/

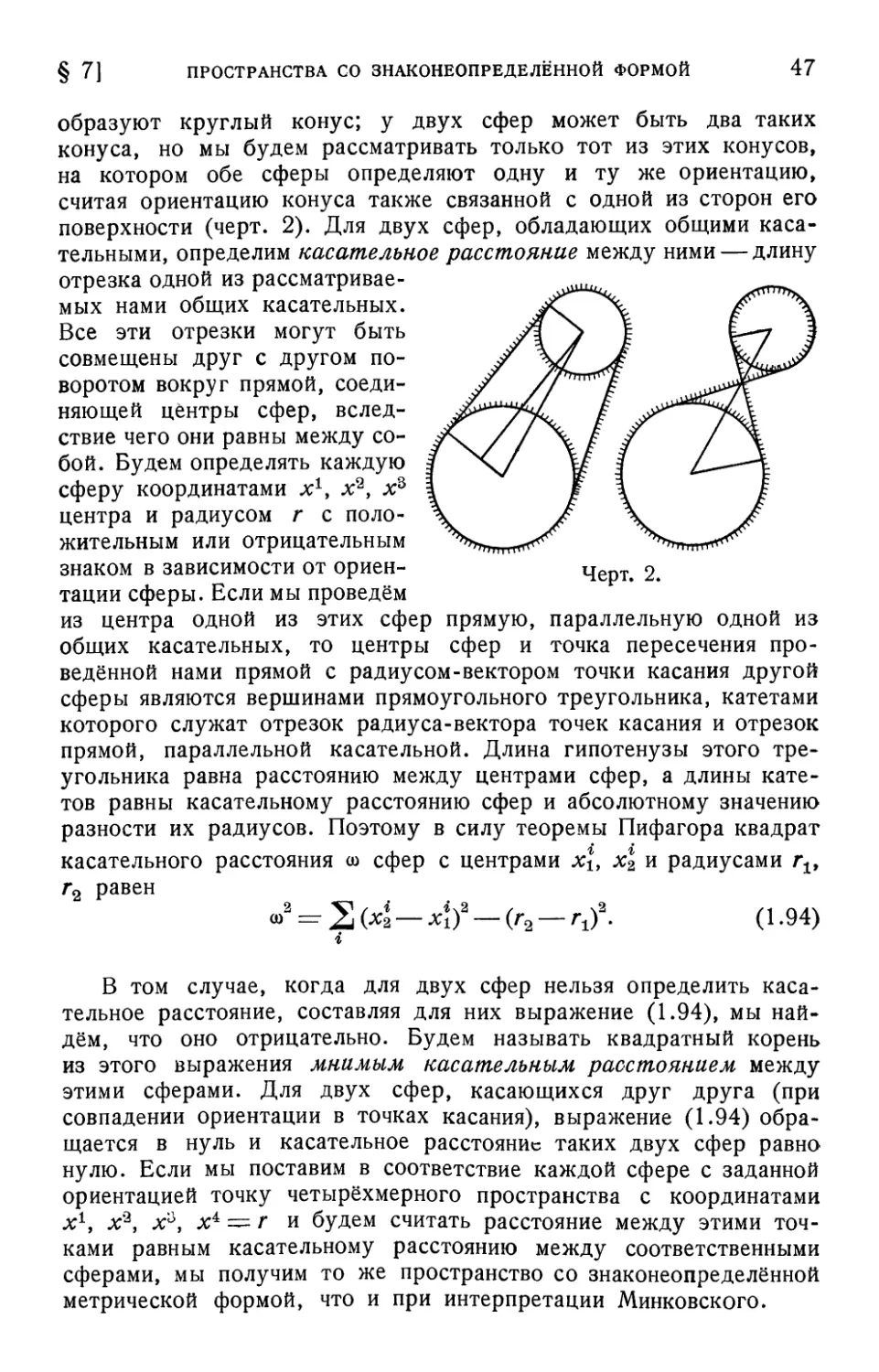

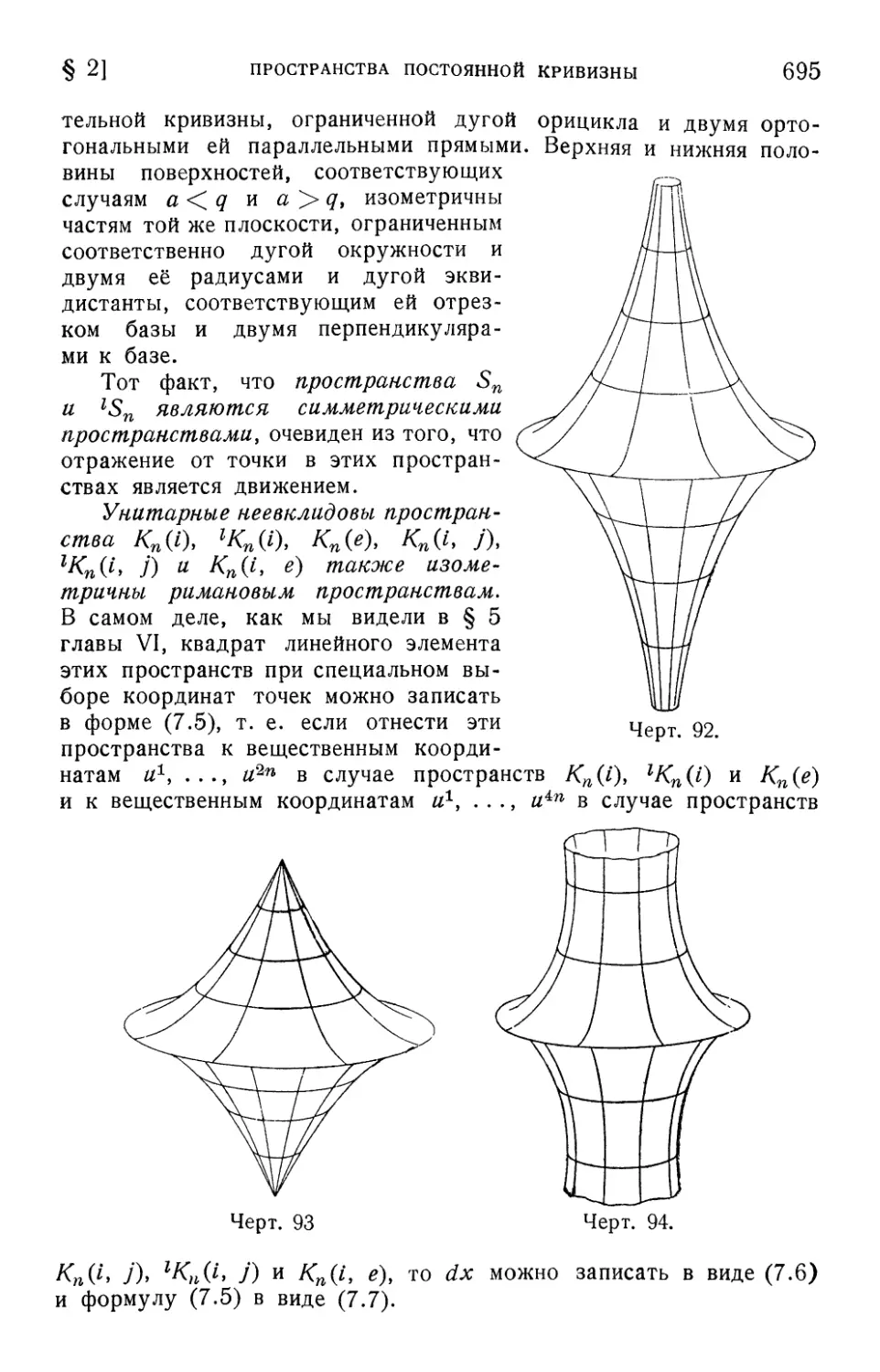
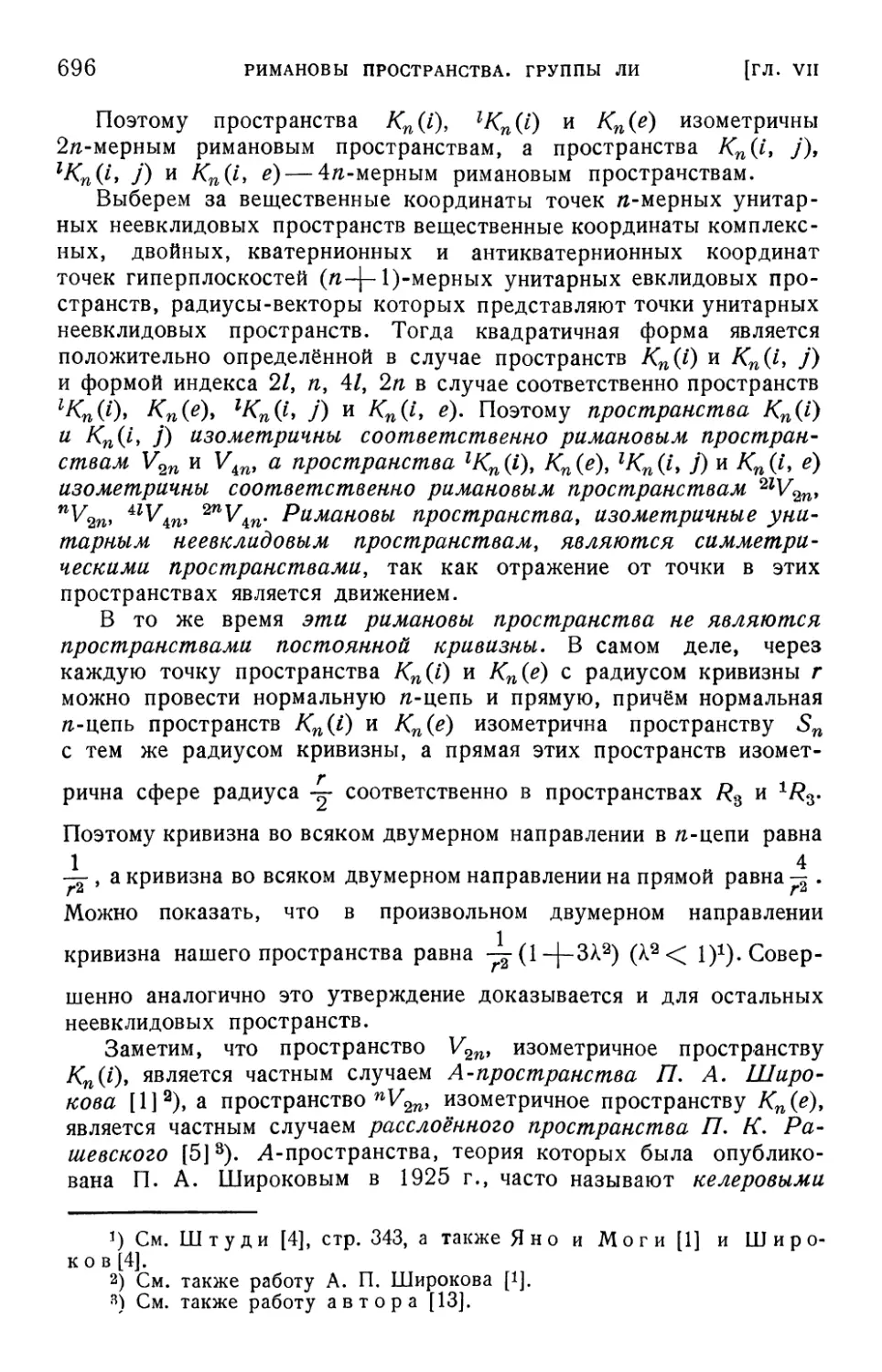
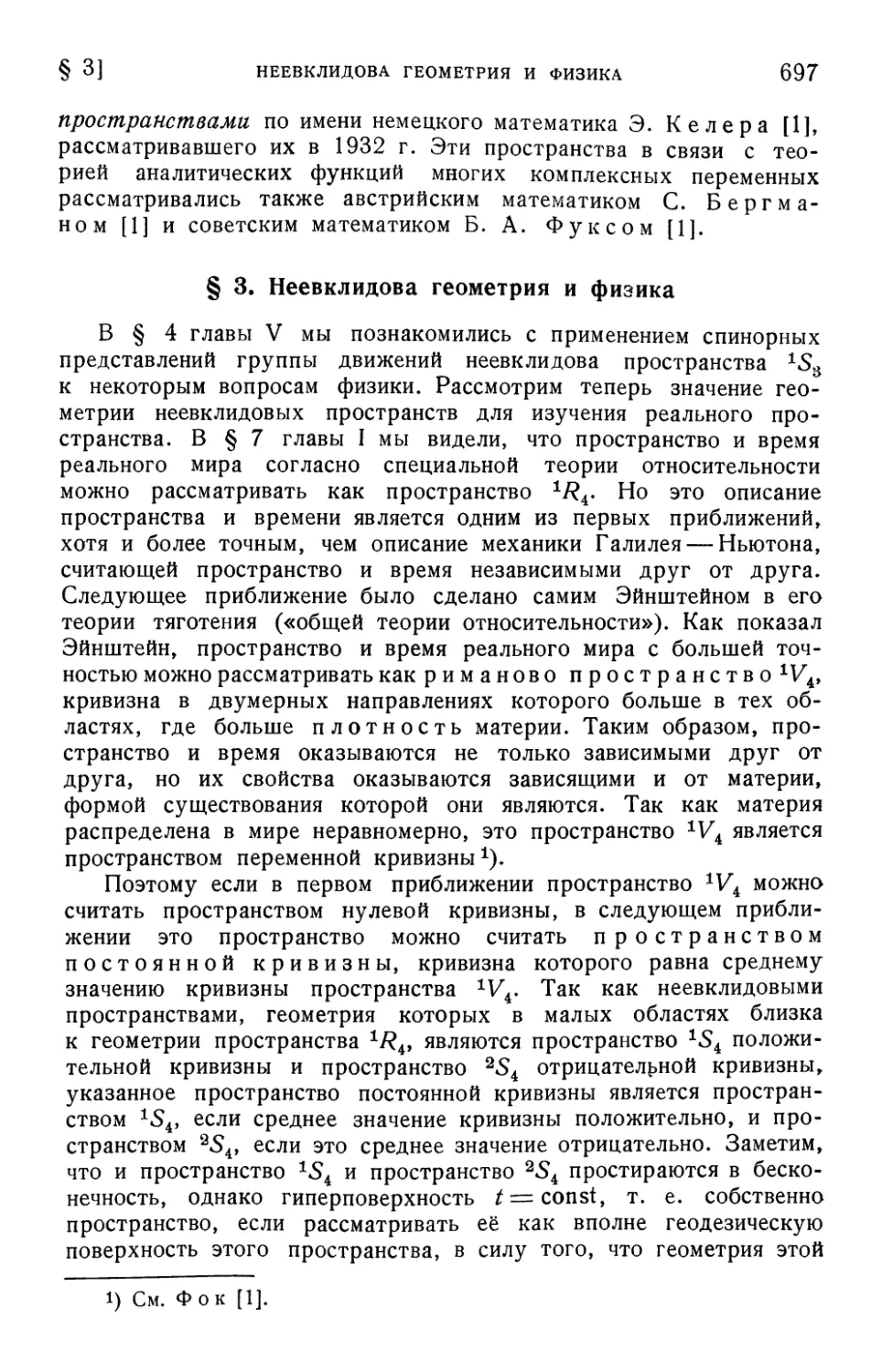




Text
Б. А. РОЗЕНФЕЛЬД
НЕЕВКЛИДОВЫ
ГЕОМЕТРИИ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ТЕХНИКО-ТЕОРЕТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1955
11-5-4
Розенфельд Борис Абрамович. Неевклидовы геометрии.
Редакторы Л. С. Атанасян и Э. П. Тихонова.
Техн, редактор С. Н. Ахламов. Корректор С. Н. Емельянова.
Сдано в набор 22/11 1955 г. Подписано к печати 12/VI 1955 г. Бумага 60х92/и.
Физ печ. л. 46,5. Условн. печ. л.е 46,5. Уч.-изд. л. 49.5. Тираж 3000 экз. Т-04903.
Цена книги 26 руб. 75 коп. Заказ № 177.
Государственное издательство технико-теоретической литературы
Москва, В-71, Б. Калужская ул., 15
Министерство культуры СССР. Главное управление полиграфической
промышленности. 4-я тип. им. Евг. Соколовой.
Ленинград, Измайловский пр., 29.
ОГЛАВЛЕНИЕ
Предисловие ................................................... '
Глава I. Евклидовы пространства................................ П
§ 1. Пространство Евклида................................ И
§ 2. Групповые аксиомы.................................. 15
§ 3. Метрические аксиомы................................ 21
§ 4. Топологические аксиомы............................. 25
§ 5. Экспериментальная проверка аксиом. Непротиворечивость,
независимость и полнота системы аксиом................... 30
§ 6. Многомерные евклидовы пространства................ 37
§ 7. Евклидовы пространства со знаконеопределённой метри-
ческой формой............................................ 44
§ 8. Комплексные евклидовы пространства и мнимые геометри-
ческие образы вещественных пространств................ 56
§ 9. Группы Ли........................................... 59
§ 10. Движения и аффинные преобразования.................. 66
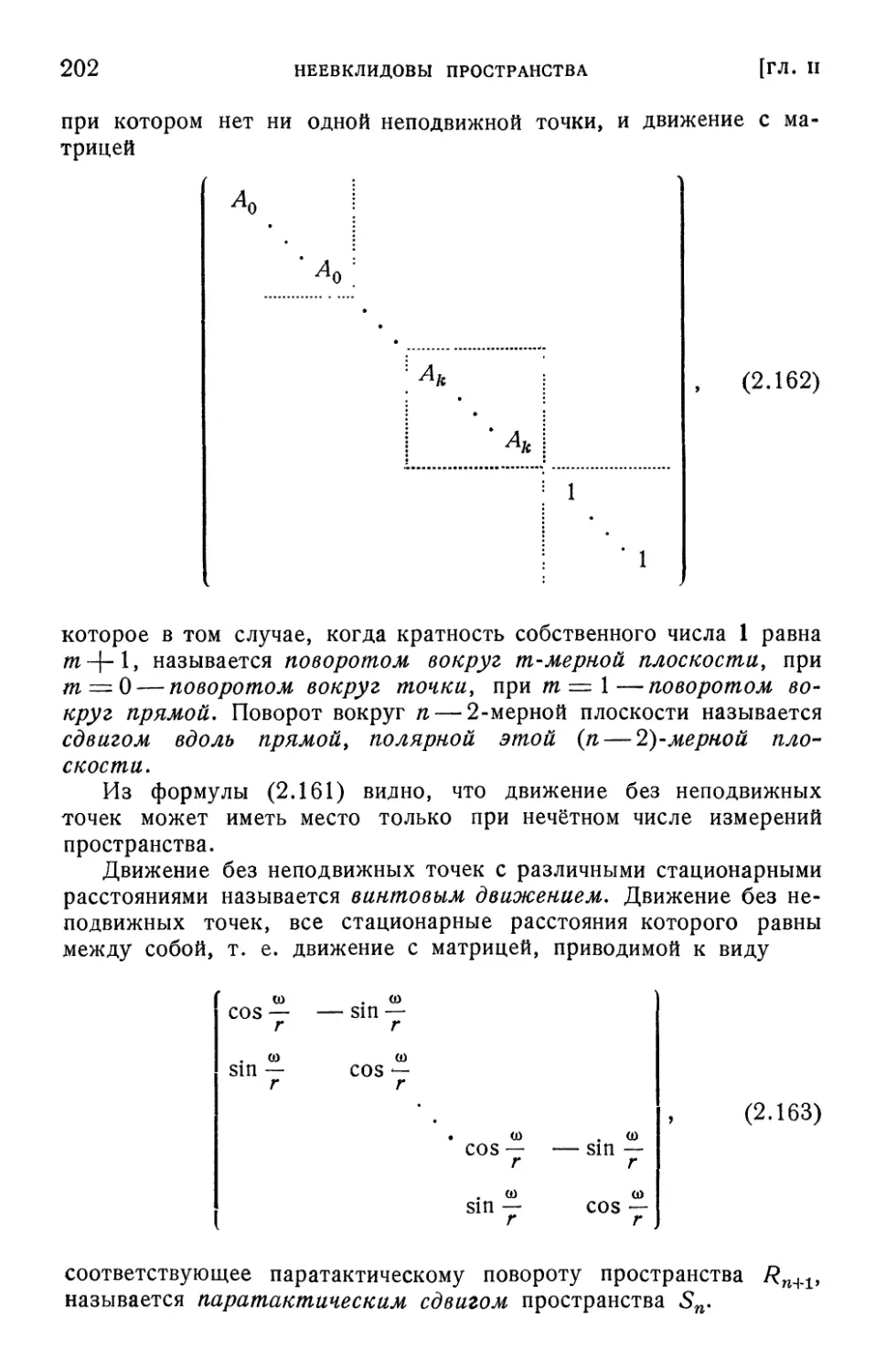
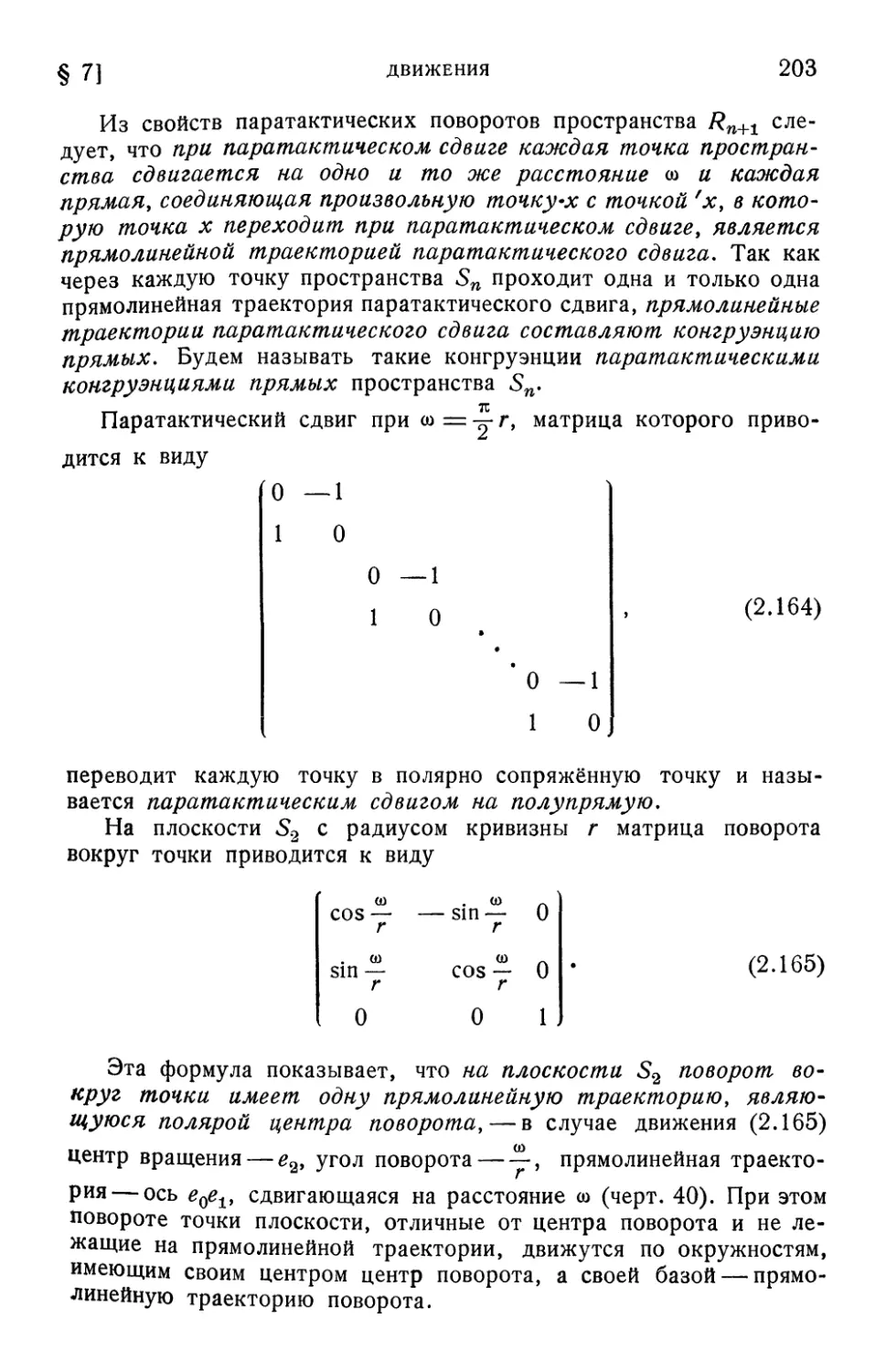
§11. Классификация движений.............................. 79
§ 12. Движения как произведения отражений от гиперплос-
костей ..................................................112
§ 13. Однородные пространства.............................124
§ 14. Инволюционные преобразования и образы симметрии . . . 126
Глава И. Неевклидовы пространства как сферы с отождест-
влёнными диаметрально противоположными точ-
ками .........................................................135
§ 1. Геометрия на сферах в евклидовых пространствах .... 135
§ 2. Неевклидовы пространства. Пространства Лобачевского и
Римана.....................................................................................................150
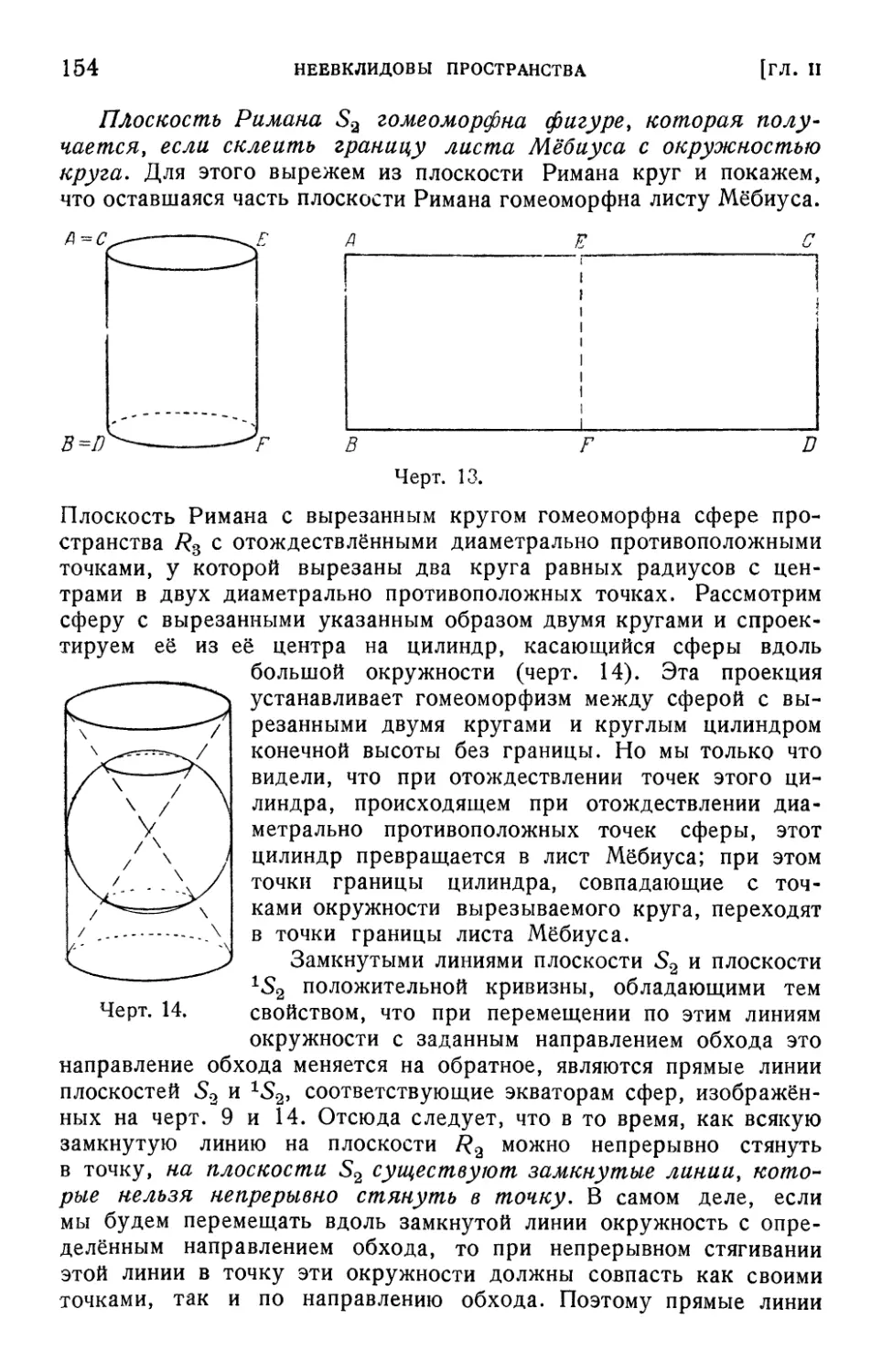
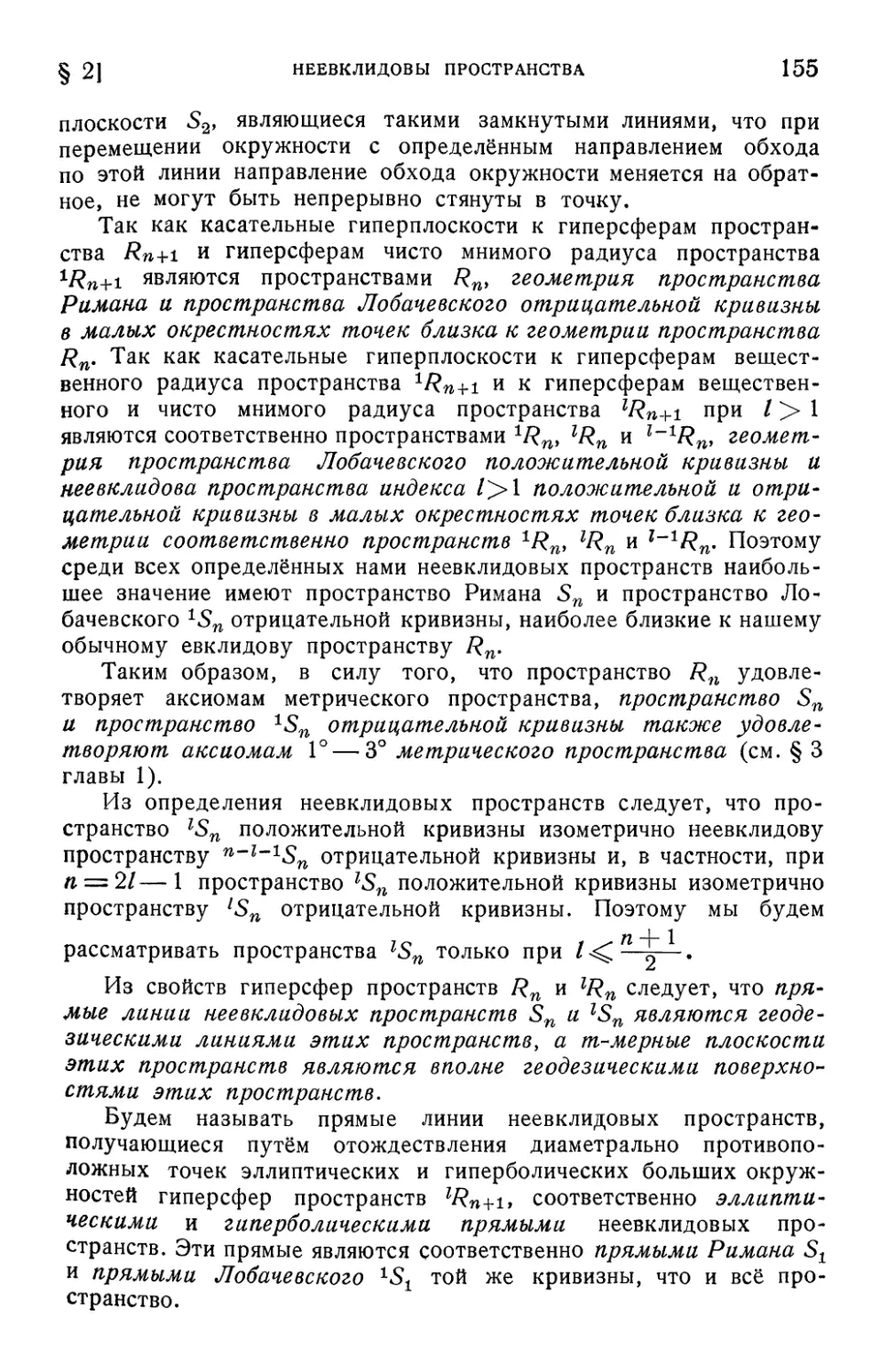
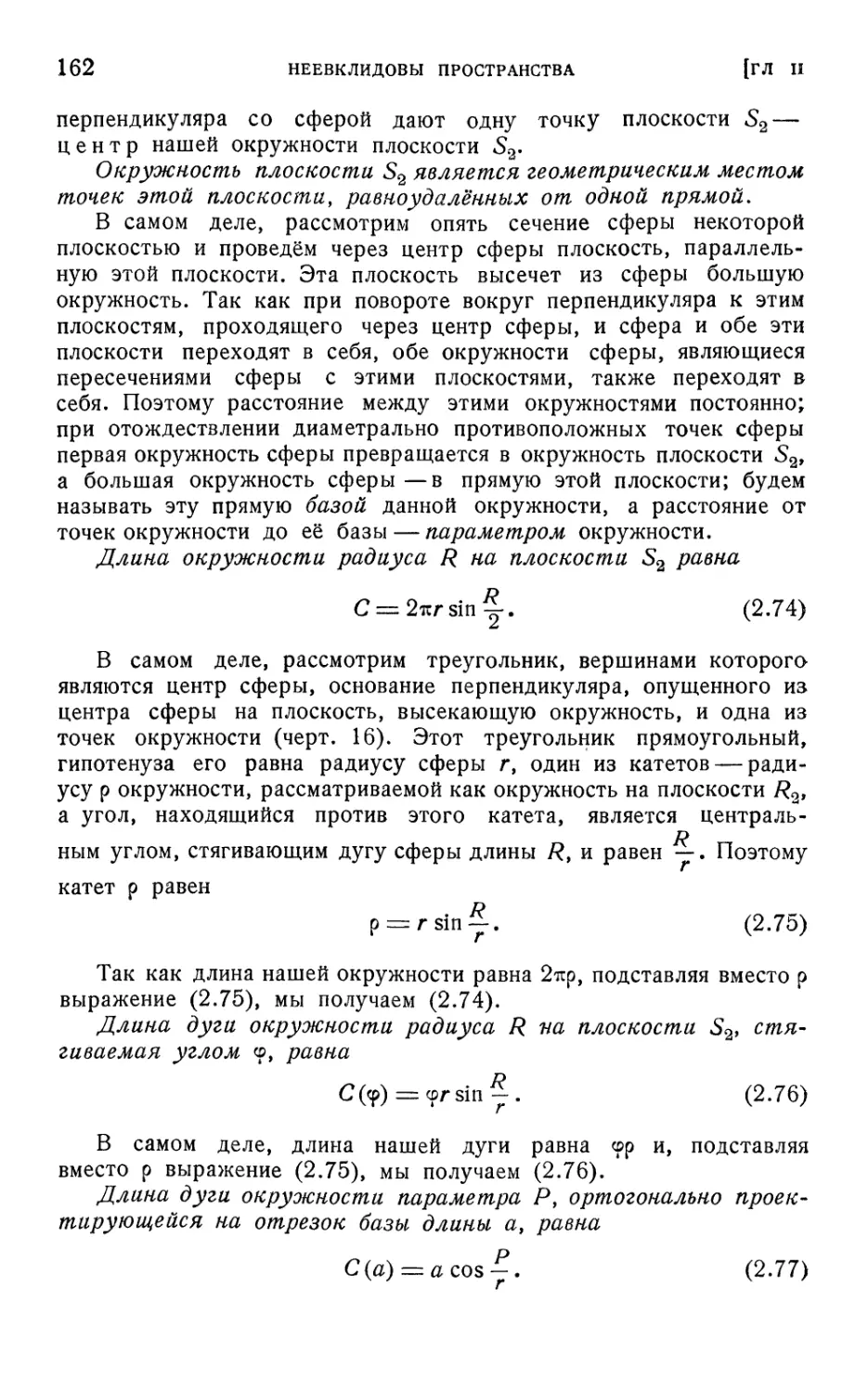
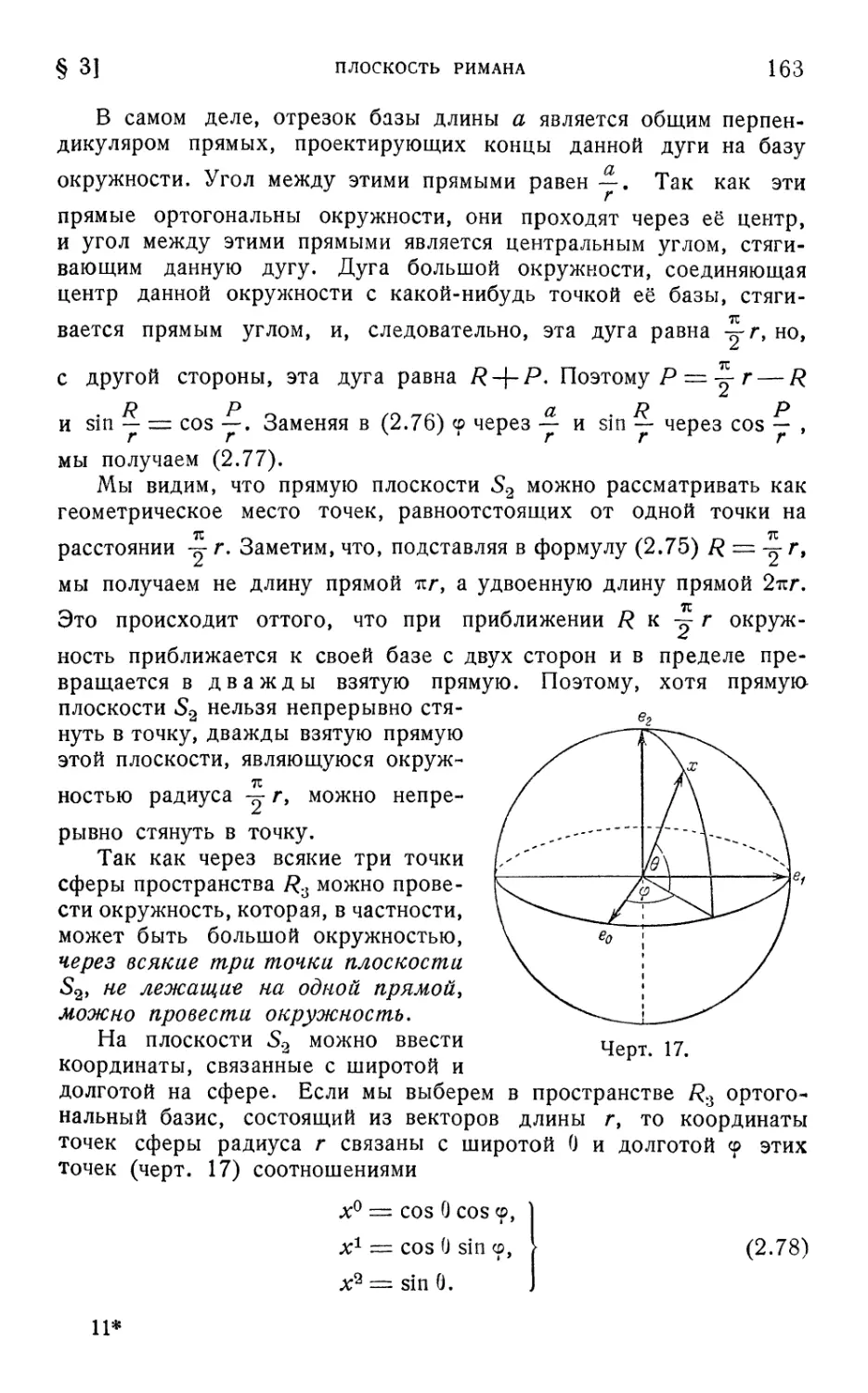
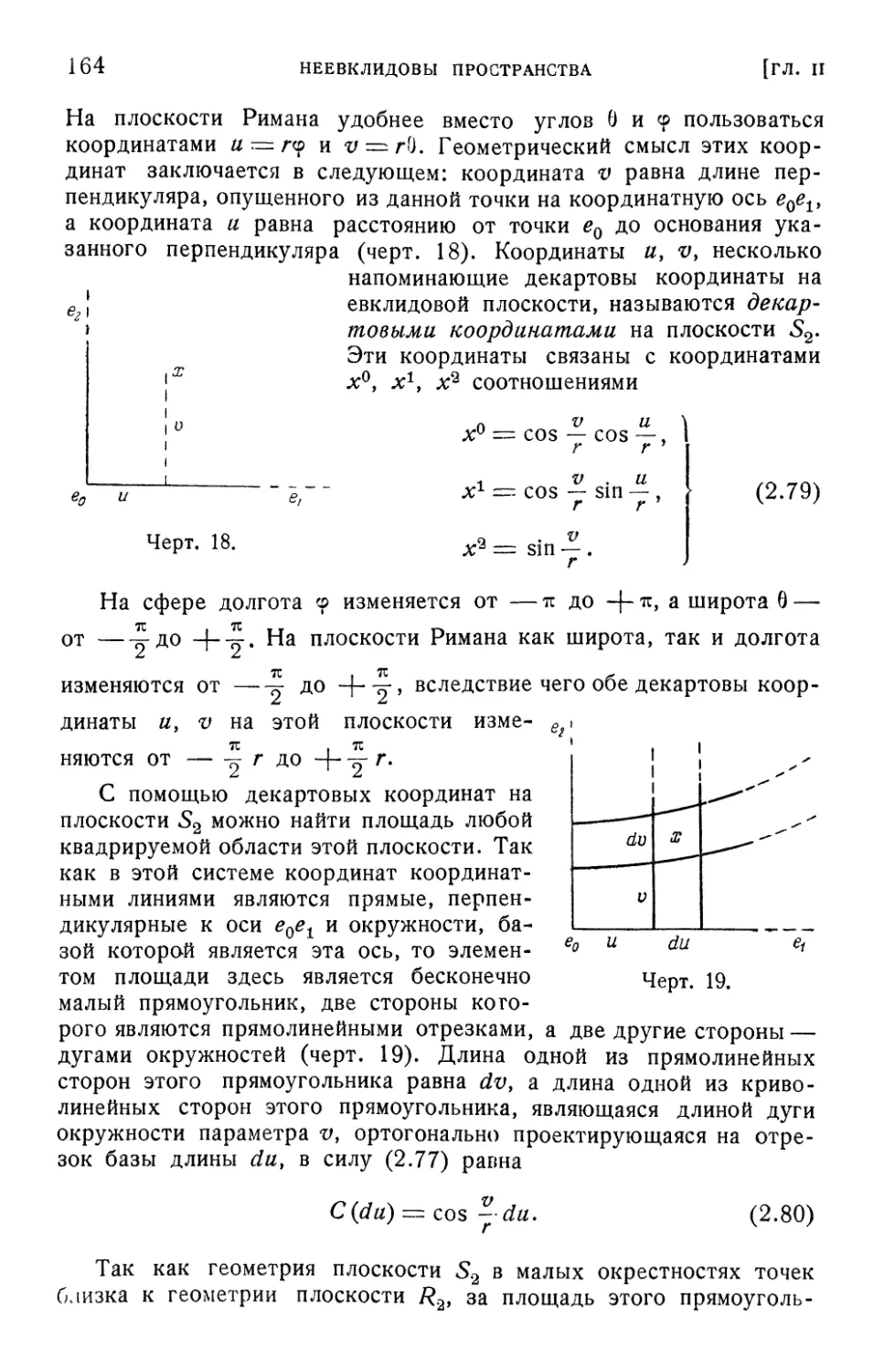
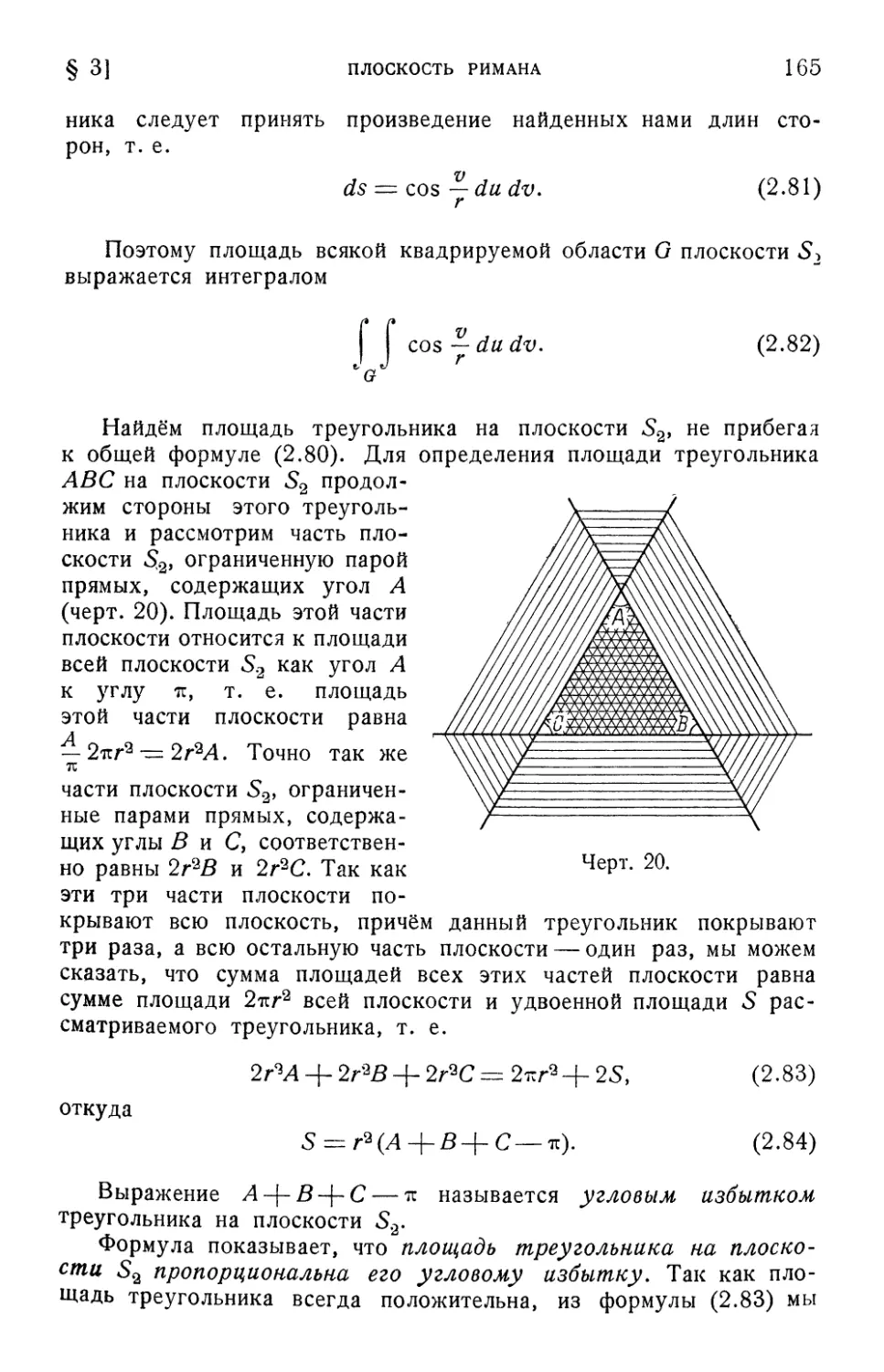
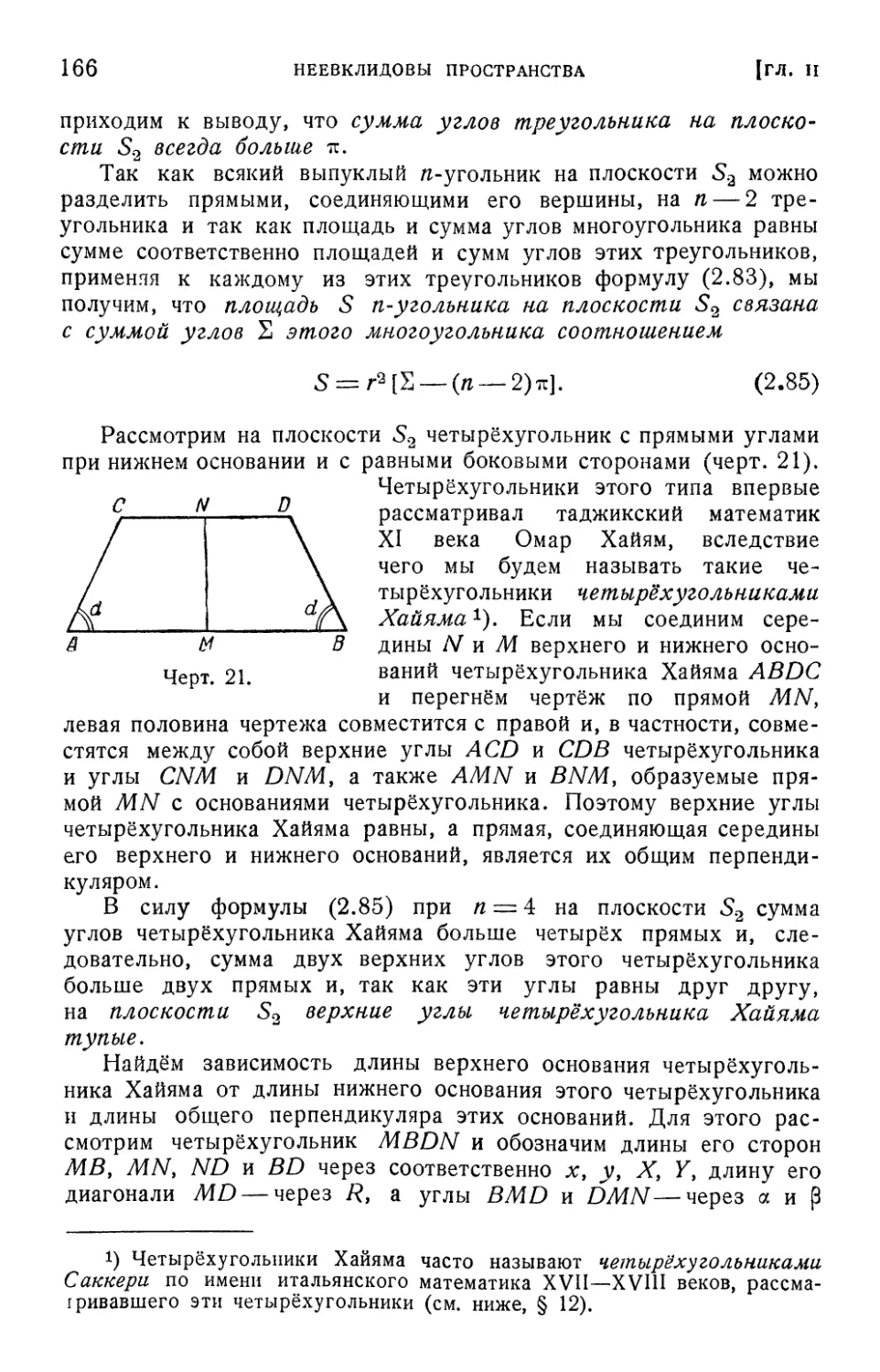
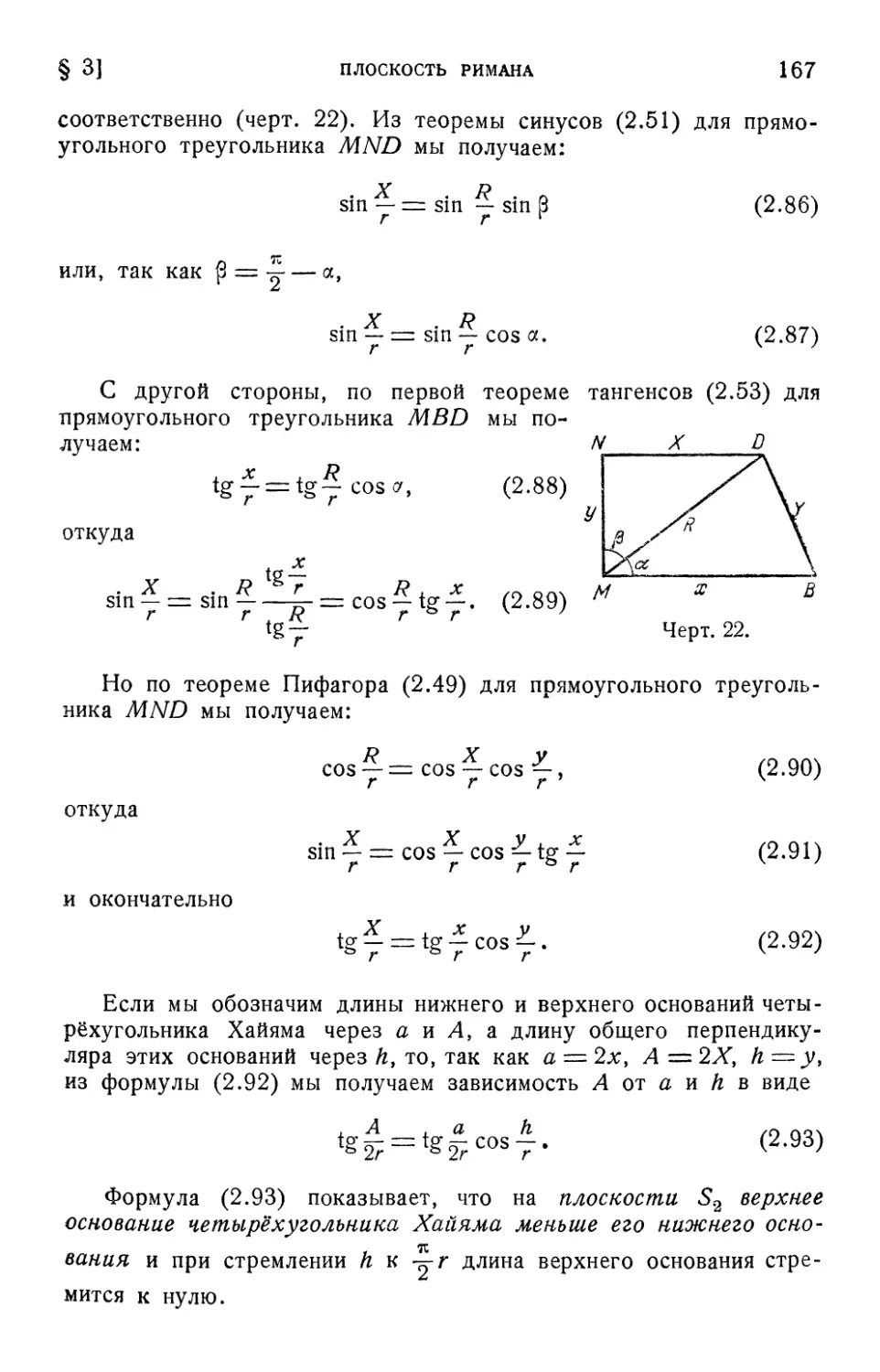
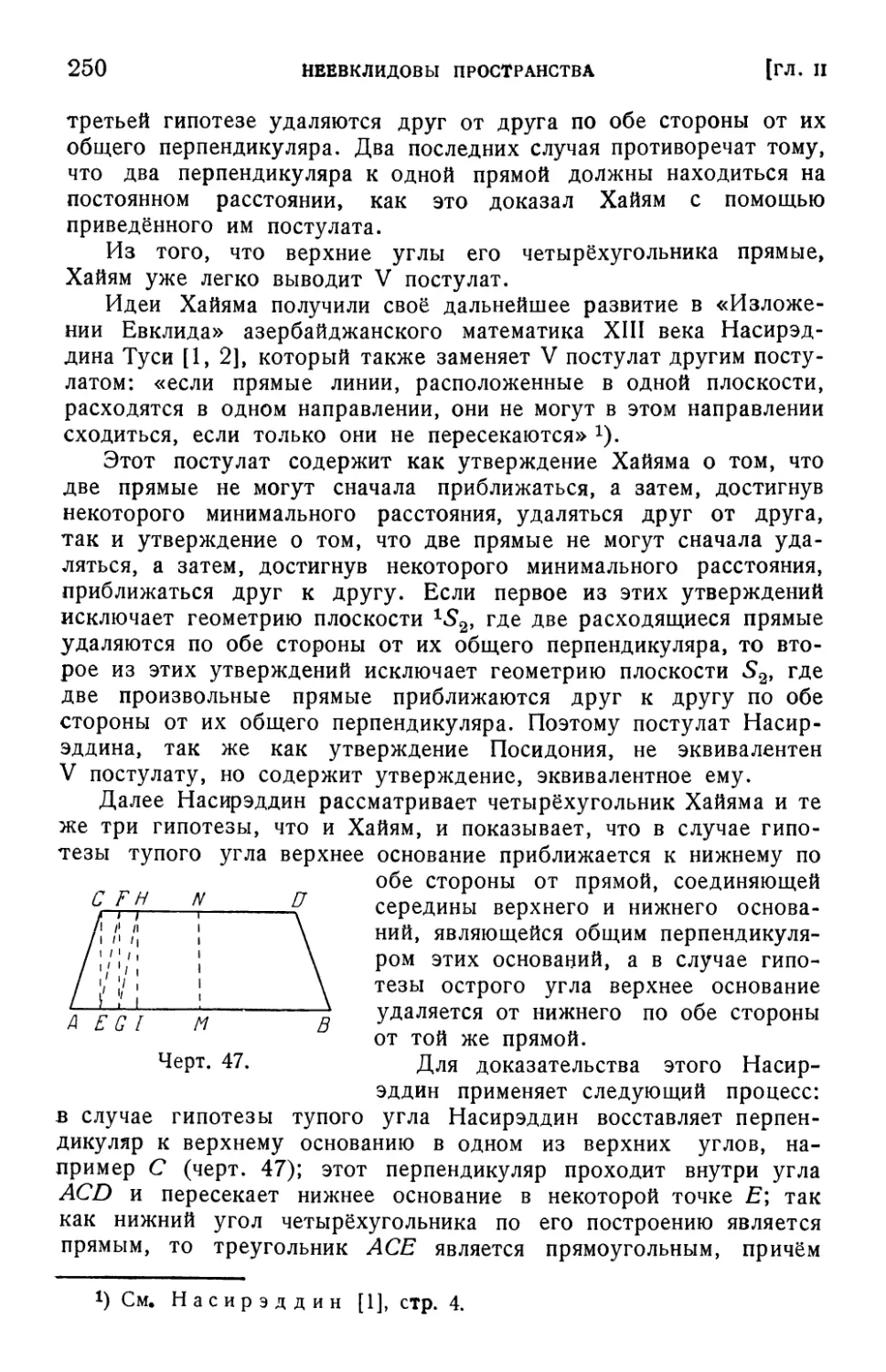
§ 3. Плоскость Римана...........................................................................160
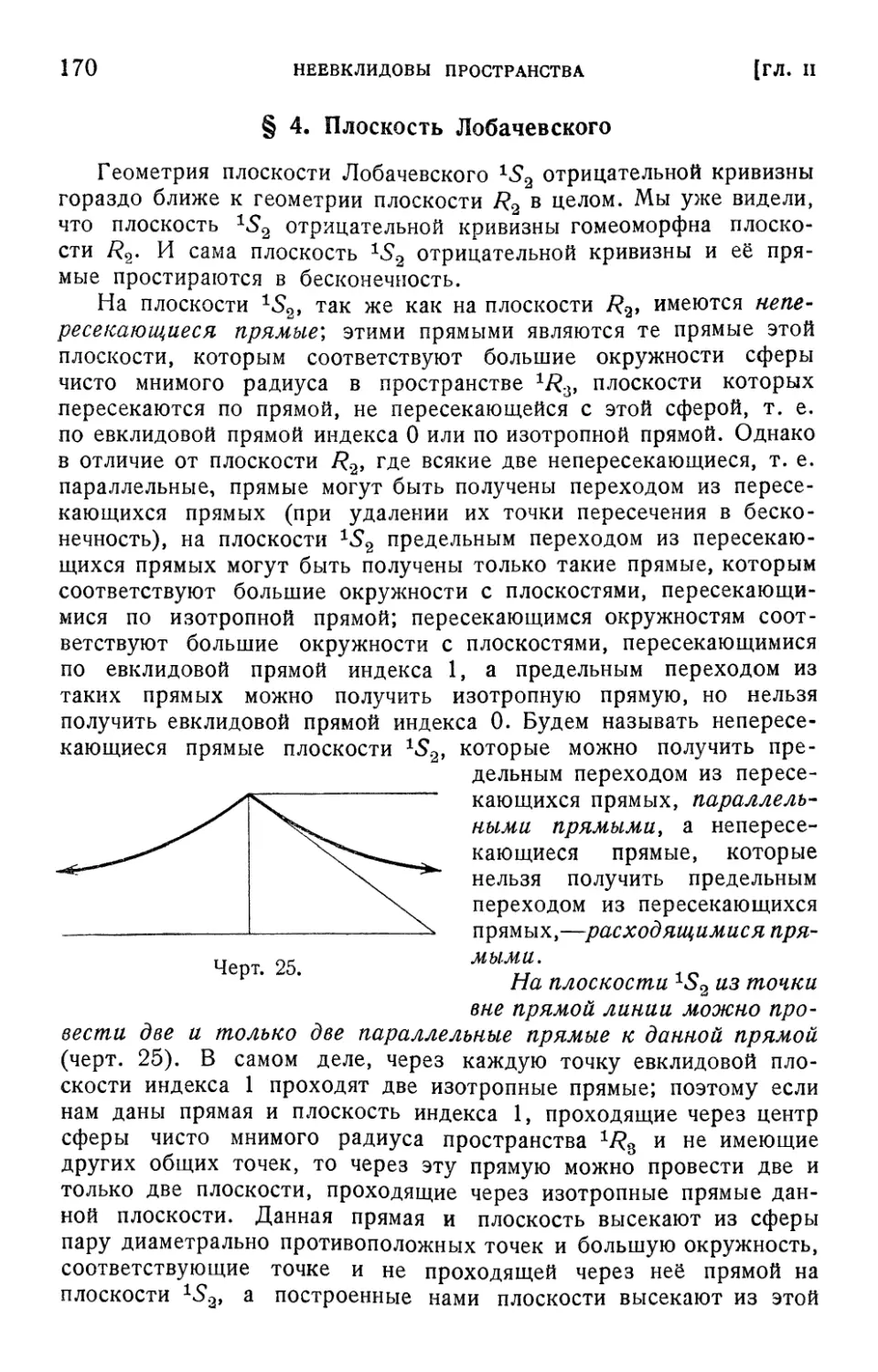
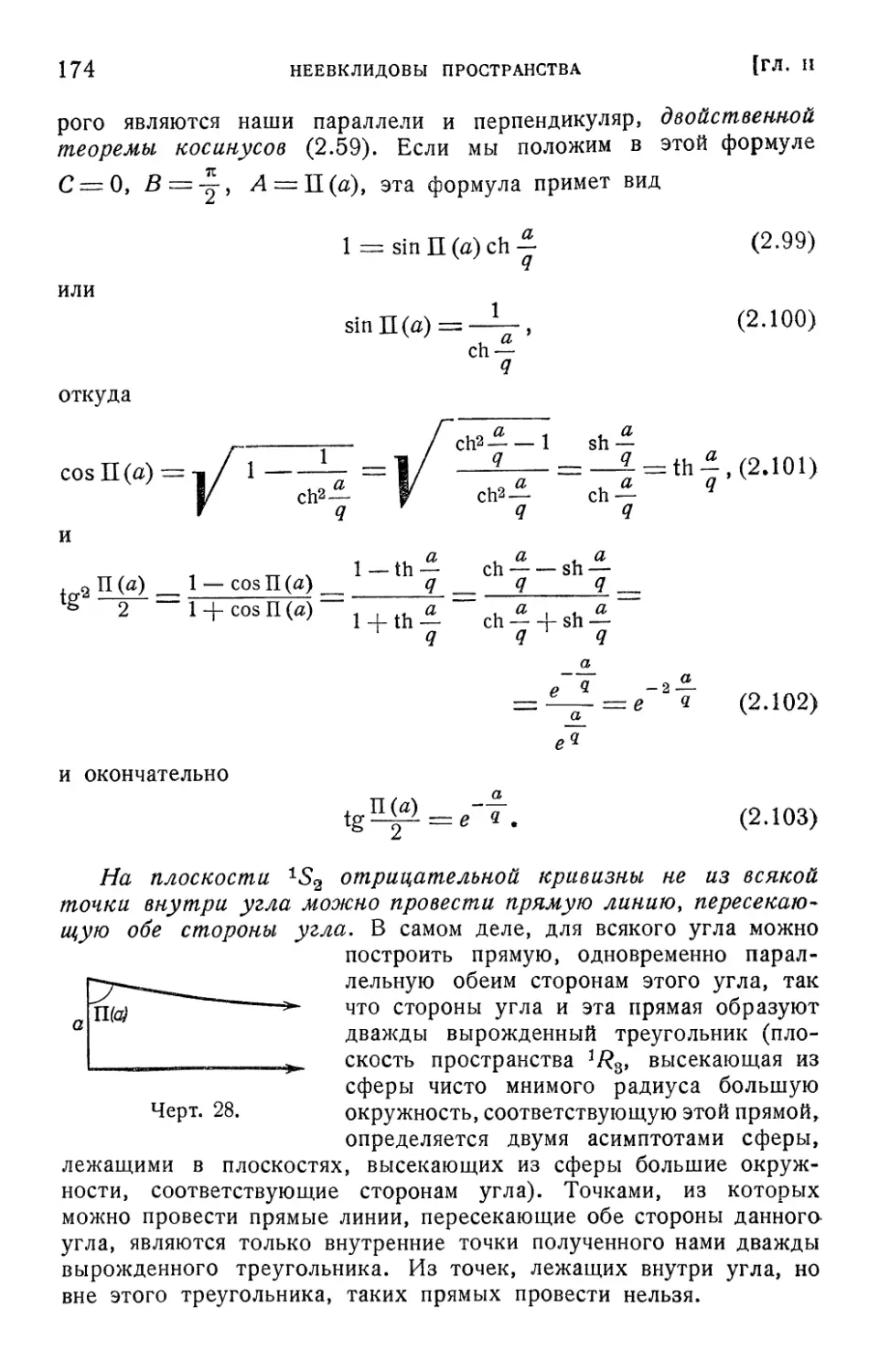
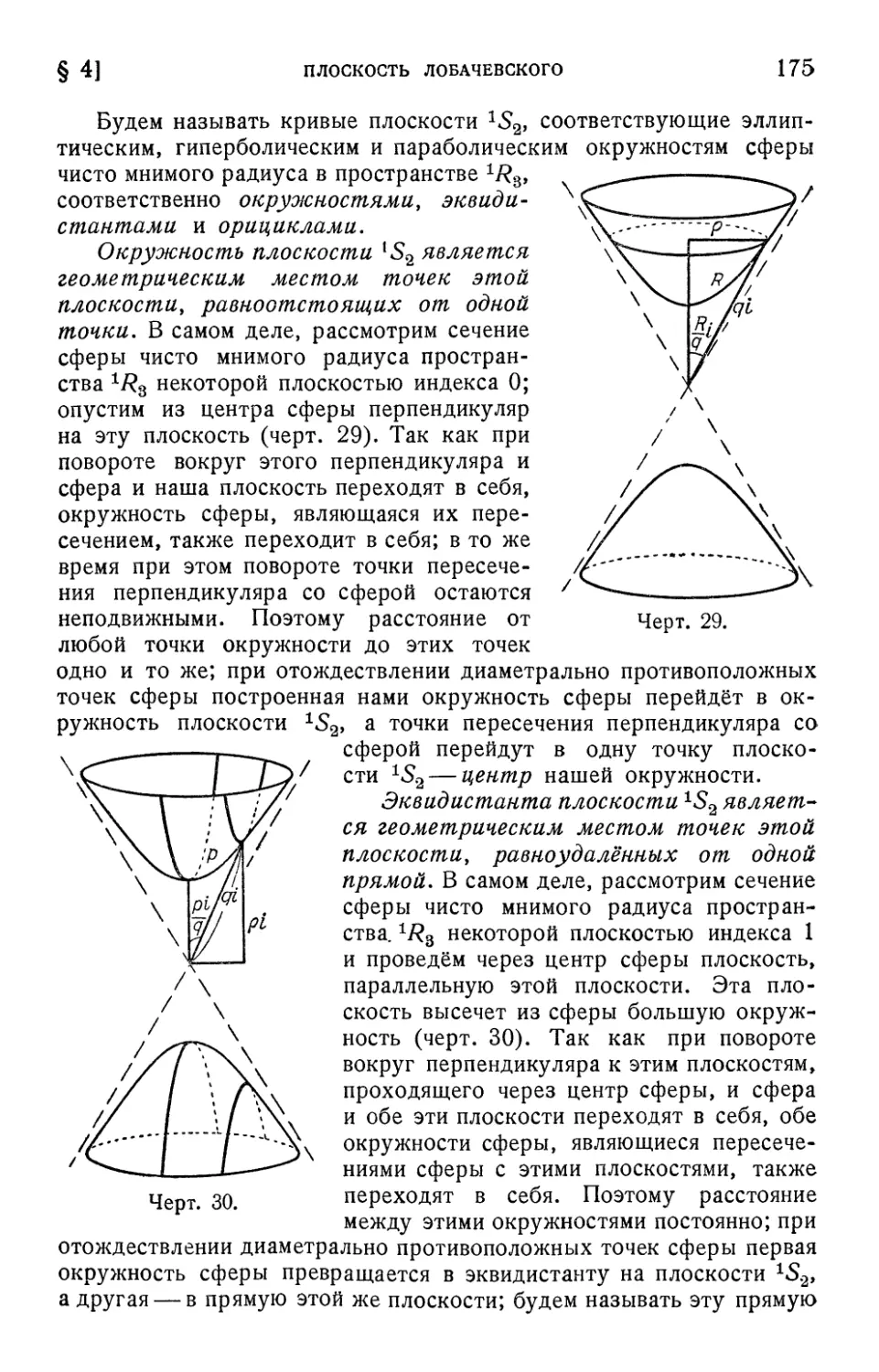
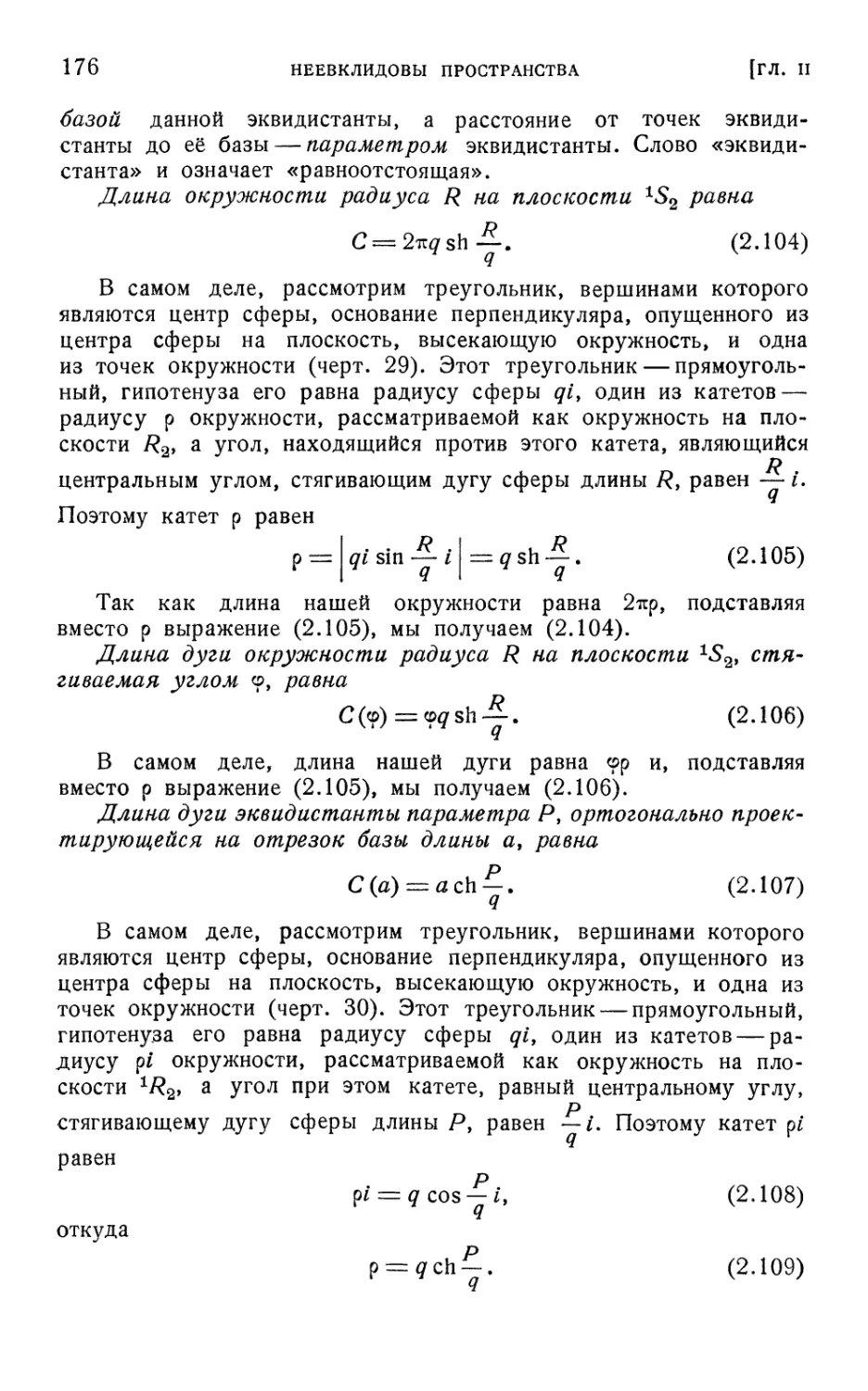
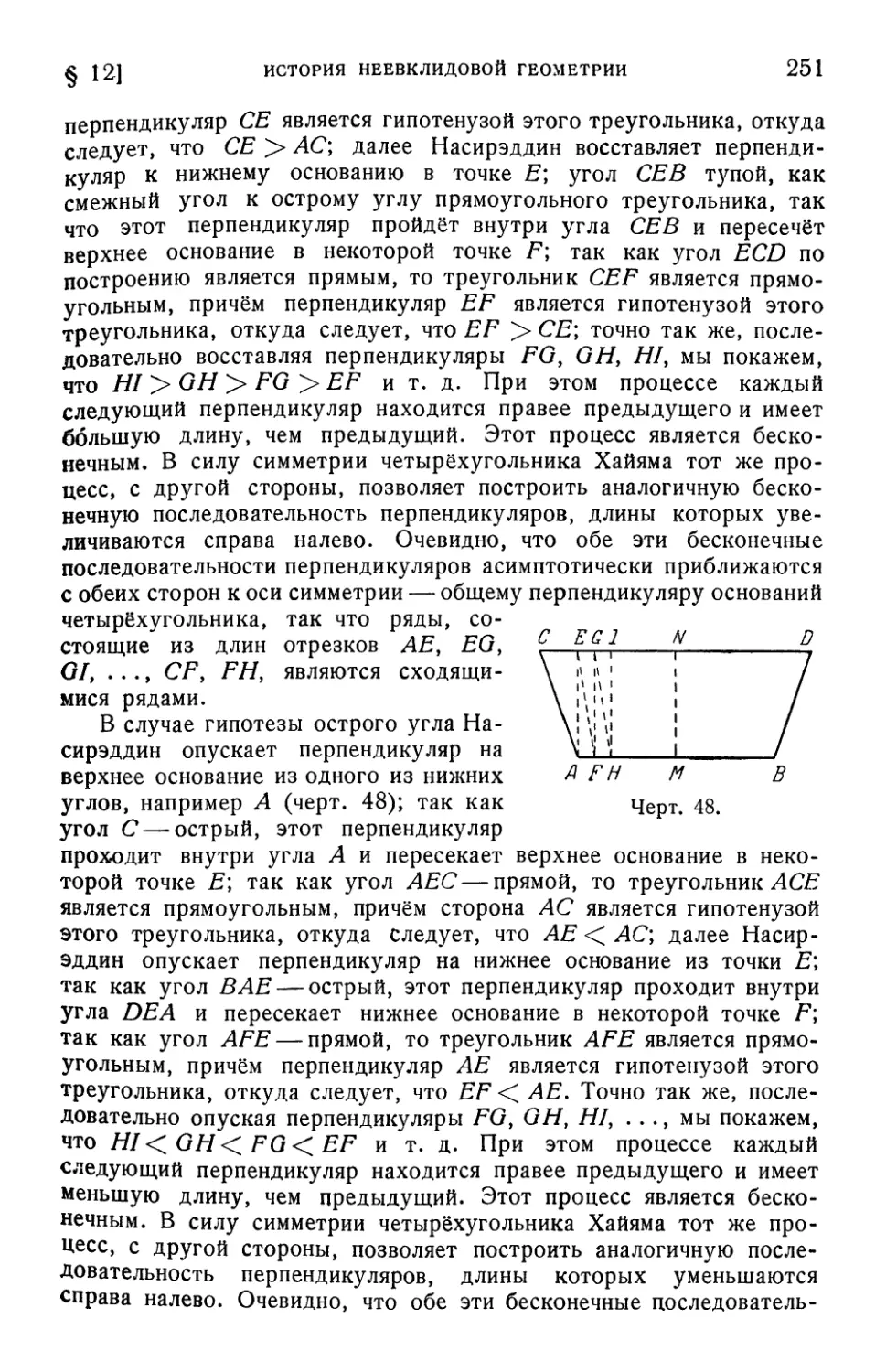
§ 4‘ Плоскость Лобачевского ...................................................................170
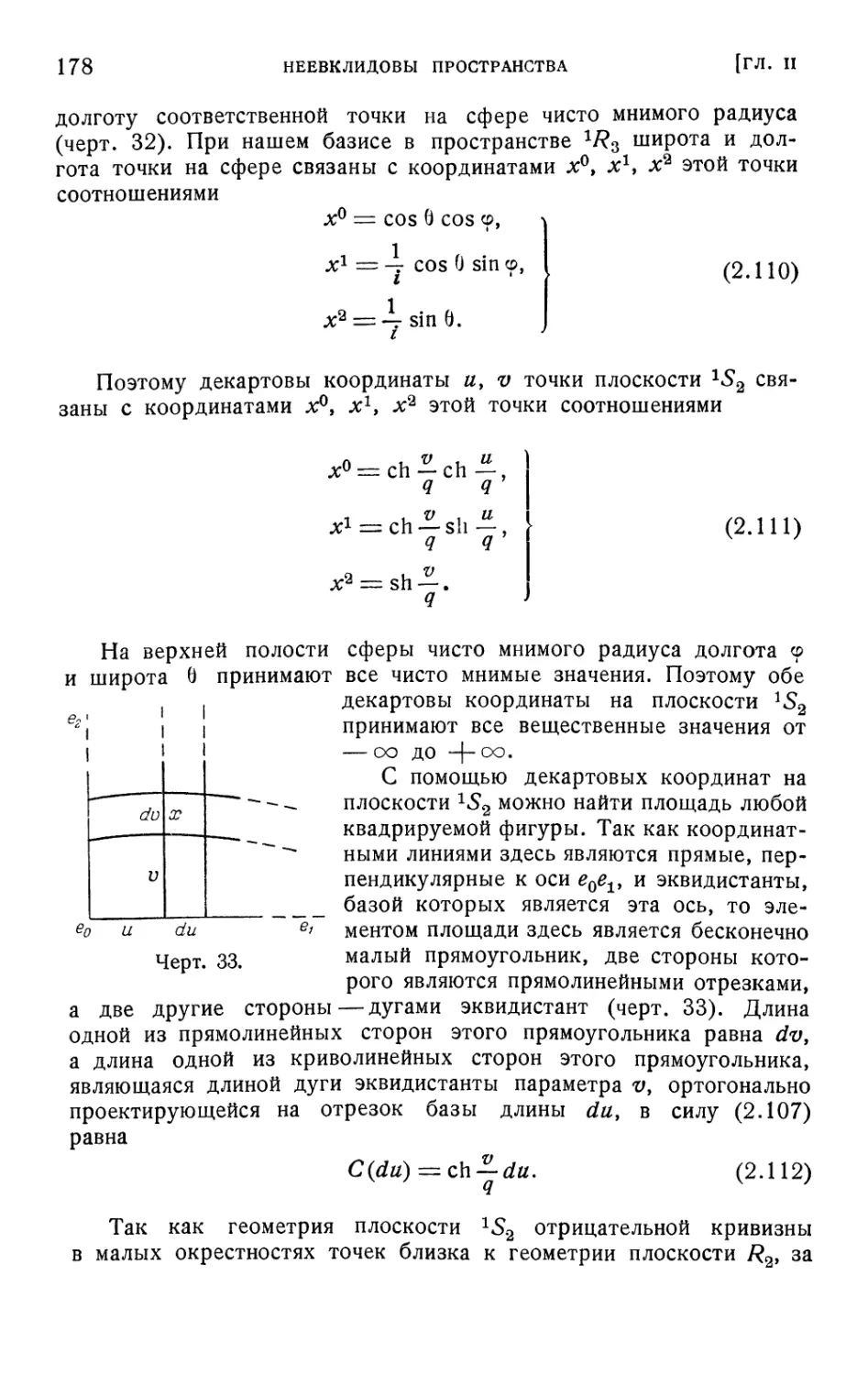
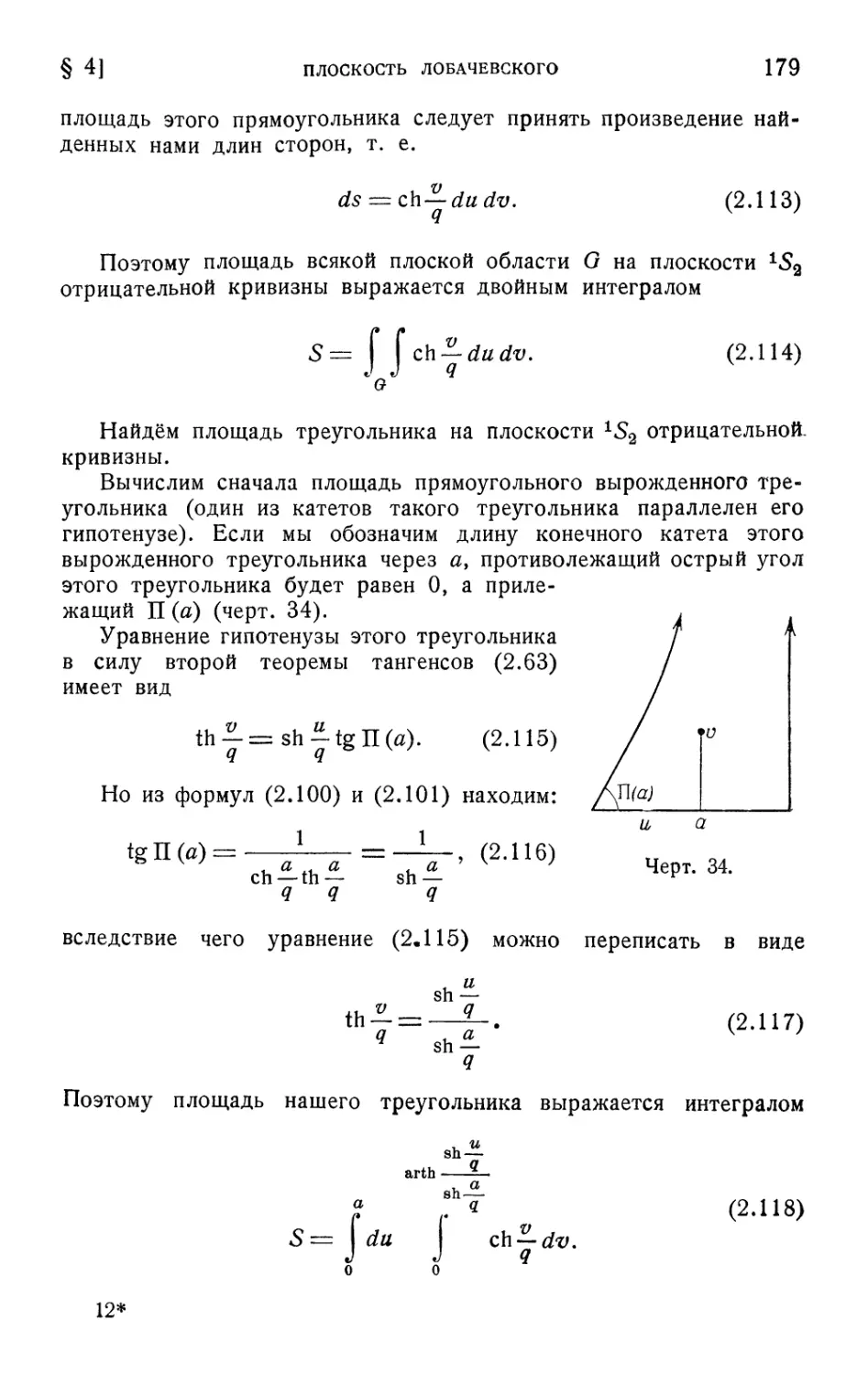
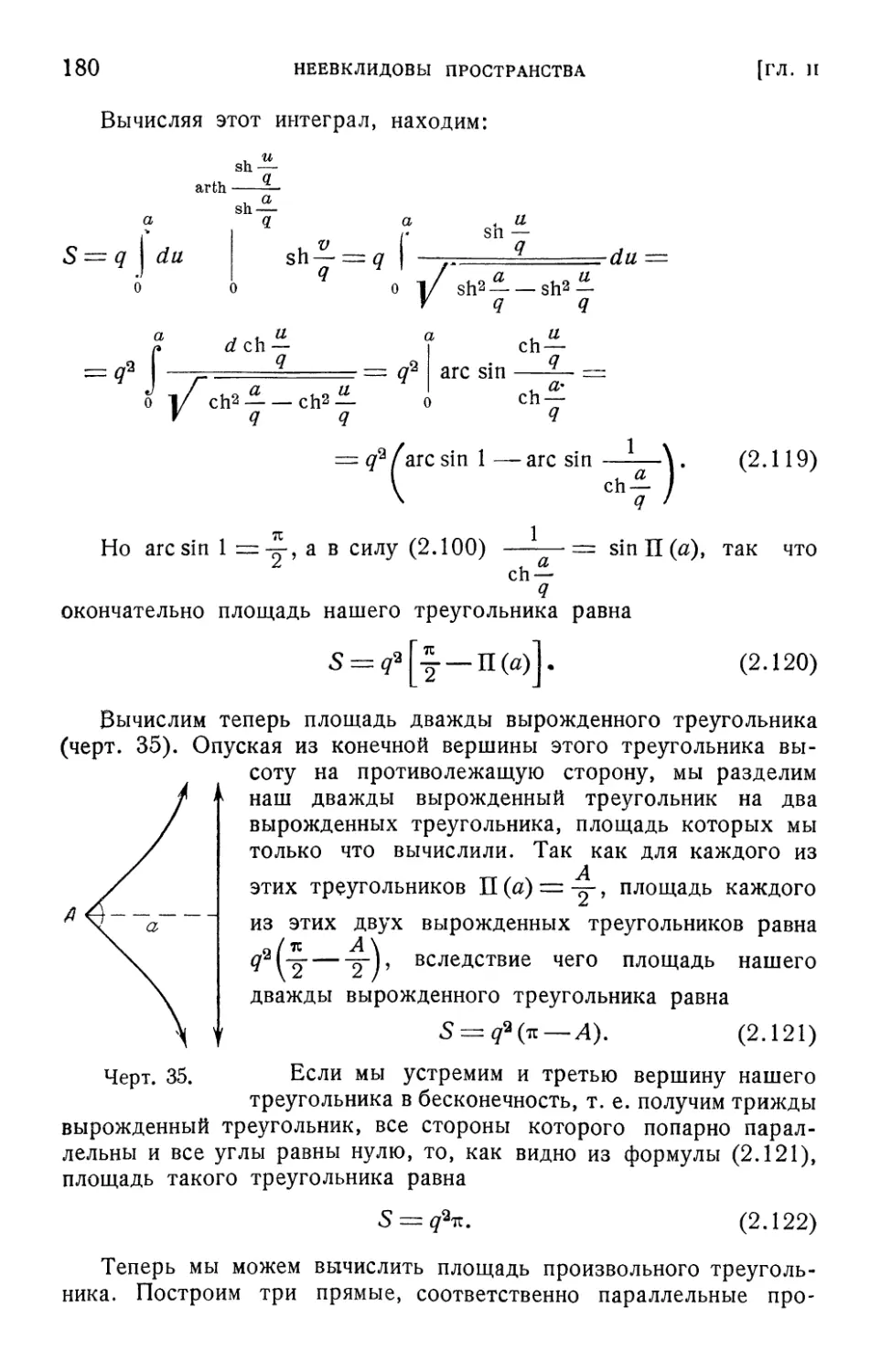
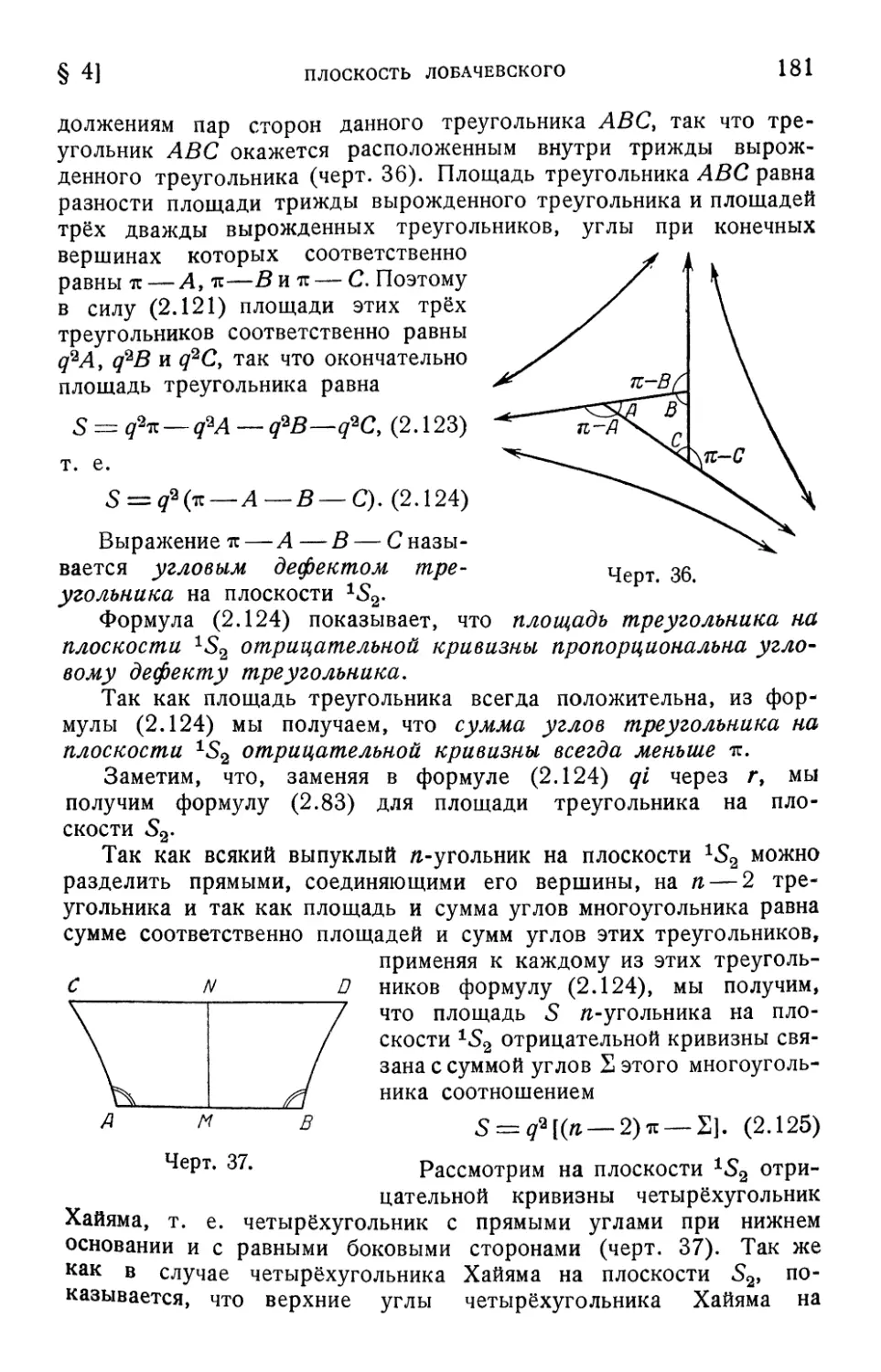
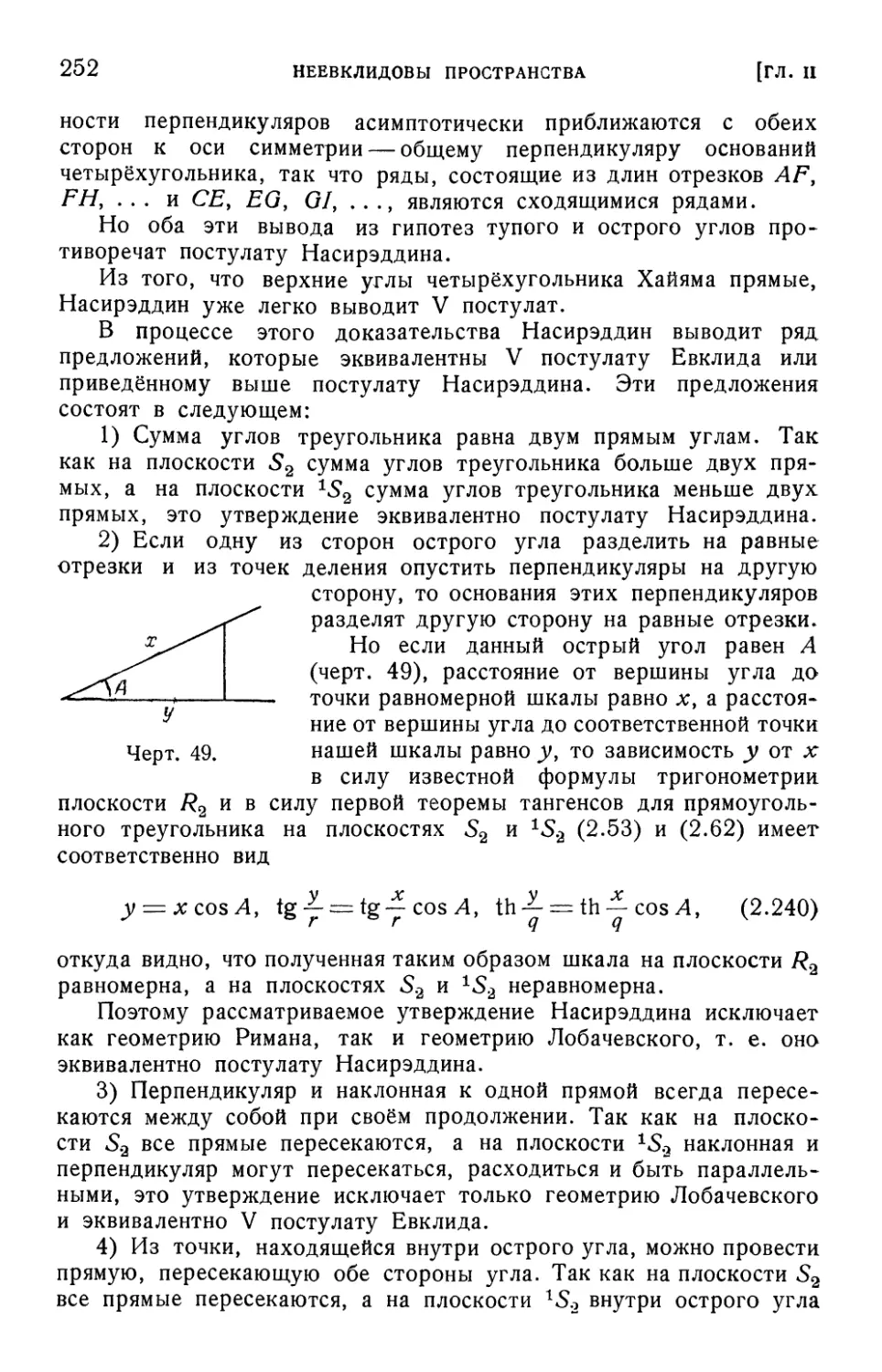
§ 5. Объёмы ...............................183
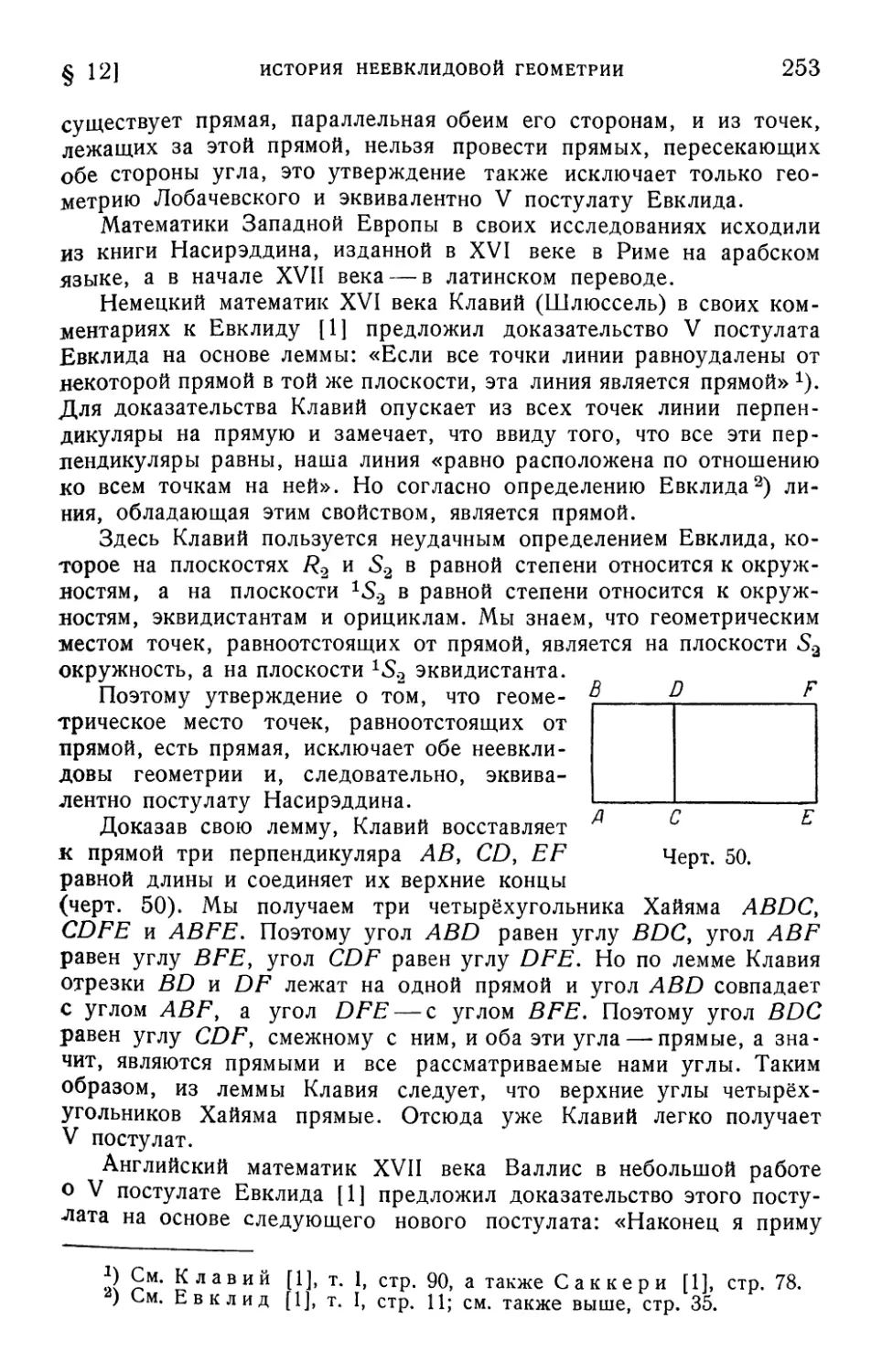
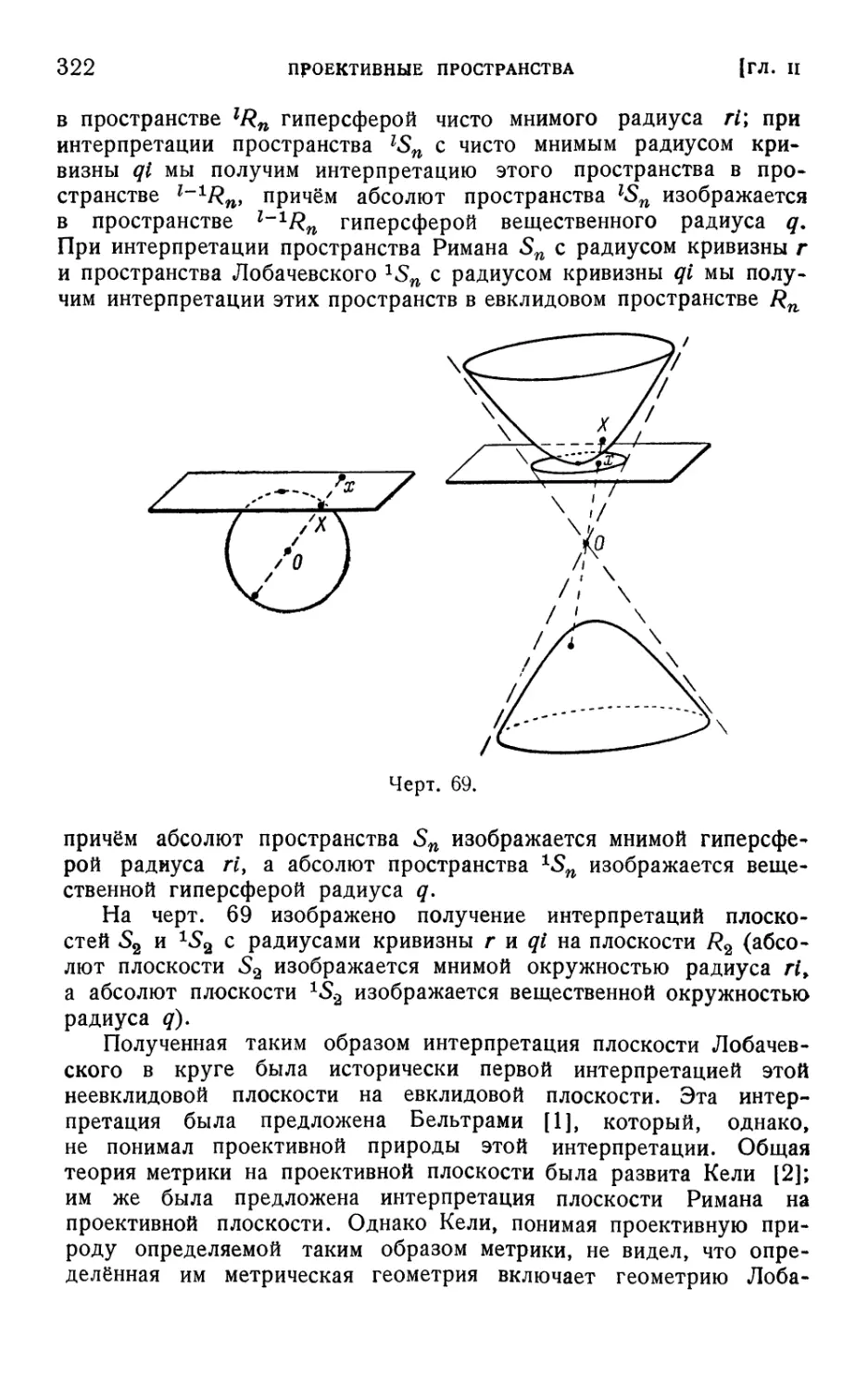
§ 6. Абсолют и идеальные точки неевклидова пространства . . 188
§ 7. Движения...........................................................................................194
§ 8. Инволюционные движения и образы симметрии.........................220
§ 9. Гиперсферы и эквидистанты.........................................................230
§ 10. Евклидова геометрия на поверхностях в неевклидовых
пространствах.........................................234
§ 11. Евклидовы пространства как предельный случай неевклидо-
вых пространств...........................*..............243
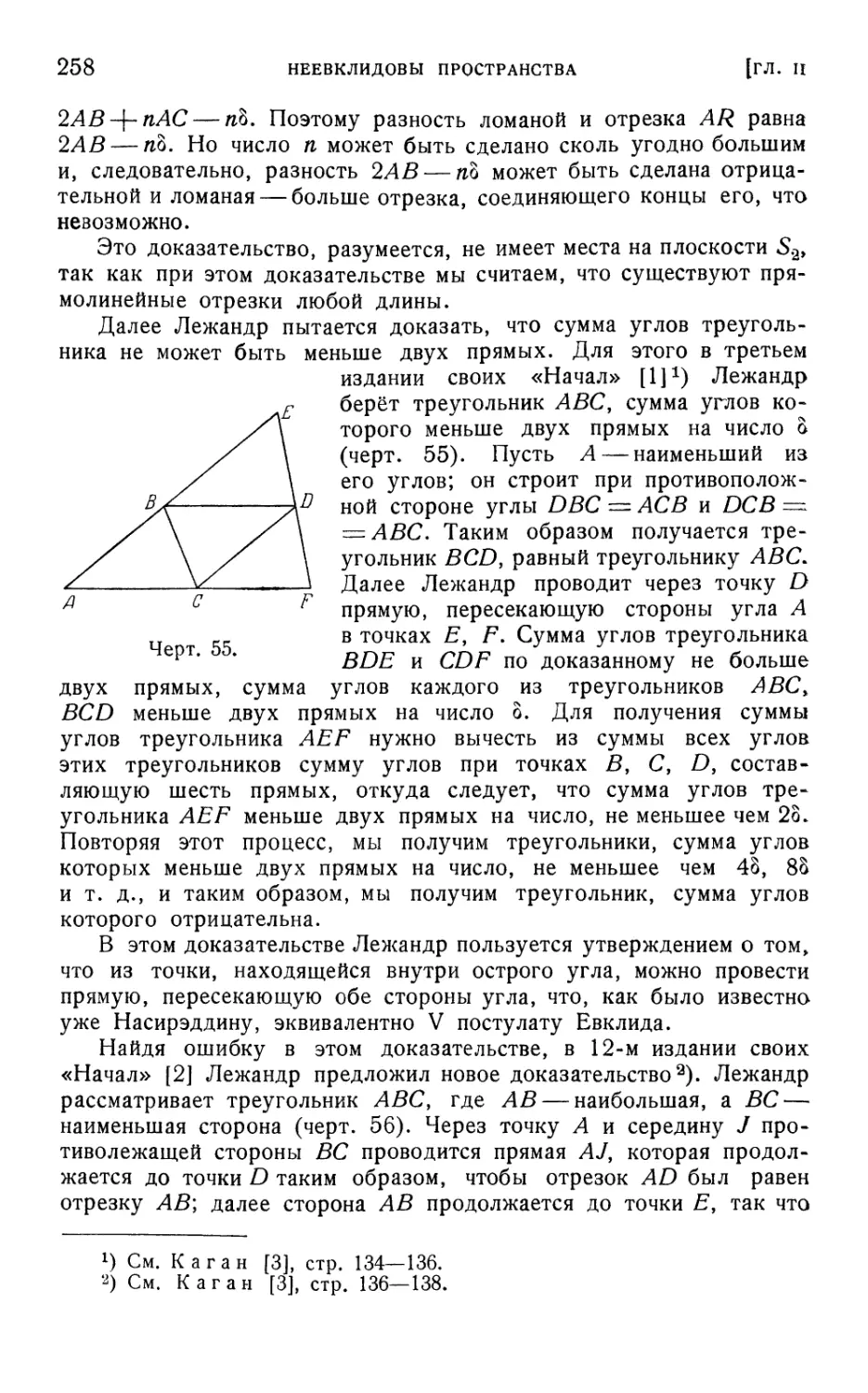
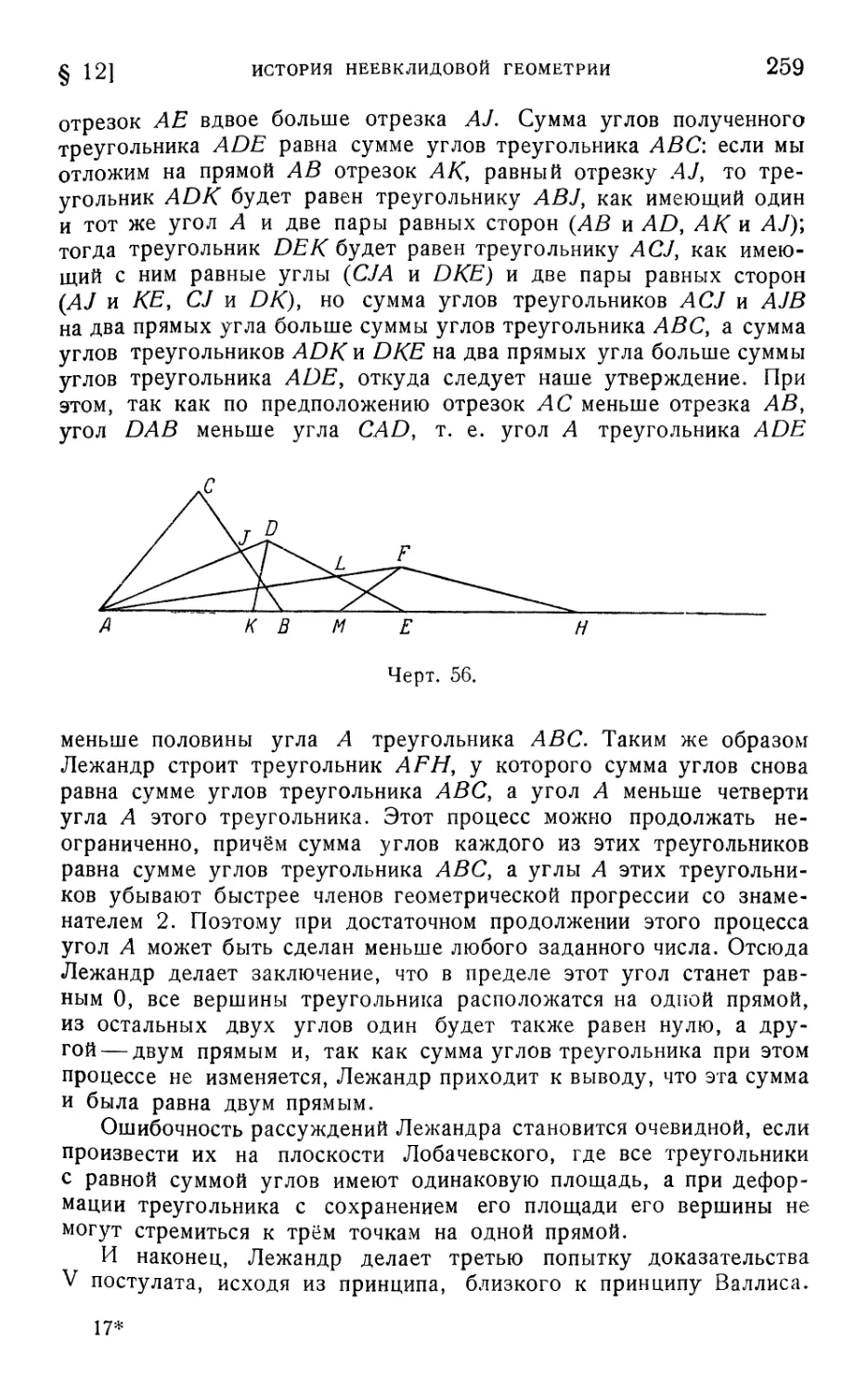
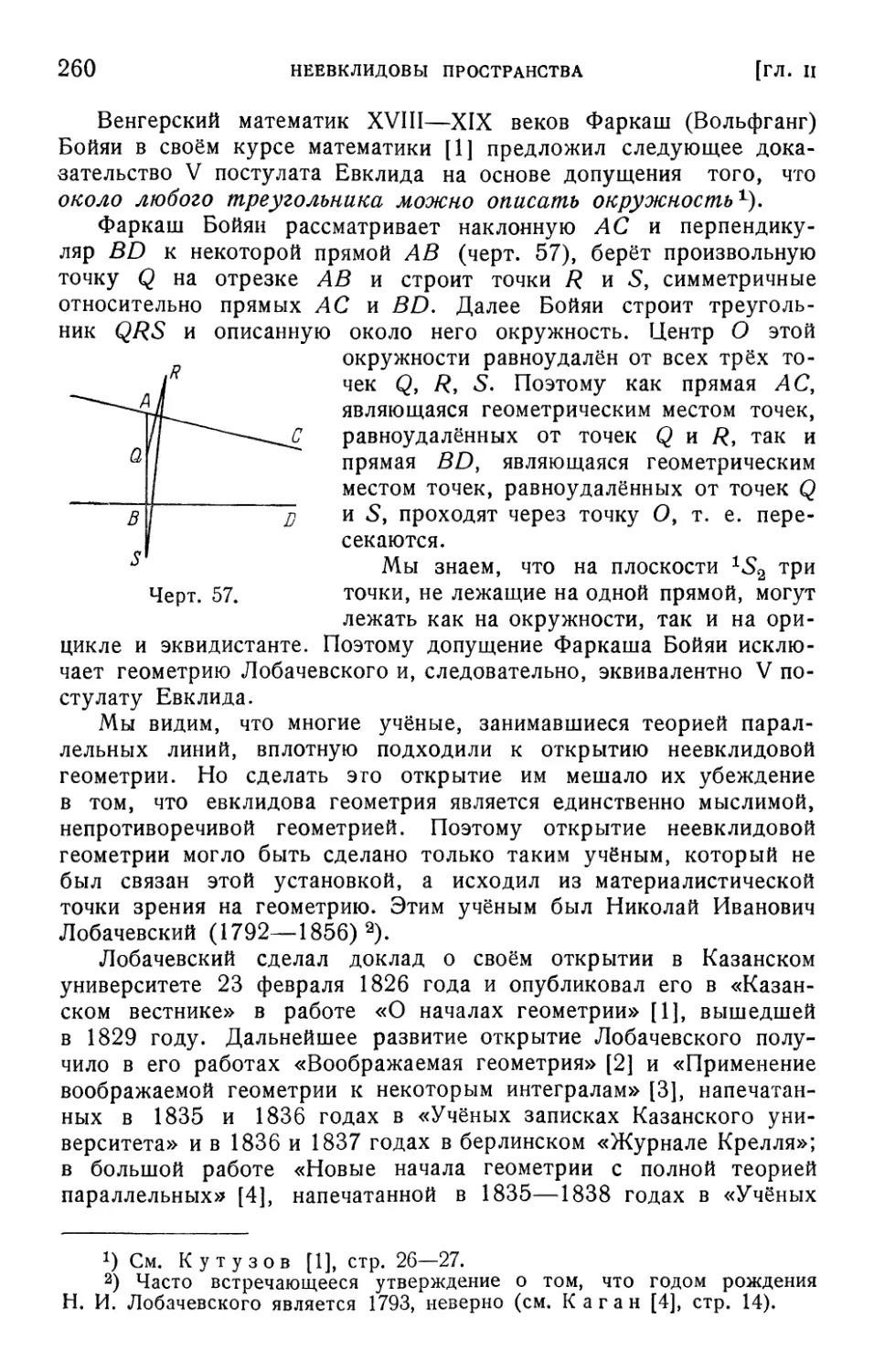
§ 12. История неевклидовой геометрии..................................................................................245
Глава III. Неевклидовы пространства как метризованные про-
ективные пространства.....................................264
§ 1. Аффинные пространства ..........................................................................................264
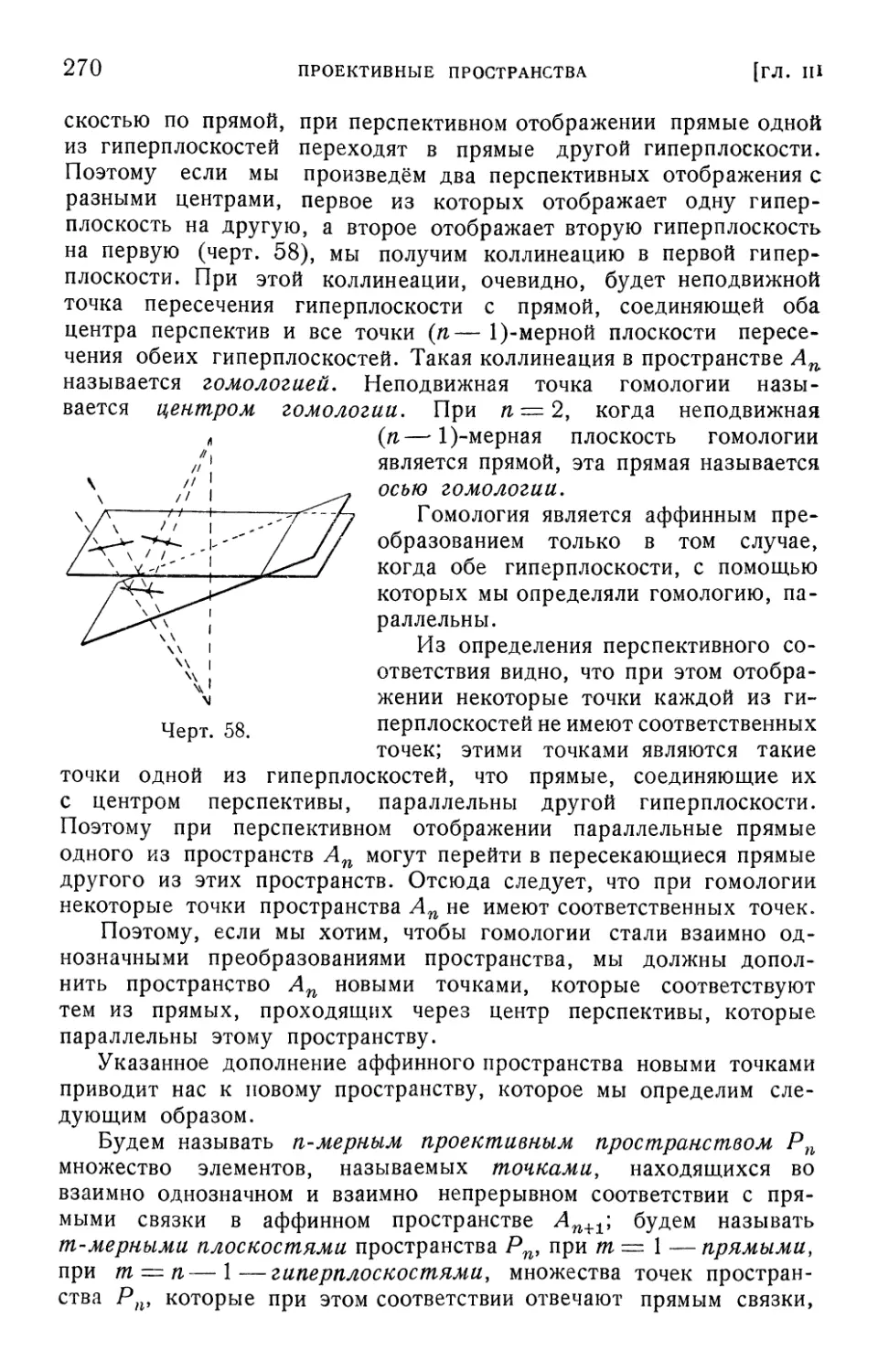
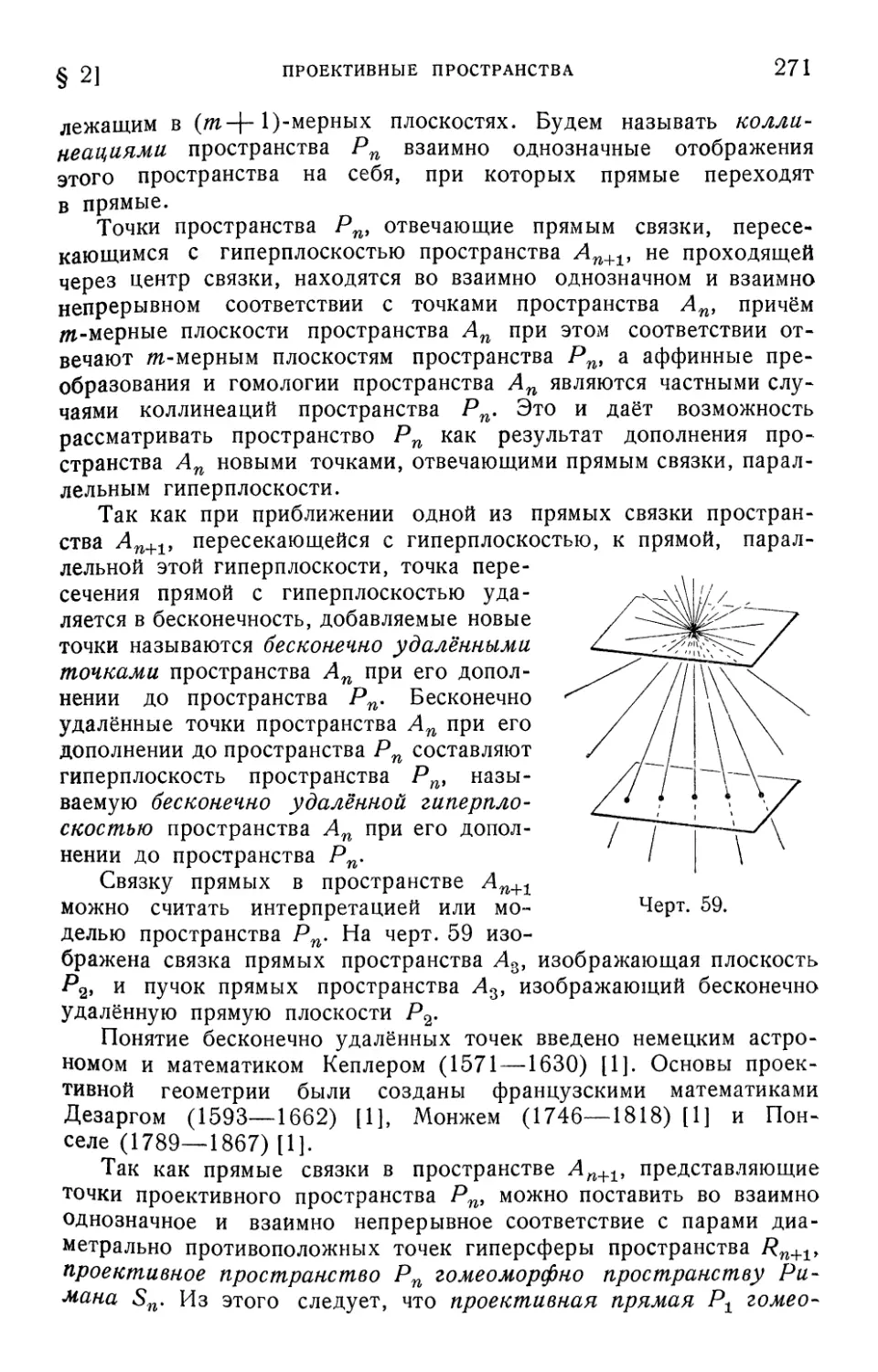
§ 2. Проективные пространства........................................................................................269
4
ОГЛАВЛЕНИЕ
§ 3. Проективные преобразования............................276
§ 4. Инволюционные проективные преобразования и образы
симметрии................................................ 291
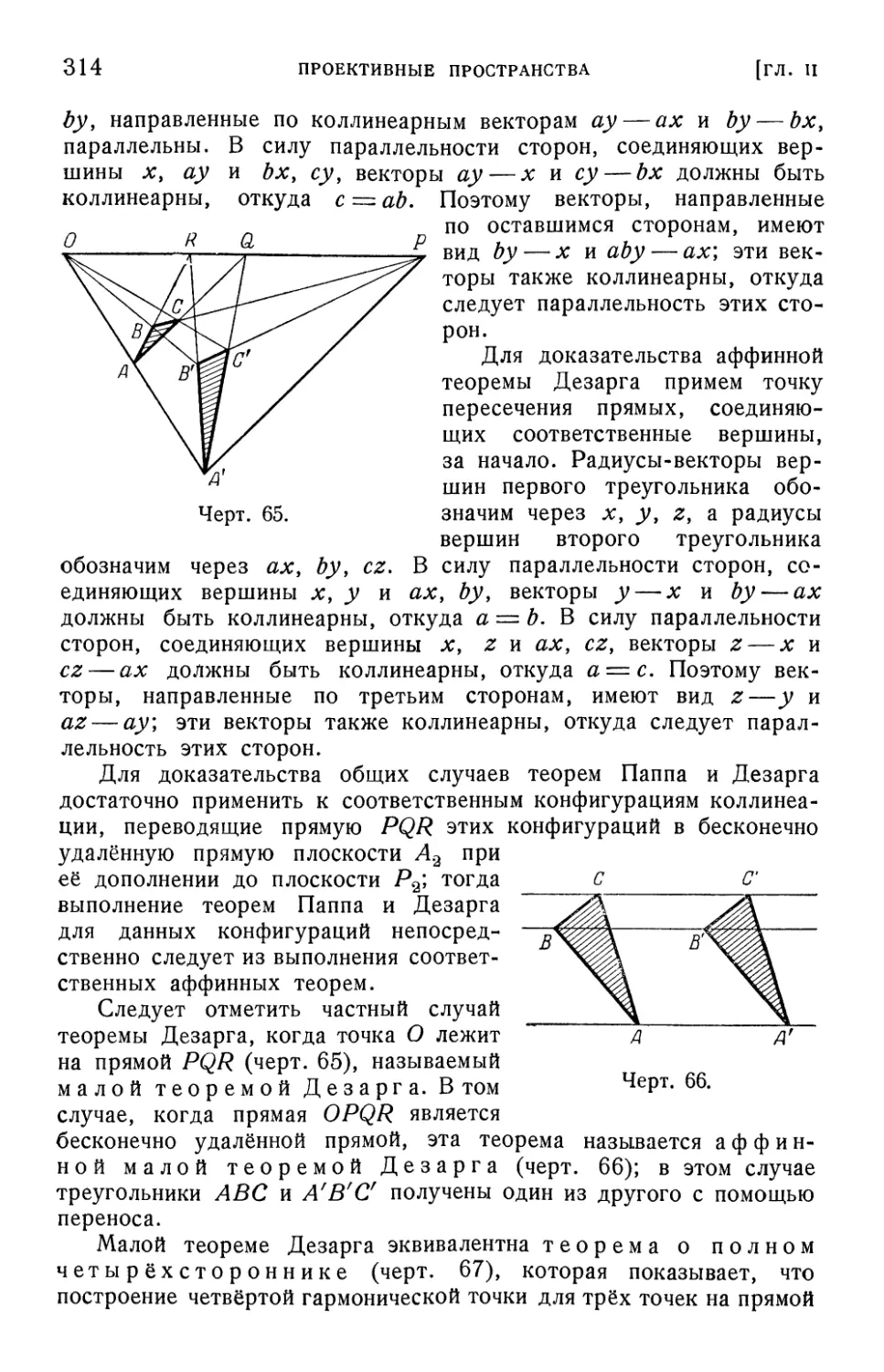
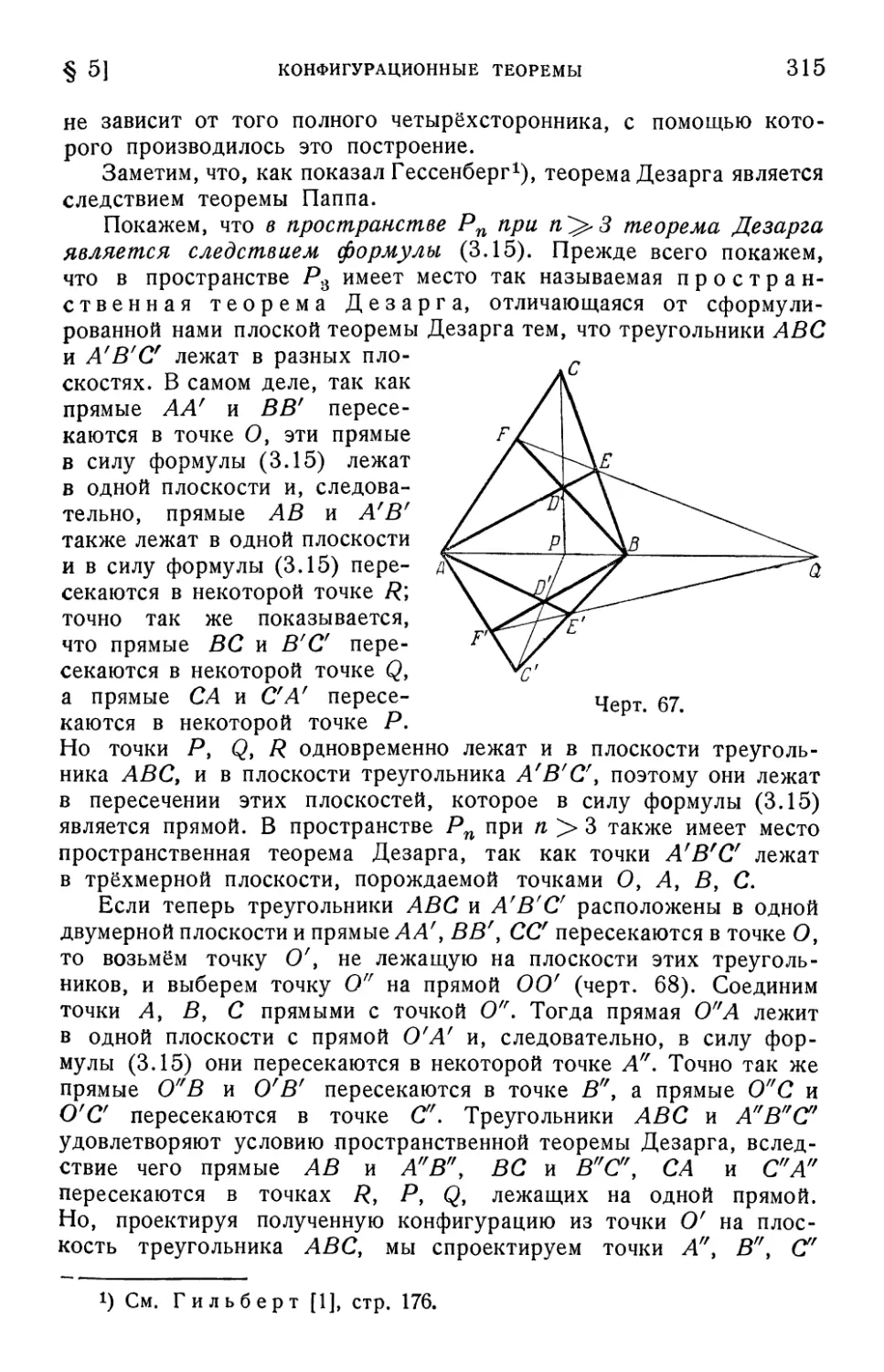
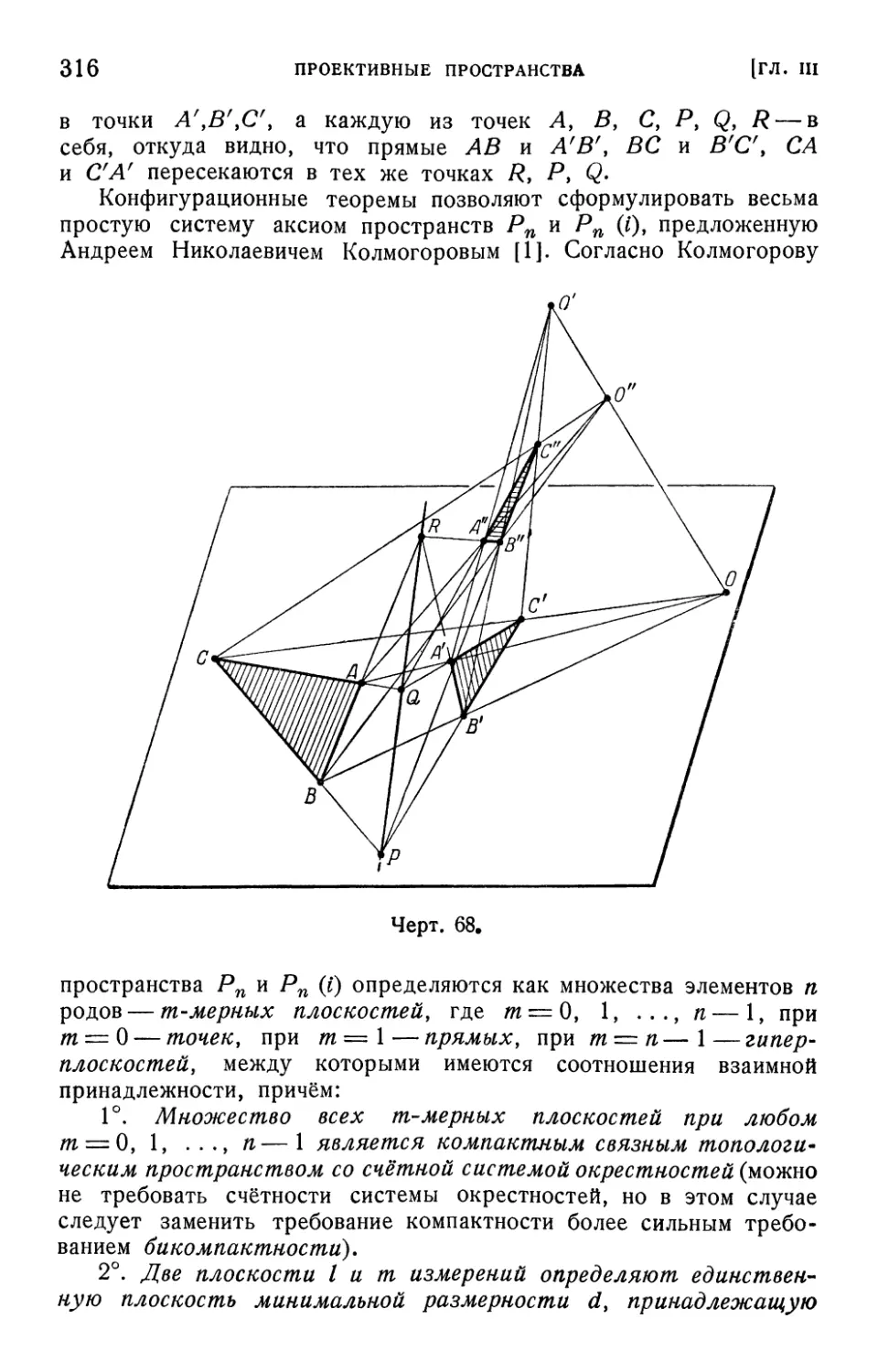
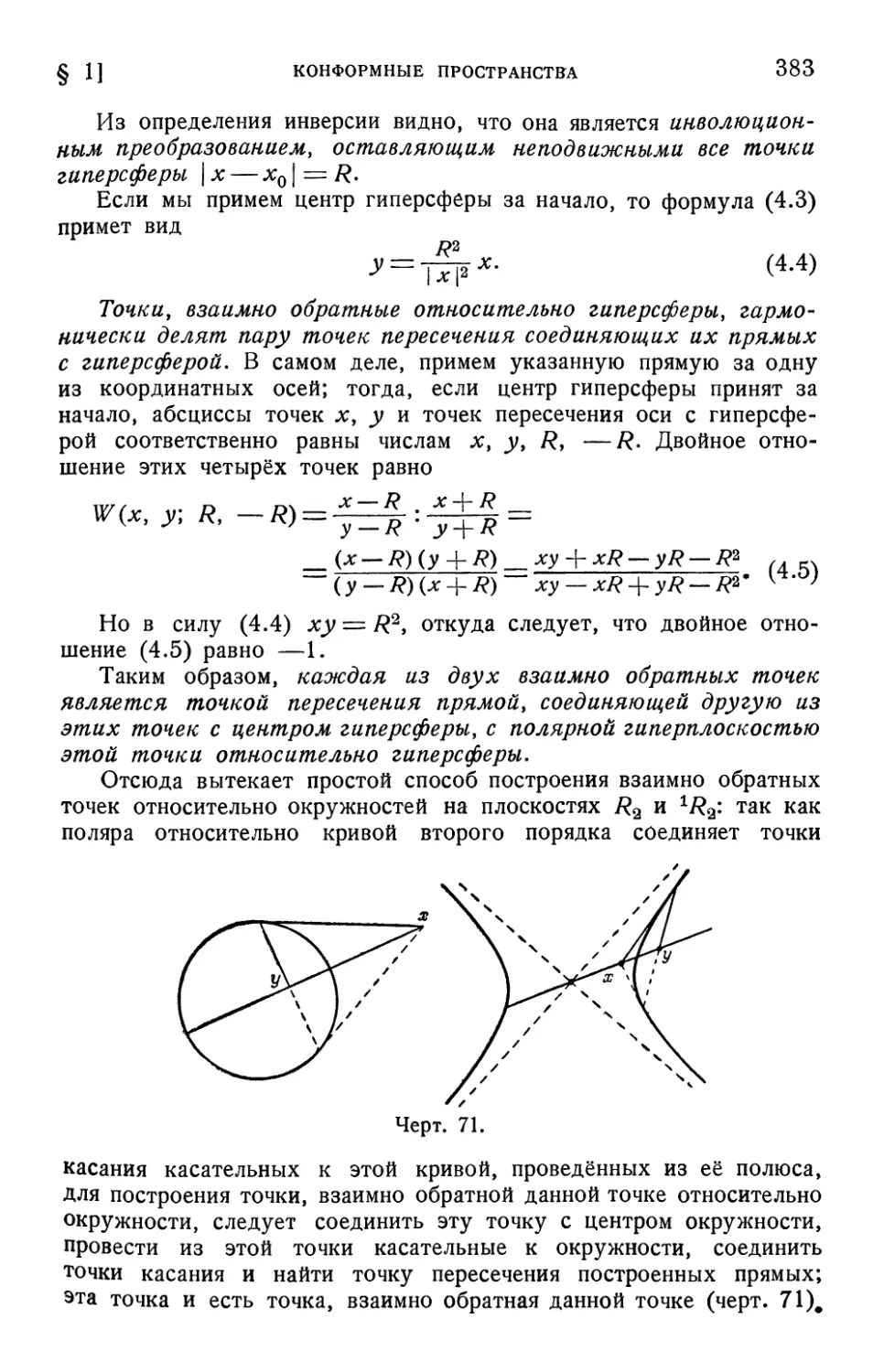
§ 5. Конфигурационные теоремы..............................312
§ 6. Неевклидовы пространства как метризованные проектив- .
