУЩЕСТВЛЕНИЕ СИСТЕМ ДЕМПФИРОВАНИЯ 1?1
§ 4-3J
Между тем можно предполагать, что существенной является
зависимость оптимальных значений коэффициентов управлений от
небольшого числа параметров, таких как скоростной напор, высота
попета количество топлива в баках, вариант загрузки. Это делает
пепесообпазной настройку системы демпфирования аэроупругих
колебаний в функции этих параметров (адаптация в функции пара¬
метров соеды) Алгоритмы такой настройки могут получаться в
пезультате идентификации летательного аппарата в период летних
испытаний и последующего аналитического конструирования. Со¬
ответствующая методика может быть представлена следующим об¬
разом На основе априорной информации и теоретических положе¬
ний разрабатывается структура математической модели объекта,
удовлетворяющая условиям полной степени наблюдаемости коор¬
динат и идентифицируемости. При необходимости достаточно де¬
тального учета эффектов нестационарной аэродинамики удобной,
как отмечалось в главе I, является модель с аэродинамическими дав¬
лениями (помимо упругих деформаций). После приведения к нор¬
мальной форме линейная математическая модель имеет вид
х —их = Д
где f — возмущающие воздействия, создаваемые, в частности, тур¬
булентной атмосферой. На летательном аппарате размещается си¬
стема датчиков, входящая в последующем в создаваемую систему
демпфирования аэроупругих колебаний. Эта система позволяет
измерять все компоненты х, f в полете. В полете на различных ре¬
жимах регистрируются векторы х, f. Путем наземной обработки ре¬
зультатов регистрации х, f осуществляется идентификация объек¬
та, т. е. определяется матрица а для различных режимов полета.
В предположении квазистационарности это делается на основе со¬
отношения
аххт = fxT — ххт,
где чертой обозначено усреднение по некоторому интервалу времени,
осле этого для всех рассматриваемых режимов полета выполняет¬
ся аналитическое конструирование оптимальных управлений с при-
лечением фундаментальной системы весовых функций или без них.
ределенные таким путем оптимальные значения коэффициентов по
Г"3 сопоставляются со значениями параметров этих
hwy Quf а* опРеделяются приближенные зависимости оптималь-
зависимп^инн пеРедаточных чисел от параметров среды. Далее эти
метпов спрп?ТИЗуЮТСЯ В УстР0Йстве настройки в функции пара-
осуществимым Т°Т ПУТЬ пРедставляется достаточно практичным и
Глава V
АВТОПИЛОТЫ и контуры
УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ
Контуры угловой стабилизации предназначены для стабилиза¬
ции и управления угловым положением летательного аппарата,
характеризуемым углами крена, тангажа, рысканья или им эк¬
вивалентными угловыми координатами и направляющими косину¬
сами. Для самолетов канал руля направления часто выполняет толь¬
ко функцию устранения угла скольжения (стабилизация 0 относи¬
тельно нулевого уровня). Соответствующий контур также будем
называть контуром угловой стабилизации.
Контуры угловой стабилизации занимают как бы промежуточное
положение между контурами демпфирования и контурами управле¬
ния траекторией, так называемыми траекторными контурами. Контур
демпфирования по отношению к контуру угловой стабилизации
принято считать внутренним, а траекторный контур — внешним
контуром. Для систем управления пилотируемых летательных ап¬
паратов наличие автоматических контуров угловой стабилизации
обычно является целесообразным для всех трех каналов (канал ру¬
ля направления, как только что упоминалось, может стабилизи¬
ровать угол скольжения относительно нулевого уровня). Иногда в
интересах простоты и малого веса аппаратуры (особенно для легких
самолетов) ограничиваются двумя и даже одним каналом угловой
автоматической стабилизации. В ракетах некоторых классов кон¬
туры стабилизации рысканья и тангажа, а иногда и крена, отсут¬
ствуют.
Целесообразность контуров автоматической стабилизации угло¬
вого положения для самолетов обусловлена рядом причин. Эти кон¬
туры, реализуя обратные связи по угловому положению летатель¬
ного аппарата, позволяют лучше организовать управление траек¬
торией (являются как бы корректирующими цепями для траекторных
контуров). Характерным в этом отношении является контур ста¬
билизации крена. Без обратной связи по крену (естественная очень
слабая обратная связь по крену в полной модели бокового движения
во внимание не принимается) одноконтурная схема управления бо¬
ковым отклонением самолета от заданной траектории содержит
дополнительное интегрирующее звено. Это затрудняет обеспечение
устойчивости управления.
Стабилизация курса, крена и тангажа позволяет резко увеличить
дискретность траекторного управления. Для ручного управления
СТРУКТУРЫ и ЗАКОНЫ СТАБИЛИЗАЦИИ АВТОПИЛОТОВ 173
f 6.11
екторией это проявляется в том, что при включенном автопилоте
тРа ику достаточно лишь время от времени вмешиваться в управле-
ЛиеЧ внося поправки в заданные значения курса и тангажа и устра-
Н "тем самым накапливающиеся ошибки выполнения траектории.
ОсГегчение работы летчика в установившихся режимах полета яви¬
лось первым фактором, стимулировавшим внедрение автопилотов —
систем стабилизации углового положения самолета.
Угловая стабилизация летательного аппарата в ряде случаев
необходима также для обеспечения нормальной работы важных
видов бортового оборудования. Так, например, для предотвращения
смаза изображения при аэрофотографировании должна быть обес¬
печена определенная точность угловой стабилизации, которая мо¬
жет быть выражена в допустимых значениях угловой скорости крена
и тангажа. Аналогичные требования возникают из условий стаби¬
лизации антенн некоторых радиолокационных, допплеровских и
иных бортовых станций.
Как уже упоминалось, автоматическая стабилизация и управле¬
ние угловым положением обеспечиваются автопилотом в классиче¬
ском понимании этого слова. Автопилот как система угловой ста¬
билизации по своему функциональному назначению занимает про¬
межуточное место между демпферами и системами автоматического
управления полетом (САУ). САУ от автопилота отличают функции
траекторного управления и всережимность (универсальность) ав¬
томатического управления.
Следует, однако, сказать, что вполне четкого деления понятий
автопилота и САУ не существует. Современные автопилоты часто
выполняют некоторые функции траекторного управления. В част¬
ности, все современные самолетные автопилоты обеспечивают стаби¬
лизацию барометрической высоты полета, что в принципе относится
к траекторному управлению. Самолетные автопилоты можно рассма¬
тривать также как первое поколение САУ [5.1 ].
§ 5.1. Простейшие структуры и законы
стабилизации автопилотов
ФооКаНаЛ самолетн°го автопилота обычно состоит из. датчиков ин-
суммЗЦИИ Часть их может не входить в комплект автопилота),
ства ИРУюгцег0,ов более общем случае — вычислительного устрой-
(оулеп с?лителев’ исполнительного устройства — рулевого агрегата
ровани°И машины)» элементов обратных связей, устройства форми-
пажа устВВ(“Да задающих (командных) воздействий со стороны эки-
ти Роиств контроля, сигнализации и обеспечения безопаснос-
Из Р°*СТВ переключения режимов.
стоVKTvnuH оЭТОВ сложной совокупности агрегатов в динамической
отобпятХи?^ схеме» соответствующей определенному режиму работы,
ся математические модели только тех звеньев, которые
174 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
входят в контуры управления в данном режиме. Ясно, что про-
стейшие возможные законы регулирования автопилотов можно по¬
лучить, добавляя сигналы угловых координат в простейшие рас¬
смотренные выше законы демпферов и автоматов устойчивости.
Однако в интересах классификации используем несколько другой
подход.
Довольно общая линейная структурная схема канала представ¬
лена на рис. 5.1. Звенья с передаточными функциями ITxi, •••
...» отображают канал объекта управления — самолета. Здесь
Рис. 5.1. Обобщенная линейная структурная схема канала автопилота и объек¬
та управления.
6 — отклонение органа управления (руля), х2, ..., хт— коор¬
динаты данного канала летательного аппарата, в число которых вхо¬
дит угловая координата, ее производная (угловая скорость) и т.п.
В интересах разграничения автопилотов и САУ будем полагать,
что по меньшей мере для каналов крена и рысканья в число указан¬
ных координат не входят координаты центра массы летательного
аппарата, т. е. будем исключать контуры траекторного управления.
Звенья с передаточными функциями W?, ..., IT^71 на
структурной схеме рис. 5.1 соответствуют датчикам информа¬
ции и, быть может, последовательным корректирующим устрой¬
ствам (фильтрам). Далее следует суммирующий элемент. Передаточ¬
ная функция W соответствует рулевому агрегату вместе с усили¬
телем.
Структурная схема рулевого агрегата обычно содержит инте¬
грирующее звено. Передаточная функция U7OC соответствует обрат¬
ной связи. Сигнал иу отображает задающее (управляющее) воздей¬
ствие, вырабатываемое членами экипажа (летчик, штурман) или
блоком траекторного управления. В автопилотах последовательной
схемы (см. ниже) управляющее воздействие летчика может сумми¬
роваться с воздействием автопилота на выходе рулевого агрегата
(с помощью раздвижной тяги).
СТРУКТУРЫ и ЗАКОНЫ СТАБИЛИЗАЦИИ АВТОПИЛОТОВ
175
§ 5.Н
Заметим, что схема рис. 5.1 представляет канал как одномерную
ему Перекрестные связи между каналами здесь не учитывают-
СИС На этапе классификации законов управления и общего ана-
СЯ я упрощенных контуров перекрестными связями обычно целе-
ЛИЗбразно пренебречь. Для канала автопилота с указанной на
рис. 5.1 структурной схемой
6 = 1 +WOC (§] + ыу)
(5-1)
или
т
6 = 2 w%Xi + «у.
1=1
(5.2)
Законом регулирования или управления автопилота обычно на¬
зывают простейшее уравнение, отображающее наиболее существен¬
ные связи и преобразования, реализуемые автопилотом. Закон уп¬
равления, как правило, не содержит малых параметров (малых по¬
стоянных времени), которые хотя и неизбежны в любой достаточно
кетальной математической модели реального автопилота, но оказы¬
вают заметное влияние лишь в области относительно высоких частот.
Простейший вид законов управления автопилота получается
из (5.2), если заменить передаточные функции датчиков W% на
коэффициенты усиления и передаточную функцию рулевого
агрегата представить в виде оператора интегрирующего звена \/Тр.
Тогда
т
(Гр = 2 £2*1 + иу. (5.3)
/=1
Если U70C = feoc, т. е. обратная связь жесткая, то канал автопило¬
та называется каналом с жесткой обратной связью. В этом случае
т
(Гр + 60С) 6=2 kzXi + uy (5.4)
(=1
или, при достаточно малой величине Tlkoz,
5 k'$Xi -p ^y, — -г—• (5.5)
i=l fcoc
Если HZ г 'T1
рении °C 1 °c^’ T’ e* B цепи обРатной связи находится диффе-
хогене УЮЩее\ Звено (например, за счет использования сигнала та-
нпй то канал автопилота именуется каналом со скорост-
П0И обратной связью. В этом случае
(Т 4- 7’ос) р8 = 2 k^Xt + ич. (5.6)
Так l=i
обратной сп30М’ угол мнения руля в автопилоте со скоростной
язью пропорционален интегралу от суммарного сигнала
176АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
управления. Вообще говоря, при рассматриваемом описании такая
же зависимость имеет место и при отсутствии обратной связи TQC =
= 0 (автопилот без обратной связи). Однако скоростная обратная
связь увеличивает стабильность эквивалентного коэффициента уси¬
ления ■ -1-— и обычно улучшает динамические характеристики
* ~Г * ос
реального рулевого агрегата.
Если
= Т°сР
™ Тоср-\-1*
т. е. в цепи обратной связи включено «реальное дифференцирующее»
звено, то канал автопилота именуется каналом с изодромной об¬
ратной связью. В этом случае, пренебрегая постоянной Т (Т = 0),
получаем
+ (5.7)
или
б = (1 + <5’8)
\ 1 ОС Г / \ 1=1 /
Канал с изодромной обратной связью в некоторой мере сочетает
свойства каналов с жесткой и скоростной обратными связями.
Действительно, непосредственно из выражения (5.8) видно, что
быстрые изменения управляющего сигнала канал воспроизводит
как регулятор с жесткой обратной связью, при медленных же из¬
менениях преобладает интегральная составляющая, аналогичная
выходной величине канала со скоростной обратной связью.
Помимо классификации по виду обратных связей используется
классификация по составу компонент суммарного сигнала управле¬
ния. Так, каналы, использующие сигналы по углу и угловой ско¬
рости, называются каналами с регулированием по углу и производ¬
ной. Каналы с использованием сигналов угла, угловой скорости и
углового ускорения именуются каналами с регулированием по углу
и двум производным. Каналы, в которых применяется сигнал, про¬
порциональный интегралу от углового отклонения, называются ка¬
налами с интегральным управлением. В общем, терминология здесь
примерно такая же, как в промышленной автоматике [5.2].
Классификацию простейших законов регулирования автопило¬
тов иллюстрирует таблица 5.1. Угловая координата здесь обозна¬
чена е. «Не применим» здесь означает то, что при обычной структуре
объекта управления данный закон регулирования не обеспечивает
структурной устойчивости. Категория «не распространен» озна¬
чает, что данный закон, вообще говоря, применяется, однако он
используется значительно реже, чем законы не отмеченные этой
категорией.
СТРУКТУРЫ и
ЗАКОНЫ СТАБИЛИЗАЦИИ АВТОПИЛОТОВ
177
§ 5.1J
Поиведенная классификация весьма примитивна. Современные
автопилоты как правило, являются многорежимными. Они имеют
ХХХяязХ*. управления, прИве= легального аппа-
пята в гооизонтальное положение, согласования и др. Для каждо
?о из этих режимов в каждом из каналов может, вообще говоря, ис-
по пазоваться закон управления, отличный от других режимов.
Вследствие этого автопилот обычно характеризуется набором за-
конов управления. Существуют нелинейности как следствие есте¬
ственных свойств реальных элементов (насыщение, зоны нечувс
вительности, люфты), а также вводимые специально для улучшения
качества управления. Далее, как видно уже. из предшествующего
изложения, оптимальные системы управления могут содержать
многочисленные перекрестные связи.
ТАБЛИЦА 5.1
Классификация простейших законов регулирования автопилотов в режиме
стабилизации
Вид сигнала
управления
Вид обрат-
ной связи
По углу и первой
производной
По углу, первой и
второй производной
По углу, первой
производной и
интегралу от
угла
Жесткая обратная связь
№ос = *ос
Скоростная обратная связь
М^ос = ТОС Р
Изодромная обратная
еняи № —
6 = £ее + ke&
не применим
6 = (1 + Тоср) х
X (&ее + А»88)
не распространен
6 = ke& + k4 +
+ &es
6 = (1 + ТосР) X
X (&8е &8е +
+ ^8)
6 = &88 + £86 +
не применим
не распростра¬
нен
осР + 1
Следует еще отметить, что в таблице 5.1 фигурируют первые
и вторые производные от угловой координаты по времени. В дей¬
ствительности чаще используются сигналы датчиков угловых ско¬
ростей (ДУС), производные этих сигналов или сигналы измери¬
телен угловых ускорений. Сигналы ДУС пропорциональны состав¬
ляющим вектора угловой скорости в связанных осях и лишь при
достаточно малых углах у, ft могут отождествляться с производными
углов крена, тангажа и рысканья (см. выражения (1.16)).
юте ТЗК’ пР„иведенные выше линейные законы управления явля-
v я ПР°стевшими и Далеко не охватывают всего множества законов
уПпг)ВЛеНИЯ” пРименяемых в современных автопилотах. Однако этот
РоваЩеННЫЯ наб°Р законов регулирования позволяет проанализи-
н ть некоторые особенности контуров угловой стабилизации.
178 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
§ 5.2. Простейшие контуры угловой стабилизации
самолетов
При приближенном анализе контуров угловой стабилизации
самолета можно использовать упрощенные модели продольного и
бокового движений (см. главу I), отображающие короткопериоди¬
ческие колебания. Основанием к этому служит уже отмечавшееся
малое влияние слабых связей на управляемое движение самолета.
Контур тангажа
Рассмотрим следующие законы управления углом тангажа:
(а)
(б)
(в)
(г)
бв = ^в(^-дз) + ^вЧ,
бв = kt р - < J (Я - fl3) di,
6В = kt (€► - й3) +
6В = + 1 [*в (О - ^з) + J.
1 ос^
(5-9)
Законы (5.9а), (5.96) соответствуют каналу с жесткой обратной
связью с воздействием по углу и производной и (во втором случае)
интегральным управлением. Закон (5.9в) соответствует каналу со
скоростной обратной связью и воздействием по углу и двум произ¬
водным (угловой скорости и угловому ускорению).
Выражение (5.9г) отвечает изодромной обратной связи и воз¬
действию по углу и первой производной.
Существенным является способ введения задающего воздейст¬
вия. В законах (5.9а)—(5.9г) задающее воздействие приведено к
углу тангажа, так что канал реагирует на разность фактического
и заданного углов тангажа. В компоненты сигнала, соответствующие
угловой скорости, угловому ускорению, задающее воздействие не
вводится. Это отвечает часто применяемому физическому способу
ввода задающего воздействия, когда оно реализуется в датчике
позиционного сигнала (гировертикали) или блоке согласования,
связывающем позиционный датчик с суммирующим усилителем.
Записываем уравнение простейшей модели продольного углового
движения (1.45):
+ 1)
Р2 + + ®а
(5.10)
Здесь, как и в законах регулирования автопилотов, знаки прираще¬
ний Д опущены. На рис. 5.2 представлены структурные схемы кон¬
тура тангажа и угловой скорости тангажа при всех четырех законах
регулирования (5.9а)—(5.9г) и простейшей модели продольного
углового движения самолета. Возмущающий момент, действующий
§ 5.21
КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ
179
на самолет, приведен здесь к отклонению руля и обозначен бвоз.
Везде принимается <ог = р'О'.
Непосредственно из структурных схем контуров или соответ¬
ствующих передаточных О'. А "
функций видно, что автопилот с жесткой
а)
7^
^вг^(ТвР+1>
рЩвШаР+шЬ
IM
К0
7
Р
(JDZ
TI
р
1<Ш
к0
3
к#' ъ
k™W"(T0p+1)
1
ft
”0
Т«Р
рг^аШар-Ю)^
р
Кд <
г)
Рис. 5.2. Структурные схемы контура тангажа при различных законах
Регулирования: а) автопилот с жесткой обратной связью с воздействием по
УГЛУ и первой производной, б) автопилот с жесткой обратной связью с
воздействием по углу, первой производной и интегралу, в) автопилот со
скоростной обратной связью с воздействием по углу, первой и второй про-
зводным, г) автопилот с изодромной обратной связью с воздействием по уг¬
лу и первой производной.
о ратной связью без интегрального управления (рис. 5.2, а) не
а еспечивает астатизма по отношению к возмущающему моменту,
все остальные указанные законы регулирования (с интегральным
180 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЁТОВ [Гл. V
управлением, со скоростной и изодромной обратными связями)
обеспечивают астатизм по отношению к возмущающему моменту,
действующему на самолет.
Некоторое преимущество «астатических» законов регулирования
угла тангажа проявляется не только в установившемся состоянии,
но и в переходных процессах. На рис. 5.3 представлены асимп¬
тотические амплитудные логарифмические характеристики (ЛАХ)
Рис. 5.3. Асимптотические амплитудные логарифмические характеристики контура
тангажа при различных простейших законах регулирования.
рассматриваемых контуров в разомкнутом состоянии (размыка¬
ние в точке а, рис. 5.2). Здесь
С0а = 1 &coz
— собственная частота внутреннего замкнутого контура (контура
демпфирования); \П\ — действительный полюс внутреннего кон¬
тура тангажа на рис. 5.2, в и внутреннего контура на рис. 5.2, г;
(Оф — мнимая часть комплексных сопряженных полюсов указанных
контуров (предполагается, что соответствующая передаточная функ¬
ция имеет один действительный и пару сопряженных полюсов). Гра¬
фики рис. 5.3 соответствуют следующим соотношениям параметров:
а> г?
б)
В)
1 6 11
1 1 1
Г) гр 'р О •
' 1 0 11 1 ос J
(5.П)
f s.ti
КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ
181
Эти соотношения достаточно характерны для типовых режимов
полета и настроек автопилота. Известно [5.3]—[5.5], что прибли¬
женным критерием удовлетворительного качества переходных про¬
весов в замкнутом контуре являются нахождение частоты среза на
участке асимптотической ЛАХ разомкнутого контура с наклоном —
20 дб!дек или вблизи него и достаточная протяженность этого уча¬
стка. Предположим, что 1/Tq значительно меньше соа. Это особен¬
но характерно для сверхзвуковых самолетов при высоких скоростях
полета. Тогда при автопилоте с жесткой обратной связью и воздей¬
ствием по углу и угловой скорости условие удовлетворительной
формы переходного процесса может быть выполнено только при низ¬
ком коэффициенте усиления (см. рис. 5.3, а). Переходные процессы
изменения угла тангажа получаются затянутыми. Таким образом,
автопилот с жесткой обратной связью без интегрального управления
не подходит для сверхзвуковых самолетов. «Астатические авто¬
пилоты» обеспечивают здесь лучшее качество процессов управления
(см. рис. 5.3, в, 5.3, г).
«Астатические автопилоты» обеспечивают также лучшую точ¬
ность угловой стабилизации при полете в турбулентной атмосфере,
чем «статические автопилоты». Это представляется в достаточной
мере очевидным, если учесть, что основная энергия спектра возму¬
щающих воздействий атмосферной турбулентности лежит в области
низших частот (спектральная плотность падает с увеличением час¬
тоты). Все же приведем поясняющие соотношения.
Упрощенные уравнения короткопериодического движения с уче¬
том нормальной составляющей ветра (1.73) можно записать в виде
(5.12)
рД0 = Да,
1 0
(р + д“г + «“2Да = а^А6в,
Дсо2 = рД0 рДа — рДав.
Отсюда вытекает
(р2 +2&хЮар+®2) Д®2 = - (Твр + 1) (дбв- Да,),
где^а, соа, Tq выражаются обычными формулами (1.47), (1.48).
1аким образом, влияние нормальной к вектору скорости полета
составляющей ветра, приведенное к отклонению руля, приближенно
характеризуется величиной
АА amz TqP ] T'gP
ав ~ твр + 1 Дав — твР+\ Дав- (5• 3)
На рис. 5.4 представлена упрощенная структурная схема линейного
ста5илизации тангажа с учетом влияния нормальной состав-
Щеи ветра. Атмосферной турбулентности соответствует случай¬
182 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
ная составляющая Дав « £/усл/У (см. § 1.3). Для стационарной изо¬
тропной турбулентности атмосферы, характеризуемой корреляцион¬
ными функциями и спектральными плотностями (1.64), (1.66), спек¬
тральная плотность Дав выразится формулой
1 + Зш2
■$ав (<О) « —уу S1 (<й) = -pg - Оиа — Г2 \2 ’ (5-14)
('+“2-Й
Спектральная плотность возмущающего воздействия, приведенного
к отклонению руля, согласно (5.13), (5.14) будет равна
5бв (®)
1
(Z>)2
о2 3<о271+1
V2 Т|ш2 + 1 ("Г2 со2 + I)2 ’
где
В данном случае, да и в любом другом случае монотонно убы¬
вающей спектральной плотности SaB (со), спектральная плотности
Рис. 5.4. Структурная схема линейного контура стабилизации
тантажа с учетом влияния нормальной составляющей ветра.
5бВ (со) имеет единственный максимум. Этот максимум лежит в об¬
ласти инфранизких частот (порядка 1/То). Амплитудная частотная
характеристика контура при астатическом законе регулирования
имеет провал в области низших частот. Поэтому дисперсии угла
тангажа и угловой скорости тангажа, вызванные влиянием турбу¬
лентности атмосферы
оо )
У 1Ф« (/®)|256B(<o)dco, I
со I
oiz = \ | Фда (/«>) |2 (®) dw, j
—co J
(5.15)
КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ
183
§ 5.2]
где Фф (р)» ф"2 (р) = Рф^ (р>> ~ соответствующие передаточные
функции, при астатическом автопилоте обычно меньше, чем при ста¬
тическом*. Важное значение имеют перегрузки, создаваемые атмос¬
ферной турбулентностью. Из уравнений (5.12) и выражения для
ускорения Д/ = Гр ДО следует
Д/ = + 1 Д“в + Гер+ 1 Д(°г = ТвР + 1 (Д1Э + Дав)- (5-16)
Включение контура стабилизации угла тангажа, вообще говоря,
увеличивает перегрузки при полете в турбулентной атмосфере. Дей¬
ствительно, согласно (5.16) дисперсия ускорений, вызванных ат¬
мосферной турбулентностью, равна
°/ = J 11 + Ф“(/ю) |2SaB (CD) dco- (5-17)
— оо ®
Из структурной схемы контура тангажа (рис. 5.4) и соотношений
(1.47) вытекает
Ф?в(р) г , (5.18)
р2 + 2£с:СОаР + СО® + (р)
где (р) =
относительно
(К = 0)
W (F? + Wfp)
—— — передаточная функция автопилота
1 Т
входной величины Ф. При выключенном автопилоте
Р2 + 2£awaP
Р‘ -t- ^асоаР -ь со;
и амплитудная характеристика замкнутого контура |1 + Ф$в (/со) |
имеет провал в области низших частот. Низкочастотные составляю¬
щие ветровых возмущающих воздействий не вызывают заметных пе¬
регрузок при выключенном автопилоте за счет самоориентации
статически устойчивого самолета по вектору воздушной скорости.
При включенном автопилоте, как видно из выражения (5.18),
1 + Ф$в (р) -> 1 при р -> 0 и отмеченный «провал» частотной харак¬
теристики отсутствует. Поэтому воздействия низкочастотных со¬
ставляющих атмосферной турбулентности существенно сильнее при
включенном автопилоте. Это не означает, однако, что при полете
в «болтанку» автопилот для уменьшения случайных перегрузок во
всех случаях следует выключать. Если самолет не имеет демпфера,
0 при выключенном автопилоте может иметь место слабое затуха¬
ние короткопериодических колебаний (малое £а). В этом случае
Ри выключенном автопилоте может иметь место резонансный пик
в амплитудной характеристике 11 + Ф“(/со)| и, как следствие, зна¬
184 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
чительная величина оу. В этих условиях включение автопилота мо¬
жет сопровождаться уменьшением о/ за счет демпфирования корот¬
копериодических колебаний, несмотря на одновременное увеличение
влияния низкочастотных составляющих атмосферной турбулент¬
ности.
^звоз
8)
Рис. 5.5. Структурные схемы контура крена при различных законах ре¬
гулирования.
Существенное снижение перегрузок, вызванных атмосферной
турбулентностью, требует применения быстродействующих органов
управления аэродинамическими силами, подобных упомянутым в
главе IV в связи с задачей демпфирования аэроупругих колебаний»
$ 5.2]
КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ
185
Контур крена
Контур управления углом крена играет важную роль во всех
процессах управления боковым движением самолета. За исключе¬
нием плоского разворота, боковое управляющее ускорение созда¬
ется посредством крена, в то время как нормальное управляющее
ускорение создается посредством угла атаки. Вследствие этого кон¬
тур управления креном, как и контур угла атаки или тангажа, вхо¬
дит как составное звено в любой контур траекторного (в данном слу¬
чае траекторного бокового) управления. Ог этого контура во многом
зависит качество управления траекторией полета. Поэтому стремят¬
ся к обеспечению максимального качества процессов управления
креном.
Рабочий диапазон углов крена велик. Для истребителей он со¬
ставляет все 360° (для углов атаки рабочий диапазон измеряется
градусами). Вследствие этого в процессе управления необходимы
высокие угловые скорости крена, измеряемые десятками, а иногда и
сотнями градусов в секунду. Это создает определенные трудности.
Однако эффективность элеронов или элевонов в основных режимах
полета позволяет при правильной организации управления полу¬
чить необходимое быстродействие управления креном.
Простейшие линейные законы управления креном имеют вид
(а) бэ — (у — Уз)
(б) бэ = (у — Уз) + k® сох 4~ ^э J (У — Уз)
(в) & = £ (у — уз) + кэХЫх 4-
(г) ~
1 ОС'
(5.19)
Здесь у3 — заданный угол крена. Структурные схемы контуров кре¬
на, отвечающие этим законам и простейшей линейной модели канала
крена самолета, приведены на рис. 5.5. Соответствующие амплитуд¬
ные асимптотические логарифмические характеристики контуров
крена в разомкнутом состоянии изображены на рис. 5.6. Изображен¬
ный вид ЛАХ отвечает соотношениям
где
со* = V
186 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ ГГл. v
Из указанных простейших контуров крена только в контуре
рис. 5.5, а (жесткая обратная связь, регулирование по углу и
Рис. 5.6. Асимптотические амплитудные логарифмические характери¬
стики контура крена при различных простейших законах управления.
угловой скорости крена) имеет место статизм по отношению,
к возмущающему воздействию 6ЭЖО3. Контуры, изображенные на
рис. 5.5, б — 5.5, «, астатические.
Контур рысканья
В тот период, когда автопилоты использовались в основном для
стабилизации установившегося прямолинейного полета, руль на¬
правления часто использовался для стабилизации угла рысканья
(курса) самолета. В этих автопилотах в канал руля направления вво¬
дился сигнал угла рысканья, угловой скорости рысканья и законы
регулирования в этом канале соответствовали таблице 5.1. Так как
канал элеронов в подобных автопилотах также строился по анало¬
гичным схемам и стабилизировал крен относительно нулевого зна¬
чения, то стабилизация угла рысканья здесь осуществлялась в
режиме, близком к плоскому развороту. Иногда с целью уменьше¬
ния влияния перекрестных связей в объекте использовались пере¬
крестные связи между каналами крена и рысканья автопилота
[5.61—[5.9].
Если рассматривать строго плоский разворот, то при упомяну¬
том построении канала руля направления структура контура рыс¬
канья полностью аналогична структуре контура тангажа. Отличия
заключаются лишь в значениях характерных параметров. Однако
современный автопилот входит как составная часть в контуры управ¬
ления траекторией. При траекторном управлении требуются зна¬
§ 5.2]
КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ
187
чительные боковые управляющие ускорения, которые создаются за
счет крена. Руль направления в этих условиях используется обычно
лишь для устранения скольжения и демпфирования колебаний рыс¬
канья.
Рассмотрим два простейших закона регулирования в канале ру¬
ля направления:
(а) бн = — /21 + у^у = У®у,
(б) бн = J /а di + k^y - $ J 0 dt +
Здесь /zi — составляющая ускорения вдоль поперечной оси,
(5.20)
Законы управления (5.20) обеспечивают обратную связь по угловой
скорости рысканья и обратную связь (в одном случае жесткую,
в другом — интегральную) по углу скольжения или поперечной пе¬
регрузке. Таким образом, канал руля направления в автопилоте
строится как автомат устойчивости и демпфирования.
Контроль ускорения jzi осуществляется посредством датчика
линейных ускорений (акселерометра), жестко связанного с самоле¬
том. Этот датчик стремятся разместить ближе к центру массы само¬
лета, однако некоторые смещения неизбежны, в частности, по при¬
чине изменения в полете положения центра массы относительно эле¬
ментов конструкции самолета. При наличии продольного смещения
датчика /цм относительно центра массы датчик воспринимает вели¬
чину, которая приближенно равна jz{ + /цмсо^. Здесь /цм считает¬
ся положительным при расположении акселерометра позади центра
массы и отрицательным при переднем расположении.
Таким образом, указанная методическая ошибка вызывает до¬
полнительную обратную связь по угловому ускорению. Это — от¬
рицательная обратная связь при переднем расположении датчика
Gum < 0) и положительная обратная связь при заднем расположе¬
нии датчика (/цм > 0). Ввиду малости /цм указанной дополнительной
связью чаще всего можно пренебречь.
Угол скольжения (3, как и угол атаки а, может контролироваться
непосредственно. Однако точное прямое измерение [3 связано с
определенными трудностями. Вследствие этого предпочтение отдают
использованию сигнала поперечного ускорения.
Структурная схема линейной модели углового бокового движе¬
ния самолета приведена на рис. 1.5. На рис. 5.7, а структурная
схема канала рысканья и скольжения изображена отдельно. На
Рис* • » ’ в представлены структурные схемы контура рысканья
или скольжения при законах регулирования (5.20). Через 6НЗОЗ здесь
клпЛаЧеН возмУЩ'а1°Щий момент рысканья, приведенный к от-
нию руля направления. Особенно мощное возмущающее
188 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
воздействие 6НВОЗ возникает при отказе двигателя на самолете с дву.
мя или большим числом двигателей. Закон (5.206) обеспечивает
астатизм по отношению к возмущающему моменту рысканья.
Рис. 5.7. Структурные схемы канала рысканья самолета и контуров
рысканья при двух простейших законах регулирования.
Следует отметить, что для современных сверхзвуковых самолетов
характерны широкое изменение путевой устойчивости и даже воз¬
можность возникновения путевой неустойчивости. Для модели
рис. 5.7, а путевая неустойчивость возникает при
I в
т т 1- ащу < 0.
Оба контура, изображенные на рис. 5.7, б, в, структурно устой¬
чивы, т. е. законы управления (5.20) позволяют обеспечить устой¬
чивость стабилизации неустойчивого объекта. Однако для практиче¬
ского использования режимов путевой неустойчивости необходимы
высокий уровень надежности автоматики, достаточная эффектив¬
$ 5.3]
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ
189
ность руля направления (или поворотного киля), достаточное
быстродействие исполнительных устройств и др.
При широком диапазоне изменения характеристик самолета ка¬
нал руля направления автопилота, как и другие каналы, целесооб¬
разно делать адаптивным (самонастраивающимся).
§5.3. Некоторые схемы конкретных автопилотов
информации.
в!
Рис. 5.8. Схемы включения автопилотов;
По способу включения исполнительных устройств (рулевых
агрегатов или рулевых машин) в проводку управления летательного
аппарата автопилоты делят¬
ся на последовательные
(дифференциальные) и па¬
раллельные.
В автопилотах последо¬
вательного типа, применяе¬
мых для самолетов с бус¬
терным управлением, руле¬
вой агрегат (РА) в виде
раздвижной тяги встраи¬
вается в разрыв проводки
управления между рычагом
управления и гидроусили¬
телем (рис. 5.8, а). Откло¬
нение руля при последо¬
вательном включении руле¬
вого агрегата равно сумме
отклонения, создаваемого
летчиком через рычаг
управления, и отклонения,
создаваемого автопилотом.
Подобное включение испол¬
нительных устройств имеет
место также в самолетных
демпферах и других систе¬
мах ручного управления
(см. главы II, III).
Как было показано при
рассмотрении оптимальных
систем ручного управления,
исполнительное устройст¬
во раздвижная тяга мо-
Жег получать сигналы не
только датчиков парамет¬
ров полета, но и сигналы
отклонений или усилий на рычагах управления. Это* очевидно*
190 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ ГГл. V
сохраняет силу для автопилотов последовательного типа. Одним
из путей обеспечения безопасности в автопилотах последовательного
типа является ограничение хода быстродействующей раздвижной
тяги. Надежность может быть повышена путем последователь¬
ного включения двух или более синхронно работающих раздвиж¬
ных тяг. Уменьшение коэффициента усиления контура при от¬
казе одной из раздвижных тяг может быть устранено путем
определенного увеличения коэффициентов усиления исправных ру¬
левых агрегатов. Отработка больших, но медленно меняющихся
управляющих воздействий, автопилотом последовательного типа мо¬
жет осуществляться посредством дополнительного исполнительного
устройства с большим ходом, но низкой скоростью отработки.
В автопилотах параллельного типа (рис. 5.8, б) рулевой агрегат
подсоединен параллельно с ручкой управления и при перемещении
ручки перемещается выходной шток или поворачивается выходной
вал рулевого агрегата. Ручное управление здесь можно осущест¬
влять, отключив или «пересилив» рулевой агрегат автопилота.
В автопилотах параллельного типа обычно предусматривается
управление самолетом через автопилот посредством пульта управле¬
ния ПУ или «строевой» рукоятки управления РУ (рис. 5.8, б).
Летчик посредством этих командных устройств посылает задающие
воздействия, отрабатываемые системой летательный аппарат —
автопилот. Возможно формирование задающих воздействий и по
усилиям, создаваемым летчиком на рычагах управления.
Для обеспечения безопасности в автопилотах параллельного
типа используются различные схемы отключения рулевых агрегатов,
ограничение максимальных усилий этих агрегатов значениями, при
которых летчик может осуществлять пересиливание. Используется
также так называемое скользящее ограничение хода. Жесткое
ограничение хода какими-либо близкими пределами неприменимо
для автопилотов параллельного типа, так как ограничивает ход
проводки ручного управления. Назначение скользящих ограничи¬
телей заключается в том, чтобы ограничить только быстрые переме¬
щения, создаваемые рулевым агрегатом. Интервал, в пределах ко¬
торого может происходить быстрая отработка при скользящих
ограничениях, перемещается вместе с исходным положением РА,
оставаясь неизменным по величине. Такое скользящее ограничение
может осуществляться, например, следующим путем. С валом РА
сочленяется тахогенератор, сигнал которого пропорционален ско¬
рости отработки. Сигнал тахогенератора поступает на цепь, экви¬
валентную апериодическому звену с достаточно большой постоян¬
ной времени. Выходной сигнал цепочки поступает на пороговый эле¬
мент. Когда модуль этого сигнала превышает заданную величину,
происходит отключение РА. При быстрых движениях сигнал на
выходе цепочки практически равен интегралу от сигнала тахогене¬
ратора, т. е. пропорционален ходу РА*
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ
191
§ 5.3]
Деление автопилотов на последовательные и параллельные, по
существу, отпадает при переходе к дистанционному управлению
пулевыми органами. Имеется целый ряд факторов, определяющих
актуальность дистанционного управления рулями. Это — труднос¬
ти осуществления механической проводки управления, неблаго¬
приятное влияние упругих деформаций самолета и самой проводки,
отрицательное влияние люфтов и др. Требования весьма высокой
надежности, являющиеся основным сдерживающим фактором для
дистанционного управления, могут удовлетворяться посредством
резервирования и внедрения высоконадежных элементов.
При дистанционном управлении рулевыми органами (рис. 5.8, в)
рычаги управления, кроме механизмов загрузки М3, связаны
только с датчиками электрических сигналов Д. Эти датчики при
ручном управлении посылают сигналы в электрогидравлические ис¬
полнительные устройства (РА — ГУ), перемещающие рулевые
поверхности.
При автоматическом управлении электрогидравлические испол¬
нительные устройства управляются сигналами вычислителя авто¬
пилота.
Автопилот последовательного типа
Рассмотрим схему автопилота последовательного типа для
легких самолетов, построенную на описанных выше элементах демп¬
феров (глава II). Обычным назначением таких автопилотов при
наличии двух каналов — канала элеронов и руля высоты (стабили¬
затора) — являются:
1. Демпфирование короткопериодических колебаний по крену и
тангажу при ручном и автоматическом управлении самолетом.
2. Приведение самолета к горизонтальному положению из лю¬
бого начального положения.
3. Стабилизация любых заданных значений крена и тангажа,
кроме значений, при которых авиагоризонт или гировертикаль,
являющиеся датчиками информации для автопилота, имеют чрез¬
мерно большие ошибки.
4. Стабилизация любого заданного курса (угла рысканья) в
диапазоне углов тангажа, при котором ошибки курсовой системы не
превышают определенных пределов.
5. Стабилизация заданной барометрической высоты полета.
Автопилот может также выполнять автоматическую балансиров¬
ку самолета по углу тангажа при изменении режимов полета путем
углД^веНН0Й пеРестановки стабилизатора в широком диапазоне
Переход от ручного к автоматическому управлению часто осу-
вле?ВЛЯеТСЯ На основе следующего требования. При ручном упра-
РабНИИ ПРОИЗВОЛЬНЬ1МИ эволюциями самолета автопилот должен
pd отать в режиме демпфирования; при автоматической стабилизации
192 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ ГГл. v
он должен стабилизировать угловое положение самолета, заданное
в процессе ручного управления.
Подобный переход от режима ручного управления к режиму ста¬
билизации может осуществляться посредством блока согласования
следующего типа.
Блок согласования. Блок согласования имеет три
почти одинаковых канала — каналы курса, крена и тангажа.
Рис. 5.9. Схема канала электромеханического блока (ме«.
ханизма) согласования (БС).
В блок согласования поступают сигналы датчиков «абсолютного»
углового положения самолета: авиагоризонта АГ и курсовой си¬
стемы КС. Блоком согласования выдаются:
а) сигналы «абсолютного» углового положения у, гр,
б) сигналы отклонений у — у3, гр — гр3, -ft — Ф3, где у3, гр3,
-&3 соответствуют значениям углов крена, рысканья и тангажа са¬
молета в момент перехода на режим стабилизации;
в) команды на изменение (переключение) законов управления
в функции заданных значений угловых координат.
Схема одного из каналов электромеханического блока согласо¬
вания изображена на рис. 5.9. Передача информации от АГ, КС
осуществляется сельсинами в трансформаторном режиме. В блоке
согласования (БС) для каждого канала имеются два сельсина-при¬
емника. Первый из этих сельсинов СН имеет неподвижный отно¬
сительно статора ротор, а второй сельсин (СП) — ротор, поворачи¬
ваемый двигателем Дв (с редуктором) в процессе согласования.
Сигнал роторной обмотки СН преобразуется фазочувствительным
усилителем ФЧУ в сигнал постоянного тока иВых2- Этот выходной
сигнал, связанный однозначной функциональной зависимостью (си¬
нусоидальной) с соответствующей «абсолютной» угловой координа¬
той, используется в режиме приведения самолета к горизонталь¬
ному угловому положению. В режиме согласования контакты В
замкнуты и сельсин СП, усилитель У и двигатель Дв образуют сле¬
дящую систему.
Ротор СП в режиме согласования повторяет (отслеживает)
с точностью до динамических и статических ошибок положение ро¬
§5.3]
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ
193
тора сельсина-датчика, т. е. воспроизводит соответствующую уг¬
ловую координату. Вместе с ротором СП в режиме согласования
поворачивается контактный датчик КД, формирующий команды не
реключения в функции абсолютной угловой координаты. В устано¬
вившемся режиме согласования выходной сигнал иВыХь являющий¬
ся сигналом рассогласования следящей системы, близок к нулю.
В режиме «стабилизация» контакты В размыкают контур следя¬
щей системы. Одновременно электромагнитная муфта фиксирует по¬
ложение ротора сельсина СП. Переход в БС от режима «согласова¬
ние» к режиму «стабилизация» может осуществляться автоматически
при освобождении ручки управления самолета по усилиям, т. е. в
момент, когда летчик перестает прикладывать к ручке силу. Такое
переключение может выполняться контактными тензодатчиками.
В режиме «стабилизация» сигнал мВых1 пропорционален синусу
разности фактического значения угловой координаты и значения
этой координаты в момент перехода на этот режим. При не очень
больших угловых отклонениях соответствующие сигналы просто
пропорциональны у — у3, $ — #3, ф — ф3.
Механизм триммерного эффекта в режи¬
ме исполнительного устройства малой
скорости. Прямым назначением механизмов триммерного эф¬
фекта является снятие постоянных усилий загрузочного механизма
при длительных отклонениях ручки управления. Однако часто этот
механизм выполняет также функцию дополнительного исполнитель¬
ного устройства канала стабилизатора. Дело в том, что по условиям
безопасности ход РАУ обычно ограничен сравнительно близкими
пределами. Максимальное угловое перемещение стабилизатора от
РАУ обычно не превышает 1—2°. Между тем при изменении режи¬
мов полета положение стабилизатора должно изменяться в широких
пределах. Если изменять положение стабилизатора путем ручного
управления, то летчик будет загружен процессом «балансировки по
тангажу».
Механизм МП с малой скоростью отработки, управляемый сигна¬
лами смещения РАУ, может обеспечивать автоматическое отклоне¬
ние стабилизатора, компенсирующее большие, но медленно меняю¬
щиеся моменты. Управление механизмом МП может осуществляться
посредством контактного устройства, связанного со штоком
гАУ. Для повышения безопасности сигналы этого контакт¬
ною датчика пропускаются через специальную «логическую
чеику»<//>/ (рис. 5.10). Назначение логической ячейки — предотвра¬
щение отклонений стабилизатора, вызывающих опасные перегрузки.
мпг^еХаНИЗМ ^^пеРемеш>ает ОДИН из концов пружины загрузоч-
лын^МеХаНИЗМа‘ За Счет этого пеРемеЩение, создаваемое МП, скла
дывается с перемещением, создаваемым РАУ:
бс = бсмп + б?ау.
7 А. А, Красовский
194 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЁТОВ [Гл. V
Ввиду малой скорости отработки механизма МП процессами
разгона и выбега этого механизма можно пренебречь, полагая
бсмп = /(б£ау),
где f — релейная функция (с зоной нечувствительности), опреде¬
ляемая контактным датчиком. Таким образом,
6с = 6рау + j/(6pay)d/.
Отсюда видно, что при описанном управлении механизмом МП
осуществляется своеобразное интегральное управление.
Рис. 5. 10. Схема канала стабилизатора автопилота последователь¬
ного типа.
Режимы работы и законы управления.
Современные автопилоты, как правило, имеют несколько режимов
работы, в каждом из которых реализуются различные законы
управления.
Рассмотрим в качестве примера автопилот последовательного
типа с четырьмя основными режимами работы:
1. Режим демпфера.
2. Режим приведения к горизонтальному полету.
3. Режим стабилизации.
4. Режим управления.
Рассмотрим законы управления в этих режимах и соответству¬
ющие схемы каналов стабилизатора и элеронов (рис. 5.10, 5.11)-
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ 195
§ 5-Э]
1 Режим демпфера. Канал стабилизатора
§ ’ + ^оЛхЛс —без нажатия кнопки «триммер»,
6c = ^4+jH6cpay)^ + ^c-при нажатии кнопки «трим¬
мер», канал элеронов
6Э = + Лэ-
Здесь Хлс *лэ - перемещения ручки управления летчиком. Коэф¬
фициенты № изменяются в функции скоростного напора и вы¬
соты полета за счет связи так называемого корректора передаточных
Phg. б. 11. Пример схемы канала элеронов автопилота последователь¬
ного типа.
чисел (КПЧ) с АРУ. Данный режим — это режим ручного управ¬
ления. Он реализуется при размыкании контактов 1—6 (рис. 5.10,
5.11) в каналах стабилизатора и элеронов. Размыкание контактов
может происходить при приложении усилия к ручке управления.
2. Режим триведение к горизонту». Для самолетов, особенно
легких, важным является возможность автоматического перехода
в горизонтальный прямолинейный полет из любого допустимого
начального положения или режима. Для осуществления такого
перехода служит режим «приведение к горизонту». Этот режим вклю¬
чается специальной кнопкой при освобождении ручки по уси¬
лию. Все контакты 1—6 (рис. 5.10, 5.11) в этом режиме замкнуты,
аконы управления имеют следующий вид:
канал стабилизатора
6срау = + k^H,
«е = бГ-К^(6срау)Л;
7*
196АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
канал элеронов
= k®xU)x + &Z? + (Ф — Ф3)-
Сигнал по Д//обычно отключается (kt = 0) при значительных углах
тангажа, а сигнал рысканья ф — ф3 отключается (fe? = 0) при зна¬
чительных углах тангажа и крена (например, |'0’| > 40°, | у| > 6°).
Эти отключения производятся контактным датчиком блока согласо¬
вания. Сигнал
kt® — = ^0 + (kt — kt) a
имеет основную составляющую £?0, пропорциональную углу на¬
клона траектории. Использование сигнала, пропорционального на¬
клону траектории, лучше соответствует задаче приведения к гори¬
зонтальному полету, чем использование сигнала угла тангажа.
Как всегда, в простейших законах управления не отражены
инерционности и нелинейности. Не отражены и синусоидальные
характеристики сельсинных схем, связывающих АГ и КС с бло¬
ком согласования. Вследствие этих характеристик система име¬
ет два положения равновесия у = 0 и у = 180°. Хотя в идеальной
системе положение у = 180° неустойчиво, в реальной системе из-за
наличия некоторой зоны нечувствительности автопилота данное рав¬
новесное состояние может реализоваться. Для вывода самолета
из перевернутого положения рекомендуется оказывать малые воз¬
мущающие воздействия ручкой управления.
3. Режим стабилизации. Этот режим предназначен для стаби¬
лизации углового положения, заданного в процессе ручного управ¬
ления. Законы стабилизации имеют вид:
канал стабилизатора
6с у = kt 4- kt (0* — 0*3),
6с = 6рау+Jf(6cpay)d/;
канал элеронов
__ I + ky3 (у — у3) при | у, | > Ymin,
| k3X + kly 4- $ СФ — 1|93) при I Тз |< Train,
где Ymin — некоторое небольшое значение угла крена, например
6°. Сигналы по у и хр обычно выключаются в тех диапазонах углов,
где ошибки соответствующих датчиков чрезмерно велики. Режим
стабилизации осуществляется при замкнутых контактах /, 5, 6
и разомкнутых контактах 2, 3, 4 (рис. 5.10, 5.11). Режим стабили¬
зации может включаться при освобождении ручки управления по
усилию.
4. Режим управления. Этот режим предназначен для управления
самолетом со стороны летчика при замкнутых контурах стабили-
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ 197
$ Б.З J
зации горизонтального углового положения. Законы управления:
канал стабилизатора
6с = + kfy - £а + keyng +
канал элеронов
6Э = 4" ^эУ + *эл-
Данный режим включается при приложении усилия к ручке лет¬
чика и включенной кнопке «приведение». Механизм МП в этом ре¬
жиме отключается, чтобы предотвратить нарастающее противодей¬
ствие отклонению самолета по тангажу. Ввиду насыщения каналов
автопилота (ограничен ход раздвижных тяг) самолету в данном
режиме можно задавать углы крена и тангажа в определенных
пределах.
Автопилот параллельного типа
В качестве примера автопилота параллельного типа рассмотрим
одну из модификаций автопилота АП-28 [5.6]. Автопилот имеет
электрогидравлические рулевые агрегаты. Устанавливается на
самолеты с управляемым стабилизатором. Для осуществления
«безударного» (т. е. не сопровождающегося резкими движениями ру¬
лей) включения автопилота предусмотрен режим согласования.
В этом режиме суммарные сигналы управления приводятся к
нулевому уровню за счет включения интегрирующих обратных свя¬
зей. Кроме режима согласования, реализуются режим приведения к
горизонту, режим стабилизации и режим управления.
Канал руля направления. Руль направления при
включенном автопилоте используется только для устранения сколь¬
жения и обеспечения демпфирования рысканья. В связи с этим канал
руля направления имеет лишь режим согласования и режим ста¬
билизации. Датчиками информации в канале руля направления
служат ДУС и датчик линейных ускорений (ДЛУ), контролирую¬
щий кажущееся ускорение (перегрузку п2{) вдоль поперечной оси
-самолета.
Для устранения статических ошибок сигнал п2\ интегрируется.
Сигнал угловой скорости рысканья (сигнал ДУС) пропускается че¬
рез дифференцирующую цепочку (ДЦ) со значительной постоянной
времени Тн. Эта дифференцирующая цепочка, имеющая передаточ¬
ную функцию р исключает проникновение в рулевой агрегат
молраЛа рОстоянн°й угловой скорости, возникающей при вираже са-
ные 73 дРУг°й стороны, эта цепочка, пропуская высокочастот-
лр^гтг2°СТавляЮ1Цие сигнала угловой скорости, сохраняет эффект
Демпфирования коротдопериодическцх колебаний.
198АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
Закон стабилизации в канале руля направления имеет вид
7nz
®у +
Блок-схема канала руля направления представлена на рис. 5.12.
Механизм согласования в этом канале состоит из двигателя и по¬
тенциометрического датчика ПД. В режиме согласования контак¬
ты 1 замкнуты, а контакты 2 разомкнуты. Двигатель механизма
Рис. 5.12. Блок-схема канала руля направления.
согласования подключен к электронному усилителю сигнала упра¬
вления ЭУ. В этом режиме сигнал датчика ПД изменяется до тех
пор, пока не «скомпенсирует» другие сигналы на входе суммирую¬
щего магнитного усилителя МУ, так что выходной сигнал МУ и
ЭУ исчезнет. После окончания согласования контакты 1 размыка¬
ются, а 2 — замыкаются. Двигатель механизма согласования ис¬
пользуется в этом режиме стабилизации для интегрирования сиг¬
нала датчика ускорений. Выходной сигнал электронного усилителя
ЭУ преобразуется фазочувствительным усилителем ФУЧ и поступа¬
ет на управляющее устройство электрогидравлического рулевого
агрегата РА. Канал руля направления рассматриваемого автопилота
имеет жесткую обратную связь.
Канал элеронов. Кроме режима согласования, канал
элеронов имеет режим стабилизации, управления и приведения к го¬
ризонту. Большинство операций по переходу с режима на режим
и формированию команд производится с помощью механизма со¬
гласования (МС). Механизм согласования в канале элеронов со¬
стоит из двигателя Де, потенциометрического датчика ПД и контакт¬
ного датчика КД (рис. 5.13).В канале элеронов рассматриваемого
автопилота используется электрогидравлический рулевой агрегат
РА, охваченный изодромной обратной связью. Изодромная обратная
связь реализуется посредством дифференцирующей /?С-цепочки.
Эта цепочка (на рис. 5.13 она обозначена ПОС} включена между
5 5.3]
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ
199
потенциометром обратной связи РА и соответствующей обмоткой
суммирующего магнитного усилителя МУ.
Помимо сигнала обратной связи, на суммирующий усилитель в
тех или иных режимах поступают следующие сигналы: сигнал с пу¬
льтаУправления ПУ, служащий для изменения заданного положе-
лыл униа лГ1ОПРПЯ„ (сигнал центрирования автопилота); сигнал
углЯаВкУр3ена\?Хальной гировертикали (ЦГВ)-, сигнал ДУС;
Рис. 5.13. Блок-схема канала элеронов.
сигнал рукоятки летчика РЛ («строевой» рукоятки), который по¬
дается как непосредственно через фазочувствительный усилитель
ФЧУ, так и через интегрирующее звено. В качестве интегрирующего
звена в режиме управления используется механизм согласования
МС. Фазочувствительный усилитель в цепи сигнала ДУС и РЛ
необходим ввиду того, что эти устройства вырабатывают сигналы
переменного тока.
В режиме стабилизации на суммирующий усилитель канала
элеронов подается также сигнал рысканья от курсовой систе¬
мы д С.
Р еж им согласования. В режиме согласования кон-
акты 1 5 разомкнуты. Замкнут только контакт 6. Рулевой агрегат
А отключен с помощью устройства, не показанного на схеме,
игнал с выхода электронного усилителя ЭУ вызывает вращение
ектродвигателя Дв до тех пор, пока сигнал потенциометрического
чика ПД не уравновесит сигналы ЦГВ и ПУ.
200АВТОГ1ИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
Режим стабилизации. В режиме стабилизации кон¬
такты /, 2, 3, 5 замкнуты, контакт 6 разомкнут. Закон регулирова¬
ния в режиме стабилизации имеет следующий вид:
бэ = Тэт\р1' ~ ОР — M’s)] • (5 21)
Величины у3 и ф3 реализуются в механизме согласования и блоке
согласования с курсовой системой (на рис. 5.13 этот блок не показан)
и соответствуют значениям крена и курса в момент окончания со¬
гласования.
Режим приведения к горизонту. В режиме
приведения к горизонту величина у3, фигурирующая в законе (5.21)
и остающаяся в режиме стабилизации постоянной, постепенно умень¬
шается до нуля. Это осуществляется пои замыкании контактов 4.
При замыкании этих контактов возникает отрицательная обратная
связь от контактного датчика к электродвигателю механизма со¬
гласования. Механизм согласования в этом режиме превращается в
релейный регулятор, уменьшающий сигнал потенциометрического
датчика до нуля (скорость обработки постоянна). Самолет приводится
в горизонтальное положение по крену.
Режим управления рукояткой летчика.
В этом режиме контакты /, 4, 6 разомкнуты, 2, <3, 5 замкнуты.
Управление от рукоятки летчика РЛ производится по «положению
и скорости». Сигнал положения рукоятки поступает от РЛ непосред¬
ственно на фазочувствительный усилитель. Сигнал интеграла от¬
клонения рукоятки образуется за счет электродвигателя механизма
согласования, на которой в этом режиме подается сигнал отклоне¬
ния РЛ. Закон управления в данном режиме имеет вид
£ Т эр + 1
9~ т9р
kly + k^-x-^
(5.22)
где хлэ — отклонение рукоятки летчика в боковом направлении.
Этот способ формирования командных сигналов летчика (послед¬
ний член в выражении (5.22)) можно пояснить следующим образом.
Привычной для летчика реакцией самолета по крену является уг¬
ловая скорость крена сох, пропорциональная в установившемся ре¬
жиме боковому отклонению ручки. Полагая у = сох/р, из (5.22) для
установившегося режима, когда элероны неподвижны рбэ = = О
и р следует устремить к нулю, получим
= £эЛХлэ .
Если бы «управление по скорости» отсутствовало (й™ = 0), то в
установившемся режиме угол крена был бы пропорционален отклоне¬
нию РЛ.
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ
201
Канал руля высоты и управляемого ста¬
билизатора Автопилот рассматриваемой схемы предназначен
пня самолетов у которых управление продольным угловым движе¬
нием осуществляется как посредством руля высоты, так и подвиж-
НО1ру1ьбвысоты?Роатклоняемый рулевым агрегатом РА, отрабаты¬
вает быстро меняющиеся, но относительно малые сигналы. Стаби¬
лизатор приводимый в движение гидромотором ГМ, отрабатывает
Рис. 5.14. Блок-схема канала руля высоты и управляемого стабилизатора.
медленно меняющиеся, но значительные по величине сигналы,
осуществляя автоматическую балансировку по тангажу. Блок-
схема канала руля высоты и стабилизатора представлена на
рис. 5.14.
Режим согласования. Согласование («обнуление»)
в канале руля высоты и стабилизатора осуществляется одновремен¬
но двумя интегрирующими элементами: механизмом согласования
МС и интегрирующим механизмом МИ, Последний осуществля¬
ет интегрирование релейной функции входного сигнала и состоит
из релейного усилителя, электродвигателя и потенциометриче¬
ского датчика (структура МИ на схеме рис. 5.14 не раскрыта).
Ь режиме согласования контакты 6, 7 замкнуты, контакты /—5
(рис. 5.14) разомкнуты. Скорость отработки МИ значительно мень¬
ше максимальной скорости отработки МС. Поэтому вначале осу¬
ществляется относительно быстрое согласование механизмом МС9
осле чего процесс медленного согласования некоторое время про¬
должается.
У Р е ж и м стабилизации. В этом режиме контакты
замкнуты, контакты 6, 7 разомкнуты. Реализуется следующий
202 АВТОПИЛОТЫ И КОНТУРЫ УГЛОВОЙ СТАБИЛИЗАЦИИ САМОЛЕТОВ [Гл. V
закон регулирования:
б. = £& - К) + + ($р + kt) + (ДЯ) - k^),
Р в
бс=-у/2(6в).
(5.23)
Здесь Ф3 — значение угла тангажа, получаемое в момент окончания
режима согласования; Д/7 — отклонение барометрической высоты,
контролируемое корректором высоты КВ\ 6В, 6С — отклонения руля
высоты и стабилизатора соответственно; flt f2 — релейные функции.
Поясним назначение и реализацию отдельных составляющих
закона (5.23). Для повышения точности и устойчивости стабилиза¬
ции барометрической высоты используется не только сам сигнал
отклонения по высоте но сигнал производной и ин¬
теграл от функции отклоне¬
ния по высоте К (ДЯ) =
= (AH)dt. Сигнал произ¬
водной получается с помощью
дифференцирующей цепи ДЦ.
Сигнал интеграла — посред¬
ством механизма интегриро-
по углу отклонения стабили-
“f
■ > Qb-
Рис. 5.15. Упрощенная структурная схема
управления рулем высоты и подвижным стаби¬
лизатором.
вания МИ, Сигнал обратной связи
затора создается датчиком обратной связи ДОС, связанным со
стабилизатором.
Стабилизатор, как уже указывалось, отклоняется гидромотором
ГМ, Управление ГМ в режиме стабилизации осуществляется кон¬
тактным датчиком КД, связанным с рулем высоты. Так реализуется
зависимость
6с = ft (бв) ИЛИ бс = у /2 (бп),
где релейная функция имеет зону нечувствительности порядка 3®.
Соединение КД с рулем высоты выполняется посредством электро¬
магнитной муфты в момент включения автопилота, так что харак¬
теристика /2 (6В) является, вообще говоря, плавающей.
Упрощенная структурная схема, соответствующая описанному
способу управления стабилизатором, изображена на рис. 5.15.
Выходной величиной здесь служит величина 6В + й6с, которая
в действительности определяет момент, действующий на самолет.
Коэффициент k имеет обычно порядок несколько единиц. Входной
величиной U6 служит суммарный сигнал на входе суммирующего
усилителя (за исключением сигнала обратной связи по отклонению
стабилизатора). Исполнительная система, управляющая рулем
высоты, принимается здесь безынерционной.
НЕКОТОРЫЕ СХЕМЫ КОНКРЕТНЫХ АВТОПИЛОТОВ
203
$ 5.3]
Роль канала стабилизатора здесь практически такая же, как
механизма триммерного эффекта в описанной выше схеме автопило¬
та последовательного типа.
Режим управления. При отклонении рукоятки лет¬
чика РЛ автоматически отключается корректор высоты, а также
подается сигнал управления «по положению» на суммирующий
магнитный усилитель. Закон управления в этом режиме сле¬
дующий. б„ = ^ + ЛвЧ — k™xm -k^be,
где Хлв __ отклонение РЛ в продольном направлении. При раз¬
воротах самолета с потенциометра механизма согласования канала
элеронов в канал руля высоты подается сигнал компенсации потери
высоты при крене.
Глава VI
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
Как и в предшествующем изложении, здесь рассматривается
аналитическое конструирование алгоритмов или законов управле¬
ния. Аналитическое конструирование элементов автопилотов, в
принципе возможное, не затрагивается. Поэтому более точным наи¬
менованием главы, по-видимому, было бы аналитическое конструи¬
рование контуров управления угловым положением самолета.
Из предыдущего видно, что современные автопилоты обычно
имеют три основных режима работы: приведение к горизонтальному
положению, стабилизация, управление. Критерии качества управ¬
ления в этих режимах и само их назначение различны. Поэтому об¬
щую задачу аналитического конструирования автопилота следует
разделить на задачи синтеза для указанных основных режимов.
Очень важное значение для многих современных летательных
аппаратов имеют автоматы безопасности и автоматы, обеспечивающие
различные ограничения. Эти автоматы могут органически объеди¬
няться с основной системой управления и синтезироваться совместно
с этой системой.
§ 6.1. Режим стабилизации
Назначением данного режима является автоматическая стабили¬
зация углового положения летательного аппарата относительно
заданного невозмущенного положения. По самому своему назначе¬
нию это — режим малых отклонений, при котором обычно можно
использовать линейные модели (линейные уравнения) объекта
управления.
Задача аналитического конструирования автопилота в режиме
стабилизации может ставиться по-разному. В качестве исходного
обобщенного объекта при решении задачи синтеза автопилота можно
рассматривать совокупность уравнений в отклонениях собственно
летательного аппарата, исполнительных устройств и инерционных
датчиков. Функция Q минимизируемого функционала в этом слу¬
чае обычно назначается в виде положительно определенной квадра¬
тичной формы отклонений от невозмущенного состояния.Ввиду того,
что летательный аппарат, как правило, не обладает асимптотической
устойчивостью невозмущенного углового положения, использу¬
ются варианты аналитического конструирования, разработанные
для нейтральных и неустойчивых объектов (см. § П.З, § П.4).
РЕЖИМ СТАБИЛИЗАЦИИ
205
I Ml
Решение задачи аналитического конструирования в указанной
постановке при полной степени наблюдаемости дает, очевидно, стру¬
ктуру и параметры не только собственно контуров угловой стабили¬
зации но и контуров перегрузки, демпфирования, т. е. «внутренних»
контуров, функционирующих в процессе ручного управления.
При этом структура и параметры внутренних контуров будут, во¬
обще говоря, отличными от структуры и параметров, получаемых при
синтезе систем ручного управления (см. главу III). Это обусловлено
как различием уравнений обобщенного объекта, используемых при
аналитическом конструировании системы ручного управления и
автопилота, так и различием в критериях оптимальности. Значи
тельные изменения структуры и параметров внутренних конту¬
ров при включении контуров стабилизации углового положения
на практике чаще всего нежелательны. Обычно проще реализовать
такую систему, в которой структура и параметры внутренних
контуров либо вообще не меняются или изменяются весьма незна¬
чительно.
Для достижения последнего можно в качестве обобщенного объ¬
екта при синтезе контуров угловой стабилизации рассматривать
летательный аппарат с оптимальной системой ручного управления,
синтезированной изложенным выше путем. Если при такой постанов¬
ке задачи синтезируемое управление реализуется с помощью спе¬
циального (дополнительного) исполнительного устройства, то ни
структура, ни параметры системы ручного управления практически
не меняются.
Если автопилот и система ручного управления имеют общие ис¬
полнительные устройства, то включение оптимального режима уг¬
ловой стабилизации должно, вообще говоря, сопровождаться не¬
которым изменением коэффициентов внутренних контуров. Впрочем,
можно так подобрать критерии оптимизации, чтобы включение ре¬
жима оптимальной стабилизации и в последнем случае не сопрово¬
ждалось заметным изменением коэффициентов внутренних кон¬
туров.
Рассмотрим подробнее задачи аналитического конструирования
автопилотов в указанных постановках.
Независимый синтез систем стабилизации
испКаК УЖе Упоминалось> для режима стабилизации целесообразно
ДостЛЬЗ?ВаТЬ лииеаРизованнЬ1е уравнения летательного аппарата.
вогоГЧНО П?ЛНЬ1МИ линейными уравнениями продольного и боко-
явпст^ВИЖеНИ]^ жесткого самолета при полете в спокойной атмосфере
нейным^ Уравнения (1-43), (1.52). Дополненная простейшим ли-
Уравнением двигателя, эта система уравнений с учетом со-
тношения ДО = Дф — Да и в предположении a^z = 0 принимает
206
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
ВИД
A6t + -^-A6t-^-A64 = 0,
АЙ + avxW + (а? — а?) Да 4- — а®1 Абт = О,
Да — aVy AV 4- (а® — а“) Да — а®Д^ — Дсог 4- а^“А6в = О,
А(Ог 4” 4" ^znzAa 4- й/п.Д®2 — йшгА6в = О,
дА — До)2 = о,
ДСОХ -|" апгх\^)х + Я^Дй)^ Я^хД? — О>тх^з == О,
&<&у 4" ату^х 4“ атуки>у 4” ^Lt/ДР — ^mz/Д^э — Яту^я = О,
ДР — Дсо^ 4- ДР 4- а* Д? = О,
Ду — Дсох = О,
Дф — Дсо^ = 0.
(6.1)
(6.2)
В рамках рассматриваемого режима стабилизации продольное и
боковое движения являются независимыми, автономными. Ясно,
что критерии оптимальности — функционалы для этих движений
должны быть независимыми, т. е. содержащими автономные группы
фазовых координат и управлений. Оптимальные управления при
этом получаются также независимыми и могут синтезироваться пу¬
тем решения двух автономных задач.
В рассматриваемой полной линейной модели продольного дви¬
жения отклонения скорости полета и угловые отклонения взаимо¬
связаны. Поэтому синтез собственно автопилота-стабилизатора уг¬
лового положения в строгой постановке должен осуществляться од¬
новременно с синтезом стабилизатора скорости (автомата тяги).
При аналитическом конструировании это получается автоматически
за счет использования уравнений (6.1) и назначения соответствую¬
щего функционала.
Для контуров стабилизации углового движения немаловажную
роль играет инерционность исполнительных устройств. Для крат¬
кости ограничимся простейшими линейными моделями исполнитель¬
ных устройств в виде апериодических звеньев:
А6В 4- yi— А6В = ив,
Абд 4 г Абд = ид,
бд
где ив, ил — синтезируемые управления. Датчики Дй, Дсог, До»
ДУ, Д6Т будем считать безынерционными. Обобщение на случай
более сложных моделей исполнительных устройств и датчиков осу¬
ществляется согласно стандартной методике.
(6.3)
207
РЕЖИМ СТАБИЛИЗАЦИИ
§ 6.1]
Из рассмотрения простер районов У"Р—ЮЦ°"Х“
уга0Тпешущ«тми интегрального или астатического управления,
ясны преимущества аналитического конструирова-
в рамках рассматриваемого метода аналитическ^
ния интегральное управлен ат павных интегралам от основных
ZSZS’управляв, по углу тан-
гажа введем дополнительную фазовую координа у
х8 = \№dt.
(6.4)
Вводя обозначения
Х1 = Дбт, х2 = ДК х3 - Да, х4 - Д®2> хъ — Д^’ — д°в,
х7 = Д6д, ue = ив, и7 = ид,
записываем уравнения (6.1), (6.3), (6.4) обобщенного объекта в
виде
(6.5)
где
х + ах = и,
х =
О
О
о
-1
a®z
umz
-1
О
О
%
О
о
о
О
о
абв
umz
О
1
Г6д
-1 О
&д
Гд
О
О
о
о
о
0
О
о
о
о
о
О
стабилизации должны
о
(6.6)
быть
Очевидно, что управления в режиме
нетерминальными. Поэтому из четырех вариантов метода аналити¬
ческого конструирования по критерию обобщенной работы, рассмо¬
тренных в приложении, в данном случае можно применить только
два: синтез нетерминальных управлений при отсутствии граничного
условия и синтез нетерминальных управлений при скользящем гра¬
ничном условии.
Применим сначала первый вариант метода (см. § П. 4), считая
коэффициенты обобщенного объекта постоянными. Учитывая ней¬
тральность (или неустойчивость) объекта, функцию Q задаем в виде
Q = -^ехр (- -^j (Р11Д62 + Р22А1/2 + рззда2 + р44дш2 +
+ м»2 + м6?. + Р77Д6’) = 4 ехр (- Щ 2 0„4, (6.7)
гДе Г, — постоянные положительные коэффициенты.
208
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
Каждому члену данной квадратичной формы и соответствующему
члену функционала можно дать определенную интерпретацию.
Оценкой качества угловой стабилизации и стабилизации скорости
служит величина
^2
4 J ехр ( (р22ДР + р44Д(02 + ₽б5д^ at, (6,8)
Оценкой перегрузки или угла атаки является
4jexp( (6.9)
Затраты на управление в виде интегральных квадратичных откло¬
нений тяги двигателя, сектора газа и руля высоты представлены вы¬
ражением
^2
4 J ехр ( (Р11д^ + рбсдб2 + р77Д6д) dt. (6.10)
В соответствии с (П.4.33) полный минимизируемый функционал в
рассматриваемой задаче имеет вид
8
z = 4- S ехР (— AikXi +
t h 1 4 1 '
Случайные возмущения не учитываются, поэтому знак математиче¬
ского ожидания опущен. Если ставить задачу синтеза с учетом слу¬
чайных возмущающих воздействий турбулентной атмосферы, то
следует использовать уравнения (1.72), учитывающие ветер. Кроме
этого, необходимо привлечь уравнения формирующих фильтров тур¬
булентности, например, (1.68), (1.69). Поэтому порядок обобщенного
объекта повышается (в случае уравнений (1.68), (1.69) на 3). Однако
основное затруднение при решении задачи синтеза с учетом воздей¬
ствий турбулентной атмосферы связано не с этим. Выходные и
«внутренние» координаты формирующих фильтров турбулентности,
т. е. компоненты случайных составляющих скорости ветра U
Uy (см. (1.68), (1.69)) и производных от них величин, трудно кон¬
тролировать в полете. Поэтому чаще всего приходится решать за¬
§ б.П
РЕЖИМ СТАБИЛИЗАЦИИ
209
дачу с. неполной степенью наблюдаемости, что усложняет процесс
получения решения (см. § П. 7). Кроме того, параметры оптималь¬
ной (с учетом турбулентности) системы будут, вообще говоря, зави¬
сеть от масштаба турбулентности L или других параметров форми¬
рующих фильтров (в случае фильтров более сложных, чем (1.68)—
(1.69)). Эти параметры заранее неизвестны.
Трудности реализации оптимальных (с учетом турбулентности)
систем стабилизации можно преодолеть с помощью использования
самонастройки, подобной изложенной в главе IV. Кроме того, ос¬
новная борьба с вредным влиянием турбулентности может быть воз¬
ложена на специальную подсистему. Здесь ограничиваемся решением
детерминированной задачи, когда оптимизируются переходные про¬
цессы возвращения в невозмущенное состояние с учетом соответст¬
вующей работы управлений и сигналов управления.
В соответствии с общей теорией (§ П.4) оптимальные управления,
минимизирующие функционал (6.11), равны
где
8 8
«в=—i ал. «7=—i AnSk* (6-i2)
k=l fe=l
(6.13)
В исходных обозначениях
(644)
— kl (Л61Д6Т -f- Л62Д V + Лб3Да 4" Лв4Дсо2 4“ Л6бДд 4"
4“ + Лб7Д6д + Л68 у ДО dt),
ид= k* (Л71Д6Т -|- Л72ДV Л73Да Л74Дсо2 -|- Л75Д$ -|-
4~ Л76Д6В + Л77Д6д + A7S f Д'® dt).
Соответствующая структурная схема оптимальной системы стабили¬
зации продольного движения представлена на рис. 6.1. Напомним,
что она синтезирована для относительно полной линейной модели
продольного движения объекта, учитывающей как короткоперио¬
дическую, так и длиннопериодическую составляющие. Данная струк¬
турная схема содержит больше связей, чем обычно реализуется в
типовых автопилотах и автоматах тяги. Однако некоторые из свя¬
зей в оптимальной системе являются слабыми и могут быть отбро¬
шены без существенного ухудшения качества управления.
210
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
Анализ глубины оптимальных связей и возможности упрощения
системы целесообразно проводить путем числовых расчетов при син¬
тезе конкретных систем. Однако следует обратить внимание на сле¬
дующую общую закономерность. Постоянную времени Т в функцио¬
нале и выражениях оптимальных коэффициентов (6.13) удобно
задавать исходя из желаемого времени переходных процессов в
замкнутой оптимальной системе. Это время обычно меньше даже вре¬
мени собственного короткопериодического движения исходного
Рис. 6.1. Структура оптимальной системы стабилизации продольного движения, синтези¬
рованная для полной линейной модели разомкнутого объекта.
объекта. Поэтому длиннопериодические составляющие весовых функ¬
ций, развивающиеся обычно после затухания короткопериодическо-'
го движения, играют в выражениях (6.13) относительно неболь¬
шую роль. Часто можно либо сразу пользоваться упрощенными
моделями продольного движения объекта, либо, как уже отмечалось,
отбрасывать слабые связи в оптимальной системе, синтезированной
для полной модели объекта.
Приведем также следующее замечание. В законах регулирования
(6.14) и структурной схеме рис. 6.1 используется информация об
отклонении тяги двигателя Дбт. Тяга двигателя обычно не доступна
для непосредственного измерения. Однако отклонения тяги при из¬
вестных коэффициентах а?, могут быть определены кос¬
венным путем посредством контроля продольного ускорения V
и величины Д1/, Да, Д'® (см. уравнения (6.1)).
Нетерминальные оптимальные управления получаются также
при задании скользящего граничного условия (см. § П.4). Назначая
матрицу р скользящего граничного условия, как и матрицу (3, диа-
РЕЖИМ СТАБИЛИЗАЦИИ
211
5 6’1
тональной, минимизируемый функционал задаем в виде
/='5'1?1р“х?(/+т)+^_ 5 S (4’+^’)<й+
15)
Согласно общей теории оптимальные управления, а значит, и струк¬
тура оптимальной системы, остаются в прежнем виде (6.12), (6.14),
рис. 6.1. Однако выражения для оптимальных коэффициентов при
минимизации функционала (6.15) отличны от (6.13). Согласно
,(П. 4.35) эти выражения имеют вид
7 7 Г
Ам = 5 pvvtwve (т) wvk (т) + 2 Pw wv6 (/) wvk (/) dt,
v=l V=1 q
7 7 г I (6-16)
A7k = 2 pvv®v7 (t) Wvk (t) + 5 pvv ( Wv7 (t) Wvk (/) di. |
v=l v=l $ J
Как правило, коэффициенты pvv задаются пропорциональными pvv
и отличия между величинами (6.13), (6.16) получаются не очень зна¬
чительными. Приведенные выше соображения, касающиеся слабых
связей и возможности упрощения системы, остаются справедли¬
выми для данного случая.
Рассмотрим теперь задачу синтеза контуров стабилизации
крена, рысканья и скольжения, т. е. задачу синтеза системы ста¬
билизации бокового движения. Уравнениями бокового углового
движения самолета в режиме стабилизации служат (6.2). Вместе с
уравнениями исполнительных устройств канала элеронов и канала
руля направления
А6Э + у— Д6Э = иэ,
1 6э
А6Н + Д6Н = ын
1 бн
и соотношением
х8 = j Др dt.
вводимым для обеспечения астатизма по углу скольжения, эта си¬
стема уравнений может быть записана в виде
х -|- ах = и.
(6.17)
212
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ ГГл. VI
где
X
а =
*1
д®х
х2
До),
У
xs
А?
*4
Д1р
%
др
Д6=
Х-,
Аби
хв
Jap
at
ах
тх
дСО</
тх
0
0
а™
ту
а^У
ту
0
0
— 1
0
0
0
0
-2
0
0
0
-1
а?
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
г/
И-
>
0
0
«э
«6
«н
и7
0
0
с₽ -
абэ
-лвн
0
итх
тх
-тх
а®
а^3
— а
6н
0
ту
ту
ту
0 0
0
0
0 0
0
0
4 о
0
0
0 V
1
0
0
Т
6э
0
0
1
0
Т
6н
^1 0
0
0
Функцию Q минимизируемого функционала задаем в виде
Q = ~~2~ ехР ( 7“) 1РцДюх + РггД^2 + РззД?2 + Р14^ф2 + Р55ДР2 +
+ рбвД6| + ₽77Д6* + Р88 (J дм)2 ] = 4- ехР (- Т-) i
или в случае скользящего граничного условия
<2=2 р„х?.
t'=l
Оптимальные управления будут иметь вид
иэ = k\ (Л61Дсод + ^462Асо^ Л63Ду + А64Дф 4~ Л6бДВ +
+ + Аз j ^P
ин = — &7 (Л71Д(ол + АгД^ + АзД? + л74Дф + Л7бдр 4-
4“ АвД^э + А?Д6Н + Ав У ДР dt),
(6.18)
(6.19)
РЕЖИМ в^АвИЛИЙАЦИЙ
ИЗ
П.11
где в случае минимизации функционала типа (П. 4.34)
8
А6к — У Pw j Wv6 (t) wvk (t) exp dt,
о
8 « } (6.20)
A7k = у ₽vv Wv7 (t) wvk (/) exp (— dt,
v=l Q
а в случае минимизации функционала типа (П.4.27) с диагональной
матрицей р скользящего граничного условия
Число перекрестных связей в практически применяемых законах
стабилизации углового бокового движения самолета (см. главу V)
обычно значительно меньше, чем в оптимальных законах (6.19).
Это можно объяснить слабостью ряда связей в оптимальной систе¬
ме. Эти связи быстро выявляются при численном синтезе и могут
быть отброшены при реализации управлений.
Пусть, например, численные значения коэффициентов бокового
движения самолета равны
= 0,95 сек \
= 0,27 сек~\
а^тх = 22 сек 2,
О'тх — 5,8 сек ,
а^ = 0,11 сек~\
Оту = —2,13 сек ,
Отх — 4 сек ,
о ту =z 7,1 сек ,
а} = — 0,02 сек~\
= 0,009 сек~\
imy = 0,35 сек~2,
al = 0,074 сек~\
Эти значения соответствуют гипотетическому самолету в режиме
горизонтального маршрутного полета при Н = 18 км, М = 1,7
(см. § П. 8). Примем Тбэ = Тбн = 0,07 сек. Коэффициенты функцио¬
нала выбираем по способу «равного вклада максимальных откло¬
нений»:
— РззЛут — p44^^PSz —Рб5^Р^ == Рвб^з/л =
= ₽„A6L =₽88(Jam)L
214
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
Полагая *)
Д©хт = 0,5 рад ■ сек-1, Дазут = 0,3 рад • сек-1, Лут = 0,07 рад,
Дг|>,п = 0,005 рад, Дрт = 0,05 рад, Д6эт = 0,1 рад,
Дбнт = 0,1 рад, (Др dtjm = 0,05 рад ■ сек,
находим
Р22 25
₽11 9 ’
Рзз 25 ■ №
'Он 49
сек-2,
= Ю4 сек~2,
Р11
100 сек~2, -Ist- = 25 сек~2, = 25 сек~2, — 100 сек-4.
Р11 Р11 Р11
Зададим в оптимизирующем функционале и выражениях (6.20)
Т = 5 сек. Определяем путем интегрирования уравнений исходного
Рис. 6.2. Переходные процессы по углу скольжения, рысканья и крена
при оптимальных управлениях (6.22).
объекта фундаментальную систему весовых функций wVk (0 и вы¬
числяем коэффициенты оптимальных управлений (6.20)
ив = — kl (0,741(0Х — 2,63со + 0,818у — 4,3ip + 3,92р +
+ 0,3846,4- 0,186н — 0,006 J р dt),
(6.22)
u7 = — ^ (— 0,301сох + 2,83со — 0,3-у + 3,794? — 3,93р +
+ 0,3846, + 0,3436н + 0,0487 J р dt).
На рис. 6.2 изображены переходные процессы в синтезированной
оптимальной системе при k& = 5, k7 = 6,4 и начальных отклонениях
по рысканью. Видно, что качество процессов стабилизации в оп¬
тимальной системе достаточно высокое, хотя налицо типичный для
*) Вычисления и анализ для данного примера осуществлены Е. Н. Рябо¬
вым с помощью ЭВМ.
РЕЖИМ СТАБИЛИЗАЦИИ
215
§ 6J]
еохзвуковых самолетов при большой высоте полета и статическом
автопилоте затянутый процесс изменения ф. Это можно устранить,
вводя в качестве дополнительной координаты х9 = jipd/. Отбрасывая
перекрестные обратные связи по отклонениям органов управле¬
ния, из (6.22) получаем
ив = — k2Q (0,741(ох — 2,63со^ + 0,818у — 4,3ф + 3,92(3 +
+ 0,3846э — 0,006 j 0 dt),
и7 = — k2 (— 0,301(ох + 2,83(0^ — 0,Зу 3,79гр — 3,93(3 +
+ 0,343бв + 0,0487 J р dt).
(6.23)
Переходные процессы в соответствующей «квазиоптимальной»
системе изображены на рис. 6.3. Здесь те же начальные условия и
коэффициенты усиления каналов, что и в предыдущем случае.
Качество процессов стабилизации осталось достаточно высоким.
Синтез систем стабилизации с сохранением структуры
внутренних контуров
Выше уже упоминалось, что определенным недостатком рас¬
смотренного решения задачи синтеза законов автоматической стаби¬
лизации является игнорирование результатов синтеза системы руч¬
ного управления (внутренних контуров). Это приводит к тому, что
при включении режима стабилизации синтезированного указанным
образом автопилота система ручного управления со всеми ее кон¬
турами демпфирования, перегрузки и т. д. должна выключаться,
это невыгодно в отношении количества аппаратуры и в то же время
не решает задачи резервирования. Целесообразна определенная пре¬
емственность в постановках задачи синтеза, когда синтез каждого
216
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. Vj
следующего уровня иерархической системы осуществляется с уче¬
том уже синтезированной оптимальной (для своих целей) структуры
предыдущих ступеней.
Для рассмотренной в главе III постановки задачи синтеза оп¬
тимальных систем ручного управления характерно использование
модели или эталона, обладающего желаемыми характеристиками
устойчивости и управляемости. При этом оптимальная система руч¬
ного управления получается комбинированной (наряду с сигналами
отклонений фазовых координат используются сигналы задающих
воздействий) и содержащей эталон как составную часть системы.
Эталон можно применить и в задаче синтеза системы управления
в режиме стабилизации невозмущенного положения. Однако здесь
задающие воздействия отсутствуют и ставится задача приближения
переходных процессов в системе самолет — автопилот к переходным
процессам эталона. Ясно, что эталон здесь должен обладать устой¬
чивостью невозмущенного положения, т. е. содержать обратные свя¬
зи по угловым координатам. В самой оптимальной системе угловой
стабилизации также, конечно, содержатся обратные связи по уг¬
ловым координатам, а эталон отсутствует.
Таким образом, эталон при синтезе в режиме стабилизации
привлекается только в качестве воображаемого эталона устойчивос¬
ти с целью получения структуры, близкой к структуре в режиме
ручного управления. Поясним данную методику на примере синтеза
канала стабилизации продольного углового движения (канала руля
высоты) на основе упрощенных уравнений продольного углового
движения. Эти уравнения записываются в обычном виде:
Да 4- -=!— Да — Дсо = О,
' и
ДсОг *4“ = О,
Д'б' — Д(0г = О
(6.24)
(для режима автоматической стабилизации воздействия летчика
Дхлв полагаются равными нулю). В качестве уравнений исполнитель¬
ного устройства принимаем уравнения (3.27), эквивалентные ко¬
лебательному звену:
(6.25)
Дхив — Дхвв = О,
Дхш, 4- 2£ншиДх’в + (£>2Дхив = «в.
С целью обеспечения интегрального управления по углу тангажа
в оптимальной системе в уравнения обобщенного объекта включаем
соотношение
х7 + Д^ = 0. (6.26)
Ввиду того, что коэффициенты эталона могут задаваться по нашему
желанию, в эталоне со структурой (6.24) и дополнительной обрат¬
§ 6.П
РЕЖИМ СТАБИЛИЗАЦИИ
217
ной связью по углу тангажа можно получить высокое качество пере¬
ходных процессов по всем координатам. Исходя из этого, задаем
уравнения эталона в виде
Даэ + Даэ — Дсо2э = О,
1 0Э
Д^гэЧ- йтгэДс1)гэ -|- апг2ЭАаэ atn~3№3 = (6.27)
Д&э — Д(огэ = 0.
Если, как мы делали в главе III, для упрощения функции Q функ¬
ционала ввести относительные координаты
Даот = Да — Даэ, Д<о2ОТ = Дсо, — Доогэ, ДФОТ = Дй — ДФЭ,
то следует использовать уравнения
Да0| 4—m— Да07 4- I -гр Да — Долгот =
1 0э \ 1 0 1 0э /
Д(0го7 4“ ^тгьД^го 4“ ^/пгэАаЭ1 4" (^/7г? О-тлз) А(Ог “Ь
+ (а™? — а^гэ) Да + <2тгэД^от — ЯтгэДй — ЯтгДХив = 0,
Д'д’от Д^02ОТ == 6,
получаемые из (6.24), (6.27). Вводя обозначения
(6.28)
Да = xlt Дсо2 = х2 Дг7 = х3, Даот = х4, А^гот ~ хб,
Ддот = х6, С ДО1 dt = х7, Дхив = х8, Дхив = х9, иъ = и9,
записываем уравнения (6.24) — (6.26), (6.28) в типовой матричной
форме
х + ах = и,
где
*1
0
X =
•
, И —
0
«9
При синтезе нетерминального управления без граничного условия
минимизируемый функционал задаем в виде
9
1 а S ехр (—49AikXi х“ +
l,k= ' '
+ ~2~ J еХР ( Т") "Ь Рб5Х5 + Рбвхб) dt +
218 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ 1Тл. VI
Коэффициенты оптимального управления в этом случае определяют¬
ся по формуле
оо оо
Аа = ₽44 J wi9wik exp (— y-j dt + p56 j w69w6k exp (— y-j di 4-
0 0
oo
+ Pee J exp (— y-)' di. (6.30)
0
Рио. 6.4. Структура оптимальной системы стабилизации
продольного углового движения, синтезированная для
простейшей модели объекта.
При синтезе нетерминального управления со скользящим гранич¬
ным условием функционал задается в виде
9 /-И
Z = “Г S ^i{X^ + Т) Н 2" J (044*4 + 055*5 + 066*1) & +
t=l t
Н-т Н-т /9 \2
+ 77? S U*dt + ~Т I S dt’ <6'31)
t t \fc=l /
и коэффициенты выражаются формулой
9 6 ?
Аан = 2 Pw^v9 (т) Wvk (т) 4- 2 Pw 1 WvWvk dt. (6.32)
v=l V=4 ,7
§ 6.2]
РЕЖИМ УПРАВЛЕНИЯ. ВОПРОСЫ АДАПТАЦИИ АВТОПИЛОТОВ 219
Оптимальное управление имеет вид
9
а = —• kl S A9kxk = — k* (Л91Да -f- Л92Дсо2 4“ АзА1®1 + АдА^от +
в £==i
4“ AsAQzot ”Ь АбАйот 4“ ^97 dt 4“ -Ae^^HB Н- ^99^-^ив)*
После затухания свободных колебаний в эталоне
Даот = Да, Дсо^от = Лсо2, Айот = Ай.
Поэтому оптимальный закон стабилизации можно представить в
форме
ив = — kl [(Ai + AJ Аа + (Аг + As) а«2 4" (Аз +. Ав) Aft 4-
4~ А7 Ай di 4~ A8A*hb А АэА-^ив]* (6.33)
Соответствующая схема при последовательном исполнительном
устройстве представлена на рис. 6.4. Структура внутренних контуров
здесь такая же, как для соответствующей системы ручного управле¬
ния (рис. 3.3).
§ 6.2. Режим управления. Вопросы адаптации автопилотов
В режиме управления летчик (или штурман), посылая команды
в автопилот, придает летательному аппарату с включенным автопи¬
лотом желаемое угловое положение. Команды могут формироваться
как посредством основных рычагов управления, так и посредством
специальной рукоятки или ручек на пульте управления. В режиме
управления с включенным автопилотом на летчика возлагается
функция осуществления траекторного управления. В этом режиме
неавтоматические контуры траекторного управления как бы замы¬
каются через летчика.
Синтез автопилота в режиме управления
Синтез законов автопилота в режиме управления может осуще¬
ствляться в основном так же, как синтез законов системы ручного
управления (см. главу III). В частности, может использоваться спо¬
соб эталона. Особенности здесь заключаются в следующем. Эталон и
собственно автопилот обязаны содержать обратные связи по углам
крена, тангажа, рысканья. Такие связи в системах ручного
управления, вообще говоря, отсутствуют. Далее, спектр задающих
воздействий летчика (штурмана) при включенном автопилоте иной,
чем при выключенном автопилоте, т. е. при ручном управлении.
При включенном автопилоте спектры задающих воздействий соот¬
ветствуют спектрам траекторных контуров и являются существенно
более узкими в сравнении с ручным управлением (в этом причина
облегчения работы летчика при включенном автопилоте).
220
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
Таким образом, формирующие фильтры задающих воздействий
летчика при синтезе законов автопилота должны существенно от¬
личаться от формирующих фильтров тех же воздействий при синтезе
системы ручного управления.
Эти отличия количественного характера не мешают распростра¬
нить общую методику, изложенную в § 3.1, на задачи синтеза авто¬
пилотов в режиме управления. Общая методика охватывает случаи
больших отклонений, нелинейных уравнений обобщенного объекта.
Однако режим управления летчиком с включенным автопилотом,
как и режим автоматической стабилизации, используется в основном
на неманевренных этапах полета. На этих режимах имеют место от¬
носительно малые отклонения координат. Для описания объекта в
рассматриваемом режиме естественно использовать линейные урав¬
нения.
Распространение методики, довольно подробно описанной в
главе III, на случай синтеза автопилотоз в режиме управления не
составляет большого труда. Поэтому ограничимся случаем синтеза
канала руля высоты при учете только короткопериодических дви¬
жений самолета. Предполагаем, что задающие воздействия в режи¬
ме управления с включенным автопилотом формируются с помощью
основной ручки (штурвала) управления самолетом, причем непо¬
средственное ручное управление не выключается. Это возможно для
автопилота последовательной схемы и реализуется, в частности, в не¬
которых автопилотах вертолетов (см. главу XI).
Уравнения короткопериодического продольного углового дви¬
жения самолета в соответствии с указанным записываем в виде (3.23)
с добавлением соотношения для угла тангажа:
Да 4" -4- Да — Д<о2 = 0,
1 0
Дй)2 4“ йни Д^г 4" 62^22Да ^/пгД-^лв йт2Дхив = 0,
Д4 — Дсо2 = 0.
(6.34)
Уравнения эталона возьмем в форме (6.27) с добавлением задающего
воздействия летчика а^2ЭДхлв (как в (3.24)). Переходя к относи¬
тельным отклонениям Даот = Да — Даэ, Дсо20т = Дсо2 — Дсо 2Э»
Д40Т = Д4 — Д4Э, записываем
Д«от + Д^о. + ( JДОС — Д(02от = 0,
1 0э \ 1 0 1 0э /
Д(02от 4“ ^/пгэДо&гот “F &т'эДсбОт 4" (#mz ^тгэ) “Н
+ (а^-а«гэ)Да + 4гД^от--а^Д&-аХЛхль- { (6’35)
— Я/изД^ив = 0, :
г
§ 6.2]
РЕЖИМ УПРАВЛЕНИЯ. ВОПРОСЫ АДАПТАЦИИ АВТОПИЛОТОВ 221
Уравнения формирующих фильтров задающих воздействий лет¬
чика принимаем в виде (3.26)
(6.36)
где, однако, постоянные времени Гф1, Тф> существенно больше,
чем аналогичные постоянные ТфвЬ 7фв2 при управлении с вы¬
ключенным контуром стабилизации углового положения. Испол¬
нительное устройство считаем эквивалентным колебательному зве¬
ну (6.25)
Д%ив ДХив == О,
ДХив 2£исоиДхив -f- соиДхив = ив.