ные пространства (интерпретации Кели — Клейна) .... 318
§ 7. Движения и образы симметрии...........................325
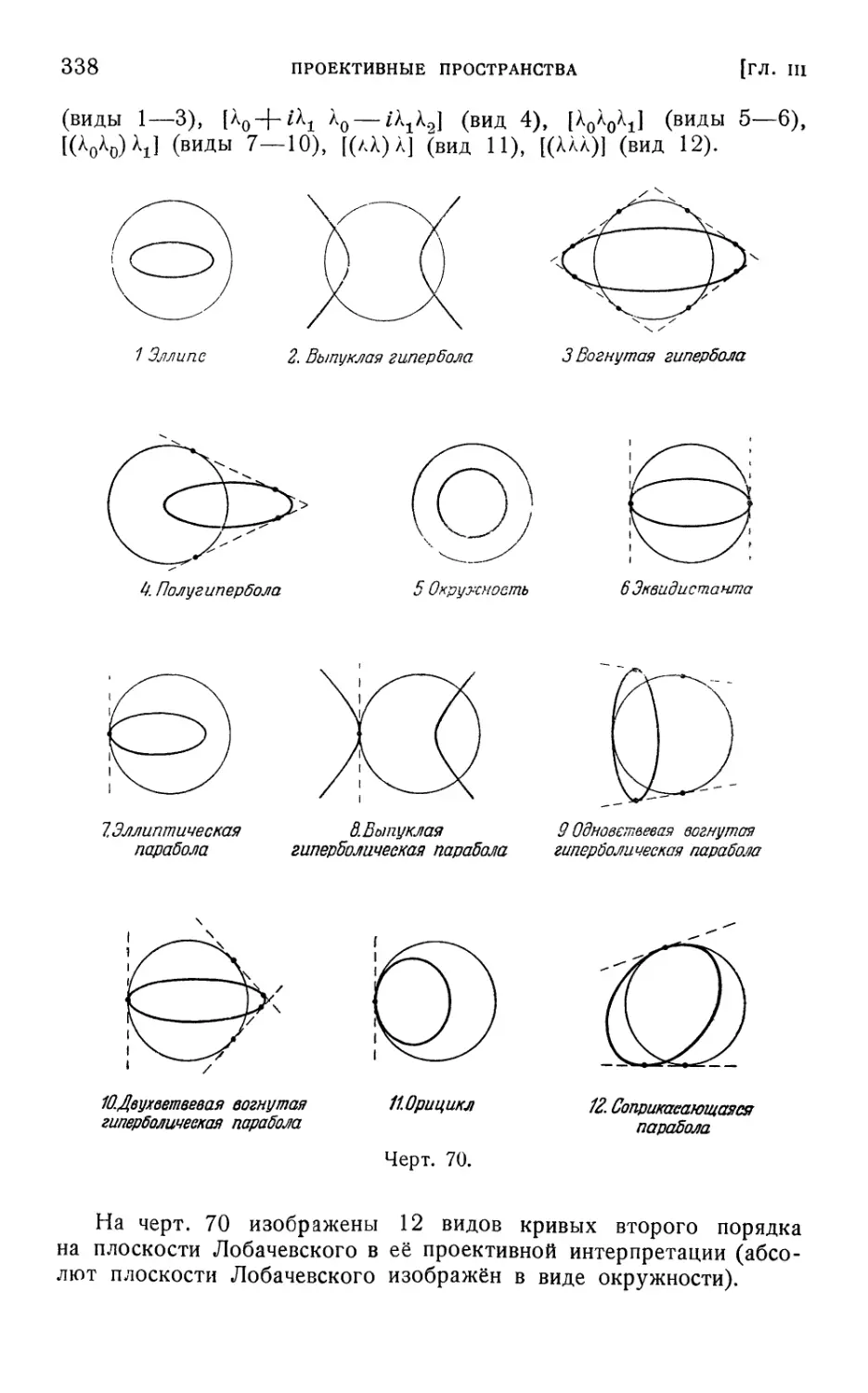
§ 8. Квадрики в неевклидовых пространствах.................334
§ 9. Применение неевклидовой геометрии в теории квадрик
в проективном пространстве.................................339
§ 10. Евклидовы пространства как метризованные проективные
пространства...............................................350
§ 11. Симплектические пространства.........................352
§ 12. Трёхмерная проективная геометрия как неевклидова гео-
метрия (интерпретация Плюккера)............................356
§ 13. Трёхмерная симплектическая геометрия как неевклидова
геометрия..................................................371
Глава IV. Неевклидовы пространства как метризованные кон-
формные пространства............................................379
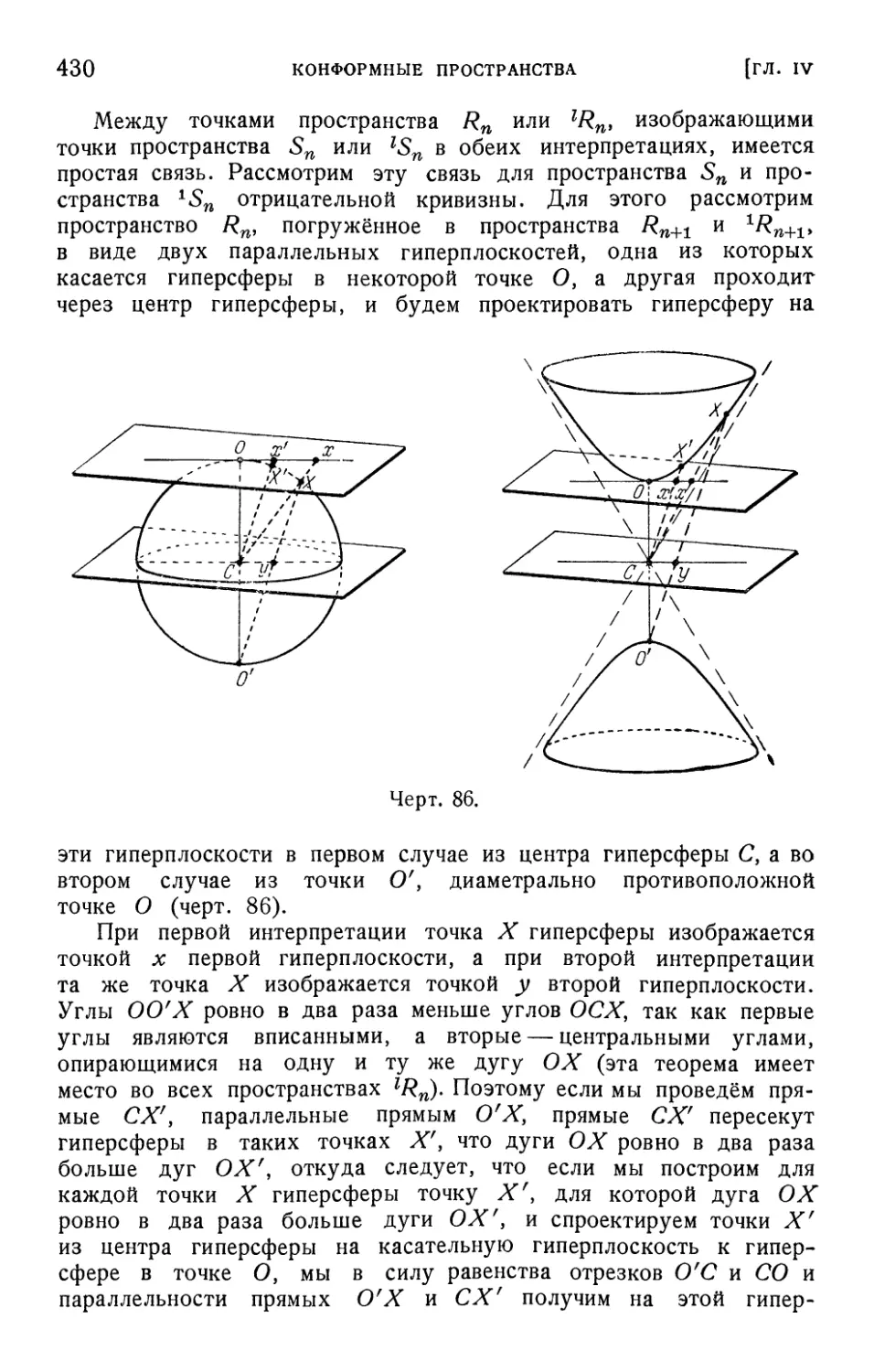
§ 1. Конформные пространства...............................379
§ 2. Конформная геометрия как неевклидова геометрия (ин-
терпретация Дарбу).........................................394
§ 3. Инволюционные конформные преобразования и образы
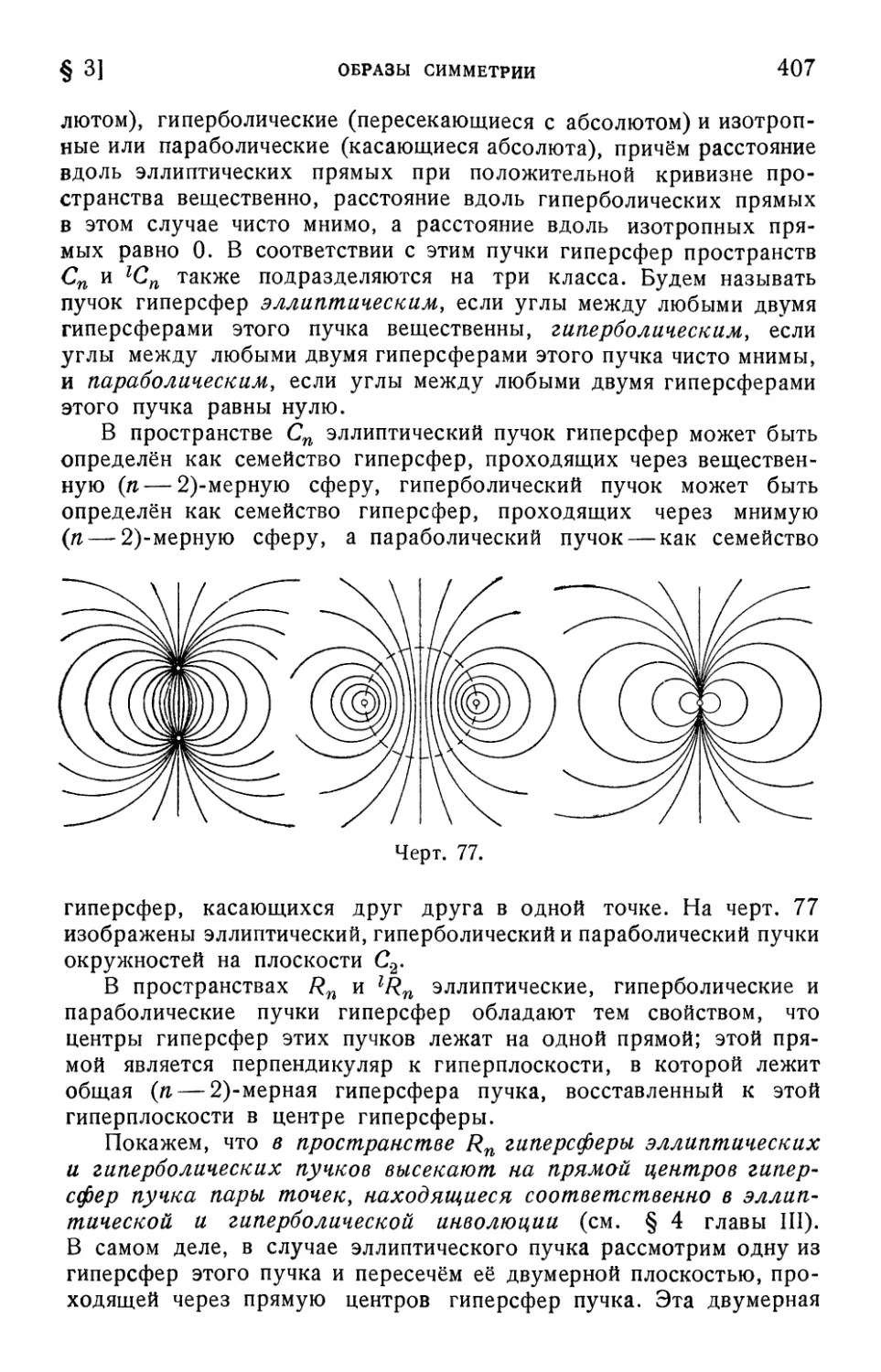
симметрии..................................................404
§ 4. Неевклидовы пространства как метризованные конформ-
ные провтранства (интерпретации Пуанкаре)..................416
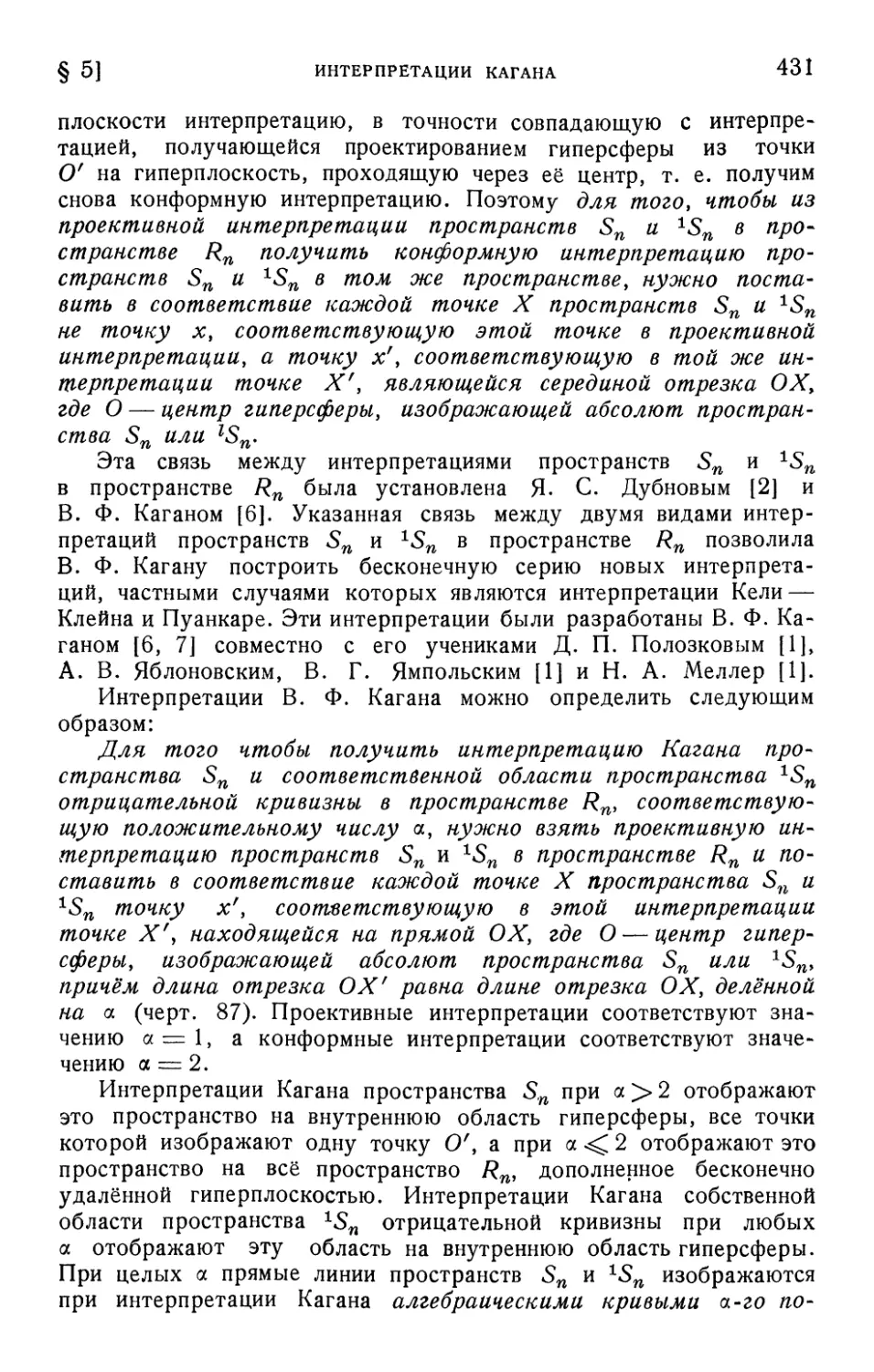
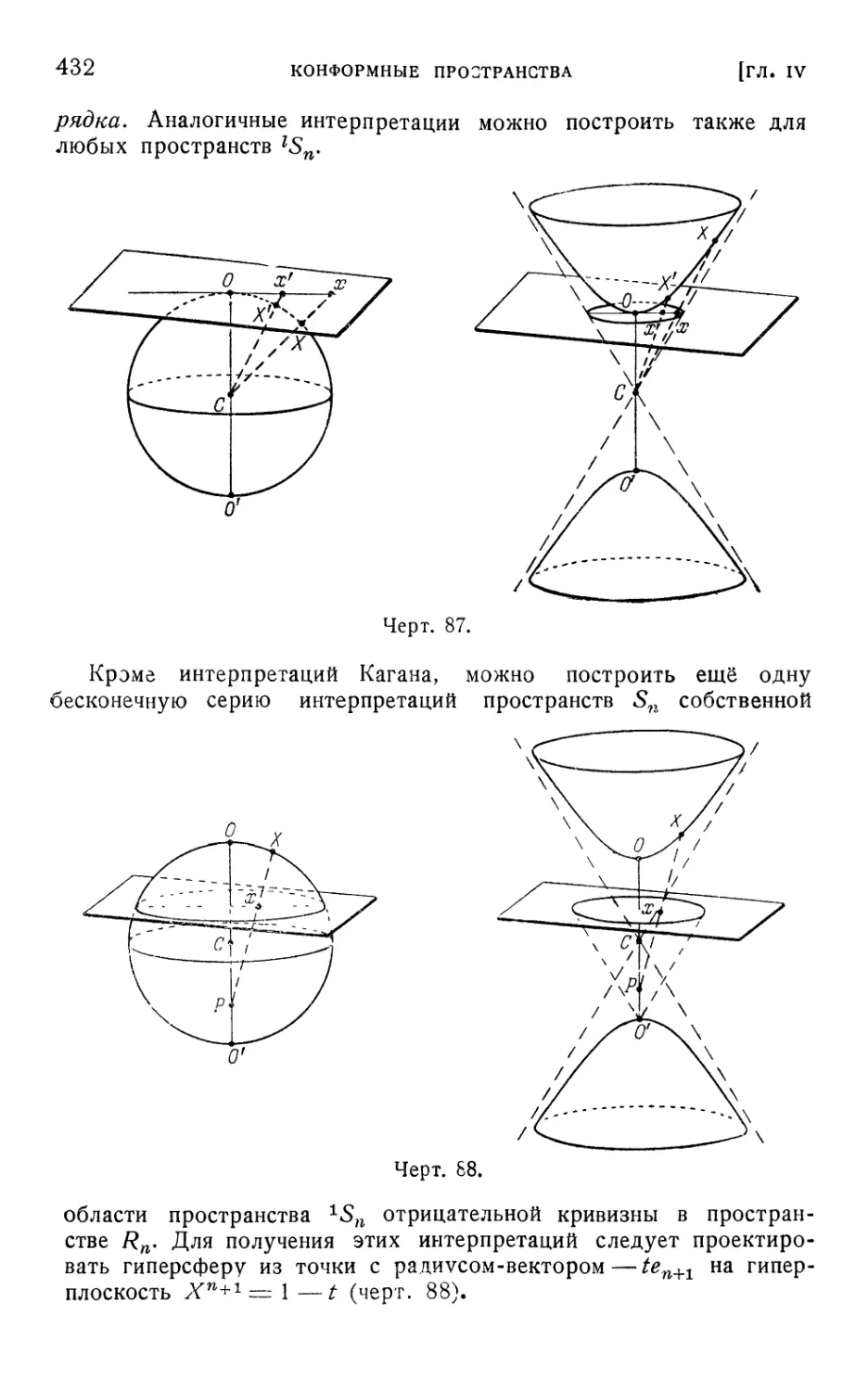
§ 5. Интерпретации неевклидовых пространств, промежуточ-
ные между проективными и конформными интерпрета-
циями (интерпретации Кагана)...............................429
Глава V. Спинорные представления движений неевклидовых
пространств.....................................................434
§ 1. Алгебры. Комплексные и двойные числа, кватернионы и
антикватернионы............................................434
§ 2. Альтернионы и спинорные представления движений неев-
клидовых пространств.......................................449
§ 3. Плоскости комплексного и двойного переменного и геоме-
трическое истолкование спинорных представлений движе-
ний неевклидовых пространств двух и трёх измерений . . 470
§ 4. Значение спиноров для физики и геометрические свой-
ства волновых полей........................................491
§ 5. Пространства кватернионов и антикватернионов и геоме-
трическое истолкование спинорных представлений движе-
ний неевклидовых пространств четырёх и пяти измерений 495
§ 6. Геометрическое истолкование спинорных представлений
движений неевклидовых пространств любого числа изме-
рений (координаты спиноров как координаты плоских
образующих максимальной размерности абсолюта) .... 509
§ 7. Геометрическое истолкование спинорных представлений
движений неевклидовых пространств любого числа измере-
ний (координаты спиноров как координаты точек абсо-
люта) .................................................... 523
§ 8. Принцип тройственности в семимерных неевклидовых про-
странствах. Октавы и антиоктавы............................532
§ 9. Полуальтернионы и спинорные представления движений
евклидовых пространств.....................................540
ОГЛАВЛЕНИЕ
5
Глава VI. Неевклидовы пространства над алгебрами.........549
£ 1. Аффинные пространства над алгебрами комплексных и
двойных чисел, кватернионов и антикватернионов .... 549
§ 2. Евклидовы пространства над алгебрами комплексных и
двойных чисел, кватернионов и антикватернионов .... 568
§ 3. Проективные пространства над алгебрами комплексных и
двойных чисел, кватернионов и антикватернионов .... 578
§ 4. Неевклидовы пространства над алгебрами комплексных и
двойных чисел. Трёхмерные неевклидовы пространства как
комплексные и двойные неевклидовы плоскости (интер-
претации Котельникова)...............................608
§ 5. Унитарные неевклидовы пространства над алгебрами ком-
плексных и двойных чисел, кватернионов и антикватерни-
онов ................................................620
§ 6. Проективная геометрия любого числа измерений как неев-
клидова геометрия .............. ................ . . 654
§ 7. Симплектическая геометрия любого числа измерений как
неевклидова геометрия.............................. . . 662
§ 8. Проективные и неевклидовы пространства над алгебрами
матриц и альтернионов ............... . . . 666
§ 9. Проективная и неевклидова плоскости над алгеброй октав 679
Глава VII. Неевклидовы пространства как римановы про-
странства постоянной кривизны. Геометрия про-
стых групп Ли как неевклидова геометрия .... 687
§ 1. Римановы пространства и пространства аффинной связ-
ности ...............................................687
§ 2. Неевклидовы пространства как римановы пространства
постоянной кривизны............................692
§ 3. Неевклидова геометрия и физика...............697
§ 4. Инвариантная аффинная связность и риманова метрика
в группах Ли....................................699
§ 5. Геометрия простых групп Ли как неевклидова геометрия 703
§ 6. Общая теория образов симметрии в неевклидовых про-
странствах ..........................................708
Библиография.............................................725
Именнойуказатель.........................................737
Предметный указатель.....................................739
Указатель обозначений....................................744
Памяти
Вениамина Фёдоровича КАГАНА
эту книгу посвящает автор
ПРЕДИСЛОВИЕ
В основу настоящей книги положен ряд курсов, посвящённых
различным вопросам неевклидовых геометрий, которые автор читал
на механико-математическом факультете Московского государствен-
ного университета и на физико-математическом факультете Азер-
байджанского государственного университета.
Первые главы книги должны быть доступны студентам II и
III курсов университета и могут служить пособием для общего
курса оснований геометрии. Последние главы содержат более
специальные вопросы и рассчитаны на студентов старших курсов
и аспирантов, специализирующихся по геометрии. Все сведения
из алгебры и топологии, необходимые для понимания книги, при-
ведены в виде точных формулировок.
Первая глава книги носит вводный характер. Вначале излагается
аксиоматика обычного пространства Евклида и более подробно
исследуются некоторые следствия из аксиом. В основу положена
не обычно излагающаяся в курсах оснований геометрии аксиома-
тика Гильберта, а более простая «точечно-векторная» аксиоматика
Вейля — Рашевского. Специально рассматриваются групповые свой-
ства векторов и метрические и топологические свойства пространства;
здесь же формулируются все сведения о группах и метрических
и топологических пространствах, необходимые для дальнейшего.
Затем рассматриваются вопросы экспериментальной проверки аксиом,
непротиворечивости, независимости и полноты системы аксиом,
а также кратко характеризуются некоторые другие аксиоматики
евклидова пространства. Далее рассматриваются обобщения обыч-
ного пространства Евклида — многомерные евклидовы пространства,
евклидовы пространства со знаконеопределённой метрической фор-
мой («псевдоевклидовы пространства») и комплексные евклидовы
пространства, необходимые для обоснования пользования мнимыми
геометрическими образами в вещественных пространствах. После
Формулировки необходимых сведений о топологических группах
и группах Ли подробно изучаются группы движений евклидовых
пространств. Глава заканчивается формулировкой необходимых
сведений об однородных пространствах и образах симметрии —
8
ПРЕДИСЛОВИЕ
понятии, охватывающем важнейшие геометрические образы всех
рассматриваемых в этой книге пространств; здесь же эти сведения
применяются в геометрии евклидовых пространств.
Во второй главе излагаются основные факты неевклидовой
геометрии. Метод изложения этой главы значительно отличается
от методов всех существующих руководств по неевклидовой гео-
метрии. В основе всех этих руководств лежит либо синтетическое
изложение неевклидовых геометрий на основе собственной аксио-
матики, либо аналитическое изложение неевклидовых геометрий
на основе проективной геометрии. Но первый способ изложения
обусловливает разрыв как между различными неевклидовыми гео-
метриями, так и между этими геометриями и другими геометри-
ческими системами, а при втором способе ясны связи между
различными неевклидовыми геометриями и связи этих геометрий
с проективной геометрией, но требуется предварительное изучение
проективной геометрии, что представляет дополнительные трудно-
сти. В основу нашего метода изложения положены следующие
факты: известно, что неевклидову геометрию Римана можно пред-
ставить как геометрию на гиперсфере евклидова пространства
с отождествлёнными диаметрально противоположными точками;
известно, далее, что тригонометрические формулы неевклидовой
геометрии Лобачевского могут быть получены из тригонометри-
ческих формул сферической тригонометрии заменой тригонометри-
ческих функций дуг гиперболическими функциями, откуда следует,
что геометрию Лобачевского можно реализовать на гиперболоиде
в евклидовом пространстве, если несколько изменить мероопреде-
ление этого пространства. Этот факт, хорошо известный геометрам,
до сих пор не клался в основу систематического изложения
неевклидовых геометрий. Здесь мы ставим своей целью изложить
неевклидовы геометрии на основе последовательного использования
этого факта, что даёт возможность кратко изложить всё основное
содержание этих геометрий. Затем приводится краткий обзор
истории неевклидовой геометрии и, в частности, излагаются важней-
шие попытки доказательства постулата о параллельных. Для
читателя, уже владеющего неевклидовой теорией параллельных,
этот обзор представляет собой полезное упражнение по пройден-
ному материалу. Кроме того, в этом обзоре он найдёт ряд новых
фактов, не имеющихся в существующих руководствах.
Третья глава посвящена связям неевклидовой геометрии с проек-
тивной геометрией. После изложения основ проективной геометрии
строится проективная интерпретация неевклидовой геометрии (интер-
претация Кели— Клейна) с помощью проектирования гиперсферы,
на которой осуществлена неевклидова геометрия, из центра гипер-
сферы на касательную гиперплоскость. Здесь же излагаются
применения неевклидовой геометрии к проективной геометрии
в теории квадрик и в линейчатой геометрии (интерпретация Плюк-
ПРЕДИСЛОВИЕ
9
кера), а также связи неевклидовой геометрии с другой геометрией,
подчинённой проективной геометрии,—симплектической геометрией»
Четвёртая глава посвящена связям неевклидовой геометрии
с конформной геометрией. После изложения основ конформной
геометрии строится конформная интерпретация неевклидовой гео-
метрии (интерпретация Пуанкаре) с помощью проектирования гипер-
сферы, на которой осуществлена неевклидова геометрия, из полюса
гиперсферы на экваториальную гиперплоскость. Здесь же излагаются
применения неевклидовой геометрии к конформной геометрии
(интерпретация Дарбу) и интерпретации неевклидовых пространств,
промежуточные между проективными и конформными интерпрета-
циями (интерпретации Кагана).
Первые две главы, если ограничиться изложением геометрий
двух и трёх измерений, полностью включают материал, необходи-
мый для курса оснований геометрии; к этому целесообразно
добавить из III и IV глав основные свойства интерпретаций Кели —
Клейна и Пуанкаре, однако они могут быть опущены, так как тот
вопрос, из-за которого эти интерпретации привлекаются в курсах
оснований геометрии (доказательство непротиворечивости неевкли-
довой геометрии), здесь решается без этих интерпретаций с помощью
осуществления неевклидовой геометрии на гиперсфере. Главы III
и IV содержат также материал курсов проективной и конформной
геометрий. Тот факт, что мы не ограничиваемся одной интерпре-
тацией неевклидовой геометрии, а стремимся изложить как можно
больше различных интерпретаций, объясняется тем, что каждая
из этих интерпретаций позволяет посмотреть на изучаемое про-
странство с новой стороны и те особенности, которые ускользают
при одних интерпретациях, наглядно видны при других. Поэтому
интерпретации, это «стереоскопическое зрение» геометра, особенно
необходимы при изучении таких пространств, как неевклидовы
пространства, геометрия которых существенно отличается от гео-
метрии нашего обычного пространства.
Пятая глава посвящена связям неевклидовых геометрий с алге-
брой— с комплексными числами и кватернионами и их аналогами
и обобщениями. Здесь излагается теория спинорных представлений
движений неевклидовых пространств и её геометрические истол-
кования— истолкование Картана, в котором координаты спиноров
определяют плоские образующие максимальной размерности абсо-
люта, и новое истолкование, в котором координаты спиноров оп-
ределяют точки абсолюта, а также применение этих геометрических
истолкований в физике.
Шестая глава посвящена геометрии неевклидовых пространств
над алгебрами комплексных чисел, кватернионов и их аналогов
и их применению в вещественных геометриях. Здесь излагаются
Интерпретации Котельникова трёхмерных неевклидовых пространств
в виде неевклидовых плоскостей над алгебрами комплексных чисел
10
ПРЕДИСЛОВИЕ
и их аналогов, а также применение новых неевклидовых геометрий
в проективной и симплектической геометриях, основанное на том,
что если за основной образ проективного и симплектического
пространств взять не точку, а в первом случае конфигурацию
точка гиперплоскость, во втором случае — прямую, то между
указанными конфигурациями можно определить расстояние, не
изменяющееся при проективных преобразованиях, а между прямыми
можно определить расстояние, не изменяющееся при симплекти-
ческих преобразованиях, причём полученные пространства изо-
метричны двум из новых неевклидовых пространств.
Последняя глава посвящена связям неевклидовых геометрий
с геометрией римановых пространств и геометрией групп Ли.
Первая из этих связей состоит в том, что неевклидовы пространства
являются римановыми пространствами постоянной кривизны или их
непосредственными обобщениями — симметрическими простран-
ствами; вторая из этих связей состоит в том, что почти все простые
группы Ли (все четыре бесконечные серии и три изолированные
группы) можно реализовать в виде групп движения неевклидовых
пространств. Здесь же изложена общая теория образов симметрии
в неевклидовых пространствах.
Вопросы, изложенные в трёх последних главах, за исключением
двух книг Котельникова, переведенной на русский язык книги
Картана по теории спиноров и двух непереведенных на русский
язык книг Картана и Кулиджа по комплексной геометрии, далеко
не исчерпывающих содержания указанных глав, освещены только
в журнальной литературе.
Неоценимую помощь автору оказал безвременно скончавшийся
Дмитрий Иванович Перепёлкин, который, уже будучи больным,
взял на себя труд рецензирования этой книги. Большое количество
советов и замечаний рецензента почти к каждой странице рукописи
существенно улучшили изложение.
Автор выражает большую благодарность всем участникам Семи-
нара по векторному и тензорному анализу при МГУ, несколько
раз обсуждавшим книгу и сделавшим ряд ценных указаний. Эта
книга посвящена памяти руководившего этим семинаром Вениамина
Фёдоровича Кагана, под руководством которого автор сделал свои
первые шаги в геометрии и который внушил автору любовь к идеям
Лобачевского и неевклидовым геометриям.
ГЛАВА ПЕРВАЯ
ЕВКЛИДОВЫ ПРОСТРАНСТВА
§ 1. Пространство Евклида
Прежде чем перейти к изучению неевклидовых геометрий,
рассмотрим наше обычное пространство, представление о котором
является непосредственной абстракцией нашего повседневного
опыта. Это пространство называют пространством Евклида по
имени геометра Евклида, жившего в Александрии (Египет) в III веке
до н. э., который в своей знаменитой книге «Начала» [I]1) дал
первое систематическое изложение геометрии нашего пространства.
Изложение Евклида основывалось на ряде аксиом, из которых
все предложения геометрии выводились чисто логическим путём.
Следует отметить, что в силу своей идеалистической философской
установки Евклид рассматривал геометрию не как науку о про-
странственных формах реального мира, возникшую из решения
практических задач (о чём красноречиво говорит само название
«геометрия», по-гречески «землемерие»2)), а как чисто логическое
учение. Поэтому Евклид ограничивался изучением логической связи
между различными геометрическими фактами и не решил ряда
геометрических задач, важных для практики, как, например, задач
измерения длины окружности, площади круга, площади поверх-
ности шара и объёма шара. Эти недостатки учения Евклида были
в значительной степени восполнены величайшим учёным древности
Архимедом, жившим в Сиракузах (Южная Италия) в том же
III веке до н. э., математические исследования которого были
связаны с вопросами физики и техники. Архимед дополнил систему
Евклида рядом аксиом и решил указанные выше важные задачи.
Продолжавшаяся в течение двух тысяч лет критика различных
недостатков системы Евклида привела к открытию в 1826 году
великим русским математиком Николаем Ивановичем Лобачевским
*) Цифры в квадратных скобках относятся к библиографическому
Указателю, см. стр. 725.
в 2) Заметим, что арабское название геометрии «хандаса», вошедшее
(сЛЗЫки некоторых народов СССР, первоначально означало «техника»
' Р* «мухандис» — «инженер»).
12 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
первой неевклидовой геометрии. Это открытие, явившееся подлин-
ной революцией в геометрии, показало, что система Евклида не
является единственной непротиворечивой геометрической системой,
как считали до того времени, а, напротив, возможны различные
непротиворечивые геометрические системы. Мнение о единственности
геометрии Евклида вытекало из господствовавшей в то время
идеалистической установки о том, что наши геометрические пред-
ставления заложены в нашем разуме до знакомства с опытом.
Открытием новой геометрии, отличной от евклидовой, Лобачевский
опроверг эту идеалистическую установку. Построив свою геометрию,
Лобачевский поставил вопрос об экспериментальной проверке того,
какая геометрия господствует в реальном мире, что указывает на
материалистические философские установки Лобачевского.
Открытие Лобачевского поставило по-новому вопрос о неза-
висимости различных аксиом геометрии и привело к созданию
совершенно строгих аксиоматических систем евклидовой геометрии
Давидом Гильбертом [1], Вениамином Фёдоровичем Каганом [1J
и другими.
Здесь мы изложим наиболее простую систему аксиом про-
странства Евклида, предложенную швейцарским геометром Г. Вей-
лем [1], с упрощениями, предложенными советским геометром
П. К. Рашевским [8].
Трёхмерное евклидово пространство /?3 можно определить
как множество, состоящее из элементов двух родов — точек и
векторов, обладающих свойствами или, как говорят, удовлетво-
ряющих аксиомам, которые подразделяются на следующие четыре
группы.
В первой группе, состоящей из четырёх аксиом, определяются
соотношения между точками и векторами; с помощью аксиом этой
группы определяется операция сложения векторов.
I, 1°. Существует по меныией мере одна точка.
I, 2°. Каждой паре точек А, В, заданных в определённом
порядке, поставлен в соответствие один и только один век-
тор.
Если вектор а поставлен в соответствие точкам А, В, причём
А — первая точка, а В — вторая точка, то вектор а будем запи-
сывать в виде АВ', точка А называется началом вектора,
а точка В — его концом.
I, 3°. Для каждой точки А и каждого вектора а суще-
ствует одна и только одна точка В, такая, что АВ = а.
Знак равенства (=) между векторами мы будем понимать
в смысле тождества, т. е. АВ и а — один и тот же вектор.
I, 4° (Аксиома параллелограмма). Если АВ = CD,
то АС = BD.
1]
ПРОСТРАНСТВО ЕВКЛИДА
13
Из аксиомы I, 4° следует, что векторы АА и ВВ для любых
-точек А, В совпадают между собой (если С совпадает с Д, D с В,
то АВ =. CD и по аксиоме I, 4° AC=BD, т. е. АА = ВВ).
Вектор АА при любом выборе точки А называется вектором-
нулём и обозначается 0.
Из аксиомы I, 4° следует также, что если АВ = CD, то
BA = DC (если АВ — CD, то по аксиоме I, 4° AC=CD, т. е.
BD = AC, откуда по той же аксиоме следует, что BA = DC).
Вектор ВА называется противоположным по отношению к век-
тору АВ. Вектор, противоположный вектору а, обозначается —а.
Из доказанного следствия аксиомы I, 4° вытекает, что для каждого
вектора существует один и только один противоположный вектор.
Если нам даны два вектора а и Ь, то им всегда можно поста-
вить в соответствие определённый вектор
с = а-\-Ь, (1.1)
называемый их суммой, определяющийся следующим образом:
если а = АВ и Ь = ВС, то с = АС. В силу аксиомы I, 4° век-
тор с не зависит от выбора точки А. В самом деле, возьмём
вместо точки А точку А'\ пусть а = А'ВГ и b = В'СГ. Но из
равенств А'В' = АВ и В'С' = ВС следует, что А'А = В'В — С С,
а из равенства А'А — СГС следует, что AfС =АС, т. е. А'С = с.
Операция (1.1) называется сложением векторов.
Сумма векторов а-\- (—Ь) обозначается а — b и называется
разностью векторов а и Ь.
Во второй группе аксиом, состоящей из пяти аксиом, опреде-
ляется операция умножения вектора на вещественное число.
II, 1°. Каждому вектору а и каждому вещественному числу
(«скаляру») k поставлен в соответствие определённый вектор.
Этот вектор мы будем обозначать
b = ka (1.2)
и будем называть его произведением вектора а на число k.
Операция (1.2) называется умножением вектора на число.
II, 2°. Умножение вектора на число 1 не изменяет вектора
1-а~а. (1.3)
II, 3°. Умножение вектора на число дистрибутивно относи-
тельно сложения чисел, т. е.
(1.4)
(k-\-l)a — ka-\-la.
14 ЕВКЛИДОВЫ пространства 1гл. I
II, 4°. Умножение вектора на число дистрибутивно отно-
сительно сложения векторов, т. е.
k(a-\-b)~ka-\-kb. (1-5)
II, 5°. Умножение вектора на число ассоциативно, т. е.
k(la) = {kl)a. (1.6)
Из аксиомы II, 3° следует, что произведение вектора на число О
является вектором-нулём, так как для любого k
£а-|-0 • я = (Z?-j-O) а = ka, (1.7)
откуда следует, что 0 • а есть такой вектор, прибавление которого
к вектору ka не изменяет его, т. е. если ka=AB, мы получаем,
что 0 • а = ВВ.
Из аксиомы II, 4° следует, что произведение вектора-нуля на
любое число является вектором-нулём, так как для любого век-
тора а
ka-^-k • 0 = А?(а + 0) = ^а, (1.8)
и если ka = АВ, то k • 0 = ВВ.
С помощью определённых нами операций (1.1) и (1.2) можно
определить линейные комбинации векторов, т. е. суммы произ-
ведений векторов на числа. Векторы а, Ь, ..., с называются
линейно зависимыми, если по крайней мере одна их линейная
комбинация
ka-\-lbтс (1.9)
является вектором-нулём, но не все числовые коэффициенты k,
I, .. ., т являются нулями; в этом случае, как легко видеть,
каждый вектор, имеющий неравный нулю коэффициент, может
быть представлен линейной комбинацией остальных векторов. Если
линейная комбинация (1.9) является вектором-нулём только в том
случае, когда все коэффициенты k, I, . .., т равны нулю, век-
торы а, Ь, ..., с называются линейно независимыми.
Понятие линейной зависимости векторов позволяет сформули-
ровать третью группу аксиом, состоящую из одной аксиомы, опре-
деляющую размерность пространства.
III (Аксиома размерности). Существуют три линейно
независимых вектора, но всякие четыре вектора линейно
зависимы.
В четвёртой группе аксиом, состоящей из пяти аксиом, опре-
деляется операция скалярного умножения векторов.
IV, 1°. Каждым двум векторам а, b поставлено в соответ-
ствие определённое число («скаляр»). Это число мы будем обо-
значать
k = (а, Ь).
(МО)
ГРУППОВЫЕ АКСИОМЫ
15
§ 2]
Число k называется скалярным произведением векторов а и Ь,
а операция (1.10) — скалярным умножением.
IV, 2°. Скалярное произведение симметрично, т. е.
(а, b)=(b, а). (1.11)
IV, 3°. Скалярное умножение дистрибутивно относительно
сложения векторов, т. е.
(а, Z? + c)=z(a, Z?) + (a, с). (1.12)
IV, 4°. Вещественный множитель можно вынести за знак
скалярного произведения, т. е.
(а, kb) = k(a, b). (1.13)
IV, 5°. Скалярный квадрат вектора (скалярное произведение
вектора на себя) неотрицателен, т. е.
(а, а)>0, (1.14)
причём знак равенства имеет место только для вектора-нуля.
Нетрудно проверить выполнение этих аксиом для точек и век-
торов обычного пространства, если понимать под векторами сво-
бодные векторы, т. е. считать равными два вектора с равной
длиной и совпадающим направлением независимо от их точки при-
ложения. С другой стороны, из этих аксиом можно логически
вывести все теоремы геометрии евклидова пространства. Ниже мы
выведем из этих аксиом некоторые теоремы евклидовой геометрии.
§ 2. Групповые аксиомы
Из первой группы аксиом евклидова пространства можно
вывести следующие свойства сложения векторов.
1°. Каждым двум векторам а, b поставлен в соответствие
определённый вектор с = а-\-Ь, называемый их суммой.
2°. Сложение векторов коммутативно, т, е.
a-\-b = b-\-a. (1.15)
В самом деле, в силу аксиомы I, 3° из произвольной точки А
> >
можно отложить вектор АВ = а, а затем вектор ВС=Ь, так что
AC=a-^-b. С другой стороны, из той же точки А можно отло-
жить вектор AD ~~ Ь. Тогда, так как AD = ВС ~ Ь, по аксиоме I, 4°
AB = DC, т. е. DC —а. Поэтому можно считать, что из точки А
Отложен сначала вектор AD = Ь, а затем DC~a, откуда АС = Ь-\-а.
3°. Сложение векторов ассоциативно, т. е.
(а + ^) + с = а+(6 + с). (1.16)
16
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
В самом деле, в силу аксиомы I, 3° из произвольной точки А
можно отложить вектор АВ = а, а затем вектор ВС = b и век-
тор CD — с. Вектор AD можно рассматривать и как сумму AC-[-CD
и как сумму AB-[~BD, но АС ~ АВ + ВС, a BD = ВС-[-CD.
4°. Среди векторов имеется вектор-нуль 0, такой, что для
любого вектора а имеет место соотношение
(1.17)
В самом деле, если а = АВ и 0 = ВВ9 то а -|- 0 также является
вектором АВ, т. е. совпадает с а.
5°. Для всякого вектора а имеется противоположный век-
тор — а, для которого
а + (—а) = 0. (1.18)
В самом деле, если а=АВ, то —а = ВА и АВ-\~ВА =
= ЛЛ = 0.
Эти свойства показывают, что векторы по сложению обра-
зуют группу. Приведём здесь некоторые сведения из теории
групп, которыми нам в дальнейшем придётся пользоваться1).
Группой называется множество элементов, удовлетворяющее
следующим требованиям (аксиомам):
1°. Каждым двум элементам а, b этого множества поста-
влен в соответствие определённый элемент этого же множе-
ства
c = aob. (1.19)
Операция (1.19) называется групповой операцией.
2°. Групповая операция ассоциативна, т. е.
(aob)oc = ao(boc). (1.20)
3°. В множестве имеется элемент е, такой, что для
любого элемента множества а
аое = а. (1-21)
4°. Для всякого элемента множества а имеется элемент а'
этого же множества, который вместе с элементом а удо-
влетворяет условию
ао>а' = е. (1.22)
Групповая операция в общем случае некоммутативна, т. е.
не для всех элементов а, b группы имеет место равенство
аоЬ = bQ>a. (1.23)
1) Более подробно о теории групп см. в книгах К уроша [1, 2].
ГРУППОВЫЕ АКСИОМЫ
17
§ 21
Элементы а. Ь, для которых осуществляется это соотношение,
называются перестановочными. Группа, в которой соотношение
(1.23) осуществляется для всех элементов, называется коммута-
тивной группой.
Мы видим, что векторы образуют коммутативную группу, если
считать за групповую операцию сложение, за элементе — вектор-
нуль, а за элемент а' — противоположный вектор — а. В качестве
других примеров коммутативных групп можно привести совокуп-
ность целых, рациональных и вещественных чисел по сложению,
а также совокупность рациональных и вещественных чисел без
нуля по умножению; в последнем случае следует считать за груп-
повую операцию умножение, за элемент е — единицу, а за эле-
мент а —обратное число —.
В дальнейшем мы большей частью будем встречаться с неком-
мутативными группами, однако по аналогии с числами групповая
операция в большинстве некоммутативных групп называется умно-
жением, элемент е называется единицей и обозначается 1, а эле-
мент аг называется обратным элементом и обозначается а-1.
Если подмножество элементов группы само является группой
с той же групповой операцией, что и данная группа, то оно на-
зывается подгруппой данной группы.
Если И—подгруппа группы G, а а — произвольный элемент G,
то будем обозначать через аОН и Но а множества элементов
aOh и ho а, где h пробегает все элементы И. Множества а О И
и Но а называются соответственно левыми и правыми смежными
классами группы Q по её подгруппе Н.
Подгруппа, для которой всякий левый смежный класс является
в то же время правым смежным классом, называется нормальным
делителем. В силу этого определения для нормального делителя
7V для всех а
aoH=NOat (1.24)
т. е. для всякого элемента п из М существует такой, вообще
говоря другой, элемент п из N, для которого
аоп — поа. (1.25)
Условие (1.25) часто переписывают в виде
аопоа' = п. (1.26)
Каждая подгруппа коммутативной группы является её нормаль-
ным делителем. Примером нормального делителя некоммутативной
группы является её центр — совокупность таких элементов группы,
которые перестановочны со всеми её элементами.
Если а и b — произвольные элементы смежных классов aoN
и доН, то элемент aob в силу (1.25) принадлежит классу
2 Зак. 177. Б. А. Розенфельд
18
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. 1
aoboN. Поэтому если считать переход от классов aoN и boN
к классу aoboN групповой операцией в множестве смежных
классов, мы находим, что смежные классы группы по её нормаль-
ному делителю образуют некоторую новую группу. Это новая
группа называется фактор-группой G/N группы G по её нормаль-
ному делителю N.
Если группа G однозначно отображена на группу G (каждому
элементу а группы G соответствует единственный элемент а
группы G) и если элементам а, b и c = aQb группы G соответ-
ствуют элементы а, b и с= aob группы G, группа G назы-
вается гомоморфной с группой G. Множество элементов группы G,
соответствующих элементу е группы G, называется ядром гомо-
морфизма. Нетрудно проверить, что ядро гомоморфизма является
подгруппой и притом нормальным делителем группы G.
В том случае, когда соответствие между гомоморфными груп-
пами является взаимно однозначным, эти группы называются изо-
морфными. Изоморфное отображение группы на себя называется
автоморфизмом группы.
С помощью данных групп можно строить новые группы: если
нам даны п групп Gx, G2, ..., Gni то совокупности п элементов
{gi> ёъ •••> гДе ёг — элемент группы Git образуют новую
группу, если мы определим групповую операцию в множестве сово-
купностей элементов с помощью соотношения
{ gl> g-2..gn ) О { gl. g2...gn } =
= UiOgi, g^og>, .... gnQ>gn}. (1-27)
Определённая таким образом новая группа в том случае, когда
группы Ох, G2, ..., Gn являются группами по умножению, назы-
вается прямым произведением этих групп, а в том случае, когда
эти группы являются группами по сложению, называется прямой
суммой этих групп.
Примерами подгрупп группы векторов являются совокупности
векторов вида
ka± (1.28)
и
ka1-\-la2 (1.29)
при любых k и I (а± у=- 0, а2 #= 0). Смежные классы по этим под-
группам имеют соответственно вид
ka^b (1.30)
и
^i + /a2 + ^. (1.31)
§2]
ГРУППОВЫЕ АКСИОМЫ
19
Векторы вида (1.28) при различных k, т. е. отличающиеся
вещественным множителем, называются коллинеарными. Если кол-
линеарные векторы а и b связаны соотношением b = ka, то
число k называется отношением этих векторов. Векторы вида
(1.29) при различных k, I, т. е. линейные комбинации двух век-
торов, в том случае, когда эти два вектора линейно независимы,
называются компланарными.
Геометрическое место концов векторов вида (1.28) или (1.30)
(где аг ¥= 0) с общим началом называется прямой линией, а гео-
метрическое место концов векторов вида (1.29) или (1.31) (где
и а2 неколлинеарны) с общим началом называется плоскостью
(термин «коллинеарные» собственно обозначает «принадлежащие
одной (прямой) линии», а термин «компланарные»—«принадле-
жащие одной плоскости»). В случае прямых (1.28) и (1.30) век-
тор предполагающийся отличным от вектора-нуля, называется
направляющим вектором прямой. Нетрудно проверить, что точки
прямой и плоскости и определяемые ими векторы удовлет-
воряют всем аксиомам евклидова пространства, за исключением
аксиомы III, которая в случае прямой должна быть заменена
аксиомой:
III'. Существует вектор, отличный от вектора-нуля, но
всякие два вектора линейно зависимы,
а в случае плоскости — аксиомой:
III". Существуют два линейно независимых вектора, но
всякие три вектора линейно зависимы.
Поэтому прямые линии евклидова пространства /?3 называют
одномерными евклидовыми пространствами Rx, а плоскости про-
странства /?3 называют двумерными евклидовыми простран-
ствами R%.
Если две прямые или плоскости образованы смежными классами
по одной и той же подгруппе или самой этой подгруппой, то эти пря-
мые или плоскости не имеют общих точек и называются параллельны-
ми. Две параллельные прямые обязательно лежат в одной плоскости.
Две параллельные прямые или плоскости могут быть переведены
друг в друга преобразованием, состоящим в том, что каждой
точке X ставится в соответствие такая точка X, что вектор
XX—один и тот же для всех точек пространства. Такое пре-
образование называется переносом (или параллельным сдвигом)
пространства.
Группа векторов (1.28) изоморфна группе вещественных
чисел по сложению, так как всякому вектору (1.28) этой группы
можно поставить во взаимно однозначное соответствие веществен-
ное число k (единственность следует из того, что если бы было
и b = k'a, то, вычитая одно из другого, мы получили бы
(в &)# —о, что невозможно при а, отличном от вектора-нуля,
2*
20 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
и fe =£ ky, сумме чисел соответствует сумма векторов (в силу
аксиомы II, 3°).
Группа векторов (1.29) изоморфна прямой сумме двух групп
вещественных чисел по сложению, так как всякому вектору (1.29)
этой группы можно поставить во взаимно однозначное соответст-
вие пару вещественных чисел {k, I} (единственность следует из
того, что если бы было b = ka1-\-la2 и b ~ k'axy-lra.2, то, вы-
читая одно из другого, мы получили бы (k—k')a1-^(l—l')a.2=0,
что невозможно при линейной независимости векторов at, а,2 и
выполнении хотя бы одного из неравенств k ф k', I iy, сумме
пар чисел, определённой по формуле (1.27), соответствует сумма
векторов (в силу аксиомы II, 3°).
Группа всех векторов пространства изоморфна прямой
сумме трёх групп вещественных чисел по сложению, так как
в силу аксиомы III всякий вектор пространства можно предста-
вить в виде линейной комбинации трёх линейно независимых век-
торов а±, а,2 и а3:
ka±-y 1а2-\- та.,, (1.32)
откуда видно, что каждому вектору пространства можно поста-
вить во взаимно однозначное соответствие тройку вещественных
чисел \k, I, т\ (единственность следует из того, что если бы
было b — ka± 1а2 + та.2 и b = Га.2-{-т'а3, то, вычитая
одно из другого, мы получили бы (k— kr)al-}-(l — /')а-з +
~У(т — Anz)^3~0, что невозможно при линейной независимости
векторов аг, а.2, а3 и выполнении хотя бы одного из неравенств
k =/= k', I =fd', т =Г ту сумме троек чисел, определённой
по формуле (1.27), соответствует сумма векторов (в силу
аксиомы II, 3°).
Примером гомоморфизма группы всех векторов пространства
является отображение векторов (1.32) на векторы (1.28) и (1.29)
с теми же значениями k и /. В первом случае гомоморфное ото-
бражение представляет собой проектирование на прямую, во вто-
ром случае — проектирование на плоскость. Ядро гомоморфизма
в первом случае состоит из векторов вида 1а2-\-та3, во втором
случае — из векторов вида та3.
Числа k, I, т, определяемые векторами прямой, плоскости и
пространства по отношению к вектору ах, отличному от вектора-
нуля в случае прямой, по отношению к линейно независимой паре
векторов а±, а.2 в случае плоскости и по отношению к линейно
независимой тройке векторов at, а,2, а3 в случае пространства,
называются координатами вектора', вектор а±, пара векторов
ах, а2 и тройка векторов а19 а.2, а3 в этом случае называются
базисом соответственно прямой, плоскости и пространства.
Обычно векторы базиса обозначаются через е± в случае прямой,
через ev е2 в случае плоскости и через е±, е2, е3 в случае про-
МЕТРИЧЕСКИЕ АКСИОМЫ
21
§ 3]
странства, а выражение вектора х через базисные векторы запи-
сывают в виде
х^х1^, (1.33)
х = х1е1 х2е2, (1.34)
х = х1е1-]~ х2е2-\- х3е3. (1.35)
Здесь х1, х2, х3 — координаты вектора х.
Если мы выберем некоторую точку О прямой, плоскости или
пространства в качестве начала и некоторый базис е2, е}>, мы
можем характеризовать всякую точку X вектором ОХ, который
мы будем называть радиусом-вектором этой точки, и координа-
тами х* этого вектора, которые мы будем называть аффинными
координатами этой точки (название «аффинные» объясняется
тем, что базисные векторы, определяющие эти координаты, пере-
водятся друг в друга аффинными преобразованиями (см. § 10)).
Мы видим, что те свойства евклидова пространства, которые
определяются первой группой аксиом, тесно связаны с группо-
выми свойствами операции сложения векторов.
§ 3. Метрические аксиомы
Из четвёртой группы аксиом евклидова пространства следует,
что в этом пространстве можно определить расстояние между
точками или, как говорят, можно задать метрику, т, е. евклидово
пространство является метрическим пространством.
Метрическим пространством называется множество элемен-
тов, называемых точками, для каждых двух из которых опреде-
лено вещественное число р (х, у), называемое расстоянием, при-
чём имеют место следующие свойства (аксиом ы):
1° (Аксиома симметрии):
р(х, j/) = р (37, х). (1.36)
2° (Аксиома позитивности):
Р(Х, д/)>0, (1.37)
причём знак = имеет место только при совпадении точек
х и у.
3° (Аксиома треугольника):
Р(Х, г)<р(х, j) + p(j, z). (1.38)
Взаимно однозначное соответствие между точками двух метри-
ческих пространств, при котором расстояния между соответствен-
ными точками равны, называется изометрическим соответствием,
а Два метрических пространства, между которыми можно устано-
вить изометрическое соответствие, называются изометричными
22
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
пространствами. Последние понятия применяются и к таким про-
странствам, в которых определено расстояние между точками, не
удовлетворяющее аксиомам метрического пространства.
Метрика евклидова пространства определяется следующим об-
разом: для всякого вектора а определяется длина I а | как абсо-
лютное значение квадратного корня из скалярного квадрата этого
вектора:
\а | = | Y(а, а) |, (1.39)
а расстояние между точками А и В определяется как длина век-
тора АВ.
Если мы условимся обозначать точки теми же буквами, что
и их радиусы-векторы, мы можем сказать, что расстояние между
точками а и b равно длине | — а\ вектора b — а.
Векторы длины 1 называются единичными векторами.
Будем называть углом между векторами а, b абсолютное зна-
чение числа ср, определяемого соотношением
C0S<P = T$nr (L40)
(мы называем углом между двумя векторами абсолютное значение
числа ср, так как вместе с числом ср соотношению (1.40) удовле-
творяет и число — ср).
Для того чтобы иметь право считать правую часть (1.40)
косинусом вещественного угла, надо доказать, что эта правая
часть не меньше — 1 и не больше +1. Это вытекает из так
называемого неравенства Коши*.
(X, уУ2 <(х,х) (у, у). (1.41)
Неравенство Коши часто называют также неравенством Буня-
ковского (которому принадлежит интегральный аналог этого не-
равенства) и неравенством Шварца.
Для доказательства этого неравенства заметим, что скалярный
квадрат вектора х — ty неотрицателен при любом вещественном t\
(x — ty, x — ty)^0. (1.42)
Таким образом, при любом t имеет место соотношение
^(^, У) — М (*, «у) + (*, х)>0. (1.43)
Если = неравенство (1.41)
ставим в (1.43) в качестве t число
тривиально. Если у #= 0, под-
Тогда получим:
(x,j/)2 —2 (х, j/)2 + (x,x) (л^)>0, (1.44)
откуда получаем (1.41).
Векторы а, Ъ, для которых (а, Ь) = 0, называются ортого-
нальными.
§ 3] МЕТРИЧЕСКИЕ АКСИОМЫ 23
Определённая нами метрика евклидова пространства удо-
влетворяет аксиомам Г—3° метрического пространства.
Аксиома 1° следует из того, что расстояние между точками а и b
равно |Z> — а|, a |Z> — а| = |а — &|; таким образом, расстояние
между точками b и а равно тому же числу. Аксиома 2° непо-
средственно следует из аксиомы IV, 5°. Аксиома 3° следует из
неравенства Коши (1.41); в самом деле,
|х—z|2 = (x— z, х — z) = (x— y-j-y— z, х—У У— z) =
= |х— ву|2-{-2(х—У> х — + — г|2. (1*45)
Но в силу неравенства Коши имеем:
(х—у, х — — «у| Iх — z|, (1-46)
и поэтому
I * —*12< I ЛИ2 +2 |х —— *| + |.У — *|2 ==
--(|x-j/| + |j/-2|)9, (1.47)
откуда получаем:
|х — 2Г|<|Х—Z\. (1.48)
Как было отмечено выше, радиус-вектор х точки плоскости
имеет вид (1.31). Пусть вектор а ортогонален к векторам alt а.2
и, следовательно, к любой их линейной комбинации. Обозначая
(а, Ь) через р, мы можем записать уравнение плоскости в виде
(а, х)=р. (1-49)
Если вектор а — единичный, то число р равно произведению
длины вектора х на косинус угла между векторами а и х, т. е.
ортогональной проекции вектора х на направление вектора а. Эта
проекция, очевидно, равна длине перпендикуляра, опущенного из
начала на плоскость, т. е. расстоянию от начала до плоскости.
Вектор а называют нормальным вектором плоскости, а урав-
нение (1.49) при единичном вектбре а называют нормальным
уравнением плоскости.
Плоскость можно также определить как геометрическое место
точек пространства, равноотстоящих от двух точек; радиусы-
векторы точек геометрического места точек, равноотстоящих от
а, b удовлетворяют условию
|х — а| = |х — &| (1.50)
или
(х— а, х — а) = (х — Ь, х — Ь), (1*51)
равносильному уравнению плоскости
(х, а-/0 = 7(|*12 —1«12)- (1-52)
24
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Будем называть углом между двумя прямыми с направляю-
щими векторами а, b и углом между двумя плоскостями с нор-
мальными векторами а, b тот из углов между векторами ±Ь,
который не больше Поэтому угол ср между двумя указанными
прямыми и плоскостями определяется соотношением
Если в пространстве выбран базис е±, е2, е3, то скалярное
произведение векторов
а = а1#! а?е,2 -ф- а3е% и b = Ь1е1 №е2 4- U -54)
в силу аксиом IV, 2° и 3° имеет вид
(а, Ь) = а№-(е1, ej + а№ (еа, е2) + а368 (е3> е3) +
+ («^2Ч-^) е.2) + (а2^+ав^) е&) +
+ (а3^ + а^3) (elt е3) (1.55)
и, в частности,
(а, а) = («1)2(е1, в1)-|_(аЭ)а (е2, е2) + (а3)2 (е3, е3)-\-
-]-2а1а2(е1, е.2)2а2а3 (е2, e3)-f-2a1a3 (elt е3). (1.56)
Мы видим, что скалярное произведение (а, Ь) является били-
нейной формой от координат векторов а и Ь, а скалярный квадрат
вектора а является квадратичной формой от его координат *)•
Последняя форма называется основной метрической формой
евклидова пространства.
Пользуясь этой терминологией аксиому IV, 5° можно сформу-
лировать так: основная метрическая форма евклидова про-
странства является положительно определённой квадратич-
ной формой.
Если базис состоит из взаимно ортогональных единичных век-
торов, он называется ортонормированным, а аффинные коор-
динаты называются декартовыми координатами.
В этом случае все скалярные квадраты (elf гх), (е2, е2), (е%, е3)
равны 1, а скалярные произведения (elf е2), (е2, е3), (е3, е±) равны О
и формулы (1.55) и (1.56) примут наиболее простой вид:
(а, + + (1.57)
(а, а) = (^)2 + (а2)2 + (а3)9. (1.58)
Приведём пример теоремы, которая доказывается с помощью
аксиом четвёртой группы и введённых нами определений.
9 Более подробно о квадратичных формах см. К у р о ш [2].
§ 4]
ТОПОЛОГИЧЕСКИЕ АКСИОМЫ
25
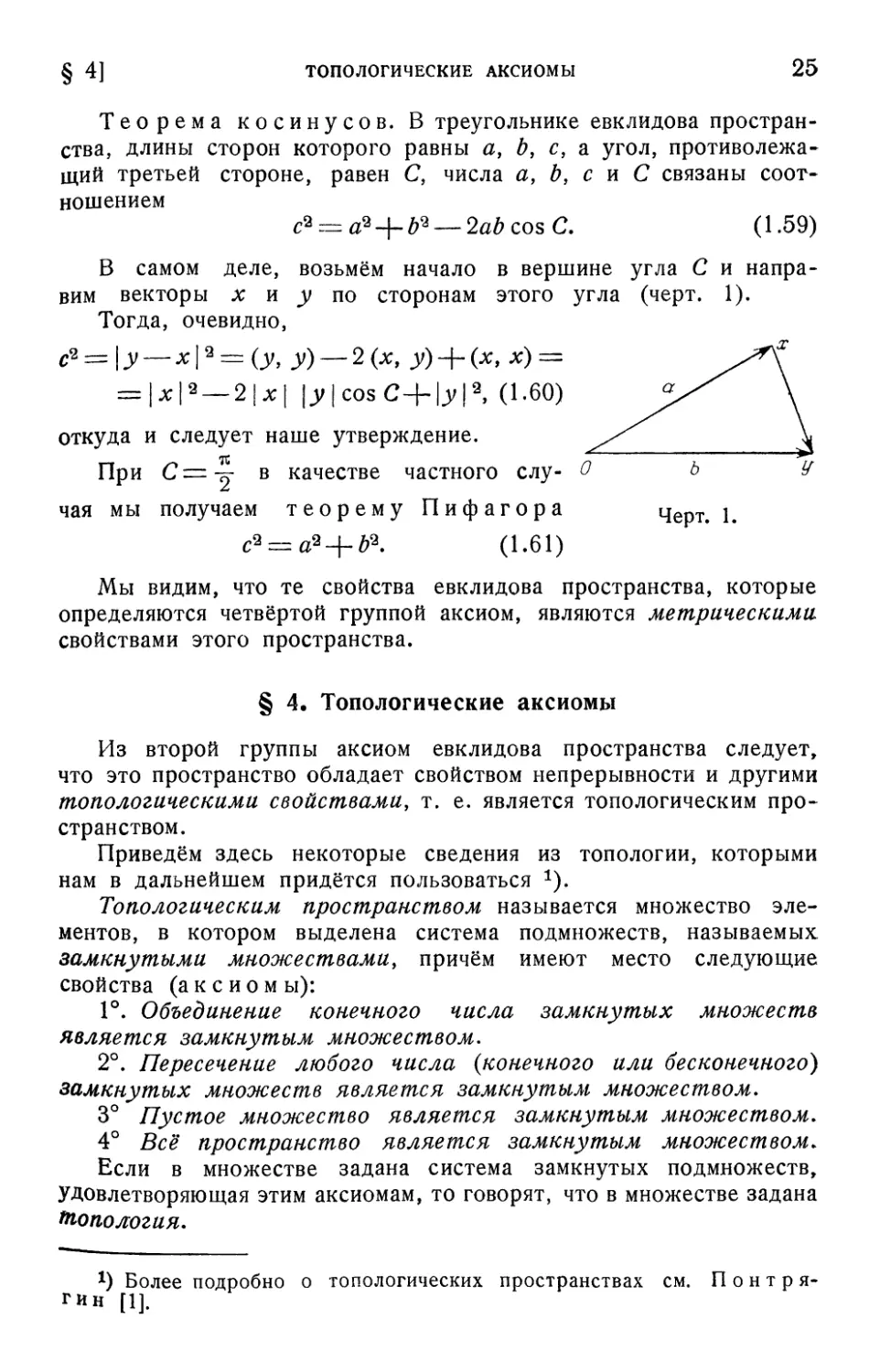
Теорема косинусов. В треугольнике евклидова простран-
ства, длины сторон которого равны а, Ь, с, а угол, противолежа-
щий третьей стороне, равен С, числа а, Ь, с и С связаны соот-
ношением
с2 = а2 + Ь2 — 2ab cos С. (1.59)
В самом деле, возьмём начало в вершине угла С и напра-
вим векторы х и у по сторонам этого угла (черт. 1).
Тогда, очевидно,
С2 — |_у — x|2 = (j/, _у)_2(х, _у) + О>
= |х|2 —2|х| |^|cosC+|^|2, (1.60) \
откуда и следует наше утверждение. \
При в качестве частного слу- О ъ У
чая мы получаем теорему Пифагора Черт. 1.
с* = а?-\-Ь2. (1.61)
Мы видим, что те свойства евклидова пространства, которые
определяются четвёртой группой аксиом, являются метрическими.
свойствами этого пространства.
§ 4. Топологические аксиомы
Из второй группы аксиом евклидова пространства следует,
что это пространство обладает свойством непрерывности и другими
топологическими свойствами, т. е. является топологическим про-
странством.
Приведём здесь некоторые сведения из топологии, которыми
нам в дальнейшем придётся пользоваться 1).
Топологическим пространством называется множество эле-
ментов, в котором выделена система подмножеств, называемых
замкнутыми множествами, причём имеют место следующие
свойства (аксиом ы):
1°. Объединение конечного числа замкнутых множеств
является замкнутым множеством.
2°. Пересечение любого числа (конечного или бесконечного)
замкнутых множеств является замкнутым множеством.
3° Пустое множество является замкнутым множеством.
4° Всё пространство является замкнутым множеством.
Если в множестве задана система замкнутых подмножеств,
Удовлетворяющая этим аксиомам, то говорят, что в множестве задана
топология.
*) Более подробно о топологических пространствах см. Понтря-
гин [1].
26
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Вместо замкнутых множеств можно задать их дополнения до
всего пространства, называемые открытыми множествами. Тогда
перечисленные аксиомы следует заменить соответственно следую-
щими аксиомами:
1'. Пересечение конечного числа открытых множеств
является открытым множеством.
2'. Объединение любого числа (конечного или бесконечного)
открытых множеств является открытым множеством.
3'. Всё пространство является открытым множеством.
4'. Пустое множество является открытым множеством.
Элементы топологического пространства называются точками.
В силу аксиомы 2' для построения всех открытых множеств можно
ограничиться некоторой системой этих множеств, такой, что всякое
открытое множество является объединением некоторых множеств
этой системы. Открытые множества такой системы называются
окрестностями, причём окрестность, содержащая точку а, назы-
вается окрестностью точки а.
Пересечение всех замкнутых множеств, содержащих данное
множество А пространства, называется замыканием множества А
и обозначается А. Каждая точка, принадлежащая к замыканию
множества, полученного из множества А исключением из него этой то-
чки (если она в него входит), называется предельной точкой множе-
ства А. Предельную точку множества А можно также определить
как такую точку, каждая окрестность которой содержит точки
множества Д, отличные от данной точки. Наоборот, зная пре-
дельные точки всех множеств, мы можем определить замкнутые
множества как множества, содержащие все свои предельные точки.
Во всяком метрическом пространстве можно определить
некоторую естественную топологию, в которой предельные точки
всякого множества определяются как такие точки, для которых
нижняя грань расстояний до этого множества равна нулю, а за-
мкнутые множества определяются, как мы указали, через предель-
ные точки; при этом все указанные нами аксиомы удовлетво-
рены.
Такую естественную топологию можно определить и на евкли-
довой прямой, на евклидовой плоскости и в евклидовом про-
странстве. В качестве окрестностей на евклидовой прямой можно
задать интервалы с рациональными координатами концов, на евкли-
довой плоскости — открытые круги (круги без их окружностей)
с рациональными радиусами и координатами центров или открытые
квадраты (квадраты без их границ) с рациональными координа-
тами вершин, а в евклидовом пространстве — открытые шары
(шары без их сфер) с рациональными радиусами и координатами
центров или открытые кубы (кубы без их поверхностей) с рацио-
нальными координатами вершин. Все эти системы окрестностей
являются счётными.
§ 4] ТОПОЛОГИЧЕСКИЕ АКСИОМЫ 27
Хотя мы определили топологию евклидовой плоскости и евкли-
дова пространства с помощью понятия расстояния, эту топологию
можно определить, и не опираясь на понятие расстояния. Если
рассматривать евклидову прямую как вещественную числовую
прямую, т. е. геометрическое изображение множества всех веще-
ственных чисел (причём каждое число изображается той точкой,
координатой которой она служит), то топология на евклидовой
прямой является тем самым топологией в множестве всех веще-
ственных чисел, а благодаря наличию топологических свойств в
множестве вещественных чисел в силу второй группы аксиом,
устанавливающей тесную связь евклидовой плоскости и евклидова
пространства с вещественными числами, топологические свойства
оказываются и у евклидовой плоскости и евклидова пространства.
Топологическое пространство называется непрерывным или
связным, если его нельзя разбить на два замкнутых непустых
множества с пустым пересечением; в противном случае топологи-
ческое пространство может быть разбито на связные пространства,
называемые связными компонентами этого пространства. Евкли-
дова прямая, евклидова плоскость и евклидово пространство связны
(первая — в силу принципа Дедекинда}, но если исключить из
прямой точку, из плоскости прямую, а из пространства плоскость,
они распадутся на две связные компоненты.
В одном и том же множестве можно по-разному определить
замкнутые подмножества, т. е. можно задать в нём различные
топологии. Так например, в любом множестве можно считать за
замкнутые множества все подмножества; тогда все подмножества
будут в то же время и открытыми множествами. В частности, мно-
жество, которое мы получим из данного пространства исключением
одной его точки, также будет замкнутым, и следовательно, здесь
и точки и их дополнения представляют собой замкнутые множества
и, значит, каждая точка играет роль свиной компоненты про-
странства. В этом пространстве каждая точка допускает окрест-
ность, состоящую из одной этой точки, вследствие чего в этом
пространстве нет предельных точек. Такого рода топологи-
ческие пространства называются дискретными,
В другом крайнем случае можно считать за замкнутые множе-
ства только пустое пространство и всё пространство; в этом случае
замыкание каждого непустого множества и, в частности, замыкание
точки будет совпадать со всем пространством.
Естественная топология евклидовой прямой, евклидовой пло-
скости и евклидова пространства удовлетворяет, кроме указанных
четырёх аксиом, ещё двум дополнительным аксиомам:
5°. Точки замкнуты,
6°. Для каждой окрестности U (х) каждой точки х суще-
ствует такая другая окрестность V (х) той же точки, что
замыкание V(x) окрестности V(х) целиком содержится в U (х).
28
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Топологические пространства, удовлетворяющие этим двум аксио-
мам, называются регулярными топологическими пространствами.
Аксиома 5° исключает второй крайний случай, где замыкание
точки совпадает со всем пространством; аксиома 6° исключает
первый крайний случай, где у каждой точки есть окрестность,
состоящая из одной этой точки, которая уже не может содержать
замыкания другой окрестности.
Будем называть однозначное отображение топологического про-
странства Т на топологическое пространство 3 непрерывным ото-
бражением, если для всякой окрестности V(y) точки у простран-
ства 3 существует такая окрестность U (х) соответственной точки х
пространства Т, что все точки U (х) соответствуют точкам V(y).
Непрерывное отображение евклидовой прямой или её части на дру-
гую евклидову прямую или её часть задаётся обычной непре-
рывной функцией.
Если топологическое пространство Т взаимно однозначно ото-
бражено на топологическое пространство 3, причём все замкнутые
множества этих пространств соответствуют друг другу, говорят,
что пространства Т и 3 топологически эквивалентны или гомео-
морф ны друг другу. В силу этого определения открытые множества
и предельные точки гомеоморфных пространств также соответствуют
друг другу. При взаимно однозначном отображении двух тополо-
гических пространств Т и 3, устанавливающем их гомеоморфизм,
всякая окрестность U (х) точки х пространства Т соответствует
некоторому открытому множеству пространства 3, содержащему
точку у, соответствующую точке х; это открытое множество или
является окрестностью V(у) точки у, или содержит такую окрест-
ность, и, таким образом, для всякой окрестности U (х) точки х
пространства Т существует окрестность V(y) пространства 3, все
точки которой соответствуют точкам окрестности U (х). Точно так же
для всякой окрестности V(у) точки у пространства 3 существует
окрестность U (х) пространства Т, все точки которой соответствуют
точкам окрестности V(у). Поэтому взаимно однозначное соответ-
ствие двух топологических пространств Т и 3, устанавливающее
их гомеоморфизм, должно быть взаимно непрерывным. С другой
стороны, при взаимно непрерывном взаимно однозначном соответ-
ствии двух топологических пространств Т и 3 открытые множества
пространства Т соответствуют открытым множествам пространства 3
и обратно, а следовательно, соответствуют друг другу и замкнутые
множества этих пространств. Таким образом, необходимым и до-
статочным условием для того, чтобы взаимно однозначное
соответствие двух топологических пространств было гомео-
морфизмом, является взаимная непрерывность этого соответ-
ствия.
В качестве примеров гомеоморфизма приведём гомеоморфизм
евклидовой прямой и интервала на ней, гомеоморфизм евклидовой
§ 4] ТОПОЛОГИЧЕСКИЕ АКСИОМЫ 29
плоскости и открытого круга на ней и гомеоморфизм евклидова
пространства и открытого шара в нём. Взаимно однозначное и взаимно
непрерывное соответствие между интервалом с концами а, —а
и всей прямой устанавливается с помощью функции у = tg ,
взаимно однозначное и взаимно непрерывное соответствие между
открытым кругом и всей плоскостью и между открытым шаром и
всем пространством устанавливается, если мы поставим в соответ-
ствие каждой точке круга или шара радиуса а, находящейся на
расстоянии х от его центра, точку соответственно плоскости или
пространства, находящуюся на той же полупрямой, соединяющей
центр с данной точкой, на расстоянии tg от центра.
Если в подмножестве S топологического пространства Т считать
замкнутыми множествами пересечения S с замкнутыми множествами
пространства Г, подмножество 5 также будет топологическим про-
странством. Подмножество S с установленной таким образом топо-
логией называется подпространством пространства Т. Примером
подпространства евклидовой прямой, плоскости и пространства
является любое множество их точек с установленной указанным
способом топологией.
Если топологическое пространство расщеплено на гомеоморфные
между собой подпространства S, то эти подпространства можно
считать точками нового топологического пространства, если считать
замкнутым множеством подпространств S такое множество этих
подпространств, что объединение всех подпространств S, соста-
вляющих это множество, является замкнутым множеством простран-
ства Т; это новое топологическое пространство называется фактор-
пространством Т/S топологического пространства Т по его
подпространствам S. Очевидно, что точки фактор-пространства T/S
замкнуты только в том случае, когда подпространства S замкнуты.
В том случае, когда подпространства S одновременно замкнуты и
открыты, фактор-пространство Т/S является дискретным топологи-
ческим пространством. Примером фактор-пространства является
фактор-пространство евклидовой плоскости по системе параллельных
прямых на ней и фактор-пространства евклидова пространства по
системе параллельных плоскостей и по системе параллельных пря-
мых в нём. Первые два из этих фактор-пространств гомеоморфны
евклидовой, прямой, третье гомеоморфно евклидовой плоскости.
Множество точек топологического пространства называется ком-
пактным, если всякое бесконечное подмножество этого множества
имеет в нём хотя бы одну предельную точку. В частности, может
быть компактным всё топологическое пространство. Евклидова пря-
мая, евклидова плоскость и евклидово пространство некомпактны,
так как, например, совокупность всех точек прямой с целочислен-
ными координатами бесконечна, но не обладает предельной точкой.
30
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Однако всякое ограниченное замкнутое множество на евклидовой
прямой, на евклидовой плоскости и в евклидовом пространстве
компактно (в первом случае — в силу принципа Больцано-Вейер-
штрасса).
С помощью данных топологических пространств можно строить
новые топологические пространства: если нам даны п топологических
пространств Тр Т2, . . Тп, то системы п точек {xlf х2, .. %п}>
где х^— точка пространства образуют новое пространство, если
мы определим замкнутые множества в множестве систем точек как
такие множества систем {xlt х2, ..., хп}, где каждая точка х^
пробегает некоторое замкнутое множество пространства Ti. Опре-
делённое таким образом новое топологическое пространство назы-
вается топологическим произведением пространств 7^, Т.2, .. ., Тп.
Из его определения следует, что система [alf a.2i . .., ап} играет
роль предельной точки множества систем {хр х.2, . .., хп], где х^
пробегает множество 3^ точек пространства 7^ тогда и только
тогда, когда каждая точка ai является предельной точкой соответ-
ственного множества
Евклидова плоскость с её естественной топологией гомео-
морфна топологическому произведению двух евклидовых прямых,
а евклидово пространство с его естественной топологией гомео-
морфно топологическому произведению трёх евклидовых прямых.
В самом деле, каждая точка плоскости и пространства находится
во взаимно однозначном соответствии с парой или тройкой вещест-
венных чисел — координат этих точек и в силу нашего определения
окрестностей это соответствие взаимно непрерывно.
Мы видим, что свойства евклидова пространства, которые опре-
деляются второй группой аксиом, являются топологическими свой-
ствами пространства. Мы уже говорили, что третья группа аксиом
евклидова пространства определяет его размерность.
§ 5. Экспериментальная проверка аксиом.
Непротиворечивость, независимость и полнота
системы аксиом
Особенностью аксиоматического определения пространства яв-
ляется то, что точки и векторы и другие геометрические образы
пространства определяются как элементы произвольной природы,
удовлетворяющие определённым аксиомам.
Чем объясняется то, что мы определяем, например, точки таким
образом, а не как элементы реального пространства? Тем, чго>
с помощью аксиом мы строим геометрическое пространство, которое
не совпадает и не может совпасть с реальным физическим простран-
ством. Геометрическое пространство на каждом данном этапе раз-
вития геометрии изменяется, всё более и более точно отражая
физическое пространство.
§ 5J ИССЛЕДОВАНИЕ СИСТЕМЫ АКСИОМ 31
Особенно наглядно видна эволюция геометрического понятия
о пространстве в вопросе о его топологических свойствах. Совре-
менное представление о пространстве как об актуальном множестве
точек, между которыми можно определить отношения предельного
перехода, сложилось только во второй половине XIX века в рабо-
тах Дедекинда и Кантора. В древности считали, что представление
о пространстве как об актуальном множестве точек должно исклю-
чать всякую непрерывность, и, например, Демокрит представлял
себе пространство дискретным, состоящим из отдельных неделимых
«атомов пространства» конечного размера, причём в каждом ограни-
ченном теле находится конечное, хотя и очень большое число таких
атомов, а Аристотель представлял себе пространство неограниченно
делимым, но считал, что невозможно, чтобы пространство состояло из
точек. Понятие вещественного числа, которое лежит в основе наших
аксиом, определяющих непрерывность пространства, было чуждо
древним; оно появилось впервые как математическое понятие в рабо-
тах таджикского ученого XI века Омара Хайяма и азербайджанского
ученого XIII века Насирэддина Туси; это понятие прочно вошло
в математику (в различных формах) только в работах Декарта,
Ньютона и Лейбница, а строгое обоснование вещественное число
получило только в упомянутых работах Дедекинда. Весьма воз-
можно, что дальнейшее развитие науки (в особенности в связи
с развитием квантовой физики) приведёт к пересмотру и теоретико-
множественной точки зрения и замене её другим представлением,
ещё более точно отражающим свойства физического пространства.
Другую линию эволюции геометрического понятия о простран-
стве, связанную с великим открытием Лобачевского и с дальнейшим
развитием его идей, мы будем подробно рассматривать ниже.
Так как геометрическое понятие о пространстве является отра-
жением пространственных соотношений реального мира, экспери-
ментальная проверка аксиом или следствий из них возможна и
необходима. Но так как всякая экспериментальная проверка связана
с определённой точностью измерения, она никогда не может достичь
абсолютной точности. Вследствие этого аксиома, которая под-
тверждалась при определённой точности измерения, может быть
опровергнута при увеличении этой точности, так что эксперимен-
тальная проверка аксиом всегда носит исторически ограниченный
характер. Например, можно поставить вопрос о проверке того
следствия из аксиом евклидова пространства, что сумма углов тре-
угольника равна к. При малой точности измерения мы всегда
найдём, что результат измерения отличается от к на величину,
меньшую погрешности измерения, в то время как при более точном
измерении, как мы увидим ниже, результат измерения будет отли-
чаться от к на величину, превосходящую эту погрешность. Однако
при той степени точности измерений, при которой аксиомы геоме-
трического пространства подтверждаются опытом, геометрия этого
32
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
пространства приносит большую пользу для практической деятель-
ности людей.
Одним из важнейших требований, предъявляемых к любой си-
стеме аксиом, является непротиворечивость этой системы,
т. е. отсутствие в ней противоречий. Из указанного нами взаимо-
отношения геометрического пространства, определяемого аксиомами,
с физическим пространством видно, что непротиворечивость не может
быть доказана с помощью ссылки на то, что эти аксиомы «выпол-
няются в реальном мире», так как при повышении точности изме-
рений эти аксиомы могут быть опровергнуты. Поэтому критерием
непротиворечивости системы аксиом является возможность построе-
ния модели или интерпретации с помощью тех или иных
математических объектов, в которой выполняются все аксиомы
данной системы. Моделей для одной и той же системы аксиом
может быть много, так как удовлетворить одним и тем же аксио-
мам могут объекты различной природы.
Простейшими моделями евклидова пространства являются:
1) Совокупность троек вещественных чисел {х1, х2, х^}. Этим
тройкам чисел можно поставить во взаимно однозначное соответствие
точки евклидова пространства, для которых эти тройки чисел служат
тройками координат. В этом случае за вектор с началом в точке
(х1, х2, х3} и концом в точке {д/1, у2, у3} можно считать тройку
чисел {j/1 — х1, у2 — х2, у3 — х3}. Сумма троек чисел {a1, a2t cP}
и {61, Ь2, изображающих векторы, есть тройка чисел {а1-}-#1,
а2-\-Ь2, а3-|-63}, произведение тройки чисел {а1, a2, eft] на число k
есть тройка чисел {ka\ ka2, ka?}, а за скалярное произведение
двух троек чисел {а1, а2, а3} и Ь2, можно принять число
аАЬг^а2Ь2^аъЬ\ Базисные векторы изображаются тройками
чисел {1, 0, 0}, {0, 1, 0}, {0, 0, 1).
2) Совокупность периодических функций периода Т вида
Олт
f(t) =z a cos &t-\-b sin <d = — . (1.62)
Этим функциям можно поставить во взаимно однозначное соответ-
ствие точки евклидова пространства, для которых тройками коор-
динат служат тройки чисел {а, Ь, с}. В этом случае за вектор
с началом и концом в точках, изображаемых функциями x(t)
и у (0 можно считать функцию f(t) = y(t)— x(Z). Сумма функ-
ций f (/) и g(t), изображающих векторы, и произведение этих функ-
ций на число являются обычными (этому соответствует указанное
выше определение сложения троек чисел и умножения тройки чисел
на число). За скалярное произведение функций, изображающих
векторы, следует принять вещественное число
т
k = (1.63)
о
§ 5]
ИССЛЕДОВАНИЕ СИСТЕМЫ АКСИОМ
33
Базисные векторы изображаются функциями 1, cos соZ и sin at,
образующими ортогональный, но ненормированный базис ^«длина»
первой из этих функций равна 1, «длины» остальных равны
Если считать арифметику непротиворечивой, построенные нами
модели также непротиворечивы, что доказывает непротиворечивость
и изложенной нами аксиоматики евклидова пространства.
Построение моделей евклидова пространства не только даёт
возможность доказать непротиворечивость его аксиоматики, но чрез-
вычайно важно и для изучения самих объектов, с помощью которых
построены модели, так как при этом изучении мы можем применять
сложившуюся в результате нашего пространственного опыта гео-
метрическую интуицию.
Весьма плодотворным является применение геометрических пред-
ставлений к изучению синусоидальных функций
f(t) = a cos sin otf, (1.64)
что можно переписать, если мы положим А = У а=А sin а,
b = A cos а в виде
f(t) = A sin (W-|~a). (1.65)
Эти функции изображаются векторами на евклидовой плоско-
сти, причём функция f(t) изображается вектором длины , на-
г £
клонённым к оси sin под углом а. Важным свойством таких
функций является то, что дифференцирование их снова приводит
к функции того же вида, но изображающейся вектором, повёрнутым
на прямой угол по часовой стрелке и растянутым в ш раз. Это
позволяет простым геометрическим построением находить решение
дифференциальных уравнений с постоянными коэффициентами,
в правой части которых находится синусоидальная функция. Изо-
бражение синусоидальных функций векторами широко применяется
в электротехнике переменных токов, где такое изображение назы-
вается векторной диаграммой. Заметим, что «длины» функ-
ций синусоидального тока и напряжения равны значениям по-
стоянного тока и напряжения, выделяющих за период то же ко-
личество тепла («эффективные значения» синусоидального тока и
напряжения), а «скалярное произведение» синусоидального тока и
напряжения в некоторой цепй равно мощности этой цепи1).
Другим важным требованием, предъявляемым к системе аксиом,
является независимость аксиом друг от друга. Для доказа-
тельства независимости некоторой аксиомы от других следует за-
менить её другой аксиомой, противоречащей ей, и доказать непро-
тиворечивость полученной новой системы с помощью построения
9 Более подробно с векторными диаграммами для синусоидальных то-
ков читатель может познакомиться по учебнику Круга [1], стр. 15.
3 Зак. 177. Б. А. Розенфельд
34
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[гл. 1
модели. Так же может быть доказана и независимость целой группы
аксиом от остальных аксиом. Например, мы уже сейчас можем
убедиться в независимости аксиомы III (аксиомы размерности про-
странства) от остальных аксиом: мы видели, что при замене этой
аксиомы на аксиому ИГ (аксиому размерности прямой) и аксиому III"
(аксиому размерности плоскости) мы получаем системы аксиом ев-
клидовой прямой или евклидовой плоскости, непротиворечивость
которых доказывается так же, как для пространства.
Ниже мы убедимся в независимости ряда других аксиом. Заме-
тим, что пространства, получающиеся при доказательствах незави-
симости тех или иных аксиом евклидова пространства, в которых
эти аксиомы заменены другими аксиомами, могут резко отличаться
по своим свойствам от евклидова пространства. Например, если мы
заменим во второй группе аксиом вещественные числа классами
вычетов по простому числу р (известно, что такие классы выче-
тов можно складывать, вычитать, умножать и делить так же, как
вещественные числа), мы получим пространство с конечным числом
точек и векторов — число точек и векторов такого пространства
равно р3,— в то время как I, III и IV группы аксиом выполняются
(разумеется, в IV группе аксиом также следует заменить веще-
ственные числа классами вычетов).
И, наконец, к системе аксиом предъявляется требование пол-
ноты, т. е. требование того, чтобы к системе объектов, удовле-
творяющей данной системе аксиом, нельзя было прибавить никаких но-
вых объектов, не изменяя соотношений между прежними объектами.
Примерами систем аксиом, не обладающих полнотой, являются при-
ведённые нами в §§ 2, 3, 4 аксиомы группы, метрического простран-
ства и топологического пространства: каждую группу можно вклю-
чить в виде подгруппы в некоторую другую группу, снова удовле-
творяющую аксиомам группы, и точно так же каждое метрическое
и топологическое пространство можно включить в виде подпростран-
ства в некоторое другое пространство, снова удовлетворяющее тем
же аксиомам. Приведённая нами система аксиом евклидова про-
странства полна, так как из неё следует, что каждая точка и
каждый вектор при определённом выборе базиса характеризуются
тройкой своих координат и всякая тройка вещественных чисел опре-
деляет точку и вектор; если бы к нашему пространству можно
было присоединить новую точку или вектор, то они также харак-
теризовались бы тройками координат; но каждая тройка чисел
является координатами одной из старых точек и одного из старых
векторов; мы получили, что две разные точки или два разных век-
тора имеют одни и те же координаты, что, как мы знаем, невозможно.
Тем самым полнота приведённой нами системы аксиом доказана.
Приведём для сравнения две другие системы аксиом евклидова
пространства, сыгравшие наибольшую роль в истории геометрии,—
системы Евклида и Гильберта.
§ 5] ИССЛЕДОВАНИЕ СИСТЕМЫ АКСИОМ 35
Евклид начинает с определения первоначальных геометрических
понятий. Однако те определения, которые Евклид даёт важнейшим
понятиям («Точка есть то, что не имеет частей», «Линия же —
длина без ширины», «Прямая линия есть та, которая равно распо-
ложена по отношению к точкам на ней», «Поверхность есть то,
что имеет только длину и ширину» х)), не являются определениями
в логическом смысле, а лишь наглядными описаниями геометриче-
ских образов.
Аксиомы Евклида подразделяются на «общие понятия» (обще-
научные положения) и «постулаты» (положения геометрического
характера). Общих понятий у Евклида пять: «равные одному и
тому же равны между собой», «если к равным прибавляются рав-
ные, то и целые будут равны», «если от равных отнимаются рав-
вые, то и остатки будут равны», «совмещающиеся друг с другом*
равны между собой» и «целое больше части». Постулатов у Евклида^
также пять: «от всякой точки до всякой точки (можно) провести прямую»
линию», «ограниченную линию (можно) неограниченно продолжать
по прямой», «из всякого центра и всяким раствором (может быть)
описан круг», «все прямые углы равны», «если прямая, падающая
на две прямые, образует внутренние и по одну сторону углы (в сумме)
меньшие двух прямых, то продолженные эти две прямые неогра-
ниченно встретятся с той стороны, где углы меньше двух прямых» * 2).
Первые два постулата означают возможность пользования линейкой,
третий—возможность пользования циркулем. Пятый постулат, равно-
сильный тому, что из точки вне данной прямой в плоскости пря-
мой и точки можно провести не более одной прямой, не пересекаю-
щей данной прямой, т. е. параллельной к данной прямой, часто
называют постулатом о параллельных. Этот постулат сыграл
важную роль в истории неевклидовой геометрии. Мы видим, что
в системе Евклида полностью отсутствует понятие непрерывности
и совершенно недостаточно охарактеризованы метрические свойства
пространства, вследствие чего в своём изложении Евклид был вы-
нужден опираться не только на свои аксиомы, но и на наглядные
соображения.
Система аксиом Евклида представляет собой пример непол-
ной системы аксиом, так как этой системе удовлетворяет
пространство, в котором имеются только такие отрезки, которые
могут быть построены из некоторого фиксированного отрезка
с помощью циркуля и линейки.
Гильберт считает пространство множеством элементов трёх ро-
дов— точек, прямых и плоскостей, между которыми имеются со-
отношения взаимной принадлежности точек, прямых и плоскостей,
соотношения, передаваемые словом «между», соотношения конгру-
х) См. Евклид [1], т. I, стр. 15.
2) См. Евклид [1], т. I, стр. 14—15.
3*
36
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
энтности (совместимости), параллельности и непрерывности, причём
описания этих соотношений даются аксиомами.
В первой группе аксиом накладываются требования на понятие
принадлежности. Здесь требуется, чтобы через две точки можно
было провести одну и только одну прямую; чтобы на прямой суще-
ствовало по меньшей мере две точки, а также существовало по
меньшей мере три точки, не лежащие на одной прямой; чтобы
через три точки, не лежащие на одной прямой, можно было про-
вести одну и только одну плоскость и чтобы на плоскости суще-
ствовала по меньшей мере одна точка; чтобы, если две точки лежат
на плоскости, проходящая через них прямая целиком лежала бы на
этой плоскости; чтобы, если две плоскости имеют общую точку,
они обязательно имели бы другую общую точку и чтобы суще-
ствовали по крайней мере четыре точки, не лежащие в одной пло-
скости.
Во второй группе аксиом накладываются требования на соотноше-
ние «между». Здесь требуется, чтобы, если точка лежит между первой
и второй точками, эти точки были бы тремя различными точками на
одной прямой и эта точка лежала бы также между второй и первой
точками; чтобы для каждых двух точек на их прямой существовала
по крайней мере одна такая точка, что вторая точка лежит между
ней и первой точкой; чтобы среди любых трёх точек прямой су-
ществовало не более одной точки, лежащей между двумя другими
и чтобы, если прямая на плоскости входит внутрь треугольника
на той же плоскости, она также выходила из него.
В третьей группе аксиом накладываются требования на соотно-
шение конгруэнтности. Здесь требуется, чтобы на всякой прямой
от всякой точки в данную сторону от неё можно было отло-
жить единственный отрезок, конгруэнтный данному; чтобы, если
два отрезка конгруэнтны третьему, они были бы конгруэнтны между
собой; чтобы, если два отрезка с общим концом и без общих вну-
тренних точек конгруэнтны двум таким же отрезкам, отрезки,
являющиеся их объединениями, также были бы конгруэнтны; чтобы
на всякой плоскости от всякой прямой в данную сторону от неё
можно было отложить единственный угол с данной вершиной,
конгруэнтный данному, и каждый угол конгруэнтен самому себе и
чтобы, если у двух треугольников конгруэнтны две стороны и угол
между ними, один из остальных углов первого треугольника был
бы конгруэнтным соответствующему углу второго треугольника.
В четвёртой группе аксиом формулируется аксиома о парал-
лельных, равносильная V постулату Евклида (Гильберт требует,
чтобы в данной плоскости из точки вне данной прямой можно
было бы провести не более одной прямой, не пересекающей данной).
В пятой группе аксиом формулируются аксиома Архимеда,
требующая, чтобы из двух отрезков меньший всегда можно было
бы отложить такое конечное число раз, что получится отрезок,
§ 6] МНОГОМЕРНЫЕ ПРОСТРАНСТВА 37
превосходящий больший отрезок, и аксиома полноты, тре-
бующая, чтобы точки прямой не допускали никакого расширения,
т. е. к ним нельзя прибавить таких новых точек, чтобы в системе,
образованной старыми и новыми точками, выполнялись бы все ак-
сиомы, относящиеся к прямой. С помощью двух последних аксиом
определяется понятие непрерывности. С помощью последней аксиомы
доказывается полнота всей системы аксиом Гильберта1). Нетрудно
показать эквивалентность системы аксиом Гильберта и приведённой
нами системы аксиом, т. е. доказать каждую из приведённых нами
аксиом с помощью аксиом Гильберта и доказать каждую из аксиом
Гильберта с помощью приведённых нами аксиом. Заметим, что
система аксиом Гильберта существенно отличается от приведённой
нами системы аксиом тем, что в то время как приведённая нами
система опирается на понятие вещественного числа, которое счи-
тается уже известным, система Гильберта не опирается на это
понятие и заменяет его аксиомами, относящимися к прямой.
§ 6. Многомерные евклидовы пространства
Понятие многомерного евклидова пространства является непо-
средственным обобщением изложенного нами понятия трёхмерного
евклидова пространства /?3.
Определим п-мерное евклидово пространство Rn как множе-
ство элементов двух родов — точек и векторов, удовлетворяющих
тем же аксиомам I, 1°—4°, II, 1°—5° и IV, 1°—5°, что и про-
странство /?3, но вместо аксиомы III удовлетворяющее аксиоме
Шбг). Существуют п линейно независимых векторов, но вся-
кие /г-(-1 векторов линейно зависимы.
Пространство Rn впервые рассматривалось Грассманом [1].
Векторы пространства Rn, так же как векторы пространства /?3,
образуют коммутативную группу по сложению. Примером под-
группы группы векторов пространства Rn является совокупность
векторов вида
Ра, + А2а2 + ... + kmam = S k«aa (1.66)
а
при любых ka. Смежные классы по этим подгруппам имеют вид
(1.67)
а
Геометрическое место концов векторов вида (1.66) и (1.67)
с общим началом называется т-мерной плоскостью, если векторы
а2, . . ., ат линейно независимы. Это геометрическое место при
w = 1 называется прямой линией, а при т = п— 1 —гиперплос-
х) См. Гильберт [1], стр. 56—60, 66—70, 86—88.
38
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
костью. В случае прямых единственный вектор а1} предполагаю-
щийся отличным от вектора-нуля, называется направляющим век-
тором прямой. Всякая т-мерная плоскость пространства Rn может
быть представлена как пересечение п— т гиперплоскостей.
Нетрудно проверить, что точки /n-мерной плоскости и опреде-
ляемые ими векторы удовлетворяют всем аксиомам пространства Rn,
за исключением аксиомы III в которой число п заменяется чи-
слом т. Поэтому /n-мерные плоскости пространства Rn являются
пространствами Rm.
Если /n-мерные плоскости пространства Rn образованы смеж-
ными классами по одной и той же подгруппе или самой этой под-
группой, то эти /n-мерные плоскости не имеют общих точек и на-
зываются параллельными. Две параллельные плоскости могут быть
переведены друг в друга переносом, который определяется
так же, как в пространстве /?.3.
Группа всех векторов пространства Rn изоморфна прямой
сумме п групп вещественных чисел по сложению, так как в силу
аксиомы IIIkW) всякий вектор пространства Rn можно представить
в виде линейной комбинации п линейно независимых векторов
+ А2аа + •. • + knan = 5 k{ait (1.68)
i
откуда видно, что каждому вектору пространства Rn можно по-
ставить во взаимно однозначное соответствие п вещественных
чисел kt (единственность следует из того, что если бы было
b = S Wai и Ь = ^'^аь то, вычитая одно из другого, мы полу-
i
чили бы = о, что невозможно при линейной неза-
i
висимости векторов ati и выполнении хотя бы одного из нера-
венств и сумме систем п чисел, определённой по фор-
муле (1.27), соответствует сумма векторов (в силу аксиомы II, 3°).
Числа &*, определённые вектором пространства Rn по отно-
шению к линейно независимым векторам ait называются коорди-
натами вектора, а система п векторов ai называется базисом.
Обычно векторы базиса обозначаются через eit а выражение век-
тора х через базисные векторы записывается в виде
х = x1e1-j-x2e2-^ .. . ~j-xnen — ^xiei; (1.69)
i
здесь x* — координаты вектора х.
Если мы выберем некоторую точку О пространства Rn в ка-
честве начала и некоторый базис eif мы можем характеризовать
всякую точку X вектором ОХ, который мы будем называть ра-
диусом-вектором этой точки, и координатами х1 этого вектора,
которые мы будем называть аффинными координатами этой точки.
§ 6] МНОГОМЕРНЫЕ ПРОСТРАНСТВА 39
В пространстве Rn, так же как в пространстве /?3, опреде-
ляется метрика, в которой для каждого вектора а определяется
длина |а| как абсолютное значение квадратного корня (1.39) из
скалярного квадрата этого вектора, а расстояние между точками А
и В определяется как длина вектора АВ.
Будем называть углом между двумя векторами а, b абсо-
лютное значение числа ср, определяемого соотношением (1.40).
В пространстве Rn, так же как в пространстве /?3, имеет
место неравенство Коши (1.41) и выполняются все аксиомы
1°—3° метрического пространства, так как при доказательстве
этого мы нигде не опирались на аксиому размерности.
Если радиус-вектор х точки гиперплоскости имеет вид
(1.67) при т = п—1, а вектор а ортогонален к векторам а19
а.2>. . ., ап_1 и, следовательно, к любой их линейной комбинации,
то мы можем записать уравнение гиперплоскости в виде (1.49),
где через р обозначено произведение (а, Ь). Если вектор а — еди-
ничный, то число р здесь равно расстоянию от начала до гипер-
плоскости. Вектор а называют нормальным вектором гипер-
плоскости, а уравнение (1.49) при единичном векторе а называют
нормальным уравнением гиперплоскости. Гиперплоскость можно
также определить как геометрическое место точек, равноотстоящих
от двух точек, что доказывается так же, как в случае простран-
ства /?3.
Угол между двумя прямыми с направляющими векторами а, b
и угол между двумя гиперплоскостями с нормальными векто-
рами а, b определяется так же, как угол между двумя прямыми
и плоскостями в пространстве /?3; этот угол определяется тем же
соотношением (1.53).
Если в пространстве Rn выбран базис ех, е,2, . .., еп, то ска-
лярное произведение векторов
a = ^aiei и b — 5 Ь{ег (1-70)
i i
в силу аксиом IV, 2° и 3° имеет вид
(й, o = ej) (i.7i)
4 3
и, в частности,
(а, а) = ^ ^агаэ (eit е^). (1-72)
Скалярное произведение (а, Ь) здесь также является били-
нейной, формой от координат векторов а и Ь, а скалярный квад-
рат вектора а является квадратичной формой от его координат.
Последняя форма называется основной метрической формой
пространства Rn. Поэтому аксиома IV, 5° здесь может быть
40
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
сформулирована так: основная метрическая форма простран-
ства Rn является положительно определённой квадратичной
формой.
Для всякой /n-мерной плоскости пространства можно указать
вектор, ортогональный к этой плоскости; таким вектором является
нормальный вектор любой гиперплоскости, проходящей через
zn-мерную плоскость. Отсюда следует, что в пространстве Rn
всегда можно выбрать базис, состоящий из взаимно ортогональных
векторов. Если все векторы такого базиса являются единичными,
базис называется ортонормированным. Соотношения, связывающие
векторы ортонормированного базиса пространства Rn, записываются
в виде
(ей ^) = 8<,. (1.73)
где — символ Кронекера, равный 1 при i=j и 0 при /#=/.
Аффинные координаты точек в случае ортонормированного базиса
называются декартовыми координатами. При ортонормированном
базисе формулы (1.71) и (1.72) принимают наиболее простой вид:
(а, Ь) = ^а^Ь\ (1-74)
i
(а, а) = 2(а<)2. (1.75)
В пространстве Rn имеет место теорема косинусов (1.59)
и её частный случай—теорема Пифагора (1.61), так как
при их доказательстве мы нигде не опирались на размерность
пространства.
Если в пространстве Rn заданы два базиса {#Д и {е^}, то
векторы каждого из этих базисов линейно выражаются через век-
торы другого по формулам
ег=^А^еь (1.76)
i if
где числа А^ и А\ составляют матрицы n-го порядка:
rt 8 51S тН ОТ ОТ ОТ гН OTW и Ai' Ai А^ Ai ...An . • An . (1.77)
. А^ Л? ... А”. . .А”' A? ... A* .
Нетрудно проверить, что если
е е$9 С г" = 2 Ci" = 5 4, (1-78)
i i
(1.79)
г'
§ 6] МНОГОМЕРНЫЕ ПРОСТРАНСТВА 41
Операция (1.79) называется операцией умножения матриц.
Считая векторы в!» совпадающими с векторами eit мы найдём,
что матрицы (Л^/) и (А\) являются взаимно обратными, т. е. их
произведение является матрицей тождественного преобразования,
элементы которой мы будем обозначать символом Кронекера 8},
так же как символ 8^. равным 1 при i=j и 0 при I ф j.
При преобразованиях (1.76) координаты xi векторов преобра-
зуются по взаимно обратным формулам
^' = 2^'Z (i.8O)
i V
так как
х = = 2 xi'et' = 22 x^At'e^ = 2 2х* (1-81)
i i’ it' i ir
Если помимо перехода от базиса {^} к базису {е^} произво-
дится также перенос начала, то координаты х* точек пространства
преобразуются по формулам
+ (1.82)
i
Если базисы {^} и {^} ортонормированные, умножая скалярна
левую и правую части первой формулы (1.76) на а левую и
правую части второй формулы (1.76) на и используя фор-
мулу (1.73), мы получим:
Al'=(eil eif), А? =(ег, е^, (1.83)
откуда находим, что в этом случае
4 (1.84)
т. е. эти матрицы обладают тем свойством, что их обратные
матрицы совпадают с транспонированными.
Так как числа Л^ и А\ являются координатами векторов, со-
ставляющих ортонормированцый базис при другом ортонормиро-
ванном базисе, то из соотношений (1.73) для каждого из этих
базисов мы находим, что матрица (Л^) удовлетворяет условиям
2^4 = 8^-.. (1.85)
ъ
Матрица (Л|/), обладающая такими свойствами, называется
ортогональной матрицей. Нетрудно проверить, что те же усло-
вия мы получим, если потребуем, чтобы матрица преобразова-
ния (1.80) удовлетворяла условию
2(х<)2 = 2(*<')2- с1-86)
i il
42
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Геометрическое место точек пространства Rn, равноотстоящих
от одной точки, называется гиперсферой. Центр и радиус гипер-
сферы определяются так же, как для обычной сферы.
В пространстве Rn, как и во всяком метрическом пространстве,
может быть определена естественная топология. В качестве окрест-
ностей в пространстве Rn можно задать внутренние области гипер-
сфер с рациональными радиусами и координатами центров или
открытые п-мерные кубы с рациональными координатами вершин.
Эти системы окрестностей являются счётными.
Пространство Rn с этой топологией гомеоморфно топо-
логическому произведению п евклидовых прямых, так как каждая
точка пространства Rn находится во взаимно однозначном соот-
ветствии с системой п вещественных чисел — координат этих то-
чек, а в силу нашего определения окрестностей это соответствие
взаимно непрерывно.
Топологические свойства пространства Rn аналогичны свойствам
пространства пространство Rn связно, но если исключить
из него гиперплоскость, оно распадётся на две связные компо-
ненты. Пространство Rn является регулярным топологическим
пространством.
Пространство Rn некомпактно, но всякое ограниченное
замкнутое множество в нём компактно. Пространство Rn гомео-
морфно внутренней области гиперсферы в нём, что устанавливается
так же, как в пространстве /?3. Можно построить фактор-простран-
ство пространства Rn по системе параллельных m-мерных плоскостей
в нём; это фактор-пространство гомеоморфно пространству
Коренным отличием пространства Rn при п > 3 от простран-
ства /?3 является то, что пространство R3 представляет собой
непосредственную абстракцию нашего повседневного простран-
ственного опыта, в то время как пространство Rn при п > 3 пред-
ставляет собой лишь систему математических объектов, удовле-
творяющих определённым аксиомам. Всякие попытки рассматривать
и исследовать реальное существование пространства четырёх и
более измерений как пространства, в которое вложено наше обыч-
ное пространство в виде трёхмерной плоскости, представляют
собой идеалистические спекуляции на математике. Эти спекуляции
были разоблачены Ф. Энгельсом в «Диалектике природы» (см.
статью «Естествознание в мире духов»1)) и математиком Ф. Клей-
ном в его «Лекциях о развитии математики в XIX столетии»2).
Действительное значение геометрии многомерных евклидовых
пространств состоит в том, что имеется большое количество моде-
лей этих пространств, построенных с помощью объектов различной
природы, и, применяя к изучению этих объектов нашу геометрическую
х) См. Энгельс [1], стр. 36—37.
2) См. Клейн [4], стр. 208.
МНОГОМЕРНЫЕ ПРОСТРАНСТВА
43
§ 6]
интуицию, сложившуюся в нашем обычном пространстве, мы мо-
жем облегчить решение различных задач, относящихся к этим
объектам.
Модели пространств Rn особенно широко применяются в ана-
лизе и его приложениях, так как всюду, где мы имеем дело с п
вещественными переменными, мы можем рассматривать эти пере-
менные как координаты точек пространства Rn' таким образом,
мы получаем целый ряд аналитических, механических и других
моделей пространства Rn.
Простейшими моделями пространства Rn являются:
1) Совокупность систем п вещественных чисел {х1, х2, .. ., хп}.
Этим системам чисел можно поставить во взаимно однозначное
соответствие точки пространства Rn, для которых эти числа слу-
жат координатами. В этом случае за вектор с началом в точке {х*}
и концом в точке {J/*} можно считать систему чисел {у* — х*}.
Сумма систем чисел {а*} и {&*}, изображающих вектор, есть си-
стема чисел произведение системы чисел {а*} на число k
есть система чисел {W‘}, а за скалярное произведение систем
чисел {а1} и {&*} можно принять число Базисные векторы
i
изображаются системами чисел {О,..., О, 1, 0,..., 0), образую-
щими ортонормированный базис.
2) Совокупность периодических функций периода Т вида
х (Z) = ак cos he sin с, (о = (1.87)
к к
где k изменяется от 1 до у, если с~0 и п — чётное число, и
k изменяется от 1 до —у-^-, если с^=0 и п — нечётное число.
Этим функциям можно поставить во взаимно однозначное соот-
ветствие точки пространства Rni координатами которых служат
числа ак, Ьк, с. В этом случае за вектор с началом и концом
в точках, изображаемых функциями x(t) и y(t), можно считать
функцию f(t) = у(/) —х(/). Сумма функций /(/) и g(f), изобра-
жающих векторы, и произведение этих функций на число являются
обычными (этому соответствует указанное выше определение сло-
жения систем чисел и умножение системы чисел на число). За ска-
лярное произведение функций, изображающих векторы, следует
принять вещественное число (1.63). В первом случае, рассмо-
тренном выше, базисные векторы изображаются функциями cos
cos 2(oZ, .. ., cos у о/, sin wZ, sin 2wZ, .. ., sin у со/, которые обра-
зуют ортогональный, но не нормированный базис «длины» базис-
ных векторов равны • Во втором случае базисные векторы
44
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
изображаются функциями 1, cos <oZ, cos 2W, . . ., cos n у —
sin <oZ, sin 2W, . . . , sin -n ~ 1 которые также образуют ортого-
нальный, но не нормированный базис («длина» первого базисного
вектора равна 1, а длины остальных векторов равны •
Если считать арифметику непротиворечивой, построенные нами
модели также непротиворечивы, что доказывает непротиворечивость
построенного нами пространства Rn.
Изображение периодических функций векторами простран-
ства Rn применяется в электротехнике сильных токов, где такое
изображение или его проекции на двумерную плоскость, так же
как в случае синусоидальных токов, называется векторной диа-
граммой. Заметим, что «длины» функций тока и напряжения и
их «скалярное произведение» имеют тот же физический смысл,
что и в случае синусоидальных токов J).
§ 7. Евклидовы пространства со знаконеопределённой
метрической формой
Наряду с определёнными нами евклидовыми пространствами Rn
можно определить пространства, отличающиеся от них тем, что
их метрическая форма уже не является знакоопределённой. Прежде
всего покажем, какие задачи приводят к необходимости опреде-
ления таких пространств.
Одной из задач физики, приводящей к геометрии, является
описание движения материальной точки. Если материаль-
ная точка движется в пространстве, то каждому моменту вре-
мени t соответствуют координаты х1, х‘3, х3 этой точки. Поэтому,
положение точки в данный момент времени можно изображать
точкой четырёхмерного пространства с координатами х1, х9, х3, Z.
Выбранная нами система координат может быть заменена любой
другой системой координат, движущейся равномерно и прямолинейно
по отношению к первой системе; в новой системе координат поло-
жение точки характеризуется новыми координатами х1', х2', х3,/\
В классической механике Галилея — Ньютона связь между коор-
динатами х\ t и х*’, Г определяется формулами
х*' = ^A'ix'1 — ъг1-\-Аг’t ]
i > (1.88)
t' — t-\-A, J
где v*— координаты вектора скорости движения новой системы
по отношению к старой.
*) См. Кваде [1] и заметку автора [14].
§ 7] ПРОСТРАНСТВА СО ЗНАКОНЕОПРЕДЕЛЕННОЙ ФОРМОЙ 45
Как известно, механика Галилея — Ньютона, хорошо согласую-
щаяся с практикой при малых скоростях, заметно расходится
с практикой при больших скоростях, сравнимых со скоростью
света. Согласно механике Галилея — Ньютона, если скорость света
по отношению к некоторой системе координат равна с, то ско-
рость света по отношению к системе координат, движущейся
в том же или в обратном направлении со скоростью v, соответ-
ственно равна с — v и c-\-v. Если скорость v во много раз меньше
скорости с, скорости с — v и c-j-v практически неотличимы от
скорости с; если же скорость v сравнима со скоростью с, разли-
чие между указанными скоростями становится ощутительным.
В то же время, как показывает эксперимент, скорость света одна
и та же для всех систем координат, движущихся равномерно и
прямолинейно друг относительно друга. Поэтому для любых таких
систем координат с ортонормированными базисами должно выпол-
няться соотношение
т. е.
2 (*2--*1)2 — с2 (Z2-/1)2= 2 (Х2 — *1 )2 — с (t'% — ^)2. (1.90)
i i
Это условие не выполняется в механике Галилея — Ньютона, пред-
полагающей существование абсолютного времени, для которого
при переходе от одной системы отсчёта к другой можно только
изменить начало отсчёта. Для того чтобы удовлетворить этому
условию, необходимо отказаться от понятия об абсолютном вре-
мени и принять, что пространство и время — не изолированные
друг от друга две формы существования материи, а две сто-
роны одной и той же формы существования материи и при
переходе от одной системы координат к другой, движущейся
относительно первой, новая временная координата t' должна выра-
жаться не только через старую временную координату /, но и
через старые пространственные координаты xi.
Этому условию удовлетворяет механика специальной теории
относительности Эйнштейна, дающая при скоростях, сравнимых
со скоростью света, гораздо большее согласие с практикой, чем
механика Галилея — Ньютона. Если мы обозначим произведение ct,
имеющее размерность длины, через х4, то согласно механике
Эйнштейна при переходе от одной системы координат с ортонор-
мированным базисом к другой такой системе, движущейся равно-
мерно и прямолинейно по отношению к первой, координаты х1,
х'3, х3, х4 преобразуются по закону
х*'^^А? х*+А*’ (i, l' = 1, 2, 3, 4), (1.91)
46 ЕВКЛИДОВЫ пространства [гл. I
причём
2м4 —4 )2- 2 (4—xb2, (1.92)
i i
где e* = e2 = e3 = 1, e4 = — 1.
Преобразования (1.91), удовлетворяющие условию (1.92), очень
похожи на преобразования координат с ортонормированным бази-
сом в пространстве /?4, которые также имеют вид (1.91), но вме-
сто условия (1.92) они связаны условием
2(4 —4)2=Sc4—42- (1-93)
i i
Поэтому в случае механики Эйнштейна мы можем по аналогии
с пространством /?4 определить в пространстве, точки которого
изображают положения материальных точек в разные моменты
времени, расстояния между точками этого четырёхмерного про-
странства, считая за расстояние между точками с координатами х\
и квадратный корень из выражения Ssi(x2 — Xi)“. Определён-
ное таким образом расстояние может быть как вещественно, так
и чисто мнимо или равно нулю. В первом случае существует такая
система координат, в которой данные точки одновременны и опре-
делённое нами расстояние между этими точками равно обычному
расстоянию между ними в этой системе координат. Во втором
случае существует такая система координат, в которой у данных
точек совпадают пространственные координаты и расстояние между
этими точками равно умноженному на произведение ic отрезку
времени между этими точками в этой системе координат. В тре-
тьем случае эти точки могут быть соединены лучом света. Изло-
женная геометрическая интерпретация механики была предложена
Минковским [1]. Преобразования (1.92) при Д'1' = 0, удовлетво-
ряющие условию (1.92), называются преобразованиями Лоренца.
Интерпретация Минковского позволяет сводить многие задачи физики
к геометрическим задачам.
Этот пример, с одной стороны, показывает плодотворность
математического понятия четырёхмерного пространства, а с другой
стороны, указывает на необходимость расширения понятия евкли-
дова пространства в сторону отказа от знакоопределённости метри-
ческой формы, так как роль метрической формы в приведённом при-
мере играет знаконеопределённая форма (х1)’3-}- (х2)2 + (х3)*3—(х4)2.
К тому же пространству приводит и следующая геометрическая
задача: рассмотрим сферы в пространстве /?3, причём будем при-
писывать каждой сфере положительную или отрицательную ориен-
тацию, которую будем характеризовать знаком радиуса; ориента-
цию сферы можно связывать с одной из сторон её поверхности.
Если две сферы обладают общими касательными, эти касательные
§ 7] ПРОСТРАНСТВА СО ЗНАКОНЕОПРЕДЕЛЁННОЙ ФОРМОЙ 47
образуют круглый конус; у двух сфер может быть два таких
конуса, но мы будем рассматривать только тот из этих конусов,
на котором обе сферы определяют одну и ту же ориентацию,
считая ориентацию конуса также связанной с одной из сторон его
поверхности (черт. 2). Для двух сфер, обладающих общими каса-
тельными, определим касательное расстояние между ними — длину
отрезка одной из рассматривае-
мых нами общих касательных.
Все эти отрезки могут быть yf у | L-y |
совмещены друг с другом по- У
воротом вокруг прямой, соеди- / //"к
няющей центры сфер, вслед-
ствие чего они равны между со- X. //у. / f
бой. Будем определять каждую / W
сферу координатами х1, х2, х3 | /
центра и радиусом г с поло- \ \ /
жительным или отрицательным \rrriv^
знаком в зависимости от ориен- Черт. 2.
тации сферы. Если мы проведём
из центра одной из этих сфер прямую, параллельную одной из
общих касательных, то центры сфер и точка пересечения про-
ведённой нами прямой с радиусом-вектором точки касания другой
сферы являются вершинами прямоугольного треугольника, катетами
которого служат отрезок радиуса-вектора точек касания и отрезок
прямой, параллельной касательной. Длина гипотенузы этого тре-
угольника равна расстоянию между центрами сфер, а длины кате-
тов равны касательному расстоянию сфер и абсолютному значению
разности их радиусов. Поэтому в силу теоремы Пифагора квадрат
касательного расстояния ш сфер с центрами х|, xl и радиусами г19
г% равен
= — х!)2 — (г2 — гх)2. (1.94)
i
В том случае, когда для двух сфер нельзя определить каса-
тельное расстояние, составляя для них выражение (1.94), мы най-
дём, что оно отрицательно. Будем называть квадратный корень
из этого выражения мнимым касательным расстоянием между
этими сферами. Для двух сфер, касающихся друг друга (при
совпадении ориентации в точках касания), выражение (1.94) обра-
щается в нуль и касательное расстояние таких двух сфер равно
нулю. Если мы поставим в соответствие каждой сфере с заданной
ориентацией точку четырёхмерного пространства с координатами
х1, х2, х3, х4 — г и будем считать расстояние между этими точ-
ками равным касательному расстоянию между соответственными
сферами, мы получим то же пространство со знаконеопределённой
метрической формой, что и при интерпретации Минковского.
48 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
Совершенно аналогично, исходя из окружностей евклидовой
плоскости R.2, мы получим трёхмерное пространство такого же
типа, а исходя из гиперсфер пространства Rn, мы получим
(/г1)'Мерное пространство такого же типа. Полученным таким
образом изображением трёхмерного пространства на плоскости
пользовался в своих работах известный русский кристаллограф
Е. С. Фёдоров [1]. Преобразования многообразия сфер, сохраняю-
щие их касательные расстояния, переводят точки в сферы и обратно,
но плоскости — в плоскости. Эти преобразования изучались Лагер-
ром [1] и известны под названием преобразований Лагерра.
Дадим теперь точное аксиоматическое определение пространства,
с которым мы встретились в двух приведённых нами примерах.
Будем называть п-мерным евклидовым пространством индекса I
lRn множество элементов двух родов — точек и векторов, удовле-
творяющих тем же аксиомам I, 1°—4°; II, 1°—5°; III(W) и IV, 1°—4°,
что и пространство Rn, но вместо аксиомы IV, 5° удовлетворяющее
аксиоме
IV, 5'. Скалярный квадрат вектора является невырожденной
квадратичной формой индекса I от его координат, т. е. надле-
жащим выбором базиса может быть приведён к виду
(х, х) = — (х1)2 — (х2)2—. . (хг)2 + (хг+1)2 + . . . +(х^)2. (1.95)
Индекс квадратичной формы (х, х) не зависит от выбора
базиса, при котором она приведена к алгебраической сумме
квадратов. В самом деле, если форма (х, х) приведена к виду
(1.95) при базисе е±, е.2, ..., еп, а при некотором другом базисе
^2', • • • , она приведена к виду
(х, х) — (хг)2 — (х2')2 — ... — (х*' )2 + (хг' +1)2 + . .. + (х”' )2,
(1.96)
причем, например, V > I, то существует вектор а, являющийся
линейной комбинацией векторов ev, е^, . . ev и ортогональный
всем векторам ег, е2...ех. Тогда в силу (1.95) выражение (а, а)
отрицательно, а в силу (1.96) это выражение положительно, откуда
видно, что предположение V > I приводит к противоречию; точно
так же приводит к противоречию предположение I' < I. Это свой-
ство квадратичных форм называется законом инерции.
В соответствии с этим определением пространство Rn будем
называть евклидовым пространством индекса 0.
Пространства lRn часто называют также псевдоевклидовыми про-
странствами. Эти пространства рассматривались Саммервиллем [1].
Пространство, рассматривавшееся хМинковским, является простран-
ством Пространство, которому изометрично многообразие
гиперсфер пространства Rn, если считать за расстояние между гипер-
сферами их касательное расстояние, является пространством 17?п+1.
§ 7] ПРОСТРАНСТВА СО ЗНАКОНЕОПРЕДВЛЁННОЙ ФОРМОЙ 49
Наряду с пространствами Rn и lRn мы определим также про-
странства, точки и векторы которых удовлетворяют тем же аксио-
мам I, 1°—4°; II, 1°—5°; III и IV, 1°—4°, что и пространства Rn
И lRn, но вместо аксиомы IV, 5° или IV, 5' удовлетворяют аксиоме
IV, 5". Скалярный квадрат вектора является вырожденной
квадратичной формой индекса I и дефекта d от его координат,
т. е. надлежащим выбором базиса может быть приведён к виду
(х, х) = — (х1)2 — (х2)2 — ... — (хг)2 + (х^1)2 + . . . + (х^)2.
(1.97)
Будем называть определённое таким образом пространство
п-мерным нолуевклидовым пространством индекса I и дефекта d
и обозначать его l+{d}Rn. При I = 0, когда форма (1.97) является
полуопределённой, будем называть это пространство п-мерным
полуевклидовым пространством дефекта d и обозначать его {d>Rn-
Пространство 1+{1}Rn может быть получено предельным
переходом из пространств lRn и l+1Rn\ для доказательства до-
статочно умножить в выражении скалярного квадрата вектора про-
странств lRn и 1+1 Rn, имеющего вид (1.75), слагаемое (хг+1)2 на t
и устремить t к нулю. При мы получим те же пространства
с базисом et, . . ., ег_х, егУ t, е1+1, . . ., еп, а при t = 0 мы полу-
чим пространство l+{t}Rn с базисом elt ..., е1_1, ег, е1+1, ..., еп.
В частности, пространство может быть получено предельным
переходом из пространств Rn и 1Rn- Точно так же доказывается,
что пространство 1+<d^Rn может быть получено предельным пере-
ходом из пространств l^d^Rn и
Пространства l^^Rn рассматривались Саммервиллем [1]. Вы-
дающийся русский математик и механик А. П. Котельников [3]
показал, что, подобно тому, как геометрическая интерпретация
механики теории относительности приводит к пространству
аналогичная геометрическая интерпретация механики Галилея —
Ньютона приводит к пространству .
В пространстве lRn определяются т-мерные плоскости, при
т = 1 прямые линии, при т = п— 1 гиперплоскости и их парал-
лельность, так же как в пространстве Rn. Координаты векторов
и аффинные координаты точек определяются в пространстве lRn
точно так же, как в пространстве Rn.
В пространстве 1Rn определяется длина вектора а, так же как
в пространстве Rn, т. е. как квадратный корень из скалярного
квадрата (а, а) этого вектора. При этом в случае, когда этот
квадрат положителен, мы будем брать абсолютное значение этого
корня, а если этот квадрат отрицателен, будем брать значение
этого корня из верхней полуплоскости комплексного переменного.
Если мы условимся называть абсолютным значением комплекс-
4 Зак. 177. Б. А. Розенфельд
50
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ> I
кого числа а само число а, если оно находится в правой полу-
плоскости или в верхней половине мнимой оси, и —а, если
оно находится в левой полуплоскости или в нижней половине
мнимой оси, и будем обозначать абсолютное значение ком-
плексного числа а через ||а||, мы можем сказать, что длина | а |
вектора а пространства lRn во всех случаях является абсолютным
значением квадратного корня из скалярного квадрата этого вектора:
| а | = || ||. (1.98)
Расстояние между точками А и В определяется как длина век-
>
тора АВ.
В пространстве lRn не выполняется неравенство Коши, при
доказательстве которого использовалась положительная определён-
ность основной метрической формы пространства. В пространстве
lRn не выполняются аксиомы 2° и 3° метрического пространства,
так как в этом пространстве существуют различные точки с нуле-
вым расстоянием, а также точки с чисто мнимым расстоянием и
так как для доказательства выполнения аксиомы 3° необходимо
выполнение неравенства Коши.
В пространстве lRn имеются векторы трёх видов — векторы
вещественной длины, векторы чисто мнимой длины и векторы
нулевой длины. Последние векторы называются изотропными век-
торами. Термин «изотропный», собственно, означает «одинаковый
по всем направлениям», вследствие чего этот термин стал приме-
няться ко всему тому, что не изменяется при вращениях (см. § 10).
К векторам нулевой длины этот термин стал применяться потому,
что эти векторы при вращениях переходят друг в друга.
Заметим, что между пространствами lRn и n~lRn можно уста-
новить такое соответствие, что если расстояние между двумя точ-
ками одного из этих пространств равно вещественному числу а,
то расстояние между соответственными точками другого простран-
ства равно ia. В таком же соответствии находятся и простран-
ства Rn и nRn- Поэтому мы ограничимся рассмотрением простран-
ств lRn при I п—I.
В пространстве lRn, так же как в пространстве Rn, показы-
вается возможность построения базиса, состоящего из взаимно
ортогональных векторов. Такой базис называется ортонормиро-
вании м, если все его векторы являются единичными или мнимо-
единичными (их длины равны 1 или мнимой единице Z). Соотно-
шения, связывающие векторы ортонормированного базиса про-
странства lRn, записываются в виде
(^> = (1.99)
где s; = z±z 1. Аффинные координаты точек пространства lRn в слу-
чае ортонормированного базиса также называются декартовыми
§ 7] ПРОСТРАНСТВА СО ЗНАКОНЕОПРЕДЕЛЁННОЙ ФОРМОЙ 51
координатами. При ортонормированном базисе формула (1.71),
имеющая место и в пространстве lRn, принимает вид
(а, (1.100)
i
а формула (1.72) принимает вид
(а, а) = 2е<(а02, (1.101)
i
т. е. тот базис, при котором основная метрическая форма простран-
ства lRn приводится к алгебраической сумме квадратов, является
ортонормированным базисом. В силу закона инерции квадратичных
форм всякий ортонормированный базис пространства Rn содержит I
мнимоединичных и п— I единичных векторов.
В полуевклидовом пространстве lv{d>>Rn определяются т-мерные
плоскости, прямые, гиперплоскости, параллельность, координаты
векторов и точек, длина вектора и изотропные векторы так же,
как в пространствах Rn и 2Rn- В пространстве l+[d^Rn можно
выбрать ортогональный базис, состоящий из I векторов чисто мни-
мой длины, п— I — d векторов вещественной длины и d изотроп-
ных векторов.
Если на m-мерной плоскости пространства lRn можно выбрать
ортонормированный базис из т векторов и в этом базисе имеется k
мнимоединичных векторов, будем называть т-мерную плоскость
евклидовой плоскостью индекса k. В частности, если k = 0 будем
называть её плоскостью индекса 0. Если все векторы т-мерной
плоскости изотропны, будем называть плоскость изотропной пло-
скостью. Если на m-мерной плоскости нельзя выбрать ортонор-
мированного базиса из т векторов, но она не является изотропной,
на ней можно выбрать такой ортогональный базис, что d из его
векторов являются изотропными; если при этом k из векторов
такого базиса имеют чисто мнимую длину, мы будем называть
эту плоскость полуевклидовой плоскостью индекса k и дефекта d.
Заметим, что m-мерные евклидовы плоскости индекса k простран-
ства lRn являются пространствами kRmi а при k = 0 — простран-
ствами Rm\ m-мерные полуевклидовы плоскости индекса k и де-
фекта d являются пространствами k+^Rn.
Прямые пространства lRn бывают трёх видов — индекса 0,
индекса 1 и изотропные, а двумерные плоскости пространства lRn
бывают шести видов — индексов 0, 1 и 2, индекса 0 и дефекта 1,
индекса 1 и дефекта 1 и изотропные.
Через каждую точку полуевклидова пространства дефекта d
l±{d}Rn можно провести d-мерную изотропную плоскость, каж-
дый вектор которой ортогонален всем векторам полуевкли-
дова пространства. В самом деле, выберем ортогональный базис
52
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
пространства Тогда скалярное произведение векторов а
и b этого пространства будет иметь вид (а, Ь) = eJaW.
Если мы подставим вместо b один из d изотропных векторов
нашего ортогонального базиса eit то скалярное произведение (а, Ь)
обратится в нуль, так как единственной отличной от нуля коор-
динатой этого вектора является координата Ьа, но она умножается
на (еа, £а) = 0. Тем же свойством обладает и любая линей-
ная комбинация изотропных векторов указанного ортогонального
базиса.
Полуевклидова плоскость дефекта d возможна только
в пространстве lRn с /;> d и не может иметь размерности меньше
и больше п — d\ для получения полуевклидовой плоскости
дефекта d нужно взять ортонормированный базис пространства и
заменить d пар базисных векторов, один из которых единичной,
а другой мнимоединичной длины, их суммой или разностью. Каж-
дый из полученных d векторов изотропен и ортогонален всем
остальным базисным векторам. Если размерность плоскости равна т,
то к полученным d изотропным векторам следует добавить т — d
неизотропных базисных векторов и полученные т векторов опре-
делят полуевклидову плоскость. Таким образом, очевидно, может
быть получена любая полуевклидова плоскость. Отсюда непосред-
ственно следуют первое и третье утверждения; то, что размерность
полуевклидовой плоскости не меньше d-\-1, следует из того, что
она содержит d-мерную изотропную плоскость.
Для. гиперплоскостей пространства lRn возможны три случая:
1) они являются пространствами lRn_r, если их нормальный вектор
имеет вещественную длину, так как в ортогональном базисе про-
странства, состоящем из нормального вектора и п—1 векторов
гиперплоскости, имеются I векторов чисто мнимой длины и все они
лежат на рассматриваемой гиперплоскости; 2) они являются про-
странствами если их нормальный вектор имеет чисто мни-
мую длину, так как из I векторов такого же базиса, имеющих
чисто мнимую длину, на гиперплоскости лежат I—1; 3) они
являются полуевклидовыми гиперплоскостями индекса I—1 и де-
фекта 1, если их нормальный вектор изотропен, так как из орто-
нормированного базиса пространства здесь могут быть заменены
суммой или разностью только один единичный и один мнимоеди-
ничный вектор и на плоскости остаётся I—1 мнимоединичных
векторов.
Гиперплоскости пространства lRn также определяются уравне-
нием {а, х) = р, причём в случае полуевклидовой гиперплоскости век-
тор а, который в этом случае также можно называть нормальным,
лежит в самой гиперплоскости (и определяет изотропную прямую,
все векторы которой ортогональны всем векторам гиперплоскости).
Евклидовы гиперплоскости пространства lRn, так же как гипер-
§ 7] ПРОСТРАНСТВА СО ЗНАКОНЕОПРЕДЕЛЁННОЙ ФОРМОЙ 53
плоскости пространства Rn, являются геометрическими местами
точек пространства, равноотстоящих от его двух точек.
Концы всех изотропных векторов пространства lRn с началом
в точке а образуют гиперповерхность ((/г— 1)-мерную поверхность)
(х — а, х—а) ~ 0, (1.102)
являющуюся конусом с вершиной в точке а. Этот конус назы-
вается изотропным конусом точки а. Изотропные плоскости
пространства lRn целиком лежат на изотропном конусе любой своей
точки. Полуевклидова гиперплоскость дефекта d имеет с изотроп-
ным конусом любой своей точки общую d-мерную плоскость, все век-
торы которой ортогональны всем векторам полуевклидовой гиперпло-
скости. Так как, дифференцируя уравнение (1.102), мы получаем
(х— a, dx) = 0 (1.103)
и так как дифференциалы радиуса-вектора любой точки изотроп-
ного конуса заполняют гиперплоскость и все векторы, ортогональ-
ные этому радиусу-вектору, также заполняют гиперплоскость, вся-
кий вектор, ортогональный этому радиусу-вектору, является касатель-
ным к изотропному конусу; поэтому полуевклидова гиперплоскость
дефекта d касается изотропного конуса по указанной d-мерной
плоскости.
Будем называть углом
между векторами а, b про-
странства lRn абсолютное зна-
чение числа 9, определяемого
тем же соотношением (1.40),
что и в случае пространства Rn.
Так какздесьнеимеет места не-
равенство Коши, то cos может
принимать любые веществен-
ные и чисто мнимые значения.
Так как двумерная пло-
скость индекса 0 является пло-
скостью а двумерная пло-
скость индекса 2 отличается
от плоскости R,2 только тем,
что все её расстояния умно-
жены на z, углы на этих
Черт» 3.
плоскостях такие же, как в евклидовом пространстве, и cos ? при-
нимает значения от — 1 до —|— 1. Иначе обстоит дело на двумер-
ной плоскости индекса 1. Выберем на этой плоскости базис,
состоящий из взаимно ортогональных единичного вектора ех и
мнимоединичного вектора е,2 и будем рассматривать углы, соста-
вляемые произвольным вектором х с вектором е± (черт. 3). Роль
изотропного конуса на двумерной плоскости индекса 1 играют две
54 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
прямые, проходящие через данную точку и содержащие сумму и
разность векторов et, е,2. Эти прямые, обозначенные на чертеже
пунктиром, делят плоскость на четыре угла. Будем называть углы,
в которых находятся векторы elt е2) —elf —е2, соответственно I,
II, III и IV углами. Если вектор х находится в I углу, т. е. в том
же углу, что и вектор elt то т. е. (х1)2— (х2)2 > 0, и
выражение
cos ф — ----- = х1 - - — (1.104)
|х||^| У(Х1)2-(Х2)2
является вещественным числом, большим 1, и поэтому его можно
считать равным сйф, где ф— положительное вещественное число.
Так как по известной формуле ch ф = cos /ф, в этом случае ф = /ф,
т. е. угол между векторами и х является чисто мнимым.
Если вектор х находится во II углу, т. е. в углу, смежном
с углом вектора е19 то (х1^*2, т. е. (х1)2— (х2)2<0, и выра-
жение (1.104) является чисто мнимым числом. Поэтому его можно
считать равным i sh ф, где ф — произвольное вещественное число.
Так как по известной формуле i sh ф = sin /ф — cos —/ф),
В этом случае ф = ~ — /ф. Случай ф > 0 соответствует случаю
х1 > 0, случай ф = 0 (т. е. ф == соответствует случаю х1 = 0,
т. е. коллинеарности вектора х с вектором е.2, случай ф < 0 соот-
ветствует случаю х2<0.
Если вектор х находится в III углу, т. е. в углу, вертикаль-
ном по отношению к углу вектора ег, то х1 < 0 и —х1 > | х21,
т. е. (х1)2 — (х2)2 > 0, и выражение (1.104) является вещественным
числом, меньшим —1. Поэтому его можно считать равным —сйф,
где ф — положительное вещественное число. Так как — сйф-_
— cos /ф -= cos (тс— /ф), в этом случае ф тс — /ф. Заменяя
вектор е± векторами е2, —е± и —е2, мы получим аналогичные
результаты, т. е. углы между векторами, лежащими в двумерной
плоскости индекса 1, чисто мнимы, если они находятся в одном
из указанных нами углов, являются комплексными числами вида
Л — /ф, если они находятся в смежных углах и являются ком-
плексными числами вида тс — /ф, если они находятся в вертикаль-
ных углах.
Мы видим, что угол между двумя векторами на двумерной
плоскости индекса 1 является вещественным только, если они кол-
линеарны (ф = 0 или тс) или ортогональны (ф = .
Если вектор х направлен по одной из изотропных прямых, то
|х| — 0 и выражение (1.104) обращается в бесконечность. В этом
случае можно считать угол ф бесконечным.
§ 71 ПРОСТРАНСТВА СО ЗНАКОНЕОПРЕДЕЛЁННОЙ ФОРМОЙ 55
Определим теперь угол между двумя векторами, лежащими
в полуевклидовой плоскости Пусть — изотропный вектор
этой плоскости, служащий её нормальным вектором, а ^ — произ-
вольный единичный или мнимоединичный вектор этой плоскости.
Тогда (ер е±) = (elt е,2) = 0 и
V + —-ь-i н Ю5Ч
‘ ~ ИИ ~ \а^±а^2\\1Ле1 + Ь2е2 \ ~ |^||^|
Таким образом, угол между двумя неизотропными векторами
полуевклидовой плоскости всегда равен 0 или тс. Так как скаляр-
ное произведение неизотропного и изотропного векторов этой пло-
скости равно нулю, угол между такими векторами можно считать
тс
равным у.
Определим угол между двумя прямыми пространства lRn с на-
правляющими векторами а, b и угол между двумя гиперплоскостями
этого пространства с нормальными векторами а, b по формуле
“5Нтгжт|- <L106)
Эта формула при вещественных |а| и |Z>| равносильна фор-
муле (1.53), но учитывает и те случаи, когда одно из этих чисел
или оба эти числа чисто мнимы. Поэтому угол между двумя пря-
мыми или гиперплоскостями может быть вещественным (когда век-
торы а, b лежат в двумерной плоскости индекса 0 или 2), чисто
мнимым, равным комплексному числу вида ~— /ф, где ф^>0 (когда
векторы а, b лежат в двумерной плоскости индекса 1) и равным О
(когда векторы а, b лежат в двумерной полуевклидовой плоскости).
В пространстве lRn сохраняется без изменения теорема
косинусов и её частный случай — теорема Пифагора,
так как при их доказательстве мы нигде не опирались ни на веще-
ственность входящих в них длин и углов, ни на положительную
определённость метрической формы.
Если в пространстве ]Rn заданы два базиса {е^ и {е?}, то
векторы ei и этих базисов выражаются друг через друга по
формулам (1.76), а координаты х* векторов при преобразованиях
этих базисов преобразуются по формулам (1.80), а если помимо
преобразования базиса производится перенос начала — по фор-
муле (1.82). Если базисы {е^ и {е?} ортонормированные, то,
используя формулу (1.99), мы найдём:
Д^=ег-(^, =8^(^й ег), (1.107)
откуда мы находим, что в этом случае
/Ц, (1.108)
56 ЕВКЛИДОВЫ пространства [гл. .
Так как числа А^ и At являются координатами векторов, соста-
вляющих ортонормированный базис, при другом ортонормирован-
ном базисе, то из соотношений (1.99) для каждого из этих бази-
сов мы находим, что матрица (Дг) удовлетворяет условиям
(1Л09>
Матрица (Д^), обладающая такими свойствами, называется орто-
гональной матрицей индекса I, а рассматриваемые нами раньше
ортогональные матрицы для отличия их от этих матриц мы будем
называть ортогональными матрицами индекса 0. Нетрудно про-
верить, что те же условия мы получим, если потребуем, чтобы
матрица преобразования (1.80) удовлетворяла условию
2ч(х03-=2^(хг')2- (i-ио)
i г'
В пространстве lRn, так же как в пространстве Rn, может
быть определена естественная топология, причём в качестве окрест-
ностей можно задать открытые n-мерные кубы с рациональными
координатами вершин. Пространство lRn с этой топологией гомео-
морфно пространству Rn.
Непротиворечивость системы аксиом пространства rRn видна
из указанной нами модели этого пространства в виде многообразия
гиперсфер пространства за расстояние между которыми
принято их касательное расстояние. Если мы назовём гиперсферой
пространства lRn геометрическое место точек этого пространства,
равноотстоящих от одной точки, и определим центр и радиус
гиперсферы и касательное расстояние между двумя гиперсферами
так же, как для гиперсфер пространства Rn, мы можем построить
аналогичные модели пространства lRn в виде многообразия гипер-
сфер пространства за расстояние между которыми так же
принято их касательное расстояние, и тем самым докажем непро-
тиворечивость системы аксиом пространства lRn при любом Z.
§ 8. Комплексные евклидовы пространства и мнимые
геометрические образы вещественных пространств
Для обоснования так называемых мнимых геометрических обра-
зов в определённых нами евклидовых пространствах следует опре-
делить ещё один вид евклидовых пространств — комплексные
евклидовы пространства.
Будем называть п-мерным комплексным евклидовым про-
странством Rn(i) множество элементов двух родов—точек и
векторов, удовлетворяющих аксиомам, получающимся из аксиом
пространства Rn заменой операции умножения вектора на веще-
ственное число операцией умножения вектора на комплексное
§ 8] КОМПЛЕКСНЫЕ ПРОСТРАНСТВА 57
число и заменой всюду слова «вещественный» на слово «комплекс-
ный». Ввиду того, что в случае комплексных чисел аксиома IV, 5°
теряет смысл, её следует заменить аксиомой
IV, 5". Скалярный квадрат вектора является невырожден-
ной квадратичной формой.
В комплексном случае всякая невырожденная квадратичная форма
надлежащим выбором базиса может быть приведена как к сумме
квадратов, так и к виду (1.96) при любом / (для перехода от
суммы квадратов к виду (1.96) достаточно умножить I базисных
векторов на Z).
В пространстве Rn(i) определяются т-мерные плоскости, при
т = 1 прямые линии, при т = п—1 гиперплоскости и их
параллельность, так же как в пространстве Rn. Координаты век-
торов и точек определяются в пространстве Rn(l) тоже так же,
как в пространстве Rn.
В пространстве Rn(i) определяется длина вектора по той же
формуле (1.97), что и в пространстве lRn, т. е. как абсолютное
значение квадратного корня из скалярного квадрата этого вектора,
причём под абсолютным значением понимается абсолютное значе-
ние комплексного числа, которое мы определили при введении
длины вектора в пространстве lRn. Длина вектора в простран-
стве Rn(i) является комплексным числом. Расстояние между точ-
ками А и В определяется как длина вектора АВ.
В пространстве Rn(i) не имеет смысла неравенство Коши, так
как скалярные произведения и скалярные квадраты векторов здесь
являются комплексными числами. В пространстве Rn(i) не имеют
смысла и аксиомы 2° и 3° метрического пространства; в этом
пространстве, так же как в пространстве lRn, существуют раз-
личные точки с нулевым расстоянием и ненулевые векторы с ну-
левыми длинами. Такие векторы называются изотропными век-
торами.
В пространстве Rn(i), так же как в пространстве Rn, всегда
можно выбрать ортонормированный базис, состоящий из единич-
ных векторов. В этом (базисе формула (1.71), имеющая место и
в пространстве Rn(t), принимает вид (1.74), а формула (1.72)
принимает вид (1.75).
По аналогии с пространством ^Rn можно определить также
п~мерное комплексное полуевклидова пространство {d}Rn(t).
Если на т-мерной плоскости пространства Rn(i) можно вы-
брать ортонормированный базис из т векторов, эта плоскость
является пространством Rm(i) и называется евклидовой плоско-
стью. Если все векторы /n-мерной плоскости изотропны, будем её
называть изотропной плоскостью. Если же на m-мерной плоско-
сти нельзя выбрать ортонормированного базиса из т векторов, но
она не является изотропной, на ней можно выбрать такой ортого-
58 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
нальный базис, что d из его векторов являются изотропными; эта
плоскость является пространством {a)Rm(ty и называется полу ев кла-
довой плоскостью дефекта d. Через каждую точку простран-
ства (^/?n(z) можно провести d-мерную изотропную плоскость, каж-
дый вектор которой ортогонален всем векторам полуевклидова
пространства.
В пространстве /?n(z), так же как в пространстве lRni опре-
деляется изотропный конус (1.102) каждой точки.
Будем называть углом между векторами а, b в простран-
стве Rn(i) абсолютное значение числа ф, определяемого тем же
соотношением (1.40), что и в случае пространства Rn. Угол между
векторами в пространстве /?n(z), так же как длина вектора,
является комплексным числом. Угол между двумя прямыми про-
странства Rn(j) с направляющими векторами а, b и угол между
двумя гиперплоскостями этого пространства с нормальными векто-
рами а, b определяются по той же формуле (1.106), что и в про-
странстве lRn.
В пространстве Rn (/) сохраняется без изменения теорема
косинусов и её частный случай — теорема Пифагора,
так как при их доказательстве мы нигде не опирались ни на
вещественность входящих в них длин и углов, ни на положитель-
ную определённость метрической формы.
В пространстве Rn(i) также можно ввести естественную топо-
логию. Для этого заметим, что комплексные числа геометрически
изображаются точками вещественной евклидовой плоскости
(«плоскости комплексного переменного»), вследствие чего в мно-
гообразии всех комплексных чисел естественно ввести топологию
плоскости R2. В пространстве /?n(z), каждая точка которого вза-
имно однозначно определяется п комплексными координатами,
естественно ввести топологию топологического произведения п
плоскостей комплексного переменного. Но так как каждая такая
плоскость гомеоморфна топологическому произведению двух пря-
мых Rlt мы находим, что пространство Rn(i) с определённой
нами топологией гомеоморфно топологическому произведению 2п
прямых или, так как такому же топологическому произведе-
нию гомеоморфно и вещественное пространство R2n, мы находим,
что пространство Rn(i) с его естественной топологией гомео-
морфно вещественному пространству R.2n.
Для определения мнимых геометрических образов веществен-
ных евклидовых пространств Rn и lRn рассмотрим множества
точек пространства Rn(i) с вещественными координатами, изо-
метричные пространствам Rn или lRn (если базис пространства Rn (i)
таков, что (х, х) — 2 т0 множество точек с вещественными
i
координатами изометрично пространству Rn, если же мы умно-
ГРУППЫ ли
59
§ 9]
жим I векторов этого базиса на Z, множество точек с веществен-
ными координатами будет изометрично пространству zZ?n). При
таком выборе базисов можно представлять себе пространства Rn
и lRn погружёнными в пространство Rn{i). Тогда точки, прямые,
плоскости и другие геометрические образы пространства Rn{i),
не лежащие в пространствах Rn и lRn, будем называть мни-
мыми точками, прямыми, плоскостями и другими геометриче-
скими образами пространств Rn и lRn.
Будем называть мнимо сопряжёнными точками пространств Rn
и lRn мнимые точки этих пространств с комплексно сопряжён-
ными координатами, а мнимо сопряжёнными прямыми, плоскостями
и другими геометрическими образами пространств Rn и lRn — мни-
мые прямые, плоскости и другие геометрические образы этих про-
странств, состоящие из соответственно мнимо сопряжённых точек.
В частности, так как изотропные прямые и плоскости про-
странства Rn{i) не лежат в пространстве Rn, эти прямые назы-
вают мнимыми изотропными прямыми и плоскостями простран-
ства Rn.
§ 9. Группы Ли
Прежде чем перейти к изучению групп движений и аффинных
преобразований евклидовых пространств, приведём необходимые
сведения из теории топологических групп и групп Ли х).
Понятие топологической группы является объединением поня-
тий группы и топологического пространства (см. §§ 2 и 4).
Множество элементов называется топологической группой, если
1° это множество является группой,
2° это множество является топологическим простран-
ством,
3° отображения группы на себя х-+ах, х->ха и х—>х-х,
где а — постоянный элемент, являются непрерывными отобра-
жениями.
Свойство 3° означает, что для всяких окрестностей V {ах),
V{ха), IZ(x-1) элементов ха, ах, х-1 существует такая окрест-
ность U {х) элемента х, что для всякого элемента и из U {х) эле-
менты иа, аи, и^1 лежат соответственно в окрестностях V{ах),
V{xa), V (хг1)-
Заметим, что так как преобразования х->а-1х, х—> ха^1,
х —>х-1— обратные преобразования для преобразований х—>ах,
хха, х—> х-1,—также являются непрерывными, эти последние
преобразования являются гомеоморфными отображениями.
Группа и топологическое пространство, участвующие в опре-
делении топологической группы, называются соответственно базис-
1) Более подробно о топологических группах и группах Ли см. в кни-
гах Понтрягина [1] и Чеботарёва [1].
60
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
ной группой и базисным пространством топологической группы.
Топологическая группа называется коммутативной или неком-
мутативной в соответствии со свойствами её базисной группы и
связной или несвязной, компактной или некомпактной в соот-
ветствии со свойствами её базисного пространства.
Подгруппой топологической группы называется замкнутое мно-
жество её элементов, являющееся подгруппой её базисной группы
и подпространством её базисного пространства. Нормальным дели-
телем топологической группы называется её подгруппа, являю-
щаяся нормальным делителем её базисной группы. Всякий нормаль-
ный делитель топологической группы определяет фактор-группу
этой группы по этому нормальному делителю, представляющую
собой топологическую группу, базисной группой которой является
фактор-группа базисной группы топологической группы по базисной
группе нормального делителя, а базисным пространством служит
фактор-пространство базисного пространства топологической группы
по базисным пространствам нормального делителя и его смежных
классов.
Две топологические группы называются изоморфными, если
их базисные группы изоморфны, а их базисные пространства
гомеоморфны.
Заметим, что в случае несвязной топологической группы та её
связная компонента, которая содержит единицу группы, является
группой и притом нормальным делителем данной топологической
группы; фактор-группа по этому нормальному делителю дискретна.
Группа всех вещественных чисел по сложению и группа всех
вещественных чисел без нуля по умножению, если считать за их
базисные пространства соответственно евклидову прямую R± («ве-
щественную числовую прямую») и ту же прямую без нуля, являются
топологическими группами; первая из этих групп связна, а вторая
состоит из двух связных компонент. Группа всех комплексных
чисел по сложению и группа всех комплексных чисел без нуля
по умножению, если считать за их базисное пространства соответ-
ственно» евклидову плоскость («плоскость комплексного перемен-
ного») и ту же плоскость без нуля, являются топологическими
группами; обе они связны. Группы всех векторов пространств Rn,
lRn и Z?w(0, если считать за их базисные пространства сами эти
пространства, также являются топологическими группами. Все
эти группы связны. Очевидно, что группы векторов пространств Rn
и lRn изоморфны между собой. Нетрудно проверить, что груп-
повые операции всех этих групп непрерывны при определённых
нами топологиях.
Из весьма разнообразных топологических групп для геометрии
важны главным образом группы Ли, открытые норвежским матема-
тиком Софусом Ли. Группой Ли называется топологическая группа,
обладающая следующим дополнительным свойством:
ГРУППЫ ли
61
§ 9]
4° всякий элемент группы обладает окрестностью, гомео-
морфной пространству Rn, вследствие чего в окрестности каж-
дого элемента группы можно ввести координаты равные коор-
динатам соответственной точки пространства Rn.
Как показано в 1952 г. Э. Глизоном, Д. Монтгомери и Л. Цип-
пиным, решившими так называемую V проблему Гильберта1), из
аксиомы 4° вытекает следующее важнейшее свойство групп Ли:
если элементы х, у и z~ ху лежат в окрестности единицы,
то в этой окрестности можно ввести такие координаты, что
координаты элемента z являются аналитическими функциями
координат элементов х и у.
Группы вещественных чисел по сложению и умножению
являются группами Ли\ каждый элемент этих групп может быть
окружён интервалом, который, как мы знаем, гомеоморфен прямой Rr,
за координату вещественного числа можно считать само это число;
функции z = x-\-y и z = xy являются простейшими аналитиче-
скими функциями х и у. Группы комплексных чисел по сложе-
нию и умножению также являются группами Ли\ каждый эле-
мент этих групп может быть окружён открытым кругом, который,
как мы знаем, гомеоморфен плоскости /?2, за координаты ком-
плексного числа х = xt + *х2 можно считать его вещественную и
мнимую части xlf х2; из z = x-]-y мы находим z1 = x1-\-y1,
z2 — x2-\-y2, а из z = xy мы находим z1 = x1y1 — х2у.2,
z2 — х1у2-]-х2у1; полученные нами функции, выражающие zt и z2
через х19 х2, у19 у2, также являются аналитическими. Группы век-
торов пространств Rn, lRn, Rn(i) также являются груп-
пами Ли\ группы векторов пространств Rn, lRn, Rn(j) имеют
своими базисными пространствами сами эти пространства, т. е.
гомеоморфны в первых двух случаях пространству Rn, а в третьем
случае — пространству R2n, за координаты векторов можно при-
нять их обычные координаты; функции zi = xi-\-yi являются про-
стейшими аналитическими функциями.
Все приведённые нами до сих пор примеры групп Ли явля-
лись коммутативными группами. Примеры некоммутативных групп
Ли нам дают группы линейных преобразований. Линейным пре-
образованием векторов пространства Rn или ]Rn называется такое
преобразование векторов
'х = Ах, (1.111)
при котором сумма векторов переходит в сумму соответственных
векторов
А (х+у) = А %4- Ау, (1.112)
1) См. Понтрягин [1], стр. 288. Важные частные случаи этой про-
блемы для коммутативных и компактных групп Ли были решены в 1934 г.
Л. С. Понтрягиным и Дж. фон-Нейманом (см. там же, стр. 284 и 338).
62
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. 1
а произведение вектора на вещественное число k переходит в про-
изведение соответственного вектора на то же число
A (kx) = kAx. (1.113)
Если при линейном преобразовании базисные векторы ei пере-
ходят соответственно в векторы ai9 то произвольный вектор
х — 2 x*ei переходит в вектор
i
Если векторы ai имеют вид
= (1.115)
3
то формулу (1.114) можно переписать в виде
= (1.И6)
i
Числа а* составляют матрицу n-го порядка
1а\ / а* • ап\ (1.117)
\ а™ й2 • ' .. ап /
Определитель \ 1 п/
а11 «2 • ' . . а1 п
а* ai . . . . а*
1 2 п (1.118)
а™ а™ . • •
матрицы (1.117) линейного преобразования (1.116) называют опре-
делителем линейного преобразования. Определитель (1.118), на-
зываемый также детерминантом этой матрицы, обозначают сим-
волом Det(aJ). Если векторы аг линейно независимы, определитель
(1.118) линейного преобразования (1.116), очевидно, отличен от
нуля.
Линейное преобразование
'х = Сх = В(Ах) (1.119)
называется произведением линейных преобразований ' х = Ах и
'х = Вх и обозначается так:
'х = (ВА)х. (1.120)
ГРУППЫ ли
63
§ 9]
Нетрудно проверить, что если преобразования 'х = Ах, 'х = Вх
и 'х = Сх определяются в каком-нибудь базисе соответственно
матрицами (a}), (bj), (с$), то
= (1-121)
к
Операция (1.121), как мы видели в § 6, называется умножением
матриц. Таким образом, матрица произведения линейных преобра-
зований равна произведению матриц этих линейных преобразований.
Так как при последовательном выполнении трёх преобразований
как первые два, так и последние два можно заменить результатами
последовательного выполнения этих двух преобразований, все пре-
образования, если считать умножением двух преобразований их
последовательное выполнение, ассоциативны. В частности, ассоциа-
тивно и определённое нами умножение линейных преобразований,
а следовательно, и умножение определяемых ими матриц.
Среди линейных преобразований имеется тождественное пре-
образование 'х = х, играющее роль единицы; матрица тождествен-
ного преобразования обозначается (8}). Все линейные преобразо-
вания и матрицы с ненулевыми определителями обладают обратными
преобразованиями и матрицами; такие линейные преобразования
и матрицы называются обратимыми линейными преобразованиями
и неособенными матрицами. Мы видим, что определённое нами
умножение линейных преобразований и матриц удовлетворяет всем
аксиомам 1°—4° групп, т. е. обратимые линейные преобразования
и неособенные матрицы образуют группы.
Так как произведение линейных преобразований соответствует
произведению соответственных матриц, группа обратимых линей-
ных преобразований векторов пространства Rn и группа неособен-
ных матриц n-го порядка изоморфны между собой. Эти группы
некоммутативны, так как в общем случае преобразование
'х = (АВ)х (1.122)
не совпадает с преобразованием (1.120).
Группа неособенных матриц п-го порядка является тополо-
гической группой*, так как матрицы n-го порядка взаимно одно-
значно изображаются точками пространства Rnz, координаты кото-
рых равны их элементам, базисное пространство группы неособенных
матриц п-го порядка гомеоморфно пространству Rn*, из которого
удалена гиперповерхность, точки которой изображают особенные
матрицы (эти точки связаны одним алгебраическим уравнением — ра-
венством определителя нулю). Так как функция (1.121) является
непрерывной функцией элементов а] и bj, а элементы матрицы,
обратной матрице (а}), являются непрерывными функциями элемен-
тов aj, все аксиомы 1°—3° топологической группы выполнены.
64 ЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. I
Группа неособенных матриц п-го порядка является группой Ли*.
так как гиперповерхность пространства /?П2, изображающая особен-
ные матрицы, является алгебраической, она представляет собой
замкнутое множество точек, и то, что остаётся в пространстве /?па
после удаления этой гиперповерхности, является открытым множе-
ством. Поэтому всякая точка этой части пространства может быть
окружена внутренней областью гиперсферы, целиком лежащей
в этой части пространства, а мы знаем, что всякая такая область
гомеоморфна самому пространству За координаты матрицы
можно считать её элементы. Функция (1.121) является аналитиче-
ской функцией элементов а$ и Ь}. Таким образом дополнительные
свойства группы Ли также доказаны. Поэтому группой Ли является
и изоморфная группе неособенных матриц n-го порядка группа
обратимых линейных преобразований пространства Rn.
В §§ 6 и 7 мы определили ортогональные матрицы, т. е.
матрицы линейных преобразований, переводящих в себя форму
2(^)2 или 3si(x02- Так как произведение двух преобразований,
переводящих в себя форму, также переводит в себя эту форму,
так как тождественное преобразование также не изменяет этих
форм и так как преобразование, обратное для преобразования, пере-
водящего в себя форму, также переводит в себя эту форму, мы
видим, что ортогональные матрицы образуют группы, являющиеся
подгруппами группы всех неособенных матриц. Мы видели, что
эти подгруппы выделяются из группы всех неособенных матриц
алгебраическими соотношениями (1.86) и (1.109), которые можно
переписать соответственно в виде
= (1.123)
г
И
= (1.124)
i
Впоследствии нам будут встречаться и другие подгруппы группы
всех неособенных матриц, выделяемые из этих групп различными
алгебраическими соотношениями. Так как элементы такой подгруппы
всегда могут быть отнесены к параметрам, алгебраически выражаю-
щимся через их координаты, все подгруппы групп всех неособен-
ных матриц, выделяемые из этих групп алгебраическими со-
отношениями, являются группами Ли. Поэтому, в частности,
являются группами Ли и группы ортогональных матриц.
Покажем, что группа ортогональных матриц индекса 0 ком-
пактна. В самом деле, просуммировав те уравнения (1.123), в кото-
рых j = k, мы получим уравнение
(1.125)
i J
§ 9] группы ли 65
Это уравнение является уравнением гиперсферы пространства
Rn* с центром в начале координат и с радиусом У п. Так как оно
является следствием уравнений (1.123), поверхность, определяемая
уравнениями (1.123), целиком лежит на этой гиперсфере. Так как
поверхность (1.123) является алгебраической и поэтому представ-
ляет собой замкнутое множество точек, а гиперсфера (1.125), на
которой она целиком лежит, ограничена, мы находим, что поверх-
ность (1.123), а следовательно, и группа ортогональных матриц
индекса 0, компактна.
В пространстве Rn(t) также можно определить линейные пре-
образования (1.111), удовлетворяющие условиям (1.112) и (1.113),
где k — комплексное число. Они также представляются в виде
(1.116) и определяют матрицы. Комплексные неособенные матрицы
и комплексные обратимые линейные преобразования (1.116) также
образуют группы, являющиеся группами Ли, что доказывается так
же, как в вещественном случае (роль координат комплексных
матриц играют вещественные и мнимые части их элементов). Раз-
ница с вещественным случаем состоит только в том, что группа
комплексных неособенных матриц связна, так как условие равен-
ства определителя нулю в этом случае равносильно двум веще-
ственным условиям и матрицы, удовлетворяющие этим условиям,
уже не делят всю совокупность матриц на два класса. Наряду
с указанными линейными преобразованиями в пространстве Rn(i)
рассматривают преобразования (1.111), удовлетворяющие условиям
(1.112) и
= (1.126)
где k — число, сопряжённое с числом k.
Если это преобразование переводит базисные векторы в век-
торы (1.115), то в силу (1.126) эти преобразования переводят
вектор х = 2 xiei в вектор
г
= (1.127)
i
откуда находим, что эти преобразования представляются в виде
— (1.128)
3
Определённые нами раньше линейные преобразования векторов
пространства Rn(i) называются линейными преобразованиями пер-
вого рода, а эти преобразования — линейными преобразованиями
второго рода. Перемножая два линейных преобразования второго
рода, мы получим линейное преобразование первого рода. Поэтому
линейные преобразования второго рода не образуют группы, а ли-
нейные преобразования первого и второго рода образуют группу.
5 Зак. 177. Б. А. Розенфельд
66 ЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. I
Так как всякому линейному преобразованию второго рода можно
поставить во взаимно однозначное соответствие линейное преобра-
зование первого рода с той же матрицей, в множестве линейных
преобразований второго рода можно ввести такую топологию, при
которой оно гомеоморфно базисному пространству группы линей-
ных преобразований первого рода. Поэтому группа линейных пре-
образований первого и второго рода векторов пространства Rn(i)
является группой Ли, состоящей из двух связных компонент, одна
из которых состоит из линейных преобразований первого рода,
а вторая — из линейных преобразований второго рода.
§ 10. Движения и аффинные преобразования
Важную роль в геометрии евклидовых пространств Rn и lRn
играют движения, которые можно определить как взаимно одно-
значные отображения этих пространств на себя, не изменяющие
расстояний между точками. Движения евклидовых пространств
называют также изометрическими преобразованиями, или орто-
гональными преобразованиями.
В случае пространств Rn, в которых расстояния между раз-
личными точками всегда отличны от нуля, взаимная однозначность
является следствием сохранения расстояний (если бы при движении
две разные точки перешли в одну и ту же точку, то в силу опре-
деления движения расстояние между данными точками было бы
равно расстоянию между точками, в которые они перешли; но рас-
стояние между последними двумя точками равно нулю, а первые
две точки различны и расстояние между ними отлично от нуля).
При движениях гиперплоскости пространства Rn и евклидовы
гиперплоскости npocmpaHcmealRnnepexodnm в такие же гиперпло-
скости, так как указанные гиперплоскости могут быть определены
как геометрические места точек, равноотстоящих от двух точек. При
движениях т-мерные плоскости пространства Rn и евклидовы
т-мерные плоскости пространства lRn переходят в такие же
плоскости, так как указанные плоскости являются пересечениями
п — т гиперплоскостей пространства Rn или евклидовых гипер-
плоскостей пространства lRn, а эти гиперплоскости переходят при
движениях в такие же гиперплоскости. В частности, при т = 1 мы
получаем, что при движениях прямые пространства Rn и неизо-
тропные прямые пространства lRn переходят в такие же
прямые.
Взаимно однозначные отображения пространств Rn и lRn на
себя, переводящие прямые в прямые, называются аффинными пре-
образованиями (от латинского слова affinitas — родство по женитьбе,
свойство). Мы видим, что движения пространств Rn и lRn являются
аффинными преобразованиями. Поэтому рассмотрим общие аффин-
ные преобразования пространств Rn и lRn.
§ 10] ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 67
При аффинных преобразованиях пространств Rn и lRn т-мер-
ные плоскости переходят в т-мерные плоскости. В силу опре-
деления аффинных преобразований это утверждение верно для
nt= 1. Предположим, что оно верно для (т— 1)-мерных плоско-
стей. Рассмотрим две (т—1)-мерные плоскости, пересекающиеся
по (т — 2)-мерной плоскости. Эти плоскости лежат в одной
/«-мерной плоскости (если базис (т— 2)-мерной плоскости состоит
из векторов е±, е.2, ..., ет_2, базис первой (т— 1)-мерной пло-
скости состоит из векторов ех, е2, • • •> em-i и базис второй
(т— 1)-мерной плоскости состоит из векторов et, е2, . .., ет_2, ет,
то базис этой /«-мерной плоскости состоит из векторов ev е.2, .. .
. ет-\> ет)- Прн аффинном преобразовании (т—1)-мер-
ные и (т — 2)-мерные плоскости согласно нашему предположению
переходят в такие же плоскости, поэтому новые (т—1)-мерные
плоскости, в которые перешли старые (т—1)-мерные плоскости,
будут снова пересекаться по (т—2)-мерной плоскости и, следова-
тельно, будут снова лежать в некоторой /«-мерной плоскости.
Покажем, что при этом аффинном преобразовании старая /«-мер-
ная плоскость переходит в новую /«-мерную плоскость. В самом
деле, через всякую точку х старой /«-мерной плоскости можно
провести прямую, пересекающуюся с нашими (т—1)-мерными
плоскостями. Эта прямая перейдёт в прямую, пересекающуюся
с новыми (т—1)-мерными плоскостями, т. е. лежащую в новой
/«-мерной плоскости, точка х перейдёт в точку 'х, лежащую на
этой прямой, и, значит, всякая точка первой /«-мерной плоскости
перейдет в некоторую точку второй /«-мерной плоскости, т. е.
первая /«-мерная плоскость перейдёт во вторую/«-мерную плоскость.
При аффинных преобразованиях параллельные прямые пере-
ходят в параллельные прямые} в самом деле, всякие две парал-
лельные прямые лежат в двумерной плоскости, а двумерные пло-
скости при аффинных преобразованиях переходят в двумерные
плоскости, следовательно, параллельные прямые переходят в две
прямые, лежащие в одной двумерной плоскости. Но параллельные
прямые при аффинном преобразовании не могут перейти в пере-
секающиеся прямые, так как в этом случае точка пересечения пере-
секающихся прямых не соответствовала бы никакой точке, что
противоречило бы взаимной однозначности аффинных преобразований.
Если точки А, В, С, D таковы, что AB = CD, то аффин-
ное преобразование переводит их в такие точки 'А, 'В, 'С, 'D,
что fAfB = fC'D. В самом деле, если точки А, В, С, D не
находятся на одной прямой, то они являются вершинами парал-
лелограмма, а при аффинных преобразованиях параллелограммы
переходят в параллелограммы, поэтому 'А'В = 'C'D. В том слу-
чае, когда точки А, В, С, D лежат на одной и той же прямой,
5*
68
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
существуют такие точки Е, F, не лежащие на этой прямой, что
АВ = CD = EF, и утверждение сначала доказывается для точек А,
В, Е, F и С, D, Е, F, откуда оно уже следует для точек А,
В, С, D.
Доказанное нами свойство позволяет ввести следущее соглаше-
ние: если аффинное преобразование переводит точки А, В в точки
М, 'В, то мы будем говорить, что аффинное преобразование
переводит вектор АВ в вектор 'А'В.
Аффинные преобразования переводят сумму векторов в сум-
му соответственных векторов', в самом деле, пусть при данном
аффинном преобразовании вектор АВ переходит в вектор 'А'В,
а вектор EF переходит в вектор 'E'F\ докажем, что AB-\~EF
вектор 'А'С = 'А'В 'В'С.
О 'С 'D 'О 'С 'D
Черт. 4.
переходит в 'А'В-\- 'Е'Р. Для этой цели построим точки С и 'С
так, чтобы BC—EF и 'B'C='F'E. Очевидно, что при данном
аффинном преобразовании точки А, В и С переходят соответственно
в точки 'А, 'В и 'С, поэтому вектор АС = АВ-}~ВС переходит в
Аналогично можно доказать, что при
аффинных преобразованиях сумма не-
скольких векторов переходит в сумму
соответственных векторов.
Аффинные преобразования пе-
реводят произведение вектора на
вещественное число в произведение
соответственного вектора на то
же число. В самом деле, аффинное
преобразование переводит два колли-
неарных вектора а и ka в два колли-
неарных вектора 'а и 'k'a. Нам нужно
показать, что число 'k всегда равно
числу k. Сначала покажем, что число 'k не зависит от вектора а.
Мы можем считать, что векторы а и ka имеют общее начало О, а век-
торы 'а и 'k'a имеют общее начало 'О. Обозначим концы векторов а,
k'a, а и 'k'a соответственно через А, В, 'А и 'В. Рассмотрим теперь
векторы b и kb с началом О и концами С, D, не коллинеарные век-
тору а (черт. 4). Наше аффинное преобразование переведёт коллине-
арные векторы b = ОС к kb — OD в коллинеарные векторы 'Ь = 'О С
и 'O'D. Но прямые АС и BD параллельны, поэтому соответ-
ствующие им при аффинном преобразовании прямые 'А'С и 'B'D
—>-
также параллельны. Но отсюда следует, что вектор 'O'D имеет
вид 'k'b и, следовательно, число 'k зависит только от числа k.
Если векторы b и kb коллинеарны вектору а, то можно ввести
§ 10] ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 69
в рассмотрение вспомогательные векторы с и kc, не коллинеар-
ные предыдущим векторам, и прийти к тому же результату.
Обозначим зависимость 'k от k через rk=f(k). Покажем, что
функция f (х) обладает свойствами
/(х+у) = /(х)+/(Л (1.129)
f(xy)=f(x)f(y). (1.130)
В самом деле, при нашем аффинном преобразовании вектор
(k-\-l)a переходит в вектор f(k-\-l)'a, но, с другой стороны,
вектор (k-\-l)a равен сумме векторов ka и 1а, а так как сумма
векторов переходит в сумму соответственных векторов, вектор
(k-\-l)a переходит в сумму векторов f(k)'a и f(l)'a, т. е.
f (£ + Z)га = f (k) 'а + f (/) 'а, (1.131)
откуда следует (1.129). Вектор (kl)a при нашем аффинном пре-
образовании переходит в вектор f(kl)'a, но, так как вектор (kl)a
можно переписать в виде k(la), этот вектор переходит в вектор
f(k)'(la), где ' (1а)— вектор, в который переходит вектор 1а, т. е.
вектор f(l)'a. Таким образом,
f(kl)'a=f(k)f(l)'a, (1.132)
откуда следует (1.130).
Покажем, что единственной функцией вещественного перемен-
ного, удовлетворяющей условиям (1.129) и (1.130), является функция
f(x) = x, (1.133)
если хотя бы для некоторого a f(a) Ф 0. В самом деле, пусть
/(х) #= 0. Из того, что 1 • х = х, в силу (1.129) следует:
=/(А7), (1.134)
т. е.
/(1) = 1. (1.135)
Отсюда в силу (1.129) для любого целого числа т имеем:
(1 + 14-... +1) = /(!)+/(!)+ •••+/(!) =
w раз т раз
1 ~4— 1 —1~ 1 ~j~ • • • (1.1 36)
т раз
с другой стороны, в силу (1.130) и (1.135), если х =# 0,
/(х)/(^) = /(х|)=/(1)=1 (1.137)
и для любого целого т
70
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Отсюда в силу (1.130) для любых целых т
и п имеем:
= (1-139)
Из (1.137) следует, что если х =£ 0, то и /(х) ф 0.
Формула (1.139) имеет место и для отрицательных рациональ-
ных чисел: так как /(0) —0, то в силу (1.129) при = — х
f(y) = —f(x), откуда следует, что для любого отрицательного
тп , /(т\
числа — функция /I — \ также равна этому числу.
Из (1.130) имеем, что если х > 0, то и
/(х)=/(Кх- /х) = [/(/х)]2>0. (1.140)
Отсюда следует, что функция f(x) монотонно возрастает, так
как если х2 > хх, то
/(х2) = /(xi)+/(x2 — *1) >/(х1)- (1-141)
Но для любого вещественного числа х всегда можно найти
такие целые числа т, п, что
откуда в силу того, что функция монотонно возрастает, следует,
что
<ь143’
или в силу (1.139)
(1-144)
т т п п 4- 1
Но рациональные числа — и —могут быть сделаны сколь
угодно близкими, откуда в силу непрерывности вещественной
числовой оси следует (1.133).
Таким образом, единственной функцией вещественного перемен-
ного, удовлетворяющей условиям (1.129) и (1.130), является функ-
ция f(k) = k и всякое аффинное преобразование, переводящее
вектор а в га, переводит вектор ka в вектор k'a.
Так как преобразование векторов, при котором сумма векторов
переходит в сумму соответственных векторов, а произведение век-
тора на вещественное число k переходит в произведение соответ-
ственного вектора на то же число, является линейным преобра-
зованием, мы показали, что при аффинном преобразовании про-
странств Rn и lRn векторы испытывают линейное преобразо-
вание. В § 9 мы видели, что линейное преобразование векторов
можно записать в векторном виде (1.111) и в координатном
виде (1.116).
§ 10] ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 71
Если при аффинном преобразовании базисные векторы пере-
ходят в векторы aif а их начало переходит в точку с радиусом-
вектором Ь, то при этом преобразовании всякий вектор с началом
в начале векторов переходит в вектор с началом в точке Ь,
причём коэффициенты разложения полученного вектора по векто-
рам соответственно равны коэффициентам разложения исходного
вектора по векторам Поэтому при аффинном преобразовании
всякая точка с радиусом-вектором х — ^lxiell переходит в точку
i
с радиусом-вектором
гх = ^х^а^Ь, (1.145)
или, обозначая, как в § 9, 2 xiai через Ах,
'х = Ах-[-Ь. (1.146)
Если вектор b имеет вид b — №ег, эту формулу можно пере-
i
писать в координатах в виде
гхг = 54^ + (1.147)
э
Формула (1.147) даёт закон преобразования координат точек
пространств Rn и lRn при аффинных преобразованиях. Определитель
матрицы (aj) называют определителем аффинного преобразования.
Так как аффинные преобразования пространств Rn и lRn переводят
линейно независимые системы векторов в линейно независимые
системы векторов, определители аффинных преобразований про-
странств Rn и lRn всегда отличны от нуля.
В силу непрерывности функций (1.147) аффинные преобразо-
вания пространств Rn и lRn являются непрерывными пре-
образованиями.
Аффинное преобразование пространств Rn и lRn, переводящее
в себя одну точку, называется центроаффинным преобразованием
с центром в данной точке. Такое преобразование может быть
записано в виде (1.116). Другим частным случаем аффинного
преобразования является преобразование
'x = x + bi (1.148)
которое, как мы видели в § 2, называется переносом. Формула
(1.148) показывает, что всякое аффинное преобразование про-
странств Rn и lRn состоит из некоторого центроаффинного пре-
образования с центром в начале пространства и из некоторого
переноса.
Вернёмся теперь к движениям пространств Rn и lRn. Так как
Движения являются частными случаями аффинных преобразований,
72
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
они также могут быть записаны в виде (1.146) и (1.147). Так как
движения пространств Rn и lRn являются такими аффинными пре-
образованиями, при которых не изменяются длины векторов, линей-
ные преобразования векторов, происходящие при движениях, свя-
заны условием сохранения скалярного квадрата вектора
(Ах, Ах) = (х, х). (1.149)
Условие (1.149) эквивалентно условию сохранения скалярного
произведения векторов
(Ах, Ау) = (х, у), (1.150)
так как из условия (1.150) вытекает условие (1.149), если поло-
жить у = х, а из условия (1.149) вытекает условие (1.150), если
заменить х разностью х—у.
Если базис пространства является ортонормированным, усло-
вие (1.149) является условием того, что линейное преобразование
векторов переводит в себя форму 2 (xi)2 или 2 Qi (х*)2. Мы Уже
i г
видели, что матрицы линейных преобразований, переводящих в себя
эти формы, являются ортогональными матрицами и удовлетворяют
соответственно условию ортогональности индекса 0 (1.123) и усло-
вию ортогональности индекса / (1.124).
Так как квадрат определителя ортогональной матрицы (а}) ин-
декса 0 равен определителю произведения этой матрицы на ма-
трицу (aJi), полученную из неё транспонированием, а это произве-
дение в силу (1.123) является единичной матрицей (&д), определитель
которой равен 1, квадрат определителя ортогональной матрицы
индекса 0 равен 1 и, следовательно, определитель ортогональной
матрицы индекса 0 равен ztl. Точно так же в силу (1.124)
произведение квадрата определителя ортогональной матрицы
индекса I на определитель матрицы (е^З^), равный (—1)г, равно
определителю матрицы (е^), также равному (—1)г, откуда
следует, что квадрат определителя ортогональной матрицы индекса I
также равен — 1 и, следовательно, определитель ортогональной
матрицы индекса I также равен ± 1 х).
Движение пространства Rn или lRn, переводящее в себя одну
точку, называется вращением вокруг этой точки. Формула (1.146)
показывает, что всякое движение пространств Rn и lRn состоит
из вращения вокруг некоторой точки и из некоторого переноса.
1) Некоторые авторы (например, Делоне и Райков [1], стр. 107)
называют движениями только движения с определителями 1* Движения
с определителями — 1 иногда называют отражениями (см., например,
Карт ан [11], стр. 17). Та же терминология, что и у нас, — в книге
Д. И. Перепелкина [2], т. 1, стр. 106).
§ 10] ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 73
Из формулы (1.145) видно, что для задания движения про-
странств Rn и lRn достаточно указать, в какие точки переходят
общее начало и концы векторов некоторого базиса.
Будем называть симплексом пространств Rn и lRn часть про-
странства, ограниченную n-^l гиперплоскостями, каждые п
из которых пересекаются в точке. Будем называть гиперплоскости,
ограничивающие симплекс, гранями симплекса, точки, в которых
пересекаются п граней, будем называть вершинами симплекса,
а прямые, соединяющие эти вершины, будем называть рёбрами
симплекса. Вершины симплекса являются общим началом и концами
векторов некоторого базиса пространства. При п~\, 2 и 3 сим-
плекс является соответственно отрезком, треугольником и тетра-
эдром. Введя понятие симплекса, мы можем сказать, что для задания
движения пространств Rn и lRn достаточно задать в опреде-
лённом порядке соответственные вершины двух переходящих
друг в друга симплексов с соответственно равными рёбрами.
Нетрудно проверить, что при аффинном преобразовании опре-
делитель, составленный из координат любых п векторов, умножается
на определитель этого преобразования. При ортонормированном
базисе пространства абсолютное значение такого определителя,
составленного из векторов, направленных по рёбрам симплекса,
выходящим из одной его вершины, делённое на п\, называется
объёмом этого симплекса, а знак этого определителя определяет
ориентацию этого симплекса. Поэтому движения пространств Rn
и lRn не изменяют объёма симплексов, движения с определителем
+1 не изменяют и ориентации симплексов, а движения с опреде-
лителем — 1 изменяют ориентацию симплексов на обратную.
Заметим, что в силу непрерывности функций (1.147) аффинные
преобразования, а следовательно, и движения пространств Rn и
lRn являются непрерывными преобразованиями.
Из формул (1.147) видно, что аффинные преобразования про-
странств Rn и lRn зависят от п(п-\-1) вещественных параметров
и, в частности, центроаффинные преобразования зависят от №
вещественных параметров, а переносы — от п вещественных пара-
метров. Так как условия ортогональности (1.123) и (1.124) состоят
из Л(М-1) уСЛ0ВИЙ, движения пространств Rn и lRn зависят от
л(п + 1)
——2----- вещественных параметров и, в частности, вращения зави-
сят от “ вещественных параметров.
Движения и аффинные преобразования пространств Rn и
lRn образуют группы, так как, последовательно выполняя два
Движения или два аффинных преобразования, мы получаем взаимно
однозначное преобразование пространства, которое в первом слу-
чае сохраняет расстояние, т. е. является движением, а во втором
74
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
случае переводит прямые в прямые, т. е. является аффинным пре-
образованием; полученное преобразование мы будем называть
произведением данных движений или аффинных преобразований.
Умножение движений и аффинных преобразований ассоциативно
как умножение всяких преобразований. Роль единицы группы
играет тождественное преобразование. Если движение или аффин-
ное преобразование переводит точку М пространства в точку 'М,
то преобразование, переводящее точку 'М в точку Л4, также
является соответственно движением или аффинным преобразованием;
очевидно, произведение этого преобразования на данное преобра-
зование является тождественным преобразованием, поэтому это
преобразование играет роль обратного элемента для данного пре-
образования. Группы движений пространств Rn и }Rn являются
подгруппами групп аффинных преобразований тех же пространств.
Последовательно выполняя два движения или два аффинных
преобразования
'x = Cx-\-d и 'х = Ах-\-Ь, (1.151)
мы находим, что произведение этих преобразований имеет вид
rx=A(Cx+d) + b = ACx + (Ad + b). (1.152)
Обратным преобразованием для движения или аффинного пре-
образования 'х = Ах 4- b является преобразование
'х = Д-1(х — b) — A~xx — А~ГЬ. (1.153)
Умножение движений и аффинных преобразований некомму-
тативно, так что преобразование (1.152) в общем случае не сов-
падает с преобразованием
'х = CAx + tCb + d), (1.154)
являющимся произведением тех же сомножителей в обратном
порядке.
Вращения пространств Rn и lRn вокруг любой точки обра-
зуют группы, являющиеся подгруппами групп движений.
Мы видели, что каждому вращению пространств Rn и lRn можно
поставить в соответствие ортогональную матрицу n-го порядка.
Нетрудно проверить, что произведению вращений при этом отвечает
произведение соответственных матриц. Поэтому группы вращений
пространств Rn и 1Rn изоморфны группам ортогональных матриц
п-го порядка.
Переносы пространств Rn и lRn также образуют группы,
являющиеся подгруппами групп движений. Мы видели, что каждому
§ 10] ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОВРАЗОВАНИЯ 75
переносу пространства Rn и lRn можно поставить во взаимно одно-
значное соответствие вектор этого переноса, причём произведению
переносов при этом соответствует сумма соответственных векторов.
Поэтому группы переносов пространств Rn и lRn изоморфны
группе векторов этих пространств.
Группы переносов пространств Rn и lRn являются нормаль-
ными делителями групп движений и аффинных преобразований
этих пространств. Для доказательства достаточно проверить
выполнение условия (1.26), где роль элемента а играет движение
или аффинное преобразование общего вида 'х — Ах-\-Ь, а роль
элемента п играет перенос гх = х-\-с. Левая часть (1.26) в этом
случае имеет вид
'х=А [(Д-1 х— А - ^) + с] 4- Ь=х — Ь + Ас — Ъ=х + Ас, (1.155)
т. е. снова является переносом.
Центроаффинные преобразования пространств Rn и lRn
с центром в любой точке образуют группы, являющиеся под-
группами групп аффинных преобразований: каждому центро-
аффинному преобразованию пространства Rn и lRn можно поставить
в соответствие неособенную матрицу n-го порядка. Нетрудно про-
верить, что произведению центроаффинных преобразований при этом
отвечает произведение соответственных матриц. Поэтому группы
центроаффинных преобразований пространств Rn и lRn изо-
морфны группам неособенных матриц п-го порядка.
Так как группы векторов пространств Rn и lRn и группы ортого-
нальных и всех неособенных матриц n-го порядка являются группами
Ли, изоморфные им группы переносов, группы вращений и группы
центроаффинных преобразований пространств Rn и lRn являются
группами Ли. Покажем, что группы всех движений и аффинных
преобразований пространств Rn и lRn также являются груп-
пами Ли. В самом деле, так как всякое движение состоит из неко-
торого переноса и некоторого вращения вокруг начала, в группе
движений может быть определена топология топологического про-
изведения группы переносов и группы движений, а так как всякое
аффинное преобразование состоит из некоторого переноса и неко-
торого центроаффинного преобразования, в группе аффинных пре-
образований может быть определена топология топологического
произведения группы переносов и группы центроаффинных пре-
образований. Формулы (1.152) и (1.153) показывают, что умножение
движений и аффинных преобразований на движение или аффинное
преобразование и переход от движения или аффинного преобразо-
вания к обратному преобразованию являются непрерывными пре-
образованиями этих групп. Тем самым все аксиомы 1° — 3° топо-
логической группы выполнены. За координаты аффинных преобра-
зований можно принять координаты их векторов переносов и элементы
матриц их центроаффинных преобразований, а за координаты
76 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
движений можно принять координаты их векторов переносов и те
параметры, через которые могут быть с помощью формул (1.123)
и (1.124) алгебраически выражены элементы их матриц вращений,
так как из формулы (1.152) следует, что координаты векторов
переносов и элементы матриц произведений двух движений или
аффинных преобразований аналитически выражаются через такие же
координаты векторов переносов и элементы матриц сомножителей.
Таким образом, дополнительные свойства группы Ли также
доказаны.
Будем называть движениями комплексного евклидова про-
странства Rn(i), так же как в случае пространств Rn и lRn,
взаимно однозначные отображения этих пространств на себя, не
изменяющие расстояний между точками.
Так же как в случае пространств Rn и lRn, доказывается, что
евклидовы гиперплоскости и прямые пространства Rn(i) пере-
ходят при движениях в такие же гиперплоскости и прямые.
Так как при движениях предельные точки переходят в предельные
точки, движения пространства Rn(l) являются непрерывными
преобразованиями.
Будем называть взаимно однозначные непрерывные отображения
пространства Rn(i) на себя, переводящие прямые в прямые, аффин-
ными преобразованиями этого пространства. Мы видим, что дви-
жения пространства Rn(t) являются аффинными преобразованиями,
поэтому сначала рассмотрим аффинные преобразования простран-
ства Rn(i)- Непрерывность аффинного преобразования в простран-
стве Rn(i) не является следствием остальных указанных нами
свойств этого преобразования.
Так же как в случае пространств Rn и lRn, доказывается, что
при аффинных преобразованиях пространства Rn(t) параллель-
ные прямые переходят в параллельные прямые, векторы пере-
ходят в равные векторы, сумма векторов переходит в сумму
соответственных векторов, а произведение вектора на ком-
плексное число переходит в произведение соответственного век-
тора на комплексное число f(k), причём функция f(k) удовле-
творяет условиям (1.129) и (1.130).
Покажем, что единственными непрерывными функциями ком-
плексного переменного, удовлетворяющими условиям (1.129) и
(1.130), являются функции
f(x) = x и /(х) —х. (1.156)
В самом деле, если/(х)— функция комплексного переменного,
удовлетворяющая условиям (1.129) и (1.130), так же как для
вещественного переменного, показывается, что для любых целых т, п
(1.157)
§10] ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 77
поэтому в силу непрерывности функции для любого веществен-
ного X
f(x) = x. (1.158)
Отсюда, так как Г2 = —1, мы получаем:
[/(013 = /(-1) = -1. (1-159)
т. е.
= i или —I. (1.160)
В силу (1.129), (1.130) и (1.160) мы получаем, что для ком-
плексного числа х = х± ix%
f (х) - f (*! + ix.2) = f (X1) + f (t) f (x.2) = xt zt ix2. (1.161)
Поэтому всякое аффинное преобразование, переводящее век-
тор а в 'а, переводит вектор ka в вектор k'a или k'a.
Так как преобразование векторов пространства Rn(i), при кото-
ром сумма векторов переходит в сумму соответственных векторов,
а произведение вектора на комплексное число k переходит в про-
изведение соответственного вектора на то же число или на сопря-
жённое с ним число k, является линейным преобразованием пер-
вого или второго рода, мы показали, что при аффинном преобразо-
вании пространства Rn(i) векторы испытывают линейное
преобразование первого или второго рода. В § 9 мы видели, что
линейное преобразование первого и второго рода можно записать
соответственно в виде (1.116) и (1.128).
Если при аффинном преобразовании базисные векторы пере-
ходят в векторы ait а их начало переходит в точку с радиусом-
вектором Ь, то при этом преобразовании точка с радиусом-векто-
ром x = переходит в точку с радиусом-вектором
г
'x = ^xiai-]-b или 'х = ^xiai-\-bi (1.162)
i i
откуда видно, что закон преобразования координат точек простран-
ства Rn(i) при аффинном преобразовании имеет вид
= + или 'xi = S (1.163)
Будем называть аффинное преобразование пространства Rn(i)
преобразованием первого или второго рода в соответствии с тем,
78
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
является ли линейное преобразование векторов, происходящее при
этом аффинном преобразовании, линейным преобразованием первого
или второго рода.
Так как движения пространства Rn(t) являются такими аффин-
ными преобразованиями, при которых не изменяются длины век-
торов, линейные преобразования векторов, происходящие при дви-
жениях, связаны условием сохранения скалярного квадрата векто-
ров (1.149).
Так как при переходе от каждой точки пространства Rn(l)
к точке с комплексно сопряжёнными координатами скалярный квад-
рат вектора (х, х), являющийся комплексным числом, переходит
в комплексно сопряжённое число, аффинные преобразования, удов-
летворяющие условию (1.149), могут быть только аффинными пре-
образованиями первого рода.
Отсюда следует, что движения пространства Rn (г) определяются
в координатах теми же формулами (1.147) и (1.123), что и дви-
жения пространства Rn.
Как видно из формулы (1.162), для однозначного задания аффин-
ного преобразования пространства Rn (i) достаточно указать, в какие
точки переходят общее начало и концы векторов некоторого базиса,
а также является ли это преобразование преобразованием первого
или второго рода.
Так же как в пространствах Rn и lRn, определяются в про-
странстве Rn(i) переносы, центроаффинные преобразования, вра-
щения и отражения от плоскостей.
Как видно из формул (1.147), аффинные преобразования про-
странства Rn(i) зависят от п(п-\- 1) комплексных и, следовательно,
от 2п(п-|-1) вещественных параметров и, в частности, центро-
аффинные преобразования зависят от № комплексных и, следова-
тельно, от 2п9 вещественных параметров, а переносы — от п ком-
плексных и, следовательно, от 2п вещественных параметров. Так
как условия ортогональности (1.123) состоят из условий,
г, z.x п (п 4-1)
движения пространства Rn(i) зависят от ——- комплексных и,
следовательно, от п(#+1) вещественных параметров и, в част-
п(п — 1)
ности, вращения зависят от ——- комплексных и, следовательно,
от п(п—1) вещественных параметров.
Точно так же как для движений пространств Rn и lRn, дока-
зывается, что движения и аффинные преобразования простран-
ства Rn(i) образуют группы, что вращения пространства Rn(i)
образуют группу, изоморфную группе комплексных ортогональ-
ных матриц п-го порядка, что переносы пространства Rn(i)
образуют группу, изоморфную группе векторов простран-
ства Rn(i), что центроаффинные преобразования простран-
§11] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ 79
ства Rn(i) образуют группу, изоморфную группе комплексных
неособенных матриц п-го порядка и что группы движений и
аффинных преобразований пространства Rn(i) являются груп-
пами Ли,
§ 11» Классификация движений
Прежде чем перейти к классификации движений пространств Rn
и lRn, приведём основные принципы классификации линейных пре-
образований векторов n-мерного пространства, являющейся одной
из задач линейной алгебры1).
Для этой классификации прежде всего следует найти собственные
векторы линейных преобразований, т. е. такие ненулевые век-
торы е, для которых выполняется условие
Ае = \е,
которое можно переписать в виде
(Д-4ф = 0,
(1.164)
(1.165)
где Е — символ тождественного преобразования, или в коорди-
натной форме
Ц(а* — X8W = 0. (1.166)
3
Числа к, соответствующие собственным векторам, называются
собственными числами линейного преобразования.
Уравнение (1.166) представляет собой систему линейных урав-
нений, решениями которой являются координаты векторов е. Усло-
вием существования ненулевых решений этой системы является
равенство нулю определителя матрицы (aj — X8j), т. е. условие
а* — X «2 a2 — X . , . а1 п • • < = 0, (1.167)
а« а2
называемое характеристическим уравнением линейного преобра-
зования. Собственные числа линейного преобразования являются
решениями этого уравнения. Так как это уравнение является алге-
браическим уравнением п-го порядка с вещественными коэффициен-
Ч См. Мальцев [1], стр. 118—186; Гельфанд [1], стр. 157—192.
80
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
тами, собственные числа линейных преобразований векторов про-
странств R и lRn могут быть как вещественными, так и попарно
комплексно сопряжёнными; в последнем случае соответственные
собственные векторы также мнимы. Если собственное число является
кратным корнем характеристического уравнения, кратность этого
корня называется кратностью собственного числа.
Если в пространстве можно выбрать базис из собственных век-
торов линейного преобразования, матрица этого преобразования
в этом базисе приобретает вид
(1.168)
В этом случае матрица называется приводимой к диагональному
виду.
Заметим, что если два собственных числа Х^ и Х^ равны, то
любая линейная комбинация собственных векторов и соот-
ветствующих этим числам, также является собственным вектором,
соответствующим тому же собственному числу.
Другим крайним случаем является тот случай, когда в про-
странстве имеется только один собственный вектор данного
линейного преобразования. В этом случае надо найти векторы е,
удовлетворяющие более слабому, чем условие (1.164), условию
(А — Х£)*е = О
(1.169)
для k = 2, 3, ..., п. Если мы обозначим вектор, удовлетворяю-
щий условию (1.169) при данном значении k и не удовлетворяю-
щий этому условию при меньших значениях k, через ек, мы можем
построить базис пространства из векторов ек. При этом все пло-
скости, определяемые векторами ек при k т, и только эти пло-
скости являются инвариантными плоскостями данного линейного
преобразования (переходят в себя при этом преобразовании). В ука-
занном базисе матрица нашего преобразования имеет вид
X 1
X 1
X ’ .
• * 1
X
(1.170)
§ И]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
81
В общем
такой базис,
случае для линейного преобразования можно найти
что его матрица принимает вид1)
1
(1.171)
^к 1
кк •
’ . ’ 1
^к
Вид (1.171) называется нормальной формой Жордана ма-
трицы.
Так как неприведение матриц к диагональному виду имеет
место только в случае кратных корней характеристического урав-
нения, а уравнение с кратными корнями бесконечно малым изме-
нением коэффициентов всегда можно превратить в уравнение с
различными корнями, матрицы, не приводимые к диагональному
виду, бесконечно малым изменением их элементов могут быть
превращены в матрицы, приводимые к диагональному виду.
В частности, линейные преобразования векторов двумерного
пространства подразделяются на четыре вида, матрицы которых
приводятся соответственно к виду
/А 1\ /л 0\
Ч» х/ Чо Ч1'172’
Линейные преобразования векторов трёхмерного пространства
подразделяются на семь видов, матрицы которых приводятся
х) См. Мальцев [1], стр. 148; Гельфанд [1], стр. 160.
6 Зак. 177. Б. А. Розенфельд
82
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
соответственно к виду
Линейные преобразования векторов четырёхмерного простран-
ства подразделяются на двадцать видов, матрицы которых при-
водятся соответственно к виду
/^1 0 0 0 \ ООО
О Х2 0 0 | I 0 ^ — /<2 о о
О О л3 О ’ 2)1 О О X3-{-iX4 О
\0 0 0 X,/ \ 0 О 1 tfc 0 0 х3- ikJ
/Xt 0 0 0 \ Д 1 00 \
0 Х2 0 0 1 (0 Xi 0 0
3) 0 0 Ag —J— zx4 0 , 4)1 1 0 0 Х2 0 1 i
\0 0 0 Х3 —iX4/ \0 0 0 х3
/X, 0 0 0 \ /- ч 0 0 0 \
1 0 Х4 0 0 \ ( 3 xt о o’
5) 0 0 Х2 0 Г 6)1( 3 0 Ч- г^з 9 9 (1.174
\о 0 0 Х3/ \( э 0 0 Х2 — ikj
/Х1 ИО 0 \ 1 I 0 0
ох/ о о /о Xi i 0 0
7) 0 0 Х.2 —]•- zx3 0 ’ 8Чо о х2 1
\о 0 0 х2 —ZX J \о oh х3
/Х1 ио 0 \ /'* 1 0 0 0 \
0 Xt' 0 0 | 0 Х1 0 0 \
9) 0 0 X., 0 ’ 10^ \ i / 0 0 Х2 0 ’
\0 0 0 X/ \о 0 0 ха/
§ 111
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
83
/ 4“ 1 ! ( i 0 \
0 А^ —|— / А^ « С 0
11) 0 с p'l" - za2 1
'\ 0 0 ! 0 Xi- — iX2'
/ + ^2 0 C 0 \
0 —|— zao С 0
12) 0 0 >4- -/X2 0 J
\ 0 0 ( -ix2/
/Ai 1 0 : 0 \ /Xt 1 0 Ox
1 0 At 1 jo 1 0 xt 0 0
13) 1 , о о Xt i о , 14) 0 0 Xi 0 r (1.174)
\0 0 0 X2 / \o о о kJ 1
ДО 0 Ox /X 1 0 Ox /X 1 0.0\
0 Xi 0 0 \ 1 o x i o’ 0 X 1.0
15) 0 0 xt о ’ 16) 0 0 A 1 > 17' Цо о x;о J
\0 0 0 x2/ \0 о о \0 0 0 X/
/XI 0 Ox /А 1 0 Ox /X 0 0 Ox
0 X : 0 0 1 ( 0 X 0 0 0 X 0 0 1
18) 0 0 ; X 1 ’ !9) о 0 A 0 20> 0 0 л 0,
\o 0 i 0 X/ \o 0 0 x/ \o 0 0 X/ J
Заметим, что матрицы, приводимые к комплексному нормаль-
ному виду, могут быть приведены и к вещественному нормальному
А ч —I— /Ал :
виду, в котором комплексные подматрицы : заме-
: iАд :
няются вещественными подматрицами
Рассмотрим теперь классификацию вращений пространств Rn.
Так как при вращениях пространств Rn происходят линейные
преобразования векторов этих пространств, мы можем определить
собственные векторы и собственные числа вращений простран-
ства Rn.
Собственные числа вращений пространства Rn, соответ-
ствующие неизотропным векторам, равны ±1, собственные
6*
84
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
лекторы вращений, соответствующие собственным числам, от-
личным от ± 1, изотропны. В самом деле, при вращении квадрат
длины вектора не изменяется, т. е. если при вращении вектор е
переходит в вектор 'е ~ \е,
(fe, 'е)~ №(е, е) = (е, е), (1.175)
откуда следует, что при (е, е) 0 Х2=1, т. е. X — ±1, а при
а ± 1 (е, е) = 0.
Собственные векторы вращений пространства Rn, соответ-
ствующие двум различным собственным числам, ортогональны,
за исключением того случая, когда соответственные собствен-
ные числа взаимно обратны. В самом деле, если 'ех = к1е1 и
е^ ~
(Ч. Ч) = ХЛ((?1> е‘2) = (е1> е-2>> (1.176)
откуда следует, что или (elf е2)~0, т. е. векторы и е2 орто-
гональны, или = 1, т. е. Х.2 = у- .
Если вращение пространства Rn обладает собственным чис-
лом X, оно обладает также собственным числом ~ той же
кратности, что и X. В самом деле, мы видели, что обратной
матрицей для ортогональной матрицы индекса 0 (сф является
транспонированная матрица (ор. Так как характеристические урав-
нения лцнейных преобразований с матрицами (aj) и (ар являются
условиями равенства нулю определителей двух взаимно транспони-
рованных матриц (aj — XoJ) и (al— ХИ), а определители двух
взаимно транспонированных матриц равны, мы находим, что корни
характеристических уравнений двух взаимно обратных вращений
пространства Rn совпадают. Но, с другой стороны, собственные
числа двух взаимно обратных линейных преобразований взаимно
обратны, откуда и следует наше утверждение.
Поэтому для всякого собственного вектора е вращения про-
странства Rn, соответствующего собственному числу X, не рав-
ному ±1, существует другой собственный вектор е* того же
вращения, соответствующий собственному числу
Комплексные собственные числа вращения пространства Rn
являются комплексными числами единичного модуля. В самом
деле, пусть X, X — два комплексно сопряжённых собственных числа,
е, е — два соответствующих им собственных вектора. Если бы
число X не было числом единичного модуля, произведение XX не
было бы равно 1 и векторы е, е были бы ортогональны; но ска-
§ 11] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ 85
лярное произведение этих векторов равно
(е, 7 = = (1.177)
i г
и векторы е, е не могут быть ортогональны.
Матраца вращения пространства Rn всегда приводима к диа-
гональному виду. В самом деле, если матрица вращения не при-
водима к диагональному виду, то, как мы видели, для одного из
собственных чисел л вращения существует вектор е, не являю-
щийся собственным вектором и удовлетворяющий условию
(Д — ХБ)2е = 0. (1.178)
Покажем, что это невозможно, т. е. каждый вектор е, удовле-
творяющий условию (1.178), является собственным вектором. Обо-
значим вектор (А — ХЕ)е через /. Если X— комплексное число,
вектор f мним. Тогда сопряжённый с ним мнимый вектор имеет вил
7=(Л — ХЕ)ё = у(ХЛ — Е)ё (1.179)
И
(7 /) = (т А ~ е) =
— ±(Х(д7, Ае) — ^(Ае, е) — (ё, Ле)+Ч7 «))• (1-180)
Но
(е, Ае) = (Ае, А2е); (е, е) = (Ае, Ае), (1.181)
вследствие чего
(7 /) = —е) — 2Х(Дё, Ле) + (Лё, Дае)) =
= — у (Ае, (ХаЕ — 2лА + Л2) е) = — у (Ае, (А — ХЕ)2 е). (1.182)
Поэтому в силу (1.178)
(7/) = 57^ = 21/^1а = о. (1.183)
i i
откуда следует, что вектор f равен 0, т. е. Ае = Хе, и вектор е
является собственным вектором. Если X — вещественное число
(т. е. ± 1), то доказательство проводится совершенно так же.
с тем упрощением, что в этом случае вектор е и число X веще-
ственны и соответственно равны вектору е и числу Л.
Так как матрицы вращений пространства Rn приводятся к диа-
гональному виду, а собственные числа этих вращений равны z±z 1
или комплексным числам единичного модуля е^к, матрицы враще-
ний пространства Rn можно привести к виду
86
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[гл.
§11] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ 87
Среди мнимых собственных векторов, соответствующих г-крат-
ному собственному числу ei(?, можно выбрать г взаимно ортого-
нальных векторов /2, . /г; сопряжённые с ними векторы
А» А» • •, /г являются собственными векторами, соответствующими
собственному числу среди вещественных собственных векто-
ров, соответствующих р-кратному собственному значению 1, можно
выбрать р взаимно ортогональных векторов Zx, Z2, . . ., Лр\ среди
вещественных собственных векторов, соответствующих «/-кратному
собственному значению —1, также можно выбрать q взаимно
ортогональных векторов /х, /2, ..., jqi при этом каждый соб-
ственный вектор ортогонален всем остальным собственным векто-
рам, кроме тех, которые соответствуют обратному собственному
числу.
Вращение пространства Rn можно привести и к вещественному
каноническому виду. Для этого достаточно заменить каждую пару
сопряжённых мнимых собственных векторов fit парой веще-
ственных векторов:
р _____р fi ft /1
т. е.
fi — e-a-i + ie-2i’ fi = e.2i_t—ie.2i. (1.186)
Так как при вращении векторы fit преобразуются по закону
'fi = e^fi, 'fi = (1.187)
векторы e2i при вращении преобразуются по закону
Гр ___'fr\~'fi eVtfi + _в*? (^2/-1+^2г)+ fe-1—ie2i)
— 2 — 2 — 2 “
4- e-№ — e~
~------------------2Z-----------cos ? — e2i sin
__ 'fj ~ 'fi - <^fi “ e~ir'fi — (^2/ —1 + (*2/-l — *%) „
— 2Z “ 2Z ~~ 2i ~~
(1.188)
т. e. векторы e,2i_v e.2i и, следовательно, все их линейные комби-
нации при вращении поворачиваются на угол ср.
Так как в силу изотропности векторов Д и f,t
^) = ^КЛ- Л) —(А> /7)1 = 0, (1.189)
88 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. 1
построенные нами вещественные векторы e2i_lf для всех соб-
ственных чисел вместе с векторами Zt, . . ., ip и j\, ..., jq обра-
зуют вещественный ортогональный базис пространства /?п. Все
векторы этого базиса можно умножением на надлежащие множи-
тели сделать единичными. Матрица вращения пространства Rn
в случае этого базиса примет вид
’ Ак
Ак i
1 j
I • 1
I —1
—1
(1.190)
где
cos — sin j
sin cos
Частными случаями вращения
щение с матрицей
с матрицей (1.19о) является вра-
(1.191)
• 1/
§ 11]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
89
— тождественное преобразование и вращение с матрицей
(1.192)
при котором всякая точка М переходит в такую точку 'М, что
отрезок 'ММ делится точкой О пополам — это вращение назы-
вается отражением от точки.
Другим частным случаем вращения с матрицей (1.190) является
вращение с матрицей
(1.193)
при котором всякая точка М переходит в такую точку 'М, что
отрезок 'ММ перпендикулярен к плоскости, порождённой собствен-
ными векторами, соответствующими собственному числу 1, и пере-
секается с этой плоскостью в своей середине; это вращение в том.
случае, когда кратность собственного числа 1 равна т, назы-
вается отражением от т-мерной плоскости, при т = 1 —отра-
жением от прямой, а при т = п—1—отражением от
гиперплоскости.
Частными случаями вращения с матрицей (1.190) являются также
вращение с матрицей
(1.194)
90
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
при котором нет ни одной неподвижной точки, кроме точки О,
вследствие чего это вращение называется поворотом вокруг точки;
вращение с матрицей
(1.195)
которое в том случае, когда кратность
равна т, называется поворотом вокруг
и вращение с матрицей
собственного числа 1
т-мерной плоскости,
V
(1.196)
которое в том случае, когда кратность собственного числа —1
равна т, называется поворотным отражением от (п — т)-мер-
ной плоскости.
Из формулы (1.194) видно, что поворот вокруг точки может
иметь место только при чётном числе измерений пространства.
При повороте вокруг точки вектор х с координатами х1, . .., х1г,
связанными условием 2 (^)2 — 1 > переходит в вектор 'х той же
§11] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ 91
длины, составляющий с вектором х угол у, определяемый соотно-
шением cos ср — (х, гх). Если мы обозначим кратность собственного
числа e^i через ц, то cos ср можно выразить так:
cos . -+(xri)2] cos ср1+[(хг^1)24----+(хГ1+Г2)2] coscp.24“---
• • • Ч~[(^п r^+1) + . . . -|-(xn) ] cos ср/г (1.197)
Найдём векторы, для которых этот угол, а следовательно, и
его косинус принимают стационарное значение. Для нахожде-
ния стационарных значений функции (1.197) при условии 2 (*92 “ 1
1
составим вспомогательную функцию
F = cos ср-j- л 2 (^)2 (1.198)
i
и приравняем нулю частные производные этой функции по х1,. . . ,хп
Ар
=zz 2х1’ cos cpj-р 2Xxi — 0, (1.199)
где + . . . + < i i\ + . . . + г,. Умножая средние части
соотношений (1.199) на xi и складывая, мы получаем:
Coscp + X = 0. (1.200)
Подставив значение X в (1.199), мы приходим к выводу, что
угол может иметь стационарное значение лишь в том случае,
когда cos ср равен одному из cos cp,z. В этом случае все xi, кроме
тех х*, для которых rt4~ .. . < / <^rt • • • fp равны нулю.
Таким образом, углы являются стационарными углами, на
которые поворачиваются векторы при повороте вокруг точки.
Вместе с тем мы показали, что векторами, поворачивающимися
на стационарный угол срй являются только те векторы, которые
лежат в плоскости, порождённой собственными векторами, соот-
ветствующими собственным числам е^ъ и е~™г. Среди стационар-
ных значений угла имеется максимальное и минимальное
значения этого угла.
Поворот вокруг точки, все стационарные углы которого равны
между собой, т. е. вращение с матрицей, приводимой к виду
cos ср - - sin ср
sin ср cos ср
cos ср — sin ср
sin ср cos ср
называется паратактическим поворотом.
(1.201)
(1.202)
92 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
При паратактическом повороте с матрицей (1.201) вектор
с координатами х* переходит в вектор с координатами
/х2г~1 —- х2^*-1 cos ср — x2i sin ср,
'x2i ~~ х2*-1 sin ср + x2i cos ср.
При паратактическом повороте каждый вектор простран-
ства поворачивается на один и тот же угол ср, так как выра-
жение (1.197), равное косинусу угла поворота вектора, при
epi гп ср2 — . . . — срд. — ср не зависит от координат вектора.
При паратактическом повороте каждая двумерная пло-
скость, определённая произвольным вектором х и вектором ' х,
в который вектор х переходит при этом повороте, переходит
в себя; если при паратактическом повороте единичный вектор х
переходит в вектор 'х с координатами (1.202), то единичный
вектор у, лежащий в двумерной плоскости, определённой векто-
рами х и 'х, и составляющий с векторами х угол ty, имеет
координаты
_у2*-1 = х2^1 cos 6— х<н sin »!>, y2i — х2^"1 sin 0 + x2i cos ф (1.203)
и вектор 'у, в который перейдёт вектор у при рассматриваемом
повороте, имеет координаты
__ х2г-1 cos --X2 Sin (Ср+
fyM — Sin ф) _|_ x2i cos (ф
т. е. лежит в той же двумерной плоскости и составляет с векто-
ром х угол ср + ф.
Определённые таким образом двумерные плоскости будем назы-
вать инвариантными двумерными плоскостями паратактиче-
ского поворота. Так как каждый вектор пространства Rn лежит
в одной и только в одной из этих плоскостей, инвариантные
двумерные плоскости паратактического поворота пространства
составляют семейство, зависящее от п — 2 вещественных пара-
метров.
На плоскости /?2 матрица поворота вокруг точки имеет вид
cos о — sin ф\
(1.205)
sin ср cos еру
В пространстве /?3 матрица поворота вокруг прямой приво-
дится к виду
cos ср — sin ср 0\
sin ср cosep 0 1, (1.206)
0 0 1/
(1.204)
§ 111
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
93
а матрица поворотного отражения от плоскости приводится к виду
cos
sin ср
О
— sin ср О
cos ср О
О —1
(1.207)
В пространстве /?4 к виду /cos cpt матрица — sin cpt поворота вокруг точки \ приводится
1 sin ?i coscpt cos ф.3 sin ф2 sin cos <р2/ > (1.208)
матрица
поворота вокруг двумерной
плоскости приводится к виду
cos ср — sin ср
sin ф
COS ср
(1.209)
1
матрица
дится к
поворотного отражения от
виду
двумерной плоскости приво-
/cos ср — sin ср
sin ср
cos ср
(1.210)
— 1
—1
а матрица паратактического поворота приводится к виду
— sin ср
cos ср
\
cos ср — sin ср
sin ср cos ср/
(1.211)
Заметим, что матрицы (1.205); (1.206) и (1.207); (1.208),
(1.209) и (1.210), (1.211) приводятся соответственно ко 2-му виду
(1.172), ко 2-му виду (1.173) и ко 2-му, 7-му и 12-му видам (1.174).
Перейдём теперь к классификации вращений пространств lRn.
Так как при вращениях пространств lRn также происходят линей-
ные преобразования векторов этого пространства, мы можем опре-
делить собственные векторы и собственные числа вращений про-
странств lRn.
94 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
Так же как для пространства Rn, показывается, что собственные
числа вращений пространства lRn, соответствующие неизотроп-
ным векторам, равны ±1, собственные векторы вращений,
соответствующие собственным числам, отличным от ± 1,
изотропны, собственные векторы вращений, соответствующие
двум различным собственным числам, ортогональны, за исклю-
чением того случая, когда соответственные собственные числа
взаимно обратны.
Если вращение пространства 1 Rn обладает собственным
числом л, оно обладает также собственным числом — той же
к
кратности, что и X. В самом деле, мы видели, что обратной
матрицей для ортогональной матрицы индекса / (aj) является
матрица (з.гар. Характеристические уравнения линейных преобра-
зований с матрицами (ар и (з^ар являются условиями равенства
нулю определителей матриц {а} — XoJ) и (г^а^— Х8^) Последняя
матрица есть произведение матриц (a3i— Х8^) и (sjSf). Так
как определители матриц (г$Р и (sjM) равны (—1/, определитель
матрицы (г^а^ — Х8^) равен определителю матрицы (a3i— Хо^).
В силу того, что определители двух взаимно транспонированных
матриц равны, корни характеристических уравнений двух взаимно
обратных вращений пространства lRn совпадают. Но, с другой
стороны, собственные числа двух взаимно обратных линейных
преобразований взаимно обратны, откуда и получается наше
утверждение.
Отсюда следует, что для всякого собственного вектора е вра-
щения пространства !Rn, соответствующего собственному числу X,
не равному ± 1, существует другой собственный вектор в* того
же вращения, соответствующий собственному числу 4-.
л
Так как доказательства того, что комплексные собственные
числа вращений пространства Rn являются комплексными числами
единичного модуля, и того, что матрицы вращений пространства Rn
всегда приводимы к диагональному виду, существенно опираются
на положительную определённость метрической формы (х, х), эти
утверждения не имеют места в пространствах lRn.
Рассмотрим строение тех вращений пространства lRn, матрицы
которых приводятся к диагональному виду. В отличие от собствен-
ных чисел вращений пространства Rn собственные числа вращений
пространства lRn, кроме значений е*ч, 1 и —1, которые принимают
собственные числа вращений пространства Rn, могут также при-
нимать произвольные вещественные значения (так как в простран-
ствах lR}l имеются вещественные изотропные векторы) и произ-
§ Н]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
95
вольные комплексные значения. Будем обозначать положительные
вещественные собственные числа вращений пространства lRn через
отрицательные вещественные собственные числа этих вращений
через — а комплексные собственные числа этих вращений,
не являющиеся комплексными числами единичного модуля, через
£T1-h<F2.
Поэтому мы можем сказать, что матрица вращения простран-
ства lRn, приводимая к диагональному виду, может быть приведена
к виду, отличающемуся от вида (1.184) тем, что некоторые пары
подматриц
(1.212)
заменены на пары подматриц
(1.213)
или на пары подматриц
(1.214)
96
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
а некоторые четвёрки подматриц
| № !
\ ;
............."............!
[ e^t |
.............!..........—• (1.215)
. e^i |
’ e*i |
’ e~4\
в случае равной кратности собственных чисел e,<₽« и e^i заменены
на четвёрки подматриц
(1.216)
§ И] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ 97
Среди вещественных собственных векторов, соответствующих
г-кратному собственному числу е\ можно выбрать г взаимно
ортогональных векторов Д, Д, . . ., Д, а среди вещественных
собственных векторов, соответствующих собственному числу
кратность которого также равна г, можно выбрать г взаимно
ортогональных векторов gv g2, . . ., gr. При этом каждую пару
собственных векторов fit gi можно заменить парой векторов
= (1-217)
т. е.
Л = «-2<-1 + «2й = — (1.218)
Так как при вращении векторы fi9 gi преобразуются по закону
'А = е?А> = (1.219)
векторы e2i преобразуются при том же вращении по закону
л, __ 'fi + 'g{ _ + e-’tgf _
- 2 “ 2 “
__g<P (g2a-l ~h g2z) e У (g2i-l — g2p _
2 —
=------2----H-----------2~~ = ch ? + e2i sh <?>
>e _ 'ft — 'gi e<ffi — e~^gi _
__ f (^2Z—1 I ^2/) & A2/—I ^21) _
— 2 ~
e-<? efA.e-V
= -----2----e2i — l ----= e2i-l sh ? + еы ch ?>
(1.220)
т. e. векторы e.2i_lt e2i и, следовательно, все их линейные ком-
бинации поворачиваются на чисто мнимый угол /ср. Легко показать,
что построенные нами векторы e2i попарно взаимно орто-
гональны. В самом деле, в силу изотропности векторов Д и gt
имеем:
(^_1, ^) = { [(А, Л) — {gi, gi)\ = V. (1-221)
Точно так же среди вещественных собственных векторов, соот-
ветствующих r-кратному собственному числу —, можно выбрать г
взаимно ортогональных векторов Д, /2, . . ., Д, а среди вещест-
венных собственных векторов, соответствующих собственному
7 Зак. 177. Б. А. Розенфельд
98
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. 1
числу —кратность которого также равна г, можно выбрать г
взаимно ортогональных векторов g13 g.2, gr, причём каждую
пару собственных векторов fi3 gi можно заменить парой взаимно
ортогональных векторов (1.217), которые преобразуются при вра-
щении по закону
4i-i — — e2i-ich ? — е2»sh ®, 'e2i = — e2i-i sh ? — «2< ch <?, (1.222)
т. e. векторы e2i_13 e2i и, следовательно, все их линейные комби-
нации при вращении поворачиваются на комплексный угол тс —/ср.
Среди мнимых собственных векторов, соответствующих /--крат-
ному комплексному собственному числу £Р1+Я>2, можно выбрать г
взаимно ортогональных векторов Д, Д, ..., Д, а среди мнимых
собственных векторов, соответствующих собственному числу
кратность которого также равна г, можно выбрать г взаимно
ортогональных векторов g13 g23 g*3, ..., gr; сопряжённые с ними
векторы Д, Д, . . ., fr и g23 . . ., gr являются собственными
векторами, соответствующими в первом случае собственному
числу а во втором случае собственному числу При
этом каждую четвёрку собственных векторов Д, Д, gi3 gL можно
заменить четвёркой вещественных векторов:
e4i-3 е±ъ- 1 ft + fiA-gj + gi 0 _ fi + fi — gj 4 > Ч<-2— 4 fi—7iA-gi — ^i _ fi—7i—gi 41 ’ ~ 41 > + > (1.223)
т. е. fi — eti-3 4“ е4»-2 4~ ie4i~l 4" ie4i> fi ~ e4i—34“ 2 г'^4»-1 ^4i’ Si ^4»-3 ^4i-2 4~ ^4i—1 ^e4i> Si~ e4i-3 ^4i—4 ^4i-14~ г^4<" . (1.224)
Так как по закону при вращении векторы Д, gi, g< 'Si^e-^g,. . : преобразуются (1.225)
векторы e4i_2, £41-1, преобразуются при вращении по
закону
§ И]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
99
СО
см
сч
100 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
или
^«44-3 — «44-3 Ch ®! COS ®2 -|-
+ «44-2 sh <?1 COS ©2 e4i_x sh ©4 sin ®2—«44ch©i sin %,
'eti-2 ~ eii-3 Sh ?1 cos©2 +
+ «44-2 Ch ©t cos ®2—e4i_t ch ?! Sin?2—«44sh?l sin (1.227)
'«44-1 = «44-3 sh?i sin ®2 +
+ «44-2 Ch ©i Sin?2+«44-!Ch©i cos©2+e4ish ©! cos c?2»
'«44 =«44-3 Ch®t sin ©a +
+ «44-2sh ?! sin ©a + «44-iSh©i sin ©a+«44ch©i cos?2..
Преобразование (1.227) можно переписать также в виде
i e±i-l
= («44-3~Z«44-l) cos (®2+Z?i)—A4i+Z«44-2) sin (®2+*®1).
'e _^i'e . - (1.228)
i L ^4г-2 —
= («44-3~-Z«44-l) Sitl (?2+Z?l)+(e4i+Ze4i-2) COS (?2+Z®x), .
т. e. при этом вращении векторы ^4^_3— и все
их линейные комбинации поворачиваются на мнимый угол
и, следовательно, сопряжённые с ними мнимые векторы ^4г-зН~^4г-1’
и все их линейные комбинации поворачиваются на со-
пряжённый мнимый угол ср2—
Так как при повороте (1.227) переходит в себя квадратичная
форма
(X4i-3)2 _ (х44-2)2 _ (X44-1)2 (j^ (1.229)
эти преобразования могут иметь место только в таких простран-
ствах lRn, для которых 2<;/<;п — 2.
Учитывая, что векторы fit fit g.L, gi изотропны и попарно вза-
имно ортогональны, за исключением пар векторов fi9 gi и fi9 gi9
соответствующих взаимно обратным собственным числам, а раз-
ность (fi9 g^ — gi) является чисто мнимым числом, мы полу-
чаем:
3’ еа-2) “ рз КЛ + Л» Л + Л)— =
= КА. А)+(А. А) — (gi> gi) — (gi, gi)\ = o,
(ем-з, ец-t) = JQ [(A + gi, fi + gi) — (fi+gi, fi+gi)] =
= KA> A)+2 (л, gi)+(g.( gi) _ (A, A) -
—2 (fi, gt)—(gi, gi)] = °.
(1.230)
§ 111
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
101
(^4i—3> — IQ КА I Si> fi~\~ Si) (A I Si> fi I Si)l
= Y& Kfi, fi) + (Si> Si) — (A, fi) — (Si> Si)] = 0,
(^4i—2’ ^4г-1) — jg l(/i Si> fi Si) (fi Si» fi £>i)]
= (A, fi)+(& sf) — (ft> ft)—(Si, Si) = o,
(^4i-2’ ^4i) — 15 Kfi Sit fi Si) (fi Si* fi ^i)l
= KA, A) - 2 (A, Si) - (Si, Si) - (Л, fi)+
+2(A,i)-(^,&)] = o,
(^4i-l> ^4i) == IQ KZj fi> fi fi) (Si Si, Si ^*i)l
= KA> A)+(A. A) — (Si, St)—(Si, St)] = o,
(1.230)
т. e. векторы £4i_3, e±i-2> ^4i-i> ea попарно взаимно ортого-
нальны.
Поэтому построенные нами вещественные векторы e2i_lt e2i и
е^_3, £4i_2, £4г-1> e^i для всех собственных чисел вместе с векто-
рами ipf соответствующими собственному значению и
векторами j19 . . .,Jqi соответствующими собственному значению—1,
образуют вещественный ортогональный базис пространства lRn, Все
векторы этого базиса умножением их на надлежащие множители
можно сделать единичными или мнимоединичными. Матрица вра-
щения пространства lRn, приводимая к диагональному виду, в слу-
чае этого базиса примет вид, отличающийся от вида (1.190) тем,
что некоторые подматрицы
(1.231)
заменены подматрицами
Bi
(1.232)
102
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
где
: chcp^ shcp^ i
1 ~ sh % ch <?i p
или подматрицами
! -Bi I
L (1.233)
где
__ —ch^ —sh j
г i — sh cp^ — ch <pf i ’
а некоторые пары подматриц
: Л,
(1.234)
А/
заменены подматрицами
Cij
(1.235)
где
•J ch cp^cos <pj sh cp^ cos <Pj
\ sh <p^ cos <pj ch <p^ cos <pj
i sh cp^ sin cp^ ch % sin cpj
: ch sin cp^ sh cp^ sin <py
— sh cp^ sin <pj — ch % sin cpj
— ch <p^ sin cpj — sh <p4 sin cpj
ch cos <pj sh <p^ cos <pj
sh cp^ cos <pj ch cp^ cos <pj
Частными случаями вращений пространства lRn являются тож-
дественное преобразование, отражение от точки, отражение от т-
мерной плоскости (при т — 1—от прямой, при т = п—1—от
гиперплоскости), поворот вокруг точки, поворот вокруг /п-мерной
плоскости и поворотное отражение от /n-мерной плоскости, кото-
§ 11]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
103
рые определяются так же, как аналогичные случаи вращений про-
странства Rn. Поворот вокруг точки пространства lRn, так же как
в случае пространства Rn, может иметь место только при чётном
числе измерений пространства.
Так же как в случае вращений пространства Rn, показывается,
что углы ф^, аф^, и ф^ + iffy, отвечающие соответственно
подматрицам (1.231), (1.232), (1.233) и (1.235), являются ста-
ционарными углами, на которые поворачиваются векторы при
повороте вокруг точки, и что векторами, поворачивающимися на
стационарные углы фй /ф^, и являются только те
векторы, которые лежат в плоскости, порождённой собственными
векторами, отвечающими собственным числам соответственно
и e~^i, е9^ и е~\ —е^ и —и (в последнем
случае плоскость, порождённая собственными векторами, мнима).
Поворот вокруг точки, все стационарные углы которого равны
между собой, в пространстве lRn также называется паратакти-
ческим поворотом. В пространствах lRn могут существовать пара-
тактические повороты, матрицы которых приводятся к виду (1.201);
будем называть такие паратактические повороты эллиптическими.
Паратактические повороты, матрицы которых приводятся к виду-
ch ср sh ф
sh ф ch ф
А А
(1.236)
ch ф sh ф
sh ф с11ф.
или
— ch ф —sh ф
— sh ф —ch ф
I
(1.237)
— ch ф —sh ф
— sh ф —ch ф
будем называть гиперболическими. При эллиптическом паратакти-
ческом повороте с матрицей (1.201) вектор с координатами х1 пере-
ходит в вектор с координатами (1.202), а при гиперболическом
паратактическом повороте с матрицей (1.236) и (1.237) вектор
с координатами х1 переходит соответственно в вектор с коорди-
натами
zx2i“x = х2 * * * * * **”1 ch ф-|-х2< sh ф, 'х2/ = х2^1 sh ф-|“х2< ch ф (1.238)
или
'х2г 1= — х2*-1 сц у — sh zx2^——х2*-1 ch ф—x2i sh Ф. (1.239)
104
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
Так же как в случае пространства Rn, показывается, что при
паратактическом повороте пространства lRn каждый вектор пово-
рачивается на один и тот же угол ф в случае эллиптического па-
ратактического поворота и 1у или те -f- /ф в случае гиперболического
паратактического поворота и что при паратактическом повороте
пространства lRn каждая двумерная плоскость, определяемая про-
извольным вектором х и вектором 'х, в который вектор X пере-
ходит при этом повороте, переходит в себя. Будем называть опре-
делённые таким образом двумерные плоскости инвариантными
двумерными плоскостями паратактического поворота} эти пло-
скости, так же как и в случае пространства Rni составляют семей-
ство, зависящее от п — 2 вещественных параметров. Заметим, что
инвариантные двумерные плоскости эллиптического паратактического
поворота являются евклидовыми плоскостями индекса 0 или 2,
а инвариантные двумерные плоскости гиперболического паратакти-
ческого поворота являются евклидовыми плоскостями индекса 1.
Отметим, что в случае паратактического поворота в пространстве lRn
можно выбрать такой базис, векторы которого попарно лежат
в инвариантных плоскостях. При этом оба базисных вектора, ле-
жащих в двумерной плоскости индекса 0, имеют вещественную
длину, оба базисных вектора, лежащих в двумерной плоскости ин-
декса 2, имеют чисто мнимую длину, а из двух базисных векторов,
лежащих в двумерной плоскости индекса 1, один имеет веществен-
ную длину, а другой — чисто мнимую длину. Отсюда следует, что
эллиптический паратактический поворот может иметь место
только в пространствах lRn с чётным I, а гиперболический
паратактический поворот может иметь место только в про-
странстве lRn, для которого п = 2/.
На плоскости матрицы поворота вокруг точки имеют вид
(ch ф shco\ /—ch ф —sh <х> \
‘ / и й ‘ й ‘ • (1.240)
sh ср ch ф/ \—sh ср —ch ф / 7
В пространстве матрицы поворота вокруг прямой приво-
дятся к виду
(ch ср sh ср 0 \ / — ch ф —sh ср 0 \
sh ср cho 0 I и I —sh ф —ch ср 0 ] (1.241)
0 0— 1 / \ 0 0—1/
и
/—1 0 0 \
I 0 cos ф —sin ф I, (1.242)
\ 0 sin ф cos ф /
§ П]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
105
а матрицы поворотного отражения от плоскости приводятся к виду
ch ф sh ф sh ф ch ф ° \ / — ch ф — sh ср - — sh ср — ch ф 0 \
0 1 и 1 0 (1.243)
. 0 0 —1 0 0 —1 /
—1 0 0 '
0 COS Ф — sin ф • (1.244)
0 sin ф COS Ф/
1 и 0.
приводятся
Повороты (1.241) и (1.242) являются поворотами вокруг евкли-
довых прямых соответственно индекса 0 и 1, а поворотные отра-
жения (1.243) и (1.244) являются поворотными отражениями дву-
мерных евклидовых плоскостей соответственно индекса
Из вращений пространства 1/?3, матрицы которых не
к диагональному виду, отметим вращение с матрицей
2
£
2
t
/2
t
— &_
2
t
(1.245)
— t
1
Собственными векторами этого вращения являются изотропный
вектор е±— е% и все векторы определяемой им изотропной прямой,
вследствие чего это вращение можно назвать поворотом вокруг
изотропной прямой.
В пространстве матрицы
к виду
поворота вокруг точки приводятся
/ cl1 sh ф4 0 0
1 sh®* ch 0 0
1 0 0 cos ф2 — sin
\ 0 0 sin ф.2 cos
— ch ?i — sh 0
— sh ?1 — ch ?i 0
0 0 COS ®2
0 0 sin ®2
— sin ?2
cos <ра
и
(1.246)
0
0
Матрицы поворота вокруг двумерной плоскости приводятся к виду
/ch ф sh © 0 0\ / —ch © — sh © 0 0\
sh <p ch © 0 0 1 I — sh © — ch © 0 0 1
0 0 1 0 ’ 1 0 0 1 0 / (1.247)
' 0 0 0 1 / ' 0 0 0 1 /
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
106
и
1 0 0 0
0 1 0 0
0 0 cos Ф — sin ф
0 0 sin ф COS Ф
(1.248)
а матрицы поворотного отражения от двумерной плоскости приво-
дятся к виду
/ ch<? sh ф 0 0 / — ch ф — sh ср 0 0\
sh ф ch ф 0 0 — sh ф — ch ф 0 ° 1
i 0 0 —1 0 1 ’ \ 0 0 —1 ° / (1.249)
\ 0 0 0 -1 ' 0 0 0 —1!
и —1 0 0 0 \
0 —1 0 0 — sin ф 1 (1.250)
0 0 COS Ф
0 0 sin ф COS Ф '
Повороты (1.247) и (1.248) являются поворотами вокруг дву-
мерных евклидовых плоскостей соответственно индекса 0 и 1,
а поворотные отражения (1.249) и (1.250) являются поворотными
отражениями от двумерных евклидовых плоскостей соответственно
индекса 1 и 0.
Из вращений пространства матрицы которых не приводятся
к диагональному виду, отметим вращение с матрицей
'^+1 /2 2 t 0
2 /2 -4+1 —t O' (1.251)
t t 1 0
0 0 0 1
Собственными векторами этого вращения являются изотропный
вектор е±— е.2, вектор вещественной длины и, так как оба эти
вектора соответствуют одному и тому же собственному числу 1,
§ И]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
107
все линейные комбинации этих двух векторов. Эти линейные ком-
бинации составляют полуевклидову плоскость, вследствие чего это
вращение можно назвать поворотом вокруг полуевклидовой пло-
скости.
В пространстве 2/?4 матрицы поворота вокруг точки приводятся
к виду (1.208),
/ch ®t 0 sh <рх 0 \ / ' ch ®x 0 sh <px 0
0 ch cp2 0 sh ©2 j 1 0 —ch cp2 0 —sh cp2
sh®! 0 ch <pt 0 /’ \ sh ?i 0 ch cpx 0
\ 0 sh <p2 0 ch ®2 ' ' 0 —sh <p2 0 —ch <p2
/ — ch <px 0 sh cpx 0 \
' 0 — ch ®2 0 — s h <p2 |
1 — sh tp-L 0 ch <px 0 /
\ 0 — sh <p2 0 — ch <p2 '
и
(1.252)
/ ch <рх cos ср2— ch <рх sin <р2
ch cpt sin <p2 ch cpj cos <p2
sh <рх cos <p2 — sh <px sin <p2
' sh <рх sin <p2 sh <pt cos <p2
sh <рх cos <p2 —sh <px sin <p2 \
sh ф. sin ф0 sh ф1 cos I
. . . • (1-253)
ch фх cos cp2 —ch sin cp2 ]
ch <px sin <p2 ch <p4 cos <p2 '
Матрицы поворота вокруг двумерной плоскости приводятся
к виду (1.209),
/ 1 0 0 0 \ Z1 0 0 ° \
0 ch <р 0 sh ср 0 — ch © 0 — sh ср
0 0 1 0 ] ° 0 1 ° J — ch ср7 (1.254)
'0 sh <р 0 ch ф ' ^0 — sh ® 0
и (1.248). Матрицы поворотного отражения от двумерной плоско-
сти приводятся к виду (1.210),
—1 0 0 ° \ 0 0 ° \
0 ch ® 0 sh ф 1 0 —ch ф 0 —sh ф I
0 0 —1 ° ’ i ° 0 —1 0 (1-255)
0 sh © 0 ch ф ' \ 0 —sh ф 0 —ch ср7
108
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
и (1.250), а матрицы паратактического поворота приводятся к виду
(1.211),
/ch v 0 sh ф 0 \ /ch © 0 sh ф 0 \ '
0 ch ф 0 ch ср I 1 ° —ch ф 0 — sh ф I
sh © 0 ch ф ° / 1 sh ф 0 ch ф ° ’
' 0 sh ф 0 ch ф ch ф ' 0 \ 0 — sh © — sh ф 0 ° \ — chcp' (1.256)
0 —ch ф 0 — sh ф 1
sh © 0 — ch ф °
0 — sh ф 0 — ch ф '
Стационарные углы поворота (1.208) вещественны, стационарные
углы поворотов (1.252) являются комплексными числами или
тс— Z<p, стационарные углы поворота (1.253) являются комплексными
числами и ф.2— /фг
Повороты (1.209), (1.254) и (1.248) являются поворотами вокруг
двумерных евклидовых плоскостей соответственно индекса 0, 1 и 2,
а поворотные отражения (1.210), (1.255) и (1.250) —поворотными
отражениями от двумерных евклидовых плоскостей соответственно
индекса 2, 1 и 0.
Из вращений пространства 2/?4, матрицы которых не приводятся
к диагональному виду, отметим вращения с матрицами
1 t — t 0
— t -^+1 2 /2 2 0
ft /2 (1.257)
— t H1 0
0 0 0 1
и
(1.258)
Вращение с матрицей (1.257) является поворотом вокруг полу-
евклидовой плоскости, определяемой векторами и е4> ана-
логичным вращению пространства ХТ?4 с матрицей (1.251).
§ 11]
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
109
Собственными векторами вращения с матрицей (1.257) являются
изотропные векторы ех— и + и, так как оба эти вектора
соответствуют одному и тому же собственному числу 1, все линей-
ные комбинации этих двух векторов. Эти линейные комбинации
составляют изотропную плоскость, вследствие чего это вращение
можно назвать поворотом вокруг изотропной плоскости.
Заметим, что матрицы (1.240); (1.241) и (1.242); (1.243) и
(1.244), (1.245); (1.252); (1.253); (1.246); (1.247), (1.249), (1.254)
и (1.255); (1.248) и (1.250); (1.256); (1.251) и (1.257), (1.258)
приводятся соответственно к 1-му виду (1.172), к 1-му, 2-му и
5-му виду (1.173) и к 1-му, 2-му, 3-му, 5-му, 7-му, 10-му, 13-му
и 18-му видам (1.174).
Перейдём теперь к классификации движений. Рассмотрим сна-
чала движения пространства Rn. Как мы видели, матрица всякого
вращения в этом пространстве приводится к виду (1.190), т. е.
всякий вектор пространства может быть представлен в виде суммы
векторов, которые при данном вращении подвергаются вращениям
с матрицами (1.191), (1.192) и (1.201).
Поэтому для выяснения строения движения fx=Ax~\-b пред-
ставим векторы х и b в виде указанных сумм векторов и рас-
смотрим преобразования, происходящие с отдельными слагаемыми
вектора х.
В том случае, когда матрица вращения имеет вид (1.191),
т. е. вращение является тождественным преобразованием, движе-
ние имеет вид
'х = х-\-Ь, (1.259)
т. е. является переносом.
В том случае, когда матрица вращения имеет вид (1.192),
т. е. вращение является отражением от начала, движение имеет
вид
'х--=- — х-\-Ь (1.260)
или
х 2= 2~)’ (1.261)
b
к е. является отражением от точки с радиусом-вектором у
В том случае, когда матрица вращения имеет вид (1.201),
т. е. является поворотом вокруг начала, движение имеет вид
'х2*-1 — х2^1 cos ср — x2i sin ср ft2*-1,
fx^ = х2*-1 sin ср — х2г' cos ср b2i.
(1.262)
Покажем, что существует такая точка с координатами что
переносом начала в эту точку при помощи преобразования
yi^xt — ai (1.263)
(1.264)
(1.267)
ПО ЕВКЛИДОВЫ пространства [гл. I
преобразование (1.262) можно привести к виду
/y'^i—l CQS ф sin у,
'у* — Sin COS Ф.
В самом деле, подставляя в (1.262) выражение координат х*
через у, мы получим:
— (у<-1 cos ф--(yi sin ср -|- ^’“1,
'У< + ^ =
= sin фСу2* ~h ^2*)cos ?Ч~ ^2*, -
или
'у*-1 = уМ-ъ cos ф—y2i sin Ф-|~^2г’“1 (cos ф—1)—sin ф-]-^-1,
'у^ — уМ-1 sin ф -|- у2^ cos ф -|- a2*-1 sin ф а2^ (cos ф — 1) +
(1.266)
Для того чтобы формула (1.266) приняла вид (1.264), нужно,
чтобы числа О1 удовлетворяли уравнениям
#2г-1 (cos ф-1)---аЫ sin ф -|- ft2*"1 = О,
а2г-1 sin ф-|- а2< (cos ф — 1)-|- b2i = 0.
Определитель этой системы в том случае, когда кратность
собственного числа ei(? данного вращения равна г, имеет вид
[(cos ф— 1)2+ sin2?]r = 2(1 — cos ф)г. (1.268)
Так как число ф отлично от 0, этот определитель отличен от
нуля и система уравнений (1.267) имеет единственное решение.
Поэтому движение (1.262) является поворотом вокруг точки с ко-
ординатами а*.
Будем называть движение, состоящее из поворота вокруг
т-мерной плоскости (при т = 1 —прямой) и переноса вдоль вектора,
лежащего в этой плоскости, винтовым движением} движение,
состоящее из отражения от т-мерной плоскости (при т = 1 —
прямой) и переноса вдоль вектора, лежащего в этой плоскости,
скользящим отражением, а движение, состоящее из поворота во-
круг плоскости, отражения от другой плоскости и переноса вдоль
вектора, лежащего в пересечении этих плоскостей, винтовым от-
ражением.
Рассматривая все возможные случаи движений прямой R±, пло-
скости /?2 и пространства /?3, мы найдём, что:
Движение прямой Rr может быть*. 1) переносом, 2) отра-
жением от точки, 3) тождественным преобразованием.
КЛАССИФИКАЦИЯ ДВИЖЕНИЙ
111
§ 11]
Движение плоскости R% может быть*. 1) поворотом вокруг
точки, 2) переносом, 3) отражением от прямой, 4) скользя-
щим отражением, 5) тождественным преобразованием.
Движение пространства R3 может быть*. 1) поворотом
вокруг оси, 2) переносом, 3) винтовым движением, 4) отра-
жением от плоскости, 5) поворотным отражением, 6) сколь-
зящим отражением, 7) тождественным преобразованиемх).
Совершенно аналогично определяются винтовые движения,
скользящие отражения и винтовые отражения в пространствах lRn
и показывается, что движения этих пространств, матрицы которых
приводятся к диагональному виду, помимо вращений также могут
быть переносами, винтовыми движениями, скользящими отражениями
и винтовыми отражениями.
Наряду с движениями в пространствах lRn можно определить
преобразования, которые переводят точки, находящиеся на веще-
ственном расстоянии а, в точки, находящиеся на чисто мнимом
расстоянии ia. Будем называть такие преобразования антидви-
жениями, а антидвижения, обладающие неподвижной точкой, бу-
дем называть антивращениями.
Так же как в случае движений, показывается, что антидвиже-
ния пространства lRn являются аффинными преобразованиями 'х =
= Ах-\-Ь, связанными условием
(Ах, Ах) = — (х, х). (1.269)
Так как квадратичные формы (Ах, Ах) и (х, х) должны иметь
один и тот же индекс, антидвижения могут иметь место
только в пространствах nR2n.
Условие (1.269) равносильно условию
(Ах, Ау) = — (х, у). (1.270)
При антидвижениях углы между векторами не изменяются.
В самом деле, обозначая через ср угол между векторами х и у,
а через Ф — угол между векторами Ах и Ау, будем иметь:
(Ах, Ау) —(х, у) (х, у) /<
C0S Ф - | Ах\|Лу | - Z|xHM - IxTiTT ~ C°S ( >27 °
Простейшим примером антидвижения является антивращение
плоскости 1/?.2 с матрицей
/sh ф ch ф\
( ‘ ‘ . (1.272)
\ch ф shcp/
*) С классификацией движений пространства /?3 читатель может более
подробно познакомиться по книгам: Богомолов [1], стр. 17 и Пере-
пелкин [2], т. II, стр. 143—180. Заметим, что некоторые авторы (см.,
например, Делоне и Райков [1], т. 1, стр. 117), называют поворотное
отражение «зеркально-винтовым движением».
112 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
Важным частным случаем антидвижения являются антивращения,
матрицы которых приводятся к виду
Эти преобразс sh ф ch ф эвания ch ср sh ср sh chcp ch ф sh ф обладают многими (1.273) 1 свойствами паратакти-
ческих поворотов, вследствие чего мы их будем называть анти-
паратактическими поворотами.
При антипаратактическом повороте с матрицей (1.273) вектор
с координатами х* переходит в вектор с координатами
/x2i'‘1 = х2^-1 sh ф-|- x2i ch ф, zx2i = х2^-1 ch ф-|-х2^ sh ф. (1.274)
Произведение двух антидвижений является движением. Нетрудно
проверить, что движения и антидвижения пространства nR$n
образуют группу.
§12. Движения как произведения отражений
от гиперплоскостей
Особую роль среди движений пространств Rn и lRn играют
отражения от гиперплоскостей. Найдём вид отражения
от гиперплоскости пространства Rnt определяемой уравнением
(а, х)~р, (1.275)
Черт. 5.
где вектор а — нормальный вектор гиперплоскости. Если вектор а
направлен из начала координат в сторону гиперплоскости, число р
положительно; если при этом вектор а
единичен, число р равно расстоянию от
начала до гиперплоскости. Вследствие
этого в том случае, когда точка х не
лежит на гиперплоскости, разность
(а, х)—р по абсолютному значению
равна расстоянию от точки х до гипер-
плоскости и положительна, если точка х
и начало находятся по разные стороны от
гиперплоскости, и отрицательна, если эти точки находятся по одну
сторону от гиперплоскости. Поэтому если при отражении от гипер-
плоскости точка х переходит в точку zx (черт. 5), вектор х — zx
равен произведению вектора а на удвоенную разность (а, х) — р, т. е.
'х = х — 2[(а, х)—р]а.
(1.276)
§12] ДВИЖЕНИЯ КАК ПРОИЗВЕДЕНИЯ ОТРАЖЕНИЙ 113
Если же а — вектор произвольной длины, то для перехода
к предыдущему случаю нужно разделить вектор а и число р на
длину | а | вектора а, т. е. в этом случае отражение от гипер-
плоскости (1.275) имеет вид
'х = х—2 (а’ а. (1.277)
(a, a) v 7
В случае гиперплоскости пространства lRn с нормальным век-
тором а вещественной длины отражение от гиперплоскости (1.275)
имеет тот же вид (1.277), что доказывается совершенно так же,
как для гиперплоскостей пространства Rn.
В случае гиперплоскости пространства lRn с нормальным век-
тором а чисто мнимой длины, если вектор а направлен из на-
чала координат в сторону гиперплоскости, число р отрицательно и,
если при этом вектор а мнимоединичен, число р равно расстоя-
нию от начала до гиперплоскости, умноженному на Z. Вследствие
этого в том случае, когда точка х не лежит на гиперплоскости,
разность (а, х)—р по абсолютному значению равна расстоянию
от точки х до гиперплоскости и положительна, если точка х и
начало находятся по одну сторону от гиперплоскости, и отрица-
тельна, если эти точки находятся по разные стороны от гипер-
плоскости. Поэтому, если при отражении от гиперплоскости точка х
переходит в точку 'х, вектор х — 'х равен произведению вектора а
на удвоенную разность р — (а, х), т. е.
'х = х — 2[р— (а, х)\а. (1.278)
Если же а — вектор произвольной чисто мнимой длины, то для
перехода к предыдущему случаю нужно разделить вектор а и
I а I
число р на вещественное число LyL, т. е. в этом случае отраже-
ние от гиперплоскости (1.274) имеет тот же вид (1.277), что и
в двух предыдущих случаях.
В том случае, когда гиперплоскость пространства Rn или lRn
проходит через начало, число р равно нулю и отражение от ги-
перплоскости имеет вид
= (1.279)
(a, a) v 7
Покажем, что всякое вращение пространства Rn или lRn
является произведением не более п отражений от гиперпло-
скостей1}. Так как движение прямой R± или 1/?1, переводящее
в себя точку этой прямой, может быть или тождественным пре-
образованием или отражением от этой точки, теорема верна для
2) См. Картан [11], стр. 20—24.
8 Зак. 177. Б. А. Розенфельд
114 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
п = 1. Предположим, что теорема верна для пространств 1,2,. . . ,
п— 1 измерений, и докажем, что она верна для пространства п из-
мерений.
Особенно прост тот случай, когда существует неизотропный
вектор а, переходящий при вращении в себя. Тогда гиперпло-
скость, перпендикулярная к этому вектору, тоже переходит в себя
и в этой плоскости происходит вращение, которое по нашему
предположению является произведением не более п—1 отраже-
ний от (п — 2)-мерных плоскостей. Тогда, если мы проведём ги-
перплоскости через каждую из этих (п— 2)-мерных плоскостей
и вектор а, то произведение отражений от этих гиперплоскостей
будет переводить в себя вектор а, а в перпендикулярной к нему
гиперплоскости определит указанное нами вращение. Поэтому это
произведение совпадает с данным вращением, т. е. данное вра-
щение является произведением не более п—1 отражений от ги-
перплоскостей.
Пусть теперь вращение не обладает неизотропным вектором,
переходящим в себя, но обладает неизотропным вектором а, пе-
реходящим в такой вектор что вектор 'а — а неизотропен.
Тогда отражение от гиперплоскости, проходящей через центр вра-
щения, перпендикулярно к вектору 'а — а, переводит вектор а
в вектор 'а\ и произведение данного вращения на это отражение
является вращением, переводящим в себя вектор а, а мы только
что видели, что такое вращение является произведением не более
п—1 отражений от гиперплоскостей. Поэтому данное вращение
является произведением не более п отражений от гиперплоскостей.
Для пространства Rn, в котором нет вещественных изотропных
векторов и вектор 'а— а всегда неизотропен, тем самым теорема
доказана. Но в случае пространства lRn нам необходимо рассмо-
треть случай, когда вектор 'а — а изотропен для всех векторов а
пространства.
В этом случае векторы 'а — а образуют /n-мерную плоскость,
так как для любых векторов а и b и чисел k, I векторы k('a— #) +
— b) в силу линейности вращения можно записать в виде
'(ka-\-lb) — (ka-\-lb). Выберем в этой плоскости базис, состоя-
щий из попарно ортогональных векторов elt е2, . . ., ет. Плоскость,
состоящая из векторов, ортогональных векторам 'а — а, имеет
размерность п — тм. содержит все векторы а/ —-а. Поэтому в этой
плоскости можно выбрать базис, состоящий из векторов е2, ...,
ет, лежащих в плоскости векторов ‘а— а, и из попарно ортого-
нальных векторов Д, Д, ..., Д_2?п, не лежащих в этой плоскости.
Дополним этот базис до базиса всего пространства векторами g19
• • • ’ gm*
Если мы обозначим
'а — a = ^iaieil 'b — Ь = ^Ь1е^ (1.280)
г г
§ 12] ДВИЖЕНИЯ КАК ПРОИЗВЕДЕНИЯ ОТРАЖЕНИЙ 115
ТО
('а, '&) = (а + 2«Ч> Н2^) = («> + ^)+
i i г
+(2*Ч «)+(2<^. 2*4). (1.281)
I i i
Но в силу сохранения скалярного произведения при вращении
('л, 'b) = (а, Ь), а в силу изотропности и попарной ортогональ-
ности векторов (eif ej) = 0 и, следовательно, (2
i 3
Поэтому из соотношения (1.281) получаем:
(*, 2 «4) = — (a. 2 №j). (1 -282)
i i
Если взять в качестве вектора b вектор или /?-, то в силу
того, что все скалярные произведения (ei9 ej) и (eif fj) равны нулю,
мы получим, что вектор 2 biet ортогонален любому вектору а
г
пространства. Поэтому вектор 2 biei равен нулю, т. е. все век-
i
торы ei и переходят в себя при нашем вращении.
Рассмотрим теперь произвольный вектор пространства
X = 2 x^i + 2 yJfj + 2 *kgk- (1.283)
i j к
Тогда в силу того, что все скалярные произведения (ei9 ej)
и (ei> fj) равны нулю, скалярный квадрат вектора х имеет вид
(х,х)=22 4> gk^xW +22(4 fk)yjyk+
i к j к
+ 2 2 (4 gk)yjzk + 2 2 gi) zkzl. (1.284)
j к к I
В силу невырожденности этой формы существует такой базис,
что
gk) = *ik- (1.285)
Если мы заменим векторы fj и gk соответственно векторами
+ и Sk~^r^bikei9 третье слагаемое суммы (1.284) можно
переписать в виде
2 2 (Л + 2 gk + 2 bikei) -yizk —
j к i i
= 22(4 ^)^й+22«^УА (1.286)
2 к Q к
8*
116
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
а четвёртое слагаемое суммы (1.284) можно переписать в виде
2 2 (gk + 2 bikei, + 2 bjiej) zW =
к I i 3
= 22 (gk, ft)^+22fe+M zkzl. (1.287)
к l к I
Поэтому, выбирая в качестве коэффициентов и числа
ajk = — (fj> gk), = Ьц = — 1 (gi, gj), (1.288)
мы обратим третье и четвёртое слагаемые суммы (1.284) в нуль
и эта сумма примет вид
(х, х) = 2 х*г* (1.289)
i 3 к
где второе слагаемое является невырожденной квадратичной фор-
мой. Подставляя в качестве вектора х вектор fp мы находим, что
векторы fj неизотропны. Но выше мы видели, что эти векторы
переходят в себя при нашем вращении. Поэтому, если п > 2т,
т. е. если существуют векторы /у, мы приходим к рассмотренному
выше случаю, когда существует неизотропный вектор, переходящий
в себя при вращении, и для этого случая теорема доказана.
Остаётся рассмотреть случай п = 2т. При нашем вращении
векторы переходят в себя, т. е. гег = а векторы gi перехо-
дят в векторы z^, причём, так как для любого вектора а раз-
ность 'а — а является линейной комбинацией векторов ег, мы можем
обозначить разность rgi— gi через
'gi — gi = ^i gift. (1.290)
3
Подставляя значение rgi из (1.290) в равенство ('§;, fg^ = (gi9 g.)9
мы найдём, что
('gi, 'gj) = (gi + H gitfk, gj + 2 guei) = (gi, gj) + gij + gjt, (1.291)
к I
откуда
gij = ~ gji- (1.292)
При нашем вращении вектор z = 2 zigi переходит в вектор
'z = '^lzi'gi = 2^ + 22^Ч- (1.293)
i i i 3
При преобразовании координат выражения 2 z*gi и 2 zi'gi
i г
остаются инвариантными, вследствие чего остаётся инвариантной
§12] ДВИЖЕНИЯ КАК ПРОИЗВЕДЕНИЯ ОТРАЖЕНИЙ 117
и билинейная форма 22 являющаяся в силу (1.292) косо-
i 3
симметрической; при этом в силу того, что при преобразовании
координат выражения 2 xizi и 2 х*е1 также остаются инвариант-
i i
ными, координаты z* и базисные векторы преобразуются оди-
наковым образом.
Но, как известно из линейной алгебры1), билинейная кососим-
метрическая форма путём применения одного и того же линейного
преобразования к обоим родам переменных может быть приведена
к каноническому виду:
2 (^-^—^4^1)- о-294)
i
Поэтому при соответственном изменении базиса формулы пре-
образования базисных векторов gi примут вид
Z/>24-l — £24-1 + ^24> '&2ъ ~ £*24 ^24-V (1.295)
Отсюда видно, что число т должно быть обязательно чётным.
Формула (1.295) показывает, что каждая из четырёхмерных пло-
скостей, определяемая векторами e2ii ёы* ПРИ любом I
переходит в себя при нашем вращении. Произвольный вектор этой
плоскости
X - + x*e.2i j-z^g.2i_r + z*g2i (1.296)
при нашем вращении переходит в вектор
'х = 4- Z2*-1 (&М-14 e2i)4-^ (g-2i—e2i-l)> U -297)
т. e.
z^-2/—1 —: 1 Z^ X^ — X^& | Z%$ ^~1 Z2i—1 — ^24--I ?^24 —» Z2^t
(1.298)
Но преобразование (1.298) является произведением отражений
от четырёх гиперплоскостей, нормальными векторами которых
являются векторы
«24-1 + ^ + (1 — «2i-l + ^2i + (l — j Q 299)
^24+ §24» J
где k — вещественное число, отличное от 0 и 1; скалярные ква-
драты этих векторов в силу (1.289) соответственно равны 1—
!) См. Мальцев [1], стр. 349.
118
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. 1
k—1, k и 1, т. е. векторы неизотропны. В силу формулы (1.279)
отражения от указанных гиперплоскостей имеют соответственно вид
f уИ “1 у2£ —1 ________
«А/ «А,
'x2i = (Z2/-1 _|_ г
^^21 — 1 — Z^~ 1
z% — Z^ ~ 1
/д.2г-1 —. )
'х* = — kz™, I
'ZM-1 = z2*”1,
f —__________— х2^.
'х91-1 — х9<-1-~ Х^ +
+А^'-1+п^’
'x™
f z%i — 1 —. ^2i — 1
^2i =___L^i-1_
w k
f x^—= X9^ — i
'x*> = —z^t
'zbi-\=zn-^ >
rZ%i = —x™.
(1.300)
Нетрудно проверить, что произведение этих отражений совпа-
дает с вращением (1.298). Таким образом, наша теорема пол-
ностью доказана.
Заметим, что в силу (1.289) скалярный квадрат произвольного
вектора пространства, в котором имеет место рассматриваемый
случай, имеет вид
(х, х) = 5(^"122г’-1 + х2^20, (1.301)
г
т. е. это пространство является пространством 2pR[p.
Примером вращения указанного вида является вращение про-
странства 9/?4 с матрицей (1.258); произвольный вектор х с коор-
динатами х1 при этом вращении переходит в вектор fx с коорди-
натами
'х1 = х1Ч~4 С*2— 'x‘i = —4 (%1 + %4)’
zx3=хз—4 с*1+^4),z^4=—4^2—
(1.302)
и разность 'х — х является изотропным вектором
'х — х = у(х2 — X3) (ех —е4) —yCx^x^^H-e.j). (1.303)
Так как определитель отражения от гиперплоскости равен —1,
вращения с определителями +1 и — 1 являются произведем
(1.304)
' х2^ — х2г |
^=^20.) "307>
§ 12] ДВИЖЕНИЯ КАК ПРОИЗВЕДЕНИЯ ОТРАЖЕНИЙ 119
ниями соответственно чётного и нечётного числа отражений
от гиперплоскостей.
Определение гиперплоскостей, произведение отражений от кото-
рых представляет собой данное вращение, особенно просто для
вращений пространства Rn. Если матрица вращения пространства Rn
приведена к каноническому виду (1.290), то это вращение может
быть представлено в виде произведения вращений
zx2i-1 — х2*”"1 cos —x™ sin ср, zx2^=x2*~1 sin ср —лт2* cos Ср,
fx3 = x3(J=h2i—1, 21)
и
'х1 — —х\ 'хэ = хэ (j^i). (1.305)
Вращения (1.305) сами являются отражениями от гиперплоско-
стей с нормальным вектором е^ а вращения (1.304) являются про-
изведениями отражений от двух гиперплоскостей, нормальными
векторами которых являются векторы
*2<-i cos-| + sin, е^_х. (1.306)
В силу формулы (1.279) отражения от указанных гиперпло-
скостей имеют соответственно вид
zx2i-1 — х2г’-1 cos ср -|- x2i sin ср,
гхЫ = х2^1 sin ср 4- х^ cos ср,
'хэ = хз (/ =£ 21 — 1, 21).
Так как вращение (1.307) является поворотом на угол ср,
а векторы (1.306) и, следовательно, определяемые ими гиперпло-
скости составляют угол ~, мы видим, что произведение отраже-
ний от двух пересекающихся гиперплоскостей пространства Rn
является поворотом на удвоенный угол.
В случае пространств lRn определение гиперплоскостей, про-
изведение отражений от которых представляет собой данное вра-
щение, особенно просто для тех вращений, матрицы которых при-
водятся к диагональному виду и собственные числа которых являются
вещественными числами или комплексными числами единичного
модуля. Такое вращение может быть представлено в виде произ-
ведения вращений (1.304), (1.305)
х2г-1 х2г-1 с’г -ХЫ s|j у, ' ХП — х2*”1 sh ср -j- Х& Ch Ср,
'хэ = хэ (jФ21 — 1, 21)
и
—х2*-*1 ch ср—х2^ sh ср, 'х^=—х2*"1 sh ср—x2i ch ср,
'х$ = хо (j^2i—1, 2/),
(1.308)
(1.309)
120
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
где |e.2i_i|= 1, a |^.3i|=Z. Вращение (1.308) является произве-
дением отражений от двух гиперплоскостей, нормальными векто-
рами которых являются векторы
e2*-ich-g- + ^sh-|, e.2i_y (1.310)
ИЛИ
e2i-lsh7 + ^2ich J- e2i (1.311)
и отражения от которых в силу формулы (1.279) имеют вид
'х2*-1 = —х2*“хсЬф—x2^sh©, 1 'x2i~1 =— х21-1, 1
‘ } (1.312)
zx2* — х2*"1 shФ-f-x2*?» = xJ(j=£2i—1) J
'x$ = хз (J =/=2i — 1, 21) J
или
zx2*-1 — x2*-1 ch<9 — x2isha, ) 'x2i =—x2i, |
' । } (1.313)
'x2i = x2i“’1sh<p— x2*ch% ? и fx3 =xi (J^=2i). j
'хз — хз (/ Ф 2i — 1, 21) J
Так как оба вектора (1.310) являются векторами длины 1,
а оба вектора (1.311) являются векторами длины Z, мы видим,
что вращение (1.308) может быть представлено как произведе-
ние отражений от двух гиперплоскостей с перпендикулярами
вещественной длины и как произведение отражений от двух
гиперплоскостей с перпендикулярами чисто мнимой длины.
Вращение (1.309) является произведением отражений от двух
гиперплоскостей, нормальными векторами которых являются век-
торы
e2<-lchf + «2ish -J- e2i (1.314)
И
e2i_ish-| + e.3ich ^_х> (1.315)
отражения от которых в силу формулы (1.279) имеют вид
zx2*-1 ~ — х2^"1 ch ф—x2i sh ф,
г л/И —___________________________________уЛъ 1
'х2* — х2*-1 sh ф-|—х2^ ch ф, ? ’ I (1.316)
'xi =xi (j^=2i—l,2i) ГХ" =XJ °^2i) '
И
zx2*-1 = x2*"1 ch ф—x2/ sh ф, )
I v — 1 —___1 )
fx2i =x2i“1sh<? — x2*chcp, ? ’ I (1.317)
'xi =xi (j*2i— 1, 21) I >x} =-^ (7>2i—1). /
§ 12] ДВИЖЕНИЯ КАК ПРОИЗВЕДЕНИЯ ОТРАЖЕНИЙ 121
Так как векторы (1.314) являются соответственно векторами
длины 1 и Z, а векторы (1.315) являются соответственно векторами
длины I и 1, мы видим, что вращение (1.309) может быть пред-
ставлено как произведение отражения от гиперплоскости с пер-
пендикуляром вещественной длины на отражение от гиперпло-
скости с перпендикуляром чисто мнимой длины и как произведение
отражения от гиперплоскости с перпендикуляром чисто мни-
мой длины на отражение от гиперплоскости с перпендикуляром
вещественной длины.
Так как вращения (1.308) и (1.309) являются поворотами, соот-
ветственно на углы iv и а векторы (1.305) и (1.311) и,
следовательно, определяемые ими гиперплоскости составляют углы
Z-|-, а векторы (1.314) и (1.315) и, следовательно, определяемые
ими гиперплоскости составляют углы мы видим, что
произведение отражений от двух пересекающихся гиперплоско-
стей пространства lRn также является поворотом на удвоен-
ный угол между ними.
Так как произведение отражений от двух пересекающихся гипер-
плоскостей с перпендикулярами вещественной длины является в то же
время произведением отражений от двух пересекающихся гипер-
плоскостей с перпендикулярами чисто мнимой длины, а произве-
дение отражения от гиперплоскости с перпендикуляром веществен-
ной длины на отражение от гиперплоскости с перпендикуляром
чисто мнимой длины является в то же время произведением отра-
жения от гиперплоскости с перпендикуляром чисто мнимой длины
на отражение от гиперплоскости с перпендикуляром вещественной
длины, всякое вращение пространства lRn можно представить себе
как такое произведение отражений от гиперплоскостей с перпен-
дикулярами вещественной и чисто мнимой длины, в котором сна-
чала стоят отражения от гиперплоскостей с перпендикулярами
вещественной длины, а затем отражения от гиперплоскостей с пер-
пендикулярами чисто мнимой длины.
Всякое произведение отражений от двух гиперплоскостей про-
странства Rn и от двух гиперплоскостей пространства lRn с пер-
пендикулярами одновременно вещественной или чисто мнимой длины
можно непрерывно перевести в тождественное преобразование,
приближая соответственные гиперплоскости друг к другу; в то же
время сами отражения от гиперплоскостей нельзя непрерывно пере-
вести в тождественное преобразование, так же как произведения
отражений от двух гиперплоскостей пространства 1Rn, одна из
которых обладает перпендикуляром вещественной длины, а дру-
гая— перпендикуляром чисто мнимой длины. Поэтому произведения
чётного числа отражений пространства Rn от гиперплоскостей
с общей точкой составляют связную группу вращений этого
122 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
пространства, а произведения нечётного числа отражений про-
странства Rn от гиперплоскостей с общей точкой составляют
вторую связную компоненту этой группы вращений. Точно
так же произведения чётного числа отражений пространства Rn
от гиперплоскостей с перпендикулярами вещественной длины
и чётного же числа отражений этого пространства от гипер-
плоскостей с перпендикулярами чисто мнимой длины, имеющих
общую точку, составляют связную группу вращений этого про-
странства, произведения нечётного числа отражений первого
из этих видов того же пространства и нечётного числа отра-
жений второго из этих видов составляют вторую связную
компоненту этой группы вращений, а произведения чётного
числа отражений одного вида того же пространства и нечёт-
ного числа отражений второго вида составляют третью и
четвёртую связные компоненты этой группы вращений.
Таким образом группы вращений пространств Rn состоят
из двух связных компонент, а группы движений пространств lRn
состоят из четырёх связных компонент. Определители матриц
вращений, составляющих связную группу вращений пространства Rn
и две первые связные компоненты группы вращений простран-
ства lRn, равны 4-1, а определители матриц вращений, составляю-
щих вторую связную компоненту группы вращений пространства Rn
и вторые две связные компоненты группы вращений простран-
ства lRn, равны — 1.
Покажем теперь, что всякий перенос пространства Rn или lRn
также является произведением отражений от гиперплоскостей.
В том случае, когда вектор переноса неизотропен, перенос является
произведением отражений от двух параллельных гиперплоскостей,
перпендикулярных вектору переноса и находящихся на расстоянии,
равном половине вектора переноса: отражения от двух параллель-
ных гиперплоскостей
(а, х) = 0 и (а, х) = р (1.318)
имеют соответственно вид (1.279) и (1.277), и произведение этих
отражений является переносом
+ (1.319)
1 (a, a) v 7
Так как расстояние между параллельными гиперплоскостями
(1.318) равно , а длина вектора переноса (1.319) равна 2 -р^-,
мы видим, что произведение отражений от двух параллельных
гиперплоскостей является переносом на вектор, длина которого
равна удвоенному расстоянию между гиперплоскостями.
Наше рассуждение неприменимо в том случае, когда вектор
переноса изотропен, но перенос на любой вектор а является про-
§ 12] ДВИЖЕНИЯ КАК ПРОИЗВЕДЕНИЯ ОТРАЖЕНИЙ 123
изведением отражений от точек
гх~—х и 'х = (1.320)
центрами которых являются точки 0 и у, а всякое отражение от
точки можно представить в виде произведения отражений от п
взаимно ортогональных гиперплоскостей.
Таким образом, всякое движение пространств Rn и lRn
является произведением отражений от гиперплоскостей.
Отражение
от прямой
Поворот
вокруг
топки
Перенос
Скользящее
отражение
Черт. 6.
На черт. 6 изображены прямые, произведениями отражений от
которых являются различные виды движений плоскости /?2.
На черт. 7 изображены плоскости, произведениями отражений
от которых являются различные виды движений пространства /?3.
Поворотное
отражение
Скользящее
отражение
Винтовое
движение
Отраже- Поворот
ние от вокруг Перенос
плоское- прямой
ти
Черт. 7.
Так как базисные пространства групп движений пространств Rn
и lRn являются топологическими произведениями групп вращений
на группы переносов, а группы переносов этих пространств связны,
группы движений пространств Rn и lRn также состоят из
соответственно двух и четырёх связных компонент.
Так как группа движений пространства nR2n состоит из четы-
рёх связных компонент, а всякое антидвижение этого пространства
является произведением некоторого движения на некоторое фикси-
рованное антидвижение, группа движений и антидвижений про-
странства nR.2n состоит из восьми связных компонент.
124
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
§ 13. Однородные пространства
Определённые нами евклидовы пространства являются частными
случаями однородных пространств, теория которых имеет важное
значение для всего нашего дальнейшего изложения.
Если в топологическом пространстве Т определена группа G
гомеоморфных отображений этого пространства на себя, обладаю-
щая тем свойством, что для каждых двух точек пространства х
и у существует преобразование этой группы, переводящее точку х
в точку у, топологическое пространство Т называется однородным
пространством или пространством Клейна, а группа преобра-
зований G — транзитивной группой. Если же группа G, опреде-
лённая в топологическом пространстве Т, не обладает этим свой-
ством, группа G называется интранзитивной, а пространство Т
можно разбить на классы транзитивности, в каждом из которых
группа транзитивна.
Транзитивная группа G называется фундаментальной группой
однородного пространства Т. Подгруппа Н группы G, состоящая
из всех преобразований, оставляющих неподвижной одну и ту же
точку пространства Т, называется стационарной подгруппой дан-
ной точки. Если преобразование ^переводит элемент х в элементу,
то стационарные подгруппы Нх и Ну этих элементов связаны
соотношением
Ну = g~lHxg.
Простейшим примером однородного пространства с фундамен-
тальной топологической группой G является базисное пространство
группы О; каждому элементу g этой группы соответствует пре-
образование fx — xg этого пространства, являющееся гомеоморф-
ным отображением этого пространства на себя.
Более общим примером однородного пространства с фундамен-
тальной топологической группой G является фактор-пространство
группы G по правым смежным классам по подгруппе Н, не содер-
жащей нормального делителя группы G. Каждому элементу g
группы G соответствует преобразование '(Нх) = Hxg этого про-
странства, также являющееся гомеоморфным отображением; все
элементы подгруппы Н переводят в себя эту подгруппу, т. е.
подгруппа Н является стационарной подгруппой нашего простран-
ства; если бы элемент g принадлежал нормальному делителю N
группы G, содержащемуся в подгруппе Н, то смежный класс Hxg,
где х — произвольный элемент G, совпадал бы со смежным клас-
сом g±Hx, где gx— некоторый другой элемент того же нормаль-
ного делителя; но g±H = Н, так как М содержится в подгруппе Н,
и мы находим, что Hxg= Нх, т. е. все элементы W оставляют
неподвижными все точки данного пространства и фундаментальной
группой этого пространства является не G, а фактор-группа G/N.
§ 13] ОДНОРОДНЫЕ ПРОСТРАНСТВА 125
Всякое однородное пространство с фундаментальной топологи-
ческой группой G и стационарной подгруппой Н можно поста-
вить во взаимно однозначное соответствие с фактор-пространством
группы G по правым смежным классам по подгруппе Н: доста-
точно поставить в соответствие каждой точке х однородного про-
странства совокупность преобразований группы G, переводящих
некоторую фиксированную точку xQ этого пространства в дан-
ную точку х; если Н—стационарная подгруппа точки х0 и
g—какое-нибудь преобразование, переводящее точку х0 в х, то
все преобразования, переводящие х0 в х, составляют смежный
класс Hg.
Группы движений евклидовых пространств Rn, lRn и Rn(t)
транзитивны, так как они содержат в качестве подгруппы группу
переносов, являющуюся транзитивной (точка х переводится в точку у
переносом у — x-j-а, где а=у — х). Поэтому евклидовы про-
странства Rni lRn и Rn(i) являются однородными простран-
ствами.
Стационарными подгруппами групп движений пространств Rn,
lRn и Rn(i) являются группы вращений, при п = 1—группа,
состоящая из тождественного преобразования и отражения от
точки.
Группы вращений пространств Rn, lRn и Rn (I) интранзи-
т и в н ы, так как они переводят центры вращений в себя.
Транзитивная группа G преобразований пространства Т назы-
вается импримитивной группой преобразований, если простран-
ство Т можно разбить на такие классы, что при всяком преобра-
зовании этой группы каждый из этих классов переходит в один
из этих же классов. Эти классы, переставляемые импримитивной
группой, называются классами импримитивности. Если разбить
пространство на классы импримитивности невозможно, группа на-
зывается примитивной. Импримитивная группа пространства Т
представляет собой примитивную группу преобразований на фактор-
пространстве пространства Т по классам импримитивности.
Если фундаментальная группа G однородного пространства
со стационарной подгруппой Н импримитивна, то существует под-
группа К группы G, содержащая в свою очередь в качестве под-
группы группу Н. Если обозначим через х тот элемент, который
переводится в себя группой Н, то подгруппой К является под-
группа преобразований группы G, переводящих в себя тот класс
импримитивности, в котором находится элемент х. Верно и обрат-
ное: если существует подгруппа К группы G, содержащая в себе
в качестве подгруппы группу Н, то группа G импримитивна на
однородном пространстве с фундаментальной группой G и стацио-
нарной группой Н.
Группы движений прямых и R1(l) импримитивны, так как,
например, стационарная группа точки О состоит из тождественного
126 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
преобразования и отражения от точки О, а эта группа является
подгруппой группы преобразований
у = ±х-\-па, (1.321)
где а — фиксированное вещественное число, п— произвольное целое
число, и точки с координатами (1.321) при фиксированном х соста-
вляют классы импримитивности этих групп.
Группы движений пространств Rn, lRn, Rn(i) при п>1
примитивны, так как стационарной подгруппой каждой точки
является группа вращений вокруг этой точки и не существует под-
группы, промежуточной между этой подгруппой и группой всех
движений.
§ 14. Инволюционные преобразования и образы симметрии
Важную роль в геометрии однородных пространств играют
инволюционные преобразования — преобразования, совпадающие
со своими обратными преобразованиями, или, что то же, преобра-
зования, квадраты которых являются тождественными преобразо-
ваниями.
Найдём все инволюционные движения евклидовых пространств Rn
и lRn. Для этого прежде всего покажем, что все инволюционные
движения пространств Rn и lRn являются вращениями. В са-
мом деле, перенос не может быть инволюционным движением, так
как преобразования 'х = х-\-р и 'х = х—р совпадают в том и
только в том случае, когда р = — р, а этому условию удовлетво-
ряет только р = 0. Далее квадрат движения 'х — АхА-b является
движением
'х = А2х + A b + b. (1.322)
Оно может совпасть с тождественным преобразованием 'х = х
только при Ах = —х, но в последнем случае наше движение
b
является отражением от точки , т. е. также является враще-
нием.
Матрицы инволюционных вращений приводятся к диаго-
нальному виду, так как квадрат матрицы, не приводящийся к диа-
гональному виду, также является матрицей, не приводящейся
к диагональному виду, и не может быть матрицей тождественного
преобразования. Собственные числа матриц инволюционных вра-
щений равны -|-1 или —1, так как собственные числа матрицы,
являющейся квадратом некоторой матрицы, равны квадратам соб-
ственных чисел последней матрицы, а все собственные числа ма-
трицы тождественного преобразования равны 1. Поэтому инволю-
ОБРАЗЫ СИММЕТРИИ
127
§ 14]
ционными движениями пространств Rn и lRn являются вращения
с матрицами, приводимыми к виду
т
(1.323)
п— т
где т может принимать значения от 0 до п—1.
Как мы видели в § И, эти вращения являются отражениями
от m-мерных евклидовых плоскостей пространств Rn и lRn, при
m — 0 — отражениями отточек, при т — 1—отражениями от пря-
мых, при т = п—1—отражениями от гиперплоскостей. Таким
образом, инволюционными движениями пространств Rn и lRn
являются отражения от т-мерных евклидовых плоскостей, при
т = 0 — от точек, при т=\—от прямых, прит = п—1 —
от гиперплоскостей.
Всякое инволюционное преобразование фундаментальной группы
однородного пространства определяет образ симметрии — множе-
ство точек или других геометрических образов однородного про-
странства, переходящих в себя при данном инволюционном пре-
образовании. Инволюционное преобразование, определяющее образ
симметрии, называется симметрией относительно этого образа.
Так как всякое инволюционное движение пространств Rn и lRn
является отражением от т-мерной евклидовой плоскости, образами
симметрии пространств Rn и lRn являются т-мерные евкли-
довы плоскости, при т = 0 — точки, при т~ 1—прямые, при
т=^п — 1 — гиперплоскости.
Рассмотрим теперь пары образов симметрии. Прежде всего
рассмотрим две m-мерные плоскости пространства Rn в том общем
случае, когда они не пересекаются и не имеют параллельных на-
правлений. Пусть уравнения этих плоскостей имеют вид
х = й0+2М“ и J = (1.324)
а Ь
где а±, а2, ..., ат и blt Ь.2, ...» Ьт— векторы ортонормирован-
ных базисов в /n-мерных плоскостях, a t1, t2, . . ., tm п и1, и2, . . .,
ит— параметры. Построим (2m-|-1)-мерный параллелепипед, рёб-
рами которого являются векторы х—у, а19 ..., ат, bv ..., bm
128
ЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
(на черт. 8 изображён этот параллелепипед для двух скрещиваю-
щихся прямых пространства /?3). Обозначим через [Хр х2, . . хт]
определитель, составленный из координат т линейно независимых
векторов х1} х2, . . ., хт относительно любого ортонормирован-
ного базиса в определяемой ими m-мерной плоскости. Очевидно,
что абсолютное значение этого определителя не зависит от выбора
базиса и является объёмом m-мерного параллелепипеда, по-
строенного на векторах хр х2, ..., хт, В этих обозначениях
1ми (2т-|-1)-мерного параллелепипеда равен
абсолютному значению определителя
[X у, Cljj • • • > ^1» • • • >
а
— ^Ььиъ, ait ат, Ь1г Ьт\, (1.325)
ъ
который в силу свойств определителей равен
[а0 a^t ат, Ь±, ..., Ьт]. (1.326)
Поэтому объём нашего (2m1)-мерного
параллелепипеда не зависит от выбора то-
чек х и у на наших m-мерных плоскостях.
При произвольном выборе этих точек основание этого (2m -|- ^-мер-
ного параллелепипеда, равное объёму 2т-мерного параллелепипеда,
построенного на векторах а^ а2, ...» ат, bv Ь.2, . . ., Ьт, постоянно,
а боковое ребро, равное |х—j/|, переменно. Так как наш пере-
менный (2m + 1)-мерный параллелепипед имеет постоянный объём
и постоянное 2т-мерное основание, его высота также постоянна;
боковое ребро (2т-|-0"меРного параллелепипеда совпадает с его
высотой в том случае, когда оно перпендикулярно основанию,
во всех остальных случаях боковое ребро больше высоты. Отсюда
следует, что число |х—у[, равное расстоянию между точками
наших m-мерных плоскостей, достигает минимума в том случае,
когда это расстояние измеряется по общему перпендикуляру этих
плоскостей. Это расстояние называется минимальным расстоя-
нием двух т-мерных плоскостей пространства Rn.
В том случае, когда m-мерные плоскости не пересекаются,
но имеют общее ^-мерное направление, т. е. если построить пло-
скость, параллельную одной из этих плоскостей, через точку дру-
гой плоскости, полученные плоскости будут пересекаться по
/г-мерной плоскости; совершенно аналогично можно показать, что
на каждой из наших m-мерных плоскостей существует единствен-
ная ^-мерная плоскость, состоящая из оснований общих перпенди-
куляров данных m-мерных плоскостей. Все эти перпендикуляры
имеют постоянную длину, равную минимальному расстоянию между
данными плоскостями.
§ 14]
ОБРАЗЫ СИММЕТРИИ
129
Рассмотрим теперь углы между векторами двух /п-мерных
плоскостей пространства Rn. Для этого проведём две /п-мерные
плоскости, параллельные нашим плоскостям, и будем рассматри-
вать единичные векторы а и b в этих плоскостях, имеющие вид
a = ^aata и Ь = ^Ььиь, (1.327)
а b
где а2, . . ., ат и b±y b.2> . . ., bm — векторы ортонормированных
базисов наших плоскостей. Стационарным значениям углов между
векторами а и b соответствуют стационарные значения косинусов
этих углов, равных скалярным произведениям (а, Ь).
Для определения стационарных значений функции (а, Ь) при
условии (а, а) = (Ь, Ь) = 1 составим вспомогательную функцию
U = (a, Ь) + -^(а, а)-\~(Ь, Ь). (1.328)
Частные производные от этой функции переменных ta и иъ по
её аргументам равны
^ = (аЛ, b) + k{aa, а), д£ь = (а, Ьь) + 1(Ьь, Ь). (1.329)
Поэтому стационарные углы определяются векторами а и Ь, соот-
ветствующими тем значениям параметров ta и иъу которые являются
решениями системы уравнений
b)-\-k(aa, а) = 0, 1
(а, ЬЬ)+1(ЬЬ, Ь) = 0.)
(1.330)
Умножая первые из этих условий на ta и суммируя по а от 1
до т, а также умножая вторые из этих условий на иъ и сумми-
руя по b от 1 до т, мы получим:
(a, b)+k = O, 1
(а, Ь)+1 = 0, J
т. е. k = 1 = — (а, Ь).
Поэтому уравнения (1.330) принимают вид:
(аа, b — (a> b)a) = 0, 1
(Ьь> а — (а, Ь) Ь) = 0. J
(1.331)
(1.332)
Но вектор (а, Ь)а является ортогональной проекцией вектора#
на направление вектора а, а вектор (а, b)b — ортогональной проек-
цией вектора а на направление вектора #, вследствие чего вектор
Ъ— (а, Ь)а является вектором, направленным по перпендикуляру,
опущенному из конца вектора b на направление вектора а, век-
тор а — (а, b)b является вектором, направленным по перпендику-
ляру, опущенному из конца вектора а на направление вектора #.
9 Зак. 177. Б. А. Розенфельд
130 ЕВКЛИДОВЫ пространства [гл. I
Поэтому векторы а и Ь, определяющие стационарные углы, обла-
дают тем свойством, что перпендикуляр из конца одного из этих
векторов, опущенный на направление другого, перпендикулярен
ко всем базисным векторам плоскости второго вектора, т. е. ста-
ционарные углы осуществляются в двумерных плоскостях,,
перпендикулярных к обеим данным плоскостям.
Отсюда же видно, что и обратно, углы между всякими двумя
векторами данных плоскостей, лежащими в двумерных пло-
скостях, перпендикулярных к этим плоскостям, являются
стационарными.
Будем называть двумерные плоскости, перпендикулярные к обеим
данным плоскостям, направляющими листами этих плоскостей.
Заметим, что направляющие листы данных плоскостей перехо-
дят в себя при отражениях от обеих этих плоскостей. Для того
чтобы выяснить картину распределения направляющих листов, пе-
ренесём параллельно одну из наших /n-мерных плоскостей таким
образом, чтобы она пересекалась с другой из этих плоскостей, и
рассмотрим вращение, являющееся произведением отражений от
этих плоскостей. Тогда направляющие листы данных плоскостей
будут инвариантными двумерными плоскостями этого вращения.
Данные zn-мерные плоскости пересекаются с каждым из напра-
вляющих листов по паре прямых, пересекающихся под соответ-
ственным стационарным углом, причём при произведении отраже-
ний от /n-мерных плоскостей в каждой инвариантной двумерной
плоскости происходит произведение отражений от указанных пря-
мых. Но произведение отражений от двух прямых, пересекающихся
под углом ср, является поворотом на угол и, следовательно»
стационарные углы произведения отражений от двух zn-мерных
плоскостей равны удвоенным стационарным углам между этими
плоскостями. Так как инвариантные двумерные плоскости враще-
ния в пространстве Rn, соответствующие различным стационарным
углам, вполне ортогональны, т. е. каждый вектор, лежащий
в одной из плоскостей, ортогонален каждому вектору, лежащему
в другой из плоскостей, направляющие листы, в которых осу-
ществляются неравные стационарные углы двух т-мерных пло-
скостей, вполне ортогональны.
Так как произведение отражений от двух m-мерных плоскостей
пространства Rn, пересекающихся по ^-мерной плоскости, обла-
дает (и — 2т 4-&)-мерной точечно неподвижной плоскостью, поро-
ждённой пересечением данных m-мерных плоскостей и пересече-
нием вполне ортогональных им (и — т)-мерных плоскостей, это
произведение отражений является поворотом вокруг этой (п—2m~\~k)-
мерной плоскости и, следовательно, обладает не более чем т — k
стационарными углами. Поэтому две т-мерные плоскости про-
странства Rn, пересекающиеся по k-мерной плоскости, также
обладают не более чем т — k стационарными углами.
ОБРАЗЫ СИММЕТРИИ
131
§ 14]
Стационарные углы двух непересекающихся zn-мерных плоско-
стей осуществляются в тех же направляющих листах, что и ста-
ционарные углы параллельных им /n-мерных плоскостей, пересе-
кающихся между собой. Как мы видим, в случае непересекающихся
плоскостей направляющие листы определены с точностью до пере-
носа. Из свойств пересекающихся m-мерных плоскостей следует,
что две непере с екающие с я т-мерные плоскости с общим k-мер-
ным направлением обладают не более чем т — k стационар-
ными углами.
Стационарные углы двух zn-мерных плоскостей пространства Rn
могут быть определены следующим образом: если единичные век-
торы а и Ь, расположенные в наших плоскостях, пробегают все
возможные значения, то при фиксированных началах этих векто-
ров их концы пробегают (т—1)-мерные сферы в этих плоско-
стях. Поэтому угол между векторами а, Ь, являющийся непре-
рывной функцией этих пространств, определён на замкнутом мно-
жестве значений и поэтому достигает минимума, который мы
обозначим через срг Соответственные значения векторов а, b обо-
значим через а19 Ь±. Рассмотрим теперь только такие векторы а,
которые ортогональны вектору alt и только такие векторы Ь,
которые ортогональны вектору Ь±, Угол между такими векторами а,
b также достигает минимума, который мы обозначим через ф2. Из
построения угла <р2 видно, что он является стационарным углом
наших плоскостей. Очевидно, что угол Соответственные
значения векторов а, b обозначим через а2, b2. Далее рассмотрим
только такие векторы а, которые ортогональны векторам alt а2,
и только такие векторы д, которые ортогональны векторам д2.
Угол между такими векторами а, b также достигает минимума,
который мы обозначим через ф3. Из построения угла ср3 видно,
что этот угол также является стационарным углом наших плоско-
стей. Очевидно, что Продолжая этот процесс дальше,
мы найдём все стационарные углы ф2, .. ., наших плоско-
стей, из которых в том случае, когда плоскости обладают общим
Л-мерным направлением, k углов равны нулю.
Произведение отражений от двух непересекающихся /п-мерных
плоскостей пространства Rn не имеет неподвижной точки и может
быть представлено в виде произведения отражения от первой пло-
скости на отражение от плоскости, проведённой параллельно вто-
рой плоскости через пересечение общего перпендикуляра данных
плоскостей с первой плоскостью, умноженного на произведение
отражения от последней плоскости на отражение от второй из дан-
ных плоскостей. Первое произведение отражений является, как мы
видели, поворотом вокруг плоскости, инвариантные двумерные
плоскости которого совпадают с направляющими листами данных
плоскостей, а стационарные углы равны удвоенным стационарным
углам между этими плоскостями. Второе произведение отражений
9*
132
ЕВКЛИДОВЫ ПРОСТРАНСТВА.