(6.37)
Желая получить астатическую систему управления, введем также
в качестве наблюдаемой координаты х7 = j &$0Tdt
х7 — Д&от = 0. (6.38)
Используя обозначения
Да = xv Д(ог = х2, ДА* = х3, Даот = х4, AcoZOT = хб,
Д^о == Xg, ДХив = Хд, Д'^ив = А"\лв = ^Ю» Д*\лв = ■^’11’
представляем уравнения обобщенного объекта (6.34) — (6.38) в ти¬
повой форме
х ах = и +
где
Х1
0
0
, и =
0
«9
0
41
■
0
4
222
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. vi
При обычных формах оптимизирующих нетерминальных функ¬
ционалов
р / 11
Г G
Л / rtj \
+4-м
\ ехр (— -у-) £ dt
+ 1 М
2k2
) ехР (—т) и* Л
.1, 1=4
9
■1,
оптимальное управление имеет вид
и
и9 = — ^9 2 ^9kxk — — ^9 Да А92Д<о2 + А93ДФ + А94Да0Т +
6=1
+ А95Дсо20Т 4" А9бДФот 4- А97 у Д$от dt 4- Л98Дхив 4“
4" А99Дхив 4“ АддоД^лв 4- Agfu (Дхлв 4“ Т^ДЯлв)]- (6.41)
Коэффициенты оптимального управления, соответствующего мини¬
муму функционала (6.39), выражаются формулой
7 оо
Ал = £ ₽w f ®V9 (/) Wvk (О ехр (— dt. (6.42)
v=4 о \ ‘ I
Коэффициенты оптимального управления, соответствующего ми¬
нимуму функционала (6.40),
11 7 г
Аян = 2 Pvv^v9 (т) wvk (т) + 2 pw ? Wv9 (t) wvk (/) dt. (6.43)
v=l v=l 0J
Структурная схема, отвечающая оптимальному управлению
(6.41) и заданным уравнениям эталона, изображена на рис. 6.5.
Это — структура системы комбинированного (по отклонениям и
задающим воздействиям) управления с моделью. Сопоставляя схе-
5 6.21
РЕЖИМ УПРАВЛЕНИЯ. ВОПРОСЫ АДАПТАЦИИ АВТОПИЛОТОВ 223
Ы рис. 6.5, рис. 6.4, рис. 3.3, убеждаемся, что синтезированные
рассмотренным методом оптимальные структуры канала руля вы¬
соты в режимах ручного управления, стабилизации и автоматиче¬
ского управления имеют много общего, т.е. обладают преемствен¬
ностью. При этом структура канала в режиме автоматического
Рис. 6.5. Оптимальная структура канала руля высоты автопилота в режиме управ¬
ления, синтезированная на основе уравнений короткопериодического движения.
управления (рис. 6.5) является среди указанных структур наиболее
общей. Оптимальные системы для режима ручного управления и
режима автоматической стабилизации могут быть получены из
системы рис. 6.5 путем выключения некоторых сигналов и изменения
параметров. Подобную преемственность оптимальных структур мо¬
жно обеспечить во всех каналах управления.
Вопросы адаптации (самонастройки) оптимальных
автопилотов
Автопилоты явились первыми системами регулирования, для
которых автоматическая параметрическая настройка получила ши¬
рокое применение. Самонастраивающимся автопилотам посвящена
Довольно обширная литература (см., например, [6.11 —[6.9]). Здесь
224
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
нет возможности и необходимости освещать многочисленные част¬
ные предложения и разработки в области адаптивных автопилотов.
Ограничимся краткой характеристикой относительно общих прин¬
ципов адаптации для автопилотов, сконструированных аналитиче¬
ским путем. Об этих принципах применительно к системам ручного
управления и системам демпфирования аэроупругих колебаний уже
говорилось в главах III, IV.
Следует заметить, что в большинстве случаев настройка контуров
угловой стабилизации летательного аппарата, как й контуров
демпфирования и перегрузки, может осуществляться в квазистацио-
нарном режиме. В этом режиме процессы настройки протекают
медленно в сравнении с переходными процессами в упомянутых кон¬
турах. Изложение принципов самонастройки или адаптации авто¬
пилотов ниже осуществляется применительно к квазистационарно-
му режиму.
Достаточно общим способом самонастройки автопилотов яв¬
ляется настройка в функции параметров среды, таких как высота,
скоростной напор, число М и др. Аналитическое конструирование
способствует применению этого способа в том смысле, что выяв¬
ляет функциональные зависимости оптимальных значений коэффи¬
циентов автопилота от параметров среды. Конечно, определение этих
зависимостей возможно лишь при знании зависимостей коэффици¬
ентов объекта от параметров среды.
С учетом квазистационарности может быть рекомендован сле¬
дующий порядок расчетов, аналогичный изложенному в главе IV
для систем демпфирования аэроупругих колебаний.
Намечается множество характерных режимов полета летатель¬
ного аппарата. Для этих режимов, отличающихся значениями пара¬
метров среды, определяются коэффициенты объекта или фундамен¬
тальная система весовых функций объекта. После назначения и уточ¬
нения функционала по формулам коэффициентов оптимальных
управлений определяются эти коэффициенты. Для практических за¬
дач, характеризующихся высокими размерностями обобщенных объ¬
ектов, расчеты обычно являются численными и выполняются на ЦВМ
или на АВМ (определение весовых функций) и ЦВМ. В результате
получаются численные оптимальные значения коэффициентов авто¬
пилота для различных режимов, т. е. различных значений параме¬
тров среды. Зависимости оптимальных коэффициентов автопилота
от параметров среды представлены здесь в отдельных, обычно не¬
многочисленных, точках пространства параметров среды. Однако
этого, как правило, достаточно для приближенной аппроксимации
искомых зависимостей. Грубая аппроксимация часто даже пред¬
почтительна, так как допустимы значительные отклонения от строго
оптимальных коэффициентов и, с другой стороны, сложные много¬
мерные функциональные преобразования трудно реализовать как
в аналоговых, так и цифровых вычислителях.
§ 6.2]
РЕЖИМ
УПРАВЛЕНИЯ. ВОПРОСЫ АДАПТАЦИИ АВТОПИЛОТОВ 225
Реализация настройки в функции параметров среды требует
контроля этих параметров, осуществления приближенных функцио¬
нальных преобразований и соответствующих изменении парамет¬
ров автопилота. Необходима значительная априорная информация
о коэффициентах объекта при различных значениях параметров среды.
Хотя связанные с отмеченным недостатки систем настройки в
функции параметров среды общеизвестны, эти системы применяются
и будут применяться с ограниченными целями в будущем, особенно
в сочетании с другими системами адаптации. В пользу такою про-
гноза о применении «разомкнутых» систем настройки автопилотов
говорит следующее.
Системы настройки в функции параметров среды практически
безинерционны. На современных летательных аппаратах разви¬
ваются системы контроля параметров среды, используемые одновре¬
менно для нескольких применений. Возможности выполнения функ¬
циональных преобразований с развитием средств микроэлектроники
расширяются. Что касается априорной информации, то в том или
ином объеме она всегда имеется перед проектированием автопилота
и эту априорную информацию желательно использовать.
Однако одного принципа настройки в функции параметров среды
недостаточно для создания рациональной системы адаптации авто¬
пилотов, особенно с учетом потребностей унификации систем управ¬
ления, сокращения срока летных испытаний, расширения допус¬
ков на элементы систем управления и др. Необходимы «замкнутые»
системы самонастройки автопилотов, способные работать в условиях
весьма ограниченной априорной информации об объекте. Эти си¬
стемы могут применяться и как единственные системы адаптации,
и в сочетании с системами настройки в функции некоторых параме¬
тров среды.
Наиболее универсальными, т. е. требующими минимальных объ¬
емов априорной информации, являются поисковые системы экстре¬
мальной «медленной» настройки параметров, о которых довольно
подробно говорилось в главе III. В этих системах посредством вы¬
числителя формируется оценка качества процесса управления.
Эта оценка минимизируется с помощью экстремального регулятора,
воздействующего последовательно или одновременно на параметры
автопилота. В качестве оценок процессов управления выбираются
величины, являющиеся аналогами функционалов, используемых на
стадии проектирования основных контуров методами аналитическо¬
го конструирования. Структура систем экстремальной поисковой
CHCT^aCTP°**KH автопилотов анало!ична структуре экстремальных
ппнг М настР°йки, рассмотренных в главе III, и не нуждается в до¬
полнительном описании.
пои еДЛенность„экстРемальн°й поисковой самонастройки, особенно
B0P3Mvn004eP-eAH0fl настР0®ке параметров, наличие дополнительных
УЩении, вносимых поисковыми, а иногда и искусственными
8 А. А, Красовский
226
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
СГл. V!
пробными сигналами (сигналами в основном контуре), непростая при¬
борная реализация являются недостатками систем экстремальной
поисковой настройки.
Применительно к оптимальным системам регулирования, скон¬
струированным рассматриваемым в данной книге методом, достаточ¬
но общим и практически интересным является корреляционный прин¬
цип самонастройки. Об этом принципе уже говорилось при рассмо¬
трении аналитического конструирования систем демпфирования
аэроупругих колебаний (глава IV). Применительно к самонастройке
автопилотов этот способ требует специального рассмотрения.
Как следует из общей теории (§ П. 4) и формул (6.13), (6.20),
(6.30), (6.42), коэффициенты оптимальных управлений выражаются
через интегралы произведений весовых функций объекта. При на¬
личии высокочастотных шумов, воздействующих на объект в про¬
цессе его функционирования (т. е. на летательный аппарат в поле¬
те), интегральные оценки произведений весовых функций могут
быть определены экспериментально путем корреляционной обработ¬
ки сигналов датчиков. Высокочастотными здесь называются шу¬
мы, частотные спектры которых лежат правее частотных спектров
весовых функций. Высокочастотные составляющие шумов в случае
их наличия в общем спектре случайных составляющих возмущаю¬
щих сил и координат, всегда могут быть выделены с помощью
фильтров высших частот.
Уравнения линейного объекта для высокочастотных случайных
составляющих запишем в виде
п
%iuj 4“ 2 ^ik-^kui = 0* = 1» • • • , /1),
fe=l
где — высокочастотные случайные возмущающие воздействия,
х/ш — реакции на эти воздействия. Шумы gZlu могут приближенно
контролироваться путем дифференцирования сигналов х{ и фильтра¬
ции сигналов xt фильтрами высших частот. Шумы контролируют¬
ся путем фильтрации сигналов xt фильтрами высших частот. Для ста¬
ционарных или квазистационарных шумов и объектов можно записать
Xkui (0 f 2 ^kfJL (^2) ^2) ^2>
0
откуда
M [х,ш (/) хкш (01 = *<шхьш =
77 п
= J J 2 W’v Ch) wkll (т2) M [^ш (t — Т1) (t — T2)I d'h dr2. (6.44)
о 0 'v-^=1
б2] РЕЖИМ УПРАВЛЕНИЯ. ВОПРОСЫ АДАПТАЦИИ АВТОПИЛОТОВ 227
По условию шумы являются высокочастотными, вслед-
£ J VV1 ^*>***- J kJ’ — ■
ствие чего корреляционные функции
₽vn (*а — Tj) = м [£уш (t — т1) ~~ тг)1
оо оо
J j Wiv (Tj Wkn (т2) Rvn (T2 — Tj) dTj dx2 —
0 0
0
где
В соответствии с этим выражения (6.44) можно записать в виде
оо
%iui%kni 2 &vinSp,m ) (О (t) dt
v,U=l о
(6.45)
(f, k = 1,2, ..., n)
Величины в полете могут определяться путем усреднения
попарных произведений высокочастотных составляющих сигналов
датчиков. Величины в этих условиях определяются путем
усреднения попарных произведений производных тех же высокочас¬
тотных сигналов. Далее необходимо определить коэффициенты оп¬
тимальных управлений
Atk = S Pvu \ (0 (t) dt.
v.U=l б
(6.46)
Исключительно простое в принципиальном и аппаратурном отноше¬
нии решение задачи получается, если
и если задать
В этом случае
J wlv (/) te»*u (/) dt = j wvi (t) w^k (t) dt
о о
Pvp. —
(6.47)
(6.48)
4k Х^щХ^щ.
8*
228
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
Кроме экстремальных и корреляционных способов самона¬
стройки могут использоваться бэспоисковые алгоритмы. Подобные
системы, являющиеся по существу специальным классом нелиней¬
ных систем, с успехом могут синтезироваться на основе метода
аналитического конструирования в его нелинейном варианте (§ П.5).
§ 6.3. Режим приведения в горизонтальное положение
Режим приведения самолета в горизонтальное положение вклю¬
чается при потере летчиком ориентировки и в других случаях и
служит для автоматического вывода самолета в горизонтальный по¬
лет из любого начального углового положения. В интересах обеспе¬
чения безопасности полета можно расширить функции этого режи¬
ма, потребовав, чтобы при включении кнопки «приведение» само¬
лет автоматически выходил из таких особенно опасных режимов
полета, как полет с углом атаки, близким к критическому, «што¬
пор» и др.
Для синтеза управлений, обеспечивающих быстрый перевод са¬
молета из сложных режимов полета с большими или критическими
значениями координат в простейший режим, необходимо исполь¬
зовать достаточно полные модели объекта. Здесь нельзя осуществ¬
лять разделение на продольное и боковое движения и нельзя поль¬
зоваться линейными уравнениями объекта. Учитывать аэроупру¬
гость в режиме приведения, по-видимому, нецелесообразно. Ввиду
возможного «кругового» изменения всех угловых координат исполь¬
зование углов у, '0, ф нежелательно и предпочтение следует отдать
направляющим косинусам между связанными и центральными
земными осями (см. главу I). Использование направляющих коси¬
нусов удобно и в отношении применения метода аналитического
конструирования для объектов с аналитическими нелинейными
характеристиками (§ П. 5): уравнения для et7- содержат лишь
нелинейные члены второго порядка (степени), в то время как три¬
гонометрические функции, стоящие в правых частях уравнения
(1.16), в математическом смысле эквивалентны медленно сходящим¬
ся степенным рядам.
Таким образом, синтез управлений в режиме приведения в ука¬
занном широком назначении этого режима целесообразно выпол¬
нять на основе общих уравнений пространственного движения само¬
лета вида (1.17). Однако здесь сразу можно сделать некоторые
упрощения. Ввиду требуемой скоротечности режима приведения са¬
молета в горизонтальное угловое положение скорость Vx и высоту
полета у0 можно рассматривать как независимые параметры, ис¬
ключив соответствующие уравнения. Целесообразно учесть в урав¬
нениях лишь наиболее сильные связи и зависимости.
,1 РЕЖИМ ПРИВЕДЕНИЯ В ГОРИЗОНТАЛЬНОЕ ПОЛОЖЕНИЕ 229
§ 6.3 J
в соответствии с (1.17) и этими замечаниями уравнения движе¬
ния самолета в режиме приведения записываем в следующей форме:
т (уу + &ух _ axVг) = Ух (Vy, V} - mg^2,
т (У г + (аУ д — ©^У*) = (Ух) тёя2з>
JX<S3X + (Л — Jу) ~ О'*’
+ /г)©х®г = Л1и(Уг, ©х, ©9, SH. 6Э),
J/Лг 4* (J у — Jх) ©х®£ = (Ууу Уг> ©г» ^в)>
С21 4* ®Р®23 — ©г®32 = О»
е22 4" ©г®21 ©х®23 = О»
е23 4" (0х®22 ®»®21 в 0.
(6.49)
Здесь сохранены уравнения лишь тех трех направляющих косину¬
сов, которые входят в уравнения движения центра массы, отражая
влияние гравитационного ускорения. Ограничимся следующими
членами разложений функций в степенные ряды:
-L Г, _ g - - а’/Ч' -
т
= 0>mxVz — атх®х — (1тх<йу + (£пх&н + ^тх^э,
М
ЗУЗт/З (ИХ (£>и I бн о I бэ о
йтуУz — ату Vz — Cltny^x — Clmytoy + ^ту^И “1“ Яту^
_MZi_ __ nVlJ\/ n3VyV'* zv2V2V^I72T/ i z70n X
Jz ^*пи"у Clfm Vу CLtnz VгУу O,mz^2'V
Здесь
(6.50)
К = у. - У уз, Уг (Vyo, 0) = g,
Т. е. разложение осуществляется относительно равновесного зна¬
чения угла атаки, значения, обеспечивающего уравновешивание
силы тяжести в горизонтальном полете. Отклонение руля высоты
в здесь отсчитывается относительно соответствующего баланси¬
ровочного положения.
Вводя обозначения
Л1 = Vy, х2 = v„ Х3 = ®х, х4 = юу, х5 = ©2, хв = е21,
х7 = 1 — е22,
•^8 — ®23»
U3 — 6Э, Щ — 6Н, Ug — 6В,
230
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл VI
уравнения (6.49) с учетом (6.50) записываем в следующей форме.
Х1 + а11х1 + #15*5 4" #17*7 *2*3 4” #1111*1 4” а1122х1х2 =
*2 4“ а22Х2 4- #24*4 4" #28*8 4~ *1*3 4" #2222*2 =
*3 4" #32*2 4" #33*3 4~ #34*4 4“ #345*4*5 = Фз3#3 4" Фз4#4»
*4 4" #42*2 4“ #43*3 4" #44*4 4“ #435*3*5 4“ #4555*5 == Ф43^3 4“ ф44#4>
Х5 4“ #51*1 4“ #55*5 4- #534*3*4 4" #5111*1 4“ #5122*1*2 = Фб5^5»
*6 — *5 4" *4*8 4- *5*7 = 0>
*7 — *5*6 4- *3*8 = 0»
*8 4“ *3 — *3*7 — *4*6 = 0,
(6.51)
где
/7 — ПУУ
#11 #(/ »
«15 =
а17 — 8* а
„3Vy /у n2VzVy
1111 — аУ » #1122 — аУ «
Vz
#22 — »
#24 Кс» ^28 8*
Z73V/ /У ПУг
#2222 — ах t а32 — атХ9
СОЛ
#33 — #/пх>
Оу
#34 — ату9
h п6э
и33 — amxt
к ^6н „ 1г—1»
^34 — #тл> #345 — у 1
„ пУг
#42 — ату9
ОХ
#43 — ату9
оу
#44 — ату>
/х-/2
#435 ““ / »
1У
»
■»
бэ
ф43 — 0>ту^
бн Vy 02
Ф44 — ату> и51 — U/rtz» а55 — #mz,
— лЗУу — п2УгУу — /убв
#5111 — #mz » #5122 — Umz 9 Ф55 — #mz,
(6.52)
_ _ „ЗКг
#4555 — #mt/>
_ !у~1х
#534 — / >
1 г
6э бн бв
Фзз — #тх, Фз4 — #тх> Ф55 — #mz»
J
Рассматривая уравнения (6.51) как уравнения обобщенного объекта
в задаче аналитического конструирования, мы пренебрегаем инер¬
ционностью исполнительных устройств. Для режима приведения это
оправдано. В горизонтальном положении самолета
622 == 1 » ^21 = ^23 ~ *6 = *8 = *7 = 1 ^22 = 0.
Поэтому в функцию Q минимизируемого функционала целесообраз¬
но ввести составляющую 0б6Хе + 077ху + 088х§. В процессе при¬
ведения важное значение имеют угол скольжения и угол атаки, ко¬
торые характеризуются величинами = х2, У» = *i соответствен¬
но. Поэтому в функцию Q целесообразно ввести составляющую
Рп*1 + 022*2- Требуется привести самолет в горизонтальное и не¬
изменное положение (состояние покоя во вращательном дви¬
жении). Поэтому у функции Q целесообразно иметь составляющую
033е0* 4- 044% 4' 055С°г = 033*1 4" 044*4 4~ 055*5*
$ 6.3]
РЕЖИМ ПРИВЕДЕНИЯ В ГОРИЗОНТАЛЬНОЕ ПОЛОЖЕНИЕ
В § П.5 изложен метод синтеза оптимальных нетерминальных управ¬
лений (без граничного условия) для объектов с полиномиальными
или аналитическими характеристиками, к которым относится объект
(6.51). Однако соответствующая теорема 5.1 предполагает асимпто¬
тическую устойчивость невозмущенного состояния объекта. Между
тем невозмущенное состояние хх = х2 = ... = х8 = 0 объекта (6.51)
неустойчиво или нейтрально (устойчиво не асимптотически).
Для осуществления аналитического конструирования применим
предварительно способ преобразования координат. Введем новые
координаты
х* = х{ ехр^ (6.53)
Уравнения объекта (6.51), которые могут быть записаны в виде
8 8 х 5
*/ + 2 aifXj + 2 aiikXfXk 4- 2 O'i.jkiXjXkxl = 2 (6.54)
M /л=1 /Л./-1 /=3
(отличны от нуля лишь коэффициенты, указанные в (6.51), осталь-
НЬ1е нУли), в новых координатах принимают форму:
1 8
Х1 4 ТтГ X; 4" 2 aijXi
1 /=1
где
aijk = exp j aijki = exp j
8
8 5
+ a^kXiXk + 2 л jkiXjXkXi = 2
7=3
(6.55)
Фо = exp
i,k=i
aiikf
и, = uh
При достаточно малом Т > 0 невозмущенное состояние х* = х? =
к этому/ объекта <6-55) асимптотически устойчиво. Поэтому
реме бУдля о^екТгб таМ6НИТЬ § П’ 5' С°ГЛаСН0 тео'
мизирующими функцией Оптимальными Управлениями, мини-
1 8
1 = AiiXi + 4 (>/2=1 A'ikxl (t2) Xj (t2) Xk (t2) + • • .
T S J h/ S Ф*/ (s A'kixl + 2 A’knx-Xi +
'3 <t L 4=4 \z=1
+
8
""F" AkilsXiXiX,. -j— • •
<t/,S=l
dt,
(6.56)
232
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
являются управления
«/ = — kf
2 AkiXi + 2 AkuXiXi +
.fc=4 \t=l Z,/=l
"Р-1
где коэффициенты A*/, A*/*, ... определяются формулами
(П.5.20):
s ~
Ац = 2 Pvv ) ^vi (i 9 t) Wyj (t, t) dt,
V=1 /
Wvl (f, f) w’ni (f, t) Wek (f, t) X
+ 5 AkiisXiXiXs + • • •)
Z,/,s=l /
(6.57)
типа
оо
8
Aijk = — 2 j
v,|LL,e=l /
X 2 [Apv^pine (04" Ap^ClpvQ (/)“!“ Ap^Upy^ (t )] / dt ,
p=l )
(6.58)
Здесь Wyt — весовые функции объекта (6.55), пропорциональные
весовым функциям исходного объекта (6.54):
Wvi (f, f) = exp ( Z r Z ) wvi (f — f).
Подставляя эти выражения в (6.56)—(6.58), осуществляя преобра¬
зование к исходным координатам и коэффициентам, и задавая k*
так, что
kf exp! 2 {р~1} Я = kP = const,
получаем следующее. Для объекта (6.54) оптимальными управления¬
ми, минимизирующими функционал
18
-у S (^) */(^) +
8
4-
8 8
+ S АмхЛ + S А^ХЛХ> + •
§ 6.3]
РЕЖИМ ПРИВЕДЕНИЯ В ГОРИЗОНТАЛЬНОЕ ПОЛОЖЕНИЕ 233
1А=3
являются управления
и, = — kpj f 5 Ф*/ (5 АЛ + .2 ^kuXiXi +
lft=3 \/=i ‘.z=‘
-f- 2 AkilsXiXiXs -J” ' ’ ’ )
i.Z,s=l /-
Г
(6.59)
где*)
8
Aif = 2 pw f exp (— -y) ovw (t) wvi (0 dt,
V=1 0
8 8
Aijk = — 2 S G^pv^pge + Apllapve 4" АреЯруц) %
v,g,E=l P=1
oo
X j exp (— wvl (/) Wpj (/) wek (/) dt,
о
V,g,E=l P=1
Auk • • •« =
n~"
8
8
(A>vapg...X 4" ^puflpv...x + • • • + ^px^pv-.p) +
' Lp=i
8
У1] (^pV|A^pe...x 4“ ДтусЯрц.-.Х 4“ ‘ ” 4“ ^PPX^PV...T)) “F
Р=1
3! 8
4~ (/v — 1) (iV — 2) S 0pvpe^...x 4- • • • 4- An)PxaPV...s) 4“
7 P=1
8 1
+ 2!
V,|L1,...X=1
-J--*-
N— 1
(6.60)
JV- 1
Р=1
(^PVIl -rflppx 4" • • • 4" Дэег|)...%#р¥ц) X
co
X j exp (— wvi (t) w» (/) ... wxs (t) dt.
0
Структура строго оптимальной системы приведения получилась
сложной, точнее, бесконечно сложной (при учете неограниченного
числа членов рядов). Однако это обусловлено поставленной слож¬
ной задачей и методом решения. Линейная часть системы приведе¬
ния, характеризуемая коэффициентами Д£/, имеет достаточно про¬
стую структуру, а именно при р = 2, q = 2 линейные составляющие
TniIV ) Предполагается, что Т достаточно мало для сходимости всех фигурирую¬
щих здесь несобственных интегралов.
234
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
управлений
8
U3 = £3 2 (фззА/ 4" Ф43^4/) ХЬ
i—l
8
U4 — Й4 2 (фз-Лз/ + Ф44^4/) ХЬ
z=l
8
^5 ~ ^5 2 ФбБ^бЛ»
1=1
где
8 р / \
Аи = S Pvv J ехР TJWv; $ Wvi W di'
v=l О
(6.61)
(6.62)
В линейном приближении продольное и боковое движения самолета
независимы, поэтому часть весовых функций wVi тождественно
равны нулю. Тождественно равны нулю и часть коэффициентов Л17.
Действительно, равны нулю все те коэффициенты Ац, у которых
один индекс (например, t) соответствует номеру какой-либо коор¬
динаты продольного движения (это номера 1, 5, 6), а второй индекс
(например, /) соответствует номеру какой-либо координаты бокового
движения (это номера 2, 3, 4, 8). Это обусловлено тем, что в указан¬
ном случае либо w^i = 0, либо wVj = 0. Что касается коэффициен¬
тов, имеющих индекс 7, то все они равны нулю, за исключением А77,
так как из (6.51) видно, что в линейном приближении соответству¬
ющее уравнение х7 = 0 полностью автономно и все w{7 = 0, w7}- =
= 0, за исключением w77 = 1. Раскрывая выражения (6.61) с уче¬
том этих замечаний, находим
^3 = ^3 [(фзз^зг 4“ Ф43^4г) Х2 “1“ (фзЗ^ЗЗ 4” Ф43^4з) Х3 4“
+ (ФЗЗ^З! + Ф43А4) Х4 + (фззАв + ф4зАв)
U4 = ^4 [(фзИз2 4" Ф44Л42) Х2 4~ (Ф34^33 4" Ф44А3) Х3 4”
+ (фзЛз-1 4" Ф1И44) Х4 4“ (фзЛзв 4~ Ф44^4в) Хв1»
U5 = ^5ф55 С^бЛ 4“ ^55Х5 4" ^Бб^б)
или в исходных обозначениях
бэ = — &3 1(^тхА32 + 0^X42) V2 4~ (атхА33 4" 48) (Ох 4“
4“ (й7?мЛз4 4- ^Ш1/Л44) toy + (ДтхЛзз 4“ ®2з1»
= — ^4 [(атхА32 4“ атуА42) V2 4" (#тхЛ33 4“ ату^4з) ®х 4"
4" (атхА34 4" атуА44) toy 4” (^тхА^ 4“ ^туА43) в88],
6В = — klamz(AbiVу 4" 455сог 4- Л6ве21).
(6.63)
О СИНТЕЗЕ АВТОМАТОВ БЕЗОПАСНОСТИ
235
9 6.4]
Структура этих законов управления вполне прозрачна. Если
учесть, что при малых углах е23 = у, е21 = d, V2 = VP, Vy = Va,
то становится ясным совпадение в диапазоне малых углов струк¬
туры оптимальных управлений (6.63) с часто используемыми в ре¬
жиме стабилизации и приведения структурами управлении. Нет
смысла в общем случае раскрывать буквенные выражения, (6л>0)
коэффициентов нелинейных членов оптимальных управлении. При
конкретном синтезе расчеты ведутся на ЦВМ в численной форме.
При этом среди многочисленных коэффициентов Л///?, Aijki, •••
лишь некоторые имеют существенное значение. Большинство этих
коэффициентов оказываются равными нулю или малыми настоль¬
ко, что влиянием соответствующих членов управлений можно пре¬
небречь.
Отбрасывание несущественных членов позволяет получить тех¬
нически реализуемые «квазиоптимальные» или «субоптимальные»
управления. Структура квазиоптимальной системы в режиме при¬
ведения может обладать достаточной преемственностью по отно¬
шению к структурам системы в режиме стабилизации и управления.
В особо простом частном случае приведения в горизонтальное
положение в пустоте решение задачи в общем виде можно провести
еще дальше. Этот случай можно рассматривать как один из ва¬
риантов задачи ориентации космического летательного аппарата
(см. главу XII).
§ 6.4. О синтезе автоматов безопасности
Многочисленные ограничения, накладываемые на параметры по¬
лета летательного аппарата различными физическими, конструктив¬
ными, медико-биологическими условиями, могут быть интерпретиро¬
ваны следующим образом. В фазовом пространстве необходимой раз¬
мерности существуют область допустимых состояний бд и область
недопустимых состояний GH. Область бд является внутренней по от¬
ношению к GH, заключена внутри GH, находится внутри поверхности
области недопустимых состояний.
но Области бд, Сн могут как непосредственно граничить (поверх-
сти уд* совпадают), так и могут быть разделены некоторой
МроТЬеИ °^ластью промежуточных состояний, в которой кратковре-
пРебЬ1Вание допустимо, но длительное нахождение гежела-
пиянт Т опасно* В Дальнейшем будем иметь в виду в основном ва-
Если nfrfJ1 КОТОРОМ существует промежуточная область состояний,
котовом М^ПО ТеМ ИЛИ ИНЬ1М причинам приобрел состояние, при
мых ^состояний3СаЮщая т°чка приблизилась к области недопусти-
область G н’ Т° несбходимо принять меры по возвращению в
обе^печ^ несколько уровней приборного
магизации. Самым низким уровнем является
236
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АВТОПИЛОТОВ
[Гл. VI
простая сигнализация о приближении к запретной зоне GH. Летчик,
получив сигнал о приближении к области GH, по собственному ус¬
мотрению, используя имеющиеся у него навыки и знание инструкции
по технике пилотирования, выводит летательный аппарат в область
допустимых состояний. Следующим уровнем является то, что иног¬
да называется «автоматами подсказки». Это — устройства, которые
не только сигнализируют о приближении к запретной зоне GH,
но и указывают целесообразные действия летчика в сложившейся
ситуации. Получив рекомендацию и согласившись с ней, летчик
выполняет соответствующие управляющие воздействия.
Далее следуют собственно автоматы безопасности, в которых
как контроль приближения к запретной зоне, так и возвращение
в область допустимых состояний осуществляются автоматически,
на основе определенных алгоритмов. Автоматы безопасности
являются управляющими устройствами, возвращающими систему
в область допустимых состояний при выходе из нее. Автоматы без¬
опасности могут создаваться как автономные устройства по отноше¬
нию к основной системе управления, располагающие собственными
исполнительными органами. Автоматы безопасности могут воздей¬
ствовать на те же исполнительные устройства, что и основная си¬
стема управления. Наконец, функции автоматов безопасности мо¬
жет выполнять сама основная система за счет предусмотренных
в ней алгоритмов или управлений.
Достаточно очевидно, что автономные автоматы безопасности
целесообразно применять только при ограниченной надежности
основной системы. При высоконадежной основной системе, облада¬
ющей необходимым уровнем резервирования, все функции предот¬
вращения выхода на опасные режимы следует возлагать на основную
систему. Синтез автоматов безопасности в этом случае выливается в
синтез законов управления основной системы, обеспечивающих пре¬
бывание вне области GH.
Ясно, что задача синтеза автоматов или алгоритмов безопасно¬
сти может ставиться, как задача оптимального управления, за¬
дача аналитического конструирования. При этом должны за¬
даваться некоторые критерии оптимального возвращения в об¬
ласть Ga или критерии точности выдерживания назначенных
ограничений.
В рамках основного рассматриваемого метода аналитического
конструирования синтез оптимальных управлений с учетом огра¬
ничений или запретной зоны GH может быть осуществлен путем
задания специальной функции Q. Это — широко известный «способ
штрафа». Функция Q назначается так, чтобы при подходе к запрет¬
ной зоне GH осуществлялся быстрый рост функционала /. Можно,
в частности, использовать разрывную функцию Q. В этом случае
функция Q претерпевает разрыв на границе области GA, принимая
в области GH и в промежуточной области большие значения.
J 6.4 J
О СИНТЕЗЕ АВТОМАТОВ БЕЗОПАСНОСТИ
237
Разрывная функция Q порождает разрывные
управления. Это видно из основного уравнения
оптимальные
dt
Ппи непоерывных характеристиках Л объекта разрыв непрерывнос¬
ти функции О обусловливает разрыв непрерывности частных про¬
извол пых дУ/дх;, что согласно формулам (П.2.4) вызывает скачки
оптимальных управлений. Эти скачки совпадают с границей облас¬
ти G на которой задается разрыв функции Q.
Разрывная функция штрафа может строиться без изменения
структуры самой функции Q, заданной, например, в виде положи¬
тельно определенной квадратичной формы. В этом случае в области
бд функция Q имеет вид
Q = 4- 2 №iX(xb
2 Л/-1
а в области GH и промежуточной области
С = 4- 2 Розд
2 Л/=1
где, например, р?7- = dp?/, d^ 1. При таком задании функции Q
для линейного объекта происходит скачкообразное увеличение
коэффициентов оптимальных управлений при переходе через гра¬
ницу области Ga.
Глава VII
СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ
И ИХ АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
Автоматическое и полуавтоматическое управление траекторией
полета играет очень важную роль на современном этапе развития
систем управления летательных аппаратов. Можно утверждать,
что именно широкое применение автоматического и полуавтомати¬
ческого траекторного управления ознаменовало переход от авто¬
пилотов в собственном смысле слова к системам управления (САУ)
в современном понимании этого названия. Автоматическое и полу¬
автоматическое управление может использоваться на всех этапах и
режимах полета, начиная от взлета и кончая посадкой. Контуры
управления траекторией на этапах захода на посадку, посадки, на¬
ведения, как правило, нестационарные, будут рассмотрены довольно
подробно ниже. Здесь ограничимся кратким рассмотрением ста¬
билизации высоты и боковой стабилизации относительно заданной
линии пути, которые обычно осуществляются посредством ста¬
ционарных контуров траекторного управления.
§ 7.1. Простейшие контуры стабилизации высоты
полета самолета
Управление высотой является весьма важным элементом управ¬
ления полетом. В маршрутном полете, за исключением полета на
малых и предельно малых высотах, обычно осуществляется стаби¬
лизация барометрической высоты на уровне, соответствующем за¬
данному статическому давлению. Это позволяет обеспечить опре¬
деленное эшелонирование по высоте, определенные условия работы
двигателей, определенную (с точностью модели атмосферы) плот¬
ность и температуру окружающего воздуха, избежать влияния рель¬
ефа. Назначая программу изменения заданной барометрической вы¬
соты, получают определенный профиль полета.
Однако барометрическая высота лишь грубо соответствует вы¬
соте над уровнем моря или уровнем, заданным посредством началь¬
ного давления, и не отражает высоту над поверхностью земли, т. е.
не соответствует относительной геометрической высоте полета.
Между тем при полете на малых и предельно малых высотах имен¬
но относительная геометрическая высота определяет вероятность
столкновения с препятствиями, а в боевых условиях также вероят¬
7 J] КОНТУРЫ СТАБИЛИЗАЦИИ ВЫСОТЫ ПОЛЕТА САМОЛЕТА 239
ность поражения средствами ПВО. Поэтому при полете на этих
высотах необходимо управление относительной геометрической вы¬
сотой полета. Управление относительной высотой необходимо также
при взлете и посадке.
Управление высотой, как и другими координатами, может быть
ручным, полуавтоматическим и автоматическим. Требования к на¬
дежности управления высотой очень жесткие, особенно при полете
на малых высотах, когда нарушения канала управления продоль¬
ным движением могут привести к катастрофе. Поэтому даже при на¬
личии полностью автоматического контура управления высотой
обычно предусматриваются ручной и полуавтоматический контуры,
как резервные.
Стабилизация барометрической высоты
Отклонения барометрической высоты контролируются высотным
корректором, статоскопом или специальной системой контроля вы¬
соты. Высотный корректор представляет собой барометрический вы¬
сотомер с устройством запоминания заданной высоты. Статоскоп
выполняет те же функции, что и высотный корректор, но запомина¬
ние высоты здесь осуществляется посредством герметизации мембран¬
ной коробки на заданной высоте. Центральные системы контроля
высоты и скорости могут использовать сигналы многих датчиков.
При стабилизации барометрической высоты контур стабилиза¬
ции угла тангажа, а также контур демпфирования остаются включен¬
ными. Поэтому система структурно устойчива без введения сигнала
производной от высоты (в структурной схеме, приведенной к одно¬
контурному виду, только одно интегрирующее звено). Однако часто
для обеспечения астатизма вводится интеграл от отклонения баро¬
метрической высоты. Тогда для сохранения структурной устойчивос¬
ти необходимо введение сигнала производной отклонения высоты.
Структура линейного продольного канала, воздействующего на
руль высоты, представлена на рис. 7.1. Здесь использована
простейшая линейная модель короткопериодического продольного
движения самолета. Связь угла наклона траектории с углом танга¬
жа получена из соотношений
Д0 = — а“ (Да + Дад) = -^“(Д^ + Дад)>
ДО1 = Д0 + Да — Дав,
(7.1)
где Дад — изменение веса, выраженное в эквивалентном прираще¬
нии угла атаки. Из (7.1) вытекает (Те = const)
Д0 =
ДО , Дав + Дад
т0р+1 + твр + 1 •
240 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
Соответствующее апериодическое звено изображено в структурной
схеме рис. 7.1. Для горизонтального полета, для которого исполь¬
зуется стабилизация барометрической высоты на заданном уровне,
Atf = VsinA0«7A0.
Соответствующее интегрирующее звено также представлено в схе¬
ме рис. 7.1. Помимо ветрового возмущающего воздействия Аав
и воздействия изменения веса Аад, в схеме рис. 7.1 учтена также
Рис. 7.1. Структурная схема линейного продольного канала, содержа¬
щего контуры стабилизации барометрической высоты, угла и угловой
скорости тангажа.
ошибка гировертикали (датчика угла тангажа) А'&гв и суммарный воз¬
мущающий момент тангажа 6ВОЗ, выраженный в отклонении руля
высоты (стабилизатора). Этот момент может создаваться воздейст¬
вием турбулентности атмосферы, изменением центровки и другими
факторами.
Структурная схема, изображенная на рис. 7.1, является много¬
контурной и поэтому не очень удобна для элементарного качествен¬
ного анализа методом логарифмических частотных характеристик.
Преобразуем схему к одноконтурному виду, в котором одним из
обобщенных звеньев является звено угловых движений, а именно,
звено преобразования «заданного» угла тангажа в фактический угол
тангажа. Под «заданным» углом тангажа здесь понимается величина
сигнала высоты, выраженная в единицах сигнала тангажа, т. е.
величина
Преобразованная структурная схема изображена на рис. 7.2.
Возмущающие воздействия в виде момента тангажа, ошибок дат¬
чиков приведены к входу звена угловых движений и их сумма обо¬
значена АФВ03. Обычно частота среза контура стабилизации высоты
§7.1]
КОНТУРЫ СТАБИЛИЗАЦИИ ВЫСОТЫ ПОЛЕТА САМОЛЕТА 241
значительно ниже собственных частот обобщенного звена угловых
движений. Это делает приближенный анализ процессов в контуре
весьма простым.
К числу наиболее простых законов регулирования по высоте
можно отнести:
^2 = kt
(7.2)
^2 = kz +
(7-3)
(7.4)
При регулировании только по отклонению высоты (закон (7.2))
и Wz = kz = const асимптотическая ЛАХ разомкнутого контура
Рис. 7.2. Преобразованная структурная схема контура стабилизации барометри¬
ческой высоты.
высоты имеет вид, как на рис. 7.3, а. Частота сон равна низшей час¬
тоте собственных колебаний звена угловых движений. Если коэф¬
фициент усиления контура высоты выбирается настолько низким,
что частота среза соср получается меньше 1/Те,т.е. (ocp попадает на
участок с наклоном — 20 дб/дек, то переходные процессы в зам¬
кнутом контуре обычно носят апериодический характер. Однако
при этом процессы получаются затянутыми, а точность стабилиза¬
ции — невысокой. При повышении коэффициента усиления разомк¬
нутого контура частота среза переходит на участок с наклоном —
40 дб/дек, а при дальнейшем увеличении усиления — на более
крутые участки и качество переходных процессов ухудшается.
При законе регулирования по отклонению и производной отклоне¬
ния высоты (закон (7.3)) частота среза может быть увеличена,
а время переходных процессов сокращено. Для случая, когда пере¬
даточное число по производной k!i превосходит величину и
^2 = асимптотическая ЛАХ разомкнутого контура имеет вид,
изображенный на рис. 7.3, б.
Закон регулирования (7.4) обеспечивает астатичность. ЛАХ
при таком законе регулирования может иметь различный вид
242 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
в зависимости от значений коэффициентов. При k% >
нули передаточной функции
_ ^р+(р+
действительны. В этом случае
<1/7"2<сон асимптотическая
Рис. 7.3. Асимптотические ЛАХ ра¬
зомкнутого контура стабилизации
высоты при трех законах регулиро¬
вания.
кн 1(D.
^Тв
при Wz = const и 1 /7\ < 1/Те <
ЛАХ разомкнутого контура имеет
вид, как на рис. 7.3, в. Хотя при
коэффициенте усиления, соответствую¬
щем рис. 7.3, в, частота среза приходит¬
ся на участок с наклоном —40 дб/дек,
качество переходных процессов в замк¬
нутом контуре может быть удовлетво¬
рительным ввиду малой протяженнос¬
ти этого участка. В частности, если
обеспечить Т2 = Те, рассматриваемый
участок с наклоном —40 дб/дек вообще
пропадает. Из структурной схемы
рис. 7.2 следует
Аав + Дссд + Гу>Д<}В03
(7ep+l)p + V-^|- Wy
где — передаточная функция обоб¬
щенного звена угловых движений.
Расчет точности стабилизации с учетом
различных возмущающих воздейст¬
вий, в том числе турбулентности ат¬
мосферы, осуществляется обычным
путем. Турбулентность атмосферы ока¬
зывает как непосредственное воздейст¬
вие через перегрузку (величина Дав),
так и воздействие через момент танга¬
жа, а стало быть, и угол тангажа
Д'&воз, вызванные случайной составля¬
ющей.
Качественный анализ влияния
турбулентности на продольное угло-
автопилотом рассматривался в главе
дя =
вое движение самолета с
V. Ввиду высокой инерционности траекторных контуров рас¬
сеивание траекторий полета по высоте, вызванное атмосферной
турбулентностью, сравнительно невелико и обычно измеряется
метрами.
71J КОНТУРЫ СТАБИЛИЗАЦИИ ВЫСОТЫ ПОЛЕТА САМОЛЕТА 243
Управление относительной геометрической высотой полета
низколетящих самолетов
Действия на малых и предельно малых высотах являются одной
из основных форм современного боевого применения авиации.
Полет на малых высотах накладывает ряд специфических жестких
требований, которые в полной мере могут быть удовлетворены лишь
при наличии достаточно совершенных систем навигации, индикации
и автоматического управления. Полет на малых и предельно малых
высотах протекает в условиях знакопеременной перегрузки, соз¬
даваемой облетом (огибанием в вертикальной плоскости) и обходом
Рис. 7.4. Простейшая структурная схема продольного канала при стабилиза¬
ции относительной геометрической высоты.
(огибанием в горизонтальной плоскости) препятствий и воздей¬
ствиями турбулентной атмосферы. Эти перегрузки вызывают интен¬
сивно нарастающее утомление экипажа, ухудшают условия восприя¬
тия информации при визуальном обзоре местности и приборной
доски, а также ускоряют расходование ресурса усталостной проч¬
ности самолета.
Медико-биологическими исследованиями установлено, что макси¬
мальная допустимая положительная перегрузка (перегрузка, на¬
правленная ВЕерх) не должна превышать 2—2,5, а отрицательная пе¬
регрузка —0,5. Поэтому система управления должна обеспечивать
облет препятствий с перегрузками, не превышающими указанные
значения, точнее, несколько меньшие пределы.
Вследствие необходимости строгого ограничения перегрузки
в системе управления полетомна малой высоте обычно используется
контур перегрузки. Датчиком относительной геометрической высоты
может служить радиовысотомер малых высот или лазерный высото¬
мер. Простая структурная схема продольного канала в режиме стаби¬
лизации относительной геометрической высоты с помощью сигнала
высотомера представлена на рис. 7.4. Относительная геометрическая
244 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ (Гл. VII
высота//0. здесь образуется как разность абсолютной высоты Н, от¬
считываемой, например, от уровня моря, и высоты рельефа Ярел,
отсчитываемой оттого же уровня. Отклонение относительной высоты
//от от заданного значения (//от)з воспринимается высотомером и через
оператор U^0T воздействует на суммарный сигнал управления 2.
Сигнал 2, помимо содержит составляющие
И?22Дсо2, зависящие от угла тангажа и угловой скорости тангажа.
Для ограничения перегрузки сигнал 2 пропускается' через зве¬
но с насыщением, после чего суммируется с сигналом датчика пере¬
грузки.
Высота рельефа //рел выступает в структурной схеме продоль¬
ного канала в роли возмущающего или задающего воздействия.
Это воздействие тем более мощное, чем сильнее пересеченность
местности и меньше (Нот)3. При упрощенном рассмотрении процес¬
сов управления относительной геометрической высотой полета //рел
можно рассматривать как некоторую заданную детерминированную
функцию времени. Это соответствует облету «типового препятствия»
(типовой склон, холм ит. п.). При более строгой постановке задачи
//рел = //рел (0 рассматривают как случайную функцию времени.
Основание такой постановки задачи следующее. Назначается мно¬
жество траекторий полета над заданным районом земной поверх¬
ности. Полет по любой из этих траекторий рассматривается как
случайное событие. Тогда сечение рельефа, отвечающее какой-либо
траектории, является реализацией случайной функции. В любом
варианте детерминированного или статистического описания рельефа
малая вероятность столкновения самолета с препятствием может
быть[обеспечена лишь тогда, когда ошибка по высоте Д//от сущест¬
венно меньше (//от)з-
При использовании в траекторном контуре только сигнала
датчика текущей относительной высоты (радиовысотомера) условие
Д//от < (//от)з можно выполнить при полете над слабопересе¬
ченной местностью не на очень малой (в среднем) Еысоте. Полет
над пересеченной и тем более гористой местностью на малой высоте
в этих условиях невозможен. Это видно даже из структурной схемы
рис. 7.4. Действительно, полет над пересеченной местностью с вы¬
сокой скоростью характеризуется мощным и быстро изменяющимся
воздействием //рел. Для того чтобы сшибка Д//От была в этих
условиях достаточно мала, необходимо, чтобы эквивалентная «следя¬
щая система» успевала отрабатывать это воздействие. Однако ско¬
рость отработки ограничена допустимой перегрузкой и воспроизве¬
дение быстроменяющегося воздействия //рел с большими «амплиту¬
дами» невозможно.
Для обеспечения облета препятствий на малых высотах в условиях
пересеченной местности необходимо управление по возмущению
//рел и притом с упреждением. Для получения соответствующих
$ 7.,]
КОНТУРЫ СТАБИЛИЗАЦИИ ВЫСОТЫ ПОЛЁТА САМОЛЕТА 245
сигналов используются радиолокационные станции переднего об¬
зора различной конструкции [7.11 — [7.3]. В подобных станциях в
той или иной форме получается информация об упрежденном зна¬
чении //рел ИЛИ ТОЛЬКО В ОДНОЙ ТОЧКе (7/рел (t + т), т = const),
или на целом линейном интервале (Ярел (t + т), т = var), или даже
на некоторой впереди лежащей площади (станции с секторным об¬
зором впереди лежащей местности).
Рис. 7.5. Структура продольного канала при управлении относительной высоты с
помощью РЛС.
Не останавливаясь подробно на многообразных возможных ва¬
риантах использования информации о рельефе впереди лежащей
местности, заметим следующее. Вследствие резкого ограничения
допустимых перегрузок «повторение» рельефа пересеченной местно¬
сти, т. е. приближение к условию Ног = const, невозможно при
наличии любой информации. Поэтому при полете над пересеченной
и гористой местностью обычно ставится задача облета наиболее
значительных вершин на достаточно малой высоте. Для предотвра¬
щения «выбросов» по высоте после прохождения вершины желатель¬
но, чтобы траектория над вершиной была горизонтальной. Можно
сформулировать и ряд других требований к «оптимальным траекто¬
риям» облета.
При наличии достаточно полной информации о рельефе впереди
лежащей местности и достаточно мощных бортовых вычислительных
средств в виде центральной или специализированной БЦВМ вы¬
числение очередного участка оптимальной траектории облета можно
ссуществлять в процессе полета. Соответствующая структура схе¬
матически изображена на рис. 7.5. По данным радиолокационной
246 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ’ТРАЕКТОРИИ [Гл. VI
станции (РЛС) вычисляется очередной текущий участок оптимальной
траектории и определяются заданная перегрузка /3, заданная относи¬
тельная высота (//От)з, и, быть может, значения других параметров,
соответствующие оптимальной траектории. Эти значения вводятся в
соответствующие точки контуров управления продольным движением.
§ 7.2. Простейшие контуры боковой стабилизации
относительно заданной линии пути
Задача стабилизации бокового движения центра массы лета¬
тельного аппарата относительно заданной линии пути решается как
при маршрутных полетах, так и при заходе на посадку, при посадке
и на других этапах полета. Стабилизация осуществляется посред¬
ством траекторных или «навигационных» контуров управления.
Эги контуры используют информацию о положение центра массы
летательного аппарата, получаемую посредством тех или иных
навигационных систем, систем наведения или систем посадки.
Физическая природа и свойства датчиков информации существенно
влияют на рациональную структуру траекторных контуров и на
процессы в этих контурах.
Для радионавигационных и радиолокационных систем обычно
характерен значительный уровень широкополосных шумов с не¬
высокими средними значениями (постоянными или медленно меня¬
ющимися составляющими). Для инерциальных навигационных си¬
стем, напротив, характерны медленно нарастающие ошибки, связан¬
ные со случайным дрейфом гироплатформ и другими факторами [7.5 ]—
[7.8]. Широкополосные шумы здесь имеют малую интенсивность.
Принцип комплексирования систем с различными характеристи¬
ками шумов и ошибок широко используется и оказывается плодо¬
творным во многих применениях. Радиоинерциальные, астроинер-
циальные системы являются примерами комплексных навигацион¬
ных систем. Как видно из дальнейшего изложения, принцип ком¬
плексного использования информации различных датчиков может
быть применен не только внутри собственно навигационных комп¬
лексов, но и в контурах управления. Так, одновременное использо¬
вание определенным образом обработанных сигналов радионавига¬
ционных и автономных датчиков информации в контуре бокового
движения позволяет обеспечить повышенную точность управления.
Структура простейших линейных контуров
боковой стабилизации
Обычно при включении контуров траекторного управления
остаются включенными, функционирующими все контуры демп¬
фирования и угловой стабилизации. Это обусловлено следующим.
Во-первых, «внутренние» контуры (контуры демпфирования и уг-
§ 7-2]
КОНТУРЫ БОКОВОЙ СТАБИЛИЗАЦИИ
247
ловой стабилизации) способствуют обеспечению устойчивости и ка¬
чества управления в траекторном контуре. Во-вторых, при нали¬
чии внутренних контуров временное размыкание внешнего траек¬
торного контура, вызванное какими-либо причинами, не приводит
к значительным отклонениям траектории летательного аппарата.
Для изображения структуры траекторного контура надо запи¬
сать выражение для бокового отклонения центра массы. Отклоне-
нИе z центра массы от за¬
данной прямой связано с
отклонением по курсу 0Р
соотношением (рис. 7.6)
z = V sin 0Г =
= V sin (1|) — Р + рв),
где Рв — угол, характери¬
зующий боковую состав¬
ляющую ветра. Для случая
малых углов
&z = V (Дф — др + Дрв).
Рис. 7.6. Координаты бокового движения центра
массы относительно прямолинейной заданной ли¬
нии пути.
Используя полную линейную модель бокового движения само¬
лета (рис. 1.5), структурную схему контуров стабилизации пред¬
ставляем в виде, изображенном на рис. 7.7. Эта схема содержит
канал элеронов и канал руля направления. Руль направления ис¬
пользуется для демпфирования колебаний рысканья и устранения
скольжения. Поэтому в соответствующем канале автопилота исполь¬
зуется сигнал угловой скорости Дсо^ и сигнал скольжения ДР или
поперечной перегрузки.
На исполнительное устройство канала элеронов, помимо сигнала
демпфирования И^Дсо* и стабилизации крена 1^1Ду, поступают
сигнал рысканья И^Дф и сигнал отклонения от заданной тра¬
ектории W^kz. Учтены ошибки гировертикали по крену Дугв,
ошибки курсовой системы Дфкс и ошибки навигационной системы Д?п.
За счет канала руля направления обычно обеспечивается малый
уровень скольжения. Это позволяет рассматривать канал крена изо¬
лированно от канала рысканья. Связь угловой скорости разворота
с углом крена при небольших углах крена и отсутствии скольжения
имеет вид
Д0Г = Дф + Дрв = Ду Ду
(см. уравнения (1.75)). В соответствии с этим структурная схема
контуров стабилизации бокового движения при отсутствии сколь¬
жения принимает вид, изображенный на рис. 7.8.
Контур стабилизации крена, как правило, является относитель¬
но широкополосным, процессы в нем протекают быстро. Поэтому так
248 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
Рис. 7.7. Структурная схема типовых контуров стабилизации при пол¬
ной линейной модели бокового движения самолета
Рис. 7.8. Структурная схема линейных контуров стабилизации
бокового движения при отсутствии скольжения.
КОНТУРЫ БОКОВОЙ СТАБИЛИЗАЦИИ
249
§ 7.21
*е, как при рассмотрении управления продольным движением, це¬
лесообразно представить этот контур в виде звена с входным воз¬
действием
U7V
= + W\3\z.
Соответствующая преобразованная структурная схема представ¬
лена на рис. 7.9. Возмущающим воздействием «спирального момен¬
та» здесь пренебрегаем, зато учитываем возмущающее воз¬
действие Ду/, о котором речь будет ниже.
Рис. 7.9. Преобразованная структурная схема линейных контуров стабилизации
бокового движения при отсутствии скольжения.
В масштабе времени переходных процессов в траекторном конту¬
ре звено угловых движений близко к безынерционному усилитель¬
ному звену. Исходя из этого, легко составить суждение об усло¬
виях структурной устойчивости данной системы. Из схемы рис. 7.9
видно, что при = 0, т. е. при отсутствии сигнала по углу
рысканья, траекторный контур может быть устойчивым только при
наличии форсирующих звеньев, т. е. воздействии как по отклонению
Д?, так и производной (производным) этого отклонения.
В автономных навигационных системах (инерциальные системы,
счислители пути, сопряженные, в частности, с допплеровскими из¬
мерителями путевой скорости) величина Дг, т. е. боковая скорость,
может быть измерена непосредственно. В радионавигационных
системах соответствующий сигнал получается путем дифференци¬
рования. Если контроль Дг осуществляется за счет дифференциро¬
вания величины Дг + Дгп, то уровень широкополосных шумов
сильно увеличивается. Это зачастую оказывается недопустимым
(вызывает качание самолета по крену). Вследствие указаннного
250 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
стремятся для обеспечения устойчивости использовать обратную
связь по углу рысканья, точнее, сигнал по отклонению продольной
оси самолета от направления заданной линии пути. Непосредствен¬
но из рис. 7.9 видно, что введение этой обратной связи обеспечивает
структурную устойчивость даже при Ц7^3 = й^3, И7у3 =
т. е. при отсутствии дифференцирования (жесткие обратные связи).
Однако при наличии жесткой обратной связи по углу рысканья
на точность траекторного управления влияют постоянные или мед¬
ленно меняющиеся ошибки курсовой системы Дфкс. Кроме того,
желательно не только отсутствие дифференцирования сигнала боко¬
вых отклонений центра массы, но фильтрация данного сигнала филь¬
тром низших частот.
Для удовлетворения последнего условия зададим передаточную
функцию Wy3 в виде передаточной функции апериодического звена
= -тДтг (7-5)
с достаточно большой постоянной времени Т. В соответствии со
структурной схемой рис. 7.9
Дуз == (Дф Дфкс) 117% (Д^ + Дгп) =
= (Д0Р — дрв -|- Дфкс) -|- Wy3 (Дг -|- Дгп).
Но
Поэтому
Д?з = («^34- п) Дг + (Дфкс - дрв) + 1ПзДг„. (7.6)
Потребуем, чтобы
^з-£- + П = ^ + ^Р. (7.7)
где ky, k\ — заданные коэффициенты. При этом по меньшей мере
будет обеспечена устойчивость траекторного контура. Из соотно¬
шения (7.5) и выражения (7.7) следует
(7.8)
где
Таким образом, совместное использование сигналов курсовой си¬
стемы и навигационной системы позволяет реализовать управление
Ду3 = (ky + kyp) kz + (Дфкс — ДРв) 4" ^зДгп. (7.9)
КОНТУРЫ БОКОВОЙ СТАБИЛИЗАЦИИ
251
§ 7.2J
Здесь истинное отклонение центра массы Дг преобразуется операто-
оом идеального форсирующего звена, помеха Дгп в рассмотренном
случае преобразуется оператором апериодического звена (7.5),
а сигнал курсовой системы — оператором (7.8). Для устранения
влияния постоянных ошибок курсовой системы можно потребовать,
чтобы оператор Wy3 соответствовал реальному дифференцирующему
звену
__ Ьг]7 ТР
Wy3-RvV Тр+1 .
Тогда из (7.7) вытекает
Итак, пары операторов
П = тДт ’ • (7- Ю)
= Wl = ^V-r^T- (7-И)
дают один и тот же полезный сигнал
Д у3 = kyAz + &уДг, (7.12)
но разную форму сигналов помех. Операторы
^з = ^гг+-^. П = ^тг + —(7.13)
дают полезный сигнал вида
Ду3 = ky\z kykz + У Дг dt, (7.14)
обеспечивающий астатизм. Коэффициенты усиления траекторного
контура ограничены сверху. Эти ограничения обусловлены рядом
факторов, таких как максимальный допустимый крен при заданной
зоне пропорционального (линейного) управления, влияние ошибок
и шумов навигационной системы и др. При безынерционном управ¬
лении креном и законе (7.12)
Ду = &уДг + kZyhz. (7.15)
Допустим, что максимальный крен ограничен величиной 20° »1/3
Рад (примерно такое ограничение существует в режимах захода на
посадку). Зона линейного управления пусть имеет ширину ± 50 м.
Тогда = 1/150 рад • м \ Общий коэффициент усиления разомк¬
нутого контура составит gky ж 1/15 сект--.
252 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
Ограниченность допустимого коэффициента усиления траектор¬
ного контура обусловливает относительно низкую частоту среза это¬
го контура и медленность соответствующих переходных процессов.
Действительно, при безынерционном управлении креном (7.15)
Az = — kzt±z — kz2bzt
где kz = gkzy, kzz = gkzy> или
Az + 2£2cd2Az + (OzAz = 0, (7.16)
где
юг = И gky, 2£лшг = ^-
При указанном выше значении kzy частота со2 составляет около
0,25 рад • секг~х. Длительность переходных процессов колебатель¬
ного звена (7.16) при оптимальном затухании = 0,7 равна
Зч-4 _ 4,3 -н 5,7
Czwz wz
При со2 = 0,25 рад • сектх время переходного процесса состав¬
ляет 17—22 сек. Решение уравнения (7.16) при произвольных на¬
чальных условиях и £2 < 1 имеет вид
Az = exp (— C/o2/)
SzAz04-
Az0
C02
V i-й
sin (<олt]/~ 1 — $z) “b
+ Az0 cos (co2/К 1 — g)
На рис. 7.10 представлены в деформированном виде (масштаб по
оси ординат во много раз крупнее масштаба по оси абсцисс) соот¬
ветствующие траектории движения самолета относительно заданной
прямой. Эти кривые практически совпадают с кривыми переходных
процессов во времени, так как при малых отклонениях по курсу
х = j V cos ф dt Vt.
На рис. 7.10, а изображены траектории при начальном отклоне¬
нии по координате, отсутствии начального отклонения по курсу
и трех значениях степени затухания g2. Эти траектории соответ¬
ствуют переходной функции колебательного звена. Траектории,
изображенные на рис. 7.10, б, получаются при наличии начального
отклонения только по курсу. Они соответствуют импульсной пере¬
ходной (весовой) функции колебательного звена
Az = Дг0 Sin ^ |/" i _
1-й
(7.17)
КОНТУРЫ БОКОВОЙ СТАБИЛИЗАЦИИ
253
§ 7.2]
Существенное значение имеет величина максимального откло¬
нения или «выброса» Дгт, обусловленная начальным отклонением
по курсу Дфо ж Из выражения (7.17) следует
При оптимальной степени затухания = 0,707
Дгт = 0,456 А^-«О,456Дфо-^-.
При Дтро = 5°, V = 200 м • сек-', сог = 0,2 сек-', & = 0,707 мак¬
симальное отклонение составляет около 40 м. На рис. 7.10, в
Рис. 7.10. Траектории движения самолета относительно заданной
прямой при простейшей структуре контура стабилизации: a) Aze=£ 0,
Az0 = 0, б) Aze = 0, Azt 0, в) Aze 0, Az0 =# 0, = 0,7.
изображен характер траекторий при наличии начальных отклонений
как по координате Дг0, так и по курсу. Степень затухания здесь
равна 0,7.
В заключение рассмотрения линейного траекторного контура
оценим ошибки, вызываемые различными факторами. На структур¬
ной схеме рис. 7.9, помимо возмущающих воздействий в виде оши¬
бок гировертикали Дугв, ошибок курсовой системы Дфкс, ошибок
навигационной системы Дгп и ветровых воздействий Д(3В, учтено
воздействие Дуу, которое существует для криволинейной невозму-
Щенной траектории (криволинейной заданной линия пути). Проис¬
254 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
хождение данного возмущающего воздействия следующее. Если
невозмущенная траектория является криволинейной с текущим
углом наклона (в горизонтальной плоскости Д0гО) и если отклони
ние близкой возмущенной траектории Д? отсчитывается в направ¬
лении нормали к невозмущенной траектории, то для малых откло¬
нений
Дг = V (Д0Г - Д0гО) = V (Дт|з + дрв) - /дег0. (7.18)
Представим Д0го в виде
Д9го=-f-Д?/. (7.19)
Здесь Ду/ — крен, необходимый для движения по невозмущенной
траектории в условиях отсутствия скольжения и ветра. Из соотно¬
шений (7.18), (7.19) вытекает, что возмущающее воздействие кри¬
визны заданной линии пути может быть приведено к виду, пред¬
ставленному на структурной схеме рис. 7.9.
Из этой структурной схемы или соответствующих соотношений
нетрудно получить следующее выражение для суммарной ошибки в
траекторном контуре:
ЛТгв + IF*A,|,KC + ^3Дгп - Г* дрв -
W 3
Обозначим (0) = (0) = (для «статического» за¬
кона стабилизации). Обычно IFy3 (0) = 1. В соответствии с (7.20)
и этими обозначениями отклонения, вызванные медленно меняю¬
щимися воздействиями, а именно, ошибками гировертикали Дугв,
ошибками курсовой системы Дфкс, постоянной боковой составляю¬
щей ветра ДРВ, медленно меняющейся ошибкой навигационной
системы Д?п, медленно меняющейся кривизной невозмущенной
траектории Ду;-, выражаются следующими формулами:
(7.21)
Отклонения, вызванные ошибками гировертикали, могут иметь
заметную величину. Так, при k^3 = ul/g = 4 • 10“3 м"[ (это соот¬
ветствует со2 « 0,2 сек~х) и Дугв = 3° Дггв « 13 м. Большими мо¬
гут быть отклонения, вызванные кривизной невозмущенной траек¬
§ 7.2]
КОНТУРЫ БОКОВОЙ СТАБИЛИЗАЦИИ
255
тории. Так, если невозмущенная траектория представляет собой дугу
окружности с радиусом, соответствующим крену в правильном ви¬
раже 30°, то при ky3 = 4 • «Г3 м~1 \Zj = 130 м. Для устранения
этого отклонения следует либо использовать астатическое регули¬
рование (например, вида(7.14)), либо компенсировать возмущающее
воздействие Ду/ за счет программного изменения крена. При аста¬
тическом управлении (7.14) устраняются отклонения от всех дру¬
гих постоянных возмущающих воздействий кроме, конечно, по¬
стоянной ошибки навигационной системы.
При операторах (7.10) значительными могут быть отклонения,
вызываемые ошибками курсовой системы и постоянным ветром.
Действительно, согласно (7.10)
Величина Тг при безынерционном управлении креном равна
kz.. or
Гу
Из этих выражений и (7.21) находим, что при £2 = 0,7, со2 = 0,2 сект\
Т = 0,5 Т2, V = 200 м • сект\ Афкс = 2° Дгкс = 73 м. При тех же
данных и боковом ветре 10 м • се/г4 Агвет = 105 м. С точки зре¬
ния влияния ошибок курсовой системы и постоянного ветра пред¬
почтение следует отдать операторам (7.11), (7.14), при которых обес¬
печивается астатизм по отношению к этим воздействиям. Однако
широкополосные шумы навигационной системы при (7.11) влияют
сильнее, чем при (7.10).
Управление при больших начальных отклонениях
от заданной линии пути
В предшествующем изложении использовались линейные моде¬
ли контуров управления боковым движением центра массы, а
начальные отклонения от заданной линии пути полагались доста¬
точно малыми. Однако для выполнения этих условий необходимо
вывести самолет в окрестность заданной траектории как по боковому
отклонению, так и по направлению движения, т. е. ликвидировать
большие начальные отклонения от заданной линии пути. Вывод
самолета на заданную линию пути может осуществляться различны¬
ми способами как в смысле алгоритма управления, так и в смысле
используемой навигационной информации. На выход на заданную
линию при больших начальных отклонениях тратится значительное
время и количество топлива. Поэтому целесообразна оптимизация
процесса выхода на заданную линию пути.
256 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
Задача оптимизации выхода на заданную линию даже при одном
и том же критерии минимума времени выхода может иметь раз¬
личные постановки и соответственно различные решения. Здесь
мы рассмотрим самую простую «кинематическую» постановку этой
задачи.
Допустим, что самолет в некоторый начальный момент времени
находится на расстоянии z0 от заданной прямой и его вектор ско¬
рости образует угол х|)0 с этой прямой (рис. 7.11). Минимальный до¬
пустимый радиус виража равен /?т1п._ Скорость полета постоянна.
Рис. 7.11. Траектория выхода на заданную прямую, состоя¬
щая из двух дуг окружностей и отрезка прямой.
Требуется среди множества гладких траекторий, состоящих из
двух дуг окружностей, разделенных отрезком прямой, указать опти¬
мальную траекторию в смысле минимума времени (минимума пути)
выхода на заданную прямую аб. То, что множество допустимых
траекторий ограничено траекториями с двумя разворотами и от¬
резком прямой, обусловлено простотой подобного движения.
Радиусы кривизны /?2 дуг окружностей множества допустимых
траекторий ограничены по модулю снизу: | | > /?mIn, | R21 > #min-
Углы разворотов Д\|)2, а также длина прямолинейного участка
I не ограничены для множества допустимых траекторий, за иск¬
лючением того, что эти величины не отрицательны. Конечно, эле¬
ментами данного множества являются и траектории с одним раз¬
воротом и отрезком прямой (Дг|)2 = 0), с одним разворотом (Дгр2 =
= 0, I = 0), с двумя разворотами без прямолинейного полета.
Запишем выражения, вытекающие из рис. 7.11:
z0 = ^1(1— cos A^i) + I sin + Rz [cos (A^i— Д'Фг) — cos AipJ, ’
L = ^Дтр! -f-1/?2Дф2,
Дг|з1 — Дф2 = гр0,
(7.22)
где L — длина пути выхода на заданную прямую — минимизируе¬
мая величина. Определяя из первого соотношения (7.22) I и
КОНТУРЫ БОКОВОЙ СТАБИЛИЗАЦИИ
257
$ 7.2]
подставляя во второе соотношение, находим
L = № + Я2)(ДЯ’х + ctgA’l’i) + -0~^8ьдУ—- (7-23)
Согласно постановке задачи необходимо указать значения Д^, /?1(
Я2, при которых L минимально. Определяя частную производную
дЬ/д^1 и приравнивая ее нулю (т. е., по существу, используя из¬
вестный метод Гаусса — Зайделя поочередной минимизации пере¬
менных), получаем
(/?! + R2) cos2 Дхр! + (^о — Ri — R2 cos 4>0) cos Aipx = 0.
Это уравнение относительно Aipx имеет два решения:
Щ=Х/2
п”0’ Оптимальная траектория выхо-
Д а заданную прямую при > л/2,
*• > ^min (• + Icos Ч’о!)-
cos = 0, cos Д^ = p2C?Sp° — •
К1 ~г Аг
Решение cos Д^ = 0, т. е. Aipx = л/2 (случай Д-фх = — л/2 со¬
ответствует отрицательным зна¬
чениям г0), имеет силу при
го > + ^2 cos ip0,
так как только при этом ус¬
ловии величина Z, равная в дан¬
ном случае г0 — — R2 cos ф0,
неотрицательна. При Дфх = л/2
длина траектории (7.23)
(1-1) +
+ ^s(l— — COS’J’o)- <7-24)
равна
Если л/2 — -ф0 — cos i|)0 > 0, что соответствует гр0 < л/2, то
чина (7.24) принимает наименьшее значение при = R2 = Rmin»
вели-
9 А. А, Красовский
258 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
Соответствующая оптимальная траектория, имеет вид, изображен¬
ный на рис. 7.12. Если по-прежнему z0 > + R2 соэфо, но л/2—
— cos ф0—ф0 < О, что имеет место при ф0 > л/2, то длина траектории
(7.24) получает наименьшее значение при = /?min и R2 = —/?min
(длина дуги R2Aty2 = R2 (я/2 — Фо) должна быть положительной).
Характер соответствующей оптимальной траектории изображен
на рис. 7.13. Хотя указанные оптимальные траектории имеют весьма
простой вид, реализация их связана с определенными трудностями.
Трудности эти вызваны в основном тем, что для достаточно точ-
Рис. 7.14. Структурная схема контуров стабилизации
бокового движения центра массы с ограничителями.
ной реализации рассматриваемых траекторий необходима от¬
носительно полная навигационная информация, в частности, из¬
мерение
порот нейлый по- Процесс б линейной зоне
Рис. 7.15. Характер траектории выхода на за¬
данную прямую при контурах с насыщением
типа рис. 7.14.
как текущего бокового отклонения z, так и продольной
координаты х. Между тем не¬
редко для точного контроля
доступна лишь одна коорди¬
ната 2.
Часто в целях простоты
системы для управления при
больших отклонениях ис¬
пользуются замкнутые кон¬
туры той же структуры, что
и при малых отклонениях,
но с элементами насыщения (ог¬
раничения). Типичная струк¬
турная схема такого рода
представлена на рис.
Звенья с насыщением
стоят в канале боковых откло¬
7.14.
здесь
нений z и в канале суммарно¬
го сигнала крена. Если вначале имеется большое отклонение по
курсу, например ф0 =л/2, то самолет разворачивается с предель¬
ным креном в сторону согласования. Канал 2 при этом насыщен.
- аналитическое конструирование КОНТУРОВ 259
§ 7.3J
Если в процессе указанного разворота сигнал курсового откло¬
нения уменьшается до уровня, при котором он уравновешивается
сигналом насыщенного канала г, то самолет переходит в прямоли¬
нейный полет (рис. 7.15).
§ 7.3. Аналитическое конструирование стационарных контуров
стабилизации траектории
Аналитическое конструирование траекторных контуров в прин¬
ципе мало отличается от синтеза «внутренних» контуров управле¬
ния и может осуществляться рассматриваемыми типовыми мето¬
дами. Как и в ранее рассмотренных задачах, целесообразна преем¬
ственность структур систем управления, заключающаяся в том,
что при включении оптимальных траекторных контуров структура
«внутренних» контуров управления не меняется.
Синтез систем стабилизации барометрической высоты
Синтез контура стабилизации барометрической высоты можно
осуществлять на основе простейшей модели продольного углового
движения в совокупности с «кинематическим» интегрирующим зве¬
ном (см., например, рис. 7.1). Однако для многих современных са¬
молетов необходима также автоматическая стабилизация скорости
и задачи синтеза контуров стабилизации скорости и высоты целесо¬
образно решать совместно.
Исходя из этого следует отдать предпочтение полной линейной
модели продольного движения самолета вида (1.30) или (1.34). С уче¬
том простейших моделей двигателя, исполнительных устройств
(вида (6.3)), соотношений ДЯ = V (ДФ — Да), х9 = ДЯ (послед¬
нее вводится для получения астатического управления по высоте)
уравнения обобщенного объекта без возмущающих воздействий за¬
пишутся в виде (см. также (6.1))
^V—aVxAV (д£ — а®) Да 4- aQxA& — ^ТД6Т = 0,
Да- avyAV + (а® _ а“) да _ — Д®2 + а®вД6в = 0,
д“г + avmzAV + а“2Да + а“2До)г — 4Ж = 0,
(7-25)
Дй — Дсог = 0, АН - УДй + УДа = 0, Д6В + Д6В=ив,
1 6в
Ч + у-дбд = Ыд) ;9_дя = о.
од
Объект (7.25) нейтрален или неустойчив (в случае неустойчивости
амолета в продольном движении). Выбирая Т не большим
9*
260 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
желаемого времени переходных процессов в замкнутой системе и
таким, чтобы 1/Т было не меньше характеристического числа обоб¬
щенного объекта (в случае его неустойчивости), задаем минимизи¬
руемый функционал в виде
где
хг = Дбт, х2 = AV, х3 = Да, х4 = Дсо2, хъ = ДА1, х6 = Д6В,
х7 = Д6д, х8 =- Д7/, х9 = у ДЯ dt, ив = uB, щ = ид,
9 00
Aik = s ₽vv J Wvi $ Wvk (V exP '7') dt> (1.21)
v=l о
Wik(t) (i, fe = 1, 2, ..., 9) — фундаментальная система весовых
функций обобщенного объекта (7.25). Минимизация функционала
(7.26) соответствует синтезу нетерминальных стационарных управ¬
лений без граничного условия. Эти управления имеют вид
9 9
ue = 2 ^7 ~ ^7 2 (7.28)
Если минимизировать функционал
9 ^4“ 9 /4"Х / \
*=1 / /•=! t \ в 7 /
di,
(7.29)
соответствующий скользящему граничному условию, то коэффи¬
циенты оптимальных управлений выразятся формулами (П.4.35)
9 * 9
= 2 pw^vz (т) tc’vfe (т) \ 2 Pvv^vz (0 ^vk (t) dt. (7.30)
v=l о V=1
Число назначаемых коэффициентов функционала (7.26) в общем
случае равно девяти (не считая Т, k%, k7). Для (7.29) обычно
f 7.3]
аналитическое конструирование контуров
261
ппинимаем Р„ s Рн и число независимых задаваемых коэффициен¬
тов также близко к девяти. Общее число коэффициентов оптималь¬
ных управлений (7.28) составляет 18. Таким образом, в данной
задаче как и во многих других рассмотренных выше задачах, раз-
мепности пространства назначаемых коэффициентов функционала
и пространства оптимальных коэффициентов различаются не очень
сильно и довольно высоки. Согласно общей трактовке, метод ана¬
литического конструирования в значительной мере сопряжен с по¬
иском в пространстве коэффициентов функционала. Поэтому для
рассматриваемой задачи, как и для многих других, существенной
является методика задания исходных значений коэффициентов
функционала.
Сопоставляя уравнения обобщенного объекта (7.25) с уравне¬
ниями (6.1), (6.3), использовавшимися для синтеза канала руля
высоты автопилота и автомата тяги в режиме стабилизации, убеж¬
даемся, что они отличаются только дополнительными соотноше¬
ниями для высоты и интеграла высоты в уравнениях (7.25). Фунда¬
ментальная система весовых функций обобщенного объекта (7.25)
близка к фундаментальной системе весовых функций объекта (6.1),
(6.3). Коэффициенты 088, 099 в функционалах (7.26), (7.29), являю¬
щиеся коэффициентами при квадратах отклонений высоты и инте¬
грала высоты, обычно задаются относительно малыми.
Вследствие указанных обстоятельств коэффициенты Лв1, Лва, ...»
Д67; Л71, Д72, ..., Л77 оптимальных управлений (7.28) оказываются
близкими к соответствующим коэффициентам управлений (6.12).
Это очень удобно с точки зрения практического осуществления:
при выключении контура траекторного управления (стабилизации
высоты) для достижения оптимальности не требуется изменять ни
структуру, ни коэффициенты «внутренних» контуров. Здесь пред¬
полагается, что коэффициенты 0И, 022, •••» Р?7 ПРИ оптимизации
«внутренних» контуров и при оптимизации системы с траекторным
контуром заданы одинаковыми. Подобная преемственность упро¬
щает и процедуру выбора коэффициентов функционала pvv, так как
позволяет производить этот выбор последовательно: сначала на
основе тех или иных соображений задается часть коэффициентов
Pw и осуществляется синтез внутренних контуров, а. затем назна¬
чаются коэффициенты Р88, р99 и осуществляется синтез траектор¬
ного контура.
Конечно, возможно и одновременное назначение всех коэффи¬
циентов функционала, но при этом целесообразно привлекать не¬
которые физические соображения или условия. Можно, например,
назначать соотношения между коэффициентами pvv, исходя из ам¬
плитуд или дисперсий вынужденных колебаний координат в сво¬
бодном (неуправляемом) полете объекта. Пусть на основе уравне¬
нии обобщенного объекта (7.25) определены амплитуды xvm (со)
Реакций координат на гармонический сигнал или щ с единичной
262 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
амплитудой и частотой со. Тогда для ориентировочного выбора
значений коэффициентов 0VV можно использовать соотношение
(©) — ^22^2т (©) — * ’ * — (©)•
(7.31)
Основное затруднение здесь связано с обоснованным выбором ча¬
стоты со. Эта трудность может быть частично преодолена назначе¬
нием характерного, может быть, широкого интервала частот cDmin.
©max и усреднением по этому интервалу:
Недостатком подобных методик предварительного выбора коэф¬
фициентов функционала является следующее. Соотношения между
коэффициентами (3VV здесь назначаются по оценкам координат вы¬
нужденного движения неуправляемого объекта. Здесь недостаточно
отражаются требования к поведению управляемой системы.
Более простая и эффективная методика заключается в следую¬
щем [9.3], [П.27]. При разработке задания на проектирование
системы управления почти всегда можно указать предельные до¬
пустимые ошибки или отклонения координат xvm. Если такие мак¬
симальные отклонения или ошибки указаны, то предварительный
выбор коэффициентов функционала целесообразно производить
на основе соотношений
1т —
(7.33)
Данный способ будет в дальнейшем именоваться способом равных
вкладов максимальных отклонений. Конечно, задание коэффициен¬
тов функционала на основе соотношений (7.33) и, тем более, соот¬
ношений (7.31), (7.32) можно рассматривать только как предвари¬
тельное. Согласно общей идее метода аналитического конструиро¬
вания после определения оптимальных управлений следует проверка
качества процессов управления в синтезированной системе. Если
процессы в этой системе в каком-либо отношении не удовлетворяют
конструктора, производятся целенаправленная корректировка ко¬
эффициентов функционала и определение скорректированных опти¬
мальных управлений. При необходимости этапы итерационного про¬
цесса аналитического конструирования повторяются несколько раз.
Чем удачнее начальный выбор коэффициентов pVv, тем быстрее
сходится итерационная процедура, вплоть до окончания ее на
первом этапе.
Приведенные здесь соображения носят общий характер и могут
использоваться при решении любых задач аналитического конструи¬
рования.
§ 7.31
аналитическое конструирование контуров
263
Синтез систем стабилизации бокового движения центра массы
летательного аппарата
При синтезе стационарных контуров стабилизации бокового
движения центра массы самолета в качестве уравнений обобщенного
объекта можно использовать совокупность уравнений углового дви¬
жения (6.2), исполнительных устройств (6.17), кинематического
соотношения Дг = V (Дф — Др), а также фильтра в цепи сигнала
навигационной системы.
(7.34)
Рассматриваются малые отклонения от невозмущенного движения
и соответственно линейные уравнения обобщенного объекта. Фильтр
(7.34) введен с целью подавления широкополосных помех, которые
могут присутствовать в навигационном сигнале.
В отличие от предшествующего упрощенного описания линей¬
ных контуров стабилизации бокового движения (§ 7.2) учитывают¬
ся скольжение и возможность взаимосвязанного регулирования
посредством элеронов и руля направления. Введем обозначения:
= Д(ох, х2 = Д(оу, х3 = Ду, = Дф, х5 = Др, хв = Д6Э,
х1 = Д6Н, х8 = Аг, х9 = Дги, х10 = J Дги dt, и6 = и3, щ = ин.
В соответствии с указанным уравнения обобщенного объекта
без учета возмущающих воздействий запишутся в виде
хь — x2~i~ а^х3 azX5 = 0, хв + -гр— xQ = uQ,
1 Лч
6э
(7.35)
х7 + -^—х7 = ы7, ха — Vx4 + Vx6 = 0,
1 Ли
В строгой постановке задача с искусственно введенной фильтра¬
цией сигнала Дг должна решаться как задача с неполной степенью
наблюдаемости. Заведомо отказываясь от использования сигнала
г ~~ х8 и Довольствуясь выходным сигналом фильтра Дги — хв,
ы ограничиваем влияние высокочастотных шумов навигационного
датчика на движение самолета. Однако решение задачи с неполной
тепенью наблюдаемости сложнее, чем при полной степени наблю¬
даемости (см. § П.8). Между тем в оптимальных управлениях,
264 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
полученных в предположении полной степени наблюдаемости, фи¬
гурируют как сигналы, пропорциональные Дг = х8, так и сигналы,
пропорциональные Дги = х9. Подбирая коэффициенты функцио¬
нала, можно сделать «вес» сигналов Ди достаточно малым и тем
самым обеспечить малое влияние высокочастотных шумов навига¬
ционного датчика.
Учитывая сказанное, ограничимся кратким рассмотрением ре¬
шения задачи с полной степенью наблюдаемости. По существу,
это типовая задача синтеза нетерминальных управлений для мно¬
гомерного стационарного линейного объекта. Она многократно
рассматривалась выше применительно к синтезу систем ручного
управления, автопилотов, стационарных контуров траекторного
управления продольным движением и здесь почти не нуждается в
пояснениях. Учитывая нейтральность или неустойчивость обоб¬
щенного объекта (7.35), задаем функционал в форме (П.4.34)
/=4- S ехр (—-т-) w хь (^)+
Z,fe=l
или форме (П.4.27)
10 10 1 / 2 2 \
= “2~ S + т) + "2” S J Рих? 4“ ~2" J ^^2” 4“ dt 4"
Н-Т
t
Оптимальные управления имеют вид
^6 = ^6 S = ^7 2 AlkXk' (7•$&)
k=l /г=1
где в случае минимизации функционала (7.36)
Aik = s Pvv \ ехр (—-у-) wvt (t) wvk (/) dt,
V=1 о ' '
(7.39)
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ КОНТУРОВ
265
§ 7.3]
а в случае минимизации функционала (7.37)
ю р 10
Aik = Tj Pw^vz (т) w^k (Т) + J 2 Pvv^vz (0 wvk (0 (7-40)
Фундаментальная система весовых функций обобщенного объекта
(7 35) сравнительно мало отличается от системы весовых функции
объекта (6.2), (6.17), содержащего только уравнения угловых дви¬
жений и исполнительных устройств. Положение здесь аналогично
имевшему место при синтезе траекторных контуров стабилизации
продольного движения. На основе рассуждений, подобных приве¬
денным выше, убеждаемся, что коэффициенты оптимальных управ¬
лений в системе с траекторным контуром мало отличаются от ана¬
логичных коэффициентов в оптимальной системе угловой стабили¬
зации (6.20). Как отмечалось, подобная преемственность оптималь¬
ных управлений позволяет при включении траекторного контура
оставлять неизменными как структуру, так и коэффициенты систе¬
мы угловой стабилизации — автопилота. Сохраняют силу изложен¬
ные выше соображения относительно выбора коэффициентов функ¬
ционала.
Управления (7.38), содержащие по десять суммируемых сигна¬
лов, могут оказаться слишком сложными для реализации. Упро¬
щение производится обычным путем отбрасывания слабых связей
с последующей проверкой поведения замкнутой системы.
Аналитическое конструирование управлений при больших
начальных отклонениях от заданной линии пути
Наиболее строгая и общая постановка задачи синтеза системы
управления траекторией базируется на использовании в качестве
обобщенного объекта уравнений пространственного движения (1.17)
или (1.81) в совокупности с уравнениями исполнительных устройств,
формирующих фильтров для случайных возмущающих воздействий
и кинематическими соотношениями типа
* = Vai + V>12 + У2е13,
У = ^х821 + К/822 + ^z823>
Z = Kce3i + К/8з2 + ^Аз-
Подобные задачи являются сложными, хотя и разрешимыми на ос¬
нове метода, изложенного в § П.5. Некоторое представление о про¬
цедуре решения и объеме численных расчетов в подобных задачах
южно получить из изложенного в главе XII применительно к сни¬
зу систем сближения космических аппаратов.
одесь мы рассмотрим самую простую задачу синтеза траектор-
ого управления боковым движением при больших начальных
266 СТАЦИОНАРНЫЕ КОНТУРЫ СТАБИЛИЗАЦИИ ТРАЕКТОРИИ [Гл. VII
отклонениях. Управление креном считается безынерционным, и
уравнения обобщенного объекта сводятся к кинематическим соот¬
ношениям
z = Vsintp = O, 4) = ^. (7.41)
Вводя обозначения = гр, х2 = г и представляя sin гр в виде
степенного ряда, записываем
Xi = “i> х2 + а21х1 + а2111х31 + а211111хъ1+ ••• =0, (7.42)
где
- Т7 __ v _ v
^21 ^2111 — 31 > ^211111 — 5! ’ * ’ *
Минимизируемый функционал зададим в виде
Тогда оптимальное управление будет равно
■ 2 2 2
2 Ацх1 + 5 ^11 IхIх 1 + 2 ^lifkXiXiXk +
[/=1 Itj=\
■ p—1
••• , (7.44)
где коэффициенты определяются формулами типа (П.5.24)
= Рп^Ц + 022*^22, Aijk = 0,
A/jfeZ = ^2111 [442ГГ1Ш + ^22 (72И1 + 71211 + 71121 + 7> j^)],
Aijkls == 0,
• •
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ КОНТУРОВ
267
| т.«]
Здесь
j wvi (/) tew (/) ехр (— -у-) dt,
о
Jv^ei = У wvi (0 w»i (0 Wsk W eXP ( f")
0
Фундаментальная система весовых функции линейного приближе¬
ния объекта (7.42) имеет вид wn (t) = 1, ®2i (*) — vt, w12 (t) — U,
w22 (0 =1- Находим
rll T ,12 ,21 ,22 n ,22 T ,12 VT2 ,21 VT2
Jll = , Jn = Jll = «'ll = 0> J22=-2~t J22——J—, J22— 4 »
4' = , A11 = ± puT + 4 ₽22^3. A2 = Лт = 4-^VT2>
Л22 = -ТГ^Т, 4111=-^-, 4111 = ^4 , 4111= — ,
Alli = р22РТ3, Л2111 = 4"зГРггТ12’ Аиш ~ “эд" Ргг^2^8»
•^211111 ~ 480 Ргг^^2-
Подставляя в (7.44), получаем
«i = — ky. ^1 + ) Ф + -yf 3- Ф3 4- Ф2 -ут 4-
+ 4г*5+4г*47г+ ’••Г’ <7Л5)
где
fl, = кЧ
Это нелинейное оптимальное управление имеет сравнительно про¬
стую структуру и его приближенное осуществление не вызывает
затруднений.
Глава VIII
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
Снижение самолета перед заходом на посадку, именуемое часто
«пробиванием облачности», предпосадочный маневр, заход на по¬
садку, выравнивание и приземление составляют вместе с этапами
взлета совокупность ответственных и напряженных этапов полета,
на которые по мировой статистике до сих пор приходится значи¬
тельный процент аварий и катастроф. Сложность управления посад¬
кой самолета вполне очевидна, так как при посадке летательный
аппарат не только должен выйти в заданную малую область про¬
странства (участок приземления на посадочной полосе), но должен
иметь определенные (с жесткими допусками) значения компонент
вектора скорости и определенное угловое положение.
Понятно то внимание, которое в течение длительного времени
уделяется навигационному, приборному обеспечению и автомати¬
зации этапов полета, связанных с посадкой. Созданы сложные си¬
стемы обеспечения полетов в районах аэродромов и системы по¬
садки. Многие требования к техническим параметрам систем по¬
садки унифицированы и имеют международные стандарты.
§ 8.1. Требования к системам посадки.
Навигационные средства обеспечения посадки
Обеспечение всепогодности функционирования имеет огромное
значение как для гражданской, так и военной авиации. Поэтому
требование снижения минимума погоды следует, по-видимому, по¬
ставить на первое место среди других требований, предъявляемых
к современным системам посадки.
Снижение погодного минимума
Согласно требованиям международной федерации гражданской
авиации ИКАО системы посадки в зависимости от допустимой вы¬
соты облачности, точнее, так называемой высоты принятия решения,
и дальности горизонтальной видимости делятся на три категории.
В системах I и II категории выравнивание и приземление (осуще¬
ствляемые после достижения высоты 20 м) выполняются при ви¬
зуальном контроле вручную. В системах III категории должны
^1.1] ТРЕВОВАМИЯ К СИСТЕМАМ, НАВИГАЦИОННЫЕ СРЕДСТВА ПОСАДКИ 269
обеспечиваться инструментальный контроль и автоматическое
управление до приземления. В системах категории Шв предпола¬
гается инструментальный контроль и автоматическое управление
рулением до стоянки.
Понятие «высота принятия решения» используется вместо ранее
применявшегося «высота нижней кромки облаков» и имеет следую¬
щий Х:мысл. После выхода из облаков и визуального обнаружения
Т А Б Л И Ц А 8.1
Категория системы посадки
I
II
ш
а
б
в
Высота принятия решения
60
30
0
0
0
Горизонтальная видимость
800
400
200
50
0
ВПП или посадочных огней летчик принимает решение на посадку
или «уход на второй круг». В таблице 8.1 указаны минимальные
значения высоты принятия решения, допускаемые системами трех
указанных категорий. Допускаемая высота облачности несколько
превышает, высоту принятия решения, так как на обнаружение
ВПП и само принятие решения уходит некоторое время.
Повышение безопасности посадки
Как уже отмечалось, до настоящего времени значительный про¬
цент аварий и катастроф происходит на этапах полета, связанных
с посадкой и взлетом. Существует целый ряд причин этого положе¬
ния. Одна из причин заключается в повышенной информационной
загрузке летчика на этапах посадки и взлета. Летчик при ручном
управлении посадкой должен управлять скоростью, высотой поле¬
та, боковым отклонением, углом атаки, скольжением, углами тан¬
гажа, крена и рысканья, посылать многочисленные разовые команды
(уборка и выпуск шасси, закрылков, воздушных тормозов и т. д.),
воспринимать информацию многочисленных указателей и сигнали¬
заторов.
Все это создает высокую информационную загрузку летчика,
увеличивает вероятность ошибок, снижает вероятность принятия
правильного решения в осложняющих обстоятельствах и аварийных
ситуациях. Безопасность посадки тесно связана также с обеспече¬
нием погодного минимума, в частности, вследствие изменения ме¬
теоусловий на аэродромах в течение полета.
Уровень безопасности зависит от всей организации управления
Движением в воздухе и на аэродромах. Автоматизация всех основ¬
ных этапов посадки и взлета в сочетании с системами управления
в°здушным движением, способны обеспечить весьма высокий
270
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
уровень безпасности, при котором вероятность аварийных ситуаций
измеряется десятимиллионными долями. Автоматические контуры
при этом должны дублироваться полуавтоматическими и ручными
контурами, а сами средства управления должны иметь необходи¬
мый уровень резервирования.
Увеличение пропускной способности аэродромов
Автоматизация управления этапами движения самолета, свя¬
занными со взлетом и посадкой, в совокупности с организацией и
автоматизацией управления воздушным движением в районе аэро¬
дрома и на аэродроме являются главными путями повышения про¬
пускной способности аэродромов.
Снижение требований к взлетно-посадочной полосе
Приборное обеспечение и автоматизация управления посадкой
увеличивают точность приземления. Это позволяет снизить требо¬
вания к размерам посадочной полосы. Аналогично автоматизация
управления взлетом обеспечивает снижение требований к длине
разбега. Следует подчеркнуть, что возможности автоматизации в
отношении снижения требований к взлетно-посадочной полосе
(ВПП) не ограничиваются выигрышем, получаемым в результате
увеличения точности приземления. При наличии соответствующих
датчиков и автоматическом управлении можно увеличить посадоч¬
ные и взлетные значения угла атаки (за счет снижения запаса,
всегда имеющегося при ручном управлении и недостаточной инфор¬
мации). Это позволяет несколько снизить посадочную и взлетную
скорости.