[ГЛ. I
является переносом вдоль общего перпендикуляра данных плоско-
стей, причём, так как на этом общем перпендикуляре этот пере-
нос определяет произведение отражений от его точек пересечения
с данными плоскостями, а произведение отражений прямой от двух
её точек является переносом на удвоенное расстояние между ними,
второе произведение отражений является переносом на расстояние,
равное удвоенной длине общего перпендикуляра данных плоско-
стей.
В частности, две скрещивающиеся прямые пространства /?3
обладают одним общим перпендикуляром, длина которого равна
минимальному расстоянию между прямыми, и одним направляющим
листом, в котором осуществляется угол между прямыми. Произ-
ведение отражения от двух скрещивающихся прямых является вин-
товым движением, состоящим из поворота в направляющем листе
на удвоенный угол между прямыми и переноса по общему пер-
пендикуляру прямых на удвоенное минимальное расстояние между
прямыми.
Если все стационарные углы двух /n-мерных плоскостей, пере-
секающихся в одной точке, равны, произведение отражений от
этих плоскостей определяет паратактический поворот в порождён-
ной ими 2/п-мерной плоскости. В этом случае направляющие листы
этих плоскостей зависят от т—1 вещественных параметров, так
как через каждую прямую 2/п-мерной плоскости, проходящую че-
рез точку пересечения /n-мерных плоскостей, можно провести
единственную инвариантную двумерную плоскость паратактического
поворота. Будем называть такие /n-мерные плоскости паратак-
тичными. Предельным случаем паратактичных плоскостей являются
вполне ортогональные плоскости, у которых все стационарные
углы прямые. Направляющие листы вполне ортогональных /п-мер-
ных плоскостей зависят от 2(/п — 1) параметров, так как здесь
направляющим листом является любая двумерная плоскость, пере-
секающаяся с обеими данными плоскостями.
Для всяких двух образов симметрии в общем случае можно
определить числовые инварианты — определяемые этими двумя
образами числа, не изменяющиеся при преобразованиях фундамен-
тальной группы, и геометрические коварианты — определяемые
этими образами геометрические образы, преобразующиеся при пре-
образованиях фундаментальной группы вместе с определяющими
их образами симметрии.
Числовым инвариантом двух точек пространства Rn является
расстояние между ними, а геометрическим ковариантом двух точек
является прямая, соединяющая эти точки. Числовым инвариантом
двух гиперплоскостей пространства Rn является угол между ними,
если они пересекаются, и расстояние между ними, если они парал-
лельны, а геометрическими ковариантами их являются (п,— 2)-мер-
ная плоскость их пересечения, если они пересекаются, или система
ОБРАЗЫ СИММЕТРИИ
133
§ 14]
их общих перпендикуляров, если они параллельны. Числовыми
инвариантами двух /n-мерных плоскостей пространства Rn являются
их стационарные углы и минимальное расстояние, а геометриче-
скими ковариантами — их направляющие листы и общий перпен-
дикуляр.
Покажем, что числовые инварианты и геометрические кова-
рианты двух образов симметрии можно найти совершенно общим
способом для любых образов симметрии: за числовые инварианты
можно принять числовые инварианты преобразования фунда-
ментальной группы, являющегося произведением симметрий
относительно данных образов (т. е. числа, определяющие кано-
нический вид матрицы этого преобразования, например, собствен-
ные числа и степени элементарных делителей этой матрицы), а за
геометрические коварианты — точки и другие геометрические
образы, переходящие в себя при том же преобразовании фун-
даментальной группы (например, неподвижные точки и инвариант-
ные прямые и плоскости этого преобразования).
В самом деле, обозначим симметрии относительно двух данных
образов симметрии х19 х2 через s2. Если преобразование а
переводит образы симметрии хх, х2 в образы хх, х2, то симме-
трии относительно этих последних образов имеют вид as^a"1,
as2a~\ Действительно, если точка х переходит при симме-
трии в точку 'х, а при преобразовании а точки х, 'х пере-
ходят в точки х, 'х, то преобразование точки х в точку гх является
произведением трёх преобразований: преобразования точки х
в точку х9 т. е. а"1, преобразования точки х в точку 'х, т. е. s,
и преобразования точки 'х в точку 'х, т. е. а. Поэтому произве-
дение симметрий относительно образов xt и х2 имеет вид
as-ip-1 as2~x — a ($х$2) я-1, (1 -333)
откуда видно, что преобразования 5Х52 и имеют одни
и те же числовые инварианты, а точки и геометрические образы,
переходящие в себя при преобразовании я ($х$2) я”1, получены из
таких же точек и геометрических образов преобразования $х$2
с помощью того же преобразования а, при котором образы х19
х2 переходили в образы х19 х2.
Мы видели, что расстояние двух точек равно половине длины
вектора переноса, являющегося произведением отражений от этих
точек, а прямая, соединяющая эти точки, переходит в себя при
этом переносе. Мы видели, далее, что угол пересекающихся ги-
перплоскостей равен половине угла поворота, являющегося произ-
ведением отражений от этих гиперплоскостей, расстояние двух
параллельных гиперплоскостей равно половине длины вектора пе-
реноса, являющегося произведением отражений от этих гиперпло-
134 ЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. I
скостей, а (п — 2)-мерная плоскость пересечения первых гипер-
плоскостей и система общих перпендикуляров вторых гиперпло-
скостей переходят в себя соответственно при этих повороте и
переносе. И, наконец, мы видели, что стационарные углы и ми-
нимальное расстояние двух w-мерных плоскостей соответственно
равны половинам стационарных углов поворота и половине длины
вектора переноса, на которые может быть разложено произведе-
ние отражений от этих плоскостей, а направляющие листы и
общий перпендикуляр этих плоскостей переходят в себя при про-
изведении отражений от них.
Совершенно аналогично определяются числовые инварианты и
геометрические коварианты двух /n-мерных евклидовых плоскостей
пространства lRn, матрицы произведения отражений от которых
приводятся к диагональному виду, — стационарные углы, минималь-
ное расстояние, направляющие листы и общий перпендикуляр,
обладающие свойствами, аналогичными свойствам стационарных
углов, минимальных расстояний, направляющих листов и общих
перпендикуляров т-мерных плоскостей пространства Rn, Однако
в отличие от пространства Rn в пространстве lRn имеются пары
плоскостей, матрицы произведения отражений от которых не при-
водятся к диагональному виду и которые поэтому определяют чи-
словые инварианты и геометрические коварианты, не имеющие
аналогов в пространстве Rn.
ГЛАВА ВТОРАЯ
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
КАК СФЕРЫ С ОТОЖДЕСТВЛЁННЫМИ
ДИАМЕТРАЛЬНО ПРОТИВОПОЛОЖНЫМИ ТОЧКАМИ
§ 1. Геометрия на сферах в евклидовых пространствах
Как мы уже говорили, гиперсферой пространств Rn и lRn на-
зывается геометрическое место точек этого пространства, отстоя-
щих от одной точки, называемой центром гиперсферы, на одном
и том же расстоянии, называемом радиусом гиперсферы. При
л = 3 гиперсфера называется сферой, при п — 2— окружностью.
Точки гиперсферы пространств Rn и lRn с центром в точке а и
радиусом г удовлетворяют уравнению
(х— а, х — а)—г\ (2.1)
Дифференцируя это уравнение, мы получим:
(dx, х — a) — Q, (2.2)
т. е. касательная к гиперсфере пространств Rn и lRn ортого-
нальна радиусу-вектору точки касания.
При ортонормированном базисе в пространствах Rn и lRn урав-
нение гиперсферы радиуса г с центром в начале имеет соответ-
ственно вид
5 О*)2 = г* (2.3)
i
И
2si(xi)2 = /'2- (2.4)
i
Так как в пространстве lRn при 1^п в отличие от простран-
ства Rn имеются отрезки как вещественной, так и чисто мнимой
и нулевой длины, в пространстве lRn при 1фп имеется три
вида гиперсфер — гиперсферы вещественного, чисто мнимого и
нулевого радиуса.
Уравнение (2.4) в случае гиперсфер чисто мнимого радиуса
r = qi принимает вид
2 е» (^)2 = — 72> (2.5)
136 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
а в случае гиперсфер нулевого радиуса это уравнение принимает
вид
Ssi(-^)2 = 0. (2.6)
i
Уравнения (2.4) и (2.5), если их рассматривать в простран-
стве Rn, являются уравнениями гиперболоидов, уравнения (2.6)
являются уравнениями конусов. В частности, уравнения окружно-
стей плоскости 1/?2, если их рассматривать на плоскости Т?2,
являются уравнениями гипербол} заметим, что ортогональные на-
правления плоскости */?2 являются сопряжёнными направлениями
относительно этих гипербол; в самом деле, если произвести отра-
жение от диаметра, проведённого в одном из этих направлений,
как окружность, так и хорды, проведённые во втором из этих
направлений, переходят в себя и, следовательно, эти хорды де-
лятся первым диаметром пополам.
С каждой гиперсферой пространства lRn связан асимптоти-
ческий конус, состоящий из её асимптот, проходящих через её
центр. Асимптотический конус гиперсферы (2.1) определяет
уравнением
(х — а, х — а) = 0, (2.
откуда видно, что асимптотический конус гиперсферы является
изотропным конусом её центра.
Топологическая структура гиперсфер пространств lRn опреде-
ляется следующей теоремой: гиперсфера вещественного радиуса
пространства lRn гомеоморфна топологическому произведению
гиперсферы пространства Rn~i на пространство Rv Для дока-
зательства рассмотрим гиперсферу (2.4) и цилиндр
= (2.8)
i
(те координаты xi, которые в уравнении (2.4) умножались на—1,
в уравнении (2.8) умножаются на 0). Так как в уравнении (2.8)
отсутствуют I координат, а остальные п — I координат определяют
пространство Rn-i, в котором уравнение (2.8) является уравнением
гиперсферы, цилиндр (2.8) состоит из параллельных Z-мерных пло-
скостей, проходящих через точки гиперсферы пространства
т. е. гомеоморфен топологическому произведению гиперсферы про-
странства Rn~i на пространство /?г. Спроектируем теперь нашу гипер-
сферу (2.4) на цилиндр (2.8) прямыми, перпендикулярными к /-мер-
ной плоскости х* — £--^ 1 xi (плоскость, параллельная плоским
образующим цилиндра, проходящая через начало). Эта проекция
устанавливает взаимно однозначное и взаимно непрерывное соот-
ветствие между гиперсферой (2.4) и цилиндром (2.8).
§ И
ГЕОМЕТРИЯ НА СФЕРАХ
137
Так как, умножая метрическую форму пространства lRn на—1,
мы получим пространство n~lRn> а гиперсферы вещественного ра-
диуса пространства lRn при этом превратятся в гиперсферы чисто
мнимого радиуса пространства n~lRn и обратно, мы находим, что
гиперсфера чисто мнимого радиуса пространства lRn гомео-
морф на топологическому произведению гиперсферы простран-
ства Rt на пространство Rn-i-
В частности, так как пространство R± является прямой, а роль
гиперсферы пространства R± играет пара точек, гиперсферы ве-
щественного радиуса пространства rRn гомеоморфны тополо-
гическому произведению гиперсферы пространства Rn_± на
прямую, а гиперсферы чисто мнимого радиуса пространства 1R^
гомеоморфны топологическому произведению пары точек на
пространство т. е. двум пространствам Rn_r. Отсюда
видно, что гиперсферы чис-
то мнимого радиуса про-
странства 1Rn состоят из
двух полостей, каждая из
которых гомеоморфна
пространству Rn^v Так
как гиперсферы пространств
Rm при т > 1 связны, так
же как сами пространства
Rm, все гиперсферы прост-
ранств lRn, кроме гипер-
сфер чисто мнимого радиуса
пространств 1Rn, связны.
На черт. 9 изображены
сферы вещественного и чисто
мнимого радиусов простран-
ства 1/?3 и гомеоморфные отображения сферы вещественного ра-
диуса на круглый цилиндр конечной высоты без границы (гомео-
морфный топологическому произведению окружности и прямой) и
одной из полостей сферы чисто мнимого радиуса на открытый круг
(гомеоморфный плоскости /?2) с помощью проектирования из центра
сферы.
Из доказанной нами теоремы видно, что в отличие от гипер-
сфер пространств Rn, которые являются ограниченными замкнутыми
множествами точек и поэтому компактны, гиперсферы про-
странств lRn в силу некомпактности пространств RT некомпактны.
На гиперсферах пространств lRn имеются прямолинейные обра-
зующие— прямые, целиком лежащие на этих гиперсферах, и пло-
ские образующие — плоскости, целиком лежащие на этих гипер-
сферах. Прямолинейные образующие гиперсфер пространств lRn
являются изотропными прямыми. В самом деле, потребуем,
чтобы прямая, соединяющая точки х и у гиперсферы (х, х) — г*,
138
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
целиком лежала на этой гиперсфере. Так как произвольная точка
прямой, соединяющей точки х и у, определяется радиусом-векто-
ром &х + (1—k)y, то наше условие примет вид
(kx + (1 — k) у, kx 4- (1 — k) у) = г2 (2.9)
или
&2(х, х)4-(1— &)2(.У, j/)4-2&(1—&)(х, = А (2.10)
Отсюда в силу того, что (х, х) = (у, y) = rQ, получаем:
2 (&2 — &) г22 (х, y)(k — &2) = 0» (2.11)
т. е.
(х, у) ~ г2. (2.12)
Но в этом случае
|x—_у|2 = (х —у, х— у) = (х, х) + (Л у) — 2(х, у) =
= Г2_[_Г2_ 2г2 —0, (2.13)
т. е. наша прямая действительно является изотропной.
Отсюда непосредственно следует, что т-мерные плоские обра-
зующие гиперсфер пространства lRn являются изотропными
плос костями.
Гиперсферы вещественного радиуса в пространстве lRn при
обладают l-мерными плоскими образующими, а гипер-
сферы чисто мнимого радиуса в том же пространстве обла-
дают (Z—V)-мерными образующими плоскостями и эти гипер-
сферы не обладают плоскими образующими большей размерности.
В самом деле, в пространстве lRn можно выбрать ортонорми-
рованный базис, состоящий из I векторов е19 . . ., ег чисто мнимой
длины и п — I векторов ем, ..., еп вещественной длины. Этот
базис всегда можно выбрать таким образом, чтобы взаимно орто-
гональные изотропные векторы •••> + (&<С0
составили бы ортогональный базис данной ^-мерной изотропной
плоскости. Отсюда видно, что в пространстве lRn при Z<;~
максимальная размерность изотропной плоскости и, следовательно,
плоской образующей гиперсферы равна Z. Так как данная ^-мер-
ная изотропная плоскость является плоской образующей гипер-
сферы, в пространстве lRn можно выбрать такой ортонормирован-
ный базис указанного выше типа, чтобы один из базисных векторов
был направлен по радиусу гиперсферы и, следовательно, был бы
ортогонален векторам е19 ..., ек, е1+1, ..., е1+к, причём в случае
гиперсферы вещественного радиуса этот базисный вектор имеет
вещественную длину, а в случае гиперсферы чисто мнимого ра-
диуса— чисто мнимую длину. Поэтому размерность плоской обра-
зующей гиперсферы вещественного радиуса в пространстве lRn
§ 1] ГЕОМЕТРИЯ НА СФЕРАХ 139
при не может быть больше /, а размерность плоской обра-
зующей гиперсферы чисто мнимого радиуса в том же пространстве
не может быть больше I—1. Эти границы действительно дости-
гаются, так как примером Z-мерной плоской образующей гипер-
сферы (2.4) является /-мерная плоскость:
-—х1+ хг+1 = — х2 + хг+2 = ... = — хг4-х2г =
= х2г+х— г = х21+2 = . . . = хп = 0, (2.14)
а примером (/—1)-мерной плоской образующей гиперсферы (2.5)
является (/—1)-мерная плоскость:
-—X1 + XZ + 1 = Х2-|-Хг + 2= . . . “ Хг“14”х2г“’1 “
-- х1 — q = х21 = x2l+1 = .. . — хп — 0. (2.15)
В частности, гиперсферы пространства Rn и гиперсферы чисто
мнимого радиуса пространства 1Rn не имеют ни прямолинейных
ни плоских образующих, гиперсферы вещественного радиуса про-
странства и гиперсферы чисто мнимого радиуса простран-
ства 2Rn обладают прямолинейными образующими, гиперсферы
вещественного радиуса пространства 2Rn и гиперсферы чисто мни-
мого радиуса пространства *Rn обладают двумерными плоскими
образующими и т. д.
Будем называть вещественные гиперсферы без прямолинейных
образующих овальными гиперсферами, а гиперсферы с прямолиней-
ными образующими, но без плоских образующих, линейчатыми
гиперсферами.
Будем называть т-мерными сферами пространств Rn и lRn
сечения гиперсфер этих пространств (т-]—1)-мерными плоскостями.
Сечение гиперсферы (2.3) пространства Rn (m-j-1)-мерной пло-
скостью
хш+2 = pm*2, хт+3~рт+3, ..., хп = рп, (2.16)
является гиперсферой пространства Rm+1
S(x°)2=r2 —2(р“)2 (а=1, .... «4-1; м=«4-2........./г), (2.17)
а и
т. е. сферой того же типа, но с радиусом, в общем случае мень-
шим радиуса гиперсферы; при рт+2 = — ... — рп — о,
т. е. когда плоскость (2.16) проходит через центр гиперсферы,
радиус сферы (2.17) принимает своё максимальное значение, равное
радиусу гиперсферы. Поэтому /n-мерные сферы пространства Rn,
высекаемые из гиперсферы плоскостями, проходящими через её
центр, называются большими сферами гиперсферы. То же назва-
ние применяется и к /n-мерным сферам пространства lRn, хотя
в этом случае большие сферы уже не являются сферами макси-
мального радиуса. Сечения гиперсфер пространств Rn и lRn дву-
мерными плоскостями называются окружностями, в частности
140
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. I
сечения гиперсфер двумерными плоскостями, проходящими через
их центр, называются большими окружностями.
Если две большие сферы гиперсферы пересекаются, они пере-
секаются по большой сфере, так как если две плоскости, прохо-
дящие через центр гиперсферы, пересекаются по плоскости, эта
плоскость также проходит через центр. В частности, если это
пересечение является двумерной плоскостью, две большие сферы
пересекаются по большой окружности, а если это пересечение является
прямой, две большие сферы пересекаются по паре диаметрально
противоположных точек гиперсферы. Поэтому если две большие
окружности гиперсферы пересекаются, они пересекаются по паре
её диаметрально противоположных точек.
Две точки гиперсферы пространств Rn и lRn можно соединять
кривыми, имеющими вещественную или чисто мнимую длину. Поэтому
можно поставить вопрос о геодезических линиях гиперсферы,
т. е. таких линиях на гиперсфере, длина дуги которых имеет ста-
ционарное значение, которое в случае вещественных длин дуги
является минимальным, и о вполне геодезических поверхностях
на гиперсфере, т. е. таких поверхностях, что всякая геодезическая
линия гиперсферы, соединяющая две точки такой поверхности,
целиком лежит на этой поверхности.
Так как при отражении относительно плоскости, проходящей
через центр гиперсферы, эта гиперсфера переходит в себя, геоде-
зическая линия, соединяющая две точки большой сферы ила
окружности, должна целиком лежать на этой сфере или
окружности-, если бы она не лежала на этой сфере или окруж-
ности, при отражении относительно плоскости она перешла бы
в другую кривую той же длины, т. е. в другую геодезическую
линию, соединяющую те же точки. Но геодезические линии являются
решениями вариационной задачи и, следовательно, интегральными
кривыми системы дифференциальных уравнений, вследствие чего
существуют такие окрестности точек, через каждые две точки кото-
рых можно провести единственную геодезическую линию. Следова-
тельно наше предположение неверно, и геодезическая линия, со-
единяющая две точки большой сферы или окружности, целиком
лежит на этой сфере или окружности.
Поэтому большие окружности гиперсфер пространств Rn
и lRn являются геодезическими линиями этих гиперсфер,
а большие т-мерные сферы гиперсфер пространств Rn и lRn
являются вполне геодезическими поверхностями этих гипер-
сфер.
Отсюда следует, что за сферическое расстояние между двумя
точками гиперсферы пространств Rn и lRn следует считать рас-
стояние между этими точками, измеренное по большой окружности,
соединяющей эти точки, равное абсолютному значению произведе-
ния угла между двумя радиусами-векторами этих точек, на радиус
ГЕОМЕТРИЯ НА СФЕРАХ
141
§ И
гиперсферы, т. е. сферическое расстояние <о между двумя точ-
ками х и у гиперсферы радиуса г с центром в начале опре-
деляется соотношением
(2.18)
В случае гиперсферы чисто мнимого радиуса qi эту формулу
можно переписать в виде
ch- = —(2.19)
q q*
Касательные гиперплоскости к гиперсфере Rn и к гипер-
сфере чисто мнимого радиуса пространства rRn являются евкли-
довыми гиперплоскостями индекса 0: для гиперсфер простран-
ства Rn это очевидно; в пространстве rRn всякий ортогональный
базис содержит только один вектор чисто мнимой длины, и так
как касательная гиперплоскость к гиперсфере ортогональна радиусу-
вектору точки касания, а в данном случае этот радиус-вектор имеет
чисто мнимую длину, все векторы в этой гиперплоскости являются
векторами вещественной длины, т. е. эта гиперплоскость является
пространством Rn_v
Касательные гиперплоскости к гиперсферам вещественного
радиуса пространства 1Rn и к гиперсферам вещественного и
чисто мнимого радиуса пространств lRn при I > 1 являются
евклидовыми гиперплоскостями ненулевого индекса*, в случае
гиперсфер вещественного радиуса пространства 1Rn радиус-вектор
точки касания имеет вещественную длину и всякий ортогональный
базис касательной гиперплоскости содержит один вектор чисто мнимой
длины, т. е. эта гиперплоскость является пространством
В случае гиперсфер вещественного или чисто мнимого радиуса
пространства lRn при Z > 1 во всяком ортогональном базисе каса-
тельной гиперплоскости всегда имеется соответственно Z и Z— 1
векторов чисто мнимой длины, т. е. эта гиперплоскость является
соответственно пространством lRn_r или
Сферическое расстояние между двумя бесконечно близкими точ-
ками сферы является бесконечно малым, равносильным расстоянию
между этими точками, измеренному по хорде, так как первое рас-
стояние относится ко второму, как половина угла между радиу-
сами-векторами бесконечно близких точек к синусу этой половины
угла. Поэтому, заменяя эти бесконечно малые их главными линей-
ными частями, мы можем выразить линейный элемент (дифферен-
циал дуги) du в точке сферы по формуле
= dx). (2.20)
Из свойств касательных гиперплоскостей гиперсфер пространств
Кп и lRn следует, что правая часть формулы (2.20) является
142
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
положительно определённой квадратичной формой от диффе-
ренциалов координат в случае гиперсферы пространства Rn
и гиперсферы чисто мнимого радиуса пространства xRn и не
является такой формой в случае гиперсфер вещественного
радиуса пространства ARn и гиперсфер вещественного и чисто
мнимого радиуса пространств lRn при I > 1.
Таким образом, на гиперсферах пространства Rn и гипер-
сферах чисто мнимого радиуса пространства 1Rn сферические-
расстояния всегда вещественны, а на гиперсферах веществен-
ного радиуса пространства yRn и на гиперсферах вещественного
и чисто мнимого радиуса пространств lRn при I > 1 расстоя-
ния могут быть как вещественными, так и чисто мнимыми
и нулевыми.
Сечение гиперсферы (2.4) пространства lRn (/n-|- 1)-мерной
евклидовой плоскостью, уравнение которой при надлежащем выборе
базиса может быть записано в виде (2.16), является гиперсферой
(т-\~ 1)-мерн°го евклидова пространства:
2 еа (Х“)а = Г2 — S su (Ри)2
» и (2.21)
(а—1, ..., /п-|-1; и = т-\-2, ..., п).
В частности, сечения гиперсферы пространства lRn двумерными
евклидовыми плоскостями являются окружностями этих плоскостей.
Так как уравнение окружности евклидовой плоскости индекса О
или 2 может быть приведено к виду
(х1)2 + (х2)2 = р2, (2.22)
а уравнение окружности евклидовой плоскости индекса 1 может
быть приведено к виду
(х1)2 —(х2)2^р2, (2.23)
мы находим, что в первом случае окружности являются замкнутыми
кривыми, имеющими вид обычных окружностей, а во втором слу-
чае окружности состоят из двух ветвей, простирающихся в беско-
нечность, т. е. имеют вид гипербол. Поэтому будем называть
окружности, высекаемые из гиперсфер евклидовыми плоскостями
индекса 0 и 2, эллиптическими окружностями, а окружности,
высекаемые из гиперсфер евклидовыми плоскостями индекса 1,
гиперболическими окружностями.
Сечение гиперсферы (2.4) пространства lRn (т 4- 1)-мерной
полуевклидовой плоскостью имеет вид параболоида простран-
ства в самом деле, если в левой части уравнения гиперсферы
имеется слагаемое (х*)2— (х^)2, а в числе уравнений полуевклидо-
вой плоскости имеется уравнение х?:—^=-р, в левой части урав-
нения /n-мерной сферы имеется произошедшее от слагаемого
ГЕОМЕТРИЯ НА СФЕРАХ
143
§ i]
(х*)- — (х^)2 = (х* — хЗ) (х* + хэ) слагаемое р (х* + хэ), причём
координаты х\ х$ входят только в это слагаемое. В частности,
уравнения сечений гиперсферы пространства lRn двумерными полу-
евклидовыми плоскостями могут быть приведены к виду
(х1)2^^2, (2.24)
т. е. эти сечения являются кривыми, имеющими вил парабол. Будем
называть окружности, высекаемые из гиперсфер полуевклидовыми
плоскостями, параболическими окружностями. В том случае,
когда полуевклидова плоскость проходит через центр гиперсферы,
в уравнениях вида xi — xi=p, входящих в состав её уравнений,
р = 0 и уравнения сечений гиперсферы двумерными полуевклидо-
выми плоскостями, проходящими через её центр, могут быть при-
ведены к виду
(х1)2^, (2.25)
т. е. эти сечения являются парами параллельных прямолинейных
образующих гиперсферы.
В общем случае на гиперсферах пространств lRn имеется три
вида больших окружностей — эллиптические большие окружности,
гиперболические большие окружности и пары параллельных прямо-
линейных образующих, играющие роль параболических больших
окружностей. На гиперсферах чисто мнимого радиуса пространств rRn
имеется только один вид больших окружностей — гиперболические
большие окружности. На черт. 10 изображены эллиптические, гипер-
болические и параболические окружности на сферах вещественного
и чисто мнимого радиуса в пространстве 1/?3.
Будем называть сферическим треугольником треугольник на
гиперсфере пространства Rn или lRn, ограниченный тремя дугами
больших кругов. Длины сторон сферических треугольников и вели-
чины их углов, измеряемые как углы между касательными к их
сторонам, проведёнными в их вершинах, связаны формулами сфе-
рической тригонометрии.
Выведем формулы сферической тригонометрии в простран-
ствах Rn и г/?п1). Прежде всего докажем сферическую тео-
рему косинусов: во всяком сферическом треугольнике сто-
роны а, Ь, с и угол С, лежащий против стороны с, связаны
соотношением
с _ а b а . b , q о z? \
cos ~ = cos — cos--h sin — sin — cos C. (2.26)
r r r 1 r r v 7
x) Co сферической тригонометрией на сферах пространства чита-
тель может более подробно познакомиться по учебнику Степанова [1].
вывод формул сферической тригонометрии с помощью векторного исчи-
сления приведён Я. С. Дубновым [3], стр. 162.
144
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Для этого рассмотрим сферический треугольник с вершинами х,
у, z (на черт. 11 изображён такой треугольник на сфере в про-
странстве /?3 и на сфере чисто мнимого радиуса в пространстве
Эллиптические
окружности
окружности
Черт. 10.
окружности
Обозначим теми же буквами х, у, z радиусы-векторы этих точек,
выходящие из центра сферы. Стороны сферического треугольника,
противолежащие точкам х, у, z, обозначим соответственно а, Ь, с,
а угол треугольника при вершине z обозначим С. Продолжим
радиусы-векторы точек х и у до пересечения с плоскостью, каса-
§ и
ГЕОМЕТРИЯ НА СФЕРАХ
145
тельной к сфере в точке z. Радиусы-векторы полученных точек
пересечения обозначим kx и 1у, где k и I— надлежащим образом
Черт. 11.
выбранные вещественные числа. Длины сторон треугольника в силу
формулы (2.18) связаны с векторами х, у, z формулами:
008^ = 1^), (2.27)
Г r2 ’ г Г2 Г Г2 7
Числа k и I мы найдём из условия ортогональности вектора z
векторам kx — z и ly— z\
(kx— z, z) = 0, (ly — z, г) = 0, (2.28)
откуда
k (x, z) = (z, z) = r2, I(y9 z) = (z, z) = r2 (2.29)
и
Угол С является углом между векторами kx — z и ly — z, и так как
\kx — z\* = k?(x, х) — 2k (х, z)~]-~(z, z) =
= Aar2 —2£^ + r2 = (£2—l)r2==r2tg2y, (2.31)
|/у — z\* = P(y, y) — 2l(y, z) + (z, z) =
= Pr^ — 2/ + r2 = (/2 — 1) Г2 = Г2 tg2 ~ (2.32)
И
(kx — z, ly — z) = kl(x, y) — k(x, z) — l(yt z)-^-(zt z) =
= kl(x, y) — k^ — lT+f* =
(COS C \
---1), (2.33)
COS — cos — /
r r /
10 Зак. 177. Б. А. Розенфельд
146
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
окончательно получим:
cosC= (**-*./;-*) =
| kx — Z | | /у — Z |
(с \
cos — \
~а b 1 I с а b
cos — cos — / cos cos — cos —
—-—- =—---------------4—-> (2-34)
r tg — • r tg— sin — Sin —
& r & r r r
откуда непосредственно получаем формулу (2.26).
Если нам дан сферический треугольник с углами при верши-
нах А, В, С и противолежащими им сторонами a, b, с, то из
формулы (2.26) и получающихся из неё заменой обозначений формул
cos — = cos у cos — sin — sin — cos A, (2.3d)
cos — = cos — cos-------sin — sin — cos В (2.36)
r r r 1 r r v z
аналитическим путём можно вывести целый ряд тригонометрических
соотношений между элементами сферического треугольника. В самом
деле, вычисляя
sin2 С__1 — cos2 С
. о с -9С
sin2 — sin2 —
г г
. а . Ь / с а b
sin2 — sin2----------cos-----------cos — cos —
r r \ r r r
sin2 — sin2 — sin2 —
r r r
1 9 O^l 9 9 9 C
l — cos2 ---cos2 ---k COS2 — COS2----cos2 —
r r r r r
. „ a . o b . _ c
sin2 — sin2 — sin2 —
r r r
О Ь C 9^9»
2 cos — cos — cos-cos2— COS2 —
r r r r r
sin2 — sin2 — sin2 —
r r r
1 О О Ь 9 C f О о b c
1—COS2-------COS2------COS2-----h 2 COS — COS — COS —
r r r 1 r r r
, o a . o b . 9 c
sin2 — sin2 — sin2 —
r r r
(2.37)
мы находим, что полученное выражение совершенно симметрично
относительно а, Ь,
sin2 А
отношения: ------- и
. 9 о
с; следовательно, тому же выражению равны
sin2 В
sin2 —
г
т. е.
sin А sin В _________ sin С
. а . b ~ с~
sin — sin — sin —
г г г
(2.38)
Мы получили сферическую
теорему синусов.
§ и
ГЕОМЕТРИЯ НА СФЕРАХ
147
Далее, подставляя значение cos у из (2.35) в (2.34) и (2.36),
мы получим:
с b I Ь с । . b . с Л .
cos у = cos у ( :os у cos у + sin у sin у cos А\ +
+ sin у sin у cos С, (2.39)
Ь с / Ь с , . Ь . с .\.
COS у = COS у I COS у cos — -ф- Sin у sin у <os А \-\-
-ф- siny sin у cos В. (2.40)
Из (2.39) получаем:
с /1 с. b \ с . о b
cos — I 1 — cos4 — I = cos — sinJ — =
r \ r) r r
b . b . с л । . л « b л хл -f \
= cos — sin — sin — cos A + sin — sin — cos C, (2.41)
r r r 1 r r 7
?. e.
c . b b . c . i • сь л c\x
cos — sin — cos — sin — cos А Ч- sin — cos C. (2.42)
r r r r ' r v
Точно так же из (2.40) получим:
ros — sin ~ — cos — sin — cos A -4- sin — cos B. (2.43)
r r r r 1 r
С помощью (2.38) формулы (2.42) и (2.43) можно переписать
в виде
с b
cos у sin В — cos у sin С cos А sin A cos С, (2.44)
Ь с
cos у sin С = cos у sin В .os A -ф- sin A cos В. (2.45)
Подставляя cos у из (2.45) в (2.44), получим:
с . Г»
cos — sin В =
г
cos — sin В cos А sin A cos В
=-------L------- -----------sin q cos д । Sjn д cos q (2.46)
или
cos у sin В (1 — cos2 A) = cos у sin В sin2 A =
— sin A cos A cos В sin A cos C. (2.47)
Сокращая на sin Л, получим окончательно:
cos С = — cos A cos В -ф- sin A sin В cos у. (2.48)
10*
148 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА {гл, II
Мы получили двойственную сферическую теорему
косинусов, не имеющую аналога в плоской тригонометрии.
Эта теорема показывает, что длина каждой стороны сферического
треугольника является функцией углов этого треугольника, откуда
следует, что на сферах не существует неравных треугольников
с соответственно равными углами.
Если данный сферический треугольник — прямоугольный тре-
угольник с прямым углом С, то сферическая теорема косинусов (2.34)
даёт нам в качестве частного случая сферическую теорему
Пифагора:
с а b /с» . _.
cos у = cos у cos у. (2.49)
В этом случае сферическая теорема синусов (2.38) даёт нам:
sin А ________________________ 1
, а . с
sin — sin —
г г
т. е.
sin у = siny sin А. (2.51)
Мы получили теорему синусов для прямоугольного сфе-
рического треугольника.
Формула (2.42) при С = у даёт нам:
с . b Ь . с я
cos у sin у — cos у sin у cos А, (2.52)
т. е.
Ь с
~ cos А. (2.53)
Мы получили первую теорему тангенсов для прямоуголь-
ного сферического треугольника. Деля левую и правую части фор-
мулы (2.51) на соответственные части формулы (2.53), мы получим:
. а b
sin — cos —
---r--b r — cos у tg A (2.54)
sin —
r
или в силу (2.49)
. a b
sin — cos —
r r a b t
---------b-= cos- cos-tg/l. (2.55)
sin —
r
Сокращая на cos у, окончательно получим:
, а Ь ,
tg-=sinytg4. (2.56)
§ И
ГЕОМЕТРИЯ НА СФЕРАХ
149
Этой формулой выражается вторая теорема тангенсов
для прямоугольного сферического треугольника:
Формулы (2.49), (2.50), (2.53) и (2.56) представляют собой
основные формулы тригонометрии прямоугольного сферического
треугольника.
Отметим, что сферическая тригонометрия была создана
в X—XIII веках математиками Ближнего и Среднего Востока.
Важную роль в истории сферической тригонометрии сыграли узбек-
ский математик X—XI веков Абу Рейхан Бируни и азербайджан-
ский математик XIII века Насирэддин Туси. Последний был автором
одного из первых трактатов, специально посвящённых сферической
тригонометрии (Насирэддин [3]); им впервые найден способ опре-
деления сторон сферического треугольника по его углам.
В случае сферы чисто мнимого радиуса г = qi мы можем заме-
нить cos-у на ch—, sin у на ish—, ig~ на fth— и переписать
формулы (2.34), (2.38), (2.48), (2.49), (2.51), (2.53) и (2.56) в виде:
сферическая теорема косинусов:
ch — — ch — ch — — sh — sh— cos C; (2.57)
q q q q q
сферическая теорема синусов:
sin A _ sin В _ sin C
, a . b . c ’
sh — sh — sh —
q q q
двойственная сферическая теорема косинусов:
cos С — — cos A cos В sin A sin В ch -у ; (2.59)
сферическая теорема Пифагора:
ch - = ch - ch — ; (2.60)
q q q
теорема синусов для прямоугольного сферического тре-
угольника:
sh — = sh — sin Л; (2.61)
q q
первая теорема тангенсов для прямоугольного сфери-
ческого треугольника:
th -у — th -у cos Л; (2.62)
вторая теорема тангенсов для прямоугольного сфери-
ческого треугольника:
th — = sh — tg Д. (2.63)
з q q
аметим, что в случае сфер чисто мнимого радиуса простран-
150 НЕЕВКЛИДОВЫ ПРОСТРАНСТВа {гл. п
ства xRn все длины а, Ь, с и углы Л, В, С, входящие в фор-
мулы (2.57)—(2.63), вещественны.
Вращения пространств Rn и lRn вокруг центров гиперсфер
переводят эти гиперсферы в себя и сохраняют сферические рас-
стояния между их точками. Так как движения пространств Rn и
lRn могут быть определены как взаимно однозначные преобразо-
вания этих пространств, сохраняющие расстояния между точками,
вращения гиперсфер пространств Rn и lRn также можно опреде-
лить как взаимно однозначные преобразования этих гиперсфер,
сохраняющие сферические расстояния между их точками (на гипер-
сферах пространств Rn и гиперсферах чисто мнимого радиуса
пространств 1Rni на которых расстояние между различными точ-
ками всегда отлично от нуля, взаимная однозначность является
следствием сохранения расстояний). Вращения гиперсфер про-
гч 7 гл /2 (/2—1)
странств Rn и <Rn зависят от ——- вещественных параметров и
образуют группы, транзитивные на этих гиперсферах. Однако в отли-
чие от групп движений пространств Rn и 1Rn группы вращений ги-
персфер пространств Rn и lRn импримитивны: классами импримитив-
ности здесь являются пары диаметрально противоположных точек.
Совершенно аналогично гиперсферам в вещественных евклидовых
пространствах Rn и lRn определяются гиперсферы комплексного
евклидова пространства Rn(i)> Так же как для гиперсфер про-
странства lRni показывается, что гиперсферы пространства Rn(J)
обладают -^--мерными плоскими образующими при чётном п и
—2 1 -мерными плоскими образующими при нечётном п и что
прямолинейные и плоские образующие гиперсфер пространства Rn(i)
являются соответственно изотропными прямыми и плоскостями. На
гиперсферах пространства Rn(i) определяется комплексное сфери-
ческое расстояние по той же формуле (2.18), что и в простран-
ствах Rn и iRn, и имеют место те же формулы сферической три-
гонометрии, что и в вещественных евклидовых пространствах.
§ 2. Неевклидовы пространства.
Пространства Лобачевского и Римана1)
Геометрия на гиперсферах в пространствах Rn+1 и lRn+1 обла-
дает большим сходством с геометрией пространств Rn и lRn, так
9 С геометрией трёхмерного пространства Лобачевского читатель
может более подробно познакомиться по книгам Ефимова [1], Ка-
гана [3], Широкова [3], Н ордена [5] и Кутузова [1] (в син-
тетическом изложении) и Клейна [2] (в аналитическом изложении), а
с геометрией^плоскости Лобачевского— также по книге Делоне [1],
с геометрией трёхмерного пространства Римана читатель может более
подробно познакомиться по книгам Богомолова [2] (в синтетическом
изложении) и Клейна [2] (в аналитическом изложении).
§ 2] НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 151
как на гиперсферах, так же как в пространствах Rn и lRn, имеется
группа взаимно однозначных отображений гиперсферы на себя, не
„ п (п + 1)
изменяющих расстояний между точками и зависящих от ——-
вещественных параметров, — группа вращений гиперсферы. Однако
в отличие от групп движений пространств Rn и lRn группы вра-
щений гиперсфер пространств Rn+1 и lRn+x импримитивны, причём
классы импримитивности здесь представляют собой пары диаме-
трально противоположных точек гиперсферы. Далее, если две
прямые пространств Rn и lRn могут пересекаться только в одной
точке, большие окружности на гиперсферах пространств Rn+1 и
lRn+i> играющие роль, аналогичную роли прямых, пересекаются
не в одной, а опять-таки в двух диаметрально противоположных
точках. Кроме того, гиперсферы чисто мнимого радиуса простран-
ства состоят из двух изолированных полостей.
Для устранения всех этих нарушений аналогии достаточно
отождествить диаметрально противоположные точки гиперсферы,
т. е. считать две диаметрально противоположные точки гиперсферы
за точку нового пространства. Будем называть п-мерным неевкли-
довым пространством индекса 0 и индекса I множество элемен-
тов, называемых точками, находящихся во взаимно однозначном
и изометрическом соответствии с парами диаметрально противо-
положных точек гиперсферы соответственно в пространстве Rn+1
и lRn+1. Будем обозначать n-мерное неевклидово пространство
индекса 0 через Sn, а n-мерное неевклидово пространство индекса I
через lSn.
Будем называть т-мерными плоскостями пространств Sn и
lSn при т= 1 прямыми, при т = п—1 гиперплоскостями,
множества точек пространств Sn и lSn, которые при этом соответ-
ствии отвечают большим яг-мерным сферам гиперсферы. Радиус
гиперсферы называют радиусом кривизны неевклидова простран-
ства, а число , где г—радиус гиперсферы, называют кривиз-
ной этого пространства (в случае чисто мнимого радиуса кри-
визны ql иногда радиусом кривизны называют вещественное число q).
Поэтому пространства Sn и lSn с вещественным радиусом кри-
визны называют пространствами положительной кривизны,
а пространства lSn с чисто мнимым радиусом кривизны называют
пространствами отрицательной кривизны. Геометрия простран-
ства 1S3 отрицательной кривизны была открыта Лобачевским [1]
в 1826 году, чем было положено начало развитию неевклидовой
геометрии, вследствие чего пространства называют простран-
ствами Лобачевского. Геометрия пространств Sn была открыта
Риманом [1] в 1854 году, вследствие чего эти пространства назы-
вают пространствами Римана. Общая теория неевклидовых про-
странств была разработана Клейном [1, 3] на основе предложенной
152 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. II
Кели [2] и им интерпретации этих пространств в проективном про-
странстве. Пространства Sn и называют также соответственно
эллиптическим и гиперболическим неевклидовыми простран-
ствами.
Гиперсферы в пространствах /?п+1 и lRn+1 с отождествлёнными
диаметрально противоположными точками можно считать интер-
претациями или моделями неевклидовых пространств Sn и lSn.
Эта интерпретация для плоскости S.2 была предложена Кели [2],
а для плоскости —Пуанкаре [3], который показал, что
каждая из полостей двуполостного гиперболоида в пространстве /?3
при изменении метрики в нём (соответствующем его превращению
в пространство }/?3) является интерпретацией плоскости !52 отри-
цательной кривизны1).
Иногда неевклидовыми пространствами называют также сами
гиперсферы в пространствах и lRn+1 без отождествления диа-
метрально противоположных точек2).
Рассматривая гиперсферы полуевклидовых пространств 7+(б7)/?п+1
и отождествляя диаметрально противоположные точки этих гипер-
сфер, мы получим п-мерные полунеевклидовы пространства
индекса I и дефекта d, которые будем обозначать z+(d)Sn. Из
свойств пространств следует, что пространства
могут быть получены предельным переходом из пространств lSn
и Z+1 Sn, а пространства 7+(d)Sn—из пространств
и z+1+(d“1)Sw. Пространства z+(d)Sw рассматривались Саммер-
виллем [1].
Определение пространств Sn и lSn показывает, что простран-
ства Sn и lSn гомеоморфны фактор-пространствам гиперсфер
пространств Rn+1 и lRn+1 по их парам диаметрально проти-
воположных точек. В частности, так как гиперсфера чисто мни-
мого радиуса пространства состоит из двух полостей, каждая
из которых изометрична пространству Rn, а при отождествлении
диаметрально противоположных точек этой гиперсферы происходит
отождествление этих полостей, мы находим, что пространство
Лобачевского rSn отрицательной кривизны гомеоморфно про-
странству Rn.
Так как гиперсферы пространства Rn+1 компактны, простран-
ства Sn также компактны. Пространства lSni так же как гипер-
сферы пространств lRn+1, некомпактны.
Так как при отождествлении диаметрально противоположных
точек окружности на плоскости R% мы получаем кривую, гомео-
морфную этой окружности, прямая Римана Sr гомеоморфна
обычной окружности.
9 См. также Клейн [2], стр. 213.
2) См. Рашевский [8], стр. 377.
§ 2]
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
153
Выясним топологическую структуру плоскости Лобачевского
положительной кривизны и плоскости Римана S2. Для этого рас-
смотрим лист Мёбиуса, т. е. фигуру, которая получена из прямо-
угольника ABCD на евклидовой плоскости /?2 склеиванием двух
его противоположных сторон АВ и CD таким образом, что склеи-
ваются противоположные углы Д, D и В, С этого прямоугольника
(черт. 12). Лист Мёбиуса является односторонней поверхностью,
т. е. на ней существуют такие замкнутые линии, что если окруж-
ность с заданным направлением обхода возвратится в исходное
Черт. 12.
положение при перемещении по такой линии, её направление
обхода изменится на обратное, или если связать направление
обхода окружности с одной из сторон поверхности, мы можем
непрерывно перейти с одной её стороны на другую (евклидова
плоскость является двусторонней поверхностью, т. е. на ней
не существует замкнутых линий с указанным свойством и с одной
из её сторон нельзя непрерывно перейти на другую). Плоскость
Лобачевского положительной кривизны гомеоморфно листу
Мёбиуса без его границы. В самом деле, в § 1 мы видели, что
сфера вещественного радиуса в пространстве 1/?.3 гомеоморфна
круглому цилиндру конечной высоты без границы в простран-
стве А?., (на черт. 9 изображено гомеоморфное отображение сферы
вещественного радиуса пространства на такой цилиндр). Этот
цилиндр можно рассматривать как фигуру, полученную из прямо-
угольника ABCD на евклидовой плоскости /?2 склеиванием двух его
противоположных сторон АВ и CD таким образом, что склеи-
ваются соседние вершины А, С и В, D (черт. 13). При отожде-
ствлении диаметрально противоположных точек сферы и соответ-
ствующих им точек цилиндра сфера вещественного радиуса про-
странства превращается в плоскость *S2 положительной
кривизны, а цилиндр — в фигуру, полученную из прямоуголь-
ника ABEF, являющегося половиной рассматривавшегося нами раньше
прямоугольника ABCD, склеиванием его противоположных сто-
рон АВ и EF таким образом, что склеиваются противоположные
вершины A, F и В, Е, т. е. в лист Мёбиуса; при этом точки
границы цилиндра, не соответствующие точкам сферы, переходят
В точки границы листа Мёбиуса.
154
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Плоскость Римана S2 гомеоморфна фигуре, которая полу-
чается, если склеить границу листа Мёбиуса с окружностью
круга. Для этого вырежем из плоскости Римана круг и покажем,
что оставшаяся часть плоскости Римана гомеоморфна листу Мёбиуса.
Черт. 13.
Плоскость Римана с вырезанным кругом гомеоморфна сфере про-
странства с отождествлёнными диаметрально противоположными
точками, у которой вырезаны два круга равных радиусов с цен-
трами в двух диаметрально противоположных точках. Рассмотрим
сферу с вырезанными указанным образом двумя кругами и спроек-
тируем её из её центра на цилиндр, касающийся сферы вдоль
Черт. 14.
большой окружности (черт. 14). Эта проекция
устанавливает гомеоморфизм между сферой с вы-
резанными двумя кругами и круглым цилиндром
конечной высоты без границы. Но мы только что
видели, что при отождествлении точек этого ци-
линдра, происходящем при отождествлении диа-
метрально противоположных точек сферы, этот
цилиндр превращается в лист Мёбиуса; при этом
точки границы цилиндра, совпадающие с точ-
ками окружности вырезываемого круга, переходят
в точки границы листа Мёбиуса.
Замкнутыми линиями плоскости S2 и плоскости
1S2 положительной кривизны, обладающими тем
свойством, что при перемещении по этим линиям
окружности с заданным направлением обхода это
направление обхода меняется на обратное, являются прямые линии
плоскостей S2 и 1S2, соответствующие экваторам сфер, изображён-
ных на черт. 9 и 14. Отсюда следует, что в то время, как всякую
замкнутую линию на плоскости R2 можно непрерывно стянуть
в точку, на плоскости S2 существуют замкнутые линии, кото-
рые нельзя непрерывно стянуть в точку. В самом деле, если
мы будем перемещать вдоль замкнутой линии окружность с опре-
делённым направлением обхода, то при непрерывном стягивании
этой линии в точку эти окружности должны совпасть как своими
точками, так и по направлению обхода. Поэтому прямые линии
§ 2] НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 155
плоскости S.2, являющиеся такими замкнутыми линиями, что при
перемещении окружности с определённым направлением обхода
по этой линии направление обхода окружности меняется на обрат-
ное, не могут быть непрерывно стянуты в точку.
Так как касательные гиперплоскости к гиперсферам простран-
ства Rn+i и гиперсферам чисто мнимого радиуса пространства
1Rn+i являются пространствами Rn, геометрия, пространства
Римана и пространства Лобачевского отрицательной кривизны
в малых окрестностях точек близка к геометрии пространства
Rn. Так как касательные гиперплоскости к гиперсферам вещест-
венного радиуса пространства и к гиперсферам веществен-
ного и чисто мнимого радиуса пространства lRn+i при I > 1
являются соответственно пространствами 1/?n, lRn и l~rRn, геомет-
рия пространства Лобачевского положительной кривизны и
неевклидова пространства индекса />1 положительной и отри-
цательной кривизны в малых окрестностях точек близка к гео-
метрии соответственно пространств 1Rn, lRn и Поэтому
среди всех определённых нами неевклидовых пространств наиболь-
шее значение имеют пространство Римана Sn и пространство Ло-
бачевского 1Sn отрицательной кривизны, наиболее близкие к нашему
обычному евклидову пространству Rn.
Таким образом, в силу того, что пространство Rn удовле-
творяет аксиомам метрического пространства, пространство Sn
и пространство rSn отрицательной кривизны также удовле-
творяют аксиомам 1° — 3° метрического пространства (см. § 3
главы 1).
Из определения неевклидовых пространств следует, что про-
странство lSn положительной кривизны изометрично неевклидову
пространству n~l~1Sn отрицательной кривизны и, в частности, при
п = <21—1 пространство lSn положительной кривизны изометрично
пространству lSn отрицательной кривизны. Поэтому мы будем
рассматривать пространства lSn только при I .
Из свойств гиперсфер пространств Rn и lRn следует, что пря-
мые линии неевклидовых пространств Sn и lSn являются геоде-
зическими линиями этих пространств, а т-мерные плоскости
этих пространств являются вполне геодезическими поверхно-
стями этих пространств.
Будем называть прямые линии неевклидовых пространств,
получающиеся путём отождествления диаметрально противопо-
ложных точек эллиптических и гиперболических больших окруж-
ностей гиперсфер пространств zA?n+i, соответственно эллипти-
ческими и гиперболическими прямыми неевклидовых про-
странств. Эти прямые являются соответственно прямыми Римана
и прямыми Лобачевского 1S1 той же кривизны, что и всё про-
странство.
156
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Будем называть прямые линии пространств lSn, получающиеся
путём отождествления диаметрально противоположных точек пара-
болических больших окружностей гиперсфер пространств lRn+1,
т. е. пар параллельных прямолинейных образующих гиперсфер,
совпадающих между собой при этом отождествлении, изотропными
(или параболическими) прямыми пространств lSn. В пространстве
iSn положительной кривизны и в пространствах lSn при I > 1
имеются прямые линии всех трёх типов; в то же время все прямые
пространств Римана Sn являются прямыми Римана а все прямые
пространств Лобачевского отрицательной кривизны являются
прямыми Лобачевского 1S1.
Точно так же в пространстве Лобачевского 1Sn положительной
кривизны и в пространствах lSn при I > 1 имеются /п-мерные
плоскости, являющиеся неевклидовыми пространствами kSm той же
кривизны, что и всё пространство, при различных k, а также
/n-мерные полунеевклидовы плоскости, являющиеся полунеевклидо-
выми пространствами k+(^Sm, и изотропные плоскости. Полунеев-
клидовы плоскости, являющиеся пространствами Sm, соответ-
ствуют /n-мерным сферам, высекаемым из гиперсферы (/п—1)-
мерными полуевклидовыми плоскостями пространства lRn+i>
проходящими через центр гиперсферы и являющимися простран-
ствами k+(d)Rm+i, /n-мерные изотропные плоскости соответствуют
/n-мерным плоским образующим гиперсферы (пары таких плоских
образующих высекаются из гиперсферы полуевклидовой плоскостью,
проходящей через центр гиперсферы и являющейся пространством
В то же время все /n-мерные плоскости пространства
Римана Sn являются /n-мерными пространствами Римана Sm, а все
/n-мерные плоскости пространства Лобачевского 1Sn отрицательной
кривизны являются /n-мерными пространствами Лобачевского
той же кривизны.
Будем называть (п—1)-мерные плоскости неевклидовых про-
странств гиперплоскостями этих пространств. Две гиперплоскости
пространства Sn всегда пересекаются по (п — 2)-мерной плоскости,
две гиперплоскости пространства lSn могут пересекаться по (п—2)-
мерной плоскости, а могут и не пересекаться; в последнем случае
гиперплоскости пространства zZ?n+i, высекающие из гиперсферы
большие (п—1)-мерные сферы, соответствующие данным гипер-
плоскостям lSn, пересекаются по (п—1)-мерной плоскости, не
пересекающейся с гиперсферой. В отличие от пространства Rn,
которое делится каждой своей гиперплоскостью на две области,
пространство Sn не делится гиперплоскостью на две области;
пространство Sn делится на две области двумя гиперплоскостями,
три гиперплоскости делят это пространство на четыре области и
всякая следующая гиперплоскость, пока их число не дойдёт до
n—|—1, увеличивает количество областей вдвое. Поэтому, в част-
ности, п+1 гиперплоскостей делят пространство Sn на 2п обла-
§ 2] НЕЕВКЛИДОВЫ ПРОСГРАНСТВА 157
стей. Две гиперплоскости пространств Sn и lSn, пересекающиеся по
(я — 2)-мерной плоскости, определяют угол, который можно опре-
делить как угол между двумя прямыми, лежащими в этих гипер-
плоскостях, выходящими из одной точки их (п— 2)-мерной
плоскости пересечения ортогонально к этой (п—-2)-мерной пло-
скости. Этот угол равен углу между теми гиперплоскостями
пространств Rn±i и lRn+i, которые высекают из гиперсферы
пространств Rn+i или большие (п—• 1)-мерные сферы, соот-
ветствующие данным гиперплоскостям пространств Sn или lSn.
Будем называть симплексом пространства Sn или lSn, так же
как в случае пространств Rn и lRn, часть пространства, ограни-
ченную п—\— 1 гиперплоскостями, каждые п из которых пересекаются
в точке. Так же как в случае пространств Rn и lRn (см. § 10 главы I)
определяются грани, вершины и рёбра симплекса пространств Sn
и lSn. Заметим, что в отличие от симплексов пространств Rn и
lRn симплексы неевклидовых пространств могут неоднозначно
определяться своей системой вершин; так, например, в простран-
стве Sn, в котором, как мы видели, п+1 гиперплоскостей делят
пространство на 2п областей, система вершин симплекса является
системой вершин одновременно 2п симплексов.
В пространствах Sn и lSn имеют место те же тригонометриче-
ские формулы (2.34), (2.38), (2.48), (2,49), (2.51), (2.53) и (2.56)
и при г = qi (2.57) — (2.63), что и на гиперсферах евклидовых
пространств. Поэтому в неевклидовых пространствах, так же как
на гиперсферах евклидовых пространств, не существует нерав-
ных треугольников с соответственно равными углами.
Точки неевклидовых пространств Sn и lSn можно представлять
векторами пространств Rn+i и lRn+i, являющимися радиусами-век-
торами одной из тех двух диаметрально противоположных точек ги-
персферы, при отождествлении которых мы получили эту точку. Будем
обозначать один из векторов, представляющих точку х неевклидова
пространства, той же буквой х; тогда другой из этих векторов
является вектором — х. Эти векторы связаны уравнением гиперсферы
(х, х)^г2 (2.64)
или, если г = qi,
(х, х) = —(2.65)
В силу формулы (1.106), определяющей угол между двумя
прямыми пространств Rn+i и lRn+i, оба направляющих вектора
которых имеют вещественную или чисто мнимую длину, расстоя-
ние (о между точками х и у неевклидова пространства с радиусом
кривизны г определяется по формуле
(О
COS ----—
Г
(х, у)
1*1|у|
(2.66)
158 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. 11
в которой можно заменить |х| и || на г, т. е. | х | [у | на А
В случае, если г = ql, формулу (2.66) можно переписать в виде
здесь можно заменить |х| и |_у | на qi, т. е. | х | |у | на —q\
(Так как произведение |х| 1 здесь всегда вещественно, в фор-
мулах (2.66) и (2.67) нет необходимости пользоваться знаками
абсолютного значения комплексного числа.)
В качестве координат точки х неевклидовых пространств S t
и lSn можно рассматривать координаты вектора х пространств
Rn+i или z7?n+i, представляющих эту точку. Будем называть точки
неевклидова пространства, представляемые базисными векторами е0,
. . ., еп пространств Z?n+i и zZ?n+i, базисными точками*, zn-мер-
ные плоскости, соответствующие (т + 1)-мерным плоскостям про-
странств Rn+i или lRn+i, определяемым системами т-\-\ векторов
eiQ, eiv •••> будем обозначать через eiQeit ... и будем
их называть координатными плоскостями, при т = 1—коорди-
натными линиями при т = п— 1 —координатными гиперпло-
скостями.
В случае пространства Римана Sn с радиусом кривизны г
мы будем пользоваться базисом пространства состоящим
из ортогональных векторов длины г. Если требовать, чтобы
векторы пространства Rn+i, представляющие точки Sn, удовле-
творяли условию (2.64), мы можем переписать это условие в ко-
ординатах в виде
2(х92=1, (2.68)
В случае пространств lSn с радиусом кривизны г мы также
будем пользоваться базисом пространства lRn+i, состоящим из орто-
гональных векторов длины г и rl при вещественном г и длины q
и qi при мнимом г = qi. Если требовать, чтобы векторы простран-
ства lRn+i> представляющие точки пространства lSn, удовлетворяли
условию (2.64) или (2.65), мы можем переписать условие (2.64)
при вещественном г в координатах в виде
2Х(лО2=1> (2.69)
а условие (2.65) можно переписать в координатах в виде
2 8» (х*)2 = — 1. (2.70)
При ортогональном базисе в пространстве Rn+1 формул} (2.66)
§ 2]
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
159
можно переписать в виде
(О
COS --=
Г
i
(2.71)
а при ортогональном базисе в пространстве ]Rn+i формулы (2.66)
и (2.67) можно переписать в виде
cos— = _____ * . .. (2.72)
г у SsH^)2|/
И -ЧП . . *
ch —= *—г---------- (2.73)
r
Будем называть n-мерным комплексным неевклидовым про-
странством Sn(i) множество элементов, называемых точками,
находящихся во взаимно однозначном и изометрическом соответ-
ствии с парами диаметрально противоположных точек гиперсферы
в пространстве По аналогии с пространством ^Sn можно
определить также п-мерное комплексное полунеевклидово про-
странство ^Sn(i). Определим прямые, плоскости, гиперплоскости
и радиус кривизны, а также координаты пространства Sn(t) так же,
как в вещественных пространствах Sn и lSn. При этом прямые линии
пространства Sn (I) являются или комплексными неевклидовыми
прямыми Sn(i) той же кривизны, что и всё пространство, или
изотропными прямыми, а /n-мерные плоскости Sn(i) являются или
zn-мерными комплексными неевклидовыми пространствами Sm(i)
той же кривизны, что и всё пространство, или m-мерными ком-
плексными полунеевклидовыми пространствами или изо-
тропными m-мерными плоскостями.
Для определения мнимых геометрических образов вещественных
пространств Sn и lSn следует представлять себе пространства Sn
и lSn погружёнными в пространство Sn(i) в виде совокупностей
точек с вещественными координатами. Тогда точки, прямые, пло-
скости и другие геометрические образы пространства Sn(t), не лежа-
щие в пространствах Sn и lSn, будем называть мнимыми точками,
прямыми, плоскостями и другими геометрическими образами соот-
ветственных пространств Sn и lSn.
Будем называть мнимо сопряжёнными точками пространств Sn
и lSn мнимые точки пространств Sn и lSn с комплексно сопряжёнными
координатами, а мнимо сопряжёнными прямыми, плоскостями и
другими геометрическими образами пространств Sn и lSn — мнимые
прямые, плоскости и другие геометрические образы пространств Sn
и lSn, состоящие из соответственно мнимо сопряжённых точек.
160 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
§ 3. Плоскость Римана
Рассмотрим более подробно плоскость Римана S2 и плоскость Лоба-
чевского отрицательной кривизны, геометрия которых в малых
окрестностях точек близка к геометрии евклидовой плоскости R2.
Геометрия плоскости Римана S?, несмотря на близость к гео-
метрии плоскости R2 в малом, резко отличается от геометрии
плоскости R2 в целом. Мы уже видели, что плоскость S2
является односторонней поверхностью своеобразной топологической
структуры. Важнейшим отличием этой плоскости от плоскости R2
является то, что плоскость S2 является замкнутой поверхностью
и имеет конечную площадь: если радиус кривизны плоскости S2
равен г, её площадь равна половине площади сферы радиуса г,
т. е. площадь плоскости S2 равна 2тгг2. Точно так же прямые
плоскости S2 являются замкнутыми кривыми и имеют конечную
длину: если радиус кривизны плоскости равен г, длина её прямых
равна половине длины окружности радиуса г, т. е. длина прямых
плоскости S2 равна кг. Поэтому на плоскости S2 не выполнен
II постулат Евклида, согласно которому каждый прямолинейный
отрезок можно неограниченно продолжать и, следовательно, воз-
можны прямолинейные отрезки любой длины.
В то же время на плоскости S2 выполняется V постулат
Евклида', согласно этому постулату всякие две прямые, составляю-
щие с третьей прямой односторонние углы, сумма которых меньше
двух прямых, обязательно пересекаются. Но на плоскости S.2 пере-
секаются все прямые, в том числе и те, которые удовлетворяют
условию V постулата.
Если разрезать плоскость R2 по прямой линии, она распадётся
на две части. Если разрезать плоскость S2 по прямой линии,
она останется связной областью, границей которой будет
служить сделанный нами разрез', в самом деле, если разрезать
поверхность сферы по большой окружности, мы получим две
полусферы, но при отождествлении диаметрально противоположных
точек сферы эти две полусферы отождествляются в одну связную
область, границей которой служит большая окружность, по кото-
рой был сделан разрез.
Всякие две прямые плоскости S2 обладают общим перпен-
дикуляром', этим общим перпендикуляром является прямая, соот-
ветствующая большой окружности, высекаемой из сферы простран-
ства /?3 двумерной плоскостью, проходящей через центр сферы и
ортогональной прямой, высекающей из этой сферы точки, соответ-
ствующие точке пересечения данных прямых. Эта двумерная пло-
скость ортогональна двумерным плоскостям, высекающим большие
окружности, соответствующие данным прямым (черт. 15). В самом
деле, при отражении от указанной плоскости двумерные плоскости,
высекающие большие окружности, соответствующие данным прямым,
§ 3]
ПЛОСКОСТЬ РИМАНА
161
котором переходят в себя данные
данными прямыми и построенной
переходят в себя. Это отражение определяет на плоскости S2 отраже-
ние от построенной прямой, при
прямые. Поэтому углы между
нами прямой равны своим смеж-
ным и, следовательно, являются
прямыми.
Длина а общего перпенди-
куляра двух прямых плоско-
сти S.2 связана с углом а
между этими прямыми соот-
ношением а = аг, где г—ра-
диус кривизны плоскости.
В самом деле, длина общего
перпендикуляра двух прямых
плоскости S2 равна углу ме-
жду радиусами-векторами точек
сферы, соответствующих кон-
цам этого перпендикуляра,
умноженному на радиус сферы г.
Но эти радиусы-векторы лежат в двумерных плоскостях, высекаю-
щих из сферы большие окружности, соответствующие данным пря-
мым, и ортогональны линии пересечения этих плоскостей. Поэтому
угол между этими радиусами-векторами равен углу между дву-
мерными плоскостями, а этот последний угол равен углу между
данными прямыми.
Будем называть окружностями плоскости S2 кривые на этой
плоскости, соответствующие окружностям сферы в пространстве 7?3,
которые мы определили как сечения
сферы плоскостями. Окружность пло-
скости S2 является геометрическим
местом точек этой плоскости, равно-
отстоящих от одной точки. В самом
деле, рассмотрим сечение сферы простран-
ства /?3 некоторой плоскостью, опустим из
центра сферы перпендикуляр на эту пло-
скость и продолжим этот перпендикуляр
до пересечения со сферой (черт. 16). Так
как при повороте вокруг этого перпенди-
куляра и сфера и наша плоскость перехо-
дят в себя, окружность сферы, являющаяся
их пересечением, также переходит в себя, в то же время при этом
повороте точки пересечения перпендикуляра со сферой остаются
неподвижными. Поэтому расстояние от любой точки окружности
До этих точек одно и то же; при отождествлении диаметрально
противоположных точек сферы построенная нами окружность
сферы перейдёт в окружность плоскости S2, а точки пересечения
11 Зак. 177. Б. А. Розенфельд
162 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ II
перпендикуляра со сферой дают одну точку плоскости S2 —
центр нашей окружности плоскости S2.
Окружность плоскости S2 является геометрическим местом
точек этой плоскости, равно удалённых от одной прямой.
В самом деле, рассмотрим опять сечение сферы некоторой
плоскостью и проведём через центр сферы плоскость, параллель-
ную этой плоскости. Эта плоскость высечет из сферы большую
окружность. Так как при повороте вокруг перпендикуляра к этим
плоскостям, проходящего через центр сферы, и сфера и обе эти
плоскости переходят в себя, обе окружности сферы, являющиеся
пересечениями сферы с этими плоскостями, также переходят в
себя. Поэтому расстояние между этими окружностями постоянно;
при отождествлении диаметрально противоположных точек сферы
первая окружность сферы превращается в окружность плоскости S2,
а большая окружность сферы—в прямую этой плоскости; будем
называть эту прямую базой данной окружности, а расстояние от
точек окружности до её базы — параметром окружности.
Длина окружности радиуса R на плоскости S2 равна
C = 2itrsin^-. (2.74)
В самом деле, рассмотрим треугольник, вершинами которого
являются центр сферы, основание перпендикуляра, опущенного из
центра сферы на плоскость, высекающую окружность, и одна из
точек окружности (черт. 16). Этот треугольник прямоугольный,
гипотенуза его равна радиусу сферы г, один из катетов — ради-
усу р окружности, рассматриваемой как окружность на плоскости /?2,
а угол, находящийся против этого катета, является централь-
но
ным углом, стягивающим дугу сферы длины R, и равен у. Поэтому
катет р равен
p = rsiny. (2.75)
Так как длина нашей окружности равна 2'яр, подставляя вместо р
выражение (2.75), мы получаем (2.74).
Длина дуги окружности радиуса R на плоскости S2, стя-
гиваемая углом ср, равна
С (ср) = фг sin ~ . (2.76)
В самом деле, длина нашей дуги равна срр и, подставляя
вместо р выражение (2.75), мы получаем (2.76).
Длина дуги окружности параметра Р, ортогонально проек-
тирующейся на отрезок базы длины а, равна
С (а) = a cos Д (2.77)
§ 3]
ПЛОСКОСТЬ РИМАНА
163
В самом деле, отрезок базы длины а является общим перпен-
дикуляром прямых, проектирующих концы данной дуги на базу
окружности. Угол между этими прямыми равен у. Так как эти
прямые ортогональны окружности, они проходят через её центр,
и угол между этими прямыми является центральным углом, стяги-
вающим данную дугу. Дуга большой окружности, соединяющая
центр данной окружности с какой-нибудь точкой её базы, стяги-
вается прямым углом, и, следовательно, эта дуга равна у г, но,
с другой стороны, эта дуга равна R-\-P. Поэтому Р — у г — R
р р a R Р
и sin у ~ cos у. Заменяя в (2.76) ср через у и sin у через cos у ,
мы получаем (2.77).
Мы видим, что прямую плоскости S2 можно рассматривать как
геометрическое место точек, равноотстоящих от одной точки на
расстоянии у г. Заметим, что, подставляя в формулу (2.75) R = у г,
мы получаем не длину прямой тгг, а удвоенную длину прямой 2тгг.
7U
Это происходит оттого, что при приближении R К у г окруж-
ность приближается к своей базе с двух сторон и в пределе пре-
вращается в дважды взятую прямую. Поэтому, хотя прямую
плоскости S2 нельзя непрерывно стя-
нуть в точку, дважды взятую прямую
этой плоскости, являющуюся окруж-
ностью радиуса у г, можно непре-
рывно стянуть в точку.
Так как через всякие три точки
сферы пространства можно прове-
сти окружность, которая, в частности,
может быть большой окружностью,
через всякие три точки плоскости
S2> не лежащие на одной прямой,
можно провести окружность.
На плоскости S.2 можно ввести
координаты, связанные с широтой и
долготой на сфере. Если мы выберем в пространстве R^ ортого-
нальный базис, состоящий из векторов длины г, то координаты
точек сферы радиуса г связаны с широтой 0 и долготой ф этих
точек (черт. 17) соотношениями
х° = cos 0 cos <р,
х1 — cos 0 sin ф,
х2 = sin 0.
(2.78)
11*
164
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
На плоскости Римана удобнее вместо углов 0 и ф пользоваться
координатами и = пэ и v = Геометрический смысл этих коор-
динат заключается в следующем: координата v равна длине пер-
пендикуляра, опущенного из данной точки на координатную ось
а координата и равна расстоянию от точки е0 до основания ука-
занного перпендикуляра (черт. 18). Координаты и, v, несколько
Черт. 18.
напоминающие декартовы координаты на
евклидовой плоскости, называются декар-
товыми координатами на плоскости S2.
Эти координаты связаны с координатами
х°, х1, х2 соотношениями
n v и
х° = cos — cos —,
г г '
V . и
х1 -- cos — sin — ,
г г ’
(2.79)
9 • V
х1 = sin — .
г
На сфере долгота ф изменяется от — п до з широта 0 —
от----|до На плоскости Римана как широта, так и долгота
изменяются от-----до +-J, вследствие чего обе декартовы коор-
динаты zz, v на этой плоскости изме-
няются от — | г до г. | ‘
С помощью декартовых координат на
плоскости S2 можно найти площадь любой---------—
квадрируемой области этой плоскости. Так
как в этой системе координат координат- --------
ными линиями являются прямые, перпен- у
дикулярные к оси eQe1 и окружности, ба- ------------------_-----
зой которой является эта ось, то элемен- е° и du 6i
том площади здесь является бесконечно Черт. 19.
малый прямоугольник, две стороны кото-
рого являются прямолинейными отрезками, а две другие стороны —
дугами окружностей (черт. 19). Длина одной из прямолинейных
сторон этого прямоугольника равна do, а длина одной из криво-
линейных сторон этого прямоугольника, являющаяся длиной дуги
окружности параметра v, ортогонально проектирующаяся на отре-
зок базы длины du, в силу (2.77) равна
С (du) = cos ~du. (2.80)
Так как геометрия плоскости S2 в малых окрестностях точек
близка к геометрии плоскости Т?2, за площадь этого прямоуголь-
ПЛОСКОСТЬ РИМАНА
165
§ 31
ника следует принять произведение найденных нами длин сто-
рон, т. е.
ds — cos у du dv. (2.81)
Поэтому площадь всякой квадрируемой области G плоскости 52
выражается интегралом
J cos ~ du dv. (2.82)
Черт. 20.
Найдём площадь треугольника на плоскости *S2, не прибегая
к общей формуле (2.80). Для определения площади треугольника
АВС на плоскости S2 продол-
жим стороны этого треуголь-
ника и рассмотрим часть пло-
скости 52, ограниченную парой
прямых, содержащих угол А
(черт. 20). Площадь этой части
плоскости относится к площади
всей плоскости 52 как угол А
к углу it, т. е. площадь
этой части плоскости равна
— 2itr2 — 2г2Д. Точно так же
к
части плоскости S2, ограничен-
ные парами прямых, содержа-
щих углы В и С, соответствен-
но равны 2г2В и 2г2С. Так как
эти три части плоскости по-
крывают всю плоскость, причём
три раза, а всю остальную часть плоскости — один раз, мы можем
сказать, что сумма площадей всех этих частей плоскости равна
сумме площади 2тгг2 всей плоскости и удвоенной площади 5 рас-
сматриваемого треугольника, т. е.
данный треугольник покрывают
2гМ + 2г2В + 2г2С = 2itr2+ 25, (2.83)
откуда
5 = г2(Д+В4-С—тг). (2.84)
Выражение А-\-В-\-С— it называется угловым избытком
треугольника на плоскости 52.
Формула показывает, что площадь треугольника на плоско-
сти S2 пропорциональна его угловому избытку. Так как пло-
щадь треугольника всегда положительна, из формулы (2.83) мы
166 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
приходим к выводу, что сумма углов треугольника на плоско-
сти S2 всегда больше к.
Так как всякий выпуклый n-угольник на плоскости можно
разделить прямыми, соединяющими его вершины, на п— 2 тре-
угольника и так как площадь и сумма углов многоугольника равны
сумме соответственно площадей и сумм углов этих треугольников,
применяя к каждому из этих треугольников формулу (2.83), мы
получим, что площадь S п-угольника на плоскости S2 связана
с суммой углов S этого многоугольника соотношением
S = r^[^ — (n — <2)r.\. (2.85)
Рассмотрим на плоскости S2 четырёхугольник с прямыми углами
при нижнем основании и с равными боковыми сторонами (черт. 21).
Четырёхугольники этого типа впервые
€-------------Я рассматривал таджикский математик
/ \ XI века Омар Хайям, вследствие
/ \ чего мы будем называть такие че-
/ \ тырёхугольники четырёхугольниками
(Г\ Хайяма1). Если мы соединим сере-
А М_________В дины /V и 7И верхнего и нижнего осно-
Черт. 21. ваний четырёхугольника Хайяма ABDC
и перегнём чертёж по прямой MN,
левая половина чертежа совместится с правой и, в частности, совме-
стятся между собой верхние углы ACD и CDB четырёхугольника
и углы CNM и DNM, а также AMN и BNM, образуемые пря-
мой MN с основаниями четырёхугольника. Поэтому верхние углы
четырёхугольника Хайяма равны, а прямая, соединяющая середины
его верхнего и нижнего оснований, является их общим перпенди-
куляром.
В силу формулы (2.85) при п = 4 на плоскости S2 сумма
углов четырёхугольника Хайяма больше четырёх прямых и, сле-
довательно, сумма двух верхних углов этого четырёхугольника
больше двух прямых и, так как эти углы равны друг другу,
на плоскости S2 верхние углы четырёхугольника Хайяма
тупые.
Найдём зависимость длины верхнего основания четырёхуголь-
ника Хайяма от длины нижнего основания этого четырёхугольника
и длины общего перпендикуляра этих оснований. Для этого рас-
смотрим четырёхугольник MBDN и обозначим длины его сторон
MB, MN, ND и BD через соответственно х, у, X, Y, длину его
диагонали MD — через R, а углы BMD и DMN—через а и [3
1) Четырёхугольники Хайяма часто называют четырёхугольниками
Саккери по имени итальянского математика XVII—XVIII веков, рассма-
тривавшего эти четырёхугольники (см. ниже, § 12).
ПЛОСКОСТЬ РИМАНА
167
§ 3]
соответственно (черт. 22). Из теоремы синусов (2.51) для прямо-
угольного треугольника MND мы получаем:
sin у sin ~ sin р (2.86)
или, так как р = у— а,
X R
sin — — sin ~ cos а. (2.87)
С другой стороны, по первой теореме тангенсов (2.53) для
прямоугольного треугольника MBD мы по-
Но по теореме Пифагора (2.49) для прямоугольного треуголь-
ника MND мы получаем:
cos — — cos — cos —, (2.90)
г г г ' 4 7
откуда
sin у = cos у cos ytg — (2.91)
и окончательно
tgy —tgycos^-. (2.92)
Если мы обозначим длины нижнего и верхнего оснований четы-
рёхугольника Хайяма через а и Д, а длину общего перпендику-
ляра этих оснований через h, то, так как а = 2х, А = 2Х, h=^y,
из формулы (2.92) мы получаем зависимость А от а и h в виде
= (2’93)
Формула (2.93) показывает, что на плоскости S2 верхнее
основание четырёхугольника Хайяма меньше его нижнего осно-
вания и при стремлении h к длина верхнего основания стре-
мится к нулю.
168
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Перегибая чертёж с четырёхугольником Хайяма (черт. 21) по пря-
мой АВ, мы получим новый четырёхугольник Хайяма ABFE
(черт. 23). При этом прямая АВ является общим перпендикуляром
как отрезок CD, а следовательно, и отре-
зок EF меньше отрезка АВ, мы видим,
что прямые СЕ и DF приближаются друг
к другу по обе стороны от их общего
перпендикуляра. А так как две произ-
вольные прямые плоскости S.2 обладают
общим перпендикуляром, мы видим, что
две произвольные прямые плоскости S2
приближаются друг к другу по обе
стороны от их общего перпендикуляра
и, следовательно, длина общего перпен-
прямых СЕ и DF. Так
С N D
Е Р Г
Черт. 23.
дикуляра двух прямых плоскости S2 является максимальным
расстоянием между этими прямыми.
Заметим, что из теоремы синусов (2.51) для прямоугольного
треугольника MBD мы получаем:
sin — — sin — sin а,
г г
(2.94)
что вместе с (2.87) даёт:
sin2 у -j- sin2 у = sin2 у. (2.95)
В заключение этого параграфа отметим, что формулы (2.84) и
(2.85) имеют место и для треугольников и многоугольников на
сфере в пространстве /?3. Формула (2.85), если применять её к сфе-
рическим многоугольникам, позволяет чрезвычайно просто найти все
выпуклые правильные многогранники пространства
т. е. выпуклые многогранники, гранями которых являются одинако-
вые правильные многоугольники. Можно доказать, что около любого
правильного многогранника пространства /?3 можно описать сферу,
причём проекции его граней на эту сферу из её центра будут
являться правильными сферическими многоугольниками. Если мы
обозначим число граней многогранника через N, число сторон
каждой его грани через п, а число граней, примыкающих к ка-
ждой его вершине, через то площадь каждого из полученных
нами сферических многоугольников, с одной стороны, равна част-
ному от деления площади поверхности сферы на N, а с другой
стороны, выражается по формуле (2.85), где Е равна произведе-
нию числа углов многоугольника п на величину каждого из этих
2^ „
углов, равную — . Поэтому
= — — 2Н <2-96>
§ 3] ПЛОСКОСТЬ РИМАНА 169
или, сокращая на кг2, получаем:
4 = --» + 2, (2.97)
ЛГ 4 1
откуда
N = „ . (2.98)
2п + 2v — пу v
Как число п сторон грани, так и число 4 граней, примыкаю-
щих к вершине, не может быть меньше 3. При /г = 4 = 3 мы
Черт. 24.
получаем Л7— 4, т. е. тетраэдр с 4 треугольными гранями, схо-
дящимися в каждой вершине по три. При п = 3, 4 — 4 мы получаем
8, т. е. октаэдр с 8 треугольными гранями, сходящимися
в каждой вершине по четыре. При п = 3, 4 — 5 мы получаем
Л/—20, т. е. икосаэдр с 20 треугольными гранями, сходящимися
в каждой вершине по пять. При п = 4, 4 = 3 мы получаем N=6,
т. е. куб с 6 квадратными гранями, сходящимися в каждой вер-
шине по три. При n = 5, 4 == 3 мы получаем N= 12, т. е. доде-
каэдр с 12 пятиугольными гранями, сходящимися в каждой вершине
по три. При п = 3, 4 = 6, /г = 4 = 4 и /г = 6, 4 = 3 знаменатель
правой части (2.98) обращается в нуль, при дальнейшем увеличе-
нии п и 4 этот знаменатель становится отрицательным. На черт. 24
изображены пять правильных многогранников.
170
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
§ 4. Плоскость Лобачевского
Геометрия плоскости Лобачевского 1S2 отрицательной кривизны
гораздо ближе к геометрии плоскости /?2 в целом. Мы уже видели,
что плоскость XS2 отрицательной кривизны гомеоморфна плоско-
сти R%. И сама плоскость XS2 отрицательной кривизны и её пря-
мые простираются в бесконечность.
На плоскости 1S2, так же как на плоскости /?2, имеются не пе-
ресекающиеся прямые} этими прямыми являются те прямые этой
плоскости, которым соответствуют большие окружности сферы
чисто мнимого радиуса в пространстве плоскости которых
пересекаются по прямой, не пересекающейся с этой сферой, т. е.
по евклидовой прямой индекса 0 или по изотропной прямой. Однако
в отличие от плоскости Т?2, где всякие две непересекающиеся, т. е.
параллельные, прямые могут быть получены переходом из пересе-
кающихся прямых (при удалении их точки пересечения в беско-
нечность), на плоскости XS2 предельным переходом из пересекаю-
щихся прямых могут быть получены только такие прямые, которым
соответствуют большие окружности с плоскостями, пересекающи-
мися по изотропной прямой; пересекающимся окружностям соот-
ветствуют большие окружности с плоскостями, пересекающимися
по евклидовой прямой индекса 1, а предельным переходом из
таких прямых можно получить изотропную прямую, но нельзя
получить евклидовой прямой индекса 0. Будем называть непересе-
кающиеся прямые плоскости \$2, которые можно получить пре-
дельным переходом из пересе-
кающихся прямых, параллель-
ными прямыми, а непересе-
кающиеся прямые, которые
нельзя получить предельным
переходом из пересекающихся
прямых,—расходящимися пря-
мыми.
На плоскости х52 из точки
вне прямой линии можно про-
вести две и только две параллельные прямые к данной прямой
(черт. 25). В самом деле, через каждую точку евклидовой пло-
скости индекса 1 проходят две изотропные прямые; поэтому если
нам даны прямая и плоскость индекса 1, проходящие через центр
сферы чисто мнимого радиуса пространства 1/?3 и не имеющие
других общих точек, то через эту прямую можно провести две и
только две плоскости, проходящие через изотропные прямые дан-
ной плоскости. Данная прямая и плоскость высекают из сферы
пару диаметрально противоположных точек и большую окружность,
соответствующие точке и не проходящей через неё прямой на
плоскости 1S2, а построенные нами плоскости высекают из этой
§ 4] ПЛОСКОСТЬ ЛОБАЧЕВСКОГО 171
сферы большие окружности, соответствующие прямым, проведён-
ным через данную точку параллельно данной прямой.
Угол между проведённой нами параллелью и перпендикуляром,
опущенным из данной точки на данную прямую, называется углом
параллельности. Угол параллельности является острым углом,
так как если бы он был прямым, из точки вне прямой можно
было бы провести только одну прямую, не пересекающую данной
прямой. Из определения угла параллельности следует, что всякая
прямая, проходящая через данную точку внутри угла параллель-
ности, пересекается с данной прямой, а всякая прямая, проходящая
через эту точку вне угла параллельности, расходится с данной
прямой. Угол параллельности зависит от длины этого перпенди-
куляра: при стремлении этой длины к нулю угол параллельности
стремится к прямому углу.
На плоскости 1S2 не выполняется V постулат Евклида.
В самом деле, перпендикуляр и наклонная к некоторой прямой
в том случае, когда наклонная составляет с этой прямой угол,
равный или больший угла параллельности отрезка, отсекаемого
перпендикуляром и наклонной на этой прямой, параллельны или
расходятся. Но угол параллельности всегда является острым углом,
а внутренние односторонние углы, составляемые перпендикуляром
и наклонной с данной прямой, в сумме меньше двух прямых.
В то же время, как нетрудно проверить, все утверждения гео-
метрии плоскости Т?2, не зависящие от V постулата, например
все аксиомы Гильберта (см. § 5 главы I), кроме аксиомы о парал-
лельных, на плоскости XS2 отрицательной кривизны выполнены.
Поэтому существование геометрии плоскости XS2 доказывает неза-
висимость аксиомы, о параллельных (или V постулата Евклида) от
остальных аксиом евклидовой геометрии.
Всякие две расходящиеся прямые плоскости XS2 обладают
общим перпендикуляром и всякие две прямые этой плоскости,
обладающие общим перпендикуляром, расходятся; общим перпен-
дикуляром двух расходящихся прямых плоскости XS2 отрицательной
кривизны является прямая, соответствующая большой окружности,
высекаемой из сферы чисто мнимого радиуса пространства х/?3
двумерной плоскостью индекса 1, ортогональной прямой индекса О
этого пространства, по которой пересекаются двумерные плоскости
индекса 1, высекающие из сферы большие окружности, соответ-
ствующие данным прямым. Эта двумерная плоскость ортогональна
двумерным плоскостям, высекающим большие окружности, соот-
ветствующие данным прямым (черт. 26). В самом деле, при отра-
жении от указанной плоскости переходят в себя двумерные пло-
скости, высекающие большие окружности, соответствующие данным
прямым. Это отражение определяет на плоскости XS2 отражение
от построенной прямой, при котором переходят в себя данные пря-
мые. Поэтому углы между данными прямыми и построенной нами
172
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
прямой равны своим смежным и, следовательно, являются прямыми.
Обратно, если две прямые плоскости 1<S2 обладают общим перпен-
дикуляром, то двумерные плоскости, высекающие большие окруж-
ности, соответствующие этим прямым, ортогональны двумерной
плоскости, высекающей большую окружность, соответствующую
общему перпендикуляру, и линия их пересечения является прямой,
перпендикулярной к этой двумерной плоскости. Но двумерная
плоскость, высекающая большую окруж-
ность, соответствующую общему перпен-
дикуляру, является плоскостью индекса 1,
поэтому линия пересечения плоскостей,
высекающих большие окружности, соот-
ветствующие данным прямым, является пря-
мой индекса 0, т. е. данные прямые рас-
ходятся.
Длина а общего перпендикуляра двух
расходящихся прямых плоскости
связана с углом ia между двумерными
плоскостями, высекающими из сферы
пространства большие окружности,
соответствующие данным прямым, со-
отношением а = aq, где qi — радиус кри-
визны плоскости. В самом деле, длина
общего перпендикуляра двух прямых пло-
скости равна абсолютному значению
произведения чисто мнимого угла между
радиусами-векторами точек сферы, соот-
ветствующими концам этого перпендикуляра, и радиуса сферы qi.
Но указанные радиусы-векторы лежат в указанных двумерных пло-
скостях и ортогональны их линии пересечения, вследствие чего угол
между этими радиусами-векторами равен углу между двумерными
плоскостями и наше произведение равно \aiqi\ = aq.
Параллельные прямые плоскости 1S2 не обладают ни точкой
пересечения, ни общим перпендикуляром, но могут быть получены
предельным переходом и из пересекающихся и из расходящихся
прямых.
Если получать две параллельные прямые плоскости 1S2 пре-
дельным переходом из двух пересекающихся прямых, то угол
между последними равен углу между двумерными плоскостями,
высекающими из сферы большие окружности, соответствующие
этим прямым, а также углу между перпендикулярами к этим пря-
мым, лежащим в плоскости индекса 0, ортогональной радиусу-
вектору точки, соответствующей точке пересечения данных прямых.
При нашем предельном переходе линия этого последнего радиуса-
вектора превращается в изотропную прямую, ортогональная ей
плоскость индекса 0 превращается в полуевклидову плоскость,
§ 4]
ПЛОСКОСТЬ ЛОБАЧЕВСКОГО
173
проходящую через эту изотропную прямую, а двумерные плоскости,
высекающие большие окружности, соответствующие нашим прямым,
переходят в плоскости, перпендикуляры к которым лежат в ука-
занной полуевклидовой плоскости. Но угол между двумя неизо-
тропными прямыми полуевклидовой плоскости равен нулю. Поэтому
значение угла между двумерными плоскостями при нашем предель-
ном переходе стремится к нулю и, так как этот угол равен углу
между пересекающимися прямыми плоскости 1<S2, мы находим, что
при получении параллельных прямых плоскости 1S2 предельным
переходом из пересекающихся прямых предельное значение угла
между этими последними прямыми равно нулю.
Если на плоскости XS2 отрицательной кривизны применять пре-
дельный переход, при котором пересекающиеся прямые переходят
в параллельные, к двум сторонам треугольника, мы получим вы-
рожденный треугольник — треугольник с двумя параллельными
сторонами; применяя тот же предельный переход к двум пересе-
кающимся сторонам вырожденного треугольника, мы получим
дважды вырожденный треугольник, у которого две пары сторон
Черт. 27.
параллельны; и, наконец, применяя тот же предельный переход
к двум пересекающимся сторонам дважды вырожденного треуголь-
ника, мы получим трижды вырожденный треугольник, у кото-
рого все стороны попарно параллельны. На черт. 27 изображены
вырожденный, дважды вырожденный и трижды вырожденный тре-
угольники плоскости 1S2.
Так как все функции, входящие в формулы тригонометрии на
сфере чисто мнимого радиуса пространства непрерывны, все
эти формулы имеют место и для получаемых предельным перехо-
дом из обычных треугольников вырожденных треугольников, в ко-
торых следует положить угол между параллельными сторонами
равным нулю.
Как мы видели, угол параллельности зависит от длины а
перпендикуляра, опущенного из данной точки на данную прямую.
Будем обозначать угол параллельности в функции отрезка а
через П(я) (черт. 28). Функция Л (я) может быть легко найдена
путём применения к вырожденному треугольнику, сторонами кото-
174
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[гл. п
рого являются наши параллели и перпендикуляр, двойственной
теоремы косинусов (2.59). Если мы положим в этой формуле
С = 0, В = Л = П(&), эта формула примет вид
1 = sin П (d) ch (2.99)
или
sin П(я) = —— , (2.100)
ch --
Q
откуда
2
(2Л01)
1 и. < CL « U
„ , ч ч I — th — ch-------------sh —
, 2 П (а) 1 — cosll(a) _____________£_ _ q q __
® 9 1 + cos П (а) . . . и а i и а
1 4 7 1 4- th — ch---------k sh —
q q q
a
e~~*
= ~^ = е
eq
а
и окончательно
, П (а) -4
tg-y2 — е ч
(2.102)
(2.103)
а
Черт. 28.
На плоскости 1S2 отрицательной кривизны не из всякой
точки внутри угла можно провести прямую линию, пересекаю-
щую обе стороны угла. В самом деле, для всякого угла можно
построить прямую, одновременно парал-
лельную обеим сторонам этого угла, так
что стороны угла и эта прямая образуют
дважды вырожденный треугольник (пло-
скость пространства 3/?3, высекающая из
сферы чисто мнимого радиуса большую
окружность, соответствующую этой прямой,
определяется двумя асимптотами сферы,
лежащими в плоскостях, высекающих из сферы большие окруж-
ности, соответствующие сторонам угла). Точками, из которых
можно провести прямые линии, пересекающие обе стороны даннога
угла, являются только внутренние точки полученного нами дважды
вырожденного треугольника. Из точек, лежащих внутри угла, но
вне этого треугольника, таких прямых провести нельзя.
§ 4]
ПЛОСКОСТЬ ЛОБАЧЕВСКОГО
175
Будем называть кривые плоскости 1S2, соответствующие эллип-
тическим, гиперболическим и параболическим окружностям сферы
чисто мнимого радиуса в пространстве
соответственно окружностями, эквиди-
стантами и орициклами.
Окружность плоскости ’Sg является
геометрическим местом точек этой
плоскости, равноотстоящих от одной
точки. В самом деле, рассмотрим сечение
сферы чисто мнимого радиуса простран-
ства некоторой плоскостью индекса 0;
опустим из центра сферы перпендикуляр
на эту плоскость (черт. 29). Так как при
повороте вокруг этого перпендикуляра и
сфера и наша плоскость переходят в себя,
окружность сферы, являющаяся их пере-
сечением, также переходит в себя; в то же
время при этом повороте точки пересече-
ния перпендикуляра со сферой остаются
неподвижными. Поэтому расстояние от
любой точки окружности до этих точек
одно и то же; при отождествлении диаметрально противоположных
точек сферы построенная нами окружность сферы перейдёт в ок-
ружность плоскости 1S2, а точки пересечения перпендикуляра со
сферой перейдут в одну точку плоско-
сти XS2 — центр нашей окружности.
Эквидистанта плоскости 1S2 являет-
ся геометрическим местом точек этой
плоскости, равноудалённых от одной
прямой. В самом деле, рассмотрим сечение
сферы чисто мнимого радиуса простран-
ства. 1/?3 некоторой плоскостью индекса 1
и проведём через центр сферы плоскость,
параллельную этой плоскости. Эта пло-
скость высечет из сферы большую окруж-
ность (черт. 30). Так как при повороте
вокруг перпендикуляра к этим плоскостям,
проходящего через центр сферы, и сфера
и обе эти плоскости переходят в себя, обе
окружности сферы, являющиеся пересече-
ниями сферы с этими плоскостями, также
переходят в себя. Поэтому расстояние
между этими окружностями постоянно; при
отождествлении диаметрально противоположных точек сферы первая
окружность сферы превращается в эквидистанту на плоскости XS2,
а другая — в прямую этой же плоскости; будем называть эту прямую
176
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
базой данной эквидистанты, а расстояние от точек эквиди-
станты до её базы — параметром эквидистанты. Слово «эквиди-
станта» и означает «равноотстоящая».
Длина окружности радиуса R на плоскости XS2 равна
С — 2itq sh
(2.104)
В самом деле, рассмотрим треугольник, вершинами которого
являются центр сферы, основание перпендикуляра, опущенного из
центра сферы на плоскость, высекающую окружность, и одна
из точек окружности (черт. 29). Этот треугольник — прямоуголь-
ный, гипотенуза его равна радиусу сферы qi, один из катетов —
радиусу р окружности, рассматриваемой как окружность на пло-
скости /?2, а угол, находящийся против этого катета, являющийся
р
центральным углом, стягивающим дугу сферы длины R, равен z.
Поэтому
катет р равен
I» I р
qi sin — i j = q sh —.
(2.105)
Так как длина нашей окружности равна 2тгр, подставляя
вместо р выражение (2.105), мы получаем (2.104).
Длина дуги окружности радиуса R на плоскости 1S2, стя-
гиваемая углом ф, равна
C(®) = <p?sh-y. (2.106)
В самом деле, длина нашей дуги равна <рр и, подставляя
вместо р выражение (2.105), мы получаем (2.106).
Длина дуги эквидистанты параметра Р, ортогонально проек-
тирующейся на отрезок базы длины а, равна
C(d) = a ch —
(2.107)
В самом деле, рассмотрим треугольник, вершинами которого
являются центр сферы, основание перпендикуляра, опущенного из
центра сферы на плоскость, высекающую окружность, и одна из
точек окружности (черт. 30). Этот треугольник — прямоугольный,
гипотенуза его равна радиусу сферы qi, один из катетов — ра-
диусу р/ окружности, рассматриваемой как окружность на пло-
скости 1/?2, а угол при этом катете, равный центральному углу,
р
стягивающему дугу сферы длины Р, равен — z. Поэтому катет pz
равен
pz = q cos-^z, (2.108)
откуда
Р = q ch . (2.109)
§ 4]
ПЛОСКОСТЬ ЛОБАЧЕВСКОГО
177
Отрезок базы длины а является общим перпендикуляром пря-
мых, проектирующих данную дугу на базу эквидистанты. В силу
(2.98) угол между этими двумерными плоскостями пространства х/?3,
высекающими из сферы большие окружности, соответствующие
этим прямым, равен -у/. Этот угол равен центральному углу
окружности, соответствующей эквидистанте, рассматриваемой как
окружность на плоскости 1/?2, стягивающему данную дугу. Поэтому
« I я . . I
длина нашей дуги равна — грг |, откуда, подставляя вместо р
выражение (2.109), мы получаем (2.107).
Так как всякая полуевклидова плоскость пространства х/?3 мо-
жет быть получена предельным переходом из евклидовой плоско-
сти индекса 0 или 1, всякий орицикл плоскости х52 может быть
получен предельным переходом из окружности при удалении
в бесконечность её центра или из эквидистанты при удалении
в бесконечность её базы. Слово «орицикл» и означает «предель-
ный круг». Орициклы называют также предельными линиями.
Так как через всякие три точки сферы пространства х/?3 можно
провести окружность, которая, в частности, может быть большой
окружностью, через всякие три
точки плоскости х52, не лежа-
щие на одной прямой, можно
провести окружность, эквиди-
станту или орицикл.
На плоскости XS2 можно вве-
сти декартовы координаты, опре-
деляющиеся следующим образом:
на плоскости JS2 отрицательной
ег\
I
I
I
__________:_________
и е.
Черт. 31.
кривизны выбираются две взаимно перпендикулярные прямые, напри-
мер оси е^ег и е$е2, и декартовыми координатами точки являются
расстоянием от точки eQ до основания перпендикуляра, опущенного
из данной точки на ось еое1} и длина v этого перпендикуляра (черт. 31).
Чисто мнимые числа и 6— представляют собой углы
в пространстве х/?3, которые можно рассматривать как широту и
12 Зак. 177. Б. А. Розенфельд
178
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
долготу соответственной точки на сфере чисто мнимого радиуса
(черт. 32). При нашем базисе в пространстве х7?3 широта и дол-
гота точки на сфере связаны с координатами х°, х1, х2 этой точки
соотношениями
х° = cos 6 cos ср,
Л 1 п •
X1 — — COS 0 Sin Ф,
I
х2 = Д- sin 0.
i
(2.110)
Поэтому декартовы координаты и, v точки плоскости 1S2 свя-
заны с координатами х°, х1, х2 этой точки соотношениями
= ch — ch —,
q q
x1 = ch — sh —,
q q
x2 ~ sh —.
q
(2.111)
На верхней полости сферы чисто мнимого радиуса долгота ср
и широта 6 принимают все чисто мнимые значения. Поэтому обе
( ( декартовы координаты на плоскости JS2
е*\ || принимают все вещественные значения от
I 11 — оо до -|- оо.
С помощью декартовых координат на
______~~ ’---плоскости г52 можно найти площадь любой
--------------___ квадрируемой фигуры. Так как координат-
" ными линиями здесь являются прямые, пер-
v пендикулярные к оси eQe19 и эквидистанты,
базой которых является эта ось, то эле-
ео и du____________е1 ментом площади здесь является бесконечно
Черт. 33. малый прямоугольник, две стороны кото-
рого являются прямолинейными отрезками,
а две другие стороны—дугами эквидистант (черт. 33). Длина
одной из прямолинейных сторон этого прямоугольника равна dv,
а длина одной из криволинейных сторон этого прямоугольника,
являющаяся длиной дуги эквидистанты параметра v, ортогонально
проектирующейся на отрезок базы длины du, в силу (2.107)
равна
С (du) = ch-^du. (2.112)
Так как геометрия плоскости 1S2 отрицательной кривизны
в малых окрестностях точек близка к геометрии плоскости /?2, за
§ 4]
ПЛОСКОСТЬ ЛОБАЧЕВСКОГО
179
площадь этого прямоугольника следует принять произведение най-
денных нами длин сторон, т. е.
, t. j j
as = ch — du dv.
q
(2.113)
Поэтому площадь всякой плоской области G на плоскости
отрицательной кривизны выражается двойным интегралом
ch — du dv,
q
(2.114)
Найдём площадь треугольника на плоскости XS2 отрицательной,
кривизны.
Вычислим сначала площадь прямоугольного вырожденного тре-
угольника (один из катетов такого треугольника параллелен его
гипотенузе). Если мы обозначим длину конечного катета этого
вырожденного треугольника через а, противолежащий острый угол
этого треугольника будет равен 0, а приле-
жащий П(а) (черт. 34). ,
Уравнение гипотенузы этого треугольника у А
в силу второй теоремы тангенсов (2.63) у
имеет вид /
thy — shytgll(a). (2.115) / Т°
Но из формул (2.100) и (2.101) находим:
tgn(fl) =----------=—,(2.116)
ch-th- sh“ ЧеРт-34‘
q q q
вследствие чего уравнение (2.115) можно переписать в виде
< и
sh —
thf = -b (2.117)
q
Поэтому площадь нашего треугольника выражается интегралом
а
О
arth------—
, а
sh —
Я
( L. V ,
ch — rfzf.
(2.118)
12*
180
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Вычисляя этот интеграл, находим:
du
i u
sh —
arth---
sh —
q a
< V f
sh— ~q
q ч ’
sn —
q
а
= <72
d ch —
q
ch2 — — ch2 —
q
= q% | arc
sin
—du —
— Sh2-
q
ch —
q __
ch —
q
Но arc sin
1
1=T’a
окончательно
площадь
= q*( arc sin
1 — arc sin
1
, а
ch —
q
(2.119)
в силу (2.100) —L-
ch —
q
нашего треугольника равна
sin П (а), так что
S-<7a[y-II(a)].
(2.120)
а
о
о
о
и
q
о
Вычислим теперь площадь дважды вырожденного треугольника
(черт. 35). Опуская из конечной вершины этого треугольника вы-
соту на противолежащую сторону, мы разделим
наш дважды вырожденный треугольник на два
вырожденных треугольника, площадь которых мы
только что вычислили. Так как для каждого из
^4
этих треугольников П (tz) — у, площадь каждого
из этих двух вырожденных треугольников равна
п / тс А \
(-ft--2")> вследствие чего площадь нашего
дважды вырожденного треугольника равна
S = q^^ — А). (2.121)
Черт. 35. Если мы устремим и третью вершину нашего
треугольника в бесконечность, т. е. получим трижды
вырожденный треугольник, все стороны которого попарно парал-
лельны и все углы равны нулю, то, как видно из формулы (2.121),
площадь такого треугольника равна
S = q*K,
(2.122)
Теперь мы можем вычислить площадь произвольного треуголь-
ника. Построим три прямые, соответственно параллельные про-
§ 4]
ПЛОСКОСТЬ ЛОБАЧЕВСКОГО
181
должениям пар сторон данного треугольника АВС, так что тре-
угольник АВС окажется расположенным внутри трижды вырож-
денного треугольника (черт. 36). Площадь треугольника АВС равна
разности площади трижды вырожденного треугольника и площадей
трёх дважды вырожденных треугольников, углы при конечных
вершинах которых соответственно
равны -к — А, тс—В и тс — С. Поэтому
в силу (2.121) площади этих трёх
треугольников соответственно равны
q^B и q2C, так что окончательно
площадь треугольника равна
S = q4 — q*A — q*B—q*C, (2.123)
т. e.
5 = ^(тс — А— В — С). (2.124)
Выражение -к — А — В — С назы-
вается угловым дефектом тре-
угольника на плоскости 1S2.
Формула (2.124) показывает, что площадь треугольника на
плоскости х52 отрицательной кривизны пропорциональна угло-
вому дефекту треугольника.
Так как площадь треугольника всегда положительна, из фор-
мулы (2.124) мы получаем, что сумма углов треугольника на
плоскости XS2 отрицательной кривизны всегда меньше тс.
Заметим, что, заменяя в формуле (2.124) qi через г, мы
получим формулу (2.83) для площади треугольника на пло-
скости S2.
Так как всякий выпуклый n-угольник на плоскости XS2 можно
разделить прямыми, соединяющими его вершины, на п — 2 тре-
угольника и так как площадь и сумма углов многоугольника равна
сумме соответственно площадей и сумм углов этих треугольников,
применяя к каждому из этих треуголь-
ников формулу (2.124), мы получим,
что площадь S n-угольника на пло-
скости х52 отрицательной кривизны свя-
зана с суммой углов S этого многоуголь-
ника соотношением
S = q^[{n — 2)тс — S], (2.125)
Черт. 37. Рассмотрим на плоскости XS2 отри-
цательной кривизны четырёхугольник
Хайяма, т. е. четырёхугольник с прямыми углами при нижнем
основании и с равными боковыми сторонами (черт. 37). Так же
как в случае четырёхугольника Хайяма на плоскости S2, по-
казывается, что верхние углы четырёхугольника Хайяма на
182
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. П
плоскости 1S2 равны, а прямая, соединяющая середины верхнего и
нижнего оснований этого четырёхугольника, является общим пер-
пендикуляром этих оснований.
В силу формулы (2.125) при п — 4 сумма углов четырёх-
угольника Хайяма на плоскости 1S2 отрицательной кривизны
меньше четырёх прямых и, следовательно, сумма двух верхних
углов этого четырёхугольника меньше двух прямых и, так как эти
углы равны друг другу, на плоскости г52
отрицательной кривизны верхние углы
четырёхугольника Хайяма острые.
Найдём зависимость длины верхнего
основания четырёхугольника Хайяма от
длины нижнего основания этого четырёх-
угольника и длины общего перпендикуляра
этих оснований. Для этого рассмотрим
четырёхугольник MBDN и обозначим
длины его сторон MB, MN, ND и BD
через соответственно х, у, X, Y, длину его диагонали MD че-
рез R, а углы BMD и DMN через соответственно а и [3 (черт. 38).
Из теоремы синусов (2.61) для прямоугольного треугольника МND
мы получаем:
. X , R . 0
sh — = sh —> sin В,
Я Я r
(2.126)
или, так как — <*,
sh -у- = sh-y- cos а. (2.127)
С другой стороны, по первой теореме тангенсов (2.62) для
прямоугольного треугольника MBD мы получаем:
th у = th-у-cos а, (2.128)
откуда
th —
sh — = sh ——l_=ch —th—. (2.129)
<7 q ihR_ q q v ’
q
Но по теореме Пифагора (2.60) для прямоугольного треуголь-
ника MND мы получаем:
ch — = ch — ch —, (2.130)
я я я v 7
откуда
sh4-= ch— ch —th —, (2.131)
q q q q
§ 5]
ОБЪЁМЫ
183
и окончательно
Если мы обозначим
рёхугольника Хайяма
ляра этих оснований
из формулы (2.132)
У_
Q
и верхнего оснований четы-
длину общего перпендику-
th — = th — ch
q
длины
через а и A, a
через h, то, так как a = 2x, A — 2X, h~ y,
мы получим зависимость А от а и h в виде
А ..а , h
th — th -я—ch —
2q 2q q
показывает, что на плоскости г52 верхнее
Q
нижнего
(2.132)
(2.133)
Формула (2.133)
основание четырёхугольника Хайяма больше его нижнего осно-
вания и при безграничном увеличении h длина верхнего осно-
вания безгранично увеличивается.
Перегибая чертёж с четырёхугольником С
Хайяма (черт. 37) по прямой АВ, мы полу-
чим новый четырёхугольник Хайяма АВРЕ
(черт. 39). При этом прямая АВ является
общим перпендикуляром прямых СЕ и DF.
Так как отрезок CD, а следовательно, и
отрезок ЕР больше отрезка АВ, мы видим,
что прямые СЕ и DP удаляются друг от Черт>
друга по обе стороны от их общего перпен-
дикуляра. А так как две произвольные расходящиеся прямые пло-
скости 1S2 обладают общим перпендикуляром, мы видим, что две
расходящиеся прямые плоскости г52 удаляются друг от друга
по обе стороны от йх общего перпендикуляра и, следовательно,
длина общего перпендикуляра двух расходящихся прямых пло-
скости XS2 является минимальным расстоянием между этими
прямыми.
Заметим,
треугольника
D
что из теоремы синусов (2.61) для прямоугольного
MBD мы получаем:
Y R
sh— = sh — sin а,
q q
(2.134)
что вместе с (2.128) даёт:
sh2 -4- sh2 — = sh2 —
q * q q
(2.135)
§ 5. Объёмы
В пространствах Sn и lSn можно определить декартовы коор-
динаты, аналогичные определённым нами декартовым координатам
на плоскостях S2 и г52. Определим декартовы координаты в про-
странстве Римана Sn и в пространстве Лобачевского 1Sn отрица-
тельной кривизны.
184
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. П
Для определения декартовых координат в этих пространствах
следует выбрать базис пространства, представляемый ортогональ-
ным базисом в пространствах Rn+1 или 1/?п+1. Тогда декартовыми
координатами точки будут: длина ип перпендикуляра, опущенного из
этой точки на координатную гиперплоскость е()е1. . . еп_х, длина ип~х
перпендикуляра, опущенного из основания первого перпендикуляра
на координатную (п — 2)-мерную плоскость длина zz№“2
перпендикуляра, опущенного из основания второго перпендикуляра
на координатную (п—3)-мерную плоскость eQe± ... еп_%, и т. д.
до расстояния иУ от основания (п—1)-го перпендикуляра до
точки £0.
Tf 1 llX Un 1
Числа ср1 = —, .. ., <рп = — в случае пространства и чисто
мнимые числа ср1 = -у- I, ..., ф™ = I в случае пространства
представляют собой углы в пространствах соответственно /?п+1
и которые можно рассматривать как многомерные обобще-
ния широты и долготы соответственной точки на гиперсфере про-
странств Rn+1 и
При ортогональном базисе в пространстве /?п+1 углы ср1, .. ., <рп
связаны с координатами х°, . .., хп этой точки соотношениями
— cos фп cos cpn-1
= cos cpn cos Cp^”1
= COS cpw COS cp^”1
cos ср2 cos ср1,
cos ср2 sin ср1,
sin ср2,
(2.136)
xn-l — cos фП sin cpn-1
xn = sin cp^.
Поэтому декартовы координаты zz1, . .., un точки простран-
ства Sn связаны с координатами х°, . . ., хп этой точки соотно-
шениями
ЦП ип~^ иХ
= cos — cos-------- . . . cos — cos---,
г г г г
(2.137)
§ 5]
ОБЪЁМЫ
185
На гиперсфере угол ср1 изменяется от —тс до + тс, а углы
ср2, фп от —~ до +-£-• Поэтому в пространстве Sn все
углы ср1, ...,c?w изменяются в пределах от—~ до +4р вслед"
ствие чего декартовы координаты и1, . . ., ип точки пространства Sn
71 . ТС
изменяются от —у г до -f-jr.
При ортогональном базисе пространства 17?п+1 углы ср1, . . ., срп
связаны с координатами х°, . . ., хп этой точки соотношениями
х° = COS <?п COS <рп-1 . . . COS Ф2 COS ср1,
X1 ~ У COS COS Фп-1 . . . COS ср2 sin ср1.
X2 = Д- COS cpw COS Фп-1 , I т . . . sin ср2,
(2.138)
хп~1~-г cos <рп sin ср**—1,
хп = Д- sin
i
Поэтому декартовы координаты и1, .. ., ип точки пространства rSn
отрицательной кривизны связаны с координатами х°, . . ., хп этой
точки соотношениями
л к ип . м^-1 «и2 .и1 1
= ch—ch---- . . . ch—ch —,
q q qq
1 и иП и и™'1 u И2 I^1
x1 = ch — ch- ... ch — sh —,
q q qq
x2 — ch — ch- . . . sh —,
q q q
„ л и иП и иП~1
= ch — sh-,
q q
, un
xn = sh —.
q j
(2.139)
На верхней полости гиперсферы чисто мнимого радиуса про-
странства 17?п+1 каждый из углов ср1, . . ., <рп пробегает всю мни-
мую ось плоскости комплексного переменного. Поэтому в про-
странстве 1SW отрицательной кривизны все декартовы координаты
я1, ...» ип изменяются от —оо до -|-оо.
Совершенно аналогично определяются декартовы координаты
в пространствах lSn для Z > 1. С помощью декартовых координат
в пространствах Sn и 1Sn можно найти объём любой кубируемой
области этих пространств. Так как в этой системе координат
координатные линии взаимно ортогональны, элементом объёма здесь
является бесконечно малый n-мерный параллелепипед, /-е ребро
которого направлено по координатной линии и*.
186
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
(ГЛ. II
Как видно из формул (2.137), координатная линия и1 простран-
ства Sn, проходящая через точку с координатами Uq, ...» «о, опре-
деляется уравнением
х = cos — ... cos -у- cos + ei sin (2.140)
где
1 гЛ
UQ Uq
— eQ cos —— ... cos — +
u*-1 u*"1
-|-cos-y—+- . . . +^_1Sin ~,
n i+i (2-141)
, ao . ao ,
bi = ei+l cos— ... sin — 4- . . .
. ao . ao-1 , . a"
• • • + cos — sin----------н e„ sin —.
I / fr-Л J* J» 'fl/ j»
Вектор x является вектором длины г, ортогональным вектору ei}
и* . . и*
вследствие чего вектор cos — ~\-eisin “ описывает окружность
радиуса г, и, следовательно, вектор х описывает окружность
п г+1
“о “о
радиуса г cos — . .. cos - r .
Z-e ребро нашего параллелепипеда представляет собой дугу
этой окружности, стягиваемую центральным углом . Поэтому
длина Z-ro ребра нашего параллелепипеда равна
и™ u^+1 da*
г cos — cos-------- . .. cos-------- =
г г г г
Uq Uo'~1 U0 + 1
= cos— cos-------...cos--------du*. (2.142)
г г Г К '
Так как геометрия пространства Sn в малых окрестностях точек
близка к геометрии пространства 7?п, за объём этого параллеле-
пипеда следует принять произведение длин его рёбер, т. е.
z/тг /Ш—2 z/3 z/2
dV = cos™"1 — cos™"1------... cos2 — cos — du1 du* . . . dun.
r r r r
Поэтому объём всякой кубируемой области Q пространства Sn
выражается n-кратным интегралом
V = J ^* . . . J COS™"1 COS™"2 иП^ * . . . COS2—^7 X
X COS du1 du^ ... dun. (2.143)
§ 51
ОБЪЕМЫ
187
Точно так же показывается, что объём всякой кубируемой об-
ласти G пространства 1Sn отрицательной кривизны выражается
n-кратным интегралом
V— []*••• [ch»-1-у
. . . ch2 — ch — du1 du? .. . dun.
q q (2.144)
Так как пространство Sn получается отождествлением диаме-
трально противоположных точек гиперсферы пространства Rn+1,
пространство Sn замкнуто и обладает конечным объёмом.
Вычислим объём пространства $п. Этот объём выражается
интегралом (2.143), если за область интегрирования G считать всё
пространство.
_ к , к
Так как здесь все переменные изменяются от —г до
этот n-кратный интеграл равен произведению п интегралов
cos™"2 du™-1
г
cos™"1 — dun. (2.145)
Производя замену переменных и1 — rt\ и* = г/2, . . ., ип = rtn,
мы придадим этому интегралу вид
cos2 dt? . .. X
COS™"2/™"1^™"1
2
[ cosn-4nd/». (2.146)
тс
Воспользовавшись известными формулами анализа
[ coS24^ = (%--?)!U, [ 2, (2.147)
«7 J \£K —1 jll
•Л к
2 "V
188 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
где &!! — произведение всех натуральных чисел той же чётности,
что и k, не превосходящих k, мы найдём окончательно, что объём
п-мерного пространства Римана Sn с радиусом кривизны г
равен при чётном и нечётном п соответственно
п п п—1 П + 1
О 2 2
У=2-^ГГП- (2Л48)
В частности, при п= 1, 2, 3, 4 мы получаем, что длина пря-
мой равна пг, площадь плоскости S2 равна 2№, объём про-
странства S3 равен тсМ, объём пространства S4 равен ук2г4.
§ 6. Абсолют и идеальные точки неевклидова пространства
Мы определили неевклидовы пространства Sn и lSn как гипер-
сферы пространств Rn+1 и z/?w+1 с отождествлёнными диаметрально
противоположными точками. Но каждой такой паре точек взаимно
однозначно соответствует прямая пространства Rn+1 или lRn+lt
проходящая через центр гиперсферы и соединяющая эти точки.
Поэтому каждой точке пространств Sn и lSn соответствует
некоторая прямая связки прямых пространств Rn+1 и lRn+1-
При этом расстояние между точками неевклидова пространства
равно абсолютному значению произведения угла между соот-
ветственными прямыми на постоянное вещественное или чисто
мнимое число—радиус кривизны пространства. Таким образом,
мы получаем интерпретации неевклидовых пространств в связках
прямых пространств Rn+1 и г7?п+1.
Так как каждая прямая связки прямых, проходящих через центр
гиперсферы пространства 7?п+1, пересекается с этой гиперсферой
и пары диаметрально противоположных точек гиперсферы находятся
во взаимно однозначном соответствии с прямыми этой связки, про-
странство Римана Sn изображается всей связкой.
Так как не всякая прямая связки прямых, проходящих через
центр гиперсферы пространства z7?w+1, пересекается с этой гипер-
сферой и пары диаметрально противоположных точек гиперсферы
вещественного или чисто мнимого радиуса находятся во взаимно
однозначном соответствии только с частью прямых связки, про-
странства lSn положительной или отрицательной кривизны
изображаются теми прямыми связки, которые пересекаются
с гиперсферой соответственно вещественного и чисто мнимого
радиуса.
Интерпретации неевклидовых пространств в связках прямых
позволяют расширить эти пространства: будем считать прямые связки,
не пересекающиеся с гиперсферой, представляющими некоторые
новые точки этого пространства. Будем называть эти новые точки,
§ 6] АБСОЛЮТ, ИДЕАЛЬНЫЕ ТОЧКИ 189
соответствующие прямым, пересекающим гиперсферу в мнимых точ-
ках, идеальными точками неевклидова пространства, а совокуп-
ность таких точек — идеальной областью этого пространства; точки
неевклидовых пространств, с которыми мы имели дело раньше,
будем называть собственными точками неевклидова пространства,
а совокупность таких точек — собственной областью этого про-
странства; совокупность точек, пограничных между этими двумя
видами точек, соответствующих асимптотам гиперсфер, будем назы-
вать абсолютом неевклидова пространства. Будем называть неев-
клидово пространство вместе с его абсолютом и идеальной областью
расширенным неевклидовым пространством. Расстояние между
любыми двумя точками расширенного неевклидова пространства,
так же как между двумя собственными точками при интерпретации
неевклидова пространства в связке прямых, определим как абсо-
лютное значение произведения угла между соответственными
прямыми связки на радиус кривизны неевклидова пространства.
Так как угол между произвольной прямой евклидова про-
странства и изотропной прямой этого пространства равен беско-
нечности, расстояние от любой точки неевклидова пространства
до точки абсолюта равно бесконечности, вследствие чего точки
абсолюта неевклидова пространства называют также бесконечно уда-
лёнными точками этого пространства.
Для пространства Римана Sn нельзя определить идеальной
области, но можно определить мнимый абсолют, соответствующий
мнимым изотропным прямым пространства Rn+1, проходящим через
центр гиперсферы.
Для пространства Лобачевского и пространств lSn при I > 1
можно определить как идеальную область, так и вещественный
абсолют. Идеальные точки неевклидовых пространств положитель-
ной кривизны соответствуют прямым индекса 1 пространств
а идеальные точки неевклидовых пространств отрицательной кри-
визны соответствуют прямым индекса 0 пространств lRn+v
Для комплексного пространства Sn(i) нельзя определить идеаль-
ной области, но можно определить абсолют, соответствующий изо-
тропным прямым пространства /?п+1(0, проходящим через центр
гиперсферы.
Так как точки /n-мерной плоскости собственной области неев-
клидова пространства соответствуют прямым связки, лежащим
в (/п+1)-мерной плоскости, то будем называть т-мерной пло-
скостью, при т = 1 —прямой, при т = п— 1 —гиперплоскостью
расширенного неевклидова пространства всякое множество его точек,
соответствующих прямым связки, лежащим в (т-|- 1)-мерных пло-
скостях.
Определённые нами в § 5 декартовы координаты в собственной
области пространства 1Sn можно продолжить и на идеальную
область этого пространства, в которой каждая из этих координат
190
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
будет принимать комплексное значение -------^-qi или
где Ф изменяется в первом случае от —сю до 0, а во втором
случае от 0 до 4-сю. Совершенно аналогично можно определить
декартовы координаты и в расширенных пространствах lSn при Z> 1.
Так как угол между двумя гиперплоскостями собственной области
пространства lSn, пересекающимися по (п — 2)-мерной плоскости,
равен углу между гиперплоскостями lRn+1, высекающими из связки
плоские пучки прямых, соответствующие данным гиперплоскостям,
то будем называть углом между двумя гиперплоскостями рас-
ширенного пространства lSn, не пересекающимися по (п — 2)-мерной
плоскости в его собственной области, угол между гиперплоскостями
пространства lRn+1, высекающими из связки плоские пучки прямых,
соответствующие данным гиперплоскостям.
Точки неевклидовых пространств Sn и lSn, как собственные,
так и бесконечно удалённые и идеальные, можно представлять
произвольными векторами пространств Rn+1 и направленными
по прямым связки, соответствующим этим точкам. Эти векторы
удовлетворяют условию
(х, х) > 0 (2.149)
для точек пространства Sn, собственных точек пространств lSn
положительной кривизны и идеальных точек пространств lSn отри-
цательной кривизны. Они удовлетворяют условию
(х, х)<0 (2.150)
для идеальных точек пространств lSn положительной кривизны и
собственных точек пространств lSn отрицательной кривизны и
удовлетворяют условию
(х, х) = 0 (2.151)
для точек абсолютов пространств Sn и lSn.
В этом случае в силу формул (1.63) и (1.105), определяющих
угол между прямыми в пространствах Rn+1 и lRn+1, расстояние со
между любыми точками пространства Sn с радиусом кривизны г
может определяться по формуле (2.66), где длины векторов х и у
не связаны никаким условием, а расстояние со между двумя точками
расширенного пространства lSn с радиусом кривизны г определяется
по формуле
или, если г = qi,
где длины векторов х и у также не связаны никаким условием;
в том случае, когда точки х и у обе собственные или когда они
§ 6]
АБСОЛЮТ, ИДЕАЛЬНЫЕ ТОЧКИ
191
обе — идеальные точки, формулы (2.152) и (2.153) можно заменить
соответственно формулами (2.66) и (2.67).
В качестве координат точек неевклидовых пространств Sn и lSn,
как собственных, так и бесконечно удалённых и идеальных, можно
рассматривать координаты векторов пространств Rn+1 и г/?п+1,
представляющих эти точки.
При ортогональном базисе в пространстве lRn+1 формулы (2.152)
и (2.153) можно переписать в виде
2
(О
COS — =
г
(2.154)
и
(2.155)
Будем называть точку пространства Римана Sn или расширен-
ного пространства lSn полюсом гиперплоскости того же про-
странства, если этой точке соответствует прямая связки простран-
ства /?п+1 или г7?п+1, ортогональная всем прямым и-мерного
плоского пучка, соответствующего гиперплоскости; эта гиперпло-
скость называется полярной гиперплоскостью данной точки. Точно
так же будем называть m-мерную и (п — т—1)-мерную плоскости
пространства Римана Sn или расширенного пространства lSn
взаимно полярными плоскостями или взаимными полярами,
если этим плоскостям соответствуют такие (т-|™ 1)-мерный и
(п — /п)-мерный плоские пучки связки в пространстве Rn+1 или
плоскости которых вполне ортогональны между собой.
Будем называть симплексы пространств Sn и lSn, все грани
которых полярны противолежащим вершинам, автополярными сим-
плексами. Векторы пространств Rn+1 и г/?п+1, представляющие
вершины автополярного симплекса соответственного пространства Sn
или lSn, образуют ортогональный базис.
Гиперплоскости неевклидовых пространств можно определить
координатами их полюсов, которые мы будем называть тангенциаль-
ными координатами соответственной гиперплоскости неевклидова
пространства. Это название происходит от латинского слова
«tangens» — «касательный», так как уравнение между координа-
тами ai определяет семейство гиперплоскостей, являющихся каса-
тельными гиперплоскостями некоторой гиперповерхности, т. е.
тангенциальные координаты определяют гиперповерхность через её
касательные гиперплоскости. Координаты xi точки и танген-
циальные координаты а* гиперплоскости, проходящей через эту
192 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. II
точку, связаны в случае пространства Sn условием
= (2.156)
г
а в случае пространства lSn условием
2^ = 0. (2.157)
i
Будем называть две точки или /n-мерные плоскости (при т = 1
прямые) пространства Sn или расширенного пространства lSn по-
лярно сопряжёнными, если они соответствуют двум ортогональным
прямым связки прямых в пространстве Rn+1 или lRn+i или двум
(zn-|-1)-мерным плоским пучкам этой связки, плоскости которых
вполне ортогональны между собой. Одна из двух полярно сопря-
жённых точек или /тг-мерных плоскостей при т < п — т—1
целиком лежит в гиперплоскости или (п — т—1)-мерной пло-
скости, полярной другой.
Так как всякая двумерная плоскость пространства или г/?п+1,
проходящая через начало и пересекающая некоторую (т-\- 1)-мерную
плоскость этого пространства, также проходящую через начало,
по прямой и под прямым углом, обязательно пересекает по прямой
и под прямым углом (т— п)-мерную плоскость этого же простран-
ства, также проходящую через начало и вполне ортогональную
(т-\-1)-мерной плоскости, всякий перпендикуляр к т-мерной
плоскости пространства Sn или расширенного пространства lSn
пересекает плоскость, полярную этой плоскости, и является
перпендикуляром к этой полярной плоскости.
Из каждой точки пространства можно опустить перпендикуляр
на /n-мерную плоскость, причём, если эта точка не лежит на данной
/n-мерной плоскости или на её поляре, — единственный. Семейства
прямых пространства, обладающие тем свойством, что через каждую
точку пространства или некоторой его области проходит единствен-
ная прямая семейства, часто встречаются в геометрии и называются
конгруэнциями прямых (слово «конгруэнция» в первоначальном
смысле слова означает «совмещение», откуда «конгруэнтный» —
«совместимый»; если между точками двух геометрических образов
пространства установлено взаимно однозначное соответствие и мы
соединим соответственные точки прямыми, мы получим конгруэнцию
прямых, «совмещающих» один из этих образов с другим). Кон-
груэнция прямых n-мерного вещественного пространства зависит
от п—1 вещественных параметров. Поэтому семейство перпенди-
куляров к zn-мерной плоскости пространств Sn и lSn является
конгруэнцией прямых. Будем называть эту конгруэнцию прямых
конгруэнцией перпендикуляров к т-мерной плоскости и её поляре.
Частным случаем этой конгруэнции при т = 0 является связка
прямых.
§ 6]
АБСОЛЮТ, ИДЕАЛЬНЫЕ ТОЧКИ
193
Из свойств связок прямых в пространствах Rn+1 и lRn+1 сле-
дует, что в пространстве Sn и в расширенных пространствах lSn:
всякие две точки опреде-
ляют одну проходящую через
них прямую;
расстояние между двумя
точками равно углу между их
полярными гиперплоскостями,
умноженному на радиус кри-
визны;
если две точки полярно со-
пряжены, каждая из них лежит
на гиперплоскости, полярной
другой;
всякие т Ц- 1 точек, не ле-
жащие в одной (/п—1)-мерной
плоскости, определяют одну
/n-мерную плоскость
и т. д.
всякие две гиперплоскости
пересекаются по (п— 2)-мерной
плоскости;
угол между двумя гипер-
плоскостями равен расстоянию
между их полюсами, делённому
на радиус кривизны;
если две гиперплоскости
перпендикулярны, каждая из
них проходит через полюс
другой;
всякие т 1 гиперплоско-
стей, не проходящие через
(п — т — 2)-мерную плоскость,
пересекаются по (п— т—1)-
мерной плоскости.
Мы видим, что каждая теорема правого столбца получается из
соответствующей теоремы левого столбца взаимной заменой слов
«точка» и «гиперплоскость», «прямая» и «(п — 2)-мерная пло-
скость», «/n-мерная плоскость» и «(п — т—1)-мерная плоскость»,
«лежит на» и «прохрдит через», «полюс» и «полярная гиперпло-
скость», «расстояние, делённое на радиус кривизны» и «угол».
Эта аналогия, имеющая место для всех теорем геометрии простран-
ства Sn и расширенных пространств lSn, называется принципом
двойственности пространств Sn и lSn.
Тот факт, что при этом принципе двойственности можно взаимно
заменять слова «расстояние, делённое на радиус кривизны» и «угол»,
показывает, что многообразия гиперплоскостей пространства Sn
и расширенных пространств lSn, если за расстояние между
двумя гиперплоскостями принять угол между ними, изоме-
тричны также соответственно пространству Sn и расширенным
пространствам lSn, но кривизны 1.
Если мы рассмотрим отрезок гиперболической прямой расши-
ренной плоскости 1S.2 отрицательной кривизны, находящийся в соб-
ственной или идеальной областях этой плоскости, и будем при-
ближать концы этого отрезка к бесконечно удалённым точкам этой
прямой, длина этого отрезка будет стремиться к бесконечности.
Но, с другой стороны, расстояние между двумя полярно сопря-
жёнными точками этой прямой, одна из которых находится в соб-
ственной области, а другая — в идеальной области, как мы видели,
13 Зак. 177. в д. Розенфельд
194
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. П
равно ~ г = qi. Поэтому, так как полярно сопряжённые точки
делят прямую на два отрезка, можно формально определить «длину
всей гиперболической прямой расширенной плоскости Лобачев-
ского отрицательной кривизны», которая равна г = nqi.
Аналогично можно формально определить «площадь всей рас-
ширенной плоскости Лобачевского отрицательной кривизны», за
которую естественно принять число 2тгг2 = 2тг (qi)2 =— 2^q2, ко-
торое, как мы видим, отрицательно. Если постулировать, что
определяемая таким образом «площадь» фигуры, составленной из
двух непересекающихся фигур, равна сумме «площадей» этих
фигур, то мы должны считать, что «площадь» части плоскости,
ограниченной парой прямых, пересекающихся под углом И, имеет
площадь, относящуюся к площади всей расширенной плоскости,
как А к углу тг, т. е. «площадь» этой части плоскости равна
^4
— (—2^q2) =— 2q2A. Это число отрицательно в случае прямых,
пересекающихся в собственной точке, когда угол А веществен и
положителен, равно 0 в случае параллельных прямых, когда
угол А равен 0, и чисто мнимо в случае расходящихся пря-
мых, т. е. прямых, пересекающихся в идеальной точке (рас-
стояние а между точками этих прямых, полярно сопряжёнными
их точке пересечения, вещественно, а угол между этими прямыми
равен
. Зная «площади» частей расширенной плоскости, огра-
ниченные двумя прямыми, мы тем же приёмом, что и в § 3 при
вычислении площади треугольника на плоскости S2, можем вычи-
слить «площадь» любого треугольника расширенной плоскости х52,
причём «площадь» треугольника в собственной области, опреде-
лённая таким образом, положительна и в точности совпадает с пло-
щадью треугольника, выражаемой формулой (2.124) и найденной
нами с помощью интегрирования. Рассматривая части расширенной
плоскости, ограниченные двумя прямыми, пересекающимися под бес-
конечно малым углом, мы можем определить «площади» любых
фигур, лежащих как в собственной, так и в идеальной областях
расширенной плоскости, ограниченной любыми спрямляемыми кри-
выми. Идея определения таких «площадей» (в несколько другой
трактовке) принадлежит советскому геометру М. Б. Хазанову
(Нальчик) [1, 2].
Совершенно так же можно определить «объём» для всех рас-
ширенных пространств lSn.
§ 7. Движения
Будем называть движениями неевклидовых пространств Sn
и lSn взаимно однозначные отображения этих пространств на себя,
не изменяющие расстояний между точками.
§ ?]
ДВИЖЕНИЯ
195
Так как собственные и идеальные области пространств lSn при
д у- 2Z— 1 не изометричны друг другу, движения этих пространств
можно определить также как взаимно однозначные отображения
собственных областей этих пространств, не изменяющие расстоя-
ний между точками. Движения пространств могут менять
местами собственную и идеальную области пространства. В случае
пространства Sn и собственной области пространства 1Sni в кото-
рых расстояние между различными точками всегда отлично от
нуля, взаимная однозначность является следствием сохранения рас-
стояний.
Очевидно, что всякое вращение гиперсферы пространств Rn+i
и lRn+i определяет некоторое движение соответственных про-
странств Sn и lSn. При п 21—1 верно и обратное: всякое дви-
жение неевклидова пространства Sn или lSn при n=k 21— 1 опре-
деляется двумя вращениями гиперсферы соответственного про-
странства Rn+1 или lRn+1, отличающимися на отражение гиперсферы
от её центра. В самом деле, для задания движения пространства Sn
или lSn достаточно задать в определённом порядке вершины двух
переходящих друг в друга при этом движении автополярных сим-
плексов, так как точки пространств Sn и lSn однозначно опреде-
ляются их декартовыми координатами, а со всяким автополярным
симплексом можно связать систему таких координат по формулам
(2.137), (2.139) и их аналогам для пространств lSn при />1.
Зададим некоторое движение пространства Sn или lSn с помощью
двух автополярных симплексов. Рассмотрим векторы простран-
ства Rn+1 или lRn+1, представляющие вершины этих симплексов,
причём выберем эти векторы так, чтобы они находились по одну
сторону от некоторой гиперплоскости. Тогда заданные нами два
симплекса определяют две системы, состоящие из п1 векторов
пространства /?п+1- или lRn+1) причём длины всех этих векторов
равны радиусу кривизны пространства Sn или lSn или отличаются
от этого радиуса кривизны множителем I и соответственно равны,
а остальные рёбра определяемых этими системами векторов сим-
плексов пространств Rn+1 и lRn+1 также равны, как гипотенузы
треугольников с равными катетами. Поэтому существует вращение
пространства Rn+r или г/?п+1, переводящее одну из этих систем
«-+ 1 векторов в другую. Это вращение, являющееся вращением
гиперсферы, порождает некоторое движение неевклидова простран-
ства, а так как при этом движении указанные нами автополярные
симплексы переходят друг в друга, это движение совпадает с за-
данным нами движением. Рассмотрим, далее, другое вращение ги-
персферы пространства Rn+1 или г/?№+1, являющееся произведением
рассмотренного нами вращения и отражения от центра гиперсферы.
Это вращение также определяет движение неевклидова простран-
ства, совпадающее с заданным нами движением. Как видно из на-
шего рассуждения, эти два вращения являются единственными
13*
196 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
вращениями гиперсферы, определяющими данное движение про-
странства Sn или lSn.
В случае пространства lS2i_v кроме вращений пространства lR2l)
движения пространства lS.2l_1 определяют и антивращения про-
странства z/?27, так как при антивращениях углы между векторами
не изменяются. Покажем, что и обратно, всякое движение неев-
клидова пространства определяется двумя вращениями
или антивращениями пространства lR2i, отличающимися на
отражение от центра вращений и антивращений.
В самом деле, зададим движение пространства с по-
мощью двух автополярных симплексов. Если при данном движении
собственная и идеальная области пространства не меняются местами,
точно так же как для пространств lSn при п 21—1, показы-
вается, что это движение определяется двумя вращениями про-
странства lR.2i, отличающимися на отражение от центра вращений.
Если же при данном движении собственная и идеальная области
пространства меняются местами, рассмотрим векторы про-
странства lR21/i представляющие вершины автополярных симпле-
ксов, определяющих движение. Эти векторы также образуют две
системы, состоящие из /г-ф-1 векторов, причём если длины этих
векторов равны радиусу кривизны пространства lS.2l_1 или отли-
чаются от этого радиуса кривизны множителем Z, длины соответ-
ственных векторов отличаются множителем Z, откуда следует, что
остальные рёбра определяемых этими системами векторов симпле-
ксов пространства lR^ также отличаются множителем Z, как гипо-
тенузы треугольников, катеты которых отличаются множителем Z.
Поэтому существует центроаффинное преобразование, переводящее
одну из этих систем векторов в другую* Это центроаффинное пре-
образование является антивращением, так как если мы обозначим
системы векторов, представляющих вершины автополярных сим-
плексов через соответственно и 'е^ то произвольный вектор
х = 2 xiei ПРИ этом центроаффинном преобразовании переходит
i
в вектор fx = 2 х^'е^ причём скалярные квадраты этих векто-
ров соответственно равны (х, х) = 2 (ei> ei) (*92 и ('х> 'х) =
i
= S ('ei> 'et) (*02, но в СИЛУ нашего условия ('еъ 'е^ = — (eit е^
i
мы получаем ('х, 'х) = — (х, х), т. е. наше преобразование дей-
ствительно является антивращением. Это антивращение порождает
некоторое движение пространства а так как при этом дви-
жении указанные нами автополярные симплексы переходят друг
в друга, это движение совпадает с заданным нами движением. Рас-
смотрим, далее, другое антивращение пространства lR21, являющееся
произведением рассмотренного нами антивращения и отражения
от центра гиперсферы. Это антивращение также определяет движе-
§ 7]
ДВИЖЕНИЯ
197
ние пространства lS.2l_v совпадающее с заданным нами движением.
Как видно из нашего рассуждения, эти два антивращения про-
странства lR2i являются единственными антивращениями этого про-
странства, определяющими данное движение пространства
Движения пространств Sn и lSn, так же как вращения гипер-
г» 7п и (п 4- 1)
сфер пространств Rn+1 и 6кп+1, зависят от — вещественных
параметров.
Движения неевклидовых пространств Sn и lSn образуют
группы, так как, последовательно выполняя два движения, мы
получаем взаимно однозначное преобразование пространства, со-
храняющее расстояния, т. е. являющееся движением, а выполнение
остальных групповых свойств очевидно.
Так как тождественное преобразование и отражение от точки
пространств А?п+1 и lRn+1 составляют подгруппу группы вращений
вокруг этой точки, а при п — %1—1 также подгруппу группы вра-
щений и антивращений вокруг этой точки, причём эта подгруппа
является нормальным делителем указанных групп, переход от этих
групп к группам движений соответственных неевклидовых про-
странств Sn и lSn является переходом от указанных групп к их фактор-
группе по подгруппе, состоящей из тождественного преобразования и
отражения от точки, т. е. группы движений пространств Sn и lSn
изоморфны фактор-группам групп вращений пространств Rn+x
и lRn+1, а при п — 21—1 группы вращений и антивращений
пространства lR2l по их подгруппе, состоящей из тождествен-
ного преобразования и отражения от центра вращений.
Поэтому, так как группы вращений пространств А?п+1 и ]Rn+i
и группа вращений и антивращений пространства lR2i являются
группами Ли, а нормальный делитель, по которому берётся фак-
тор-группа— конечная группа, группы движений пространств Sn
и lSn являются группами Ли.
Группы движений пространств Sn и lSn транзитивны в соб-
ственных, а также идеальных областях этих пространств, так как
транзитивны группы вращений гиперсфер пространств Rn+1 и lRn+1',
группа движений неевклидова пространства транзитивна
также в области, состоящей из собственной и идеальной области
этого пространства.
Группы движений пространств Sn и lSn при пф\ и п 21— 1
также примитивны, так как, хотя группы вращений гиперсфер
импримитивны, при переходе от гиперсфер к неевклидовым про-
странствам происходит отождествление диаметрально противопо-
ложных точек гиперсфер, составляющих классы импримитивности
групп вращений. Группы движений прямых и 1S1 и пространств
импримитивны: классами импримитивности прямых и 1S1
являются пары полярно сопряжённых точек, классами имприми-
тивности пространств lS2i_1 являются собственная и идеальная
198 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. II
области пространства, которые в этом случае могут меняться
местами.
Так как отражение от точки пространства Rn+1 является про-
изведением отражений от п-|-1 гиперплоскостей, это отражение
принадлежит к той же связной компоненте группы вращений про-
странства Rn+li что и тождественное преобразование, при нечёт-
ном п и к другой связной компоненте при чётном п, Отсюда сле-
дует, что отождествление элементов этой группы, происходящее
при переходе к фактор-группе, при чётном п происходит таким
образом, что каждый элемент одной связной компоненты отожде-
ствляется с некоторым элементом другой связной компоненты,
а при нечётном п происходит таким образом, что каждый элемент
каждой связной компоненты отождествляется с другим элементом
той же связной компоненты. Поэтому, так как группа вращений
пространства Rn+1 состоит из двух связных компонент, группа
движений пространства Sn при чётном п связна, а при нечёт-
ном п состоит из двух связных компонент.
При чётном п группа движений пространства Sn изоморфна
связной компоненте группы вращений пространства Rn+1-
Поэтому в пространстве Sn при чётном п отражение от гипер-
плоскости может быть получено непрерывным образом из тож-
дественного преобразования, а в пространстве Sn при нечётном п
отражение от гиперплоскости не может быть получено таким об-
разом. Отсюда следует, что если мы будем различать ориентацию
гиперсфер, переходящую в противоположную при отражении гипер-
сферы от гиперплоскости, проходящей через её центр (при п = 2,
когда гиперсфера является окружностью, такой ориентацией может
служить направление обхода по окружности), то в пространстве Sn
при чётном п гиперсфера может изменить свою ориентацию при
непрерывном движении, а в пространстве Sn при нечётном п это
невозможно. Для указанного изменения ориентации при чётном п
достаточно подвергнуть гиперсферу сдвигу вдоль прямой, прохо-
дящей через её центр, таким образом, чтобы её центр вернулся
в своё исходное положение. Если мы будем называть простран-
ства Sn односторонними, если в них можно изменить ориентацию
гиперсферы с помощью непрерывного движения, и двусторонними,
если такое изменение ориентации невозможно, то мы получаем,
что пространства Sn при чётных п — односторонние, а при
нечётных п — двусторонние, В § 2 мы видели, что плоскость S.2
является односторонней; очевидно, что прямая S1 и пространство
являются двусторонними.
Так как отражение от точки пространства lSn является произ-
ведением пД-1 отражений от I гиперплоскостей с перпендикулярами
индекса 1 и п-\- 1—I гиперплоскостей с перпендикулярами ин-
декса 0, это отражение принадлежит к той же связной компо-
ненте группы вращений пространства г/?п+1, что и тождественное
ДВИЖЕНИЯ
199
§ ?]
преобразование, при нечётном п и чётном I и к одной из осталь-
ных связных компонент в остальных трёх случаях (нечётное п и
нечётное /, чётное п и чётное Z, чётное п и нечётное Z). Отсюда
следует, что отождествление элементов этой группы, происходящее
при переходе к фактор-группе, при нечётном п и чётном Z про-
исходит таким образом, что каждый элемент каждой связной ком-
поненты отождествляется с другим элементом той же связной ком-
поненты, а в остальных трёх случаях происходит таким образом,
что каждый элемент одной связной компоненты отождествляется
с некоторым элементом одной из остальных трёх связных компо-
нент. Поэтому, так как группа вращений пространства г/?п+1 со-
стоит из четырёх связных компонент, группа движений простран-
ства lSn при п 21 — 1 при нечётном п и нечётном I, при
чётном п и чётном I и при чётном п и нечётном I состоит
из двух связных компонент, а при нечётном п и чётном I со-
стоит из четырёх связных компонент.
Так как группа вращений и антивращений пространства lR.2I
состоит из восьми связных компонент, первые четыре из которых
составляют группу вращений этого пространства, группа движений
пространства lR.2l при нечётном I состоит из четырёх связных
компонент, а при чётном I состоит из восьми связных компонент.
В частности, группа движений плоскости S.2 связна, группа
движений плоскости 1S2 состоит из двух связных компонент,
группы движений пространств и состоят из двух связ-
ных компонент, группа движений пространства 2S3 состоит
из восьми связных компонент.
В пространствах lSn, так же как в пространстве Sn, можно
определить ориентацию гиперсфер и односторонность или двусторон-
ность собственной области пространства. Так же как в простран-
стве Sn, показывается, что необходимым условием односторонности
собственной области пространства является чётность его числа изме-
рений, однако для односторонности собственной области необхо-
димо также, чтобы эта собственная область обладала замкнутыми
прямыми; при выполнении этих двух условий собственная область —
односторонняя. Так как замкнутые прямые имеются в собственных
областях всех пространств lSn * кРоме собственной об-
ласти пространства xSn отрицательной кривизны, мы получаем,
что собственная область пространства Лобачевского xSn отри-
цательной кривизны всегда двусторонняя, а собственные области
остальных неевклидовых пространств lSn — односторонние при
чётном п и двусторонние при нечётном п.
Классификация движений неевклидовых пространств Sn и lSn
сводится к классификации вращений пространств /?п+1 и lRn+1*
Так как повороту прямой связки пространств Rn+1 и lRn+1 на
угол ф соответствует сдвиг точки пространства Sn или lSn на
200 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. п
расстояние = <?г, стационарным углам вращений пространств Rn+1
и lRn+1 соответствуют стационарные расстояния движений про-
странств Sn и lSn, равные (oi = Поэтому при представлении
движений пространств Sn и lSn вращениями пространств Rn+1 и lRn+1
следует заменять стационарные углы вращений пространств Rn+1
и lRn+1 отношениями у, где — стационарные расстояния дви-
жений пространства Sn или lSn. Собственные векторы вращений
пространств и lRn+1 определяют неподвижные точки движе-
ний пространств Sn и lSni а инвариантные (£-|-1)-мерные пло-
скости вращений пространств А?п+1 и г/?п+1 определяют инвари-
антные мерные плоскости движений пространств Sn и lSn.
Инвариантные прямые движений пространств Sn и lSn называются
прямолинейными траекториями этих движений. Пересечения пря-
молинейных траекторий движения пространства Sn или lSn с абсо-
лютом этого пространства являются неподвижными точками этого
пространства.
Из свойств вращений пространства Rn+1 следует, что матрицы
движений пространства Римана Sn могут быть приведены к виду
Ло
, (2.158)
где
<П,-
COS —
— sin —
О),’
sin —
cos
§ 7]
ДВИЖЕНИЯ
201
При этом матрицы, отличающиеся множителем — 1, определяют
одно и то же движение.
Частными случаями движения с матрицей (2.153) являются дви-
жение с матрицей
— тождественное преобразование и движение с матрицей
(2.160)
при котором в том случае, когда кратность одного из собствен-
ных чисел матрицы равна т -1- 1, остаются неподвижными две
взаимно полярные координатные плоскости eQet . . . ет и ет+1 . . . еп>
всякая точка х переходит в такую точку 'х, что прямая 'хх пере-
секается с этими плоскостями и, следовательно, перпендикулярна
к каждой из них, и два отрезка, на которые точки х, гх делят
эту прямую, делятся этими плоскостями пополам — это движение
называется отражением от т-мерной плоскости и полярной ей
(п — т— V)-мерной плоскости, при т = 0 — отражением от
точки и её полярной гиперплоскости, при zn=l—отраже-
нием от прямой и её полярной (п— 2)-мерной гиперплоскости.
Частными случаями движения с матрицей (2.158) являются дви-
жение с матрицей
Ло
: ^к
1 Ак
(2.161)
202
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
при котором нет ни одной неподвижной точки, и движение с ма-
трицей
(2.162)
которое в том случае, когда кратность собственного числа 1 равна
/п+1, называется поворотом вокруг т-мерной плоскости, при
/п = 0— поворотом вокруг точки, при т = 1—поворотом во-
круг прямой. Поворот вокруг п— 2-мерной плоскости называется
сдвигом вдоль прямой, полярной этой (п — 2)-мерной пло-
скости.
Из формулы (2.161) видно, что движение без неподвижных
точек может иметь место только при нечётном числе измерений
пространства.
Движение без неподвижных точек с различными стационарными
расстояниями называется винтовым движением. Движение без не-
подвижных точек, все стационарные расстояния которого равны
между собой, т. е. движение с матрицей, приводимой к виду
Ю . (О
COS — — sin —
Г г
О) О)
Sin — COS —
Г г
• (D . (О
cos — — sin —
г г
(2.163)
. О) О)
sin — cos —
г г
соответствующее паратактическому повороту пространства Rn^
называется паратактическим сдвигом пространства Sn.
§ 7]
ДВИЖЕНИЯ
203
Из свойств паратактических поворотов пространства Rn+1 сле-
дует, что при паратактическом сдвиге каждая точка простран-
ства сдвигается на одно и то же расстояние со и каждая
прямая, соединяющая произвольную точку-х с точкой 'х, в кото-
рую точка х переходит при паратактическом сдвиге, является
прямолинейной траекторией паратактического сдвига. Так как
через каждую точку пространства Sn проходит одна и только одна
прямолинейная траектория паратактического сдвига, прямолинейные
траектории паратактического сдвига составляют конгруэнцию
прямых. Будем называть такие конгруэнции паратактическими
конгруэнциями прямых пространства Sn.
Паратактический сдвиг при со = у г, матрица которого приво-
дится к виду
0 —1
1 0
0 —1
1 0
’ 0 —1
1 о
(2.164)
переводит каждую точку в полярно сопряжённую точку и назы-
вается паратактическим сдвигом на полупрямую.
На плоскости S2 с радиусом кривизны г матрица поворота
вокруг точки приводится к виду
О) . (D м
cos— —sin— 0
г г
sin — cos — О
г г
О 0 1
(2.165)
Эта формула показывает, что на плоскости S2 поворот во-
круг точки имеет одну прямолинейную траекторию, являю-
щуюся полярой центра поворота, — в случае движения (2.165)
центр вращения — е2, угол поворота — —, прямолинейная траекто-
рия— ось eQex, сдвигающаяся на расстояние со (черт. 40). При этом
повороте точки плоскости, отличные от центра поворота и не ле-
жащие на прямолинейной траектории, движутся по окружностям,
имеющим своим центром центр поворота, а своей базой — прямо-
линейную траекторию поворота.
204
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Заметим, что на плоскости S2 отражение от прямой является
в то же время отражением от её полюса и представляет собой
поворот вокруг этого полюса на угол к.
Черт. 40.
В трёхмерном пространстве S3 с радиусом
кривизны г
матрица винтового движения приводится к виду
U)Q . О)0
cos — — sin —
г г
(1)0
sin —
(2.166)
(Оч (!)ч
sin — cos —L
г г
матрица поворота вокруг прямой приводится к виду
о) . о)
cos — — sin —
г г
. (О (D
sin — cos —
г г
1
1
(2.167)
§ 7]
ДВИЖЕНИЯ
205
матрица паратактического сдвига приводится к виду
(О.О)
COS — sin —
Г Г
(О О)
sin — COS —
Г Г
(О <о •
COS — sin —
Г Г
О) О)
sin — COS —
Г Г
(2.168)
Из этих формул видно, что в пространстве S3 винтовое дви-
жение имеет две прямолинейные траектории, являющиеся
взаимно полярными прямыми, — в случае движения (2.166) —
оси eQe± и е2£3, сдвигающиеся соответственно на расстояния ш0 и
Фр поворот вокруг прямой имеет одну прямолинейную траек-
торию, полярную его оси — в случае движения (2.167) прямоли-
нейная траектория — ось е^, сдвигающаяся на расстояние со, ось
(О
поворота — ось £2£3, а угол этого поворота равен — ; паратакти-
ческий сдвиг имеет двупараметрическое множество прямоли-
нейных траекторий, являющееся конгруэнцией. При винтовом
движении точки пространства, не лежащие на прямолинейных траек-
ториях винтового движения, движутся по кривым, которые мы бу-
дем называть винтовыми линиями, а при повороте вокруг оси
точки пространства, не лежащие на оси поворота и на прямоли-
нейной траектории, движутся по окружностям в плоскостях, перпен-
дикулярных к оси.
Матрицу (2.166) винтового движения можно представить в виде
произведения матриц двух поворотов, осями которых служат прямо-
линейные траектории винтового движения
О)0 . (1)А
cos — — sin —
г г
(О0 (On
sin — cos —
г г
cos^ _ sin^
sin^ cos^
г г
1
1
о)1
cos —
r
(»1
sin —
г
0)1
— sin —-
cos —
(2.169)
206
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Поэтому винтовое движение в пространстве S3 является,
произведением поворотов вокруг двух взаимно полярных осей.
Матрицу (2.166) можно также представить в виде произведе-
но “Ь
ния матриц двух паратактических сдвигов на расстояния ——-
(Ол-(D-.
и —-, при которых ПО ОСИ CqC-l происходят сдвиги в одном
направлении, а по оси е2е3— в противоположных направлениях
cos — — sin —
г г
, (Di (^1
sin — cos —
г г
wo A
cos --------1
2r
. (Da -4- (Di
Sln Ар
. (Da -I" Hl
— Sltl 2r
cos^pl
2r
(Da —I— (Di
COS i
2г
. (Оа -4-
Sin - -л1-- 1
2г
.
— sin -------
2г
(ЙА -I— (Di
cos -А?—J
2г
(Dg-- (Dt
COS ~А-------
2r
. (Da --- (Di
— sin -As-------1
2r
. (Da---- (Di
Sin -As-----±
2r
(Da- (Di
cos -A—-
2r
(Da- (Di . (Da- (Di
cos-As—1 —sin-As--------
2r 2r
. (2.170)
. (Da — <d1
sin -A—*
2r
(Da- (Di
cos-A—1
2r
Поэтому винтовое движение в пространстве S2 является про-
изведением двух паратактических сдвигов, переводящих в себя
прямолинейные траектории винтового движения, причём при
этих паратактических сдвигах на одной из этих траекторий
происходят сдвиги в одном направлении, а на другой из них —
в противоположных направлениях.
Из свойств вращений пространства lRn+1 следует, что приво-
димые к диагональному виду матрицы движений пространств lSn
при пФ 21—1 и матрицы движений собственной области про-
странства lS2l_1 могут быть приведены к виду, отличающемуся от
§ 7]
ДВИЖЕНИЯ
207
вида (2.158) тем, что некоторые подматрицы (2.171)
’ Ai i
заменены на подматрицы : Bi
(2.172)
где J ch^- r Bi = \ : Sh — : Г • sh .*'< 1 Г : Ch — : r
а некоторые пары подматриц ; Ai ! ’л
Aj ; Ai: (2.173)
заменены на подматрицы
(2.174)
: Сц •
где
: ch — ^3 cos — sh — cos W3 — sh — • <*3 sin — — ch . <*3 Sin— ;
; Г r r r r r r r :
: Sh ^3 cos — ch — cos шз — ch — . ™3 sin — — sh . I sin — •
e ~~ r r r r r r r r :
’ >
! sh — • *3 sin — <0/ ch — sin ch — шз cos — sh Ш - : cos —
r r r r r r r r
i ch — sin — sh — sin W3 sh — cos — ch cos —
: Г r r r r r r r
208
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
или при r=^qi — к виду, отличающемуся от указанного вида за-
меной г на q.
Частными случаями движений пространств lSn и движений соб-
ственной области пространства являются тождественное пре-
образование, отражение от /n-мерной плоскости и её полярной
(п— т—1)-мерной плоскости (при = 0 от точки и её полярной
гиперплоскости, при т = 1 от прямой и её полярной (п— 2)-мер-
ной плоскости), винтовое движение, поворот вокруг т-мерной
плоскости (при т = 0 вокруг точки, при т = 1 вокруг прямой),
сдвиг вдоль прямой и паратактический сдвиг, которые опреде-
ляются так же, как аналогичные случаи движений пространства Sn.
Винтовое движение и паратактический сдвиг пространства lSn,
так же как в случае пространства Sn, может иметь место только
при нечётном числе измерений пространства.
Будем называть паратактические сдвиги пространства lSn, ма-
трицы которых приводятся к виду (2.163), эллиптическими пара-
тактическими сдвигами, а паратактические сдвиги, матрицы ко-
торых приводятся к виду
, (О 1 (£>
ch — sh —
г г
sh — ch —
г г
• к со U ш
ch — sh —
г г
(2.175)
— гиперболическими паратактическими сдвигами. Эллиптиче-
ские паратактические сдвиги пространств lSn соответствуют эллипти-
ческим паратактическим поворотам пространства г/?п+1, а гиперболи-
ческие паратактические сдвиги пространств lSn — гиперболическим
паратактическим поворотам пространств
Из свойств паратактических поворотов пространства lRn+1 сле-
дует, что при паратактическом сдвиге каждая точка простран-
ства сдвигается на одно и то же расстояние, каждая прямая,
соединяющая произвольную точку х с точкой 'х, в которую
точка х переходит при паратактическом сдвиге, является
прямолинейной траекторией паратактического сдвига, прямо-
линейные траектории паратактического сдвига составляют
конгруэнцию прямых, прямолинейные траектории эллиптиче-
ского паратактического сдвига являются эллиптическими пря-
мыми, а прямолинейные траектории гиперболического пара-
тактического сдвига являются гиперболическими прямыми.
§ 7]
ДВИЖЕНИЯ
209
Будем называть конгруэнции прямолинейных траекторий эллипти-
ческого и гиперболического паратактических сдвигов соответственно
эллиптической и гиперболической паратактическими конгруэн-
циями прямых пространств lSn.
Из свойств паратактических поворотов пространства lRn+1 сле-
дует также, что эллиптический паратактический сдвиг может
иметь место только в пространствах lSn с чётным I, а гипер-
болический паратактический сдвиг может иметь место только
в пространстве lSn, для которого n — Zl—1.
В пространствах 1Sn при чётном I можно определить эллипти-
ческий паратактический сдвиг на полупрямую, матрица которого
приводится к виду (2.164).
Примером движения пространства г52г__1, меняющего местами
собственную и идеальную области этого пространства, является
движение с матрицей, приводимой к виду
(2.176)
sh — ch —
г г
1 (1) 1 О)
ch — sh —
г г
соответствующее антипаратактическому повороту пространства lR^i-
Это движение можно рассматривать как гиперболический паратак-
. тс
тический сдвиг, в котором ш заменено на t -^г— со.
Г иперболический паратактический сдвиг (2.176) при ш = 0,
матрица которого приводится к виду
0 1
1 0
0 1
1 0 , (2.177)
0 1
1 0
переводит каждую точку в полярно сопряжённую точку и называется
гиперболическим паратактическим сдвигом на полупрямую.
Произвольное движение пространства ZS.2^X, меняющее местами
собственную и идеальную области этого пространства, является
14 Зак. 177. Б. А. Розенфельд
210 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
произведением некоторого движения собственной области этого про-
странства на некоторое движение, меняющее местами собственную
и идеальную области, например на гиперболический паратактиче-
ский сдвиг на полупрямую.
Кроме рассмотренных нами движений пространств lSn с матри-
цами, приводимыми к диагональному виду, имеются движения
пространств lSn с матрицами, неприводимыми к диагональному
виду, соответствующие вращениям или антивращениям пространства
lRn+i> обладающим тем же свойством; ниже мы приведём при-
меры таких движений для двумерных и трёхмерных неевклидовых
пространств.
На вокруг плоскости XS2 с радиусом точки приводится к виду кривизны ql матрица поворота
1 0 0
0 (D COS — q . (О sin — q > (2.178)
0 . (О sin — q (D cos — q
а матрица сдвига вдоль собственной
прямой приводится к виду
1 (О 1 О) п
ch — sh — 0
q q
. (О 1 (О 0
sh — ch —
q q
о о 1
(2.179)
Из этих формул видно, что на плоскости XS2 поворот вокруг
точки имеет одну прямолинейную траекторию, являющуюся
идеальной прямой, полярной центру поворота, — в случае дви-
жения (2.178) прямолинейная траектория — ось еге2, сдвигающаяся
на расстояние цо, центр поворота — точка е§, а угол этого пово-
рота равен ~ ; а сдвиг вдоль собственной прямой также имеет
одну прямолинейную траекторию — прямую сдвига — и в то же
время является поворотом вокруг идеальной точки, полярной
прямой сдвига,—в случае движения (2.179) прямолинейная траек-
тория— ось е^ех, сдвигающаяся на расстояние со, центр поворота —
е2, а угол этого поворота равен
1~. При повороте (2.178)
точка
точки
собственной области плоскости, отличные от центра пово-
рота, движутся по окружностям, имеющим своим центром центр
поворота, а при сдвиге (2.179) точки собственной области плоско-
сти, не лежащие на прямолинейной траектории сдвига, движутся
по эквидистантам, имеющим своей базой прямолинейную траекто-
рию поворота.
§ 7]
ДВИЖЕНИЯ
211
Отметим также движение плоскости 1S.2, матрица которого не
приводится к диагональному виду, — движение с матрицей
Это движение обладает одной неподвижной точкой — точ-
кой абсолюта е0 — е± и одной прямолинейной траекторией —
полярой этой точки, являющейся изотропной прямой (эта пря-
мая проходит через точку eQ — elf а все остальные её точки
идеальны). Вращение пространства 1Л3, соответствующее этому дви-
жению, является поворотом вокруг изотропной прямой с направляю-
щим вектором е0— е±. При этом повороте переходят в себя все полу-
евклидовы плоскости, ортогональные этому вектору, и, следова-
тельно, параболические окружности, высекаемые этими полуевкли-
довыми плоскостями из сферы чисто мнимого радиуса. При переходе
от этой сферы к плоскости 4S2 параболические окружности сферы
переходят в орициклы плоскости 152. Таким образом, при движе-
нии (2.180) все точки собственной области плоскости х52 движутся
вокруг точки
Черт. 41.
поворот
по орициклам. Поэтому такое движение называют орициклическим
поворотом. Это движение можно получить предельным переходом
из поворота вокруг точки при стремлении этой точки к точке
абсолюта и из сдвига вдоль прямой при стремлении этой прямой
к изотропной прямой. На черт. 41 изображены поворот вокруг
точки, сдвиг вдоль прямой и орициклический поворот плоскости.
Заметим, что кроме указанных видов движений в собственной
области плоскости XS2 можно определить также отражение от
14*
212
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
прямой, которое здесь в отличие от плоскости S,2 уже не сводится
к повороту вокруг точки, и скользящее отражение — движение,
состоящее из сдвига вдоль прямой и отражения от неё.
В пространстве XS3 с радиусом кривизны qt матрица винтового
движения приводится к виду
ch — sh —
q q
sh — ch —
q q
sin —
q
— sin —L
q
wi
cos —
q
(2.181)
матрица сдвига вдоль собственной прямой
ch — sh —
q q
sh — ch —
q q
1 о
о 1
приводится к виду
(2.182)
а матрица поворота вокруг собственной прямой приводится к виду
1 О
О 1
(О . О)
COS — — sin — •
q q
(О О)
sin — COS —
q q
(2.183)
Из этих формул видно, что в пространстве х53 винтовое дви-
жение имеет две прямолинейные траектории, являющиеся вза-
имно полярными собственной и идеальной прямыми,—в случае
движения (2.181) — оси е^е± и е^е^, сдвигающиеся соответственно
на расстояния <о0 и Zcox; сдвиг вдоль собственной прямой имеет
одну прямолинейную траекторию — прямую сдвига—и является
в то же время поворотом вокруг идеальной прямой, полярной
прямой сдвига,—в случае движения (2.182) прямолинейная траек-
тория— ось е^е^, сдвигающаяся на расстояние со, ось поворота —
ось е2£3, а угол этого поворота равен I у; поворот вокруг соб-
ственной прямой имеет одну идеальную прямолинейную траек-
торию, полярную оси поворота, и является в то же время
сдвигом вдоль этой прямолинейной траектории, — в случае
§ 7]
ДВИЖЕНИЯ
213
(2.183) прямолинейная траектория — ось е.2е^ сдвигаю-
расстояние Zoo, ось поворота — ось eQelt а угол этого
О) W-»
равен —. При винтовом движении точки собственной
движения
щаяся на
поворота
области пространства, не лежащие на прямолинейных траекториях
винтового движения, движутся по кривым, которые мы будем
называть винтовыми линиями', при сдвиге вдоль собственной пря-
мой точки собственной области пространства, не лежащие на этой
прямой, движутся по эквидистантам этой прямой в проходящих
через неё плоскостях; при повороте вокруг собственной прямой
точки собственной области пространства, не лежащие на оси, дви-
жутся по окружностям в плоскостях, перпендикулярных к оси.
Матрицу (2.181) винтового движения можно представить в виде
произведения матриц сдвига
вокруг той
вдоль собственной прямой и поворота
же прямой
ch^<>
q
sh-^
q
sh^
q
ch^>
q
cos —
q
sin —-
q
— sin —
q
ш1
cos —
q
1
ch —
q
sh —
q
sh^>
q
ch^>
q
cos —L
q
sin —L
q
— sin —
q
cos —
q
. (2.184)
Поэтому винтовое
неведением сдвига
этой же прямой.
Отметим также движение пространства 1S3, матрица которого
не приводится к диагональному виду,—движение с матрицей
движение
вдоль собственной прямой
пространстве
является про-
и поворота вокруг
£2
2
2
t
о
£2
2
£2
2
t
О
(2.185)
1
О
О
1
1
О
О
1
в
t
О
— t
О
1
О
О
1
214 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. п
Неподвижными точками этого движения являются точка абсо-
люта е0 — ev идеальная точка ел и, так как эти две точки соот-
ветствуют одному и тому же собственному числу 1, все точки
прямой, определяемой этими точками. Эта прямая изотропна, вслед-
ствие чего это движение можно назвать поворотом вокруг изо-
тропной прямой. Прямолинейными траекториями этого движения
являются все прямые пучка, определяемого осью и её полярой,
также являющейся изотропной прямой, — в данном случае эта пря-
молинейная траектория определяется той же точкой абсолюта —ех
и точкой е2 и, следовательно, центром пучка является точка во~
а его плоскость определяется точками е$ — е1У е2 и е3. При пово-
роте вокруг изотропной прямой в собственной области простран-
ства происходят орициклические повороты в плоскостях, проходя-
щих через прямолинейную траекторию, т. е. все точки собственной
области движутся по орициклам в указанных плоскостях. Поэтому
такое движение называют также орициклическим поворотом. Это
движение можно получить предельным переходом из поворотов
вокруг собственной и идеальных прямых при стремлении этих пря-
мых к изотропной прямой.
В пространстве 2S3 с радиусом кривизны г матрица винтового
движения приводится к виду (2.166),
ch — 0 sh — О
г г
О ch — 0 sh —
(2.186)
sh-^> о ch^ О
г г
О sh 0 ch
г г
и
ch — cos — — ch — sin — sh — cos — — sh — sin —
r r r r r r r r
ch — sin — ch — cos — sh — sin — sh — cos —
r r r r r r r r
, (Da (D< ,10л. (Oj . , (Da . (D<
sh — cos — — sh — sin — ch — cos —- — ch — sin —-
r r r r r r r r
, (Da (D^ 1 (Da L. Ш0 • W1 1 CO0
sh — sin — sh — cos — ch — sin — ch — cos —
r r r r r r Г Г J
(2.187)
Матрица поворота вокруг эллиптической прямой приводится
к виду (2.167); матрица поворота вокруг гиперболической прямой
ДВИЖЕНИЯ
215
§ 7]
приводится к виду
ch — 0 sh — О
г г
0 10 1
sh- 0 ch- О
г г
0 10 1
(2.188)
матрица эллиптического паратактического сдвига приводится к виду
(2.168); матрица гиперболического паратактического сдвига приво-
дится к виду
ch — 0 sh — О
г г
О ch - 0 sh —
(2.189)
sh - 0 ch - О
г г
О sh - 0 ch —
г г
Из формул (2.166), (2.186) и (2.187) видно, что в простран-
стве 2S3 винтовое движение имеет две прямолинейные траек-
тории, являющиеся взаимно полярными прямыми, которые
могут быть двумя эллиптическими прямыми, двумя гипербо-
лическими прямыми и двумя мнимо сопряжёнными прямыми, —
этими прямолинейными траекториями являются в случае движения
(2.166) эллиптические прямые и е^е^, сдвигающиеся соответ-
ственно на расстояния оо0 и <»1, в случае движения (2.186) гипер-
болические прямые etf^ и erez, сдвигающиеся соответственно на
расстояния Zw0 и а в случае движения (2.187) мнимо сопряжён-
ные прямые, определяющиеся точками е0— ie^, e1~\-ie<1 и £0-|-Z£3,
и сдвигающиеся соответственно на мнимо сопряжённые
расстояния + и — Z<»0. Из формул (2.167) и (2.188) видно,
что повороты вокруг эллиптической и гиперболической прямой
имеют одну соответственно эллиптическую или гиперболиче-
скую прямолинейную траекторию, полярную оси поворота, и
являются в то же время сдвигом вдоль этой прямолинейной
траектории. В случае движения (2.167) прямолинейной траекто-
рией служит ось е^е±, сдвигающаяся на расстояние oj, осью пово-
рота— ось е$%, а угол этого поворота равен —; в случае движе-
ния (2.188) прямолинейной траекторией служит ось е^е^, сдвигаю-
щаяся на расстояние Zoo, осью поворота — ось е±е2, а угол этого
216
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
поворота равен i —. Паратактические сдвиги пространства 2S.3
имеют двупараметрическое множество прямолинейных траекторий,
являющееся конгруэнцией. При винтовом движении точки простран-
ства, не лежащие на прямолинейных траекториях винтового движе-
ния, движутся по кривым, которые мы будем называть винтовыми
линиями, а при поворотах вокруг оси точки пространства, не
лежащие на оси поворота и на прямолинейной траектории, движутся
по окружностям в плоскостях, перпендикулярных к оси.
Матрицы (2.166) и (2.186) винтовых движений можно предста-
вить соответственно в виде произведения (2.169) и в виде произ-
ведения матриц двух поворотов, осями которых служат прямоли-
нейные траектории винтовых движений
ch — 0 sh — О
г г
О ch— 0 sh—
г г
sh — 0 ch — О
г г
О sh^ О
г
ch-^
г
О
sh^>
г
О
О sh— О
г
1 0 1
О ch^ О
Г
1 0 1
1
О
1
О
ch —
г
О 1 О
ch — 0 sh —
г г
О 1 О
sh о ch
г г
(2.190)
Поэтому винтовые движения пространства 2S3 с вещественными
прямолинейными траекториями являются произведениями пово-
ротов вокруг двух взаимно полярных осей.
Матрицы (2.166), (2.186) и (2.187) можно представить в виде
произведений (2.170),
ch 0 sh —- o'
Г г
0 ch 0 sh
г г
sh — 0 ch — 0
г г
0 sh — 0 ch
г г
§ 7]
ДВИЖЕНИЯ
217
ch (O0 + (0^ 2r 0 sh шо + W1 2r 0
0 ch (Oq -|- (Of 2r 0 sh OJ0 Ш1 2r
— sh OJq (Of 2r 0 ch (Oq —|- (Df 2r 0 X
0 sh °jo 0Ji 2r 0 ch (Bq -|- (0! 2r
ch «>o— <°1 2r 0 sh (Oq •— (Ot 2r 0
0 ch 9#* 0 sh (Of — (Op 2z*
X sh (O0 — (Ot 2r 0 ch (Bq— (Bf 2r 0 (2.191)
0 sh ®o — “1 2r 0 ch • <ot <Oq 2r
1 (On (О< , (On . (О« f (On cd1 . (Oq . (В1
ch — cos — —ch — sin — sh — cos — — sh — sin —
r r r r r r r r
1 (On . (Of 1 (On (Of , (On . (Of . (o0 (Of
ch — sin — ch — cos — sh — sin — sh — cos —
r r r r r r r r
1 (On (Of 1 (O0 . (Of , (Oq (Of
sh — cos — — sh — sin — ch — cos — -
r r r r r r
sh — sin — sh — cos — ch — sin —
r r r r r r
ch — 0 sh — 0
r r
0 ch — 0 sh —
r r
ch — 0 ch — 0
r r
sh 0 ch
r r
(Of
--- Sin —
r
(Of
cos —
r
(Of
COS — ---
r
(Of
sin —
r
ch — cos —
r r
0
(Of
cos —
r
(Of
sin —
r
sin
<°i
(Of
cos —
(2.192)
218
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
двух паратактических сдвигов, в первом случае двух эллиптических
(On —I— (1)< (Од —- (О-.
сдвигов на расстояния —~—i- и —, во втором случае двух
гиперболических сдвигов на расстояния Z -ш<) у--1- и I ,
в третьем случае гиперболического сдвига на расстояние Zw0 и
эллиптического сдвига на расстояние ш*, причём в первом случае
по оси и во втором случае по оси е$е2 происходят сдвиги
в одном направлении, а в первом случае по оси е2е3 и во втором
случае по оси e±e3 происходят сдвиги в противоположных напра-
влениях. Поэтому винтовое движение в пространстве 2 S3 являете я
произведением двух паратактических сдвигов, причём в том
случае, когда эти сдвиги одновременно эллиптические и гипер-
болические, они переводят в себя прямолинейные траектории
винтового движения, и при этих сдвигах по одной из этих
траекторий происходят сдвиги в одном направлении, а на дру-
гой из них — в противоположных направлениях.
Из движений пространства 2S3, матрицы которых не приводятся
к диагональному виду,
отметим движения с матрицами
и
1 t — t 0
— t --+1 2 1 & 2 0
— t /2 2 /2 4+1 0
0 0 0 1
(2.193)
2
2
2
2
О
t t
2 2
1 О
О 1
2______£
2 2
О
t
2
2
2
1
(2.194)
Движение с матрицей (2.193) является поворотом вокруг изо-
тропной прямой, определяемой точками e1-j-e2 и е3, аналогичным
движению пространства 1S3 с матрицей (2.185).
Неподвижными точками движения (2.194) являются точки абсо-
люта е0 — е.3 и е1-]-е2 и, так как эти две точки соответствуют
одному и тому же собственному числу 1, все точки прямой, опре-
деляемой этими точками. Эта прямая целиком лежит на абсолюте.
При этом движении все точки пространства движутся по изотроп-
ным прямым, так что прямолинейные траектории этого движения
составляют двупараметрическое множество, являющееся конгруэн-
§ 7]
ДВИЖЕНИЯ
219
цией. Это движение может быть получено предельным переходом
из эллиптического и гиперболического паратактического сдвигов
при стремлении прямолинейных траекторий этих сдвигов к изо-
тропным прямым, вследствие чего это движение, играющее про-
межуточную роль между эллиптическим и гиперболическим пара-
тактическими сдвигами, можно называть параболическим паратак-
тическим сдвигом, а конгруэнцию прямолинейных траекторий
этого движения — параболической паратактической конгруэнцией
прямых пространства 2S3.
Матрицу (2.193) можно представить в виде произведения
двух параболических паратактических сдвигов.
Так как при соответствии групп вращений пространств /?п+1
и lRn+1 или группы вращений и антивращений пространства lR2l
и групп движений пространств Sn и lSn отражение от гиперпло-
скости пространства Rn+1 или z/?n+1 соответствует отражению от
гиперплоскости, из найденных нами свойств групп вращений про-
странств Rn+1 и lRn+1 (§ 12 главы I) следует, что всякое движе-
ние пространств Sn и lSn при n^Zl— 1 является произведением
отражений от гиперплоскостей, а всякое движение простран-
ства является произведением отражений от гиперпло-
скостей и, может быть, гиперболического паратактического
сдвига на полупрямую.
В частности, поворот вокруг точки на плоскости S.2 является
произведением отражений от двух прямых (центр поворота
является точкой пересечения этих прямых, а прямолинейная траектория
является общим перпендикуляром этих прямых); поворот вокруг
точки на плоскости 1S,2 является произведением отражений от
двух пересекающихся прямых (центр поворота является точкой
пересечения этих прямых); сдвиг вдоль прямой на плоскости х52
220
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
является произведением отражений от двух расходящихся
прямых (прямолинейная траектория сдвига является общим пер-
пендикуляром этих прямых); орициклический поворот плоскости X<S2
является произведением отражений от двух параллельных пря-
мых (бесконечно удалённая неподвижная точка орициклического
поворота является точкой пересечения этих прямых).
Аналогично можно определить движения в комплексном неевкли-
довом пространстве. Будем называть движениями комплексного
неевклидова пространства SW(Z), так же как в случае пространств Sn
и lSn, взаимно однозначные отображения этих пространств на себя,
не изменяющие расстояний между точками.
Очевидно, что всякое вращение гиперсферы пространства Rn+1 (Z)
определяет некоторое движение пространства Sn(i). Так же как
для пространств Sn и lSn, показывается, что и обратно, всякое
движение пространства Sn(i) определяется двумя вращениями гипер-
сферы пространства Rn+1(i), отличающимися на отражение гипер-
сферы от её центра.
Движения пространства SW(Z), так же как вращения гиперсфер
г» л (л 4-1)
пространства Rn+1 (Z), зависят от ———- комплексных и, следо-
вательно, от л(л-|-1) вещественных параметров.
Точно так же как для движений пространств Sn и lSn, дока-
зывается, что движения пространства Sn(i) образуют группу,
что группа движений пространства Sn(l) изоморфна фактор-
группе группы вращений пространства Rn+1 (Z) по её подгруппе,
состоящей из тождественного преобразования и отражения от
центра вращений, что эта группа является группой Ли, что
она транзитивна и при п > 1 примитивна.
Так же как для движений пространства Sn, доказывается, что
всякое движение пространства Sn(i) является произведением
отражений от гиперплоскостей и что группа движений про-
странства Sn(l) состоит из двух связных компонент, одна из
которых состоит из произведений чётного числа отражений от
гиперплоскостей, а вторая — из произведений нечётного числа этих
отражений.
§ 8. Инволюционные движения и образы симметрии
В пространствах Sn и lSn, так же как в пространствах Rn
и lRn, имеются инволюционные движения — движения, совпадаю-
щие со своими обратными, и определяемые этими движениями
образы, симметрии — множества точек или других геометрических
образов, переходящих в себя при инволюционном движении.
Так же как для движений пространств Rn и lRn, показывается,
что матрицы инволюционных движений пространств Sn и lSn
приводятся к диагональному виду. Так как собственные числа
матрицы, являющейся квадратом некоторой матрицы, равны квадра-
§ 8]
ОБРАЗЫ СИММЕТРИИ
221
там собственных чисел последней матрицы, а все собственные числа
матрицы тождественного преобразования одновременно равны 1
или —1, все собственные числа матриц инволюционного движе-
ния равны 1 и —1 или все эти числа равны I и —1\ в послед-
нем случае, так как мнимые собственные числа вещественных матриц
должны быть попарно комплексно сопряжены, количество собствен-
ных чисел i должно быть равно количеству собственных чисел —Z,
вследствие чего этот случай может иметь место только для матриц
чётного порядка, т. е. при нечётном п.
Поэтому инволюционными движениями пространств Sn и lSn
являются движения с матрицами, приводимыми к виду
т-\- 1
(2.196)
п— т
где т принимает значения от 0 до п — 1, и
л +1
2
п +1
2
(2.197)
В последнем случае матрица движения может быть приведена
к вещественному виду
(О —1
1 О
О —1
1 О
(2.198)
’ 0 —1
1 О
222
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Как мы видели, движения пространств Sn и lSn с матрицами
(2.196) являются отражениями от /n-мерных неевклидовых плоско-
стей и в то же время от их (п — т—1)-мерных полярных плоско-
стей, при т — 0 эти движения являются отражениями от точек и
их полярных гиперплоскостей, при т = 1—отражениями от пря-
мых и их полярных (п — 2)-мерных плоскостей.
В пространстве в котором имеются взаимно полярные
мнимо сопряжённые (Z—1)-мерные плоскости, отражение от этих
плоскостей приводится к виду (2.197) или (2.198).
Как мы видели, движения пространства 8п при нечётном п
с матрицами (2.197) или (2.198) являются паратактическими сдви-
гами на полупрямую, а движения пространств lSn при нечётном п
и чётном I с теми же матрицами являются эллиптическими пара-
тактическими сдвигами на полупрямую.
Матрица (2.196) при т = —- может быть приведена также
к виду
О 1
1 О
О 1
1 О
(2.199)
’ 0 1
1 О
Как мы видели, движение пространства с матрицей (2.199)
является гиперболическим паратактическим сдвигом на полупрямую.
Так как отражение от пары мнимо сопряжённых взаимно по-
лярных прямых не имеет вещественных неподвижных точек, соот-
ветственным образом симметрии следует считать совокупность
вещественных прямых, соединяющих мнимо сопряжённые точки
этих плоскостей, — эти прямые являются общими перпендикулярами
мнимых плоскостей, а совокупность этих прямых является конгру-
энцией перпендикуляров этих плоскостей.
Точно так же, так как паратактический сдвиг на полупрямую
в пространстве Sn и эллиптический паратактический сдвиг на
полупрямую в пространстве г8п не имеют вещественных неподвиж-
ных точек, а гиперболический паратактический сдвиг на полупря-
мую в пространстве 1821_± имеет все свои неподвижные точки на
абсолюте, образами симметрии, соответствующими этим сдвигам,
также следует считать совокупности прямых, переходящих при этих
сдвигах в себя, т. е. соответственные паратактические конгруэнции.
Поэтому образами симметрии пространства Sn являются
т-мерные плоскости вместе с их (п — т—Химерными поляр-
ОБРАЗЫ СИММЕТРИИ
223
§ 8]
ними плоскостями, при т = 0— точки вместе с их полярными
гиперплоскостями, при т~\—прямые вместе с их поляр-
ными (п— 2)-мерными плоскостями и при нечётном п — пара-
тактические конгруэнции. Точно так же образами симметрии
пространства lSn являются т-мерные неевклидовы плоскости
вместе с их (п — т—^-мерными полярными плоскостями,
при т = 0— точки вместе с их полярными (п — 2)-мерными
плоскостями, при нечётном п и чётном I — эллиптические
паратактические конгруэнции и при п~21—1—конгруэнции
перпендикуляров к паре мнимо сопряжённых взаимно полярных
(I—1)-мерных плоскостей и гиперболические паратактические
конгруэнции.
В качестве примера пар образов симметрии рассмотрим две
zn-мерные плоскости вместе с их (п— т—1)-мерными полярными
плоскостями в пространстве Sn; будем считать, что т^п — т— 1,
т. е. п^2т-±-1. Две /n-мерные плоскости пространства Sn изо-
бражаются двумя (т1)-мерными плоскостями, проходящими через
точку пространства причём стационарные углы между двумя
плоскостями пространства Rn+1 определяют стационарные расстоя-
ния двух плоскостей пространства Sn, равные произведениям ста-
ционарных углов на радиус кривизны пространства Sn, а напра-
вляющие листы двух плоскостей пространства Rn+1 определяют
общие перпендикуляры двух плоскостей пространства Sn. Так как
стационарные углы между плоскостями пространства Rn+1 осу-
ществляются в их направляющих листах и углы между всякими
двумя векторами данных плоскостей, лежащими в направляющих
листах, являются стационарными, стационарные расстояния пло-
скостей пространства Sn осуществляются на их общих пер-
пендикулярах и расстояния между всякими двумя точками
данных плоскостей, соединяемых общими перпендикулярами,
являются стационарными.
Так как направляющие листы двух плоскостей пространства
Rn+i вполне ортогональны, общие перпендикуляры двух плоско-
стей пространства Sn, в которых осуществляются первые
стационарные расстояния этих плоскостей, полярно сопряжены.
Так как две (т-\- 1)-мерные плоскости пространства Rn+r,
пересекающиеся по (£-|-1)-мерной плоскости, при /г —1 = О
в точке, обладают не более чем т — k стационарными углами,
две непересекающиеся т-мерные плоскости пространства Sn
обладают не более чем т~\~\ стационарными расстояниями,
а две т-мерные плоскости пространства Sn, пересекающиеся
по k-мерной плоскости, обладают не более чем т — k стацио-
нарными расстояниями.
Так как произведение отражений от двух плоскостей простран-
ства Rn+1, имеющих общую точку, является вращением, инвариант-
ными двумерными плоскостями которого являются направляющие
224
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
листы данных плоскостей, а стационарные углы которых равны
удвоенным стационарным углам данных плоскостей, произведение
отражений от двух плоскостей пространства Sn является
движением, прямолинейными траекториями которого являются
общие перпендикуляры данных плоскостей, а стационарные рас-
стояния которых равны удвоенным стационарным расстояниям
данных плоскостей.
Стационарные расстояния двух /n-мерных плоскостей простран-
ства Sn являются их числовыми инвариантами, а общие перпен-
дикуляры этих плоскостей являются их геометрическими ковари-
антами. Мы видим, что эти числовые инварианты и геометрические
коварианты могут быть определены с помощью произведения отра-
жений от данных плоскостей.
Если все стационарные расстояния двух непересекающихся
/n-мерных плоскостей равны, то произведение отражений от этих
плоскостей определяет паратактический сдвиг в порождённой ими
(2/п-|- 1)-мерной плоскости. В этом случае общие перпендикуляры
плоскостей составляют паратактическую конгруэнцию. Будем назы-
вать такие /n-мерные плоскости паратактичными. Предельным
случаем паратактичных плоскостей являются полярно сопряжённые
тс
плоскости, у которых все стационарные расстояния равны у г;
общим перпендикуляром таких плоскостей является любая прямая,
пересекающаяся с обеими данными плоскостями.
Совершенно аналогично определяются числовые инварианты и
геометрические коварианты двух неевклидовых ^-мерных плоско-
стей пространства lSn, матрица произведения отражений от которых
приводится к диагональному виду, — стационарные расстояния и
общие перпендикуляры, обладающие свойствами, аналогичными
свойствам числовых инвариантов и геометрических ковариантов
/^-мерных плоскостей пространства Sn, Заметим, что в простран-
ствах lSn при 7^2 общие перпендикуляры двух плоскостей могут
быть как вещественными (эллиптическими или гиперболическими)
прямыми, так и попарно мнимо сопряжёнными прямыми; в про-
странстве общие перпендикуляры двух плоскостей всегда
вещественны и из них не более чем один является гиперболической
прямой. В пространствах lSn, так же как в пространствах Sn,
определяются паратактичные и полярно сопряжённые плоскости.
В отличие от пространства Sn в пространствах lSn имеются пары
плоскостей, матрицы произведений отражений от которых не при-
водятся к диагональному виду и которые поэтому определяют
числовые инварианты и геометрические коварианты, не имеющие
аналогов в пространстве Sn.
Аналогично определяются числовые инварианты и геометриче-
ские коварианты остальных образов симметрий пространств Sn
и lSn: паратактических конгруэнций пространства Sn, эллиптиче-
§ 81
ОБРАЗЫ СИММЕТРИИ
22 5
ских паратактических конгруэнций пространств lSn, конгруэнций
перпендикуляров к паре мнимо сопряжённых взаимно полярных
плоскостей и гиперболических паратактических конгруэнций про-
странства (см. ниже, § 6 главы III).
Рассмотрим более подробно образы симметрии на плоскостях S2
и г52 и в пространствах Л>3, 1S3 и 2S3.
Образом симметрии плоскости S2 является точка вместе с её
полярой.
Две точка плоскости $.2 с радиусом кривизны г определяют
один числовой инвариант—расстояние со и один геометрический
ковариант — прямую, соединяющую эти точки, и её полюс; две
(О
прямые, полярные этим точкам, пересекаются под углом у в по-
люсе прямой, соединяющей эти точки и являющейся общим пер-
пендикуляром этих прямых.
Образами симметрии плоскости XS2 являются: 1) точка соб-
ственной области вместе с её полярой', 2) точка идеальной
области вместе с её полярой.
Две точки собственной области плоскости х52 с радиусом
кривизны qi определяет один числовой инвариант—расстояние со,
являющееся вещественным числом, и один геометрический кова-
риант— прямую, соединяющую эти точки, и идеальный полюс этой
прямой; две эллиптические прямые плоскости 1S2, полярные этим
(О
точкам, пересекаются под углом —i в полюсе прямой, соединяю-
щей эти точки.
Две прямые собственной области плоскости 1S2 определяют
один числовой инвариант—угол и один геометрический ковариант—•
точку пересечения этих прямых с её полярой, являющейся общим
перпендикуляром этих прямых. Две собственные прямые плоско-
сти 152 являются пересекающимися, если их точка пересечения
является собственной точкой, расходящимися, если их точка пере-
сечения является идеальной точкой, и параллельными, если их точка
пересечения — точка абсолюта; в первом случае общий перпенди-
куляр прямых является эллиптической прямой, во втором случае —
гиперболической прямой, в третьем случае — изотропной прямой;
в первом случае угол между прямыми веществен и
(D
равен —,
где
ш — чисто мнимая длина общего перпендикуляра этих прямых,
равная расстоянию между их полюсами; во втором случае угол
между прямыми чисто мним и равен ^i, где а) — вещественная
Длина общего перпендикуляра этих прямых, равная расстоянию
между их полюсами; в третьем случае угол между прямыми равен
нулю, так же как расстояние между их полюсами, соединяемыми
изотропной прямой.
15 Зак. 177. Б. А. Розенфельд
226
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Образами симметрии пространства S3 являются: 1) точка вместе
с её полярной плоскостью, 2) пара взаимно полярных прямых
и 3) паратактическая конгруэнция.
Две точки пространства S3 с радиусом кривизны г определяют
один числовой инвариант — расстояние со и один геометрический
ковариант—прямую, соединяющую эти точки, и поляру этой пря-
мой; две плоскости пространства S3, полярные этим точкам, пере-
секаются под углом по поляре прямой, соединяющей эти точки.
Две прямые пространства S3 в общем случае определяют два
числовых инварианта — максимальное и минимальное расстоя-
ния о)0 и (Dj и два геометрических коварианта — общие перпенди-
куляры прямых, по которым осуществляются экстремальные рас-
стояния; две прямые, полярные этим прямым, определяют те же
самые экстремальные расстояния и общие перпендикуляры. Если
две прямые пересекаются, их минимальное расстояние равно нулю,
со
угол между прямыми равен где <о — максимальное расстояние
прямых, а роль одного из общих перпен-
дикуляров играет перпендикуляр, восстав-
ленный к плоскости этих прямых в точке
их пересечения.
Две прямые пространства 53, экстре-
мальные расстояния которых равны, назы-
ваются паратактичными прямыми (или
параллельными в смысле Клиффорда)',
в этом случае прямые имеют не два общих
перпендикуляра, а семейство общих пер-
пендикуляров, зависящее от одного веще-
ственного параметра.
Через каждую точку пространства S3,
не лежащую на данной прямой и на её
поляре, можно провести две прямые, па-
ратактичные этой прямой: для этого надо опустить перпендику-
ляр AD из данной точки А на данную прямую ВС, провести пря-
мую EF, полярную этому перпендикуляру, от точки G пересечения
этого перпендикуляра с прямой EF отложить на нём расстояние <о,
равное расстоянию от точки до прямой, и соединить полученную
точку Н с данной точкой (черт. 42). В самом деле, так как всякая
прямая, пересекающая две взаимные поляры, перпендикулярна
к ним обеим, перпендикуляр AD, опущенный из точки А на пря-
мую ВС, и его поляра EF являются общими перпендикулярами
данной прямой ВС и прямой АН, построенной нами, и, так как
расстояния между этими прямыми по этим общим перпендикулярам
равны, эти прямые паратактичны друг другу. Задача имеет два
решения АН и АН', так как расстояние, равное расстоянию от
§ 8]
ОБРАЗЫ СИММЕТРИИ
227
точки до прямой, можно отложить на прямой EF в двух напра-
влениях от точки G.
Угол между двумя прямыми, проходящими через данную
точку и паратактичными данной прямой, находящейся на рас-
v 2oj D
стоянии со от этой точки, равен В самом деле, расстоя-
ние между точками сторон этого угла, полярно сопряжёнными его
Г) 2(0
вершине, равно 2со, откуда следует, что этот угол равен —.
Из того, что через каждую точку пространства, не лежащую
на данной прямой и её поляре, можно провести только две прямые,
паратактичные данной прямой, следует, что все прямые, паратак-
тичные данной прямой, если к ним присоединить данную прямую
и её поляру (предельные случаи паратактичных прямых при со = О
и образуют две конгруэнции. Эти конгруэнции, очевидно,
совпадают с теми двумя паратактическими конгруэнциями, кото-
рые образованы прямолинейными траекториями паратактических
сдвигов, переводящих в себя данную прямую и её поляру; если
выбирать произвольно направление сдвига на одной из этих пря-
мых, то двум паратактическим сдвигам соответствуют два различ-
ных направления сдвига на второй из этих прямых.
Образами симметрии пространства являются: 1) точка соб-
ственной области вместе с её полярной плоскостью, 2) точка
идеальной области вместе с её полярной плоскостью и 3) пара
взаимно полярных прямых.
Две точки собственной области пространства 1S3 с радиусом
кривизны qi определяют один числовой инвариант—расстояние со,
являющееся вещественным числом, и один геометрический кова-
риант— прямую, соединяющую эти точки, и идеальную поляру
этой прямой; две идеальные плоскости пространства полярные
СО
этим точкам, пересекаются под углом ~i по поляре прямой, со-
единяющей эти точки.
Две плоскости собственной области пространства опре-
деляют один числовой инвариант—угол и один геометрический
ковариант — прямую пересечения этих плоскостей с её полярой,
являющейся общим перпендикуляром этих плоскостей. Две соб-
ственные плоскости пространства 1S3 называются пересекающимися,
если их прямая пересечения является гиперболической прямой,
расходящимися, если их прямая пересечения является эллиптиче-
ской прямой, и параллельными, если их прямая пересечения
является изотропной прямой; в первом случае общий перпендикуляр
плоскостей является эллиптической прямой, во втором случае —
гиперболической прямой, в третьем случае — изотропной прямой.
В
первом случае угол между плоскостями веществен и равен
(О
7’
15*
228
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
где со/— чисто мнимая длина общего перпендикуляра этих пло-
скостей, равная расстоянию между их полюсами; во втором случае
угол между плоскостями чисто мним и равен
— I, где со — веще-
Q
ственная длина общего перпендикуляра этих плоскостей, равная
расстоянию между их полюсами; в третьем случае угол между
плоскостями равен нулю, так же как расстояние между их полю-
сами, соединяемыми изотропной прямой.
Две прямые собственной области пространства 1S3 в общем
случае определяют два числовых инварианта — минимальное веще-
ственное расстояние со0 и стационарное чисто мнимое расстоя-
ние Zcot и два геометрических коварианта — общие перпендику-
ляры прямых, по которым осуществляются стационарные расстоя-
ния, причём первое расстояние осуществляется по гиперболической
прямой, а второе — по эллиптической прямой; две идеальные пря-
мые, полярные данным прямым, определяют те же самые стацио-
нарные расстояния и общие перпендикуляры.
Две прямые, лежащие в одной плоскости, называются пересе-
кающимися, если их точка пересечения — собственняя точка, рас-
ходящимися, если их точка пересечения — идеальная точка, и па-
раллельными, если их точка пересечения — точка абсолюта. В пер-
вом случае минимальное вещественное расстояние прямых равно
(О
нулю, угол между прямыми веществен и равен—, где mi—ста-
ционарное чисто мнимое расстояние прямых, а роль гиперболиче-
ского общего перпендикуляра играет перпендикуляр к плоскости
этих прямых в точке их пересечения; во втором случае стационар-
ное чисто мнимое расстояние прямых равно нулю, угол между
прямыми чисто мним и равен — i, где со — минимальное веществен-
ное расстояние прямых, а роль эллиптического общего перпенди-
куляра играет перпендикуляр к плоскости прямых в точке их
пересечения; в третьем случае угол между прямыми равен нулю,
а роль общих перпендикуляров играют две взаимно полярные
изотропные прямые, пересекающиеся в точке пересечения данных
прямых, причём одна из этих прямых перпендикулярна к плоскости
этих прямых, а вторая лежит в этой плоскости.
Образами симметрии пространства 2S3 являются: 1) точка соб-
ственной или идеальной области вместе с её полярной пло-
скостью, 2) пара взаимно полярных эллиптических прямых,
3) пара взаимно полярных гиперболических прямых, 4) элли-
птическая паратактическая конгруэнция прямых, 5) гипербо-
лическая паратактическая конгруэнция прямых и 6) конгру-
энция перпендикуляров к паре мнимо сопряжённых взаимно
полярных прямых.
ОБРАЗЫ СИММЕТРИИ
229
§ 8]
Две точки собственной и идеальной областей простран-
ства 2S3 с радиусом кривизны г определяют один числовой инва-
риант—расстояние со и один геометрический ковариант — пря-
мую, соединяющую эти точки, и поляру этой прямой; две плоскости
ОС*
пространства "53, полярные этим точкам, пересекаются под углом
по поляре прямой, соединяющей эти точки.
Две эллиптические или гиперболические прямые простран-
ства 2S3 в общем случае определяют два числовых инварианта — в
первом случае стационарные чисто мнимые расстояния, во втором
случае экстремальные вещественные расстояния <п0 и <о1 и два
геометрических коварианта — общие перпендикуляры прямых, по
которым осуществляются стационарные расстояния; в первом случае
эти общие перпендикуляры — гиперболические, а во втором случае —
эллиптические прямые; две соответственно эллиптические или гипер-
болические прямые, полярные этим прямым, имеют те же самые ста-
ционарные расстояния и общие перпендикуляры. Если две прямые
пересекаются в собственной или идеальной точке, то одно из стацио-
нарных расстояний равно нулю, угол между прямыми равен у,
где <о — второе стационарное расстояние, а роль одного из общих
перпендикуляров играет перпендикуляр, восставленный к плоскости
этих прямых в точке их пересечения. Две прямые пространства 23 ,
стационарные расстояния которых равны, называются паратак-
тичными прямыми; в этом случае прямые имеют не два общих
перпендикуляра, а семейство таких перпендикуляров, зависящее
от одного вещественного параметра. Так же как в S3, доказы-
вается, что через каждую точку 2S3, не лежащую на данной пря-
мой, можно провести две прямые, паратактичные этой прямой, и
что все прямые, паратактичные данной эллиптической или гипер-
болической прямой, если к ним присоединить данную прямую и её
поляру, являются соответственно эллиптическими и гиперболическими
паратактическими конгруэнциями.
Заметим, что в пространстве 2S3 можно определить также пары
паратактичных изотропных прямых, за которые следует счи-
тать пары изотропных прямых этого пространства, принадлежащие
одной параболической паратактической конгруэнции (обычное опре-
деление паратактичных прямых для изотропных прямых не имеет
смысла).
Так же как для пространств Sn и lSn, показывается, что обра-
зами симметрии пространства Sn(i) являются т-мерные неев-
клидовы плоскости вместе с их (п — т—Химерными поляр-
ными плоскостями, при т=-0 — точки вместе с их полярными
гиперплоскостями, при т = 1 —прямые вместе с их полярными
(п— 2)-мерными плоскостями и при нечётном п — паратакти-
ческие конгруэнции, определяющиеся в пространстве Sn(i) так же,
230 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. II
как в пространстве Sn. Точно так же показывается, что неевкли-
довы плоскости пространства Sn(f) обладают числовыми инвариан-
тами и геометрическими ковариантами, совершенно аналогичными
инвариантам и ковариантам плоскостей пространств Sn и lSn.
§ 9. Гиперсферы и эквидистанты
В неевклидовых пространствах Sn и lSn можно определить
гиперсферы — геометрические места точек, отстоящих от одной
точки, называемой центром гиперсферы, на одном и том же рас-
стоянии, называемом радиусом гиперсферы. Так как расстояние
от центра гиперсферы до полярной гиперплоскости этого центра
равно г, где г — радиус кривизны неевклидова пространства, то
все точки гиперсферы отстоят от этой гиперплоскости также на
постоянном расстоянии, дополняющем радиус гиперсферы до ~ г.
Поэтому гиперсферу неевклидова пространства называют в то же
время эквидистантой гиперплоскости', эту гиперплоскость назы-
вают базой гиперсферы, а расстояние от точек гиперсферы до её
базы называют параметром гиперсферы.
Гиперсфера в пространстве Sn или lSn ортогональна ко всем
прямым, проходящим через её центр и, следовательно, перпенди-
кулярным к её базе. В самом деле, при отражении от каждой из
этих прямых гиперсфера переходит в себя, откуда следует, что
каждый из углов, составляемых этой прямой с касательными
к гиперсфере в точках её пересечения с этой прямой, равен углу,
смежному с ним, т. е. является прямым углом.
В пространстве Sn центр всякой гиперсферы является собствен-
ной точкой, а база — собственной гиперплоскостью.
Гиперсфера радиуса R пространства Sn с радиусом кри-
визны г изометрична гиперсфере пространства Rn с радиусом
р
г sin —. В самом деле, гиперсфера радиуса R в пространстве Sn
с радиусом кривизны г изометрична (п—1)-мерной сфере того же
радиуса г на гиперсфере радиуса г в пространстве RnV1, но
эта (п— 1)-мерная сфера является пересечением этой гиперсфе-
ры с гиперплоскостью, являющейся пространством R^', радиус
[п—1)-мерной сферы в этом пространстве равен радиусу окруж-
ности, являющейся сечением этой сферы плоскостью /?,2, проходящей
через её центр, а этот радиус, как мы видели в § 3, равен
. R
г sin —.
г
В пространстве xSn, если центр гиперсферы является собствен-
ной точкой, база этой гиперсферы является идеальной гипер-
плоскостью, а если база является собственной гиперплоскостью,
центр является идеальной точкой. Поэтому в собственной области
§ 9]
ГИПЕРСФЕРЫ И ЭКВИДИСТАНТЫ
231
этого пространства можно определить гиперсферы собственной
области, т. е. геометрические места точек этой области, отстоя-
щих от одной точки этой области на одном и том же расстоянии,
и эквидистанты гиперплоскостей собственной области, т. е.
геометрические места точек этой области, отстоящих от одной
гиперплоскости этой области на одном и том же расстоянии.
Гиперсфера радиуса R собственной области пространства rSn
с радиусом кривизны qi изометрична гиперсфере пространства Rn
D
с радиусом q sh —. В самом деле, гиперсфера радиуса R в соб-
ственной области пространства с радиусом кривизны qi изо-
метрична (п—1)-мерной сфере того же радиуса на гиперсфере
чисто мнимого радиуса qi в пространстве 1Rn+1, но эта (п—1)-
мерная сфера является пересечением гиперсферы с гиперплоскостью,
перпендикулярной к прямой, соединяющей центр гиперсферы с цен-
тром (п— 1)-мерной сферы на этой гиперсфере. Так как эта прямая
является прямой индекса 1, гиперплоскость, высекающая (п—1)-
мерную сферу из гиперсферы, является гиперплоскостью индекса О,
т. е. пространством Rn; радиус (п—1)-мерной сферы в этом про-
странстве равен радиусу окружности, являющейся сечением этой
сферы плоскостью /?2, проходящей через её центр, а этот радиус,
как мы видели в § 4, равен ^sh^-.
Эквидистанта гиперплоскости с параметром Р в собствен-
ной области пространства 1Sn с радиусом кривизны qi изоме-
трична гиперсфере пространства 1Rn с чисто мнимым радиусом
Р
iq ch —. В самом деле, эквидистанта гиперплоскости с параме-
тром Р в собственной области пространства с радиусом кри-
визны qi изометрична геометрическому месту точек гиперсферы
чисто мнимого радиуса qi в пространстве 1Rn+1, отстоящих на рас-
стоянии Р от большой (п—1)-мерной сферы этой гиперсферы, но
это геометрическое место является пересечением гиперсферы с гипер-
плоскостью, параллельной гиперплоскости, высекающей из гипер-
сферы большую (п—1)-мерную сферу. Так как эта последняя
гиперплоскость является гиперплоскостью индекса 1, гиперплоскость,
высекающая нашу (п—1)-мерную сферу из гиперсферы, также
является гиперплоскостью индекса 1, т. е. пространством
радиус (/г—1)-мерной сферы в этом пространстве равен чисто
мнимому радиусу окружности, являющейся сечением этой сферы
плоскостью 1Ryf проходящей через её центр, а этот радиус, как
" р
мы видели в § 4, равен iq ch —.
Заметим, что эквидистанта гиперплоскости в собственной обла-
сти пространства состоит из двух полостей, расположенных
по разные стороны от её базы. Так как все перпендикуляры к базе
232
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. П
эквидистанты гиперплоскости проходят через её идеальный центр,
будем называть точки разных полостей этой эквидистанты, располо-
женные на одном перпендикуляре к базе, диаметрально противо-
положными точками эквидистанты.
Таким образом, на гиперсферах пространства Римана Sn и соб-
ственной области пространства Лобачевского отрицательной
кривизны, если отождествить диаметрально противоположные точки,
господствует геометрия пространства Римана а на эквиди-
станте гиперплоскости собственной области пространства Лобачев-
ского отрицательной кривизны, если отождествить диаметрально
противоположные точки этой эквидистанты, господствует геометрия
собственной области пространства Лобачевского 1Sn_1 отрицатель-
ной кривизны.
Уравнение гиперсферы с центром в точке а и радиусом R
в пространстве Sn с радиусом кривизны г имеет вид
(а, х) = г2 cos у. (2.200)
В частности, если центр гиперсферы совпадает с базисной
точкой eQ, это уравнение можно переписать в виде
x0=cos^- (2.201)
или, так как (х°)2 + • ♦ • +(хП)2 = 1 и, следовательно, (х1)2-]- . . .
.. . + (хп)2 = sin2 у , в виде
(х0)2 sin2y —[(х1)2 + . . . 4- (х«)2] cos2 у = 0. (2.202)
Уравнение гиперсферы с центром в точке а и радиусом R
в собственной области пространства 1Sn с радиусом кривизны qi
имеет вид
(а, х) = —?2ch^-. (2.203)
В частности, если центр гиперсферы совпадает с базисной точ-
кой eQi это уравнение можно переписать в виде
ch | (2.204)
или, так как — (х0)2(х1)2 + • • • + (-vn)2 = — 1 и, следовательно,
(х1)2 • • • + С^”)2 — sh2 —, в виде
Q
— (х0)2 sh2 + [(X1)2-!- . .. + (х«)2] ch2 = 0. (2.205)
Уравнение эквидистанты гиперплоскости с полюсом а и с пара-
метром Р в собственной области пространства 1Sn с радиусом
§ 9] ГИПЕРСФЕРЫ И ЭКВИДИСТАНТЫ 233
кривизны qi, т. е. гиперсферы с идеальным центром а и радиу-
сом ^ql— Р, имеет вид
(а, х) — iq2 cos ------=lq2 cos sin q2 sh у •
(2.206)
В частности, если база эквидистанты совпадает с базисной пло-
скостью eQe1 . . . en_lt т. е. её полюс совпадает с базисной точ-
кой еп, это уравнение можно переписать в виде
хп = Sh у (2.207)
или, так как— (х°)2-|- (л;1)2 + • • • + (*”)2 = — 1 и, следовательно,
(х0)2— (х1)2— . . . —(х"-1)2 = ch2 -у, в виде
[ —(х°)24-(хг)24- . .. -Нх"-1)2] sh2 (x")2ch2-^ = 0. (2.208)
В пространствах Sn и lSn можно определить также эквиди-
станту т-мерной плоскости, т. е. геометрическое место точек,
отстоящих от т-мерной плоскости, называемой базой эквидистанты,
на одном и том же расстоянии, называемом параметром экви-
дистанты. Так как расстояние от любой точки m-мерной пло-
скости до любой точки полярной ей (п— т—1)-мерной плоскости
тс
равно г, где г — радиус кривизны неевклидова пространства, то
все точки эквидистанты т-мерной плоскости отстоят от полярной
ей (п — т—1)-мерной плоскости также на постоянном расстоянии,
дополняющем параметр этой эквидистанты до ~ г. Поэтому экви-
дистанта т-мерной плоскости неевклидова пространства является
в то же время эквидистантой (п—т — 1)-мерной плоскости*,
эту (п — т— 1)-мерную плоскость называют второй базой эквиди-
станты, а расстояние от точек эквидистанты до её второй базы
называют вторым параметром эквидистанты.
Эквидистанта т-мерной плоскости в пространстве Sn
или lSn ортогональна ко всем прямым, соединяющим точки ее
баз и, следовательно, перпендикулярным к обеим её базам.
В самом деле, при отражении от каждой из этих прямых эквиди-
станта переходит в себя, откуда следует, что каждый из углов,
составляемых этой прямой с касательными к эквидистанте в точках
её пересечения с этой прямой, равен углу, смежному с ним, т. е.
является прямым углом.
Произвольная точка эквидистанты m-мерной плоскости с пара-
метром Р пространства Римана Sn с радиусом кривизны г, базами
234
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
которой служат координатные плоскости eoet ... ет и ет+1 . . . еп,
имеет вид
х = (а% + а1е1 -|- . .. -|- а™ет) cos у +
+ (.^ет+1 4-... 4- sin у, (2.209)
где координаты аг и Ь3 связаны условиями (a°)2-j-.. .-\-(ап)2 = 1
и (&°)2 —. -|-(#1‘'7И“1)2 — 1. Поэтому координаты этой точки
р
удовлетворяют условиям (х0)2 + (X1)2 + . . . -]~ (хте)2 = cos2 — и
р
t— Sjn2 __ откуда следует, что уравнение нашей
эквидистанты имеет вид
1(ХО)2 + (Х1)2+ . . . +(xm)2] sin2 —
— [(х”^1)2-j- ... 4-(х»)2] cos2 у = 0. (2.210)
Аналогично можно найти уравнение эквидистант /п-мерных пло-
скостей в пространствах 18п.
§ 10. Евклидова геометрия на поверхностях
в неевклидовых пространствах
В пространствах lSn, кроме гиперсфер этих пространств, соот-
ветствующих сечениям гиперсфер пространств ]Rn+1 гиперплоско-
стями с евклидовой метрикой, имеются гиперповерхности, соответ-
ствующие сечениям гиперсфер lRn+1 полуевклидовыми гиперплоско-
стями.
В § 4 мы встречались с линиями плоскости 1S2, соответствую-
щими сечениям сферы чисто мнимого радиуса в пространстве 1/?3
полуевклидовыми плоскостями; мы называли такие линии ори-
циклами. Рассмотрим аналогичную поверхность в пространстве
Лобачевского ^Sn.
Будем называть поверхность собственной области пространства 1Sn
с радиусом кривизны qi, соответствующую сечению гиперсферы
чисто мнимого радиуса в пространстве 1Rn+1 полуевклидовой гипер-
плоскостью орисферой собственной области пространства xSn.
Орисфера собственной области пространства Лобачевского х8п
с радиусом кривизны qi ортогональна ко всем прямым, прохо-
дящим через точку абсолюта пространства г8п', эта точка
изображается той изотропной прямой пространства 1Rn+1,
которая ортогональна полуевклидовой гиперплоскости, высе-
кающей из этой гиперсферы (п—\)-мерную поверхность, соот-
ветствующую орисфере. В самом деле, при отражении от каждой
§ 10] ЕВКЛИДОВА ГЕОМЕТРИЯ НА ПОВЕРХНОСТЯХ 235
из этих прямых орисфера переходит в себя, откуда следует, что
каждый из углов, составляемых этой прямой с касательными к ори-
сфере в точке её пересечения с этой прямой, равен углу, смежному
с ним, т. е. является прямым углом.
Таким образом, в то время как гиперсфера собственной области
пространства Лобачевского 1Sn отрицательной кривизны ортого-
нальна всем прямым связки пересекающихся прямых, а эквиди-
станта гиперплоскости этой области ортогональна всем прямым связки
расходящихся прямых, орисфера этой области ортогональна всем
прямым связки параллельных прямых.
Орисфера собственной области пространства lSn отрица-
тельной кривизны изометрична евклидову пространству
В самом деле, выберем базис пространства 1/?/г+1 таким образом,
чтобы полуевклидова гиперплоскость высекающая из гипер-
сферы радиуса qi (п— 1)-мерную поверхность, изометричную нашей
орисфере, была параллельна гиперплоскости, проходящей через
изотропный вектор + и базисные векторы вещественной длины
е2, . . ., еп. Тогда расстояние между точками
х = х1(е0 + е1) + х%+ . .. + *%, \
и J (2.211)
У = У (*о + «1) + У e-г+• • • + Упеп J
этой гиперплоскости определяется соотношением
0)2 = (у2 _ х2)-2 + (у> _ х3)2 . . . + (/* — (2.212)
а квадрат линейного элемента этой гиперсферы, в силу (2.20)
вычисляемый по формуле d<o’2 = (dx, dx), имеет вид
du? = dx^ + dx^ + . . . -\-dxn\ (2.213)
Таким образом, расстояние между любыми двумя точками этой
гиперплоскости равно расстоянию между ортогональными проек-
циями этих точек на (п—1)-мерную плоскость, порождённую
базисными векторами • • •, еп, являющуюся плоскостью
индекса 0, т. е. изометричную пространству Поэтому в каче-
стве криволинейных координат на всякой (п—1)-мерной поверх-
ности, лежащей в нашей полуевклидовой гиперплоскости и пересе-
кающейся с каждой из изотропных прямых этой гиперплоскости
в одной и только одной точке, можно взять координаты х\ х^,.. .
•.хп указанной (п— 1)-мерной плоскости. На этой (п— ^-мер-
ной поверхности квадратичная форма (2.213) является невырожден-
ной и положительно определённой т. е. на указанной поверхности
господствует геометрия пространства Rn_lt совпадающая с геомет-
рией (п—1)-мерной плоскости индекса 0. Так как (п—1)-мерная
поверхность на гиперсфере радиуса qi пространства изо-
метричная нашей орисфере, является именно такой поверхностью,
236 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [ГЛ. II
то эта поверхность, а следовательно, и наша орисфера действи-
тельно изометричны пространству Rn^1.
Таким образом, в то время как на гиперсфере собственной
области пространства Лобачевского xSn отрицательной кри-
визны при отождествлении её диаметрально противоположных
точек господствует геометрия Римана, а на эквидистанте
гиперплоскости этой области при отождествлении её диаме-
трально противоположных точек господствует геометрия Лоба-
чевского, на орисфере этой области господствует геометрия
Евклида,
При соответствии между рассматриваемой нами орисферой про-
странства rSn и пространством как видно из нашего по-
строения, каждой точке орисферы соответствует одна и только одна
точка пространства Rn^ Из этого же построения видно, что при
этом соответствии прямым линиям пространства Rn_± соответствуют
такие кривые на орисфере, которые изображаются на гиперсфере
радиуса qi пространства rRn+1 пересечениями (п—1)-мерной поверх-
ности, изображающей орисферу, с двумерными полуевклидовыми
плоскостями, лежащими в рассматриваемой полуевклидовой гипер-
плоскости и проходящими через данные прямые линии (п—1)-
мерной евклидовой плоскости, порождённой векторами е%, е3, . . ., еп,
т. е. орициклами.
Так как всякая полуевклидова гиперплоскость пространства
lRn+1 может быть получена предельным переходом из евклидовой
гиперплоскости индекса 0 или 1, а полуевклидовы гиперплоскости
и евклидовы гиперплоскости индекса 0 и 1 высекают из гипер-
сферы чисто мнимого радиуса в пространстве (п— 1)-мерные
поверхности, изображающие соответственно орисферы, гиперсферы
и эквидистанты гиперплоскостей, орисфера собственной области
пространства Лобачевского отрицательной кривизны может
быть получена предельным переходом и из гиперсферы, и из
эквидистанты гиперплоскостей этой области (при стремлении
центра гиперсферы к точке абсолюта). Слово «орисфера» и озна-
чает «предельная сфера». Орисферы называют также предельными
гиперповерхностями.
Заметим, что формулы тригонометрии пространства Лобачев-
ского, выведенные нами как формулы сферической тригонометрии
на сфере чисто мнимого радиуса в пространстве 1/?3, выводились
самим Лобачевским с помощью евклидовой геометрии на орисфере
пространства XS3.
Поверхности, аналогичные орисферам пространства rSn, можно
определить и в остальных пространствах lSn‘, совершенно анало-
гично тому, как мы это делали для орисфер пространства
можно показать, что на гиперповерхностях пространств lSn, являю-
щихся аналогами орисфер пространства lSn, господствует евкли-
дова геометрия.
§ 10]
ЕВКЛИДОВА ГЕОМЕТРИЯ НА ПОВЕРХНОСТЯХ
237
Евклидова геометрия имеет место и на некоторых поверхностях
в пространстве Римана Sn.
В трёхмерном пространстве S3 такими поверхностями являются
поверхности Клиффорда [1], которые можно определить как экви-
дистанты прямых этого пространства. Так как поверхность Клиф-
форда является поверхностью вращения вокруг каждой из её баз,
эти базы называются осями этой поверхности, а параметры этой
поверхности называются радиусами этой поверхности.
В силу своего определения поверхность Клиффорда является
геометрическим местом прямых, паратактичных её осям и находя-
щихся от них на постоянных расстояниях, равных радиусам по-
верхности. Так как через каждую точку пространства S3 проходят
две прямые, паратактичные данной прямой, через каждую точку
поверхности Клиффорда проходят две её прямолинейные образую-
щие, откуда следует, что прямолинейные образующие поверхности
Клиффорда составляют два связных семейства. Так как угол между
двумя прямыми пространства S3, проходящими через одну точку
и паратактичными одной и той же прямой, находящейся на рас-
203
стоянии со от точки пересечения прямых, равен —, где г — ра-
диус кривизны пространства, то угол между двумя прямолиней-
ными образующими поверхностями Клиффорда, пересекающимися
в одной из её точек и, следовательно, принадлежащими к раз-
27?
личным семействам её прямолинейных образующих, равен — ,
где R— меньший из радиусов поверхности. Таким образом, прямо-
линейные образующие поверхности Клиффорда, принадлежащие
к разным семействам её прямолинейных образующих, пересекаются
под постоянным углом. Будем называть поверхность Клиффорда
прямоугольной, если этот угол прямой, и косоугольной, если этот
угол острый.
Для случая поверхности Клиффорда радиуса R, осями которой
служат координатные линии eQex и е^е^, формулу (2.209) можно
переписать в виде
х = (eQ cos Z° —sin Z°) cos у- + (^cos I1 + е.3 sin Z1) sin у, (2.214)
а уравнение эквидистанты (2.210) — в виде
[(х°)3 + (X1)2! sin2 £ — [(х2)2 + (х8)2] cos2 £ = 0. (2.215)
Так как квадрат линейного элемента на любой поверхности
в S3 в силу (2.20) вычисляется по формуле da2 = (dx, dx), квадрат
линейного элемента поверхности Клиффорда, если считать её кри-
волинейными координатами параметры Z0 и Z1, имеет вид
dufi — cos2y-d/°2 + sin2y-dZ12, (2.216)
238 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. II
а заменяя криволинейные координаты /° и Z1 криволинейными
о о
координатами zz° = Z° cos и zz1 = Z1siny, получим:
t/o)2 = du®2 -]-du12. (2.217)
Формула (2.217) показывает, что на поверхности Клиффорда
господствует геометрия плоскости Т?.2.
Координатные линии и1 являются сечениями поверхности Клиф-
форда плоскостями, проходящими через одну из её осей. Так как
все точки поверхности Клиффорда отстоят от первой оси на рас-
стоянии 7?, а от второй оси на расстоянии уГ— R, эти коорди-
натные линии являются окружностями радиусов R и у г— R. Так
как квадрат линейного элемента евклидовой плоскости имеет вид
(2.217) только в том случае, когда координатные линии являются
прямыми, образующими ортогональную сеть, а наши окружности
при развёртывании поверхности Клиффорда на евклидову плоскость
переходят в эти прямые, эти окружности являются геодезическими
линиями поверхности Клиффорда и образуют на ней ортогональ-
ную сеть.
Линии Z° = Z, Z1 = ztZ имеют вид (так как cos (±Z) = cosZ,
sin (± Z) = ± sin Z)
(7? 7? \ / R R\
е0 cos ——sin — j±sin Z(^x cos ——[-£3sin 4, (2.218)
откуда видно, что эти линии являются прямыми линиями простран-
ства S3, т. е. прямолинейными образующими поверхности Клиф-
форда. Так как угол между двумя прямолинейными образующими
поверхности Клиффорда, принадлежащими к разным семействам,
27?
равен -у, то если при развёртывании этой поверхности на евкли-
дову плоскость разрезать её по двум прямолинейным образующим
разных семейств, поверхность Клиффорда изобразится в виде
27?
ромба с острым углом — и с длиной сторон кг. При этом
прямолинейные образующие этой поверхности изображаются пря-
мыми, параллельными сторонам ромба, а окружности ui изобра-
жаются прямыми, параллельными диагоналям ромба.
Поверхность Клиффорда обладает конечной площадью,
27?
равной площади ромба со сторонами кг и острым углом -у , т. е.
itVsin^-. (2.219)
Таким образом, поверхность Клиффорда представляет собой
поверхность с евклидовой геометрией, обладающую конечной пло-
щадью.
§ 10] ЕВКЛИДОВА ГЕОМЕТРИЯ НА ПОВЕРХНОСТЯХ 239
В пространстве Римана большего числа измерений можно также
построить n-мерную поверхность, обладающую такими же свой-
ствами х).
Для этого рассмотрим пространство и, если в этом про-
странстве выбран базис из взаимно сопряжённых точек, рассмот-
рим п попарно полярно сопряжённых прямых, Z-я из которых
порождается базисными точками ег и en+i. Рассмотрим геометри-
ческое место точек пространства S2n_lf отстоящих от Z-й из этих
прямых на расстоянии Rif причём числа связаны соотношением
cos2 CQs2 = 1. Это геометрическое место точек
является n-мерной поверхностью. Прямые, проходящие через точки
ei и en+i, будем называть осями этой поверхности.
Произвольная точка Z-й оси имеет вид ei cos I-]- £n+isin Z, вслед-
ствие чего произвольная точка нашей поверхности имеет вид
х = (е0 cos /°-Р £nsin Z°) cos + .
... + cos Z»-1 + sin Z»-1) cos . (2.220)
Координаты этой точки имеют вид
х1 = cos I* cos , xn+i = sin Z* cos —(2.221)
Исключая из соотношений (2.221) числа Z\ мы получим урав-
нение нашей поверхности в виде
(х0)2 + (хп)2 = cos2 ,
(х72 + (х«+1)2 = cos2 ,
(2.222)
(х»-х)2+ (х2»-1)2 = cos2^^-.
При п = 2 уравнения (2.222) сводятся к уравнению поверх-
ности Клиффорда (2.215).
Квадрат линейного элемента построенной поверхности, вычи-
сляемый по формуле t/<o2 = (dx, dx), если считать криволинейными
координатами этой поверхности параметры Z°, Z1, . . 1п~\ имеет вид
<Ао2 = cos2 dl& + .. . + cos2 dln~^ (2.223)
Э См. заметку автора [3].
240
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
или, после замены криволинейных координат Z* криволинейными
D.
координатами и! = I* cos -у-,
= dMo24-</ai24- . .. (2.224)
Формула (2.224) показывает, что на n-мерной поверхности
(2.222) господствует геометрия пространства Rn.
Координатная линия W1 является сечением поверхности (2.222)
двумерной плоскостью, проходящей через Z-ю ось и фиксирован-
ную точку. Так как все точки нашей поверхности отстоят от
/-й оси на расстоянии Riy эти координатные линии являются окруж-
ностями радиусов у г — Rv Так как квадрат линейного элемента
имеет вид (2.224) только в том случае, когда координатные линии
являются прямыми, образующими ортогональную сеть, а наши
окружности при развёртывании нашей поверхности на простран-
ство Rn переходят в эти прямые, эти окружности являются геоде-
зическими линиями нашей поверхности и образуют на ней орто-
гональную сеть.
Линии Z* = гJ, (з0 = 1, ± 1 при Z Ф 0) имеют вид (так как
cos Z = cos Z, sin Z — sin Z)
x = cos/(eo cos^+ . . . +^„_! COS +
4- sin I (e„eosin -y2 + • • • + e^-fn sin , (2.225)
откуда видно, что эти линии являются прямыми линиями про-
странства S2n_1? т. е. прямолинейными образующими нашей по-
верхности. Очевидно, что эти прямые паратактичны осям этой
поверхности. Так как имеется 2П-1 комбинаций чисел через
каждую точку нашей поверхности проходит 2П-1 прямолинейных
образующих (2.225).
При развёртывании поверхности (2.222) на пространство Rn
прямые (2.225) переходят в прямые, параллельные диагоналям
многомерного прямоугольного параллелепипеда, рёбрами которого
служат изображения окружностей zz\ Так как радиус окруж-
ности и1 равен у г — Rit то эта окружность является окружностью
~ - I к RA Ri
плоскости R,2 радиуса г sin I у-= г cos -у-, вследствие чего
R •
длина этой окружности равна 2ттгcos —р, Так как длина диаго-
R'
нали прямоугольного параллелепипеда с рёбрами 2^rcos-y в силу
R R
того, что cos2 -—•+ . • . + cos2 —= 1, равна 2ттг, т. е. длине
удвоенной прямой пространства S.2n-i, построенный нами парал-
§ 10] ЕВКЛИДОВА ГЕОМЕТРИЯ НА ПОВЕРХНОСТЯХ 241
лелепипед изображает поверхность (2.222) двузначно, и для взаимно
однозначного изображения этой поверхности следует рассмотреть
половину этого параллелепипеда, образованную сечением его гипер-
плоскостью, параллельной одной из граней, проходящей через
точку пересечения его диагоналей (при этом следует отождествлять
точки параллельных граней первоначального параллелепипеда,
соединяемые прямыми, параллельными одному из рёбер, а точки
новой грани — с точками параллельной ей грани, соединяемыми
с ними прямыми, параллельными одной из диагоналей первоначаль-
ного параллелепипеда).
На черт. 43 показаны параллелограммы, изображающие поверх-
ность Клиффорда на плоскости /?2, и параллелепипеды, изобра-
жающие трёхмерный аналог поверхности Клиффорда в простран-
стве /?3. Прямоугольник ABDC, у которого отождествлены точки
Черт, 43.
противоположных сторон, соединяемые прямыми, параллельными
его сторонам, изображает поверхность Клиффорда двузначно; одно-
значно изображает эту поверхность прямоугольник ABFE, у кото-
рого отождествлены точки противоположных сторон, соединяемые
прямыми, параллельными стороне АВ и диагонали AD, и равно-
великий ему параллелограмм ABF'E' и ромб AE'BG, у которых
отождествлены точки противоположных сторон, соединяемые пря-
мыми, параллельными их сторонам. Прямоугольный параллелепипед
ABCDEFGH, у которого отождествлены точки противоположных
граней, соединяемые Прямыми, параллельными его рёбрам, изобра-
жает трёхмерный аналог поверхности Клиффорда двузначно; одно-
значно изображает эту поверхность прямоугольный параллелепипед
ABCDIJKL, у которого отождествлены точки противоположных
граней, соединяемые прямыми, параллельными рёбрам ABt AD
16 Зак. 177. Б. А. Розенфельд
242
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[гл. II
и диагонали AG, и равновеликий ему косой параллелепипед
ABCDI'J'K'L', у которого отождествлены точки противоположных
граней, соединяемые прямыми, параллельными его рёбрам.
Поверхность (2.222) обладает конечным объёмом, равным поло-
вине объёма первоначального параллелепипеда, т. е. половине
D.
произведения длин 2тгг cos окружностей иг. Следовательно,
этот объём равен
2w“icos — cos — ... cos (2.226)
г г г
При п = 2 число (2.226), если положить /?0 = R, R± = ^ г — R>
обращается в число (2.219).
Таким образом, поверхность (2.222) представляет собой п-мерное
пространство с евклидовой геометрией, обладающее конечным
объёмом.
В противоположность орисфере пространства 1Sw+1, изомет-
ричной всему евклидову пространству Rn, поверхность Клиффорда
и её многомерные аналоги в пространствах S3 и изомет-
ричны не всей плоскости R2 или всему пространству Rn, а только
ромбу плоскости /?2 или параллелепипеду пространства Rn с отожде-
ствлёнными точками противоположных сторон или граней.
Евклидова геометрия господствует и на эквидистантах прямой
в пространствах 1S3 и 2S3. Произвольная точка эквидистанты пря-
мой eQe1 пространства имеет вид
х = (eQ ch Z° + sh Z°) ch — + (е.2 cos Z1 + е3 sin Z1) sh — , (2.227)
Q Q
а уравнение этой эквидистанты имеет вид
7 = 0. (2.228)
Квадрат линейного элемента этой поверхности, если считать
её криволинейными координатами параметры Z0 и Z1, имеет вид
rfo>2=:ch2y d/°34-sh2 у (2.229)
а заменяя криволинейные координаты /° и Z1 криволинейными
R R
координатами и°= /° ch -у и ur= I1 sh — , получим формулу (2.217).
Эквидистанта прямой пространства х53 изометрична цилиндру про-
странства Ri *)•
Для эквидистант прямой пространства 2<S3 доказательство анало-
гично. Так как эти эквидистанты, так же как поверхности Клиф-
форда пространства 53, являются геометрическими местами прямых,
Э Эта теорема была сообщена автору А. Я. Вольманом (Кишинёв).
§ 111
ЕВКЛИДОВЫ ПРОСТРАНСТВА КАК ПРЕДЕЛЬНЫЙ СЛУЧАЙ
243
паратактичных её базам и находящихся от них на постоянных
расстояниях, будем называть эквидистанты эллиптической и гипер-
болической прямых пространства 2<$3 соответственно эллиптиче-
скими, и гиперболическими поверхностями Клиффорда про-*
странства 2S3. Прямолинейные образующие эллиптических и гипер-
болических поверхностей Клиффорда являются соответственно
эллиптическими и гиперболическими прямыми. Эллиптические и
гиперболические поверхности Клиффорда пространства 253 изо-
метричны соответственно ромбу плоскости /?2 с отождествлёнными
противоположными сторонами и всей плоскости /?2.
В пространствах zS2n~x можно определить поверхности, анало-
гичные поверхностям (2.222), так же, как мы это делали в про-
странстве S2n_x. Можно показать, что на поверхностях простран-
ства lS2n_lf являющихся аналогами поверхностей (2.222) про-
странства S2n_x, также господствует евклидова геометрия.
§ 11. Евклидовы пространства как предельный случай
неевклидовых пространств
Как известно, пространство Rn можно рассматривать как пре-
дел гиперсферы пространства Rn+1 при стремлении радиуса гипер-
сферы к бесконечности: если мы рассмотрим гиперсферу, про-
ходящую через некоторую фиксированную точку пространства
7?п+х и касающуюся в этой точке некоторой фиксированной гипер-
плоскости, и будем увеличивать радиус этой гиперсферы, то при
достаточно большой величине радиуса эта гиперсфера будет сколь
угодно мало отличаться от касательной гиперплоскости в этой
точке, являющейся пространством Rn. Тот же результат мы полу-
чим, если будем рассматривать половину гиперсферы при отож-
дествлении диаметрально противоположных точек гиперсферы, т. е.
рассмотрим вместо неё пространство Sn.
Точно так же пространство Rn можно рассматривать как пре-
дел одной из двух полостей гиперсферы чисто мнимого радиуса
в пространстве 1Rn+1' если мы рассмотрим такую полость, про-
ходящую через некоторую фиксированную точку пространства
и касающуюся в этой точке некоторой фиксированной гипер-
плоскости, и будем увеличивать модуль радиуса этой гиперсферы
чисто мнимого радиуса, эта полость будет сколь угодно мало
отличаться от касательной гиперплоскости в данной точке, а каса-
тельные гиперплоскости к гиперсферам чисто мнимого радиуса
в пространстве 17?п+х являются пространствами Rn. Тот же результат
мы получим, если рассмотрим обе полости гиперсферы, но отож-
дествим её диаметрально противоположные точки, т. е. рассмотрим
пространство 1Sn отрицательной кривизны.
Таким образом, геометрии пространства Римана и про-
странства Лобачевского отрицательной кривизны, при доста-
16*
244
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
точно большой величине модуля радиуса кривизны, сколь угодно
мало отличаются от геометрии евклидова пространства Rn.
Совершенно аналогично, пользуясь тем, что касательные гипер-
плоскости к гиперсферам вещественного и чисто мнимого радиуса
в пространствах являются соответственно пространствами
lRn и 1~1Rni мы находим, что геометрии пространства lSn поло-
жительной кривизны, и пространства 1+±Sn отрицательной кри-
визны при достаточно большой величине модуля радиуса кри-
визны сколь угодно мало отличаются от геометрии евклидова
пространства lRn.
Нетрудно видеть, что при стремлении радиуса кривизны неев-
клидовых пространств к бесконечности все формулы тригонометрии
этих плоскостей в пределе переходят в формулы тригонометрии
евклидовых пространств; в самом деле, функции cos — , sin — ,
ch — и sh — можно представить степенными рядами:
X . X2 . X4
cos — =
sin - —
q
ch —
q
2г2 1 4! г4 । X5
X
г 3!Н * 5! г5
1 1 Х3 1 1 xi 1
1 2?з 1 4!^ 1 •
X 4--— 1 •’Х 1
~q 3!^ 1 5! qb 1
(2.230)
а при стремлении г и q к бесконечности можно отбросить
степени
высшие
_____... г и . Перепишем теоремы косинусов неевклидовых
пространств (2.34) и (2.57), заменяя функции cos у и ch со-
ответственными степенными рядами:
Отбрасывая степени и
1__£L
2г2
—, начиная с третьей, мы
& b% , ab '
№ Т2" COS
с2 ____ . . а2 । № ab
— 1 ' — ?2"C0S
получим:
(2.232)
= 1
§ 121
ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
245
или
с2 = а2 4“ — 2&Z> cos С,
(2.233)
т. е. эти теоремы в пределе переходят в теорему косинусов евкли-
дова пространства.
Далее, перепишем теоремы синусов неевклидовых пространств
(2.38) и (2.58), заменяя функции sin у и sh-у соответственными
степенными рядами:
sin А _____ sin В
а b
sin С
с
sin А
sin В
sin С
(2.234)
на
Отбрасывая степени у и
г и q, мы получим:
начиная с третьей, и сокращая
sin A sin В sin С
а b с 9
(2.235)
Q ’
т. е. эти теоремы в пределе переходят в теорему синусов евкли-
дова пространства.
Перепишем двойственные теоремы косинусов неевклидовых про-
странств (2.48) и (2.59), заменяя функции cos у и ch ~ соответ-
ственными степенными рядами:
cos С = -— cos A cos В sin A sin В (1 — «р . . . V j
' 7 } (2.236)
Отбрасывая степени у и у, начиная со второй, мы получим:
cos С = — cos A cos В sin A sin В = — cos (А 4~ В) (2.237)
или
С = к — А — В, (2.238)
т. е. эти теоремы в пределе переходят в теорему о том, что
сумма углов треугольника в евклидовом пространстве всегда равна тг.
cos С = — cos A cos В 4- sin
§ 12. История неевклидовой геометрии
Теперь, когда читатель уже знаком с основами неевклидовой
геометрии, мы можем более подробно рассмотреть те исследования,
которые подготовили открытие неевклидовой геометрии.
Открытие неевклидовой геометрии явилось результатом двух-
тысячелетнего развития теории параллельных линий. В § 5
246 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. п
главы I мы видели, что в системе аксиом Евклида имелся V посту-
лат, на который Евклид опирался при доказательстве свойств
параллельных линий. Развитие теории параллельных линий от
Евклида до Лобачевского состояло главным образом в различных
попытках доказать V постулат с помощью других аксиом Евклида
или с помощью утверждений, эквивалентных V постулату, но имею-
щих более наглядный характер.
V постулат Евклида был не первой попыткой сформулировать
аксиому, необходимую для изложения теории параллельных линий.
Необходимость такой аксиомы была ясна ещё Аристотелю, кото-
рый, разбирая в своём логическом трактате «Первая аналитика»
логическую ошибку «постулирование основания» («petitio principi»),
т. е. неявное использование утверждения, равносильного доказы-
ваемому, пишет: «Так поступают те, кто думает описать парал-
лельные линии. В самом деле, они, сами того не зная, (в основу
доказательства) берут то, что (само) не может быть доказано,
если линии непараллельны»1). Таким образом, ещё во времена
Аристотеля, т. е. за сто лет до Евклида, существовали попытки
«описать параллельные линии» и при этих попытках совершалась
ошибка «постулирование основания».
До нас не дошло сочинение Аристотеля, содержащее ту акси-
ому, которую он считал необходимой для изложения теории парал-
лельных линий, но таджикский учёный XI века Омар Хайям в своих
комментариях к Евклиду приписывает Аристотелю постулат: «Две
сходящиеся прямые линии пересекаются, и невозможно, чтобы две
сходящиеся прямые линии расходились в направлении схождения»2).
Этот постулат состоит из двух утверждений, каждое из которых
эквивалентно V постулату. Эквивалентность первого из этих утвер-
ждений V постулату видна из того, что две прямые, приближаю-
щиеся друг к другу, обязательно пересекаются на плоскостях Т?2
и S2 и могут не пересекаться на плоскости XS2; эквивалентность
второго из этих утверждений V постулату видна из того, что
две прямые, которые сначала приближаются друг к другу, а затем,
достигнув некоторого минимального расстояния, удаляются друг от
друга, невозможны на плоскостях Л?2 и S2 и возможны только на
плоскости х52, где две расходящиеся прямые удаляются друг от
друга по обе стороны от их общего перпендикуляра; таким обра-
зом, этот постулат, так же как V постулат Евклида, исключает
геометрию Лобачевского и не исключает геометрии Римана.
Одним из первых критиков теории параллельных линий Евклида
был греческий философ-стоик I века до н. э. Посидоний. Поси-
доний исходит из другого определения параллельных линий, чем
х) См. Аристотель [1], стр. 155. Мы переводим слово fpd'feiv
означающее и «проводить» и «описать», его вторым значением.
2) См. Хайям [1], стр. 75.
§ 12] ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
247
Евклид: если Евклид определяет параллельные линии как непере-
секающиеся прямые, лежащие в одной плоскости, то Посидоний пред-
лагает называть параллельными «такие прямые, которые, находясь
в одной плоскости, не сближаются и не удаляются одна от другой,
так, что все перпендикуляры, проведённые из точки одной из них
с другой, равны между собой» 1). Так как геометрическое место
точек, равноудалённых от прямой, на плоскости S,2 является окруж-
ностью, а на плоскости — эквидистантой, определение Поси-
дония исключает как геометрию Римана, так и геометрию Лоба-
чевского. Поэтому утверждение Посидония, не будучи эквивалентным
V постулату, исключающему только вторую из геометрий, содер-
жит утверждение, эквивалентное ему. Мы видим, что Посидоний,
доказывая V постулат с помощью своего определения, допустил
ту самую логическую ошибку «постулирование основания», о кото-
рой говорил Аристотель.
С доказательством V постулата выступил и Клавдий Птолемей
(I в. н. э.) — знаменитый астроном и математик, живший в Алек-
сандрии. Птолемей считал, что параллельные линии должны пере-
секаться с каждой секущей таким образом, что сумма внутренних
односторонних углов с одной стороны равна сумме таких же углов
с другой стороны, откуда следует, что каждая из этих сумм равна
двум прямым углам2). Допущение Птолемея, очевидно, эквива-
лентно V постулату Евклида.
Важную роль в теории параллельных линий сыграл Прокл
Диадох (V век н. э.) — греческий математик и философ-неоплато-
ник. Прокл составил обширные комментарии к I книге «Начал»
Евклида [1]. В примечании к задаче о проведении через точку,
лежащую вне прямой, параллельной прямой к этой прямой (пред-
ложение 31), Прокл показал, что V постулат Евклида может быть
заменён эквивалентным постула-
том: «Через точку, лежащую вне
данной прямой, можно провести
не более одной прямой, не пере-
секающей данной прямой» 3).
Прокл также предложил до-
казательство V постулата, состоя-
щее в следующем4): пусть две
прямые АВ и CD пересекаются
прямой EG таким образом, что односторонние углы BEG и DGE
в сумме меньше двух прямых (черт. 44). Проведём прямую EF,
составляющую с прямой EG такой же угол, что и прямая GD. Из
остальных аксиом и постулатов Евклида следует, что прямая EF
Ч См. Прокл [1], стр. 176, а также Каган [3], стр. 127.
2) См. Прокл [I], стр. 362.
8) См. Прокл [1], стр. 376, а также Каган [3], стр. 115.
4) См. Прокл [1], стр. 371—372, а также Каган [3], стр. 117—118.
248
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
будет параллельна прямой CD (если бы прямые EF и GD пере-
секались в точке Н, то в треугольнике EGH внешний угол был бы
равен одному из не смежных с ним внутренних углов). Расстояние
между пересекающимися прямыми EF и ЕВ по мере удаления от
их точки пересечения неограниченно возрастает. Прокл считает,
что расстояние между двумя параллельными прямыми на всём их
протяжении является ограниченной величиной; поэтому расстояние
между прямыми EF и ЕВ при достаточном удалении от точки Е
станет больше расстояния между параллельными прямыми EF и
GD, и прямая АВ пересечётся с прямой CD.
Сделанное Проклом допущение, что расстояние между двумя
непересекающимися прямыми является ограниченной величиной, на
самом деле эквивалентно V постулату Евклида: на плоскости х52
прямые АЕ и BD, пересекающие прямую АВ под одинаковыми
углами, расходятся, и расстояние между ними может быть сделано
больше любой наперёд заданной величины. Таким образом, Прокл,
так же как Посидоний и Птолемей, в своём доказательстве допу-
скает «постулирование основания».
В эпоху средних веков, когда центр научной мысли переместился
на Ближний и Средний Восток, ошибка Посидония была повторена
египетским математиком X века Ибн ал-Хайсамом (известен в За-
падной Европе под искажённым именем Альгазен).
Важное значение для теории параллельных линий имели упо-
минавшиеся комментарии к Евклиду Омара Хайяма. В этих ком-
ментариях Хайям выводит V постулат Евклида из приведённого
выше постулата, приписываемого им Аристотелю. Прежде всего
Хайям доказывает, что два перпендикуляра к одной прямой не
могут пересечься, так как в этом случае они в силу симметрии
пересеклись бы по обе стороны от этой прямой и мы получили бы,
что две различные прямые пересекаются в двух точках. Отсюда и
из первого утверждения приведённого им постулата Хайям выводит,
что два перпендикуляра к одной прямой не могут сходиться. Из
второго утверждения того же постулата следует, что эти два пер-
пендикуляра не могут и расходиться, так как в силу симметрии
они расходились бы по обе стороны от прямой. Поэтому два пер-
пендикуляра к одной прямой должны находиться на постоянном
расстоянии. Далее рассматривается четырёхугольник Хайяма, т. е.
четырёхугольник с прямыми углами при основании и с равными
боковыми сторонами (черт. 45), который мы рассматривали на
плоскостях S2 и х52 (§§ 3 и 4). Как мы видели, верхние углы
четырёхугольников Хайяма равны, а прямая, соединяющая середины
верхнего и нижнего оснований, является их общим перпендикуля-
ром. Хайям рассматривает три гипотезы: когда верхние углы его
четырёхугольника являются прямыми, тупыми и острыми. Мы знаем,
что первый случай осуществляется на плоскости /?2, второй —
на плоскости S2, а третий — на плоскости XS2.
§ 121
ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
249
Далее Хайям показывает, что верхнее основание его четырёх-
угольника в этих трёх предположениях соответственно равно,
меньше или больше нижнего основания. Для четырёхугольника
Хайяма на плоскостях S2 и XS2, как мы показали в §§ 3 и 4,
длина А верхнего основания четырёхугольника Хайяма связана
с длиной а его нижнего основания и длиной h общего перпен-
дикуляра этих оснований в этих трёх случаях соответственно'
соотношениями:
А = а, tg ~ = tg~ cos —, th Д- = th ch —. (2.239)
’ & 2r & 2r r ’ 2q 2q q v 7
Хайям доказывает это, восставляя перпендикуляр PR в сере-
дине Q общего перпендикуляра верхнего и нижнего оснований
четырёхугольника и перегибая чертёж по прямой PR. При нало-
жении верхней части чертежа на нижнюю верхнее основание четы-
рёхугольника упадёт на его нижнее основание, причём в первом
случае концы верхнего основания совпадут с концами нижнего
основания, во втором случае концы верхнего основания попадут
Черт. 46.
между концами нижнего основания, а в третьем случае концы
верхнего основания попадут по разные стороны от концов нижнего
основания.
Далее Хайям перегибает чертёж по прямой АВ. Тогда четы-
рёхугольник Хайяма ABDC совмещается с таким же четырёх-
угольником ABFE (черт. 46).
При этом прямая АВ является общим перпендикуляром прямых
СЕ и DF. Эти две прямые при первой гипотезе Хайяма находятся
на постоянном расстоянии, при второй гипотезе приближаются
Друг к другу по обе стороны от их общего перпендикуляра, а при
250
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
третьей гипотезе удаляются друг от друга по обе стороны от их
общего перпендикуляра. Два последних случая противоречат тому,
что два перпендикуляра к одной прямой должны находиться на
постоянном расстоянии, как это доказал Хайям с помощью
приведённого им постулата.
Из того, что верхние углы его четырёхугольника прямые,
Хайям уже легко выводит V постулат.
Идеи Хайяма получили своё дальнейшее развитие в «Изложе-
нии Евклида» азербайджанского математика XIII века Насирэд-
дина Туси [1, 2], который также заменяет V постулат другим посту-
латом: «если прямые линии, расположенные в одной плоскости,
расходятся в одном направлении, они не могут в этом направлении
сходиться, если только они не пересекаются» х).
Этот постулат содержит как утверждение Хайяма о том, что
две прямые не могут сначала приближаться, а затем, достигнув
некоторого минимального расстояния, удаляться друг от друга,
так и утверждение о том, что две прямые не могут сначала уда-
ляться, а затем, достигнув некоторого минимального расстояния,
приближаться друг к другу. Если первое из этих утверждений
исключает геометрию плоскости XS2, где две расходящиеся прямые
удаляются по обе стороны от их общего перпендикуляра, то вто-
рое из этих утверждений исключает геометрию плоскости S2t где
две произвольные прямые приближаются друг к другу по обе
стороны от их общего перпендикуляра. Поэтому постулат Насир-
эддина, так же как утверждение Посидония, не эквивалентен
V постулату, но содержит утверждение, эквивалентное ему.
Далее Насирэддин рассматривает четырёхугольник Хайяма и те
же три гипотезы, что и Хайям, и показывает, что в случае гипо-
тезы тупого угла верхнее основание приближается к нижнему по
обе стороны от прямой, соединяющей
& середины верхнего и нижнего основа-
[\ 1\ |-\ ний, являющейся общим перпендикуля-
/;/!/; | \ ром этих оснований, а в случае гипо-
/ ’/ i/ ' [ \ тезы острого угла верхнее основание
л- L ---------j удаляется от нижнего по обе стороны
L (j L г! D
от той же прямой.
Черт. 47. Для доказательства этого Насир-
эддин применяет следующий процесс:
в случае гипотезы тупого угла Насирэддин восставляет перпен-
дикуляр к верхнему основанию в одном из верхних углов, на-
пример С (черт. 47); этот перпендикуляр проходит внутри угла
ACD и пересекает нижнее основание в некоторой точке Е\ так
как нижний угол четырёхугольника по его построению является
прямым, то треугольник АСЕ является прямоугольным, причём
х) См. Насирэддин [1], стр. 4.
ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
251
§ 12]
перпендикуляр СЕ является гипотенузой этого треугольника, откуда
следует, что СЕ > АС; далее Насирэддин восставляет перпенди-
куляр к нижнему основанию в точке Е; угол СЕВ тупой, как
смежный угол к острому углу прямоугольного треугольника, так
что этот перпендикуляр пройдёт внутри угла СЕВ и пересечёт
верхнее основание в некоторой точке F; так как угол ECD по
построению является прямым, то треугольник CEF является прямо-
угольным, причём перпендикуляр EF является гипотенузой этого
треугольника, откуда следует, что EF > СЕ; точно так же, после-
довательно восставляя перпендикуляры FG, GH, HI, мы покажем,
что HI > GH > FG > EF и т. д. При этом процессе каждый
следующий перпендикуляр находится правее предыдущего и имеет
большую длину, чем предыдущий. Этот процесс является беско-
нечным. В силу симметрии четырёхугольника Хайяма тот же про-
цесс, с другой стороны, позволяет построить аналогичную беско-
нечную последовательность перпендикуляров, длины которых уве-
личиваются справа налево. Очевидно, что обе эти бесконечные
последовательности перпендикуляров асимптотически приближаются
с обеих сторон к оси симметрии — общему перпендикуляру оснований
четырёхугольника, так что ряды, со-
стоящие из длин отрезков АЕ, EG,
GI, . .., CF, FH, являются сходящи-
мися рядами.
В случае гипотезы острого угла На-
сирэддин опускает перпендикуляр на
верхнее основание из одного из нижних
углов, например А (черт. 48); так как
угол С — острый, этот перпендикуляр
проходит внутри угла А и пересекает
торой точке Е; так как угол АЕС— прямой, то треугольник АСЕ
является прямоугольным, причём сторона АС является гипотенузой
этого треугольника, откуда следует, что АЕ < АС; далее Насир-
эддин опускает перпендикуляр на нижнее основание из точки Е;
так как угол ВАЕ — острый, этот перпендикуляр проходит внутри
угла DEA и пересекает нижнее основание в некоторой точке F;
так как угол AFE — прямой, то треугольник AFE является прямо-
угольным, причём перпендикуляр АЕ является гипотенузой этого
треугольника, откуда следует, что EF < АЕ. Точно так же, после-
довательно опуская перпендикуляры FG, GH, HI, . . ., мы покажем,
что HI < GH < FG < EF и т. д. При этом процессе каждый
следующий перпендикуляр находится правее предыдущего и имеет
меньшую длину, чем предыдущий. Этот процесс является беско-
нечным. В силу симметрии четырёхугольника Хайяма тот же про-
цесс, с другой стороны, позволяет построить аналогичную после-
довательность перпендикуляров, длины которых уменьшаются
справа налево. Очевидно, что обе эти бесконечные последователь-
С ECI N D
A FH М В
Черт. 48.
верхнее основание в неко-
252
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
ности перпендикуляров асимптотически приближаются с обеих
сторон к оси симметрии — общему перпендикуляру оснований
четырёхугольника, так что ряды, состоящие из длин отрезков AF,
FH, ... и СЕ, EG, GI, ..., являются сходящимися рядами.
Но оба эти вывода из гипотез тупого и острого углов про-
тиворечат постулату Насирэддина.
Из того, что верхние углы четырёхугольника Хайяма прямые,
Насирэддин уже легко выводит V постулат.
В процессе этого доказательства Насирэддин выводит ряд
предложений, которые эквивалентны V постулату Евклида или
приведённому выше постулату Насирэддина. Эти предложения
состоят в следующем:
1) Сумма углов треугольника равна двум прямым углам. Так
как на плоскости S2 сумма углов треугольника больше двух пря-
мых, а на плоскости х52 сумма углов треугольника меньше двух
прямых, это утверждение эквивалентно постулату Насирэддина.
2) Если одну из сторон острого угла разделить на равные
отрезки и из точек деления опустить перпендикуляры на другую
сторону, то основания этих перпендикуляров
разделят другую сторону на равные отрезки.
Но если данный острый угол равен А
(черт. 49), расстояние от вершины угла до
——*---------- точки равномерной шкалы равно х, а расстоя-
V ние от вершины угла до соответственной точки
Черт. 49. нашей шкалы равно у, то зависимость у от х
в силу известной формулы тригонометрии
плоскости R2 и в силу первой теоремы тангенсов для прямоуголь-
ного треугольника на плоскостях S2 и XS2 (2.53) и (2.62) имеет
соответственно вид
у = х cos A, tg у = tg у cos Д, th= th у cos Д, (2.240)
откуда видно, что полученная таким образом шкала на плоскости /?2
равномерна, а на плоскостях S2 и XS2 неравномерна.
Поэтому рассматриваемое утверждение Насирэддина исключает
как геометрию Римана, так и геометрию Лобачевского, т. е. оно
эквивалентно постулату Насирэддина.
3) Перпендикуляр и наклонная к одной прямой всегда пересе-
каются между собой при своём продолжении. Так как на плоско-
сти S2 все прямые пересекаются, а на плоскости XS2 наклонная и
перпендикуляр могут пересекаться, расходиться и быть параллель-
ными, это утверждение исключает только геометрию Лобачевского
и эквивалентно V постулату Евклида.
4) Из точки, находящейся внутри острого угла, можно провести
прямую, пересекающую обе стороны угла. Так как на плоскости $2
все прямые пересекаются, а на плоскости XS2 внутри острого угла
§ 12] ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ 253
существует прямая, параллельная обеим его сторонам, и из точек,
лежащих за этой прямой, нельзя провести прямых, пересекающих
обе стороны угла, это утверждение также исключает только гео-
метрию Лобачевского и эквивалентно V постулату Евклида.
Математики Западной Европы в своих исследованиях исходили
из книги Насирэддина, изданной в XVI веке в Риме на арабском
языке, а в начале XVII века — в латинском переводе.
Немецкий математик XVI века Клавий (Шлюссель) в своих ком-
ментариях к Евклиду [1] предложил доказательство V постулата
Евклида на основе леммы: «Если все точки линии равноудалены от
некоторой прямой в той же плоскости, эта линия является прямой» 1).
Для доказательства Клавий опускает из всех точек линии перпен-
дикуляры на прямую и замечает, что ввиду того, что все эти пер-
пендикуляры равны, наша линия «равно расположена по отношению
ко всем точкам на ней». Но согласно определению Евклида2) ли-
ния, обладающая этим свойством, является прямой.
Здесь Клавий пользуется неудачным определением Евклида, ко-
торое на плоскостях /?,2 и S2 в равной степени относится к окруж-
ностям, а на плоскости XS.2 в равной степени относится к окруж-
ностям, эквидистантам и орициклам. Мы знаем, что геометрическим
местом точек, равноотстоящих от прямой, является на плоскости S.2
окружность, а на плоскости XS.2 эквидистанта.
Поэтому утверждение о том, что геоме-
трическое место точек, равноотстоящих от
прямой, есть прямая, исключает обе неевкли-
довы геометрии и, следовательно, эквива-
лентно постулату Насирэддина.
Доказав свою лемму, Клавий восставляет
к прямой три перпендикуляра АВ, CD, EF
равной длины и соединяет их верхние концы
(черт. 50). Мы получаем три четырёхугол!
CDFE и ABFE. Поэтому угол ABD равен углу BDC, угол ABF
равен углу BFE, угол CDF равен углу DFE. Но по лемме Клавия
отрезки BD и DF лежат на одной прямой и угол ABD совпадает
с углом ABF, а угол DFE — с углом BFE. Поэтому угол BDC
равен углу CDF, смежному с ним, и оба эти угла — прямые, а зна-
чит, являются прямыми и все рассматриваемые нами углы. Таким
образом, из леммы Клавия следует, что верхние углы четырёх-
угольников Хайяма прямые. Отсюда уже Клавий легко получает
V постулат.
Английский математик XVII века Валлис в небольшой работе
о V постулате Евклида [1] предложил доказательство этого посту-
лата на основе следующего нового постулата: «Наконец я приму
Черт. 50.
Хайяма ABDC,
х) См. Клавий [1], т. I, стр. 90, а также Сак кер и [1], стр. 78.
) См. Евклид [1], т. I, стр. 11; см. также выше, стр. 35.
254 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. и
(считая уже известными учение об отношении и понятие о подоб-
ных фигурах) следующее положение: для каждой фигуры всегда
существует другая подобная ей фигура произвольной величины» х).
Для того чтобы доказать, что две прямые АВ и CD, пересе-
каемые третьей прямой АС таким образом, что внутренние одно-
сторонние углы ВАС и DCA в сумме меньше двух прямых, пере-
секаются (черт. 51), Валлис передвигает угол ВАС по прямой АС
до тех пор, пока движущаяся сторона АВ, которую мы будем обо-
значать А'В', не пересечётся со стороной CD в точке Р', что при
р достаточном приближении точки А' к точке С
/\ произойдёт обязательно. Тогда А'СР' есть
/ \ треугольник и по предположению существует
\ / \ другой подобный ему треугольник любой
4 Я величины. Поэтому на отрезке АС можно-
\ построить треугольник АСР, подобный тре-
/ \ \ угольнику А'СР' и Р будет искомой точкой
L--------------X пересечения.
£ А л Мы знаем, что на плоскостях и 1S2
Черт. 51. не существует неравных треугольников с со-
ответственно равными углами. Поэтому
постулат Валлиса исключает обе неевклидовы геометрии и, следо-
вательно, эквивалентен постулату Насирэддина.
Итальянский математик XVII—XVIII веков Саккери в сочинении
«Евклид, очищенный от всех пятен» [1], также пытается доказать
V постулат Евклида. Саккери рассматривает четырёхугольник Хай-
яма и делает те же три гипотезы о его верхних углах, что и Хайям
и Насирэддин.
Саккери опровергает гипотезу тупого угла следующим образом:
он показывает, что при гипотезе тупого угла, так же как при ги-
потезе прямого угла, имеет место V постулат Евклида. Отсюда
Саккери делает вывод, что при гипотезе тупого угла имеет места
евклидова геометрия, в которой, «как ясно для всех геометров»,
справедлива гипотеза прямого угла, вследствие чего «гипотеза ту-
пого угла всецело ложна, так как она сама себя разрушает». Смысл
этого доказательства состоит в том, что, так как из остальных
аксиом и постулатов евклидовой геометрии при прибавлении V по-
стулата следует справедливость гипотезы прямого угла, гипотеза
тупого угла, при которой выполняется V постулат, противоречит
остальным аксиомам и постулатам евклидовой геометрии.
После этого Саккери переходит к опровержению гипотезы
острого угла. Для этого он доказывает целый ряд вытекающих из
этой гипотезы утверждений, имеющих место в геометрии Лобачев-
ского: он показывает, что при этой гипотезе две прямые могут
пересекаться или могут иметь общий перпендикуляр, по обе сто-
!) См. Каган [3], стр. 124—126.
§ 12] ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ 255
роны от которого они удаляются друг от друга, или могут беско-
нечно удаляться друг от друга в одну сторону и неограниченно
сближаться в другую сторону, т. е. по терминологии, принятой
в геометрии Лобачевского, две прямые могут пересекаться, расхо-
диться и быть параллельными. Рассматривая последний случай,
Саккери приходит к выводу, что эти прямые должны иметь общий
перпендикуляр в бесконечности. И действительно, мы знаем, что
на расширенной плоскости Лобачевского при стремлении точки
пересечения двух прямых, к точке абсолюта общий перпендикуляр
этих прямых, являющийся полярой их точки пересечения, стремится
к поляре точки абсолюта, т. е. к касательной к абсолюту в этой
точке. Но из того, что две параллельные прямые имеют в беско-
нечности общий перпендикуляр, Саккери делает вывод, что они
в бесконечности касаются друг друга, что уже не соответствует
действительности. Придя к выводу, что две параллельные прямые
касаются друг друга, Саккери восклицает: «Гипотеза острого угла
совершенно ложна, так как она противоречит природе прямой ли-
нии» х). Не удовлетворившись этим доказательством, Саккери рас-
сматривает эквидистанты прямых при гипотезе острого угла, вы-
числяет с помощью бесконечно малых длину дуги эквидистанты,
ортогонально проектирующуюся на её базу в виде отрезка длины а
(в § 4 мы видели, что для эквидистанты параметра Р длина такой
дуги равна a ch yj. Здесь Саккери также делает ошибку и, придя
к выводу, что длина этой дуги равна а, вновь объявляет гипотезу
острого угла опровергнутой* 2). При всей ложности выводов Сак-
кери относительно гипотезы острого угла, он имеет ту несомнен-
ную заслугу, что проник гораздо дальше, чем его предшественники,
в неевклидову геометрию.
Швейцарский математик XVIII века Ламберт в своей «Теории
параллельных линий» [1] рассматривает четырёхугольник с тремя
Черт. 52.
прямыми углами, который можно рассматривать как половину че-
тырёхугольника Хайяма. Ламберт также рассматривает три гипо-
тезы в зависимости от того, будет ли четвёртый угол его четырёх-
угольника прямым, тупым или острым (черт. 52).
г) См. Саккери [1], стр. 109, а также Каган [3], стр. 147.
2) См. Саккери [1], стр. 129, а также Каган [3], стр. 147.
256 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. II
Ламберт, как и Саккери, опровергает гипотезу тупого угла. Он
делает это, показывая, что при гипотезе тупого угла два перпен-
дикуляра к одной прямой пересекаются1), что не противоречит
V постулату Евклида, но противоречит другим аксиомам и посту-
латам евклидовой геометрии. Ламберт, ловидимому, первый заме-
чает, что гипотеза тупого угла имеет место на сфере.
Переходя к гипотезе острого угла, Ламберт доказывает ещё
больше утверждений, имеющих место в геометрии Лобачевского,
чем Саккери. В частности, он находит, что сумма углов треуголь-
ника при этой гипотезе меньше двух прямых и что площадь тре-
угольника пропорциональна угловому дефекту. Сопоставляя этот
результат с тем, что на сфере сумма углов треугольника больше
двух прямых и площадь треугольника пропорциональна угловому
избытку, Ламберт говорит: «Мне кажется очень замечательным, что
вторая гипотеза оправдывается, если вместо плоских треугольников
взять сферические. Я из этого почти должен был бы сделать за-
ключение, что третья гипотеза имеет место на какой-то мнимой
сфере. Во всяком случае, должна же существовать причина, почему
она на плоскости далеко не так легко поддаётся опровержению,
как это могло быть сделано в отношении второй гипотезы»2).
Кроме того, Ламберт обнаруживает, что при гипотезе острого
угла, так же как при гипотезе тупого угла, должна существовать
абсолютная единица длины (то, что мы сейчас называем радиусом
кривизны).
Ламберт не нашёл противоречия в гипотезе острого угла и при-
шёл к выводу, что все попытки доказать V постулат не привели
к успеху. Тем не менее он остался уверен в невозможности другой
геометрии, кроме евклидовой. Ламберт стоял на пороге открытия
неевклидовой геометрии, но сделать это открытие ему мешала идеа-
листическая установка о том, что евклидова геометрия является един-
ственной непротиворечивой геометрией.
«Мнимая сфера», о которой догадывается Ламберт,—это сфера
чисто мнимого радиуса в пространстве 1/?3, на каждой из полостей
которой, как мы видели, господствует геометрия Лобачевского.
Другой швейцарский математик XVIII века Бертран в своём курсе
геометрии [1] ) пытается доказать V постулат Евклида с помощью
следующих соображений: часть плоскости между двумя параллель-
ными линиями содержится в плоскости бесконечное множество раз,
а часть плоскости, ограниченная углом между двумя прямыми, со-
держится в плоскости конечное число раз. Из этого Бертран делает
вывод, что всякая часть плоскости, содержащаяся между двумя
параллельными прямыми, меньше всякой части плоскости, ограни-
х) См. Ламберт [1], стр. 192, а также Каган [3], стр. 149.
2) См. Ламберт [1], стр. 202—203, а также Каган [3], стр. 150.
з) См. Каган [3], стр. 128—130.
§ 121
ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
257
ценной углом между двумя прямыми. Далее он рассуждает следую-
щим образом: пусть две прямые АК и CL (черт. 53) образуют
с третьей внутренние односторонние углы AKL и CLK, составляю-
щие в сумме меньше двух прямых; проведём прямую LM, парал-
лельную прямой А К. Если прямая CL не пересекается с прямой А К,
угол CLM находится целиком внутри полосы, заключённой между
прямыми LM и КА. Но Бертран считает
угол больше полосы между двумя парал-
лельными линиями.
Неверность рассуждений Бертрана ста-
новится очевидной, если произвести их на
плоскости Лобачевского. Ошибка Бертрана
состоит в недопустимых количественных
сравнениях частей плоскости, простираю-
щихся в бесконечность.
Французский математик XVIII—XIX ве-
ков Лежандр в своём курсе геометрии [1,2]
также пытается доказать V постулат Евклида. Прежде всего
Лежандр доказывает известную уже Насирэддину выводимость
V постулата из утверждения о том, что сумма углов треугольника
равна двум прямым. Далее Лежандр показывает, что сумма углов
треугольника не может быть больше двух прямых. Это последнее
доказательство состоит в следующем: пусть в треугольнике АВС
сумма углов больше двух прямых (черт. 54).
Построим на продолжении стороны АС треугольники CDE,
EFQ, . . ., PQR, равные треугольнику АВС, и соединим вершины
В, D, F, . . ., Q прямыми линиями. Сумма углов АСВ, BCD, DCE
равна двум прямым. Так как угол DCE по построению равен
углу САВ, а сумма углов треугольника АВС по условию больше
двух прямых, мы находим, что угол BCD меньше угла АВС. Так
как стороны АВ, ВС треугольника АВС соответственно равны сто-
ронам CD, СВ треугольника BCD, отсюда следует, что третья
сторона А С первого треугольника больше третьей стороны BD вто-
рого. Обозначим разность сторон АС и BD через 3. Если число
треугольников, построенных нами на продолжении стороны АС
равно п, то длина отрезка AR равна пАС, а длина ломаной
ABDFH...QR равна 2ЛВ-|-пВ£) или, так как АС — BD = §,
17 Зак. 177. Б. А. Розенфельд
А С F
Черт. 55.
двух прямых, сумма
258 НЕЕВКЛИДОВЫ ПРОСТРАНСТВА [гл. п
2АВ-\~пАС— пЪ. Поэтому разность ломаной и отрезка AR равна
2АВ— пЗ. Но число п может быть сделано сколь угодно большим
и, следовательно, разность 2АВ — пЗ может быть сделана отрица-
тельной и ломаная — больше отрезка, соединяющего концы его, что
невозможно.
Это доказательство, разумеется, не имеет места на плоскости S.2>
так как при этом доказательстве мы считаем, что существуют пря-
молинейные отрезки любой длины.
Далее Лежандр пытается доказать, что сумма углов треуголь-
ника не может быть меньше двух прямых. Для этого в третьем
издании своих «Начал» [I]1) Лежандр
берёт треугольник АВС, сумма углов ко-
торого меньше двух прямых на число 3
(черт. 55). Пусть А — наименьший из
его углов; он строит при противополож-
ной стороне углы DBC = АСВ и DCB =
= АВС. Таким образом получается тре-
угольник BCD, равный треугольнику АВС.
Далее Лежандр проводит через точку D
прямую, пересекающую стороны угла А
в точках Е, F. Сумма углов треугольника
BDE и CDF по доказанному не больше
углов каждого из треугольников АВС,
BCD меньше двух прямых на число о. Для получения суммы
углов треугольника AEF нужно вычесть из суммы всех углов
этих треугольников сумму углов при точках В, С, D, состав-
ляющую шесть прямых, откуда следует, что сумма углов тре-
угольника AEF меньше двух прямых на число, не меньшее чем 23.
Повторяя этот процесс, мы получим треугольники, сумма углов
которых меньше двух прямых на число, не меньшее чем 43, 83
и т. д., и таким образом, мы получим треугольник, сумма углов
которого отрицательна.
В этом доказательстве Лежандр пользуется утверждением о том,
что из точки, находящейся внутри острого угла, можно провести
прямую, пересекающую обе стороны угла, что, как было известно
уже Насирэддину, эквивалентно V постулату Евклида.
Найдя ошибку в этом доказательстве, в 12-м издании своих
«Начал» [2] Лежандр предложил новое доказательство2). Лежандр
рассматривает треугольник АВС, где АВ — наибольшая, а ВС —
наименьшая сторона (черт. 56). Через точку А и середину J про-
тиволежащей стороны ВС проводится прямая AJ, которая продол-
жается до точки D таким образом, чтобы отрезок AD был равен
отрезку АВ', далее сторона АВ продолжается до точки Е, так что
Э См. Каган [3], стр. 134—136.
2) См. Каган [3], стр. 136—138.
§ 12]
ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ
259
отрезок АЕ вдвое больше отрезка AJ. Сумма углов полученного
треугольника ADE равна сумме углов треугольника АВС\ если мы
отложим на прямой АВ отрезок АК, равный отрезку AJ, то тре-
угольник ADK будет равен треугольнику ABJ, как имеющий один
и тот же угол А и две пары равных сторон (АВ и AD, АК и AJ)',
тогда треугольник DEK будет равен треугольнику ACJ, как имею-
щий с ним равные углы (CJA и DKE) и две пары равных сторон
(AJ и KE, CJ и DK), но сумма углов треугольников ACJ и AJB
на два прямых угла больше суммы углов треугольника АВС, а сумма
углов треугольников ADK и DKE на два прямых угла больше суммы
углов треугольника ADE, откуда следует наше утверждение. При
этом, так как по предположению отрезок АС меньше отрезка АВ,
угол DAB меньше угла CAD, т. е. угол А треугольника ADE
Черт. 56.
меньше половины угла А треугольника АВС. Таким же образом
Лежандр строит треугольник AFH, у которого сумма углов снова
равна сумме углов треугольника АВС, а угол А меньше четверти
угла А этого треугольника. Этот процесс можно продолжать не-
ограниченно, причём сумма углов каждого из этих треугольников
равна сумме углов треугольника АВС, а углы А этих треугольни-
ков убывают быстрее членов геометрической прогрессии со знаме-
нателем 2. Поэтому при достаточном продолжении этого процесса
угол А может быть сделан меньше любого заданного числа. Отсюда
Лежандр делает заключение, что в пределе этот угол станет рав-
ным 0, все вершины треугольника расположатся на одной прямой,
из остальных двух углов один будет также равен нулю, а дру-
гой— двум прямым и, так как сумма углов треугольника при этом
процессе не изменяется, Лежандр приходит к выводу, что эта сумма
и была равна двум прямым.
Ошибочность рассуждений Лежандра становится очевидной, если
произвести их на плоскости Лобачевского, где все треугольники
с равной суммой углов имеют одинаковую площадь, а при дефор-
мации треугольника с сохранением его площади его вершины не
могут стремиться к трём точкам на одной прямой.
И наконец, Лежандр делает третью попытку доказательства
V постулата, исходя из принципа, близкого к принципу Валлиса.
17*
260
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Венгерский математик XVIII—XIX веков Фаркаш (Вольфганг)
Бойяи в своём курсе математики [1] предложил следующее дока-
зательство V постулата Евклида на основе допущения того, что
около любого треугольника можно описать окружность** 2).
Фаркаш Бойяи рассматривает наклонную АС и перпендику-
ляр BD к некоторой прямой АВ (черт. 57), берёт произвольную
точку Q на отрезке АВ и строит точки R и 5, симметричные
относительно прямых АС и BD. Далее Бойяи строит треуголь-
ник QRS и описанную около него окружность. Центр О этой
окружности равноудалён от всех трёх то-
чек Q, /?, S. Поэтому как прямая АС,
являющаяся геометрическим местом точек,
равноудалённых от точек Q и R, так и
прямая BD, являющаяся геометрическим
местом точек, равноудалённых от точек Q
и S, проходят через точку О, т. е. пере-
секаются.
Мы знаем, что на плоскости х52 три
точки, не лежащие на одной прямой, могут
лежать как на окружности, так и на ори-
цикле и эквидистанте. Поэтому допущение Фаркаша Бойяи исклю-
чает геометрию Лобачевского и, следовательно, эквивалентно V по-
стулату Евклида.
Мы видим, что многие учёные, занимавшиеся теорией парал-
лельных линий, вплотную подходили к открытию неевклидовой
геометрии. Но сделать это открытие им мешало их убеждение
в том, что евклидова геометрия является единственно мыслимой,
непротиворечивой геометрией. Поэтому открытие неевклидовой
геометрии могло быть сделано только таким учёным, который не
был связан этой установкой, а исходил из материалистической
точки зрения на геометрию. Этим учёным был Николай Иванович
Лобачевский (1792—1856) 2).
Лобачевский сделал доклад о своём открытии в Казанском
университете 23 февраля 1826 года и опубликовал его в «Казан-
ском вестнике» в работе «О началах геометрии» [1], вышедшей
в 1829 году. Дальнейшее развитие открытие Лобачевского полу-
чило в его работах «Воображаемая геометрия» [2] и «Применение
воображаемой геометрии к некоторым интегралам» [3], напечатан-
ных в 1835 и 1836 годах в «Учёных записках Казанского уни-
верситета» и в 1836 и 1837 годах в берлинском «Журнале Крелля»;
в большой работе «Новые начала геометрии с полной теорией
параллельных» [4], напечатанной в 1835—1838 годах в «Учёных
х) См. Кутузов [1], стр. 26—27.
2) Часто встречающееся утверждение о том, что годом рождения
Н. И. Лобачевского является 1793, неверно (см. Каган [4], стр. 14).
§ 12] ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ 261
записках Казанского университета»; в работе «Геометрические
исследования по теории параллельных линий» [5], напечатанной
в 1840 году в Берлине и в его последней работе «Пангеомет-
рия» [6], напечатанной в 1855 году в «Учёных записках Казан-
ского университета» и в 1856 году в сборнике, посвящённом
пятидесятилетию Казанского университета.
Название «пангеометрия» («всеобщая геометрия»), которым
Лобачевский к концу жизни заменил название «воображаемая гео-
метрия», подчёркивает более общий характер геометрии Лоба-
чевского по сравнению с евклидовой геометрией, которую можно
рассматривать как предельный случай геометрии Лобачевского
при стремлении её радиуса кривизны к бесконечности (см. § И).
Уже в своей первой работе Лобачевский говорит:
«Первые понятия, с которых начинается какая-нибудь наука,
должны быть ясны и приведены к самому меньшему числу. Тогда
только они могут служить прочным и достаточным основанием
учения. Такие понятия приобретаются чувствами; врождённым — не
должно верить» х).
Рассматривая V постулат Евклида и вводимый им новый по-
стулат, противоположный V постулату, Лобачевский приходит
к выводу, что: «То и другое может быть принято без всякого
противоречия в последствии, отчего и происходят две геометрии:
одна, употребительная до сих пор по своей простоте, соглашается
со всеми измерениями на самом деле; другая воображаемая, более
общая и поэтому затруднительная в своих вычислениях, допускает
возможность зависимости линий от углов» 2).
Изложив открытую им непротиворечивую геометрическую си-
стему, которую он назвал «воображаемой геометрией», а мы в на-
стоящее время называем неевклидовой геометрией Лобачевского,
Лобачевский пишет: «Итак, не говоря о том, что в воображении
пространство может быть продолжаемо неограниченно, сама При-
рода указывает нам такие расстояния, в сравнении с которыми
исчезают за малостию даже и расстояния нашей земли до непо-
движных звёзд».
«После этого нельзя утверждать более, что предположение,
будто мера линий не зависит от углов — предположение, которое
многие геометры хотели принимать за строгую истину, не требующую
Доказательства, — может быть оказалось бы приметно ложным ещё
прежде, нежели перейдём за пределы видимого нами мира» 3).
Таким образом, сразу же после изложения своего открытия
Лобачевский ставит вопрос об экспериментальной проверке того,
какая геометрия господствует в реальном мире.
') См. Лобачевский [1], стр. 186.
2) См. Лобачевский [1], стр. 194.
3) См. Лобачевский [1], стр. 209.
262
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
[ГЛ. II
Открытие Лобачевского не получило широкого признания при
его жизни. Но Лобачевского не смутила ни стена непонимания, ни
насмешки, которыми осыпал его великое открытие реакционный
журнал «Сын отечества». Лобачевский продолжал неутомимо раз-
вивать своё открытие, применять геометрические соображения, воз-
никающие при развитии его идей, к вычислению определённых
интегралов и публиковать всё новые работы, разъясняющие его
открытие.
Независимо от Лобачевского ту же геометрию открыл венгер-
ский математик Янош (Иоганн) Бойяи (1802—1860), сын Фаркаша
Бойяи1). Янош Бойяи опубликовал свои исследования в 1832 году
в виде приложения к курсу математики отца под названием «При-
ложение, содержащее абсолютно истинное учение о пространстве,
не зависящее от истинности или ложности XI аксиомы Евкли-
да2), что а приори никогда не может быть решено» [1]. «Абсо-
лютно истинное учение о пространстве» состоит в том, что Янош
Бойяи стремится сформулировать все теоремы геометрии в «абсо-
лютном» виде, т. е. в таком виде, в котором они были бы верны
и на плоскости и на плоскости 1S2. Так, например, теоремы
синусов обеих геометрий
sin А _ __ sin В sin С — и sin А sin В sin С
а b с sh — sh — sh —
q Я Я
он объединяет в виде теоремы
sin А _sin В ___sin С
~ О — Ос
(2.241)
(2.242)
где QZ? — длина окружности радиуса /?, которая в этих геоме-
триях соответственно равна
QR = 2vR, Q)R = 2nq sh (2.243)
Заметим, что теорема (2.241) имеет место и на плоскости (где
Q/? =2ттг sin .
Точно так же связь между расстояниями х и у от точки до
двух взаимно перпендикулярных осей и расстоянием R от этой
точки до точки пересечения осей, которая на плоскости /?2 в силу
теоремы Пифагора, а на плоскости 1S2 в силу формулы (2.135)
имеет соответственно вид
х24~У2 sh2y-]-Sh2y — sh2 (2.244)
Янош Бойяи объединяет в виде теоремы
(СМ2+(ОМ3 = (CW-
(2.245)
1) См. также Каган [5].
2) V постулат Евклида в некоторых рукописях называется XI аксиомой.
§ 12] ИСТОРИЯ НЕЕВКЛИДОВОЙ ГЕОМЕТРИИ 263
Заметим, что теорема (2.245) также имеет место и на плоско-
сти S.2 (где в силу (2.94) sin* 2 у + sin’2 у = sin2y-^.
После смерти крупнейшего немецкого математика Карла Фрид-
риха Гаусса (1777—1855) из его писем и бумаг1) обнаружилось,
что Гаусс также, независимо от Лобачевского и Яноша Бойяи, при-
шёл к неевклидовой геометрии. Гауссу принадлежит термин «неев-
клидова геометрия» и ряд остроумных доказательств отдельных
теорем. Однако в отличие от Лобачевского и Яноша Бойяи Гаусс,
понимая революционное значение неевклидовой геометрии, не ре-
шился опубликовать свои результаты, боясь испортить отношения
с церковью и властями. Заметим, что, находясь на материалисти-
ческих позициях по отношению к геометрии, Гаусс остаётся на
идеалистических позициях по отношению к теории чисел: в письме
к Бесселю он пишет, что «мы должны примириться с тем, что
если число является продуктом только нашего духа, пространство
является реальностью вне нашего духа и мы не можем предписы-
вать ей её законы а приори» 2).
К неевклидовой геометрии пришли также профессор права
Харьковского университета Фердинанд Карл Швейкарт (1780—1857),
также не опубликовавший своих результатов, и его племянник
Франц Адольф Тауринус (1794—1874), опубликовавший в 1825 и
1826 годах две брошюры, посвящённые неевклидовой геометрии,
где Тауринус доказывает ряд теорем геометрии Лобачевского,
включая вывод тригонометрических формул; однако Тауринус не
отдавал себе полного отчёта о содержании и значении проблем,
решением которых он занимался, и, не встретив сочувствия, сжёг
все оставшиеся у него экземпляры своих брошюр 3).
Важнейшим событием в истории неевклидовой геометрии после
открытия Лобачевского было открытие немецким математиком
Бернгардом Риманом (1826—1866) геометрии римановых про-
странств и являющейся частным случаем этой геометрии неев-
клидовой геометрии Римана. Это открытие было изложено
в лекции Римана «О гипотезах, лежащих в основании геомет-
рии» [1], прочитанной им в 1854 году в Геттингенском универси-
тете. Заметим, что к своему открытию Риман был приведён необ-
ходимостью геометрической интерпретации задач математической
физики.
Э См. Энгель и Ш т е к к е л ь [1], стр. 211—285, а также Каган [5].
2) См. Энгель и Штеккель [1], стр. 227.
3) См. Энгель и Штеккель [1], стр. 239—283.
ГЛАВА ТРЕТЬЯ
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
КАК МЕТРИЗОВАННЫЕ ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
§ 1. Аффинные пространства1)
Мы видели, что в тех системах аксиом, которыми мы харак-
теризовали евклидовы пространства Rn и lRn (§§ 6 и 7 главы I),
полностью совпадают аксиомы первой, второй и третьей групп и
отличаются только аксиомы четвёртой группы. Поэтому естественно
рассмотреть пространство, определяемое только аксиомами первых
трёх групп, а пространства Rn и lRn рассматривать как простран-
ства, получаемые из этого пространства с помощью дополнитель-
ных ограничений.
Так как пространства Rn и lRn отличаются только аксиомами,
относящимися к скалярному произведению, а движения этих про-
странств являются аффинными преобразованиями этих пространств,
сохраняющими скалярное произведение векторов, то в качестве
фундаментальной группы определяемого нами пространства мы
рассмотрим группу аффинных преобразований, которая для своего
определения не нуждается в аксиомах четвёртой группы.
Поэтому будем называть пространство, система аксиом кото-
рого состоит из аксиом I, II и III(w), п-мерным аффинным про-
странством Ап.
Так как определения коллинеарности и отношения векторов,
определение т-мерных плоскостей и, в частности, прямых и
гиперплоскостей, параллельности плоскостей, а также опреде-
ление аффинных координат в пространствах Rn и lRn основаны
только на аксиомах первых трёх групп, все эти определения со-
храняются и в пространстве Ап. В частности, прямые линии здесь
определяются уравнениями
% — at-\-b, (3.1)
i) С геометрией трёхмерного аффинного пространства читатель может
более подробно познакомиться по учебнику Делоне и Райкова II],
т. I и II.
§ 1] АФФИННЫЕ ПРОСТРАНСТВА 265
а /n-мерные плоскости—уравнениями
х = + * (0=1, 2, т). (3.2)
а
Вектор а в уравнении (3.1) называется направляющим векто-
ром прямой, параметр t здесь называется аффинным параметром
прямой.
Так как понятия скалярного произведения векторов, расстоя-
ний, углов основывались на аксиомах четвёртой группы, эти по-
нятия в пространстве Ап отсутствуют. В частности, в этом про-
странстве нельзя определить нормальных векторов гиперплоскостей.
Точки гиперплоскостей пространства Ап удовлетворяют уравнениям
вида
^uixi-\-v = О (Z = 1, 2.......п). (3-3)
г
Если в пространствах Rn и lRn можно сравнивать два произ-
вольных отрезка по их длине, в пространстве Ап можно
сравнивать только отрезки на одной и той же или на параллель-
ных прямых: в этом случае можно определить отношение этих
отрезков как отношение коллинеарных векторов, началами и кон-
цами которых служат концы этих отрезков.
Точки /n-мерной плоскости в пространстве Ап и определённые
ими векторы удовлетворяют всем аксиомам этого пространства,
за исключением аксиомы IIIкоторую здесь следует заменить
аксиомой III(ш). Поэтому /п-мерные плоскости пространства Ап
являются пространствами Ат.
Основы аффинной геометрии были созданы немецким матема-
тиком Мёбиусом (1790—1868) [1].
Определим аффинные преобразования пространств Ап так же,
как в пространствах Rn и lRn, т. е. как взаимно однозначные
преобразования этих пространств, переводящие прямые в прямые.
Совершенно так же, как для аффинных преобразований про-
странств Rn и lRn, доказывается, что аффинные преобразования
пространства Ап имеют вид
'х = Ах-{-Ь, (3.4)
где 'х = Ах — обратимое линейное преобразование векторов. Част-
ные случаи преобразований (3.4), имеющих вид
fх х —J— b (3.5)
и
'х = Ах, (3.6)
мы будем здесь называть соответственно переносами и центро-
аффинными преобразованиями. Формулу (3.4) можно переписать
266
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
в координатах в виде
V = (3.7)
где определитель матрицы (af) отличен от нуля.
Эта формула показывает, что аффинные преобразования про-
странства Ап зависят от п(п-{-\) вещественных параметров.
Аффинными преобразованиями прямой будем называть те
преобразования этой прямой, которые происходят при аффинных
преобразованиях пространства Ап, переводящих в себя эту пря-
мую. Эти преобразования имеют вид
'х = ах-\-Ь, (3.8)
т. е. если рассматривать прямую А± как вещественную числовую
прямую, аффинные преобразования прямой А± являются линейными
преобразованиями вещественной числовой прямой.
Для однозначного задания аффинного преобразования доста-
точно указать, в какие точки переходят общее начало и концы
векторов некоторого базиса.
Аффинные преобразования пространства Ап переводят колли-
неарные векторы в коллинеарные векторы и сохраняют отношение
коллинеарных векторов, откуда следует, что эти преобразования
сохраняют отношения отрезков на одной и той же или параллель-
ных прямых.