Уменьшение ударных перегрузок при приземлении
Автоматизация управления выравниванием и приземлением спо¬
собна значительно повысить точность приземления по скорости, а
именно, снизить вертикальную составляющую скорости в момент
касания ВПП. Это вызывает снижение уровня ударных перегрузок
при приземлении и увеличение срока службы тех агрегатов, срок
службы которых зависит от этих перегрузок.
Навигационные средства обеспечения посадки
Воздушное движение в районе стационарного аэродрома, вы¬
полнение предпосадочного маневра, захода на посадку обеспечи¬
ваются специальными радионавигационными и радиолокационными
системами [8.1] — [8.6]. Прежде чем кратко описать эти системы,
поясним этапы полета, связанные с посадкой (рис. 8.1).
8.1] ТРЕБОВАНИЯ К СИСТЕМАМ, НАВИГАЦИОННЫЕ СРЕДСТВ А ПОСАД КИ 271
Снижение самолета перед посадкой до высоты 400—600 м на¬
зывается «пробиванием облачности». Далее следует предпосадоч¬
ный маневр, типичным видом которого является «коробочка» с че¬
тырьмя разворотами (рис. 8.1). Однако обычно предусматривается
• возможность выполнения неполной «коробочки», т. е. вписывание
в эту траекторию с любого другого направления с выполнением
одногб четвертого разворота, третьего и четвертого разворотов или
второго, третьего и четвертого разворотов. Возможен также заход
на посадку «с прямой» без выполнения предпосадочного маневра.
б)
Рис.8.1. Этапы снижения, предпосадочного маневра, захода на посадку и
посадки.
После четвертого разворота самолет выходит на посадочное на¬
правление (ось ВПП) и происходит заход на посадку. Этот этап
подразделяется на следующие подэтапы. Подэтап I — горизонталь¬
ный полет на высоте 400—600 м. Подэтап Па — снижение по глис¬
саде до высоты порядка 50 м. Подэтап Пб — снижение по «продол¬
жению глиссады» до высоты порядка 20 м. Далее следуют выравни¬
вание и приземление, составляющие этапы собственно посадки.
Навигация в районах стационарных аэродромов обеспечивается
с помощью систем ближней навигации. К этому классу радионави¬
гационных систем относится система РСБН-2 [8.4] и зарубежная
система «VOR».
Система ближней навигации. Радионавигационная система ази¬
мутально-дальномерного типа РСБН-2 обеспечивает самолетовож¬
дение в районе азимутально-дальномерного маяка (районе аэродро¬
ма), снижение по заданной траектории («пробивание облачности»)
в напРавлении на азимутально-дальномерный маяк или в посадоч¬
ном направлении, заход на посадку с помощью специальных кур¬
со-глиссадных маяков (подсистема «Катет С»). Кроме того, опреде¬
ляются координаты самолетов, находящихся в районе аэродрома,
НТО используется для управления воздушным движением.
272
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
Рис. 8.2. К
пояснению
функционирования ази¬
мутально-дальномерной
радионавигационной си¬
стемы: 1 — диаграмма
направленности азиму¬
тальной антенны, 2 —
диаграмма направлен¬
ности антенны опорных
сигналов.
Первоначальное определение местоположения самолета как бор¬
товой, так и наземной аппаратурой осуществляется в полярных
координатах с центром в точке расположения азимутально-дально¬
мерного маяка. Число самолетов, обслуживаемых одновременно,
не должно превышать 100. Это определяется пропускной способ¬
ностью дальномерного канала. Пропускная способность в отноше¬
нии определения азимутов самолетов прак¬
тически не ограничена.
Радионавигационное и радиолокационное
поле в районе аэродрома создается азиму¬
тально-дальномерным маяком, обычно разме¬
щаемым в районе ВПП на возвышении. Маяк
имеет три передатчика: азимутальный пере¬
датчик, передатчик опорных импульсов и пе¬
редатчик дальномерных импульсов. Антенна
азимутального передатчика остронаправлен¬
ная. Диаграмма направленности этой антенны
1 узкая в азимуте (рис. 8.2), вращается со
скоростью 100 об/мин и облучает последова¬
тельно все самолеты, находящиеся в зоне дейст¬
вия маяка. С антенной связаны датчики опор¬
ных импульсов. Сигналы опорных импульсов
передаются всенаправленной антенной (с кру¬
говой диаграммой направленности 2) передат¬
чика опорных импульсов.
Опорные сигналы и сигналы азимутального
передатчика принимаются специальным борто¬
вым приемником самолета. Опорный импульс
в тот момент, когда ось диаграммы направ-
на борту возникает
ленности азимутальной антенны совпадает с направлением на се¬
вер *). Ввиду того, что антенна азимутального передатчика вра¬
щается равномерно, интервал времени между моментами максимума
облучения остронаправленной антенной и опорным импульсом про¬
порционален углу азимута А самолета. Этот интервал времени из¬
меряется на борту самолета и соответствующий сигнал поступает
как в указатели полярных координат, так и в вычислительное уст¬
ройство (счетно-решающий прибор СРП). В определенных режимах
(полет по азимуту) этот сигнал подается в нуль-индикатор или при
наличии систем автоматического и полуавтоматического управле¬
ния — в эти системы. Расстояние D от азимутально-дальномерного
маяка до самолета (рис. 8.2) измеряется дальномерным каналом
с активным ответом на земле. Сигнал дальности, как и сигнал
азимута, поступает на прямой индикатор, счетно-решающий прибор
*) По радиолинии посредством всенаправленной антенны передаются две
последовательности опорных импульсов, из которых на борту формируется один
опорный импульс за один оборот.
Д.1] ТРЕБОВАНИЯ К СИСТЕМАМ, НАВИГАЦИОННЫЕ СРЕДСТВА ПОСАДКИ 273
СРП, а в соответствующих режимах (полет по «Орбите») подается
на нуль-индикатор или при наличии полуавтоматической и автома¬
тической систем — в эти системы.
Счетно-решающий прибор СРП предназначен для преобразо¬
вании полярных координат в прямоугольные (декартовы) коорди¬
наты! отсчитываемые относительно заданной линии пути.
Система имеет следующие режимы работы: «Навигация», «Про¬
бивание облачности», «Посадка». Режим «Навигация» имеет подре¬
жимы «Азимут», «Орбита», «СРП».
В режиме «Азимут» осуществляется полет на азимутально-даль¬
номерный маяк или от этого маяка по сигналам отклонения азимута
от заданного значения. По существу, здесь выполняется управле¬
ние боковым движением центра массы самолета путем стабилизации
относительно заданной линии пути — прямой, проходящей через
маяк и имеющей заданный азимут. Особенностью данного траек¬
торного контура является его нестационарность, вызванная при¬
ближением или удалением от радиомаяка и измерением угловых откло¬
нений центра массы (разности фактического и заданного азимутов).
В подрежиме «Орбита» управление осуществляется по отклоне¬
нию фактической дальности D от заданной. Здесь также выполня¬
ется стабилизация относительно заданной линии пути, но эта ли¬
ния представляет собой окружность с центром в точке расположения
азимутально-дальномерного маяка. Коэффициент пропорциональ¬
ности между линейным отклонением от заданной линии пути
и сигналом управления здесь постоянен, так что и в этом отношении
соответствующий контур траекторного управления стационарен.
Контур траекторного управления практически стационарен так¬
же в режиме «СРП». В этом режиме сигнал рассогласования пропор¬
ционален линейному отклонению от заданной прямой. Эта прямая
может иметь любое положение в горизонтальной плоскости, зада¬
ваемое с помощью специальных ручек на блоке СРП.
Итак, управление движением центра массы самолета в режиме
«Навигация» по системе РСБН-2 является стабилизацией относи¬
тельно заданной линии пути (ручной, полуавтоматической или ав¬
томатической). При этом для подрежимов «СРП» и «Орбита» соот¬
ветствующие контуры траекторного управления практически ста¬
ционарны, а для подрежима «Азимут» — нестационарны.
«Пробивание облачности» — снижение до высоты 400—600 м —
по системе РСБН-2 может осуществляться как в направлении на
азимутально-дальномерный маяк (АДМ), так и в направлении оси
ВПП. В обоих случаях управление осуществляется следующим об¬
разом. Дальномерный канал с АДМ или специальным ретранс¬
лятором, установленным вблизи глиссадного радиомаяка, контро¬
лирует относительную наклонную дальность D. Барометрический
высотомер или система контроля воздушных параметров измеряет
текущую^барометрическую высоту Н.
274 СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ [Гл. yill
Функциональные преобразователи формируют сигналы, зави¬
сящие от D и Н: /
«1 = fl Р). «2 = /2
Разность этих сигналов и± — и2 используется как сигнал рассогла¬
сования при управлении на этапе пробивания облачности. Невоз¬
мущенная траектория здесь определяется соотношением //(D) =
= /2 (Н) или в явном виде D = D (Я). Эта функция, вообще говоря,
задается применительно к каждому конкретному типу самолета.
Режим «пробивание облачности» может непосредственно перехо¬
дить в режим захода на посадку (посадка с «прямой»). Точность
описанных средств навигации недостаточна для управления на
этапе захода на посадку. Поэтому на этом этапе управление пере¬
дается курсо-глиссадным маякам «Катет С» или «СП-50» или другим
системам обеспечения захода на посадку.
Курсовой и глиссадный радиомаяки работают по принципу рав¬
носигнальной зоны. Курсовой радиомаяк (КРМ) обычно распола¬
гается вблизи конца ВПП на продолжении ее оси. Глиссадный ра¬
диомаяк (ГРМ) размещается сбоку ВПП вблизи ее середины. КРМ
имеет правый и левый лепестки диаграммы направленности. Излу¬
чение левого и правого лепестков модулировано различными ча¬
стотами. Это излучение происходит поочередно (частота манипуля¬
ции 13 гц).
При движении строго по равносигнальной плоскости интенсив¬
ность воспринимаемого излучения с различными частотами моду¬
ляции одинакова и выходной сигнал бортового курсового радио¬
приемника равен нулю. При отклонении от равносигнальной зоны
на выходе курсового приемника возникает сигнал, знак которого
соответствует направлению отклонения.
Аналогично функционируют глиссадный радиомаяк и глиссад¬
ный бортовой радиоприемник. Главным отличием является то,
что равносигнальная зона здесь представляет собой плоскость (в
идеальном представлении), образующую малый угол (порядка 2,5°)
с плоскостью ВПП. Пересечение равносигнальной зоны ГРМ с рав¬
носигнальной зоной КРМ соответствует глиссаде — номинальной
невозмущенной'траектории захода на посадку. Эта номинальная
траектория совпадает по курсу с осью ВПП, а с горизонтальной
плоскостью образует указанный малый угол.
Сигналы курсового и глиссадного радиоприемников посылаются
на нуль-индикатор или при наличии системы полуавтоматического
и автоматического управления заходом на посадку преобразуются
совместно с другими сигналами и посылаются на командный (ди-
ректорный) прибор и в автоматическую систему.
Ввиду радиального распространения излучения курсовой и глис¬
садный приемники измеряют непосредственно не линейное, а угло¬
вое отклонение центра массы самолета, т. е. угол между равносиг-
§ 8^1 ТРЕБОВАНИЯ К СИСТЕМАМ, НАВИГАЦИОННЫЕ СРЕДСТВА ПОСАДКИ 275
наА>н°й линией и направлением на самолет в точке расположения
радиомаяка. Возникающая из-за этого нестационарность траектор¬
ий контуров может приводить к некоторым нежелательным послед¬
ствия^. Для устранения нестационарности в некоторых системах
•заходу на посадку предусмотрены дальномерные каналы, контро¬
лирующие текущую дальность до курсо-глиссадных маяков.
Следует также отметить, что реальные равносигнальные зоны
заметно отличаются от расчетных или идеальных. Вследствие отра¬
жения излучения от местных предметов равносигнальная линия
представляет собой сложную пространственную кривую, носящую
характер реализации случайной функции. При движении самолета
искривления равносигнальной зоны воспринимаются как случай¬
ные помехи в радиотракте. Для уменьшения влияния этих помех
в цепях сигналов курсового и глиссадного приемников предусмот¬
рены специальные фильтры (см. ниже).
Кроме случайных искривлений равносигнальной зоны в реаль¬
ных системах приходится иметь дело с изменениями крутизны ха¬
рактеристик курсового и глиссадного каналов, связанных с изме¬
нениями мощности излучения и другими факторами. Эти эффекты
в той или иной мере имеют место для всех радиотехнических систем
обеспечения захода на посадку, в том числе системы СП-50 и анало¬
гичной зарубежной системы ILS.
Система СП-50. Система СП-50 предназначена для управления
движением и контроля за полетами в районе аэродрома, обеспече¬
ния захода на посадку и визуальной посадки на стационарные аэро¬
дромы. Система представляет собой довольно громоздкий комплекс
средств, включающий обзорный и диспетчерский радиопеленгатор,
курсо-глиссадные и маркерные радиомаяки, командно-диспетчер¬
ский пункт, средства связи, светотехническое оборудование поса¬
дочной полосы.
Средства обеспечения собственно захода на посадку аналогичны
рассмотренным выше. Как и в системе «Катет С» курсовой радио¬
маяк размещается на оси ВПП на расстоянии 600—1000 м от
конца взлетно-посадочной полосы (рис. 8.3). Глиссадный радио¬
маяк располагается сбоку ВПП. В комплект наземного оборудова¬
ния входят маркерные радиомаяки или приводные радиостанции.
Дальний маркерный маяк располагается на расстоянии 6—10 км
от начала ВПП на продолжении ее оси. После прохождения этого
маяка осуществляется переход на снижение по глиссаде. Ближний
маркерный маяк располагается на расстоянии порядка 1000 м от
начала ВПП.
Стандарты (номиналы) статических характеристик курсового
и глиссадного каналов для курсо-глиссадных систем вообще изоб¬
ражены на рис. 8.3. Характеристика курсового канала выражает
зависимость тока iK на выходе бортового курсового приемника от
Угла е между линией КРМ — самолет и осью ВПП. Номинальный
$78
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
линейный участок этой характеристики имеет ширину ± 2,5°., Па¬
дение iK при возрастании |е| наступает при сравнительно больших
углах.
Характеристика глиссадного канала выражает зависимость тока
на выходе бортового глиссадного приемника от угла £ между ли¬
нией ГРМ — самолет и лучом номинальной глиссады. Ввиду того,
Рис. 8.3. Координаты и номинальные характеристики курсового и глис¬
садного каналов.
что сам луч глиссады образует с горизонтальной плоскостью ма¬
лый угол, ширина пропорционального участка данной характе¬
ристики составляет всего ± 0,5°.
Описанные здесь средства обеспечения посадки эксплуатируются
весьма давно. Максимум, что они могут дать при надлежащей си¬
стеме индикации или автоматизации, это заход на посадку по I ка¬
тегории (см. выше). Для обеспечения посадки по II и, тем более,
III категории необходимы средства повышенной точности и надеж¬
ности. Подобные системы могут создаваться как на базе высокоточ¬
ных и надежных курсо-глиссадных радиомаяков, так и на основе
других точных измерителей относительных координат центра массы,
включая автономные (не содержащие наземного оборудования) на¬
вигационные системы.
§ 8.2. Полуавтоматическая система захода на посадку
и самолетовождения в районе аэродрома
Ручное управление траекторией самолета на режимах «ближней
навигации» (самолетовождение в районе аэродрома) и посадки
представляет известные трудности. Так, например, заход на по¬
садку с использованием только нуль-индикатора РСБН-2, СП-50
и им аналогичных требует высшей квалификации летчиков. Это есте¬
ственно, так как для обеспечения устойчивости и качества процес¬
сов управления траекторией летчику приходится воспринимать
информацию нескольких приборов (нуль-индикатора, авиагоризон-
ПОЛУАВТОМАТИЧЕСКАЯ СИСТВМА ЗАХОДА НА ПОСАДКУ ffT
та, курсовой системы и др.) и вырабатывать управляющие воздей¬
ствия^ соответствии с совокупностью показаний этих приборов.
Для облегчения техники пилотирования в режимах управления
траекторией используются командные или директорные приборы.
Начало внедрения этих приборов в нашей стране относится к пяти¬
десятым годам и выполнено под влиянием работ Г. С. Поспелова,
В. Г. Тарасова.
Управление по директорному прибору часто называется дирек-
торным полуавтоматическим управлением. Сущность дирёкторного
управления заключается в следующем. Совокупность сигналов
датчиков информации поступает в вычислитель. В вычислителе фор¬
мируется суммарный сигнал рассогласования или управления, по¬
добно тому как это осуществляется в полностью. автоматической
системе. Обычно директорное управление используется как в про¬
дольном, так и боковом каналах и формируются два соответствую¬
щих суммарных сигнала рассогласования.
Эти сигналы поступают на директорный прибор и вызывают про¬
порциональные отклонения командных стрелок или меток этого
прибора. Задача летчика заключается в том, чтобы, отклоняя ры¬
чаги управления пропорционально отклонениям командных стре¬
лок, приводить эти стрелки в нейтральное положение, т. е. при¬
водить суммарные сигналы рассогласования к нулевому уровню.
Нахождение командных стрелок в нейтральном положении при ис¬
правной системе означает, что летательный аппарат выполняет
движение, предписанное законами управления.
Директорный прибор не выключается и при полностью автома¬
тическом управлении. В этом режиме он служит индикатором ис¬
правного состояния автоматической системы. Законы формирования
сигналов в автоматической и полуавтоматической системе обычно
одинаковы *). Поэтому при нормальном функционировании авто¬
матической системы командные стрелки должны находиться вблизи
нейтрального положения.
Наличие каналов автоматического, полуавтоматического и руч¬
ного управления можно рассматривать как определенный вид ре¬
зервирования. При отказе исполнительных устройств автоматиче¬
ской системы (вычислитель у автоматической и полуавтоматической
систем обычно общий) происходит переход на управление по дирек¬
торному прибору. При отказе вычислителя или директорного при¬
бора осуществляется переход на ручное управление по совокуп¬
ности показаний обычных приборов и визуальной информации о
траектории полета.
Система «Привод». Полуавтоматическая система захода на посад-
КУ и самолетовождения в районе аэродрома «Привод» выполняется
*) Командные сигналы, поступающие на директорный прибор, часто подвер¬
гаются дополнительной фильтрации ввиду чувствительности человека к уровню
278 СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ (5АМОЛЕТО® [Гл. VIII
в нескольких вариантах (Привод В, Е, ЕК, АН, Д, С и др.).
Система работает совместно с системами РСБН-2с, СП-50 и им по¬
добными и бортовыми навигационными устройствами. Она обеспе¬
чивает возможность директорного управления на всех режимах,
существующих в указанных системах. Командные сигналы этой
системы могут использоваться в автоматических каналах управ¬
ления.
Конкретно система «Привод» обеспечивает:
1. Управление по директорному прибору при полете по марш¬
руту и выходе в район аэродрома в радионавигационном поле си¬
стемы ближней навигации (режимы «СРП», «Азимут», «Пробивание
облачности»).
2. Управление при выполнении предпосадочного маневра «ко¬
робочка».
3. Управление по директорному прибору при заходе на посадку.
Кроме того, система обеспечивает возможность управления по
директорному прибору при стабилизации высоты полета, при вы¬
ходе на заданный курс и стабилизации этого курса.
Переключение режимов осуществляется с помощью пульта
управления системы «Привод».
На двух комбинированных указателях-приборах (командно-пи¬
лотажный прибор КПП, навигационно-пилотажный прибор НПП)
система «Привод», кроме командных сигналов (отклонений команд¬
ных стрелок КПП), выдает показания магнитного курса (МК), за¬
данного курса (ЗК), курсового угла радиостанции (КУР), крена,
тангажа, отклонения от заданной линии пути.
Командно-пилотажный прибор. Вид передней
панели командно-пилотажного прибора системы «Привод» представ¬
лен на рис. 8.4. В центре шкалы располагается неподвижный индекс,
окруженный малым кольцом 3. Командная стрелка бокового кана¬
ла 1 и командная стрелка продольного канала 2 перемещаются маг¬
нитоэлектрическими устройствами (типа микроамперметров с
повышенной частотой собственных колебаний). В эти устройства
поступают командные сигналы из вычислителя. Очевидно, что устрой¬
ство перемещения стрелки входит как звено в контур полуавтома¬
тического управления и его инерционность как бы суммируется
с инерционностью человека. Этим, а также требованием достаточ¬
ной помехозащищенности по отношению к угловым ускорениям
самолета, определяется необходимость повышенной собственной
частоты магнитоэлектрических поворотных устройств отклонения
стрелок.
Аналогичными магнитоэлектрическими устройствами переме¬
щаются стрелка бокового отклонения 4 и стрелка отклонения по
высоте 5. Эти стрелки указывают отклонения от заданной линии
пути. Так, в режиме захода на посадку стрелка 4 указывает откло¬
нение от курсовой равносигнальной зоны, а стрелка 5 — отклоне-
s A’
ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ 279
ние от глиссадной равносигнальной зоны. Назначение информации,
передаваемой стрелками 4, 5, заключается в контроле правильности
директорного или автоматического управления и обеспечения воз¬
можности перехода на ручное управление.
Аналогичное назначение имеет информация о фактическом крене
и тангаже, передаваемая посредством стрелки-силуэта самолета 8
и ленточной подвижной шкалы тангажа 10. Эта информация посту¬
пает от датчика гировертикали и воспроизводится посредством сле¬
дящих систем, перемещающих стрелку 8 и шкалу 10.
Рис. 8.4. Передняя панель командно-пилотажного
прибора системы «Привод»: 1 — командная стрелка
бокового канала, 2 — командная стрелка продольного
канала, 3 — центральный индекс, 4 — стрелка боко¬
вых отклонений, 5 — стрелка отклонений по высоте,
6, 7 — бленкеры, 8 — указатель крена, 9— шка¬
ла крена, 10 — шкала тангажа, 11 — указатель сколь¬
жения, 12 — кнопка арретирования гироагрегата, 13—
ручка установки шкалы тангажа.
Сигнал дистанционного арретирования гироузла датчика крена
и тангажа посылается с помощью кнопки — сигнала 12. Ручка 13
служит для установки положения шкалы тангажа путем поворота
статора сельсина-приемника соответствующей следящей системы.
Сигнализация наличия питания в продольном и боковом каналах
осуществляется флажками 6, 7, которые при включенном питании
находятся в убранном положении. Кроме перечисленных указате¬
лей, КПП имеет указатель скольжения 11.
Навигационно-пилотажный прибор. Видпа-
Нели навигационно-пилотажного прибора представлен на рис. 8.5.
По шкале 2 против индекса 1 отсчитывается текущий курс ф. Соот¬
ветствующая информация поступает с курсовой системы. Шкала 2
поворачивается следящей системой. На той же шкале стрелка 3
Показывает заданный курс % (ЗК). Эта стрелка поворачивается
280
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
с помощью механического дифференциала, суммирующего’ (вычи¬
тающего) повороты выходных осей следящих систем заданного и
фактического курса. Поэтому при изменении только фактического
курса положение стрелки 3 относительно шкалы 2 не меняется.
На этапе захода на посадку заданный курс соответствует курсу
(азимуту) ВПП аэродрома посадки и задается вручную правым или
левым летчиком (система «Привод» устанавливается обычно на
Рис. 8.5. Передняя панель навигационно-пилотажного
прибора системы «Привод>: 1 — нулевой индекс кур¬
са (МК), 2 — шкала МК» 3 — стрелка заданного
курса (3K), 4 — стрелка курсового угла радиостанции
(КУР), 5 — шкала КУР, 6 — стрелка отклонения по
высоте, 7— стрелка бокового отклонения, 8 — бленкер
входа в зону глиссадного радиомаяка, 9 — бленкер
входа в зону курсового радиомаяка.
самолеты с двумя летчиками) посредством ручки заданного курса
ЗК и так называемого механизма согласования.
При выполнении предпосадочного маневра важное значение
имеет курсовой угол радиостанции (КУР) — угол между продоль¬
ной осью (вектором скорости) и направлением на дальнюю привод¬
ную радиостанцию (дальний маркерный маяк) ДПРС. Этот угол
контролируется автоматическим радиокомпасом АРК и посредством
следящей системы передается на стрелку 4. КУР отсчитывается
по неподвижной шкале 5.
В центральной части панели НПП располагаются указатели
отклонений от заданной траектории. Стрелки этих указателей
(нуль-индикаторов) 6, 7 перемещаются магнитоэлектрическими
устройствами подобно стрелкам 4, 5 КПП. На НПП располагаются
сигнализаторы <$, 9, срабатывающие при входе в зону уверенного
приема сигналов курсового и глиссадного радиомаяков.
Помимо визуальной информации, НПП формирует некоторые
сигналы, используемые в вычислителе. Такими сигналами являются
сигнал отклонения от заданного курса Дф = ф — ф3 и сигнал ра-
ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ 281
§ «
лиопеленга еарк- Величина едрк обозначает угол между заданным
направлением и линией самолет — ДПРС. Эта величина равна
gAPK = Дф — КУР (рис. 8.6). Она формируется в НПП и посту¬
пает в вычислитель в виде сигнала сельсина-датчика. Кроме того,
величина едрк реализуется в виде угла поворота щетки контактного
устройства, расположенного в НПП. Это устройство выдает команды
разворотов при выполнении предпосадочного маневра «коробочка»,
формирование командных сигналов. Ди¬
намические и статические искажения преобразования командного
сигнала в отклонение командной стрелки (ошибки магнитоэлектри¬
ческого устройства) относительно малы. Поэтому отклонение
командной стрелки можно считать пропорциональным командному
сигналу ик. Законы полуавтоматического директорного управления
будем записывать в виде законов отклонения командных стрелок.
Законы разные для разных этапов полета. Главное различие заклю¬
чается в сигналах датчиков, используемых на различных этапах,
так как смена этапов сопровождается переключением сигналов дат¬
чиков информации. Кроме того, выражения законов различны для
малых и больших отклонений (имеются ограничители — элементы
с насыщением).
Как и при рассмотрении простейших автоматических контуров,
ограничимся записями линейных законов. Ограничители предста¬
вим на структурных схемах.
В качестве первого характерного этапа полета рассмотрим этап
захода на посадку. В этом режиме закон управления системы «При¬
вод» в боковом канале имеет вид
6к = kl (Fly + + W& + W&),
(8-1)
где
Лр+1 ’
282
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII .
Здесь бк— отклонение командной стрелки бокового канала, Т
= з з?5 сек, Т2 — 2 4- 2,5 сек — постоянные времени,
&L kz — постоянные коэффициенты. Закон управления (8.1)
можно представить также в виде
«. = тДг [о + й д* + + тДг 4 2)
Летчик, управляя креном, поддерживает бк близким к нулю. Это
может быть только в том случае, когда величина в квадратных скоб¬
ках (точнее, ее низкочастотная часть) также близка к нулю и
4тр
Тр+У
1
1 + ^2
Представленное в таком виде управление может быть сопоставлено
с простейшими законами стабилизации относительно заданной ли¬
нии пути, рассмотренными в предшествующей главе, и таким обра¬
зом интерпретировано. Поясним назначение основных операторов.
Оператор апериодического звена (Тр + 1)~1 служит для по¬
давления центрированных (не имеющих постоянной составляющей)
шумов, вызванных, в частности, искривлениями равносигнальной
зоны. Качания командной стрелки под действием этих шумов вы¬
зывают неприятные ощущения у летчика.
Сигнал &ее является основным сигналом стабилизации относи¬
тельно курсовой равносигнальной зоны. Сигнал k% Тр (Тр + Ь—1Дф,
как и сигнал (Тр ф- 1)-1е, служит для обеспечения устойчивости
и качества этой стабилизации.
Изодромность обратной связи .по курсу, т. е. преобразование
сигнала Дф оператором реального дифференцирующего звена
Тр (Тр + I)-1, обеспечивает астатизм по отношению к ошибкам
курсовой системы и ошибкам задания азимута ВПП.
Закон управления (8.2), как и другие законы директорного
управления, реализуются в системе «Привод» с помощью операцион¬
ных магнитных усилителей и иных аналоговых элементов, разме¬
щенных в вычислителе. При этом используются ограничители, ви¬
доизменяющие алгоритм управления при значительных отклоне¬
ниях. Соответствующая структурная схема представлена на рис. 8.7.
Схема имеет три входа, на которые в данном режиме поступают
сигнал е от курсового радиоприемника, сигнал Дф от навигационно¬
пилотажного прибора и сигнал крена у от гировертикали. Сигнал е,
усиленный в раз, проходит ограничитель ОГР-1 и подается на
суммирующий элемент. Тот же сигнал, умноженный на величину
kz, проходит дифференцирующее звено и с некоторой задержкой
8.21
f
ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ 283
после входа в зону курсового радиомаяка подключается к аперио¬
дическому звену с постоянной времени Г. Так формируется сигнал
(Тр + 1Г1.
• Для формирования сигнала k± Тр (Тр 4- 1) Дф на основе прин¬
ципа суперпозиции используются то же самое апериодическое
звено и элементы суммирования и вычитания. А именно, сигнал
Дф, умноженный на kt, с одной стороны, поступает непосредственно
Рис. ^8.7. Структурная схема формирования командного сигнала в боковом канале
системы «Привод» на режиме захода на посадку.
в точку Л, а с другой стороны, проходит ограничитель ОГР-2 и с
обратным знаком подается на указанное апериодическое звено.
В линейной зоне, т. е. до насыщения в звене ОГР-2 (а это имеет
место при | ^Дф| < 10°) в точке А от Дф образуется сигнал
$ $Тр
К сумме указанных сигналов в точке Б добавляется сигнал k&y.
Так образуется суммарный сигнал вида
v $тР р ki .
+ Тр+ ! 4- k& + 8
(для линейной области). Этот сигнал проходит ограничитель ОГР-3,
апериодическое звено с постоянной Т2 и суммируется с сигналом у.
В результате образуется командный сигнал, который подается на
магнитоэлектрическое отклоняющее устройство командной стрелки
бокового канала. В других режимах управления, как упоминалось,
используются сигналы других датчиков информации и структура
бокового канала отличается от указанной. Однако часть структуры
сохраняется. Так, в режиме «Навигация, СРП», структурная схема
бокового канала имеет вид, изображенный на рис. 8.8. В этом ре¬
жиме сигнал отклонения от заданной линии пути выдается бортовой
аппаратурой системы РСБН-2, а именно, счетно-решающим прибо¬
284
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
ром СРП. При этом начальные отклонения как по г, так и по Aip
могут быть большими и возникает задача оптимизации выхода на
заданную линию пути при больших начальных отклонениях. Во¬
просы оптимизации подобных процессов рассматривались в пред¬
шествующей главе.
В системе «Привод» используется относительно простой алго¬
ритм управления в данном режиме. Перед суммированием сигнала
Рис. 8.8. Структурная схема формирования командного сигнала в боковом
канале системы «Привод» в режиме «Навигация, СРП».
z с другими сигналами первый проходит звено с переменной крутиз¬
ной характеристики и насыщением и фильтр низших частот с «пе¬
ременной времени» 7ф(з). Как крутизна характеристики, так и ве¬
личина Тф зависят от текущего отклонения, точнее, от сигнала z,
поступающего от СРП. Это имеет следующий смысл. При больших
Рис. 8.9. Характеристика нелинейного элемента и траектории выхода
на заданную линию пути.
отклонениях звено насыщено и в результате управления по дирек-
торному прибору самолет выходит на прямую, составляющую с за¬
данным направлением угол порядка 50° (рис. 8.9). При больших
отклонениях инерционность траекторного контура может быть по¬
вышенной, так как z и г не меняют знаков. Поэтому с целью умень¬
шения влияния шумов навигационной системы при больших z (до
точки В на рис. 8.9) используется большое значение Т$ = 8 4-
4- 10 сек. При уменьшении z в точке Б осуществляется переход
на участок характеристики нелинейного элемента с большим на-
8.2 J
ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ 285
клоном. Это обеспечивает достаточную интенсивность разворота
на участке БГ. После достижения точки В величина Тф уменьшается
д0 g—8 сек. В точке Г происходит переход на участок характе¬
ристики нелинейного элемента с малым наклоном и одновременно
величина 7Ф уменьшается до значения 1,5 сек. Это (без учета шумов)
обеспечивает плавный подход к заданной линии пути. Кроме ука¬
занного, в системе предусмотрено выключение сигналов z и Дф
при превышении производной г, точнее, модулем некоторого усред¬
ненного значения этой производной, величины, соответствующей
скорости полета V. Это повышает помехоустойчивость по отноше¬
нию к некоторым видам помех.
Структурная схема бокового канала, аналогичная приведенной
на рис. 8.8, имеет место в режиме «Навигация», «Азимут». Разли¬
чие заключается лишь в том, что вместо сигнала z поступает сигнал
углового отклонения центра массы самолета от заданной прямой,
проходящей через азимутальный маяк системы РСБН-2. Струк¬
турная схема подобного типа сохраняется и в режиме управления
от автономного навигационного устройства.
Переходим к рассмотрению продольного канала. В режиме за¬
хода на посадку закон управления по директорному прибору в про¬
дольном канале системы «Привод» в линейной области имеет вид
/,2
*6т
?вР +1
f I 4~ Ь-)Р + Ьр _а
T’sP+l Ь-Г(Т4р + 1)(Т6р+1)
(8.3)
где Т4 = 1 сек, Тъ — 2,5 сек, Те — 2,5 сек — постоянные времени,
^бт> £2. bo, blt b, — постоянные коэффициенты, £ — угловое вер¬
тикальное отклонение центра массы самолета от глиссады. Оператор
(Тв Р + О'"1, как и аналогичный оператор в боковом канале, пред¬
назначен для сглаживания помех различного происхождения,
в том числе создаваемых искривлениями равносигнальной зоны.
Сигнал сглаженной производной отклонения от глиссады и сиг¬
нал изодромной обратной связи по углу тангажа предназначены
для обеспечения устойчивости и качества стабилизации на глиссаде.
В режиме стабилизации барометрической высоты используется ана¬
логичный закон, но сигнал углового отклонения от глиссады £ за¬
меняется сигналом отклонения барометрической высоты.
Структурная схема продольного канала, реализующая при ма¬
лых отклонениях закон (8.3) и аналогичный закон при стабилиза¬
ции высоты, представлена на рис. 8.10. Сигнал отклонения от глис¬
сады £, поступающий с глиссадного радиоприемника, сначала про¬
ходит нелинейный элемент с невысокой крутизной характеристики
в области малых отклонений и с повышенной крутизной характе¬
ристики в области больших отклонений. Назначение этого элемента
следующее. Вследствие изменения дальности до радиомаяка контур
286
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
нестационарен (регулирование коэффициента усиления в функции
дальности или высоты в системе СП-50 не применяется). Это создает
трудности, в частности, потерю устойчивости стабилизации на зна¬
чительном расстоянии до глиссадного радиомаяка (ГРМ).
В некоторой мере эти трудности удается преодолеть за счет
указанного нелинейного элемента. При входе в зону уверенного
приема сигнала ГРМ, который имеет место на значительном удале¬
нии от ГРМ (6 4- 10 км), возникают значительные отклонения
При этом крутизна характеристики нелинейного элемента и эффек-
Рис. 8.10. Структурная схема формирования командного сигнала в продольном кана¬
ле системы «Привод» в режимах захода:на посадку и стабилизации барометрической
высоты.
тивное передаточное число по £ имеют повышенные значения. В ус¬
тановившемся процессе стабилизации на глиссаде угловые отклоне¬
ния £ относительно малы и передаточное число нелинейного элемен¬
та имеет невысокое значение. Это предотвращает потерю устойчи¬
вости на большой дальности до ГРМ.
После прохождения нелинейного элемента сигнал £ в режиме
захода на посадку, с одной стороны, поступает через усилительное
звено в точку А (рис. 8.10), а с другой стороны, проходит в эту
точку через усилительное (^), дифференцирующее звено и аперио¬
дическое звено с постоянной времени Т6. Так образуются сигналы
kit» ki (Тьр + I)-1. Для создания изодромной обратной связи по
углу тангажа на основе принципа суперпозиции используются
звенья, формирующие одновременно и другие сигналы. Апериоди¬
ческие звенья с передаточными функциями (Тър + 1)“\ (TQp -|- I)--1
совместно с звеном (Т\р -|- 1)~1 позволяют в указанном соединении
образовать оператор
1 1 __ + ^0
(7> + 1) (Т5р 4- 1) (Твр + 1) (7\р + 1) (Тър + 1) (Т Qp + 1)
где
= Л + Л + Ь1==7\Тл + ТлТл + 7\7\, ьл = 7\1\1\,
п ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ 287
$ 8.2J
фигурирующий в выражении (8.3). Рассмотрим кратко управление
в режиме предпосадочного маневра. Система «Привод» позволяет
выполнять как полную «коробочку» (правую и левую) с четырьмя
разворотами, так и «встраиваться» в любую из сторон «коробочки»,
‘а также выполнять заход на посадку «с прямой» (рис. 8.11).
Ввиду ограниченных требований к точности выполнения «коро¬
бочки» управление ведется не по сигналам отклонения от заданной
линии пути («коробочки»), а по сигналам отклонений от заданного
курса, изменяемого на 90° после достижения определенных значе¬
ний радиопеленга и курсового угла радиостанции. Команды на вто¬
рой, третий и четвертый развороты и соответствующие изменения
заданного курса формируются по сигналам радиокомпаса и кур¬
совой системы в навигационно-пилотажном приборе НПП (см. выше).
Первый разворот начинается в точке а (рис. 8.11) по команде
летчика (включение режима «коробочка» на пульте управления).
Это производится приблизительно через 90 сек после прохождения
БИРС. В момент включения разворота с квадратурной обмотки
(обмотки, сдвинутой на 90° по отношению к основной) датчика НПП
подается сигнал, соответствующий Дф = 90°. На отклоняющее
устройство командной стрелки директорного прибора подается сиг¬
нал Дф и сигнал крена в соответствии с законом (для линейной об¬
ласти)
= т2р&+ 1' + 7\р) V +
Летчик, осуществляя обычное управление по директорному при¬
бору, т. е. отклоняя штурвал (ручку) пропорционально отклонению
командной стрелки, выполняет разворот. После выхода на курс,
288 СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ [Гл. VIII
перпендикулярный к посадочной полосе (точка б), закон стабили¬
зации сохраняется и самолет продолжает полет с этим курсом до
точки в. В этой точке радиопеленг по отношению к ДПРС (ДМ)
составляет 150°. Контактное устройство в НПП выдает команду
на следующий разворот и происходит изменение заданного курса
вновь на 90°. Второй и третий развороты выполняются аналогично
первому.
Третий разворот начинается при еАрк = 60°, четвертый раз¬
ворот — при едрк = 15°. На четвертом развороте сначала управ¬
ление осуществляется по едрк, формируемым обычным способом в
НПП. После уменьшения еЛРК до значения порядка 10° осу¬
ществляется переход на управление по сигналам курсового радио¬
приемника (в это время самолет входит в зону устойчивого приема
сигналов КРМ). Аналогичная смена источников информации проис¬
ходит при заходе на посадку «с прямой», отличающейся по направле¬
нию от оси ВПП на угол, больший 10° (пунктирная кривая на
рис. 8.11).
Основным базовым элементом системы «Привод» является маг¬
нитный усилитель постоянного тока. На основе этого усилителя
выполнены операционные магнитные усилители, элементы с насы¬
щением и бесконтактные реле. Аппаратура в целом не содержит
электронных ламп.
Наряду с системой «Привод» широкое применение имеет система
полуавтоматического управления «Г1уть-4». Система «Путь-4» вы¬
пускается во многих вариантах. Общая структура системы «Путь-4»
аналогична системе «Привод».
§ 8.3. Автоматическая система захода на посадку
и самолетовождения в районе аэродрома
Факторы, обусловливающие автоматизацию управления заходом
на посадку и посадкой, были рассмотрены выше. Это требования
снижения погодного минимума, повышения пропускной способ¬
ности аэродромов, повышения безопасности, увеличения точности
приземления и снижения необходимых размеров ВПП и др. Внедре¬
ние полуавтоматического управления лишь частично решает задачу
автоматизации управления на этапах посадки. Загруженность лет¬
чика пилотированием по директорному прибору, формированием
разовых команд, контролем исправности системы остается высокой.
Точность полуавтоматического управления ниже точности пол¬
ностью автоматического управления. Поэтому наблюдается тенден¬
ция полной автоматизации процессов управления заходом на по¬
садку и посадки вплоть до приземления. Автоматизируется смена
подрежимов, формирование разовых команд, управление^скоростью
на этапах посадки.
§ 8.3]
автоматическая система захода на посадку
289
Система автоматического управления заходом на посадку, по
существу, является обязательной подсистемой современной САУ
самолета. В качестве примера системы автоматического управления
заходом на посадку и самолетовождения в районе аэродрома рас¬
смотрим систему БСУ-ЗП, предназначенную для пассажирских са¬
молетов (ИЛ-18, ТУ-104, ТУ-124, ТУ-134).
Система БСУ-ЗП
Система обеспечивает автоматическое управление на следующих
режимах:
1. Стабилизация относительно заданной линии пути по сигна¬
лам допплеровской навигационной системы.
2. Автоматическое самолетовождение в радионавигационных по¬
лях систем РСБН-2, VOR (подрежимы «СРП», «Азимут», «Проби¬
вание облачности»).
3. Автоматическое и полуавтоматическое управление заходом
на посадку после четвертого разворота по сигналам систем СП-50,
до высоты 50 м.
Кроме того, система БСУ-ЗП, содержащая в качестве одной из
подсистем автопилот, обеспечивает в соответствующих подрежимах
обычные функции современного автопилота:
4. Стабилизация углового положения относительно трех осей.
5. Выполнение координированных разворотов, набора высоты
и снижения с помощью рукояток пульта управления.
6. Стабилизация барометрической высоты.
В системе БСУ-ЗП предусмотрены так называемое автоматиче¬
ское триммирование и индикация усилия в проводке управления
к рулю высоты. При разработке системы было уделено внимание
автоматическому встроенному контролю, отключениям неисправ¬
ных каналов и сигнализации, автоматическому переходу на автоном¬
ное управление при отказах радиотехнических систем, т. е. сред¬
ствам обеспечения безопасности.
Система БСУ-ЗП, содержащая в качестве подсистемы «Путь-
4МПА», обеспечивает индикацию параметров, соответствующих
этой полуавтоматической подсистеме: бк, бт, У» Фзад, Ф, Аф,
е, ₽.
Комплект системы. Система БСУ-ЗП состоит из:
1) автопилота АП-6ЕМ-ЗП;
2) системы полуавтоматического управления «Путь-4МПА»;
3) автомата триммирования АТ-2 в канале руля высоты;
4) системы контроля и сигнализации, состоящей из ряда бло¬
ков в каждой из предшествующих подсистем.
Вся система содержит 30 блоков и имеет вес 190 кг.
Автомат триммирования АТ-2. При ручном управ¬
лении рулями без гидроусилителей (бустеров) и рулевых агрегатов
Ю А. А. Красовский
290
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
снимают постоянных составляющих
При наличии необратимых бустеров
Рис. 8.12. Блок-схема автомата триммирования
АТ-2.
(рулевых машин) летчик ощущает шарнирные моменты рулей
по усилиям на штурвале (ручке) и педалях и снимает постоян¬
ные составляющие этих моментов с помощью триммеров. При на¬
личии бустерного управления применяются механизмы загрузки
и механизмы триммерного эффекта. Механизмы триммерного эф¬
фекта снимают постоянные составляющие усилий на ручке, но не
— шарнирных моментов рулей,
с высокими выходными уси¬
лиями нет особой необходи-’
мости в уничтожении по¬
стоянных составляющих
шарнирных моментов.
Однако при прямом
управлении рулями посред¬
ством рулевых агрегатов
(рулевых машин) парал¬
лельного типа, как это име¬
ет место в системе БСУ-ЗП,
возникает необходимость в
автоматическом парирова¬
нии (снятии) постоянной
составляющей шарнирного
момента по крайней мере в канале руля высоты. Дело в том, что при
изменении режимов полета постоянная, точнее, медленно меняющая¬
ся составляющая шарнирного момента руля высоты, соответствую¬
щая балансировочному положению этого органа управления, мо¬
жет достигать больших значений.
В этих условиях при отсутствии автомата триммирования вне¬
запное отключение рулевого агрегата (в частности, автоматическое
отключение блоком безопасности) приводило бы к сильному толчко¬
образному воздействию на проводку и колонку (ручку) управ¬
ления.
Для предотвращения эффекта, могущего вызвать аварию, пред¬
назначен автомат триммирования АТ-2. Это устройство осуществляет
индикацию и снятие нагрузок в проводке управления рулем высоты,
возникающих при изменении режима полета и центровки самолета.
АТ-2 включается одновременно с включением канала руля высоты
автопилота.
АТ-2 состоит из датчика усилий ДДУ, блока управления трим¬
мирования БУТ-3, электромеханизма УТ-15, указателя автомата
триммирования УАТ-3. Дублированный датчик усилий (ДДУ)
состоит из упругого элемента, встроенного в тягу управления, ин¬
дуктивного и контактного датчиков. При наличии усилия упругий
элемент деформируется и индуктивный датчик посылает в фазочув¬
ствительный усилитель (фазовый дискриминатор ФД) блока БУТ-3
сигнал переменного тока.
автоматическая система захода на ПОСАДКУ 291
5 8.3]
Выходной сигнал фазочувствительного усилителя поступает на
магнитный усилитель, а также на указатель УА1-3 (рис. о. 12).
Магнитный усилитель посылает сигналы в реле, управляющее
электромеханизмом триммера УТ-15. Реле имеет задержку сра а
тывания порядка 5 ± 2 сек для исключения влияния кратковре¬
менных «импульсов» шарнирного момента. Когда усилие в тяге
управления превышает допустимое значение, срабатывает контакт¬
ный датчик ИДУ и через так называемый блок контроля отключается
Рис. 8. 13. Структурная схема контура шарнирного мо¬
мента при включенном автомате триммирования АТ-2.
электромеханизм УТ-15, если в момент замыкания контактного
датчика он работал в направлении увеличения усилия (по абсолют¬
ному значению). Кроме того, загорается сигнальная лампа, распо¬
ложенная на указателе УТ-3.
Как уже отмечалось, автомат АТ-2 должен снимать медленно
меняющуюся составляющую шарнирного момента. Поэтому ско¬
рость отработки электромеханизма УТ-15 мала и для описания
контура шарнирного момента можно пользоваться простейшей
структурной схемой, представленной на рис. 8.13. В этой схеме
датчик усилий, фазочувствительный и магнитный усилители пред¬
ставлены усилительным звеном с коэффициентом kD. Задержка во
времени отображается апериодическим звеном, электромеханизм
УТ-15 — интегрирующим звеном. В качестве входного воздействия
фигурирует шарнирный момент руля Мшр при неотклоненном трим¬
мере.
Отрицательная обратная связь возникает за счет момента Мшт,
создаваемого отклоненным триммером. Разность ДМ = Мшр— Мшт
является результирующим шарнирным моментом, создающим уси¬
лие в проводке управления. Медленно меняющаяся составляющая
ДМ поддерживается данным регулятором на достаточно низком
уровне.
Система полуавтоматического управления «Луть-4МПА»
«Путь-4МПА» является вариантом системы «Путь-4». Она со¬
стоит из двух одинаковых полукомплектов основных агрегатов, по¬
добно аналогичной системе «Привод». Использование двух полу¬
комплектов обусловлено требованиями надежности.
С целью выявления отказавшего полукомплекта используется
следующий способ, довольно характерный для одинаковых дубли¬
рованных автоматических каналов или датчиков при наличии дру-
10
292
СИСТЕМЫ ОБЕСПЕЧЕНИЯ ПОСАДКИ САМОЛЕТОВ
[Гл. VIII
гих разнородных датчиков информации. Командные сигналы полу¬
комплектов, формируемые в вычислителях, вычитаются и разност¬
ный сигнал подается на пороговый элемент (магнитный усилитель
в режиме реле). При определенном значении разности сигналов ре¬
лейный магнитный усилитель срабатывает и включает сигнализатор.
При автоматическом заходе на посадку появление рассогласо¬
вания, превышающего допустимое (пороговое) через 50 сек или более
после начала выхода на глиссаду, вызывает, кроме того, автомати¬
ческое отключение соответствующего канала связи с автопилотом.
При этом происходит переход на режим угловой стабилизации са¬
молета. Летчик в случае появления светового сигнала об отказе
должен по показаниям совокупности пилотажно-навигационных
приборов определить исправный полукомплект и включить его
командный сигнал на автопилот. В случае недостатка времени осу¬
ществляется переход на ручное пилотирование по нуль-индикатору
(стрелкам отклонений) или «уход на второй круг».
Автопилот АП-6ЕМ-ЗП
Этот автопилот имеет три канала. В канале руля высоты при¬
менена изодромная обратная, связь. В каналах элеронов и руля
направления используются жесткие обратные связи. Для обеспе¬
чения координации разворотов (устранения скольжения) и улуч¬
шения качества стабилизации применены перекрестные связи между
каналами и ввод задающих воздействий как в канал элеронов, так
и в канал руля направления.
Структура автопилота АП-6ЕМ-ЗП и ряд его базовых элементов
явились результатом последовательной модернизации автопилотов
старых типов (С-1, АП-5, АП-5-2М, АП-6Е) [5.9], [5.6], [5.7]. Сум¬
мирование сигналов датчиков и органов настройки выполняется
посредством мостовых потенциометрических схем. Выходные ка¬
скады усилителей автопилота являются релейными каскадами,
охваченными местными обратными связями. За счет этих обратных
связей при наличии сигнала управления возникают автоколебания,
обеспечивающие вибрационную линеаризацию. При этом выходной
сигнал релейного усилителя имеет форму широтно-модулированного
сигнала.
Рулевые агрегаты (рулевые машины) представляют собой ис¬
полнительные устройства с электромагнитными порошковыми муф¬
тами.
Законы управления в различных режимах работы системы
БСУ-ЗП приведены в таблице 8.2. Эти законы соответствуют
линейной области. Командные сигналы бк, бт, фигурирующие в
данных выражениях, поступают от вычислителей подсистемы
«Путь-4МПА» через блок связи. Эти сигналы близки к описанным
выше для системы «Привод».
§ 8.3]
АВТОМАТИЧЕСКАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ
293
ТАБЛИЦА 8.2
Законы управления автопилота АП-6ЕМ-ЗП в системе БСУ-ЗП
Канал руля высоты
Т'осР~ в в Юг + “Е
Режим
Вид сигнала
Стабилизация угла танга-
жа
k*Tp . а и
Стабилизация высоты
«Iе + j ДО + АхДн
Заход на посадку, «пробива¬
ние облачности»
«2 =“ 1 + ^2
Каналы элеронов и руля направления
69 » k®x(&x + иэ, 6Н = 4" ин
Режим
Вид сигнала
Стабилизация заданного
курса
“э = Д’Ф» “н в ДФ + *2?
Координированный разворот
«э = Фт — Тзад). “н = *2 (Y — тзад)
Заход на посадку
“э = *э“2> ин = *н“2
«2 = У + Ф (ДФ) + т , . Дф +
Г1р+ 1
k^p
+ &тв+ — --8
х Лр+1
«СРП»
«Азимут»
«э = ЬэКЬк, «н =
Глава IX
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
СИСТЕМ УПРАВЛЕНИЯ ПОСАДКОЙ
Известно несколько попыток аналитического конструирования
систем управления посадкой [9.1] — [9.3]. Однако из-за трудностей
обычных методов аналитического конструирования полученные ре¬
шения представляют собой скорее иллюстрации теории, а не прак¬
тические методы синтеза реальных многомерных сложных систем.
Рассматриваемый метод позволяет существенно продвинуться в со¬
здании практически эффективных методов синтеза контуров управ¬
ления на этапе посадки.
§ 9.1. Постановка задачи аналитического конструирования
контуров управления посадкой
Для применения методов аналитического конструирования в
принципе не обязательно деление движения на невозмущенное и
возмущенное, программное и фактическое. Для некоторых типов
летательных аппаратов, таких как самолеты с вертикальным взле¬
том и посадкой (СВВП), назначение одной программной траектории,
по-видимому, нецелесообразно с точки зрения рациональной орга¬
низации посадки. Однако для самолетов и аэродромов обычных ти¬
пов строго определенная программная траектория — глиссада яв¬
ляется единственным повсеместно распространенным способом ор¬
ганизации движения на этапе захода на посадку. Поэтому задачу
синтеза системы управления на этапе захода на посадку целесооб¬
разно ставить как задачу стабилизации относительно заданной тра¬
ектории в фазовом пространстве с учетом отклонений координат
в конце этапа захода на посадку (нетерминальная и квазитерминаль-
ная задачи, см. § П.З).
На этапах выравнивания и приземления может задаваться как
строго определенная программная траектория движения, так и
«гибкая» траектория, включая задание лишь граничных условий
в момент касания ВПП [9.41 — [9.5]. Этому соответствуют нетер¬
минальные, квазитерминальные и чисто терминальные постановки
задачи аналитического конструирования.
При выборе земной системы координат для описания движения
на этапе захода на посадку и посадки ось х целесообразно ориенти¬
ровать вдоль оси ВПП. Как указывалось выше, глиссада захода на
посадку обычно задается в виде прямой с малым наклоном к пло-
295
ПОСТАНОВКА ЗАДАЧИ
$ 9.11
гкости ВПП Такой же вид имеет идеальная равносигнальная ли¬
ния курсо-глиссадных радиомаяков - наиболее распространенного
средства обеспечения посадки.
И Для этапа захода на посадку ось х неподвижной относительно
земли системы координат будем ориентировать по направлению глис-
ось и этой системы координат поместим в вертикальной пло-
скости а начало координат — в точку пересечения продолжения
прямолинейной глиссады с горизонтальной плоскостью (плоскостью
ВПП).
Для этапа выравнивания и приземления *), начинающегося на
высоте порядка 10—20 ось у неподвижной земной системы коор¬
динат целесообразно ориентировать вертикально, а начало этой
системы координат целесообразно совмещать с расчетной точкой
касания ВПП.
Функционал для этапа захода на посадку
Если в конце захода на посадку (на высоте 50 4- 60 м для этапа
На (рис. 8.1), на высоте 20 м для этапа 116) имеют место значитель¬
ные (например, порядка десяти метров по высоте и десятков метров
вбок) отклонения от номинальной траектории, то выполнение по¬
садки сильно затрудняется или даже становится невозможным.
В этих случаях для выхода на ось ВПП необходимо произвести
весьма энергичный боковой маневр, а для приземления в заданной
'области ВПП — энергичный продольный маневр, что может быть
недопустимым по условиям безопасности или просто невыполнимым
из-за нехватки времени. Аналогичное положение имеет место при
наличии в конце захода на посадку значительных составляющих
путевой скорости, нормальных к номинальной траектории, т. е.
при значительном отклонении по направлению движения.
При квазитерминальной постановке задачи требования к точ¬
ности вывода самолета в завершающий момент захода на посадку /2
могут быть отражены путем назначения функции V3 (см. § П.2),
например, в виде
Уэ = Vt=lt = ртуг + р22г2 4- р--уу2 4- P--Z2,
где у и г — вертикальное и боковое отклонения центра массы само¬
лета от номинальной траектории; у, г — соответствующие скорости;
pzz, р^, pZ2— положительные коэффициенты, назначаемые путем
применения обычных способов на основе требований к точности.
) Более детальное деление на подэтапы: выдерживание, парашютирование
Для автоматической посадки, да и ручной посадки при высоких скоростях, по
существу, теряет смысл, так как из-за недостатка времени все эти подэтапы
сливаются в единый процесс.
296
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
Помимо точности вывода самолета в конечный момент времени за¬
хода на посадку t2 имеют значение точность стабилизации относи¬
тельно номинальной траектории в любой другой момент времени
и качество переходных процессов движения центра массы. Эти тре¬
бования могут быть отражены в функции Q минимизируемого функ¬
ционала, например, путем назначения следующей составляющей
этой функции:
fW2 + Р^и2 + Р^ у2 + Рг* г2.
Положительные коэффициенты 0^, 0^, точнее, их отношения,
выбираются согласно обычной методике. Для захода на посадку,
как и других этапов, связанных с посадкой, угол крена, углы атаки
и скольжения должны быть ограничены. Это обусловлено требо¬
ваниями безопасности и другими факторами. Угол крена обычно
ограничивается величиной порядка 15 4- 20°. Угол скольжения во
избежание возможности срыва потока на крыльях поддерживается
малым. Угол атаки не должен вплотную приближаться к крити¬
ческому значению.
Самой простой формой учета ограничений является использо¬
вание обычных составляющих функции' Q функционала в виде
положительно определенной квадратичной формы
PvvY2 + РззР2 + Раа Да2,
где PVY, Р₽р, раа = const, Да— отклонение фактического угла атаки
от посадочного расчетного значения. Более жесткое ограничение
для угла атаки может быть получено путем введения быстро нара¬
стающей функции штрафа, например, вида
РоаДаф + (9.1)
где аПр—значение угла атаки, близкое к критическому, т — до¬
статочно большое положительное число. Использование выражений
вида (9.1) целесообразно при синтезе нелинейных аналитических
(в форме рядов) оптимальных управлений.
При синтезе кусочно-линейных оптимальных управлений
(см. § П.6) следует использовать квадратичные функционалы с ку¬
сочно-постоянными коэффициентами. В этом случае составляющую
функции Q, отражающую ограничения угла атаки, можно задавать;
в виде раа(а) Да2, где 0аа постоянно при а < апр и а > апр и меня¬
ется скачком при а — апр.
В процессе захода на посадку имеют значения угловые отклоне¬
ния самолета по курсу и тангажу Дф, ДО, а также угловые скорости
относительно всех трех осей <х>х, cov, со2. Поэтому эти параметры по¬
лета также могут учитываться в функционале, в частности, в виде
дополнительных квадратичных членов функции Q.
ПОСТАНОВКА ЗАДАЧИ
297
§ 9.1J
Что касается требований к управлению скоростью полета на
этапе захода на посадку, то здесь следует различать по крайней
мере два варианта. При первом варианте, наиболее распространен¬
номв настоящее время, на этапе захода на посадку воздушная
скорость стабилизируется относительно заданного значения. В этом
варианте при синтезе системы управления продольным движением,
Вк^чающерй автомат таги, в
но вводить составляющую , где а и отклонения (рактиче
ской воздушной скорости от заданной.
Во втором варианте, применяемом при достаточно точном конт¬
роле угла атаки, осуществляется управление тягой с целью стаби¬
лизации угла атаки относительно заданного посадочного значения.
В этом случае в функционале можно ограничиться уже упоминав¬
шейся составляющей рааДа2.
В соответствии с изложенным и общей теорией (§ П.2) для син¬
теза квазитерминальных управлений на этапе захода на посадку
в общем случае пространственного движения можно рекомендовать
следующий функционал *):
7 == М [р^Т/2 (t2) Ц- pZ2z2 (Z2) 4- РууУ2 (t2) 4- Р^2 (Ъ) 1 +
+ M (P^f/2 4“ P^22 4“ P^ У2 + P^Z2 + Paa (a) Aa2 + PppP2 + PvvT2 +
x
4" Р1|л|)Дф2 + Рй^ДФ2 4" PcoxcdxU)* 4" pcor/co/0^ + Pto2(oz^z+ pyy AV2) dt 4-
1 Г L1 / X x л *• / fi V „ h .
4- —M
я
dt +
(9.2)
Здесь последний член, отражающий «обобщенную работу» сигналов
управления, не раскрыт и имеет обозначения, как в общей формули¬
ровке основной теоремы § П.2. Величины бв, 6Э, бн, бд обозначают
отклонения руля высоты (стабилизатора), элеронов, руля направ¬
ления и сектора газа соответственно. Величины k3t kH, /гл —
коэффициенты усиления соответствующих каналов.
На этапе захода на посадку обычно допустимо деление простран¬
ственного движения самолета на независимые продольное и боковое
Движения. Поэтому функционал (9.2) в дальнейшем будет разби¬
ваться на два функционала, оптимизирующие эти независимые дви¬
жения.
*) Индекс * для решения «7-уравнения» (П.2.3) введен для отличия от
означения скорости летательного аппарата.
298
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
Функционал для этапа приземления
Движение самолета с высоты порядка 10—20 м до касания ко¬
лесами посадочной полосы в классической схеме посадки при руч¬
ном управлении подразделяется на ряд подэтапов: планирование,
выравнивание, парашютирование. Назначение этих подэтапов:
приблизиться к ВПП до касания ее, погасить вертикальную ско¬
рость до значений нескольких десятков см/сек (до 1 м/сек) в момент
касания, уменьшить полную скорость самолета относительно воз¬
духа до посадочного значения, обеспечить определенное угловое
положение самолета в момент касания ВПП, обеспечить приземление
на определенной площадке с заданными размерами.
При посадочных скоростях современных самолетов деление на
указанные подэтапы, как уже отмечалось, является в значительной
мере условным, так как из-за недостатка времени они сливаются
в единый процесс посадки. Движение самолета с высоты 10—20 м
до касания ВПП для краткости будем называть приземлением или
собственно посадкой. Этап приземления характеризуется существен¬
ной нестационарностью самолета как объекта управления. Это обу¬
словлено изменением скорости, большими значениями угла атаки,
близкими к критическому, аэродинамическим влиянием земли. Воз¬
можные управляющие воздействия на этапе приземления малы,
а время резко ограничено.
На этапе приземления необходимо обеспечивать высокую точ¬
ность управления и весьма высокую надежность. Все это создает
значительные трудности автоматизации приземления. Однако дан¬
ная проблема поставлена современной техникой в повестку дня и
системы посадки категории III должны обеспечивать автоматиче¬
ское управление приземлением. Для контроля траектории самолета
на этапе приземления могут применяться системы, использующие
различные виды излучения, в частности, прецизионные курсо-глис¬
садные радиомаяки, а также прецизионные автономные бортовые
измерительные системы.
В отношении принципа управления движением центра массы на
этапе приземления различают стабилизацию относительно жесткой
траектории в пространстве и стабилизацию относительно нежесткой
траектории. В качестве жесткой программной (или номинальной)
траектории приземления чаще всего рассматривается экспонента
с асимптотой, расположенной несколько ниже поверхности посадоч¬
ной полосы (для обеспечения конечного значения номинальной
вертикальной скорости в момент касания).
Часто считают, что задание жесткой программной траектории
приземления вследствие ограниченности времени делает процесс
приземления чрезмерно напряженным в динамическом отношении.
Однако назначение программной траектории еще не определяет
управления. При аналитическом конструировании всегда можно
ПОСТАНОВКА ЗАДАЧИ
299
$ 9.П
так задать коэффициенты функционала (как функции времени),
чтобы обеспечить приемлемое распределение динамической напря¬
женности процессов во времени. Таким образом, при аналитическом
конструировании вполне допустимо введение в минимизируемый
функционал отклонений от жесткой программной траектории.
Использование нежестких траекторий продиктовано стремле¬
нием снизить динамическую напряженность процессов. Подобные
траектории могут иметь закрепленную точку приземления и точку
приземления, свободную в некоторых пределах. Примером нежест¬
ких траекторий со свободной точкой приземления могут служить
траектории, получающиеся при управлении по принципу стабили¬
зации вертикальной скорости относительно значения, пропорцио-
нального высоте полета.
Важным вопросом является вопрос об органах управления на
этапе собственно посадки. Чаще всего в качестве органов управле¬
ния при автоматической посадке используются обычные органы
управления самолета: руль высоты (управляемый стабилизатор),
элероны, руль направления и ручка управления двигателем (РУД),
т. е. органы, используемые и при ручной посадке. Такое традицион¬
ное решение является вполне естественным, хотя не единственно
возможным и не наилучшим в динамическом отношении. Действи¬
тельно, этап собственно посадки самолета длится всего 15 4- 20 сек
и требует точного, прецизионного управления траекторией.
Создание управляющих сил посредством изменения углов атаки
и скольжения связано со значительным запаздыванием. Наилуч¬
шими в этом смысле были бы органы управления, непосредственно
создающие управляющие силы для движения центра массы, такие
как посадочные щитки. Однако использование для непрерывного
управления траекторией мощных органов типа посадочных щитков
требует мощного, быстродействующего и высокоточного привода.
Одним из возможных направлений является струйное управление
пограничным слоем.
Есть основание предполагать, что малые быстродействующие
органы управления силой, пригодные для борьбы с аэроупругостью,
могут использоваться и для «коррекций» траектории на этапе при¬
земления. Однако в дальнейшем для этапа приземления везде имеют¬
ся в виду обычные органы управления самолета.
Движение центра массы самолета на этапе собственно посадки
целесообразно описывать в земной системе координат, начало ко¬
торой совмещено с желаемой точкой касания ВПП, ось Оу направ¬
лена вверх, а ось Ох — вдоль оси ВПП. Измерительная система,
обеспечивающая этап собственно посадки, обычно контролирует отно¬
сительную дальность до заданной точки касания. Тем самым прибли¬
женно контролируется время, оставшееся до момента приземления.
Для этапа собственно посадки, пожалуй, больше, чем для дру¬
гих этапов полета, подходит терминальная и квазитерминальная
300
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
постановки задачи синтеза оптимальных управлений. Существенное
значение имеют вертикальная скорость у (t2) в момент приземления
(касания), боковое отклонение и боковая скорость z (/2), z, (/2) в этот
момент времени. Даже небольшое превышение номинального зна¬
чения вертикальной скорости г/н (/2) приводит к «грубой»- посадке.
Уровни ошибок z (/2), 2 (t2) определяют необходимую ширину
ВПП. Существенное значение имеют угол атаки и угол скольжения
в момент касания, угловые скорости и угловые координаты самолета
в этот момент времени. Отличие угла атаки от номинального поса¬
дочного значения при номинальной воздушной посадочной скорости
вызывает дополнительную вертикальную аэродинамическую силу,
которая либо увеличивает нагрузку на шасси, либо уменьшает эту
нагрузку, но увеличивает вероятность отрыва самолета от ВПП
после касания. Наличие угла скольжения создает боковую силу,
стремящуюся сместить самолет вбок при пробеге. Угловые отклоне¬
ния и угловые скорости в момент касания являются начальными
возмущающими воздействиями для этапа пробега.
Что касается путевой посадочной скорости (т. е. модуля вектора
абсолютной скорости в момент касания), то при обеспечении всех
других ограничений желательно иметь ее минимальной. Это сокра¬
щает длину пробега при посадке.
Таким образом, в классе квадратичных оценок терминальную
часть функционала для этапа приземления при пространственном
рассмотрении целесообразно задавать в виде
/тер = М [р^ (у (/2) — Г/н)2 + PzzZ2 (/2) + Ра & (Аг) +
+ Раа (а (^2) — ан)2 + Р2(^)4" Pvt?2 (^2) + Рмл^Дф2 (^2) + Ря^Д^2 (/2) +
+ РсОХСОХ^Х (^2) + P(i)y(J)^y (^2) 4” Ра>2(02<02 (/2) Р^О* (9*3)
При решении квазитерминальной задачи второго рода (нетерми¬
нальные задачи для этапа приземления не рассматриваем) назна¬
чается также интегральная оценка движения. Будем предполагать
существование номинальной траектории — глиссады приземления
в пространстве. Эта траектория описывается функциями z/H (х), zH =
= 0. Допустимость значительных отклонений от номинальной траек¬
тории на начальном участке — участке выравнивания всегда можно
учесть путем подбора переменных коэффициентов функционала.
В соответствии со сказанным интегральную назначаемую часть
функционала при оптимизации пространственного движения на
этапе приземления зададим в виде
/инт = J М [Рда (у — у» (х))2 + р;. (у — у'я (х))2 + 0«г2 + Р--г2+
t
"Ь Раа (<х — ан)2 + РррР2 + Рту?2 4" рг|ирДф2 -|- Р^А^2 4" Рсохсох^х 4*
+ PtOi/COt/^Z/ 4- P(O2(D2^z] dt.
ПОСТАНОВКА ЗАДАЧИ
301
§ 9-1
Полный оптимизирующий функционал для этапа приземления при-
ни мает вид t t
J Vi / Л \a . 7 / \a . 7 ; Л.. \a ..
1 = Лер + Лнт + — М
t
/ п
av* \р
'1
1
Связь бокового и продольного движений в процессах нормального
приземления самолетов не настолько сильная, чтобы стоило ее
учитывать. Поэтому, как и при заходе на посадку, продольное
и боковое движения целесообразно оптимизировать изолированно,
расчленяя функционал (9.5) на два соответствующих функционала.
Обработка информации» учет шумов
Системы посадки содержат радиотехнические и иные измеритель¬
ные устройства, шумы и ошибки которых существенно влияют на
процессы управления. Поэтому даже при элементарной постановке
задачи проектирования обычно осуществляется синтез или подбор
фильтров информационной части системы. При аналитическом кон¬
струировании естественно осуществлять более полную оптимизацию
системы с учетом шумов.
Рассмотрим кратко постановку задачи аналитического конструи¬
рования информационной части системы. Подробному рассмотре¬
нию синтеза информационно-управляющих систем (пилотажно-на¬
вигационных комплексов) посвящена глава XIII.
Пусть уравнения собственно объекта, исполнительных устройств
и формирующих фильтров имеют вид
*°б + №(X?6 .... x°t0=26 о+
г 1=1
+ 2 <(^б> • • •• 0Кб(0. (i = 1,2,..., пх), (9.6)
k=l
гДе /?б, ф?/6, — известные (заданные) функции, и°б — синтези¬
руемые управления объекта, — белые шумы типа, рассматривае¬
мого в основной теореме (§ П.2).
Пусть исходная измерительная система совместно с формирую¬
щими фильтрами шумов этой системы описывается уравнениями
*?3+анз(х?6, ..., x°f,xr,..., х«:,о=
= 2 (хГ, .... xZ t) иТ + у № (*13, .... xZ 0 IT (0 (9.7)
/=1 *=1
(I = 1, 2 п2).
302
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
Здесь /Г, ср У/, гр/fe — известные функции; — белые шумы также
рассматриваемого типа; и*3 — синтезируемые управления в изме¬
рительной системе, введенные для общности задачи. Описание ис¬
ходной непрерывной измерительной системы в виде (9.7) является
весьма общим. Здесь могут быть отражены нелинейные свойства
датчиков, их объединение в комплексную систему и др.
Практически постоянные во времени случайные составляющие
ошибок датчиков информации могут быть с некоторым приближе¬
нием учтены путем подбора специальных сильно инерционных фор¬
мирующих фильтров. Безынерционные датчики, описываемые ал¬
гебраическими уравнениями, либо исключаются путем замены пе¬
ременных, либо, что удобнее, заменяются инерционными датчиками
с достаточно малыми постоянными времени.
Подсистемы (9.6), (9.7) при решении задачи аналитического кон¬
струирования системы в целом рассматриваются в совокупности
как обобщенный объект. Этот обобщенный объект, вообще говоря,
имеет неполную степень наблюдаемости (но, по предположению,
полную наблюдаемость по Калману). Неполная степень наблюдае¬
мости обусловлена двумя основными факторами. Во-первых, коор¬
динаты собственно объекта, входящие в (9.6), по самой постановке
задачи могут быть измерены не непосредственно, а через систему
(9.7) и поэтому не должны непосредственно входить в синтезируе¬
мые управления. Во-вторых, если исходные шумы датчиков и воз¬
мущающие воздействия не являются белыми шумами, то, как ука¬
зывалось, системы (9.6), (9.7) содержат формирующие фильтры.
Координаты (внутренние и выходные величины) этих фильтров
также недоступны для непосредственного измерения.
Таким образом, синтез системы в целом с учетом измерительной
подсистемы и формирующих фильтров требует решения задачи с не¬
полной степенью наблюдаемости. Методы приближенного решения
задач с неполной степенью наблюдаемости изложены в § П.7.
Другой постановкой задачи синтеза является аналитическое
конструирование системы обработки информации по критериям
наилучшего приближения выходного вектора этой системы к век¬
тору истинных значений координат объекта. Синтез оптимальной
в отношении точности контроля измерительной системы дополняет¬
ся последующим синтезом системы управления. Этот синтез вы¬
полняется в детерминированной или статистической постановках
при уже определенной измерительной системе. Таким образом, за¬
дача синтеза здесь решается по частям. Такое решение задачи син¬
теза имеет положительные стороны, в частности, применительно
к бортовым комплексам летательных аппаратов.
Одна из этих сторон связана с универсальностью измеритель¬
ных комплексов летательных аппаратов. Эти комплексы должны
обеспечивать не только автоматическое управление, но и неавтома¬
тическое управление, навигацию, контроль полета. Поэтому обес¬
ПОСТАНОВКА ЗАДАЧИ
303
§kl]
печение необходимой точности измерительных комплексов является
некоторой мере самостоятельной задачей. Далее, оптимизация
по частям упрощает теоретическое и практическое решение задачи.
Минимизация шумов на выходе измерительного комплекса облег¬
чает энергетические условия в исполнительном комплексе.
Задача синтеза оптимального фильтра для обработки информа¬
ции системы датчиков является одной из основных в теории измере¬
ния и управления, имеет множество постановок и богатую литера¬
туру. Применительно к контролю динамических систем, описывае¬
мых линейными дифференциальными или разностными уравнениями,
широкое распространение получило решение Калмана — Бьюси
[9.61 - 19.9].
Теорема разделения (или статистической эквивалентности)
[9.10], согласно которой оптимальная система состоит из фильтра
Калмана, синтезированного без учета управлений, и Оптимильной
системы управления, синтезированной без учета шумов, является
обоснованием упоминавшейся поочередной оптимизации для слу¬
чая функционала Летова—Калмана.
Оптимальный фильтр Калмана — Бьюси представляет собой
модель контролируемого объекта, на входы которой подаются ли¬
нейно преобразованные разности сигналов датчиков информации
и соответствующих выходных сигналов модели (оценок координат).
Такая структура рациональной системы фильтрации была предска¬
зана и в частных формах получила применение задолго до строгого
доказательства ее оптимальности. В работе [3.25] описана подобная
структура.
Рассмотрим постановку задачи аналитического конструирования
оптимальной непрерывной системы обработки информации в рам¬
ках излагаемой общей теории. Пусть контролируемый объект со¬
вместно с формирующими фильтрами возмущающих воздействий
задан уравнениями (9.6) без управлений
*°б + А?б(х?6, ..х^, 0=2 ^б(0 (i = i,2 П1).
k=l
Исходная измерительная система совместно с формирующими фильт¬
рами шумов этой системы описывается уравнениями (9.7). Наблю¬
даемыми являются лишь выходные величины измерительной си¬
стемы, т. е. часть координат х"3 (другая часть относится к форми¬
рующим фильтрам и недоступна для непосредственного контроля).
Ошибками измерительной системы являются разности
= X?— х°6, . . ., &Ху ~Ху3 — Ху6,
где х°б, Ху6—координаты объекта, подлежащие контролю,
xi , ...» Ху3 — соответствующие им выходные величины измерительной
системы. Оптимизирующий функционал в общем случае задается
304
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл, IX
в форме (П.2.2)
7 = М{У3[Дх1(/2),
AXv(/2)J}
4-М
Axv, t)dt
где V* — решение уравнения
при граничном условии V*=tt = V3. Как только что отмечалось,
наблюдаемыми являются выходные величины исходной измеритель¬
ной системы, т. е. величины х”3, ..., х?3. Таким образом, задача ана¬
литического конструирования оптимальной системы обработки
информации в рассматриваемой постановке является задачей с не¬
полной степенью наблюдаемости. Определяя одним из методов, опи¬
санных в § П.7, приближенное решение уравнения (9.9) в виде
V* = V*(43, х”3),
записываем приближенно оптимальные управления в форме
= (/=1.2 т2). (9.10)
Введение в исходной измерительной системе связей (9.10) делает
систему приближенно оптимальной в указанном смысле.
§ 9.2. Аналитическое конструирование систем
захода на посадку
При синтезе контуров управления самолетом в режиме захода
на посадку обычно применяют линейные математические модели
движения самолета. Это обосновывается тем, что отклонения от
невозмущенного или номинального движения в режиме захода на
посадку (после четвертого разворота) достаточно малы. Хотя угол
атаки при заходе на посадку и приближается к критическому значе¬
нию, он все же обычно остается в пределах почти линейного участка
характеристики су (а). Углы крена не превосходят 15°. Таким об¬
разом, использование линеаризованных уравнений продольного
и бокового движений, например, уравнений (6.1), (6.2), на этапе
захода на посадку вполне допустимо.
СИСТЕМЫ ЗАХОДА НА ПОСАДКУ
305
5 9.2J
Воздушная скорость полета при заходе на посадку (после чет¬
вертого разворота) обычно изменяется не сильно и аэродинамические
коэффициенты и коэффициенты уравнений можно считать постоян-
нымш т. е. использовать стационарные линейные модели продоль¬
ного и бокового движений самолета. Ввиду автономности (незави¬
симости) линейных моделей продольного и бокового движении при
заходе на посадку задачи синтеза соответствующих каналов систем
управления целесообразно ставить и решать как автономные.
(9.U)
Синтез каналов управления продольным движением
Будем использовать уравнения движения собственно самолета
и изменения тяги в форме (6.1). С учетом ветра (см. § 1.3, уравне¬
ния (1.71)) эти соотношения запишутся в виде
А6 т Н—Дбт ~ Дбд»
ДУ + avxbV + (ах — а") Да + ахДО — ахбтД6т =
= — ах MJX — ахДав,
Да — aytsV + — а%) Да — я^ДО — Дсо2 =
= — ау Д6В -|- aytsJJх — Дав 4" ^Дав,
Дсо2 -р am2W 4* Да 4“ ^т. Д^'4 = &т.;Дбв — amz^Uху
ДФ — Д(о2 = 0, Д9 = Дй — Да + Дав.
По поводу этих уравнений целесообразно сделать несколько за¬
мечаний. Влияние ветра в уравнении тяги двигателя не отражено,
так как это влияние учтено в уравнении скорости (считается, что
изменение воздушной скорости мгновенно влияет на тягу двигателя,
как и на лобовое сопротивление).
Двигатель описывается здесь простейшим уравнением аперио¬
дического звена. Как неоднократно отмечалось, турбореактивные,
турбовинтовые и другие самолетные двигатели вместе с обслуживаю¬
щей их автоматикой представляют сложные динамические системы.
Однако сложная математическая модель двигателя усложняет ре¬
шение задачи аналитического конструирования, а также требует
Довольно обширного обоснования. Поэтому для каждого конкрет¬
ике режима ограничиваемся простейшей линейной моделью. Впро-
чем» видоизменение решения при линейной математической модели
‘Двигателя любой сложности вполне очевидно.
невозмущенное движение при составлении уравнений (9.11)
ринято расчетное движение по глиссаде. В (9.11) целесообразно
У итывать случайные составляющие ветра. В соответствии с рас-
Р°страненной моделью атмосферной турбулентности (см. § 1.3,
306
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
(9.12)
формулы (1.68), (1.69)), формирующие фильтры для случайных функ¬
ций Д£/х, Дав = можно представить в виде
+ -7- Д^х = Дав + 4- Дав = Ъъу,
Да» + "Т7 Да® + Да® = уТ—1 ^ву’
где =Ввх (0. Бвд= %ву (0 — белые шумы. К уравнениям обобщен-
ного объекта следует также отнести уравнение «кинематического»
звена
у = УД0 = V (Дй — Да + Дав), (9.13)
где у — вертикальное линейное отклонение центра массы самолета
от глиссады.
Как описано в предшествующей главе, при заходе на посадку
по курсо-глиссадным маякам контролируется величина &=ylr> где
г — расстояние до глиссадного радиомаяка. Однако при наличии
дальномерного канала или достаточно точного определения высоты
на борту имеется информация о расстоянии г и можно определять у.
Информация об г необходима и для реализации квазитерминальных
оптимальных управлений. Поэтому будем в дальнейшем предпола¬
гать возможность определения г и соответственно у. Следует, одна¬
ко, напомнить, что измерение £, а значит, и определение у = rt*
связаны со значительными случайными ошибками. Эти ошибки вы¬
званы, в частности, случайными искривлениями равносигнальной
зоны.
Для уменьшения влияния этих шумов используются специаль¬
ные фильтры низших частот. Не рассматривая задачи синтеза си¬
стемы оптимальной обработки информации в данном режиме, при¬
мем обычную структуру сглаживающих фильтров в цепях сигна¬
лов у. у:
Uy 4“ ~т Uy = (у + ^i/)>
7 Ф</ 1 фу
“y+^~Uy = иУ = ГГ^у+^—(У+1у>-
У 1 фу у 1 фу 1 фу
Если искривления равгосигнальной зоны имеют высокочастотный
(в пространственно-временном смысле) характер и остальные со¬
ставляющие также имеют широкий спектр, то можно считать
белым шумом. В противном случае необходимо еще рассматривать
формирующий фильтр для Если ставится задача синтеза опти¬
мальных управлений не только в линейной зоне, но и с учетом на¬
сыщения глиссадного канала, то вместо линейной функции у
целесообразно рассматривать кусочно-линейную функцию fr (у +
+ ^), зона линейности которой зависит, вообще говоря, от г.
(9.14)
СИСТЕМЫ ЗАХОДА НА ПОСАДКУ
307
§ 9.2]
Для исключения влияния медленно меняющихся ошибок гиро-
пеотикали сигнал этого датчика нередко пропускается через ре¬
альное дифференцирующее звено с большой постоянной време¬
ни Соответствующий выходной сигнал определяется соотношением
«о + “о = А®2- (9.15)
Основное в задаче синтеза системы захода на посадку заключено
в синтезе траекторных контуров. Инерционность привода органов
управления в этих контурах играет сравнительно малую роль.
Поэтому исполнительные устройства будем считать безЫнерцион-
ными.
Уравнения (9.11) — (9.15) в совокупности образуют в рассмат¬
риваемой задаче уравнения обобщенного объекта. Вводя обозна¬
чения
ДУ = хх, Да = х2, ДФ = х3, Дсо2 = х4, у = х5,
Д6Т = хб, Д^ = х7, ktiy = х8, Д^ = х9, \UX = хХ0,
Дав == ххх, == *^12» А5д = fZp == ^з»
записываем уравнение обобщенного объекта в стандартной форме
х + ах = Ьи + с£.
Обобщенный объект здесь имеет двенадцатый порядок. Согласно
сказанному выше, при синтезе квазитерминальных управлений
функционал можно задать в виде
ti
(9.16)
дУ* \Р
дхг )
dt +
Здесь t2 — конечный для захода на посадку момент времени, /х —
какой-либо предшествующий момент времени,!/* — решение урав¬
нения (П.23). Видоизменения функционала для всех четырех вариан¬
тов оптимальных управлений (два рода квазитерминальных управ¬
лений и два вида нетерминальных управлений, см. § П.З) очевидны.
308
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
(Гл. IX
(9-17)
Если решать задачу в предположении полной степени наблю¬
даемости, то в оптимальные управления
войдут все двенадцать координат, в том числе
у --= х5, ДФ = х3, Д(7Х = х10, Дав = Аав = *12-
Оптимальная система в предположении полной степени наблюдае¬
мости получается комбинированной, т. е. осуществляющей регули¬
рования как по отклонениям, так и по возмущениям. Однако прак¬
тическое осуществление подобной системы связано с очень боль¬
шими трудностями, заключающимися прежде всего в измерении
таких случайных величин, как компоненты атмосферной турбулент¬
ности Д(7Х, Дав, Да^ на глиссаде, искажения равносигнальной
зоны и другие шумы, составляющие Конечно, здесь, как и в
других случаях, возможно создание оптимальных систем оценива¬
ния, например, фильтров Калмана. Такие системы представляют
собой модели контролируемых процессов, позволяющие контроли¬
ровать величины, недоступные для непосредственного измерения.
Однако все это основано на использовании априорной информации
и при практических ограничениях объема этой информации имеет
ограниченные возможности. Поэтому при учете случайных возму¬
щающих воздействий задача аналитического конструирования си¬
стемы захода на посадку обычно должна решаться как задача с не¬
полной степенью наблюдаемости.
Довольно содержательной является и значительно более про¬
стая задача синтеза без учета возмущающих воздействий и шумов
и при естественном в этих условиях предположении о полной сте¬
пени наблюдаемости. Здесь отметим, что приращение тяги Д6Т труд¬
но поддается непосредственному измерению, но легко контролирует¬
ся продольное ускорение ДУ. Поэтому из уравнений обобщенного
объекта целесообразно исключить Д6Т, введя в число координат
ДУ = х7. Кроме того, для простоты задания критерия (функции
Q) в числе фазовых координат удобно иметь у = хв. Учитывая это,
преобразуем уравнения (9.11), (9.13) к виду
+ а12х2 + а13х3 = buuv
х2 + а21х4 -f- а22х2 + а23х3 — х4 = fr24u4,
х9 — + а41хх + а42ха 4- а44х4 = 644и4,
Хъ — Хв = О, хв 4- авХхх + аб2х2 4- ав3х3 = Ьв4и4,
Хз 4* а71Л1 4* a78^» 4* а73*3 4* а14.х1 = ^71М1>
х7.
(9.18)
СИСТЕМЫ ЗАХОДА НА ПОСАДКУ
309
« 9.2]
функционал
х = AV, х2 = Да, х3 = Д^, х< = Диг, х5 = у, х„ = у,
__ ДУ, ди = ах, aL2 — ах CLx> £13 — ах, ^11 — ах ,
fljsi = _ ау^ а22 = аУ'~ ау' = ау' ^24 = “ ау ’ 6241 = атг>
d = Ctmz9 CL^ = amz* ^44 £mz, £6i Vcty, = (&У &у)’
аб3 = Vat ^б4 = Vay , а71 = ахау — ахау — (аху,
я72 = (а“ — ау — ах) (ах — ах), а13 = аха^у — аха°у — ахах,
а74 = axt ^71 ~ а* ~ТЛ ’ ^4 = ^1 = Д^д-
Самыми простыми в отношении технической реализации являют¬
ся стационарные управления. Оптимальные стационарные управ¬
ления для стационарного объекта получаются при решении нетер¬
минальной задачи без граничного условия и нетерминальной
задачи со скользящим граничным условием (§П.З, § П.4). Обобщен¬
ный объект (9.18) нейтрален (или неустойчив) и при отсутствии
граничного условия квадратичный оптимизирующий
задается в виде (П.4.34)
/ = 4- ехр (- 4-) 2 Alkxt (/2) xk (/2) +
\ 7 i,k=l
7
+ 4-jexp(-4-)SP‘^ +
, 1 ? < \ / «1 «4 \ ,
+ _ jexp.-^Ц — + dtA-
+ 4 Jexp (- 4) (2 kib* g Avx^dt.
Оптимальные управления имеют вид
ui = ~ £ (ьп 2 A/*/ + fe71 ,
\ 1=1 i=\ /
и4 = — ^4 (ь24 У A/*/ + bu у А \/х1 -р &б4 ,
\ 1=1 1=1 1=1 /
Z=1
(9.19)
(9.20)
гДе коэффициенты Aik имеют обычные выражения
7
Aik = ^ехр ( —"Г-) 2 VvvWvi(f)wvk(t)dt.
о v—1
310
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Ел. ix
Оптимальные управления были определены *) для следующих
значений параметров, соответствующих посадочному режиму лег¬
кого самолета:
ап = 0,044 сек-1. а13 = 10 м - сект2, а12 = — I м • сект2.
Ьп = 6,9 м • сек,-2. а21 = 0,002 лг"4, а22 = 0,67 сек-1. а23 = 0,
&2i = 0, а41 = 0, а42 = 1,14 сек-2. = 1,35 сек-1,
&44 = — 8,1 сек~2. а61 = — 0,194 сек-1. ав2 = 65 м • сек~2,
а63 = 0, &64 = 0, а71 = 0, а72 = 0,727 м • сек-2,
Рис. 9.1. Кривые переходных процессов приуоптимальных стацио¬
нарных управлениях рулем высоты и сектором газа на этапе захода
на посадку.
Коэффициенты функционала имели значения
011 = 022 = 033 = 044 = 077 = 0. 4^ = 21 0^^, Т = 103 СвК.
Рее
Оптимальные управления, вычисленные при этих условиях,имеют
вид
6Д = 0,0347Д V — 0,362Да + 0.07ДО + 0,304До2 +
+ 0,06510“Зу + 0,12910_3г/ + 0,23 Ю-5^,
6В = 0,00353ДУ — 0,201 Да + 0,35Дй + 0.108Д®, +
+ 0,2910~3г/ + 0,2710‘3у.
‘) Вычисления с помощью ЭВМ выполнены В. В. Поповым.
(9.21)
СИСТЕМЫ ЗАХОДА НА ПОСАДКУ
311
9.2]
к ивые переходных процессов при оптимальных управлениях (9.21)
ведены на рис. 9.1. Эти процессы соответствуют начальному
ПРИлонению центра массы самолета от глиссады планирования. Как
°ТК о качество переходных процессов вполне удовлетворительное.
C^nveT обратить внимание на то, что управления (9.21) и соответ¬
ствующие процессы получены при очень большом значении посто¬
янной Т.
Синтез каналов управления боковым движением
(9.22)
Для этапа захода на посадку могут быть использованы обычные
линеаризованные уравнения бокового движения, в частности, урав¬
нения (1.75)
Дсох + атх^х + #тхДР = а,тх№>3
Дй)^ -р Umy^^x, “И &пгу^&у 4" Ощу^^ = Оту^^э 4~
ДР А^у ^2 Др 4“ ^2 Ду ДРв ~
Ду — Д(ох = 0, Дф — Дсо^ =0.
Производная ветрового возмущения Дрв может быть исключена
(заменена на другие параметры ветрового возмущения) путем при¬
влечения уравнения формирующего фильтра. Используя простей¬
шую типовую модель атмосферной турбулентности (1.68), уравне¬
ния формирующего фильтра ветрового возмущающего воздействия
записываем в виде
ДРв + ДРв = £вг,
ДРв + ДРв + ДРв = /3“ — J ^вг’
(9.23)
гДе £bz — белый шум. Как и в предыдущем случае, будем предпо¬
лагать наличие дальномерного канала в системе курсо-глиссадных
маяков захода на посадку или иных средств определения линейного
бокового отклонения z центра массы самолета. Кинематическое
соотношение запишется в виде
2 = V (Дф — Др + Дрв). (9.24)
Сглаживающие фильтры в цепях сигнала бокового отклонения и его
производной примем в виде апериодических звеньев
(9.25)
312
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Тл. 1Х
где %г — шум, создаваемый искривлениями равносигнальной зоны
и другими факторами. Если этот шум нельзя считать белым (по
отношению к данной системе), то следует ввести еще дополнитель¬
ный формирующий фильтр этого шума.
Выражения (9.25) записаны для линейной зоны сигнала откло¬
нения. Учет насыщения может быть произведен обычным путем.
Можно также ввести фильтр в цепь сигнала курсовой системы
с целью исключения влияния медленно меняющихся ошибок этой
системы. Тогда в число уравнений обобщенного объекта войдет
уравнение
йф + ^5— Иф = Дсо (9.26)
'фф
При безынерционных исполнительных устройствах и других
указанных предположениях уравнения (9.22) — (9.26) образуют
в данной задаче полную систему уравнений обобщенного объекта
одиннадцатого порядка. Согласно (9.2) в качестве функционала,
оптимизирующего боковое движение на этапе захода на посадку,
можно задать выражение
(9.27)
где для последнего члена сохранено общее обозначение. Если ре¬
шать задачу как задачу с полной степенью наблюдаемости, то в оп¬
тимальные управления войдут все 11 фазовых координат обобщен¬
ного объекта (9.22) — (9.26), в том числе координаты Д0В, Д £в» Дф,
г, г, недоступные для непосредственного измерения. Как и выше,
задача с полной степенью наблюдаемости в данной постановке мо¬
жет иметь практический смысл при условии создания комплекс¬
ной информационной системы, позволяющей оценивать все фа¬
зовые координаты обобщенного объекта.
Для синтеза более простой системы необходимо решить задачу
с неполной степенью наблюдаемости. В качестве наблюдаемых коор¬
динат обобщенного объекта (9.22) — (9.26) в этом случае естествен¬
но принять uz, uz, Uy, Ду, Д(ох, Дсо^. Решение задачи осуществля¬
ется типовыми способами (см. § П.7).
Здесь мы ограничимся рассмотрением более простой задачи син¬
теза, когда шумы, возмущающие воздействия, скольжение отсут-
СИСТЕМЫ ЗАХОДА НА ПОСАДКУ
313
§ 92]
твуют и имеет место полная степень наблюдаемости. При отсут-
Ствии скольжения боковое движение целесообразно описывать про¬
стейшим уравнением крена (передаточная функция (1.59)). При
этих предположениях уравнения обобщенного объекта принимают
Дп)ж 4* — dmx^^at Ду Д^х =
Дф — а? Ду = О, Z— УДф = 0.
Введем безразмерные фазовые координаты
ТуЬ®х = = *i> ДУ = *2. ДФ = х3, -Дг = х4.
атх У
Уравнения обобщенного объекта запишутся в виде
х + ах = и,
(9.28)
где
х =
Х1
«1
а11
0
0
0
Х2
» U =
0
, С1 —
^21
0
0
0
х3
0
0
fl32
0
0
Xi
0
0
0
й43
0
— ^21 — ^43 — Т ’ ^32 — —
1 V
(9.29)
— Туатх&83,
V ‘
Обобщенный объект — стационарный нейтральный (структур¬
ная схема представляет собой последовательное соединение аперио¬
дического и трех интегрирующих звеньев). Предполагаем, что су¬
ществует дальномерный канал или другая аппаратура, позволяю¬
щая измерять (хотя бы приближенно) время, оставшееся до конца
захода на посадку, т. е. до выхода на ближний маркерный маяк или
другую назначенную точку. При таком условии естественно синте¬
зировать и осуществлять квазитерминальные управления.
Рассмотрим синтез квазитерминального управления первого рода.
Ввиду наличия трех интегрирующих звеньев весовые функции
объекта имеют различные степени расходимости, а именно
«р(-тУ 0 о о
'-«Pi-y-l 1 о о
(/-7,11 -ехр( —4- 1 О'
— — ехР — (ту)])тту "27/ ту 1
(9.30)
314
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
Вследствие этого целесообразно осуществить преобразование
координат с различными коэффициентами пропорциональности и ис¬
пользовать функционал типа (П.4.36) при = 0, р = q = 2.
Рис. 9.2. Переходные процессы в
оптимальном контуре при нестацио¬
нарном квазитерминальном (перво¬
го рода) управлении.
Рис. 9.3. Переходные процессы в опти¬
мальном стационарном контуре.
Учитывая детерминированность задачи и полагая матрицу р диаго¬
нальной, записываем
/=4- 2 р« ехр I- 2Х< * &)] + 4- J -р-dt+
+ 4- {{*12 А “■ ехР+ %1) и - *<}<и- <9-31)
Управление, минимизирующее этот функционал, согласно (П.4.37)
равно
«1 = — ki 2 ехР I— (\ + М (* — zi)l х/> (9.32)
/=1
где
Ац = 2 Pvv ехр [— 2A,V (/2 — /)] (/2 — /) wvl (t2 — /). (9.33)
V=1
$ 9.3 J
СИСТЕМЫ ПОСАДКИ (ПРИЗЕМЛЕНИЯ)
315
Коэффициенты оптимального управления были вычислены*) по
этим формулам при следующих значениях параметров:
Ри = Р22 = Рзз = !> Рм = °>04’ = 1 сек,
У = 70 м • сек~1, = 0,05, %2 = 0,048,
Х3 = 0,023, Х4 = — 0,0025.
На рис. 9.2 изображены переходные процессы в контуре при
синтезированном нестационарном управлении.
Для сравнения на рис. 9.3. изображены кривые переходных
процессов в стационарном контуре при управлении вида
U1 = — (kaXtox + 6эАу + &эАф + klz), (9.34)
постоянные коэффициенты которого подбирались из условия наи¬
лучшего качества переходного процесса по г. Сопоставление рис. 9.2,
9.3 показывает преимущество нестационарного оптимального
управления.
§ 9.3. Аналитическое конструирование систем
посадки (приземления)
Для этапа собственно посадки, как и для этапа захода на по¬
садку, допустимо раздельное рассмотрение продольного и бокового
движений. Рассмотрим продольное движение на этапе собственно
посадки, как наиболее сложное в динамическом отношении. Ис¬
ходные уравнения продольного движения без учета ветра на этапе
посадки могут быть записаны в виде
mV = Р (У, бт) — X (V, а) — mg sin 0,
mVQ = Y (17, а, у, бв) + Р (V, бт) sin а — mg cos 0,
/Д = Мг (а, ®г, V, 6В, 6Т),
й= со2, Ф = 0 а, y = Vsin0, х = —Vcos0.
Здесь учитывается зависимость подъемной силы Y от высоты над
ВПП, обусловленная аэродинамическим влиянием земли. Ось зем¬
ной системы координат совпадает с осью ВПП и направлена на¬
встречу приземляющемуся самолету. Будем предполагать, что на¬
значены траектория и программа изменения скорости для невозму¬
щенного движения при приземлении. Как уже отмечалось выше,
недостаток, свойственный способу «жесткой траектории» (возмож¬
ность возникновения неоправданно высокой динамической напря¬
женности) всегда можно преодолеть путем подбора оптимизирую¬
щего функционала.
Зная невозмущенное движение, в соответствии с обычной мето¬
дикой определяем линейные, в данном режиме заведомо нестацио-
’) Все расчеты для данного примера выполнены на ЭВМ В. В. Невструевым.
316
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. 1Х
нарные, уравнения первого приближения
ДУ + ах ДУ + + А О = ал6тД6т>
Да — а у к. V 4- (af — dy) Да —. а уДд — Дсо2 — с^Дд =
= —а£вД6в — 4тДбт
Д®2 4“ Я/пгДУ 4" ^/пгДа 4* йтгД®2 = ОгпгД6в 4" <2тгД6т,.
ДА — Д®2 = 0, Дг/ — УД4 4- УДа = 0.
(9.35)
Эти уравнения отличаются от применявшихся выше линеаризо¬
ванных уравнений продольного движения только членом ауку и
несколько более полным учетом управляющих воздействий. Однако
линейная математическая модель объекта на этапе, приземления
является, вообще говоря, слишком грубым приближением. Данному
этапу свойственны углы атаки, близкие к критическим. В окрест¬
ности посадочных углов атаки кривые аэродинамических коэффи¬
циентов отличаются от прямых. Поэтому здесь целесообразно
учесть нелинейные члены прежде всего в зависимостях подъемной
силы, лобового сопротивления и аэродинамического момента от
угла атаки. Зависимость момента Мг от угловой скорости со2 обу¬
словлена главным образом изменением угла атаки на хвостовом
оперении (или эквивалентных этому оперению поверхностях). По¬
этому одновременно с учетом нелинейных членов разложения Мг
по углу атаки Да целесообразно учесть нелинейные члены разложе¬
ния по Дсо2.
Ограничиваясь аппроксимацией полиномами третьей степени,
записываем
ДУ 4- ах№ 4- (ах — ах) Да 4- а“2Да2 4- ах"Да3 4- а°Дй = а6хтД6Т,
Да — ДУ 4* (йу — а“) Да — а“2Да2 — а“3Да3 —
- а®Дд - Дсо2 - аиу\у = - а®вД6в — а®тД6т,
До)2 4- а^ДУ 4- <2^Да 4- а^Да2 4- 4- аХД®2 4-
4- а%Дсо2 4- а^’Да>! 4- а^гДаДсог 4- Да2Д®2 4-
4- ДаДсо2 = а^Д6в 4- а^Д6т,
ДФ — Д <аг = 0,
Дг/ — УДО 4- УДа = 0.
(9.36)
К уравнениям (9.36) следует добавить уравнения двигателя, свя¬
зывающие изменение тяги Д6Т с отклонением ручки управления
§ 9.3]
СИСТЕМЫ ПОСАДКИ (ПРИЗЕМЛЕНИЯ)
317
двигателем Дбд. Используем простейшую модель двигателя
ТдД6т + Д6Т = £дД6д, (9.37)
хотя на посадочном этапе, по-видимому, желательно применение бо¬
лее точных нелинейных математических моделей силовой установки.
Инерционностью исполнительных устройств пренебрегаем. Од¬
нако для обеспечения астатизма, особенно необходимого при суще¬
ственно нестационарном программном движении, вводим переменные
Д6д = и7, Д6В = и8. (9.38)
Обозначаем
ДК = х19 Да = х29 ДФ = х3, Д(о2 = х4,
Д^/ = Д6Т == Xq9 Д6д == ^7> Д^в =
В этих обозначениях уравнения обобщенного объекта (9.36) —
— (9.38) принимают вид
xi + <*n*i 4- а12х2 + а13х3 4- alext 4- а122Хг + <*1222*2 = О,
Х2 4" “21^1 4“ #22^2 4“ ^23*^3 ^4 4" #25*^5 4“ #26*^6 4“ #28*^8 4"
4" #222*2 + #2222*2 = О,
*3 Х4 = О,
Х4 4" #41*1 + #42*2 4- #44*4 4“ #46*6 -|- U^qXq 4" #422*2 4*
+ <*4222*2 + <*444*4 4- <*4444X4 4- <*424*2*4 +
2 2
4* #4224*2*4 4е #4244*2*4 = О,
*5 4- #52*2 4“ #53*3 = О,
*6 + #66*6 4“ #67*7 =
*7 = Щ9 х8 = и8.
(9.39)
л а 0
#12 — Q>x CLx*
с;8
“1222 — #ж 9
а2Ъ = — Оу9
а.
— Umzt
— zyal
#ГП2,
п /,ас02
“424 — “/П2 * I
#42
#422
#is — #*»
V
#21 Яу*
6т
#2б — аУ >
(02
а44 — ат2,
а8
#4222 ~ ^гпгз
“4224 ~ атг ,
= 1
66 Та ’
_ ~бТ
#16 #Х >
0 а
#22 ~ аУ &У9
6в
#28 — аУ 9
п б т
“46 #/П2,
(02*
#444 = ^гпг »
а(02«
“4244 — ^т2 >
Тл •
(9.40)
318
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. тх
В соответствии с изложенным в § 9.1 и уравнениями обобщенного
объекта оптимизирующий функционал задаем в виде *)
I ~ 4" РаоДсС2 (^2) 4" Р^оД1®2 (^2) 4" РшгшгДаЬ (^2) 4“
+ рууД^Чи 4-
+ У (Pz/рД//2 4" Pz/^Д^2 4" РааДоС2 4- Р^Д1®’24- РсогсогДфг) dt -J-
— Р11Л1 (^2) 4" Рг2^2 (^2) 4“ Рззх3 (^2) 4- р44^4 (^2) 4“ р23^2 (^2) %3 (^2) 4“
4“ j $22*2 + Рзз%3 4“ Р44*4 + Рб5Хб 4" Р23Х2Хз) dt +
дУ*
дхп
дУ* \2
dx8 /
dt.
(9.41)
где
Р11 — Руу> Р22 — Раа 4“ Р*/*Д^2» Рзз — РОФ 4“ Рй^2,
Р44 == P<j)Z(O2, Р23 ~ 2p^V2, Р22 = Раа 4- PiH^2»
Рзз = Р<Н> 4“ Р^/^2> Р44 = Рогоз, Рб5 = Руг/, Р23 = ^P^V2.
(9.42)
Минимизация функционала (9.41) соответствует синтезу квази-
терминальных управлений, что для этапа собственно посадки
является наиболее целесообразным. Согласно § П.5 для данно¬
го случая следует использовать следующий вариант основной
теоремы.
Для объекта
Xi + 2 aijXj + 2 aiikx{xk + ацыхр^ + ... = <piyu, (9.43)
/=1 i,k=\ j,k,i=i j=i
(i = 1,2, ..., n)
*) Как и раньше, обозначение У* для решения «V-уравнения» введено для
отличия от обозначения путевой скорости полета V.
СИСТЕМЫ ПОСАДКИ (ПРИЗЕМЛЕНИЯ)
319
т **
$ 9-31
оптимальными в смысле минимума функционала
7 = 4- 2 PnX{(Qxi(Q +
t.i=i
П 1 "* г" / \ л
i, './=> /=1 G
+4" з (k< ij cPft/ (з AkiXi + z AkuXiXt +..
И j=\ L fe=l V=1 i,l=l
являются управления
~ n In n
2 ( S ^kiXi + 2 ^ki/XlXl +
_fe=l \Z=1 Z, Z=1
+ 2 ^kilsXiXtXs + . . .
i,l,s=l
Р dt (9.44)
\ (9.45)
где коэффициенты связаны с весовыми функциями уравнений пер¬
вого приближения
4+2 а‘<х1 = 0
/=i
формулами
Ач W = S P^Wvi (/2> 0 (t2, О +
V,J1=1
п
+ I 2 MMf.Oaw
/, V,|X=1
n
Aim (0 = — 2 fУ'* (*'»0w*k z)x
V,H,8=1 £
X 2 ) ^РМ-е (О + Арц (/ ) &pve (0 4* Дое (j ) ttpvn (t )] dt',
p=l
(9.46)
Aijk s (0 = — 2 Wvi *) w»j (*’> 0 • • • w*» (*'> 0 x
' ,v v,n x=i
x I 2 У) ap^- -x (O 4* Дщ (О cLpv...% (f) 4-
lp=l
+ .. . + ^pX (?) Qpv...p (01 +
320
СИСТЕМЫ УПРАВЛЕНИЯ ПОСАДКОЙ
[Гл. IX
+ “121 S ) ^ре...Х (О + ^pve ) #рц...Х (О + • • • 4"
+ АррХ (О ^pv...T] (/')] +
+ (N _ i)!(jv — 2) 5 ^₽vt*e (О ЛрВ-Х (О + • • • +
+ ^рЧрХ ) O'pv...^ (t )] +
+ IvZTT i + ■■■ + AP^-* (O)! df.
P=1 J
(9.46)
В рассматриваемом конкретном случае объекта (9.39) и функционала
(9.41) п = 8, р = q = 2, <р77 = ф88 = 1, остальные (pz/- = 0. Отлич¬
ные от нуля коэффициенты уравнений объекта и функционала ука¬
заны в (9.40), (9.42).
После определения на АВМ или ЦВМ фундаментальной си¬
стемы весовых функций уравнений первого приближения расче¬
ты коэффициентов оптимальных управлений выполняются на ЦВМ
согласно алгоритму (9.46). Упрощение синтезированной оптималь¬
ной структуры системы осуществляется, как обычно, путем оце¬
нивания глубины различных связей и отбрасывания слабых об¬
ратных связей.
Глава X
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ
И НАЗЕМНЫЕ ЦЕЛИ И ИХ АНАЛИТИЧЕСКОЕ
КОНСТРУИРОВАНИЕ
Наведение самолетов на воздушные и наземные цели осуществ¬
ляется посредством различных технических средств и систем: назем¬
ных систем перехвата, бортовых радиолокационных станций пере¬
хвата, навигационных и прицельно-пилотажных комплексов, бом¬
бардировочных прицелов. Наведение в отношении используемых
средств, структуры контуров относится к числу сложных видов
управления пространственным движением летательных аппаратов.
Достаточно полное описание процессов наведения требует привле¬
чения относительно сложных математических моделей. Однако не¬
которые важные закономерности могут быть выяснены при исполь¬
зовании простейших моделей, построенных на основе использования
специфичных относительных координат и параметров движения.
§ 10.1. Простейшие контуры наведения
на воздушные цели
Введем понятие «промаха» или «пролета» Д (/). Промахом Д (/)
в данный момент времени t (текущим «промахом») называется то
минимальное расстояние, на котором летательный аппарат пройдет
по отношению к цели, если, начиная с данного момента времени /,
аппарат и цель будут двигаться равномерно и прямолинейно или
ускоренно, но с одинаковыми векторами ускорений. Отрезок, со¬
единяющий цель с наименее удаленной точкой траектории относи¬
тельного движения аппарата, имеет определенную направленность,
поэтому промах в пространственном движении — векторная ве¬
личина.
Рассмотрим скалярное и векторное выражения промаха. Обо¬
значим через ИОт вектор относительной скорости
V0T = V — Кц = — г = — ror — гог,
где К — скорость аппарата, Уц — скорость цели, г = гог — вектор
относительной дальности, г0 — единичный вектор относительной
дальности, направленный от аппарата к цели (рис. 10.1).
Плоскость, проходящая через векторы относительной скорости
и относительной дальности, заштрихована на рис. 10.1. В этой
плоскости отсчитывается промах, равный длине перпендикуляра,
°пущенного из точки цели Ц на направление вектора относитель-
11 А. А. Красовский
322
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
ной скорости Кт, А = г sin р. Здесь р угол между векторами Кт,
г. С другой стороны, угловая скорость линии аппарат — цель (так
называемой линии визирования) по абсолютной величине равна
V0T sin р
соп = .
в г
Отсюда вытекает
д=4^- <1ол)
у от
Векторное выражение промаха следующее:
. = ^отХ г = гхг = (Г,/ + Г,/) X гог =
(10.2)
По мо-
Го X Г о _ f2caB
= V _ V'ot ’
у от ОТ
где <ов = г0 X г0 — угловая скорость линии визирования.
дулю выражения (10.1), (10.2) совпадают, но согласно (10.2) вектор
А перпендикулярен к заштрихованной на рис. 10.1 плоскости.
Это не вполне согласуется
с «естественным» представ¬
лением о промахе, компла¬
нарным с векторами Кт, г,
но удобно в математическом
отношении и, будучи раз
оговорено, не создаст каких-
либо затруднений. Диффе¬
ренцируя величину АКт =
= Кт X г, находим
4_(ДУот) =
at
= Кт X Г + Кот X Г =
= (V-П) X Г =
= -гх(у-Л), (10.3)
где J = К, /ц = К— ускорения аппарата и цели. При движении
цели и аппарата с одинаковыми ускорениями и, как частный слу¬
чай, при равномерном прямолинейном движении цели и аппарата
Кт = J — Кт = const, А = 0,
т. е. промах остается постоянным. Основным фактором целенаправ¬
ленного изменения промаха является ускорение j аппарата, точнее,
составляющая этого ускорения, нормальная к линии аппарат —
цель. Составляющая ускорения, коллинеарная с вектором относи¬
тельной дальности, влияет только на скорость сближения с целью.
Посредством кривых изменения промаха удобно в общих чертах
описывать различные этапы наведения. В качестве примера на
§ 10.1]
ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА ВОЗДУШНЫЕ ЦЕЛИ 323
рис ю.2 иллюстрируются этапы наведения самолета на воздушную
цель. Пунктирной линией здесь обозначена регулярная (при за-
данном начальном относительном положении и заданном движении
цели) составляющая промаха, обусловленная методом наведения.
Заштрихованная полоса обозначает рассеивание, создаваемое ошиб¬
ками системы наведения и другими случайными факторами. Вна¬
чале самолет имеет практически произвольный курс относительно
цели и промах весьма велик. На начальном этапе происходит раз¬
ворот для выхода на режим дальнего наведения. В процессе разво¬
рота промах интенсивно уменьшается. Далее следует наведение
Рис. 10.2. Изменение промаха на различных этапах наведения
на воздушную цель.
посредством наземной системы перехвата, так называемое дальнее
наведение. Координаты цели и наводимого самолета на этом этапе
определяются наземными радиолокационными станциями. На ос¬
нове этой информации вычислительными устройствами пунктов
наведения формируются команды наведения. Эти команды по ко¬
мандной радиолинии передаются на самолет, где воспринимаются
летчиком или автопилотом.
На этапе дальнего наведения промах уменьшается, но остается
относительно большим из-за ошибок в определении вектора ско¬
рости цели и других факторов. Поэтому дальнее наведение обычно
обеспечивает лишь выход в район цели. Далее может следовать
обнаружение цели бортовой радиолокационной станцией (РЛС),
«захват» цели этой станцией и переход на самонаведение (ближнее
наведение).
На этапе самонаведения управление самолетом осуществляется
по сигналам бортовой РЛС перехвата. Промах на этапе самонаве¬
дения резко уменьшается и его дисперсия сводится к относительно
низкому уровню.
Заметим, что если атака ведется на пересекающихся курсах и
самолет применяет неуправляемые реактивные снаряды, то матема-
*4*
324
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
тическое ожидание промаха самолета перед пуском снарядов долж¬
но иметь определенную величину. После пуска снарядов промах,
исчисляемый теперь уже для этих снарядов, изменяется сначала
практически скачкообразно. Это вызвано стартовой скоростью сна¬
рядов. Дисперсия промаха для неуправляемых снарядов в процес¬
се их движения к неманеврирующей цели остается почти такой,
какой она была сразу после пуска (/ц = 0, / = 0). Для управляемых
снарядов промах убывает, составляя при подходе к цели малую
величину. После пуска снарядов самолет выходит из атаки и про¬
мах его увеличивается (рис. 10.2).
Хотя промах является удобной величиной для описания процес¬
сов наведения и самонаведения, использование одной этой величи¬
ны недостаточно. Важное значение имеет угол v между вектором
относительной дальности г и вектором скорости цели Иц или синус
этого угла sin v, именуемый ракурсом цели. Значение этого угла
в конце самонаведения важно с точки зрения применения того или
иного вооружения самолета. Существенное значение имеет также
характер траектории наведения в относительных и абсолютных
координатах.
Методы дальнего наведения
Метод наведения имеет много общего с законом управления
в контуре наведения и выражает в идеализированной форме связи,
накладываемые на движение центра массы летательного аппарата
при наведении. В зависимости от степени идеализации связей полу¬
чаются разные классификационные признаки методов наведения.
Наиболее простая классификация получается, если допустить су¬
ществование связей, накладываемых непосредственно на вектор
скорости наводимого летательного аппарата. Соответствующие
траектории наведения часто называются «кинематическими» траек¬
ториями.
В реальном контуре связи существенно сложнее кинематических.
Траектории даже невозмущенного реального движения не совпа¬
дают с кинематическими. Однако кинематические траектории все же
дают некоторое представление о реальных динамических траек¬
ториях и о способе формирования сигнала управления. Поэтому
классификация методов наведения по виду кинематических связей
и траекторий считается полезной.
Наведение по кривой погони
При наведении по кривой погони вектор скорости наводимого .
летательного аппарата направлен в точку цели, т. е. совпадает
по направлению с вектором относительной дальности. Из (10.2) для
tA 11 ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА ВОЗДУШНЫЕ ЦЕЛИ 325
§ 10.IJ
этого случая следует
д = гЧ = гх V».
У ОТ от
Для плоского движения сов = ср, где ф — угол, образуемый линией
визирования с некоторым неподвижным направлением. Для пло
ского движения по кривой погони гср = Vasili v. Если курс цели
ф^ и угол линии визирования ср отсчитывается от одного и того же
направления, например, меридиана, то v = — ф и
гф = — 1/ц sin (ф — фц). (10-4)
Это уравнение совместно с соотношением г = — V + Vucos (<р —
— фц) образуют дифференциальные уравнения кривой погони в по¬
лярных координатах при плоском движении точки цели, когда
Рис. 10.3. Характер траектории и изменение промаха (А) курса (М?) и угла V
при наведении по кривой погони на равномерно прямолинейно движущую¬
ся цель.
кривая погони является плоской кривой. При наведении по кривой
погони в горизонтальной плоскости уравнение (10.4) можно рас¬
сматривать как уравнение заданного курса преследующего лета¬
тельного аппарата
гфз = — sin Сф3 — фц).
Характер траектории и изменения Д, ф = ф3, v при наведении по
кривой погони на прямолинейно равномерно движущуюся цель
представлен на рис. 10.3. Кривизна кривых погони в окрестности
цели неограниченно увеличивается, за исключением направления,
совпадающего с линией пути цели. Угол v монотонно уменьшается,
стремясь к нулю при подходе к цели. Кривая погони всегда вы¬
водит преследующий летательный аппарат в хвостовой сектор цели.
Промах Д монотонно уменьшается, однако обращается в нуль
только в точке цели, где г = 0, v = (X
326
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
Параллельное сближение
В кинематической трактовке параллельным сближением наводи¬
мого летательного аппарата называется такое движение, при кото¬
ром линия аппарат — цель перемещается параллельно самой себе,
т. е.
©в = 0.
Вектор относительной скорости КОт при параллельном сбли¬
жении направлен в точку цели, а вектор абсолютной скорости
аппарата V — в так называемую точку встречи В (рис. 10.4). Для
того чтобы выйти на режим параллельного сближения из произ¬
вольного начального положения наводимый летательный аппарат
Рис. 10.4. Характер траектории и изменения координат при параллель¬
ном сближении.
должен выполнить разворот. На участке разворота (до точки 1
на рис. 10.4) промах уменьшается до нуля, курс (рассматривается
наведение в горизонтальной плоскости) и угол v интенсивно изме¬
няются. В установившемся «кинематическом» параллельном сбли¬
жении промах равен нулю, углы ip и v при прямолинейном равномер¬
ном движении цели постоянны.
При движении в горизонтальной плоскости угловая скорость
линии визирования равна нулю, если
sin (ф — %)= V sin (ф — гр),
где ф — % — угол между линией визирования и вектором ско¬
рости цели, ф — ip— угол между линией визирования и вектором
скорости аппарата.
Отсюда вытекает
V? = = ф —arcsin p^-.sin (ф —.фц) L (10.5^
$ 10 1]' ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА ВОЗДУШНЫЕ ЦЕЛИ 327
Прямая с разворотом
При изложении вопросов стабилизации относительно заданной
линии пути (глава VII) уже рассматривались развороты, сопря¬
женные с участками прямолинейного полета. Однако при наведении
самолета выход на линию пути цели необязателен и часто нежела¬
телен, однако необходимо сближение с целью. Кроме тою, линия
пути цели заранее неизвестна, случайна, так что маневрирование
в процессе наведения должно осуществляться на основе текущей
информации о положении и векторе скорости цели.
Рис. 10.5. Характер траектории и изменение координат при наведении по методу «пря¬
мая с разворотом».
«Кинематическая» траектория при наведении по методу «прямая
с разворотом» на прямолинейно равномерно движущуюся цель со¬
стоит из двух отрезков прямых, сопряженных с дугой окружности
(рис. 10.5). Траектория определяется углом q, образуемым конеч¬
ным прямолинейным участком траектории с линией полета цели,
длиной этого участка /, радиусом разворота R и углом разворота
Фраз. Кроме того, конечно, должна быть указана точка встречи (на
рис. 10.5 — точка 10).
Если известны положения и векторы скорости цели и наводи¬
мого самолета, то всегда можно построить траекторию указанного
вида и притом с заданными параметрами q и /?, если эти параметры
не выходят за допустимые пределы. Построение траектории экви¬
валентно решению системы тригонометрических уравнений. Оно
осуществляется счетно-решающим устройством на пункте наведе¬
ния, причем решение осуществляется непрерывно или с малыми
интервалами дискретности в предположении прямолинейного рав¬
номерного будущего движения цели. На основе этого решения оп¬
ределяется текущий заданный курс ф3. Характер изменения А, ф =
—Фз в процессе наведения по методу «прямая с разворотом» на рав¬
номерно прямолинейно движущуюся цель представлен на рис. 10.5.
328
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
Гл. X
Структура простого контура дальнего наведения
вычисле-
Рис. 10.6. К
нию управляющего ус¬
корения при горизон¬
тальном наведении.
Структура контуров дальнего наведения может быть представ¬
лена множеством способов. Наиболее полное представление конту¬
ров дальнего наведения должно включать полную модель простран¬
ственного движения наводимого самолета типа (1.17), математиче¬
скую модель бортовой системы управления, кинематическую модель
движения цели, математическую модель первичной информацион¬
ной системы (радиолокационных станций, средств передачи инфор¬
мации на пункты наведения), алгоритм наведения, математическую
модель командных радиолиний наведения. Подобное полное пред¬
ставление контуров наведения очень сложно и мо¬
жет использоваться лишь на заключительных
этапах проектирования.
Для начального грубого анализа и синтеза
контуров дальнего наведения используются прос¬
тейшие структуры и модели. В качестве примера
рассмотрим простую структурную схему контура
дальнего горизонтального наведения (наведения
в горизонтальной плоскости) по методу кривой
погони. Из соотношения (10.3) для плоского
движения следует
(Ар V0T) = — г (j, — jw), (Ю.6)
где Дг — горизонтальная составляющая прома¬
ха, /г — горизонтальная составляющая нормаль¬
ного к линии визирования ускорения наводимо¬
го самолета, /цг — горизонтальная составляющая
линии визирования ускорения цели. Ускорение
нормального к
равно
/г = cos qc + V sin (/с,
(Ю.7)
где qQ — угол между вектором скорости самолета и линией визи¬
рования (рис. 10.6). Составляющая cos qc является управляю¬
щей, через нее замыкается контур наведения. Составляющая V sin qQ
является, вообще говоря, мешающей, так как нет возможности
управлять скоростью в интересах ликвидации промаха. Скоростью
V управляют для обеспечения достаточной скорости сближения
с целью. Из выражений (10.6), (10.7) и Аг = г2ф//От, следует
(^ф) = — rVcos^ij) — r(Vsin<7c— /цг). (10.8)
При наведении строго по кривей погони qc = 0. В реальном
наведении по методу погони qc не равно тождественно нулю, но
§ 10.13
ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА ВОЗДУШНЫЕ ЦЕЛИ 329
малая величина. Поэтому
(Г2ф) = — rIZli? 4- г/цГ. (10.9)
Уравнения типа (10.8), (10.9) обычно именуются уравнениями
кинематического звена. Если ip принять за входную величину, а ф —
за выходную величину, то согласно (10.9) кинематическое звено
может быть представлено в виде последовательного соединения не¬
стационарного усилительного звена с коэффициентом усиления г,
Рис. 10.7. Структурная схема контура дальнего горизонтального наведен иг..
интегрирующего звена, нестационарного усилительного звена с ко¬
эффициентом усиления 1/г2 и второго интегрирующего звена.
Координаты цели и наводимого самолета, а значит, и угол ф,
определяются наземными РЛС дискретно с некоторым периодом
повторения Тп. Если в качестве математической модели всей назем¬
ной системы наведения, включая командную радиолинию, принять
импульсный элемент с прямоугольными выходными импульсами
без скважности, то структурная схема контура горизонтального
дальнего наведения по методу погони имеет простой вид, представ¬
ленный на рис. 10.7. Здесь учтены ошибки Дфп заданного курса,
обусловленные в основном ошибками РЛС. Импульсный элемент
с прямоугольными выходными импульсами представлен в виде по¬
следовательного соединения 6-импульсного элемента и соответ¬
ствующего формирующего звена.
Звено углового движения по курсу на структурной схеме
рис. 10.7 не раскрыто. Одна из возможных структур этого звена
изображена на рис. 10.8. Сигнал ф3 по командной радиолинии
(КРЛ) поступает в канал элеронов автопилота. Для этого канала
закон регулирования имеет вид
6Э = 1 ■ у + 4- б^Дф + k3 J ДфЛ. (10.10)
Таким образом, здесь используются интегральное управление
по сигналу отклонения от заданного курса, жесткая и изодромные
обратные связи по углу крена и сигнал угловой скорости крена.
Руль направления используется для устранения скольжения, соот¬
ветствующий канал автопилота имеет простейшую типовую струк¬
330
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл X
туру (см. главу V и рис. 10.8). Помимо автоматического канала
управления боковым движением, существует полуавтоматический
канал с директорным прибором. На отклоняющее устройство команд-
Рис. 10.8. Структурная схема бортовой системы управления боковым движением
самолета в режиме дальнего наведения.
ной стрелки бокового канала поступает сигнал, в основном анало¬
гичный (10.10), а именно:
^к = 7\р\ 1 + Т\р-\- 1 + ^2 У . (10.11)
Структура простого контура ближнего наведения
После обнаружения и захвата цели бортовой РЛС перехвата
самолет переходит на режим ближнего наведения (самонаведения).
В этом режиме управление самолетом осуществляется по сигналам
бортовой РЛС. Иногда переход на самонаведение в боковом и про¬
дольном каналах осуществляется не одновременно. Бортовая РЛС
после захвата цели осуществляет ее угловое сопровождение и конт¬
ролирует абсолютную угловую скорость линии визирования <ов
обычно в проекциях на связанные с антенной РЛС оси.
Умножение компонент угловой скорости на г2/Уот согласно вы¬
ражению А = г2(ов/Уот дает компоненты вектора промаха также
в антенных осях. Определение‘относительной дальности г и отно¬
сительной скорости Уот = + г2сов « — г может осуществляться
дальномерным каналом РЛС.
$ 10 1] ПРОСТЕЙШИЙ КОНТУРЫ НАВЕДЕНИЯ НА ВОЗДУШНЫЙ ЦЕЛИ 331
Итак, бортовая РЛС позволяет определить компоненты угло,-
вой скорости линии визирования и компоненты промаха в антен¬
ных осях. Кроме того, может быть получена информация об углах
между направлением на цель и самолетными осями, а также хотя бы
приближенно определен угол qc между вектором скорости Ии век¬
тором относительной дальности г. На основе этой информации мо¬
гут быть осуществлены различные методы самонаведения.
Для самолетов, вооруженных самонаводящимися ракетами клас¬
са «воздух-воздух», допускающими атаки под любыми ракурсами
или атаки в широких секторах пространства цели, наиболее под¬
ходящими методами самонаведения являются методы, подобные так
называемой «пропорциональной навигации» [10.1] — [10.6]. Про¬
порциональной навигацией называют такой метод наведения, при
котором угловая скорость разворота вектора скорости наводимого
аппарата пропорциональна угловой скорости линии визирования.
Угловая скорость разворота вектора скорости пропорциональна
нормальному к вектору скорости ускорению. Поэтому пропорцио¬
нальную навигацию можно рассматривать как метод наведения,
при котором нормальное к вектору скорости ускорение наводимого
аппарата пропорционально угловой скорости линии визирования.
Угол между вектором скорости и линией визирования qc обычно
ограничен, нормальное к вектору скорости V ускорение не сильно
отличается от управляющего ускорения, нормального к линии ви¬
зирования.
Наведение, при котором управляющее ускорение пропорцио¬
нально угловой скорости линии визирования, часто называется
параллельным сближением (в динамической трактовке). Для само-
наводящихся ракет также часто используется метод динамического
параллельного сближения, причем коэффициент пропорциональ¬
ности между управляющим ускорением и угловой скоростью линии
визирования здесь чаще всего постоянен [10.1] — [10.6]. В этом
случае динамическая напряженность процессов наведения, связан¬
ная с коэффициентом усиления контура (контур рассматривается
как квазистационарный), быстро нарастает с приближением к цели.
Для пилотируемых самолетов коэффициент пропорциональ¬
ности между управляющим ускорением и угловой скоростью линии
визирования целесообразно уменьшать по мере приближения к це¬
ли. Если этот коэффициент убывает пропорционально r2/V0T, то
управление осуществляется по сигналам промаха.
В качестве законов полуавтоматического самонаведения могут,
в частности, использоваться следующие простые законы:
бк = Т^Г(Т-^а),
бп = Тр
(10.12)
332
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
где 6К, 6П — отклонения командных стрелок бокового и продоль¬
ного каналов; Д2а, &уа—«боковая» и «вертикальная» составля¬
ющие промаха в связанных осях. Оператор инерционного звена
служит для подавления шумов, обусловленных в основном шу¬
мами РЛС.
В законах (10.12) искусственная обратная связь по «вертикаль¬
ному» ускорению, точнее, «вертикальной» перегрузке, отсутствует.
Ограничение «вертикальной» перегрузки получается за- счет есте¬
ственной статической устойчивости самолета. В (10.12) имеется
обратная связь по углу крена у, который при отсутствии скольже¬
ния является мерой ускорения, однако не ускорения по антенной
оси za. Для более точного соответствия вектора управляющего
ускорения вектору промаха целесообразно использовать обратные
связи по перегрузкам в антенных осях. Подобные обратные связи
реализуются с помощью акселерометров, связанных с антенной,
осуществляющей механическое угловое сопровождение цели или
со специальной следящей платформой для случая электрического
углового сопровождения (случай фазированной решетки).
Простейшие законы директорного управления при наличии об¬
ратных связей по перегрузкам имеют вид
+ 1 (? + ^2 Да — &S?A?a)>
(10.13)
= ~fp6+ Г^2 + — ^^э),
где jya, jza — кажущиеся (не имеющие гравитационной составляю¬
щей) ускорения наводимого самолета в антенных осях. При автома¬
тическом самонаведении могут использоваться законы, аналогич¬
ные (10.13).
Для движения в вертикальной неподвижной плоскости (для слу¬
чая плоского движения структура контуров самонаведения наибо¬
лее проста) из уравнения (10.3) следует
(Ав^от) = г (/в /цв)> (10.14)
где.
/в =-^-Aacos<7c+ V sin qc + gB (10.15)
— нормальная к линии визирования составляющая ускорения са¬
молета, ga— нормальная к линии визирования составляющая гра¬
витационного ускорения (отрицательная величина). Вертикальная
составляющая промаха Дв, фигурирующая в (10.14), в данном слу¬
чае, очевидно, совпадает с составляющей промаха &уа по антенной
оси у а (крен отсутствует).
ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА ВОЗДУШНЫЕ ЦЕЛИ 333
I 10.1J
Уравнение закона управления для данного случая без учета
инерционности исполнительных устройств и датчиков информации
можно записать в виде
бв=- сдв. (ю. 16)
Из уравнений (10.14) — (10.16) и передаточных функций (1.46)
простейшей модели продольного движения вытекает простая струк¬
турная схема контура самонаведения, представленная на рис. 10.9.
Рис. 10.9. Простейшая структурная схема контура самонаведения самолета в вертикальной
{плоскости при управлении по вертикальному промаху.
На этой схеме величина 6ДПВ обозначает ошибки измерения промаха,
обусловленные ошибками.углового сопровождения цели и другими
факторами.
Самое простое уравнение процесса самонаведения получается,
если пренебречь инерционностью контура перегрузки, т. е. пола¬
гать, что управляющее ускорение просто пропорционально изме¬
ренному промаху:
/в ёв ~ kj (Ав ^ДПв)«
При этом
-±- (Д„1/ т) = - rktBbB - г (^В6ДПВ - /цв).
Для случая г « — V0T = const
-^_krAB = kr6AnB-r^-,
от
где k = ^В/Уот- При 6ДПВ = 0, /цв = 0
Дв = Дво ехр | k (го — г2)j =
= Д.о ехр [-4 kf-^- (1 - .
334
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
tTa. X
Обычно величина kfB выбирается так, чтобы
имело порядок нескольких единиц. Увеличение а приводит к чрез¬
мерно большим перегрузкам наводимого самолета, уменьшением —
чрезмерно затянутому процессу ликвидации промаха и повышенному
влиянию маневров цели (ускорения /дв).
В заключение заметим, что атака воздушной цели с использо¬
ванием оптического прицела для сопроводительного огня пушеч¬
ного вооружения может рассматриваться как неавтоматическое са¬
монаведение. Здесь осуществляется визуальное визирование цели.
Управление осуществляется так, чтсбы математическое ожидание
промаха снаряда после выхода из ствола пушки было близким к ну¬
лю. В соответствии с этим можно записать
(^+^ств-Уц)хг
(^сн)от
= 0,
(10.17)
где (Усн)от—скорость снаряда относительно цели, Дсн—промах
снаряда, А — промах самолета, V — скорость самолета, Уот — аб¬
солютная величина скорости самолета относительно цели, Уств —
скорость, приобретаемая снарядом в стволе и совпадающая по на¬
правлению с осью ствола пушки. Итак,
г X Кств = г2(&в- (10.18)
Угол между векторами г, Иств (угол упреждения) обычно мал и
соотношение (10.18) означает, что в процессе сопроводительной
стрельбы угол между осью пушки и линией визирования цели
должен быть пропорционален угловой скорости линии визирова¬
ния сов, причем коэффициентом пропорциональности служит вели¬
чина Г/Уств.
В формуле прицеливания часто учитываются дополнительные
факторы, такие как действие лобового сопротивления и силы тя¬
жести на снаряд. Лобовое сопротивление создает ускорение, направ¬
ленное противоположно вектору скорости снаряда и имеющее по¬
этому составляющую, нормальную к линии снаряд — цель. По¬
правки, соответствующие указанным факторам, обычно невелики
и угол упреждения приближенно определяется формулой (10.18).
Ось ствола пушки обычно жестко связана со строительной осью
самолета, например, продольной строительной осью самолета. Та¬
ким образом, при сопроводительной стрельбе продольная строи¬
тельная ось самолета должна образовывать с линией визирования
$ 10 2] ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА НАЗЕМНЫЕ ЦЕЛИ 335
УГОЛ пропорциональный угловой скорости линии визирования
согласно соотношению (10.18). Такой метод самонаведения иногда
называется наведением с последовательными упреждениями. Коэф¬
фициент пропорциональности в данном варианте метода уменьшает¬
ся в соответствии с уменьшением относительной дальности. Реа¬
лизация метода зависит от конструкции прицела и способа управ¬
ления самолетом.
§ 10.2. Простейшие контуры наведения на наземные цели
Дальнее наведение самолетов на наземные цели осуществляется
посредством навигационных систем и способов навигации и реали¬
зуется, в частности, путем стабилизации траектории относительно
заданной линии пути. Здесь рассматривается ближнее наведение
или самонаведение, выполняемое при условии оптического или ра¬
диолокационного визирования цели.
Рис. 10.10. Этапы наведения и изменение промаха при бомбометании
с горизонтального полета.
Наведение осуществляется в зоне радиолокационной или опти¬
ческой видимости цели или ориентира, если наведение осуществля¬
ется по вынесенному ориентиру. Для малоконтрастных назем¬
ных целей проблема автоматического распознавания и сопровож¬
дения цели является весьма трудной. Поэтому визирование це¬
ли обычно осуществляется человеком с помощью прицела того или
иного типа.
Различают наведение по направлению (или боковое наведение) и
наведение по дальности (или продольное наведение). При бомбоме¬
тании с горизонтального полета, прицельном десантировании,
выполнении некоторых задач аэрофотографирования осуществ¬
ляется наведение по направлению. Продольное наведение здесь
вырождается в формирование разовой команды на отцепку бомб,
груза и т. д.
Изменение горизонтальной составляющей промаха в процессе
наведения по направлению при бомбометании с горизонтального
336
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
полета поясняет рис. 10.10. Горизонтальный промах Дг при вы¬
ходе в район цели (дальнем наведении) относительно велик. После
обнаружения цели осуществляется ближнее наведение по направ¬
лению (боковая наводка), в процессе которой промах Дг резко умень¬
шается. Далее следует отцепка и свободный (баллистический) полет
бомбы. Если не учитывать изменение скорости ветра с высотой,
то боковое ускорение бомбы в баллистическом полете можно по¬
лагать равным нулю. В этих условиях согласно уравнению (10.3)
для случая неподвижной цели горизонтальная составляющая про¬
маха бомбы, точнее, величина ДгГбом (Убом = Уот— скорость
бомбы) остается постоянной. Таким образом, боковая ошибка
Рис. 10.11. Этапы наведения и изменения промаха при бомбометании с
кабрирования.
бомбометания приблизительно равна промаху самолета в конце
бокового наведения и от точности наведения в значительной мере
зависит эффективность бомбометания.
Для бомбометания с кабрирования изменение промаха иллю¬
стрирует рис. 10.11. Боковая наводка здесь обычно происходит на
больших дальностях до цели, чем в предыдущем случае, но также
сопровождается интенсивным уменьшением бокового промаха. Да¬
лее следует кабрирование. Если на этапе кабрирования визиро¬
вание цели прекращается и ручное или автоматическое управление
боковым движением осуществляется по сигналам автономных дат¬
чиков, то промах несколько возрастает.
После отцепки бомба продолжает полет по баллистической тра¬
ектории. Ввиду значительной протяженности баллистического по¬
лета в данном случае приходится считаться с увеличением дисперсии
величины ДгУб0М на данном участке. Это увеличение вызвано, в част¬
ности, влиянием неравномерного по высоте ветра.
п от ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА НАЗЕМНЫЕ ЦЕЛИ 337
§ 10.2 J
Структура контура при векторном методе
наведения по направлению
Векторный метод боковой наводки основан на контроле угла р
между вектором путевой скорости и направлением на цель. Угол р
контролируется посредством бомбардировочного прицела путем
визирования цели и учета ветра. Данные о ветре (угле сноса) вво¬
дятся в прицел предварительно или получаются с помощью того же
бомбоприцела или допплеровской навигационной системы. Сколь¬
жение р при боковой наводке стремятся поддерживать близким
к нулю.
Сигнал бомбоприцела на этапе боковой наводки обычно посту¬
пает в каналы элеронов автопилота. Заметим, что метод самонаве¬
дения, при котором сигнал управления пропорционален углу между
вектором скорости и вектором относительной дальности, иногда
называется флюгерным наведением. Таким образом, векторный ме¬
тод боковой наводки является неавтоматическим (с ручным сопро¬
вождением цели) вариантом флюгерного самонаведения. Уравнение
кинематического звена при неподвижной цели и постоянной ско¬
рости самолета V0T = V = const согласно (10.3) запишется в дан¬
ном случае в виде
Дг = --^/г, (10.19)
где /г — нормальная к линии визирования составляющая горизон¬
тального ускорения самолета, г — горизонтальная дальность до
цели. Угол р, в процессе боковой наводки обычно невелик. Поэтому
Дг = rsinp, = гр. (10.20)
Угол крена также ограничен, скольжение мало и приближенно
можно принять
/г = —gY. (10.21)
В соответствии с этими соотношениями и простейшей линейной
структурной схемой управления креном структура контура вектор¬
ного наведения по направлению имеет вид, представленный на
рис. 10.12. В этой схеме учтены ошибки Др измерения угла р,
вызванные ошибками ручного сопровождения цели и ошибками
контроля угла сноса; ошибки гировертикали Дугв и воздействие спи¬
рального момента а^Юу.
Если контур управления креном считать безынерционным
идеальным
T = _FV(p+ Др)
и'полагать Wy = k у = const, то уравнение контура наведения вы¬
рождается в уравнение первого порядка
ГДг + Дг = — Мр,
338
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
где
Для увеличения интенсивности ликвидации начального промаха
(ошибки дальнего наведения) следует делать Т как можно меньше.
Рис. 10.12. Упрощенная структурная схема контура при векторном мето¬
де наведения по направлению на неподвижную цель.
Однако уменьшение Т требует увеличения коэффициента пропор¬
циональности ky. Увеличение ky вызывает возрастание крена при
заданной ошибке в направлении движения и может привести к ухо¬
ду цели из поля зрения бомбоприцела.
Структура контура при синхронном методе
наведения по направлению
Синхронный метод боковой наводки осуществляется с помощью
бомбоприцела, стабилизированного в азимуте. Штурман, наклады¬
вая так называемую курсовую черту в поле зрения бомбоприцела
на цель, обеспечивает запоминание начального положения линии
визирования. Запоминание осуществляется с помощью гиростаби¬
лизатора. В последующем штурман продолжает визировать цель,
обеспечивая измерение угла Дер между текущим направлением ли¬
нии визирования и начальным направлением (рис. 10.13).
Сигнал, пропорциональный Дер, поступает в контур крена. Ту¬
да же посылается сигнал, пропорциональный углу рысканья отно¬
сительно запомненного направления. Таким образом, при синхрон¬
ном методе боковой наводки в траекторном контуре используется
сигнал вида
+ те^Дф. (10.22)
Этот сигнал по форме аналогичен тому, который используется в бо¬
ковом контуре управления заходом на посадку по системе курсо¬
глиссадных маяков (глава VIII). Разница заключается только в
5 10.51
ПРОСТЕЙШИЕ КОНТУРЫ НАВЕДЕНИЯ НА НАЗЕМНЫЕ ЦЕЛИ 339
обозначении Дер вместо е и, разумеется, в характере и величине оши¬
бок, не учтенных в выражении (10.22). При отсутствии скольжения
ДОг = Д^ + Др8, Д<р = н — Д’Ф — Д₽в. (10.23)
Соотношения (10.19) — (10.23) в сочетании с обычной структурой
контура крена соответствуют структурной схеме, представленной
на рис. 10.14. В этой схеме уч¬
тены ошибки Дфп определения
угла Дф, вызванные в основ¬
ном ошибками визирования це¬
ли, а также ошибки гироверти¬
кали Дуги и угол ветра Д0В.
Скольжение считается равным Рис. 10.13. К пояснению синхронного метода
т-> Tir/ib боковой наводки.
нулю. Если принять = k± =
= const, = kz = const и считать управление креном безынер¬
ционным:
то уравнение контура, записанное относительно промаха Дг,
Рис. 10.14. Структурная схема контура синхронной боковой наводки на неподвиж¬
ную цель при отсутствий скольжения.
вырождается в уравнение второго порядка. При г = — V — const
это уравнение имеет вид
/Дг + (М-р)Аг + = -*- г* (^дрв - $Дфп). (10.24)
Это — неоднородное вырожденное гипергеометрическое уравнение,
теория которого широко известна [10.7], [10.8]. Собственное дви¬
жение, соответствующее однородному уравнению, носит, вообще
говоря, колебательный характер. Наиболее существенным является
значение Др в тот момент времени, в который происходит отцепка
340
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
tfri. х
бомбы, так как именно это значение Дг в значительной мере опре¬
деляет боковое отклонение бомбы при падении.
Из уравнения (10.24) видно, что для промаха синхронная боко¬
вая наводка обеспечивает астатизм по отношению к воздействию
бокового ветра и ошибок визирования цели. При синхронной бо¬
ковой наводке выход самолета на цель происходит в определенном
направлении, а именно, в направлении линии визирования, фикси¬
рованном в начальный момент времени. Это имеет важное значение
для наведения на вытянутые объекты, у которых длина существенно
превышает ширину.
§ 10.3. Аналитическое конструирование контуров
самонаведения
Как можно было убедиться из предшествующего изложения,
рассматриваемый метод аналитического конструирования позво¬
ляет в принципе решать задачи синтеза оптимальных управлений
объектами, представляемыми достаточно сложными математиче¬
скими моделями. Это относится и к задачам самонаведения. Можно
поставить и решить задачу синтеза контуров самонаведения для
общего случая пространственного движения наводимого аппарата
и цели, сложной модели станции (головки) самонаведения и другой
бортовой аппаратуры. Однако получение законченных решений'
в этом случае на том или ином этапе всегда требует трудоемких
численных расчетов, осуществимых лишь с помощью достаточна
мощных ЭВМ. Полностью аналитическое решение возможно лишь
для простейших математических моделей наводимого аппарата и
«кинематического звена».
Некоторые задачи такого характера рассматривались нами в ра¬
ботах [П.26], [П.27]. Здесь мы осуществим более широкое рассмот¬
рение задач синтеза простых контуров самонаведения для случая
плоского движения.
Синтез контура самонаведения для модели аппарата
в виде колебательного звена
В качестве обобщенного объекта примем структуру, представ¬
ленную на рис. 10.9, но в разомкнутом состоянии и при отсутствии
шумов станции самонаведения (6ДПВ = 0) и других возмущающих
воздействий *).
Соответствующие уравнения имеют вид
а + 2£асоаа + <Оа6в,
.• , V п (10.25)
Ав + г ~т V cos ^са = °-
0 от
♦) Учет случайных возмущающих воздействий осуществляется пэ типовой
методике добавления уравнений формирующих фильтров.
4 10’1
ДНАЛИТ. КОНСТРУИРОВАНИЕ КОНТУРОВ САМОНАВЕДЕНИЯ 341
Вводя обозначения.Xj = А». Хг = «> хз = а, записываем уравнения
(10.25) в форме Коши
*1+ r TaV C0S ^*2 = 0,
1 6 от
%2 Х3 ~ 0>
%з + 2£аш<х*з + ®а*2 = «з-
(10.26)
где из = _ ^всо«6в. Полагая параметры со», V, Тв и cos qc в про¬
цессе самонаведения постоянными и считая постоянной скорость
сближения г = — Уот. определяем фундаментальную систему весовых
функций обобщенного объекта (10.26) в предположении, что 1:
и»и=1, щ21 = 0, щ31 = 0,
ЬУ2з О = ^23 t ) = w23 СО — , /—Sin (У 1 ?а шаТ),
“сД 1-Й
&33 (О = “>23 (О. ®22 (О = ®23 (О + 2£а<0а'1У2з (Т),
^32 СО ~ ^а^23 С0>
V
Т.г
t—l'
cos qc w22 (т) (г0 + rtr + rc) dr,
*0
i—t'
cos qc f w23 (т) (r0 + rt' + re) dr.
b
f
(10.27)
Здесь выражения большинства весовых функций представлены в не¬
раскрытой до конца форме, так как в этой форме удобнее выполнять
промежуточные преобразования при вычислении коэффициентов оп¬
тимальных управлений.
Согласно общей теории фундаментальная система весовых функ¬
ций позволяет определить коэффициенты оптимальных управлений
для всех четырех вариантов синтеза (два варианта квазитерминаль¬
но го решения и два варианта нетерминального решения, см. § П.4).
Квазитерминальная постановка задачи синтеза оптимальных уп¬
равлений имеет прямой смысл, так как основное значение придается
величине конечного промаха у цели. Однако реализация терми¬
нальных управлений требует непосредственного или косвенного
контроля относительной дальности г. Впрочем, и нетерминальные
оптимальные управления процессом самонаведения всегда являют¬
ся нестационарными и зависят от г. Таким образом, реализация
всех вариантов оптимальных управлений процессом самонаведения
требует измерения или предсказания текущего значения г с той
или иной степенью точности.
342
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
ГГл. X
Заметим, что в постановках задач синтеза контуров самонаве¬
дения самолета и ракеты должно быть некоторое отличие. Это от¬
личие вызвано тем, что самонаведение самолета заканчивается на
некоторой относительной дальности до цели (дальности применения
вооружения). Назначение процесса самонаведения здесь — при¬
вести самолет в эту окрестность цели с минимальным промахом.
Таким образом, для случая самонаведения самолета в качестве ко¬
нечного момента времени в функционале следует учитывать момент
выхода на заданную дальность.
При синтезе контуров самонаведения ракеты основное значение
имеет промах в момент пролета цели и в качестве конечного момента
времени следует рассматривать величину г0/ (— г). Ограничимся здесь
второй постановкой задачи, т.е. синтезом контура самонаведения ракеты.
Квазитерминальное оптимальное управление первого рода
Для квазитерминального решения первого рода (см. §§ П.З, П.4)
минимизируемый функционал задаем в виде
_ г°
/=4Р11л^1 y)+4-J ~^dt+
Го
t
Гр ГО
+ “2" J dt + ~2" У ^3 ИзЛ + ^32*2 + ^33Хз)2^1. (10.28)
t 3 t
Назначаемая часть функционала здесь содержит только интеграль¬
ную квадратичную оценку управления (отклонения руля высоты)
и квадрат конечного промаха. Согласно общему выражению (П.4.24)
матрица коэффициентов оптимальных квазитерминальных управ¬
лений первого рода.
А == wT (■“ “Т*"’ ( 7-’ *)•
Для коэффициентов Л31, Л32, Л33 имеем в данном случае
А1 = PllO’lS ( J-r ^11 (— -J-. t}.
As = Р11^13 ( r-f- . ^12 ( 7“ ’ ’
Аз = Pillis ( J- . ^18 ( rf- . t
аналит. конструирование контуров САМОНАВЕДЕНИЯ 343
§ 10.31
Согласно (10.27)
wn = 1,
V
= cos qQ
1 er
4- -t
Г
J ^22 (т) ('’о + rt 4- гт) dx =
0
г г ~
г г
r jj w22(x)dx+'r f xw22(x)dx ,
0 о -
г
У р • ■
—^-cos9c ау23(т)(г0 + г/ + гт)Л =
7 ег 4
V
COS
TQr
9с
г г
г в23(т)Л4-г I w23(T)dT
о 6
>
где
ехр (— £а<оат)
Интегрируя,
Г^’
а>12
аи23(т) = ~"‘г' sin(/l — &оат),
^22 (т) = &У23 (т) 4- 2Ca(0aU>23 (т)-
находим
4^г{_еч4ш“т)х
yjlz.3)Sin 1 VT^&»a 4-) +
К i - \ г /
X
^13
4-) +4&-1+2&
УТ~?sin t^1 “ ^®“Т/+
Y 1 -а
-|- 2;aCOS V\ — СаС0а4-) + СОа 4-
\ Г / г
+ (4£а — 1) COS (V 1 — СаСОа
X
' f
(10.29)
344
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл X
Оптимальное в смысле минимума функционала (10.28) управление
и3 = — kaBtoaSB = — ^Зрц^1з 4" ^12 Х2 "Н
+ ^13
'о
г
Отсюда вытекает
6В = k*Wu (г)
где
7^-Ав + №12(г)а+ — №13(г)а
(10.30)
>
X
»
X
т)]-,
(10.31)
Графики изменения ш*3, Ш12, как функций относительной даль¬
ности г, точнее, безразмерной величины г* = — соаг/г, представле¬
ны *) на рис. 10.15 для нескольких значений £а < 1. Если в качест¬
ве независимого аргумента вместо времени t принятьбезразмерную
дальность до цели г* = —(оа г/г, то уравнения оптимальной системы
(10.25), (10.30) можно представить в виде
d2a da
= — (г*) + №*2 (г*) а — в>в (г*) , (10.32)
-^--гМа = 0,
, V cos qc
где d= т J '
*) Все вычисления на ЭВМ по данному и последующим примерам в этой
главе выполнены В. В. Невструевым.
аналит конструирование контуров самонаведения 345
§ 10.3]
нарном квазитерминальном (первого рода) управления.
346
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
(10.33)
Запись уравнений (10.32) можно еще упростить, если ввести
Рио. 10.17. Переходные процессы в контуре самонаведения при стационарном
управлении.
безразмерный промах Д* = Д/d. При этом получаем
+ а = — &<у13(г*) I Дв + u>i2 (г*) а — ш13 (г*) j ,
(10.34)
где k — pn^fd2- Ha рис. 10.16 представлены процессы изменения
промаха, угла атаки и управляющего воздействия
и* = to13 (г*) | д; + се-12 (г*) а — ау13 (г*) j
в оптимальной системе (10.34) при начальных условиях
Дв (Го) = Дво, а (г*) = 0, = о
и указанных на рисунке значениях k, £а. Для сравнения на рис. 10.17
изображены процессы изменения промаха и управляющего воздей¬
аналит. конструирование контуров самонаведения 347
$ 10.3]
ствия в системе со стационарным управлением
2Са^-+а = -м* = ^Дв-^а + ^'^-,
dr*
г*а = 0,
где коэффициенты k*, ka, ka подобраны из условия наилучшего
качества переходного процесса ликвидации начального промаха.
Из сопоставления кривых рис. 10.16, 10.17 видно, что оптималь¬
ные нестационарные квазитерминальные (первого рода) управления
при равной «мощности» управления («квадратичная» площадь под
кривой и) обеспечивают лучшее устранение начального промаха,
чем при управлении с постоянными коэффициентами. Однако
минимизируемый функционал (10.28) не содержит назначаемой ин¬
тегральной оценки качества переходных процессов. Поэтому еще
лучших результатов можно ожидать от квазитерминальных неста¬
ционарных управлений второго рода, при которых оптимизирую¬
щий функционал содержит интегральную оценку качества пере¬
ходных процессов.
Квазитерминальные оптимальные управления второго рода
Для квазитерминального решения второго рода (см. §§ П.З, Г1.4)
минимизируемый функционал задаем в виде
РцА» ( + ~<Г J (PiiAb + ₽22а2 + Рзза2) di Н-
t
'о _£о
7 2
+ ~2” J + ~2~ + ^З2а + Лзза)2 di =
_£о
г
& ~ Р11х1 + ~2~ j + &22Х2 + Рззхз) dt +
t
ro rn
г 2 I
4 g- У j &3 (A1X1 + ^3ZX2 + ^33Хз)2^' (10.36)
Наряду с квадратом конечного значения промаха здесь фигурирует
348
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. х
интегральная оценка
Гр
J (РпДв + ₽22а2 + Рзз»2) dt,
t
отражающая качество переходных процессов ликвидации промаха
и изменения угла атаки. Коэффициенты рп, 022, Рзз считаем постоян¬
ными. Согласно общему выражению (П.4.21) матрица коэффициентов
квазитерминальных оптимальных управлений второго рода имеет вид
_ £о
+
A = wT ~ рш (—, t
I wT (t', t)$(t')w(t', t)dtf.
Для коэффициентов управления u3
^3 = ^3 (^31^1 4“ ^32^2 4“ A33Xз)
(10.37)
имеем
_<o
Л1 = Pn^is (— -J- . + Ph a»i3 (*'» 0
^32 = Pll^lS (— -J- ’ W12 (— 7- ’ +
/0 _£o
+ Pll j ^13 . 0 W12 (f , t) dt’ + f 32 j U>23 (*'. 0 ®22 tt', 0 dt’ +
£0
+ Рз3 J ^33 (*', 0 ^32 (*'» 0 di',
t
_r±
^33 = P11^13 у > t^ 4" Pll j ^13 (t', t) dtf +
t
_г± _To
+ P22 j wl3(t', /M' + ₽33 j W33(t', t)dt'.
1
(10*38)
аналит. конструирование контуров самонаведения 349
§ 10.3]
Учитывая выражения (10.27), оптимальное управление (10.37)
представляем в виде
«3 = — kid? рз1 + ^32 (г) а + Дзз(г)а] » (10.39)
где
+ -^г- f ^з(С /)&у12(С Odt +
г
+ У “'аз (т) йУзз (т) di — -Ь ®аШ23 (— 4-j ’
о
г0
г
Лзз(г) = -^= ^••“’13 ( 7 ’ +
t
I Р22
dx+У dx-
о
(10.40)
На основе аналитических выражений (10.27), (10.29) для весо¬
вых функций можно получить конечные алгебраические выражения
Для коэффициентов оптимального управления. Однако эти формулы
Довольно громоздки и для численных расчетов удобнее пользоваться
выражениями вида (10.38), (10.40).
Как и ранее, можно использовать безразмерную дальность г* =
*= —(dof/r и безразмерный промах Д^ = Ae/d. Тогда уравнения
350
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл X
замкнутого оптимального контура самонаведения принимают вид
dr*2
2£а>+а = -^-
+
I (10.41)
I
г*сс = 0.
Для
циенты
получения конкретных процессов
функционала (10.36) рп, рп, р22,
/
коэффи-
Согласно спосо-
следует задать
Рзз-
4?7 (Г7
Рис. 10.19. Переходные процес¬
сы в контуре самонаведения при
оптимальном квазитерминаль-
ном (второго рода) управлении.
Рис. 10.18. Графики коэффициентов квазитерминаль¬
ных управлений второго рода.
бу «равного вклада максимальных
отклонений» записываем
аналит. конструирование контуров самонаведения 351
§ 10.3 3
ЕСЛИ Двт= «т = °>2 Рад< ат= 2 Рад ’ СвК~'’ Т0 МР11 =
= 2,5 • Ю6 л2 • рад~2< ₽зз/₽ц = 2,5 • 103 л*2 • сек3 рад 2- При
/Рп = Ю Са = 0,5 и указанных других значениях параметров
определены кривые изменения коэффициентов оптимального управ¬
ления. Эти кривые представлены на рис. 10.18. На рис. 10.19
изображено изменение промаха и управляющего воздействия при
рассматриваемом квазитерминальном (второго рода) управлении.
Коэффициент усиления здесь равен = Ю. Качество про¬
цесса ликвидации начального промаха здесь выше, чем при квази¬
терминальном управлении первого рода.
Нетерминальные оптимальные управления
со скользящим граничным условием
Для получения нетерминального решения со скользящим гра¬
ничным условием (см. § П.4) минимизируемый функционал задаем
в виде
t
=4" рцд» +4" И +^22<z2 + Р33*2)dt +
/-т3
2 t
+ 4" j + J + + (10.42)
/-т3 3 t--т3
где т3 — заданный интервал времени, t — текущий момент времени.
Верхний предел скользящего интервала времени здесь совпадает
с текущим моментом времени. Это позволяет осуществлять оптими¬
зацию процесса самонаведения до самой особой точки — цели, когда
t = — г0/г. Коэффициенты оптимального управления
u3 = k$ (Д31Д0 -J- Д32а -ф- Л33а)
в данном случае выражаются формулами
41 = Pillis (С 1 — %) + ₽11 J “Чз (('> 1 — ь) di'>
■4S = РцШ13 ((, t — т3)а>12((, t — т3)4-
+ Р11 j ®13 (('» 1 — b) 0У12 (С, t — Т3) di' +
,-т3
т хз
+ Р22 \ ®23 (т) ®22 (т) di + Раз j Шзз (т) Ш32 (%) dT,
о о
(10.43)
352
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. х
t
А33 = Рп™2з(М — Т3) + Р11 J W213 (f, t — T3) dt' +
T3 т3
+ ₽22 ( йУ2з(т)</т + Рзз f Шзз(т)£«т.
На рис. 10.20 приведены графики изменения коэффициентов
(10.43) , вычисленные при указанных выше значениях коэффициен¬
тов назначаемой части функционала, £а = 0,5 и т3о)а = 10. На
рис. 10.21 приведены кривые изменения промаха и управляющего
воздействия при оптимальном управлении с коэффициентами
(10.43) . Как видно, нетерминальное управление со скользящим
граничным условием дает в данном случае результаты, близкие по¬
лучаемым при квазитерминальном управлении второго рода.
Нетерминальные оптимальные управления без граничного условия
Согласно общей теории для линейных систем этот вид управле¬
ний получается при минимизации функционала (П.4.25), который
в рассматриваемом конкретном случае принимает вид
з t2
1 = S А‘* (/2) Xk (t2) + 4- (рпх? + р224 + Рзз*з) dt +
I, k=\
G ^2 t2
4” "5“ J ~р“ 4" ~2~ .1 (41X1 + Л32Х2 + 4зХз)2
G 3 G
Если £а> 0, соа > 0, а это (устойчивость летательного аппарата
по перегрузке) практически всегда имеет место, то исходный обоб¬
щенный объект (10.26) в рассматриваемых координатах нейтрален.
Между тем положительная определенность первой квадратичной
формы функционала имеет место для устойчивых исходных объектов.
Используем стандартную для нейтральных и неустойчивых объек¬
тов методику, а именно, задаем оптимизирующий функционал в виде
/ = ехр 2 Aik (/2) Xi (t2) xk (/2) +
4" -у- У exp (PllXl + &22x2 + P33X3) dt +
G
+ 42x2 4" 4з*з)2 dt» (10.44)
АНАЛИТ. КОНСТРУИРОВАНИЕ КОНТУРОВ САМОНАВЕДЕНИЯ 353
Рис. 10.21. Переходные процессы в контуре самонаведения при оптималь¬
ном нетерминальном управлении со скользящим граничным условием.
12 А. А. Красовский
354
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
х
Рис. 10.23. Переходные процессы в контуре самонаведения при опти<
мальном нетерминальном управлении без граничного условия.
f 10.»]
аналит. конструирование контуров САМОНАВЕДЕНИЯ 355
Согласно общей теории коэффициенты оптимального управления
и = + А^2 + лзз*з)
выражаются в данном случае формулами
Л,1-Це*р(-^Ь"<Л/)‘К'’
Л32 = ₽11 J ехР (— -у-) (f’ о О»18 (/', О dt' ф
t
li-t
ф р22 J ехр ( — 2 да2з (Т) ш22 (т) dr ф
О
ф р83 У ехр (— 2 -^ф-^-) ш3з СО даз2 (О d х,
О
Аз = Р11 j ехр (— 2 КУ13 (*'» 0 dt' ф
t
+ 022 У ехр (— 2 -^ф^-) и>23 (О dr ф
О
+ 033 j ехр (— 2 ^ф^-) 0У5з (О dr.
*0
(10.45)
На рис. 10.22 представлены графики оптимальных коэффициентов
(10.45), полученные при прежних значениях Р22/р11, ₽зз/₽п> Sa = 0,5
и Тша = 1. На рис. 10.23 изображены кривые изменения промаха
и управляющего воздействия при соответствующем нетерминальном
оптимальном управлении без граничного условия.
Синтез контура самонаведения для сложной линейной модели
обобщенного объекта
В рассмотренном случае весь обобщенный объект был представ¬
лен колебательным и «кинематическим звеном». Возмущающие воз¬
действия, инерционность датчиков информации и исполнительного
Устройства не учитывались. Рассмотрим теперь более сложную мо¬
дель плоского движения обобщенного объекта, в которой учтем
12*
356
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
случайные возмущающие воздействия и инерционность звеньев
бортовой системы управления.
Как уже упоминалось, измерение промаха на борту летательного
аппарата осуществляется посредством станции или головки само¬
наведения. Станция самонаведения осуществляет угловое сопровож¬
дение цели и сопровождение по дальности. Представим контур уг¬
лового сопровождения станции самонаведения в виде контура ли¬
нейной следящей системы второго порядка, в котором совместно
с сигналом рассогласования воздействует помеха. Соответствующее
уравнение имеет вид
7*гсфгс + фгс = ^ГС (ф фгс 4" ^гс)«
Здесь ф — угол, характеризующий направление линии визирова¬
ния (линии аппарат — цель); фгс — угол поворота системы угло¬
вого сопровождения; £гс = £Гс (0 — помеха; Trct krc — постоянные.
Величины ф, фгс в отдельности обычно недоступны для непосредствен¬
ного измерения на борту летательного аппарата (величина ф непо¬
средственно вообще не контролируется, величина фгс для определе¬
ния требует инерциальной опорной системы координат). С помощью
ДУС или иным путем обычно непосредственно измеряется фгс. В вы¬
ражение промаха входит величина угловой скорости линии визиро¬
вания совв= ф. Поэтому уравнение системы углового сопровожде¬
ния целесообразно представить в виде
Т гс^гс + ® ГС 4“ ^ГС^ГС ^гс^вв 4“ kiz ^гс
или
*2 *з = 0, Х3 4" 030*0 4“ 032*2 4" 033*3 = Вз>
где
- А — f2C°BB - — ’
*о — — у ’ *2 — ^гс» *3 — tt)rc>
v от
В качестве математической модели бортового исполнительного
устройства примем колебательное звено
б в 4" 2£ийэи6в4“ = kuun,
где SB — отклонение руля высоты, £и, сои, ku — постоянные, ии —
суммарный сигнал управления. Вводя обозначения бв = х4, бв = х5,
&иии = 05» уравнения исполнительного устройства записываем
в виде
*4 *5 ~ 0» *5 4" 054*4 4- 055*5 = 05»
где
054 = ^и» 055 = 2^и6)и.
где
АНАЛИТ. КОНСТРУИРОВАНИЕ КОНТУРОВ САМОНАВЕДЕНИЯ 357
§ 10.31
х^поавление изменения угла атаки принимаем в обычной для жест¬
кого летательного аппарата упрощенной (короткопериодическое дви¬
жение) форме: . 2 бв 2
а 4- 2£асоаа + соаа = — ka (оа6в.
Используя обозначения а = *6, а = *7, записываем
. Х7 = 0, *7 + #74*4 4" #76*6 4“ а77х7 = 0,
6Z74 == ®а> #76 = ^а, #77 = 2£а<Т)а.
В кинематическом звене учтем случайные ускорения цели и
ускорения наводимого летательного аппарата, создаваемые внешней
случайной возмущающей силой. Подобные ускорения могут воз¬
никать, в частности, за счет турбулентности атмосферы. С учетом
сказанного полная система уравнений рассматриваемого линейного
обобщенного объекта запишется в виде
*0 4- #06*6 = ^0» *2 *3 = 0,
*3 4" #30*0 4- #32*2 4- #33*3 — £з>
*4 " *5 = 0» Х5 4" #54*4 4- #55^
хв —- *7 = 0, х7 4- а74х4 4- а7бл
(10.46)
где
V cos <7с
Оов = Г -rjf-
J е'от
0)2 Г
= “у ’ £о = ~у (/цв /вп),
* от от
в /цв, /вп — случайные ускорения цели и наводимого аппарата,
нормальные к линии визирования. Остальные обозначения указаны
выше. Величина
г2оу
х — А — вв-
л0 — мв ~ у
к от
в рассматриваемой модели обобщенного объекта недоступна для
непосредственного измерения. С точностью до шумов станции само¬
наведения она может быть определена косвенным путем (посред¬
ством контроля Юге и г). Для того чтобы привести задачу к случаю
полной степени наблюдаемости, исключим х0 из уравнений (10.46),
введя одновременно обозначение = согс. Считая параметры V,
Тгс, Те, Уот, cos qc постоянными, находим
*1 4~ #11*1 4~ #12*2 4" #13*3 4" #16*6 = £1»
*2 *з~0, гз *1 = 0, х4 %б = 0,
*5 4" #54*4 4“ #55^6 = #5» Хв Х7 = 0,
*7 “Ь #74*4 4“ #76*6 4” С177Х7 = 0,
(10.47)
358
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
СГл. х
где
5 ГС +
/вп
-г /’
/цв
Ди — -у 2 — »
1 ГС
п 9 го Г
#12 ~ т г ’
1 ГС '
„ _ *гс | 2 ?
“13 J- 1 т г ’
1 ГО 1 ГС *
„ _ krcV COS
“16 Т Т
1 гс7 е
Если gx не является белым шумом, то необходимо знать уравне¬
ние формирующего фильтра и решать задачу с неполной] степенью
наблюдаемости (величина и внутренние координаты формирую¬
щего фильтра недоступны для измерения). Для случая белого шума
решение совпадает с детерминированным случаем (см. Приложение)
и может осуществляться при полной степени наблюдаемости, так
как все величины
%1 = (0гс, Х2 = СОгс> %з ~ wrc, -^4 = ^в> 1 /1Л
( (10.48)
= бв, хв = а, х7 = a J
в принципе доступны для измерения на борту летательного аппа¬
рата. Основной величиной, характеризующей промах, здесь являет¬
ся угловая скорость сопровождения
х2 = <огс « совв =-^ V0T. (10.49)
Поэтому при решении квазитерминальной задачи прежде всего не¬
обходимо учесть значение х2 у цели, т. е. х2 (—r0/r)f если г = const.
Можно учесть также желательность ограничения других параметров,
в частности, угла атаки наводимого летательного аппарата или пе¬
регрузки у цели. Учитывая в терминальной части функционала
только основную величину (10.49) для квазитерминальной задачи
первого рода, оптимизирующий функционал задаем в виде
г0
У
+
Для случая, когда является белым шумом, оптимальное управ-
$ 10.3]
аналит. конструирование контуров самонаведения 359
ление имеет вид
„ = _ kl 2 A^xk = —kl Ив2®го + Л53согс +
* A=1
Л81®го 4" ^5А + Л65 4* 45ва 4" (10.51)
Р It = OJI — фундаментальная матрица весо¬
вых Функций обобщенного объекта (10.47), то матрица коэффициен¬
тов оптимальных управлений
у <)pw(-y/).
Отсюда следует
Лй = Р22^2Б (— -у ’ "У ’ •
Таким образом, оптимальное нестационарное управление, миними¬
зирующее функционал (10.50):
И8 = — ^5Рг2^2Б f ®22 I ®ГС 4*
Л = шт ( —
Для квазитерминальной задачи второго рода минимизируемый
функционал задаем в форме
Го
f о
dt
+4-м
Г0
+4-м
Оптимальное управление имеет вид (10.51), где в данном случае
~т'
_£о
/ 7
4- 2 ₽wte»v5(f, t)wvk(t', t)df. (10.54)
< v-l
Л5й = p22w25
360
КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ
[Гл. X
Для нетерминальной задачи со скользящим граничным условием
назначается функционал вида
■ 7
Г t "1
С 7
2 Pkk^k (0
+ 4-м
j 3 $kkXk di
_/г=1
Д3 4=1
t
+4-м
Коэффициенты оптимального управления, минимизирующего этот
функционал, выражаются формулой
7
Ask = 2 PvvO>v5 (Л t ~ Ъ,) ™vk (t — Т3) +
V=1
f 7
+ j 2 ₽vv^v5(^', t — iQwVk(t', t — x^dt'. (10.56)
f-T3 V=1
Согласно общей теории, рациональное решение нетерминальной
задачи без граничного условия для неустойчивого исходного объекта
(каким является обобщенный объект (10.47)), требует назначения
переменных коэффициентов функционала. Для объекта (10.47) точка
цели (г = 0) является особой: при подходе к этой точке совв, а зна¬
чит, и core неограниченно нарастают. Поэтому назначение экспонен-
циального множителя вида exp I для процесса самонаведения,
описываемого посредством промаха Дв (см. (10.44)), здесь не решает
задачи.
В качестве функции х (/) (см. § П.З) в данном случае удобно
выбрать r~d, где d > 2. В результате получаем следующее. Опти¬
мальным управлением, минимизирующим функционал
/-4-М
7
k=l
+
§ 10.3]
аналит конструирование контуров САМОНАВЕДЕНИЯ 361
Рис. 10.24. Структурная схема линейного контура самонаведения при оптимальных нестационарных управлениях.
362 КОНТУРЫ НАВЕДЕНИЯ САМОЛЕТОВ НА ЦЕЛИ (Гл. X
является управление вида (10.51), где коэффициенты выражаются
формулой
7
А5к= \ г2<<(05 Pwa’vstf', t)wvk(f, t)dt'. (10.58)
7 v=j
Структурная схема контура самонаведения при всех четырех оп¬
тимальных управлениях одинакова (рис. 10.24). Различны лишь
законы изменения передаточных чисел Аы, как функций относи¬
тельной дальности до цели г.
Г лава XI
СИСТЕМЫ АВТОМАТИЧЕСКОГО управления вертолетов
и их аналитическое конструирование
Техника пилотирования вертолета не является простой и по¬
пытки автоматизации управления предпринимались на самой
ранней стадии развития вертолетостроения. В целом задачи автома¬
тизации управления вертолетами те же, что и для самолетов: улуч¬
шение устойчивости и управляемости при ручном и полуавтомати¬
ческом управлении, облегчение работы летчика, осуществление тра¬
екторного управления и др. Однако вследствие сильного отличия
вертолета как объекта управления от самолета роль и вес различ¬
ных функций автоматического управления для вертолета в сравне¬
нии с самолетом существенно отличаются. Отличаются, естественно,
оптимальные структуры и законы управления. Поэтому прежде
всего целесообразно рассмотреть вертолет как объект управления.
Сама механика управления и полета вертолета освещена в обширной
литературе (см., например, 111.1 J — 111.6]). Это относится, в част¬
ности, к работе автомата перекоса и несущего винта. Поэтому не
будем производить пояснений работы основных агрегатов, отсылая
к упомянутой литературе.
§ 11.1. Математические модели вертолета
как объекта управления
Строгое описание динамики вертолета существенно сложнее опи¬
сания динамики жесткого самолета. Это обусловлено тем, что каж¬
дая лопасть несущего винта имеет от одной (для так называемых
«жестких» несущих винтов) до трех (для обычных винтов) дополни¬
тельных вращательных степеней свободы. Эти степени свободы
создаются так называемыми осевыми, горизонтальными и вертикаль¬
ными шарнирами. Кроме того, сами лопасти несущего винта являют¬
ся весьма гибкими и приобретают необходимую несущую способ¬
ность только за счет центробежных сил.
При разработке приемлемой для практического применения
математической модели вертолета обычно прибегают к упрощенному
представлению несущего винта. В собственном вращательном дви¬
жении будем рассматривать несущий винт как твердое тело, вра¬
щающееся вокруг неподвижной оси. Это может быть аргументиро¬
вано тем, что колебательные движения лопастей, существующие
при отклонении оси конуса несущего винта от оси вращения (оси
364 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
втулки), вызывают циклические пульсации, незаметные в среднем
движении. Моменты кориолисовых сил, возникающих при измене¬
нии положения оси конуса несущего винта, также не оказывают
заметного влияния на среднюю скорость вращения винта.
В соответствии с этим для несущего винта записываем
*^нв^ 4" Мнв (Й, 6НВ, У у\) = Л4дв (бсг). (11.1)
Здесь /«в—момент инерции несущего винта; Q — скорость вра¬
щения несущего винта; 7ИНв— момент сопротивления вращению,
зависящий помимо Q от общего шага винта бнв и воздушной скорости
Vy\ вдоль оси 0у± вертолета; 7ИДВ — момент двигателя, зависящий от
положения сектора газа бег. Следует заметить, что крутящий момент
несколько запаздывает по отношению к изменению положения сек¬
тора газа. Поэтому в уточненной трактовке бсг обозначает не откло¬
нение сектора газа, а некоторое управляющее воздействие, мгновен¬
но влияющее на мощность, развиваемую двигателем.
Главными параметрами, от которых зависит тяга несущего винта
Г, являются Q, бНв, Ууъ Однако при наличии поступательной скоро¬
сти вдоль осей О%1, Огг возникает дополнительная подъемная си¬
ла, зависящая от Vxi, Vzi, а также от угла наклона оси конуса несу¬
щего винта. Последний зависит от отклонений ручки управления,
точнее, отклонений шайбы автомата перекоса бп, бб, а также угло¬
вых скоростей тангажа cozi и крена Поэтому
Т = Т (Q, бнв, УуЪ УхЬ Vzb бп> ^б, COxi, (Dzi). (Н.2)
Дальнейшие уравнения относятся к одновинтовому вертолету.
Все движущие и управляющие силы и моменты, за исключением
момента рыскания, создаются в основном несущим винтом. Сила
вдоль связанной нормальной оси Ог/Х равна проекции тяги Т на эту
ось плюс проекция подъемной силы фюзеляжа. Поэтому зависит
от тех же параметров, что и Т
Yi — Y^Q, бнв, Vyi, VxU Vzi, бп, бб, сохЬ ®zi). (11.3)
Сила Хх вдоль продольной связанной оси вертолета состоит из
проекции силы Т на эту ось, а также проекции силы лобового со¬
противления. Поэтому
Х1 = Х1(бп, бб, Vxi, Vzi, Vyi, ®гЬ Q, бнв). (11-4)
Аналогичное происхождение имеет сила вдоль поперечной свя¬
занной оси вертолета. Силу вдоль этой оси создает также хвостовой
винт. Поэтому
= Zi (бб, бп, Vzl, Vxl, Vyl9 бнв, бхв)« (11.5)
При отклонении оси конуса, а значит, и вектора силы тяги несущего
винта, эта сила создает управляющие моменты тангажа и крена.
Кроме того, при поступательном движении вертолета некоторые
МОДЕЛИ ВЕРТОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
365
§ 11.1]
ы тангажа и крена возникают за счет углов атаки и сколь¬
жения фюзеляжа: Учитывая выражения (11.4), (11.5) найдем
Мх1 =Мл(бб» Sn» Kb Vxb УуЬ <0x1, (Ozl, бнв, бхв, й), (11.6)
Мгх = Mzl (6 п» 6g, Vxl, Vzl, У yb (Ozl, (0x1, бнв). (11.7)
М ент относительно нормальной связанной оси Оуг складывается
М момента М& (бег), создаваемого двигателем; момента хвосто-
вого винта Л1хв(6хв, (0,1), зависящего от шага этого винта 6ХВ и уг-
ловой скорости рыскания; момента фюзеляжа и вертикального опе¬
рения ТИфю ((Oz/i, Vzi, Vxi), зависящего от угловой скорости рыска¬
ния и угла скольжения. Таким образом,
fy[y\ = Му\ (бхв, (^1/1, бег, Vzl, Vxl) =
= —А1ДВ(бсг) + AfXB(бхв, (Ог/i) 4- Л4фЮ(соР1, Vzi, Vxi). (П-8)
Рассматривая фюзеляж как твердое тело, записываем уравнения
пространственного движения вертолета при отсутствии ветра в виде
Jxl(^xl 4" (A Jу) (°Z/l(°zl =
= МхХ (бп, 6б, 6НВ, 6Хв, У xb У yb Vzb (0*1, (^zl, ^),
Jyl®yl (^X z) ^xl^z\ = Myl (5XB, 6cr, Vxl, Vzl, (0^/1),
Jz\^z\ 4" (Jу — J^^x№y\ =
= MZ1 (6n, 6g, 6HB, Vxl, У yb Vzb (0x1, (Ozl, £2),
m (Vxl 4“ (Or/lVzl — (Ozl^z/l) =
== %i (6n, 6g,6HB, Vxl, УуЬ УгЬ (0x1, (Ozl, Й)
m (Уy\ + (OzlVxl — (0x1 Vzl) =
& У1 (бп, бб, бнв, Vxl, У yb У zb (0x1, (Ozl, £2) —fflg£22f
m (Уzl 4' (0x1 Уy\ — (Of/lVxl) =
& ^i (бп, 66, SHB, 6:
JHBQ + A4HB (6]
8 ц 4~ (0f/1813 (0z1812 == 0»
612 4~ (0zl8u — (0xl813 = 0,
e13 4“ (0xl8ia — (008ц = 0,
®31 4~ (0i/1833 (0z1832 = 0,
6 32 4" (°zl83i — (0xl833 = 0,
e33 4" (0x1832 — (0r/1831 = 0,
(11.9)
'нв, Sxb, Ухь Ууь Vzi, (0хЬ co^b со21, Q) — mgZw
•нв V,b Q) = Мдв (бег),
e 21 4" Wi/le23 le22 =
^22 4“ ^zl^2l ^xl^23 =
e23 + Q>1S22 —C°r/le21 =
* == Vxien + ^0812 + ^zi813,
У = Уxl&21 4" ^f/1^22 4" 1^z1823,
г = Vxis31 4" ^r/i832 4" Vzie33.
- — _ . • - — f
В этих уравнениях учтены как сильные, так и относительно слабые
зависимости. Для получения уравнений первого приближения
366 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
необходимо задать невозмущенное движение. Часто в качестве не¬
возмущенного движения рассматривают прямолинейный полет, в ко¬
тором
сох1 = со0 = ш21 = 0, Уг1 = О, VX1 = (Vxi)o, Vyi = (Vf/i)0-
Для этого режима уравнения линейного приближения имеют вид
атхЛ<оХ1 -|- -в/пхА^и 4" С1^ХЬУх1-\-amx\V2\ =
= + #?nxAS6 4“ а&тх A6XB,
A^I/l + ^my^y\ 4" z\ = C^rny A8cr 4" ^°ASXB,
A^ZI 4- CLtnz^xX + ^mzA(Ozl 4" ttrnz^Vxl 4“ d'tnz^у \ 4"
4- a^VzX + a^AQ = 4nzASn 4- 4US6 4- 4zBASHb,
Al\i 4“ ax AVxi 4" ax AVzi 4" а>хУ4~ tfx^Aco^i 4~
4- аГАо,! 4- a*Afl = ^пАбп 4- Лбб 4- a6xHBASHB,
AVy\ 4" ^z/Acojii 4" 4" ^xAVxi 4" #^AQ =
= ^Лбп + 4бА6б4-4нЖв,
AVzi 4“ az Acoxl 4- ci^Дсоуi 4“ o^zAcozi 4" AVxi 4"
4- a2zW2X + 4AV = a*nA6n 4- ^66AS6 4- az6xBA6XB,
AQ + 4 AQ 4- a^\Vyi = cfcrAScr 4- 4HB A6HB,
Ду — Дсох =0, Дяр — Д©р = 0, ДО1 — Дсог = 0,
Д£ — AVxi + a?Afl = 0, Др—ДГ^ + aJ Д0 = 0,
Дг — Д7г1 = 0.
(11.10)
Коэффициенты имеют следующие выражения:
МОДЕЛИ ВЕРТОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
367
9 П-П
В уравнениях (11.10) уже отброшено несколько линейных чле¬
нов, коэффициенты которых при данном невозмущенном движении
пренебрежимо малы. Однако математическая модель вертолета
(11.10) довольно громоздка и не вполне удобна для элементарного
анализа. Элементарный анализ динамических свойств вертолета
368 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
как объекта управления обычно осуществляют путем расчленения
движения на отдельные не очень сильно связанные составляющие.
Из системы уравнений (11.10) можно выделить уравнение скорости
вращения несущего винта и вертикальной, точнее нормальной, ско¬
рости
AQ + а°ДЙ + avm^Vyl = 4СГД6СГ + 4нвД6Нв, ) (1 j j 1)
Д7У1 + avyvbVyl + а^ДЙ = 4"ВД6НВ + Д/, J 1
где Д/ = а®пД6п + а®бД6б — а“2Дшг1 — ayxAVxl рассматривается как
возмущающее воздействие. В режиме висения, т. е. при отсут¬
ствии регулярной поступательной скорости, это воздействие не
Рис. 11.1. Структурная схема линейной модели канала вер¬
тикальной скорости и скорости вращения несущего винта.
велико, так как оно создается в основном подъемной силой не¬
сущего винта и фюзеляжа, возникающих при поступательном дви¬
жении. Ручка общего шага несущего винта обычно имеет непосред¬
ственную связь с сектором газа, образуя орган управления «шаг —
газ». Эта связь устроена так, что
4сгдбсг-ь4нвдбнв~о. (п.12)
Точность выполнения соотношения обычно невелика из-за неточ¬
ного знания коэффициентов а^г, а6™. При нестрогом выполнении
(11.12) изменение общего шага несущего винта создает непосредст¬
венное воздействие на Q. Кроме того, на скорость вращения Q
влияет вертикальная скорость Vy. Для стабилизации скорости
вращения несущего винта обычно устанавливается регулятор ско¬
рости вращения, воздействующий на подачу топлива в двигатель.
Структурная схема, соответствующая уравнениям (11.11) и ли¬
нейному регулятору скорости вращения несущего винта, представ¬
лена на рис. 11.1. Входным воздействием здесь служит изменение
общего шага несущего винта ДбНв. Связь, обозначенная пунктиром,
$ цд] МОДЕЛИ ВЕРТОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ 369
существует при нарушении условия (11.12), т. е. при
6НВ . бег ~бнв 1 бег 7 и
Um Д6 &т — &т ^рас^/и
Величина Ц7рег обозначает передаточную функцию регулятора ско¬
рости вращения несущего винта вместе с соответствующим испол¬
нительным устройством. Из рис. 11.1 видно, что данная модель ка¬
нала нормальной скорости и скорости вращения несущего винта
при Д/ = О устойчива даже при отсутствии регулятора (№рег = 0).
Регулятор скорости вращения как бы уменьшает глубину обратной
связи по AQ, а идеальный регулятор (№рег = &рег) при неограничен¬
ном увеличении коэффициента усиления йрег сводит эту обратную
связь к нулю. При упрощенном анализе и наличии регулятора
скорости вращения несущего винта часто полагают AQ = 0.
Как и для самолета, продольным движением вертолета называют
поступательные движения вдоль осей х, у и вращательное движе,
ние вокруг оси г; боковым движением — вращения вокруг осей х-
у и поступательное движение вдоль оси z. Взаимные (перекрест¬
ные) связи продольного и бокового движений для вертолета силь¬
нее, чем для самолета. Это вызвано самим механизмом работы несу¬
щего винта. Однако и для вертолета при приближенном анализе
режимов стабилизации допустимо изолированное рассмотрение про¬
дольного и бокового движений.
Полагая для продольного движения ДсоХ1 = 0, Дсо^ = 0, ДУ^ =
= 0, Д6б = 0, Д6ХВ = 0, а также AQ = 0, из (11.10) получаем
ДсОг! + ^/nzA^zl + Omz^V х\ + Umz^V у\ = Cl^z\dn + Я^/Дбнв,
Д1/х1 + а?ДУх1 + axyAVyX + «ГД®. + = Й*ПД6П + а«нвД6нв, •
ДЙ уХ + + ayyAVyX + ayxAVxX = а^пД6п + а^нвД6нв.
(11.13)
Коэффициенты с?уХ, обычно малы. Поэтому нижнее уравнение —
уравнение нормальной скорости можно рассматривать автономно.
Полагая Д6Нв = 0 и пренебрегая членами а^ДУ.ь а^ДУ,ь полу¬
чаем еще более простую модель
Дй>21 + ^mzA^zl + Omz&V х\ = ^mzA8n,
ДК1 + + а“2Д®2 + а*АЪ = Лбп.
Соответствующая структурная схема представлена на рис. 11.2.
Из этого рисунка видно, что перекрестные связи вместе с участками
канала угла тангажа и канала поступательной скорости Vxi
образуют замкнутый контур .Этот контур, как правило, неустойчив —
В нем могут возникать медленно расходящиеся процессы. Соответ-
(П-14)
370 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ ^л. XI
ствующее рассматриваемой модели
P2 + а^Р
а°гр + а*
обычно имеет один отрицательный
комплексных сопряженных корней с положительными действитель¬
ными частями
D(p) =
= 0
характеристическое уравнение
Vx
Clmz
I Vx
p + ax
вещественный корень и пару
Рис. 11.2. Автономная упрощенная линейная мо¬
дель продольного горизонтального и углового
движений вертолета.
D (р) = (р + X) (р2 — 2£псопр + соп),
где А, > 0, £п >0, соп>0. Таким образом, вертолет как объект
управления в продольном
поступательном и угловом
движениях характеризует¬
ся колебательной неустой¬
чивостью. Вертолет не мо¬
жет выполнять сколько-ни¬
будь длительный неуправ¬
ляемый полет. Однако па¬
раметры собственного не¬
устойчивого движения
(период 10 4- 25 сек) тако¬
вы, что допускают ручное
и, тем более, полуавтома¬
тическое и автоматическое управление данным неустойчивым объек¬
том. Конечно, несмотря на медленность собственного расходящегося
движения неустойчивость несколько усложняет технику ручного
пилотирования.
При анализе контуров стабилизации вертолета частотным мето¬
дом неустойчивость объекта отражается прежде всего в том, что
соответствующее звено не минимальнофазное. На рис. 11.3, 11.4
приведены заимствованные из 111.7] логарифмические частотные
характеристики вертолетов Ми-8, Ми-10 по каналу тангажа в ре¬
жиме висения. Использованная при построении этих характе¬
ристик модель движения близка к (11.14). Согласно модели (11.14)
передаточные функции вертолета по каналу угла тангажа и скорости
Vxi имеют вид
P “Ь (firm “1“ Ях ) Р + (ClmzClx CLX Clrnz) Р Clx Q>mz
ZY6n«2 I /хубп W2 бп WZx “O'
тргбп djc P \flx Clrnz CttnzQ'X ) P ClmzCljc
/убп n I ^бп Ух n6nnVx
amzP amz^x ах amz
(11.1В)
В режиме висения (невозмущенное состояние — висение) член
а тгУ — мал. Это означает, что передаточная функция (р)
g 11.1 J
МОДЕЛИ ВЕРТОЛЕТА КАК ОБЪЕКТА УПРАВЛЕНИЯ
371
обращается практически в нуль при р = 0 и установившийся угол
тангажа при постоянном отклонении ручки равен нулю. На ступен¬
чатое отклонение ручки вертолет реагирует сначала изменением
угла тангажа и «горизонтальной» скорости. После окончания соот¬
ветствующего переходного процесса вновь устанавливается практи¬
чески нулевой угол тангажа (для режима малых скоростей — режи¬
ма висения).
Рис. 11.3. Частотные характеристики вертолета МИ-8 по тангажу
в режиме висения.
А,д6;у,град
Рис. 11.4. Частотные характеристики вертолета МИ-10 по тангажу
в режиме висения.
Линеаризованные уравнения бокового движения вертолета
получаются из уравнений (11.10) в предположении ДУн = 0,
Д1Л/1 = 0, Дсо21 = 0, Дбп = 0, ДбСг = 0. Эти уравнения имеют
вид
Д«х1 4" ОтхД«х1 4" $пх&Уz\ = Я/лхД^б 4“ атх Д^хв> 1
Д(0^1 4" <2т^Д^1 4~ Я^ДКи = ^т/Д^хв, ! 0116)
ДУ,1 4“ Д<Х>х1 4" #г^Дй>£/1 4- CLzZ&Vz\ 4~ ЯгД? =
= а26бДбб + а26хвДбхв.