Так как линейные преобразования вещественной числовой пря-
мой можно также определить как взаимно однозначные преобра-
зования этой прямой, сохраняющие отношения отрезков, аффинные
преобразования прямой можно ещё определить как взаимно
однозначные преобразования прямой Alf сохраняющие отношения
отрезков.
Аффинные преобразования пространства Ап образуют группу,
являющуюся группой Ли. Эта группа состоит из двух связных
компонент, одна из которых состоит из преобразований с по-
ложительным определителем, а другая — из преобразований
с отрицательным определителем.
Центроаффинные преобразования пространства Ап образуют
группу, являющуюся стационарной подгруппой группы аффин-
ных преобразований. В § 10 главы I мы видели, что группа
центроаффинных преобразований пространства Ап изоморфна
группе всех неособенных матриц п-го порядка, а также что
переносы пространства Ап образуют группу, являющуюся нор-
мальным делителем группы аффинных преобразований и
изоморфную группе векторов пространства Ап.
Группа аффинных преобразований пространства Ап тран-
зитивна и примитивна, так как она содержит в качестве под-
группы транзитивную группу переносов. Стационарной подгруппой
§ 11
АФФИННЫЕ ПРОСТРАНСТВА
267
каждой точки является группа центроаффинных преобразований
с центром в этой точке, и не существует подгруппы, промежу-
точной между этой подгруппой и группой всех аффинных преоб-
разований.
Нахождение всех инволюционных аффинных преобразований
пространства Ап производится точно также, как нахождение всех
инволюционных движений пространств Rn и lRn (см. § 14 главы I).
В результате мы получаем, что инволюционные аффинные пре-
образования пространства Ап являются центроаффинными преобра-
зованиями с матрицами, приводимыми к виду
т
(3.9)
п— т <
где т принимает значение от 0 до п—1.
Преобразование, матрица которого приводится к указанному
виду, при т ~ 0 при произвольном выборе начала может быть
записано в виде
х' = — х + Ь. (3.10)
Это преобразование является отражением от точки', при от-
ражении от точки а каждая точка х переходит в точку 'х, нахо-
дящуюся на прямой, соединяющей эту точку с точкой а, и отно-
шение отрезков 'ха и ха равно 1, т. е. векторы 'х — а и а — х
равны, откуда 'х = 2а — х\ поэтому преобразование (3.10) является
b
отражением от точки .
Преобразование, матрица которого приводится к указанному виду,
при т > 0 представляет собой отражение от т-мерной плоскости,
определяемой векторами е±, . . ., ет, параллельно (п — т)-мерному
направлению, определяемому векторами ет+1, ..., еп\ при отра-
жении от m-мерной плоскости параллельно (п — т)-мерному на-
правлению каждая точка х переходит в точку 'х, находящуюся
на (п — /п)-мерной плоскости, проведённой через точку х парал-
лельно данному (п — ^-мерному направлению, и являющуюся
отражением точки х от точки пересечения этой плоскости с данной
w-мерной плоскостью.
Отсюда следует, что образами симметрии аффинного про-
странства Ап являются точки и конфигурации — т-мерная
268
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
плоскость -|- (п — т)~мерное направление, не имеющее с ней
параллельных направлений, при т = п—1—гиперплоскость
направление, не параллельное ей.
Заменяя в аксиомах аффинного пространства Ап вещественные
числа комплексными, мы определим п-мерное комплексное аф-
финное пространство An(i). В этом пространстве можно опре-
делить коллинеарность и отношение векторов, m-мерные плоско-
сти, в частности, прямые и гиперплоскости, параллельность
плоскостей и аффинные координаты совершенно так же, как
в пространстве Ап.
Определим аффинные преобразования пространства An(i)
так же, как в пространстве Rn(i), т. е. как взаимно однозначные
непрерывные преобразования этого пространства, переводящие
прямые в прямые. Поэтому аффинные преобразования простран-
ства Ап(1) имеют вид (3.4), где 'х~Ах — обратимое линейное
преобразование первого или второго рода, т. е. преобразование
векторов, удовлетворяющее условию (1.111) и в случае преобра-
зования первого рода — условию (1.112), а в случае преобразо-
вания второго рода — условию (1.125). В соответствии с этим
аффинное преобразование называется также аффинным преобразо-
ванием первого или второго рода.
Аффинные преобразования первого рода пространства Ап(1)
имеют тот же вид (3.7), что и аффинные преобразования про-
странства Ап, аффинное преобразование второго рода пространства
An(i) имеет вид
= (3.11)
3
где определитель матрицы (ар отличен от нуля.
Формулы (3.7) и (3.11) показывают, что аффинные преобра-
зования пространства An(t) зависят от п(п-|-1) комплексных и,
следовательно от 2п(п-|-1) вещественных параметров.
Аффинными преобразованиями прямой At (Z) будем называть
те преобразования, которые происходят при аффинных преобразо-
ваниях пространства Ап(1), переводящих в себя эту прямую. Эти
преобразования имеют вид (3.8) и
'х = ax-j-b, (3.12)
т. е. если рассматривать прямую At(i) как плоскость комплекс-
ного переменного, аффинные преобразования первого и второго
рода прямой At (Z) являются линейными преобразованиями пер-
вого и второго рода плоскости комплексного переменного.
Так как линейные преобразования первого и второго рода
плоскости комплексного переменного можно также определить как
взаимно однозначные преобразования этой плоскости, соответ-
ственно сохраняющие отношения отрезков или заменяющие их на
§ 2] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 269
сопряжённые комплексные числа, аффинные преобразования пер-
вого и второго рода прямой (I) можно также определить как
взаимно однозначные преобразования прямой А±(1), соответственно со-
храняющие отношения отрезков или заменяющие их на сопряжён-
ные комплексные числа.
Аффинные преобразования пространства Ап(1) и, в част-
ности, аффинные преобразования первого рода этого простран-
ства образуют группы, являющиеся группами Ли, причём
группа аффинных преобразований первого рода связна, а
группа всех аффинных преобразований состоит из двух связ-
ных компонент.
Если представлять себе пространство Ап погружённым в комп-
лексное пространство Ап(1) в виде совокупности точек с вещест-
венными координатами, то точки, прямые, плоскости и другие
геометрические образы пространства An(t), не лежащие в про-
странстве Ап, будем называть мнимыми точками, прямыми пло-
скостями и другими геометрическими образами пространства Ап.
§ 2. Проективные пространства г)
В аффинном пространстве Ап кроме аффинных преобразований
можно определить более общие точечные преобразования, пере-
водящие прямые в прямые, но уже не сохраняющие параллель-
ности прямых. Эти преобразования называются коллинеациями.
Очевидно, что аффинные преобразования являются частными слу-
чаями коллинеаций.
Изучение коллинеаций, не являющихся аффинными преобразо-
ваниями, мы начнём с рассмотрения одного частного случая. Рас-
смотрим проектирование одной из двух гиперплоскостей про-
странства Ап+1 на другую, т. е. такое отображение одной из этих
гиперплоскостей на другую, при котором все прямые, соединяю-
щие попарно соответственные точки, проходят через некоторую
фиксированную точку. Такое отображение называется перспектив-
ным отображением, а фиксированная точка, определяющая это
отображение, называется центром перспективы. На перспектив-
ном отображении основаны действия человеческого глаза и фото-
аппарата, состоящие в таком отображении всех плоскостей в поле
зрения глаза или фотоаппарата на сетчатку глаза, которую в пер-
вом приближении можно считать плоской, или на фотографическую
пластинку. Так как прямые, соединяющие точки прямой одной из
гиперплоскостей с центром перспективы, лежат в одной двумер-
ной плоскости, а эта плоскость пересекается со второй гиперпло-
Э С геометрией трёхмерного проективного пространства читатель
может более подробно познакомиться по книгам Ефимова [1], Глаго-
лева [1] и Четверухина [4] (в синтетическом изложении) и Д е-
лоне и Райкова [1], т. II (в аналитическом изложении).
270
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. Ш
скостью по прямой, при перспективном отображении прямые одной
из гиперплоскостей переходят в прямые другой гиперплоскости.
Поэтому если мы произведём два перспективных отображения с
разными центрами, первое из которых отображает одну гипер-
плоскость на другую, а второе отображает вторую гиперплоскость
на первую (черт. 58), мы получим коллинеацию в первой гипер-
плоскости. При этой коллинеации, очевидно, будет неподвижной
точка пересечения гиперплоскости с прямой, соединяющей оба
центра перспектив и все точки (п— 1)-мерной плоскости пересе-
чения обеих гиперплоскостей. Такая коллинеация в пространстве А^
называется гомологией. Неподвижная точка гомологии назы-
вается центром гомологии. При п = 2, когда неподвижная
(п—1)-мерная плоскость гомологии
является прямой, эта прямая называется
осью гомологии.
Гомология является аффинным пре-
образованием только в том случае,
когда обе гиперплоскости, с помощью
которых мы определяли гомологию, па-
раллельны.
Из определения перспективного со-
ответствия видно, что при этом отобра-
жении некоторые точки каждой из ги-
перплоскостей не имеют соответственных
точек; этими точками являются такие
точки одной из гиперплоскостей, что прямые, соединяющие их
с центром перспективы, параллельны другой гиперплоскости.
Поэтому при перспективном отображении параллельные прямые
одного из пространств Ап могут перейти в пересекающиеся прямые
другого из этих пространств. Отсюда следует, что при гомологии
некоторые точки пространства Ап не имеют соответственных точек.
Поэтому, если мы хотим, чтобы гомологии стали взаимно од-
нозначными преобразованиями пространства, мы должны допол-
нить пространство Ап новыми точками, которые соответствуют
тем из прямых, проходящих через центр перспективы, которые
параллельны этому пространству.
Указанное дополнение аффинного пространства новыми точками
приводит нас к новому пространству, которое мы определим сле-
дующим образом.
Будем называть п-мерным проективным пространством Рп
множество элементов, называемых точками, находящихся во
взаимно однозначном и взаимно непрерывном соответствии с пря-
мыми связки в аффинном пространстве Лп+1; будем называть
т-мерными плоскостями пространства Рп, при т= 1 —прямыми,
при т = п—1—гиперплоскостями, множества точек простран-
ства Рп, которые при этом соответствии отвечают прямым связки,
§ 21
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
271
лежащим в (т-\- 1)-мерных плоскостях. Будем называть колли-
неациями пространства Рп взаимно однозначные отображения
этого пространства на себя, при которых прямые переходят
в прямые.
Точки пространства Рп, отвечающие прямым связки, пересе-
кающимся с гиперплоскостью пространства Л№+1, не проходящей
через центр связки, находятся во взаимно однозначном и взаимно
непрерывном соответствии с точками пространства Ап) причём
/n-мерные плоскости пространства Ап при этом соответствии от-
вечают /n-мерным плоскостям пространства Рп, а аффинные пре-
образования и гомологии пространства Ап являются частными слу-
чаями коллинеаций пространства Рп. Это и даёт возможность
рассматривать пространство Рп как результат дополнения про-
странства Ап новыми точками, отвечающими прямым связки, парал-
лельным гиперплоскости.
Так как при приближении одной из прямых связки простран-
ства Л№+1, пересекающейся с гиперплоскостью, к прямой, парал-
лельной этой гиперплоскости, точка пере-
сечения прямой с гиперплоскостью уда-
ляется в бесконечность, добавляемые новые
точки называются бесконечно удалёнными
точками пространства Ап при его допол-
нении до пространства Рп. Бесконечно
удалённые точки пространства Ап при его
дополнении до пространства Рп составляют
гиперплоскость пространства Рп, назы-
ваемую бесконечно удалённой гиперпло-
скостью пространства Ап при его допол-
нении до пространства Рп.
Связку прямых в пространстве Ап+1
можно считать интерпретацией или мо-
Черт. 59.
делью пространства Рп. На черт. 59 изо-
бражена связка прямых пространства Л3, изображающая плоскость
Р2, и пучок прямых пространства Л3, изображающий бесконечно
удалённую прямую плоскости Р2.
Понятие бесконечно удалённых точек введено немецким астро-
номом и математиком Кеплером (1571 —1630) [1]. Основы проек-
тивной геометрии были созданы французскими математиками
Дезаргом (1593—1662) [1], Монжем (1746—1818) [1] и Пон-
селе (1789—1867) [1].
Так как прямые связки в пространстве Лп+1, представляющие
точки проективного пространства Рп, можно поставить во взаимно
однозначное и взаимно непрерывное соответствие с парами диа-
метрально противоположных точек гиперсферы пространства Rn+1>
проективное пространство Рп гомеоморфно пространству Ри-
мана Sn. Из этого следует, что проективная прямая Р± гомео-
272 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
морфна обычной окружности, а проективная плоскость Р2
гомеоморфно замкнутой фигуре, получающейся при склеивании
границы листа Мёбиуса с окружностью круга. Отсюда же сле-
дует, что пространства Рп являются односторонними при
чётном п и двусторонними при нечётном п.
Так как пространство Sn компактно, проективное простран-
ство Рп также компактно.
Будем определять точки пространства Рп векторами простран-
ства Ап+1, принадлежащими прямой связки этого пространства,
соответствующей данной точке пространства Рп. Координаты этого
вектора называются проективными координатами этой точки.
Таким образом, каждая точка пространства Рп характеризуется
п-Д-1 координатами х°, х1, хп, определёнными с точностью
до умножения на общий ненулевой множитель, т. е. координаты
kx* при любом определяют ту же точку пространства Рп,
что и координаты xi.
В случае проективной прямой Р± вместо двух координат х°, х1,
определённых с точностью до ненулевого множителя, часто поль-
х0
зуются их отношением х = . Тогда все точки прямой Pt, за
исключением точки х1 = 0, находятся во взаимно однозначном
соответствии с вещественными числами и проективную прямую
можно рассматривать как расширенную вещественную числовую
прямую. Точка х1 — 0 в этом случае является бесконечно уда-
лённой точкой расширенной числовой прямой и обозначается
знаком сю.
Так как всякий вектор пространства Ап+1 может быть пред-
ставлен в виде
х = 2*Ч (Z = 0, 1, п), (3.13)
i
где eQ, elt ..., еп — базисные векторы, координаты каждой точки
пространства Рп можно рассматривать как коэффициенты разло-
жения одного из векторов, представляющих эту точку, по векто-
рам, представляющим пД- 1 точек; эти точки называются базис-
ными точками пространства Рп. Заметим, что в отличие от аф-
финных координат в пространстве Д№+1, вполне определяемых
заданием базисных векторов этого пространства, проективные
координаты в пространстве Рп не определяются заданием базис-
ных точек, заданных векторами eQ, е±, . . ., еп. Для того чтобы
определить проективные координаты с точностью до веществен-
ного множителя, достаточно кроме базисных точек задать точку
с координатами 1, 1,..., 1; эта точка называется единичной
точкой и задаётся вектором eQ Д- ех Д- . . . Д- еп\ компоненты лю-
бого вектора, задающего единичную точку по направлениям, опре-
деляемым базисными точками, отличаются от векторов eQ, е1,..., еп
одним и тем же вещественным множителем.
§ 2] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 273
В том случае, когда вектор, представляющий точку х про-
странства Рп, является линейной комбинацией векторов, представ-
ляющих точки xt, х.2, . . ., хк, будем говорить, что эта точка
является линейной комбинацией точек х±, х2, . . ., хк. В частности,
каждая точка пространства Рп является линейной комбинацией
базисных точек.
Точки /n-мерной плоскости пространства Рп являются линей-
ными комбинациями т-\-\ точек, которые можно назвать базис-
ными точками плоскости. Если базисными точками т-мерной
плоскости являются точки а0, а±, . . ., ат, произвольная точка этой
плоскости может быть записана в виде
(3.14)
а
Всякую m-мерную плоскость пространства Рп можно рассма-
тривать как /n-мерное пространство Рт. При этом числа ta в фор-
муле (3.14) играют роль проективных координат точек этого
zn-мерного пространства.
Две плоскости пространства Рп определяют плоскость, являю-
щуюся пересечением этих плоскостей,—плоскость максимального
числа измерений, лежащую на обеих данных плоскостях, и пло-
скость, порождённую этими плоскостями, — плоскость мини-
мального числа измерений, проходящую через обе данные пло-
скости.
Если числа измерений данных плоскостей равны I к т, то
число измерений d их пересечения и число измерений s пло-
скости, порожденной этими плоскостями, связаны соотно-
шением
l^rn = d-\-si (3.15)
причём в том случае, когда плоскости не пересекаются, число
d—размерность их пересечения — следует считать равным— 1.
Это утверждение непосредственно следует из того, что в пло-
скости, порождённой двумя данными плоскостями, можно выбрать
базис из s-|-l точек, в который входит d-|-l точек, составляю-
щих базис пересечения плоскостей (если плоскости не пересе-
каются =0, т. е. d = — 1), I — d точек базиса первой пло-
скости, не входящих в базис пересечения, и т — d точек второй
плоскости, не входящих в базис пересечения, т. е. $ + 1 — /—d-{-
-р т — d-\-d-\- 1, откуда вытекает соотношение (3.15).
Две параллельные прямые или плоскости пространства Ап при
его дополнении до пространства Рп пересекаются в бесконечно
удалённых точках.
Так как уравнения гиперплоскостей пространства Лп+1, про-
ходящих через центр связки, имеют вид (3.3) при v = 0,
18 Зак. 177. Б. А. Розенфельд
274 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. Ill
координаты точек гиперплоскости пространства Рп удовлет-
воряют уравнению
^и^ = 0. (3.16)
Числа uit так же как проективные координаты точек, опреде-
лены с точностью до умножения на общий ненулевой множитель,
т. е. числа ku4 при любом k ф 0 определяют ту же гиперплоскость
пространства Рп, что и числа иг. Следовательно, эти числа можно
считать координатами гиперплоскости; эти координаты называются
тангенциальными координатами гиперплоскости.
Если базисные векторы пространства Ап+1 выбраны таким об-
разом, что векторы elf е.2, ..., еп параллельны гиперплоскости,
в виде которой пространство Ап погружено в пространство Ап+1,
причём эта гиперплоскость имеет уравнение х° — 1, и мы примем
за базис пространства Ап векторы, равные векторам elf е.2)
е3, ..., еп, то аффинные координаты X1, . . ., Хп точек простран-
ства Ап связаны с их проективными координатами х°, х1, ..., хп
соотношениями Xi = —, а бесконечно удалённые точки удовлет-
воряют условию х° = 0.
Мы видим, что свойства точек и гиперплоскостей пространства
Рп обладают параллелизмом, с которым мы уже встречались при
рассмотрении расширенных неевклидовых пространств. В самом
деле:
точки пространства Рп опре-
деляются п -ф-1 координатами
х°,.. ., хп, определёнными с точ-
ностью до общего ненулевого
множителя;
координаты точек, лежащих
на гиперплоскости с тангенциаль-
ными координатами и0, ..., ип,
удовлетворяют уравнению (3.16);
всякие две точки определяют
проходящую через них прямую;
всякие m —1 точек, не ле-
жащих в одной (т—1)-мерной
плоскости, определяют m-мер-
ную плоскость, порождённую
этими точками и т. д.
гиперплоскости пространства
Рп определяются n-j-1 танген-
циальными координатами и0, ...
..., ип, определёнными с точ-
ностью до общего ненулевого
множителя;
тангенциальные координаты
гиперплоскостей, проходящие че-
рез точку с координатами
х°, . . ., хп, удовлетворяют урав-
нению (3.16);
всякие две гиперплоскости
пересекаются по (п — 2)-мерной
плоскости;
всякие m-j-1 гиперплоско-
стей, не проходящих через одну
(п — т — 2)-мерную плоскость,
пересекаются по (п—т—1)-мер-
I ной плоскости.
Мы видим, что здесь, так же как в расширенных неевклидовых
пространствах, каждая теорема правого столбца получается из
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
275
§ 21
соответственной теоремы левого столбца взаимной заменой слов:
«точка» и «гиперплоскость», «прямая» и «(п— 2)-мерная плоскость»,
«/n-мерная плоскость» и «(п— т—1)-мерная плоскость», «лежит»
и «проходит через». Эта аналогия, также имеющая место для
всех теорем проективного пространства Рп, называется принципом
двойственности проективного пространства Рп.
Поэтому говорят, что в проективном пространстве Рп гео-
метрия многообразия гиперплоскостей совпадает с геометрией
этого пространства.
Будем называть симплексом пространства Рп, так же как
в пространствах Rn, lRn, Sn и lSn, часть пространства, ограничен-
ную n—]—1 гиперплоскостями, каждые п из которых пересекаются
в точке. Так же как в случае пространств Rn и lRn, определяются
грани, вершины и рёбра симплекса пространства Рп. Очевидно,
что, так же как в пространстве Sn, симплекс пространства Рп
неоднозначно определяется своей системой вершин и система вер-
шин симплекса пространства Рп является системой вершин одно-
временно 2п симплексов.
Будем называть п-мерным комплексным проективным про-
странством Рп^)1) множество элементов, называемых точками,
находящихся во взаимно однозначном соответствии с прямыми
связки в пространстве An+1(i). В пространстве Pn(i) определяются
zn-мерные плоскости и, в частности, прямые и гиперплоскости,
пересечение плоскостей и плоскость, порождённая плоскостями,
а также принцип двойственности, совершенно так же, как в веще-
ственном пространстве Рп. Так как связка прямых в пространстве
Ди+1(/) компактна, пространство Pn(i) также компактно.
Если представлять себе пространство Рп, погружённым в про-
странство Рп(Г) в виде совокупности точек с вещественными коор-
динатами, то точки, прямые, плоскости и другие геометрические
образы пространства Рп, не лежащие в пространстве Рп(1), будем
называть мнимыми точками, прямыми, плоскостями и другими
геометрическими образами пространства Рп.
В случае комплексной проективной прямой ^(0 вместо двух
комплексных координат х°, х1, определённых с точностью до
множителя, часто пользуются их отношением х = -^. Тогда все
точки прямой (I), за исключением точки х1 = 0, находятся во
взаимно однозначном соответствии с комплексными числами и пря-
мую Pt (г) можно рассматривать как расширенную плоскость
комплексного переменного. Точка х1 = 0 в этом случае является
бесконечно удалённой точкой расширенной плоскости комплекс-
ного переменного и обозначается знаком оо.
Э Более подробно о трёхмерном комплексном проективном простран-
стве см. монографию Картана [10].
18*
276
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. Ш
§ 3. Проективные преобразования
Так как при центроаффинных преобразованиях пространства Лп+1,
переводящих в себя связку прямых этого пространства, все пло-
ские пучки этой связки переходят друг в друга, центроаффинные
преобразования связки прямых пространства Ап+± изображают
коллинеацию проективного пространства Рп.
Покажем, что всякая коллинеация пространства Рп изобра-
жается центроаффинным преобразованием связки прямых про-
странства Ап+1. Пусть пространство Рп получено из пространства
Ап, погружённого в пространство Ап+1 в виде гиперплоскости Ап,
дополнением последней бесконечно удалёнными точками, образую-
щими бесконечно удалённую гиперплоскость пространства Ап при
его дополнении до пространства Рп. Тогда пространство Рп может
быть изображено связкой прямых в пространстве Лп+1 с центром,
не лежащим на гиперплоскости Ап. Так же как для аффинных
преобразований, показывается, что при коллинеациях /п-мерные
плоскости переходят в /n-мерные плоскости. Рассмотрим колли-
неацию Т пространства Рп, переводящую некоторую гиперпло-
скость d0 в бесконечно удалённую гиперплоскость. Рассмотрим,
далее, преобразование 5 того же пространства, изображаемое
центроаффинным преобразованием связки, переводящим пучок пря-
мых, параллельных гиперплоскости Ап, изображающей бесконечно
удалённую гиперплоскость, в пучок прямых, изображающий гипер-
плоскость dQ. Тогда преобразование ST переводит бесконечно уда-
лённую гиперплоскость в себя, т. е. является преобразованием
пространства Ап. Так как это преобразование взаимно однозначно
и переводит прямые в прямые, это преобразование в силу дока-
занного нами в § 10 главы I является аффинным преобразованием
пространства Ап. Если базис пространства АпЬ1 выбран таким
образом, что векторы elt •..., еп параллельны гиперплоскости Ап,
а уравнение этой гиперплоскости имеет вид х°=1, полученное
нами аффинное преобразование может быть записано в виде
'х1 = 2 ajx3 + 4- (3.17)
j
Тогда центроаффинное преобразование пространства
'хъ = S aJxj + ^о-^° [ (3.18)
У *
переводит гиперплоскость Ап в себя и определяет на ней получен-
ное нами преобразование (3.17). Поэтому преобразование ST про-
странства Рп изображается центроаффинным преобразованием
(3.18). Так как преобразование S"1, обратное преобразованию S,
§ 3] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 277
изображается центроаффинным преобразованием, произведение
этих преобразований S~1ST также изображается центроаффинным
преобразованием; но это преобразование совпадает с данной кол-
линеацией Т; таким образом, коллинеация Т действительно изо-
бражается центроаффинным преобразованием связки прямых про-
странства Дп+1.
Поэтому коллинеации пространства Рп в координатах имеют
вид
k'xl = ^laijxi, (3.19)
где определитель матрицы (ар отличен от нуля, k — произвольное
вещественное число, отличное от нуля, а индексы i, j пробегают
значения не от 1 до п, а от 0 до п.
Коллинеациями прямой Рг будем называть те преобразования
этой прямой, которые происходят при коллинеациях пространства
Рп, переводящих в себя эту прямую. Эти преобразования имеют
тот же вид (3.19), где индексы /, j пробегают значения 0, 1.
Для задания коллинеации проективного пространства Рп
достаточно указать, в какие точки переходят п-\-2 точек,
не лежащих по п—1 на одной гиперплоскости. В самом деле,
в этом случае всегда можно представить данные точки такими
векторами eQ, elt . . ., еп, е, что вектор е является суммой векто-
ров eQ, е±, . . ., еп, а те точки, в которые переходят данные точ-
ки,— такими векторами z£0, z£1} . . ., 'еп, 'е, что вектор 'е является
суммой векторов fe^, Гег, ..., геп. Тогда центроаффинное преоб-
разование, переводящее векторы е^, elt ..., еп соответственно^
в векторы 'eQ, гех, . . ., 'еп, переводит вектор е в вектор 'е. Если
бы не требовали, чтобы точка, представляемая вектором е, пере-
ходила в точку, представляемую вектором ге, векторы 'е§, гех, ... 'еп
были бы определены с точностью до ненулевых вещественных
множителей и точка, представляемая вектором е, могла бы перейти
в точку, представляемую любой линейной комбинацией векторов
%, 'е±, ..., 'еп с ненулевыми коэффициентами.
Так как коллинеации пространства Рп изображаются центро-
аффинными преобразованиями связки прямых пространства Лп+1,
коллинеации проективного пространства Рп составляют груп-
пу, гомоморфную группе линейных преобразований векторов
пространства Дп+1. При этом тождественному преобразованию
пространства Рп соответствуют все центроаффинные преобразо-
вания, переводящие в себя каждую прямую связки, т. е. преобра-
зования /xi = kx*.
Преобразования 'хг = 1гхг составляют ядро этого гомоморфизма.
Поэтому группа коллинеаций пространства Рп изоморфна фак-
тор-группе группы линейных преобразований векторов простран-
ства Ап+1 по её подгруппе, состоящей из преобразований /xi = kxi.
27%
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
Ту же фактор-группу мы получим, если будем рассматривать
только линейные преобразования пространства Ап+1 с определите-
лем ±1 и преобразования ,xi = kxl с тем же определителем; но
последние сводятся только к тождественному преобразованию
'х1 = х* и отражению от центра связки 'xi = — х*. Так как ма-
трицы этих преобразований имеют соответственно вид (8j) и (—8j),
группа коллинеаций пространства Рп изоморфна фактор-группе
группы матриц (п-[-1)-го порядка с определителем ±1 по её
подгруппе, состоящей из матриц (8J) и (— 8j).
Коллинеации пространства Рп зависят от того же числа пара-
метров, что и вещественные матрицы (п-|-1)-го порядка с опре-
делителем ± 1, т. е. коллинеации пространства Рп зависят от
(n—|— I)2—1 = п (п + 2) вещественных параметров. В частности,
коллинеации прямой Pt, плоскости Р% и пространства зависят
соответственно от 3, 8 и 15 вещественных параметров.
Так как группа вещественных матриц (п-[- 1)-го порядка с оп-
ределителем zt 1 состоит из двух связных компонент, одна из
которых содержит матрицы с определителем -(- 1, а другая — ма-
трицы с определителем —1, а матрица (— 8J) находится в первой
из этих связных компонент при нечётном п и во второй — при
чётном п, при переходе к фактор-группе в первом случае отожде-
ствление элементов происходит внутри связных компонент, а во
втором случае — между связными компонентами. Поэтому группа
коллинеаций пространства Рп при чётном п связна, а при
нечётном п состоит из двух связных компонент.
В первом случае мы получим ту же группу, если ограничимся
матрицами с определителем +1. В этом случае преобразования
гх* = kx* сводятся к одному тождественному преобразованию и
группа коллинеаций пространства Рп при чётном п изоморфна
группе матриц (п-\~1)-го порядка с определителем 4“1.
Так как равенство определителя ± 1 является алгебраическим
условием, группа матриц (п-|-1)-го порядка с определителем z±z 1
является группой Ли. Поэтому группа коллинеаций простран-
ства Рп является группой Ли.
Если рассматривать пространство Рп как пространство Ап,
дополненное бесконечно удалёнными точками, и аффинные коор-
динаты точек пространства Ап связаны с проективными координа-
гх « Xi
тами точек пространства Рп соотношениями 20—— , коллинеации
(3.19) представляются в этом аффинном пространстве дробно-ли-
нейными преобразованиями
Xi = .
(3.20)
§ 3]
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
279
(3.21)
В частности, коллинеации прямой Р± представляются на веще-
ственной числовой прямой дробно-линейными преобразованиями ве-
щественного переменного
, ах А- b
х =—i“7 •
сх —d
Группа центроаффинных преобразований пространства Ап+1
с общим центром, если исключить из пространства центр этих
преобразований, транзитивна, но импримитивна; классами имприми-
тивности здесь являются прямые, проходящие через этот центр.
Так как точки пространства Рп находятся во взаимно однозначном
соответствии с этими классами импримитивности, а группа, поро-
ждаемая на множестве этих классов импримитивности центроаф-
финными преобразованиями пространства Дп+1, изоморфна группе
коллинеаций пространства Pni группа коллинеаций пространства
Рп транзитивна и примитивна.
Группа аффинных преобразований пространства Ап изоморфна
подгруппе группы коллинеаций пространства Рп, переводящих
в себя некоторую гиперплоскость пространства Рп, так как, чтобы
получить из пространства Ап пространство Рп, нужно добавить к
первому пространству бесконечно удалённую гиперплоскость. В си-
лу принципа двойственности той же группе изоморфна группа кол-
линеаций пространства Рп, переводящих в себя некоторую точку.
Так как матрицы, представляющие коллинеации пространств Р19
Р2 и /А, являются произвольными неособенными матрицами соот-
ветственно второго, третьего и четвёртого порядка, каждая из
этих матриц может быть приведена в случае прямой Pt к одному
из четырёх видов (1.172), в случае плоскости Р2— одному из
семи видов (1.173) и в случае пространства Р3— к одному из
двадцати видов (1.174).
Укажем геометрические свойства этих коллинеаций, причём
для сокращения будем записывать матрицу (1.171) в виде
[(^1^1 • • • ^1) (^2^2 • • • • • • (^п^п • • •
Коллинеации прямой Р± обладают следующими свойствами:
1) Коллинеация с матрицей обладает 2 неподвижными
точками eQ, ег.
2) Коллинеация с матрицей [a0+z’\l\)— ^11 обладает 2 мни-
мо сопряжёнными точками eQ, ev
3) Коллинеация с матрицей [(АА)] имеет 1 неподвижную
точку eQ.
4) Коллинеация с матрицей [АА] является тождественным пре-
образованием.
Коллинеации плоскости Р2 обладают следующими свойствами:
1) Коллинеация с матрицей [А0А1А.2] обладает 3 неподвижными
точками eQ, е1} е2 и 3 инвариантными прямыми еое1, е0е2, е^.
280 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
2) Коллинеация с матрицей [Х04-/Хх — *Л1 обладает
2 мнимо сопряжёнными неподвижными точками е0, elf 1 веществен-
ной неподвижной точкой е2, 1 вещественной инвариантной пря-
мой eQet и 2 мнимо сопряжёнными инвариантными прямыми
е0е2* е1е2’
3) Коллинеация с матрицей [(Х0Х0)Хх] обладает 2 неподвижными
точками eQi е2 и 2 инвариантными прямыми eQelt eQe2.
4) Коллинеация с матрицей [Х0Х0Хх] имеет своими неподвижными
точками все точки прямой eQe± и точку е2, инвариантными пря-
мыми— все прямые пучка с центром е2 и прямую еое1.
5) Коллинеация с матрицей [(XXX)] обладает 1 неподвижной
точкой е0 и 1 инвариантной прямой еое1.
6) Коллинеация с матрицей [(XX) X] имеет своими неподвижными
точками все точки прямой eoelf инвариантными прямыми — все
прямые пучка с центром е0.
7) Коллинеация с матрицей [XXX] является тождественным пре-
образованием.
Коллинеации пространства Р3 обладают следующими свойст-
вами 1):
1) Коллинеация с матрицей [Х0ХхХ.2Х3] обладает 4 неподвижными
точками е0, elf е2, е3, 4 инвариантными плоскостями
£0£.2£3, ^1^3 и 6 инвариантными прямыми eoelf е0е2, е0е3, ^1^.2,
^1^3» ^2^3*
2) Коллинеация с матрицей [Хо—f-ZXx Хо—
обладает 4 попарно мнимо сопряжёнными неподвижными точками
е0 и е19 е2 и е3, 4 попарно мнимо сопряжёнными инвариантными
плоскостями и ^о^з и ^1^3’ 2 вещественными ин-
вариантными прямыми и е2е3 и 4 попарно мнимо сопряжён-
ными инвариантными прямыми eQe2 и ete3, еое3 и ехе2.
3) Коллинеация с матрицей [XqX^-P ZX,3X2— ZX3] обладает
2 вещественными неподвижными точками eQt elt 2 мнимо сопряжён-
ными неподвижными точками е2, е3, 2 вещественными инвариант-
ными плоскостями £о£2£3, ^^3, 2 мнимо сопряжёнными инвариант-
ными плоскостями eQe1e2, 2 вещественными инвариантными
прямыми eoelf е2е3 и 4 попарно мнимо сопряжёнными инвариант-
ными прямыми и е±е31 е0е3 и e±e2.
4) Коллинеация с матрицей [(Х0Х0) ХхХ2] обладает 3 неподвиж-
ными точками е0, е2, е3, 4 инвариантными прямыми egelt е0е2,
eQe3, еъеъ и 3 инвариантными плоскостями е0^2> ^1^3» ^(Авз-
*) См. нашу заметку [20]. В классификациях коллинеаций простран-
ства Р3, приведённых в учебниках Бюшгенса [1] (стр. 465—467) и
Глаголева [1] (стр. 202—203), пропущены случаи 12) (в учебнике Гла-
голева) и 17) (в обоих учебниках). Полная классификация коллинеаций
пространства Р3 (Z), из которой без труда получается классификация колли-
неаций пространства Р3, была впервые проведена Сегре [1] и приведена
Бертини [1] (стр. 105) и Картавом [10] (стр. 106).
§ 3] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 281
5) Коллинеация с матрицей [a0X0XxA2] имеет своими неподвижными
точками все точки прямой и точки е2, е8, инвариантными пря-
мыми — все прямые пучков с центрами е2, е8 в соответственных
плоскостях e^eye2i eQexe8 и прямые еое1} е2е8, инвариантными плоско-
стями—все плоскости пучка с осью £2£3 и плоскости е0е1е8.
6) Коллинеация с матрицей [(Х0Х0) ~|- /Х2 — /л.2] обладает
1 вещественной неподвижной точкой е0 и 2 мнимо сопряжёнными
неподвижными точками е2 и е8 2 вещественными инвариантными
прямыми eoelf е2е.3 и 2 мнимо сопряжёнными инвариантными пря-
мыми eQe2 и £0£3, 1 вещественной инвариантной плоскостью eQe2e8
и 2 мнимо сопряжёнными инвариантными плоскостями е^е1е2 и
*0*1*3*
7) Коллинеация с матрицей [имеет своими
неподвижными точками все точки вещественной прямой и 2 мнимо
сопряжённые точки е2 и инвариантными прямыми — веществен-
ные прямые е^е1У е2е3 и все прямые мнимых пучков с мнимо сопря-
жёнными центрами е2 и е3 в соответственных мнимо сопряжённых
плоскостях eQe1e2 и инвариантными плоскостями — все пло-
скости пучка с вещественной осью е2е3 и 2 мнимо сопряжённые
плоскости eQere2 и е^е^.
8) Коллинеация с матрицей [(Хо^о) (л1л1)] обладает 2 неподвиж-
ными точками £0, е2, 3 инвариантными прямыми eQe2, е2е3 и
2 инвариантными плоскостями е^е2е3.
9) Коллинеация с матрицей [(а0Х0) Л1Л1] имеет своими непо-
движными точками все точки прямой е2е3 и точку £0, инвариантными
прямыми — все прямые пучка с центром е0 и плоскостью eQe2e3 и
прямые eQelt е2е3, инвариантными плоскостями — все плоскости
пучка с осью eQe± в плоскости eQe2e3.
10) Коллинеация с матрицей [a0^i^i] имеет своими неподвиж-
ными точками все точки прямых eQelt е2е3, инвариантными пря-
мыми— все прямые, соединяющие произвольную точку прямой
с произвольной точкой прямой е2е3, и сами прямые eQelf е2е3, инва-
риантными плоскостями— все плоскости пучков с осями eQelt е2е3.
11) Коллинеация с матрицей [(Аэ —]— /Лха0 (^о—\) — ^1)1
обладает 2 мнимо сопряжёнными неподвижными точками е0 и е2,
1 вещественной инвариантной прямой eQe2, 2 мнимо сопряжёнными
инвариантными прямыми еое1 и е2е3 и 2 мнимо сопряжёнными инва-
риантными плоскостями е^ехе2 и е$е2е3.
12) Коллинеация с матрицей ZAX л0 — л0 —
имеет своими неподвижными точками все точки мнимо сопряжённых
прямых еое1 и #2*3, инвариантными прямыми — все прямые, соеди-
няющие произвольную точку прямой еое1 с произвольной точкой £2е3,
в том числе все вещественные прямые, соединяющие мнимо сопря-
жённые точки этих прямых, и сами прямые е()е1 и е2£3, инвариант-
ными плоскостями — все плоскости пучков с мнимо сопряжёнными
осями и е2е3.
282 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА (гл. III
13) Коллинеация с матрицей [(Х0Х0Х0) ХД обладает 2 неподвиж-
ными точками е0, е.3, 2 инвариантными прямыми eoelt е0е.3 и 2 инва-
риантными плоскостями £0е1ез-
14) Коллинеация с матрицей [(Х0Х0) Х0ХД имеет своими неподвиж-
ными точками все точки прямой е0е2 и точку е3, инвариантными
прямыми — все прямые пучков с центрами е0, е3 в соответственных
плоскостях ^о^з» инвариантными плоскостями — все плоско-
сти пучка с осью и плоскость е$хе2.
15) Коллинеация с матрицей [Х^Х^-Д имеет своими неподвиж-
ными точками все точки плоскости е^ехе2 и точку е3, инвариантными
прямыми — все прямые в плоскости е^е.?, и все прямые связки
с центром е3, инвариантными плоскостями — все плоскости связки
с центром е3 и плоскость е^е^.
16) Коллинеация с матрицей [(аала)] обладает 1 неподвижной
точкой 1 инвариантной прямой eQer и 1 инвариантной плоскостью
17) Коллинеация с матрицей [(XXX) X] имеет своими неподвиж-
ными точками все точки прямой е0е3, инвариантными прямыми —
все прямые пучка с центром е0 в плоскости инвариантными
плоскостями — все плоскости пучка с осью еое1.
18) Коллинеация с матрицей [(XX) (XX)] имеет своими неподвиж-
ными точками все точки прямой е0е2, инвариантными прямыми —
все касательные к поверхности второго порядка
х°х3 — = 0 (3.22)
в точках её прямолинейной образующей еое2 и прямую eQe2, инва-
риантными плоскостями — все плоскости пучка с осью eQe2.
19) Коллинеация с матрицей [(XX) Ха] имеет своими неподвижными
точками все точки плоскости eQe2e3, инвариантными прямыми — все
прямые в плоскости е$е2е3 и все прямые связки с центром eQ,
инвариантными плоскостями — все плоскости связки с центром eQ.
20) Коллинеация с матрицей [ХХХХ] является тождественным
преобразованием.
Все указанные свойства неподвижных точек и инвариантных
прямых и плоскостей коллинеаций проверяются непосредственно,
за исключением свойств инвариантных прямых коллинеаций с ма-
трицей [(Ха) (XX)]. Для доказательства этого заметим, что точка х
с координатами xi при этой коллинеации переходит в точку zx
с координатами
'х" = Хл:0-]-^1, 'х^Хх1, 'х2 = Хх2-|-х3, 'х3 = Хх3. (3.23)
Прямая 'хх является инвариантной прямой данной коллинеации;
в самом деле, эта прямая пересекает прямую е$2 в точке
z = — ХхД- = *%+ -Ло, (3.24)
§ 3] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 283
и произвольная точка у = их + z прямой zxx, имеющая координаты
= jjlx0—х1, у1 = рис1, у2 = |лх2-|-х3, уа _ |лх8, (3.25)
при данной коллинеации переходит в точку 'у с координатами
zy° = Хрьх°4-(А-|-|1)х1, 'у1 = Лрьх1, I
— AjjlX2(А Ц-!1) X3, J73 = AjjlX3, J (3.26)
т. е. в точку Ар-х + (л + рь)^, являющуюся точкой той же прямой.
Касательная к квадрике (3.22) в точке z имеет вид
xiX3_xsXi =0, (3.27)
где Xi — координаты произвольной точки касательной плоскости;
очевидно, что и точка х и точка z лежат в этой плоскости, т. е.
вся инвариантная прямая 'хх = xz лежит в этой плоскости; так как
эта прямая проходит через точку z, она является касательной
к квадрике в этой точке. Так как точка х — произвольная точка
пространства, не лежащая на прямой eoelf мы видим, что через
каждую точку пространства, не лежащую на прямой eoelt проходит
единственная инвариантная прямая и что эта прямая пересекается
с прямой еое1 и касается поверхности (3.22) в точке её пересече-
ния с прямой Так как прямая е0е2 также является инвариант-
ной прямой, мы видим, что в этом случае каждая точка простран-
ства лежит на некоторой инвариантной прямой, откуда следует,
что кроме этих прямых не существует других инвариантных прямых
данной коллинеации.
Будем называть конгруэнцию прямых пространства Р3, пересе-
кающихся с двумя скрещивающимися прямыми, гиперболической
линейной конгруэнцией прямых, конгруэнцию прямых простран-
ства соединяющих мнимо сопряжённые точки двух мнимо сопря-
жённых прямых, эллиптической линейной конгруэнцией прямых,
а конгруэнцию прямых пространства Р3, касающихся поверхности
второго порядка в точках ее прямолинейной образующей, пара-
болической линейной конгруэнцией прямых. Две скрещивающиеся
прямые, определяющие гиперболическую линейную конгруэнцию,
две мнимо сопряжённые прямые, определяющие эллиптическую
линейную конгруэнцию, и прямолинейную образующую поверхности
второго порядка, определяющую параболическую линейную кон-
груэнцию, будем называть осями этих конгруэнций. Нетрудно
проверить, что через каждую точку пространства, не лежащую на
оси конгруэнции, проходит единственная прямая конгруэнции. Мы
видим, что инвариантные прямые коллинеации с матрицей
соединяющие точки прямых еое1 и е2е3, вещественные
инвариантные прямые коллинеации с матрицей Ио + Н* A0+/At
л0—Ао — ZXJ, соединяющие мнимо сопряжённые точки пря-
мых еое1 и е2е3, и инвариантные прямые коллинеации с матри-
284 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. Ill
цей [(лХ)(ХХ)], пересекающие прямую е±е.2, образуют соответ-
ственно гиперболическую, эллиптическую и параболическую
линейные конгруэнции. Заметим, что при стремлении друг к другу
прямых eQe1 и е2е3 первые две из этих коллинеаций в пределе
переходят в третью коллинеацию, откуда видно, что параболиче-
ская линейная конгруэнция может быть получена предельным пере-
ходом из гиперболической и эллиптической линейной конгруэнции
при стремлении друг к другу их осей.
Будем называть двойным отношением четырёх точек х, у*
z, w на прямой пространства Рп с координатами х*, у\ z1 =
~xi-^~ kyi, Wi = xi + ly1 число
lF(x, у, z, w)^—. (3.28)
Непосредственным подсчётом легко убедиться в том, что это
число не зависит от умножения координат точек х, у, z и w на
вещественные множители.
Коллинеации пространства Рп оставляют двойное отноше-
ние четырёх точек на прямых инвариантным, так как если
наши четыре точки представляются векторами х, у, z = x-\-ky,
w = х-\-1у, то коллинеация переводит их в точки, представляю-
щиеся векторами Ах, Ay, Az, Aw, где 'х = Ах— линейное пре-
образование. Но в силу линейности преобразования Az = Ах-\-
-\-kAy, Aw = Ах-\-1Ау и двойное отношение последних четырёх
I
точек равно тому же числу , что и двойное отношение первых
четырёх точек. Двойное отношение четырёх точек называют также
сложным или ангармоническим отношением этих точек.
Будем называть двойным отношением двух точек и двух
гиперплоскостей пространства Рп с координатами точек х\ yi и
тангенциальными координатами гиперплоскостей zit wi число
W(x, у, z, w) = A------ --- (3.29)
i i
Двойное отношение двух точек х, у и двух гиперплоскостей
и, v равно двойному отношению данных точек х, у и двух точек
z', w' пересечения прямой ху с гиперплоскостями z, w. В самом
деле, точки и' и v' имеют соответственные координаты xi-\-kyi,
удовлетворяющие уравнениям гиперплоскостей z и w, т. е.
соответственно
524(х’Ч-^у) = о, (з.зо)
i i
§ 3]
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
285
откуда
^izixi + k^iziyi = 0, + = о
i i i i
И
2 w? 2 wixi
k —___J________ I —___1______.
2 х*/ ’ 2 й*/’
i i
(3.31)
(3.32)
Отношение в случае, когда значения k и I имеют вид (3.32),
равно (3.29). Из того, что коллинеации пространства Рп оставляют
инвариантными двойные отношения четвёрок точек на прямых,
следует, что коллинеации пространства Рп оставляют инвариант-
ными также двойные отношения пар точек и пар гиперплоскостей.
Найдём выражение двойного отношения четырёх точек пря-
^•о
мой Р± через координаты х =этих точек. Для этого заметим,
что точки прямой Р± можно характеризовать также тангенциаль-
ными координатами х0, xt, связанными с координатами х°, х1 соот-
ношением
x^+x^^Q (3.33)
или
5=-?- (3-34>
•Xх Л.()
ГТ
Поэтому координата х = точки связана с тангенциальными
« хл
координатами этой же точки соотношением х =------
Хд
Выражение (3.29) для прямой Pt может быть переписано в виде
W(x, у, z, + ^ + ^1 (3 35)
Полагая х1 = хх = 1, х°~-—~ = х, мы можем переписать это
выражение в виде
z, = (3.36)
или, что равносильно этому,
W(x, у, z, = (3.37)
V х ' Z— X W — X V 7
Выражение (3.37) называется двойным отношением четырёх
чисел.
Отметим следующие свойства двойного отношения четырёх чисел,
а следовательно, и четырёх точек.
286
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
Двойное отношение не изменяется от перемены местами
пар чисел х, у и z, w и от одновременной перемены местами
обеих пар, так как
W (z, w, х, у) = ^^:У^ = ^Г:^У = ^(х, у, z, <w},
(3.38)
W(y, x; w, = = y\ z, w).
7 w — у z — y z — x W — X v
(3.39)
Двойное отношение заменяется обратным числом при пере-
мене местами чисел одной из пар, так как
W(y, х; z, w) =
w — х____________1_________________1_______
w — у z — у . w — у W (х, у; z, w) ’
Z — X * w — X
(3.40)
Двойные отношения W(x, у; z, w) и W(x, w; z, у) связаны
соотношением
W(x, у, z, w)-j~W(x, w; z, j/)=l, (3.42)
так как
Г(х, у, z, w)H-№(x, w; z, y) = J :
у — w
y — *
__(z—y)(w — x) — (z — w) (y — x)
~ (z — x)(w — y)
(3.43)
но, как нетрудно проверить,
(z—уДм— x)— (z— w) (y — x) = (z — x) (w—y). (3.44)
Соотношения (3.40), (3.41), (3.42) показывают, что если двой-
ное отношение четырёх точек в каком-нибудь порядке равно X,
двойное отношение тех же четырёх точек в другом порядке может
быть также равно -у- и 1—а и, следовательно, также □—
К 1 — Л
К—1 . 1 X
к — 1 к и к —г
Формула (3.37) показывает, что двойное отношение четырёх
точек прямой положительно, если они не разделяют друг друга, и
отрицательно, если они разделяют друг друга.
Если двойное отношение W(x, у; z, w) равно —1, говорят,
что пары точек х, у и z, w гармонически разделяют друг друга,
или что точки х, у, z, w составляют гармоническую четвёрку.
§ 3] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 287
Если пара точек и, v одновременно гармонически делит и
пару точек х, у и пару точек г, w, то двойное отношение
W(x, у\ z, w) связано с двойным отношением W(и, v; х, z)
соотношениями
W{x, у, z, w) = J (3-45)
И _______________
1V7 / ч ]/* U7 (*, У5 z, w) + 1 /о .
W(u, v\ х, z) = -Ц- \_1Z2--J . (3.46)
YW(x, у; z, w) — 1
В самом деле, так как всякие три точки прямой Pt можно пере-
вести коллинеацией этой прямой в любые другие три точки этой
прямой, переведём точки и, v, х в точки 0, сю, 1; тогда точка у
как четвёртая гармоническая для точек 0, оо, 1 перейдёт в точку — 1.
Точка z при этом перейдёт в некоторую точку а\ тогда точка w как
четвёртая гармоническая для точек 0, оо, а перейдёт в точку —а.
Тогда двойное отношение 1Г(х, у\ z, w) равно двойному отно-
шению
Г(1, —1; а, — = : Та.+1 _ (3.47)
а двойное отношение W(и, v\ х, z) равно двойному отношению
и/(0, оо; 1, а) = \=^-.а^^ = а. (3.48)
Заменяя в (3.47) W(l, —1; а, —а) равным ему двойным
отношением W(x, у, z, w), a a=W(0, оо; 1, а) — равным ему
двойным отношением U7(rz, v\ х, z), мы получим (3.45), откуда,
выражая IF(zz, v; х, z) через U7(x, у; z, w), получим (3.46).
Так как двойное отношение (3.47) положительно, мы видим,
что две пары точек обладают вещественной парой точек, одновре-
менно гармонически делящих обе эти пары точек только в том
случае, когда они не разделяют друг друга. Если же данные пары
точек разделяют друг друга, то пара точек, одновременно гармо-
нически делящих эти пары точек, мнима. Формулы (3.45) и (3.46)
имеют место и в этом случае, но двойное отношение W (и, v\ х, z)
здесь является комплексным числом единичного модуля.
Так как дробно-линейные преобразования вещественной числовой
прямой можно также определить как взаимно однозначные пре-
образования расширенной числовой прямой, сохраняющие двойные
отношения четвёрок чисел, коллинеации проективной прямой Pt
можно определить также как взаимно однозначные преобразования
прямой сохраняющие двойные отношения четвёрок точек.
Кроме коллинеаций в проективном пространстве Рп можно опре-
делить корреляции — взаимно однозначные отображения точек этого
пространства на его гиперплоскости, при которых точки, лежащие
288 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
на одной прямой, переходят в гиперплоскости, проходящие через
одну (п— 2)-мерную плоскость. Покажем, что при корреляции
тангенциальные координаты гиперплоскостей линейно выра-
жаются через координаты соответственных точек. В самом
деле, выше мы видели, что коллинеации пространства Рп отобра-
жаются центроаффинными преобразованиями связки прямых в про-
странстве т. е. при коллинеациях координаты преобразован-
ных точек линейно выражаются через координаты преобразуемых
точек. Совершенно так же показывается, что при отображении
одного пространства Рп на другое, при котором прямые одного
пространства переходят в прямые другого пространства, коорди-
наты точек второго пространства линейно выражаются через коор-
динаты точек первого пространства. Но в силу принципа двой-
ственности многообразие гиперплоскостей пространства Рп является
моделью пространства Рп) при этом прямые пространства Рп изо-
бражаются пучками гиперплоскостей, пересекающихся по (п— 2)-
мерной плоскости, т. е. (п—2)-мерными плоскостями, причём можно
выбрать такие системы координат, что координаты точек будут
равны тангенциальным координатам соответственных гиперплоско-
стей. Поэтому корреляции можно рассматривать как отображение
одного пространства Рп на другое, при котором прямые одного
пространства переходят в прямые другого пространства, откуда
вытекает наше утверждение.
Отсюда следует, что корреляции пространства Рп могут быть
записаны в виде
lui — (3.49)
з
где определитель матрицы (а^) отличен от нуля, a Z — произволь-
ное вещественное число, отличное от нуля.
Из формулы (3.49) видно, что если координаты точки х являются
линейными комбинациями координат /п-|-1 точек, то тангенциаль-
ные координаты соответственной гиперплоскости являются линейными
комбинациями с теми же коэффициентами координат т-\-1 соот-
ветственных гиперплоскостей. Поэтому если точка х пробегает
/n-мерную плоскость, соответственная гиперплоскость пробегает
совокупность гиперплоскостей, пересекающихся по (п— т~ 1)-
мерной плоскости, т. е. при корреляции пространства Рп т-мер-
ные плоскости переходят в (п — т — У)-мерные плоскости.
Произведение двух корреляций является коллинеацией. Поэтому
совокупность всех коллинеаций и корреляций образует группу.
Группа всех коллинеаций и корреляций пространства Рп назы-
вается группой проективных преобразований этого пространства.
Число связных компонент этой группы равно удвоенному числу
связных компонент группы коллинеаций пространства Рп> т. е.
состоит из двух связных компонент при чётном п и четырёх
§ 3] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 289
связных компонент при нечётном п. При п = 1 корреляции совпа-
дают с коллинеациями и группа проективных преобразований
прямой Р± состоит не из четырёх, а из двух связных компонент.
Заметим, что всякая корреляция пространства Рп может быть
представлена как произведение некоторой коллинеации на простей-
шую корреляцию
1щ = х\ (3.50)
ставящую в соответствие каждой точке гиперплоскость, танген-
циальные координаты которой пропорциональны координатам этой
точки (в этом случае матрица корреляции совпадает с матрицей
соответственной коллинеации).
Удобно считать основным образом проективного пространства Рп
не точки или гиперплоскости, которые переходят в однородные
образы только при коллинеациях, а конфигурации точка-|-гипер-
плоскость, которые переходят в однородные образы при всех
проективных преобразованиях пространства Рп. Будем называть
эти образы 0-парами1). Мы видели, что две 0-пары простран-
ства Рп обладают проективным инвариантом—двойным отноше-
нием точек и гиперплоскостей этих 0-пар.
В пространстве Рп(1) определяются проективные преобразова-
ния и, в частности, коллинеации и корреляции совершенно так же,
как в вещественном пространстве Рп.
Точно так же, как в пространстве Рп, показывается, что кол-
линеации пространства Pn(t) образуют группу, являющуюся группой
Ли, и что группа коллинеаций пространства Рп(1) изоморфна
фактор-группе группы линейных преобразований векторов про-
странства An+X(i) по ее подгруппе, состоящей из преобразо-
ваний fxi = kxi. Ту же фактор-группу мы получим, если будем,
рассматривать только линейные преобразования векторов простран-
ства (/) с определителем -|-1 и преобразования 'х* = kx* с тем же
определителем; но числа k в случае таких преобразований сводятся
К «4-1 корням (п-|- 1)-й степени из единицы 1, sn+1, s^+1, • • -*en+i'
Поэтому группа коллинеаций пространства Рп(1) изоморфна
фактор-группе группы комплексных матриц (п-\-\)-го порядка
по её подгруппе, состоящей из матриц преобразований 'х* = х*,
'х* = гп+1х*, . . ., 'х* = Qn+ixi> из чего следует, что эта группа
Связна и зависит от п(п-\-2) комплексных, т. е. от 2п(п-\-2)
вещественных параметров.
Коллинеации пространства Рп(1), изображающиеся в простран-
стве Лп+1(0 центроафинными преобразованиями первого и второго
9 0-пары пространства (конфигурации точка -р плоскость) впервые
рассматривались Д. М. Синцовым [1] в его теории коннексов.
А. П. Котельников [4], также рассматривавший эти конфигурации,
называл их мутовками.
19 Зак. 177. Б. А. Розенфельд
290
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
рода, называются соответственно коллинеациями первого и вто-
рого рода\ эти коллинеации в координатах имеют соответственно
вид (3.1) и
kfxi = 2 (3.51)
з 3
где определитель матрицы (ар отличен от нуля.
Как следует из свойств аффинных преобразований простран-
ства Ап+1(1), для однозначного задания коллинеации простран-
ства Рп(1) достаточно указать, в какие точки переходят п-|-2
точек, не лежащих по п-\-1 на одной гиперплоскости, а также
является ли эта коллинеация коллинеацией первого или второго
рода.
В пространстве Рп (I) определяется двойное отношение четырёх
точек на прямой так же, как в пространстве Рп. Это двойное
отношение остаётся инвариантным при коллинеациях первого
рода, что доказывается так же, как для двойного отношения
в пространстве Рп.
Точно так же в пространстве Pn(i) имеются корреляции двух
родов, называемые корреляциями первого и второго рода\ эти
корреляции в координатах имеют соответственно вид (3.41) и
(3.52)
з
где определитель матрицы (а^) отличен от нуля.
Коллинеации и корреляции второго рода пространства Pn(i)
часто называют также соответственно антиколлинеациями и анти-
корреляциями.
Произведение двух коллинеаций второго рода, а также произ-
ведение двух корреляций второго рода являются коллинеацией.
Поэтому совокупность всех коллинеаций первого рода и корреляций
первого рода, совокупность всех коллинеаций первого рода и
корреляций второго рода, а также совокупность всех коллинеаций
и корреляций образуют группу. Будем называть группу всех
коллинеаций и корреляций пространства Pn(i) группой проектив-
ных преобразований этого пространства. Эти группы состоят из
четырёх связных компонент—из множества коллинеаций первого
рода, являющегося связной группой, и из множеств коллинеаций
второго рода и корреляций первого и второго рода.
Коллинеациями первого и второго рода прямой Р± (I) будем
называть те преобразования этой прямой, которые происходят при
коллинеациях первого и второго рода пространства Рп(Г)> пере-
водящих в себя эту прямую. Эти преобразования имеют тот же
вид (3.19) и (3.51), где индексы Z, j пробегают значения 0, 1.
Корреляции первого и второго рода на прямой Р1(Г) совпадают
с коллинеациями, вследствие чего группа проективных преобразо-
§ 4] ОБРАЗЫ СИММЕТРИИ 291
ваний прямой Р1(1) состоит из двух связных компонент. Колли-
неации первого и второго рода прямой Pt (/) предста-
вляются на плоскости комплексного переменного соответствен-
но дробно-линейными преобразованиями первого и второго
рода (3.21) и _
/ CLX И- Ь /П
х — . (3.53)
сх + d
Заметим, что всякая коллинеация и корреляция второго рода
может быть представлена в виде произведения некоторой колли-
неации или корреляции первого рода на простейшую коллинеацию
второго рода
fxi = xii (3.54)
ставящую в соответствие каждой точке точку с комплексно сопря-
жёнными координатами.
Так как при преобразовании (3.54) точки с координатами х\
У, х*4~(/ переходят соответственно в точки с коор-
динатами х\ yi9 xi-\-kyii xi-\-lyi, двойное отношение этих
четырёх точек — при преобразовании (3.54) заменяется комплексно
сопряжённым числом , Поэтому, так как всякая коллинеация
второго рода является произведением коллинеации первого рода
на преобразование (3.54), коллинеации второго рода заменяют
двойные отношения четырёх точек комплексно сопряжёнными
числами.
§ 4. Инволюционные проективные преобразования
и образы симметрии
Так как квадраты матриц, не приводимых к диагональному
виду, также являются матрицами, не приводимыми к диагональному
виду, инволюционные коллинеации пространств Рп являются такими
коллинеациями, матрицы которых приводятся к диагональному
виду. В виду того, что собственные числа квадрата матрицы
равны квадратам собственных чисел этой матрицы, а матрица
коллинеации, являющейся тождественным преобразованием, имеет
равные собственные числа, собственные числа матриц инволюцион-
ных коллинеаций могут отличаться только множителем —1. Если
мы потребуем, чтобы определители матриц инволюционных кол-
линеаций были бы равны ztl, мы получим, что все собственные
числа матриц инволюционных коллинеаций равны только значе-
ниям —1 или /, —Z; в последнем случае, так как мнимые
собственные числа вещественных матриц должны быть попарно
комплексно сопряжены, количество собственных чисел I равно
19*
292
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
количеству собственных чисел —Z, вследствие чего этот случай
может иметь место только для матриц чётного порядка, т. е. при
нечётном п.
Поэтому инволюционные коллинеации пространства Рп являются
коллинеациями, матрицы которых приводятся к виду
(3.55)
п— т
где т принимает значение от 0 до п—1, и
(3.56)
В последнем случае матрица коллинеации может быть при-
ведена к вещественному виду
О —1
1 О
О —1
1 О
(3.57)
О —1
1 О
ОБРАЗЫ СИММЕТРИИ
293
§ 4]
Инволюционная коллинеация пространства Рп с матрицей (3.55)
записывается в виде
'xi = xi (i<^m), 'хз =— хз (у > т) (3.58)
и состоит в том, что каждой точке х ставится в соответствие
точка 'х, находящаяся на единственной прямой, проходящей через
точку х и пересекающейся с т-мерной плоскостью еое1 ... ет
и (п — т—1)-мерной плоскостью ет+1 . . . еп, и вместе с точкой х
гармонически делящая пару точек пересечения этой прямой с ука-
занными плоскостями. В самом деле, эта прямая является пере-
сечением (т-\- 1)-мерной плоскости xeQe1 . . . ет и (п — т)-мерной
плоскости хет+1 - . . еп, и в силу общей формулы (3.15) эти
плоскости, порождающие всё пространство Рп, пересекаются по
прямой; точки z и w пересечения этой прямой с плоскостями
Vi • • • и ^тп+1 • • • еп имеют соответственно координаты
zi = xi(l^m)i z3 = 0 (/> rn) 1
и \ (3.59)
= Q (Z т), wi = хз (j > т), J
вследствие чего точка 'х, находящаяся на прямой х = w и вместе
с точкой гармонически делящая пару точек z, <w, имеет коорди-
наты (3.58). Коллинеация с матрицей (3.55) оставляет неподвижными
все точки плоскостей eQe± . . . ет и ет+1 .. . еп и только эти
точки.
Инволюционная коллинеация с матрицей (3.55) при т = О
оставляет неподвижной точку е0 и все точки гиперплоскости
eie2 • • • еп и является гомологией. Такая коллинеация называется
инволюционной гомологией и записывается в виде
'х° = х°, гхз = — хз (у>0). (3.60)
Совершенно так же, как для коллинеаций с матрицами (3.55),
показывается, что коллинеация с матрицей (3.56) состоит в том,
что каждой точке х ставится в соответствие точка гх, находя-
щаяся на единственной прямой, проходящей через точку х и пере-
секающейся с плоскостями eQe± . . . еп_г и еп+х ... еп, которые
2 2
П— 1
в данном случае обе ——мерны и мнимо сопряжены, и вместе
с точкой х гармонически делящая пару мнимо сопряжённых точек
пересечения этой прямой с указанными плоскостями. Такая кол-
линеация называется эллиптической инволюцией. Эллиптическая
инволюция не имеет вещественных неподвижных точек, но имеет
две неподвижные мнимые 1 -мерные плоскости.
294
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
Эллиптическая инволюция пространства Рп с матрицей (3.56)
записывается в виде
^x2i=z_x2i-l) fx2i + l = X2it (3.61)
Инволюционная коллинеация с матрицей (3.55) при нечётном п
и т = оставляет неподвижными все точки двух веществен-
ных —* -мерных плоскостей; так как эта коллинеация, так же
как эллиптическая инволюция, обладает двумя неподвижными
п — 1
—2—мерными плоскостями, которые здесь не мнимы, а веще-
ственны, эта коллинеация называется гиперболической инволюцией.
Матрица коллинеации гиперболической инволюции может быть
приведена также к виду
О 1
1 О
О 1
1 О
(3.62)
’ 0 1
1 О
Гиперболическая инволюция пространства Рп с матрицей (3.62)
записывается в виде
fx2^1 = x2i. (3.63)
Эллиптическая и гиперболическая инволюции на прямой Р±
состоят в том, что каждой точке х этой прямой ставится в соот-
ветствие точка 'х той же прямой, вместе с точкой х гармонически
делящая пару соответственно мнимо сопряжённых или вещественных
точек этой прямой. Формулы (3.61) и (3.63) для этих инволюций
на прямой Pt имеют вид
'х° = — х1, 'х1 = х° (3.64)
и
'xQ = x\ fx^ = xQ (3.65)
или, если перейти от координат х°, х1 к координате х = ,
'х = —1 (3.66)
И
= (3.67)
§ 4]
ОБРАЗЫ СИММЕТРИИ
295
Понятие инволюционной гомологии на плоскости Р2 позволяет
определить инволюцию на проективной прямой Pt с помощью
простого построения на плоскости Р2. Рассмотрим две точки а, b
на прямой Рг и проведём через точку b произвольную прямую,
не совпадающую с данной прямой. Рассмотрим инволюционную
гомологию на нашей плоскости, определяемую точкой а и построен-
ной нами прямой (черт. 60). Эта инволюционная гомология пере-
водит точку х в точку 'х, а прямые ху и xz, выходящие из
точки х и пересекающие ось
гомологии в точках у и z,
соответственно в прямые 'ху
и rxz. При этом точки у и z,
как точки оси, остаются
неподвижными, а точка
пересечения прямых xz и 'ху
переходит в точку zw пе-
ресечения прямых 'xz и ху.
Точки, переходящие друг
в друга в инволюционной
гомологии, лежат на пря-
мой, проходящей через центр Черт. 60.
этой гомологии, т. е. пря-
мая W необходимо проходит через точку а. Но ось гомологии
и прямая 'ww являются диагоналями четырёхугольника ywz'w,
а точки w и zw являются точками пересечения противоположных
сторон этого четырёхугольника. Если мы будем называть фигуру,
образованную четырьмя прямыми, из которых никакие три не
проходят через одну точку, и шестью точками их пересечения,
полным четырёхсторонником, то примером полного четырёх-
сторонника является фигура ywz'wx ' х, состоящая из четырёх-
угольника ywz ftw и треугольников '<wzx и ‘wz'x. Будем называть
прямые, соединяющие противоположные точки четырёхсторонника,
диагоналями} в нашем случае диагоналями являются прямые yz,
'т и 'хх. Мы показали, что две диагонали полного четырёх-
сторонника на плоскости Р2 пересекают третью диагональ
в паре точек, гармонически делящей пару вершин, соединяемых
этой диагональю.
Заметим, что определённые нами в § 1 инволюционные аффин-
ные преобразования — отражение от точки и отражение от m-мер-
ной плоскости параллельно данному (п — т)-мерному направлению
можно рассматривать как инволюционные коллинеации, причём
в первом случае инволюционная коллинеация является инволюцион-
ной гомологией, центром которой служит данная точка, а непо-
движной гиперплоскостью—бесконечно удалённая гиперплоскость,
а во втором случае неподвижной m-мерной плоскостью коллинеации
служит данная m-мерная плоскость, а неподвижной (п— т—1)-
296 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
мерной плоскостью — совокупность общих бесконечно удалённых
точек (п — яг)-мерных плоскостей, параллельных данному (п — /п)-
мерному направлению.
Для определения всех инволюционных корреляций пространства Рп
найдём закон преобразования гиперплоскостей с тангенциальными
координатами в точки с координатами гхг при корреляции:
rtti = S (3.68)
з
Для этого заметим, что если точки с координатами хг лежат на
гиперплоскости с тангенциальными координатами uit т. е.
2^ = 0, (3.69)
i
то точки с координатами 'х* лежат на гиперплоскости с танген-
циальными координатами 'ui9 т. е.
= (з.7о>
i
Но формулу (3.70) можно переписать в виде
(3-71)
< j
что может быть записано в виде (3.69) в том случае, если
tti = ^aji'xa. Поэтому квадрат преобразования (3.68) переводит
i
точку с координатами х* в точку с координатами "х\ связанную
с координатами первой точки соотношениями
2 = S (3.72)
з з
Квадрат преобразования (3.68) является тождественным преоб-
разованием в том случае, когда "х* = kxii т. е. при тождествен-
ном выполнении условий
2 (ао- — kajt) xi = 0, (3.73)
3
сводящимся к условиям
Oij ~~ kajt* (3.74)
Так как
= ka^ — k2aijt (3.75)
мы находим, что k2 — 1, т. е. k — ± 1. Поэтому элементы матрицы
инволюционной корреляции связаны соотношениями
aij = aji’ (3.76)
или
O'ij — Oji> (3.77)
ОБРАЗЫ СИММЕТРИИ
297
§ 4]
т. е. матрицы инволюционных корреляций пространства
являются симметрическими или кососимметрическими.
Заметим, что определители кососимметрических матриц могут
быть отличны от нуля только в случае чётного порядка матриц.
Поэтому инволюционные корреляции с кососимметрическими матрица-
ми имеют место в пространствах Рп только при нечётном п.
Корреляция с симметрической матрицей называется полярным
преобразованием относительно гиперповерхности второго поряд-
ка, или, как мы будем коротко говорить, квадрики
(3.78)
i 3
Уравнение (3.78) при надлежащем выборе базиса можеть быть
приведено к виду
2(х»)2 = 0, (3.79)
i
ИЛИ
2^(х’)2 = 0, (3.80)
i
где = ± 1. Квадрика (3.79) является мнимой гиперповерхностью,
квадрики (3.80) вещественны; в том случае, когда среди чисел е*
встречается т раз—1 и п — т-\-\ раз-Р 1 и I—меньшее из
чисел т и п — т-\-\, квадрика называется квадрикой индекса I.
Полярное преобразование относительно квадрик (3.79) и (3.80)
имеет соответствующий вид
ui—xi (3.81)
и
(3.82)
Гиперплоскость, соответствующая точке при полярном преоб-
разовании относительно квадрики, называется полярной гипер-
плоскостью точки, а точка — полюсом этой гиперплоскости',
m-мерная и (п — т—1)-мерная плоскости, соответствующие друг
другу при этом преобразовании, называются взаимно полярными
плоскостями. Симплекс пространства Рп, каждая вершина кото-
рого является полюсом противоположной грани, называется авто-
полярным симплексом данной квадрики. В случае квадрик (3.79)
и (3.80) базисные точки являются вершинами автополярного сим-
плекса.
Покажем, что полярное преобразование относительно квад-
рики пространства Рп может быть определено как преобразова-
ние, ставящее в соответствие каждой точке xQ пространства
Рп гиперплоскость, состоящую из таких точек на каждой из
прямых, проходящих через точку xQ, которые являются чет-
вёртыми гармоническими для точки х0 и двух точек пересече-
ния этой прямой с квадрикой. В самом деле, выбирая некоторую
298
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
точку у на каждой из прямых, проходящих через точку х0, мы
можем записать произвольную точку этой прямой в виде xQ-}-ky.
Тогда точки пересечения этой прямой с квадрикой (3.78) определятся
значениями k, являющимися решениями квадратного уравнения
2 2 aij (Хо+kyi) (4 + Л/) =
= Л2 2 2 ауУУ + 2k S 2 ЯцХоУ*+ 22 = 0. (3.83)
г J i j i j
Так как двойное отношение точек х0, у и двух точек пересечения
k
прямой с квадрикой равно отношению корней этого уравнения,
то в том случае, когда точки х0, у гармонически разделяют точки
пересечения прямой с квадрикой, корни k± и k2 отличаются знаками,
т. е. их сумма равна нулю. Так как сумма корней квад-
ратного уравнения (3.83) имеет вид
^1 + ^2 — —
2 2 2 a-ijxly3
i J
(3.84)
а знаменатель этого выражения в том случае, когда точка х0 и,
следовательно, точка у не лежат на квадрике, отличен от нуля,
условие равенства нулю суммы ^ + ^2 равносильно условию
2 2 — 0, (3.85)
т. е. точки у, удовлетворяющие указанному условию, являются
точками гиперплоскости, тангенциальными координатами которой
являются выражения =
Заметим, что если уравнение квадрики индекса I приведено
к виду 2 ~ 0 и базисная гиперплоскость х° 0 принята
за бесконечно удалённую гиперплоскость, а в остальной части про-
странства Рп расстояние между точками с координатами хз и уз
определить по формуле
<3-86>
i
мы получим пространство lRni при 1 = 0— пространство Rn', так
как уравнение нашей квадрики можно переписать в виде
ш=-..
ОБРАЗЫ СИММЕТРИИ
299
§ 4]
данная квадрика в этом пространстве Rn или l *Rn будет гиперсфе-
рой радиуса Y—ео> т- е- 1 ПРИ so — — 1 и i при s0= 1. При этом
базисные точки, являющиеся вершинами автополярного симплекса
этой квадрики, будут началом и бесконечно удалёнными точками п
взаимно ортогональных прямых этого пространства, проходящих
через начало. Поэтому из свойств гиперсфер в пространствах Rn
и lRn (см. § 1 главы II) следует, что квадрика индекса I в про-
странстве Рп при Z > О делит пространство Рпна две области,
причём всякий автополярный симплекс этой квадрики имеет I
вершин в одной из этих областей и п — I—|- 1 вершин — в дру-
гой из них, и что квадрика индекса I в пространстве Рп при
О < I П 1 обладает (Z—\)-мерными плоскими образующими
и не обладает плоскими образующими большей размерности.
Будем называть квадрики индекса 1 (не имеющие ни линейча-
тых, ни плоских образующих) овальными квадриками, а квадрики
индекса 2 (имеющие линейчатые образующие, но не имеющие плос-
ких образующих) линейчатыми квадриками.
При корреляции, приводимой к виду (3.81), не существует
точек, лежащих в гиперплоскостях. При корреляции, приводимой
к виду (3.82), такие точки существуют — это точки самой квадрики,
а их полярные гиперплоскости — касательные гиперплоскости
к квадрике в этих точках.
Корреляция с кососимметрической матрицей называется нуль-
системой. Это название объясняется тем, что в отличие от поляр-
ного преобразования в нуль-системе каждая точка соответствует
гиперплоскости, проходящей через эту точку (в этом случае квадра-
тичная форма (3.78) тождественно равна нулю).
Рассмотрим теперь образы симметрии пространства Рп, опре-
деляемые его инволюционными проективными преобразованиями.
Так как все инволюционные коллинеации пространства Рп,
кроме эллиптической инволюции, обладают неподвижными точками,
причём эти неподвижные точки заполняют т-мерную и (п— т— 1)-
мерную плоскости, порождающие всё пространство, за образ сим-
метрии, соответствующий этим инволюционным коллинеациям, сле-
дует считать конфигурацию т-мерная плоскость -ф- (п—т—^-мер-
ная плоскость', при т — 0, т. е. в случае инволюционной гомологии,
образом симметрии является конфигурация точкагиперпло-
скость, которую мы в § 3 назвали 0-парой. Будем называть кон-
фигурации zn-мерная плоскость-\-{т — п— 1)-мерная плоскость
т-парами х).
Эллиптическая инволюция пространства Рп не обладает вещест-
венными неподвижными точками, но обладает мнимыми неподвижными
i) 1-пары пространства Р3 (пары прямых) впервые рассматривались
А. П. Котельниковым [2], который называл их мбторами.
300 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
Я — 1
точками, заполняющими две мнимо сопряженные ——мерные
плоскости. Поэтому можно сказать, что образом симметрии, соответ-
п — 1
ствующим эллиптической инволюции, является м н и м а я—g—пара.
Вместо этого мнимого образа можно рассматривать вещественный
образ—совокупности прямых, соединяющих мнимо сопряжённые точки
плоскостей этой —~ *-пары. Так как через каждую точку про-
странства проходит одна и только одна прямая этого семейства, оно
является конгруэнцией прямых; будем называть это семей-
ство прямых эллиптической линейной конгруэнцией прямых про-
странства Рп.
Заметим, что всякое семейство прямых, соединяющих произ-
вольные точки двух вещественных плоскостей любой яг-пары про-
странства Рп, обладает тем свойством, что через каждую точку
пространства, кроме точек самих плоскостей яг-пары, проходит
одна и только одна прямая семейства, т. е. это семейство прямых
также является конгруэнцией прямых; в случае 0-пары эта кон-
груэнция является связкой прямых; эти конгруэнции прямых также
переходят в себя при соответственных инволюционных коллинеациях,
причём при т ф 0 прямые конгруэнций определяют соответствен-
ную яг-пару, вследствие чего эти конгруэнции прямых можно рас-
сматривать как образы симметрии. В частности, так как такая
п — 1 х
конгруэнция прямых при т = —переходит в себя при гипер-
болической инволюции, будем называть её гиперболической линей-
ной конгруэнцией прямых пространства Рп. Заметим, что при
я — 1
стремлении ——мерных плоскостей, определяющих эллиптическую
и гиперболическую линейные конгруэнции, к совпадению эти кон-
груэнции в пределе переходят в параболическую линейную кон-
груэнцию прямых пространства Рп. Можно показать, что эта
конгруэнция представляет собой совокупность общих касательных
к квадрикам х‘2г’х^’+1— х2*+1х^ = 0, при п > 3 являющихся ко-
п .. я — 1
нусами. При нечетном —— эти прямые касаются также невы-
рожденной квадрики JC*4^43— х4*+1х4*+2) = 0 1). Определён-
ные нами в § 3 эллиптические, гиперболические и параболические
конгруэнции прямых пространства являются частными случаями
определённых здесь конгруэнций пространства Рп.
Образом симметрии пространства Рп, определяемым полярным
преобразованием относительно мнимой или вещественной квадрики,
является совокупность 0-пар, состоящих из полюсов и поляр отно-
*) См. В. И. Семянистый (Грозный) [1].
§ 4] ОБРАЗЫ СИММЕТРИИ 301
сительно этой квадрики; будем называть такие 0-пары авто поляр-
ными относительно этой квадрики.
Образом симметрии пространства Рп, определяемым нуль-си-
« п — 1
стемой, является совокупность ——мерных плоскостей, переходя-
щих при этой нуль-системе в себя. Эти п % ^-мерные плоскости
называются нулъ-плоскостями нуль-системы, а их совокупность
п — 1
называется линейным комплексом ——мерных плоскостей про-
странства Рп,
Следовательно, образами симметрии проективного простран-
ства Рп являются т-пары, при т = 0 0-пара, совокупности
0-пар, автополярных относительно квадрик, и при нечётном п
эллиптическая линейная конгруэнция прямых и линейный комп-
п — 1
леке —^--мерных плоскостей.
Рассмотрим более подробно образы симметрии пространств Р1,
Р.3 и Р3.
Инволюционными проективными преобразованиями прямой Рх
являются:
1) гиперболическая инволюция, приводимая к виду
'х* = хР, fx1=^ — x1; (3.88)
2) эллиптическая инволюция, приводимая к виду
'х^х1, 'х1^ — х°. (3.89)
Поэтому образами симметрии прямой Р± являются пара
вещественных точек, переходящая в себя при гиперболической
инволюции, и пара мнимо сопряжённых точек, переходящая
в себя при эллиптической инволюции.
Инволюционными проективными преобразованиями плоскости Р,2
являются:
1) инволюционная гомология, приводимая к виду
'х° = х0, 'х'^ — х1, 'х* = —х\ (3.90)
2) полярное преобразование относительно мнимой кривой вто-
рого порядка, которое при приведении уравнения этой кривой
к виду
(х0)2 + (х1)2 + (х2)2 = 0 (3.91)
приводится к виду
zz0 = x°, их~х\ и2 = х2; (3.92)
3) полярное преобразование относительно вещественной кривой
второго порядка, которое при приведении уравнения этой кривой
к виду
— (х0)2 + (х1)2 + (х2)2 = 0
(3.93)
302
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
приводится к виду
= —х°, ^ — х1, я2 = х2. (3.94)
Поэтому образами симметрии плоскости Р2являются: 1)0-па-
ра, т. е. конфигурация точкапрямая, переходящая в себя
при инволюционной гомологии*, 2) совокупность 0-пар, автопо-
лярных относительно мнимой кривой второго порядка, пере-
ходящая в себя при полярном преобразовании относительно
этой кривой', 3) совокупность 0-пар, автополярных относительно
вещественной кривой второго порядка, переходящая в себя при
полярном преобразовании относительно этой кривой.
Инволюционными проективными преобразованиями простран-
ства являются:
1) инволюционная гомология, приводимая к виду
fx® = x®, 'х1 — — х1, 'х2 =— х\ fx3^= — х3; (3.95)
2) гиперболическая инволюция, приводимая к виду
zx° = х°, 'х1 = х1, 'х^ = — х2, 'х3 = — х3; (3.96)
3) эллиптическая инволюция, приводимая к виду
zx° = х2, гхх = х^, 'х2 =— х°, 'х^ = — х1; (3.97)
4) полярное преобразование относительно мнимой квадрики,
которое при приведении уравнения этой квадрики к виду
(х0)2 + (х1)2 + (х2)2 + (х3)2 = 0 (3.98)
приводится к виду
zz0 = х°, ^zzzx1, й2 = х2, zz3 = x3; (3.99)
5) полярное преобразование относительно овальной квадрики,
которое при приведении уравнения этой квадрики к виду
— (х0)2 + (х1)2 + (х2)2 + (х3)2 = 0 (3.100)
приводится к виду
zz0 =—х°, — х1, zz2 = x2, и3 = х3; (3.101)
6) полярное преобразование относительно линейчатой квадрики»
которое при приведении уравнения этой квадрики к виду
— (*0)2 — С*1)2 + (*2)2 + (*3)2 = 0 (3.102)
приводится к виду
zz0 — — х°, и± = — х1, zz2 == х2, zz3 = х3; (3.103)
7) нуль-система, приводимая к виду
«0 = х2, zz1 = x3, и2 = — х°, и3 = — х1. (3.104)
ОБРАЗЫ СИММЕТРИИ
303
§ 4]
Поэтому образами симметрии пространства Р3 являются:
1) 0-пара, т. е. конфигурация точкаЦ- плоскость, переходящая
в себя при инволюционной гомологии; 2) 1-пара, т. е. пара
скрещивающихся прямых, переходящая в себя при гиперболиче-
ской инволюции; вместо 1-пары можно рассматривать гиперболиче-
скую линейную конгруэнцию прямых, осями которой служат пря-
мые этой 1-пары; 3) эллиптическая линейная конгруэнция пря-
мых, осями которых служат две мнимо сопряжённые прямые,
переходящие в себя при эллиптической инволюции; 4) совокуп-
ность 0-пар, автополярных относительно мнимой квадрики,
переходящая в себя при полярном преобразовании относительно
этой квадрики; 5) совокупность 0-пар, автополярных относи-
тельно овальной квадрики, переходящая в себя при полярном
преобразовании относительно этой квадрики; 6) совокупность
0-пар, автополярных относительно линейчатой квадрики, пере-
ходящая в себя при полярном преобразовании относительно
этой квадрики; 7) линейный комплекс кривых — совокупность
нуль-прямых нуль-системы, т. е. прямых, переходящих в себя
при нуль-системе.
Рассмотрим числовые инварианты и геометрические коварианты
двух /n-пар пространства Рп при т п — т—1.
Матрица коллинеации, являющейся произведением двух
инволюционных коллинеаций пространства Рп, вместе с каждым
собственным числом а обладает собственным числом — той же
а
кратности. В самом деле, рассмотрим две произвольные инволю-
ционные коллинеации 5 и Т и их произведения ST и TS. Так как
S-"1 (ST) S = = TS, то если коллинеация ST в некотором
базисе представляется какой-нибудь матрицей, то коллинеация TS
в том же базисе представляется той же матрицей, что и коллинеа-
ция ST в базисе, полученном из первоначального базиса с помощью
коллинеации S. Но в силу инволюционности наших коллинеаций
коллинеация (TS) (ST) = Т(SS) Тявляется тождественным преобразо-
ванием, откуда следует, что TS = (S71)-1, т. е. S-1 (5Г) S = (ST)"1.
Но матрицы одной и той же коллинеации в разных базисах имеют
одни и те же собственные числа, а матрицы двух взаимно обрат-
ных коллинеаций имеют взаимно обратные собственные числа, откуда
следует наше утверждение.
Рассмотрим прямую пространства Рп, соединяющую неподвижные
точки р и q этой коллинеации. Они определяются собственными
векторами матрицы коллинеации ST, отвечающими собственным
числам а и —. Мы видели, что при коллинеации 5 собственное
число а переходит в собственное число —Поэтому коллинеация S
переводит точку р в точку q и обратно. Точно так же доказывается,
304 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
что и при коллинеации Т происходит то же самое. Поэтому наша
прямая как прямая, соединяющая две точки, переходящие друг в
друга при коллинеации S, пересекается с обеими плоскостями
/«-пары, определяющей коллинеацию S, а как прямая, соединяю-
щая две точки, переходящие друг в двуга при коллинеации Т,
пересекается с обеими плоскостями /«-пары, определяющей кол-
линеацию Т. Следовательно, эта прямая пересекается со всеми
четырьмя плоскостями двух данных /«-пар. Эга прямая называется
директрисой или трансверсалью двух /«-пар, а лежащие на ней
две неподвижные точки произведения коллинеаций — направляю-
щими точками двух /«-пар. Всякая прямая, пересекающаяся со
всеми четырьмя плоскостями двух /«-пар, является директрисой;
в самом деле, две точки этой прямой, одновременно гармонически
делящие обе пары точек пересечения этой прямой с плоскостями
данных /«-пар, являются неподвижными точками произведения
инволюционных коллинеаций, определяемых этими парами. Эта
прямая переходит в себя при каждой из этих коллинеаций и, сле-
довательно, при их произведении, причём при каждой из данных
коллинеаций на этой прямой происходит инволюция, неподвижными
точками которой являются точки пересечения данной прямой с пло-
скостями /«-пар, определяющих коллинеации. Поэтому в силу
доказанного выше собственные числа матрицы коллинеации, про-
исходящей на этой прямой при произведении данных коллинеаций,
взаимно обратны, но эти собственные числа являются собствен-
ными числами матрицы произведения коллинеаций, соответствую-
щими неподвижным точкам, находящимся на этой прямой, т. е.
эта прямая действительно является директрисой.
Директрисы двух /«-пар пространства Рп могут быть как веще-
ственными, так и попарно мнимо сопряжёнными; в первом случае
пара направляющих точек, находящихся на директрисе, также
может быть как вещественной, так и мнимо сопряжённой. В случае
вещественных направляющих точек собственные числа а, — ма-
трицы коллинеации на директрисе вещественны; в случае мнимо
сопряжённых направляющих точек вещественной директрисы
1
числа а, — комплексно сопряжены, т. е. они являются комплекс-
ными числами единичного модуля; в случае мнимой директрисы
числа а, ----комплексные числа общего вида, сопряжённые с ана-
логичными числами, соответствующими мнимо сопряжённой дирек-
трисе.
Найдём связь между собственными числами а, ~ матрицы произ-
ведения инволюционных коллинеаций, определяемых двумя /«-па-
рами, соответствующими некоторой директрисе этих /«-пар с двойным
§ 4] ОБРАЗЫ СИММЕТРИИ 305
отношением точек х, и и у, v пересечения этой директрисы с пер-
вой и второй плоскостями /n-пары. Для этого рассмотрим ту кол-
линеацию, которая происходит при нашей коллинеации на этой
директрисе, являющейся инвариантной прямой этой коллинеации.
Мы видели, что коллинеацией на прямой две пары точек, этой
прямой, не разделяющие друг друга, всегда можно перевести
в пары точек, координаты х = которых равны 1, —1 и а, —а.
Инволюции, неподвижными точками которых являются эти пары
точек, имеют соответственно вид
•у = Т и •У = Т’ (3.105)
а произведение этих инволюций имеет вид
у = а2х. (3.106)
Если написать коллинеацию (3.106) в проективных координатах
и потребовать, чтобы матрица этой коллинеации имела определи-
ла 0\
тель +1, мы найдём, что эта матрица имеет вид I 11.
\ а /
Поэтому числа а, ~ являются собственными числами этой ма-
трицы. Но, с другой стороны, мы видели, что тому же числу а
равно двойное отношение IF(0, сю; 1, а), а двойное отношение
U7(l, — 1; а, —а) выражается через это число по формуле (3.47).
Поэтому двойное отношение W(x, у; и, v) наших двух пар точек
. 1
директрисы связано с соответственными собственными числами а, —
матрицы произведения инволюционных коллинеаций соотношением
W. у; и, = (3.107)
Применяя формулы (3.41) и (3.42), мы получим также соотно-
шение
W(x, и-, у, = (3.108)
Совершенно так же показывается, что эти же формулы имеют
место и для пар точек, разделяющих друг друга (в этом слу-
чае направляющие точки мнимы), и в случае мнимой директрисы.
Условимся во всех случаях записывать собственные числа а, —
матрицы коллинеации на директрисе в виде eiu\ и будем
называть число а) инвариантом двух т-пар, соответствующим
данной директрисе. Инвариант w веществен в случае мнимо сопря-
жённых направляющих точек вещественной директрисы, чисто мним
20 Зак. 177. Б. А. Розенфельд
306
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
в случае вещественных направляющих точек и является комплекс-
ным числом общего вида в случае мнимой директрисы. Полагая
в формулах (3.107) и (3.108) а = е™>, мы можем переписать их
в виде
W(x, и\ у, v) = — ctg2|- (3.109)
и
W(x, у\ и, v) = cos'2 . (3.110)
При т^п — т — 1 (п— т—1)-мерные плоскости двух т-пар
пространства Рп пересекаются по плоскости не менее п— 2т—1
измерений, являющейся неподвижной плоскостью каждой из инво-
люционных коллинеаций, определяемых этими /n-парами, и, следо-
вательно, являющейся неподвижной плоскостью произведения этих
коллинеаций. Если /n-мерные плоскости двух /n-пар пересекаются
по некоторой плоскости, эта плоскость также является неподвижной
плоскостью каждой из инволюционных коллинеаций и, следова-
тельно, также является неподвижной плоскостью произведения этих
коллинеаций. Можно считать, что каждая точка первой из этих
неподвижных плоскостей произведения инволюционных коллинеаций
соответствует собственному числу 1, а каждая точка второй из
этих плоскостей соответствует собственному числу — 1. Поэтому
произведение инволюционных коллинеаций обладает не более чем
(п -J- 1) — (я — 2/п — 1) — 2/п + 2 линейно независимыми неподвиж-
ными точками, соответствующими собственным числам, отличным
от 1 и —1. Так как каждая пара из этих неподвижных точек,
соответствующих двум взаимно обратным собственным числам,
определяет директрису, две т-пары пространства Рп обладают
не более чем т-\-\ различными инвариантами w, отличными
от 0. В том случае, когда две /n-пары обладают т -j- 1 инвариан-
тами, директрисы этих /n-пар порождают (2/n-j- 1)-мерную пло-
скость, а точки пересечения директрис с /n-мерными плоскостями
/n-пар порождают эти /n-мерные плоскости. Поэтому в том случае,
когда /n-мерные плоскости /тг-пар пересекаются по ^-мерной пло-
скости, директрисы, пересекающиеся с /n-мерными плоскостями
/n-пар в точках, высекают из плоскостей /n-пар четвёрки точек,
две из которых совпадают, вследствие чего двойное отношение
IF(x, у\ и, v) этих точек равно 1 и инвариант w равен 0. Так
как в этом случае из т-}-\ директрис данных /n-пар, определяе-
мых линейно независимыми базисными точками, &-|-1 директрис
пересекаются с /n-мерными плоскостями /n-пар в точках их пере-
сечения, мы находим что две т-пары пространства Рп, т-мерные
плоскости которых пересекаются по k-мерной плоскости, обла-
дают не более чем т — k различными инвариантами ш, отлич-
ными от 0.
§ 4] ОБРАЗЫ СИММЕТРИИ 307
Мы видим, что числовые инварианты двух /n-пар простран-
ства Рп и их геометрические коварианты — директрисы и напра-
вляющие точки — определяются с помощью произведения инволю-
ционных коллинеаций, являющихся симметриями относительно этих
т-пар.
Рассмотрим числовые инварианты и геометрические коварианты
двух линейных комплексов пространства РпгУ Все собственные
числа матрицы коллинеации, являющейся произведением двух
нуль-систем пространства Рп, имеют чётную кратностью
в самом деле, коллинеация, являющаяся произведением двух нуль-
систем
Hi — 2 aijxi и Ui — 2 bijxi> (3.111)
имеет вид
(3-Н2)
3 Ь
где матрица (&*') связана с матрицей (Ь^) соотношением
^bikbkj = 4 (3.113)
к
Собственные числа матрицы коллинеации (3.112) являются кор-
нями характеристического уравнения
Det (2 bikakj — X8j) = 0, (3.114)
к
которое в силу (3.113) можно переписать в виде
Det(2^(afc,—^))= 0, (3.115)
или в силу теоремы об умножении определителей
Det (bij) Det (а^ — kb^) = 0. (3.116)
Поэтому уравнение (3.115) равносильно уравнению
Det(aiy —Х^у) = 0 (3.117)
в силу того, что определитель матрицы (ЬК') отличен от нуля.
Таким образом, собственные числа матрицы коллинеации яв-
ляются корнями уравнения (3.117), левая часть которого предста-
вляет собой определитель кососимметрической матрицы (а.^—^Ьу).
Будем обозначать через x\t ...<Л] алгебраическую сумму выра-
жений Xii„.ik при всех возможных перестановках индексов
ilt Z.2, ..., ik, делённую на k\, причём слагаемые этой суммы
берутся со знаком при чётных перестановках этих индексов и
*) См. Ю. И. Домшлак (Барда), А. М. Левинов (Шемаха) и
В. И. Семянистый [1].
20*
308 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
со знаком — при нечётных перестановках; получение выраже-
ния из выражения называют альтернированием
(от латинского слова alternus — попеременный). В частности,
Х[12] = Х21)’ (3.118)
х [123] = -gp (х123 + х231 -(- х312 х132 х321 х213) (3.119)
и т. д. Применяя это обозначение, мы можем сформулировать сле-
дующее известное свойство определителей кососимметрических
матриц1): определитель всякой кососимметрической матрицы 2п-го
порядка может быть представлен в виде
Det(av) = ((2n— 1)!! а,12а34 . . . a.2n_Vin} )2. (3.120)
В частности, ^14 0 ^12 <71 <з" О — «12* (3.121)
0 а13
^12 агз 0 — «•23 ^23 0 (ЭТ со <3 <3 = (^12^34 - «13«24 + «14«2з)2- (3.122)
а14 «-24 а34 0
Таким образом, определитель всякой кососимметрической ма-
трицы является квадратом целой рациональной функции от её коэф-
фициентов, вследствие чего все линейные множители левой части
уравнения (3.117) входят туда в чётных степенях, откуда и сле-
дует наше утверждение.
Условимся, так же как в случае zn-nap, записывать собственные
числа матрицы произведением двух нуль-систем в виде е^ и в том
случае, когда эта матрица нормирована условием равенства опре-
делителя zt 1, будем называть числа w инвариантами двух линей-
ных комплексов. Так как коллинеация пространства Рп имеет не
более zz —1 линейно независимых неподвижных точек, а эти точки
попарно соответствуют одним и тем же собственным числам, два ли-
нейных комплекса пространства Рп обладают не более чем
различными инвариантами. Так как определитель матрицы произ-
ведения нуль-систем равен ±1, а в силу того, что определитель
кососимметрической матрицы является квадратом многочлена, этот
определитель равен в точности +1 > инварианты двух линейных
комплексов связаны тем условием, что их сумма равна 0. Поэтому
9 См. Широков [2], стр. 270.
§ 4] ОБРАЗЫ СИММЕТРИИ 309
два линейных комплекса пространства Рп обладают не более
п — 1
чем —£— независимыми различными инвариантами и, в частности,
два линейных комплекса пространств Р8, Рб, Рч обладают соответ-
ственно не более чем 1, 2, 3 независимыми различными инвариантами.
Каждое собственное число матрицы коллинеации, левая часть
характеристического уравнения которой является квадратом много-
члена, определяет неподвижную прямую этой коллинеации. Непод-
вижные прямые, определяемые произведением двух нуль-систем,
являются геометрическими ковариантами двух линейных комплексов.
Будем называть эти прямые характеристическими прямыми двух
линейных комплексов.
Числовыми инвариантами и геометрическими ковариантами двух
квадрик пространства Рп являются соответственно собственные
числа матрицы произведения полярных преобразований относительно
этих квадрик и неподвижные точки этой коллинеации. Условимся
в этом случае записывать собственные числа матрицы произведения
двух полярных преобразований в виде еш и в том случае, когда
эта матрица нормирована условием равенства определителя ± 1;
будем называть числа w инвариантами двух квадрик. Так как
коллинеация пространства Рп имеет не более линейно непод-
вижных точек, две квадрики пространства Рп обладают не более
чем п-1- 1 различными инвариантами. Если две квадрики одного
индекса обладают общим автополярным симплексом, то, считая
вершины этого симплекса за базисные точки, мы приведём урав-
нения наших двух квадрик к виду
5е<(х72 = 0 и Ss/W)2 = 0- (3.123)
i i
Так как полярные преобразования относительно этих двух
квадрик имеют соответственно вид
ui = грсг и иг = (3.124)
произведение этих полярных преобразований имеет вид
'х* = еш*х*. (3.125)
Отсюда следует, что случай, когда две квадрики обладают
общим автополярным симплексом, соответствует тому случаю, когда
матрица произведения полярных преобразований относительно
квадрик приводится к диагональному виду, и что в этом случае
инварианты двух квадрик совпадают с числами <о^, определяемыми
уравнениями (3.123) этих квадрик. Ввиду того, что произвольная
коллинеация может быть получена из коллинеации, матрица которой
приводима к диагональному виду, предельным переходом, произ-
вольная пара квадрик одного индекса может быть получена
310 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
предельным переходом из пары квадрик одного индекса с общим авто-
полярным симплексом. Поэтому, так как все собственные числа и,
следовательно, определитель матрицы коллинеации (3.125.), являю-
щейся произведением полярных преобразований относительно двух
квадрик одного индекса с общим автополярным симплексом, поло-
жительны, этим же свойством обладает и определитель матрицы
произведения полярных преобразований относительно двух произ-
вольных квадрик одного индекса. Поэтому, так как определитель
матрицы произведения двух полярных преобразований равен z±z 1,
этот определитель для произведения полярных преобразований
относительно двух квадрик равного индекса равен + 1 и инва-
рианты двух квадрик одного индекса связаны тем условием,
что их сумма равна 0.
Образы симметрии пространства Рп(1) мы рассмотрим в § 3
главы VI.
Геометрическими ковариантами двух пар точек прямой Р±
являются их направляющие точки. Две пары точек прямой Р±
обладают одним числовым инвариантом, определяемым двойным
отношением этих пар точек.
Геометрическими ковариантами двух Q-пар плоскости Р2 яв-
ляются прямая, определяемая точками этих 0-пар, и точка пересече-
ния прямых этих 0-пар. Две 0-пары плоскости Р2 обладают одним
числовым инвариантом, определяемым двойным отношением
этих 0-пар.
Геометрическими ковариантами двух кривых второго порядка
плоскости Р2 являются неподвижные точки произведения соответ-
ственных полярных преобразований, причём в том случае, когда
матрица этой коллинеации приводится к диагональному виду, эти
неподвижные точки являются вершинами общего автополяр-
ного треугольника этих кривых. В этом случае две кривые
одного индекса определяют три инварианта o>,z, сумма которых
равна нулю.
Геометрическими ковариантами двух Q-пар пространства Р.3
являются прямая, определяемая точками этих 0-пар, и прямая
пересечения плоскостей этих 0-пар. Две 0-пары пространства Р3
обладают одним числовым инвариантом, определяемым двойным
отношением этих 0-пар.
Геометрическими ковариантами двух пар прямых пространства
Р3 являются их директрисы, которые в общем случае являются
двумя вещественными или мнимо сопряжёнными прямыми. Этот
факт следует также из того, что через три скрещивающиеся прямые
пространства Р.3 проходит единственная линейчатая квадрика, на ко-
торой эти прямые являются прямолинейными образующими одного
семейства; четвёртая прямая в общем случае пересекает эту квад-
рику в двух вещественных или мнимо сопряжённых точках. Дирек-
трисами являются две вещественные или мнимо сопряжённые
ОБРАЗЫ СИММЕТРИИ
311
§ 4]
прямолинейные образующие второго семейства этой квадрики,
проходящие через точки пересечения четвёртой прямой с квадри-
кой. Случаю, когда четвёртая прямая касается квадрики, соответ-
ствует случай совпадения директрис. В том случае, когда четвёртая
прямая целиком лежит на квадрике, являясь её прямолинейной
образующей того же семейства, роль директрис играют все прямо-
линейные образующие второго семейства этой квадрики. В этом
случае будем называть четыре прямые конквадричными. Две пары
скрещивающихся прямых пространства Р3 обладают двумя число-
выми инвариантами w0 и определяемыми двойными отно-
шениями точек пересечения этих прямых с их директрисами.
В случае совпадения директрис и в случае конквадричности прямых
две пары прямых определяют один числовой инвариант, в послед-
нем случае потому, что двойные отношения данных прямых со всеми
прямолинейными образующими второго семейства совпадают.
Геометрическими ковариантами двух эллиптических линейных
конгруэнций прямых пространства Р3 являются две общие прямые
этих конгруэнций, играющие роль директрис для мнимо сопряжён-
ных осей этих конгруэнций. Две эллиптические линейные кон-
груэнции прямых пространства Р3 обладают двумя числовыми
инвариантами, определяемыми двойными отношениями точек пере-
сечения мнимо сопряжённых осей конгруэнции с общими прямыми
конгруэнций.
Геометрическими ковариантами двух линейных комплексов
пространства Р3 являются характеристические прямые, причём
в том случае, когда матрица произведения их нуль-систем приво-
дится к диагональному виду, два линейных комплекса определяют
две характеристические прямые, вещественные или мнимо сопря-
жённые. При этом при каждой из нуль-систем, определяемых
этими комплексами, каждая точка каждой из характеристических
прямых переходит в плоскость, порождаемую этой точкой и другой
характеристической прямой: в силу общих свойств корреляции
нуль-система переводит каждую прямую в некоторую прямую,
являющуюся линией пересечения плоскостей, соответствующих
точкам данной прямой. В силу неподвижности характеристической
прямой при произведении нуль-систем характеристическая прямая
при обеих нуль-системах переходит в одну и ту же прямую;
но каждая точка этой прямой при обеих нуль-системах переходит
в плоскость, проходящую через эту точку и характеристическую
прямую, поэтому при произведении нуль-систем каждая точка этой
прямой неподвижна и эта прямая необходимо совпадает со второй
характеристической прямой. Поэтому каждая прямая, пересекаю-
щаяся с обеими характеристическими прямыми, переходит в себя
при обеих нуль-системах, т. е. является общей прямой линейных
комплексов. Обратно, всякая общая прямая линейных комплексов
инвариантна при произведении нуль-систем, вследствие чего на ней
312 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
имеются две неподвижные точки. Она не может совпасть с харак-
теристической прямой, так как эта прямая неинвариантна при каж-
дой из нуль-систем; поэтому она пересекается с обеими харак-
теристическими прямыми. Мы пришли к выводу, что два линейных
комплекса пространства Р% в том случае, когда матрица произ-
ведения их нуль-систем приводится к диагональному виду,
пересекаются по гиперболической или эллиптической линейной
конгруэнции, осями которой являются характеристические
прямые линейных комплексов. В этом случае два линейных
комплекса обладают единственным числовым инвариантом*.
собственные числа матрицы произведения нуль-систем имеют
вид е™>, eiM, e~ici, e~iui, и инвариантом линейных комплексов
является вещественное или чисто мнимое число <о. Кроме двух
указанных случаев возможен предельный случай, когда характери-
стические прямые двух линейных комплексов сливаются; конгруэнция
прямых, по которой пересекаются линейные комплексы, в этом случае
является параболической линейной конгруэнцией, а единственная
характеристическая прямая двух линейных комплексов является осью
этой конгруэнции; инвариант ш двух комплексов в этом случае
равен 0.
Геометрическими ковариантами двух квадрик, пространства
являются неподвижные точки произведения соответственных поляр-
ных преобразований, причём в том случае, когда матрица этой
коллинеации приводится к диагональному виду, эти неподвижные
точки являются вершинами общего автополярного тетраэдра
этих квадрик. В этом случае две квадрики одного индекса
определяют четыре инварианта сумма которых равна нулю.
§ 5. Конфигурационные теоремы
Существенную роль в геометрии аффинного и проективного
пространства играют так называемые конфигурационные теоремы.
соответственные вершины двух
Одной из важнейших конфи-
гурационных теорем является
теорема Паппа: у шести-
угольника ABCDEF, вписан-
ного в пару пересекающихся
прямых, точки пересечения
Р, Q, R противоположных
сторон лежат на одной пря-
мой (черт. 61). Другой важ-
ной конфигурационной теоремой
является теорема Дезарга:
если прямые, соединяющие
треугольников АВС и А'В'С',
лежащих в одной двумерной плоскости, пересекаются в одной
§ 5]
КОНФИГУРАЦИОННЫЕ ТЕОРЕМЫ
313
точке О, то точка пересечения Р, Q, R соответственных сто-
рон треугольников лежат на одной прямой (черт. 62).
Заметим, что треугольники АВС и А'В'С' теоремы Дезарга
переводятся друг в друга гомологией с центром О и осью PQR>
вследствие чего эту теорему
называют также теоремой
о гомологических тре-
угольниках.
Для доказательства этих
теорем достаточно доказать
частные случаи этих теорем,
а именно, когда прямая PQR
является бесконечно удалён-
ной прямой плоскости А.2
при её дополнении до плос-
кости Р2, В этом случае
мы получаем аффинную
теорему Паппа: если
у шестиугольника, вписан-
ного в пару пересекающихся
прямых, две пары противо-
положных сторон парал-
лельны, третья пара про-
тивоположных сторон также параллельна (черт. 63), и а ф ф и н»
ную теорему Дезарга: если прямые, соединяющие соот-
ветственные вершины двух треугольников, лежащих в одной
двумерной плоскости, пересекаются в одной точке и две пары
соответственных сторон параллельны, третья пара соответ-
ственных сторон также параллельна (черт. 64).
Для доказательства аффинной теоремы Паппа примем точку
пересечения данных прямых за начало, радиусы-векторы вершин
шестиугольника, лежащих на одной из этих прямых, мы можем
обозначить через х, ах, Ьх. Тогда вершины шестиугольника,
лежащие на другой из этих прямых, мы можем обозначить через
ay, by, су. Стороны, соединяющие вершины ах, ау и Ьх,
314
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. II
by, направленные по коллинеарным векторам ау — ах и by — bx,
параллельны. В силу параллельности сторон, соединяющих вер-
шины х, ау и Ьх, су, векторы ау — х и су — Ьх должны быть
коллинеарны, откуда c = ab. Поэтому векторы, направленные
по оставшимся сторонам, имеют
----------j,--4—----------вид by — хи aby — ах\ эти век-
/1 // ^^^^7 ТОРЫ также коллинеарны, откуда
следует параллельность этих сто-
\ 7 Р°н’
7 Для Д°казательства аффинной
tlF 7 теоремы Дезарга примем точку
\ / пересечения прямых, соединяю-
\ W / щих соответственные вершины,
за начало. Радиусы-векторы вер-
д шин первого треугольника обо-
Черт. 65. значим через х, у, z, а радиусы
вершин второго треугольника
обозначим через ах, by, cz. В силу параллельности сторон, со-
единяющих вершины х, у и ах, by, векторы у — х и by — ах
должны быть коллинеарны, откуда а = Ь. В силу параллельности
сторон, соединяющих вершины х, z и ах, cz, векторы z — х и
cz— ах должны быть коллинеарны, откуда а = с. Поэтому век-
торы, направленные по третьим сторонам, имеют вид z—у и
az — ау\ эти векторы также коллинеарны, откуда следует парал-
лельность этих сторон.
Для доказательства общих случаев теорем Паппа и Дезарга
достаточно применить к соответственным конфигурациям коллинеа-
ции, переводящие прямую PQR этих конфигураций в бесконечно
удалённую прямую плоскости А2 при
её дополнении до плоскости тогда
выполнение теорем Паппа и Дезарга
для данных конфигураций непосред-
ственно следует из выполнения соответ-
ственных аффинных теорем.
Следует отметить частный случай
теоремы Дезарга, когда точка О лежит
на прямой PQR (черт. 65), называемый
малой теоремой Дезарга. В том
случае, когда прямая OPQR является
бесконечно удалённой прямой, эта теорема называется аффин-
ной малой теоремой Дезарга (черт. 66); в этом случае
треугольники АВС и А'В'С' получены один из другого с помощью
переноса.
Малой теореме Дезарга эквивалентна теорема о полном
четырёхстороннике (черт. 67), которая показывает, что
построение четвёртой гармонической точки для трёх точек на прямой
§ 5]
КОНФИГУРАЦИОННЫЕ ТЕОРЕМЫ
315
лежат и
в плоскости треуголь-
не зависит от того полного четырёхсторонника, с помощью кото-
рого производилось это построение.
Заметим, что, как показал Гессенберг1), теорема Дезарга является
следствием теоремы Паппа.
Покажем, что в пространстве Рп при п^>3 теорема Дезарга
является следствием формулы (3.15). Прежде всего покажем,
что в пространстве имеет место так называемая простран-
ственная теорема Дезарга, отличающаяся от сформули-
рованной нами плоской теоремы Дезарга тем, что треугольники АВС
и А'В'С' лежат в разных пло-
скостях. В самом деле, так как
прямые АА' и ВВ' пересе-
каются в точке О, эти прямые
в силу формулы (3.15) лежат
в одной плоскости и, следова-
тельно, прямые АВ и А'В'
также лежат в одной плоскости
и в силу формулы (3.15) пере-
секаются в некоторой точке /?;
точно так же показывается,
что прямые ВС и В'С' пере-
секаются в некоторой точке Q,
а прямые СА и С' А' пересе-
каются в некоторой точке Р.
Но точки Р, Q, R одновременно
ника АВС, и в плоскости треугольника А'В'С', поэтому они лежат
в пересечении этих плоскостей, которое в силу формулы (3.15)
является прямой. В пространстве Рп при п > 3 также имеет место
пространственная теорема Дезарга, так как точки А'В'С' лежат
в трёхмерной плоскости, порождаемой точками О, А, В, С.
Если теперь треугольники АВС и А'В'С' расположены в одной
двумерной плоскости и прямые ЛА', ВВ', СС' пересекаются в точке О,
то возьмём точку О', не лежащую на плоскости этих треуголь-
ников, и выберем точку О" на прямой ОО' (черт. 68). Соединим
точки А, В, С прямыми с точкой О". Тогда прямая О"А лежит
в одной плоскости с прямой О'А' и, следовательно, в силу фор-
мулы (3.15) они пересекаются в некоторой точке А". Точно так же
прямые О"В и О'В' пересекаются в точке В", а прямые О"С и
О'С' пересекаются в точке С'. Треугольники АВС и А" В" С'
удовлетворяют условию пространственной теоремы Дезарга, вслед-
ствие чего прямые АВ и А"В", ВС и В"С", СА и С"А"
пересекаются в точках /?, Р, Q, лежащих на одной прямой.
Но, проектируя полученную конфигурацию из точки О' на плос-
кость треугольника АВС, мы спроектируем точки А", В", С'
х) См. Гильберт [1], стр. 176.
316
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
в точки А',В',С', а каждую из точек А, В, С, Р, Q, Р— в
себя, откуда видно, что прямые АВ и А'В', ВС и В'С', СА
и С'А' пересекаются в тех же точках /?, Р, Q.
Конфигурационные теоремы позволяют сформулировать весьма
простую систему аксиом пространств Рп и Рп (I), предложенную
Андреем Николаевичем Колмогоровым [1]. Согласно Колмогорову
Черт. 68.
пространства Рп и Рп (I) определяются как множества элементов п
родов — т-мерных плоскостей, где zn = 0, 1, ..., п—1, при
/п = 0 — точек, при т = 1—прямых, при т = п—1—гипер-
плоскостей, между которыми имеются соотношения взаимной
принадлежности, причём:
1°. Множество всех т-мерных плоскостей при любом
т = 0, 1, . . ., п— 1 является компактным связным топологи-
ческим пространством со счётной системой окрестностей (можно
не требовать счётности системы окрестностей, но в этом случае
следует заменить требование компактности более сильным требо-
ванием бикомпактности).
2°. Две плоскости I и т измерений определяют единствен-
ную плоскость минимальной размерности d, принадлежащую
§ 5] КОНФИГУРАЦИОННЫЕ ТЕОРЕМЫ 317
обеим этим плоскостям (эта плоскость называется пересечением
этих плоскостей; плоскости могут не иметь ни одной плоскости,
принадлежащей им обеим; в этом случае следует считать d = — 1),
и единственную плоскость максимальной размерности s, при-
надлежащую обеим этим плоскостям (эта плоскость назы-
вается плоскостью, порождённой этими плоскостями; плоскости
могут порождать всё пространство; в этом случае следует считать
s = п), причём размерности I, т, d, s связаны соотношением
(3.15). Определяемые таким образом отображения множеств
пар плоскостей на их пересечения и плоскости, порождён-
ные ими, являются непрерывными отображениями.
3°. В пространстве выполняется теорема Паппа («аксиома
Паппа»).
Как показал Колмогоров, множество элементов, удовлетворяю-
щих этим аксиомам, может быть только пространством Рп или
пространством Рп (0. Поэтому для выделения пространства Рп (0
следует добавить к аксиомам 1°—3° аксиому полноты.
Заметим, что требование выполнения соотношения (3.15) может
быть заменено рядом более слабых аксиом. Для случая п = 2 эти
аксиомы имеют вид:
1) две различные точки определяют единственную принад-
лежащую им прямую (т. е. из Z= т = 0 и d =—1 сле-
дует s = 1),
2) две различные прямые определяют единственную принад-
лежащую им точку (т. е. из Z — т — 1 и s = 2 следует d — 0),
3) существуют прямая и точка, не принадлежащие друг
другу (т. е. случай, когда l—\, т = 0, s = 2, d =— 1).
Для случая п = 3 эти аксиомы имеют вид:
1) две различные точки определяют единственную принад-
лежащую им прямую (т. е. из 1=т = 0 и d =—1 сле-
дует s — 1),
2) две различные плоскости определяют единственную принад-
лежащую им прямую (т. е. из I = т = 2 и s = 3 следует d = 1),
3) точка и не принадлежащая ей прямая определяют един-
ственную принадлежащую им плоскость (т. е. из I— 0, т = 1,
d= — 1 следует у = 2),
4) плоскость и не принадлежащая ей прямая определяют
единственную принадлежащую им точку (т. е. из Z = 2, т — 1,
s — 3 следует d = 0),
5) существуют плоскость и точка, не принадлежащие друг
другу (т. е. случай, когда 1 = 2, т = 0, s = 3, d =—-1).
Во второй аксиоме для случая п = 2 и четвёртой аксиоме
для случая п = Ъ требование единственности точки, принадлежа-
щей двум прямым или плоскости и прямой, может быть опущено,
так как эта единственность легко доказывается с помощью других
аксиом.
318 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
В пространствах Рп и Рп(Г) при п>3 теорема Дезарга
выполняется в силу аксиомы 2°, а при п = 2, где теорема Дезарга
не является следствием аксиомы 2°, эта теорема, как следует
из упомянутой нами теоремы Гессенберга, выполняется в силу
аксиомы 3°.
Существуют множества элементов, удовлетворяющих аксиомам
1° и 2°, но не удовлетворяющих аксиоме 3°. Примером таких
множеств являются так называемые кватернионные проективные
пространства Рп (I, у), которые мы будем подробно рассматривать
в § 3 главы VI. Как показал Колмогоров, при п^>3 эти простран-
ства являются единственными множествами элементов, удовлетво-
ряющих аксиомам 1° и 2°, но не удовлетворяющих аксиоме 3°.
При п — Ъ, когда теорема Дезарга не является следствием
аксиомы 2°, существуют и другие множества элементов, удовле-
творяющих аксиомам 1° и 2°, но не удовлетворяющих аксиоме 3°,
в этих множествах не выполняется теорема Дезарга. Примером
таких множеств является так называемая октавная проективная
плоскость Р2 (I, j, I), которую мы будем рассматривать в § 9
главы VI. Для исключения этих случаев следует потребовать,
чтобы в пространстве выполнялась теорема Дезарга («аксиома
Дезарга»).
Как показал П. К. Рашевский [2], роль конфигураций Паппа
и Дезарга на проективных плоскостях при указанных условиях
неслучайна и всякая попытка потребовать выполнения какой-нибудь
другой «конфигурационной аксиомы» автоматически приводит к гео-
метрии с аксиомой Паппа или Дезарга.
Пространства Рп, Рп (t), Рп (f, /) и Р2 (i, J, Г) являются част-
ными случаями более общих «проективных пространств», под кото-
рыми имеют в виду множество элементов п родов — т-мерных
плоскостей, такое, что две плоскости I и т измерений опреде-
ляют единственное d-мерное пересечение и единственную ^-мерную
плоскость, порождённую ими, причём размерности Z, т, d, s
связаны соотношением (3.15). Такие «проективные пространства»
могут не обладать непрерывностью и даже могут состоять из конеч-
ного числа элементов1).
§ 6. Неевклидовы пространства как метризованные
проективные пространства (интерпретации Кели — Клейна)
Так как связки прямых в аффинном пространстве Лп+1 обра-
зуют интерпретации проективного пространства Рп, то интер-
претации неевклидова пространства Sn и расширенных неевкли-
довых пространств lSn в связках прямых пространств Rn+1
9 Более подробно о проективных плоскостях с различными конфигу-
рационными аксиомами см. работы П. К. Рашевского [3],
Л. А. Скорнякова [1] и Б. И. Аргунова (Смоленск) [1].
§ 6] ИНТЕРПРЕТАЦИИ КЕЛИ--КЛЕЙНА 319
и приводят нас к новым интерпретациям неевклидовых
пространств, в которых точки пространства Sn и расширен-
ных пространств lSn представляются точками проективного
пространства Рп.
Так как при интерпретациях как неевклидовых, так и проектив-
ных пространств в связках прямых m-мерные плоскости этих
пространств изображаются (т~\~1)-мерными плоскими пучками
прямых, при интерпретациях пространств Sn и расширенных
пространств lSn в пространстве Рп т-мерные плоскости,
при т= 1—прямые неевклидовых пространств изображаются
т-мерными плоскостями, при т=\—прямыми проективного
пространства.
Как было отмечено выше, уравнение изотропного конуса
(х, х) = 0 (3.126)
является в проективном пространстве уравнением квадрики, поэтому
при интерпретации пространства Sn и расширенных про-
странств lSn в пространстве Рп абсолют неевклидова простран-
ства изображается квадрикой в проективном пространстве.
В виду того, что точки и m-мерные плоскости неевклидовых
пространств изображаются точками и m-мерными плоскостями
проективного пространства, часто отождествляют квадрику в про-
ективном пространстве, изображающую абсолют неевклидова про-
странства, с этим абсолютом.
Таким образом, пространство Sn и расширенные простран-
ства lSn можно рассматривать как метризованное проективное
пространство Рп.
Абсолют пространства Римана Sn является мнимой квадри-
кой. Абсолюты пространств lSn делят пространство Рп на две
области, одна из которых изображает собственную область про-
странства lSn, а другая — идеальную область этого пространства.
Абсолют пространства Лобачевского *Sn представляет собой
вещественную овальную квадрику. Всякий симплекс, автополярный
относительно этой квадрики, имеет одну вершину в одной из этих
областей и п вершин в другой из этих областей; первая из этих
областей называется внутренней областью овальной квадрики,
вторая — внешней областью этой квадрики. Так как евклидовы
прямые индексов 0 и 1, принадлежащие к связке пространства 1/?п+1,
отделяются друг от друга изотропным конусом, то они изобра-
жаются в пространстве Рп точками внутренней и внешней областей
абсолюта; так как вершины автополярного симплекса изображаются
линиями векторов ортогонального базиса, а во всяком таком базисе
пространства 1/?п+1 один вектор имеет чисто мнимую точку,
а п — вещественную длину, точки внутренней области абсолюта
соответствуют прямым индекса 1 связки пространства 1/?я+1, а точки
внешней области абсолюта соответствуют прямым индекса 0 этой
320
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
связки. Поэтому собственная область пространства 1Sn отри-
цательной кривизны изображается в пространстве Рп внутрен-
ней областью абсолюта, а идеальная область пространства rSn
изображается в пространстве Рп внешней областью абсолюта.
Наоборот, собственная и идеальная области пространства xSn
положительной кривизны изображаются в пространстве Рп
соответственно внешней и внутренней областями абсолюта.
Так как движения пространств Sn и lSn при их интерпретации
в связках прямых пространств Rn+1 и г7?п+1 изображаются враще-
ниями этих пространств или в случае вращениями и анти-
вращениями пространства Z/?2Z, т. е. центроаффинными преобразо-
ваниями, сохраняющими скалярное произведение или умножающими
его на — 1 и, следовательно, в обоих случаях переводящими
в себя изотропный конус, а при интерпретации пространства Рп
в связке прямых пространства Ап+1 центроаффинные преобразо-
вания пространства Ап+1 изображают коллинеации пространства Рп,
мы получаем, что движения пространств Sn и lSn при их интер-
претации в пространстве Рп изображаются коллинеациями,
переводящими в себя абсолют неевклидова пространства.
Отметим, что две полярно сопряжённые точки х и у неевкли-
дова пространства связаны условием
(х, -у) = 0, (3.127)
совпадающим с условием того, что каждая из этих точек лежит
на гиперплоскости, полярной другой точке относительно квад-
рики (3.126). Отсюда следует, что полюсы и полярные гипер-
плоскости и взаимно полярные плоскости пространства Sn и
расширенных пространств lSn изображаются в пространстве Рп
полюсами и полярными гиперплоскостями и взаимно поляр-
ными плоскостями относительно абсолюта.
Но всякая коллинеация, переводящая в себя квадрику, пере-
становочна с полярным преобразованием относительно этой квадрики
и обратно: если коллинеация переводит в себя квадрику, она
переводит точки и гиперплоскости, полярные относительно этой
гиперплоскости, в точки и гиперплоскости, также полярные отно-
сительно этой квадрики, т. е. если точка х полярна гиперпло-
скости и и коллинеация переводит точку х в точку гх, а гипер-
плоскость и — в гиперплоскость ги, точка гх полярна гиперплоско-
сти 'и. Если мы выполним сначала коллинеацию, а затем поляр-
ное преобразование, точка х перейдёт сначала в точку 'х, а затем
в гиперплоскость 'и, а если мы выполним сначала полярное
преобразование, а затем коллинеацию, точка х перейдёт сначала
в гиперплоскость и, а затем в гиперплоскость 'и. Обратно, если
коллинеация перестановочна с полярным преобразованием, то гипер-
плоскость 'и, полученная коллинеацией из гиперплоскости и,
полярной точке х, совпадает с гиперплоскостью, полярной точке 'х,
§ 6] ИНТЕРПРЕТАЦИИ КЕЛИ— КЛЕЙНА 321
полученной коллинеацией из точки х, и если точка х — произвольная
точка квадрики, гиперплоскость и является касательной гиперплос-
костью к квадрике в точке х, т. е. проходит через точку х, и
точка 'х, полученная коллинеацией из точки х, также лежит
в гиперплоскости 'и, полученной коллинеацией из гиперплоскости и.
Таким образом, точка 'х также лежит на квадрике и наша кол-
линеация переводит квадрику в себя. Поэтому при интерпретации
пространств Sn и lSn в пространстве Рп движения про-
странств Sn и lSn можно также определить как коллинеации
проективного пространства Рп, перестановочные с полярным
преобразованием относительно абсолюта.
Интерпретации пространства Sn и расширенных пространств lSn
в пространстве Рп могут быть получены пересечением связок пря-
мых пространств /?п+1 и lRn+1, изображающих эти пространства,
с любой гиперплоскостью, не проходящей через центр связки и
дополненной бесконечно удалённой (п—1)-мерной плоскостью
до пространств Рп. В качестве этих гиперплоскостей особенно
удобно рассматривать гиперплоскости, касательные к гиперсферам,
при отождествлении диаметрально противоположных точек которых
получаются собственные области рассматриваемых неевклидовых
пространств. Так как касательная гиперплоскость к гиперсфере
вещественного радиуса в пространстве lRn+r является простран-
ством lRn, а касательная гиперплоскость к гиперсфере чисто мни-
мого радиуса в пространстве lRn+1 является пространством z“1Z?n,
пространства Рп, в которых интерпретируются пространства Sn и
lSn> можно рассматривать как соответственно пространства Rn и
lRn или дополненные бесконечно удалёнными гиперпло-
скостями. При этих интерпретациях абсолют пространств Sn и lSn
изображается пересечением гиперплоскости, касательной к гипер-
сфере, с изотропным конусом, являющимся асимптотическим кону-
сом этой гиперсферы. Это пересечение является (п—1)-мерной
сферой, радиус которой является катетом прямоугольного треуголь-
ника с вершинами в центре гиперсферы, центре (п—1)-мерной
сферы, являющемся основанием перпендикуляра, опущенного из
центра гиперсферы на гиперплоскость (п—1)-мерной сферы, и
произвольной точкой (п—1)-мерной сферы; гипотенуза этого тре-
угольника лежит на изотропной прямой и поэтому равна нулю, а
второй катет равен радиусу гиперсферы. Поэтому в силу теоремы
Пифагора, если радиус гиперсферы равен г, радиус (п—1)-мер-
ной сферы равен ir, и наоборот. При этом собственная область
пространства lSn изображается той из областей, на которые
(я-—1)-мерная гиперсфера делит пространство lRn или l~‘1Rni
в котором находится центр этой гиперсферы. Таким образом,
при интерпретации пространства lSn с вещественным радиусом
кривизны г мы получим интерпретацию этого пространства в про-
странстве lRn, причём абсолют пространства lSn изображается
21 Зак. 177. Б. А. Розенфельд
322
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. II
в пространстве lRn гиперсферой чисто мнимого радиуса ri\ при
интерпретации пространства lSn с чисто мнимым радиусом кри-
визны qi мы получим интерпретацию этого пространства в про-
странстве причём абсолют пространства lSn изображается
в пространстве l~‘1Rn гиперсферой вещественного радиуса q.
При интерпретации пространства Римана Sn с радиусом кривизны г
и пространства Лобачевского 1Sn с радиусом кривизны qi мы полу-
чим интерпретации этих пространств в евклидовом пространстве Rn
причём абсолют пространства Sn изображается мнимой гиперсфе-
рой радиуса л, а абсолют пространства 1Sn изображается веще-
ственной гиперсферой радиуса q.
На черт. 69 изображено получение интерпретаций плоско-
стей S2 и х52 с радиусами кривизны г и qi на плоскости /?2 (абсо-
лют плоскости S2 изображается мнимой окружностью радиуса ri>
а абсолют плоскости 1S2 изображается вещественной окружностью
радиуса q).
Полученная таким образом интерпретация плоскости Лобачев-
ского в круге была исторически первой интерпретацией этой
неевклидовой плоскости на евклидовой плоскости. Эта интер-
претация была предложена Бельтрами [1], который, однако,
не понимал проективной природы этой интерпретации. Общая
теория метрики на проективной плоскости была развита Кели [2];
им же была предложена интерпретация плоскости Римана на
проективной плоскости. Однако Кели, понимая проективную при-
роду определяемой таким образом метрики, не видел, что опре-
делённая им метрическая геометрия включает геометрию Лоба-
§ 6]
ИНТЕРПРЕТАЦИИ КЕЛИ---КЛЕЙНА
323
невского. Этот последний факт был обнаружен Клейном [1, 2}.
Поэтому изложенные интерпретации неевклидовых пространств
в проективном пространстве называют интерпретациями Кели —
Клейна.
Заметим, что в центре гиперсферы евклидова пространства,
являющейся точкой касания гиперсферы и гиперплоскости, углы
между прямыми неевклидова пространства равны углам между
изображающими их прямыми евклидова пространства.
Расстояние между двумя точками неевклидова пространства Sn
или lSn с радиусом кривизны г, изображаемыми двумя точками
проективного пространства Рп, соответствующими векторам х и у
аффинного пространства Лп+1, выражается через эти векторы
по знакомой нам формуле
где (х, у)— билинейная форма, соответствующая квадратичной
форме (х, х), являющейся левой частью уравнения (3.126) абсо-
люта, а | х] и 1^1 — абсолютные значения квадратных корней
из квадратичных форм (х, х) и (у, у). В самом деле, векторы х
и у пространства Дп+1 можно рассматривать как направляющие
векторы двух прямых связки в пространстве Rn+1 или lRn+1,
представляющих данные точки неевклидова пространства, а урав-
нение (3.126) является в то же время уравнением изотропного конуса
в пространстве Rn+1 или lRn+v
Формулу (3.128) можно преобразовать так, чтобы получить
чисто проективное определение расстояния между двумя точками
проективного пространства при интерпретации в нём пространства Sn
или lSn. Для этого возведём обе части формулы (3.128) в квад-
рат и запишем полученное равенство в виде
гпсЗ “ — У> <У> х) Г (х, х) (у, у) • Заметим, что скалярное произведение (3.129;
(х, у) — 2 2 a^xtyJ г j (3.130)
можно представить в виде (х, у) = 2 ViX*, i где = 2 ai} yj 3 (3.131) (3.132)
— тангенциальные координаты гиперплоскости, полярной точке у
Поэтому если мы обозначим тангенциальные координаты
21*
324
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
гиперплоскости, полярной точке х, через uit мы можем переписать
равенство (3.129) в виде
2 2 Vi^
__ i . i_______
r ~ 5 ' S Vixt '
i i
(3.133)
Но правая часть этого выражения является двойным отношением
W(x, у; и, v) двух точек х, у и двух гиперплоскостей zz, v,
соответственно полярных этих точкам, т. е. мы можем перепи-
сать (3.133) в виде
cos2 у = W(х, у\ и, v). (3.134)
Двойное отношение !F(x, у\ и, v) равно двойному отношению
cos2y=lT(x, у, и', v') (3.135)
четырёх точек х, у, и/ и vr, где и' и vf являются точками
пересечения гиперплоскостей zz, v с прямой, определяемой точ-
ками х, у.
Сравнивая эту формулу с формулой (3.110), мы находим, что
эта формула эквивалентна формуле
— ctg3y = ir(x, и'", у, v'). (3.136)
В силу определения точек и', v' пары точек х, и' и у, v'
одновременно гармонически делятся парой точек /, k пересечения
прямой, определяемой точками х, у, с абсолютом. Поэтому в силу
(3.46) двойное отношение W(j, k\ х, у) равно
± i ctg ±Z ctg gj _ io) -+1 r 1 GJ 1 r
W(J, k-. х, ,+ УП^:>.У1±1 у W(x, и'; — l GJ (О
ctg — zp z cos — qz z sin ~r e+ r + — = e~ (3.138)
co . . w . ctg — ±. i cos—zh i sin & r r откуда окончательно a>= l^-ln F(/, i w r e r k; jO •
Таким образом, расстояние между двумя точками простран-
ства Sn и lSn с радиусом кривизны г, изображаемыми точками
х и у пространства Рп, равно логарифму двойного отношения
этих точек и точек пересечения прямой, определяемой этими
§ 7] ДВИЖЕНИЯ И ОБРАЗЫ СИММЕТРИИ 325
точками, с абсолютом, умноженному на постоянную вели-
, г .
чину —
В частности, при о ~ г имеем In W = гЛ, т. е. W — 1.
Таким образом, полярно сопряжённые точки гармонически раз-
деляют точки пересечения определяемой ими прямой с абсо-
лютом.
В том случае, когда прямая, определяемая точками х, у,—
эллиптическая прямая, точки j и k мнимо сопряжены, двойное
отношение IF(/, k\ х, у) является отношением двух комплексно
сопряжённых чисел pei9 и pe~iB, равным комплексному числу еди-
ничного модуля логарифм этого числа равен чисто мнимому
числу 2/0 и расстояние <о равно числу 0г, вещественному или
чисто мнимому одновременно с г. В том случае, когда прямая,
определяемая точками х и у, — гиперболическая прямая и точки
х, у находятся одновременно в собственной или идеальной обла-
сти неевклидова пространства, точки j и k вещественны, а пары
точек х, у и /, k не разделяют друг друга, вследствие чего
двойное отношение W(j,k ; х, у) вещественно и равно положи-
тельному числу, логарифм которого равен вещественному числу и
расстояние <о вещественно в случае чисто мнимого г и чисто мнимо
в случае вещественного г.
В частности, в случае пространства Sni где точки У, k всегда
мнимы, а радиус кривизны г веществен, формула (3.138) может
быть переписана в виде
<0 = -^-ln W(J, k- X, у), (3.139)
а в случае собственной области пространства отрицательной
кривизны, где точки /, k всегда вещественны, а радиус кривизны
r = qi чисто мним, формула (3.138) может быть переписана
в виде
(О = 1 In W(j, k; х, у). (3.140)
Из формулы (3.138) следует, что в случае изотропных пря-
мых, т. е. прямых, вдоль которых <о = 0, их точки пересечения
с абсолютом у, k совпадают, т. е. изотропные прямые неевкли-
довых пространств являются касательными к абсолюту.
§ 7. Движения и образы симметрии
Как мы видели, при интерпретации пространств Sn и lSn
в пространстве Рп движения пространств Sn и lSn изображаются
коллинеациями пространства Рп, переводящими в себя абсолют.
Поэтому все образы симметрии неевклидовых пространств,
рассмотренные нами в § 8 главы II, являются частными случаями
326 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
образов симметрии пространства Рп, рассмотренных нами в § 4
этой главы.
В самом деле, точка и её полярная гиперплоскость в про-
странствах Sn и lSn при этой интерпретации являются част-
ным случаем 0-пары пространства Рп. При этом, как мы видели
в § 6, расстояние <о между двумя точками пространств Sn и lSn
связано с двойным отношением IF соответственных 0-пар простран-
ства Рп соотношением
IF^cos2-^ (3.141)
Отражение от точки и её полярной гиперплоскости в про-
странствах Sn и lSn является инволюционной гомологией в про-
странстве Pni определяемой соответственной 0-парой.
Точно так же т-мерная плоскость и полярная (п— т—1)-
мерная плоскость в пространствах Sn и lSn являются част-
ным случаем т-пары пространства Рп* Так как общие перпен-
дикуляры двух /n-мерных плоскостей пересекаются как с этими
плоскостями, так и с их полярами, они являются директрисами
этих /n-пар. Рассматривая пары точек пересечения этих /п-пар
с директрисами как 0-пары проективной прямой мы в силу
сказанного нами о 0-парах получаем, что i-e стационарное рас-
стояние между /n-мерными плоскостями пространств Sn и lSn
связано с двойным отношением Wi точек пересечения плоскостей
соответственных /n-пар пространства Рп соотношением
ri==zcos2^. (3.142)
Отражение от /n-мерной плоскости и полярной ей (п—т—^-мер-
ной плоскости пространств Sn и lSn является инволюционной колли-
неацией в пространстве Рп, определяемой соответственной /п-парой.
Паратактические конгруэнции прямых пространства Sn,
эллиптические паратактические конгруэнции прямых про-
странства lSn и конгруэнции перпендикуляров к мнимо сопря-
п — 1
женным взаимно полярным ——мерным плоскостям про-
п+1
странства 2 Sn являются частными случаями эллиптических
линейных конгруэнций прямых пространства Рп. В самом деле,
паратактические конгруэнции прямых Sn и эллиптические пара-
тактические конгруэнции lSn состоят соответственно из прямо-
линейных траекторий паратактических сдвигов Sn и эллиптических
паратактических сдвигов lSn, матрицы которых могут быть при-
ведены к виду (2.163). Отсюда следует, что координаты точек
прямых этих конгруэнций имеют вид
'x2i = x2i cos t — x2i+1 sin t> 1
'x2<+1 = x2* sin Z-j-x2**1 cosJ (3.143)
§ 7] ДВИЖЕНИЯ И ОБРАЗЫ СИММЕТРИИ 327
Находя точки пересечения прямых этих конгруэнций с абсолю-
тами пространств Sn и lSn, мы видим, что прямые паратакти-
ческих конгруэнций Sn и эллиптических паратактических
конгруэнций lSn соединяют мнимо сопряжённые точки двух
мнимо сопряжённых образующих - ~1 -мерных плоскостей
абсолюта с уравнениями
x^-^-ix1 = x^-\-lx^ = ... = xn^x-\-ixn = 0, |
х°— 1хх = х2 — ix§ = ... = хп~х— lxn = 0, J (3.144)
т. е. эти прямые составляют эллиптические линейные конгруэнции
прямых пространства Рп. С другой стороны, прямые конгруэн-
ции перпендикуляров к мнимо сопряжённым взаимно полярным
—мерным плоскостям пространства 2 Sn соединяют мнимо
сопряжённые точки этих мнимо сопряжённых плоскостей, т. е.
эти прямые также составляют эллиптическую линейную конгруэн-
цию прямых пространства Рп. Паратактический сдвиг на полу-
прямую вдоль прямой паратактической конгруэнции прямых про-
странства Sn и эллиптической паратактической конгруэнции пря-
мых пространства lSn и отражение мнимо сопряжённых взаимно
_1 п+1
полярных —2—мерных плоскостей 2 Sn являются эллиптиче-
скими инволюциями пространства Рп, определяемыми соответст-
венными эллиптическими линейными конгруэнциями прямых.
Гиперболические паратактические конгруэнции прямых про-
п+1
странства 2 Sn являются частными случаями гиперболических
линейных конгруэнций пространства Рп. В самом деле, гипер-
болические паратактические конгруэнции прямых пространства
п+1
2 Sn состоят из прямолинейных траекторий гиперболических
п+1
паратактических сдвигов 2 Sn, матрицы которых могут быть
приведены к виду (2.175), откуда следует, что координаты точек
прямых этих конгруэнций имеют вид
zx2< = x2i ch Z + х2<+! sh Z, ) i
'x2*+1 = x2ishZ-|-x2<+1chZ. J
Находя точки пересечения прямых этих конгруэнций с абсо-
п+1
лютом пространства 2 Sn, мы получаем, что прямые гипербо-
п+1
лических паратактических конгруэнций пространства 2 Sn
соединяют произвольные точки двух пересекающихся
328
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
П — 1 .
вещественных ——мерных плоских образующих абсолюта
с уравнениями
х° -|- X1 = X2 -|- Xs =
х° — X1 — X2---X3 =
= хп-1 + хп = О,
— --хп — О,
(3.146)
т. е. точки двух плоскостей п-—^ -пары пространства Рп и эти
прямые составляют гиперболическую линейную конгруэнцию прямых
пространства Рп. Гиперболический паратактический сдвиг на по-
лупрямую вдоль прямых гиперболической паратактической кон-
п+1
груэнции пространства 2 Sn является гиперболической инволю-
цией пространства Рп, определяемой соответственной ^-^-^-парой
пространства Рп.
Группы движений пространств Sn и lSn, переводящие в себя
паратактические конгруэнции прямых этих пространств, могут
^ыть определены также как группы движений пространств Sn
и lSn, переводящих в себя пары плоскостей (3.144) и (3.146),
так как всякое движение, переводящее в себя паратактическую
конгруэнцию прямых, переводит в себя плоскости, по которым
прямые конгруэнции пересекаются с абсолютом, а всякое движе-
ние, переводящее в себя эти плоскости, переводит друг в друга
прямые, пересекающиеся с этими плоскостями, т. е. прямые пара-
тактической конгруэнции.
Группы движений пространств Sn и lSn, переводящие в себя
паратактические конгруэнции этих пространств, могут быть опре-
делены также как группы движений этих пространств, перестано-
вочных с паратактическим сдвигом на полупрямую вдоль прямых
этих конгруэнций. В самом деле, если некоторое движение, пере-
водящее в себя паратактическую конгруэнцию, переводит две про-
извольные полярно сопряжённые точки х и у одной произвольной
прямой конгруэнции соответственно в точки 'х и 'у, то точки
'х и 'у также лежат на одной прямой конгруэнции и полярно
сопряжены. Поэтому если мы выполним сначала данное движение,
а затем паратактический сдвиг на полупрямую, точка х перейдёт
сначала в точку у, а затем в точку гу, а при выполнении этих
преобразований в обратном порядке точка х перейдёт сначала
в точку 'х, а затем в точку у. Обратно, если эти преобразова-
ния перестановочны, точка 'у, полученная движением из точки
у, полярно сопряжённой и лежащей на одной прямой конгруэн-
ции с точкой х, полярно сопряжена и лежит на одной прямой
конгруэнции с точкой 'х, полученной движением из точки х,
т. е. это движение переводит полярно сопряжённые точки прямых
конгруэнции в такие же точки, и, следовательно, она переводит
паратактическую конгруэнцию в себя.