372 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ ГГл. X!
Связь, выражаемая членом а^у A Vzi, обусловлена в основном
изменением силы, создаваемой хвостовым винтом, при изменении
скорости вдоль оси 0zv Если этот член рассматривать как возму¬
щающее воздействие, то уравнение рысканья становится как бы
автономным:
А«р1 + Д<оу1 = + Д/у, (11.17)
где
’ Д/у = -а^ДУг1.
Согласно этому уравнению канал рысканья вертолета имеет про¬
стейшую структуру (апериодическое звено). Если обеспечивается
Рис. 11.5. Частотные характеристики вертолета МИ-8 по каналу
крена в режиме висения.
Рис. 11.6. Частотные характеристики вертолета МИ-10 по каналу
крена в режиме висения.
стабилизация угла или угловой скорости рысканья такая, что мож¬
но принять
= о, а®;вД6хв = а^ДУг1.
$ 11-21 .
АВТОПИЛОТ ВЕРТОЛЕТА
373
т0 уравнения (11.16) принимают вид
А<ИХ1 4" + О/п*АУг1 = <2тхА6б,
AVzi 4* йг2 A7zi 4- flz^AcOxi 4~ flzAy = az6A66,
(11.18)
где
бхв бхв
По своей структуре уравнения бокового движения (11.18) совершен¬
но аналогичны уравнениям продольного движения вертолета (11.14).
В режиме висения и коэффициенты модели бокового движения
вертолета (11.18) довольно близки к коэффициентам соответствую¬
щей модели продольного движения (11.14). На рис. 11.5, 11.6 при¬
ведены заимствованные из 111.7] логарифмические частотные харак¬
теристики вертолетов Ми-8, Ми-10 по каналу крена в режиме ви¬
сения. Использованная при построении этих характеристик модель
бокового движения близка к (11.18). Колебательность по каналу
крена выше, чем по каналу тангажа.
§ 11.2. Автопилот вертолета. Простейшие структуры
контуров стабилизации и управления
Как уже отмечалось, сложность и специфичность техники пи¬
лотирования вертолета обусловливают потребность в автоматиза¬
ции управления. Прежде всего внедряются системы автоматиче¬
ского управления угловым положением вертолета и стабилизации
барометрической высоты — автопилоты. Главное назначение авто¬
пилотов заключается в улучшении свойств объекта управления
(вертолета с АП) и разгрузке летчика.
Как и в самолетных САУ, посредством автопилота вертолета
могут реализовываться внутренние контуры (контур демпфирова¬
ния, угловой стабилизации) и замыкаться контуры траекторного
управления, такие как контуры управления движением центра
массы при висении, посадке, полете в строю и др. При этом авто¬
пилот объединяется с соответствующими измерительными систе¬
мами в единый комплекс.
В качестве примера автопилота вертолета рассмотрим автопилот
АП-34Б [11.7], устанавливаемый на одновинтовых вертолетах оте¬
чественной конструкции. АП-34Б обеспечивает стабилизацию угло¬
вого положения вертолета относительно трех осей, стабилизацию
барометрической высоты, выполнение при включенном автопи¬
лоте эволюций с помощью обычных рычагов управления. Улуч¬
шение характеристик устойчивости и управляемости за счет авто¬
пилота и осуществление управления с помощью обычных рыча¬
гов облегчают пилотирование, в частности, на малых высотах.
374 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
Автопилот имеет жесткие обратные связи во всех четырех каналах
и простые законы управления. Для режима стабилизации законы
управления в линейной области следующие:
Д6П = $пда+/$Ч» 1
Дбб = л&д? + СЧ,
Д8хв = ^бхв Д'Ф +
Абнв = кн6тДН. J
В канале высоты и в канале рысканья используется либо режим
автоматической стабилизации, либо режим ручного управления.
7 4 8
Рис. 11.7. Упрощенная схема рулевого агрегата.
При воздействии со стороны летчика на ручку «шаг — газ» и пе¬
дали автоматическое управление общим шагом несущего винта и
шагом хвостового винта выключается и соответствующие каналы
автопилота переводятся в режим согласования («обнуления»). В про¬
цессе ручного пилотирования вертолет получает требуемые высоту
и положение в азимуте. После этого включается автоматическая
стабилизация высоты и угла рысканья. Таким образом, в процессах
ручного управления по высоте и углу рысканья АП-34Б не участ¬
вует и не воздействует на динамические свойства вертолета как
объекта управления. Это может быть оправдано тем, что динамиче¬
ские свойства вертолета по указанным каналам относительно бла¬
гоприятные.
Свойства вертолета по каналам тангажа и крена менее благо¬
приятные. Поэтому здесь желательно более полное взаимодействие
ручного и автоматического управлений. В АП-34Б это взаимодей¬
ствие реализуется посредством последовательной схемы, осущест-
АВТОПИЛОТ ВЕРТОЛЕТА
375
§ 11.2J
пяемой на комбинированных рулевых агрегатах. Рулевые агре¬
гаты вертолета КАУ-30, РА-60 не входят в комплект автопилота
АП-34Б, но являются его исполнительными устройствами. Схема
этих рулевых агрегатов приведена на рис. 11.7.
С тягой управления связан золотник /, который управляет
поступлением масла в силовой цилиндр 3. Этот цилиндр жестко свя¬
зан с корпусом вертолета, а цилиндр золотника 1 выточен в подвиж¬
ном блоке 4, связанном с поршнем 2 силового цилиндра через малый
цилиндр 6. Если поршень малого цилиндра 5 неподвижен относи¬
тельно этого цилиндра, что бывает в режиме ручного управления,
то комбинированный рулевой агрегат ничем не отличается от обыч¬
ного гидроусилителя (бустера). Автоматическое управление осуще¬
ствляется через пропорциональный электромагнит 7, золотник 3,
малый цилиндр 6 с поршнем 5 и датчик обратной связи 9. При вы¬
ключенном автоматическом канале поршень и шток силового ци¬
линдра отслеживают перемещения золотника /, создаваемые лет¬
чиком. При включенном автоматическом канале шток силового ци¬
линдра отслеживает сумму перемещений золотника 1 и поршня 5
относительно цилиндра 6.
Достаточно простая линейная модель комбинированного агре¬
гата описывается уравнениями
X ШТ kuiT (^р “г -^МЦ ■Я'Шт)»
^МЦ.= ^МЦ-^з>
(11.20)
Х3 + 2?з(йз^з+ = k3Uy — kxm,
где хшт — перемещение штока силового цилиндра, хр — перемеще¬
ние тяги ручного управления и золотника /, хмц — относительное
перемещение в малом цилиндре, х3— перемещение золотника 8 под
действием пропорционального электромагнита 7, иу — сигнал ав¬
томатического управления, поступающий на усилитель, — -^-хмц—
сигнал обратной связи, поступающий на тот же усилитель, со3 —
частота собственных (недемпфированных) колебаний пропорцио¬
нального электромагнита с золотником.
Соответствующая линейная структурная схема представлена на
рис. 11.8, а. Для диапазона самых низких частот можно идти на
дальнейшее упрощение динамической модели комбинированного
рулевого агрегата, представляя ее в виде безынерционного сумми¬
рующего звена (рис. 11.8, б).
В каналах тангажа и крена штоки силовых цилиндров комби¬
нированных рулевых агрегатов воздействуют на автомат перекоса,
изменяя циклический шаг несущего винта. При этом создаются
управляющие воздействия, обозначенные в уравнениях вертолета
и автопилота 6Д, 6б. Суммирование в комбинированных рулевых
376 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
агрегатах воздействий ручного и автоматического каналов еще не
решает полностью задачи взаимодействия этих каналов при управ-
лении креном и тангажом. Действительно, при включенном автома¬
тическом канале ручное управление, например, по тангажу, будет
встречать противодействие (обратное перемещение штока) со сто¬
роны автоматического канала. Пределы изменения выходной вели¬
чины автоматического канала (относительные перемещения малого
цилиндра) невелики и составляют всего 20 4-25% от полного
Рис. 11.8. Простейшие линейные структурные схемы электрогидравлического комбини¬
рованного рулевого агрегата.
хода штока (xmT)m- Поэтому при значительном отклонении ручки
управления канал автоматического управления будет насыщен.
В этом состоянии он не будет создавать изменяющегося противодей¬
ствия, но не будет также и обеспечивать демпфирования.
Чтобы избежать этого, в каналах крена и тангажа автопилота
АП-34Б предусмотрены так называемые компенсирующие датчики
(или датчики компенсации). Это название не вполне удачно, так
как упомянутые датчики осуществляют не компенсацию, а посы¬
лают дополнительные задающие воздействия в автоматические ка¬
налы. Эти каналы соединены с ручкой управления вертолета и при
отклонении последней посылают сигналы в автоматические каналы
крена и тангажа. Эти сигналы имеют знаки, соответствующие на¬
правлениям желаемых отклонений. Таким образом, сигналы ком¬
пенсирующих датчиков заставляют автоматические каналы дей¬
ствовать согласованно с каналами ручного управления и суммар¬
ные отклонения автомата перекоса увеличиваются.
На рис. 11.9 изображена упрощенная структурная схема канала
тангажа автопилота АП-34Б. Комбинированный рулевой агрегат
представлен здесь простым суммирующим звеном. В автомати¬
ческий канал, кроме сигнала отклонения по тангажу и сиг¬
нала демпфирования Z?szcoz, поступает сигнал центрирования с пуль¬
та управления. Рукоятки центрирования на пульте управления
предназначены для изменения углового положения вертолета в не¬
больших пределах (±5°) без воздействия на ручку управления.
Усилительное звено с коэффициентом &ком отображает компенсацион-
§ И-21
АВТОПИЛОТ ВЕРТОЛЕТА
377
ый датчик. В режиме согласования часть канала, содержащая
сигналы тангажа, компенсационного датчика и центрирования,
охватывается интегрирующей обратной связью. Сигнал датчика об¬
ратной связи автоматического канала, характеризующий положе¬
ние поршня малого цилиндра, кроме усилителя сигнала управления
посылается на индикатор ИН-4. Эти индикаторы установлены во
Рис. 11.9. Упрощенная структурная схема канала тангажа
АП-34Б.
всех четырех каналах автопилота. В сочетании с положением ры¬
чагов ручного управления показания этих индикаторов характери¬
зуют положение всех органов управления вертолета. Структурная
схема канала крена автопилота полностью аналогична структурной
схеме канала тангажа.
Упрощенная структурная схема канала хвостового винта (ка¬
нала рысканья) автопилота АП-34Б представлена на рис. 11.10.
Как уже упоминалось, принципиальное отличие каналов рысканья
и высоты от каналов крена и тангажа заключается в отсутствии
Рис. 11.10. Упрощенная структурная схема канала хвос¬
тового винта (канала рысканья) автопилота АП-34Б.
компенсационных датчиков и отсутствии совместной работы руч¬
ного и автоматического каналов. При воздействии на педали авто¬
матический канал стабилизации рысканья отключается и перево¬
дится в режим согласования.
378 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
Простейшие структуры контуров стабилизации и управления
Упрощенная структурная схема контура стабилизации высоты
полета вертолета получается из схемы рис. 11.1 для каналов верти¬
кальной скорости и скорости вращения несущего винта путем до¬
бавления интегрирующего звена и обратной связи по высоте. Соот¬
ветствующая структурная схема контура высоты изображена на
рис. 11.11. Канал высоты автопилота представлен здесь переда¬
точной функцией И^бнв. Для идеального автопилота, точно реали¬
зующего законы вида (11.19), W^b обращается в постоянный коэф-
АГ
Рис. 11.11. Упрощенная линейная структурная схема конту¬
ра стабилизации барометрической высоты полета вертолета.
фициент £^нв- Через &НП обозначены ошибки датчика барометриче¬
ской высоты (высотного корректора). Возмущающие воздействия,
создаваемые изменением полетного веса, турбулентностью атмо¬
сферы и другими факторами, могут быть приведены к изменению
общего шага несущего винта и учтены в ДД Непосредственно из
структурной схемы рис. 11.11 видно, что структурная устойчивость
стабилизации высоты полета вертолета обеспечивается без введения
сигнала производной отклонения высоты. Действительно, если пре¬
образовать эту схему к одноконтурному виду, полагая, в частности,
регулятор скорости вращения несущего винта безынерционным
№Рег = брег, то схема собственно объекта будет содержать одно ин¬
тегрирующее звено, форсирующее звено и звено второго порядка.
Довольно благоприятные свойства вертолета в отношении стабили¬
зации высоты имеют существенное значение, так как для вертоле¬
тов требуется относительно высокая точность автоматического и
ручного управления высотой полета.
Упрощенная структура контура стабилизации и управления
углом тангажа получается путем сочетания схемы рис. 11.2 со схе¬
мой канала автопилота. Для автопилота АП-34Б без учета нелиней¬
$ 11.21
АВТОПИЛОТ ВЕРТОЛЕТА
379
ностей и инерционности структура канала изображена на рис. 11.9.
Соответствующая структурная схема контура представлена на
рис. 11.12. На этой схеме не показана цепь с интегрирующим зве¬
ном, которая включается только в режиме согласования.
Для рассматриваемой упрощенной модели продольного движе¬
ния вертолета передаточные функции W&1, связывающие
угол тангажа и продольную скорость с отклонением автомата
Рис. 11.12. Упрощенная линейная структурная схема контура стабилизации
и управления тангажом вертолета.
перекоса, имеют вид (11.15). Будем называть их передаточными
функциями вертолета.
Для замкнутого контура согласно структурной схеме рис. 11.12
справедливы соотношения
Ай = —Г^ПД6П,
Абп = (k^p АЙ1 + (1 -|- ^ком^бп) Абрп,
(11.21)
(сигнал центрирования во внимание не принимается). Отсюда по-
лучаем передаточную функцию замкнутого контура
фбр" =
kW6J
1 + (*6п + <Р)
(11.22)
где
1 + ^ком^бп- Согласно (11.15)
wbj
D(p)
k =
380 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
где
П(р) = (Р + (Р2 — 2£п«пР + ®п).
В соответствии с этим и выражением (11.22) характеристическое
уравнение замкнутого контура имеет вид
(р + %) (р2 — 2£псопр + (Оп) —
- (4, + Ср) (а£а? - a6xnaZ+ а^р) = 0.
Как отмечалось, величина
обычно мала, особенно в режиме висения. Поэтому характеристиче¬
ское уравнение можно представить в приближенной форме:
р8 + (Л — 2£п®п — Р2 + (®П - 2£псопХ — а%$п) р + = 0.
Условия устойчивости
* — 2£псоп - >0, со2 - 2£п<опЛ - > 0,
(К - 2£псоп - а«"гС) (®п - 2Сп<опХ - а^?п) > Х<о2
всегда могут быть удовлетворены подбором передаточных чисел
автопилота по углу и угловой скорости тангажа (величина
отрицательна). Итак, если вертолет без автопилота в рассматривае¬
мом продольном движении колебательно неустойчив, то при вклю¬
ченном автопилоте имеет место устойчивость. В отношении управ¬
ляемости вертолет с автопилотом в рассматриваемом продольном
движении сравнительно близок к вертолету без автопилота. Дей¬
ствительно, нули передаточных функций W&1, ф^рп одинаковы и, в
частности, при а6т2ахХ— a^c^mz = 0 обе передаточные функции имеют
нулевой нуль. Это означает, что в отношении угла тангажа верто¬
лет в режиме висения как с включенным автопилотом, так и с вы¬
ключенным автопилотом реагирует на скорость отклонения ручки
управления. Из (11.15), (11.21) убеждаемся также, что
Таким образом, как при включенном, так и при выключенном авто¬
пилоте постоянному отклонению ручки управления соответствует
некоторая постоянная продольная установившаяся скорость.
Как отмечалось, в режиме висения упрощенная модель бокового
движения вертолета в основном аналогична рассмотренной модели
продольного движения (канал рысканья, имеющий простейшую
I 11.3]
СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТА
381
структуру (11.17), можно рассматривать изолированно). Аналогич¬
ны и законы управления по крену и тангажу (см. (11.19)). Таким
образом, простейшая структура контура крена и поперечной ско¬
рости в режиме висения аналогична рассмотренным для продоль¬
ного движения.
§ 11.3. Аналитическое конструирование системы
управления вертолета
Постановка задач синтеза системы управления вертолета может
быть аналогичной рассмотренным задачам синтеза САУ самолета.
В качестве первого этапа может фигурировать синтез системы
устойчивости и управляемости вертолета (системы ручного управ¬
ления). На этом этапе согласно методик главы III назначается
эталон вертолета как объекта ручного управления. По эксперимен¬
тальным данным или априорным соображениям задаются спектры
задающих воздействий летчика на различных режимах пилотиро¬
вания. Дальнейший синтез выполняется по критерию приближения
вертолета с синтезируемой системой к эталону. Приближение осу¬
ществляется на множестве задающих воздействий летчика.
Такой же подход можно применять при синтезе контуров угло¬
вой стабилизации вертолета и синтезе траекторных контуров. Как
следует из общей теории (см. главу III), оптимальные системы,
синтезированные на основе приближения к эталону, содержат в
качестве физической подсистемы эталон — модель динамики авто¬
матизированного объекта. Это благоприятно с различных точек
зрения. Действительно, наличие бортовой модели объекта, близкой
по своим динамическим характеристикам к реальному автоматизи¬
рованному объекту, позволяет осуществлять комплексную систему
оптимального оценивания координат (фильтр Калмана — Бьюси).
Наличие модели облегчает задачу встроенного контроля системы
управления. Наконец, наличие модели упрощает решение проблемы
адаптации системы управления. Все это говорит в пользу методики
аналитического конструирования на основе приближения свойств
объекта с САУ в различных режимах полета к свойствам эталона,
задаваемого для каждого из режимов. Эта методика синтеза мо¬
жет быть последовательно осуществлена для вертолета, начиная
с системы устойчивости и управляемости и кончая системой
посадки, полета в строю и другими подсистемами траекторного
управления.
Ограничимся, однако, рассмотрением частных примеров синте¬
за контуров управления вертолетом в режиме стабилизации и пере¬
хода из одной точки пространства в другую *).
*) Излагаемые в этом параграфе примеры разработаны Р. М. Карапетяном.
382 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
Примеры конкретных моделей движения вертолета
Линеаризованные уравнения продольного движения вертолета
выше записаны в виде (11.13). Это — уравнения угловой скорости
вращения относительно поперечной оси и поступательных скоростей
вдоль продольной и нормальной осей. Вводя обозначения
ДКй = *Х, = Ха, ДУ21 = Х3, Д(0х1 = *4, ДсО^ == Хб,
Д(0з1 = Xqi AQ = х^9 Дбп = Дб($ == х$) Дбцв = *ю»
Дбхв = *ц, Д'О* = х12, Ду = *i3,
уравнения (11.13) представляем в форме
Xi + anXl + #12X2 4" #16*6 4" ^igXg + 621,10*ю + 621,12*12 = 0,
Xa 4“ 62ai*i “1“ ^22*^2 4“ 622gXg 4“ ^28*8 4“ 622,10*10 = 9»
Xq OftiX} -j- 62g2*2 4“ 62ggXg 4“ 62ggXg 4" 62б,Ю*ю == 9»
Для одного из режимов полета вертолета МИ-6 коэффициенты имеют
следующие значения:
ап = 0,031 сек^1,
6X1,10 =1,04 м • сек~2,
а28 = 0,3 м • сек~\
аба = 4,7510~3 м~\
а12 = — 0,0034 сек~\ а18 = 3,4 м • се/с-1,
я18 = 15 м • сек~\
a1J2 = 9,8 м • сек~\ а21 = —0,049 сек~\
а22 = 0,62 сек~\
а23 = 47 м • секГ2, 622, ю = 74 м • сек~2,
а61 = 7,710~4 м~\
a6Q = 0,32 сек~^ aQ8 = 3,3 сек~\
б2б,1о = 1 сек~1.
Уравнения (11.23) дополним кинематическими соотношениями
*14 х± — 0, xi5 х2 — 0, х±2 х8 — 0, (11.24)
где
*14 = У ДУХ1Л, х15 = У &Vy\dt
— интегралы проекций скоростей в связанной системе координат.
Кроме того, учтем инерционность сервопривода общего шага и
циклического шага, включив в число уравнений обобщенного объ¬
екта уравнения апериодических звеньев вида
*8 4~ 628gXg =e U8,
*10 4" 6210,10*10 = 661О.
(11.25)
СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТА
383
J 11-91
Линеаризованные уравнения бокового движения вертолета (11.16)
представим в виде
Хз + «33*3 + «34*4 + «ЗБ*6 + «39*9 + «3,11*11 + «3,13*13 = °>
Xi + «43*3 "Ь «44*4 "h «49*9 Н" «4,11*11 =
(11.26)
Xs Н" «Б3*3 "I" «65*6 "Ь «5,11*11 О*
для рассматриваемого режима полета вертолета МИ-6 коэффициен¬
ты уравнений (11.26) равны
а38 = 0,1 сек"\ ^34 = 3,55 м • сек~\ «зв = 1,3 м • сек~\
а39 = — 15,3 м • сек~2,
а3 п = — 5,45 м • сек~2, оз,ц = —9,8 м • сек~2,
ai3 = 0,042 сек-1, 044 = 2,4 м • сек~\
ai9 = — 22,7 м ■ сек"2, 04>ц = — 2,1 м • сек"2,
ам = 0,025 сек-1, 0В6 = 0,9 м • сек"1,
аъ9 = 0,69 м ■ сек~2, О5,ц = — 3,9 м • сек-2.
Как и в предыдущем случае, добавляем кинематические соотноше¬
ния
*1з ~■ *4 = 0, х 43 х3 = 0, (11.27)
где
х19 = j AVzi dt
— интеграл поперечной скорости, а также уравнения исполнитель-
ных устройств
•^9 ~Н ^99-^9 == ^9» %11 Я11Д1*11 = ^11* 0 1 *28)
Уравнения (11.23), (11.26) совместно с уравнением скорости вра¬
щения несущего винта
х7 + а72х2 + а71х7 аудо^ю = ui> 01 -29)
где и7 = ^гДбсг, составляют конкретную линейную модель дви¬
жения вертолета, расщепленного на продольные и боковые движе¬
ния. Однако более строгое описание движения вертолета требует
учета взаимосвязи продольного и бокового движений. В линейном
приближении взаимосвязи продольного и бокового движений уч¬
тены в уравнениях (11.10), являющихся в этом смысле более точ¬
ными в сравнении с совокупностью уравнений (11.23), (11.26),
(11.29). Еще более точное описание, необходимое для исследования
Движения при больших отклонениях по угловым координатам,
384 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
угловым скоростям и т. д., требует применения нелинейных мате¬
матических моделей вертолета типа (11.9).
Рассмотрим конкретную нелинейную математическую модель
вертолета МИ-6, содержащую помимо линейных квадратичные чле¬
ны разложения функций в степенные ряды. Уравнения поступатель¬
ных и угловых скоростей вертолета имеют вид
*1 4“ а11Х1 4" #12*2 + #13*3 4" #14*4 4" #15*5 + #16*6 + #17*7 4"
4" а18Х8 + а19Хд + #1,10*10 + #111*1 4" #122*2 + #112*1*2 = 0,
*2 4" #21*1 4" #22*2 + #26*6 4" #27*7 4” #28*8 4" #29*9 4"
4“ #2,10*10 4- #211*1 4“ #212*1*2 4“ #222 *2 = 0>
*3 4" #31*1 + #32*2 4- #33*3 4- #34*4 + #36*5 4" #36*6 + #37*7 4"
4" #38*8 4" #39*9 4" #3,10*Ю 4" #311*1 4“ #312*1*2 4" #313*1*3 4“
4" #323*2*3 4- #333*3 4- #322*2 = 0,
*14" #41*1 4” #42*2 4“ #43*3 4- #44*4 4" #45*5 4“ #46*6 4" #47*7 4"
4“ #48*8 4" #49*9 4“ #4,10*Ю 4“ #4,11*ц 4" #411*? 4” #412*1*2 4“
4“ #413*1*3 4- #423*2*3 4" #433*3 = 0,
*5 4“ #51*1 4" #52*2 4" #53*3 + #54*4 4* #55*5 4“ #56*6 4“ #57* ?4"
4“ #58*8 4" #59*9 4“ #5,10*ю 4" #5,11*11’4" #511*1 4" #512*1*2 4"
+ #513*1*3 4" #523*2*3 ~
*6 4" #61*1 + #62*2 4" #63*3 4" #64*4 4" #65*5 4" #66*6 4" #67*7 4"
4" #68*8 4- #69*9 4- #6,10*10 4“ #6,11*11 4" #612*1*2 4" #622*2 = 0.
(11.30)
Численные значения коэффициентов следующие:
#13 = — 8,210-3 сек-1» а14 = — 0,22 м • сек~\
#15 = 1»7Ю-3 сек-1, а17 = — 710—2 м • сек-1,
а19 = — 0,33 м • сек-2, аш = ЗЮ-4 м~~\ = 3,210-3 м~\
#П2==—3,910 м 1,
а27 = — 1,4 м • сек~\ а29 = 1 м • се/с~~2, а2ц — — 610-4
#212 = — 1,310 2 М \
а222 = 510-3 л-1, #31 = 1,110-2 сек-1, а32 = — 410—2 сек-1,
#зв == 0,2 м • сек~\
§ 11.3]
СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТА
385
#37 = 4,51 СГ2 м • сек~\ а88 = 3,5 м • сек~\
#з,ю = 2,810-3 м~\ а323 = 1,210_3 м~\
яздз = 1,510‘“’4 лС1, «322 = —2,810“3 мГ\
= 61СГ"3 лГ1 • сек~\ = — 1,510“2 м~' • сек~\
«45 = 0’59
сек
, #4в = 0,3 сек ,
а47 = 3,410-2 секЛ
«18 =
1,2 сек~\ #4>10 = 3,3 сек~'
а411 = 2,510“4
о
м ",
«412 — — 1,210 М ",
«413 = 1.1Ю-3
м~2,
«423 = — 1,210 3 м 2,
Я433 = 810 4 лг 2,
’ «51
= — 1,510-3 м~х -сек~~\
а62 = — 710“4 м~1
• сек
“Л «54 = — 8,210“3 сек~\
aw = - 1.31O-3
i —1
сек
1, #б7 = 5,710-’2 сек~\
«88 = —0,11
секГ
2, «59 = 0,69 сек~\
«5,10 = 1.4 сек 2,
#511 = 2,510“4
«512 =— 1,410 М 2, #513 = 310 3 м 2,
«523 = 810-4 лС2, аб1 = 8,610“4 м~[ • сек~~\
«62 = 4,810-3 At-1 • сек~\
аб3 = 1,210~3 лГ”"1 • сек~\ а64 = 3,510-2 секГ\
а6Ь = 410“3 сек~х, ам = 0,32 сек~х ,
аб7 = —410“3 сек~\ aQ8 = —3,3 сек~\
ав9 = 0,32 секГ2, «б,ю = — 1 секГ2,
«б.и = 210 " сек “, #5,12 = 3,210 м 2, «6,22 = — 816 4 м 2.
Значения остальных коэффициентов указаны выше.
Уравнения (11.30) совместно с кинематическими соотношениями
(11.24), (11.27), уравнениями исполнительных устройств (11.25),
(11.28) и уравнением скорости вращения несущего винта (11.29)
(или в более общем случае уравнениями силовой установки) обра¬
зуют конкретную нелинейную математическую модель вертолета.
Как видно, эта модель довольно сложна.
13 А. А. Красовский
386 СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕРТОЛЕТОВ [Гл. XI
Примеры аналитического конструирования контуров
у прав лен ия вертолетом
Одним из наиболее трудных по технике пилотирования маневров
является приведение вертолета в режим висения в заданной точке
пространства при произвольном начальном движении вертолета.
Если имеются измерительные системы, выдающие необходимую ин¬
формацию, т. е. контролирующие как угловое положение, так и
относительные координаты центра массы вертолета, то процесс вы¬
хода в заданную точку может быть автоматизирован. Естественно
рассмотреть задачу аналитического конструирования управлений
для выхода в заданную точку пространства. Для простоты решения
рассмотрим сначала линейную модель объекта в виде совокупности
записанных выше автономных уравнений продольного и бокового
движений. Уравнения продольного движения были представлены
в форме (11.23), (11.24), (11.25). Задачу приведения вертолета в ре¬
жим висения в заданной точке пространства естественно формули¬
ровать как квазитерминальную. При этом, однако, оптимальные
управления будут нестационарными.
Возможна и нетерминальная постановка задачи приведения в
заданную точку пространства, порождающая стационарные опти¬
мальные управления. Ограничимся здесь именно такой постановкой
задачи (нетерминальной без граничного условия, см. § П.4). До¬
пустим, что максимальные допустимые отклонения в режиме висения
имеют величину
(хи)т = (J ДКп dt)m = (x15)m = (J Д dt)m — 4 м,
(xi)m = (Ж1)т = 2 м • сек"1, (х2)т = (ДГу1),„ = 0,56 м • сек"1,
(х1г)т = (^),п = 0.15°, (xe)m = (Дсог1)т = 0,6°/сек.
По способу равного вклада максимальных отклонений определяем
значения коэффициентов и задаем функцию Q в виде
Q ~ х рх = ехр — 2 -yrj (%i4 4~ ^15 4“ 4xi50%2 4“
4- 1,6105Хб 4- 2,7104х?2).
Способом проб установлено, что лучшее качество переходных про¬
цессов получается при неканонической квадратичной форме:
хгрх = ехр 2 j (х24 4- х25 4- 4%1 4- 50x1 4-1,6105х14-
4-2,7104Xi2 4- lO^x^ —- 2,51О2х2х1о 4- 1,2104х6х8 —
— 4,2103х12х14 4" 8103х8х12). (11.31)
Обобщенный объект в данном случае неустойчив. Поэтому согласно
общей методике синтеза нетерминальных управлений введен мно¬
житель ехр (— 2 ЦТ), При Т•= 4 сек, а88 = «ю.ю = 2,5 сек~1 оп¬
тимальные управления, минимизирующие функционал с квадратичной
§ 1 гзэ
СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТА
387
формой (11-31) для объекта (10.23), (10.24), (10.25), получены в виде
и =* 0,015%!4 + 0,22%! 4,Зх12 3,9хб 3,7xs,
„ 8 0,056х15 — 0,01 х14 — 0,19%! — 0,56х2 + 2,8х12 + 2,8хб.
«ю ’
Аналогично решается задача синтеза управлений боковым дви¬
жением вертолета и скоростью вращения несущего винта (силовой
установкой). Полученные таким образом управления были приме¬
нены к полной нелинейной модели вертолета, представленной урав¬
нениями (11.30), (11.24), (11.25), (11.27), (11.28), (11.29). Получен¬
ные с помощью ЦВМ процессы автоматического выхода вертолета
в режим висения в заданной точке пространства представлены на
Рис. 11.13. Несмотря на то, что управления синтезированы для линей¬
ных автономных моделей продольного и бокового движений, качество
процессов выхода в заданную точку получилось удовлетворительным.
Глава XII
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ СИСТЕМ
УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
Космическое пространство представляет собой редкую по чисто¬
те механических явлений сферу мироздания. Математические моде¬
ли движения аппарата в условиях космического полета обычно зна¬
чительно точнее математических моделей движения в плотных слоях
атмосферы. Это обстоятельство, а также актуальность вопросов
управления космическими аппаратами, обусловили появление зна¬
чительного числа работ по оптимальному управлению в космосе.
Здесь нет возможности и необходимости приводить хотя бы бег¬
лый обзор этих работ. Цель данной главы — рассмотреть некоторые
задачи синтеза оптимальных управлений космическим аппаратом
(КА) на основе излагаемого метода аналитического конструирования.
§ 12.1. Аналитическое конструирование систем ориентации
Обычно процессы управления угловым положением КА подраз¬
деляются на процессы ориентации и процессы стабилизации.
Процесс ориентации заключается в переводе КА из некоторого
начального углового положения в конечное положение, причем этот
перевод может осуществляться в пределах больших углов. Одна из
типовых задач, решаемых в процессе ориентации,— придание дви¬
гательным установкам, жестко связанным с КА, определенного
направления. С помощью ориентированной определенным образом
двигательной установки осуществляется очередная коррекция тра¬
ектории — дискретное управляющее воздействие в «траекторном
контуре».
Процесс угловой стабилизации заключается в поддержании угло¬
вого положения, заданного при ориентации. Стабилизация необхо¬
дима, в частности, в процессе работы двигательной установки, так
как за счет неизбежных эксцентриситетов тяги в это время возникают
относительно большие возмущающие моменты. Процессы ориента¬
ции и стабилизации при многократном их применении обычно че¬
редуются. Это иллюстрирует рис. 12.1. На этом рисунке изображе¬
ны графики управляющего момента М и угла поворота ср КА в про¬
цессах ориентаций и стабилизации в плоскости (поворот вокруг
одной неподвижной в пространстве оси). Сначала здесь представлен
процесс быстрой ориентации (участок а), затем процесс стабилиза¬
ции при заметном возмущающем моменте (участок б), далее процесс
стабилизации при незначительном возмущающем моменте и т. д.
СИСТЕМЫ ОРИЕНТАЦИИ
389
§ 12J1
На структуру и свойства контуров угловой стабилизации и ори-
ции сильное влияние оказывает вид органов управления —
еНТЗойств, создающих управляющие моменты. В качестве органов
Ужового управления КА наиболее широко применяются реактив-
Угл двигатели. В зависимости от вида рабочего тела реактивные дви-
НЬ1е.пи ориентации и стабилизации подразделяются на жидкостные
ГаТ зовые. При любом типе реактивных двигателей управления са-
И Г3 важным показателем является расход рабочего тела, затра¬
ченный на управление движением. Этот расход для углового движе¬
ния пропорционален изменению момента количества движения КА
Рис. 12.1. Чередование процессов ориентации и стабилизации косми¬
ческого аппарата: а) ориентация, б — стабилизация при коррекции
траектории, в — стабилизация, г — ориентация, д — стабилизация.
и может быть выражен как сумма интегралов модулей управляющих
моментов. Таким образом, при оптимизации систем ориентации и
стабилизации КА в минимизируемом функционале целесообразно
иметь составляющую вида
(12.1)
или близкую к ней составляющую. Здесь t2 — tr — рассматривае¬
мый интервал времени, Uj — управляющие моменты или пропор¬
циональные им величины. Составляющая
<12-2>
типового функционала (П. 2.2) стремится к (12.1) при q -> 1 (по ус¬
ловию допускаются только такие значения q, при которых zq —
четная функция z, например, q = 2£/(2й— 1), k — целое число).
Кроме ограничения по расходу рабочего тела, обычно имеется
ограничение максимальных возможных управляющих моментов.
То ограничение непосредственно учитывается в функционале
390 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. Хп
типа (П. 2.2) только при q оо, что противоречит предыдущему
условию. Таким образом, оба ограничения вместе непосредственно
не «вписываются» в типовой функционал (П. 2.2). Несмотря на это,
косвенный учет ограничения управляющих моментов здесь имеется
и проверка результатов синтеза оптимальных управлений показы¬
вает их ограниченность по модулю.
Оптимизации процессов ориентации КА с помощью различных
методов посвящены работы 112.1]—[12.7].
Синтез системы ориентации в плоскости
Сначала на основе элементарных соображений определим про¬
цесс и структуру контура оптимальной плоской ориентации, а за¬
тем близкую задачу решим формальным методом аналитического
конструирования. ‘
Допустим, что необходимо повернуть КА вокруг главной не¬
подвижной оси инерции (момент инерции J) на угол Ф за время Т.
В начальный и конечный моменты времени КА неподвижен. Пред¬
полагается, что максимальный располагаемый момент Мт больше
или равен 47Ф/Т2 (при Мт < 47Ф/Т, как видно из дальнейшего,
ориентация за время Т невозможна). Расход рабочего тела, выража-
т
емый величиной |44|d/, должен быть минимальным.
о
Угловая скорость со КА в процессе ориентации подчинена урав-
нению
/со =44, |44|<44т.
(12.3)
По условию
т
^со dt = Ф.
б
(12.4)
Очевидно, что при указанных условиях любой процесс ориентации,
претендующий на оптимальность в смысле минимума расхода рабо¬
чего тела, должен состоять из этапа разгона и этапа торможения.
Минимальный расход рабочего тела будет в том случае, когда на
этапе разгона за возможно короткий промежуток времени набирается
скорость, достаточная для преодоления угла Ф за предписанное
время, а на этапе торможения аналогичным возможно более корот¬
ким отрицательным воздействием скорость вращения приводится к
нулю. Это положение иллюстрирует рис. 12.2. Здесь представлены
графики изменения управляющего момента в виде пары прямоуголь¬
ных импульсов противоположных знаков и соответствующие графи¬
ки изменения угловой скорости. Площади, ограниченные кривыми
со, одинаковы в соответствии с (12.4). На рис. 12.2,а длительность
импульса равна 772, а график изменения со имеет вид треугольника
с высотой 2Ф/Т. На рис. 12.2,6 импульсы имеют длительность
СИСТЕМЫ ОРИЕНТАЦИИ
391
§ 12-11
з а вЫсота трапецеидального графика изменения со составляет
”8 ’ 1 лр
8 ф/т Для случаев виг длительности импульсов составляют 1
1 т а максимальные значения угловой скорости, соответствующие
и g- * »
высотам трапеций, равны соответственно Ф/Т а-^-Ф/Т.
Таким образом, чем короче «разгонный» и «тормозной» импуль¬
сы, тем при заданной средней j Л 7™ —
угловой скорости поворота меньше
Рис. 12.2. Графики изменения момента и угловой скорости в процессе плоской ориен¬
тации.
максимальная угловая скорость КА. Расход рабочего тела пропор¬
ционален моменту количества дижения, а стало быть, и максималь¬
ной угловой скорости.
Если бы секундный расход рабочего тела и соответствующий
управляющий момент небыли ограничены по величине, то для полу¬
чения минимального расхода следовало бы придавать вращение
«Ударом» в начале интервала Т и останавливать вращение «ударом»
в конце интервала Т. Очевидно, что при таком б-импульсном управ¬
лении расход рабочего тела будет вдвое меньше, чем при прямо¬
угольных импульсах длительностью Т/2. Однако секундный рас¬
ход и соответствующий управляющий момент ограничены. Поэтому
оптимальным управлением является управление, состоящее из па-
РЬ1 прямоугольных импульсов максимальной высоты Мт, располо¬
женных на конце интервала Т (рис. 12.3).
Длительность импульсов и постоянная угловая скорость й
°пределяются из следующих соотношений. Из выражения (12.4) и
392 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. Хц
трапецеидального графика изменения со следует
т
^dt=(T — ДТ)Й = Ф.
6
С другой стороны, согласно (12.3)
Й = -^_Д7\
Отсюда получаем
где
дт2
Т2
Q2
(12.5)
(12.6)
Mtn т (Г) — J_ ОТ— JL
-j— 1 ^т— 2 “2 J
Квадратные уравнения (12.5), (12.6) определяют \Т и Q.
Итак, оптимальное управление как функция времени полностью
определено. Однако реализация таких программных управлений свя-
Рис. 12.3. Графики изменения момента, уг¬
ловой скорости и угла в оптимальном про¬
цессе ориентации.
зана с некоторыми трудностями..
Очевидно, что для каждого задан¬
ного угла поворота Ф и времени
поворота Т необходимо опреде¬
лить ДТ из соотношения (12.5).
Далее необходимо осуществлять
включение двигателей ориента¬
ции по указанной во времени
программе. Неточное знание Мт,
J приведет к ошибкам в конечном
положении КА. Повышенные тре¬
бования к объему априорной ин¬
формации — общий недостаток
систем программного управления.
Возникает естественная мысль
о получении такого же закона
изменения управляющего момен¬
та не путем программного управления, а в замкнутом контуре, т. е.
в системе с обратной связью. Это означает, что требуется найти
управляющий момент как функцию фазовых координат <р, со = ф-
Из самого изменения управляющего момента следует, что опти¬
мальная система должна быть релейной и необходимо найти линии
переключения на фазовой плоскости.
Совместим центр фазовой плоскости (начало координат) с конеч¬
ным положением КА, т. е. будем считать, что в этом положении
Q
т
СИСТЕМЫ ОРИЕНТАЦИИ
393
§ 12.0
= 0. Между переключениями движение системы описы-
соответствует параболическим фазовым траекториям и горизон-
тальным прямым
со2 = ± 2~- <р + const = ± 2Q™ ф + const,
й) = const.
(12.7)
уравнение первой линии переключения, соответствующей заднему
фронту первого импульса (рис. 12.3), получается из (12.6) заменой
ф на —Ф + оо ~ ^2- Это вытекает из того, что на данной линии пе-
Jm
реключения скорость со достигает значения Q, а угол ср отличается
от начального угла *) —Ф на приращение, которое согласно
(12.7) равно
Таким образом, уравнение первой линии переключения имеет
вид
Е L + _J_f_o+_I_Q2\ = _L_2L 9 — = о
fi2 Qm 2Фт I 2Qm I 2 fi2 Qm 2Фт u-
т \ / т
Переходя к обозначениям ср, со вместо Ф, Q, записываем
Эта линия переключения изображена на рис. 12.4 (ветвь /), где пред¬
ставлена фазовая плоскость <р/Ф,„, co/Qm. Ей симметрична ветвь
2 в четвертом квадранте фазовой плоскости.
Другая линия переключения соответствует переднему фронту
отрицательного импульса на рис. 12.3. Очевидно, что эта линия
определяется уравнением
или
<Р
Эта линия также представлена на рис. 12.4 в виде ветви 3. Ей сим¬
метрична ветвь 4.
На рис. 12.4 изображены также фазовые траектории при данном
°птимальном законе одноосной ориентации.
*) Знак «минус» появился вследствие расположения начала координат в точ-
е конечного положения КА.
394 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. ХЦ
Движение КА, начавшееся, например, в точке а, происходит по
параболической фазовой траектории до точки б. В точке б осущест¬
вляется выключение управляющих моментов, дальнейшее движе¬
ние имеет постоянную скорость и соответствует горизонтальному
участку бв. В точке в включается отрицательный управляющий
момент и КА по параболической фазовой траектории приходит в
желаемое положение, совпадающее с началом координат на фазовой
плоскости.
Легко построить релейный закон управления, соответствующий
данным линиям переключений. Это управление имеет вид
'M“_"rM'4Sien^t + 2_£—Зтггн) +
+ М^г+тО-(12-8)
В области I (рис. 12.4)
(О Q (О
О
6 = 5|й Ьйг + ~
м = мт.
В области II
а = 1, b = — 1, М = 0.
В области III
а=1, &=1, М = — Мт.
СИСТЕМЫ ОРИЕНТАЦИИ
395
5 12.11
В области IV
а = — 1, 6=1, Л4 = 0.
реализация управления (12.8) не встречает особых трудностей.
(-тпуктура системы, реализующей управление (12.8), а также струк-
‘ J гла П ТТРППМ ППРП-
тура контура в целом пред¬
ставлены на рис. 12.5. Сиг¬
нал угловой скорости со вы¬
рабатывается датчиком
угловой скорости. Угол ф
может ко нтр о л и р ов ать с я
астродатчиком, гироплат¬
формой, датчиком горизон¬
та или другим датчиком уг¬
лового положения. Шумы и
ошибки датчиков на схеме
рис. 12.5 не отображены.
Попытаемся теперь ре¬
шить сходную задачу фор¬
мальным методом аналити¬
ческого конструирования.
Задача будет сходной,
но не идентичной, так как
применяемый функционал
не допускает одновременно¬
го непосредственного уче¬
та ограниченности управления и минимизации расхода рабочего
тела.
Уравнение вращательного движения /со = М представим в виде
(12.9)
Рис. 12.5. Структурная схема оптимального кон¬
тура плоской ориентации.
где
*1 — х2 = 0, х2 = и2,
имеет вид
(12.10)
м
Хг = <р, х2 = ср = й, И2 = -J-.
Фундаментальная система весовых функций объекта
дап=1, ау12 = /, 1
ш21 = 0, w22 = 1. J
Для ориентации за заданное время Т целесообразна, очевидно, ква-
зитерминальная постановка задачи. Зададим функционал в виде
396 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. Хц
Учитывая доминирующую роль требования минимума расхода ра¬
бочего тела, назначаем q близким к единице, например,
где d — большое положительное целое число. Тогда р = q/(q — 1) =
= 2d — большое четное число.
Оптимальное управление будет иметь вид
u2 = — k% (А21Х1 + A22xi)p~i . (12.12)
Коэффициенты Л21, Л22 этого управления определяются формулой
(П. 4.22), которая в скалярной форме для данного случая имеет вид
Л2* = Р11^12 (Т О (Т ОН- Р22®22 О (Т — t)
+ J Р1Х^12 (Г - О (f - О dt' + \ рл (t'-t)w2k (/' - 0 di'.
* (12.13)
С учетом (12.10) при постоянных ри, р22 находим
Л21 = ри(Т-0 + 4-р11(7’-0’,
л22 = р2г + р22 (Т - 0 + Р11 (Т-ty + 4 pu (Т - О3.
Итак, оптимальное управление равно
«2 = - & j[pU (Т - о + -Lpu (Т - о2] Ф +
+ [р22 + Р22 (Т-1)+ Р11 (Т - О2 + 4 Р11 (Т ~ О’] <₽f_1 • (12-14)
Оно является нелинейным (при d =# 1) нестационарным управле¬
нием.
Рассмотрим случай, когда рп = р22 = 0» т. е- квазитерминаль-
ную задачу первого рода (§ П. 3). При этом оптимальное управление
имеет вид
и2 = — ^2 {Ри (Т — 0 ф + [р22 + Ри (Т — /)2] ф)р 1 ,
или
“2 = - -^-{(1 “ -т) Ф + р + f1 - 4-)2| ’ <1215)
где
Х=рЭг’ ^ = ^(р117’Г17'2.
СИСТЕМЫ ОРИЕНТАЦИИ
397
$ 12.П
Если ввести безразмерное время т = то движение в рассмат¬
риваемой оптимальной системе будет соответствовать уравнению
р ^+^{(1_т)ф + [х + (1_т)2]^р-' = 0. (1216)
dr2
Кривые переходного процесса в данной оптимальной системе при
х = IO"2, k* = 10б, (dcp/dr)T=o = 0 представлена на рис. 12.6. Про-
г достаточно близок к строго оптимальному по расходу рабочего
?Sa (см. выше).
Перейдем к рассмотрению задачи пространственной ориентации.
Рис. 12.6. Кривые переходного процесса в оп¬
тимальной в смысле минимума функционала
(12.11) системе плоской ориентации.
Пространственное угловое движение КА как твердого тела опи¬
сывается уравнениями Эйлера и уравнениями направляющих ко¬
синусов:
J х®х г-
= МХЬ
811
+
<%81з -
-®2е12
= 0,
Jy«y + (А "
- Jz)
= ^z/b
812
+
со2еи -
- “х813
= 0,
Z^Z + (J у ~
= м21,
813
+
“хе12 -
- Vh
= 0,
е21 + «/23 “
— WzE22 —
0,
831
+
®/зз ~
- “Аг
-о.
Е22 + С0г821 “
— G)xE23 ~
0,
632
+
“2е31 -
— <охе33
= 0,
823 + «х£22 ~
-«/21 =
0,
езз
+
“х832 ~
- “/31
= 0
Вводя обозначения:
(12.17)
«х
Ыу = Х2>
«г = *3»
6^2 *^4»
813 — *5»
621
= *6’
823 == ^7»
831 = *^8»
832 = Х9>
811 ~ *10>
£22
— «^П»
833 = ^12>
(12.18)
398 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. XII
записываем эти уравнения в виде
4” ^123X2X3 = Wp
■Хдо “Ь -^2-^5
х3х4 = 0,
Х2 4" O'ii%XiX3 = u2>
-^4 4" -^З^Ю
- XjXs = 0,
Х3 4" ^312^1-^2 = ^3’
х5 + хгх4 —
Х2Х10 = 01
Х6 4- х2х7 — х3хп = 0,
%8 + *2*12 “
- х3х9 = 0,
Хп 4- х3х6 — Хгх, = 0,
*9 4" *3*8
•v12 =. 0,
X, 4- XjXh — Х2Х6 = 0,
*12 + х±х9 —
■ х2х8 = 0.
(12.19)
J
Здесь
J х — Jz „ _ Jy J X
♦ #312 — J~z
Jy
и3 —
Мл
Jz
(12.20)
»
и2 =
Jy '
_ Jz — J у
#123 — /
J x
и
ul~ J »
J X
Коэффициенты
#10,2,5 = #4,3,10 = #514 = #627 = #11,3,6 = #7,1,11 =
= #8,2,12 = #938 — #12,1,9 = 1,
#10,3,4 = #415 ~ #5,2,10 = #6,3,11 = #11,1,7 = #726 =
— #839 — #9,1,12 = #12,2,8 = 1
(12.21)
в уравнениях (12.19) не имеют буквенных обозначений, так как они
равны либо 1, либо —1. Требуется синтезировать управления иъ
u2, и3, переводящие за время Т КА из произвольного начального
углового положения в заданное угловое положение:
612 — -^4 — ®13 — «^5 — ^21 — -^6 — ®23 — *^7 — ^31 — -^8 — ^32 — -^9 —
При этом расход рабочего тела, характеризуемый величиной
т
§ (| АК11 + | | + | Мн |) dt =
о
т
= (* (Jх\ | #11 + Jу\ | #21 "Ь ^11 #31) dt. (12.22)
о
должен быть по возможности минимальным *).
*) Как и в задаче плоской ориентации, абсолютный минимум расхода ра¬
бочего тела не достигается при управлениях, полученных рассматриваемым
методом аналитического конструирозания, так как эти управления обеспечива¬
ют плавный подход КА к желаемому положению.
§ I2-11
СИСТЕМЫ ОРИЕНТАЦИИ
399
Задачу естественно рассматривать как квазитерминальную и
минимизируемый функционал задать в виде
i=4 X р“х'+4- f X р“х‘2 dt+4" ,f S №r)4dt+
г=1 о X=1 о 1=1
+vjx (12-23)
О X=1
где q = 2k—1 ’ — большое положительное целое число.
Для углов, а стало быть, и направляющих косинусов, для компо¬
нент угловой скорости в связанных осях трудно указать какой-ли¬
бо приоритет. Поэтому коэффициенты при аналогичных компонен¬
тах в функционале целесообразно назначать одинаковыми:
Р11 = Р22 = Рзз = Р(0, Р44 “ Рб5 “ Рбб = Р77 — Рб8 ~ р99 — ре>
Р11 ~ Р22 = Рзз ~ Рю, Р44 — Р55 = Рбб “ Р77 = Рв8 = Р99 — Ре-
Для получения оценки, соответствующей (12.22), коэффициенты уси¬
ления следует задавать обратно пропорциональными соответст¬
вующим моментам инерции. В соответствии с этим функционал
(12.23) в полураскрытой форме и исходных обозначениях запишет¬
ся так:
~ ~2~ Рсо (Т) + (ду (Г) + (1)2 (Т)] 4" -у- ре [£12 (Т) 4" 8f3 (Т) -f-
1 т
+ £21 (Т) + 623 (Т) + е31 (Г) + е32 (71)] + \ Рю [(wx + + (Oz) 4“
6
1 т
+ Ре (е?2 + £1з + £21 + £гз + £31 4" ез2)1 dt + —^(Mqi + Mqy\ + Mqz\)dt-\-
0
+ <12-24)
0 1=1 x 7
Заметим, что величина
e12 + £13 + £21 + £23 4" £31 + £32 = 1 — £11 4“ 1 £22 4" 1 — 833
обращается в нуль при еп = ±1, е22 = ± 1, е3з = ± 1, что соответ¬
ствует восьми положениям, при которых оси КА или совпадают с
осями заданного базиса или противоположны им. Поэтому следует
ожидать, что данный функционал будет пригоден при не чрезмерно
больших начальных угловых отклонениях и начальных угловых ско¬
ростях. При чрезмерно больших начальных отклонениях он может
порождать неоднозначность конечного положения КА.
400 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. XII
Синтез оптимальных управлений будем осуществлять на основе
метода аналитического конструирования для объектов с полино¬
миальными характеристиками (см. § П. 5).
Для рассматриваемого объекта (12.19) линейное приближение
имеет предельно простой вид: = 0 (f = 1, 2, 12). Поэтому
весовые функции постоянны:
.... 11 при i = k,
(0 при t=£k.
В уравнениях (12.19) отличны от нуля только коэффициенты квад¬
ратичных членов.
Вследствие этого выражения (П. 5.20), (П. 5.25) коэффициентов
оптимальных управлений для данного объекта сильно упрощаются:
т 1
Au(t) = ри+ ^udt', Лу = 0 при /=/=<,
t
Ацк (0 = - f 2 [Apl (f) aPI-k + Api (/') aplk + Apk (/') apli] dt',
t p=i
4 J’ 11 AP‘i и «₽«+m aPi‘+
Aijki (t) =
t p=i
4“ Арц (t ) CLpik + Apjk (^ ) Gpil 4“ Apjl ) &pik 4“ Apkl ) &pi/] dt
’ -
находим
Учитывая выражения (12.20), (12.21), последовательно
^ii (0 ~ ^22 (0 = Азз (0 = рсо 4“ (^ 1
^44 (0 “ ^55 (0 = ’ = ^99 (0 = Ре 4“ Ре (Т 0- /
Все остальные Aik = 0.
Далее находим
(12.25)
(12.26)
^123 ~
(12.27)
Все остальные коэффициенты Л^, кроме отличающихся от (12.27)
только расположением индексов и поэтому равных соответствующим
коэффициентам (12.27), равны нулю,
СИСТЕМЫ ОРИЕНТАЦИИ
401
Производя вычисления коэффициентов кубических членов,
получаем
Jz д _ д _ Jx д _
♦ -7 7“ ^1212 — т т ^1313 — J Т **2323 —
Jy Jx JX J z Jz Jy
= -Г + ^7^ + ^77^) [p“(T “/)2 +4-P“ “ Z>8] ’
7 Г ^1,3,5,10 = J IT 7 ^1,2,4,10 = 7 ~T T A,2,6,11 =
Jz JX J у Jy Jx JZ JX Jy Jz
J У A Jx a x A
== 7 1 _ / /11,3,8,12 =7 7 7" /12,3,9,12 =7 7 Г /12Д7,11 =
J X Jy J Z у J X J Z J Z J.X Jy
=4[pe(T-0* + 4-₽e(T-03].
Л 1,12,1,12 = — A1717 = — Aoi9 = ^1,11,1,11 = ^2,10,2,10 = ^2,12,2,12 =
= /^2525 = ^2828 ~ ^3,10,3,10 = Аз, 11,3,11 = Aj434 = /^3636 =
= 4-[Pe +
Al736 = ^1928 = /^2534 ~ ”3" Pe (? ty* 4 3“ Pe t)3 j .
(12.28)
Все другие коэффициенты-Ацм с существенно отличными (т. е. от¬
личающиеся не только порядком расположения) индексами равны
нулю.
Оптимальные управления согласно (П. 5.23) равны
uk = — kpk \ 2 AkiXi + X AkiiWi + 2 Aknsxixlxs + • • •)
V=1 Z,/=l Z,Z,s=l /
Подставляя полученные выражения, полагая, как и ранее, ре =
= pQ = 0 (квазитерминальная задача первого рода) и производя
несложные преобразования, получаем следующие выражения опти¬
мальных управлений, определенных с точностью до кубических чле¬
нов аргументов:
^1 ^1 {Р(0^х 4" 2ре (Т t) (632^33 ^23^22) 2 (%1 4“ ^2 4“ *з) X
X Рш (Т — /) СО^СО2 + 4 (х2 + Х2 + Х3) Рсо (Т — /)2 (Х^ + Х2(0г) +
+ 2ре (Т — /)2 <2 (822 + 633 — 823 — £32) + [Зе21е23 — х2 (е13ец —
ез1езз)1 Wz 4" [Зе31е32 хх (e2ie22 ei2en)l ®у}} »
^2 = ^2 {pco^i/ 4“ 2ре (Т t) (ЕхзЕц е31еэз)
•— 2 (Х1 4- х2 4- х3) рш (Т — /) (DXG)Z 4- 4 (Xi 4- х2 4- х3) рсо (Т — t)2 X
х (Xjtoi 4- х3оъ) Ыу 4- 2ре (Т — /)2 {2 (бц 4" £зз — е1з — e3i) 4г
402 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. XII
+ [2е31е32 xi (e2ie22 ei2eii)l “h [^ei2ei3
^3 (£32£33 е23е2г)1 »
W3 = ks { Pci)CO2 + 2pe (T f) (^21^22 £12£11)
— 2 (xx + x2 + x3) pw (T — /) co/op + 4 (xr + x2 + x3) p^ (T — /)2 x
X (xaG)x+x3(D^) сог+2ре (T— /)2 (2 (£11+ 822 — £12 — 4i)0)2+[3e21£23 —
X2 (е1ое11 £31е3з)1 + [Зе12€1з — X3 (£32e33 £23£22)J / » J
(12.29)
где
Направляющие косинусы можно выразить через угол крена у,
рысканья гр и тангажа ft, обычно контролируемые датчиками угло¬
вого положения летательного аппарата относительно земных ко¬
ординат. Однако при этом получаются довольно сложные выраже¬
ния, а именно:
£ззез2 — £22е2з = sin Y cos Y (cos2 Ф + cos2 ft — sin2 Ф sin2 ft) +
+ sin гр cos гр sin ft (cos2 у — sin2 y),
enei3 — Бззез1 = 2 sin гр cos гр cos ft cos у +
+ sin у sin ft cos ft (cos2 ft — sin2 гр),
e22e2i ~ enei2 = cos ft (cos у sin ft + cos2 гр cos у sin ft —
— cos гр sin у sin гр).
Только при малых углах у, гр, ft эти выражения упрощаются:
£33£32 ^22£23~2y, £11£13 £33£31 ~ 2гр, ®22£21 £11£12 ~ 2ft.
Для реализации оптимальных управлений ориентацией, по-видимо¬
му, целесообразно использовать датчики, непосредственно контро¬
лирующие направляющие косинусы.
Заметим, что оптимальные управления (12.29) пространственной
угловой ориентации не вырождаются строго в управления вида
(12.15) даже для плоского случая, когда, например, со2 = ыу = 0.
Это можно объяснить различием критериев оптимальности
(в (12.11) фигурирует квадрат угла, а в (12.24) — квадраты направ¬
ляющих косинусов), а также, возможно, тем, что аргументы опти¬
мальных управлений (12.29) представлены лишь тремя первыми
членами степенных рядов.
Вводя безразмерное время т = t/T и безразмерные угловые ско¬
рости Йл = 0)^7, = соуТ, Й2 = (о?Т, уравнения оптимальной
§ 12.11
СИСТЕМЫ ОРИЕНТАЦИИ
403
системы при управлениях (12.29) записываем в виде
4" 4” ^1 {^х 4“ (1 Т) (е32е33 82382г)
Т- 2 (%! 4- х2 4- Х3) (1 — т) Q^Q2 4- 4 (хх 4- х2 4- х3) (1 — т)2 х
X (xjQ^ 4~ и2Йг) 4“
4" %£ (1 Т)2 (2 (б22 4- 833 823 83г) 4" [З£21823 Х2 (е13811
ез1езз)1 4~ [Зе31е32 (е21в22 8i28п)1 } = 0»
Ь X2QxQz 4“ ^2(^1/ 4" %8 (1 (813811 е31е3з) 2 (хх 4- х2 4-
4- х3) (1 — т) QXQ2 4- 4 (хх 4- х2 4- х3) (1 — т)2 (xxQx 4- 4~
4- Хе (1 — т)2 (2 (811 4- 833 — £13 — 831) 4- [Зе31е32 —
•— (821822 812811)1 ^х 4- [Зб12^13 *3 (832833 823622)1 Ф?) ) ~
А_£. 4- xxQxQy 4- кз (Й2 4- Хе (1 — т) (е21е22 — е12еп) —
— 2 (хх 4- х2 4- х3) (1 — т) QXQ^ 4- 4 (хх 4- х2 4- х3) (1 — т)2 х
X (x2Qx 4- K3Qy) Q2 4“ Хе (1 — т) 2 (2 (8ц 4~ £22 — £12 — £21) &Z 4"
4“ [3£21£2з х2 (£1з£ц 8л8зз)1 ^х 4- [3£12£1з (8зг8зз
е23822)1Ц/)} = 0»
“Jf" 4" ^z/813 ^Z812 — О,
“JT" 4- ^z8ll ^х813 = О,
4“ ^х812 Ц/811 = 0>
-^4-Й.823 -^22 = 0, ^- +
4" ^833 ^Z832 = О,
4^ + Qze21-Qxe23 = 0, 4^- +
+ ^z831 — 0с833 — О,
+ ^Л822 ^VS21 — 0’ fa +
“Ь £\832 ^i/831 — 0>
(12.30)
где
2реГ2
Р<о
Хе
Лз = kldT2 '
404 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. XII
Численное решение этой системы дифференциальных уравнений
было получено на ЭВМ при следующих начальных условиях:
/т 1 „ 2-/2 ,лч 2 + /2
е11 (0) — ~2~ » е12 (0) — 4 » 81з (0) — 4 >
е21 (0) — • 622 (0) — ~2~ »
е31(0)=-4". «з2(0) = -Ц^
е2з(0) =
М0) = -Ц^
Рис. 12.7. Кривые изменения направ¬
ляющих косинусов 8ц (/)» г22 (О, еза (О
в оптимальном процессе пространствен¬
ной ориентации.
(это соответствует г|) (0) = О (0) =
= ?(0) = -=-), ЙЖ(О) = Й,(О) =
= Q2 (0) = 0 и значениях:
хе = 1,73, k\ = 2,0,
^ = 2,4, ^ = 2,2,
1:1,2: 1,5.
На рис. 12.7 изображены кри¬
вые изменения направляющих
косинусов еп (/), е22 (/), е33 (/) в
полученном процессе простран¬
ственной ориентации. Видно, что качество переходного процесса
ориентации достаточно высокое.
§ 12.2. Аналитическое конструирование контуров
стабилизации вращающихся искусственных спутников
Стабилизация вращением широко используется в космической
технике, в частности, для искусственных спутников Земли
[12.8] — [12.10]. Вращающийся спутник, как и любой гироскоп,
обычно обладает осевой симметрией, так что его эллипсоидом инер¬
ции служит эллипсоид вращения (Jy = Jг = Jэ). Скорость враще¬
ния <ох = Q вокруг оси Охх существенно превышает максималь¬
ные возможные (допустимые) экваториальные скорости вращения
|®№.
Уравнения экваториальных угловых скоростей в связанных осях
для вращающегося спутника принимают вид
Н- (А — 7Э)Qco2 =*/эсо2—(</х — J3)Q^y= (12.32)
§ 12.2]
КОНТУРЫ СТАБИЛИЗАЦИИ ВРАЩАЮЩИХСЯ СПУТНИКОВ 405
Скорость вращения спутника Q обычно можно считать постоянной
и уравнения (12.32) рассматривать как стационарные линейные
уравнения. Объект вида (12.32) относится к двумерным объектам
с так называемыми антисимметричными связями [12.11]. Для ги¬
роскопа, который является характерным примером объекта с анти¬
симметричными связями, Б. В. Булгаковым были введены комплекс¬
ные координаты. Метод комплексных передаточных функций был
предложен в наших работах [12.11 ] — [12.13] и получил развитие
в трудах ряда авторов 112.14] — [12.17].
Умножая нижнее уравнение (12.32) на / = У—1, складывая
с верхним и вводя комплексную экваториальную угловую скорость
и комплексный момент
«э = мэ = мх1 + ]МуЬ
получаем
- i У х - А) = мэ. (12.33)
Прежде чем заниматься конкретной задачей синтеза контура стаби¬
лизации вращающегося спутника, рассмотрим вариант метода син¬
теза линейных управлений, специально приспособленный для объек¬
тов с антисимметричными связями.
Стационарные оптимальные управления
для антисимметричного объекта
Допустим, что матрица коэффициентов линейного объекта
х-\-ах = и (12.34)
имеет следующую структуру:
а =
#611 #612
#612 #611
(12.35)
где аби> #612 — блочные матрицы (п X п). Такой объект будем назы¬
вать объектом с антисимметричными связями. Он как бы состоит
из двух одинаковых /г-мерных каналов, между которыми имеются
перекрестные связи такие, что каждой перекрестной связи в одном
канале соответствует аналогичная перекрестная связь в другом ка¬
нале, но имеющая противоположный знак (матрицы аб12, —#612)-
Введем блочные матрицы-столбцы
и =
#62
(12.36)
Из (12.34) — (12.36) следует
АГб! + #611*61 + #612*62 = #61,
*62 #612*61 + #611*62 = #62-
(12.37)
406 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. Хи
Применяя матрицы с комплексными элементами
Ч = *61 + /*62, #б = #61 + /#62,
из (12.37) находим
*б + (#бп — /#612) хб = иб.
(12.38)
Если фундаментальную матрицу весовых функций объекта (12.34),
удовлетворяющую уравнению
w + aw = 0, w (/,/) = 1
(12.39)
(1 — единичная матрица 2n X 2п), представить в виде блочной
матрицы
^611 ^612
0Уб21 0Уб22
, ПУ 611 (Л 0 = ОУ622 (Л 0 = 1,
0У612 (Л 0 = 0Уб21 (Л 0 = 0.
1 — единичная матрица п X /г), то согласно (12.35), (12.39)
^611 + #611^611 + #612^621 = 0,
0У612 + #611^612 + #612^622 = 0,
0Уб21 — #612^611 + #611^621 = 0,
0У622 — #612^612 + #611^622 = 0.
(12.40)
Отсюда вытекает
ОУбИ — 0У622 + #611 (ОУбИ — 0Уб22) + #612 (0Уб12 + &Уб21) = 0,
0Уб12 + 0Уб21 + #611 (0У612 + 0Уб21) — #612 (^611 — ПУб22) = 0.
Это означает, что
(12.41)
(см. начальные условия). Таким образом, фундаментальная матри¬
ца весовых функций объекта с антисимметричными связями име¬
ет вид
w = . (12.42)
— 0У612 0У611
Введем матрицу с комплексными элементами
г^б = ^611 + /0У621 = ОУбП — jW612.
Согласно (12.40), (12.41) эта матрица удовлетворяет уравнениям
(12.43)
(1 — единичная матрица п X п). Для объектов с антисимметричными
связями, как и объектов общего вида, могут решаться задачи ква-
зитерминального и нетерминального управления. Стабилизации
S 12.2]
КОНТУРЫ СТАБИЛИЗАЦИИ ВРАЩАЮЩИХСЯ СПУТНИКОВ
407
вращающегося спутника наиболее соответствуют нетерминальные
стационарные управления при отсутствии граничного условия или
со скользящим граничным условием (см. § П.4).
Для объекта с антисимметричными связями (12.34) неустойчи¬
вого или нейтрального (каковым является вращающийся спутник),
рассмотрим нетерминальное решение без граничного условия. Со¬
гласно (П. 4.34) общий вид функционала здесь следующий:
Т = 4 ехр (—Т-) х< W Ах &) + 4 J ехР (- 4) %т₽х dt +
G *2.
+ ехр ( uTk~2 udt 4- ехр (—xTAk2Axdt, (12.44)
где
оо
А = § ехр [ - wT (/) Роу (/) dt. (12.45)
о
Здесь используется квадратичная оценка управляющих воздействий
и оптимальное управление получается линейным:
° II
Рбн II *
(12.47)
u = — k2Ax. (12.46)
Обобщение на случай оценки по модулям, соответствующей расходу
рабочего тела при реактивных двигателях стабилизации, осуществ¬
ляется обычным путем. Для объекта с антисимметричными связями
матрица р задается в виде
о II ₽«П
р = |о
Представляя матрицу А в виде
^би
^621
из (12.45), (12.42), (12.48) получаем
оо
Леи = Лб22 = Jехр (—[шеи (0 РбпОУбц (0 + &Уб12(0РбцаУб12(0]dt,
о
оо
Лб12=— Лб21= [ ехр (0 Рбпа>б12 (0 —1^612(ОРбпИ'бп(01
о
-^612
^622
А =
(12.48)
(12.49)
Таким образом, для объекта с антисимметричными связями опти¬
мальная система управления — система с антисимметричными/
408 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. XII
связями. Если
£2 =
кб о II
|о г
то все выражения можно записать в компактной форме, используя
комплексные координаты. Действительно, из (12.46) — (12.49) сле¬
дует
4 б =
где
Аб = Л бп — Мб12-
Используя выражения (12.49), получаем
Лб = j exp -у) йУбт (0 Рб11О»б (0 (12.50)
о
где
ИУб = ^611 — jw62l = йУбП + /^612.
В компактной форме можно записать также уравнение
Л ^# + 1 у-) + [ат + 1 -jr j Л =
л„
■<412
#611 + 1 “jT #612
+
т 1т
#611 + 1 у #612
^12
Ли
■ 1 1
#612 #611 + 1 -у
Т Т . 1 I
#612 #611 + 1 у-
Ли
Лх2
— 6 —
Ри 0
^12
Ли
— р —
о Ри
решением которого служат величины (12.49) (выраженные через ве¬
совые функции). Здесь 1 — единичные матрицы (п X п) или (2п X
X 2п). Раскрывая (12.51), получаем
Лпабп +
2
Т
+ #611ЛИ — А12аб12 + #б1гЛ12 = ₽бп,
Л21^б12 Ч Л12 + #бцЛ12 + Л12#бц — ^612Л1Х = 0.
Умножая нижнее уравнение на —/ и складывая оба уравнения,
находим
^бав + #б Лб Н—Лб = рб,
где
#6 = #6Ц— /#б12> #6 = #611 +/#612, Рб = РбН-
§ 12.2]
КОНТУРЫ СТАБИЛИЗАЦИИ ВРАЩАЮЩИХСЯ СПУТНИКОВ 409
Итак, для объекта с антисимметричными связями, описываемого
в комплексных координатах уравнением (12.38)
Х6 + абхб = иб, (12.52)
оптимальным в смысле минимума функционала (12.47) является
управление
иб = —k26A6x6, (12.53)
где Лб выражается через фундаментальную матрицу комплексных
весовых функций
оо
4 = f ехР (— 4) “’бт (0 Мб (0
о
^б + «бауб = 0>
или определяется алгебраическим уравнением
Абаб + 4тЛб + 4 = Рб- (12-55)
Вернемся теперь к задаче синтеза контуров стабилизации.
Синтез контура стабилизации вращающегося спутника
Рассмотрим задачу стабилизации положения оси Ох± — оси вра¬
щения спутника в инерциальном пространстве, например, в направ¬
лении на заданную звезду. Уравнение (12.33) экваториальной уг¬
ловой скорости спутника в связанных осях здесь надо дополнить
выражениями углов отклонения оси Охх относительно желаемого на¬
правления.
Угловые отклонения можно рассматривать в неподвижной систе¬
ме координат. Однако при этом в уравнениях обобщенного объекта
появляются переменные (периодические) коэффициенты. Для того
чтобы избежать этого, будем рассматривать угловые отклонения,
как и угловые скорости, в связанной со спутником вращающейся
системе координат. В задаче стабилизации угловые отклонения обыч¬
но малы и углы можно рассматривать как векторы. В соответствии
со сказанным в качестве угловых отклонений будем рассматривать
величины
х2 = j ^'ydty x4 = J ®zdt. (12.56)
Уравнения объекта (12.32), (12.56) записываем в виде
х + ах = и,
410 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. XII
где
а =
или
О
— 1
J Э X
J— V
J э
о
Xj = (l)y,
и
и1 г ’
•'э
Jx J-i
J3
О
О
О
О
О
Q
0
О
О
о
— 1
о
где
аб =
Хб = ||Хб1Хб2||Т,
/ 7э7— '
J 3
— 1 I
о
о
Xq + абх6 — иб>
Матрицу коэффициентов функционала задаем в виде
0
₽н
0
₽б
> 06 —
0
Ргг
Уравнение (12.55) коэффициентов оптимального
нимает в данном случае
А1 Аг
А1 Аг
управления при-
где
/Q(l-f) О
— 1 О
ВИД
/Q(/_l)
О
+
— 1
О
А,
А1
Аг
Аг
+
+ 4-
Аг
^12
Рн 0
^21
^22
0 022
(12.57)
f = JxU3.
Раскрывая уравнение (12.57), находим
Л * 'гр. I ^3Ргг
11 ~ 2 7rilT 4_|_ Q2T2(f — I)2
-ГЛр22
д = 2
12 2 + jQT(f— 1) ’
4-7’2Р22
Д - 2
21 2 — jQT(f — 1) ’
^22 = ~2~ ^*022*
(12.58)
§ 12.3]
СИСТЕМЫ СБЛИЖЕНИЯ
411
Согласно (12.53) (12.58) оптимальное управление равно
иб = + /«з = — кб [Лп (%! + /х3) + Л12 (х2 + /х4)] =
“ — 4 + Й2Т2 (/ — 1) {['^7 (4 У — ^ + ^2] (*1 + №) +
+ ~2~ ^[2 —fiT (f — 1)1 (xt + /х4)| .
Окончательно получаем
- ТГ " - к- F + 2 <f -1)’] +
+ т ^(Oydt + -^-Т2Й(/ — 1) >
и2=4г=~k* {[?2+21+■&■Q2?2(/ -1)2 К+
+ Т ^zdt - 4- Гй (/- 1) .
(12.59)
Угловые отклонения ( со^ dt, § co2d/могут контролироваться непо¬
средственно во вращающейся системе координат. Система стабили¬
зации оказывается работоспособной как в двухканальном выпол¬
нении, когда осуществляются оба управления (12.59), так и в
одноканальном выполнении, когда реализуется лишь одно из управ¬
лений (12.59).
§ 12.3. Аналитическое конструирование систем сближения
Не будем делать различия между системами сближения и при¬
чаливания, полагая что назначением рассматриваемой системы яв¬
ляется приведение КА в заданную точку в заданном угловом поло¬
жении с минимальными относительными скоростями и минимальным
расходом рабочего тела. Приведение в заданную точку в заданном
угловом положении соответствует задаче причаливания и стыковки
данного КА с аппаратом, угловое положение которого неизменно
и который совершает свободный орбитальный полет. Вопросы опти¬
мизации подобного сближения в различных постановках рассматри¬
ваются в ряде работ [12.18] — [12.25]. Возможна и другая постановка
задачи, когда оба аппарата в процессе сближения и причаливания
выполняют управляемые движения и синтезируются оптимальные
управления для обоих аппаратов. Учитывая первую постановку
задачи, опорную систему координат совместим с аппаратом, выпол¬
няющим пассивный полет. Эту систему будем считать инерциальной.
412 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. XII
Рассматриваемое сближение КА начинается с дальностей, при
которых кривизной и изменением интенсивности гравитационного
поля можно пренебречь. В этих условиях в относительном движении
гравитационные ускорения сокращаются и их можно отбросить
(безгравитационное сближение). Предполагаем, что управление
угловым положением на этапе сближения, как и в рассмотренных
процессах пространственной ориентации, осуществляется посред¬
ством трех или большего числа пар двигателей, создающих моменты
относительно главных осей инерции управляемого аппарата. Управ¬
ление движением центра массы наводимого аппарата осуществляет¬
ся посредством трех двигательных установок с реверсивной тягой,
создающих силы вдоль главных осей инерции.
В соответствии со сказанным уравнения обобщенного объекта
будут состоять из уравнений углового движения типа (12.17) и урав¬
нений относительного движения центра массы:
Ш (Vxi + ^уУх\ — <bz\VyX) = Xv
т (Vr/i + амКй — <OxiVzi) = Yv
т (V2\ + ^xiVz/i ^t/iKti) = Zp (12 gQ)
* = Vx^ll + + 1^21613,
У = V^xl^21 4“ Vi/1822 4“ V21823»
г = УХ1831 + K/1832 + ^21833. )
Здесь Vx\, Vy\, Vzi — компоненты вектора относительной скорости
в связанной с управляемым аппаратом системе координат, х, у, г —
компоненты вектора относительной скорости в инерциальной, свя¬
занной с неуправляемым КА, системе координат. Желаемое конечное
положение аппарата соответствует
(0^ = (Оу =; C0z = 0, 8^2 ~ ^13 “ ^21 = ^23 ~ ^31 === ^32 =
Vxi = vyl = Vzi = 0, x = y = z = o.
Используем прежние обозначения координат (12.18) и введем до¬
полнительные обозначения:
Vxi = -^13» Vу\ — Xj4, Vz\ ~ Х15, х = Х1б, У = Х17, 2 == Х18.
Теперь уравнения обобщенного объекта (12.17), (12.60) запишутся
в виде
*1
4" ^123-^2^3 = 41»
Х10 + *2*5 -
— x3xt = 0, |
х2
4“ ^213*1*3 = ^2»
Xi + Х3х1о
— xtx5 = 0, 1
х3
4“ ^312^1-^2 ~ ^3»
Х5 + -
-XX -0 1(12-61)
л 2 v10 |
*6
+ х2х, — х3хи = 0,
xs 4- x2z12
x3xe =* 0, j
$ 12.3]
СИСТЕМЫ СБЛИЖЕНИЯ
413
*11
4-
*3*6”
- хгх7 = 0,
*9
+ *3*8
= 0,
*7
+
*1*11 -
- х2хв = 0,
*12
+ *1*9 —
х2х8 = 0,
*13
4-
*2*15 “
— х3х14 = U13f
*16
*10*13 “
-х4х14 —х5х15
= 0,
*14
4-
*3*13 “
*17
— *6*13 —
*11*14 *7*15
= 0,
*15
4-
*1*14 "
— Х2*13 = 015»
*18
— *8*13 —
‘ *9*14 *12*15
= 0.
Здесь
11
1
1
*
it =
МУ\
у и
мг1
и — 1
и
01
Jx ’
—
Т > U3
Jy
~ Jz '
- “13 * m ’
14 пг
J Z J у
J X J Z ~
J у — X
015
~ m '
0123
Jx ’
0213 =
j > 0312
Jy
~ Jz
Коэффициенты
010,2,5 ~ 04,3,10 = 0514 = 0627 = 0Ц.3.6 = 07,1,11 = 08,2,12 =
= 0938 = 012,1,9 = 013,2,15 = 014,3,13 = 015,1,14 = 1,
010,3,4 — 0415 = 05,2,10 = 06,3,11 = 0Ц,1,7 = 0726 ~ #839'= 09,1,12 =
= 012,2,8 = 013,3,14 = 014,1,15 = 015,2,13 = 016,10,13 = 016,4,14 =
= 016,5,15 — 017,6,13 = 017,11,14 = 017,7,15 = 018,8,13 = 018,9,14 =
= 018,12,15 = — 1
(12.63)
в уравнениях (12.61) не имеют буквенных обозначений, так как
равны ±1. Задачу синтеза системы сближения следует ставить,
конечно, как задачу квазитерминальную. В соответствии с целью
управления минимизируемый функционал задаем в виде
= 2 Р//*/ (Т) + 2 Р//*/ (71) + f ( 2 Р//*/ + 2 Р//*/') dt 4-
/=1 /=13 о \х=1 /=13 /
где q =
2k
2k — 1
k — большое положительное целое число. Величина
2 р/Л (Г) = Р1Х (Г) + р22(»у (Т) + р33«>2 (Т) + р44е?2 (Т) +
4" Рб5е?3 (Т) -f- рввб21 (Т) + Р77б23 (Т) 4- Рв8е31 (Т) + р99832 (Т)
414 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. XII
является оценкой относительных угловых отклонений и относитель-
ных угловых скоростей КА в конечный момент сближения. Если
требования по всем трем вращательным степеням свободы идентич¬
ны, то
Р11 = Р22 = Рзз = Pw» Р44 = р55 = • • • = р99 = Ре- (12.65)
Величина
18
(7*) = Р13,13^x1 (?) 4" Р14.14К/1 (7") + р 15,15^21 (Т) -J-
+ Р16,16*2 (Т) + Р17, \1У2 (Т) + Р18,18Z2 (Г)
является оценкой относительных поступательных скоростей и от¬
носительных координат центра массы КА в тот же конечный момент
сближения. При идентичных требованиях по всем трем поступатель¬
ным степеням свободы
Р13,13 = р14,14 = Р15.15 = Pv, Р16.16 = Р17.17 = Р18.18 = Рх- (12.66)
Величина
г / 9 18 \ т
\ ( 2 РйХ1 + 2 PiZ-4) d/ = \ (Pll^x + + Рзз03* + ?44е?2 +
О V=1 *=13 / о
+ Рб5е?3 + Рббе21 + Р77823 + Рв8е31 + Рэ9832 + Р13,13^x1 + Р14,14^1 +
+ Р15,1бИ1 + Р16,16-^2 + Р17,\1У2 + Р18,18^2) dt
служит интегральной квадратичной оценкой относительного угло¬
вого и поступательного движения. При идентичности требований
к процессам по трем вращательным степеням свободы
Р11 = Р22 ~ Рзз = Рю, Р44 = Рб5 = ’ * ’ = Рэ9 ~ Ре- (12.67)
При идентичности требований к процессам поступательного дви¬
жения
Р13,13 = Р14.14 = Р15,15 = Piz, Р16.16 = Р17.17 = Р18,18 = Рх- (12.68)
Величина
является оценкой расхода рабочего тела на угловую ориентацию
в процессе сближения за время Т. Для того чтобы эта величина со¬
ответствовала расходу рабочего тела, коэффициенты усиления вы¬
бираются согласно соотношению
§ 12.3]
СИСТЕМЫ СБЛИЖЕНИЯ
415
где /х, — плечи пар двигателей ориентации. Коэффициенты
^14, ^15 выбираются одинаковыми и величина
V.f S
о £=13 о
служит оценкой расхода рабочего тела на управление поступатель¬
ным движением в процессе сближения. Величина
в соответствии с общей трактовкой метода является оценкой, обеспе¬
чивающей ограниченность сигналов управления. Как и в задаче
ориентации (§ 12.1), синтез оптимальных управлений будем осу¬
ществлять на основе метода аналитического конструирования для
объектов с полиномиальными характеристиками в квазитерминаль¬
ном (первого рода) варианте (см. § П. 5). Оптимальные управления,
минимизирующие функционал (12.64), имеют вид
/ 18 18 18 \р—1
= kPi I A[jXj -|- Aijk%jXk -p AijkiXjXkXi -f- • • • )
\/=i i,k=\ i,k,i=i /
(12.69)
(i = 1, 2, 3, 13, 14, 15),
где для данного объекта коэффициенты определяются формулами
т
Ац (/) = рц + } Рй d?> Ан = 0 при / =# i,
i
Т. 18
Atjk (t) = — 2 (?) aP/fi + ^р/ (О apik + APk (?) aptj] dt',
t p=\
9 ? 18
Aijki (t) = q- \ 2 [Apij (?) aPki + APik (?) apji +
3 t p=\
+ Apu (?) aPjk + Apjk (?) apuA' APji(?)aPik + APki (?) aPij] d?,
j
(12.70)
416 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. хп
Учитывая выражения (12.62), (12.63) при соотношениях (12.65) —
(12.68), находим
— Аг — Аз “ Рсо + Р<А> (Т
А4 = ^55 = * ‘ ‘ “ Аэ = Ре А Ре (Т О»
^13,13 = ^14,14 = Аб,15 = PV + Pv (Т — t),
Аб,16 = 17,17 = Ав,18 = Рх + Рх (Т — t)-
(12.71)
Остальные Ац равны нулю. Далее определяем при тех же условиях
коэффициенты квадратичных членов
а™ = - (АА+АА + АА) [ро (т—о +
+ 4 риг-о2].
А,9,12 =—А,7,11 = А,5,10 =—А,8,12 = А,6,11 =—А,4,1О = (12.72)
= Ре (Т-f) +^Ре
А,14,16 = А,15,16 = А 10,13,16 = А,13,17 = А,15,17 = А1,14,17 =
= А, 13,18 = А, 14,18 = Аг, 15,18 = Рх (71 — 0 + “2~ Рх(^ — ^)2-
Все другие А/* равны нулю, кроме получающихся из (12.72) про¬
стой перестановкой индексов и поэтому равных этим коэффициентам.
При тех же условиях определяем коэффициенты кубических членов
аргументов оптимальных управлений. Для управлений иъ и2, и3
вращательным движением (ориентацией) коэффициенты равны
(12.73)
СИСТЕМЫ СБЛИЖЕНИЯ
417
§ 12.31
Подставляя в (12.69) и производя простые преобразования, получаем
сЛедуютие выражения для оптимальных управлений угловым дви¬
жением КА в процессе сближения:
U1 = - k? {[р<0 + Ро (Т - 01 + 2 | р8 (Т -1) + Ь- (Т - О’] X
X (ез2еаз — 833832) — 2 (хх + х2 4- «з)[р® (Г — I) + Д- Ро (Т — /)2j X
X <лу(ог + 4(хх + х2 + х3) |рш (Т — О2 + 4"Р® — ^3]+
4" X2®z) <0* 4“ 2 |^ре (Т — /)2 4 д- Рг (Т— О3] (2 (822 4* езз — 823 —
В32) 4“ [3^21^23 ^2 (^13^11 ^31^33)1 4"
\2d-1
4” [Зв31832 Х-£ (821822 В12е11)1 J »
иа = - № {[Ро + Ро (Т - 0] 4- 2 [ре (Т - 0 + 4" Ре (т - О2 j х
К (е1з®11 — 8з1езз) — 2 (хх 4- Ха 4- из) Ро (У — t) 4—2~ Р® (^ О2 X
х ®/0г + 4 (хх 4- ха 4- Х8) [р® (У — О2 + 4“ Р“ — W1 (zi®* +
4- «з®2) ®р + 2 [ре (Т - О2 + 4- Ре (Т ~03] <2 (е‘1 + езз - е?з -
e3i) ®у [Зе31е32 и± (821е22 ei2en)l 4~
'j 2d—1
4~ [Зе12813 х3 (е32е33 е2з822)1) j >
из = — ^3d |[ро 4-Рш(У — 01 ®z 4-2 [ре (У — 0 +4"Ре(У-^)2] X
X (е21822 — 812еи) — 2 (хх 4~ хз T хз) [р® (У ~ t) 4~ “^“Р® (У — 02j X
X <лх<лу 4- 4 (хх 4- х2 4- х3) [р® (У — О2 + 4" Р® ~ *)3] (Хз®х +
4- Нз®Ь о)2 4- 2 ! ре (У - /)2 4- -L Ре (У - /)з] (2 (8?, + 822 - 8?2 ~
821) ®г 4" [Зе21823 Х2 (81381х 832833)] СОД 4"
Ш-1
+ (Зе12е13 — х3 (833833 — е23е22)] со^> j
(12.74;
14 А. А. Красовский
418 СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
[Гл. XII
где
Эти управления ничем не отличаются от полученных при решении
задачи собственно оптимальной ориентации. При 0е = 0^ = 0 они
совпадают с (12.29). Таким образом, оптимальное управление угло¬
вым положением КА в процессе сближения при указанных условиях
точно такое же, как оптимальное управление в процессе собствен¬
но ориентации КА. Определяем коэффициенты кубических членов
аргументов управлений u13, u14, и1б:
Аз, 13,6,6 — Аз, 13,8,8 — А 13,13,10,10 = -^14,14,4,4 =
== -414,14,9,9 = Д14,14,11,11 = 415,15,5,5 = A\^jj =
= л15>15,12112=4 [рх а - о2 + 4 -оз] *
А, 10,13,14 = А, 10,13,15 = А, 11,13,14 = А,7,13,15 =
= А,9,13,14 = А,12,13,15 = А,5,14,15 = А,11,14,15 =
= л9,12.14.15 = 4[Рх а - о2+4 -оз] •
(12.75)
В соответствии с (12.69), (12.71), (12.72), (12.75) получаем выраже¬
ния для оптимальных управлений поступательным движением КА
в процессе сближения:
г/13 = —kft + 0|/ (Т — /) + 4рх (Т — t)2 + -£-0^ (71 — /)3] Vxi +
+ [2рх (T — t) + 0х (Т — О2] (8и* + e2iZ/ + е3^)}
u14 = -k\t | [pv + 0у (Т - 0 + 4рх (Т - О2 + 4- k (Г - О3] Vyx +
+ [2рх (Т — t) + 0Х (Т — /)2] (е12% + е22// + е32г)} ,
^15= —^5 + 0у (Т — t) + 4рл (Т— I)2 + -у 0Х(Т — /)3 J Vzl +
+ [2рЛ (Т 0 + Рх О2! (813* + е2з£/ + 8ззг)}
(12.76)
Оптимальные управления (12.76), как и управления (12.74), опре¬
делены с точностью до кубических членов аргументов, хотя после
преобразований их аргументы содержат лишь линейные формы
$ 12-31
СИСТЕМЫ СБЛИЖЕНИЯ
419
координат
%1 = £11% + &21У + 8312»
У1 = 812Х + е22У + 8322>
2*1 = Е13Х 4" 82зУ + 8332
(12.77)
и скоростей Vxi, Vvi, V2\ в связанных осях. Осуществление этих
управлений требует измерения компонент (12.77) вектора относи¬
тельной дальности и относительной скорости в связанной с управляе¬
мым аппаратом системе координат. Измерение компонент хх, уъ zx на
борту управляемого аппарата осуществляется проще, чем измерение
компонент х, у, г в инерциальных координатах.
Действительно, для определения хх, г/х, гх в. принципе достаточно
иметь систему углового сопровождения «цели» и дальномер. Что
касается компонент скорости в связанной системе координат, то
по крайней мере при низких угловых скоростях сох, cov, со2 или
достаточно точном измерении этих скоростей Vxi, Vy\, V2i могут
определяться согласно формулам:
Vxi = + 0)^! — azyv
Vyi = +
V2i = zx + coj/x —
Совокупность уравнений объекта (12.61) и оптимальных управле¬
ний (12.74), (12.76) составляют уравнения замкнутой оптимальной
системы сближения.
Для случая, когда в назначаемой части функционала присут¬
ствует лишь терминальная составляющая, т. е. ре = ры = Рх =
== Ру = 0, эти уравнения имеют вид
+ x3QyQ2 + k* {Йж + %в (1 — т) (е32е33 — е23е22) — 2(хх +
+ Х2 + и3) (1 — т) + 4 (хх + Х2 + Х3) (1 — т)2 (Ххйу -I- Х2йг) X
х йх-|- Хе (1 — т)2 (2 (822 Н- 833 823 — 83г) Н- [Зе2Х823 —
Х2 (813811 83183з)1 &Z 4* [383Х832 Х1 (821822 812811)1 Ру) } = ^> .
-fit- + Х.ДД + ki {Ц, + Хе (1 — т) (8Х38ХХ — 831833) — 2 (хх + Х2 +
+ хз) (1 — т) QxQ2 + 4 (хх + х2 + х3) (1 — т)2 (xxQ2 + x3Q2) +
4" Хе (1 — т)2 (2 (ей + 8зз — 8?з — 83i) + [Зезхе32 — хх (е21е22 —
—— 8128и)1 4~ {ЗеХ2е13 х3 (8^853 82з82г)1 Рг)} = О»
(12.78)
!«•
420
СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ [Гл. XII
4- + k*3 (Q2 + Хе (1 — t) (e21e22 — e12eu) —
— 2 (kj + x2 + x3) (1 — t) (xx + x2 + x3) (1 — t)2 (x2Qx +
+ XgQ^) Qz + Хе (1 — t)2 (2 (811 + 822 — 612 — 821) &z + [3e21823 —
— ^2 (813811 83183з)1 Ос + [3s12813 Xg (s328gg е23е2г)1 =
+ Ц/813 — ^z812 = 0» fa + ^823 ^z822 = 0,-
+ Q/U ^x813 = 0> "2^" + ^z821 ^x823 = 0,
fa3 ’ + ^x812 Ц/811 = 0> fa + ^x822 Цу821 — 0,
fa1- + ^r/833 — ^z832 — 0» "2^ ^X18u f^r/1812 t/zl813 = 0,
4“ ^z831 ^x833 = 0> “2r ^xl821 ^A/l822 ^z1823 = 0,
~2^ Ь ^x832 Q/31 = ^xl831 £^1832 f^zl833 = 0,
<^xl
dx
I
+ Qj/Ai —QzUy\ + &i3 {[1 + 2%x(1 — t)2] Ux\ +
+ Xx 0 — T) (811* + e21f/ + 831г)}2d 1 = 0,
+ ^z^xl — QXUZ\ + £14 {[1 + 2%x (1 — t)2] Uyl +
+ Xx (1 - T)(e12x + 822f/ + e^z)}2^1 = 0,
+ &xUy{ — QyUx\ + £15 {[1 + 2%x (1 — r)2] Uz{ +
+ Xx (1 — T) (813* + 82g£/ + egg?)}2'*”1 = 0,
(12.78)
Шух
dx
dx
где
</xi = VziT, Uух = VyiT,
T = -^r-, = (f)xT, = ayT, Qz = (O2T,
^1=У21Т, Xe = ~~~ >
Г(О
2ржТ*
Ру ’
1х =
(1=1, 2, 3),
(I = 13, 14, 15).
9
12.31
СИСТЕМЫ СБЛИЖЕНИЯ
421
цисленное решение этой системы уравнений было получено на
ЭВМ при следующих начальных условиях:
еи (0) "2” ’ е12 (0) — 4 ,
е21 (0) = ~~2~ 9 е22 (0) ~ ~2~ ’
(0) - .
е23 (0) ~ 2~ 9
/Л\ 2-/2
езз (0) “ 4 »
QJ0) = Q,(0) = Qz(0) = 0, х(0) = у(0) = z(0) = НО м,
С/х1(0)-^1(0)=^г1(0) = 0,
и следующих значениях постоянных:
Хе = 1,73, х, = 40, £* = 2,0, £2 = 2,4,
£3 = 2,2, &1з = £14 — £15 = 20, Jx: Jy : Jz — 1 :1,2 : 1,5.
Кривые переходных процессов
Кривые изменения направля-
УМоХВм?СИ“УСОВ 811 (0’ 8« <*>’ 8*’ (/) И
овых скоростей в процессе опти¬
мального сближения.
в синтезированной, оптимальной
в указанном смысле, системе
представлены на рис. 12.8,
12.9. Естественно, что про¬
цесс ориентации совпадает с
ранее полученным тем же
Рис. 12.9. Кривые изменения координат
центра массы и компонент поступатель¬
ной скорости в процессе оптимального
сближения.
методом. Как видно, качество процессов сближения при синтези-
рованных управлениях получается достаточно высоким.
Глава XIII
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
ПИЛОТАЖНО-НАВИГАЦИОННЫХ КОМПЛЕКСОВ
Под пилотажно-навигационным комплексом (ПНК) понимается
совокупность датчиков информации, систем обработки и отображе¬
ния информации, системы управления, предназначенная для нави¬
гации и пилотирования летательного аппарата. В дальнейшем речь
будет идти в основном о бортовых пилотажно-навигационных комп¬
лексах, хотя эти комплексы могут быть тесно связаны с наземным
оборудованием и обеспечением полетов. Пилотажно-навигационные
комплексы существовали на всех стадиях развития летательных
аппаратов, но в прошлом они были неавтоматическими. На пило¬
тируемых аппаратах основную обработку информации и управление
в прошлом выполнял человек, экипаж. Экипаж в неавтоматизиро¬
ванных ПНК являлся главным звеном, в котором замыкались по¬
токи необработанной или слабо обработанной информации, получен¬
ной от приборов, сигнализаторов, визуального наблюдения за
местностью и воздушным пространством, линией связи и др.
Усложнение задач пилотирования и навигации, усложнение пи¬
лотажно-навигационного оборудования потребовали автоматизации
пилотажно-навигационных комплексов. При этом очень сильное
развитие получила интеграция оборудования, заключающаяся в
органическом объединении многих подсистем в единый комплекс
на базе бортовых вычислительных машин (вычислителей). Комплекс¬
ное использование информации различных датчиков позволяет по¬
высить точность и надежность определения координат. Комплекси-
рование подсистем существенно расширяет возможности навигации
и управления.
Проектирование современных пилотажно-навигационных комп¬
лексов, которые с полным основанием могут быть отнесены к клас¬
су «больших» или «сложных» систем, представляет нелегкую за¬
дачу. К решению этой задачи естественно привлекать методы опти¬
мальной фильтрации и методы аналитического конструирования.
§ 13.1. Общая постановка задачи аналитического
конструирования пилотаж ю-навигациояных комплексов
Отправной основой проектирования пилотажно-навигационного
комплекса, как и другого оборудования, является назначение лета¬
тельного аппарата. Применение, функционирование летательного
§ 13.1J
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
423
ппарата разбивается на ряд этапов и режимов. Для многоцелевых
летательных аппаратов возможные применения и этапы функциони¬
рования могут быть представлены в виде сети или «дерева целей»
? Ис. 13.1). Для иллюстрации на рис. 13.1 изображен график этапов
применения гипотетического многоцелевого истребителя. Этап 1—2
соответствует рулению при взлете, 2—3 — разбегу, 3—4 — взлету.
Далееследуют этапы, зависящие от решаемой боевой задачи. Так,
при перехвате воздушной цели на этапе 4—5 осуществляется форси¬
рованный набор высоты и скорости, на этапе 5—6 — дальнее наве¬
дение на воздушную цель, на этапе 6—7 — самонаведение на воздуш¬
ную цель, на этапе 7—8 — атака воздушной цели, на этапе 9—10 —
Рис. 13.1. График, иллюстрирующий назначение и этапы функцио¬
нирования многоцелевого самолета.
выход из атаки, на этапе 10—7 — маневр для повторной атаки, на
этапе 10—11 — возвращение в район аэродрома. Этапы Ц—12 —
«пробивание облачности», 12—13 — предпосадочный маневр, 13—
14 — заход на посадку, 14—15 — посадка, 14—12 — уход на вто¬
рой круг при несостоявшейся посадке, 15—16 — руления являются,
как и этапы взлета, общими почти для всех возможных применений
самолета.
При действии по наземным целям на этапе 4—23 осуществляют¬
ся набор высоты, скорости и профильный полет, на этапе 23—
24 — полет на малых и предельно малых высотах, на этапе 24—
25 — маневр для обнаружения малоразмерной наземной цели и т. д.
Пунктирная линия на рис. 13.1 изображает процессы наземного
обслуживания, предполетную, послеполетную подготовку и др.
На этих этапах пилотажно-навигационный комплекс может осущест¬
влять самопроверку. Однако чаще всего на этапах наземного обслу¬
живания ПНК выступает в качестве объекта проверки посредством
контрольно-проверочной аппаратуры. Эти этапы не раскрыты.
Назначение и этапы функционировал летательного аппарата —
необходимая, но недостаточная исходная информация для проекти¬
рования ПНК. В первую очередь она должна дополняться количест¬
венными характеристиками — требованиями для каждого этапа
и режима. Количественные характеристики должны охватывать
424
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
условия выполнения каждого этапа, существующие или накладывае¬
мые ограничения, точность и быстродействие, качество и надеж¬
ность выполнения этапа и др.
Разработка научно обоснованных тактико-технических или тех¬
нических требований к летательному аппарату на всех этапах
и режимах его функционирования является сложным процессом,
как правило, итеративного характера. Первоначальные требова¬
ния корректируются, уточняются на различных стадиях проектиро¬
вания и разработки комплекса. Однако объем коррекции должен
быть ограничен для сохранения целевого назначения и задуманного
облика летательного аппарата.
Совокупность «дерева целей» и тактико-технических или техни¬
ческих требований к летательному аппарату на каждом этапе состав¬
ляет отправную основу проектирования ПНК. Первым этапом про¬
ектирования обычно является рассмотрение существующих техни¬
ческих средств и возможностей экипажа, пригодных для достижения
намеченных целей и удовлетворения предъявленных требований.
Если оказывается, что существующие технические средства и воз¬
можности экипажа обеспечивают выполнение поставленных задач,
то проектирование, точнее, подбор ПНК, на этом завершается. Одна¬
ко для нового летательного аппарата это довольно редкий случай.
Даже при наличии так называемых унифицированных пилотажно¬
навигационных комплексов, обеспечивающих возможность приме¬
нения на летательных аппаратах различных видов, обычно необхо¬
дим индивидуальный комплект для каждого типа летательного аппа¬
рата. Может быть использован агрегатный принцип, при котором
индивидуальный комплект набирается из агрегатов, составляющих
функционально избыточный унифицированный комплекс. Подбор
индивидуального комплекта из агрегатного унифицированного комп¬
лекса может рассматриваться как частный случай решения задачи
проектирования.
Однако типовой является полная задача проектирования ПНК,
при которой основная часть по крайней мере системы обработки
информации создается заново. В то же время очень редко возника¬
ет ситуация, при которой все части комплекса необходимо созда¬
вать заново. Обычно значительная часть комплекса и прежде всего
датчики пилотажно-навигационной информации выбираются из чис¬
ла существующих или создаваемых в интересах ряда разработок.
Для этих датчиков и подсистем с той или иной степенью достовер¬
ности известны характеристики точности, спектры шумов и ошибок.
Если для выполнения некоторой из поставленных задач не удается
подобрать из числа существующих датчик или подсистему, то раз¬
рабатывается задание на создание необходимой подсистемы. В этом
задании обосновываются требования к точности.
Таким образом, при синтезе ПНК характеристики ошибок и шу¬
мов датчиков следует считать известными стой или иной степенью
§ 13-11
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
425
точности. Помимо этого, известны также области нормального функ¬
ционирования или работоспособности конкретных подсистем или
датчиков. Это очень существенно при определении структуры и
принципа функционирования комплекса. В качестве примера в таб¬
лице 13.1 приведены этапы, соответствующие задаче перехвата
согласно графику рис. 13.1, и указаны области функционирования
основных датчиков информации. Индекс + означает, что соответ¬
ствующий датчик в условиях отсутствия искусственных помех
ТАБЛИЦА 13.1
" № этап а
Датчик,
средство, подсистема
сч
д
7
сч
со
1
СО
1
LO
ь-
1
СО
00
1
ь-
о
7
CD
10-11
11—12
12—13
13—14
14—15
<О
Визуальный контроль
+
+
+
—
—
±
±
+
±
±
±
±
+
+
Гировертикаль
—
+
+
+
+
+
+
+
+
+
+
+
+
—
Барометрический высото¬
мер, высотный корректор
—
—
±
+
+
+
+
+
+
+
+
+
±
—
Радиовысотомер
—
—
±
+
+
±
±
±
+
+
+
+
±
—
Курсовая система
+
+
+
+
+
+
+
+
+
+
+
+
+
+
Инерциальная система
±
+
+
+
±
±
±
+
+
+
±
±
±
±
Радиосистема ближней на¬
вигации и захода на по¬
садку
±
+
+
+
+
±
Система дальнего наведе¬
ния
—
—
—
+
—
—
—
±
±
—
—
—
~-
Станция самонаведения
—
—
—
—
—
+
±
—
—
—
—
—
—
—
Радиокомпас
+
+
+
—
—
—
Указатель скорости
—
+
+
+
+
+
+
+
+
+
+
+
+
—'
и отказов на данном этапе обладает полной работоспособностью;
индекс ± означает частичную работоспособность; индекс — ука¬
зывает на невозможность получения полезной информации с по¬
мощью данного датчика на данном этапе. Области работоспособности
датчиков, представленные в виде таблиц или другим способом, могут
служить основой при синтезе логической части ПНК, а именно той
части, которая управляет включением и выключением различных
источников информации. Заметим, что в неавтоматизированных
комплексах и в автоматизированных, но несовершенных, операции
по включению и выключению различных средств, переключению
режимов их работы вызывают значительную загрузку экипажа.
Перечисленные материалы (назначение, способы и этапы примене¬
ния летательного аппарата, требования к качеству выполнения по¬
ставленных задач, состав и области функционирования датчиков
информации) являются исходными материалами при синтезе ПНК —
426
ПИЛОТАЖНО-НАВИГАШЮННЫЕ КОМПЛЕКСЫ
[Гл. XIII
начальной или априорной информацией. К этой же категории сле¬
дует отнести математические модели движения летательного аппа¬
рата на различных этапах и режимах его применения.
В настоящее время можно считать доказанным, что во всех тех
случаях, когда с достаточным уровнем достоверности известна мате¬
матическая модель контролируемых процессов, высокосовершенная
система обработки информации должна строиться с учетом этой
модели. Известные фильтры Калмана — Бьюси являются примером
подобных систем. Математические модели движения летательных
аппаратов, особенно движения центра массы (навигационные за¬
дачи), известны с относительно высокой достоверностью. Для тех
движений и режимов, для которых коэффициенты уравнений неста¬
бильны и заданы с невысокой точностью, возможно применение про¬
цессов идентификации в полете. Кроме того, достоверность матема¬
тической модели часто повышается, если рассматривать летатель¬
ный аппарат совместно с системой устойчивости и управляемости,
автоматом тяги и другими подсистемами, стабилизирующими внеш¬
ние динамические характеристики.
Таким образом, при синтезе информационной части пилотажно¬
навигационного комплекса целесообразно использовать математи¬
ческие модели движения летательного аппарата (возможно, совмест¬
но с некоторыми системами управления) на основных этапах и ре¬
жимах применения. Что касается использования математических
моделей объекта при синтезе управляющей части ПНК — систем
управления, то этот вопрос совершенно очевиден.
Итак, математические модели контролируемых и управляемых
процессов составляют весьма важную часть исходного материала
при синтезе ПНК. Перейдем теперь к более конкретной постановке
и решению задачи синтеза ПНК. Для каждой математической мо¬
дели объекта, каждого возможного состава датчиков информации
и характеристик их точности, каждого критерия оптимальности
ПНК задача решается отдельно. Поэтому синтез ПНК целесообраз¬
но выполнять для каждого этапа и режима полета, отличающегося
задачей и требованиями, составом и точностью датчиков, уравнения¬
ми движения.
Для рассматриваемого этапа уравнения движения летательного
аппарата, точнее, обобщенного объекта, записываются в виде
%/с 4“ Fic (-Чс, • • • 9 ^хс> -^1и, ...» ^Хи> -^1в> • • • > -^цв) = 0, (13.1)
%kn + Р kn (-^1и, -^еи) — ^/ги> (13.2)
-£/в “Ь Рjb (-Чв, ...» ^т]в) = ^/в (^)» (13.3)
где 'XiC (i = 1, 2, ..., х)— координаты (параметры полета летатель¬
ного аппарата); %1И, ...» х%и — отклонения органов управления ле¬
тательного аппарата — выходные величины исполнительных уст¬
ройств; Хки (k = 1, 2, ..., е > %) — координаты исполнительных
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
42?
j 15.11
устройств (включая внутренние); ики — синтезируемые управле¬
ния в исполнительной части ПНК; XiD, Хцв— случайные воз¬
мущающие воздействия, испытываемые летательным аппаратом и
создаваемые турбулентностью атмосферы и иными факторами;
/ в (/ = 1» • ••» Л > е) — те же возмущающие воздействия как
выходные величины формирующих фильтров и (при т] > е) внутрен¬
ние координаты этих фильтров; (/) — белые шумы типа, ука¬
занного в основной теореме (см. § П. 2). Датчики информации, из¬
мерительные, навигационные системы, как и другие составные час¬
ти комплекса, считаем непрерывными динамическими системами.
Уравнения датчиков информации, измерительных систем, как
и предшествующие уравнения, запишем в общем виде
Х/д + Лд(Л1д, ...» Х£д, Х1с, • •
(13.4)
•Хас, -Х1ш, • • •
(13.5)
Здесь Х/д (Z = 1, 2, ..., £) — выходные величины и внутренние ко¬
ординаты датчиков информации; Xic, ..., хас (а •< х)— упоминав¬
шиеся координаты движения летательного аппарата; Х1Ш, ..., хаш —
шумы и ошибки датчиков информации; xqui (q = 1,2, ..., р > а) —
те же шумы и ошибки как выходные величины формирующих
фильтров и как внутренние координаты этих фильтров; (/) —
белые шумы указанного, типа. В уравнениях (13.1) —(13.5)
время в явном виде не записано. Однако эти нелинейные системы
могут быть и нестационарными и можно в качестве дополнительно¬
го аргумента функций ввести время t.
Постановка задачи синтеза пилотажно-навигационного комплек¬
са может быть различной. Можно, например, синтезировать сначала
исполнительную часть комплекса — систему управления в пред¬
положении, что информационная часть комплекса является идеаль¬
ной, т. е. выдает истинные значения координат. Можно сначала син¬
тезировать оптимальную систему обработки информации, предпо¬
лагая управления отсутствующими, а затем синтезировать САУ
без учета шумов. Теорема разделения [9, 10] дает обоснование
такого подхода.
Более общим является подход, при котором информационная
и исполнительная части комплекса синтезируются одновременно
на основе использования как критерия качества информационной
части системы — системы обработки информации, так и критерия
качества собственно управления.
Вообще говоря, необходимость использования двух критериев
(или обобщенного критерия, включающего указанные) не является
очевидной. Основной целью получения информации в бортовом комп¬
лексе является управление и, казалось бы, можно ограничиться од¬
ним определяющим критерием — качеством управления. Однако
428
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
ГГл. Xin
пилотажно-навигационная информация используется не только для
автоматического, но и для ручного и полуавтоматического управ¬
ления, а также для регистрации режима полета, техники пилоти¬
рования, аварийной регистрации и др. Высокий уровень шумов на
выходе информационной части комплекса может создавать «насы¬
щение» исполнительной части комплекса, делать недостоверным ма¬
тематическую модель, принятую при синтезе этой части. Чаще все¬
го точность информационной части ПНК, выраженная соответствую¬
щим образом, служит достижимой или недостижимой границей
точности управления.
Таким образом, критерий качества обработки пилотажно-нави¬
гационной информации, критерий оптимальности информационной
части комплекса должен служить важным самостоятельным показа¬
телем качества комплекса.
По условию датчики информации заданы и синтезу подлежит
система обработки информации. Эта система, получая сигналы дат¬
чиков *) %/д, должна выдавать сигналы Х/м, с максимальной воз¬
можной точностью воспроизводящие истинные координаты лета¬
тельного аппарата xic. Конечно, вследствие наличия шумов датчи¬
ков и, возможно, неполного их состава (а < х, см. уравнения (13.1),
(13.4)) абсолютно точное воспроизведение вектора хс (xic, ..., хцс)
невозможно. Вектор хм (xiM, ..., ххм) может быть лишь оценкой век¬
тора хс. Естественно в качестве назначаемой подынтегральной функ¬
ции функционала, оптимизирующего систему обработки информа¬
ции, задать некоторую норму разности векторов хс — хм:
Qm = Qm (-^lc -^lM, • • • 9 Ххс ^хм)« (1 3.6)
Обычно систему обработки информации стремятся построить так,
чтобы оценка вектора истинных координат была несмещенной. Это
означает, что математическое ожидание вектора выходных величин
системы обработки информации М (хм) и математическое ожидание
вектора истинных координат М (хс) при одинаковых начальных
условиях (хм (0) = хс (0)) должны совпадать:
М[хм(01 = М[хс(01.
(13.7)
В векторной форме уравнения (13.1) — (13.5) запишутся
так:
Хс + Рс (*с, *и, Хв) = о,
(13.8)
Х'А ~Ь Р. (*^и) = ^И»
(13.9)
хъ + РМ=^9
(13.10)
А^д “i“ Рд (Хд, Xq, Хщ) = 0,
(13.11)
“К Рш (А'ш) =
(13.12)
*) Включая внутренние координаты, так как их восстановление
при извест-
ных уравнениях датчиков не встречает принципиальных затруднений.
ОВЩАЯ ПОСТАНОВКА ЗАДАЧИ
429
| 13.11
где хи, хв» хш — полные векторы координат исполнительных
устройств, датчиков информации, формирующих фильтров возму¬
щающих воздействий и шумов соответственно; хи, хс, хв> — век¬
торы, составленные из всех или части компонент векторов хи, хс,
х хш. Пусть возмущающие и управляющие воздействия отсутст¬
вуют, начальные условия являются произвольными, но детермини¬
рованными. Уравнение (13.8) принимает вид
хс + (*с) = 0, (13.13)
где Fc (хс) = Fc (хс, 0, 0). Вследствие детерминированности
М [хс (01 = хс У)* М [хм (/)] = хм (/) и условие несмещенной оцен¬
ки (13.7) принимает вид
хм(/) = хс(/). (13.14)
Так как начальные значения хм (0) = хс (0) произвольны, то соот¬
ношение (13.14) будет иметь место тогда и только тогда, когда век¬
тор хм подчинен уравнению, полностью аналогичному (13.13):
*м + Fe(xJ = 0. (13.15)
Это соответствует наличию модели свободного движения объекта —
летательного аппарата. Конечно, автономная модель свободного дви¬
жения не решает задачи обработки информации, а вследствие неиз¬
бежных ошибок в задании начальных условий и воспроизведении
Fc выходные величины подобной модели имеют прогрессирующее
расхождение с хс даже при свободном движении объекта. Модель
может играть роль системы обработки информации, если на входы
этой модели поступают сигналы датчиков и другие сигналы, обес¬
печивающие устойчивость выходного вектора модели хм относи¬
тельно вектора истинных координат хс. Таким образом, на входе
модели должны подаваться управления им = им (хд, хм, хи):
хм -|- Fc (хм) = им (хд, хм, хи). (13.16)
Входные величины модели (системы обработки информации) здесь
считаются функциями сигналов датчиков, выходных сигналов мо¬
дели и координат исполнительных устройств. Это обусловлено сле¬
дующим. Задачи синтеза ПНК — это типичная задача с неполной
степенью наблюдаемости. Из всех векторов фазовых координат,
входящих в уравнения (13.8) — (13.12), (13.16), наблюдаемыми яв¬
ляются лишь вектор сигналов датчиков хд, вектор выходных сиг¬
налов модели хм и вектор координат исполнительных устройств
Эти наблюдаемые векторы фигурируют в возможном (синтези¬
руемом) управлении моделью. Управления в исполнительной части
системы (вектор ии) можно синтезировать также как функцию всех
наблюдаемых векторов: хм, хи, хд. Из самого назначения системы
обработки информации следует, что вектор хм лучше воспроизводит
координаты объекта, чем наблюдаемый вектор сигналов датчиков хд.
430
ЙЙЛО^АЖЙО-ЙАЁЙГАЦЙОНЙЫЁ КОМЙЛЁКСЫ
[Гл. ХШ
Что касается вектора им, также непосредственно наблюдаемого,
то согласно (13.16) он зависит от тех же векторов хм, хи и вектора хд.
Таким образом,
ии — ип (хм> *^и)‘ (13.17)
Заметим еще, что далеко не всегда математическая модель реальных
процессов известна с такой степенью точности, при которой отли¬
чия уравнений контролируемых процессов и уравнений, реализуе¬
мых в системе обработки информации, пренебрежимо малы. Поэтому
Рис. 13.2. Общая структура системы: объект — пилотажно-навига¬
ционный комплекс.
для общности Fc в (13.16) следует заменить на некоторую другую
(но, как правило, близкую) векторную функцию FM.
Итак, уравнения объекта и ПНК на каждом этапе и режиме при¬
менения записываются в виде
Хс + (*с> *и, *в) = О,
хи -J- Fa (хи) = ии (хм> хи),
Хд Рд С^д> -^ш) с=
(^ш) == ^ш»
•^м “Ь ^м (-^м) == (-^д> -^м’ ^и)- ’
(13.18)
*в + ^в (*в) =
Общая'структура системы, соответствующей этим уравнениям, изоб¬
ражена на рис. 13.2. Формирующие фильтры, являющиеся фиктив¬
ными системами, здесь не изображены. Дополнительно к уравнениям
(13.18) обозначена система индикации, используемая для ручного, по¬
луавтоматического управления и регистрации. Формирование управ¬
ляющих воздействий в информационной части системы осуществля¬
ется вычислителем /, реализующим зависимость цм = и^ (хд, хм, хи).
Формирование управляющих воздействий в исполнительной части
системы осуществляется вычислителем II, реализующим зависимость
иИ = (хм, хи)- Синтезу подлежат именновычислители I и II. С пер¬
вого взгляда кажется, что подобная постановка задачи синтеза не
§ 13.1 J
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
431
является общей, так как структура системы в значительной мере
предопределена. Однако это не так. За векторным изображением
скрывается множество возможных вариантов структур и парамет¬
ров, из которых путем синтеза выбирается структура и определен¬
ные значения параметров. Наличие модели в исходной структуре
еще ничего не предопределяет, так как управление им (хд, хм, хи)
может коренным образом менять поведение модели, придавая систе¬
ме обработки информации различные свойства. Система, представ¬
ленная на рис. 13.2, может быть многосвязной и многоконтурной,
причем в самой методике синтеза можно использовать иерархию
контуров. При этом, например, летательный аппарат с системой
устойчивости и управляемости, синтезированной на первом этапе,
рассматривается как обобщенный объект. Для этого обобщенного
объекта синтезируются система обработки пилотажно-навигацион¬
ной информации и «внешние» контуры управления. Такой подход
имеет то преимущество, что стабильность характеристик летательно¬
го аппарата совместно с внутренними контурами отрицательных
обратных связей существенно выше, чем аппарата с выключенными
системами управления. Поэтому обычная, неадаптивная модель мо¬
жет точнее отображать свойства такого обобщенного объекта. Для
построения самой системы устойчивости и управляемости может
быть использована часть информационной системы комплекса, часть
общей бортовой модели, т. е. система устойчивости и управляемос¬
ти может синтезироваться как органическая часть пилотажно-на¬
вигационного комплекса.
Для формулировки и решения задачи аналитического констру¬
ирования удобно иметь порядковую нумерацию переменных и ска¬
лярную форму записи уравнений. ВведехМ обозначения
Xi = Xia ) . 1
f при I = 1,
li= г ia J
fi = )
%i = Xi—£—х,и 1
fi = Л-£-н,и I
%i = %i—x—E,c 1
fi = Fi—ь—x—e,c I
%i ~ Xi—Z—2x—е,в ]
li 1 i—u—2x—е,в '
при i = C+ 1, ...» £ +
при i — t, x -j- 1, ...» £ -f- x -f- e;
при f = £ + x-|-e+l> •••> £ + 2x-J-e;
при f = £4-2x4-8 4-1, ...» £ + 2х + е+т);
L Xi—£—2X—8—Г],Ш
fi = F
jnpH i —£-j-2x-|-e-j-Л 1,£ + 2x4-
4" c + Л + P- j
(13.19)
432
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
Тогда уравнения обобщенного объекта (13.18) в скалярной форме
принимают вид
Xi + fi = щ + (/=1,2, ... , £ + 2х + е + Л + Р)» (13.20)
где
ut = Ui-t-w при i = £ + х + 1, S + He,
щ = u^tM при i = Z + 1» • • • > ? + x,
ut = 0 при всех других значениях i\
2x—е,в При i = g + 2x4-8+l, • • • , £ + 2x + Г|,
= Ez_£_2х-е-л,ш при / = ^ + 2х + е + л + 1» •••, £ + 2х +
+8 + л + Р;
g. = 0 при всех других значениях i.
(13.21)
Нумерация фазовых координат в уравнениях (13.20) выполнена
так, что первые £ + х + е координат (сигналы датчиков, выходные
величины модели и координаты исполнительных устройств) являют¬
ся наблюдаемыми, остальные — ненаблюдаемыми.
Для завершения постановки задачи синтеза необходимо задать
критерий качества комплекса. ПНК выполняет как функцию обра¬
ботки информации, так и управления и критерий должен учитывать
оба эти назначения. Мгновенная ошибка информационной части
комплекса согласно предыдущему характеризуется некоторой нор¬
мой разности векторов хс — хм:
QM = QM (*1с -^lM, • • • , Хкс — XxM) =
= См(^4-х-|-е+1 — *£+1, • • • , Х£-|_2х+е — *£+x).
Система координат на каждом этапе полета летательного аппа¬
рата выбирается так, чтобы некоторая норма вектора хс характери¬
зовала мгновенную точность управления:
Qc = QС (* 1с, • • • , *хс) = Qc (^4-x+e+b • • • , ^+2х+е)-
Синтез ПНК является задачей с неполной степенью наблюдаемости,
и согласно общей методике решения задач такого класса, изложен¬
ной в § П. 7, минимизация функционала со строго заданными функ¬
циями QM, Qc неосуществима. Можно минимизировать функционал
с некоторыми другими функциями Q^, Qc, близкими в определенном
смысле к заданным функциям QM, Qc. В зависимости от существа
конкретного рассматриваемого этапа движения летательного аппара¬
та, от требований на этом этапе задача аналитического конструиро¬
вания ПНК может ставиться как терминальная (квазитерминаль-
ная) или как нетерминальная.
§ 13.1]
ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ
433
Запишем функционал для квазитерминальной задачи. В соот¬
ветствии с изложенным и основной теоремой метода аналитиче¬
ского конструирования по критерию обобщенной работы в варианте
неполной степени наблюдаемости (§ П. 7) функционал записывается
/2
в виде
I = М (У3 [х± (/2), х2 (/2), • • • , Xfc-j-x-f-e (^2)]} + М (QM Qc) dt -|-
Ji
4гм[^(*<^Рр13 22)
4
где V = V (хх, х2, х^+х+е, 0 есть решение уравнения
дУ
dt
£+*+е
V
/=1
при граничном условии
V (xlt Х2, • • • , %£_|_х4-е» ^2) -(Хр Х2, ...» X£_|_x+e)
и Qm + Qc — функции, определяемой дополнительными уравнения¬
ми, получающимися в результате минимизации некоторых оценок
(дополнительных функционалов) различия Qm + Qc и QM + Qc.
Оптимальные управления, минимизирующие функционал (13.22),
равны
(13.24)
(/ — С + 1» С + 2, .. ., £ + х + е).
Легко видеть, что данная формулировка не является завершенной,
так как не указаны дополнительные функционалы и порождаемые
ими уравнения. В соответствии с § П. 7 в §§ 13.2, 13.3 приводят¬
ся законченные формулировки для линейной модели обобщенного
объекта и для модели с полиномиальными характеристиками. В за¬
ключение этого параграфа приведем одно общее замечание, касаю¬
щееся учета влияния шумов.
Согласно основной теореме (§ П. 2, § П. 7), параметры опти¬
мальных управлений не зависят от уровней шумов рассматриваемой
структуры, но, вообще говоря, зависят от формы спектра шумов
(параметров формирующих фильтров). Для случая полной степени
наблюдаемости инвариантность оптимальных управлений к уров¬
ням шумов не может рассматриваться как недостаток или парадокс
Данного метода аналитического конструирования. Действительно,
при полной степени наблюдаемости оптимальные управления сами
зависят от шумов, реализуя принцип управления по возмущениям.
При исчезновении шумов исчезают и соответствующие воздействия.
434 ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ [Гл. XIII
Коэффициенты оптимальных управлений здесь действительно не
должны зависеть от интенсивностей шумов. Иначе обстоит дело при
неполной степени наблюдаемости, когда шумы не поддаются конт¬
ролю и не могут фигурировать в качестве самостоятельных аргу¬
ментов синтезируемых управлений. В этих условиях инвариант¬
ность коэффициентов оптимальных, точнее, субоптимальных управ¬
лений по отношению к уровням шумов является некоторым недо¬
статком метода, обусловленным приближенностью решения для
случая неполной степени наблюдаемости.
Чтобы частично устранить этот недостаток, можно использовать
нормированные формирующие фильтры, выходные величины ко¬
торых имеют единичные дисперсии. Использование таких форми¬
рующих фильтров обусловливает появление коэффициентов перед
нормированными шумами в уравнениях объекта. Эти коэффициенты
соответствуют уровням реальных шумов. Коэффициенты синтезируе¬
мых управлений оказываются здесь уже зависящими от уровней шумов.
§ 13.2. Аналитическое конструирование ПНК
при линейной математической модели обобщенного объекта
Линейная модель обобщенного объекта означает, что уравнения
летательного аппарата на рассматриваемом режиме полета, уравне¬
ния датчиков, исполнительных устройств и формирующих фильт¬
ров линейны:
£+2х+е+т]+0
xi + *2 aikXk = Ui + &
(i = 1, 2, ..., t + 2x + e + T] + ₽).
Оценки мгновенных ошибок информационной части ПНК и точ¬
ности управления задаем в виде канонических положительно опре¬
деленных квадратичных форм
х
Qm = 2 (x^_|_x4-e_|_v *£-|-v)2 =
v=l
C+x
= 2 (Рцц4 + рц, х+е+ц-^ц-^х+е+ц Рх-+е4-ц,х+е+ц^х+е+ц)>
М+1
X £+х
Qc = 2 ^+x4-e-j-v^^4-x4-e4-v = 2 Рх+е+ц.х+еи-ц^хЧ-е+ц,
v=l цМ+1
где
Рцц = Рх4-е+ц,х4-е+ц = ^“Рц.х+е+ц =
Рх-Н+ц.х+е+ц = Н = £ + 1, • • . , t + X,
(13.26)
lye — положительные коэффициенты.
J 13.21
ПИК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
435
Таким образом,
Q ~ Qm + Qc = 151 $ikxiXk*
где = 0, Кроме
Рцц — 2~ Рц.и+е+ц — Рх+е+ц,х4-е+ц = + Аи
Н — £ + Ь • ••> £ + х, ^ = С + 2х + е + ,п + Р-
Согласно общей методике аналитического конструирования при не¬
полной степени наблюдаемости (§ П. 7), функция Q* = Q*M + Qc
задается в той же форме, что и Q, но с другими, предварительно
неизвестными, коэффициентами
Q* = Qm + Qc = 5 ^хЛ.
l,k—\
Для линейного объекта и квадратичной функции Q* решение урав¬
нения (13.23) является квадратичной формой, причем по условию
квадратичной формой только части фазовых координат. Заметим,
что наблюдаемыми являются фазовые координаты х19 х2, ..., х^+и+е,
а управления могут иметь номера только от £ + 1 до £ + х + е
(см. предшествующий параграф). Далее, согласно предыдущему,
управления в исполнительной части системы u^+x_]_i, ..., u^x+s
могут зависеть только от выходных сигналов системы обработки
информации %£+1, ..., х^+х и координат исполнительных устройств
■^ь+х-Н, • • •, ^+х+е*
Таким образом,
Am — Ацг — 0 при i — £ -J- 1, ..., £ + х и k Z> £ “И х е,
Akt = Aik = 0 при f = £ 4- х + 1, ..., £ + х + е
и & < £ + 1
или
k > £ + X + 8.
Для краткости запишем
1 п
= “о" 2 AikX^X^
z i,k=\
(13.27)
учитывая, что согласно (13.27) некоторая часть входящих сюда ко¬
эффициентов тождественно равна нулю. Соответствующим образом
задается У3. Для квазитерминальной задачи
1 '
V, = -о- S PikXi (/2) хк (/2),
z i,k=\
гДе pi* — заданные числа, причем pi/t = pAl = 0 при i = £ 4-
43в
ПИЛОТАЖЙб-ЙАЙИГАЦиОННЫЁ КОМПЛЕКСЫ
1Гл. Xtit
Если рассматривать нетерминальную задачу со скользящим гра¬
ничным условием, то для минимизации на интервале от t до t + т
следует V3 задавать в виде
^з = 4-2 PikX{ (t 4- т) xk (t + т),
z г
Z i,k=\
а для минимизации на интервале от t — т до t:
= 4- S p‘kxi w ч (О-
2 i,k=\
Обозначим не заданные коэффициенты т. е. все коэффициенты
Aik = Aki (iy k = 1, 2, £ + 2x + e + т] + p), за исключением
указанных в условии (13.27), Ajr. Учитывая вышеизложенное и
применяя теорему 7.1 (см. § П. 7) к рассматриваемому случаю ли¬
нейного обобщенного объекта, формулируем следующие результа¬
ты. Для обобщенного объекта (13.25) при указанных условиях опти¬
мальными в смысле минимума функционалов
п
7 = 4~ М S р‘л +
(по управлениям и()
(по коэффициентам Ajr) являются управления
Щ — — 2^ AjkxkJ , (i — £ -f~ 1, • • •, С + х + е)» (13.29)
где Aik подчиняются условиям (13.27) и определяются как решение
системы уравнений
п
Aik 2 (aviAVk 4” avkAvi) Др„ — — pt£,
(13.30)
п
ДР/7 4- 2 (Я/уДРуг 4~ Я/уДРу/) — О
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОВЪЁК?А
43f
j и.П
при граничных условиях
Aik (^2) = Pi>>
A₽/AQ = 0.
Аналогично, оптимальными в смысле минимума функционалов
п
уМ + т) xk(! + т) +
Т ГС+х+е '+х . 7
л +vM S j (т) й ■
J L t=&+l t J
4+x+e z+x / £+*+e ,p
S г*- S Aikxkldt •
•=£+l t \ ft=l /J
+4"
i,k=A
+ —м
р
(по управлениям ut)
/-Н п
У Л*=1
(минимум по коэффициентам А1г)
L /=£-Н t
(13.31)
1 =
I
являются управления (13.29), где также удовлетворяют услови¬
ям (13.27) и определяются как решение системы уравнений (13.30)
при граничных условиях
^ik (^ + Т) = Pt>>
А Р/> (t + т) = 0.
В качестве примера рассмотрим задачу аналитического кон¬
струирования ПНК для установившегося режима маршрутного по¬
лета самолета. Назначением ПНК, в который составной частью
входит автомат тяги, считаются стабилизация относительно задан¬
ной линии пути, стабилизация скорости полета и стабилизация угло¬
вого положения самолета. В качестве датчиков информации на этом
режиме примем гировертикаль, курсовую систему, радиовысото¬
мер, барометрический высотомер (корректор высоты), датчики
угловых скоростей в связанной системе координат, датчики линей¬
ных ускорений в связанной системе координат, радиосистему ближ¬
ней навигации и допплеровский измеритель путевой скорости.
Заданную траекторию будем считать прямолинейной, отклонения
небольшими и уравнения обобщенного объекта линейными.
Рассмотрим сначала математические модели перечисленных дат¬
чиков информации. В условиях установившегося прямолинейного
полета, когда длительные ускорения отсутствуют, линейную
438
пилотажно-наёйгаЦионные комплексы
Ь'л. Xi»
математическую модель гировертикали представим в виде
= я - + Ьг, А«г + krдаг = g#r,
Тг = У — МТг + Bvr. А?г + МТг = Svr.
где Фг, уг — выходные величины гировертикали; О = (иг, у =
= сох — угловые скорости тангажа и крена; ДФГ, Дур — ошибки
гировертикали, создаваемые моментами трения в подвесе и ускоре¬
ниями [13.1 ], [13.2]. Величина 1/^(постоянная времени коррекции)
обычно имеет порядок сотен секунд и возмущающие воздействия
(0, (0 считаются белыми шумами.
Курсовая система содержит корректируемый от магнитного дат¬
чика гироскоп и математическую модель этой системы естественно
принять в виде, аналогичном (13.32):
ФкС = Ф ^ксА'Фкс "4“ ^1|>KC> Д'фкс “4“ ^КС^Фкс = ^фкс* (13.33)
Для
дель:
радиовысотомера примем следующую математическую мо-
= Н + ^рел + £рв,
— £рел-
Здесь Н — истинная высота над уровнем моря или другим задан¬
ным уровнем; //рел — высота рельефа; #рв — выходная величина
радиовысотомера; gpB = £рв (О, £Рел = £Рел (0 — белые шумы
рассматриваемого вида; Грв — постоянная времени выходного
фильтра радиовысотомера; сорел, £Рел — параметры «среднего хол¬
ма» рельефа. Таким образом, постоянная ошибка радиовысотомера
здесь не учитывается, а учитываются флуктуационная ошибка в
виде белого шума, сглаженного апериодическим звеном, и ошибка от
рельефа в виде белого шума, сглаженного колебательным звеном.
Последнее означает, что сечение рельефа вдоль маршрута полета
считается возможным аппроксимировать суммой переходных функ¬
ций колебательного звена со сдвинутыми аргументами и случайны¬
ми «амплитудами».
В барометрическом высотомере (или статоскопе, корректоре вы¬
соты), напротив, учтем постоянную случайную ошибку, но будем
игнорировать флуктуационную ошибку, возникающую, в частнос¬
ти, за счет турбулентности атмосферы. В соответствии с этим матема¬
тическая модель барометрического высотомера принимается в виде
ТбвЯбв + Ябв = Я + ДЯбв, |
днбв = о, J
где Ябв — выходная величина; — постоянная времени, за¬
висящая, в частности, от длины трубопровода статического давле-
(13.35)
§ 13-2]
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
439
ния; Д#бв — случайная, но постоянная во времени ошибка высото¬
мера. Датчики угловых скоростей воспринимают вибрации и изгиб-
ные колебания корпуса самолета. Поэтому учтем некоторую флуктуа¬
ционную составляющую ошибок этих датчиков. Кроме того, учтем
постоянные по времени случайные ошибки. Математические модели
ДУС принимаем в виде
Тдус-СОхд + 2£Ayc7\yc(0XA + <*>хд = сох + |хдус + Д°)хд,
(13.36)
где сохд, сог/д, со2д — выходные величины датчиков, 7\yc, £дус —
параметры ДУС. Аналогична структура математических моделей
датчиков линейных ускорений:
где /хД, Дд, /2Д — выходные величины датчиков линейных ускоре¬
ний (акселерометров), установленных по строительным (связанным)
осям; Д, jy, jz — компоненты истинного негравитационного ускоре¬
ния по тем же осям; ДДд, ДДд, Д/Зд — постоянные во времени
ошибки акселерометров, £хак, ^ак, ?2ак — белые шумы, отобража¬
ющие в основном влияние вибраций. В этих уравнениях, как и в
предшествующих (13.32) — (13.36), в целях сокращения записи опу¬
щены знаки Д отклонений от невозмущенного состояния, за исклю¬
чением некоторых составляющих ошибок. Уровни ошибок и шумов
в математических моделях (13.36), (13.37) пока не конкретизируют¬
ся. Соответствующие датчики угловых скоростей и линейных ускоре¬
ний могут быть как пилотажного, так и навигационного класса
точности. В последнем случае они составляют основу бесплатфор-
менной инерциальной системы [13.3], [13.4]. Относительно радио¬
системы ближней навигации предполагаем, что она контролирует
продольную х и боковую z координаты вдоль заданного прямоли¬
нейного маршрута полета. Соответствующую математическую модель
440
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
принимаем в виде
(13.38)
где %нс, ?нс — выходные величины радионавигационной системы;
Нхнс, tzHc — белые шумы. Для допплеровской системы измерения
путевой скорости (ДИСС) учтем постоянную времени выходного
фильтра ТдП и уравнения запишем в виде
(13.39)
где цдп — выходная величина ДИСС, £дп — белый шум.
Перейдем к рассмотрению математических моделей движения
самолета. Для рассматриваемого режима маршрутного полета це¬
лесообразно использовать полные или упрощенные линейные моде¬
ли продольного и бокового движений, приведенные в главе I. Могут
использоваться как модели, учитывающие аэроупругость конструк¬
ции и турбулентность атмосферы, так и модели, не учитывающие эти
факторы. Достаточно детальный учет аэроупругости приводит к мо¬
делям высокой размерности. Постоянные времени формирующих
фильтров воздействий турбулентности, как правило, заранее не¬
известны и в лучшем случае могут быть определены в полете путем
специальной статистической обработки сигналов датчиков. Конту¬
ры демпфирования аэроупругих колебаний и парирования турбу¬
лентных возмущений являются наиболее высокочастотными, обычно
выходящими за пределы частот сигналов других звеньев ПНК.
Вследствие этого систему демпфирования аэроупругих колеба¬
ний и борьбы с воздействиями турбулентности, если таковая необхо¬
дима на самолете, целесообразно проектировать в определенной
мере автономно. Это означает, что сначала проектируется указан¬
ная система, затем при синтезе ПНК самолет с этой системой счи¬
тается жестким. В соответствии с такой методикой и простейшей
моделью двигателя линеаризованные уравнения продольного дви¬
жения принимаем в виде (1.34) или (7.25)
Д6Т + 4" Абт - А Абд = 0,
1 д 1 д
ДУ + ахДУ + (а? - а®) Да И аехДЪ - а®тДбт = 0,
Аа — а#ДУ + (а® — а®) Ла - а®Дб- — Да>2 — «увДбв = 0,
А<о2-|- ат2ДИ атгДа -|- ат2Дсо2 — ат2Дбв = 0,
ДО — Да>2 = 0, ДН — И0АО + И0Да = 0, Дх — ДИ = 0.
(13.40)
§ 13.21
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
441
Для бокового движения уравнения записываются в форме (1.52)
или (7.35):
До)х 4" 4“ агпх^^у 4“ 4хД₽ — ^тхАбэ — 6ZmxA6H = О,
Дй)^ 4- Отпу^^х 4" Яту&Ыу 4" Я/Пг/Др — CLmy^63 — а^пу^н = О,
ДР— Дсо^ 4- af др 4- ajAy = 0, Ду — Дсох = 0,
Дг — К0ДР 4- VqДф — 0, Дф — = 0.
Обозначения здесь прежние, причем знаки приращений Д не опу¬
щены, как в уравнениях датчиков. Использование относительно
полных моделей продольного и бокового движений вызывает два
затруднения. Во-первых, система обработки информации в виде
модели, идентичной математической модели движения, имеет отно¬
сительно высокий порядок. Во-вторых, многочисленные коэффициен¬
ты, входящие в полную математическую модель, известны с невы¬
сокой точностью. Однако эти затруднения преодолимы. При обработ¬
ке информации посредством БЦВМ, а это, по существу, основное
назначение БЦВМ, воспроизведение моделей указанной размернос¬
ти с необходимой точностью выполняется сравнительно легко. Что
касается неточного знания коэффициентов, то, как уже отмеча¬
лось, летательный аппарат может рассматриваться с внутренними
контурами (системой устойчивости и управляемости), при наличии
которых стабильность динамических характеристик существенно
повышается. Кроме того, может использоваться идентификация в
полете. Таким образом, могут реализовываться как упрощенные,
так и относительно полные модели продольного и бокового движений
типа (13.40), (13.41). Согласно общей теории синтезируемая система
обработки информации содержит модели контролируемых процес¬
сов. При использовании уравнений (13.40), (13.41) и точном знании
коэффициентов этих уравнений система обработки информации син¬
тезируется в виде
(13.41)
А5ТМ 4 А6ТМ — ^тм»
А^.м 4- flxAVM 4- (ах — ах) Дам 4~ ^хА0*м — ах Абтм —
АсХм #г/А^м (fly йу) А(ХМ (2^Д0’М Д(02м = (13.42)
Ao)ZM 4" Я/пгАУм 4“ &mzAcZM 4" ЯШ2Ао)2м ~ ^cozm,
А^м А<Лгм = А77м VqA'O^ 4- = г/нм,
Ахм АИМ = uXM;
А^ХМ 4“ Я/пхА^хм 4" ^mxA^f/M 4“ ^тхАРм — ^сохм, I
А^м 4“ ^гш/А^хм 4- ату^ь ум 4~ я^дрм — ^С1Г/М» (
(13.43)
442
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
+ аг Д₽м + ЯгАум = И0М, I
Аум — A(dxm = иум, Агм + УоА0м — К0Дфм = uZMi } (13.43)
Афм A(Of/M = £/-фм.
Управления здесь введены в каждое уравнение первого порядка.
Подобная максимальная степень управляемости в системе обработ¬
ки информации расширяет возможности системы и целесообразна,
если, конечно, ее допускает быстродействие и объем памяти БЦВМ.
Остается записать уравнения исполнительных устройств. Мате¬
матические модели исполнительных устройств принимаем в виде
колебательных звеньев:
Абд + 2^д(овдД6д + ш^дДбд = Ид,
А6В + 2£6во)бвД6в ©1ВД6В = ив,
А% + 2С6э®6эД6э + совэД6э = и3,
А6Н 4- 2^ви®бнА6н + а>бНА6н = ин,
(13.44)
(13.4Г)
где Ид, ив, иэ, ин — синтезируемые управления в исполнительной
части комплекса.
Общий порядок системы дифференциальных уравнений (13.32) —
(13.45) равен 69, т. е. высок. Однако уравнения обобщенного объек¬
та (13.32) — (13.45) распадаются на две независимые группы урав¬
нений, соответствующих продольному и боковому движениям. Оче¬
видно, что аналитическое конструирование оптимальных управле¬
ний в данном случае следует производить раздельно и сам ПНК
будет состоять из двух независимых в информационном отноше¬
нии пол у комплексов.
Рассмотрим сначала синтез части ПНК, относящейся к продоль¬
ному движению. Вводим обозначения
*1 = $г,
*2 — #рв, *
3 — #бв, *4 — ^^'д, *5 — Ф?Д>
*6 ~ /хд»
*7 = /*Д> *8
= /*/Д» *9 ~ /*/Д» *10 ~ *нс»
*11 = удп,
*12 ~ Абтм,
*1з - ДКм, х14 = Досм,
*15 = A(Dzm,
*1в = АОМ,
*17 ~ А//м, х18 = Дхм,
*19 “ Абд,
*20 = Абд,
*21 Абв, *22 Абв,
*23 == А6Т,
*24 = AV,
Л^25 ‘— ДОС, *26 — ДсО^, *27 — 1
*28 == АТ/,
*29 == А%,
^30 = Д^г, *31 ~ ^рел,
*32 = ^рел,
*33 = Д//бв
, Х34 = Д<02Д, Х35 =
*86 —
*37 ~ Ахнс,
*38 = А^дп» ^1 = &0т,
$ 13.2]
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
443
g £хнс
~10 ” Тнс ’
?7 —
^хак
I
! (13.46)
Здесь
Мг =
ДФГ
аЪг ’
тг
77 * 27 * рел
п рел ~ —
рел
д/хд
Д/хд =
а)Х ’
1У
Н6в =
”бв
Д^гд —
Д“гд
абв
“«>2 ’
Дх„^
, • ДУдп
Ду
Д*НС “
НС
ДП
ан:
°ДП
— нормированные случайные ошибки, возмущения и шумы,
дисперсии которых имеют соответствующие единичные значения.
В этих обозначениях верхние уравнения (13.32), уравнения (13.34),
(13.35), нижние уравнения (13.36), верхние уравнения (13.37),
(13.38), уравнения (13.39), (13.40), (13.42), (13.44), составляющие
продольный обобщенный объект принимают вид
*1 *26 “1“ ^1>
; , i 1
*2 “Г 7 *2 т *28 '
1 рв рв
I , 1 1
*3 + т *3 т *28
1 бв 1 бв
арел 4Z __ t
"7 Л31 — &2>
рв
-0
т Л33 —
'бв
1
Х<
1
*4 —
72 * 72
дус дус
26
^-х -I
Т2 л34 — $5»
1 ДУС
1
72
1 ак
1
Х1
Т2 1
1 ак
'8
м
72
л ак
л ак
*24'
а*
1-
V 1
а6т
X
*23
1 72
ак
л25
Т2
ак
aix
*8"
*9
— 0
Т2
1 ак
л35 — 5
7>
’ *24 '
-ML
72
ак
*25
—
/ Х22
ак
aiy
Т2
л ак
*36
= ?9>
(13.47)
’ I 1
I” 7 *10
* нс
gHC
7
•нс
*37 —
444
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
(Гл. ХЩ
2, | 1 1 ^ДП £
*11 4 7 *11 7 *29 7 *38 — Ь11»
1ДП дп дп
• . 1 —
*12 “Г *12 — ^12»
*13 4” ^х*1з 4" (flx — ах) *14 4" #х*1б = ^13»
*14 ^(/*13 4" (ау ау) *14 ^*16 *15 = ^14»
*15 4“ ^mz* 13 4" ^/nz*i4 4- ^mz*i5 ~ ^15» *16 *15 = ^16»
*17 70^16 4“ ^0*14 ~ ^17> *18 *13 “ ^18» *19 *20 == 0,
*20 4“ 2^д(0бд*20 4“ W6fl*19 = ^20» *21 *22 “ 0>
*22 4“ 2£бв^6в*22 4“ W6b*21 = ^22»
*23 4 7 "^23 7^” *19 = 0’
1 Д 1 Д
*24 4“ ^Af*24 4“ (&X ax) %25 4" ^X*27 &X *23 = 0>
*26 аУ *24 4“ (fly ay) *25 йуХ?.! ay *21 = 0,
-*26 4" ^mz*24 ”Г ^mz*25 “Г ^fnz*26 ^/nz*21 =
*27 *26 = 0, *28 ^0*27 4“ 0*25 ~ 0> *29 *24 = 0>
*30 4“ ^г*30 = ^ЗО» *31 *32 = 0,
*32 4“ 2£релйЭрел*32 4" ^0рел*31 = ?32> *33 = 0> *34 = 0,
*35 = *36 = 0» *37 = *38 ~ O’
Здесь
(13.47)
)
^12 — ^тм, ^13 — ^14 — ^ам> ^15 — ^©ZM» ^16 — ^Ом»
Ui? = UffMf = UXM, U2q = ид, U22 —
а контролируемые акселерометрами составляющие ускорений
считаются равными:
jx - gM = - ax\V - аах\а + а$тД6т,
iy = VQ (avyl±V + а“Аа + йуВД6в).
В форме (13.25) уравнения (13.47) запишутся так:
38
xi 4" 2 aikxk = ui 4" L’» (13.48)
k=i
где значения коэффициентов ясны из (13.47) и синтезируемыми
управлениями являются и12, ...» Ui8, u20, u22, остальные щ = 0.
Наблюдаемыми, как и в общем случае, являются сигналы датчиков
хл (i = 1# 2, 11), выходные величины модели (i = 12,
$ 13-21
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
445
13 ... £ + х = 11 + 7 = 18), координаты исполнительных
устройств Xi ( i = 19, 20, ..., £ + х + е = 11 + 7 + 4 = 22). Для
непосредственного использования в управлениях недоступны ис¬
тинные координаты самолета xt (i = 23, 24, ..., £ + 2х + е =
_ 11 + 14 + 4 = 29), ненаблюдаемыми в отдельности являются так¬
же шумы и ошибки датчиков xt (i = 30, 31, ..., £ + 2х + е + т] +
р = 11 + 14 + 4 + 0 + 9 = 38). В соответствии с (13.26) функ¬
ции QM, Qc, Q = Qm + Qc задаем в виде
7
QM = 2 ^11+v (*22+v — АГ1 i+v)2,
v=l
где р//г = о, кроме
Р12.12 = 2"Р12,23 = ^12,
Р14,14 = Р14.25 = ^14,
Р16,16 = Р16.27 = ^16,
7 38
Qc = 2 Q = 2
v=l i,k=l
P13,13 = P13.24 = ^13,
P15,15 = P15.26 =
P17.17 = 2" P17»28 = ^17’
P23.23 = + Г 23, P24.24 = ^13 + ^ 24,
P25.25 = d[4 + Г 25, p26,26 = d\5 + Г 26, p27,27 = d[Q + Г 27,
P28.28 = d\7 + Г 28, P29.29 = d\Q + Г 2g.
Заметим, что нормирующие множители a$ri арел, ... в выражениях
(13.46) и (13.47) целесообразно задавать в соответствии с весовыми
коэффициентами функционала, а именно
2 2 2
= г27,27, Ярел = ^бв = ^28,28, • • •
Для случая нетерминальной задачи со скользящим граничным
условием при р = q = 2 в соответствии с (13.31) минимизируемые
функционалы задаем в виде:
Г 38
Г*+т 38
1 =
+4-м
_/,Л=1
22 .2
z=12 dt Ri
+4-“
(13.49)
(минимум по управлениям u(),
38
J
i i.k=i
(минимум по коэффициентам Д/,).
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
446 ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ [ГЛ Х1Ц
Оптимальными управлениями, минимизирующими эти функцио¬
налы, согласно (13.29) и условиям *):
Aki = Aik = 0 при i = 12,
Aki = Aik = 0 при i = 20,
являются
(13.50)
(i= 12,
13, 18),
(13.51)
(Z = 20,
22),
где Aik определяются уравнениями типа
(13.30):
38
Aik — S (dvi^vk + aykAVi) + Д0,7г = — Pf/г,
v=l
38
ДР/> + 2 (^/v^Pvr + #nApv/) = 0,
V=1
(13.52)
при граничных условиях
(13.53)
и условиях (13.50). Итак, решение задачи синтеза ПИК в рассмат¬
риваемом режиме полета сводится к решению системы линейных
дифференциальных и алгебраических, получаемых путем учета
условий (13.50), уравнений (13.52) при граничных условиях (13.53).
Коэффициенты, входящие в оптимальные управления (13.51), бе¬
рутся в момент времени t, Aik = Aik (0- Если обобщенный объект
является стационарным, т. е. = const, то эти значения коэф¬
фициентов при скользящих граничных условиях (13.53) не зависят
от t. Таким образом, для стационарного линейного обобщенного
объекта определенные указанным путем оптимальные управления
являются стационарными и весь синтезируемый ПНК также ста¬
ционарен.
Решение уравнений (13.52) при условиях (13.53), как обычно,
осуществляется путем замены независимого аргумента — времени
t' = —t + т, при которой момент t = т обращается в начальный (ну¬
левой). Общее число заданных коэффициентов (13.50) с учетом
симметрии равно
7-16 + 2(11+ 16) = 166.
*) Такой вад имеет условие (13.27) в данном конкретном случае.
§ 13.21
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
447
Исключим алгебраические уравнения
38
— 2 (^vi^-vk + ^vk^vi) 4“ ДР^ = — Р/fc»
v=l
соответствующие Aik = 0, где i, k — индексы заданных коэффици¬
ентов (13.50). Для этого подставим
38
ДР^ = 2 (^ViAyk “Ь ttykAyi) Р/£
V=1
в нижние уравнения (13.52). Тогда порядок системы дифференци¬
альных уравнений
Ajr (aViAVk + ^vkA^i) 4~ ДРл Р/>»
V
Др/Г + S (я/уДРгг 4- #rvAPv/) 4-
V
+ 2 ad 2 (а^Ау, 4" ЯцгАщ —
/ I ц
4“ S ari [2 (йулАу. 4" ЯцНц/ — Pt/) 1 = 0
1 L ц ]
(13.54)
Р/г) +
с учетом симметрии AJr = Аг^ ДР/г = ДР</ будет равен
38(38 4- 1) —2 . 166 = 1150.
Хотя это весьма высокий порядок, каждое из уравнений системы
содержит не очень большое число неизвестных и интегрирование
этих уравнений возможно на современных достаточно мощных ЭВМ.
Заметим, что из общего числа 1150 величин 4/г, Др>, определяе¬
мых путем интегрирования уравнений (13.54), в синтезируемых
управлениях (13.51) используется только 7 • 22 4- 2 • 11 = 176
коэффициентов Л/г.
Структура синтезированного пилотажно-навигационного комп¬
лекса продольного движения изображена на рис. 13.3. Ввод в вы¬
числители производных Д6В, Д6д, со2Д, jу д, jх д здесь не показан,
так как эти производные могут определяться самими вычислителя¬
ми. Заметим, что деление системы обработки информации на вы¬
числитель /, выполняющий операции
22
Щ = — k2i 2 Alkxk (i = 12, 13, ..., 18),
fe=l
вЬ1числитель //, реализующий операции
22
Щ = $ 2 Alkxk (i = 20, 22),
/г=12
448
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
и модель, реализующую уравнения (13.43), является условным.
Все эти операции может выполнять один вычислитель (в дискрет¬
ном варианте).
Рис. 13.3. Структура синтезированного ПНК продольного движения в режиме маршрут^
ного полета.
Упрощение решения задачи синтеза можно достигнуть путем
увеличения числа заданных коэффициентов Д£^. Можно, в частнос¬
ти, полагать равными нулю все коэффициенты не входящие в
$ 13.2]
ПНК ПРИ линейной модели объекта
449
синтезируемые упрзвления. При этом порядок системы дифференци-
альных уравнений типа (13.54), определяющих не заданные коэф¬
фициенты, сокращается до 352 без учета симметрии. Конечно, при
этом происходит некоторая «потеря в оптимальности», так как вво¬
дятся дополнительные искусственные ограничения на коэффициен¬
ты несуществующих управлений. По этому пути можно идти еще
дальше, увеличивая число заданных коэффициентов и уменьшая
число синтезируемых. Как крайний случай можно даже рассмотреть
задачу, когда коэффициенты всего комплекса, кроме одного, заданы
и определению подлежит один-единственный коэффициент.
Подобные подходы могут иметь смысл при решении задач на
«усовершенствование существующих комплексов». В этих случаях
большинство связей и коэффициентов ПНК заданы на основе эври¬
стических и иных методов и соображений и синтезу подлежит не¬
большое число дополнительных связей в ПНК.
Перейдем к рассмотрению задачи синтеза полукомплекса, отно¬
сящегося к боковому движению для того же режима маршрутного
полета самолета. Естественно, что в целом задача решается анало¬
гично изложенной.
Используя независимость продольного и бокового движений в
рассматриваемых математических моделях, нумерацию координат
бокового движения произведем заново. Вводим обозначения
— Дф»
*3 — Х^ — Оед, Х6 — ®уя>
Xq = /гд, Xq = ZHC, Хю = ДсО^м,
*13 = *14 = Д^м>
„ х17 = Д60, х18 = Дбн, х19 = Дбн>
х22 = Д₽, х23 = Ду, х24 = Дг,
х _дй; =
— п » *27 “ ,
uVp а|)кс
у _ д/ — А/гД
*30 — ПРД — а.г >
F _ £хдус t __
S4 — — > Se -
ДУС
Ац>*Д г — — А(°УД
, Л29 — ,
и(&у
х —\z A*HC
*31 — — >
инс
t ^гак
б8~ Т2 >
л ак
___ Еур «.
э26 — п 9 Ь!
иуг
^удуо
Т2 9
Д^с
(13.55)
Х28 — Д®;
— I’l’KC
>
В этих обозначениях нижние уравнения (13.32), уравнения (13.33),
верхние уравнения (13.36), нижние уравнения (13.37) и (13.38),
15 А. А, Красовский
450
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. Х1П
уравнения (13.41), (13.43), (13.45), составляющие боковой обобщен¬
ный объект, принимают вид
Х4 + Х3 —
ДУС
1 &(0Х О.
— Х20 — ~2 Х23 — ?4>
дус дус
*1 *20 4- ^г^УГ*2б — 51» *2 *21 4- ^г^'Фкс*27 ^2>
*3 *4 = 0»
*14--^
ДУС
*5 *6 = О’
х« + ^лус хв +
ДУС
х7 — х6 = О,
’ , 2?ак , 1 Vo
*8 4” ~7г *8 4 *7 —
8 Т2 Т2
ак 1 ак 2 ai
*9 4 m *9 Т' *31 = ^9>
нс нс
^10 4“ ^тх*ю 4~ Я/пх*ц + ^/лх*12 ~ ^Ю>
*и4- #m$/*10 4“ ^ту^и 4" ^mt/*i2 — ^п,
*12 *11 4” *12 4“ *13 = ^12» *13 *ю ~ ^13>
*14 4“ ^0*12 ^0*15 = ^14> *15 *11 = ^15» *16 *17 =
*17 4“ 2^бэ^дэ*17 4“ ^6э*Ю = ^17» *18 *19 =
*19 4~ 2^6н^бн*19 4~ ^бн*18 = ^19,
*20 4“ ^тх*20 4“ #mAC*21 4" ^тх*22 — ^mx*ie — ^/nx*is ~
" ^mt/*i8 =
= 0,
1
Т2
дус
1
Т2
ДУС
*21
22
^*29 = ^
1 ДУС
ajz
*30 = ^8>
2 ак
(13.56)
Г|3
бэ V
;nz/*22
^/nz/*16 “
= 0,
*23 *20
*25 “
“ *21 =
*21 4” ^mz/*20 4“ Я/п^*21 4~
*22 *21 + ^z*22 + ^г*23
*24 4“ 1^0*22 ^0*25 = 0,
4" &г#уг*2б = t26> *27 4” &<с#1|ЖС*27 = ?27>
= 0, %29 = *30 — 0, *31 — 0.
&
*28
I
Здесь &Ю ^сохм»
^11 ^С0//М»
U12 Wj3M, U13 — UyM,
^14 ^гм,
м1б = ип = иэу wi9 = ин> а контролируемое акселерометром
боковое ускорение считается равным VQqlД(3. В сокращенной форме
f 13.3)
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
451
уравнения (13.56) имеют вид
xi + 5 aikxk = ui + (13.57)
k=\
где значения ац, ясны из (13.56) и синтезируемыми управлениями
являются «ю. «н. •••. «и» «к. «io. остальные = 0. Непосредствен¬
но наблюдаемыми являются сигналы датчиков информации xt (i —
__ 1 2, .... С = 9), выходные величины модели х{ (i = 10, 11, ...
r-{-x = 9 + 6 = 15), координаты исполнительных устройств
= 16, 17, ..., £ + x + e = 9-f-6-|-4 = 19). Непосредствен¬
но ненаблюдаемыми являются истинные координаты самолета
xt (i = 20, 21, ..., £ + 2х + е = 25) и шумы и ошибки датчиков
информации х{ (i = 26, 27, ..., £4-2х + е + т]4-р = 31). В со¬
ответствии с (13.26) функции QM, Qc, Q = Qu + Qc задаем в виде
Qm — 2 ^9+v (^194-V ~“ ^9+v)2. I
V»1 |
6 31 f
Qc = 3 r19+v^l94-v, Q = Qm + Qc = 5 $ikXiXk* I
v=l i,k=A )
где $ik = 0, кроме
Pio,io 2" P 10,20 = dio,
Р12Д2 — 2” P12,22 = dl2,
Pll,11 = Pll,21 = d\i9
P13,13 = P13,23 = dl3,
P14.14 = Y P14,24 = ^14» P15.15 = ^~P15,25 = ^16,
Рго,2о = d\o + Г20» Р2Ц21 = + <*21, Рг2,22 = di2 + Г22,
P23,23 = d[3 + r 23, P24,24 = d\A + Г 24, p25,25 = ^15 + Г 25-
Для случая нетерминальной задачи со скользящим граничным усло¬
вием при р = 9= 2 в соответствии с (13.31) минимизируемые функ¬
ционалы задаем в виде:
31
rz+T 31
Г 19 Ч* 2
s I
f—1П у
(минимум по управлениям «Д
4х 31
J 2
i i,k=\
(минимум по коэффициентам Ajr).
+-гм: „
Lz=io у
19 / 19
(13.59)
1
2
16*
452
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
Оптимальными управлениями, минимизирующими эти функционалы,
согласно (13.29) и условиям
Л/ = Afe = 0 при i = 10, 11, .... 15 и k> 19,
Aki = Alk = 0 при i =17, 19 и k < 10 или k> 19
являются
19
Ui = $ 2 ^ikXk
(i = 10, 11, ...
, 15),
fe=l
19
^ = — $ 2Лл
fe=10
(i = 17,19),
где Aik определяются уравнениями типа (13.30):
31
Aik S "Ь “Ь = —
V=1
31
ДР/Г “И 2 (^/V^Pv/' 4” tfrvAPv/) = 0
V=1
при граничных условиях
^lk (t + т) = Pik> ДР/r (^ + т) = 0
и условиях (13.60). Пусть Z, k — индексы заданных коэффициентов
(13.60). Для этих индексов согласно верхним уравнениям (13.62)
31
ЛР^ = 2 4" ^vk^vi) —P/fc* (13.63)
v=l
Подставляя эти алгебраические выражения в нижние уравнения
(13.62), получим систему дифференциальных уравнений вида (13.54),
определяющих незаданные величины Д/г, Др/Г. Общее число задан¬
ных коэффициентов (13.60) с учетом симметрии равно 6-12 +
+ 2 (9 + 12) = 114. Порядок системы дифференциальных урав¬
нений вида (13.54) для данного случая с учетом симметрии Af, =
= Arf, Др/r = Дрг/ равен 31(31 + 1) — 2 • 114 = 764. Непо¬
средственно в оптимальных управлениях (13.61) испольауется 19 х
X 6 + 10 • 2 = 134 коэффициента А/г.
Все приведенные выше соображения относительно возможности
снижения размерности системы уравнений оптимальных коэффи¬
циентов сохраняют силу и для данного случая. Структура синтези¬
рованного ПНК бокового движения изображена на рис. 13.4.
В заключение приведем еще одно замечание, касающееся надеж¬
ности оптимальных ПНК. Отказ (типа исчезновения сигнала ) дат¬
чика информации можно трактовать как потерю наблюдаемости вы-
ПНК ПРИ ЛИНЕЙНОЙ МОДЕЛИ ОБЪЕКТА
453
$ 13.27
одной величины датчика. При этом, как правило, происходит ухуд¬
шение общей точности контроля движения ПНК. Предвидя возмож¬
ность отказов тех или иных датчиков, можно заранее выполнить син-
Рис. 13.4. Структура синтезированного ПНК бокового движения в режиме маршрут¬
ного полета.
тез для случаев ограниченной степени наблюдаемости, соответствую¬
щих этим отказом. Система бортового контроля исправности датчи¬
ков информации может строиться на базе общей системы обработки
информации ПНК. В частности, значительное расхождение сигнала
Датчика с соответствующим выходным сигналом исправной модели
может служить признаком отказа датчика. Если подобная система
позволяет достаточно надежно обнаруживать отказы датчиков, то
454
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
ее можно использовать для автоматической смены программ обработ¬
ки информации. В этом случае при отказе датчика включается про¬
грамма (алгоритм) работы вычислителя //, соответствующая опти¬
мальной обработке информации при пониженной степени наблюдае¬
мости. При этом потеря точности будет в определенном смысле
минимальной.
§ 3.3. Синтез ПНК при нелинейной математической модели
объекта с аналитическими характеристиками
Нелинейный обобщенный объект с аналитическими характерис¬
тиками описывается уравнениями (13.20), (13.19), (13.21), где функ¬
ции представляются полиномами или бесконечными степенными
рядами:
п п п
fi = 2>a[lxi+ 2 a!lkxi-xk+ 3 alikixlxkxi + ••• (13.64)
/=1 i,k=\ j,k,l=A
(z = 1, 2, ..., n = £ + 2x -j- e -f~ Л 4“ ?)•
Как и ранее, координаты xlt х2, ..., Х£+х+е (сигналы датчиков, вы¬
ходные величины модели и координаты исполнительных устройств)
являются непосредственно наблюдаемыми, а остальные — нена¬
блюдаемыми. Синтезируемые управления щ имеют номера z = £ +
+ 1, ..., £ + х + е, причем управления в исполнительной части
системы щ (z = £ + х + 1, ...» £ + х + е) не должны зависеть
не только от ненаблюдаемых координат, но и от выходных величин
датчиков xlf х2, ..., х^. Вследствие этого функция V, являющаяся
решением уравнения (13.23) и представляемая рядом, ищется в виде
V = -^-IjAiiXiXj + 4" .2 AilkXiXjXb 4- ... ,
где
Ац = Ац■ = 0, 1 при г = £ -J- 1 + х
Aijk = Ajik — • • • = Akij = 04 и / > £ 4*х 4~ 8>
A(i = A/i = 0, при t = £ 4- х 1, ..., £ 4-х 4-е
A(/k = Ацк = ••• = Akii = 0, и />£ 4- « + 8 или £>£ 4- х 4-е,
J или / < £ 4~ 1 или k < £ 4-
Все остальные коэффициенты (кроме заданных по условиям
наблюдаемости (13.65)) обозначим, как в § П. 7, через 4ег1, ЛелЕ, ...
Совпадение индексов с номерами некоторых групп координат здесь
случайное и не должно приниматься во внимание. В соответствии с
СИНТЕЗ ПНК ПРИ НЕЛИНЕЙНОЙ МОДЕЛИ
455
$ 13.31
теоремой 7.1 минимизация функционалов
I = M
|4
ij
+ 4“ S x> x» +
n n
+
(п п \
-у S $ИХ1Х1 + "о" $Ljkxixixit + • • • I dt 4“
U=i i,i,k=\ J _
Ш)”
L '
4-М
^2
+ —м
“ Я
I,
di + — M У ^nX/ “J-
+ £ AijkXiXk + £ Ai/MXjX^ + • • Л P dt
i,k i.k.i /J
(по управлениям ut),
r n
j 5(р:/-мал
r, ^/=1
(по коэффициентам Дет)),
r n
( 3 (tiib-Wdi
Г, i.r.k=i
(по коэффициентам A^,
(13.66)
обеспечивается при управлениях
щ = — kH /2 AijXj + 2 AtjkXjXk 4- 2 -f- •••Y7 > (13.67)
\ / iJi iAi /
незаданные коэффициенты которых определяются путем решения
Уравнений (П. 7.29):
п
Ац — 2 (avtAyj 4* ciVjAyi) 4* = — Pi/>
V=1
n
^PeT) + 2 8V A0vll + anvA₽ ve) — 0>
v=l
. n
Aijk - ^2 (ayiAyjk 4~ civjAVik 4~ ftvkAyij) 4” ДРх/й =
n
== — $i/k 4“ 2 (Ayidyjk 4~ Ayjdvik 4“ Ayk^vii)^
V=1 1
(13.68)
456
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
п
^Рет|£ 4~ 2 (^ evAPvnC + £tivA0v8£ 4" tffcvAPveT]) “ О»
v=l
п
Aijki — 5 (aviAVjki 4“ &vjAviki 4“ aykAviji 4* aviAvtjk) 4“
v=l
2 n
4- ДР///г/ = — Pz/л/ 4-v 2 (Avijavki 4“ Avlkavii 4- Avu^jk 4-
J V=1
4“ AyjkCivii 4“ AVjiavik 4” AVkiQvij) 4“
n
4“ S (AViaVjki 4” Ayjaviki 4~ Ay^vift 4“ AyidyijkK
V=1
n
A₽<0 4~ 5 (#evAPvT]£0 4" ^nvAPverjO 4“ #£vAPv8T)0 4"
V=l
4" ^Ov^Pvens) = 0
(13.68)
при условиях (13.65) и граничных условиях
^гт] (^2) = Perp (^2) = РеП£> • • • > 1
ДРеп (/2) = 0> ДРет]£ (^2) = 0» • • • J
Для объектов высокой размерности уравнения (13.68), вообще го¬
воря, весьма громоздки. Одним из путей упрощения задачи, как и
для линейного объекта, является увеличение числа заданных коэф¬
фициентов управлений. Задание нулевых значений большинству
коэффициентов управлений может быть оправдано соображениями
простоты реализации. При этом, конечно, неизбежны «потери в опти¬
мальности» и итерационная процедура поиска приемлемого окон¬
чательного решения задачи обычно содержит большее число шагов.
В качестве конкретного примера рассмотрим задачу синтеза на¬
вигационного комплекса, состоящего из бесплатформенной инерци¬
альной системы и радиотехнической системы контроля трех прост¬
ранственных координат центра массы летательного аппарата. Бес-
платформенная инерциальная система состоит из трех датчиков угло¬
вой скорости (ДУС) и трех акселерометров, оси чувствительности
которых ориентированы по ортогональным связанным осям летатель¬
ного аппарата. Уравнения ДУС принимаем в виде (13.36)
Тдус^хд 4“ 2СдусТдуСЦ>хд 4- °^Д = Wx 4* £*дус 4" Д^хд,
Асолд = О,
7^ус0)(/д 4" 2£дуС7дуС0\/д 4“ ®уд = ®у 4~ £(/Дус 4” АсО^д,
Асо^д = О,
7дуС(0гд 4" ^^дус^дус^гд + ®гд = ®2 + £гдус + Д®гд
Д(О2д = О-
(13.69)
} (13.70)
457
, СИНТЕЗ ПНК ПРИ НЕЛИНЕЙНОЙ МОДЕЛИ
5 13-3’
уравнения акселерометров с учетом возможных больших углов кре-
наРи тангажа запишем в виде
Tlujxn 4" 2^ак7’ак/*д 4" /хд = !х 4* А/хд + £хак>
Д/*д = 0.
Т^к1уп 4“ 2Сак7*ак/уд 4* /уд = /у ge22 4* А/'уд 4" £уак>
А/уд ~ 0>
Уак/гд 4“ 2£ак7'ак/хд 4* Ад = /а g&23 4“ А/ад 4" £гак>
А/ад =
где e2i, е22, е23 — соответствующие направляющие косинусы, /ж,
j jt — компоненты ускорения в связанных осях. Будем предпола¬
гать, что движение летательного аппарата описывается уравнения¬
ми Эйлера:
Jx®x 4- (Jz — Jу) ®y®a = Mxi,
Jyay + (Jx — Jz) (0/0, = Afj,],
/Д + № - Jx) <w>y = Mzlt
vx + ^yVz—®zVy = ix>
Vy 4" ®x^a = /у»
Vz4-“*^y — ®yKa = /a»
причем моменты Afxj, AfF1, Мг\ являются случайными функциями
типа белых шумов, а ускорения /ж, ]'у, ]г представляют собой белые
шумы, профильтрованные апериодическими звеньями:
Ы» + /х = ^> Tjyiy + iy-liy Tjziz + iz — ^lz- (13.73)
Производные координат центра массы определяются соотношениями
х = Ужеп 4~ УуЧз 4- Уае1з>
У = Кхе21 4” ^уе22 4“ Уа823>
Z = V,e31 + К,е32 + V2e33. ,
Уравнения (13.72) — (13.74) совместно с кинематическими со¬
отношениями Пуассона
8и
4-
СО^бхз
— ^12
= 0,
821
4-
^1/823
— С02822 = 0,
831
4-
о)^е33
®z^32
= 0,
812
4-
~ЧАз
= 0,
822
4-
w2e2i ■
^х823 =
£32
4-
C0z831
й)х833
= 0,
813
4-
(0А-С12
= 0,
823
4-
°\822
С0Р821 ~
(13.75)
езз 4- «*е32 — со^еад = 0 j
458
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл XIII
TjzjzM “Ь/-М UjZM)
являются уравнениями контролируемого процесса. Система уравне-
ний модели согласно предыдущему должна иметь аналогичную
структуру:
•^Х^ХМ 4“ (*^2 Jу) = ^(ОХМ,
Jу^ум 4“ (Jх z) = ^(О^М,
J4" (Jу — Jх) = ^©гм,
Км 4" G^mKi: ФгмК/ь /хм = UVxm>
VyM 4“ ®ZmVxm ^ХмКм jyM = UVyM)
VZM 4“ юхм^ум — хм — jzM = ^V2Mf
Tjxj
хм +/■ ХМ ^/хм, ТiyjyM 4” /ум ЩуМ)
£11м 4" ®ум®13м ^гм®12м = U\ 1м,
®12м 4” ®zm811m G>xm813m = ^12м,
®13м 4” ^хм®12м ®£/м611м = ^13м,
®21м 4“ ^г/м®23м <Дгм&22м = ^21м,
622м 4“ Qzm^Im — ®хм^23м = ^22м,
®23м 4“ ^хм^22м й\/м^21м = ^23м,
631м 4“ ^г/м^33м — <*Ьм632м = ^31 м,
Е32м 4“ ^zm^Im — wxmE33m = ^32м,
е33м 4” ^хм^Згм — й\/ме31м = Иззм,
Хм — хм®11м V ^м®12м У гм®13м =
Ум Vхм®21м 1/м®22м Угм®23м s
2М Км®31м г/м®32м КмФзЗм = ^zm*
Остается записать уравнения радиотехнической системы
координат центра массы
Т хд^д 4- *д = * 4- Д-^д 4"
ТудУд + Уд = У + ^Уд +
Тщ2д “к 2д = 2 4- Д2д 4- £
где Дхд, Дг/д, Дгд — постоянные в(
— белые шумы, хд, г/д, гд — выходные величины.
Введем обозначения
ДсОхд
Х^ = О)хд, %2 = ®хд, %з — Д^хд = ~ , Х4 = (О^д,
и©х
— Асо
х5 = (&уд, хв = Дсо^д = , х7 = со2Д, = (о2Д,
®у
(13.76)
^хм,
контроля
(13.78)
?хд, Дхд = 0, j
^д> ДУд = о, 1
(13.77)
гд, Дгд = 0, ;
э времени ошибки,
£*Д> ?!/Д>
СИНТЕЗ ПНК ПРИ НЕЛИНЕЙНОЙ МОДЕЛИ
459
§ 13.31
*25 = 8цм>
*26 — ®12M» *27 ^13M> *28 ^21M>
^29 = e22M>
*30 = ®23m> *31 = ®31M» *32 = ^32м»
*33 ~ 633м»
*34 = *M» *35 = ^XM9 *36 = ^M»
*37 = ^ум»
%38 = ^м»
*39 = ^zm> *40 = /хм» *41 = /ум»
*42 /гм»
*43 = ®хм»
*44 = ^Ум’ *45 = ®zm» *46 = 611»
*47 = g12»
*48 = ®13>
*49 = e21» *50 = 622» *51 = 623»
*52 = 631»
*63 = ®32>
*54 — e33» *55 — *> *56 — ^x» *57 — У»
*58 =
*59 — ^» *60 — *61 — /х» *62
= /</.
*63 = /z»
*64 = ®x’ *65 = ^У» *66 =
(13.78)
Здесь, как и'выше, коэффициенты а^х, ... обозначают нор¬
мирующие множители, при которых дисперсии случайных ошибок
Д<охд, Дш^д, ... являются единичными.
В этих обозначениях уравнения обобщенного объекта (13.70) —
(13.77) могут быть представлены в виде
где
66 66
xi + O-itxi + 2 ailkXiXk =
i=i i,fe=i
(13.79)
(13.80)
460
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. XIII
#65,64,66
#66,64,65 =
g
#17,63 =
1
ак
72 *
* ак
ах
1
Т 9
1 хл
ау
#19,55 —
т ’
1 ХЛ
1
Т 9
УЛ
d2
#21,57 =
т 9
1 УЛ
1
Т 9
#23,59 = —
Т 9
1 гд
[ (13.80)
СИНТЕЗ ПНК ПРИ НЕЛИНЕЙНОЙ МОДЕЛИ
461
5 13.31
^35 40 = $37,41 = $39,42 = 1 » $40,40 = “у ,
1 ]‘х
1 1 1
$41,41 = у—» $42,42 = у—, $56,61 = $58,62 = $60,63 = ^“1, '
1У 1 ]'г
1 1 1
$61,61 = “у ’ $62,62 = “у , $63,63 = “У .
11* Чу Ч2 )
Остальные коэффициенты равны нулю. Синтезируемыми управле¬
ниями являются
$25 $11м»
$29 — $22m»
$30
— $23м>
$31 “ $31м»
$32 — $32м»
$33 = $33 м»
$34
== $XM>
$35 = $Vxm,
$36 = $У-М>
$37 = $V*/M>
$38
= $zm,
$39 = $V2m»
u — “/*«
«40 j
JX
$41 —
$44 =
Чум
Т- ’
11У
иа>ум
Jy ’
* f ^сохм
$43 “ 7 j
J х
(13.81)
$42 —
$45 =
Как видно, система уравнений обобщенного объекта здесь имеет
высокую размерность и задача синтеза сравнительно сложна. Одна¬
ко вследствие определенной симметрии уравнений и равенства ну¬
лю большинства коэффициентов а//, $//^ эта задача практически
разрешима. В соответствии с назначением комплекса критерий опти¬
мальности должен содержать оценку приближения выходного векто¬
ра модели к вектору истинных координат. Задаем
45 66
Q = QM = 2 (Х{ — x21+l)2 = ^/Х(Х/,
i=25 r,/=l
где P17 = L pM+21 = Pl+21J+21 = di, при i = 25, 26, .... 45 все
остальные рг/, pZ;ft, ... равны нулю. В аналогичной форме задаем
функцию конечного состояния
2 P.7*z (Q X/ (t2),
ij
т. e. считаем
Pu = — p/,/4-21 = Pi-i-21, *4-21 == Q при i = 25, 26, . . ., 45,
462
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ
[Гл. ХШ
все остальные рф pZ)*, ... равны нулю. Таким образом, в соответст¬
вии с (13.66) минимизируются функционалы:
66
Li,/=i
66
тр
+ 4” S &.kxixixk Ч j dt +-|- М S j dt ■+
+ kt АцХ/ -|- J] AijkXjXk + ,
^2
(по управлениям и(),
ее
J 5 (₽у-₽</М»
F, ‘>/=1
(по коэффициентам Леп)>
<• ее
J 3 (М2<#,
(по коэффициентам Лгп^),
(13.82)
Координаты ха, хе, х9, х12, х16, х18, х20, х22, х24 (ошибки датчиков) и
хы, ..., х6в (истинные координаты контролируемого процесса) не¬
посредственно ненаблюдаемы. Поэтому
Л/ = Ан — О ПРИ 1 = 25», 26, ..., 45 и 1
/ = 3, 6, 9, 12, 15, 18,‘ 20, 22, 24, 46, ..., 66,
Auk = Ailk = Akll = Atki = Aiki = Ak!j = 0 при
i ~ 25, 26, ..., 45 и / или k = 3, 6, 9, 12, 15, 18,
20, 22, 24, 46, .... 66,
Согласно общей теории оптимальными управлениями, минимизи¬
рующими функционалы (13.82), являются управления
(13.84)
$ 13.31
СИНТЕЗ ПНК ПРИ НЕЛИНЕЙНОЙ МОДЕЛИ
463
где коэффициенты определяются как решение системы
(13.68):
66
Aij — S (ctviAyj + aVjAvi) + Ар / = — 0О-,
v=l ,
66
ДРет] + 5 (a ev Apvn + tftyyAPve) — 0, I
v=l
уравнений
(13.85)
66
Aijk — S (aviAyjk + avjAvik + ctykAyij) + АР/д =
V=1
66
= 2 (AyiUyjk 4" Avjdvik •-[- AykO'vijjj
V=1
66
Apetf + 2 (a ev + Я^дДрует]) — 0
V=1
при условиях (13.83) и граничных условиях
^еП (^2) = Реп» ^ет]£ (^2) = 0, . . . , 1
дрел(/2) = о, дре^(/2) = о, ... ) (1 0
Для нетерминальной задачи со скользящим граничным условием,
когда tr = t, t2 = t + х, решение уравнений (13.85) определяется
при условиях (13.83) и
^ет] (f + т) = Реп» ^еп£ (^ + т) = 0, • • • ,
ДРеп “Ь т) = ®» ДРеп£ 4" т) = 0, • • •
Уравнения коэффициентов оптимальных управлений (13.85),
(13.86) имеют высокую размерность, даже если ограничиваться ли¬
нейным и квадратичным приближениями, т. е. определять Л//,
Аць. Прямое численное интегрирование этих уравнений на ЭВМ
требует большого объема памяти. Поэтому целесообразен пред¬
варительный анализ в общей форме (аналитическое иссле¬
дование).
Этот анализ может, в частности, базироваться на том, что исход¬
ные уравнения обобщенного объекта (13.70) — (13.77) или (13.79)
в линейном приближении распадаются на множество независимых
гРУпп малой размерности. Для каждой из таких групп синтез ли¬
нейных членов оптимальных управлений может выполняться авто¬
номно и достаточно просто. Это проявляется в том, что уравнения
(13.85) также распадаются на автономные группы сравнительно
невысокой размерности. Интегрирование этих групп уравнений мож¬
но вести последовательно, используя ЭВМ ограниченной мощности.
464 ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ [Гл XIII
Это относится и к уравнениям коэффициентов квадратичных членов
(13.86) и последующим уравнениям. Особенно простое решение полу¬
чается в случае, когда уравнения обобщенного объекта в линейном
приближении независимы, в частности, все а/; = 0. Подобного
положения можно достигнуть путем соответствующего линейного
преобразования координат. Однако при этом усложняется учет не¬
полной степени наблюдаемости.
В заключение заметим, что упрощения задачи определения ко¬
эффициентов оптимальных управлений можно достигнуть также пу¬
тем введения дополнительных искусственных ограничений (см.
§ П. 7), связанных, в частности, с соображениями технической осу¬
ществимости.
ПРИЛОЖЕНИЕ
§ П.1. Краткий очерк развития методов
аналитического конструирования систем управления
Под аналитическим конструированием понимается синтез опти¬
мальных систем управления, основанный на минимизации функцио¬
нала, т. е. решении вариационной задачи. Термин «аналитическое
конструирование регуляторов» был введен А. М. Летовым в статьях
[П.13, вызвавших много последующих публикаций [П.2] — [П.8].
В этих статьях была сформулирована и решена следующая задача*).
Дан линейный стационарный объект, описываемый уравнениями
Xi + js aikxk = btu (i = 1, 2 n), (П.1.1)
k=l
где aikt b{ — заданные величины. Требуется указать управление
и, обеспечивающее стремление х19 х2, •••, хп к нулю при /-=> оо
(устойчивость замкнутой системы) и минимизирующее функционал
°° п 00
/(«) = J +(П.1.2)
О z==1 о
Решение задачи получено в виде
и = — 2 2 biAikXk> (П. 1.3)
/?=1 /=1
где коэффициенты Aik удовлетворяют системе нелинейных алгебра¬
ических уравнений
2 (Aipapk 4“ Akpdpi) 4- 2 bpApi 2 bPAPk = Р/л- (П.1.4)
p=i p=i p=i
Практически одновременно со статьями А. М. Летова была опуб¬
ликована работа Р. Калмана [П.9], в которой иным методом решена
та же задача в несколько более общем виде. Соответствующая теоре¬
ма имеет следующую формулировку (несколько отличающуюся от
первоисточника). Если дан объект
х-\-ах = Ьи, (П.1.5)
то оптимальным управлением, минимизирующим функционал
^2 ^2
/=4~хТ (/2) рх (/2)+44 ^+44 “T^-2 ы dt’ (п-1 -6)
*) Везде используем ранее введенные нами обозначения, но в выражениях
(П.1.1) — (П.1.3) величина и — скалярная.
466
ПРИЛОЖЕНИЕ
является управление
и = — k2bTAx, (П.1.7)
где А = Ат — решение матричного уравнения Риккати:
А — Аа — а? А — Л6£2&ТЛ = — р (П. 1.8)
при граничном условии A (/2) = р- Здесь а, b — матрицы типа п X
X п и п X т коэффициентов объекта, зависящих в общем случае
от времени (нестационарный объект); х, и — матрицы-столбцы
(n-мерный и /п-мерный векторы); р, р — заданные матрицы коэффи¬
циентов функционала типа п X и; k2 — заданная неособая т X т
матрица, /Г2 — обратная ей матрица; индекс «т» обозначает транс¬
понирование. Постановки и решения задачи аналитического конст¬
руирования, приведенные в работах [П.10] — [П.12], или совпа¬
дают с указанным или являются его частным случаем. Постановка
задачи и решение (П.1.1) — (П.1.4) также являются частным случа¬
ем (П.1.5) — (П.1.8). Действительно, полагая /1 = 0, /2 = оо,
х,(оо) = 0, k = 1 — скалярная величина, и — скалярная величина,
А = 0 (стационарное оптимальное управление для стационарного
объекта), вместо (П.1.5) — (П.1.8), получаем (П.1.1) — (П.1.4).
В ряде работ была поставлена сходная задача аналитического
конструирования для нелинейных объектов [П.11], [П.13]. Опуская
частные случаи, рассмотрим достаточно общую задачу для детерми¬
нированного без возмущающих воздействий нелинейного объекта
с линейно входящими управлениями [П.11], [П.13]. Для объекта,
описываемого уравнениями
-f- (Хх, ..., хя, t) = 2 ф/7 (*1> • • • > %п) Ufa (П.1.9)
/=1
оптимальными в смысле минимума функционала
i = *^2)] +
^2 tn I \q
+ { <2 (^ хп)dt + 7- J J dt, (П.1.10)
являются управления
= > (ПЛЛ1)
где V (хх, ..., хл, /) — решение уравнения в частных производных:
=-« (П.1.12)
при граничном условии
^<—<2 = ^3 • • • »
(П.1.13)
$nj] РАЗВИТИЕ МЕТОДОВ АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ
467
Здесь /о ф// — заданные характеристики объекта, выраженные
непрерывными функциями; V3, Q — заданные функции функцио¬
нала, назначаемые на основе требований к синтезируемой системе;
р9 q — заданные положительные числа, удовлетворяющие соотно¬
шению
и такие, что zp, zq — четные функции z.
Доказательство теоремы, представленной соотношениями
(П.1.9) — (П.1.13), приведено в следующем параграфе.. Для линей¬
ного объекта
п
fl = 2 Фч =
fe=l
где aik, bij — постоянные или функции времени. Назначая V3, Q
в виде квадратичных форм
V3 = -^-xT (t2) рх (/2), Q = 4" х^х
и полагая р = q = 2, вместо функционала (П.1.10) получаем функ¬
ционал (П.1.6), где
. О
О ... kl
Уравнение (П.1.12) при этом принимает форму
п т / п \2 п
£=1 1 /=1 \/г=1 R J l,k=\
Полагая
1 1 п
1^ == п X -/4% = q AikXiXki
2 2 i,k=]
для матрицы коэффициентов получаем уравнение Риккати (П.1.8)
и оптимальное управление (П.1.7). Таким образом, решение Калма¬
на (П.1.6) — (П.1.8) получается как частный случай (П.1.9) —
(П.1.13) для линейного объекта.
Метод аналитического конструирования, соответствующий тео¬
ремам (формулам ) (П.1.1) — (П.1.4), (П.1.5) — (П.1.8), будем на¬
зывать методом Летова — Калмана. Так же будем называть метод,
базирующийся на выражениях (П.1.9) — (П.1.13) для нелинейного
объекта, хотя в этом общем случае метод остается не завершенным,
ибо не указана методика решения нелинейного уравнения в част¬
ных производных (П.1.12). Метод аналитического конструирования
Летова — Калмана явился существенным развитием теории синтеза
468
ПРИЛОЖЕНИЕ
непрерывных систем управления. Он позволяет довольно полно
учесть технические требования к качеству процессов регулирования
и, с другой стороны, аналитическим путем (с последующим приме¬
нением современной вычислительной техники) определить оптималь¬
ную структуру и параметры системы управления.
Однако для объектов высокой размерности применение метода
встречает значительные трудности, прежде всего вычислительного
характера. Действительно, порядок системы нелинейных дифферен¬
циальных уравнений коэффициентов оптимальных управлений:
п п пт
Aik 2 QpkAip 2 apiAkp 2 bpqkqrblr AlpAkl —
P=1 P=1 p,/=l q,r=\ j 14)
эквивалентной матричному уравнению Риккати (П.1.8), с учетом
симметрии Aik = Аы равен п(п + 1). При п = 10 этот порядок
составляет 55, а при п = 50 равен 1275. Интегрирование систем не¬
линейных уравнений такой размерности, включая и второй пример
(п = 1275), вообще говоря, доступно для соответствующих современ¬
ных ЦВМ. Кроме того, получено выражение решения указанных
уравнений через фундаментальную матрицу решений специальной
системы линейных уравнений размерности 2и [П.16]. Однако су¬
ществуют дополнительные трудности. Дело в том, что лишь для спе¬
циальных задач (так называемого терминального управления) мож¬
но указать обоснованные требования к фазовым координатам в
фиксированный момент времени /2. Только для таких задач можно
обоснованно назначать квадратичную форму —-хт (/2)рх (^) и полу¬
чать соответствующее граничное условие A (t2) = р, т. е. (/2) =
= pik. Для нетерминальных задач *) граничного условия не су¬
ществует. Рекомендуемое иногда для нетерминальных задач гранич¬
ное условие А (/2) = р = 0 не является обоснованным, так как при¬
водит к управлениям, коэффициенты которых зависят от относи¬
тельного времени /2 — t (t — текущее абсолютное время). Таким
образом, управление, по существу, здесь все равно получается тер¬
минальным.