§ 7] ДВИЖЕНИЯ И ОБРАЗЫ СИММЕТРИИ 329
Группы движений пространств Sn и iSn, переводящих в себя
паратактическую конгруэнцию прямых пространства Sn, эл-
липтическую паратактическую конгруэнцию прямых простран-
ства lSn и гиперболическую паратактическую конгруэнцию
прямых пространства 2 Sn, могут быть определены как
группы движений этих пространств, перестановочных с не-
которой нуль-системой. В самом деле, паратактический сдвиг
на полупрямую вдоль прямых паратактической конгруэнции пря-
мых пространства Sn может быть приведён к виду
'x2i = x2i+1, 'х2<+1 = — х-* (3.147)
и произведение этого преобразования на полярное преобразование
относительно абсолюта пространства Sn, имеющее вид
uJ = xI, (3.148)
представляет собой нуль-систему
u2i = x2<+1, u-2i+i = — x2i. (3.149)
Эллиптический паратактический сдвиг на полупрямую вдоль
прямой эллиптической паратактической конгруэнции прямых про-
странства 2lSn также может быть приведён к виду (3.147) и про-
изведение этого преобразования на полярное преобразование от-
носительно абсолюта 2ZSW, отличающееся от преобразования
(3.148) изменением знаков иТ при 0 / С 2Z, представляет собой
нуль-систему, отличающуюся от нуль-системы (3.149) тем же из-
менением знаков.
Гиперболический паратактический сдвиг на полупрямую вдоль
прямых гиперболической паратактической конгруэнции прямых
п+1
пространства 2 Sn может быть приведён к виду
'x2i — 'x2**1 = x2i (3.150)
и произведение этого преобразования на полярное преобразование
п+1
относительно абсолюта пространства 2 Sn, имеющее вид
u2i~x2i, «2«+1 =— x2i+1, (3.151)
совпадает с нуль-системой (3.149).
Так как всякое движение неевклидова пространства переста-
новочно с полярным преобразованием относительно абсолюта этого
пространства, то перестановочность движения с паратактическим
сдвигом на полупрямую вдоль прямых паратактической конгруэн-
ции влечёт за собой перестановочность этого движения с нуль-
системой и обратно.
Таким образом, со всякой паратактической конгруэнцией
прямых пространства Sn, эллиптической паратактической
330 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
конгруэнцией прямых пространства 2lSn и гиперболической
п + 1
паратактической конгруэнцией прямых пространства 2 Sn
связан линейный комплекс мерных плоскостей, а именно
линейный комплекс, определяемый соответственной нуль-си-
стемой.
Рассмотрим числовые инварианты и геометрические коварианты
двух паратактических конгруэнций пространств Sn и lSn *). Так
как всякий паратактический сдвиг на полупрямую есть произведе-
ние полярного преобразования относительно абсолюта на некото-
рую нуль-систему, причём это произведение перестановочно, а
полярное преобразование инволюционно, произведение двух пара-
тактических сдвигов на полупрямую является произведением
соответственных нуль-систем. Поэтому в силу свойств нуль-
систем все собственные числа матрицы движения, являющегося
произведением двух паратактических сдвигов на полупрямую,
имеют чётную кратность. В то же время эта матрица как ма-
трица движения неевклидова пространства вместе с каждым соб-
ственным числом а обладает собственным числом — той же крат-
ности. Условимся записывать собственные числа матрицы произ-
ведения двух паратактических сдвигов на полупрямую в виде еы
в случае паратактических конгруэнций пространства Sn и эллип-
тических паратактических конгруэнций пространства 2lSn и в виде
е* в случае гиперболических паратактических конгруэнций про-
п+1
странства 2 Sn. Числа со будем называть инвариантами двух
паратактических конгруэнций. Так как коллинеация простран-
ства Рп имеет не более п-|-1 линейно независимых неподвижных
точек, а эти точки соответствуют одному и тому же инварианту
по четыре, две паратактические конгруэнции прямых про-
странств Sn и lSn при чётном обладают не более чем
п 4-1 п 4- 1
—— различными инвариантами, а при нечетном —g— об-
ладают не более чем —различными инвариантами. В част-
ности, число различных инвариантов двух паратактических кон-
груэнций прямых пространств S3, S6 S7, S9 и соответственных
пространств lSn в первых двух случаях равно 1, а во вторых
двух случаях — 2.
п+1 п 4-1
В пространствах 2 Sn при чётном —i—, в которых одно-
временно существуют эллиптические и гиперболические конгруэн-
1) См. Домшлак, Левинов и Семянистый [1].
§ 7] ДВИЖЕНИЯ И ОБРАЗЫ СИММЕТРИИ 331
ции, существуют конгруэнции, получающиеся предельным пере-
ходом из конгруэнций обоих типов. Эти конгруэнции являются
частными случаями параболических линейных конгруэнций, вслед-
ствие чего их можно называть параболическими паратактиче-
скими конгруэнциями. Эти конгруэнции состоят из изотропных
прямых, касающихся абсолюта в точках одной из его —~--мер-
ных плоских образующих х).
Найдём те классы коллинеаций, к которым относятся различ-
ные виды движений неевклидовых плоскостей S2 и lS2 и про-
странств S3, ZS3 и 2S3.
На плоскости S2 поворот вокруг точки с матрицей (2.165)
[ г- I
является коллинеацией с матрицей [е ге Г1 |. Вещественной не-
подвижной точкой этого поворота является центр поворота, мни-
мыми неподвижными точками являются точки пересечения прямо-
линейной траектории поворота с абсолютом.
На плоскости 1S2 поворот вокруг точки с матрицей (2.178)
[.СО . (О “1
\ е % е «]. Вещественной
неподвижной точкой этого поворота также является центр пово-
рота, а мнимыми неподвижными точками — мнимые точки пере-
сечения прямолинейной траектории поворота с абсолютом. Сдвиг
вдоль гиперболической прямой (2.179) является коллинеацией
[СО СО ~|
е<1 е <1 1J. Неподвижными точками этого сдвига яв-
ляются точки пересечения прямолинейной траектории сдвига
с абсолютом и полюс этой прямой. Орициклический поворот
(2.180) является коллинеацией с матрицей [(111)]. Неподвижной
точкой этого поворота является точка абсолюта, являющаяся его
центром, а прямолинейной траекторией — изотропная прямая, ка-
сающаяся абсолюта в этой точке.
В пространстве S3 винтовое движение с матрицей (2.166)
Г г— -i — г— г W11
является коллинеацией с матрицей [0 r е r е r е r J; мни-
мыми неподвижными точками этого движения являются точки пере-
сечения прямолинейных траекторий этого движения с абсолютом.
Поворот вокруг прямой с матрицей (2.167) является коллинеа-
[. СО . ”1
е г е г r 1 1 ]; вещественными неподвижными
точками этого движения являются все точки его оси, а мнимыми
неподвижными точками — точки пересечения поляры оси с абсо-
лютом. Паратактический сдвиг с матрицей (2.168) является
со <л со "I
е r е r е r е r J; эллиптической
J) См. Семянистый [1].
332 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
линейной конгруэнцией прямых, определяемой этой коллинеацией,
является паратактическая конгруэнция прямых, состоящая из прямо-
линейных траекторий этого сдвига; оси этой линейной конгруэн-
ции, состоящие из неподвижных точек коллинеации, целиком лежат
на абсолюте, т. е. являются его прямолинейными образующими.
В пространстве XS3 винтовое движение с матрицей (2.181)
[<°о _
е% е ч е % е я J; веще-
ственными и мнимыми неподвижными точками этого движения
являются точки пересечения соответственно гиперболической и
эллиптической прямолинейной траектории этого движения с абсо-
лютом. Сдвиг вдоль гиперболической прямой (поворот вокруг
эллиптической прямой) с матрицей (2.182) является коллинеацией
[О) (О ”1
е^ е И 1J; неподвижными точками этого движе-
ния являются все точки эллиптической прямой, являющейся полярой
прямой сдвига, и точки пересечения прямой сдвига с абсолютом.
Поворот вокруг гиперболической прямой (сдвиг вдоль эллипти-
ческой прямой) с матрицей (2.183) является коллинеацией с ма-
Г -^1
трицей [ 1 1 е Q е v J; вещественными неподвижными точками
этого движения являются все точки гиперболической прямой, являю-
щейся его осью, а мнимыми неподвижными точками — точки пере-
сечения оси с абсолютом. Поворот вокруг изотропной прямой
с матрицей (2.185) является коллинеацией с матрицей [(111) 1];
неподвижными точками этого движения являются все точки изо-
тропной прямой, являющейся его осью, а инвариантными пря-
мыми— пучок изотропных прямых, касающихся абсолюта в точке
касания оси.
В пространстве 253 винтовые движения с матрицами (1.166),
(2.186) и (2.187) являются соответственно коллинеациями с матри-
Г . О)(1 , (О0 , <О1 Ш1 *1 Г (О ) (Oj СО[ "1 Г (О0+ ц>о— itOj
цами [е г е г r е r е * r J, [е r е r е r е r J и р r е г
— a)0+i<o1 — u)0— icDjl
е r е r J; неподвижными точками этого движения, в пер-
вом и третьем случаях мнимыми, являются точки пересечения
прямолинейных траекторий этого движения с абсолютом. Поворот
вокруг эллиптической прямой с матрицей (2.167) является кол-
Г I
линеацией с матрицей [е r е r 1 1 вещественными неподвиж-
ными точками этого движения являются все точки эллиптической
прямой, являющейся его осью, а мнимыми неподвижными точками—
точки пересечения поляры оси с абсолютом. Поворот вокруг ги-
перболической прямой с матрицей (2.188) является коллинеацией
[to _ “I
е r е r 1 1J; неподвижными точками этого движения
являются все точки его гиперболической прямой, являющейся осью,
§ 7] ДВИЖЕНИЯ И ОБРАЗЫ СИММЕТРИИ 333
и точки пересечения поляры оси с абсолютом. Поворот вокруг
изотропной прямой с матрицей (2.193) является частным случаем
коллинеации [(111) 1]; неподвижными точками этого движения
являются все точки изотропной прямой, являющейся её осью,
а инвариантными прямыми — пучок изотропных прямых, касаю-
щихся абсолюта в точке касания оси. Эллиптический паратак-
тический сдвиг с матрицей (2.168) является коллинеацией с ма-
Г . . <0 . (О . О)
I г— г— — ъ— —г —
трицей \_е % е Q е ч е «J; эллиптической линейной конгруэнцией
прямых, определяемой этой коллинеацией, является эллиптическая
паратактическая конгруэнция прямых, состоящая из прямолинейных
траекторий этого движения, оси этой конгруэнции являются двумя
мнимыми прямолинейными образующими абсолюта. Гиперболиче-
ский паратактический сдвиг с матрицей (2.190) является кол-
[<0 (13 со со П
e<i е Q е % е «]; гиперболической линейной
конгруэнцией прямых, определяемой этой коллинеацией, является
гиперболическая паратактическая конгруэнция прямых, состоящая
из прямолинейных траекторий этого движения, оси этой конгруэн-
ции являются двумя вещественными прямолинейными образующими
абсолюта. Параболический паратактический сдвиг с матрицей
(2.194) является коллинеацией с матрицей [(11) (11)]; параболи-
ческой линейной конгруэнцией прямых, определяемой этой колли-
неацией, является параболическая паратактическая конгруэнция
прямых, состоящая из прямолинейных траекторий этого движения,
ось этой конгруэнции является прямолинейной образующей абсо-
люта, а прямые этой конгруэнции являются изотропныма прямыми,
касающимися абсолюта в точках этой оси.
Образы симметрии плоскостей S2 и lS2 являются частными
случаями образов симметрии плоскости Р2, а образы симметрии
пространств S3, XS3 и 2S3 являются частными случаями образов
симметрии пространства Р3, в частности, точка и её поляра на
плоскостях S2 и х52 и точка и её полярная плоскость в простран-
ствах S3, 1S3 и 2S3 являются частными случаями 0-пар плоскости Р2
и пространства Р3. Пара взаимно полярных прямых в простран-
ствах S3, 1S3 и 2S3 является частным случаем 1-пары простран-
ства Р3. Паратактическая конгруэнция прямых пространства S3,
эллиптическая паратактическая конгруэнция прямых пространства 2S3
и конгруэнция перпендикуляров к двум мнимо сопряжённым вза-
имно полярным прямым пространства 2S3 являются частными слу-
чаями эллиптических линейных конгруэнций прямых простран-
ства Р3. Гиперболическая паратактическая конгруэнция прямых
пространства 2S3 является частным случаем гиперболической линей-
ной конгруэнции прямых пространства Р3.
Как следует из общей теории, стационарные расстояния со0 и
двух прямых в пространствах S3, 1S3 и 2S3 определяют^/ двойными
334 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
отношениями IF0 и точек пересечения этих прямых и их поляр
с их общими перпендикулярами по формуле (3.142). Поэтому
случаю паратактичности двух прямых S3 и 2S3 соответствует слу-
чай конквадричности соответственных двух пар прямых Р3. Это
видно и из того, что паратактичные прямые пространств 53 и 2S3
обладают не двумя, а однопараметрическим семейством общих
перпендикуляров, а конквадричные прямые пространства Р3 обла-
дают не двумя, а однопараметрическим семейством директрис. Как
следует из общей теории, две паратактические конгруэнции про-
странств S3 и 2S3 обладают одним числовым инвариантом; много-
образия этих конгруэнций мы будем рассматривать более подробно
ниже, в § 10.
§ 8. Квадрики в неевклидовых пространствах
При интерпретациях пространств Sn и lSn в пространстве Ргь
квадрики, т. е. гиперповерхности второго порядка, пространств
и lSn являются квадриками пространства Рп. Так как при этой
интерпретации абсолюты пространств Sn и lSn также являются
квадриками пространства Рп, то числовые инварианты и гео-
метрические коварианты квадрики Sn и lSn представляют
собой частный случай числовых инвариантов и геометриче-
ских ковариантов двух квадрик пространства Рп, одной из
которых является данная квадрика, а другой — абсолют Sn
или lSn х).
Как мы видели в § 4, числовыми инвариантами и геометриче-
скими ковариантами двух квадрик пространства Рп в том случае,
когда матрица произведения полярных преобразований относи-
тельно этих квадрик приводится к диагональному виду, являются
собственные числа этой матрицы и вершины общего автополярнога
симплекса квадрик. Вершины общего автополярного симплекса
данной квадрики и абсолюта неевклидова пространства называются
центрами квадрики в неевклидовом пространстве. Если матрица
произведения полярных преобразований относительно квадрики и
абсолюта приводится к диагональному виду и имеет собственные
числа я0, а19 ...» ап, а базисными точками являются вершины
общего автополярного симплекса этих квадрик, причём уравнение
абсолюта в этом базисе имеет вид
2е<(х<)2 = 0> (3.152)
i Э
Э Классификация кривых второго порядка на плоскостях S2 и 1^2 при-
ведена Клейном [2], стр. 250—255, Кулиджем [1], стр. 142—143 и
Либманом [1], стр. 142; классификация квадрик пространств S3 и 15$
приведена Кулиджем [1], стр. 154—156.
§ 8] квадрики 335
уравнение квадрики примет вид
2аА(х*)9 = 0. (3.153)
i
В пространстве Sn матрицы произведений полярных преобра-
зований относительно квадрики и абсолюта всегда приводятся
к диагональному виду; в пространствах lSn эти матрицы могут
не приводиться к диагональному виду в случаях касания квадрик
с абсолютом.
Так как каждое собственное число матрицы коллинеации соот-
ветствует определённой неподвижной точке этой коллинеации,
каждое собственное число матрицы произведения полярных пре-
образований относительно данной квадрики и абсолюта неевкли-
дова пространства соответствует определённому центру. Если k
из этих собственных чисел совпадают, каждая точка (k—^-мер-
ной плоскости, порождённой соответственными центрами, является
центром, т. е. в качестве центров можно взять любую систему к
взаимно полярно сопряжённых точек этой плоскости. В этом
случае квадрика допускает движения, переводящие эту квадрику
в себя и оставляющие инвариантной плоскость, порождённую
центрами, соответствующими совпавшим собственным числам, и
точечно неподвижной её полярную плоскость. Так как эти дви-
жения являются вращениями вокруг неподвижной плоскости, такая
квадрика является поверхностью вращения. Если среди
собственных чисел имеется h групп равных чисел, квадрика
является Л-кратной поверхностью вращения.
В том случае, когда матрица произведения полярных преобра-
зований данной квадрики и абсолюта неевклидова пространства
приводится к такому диагональному виду, что первые т-\-1 соб-
ственных чисел этой матрицы равны некоторому числу а, а послед-
ние п — т собственных чисел этой матрицы равны некоторому
другому числу Ь, центры этой квадрики заполняют взаимно поляр-
ные /n-мерную и (п— т—1)-мерную плоскости. В этом случае
квадрика является двойной поверхностью вращения.
Поэтому если нам даны две прямые, пересекающиеся с обеими
плоскостями, состоящими из центров квадрики, вращением этой
квадрики прямые можно совместить одну с другой, причём точки
пересечения прямых с квадриками при этом совмещении совпадут.
Отсюда видно, что расстояния от любой точки нашей квадрики
до каждой из плоскостей, состоящих из центров квадрики, равны,
т. е. наша квадрика является эквидистантой /п-мерной
плоскости и её поляры. В § 9 главы II мы видели,
что уравнение (2.210) такой эквидистанты в пространстве Sn
является уравнением этого типа. Частными случаями таких квад-
рик, как мы видели в § 10 главы II, являются поверхности
Клиффорда в пространствах 53 и 2S3.
336
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
В частности, при т = О мы получим гиперсферу неевкли-
дова пространства Sn или lSn, являющуюся в то же время экви-
дистантой гиперплоскости. В §9 главы II мы видели, что
уравнения (2.202) и (2.205) гиперсфер в пространстве Sn и в соб-
ственной области пространства отрицательной кривизны и урав-
нение (2.208) эквидистанты гиперплоскости в собственной области
пространства 1Sn отрицательной кривизны являются уравнениями
этого типа.
База гиперсферы, рассматриваемой как эквидистанта гипер-
плоскости (т. е. гиперплоскость, полярная центру гиперсферы),
пересекается с абсолютом пространства Sn и lSn по (п — 2)-мер-
ной квадрике, которая может быть вещественной или мнимой.
Гиперсферы пространств Sn и lSn касаются абсолюта по этой
(п— 2)-мерной квадрике, что может служить определением гипер-
сферы пространств Sn и lSn. В случае гиперсфер пространства Sn
и собственной области пространства 1Sn отрицательной кривизны
эта (п — 2)-мерная квадрика мнима, а в случаях эквидистант гипер-
плоскостей собственной области пространства 1Sn отрицательной
кривизны эта (п— 2)-мерная квадрика вещественна.
Гиперповерхности пространств lSn, соответствующие сечениям
гиперсфер пространства lRn+1 полуевклидовыми плоскостями, и,
в частности, орисферы собственной области пространства 1Sn
отрицательной кривизны также являются квадриками неевклидовых
пространств. Так как орисфера собственной области простран-
ства 1Sn отрицательной кривизны может быть получена предель-
ным переходом и из гиперсферы и из эквидистанты гиперплоскости
той же области, а гиперплоскостью пространства 1Sn, промежу-
точной между гиперплоскостями, имеющими вещественное и мнимое
пересечение с абсолютом пространства 1Sn, является гиперпло-
скость, касательная к абсолюту 1Sn, и так как абсолют простран-
ства является овальной квадрикой и поэтому имеет со своей
касательной гиперплоскостью только одну общую точку, орисфера
собственной области пространства ySn отрицательной кри-
визны представляет собой квадрику этого пространства, ка-
сающуюся абсолюта в одной точке; эта точка является центром
связки параллельных прямых, ортогональных к орисфере.
Приведём результаты классификации кривых второго порядка
на плоскостях S2 и !S2.
На плоскости S2 имеются два вида вещественных кривых вто-
рого порядка:
1) эллипс — кривая, пересекающаяся с абсолютом в 4 мнимых
точках и имеющая с ним 4 мнимые общие касательные;
2) окружность — кривая, касающаяся абсолюта в 2 мнимых
точках.
Матрицы коллинеаций, являющихся произведениями полярных
преобразований относительно абсолюта плоскости S2 и относи-
КВАДРИКИ
337
§ 8]
тельно данной кривой, приводятся соответственно к виду [А0ХД2]
и
На плоскости отрицательной кривизны, если ограничиться
кривыми, хотя бы частично содержащими точки собственной области,
имеется 12 видов вещественных кривых второго порядка:
1) эллипс — кривая, пересекающаяся с абсолютом в 4 мнимых
точках и имеющая с ним 4 общие касательные;
2) выпуклая гипербола — кривая, пересекающаяся с абсолютом
в 4 вещественных точках и имеющая с ним 4 мнимые общие каса-
тельные;
3) вогнутая гипербола — кривая, пересекающаяся с абсолютом
в 4 вещественных точках и имеющая с ним 4 вещественные каса-
тельные;
4) полугипербола—кривая, пересекающаяся с абсолютом в 2 ве-
щественных и 2 мнимых точках и имеющая с ним 2 вещественные
и 2 мнимые общие касательные;
5) окружность — кривая, касающаяся абсолюта в 2 мнимых
точках;
6) эквидистанта — кривая, касающаяся абсолюта в 2 веще-
ственных точках;
7) эллиптическая парабола — кривая, касающаяся абсолюта
в 1 точке, пересекающая его в 2 вещественных точках и имеющая
с ним 2 мнимые общие касательные;
8) выпуклая гиперболическая парабола — кривая, касающаяся
абсолюта в 1 точке, пересекающая его в 2 вещественных точках
и имеющая с ним 2 мнимые общие касательные;
9) одноветвевая вогнутая гиперболическая парабола —
кривая, касающаяся абсолюта в 1 точке, пересекающая его
в 2 вещественных точках, имеющая с ним 2 вещественные общие
касательные и состоящая из одной ветви 1);
10) двухветвевая вогнутая гиперболическая парабола — кри-
вая, касающаяся абсолюта в 1 точке, пересекающая его в 2 веще-
ственных точках, имеющая с ним 2 вещественные общие касатель-
ные и состоящая из двух ветвей;
И) орицикл — кривая, касающаяся абсолюта в 1 точке, пред-
ставляющей собой 4 слившиеся точки;
12) соприкасающаяся парабола — кривая, касающаяся абсолюта
в 1 точке, представляющей собой 3 слившиеся точки, пересекаю-
щая абсолют в 1 точке и имеющая с ним 1 общую каса-
тельную.
Матрицы коллинеаций, являющихся произведениями полярных
преобразований относительно абсолюта плоскости и относи-
тельно данной кривой приводятся соответственно к виду
х) Одноветвевая вогнутая гиперболическая парабола пропущена в клас-
сификации Клейна и Кулиджа, но имеется в классификации Либмана.
22 Зак. 177. Б. А. Розенфельд
338
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
(виды 1—3), [а0+/Х1 л0 — ZA1A9] (вид 4), (виды 5—6),
[(VoHil (виды 7—10)> [(Л*)М (вид И), [(АЛЛ)] (вид 12).
3 Вогнутая гипербола
1 Эллипс 2. Выпуклая гипербола
б. Полугипербола
5 Окружность
6 Эквидистанта
1. Эллиптическая
парабола
9 Одноветвевая вогнутая
гиперболическая парабола
8. Выпуклая
гиперболическая парабола
1О.Двухветвевая вогнутая 11.0рицикл
гиперболическая парабола
12. Соприкасающаяся
парабола
Черт. 70.
На черт. 70 изображены 12 видов кривых второго порядка
на плоскости Лобачевского в её проективной интерпретации (абсо-
лют плоскости Лобачевского изображён в виде окружности).
§ 9] ПРИМЕНЕНИЕ В ТЕОРИИ КВАДРИК 339
§ 9. Применение неевклидовой геометрии в теории квадрик
в проективном пространстве х)
Неевклидова геометрия позволяет весьма просто решить ряд
задач теории квадрик в проективном пространстве. В § 4 мы
видели, что квадрика индекса I в пространстве Рп при 0 < I —
обладает (Z—1)-мерными плоскими образующими и не обладает
плоскими образующими большей размерности; под плоскими обра-
зующими здесь имеются в виду вещественные плоскости. Кроме
вещественных плоских образующих можно рассмотреть также мни-
мые плоские образующие, для определения которых следует
представить пространство Рп погружённым в пространство Pn(i)
в виде совокупности точек с вещественными координатами и квад-
рику в пространстве Рп(1\ определяемую тем же уравнением, что
и данная квадрика пространства Рп, причём данная квадрика будет
совокупностью точек квадрики пространства Рп(1) с вещественными
координатами. Квадрика пространства Pn(i) обладает такими же
плоскими образующими, что и квадрика пространства Pni у которой
имеются плоские образующие максимальной размерности. Будем
называть мнимыми плоскими образующими вещественной квад-
рики плоские образующие указанной квадрики пространства Рп(1\
проходящие через точки данной вещественной квадрики. Если
учитывать мнимые плоские образующие, все квадрики простран-
ства Рп имеют плоские образующие одних и тех же размерностей.
Максимальная размерность плоских образующих равна при
чётном и нечётном п соответственно у—1 и ~• В самом
деле, эта размерность совпадает с максимальной размерностью
вещественных плоских образующих произвольного индекса, а та-
кими вещественными плоскими образующими максимальной размер-
ности обладают квадрики, индекс которых при чётном и нечётном п
п п + 1
соответственно равен и —, размерность же соответственных
плоских образующих, как мы видели, меньше индекса на единицу.
В частности, плоскими образующими максимальной размерности
квадрик являются: в пространстве Р.2— точки, в пространствах
и — прямые, в пространствах и Р6— двумерные
плоскости, в пространствах Рч и Р8 — трёхмерные плос-
кости.
Выясним строение многообразия /n-мерных вещественных обра-
зующих квадрики индекса т-[~1. Для этого введём в простран-
ство Рп такую метрику пространства 5Л, чтобы наша квадрика стала
эквидистантой взаимно полярных /n-мерной и (п— т—1)-мерной
*) См. работу автора и А. М. Левинова [1].
22*
340 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
плоскостей. Если уравнение нашей квадрики имеет вид
— (х0)2— (х1)2— . . . — (xm)2 -j_(x^+i)2 4- . . . + (хп)2 = 0, (3.154)
для этого достаточно ввести метрику пространства Sn с абсолю-
том 2 ~ 0, тогда квадрика (3.154) будет эквидистантой т-мер-
ной плоскости eQem . . . еп и (п— т—1)-мерной плоскости
em+iem+'2 - • • еп- В этом случае m-мерные плоские образующие
квадрики будут паратактичны к её m-мерной базе. Поэтому
перпендикуляр, опущенный из любой точки базы на любую m-мер-
ную плоскую образующую, будет общим перпендикуляром этих
m-мерных плоскостей. Выберем на m-мерной базе фиксированный
автополярный симплекс и опустим из вершин этого симплекса
перпендикуляры на некоторую m-мерную плоскую образующую.
Так как эти перпендикуляры являются общими перпендикулярами
m-мерных плоскостей, они пересекут и притом также ортогонально
(п— т— 1)-мерную базу нашей эквидистанты, являющуюся поля-
рой её m-мерной базы. Так как общие перпендикуляры двух пло-
скостей, основания которых на одной из m-мерных плоскостей
являются вершинами автополярного симплекса, попарно полярно
сопряжены, наши общие перпендикуляры также попарно полярно
сопряжены и, следовательно, высекают из (п— т—1)-мерной базы
систему вершин m-мерного автополярного симплекса. При этом
если считать нумерацию вершин симплекса на m-мерной базе за-
данной, мы получаем вполне определённую нумерацию вершин по-
строенного нами симплекса на (п — т—1)-мерной базе, которую
можно рассматривать как пространство Таким образом,
каждой т-мерной плоской образующей нашей квадрики одно-
значно соответствует система вершин т-мерного автополяр-
ного симплекса в пространстве Sn_m_± с заданной нумерацией.
В обратную сторону это соответствие неоднозначно: каждой
системе вершин m-мерного автополярного симплекса соответствуют
прямые, соединяющие вершины фиксированного автополярного сим-
плекса на m-мерной базе с соответственными вершинами этого
автополярного симплекса. Число этих прямых т-\-\. Каждая из
этих прямых пересечёт квадрику в двух точках; если мы выберем
эти точки пересечения за базисные точки е0, ег, . . . , ет,
£w+1, • • •, а за базисные точки е2т+2, . . ., еп примем любую
систему вершин автополярного симплекса, лежащего в (п—2т—2)-
мерной плоскости, полярной (2m -j- 1)-мерной плоскости, поро-
ждённой указанными прямыми, уравнение нашей квадрики примет
вид
x0xm + l^rXlxm + 2Jr t . .-4-x^X2m + 1+(x2^ + 2)24-. . .+(х")2==0. (3.155)
Эти формулы показывают, что каждая m-мерная плоскость
вида е^е^ . . .е,-^, где а— одна из точек ek, ек+т+1, т. е. каждая
§ 9] ПРИМЕНЕНИЕ В ТЕОРИИ КВАДРИК 341
m-мерная плоскость, порождённая точками, выбранными по одной
из каждой пары точек пересечения построенных нами прямых
с нашей квадрикой, является m-мерной плоской образующей нашей
квадрики. Так как из т-\-\ пар точек можно выбирать по одной
из каждой пары 2m+1 способами, число т-мерных плоских обра-
зующих нашей квадрики, соответствующих системе вершин
некоторого т-мерного автополярного симплекса с заданной
нумерацией в пространстве равно
В силу нашего построения установленное нами соответствие
между m-мерными автополярными симплексами пространства Sn_m^
с заданной нумерацией вершин и системами 2Ш+1 плоских обра-
зующих квадрики взаимно непрерывно. Поэтому строение много-
образия т-мерных плоских образующих квадрики индекса т-\-1
в пространстве Рп определяется тем, что фактор-простран-
ство этого многообразия по системам плоских образующих,
порождённых точками пересечения квадрики с т-\-\ попарно
полярно сопряжёнными прямыми, соединяющих точки взаимно
полярных т-мерной и (п— т—Ру-мерной плоскостей, не пере-
секающихся с квадрикой, гомеоморфно многообразию т-мерных
автополярных симплексов пространства Sn_m_r с заданной
нумерацией вершин.
В частности, при т = 0, когда квадрика является овальной,
ее m-мерные плоские образующие являются точками, так что их
многообразие совпадает с самой квадрикой. В этом случае т-мер-
ные автополярные симплексы пространства являются точ-
ками пространства и их многообразие совпадает с самим
пространством Sn_±. Таким образом, фактор-пространство оваль-
ной квадрики пространства Рп по парам её точек пересечения
с прямыми, проходящими через фиксированную точку, поляр-
ную гиперплоскости, не пересекающейся с квадрикой, гомео-
морфно пространству Sw_1, что по существу совпадает с тем
хорошо известным фактом, что пространство Рп гомеоморфно
гиперсфере пространства Sn (ничем не отличающейся от гиперсферы
пространств /?п) с отождествлёнными диаметрально противополож-
ными точками.
Другим, более простым случаем является случай m = п— т— 1
и т~п—т — 2, т. е. т = ~~ * и т = ~—1, который, как
мы видели, представляет собой случай плоских образующих
максимальной размерности. При т = п—т—1 т-мер-
ные автополярные симплексы являются (п — т—1)-мерными сим-
плексами пространства Sn_w_x, а при т = п — т — 2 т-мерные
автополярные симплексы единственным образом дополняются до
(п—т—1)-мерных симплексов пространства 5W_W_1; в качестве
последней вершины этого симплекса следует считать полюс
342 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
гиперплоскости, определяемой m-мерным симплексом. Поэтому много-
образие m-мерных автополярных симплексов пространства
с заданной нумерацией вершин при m = п—т—1 совпадает,
а при т = п— т — 2 гомеоморфно многообразию (п— т — ^-мер-
ных автополярных симплексов пространства Sn_m_v Таким обра-
зом, фактор-пространство многообразия плоских образующих
максимальной размерности квадрики в пространстве Рп по си-
п+1 п
стемам 2 2 плоских образующих при нечётном п и 22 плоских
образующих при чётном п гомеоморфно многообразию авто-
полярных симплексов максимальной размерности с заданной
нумерацией вершин соответственно в пространстве Sn±\ и Sn •
~Г" Т
Доказанная теорема позволяет подсчитать размерность много-
образия m-мерных плоских образующих квадрики индекса т-ф1
в пространстве Рп. Для этого заметим, что размерность нашего
многообразия равна размерности его фактор-пространства по конеч-
ному множеству плоскостей и, следовательно, равна размерности
многообразия m-мерных автополярных симплексов пространства
так как каждый m-мерный симплекс этого пространства
лежит в некоторой m-мерной плоскости, размерность этого много-
образия симплексов равна сумме размерности многообразия т-мер-
ных плоскостей в пространстве Sn_m_1 и размерности многообра-
зия m-мерных автополярных симплексов в m-мерной плоскости.
Для определения первой из этих размерностей докажем, что
размерность многообразия т-мерных плоскостей простран-
ства Рп и, следовательно, Sn равна
т). (3.156)
В самом деле, утверждение тривиально при т = 0 (многообра-
зие точек пространства Рп n-мерно); предположим, что оно верно
для (т—1)-мерных плоскостей. Всякая m-мерная плоскость про-
странства Рп пересекается с любой (п — т)-мерной плоскостью
и поэтому входит в одну из связок с центрами на некоторой
(п— т)-мерной плоскости. Размерность многообразия тех т-мер-
ных плоскостей, которые входят более чем в одну из этих связок,
меньше размерности многообразия всех m-мерных плоскостей,
вследствие чего размерность многообразия всех m-мерных пло-
скостей равна сумме размерности (п— т)-мерной плоскости, т. е.
п — т, и размерности многообразия m-мерных плоскостей, при-
надлежащих одной связке. Размерность многообразия т-мерных
плоскостей, принадлежащих связке, равна размерности многообра-
зия (т—1)-мерных плоскостей пространства Pn~lf так как т-мер-
ные плоскости, принадлежащие связке, находятся во взаимно одно-
значном и взаимно непрерывном соответствии с (т—1)-мерными
плоскостями пересечения этих плоскостей с гиперплоскостью, не
§ 9] ПРИМЕНЕНИЕ В ТЕОРИИ КВАДРИК 343
проходящей через центр связки. По предположению индукции эта
размерность равна
= — 1)+ 1] 1(я— 1) — (т— 1)] т(п— т), (3.157)
поэтому размерность многообразия /n-мерных плоскостей простран-
ства Рп действительно равна п — т-[-т(п — /п) = (т + 1) (д — /п).
Для определения второй из указанных размерностей докажем,
что многообразие т-мерных автополярных симплексов простран-
ства Sn с заданной нумерацией вершин гомеоморфно фактор-
пространству группы движений этого пространства по си-
стеме 2п движений. В самом деле, каждому n-мерному автопо-
лярному симплексу пространства Sn с заданной нумерацией вершин
можно поставить в соответствие движения этого пространства,
переводящие некоторый фиксированный автополярный симплекс
пространства с заданной нумерацией вершин в данный симплекс.
При этом каждому движению однозначно соответствует симплекс,
в который оно переводит фиксированный симплекс. В обратную
сторону это соответствие неоднозначно: в § 2 главы II мы видели,
что система вершин каждого симплекса пространства Sn является
системой вершин одновременно 2п симплексов. Поэтому каждой
системе вершин n-мерного автополярного симплекса простран-
ства Sn с заданной нумерацией вершин соответствует 2п движений
этого пространства, переводящих каждую из этих вершин в себя,
а один из определяемых этими вершинами автополярных симплек-
сов— во все эти 2п симплексов. Зафиксировав в пространстве Sn
n-мерный автополярный симплекс с заданной нумерацией вершин,
мы можем поставить во взаимно однозначное соответствие каждому
n-мерному автополярному симплексу пространства Sn 2п движений,
переводящих систему вершин фиксированного симплекса в систему
вершин данного симплекса. Как видно из нашего рассуждения,
это соответствие между симплексами и системами 2п движений
взаимно непрерывно.
Так как при полученном нами соответствии каждому симплексу
соответствует конечное число движений, размерность многообра-
зия автополярных симплексов пространства Sn равна числу
параметров, от которых зависит группа его движений,
т. е. Поэтому сумма размерности многообразия /п-мер-
ных плоскостей в пространстве Sn_m_1 и размерности многообразия
/n-мерных автополярных симплексов в /n-мерной плоскости равна
(«+!)[(«_ т— 1) — т]+ от("г+1) = (m-j- 1)(Л — 2/п— 1) +
I т(т+У) (от+ l)(2n —3m —2) „ .
344
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
Таким образом, размерность многообразия т-мерных пло-
ских образующих квадрики индекса т-\-\ в пространстве Рп
равнаг)
Qn, т = (^+1)(2и-3»г-2) . (3.159)
В частности, при т = 0 эта формула даёт л—1, что
соответствует тому, что многообразие точек квадрики в простран-
стве Рп (п—1)-мерно, а при т = и т —у—1 эта Ф°Р"
мула даёт:
Q п-i
п, —?—
Q п
п, —
1 [гл —| (п - 1) - 2*j
п + 1 п — 1
9 9 Л2_________ 1
9 = (3.160)
Z о
п . (3.161)
о
Заметим, что числа Q n_i и Q п равны числам параметров
nt -у- п, —
групп движений соответственно в пространствах Sn-i и Sn
~~2~ Т”
Совершенно так же, как мы нашли топологическую структуру
многообразия m-мерных плоских образующих квадрики индекса т-|-1
в пространстве Рп, можно доказать аналогичную теорему о много-
образии m-мерных плоских образующих квадрики индекса Z, где
т-\~ 1 <Z<-J. Для этого нужно ввести в пространство Рп ме-
трику пространства при которой наша квадрика становится
эквидистантой m-мерной и (л—т—1)-мерной плоскостей. Совер-
шенно так же, как в случае квадрики индекса т-|-1, доказы-
вается, что размерность многообразия т-мерных образующих
квадрики индекса I, где в пространстве Рп
равна тому же числу (3.154). Аналогичные теоремы доказываются
и для m-мерных плоских образующих квадрики пространства Рп(1)*
Рассмотрим более подробно многообразия плоских образующих
максимальной размерности кбадрик пространства Рп, т. е. много-
п 4-1 п
образия плоских образующих квадрик индекса —— и
Многообразие плоских образующих максимальной размер-
ности квадрики пространства Рп при чётном п связно, а при
нечётном п состоит из двух связных компонент, называемых
*) Чисто проективное доказательство этой теоремы см. Бертини [1],
стр. 141 и Ходж и Пидо [1], стр. 265.
§ 9] ПРИМЕНЕНИЕ В ТЕОРИИ КВАДРИК 345
семействами плоских образующих1). Для доказательства введём
в пространство Рп метрику пространства Sn и представим себе
п — 1
нашу квадрику как эквидистанту взаимно полярных ——мерных
плоскостей при нечётном п и взаимно полярных — 1 ^-мерной
и --мерной плоскостей при чётном п. Тогда плоские образующие
максимальной размерности будут в первом случае ~ *-мерными
плоскостями, паратактичными обеим базам, а во втором случае
— 1 ^-мерными плоскостями, паратактичными —1 ^-мерной
базе. Поэтому если применить к одной плоской образующей
максимальной размерности квадрики все движения пространства Sn,
переводящие в себя базы эквидистанты, мы получим все плоские
образующие максимальной размерности этой квадрики. При этом
если две плоские образующие могут быть переведены друг в друга
с помощью движения из связной группы, эти плоские образую-
щие принадлежат к одному семейству, и обратно', всякое дви-
жение из связной группы можно непрерывно перевести в то-
ждественное преобразование, для чего достаточно заменить его
стационарные расстояния произведениями и заставить t про-
бегать все вещественные значения от 1 до 0. При этом неподвиж-
ные точки и инвариантные плоскости всех движений со стационар-
ными расстояниями ох/ совпадают, вследствие чего, если данное
движение переводило в себя базы эквидистанты, т. е. они были
его инвариантными плоскостями, все рассматриваемые движения
также переводят в себя эти базы. Поэтому каждое из этих дви-
жений переводит одну из двух данных плоских образующих в не-
которую плоскую образующую и полученные плоские образующие
образуют непрерывное семейство плоских образующих, соединяющих
две данные плоские образующие; обратно, всякому непрерывному
семейству плоских образующих, соединяющих две данные плоские
образующие, соответствует непрерывное семейство движений, пере-
водящих первую из данных плоских образующих в произвольную
плоскость из непрерывного семейства. При этом второй из данных
плоских образующих соответствует движение, переводящее первую
из этих плоскостей во вторую, а первой из этих плоскостей соот-
ветствует тождественное преобразование. Отсюда следует, что если
две плоские образующие могут быть переведены друг в друга
с помощью движения из второй связной компоненты группы
движений, эти плоские образующие принадлежат к разным
семействам. Утверждение теоремы непосредственно следует из
9 Чисто проективное доказательство этой теоремы см. Бертини [1],
стр. 143 и Ходж и Пидо [1], стр. 256 и 262.
346 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. III
этих утверждений и из того, что группа движений пространства Sn
связна при чётном п и состоит из двух связных компонент при
нечётном п.
В частности, многообразие точек кривой второго порядка пло-
скости Р,2 связно; многообразие прямолинейных образующих линей-
чатой квадрики пространства состоит из двух семейств; много-
образия прямолинейных образующих линейчатой квадрики простран-
ства Р4 связно; многообразие двумерных плоских образующих
квадрики индекса 3 пространства состоит из двух семейств;
многообразие двумерных плоских образующих квадрики индекса 3
пространства PQ связно; многообразие трёхмерных плоских обра-
зующих квадрики индекса 4 пространства Рч состоит из двух
семейств.
Из доказанной теоремы следует, что многообразие всех плоских
образующих квадрик пространства Рп, размерности которых
меньше, чем максимальная, связны. В самом деле, при k < — 1
через две ^-мерные плоские образующие квадрики можно всегда
провести (26 + 2)-мерную плоскость, высекающую из нашей квад-
рики такую квадрику, из которой наши две ^-мерные плоские
образующие являются плоскими образующими максимальной раз-
мерности; но согласно доказанной теореме многообразие плоских
образующих квадрики пространства связно и наши две плоские
образующие всегда принадлежат к одному связному многообразию.
Две плоские образующие максимальной размерности квад-
рики в пространстве P.2rrMl пересекающиеся по k-мерной пло-
скости (при k = — 1 не пересекающиеся, при k = 0 пересекаю-
щиеся в точке, при k= 1 пересекающиеся по прямой), принад-
лежат к одному семейству при чётном m-\-k и разным
семействам при нечётном m-^k1). Для доказательства введём
в пространство метрику пространства 52ш+1 и представим
нашу квадрику как эквидистанту двух взаимно полярных /п-мерных
плоскостей. Мы видели, что всякие две образующие плоскости
максимальной размерности этой квадрики могут быть переведены
друг в друга движением пространства 52ш+1. При этом для всяких
двух плоских образующих максимальной размерности, пересекаю-
щихся по ^-мерной плоскости, можно выбрать базы эквидистанты
таким образом, что одна из этих плоских образующих может быть
получена из другой с помощью отражения от (m-\-k -|~ 1)-мерной
плоскости, порождённой одной из баз и ^-мерной плоскостью
пересечения плоских образующих. Если в пространстве выбран
автополярный симплекс, вершины eQ, elf . . ., ек, ек+1,.. ., ет
которого лежат на первой плоской образующей, а вершины
*) Чисто проективное доказательство этой теоремы см. Бертини [1],
стр. 143 и Ходж и Пидо [1], стр. 258.
§ 9] ПРИМЕНЕНИЕ В ТЕОРИИ КВАДРИК 347
eQi elt . >., ек, em+li * * ., e,2m_k на второй плоской образующей, то
в качестве одной из баз эквидистанты можно взять плоскость,
порождённую базисными точками , ек-\-е2т+1,
&к+1 ет+1> • • • > ет + е2т-к> а в качестве другой из баз — пло-
скость, порождённую базисными точками £()—e.2w__fc+1, ., ек—е.2т+1,
ек+1— ет+1> • • • > ет — е2т-к- Но отражение от (от—|—fe—1)-мер-
ной плоскости принадлежит к связной группе движений при чёт-
ном m-^-k и ко второй связной компоненте группы движений
при нечётном m-[-k, вследствие чего наши две плоские образующие
принадлежат к одному семейству при чётном m~}-k и к разным
семействам при нечётном m~\~k.
Из доказанной теоремы следует, что две непересекающиеся
плоские образующие максимальной размерности квадрики в про-
странстве Л3ш+1, а также плоские образующие максимальной
размерности той же квадрики, пересекающиеся по прямой и
плоскостям нечётного числа измерений, принадлежат к одному
семейству при нечётном тик разным семействам при чёт-
ном т. С другой стороны, две плоские образующие максимальной
размерности той же квадрики, пересекающиеся в точке и по
плоскостям чётного числа измерений, принадлежат к одному
семейству при чётном тик разным семействам при нечёт-
ном т.
В частности, две непересекающиеся прямолинейные образующие
линейчатой квадрики в пространстве принадлежат к одному
семейству, а две пересекающиеся прямолинейные образующие той
же квадрики принадлежат к разным семействам. Две непересекаю-
щиеся двумерные плоские образующие квадрики индекса 2 в про-
странстве и две двумерные плоские образующие той же квад-
рики, пересекающиеся по прямой, принадлежат к разным семей-
ствам, а две двумерные плоские образующие той же квадрики,
пересекающиеся в точке, принадлежат к одному семейству. Две
непересекающиеся трёхмерные плоские образующие квадрики ин-
декса 4 пространства и две трёхмерные плоские образующие
той же квадрики, пересекающиеся по прямой, принадлежат к од-
ному семейству, а две трёхмерные плоские образующие той же
квадрики, пересекающиеся в точке и по двумерной плоскости,
принадлежат к разным семействам.
Аналогичные теоремы совершенно так же доказываются для
плоских образующих максимальной размерности квадрик простран-
ства Pn(i).
Из доказанных нами теорем можно сделать некоторые выводы
о паратактических конгруэнциях прямых неевклидо-
вых пространств. Как мы видели, паратактические конгруэнции
состоят из прямых, соединяющих точки двух непересекающихся
вещественных или мнимых /n-мерных плоских образующих про-
странства S.2w+1, 2ZS2m+i или w+1^2m+f в том случае, когда
348
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. Ш
непересекающиеся плоские образующие максимальной размерности
абсолюта неевклидова пространства принадлежат к одному семей-
ству, имеются два класса паратактических конгруэнций, соответ-
ствующих парам плоских образующих, принадлежащих к различным
семействам, а в том случае, когда эти непересекающиеся плоские
образующие максимальной размерности принадлежат к разным
семействам, имеется только один класс паратактических конгруэн-
ций. Эти классы паратактических конгруэнций составляют, очевидно,
связные семейства. Таким образом, многообразие паратакти-
ческих конгруэнций прямых пространств S2m+1, 2ZS2m+1L и
m+1S.2m+t связно при чётном т и состоит из двух связных
компонент при нечётном т. В последнем случае паратактические
конгруэнции, принадлежащие к одному классу, называются одно-
имёнными, а паратактические конгруэнции, принадлежащие к раз-
личным классам, называются разноимёнными.
Из доказанных нами теорем вытекает следующая теорема
о строении многообразия плоских образующих максимальной раз-
мерности квадрики в пространстве Рп.
Многообразие плоских образующих максимальной размерно-
сти квадрики пространств Р2т при чётном т, фактор-про-
странство этого многообразия по парам плоскостей при нечёт-
ном т, каждое семейство плоских образующих максимальной
размерности квадрики пространства P2m+i пРи чётном т
и фактор-пространство каждого из этих семейств по парам
плоскостей при нечётном т гомеоморфны связной группе дви-
жений пространства Sm.
В самом деле, мы видели, что фактор-пространство много-
образия плоских образующих максимальной размерности квадрик
в пространствах Р2т и P2W+1 по системам соответственно 2м и
2т + 1 плоскостей гомеоморфно многообразию m-мерных автополяр-
ных симплексов с заданной нумерацией в пространстве. Так как
2W + 1 плоских образующих указанных систем в случае простран-
ства Р2т+1^ К0ГДа многообразие плоских образующих максималь-
ной размерности квадрики состоит из двух семейств, делятся между
этими двумя семействами поровну, мы можем сказать, что фактор-
пространство многообразия плоских образующих минимальной раз-
мерности квадрики пространства Р2т и фактор-пространств каждого
из семейств плоских образующих максимальной размерности квад-
рики пространств Р2т+1 по системам 2Ш плоскостей гомеоморфно
многообразию m-мерных автополярных симплексов с заданной
нумерацией в пространстве Sm. С другой стороны, мы видели, что
многообразие m-мерных автополярных симплексов с заданной нуме-
рацией в пространстве Sm гомеоморфно фактор-пространству группы
движений пространства Sm по системам 2т движений. Так как 2W дви-
жений такой системы при нечетном т, когда группа движений про-
странства Sm состоит из двух связных компонент, делятся между
§ 9] ПРИМЕНЕНИЕ В ТЕОРИИ КВАДРИК 349
этими связными компонентами поровну, мы можем сказать, что
многообразие /n-мерных автополярных симплексов с заданной ну-
мерацией в пространстве Sm гомеоморфно фактор-пространству связ-
ной группы движений пространства Sm по системе 2,п движений
при чётном т и по системам движений при нечётном т.
Отсюда следует, что при чётном т, когда системы 2Ш плоских
образующих взаимно однозначно и взаимно непрерывно соответ-
ствуют системам движений, можно установить взаимно одно-
значное и взаимно непрерывное соответствие между самими пло-
скими образующими и движениями связных групп, а при нечётном
т, когда системы 2/п плоских образующих взаимно однозначно и
взаимно непрерывно соответствуют системам 2W-1 движений, можно
установить взаимно однозначное и взаимно непрерывное соответ-
ствие между парами плоских образующих и движений связных
групп, откуда непосредственно следует утверждение теоремы.
Нетрудно показать, что указанные пары плоских образующих сим-
метричны относительно баз нашей эквидистанты.
В частности, из доказанной теоремы мы получаем, что фактор-
пространство кривой второго порядка на плоскости Р2 по парам
точек и фактор-пространство каждого из семейств прямоли-
нейных образующих линейчатой квадрики пространства Р% го-
меоморфны связной группе движений прямой Это хорошо
известный факт, так как и указанная кривая, и каждое из указан-
ных семейств, и связная группа движений прямой гомеоморфны
обычной окружности, а фактор-пространство окружности по парам
её диаметрально противоположных точек, т. е. прямая S1} гомео-
морфно ей самой. Из этой теоремы мы также получаем, что
многообразие прямолинейных образующих линейчатой квадрики
пространства Р± и каждое из семейств двумерных плоских
образующих квадрики индекса 3 пространства Рь гомеоморфны
группе движений плоскости S.2, а фактор-пространства много-
образия двумерных плоских образующих квадрик индекса 3
пространства PQ и каждого из семейств трёхмерных плоских
образующих квадрики индекса 4 пространства по парам
плоскостей гомеоморфны группе движений пространства S3.
Переходя к комплексным координатам, мы получим из дока-
занной теоремы следующую теорему для квадрик простран-
ства Рп(Гр
Многообразие плоских образующих максимальной размер-
ности квадрики пространства P2m(i) при чётном т и фактор-
пространство этого многообразия по парам плоскостей при
нечётном т, каждое семейство плоских образующих макси-
мальной размерности квадрики пространства Р2т+1 (О при чёт-
ном т и фактор-пространство каждого из этих семейств по
парам плоскостей при нечётном т гомеоморфны связной группе
движений пространства
350 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
Так как мнимая квадрика пространства Рп является квадрикой
пространства Pn(i), эта теорема определяет строение многообразия
плоских образующих максимальной размерности мнимой квадрики
пространства Рп.
Две последние теоремы могут быть доказаны из совершенно
других соображений с помощью одной теоремы Картана х).
§ 10. Евклидовы пространства
как метризованные проективные пространства
Для евклидовых пространств Rn и lRni которые, как мы ви-
дели в § 11 главы II, являются предельными случаями неевкли-
довых пространств Sn и lSn, также можно построить интерпретации
в проективном пространстве Рп.
Так как пространство lRn может быть получено предельным
переходом из пространства lSn положительной кривизны и простран-
ства 1+1Sn отрицательной кривизны, а абсолюты пространств lSn и
являются квадриками Z-ro и (Z-f-1)-го порядка, то роль абсо-
люта пространства lRn играет то, что может быть получено предель-
ным переходом и из той, и из другой квадрики. Этот предельный
переход может быть произведён двумя способами: уравнения
абсолютов пространств lSn и 1+1 Sn могут быть записаны в обычных
координатах в виде
/х° + 2 eixi = 0 и —+ = 0 (3.162)
i i
и в тангенциальных координатах в виде
Zr/0—(- 5 г1иъ — 0 и —IUq—(- 2 = 0* (3.163)
г г
Общий предел получается при стремлении t к нулю. В первом
случае мы получаем конус с вершиной eQ, а во втором случае —
соответствующую ему по принципу двойственности (п — 2)-мерную
квадрику в гиперплоскости еге,2 ... еп. Эта квадрика является
квадрикой индекса Z, в частности при Z = 0 — мнимой квадрикой.
При первом из этих предельных переходов мы получим полунеев-
клидово пространство (см. § 2 гл. II). При втором из этих
предельных переходов мы получим пространство lRn, при Z= 0—про-
странство Rn. В самом деле, дополним пространство Rn или lRn беско-
нечно удалённой гиперплоскостью до проективного пространства Рп.
Так как группа движений пространств Rn и lRn является подгруп-
пой группы аффинных преобразований этого пространства, а эта
группа в свою очередь является подгруппой группы коллинеаций
этого пространства, группы движений пространств Rn и lRn яв-
Э См. К ар тан [И], стр. 119. См. также § 6 главы V этой книги.
§10] ЕВКЛИДОВЫ ПРОСТРАНСТВА 351
ляются подгруппами группы коллинеаций. Так как при движениях
пространств Rn и lRn изотропные прямые этих пространств пере-
ходят друг в друга, а эти прямые пересекаются с бесконечно
удалённой гиперплоскостью в бесконечно удалённых точках изо-
тропного конуса, образующих (п — 2)-мерную квадрику индекса О
или Z, эта (и— 2)-мерная квадрика переходит в себя при всех
движениях пространства Rn или lRn. Через эти (п — 2)-мерные
квадрики проходят все гиперсферы пространств Rn и lRn. Эта
(п— 2)-мерная квадрика называется абсолютом пространств Rn
или lRn.
В случае плоскостей R2 и роль абсолюта играют соответ-
ственно мнимая или вещественная пары точек, называемых цикли-
ческими точками плоскости, в случае пространств и lR,3 роль
абсолюта играют, собственно, мнимая и вещественная кривые вто-
рого порядка, называемые шаровыми кругами пространства.
Однако в отличие от неевклидовых пространств Sn и lSn не
всякое проективное преобразование, переводящее в себя
(п— 2)-мерную квадрику индекса 0 или Z, является движением
пространства Rn или lRn. Наиболее общие проективные преобра-
зования, переводящие в себя эту квадрику, являются аффинными
преобразованиями (так как они переводят в себя бесконечно уда-
лённую гиперплоскость, в которой лежит эта квадрика), перево-
дящими гиперсферы в гиперсферы; такими преобразованиями
являются преобразования подобия — преобразования, состоящие из
движений пространства Rn или lRn и гомотетий.
Угол ф между двумя прямыми пространств Rn и lRn выра-
жается через двойное отношение W(j, k\ х, у) бесконечно уда-
лённых точек этих прямых х, у и точек j, k пересечения
прямой с абсолютом пространства Rn и lRn по формуле
<? = 1^111^(7, k-, х, j)|. (3.164)
В самом деле, как мы видели в § 6 главы II, связки прямых
пространств Rn и lRn) если за расстояние между двумя прямыми
принять угол между ними, являются интерпретациями пространств
Sn+1 и 1Sn_1. Вместо связки прямых можно говорить об их бес-
конечно удалённых точках, образующих интерпретации тех же
пространств и lSn_1 в пространстве P^-l- Роль точек абсо-
люта пространств и lSn_1 играют изотропные прямые связки,
а во втором случае — точки абсолюта пространств Rn и lRn. Но
для пространств Sn и lSn с радиусом кривизны г в § 5 этой главы
мы доказали формулу (3.138), которая при принимает
вид (3.164). В случае пространства Rn эта формула может быть
переписана в виде
<?=^1п W(j, k; х, у).
(3.165)
352 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
Двойное отношение четырёх точек на бесконечно удалённой
гиперплоскости называют также двойным отношением четырёх
прямых пучка, проходящих через эти точки (оно равно двой-
ному отношению четырёх точек пересечения этих прямых с любой
другой прямой). Поэтому угол между двумя прямыми х, у
пространств Rn и lRn выражается через двойное отношение
этих прямых и изотропных прямых j, k, лежащих в опре-
деляемой ими двумерной плоскости и проходящих через их
точку пересечения, по формуле (3.164) (в случае простран-
ства Rn по формуле (3.165)). Аналогично могут быть построены
проективные интерпретации полунеевклидова пространства 1+^S}1
и полуевклидова пространства l+[d}Rn, причём роль абсолютов
этих пространств играют соответственно конус, состоящий из
плоскостей, проходящих через (d—1)-мерную плоскость, и квад-
рика, лежащая в (п — я?)-мерной плоскости; поэтому бесконечно
удалённую гиперплоскость пространства J+^d}Rn при его дополне-
нии до пространства Рп можно рассматривать как пространство
Z4-(cZ-l)D
1 кп — 1 •
Формула (3.165) была впервые доказана Лагерром [1], а проек-
тивная интерпретация плоскости R2 была предложена Кели [2].
Общая теория проективных интерпретаций пространств l+^d}Sn и
l^d}Rn построена Саммервиллем [1].
§ 11. Симплектические пространства
Как было отмечено выше, n-мерные неевклидовы пространства
Sn и lSn можно определить как гг-мерное проективное простран-
ство Рп, в котором рассматриваются только коллинеации, перево-
дящие в себя невырожденную квадратичную форму индекса 0 или
I (х, х) = ^х*хэ (а,^ = а^, или, что равносильно этому,
* з
невырожденную симметричную билинейную форму того же индекса
(X, У) = 22^-х*уэ. Естественно теперь рассмотреть то про-
i з
странство, которое мы получим, если будем рассматривать в про-
странстве Рп только те коллинеации, которые переводят в себя
невырожденную кососимметрическую билинейную форму
[X, = 2 2 (3* 166)
где определитель матрицы (&/t/) отличен от нуля.
Так как кососимметрическая билинейная форма может быть
невырожденной только в случае чётного числа переменных, то
мы будем считать размерность рассматриваемого пространства
равной 2гг—1. Коллинеации пространства P^n-v переводящие
в себя невырожденную кососимметрическую билинейную форму,
§11] СИМПЛЕКТИЧЕСКИЕ ПРОСТРАНСТВА 353
называются симплектическими преобразованиями, а пространство
р2п__1, в котором рассматриваются только эти коллинеации, назы-
вается (2п—1)-мерным симплекпъическим пространством Sp2n_v
Если мы будем записывать коллинеации в виде 'х — Ах, то усло-
вие того, что коллинеация является симплектическим преобразо-
ванием, может быть записано в виде
[Ах, Ду] = [х, >]. (3.167)
Как мы уже упоминали в § 12 главы I, всякую невырожденную
кососимметрическую билинейную форму от 2п переменных можно
при надлежащем выборе базиса привести к виду
[х, = ’£(x2iy2i+1 — x2i+1y2i). (3.168)
i
В этом случае, составляя условие того, что коллинеация
'х1 = 5 является симплектическим преобразованием, т. е.
j
5 {'x2ify2i+1 —гх2*+1/y2i) = 2 (x2iy2i+1 — x2i+1y2i), (3.169)
i
мы найдём, что элементы матрицы (а^) связаны соотношением
5(а^аг+1 — aj+1alc) = Sj, к-i — zc+i- (3.170)
2i
Матрица 2га-го порядка, удовлетворяющая условиям (3.170),
называется симплектической матрицей 2п-го порядна.
Так как условия (3.170) представляют собой =
-=п(2п—1) условий, симплектические матрицы 2п-го порядка и,
следовательно, симплектические преобразования пространства Sp2n_x
зависят от (2п)2—п(2п— 1) = n(2n-|- 1) вещественных параметров.
Заметим, что определитель симплектической матрицы равен Ц- 1.
С каждым симплектическим пространством Sp2n_1, определённым
с помощью кососимметрической билинейной формы (3.166), связана
нуль-система
= S n^jX^, Uj.j = Ujp (3.171)
J
матрица которой совпадает с матрицей этой кососимметрической
билинейной формы. Будем называть эту нуль-систему, являющуюся
аналогом полярного преобразования относительно абсолюта в не-
евклидовом пространстве, абсолютной нуль-системой симплекти-
ческого пространства. Симплектические преобразования можно
определить как коллинеации, перестановочные с абсолютной нуль-
системой. При том базисе, при котором кососимметрическая били-
нейная форма (3.164) принимает вид (3.168), нуль-система (3.168)
принимает вид
u2i = — х2*+г, a2i+x = x21. (3.172)
23 Зак. 177. Б. А. Розенфельд
354 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
Абсолютная нуль-система определяет линейный комплекс
(п—1)-мерных плоскостей, переходящих в себя при этой нуль-
системе, т. е. являющихся её нуль-плоскостями. Будем называть
этот линейный комплекс абсолютным линейным комплексом
(п—^-мерных плоскостей симплектического пространства. Связь
симплектической геометрии с некоторым линейным комплексом
плоскостей и является причиной того, что эта геометрия называется
симплектической: первоначально группа симплектических преобра-
зований называлась группой линейного комплекса или комплекс-
группой, а затем, чтобы избежать смешения этого понятия с
понятием группы комплексных матриц, термин «комплекс» был
переведён на греческий язык.
Инволюционными симплектическими преобразованиями про-
странства Sp2n^i являются инволюционные коллинеации про-
странства P%n-i’ переводящие в себя определяющую его форму.
Поэтому инволюционными симплектическими преобразованиями
Sp^n-i являются преобразования, приводимые к видам
'x2i = x2i, /x2i+1 = x2i+1 при 2Z < m
'x2i =— x2i, 'x2i+1 =— x2i+1 при 2Zm
X2^ —___+ l — x2i'
fx2i = x2i+1, 'x2i+1 =— x2i при 2Z < m;
'x2i = — x2i+\ 'x2*+1 — x2i при 2Z^ m\
' x2i = x2i+1, 'x2*+1 = x2i.
Преобразование (3.173) является инволюционной коллинеацией,
переводящей в себя (2m—1)-пару, состоящую из (2m—1)-мерной
и (2п — 2m—1)-мерной плоскостей, переходящих друг в друга
при абсолютной нуль-системе. Эти плоскости при чётном п и т = ~
могут быть мнимо сопряжёнными; в этом случае прямые, соеди-
няющие мнимо сопряжённые точки этих плоскостей, образуют эл-
липтическую линейную конгруэнцию прямых.
Преобразования (3.174) и (3.175) являются эллиптиче-
скими инволюциями, а преобразование (3.176) является
гиперболической инволюцией, причём все эти инволю-
ции перестановочны с абсолютной нуль-системой. Эти инволюции
переводят в себя пары соответственно мнимо сопряжённых или
вещественных (п—1)-мерных плоскостей, являющихся нуль-пло-
скостями абсолютной нуль-системы, и линейные конгруэнции пря-
мых, соединяющих соответственно мнимо сопряжённые точки двух
мнимо сопряжённых нуль-плоскостей или произвольные точки двух
вещественных нуль-плоскостей. Будем называть эти линейные
конгруэнции прямых в первом случае эллиптической симплекти-
ческой линейной конгруэнцией прямых индекса 0, во втором
(3.173)
(3.174)
(3.175)
(3.176)
§11] СИМПЛЕКТИЧЕСКИЕ ПРОСТРАНСТВА 355
случае—эллиптической симплектической линейной конгруэнцией
прямых индекса т, в третьем случае — гиперболической линейной
конгруэнцией прямых.
Следовательно, образами симметрии симплектического про-
странства Sp^n-x являются (2m—Y)-мерные плоскости, при
—прямая, с плоскостями, соответствующими им в аб-
солютной нуль-системе, эллиптические симплектические линей-
ные конгруэнции прямых, гиперболическая симплектическая
линейная конгруэнция и при чётном п эллиптическая линейная
конгруэнция прямых, соединяющих мнимо сопряжённые точки
пары мнимо сопряжённых (п—1)-мерных плоскостей, соответ-
ствующих друг другу в абсолютной нуль-системе.
Так как все образы симметрии симплектического простран-
ства Sp2n-i являются в то же время образами симметрии в проек-
тивном пространстве P%n-i> числовыми инвариантами и геометриче-
скими ковариантами пар образов симметрии в пространстве Sp.2n_1
являются инварианты и коварианты этих же образов в простран-
стве Р2п_г
Заметим, что произведения нуль-системы на инволюции (3.174),
(3.175) и (3.176) являются полярными преобразованиями относи-
тельно соответственно мнимой квадрики
(Х0)2 + (х1)2+ . . . +(Х2П-1)2 = О (3.177)
и вещественных квадрик
_(X°)2_(X1)2_ . . . __(x2m-l)2_|_^)2_^_ . . . +(х2п-1)2 (),
(3.178)
—О°)2+W — • • •—(^)2+(^+1)2+- * • = 0. (3.179)
Если считать эти квадрики абсолютами неевклидовых про-
странств S2n_lf 2mS2w_1 и nS2n__lf инволюции (3.172), (3.173) и
(3.174) являются паратактическими сдвигами этих неевклидовых
пространств на полупрямую вдоль прямых линейных конгруэнций,
определяемых этими инволюциями. Поэтому со всякой эллип-
тической симплектической линейной конгруэнцией прямых
индексов 0 и т и гиперболической симплектической линейной
конгруэнцией прямых пространства Sp2n_1 связана в первом
случае мнимая, а во втором и третьем случаях вещественная
квадрика. Если рассматривать эти квадрики как абсолюты
соответственно неевклидовых пространств 5.2w_1, и
nS2n_lf данные конгруэнции прямых являются соответственно
паратактической конгруэнцией прямых S.2n__t, эллиптической
паратактической конгруэнцией прямых и гиперболи-
ческой паратактической конгруэнцией прямых nS2n_1.
23*
356
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
§ 12. Трёхмерная проективная геометрия
как неевклидова геометрия (интерпретация Плюккера)
Прямые линии пространства удобно задавать с помощью
плюккеровых координат, называемых так по имени впервые
применившего их Плюккера [1]. Плюккеровы координаты опреде-
ляются следующим образом: если прямая проходит через две точки
с координатами х°, х1, х2, х3 и у®, у1, у2, у\ то плюккеровыми
координатами этой прямой называются шесть определителей вто-
рого порядка:
р01 = р03 = У0 х° У° X1 У1 X3 У3 J = х0^1 = х°_у3 — х1^0, Р02 = — x3j/°, р23 = х° У° X2 У2 X2 У* X3 У3 = xQy2 = х2у3 — х2_у°, — х3у2, (3.180)
X3 X1 X1 X2
/У' = У3 У1 = х3уА — х1 у3, р12 = У1 У2 = Xs-у2 —х2уУ
Как видно из этого определения, плюккеровы координаты опре-
делены с точностью до умножения на ненулевое вещественное
число.
Плюккеровы координаты не зависят от выбора пары точек на
прямой: если мы заменим точки с координатами хг и у1 точками
с координатами r xt = axt-\-by\ ' у1 = ex:1-\-dy\ то
гр*з •—
Гх1 'хз
ryi гуз
Так как
axi + byi ахз -[- Ьуз
сх* -|- dyl схз + dyi
7 а b с d X* ХЗ yi уз = {ad — be) pti. (3.181)
Х° X1 X2 У° у1 у2 X3 -у3 = 0, (3.182)
Х° X1 X2 у0 у1 у2 X3 У3
то, раскладывая этот определитель по двум строкам, получим:
х° х1
У
X2 X3 Х° X2
у2 у^ у® у2
X3 X1 Х° X3
yl “Ь уО уЗ
X1 X2
= 0,
(3.183)
т. е. плюккеровы координаты прямых связаны соотношением
р03р12 0> (3.184)
§ 12]
ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА
357
В случае пересечения двух прямых их плюккеровы коорди-
наты связаны соотношением
/7°^+Л31+^ (3.185)
В самом деле, в этом случае можно определить эти прямые
точками с координатами хг, уг и х*, z\ где х*— координаты точки
пересечения этих прямых. В этом случае
х° X1 X2 Xй
У° У1 У2 У3
х° X1 х- Xs = 0
ZQ Z1 Z2 Z3
(3.186)
Раскладывая этот определитель по первым двум строкам, мы
получим:
(3.187)
Обозначая плюккеровы координаты наших прямых соответст-
венно через pw и qw, мы перепишем соотношение (3.187) в виде
(3.185).
Кроме определённых нами плюккеровых координат прямых,
называемых лучевыми, можно определить осевые плюккеровы
координаты прямых, определение которых двойственно определе-
нию введённых выше координат. Пусть через прямую проходят
две плоскости с тангенциальными координатами zz0, ult и%, u?j и
tr0, vlf v2, т/3, тогда осевыми плюккеровыми координатами этой
прямой называются шесть определителей второго порядка:
«0 «1 u^ u.2
Poi = ^1 = uov1 — u1vo, р02 = ^0 ^2 = «0®2 —
Pos = «0 «3 = u0v.3—u3v0, p.2.3 = «2 «3 ^2 ^3 = «2^3 —«3^2- (3.188)
«3 «1 «2
P‘il ~ ^3 = U3V1 — U1VS, p12 = = Ul°2 U2V1'
Эти координаты также определены с точностью до умножения
на ненулевое вещественное число. Так же как для лучевых коор-
динат, можно показать, что осевые плюккеровы координаты пря-
мых не зависят от выбора плоскостей, проходящих через эти
прямые, и что эти координаты связаны соотношением
Р01Р23+PozPsi + РозРи = °- (3.189)
358
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
Аналогично предыдущему можно показать, что в случае пере-
сечения двух прямых (т. е. когда две прямые лежат в одной пло-
скости) осевые плюккеровы координаты этих прямых связаны
соотношением
Р01723 + Ро^й1 + Porfiz + Р12?оз + /W02 + = 0 • (3.190)
Найдём связь между лучевыми и осевыми координатами рч и
ру одной и той же прямой. Для этого заметим, что если точки
с координатами х*, zi лежат на одной прямой, то все опреде-
лители третьего порядка матрицы
'х° х1 х2 х3’
?° У1 У2
<2° Z1 Z2 ZZ .
(3.191)
равны 0, так как координаты каждой из этих точек являются ли-
нейной комбинацией других. Эти условия можно записать так:
р23^ + р31г2 + = 0,
р23^0 — р03^2 р02^3 О,
+ р03?1 — р01г3 = 0,
р12г° — р02^1 р01г2 = 0,
(3.192)
где рч имеют вид (3.180).
Эти равенства можно рассматривать как уравнения плоскостей,
проходящих через нашу прямую; среди этих уравнений имеется
только два независимых, за которые можно принять любые два
уравнения. Перепишем первые два из этих уравнений в виде
т. е.
яог° Д- Д- я2г2 + = 0,
4" “Ь =
(3.193)
ио — 0,
= 1р-А,
U1—kp'i3, U.2= kp?jl, Ua=kp12, ]
^ = 0, ,2 = -/роз( v.3==lpOl j (3.194)
где k и I — произвольные множители.
Тогда осевые плюккеровы координаты данной прямой имеют
вид
Ро± — — Ы(р™У, Р^^^Р^+Р^Р^Рц, 'I
Р02=—А/рИр23, р.31 =—klpPp'*, i (3.195)
j90 3= — klp12p2\ P12 = klp^p23 J
или, заменяя в силу (3.184) р31/?02Д-р12р03 на —р01р23 и полагая
kl =— мы получим:
Р<н=Р^> Рм=Р&1, Рм=р12, Рж=Р01> Psi=p°l Рп = Р0&- (3.196)
§ 12]
ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА
359
Заметим, что если записывать сокращённо равенство (3.185)
в виде
(А ?) = 0, (3.197)
равенство (3.184) примет вид
(А Р) = 0, (3.198)
а соотношение (3.196) можно переписать в виде
д , ч
= (3.199)
При проективных преобразованиях пространства Р3 плюк-
керовы координаты преобразуются линейно. В самом деле, при
коллинеации
> = 2aW (3.200)
i 3
плюккеровы координаты прямых изменяются по закону
'pij = 'х1 ’у) — 'xi 'у' = (5 а{кх,с) (S ajy1) — (2 арс1) (2 акУк) —
к I I к
= 2 2 (хку1—х1ук) = 2 2 аъа{ рк1> (3.201)
к I к I
а при корреляции
иг = 2 atjx3 (3.202)
з
лучевые плюккеровы координаты прямых переходят в осевые
плюккеровы координаты прямых по закону
'Pij = — UjVi = (2 aikx*) (2 а пУ1) — (S aflxl) (2 aiky*) =
к I I k\
= S 5 “uAji (xky’-—xlyk) = 22 aikajlP^. (3.203)
к l к 1
Заметим, что для простейшего вида коллинеации
'х° = ах°, 'х1 = рх1, 'х2 = 'х6 = ох3, офуЗ = 1 (3.204)
линейное преобразование плюккеровых координат (3.201) можно
записать в виде
>01 — оф/?01, >02 = аур02, 'р°§ = а>03,
>23 >31 = >12 =
Если ввести обозначения
ар^ЗГ^А, а7 = (р8)_1 = В, а8 = (^)-1 = Г, (3.206)
то предыдущие соотношения можно переписать так:
'р01 = ApQ1, = В//32, >УЗ = Гроа,
>23 _ д-уз, /р31 = В'У1, >12 = Г-1р12 •
(3.205)
(3.207)
360
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
Аналогично для простейшего вида корреляции
rz0=ax°, и± = и2 = ^х2, = Вх3, = 1 (3.208)
соответственное линейное преобразование плюккеровых координат
в силу (3.196) и (3.203) можно записать в виде
>01 = >23 = '№> >°2 = >31 = ?>81. >°3 = >12 = РЧР12- I
'Р'& — >01 = «₽Р°1, >31 = >02 = aW°2. >12=>оз = а>°3 J
или, в обозначениях (3.206)
'рР1 = А.~1р^, ///>2 = В“>И, >оз = г_>12,
'р® = AjpOi, 'р31 — В/?02, >12 = Гр03.
(3.210)
Плюккеровы координаты прямых пространства Р3 позволяют
установить взаимно однозначное соответствие между этими прямыми
и точками пространства Рб, координаты которых численно равны
плюккеровым координатам этих прямых. Так как плюккеровы коор-
динаты связаны соотношением (3.184), точки пространства Рб, изо-
бражающие прямые пространства Р3, образуют квадрику. Эта
квадрика является квадрикой индекса 3. В самом деле, если мы
перейдём к переменным
„о __ Z^ + z?23 п1 _ ро2 + рз1 _ роз + р12
Р — 2 ’ р “ 2 ’ р “ 2 ’
пз - Z?01 “Z?23 "Р^ „5 _ Z>°3~Р12
Р — 2 > р — 2 ’ р ~~ 2 ’
(3.211)
то соотношение (3.183) можно переписать в виде
(р°)2 + ОТ + (Р2)2 — W — (z?4)2 —W = 0. (3.212)
Будем называть эту квадрику квадрикой Q4.
Из результатов § 4 следует, что квадрика Q4 обладает прямо-
линейными и двумерными плоскими образующими, а из результа-
тов § 9 следует, что прямолинейные образующие этой квадрики
образуют одно семейство, зависящее от пяти параметров (фор-
мула (3:159) при п —5, т = 1 даёт Q6>1 = 5), а плоские обра-
зующие образуют два семейства, каждое из которых зависит от трёх
параметров (формула (3.159) при п = 5, т = 2 даётфб>2 = 3).
Прямолинейные образующие квадрики Q4 изображают плос-
кие пучки прямых пространств Р3. В самом деле, если точки
р, q лежат на квадрике Q4, уравнение которой мы будем записывать
в виде (3.198), и если прямая, соединяющая эти точки, является
прямолинейной образующей квадрики, то для произвольной точки
kp-\-lq этой прямой имеет место соотношение
(kp-\-lq, kp + lq) = 0 (3.213)
или
£2(А P) + Ml(p, q) + P(g, ?) —0. (3.214)
§ 12] ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА 361
Так как точки р, q лежат на квадрике, т. е. (р, р) = (q, q) =
= 0, мы находим, что эти точки связаны соотношением (р, q) = О,
т. е. плюккеровы координаты соответственных прямых ’ связаны
условием (3.185), означающим, что эти прямые пересекаются.
Так как из (р, r)=^(q, г) = О следует (kp-^-lq, г) = о при лю-
бых k, I, то прямая, изображаемая произвольной точкой kp-\-lq
нашей прямолинейной образующей, пересекается с любой прямой,
пересекающейся с прямыми, изображаемыми точками р и q. Такая
прямая или проходит через точку пересечения этих прямых или
лежит с ними в одной плоскости. Поэтому прямая, изображаемая
точкой kp-^-lq, также проходит через точку пересечения двух
первых прямых и лежит с ними в одной плоскости.
Плоские образующие квадрики Q4 изображают связки и пло-
ские поля прямых (совокупности прямых, лежащих в одной пло-
скости) пространства Р3. В самом деле, если точки р, q, г лежат
на квадрике Q4 и если двумерная плоскость, порождённая этими
точками, является плоской образующей квадрики, то для произ-
вольной точки kp-\-lq-\-mr этой плоскости имеет место соотно-
шение
{kp-\-lq-\-mr9 kp-\-lq-\-mr) = 0 (3.215)
или
ЬЧр, P) + P{q, q)+m4r, f)-{~2kl(p, ?) +
-\-2km(p, r)-\-2lm((p r) = 0. (3.216)
Так как точки р, q, г лежат на квадрике, т. е. (р, р') = (q, q)—
= (r, г) = 0, а числа k, I, т произвольны, мы находим, что эти
точки связаны соотношениями (р, q) = (р, г) = (q, г) = 0, т. е. со-
ответственные прямые попарно пересекаются. Следовательно, эти
прямые проходят через одну точку или лежат в одной плоскости.
Так как из (р, s) — (q, s)(г, s) = 0 следует (kp-\- lq-\- mr> s)=0
при любых k, I, m, то прямая, изображаемая произвольной точкой
kp-\-lq-\- тг нашей плоской образующей, пересекается с любой
прямой, пересекающейся с прямыми, изображаемыми точками р, q
и г. В том случае, когда эти прямые проходят через одну точку,
прямая, пересекающаяся с ними, также проходит через эту точку,
а в том случае, когда эти прямые лежат в одной плоскости, пря-
мая, пересекающаяся с ними, также лежит в одной плоскости с ними.
В первом случае мы получаем, что прямая, изображаемая точкой
kp-\-lq-\-mr, также проходит через точку пересечения трёх пер-
вых прямых, а во втором случае — что она лежит с ними в одной
плоскости.
Связки прямых пространства Р.3 находятся во взаимно одно-
значном соответствии с точками этого пространства, а плоские
поля — с плоскостями, поэтому можно считать, что плоские
образующие одного семейства квадрики Q4 изображают точки
362 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. Ш
пространства Р3, а плоские образующие другого семейства изобра-
жают плоскости этого пространства. Точки и плоскости простран-
ства Р3 зависят от трёх параметров, а плоские пучки — от пяти
параметров (плоскость пучка зависит от трёх параметров, а центр
пучка на этой плоскости от двух параметров), что совпадает с ука-
занными числами параметров и прямолинейных и плоских образую-
щих квадрики Q4.
Сопоставим свойства прямолинейных и плоских образующих
квадрики Q4, вытекающие из результатов § 9, со свойствами пуч-
ков, связок и плоских полей пространства Р3:
две плоские образующие
квадрики Q4, принадлежащие к
одному семейству, пересекаются
в точке;
две плоские образующие
квадрики Q4, принадлежащие
к разным семействам, не пере-
секаются или пересекаются по
прямой;
ps
две связки пространства Р3
имеют общую прямую (соеди-
няющую центры связок), два
плоских поля пространства Р3
имеют общую прямую (линию
пересечения плоскостей полей);
связка и плоское поле не
имеют общих прямых или имеют
общий пучок прямых (если центр
связки лежит на плоскости поля).
@4
Так как условие (р, q) = 0, означающее пересечение прямых
пространства Р3, изображаемых точками р, q, является в то же
время условием полярной сопряжённости относительно квадрики Q4,
семейства прямых пространства Р.3, изображаемые на квад-
рике Q4 сечениями этой квадрики двумя взаимно поляр-
ными плоскостями, таковы, что каждая прямая одного из
этих семейств пересекается со всеми прямыми другого семей-
ства.
В частности, сечение квадрики Q4 четырёхмерной касатель-
ной плоскостью изображает семейство прямых, пересекающих
одну прямую (изображаемую точкой касания).
Сечение квадрики Q,4 трёхмерной плоскостью, поляра кото-
рой пересекается с квадрикой в двух точках, изображает ги-
перболическую линейную конгруэнцию прямых (оси этой конгру-
энции изображаются точками пересечения квадрики с полярой).
Рассматривая мнимые точки квадрики Q4, изображающие мнимые
прямые пространства Р3, мы найдём также, что сечение квадрики Q4
трёхмерной плоскостью, поляра которой не пересекается с ква-
дрикой, изображает эллиптическую линейную конгруэнцию пря-
мых (мнимые оси этой конгруэнции изображаются мнимыми точками
пересечения квадрики с полярой). Переходя к пределу, когда ве-
щественные или мнимые точки пересечения квадрики с полярой
§ 121
ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА
363
сливаются, мы получим, что сечение квадрики Q4 трёхмерной
плоскостью, поляра которой касается абсолюта, изображает
параболическую линейную конгруэнцию прямых (ось этой кон-
груэнции изображается точкой касания поляры с квадрикой). Так
как гиперболическая линейная конгруэнция прямых расщепляется
на плоские пучки прямых с центрами на осях конгруэнции двумя
способами (с центрами на той или на другой оси), параболическая
линейная конгруэнция прямых расщепляется на плоские пучки пря-
мых с центрами на оси одним способом, а эллиптическая линей-
чатая конгруэнция не содержит плоских пучков, сечения квадрики Q4
трёхмерными плоскостями, изображающие эти конгруэнции,
являются в первом случае линейчатой квадрикой, во втором случае
конусом, в третьем случае овальной квадрикой.
Сечение квадрики Q4 двумя взаимно полярными двумерными
плоскостями изображает два семейства прямолинейных обра-
зующих линейчатой квадрики (так как линейчатая квадрика яв-
ляется единственной поверхностью с такими двумя семействами пря-
молинейных образующих, что каждая прямолинейная образующая
одного семейства пересекается с каждой прямолинейной образую-
щей другого семейства). Рассматривая мнимые точки квадрики Q4,
мы найдём, что мнимое сечение квадрики Q4 двумя взаимно по-
лярными двумерными плоскостями, не пересекающимися с ква-
дрикой, изображает два семейства мнимых прямолинейных
образующих мнимой квадрики, а сечение квадрики Q4 двумя
мнимо сопряжёнными взаимно полярными двумерными плоско-
стями изображает два семейства мнимых прямолинейных об-
разующих овальной квадрики.
Сечения квадрики Q4 четырёхмерными плоскостями, не ка-
сающимися её, изображают линейные комплексы прямых про-
странства А,. В самом деле, всякая такая четырёхмерная пло-
скость определяется уравнением
aoiPQ1 4~ «озР02 + «оз#® + «аз#® + а?лРМ 4~ «ia#2 = 0. (3.217)
Дополним числа а^ до кососимметрической матрицы, добавив
числа а^ = — а^ и а^ = 0. Тогда условие (3.217) можно перепи-
сать в виде
22«*j0## — ^У) = ° (3.218)
i 3
или в виде
т. е.
— 2 (2 «^ОУ — 2 (2 «^)/ = о,
з i * 3
2 (2 «<^)У = °-
i j
(3.219)
364
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
С другой стороны, то же выражение можно привести к виду
т. е.
S (S xi+2 (2 алУ^ х3' = 0,'
* J j ъ
S (2 ацуз) = о.
(3.220)
Равенство (3.219) показывает, что точка у лежит в плоскости,
соответствующей в нашей нуль-системе точке х, а равенство (3.220)
показывает, что точка х лежит в плоскости, в которую при нашей
нуль-системе переходит точка у. Отсюда следует, что прямая пере-
сечения этих плоскостей совпадает с прямой ху, т. е. каждая пря-
мая, удовлетворяющая условию (3.217), при нашей нуль-системе
переходит в себя и поэтому является нуль-прямой этой нуль-си-
стем ы.
В силу формулы (3.120) определитель матрицы (а^«) равен
(^01^23 Н-^02аз1 но равенство нулю этого выражения
является условием того, что плоскость (3.217) касается квадрики Q4.
В последнем случае числа являются осевыми плюккеровыми ко-
ординатами прямой, изображаемой точкой касания.
Так как каждой точке пространства Рб, не лежащей на квад-
рике Q4, соответствует полярная ей гиперплоскость, не касающаяся
квадрики, можно считать, что точки пространства Рб, не лежа-
щие на квадрике Q4, изображают линейные комплексы про-
странства Р3. Числа а^, являющиеся коэффициентами уравнения этой
четырёхмерной плоскости, совпадающие в то же время с элемен-
тами матрицы нуль-системы, определяющей линейный комплекс,
можно считать координатами линейного комплекса.
Если мы определим в пространстве неевклидову метрику,
считая квадрику Q4 за абсолют, мы превратим пространство
в пятимерное неевклидово пространство индекса три 35б.
Группа проективных преобразований пространства Р3 изо-
морфна группе движений неевклидова пространства 3S6. В самом
деле, мы видели, что при каждой коллинеации и корреляции про-
странства Р3 происходит линейное преобразование плюккеровых
координат, т. е. коллинеация в пространстве Рб; так как при кол-
линеациях и корреляциях Р3 прямые переходят в прямые, эти кол-
линеации переводят в себя абсолют пространства 3S6, т. е. являются
движениями пространства 35б. Обратно, при движениях простран-
ства прямые пространства А3, изображаемые точками квад-
рики Q4, переходят в прямые; при этом, так как плоские образую-
щие этой квадрики переходят в такие же плоские образующие,
точки пространства Р3 переходят в точки или плоскости и, следо-
вательно, преобразования, происходящие в пространстве Р3 при дви-
жениях пространства 3S6, являются коллинеациями или корреляциями
пространства Р3.
§ 12]
ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА
365
Заметим, что как группа проективных преобразований простран-
ства Р3, так и группа движений пространства 3£б зависят от 15 ве-
щественных параметров и состоят из четырёх связных компонент
Как мы видели в § 4, два линейных комплекса прямых про-
странства Р3 обладают одним проективным инвариантом. Если ко-
ординаты двух линейных комплексов равры и этим инва-
риантом является выражение
у(^01^2з+^02^31+^03^12+^23^01+^31^02+^12^0з)2 = (А &)2 /3 221)
4 (^01^23+^02^31+^03^12) (^01^23+^02^31+ ^03^12) (#, а) *
Многообразие линейных комплексов прямых проективного
пространства Р3, если считать за расстояние между двумя
комплексами их проективный инвариант о), связанный с их инва-
риантом U соотношением U — cos2 изометрично неевклидову
пространству 3S6 с радиусом кривизны +1. Это утверждение
непосредственно следует из сравнения формулы (3.221) с форму-
лой (3.130), определяющей метрику неевклидова пространства.
Таким образом, проективную геометрию пространства Р3,
если за основной образ пространства принять линейный комп-
лекс прямых, можно рассматривать как неевклидову геомет-
рию пространства 35б.
Так как к полученной интерпретации трёхмерной проективной
геометрии в виде пятимерной неевклидовой геометрии привело вве-
дение плюккеровых координат прямых, эту интерпретацию назы-
вают интерпретацией Плюккера,
Сведение проективной геометрии к неевклидовой с помощью
интерпретации Плюккера использовалось для решения задач проек-
тивной геометрии1).
Так как при интерпретации Плюккера прямые Р3 изображаются
точками абсолюта пространства 3S6, то проективную геометрию про-
странства Р3, если за основной образ пространства считать прямую,
можно рассматривать как геометрию на абсолюте пространства 3S6.
В силу изоморфизма группы проективных преобразований про-
странства Р3 и группы движений пространства 3S6 всякому инво-
люционному проективному преобразованию первого пространства
соответствует инволюционное движение второго пространства. При-
ведём сравнительную таблицу соответственных инволюционных пре-
образований этих пространств:
3 S
отражение от точки и от её
полярной гиперплоскости;
отражение от эллиптической
прямой и её полярной трёхмер-
ной плоскости;
нуль-система;
эллиптическая инволюция;
Э См., например, работу автора [8].
366
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
отражение от гиперболиче-
ской прямой и её полярной трёх-
мерной плоскости;
отражение от пары взаимно
полярных двумерных плоско-
стей, не пересекающихся с аб-
солютом;
отражение от пары взаимно
полярных двумерных плоскостей,
пересекающихся с абсолютом;
отражение от пары мнимо
сопряжённых взаимно полярных
двумерных плоскостей;
гиперболический паратакти-
ческий сдвиг на полупрямую;
гиперболическая инволюция;
полярное преобразование от-
носительно мнимой квадрики;
полярное преобразование от-
носительно линейчатой квадрики;
полярное преобразование от-
носительно овальной квадрики;
инволюционная гомология.
Последнее из этих соответствий следует из того, что при ин-
волюционной гомологии остаются неподвижными точка и плоскость,
определяющие две плоские образующие квадрики Q4, принадлежа-
щие к разным семействам, а прямые, соединяющие произвольные
точки двух таких плоских образующих, составляют гиперболиче-
скую конгруэнцию прямых.
Приведём теперь соответствие между связными компонентами
группы проективных преобразований пространства Р3 и группы
движений пространства 3S6:
движения с определителем
—J—1, переводящие собственную и
идеальную области в себя (со-
держат тождественное преобра-
зование).;
движения с определителем
— 1, переводящие собственную
и идеальную области в себя (со-
держат отражение от точки);
движения с определителем
-|-1, переводящие собственную
область в идеальную и обратно
(содержат гиперболический па-
ратактический сдвиг на полу-
прямую);
движения с определителем
— 1, переводящие собственную
область в идеальную и обратно;
коллинеации с положитель-
ным определителем (содержат
тождественное преобразование);
корреляции с положитель-
ным определителем (содержат
нуль-систему);
коллинеации с отрицатель-
ным определителем (содержат
инволюционную гомологию);
корреляции с отрицатель-
ным определителем.
§ 12]
ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА
367
В § 4 мы видели, что положительность определителя матриц
нуль-систем вытекает из формулы (3.120).
Так как коллинеация (3.204) пространства Р3 изображается
в пространстве 3S6 движением (3.205), мы можем найти связь между
числовыми инвариантами соответствующих друг другу образов
симметрии пространств Р3 и 3S6.
Если две пары прямых пространства Р3 определяют на своих
директрисах двойные отношения
1Г0 = cos2 ф0, = cos2 Фр (3.222)
то, как следует из результатов § 4, произведение двух гипербо-
лических инволюций, переводящих в себя эти пары прямых, является
коллинеацией, приводимой к виду
г х^ — х1, zx2 = £2^х2, fx^ = e~‘2^ix^. (3.223)
В силу (3.205) эта коллинеация изображается в пространстве
движением
fzp03 — (<Ро~<Pi)pO3* 1
'— P^t р^~ — + fр^2 — 2г (<Ро—cpJjnIS, J (^*2 4)
Но, как следует из результатов § 8 главы II, это движение
является призведением отражений относительно двух прямых про-
странства 3S5 кривизны -]-1 со стационарными расстояниями ?0 + ?i
и <?0 — Таким образом, две пары прямых пространства Р3, опре-
деляющие на своих директрисах двойные отношения (3.222), соот-
ветствуют двум прямым пространства 3S6 со стационарными рас-
стояниями <?() + <?! и 70 — ф1.
Если уравнения двух линейчатых квадрик пространства Р3 одно-
временно приводятся к виду
— (*0)2 — С*1)2 + (*2)2 + (*Т = 0 и
— (х°)2 — (х1)2 + e2i^ (х2)2 + e2i^ (х3)2 — 0
(?о + <?1 + % + % = °)>
(3.225)
то, как мы видели в § 4, произведение полярных преобразований
относительно этих квадрик является коллинеацией, приводимой
к виду
'х° = £2^ох°, 'х1 tf^X1, ZX2 = £2*?9Х2, ZX3 = £2^!Х3
(?о + <?1 + % + % = 0)-
В силу (3.205) эта коллинеация изображается в пространстве
движением
fzj^02—Qii (<Pj-}-<Pa)pO2, zp03—-^2г (cpj+cp;i)p03^ A
'p23=e-2i (<p»+'Pi)p23j 'pi8==e-a«(<Po+<f2)pi3( >р\1—е-21 (<Ра+<р3)р12 J (3-227)
(3.226)
368 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [ГЛ. Щ
Но, как следует из результатов § 8 главы II, это движение
является произведением отражений относительно двух двумерных
плоскостей пространства 3S6 кривизны +1 со стационарными рас-
стояниями <р0 + <?! =-------Ф3, (р0 и ?о+?3 =
= фх — Таким образом, две квадрики пространства Р3, уравне-
ния которых одновременно приводятся к виду (3.225), соответ-
ствуют двум двумерным плоскостям пространства 3S6 со стацио-
нарными расстояниями ?оН“?з*
Применим полученные результаты к трёхмерным неевклидовым
геометриям. Группы движений пространств S3, 1S3 и 2S3 изоморфны
подгруппам группы проективных преобразований, переводящим
в себя соответственно мнимую, овальную и линейчатую квадрики.
Эти квадрики изображаются в пространстве 3S6 парами взаимно
полярных двумерных плоскостей, в первом случае не пересекаю-
щихся с абсолютом, во втором случае мнимо сопряжённых, а в тре-
тьем случае пересекающихся с абсолютом. Поэтому группы дви-
жений пространства S3, TS3 и 2S3 изоморфны подгруппам группы
движений пространства 3S6, переводящим в себя эти пары плоско-
стей.
Если мы выберем базисные точки е0, е19 е2 пространства 3S6
на первой из этих двумерных плоскостей, а точки е39 е,— на
второй из этих плоскостей, то движение пространства 35б, пере-
водящее в себя эти две плоскости, представится матрицей
ао а1
а0 а1 а2
а2 а2 а2
* <3-228)
й* а* а*
й| а^ al
В первом случае, когда двумерные плоскости являются плоско-
стями S2, ненулевые подматрицы третьего порядка являются неза-
висимыми друг от друга ортогональными матрицами индекса 0. Во
втором случае, когда двумерные плоскости являются мнимо сопря-
жёнными плоскостями S.2(Z), ненулевые подматрицы являются комп-
лексно сопряжёнными между собой комплексными ортогональными
матрицами. В третьем случае, когда двумерные плоскости являются
плоскостями х5.2, ненулевые подматрицы являются независимыми
друг от друга ортогональными матрицами индекса 1.
Отсюда следует, что группа движений пространства S3 изо-
морфна прямому произведению двух групп движений плоско-
сти 5.2, группа движений пространства 1S3 изоморфна группе
§ 12] ИНТЕРПРЕТАЦИЯ ПЛЮККЕРА 369
движений плоскости S2 (I), а группа движений пространства 2S3
изоморфна прямому произведению двух групп движений плоско-
сти XS2.
Так как при этом пары точек квадрики Q4, переходящие друг
в друга при отражениях относительно этих пар двумерных пло-
скостей, изображают пары взаимно полярных прямых пространств S3,
и 253, а эти пары точек квадрики Q4 высекаются из неё
прямыми, в случае пространств 53 и 2S3 соединяющими произ-
вольные точки соответственных двумерных плоскостей, а в случае
пространства XS3 соединяющими мнимо сопряжённые точки соответ-
ственных мнимых двумерных плоскостей, мы получаем следующие
интерпретации многообразий пар взаимно полярных прямых про-
странств 53, 1S3 и 2S3:
Многообразие пар взаимно полярных прямых пространства S3
взаимно однозначно изображается точками двух плоскостей S2,
многообразие пар взаимно полярных прямых пространства
взаимно однозначно изображается точками плоскости S2(Z),
многообразие пар взаимно полярных прямых пространства 2S3
взаимно однозначно изображается точками двух плоско-
стей 1S2.
При этих интерпретациях движения пространства S3 изобра-
жаются независимыми движениями двух плоскостей S2, движения
пространства 1<S3 изображаются движениями плоскости S2 (Z), а дви-
жения пространства 253 изображаются независимыми движениями
двух плоскостей 1S2.
Построенная таким образом интерпретация многообразия прямых
пространства 53 была предложена Фубини [1] и независимо от
него Штуди [2] и называется интерпретацией Фубини, Построен-
ная таким образом интерпретация многообразия прямых простран-
ства х53 была предложена А. П. Котельниковым [2] и независимо
от него Штуди [1] и называется интерпретацией Котельникова,
Об этих интерпретациях, а также об определяющихся с помощью
других видов комплексных чисел интерпретациях Котельникова
многообразий прямых пространств S3 и /?3 мы будем говорить
более подробно ниже, в § 4 главы VI.
Две прямые пространства 35б, соответствующие двум парам
взаимно полярных прямых пространства S3 или 2S3, пересекаются
с обеими двумерными плоскостями пространства 3S6, изображаю-
щими абсолют пространства S3 или 2S3. Поэтому общие перпен-
дикуляры этих двух прямых пространства 3S6 лежат в двумерных
плоскостях, изображающих абсолют, и стационарные расстояния
этих двух прямых равны расстояниям между их точками пере-
сечения с этими двумерными плоскостями, измеренным в этих
плоскостях. Как мы видели в § 6 главы II, если стационарные
расстояния двух прямых в пространствах 53 или 2£3 с радиусами
кривизны г равны со0 и <о1, двойные отношения точек пересечения
24 Зак. 177. Б. А. Розенфельд
370 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. Ш
этих прямых и их поляр с их общими перпендикулярами равны
и70 = соз2-^ и r^cos2^. (3.229)
Поэтому стационарные расстояния двух прямых простран-
ства 3S6, соответствующих этим прямым пространства S3 или 2S3
и их полярам, и, следовательно, расстояния между точками пере-
сечения этих прямых с двумерными плоскостями, изображающими
абсолют, измеренные в этих плоскостях, равны
и “о-Л!, (3.230)
Точно так же мы найдём, что две прямые пространства 35б,
изображающие две пары взаимно полярных прямых простран-
ства Ч$3, имеют два мнимо сопряжённых перпендикуляра. Они
лежат в двух мнимо сопряжённых плоскостях пространства 35б,
изображающих абсолют пространства т53. Стационарные расстояния
двух прямых пространства 35б, изображающих две прямые про-
странства х53 с радиусОлМ кривизны q со стационарными расстоя-
ниями <о0 и и их поляры, равны двум комплексно сопряжён-
ным числам
-^-+-^1. и ^0^1. (3.231)
Формулы (3.230) показывают, что паратактичные прямые про-
странств S3 и 2S3, у которых (^ = ±0)0 и их поляры соответ-
ствуют прямым пространства 35б, пересекаются на одной из пло-
скостей, изображающих абсолют. Поэтому паратактические кон-
груэнции прямых этих пространств изображаются в пространстве 3S&
сечениями квадрики Q4 трёхмерными плоскостями, проходящими
через одну из двумерных плоскостей, изображающих абсолют,
и через одну точку на другой из этих плоскостей. Эта последняя
точка может служить изображением паратактической конгруэнции.
Эта точка, как всякая точка пространства 35б, не лежащая на
квадрике Q4, изображает некоторый линейный комплекс. Нетрудно
проверить, что это — тот самый линейный комплекс, который
определяет нуль-систему, являющуюся произведением паратакти-
ческого сдвига на полупрямую, определяемую паратактической
конгруэнцией, на полярное преобразование относительно абсолюта
пространства 53 или 253. Точки, изображающие паратактические
конгруэнции, лежат на одной двумерной плоскости в случае одно-
имённых паратактических конгруэнций и на разных двумерных
плоскостях в случае разноимённых конгруэнций. В первом случае
расстояние между точками, изображающими паратактические кон-
груэнции, является метрическим инвариантом этих конгруэнций.
Из нашей интерпретации следует, что если считать этот метри-
§13] ТРЁХМЕРНАЯ СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ 371
ческий инвариант за расстояние между двумя одноимёнными пара-
тактическими конгруэнциями, многообразие одноимённых пара-
тактических конгруэнций пространств S3 и 2S3 изометрично
соответственно плоскостям S2 и 152. Нетрудно проверить, что
в последнем случае гиперболические паратактические конгруэнции
изображаются точками собственной области плоскости 1S,2 кри-
визны 1, эллиптические паратактические конгруэнции изображаются
точками идеальной области этой плоскости, а параболические
паратактические конгруэнции изображаются точками абсолюта этой
плоскости.
С другой стороны, из изложенной интерпретации следует, что
каждой паре взаимно полярных прямых пространств S3 и 2S3 с ра-
диусом кривизны г, принадлежащих к паратактической конгруэнции,
взаимно однозначно соответствует точка на одной из двумерных
плоскостей, изображающих абсолют, причём расстояние между
двумя точками такой плоскости, изображающими две прямые кон-
груэнции с длиной общего перпендикуляра со, в силу (3.230)
равно . Поэтому многообразие пар взаимно полярных прямых
паратактических конгруэнций пространств S3 и 2S3 изометрично
соответственно плоскости S2 и с радиусом кривизны ~. Пере-
ходя от плоскостей S2 и к соответствующим сферам про-
странств /?3 и 1/?3 и ставя в соответствие каждой из двух диа-
метрально противоположных точек сферы одну из двух взаимно
полярных прямых, мы получаем, что паратактическая конгруэн-
ция прямых пространства S3 и 2S3 радиуса кривизны г изо-
метрична сфере радиуса г в пространстве соответственно
/?3 и 1/?3. Мы получили теорему о сферическом изобра-
жении паратактической конгруэнции х). Заметим, что
при этом сферическом изображении окружности на сфере соответ-
ствуют семействам прямолинейных образующих поверхностей Клиф-
форда, в частности большие окружности — семействам прямолиней-
ных образующих прямоугольных поверхностей Клиффорда.
§ 13. Трёхмерная симплектическая геометрия
как неевклидова геометрия
Геометрия симплектического пространства Sp3 допускает про-
стую интерпретацию в виде неевклидовой геометрии с помощью
интерпретации Плюккера проективного пространства Р.3 в неевкли-
довом пространстве 3S6. В самом деле, выше было отмечено, что
группа симплектических преобразований пространства Sp3 является
подгруппой группы проективных преобразований пространства Р3,
х) Для случая пространства 53 см. Клейн [3], стр. 323 и Кар-
тан [Ю], стр. 265.
24*
372 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл» III
переводящей в себя линейный комплекс прямых. Но линейн’ые
комплексы прямых пространства Р3 при интерпретации Плюккера
изображаются точками собственной или идеальной области про-
странства 3S6, поэтому группа симплектических преобразований
пространства Sp3 изоморфна подгруппе группы движений про-
странства 3S6, переводящей в себя точку собственной или идеаль-
ной области и, следовательно, полярную ей гиперплоскость про-
странства 3S6. Но всякая гиперплоскость пространства 3S6, полярная
точке собственной или идеальной области, является неевклидовым
пространством 254. Поэтому группа симплектических преобразо-
ваний пространства Sp3 изоморфна группе движений про-
странства 2S4.
Так как нуль-система пространства Р3 изображается в про-
странстве отражением от точки, изображающей линейный ком-
плекс прямых, определяемый этой нуль-системой, то вещественные
или мнимо сопряжённые прямые, переходящие друг в друга при
этой нуль-системе, изображаются в пространстве 3S6 веществен-
ными или мнимо сопряжёнными точками пересечения квадрики Q4
с прямыми, проходящими через эту точку. Но всякая такая прямая
пересекается в одной точке с гиперплоскостью, полярной точке,
изображающей линейный комплекс прямых. Поэтому всякой паре
вещественных или мнимо сопряжённых прямых пространства Sp3,
переходящих друг в друга при его абсолютной нуль-системе, можно
поставить во взаимно однозначное соответствие точку гиперпло-
скости пространства 3S6 кривизны +1, являющейся простран-
ством 2S4 кривизны + 1.
Числовыми инвариантами двух пар прямых пространства Sp3,
переходящих друг в друга при его абсолютной нуль-системе,
являются числовые инварианты этих двух пар прямых простран-
ства Р3. В § 12 мы видели, что если две пары прямых про-
странства Р3 определяют на своих директрисах двойные отноше-
ния = cos2 <р0 и = cos2 то они соответствуют двум прямым
пространства 2S3 со стационарными расстояниями <р0-|- и ф0 — <рг
Но две прямые пространства 3S6, определяемые двумя парами
вещественных или мнимо сопряжённых прямых пространства Sp3,
переходящих друг в друга при его абсолютной нуль-системе,
пересекаются в точке, изображающей линейный комплекс прямых,
определяемый этой нуль-системой, а их не равное нулю стацио-
нарное расстояние равно расстоянию между точками пересечения
этих прямых с гиперплоскостью, полярной указанной точке, т. е.
расстоянию между теми двумя точками пространства 2S4, которые
мы поставили в соответствие данным двум парам прямых про-
странства Sp.3, Отсюда следует, что двойные отношения, опреде-
ляемые этими парами прямых на их директрисах, равны. Поэтому
две мнимо сопряжённые или скрещивающиеся вещественные
прямые пространства Sp3 и прямые, в которые они переходят
§ 13] ТРЕХМЕРНАЯ СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ 373
при абсолютной нуль-системе пространства Sp2, конквадричны,
т. е. принадлежат к одному семейству прямолинейных образующих
мнимой или линейчатой квадрики. Эти две пары прямых опре-
деляют единственный числовой инвариант — двойное отношение
UZz=cos2<p четвёрок точек пересечения этих прямых со всеми
прямолинейными образующими второго семейства квадрики, на
которой они лежат. В силу связи между проективными инвариан-
тами двух пар прямых пространства Р3 и стационарными расстоя-
ниями двух соответствующих им прямых пространства 3S6 инва-
риант W — cos2 ф двух мнимо сопряжённых или скрещивающихся
вещественных прямых пространства Sp3 связан с расстоянием о)
двух точек пространства 2S4, изображающих эти две пары прямых,
соотношением = 2ф или W = cos2 Если же две веществен-
ные прямые пространства Sp2 пересекаются, то прямые, в которые
они переходят при абсолютной нуль-системе, также пересекаются.
Точки квадрики Q4, изображающие эти прямые, лежат на прямо-
линейных образующих этой квадрики и проектируются из точки,
изображающей линейный комплекс, определяемый абсолютной нуль-
системой пространства Sp.^ на её полярную гиперплоскость в виде
двух точек, лежащих на изотропной прямой, т. е. расстояние между
этими точками равно нулю. В этом случае двойное отношение
точек пересечения данных прямых пространства Sp3 и прямых,
в которые они переходят при абсолютной нуль-системе, с един-
ственной прямой, пересекающей все эти четыре прямые, — этой
прямой является прямая, соединяющая точки попарного пересечения
этих прямых,—равно 1. Отсюда видно, что это двойное отно-
шение также связано с расстоянием между соответственными точ-
ками пространства 2S4 соотношением IF=cos2-^-. Поэтому много-
образие пар прямых симплектического пространства Sp3, пере-
ходящих друг в друга при абсолютной нуль-системе, если
считать за расстояние между двумя парами прямых их симп-
лектический инвариант <», связанный с двойным отношением W
четвёрок точек пересечения двух пар прямых с прямыми, пере-
секающими эти две пары прямых, соотношением W = cos2
изометрично неевклидову пространству 2S4 с радиусом кри
визны + 1.
Таким образом, симплектическую геометрию простран-
ства Sp^, если за основной образ пространства принять пару
прямых, переходящих друг в друга при абсолютной нулъ-
системе, можно рассматривать как неевклидову геометрию
пространства 2S4.
При полученной нами интерпретации мнимо сопряжённые и
вещественные пары прямых пространства Sp?j, переходящие друг
374
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. III
в друга при абсолютной нуль-системе, изображают соответственно
точки собственной или идеальной областей пространства 254 с радиу-
сом кривизны -|- 1.
Точки абсолюта пространства 234 изображают ну ль-прямые
абсолютной нуль-системы пространства Sp.3, так как эти точки
являются точками пересечения квадрики Q4 с гиперплоскостью,
полярной точке, изображающей линейный комплекс, определяемый
абсолютной нуль-системой, и, следовательно, изображают прямые
этого линейного комплекса.
Расстояние между двумя точками пространства 2S4, изобра-
жающими две пары прямых пространства Sp3, соответствующих
друг другу в абсолютной нуль-системе, является симплектическим
инвариантом двух прямых пространства Sp.3, одна из которых
принадлежит к первой, а вторая — ко второй паре прямых, пере-
ходящих друг в друга при абсолютной нуль-системе. Если мы
будем считать этот симплектический инвариант расстоянием между
двумя прямыми пространства Sp.3 и ограничимся рассмотрением
только вещественных прямых, мы получим пространство, изомет-
ричное уже не пространству 254, а двузначно изображающей это
пространство гиперсфере пространства 2/?5. Поэтому многообразие
вещественных прямых симплектического пространства Sp3,
если считать за расстояние между прямыми симплектический
инвариант со, связанный с двойным отношением W четвёрок
точек этих прямых и прямых, в которые они переходят при
абсолютной нуль-системе, с прямыми, пересекающими эти две
пары прямых, соотношением W = cos2 , изометрично гипер-
сфере единичного радиуса в пространстве 2/?б.
Таким образом, симплектическую геометрию простран-
ства Sp3, если за основной образ пространства принять пря-
мую, можно рассматривать как геометрию на гиперсфере
пространства 2/?б.
При полученной нами интерпретации прямые, переходящие друг
в друга при абсолютной нуль-системе, изображаются диаметрально
противоположными точками гиперсферы, при отождествлении кото-
рых она превращается в собственную область пространства 254.
Для того чтобы выразить найденный нами симплектический
инвариант двух прямых пространства Sp3 через координаты пар
точек на этих прямых, предположим, что абсолютная нуль-система
имеет вид
Uq = x\ и1 = — х°, и.2 = х\ и$ =—х2, (3.232)
т. е. определяемый ею линейный комплекс изображается в про-
странстве точкой е01 + е23. Рассмотрим проекции 'р и 'q точек р
и q пространства из точки + на гиперплоскость
/?014"Р23 ~ 0, полярную этой точке. Тогда расстояние со между
§13] ТРЁХМЕРНАЯ СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ 375
точками 'р и 'q равно симплектическому инварианту прямых, изо-
бражаемых в пространстве 3S6 точками р и q. При этом точка 'р
имеет координаты
'р01 — , /^02 = р02? /рОЗ — рОЗ,
poi__раз ’ (3.233)
/^23 = ™ , '/231 = р31, 'р12 = Р12,
а точка 'q имеет координаты, выражающиеся по тому же закону
через координаты точки q. Очевидно, инвариант со определяется
из соотношения
Но
COS О) =
(za fq)
V (,'р. 'р) (,'я. 'я)
(3.234)
('р, 'Я) = Р2&- д<>1 2 +^S1 +
+ fc^- + ^902_|_pl3^ =
=4 ^23+p(>iqil+p™qli+i p^&q01 +pSlq02+
Ц_ р12д0-2 _ pOlqOi _ (3.235)
('p, 'p) = /V23 + 2р03р81 + 2p°3p12 — 4 о01)2—4 (P28)2, (3.236)
что в силу (3.185) можно переписать в виде
ср, »=—4 (рм)2-ро1р23-4 (р23)2=- 4<р01+/’23)2- <з-237)
Точно так же получаем:
('я, 'я) = -^ (<701 + <723)2, (3.238)
поэтому
COS (О —
.1 pOipM 4- ^02931_|_р03912 4- X. pWqOi 4- pStqOZ 4- pi2?02 _ 2. poiqQi — L pWq23
-4<^i+/’23) («oi+^)
(3.239)
И
o <0 COS <0 —I— 1
C0SJ ~2~ 2 =
_ pfSgii 4. pCBqiz 4- pstqoi 4. pi2q<8 _ polqoi _ ^23
— — (pOl 4- p28) (qOl 4- 023) •
(3.241)
(3.242)
(3.243)
376 ПРОЕКТИВНЫЕ ПРОСТРАНСТВА [гл. III
Если первая прямая определяется точками с координатами x* i
и у, а вторая прямая — точками с координатами z* и то,
подставляя вместо плюккеровых координат их выражения рч = х*уэ—
— хэу\ qti = ziewo — zW, мы можем переписать выражение (3.240)
в виде
__ (xQw1 Ц- x2w3 * — ^wQ — x3w2) (z^y14- ,г2у3 — zty0 — £3y2) _
(xQyi 4~ x2y3 — дДу° — лДу2) (z^w1 4" £2w3 — z^wQ — z3w2)
(xGzl — X2Z3 — X^Z° — XSZ2) (w0)'1 4- w2y3 — w\y° — w3y2)
(x°yl 4" -*2y3 — xtyo — X3y2) (z°wl 4- 22W3 — ziw0 — Z3W2)
Это соотношение можно переписать также в виде
2j (х2г*ДО2^-Ы — j£2fc’4-t<Qy2fc) 2, ^2iy2i+l — 2i2£+ly2/)
w= —__________________________-______________________
2 (x2iy2i+l x2i+Ly2i) 2 C?2*W2/+1 — Z2i +^w2i)
i i
2 (x2iZ2i^ — хЫ+Ч2*) 2 (w2^2^1 — w2i^y2i)
___________________________i_____________________
2 (x2fy2^+l - Х2г+1У2^) 2 -- Z2^^W2^)
i i
или в виде
yz_ [x, w] [z, y] — [x, z] [tt>, y]
[x, y] [z, w]
Заметим, что так как через всякие две прямые пространства Рп
можно провести трёхмерную плоскость, две прямые в пространстве
Sp2n+i любого числа измерений обладают симплектическим инва-
риантом, за который можно принять определённое нами
расстояние между двумя прямыми в трёхмерной плоскости, прохо-
дящей через эти прямые. Следовательно, многообразие прямых
пространства Sp2n+1 любого числа измерений можно рассма-
тривать как метрическое пространство. Метрику этого про-
странства мы будем подробно рассматривать ниже, в § 7 главы VI.
Выбрав сначала такой базис, базисные точки е0, elt е2, е3
которого находятся в трёхмерной плоскости, определяемой дан-
ными двумя прямыми пространства Sp.2n+1, а затем переходя к про-
извольному базису, мы покажем, что выражение IF=cos2-^-, где
со — определённое нами расстояние между двумя прямыми простран-
ства Sp2n+1, имеет тот же вид (3.242), где I изменяется не от 0
до 1, а от 0 до п.
Найдём, какие семейства прямых пространства Sp3 играют
роль геодезических линий при введённой нами мет-
рике в пространстве прямых Sp3. Прямые таких геодезических
семейств вместе с прямыми, в которые они переходят при абсо-
лютной нуль-системе, изображаются в пространстве 2S4 точками
§13] ТРЕХМЕРНАЯ СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ
377
прямых линий этого пространства. Поэтому эти прямые изобра-
жаются в пространстве 3S6 точками пересечения квадрики с пря-
мыми, соединяющими полюс гиперплоскости, являющейся нашим
пространством 2S4, с точками прямых линий на этой гиперплоско-
сти. Все прямые, соединяющие полюс гиперплоскости с точками
прямых на ней, лежат в одной двумерной плоскости. Если эта
двумерная плоскость не касается квадрики Q4, она высекает из
неё кривую второго порядка, изображающую семейство прямо-
линейных образующих линейчатой квадрики. Если эта двумерная
плоскость касается квадрики Q4, она высекает из неё пару прямо-
линейных образующих, изображающую два плоских пучка прямых,
обладающих общей прямой; в последнем случае каждая прямая
пространства 35б, соединяющая полюс гиперплоскости с точками
прямолинейных образующих, пересекается с обеими этими прямо-
линейными образующими, что соответствует тому, что прямые,
переходящие при абсолютной нуль-системе в прямые одного плос-
кого пучка, являются прямыми второго плоского пучка. Поэтому
геодезическим семейством прямых при введённой нами метрике
в многообразии прямых пространства Sp3, проходящим через
две скрещивающиеся прямые, является семейство прямолиней-
ных образующих линейчатой квадрики, содержащее две данные
прямые и две прямые, в которые они переходят при абсолютной
нуль-системе, а геодезическим семейством прямых, проходящим
через две пересекающиеся прямые, является плоский пучок пря-
мых, определяемый этими прямыми.
Заметим, что семейства прямолинейных образующих линейчатых
квадрик пространства Sp3, играющие роль геодезических линий
в определённой нами метрике в многообразии прямых, обладают
тем свойством, что второе семейство прямолинейных образующих
этих квадрик состоит из нуль-прямых абсолютной нуль-системы.
В силу изоморфизма группы симплектических преобразований
пространства Sp3 и группы движений пространства 254 всякому
инволюционному симплектическому преобразованию первого про-
странства соответствует инволюционное движение второго простран-
ства. Приведём сравнительную таблицу соответственных инволю-
ционных преобразований этих пространств:
2\
отражение от собственной
точки и её полярной гиперплос-
кости;
отражение от идеальной
точки и её полярной гиперплос-
кости;
гиперболическая инволюция
с неподвижными прямыми, пере-
ходящими друг в друга при абсо-
лютной нуль-системе;
эллиптическая инволюция
с неподвижными прямыми, пере-
ходящими друг в друга при
абсолютной нуль-системе;
378
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
[ГЛ. II
отражение от эллиптической
прямой и полярной ей двумерной
плоскости, не пересекающей
абсолюта;
отражение от эллиптической
прямой и полярной ей двумерной
плоскости, пересекающей абсо-
лют;
отражение от гиперболиче-
ской прямой и полярной ей дву-
мерной плоскости;
эллиптическая инволюция,
неподвижные прямые которой
являются осями эллиптической
симплектической линейной кон-
груэнции индекса 0;
эллиптическая инволюция,
неподвижные прямые которой
являются осями эллиптической
симплектической линейной кон-
груэнции индекса 1;
гиперболическая инволюция,
неподвижные прямые которой
являются осями гиперболической
симплектической линейной кон-
груэнции.
ГЛАВА ЧЕТВЁРТАЯ
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
КАК МЕТРИЗОВАННЫЕ КОНФОРМНЫЕ ПРОСТРАНСТВА
§ 1. Конформные пространства
В евклидовых пространствах Rn и lRn можно определить кон-
формные преобразования — такие дифференцируемые преобразо-
вания этих пространств, при которых не изменяются углы между
кривыми. Преобразование у = у (х«?) является дифференцируемым,
если в каждой точке х области его определения имеются частные
производные
При дифференцируемом преобразовании соответственные диф-
ференциалы dx* и dy* координат соответственных точек связаны
соотношением
dy1 — 2 k* (х) dxi, (4.2)
представляющим собой центроаффинное преобразование про-
странств Rn и lRn. Из §§ 10 и 11 главы I следует, что центроаф-
финное преобразование пространств Rn и lRn, сохраняющее углы
между векторами этого пространства, является вращением, гомоте-
тией или их произведением, а в случае пространства lR.2i такое
преобразование может быть также антивращением этого простран-
ства или произведением антивращения и гомотетии. При
вращении длины векторов не изменяются, при гомотетии длины
всех векторов умножаются на одно и то же число, а при антивра-
щении длины всех векторов умножаются на Z, если они вещественны,
и делятся на Z, если они чисто мнимы. Поэтому при конформном
преобразовании длины дифференциалов векторов в одной точке
умножаются на одно и то же вещественное число k (х) или
эти длины умножаются на чисто мнимое число lk(x), если
они вещественны, и на чисто мнимое число -i- k (х), если они
чисто мнимы, где k (х) — некоторая вещественная функция
точки.
380
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
Если длина дифференциала вектора была равна нулю, то он
при конформном преобразовании снова перейдёт в дифференциал
вектора, длина которого равна нулю, т. е. если мы будем назы-
вать вещественные или мнимые кривые пространств Rn и lRn, все
касательные векторы которых изотропны, изотропными кривыми,
мы находим, что при конформных преобразованиях вещественные
или мнимые изотропные кривые переходят в такие же кривые.
Конформные преобразования пространств Rn и lRn при п^>3
обладают замечательным свойством, резко отличающим их от кон-
формных преобразований плоскостей R2 и 1/?2: при п^>3 все кон-
формные преобразования пространств Rn и lRn переводят гипер-
сферы этих пространств в гиперсферы или гиперплоскости.
Приведём доказательство этой теоремы для пространства Т^1). Для
этого рассмотрим триортогоналъные системы поверхностей про-
странства /?3, т. е. множества поверхностей этого пространства,
состоящие из трёх однопараметрических семейств поверхностей
и обладающие тем свойством, что всякие две поверхности разных
семейств пересекаются ортогонально в каждой точке их линии
пересечения. Как известно, линия пересечения двух поверхностей
двух различных семейств триортогональной системы является линией
кривизны каждой из этих поверхностей. На поверхностях общего
вида линии кривизны образуют два однопараметрических семейства,
причём линии кривизны разных семейств пересекаются ортогонально
или, как говорят, образуют ортогональную сеть. Поэтому одно-
параметрические семейства поверхностей общего вида, включаю-
щиеся в триортогональные системы, включаются в них единствен-
ным образом. Иначе обстоит дело с семействами концентрических
сфер и семействами параллельных плоскостей. Так как на сфере
и плоскости любая кривая является линией кривизны, для построе-
ния триортогональной системы, включающей семейство концентри-
ческих сфер или параллельных плоскостей, достаточно построить
на одной из сфер или плоскостей семейства произвольную орто-
гональную сеть и рассмотреть все конические или цилиндрические
поверхности, образованные общими нормалями сфер или плоско-
стей в точках линий этой сети. Отсюда видно, что семейства кон-
центрических сфер и параллельных плоскостей включаются в беско-
нечное множество триортогональных систем. Но при конформных
преобразованиях пространства R3 триортогональная система поверх-
ностей переходит в такую же систему, вследствие чего семейства
поверхностей, включающиеся в бесконечное множество триортого-
нальных систем, при конформных преобразованиях могут перейти
только в семейства поверхностей, обладающие тем же свойством.
Поэтому при конформных преобразованиях пространства R3 сферы
действительно переходят только в сферы или плоскости.
!) См. Каган [2], т. I, стр. 74 и т. II, стр. 70.
§ и
КОНФОРМНЫЕ ПРОСТРАНСТВА
381
Совершенно аналогично проводится это доказательство для
пространств Rn и lRn при любых пи/. Разница состоит только
в том, что вместо триортогональных систем поверхностей рассма-
триваются п-ортогональные системы гиперповерхностей, т. е.
множества гиперповерхностей, состоящие из п однопараметрических
семейств гиперповерхностей и обладающие тем свойством, что две
гиперповерхности разных семейств пересекаются ортогонально
в каждой точке их (п— 2)-мерной поверхности пересечения. Роль
семейств концентрических сфер и параллельных плоскостей про-
странства здесь играют семейства концентрических гиперсфер
и семейства параллельных гиперповерхностей.
При п = 2 указанное доказательство не имеет места, так как
семейство концентрических окружностей и семейство параллельных
прямых плоскостей R,2 и 1Т?.2 могут быть включены в ортогональ-
ную сеть кривых единственным образом — вторые семейства сетей
образуют общие нормали окружностей или прямых, вследствие
чего эти сети могут быть переведены конформными преобра-
зованиями плоскостей R,2 и 1/?.2 в произвольные ортогональные
сети.
Эта теорема для пространства R.3 впервые доказана Лиувил-
лем [1] и известна под названием теоремы Лиувилля1).
В случае п = 2, когда теорема Лиувилля не имеет места, рас-
сматривается частный случай конформных преобразований —пре-
образования, переводящие круги в круги или прямые. Эти пре-
образования называют круговыми преобразованиями плоскостей R2
и
Конформные преобразования пространств Rn и lRn при п^>3
и круговые преобразования плоскостей R2 и 1R.2 называют также
преобразованиями Мёбиуса и аналлагматическими преобразова-
ниями.
Из теоремы Лиувилля следует, что при конформных преобра-
зованиях пространств Rn и lRn при п^>3 /n-мерные сферы пере-
ходят в /n-мерные сферы или /n-мерные плоскости, а окружности
переходят в окружности или прямые, так как /n-мерные сферы
и окружности являются пересечениями гиперсфер, а /n-мерные пло-
скости и прямые являются пересечениями гиперплоскостей.
В частности, отсюда и из того, что при конформных преобра-
зованиях вещественные или мнимые изотропные кривые переходят
в такие же кривые, а изотропные окружности представляют собой
пары параллельных изотропных прямых, следует, что при конформ-
ных преобразованиях в Rn и lRn при п 3 вещественные или
мнимые изотропные прямые переходят в такие же прямые.
Заметим, что последний факт имеет место и при п = 2.
х) Доказательство теоремы Лиувилля для пространств Rn и lRn дру-
гим способом см. Схоутен и Стройк [1], стр. 225.
382 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
Всюду в дальнейшем, говоря о конформных преобразованиях,
мы будем предполагать, что п^>3. Отметим, что все изложенные
ниже свойства конформных преобразований в пространствах Rn
и lRn относятся также к круговым преобразованиям плоско-
стей R2 и 1/?2.
Простейшим видом конформных преобразований пространств Rn
и lRn являются движения этих пространств. Другим простым видом
конформного преобразования являются гомотетии и преобразования
подобия, состоящие из движения и гомотетии. При гомотетии
и преобразовании подобия длины всех отрезков умножаются на одно
и то же вещественное число, все углы остаются неизменными,
гиперплоскости переходят в гиперплоскости. При этом в простран-
стве lRn гиперплоскости с перпендикулярами вещественной и чисто
мнимой длины переходят в гиперплоскости с такими же перпенди-
кулярами. Далее, гиперсферы переходят в гиперсферы, причём
радиусы гиперсфер умножаются на одно и то же вещественное
число, и следовательно, в пространстве lRn гиперсферы веществен-
ного и чисто мнимого радиуса переходят в гиперсферы такого же
радиуса.
В пространстве lR2l частными случаями конформного преобра-
зования являются также антидвижения, при которых длины всех
отрезков умножаются на Z, если они вещественны, и делятся на
если они чисто мнимы. При антидвижениях все углы остаются
неизменными, гиперплоскости переходят в гиперплоскости, причём
гиперплоскости с перпендикулярами вещественной длины переходят
в гиперплоскости с перпендикулярами чисто мнимой длины и
наоборот, а гиперсферы переходят в гиперсферы, причём гипер-
сферы вещественного радиуса переходят в гиперсферы чисто
мнимого радиуса и наоборот. Частными случаями конформных
преобразований пространства lR.2l являются также произведения
антидвижений и преобразований подобия.
Важнейшим видом конформного преобразования являются пре-
образования вида
(4-3)
При этом преобразовании точки у и х лежат на одной прямой,
проходящей через точку х0, по одну сторону от этой точки, если R
и |х — xQ | оба вещественны или чисто мнимы, и по разные сто-
роны от этой точки, если одно из чисел R и | х — х0| вещественно,
а другое чисто мнимо, причём произведение расстояний |_у— х0|
и |х — х0| от точек х и у до точки х0 равно постоянному числу 7?2.
Точки х и у, связанные соотношением (4.3), называются взаимно
обратными точками относительно гиперсферы |х — х01 = R
с центром в точке х0 и радиусом R, а преобразование (4.3) назы-
вается инверсией относительно гиперсферы.
§ 1]
КОНФОРМНЫЕ ПРОСТРАНСТВА
383
Из определения инверсии видно, что она является инволюцион-
ным преобразованием, оставляющим неподвижными все точки
гиперсферы |х — xQ\ = R.
Если мы примем центр гиперсферы за начало, то формула (4.3)
примет вид
У = -^х- (4-4)
Точки, взаимно обратные относительно гиперсферы, гармо-
нически делят пару точек пересечения соединяющих их прямых
с гиперсферой. В самом деле, примем указанную прямую за одну
из координатных осей; тогда, если центр гиперсферы принят за
начало, абсциссы точек х, у и точек пересечения оси с гиперсфе-
рой соответственно равны числам х, у, R, —R. Двойное отно-
шение этих четырёх точек равно
»7(х. у, R, = =
_ (x — R)(y-\-R) __ xy + xR — yR — R* (
~ (y — R)(x + R)~ *У — xR + yR — RZ'
Но в силу (4.4) xy = R2, откуда следует, что двойное отно-
шение (4.5) равно —1.
Таким образом, каждая из двух взаимно обратных точек
является точкой пересечения прямой, соединяющей другую из
этих точек с центром гиперсферы, с полярной гиперплоскостью
этой точки относительно гиперсферы.
Отсюда вытекает простой способ построения взаимно обратных
точек относительно окружностей на плоскостях R% и 1/?2: так как
поляра относительно кривой второго порядка соединяет точки
касания касательных к этой кривой, проведённых из её полюса,
Для построения точки, взаимно обратной данной точке относительно
окружности, следует соединить эту точку с центром окружности,
провести из этой точки касательные к окружности, соединить
точки касания и найти точку пересечения построенных прямых;
эта точка и есть точка, взаимно обратная данной точке (черт. 71)е
384 КОНФОРМНЫЕ ПРОСТРАНСТВА [ГЛ. IV
Заметим, что построенные нами прямые перпендикулярны, так как
при отражении от той из этих прямых, которая проходит через
центр окружности, окружность переходит в себя, касательные
переходят друг в друга и, следовательно, вторая прямая переходит
в себя. Поэтому для построения точки, взаимно обратной
данной точке относительно окружности, следует соединить
эту точку с центром окружности, провести из этой точки
одну касательную к окружности и опустить из точки каса-
ния перпендикуляр на построенную прямую', основание перпен-
дикуляра и есть точка, взаимно обратная данной точке.
Инверсия (4.3) определена для всех точек пространства Rn,
кроме точки х0, и для всех точек пространства lRn, кроме точки х0
и точек изотропного гиперконуса |х — хо| = О с вершиной
в точке х0. Поэтому при рассмотрении инверсий целесообразно
дополнить пространство Rn и lRn новыми точками, присоединение
которых сделало бы инверсии взаимно однозначными преобразова-
ниями. При рассмотрении инверсии (4.3) целесообразно добавить
к пространствам Rn и lRn точки, которые можно было бы считать
взаимно обратными точке х0 и точкам конуса |х — х0|. Но, выпол-
няя последовательно две инверсии
Я? Rl
У—= — xi) и -У ~ *2 = j Л (X — ха). (4-6)
мы получим преобразование
V—V - J?2[|X-X1|2(X-X2)+^(X-X1)| z4 7>
У 2 I xt — х2 I'2 |х —Х! |2 + 2^ | х~ хх I2 + У?* ’
переводящее точку хг в точку х.2, а точку х, удовлетворяющую
условию |х — xt| = 0, в точку у, удовлетворяющую условию
— х.2| = 0. Точка xt и точки конуса |х — переходят
при первой инверсии в точки, добавляемые нами для взаимной
однозначности этой инверсии, а точка х.2 и точки конуса | х — х,2 |=0
получаются при второй инверсии из точек, добавляемых нами для
взаимной однозначности этой инверсии. Поэтому добавляемые нами
точки одни и те же для всех инверсий.
Покажем, что инверсии относительно гиперсфер пространств
Rn и 1Rn являются конформными преобразованиями. Прежде
всего, из формулы (4.3) видно, что инверсии являются дифферен-
цируемыми преобразованиями пространств Rn и lRn.
Рассмотрим инверсию (4.4) и найдём дифференциал векторной
функции, при помощи которой задаётся эта инверсия:
dy = 7?2
(х, x)dx — 2 (х, dx) х
(х, х)2
(4.8)
§ 1] КОНФОРМНЫЕ ПРОСТРАНСТВА 385
Составим скалярное произведение дифференциалов dy и 8у
Е>4
(dy, оу) = ((х, х) dx — 2 (х, dx) х, (х, х) ох — 2 (х, 8х) х) =
= <2^[(х, x)2(dx’ Sx) —2(х, х)(х, Зх)(х, dx) —
— 2(х, х)(х, dx)(x, 8х) + 4(х, х)(х, dx)(x, ох)] =
=^<dx- 8х>- <4'9>
Отсюда, в частности, получаем
\dy\2 = (dyt dy)
I Sy I2 = (S^, Sy)
~ (x, x)‘i (dX’ dx^’
P4
— 7------^г(°Х} OX).
(x, xy v '
(4.Ю)
Составляя выражение для косинуса угла между дифферен-
циалами dy, оу и для косинуса угла © между дифференциалами dx,
8х, мы найдём, что
. (dy, бу) {dx, бх) /л 1
cos Ф = А г;= "А—, , »--т = COs (4.11)
f \dy | |бу | \dx \ | ox | ‘ v 7
Так как угол между соответственными кривыми равен углу
между соответственными дифференциалами радиусов-векторов точек,
мы видим, что инверсии не изменяют углов между кривыми и,
следовательно, действительно являются конформными преобразова-
ниями пространств Rn и lRn.
Из формулы (4.10) мы видим также, что длины дифферен-
циалов дуг в окрестности каждой точки умножаются на веществен-
R*
ное или чисто мнимое число п.
|х|
Покажем, что при инверсии гиперсферы пространств Rn и lRn
переходят в гиперсферы или гиперплоскости (при п 3 это
утверждение является непосредственным следствием того, что инвер-
сия является конформным преобразованием, но при п = 2 это
утверждение не является следствием этого). В самом деле, умно-
жая обе части уравнения (х — а, х — а)~г'2 гиперсферы про-
странства Rn или lRn с центром в точке а и радиусом г на
произвольный вещественный множитель А =У 0 и перенося г2 в левую
часть, мы получим уравнение
А(х, х) + (В, х)+С = 0, (4.12)
где А, С — вещественные числа, а В—вектор.
При преобразовании (4.6) уравнение (4.12) перейдёт в уравнение
С(х, х) + (5, х)/?2 + Д/?4 = 0. (4.13)
25 Зак. 177. Б. А. Розенфельд
386
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
Это уравнение снова является уравнением гиперсферы, за исклю-
чением случая С=0. В последнем случае оно является уравне-
нием гиперплоскости, нормальным вектором которой служит век-
тор В. Случаю С = 0 соответствует случай (а, а) = /?’2, т. е. тот
случай, когда гиперсфера проходит через начало. Если в уравне-
нии (4.12) положить 4 = 0, т. е. рассмотреть уравнение, опреде-
ляющее гиперплоскость, соответственное уравнение (4.13) определит
гиперсферу, если данная гиперплоскость не проходит через начало,
и гиперплоскость, если данная гиперплоскость проходит через
начало.
Сравнивая уравнение гиперсферы (х — а, х— а) = г2 с уравне-
нием (4.12), мы находим, что числа А, С и вектор В связаны
с радиусом-вектором центра гиперсферы а и радиусом гиперсферы г
соотношениями
В = — 24а, С = А ((а, а) — г2), (4.14)
откуда
Поэтому, так как для гиперсферы с уравнением (4.13) роль
чисел 4, С и вектора В соответственно играют числа С, 4 7? 4 и
вектор BR2, эта гиперсфера обладает центром а' и радиусом rf,
определяющимися соотношениями
“' = -¥ = (4.16)
Отсюда видно, что если при инверсии в пространстве lRn
гиперсфера переходит в гиперсферу, то гиперсфера веществен-
ного радиуса переходит в гиперсферу вещественного радиуса,
а гиперсфера чисто мнимого радиуса переходит в гиперсферу
чисто мнимого радиуса. Если при инверсии гиперсфера перехо-
дит в гиперплоскость, то в уравнении гиперсферы С = 0 и радиус
гиперсферы определяется из соотношения
Г2_ &,В)
“ 42 •
(4.17)
Так как вектор В служит нормальным вектором гиперплоскости,
мы приходим к следующему выводу: если при инверсии в про-
странстве lRn гиперсфера переходит в гиперплоскость, то
гиперсфера вещественного радиуса переходит в гиперплоскость
с перпендикуляром вещественной длины, а гиперсфера чисто
мнимого радиуса переходит в гиперплоскость с перпендикуляром
чисто мнимой длины.
Как было отмечено выше, инверсия относительно гиперсферы
является инволюционным конформным преобразованием, оставляю-
щим неподвижными все точки гиперсферы и вполне определяю-
§ 11
КОНФОРМНЫЕ ПРОСТРАНСТВА
387
щимся гиперсферой, а отражение от гиперплоскости является инво-
люционным движением и, следовательно, также инволюционным
конформным преобразованием, оставляющим неподвижными все точки
гиперплоскости и вполне определяющимся ими. Поэтому в том
случае, когда при конформном преобразовании гиперсфера пере-
ходит в гиперплоскость, точки, взаимно обратные относительно-
гиперсферы, переходят в точки, симметричные относительно гипер-
плоскости.
Мы видели, что для того, чтобы инверсии относительно гипер-
сфер стали взаимно однозначными преобразованиями пространства,
приходится дополнить пространства Rn и lRn новыми точками,
которые при инверсии относительно гиперсфер соответствуют цен-
трам гиперсфер и точкам их асимптотических конусов. Для того
чтобы произвести указанное дополнение пространств Rn и lRnr
новыми точками, рассмотрим стереографические проекции про-
странств Rn и lRn соответственно на гиперсферу пространства /?п+1
и гиперсферу вещественного радиуса пространства
Для определения стереографической проекции пространства Rn
на гиперсферу в пространстве 7?п+1, а пространства lRn на гипер-
сферу вещественного радиуса в пространстве погрузим про-
странство Rn в пространство /?п+1, а пространство lRn в простран-
ство lRn+-L в виде гиперплоскости = 0 с перпендикуляром
вещественной длины. Далее, поставим в соответствие каждой
точке этой гиперплоскости точку гиперсферы
(X, Х)+(Хп+1)2= 1 (4.18)
с центром на этой гиперплоскости, являющуюся точкой пересече-
ния гиперсферы с прямой, соединяющей данную точку гиперсферы
с точкой еп+1 (черт. 72). Если мы обозначим координаты точки х
нашей гиперплоскости через х1, х2, . .., хп, 0, то координаты Хг
25*
388
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
произвольной точки прямой, соединяющей эту проекции О, удовлетворяют условиям X1 —0 _ _ хп — 0 __ Xw+1 — точку с - = k, k, - 1—k. центром (4.19) (4.20) (4.21)
или *1 — 0 — хп — 0 ~ X1 _ X» _ 1 _ 0—1 xn+1 _
откуда X1 ’ хп Xх = kx\ .... Хп = kx11, 1 хп+1 =
Подставляя эти координаты в уравнение гиперсферы (4.18),
мы находим, что значения k, при которых точки нашей прямой
лежат на гиперсфере, равны 0 (центр проекции) и
Подставляя последнее значение k в (4.21), мы находим коор-
динаты точки X гиперсферы, соответствующей точке х гипер-
плоскости, в виде
V”1 уп 2хп уП + 1 х) 1 /А QQ\
С другой стороны, из (4.20) мы находим:
= (4.24)
При построенной нами стереографической проекции в случае
пространства Rn всякой точке х гиперплоскости соответствует
единственная точка X гиперсферы и всякой точке X гиперсферы,
за исключением центра проекции, соответствует единственная точ-
ка х гиперплоскости. При этой проекции в случае пространства
lRn всякой точке х гиперплоскости, за исключением точек сферы
(х, х) = —1, т. е. точек, соединяющихся с центром проекции
прямыми, параллельными асимптотам гиперсферы, соответствует
единственная точка X гиперсферы. Обратно, всякой точке X ги-
персферы, за исключением центра проекции и точек пересечения
гиперсферы с гиперплоскостью т. е. гиперплоскостью,
касательной к гиперсфере в центре проекции, параллельной данной
гиперплоскости, соответствует единственная точка х гиперплоско-
сти (в случае пространства Rn сфера (х, х) — — 1 и все точки
пересечения гиперсферы с гиперплоскостью Хп+1=\, за исклю-
чением самого центра проекции, мнимы).
Для установления взаимно однозначного соответствия между
пространством Rn и гиперсферой в пространстве Rn+1 или, что
равносильно этому, овальной квадрикой в пространстве Рп+1 до-
статочно дополнить пространство Rn точкой, соответствующей
§ 1] КОНФОРМНЫЕ ПРОСТРАНСТВА 389
центру проекции. Для установления взаимно однозначного соот-
ветствия между пространством lRn и гиперсферой в пространстве
г/?п+1 следует, с одной стороны, дополнить пространство lRn+i
бесконечно удалённой гиперплоскостью до пространства и
дополнить гиперсферу бесконечно удалёнными точками её прямо-
линейных образующих, которые мы будем называть бесконечно
удалёнными точками гиперсферы, а с другой стороны, следует
дополнить пространство lRn новыми точками, соответствующими
центру проекции и точкам пересечения гиперсферы с гиперплоско-
стью Хп+1=1. После дополнения пространств Rn+1 и lRn+1 до
пространства Рп+1 и дополнения пространств Rn и lRn новыми
точками пространства, получающиеся в результате этих дополне-
ний, становятся гомеоморфными соответственным квадрикам в про-
странстве Рп+1.