Для получения нетерминальных управлений, коэффициенты ко¬
торых зависят (в нестационарном варианте) лишь от абсолютного
времени /, необходимо найти «вынужденное решение» уравнений
(П.1.8) или (П.1.14), не зависящее от граничного условия. Сам ми¬
нимизируемый функционал при этом принимает вид
/ = -1-хт (/2) Ах (/2) + 4" J х^х+ 4“ У иТ^~2“ (П1 •15)
*) Использование так называемого скользящего граничного условия, описанно¬
го в § П.З, здесь не рассматривается.
§ П.1] РАЗВИТИЕ МЕТОДОВ АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ 469
Показано [П.9], [П. 16],. что для довольно широких условий су¬
ществует только одно устойчивое вынужденное решение уравне¬
ний (П.1.14). Это облегчает его получение. Однако для нели¬
нейных объектов, за исключением объектов простейшего вида и
малой размерности, трудности решения уравнения (П.1.12) ос¬
таются непреодоленными.
Трудности рассмотренного метода аналитического конструиро¬
вания побудили автора к разроботке другого варианта метода,
условно именуемого аналитическим конструированием по Крите-
рию обобщенной работы. Этот метод на различных стадиях своего
развития и применения опубликован в статьях [П.17] — [П.25] и
монографиях [П.26], [П.27]. В наиболее законченной форме метод
излагается в последующих параграфах Приложения и иллюстри¬
руется основным содержанием книги. Поэтому здесь нет необходи¬
мости сколько-нибудь подробно останавливаться на существе ме¬
тода. Ограничимся очень краткими пояснениями. Если к функцио¬
налу (п.1.10) добавить член
то оптимальные управления, минимизирующие новый, полученный
таким путем функционал, будут иметь вид (П.1.11), где, однако,
V определяется теперь линейным уравнением в частных производ¬
ных
дУ
dt
п
(П.1.17)
при прежнем граничном условии (П.1.13). Точно такой же резуль¬
тат получается, если минимизируемый функционал имеет вид j
^2
/ = ^3fxi(U. • • •. j Q(*i хп, t)dt, (П.1.18)
но допустимые управления стеснены дополнительным условием
Л m / Л т / П \Р
-И £Д) ^=const> (пдл9)
или если минимизируемый функционал (П.1.10), но дополнительное
условие имеет вид
\ d/ = const.
(П.1.20)
470
ПРИЛОЖЕНИЕ
При использовании обозначения
п
V Ж
— 2j ф*/ дхк
4=1 Я
оптимальные
управления
ut = —
можно трактовать как выходные величины некоторых безынерцион¬
ных исполнительных устройств, на входы которых поступают сиг¬
налы управления vj. В соответствии с этим величина (П.1.16) может
интерпретироваться как оценка сигналов управления, в частности,
при р = 2 — работа сигналов управления за время t2 — tr в опти¬
мальной системе. Таким образом, добавление в минимизируемый
функционал или дополнительное ограничивающее условие оценки
сигналов управления в оптимальной системе (П.1.16) делает урав¬
нение для У-функции линейным. Это коренным образом упрощает
отыскание решения для линейных и особенно нелинейных объектов.
Минимизируемый функционал
^2
I = v3 [хх (/2), .... хп О + j Q (Xj хп,
(ПГ2,)
/=1 /=1 \ /
является полуопределенным в том смысле, что вначале задаются
Л/, V3, Q, а V получается после решения уравнения (П.1.17). Одна¬
ко это, как показано далее в Приложении и основной части книги,
не снижает эффективности метода. Данный метод в различных его
вариантах оказывается наиболее удобным методом аналитического
конструирования систем управления для сложных объектов.
§ П.2. Основная теорема. Достоинства метода
аналитического конструирования по критерию обобщенной работы
Различные формулировки «основной теоремы» аналитического
конструирования по критерию обобщенной работы опубликованы
в трудах [П.21], [П.23], [П.25], [П.27]. Приведем здесь достаточно
общую формулировку, охватывающую нелинейные объекты при на¬
личии случайных возмущающих воздействий. Далее рассмотрим на¬
иболее важные частные случаи теоремы. Здесь, как и во всей книге,
ограничиваемся лишь инженерным или физическим уровнем стро¬
гости формулировок и доказательств.
§ П.2]
ОСНОВНАЯ ТЕОРЕМА
471
Основная теорема
Для объекта, описываемого уравнениями
т
x( + fi(xlt ...» хп, t) = 5<pz/(x1( Х„, t)Uj +
/=1
г
+ 5 W*1> • • •» (» = 1, 2, ... ,.п),
k=\
оптимальными в смысле минимума функционала
(П.2.1)
~ ^2
/ = M{V3[x1(/2), . .., хл(/2)]} 4-М ^Q(xx, ..х„, t)dt 4-
+> S
L/-i И
где V — решение уравнения
в
t=l
dt +—М 1
J р ь
dV
dt
(П.2.3)
при граничном условии Vt=t2 = V3, являются управления
= • (П.2.4)
Здесь Д-, <pt7, — заданные непрерывные функции (характеристи¬
ки) объекта; Q, V3 — заданные непрерывные функции; р, q — по¬
ложительные заданные числа, удовлетворяющие соотношению
~ = 1 и такие, что zp, £ — четные функции z\ (/) — белые
шумы в виде последовательностей случайных по «площади» стати¬
стически независимых 6-импульсов, разделенных сколь угодно ма¬
лыми, но конечными интервалами времени; k; — положительные
величины; М — символ математического ожидания. .
Прежде чем рассматривать доказательство этой теоремы, приве¬
дем пояснения функционала (П.2.2). Функция V3 задается положи¬
тельно определенной *) относительно координат xlf ..., хп и обра¬
щающейся в нуль при Xi = • • • = хп = 0. Член
м(К[Xi(t2), .... xn(t2)]}
*) Ниже будет рассмотрен частный, но исключительно важный случай, ког¬
да Vg = у. В этом случае V3 не задается, а определяется как вынужденное ре¬
шение уравнения (П. 2.3). Однако и в этом случае стремятся к обеспечению
положительной определенности V3.
472
ПРИЛОЖЕНИЕ
является оценкой точности приведения системы в желаемое состоя¬
ние (%!=•••= хп = 0) в конечный момент времени t = t2. Функ¬
ция Q также задается положительно определенной и исчезающей
в начале координат. Член
является интегральной оценкой качества переходных процессов и
точности стабилизации желаемого невозмущенного состояния.
Ввиду того, что по условию zq — четная функция ?, величина
т I и- \q
У (-Л есть положительно определенная функция управлений щ.
Член
(П.2.5)
будем условно называть обобщенной взвешенной работой управле¬
ний. То, что это название является в определенной мере условным,
видно из следующего. При q = 2 имеем
Эта величина чаще всего действительно соответствует взвешенной
сумме работ, совершаемых управлениями щ за время t2 — tr. При
qt близком к 1 (zq — четная функция г), величина (П.2.5) близка к
т. е. в этом случае рассматриваемый член близок к математическому
ожиданию взвешенной суммы интегралов модулей управлений или
«расходов» управлений. При большом значении q, например q =
= 100, член (П.2.5) мал, если | щ\ < kj, и велик, если | щ | 2> kj
в течение сколько-нибудь значительного интервала времени. Таким
образом, при больших q член (П.2.5) играет роль оценки управле-,
ний по модулю, резко возрастающей при превышении | щ1 уровня
kp Последний член функционала (П.2.2)
Г rn z2 / п \Р
j b/lX-Srp'] (п.2,6)
условно будем называть обобщенной работой сигналов управления
в оптимальной системе. Обоснованием такому наименованию может
§ П.2]
ОСНОВНАЯ ТЕОРЕМА
473
т
служить следующее. По условию zp — четная функция и S —
положительно определенная функция переменных
п
VI=Y 4ki
k=\
дУ
dxk
(П.2.7)
Согласно (П.2.4) оптимальные управления равны
щ = — kpvp~x
(П.2.8)
и величины и/, как уже отмечалось, можно трактовать как сигналы
управления на входах безынерционных исполнительных устройств
с характеристиками (П.2.8). При этом kp играют роль коэффициен¬
тов усиления каналов оптимальной системы управления. При р =
= 2 (это соответствует q = 2) член (П.2.6) равен
(П.2.9)
Обычно величина (П.2.9) имеет смысл взвешенной суммы работ, со¬
вершаемых сигналами управления на входах исполнительных
устройств за время t2 — При р, близком к 1 (q велико), член
(П.2.6) имеет смысл интегральной оценки взвешенной суммы моду¬
лей сигналов управления и/, т. е. оценки «расходов» сигналов
управления на входах исполнительных устройств в оптимальной
системе. При большом значении р (q « 1) величина (П.2.6) мала
при | у/|< 1/kj и велика при | Vf \ > 1/Л/, т. е. играет роль оценки
превышения сигналами управления Vj заданных уровней.
Приведем краткое доказательство сформулированной теоремы.
Полная производная V в силу уравнений объекта (П.2.1) и соотно¬
шения (П.2.3) равна
п / т г
= 4г + ( — +S + S
i=l 1 \ /=1 k=\
n tn nr
= -Q + S + S (П.2.10)
t=l /=1 1 i=\ /г=1 L
Интегрируя это выражение в пределах от до /2, получаем
V (/2), ...» хп (/2), l^i (^1)» • • • > хп (/х), =
п т *2 п г
--^Qdt + Z g Ya12.1i)
По условию
И-Ми. •••. = v3[x1(t2) Xn(t2)]. (П.2.12)
474
ПРИЛОЖЕНИЕ
Покажем, что величина
я = м[£ V
_Z=1 k=\ 4
не зависит от синтезируемых управлений. Согласно принятой мо¬
дели белых шумов
^(0 = 55ftv6(/-/v), (П.2.13)
где Skv — независимые центрированные случайные величины,
& (t — iv) — дельта-функция, «импульс» которой соответствует мо¬
менту времени t = tv. Поэтому
Фазовые координаты xt (i = 1, 2, ..., ri) вследствие воздействия
дельта-функций претерпевают скачкообразные изменения в момен¬
ты времени tv. Согласно (П.2.1), (П.2.13) приращения координаты
Xi за время от tv — 0 до tv + 0 равно
*v+0
kXiv == kv (^ ^v)
tv—0
Эти приращения с точностью до бесконечно малых не зависят от
управлений Поэтому величина /?, которая может быть представ¬
лена в виде
Я = £М[Д#] = £м
V V
также с точностью до бесконечно малой не зависит от управлений.
Согласно выражениям (П.2.11), (П.2.12) находим
- z2
м (V3 [*! (/2), .... Хп (/2)]} н- М
п т Г £
= М {V (Xi (ZJ, .... хп (/,), /11} + S S М 4uuidZ
z=i ;s=i
+ Я
(П.2.14)
§ П.2]
ОСНОВНАЯ ТЕОРЕМА
475
Подставляя это в (П.2.2), получаем
п т
L*1
tl
+v«:
ы
р
dt +R.
J (П.2.15)
Придадим управлениям (П.2.4) на интервале — h произвольные
вариации 6«/:
р-1
(П.2.16)
Первый и последний члены функционала (П.2.15), очевидно, оста¬
нутся неизменными, остальные получат приращения как непосред¬
ственно за счет 6t//, так и за счет приращений фазовых координат
системы, вызванных 8uj. Подставляя (П.2.16) в (П.2.15), находим
т п
-м 1J
L/=i 6
§Ujdt +
+ — М
я
дУ Y *
<Р*' dxk I к/
^2
ж Y«1+r.
+> х
р L/=i
Учитывая, что (р — 1) q = р
SdV о . 1
ЧЫ ~d^~8ui + ~2
fe=l *
из (П.2.17) получаем
I + 81 = М {У [Xj (/х), ...,
Г т / п
+ V-M S П\£ч>«^
би/
~kT
д*к
(П.2.17)
(П.2.18)
(П.2.19)
2 Р 8и*
476
ПРИЛОЖЕНИЕ
Здесь, как и в (П.2.18), точками обозначены члены, содержащие
третьи и более высокие степени вариаций би/. По условию q> 1,
z2~p > 0 при z у= 0 и непосредственно из выражения (П.2.19)
видно, что функционал / имеет минимум при би/ = 0, т. е. управ¬
ления (П.2.4) действительно являются оптимальными.
Обратим внимание на следующее. При белых шумах указанного
вида оптимальные управления в детерминированной и стохасти¬
ческой системах одинаковы и, стало быть, не зависят от уровней
шумов. Это можно объяснить тем, что указанные шу.мы представ¬
ляют последовательности разделенных конечными интервалами вре¬
мени независимых случайных б-импульсов. Оптимизация переход¬
ных процессов здесь обеспечивает и максимальную точность в уста¬
новившемся режиме случайных возмущающих воздействий.
Степень наблюдаемости
Решение уравнения (П.2.3) в общем случае является функцией
всех фазовых координат объекта (П.2.1) : V = V (хъ ...» хл, /).
Вследствие этого оптимальные управления (П.2.4) в общем случае
также являются функциями всех фазовых координат объекта:
и/ = и/ (%х, ..., хл, /). Реализация таких управлений предполагает
возможность измерения и использования для управления всех
фазовых координат объекта. Это — условие полной степени наблю¬
даемости [П.17] — [П.25]. При пояснении понятия степени наблю¬
даемости всегда отмечается его отличие от наблюдаемости по Кал ма¬
ну. Полная степень наблюдаемости — это возможность непосред¬
ственного прямого измерения всех фазовых координат. Полная
наблюдаемость по Калману — это возможность измерения всех
фазовых координат прямым или косвенным путем. При косвенных
измерениях контролируются величины, функционально связанные
с фазовыми координатами. Поэтому косвенные измерения требуют
значительного объема априорной информации о функциональных
зависимостях — характеристиках объекта.
При неполной степени наблюдаемости — невозможности прямо¬
го контроля всех фазовых координат — могут иметь место два слу¬
чая. Первый случай соответствует невозможности прямого контроля
всех фазовых координат, но возможности косвенного контроля.
Это — случай неполной степени наблюдаемости, но полной наблю¬
даемости по Калману и достаточной для косвенных измерений апри¬
орной информации. В этом случае синтез оптимальных управлений
может осуществляться как при полной степени наблюдаемости.
Реализация оптимальных управлений здесь может осуществляться
с помощью косвенного измерения части фазовых координат.
Второй случай неполной степени наблюдаемости соответствует
невозможности прямого контроля части фазовых координат и не¬
возможности косвенного измерения этих координат либо по причине
ОСНОВНАЯ ТЕОРЕМА
477
$ П.2]
неполной наблюдаемости по Калману, либо ввиду отсутствия до¬
статочного объема априорной информации. Этот второй случай не¬
полной степени наблюдаемости требует синтеза управлений, яв¬
ляющихся функциями только измеримых фазовых координат. Для
этого случая, а также других ограничений на форму функции V
разработаны специальные приемы приближенного решения урав¬
нения (П.2.3). Эти приемы изложены ниже (§ П.7).
Достоинства метода аналитического конструирования
по критерию обобщенной работы
Метод синтеза, основанный на минимизации функционала (П.2.2),
целесообразно сопоставить с методом аналитического конструирова¬
ния Летова — Калмана в форме, которая по своей общности экви¬
валентна основной теореме. В качественном отношении это уже осу¬
ществлялось в предшествующем параграфе.
Для объекта (П.2.1) оптимальными в смысле минимума функцио¬
нала
(П.2.20)
являются управления
(П.2.21)
, хл, t)dt -р-
+ —м
я
где V — решение уравнения
(П.2.22)
при граничном условии V>e,a = V3. Доказательство аналогично
приведенному выше для основной теоремы. Полная производная
V' в силу уравнения объекта (П.2.1) и соотношения (П.2.22) равна
т
+ S 2 (П.2.23)
f=l fex=ll
478
ПРИЛОЖЕНИЕ
я=м У У Слр-
дх1
Аналогично предыдущему
не зависит от ut. Интегрируя (П.2.23), для средних (математических
ожиданий) получаем
М (V' [хх (/2) хп (/а), ^]) — М {V [хх (/J (ZJ, *х]} =
= — м[> 4-
т *» / п VI пт Г*«
Ж
L/=i?;\ fe=i * / v
(П.2.24)
' т
+ Vм
дУ'
dxk
(=!/=]
rt
Ф tiui | + R.
р
т ,
»
Добавляя к обеим частям равенства член —М
q L /=i rt
меняя местами члены с отрицательными знаками и учитывая ==
= V3, находим ,
г*»
п т
Г = М {V' [хх (/х), .... хп
^8
L/1
+ —м
я
р
| dt 4“
(П.2.25)
Это совпадает с выражением (П.2.15) (вместо V здесь V')- Совпадают
и выражения оптимальных управлений (П.2.21), (П.2.4). Поэтому
дальнейшее доказательство полностью совпадаете изложенным вы¬
ше (см. (П.2.16) — (П.2.19)).
Переходя непосредственно к рассмотрению достоинств метода
аналитического конструирования по критерию I (обобщенной рабо¬
ты), сначала обратим внимание на вычислительные преимущества.
Для построения оптимальных управлений (П.2.4) необходимо ре¬
шить линейное уравнение в частных производных (П.2.3). Для по¬
строения оптимальных управлений (П.2.21) следует решить нели¬
нейное уравнение в частных производных (П.2.22). Вычислительные
трудности решения нелинейных уравнений типа (П.2.22) весьма ве¬
лики в сравнении с решением линейных уравнений вида (П.2.3).
' Особенно это относится к наиболее важным для практики задачам
высокой размерности для нелинейных объектов и наиболее важного
случая нетерминальных управлений (см. § П.З), когда граничное
условие для искомого решения отсутствует. Для этого наиболее рас-
ОСНОВНАЯ ТЕОРЕМА
479
Ц зависящее от граничных условий. Для нелинейного уравнения
вида (П.2.22) существует множество таких решений, одни из которых
устойчивы, другие неустойчивы. Для уравнения (П.2.3), как пра¬
вило, имеется одно-единственное вынужденное решение.
Для объектов высокого порядка (высокой размерности) вычис¬
лительные трудности нахождения решения нелинейного уравне¬
ния вида (П.2.22), соответствующего собственно оптимальным уп¬
равлениям, трудно преодолимы. Между тем определение решения
уравнения (П.2.3) для тех же объектов не встречает больших за¬
труднений (конечно, с применением соответствующей вычислитель¬
ной техники). Решение уравнения (П.2.3) может быть найдено на
основе изложенных ниже типовых способов.
Указанное преимущество метода аналитического конструирова¬
ния, основанного на минимизации функционала обобщенной работы
/ имеет, как уже упоминалось во введении, принципиальное значе¬
ние. Дело в том, что практический процесс аналитического конст¬
руирования является обычно итерационным, требующим неодно¬
кратного решения соответствующих уравнений (П.2.3) или (П.2.22).
Назначаемый на первом исходном этапе функционал лишь в исклю¬
чительных случаях дает решение, удовлетворительное со всех точек
зрения. Обычно полученное решение нуждается в корректировке
в свете многочисленных дополнительных требований практики,
иногда даже не поддающихся строгой формализации. Поэтому по¬
сле получения первого решения возникает потребность в корректи¬
ровке функционала (изменении его коэффициентов) и повторном ре¬
шении задачи. Это может повторяться несколько раз. Чем проще
получить однократное решение задачи, тем успешнее осуществляет¬
ся подобный итерационный процесс. Линейность уравнения (П.2.3)
позволяет обнаружить общие закономерности оптимальных управ¬
лений и осуществлять целенаправленную корректировку функ¬
ционала.
Кроме вычислительных преимуществ, важное значение имеет
качество процессов управления в оптимальных системах, синтези¬
рованных тем или иным методом. Для сравнения качества управле¬
ния в оптимальных системах, соответствующих / = min, Г = min,
необходимо вычислить одинаковые или сопоставимые показатели
качества. Подставляя в выражение (П.2.2) величину
’ \7=Т
получаемую из (П.2.4), и принимая во внимание, что
= <7.
480
ПРИЛОЖЕНИЕ
находим
/min =М{73[Х1(/2), ..
Хп(/2)]} +
+ М
У Q («^1» • • •» 0
4
С другой стороны, из (П.2.19) следует
/min = М (V [Хх (/х), . . . , Хп (tj), /J} -|- R.
Итак, для системы, оптимальной по критерию /, в детерминирован¬
ном случае
V3 [хх (/2) хп (/2)J + j Qdt + £ J =
= V[x1(/1), ...» хя(О, /J,(П.2.26)
где V — решение уравнения
^--Sng-=-e (П.2.27)
/=1 1
при граничном условии
V3.
Аналогично получаем, что для системы, оптимальной по крите¬
рию Г,
V3 [хх (/2), ..., хп &)] + f Qdt + -L £ C (^L)’ dt =
Z ? /=1 j \ k! 1
= V'[x1(/1), .... x„(/x), /J, (П.2.28)
где V' — решение уравнения
при граничном условии Vt=t2 = V3. Функция V может быть интер¬
претирована как функция Ляпунова для исходного неуправляемого
объекта, а функция V — как функция Ляпунова для замкнутой
оптимальной системы. Действительно, функция У3 задается всегда
положительно определенной. Положительно определенной задается
и функция Q. По крайней мере для устойчивого объекта (невозму¬
щенное состояние хг = • • • = хп = 0 асимптотически устойчиво с
областью притяжения, охватывающей всю рассматриваемую область
фазового пространства) решения V, V' уравнений (П.2.27), (П.2.29)
также положительно определенные (см. § П.З). Уравнения (П.2.27),
= <П-2-30)
$ П.2) ОСНОВНАЯ ТЕОРЕМА 481
(Г1.2.29) можно представить в виде
I/ W . V ' dV
1=1 *
i/z , V w у dw .
V = dt + XJ dxt X(~ dt 2-1 dxt '1
Z=1 1 =1 1
m / n \p
=-Q,(n.2.3i)
где для (П.2.30)
*i + h = О, (П.2.32)
а для (П.2.31)
m kp ( n • V“’
*i + fi = S Vaub и! = j- S W 4^7у • (Г1.2.33)
Соотношения (П.2.32) есть уравнения исходного объекта без управ¬
лений, а (П.2.33) — уравнения замкнутой оптимальной в смысле
минимума Г системы при коэффициентах усиления каналов kp/p.
Дальнейшее сопоставление распадается на ряд случаев. Первый из
них — случай низких коэффициентов усиления в каналах оптималь¬
ной системы. Очевидно, что при достаточно малых kt решение урав¬
нения (П.2.29) с учетом идентичности граничных условий близко к
решению уравнения (Г1.2.27) и значения критериев (показателей)
(П.2.26), (П.2.28) практически одинаковы. При малых kt послед¬
ний член в функционале (П.2.2) мал и показатели I, Г практически
одинаковы. Малые коэффициенты усиления kj необходимы тогда,
когда мощности, работы или «расходы» управляющих воздействий
сильно ограничены. Таким образом, при сильно ограниченных до¬
пустимых затратах управляющих воздействий оптимальные управ¬
ления, синтезированные на основе минимизации функционалов /,
Г в отношении качества процессов управления практически экви¬
валентны.
Рассмотрим теперь второй случай, когда Q = 0, а исходный
объект обладает невысокой устойчивостью невозмущенного состоя¬
ния. Последнее означает, что, будучи выведен из невозмущенного
состояния, объект возвращается в него за длительное время. Синтез
управлений при Q = 0 именуется синтезом терминальных (для слу¬
чая функционала /') или квазитерминальных (для функционала /)
управлений (см. § П.З). Рассмотрим множества фазовых траекто¬
рий объекта
Xi + fi (Xv ..., xn,t) = О
16 А. А Красовский
482
ПРИЛОЖЕНИЕ
и системы
xl + fl (х1>
Uj = -
т
• • • > Xni ty tyijUj = О,
1= 1
kl
Р
приводящих в момент времени t = t2 на поверхность
V3 (xv ..., хп) = С = const. (П.2.34)
Согласно уравнениям (П.2.30), (П.2.31) при Q = 0 геометрическими-
местами начальных (t = /х) точек фазовых траекторий, приводящих
при t = t2 на поверхность (П.2.34), для объекта (П.2.32) является
поверхность
V (хь ..., хп, t2) = С, (П.2.35)
а для системы (П.2.33) — поверхность
Vf(xv ..., х„ t2) = C. (П.2.36)
Функции У, V, как и У3, являются положительно определенными,
поверхности (П.2.35), (П.2.36), (П.2.34) — выпуклыми, и для них
существуют некоторые средние радиусы, определяемые, например,
как среднее арифметическое между радиусом охватывающей и впи¬
санной сфер. По предположению объект без управлений обладает
слабой устойчивостью и средний радиус поверхности (П.2.35) не
сильно отличается (превышает) от среднего радиуса поверхности
(П.2.34). Система с оптимальными управлениями обладает относ i-
тельно высокой устойчивостью и средний радиус поверхности
(П.2.36) существенно превышает средние радиусы поверхностей
(П.2.34), (П.2.25). Вследствие этого значение функции У (/х),...
..., хп (/х), /х] существенно превышает значение функции
У' [хх (/х), ..., хп (/х), при равных значениях хх (/х), ..., хп (/х).
Таким образом, при данных условиях преимущество в отноше¬
нии качества процессов управления имеет решение Летова — Кал-
мана, основанное на минимизации функционала Г. Первым путем
преодоления этого недостатка метода аналитического конструиро¬
вания по критерию обобщенной работы является преобразование
фазовых координат, обеспечивающее высокую устойчивость объек¬
та в новых координатах. При этом, конечно, преобразуется и мини¬
мизируемый функционал в исходных фазовых координатах. При
высокой устойчивости невозмущенного состояния объекта в преоб¬
разованном пространстве функции У, У' в этом пространстве отли¬
чаются не сильно и качество процессов управления в системах,
синтезированных по критериям /, получается близким. Этот спо¬
соб подробно рассмотрен в § П.З, § П.4 и проиллюстрирован мно¬
гими конкретными примерами в основных главах книги. Другой
путь улучшения качества процессов управления в оптимальной си¬
стеме заключается в применении достаточно быстро нарастающей
ТЕРМИНАЛЬНЫЕ И НЕТЕРМИНАЛЬНЫЕ УПРАВЛЕНИЯ
483
п.з]
функции фазовых координат Q, т. е. применении в функционале
достаточно сильной оценки качества переходных процессов. При
q > О (положительно определенная функция) поверхности
V (xv ..., хп, t) =С, V' (xv ... t xn,t) = C,
совпадающие по условию при t = /2 c V3 (xlf ..., xn) = С, деформи¬
руются (стягиваются) при возрастании t быстрее, чем геометриче¬
ские места изображающих точек в свободном движении объекта и
оптимальной системы соответственно. Это видно из того, что полные
производные V, V' в силу уравнений объекта и соответственно
замкнутой системы равны — Q (см. (П.2.30), (П.2.31)).
При быстро нарастающей функции Q она является определяю’
щей и решения уравнений (П.2.30), (П.2.31) при одинаковом гранич¬
ном условии получаются близкими.
Сказанное позволяет сделать заключение, что путем применения
соответствующих способов качество переходных процессов в опти¬
мальных системах, синтезированных по критериям / и может
быть сделано примерно равноценным. В § П.4 это иллюстрируется
на простейших конкретных примерах. В отношении точности в уста¬
новившемся режиме при действии шумов системы, оптимальные по
критерию /, имеют некоторое преимущество [П.24]. Достоинством
является и сам учет «работы» сигналов управления в функционале
/, так как «энергия» этих сигналов во многих конкретных системах
имеет немаловажную роль. Все это в совокупности составляет весь¬
ма значительное преимущество метода аналитического конструирова¬
ния по критерию обобщенной работы, основанного на минимизации
функционала I.
§ П.З. Терминальные и нетерминальные управления.
Особенности аналитического конструирования управлений
для неустойчивого объекта
Существует важный класс задач, в которых показателем или кри¬
терием качества управления является точность приведения объек¬
та в желаемое состояние в определенный конечный момент времени.
Этот момент или назначен заранее или приближение к нему может
контролироваться в процессе управления, т. е. известно текущее
относительное время. Такие задачи получили название терминаль¬
ных. Имеется также класс задач, еще более важных с практической
точки зрения, в которых критерием качества управления является
как точность в конечный момент времени, так и качество процессов
приведения в конечное состояние. Такие задачи мы будем называть
кв^зитерминальными. Задачи управления посадкой, приземлением,
сближением и причаливанием, наведением летательных аппаратов
могут формулироваться как терминальные или квазитерминальные
И*
484
ПРИЛОЖЕНИЕ
Решение квазитерминалъных задач
Решение определенного вида квазитерминалъных задач в рамках
рассмотренной основной теоремы получается как частный случай.
Действительно, примем в функционале (П.2.2) Q = 0. Тогда этот
функционал получает вид
/ = М {К, [Хх(/2), ...» хп &)]} +
4>ki
(П.3.1)
+
Момент t = t2 является характерным (конечным) моментом управ¬
ления. Член М (И3 [%i (/2)» •••, %п (^)Н, гДе Уз “ заданная опре¬
деленно положительная функция, служит оценкой точности приве¬
дения объекта в желаемое конечное состояние. Остальные члены
имеют указанный ранее смысл, причем величина
ввиду неотрицательности функции гр может трактоваться так же,
как интегральная оценка неотрицательной функции фазовых коор¬
динат. Таким образом, минимизация функционала (П.3.1) эквива¬
лентна минимизации оценки точности приведения в конечное состоя¬
ние при заданной сумме взвешенных обобщенных работ управлений и
сигналов управления или заданной сумме взвешенных работ управ¬
лений и интегральной оценки некоторой неотрицательной функции
фазовых координат. Очевидно, что минимизация функционала
(П.3.1) соответствует задаче квазитерминального управления. Подоб¬
ные задачи будем называть задачами квазитерминального управле¬
ния первого рода. Согласно основной теореме решение задач квази¬
терминального управления первого рода получается в виде
= • (П.3.2)
где V — решение уравнения
(П.з.з)
i=l
при граничном условии Vi=t, = V3. Никаких ограничений на
устойчивость исходного объекта (П.2.1) здесь не накладывается, т. е.
невозмущенное состояние xt = • • • = xa — 0 объекта может быть
I П.З]
ТЕРМИНАЛЬНЫЕ И НЕТЕРМИНАЛЬНЫЕ УПРАВЛЕНИЯ
485
асимптотически устойчивым, «нейтральным» (устойчивым не асимп¬
тотически) или неустойчивым. При любой положительно определен¬
ной функции V3 функция V получается также положительно опре¬
деленной. Действительно, полная производная функции V по времени
в силу уравнений свободного движения исходного объекта xt + ft =
= 0 (г = 1, 2, ..., п) и (П.3.3) равна нулю: V = 0. Интегрируя по
времени от t1 до /2, получаем
V (/j), ...» хп (/J, /J = V3 [Xj (/2), •.., хп (/2)].
Вследствие произвольности начальных значений координат (/J,...
...» хп (^1) и положительной определенности У3 отсюда следует по¬
ложительная определенность V. Для оптимальной системы соглас¬
но (П.2.1), (П.3.2) при = 0 (k = 1, 2, ..., г)
т / п \р— 1
Xi + fi = — X Ф/ЛЦ S Ф*/ ’ (‘ = 1>2 п). (П.3.4)
В оптимальной системе
ед*=- Ь <п-3-5)
Величина
т / п \р
(П.3.6)
/=1 \ fe=l л J
неотрицательна. Поэтому можно ожидать, что невозмущенное со¬
стояние оптимальной системы даже для неустойчивого исходного
объекта будет устойчивым, если коэффициенты усиления каналов
kj достаточно велики. Это заведомо имеет место, если величина
П.З.6) не только не отрицательна, но является положительно опре¬
деленной функцией фазовых координат.
К квазитерминальным задачам будем относить и общую зада¬
чу основной теоремы, когда Qy=0— положительно определенная
функция фазовых координат, a t2 — заданный конечный момент
времени. Такую задачу будем называть задачей квазитерминаль-
ного управления второго рода. Для ее решения необходимо оты¬
скать решение уравнения (П.2.3) приграничном условии Vt=t2=V3-
Каких-либо ограничений на устойчивость исходного объекта здесь
также не накладывается. Так же как в предшествующем случае,
Доказываются положительная определенность функции Vпри поло¬
жительно определенных V3, Q и устойчивость невозмущенного со¬
стояния оптимальной системы для неустойчивого исходного объек¬
та при достаточно больших (и сколь угодно больших) коэффи¬
циентах усиления kj и положительной определенности величины
(П.3.6) как функции фазовых координат. Совершенно очевидно* что
486
ПРИЛОЖЕНИИ
решения уравнений (П.2.3), (П.3.3) являются функциями фазовых
координат, относительного времени /2 — / и (в общем случае) аб¬
солютного времени t\
v = v (*^i> • • • > О*
От этих же аргументов зависят и оптимальные управления (П.2.4),
(П.3.2). Реализация подобных оптимальных квазитерминальных
управлений возможна лишь тогда, когда относительное время
t2 — t известно. В задачах приземления, сближения, причаливания,
самонаведения и др. относительное время может хотя бы приближен¬
но определяться посредством измерения относительной дальности
и реализация квазитерминальных управлений в принципе возмож¬
на. Однако в большинстве случаев задача оптимизации управления
ставится как нетерминальная. В этих случаях необходимо оптими¬
зировать переходные процессы вне зависимости от момента их
возбуждения и необходимо минимизировать ошибки не в заданный,
а в произвольный момент времени. Иными словами, в большинстве
задач невозможно обоснованно назначить фиксированный мо¬
мент времени /2. К нетерминальным относятся все задачи стабили¬
зации и управления в маршрутных режимах полета летательных
аппаратов.
Решение нетерминальной задачи без граничного условия
Для решения нетерминальных задач основная теорема нуждает¬
ся в некотором видоизменении. Первый вариант нетерминального
решения получается путетл исключения граничного условия по¬
средством задания функции 1/3, равной вынужденному решению
уравнения (П.2.3):
Тогда формулировка основной теоремы принимает следующий вид.
Для объекта, описываемого уравнениями (П.2.1), оптимальными
управлениями, минимизирующими функционал
(П.3.7)
+
где V — вынужденное (не зависящее от граничных условий) реше¬
ние уравнения
dV dV
* ёг
(П.3.8)
ТЕРМИНАЛЬНЫЕ И НЕТЕРМИНАЛЬНЫЕ УПРАВЛЕНИЯ
487
5 п.31
являются управления
= • (П.3.9)
Здесь #2» h — произвольные моменты времени. Вынужденное ре¬
шение уравнения (П.3.8) зависит от фазовых координат и, в общем
случае, от абсолютного времени /. Поэтому оптимальные управле¬
ния (П.3.9) являются функциями фазовых координат и абсолют¬
ного времени:
llj = llj (Хр • • • , ty*
Это — нетерминальные управления. Для их реализации не нужен
контроль относительного времени. Именно эта постановка и решение
задачи аналитического конструирования (точнее, частные случаи
этого решения) рассматриваются в большинстве опубликованных
нами ранее работ [П.17]— [П.25]. Это решение в совокупности с
еще одним вариантом нетерминального решения, излагаемым ниже,
широко используется и в данной книге. Посредством этих решений
осуществляется синтез систем управления для большинства режимов
полета. Только для задач посадки, самонаведения и сближения, ори¬
ентации рассматриваются квазитерминальные управления (гл. IX,
X, XII). Применимость решения задачи нетерминального управле¬
ния в указанной постановке существенно зависит от устойчивости
исходного объекта. Дело в том, что в функционал (П.3.7) наряду с
заданными определенно положительными функциями фазовых ко¬
ординат, синтезируемых управлений и сигналов управления (в
оптимальной системе) входит функция V [л^^), /21 значе¬
ний фазовых координат в конечный момент времени. Если эта функ¬
ция не положительно определенная, то, вообще говоря, теряется
смысл самой минимизации функционала /. Минимизация функцио¬
нала с функцией V, не положительно определенной, может привес¬
ти к неустойчивой и непригодной для применения системе, хотя она
и будет оптимальной в смысле минимума функционала /. Таким
образом, в данной задаче нетерминального управления следует
потребовать, чтобы функция 7, являющаяся вынужденным реше¬
нием уравнения (П.3.5), была положительно определенной.
Если невозмущенное состояние хг = • • • = хп = 0 исходного
объекта (без управлений и возмущающих воздействий)
+ fi (*v .. •, xn,t) = 0 (i = 1,2, ..., п) (П.3.10)
асимптотически устойчиво с областью притяжения G, охватываю¬
щей всю область возможных начальных значений фазовых коорди¬
нат, то обращающееся в нуль решение уравнения (П.3.8) является
положительно определенной функцией фазовых координат в области
G. Функция Q здесь, как всегда, считается положительно опреде¬
ленной. Действительно, уравнение (П.3.5) можно представить в
488
ПРИЛОЖЕНИЕ
виде
V = -Q, (П.3.11)
где V — полная производная функции V по времени, вычисленная
для свободного движения объекта. Интегрируя (П.3.11) по време¬
ни в пределах от tr до оо и учитывая, что вследствие условия асимп¬
тотической устойчивости Xj (оо) = • • • = хп (оо) = 0, получаем
V [хх (/]}, .. •, хп (/j), /х] = У Q dt.
В силу положительной определенности Q
V[xM -•-> *М> М>0
для всех ненулевых начальных значений вектора
% (^1) = 1-^1 (^1)» • • • > %п (^1)1»
принадлежащих области G. Таким образом, для устройчивого объек¬
та решение уравнения (П.3.8) является положительно опреде¬
ленным.
Устойчивость объекта служит достаточным условием примени¬
мости рассматриваемого метода синтеза оптимальных нетерминаль¬
ных управлений. Однако во многих случаях исходный объект явля¬
ется неустойчивым или нейтральным (т. е. обладающим неасимпто¬
тической устойчивостью невозмущенного состояния).
Решение нетерминальной задачи без граничного условия
для неустойчивого объекта
Для обеспечения применимости рассматриваемого метода к не¬
устойчивым и нейтральным объектам разработан ряд способов
[П.26], [П.27]. Наиболее универсальным из них является способ
преобразования переменных. Он заключается в следующем. Вво¬
дятся новые координаты, пропорциональные исходным
xt =n(t)x*,
где х (0 >0 — достаточно быстро монотонно нарастающая функ¬
ция времени. В новых координатах уравнения объекта принимают
вид
Z + -£-*,’ + /у (Xi’,.... Z, 0=2 ф’/ (**>• • •» Хп, t) и' +
+ . Хп, /)gZ(O> (П.3.12)
Аг=1
$ п.з]
ТЕРМИНАЛЬНЫЕ И НЕТЕРМИНАЛЬНЫЕ УПРАВЛЕНИЯ
489
где
/’ = 4" fi (кх*> • • • • хх'*’ 0.
ф‘/ = 4- Ча (нх'> • • • > хх"> 0>
= 4-Ф/л(кхь • • •« 0»
ы/ = и1> Ik — 1*
Если величина
X d 1 л
— = -п- 1пх> О
х dt
достаточно вёлйка, то невозмущенное состояние объекта в коор¬
динатах х* устойчиво. Это видно хотя бы из того, что при любой
заданной «степени неустойчивости» исходного объекта, т. е. при
любой заданной интенсивности нарастания координат х£, коорди¬
наты Xi = х£/х (/) будут убывать и стремиться к нулю при доста¬
точно быстром возрастании функции х (/). Итак, преобразованный
объект (П.З. 12) при достаточно быстро нарастающей функции х (/)
устойчив.
Назначая определенно положительную функцию Q* (xi, х„)
и применяя к устойчивому объекту (П.З. 12) основную теорему (в ва¬
рианте (П.З.7) — (П.З.9)), получаем оптимальные управления
где V * — вынужденное решение уравнения
Z=1 х ' ux,i
В силу устойчивости объекта функция У* получается положитель¬
но определенной и минимизируемый функционал
+
/*«м(к*[х;(/а),.... х^2)лп + м
490
ПРИЛОЖЕНИЕ
имеет смысл оценки качества процессов управления. Возвращаясь
снова к исходным переменным, получаем, что функционал
I = М{V[хх(/а), ....
+ —м
<7
L/=ir,
xn)dt +
+ —м
р
di ,
(П.3.14)
где
>
(П.3.15)
= •
• • >
минимизируют управления
п
(П.3.16)
Вследствие положительной определенности функций Q*, V* функ¬
ции Q, V также положительно определенные и функционал (П.3.14)
сохраняет смысл оценки качества процессов управления. Задача
решена.
Для ряда задач данный способ нуждается в обобщении. Дело в
том, что степени расходимости различных фазовых координат сво¬
бодного движения исходного объекта могут быть различными. Ха¬
рактерным примером этого служит нейтральный объект в виде по¬
следовательного соединения интегрирующих звеньев. В свободном
движении подобного объекта фазовые координаты, которыми слу¬
жат выходные величины интегрирующих звеньев, изменяются как
полиномы t степени й, где k — номер фазовой координаты. Для по¬
добных объектов оказывается целесообразным вводить различные
коэффициенты преобразования х, (/) для различных фазовых ко¬
ординат
xt = (Ох?, (П.3.17)
где Ki (0 — достаточно быстро монотонно нарастающие функции
времени. Проделав вычисления, аналогичные предыдущему, полу¬
чаем следующее. Для объекта
т г
fI (Хр • • • , Х^, /) = 2 (f>ij (Хр . . . , Х^, /) Uj 4~ [2 (П.3.18)
/=1 к=\
I п.31 ТЕРМИНАЛЬНЫЕ И НЕТЕРМИНАЛЬНЫЕ УПРАВЛЕНИЯ
491
оптимальными в смысле минимума функционала
I = М {Уз
хп (^2)
(^2)
*1 (*2)
*1 (У
где V* — решение уравнения
при граничном условии JZ*=/2 = IZ3, являются управления
(П.3.20)
(П.3.21)
Здесь Уз = Уз (х*, ..., х*п) — заданная функция;
ft = -}- fi (^1X1, .... ипх„, t).
Данная формулировка относится к общему случаю квазитерминаль-
ной задачи. Это сделано сознательно, так как даже из общего обзо¬
ра достоинств и недостатков метода аналитического конструирова¬
ния по критерию обобщенной работы (см. предыдущий параграф)
видно, что для нейтральных и неустойчивых объектов преобразо¬
вание фазовых координат может оказаться целесообразным при ре¬
шении как нетерминальных, так и квазитерминальных задач. Это ил¬
люстрирует также синтез контуров захода на посадку (см. главу IX).
При синтезе нетерминальных управлений без граничного условия
полагают V3 = V* и определяют вынужденное решение уравнения
(П.3.20). Так как устойчивость невозмущенного состояния объекта
в преобразованной системе координат обеспечена, функция V* по¬
лучается положительно определенной. В качестве функций xz (/)
удобно выбирать экспоненты. Этот способ многократно использует¬
ся в основных главах книги.
Решение нетерминальной задачи со скользящим
гран ичным условием
В рамках рассматриваемого метода нетерминальные управления
получаются также путем использования скользящего интервала
времени в функционале и соответствующего скользящего граничного
условия.
492
ПРИЛОЖЕНИЯ
Действительно, зададим функционал в виде
I == М (V3 [X! (t + т), ..., хп (t 4- т)]} +
Г Л> , ч 1
J <2(хх, ..
., /) dt
+ —м
я
- t
и=1 t J
+ —М
р
где т — заданный интервал времени, равный, например, желаемо¬
му времени переходных процессов в оптимальной системе; Q, V3 —
заданные положительно определенные функции фазовых координат.
Функционал (П.3.22) характеризует качество процессов управления
на скользящем интервале времени от t до t + т. Можно также ис¬
пользовать интервал от t — т до t. Согласно основной теореме опти¬
мальными управлениями, минимизирующими функционал (П.3.22),
являются управления вида (П.2.4), где V есть решение уравнения
(П.2.3) при скользящем граничном условии
Vt+x = V3. (П.3.23)
Совершенно очевидно, что решение уравнения (П.2.3) при скользя¬
щем граничном условии (П.3.23) является функцией фазовых ко¬
ординат, абсолютного времени ‘(в общем случае) и продолжитель¬
ности интервала т. От этих же аргументов зависят оптимальные
управления (П.2.4)
tlj == Uj (х^, • • • , /, т).
Таким образом, оптимальные управления при скользящем функцио¬
нале (П.3.22) являются нетерминальными и могут быть реализова¬
ны без контроля относительного времени. Данное решение не имеет
ограничений в отношении устойчивости объекта и удобно для при¬
менения прежде всего к неустойчивым или нейтральным объектам.
Так же как и в случаях квазитерминального управления, функция
V получается положительно определенной при положительно опре¬
деленных V3, Q. Для неустойчивого исходного объекта устойчи¬
вость оптимальной системы при положительно определенных V3,
Q заведомо обеспечивается, если коэффициенты усиления kj жечь-
точно велики, а величина вида (П.Заявляется положительно опре¬
деленной функцией фазовых координат. Все указанные решения или
способы ниже конкретизируются и доводятся до конечных резуль¬
татов для наиболее распространенных частных случаев.
ЦП.41 ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОБЪЕКТА 493
§ П.4. Оптимальные управления для линейного объекта
Уравнения линейного объекта запишутся в виде
2 GiyXy = 2 bljUj + S (П.4.1)
V=1 /=1 fe=l
где коэффициенты aiv, Ьц, cik постоянны для стационарных объек¬
тов и являются функциями времени для нестационарных объектов.
В матричной форме уравнения линейного объекта записываются в
виде
х ах = bu + eg, (П.4.2)
где х, u, g — векторы (матрицы-столбцы), а = || aiv ||, b = ||& z/1|,
с = ||^|| — матрицы коэффициентов. Функции Q, V3 для линей¬
ного объекта целесообразно задавать в виде положительно опреде¬
ленных квадратичных форм:
п п
Q = 4~ 2 ^kXtXk = 4- хтРх, V3 = 4~ 2 PikXiXk = 4~ хтрх.
l,k=\ <Л=1
(П.4.3)
Здесь fiik = fiki — заданные коэффициенты (в общем случае —
функции времени); = pki — заданные коэффициенты (постоян¬
ные числа); р = || (3,/? ||, р = || pik || — квадратные матрицы коэф¬
фициентов; индекс «т» отмечает транспонированную матрицу. Ре¬
шение уравнения (П.2.3), которое в данном случае принимает вид
dV V dv п /пл
~dt l^xv-^ = -Q, (П.4.4)
Z,v=l 1
следует искать также в виде квадратичной формы
п
V = 4" 2 AikXiXb = 4" хтАх, (П.4.5)
l,k=\
где А — Дт = || Aik || — матрица неизвестных пока коэффициентог,
Подставляя выражения (П.4.3), (П.4.5) в (П.4.4) и приравнивая
коэффициенты при одинаковых произведениях независимых пере¬
менных, получаем известные [П.17]— [П.27] уравнения:
^ik AivaVk Akydyi = (i, k = 1,2, ..., м). (П.4.6)
V=1 V = 1
Итак, согласно основной теореме для линейного объекта (П.4.1),
494
ПРИЛОЖЕНИЯ
оптимальными управлениями, минимизирующими функционал
" ^2 fl
п
9 М (/2) %k (^2) ”^2^i S ^^x(xkdt +
л г h 1 * Y l h—1
1 =
m
+ —M
Q
№’
dt +—M }
? 17
являются управления
/ n \p-1
Uy = kj I bfei-AikXi I
\i,k=\ /
(П.4.8)
где Aik— решение системы линейных уравнений (П.4.6) при
условии
A[k (^2) =
При р — q = 2 этот важный частный случай основной теоремы удоб¬
но записывать в матричной форме. Для объекта (П.4.2) оптимальны¬
ми управлениями, минимизирующими функционал
/ = ^М[^(/2)рх(/2)] + 4м
j* x^xdt
+
+ 4-м
^2
+ 4-м
\ tTkr^udt
Ji
i хт Abk2^ Axdt
Ji
являются управления
и — — k2bTAx,
где А — решение уравнения
А — Аа — а* А = — ₽
при условии
Д*(/2) = р.
Здесь
(П.4.9)
(П.4.10)
(П.4.11)
(П.4.12)
(П.4.13)
k\ 0 . .
0 k\ . .
k\2 0 ...
0 k?2 . . .
to
II
. . .k2m
, k~2 =
k~2
. . . . Km
— квадратные диагональные матрицы коэффициентов. Таким об¬
разом, синтез оптимальных линейных управлений для линейного
объекта сводится к решению уравнения (П.4.11).
Одним из наиболее удобных способов является выражение ре¬
шения уравнения (П.4.11) через весовые функции исходного объекта.
§ П.4] ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОБЪЕКТА
495
фундаментальной системой весовых функций объекта (П.4.2) на¬
зывается совокупность м2 функций wik (t, t'), матрица которых
w (t, О = В инь (Л t') || удовлетворяет уравнению
w+aw = 0, w(t',t')=l, (П.4.14)
где 1 — единичная матрица. Весовую функцию Wik (/, /') при t> t'
можно рассматривать также как реакцию координаты xt в момент
времени I на единичное «возбуждение» координаты xk в момент вре¬
мени или, что то же, как реакцию координаты xt в момент време¬
ни t на б-импульс, поданный на /г-й вход (правую часть /г-го урав¬
нения) в момент времени Система весовых функций wik (t, t')
является фундаментальной системой решений уравнений объекта и
матрица w = || wik || является неособой матрицей при любом ко¬
нечном Дифференцирование в (П. 4.14) осуществляется по первому
аргументу, так что правильнее записать
w(t, t') + aw (/, f) = 0, w (f, t') = 1. (П.4.15)
Если же дифференцирование осуществляется по второму аргументу,
то получим сопряженное уравнение:
-^-шт(/,О —атшт(/,0 = 0, w (Г, 0=1. (П.4.16)
Для доказательства (П.4.16) запишем тождество [П.28]
w (t, О w (/', о = w (t, о, t > t' > о
Дифференцируя по f, получаем
[^^(ЛО
Из (П.4.15) следует
W (О О + w(t, о ^^(/',0 = 0.
~^г w (t’, /J + aw (f, О = 0.
Поэтому
[ w (t, о] W (f, t]) — w (t, О aw (t', О = 0.
Умножая справа на w~l (t', /), находим
w (I, I’) — w (t, t') а = 0. (П.4.17)
Транспонируя это уравнение, получаем (П.4.16).
Покажем теперь, что решение уравнения (п.4.11) оптимальных
коэффициентов при граничном условии (П.4.12)
Л(0 = (t2, t)pw (t2, t) + (П.4.18)
496
ПРИЛОЖЕНИЕ
Действительно,
A (t2) = wT (t2, tj pw (t2, t2) = p,
т. e. граничное условие удовлетворяется. Далее
Л (/) = [ -^- 0Ут (*2. О | Р^ (Z2- 0 + (^2> О Р -^-О’ (^2. О —
- (/, 0 0 (0 w (t, I) + У -A [w* (Г, 0] 0 (Г) w (t',t) dt' +
t
^2
+ ^w-(t',f)p(t')^rw(t',t')di'.
1
Используя выражения (П.4.16), (П.4.17), получаем
А = а4 (0 w* (t2, t) pw (t2, t) 4- w” (/a, t) pw (t2, t) a(t) -— 0 (t) -f-
t2 tt
+ J aT (0 w* (f, t) 0 (f) tv (f, t)dt'+\ w' (f, t) 0 (f) w (f, /) a (t) dt' =
t _ t
Г t2
= aT tvT (t2, t) pw (t2, t) + J wT (t', t) 0 (/') w (t', t) dt' ->
t
Или
+ а-₽.
t J
А — Аа — а1 А = — р,
т. е. (П.4.18) действительно удовлетворяет уравнению (П.4.11) при
граничном условии (П.4.12).
Случай линейного объекта и линейных оптимальных управлений
является весьма важным. Поэтому сформулируем указанное положе¬
ние в виде специальной теоремы.
Теорема 4.1. Для линейного объекта
х а (/) х — Ьи с£,
оптимальными в смысле минимума функционала
/ = уМ[хт (/2) рх (^2)] + ~2“ № J хтР% dt
(П.4.19)
+
-i-М ^u'k-2udt +-g-M J
являются управления
xTAbk2bTAxdt (П.4.20)
Lii J
u = — WtrAx,
(П.4.21)
§ П.4] ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОБЪЕКТА
497
где
А = wT (/2, 0 рда (/2, t) + J да’ (Г, О р (/') да (/', t) dt'. (П.4.22)
Согласно терминологии, введенной в предшествующем параграфе,
эта теорема дает решение квазитерминальной задачи второго рода.
Для квазитерминальной задачи первого рода р = 0 и функционал,
а также выражение коэффициентов оптимальных управлений при¬
нимают вид
р2
1 = -i- М [х’ (Q рх (/2)] + 4“ м J dt +
Г *2
L*i
Г*2
т
L*i J
Л = ^т(/2, t)pw(t„ t). (П.4.24)
Для нетерминальной задачи без граничного условия функционал
равен
^2
7 = -±-М[хт(/2)Л(/2)х(/2)] + 4-М Jx’pxdZ +
^2
^2
^2
+ М j u^k-Hi dt + М j xTAbk2bTAx dt
(П.4.25)
LG
и матрица коэффициентов оптимальных управлений выражается
формулой
^2
Л = J да’ (/',/) р (Г) да (f, t) dt’. (П.4.26)
Для нетерминальной задачи со скользящим граничным условием
t2 = t + т и функционал и выражение для матрицы коэффициентов
оптимальных управлений принимают форму
/'4-т
А = да’ (t + т, t) рда (t т, t) + j да’ (/', t) р (f) да (/', t) di’. (П.4.28)
+ 4-м
"Z+t
\ u’&~2u dt
f xTAbk2b^Ax dt
J
t
1 2
J
t
498
ПРИЛОЖЕНИЕ
(П.4.29)
Стационарный объект. Стационарные оптимальные управления
без граничного условия
Для объекта с постоянными параметрами а = const (стационар¬
ного объекта) весовые функции зависят только от разности аргумен¬
тов w (t, t') — w (t — t'). Поэтому решения квазитерминальной за¬
дачи первого рода (минимизируемый функционал (П.4.23)) для ста¬
ционарного объекта имеет вид
и = —k2bJ Ах,
A = wT (/2 — t) pw (t2 — t).
Для квазитерминальной задачи второго рода (функционал (П.4.20))
решение имеет форму
^2
А = wT (t2 — t) pw (t2 — t) 4- \ wT (f — t) (t' — t)dt' =
t2—t
= wr(t2 — t)pw(t2 — 0+ f ^T(O)P®(e)d0. (П.4.30)
0
Коэффициенты оптимальных для стационарного объекта квазитер-
минальных управлений являются функциями относительного вре¬
мени t2 — t. Таким образом, даже для стационарного объекта ква-
зитерминальные оптимальные управления нестационарны. Это ука¬
зывает на то, что терминальные задачи должны ставиться лишь там,
где их постановка оправдана самой целью управления и где имеется
возможность контроля относительного времени t2 — t. Для нетер¬
минальной задачи без граничного условия оптимальные управления
стационарного объекта получаются стационарными. Для устойчи¬
вого стационарного объекта матрица коэффициентов оптимальных
управлений в задаче без граничного условия равна
оо оо
Д = j'ayT(*'-O₽ay(f — t)dt'= f (/)₽ау (/) dt. (П.4.31)
t о
Соответствующее скалярное выражение коэффициентов оптимальных
управлений через интегральные оценки произведений весовых функ¬
ций устойчивого линейного стационарного объекта
A‘ik = 5 Pvp,
v,p.= l
было приведено уже в первых публикациях по рассматриваемому
методу аналитического конструирования [П.17], [П.26].
Если линейный стационарный объект неустойчив, то при реше¬
нии задачи без граничного условия можно применить метод замены
переменных (см. § П.З). В данном случае величину х удобно
J* wvi(t)w^(t)dt (П.4.32)
о
J п4) ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОБЪЕКТА 499
задавать в виде экспоненты
% = ехр (-^),
где 1/Т больше характеристического числа [П.29] объекта, так что
объект в новых координатах заведомо устойчив. В соответствии с
общими выражениями (П.3.14) — (П.3.16) в данном случае будем
иметь следующее: для стационарного объекта оптимальными в смыс¬
ле минимума функционала
i=4-м fexp (—4г) ? <у]+
" ^2
jexp[
+4-м
xTAbk2bTAx dt
где ехр (—2//Т) — скалярный множитель, являются управления
и = — ехр k2bTAx, (П.4.33)
где
оо
ехр ( wT (/) (/) dt.
6
Управления (П.4.33) нестационарны вследствие наличия множите¬
ля ехр (—21/Т). Чтобы сделать оптимальные управления стацио¬
нарными, можно задать коэффициенты усиления каналов в виде
k] ехр (2//Т), где kt = const. Тогда получаем нижеследующее. Для
стационарного объекта
х + ах = bu + с%, а = const, b = const,
как устойчивого, так и неустойчивого, но с характеристическим чи¬
слом, небольшим 1/Т, оптимальными управлениями, минимизиру¬
ющими функционал
(П.4.34)
800
приложении
являются стационарные управления
и = -
где А определяется выражением (П.4.33). Для объектов, фазовые
координаты которых в свободном движении имеют резко отличаю¬
щиеся степени расходимости, целесообразно использовать преобра¬
зование координат с различными коэффициентами пропорциональ¬
ности
xt = (/) х* = exp [Xz (t — /J] x*,
где X, — положительные действительные числа. В соответствии с
общими выражениями (П.3.17) — (П.3.21), линейными уравнения¬
ми объекта и квадратичной функцией Q* в данном случае получаем
следующее: для объекта
(П.4.35)
п т г
4" 2 <куХу = 2 bijUj Д- 2 clk^
v=l /=1 fe=l
имеющего фундаментальную матрицу весовых функций w =|| Wik||,
оптимальными управлениями, минимизирующими функционал
являются управления
Щ - Ш bkjA*ik exp [- (X, + XJ (t - /J] хУ \ (П.4.37)
\l,k=] J
где
A*k= 5 pCgexp[—(Xv +А,ц)(/2 —/)]oyv< (/2, +
ЧЦ=1
c n
+ _ 2 ₽vn(Oexp[— (Xv + — *1)] Wvi (t', f) w^k
7 v,u=i
(П.4.38)
Из этих выражений как частные случаи можно получить предшест¬
вующие формулы.
| П.41 ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОВЪЕКТА Mt
Стационарный объект. Стационарные оптимальные управления
при скользящем граничном условии
Решение задачи для произвольного линейного объекта при сколь¬
зящем граничном условии выражается формулами (П.4.27), (П.4.28).
Для стационарного объекта формула (П.4.28) принимает вид
А = wT (т) pw (т) + j wT (/) pay (/) dt. (П.4.39)
о
Таким образом, для стационарного объекта оптимальными управ¬
лениями, минимизирующими функционал (П.4.27), являются управ¬
ления
и = — k2bTAxt (П.4.40)
где А выражается формулой (П.4.39). Матрица, определяемая
(П.4.39), постоянна и оптимальные управления (П.4.40) стационар¬
ны. Так же как в предшествующем случае, это является достоинст¬
вом рассматриваемого решения. Время т целесообразно назначать
в соответствии с желаемым временем переходных процессов в опти¬
мальной системе.
Преимущества определения коэффициентов оптимальных
управлений через весовые функции исходного объекта
Коэффициенты оптимальных управлений линейного объекта мо¬
гут определяться путем непосредственного решения системы урав¬
нений оптимальных коэффициентов (П.4.6) (матричная форма
(П.4.11)). Для квазитерминальных задач решение соответствует опре¬
деленному граничному условию и может определяться типовыми
методами интегрирования систем обыкновенных дифференциальных
уравнений. При скользящем граничном условии решение может
определяться таким же путем. Для построения нетерминального
управления без граничного условия определяется вынужденное
решение уравнений (П.4.6). Это решение численно может опреде¬
ляться путем последовательных приближений [П.27].
Однако вычисление А на основе указанных выше выражений по
фундаментальной системе весовых функций исходного объекта имеет
несомценные преимущества перед прямым решением (П.4.6) или
(П.4.11), особенно для объектов высокой размерности (высокого по¬
рядка). Действительно, система уравнений (П.4.6) с учетом симмет¬
рии коэффициентов Ац = Ац содержит -±-п (п + 1) уравнений и
неизвестных. При п = 10 это составляет 55, а при п = 100 — рав¬
но 5050. Таким образом, для объектов высокой размерности система
Уравнений оптимальных коэффициентов чрезвычайно громоздка.
Между тем для определения фундаментальной системы весовых
602
приложение
функций исходного объекта достаточно п раз (задавая каждый раз
единичное начальное отклонение очередной координате) проинтег¬
рировать уравнения самого исходного объекта, имеющие размер¬
ность п. Это — относительно простая задача даже при высоком п.
Она может решаться как с помощью цифровой вычислительной ма¬
шины (ЦВМ), так и с помощью аналоговой машины (АВМ), а иногда
и в общем аналитическом виде. Дальнейшие операции, необходимые
для вычисления коэффициентов оптимальных управлений, соглас¬
но формулам (П.4.22), (П.4.24), (П.4.26), (П.4.28), (П.4-.30), (П.4.31),
(П.4.33), (П.4.38), (П.4.39) сводятся к умножению, сложению, ин¬
тегрированию и просто и быстро реализуются посредством ЦВМ или
ручного счета (последнее для относительно простых задач).
Определение оптимальных управлений по весовым функциям
исходного объекта, кроме вычислительных преимуществ, имеет так¬
же то преимущество, что весовые (импульсные переходные) функции
исходного объекта могут в некоторых случаях определяться экспе¬
риментально, без разработки детальной математической модели
объекта, т. е. без решения задачи идентификации. Рассмотрение
о.крывающихся в связи с этим возможностей осуществляется, в
частности, в главе IV, посвященной аналитическому конструиро¬
ванию систем демпфирования аэроупругих колебаний. Заметим еще,
что в простых случаях синтеза оптимальных управлений для ста¬
ционарного линейного объекта на основе формул (П.4.31), (П.4.32)
могут оказаться полезными алгебраические выражения для интег¬
ральных квадратичных оценок весовых функций. Приведем соответ¬
ствующие формулы [П.26], [П.27].
Преобразование Лапласа фундаментальной матрицы весовых
функций стационарного объекта определяется выражением
(pl + a)W (р) = 1,
где 1 — единичная матрица, W (р) — обозначение преобразования
Лапласа оригинала w (t). Обозначим элементы матрицы
Г (р) = (pl + а)-1
(т. е. преобразования Лапласа весовых функций wiv (/)) через
Wiv (р). Тогда
где Avt- (р) — алгебраическое дополнение элемента v-й строки, /-го
столбца определителя |pl + а\\ aQ, а1У ..., ап — коэффициенты ха¬
рактеристического уравнения |р! + а \ = 0, в частности, aQ = | а |,
ап = 1 (скалярная единица); Ь™, ..., bvnl — коэффициенты пред¬
ставления Av/ (р) в виде полинома. Для интегральных квадратич¬
ных оценок весовых функций устойчивого объекта справедлива
g П.4] ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОБЪЕКТА
503
формула
lWviWyikdt = -^ SAX'11,
б ZUn/X <7=1
где Д — определитель, численно равный
Гурвица
(П.4.42)
старшему определителю
CLq
0
#2
о — а0
а4
ая
0,2
Д =
С1п^\ .
п-й строки, ^-го столбца
Д<7 — алгебраическое дополнение элемента
определителя Д;
B\vkli = b\vb^-, В'^ = ь№х - Ь‘№ -
В^ = ь№ - b‘2vbp - b‘№ + Ь‘№ + ь»,
в^ = Ь^.
Формула (П.4.32) с учетом (П.4.42) может быть записана в виде
Aik = 2 pvg i А.вГЦ- (П.4.43)
V,|1=1 <7=1
Хотя для задач высокой размерности определение оптимальных
управлений через весовые функции объекта имеет неоспоримое пре¬
имущество, в некоторых случаях, особенно для стационарных объек¬
тов невысокого порядка, прямое решение линейных уравнений
(П.4.6) или (П.4.11) оказывается целесообразным. Нетерминальные
оптимальные управления без граничного условия для стационарно¬
го объекта и функционала являются стационарными и их коэффи¬
циенты определяются алгебраическими уравнениями
2 Л’Аи 4" S ^kvClvi — р//г (П.4.44)
v=l V=1
или в матричной форме
Аа + атА = р. (П.4.45)
Неизвестные Aiv здесь имеют двойную нумерацию, поэтому для
использования стандартных программ решения систем линейных
алгебраических уравнений на ЦВМ необходимы некоторые преобра¬
зования. Соответствующий алгоритм образования матрицы стандарт¬
ной программы указан Р. М.Карапетяном [П.30]. Е. А. Барбашин,
рассматривая построение функций Ляпунова для л инейных стацио¬
нарных систем, предложил [П.31] буквенное выражение решения
504
ПРИЛОЖЕНИЕ
где
уравнений (П.4.45). При этом главный определитель системы урав¬
нений (П.4.45) имеет следующее выражение:
а11
• • •
•
<*12
°11 + й22
• • •
•
а (11,/7)
• a (ik, jl) •
• а (пп, jl)
а (11, пп)
• a (ik, пп) •
• апп
(П.4.46)
0 при
a (ik, jl) =
aki при
ал + akk при
аи при
Z=#J, £=/=/’> i=£l>
i = j, I,
i = j, k = Z, i k,
i = j = k = I,
a (ik, jl) = a (ki, jl) = a (ki, Ij).
Для некоторых простейших структур нестационарного исходного
объекта непосредственное интегрирование уравнений (П.4.6) может
осуществляться в квадратурах или элементарных функциях 1П.27].
Оптимальные управления для простейшего линейного объекта
Сопоставление метода Летова — Каймана с рассматриваемым
методом аналитического конструирования в общей качественной
форме осуществлено в § П.2. Для конкретного сравнения следует
решить конкретные примеры обоими методами. Ввиду больших
вычислительных трудностей общее буквенное решение по методу
Летова — Калмана удается получить только для самых простых
объектов. По-видимому, самым простым одномерным линейным
объектом является интегрирующее звено: х = и, где х и и — ска¬
лярные величины. Задачи синтеза управления и подобным объектом
путем минимизации функционала
/j
<п-4-47)
или функционала
tz
/= 2_Рхг(/2)+4-р^2^+4 (ПЛ48)
t, G G
можно рассматривать как задачи оптимизации управления скоро¬
стью некоторой точки, при котором штраф зависит от квадрата
}П,4] ОПТИМАЛЬНЫЕ УПРАВЛЕНИЯ ДЛЯ ЛИНЕЙНОГО ОБЪЕКТА 505
конечного отклонения точки, интеграла от квадрата текущего
отклонения, интеграла от квадрата скорости, а для функционала I
зависит также от интеграла
^2
) (Ax)2dt.
Минимизация Г соответствует задаче Летова — Калмана. Ее реше¬
ние получается в виде и = — где в данном случае А определя¬
ется скалярным дифференциальным уравнением Риккати
<4 —£М2 = —Р (П.4.49)
при граничном условии А (/2) = р. Решение уравнения (П.4.49)
имеет вид
р ch [Л /₽ (/2 - 0] + sh [ft /р 02 - 0]
А (/) = - .
ch [fe /р (tt - /)] + -£=- sh [k Kp (it — 0]
Величина А постоянна, т. e. оптимальное управление стационарно,
только при -~=- = 1, когда А (/) = р. В оптимальной системе
X + k2A (/) х = 0.
Решение этого уравнения имеет вид
ch[feKP(/2-0]+-^-sh[*/₽(/2-01
х(0 = х(А) У . (П.4.50)
ch (k /РТ) -I- Sh (ft /рт)
где Т — t2 — tr. Обычно необходимо, чтобы | х (t2) | | х (tv)
Согласно (П.4.50)
£01)
ch (k КрГ) + -М- sh (k /РТ)
х(/2) =
и указанное условие выполняется, если величина kj/flT существен¬
но больше единицы. Значение функционала /' в рассматриваемой
оптимальной системе
pchtfe/pO+^sh^/pT)
7min = -1. Х2 (Z1) А (/1) = _L Х2(Л) * . (П.4.51)
ch (k /рТ) + sh (k /РТ)
Если k КрТ существенно больше 1, то
506
ПРИЛОЖЕНИЕ
Рассмотрим теперь решение задачи аналитического конструиро¬
вания оптимального управления для того же простейшего объекта
х = и на основе минимизации функционала (П.4.48). В этом случае
коэффициент А (t) оптимального управления и = —k2Ax опреде¬
ляется уравнением
А = — р (П.4.52)
при прежнем граничном условии A (t2) = р и
А = р — Р(/ — /2). (П.4.53)
Согласно общей теории минимальное значение функционала I мож¬
но записать сразу:
7min = 4- Л (71)х2 (71) = 4 (Р + Р?)х2 (71)-
Заметим, что при k У"рТ 1 величина (П.4.51) имеет практиче¬
ски такое же значение. Однако для того чтобы сопоставить качество
процессов управления в рассматриваемых двух простейших опти¬
мальных системах, следует определить для (П.4.53) величину
tz
/min = 4 Р*2 (7а) + 4 J х2 di + 4 k* j А2х2 (П.4.54)
Здесь х (/) определяется уравнением
х + k2 [р — р (/ — /2)] х = 0
и равно
х (7) = х (/1) ехр k2 [р + 4 рт 4- 4 ₽ (7г ~ 7)] (7 — . (П.4.55)
Величина
х2 (/2) = х (/J exp J — k2 (р + 4 РТ) 71]
много меньше по модулю |x(/i)|, если
^(р.+4Ит>>1- (ПА56)
В соответствии с (П.4.54), (П.4.55)
I П.б] ОБЪЕКТ С АНАЛИТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ
507
Наименьшее значение этой величины получается при
и оно равно
т. е. то же, что в оптимальной системе, синтезированной по методу
Летова — Калмана. Этот простейший пример иллюстрирует общее
сопоставление методов аналитического конструирования, изложен¬
ное в § П.2.
§ П.5. Оптимальные управления для нелинейного объекта
с аналитическими характеристиками
Допустим, что функции исходного объекта, являясь нелиней¬
ными, могут быть представлены степенными рядами, сходящимися
во всей рассматриваемой области фазового пространства, или поли¬
номами
п
п
п
fi=^lalixi+ 5 ацкх1х1г+ 2 aljkixlxkxl + •••, (П.5.1)
/=1 /Л=1 /Л/=1
ГДе G'ijk — ^ikjt Clijkl = CLijlk ~ ftiklj = d’lkjl = CLiljk ~ Clukj, • • •
постоянные коэффициенты или функции времени, одинаковые при
любом расположении индексов, начиная со второго. Положительно
определенные функции Q, V3 минимизируемого функционала в об¬
щем случае зададим также в виде степенных рядов
1 I '
Q = ~2 5 $UXlXi + — 2 ViikXtXjXk +
+ 4- ^ijkiXiXjX^t + • • • , (П.5.2)
* г ; ь /—1
+ ~т 2 PijkiXiXjXkxl + • • • , (П.5.3)
** ; ; b /—I
где pt7, pz/^, ... — постоянные величины или функции времени,
не меняющиеся при перестановке индексов, pz/, р^, ... — постоян¬
ные величины, одинаковые при любом расположении индексов.
Решение уравнения
п
дУ
dt
(П.5.4^
(М ■
S08
ПРИЛОЖЕНИЕ
в данном случае целесообразно искать также в виде ряда
1 XI j **
= “2" 2 + — S AijkXiXjXk +
1 V*
+ -г- 5 AijkiXiXjXkxt + • • • , (П.5.5)
* ; f ъ / —1
где Ац, Aijk, ... — в общем случае функции времени, обладающие
той же симметрией по индексам, что и. коэффициенты рядов (П.5.2),
(П.5.3). Принимая во внимание, что
п п п
-д ~ 2 AiiXj + 2 AijkXjXk + 2 AijklXjXkXi + • • • , (П.5.6)
oxi /=1 j,k=\
подставляем эти выражения в (П.5.4). Приравнивая коэффициенты
при одинаковых произведениях независимых переменных, находим
п
Р=1
п
п
= —fiijk + 5 (Api^pjk + APjapik-\- ApkaPij),
p=i
n
(П.5.7)
p=i
+ APjkCiPii + APjiaPik + Армеец) 4-
n
С первого взгляда структура этой системы уравнений кажется до¬
вольно сложной. Однако алгоритм построения каждого очередно¬
го уравнения относительно прост и может быть записан в общем
виде:
п
$ П.5]
ОБЪЕКТ С АНАЛИТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ 609
п
+ (N — 1)(N — 2)
п
Индексы всех сомножителей здесь являются дополнительными в
том смысле, что в совокупности индексы первого, сомножителя без
первого индекса р и индексы второго сомножителя также без индек¬
са р образуют полную совокупность индексов ijk...s, расположен¬
ных в каком-либо порядке. Назовем порядком коэффициента а, А
или р число индексов, уменьшенное на единицу. Тогда api, APj,
₽// будут коэффициентами первого порядка, apiki АР]ь, fiijk
коэффициентами второго порядка и т. д. Существенно различными
будем называть коэффициенты объекта, управлений или функциона¬
ла (сопоставляются коэффициенты одной из этих групп) с су¬
щественно различными индексами в том смысле, что ни один из этих
индексов (совокупностей индексов ijk...) не может быть получен из
другого путем перестановки. Теперь структуру уравнения (П.5.8)
можно описать следующим образом. Сумма в левой части уравнения
представляет собой сумму произведений всех (в рамках заданной
совокупности индексов ijk...s) существенно различных первого по¬
рядка коэффициентов объекта на коэффициенты управлений (N —
— 1)-го порядка с дополнительными индексами. Первая сумма в
правой части (П.5.8) является суммой произведений всех (в рамках
той же заданной совокупности индексов) существенно различных
коэффициентов управлений первого порядка на коэффициенты
(2V — 1)-го порядка объекта с дополнительными индексами. Следую¬
щая сумма в правой части, имеющая множитель 2I/(JV — 1), пред¬
ставляет собой сумму произведений всех (в рамках заданной сово¬
купности индексов) существенно различных коэффициентов второго
порядка управлений на коэффициенты объекта с дополнительными
индексами (порядок N — 2). Далее суммы строятся аналогично.
Последняя сумма (с коэффициентом опять 2!/(УУ — 1)) получается
равной сумме всех (в рамках заданной совокупности индексов) су¬
щественно различных коэффициентов управлений (N — 2)-го поряд¬
ка на коэффициенты второго порядка объекта с дополнительными
индексами. Для задач терминального управления уравнения (П.5.8)
должны решаться при граничном условии
^ijk..,s (/2) — (G jt • <• ♦ ♦ s = 1« • • •« N — 2* • • •). (П.5.9,)
610
ПРИЛОЖЕНИЕ
Для задач без граничного условия должно определяться вынужден¬
ное решение уравнений (П.5.8). Для задач со скользящим гранич¬
ным условием
Aijk...s (t — Pijk...s jt • • • > s — 1,2, . . . , /2, N — 2, 3, ...).
(П.5.10)
В любом случае решение уравнений (П.5.8) (развернутая форма —
(П.5.7)) может осуществляться последовательно. Коэффициенты пер¬
вого порядка оптимальных управлений определяются через коэф¬
фициенты первого порядка объекта точно так же, как коэффициен¬
ты линейных оптимальных управлений для линейного объекта
(сравнить (П.4.6) и (П.5.7)). Таким образом, коэффициенты первого
порядка оптимальных управлений для нелинейного объекта могут
быть выражены через фундаментальную систему весовых функций
линейного приближения объекта согласно описанным выше фор¬
мулам.
Покажем, что такая возможность имеется и для коэффициентов
старших порядков. Обозначим фундаментальную систему весовых
функций сопряженного линейного приближения объекта k (/, Г) =
= || кц (t, t') ||. Матрица k (/, /') удовлетворяет уравнению
или, в скалярной форме,
кЧ = Р?1apikph kli f) = {0 при i / }
(П.5.11)
(П.5.12)
(i,/= 1,2, ..
Запишем тождества
n).
(П.5.13)
d
dt
Введем для краткости обозначения
При этом
'1 при i = v, / = [л, k = е, ..., s = х;
к0 при всех других условиях.
(П.5.14)
(П.5.15)
§ п-5]
ОБЪЕКТ С АНАЛИТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ
511
Подставляя в (П.5.13) выражения производных согласно (П.5.12),
находим
ЬУ]1 2 (apikpi + = о,
p=i
kW - 2 (apik^ + apjk%:e + apkk$F) = 0>
рт=1
(П.5.16)
- 2 (api^ + aPiW:::* + • • • + apsl&) = 0. ■
p=l.
Покажем, что вынужденное решение уравнений (П.5.7), (П.5.8)
может быть представлено в следующем виде:
п
— 2 l^pv (О Ярце (О + ^4рц (О G'pve (?') +
р=1
+ Ape (t') dpvpL (О1|
Aiik...s ({) = -[ 2 (/, П {pvn...x (П -
— 2 Mpv (О ЯрЦ...х (/') + АР1Л (f) aPv.„x (О + • • • +
р=1
(П.5.17)
+ АрХ (t ) apv,„p (t )] Т7 j— 2 Mpvu (^ ) Яре...% (О +
/v 1 Р=1
+ Apve (f) аРц...х (tf) + • • • + Adpx (f) аРу...т[ (01 —
3!
(W — 1)(W —2)
n
2 MpVUE (О Яр£. ,.x (/') + ’ • ‘ +
P=1
+ ^pnpx(^) apv...^(/,)l
512
ПРИЛОЖЕНИЕ
Для того чтобы убедиться в справедливости этих формул, достаточ¬
но продифференцировать выражения (П.5.17) по времени, подста¬
вить выражение (П.5.16), учесть условие (П.5.15) и сопоставить с
уравнениями (П.5.7), (П.5.8). Так, для общего члена находим
1 п п
(/) = J 2 2 [apt (f) ktf;:? (t, t') +
v,u X=1 p=l
+ aPj (/) (^, О 4~ • • * + aps(t) (t, ^)1
X 12 Mpv (^) Ярц.,.% (0 4" Ару. (O apv...% (t') + • • •
• • • 4“ Лрх ) apV—P (/')] 4~ ■д?—“Г" 2 Mpv|n (t ) #pe...y (O +
/v 1 p=l
+ Ap^ (t') ЯрЦ...х (/') + • • • + APPX (f) apv„.i\ (/')] +
4 v i 2 Mpvy,...-n (^) #ppx (04- (^) aPp\y (04- • • •
/v 1 p=\
• • • + Ape...x (f) Орчр (f)]} dt' - (f) +
4" 2 [Api (/) aPjk...s (0 4" Apj (t) aPi.„s (t) 4- • • •
p=i
• • • 4- Aps (/) aPi_r (01 + —г 2 [Apij (/) aPk...s (0 +
/v 1 p=i
4" Apik (0 dpj'.'S (t) + • • • + Aprs (t) O'Plj^.q (01 +
(П.5.18)
4" Д/ _T" 2 [Aplj...q (t) dprs (/) 4" Apii.„s (t) aprq (0 + ‘ *
/v 1 p=l
• • * 4- AplS...q (t) Clpii (/)]. f
Заметим, что вследствие симметрии выражения в фигурных скобках
относительно индексов v, р, ..., % (эта величина не меняется при про¬
извольной перестановке этих индексов) суммы
2
v,g,...,x=l
одинаковы при любом расположении верхних индексов у .
Осуществляя указанное знаком X перемножение под интегралом в
(П.5.18), принимая во внимание только что сделанное замечание и
выражения (П.5.17), получаем (П.5.8). Таким образом, выражения
§П.5]
ОБЪЕКТ С АНАЛИТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ
513
(П.5.17) действительно удовлетворяют уравнениям (П.5.8) и, не
завися от начальных условий, являются вынужденным решением
этих уравнений. Матрица весовых функций сопряженных уравне¬
ний линейного приближения объекта связана с матрицей весовых
функций уравнений линейного приближения того же объекта соот¬
ношением
k(t, Г) = оут(Г, /).
В самом деле, из тождества
ww~x = 1, о"1 + ww”"1 = О
и
w + aw = О
следует
ww""1 ^-а = 0, w~x — w~'a = 0, (оТ1)1 — ат (&гГ’1)т = 0.
Последнее совпадает с уравнением (П.5.11) матрицы весовых функ¬
ций сопряженного линейного объекта. Совпадают и начальные
условия. Таким образом,
= nr.
Но
= 1, = w ' (t,t'), [w ' = w1
и
k (t, f) = W* (t'y t).
Отсюда следует
= ... wxs(f,t). (П.5.19)
Чтобы записать выражения (П.5.17) коэффициентов оптимальных
управлений в окончательной форме, заметим еще следующее. Форму¬
лы (П.5.17) можно, в частности, применять при синтезе нетерми¬
нальных управлений без граничного условия *). В таких задачах
оптимальные управления не должны содержать относительное вре¬
мя. Поэтому интегралы в (П.5.17) или должны быть неопределен¬
ными, или иметь бесконечный предел t2= оо. Полагая /2 = оо, учи¬
тывая (П.5.19) и меняя местами пределы интегрирования, получаем
следующую окончательную форму выражений коэффициентов опти¬
мальных управлений:
Ац (0 — 2
V,|Ll:=l
оо
t
(П.5.20)
I
Aljk (0 = S f Wvl (t', t) Wuj (t', f) Wek (t', t) Pvue (!') —
V,|Ll,8=l I I
*) Обобщение на случай терминальных задач рассмотрено ниже.
17 А. Ал Красовский
514
ПРИЛОЖЕНИЕ
— 2 [^pv (?') Ярце (0 4" ^PP (I ) apv& (0 4"
Р=1
4“ Ape (?') ^pvjJL (011 ^0
co
t
n
2
v(|n,...,x=l
^%s (O f) x
• • • + Арх (O apv^p (01
'~N~'
2!
tf-1
2 Mpvp, (t ) ^pe...% (04"
P=1
(П.5.20)
+ Apve (t') (O + • • •
лми
4" Appx (?') (01
K
3!
(TV — 1) (/V — 2)
2 Hpvjxe (0 <2p£...% (?') + • • •
P=1
• • • 4- Лрпрх (О (01 —
AM
2!
W — 1
n
2 [z4pvin...'n (O cipp% (tf) + • • •
Интегралы здесь предполагаются сходящимися. Это ограничение не
является сильным, так как согласно предыдущему нетерминальные
управления без граничного условия целесообразно применять для
объектов устойчивых или устойчивых в преобразованных координа¬
тах. В этом случае интегралы в (П.5.20) сходятся по крайней мере
при ограниченных pV|n, Pv^e, ...» ^vu8> ••• • Полученный результат
можно сформулировать в виде теоремы.
Теорема 5.1. Если невозмущенное состояние объекта
п п
Xi + 2 ацХ/ 4- S aiikXjXk +
/=i /,й=1
п т г
+ 2 ai/kiXjXkXi + • • • =2 ф//«/ + 2 (П.5.21)
/Д/—1 /=1 fc=i
; П.81
ОБЪЕКТ G АНАЛИТИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ
515
асимптотически устойчиво, то оптимальными управлениями, мини¬
мизирующими функционал
п
(^2) (^2) 4*
U=1
п
Ф “з" S Xk(^) 4" ••• 1’4
/,/Л=!
п
4- М J ( 4 X ^х, + 4 ^ikXtXjXk + • • • j dt +■
\ './=i '" '
m ,
,де
L/=1 <t
4—м
я
dt 4 — М
Р
< т ‘г
SJ
i—1 ¥
/=1 tl -
т {2
n n
4 ami*ixi 4 AkusXiXiX3 4
t,Z=l 1,1, s=l
(П.5.22)
являются управления
[it l n n
2 Ф/г/ \ 2 AkiXt 4 3 AkuXiXi 4
k=l V=1
n lp-1
4 5 AkiisXiXiXs 4 • • • , (П.5.23)
i,l,s=l J
где коэффициенты при t2 = оо имеют выражения (П.5.20). Формулы
(П.5.20) удобны при численном решении задачи синтеза и для объек¬
тов высоких размерностей позволяют очень сильно сократить объем
вычислений в сравнении с прямым решением уравнений (П.5.7),
(П.5.8). Действительно, если требуется определить коэффициенты
до W-го порядка, то общий порядок системы уравнений (П.5.7),
(П.5.8) будет приблизительно равен nN/N\ (с учетом симметрии коэф¬
фициентов). При п = 20, N = 4 это составляет около семи тысяч.
Таким образом, для объектов высоких размерностей система урав¬
нений (П.5.7), (П.5.8) исключительно громоздка.
Между тем основу определения искомых коэффициентов с по¬
мощью (П.5.20) составляют весовые функции линейного приближе¬
ния объекта, которые определяются легко путем интегрирования
системы линейных уравнений n-го порядка. Дальнейшее согласно
(П.5.20) сводится к перемножению, сложению, интегрированию и
Др., что требует умеренного объема элементарных арифметических
операций и весьма легко реализуется с помощью ЦВМ. Заметим,
что для стационарного устойчивого объекта формулам (П.5.20)
17*
516
ПРИЛОЖЕНИЕ
можно придать следующий вид:
п
Aij = 3 Pv|n»A/ix,
v,h=1
n
п
Aijk = 2 Pvp,8 — 2 (Apv^p^g -ф- АрцЯруе -ф- • • •
- - - • р=1
v,ji,e=l
• • • ApzClpvij) Jvge>
• ••••«?••
n
Aijk...s= 2 P'
п
5 (АруЯрЦ' ^ -ф ApnCipV"X • • •
p=i
2! п
• • * + A>x^pv...p) ъг 1 2 (ApVVLapQ..,^ -ф-
1 1 p=i
+ ^pve#pp,...x + • * • + ^PX^pv.-.n) —
3! п
(fl ЩДГ 2) + • • • -ф- ^4pnpx^pv...^)
(П.5.24)
oo
Лц.'.’е = j Wvl (t) W^j (t) ... Wes (f) dt
0
— интегральные оценки произведений весовых функций. Для ква-
зитерминального случая самая простая форма решения получает¬
ся при квадратичной назначаемой части функционала, т. е. при
'Ч п
| -ф-
J i1
4-М 2 PiiXi(t^Xj(t2) +фм f £
{т Г п
S f ki S чы *
i=i £ L t=i
/ п п п X
К Ак1х{ 4- J] AkiiXM -f- Аш^х^ + • • • I
M—l /
U./-1
4- —м
Q
2ЖР +>
L/=l tt J
Р
dt\-
vp,...e«
J
п
1 =
т h
1
P
§ П.6] ОБЪЕКТ С КУСОЧНО-ЛИНЕЙНЫМИ ХАРАКТЕРИСТИКАМИ 517
В этом случае коэффициенты линейных членов аргументов управле¬
ний определяются формулами (П.4.22)
п
Ац (t) = 5 (/2,0 О +
остальные коэффициенты Ацк (/), А^м (0» ••• выражаются форму¬
лами (П.5.20), в которых следует положить pvtte (/') = • • ■
• • • = Pvg...% (h = 0 и верхний предел интегрирования (оо)
заменить на t2.
§ П.6. Оптимальные управления для объекта
с кусочно-линейными характеристиками
В главе I указывалось, что характеристики многих объектов
допускают кусочно-линейную аппроксимацию вида (1.93). При та¬
кой аппроксимации исходные уравнения объекта уступают место
N системам уравнений (субобъектам)
п т
п
+ 2 °4k^k 4" #0Z = S
(П.6.1)
каждое из которых имеет силу только в соответствующей области
фазового пространства. Кусочно-линейное представление особенно
удобно для объектов, имеющих характеристики с насыщением, в
частности, для исполнительных устройств, рассматриваемых как
часть обобщенного объекта. В связи с этим целесообразно обобще¬
ние рассматриваемого метода аналитического конструирования на
объекты с кусочно-линейными характеристиками.
Основная теорема (§ П.2) для каждого субобъекта, очевидно,
сохраняет силу, но окончательное решение имеет особенности.
Функцию Q оптимизирующего функционала зададим почти одина¬
ковой для всех областей Gv фазового пространства (всех субобъек¬
тов). Эту функцию назначаем в виде положительно определенной
квадратичной формы
п
где cv — независимая от координат величина (постоянная или функ¬
ция времени). Очевидно, что введение величины cv ничего не меняет
в существе критерия оптимизации, но, как видно из дальнейшего,
необходимо для получения решения. Функцию V9 также задаем в
518
ПРИЛОЖЕНИЕ
виде положительно определенной квадратичной формы
1
V3=~9- 2 PlkX( (/а) xk (/2).
z i,k=\
(П.6.2)
Рассматриваем детерминированный случай. Таким образом, миними¬
зируемый функционал назначается в виде
n / п
I = (^2) \ I 4*
/,/2=1 \ i,k=\
<n-6-3>
где V — решение уравнения
n / n \ n
~ S I a°z + S J=~ ~ 4“ S ^ikXixk (п.6.4)
при условии
1 n
V/^t, = -S- 3 PzfeX/X*.
z i,k=l
Под t± и t2 можно понимать различные моменты времени. Так, мож¬
но полагать, что /х, t2 — начальный и конечный моменты пребыва¬
ния изображающей точки в данной области Gvфaзoвoгo пространства.
Однако в этом случае определение самих этих моментов представ¬
ляет самостоятельную задачу. Проще под t2 понимать момент вре¬
мени, в который замкнутая система с синтезируемым управлением
приходила бы практически в невозмущенное состояние, если бы
область Gv занимала все фазовое пространство. Иными словами,
проще всего синтезировать управления в областях Gv так, как буд¬
то каждый данный субобъект является единственным и занимает
все фазовое пространство. В последующем из полученных таким об¬
разом N групп (по числу субобъектов) управлений «сшиваются»
общие управления. В рамках такой постановки задачи возможны
все рассматриваемые в § П.З, § П.4 решения (квазитерминальные
первого и второго родов, нетерминальные без граничного условия
и со скользящим граничным условием). Решение уравнения (П.6.3)
ищем в виде
V = 2 -у 2
/=1 /,/=1
(П.6.5)
§ П.6] ОБЪЕКТ G КУСОЧНО-ЛИНЕЙНЫМИ ХАРАКТЕРИСТИКАМИ 519
Подставляя это выражение в (П.6.4) и приравнивая коэффициенты
при одинаковых степенях, находим
(П.6.6)
Первое из этих соотношений можно рассматривать как выражение
для cv и не принимать во внимание. Нижнее уравнение (П.6.6) пол¬
ностью совпадает с уравнением коэффициентов оптимальных управ¬
лений обычного линейного объекта и решение его выражается через
соответствующие весовые функции. Если, в частности, использо¬
вать нетерминальное решение со скользящим граничным условием,
т. е. полагать t2 = t + т, = /, то матрица коэффициентов выра¬
зится формулой (П.4.28):
Н-т
= [оЛ (/ 4- т, /)]т pwv (t + т, 0 + j [оуv (f, /)]т (f, t) dt', (П.6.7)
t
где (/, f) — фундаментальная матрица весовых функций v-го
субобъекта, удовлетворяющая уравнению
tiv + aW = 0, wv(f,f) = 1.
Если объект является стационарным, т. е. av = const, то
Av = [аЛ (T)]Tpwv (т) + J [иЛ (ЭД’ (0 dt. (П.6.8)
О
Среднее из уравнений (П.6.6) в матричной форме имеет вид
= (П.6.9)
где До, ао — матрицы-столбцы. Решение (П.6.9) обязано удовлет¬
ворять граничному условию
л?(/2) = о, (П.6.10)
так как при t — t2 функция (П.6.5) должна обращаться в (П.6.2).
Уравнение (П.6.9) является сопряженным по отношению к уравне¬
нию объекта и его фундаментальная матрица весовых функций,
Удовлетворяющая уравнению
kv-(aykv = 0, kv(t',t') = l,
520
ПРИЛОЖЕНИЕ
связана с матрицей wv соотношением
Г(ЛГ) = [аЛ(/'Ж (П.6.11)
(см. § П.5). Для общего случая (Д\ ао зависят от t, объект неста¬
ционарный) решение уравнения (П.6.9) при граничном условии
(П.6.10) имеет вид
До = — \kv (t, f) А\Г) ао (/') dt' =
h
= — ( (f, 0Г (?) & (/') dt'. (П.6.12)
t
При скользящем граничном условии и стационарном объекте, когда
Av = const, ао = const, t2 = t + т, wv (t\ t) = wv (tf — /), выражение
(П.6.12) принимает форму
л? = -j[wv(0M«.
о .
Сформулируем окончательный результат в скалярной форме при¬
менительно к стационарному объекту и скользящему граничному
условию.
Теорема 6.1. Если объект описывается уравнениями (П.6.1)
п п Ч
Х.+ + (Пб13)
а\ = const, ali = const (f, k = 1,2, ..., n), J
каждая группа которых (соответствующая определенному v) спра¬
ведлива в области Gv фазового пространства, то оптимальными
управлениями, минимизирующими функционалы
п /и \
/v = Pik^i (t + т) xk (t + т) 4- I cv + j dt 4"
i,k=l / \ i,k=l /
m yr « / n \lp
+ y S J \"^y/ S j ^kj ^kXkJ М
(П.6.14)
для области Gv, являются управления
jyb 4>kj 4- 2 AtkXtj
p—i
*
(П.6.15)
§ П.71 ОБЪЕКТЫ С НЕПОЛНОЙ СТЕПЕНЬЮ НАБЛЮДАЕМОСТИ 52]
(П.6.16)
где коэффициенты Лоа выражаются формулами
п т п
Aik = 2 PpqWll (т) W^k (т) + J (0 wlk (О
Р.?=1 0 р,<7=1
" Г
Alk = — 5 J Wkp (/) dtAvpqalq.
P,q=\ о
При р = q = 2 оптимальные управления являются линейными в
каждой из областей Gv. При любом р аргументы оптимальных управ¬
лений в областях Gv являются линейными функциями, состоящими
из постоянных (в области Gv) величин и линейных однородных форм
фазовых координат. Как постоянные составляющие А о*, так и коэф¬
фициенты Avik различны для различных областей фазового простран¬
ства. Таким образом, для кусочно-линейного объекта оптимальными
в указанном смысле являются управления с кусочно-линейными ар¬
гументами и постоянными составляющими.
Поверхности, разделяющие области Gv, обычно имеют простую
топологическую структуру. В связи с этим осуществление переклю¬
чений «законов управления», т. е. реализация полученных кусоч¬
но-непрерывных оптимальных управлений, не встречает особых
затруднений. Заметим, что синтезированные указанным путем
оптимальные системы можно отнести к системам с переменной струк¬
турой (СПС) по тому формальному признаку, что в каждой области
Gv фазового пространства действует свой закон управления. Одна¬
ко эти системы, за исключением особых случаев, не относятся к
класу СПС, разработанному С. В. Емельяновым и его учениками
1П.32], 1П.ЗЗ].
§ П.7. Аналитическое конструирование оптимальных управлений
для объектов с неполной степенью наблюдаемости
Существует широкий класс объектов, часть фазовых координат
которых недоступна как для непосредственного, так и косвенного
измерения. Невозможность контроля части фазовых координат мо¬
жет иметь место как вследствие отсутствия соответствующих датчи¬
ков, так и вследствие действия интенсивных шумов, неотделимых
от полезных сигналов. Невозможность контроля части фазовых ко¬
ординат возникает также при неполной наблюдаемости по Калману
1П.34], [П.35]. Пусть объект описывается уравнениями (П.2.1)
tn Г
х{ + ft (Х1, .. •, Хп, о = 2 Фо«/ + 2 ’Ыа- (П.7.1)
/=1 fc=l
Он может быть обобщенным объектом, включающим формирующие
фильтры, датчики, исполнительные устройства и др. Координаты
522
ПРИЛОЖЕНИЕ
xlf x2f ...» xd, d < n, доступны для контроля и могут быть использо¬
ваны в управлениях. Координаты л^+ь xd+2, ...» хп не поддаются
измерению и не могут фигурировать в синтезируемых управлениях.
Степень наблюдаемости равна d/п < 1. Очевидно, что строго опти¬
мальные управления (П.2.4), минимизирующие функционал
(П.2.2), при данном условии нереализуемы. Действительно, решение
уравнения (П.2.3), за исключением особых случаев, зависит от всех
фазовых координат xlf хп. Соответственно и управления (П.2.4)
зависят от всех фазовых координат и при неполной степени наблю¬
даемости неосуществимы. Таким образом, неполная степень наблю¬
даемости несовместима со строгой оптимальностью в смысле миниму¬
ма функционала (П.2.2) с заданной функцией Q. Однако в особом
случае управления вида (П.2.4) являются осуществимыми оптималь¬
ными управлениями и при неполной степени наблюдаемости. Это
случай, когда
• V (Хр • • • > О = d (^i> • • • > %d) п—л • • • > хл), (П.7.2)
т. е. когда функция V состоит из двух слагаемых, одно из которых
зависит только от наблюдаемых координат, а второе — от ненаблю¬
даемых координат и, кроме того <pz/ = 0 при i =# /, = 1.
В этом случае оптимальными управлениями, минимизирующими
функционал
Ц = М (Е, [*! (/2),
(П.7.3)
являются управления
«/ = —*’ /= 1,2, ...» d.
Доказательство этого положения такое же, как основной теоремы
(см. § П.2). Подобное решение задачи с неполной степенью наблюда¬
емости, конечно, весьма удобно, так как позволяет применить все
изложенные достаточно мощные методы, разработанные для случая
полной степени наблюдаемости. Однако выполнение соотношения
(П.7.2) и ф// = 0 при i Ф j является весьма редким особым случа¬
ем. Конечно, практическая применимость управлений, получаю¬
щихся простым отбрасыванием в управлениях с полной степенью
наблюдаемости неконтролируемых членов, может быть шире упо¬
мянутого особого случая. Подобное почти всегда бывает с прибли¬
женными методами. Однако здесь уже не существует строгого обо¬
снования применимости указанного подхода. Более общим является
П.7] ОБЪЕКТЫ С НЕПОЛНОЙ СТЕПЕНЬЮ НАБЛЮДАЕМОСТИ 523
способ, основанный на приближенном решении уравнения
+ (П.7-4)
Этот способ применим не только при неполной степени наблюдаемос¬
ти, но и в более общем случае, когда из условий реализуемости опти¬
мальных управлений задана форма функции V. Точное решение
уравнения (П.7.4) в этом случае, вообще говоря, невозможно, одна¬
ко приближенное решение, удовлетворяющее уравнению
T-S-g-A + в-ле., (П.7.5)
/=1 1
может быть при достаточно малом A Q вполне приемлемым. Действи¬
тельно, при выполнении соотношения (П.7.5) вариации управлений
(П.2.16) соответствуют вариациям функционала (см. П.2.19)
h
Z + 67 = M(V[x1(/1), .... хя(/х),4]) + УAQt# +
При достаточно малом AQ управления
близки к оптимальным. Для отыскания приближенного решения
уравнения (П.7.4) в заданной, удобной с точки зрения реализации,
форме можно минимизировать различные оценки левой части этого
уравнения [П.23].Так, можно минимизировать
G t2
j AQ dt, J AQ2 dt, f AQ2 dx± ... dxn.
ti G G
Здесь в последней оценке интегрирование ведется в фазовом прост¬
ранстве по области G допустимых отклонений координат в опти¬
мальной системе. Для минимизации подобных оценок на множестве
функций заданной формы можно использовать известные прямые
методы вариационного исчисления, в частности, метод Рица. Так,
если V ищется в виде суммы заданных функций
V = ^dvVv,
(П.7.6)
524
ПРИЛОЖЕНИЕ
где dv — неизвестные постоянные коэффициенты, рассматривается
случай стационарного объекта и стационарного управления (нетер¬
минальная задача) и используется оценка
е / п dV \2
= J I — S X dv ~дхГ Ъ I dX1 • • ' dx"’
G \ Z=1 v /
то. условия экстремума по коэффициентам имеют вид
ц G \ i=l v / Z=1
Отсюда получается система линейных алгебраических уравнений
для определения dv:
• 2 ^ixvdv = Уц, (П.7.7)
где
= УQS ^r^dXi • • •dXn-
G 1=1
(П.7.8)
Отыскание приближенного решения уравнения (П.7.4), удовлетво¬
ряющего условию неполной степени наблюдаемости, возможно так¬
же путем приближения в пространстве коэффициентов представле¬
ния V в виде степенного ряда. Для линейного объекта и квадратич¬
ного функционала соответствующий способ рассмотрен в [П.26],
[П.27]. Он заключается в следующем. Для линейного объекта коэф¬
фициенты оптимальных управлений при полной степени наблюдае¬
мости и квадратичном функционале определяются уравнениями
(П.4.6)
п п
Л^ 2 ^iv^vk S ^kv^vl = (П.7.9)
V=1 V=1
В случаях неполной степени наблюдаемости все коэффициенты
осуществимых управлений, имеющие индексы ненаблюдаемых ко¬
ординат, должны быть тождественно равными нулю. Ясно, что
при заданных 0^ уравнения (П.7.9) в этих условиях удовлетворять¬
ся не могут. Однако можно подобрать такие значения 0**, чтобы
уравнения
п п
Л^— 2 ^ivO'Vk— 5 Л/jv^vZ = —0Zfc
V=1 V=1
(П.7.10)
§ П.7] ОБЪЕКТЫ С НЕПОЛНОЙ СТЕПЕНЬЮ НАБЛЮДАЕМОСТИ 525
удовлетворялись при заданном числе нулевых коэффициентов А^.
Условие неполной степени наблюдаемости запишется в виде
Арр = Арр = 0, (П.7.11)
где <7 соответствует номерам неконтролируемых (ненаблюдаемых) ко¬
ординат, а р соответствует номерам синтезируемых управлений. Есте¬
ственно стремиться найти уравнения для А^, при которых условие
(П.7.11) выполняется и одновременно $*ik в определенном смысле
наименьшим образом отличаются от желаемых 0^, назначаемых
на основе технических требований. Критерием близости 0^ и 0^
может служить квадратичная оценка вида
J (0/л — 0ik)2 dt = \ 5 ( Aik — 5 AivaVk — 2 Akvdvi + 0/ft) di.
I t.k=\ £ i,k=\ \ v=i v=i /
Минимизация этого функционала по всем Aik9 не равным тождест¬
венно нулю, приводит к уравнениям Эйлера — Лагранжа
(П.7.12)
где
Wk dt [mJ- U’
В раскрытой форме при = const эти уравнения имеют вид
п п
Aik 4- 5 (aiq — aqi) ^kq 4“ 2 (akq — Clqk) A[q —
q=\ q=\
n n n
^pq^kqAip 2 ^'pqO'iqAkp 2 (flpiO'kq 4~ Ctpk^iq) Apq =
P»<7=1 P,<7=1 P,<7=1
= — fiik — 2 ttkfiiq — 2 ttifikq- (П.7.13)
q=\ q=\
Здесь f, k соответствует номерам всех не заданных коэффициентов.
Эта система линейных дифференциальных уравнений определяет
коэффициенты оптимальных в указанном смысле управлений при
неполной степени наблюдаемости. Как и для случая полной степени
наблюдаемости, здесь возможно решение квазитерминальных и не¬
терминальных задач. Решение нетерминальной задачи без гранич¬
ного условия требует определения вынужденного решения системы
(П.7.13). При решении квазитерминальных задач определяется пол¬
ное решение системы (П.7.13) при заданном граничном условии.
Особенность заключается в том, что для получения решения системы
526
ПРИЛОЖЕНИЕ
уравнений (П.7.12) необходимо задать граничные условия как для
самих коэффициентов
Aik(t^ =
так и для их производных (Q. Между тем в оптимизирующем
функционале эти производные непосредственно не фигурируют. Для
того чтобы преодолеть это затруднение, а также избавиться от усло¬
вия aik = const, принятого при записи уравнений (П.7.13), пред¬
ставим уравнение (П.7.12) в несколько ином виде. Введем обозна¬
чение
п п
Aik — S Aiv^y/i — 2 Akvdvi + Pzfe = —
V=1 V=1
(i, k = 1, 2 n).
С учетом (П.7.11) эти соотношения можно представить в виде сово¬
купности дифференциальных и алгебраических соотношений:
(П.7.14)
п п
Лет) 2 Л2 Л-qv^ve 4" Реп = — ДРеп, (П.7.15)
v=l v=l
п п
— 2 Лр^^ — 3 л^я^р Рр^ = — дрр^,
V=1 v==l
(П.7.16)
где е, т] соответствуют индексам всех не заданных коэффициентов
Aik, а р, q — индексам всех заданных (нулевых) коэффициентов
Aik. Подставляя выражение
f= 3 д₽« = 2д₽1п + 2ДРи
l,k= 1 е»п P,q
в уравнения Эйлера — Лагранжа
* [dAeJ У’
получаем
АРеп ”1“ 2 APen^nv 4“ 5 APnv^ev = О* (П.7.17)
v=l v=l
Пусть общее число не заданных коэффициентов ЛеТ1 равно 2D (вслед¬
ствие симметрии Ле11 = Лле это число всегда четное). Тогда без уче¬
та соотношений Лел = Лле система (П.7.15) содержит п2— 2D
линейных дифференциальных уравнений, а система (П.7.16) — 2D
алгебраических линейных уравнений. Система (П.7.17) также без
учета симметрии содержит 2D линейных дифференциальных урав¬
нений. Число неизвестных Лел, Др^ без учета их симметрии со¬
ставляет 2D 4-я2, т. е. совпадает с числом уравнений. Таким
J П.Т] ОБЪЕКТЫ 6 НЕПОЛНОЙ СТЕПЕНЬЮ НАБЛЮДАЕМОСТИ 527
образом, система уравнений
ДРеП 4" 5 APev^nv 4“ 2 APnv^ev = О,
(П.7.18)
V=1 v==l
п п
при заданных начальных (или граничных условиях) или без таких
условий (когда ищется вынужденное решение) полностью опреде¬
ляет искомые коэффициенты оптимальных управлений ДеТ1 и вели¬
чины Др,*. Систему уравнений (П.7.18) можно упростить, исключив
алгебраические уравнения путем подстановки выражения для Дррд
в дифференциальные уравнения. При этом с учетом условий симмет¬
рии Деп = ДЛе, ДРеп = Д Рпе получаем систему 2D линейных диф¬
ференциальных уравнений первого порядка. В частности, если не
заданным является только один коэффициент, то он определяется
двумя уравнениями первого порядка или одним уравнением второго
порядка.
При решении квазитерминальной задачи в качестве граничных
условий естественно принять
Ап (^2) — РеП, ДРеП (^2) — О-
(П.7.19)
Условие ДеТ) (t2) = рет1 является обычным и вытекает из основ¬
ной теоремы. Условие Д(Зел (/2) = 0 соответствует стремлению по¬
лучить возможно меньшие значения Др8П (/)• Итак, задача синтеза
оптимальных в указанном смысле управлений для линейного объек¬
та при неполной степени наблюдаемости сводится к интегрированию
уравнений (П.7.18) при граничных условиях (П.7.19) (квазитерми-
нальная задача), условиях
Ап + т) = Реп» ДРеП (^ 4" т) = О
(задача со скользящим граничным условием) или вообще без гранич¬
ных условий. Перейдем к синтезу оптимальных управлений для не¬
линейного объекта с неполной степенью наблюдаемости. Дан объект
вида
п п п
г
= И/ + 2 (П.7.20)
k=\
(i =■ 1, 2, ... , п),
528
ПРИЛОЖЕНИЕ
где часть может быть тождественно равна нулю. Вследствие не¬
контролируемое™ некоторых фазовых координат или по другим
причинам часть коэффициентов синтезируемых управлений Ард,
Apqn Apqrd9 ... заданы (в частности, равны нулю). Требуется опре¬
делить остальные коэффициенты Лет1, Ле^, Ле^е, ••• так, чтобы
функционал
п
п
L ^/=1
■ G /
4-М
п
L
G Г
+ —м
q
(П.7.21)
(П.7.22)
7"м *<(Ело*/4-
р U t, L v=i
. п п 1
4~ У*| AijkXjXk 4- У? AijkiXjXkxt 4- • • • 1 dt\
i,k=\ J] J
был минимален и вместе с тем коэффициенты 0*/, 0/%, ... наимень¬
шим образом отличались от заданных значений 0//, 0/д, ... в смысле
минимумов вспомогательных функционалов
п
J 2(₽/’/-М2^
V, ‘.i=i
(по коэффициентам Ае(1)
J 2 (tiik-Mdt
/,м=1
(по коэффициентам Л8П^).
В функционале (П.7.21) рц, р^, — заданные величины, причем
для индексов, соответствующих заданных коэффициентам:
Рр<7 = ^-pq (^2)» Ppqr = Apqr (^2)» • • •
Допустим сначала, что нет заданных коэффициентов Apq, Apqrt ... .
Тогда 0*/ = 0Z/, 0*/^ = 0z/aj, и согласно теореме 5.1, точнее, анало¬
гичной теореме для квазитерминальной задачи, оптимальные управ¬
ления равны
и>1 = — kp (2 АцХ] + 2 AakXjXk + S AijkiXjX^ 4- • • >
\/«l /,fe=l /Л./=1 /
(П.7.23)
$ П.7] ОБЪЕКТЫ С НЕПОЛНОЙ СТЕПЕНЬЮ НАБЛЮДАЕМОСТИ 529
где Л//, Aijkf ... есть решение систем уравнений
п
Ац — 2 (flviAvj -f- civjAVi) = — P//,
V=1
n
Ai/k — 2 (aviAyjk 4“ ayjAyik 4“ aykAyij) =
V=1
n
= — fink 4~ 2 (AViavjk 4" AVjaVik 4“ Aykavij)t
V=1
ft
Aijki — 2 (aviAyjki 4“ ttyjAyiki 4" aykAyin 4" ayiAyijk) =
V=1
2 v
= fiijki 4—q“ 2 (AyijCivki 4“ AyikCivji 4~ Avu<2vjk 4- Ayjkdyu 4"
0 V=1
n
4“ AVjiaVik 4“ AVkiayij) 4“ 5 (Ayiayjki 4“ Ayjaviki 4" Aykdyiji -}-Aviavijk)i
y=\
(П.7.24)
при граничных условиях
Aij (^2) = Pib Aijk(t<A = pr/fe, Aijki (^2) = pz/fe/» • • • (П.7.25)
Если часть коэффициентов Ai^ Ащ, ... задана, то уравнения
(П.7.24) не могут быть удовлетворены, но могут быть удовлетворе¬
ны уравнения
п •
Ац — 2 (ayiAvj 4“ ayjAyi) = — Pz/»
V=!=l
п
Aijk — 2 (flyiAvjk 4- йуjAvik 4- (LykAyij) =
V=1
n
= — fink + 2 (AVi<2Vjk 4~ AV]aVik 4“ AvkQyij),
V=1
n
Aijki — 2 (flytAyjki 4" ayjAViki 4“ QykAyiji 4" ayiAyijk) =
v=l
= — fiijki 4—о- 2 (Avijavki 4" Ayikdyji + Ayuayjk 4” Ayjkavii 4-
0 V=1
n
4- Ayjiayik 4“ AyklUylj) 4” 2 (AylClyjkl 4“ Ayjdyikl 4“ Aykayijl 4" Ayldyjkl)
V=1
(П. 7.26)
530
ПРИЛОЖЕНИЕ
Ввиду задания коэффициентов Apqy Apqr, ... часть уравнений
(П.7.26) являются алгебраическими. При удовлетворении уравнений
(П.7.26) и граничных условий (П.7.25) и осуществлении управле¬
ний (П.7.23) функционал (П.7.21) минимален. Введем обозначения
Pi/ — Ро’ = АРо', Pz/fe — Po'fe = Д₽//ь • •. (П.7.27)
Условия приближения (П.7.22) минимизируемого функционала
(П.7.21) к желаемому (0*;- = Pz/, 0^ = 0/^) записываются в виде
уравнений Эйлера — Лагранжа:
Подставляя выражения для A0Z/, А0^, ...» согласно (П.7.27),
(П.7.26), находим
п
Aij — 2 (aviAVj + aVjAvi) + Д0/7- = — Pz/,
V=1
n
A0en “I" 2 (^evApvn 4" ^4vA0ve) = 0,
v=l
n
Aijk — 2 + ayjAyik 4" chkAyij) 4" Д0//л =
V=1
n
= — Pz/As 4- 2 4" ^vj^vik 4-
v=l
n
Apeiu+ 5 (a evA0vt]£ 4“ #TyvApye£ 4“ tf&vAPven) —
V=1
n
Aijki — S (aviAviki 4“ avjAviki 4" QvkAviji 4- QviAvijk) + =
V=1
= -₽//« + 4 2 и vijChkl 4” AyikCLyjl 4“ Avilovjk 4" ^vjkO'Vil 4"
0 V=1
n
APenSO 4~ 5 (# evAPvri£9 4” ^nvA0venO 4“ ^^vA0ven6 4~ ^evA0Ven^) — 0,
v=l
(П.7.29)
§ П.7] ОБЪЕКТЫ С НЕПОЛНОЙ СТЕПЕНЬЮ НАБЛЮДАЕМОСТИ 531
Здесь учтено, что величины A0Z/, Apz/fc, ..., как и величины Ац,
Aijk, ...» Pz/» Pz/Ъ ...» не меняются при перестановках индексов
(ДР// = ДР/ь APz/fe = ДРцк = • • •)• По условию часть коэффици¬
ентов Atj, Ai/k, ... заданы. Поэтому часть уравнений (П.7.29) в
нечетных группах (если считать сверху) являются не дифференци¬
альными, а алгебраическими. Выше, при рассмотрении линейного
объекта и квадратичного функционала при условиях Ард = 0 эти
алгебраические уравнения были записаны отдельно. Здесь в целях
некоторого сокращения записи эти алгебраические уравнения не вы¬
делены.
С учетом заданных коэффициентов AZ/, А1/к, ... число уравне¬
ний в системе (П.7.29), оборванной на каком-то числе N индексов
(определение оптимальных управлений с точностью до N — 1
степеней аргументов), равно числу неизвестных AeTi, Ает^» • ••,
Ае^...р; ДР//, ДР/м, ...» ДР//*,..?. При практическом использовании
'-ХГ' '~лГ
метода, конечно, следует учитывать симметрию коэффициентов по
индексам, что сокращает число необходимых уравнений.
Итак, задав граничные условия для Др;/, Др^, ... и исполь¬
зовав граничные условия (П.7.25), можно последовательно решать
линейные уравнения (П.7.29). В качестве граничных условий для
ДР;/, ДР//*, ... естественно принять Др</ (t2) = О, Др^ (t2) = 0, ...
При нетерминальной задаче без граничного условия следует
определить вынужденное решение уравнений (П.7.29). Таким обра¬
зом доказана следующая теорема.
Теорема 7.1. Если дан объект
п п п п
Xi + + 2 ctijkXjXk + 2 aijkiXjXkxi + • • • = ui + 2 'fe&b
/=1 j,k=\ k=\
причем часть коэффициентов синтезируемых управлений задана,
то оптимальными в смысле минимума функционалов
п
п
у- S PlikXdt2)Xj(t2)Xk(t2)-] 1-
4“М Pz/*Z*/4“ — Jj $ijkXiXjXk 4- • • • +
\ Z,/=1 /,/л=1 / .
L t z, J U L \J=i
+ s
i,k=l
(по управлениям uz),
n
AijkXjXfc -f- AijkiXjX^Xi 4~ * * *
/,M=i
>
652
ПРИЛОЖЕНИЕ
П
J 2 (₽о-Р</Ж
У, ^/=1
(по коэффициентам Д8Т1)
г п
J 2
(по коэффициентам ДЕТ1е)
являются управления
(п п п \Р—1
2 AijXf + 2 AijkXjXk + 3 AijkiXjX^ + • • •) >
Н М=1 /ДЫ /
где не заданные коэффициенты 4ел, Де^, ••• определяются уравне¬
ниями (П.7.29) при граничных условиях
^z/(^) = Pz/, A7fe(^) = Po’b Aijki(t2) = puki, ••• (П.7.30)
и (частный случай) A0Z/ (Z2) = О, А0^ (/2) = 0, ...
Если в функционале / коэффициенты plh рцк, ... не заданные
величины, но (П.7.30) выполняется, то коэффициенты ДеТ1, Дет£» •••
определяются как вынужденное решение системы уравнений (П.7.29)
(нетерминальная задача).
§ П,8. Статистическое исследование динамических систем
Анализ синтезированной системы, по существу, является обяза¬
тельной составной частью итерационного процесса синтеза. Если
рассматривается детерминистическая постановка задачи, т. е. шумы
не учитываются, начальные условия считаются детерминированны¬
ми, то для анализа качества синтезированной системы обычно до¬
статочно получить один или несколько переходных процессов. Это
не вызывает затруднений. При стохастической задаче, когда при¬
сутствуют шумы и начальные условия случайны, анализ может вы¬
полняться на основе статистического моделирования. Однако для
многомерных нелинейных систем необходимый объем статистиче¬
ского моделирования может оказаться чрезмерно большим. Широко
известные приближенные методы определения статистических ха¬
рактеристик процессов в линейных и нелинейных системах [3.6] —
13.8] дают ограниченную информацию в виде приближенных зна¬
чений низших моментов, корреляционных функций и т. п. В связи
с этим представляет интерес применение уравнения Фоккера —
Планка — Колмогорова (ФПК-уравнения) для анализа стохасти-
§ П.8] СТАТИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СИСТЕМ 533
ческих динамических систем по крайней мере низшего и среднего
уровней сложности. ФПК — уравнение, описывающее изменение
плотности вероятности в фазовом пространстве, давно привлекает
внимание как средство статистического исследования широкого
класса непрерывных динамических систем (П.361 — [П.39]. Об¬
щность и в то же время максимальная возможная полнота
статистического описания поведения стохастической системы харак¬
терны для этого уравнения. Однако прямое решение ФПК-уравне-
ния для многомерных систем наталкивается на существенные трудно¬
сти 1П.39], характерные для всех многомерных задач с уравнениями
в частных производных. Так, прямое численное решение ФПК-
уравнения на ЭВМ для многомерных систем требует огромного
объема памяти. Естественно применить для решения ФПК-уравнения
метод рядов, подобно тому как это было сделано выше для решения
уравнения функции V. Особенность здесь заключается прежде все¬
го в том, что ФПК-уравнение является в общем случае нелинейным.
Оно порождает бесконечную систему нелинейных обыкновенных
дифференциальных уравнений для коэффициентов бесконечного сте¬
пенного ряда. Для возможности интегрирования приходится огра¬
ничиваться «укороченной» системой уравнений коэффициентов и
соответственно полиномиальным представлением решения. Пе¬
рейдем непосредственно к изложению способа.
Общий случай
Плотность вероятности р (хь х2, ..., хл, t) непрерывной динами¬
ческой системы, описываемой уравнениями
Д- + Л(*ъ • • • , О = Ь (*=1,2, ... , п), (П.8.1)
где (/) — белые шумы с матрицей спектральных плотностей
S = 1|5//|[, подчиняется ФПК-уравнению
др
dt
i=l i,k=\ 4 R
(П.8.2)
которое при переходе к логарифмической плотности вероятности
In р преобразуется к виду 1П.26]
д In р у г d In р 1 у о I д2 1пр , д In р д In р\ __ у dfi
dt dxi 2 lk \ dxtdxk dxi dxk ) ~~ dxi
(П.8.3)
Для метода степенных рядов переход к логарифмической плотности
вероятности вполне естествен, так как In р при обычных гладких
распределениях вероятности имеет относительно простые выражения
в форме полинома или быстро сходящегося степенного ряда. Так,
534
ПРИЛОЖЕНИЕ
при нормальном центральном распределении In р является квадра¬
тичной формой:
1 п
1пр = а0 + 2 <^ikXiXk.
х i,k=\
Функции предполагаем аналитическими:
f{ = 2 aikxk + 2 амх^ + 5 ашщХ^Х", + • • • (П.8.4)
fe=l fej=l k,l,m=\
Начальную логарифмическую плотность вероятности представляем
полиномом
In р° = а? 4“ 2 ^iXi 4—х- 2 4” • • •
£=1 £ l,k=\
• • • + 4г 2 a°‘^xixk • • • хз> (П.8.5)
где ао, а?, — заданные величины. В такой же форме ищем
решение уравнения (П.8.3), т. е. текущую логарифмическую плот¬
ность вероятности:
1пр = а0 4- 2 + "о” 2 (ZikXiXk 4- • • •
i-=o * 2 l,k={
• • • + 4" 2 • • • **-
i,k,...,s=\ '—ft-'
(П.8.6)
Подставляя выражение (П.8.6) в (П.8.3), собирая и приравнивая
нулю коэффициенты при одинаковых произведениях фазовых коор¬
динат, находим
1 п п
(X,Q 2 Spq fapq + tLpQ'q) = 2 ^рр,
Z Р,<7=1 Р=1
п п п
C^i — 2 ^pi^p 2 Spq (<Xpqi 4" ^pi^q} = 2 2 Clpph
P=1 P,<7=1 P=1
n n
&lk — 2 (ttpitypk 4" apk&pi) 2 2 dpiktyp
p=l P=1
n
2
p,<7=l
Spq (3apqlk + 2aplkpcq + apiaqk + apkaqi)
n
= 6 2 O'ppiki
P=1
(П.8.7)
i
i
n
I
O'ikLj —
N p~l
(Clpi&pkl...s 4- ’ ’ ’ 4~ /г/...z) —
"~N~" ~N ~
I
I
§ П.8] СТАТИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СИСТЕМ 535
N | (apikCLplm...s + * ’ ‘ + Clprs&'pik...tn) —
p=i 'лТ^Г 7j—7
31
(/V 1) (W 2) S ^aPikl(X,P^i 4“ * ’ * 4“ apfrs&pik^jn) —
Р=1 71—7 77^2
I
Р=\
W+2
Р,<7=1
N
N ap^^jap —2~ S $pq N (N + 1) aPqik^s +
p=\ 47+7 Pi7=1 [ '7^2
+ 2Napaqik^^-}-apiaqki...s+ ••• 4-<WM.<4-
47+Г ^~n
2!
4 щ | (^pik^ql...s + • • • 4" CLprs&qik...f) 4“
)T^7
3!
4“ (/V —- 1) (2V — 2) (aPikia<^-^ + • • • + UpfrsUgi^.l/) +
77^2 7—7
I П
+ (^ptk^ps + • • • + Upki. ..s^pi) = N(N + 1) S ^pplk...st
n J p=i ЖнГ
(П.8.7)
N-1
Решение этой замкнутой системы уравнений при начальных усло¬
виях
а0 (0) = «о, at (0) = а? aM...s(0) = a?ftz.„,
"~n~"
определяет искомую текущую логарифмическую плотность вероят¬
ности (П.8.6). Величина а0 (t) согласно (П.8.7) определяется квад¬
ратурой
/ " 1 р п
ао (0 = ао + j 2 арр (t') dt' + -у- \ 2 Spq lapq (О 4" ар (О а</ )1 dt'.
о Р=1 2 О Р>Я=1
(П.8.8)
Общий порядок системы уравнений (П.8.7) без первого, соответст¬
вующего (П.8.8), с учетом симметрии коэффициентов
&ik = (x>kb Яш = auk 3 • • • = aikh • • • (П.8.9)
536.
ПРИЛОЖЕНИЕ
равен
“2|“П (п + 1) +-gj-n(n + 1) (п + 2) + ••• +
+ -4г^(^ + !) • • • (п + АГ — 1).
В таблице П.8.1 приведены численные значения порядка системы
уравнений (П.8.7) при различных значениях порядка исходной си¬
стемы уравнений п и различных степеней N полиномиального пред¬
ставления искомой функции. При квадратичном представлении ло¬
гарифмической плотности вероятности (решение в виде нормально¬
го закона распределения вероятностей) порядок определяющей
системы уравнений не превосходит 1000 вплоть до размерности ис¬
ходной системы уравнений п = 43. При полиномиальном представ¬
лении четвертой степени размерность определяющей системы урав-
§ П.8] СТАТИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СИСТЕМ 537
нений 1000 получается уже при п = 10, а при N = 10 эта размер¬
ность получается при п = 4.
Таким образом, хотя определяющая система уравнений при боль¬
ших значениях n, N весьма громоздка, для умеренных значений
размерности и, особенно, невысоких степеней аппроксимации иско¬
мого распределения она доступна для численного интегрирования
на современных ЭВМ.
Из всех известных методов статистической динамики данный
метод дает наиболее полное, детальное решение. Действительно,
в результате получается многомерный закон распределения вероят¬
ностей, из которого можно найти любые статистические характерис¬
тики. Для анализа получающихся результатов. удобно использо¬
вать (п — 1)-мерные «осевые» сечения вида
In р (0, • • • , 0, Xj, 0, ... , 0, /) = In Pi =
= а0 + atxt 4- -±- aitx2i + • • • + .
AT
Обоснование необходимой степени N, а также различные упроще¬
ния системы уравнений (П.8.7) могут осуществляться на основе
привлечения дополнительных конкретных условий и соображений.
В частности, значительные упрощения получаются для случая
свободного движения (Spq = 0) и для некоторых систем, синтези¬
рованных методом аналитического конструирования по критерию
«обобщенной работы» со специально выбранной функцией Q. Рас¬
смотрим эти случаи.
Свободное движение
Если шумы отсутствуют = 0), но начальные условия явля¬
ются случайными, то уравнение (П.8.3) вырождается в следующее
уравнение:
п п
д In р . dlnp Х' dfi
dt Zj I i dxi ~ Zj dXi ’
i=i ‘ z=i
а система уравнений (П.8.7) превращается в следующую:
п
а0 = S аРР>
Р=1
п п
CCi — 2 CLpityp — 2 S CLpph
Р=1 Р=1
п
— S (Upiccpk UpkOCpi) — 2<2pik^p = 6 2 appifa
P=1 P=1
I
Решение этой системы уравнений может быть выражено через
интегралы произведений весовых функций wtj (t, 4) линейного
п
538
ПРИЛОЖЕНИЕ
приближения объекта (П.8.1):
(* п
«о(0 = «о+ 2 app(t')dt',
О Р=1
at (0 = 2 a°vwvl (0, 0 4- 2 2 [ 2 appv (/') wvl (f, t) dt',
V=1 V=1 g p=l
n
«</(/) = 3 a°u®Vi(0, 0^/(0, 0 +
V,n=l
(0 = a°/k...swvi (0, 0 ауц/ (0, t) ... wXs (0, t) +
N v,p,...,X=l
+ 2 [ W + 1) 2 appi...s (f) + N 2 apik...s (f) ap (/') +
V,^,...,X=1 g p=l ^M+2 p=1
4" 2 apv 4" * * * 4" (O apX (01 +
P=1 N N
4" yy _ 1 2 4~ ’ ‘ ’ 4" apv...r\ (?') appx (014-
p=i ArZf
31 n
4“ (yv — 1)(AZ —2) 2 (Oapvpe (t') + • • • +
J P=1 N-S
4“ tyn^(0apnpx(01 +
4” дг_i 2 tappxaP^ji(O4- • • • 4-apvp.it'}(01 ? x
X wvi ft', t) t) ... w*s (t\ t) dt'.
(П.8.11)
В том, что выражения (П.8.11) удовлетворяют уравнениям
(П.8.10), можно убедиться непосредственной подстановкой с учетом
выражений
0 — 2 apiwip(t', f) = 0.
ar Р=1
$ П.8] СТАТИСТИЧЕСКОЕ ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СИСТЕМ 539
Начальные условия также удовлетворяются.
Для линейных систем получаем особо простые выражения
Щ (0 = 2 a!Xz (0, t),
V=1
V,|l=l
az/ft...s (/) = 2 (0, о (0, t) ... ayXs (0, t).
v,n,...,x=i N
В этом случае, если начальная логарифмическая плотность вероят¬
ности выражается полиномом степени то и текущая логарифми¬
ческая плотность вероятности будет представлять собой полином
степени /V. В частности, нормальному начальному распределению
здесь соответствует нормальное текущее распределение.
Оптимальная система
Пусть дан объект
Xi + fi(Xlt ... , х„, /) = «, + & 0 = 1,2,..., п), (П.8.12)
где h = (0 — независимые белые шумы с диагональной матри¬
цей спектральных плотностей S = ||Sn||. Начальная (в момент
t = tr) плотность распределения равна
р (Хр ...» хл, tj) = ••• 9 (П.8.13)
Для объекта (П.8.12) синтезированы управления ис, минимизирую¬
щие функционал
I = м V [х, 08) хп (/2), t2] + J 4- S dt +
I *=1
где V (хх, ..., хл, 0 — решение уравнения
(П.8.14)
при граничном условии
V • • • > ^i) Pi (*х> • • • > хп)> (П.8.15)
540
ПРИЛОЖЕНИЕ
а — положительная величина. Согласно основной теореме (§ П.2)
эти управления имеют вид
(п.8.16)
Покажем, что плотность вероятности для такой системы определя¬
ется выражением
р(Хр .... хп, t) = ехр[— а7(х1( ... , хп, 0]. (П.8.17)
Действительно, уравнения замкнутой системы согласно (П.8.12),
(П.8.16) имеют вид
х{+(л+<п-8-18)
ФПК-уравнение для логарифмической плотности вероятности запи¬
шется в виде
(П.8.19)
Непосредственной подстановкой с учетом (П.8.14) убеждаемся, что
уравнение имеет решение
In р = — aV, (П.8.20)
Это решение в соответствии с (П.8.15) удовлетворяет начальному
условию (П.8.13). Из (П.8.20) следует (П.8.17). Таким образом,
если указанный функционал приемлем по условиям задачи и опре¬
делена функция У, то тем самым определен и закон распределения
плотности вероятности в фазовом пространстве.
§ П.9. Значения коэффициентов линейных моделей
продольного и бокового движений самолета
В таблицах П.9.1, П.9.2 указаны значения коэффициентов ли¬
нейных стационарных математических моделей продольного и бо¬
кового движений гипотетического легкого сверхзвукового самолета
для девяти (продольное движение) и восьми (боковое движение)
режимов полета, отличающихся высотой (//) и числом Маха (М).
Обозначения коэффициентов соответствуют принятым в данной
книге и указанным в главе I.
§ П.91
ЗНАЧЕНИЯ КОЭФФИЦИЕНТОВ ЛИНЕЙНЫХ МОДЕЛЕЙ
541
ТАБЛИЦА П.9.1
'Ф ю
77
00 05
77
^(N
of ID
77
00 00
77
^F
ь- со
w 1
^10
’""IcD
^.o
со
•оИ
LOCjJ
04 —<
I I
47
77
« *
1 1
1 1
1 1
1 1
СМ
05
10
CD 10
io io
. ь> 1
CO b-
C^S
CO »-*
04 СО
5 Е 5
Q Я
о*-7
О —f
1
о —*
О* О
CD СО
и 5> |
°iO4
10
00 —•
«о £ {£
04 —<
00
(N10
—f 04
I I
1 1
I I
1 1
1 1
1 1
1 1
05
10
00 00
я 1
CO CD
СО
04
О О
ON «
(О О
О о
О О
<о о
У
о* О
о* о”
do
66
СМ
CO
1
04 b-
ь«- ь-
05 04
О 04
*
а о
04 04
—< 04
04
04 04
tF cd
,52
,04
tF CO
L0 Ь-
С
Н 1
00 CO
tF CD
04 04
д
О —«*
О
О О
О О
S
1=2
* Ь 1
10
CD^OO
04
ю
05.05^
CQ
а а
04 10
—f tF
-704
0*0*
н
. см
I
05
04
'«Ф 00
—<
со. g Ц
10 ^F
CO CD
CD О?
in* bf
а
co
CO
» ’Т
04 b-
CD 00
b- b-
=Ssb> 1
CO b-
—< 10
—< 04
„(0
ат
сек
o' О
О O*
о o'
о* о*
10
CO
04
СО 05
04 04
—' 10
о о
н ■»> L
о —
О
oo
о о
М 8
о о*
о* о*
1
о o'
о о
т
CD b-
10
1
ь-> со
b- 04
CO 04
04 04
«
о~о
<D О
о о
о о
CJ
77
77
77
77
со
«
04 ’Ф
об
0,11
0,36
-ч 04
0*0
СО Ь-
о о
о о
10
CD 10
10
СО Ь^
^о
05 05
О
О
О
—И т—t
г—Ч
10
04
00
а£
ЛИТЕРАТУРА
Глава I
1.1. В е д р о в В. Q., Динамическая устойчивость самолета, Оборонгиз, 1938.
1.2. Остославский И. В., Калачев Г. С., Продольная устойчи¬
вость и управляемость самолета, Оборонгиз, 1951.
1.3. Остославский И. В., Аэродинамика самолета, Оборонгиз, 1957.
1.4. Об. «Аэродинамика», под ред. Дюренда, перев. с англ., т. V, Оборонгиз,
1938.
1.5. Эткин Б., Динамика полета. Устойчивость и управляемость, перев.
с англ., Изд-во «Машиностроение», 1964.
1.6. М и е л е А., Механика полета, перев. с англ., Изд.-во «Наука», т. I, 1965.
1.7. Пышно в В. С., Динамические свойства самолета, Оборонгиз, 1951.
1.8. В е д р о в В. G., Тайц М. А., Летные испытания самолетов, Оборонгиз,
1951.
1.9. Остославский И. В., Стражева И. В., Динамика полета,
утойчивость и управляемость летательных аппаратов, Изд-во «Машинострое¬
ние», 1965.
1.10. Лебедев А. А., Чернобровкин Л. М., Динамика полета,
t Оборонгиз, 1962.
1.11. Калачев Г. С., Показатели маневренности, управляемости и устой¬
чивости самолетов, Оборонгиз, 1958.
1.12. М а й л с Дж. У., Потенциальная теория неустановившихся сверхзвуко¬
вых течений, перев. с англ., «Физматгиз», 1963.
1.13. Белоцерковский G. М., Пространственное неу становившееся дви¬
жение несущей поверхности, ПММ, т. XIX, вып. 4, 1955.
1.14. Красильщиков Е. А., Поле скоростей, возбужденное вибрациями
крыла, распространяющимися по поверхности, Изв. АН СССР, «Механика
жидкости и газа», № 5, 1968.
1.15. Зауэр Р., Нестационарные задачи газодинамики, перев. с нем., Изд-во
«Мир», 1969.
1.16. Б е л о ц е р к о в с к и й С. М., Скрипач Б. К., Табачни¬
ков В. Г., Крыло в нестационарном потоке газа, Изд-во «Наука», 1971.
1.17. БисплингхоффР. Л., Эшли X., ХалфмэнР. Л., Аэроупру¬
гость, перев. с англ., ИЛ, 1958.
1.18. Дмитриев G. П., Ривкин Б. С., Определение параметров диффе¬
ренциальных уравнений в задачах статистической идентификации, Автома¬
тика и телемеханика, № 7, 1970.
1.19. Д о г а н о в с к и й С. А., Об алгоритмах идентификации, реализуемых
параметрическими системами регулирования, Автоматика и телемеханика,
№ 11, 1970. 1
1.20. О п о й це в В. И., Идентификация статических объектов кусочно-линей¬
ными функциями, Автоматика и телемеханика, № 5, 1970.
1.21. Опойцев В. И., Идентификация многомерных статических объектов,
Автоматика и телемеханика, № 9, 1970.
1.22. Перельман И. И., Обобщение модели Калмана в задачах идентифи¬
кации, Автоматика и телемеханика, № 9, 1970.
ЛИТЕРАТУРА
543
1.23. Цыпкин Я. 3., Адаптация и обучение в автоматических системах,
Изд-во «Наука», 1968.
1.24. Identification in Automatic Control System, Труды I международного симпо¬
зиума ИФАК по идентификации, «Academia», Prague, 1967.
1.25. Goodman Т. Р., ReswickJ. В., Determination of System Characte¬
ristics from Normal Operating Records, Trans. ASME, v. 78, Febr.
1956.
1.26. Kalman R. E., Design of Salf-Optimising Control System. Trans. ASME,
v. 80, Febr., 1958.
1.27. Че та ев H. Г., Устойчивость движения, Гостехиздат, 1946.
1.28. БюшгенсГ. С., Студнев Р. В., Динамика пространственного дви¬
жения самолета, Изд-во «Машиностроение», 1967.
1.29. Монин А. С., Я г л о м А. М., Статистическая гидромеханика, 1, Изд-во
«Наука», 1967.
1.30. МонинА. С., Я г л о м А. М., Статистическая гидромеханика, 2, Изд-во
«Наука», 1967.
1.31. Доброленский Ю. П., Динамика полета в неспокойной атмосфере,
Изд-во «Машиностроение», 1969.
1.32. Гудков А. И., Л е ш а к о в П. С., Р а й к о в Л. Г., Внешние на¬
грузки и прочность летательных аппаратов, Оборонгиз, 1963.
1.33. D о ne 1 у Р., Summary of information relating to gust loads on airplans,
NASA Report, 997, 1950.
1.34. Taylor G. I., The spectrum of turbulence, Proc. Roy. Soc., A-164, № 919,
1938.
1.35. Gifford F. J., A simultaneous Lagrangian-Eulerian turbulence experi¬
ment, Mounthly Weath. Rev., v. 83, № 3, 1955.
1.36. Цв а н г Л. P., Измерения частотных спектров температурных пульсаций
в приземном слое атмосферы, Изв. АН СССР, «Геофизика», № 8, 1960.
1.37. Копров Б. М., ЦвангЛ. Р., Прямые измерения турбулентного по¬
тока тепла с борта самолета, Изв. АН СССР, «Физика атмосферы и океана»,
т. I, № п, 1965.
1.38. L i е р m a n Н. W., On the application of statistical concepts to the buffe¬
ting problem, JAS, № 12, 1952.
1.39. Жуковский H. E., О движении твердого тела, имеющего полости,
наполненные однородной капельной жидкостью, Поли. собр. соч., т. 2,
Гостехиздат, 1949.
1.40. Сретенский Л. С., Колебания жидкости в подвижном сосуде, Изв.
АН СССР, ОТН, № 10, 1951.
1.41. Рабинович Б. И., Об уравнениях возмущенного движения твердого
тела с цилиндрической полостью, частично заполненной жидкостью, ПММ,
т. XX, вып. 1, 1956.
1.42. Рабинович Б. И., Об уравнениях упругих колебаний тонкостенных
стержней с жидким заполнением при наличии свободной поверхности,
Изв. АН СССР, ОТН, мех. и маш., № 4, 1959.
1.43. Моисеев Н. Н., Движение тела, имеющего полости, заполненные идеаль¬
ной жидкостью, ДАН СССР, т. 85, № 4, 1952.
1.44. Нариманов Г. С.,О движении твердого тела, полость которого частич¬
но заполнена жидкостью, ПММ, т. XX, вып. 1, 1956.
1.45. Нариманов Г. С., О движении сосуда, частично заполненного жид¬
костью, с учетом немалости движения последней, ПММ, т. XXI, вып. 4,
1957.
1.46. Гладкий В. Ф. Динамика конструкции летательного аппарата, Изд-во
«Наука», 1969.
1.47. Рапопорт И. М., Динамика упругого тела, частично заполненного
жидкостью, Изд-во «Машиностроение», 1966.
1.48. The Dynamic behavior of liquids in moving containers, NASA, Washington,
1966.
544
ЛИТЕРАТУРА
1.49. Г р и г о л ю к Э. И., Шкл яр чу к Ф. Н., Уравнения возмущенного
движения тела с тонкостенной упругой оболочкой, частично заполненной
жидкостью, ПММ, т. 34, вып. 3, 1970.
1.50. Микишев Г. Н., Рабинович Б. И., Динамика твердого тела с по¬
лостями, частично заполненными жидкостью, Изд-во «Машиностроение»
1968.
1.51. Котик М. Г., Критические режимы сверхзвукового самолета, Изд-во
«Машиностроение», 1967.
1.52. Л о в и н г у д Д. А., Гейслер И. Д., Управление полетом ракет-но¬
сителей «Сатурн», Вопросы ракетной техники, № 12, 1966.
1.53. Фрейн В. И., Вонг Б., Метод предварительного анализа устойчивости
с учетом аэроупругости конструкции ракеты, Вопросы ракетной техники,
№ 8, 1963.
1.54. Ф р и д Л. И., М и л л е р К. Л., Увеличение устойчивости автопилота ме¬
тодом демпфирования изгибных колебаний корпуса ракеты, Вопросы ра¬
кетной техники, № 5, 1962.
1.55. Э н д р ю Г. М.,, Д ж о н с о н Д. М., Автоматическое управление аэро-
упругими колебаниями, Вопросы ракетной техники, № 7, 1964.
1.56. Кениг Г., Влияние реактивной силы на изгибные механические харак¬
теристики ракеты, Вопросы ракетной техники, № 5, 1965.
1.57. РинаскиИ. К«| ‘Оптимальное управление упругой ракетой-носителем,
Вопросы ракетной техники, № 11, 1968.
Глава II
2.1. Г е р а т е в о л ь 3., Психология человека в самолете, перев. с нем., ИЛ,
1956.
2.2. Платонов К. К., Психология летного труда, Воениздат, 1960. ’
2.3. Система «Человек и автомат», Изд-во «Наука», 1965.
2.4. Суходольский Г. В., К вопросу о формировании у человека-опера¬
тора навыка слежения за движущейся целью, Сб. «Проблемы общей и инже¬
нерной психологии», Изд-во ЛГУ, 1964.
2.5. М и х а л е в И. А., О к о е м о в Б. Н., Павлина И. Г., Ч и к у -
лаев М. С., Эйдинов Н. М., Системы автоматического управления
самолетом, Методы анализа и расчета, Изд-во «Машиностроение», 1971.
2.6. Красовский А. А., Поспелов Г. С., Основы автоматики и тех¬
нической кибернетики, Госэнергоиздат, 1962.
2.7. Сб. «Приспосабливающиеся автоматические системы», под ред. Э. Мишкина
и Л. Брауна, ИЛ, 1963.
2.8. Р у тм а н Р. С., Самонастраивающиеся системы с настройкой по дина¬
мическим характеристикам, Автоматика и телемеханика, № 5, 1962.
2.9. Маслов Е. П., О с о в с к и й Л. М., Самонастраивающиеся системы
управления с моделью (обзор), Автоматика и телемеханика, № 6, 1966.
2.10. О с о в с к и й Л. М., Линейные самонастраивающиеся модели с настрой¬
кой по фазовым характеристикам, Автоматика и телемеханика, № 2, 1963.
2.11. Кухте н ко В. Щ Динамика самонастраивающихся систем со стабили¬
зацией частотных характеристик, Изд-во «Машиностроение», 1970.
Глава III
3.1. Б и к е Ж. А., Человек-оператор в системах управления, В сб. «Современ¬
ная теория систем управления», перев. с англ., Изд-во «Наука», 1970.
3.2. Шеридан Т. Б., Экспериментальное исследование изменений переда¬
точной функции человека-оператора во времени, Труды I конгресса ИФАК,
Теория дискретных, оптимальных и самонастраивающихся систем, Изд-во
АН СССР, 1961.
ЛИТЕРАТУРА
545
3.3. Tustin A., The Nature of the Operators Response in Manual Control and
its Implications for Controller Design. Journ. Inst. Elec. Engrs. London, 1947.
3.4 Mayne R., Some Engineering Aspects of the Mechanism foT Body Control,
Electrical Engineering, March, 1951.
3.5. HydmanR. W. and Beach R. L., The Transient Response of the Hu¬
man Operator, IRE Trans, on Medical Electronics, December 1959.
3.6. Пугачев В. С., Теория случайных функций, Физматгиз, 1962.
3.7. Солодовников В. В., Статистическая динамика линейных систем
автоматического регулирования, Физматгиз, 1960.
3.8. Ле н и н г Дж. X., Бэгтин Р. Г., Случайные процессы в задачах ав¬
томатического управления, ИЛ, 1958.
3.9. Лившиц Н. А., П у г а ч е в В. Н., Вероятностный анализ систем ав¬
томатического управления, Изд-во «Советское радио», 1963.
3.10. Леонов Ю. П., Проблема формирующего фильтра и оптимальные ли¬
нейные системы, Автоматика и телемеханика, № 6, 1960.
3.11. С т и р Е. Б., Формирующие фильтры для случайных процессов. В сб. «Со¬
временная теория систем управления», перев. с англ., Изд-во «Наука», 1970.
3.12. Андронов А. А., В и т т А. А. , X а й к и нС. Э., Теория колебаний,
Физматгиз, 1959.
3.13. Кокотович П. В., Метод точек чувствительности в исследовании и
оптимизации линейных систем управления. Автоматика и телемеханика,
№ 12, 1964.
3.14. Кокотович П. В., Рутман Р. С., Чувствительность систем авто¬
матического управления, Автоматика и телемеханика, № 4, 1965.
3.15. Т о m о v i с R., Sensitivity analysis of dynamic sistems, Belgrade, 1963.
3.16. РозенвассерЕ. H.,Юсупов P. M., Чувствительность систем авто¬
матического управления, Изд-во «Энергия», 1969.
3.17. Красовский А. А., Лекции по курсу «Основы автоматики», вып. II,
«Самонастраивающиеся системы», Издание ВВИА им. Н. Е. Жуковского,
1959.
3.18. Красовский А. А., Динамика непрерывных систем автоматического
регулирования с экстремальной самонастройкой корректирующих устройств,
Труды I международного конгресса ИфАк, «Теория непрерывных систем»,
Изд-во АН СССР, 1961.
3.19. К р а с о в с к и й А. А., Статистическая динамика систем с пропорциональ¬
ной экстремальной самонастройкой последовательных корректирующих
устройств, Изв., АН СССР, ОТН, «Энергетика и автоматика», № 4, 1960.
3.20. ВарыгинВ. Н., Некоторые вопросы построения систем с корректирую¬
щими устройствами, самонастраивающимися на экстремум, Автоматика и
телемеханика, № 1, 1961.
3.21. К а з а к о в И. Е., Динамика самонастраивающихся систем с экстремаль¬
ной непрерывной настройкой корректирующих цепей при случайных воз¬
мущениях, Автоматика и телемеханика, № 11, 1960.
3.22. Me С г a t h R. J., R i d e о u t V. C., A Simulator Study of a Two-Para¬
meter Adaptive System, IRE Transactions, AC-6, № 1, 1961.
3.23 Me G r a t h R. J., R i d e о u t V. C. A Parameter-Perturbation Adaptive
Control System, IRE Transactions, AC-6, № 2, 1962.
3.24. А л и м о в Ю. И., Приближенный расчет быстродействующих систем авто¬
матической оптимизации параметров при гармонических пробном и поиско¬
вых сигналах, Изв. АН СССР, ОТН, «Техническая кибернетика», № 1, 1963.
3.25. Красовский А. А., Динамика непрерывных самонастраивающихся
систем, Физматгиз, 1963.
3.26. КроноэрР. И., Д р ю П. Ж., Исследование цепи самонастройки в си¬
стемах с параметрической самонастройкой. В сб. «Теория самонастраиваю¬
щихся систем управления», Труды II международного симпозиума ИФАК
по самонастраивающимся системам, Изд-во «Наука», 1969.
18 А. А. Красовский
546
ЛИТЕРАТУРА
3-27. Алимов Ю. И., Обабков В. К., Приближенный расчет быстродей¬
ствующих систем автоматической оптимизации параметров при почти перио¬
дических пробных и поисковых сигналах. Изв. АН СССР, «Техническая
кибернетика», № 4, 1963.
3.28. Margolis М., L е о n d е s С. Т., A Parameter Tracking Servo for Adap¬
tive Control Systems, IRE Wesson Convention Record, Part IV, 1959.
3.29. Маргол и с M., JI e о н д e с К. Т., О теории самонастраивающейся
системы регулирования; метод обучающейся модели, Труды I международ¬
ного конгресса ИФАК, т. II, Изд-во АН СССР, 1961.
3.30. Казаков И. Е., Е в л а н о в Л. Г., К теории самонастраивающихся
систем с поиском градиента методом вспомогательного оператора, Труды II
международного конгресса ИФАК, Изд-во АН СССР, 1965.
3.31. Алимов Ю. И.,Обабков В. К., К теории форсированных процессов
в самонастраивающихся системах со вспомогательным оператором, Изв.
АН СССР, «Техническая кибернетика», № 5, 1966.
3.32. ЛиУ. Уайтейкер, Оценка качества переходных процессов для само¬
настраивающихся систем управления. В сб. «Самонастраивающиеся авто¬
матические системы», Изд-во «Наука», 1964.
3.33. Н i z a J. С. and L i С. С., On Analytical Synthesis of a Glass of Model-
Reference Time-Varying Control Systems, IEEE, Paper 63—123, 1963.
3.34. ДональсонД. Д., КишиФ. X., Обзор теории и методов адаптив-
тивных систем управления. В сб. «Современная теория систем управления»,
перев. с англ., Изд-во «Наука», 1970.
Глава IV
4.1. Н а й л э н д Ф. С., Самонастраивающиеся системы управления для боль¬
шой упругой ракеты, Вопросы ракетной техники, № 1, 1962.
4.2. Б л е й к о к Дж. Г., Автоматическое управление самолетами и ракетами,
перев. с англ., Изд-во «Машиностроение», 1969.
4.3. G 1 а г k D. С., Pritchard F. Е., R е у п о 1 d s Р. A., Application of
Self-Adaptive Control Techniques to the Flexible Supersonic Transport, SAE
Paper, № 75, 1963.
4.4. W h i t а к e r H. P., Adaptive Control Systems. Air Space and Instruments,
1963.
4.5. S m i t h G. W., Synthesis of Self-Adaptive Autopilot for a Lage Elastic Boo¬
ster, IRE Transaction Automatic Control, № 3, 1961.
4.6. Gaylor R., Sch aeper koef fer R. L., Gunningham D. G.,
An Adaptive Tracking Filter for Bending-Mode Stabilization, Journ. Space¬
craft and Rockets, № 5, 1967.
4.7. Красовский А. А., Об оптимальном управлении линейными пассив¬
ными объектами, Автоматика и телемеханика, № 1, 1972.
Глава V
5.1. П е т р о в Б. Н., Красовский А. А., Попов Е. П., Раушен-
бах Б. В., Научные проблемы управления летательными аппаратами,
Вестник АН СССР, № 11, 1970.
5.2. Автоматизация производства и промышленная электроника, т. 3, «Регуля¬
тор автоматический», стр. 206—207.
5.3. Чеснат Г., Майер Р. В., Проектирование и расчет следящих систем
и систем регулирования, перев. с англ., Госэнергоиздат, 1959.
5.4. Теория автоматического регулирования, т. I, под ред. В. В. Солодовникова,
Изд-во «Машиностроение», 1967.
5.5. Бесекерский В. А., Динамический синтез систем автоматического
регулирования, Изд-во «Наука», 1970.
ЛИТЕРАТУРА
547
5.6. Боднер В. А., Козлов М. С., Стабилизация летательных аппаратов
и автопилоты, Оборонгиз, 1961.
5.7. Автопилот АП-6Е, Техническое описание для транспортных самолетов,
Оборонгиз, 1961.
5.8. Павлов В. А., Пон ы р ко С. А., Хованский Ю. М., Стабилиза¬
ция летательных аппаратов и автопилоты, Изд-во «Высшая школа», 1964.
5.9. О л ь м а н Е. В., Соловьев Я. И., Токарев В. П., Автопилоты,
Оборонгиз, 1946.
Глава VI
6.1. Меллон Д., Применение самонастраивающихся систем для управления
полетом. «Самонастраивающиеся автоматические системы», Труды между¬
народного симпозиума ИФАК, Изд-во «Наука», 1964.
6.2. Ли И., Я н г Л., М е й р и Ж., Выполнение человеком функций самона¬
стройки в системах управления летательными аппаратами. «Теория самона¬
страивающихся систем управления», Труды II международного симпозиума
ИФАК по самонастраивающимся системам, Изд-во «Наука», 1969.
6.3. Miller В., Autopilot Incorporates Dual Stabilization. Aviation Week
and Space Technology, № 5, 1962.
674. Klass P. J., Median Signals Control Flight of F-lll. Aviation Week and
Space Technology, № 24, 1966.
6.5. Leondes G. T., Pearson J.L., Missile Autopilot Adaption Using Cont
rol Surface Hinge-Moment Feedback, Journal Spacecraft and Rockets, № 2,
1968.
6.6. D i p г о s e К. V., Self-Adaptive Control System, Aeronautical Journal,
№ 688, 1968.
6.7. M a 1 1 e г у C. G., N e e b e F. C., Flight Test of General Electric Self-Adap¬
tive Control, Journal of Aircraft, № 5, 1966.
6.8. Козлов M. С., Ф e д о p e н к о Г. И., Динамика самонастраивающейся
системы управления полетом, сохраняющей заданный запас устойчивости.
Самонастраивающиеся автоматические системы, Труды I Всесоюзной кон¬
ференции по теории и практике самонастраивающихся систем, Изд-во «На¬
ука», 1965.
6.9. Боднер В. А., Теория автоматического управления полетом, Изд-во
«Наука», 1964.
Глава VII
7.1. Snyder Е. О., Terrain-Following Radar that doesn’t scat continuously,
Electronics, № 7, 1967.
7.2. К i s s 1 i n g e г R. L., V e t s h G. J., Manual Terrain-Following System
Development for a Super-Sonic Fighter Aircraft, Journal of Aircraft, № 4,
1966.
7.3. Terrain-Following Radars, «Flight International», Feb, 16, 91, 1967.
7.4. Smith E. J., A. Universal Terrain-Following Algorithm, AIAA Paper,
№ 817, 1969.
7.5. Мак-Клаур К. Л., Теория инерциальной навигации, перев. с англ.,
Изд-во «Наука», 1964.
7.6. Андреев В. Д., Теория инерциальной навигации. Автономные системы,
Изд-во «Наука», 1966.
7.7. Фридлендер Г. О., Инерциальные системы навигации, Физматгиз,
1961.
7.8. Горенштейн И. А., Шульман И. А., Сафарян А. С., Инер¬
циальная навигация, Изд-во «Советское радио», 1962.
18*
548
ЛИТЕРАТУРА
Глава VIII
8.1. Одинцов В. А., Радионавигация летательных аппаратов, Изд-во «Ма¬
шиностроение», 1968.
8.2. Астафьев Г. П., Ш и б а ш е в и ч В. С., Ю р к о в Ю. А., Радио¬
технические средства навигации летательных аппаратов, Изд-во «Советское
радио», 1962.
8.3. Белавин О. В., ЗероваМ. В., Современные средства радионавига¬
ции, Изд-во «Советское радио», 1965.
8.4. РСБН-2, Изд-во «Машиностроение», 1962.
8.5. Donne М., The British BLUE Sistem. Airlift, № 9, 1961.
8.6. Wharton A., Automation on the Flight Deck, Aircraft, № 12, 1966.
Глава IX
9.1. T о л о к н о в В. И., Об одной задаче аналитического конструирования
оптимального регулятора, Известия АН СССР, «Техническая кибернетика»,
№ 5, 1966.
9.2. Э л л е р т Ф. И., М е р р и э м К. У., Система управления продольным
движением при приземлении самолета в режиме выравнивания, Труды II
международного конгресса ИФАК, Изд-во «Наука», 1965.
9.3. М е р р и э м К. У., Теория оптимизации и расчет систем управления с об¬
ратной связью, перев. с англ., Изд-во «Мир», 1967.
9.4. KenwardJ. R., Approach criteria, Journal of the Royal Aeronatical
Society, № 633—64, 1963.
9.5. Battle F. H., Desighn goals, techniques and tests of a new instrument
landing aid, IRE International Convention Record, 1962.
9.6. Kalman R., Bucy R., New results in linear filtering and prediction
theory, Journ. Basic Engr. (ASME Trans.), v. 83, D, 1961.
9.7. JorrensonH. W., Kalman Filtering Techniques, Academic Press, NY-L,
1960.
9.8. Л и P., Оптимальные оценки, определение характеристик и управление,
перев. с англ. Изд-во «Наука», 1966.
9.9. Ройте нберг Я. Н., Автоматическое управление, Изд-во «Наука»,
1971.
9.10. Б р а й с о н А., X о Ю - ш и, Прикладная теория оптимального управле¬
ния, Изд-во «Мир», 1972.
Глава X
10.1. Л о к к А. С., Управление снарядами, перев. с англ., Гостехиздат, 1957.
10.2. Коренев Г. В., Введение в механику управляемого полета, Изд-во
«Наука», 1964.
10.3. Доброленский Ю. П., Иванова В. И., Поспелов Г. С.,
Автоматика управляемых снарядов, Оборонгиз, 1963.
10.4. Сб. «Конструирование управляемых снарядов», под ред. А. Е. Пакета и
С. Рамо, перев. с англ., Воениздат, 1963.
10.5. Т и п у г и н В. Н., В е й ц е л ь В. А., Радиоуправление, Изд-во «Совет¬
ское радио», 1962.
10.6. К р ине цк и й Е. И., Системы самонаведения, Изд-во «Машинострое¬
ние». 1970.
10.7. Камке Э., Справочник по обыкновенным дифференциальным уравнениям,
перев. с нем., ИЛ, 1951.
10.8. Лебедев Н. Н., Специальные функции и их приложения, Физматгиз,
1953.
ЛИТЕРАТУРА
549
Глава XI
11.1. Миль М. Л., Аэродинамика несущего винта с шарнирным креплением
лопастей при криволинейном движении, Труды ЦАГИ, № 465, 1940.
11.2. В и л ь д г р у б е Л. С., Оптимальные параметры геликоптеров на режимах
вертикального полета, Техника воздушного флота, №№ 3, 5, 1946.
11.3. Юрьев Б. Н., Аэродинамический расчет вертолетов, Оборонгиз, 1956.
11.4. Гесс о у А., Мейерс Г., Аэродинамика вертолета, Оборонгиз, 1954.
11.5. Миль М. Л., Некрасов А. В., Браверман А. С., Грод¬
но Л. Н., Лейканд М. А., Вертолеты, расчет и проектирование, т. I,
«Аэродинамика», Изд-во «Машиностроение», 1966.
11.6. Пейн П. Р., Динамика и аэродинамика вертолетов, Оборонгиз, 1963.
11.7. Д м и т р и е в И. С., Е с а у л о в С. Ю., Системы управления одновинто¬
вых вертолетов, Изд-во «Машиностроение», 1969.
11.8. Вол В. П., Аналитическое конструирование оптимальной системы авто¬
матического управления полетом вертолетов в строю, Автоматика и телеме¬
ханика, № 5, 1969.
Глава XII
12.1. Брошевский М. 3., Иослович И. В., Некоторые задачи опти¬
мальной стабилизации осесимметричного спутника, Космические исследо¬
вания, вып. 3, 1966.
12.2. Иослович И. В., Оптимальная стабилизация осесимметричного спут¬
ника с помощью системы из п реактивных двигателей, Космические иссле¬
дования, вып. 4, 1966.
12.3. Белецкий В.В., Об оптимальном приведении искусственного спутника
Земли в гравитационно-устойчивое положение, Космические исследования,
вып. 3, 1971.
12.4. Л а в р о ц к и й Э. К., О задаче оптимальной ориентации спутника, Кос¬
мические исследования, вып. 6, 1970.
12.5. Р а у ш е н б а х Б. В., Т о к а р ь Е. Н., Некоторые вопросы управления
в межпланетном пространстве. В сб. «Искусственные спутники Земли»,
Изд-во АН СССР, 1960.
12.6. Фрай В. Е., С т и р н е Е. В., Стабилизация и регулирование положе¬
ния спутников, Вопросы ракетной техники, № 8, 1960.
12.7. Проблемы ориентации искусственных спутников, под ред. С. Ф. Сингера,
Изд-во «Наука», 1966.
12.8. Л э н д ж Б. О., Ф л е м и н г А. В., П а р к и н с о н Б. В., Синтез си¬
стемы управления для вращающихся воздушно-космических летательных
аппаратов, Вопросы ракетной техники, № 4, 1967.
12.9. Рифкин А., Вогел Е., Ориентация космического корабля, стабили¬
зируемого вращением, Вопросы ракетной техники, № 7, 1967.
12.10. П у з и ц к и й А. В., Космические аппараты, стабилизированные враще¬
нием, Авиация и космонавтика, № 1, 1969.
12.11. Красовский А. А., О двухканальных системах автоматического
регулирования с антисимметричными связями, Автоматика и телемеханика,
№ 2, 1957.
12.12. К р а с о в с к и й А. А., К теории двухканальных следящих систем с ре¬
лейным элементом в цепи переменного тока, Автоматика и телемеханика,
№ 9, 1960.
12.13. Красовский А. А., Двухканальные следящие системы с антисим¬
метричными связями при наличии случайных возмущающих воздействий,
Автоматика и телемеханика, № 2, 1961.
12.14. К н е л л е р В. Ю., Об одном типе мостов переменного тока с автомати¬
ческим уравновешиванием, Автоматика и телемеханика, № 2, 1958.
550
ЛИТЕРАТУРА
12.15. Казамаров А. А., Палатник А. М., Роднянский Л. О.,
Динамика двумерных систем автоматического регулирования, Изд-во «На¬
ука», 1967.
12.16. Р о з е н б е й м К. В., К теории линейных двумерных систем автомати¬
ческого регулирования общего вида с модуляцией, Автоматика и телеме¬
ханика, № 5, 1970.
12.17. Б о н д а р о с Ю. Г., Аналитическое конструирование контуров управ¬
ления двумерными системами. Изв. АН СССР, «Техническая кибернетика»,
№ 5, 1971.
12.18. Легостаев В. П., Раушенбах Б. В., Автоматическая сборка
в космосе, Космические исследования, вып. 6, 1969.
12.19. Лебедев А. А., С о к о л о в В. Б., Встреча на орбите, Изд-во «Маши¬
ностроение», 1969.
12.20. С м о й л о в и ч Г. В., Сближение космических аппаратов при постоян¬
ном направлении вектора относительной дальности, Космические исследо¬
вания, вып. 6, 1968.
12.21. Пономарев В. М. Теория управления движением космических аппа¬
ратов, Изд-во «Наука», 1965.
12.2£. Исаев А. Е., Двухимпульсный переход на орбиту космической станции
с обеспечением условия «мягкой» встречи, Космические исследования,
вып. 5, 1967.
12.23. Аншаков Г. П., К у д ю р о в Л. В., Об одном методе управления
при «мягкой» встрече космических аппаратов на орбите, Космические ис¬
следования, вып. 6, 1971.
12.24. Соколов В. Б.^ Исследование некоторых задач сближения и мягкой
посадки с помощью обобщенных параметров, Космические исследования,
вып. 1, 1967.
12.25. Иванов К. Б., Почти оптимальное управление одним классом нели¬
нейных динамических систем, Космические исследования, вып. 4, 1967.
Глава XIII
13.1. Булгаков Б. В., Прикладная теория гироскопов, Гостехиздат, 1955.
13.2. Фридлендер Г. О., Козлов М. С., Авиационные гироскопические
приборы, Оборонгиз, 1961.
13.3. Мак-Клур К. Л., Теория инерциальной навигации, перев. с англ.,
Изд-во «Наука», 1964.
13.4. Захарин М. И., 3 а х а р и н Р. М., Кинематика инерциальных си¬
стем навигации, Изд-во «Машиностроение», 1968.
Приложение
П.1. Летов А. М., Аналитическое конструирование регуляторов, I, II, III»
Автоматика и телемеханика, №№ 4, 5, 6, 1960.
П.2. Литовченко И. А., К изопериметрической задаче аналитического
конструирования, Автоматика и телемеханика, № 12, 1961.
П.З. Салуквадзе М. Е., Аналитическое конструирование регуляторов.
Постоянно действующие возмущения, Автоматика и телемеханика,
№ 10, 1961.
П.4. Летов А. М., Аналитическое конструирование регуляторов. Дальней¬
шее развитие проблемы, V, Автоматика и телемеханика, № 11, 1962.
П.5. Красовский Н. Н., Летов А. М., К теории аналитического кон¬
струирования регуляторов, Автоматика и телемеханика, № 6, 1962.
П.6. Красовский Н.Н., Лидский Э. А., Аналитическое конструиро-
41 вание регуляторов в системах со случайными свойствами, Автоматика и
телемеханика, № 11, 1961.
ЛИТЕРАТУРА
651
П.7. С а л у к в а д з е М. Е., Об аналитическом конструировании оптималь¬
ного регулятора при постоянно действующих возмущениях, Автоматика
и телемеханика, № 6, 1962.
П.8. СалуквадзеМ. Е. К вопросу аналитического конструирования оп¬
тимального регулятора, Автоматика и телемеханика, № 4, 1963.
П.9. Ка I man R., Contributions to the Theory of Optimal Control., Bull. Soc.
Mat. Mex. v. 5, 1960.
П.10. Зубов В. И., К теории аналитического построения регуляторов, Ав¬
томатика и телемеханика, № 8, 1963.
П.11. Зубов В. И., Теория оптимального управления, Изд-во «Судостроение»,
1966.
П.12. П а р а е в Ю. И., О решении одной задачи аналитического конструирова¬
ния регуляторов, Автоматика и телемеханика, № 4, 1964. •
ПЛЗ. Весткотт Д. Г., Флорентин Д. Д., П и р с о н Д. О., Прибли¬
женные методы теории оптимальных и самонастраивающихся систем, Труды
II конгресса ИФАК, «Оптимальные системы. Статистические методы»,
Изд-во «Наука», 1965.
П.14. Летов А. М., Динамика полета и управление, Изд-во «Наука», 1969.
П.15. Ата нс М., Фалб П., Оптимальное управление, перев. с англ.,
Изд-во «Машиностроение», 1968.
П.16. Ройтенберг Я. Н., Автоматическое управление, Изд-во «Наука»,
1971.
П.17. Красовский А. А., Интегральные оценки моментов и синтез линей¬
ных систем, Автоматика и телемеханика, № 10, 1967.
П.18. К р а с о в с к и й А. А., Интегральные оценки моментов и синтез нелиней¬
ных систем, Автоматика и телемеханика, № 12, 1967.
П.19. К р а с о в с к и й А. А., Интегральные оценки моментов и синтез регуля¬
торов нейтрального объекта, Автоматика и телемеханика, № 1, 1968.
П.20. Красовский А. А., Интегральные оценки моментов и синтез регуля¬
торов нестационарного объекта, Автоматика и телемеханика, № 2, 1968.
П.21. Красовский А. А., Обобщение задачи аналитического конструиро¬
вания регуляторов при заданной работе управлений и управляющих
сигналов, Автоматика и телемеханика, № 7, 1969.
П.22. Красовский А. А., Развитие аналитического метода синтеза условно
оптимальных управлений, Автоматика и телемеханика, § 11, 1969.
П.23. Красовский А. А., Аналитическое конструирование контуров систем
автоматического регулирования по критерию обобщенной работы, Извес¬
тия АН СССР, «Техническая кибернетика», № 3, 1970.
П.24. Красовский А. А., О преимуществах систем управления, сконструи¬
рованных по критерию обобщенной работы, Изв. АН СССР, «Техническая
кибернетика», № 5, 1970.
П.25. Krasovsky A. A., A New Solution to the Problem of a Control System
Analytical Design. Automatica, № 1, 1971.
П.26. Красовский А. А., Статистическая теория переходных процессов
в системах управления, Изд-во «Наука», 1968.
П.27. Красовский А. А., Аналитическое конструирование контуров управ¬
ления летательными аппаратами, Изд-во «Машиностроение», 1969.
П.28. Красовский Н. Н., Теория оптимального управления движением,
Изд-во «Наука», 1968.
П.29. Ч е т а е в Н. Г., Устойчивость движения, Гостехиздат, 1946.
П.30. Карапетян Р. М., О численном решении уравнений оптимальных
коэффициентов в задачах аналитического конструирования регуляторов.
Автоматика и телемеханика, № 12, 1971.
П.31. Б а р б а ш и н Е. А., Функции Ляпунова, Изд-во «Наука», 1970.
П.32. Емельянов С. В., Теория систем с переменной структурой, Изд-во
«Наука», 1970.
552
ЛИТЕРАТУРА
П.ЗЗ. Сб. «Системы е переменной структурой и их применение в задачах автома¬
тизации полета», под ред. Б. Н. Петрова и G. В. Емельянова, Изд-во «Нау¬
ка», 1968.
П.34. Кал м а н Р., Об общей теории систем управления, Труды I конгресса
ИФАК, т. 2, Изд-во АН СССР, 1961.
П.35. КалманР., ФалбП., Арбиб М., Очерки по математической теории
систем, Изд-во «Мир», 1971.
П.36. Kolmogorov A. N., Ueber die analytischen Methoden in der Wahr-
scheinlichkeits rechung, Math. Ann., v. 104, 1931.
П.37. Ан дронов А. А., П о н т p я г и н Л. С., В и т т А. А., О статистиче¬
ском рассмотрении динамических систем, Журнал экспериментальной и
теоретической физики, т. 3, вып. 3^ 1933.
П.38. Б а р р е т Д. Ф., Применение уравнений Колмогорова для исследования
систем автоматического управления со случайными возмущениями, Труды
I конгресса ИФАК, Статистические методы, Изд-во АН СССР, 1961.
П.39. Мерклингер К. Дж., Численный анализ нелинейных систем управ¬
ления с помощью уравнения Фоккера — Планка — Колмогорова. Труды
II конгресса ИФАК, Оптимальные системы. Статистические методы, Изд-во
«Наука», 1965.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоматизация управления полетом
10
Автоматизация управления полетом,
автоматический поиск 10
Автоматизация управления полетом,
автоматический синтез схем 11
Автоматизация управления полетом,
проектирование 10
Автоматизация управления полетом,
система управления 10
Автоматизация управления полетом,
функции человека 10
Автоматическая настройка контуров
демпфирования 96
Автоматическое управление траекто
рией 238
Автомат передаточных чисел АРУ-ЗВ
78, 80
Автомат устойчивости 98
Автомат устойчивости, самонастрой¬
ка 102
«Автоматы подсказки» 236
Автономная модель свободного дви¬
жения 429
Автономная система 34
Автопилот 173
Автопилот астатический 181
Автопилот дифференциальный 189
Автопилот, независимый синтез сис¬
тем стабилизации 205
Автопилот параллельный 189, 190
Автопилот параллельный, канал при¬
ведения к горизонту 200
Автопилот параллельный, канал руля
высоты 200
Автопилот параллельный, канал руля
высоты, закон стабилизации 198
Автопилот параллельный, канал руля
высоты, режим согласования 201
Автопилот параллельный, канал руля
высоты, режим стабилизации 201
Автопилот параллельный, канал руля
высоты, режим управления 202
Автопилот параллельный, канал руля
направления 197
Автопилот параллельный, канал уп¬
равления рукояткой летчика 200
Автопилот параллельный, канал эле¬
ронов 198
Автопилот параллельный, обеспечение
безопасности 190
Автопилот параллельный, режим сог¬
ласования 199
Автопилот параллельный, устранение
статистических ошибок 197
Автопилот последовательный 189, 191
Автопилот последовательный, законы
управления 194
Автопилот последовательный, обеспе¬
чение безопасности 190
Автопилот последовательный, повы¬
шение надежности 190
Автопилот последовательный, режим
демпфера 195
Автопилот последовательный, режим
«приведение к горизонту» 195
Автопилот последовательный, режим
стабилизации 196
Автопилот последовательный, режим
управления 196
Автопилот последовательный, режимы
работы 194
Автопилот самонастраивающийся 223
Автопилот, синтез в режиме управле¬
ния 219
Адаптация оптимальных автопилотов
223
Адаптивность систем демпфирования
аэроупругих колебаний 167
Адаптивные оптимальные системы
ручного управления 125
Адаптивные системы демпфирования
166
Алгоритмы самонастройки беспоиско-
вые 125
Аналитические характеристики 21
Аналитическое конструирование 11,
14, 465
Аналитическое конструирование, ите¬
рационный подход 14
554
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аналитическое конструирование кри¬
терия качества 11
Аналитическое конструирование при
неполной степени наблюдаемости
146
Аналитическое конструирование при
полной степени наблюдаемости 139
Атмосферная турбулентность 52
Атмосферная
турбулентность
изо-
тропная 52
Атмосферная
турбулентность,
мас-
штаб турбулентности 55
Атмосферная
турбулентность
одно-
родная 52
Аэродинамические перекрестные свя¬
зи 29
Аэроупругие колебания 60
Аэроупругий летательный аппарат 53,
59
Аэроупругость 59, 60
Барометрическая высота 238
Барометрическая высота, стабилиза¬
ция 239
Барометрический высотомер 438
Безопасность посадки 269
Белый шум 105
Беспоисковые алгоритмы самона¬
стройки 125
Беспоисковые системы самонастрой¬
ки 125
Боковое движение 29
Боковое движение вертолета 369
Бустерное управление 75, 76
Векторный метод боковой наводки
937
Весовые функции 98
Влияние аэроупругости 60
Влияние упругих колебаний 60
Вращающийся спутник 404
Выравнивание 298
Высота принятия решения 269
Высотный корректор 239
Гипотеза Тэйлора 53
Гироскоп 405
Глубина оптимальных связей 210
Горизонтальный полет с постоянной
скоростью 31
Датчик МРД-126 79
Датчик реостатный МРД-106 79
Движение самолета боковое 29
Движение самолета длиннопериоди¬
ческое 36
Движение самолета как твердого те¬
ла 19, 20, 53
Движение самолета продольное 29
Движение самолета фугоидное 36
Демпферы крена 89
Демпферы самолетные 87
Демпферы тангажа 87-
Демпфирование аэроупругих колеба¬
ний 138
Демпфирование аэроупругих колеба¬
ний, аналитическое конструирова¬
ние с помощью фундаментальной
матрицы весовых функций 153
Демпфирование аэроупругих колеба¬
ний, практическое осуществление
162
Директорное полуавтоматическое уп¬
равление 277
Дистанционное управление рулевыми
органами 191
Дифференциальные автопилоты 189
Дифференциальные автопилоты, зако¬
ны управления 194
Дифференциальные автопилоты, обес¬
печение безопасности 190
Дифференциальные автопилоты, по¬
вышение надежности 190
Дифференциальные автопилоты, ре¬
жим демпфера 195
Дифференциальные автопилоты, ре¬
жим «приведение к горизонту» 195
Дифференциальные автопилоты, ре¬
жим стабилизации 196
Дифференциальные автопилоты, ре¬
жим управления 196
Дифференциальные автопилоты, ре¬
жимы работы 194
Естественное резервирование 166
Жесткая траектория приземления 298
Задача идентификации 21
Задача изопериметрическая 11
Задача квазитерминальная 483
Задача квазитерминальная первого
рода 484
Задача квазитерминальная, решение
484
Задача нетерминальная без гранично¬
го условия 486
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
555
Задача нетерминальная без гранично¬
го условия для неустойчивого объ¬
екта 488
Задача нетерминальная со сколь¬
зящим граничным условием 491
Задача полуавтоматического самона¬
ведения 331
Задача синтеза контуров самонаст¬
ройки 125
Законы управления автопилота 177
Законы управления креном 185
Идентификация аэродинамических
объектов 22
Идентификация моментных характе¬
ристик 22
Идентификация текущая 84
Изопериметрическая задача 11
Изотропная турбулентность 52
Импульсная переходная функция 38
Канал руля управления 172
Канал руля управления с регулиро¬
ванием по углу и производной 176
Канал руля управления с регулиро¬
ванием по углу и двум производ¬
ным 176
Квазиоптимальные управления 235
Квазистационарная линейная система
35
Квазитерминальные задачи 483
Квазитерминальные задачи первого
рода 484
Квазитерминальные задачи, решение
484
Кинематические траектории 324
Кинематическое соотношение Пуас¬
сона 457
Комплекс пилотажно-навигационный
10, 422
Комплекс пилотажно-навигационный,
надежность 452
Комплекс пилотажно-навигационный
унифицированный 424
Контур крена 185
Контур рысканья 186
Контур стабилизации вращения спут¬
ника 409
Контур стабилизации крена 172
Контур тангажа 178
Контур траекторный 172
Контур угловой стабилизации 172
Контур управления самолетом 37
Короткопериодические колебания 86
Корректор высотный 239
Корреляционная самонастройка сис¬
тем демпфирования аэроупругих
колебаний 167
Коэффициент перегрузки по переме¬
щению ручки 75
Коэффициент перегрузки по усилию
75
Коэффициент статической путевой ус¬
тойчивости 44
Критерий Сильвестра 23
Курс 18
Кусочно-линейная аппроксимация ха¬
рактеристик объекта 72
Кусочно-линейные характеристики 21
Летова — Калмана метод аналитичес¬
кого конструирования 11, 467
Линейная модель продольного дви¬
жения 34
Линейный контур боковой стабили¬
зации 246
Линия визирования 322
Масштаб турбулентности 55
Матричное уравнение Риккати 466
Метод вспомогательного оператора
125
Метод комплексных передаточных
функций 405
Метод Летова—Калмана 11, 467
Метод собственных форм 68, 70
Метод собственных функций 68, 70
Методы дальнего наведения 324
Механизм триммерного эффекта 193
Минимизация функционала 11
Модель барометрического высотоме¬
ра 438
Модель бокового движения 44
Модель гировертикали 438
Модель канала рысканья 51
Модель продольного и бокового дви¬
жения 32
Модель продольного углового движе¬
ния 40
Модель свободного движения авто¬
номная 429
Модель с распределенными парамет¬
рами 67
Модель с сосредоточенными массами
67
Наблюдаемость по Калману 476
Наблюдаемость по Калману полная
476
556
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Наведение на цель 321
Наведение на цель боковое 335
Наведение на цель по дальности 335
Наведение на цель по кривой погони
324
Наведение на цель по методу «пря¬
мая с разворотом» 327
Наведение на цель по направлению
335, 337
Наведение на цель по направлению,
векторный метод 337
Наведение на цель по направлению,
синхронный метод 338
Наведение на цель продольное 335
Наведение на цель с последователь¬
ными упреждениями 335
Навигационные средства обеспечения
посадки 270
Навигация пропорциональная 331
Навигация с интегральным управле¬
нием 176
Настройка автоматическая контуров
демпфирования 96
Нежесткая траектория приземления
299
Независимый синтез систем стабили¬
зации автопилота 205
Нейтральность по перегрузке 41
Неполная степень наблюдаемости 476
Нестационарность аэродинамики 20
Нетерминальная задача без гранич¬
ного условия 486
Нетерминальная задача без гранич¬
ного условия для неустойчивого
объекта 488
Нетерминальная задача со скользя¬
щими граничными условиями 491
Нетерминальное управление 106
Неустойчивость в путевом отношении
45
Неустойчивость колебательная 47
Неустойчивость спиральная 47
Обобщенная взвешенная работа сиг¬
налов управления 472
Обобщенная взвешенная работа уп¬
равлений 473
Однородная турбулентность 52
Определение характеристик аэроди¬
намических объектов 21
Оптимальные управления для линей¬
ного объекта 493
Ортогональные пробные колебания 22
Отклонение рулей 37
Относительная геометрическая высо¬
та 238
Параллельное сближение 326, 331
Параллельный автопилот 189, 190
Параллельный автопилот, канал при¬
ведения к горизонту 200
Параллельный автопилот, канал руля
высоты 200
Параллельный автопилот, канал руля
высоты, закон стабилизации 198
Параллельный автопилот, канал руля
высоты, режим согласования 201
Параллельный автопилот, канал руля
высоты, режим стабилизации 201
Параллельный автопилот, канал руля
высоты, режИхМ управления 202
Параллельный автопилот, канал руля
направления 197
Параллельный автопилот, канал уп¬
равления рукояткой летчика 200
Параллельный автопилот, канал эле¬
ронов 198
Параллельный автопилот, обеспече¬
ние безопасности 190
Параллельный автопилот, режим сог¬
ласования 199
Параллельный автопилот, устранение
статических ошибок 197
Парашютирование 298
Перегрузка максимальная отрица¬
тельная 249
Перегрузка максимальная положи¬
тельная 243
Передаточные функции вертолета 379
Пилотажно-навигационный комплекс
10, 422
Пилотажно-навигационный комплекс,
надежность 452
Планирование 298
Плоская ориентация 390
Подавление аэроупругих колебаний
163
Полет на малых высотах 243
Полиномиальное представление ха¬
рактеристик объекта 72
Полиномиальные характеристики 21
Полная линейная модель продольного
движения 34
Полная наблюдаемость по Калману
146
Полная степень наблюдаемости 476
Положение масс летательного аппа¬
рата 148
Положительное отклонение руля 37
Полуавтоматическое управление 104
Полуавтоматическое управление ди-
ректорное 277
Полуавтоматическое управление тра¬
екторией полета 239
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
557
Полупассивные системы демпфирова¬
ния 163
Последовательный автопилот 189, 191
Последовательный автопилот, зако¬
ны управления 194
Последовательный автопилот, обеспе¬
чение безопасности 190
Последовательный автопилот, повы¬
шение надежности 190
Последовательный автопилот, режим
демпфера 195
Последовательный автопилот, режим
«приведение к горизонту» 195
Последовательный автопилот, режим
стабилизации 196
Последовательный автопилот, режим
управления 196
Последовательный автопилот, режи¬
мы работы 194
Принцип комплексирования систем
246
Пробивание облачности 270
Продольное движение вертолета 369
Продольное движение самолета 29,
32
Проектирование систем управления
полетом 10
Промах 321
Пропорциональная навигация 331
Процесс ориентации космического ап¬
парата 388
Процесс стабилизации космического
аппарата 338
Пуассона кинематические соотноше¬
ния 457
Путевой угол 18
Раздвижные тяги 87
Ракурс цели 324
Резервирование естественное 166
Реостатный датчик МРД-106 79
Риккати матричное уравнение 466
Ручное управление 74, 104
Самолетные демпферы 87
Самонастраивающиеся автопилоты
223
Самонастройка с поиском 126
Самонастройка экстремальная 126
Сверхзвуковые самолеты 29
Сильвестра критерий 23
Синтез автоматов безопасности 235
Синтез автопилота в режиме управ¬
ления 219
Синтез внутренних контуров 39
Синтез контура самонаведения раке¬
ты 342
Синтез контура стабилизации вра¬
щающегося спутника 409
Синтез ручного управления продоль¬
ным движением 111
Синтез систем стабилизации баромет¬
рической высоты 259
Синтез системы ориентации космиче¬
ского аппарата 390
Синтез траекторного управления бо¬
ковым движением 265
Система автономная 34
Система ближней навигации 271
Система демпфирования полупассив-
ная 163, 165
Система линейная квазистационарная
35
Система полуавтоматическая «Путь-
4 МПА» 291
Система причаливания 411
Система прямого действия 165
Система ручного управления 15, 75,
104
Система ручного управления адап¬
тивная оптимальная 125
Система самонастройки беспоисковая
125
Система сближения 411
Система с настройкой в функции па¬
раметров среды 83
Система с разомкнутым контуром
самонастройки 83
Система стационарная 34
Скользящее ограничение хода авто¬
пилотов 190
Слабые связи в системе 34
Соотношения Пуассона кинематиче¬
ские 487
Спиральная неустойчивость 47
Способ равных вкладов максималь¬
ных отклонений 262
Спутник вращающийся 404
Средства частичной автоматизации
75
Стабилизация барометрической высо¬
ты 239
Стабилизация относительно жесткой
траектории 398
Стабилизация относительно нежест¬
кой траектории 298
Статическая неустойчивость по пере¬
грузке 42
Статическая неустойчивость по пере¬
грузке в путевом отношении 45
Статическая устойчивость по пере¬
грузке 41
558
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Статическая устойчивость по пере-
• грузке в путевом отношении 45
Статоскоп 239
Стационарные оптимальные управле¬
ния без граничного условия 498
Стационарные оптимальные управле¬
ния для антисимметричного объек¬
та 405
Степень наблюдаемости 476
Степень наблюдаемости неполная 476
Степень наблюдаемости полная 476
Субобъект 73
Субоптимальное управление 235
Текущая идентификация 84
Терминальное управление 15
Терминальные задачи 15, 483
Траектория приземления жесткая 298
Траектория приземления кинемати¬
ческая 324
Траектория приземления нежесткая
299
Траектория приземления номинальная
298
Траекторный контур 182
Турбулентность атмосферы 52
Турбулентность атмосферы изотроп¬
ная 52
Турбулентность атмосферы, масштаб
турбулентности 55
Турбулентность атмосферы однород¬
ная 52
Тэйлора гипотеза 53
Тяги раздвижные 87
Увеличение пропускной способности
аэродромов -270
Угол атаки 19
Угол крена 18
Угол путевой 18
Угол рысканья 18
Угол скольжения 19
Угол тангажа 18
Унифицированный пилотажно-нави¬
гационный комплекс 424
Управление бустерное 75, 76
Управление высотой 238
Управ пение высотой полета низколе¬
тящих самолетов 243
Управление квазиоптимальное 235
Управление нетерминальное 106
Управление оптимальное для линей¬
ного объекта 493
Управление оптимальное стационар¬
ное для граничного условия 498
Управление оптимальное стационар¬
ное при скользящем граничном ус¬
ловии 501
Управление полуавтоматическое 104
Управление прямое 75
Управление ручное 74
Управляемость самолета 74, 75
Уравнение Риккати матричное 466
Уравнение тонкой балки переменно¬
го сечения 67
Уравнение Фоккера — Планка — Кол¬
могорова 532
Устойчивость статическая . по пере¬
грузке 41
Устойчивость статическая по пере¬
грузке в путевом отношении 45
Устройства триммерного эффекта 76
Учет влияния ветра в уравнениях
движения 56
Фильтр Калмана — Бьюси 381
Флаттер 20, 60
Флюгерное наведение 337
ФПК-уравнение 532
Фугоидное движение 36
Фундаментальная система весовых
функций линейной модели самоле¬
та 39
Функции весовые 38
Функции импульсные переходные 38
Функционал для захода на посадку
295
Функционал для этапа приземления
298
Характеристики турбулентности ат¬
мосферы 52
Экспериментальное определение ха¬
рактеристик 20, 21
Экстремальная самонастройка 126
Эталон 216, 219
Александр Аркадьевич Красовский
Системы автоматического управления полетом
и их аналитическое конструирование
М., 1973 г., 560 стр. с илл.
Редактор Д. С. Фурманов
Техн редактор В. Н. Кондакова
Корректоры С.И. Емельянова, А. Л, Ипатова
Сдано в набор 18/11 1973 г. Подписано к печати 31/VIII 1973 г. Бумага 60х9071в.
Физ. печ. л. 35. Условн. печ. л. 35. Уч.-изд. л. 35,37. Тираж 4000 экз. Т-11079
Цена книги 3 р. 25 к. Заказ № 3—422.
Издательство «Наука»
Главная редакция физико-математической литературы.
117071, Москва, В-71, Ленинский проспект, 15.
Головное предприятие республиканского производственного
объединения «Полиграфкнига» Госкомиздата УССР,
р. Киев, ул Довжрнко, 3.
Отпечатано с матриц во 2-ой типографии изд-ва «Наука». Зак. 3031
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ,
117071, Москва, В-71, Ленинский проспект, 15
ГОТОВЯТСЯ К ПЕЧАТИ:
Г. В. Коренев, Цель и приспособляемость движения.
Основы автоматического управления, под редакцией В. С. Пугаче¬
ва, издание третье, переработанное.
Б В. Р а у шен бах, Е. Н Токарь, Управление ориентацией
космических аппаратов.
Я. 3. Цыпкин, Релейные автоматические системы.
Серия «Теоретические основы технической кибернетики»
Л. А. Р а с т р и г и н, Системы экстремального управления.
В. И. Уткин, Скользящие режимы и их применения в системах
с переменной структурой.
А. М. Ф о р м а л ь с к и й, Управляемость и устойчивость систем с
ограниченными ресурсами.
Предварительные заказы на указанные выше книги принимаются
всеми магазинами Книготорга и Академкниги.
При отказе в приеме заявки заказы можно направлять по адресу:
103050, Москва, К-50, ул. Медведева, 1, отдел «Книга — почтой» мага¬
зина № 8.