Покажем, что новые точки, которыми следует дополнить про-
странства Rn и lRn для взаимной однозначности стереографической
проекции, совпадают с теми точками, которыми следует дополнить
эти пространства для взаимной однозначности инверсий относи-
тельно гиперсфер. В самом деле, рассмотрим инверсию
y = \hx (4-25)
относительно гиперсферы (х, х) = 1. При нашем соответствии
между пространством Rn или lRn и гиперсферой точке у простран-
ства Rn или lRn соответствует точка Y гиперсферы с такими
координатами Y*, что при i < п + 1
2 —-—
Y* = 7--УЛ_Т = (t’ Х}— = 1,2Л \ = X* (4.26)
(У, У) + 1 1 , , 1 + (X, х)
(х, х)^
И
уп+1 (У, у) 1 ______ (х, х) 1 (х, х) _ 27)
(х, х) ’
т. е. инверсия (4.25) в пространствах Rn и lRn изображается на
гиперсфере отражением от гиперплоскости Хп+1 = 0. При этом
отражении точка — сп+1, изображающая центр гиперсферы (х, х) = 1,
переходит в точку еп+1, являющуюся центром проекции, а пере-
сечение гиперсферы с гиперплоскостью Хп+1 =— 1, изображаю-
щее асимптотический конус гиперсферы (х, х) = 1, переходит
в пересечение гиперсферы с гиперплоскостью Хп+1=\, касатель-
ной к гиперсфере в центре проекции.
При стереографической проекции т-мерные сферы на гипер-
сфере соответствуют /n-мерным сферам или плоскостям пространств
390
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
Rn и lRn. В самом деле, т-мерная сфера на гиперсфере является
сечением её (/n-f-1)-мерной плоскостью; если точки гиперсферы
лежат на гиперплоскости, т. е. координаты точки X гиперсферы
связаны одним линейным соотношением, то, подставляя вместо этих
координат их выражения (4.23) через координаты точки х гипер-
плоскости, мы получим линейное соотношение между выражением
(х, х) и координатами точки х, т. е. уравнение гиперсферы или,
если коэффициент при (х, х) равен нулю, гиперплоскости; так как
(/n+1)-мерная плоскость пространств Rn+1 и lRn+1 является пере-
сечением п— т гиперплоскостей, совокупность точек пространств
Rn и lRni соответствующих тп-мерной сфере на гиперсфере, яв-
ляется пересечением п— т гиперсфер или гиперплоскостей, т. е.
тп-мерной сферой или плоскостью.
При стереографической проекции углы между кривыми на
гиперсфере равны углам между соответственными кривыми
пространств Rn и lRn. В самом деле, пусть две кривые на ги-
персфере пересекаются в точке X под углом а (черт. 73). Каса-
тельные к этим кривым пересекают гиперплоскость ЛгЛ+1 = 1,
касательную к гиперсфере в центре проекции О, в точках Y и Z.
Треугольники XYZ и OYZ равны, так как сторона YZ общая
для этих треугольников, стороны XY и OY равны, как касатель-
ные к гиперсфере, проведённые из одной точки, и сторона XZ
равна стороне OZ по той же причине. При стереографической
проекции точка X гиперсферы проектируется в точку х гиперпло-
скости Хп+1 = 0, кривые на гиперсфере, пересекающиеся в точке
X, проектируются в кривые на гиперплоскости, пересекающиеся
в точке х, и касательные к кривым на гиперсфере в точке X
проектируются в касательные к кривым на гиперплоскости в точке х.
Но последние касательные параллельны прямым OY и OZ,
так как эти касательные являются линиями пересечения двумерных
плоскостей OYX и OZX с гиперплоскостью Хп+1 = 0, откуда
следует, что угол между этими касательными и, следовательно,
между кривыми на гиперплоскости равен углу YOZ, т. е. углу а.
§ 1] КОНФОРМНЫЕ ПРОСТРАНСТВА 391
При стереографической проекции т-мерные плоские обра-
зующие гиперсферы соответствуют т-мерным изотропным
плоскостям пространств Rn и lRn. В самом деле, при стереогра-
фической проекции изотропные кривые на гиперсфере переходят
в изотропные кривые пространств Rn и lRn, так как угол между
изотропной и неизотропной кривой равен бесконечности, а при
стереографической проекции углы сохраняются. Поэтому при сте-
реографической проекции прямолинейные образующие гиперсферы,
являющиеся изотропными прямыми и поэтому высекающиеся из
гиперсферы двумерными плоскостями, переходят в изотропные
кривые пространств Rn и lRn, соответствующие сечениям гипер-
сферы двумерными плоскостями. Такими кривыми в пространствах
Rn и lRn являются окружности или прямые, но так как изотроп-
ные окружности представляют собой пары параллельных изотроп-
ных прямых, эти изотропные кривые являются прямыми. Если мы
предположим наше утверждение верным для (т—1)-мерных пло-
ских образующих, мы легко его докажем для m-мерных плоских
образующих, так как всякая такая плоская образующая порождается
двумя (т—1)-мерными плоскими образующими, пересекающимися по
(т— 2)-мерной плоской образующей, и через каждую точку m-мер-
ной плоской образующей можно провести прямолинейную образую-
щую, пересекающуюся с обеими (т— 1)-мерными плоскими обра-
зующими. В силу того, что наше утверждение уже доказано для
т=1, оно тем самым доказано для любых т.
Будем называть п-мерным конформным пространством ин-
декса I 1Сп множество элементов, называемых точками, находя-
щихся во взаимно однозначном и взаимно непрерывном соответ-
ствии с точками квадрики индекса ZJ-1 пространства Рп+1\ про-
странство °СП будем обозначать Сп. Будем называть т-мерными
сферами пространств Сп и 1Сп, при т = 1—окружностями,
при т — п— 1 —гиперсферами, множество точек этих пространств,
которые при этом соответствии отвечают сечениям квадрики
(т+1)-мерными плоскостями. Будем называть т-мерными изо-
тропными плоскостями пространств Сп и 1Сп, при т = 1 — изо-
тропными прямыми, множество точек этих пространств, которые
при этом соответствии отвечают m-мерным плоским образующим
Квадрики. Далее, будем называть углом между двумя кривыми
пространств Сп и 1Сп, соответствующими кривым квадрики с каса-
тельными х, у, абсолютное значение произведения -% на логарифм
двойного отношения прямых х, у и прямолинейных образующих
J, k квадрики, лежащих в двумерной плоскости, определяемой
прямыми х, у у и проходящих через их точку пересечения.
Если квадрика пространства является гиперсферой про-
странства Rn+i или гиперсферой вещественного радиуса простран-
ства дополненных до пространства Рп+1, и установлена
392 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
стереографическая проекция пространств Rn и lRn на эти гипер-
сферы, то точки пространств Сп и гСп, отвечающие точкам гипер-
сфер, соответствующим при стереографической проекции точкам
пространств Rn и lRn, находятся во взаимно однозначном и вза-
имно непрерывном соответствии с точками пространств Rn и lRn.
При этом т-мерные сферы и плоскости пространств Rn и lRn,
соответствующие т-мерным сферам на гиперсфере, при рассма-
триваемом соответствии отвечают ,/п-мерным сферам пространств
Сп и 1Сп\ изотропные прямые и плоскости пространств Rn и lRni
соответствующие изотропным прямолинейным и плоским образую-
щим гиперсферы, отвечают изотропным прямым и плоскостям про-
странств Сп и 1Сп, а углы между кривыми пространств Rn и lRn,
равные углам между соответственными кривыми гиперсфер, в силу
формулы (3.164) равны определённым нами углам между отвечаю-
щими им кривыми пространств Сп и 1Сп. Это даёт возможность
рассматривать пространства Сп и 1Сп как результат дополнения
соответственно пространств Rn и lRn новыми точками.
Так как при приближении точки пространств Rn и lRn к цен-
тру гиперсферы точка, взаимно обратная этой точке, удаляется
в бесконечность, добавляемая нами новая точка, соответствующая
центру стереографической проекции, которая, как мы видели, со-
впадает с точкой, взаимно обратной центру гиперсферы, называется
бесконечно удалённой точкой пространств Rn и lRn при их до-
полнении до пространств Сп и 1Сп. Добавляемые нами новые точки,
соответствующие точкам пересечения гиперсферы с гиперплоско-
стью, касательной в центре проекции, называются идеальными
точками пространства lRn при его дополнении до пространства 1Сп,
а совокупность этих точек называется идеальным конусом. Таким
образом, если при дополнении пространства Ап до пространства
Рп следует дополнять его гиперплоскостью, при дополнении про-
странства Rn до пространства Сп следует дополнить его точкой,
а при дополнении пространства lRn до пространства 1Сп сле-
дует дополнить его конусом. С таким дополнением плоско-
сти R2 мы встречаемся при дополнении плоскости комплекс-
ного переменного до расширенной плоскости комплексного пере-
менного.
Квадрики в пространстве Рп+1 можно считать интерпретациями
или моделями пространств Сп и 1Сп.
Из определения пространств Сп и гСп видно, что инверсии отно-
сительно гиперсфер являются взаимно однозначными и взаимно
непрерывными преобразованиями этих пространств. Ниже (в § 2)
мы увидим, что при дополнении пространств Rn и lRn при /г^>3
до пространств Сп и 1Сп все конформные преобразования про-
странств Rn и lRn могут быть расширены до взаимно однозначных
преобразований пространств Сп и 1Сп, чем и объясняется название
пространств Сп и гСп.
КОНФОРМНЫЕ ПРОСТРАНСТВА
393
§ 11
Так как пространство Рп+1 компактно, вследствие чего ком-
пактны и квадрики в этом пространстве, пространства Сп и 1Сп,
гомеоморфные этим квадрикам, также компактны. Так как /n-мер-
ные сферы пространств Сп и 1Сп, при т — п—1—гиперсферы,
при /п—1—окружности, получающиеся дополнением /п-мерных
плоскостей этих пространств, являющихся соответственно простран-
ствами Rm и получаются из этих пространств таким же
образом, как пространства Сп и гСп из соответственных про-
странств Rn и lRn, т-мерные сферы пространств Сп и 1Сп
являются пространствами Ст и кСт. Поэтому /п-мерные
сферы пространства Сп получаются из /n-мерных сфер простран-
ства Rn без какого бы то ни было дополнения или из /п-мерных
плоскостей этого пространства дополнением бесконечно удалён-
ной точки. Точно так же /n-мерные сферы пространства 1Сп
получаются из /n-мерных сфер пространства lRn дополнением
идеальных точек или из /n-мерных плоскостей этого про-
странства дополнением бесконечно удалённой и идеальных
точек.
Отсюда видно, что при дополнении пространств Rn и lRn
до пространств Сп и гСп /n-мерные плоскости, при т = п —
—1 —гиперплоскости, при т = 1 —прямые, пространств Rn и lRn
представляют собой те /n-мерные сферы, при т — п—1—гипер-
сферы, при т = 1 — окружности, пространств Сп и 1Сп, которые
проходят через бесконечно удалённую точку.
Из того, что это пространство Сп гомеоморфно гиперсфере
вещественного радиуса пространства z/?n+1, дополненного до про-
странства zCn+1, и из доказанного утверждения следует, что мно-
гообразие бесконечно удалённых точек гиперсферы вещественного
радиуса в пространстве lRn+1 при дополнении этого пространства
до пространства Рп+1 гомеоморфно многообразию идеальных точек
той же гиперсферы в том же пространстве при дополнении этого
пространства до пространства 1Сп+1.
Так как при инверсиях относительно гиперсфер пространства lRn
гиперсферы вещественного радиуса переходят в гиперсферы веще-
ственного радиуса или гиперплоскости с перпендикуляром веще-
ственной длины, то будем называть гиперсферами вещественного
радиуса пространства 1Сп гиперсферы, соответствующие гипер-
сферам вещественного радиуса и гиперплоскостям с перпендику-
ляром вещественной длины.
С другой стороны, так как при инверсии гиперсферы чисто
мнимого радиуса переходят в гиперсферы чисто мнимого радиуса
или гиперплоскости с перпендикуляром чисто мнимой длины,
будем называть гиперсферами чисто мнимого радиуса простран-
ства 1Сп гиперсферы, соответствующие гиперсферам чисто мнимого
радиуса и гиперплоскостям с перпендикуляром чисто мнимой
длины.
394 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
Совершенно аналогично определяется комплексное конформное
пространство 1Сп(1) как множество элементов, находящихся во
взаимно однозначном и взаимно непрерывном соответствии с точ-
ками квадрики пространства Pn+1(Z). Пространство Cn(Z) можно
рассматривать как результат дополнения пространства Rn(i) беско-
нечно удалённой точкой и идеальными точками, совокупность ко-
торых также называется идеальным конусом. В пространстве Cn(i)
определяются сферы и окружности, изотропные плоскости и пря-
мые, углы и конформные преобразования так же, как в простран-
ствах Сп и 1Сп.
§ 2. Конформная геометрия как неевклидова геометрия
(интерпретация Дарбу)
Так как квадрику индекса I в пространстве Рп можно рас-
сматривать как абсолют неевклидова пространства lSn) определён-
ную нами в § 1 интерпретацию пространств Сп и 1Сп в виде
овальной квадрики и квадрики индекса Z+1 пространства Рп+1
можно также рассматривать как интерпретацию пространств Сп и
хСп соответственно на абсолютах пространств 1Sw+1 и Z+1SW+1.
Покажем, что многообразие гиперсфер вещественного радиуса
пространств Сп и 1Сп взаимно однозначно и взаимно непрерывно
отображается на собственную область соответственно про-
странства 1Sw+1 и l+1Sn+1 положительной кривизны, а много-
образие гиперсфер чисто мнимого радиуса пространств Сп и
1Сп взаимно однозначно и взаимно непрерывно отображается
на идеальные области тех же пространств.
Для этого произведём стереографическую проекцию простран-
ства Rn или lRn на абсолют пространства 1Sn+1 или Z+1SW+1.
Уравнение (4.18) этого абсолюта, если каждую координату X*
Xi
обозначить -р, примет вид
— (ЛГ°)2 + (Х %) + (ЛГге+1)2 = 0. (4.28)
Рассмотрим в пространстве 15?г+1 или точку с коорди-
натами 5°, s1, ..., sn+1, не лежащую на абсолюте, вследствие
чего эти координаты можно нормировать условием
— (s°)2 + Cs 5) + (^г+1)2 = ±1. (4.29)
Рассмотрим далее гиперплоскость, полярную этой точке отно-
сительно квадрики. Уравнение этой гиперплоскости может быть
записано в виде
— Л¥°+($, Х)4-$’»+1Л'п+1 = 0, (4.30)
где s — вектор пространства Rn или lRn с координатами s1, . . ., sn-
§ 2]
ИНТЕРПРЕТАЦИЯ ДАРБУ
395
В пространстве Rn или lRn уравнение гиперплоскости (4.30) имеет
вид
(4, + Л>+1= 1.
\5° / 1 5°
(4.31)
В силу соответствия (4.23) координаты точек пространства Rn
или lRn, соответствующих точкам (п—1)-мерной квадрики, высе-
каемой из абсолюта пространства 1Sn+1 или z+1Sn+1 гиперплоско-
стью (4.30), удовлетворяют уравнению
2 / s \ (х, х) — 1 __1
(X, х) + 1 ’ Х) "+ ТуО- (х, х) + 1 — 1
(4.32)
или
(х, x)(s«+x — s°) + 2(s, х) —(s«+1 + s°) = 0. (4.33)
Если =£ 5°, уравнение (4.33) может быть переписано
в виде
/ ч 2 / ч I S°4-Sw+1 Л /л олч
(х, х) _ gn+l (s, *) + — 0 (4.34)
или
о
(х, х)
(3, ?)
(5° — Sn + 1)2
(50)2 _ (.у, .у) _ (5п+1)2 _
(^ — ^4-1)2 °'
(4.35)
Это соотношение в силу (4.29) может быть записано в виде
2
(*> *) —*Н
_ fo, 3) _ н- 1
(50 — 5П+1)2 ($0 — $п 4-1)2 •
(4.36)
Уравнение (4.36) есть уравнение гиперсферы радиуса
I
1
15° — 5w+i |
центр которой находится в точке с координа-
sn
ИЛИ -j— ----7ГТТ“| >
тами ^ — ^4-1 ’ • • • ’ .$0 — 5п4-1 •
Если же 5п+1 = 5°, условие (4.33) может быть переписано
В виде
(5, х) — -|-(s0-|-^+1)z=0,
(4.37)
т. е. в виде уравнения гиперплоскости.
Формулы (4.34) и (4.37) позволяют по гиперсфере и гипер-
плоскости найти координаты изображающей её точки простран-
ства 1Sn+1 или z+1Sn+1. В самом деле, из (4.34) находим, что для
гиперсферы пространства Rn или lRn с центром а и радиусом г
координаты соответственной точки пространства 1Sn+1 или z+1Sn+1
396
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
связаны с координатами центра и с радиусом гиперсферы соот-
ношениями, слева при вещественном г, справа при мнимом г = qi:
оУ—________ an
a “5o —
, 1
sn
5°—.yn-bl ’
1 sl
/71----------------
sn
(]П_________
*’ 5°—5W+1’
1
9 sO — gn+1’
«$° — + i ’
(4.38)
откуда
5°—+ 1 = =
aX
sn___
I cl
I S° — + =
I &
_ 1
an q ’
(4.39)
sn
Далее из (4.29) находим, что
($0)2 _ (S»+l)2 —
= (s° + sn+1) (s° — sn+1) =
= (S, S) — 1=-^
1,
(S0)2 _ (5n+l)2 —
= (s°-|- Sn+1) (5°---Sn+1) =
= (S) s)+ 1 = ^+1, (4.40)
4
1
т. e.
(я, a)
1
(a, a) — r*
(Д> a) । i
“ 1
V
a) + ?2 (4.4!)
1
и окончательно
о _ (a, д) —r2 + 1
2r
s'
a1
an
(a, a) — r2 — 1
2r
__-4- (a> g) + ?2+l
2?
- s« = ± a-
q' ' q'
(a, д) + ^-1
2^
(4.42)
S
Точно так же для гиперплоскости пространства Rn или lRn
с единичным или мнимо единичным нормальным вектором а и
расстоянием от начала р и pi, сравнивая уравнение (4.37) с нор-
мальным уравнением этой гиперплоскости, мы находим, что коор-
динаты соответственного вектора связаны с координатами вектора а
и числом р соотношениями
(21=:±S1, ..., ап ~ ±Sn, у (S0-4-Sn+1) =: ± р (4.43)
или, так как здесь
sQ = ±p, = ..., sn = ±an, sn+1 = ±р. (4.44)
§ 2] ИНТЕРПРЕТАЦИЯ ДАРБУ 397
Из непрерывности функций (4.42) и (4.44) видно, что полу-
ченное нами соответствие между гиперсферами пространства Сп
или 1Сп и точками пространства Sn+1 или z+1Sn+1 является также
взаимно непрерывным.
Таким образом, точке пространства 1Sn+1 или z+1Sn+1 взаимно
однозначно соответствует гиперсфера пространства Сп или 1Сп.
Координаты этих точек можно рассматривать как координаты
гиперсфер пространства Сп и 1Сп, которые называют полисфери-
ческими координатами этих гиперсфер. В случае п = 2 эти
координаты называют тетрациклическими координатами окруж-
ностей плоскостей С2 и 1С,2. В случае п = 3 эти координаты
называются пентасферическими координатами сфер пространств
С3 и ZC3. Пентасферические координаты в пространстве /?3 были
введены Дарбу [1], полисферические координаты в пространстве
Rn были введены Клейном х). Названия «тетрациклические (т. е.
четырёхкруговые) координаты», «пентасферические (т. е. пяти-
сферические) координаты» и «полисферические координаты» объяс-
няются тем, что для их определения достаточно задать п-|-2 гипер-
сферы (при п = 2 четыре окружности, при п = 3 пять сфер),
соответствующие базисным точкам пространств xSn+1 и z‘+1Sn+1.
Составляя выражение —(s0)2-1- (s, s) + (sn+1)2 для полисфе-
рических координат (4.42) и (4.44), мы видим, что это выражение
равно -|-1 для гиперсфер вещественного радиуса и гиперплоско-
стей с перпендикулярами вещественной длины и —1 для гиперсфер
мнимого радиуса и гиперплоскостей с перпендикулярами чисто
мнимой длины.
Тем самым мы поставили в соответствие каждой гиперсфере
вещественного радиуса пространств Сп и 1Сп точку собственной
области соответственно пространств и z+1Sn+1 положительной
кривизны, а каждой гиперсфере чисто мнимого радиуса тех же
пространств — точку собственной области соответственно про-
странств !Sn+1 и z+1Sn+1 отрицательной кривизны.
Определим угол между двумя пересекающимися гиперсферами
пространств Сп и 1Сп следующим образом: если эти гиперсферы
являются гиперсферами пространств Rn и lRni будем называть
углом между этими гиперсферами угол между двумя окружностями,
образующимися при пересечении этих гиперсфер любой двумерной
плоскостью, проходящей через их центры. Если одна из этих
гиперсфер является гиперсферой, а другая — гиперплоскостью
пространств Rn и lRn, будем называть углом между ними угол
между окружностью и прямой, образующимися при пересечении
этих гиперсферы и гиперплоскости любой двумерной плоскостью,
проходящей через центр гиперсферы и перпендикулярной гипер-
плоскости. Если же эти гиперсферы являются гиперплоскостями
*) См. Клейн [3], стр. 197.
398
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
пространств Rn и lRn, будем называть углом между ними угол
между этими гиперплоскостями.
В первом случае этот угол может быть определён как угол
треугольника, вершинами которого являются центры гиперсфер
и одна из их точек пересечения, противолежащий стороне этого
треугольника, соединяющей центры гиперсфер, если этот угол острый
или прямой, или как угол, смежный с этим углом, если этот угол
тупой (черт. 74). По теореме косинусов евклидовой геометрии
мы найдём, что первый из этих углов выражается через центры a, b
и радиусы Rlt R% наших окружностей по формуле
|а —b\* = Ri + R& — 2/?х/?2 cos <?. (4.45)
Считая угол между нашими гиперсферами равным этому углу
или равным дополнению этого угла до it, мы в силу соотношения
cos (it — 7) — — cos ср найдём, что угол
ср между нашими окружностями опреде-
ляется из соотношения
cos <р =
2/?Х/?2
(4.46)
Будем называть число <р, определяемое
Черт. 74. по центрам и радиусам двух гиперсфер по
формуле (4.46), углом между этими гипер-
сферами и в том случае, когда это число мнимо. Такой случай
имеет место, например, для непересекающихся гипер-
сфер пространства Rn (черт. 75). В самом деле, в том
Черт. 75.
случае, когда одна из двух непересекающихся гиперсфер нахо-
дится внутри другой, мы имеем:
|/?х — — Н
(4.47)
откуда
Ri — 2RiRz + Rz>\a-b\2 или Rl+Rl — | л—£ |2 >2R1R1. (4.48)
В том случае, когда каждая из этих гиперсфер находится вне
другой, мы имеем:
|Я14-Я2|<1« —*1. (4.49)
§ 2]
ИНТЕРПРЕТАЦИЯ ДАРБУ
399
откуда
Ri4-2RiR2-\-Rlc\a-b |2 или R? + Rl — | а-b |2< 2RiRz. (4.50)
Формула (4.46) показывает, что в обоих случаях cos?>l.
Поэтому в этих случаях наш инвариант представляет собой чисто
мнимое число ф = Z<p, для которого cos ф = ch ф является веще-
ственным числом, большим 1.
Найдём угол между двумя концентричными гиперсферами
lRn. В этом случае а = Ь и формула (4.46)
пространств Rn
принимает вид
и
#1 + ^2
C0S?“ 2R& ’
откуда находим:
.^1-^2
Sin V ~ I
2R{ R±
е~г(? = cos ф — i sin ф =
(4-51)
(4.52)
(4.53)
и окончательно
(4.54)
Угол между гиперсферой и гиперплоскостью пространств Rn
и lRn> может быть определён из треугольника, вершинами кото-
рого служат центр гиперсферы, основание
перпендикуляра, опущенного из центра ги-
персферы на гиперплоскость, и одна из их
точек пересечения, как угол, находящийся
между радиусом гиперсферы и перпендику-
ляром (черт. 76). Из этого треугольника мы
находим, что если радиус гиперсферы ра-
вен г, а расстояние от центра гиперсферы
до гиперплоскости равно d, то косинус на-
d
шего угла равен отношению —. Если центр
гиперсферы—точка#, а гиперплоскость опре-
деляется единичным или мнимоединичным нормальным вектором b
и расстоянием от начала р или pi, то расстояние d равно в пер-
вом случае (#, Ь)—р, а во втором случае [(#, Ь)—р]1, вследствие
чего угол между гиперсферой и гиперплоскостью определяется
соответственно по формулам
cos ? = | |, cos?=z| (*»)-/>
(4.55)
400 КОНФОРМНЫЕ ПРОСТРАНСТВА [ГЛ. IV
Угол между двумя гиперплоскостями пространства Rn и lRn
с единичными или мнимо единичными нормальными векторами а,
b определяется по формуле
coso — | (а, 6)|. (4.56)
Докажем, что угол между двумя гиперсферами пространств Сп
и 1Сп равен расстоянию между точками расширенных неевклидо-
вых пространств xSn+1 и кривизны +1, изображающими
эти гиперсферы. В самом деле, косинус расстояния ш между
двумя точками пространств 15п+1и z+1Sn+1 с координатами $0, . . .,
. . ., и £0, . . ., tn+\ представляющими соответственно гипер-
сферы с центрами а и b и вещественными радиусами г± и г2,
равен
I (а, а) — ri + 1
cos — I S0Z^0 —(s, t) + | — I--------—------X
(b, b) — rl+l (a, b) (a, a) — r* — 1 . (b, b) — r* — 1 i _
। — (я, a) — (b, b) + r\ + r[ + 2 (a, b) i i r[ +r^ —(a —b, a — b) i
““ I ~ 2Г1Г2 I “ I I ’
(4.57)
что в силу (4.46) равно косинусу угла между данными гиперсфе-
рами. Точно так же косинус расстояния ш между двумя точками
пространств 1Sn+1 и z+1Sn+1, представляющими соответственно
гиперсферу с центром а и вещественным радиусом г и гиперпло-
скость с единичным нормальным вектором b и вещественным рас-
стоянием от начала р, равен
cos ср = | — S°£° —|— (s, /)4~ Sn+Hn+r I =
= I _ ^) —r2+ 1 / a \ . (a, a) — r*—\ I = I (a, b)—p I
I 2r \ r ’ / ‘ 2r | r p
(4.58)
что в силу (4.55) равно косинусу угла между данными гиперсфе-
рой и гиперплоскостью. Косинус расстояния ш между двумя точ-
ками пространств и z+15n+1, представляющими соответственно
две гиперплоскости с единичными направляющими векторами а и b
и вещественными расстояниями р± и р,2 от начала, равен
cos 0) = — s°/° + (5, t)sn+1tn+1 =
= ±(— PiP2 + (a, b')-\-p1p^ — ±(a, b), (4.59)
что равно косинусу угла между данными гиперплоскостями. Совер-
шенно аналогично наше утверждение доказывается и в случае
гиперсфер чисто мнимого радиуса и гиперплоскостей с перпенди-
кулярами чисто мнимой длины.
§ 21
ИНТЕРПРЕТАЦИЯ ДАРБУ
401
Таким образом, установленное нами взаимно однозначное соот-
ветствие гиперсфер пространств Сп и 1Сп и точек пространств xSn+1
и z+1Sn+i положительной и отрицательной кривизны обладает тем
свойством, что если считать за расстояние между двумя гипер-
сферами угол между ними, то многообразие этих гиперсфер
изометрично соответственно расширенному неевклидову про-
странству rSn+1 или 1+1Sn+1 с радиусом кривизны 1, причём
точки собственной области этого пространства изображают
гиперсферы вещественного радиуса, а точки идеальной области
изображают гиперсферы чисто мнимого радиуса.
Как мы видели в § 6 главы II, расширенному неевклидову
пространству lSn кривизны 1 изометрично и многообразие гипер-
плоскостей пространства lSn, если считать за расстояние между
гиперплоскостями их угол. Поэтому многообразие гиперсфер про-
странств Сп и 1Сп можно поставить во взаимно однозначное
соответствие с многообразием гиперплоскостей соответственно
пространств 15п+1 и z+1Sn+1 любой кривизны, причём угол
между гиперсферами равен углу между соответственными
гиперплоскостями.
Из установленного нами соответствия вытекает следующая
важная теорема: группы конформных преобразований про-
странств Сп и гСп при п^З изоморфны группам движений
соответственно пространств xSn+1 и ?+1Sw+1.
В самом деле, так как конформные преобразования пространств
Сп и 1Сп переводят гиперсферы в гиперсферы, эти преобразова-
ния изображаются некоторыми преобразованиями пространств xSn+1
и z+1Sn+1. С другой стороны, при конформных преобразованиях
пространств Сп и 1Сп сохраняются как углы между пересекающи-
мися кривыми, так и углы между пересекающимися гиперсферами.
Отсюда следует, что соответственные преобразования пространств
xSn+1 и z+1Sn+1 сохраняют вещественные расстояния между точ-
ками этого пространства, а значит, они сохраняют и чисто мни-
мые расстояния между точками пространств xSn+1 и z+1Sn+1, т. е.
являются движениями этих пространств. Обратно, при движении
пространств х5п+1 и z+xSn+1 происходят преобразования про-
странств Сп и 1Сп, переводящие гиперсферы в гиперсферы с сохра-
нением углов между ними, т. е. конформные преобразования Сп
и 1Сп.
Точно так же доказывается, что группы круговых преобразо-
ваний плоскостей С.2 и 1С2 изоморфны группам движений со-
ответственно пространств XS3 и 2S3.
Эти теоремы дают аналитическое выражение конформных пре-
образований пространств Сп и 1Сп при и круговых преоб-
разований плоскостей С2 и ХС2: эти преобразования выражаются
в полисферических координатах по тем же формулам, что дви-
жения пространств xSn+t и z+1Sn+1. В главе V в связи с рассмо-
26 Зак. 177. Б. А. Розенфельд
402
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
трением спинорных представлений движений пространств х5п+1 и
z+1Sn+1 мы найдём другой способ аналитического выражения
конформных и круговых преобразований.
При изоморфизме групп конформных преобразований про-
странств Сп и 1Сп и групп движений пространств xSn+1 и 7+1Sn+1
инверсии относительно гиперсфер пространств Сп и гСп изо-
бражаются отражениями от точек пространств 1Sw+1 и г+15п+1,
изображающих эти гиперсферы, и гиперплоскостей, полярных
этим точкам. В самом деле, мы видели, что инверсия (4.45) от-
носительно гиперсферы единичного радиуса с центром в начале
изображается отражением от гиперплоскости хп+1 =• 0, являю-
щимся в то же время отражением от базисной точки £п+1. Фор-
мулы (4.42), если положить в них а1 = . . . = ап = 0 и г=1,
показывают, что эта базисная точка служит изображением ука-
занной гиперсферы. Так как эту гиперсферу конформным преоб-
разованием пространства Сп и 1Сп можно перевести в любую ги-
персферу вещественного радиуса или гиперплоскость с перпенди-
куляром вещественной длины, а в пространствах 1Sn+1 и z+1Sn+1
это преобразование изображается движением, наше утверждение
доказано для всех гиперсфер вещественного радиуса и гипер-
плоскостей с перпендикулярами вещественной длины. Аналогично
это утверждение доказывается и для гиперсфер чисто мнимого
радиуса и гиперплоскостей с перпендикулярами чисто мнимой
длины.
Так как всякое движение пространств 15п+1 и z+1Sw+1 при n^^l
является произведением отражений от точек и их полярных ги-г
перплоскостей, мы получаем, что всякое конформное преобразо-
вание пространств Сп и 1Сп при и п^Ъ1 и всякое кру-
говое преобразование плоскости С% являются произведением
инверсий относительно гиперсфер. В частности, движения про-
странств Rn и lRn являются произведениями отражений гипер-
плоскостей, а гомотетии пространств Rn и lRn являются произве-
дениями инверсий относительно двух концентричных гиперсфер.
При п = 2/ существуют движения пространства z+1Sn+1, пере-
водящие собственную область этого пространства в его идеаль-
ную область, не являющиеся произведением отражений относи-
тельно точек. Эти движения соответствуют конформным преобра-
зованиям пространства 7С2?, -переводящим гиперсферы вещественного
радиуса в гиперсферы чисто мнимого радиуса и наоборот, которые,
таким образом, имеют место только при п = 2/ (инверсии, а сле-
довательно, и их произведения переводят гиперсферы веществен-
ного и чисто мнимого радиуса в гиперсферы такого же радиуса).
Примером конформного преобразования, переводящего гиперсферы
вещественного радиуса в гиперсферы чисто мнимого радиуса и
обратно, является антидвижение пространства lR2l. Можно пока-
зать, что произвольное конформное преобразование этого типа
§ 2]
ИНТЕРПРЕТАЦИЯ ДАРБУ
403
является произведением какого-нибудь антидвижения, например
антипаратактического поворота на прямой угол, на произвольное
преобразование, порождаемое инверсиями 1)«
Как мы видели в § 7 главы II, группа движений пространства
iSn при п4=21—1 состоит из четырёх связных компонент при
чётном I и нечётном п и из двух связных компонент во всех ос-
тальных случаях, а группа движений пространства lS2l_1 состоит
из восьми связных компонент при чётном Z и из четырёх связных
компонент при нечётном I. Учитывая, что группы конформных
преобразований пространств Сп и 1Сп изоморфны группам движе-
ний пространств 1Sn+1 и z+1Sn+1, мы находим, что группа кон-
формных преобразований пространства 1Сп при пф21 состоит
из четырёх связных компонент при нечётном I и чётном п и
из двух связных компонент во всех остальных случаях, а группа
конформных преобразований пространства 1С21 состоит из
восьми связных компонент при нечётном I и из четырёх связ-
ных компонент при чётном I. Удвоение числа связных компонент
группы конформных преобразований пространств 1С21 происходит
за счёт того, что в этом случае, кроме конформных преобразова-
ний, являющихся произведениями инверсий, имеются преобразова-
ния, состоящие из произведений инверсий и из антидвижений про-
странства lR.2i‘
Таким образом, конформную геометрию пространств Сп и
1Сп, если за основной образ принять гиперсферу, можно рас-
сматривать как неевклидову геометрию пространств 1Sn+1 и
l+isn+1.
С другой стороны, полученное соответствие между простран-
ствами Сп и 15п+1 и между пространствами 1Сп и z+1Sn+1 можно
рассматривать как интерпретации расширенных неев-
клидовых пространств и z+1Sn+1 в конформных
пространствах Сп и 1Сп.
Так как к изложенным интерпретациям привело введение тетра-
циклических и пентасферических координат Дарбу, эти интерпре-
тации пространств и z+1Sn+1 в пространствах Сп и 1Сп на-
зывают интерпретациями Дарбу,
Сведение конформной геометрии к неевклидовой с помощью
интерпретации Дарбу часто использовалось для решения задач
конформной геометрии2).
Так как расширенное пространство 15п+1 является метризован-
ным пространством Рп+1, изложенную интерпретацию можно
9 Эта особенность пространств 1Сп при п = 2/ упущена Схоутеном
и Стройном, которые считают ([1], стр. 225), что конформные преоб-
разования во всех случаях порождаются инверсиями относительно гипер-
сфер.
2) См., например, монографии Кулиджа [2] и Бляшке [2].
26*
404 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
рассматривать в то же время как интерпретацию пространства Рп+1
в виде многообразия гиперсфер пространства Сп х).
При интерпретации Дарбу точки самих конформных пространств
Сп и 1Сп изображаются точками абсолютов пространств 1Sn+1 и
г+1«$п+1. Поэтому конформную геометрию, если за основной образ
пространства считать точку, можно рассматривать как геомет-
рию на абсолютах пространств 1Sn+1 и z+1Sn+1.
Точно так же как для пространств Сп и 1Сп, доказывается,
что многообразие гиперсфер пространства Сп(Г), если считать
за расстояние между двумя гиперсферами угол между ними,
изометрично пространству Sn+1(l) с радиусом кривизны 1 и
группа конформных преобразований пространства Cn(i) изо-
морфна группе движений пространства Sn+1 (i).
Если приписывать каждой гиперсфере положительную или от-
рицательную ориентацию, характеризуя её знаком радиуса, то мно-
гообразие ориентированных гиперсфер вещественного и чисто мни-
мого радиуса пространств Спъ 1Сп изометрично гиперсфере радиуса 1
соответственно в пространствах 1/?п+2 или г+1/?п+2 и п+1/?п+2 или
n+1+lRn+%- При этом за расстояние между двумя гиперсферами
следует считать угол между ними. Ту же метрику в многообразии
ориентированных гиперсфер и гиперплоскостей пространств Rn и
lRn мы получим, если примем за расстояние между гиперсферами
с радиусами и г2 не угол между ними, а угол между гипер-
сферами с теми же центрами и радиусами г\— г0 и г2 — г0; в этом
случае группа вращений гиперсферы (пД- 2)-мерного пространства
изображается группой преобразований гиперсфер, при которых
точки и гиперплоскости переходят в гиперсферы и обратно, но
гиперсферы радиуса г0 переходят в себя 2). Предельным случаем
этих групп преобразований гиперсфер является группа преобразо-
ваний Лагерра (см. § 7 главы I), при которых точки переходят
в гиперсферы и обратно, но гиперплоскости — в гиперплоскости;
инвариантом двух гиперсфер здесь является касательное расстоя-
ние. Если принять это расстояние за расстояние между гиперсфе-
рами пространства Rn или lRn, многообразие ориентированных
гиперсфер этого пространства изометрично соответственно про-
странству 1Rn+1 и г+1/?ге+г
§ 3. Инволюционные конформные преобразования
и образы симметрии
В силу изоморфизма групп конформных преобразований про-
странств Сп и гСп и групп движений пространств xSn+1 и z+1Sn+1
всякому инволюционному конформному преобразованию первых
пространств соответствует инволюционное движение вторых про-
*) См. работу Д. 3. Гордевского (Харьков) [1].
2) См. Бляшке [2], стр. 208, а также нашу работу [2].
ОБРАЗЫ СИММЕТРИИ
405
§ 3]
странств. Найдём инволюционные конформные преобразования про-
странств Сп и 1Сп, соответствующие отражениям от плоскостей
пространств и г+15п+1.
Покажем, что взаимно полярным (т-\- 1)-мерной и (п — т— 1)-
мерной плоскостям пространств и z+1Sn+1 взаимно однозначно
соответствуют (п — т— 2)-мерная и zn-мерная сферы пространств
Сп и гСп. В самом деле, всякой (m-|-1)-мерной плоскости про-
странств 1Sn+1 и z+1Sn+1 соответствует m-мерное пересечение этой
плоскости с абсолютом. Так как при стереографической проекции
пространства Сп или 1Сп на этот абсолют сечение абсолюта ги-
перплоскостью соответствует гиперсфере пространства Сп или 1Сп,
а (zn-ф- 1)-мерная плоскость пространства 1Sn+1 или z+1Sn+1 есть
пересечение п—т гиперплоскостей этого пространства, указанное
/n-мерное сечение абсолюта соответствует пересечению п— т ги-
персфер пространства Сп или 1Сп, т. е. т-мерной сфере этого
пространства.
Отсюда видно, что если гиперсфера пространства Сп или гСп
проходит через т-мерную сферу, то точка пространства 1Sn+1
или z+1Sw+1, изображающая эту гиперплоскость, лежит
в (п — т—\)-мерной плоскости, полярной (т~\- 1)-мерной пло-
скости, точки пересечения которой с абсолютом соответствуют
точкам данной сферы. В самом деле, точка, изображающая ги-
персферу, является полюсом гиперплоскости, точки пересечения
которой с абсолютом соответствуют точкам данной гиперсферы;
если гиперсфера проходит через т~мерную сферу, гиперплоскость,
соответствующая гиперсфере, проходит через (т-\- 1)-мерную пло-
скость, соответствующую /n-мерной сфере, и следовательно, по-
люс этой гиперплоскости лежит в плоскости, полярной этой
(т -ф- 1)-мерной плоскости.
Будем называть две сферы пространств Сп и 1Сп, изображае-
мые двумя полярно сопряжёнными плоскостями пространств 1Sn+1
и z+1Sn+1, сопряжёнными т-мерными сферами. Если одна из
полярно сопряжённых плоскостей пространства 1Sn+1 или z+1Sn+1
пересекает абсолют, а другая не пересекает абсолюта, одна из
двух сопряжённых сфер пространства Сп или 1Сп вещественна,
а другая мнима.
Поэтому будем называть инволюционное конформное преобра-
зование в пространствах Сп и 1Сп, соответствующее отражению от
(т — т—1)-мерной плоскости, инверсией относительно т-мер-
ной сферы, а точки, переходящие друг в друга при этом преоб-
разовании, взаимно обратными точками относительно этой
сферы. Всякая инверсия относительно m-мерной сферы является
в то же время инверсией относительно (п— т — 2)-мерной сферы,
сопряжённой с ней.
Так как отражение от (т-{-1)-мерной плоскости пространств
15п+1 и z+1Sn+1 является произведением отражений от п — т взаимно
406
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
перпендикулярных гиперплоскостей, пересекающихся по (яг-|-1 ^мер-
ной плоскости, отражение от (п— т—1)-мерной плоскости про-
странств 1Sn+1 и z+1Sn+1 является произведением отражений от
п— т взаимно полярно сопряжённых точек, лежащих в этой пло-
скости, являющихся полюсами гиперплоскостей, пересекающихся
по (т-}~ 1)-мерной поляре этой плоскости. Но отражение от точки
пространств 1Sn+1 и z+1Sn+1 изображает инверсию относительно
гиперсферы пространств Сп и 1Сп, изображаемой этой точкой. С дру-
гой стороны, точка, лежащая в плоскости пространств xSn+1 и
Z+XSW+1, изображает гиперсферу пространств Сп и 1Сп, проходящую
через сферу, изображаемую плоскостью; а взаимно полярно сопря-
жённые точки пространств 15п+1 и z+xSn+1 изображают взаимно
ортогональные гиперсферы пространств Сп и гСп. Поэтому инвер-
сия относительно т-мерной сферы пространств Сп и 1Сп яв-
ляется произведением инверсий относительно п — т взаимно
ортогональных гиперсфер, проходящих через эту сферу. В про-
странствах Rn и lRn в качестве этих гиперсфер можно всегда вы-
брать п — т—1 взаимно ортогональных плоскостей, проходящих
через центр сферы, и гиперсферу с тем же центром и с тем же
радиусом, что и данная сфера.
Роль инверсии относительно т~мерной плоскости пространств
Rn и lRn играет отражение от этой плоскости, так как, если
сфера переходит при конформном преобразовании в плоскость,
точки, взаимно обратные относительно сферы, переходят в точки,
симметричные относительно плоскости.
Так как одна из двух точек, симметричных относительно
(п — т—1)-мерной плоскости пространства xSn+1 и z+1Sn+1, мо-
жет быть получена из другой как точка пересечения всех окруж-
ностей, проходящих через первую точку и пересекающих данную
плоскость под прямым углом, а при конформном преобразовании
окружности переходят в окружности и углы между пересекающи-
мися кривыми сохраняются, мы получаем, что одна из двух взаимно
обратных точек относительно т-мерной сферы 1Сп может быть
получена из другой как точка пересечения всех окружностей,
проходящих через первую точку и пересекающих данную сферу
под прямым углом.
В частности, прямым линиям пространств 1Sn+1 и Z+XSW+1 соот-
ветствуют семейства гиперсфер пространств Сп и гСп, проходящих
через (п— 2)-мерную сферу.
Следовательно, в нашей метрике в многообразии гиперсфер
пространств Сп и 1Сп роль геодезических линий играют семей-
ства гиперсфер, проходящих через (п — 2)-мерную сферу. Такие
семейства гиперсфер пространств Сп и гСп называются пучками
гиперсфер.
Как мы видели, прямые пространств xSn+1 и z+x5n+1 подразде-
ляются на три класса — эллиптические (не пересекающиеся с абсо-
§ 3]
ОБРАЗЫ СИММЕТРИИ
407
лютом), гиперболические (пересекающиеся с абсолютом) и изотроп-
ные или параболические (касающиеся абсолюта), причём расстояние
вдоль эллиптических прямых при положительной кривизне про-
странства вещественно, расстояние вдоль гиперболических прямых
в этом случае чисто мнимо, а расстояние вдоль изотропных пря-
мых равно 0. В соответствии с этим пучки гиперсфер пространств
Сп и 1Сп также подразделяются на три класса. Будем называть
пучок гиперсфер эллиптическим, если углы между любыми двумя
гиперсферами этого пучка вещественны, гиперболическим, если
углы между любыми двумя гиперсферами этого пучка чисто мнимы,
и параболическим, если углы между любыми двумя гиперсферами
этого пучка равны нулю.
В пространстве Сп эллиптический пучок гиперсфер может быть
определён как семейство гиперсфер, проходящих через веществен-
ную (п — 2)-мерную сферу, гиперболический пучок может быть
определён как семейство гиперсфер, проходящих через мнимую
(п— 2)-мерную сферу, а параболический пучок — как семейство
гиперсфер, касающихся друг друга в одной точке. На черт. 77
изображены эллиптический, гиперболический и параболический пучки
окружностей на плоскости С2.
В пространствах Rn и lRn эллиптические, гиперболические и
параболические пучки гиперсфер обладают тем свойством, что
центры гиперсфер этих пучков лежат на одной прямой; этой пря-
мой является перпендикуляр к гиперплоскости, в которой лежит
общая (п — 2)-мерная гиперсфера пучка, восставленный к этой
гиперплоскости в центре гиперсферы.
Покажем, что в пространстве Rn гиперсферы эллиптических
и гиперболических пучков высекают на прямой центров гипер-
сфер пучка пары точек, находящиеся соответственно в эллип-
тической и гиперболической инволюции (см. § 4 главы III).
В самом деле, в случае эллиптического пучка рассмотрим одну из
гиперсфер этого пучка и пересечём её двумерной плоскостью, про-
ходящей через прямую центров гиперсфер пучка. Эта двумерная
408
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
плоскость пересечёт нашу гиперсферу по окружности, а общую
(п — 2)-мерную сферу гиперсфер пучка — в паре точек (черт. 78).
Будем считать прямую центров гиперсфер
д пучка вещественной числовой прямой, а центр
( р \ общей (м — 2)-мерной сферы — началом.
______________1— Обозначим радиус общей (п—2)-мерной
х \___________сферы через R, а абсциссы точек пересечения
\1 / нашей гиперсферы с прямой центров — х и 'х.
Тогда в силу известной теоремы элементарной
Черт. 78. геометрии величина R является средним про-
порциональным между абсолютными значе-
ниями | х | и |'х | абсцисс х и ' х, откуда, так как одно из чи-
сел х, 'х положительно, а другое отрицательно, будем иметь:
/?2
(4.60)
Мы получили эллиптическую инволюцию, принимающую вид
(3.66) при /?=1. В случае гиперболического пучка гиперсфер
то же рассуждение при радиусе (п—2)-мерной сферы Ri и за-
мене теоремы элементарной геометрии соответственной теоремой
геометрии плоскости /?.2(0 мы найдём, что связь между абсциссами
х и 'х имеет вид
= (4.61)
т. е. мы получим гиперболическую инволюцию, принимающую вид
(3.67) при R = 1.
Из последнего факта следует, что а пространстве Rn все ги-
персферы гиперболического пучка гиперсфер пересекают под пря-
мым углом вещественную ги-
персферу с центром на прямой
центров гиперсфер пучка, прохо-
дящую через гиперсферы-точки
пучка. В самом деле, из (4.61)
видно, что абсциссы неподвижных
точек преобразования (4.61) равны
± R, а эти неподвижные точки
и есть гиперсферы-точки пучка.
Рассмотрим одну из гиперсфер
нашего пучка и найдём угол её пересечения с гиперсферой с центром
на прямой центров, проходящей через гиперсферы-точки (черт. 79)
по формуле (4.46). Если мы обозначим абсциссы точек пересече-
ния нашей гиперсферы с прямой центров через х, 'х, то абсциссы
центров наших гиперсфер соответственно равны 0, —х, а ра-
диусы этих гиперсфер соответственно равны /?, --- х . Поэтому
§ 3j ОБРАЗЫ СИММЕТРИИ 409
формула (4.41) даёт:
cos» =-------х , ,' ; , -------L. (4.62)
2'г|ЛТЛ |
Числитель правой части этого выражения равен R2— ’хх> что
в силу (4.61) равно нулю, т. е. cos © = 0 и наши гиперсферы
действительно пересекаются под прямым углом. На черт. 77 окруж-
ность, ортогональная всем окружностям гиперболического пучка,
показана пунктиром.
В пространствах Rn и lRn частными случаями гиперболических
пучков гиперсфер следует считать также семейства концентричных
гиперсфер. В самом деле, семейство всех гиперсфер пространств Rn
и lRn с центром а изображается в пространствах 15w+1 и z+1Sn+1
некоторой линией. Эта линия проходит через точку с координатами
s° (0) = a)2+1, (0) = а1...s«(0) =
= ап, sra+1 (0) = , (4.63)
для получения которых надо умножить все координаты (4.42) на
г и устремить г к нулю, и через точку с координатами
s°(oo)=l, s1 (оо) = 0, . . ., s™(oo) —0, sn+1 (оо) = 1, (4.64)
для получения которой надо разделить все координаты (4.42) на г
и устремить г к бесконечности. Но координаты si(r) произвольной
точки нашей линии, изображающей гиперсферу радиуса г, являются
линейными комбинациями координат (4.63) и (4.64)
si(r) — s{ (0) у — $*(оо)у. (4.65)
Поэтому линии (4.65) являются прямыми линиями, проходящими
через точку e0-^-en+lf лежащую на абсолюте пространства 15п+1
или z+1Sn+1. Так как координаты (4.42) всегда можно представить
в виде (4.65), всякая прямая пространств 1Sw+1 и z+1Sn+1, про-
ходящая через точку e0-Hn+i абсолюта, изображает семейство
концентричных гиперсфер. Обратно, так как прямые пространств
15n+i и z+1Sn+1, проходящие через точку ^0“b^n+i абсолюта,
являются гиперболическими прямыми, семейство концентричных
сфер действительно можно рассматривать как частный случай
гиперболического пучка гиперсфер.
Так как движением пространств 15те+1 и l+1Sn+1 всякую гипер-
болическую прямую этих пространств можно перевести в любую
Другую гиперболическую прямую, конформным преобразованием
пространств Сп и 1Сп всякий гиперболический пучок гиперсфер
можно перевести в семейство концентричных гиперсфер.
410 КОНФОРМНЫЕ ПРОСТРАНСТВА [ГЛ. IV
Радиусы г гиперсфер пространств Rn и lRn, изображаемых
точками пространств 15п+1 и z+1Sw+1, образуют скалярную функ-
цию r(s). Гиперповерхности уровня этой функции, как видно из
формул (4.42), имеют уравнения
(г2—l)(s°)2 + (s, s)-|_(r2_|_i)(sn+i)2_2r2s°^+1 = 0. (4.66)
Линиями тока этой функции являются прямые, изображающие
семейства концентричных гиперсфер. Все эти прямые пересекаются
в точке £0-|-£п+1, поэтому они образуют связку параллельных
прямых пространства или Z+1SW+1. Так как гиперповерх-
ности (4.66) ортогональны прямым такой связки, они являются
орисферами пространства 1Sw+1 или их аналогами в простран-
ствах г+15те+1 и, следовательно, на них господствует евклидова
геометрия (см. § 10 главы II). Нетрудно и непосредственно про-
верить, что если расстояние между центрами двух гиперсфер
пространств Rn и lRn радиуса г равно то расстояние между
точками гиперповерхности (4.66), изображающей эти гиперсферы,
(D
измеренное по этой гиперповерхности, равно у, т. е. метрика
гиперповерхности (4.66) только масштабом отличается от метрики
пространства Rn или lRn.
В силу изоморфизма группы конформных преобразований про-
странств Сп и 1Сп и групп движений пространств 1Sw+1 и l+1Sn+1
числовые инварианты и геометрические коварианты двух /п-мерных
сфер пространств Сп и 1Сп определяются числовыми инвариантами и
геометрическими ковариантами двух соответствующих им (т—т—1)-
мерных плоскостей пространств 1SW+1 и z+1Sn+1. При этом общие
перпендикуляры двух (п— т—1)-мерных плоскостей изображают
пучки гиперсфер, называемые направляющими пучками гиперсфер
двух данных т-мерных сфер пространств Сп и гСп, а стационар-
ные расстояния двух (п— т—1)-мерных плоскостей равны ста-
ционарным углам между данными /n-мерными сферами.
Произведение инверсий относительно двух m-мерных сфер является
конформным преобразованием, переводящим в себя направляющие
пучки гиперсфер данных двух /n-мерных сфер, причём каждая
гиперсфера каждого из этих пучков переходит в гиперсферу того
же пучка, составляющую с ней угол 2а)й где — стационарный
угол данных /n-мерных сфер, соответствующий этому пучку.
Рассмотрим несколько более подробно /n-мерные сферы про-
странства Сп. Будем называть две /n-мерные сферы Сп зацеплен-
ными, если любая гиперсфера, проходящая через одну /п-мерную
сферу, пересекается с другой т-мерной сферой. Будем называть
две /n-мерные сферы расцепленными, если существует гиперсфера,
проходящая через одну /n-мерную сферу и не пересекающаяся
с другой /n-мерной сферой. Далее будем называть две /п-мерные
сферы встречающимися, если они имеют общую точку, но не
§ 3]
ОБРАЗЫ СИММЕТРИИ
411
лежат на одной (m-ф- 1)-мерной сфере. Две m-мерные плоскости
в пространстве Rn, если их рассматривать как m-мерные сферы
пространства Сп, следует считать встречающимися сферами, так
как при дополнении пространства Rn до пространства Сп эти
плоскости имеют общую бесконечно удалённую точку. Две боль-
шие m-мерные сферы гиперсферы пространства Rn+1, если рас-
сматривать эту гиперсферу как интерпретацию пространства Сп,
являются зацепленными сферами. На черт. 80 изображены заце-
пленные, расцепленные и встречающиеся окружности.
Две зацепленные m-мерные сферы называются паратакпгич-
ными, если любая гиперсфера, проходящая через одну из них,
пересекает другую под одним и тем же углом (две паратактичные
большие m-мерные сферы гиперсферы пространства Rn+r при
отождествлении диаметрально противоположных точек этой гипер-
сферы превращаются в паратактичные m-мерные плоскости про-
странства S№). Две сопряжённые m-мерные сферы обладают
тем свойством, что любая гиперсфера, проходящая через одну
из них, ортогональна другой, вследствие чего они являются частным
случаем паратактичных сфер (две сопряжённые большие т-мерные
сферы гиперсферы пространства при отождествлении диа-
метрально противоположных точек этой гиперсферы превращаются
в полярно сопряжённые m-мерные плоскости пространства Sw).
Две m-мерные сферы, лежащие на одной (т-ф- 1)-мерной сфере,
называются косферичными. Две косферичные т-мерные сферы
могут пересекаться по (т—1)-мерной сфере, не пересекаться
(пересекаться по мнимой (т—1)-мерной сфере) или касаться.
Рассмотрим две (п—m—1)-мерные плоскости пространства 1<Sw+1,
представляющие две некосферичные m-мерные сферы простран-
ства Сп. Отраничимся рассмотрением того случая, когда п — m—
— 1 m —|— 1.
Так как m-мерные сферы некосферичны, (п— т—1)-мерные
плоскости не пересекаются. С другой стороны, так как поляры
этих (п— m—1)-мерных плоскостей высекают из абсолюта про-
странства 1Sn+1 изображения данных m-мерных сфер, наши
(п— т—1)-мерные плоскости не пересекаются с абсолютом про-
странства 1Sw+1 и являются пространствами Две такие
(п — m—1)-мерные плоскости могут быть расположены в про-
412
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
странстве 1Sn+1 тремя способами: (2п— 2m—1)-мерная плоскость,
порождённая этими (п — т—1)-мерными плоскостями (из условия
п — т—1<^т-(-1 следует, что 2п— 2т—может
не пересекаться с абсолютом пространства 15п+1, может пересе-
каться с этим абсолютом и может касаться этого абсолюта. В пер-
вом случае все п, — т общих перпендикуляров (п — т—1)-мерных
плоскостей являются эллиптическими прямыми; во втором случае
п — т—1 из этих общих перпендикуляров являются эллиптиче-
скими прямыми, а (п,— т)-$ является гиперболической прямой;
в третьем случае п — т — 1 из этих общих перпендикуляров
также являются эллиптическими прямыми, а (п— т)-& является
изотропной прямой. В первом случае все п — т стационарных
расстояний (п— т—1)-мерных плоскостей вещественны и отличны
от нуля; во втором случае п — т—1 из этих расстояний веще-
ственны и отличны от нуля, а (п— т)-е чисто мнимо; в третьем
случае п—т— 1 из этих расстояний также вещественны и отличны
от нуля, а (п— т)-е равно нулю. Заметим, что общие перпенди-
куляры (п — т—1)-мерных плоскостей пространства 1Sw+1 изо-
бражают направляющие пучки гиперсфер, а стационарные расстоя-
ния этих плоскостей равны стационарным углам т-мерных сфер,
т. е. стационарным углам между гиперсферой, проходящей через
одну из m-мерных сфер, и другой m-мерной сферой. Отсюда
следует, что первый случай расположения (п,— т—1)-мерных
плоскостей соответствует зацепленным m-мерным сферам, второй
случай расположения (тг— т—1)-мерных плоскостей соответствует
расцепленным m-мерным сферам, а третий случай расположения
(п—т—1)-мерных плоскостей соответствует встречающимся
m-мерным сферам.
При 2т-]-2 через две m-мерные сферы пространства Сп
в общем случае проходит одна (2m2)-мерная сфера. Две т-мер-
ные сферы пространства Сп при п^2т-\~2 в общем случае
расцеплены, так как при этом условии две (п — т—1)-мерные
плоскости пространства 1Sw+1, не пересекающие абсолюта, обяза-
тельно имеют один общий перпендикуляр, являющийся гиперболи-
ческой прямой. Если две m-мерные сферы находятся в простран-
стве Сп при /£<^2т-|“2, могут быть все три случая: зацепление,
расцепление и встреча.
Рассмотрим теперь простейшие виды m-мерных сфер про-
странств Сп и гСп — пары точек (т = 0) и окружности
(m = 1). Пары точек пространств Сп и 1Сп изображаются прямыми
линиями пространств 1Sn4.1 и г+15п+1, высекающими из абсолютов
этих пространств пары точек, изображающие данные пары точек.
Поэтому две пары точек пространств Сп и 1Сп в общем случае
обладают двумя стационарными углами, равными ста-
ционарным расстояниям соответствующих им прямых пространств
1Sw+i и z+1Sw+1. В частности, две пары точек могут быть конца-
§ 3]
ОБРАЗЫ СИММЕТРИИ
413
кличны, т. е. могут находиться на одной окружности; в этом
случае соответственные прямые пересекаются под единственным
стационарным углом, который мы будем называть углом между
двумя концикличными парами точек. Если две прямые про-
странства 1Sw+1 или г+15п+1 пересекаются под углом ср, то гипер-
плоскости, проходящие через каждую из этих прямых и (п — 3)-
мерную плоскость, полярную к двумерной плоскости этих прямых,
также пересекаются под углом ср и, следовательно, полюсы этих
гиперплоскостей находятся на расстоянии ср. Так как эти гипер-
плоскости проходят через полярную плоскость двумерной плоскости
рассматриваемых прямых, то они ортогональны этой плоскости.
Вследствие этого полюсы этих гиперплоскостей изображают
гиперсферы, ортогонально пересекающие окружность данных пар
точек в этих парах точек. Очевидно, угол между этими гипер-
сферами равен расстоянию между полюсами. Отсюда мы нахо-
дим, что угол между двумя концикличнымц парами точек
пространств Сп и 1Сгг равен углу между двумя гиперсферами,
ортогонально пересекающими ок-
ружность данных пар точек
в этих парах точек.
Угол между двумя парами точек
х, у и z, w на прямой пространства
Rn или lRn связан с двойным отноше-
нием W(x, z; у, w) соотношением
W(x, z\ у, w)=cos2-|-. (4.67)
В самом деле, гиперсферы, ортогонально пересекающие прямую
данных пар точек в этих парах точек, имеют центры в точках
Х~\~У к * + w ~ у—X
с абсциссами а = —, b = —— и радиусы Rx = 2— ,
R% = W 2 - (черт. 81). Применяя формулу (4.46), мы находим,
что в том случае, когда в этой формуле под знаком абсолютной
величины находится положительное число,
? i + cos? + +
cos 2“ 2 “ 4^ "
(у — X ! W — Z\2 ( X 4- у Z — w\2
__ (/?i+/?2)2--(a-6)2 _ + \ 2 2~; __
4А>1/?2 . у — х w — z
4~2 2
__ (у — х + w — z)2 + С* 4- У ~ — W)2_ (z —у) (x — w)___.
“ 4 (у — x)(w — z) ““ (W — 2?) (у — х) —
У — z w— Z ,vr , ч /у1
: = w(*> z' У' (4-68)
414 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
В том случае, когда в формуле (4.46) под знаком абсолютной
величины находится отрицательное число, мы таким же образом
найдём, что cos2 у равен двойному отношению W(x, w; у, z).
Применяя формулы (3.41) и (3.42), мы можем переписать
формулу (4.67) в виде
W(x\ у\ z, w) =—ctg2y. (4.69)
Последняя формула показывает, что случай, когда пары точек
х, у и z, w гармонически разделяют друг друга (W = — 1), соот-
ветствует прямому углу между гиперсферами.
Вместо угла между концикличными парами точек можно
рассматривать функцию (4.69) от этого угла, которую в силу
доказанного мы будем называть двойным отношением двух кон-
цикличных пар точек,
В том случае, когда двойное отношение двух концикличных
пар точек отрицательно, будем говорить, что они разделяют друг
друга, а в том случае, когда оно положительно, будем говорить,
что они не разделяют друг друга (в последнем случае угол ф
между ними чисто мним). Заметим, что две разделяющие друг
друга пары точек окружности Сх, находящейся на сфере
с помощью непрерывной деформации на сфере С2 можно перевести
в две не разделяющие друг друга пары точек той же окружности Сх.
Окружности пространств Сп и 1Сп изображаются двумерными
плоскостями пространств 1Sw+1 и z+1<$n+1, высекающими из абсо-
лютов этих пространств кривые, изображающие данные окружности.
Поэтому две окружности пространств Сп и 1Сп в общем случае
обладают тремя стационарными углами, равными ста-
ционарным расстояниям соответствующих им двумерных плоскостей
пространств 1Sw+1 и z+1Sn+1. Две двумерные плоскости этих про-
странств обладают тремя стационарными расстояниями только
в том случае, когда они находятся в пятимерной плоскости, но
через них нельзя провести четырёхмерной плоскости. Поэтому
две окружности пространств Сп и 1Сп обладают тремя стационар-
ными углами только в том случае, когда они находятся на четы-
рёхмерной сфере, но через них нельзя провести трёхмерной сферы.
В случае пространства Сте.два из трёх стационарных углов двух
окружностей вещественны и один чисто мним, т. е. две окруж-
ности в пространстве Сп при /г ^4 в общем случае расцеплены.
Следовательно, две расцепленные окружности пространства С3,
погружённого в пространство С4, с помощью непрерывной де-
формации в пространстве С4 можно перевести в две зацеплен-
ные окружности того же пространства С3.
Две окружности пространств С3 и гС3 изображаются двумя
прямыми пространств 154 и Z+1S4 и определяют два стационарных
§ 3] ОБРАЗЫ СИММЕТРИИ 415
угла, причём в случае С3 могут иметь место все три случая —
зацепление, расцепление и встреча.
Семейство окружностей пространств С3 или гС3, зависящее
от двух вещественных параметров, изображающееся в простран-
стве XS4 и г+154 прямыми, лежащими в трёхмерной плоскости,
являющейся пространством 53 или * 2S3, и составляющими пара-
тактическую конгруэнцию прямых в этом пространстве, называется
паратактической конгруэнцией окружностей пространства С3
или гС3. Все окружности этой конгруэнции паратактичны друг
другу. Так как в § 11 главы III мы видели, что паратактиче-
ские конгруэнции прямых пространств S3 и 2S3 изометричны
сферам пространств /?3 и 1/?3, то это же относится и к изо-
бражаемым этими конгруэнциями паратактическим конгруэнциям
окружностей.
Мы получили, таким образом, теорему о сферическом
изображении паратактических конгруэнций окруж-
ностей пространств С3 и гС3, частным случаем которой является
теорема Блока о сферическом изображении паратактической
конгруэнции окружностей пространства С3Х). Так как при ото-
бражении паратактических конгруэнций прямых пространств S3
и 2S3 на сферы пространств /?3 и х/?3 окружностям на этих сферах
соответствуют семейства прямолинейных образующих поверхностей
Клиффорда, а большим окружностям — семейства прямолинейных
образующих прямоугольных поверхностей Клиффорда, в простран-
ствах С3 и гС3 окружностям и, в частности, большим окружностям
на сферах пространств /?3 и х/?3 соответствуют семейства окруж-
ностей, изображающие семейства прямолинейных образующих
поверхностей Клиффорда в г+154. В пространстве С3 эти после-
довательности окружностей называются рядами Ивона-Вил-
ларсо, причём прямоугольным поверхностям Клиффорда соответ-
ствуют прямые ряды Ивона-Вилларсо, а косоугольным
поверхностям Клиффорда соответствуют косые ряды Ивона-
Вилларсо 2).
Тот факт, что абсолют пространства 35б в силу интерпретации
Дарбу изображает пространство 2С4, а в силу интерпретации
Плюккера (§ И главы III) изображает многообразие прямых
пространства Р3, причём группа движений пространства 3S6 изо-
морфна как группе конформных преобразований пространства 2С4,
так и группе проективных преобразований пространства Р3,
позволяет рассматривать многообразие прямых пространства Р3
как интерпретацию пространства 2С4. Мысль о применении кон-
формной геометрии для изучения многообразия прямых простран-
ства Р3 была предложена Картаном [3]. Приведём сравнительную
1) См. Адам ар [1], стр. 584.
2) См. Адамар [1], стр. 569 и 580.
416 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
таблицу геометрических образов пространств 3С4 и Р3, соответ-
ствующих друг другу при указанной интерпретации:
Рз
точка; прямая;
изотропная прямая; плоский пучок прямых;
изотропная двумерная пло- связка или плоское поле
скость; прямых;
окружность; семейство прямолинейных образующих линейчатой квад- рики;
овальная двумерная сфера; эллиптическая линейная кон- груэнция прямых;
линейчатая двумерная сфера; гиперболическая линейная конгруэнция прямых;
гиперсфера; линейный комплекс прямых.
§ 4. Неевклидовы пространства
как метризованные конформные пространства
(интерпретации Пуанкаре)
Построенной нами в § 1 стереографической проекции конформ-
ных пространств Сп и 1Сп на гиперсферы единичного радиуса
пространств Rn+1 и lRn+1 можно придать и другое геометрическое
толкование. В самом деле, отождествляя диаметрально противо-
положные точки гиперсфер, мы получим неевклидовы простран-
ства Sn и lSn; тем самым получаем интерпретации неевклидовых
пространств Sn и lSn положительной кривизны в конформных
пространствах Сп и 1Сп.
При рассматриваемой нами стереографической проекции точке
пространства Сп или 1Сп с координатами х* соответствует точка
гиперсферы с координатами X1, связанными с координатами х*
формулами (4.23) и (4.24). Как следует из доказанного нами
в § 1, при стереографической проекции т-мерные сферы гипер-
сферы соответствуют т-мерным сферам пространств Сп и 1Сп,
т-мерные плоские образующие гиперсферы соответствуют
т-мерным изотропным плоскостям пространств Сп и 1СП9 а углы
между кривыми на гиперсфере равны углам между соответст-
венными кривыми пространств Сп и 1Сп.
При стереографической проекции диаметрально противопо-
ложные точки гиперсферы соответствуют точкам простран-
ства Сп или 1Сп, взаимно обратным относительно гиперсферы
(х, х) = —1. В самом деле, составляя координаты (4.23) для
точек х и у пространств Сп или lCni мы находим, что при
X
(х, х)
У
координаты соответственных точек гиперсферы отли-
чаются только знаками.
§ 4] ИНТЕРПРЕТАЦИИ ПУАНКАРЕ 417
Найдём сферическое расстояние точек X и Y гипер-
сферы, соответствующих данным точкам х и у пространства Сп
или 1Сп. Для этого заметим, что если мы будем рассматривать
гиперсферу как конформное пространство, то угол между парой
точек X, Y гиперсферы и парой диаметрально противоположных
точек —X, —У, определяемый как угол между двумя конциклич-
ными парами точек конформного пространства, равен углу между
двумя (п—1)-мерными сферами, ортогонально пересекающими
окружность данных пар точек в этих парах точек. Но пары точек X
и Y, —Хи —Y лежат на большой окружности гиперсферы,
а указанные (п—1)-мерные сферы являются большими сферами,
лежащими в я-мерных плоскостях, перпендикулярных к двумерной
плоскости указанной большой окружности. Поэтому угол между
указанными (п—1)-мерными сферами равен углу между /^-мер-
ными плоскостями, в которых они лежат, а этот угол равен углу
между векторами X, У, который в силу того, что радиус нашей
гиперсферы равен 1, равен сферическому расстоянию со между
нашими точками.
Так как при стереографической проекции сохраняются углы
между сферами, при этой проекции сохраняется угол между кон-
цикличными парами точек. Поэтому в силу того, что при стерео-
графической проекции точки X, У, —X, —Y гиперсферы пере-
X у
ходят соответственно в точки х, у, —,---------(у у) пР0СТРан"
ства Сп или 1Сп, угол между этими парами точек также равен со.
Таким образом, двойное отношение этих пар точек в силу (4.67)
связано со сферическим расстоянием со соотношением
w(x, у, —-7-^Л = соз2£. (4.70)
\ у’ (х, х) ’ (у, у)) 2 v '
Эта формула и позволяет определить сферическое расстояние
соответственных точек X, Y по данным точкам х, у пространства Сп
или 1Сп.
Формула (4.70) определяет метрику гиперсферы единичного
радиуса пространства Rn+1 в пространстве Сп и метрику
гиперсферы единичного радиуса пространства lRn+1 в простран-
стве 1Сп.
Большие окружности и большие т-мерные сферы гиперсферы
единичного радиуса пространства Rn+1 или 1Rn+1 изображаются
в пространстве Сп или 1Сп соответственно окружностями
и т-мерными сферами, ортогональными в гиперсфере (х, х) = — 1
или пересекающими гиперсферу (х, х) = 1 в двух диаметрально
противоположных точках. В самом деле, большие окружности и
/n-мерные сферы гиперсферы единичного радиуса пространства /?п+1
или 1Rn+r, как и все окружности и /n-мерные сферы гиперсфе-
ры, изображаются в пространстве Сп или 1Сп соответственно
27 Зак. 177. Б. А. Розенфельд
418 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
окружностями и m-мерными сферами. Но каждая большая окруж-
ность и m-мерная сфера переходит в себя при отражении гипер-
сферы от её центра. Это отражение, как мы видели, изображается
в пространстве Сп или 1Сп инверсией относительно гиперсферы
(х, х) =— 1. Поэтому, большая окружность и m-мерная сфера
гиперсферы единичного радиуса пространства 7?п+1 или lRn+1 изо-
бражаются в пространстве Сп или 1Сп такими окружностью и
m-мерной сферой, которые переходят в себя при указанной инвер-
сии, вследствие чего в случае, когда гиперсфера (х, х) = — 1
вещественна и наша окружность или /n-мерная сфера пересекаются
с ней, углы между окружностью или m-мерной сферой и этой
гиперсферой равны своим смежным, т. е. эти углы прямые. С дру-
гой стороны, гиперсфера (х, х) = 1 изображает большую (п—1)-
мерную сферу гиперсферы пространства Rn+1 или г/?п+1, являю-
щуюся пересечением этой гиперсферы с гиперплоскостью Лп+1 = О,
и всякая большая окружность и т-мерная сфера гиперсферы, пере-
секающаяся с этой сферой, пересекает её в диаметрально противо-
положных точках. При стереографической проекции каждая точка
этой сферы переходит в себя и, следовательно, диаметрально про-
тивоположные точки этой сферы остаются такими же точками.
Поэтому в том случае, когда окружность или m-мерная сфера
пространства Сп или 1Сп, изображающая большую окружность и
/n-мерную сферу гиперсферы единичного радиуса пространства Rn+1
или lRn+1, пересекаются с гиперсферой (х, х) = 1, они пересекают
её в диаметрально противоположных точках.
Так как при вращениях гиперсферы пространства Rn+1 или lRn+1
сохраняются углы между кривыми, вращения этой гиперсферы
изображаются в пространстве Сп или 1Сп преобразованиями, при
которых сохраняются углы между кривыми, т. е. конформ-
ными преобразованиями. С другой стороны, при вращениях
гиперсферы диаметрально противоположные точки гиперсферы пере-
ходят в диаметрально противоположные, поэтому конформные пре-
образования Сп или 1Сп, изображающие эти вращения, переводят
х
точки х и----------- в точки, связанные тем же соотношением. Таким
(X, X)
образом, вращения гиперсферы единичного радиуса пространств
Rn+1 и lRn+1 изображаются такими конформными преобра-
зованиями пространств Сп и 1Сп, при которых переходит в себя
мнимая или вещественная гиперсфера (х, х) = — 1. В том слу-
чае, когда эта гиперсфера вещественна, тот факт, что эта гипер-
сфера переходит в себя, вытекает также из того, что точки этой
гиперсферы не изображают точек гиперсферы пространства г/?те+1.
При п = 2 указанные конформные преобразования являются кру-
говыми преобразованиями, так как при вращениях сферы про-
странств и lR^ окружности на этой сфере переходят в окруж-
ности.
§ 4]
ИНТЕРПРЕТАЦИИ ПУАНКАРЕ
419
Рассмотрим теперь аналогичную стереографическую проекцию
конформных пространств Сп и 1Сп на гиперсферы мнимо единич-
ного радиуса пространств Rn+1 и lRn+1. Для этого определим
проекции пространств Rn и lRn
на указанные гиперсферы, погру-
жая пространство Rn в простран-
ство 1Rn+1, а пространство lRn
в пространство l+1Rn+1, в виде
гиперплоскости Хп+ = 0 с пер-
пендикуляром чисто мнимой длины,
и поставим в соответствие каждой
точке этой гиперплоскости точку
гиперсферы
(X, X) — (Хм+1)2 = — 1. (4.71)
Центр этой гиперсферы ле-
жит на гиперплоскости и является
точкой пересечения гиперсферы
с прямой, соединяющей данную
точку гиперсферы с точкой — еп+1
(черт. 82). Если мы обозначим
координаты точки х нашей гипер-
плоскости через х1, х2, . . ., хп,
то координаты точек прямой,
соединяющей эту точку с центром проекции, удовлетворяют усло-
виям
X1 — 0_ _ Хп — О _ Хп+1 + 1 _ ,
Х1 — 0 — ~ X» — 0 — 04-1 —
или
X1 _ Хп _ i + xn+1
х1 — • • • — 1 —
откуда
X1 = kx1, Хп — kxn, Xn+1 = k — 1.
(4-72)
(4.73)
(4-74)
Подставляя эти координаты в уравнение гиперсферы (4.71), мы
находим, что значения k, при которых точки нашей прямой лежат
на гиперсфере, равны 0 (центр проекции) и
1 — (х, х) ’
(4.75)
Подставляя последнее значение k в (4.74), мы находим коорди-
наты точки X гиперсферы, соответствующей точке х гиперплос-
кости, в виде
.1___ 2а:1
1 — (х, х)
____ _____<2>х'^_____ Х^^^_____________ 1 ~(4
’ ’ ’ 1 — (х, х) ’ 1 — (х, х) * '
27*
420
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
С другой стороны, из (4.73) мы находим:
.— __________
1 + Х»+1 '
(4.77)
При построенной нами стереографической проекции всякой
точке х гиперплоскости, за исключением точек сферы (х, х) = 1,
т. е. точек, соединяющихся с центром проекции прямыми, парал-
лельными асимптотам гиперсферы, соответствует единственная
точка гиперсферы. Обратно, всякой точке X гиперсферы, за исклю-
чением центра проекции и в случае пространств lRn точек пересе-
чения гиперсферы с гиперплоскостью Xw+1 = —1, т. е. гипер-
плоскостью, касательной к гиперсфере в центре проекции, парал-
лельной данной гиперплоскости, соответствует единственная точка х
гиперплоскости. Дополняя пространство Rn точкой, соответствующей
центру проекции, а пространство lRn точками, соответствующими
центру проекции, и точками пересечения гиперсферы с гиперпло-
скостью XnV1 =—1, мы превращаем эти пространства соответ-
ственно в пространства Сп и 1Сп.
Так же как при стереографической проекции пространств Сп
и 1Сп на гиперсферы единичного радиуса в пространствах /?п+1
и lRn+1, показывается, что при стереографической проекции про-
странств Сп и 1Сп на гиперсферы мнимо единичного радиуса в про-
странствах и l+1Rn+1 /n-мерные сферы гиперсферы соответ-
ствуют /n-мерным сферам пространств Сп и 1Сп, а /^-мерные
плоские образующие гиперсферы соответствуют zn-мерным изо-
тропным плоскостям пространств Сп и гСп. Далее, углы между
кривыми на гиперсфере равны углам между соответственными кри-
выми в пространстве Сп или гСп\ диаметрально противоположные
точки гиперсферы соответствуют точкам пространства Сп или 1Сп,
взаимно обратным относительно гиперсферы (х, х)^=1; большие
окружности и большие /n-мерные сферы гиперсферы изображаются
в пространстве Сп или 1Сп соответственно окружностями и zn-мер-
ными сферами, ортогональными к гиперсфере (х, х) = 1 или пере-
секающими гиперсферу (х, х) =—1 в диаметрально противопо-
ложных точках.
Так же как при стереографической проекции пространств Сп и 1Сп
на гиперсферы единичного радиуса, показывается, что при стерео-
графической проекции пространств Сп и гСп на гиперсферы мнимо-
единичного радиуса угол между радиусами-векторами точек X, Y
гиперсферы равен углу между парами точек X, Y и —X, —Y
гиперсферы и углу между соответствующими им точками х, у и
(х^х) * Ту^у) пРостРанства или 1Сп. Поэтому если сфериче-
ское расстояние точек X, Y гиперсферы равно о), угол между
§ 4] ИНТЕРПРЕТАЦИИ ПУАНКАРЕ 421
и . и о II II
радиусами-векторами этих точек равен || ы, || и, так как cos2 у"- =
= cos2 2 ’ дво^ное отношение указанных пар точек про-
странства Сп или 1Сп связано со сферическим расстоянием о)
соотношением
W х,
=ch V-
(*, (У, У) / 2
(4-78)
Эта формула позволяет определить сферическое расстояние
соответственных точек X, Y по данным точкам х, у простран-
ства Сп или 1Сп.
Формула (4.78) определяет метрику гиперсферы мнимо еди-
ничного радиуса пространства 1Rn+1 в пространстве Сп и мет-
рику гиперсферы мнимоединичного радиуса пространства l+1Rn+1
в пространстве 1Сп.
Точно так же как для гиперсферы единичного радиуса про-
странств Rn+1 и lRn+1, показывается, что вращения гиперсфгры
мнимоединичного радиуса пространств и l+1Rn+x изобра-
жаются такими конформными преобразованиями пространств
Сп и 1Сп, при которых переходит в себя гиперсфера
(х, х)=1, а при п = 2 указанные конформные преобразования
являются круговыми преобразованиями.
Так как конформные пространства Сп и 1Сп с введённой нами
метрикой на них представляют собой интерпретации гиперсфер
пространств Rn+1 и lRn+li пары точек этих пространств, изо-
бражающие диаметрально противоположные точки гиперсфер,
образуют интерпретации собственных областей неевклидовых
пространств Sn и lSn положительной и отрицательной кри-
визны.
Заменим теперь пары диаметрально противоположных точек
гиперсфер точками неевклидовых пространств, большие окружности
и /я-мерные сферы гиперсфер прямыми и /n-мерными плоскостями
неевклидовых пространств, сферическое расстояние между точками
гиперсфер единичного и мнимоединичного радиуса соответственно
СО (О
отношениями у и —, где о) — расстояние между соответственными
точками неевклидовых пространств с радиусами кривизны, равными
соответственно г и qi, а пары вращений гиперсфер, отличающихся
отражением гиперсферы относительно её центра,—движениями
неевклидовых пространств. Легко убедиться в том, что в построен-
ной нами интерпретации:
Точки собственной области пространства Sn или lSn с вещест-
венным радиусом кривизны г изображаются в конформном
х
пространстве Сп или 1Сп парами точек х,
(х, х) ’
взаимно
422 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
обратными относительно гиперсферы (х, х) —— 1, причём расстоя-
ние о) между двумя точками х, у определяется двойным отношением
соответственных пар точек по формуле
= -<й)’ -(/и-)- (4-79)
Точки гиперсферы (х, х) = — 1 изображают точки абсолюта,
прямые и /n-мерные плоскости собственной области пространства
изображаются окружностями и /n-мерными сферами, ортогональ-
ными к гиперсфере (х, х) = — 1 или пересекающими гиперсферу
(х, х)= 1 в её диаметрально противоположных точках, углы между
прямыми и плоскостями равны углам между соответственными
окружностями и сферами, а движения собственной области про-
странства изображаются конформными преобразованиями Сп или 1Сп,
переводящими в себя гиперсферу (х, х) = —1. С другой стороны,
точки собственной области неевклидова пространства или l+1Sn
с чисто мнимым радиусом кривизны qi изображаются в конформ-
ном пространстве Сп или 1Сп парами точек, взаимно обратных
относительно гиперсферы (х, х) = 1, причём расстояние между
двумя точками х, у определяется двойным отношением соответ-
ственных пар точек по формуле
ch2-^ = w(x, у; т^-r, (4.80)
2q \ (х, х) (у, у) j v
Точки гиперсферы (х, х) = 1 изображают точки абсолюта, прямые
и /n-мерные плоскости собственной области пространства изобра-
жаются окружностями и прямыми и /n-мерными сферами, ортого-
нальными к гиперсфере (х, х) = 1 или пересекающими гиперсферу
(х, х) = — 1 в её диаметрально противоположных точках, углы
между прямыми и плоскостями равны углам между соответствен-
ными окружностями и сферами, а движения собственной области
пространства изображаются конформными преобразованиями Сп
или гСп, переводящими в себя гиперсферу (х, х)=1.
Сравнивая формулу (4.79) с формулой (3.110), мы находим,
что эта формула эквивалентна формуле
-etg>^=r(x,
В силу свойств инверсии относительно гиперсферы пары точек х,
У
(У, У)
X
7-----Г и У,
(х, х)
одновременно гармонически делятся парой
точек пересечения окружности, определяемой этими четырьмя точ-
ками, с гиперсферой (х, х) = — 1, изображающей абсолют. Поэтому
423
§ 4] ИНТЕРПРЕТАЦИИ ПУАНКАРЕ
в силу (3.46) двойное отношение W(J; k; х, у) равно
,у//. а ч ^~х) ;У’~ Ъбг) + 1
W(j, k; х, у) ——..................- ’ - V7’ y’-i-----
r(x, — -т——г? У. — т-У )-1
Г \ (х, х) 7 В (у, у)/
. (D (О (П
± Z ctg -FT— + 1 Сtg -7— + i cos 7— nz Z sin -7—
* * & 2r 2r 2r 2r
, <B . (О . GJ 1 G)
± 1 ctS ъ-----1 Ctg -X— ± i cos -7— ± Z sin ——
& 2r & 2r 2r 2r
откуда окончательно
<0 = 1 у In IF (у, k\ x, j)|. (4.83)
Точно так же, исходя из формулы (4.80), мы получим формулу
a) = \\q In W(у, k\ х, .у) II- (4.84)
Таким образом, расстояние со между двумя точками про-
странства Sn или lSn с радиусом кривизны г, изображаемыми
точками пространства Сп или 1Сп, равно произведению посто-
янной величины ±ri на логарифм двойного отношения этих
точек и точек, одновременно гармонически делящих данные
точки и точки, взаимно обратные им относительно гиперсферы,
изображающей абсолют.
В частности, при-со—имеем In W = Tzri, т. е. UZ —— 1.
Таким образом, полярно сопряжённые точки пространств Sn и
lSn изображаются в пространствах Сп и 1Сп точками, гармо-
нически разделяющими точки j, k.
Эти же интерпретации можно рассматривать и как интерпре-
тации пространств Sn и lSn в евклидовых пространствах Rn и lRn.
В том случае, когда гиперсфера (х, х) = — 1 или (х, х) = 1
вещественна, переведя её конформным преобразованием в гиперпло-
скость, мы получим другую форму интерпретации пространств Sn
и lSn в пространствах Rn и lRn. При этой интерпретации точки
собственной области пространства lSn положительной или отри-
цательной кривизны изображаются соответственно в простран-
ствах lRn и l~~1Rn парами точек, симметричных относительно ги-
перплоскости; расстояния между точками х и у определяются по
формулам (4.83) и (4.84), где х, у — точки, одновременно гармо-
нически делящие пары точек х, хг и у, уг, причём х’ и/ —
точки, симметричные точкам х и у относительно гиперплоскости.
424 КОНФОРМНЫЕ ПРОСТРАНСТВА [гл. IV
Далее, точки гиперплоскости изображают точки абсолюта; прямые
и /n-мерные плоскости пространства изображаются окружностями
или /n-мерными плоскостями, ортогональными гиперплоскости;
углы равны соответственным углам, а движения изображаются
конформными преобразованиями, переводящими в себя гипер-
плоскость.
В частности, пространство Sn (не имеющее идеальной об-
ласти) и собственная область пространства xSn отрицательной
кривизны интерпретируются в пространстве Сп, т. е. в про-
странстве Rn, дополненном одной бесконечно удалённой точкой.
При этой интерпретации точки пространства Sn изображаются
парами точек, взаимно обратных относительно мнимой гиперсферы
(х, х) = —1, а точки собственной области пространства от-
рицательной кривизны изображаются парами точек, взаимно об-
ратных относительно вещественной гиперсферы (х, х)=1. При
этом формулы (4.83) и (4.84) для пространств Sn и lSn могут
быть переписаны соответственно в виде
0> = у In W(J, k\ х, у) (4.85)
И
ш = q In IT(j, k\ x, у). (4.86)
В случае пространства xSn вместо пар точек можно рассматри-
вать только ту точку, которая находится во внутренней области
гиперсферы. Тогда точки собственной области пространства с ра-
диусом кривизны qi изображаются в пространстве Rn точками,
находящимися внутри гиперсферы (х, х) — 1. Расстояние ш между
двумя точками х, у определяется двойным отношением этих точек
и точек у, k пересечения окружности или прямой, проходящей
через эти точки и ортогональной к гиперсфере (х, х) = 1, с этой
гиперсферой, по формуле (4.86). Прямые и /я-мерные плоскости
собственной области пространства изображаются дугами окруж-
ностей или отрезками прямых и частями /n-мерных сфер или
плоскостей, ортогональных к гиперсфере (х, х)=1, находящи-
мися внутри этой гиперсферы. Углы между прямыми или пло-
скостями равны углам между соответственными окружностями и
прямыми и сферами или плоскостями, а движения пространства
г8п изображаются конформными преобразованиями, переводящими
в себя гиперсферу (х, х) = 1. Переведя гиперсферу (х, х) — 1
конформным преобразованием в гиперплоскость, а внутреннюю
область этой гиперсферы в полупространство, мы получим другую
форму интерпретации этого пространства, при которой точки
собственной области пространства 1Sn с радиусом кривизны qi
изображаются в пространстве Rn точками полупространства.
Расстояние w между двумя точками х, у определяется двой-
ным отношением этих точек и точек у, k пересечения окруж-
§ 4] ИНТЕРПРЕТАЦИИ ПУАНКАРЕ 425
ности или прямой, проходящей через данные точки и ортогональ-
ной к гиперплоскости, ограничивающей полупространство, с этой
гиперплоскостью, по формуле (4.86). Прямые и zn-мерные
плоскости собственной области пространства изображаются
полуокружностями или полупрямыми и т-мерными полусферами и
полуплоскостями, ортогональными к этой гиперплоскости, причём
углы между прямыми или плоскостями равны углам между соот-
ветственными полуокружностями или полупрямыми и полусферами
или полуплоскостями, а движения пространства изобра-
жаются конформными преобразованиями, переводящими в себя
гиперплоскость, ограничивающую полупространство.
Заметим, что окружности пространства Sn и окружности, экви-
дистанты прямых в двумерных плоскостях и орициклы собствен-
ной области пространства отрицательной кривизны изобра-
жаются в пространстве Rn окружностями или прямыми, не орто-
гональными к гиперсфере (х, х) = — 1 в случае пространства Sn
и к гиперсфере (х, х) — 1 или гиперплоскости в случае про-
странства 1Sn. В последнем случае окружности, эквидистанты и
орициклы изображаются соответственно окружностями или пря-
мыми, не пересекающимися с гиперсферой (х, х)=1, и окруж-
ностями, не пересекающимися с гиперплоскостью, окружностями
или прямыми, пересекающимися с гиперсферой (х, х) = 1 или ги-
перплоскостью, и окружностями или прямыми, касающимися ги-
персферы (х, х)=1, и окружностями, касающимися гиперпло-
скости. Точно так же гиперсферы пространства Sn и гиперсферы,
эквидистанты гиперплоскостей и орисферы собственной области
пространства 1Sn отрицательной кривизны изображаются в про-
странстве Rn гиперсферами и гиперплоскостями, не ортогональ-
ными к гиперсфере (х, х) — — 1 в случае пространства Sn и
к гиперсфере (х, х) = 1 или гиперплоскости в случае про-
странства 1Sn. В последнем случае гиперсферы, эквидистанты
гиперплоскостей и орисферы изображаются соответственно гипер-
сферами и гиперплоскостями, не пересекающимися с гиперсферой
(х, х)=1, и гиперсферами, не пересекающимися с гиперпло-
скостью, гиперсферами и гиперплоскостями, пересекающимися
с гиперсферой (х, х) = 1 или гиперплоскостью, и гиперсферами,
касающимися гиперсферы (х, х) = 1 или гиперплоскости.
Заметим, что в случае интерпретации плоскости S2 на пло-
скости С2 мнимо сопряжённые точки у, k можно заменить веще-
ственной парой точек, сопряжённой с ними в смысле сопряжён-
ности сфер.
На черт. 83 изображены треугольники плоскостей S2 и 1S2
в интерпретации этих плоскостей на плоскости С2. Наглядно видно,
что сумма углов этого треугольника в первом случае больше тс,
а во втором случае меньше тс. На черт. 84 изображены трижды
вырожденные треугольники плоскости 1S2 в её интерпретации
426
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
в круге плоскости /?2 и на полуплоскости этой плоскости. На
черт. 85 изображены окружность, эквидистанта и орицикл на
Черт. 83.
плоскости XS2 в её интерпре-
тации в круге плоскости /?2
(во втором случае пунктиром
изображена база эквидистанты).
Интерпретации плоскости
1S2 и пространства 1S3 отрица-
тельной кривизны в круге пло-
скости Т?2 и в шаре простран-
ства были предложены
Пуанкаре [1, 2], вследствие чего все изложенные нами интерпре-
тации пространств Sn и lSn в пространствах Rn и lRn или Сп
и 1Сп называют интерпретациями Пуанкаре. Интерпретация пло-
скости S2 на плоскости С2 была предложена Клейном [2], а интер-
претация плоскости 1S2 положительной кривизны на плоскости гС%
была предложена советским
геометром И. М. Ягломом [1].
Тот факт, что в п-мерном
конформном пространстве могут
быть построены и интерпрета-
ция (п~Р 1)-мерных неевклидо-
вых пространств(интерпретация
Дарбу), и интерпретация п-мер-
ных неевклидовых пространств Черт. 84.
(интерпретация Пуанкаре), по-
зволяет построить интерпретации (п-|- 1)-мерных неевклидовых про-
странств в n-мерных неевклидовых пространствах, т. е. интерпре-
тации пространств на их гиперплоскостях. В самом деле, если мы
рассмотрим интерпретацию Пуанкаре пространства в про-
странстве Сп, то гиперсферы этого пространства изображают ги-
персферы, эквидистанты гиперплоскостей и орисферы простран-
ства 1Sn. Но, с другой стороны, гиперсферы пространства Сп
в силу интерпретации Дарбу изображают точки пространства
положительной кривизны или гиперплоскости пространства
1Sn+1 отрицательной кривизны. Таким образом, мы получили, что
§ 4] ИНТЕРПРЕТАЦИИ ПУАНКАРЕ 427
гиперплоскости пространства 1Sn+1 отрицательной кривизны
изображаются гиперсферами, эквидистантами гиперплоскостей
и орисферами пространства xSn той же кривизны, которое
можно рассматривать как гиперплоскость пространства 1Sn+1.
При этом каждой гиперсфере, эквидистанте гиперплоскости и ори-
сфере пространства 1Sn соответствуют две гиперплоскости про-
странства 1SW+1, соответствующие двум гиперсферам простран-
ства Сп, состоящим из точек, взаимно обратных относительно
гиперсферы (х, х) 1. Это соответствие можно сделать взаимно
однозначным, если приписать каждой гиперсфере, эквидистанте
гиперплоскости и орисфере пространства две возможные
ориентации. В силу свойств интерпретации Пуанкаре углы между
гиперсферами пространства Сп равны углам между соответствую-
щими им гиперсферами, эквидистантами гиперплоскостей и ори-
сферами пространства 1Sn, а в силу свойств интерпретации Дарбу
углы между гиперсферами пространства Сп равны расстояниям
между соответствующими им точками пространства г5п+1 положи-
тельной кривизны и, следовательно, углам между соответствую-
щими им гиперплоскостями пространства 15п+1 отрицательной
кривизны. Поэтому при нашей интерпретации углы между ги-
персферами, эквидистантами гиперплоскостей и орисферами
пространства xSn равны углам между соответствующими
им гиперплоскостями пространства 15л+1.
Такая интерпретация может быть построена следующим обра-
зом: в пространстве 1SW+1 выбирается гиперплоскость и каждой
гиперплоскости ставится в соответствие геометрическое место
таких точек, что перпендикуляры к фиксированной плоскости,
восставленные в этих точках, параллельны данной гиперплоскости.
Это геометрическое место является гиперсферой пространства 1Sn,
если гиперплоскости расходятся, эквидистантой гиперплоскости
пространства 15та, если гиперплоскости пересекаются (плоскость
пересечения есть база эквидистанты), и орисферой^ если гипер-
плоскости параллельны. Эта интерпретация для пространства х53
была предложена советским геометром 3. А. Скопец (Ярос-
лавль) [1]. Аналогичные интерпретации можно построить также
для любых пространств ]Sn.
С помощью интерпретации Дарбу можно получить и другие
интерпретации пространств Sn и lSn в пространствах Сп и гСп,
В самом деле, так как согласно интерпретации Дарбу многооб-
разия гиперсфер вещественного и мнимого радиуса пространств
Сп и 1Сп, если считать за расстояние между двумя гиперсферами
угол между ними, изометричны расширенным пространствам
и l+1Sn+1, то совокупность гиперсфер пространств Сп и 1Сп, орто-
гональных одной гиперсфере вещественного радиуса, изображается
в пространствах х5п+1 и z+1Sn+1 совокупностью точек, полярно
сопряжённых собственной точке. Эта совокупность точек является
428
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
пространством или l+1Sn кривизны +1, т. е. совокупность
гиперсфер пространства Сп и 1Сп, ортогональных одной гипер-
сфере вещественного радиуса, если считать за расстояние
между двумя гиперсферами угол между ними, изометрична
пространству 1Sn или l+1Sn кривизны -{-1. С другой стороны,
совокупность гиперсфер пространств Сп и 1Сп, ортогональных
одной гиперсфере чисто мнимого радиуса, изображается в про-
странствах 1Sn+1 и z+1Sn+1 совокупностью точек, полярно сопря-
жённых идеальной точке. Эта совокупность точек является про-
странством Sn или lSn кривизны +1, т. е. совокупности гипер-
сфер пространств Сп и 1Сп, ортогональных одной гиперсфере
чисто мнимого радиуса, если считать за расстояние между двумя
гиперсферами угол между ними, изометричны пространству Sn
или lSn кривизны -|-1. Прямые линии и /n-мерные плоскости
пространств Sn и lSn при этих интерпретациях, так же как при
интерпретации Дарбу, изображаются соответственно (п — 2)-мер-
ными и (п — т—1)-мерными сферами с тем условием, что здесь
все эти сферы ортогональны к рассматриваемой гиперсфере веще-
ственного или чисто мнимого радиуса.
В частности, совокупность гиперсфер пространства Сп, ор-
тогональных вещественной гиперсфере, является интерпрета-
цией пространства xSn кривизны 4“ 1, а совокупность гипер-
сфер пространства Сп, ортогональных мнимой гиперсфере,
является интерпретацией пространства Sn кривизны 4~ 1 • Эти
интерпретации неевклидовых пространств Sn и rSn для п = 3 были
предложены Вельштейном х), вследствие чего будем называть эти
интерпретации интерпретациями Велыитейна. Заметим, что сам
Вельштейн ошибочно считал кривизну пространства 1Sn, получаю-
щегося при его интерпретации, отрицательной.
Из интерпретаций Вельштейна нетрудно вывести интерпретации
Пуанкаре: для этого достаточно рассмотреть многообразия гипер-
плоскостей пространств Sn и lSn кривизны 4" Ь которые, если
считать за расстояние между двумя гиперплоскостями угол между
ними, изометричны тем же пространствам. В интерпретациях Вель-
штейна гиперплоскости пространств Sn и lSn изображаются парами
точек, взаимно обратных относительно рассматриваемой гипер-
сферы вещественного или чисто мнимого радиуса, и для получе-
ния интерпретаций Пуанкаре нужно умножить все расстояния
в полученных неевклидовых пространствах на заданный радиус
кривизны и в случае пространства 1Sn из каждой пары точек,
взаимно обратных относительно вещественной гиперсферы, взять
ту из точек этой пары, которая находится во внутренней области
этой гиперсферы.
1) См. Вебер и Вельштейн [1], стр. 67.
§ 5]
ИНТЕРПРЕТАЦИИ КАГАНА
429
Заметим, что при предельном переходе, переводящем неевкли-
довы пространства Sn и lSn в евклидовы пространства Rn и lRn,
интерпретации Пуанкаре этих пространств переходят в те интер-
претации пространств Rn и lRn в пространствах Сп и 1Сп, с по-
мощью которых мы в § 1 определили пространства Сп и 1Сп.
А именно, при переходе пространств Sn и lSn в пространство Rn
гиперсферы (х, — 1 и (х, х) = 1 стягиваются в точку и
мы получаем пространство Сп с выделенной точкой (бесконечно
удалённой точкой пространства Rn при его дополнении до про-
странства Сп), а при переходе пространств lSn и 1+1 Sn в про-
странство lRn гиперсферы (х, х) = — 1 и (х, х) = 1 переходят
в изотропный конус, и мы получаем пространство гСп с вы-
деленным изотропным конусом (идеальным конусом пространства
lRn при его дополнении до пространства 1Сп\ вершина этого ко-
нуса— бесконечно удалённая точка). Аналогично тому, что имеет
место при проективных интерпретациях пространств Rn и ]Rn,
не всякое конформное преобразование, переводящее в себя беско-
нечно удалённую точку или идеальный конус, является движением
пространства Rn или lR^. Наиболее общие конформные преобра-
зования, переводящие в себя эту точку или конус, являются пре-
образованиями подобия, так как эти преобразования пере-
водят прямые в прямые (прямые — окружности, проходящие через
бесконечно удалённую точку) и, следовательно, являются аффин-
ными преобразованиями ив то же время переводят гиперсферы
в гиперсферы.
§ 5. Интерпретации неевклидовых пространств,
промежуточные между проективными и конформными
интерпретациями (интерпретации Кагана)
Изложенные нами проективные интерпретации неевклидовых
пространств (интерпретации Кели — Клейна) и конформные интер-
претации тех же пространств (интерпретации Пуанкаре) обладают
большой аналогией. В самом деле, и те и другие интерпретации
можно рассматривать как интерпретации в евклидовом пространстве
Rn или lRni тем или иным способом дополненном в бесконечности,
причём и те и другие интерпретации могут быть получены путём
проектирования гиперсферы пространства Rn+r или 1Rn+r на евкли-
дову гиперплоскость этого пространства: в случае проективных
интерпретаций центр проекции находится в центре гиперсферы,
а за гиперплоскость проекции может быть принята гиперплоскость,
касательная к гиперсфере, а в случае конформных интерпретаций
центр проекции находится на гиперсфере, а за гиперплоскость
проекции может быть принята гиперплоскость, проходящая через
центр гиперсферы перпендикулярно к радиусу-вектору центра
проекции.
430
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
Между точками пространства Rn или lRn, изображающими
точки пространства Sn или lSn в обеих интерпретациях, имеется
простая связь. Рассмотрим эту связь для пространства Sn и про-
странства *Sn отрицательной кривизны. Для этого рассмотрим
пространство Rn, погружённое в пространства Rn+1 и 1Rn+1>
в виде двух параллельных гиперплоскостей, одна из которых
касается гиперсферы в некоторой точке О, а другая проходит
через центр гиперсферы, и будем проектировать гиперсферу на
Черт. 86.
эти гиперплоскости в первом случае из центра гиперсферы С, а во
втором случае из точки О', диаметрально противоположной
точке О (черт. 86).
При первой интерпретации точка X гиперсферы изображается
точкой х первой гиперплоскости, а при второй интерпретации
та же точка X изображается точкой у второй гиперплоскости.
Углы 00'X ровно в два раза меньше углов OCX, так как первые
углы являются вписанными, а вторые — центральными углами,
опирающимися на одну и ту же дугу ОХ (эта теорема имеет
место во всех пространствах lRri). Поэтому если мы проведём пря-
мые СХ', параллельные прямым О'Х, прямые СХ' пересекут
гиперсферы в таких точках X', что дуги ОХ ровно в два раза
больше дуг ОХ', откуда следует, что если мы построим для
каждой точки X гиперсферы точку X', для которой дуга ОХ
ровно в два раза больше дуги ОХ', и спроектируем точки X'
из центра гиперсферы на касательную гиперплоскость к гипер-
сфере в точке О, мы в силу равенства отрезков О'С и СО и
параллельности прямых О'Х и СХ' получим на этой гипер-
§ 5]
ИНТЕРПРЕТАЦИИ КАГАНА
431
плоскости интерпретацию, в точности совпадающую с интерпре-
тацией, получающейся проектированием гиперсферы из точки
О' на гиперплоскость, проходящую через её центр, т. е. получим
снова конформную интерпретацию. Поэтому для того» чтобы из
проективной интерпретации пространств Sn и 1Sn в про-
странстве Rn получить конформную интерпретацию про-
странств Sn и xSn в том же пространстве, нужно поста-
вить в соответствие каждой точке X пространств Sn и 1Sn
не точку х, соответствующую этой точке в проективной
интерпретации, а точку х', соответствующую в той же ин-
терпретации точке X', являющейся серединой отрезка ОХ,
где О — центр гиперсферы, изображающей абсолют простран-
ства Sn или lSn.
Эта связь между интерпретациями пространств Sn и xSn
в пространстве Rn была установлена Я. С. Дубновым [2] и
В. Ф. Каганом [6]. Указанная связь между двумя видами интер-
претаций пространств Sn и xSn в пространстве Rn позволила
В. Ф. Кагану построить бесконечную серию новых интерпрета-
ций, частными случаями которых являются интерпретации Кели —
Клейна и Пуанкаре. Эти интерпретации были разработаны В. Ф. Ка-
ганом [6, 7] совместно с его учениками Д. П. Полозковым [1],
А. В. Яблоновским, В. Г. Ямпольским [1] и Н. А. Меллер [1].
Интерпретации В. Ф. Кагана можно определить следующим
образом:
Для того чтобы получить интерпретацию Кагана про-
странства Sn и соответственной области пространства г8п
отрицательной кривизны в пространстве Rn, соответствую-
щую положительному числу а, нужно взять проективную ин-
терпретацию пространств Sn и XS^ в пространстве Rn и по-
ставить в соответствие каждой точке X пространства Sn и
1Sn точку х', соответствующую в этой интерпретации
точке X', находящейся на прямой ОХ, где О — центр гипер-
сферы, изображающей абсолют пространства Sn или xSn,
причём длина отрезка ОХ' равна длине отрезка ОХ, делённой
на а (черт. 87). Проективные интерпретации соответствуют зна-
чению а = 1, а конформные интерпретации соответствуют значе-
чению а = 2.
Интерпретации Кагана пространства Sn при а > 2 отображают
это пространство на внутреннюю область гиперсферы, все точки
которой изображают одну точку О', а при а 2 отображают это
пространство на всё пространство Rn, дополненное бесконечно
удалённой гиперплоскостью. Интерпретации Кагана собственной
области пространства XSW отрицательной кривизны при любых
а отображают эту область на внутреннюю область гиперсферы.
При целых а прямые линии пространств Sn и XSW изображаются
при интерпретации Кагана алгебраическими кривыми а-го по-
432
КОНФОРМНЫЕ ПРОСТРАНСТВА
[ГЛ. IV
рядка. Аналогичные интерпретации можно построить также для
любых пространств lSn.
Черт. 87.
Крэме интерпретаций Кагана, можно построить ещё одну
бесконечную серию интерпретаций пространств Sn собственной
области пространства 15?г отрицательной кривизны в простран-
стве Rn. Для получения этих интерпретаций следует проектиро-
вать гиперсферу из точки с радиусом-вектором—ien+1 на гипер-
плоскость Xn+1 ~ 1 —t (черт. 88).
ИНТЕРПРЕТАЦИИ КАГАНА
433
§5]
Проективные интерпретации соответствуют значению t = О,
а конформные интерпретации соответствуют значению Z=l. Эти
интерпретации для пространства Sn при 111 < 1 отображают про-
странство на всё пространство дополненное бесконечно уда-
лённой гиперплоскостью, а при [£| >0 — на внутреннюю область
гиперсферы. Эти интерпретации для собственной области про-
странства отрицательной кривизны при любых t отображают
эту область на внутреннюю область гиперсферы. Прямые линии
пространств Sn и 1Sn при изображаются при этих интер-
претациях кривыми второго порядка. Аналогичные интерпрета-
ции можно построить также для любых пространств lSn.
28 Зак. 177. Б. А. Розенфельд
ГЛАВА ПЯТАЯ
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ ДВИЖЕНИЙ
НЕЕВКЛИДОВЫХ ПРОСТРАНСТВ
§ L Алгебры. Комплексные и двойные числа,
кватернионы и антикватернионы
В предыдущих главах мы часто встречались с применением
к геометрии комплексных чисел. В этой и следующей главах мы
рассмотрим применение к геометрии алгебр — систем чисел более
сложной природы, частным случаем которых являются комплексные
числа. Эти числа называют также гиперкомплексными числами.
Вещественной алгеброй называется множество элементов, в кото-
ром определено сложение элементов, удовлетворяющее аксиомам
1° — 5° сложения векторов (см. § 2 главы I), умножение элемента
на вещественное число, удовлетворяющее аксиомам II, 1° — 5° и
умножения вектора на вещественное число (см. § 1 и § 6
главы I), и умножение элементов, удовлетворяющее аксиомам:
1° всяким двум элементам а, р поставлен в соответствие
определённый элемент
8 = ар, (5.1)
называемый их произведением',
2° умножение элементов ассоциативно, т. е.
«W=(aP)i; (5.2)
3° умножение элементов дистрибутивно относительно сло-
жения
«(? + !) = а₽ + аТ и (Р + т)а = ₽« + т«; (5.3)
4° вещественный множитель можно выносить за знак произ-
ведения
= (5.4)
Число п, определяемое аксиомой III(W), называется рангом ал-
гебры.
Если в определении вещественной алгебры заменить веществен-
ные числа комплексными, мы получим комплексную алгебру.
§ 1] АЛГЕБРЫ 435
Алгебра является частным случаем кольца, т. е. множества
элементов, в котором определены сложение и умножение эле-
ментов, первое из которых удовлетворяет аксиомам коммутатив-
ной группы (см. § 2 главы I), а второе — приведённым здесь
аксиомам 1 ° — 3°.
Приведём некоторые свойства колец. В общем случае элементы
кольца неперестановочны по умножению (оф #= ра). Если все эле-
менты кольца перестановочны по умножению, кольцо называется
коммутативным»
В общем случае в кольце нет единицы, т. е. такого элемента 1,
что для любого элемента а имеет место соотношение 1 «а = а« 1 = а.
Кольца, в которых имеется такая единица, называются кольцами
с единицей. Если в кольце с единицей для элемента а существует
элемент а-1, удовлетворяющий соотношению аа"1 = = 1,
элемент а"-1 называется обратным элементом для эле-
мента а.
Так как кольцо является группой по сложению, среди элемен-
тов кольца всегда имеется элемент нуль. Если мы будем обозна-
чать суммы вида а —|— (— Р) через а — р, то в силу дистрибутивности
умножения для любого элемента а будем иметь: а • 0 = а (р — р) =
= оф — оф = 0, т. е. если один из сомножителей равен нулю, то
произведение равно нулю. Поэтому 0 не обладает обратным эле-
ментом (если бы существовал такой элемент а, то должно было бы
быть а • 0 = 1, что противоречит тому, что а «О = 0). В кольце могут
быть и другие элементы, не обладающие обратными элементами;
в частности, к таким элементам относятся делители нуля, т. е.
такие элементы а, р, для которых ар = 0, хотя ни а, ни р не
равны 0. Делители нуля не имеют обратных элементов. В са-
мом деле, если бы элемент а обладал обратным элементом а-1,
то должно было бы быть (а“1а)р — р =^= 0, но, с другой стороны,
а-1(ар) = а-1 -0 = 0.
Если совокупность элементов кольца без 0 является группой
по умножению, т. е. если кольцо обладает единицей и всякий от-
личный от 0 элемент обладает обратным элементом, кольцо назы-
вается телом. Коммутативное тело называется полем.
Если подмножество элементов кольца само является кольцом
с теми же операциями, что и данное кольцо, это подмножество
называется подкольцом данного кольца. Примером подкольца не-
коммутативного кольца является его центр — совокупность эле-
ментов кольца, перестановочных со всеми элементами кольца.
Пусть кольцо К взаимно однозначно отображено на кольцо К
и элементам а, р, -у = а —|—р и 3 — ар кольца К соответствуют
элементы а, р, у = а-|-р и 3 = ар кольца К. Тогда кольца К и
К называются изоморфными. Изоморфное отображение кольца на
себя называется автоморфизмом кольца.
28*
436
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Взаимно однозначное отображение кольца К на кольцо К, при
котором элементам а, р, у = а р и 3 = ар кольца К соответ-
ствуют элементы а, (3, -у —а-|-р и 3 = р а кольца К, называется
антиизоморфным отображением. Антиизоморфное отображение
кольца на себя называется антиавтоморфизмом. Инволюционный
антиавтоморфизм кольца, т. е. такой антиавтоморфизм а —> а, при
котором а = а, называется инволюцией, а кольца, в которых
определён такой антиавтоморфизм, называются кольцами с инво-
люцией.
В алгебрах кроме определённых нами кольцевых изоморфизмов,
автоморфизмов, антиизоморфизмов и антиавтоморфизмов колец
рассматривают также алгебраические изоморфизмы, автоморфизмы,
антиизоморфизмы и антиавтоморфизмы, т. е. такие отображения
алгебр друг на друга или на себя, при которых, кроме того, что
элементам а, р, — а~рр и 8 = ар некоторой алгебры соответ-
ствуют элементы а, р, -у —а-|_р и 3 = а р или ра другой или
той же алгебры, произведению &а элемента а на число соответ-
ствует произведение kz (число k — вещественное в случае веще-
ственной алгебры и комплексное в случае комплексной алгебры).
Всюду в дальнейшем, говоря об изоморфизмах, автоморфизмах,
антиизоморфизмах и антиавтоморфизмах алгебр, мы будем иметь
в виду только кольцевые изоморфизмы, автоморфизмы, анти-
изоморфизмы и антиавтоморфизмы.
С помощью данных колец можно строить новые кольца: если
нам даны п колец Kt, К2, ..., Кп, то системы элементов
{6-р &2, . .., kn], где — элемент кольца образуют новое
кольцо, если мы определим умножение и сложение в множестве
этих систем с помощью соотношений
{&!» . . . , kn] —|- {ki, kit • • • , kn] =
= {^1 + ^1, ^2 + ^2; •••, (5.5)
{&Р ^2» * * * ’ ^п} {^1» ^2> • • • > &п} {^1^1, ^2^2, • • » , • (5*6)
Определённое таким образом новое кольцо называется прямой
суммой колец Кх, К2, . . ., Кп.
Вещественные и комплексные числа по их обычному сложе-
нию и умножению образуют поля. Эти поля обладают единицей.
Автоморфизмы этих полей выражаются функциями /(х), удовле-
творяющими условиям f(x 4-j/) =zf(x)-\-f(y), f(xy) = f(x)f(y).
Как видно из § 10 главы I, поле вещественных чисел не обла-
дает автоморфизмами, отличными от тождественного преобразова-
ния, а единственным непрерывным автоморфизмом поля комплекс-
ных чисел, отличным от тождественного преобразования, является
переход к комплексно сопряжённому числу /(х) = х. Этот авто-
§ и
АЛГЕБРЫ
437
морфизм является инволюционным и в силу коммутативности поля
комплексных чисел его можно рассматривать также как антиавто-
морфизм, т. е. как инволюцию. Поле вещественных чисел является
подкольцом поля комплексных чисел; примерами подколец поля
вещественных чисел являются поле рациональных чисел, кольцо
целых чисел и кольцо чётных чисел (последнее кольцо — без
единицы).
Вещественные и комплексные матрицы п-го порядка, если
считать суммой матриц (ар и (Ьр матрицу (а*-\-Ьр, а произ-
ведением этих матриц считать
матрицу (2^^), °^РазУюгп^
кольца. В этих кольцах имеется единица — матрица (8J) и опре-
делена инволюция — переход к транспонированной матрице
(ар —> (ар. Из (5.4) следует:
(ka)(l^ = (kl)(^, (5.7)
поэтому если в алгебре выбран базис из элементов е±, е2, . . ., еп,
то из (5.3) получаем:
S = (5.8)
i 3 i 3
Таким образом, для вычисления любых произведений элементов
алгебры нам достаточно знать закон умножения базисных элемен-
тов алгебры:
= (5.9)
к
Если вещественная или комплексная алгебра обладает едини-
цей 1, то произведения k-\ образуют подкольцо, изоморфное
соответственно полю вещественных или комплексных чисел. Поэтому
мы будем считать произведения k • 1 соответственно веществен-
ными или комплексными числами.
Кольца вещественных и комплексных матриц п-го порядка
являются соответственно вещественной и комплексной алгеб-
рами ранга п2; роль базисных элементов здесь играют матрицы (ер,
у которых на пересечении Z-й строки и у-го столбца стоит 1,
а все остальные элементы равны нулю.
Поле комплексных чисел можно рассматривать как веще-
ственную алгебру ранга 2; базис этой алгебры состоит из еди-
ницы 1 и мнимой единицы i.
Выделим класс вещественных алгебр, обладающих следующими
свойствами комплексных чисел:
1° в алгебре имеется единица 1;
2° в алгебре определена инволюция а —> а;
3° элементы, инвариантные при инволюции (а = а), и только
эти элементы являются произведениями 1 на вещественные
числа*,
438 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
4° произведение аа является произведением 1 на невырож-
денную квадратичную форму от координат элемента а.
Всякий элемент алгебры с указанными свойствами может быть
представлен в виде
Элемент инвариантен при инволюции и в силу 3° является
произведением 1 на вещественное число. Элемент при инво-
люции умножается на —1; будем называть такие элементы анти-
инвариантными элементами.
Квадраты антиинвариантных элементов инвариантны, так как
если а — — а, то
а2 ~ а а = а а = (— а) (— а) = а2. (5.11)
Поэтому в силу 3° квадраты антиинвариантных элементов
являются произведениями 1 на вещественные числа.
Если мы обозначим а через р, а а ” через 7, то а = р -рЪ
а = р — 7 и, так как элементы р как произведения 1 на веще-
ственные числа перестановочны со всеми элементами алгебры,
произведение аа имеет вид
<7<х = (|Э — 7)(р4-7) = £2_ -д (5.12)
Как мы видим, произведение аа является произведением 1 на
квадратичную форму от координат элемента а. Вид этой формы
показывает, что для того, чтобы было выполнено требование 4°,
т. е. чтобы эта форма была невырожденной, необходимо и доста-
точно, чтобы среди антиинвариантных элементов можно было
выбрать базис из элементов, квадраты которых отличны от 0.
Рассмотрим сначала случай, когда ранг алгебры равен 2. Тогда
все антиинвариантные элементы отличаются только вещественными
множителями. Здесь может быть 2 случая: квадраты этих элемен-
тов могут быть равны произведениям 1 на отрицательные или
положительные вещественные числа, причём в первом случае мы
можем выбрать среди этих элементов элемент I, для которого
/2 = —1, и получим поле комплексных чисел, а во втором
случае мы можем выбрать элемент е, для которого £2 —-f-1.
Пусть теперь ранг алгебры больше 2. Тогда существуют два
линейно независимых антиинвариантных элемента и ч2, причём
элемент всегда может быть выбран таким образом, чтобы его
квадрат не был бы равен 0 (в случае невозможности такого вы-
бора, не было бы выполнено требование 4°). Произведение 7^
АЛГЕБРЫ
439
§ И
выбранных нами элементов может быть единственным образом
записано в виде
7112 = Р+т- (5.13)
Равенство (5.13) можно переписать в виде
71 (ъ — -т 71) = 7- (5.14)
Элемент f2------- как линейная комбинация двух антиинва-
риантных элементов также является антиинвариантным элементом.
Далее, элементы и *f2 всегда можно выбрать таким образом,
чтобы квадрат элемента у2------v Ti не был бы равен 0 (в случае
11
невозможности такого выбора не было бы выполнено требование 4°).
Умножим элементы и f2----------на такие вещественные числа,
71
чтобы квадраты полученных элементов были бы равны -J-1 или
— 1, и обозначим полученные элементы через ех и е2. Элементы е±
и е2 антиинвариантны, а в силу (5.14) их произведение также
является антиинвариантным элементом.
Так как
= e2q = (— е2) (— ej = e2ev (5.15)
а, с другой стороны, ete2 = — e±e2t мы получаем:
¥2=“¥i- (5.16)
Отсюда следует, что
(^1^2)^ (^1^2) (^1^2) == ^1^2* (5.17)
Элементы elt е2 и е±е2 линейно независимы; в самом деде, из
предположения, что
ае± + be2 = 0, (5.18)
вытекает, что
ае* + be±e2 + се^е2 = 0. (5.19)
Но элемент ае* инвариантен, а элемент Ье±е2-\-се{е2 антиин-
вариантен, вследствие чего оба эти элемента равны нулю. Из ра-
венства ае% = 0 следует равенство а = 0. Умножая равенство
+ = 0 на e2i мы получаем:
^ + ^ = 0.
(5.20)
Учитывая, что элемент Ье*ех антиинвариантен, а элемент cefe*
инвариантен, мы приходим к выводу, что оба эти элемента равны
440 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
нулю. Из равенства Ье21е1 = 0 следует равенство Ь = 0, а из ра-
венства ce^ef = 0 следует равенство с = 0. Тем самым линейная
независимость элементов е19 е2 и доказана. Поэтому элемент ete2
может быть принят за базисный элемент алгебры и ранг алгебры
>4.
Докажем, что ранг алгебры не может быть больше 4. В самом
деле, пусть у — антиинвариантный элемент, линейно независимый
от elt е% и Положим
М = Р1 + ъ e2Y = p2 + Y2, ^27 = ^3+13 <5-21)
и рассмотрим элемент
= Т г г ^2 7 г; ?з^1^2- (5.22)
ех (^2)2
Элемент 3 обладает тем свойством, что как он сам, так и
произведения £х3, £28 и антиинвариантны. В самом деле,
в силу требования 4° элемент 7 всегда можно выбрать таким об-
разом, чтобы квадрат элемента 3 и квадраты произведений ехВ,
и были бы отличны от 0. Тогда, точно так же как выше
для е± и е2, мы найдём:
= — Sex, £2S = —Зг2, (гхг2) 3 = — 3 (гхг2). (5.23)
Но отсюда следует:
^3^2 = (£х3) е2 = (— 8^х) е2 = — Зе1^2- (5.24)
С другой стороны,
^1^2 = е1 (^з) = е1 е2^) = “ = ^1^2’ (5.25)
т. е. 8^2=0, что противоречит тому, что квадрат В^2 отли-
чен от 0.
Таким образом, базис нашей алгебры исчерпывается элемен-
тами 1, е19 е% и ete2 = — e2elt причём квадраты элементов е± и е2
равны -j- 1 или — 1. Поэтому у нас остаётся четыре случая:
1) е2 = е2 = — 1;
2) 4 = — 1, = +1;
3) ^ = + 1, е* = -1;
4) е| = е| = +1.
Три последних случая дают одну и ту же алгебру: в силу (5.17)
мы получаем в 1-м и 4-м случаях (ete2)2 = —1, а во 2-м и 3-м
§ И
АЛГЕБРЫ
441
случаях (^1^2)’2 = 1. Устанавливая между базисными элементами
в трёх последних случаях соответствие:
2-й случай
ei
е1е2
3-й случай
е2
ei
— eie2
4-й случай
№
ei
---
мы устанавливаем изоморфизм между этими алгебрами.
Таким образом, указанным нами требованиям удовлетворяют
только четыре алгебры, элементы которых можно записывать соот-
ветственно в виде
а = а bi, i2 = — 1; (5.26)
ос = a-\~be, е2 = 4-1; (5.27)
ос — а —j— Ы —сj —dk, i~ — = — 1, ij -— — ji (5.28)
oc = a-\-bi-]-ce-{-df, z’2 =—1, = —|—1, ie = — ei — f. (5.29)
Первая из этих алгебр — поле комплексных чисел. Элементы
второй из этих алгебр будем называть двойными числами, эле-
менты третьей из этих алгебр будем называть кватернионами>
элементы четвёртой из этих алгебр будем называть антикватер-
нионами. Элемент е алгебры двойных чисел, элементы i, j, k
алгебры кватернионов и элементы i, е, f алгебры антикватернио-
нов будем называть соответственно двойной единицей, кватер-
нионными единицами и антикватернионными единицами.
Антикватернионы называют также псевдокватернионами.
Если мы будем называть абсолютное значение квадратного
корня из вещественного числа оса модулем | а | элемента а, то из
наших требований следует соотношение
|аР!рр = |оф|'2,
(5.30)
так как выражение | оф |2 равно офоф = рософ.
Из требования 3° следует, что если элемент а рассматриваемых
алгебр обладает обратным элементом а-1, этот последний элемент
имеет вид
В найденных нами алгебрах элемент о:, называемый в этих
алгебрах элементом, сопряжённым с элементом о:, имеет соот-
ветственно вид
a = а — bi,
а = а— be,
о. =а — bi — cj — dk, а = а — bi — се — df.
(5.32)
442 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
Квадратичная форма а а имеет соответственно вид
а а а1 2#2, аа = tz2 — Z>2, |
_ } (5.33)
аа. = #2-|-Z>2-}- c24-d2, аа = &2-|-#2— с2 — d2. J
Формула (5.33) показывает, что квадратичная форма «а является
положительно определённой в случае комплексных чисел и ква-
тернионов и знаконеопределённой в случае двойных чисел и анти-
кватернионов.
Отсюда и из формулы (5.31) видно, что в алгебрах комплекс-
ных чисел и кватернионов все элементы, кроме нуля, обладают
обратными элементами, т. е. комплексные числа образуют поле,
а кватернионы образуют тело, В алгебрах двойных чисел и анти-
кватернионов имеются элементы, отличные от нуля, но удовлетво-
ряющие условию аа = 0; эти элементы не обладают обратными эле-
ментами и являются делителями нуля, так как для них | а | = 0.
Доказанная нами теорема является частным случаем более об-
щей теоремы Алберта [1]. Утверждение этой теоремы для
случая положительно определённой формы <хя является следствием
теоремы Гурвица [1] о том, что положительно определён-
ными квадратичными формами, произведение которых снова является
квадратичной формой, могут быть только формы с одной, двумя,
четырьмя и восемью переменными. То, что указанное утверждение
является следствием теоремы Гурвица, показал Ю. В. Линник [1],
который дал новое доказательство этой теоремы, показав, что ква-
дратичные формы, удовлетворяющие условию этой теоремы, являются
квадратами модулей вещественных и комплексных чисел, кватер-
нионов и октав (чисел Кели), составляющих неассоциативную ал-
гебру (см. ниже, § 8). Заметим, что квадраты модулей комплекс-
ных чисел и кватернионов являются суммами соответственно двух
и четырёх квадратов (и, как мы увидим, квадраты модулей октав
являются суммами восьми квадратов). Благодаря этому указанные
выше алгебры имеют важное применение в теории чиселх).
Отметим теорему Фробениуса[1] о том, что поле веще-
ственных чисел, поле комплексных чисел и тело кватернионов
суть единственные вещественные алгебры, являющиеся телами.
Отметим также теорему Л. С. Понтрягина2) о том, что
поле вещественных чисел, поле комплексных чисел и тело ква-
тернионов суть единственные связные локально компактные
топологические тела, обладающие счётной системой окрестно-
стей. (Можно не требовать счётности системы окрестностей, но
в этом случае следует заменить требование компактности более
1) См. ту же статью Линника [1].
2) См. Понтрягин [1], стр. 175.
АЛГЕБРЫ
443
§ 1]
сильным требованием бикомпактности; приведённая нами в § 5
главы III аксиоматика проективного пространства Колмогорова [1]
основана на этой теореме Понтрягина.)
С комплексными числами математики впервые столкнулись при
решении квадратных и кубических уравнений. Первое изложение
теории комплексных чисел мы встречаем в трактате по алгебре
итальянского математика XVI века Бомбелли [1]. Однако в течение
нескольких веков комплексные числа были окутаны мистическим
туманом; они считались, по выражению Лейбница, «амфибией между
бытием и небытием». Этот мистический туман рассеялся только
после введения геометрического представления комплексных чисел
в виде точек «плоскости комплексного переменного», впервые пред-
ложенного датским математиком XVIII века Бесселем [1]. Большую
роль в деле внедрения этого представления сыграли Гаусс и Коши,
вследствие чего плоскость комплексного переменного в немецкой
литературе часто называли «плоскостью Гаусса», а во француз-
ской литературе — «плоскостью Коши». Кватернионы впервые рас-
сматривались Эйлером1) в связи с его работами по теории чисел
и применялись к геометрии Гауссом [1], однако широкое развитие
теория кватернионов получила только в работах ирландского ма-
тематика Гамильтона [1], которому принадлежит и термин «кватер-
нион» (от латинского quaternus—четверной). Двойные числа впервые
рассматривались Клиффордом [1]. И двойные числа и кватернионы
широко применялись к геометрии А. П. Котельниковым [1, 2, 4].
Заметим, что алгебра вещественных матриц /г-го порядка удо-
влетворяет, если считать инволюцией в этих алгебрах транспони-
рование, требованиям 1° и 2°, но не удовлетворяет требованию 3°,
так как инвариантные элементы этой алгебры являются симметри-
ческими матрицами (для этих матриц ai — а4), которые не являются
произведениями матрицы (8J) на вещественное число. Примерами
алгебр, удовлетворяющих требованиям 1° — 3°, но не удовлетво-
ряющих требованию 4°, являются алгебры, элементы которых можно
записывать в виде
а = а-|-6з, s2 = 0; (5.34)
a Z2=—-1, е2 = 0, /з — — sZ = nq; (5.35>
а = а-\-Ье-\-сг-{-d£, £2 —-|-1, s2 = 0, ее = — ee = t>. (5.36)
Элементы первой из этих алгебр называются дуальными числами,
элементы второй — полукватернионами, элементы третьей — по-
лу антикватернионами. Дуальные числа, так же как двойные числа,
впервые рассматривались Клиффордом [1] и широко применялись
к геометрии А. П. Котельниковым [1, 2] (см. также [4]).
х) См. Эйлер [1], стр. 369.
444
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Инволюция в алгебрах дуальных чисел, полукватернионов и
полуантикватернионов имеет соответственно вид
а=а— Ьг,а=а— bl — сг — cbf\, а=а— be — сг — dt, (5.37)
а квадратичная форма аа имеет соответственно вид
а а — я2, ая —я2—#2, аа = а2— Ь^. (5.38)
Элементы г, т], С этих алгебр и все их линейные комбинации
являются делителями нуля.
Алгебра двойных чисел изоморфна прямой сумме двух полей
вещественных чисел, В самом деле, вместо базиса 1, е в этой
алгебре можно выбрать базис, состоящий из элементов
обладающих свойствами
е\ = е+, eL = е_, е+е_ = 0. (5.40)
Если мы будем записывать двойные числа а в виде а=Ае+-\-Ве_,
то наряду с имеющим место при любом базисе соотношением
(Ае+ + Ве_) + (Се+ + De_) = (А + С) е+ + (В + D) е_, (5.41)
в силу (5.40) мы получаем:
(Де+ + Ве_) (Се+ + De_) = (Д С) е+ + (В£>) е_. (5.42)
Формулы (5.40) и (5.41) устанавливают изоморфизм между
алгеброй двойных чисел и прямой суммой двух полей веществен-
ных чисел.
Заметим, что при этом представлении двойное число, сопря-
жённое с числом а = Ае+-\-Ве_, имеет вид а = Ве+-\-Ае_ (так
как е+~е_, е_ = е+), а квадратичная форма аа равна произве-
дению АВ (так как e+-Jre__ = 1).
Алгебры комплексных, двойных и дуальных чисел изоморфны
алгебрам вещественных матриц второго порядка соответственно
/ а Ь\ (а Ь\ /а Ь\
вида , , , и п ) • В самом деле, в этих алгеб-
\—b а) \Ь а] \0 а)
рах можно выбрать базисы, состоящие из матриц
Г1 0\ / 0 1\ /1 0\ /0 1\ /1 0\ /0 1\
.0 1/’ 1 0/’ \0 1/’ \1 0/’ (о 1/’ (о о/’ (5’43)
и, поставив в соответствие этим базисным элементам базисные эле-
менты 1, Z; 1, е\ 1, г алгебр комплексных, двойных и дуальных
§ 1]
АЛГЕБРЫ
445
чисел, мы убедимся в изоморфизме этих алгебр. При этих изомор-
/ a b\ fa b\ fa Ь\
физмах матрицы (___1, К f \ отвечают соответ-
ственно комплексному числу a-j-bi, двойному числу а—|— be и ду-
альному числу а-[-Ьз.
Алгебры кватернионов, антикватернионов и полукватернио-
нов изоморфны алгебрам комплексных матрац второго порядка
/ А В\ / А В\ [А В\
соответственно вида I - - I, ( ), — . в самом
\— £> Д / \d A j yU А]
деле, в этих алгебрах можно выбрать базисы, состоящие из матриц
1 0\ / 0 1\ /0 i \ / i 0\
0 м’ 1 0/’ 0/’ \0 — г/
1 0\ / i 0\ /0 1\ /0
о \) ’ \ 0 —v V 0/ \ * о/ (5.44)
'1 0\ / i 0\ /0 1\ /0 г\
0 1/ \ 0 — ч ’ \0 0/’ \0 0/’
и, поставив в соответствие этим базисным элементам базисные эле-
менты 1, Z, j, k\ 1, Z, е, f\ 1, Z, г, т] алгебр кватернионов, анти-
кватернионов и полукватернионов, мы убеждаемся в изоморфизме
этих алгебр. При этих изоморфизмах кватерниону a-\-bi-\-cj-\-dk,
антикватерниону а -\-bi-\-ce-\-df и полукватерниону a-\-bi-[-cz-\-dr[
отвечают соответственно матрицы
' А В\ . f а —di b —ci \ /д в\
ч— В А) у— b —f—• с i а — dit /’ \В
f а—bi с—di\ f А В\ / а —|— bi с —di
\с—di а— bi; \ 0 AJ \ 0 а — bi
(5.45)
Алгебра антикватернионов изоморфна алгебре всех веще-
ственных матриц второго порядка. Действительно, в этой алгебре
можно выбрать базис, состоящий из матриц
1 °\ / ° 1\ /О 1\ /1 0\
о 1/ 1 о/’ V о/’ \о — 1/
и, поставив в соответствие этим базисным элементам базисные эле-
менты 1, i, е, f алгебры антикватернионов, мы убеждаемся в изо-
морфизме этих алгебр. При этом изоморфизме антикватерниону
# + Ы-\-се-\- df отвечает матрица
А
С
В\ f a-\-d
Dj = \-b-+-c
а — d;
(5.47)
446
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Алгебры антикватернионов и полуантикватернионов изо-
морфны алгебрам двойных матриц второго порядка вида соот-
/ А В\ [А В\
ветственно ( о - ] и л . В самом деле, в этих алге-
\— В А) \ О А)
брах можно выбрать базисы, состоящие из матриц
1 0\ / 0 1\ /0 /е °\ '
о 1/’ 1 0/ ’ \е 0/ \0 —е/ ’
'1 0\ / е 0\ 1\ /° е\ (5.48)
0 1/’ \ о —eJ’ \0 0/’ \0 0/’ J
и, поставив в соответствие этим базисным элементам базисные эле-
менты 1, Z, е, f\ 1, е, е, С алгебр антикватернионов и полуанти-
кватернионов, мы убеждаемся в изоморфизме этих алгебр. При
этом изоморфизме антикватерниону a-\-bi-\-ce-[-df и полуанти-
кватерниону а + be -ф- се -|- dt отвечают соответственно матрицы
A / а—de b—|—/А
k—В AJ \—Ь-[-се а—dej’ \0
/а-\-Ье c-4-de\
аН о a- J-<5-49)
Заметим, что алгебра двойных матриц второго порядка вида
/Д В\
( — — ) также изоморфна алгебре антикватернионов.
Алгебры полукватернионов и полу антикватернионов изо-
морфны алгебрам дуальных матриц второго порядка вида со*
/ А В\ ГА В\
ответственно — - } и ( — — ). Действительно, в этих ал-
\—В А) \В А)
гебрах можно выбрать базисы, состоящие из матриц
(5.50)
и, поставив в соответствие этим базисным элементам базисные эле-
менты 1, Z, е, Tj; 1, е, е, С алгебр полукватернионов и полуанти-
кватернионов, мы убеждаемся в изоморфизме этих алгебр. При
этом изоморфизме полукватерниону а + Ы -ф- се -ф- di\ и полуанти-
кватерниону a-\-be-\-ce-\-dt отвечают соответственно матрицы
А В\ / a-\-de fr-j-ceX ГА В\ Га—de b-1-сг\
k—В а)~~\—Ь-[-се а—deJ\B а)~\Ь—се a-\-deJ ’
§ 11
АЛГЕБРЫ
447
Заметим, что при указанных представлениях элемент, сопря-
жённый с элементом, представляемым матрицей
w / D —В\
ставляется матрицей I__Л / ’ 3 квадРатичная форма аа равна
определителю AD — ВС этих матриц.
Алгебры кватернионов, антикватернионов, полукватернионов и
пред-
полуантикватернионов можно представить также вещественными
матрицами четвёртого порядка.
Кроме операции прямой суммы, которую можно определить над
всеми кольцами, над алгебрами можно определить также операцию
прямого произведения. Будем называть прямым произведением
двух алгебр А и В рангов п и т с базисами е±, е%, . . ., еп и Д,
А» •••’/»! алгебру ранга тп с базисом, состоящим из пар (^, /Д
умножение которых определяется формулой
(4 fj) = (е/б fify. (5.52)
Базисные элементы (е^ ff) прямого произведения обычно запи-
сываются в виде произведений ejj = /Зег базисных элементов et и /j.
Нетрудно видеть, что прямое произведение вещественной ал-
гебры А с базисом е±, е^, . . ,, еп на поле комплексных чисел
является комплексной алгеброй с тем же базисом, которую мы
будем называть алгеброй А(0. Точно так же прямое произведение
той же алгебры А на алгебры двойных и дуальных чисел, ква-
тернионов, антикватернионов, полукватернионов и полуантикватер-
нионов можно рассматривать как результат перехода в алгебре А
от вещественных координат к двойным, дуальным, кватернионным
и т. д. координатам. Будем обозначать полученные таким образом
алгебры соответственно А (г), А(е), A(z, У), A(z, е), A(i, s) и A(tf, г).
В том случае, когда в алгебрах, являющихся сомножителями
прямого произведения, имеются базисные элементы, обозначающиеся
одинаковыми буквами, базисные элементы одной из этих алгебр
будем отличать штрихами. Заметим, что прямые произведения двух
полей комплексных чисел и поля комплексных чисел на алгебру
двойных чисел изоморфны между собой, что очевидно, если по-
ставить в соответствие базисные элементы /, и' одной алгебры
и базисные элементы Z, —ei, е другой алгебры; эту алгебру мы
будем называть алгеброй двойных комплексных чисел. Точно
так же алгебры комплексных кватернионов и комплексных анти-
кватернионов изоморфны между собой, что очевидно, если поста-
вить в соответствие базисные элементы У, k, jir, kt' одной алгебры
и базисные элементы —eir, —fi', е, f другой алгебры. Алгебра
двойных комплексных чисел впервые рассматривалась Коклем [1J
под названием тесаринов, а также Липшицем1) и Шваном [1] под
0 См. Липшиц-[1], стр. 128.
448 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
названием бикомплексных чисел- Алгебра комплексных кватернионов
рассматривалась Гамильтоном [1] под названием бикватернионов',
алгебры двойных и дуальных кватернионов рассматривались Клиф-
фордом [1] под названием эллиптических и параболических би-
кватернионов (комплексные кватернионы Клиффорд называл гипер-
болическими бикватернионами).
Алгебры, являющиеся прямыми произведениями алгебры вещест-
венных матриц п-го порядка на алгебры двойных чисел, кватер-
нионов, антикватернионов, и другие рассмотренные нами алгебры
называются алгебрами соответственно двойных, кватернионных,
антик вате рнионных и т. д. матриц п-го порядка', элементы
этих алгебр записываются в виде матриц с двойными, кватернион-
ными, антикватернионными и т. д. элементами, причём сложение и
умножение этих матриц определяется так же, как для вещест-
венных матриц. Следует подчеркнуть, что, говоря об алгебре
кватернионных или антикватернионных матриц п-го порядка,
мы имеем в виду вещественные алгебры ранга 4п2, являющиеся
прямыми произведениями соответственных вещественных алгебр
рангов 4 и п2; данное нами в § 1 определение вещественной и
комплексной алгебры можно распространить на случай алгебры и,
в частности, алгебры матриц, над коммутативным кольцом, над
некоммутативными же кольцами алгебры не определяются.
Из того, что алгебра комплексных кватернионов изоморфна
прямому произведению алгебры антикватернионов на алгебру ком-
плексных чисел, а алгебра антикватернионов изоморфна алгебре
вещественных матриц второго порядка, следует, что алгебра ком-
плексных кватернионов изоморфна алгебре комплексных матриц
второго порядка.
Прямое произведение алгебр вещественных матриц п-го и
N-го порядков изоморфно алгебре вещественных матриц nN-го
порядка. В самом деле, элементы такой алгебры можно рассма-
тривать как матрицы п-го порядка, элементами которых служат
матрицы N-ro порядка. Поэтому если элементы матрицы п-го по-
рядка (а}) являются матрицами Af-ro порядка (nJ)*, то изоморфизм
между алгеброй этих матриц и алгеброй вещественных матриц
nN-го порядка может быть установлен соотношением
= (5.53)
Матрица nN-vo порядка, рассматриваемая как матрица п-го
порядка, элементами которой служат матрицы N-ro порядка,
является частным случаем часто применяющихся в алгебре «кле-
точных матриц» х).
Из доказанного нами утверждения и из того, что алгебра анти-
кватернионов изоморфна алгебре вещественных матриц второго
1) См. Мальцев [1], стр. 40.
§ 2] альтернионы 449
порядка, следует, что алгебра антикватернионных матриц
п-го порядка изоморфна алгебре вещественных матриц 2п-го
порядка.
Прямое произведение двух алгебр кватернионов изоморфно
прямому произведению двух алгебр антикватернионов. В самом
деле, поставив в соответствие базисным элементам Z • 1, j • 1,
k . 1, 1 • Z', 1 • /, 1 • k' первой алгебры базисные элементы Z • 1,
е • Г, /-Z', 1 • i • er, i-f второй алгебры, а произведениям
первых базисных элементов — произведения соответствующих им
вторых базисных элементов, мы убеждаемся в изоморфизме этих
алгебр. Из этого и из того, что прямое произведение двух алгебр
антикватернионов изоморфно прямому произведению двух алгебр
вещественных матриц второго порядка, т. е. алгебре веществен-
ных матриц четвёртого порядка, следует, что прямое произведе-
ние двух алгебр кватернионов изоморфно алгебре вещественных
матриц четвёртого порядка.
Прямое произведение любой алгебры на алгебру двойных
чисел изоморфно прямой сумме двух алгебр, изоморфных данной
алгебре. В самом деле, если данная алгебра имеет базис е±, е2, ..., еп,
то в прямом произведении этой алгебры на алгебру двойных чисел
можно выбрать базис е±е+, . .., епе+, e1e_J ...,епе_ и, ставя в
соответствие этот базис базису (elt 0), . .., (еп, 0), (0, е±), . . . ,(0, еп)
прямой суммы двух алгебр, изоморфных данной алгебре, мы убе-
ждаемся в изоморфизме этих алгебр.
Заметим, что есди алгебра матриц является прямым произве-
дением некоторой алгебры матриц на алгебру двойных чисел,
произвольную матрицу этой алгебры мы будем записывать в виде
А = А+е+ + А_е_, где А + , А_—матрицы первоначальной алгебры.
Так как определитель матрицы получается из её элементов с по-
мощью действий умножения и сложения, в силу (5.40) мы находим,
что определитель матрицы А связан с определителями матриц А +
и А_ соотношением
А — е + det А+ -}~е_ det А_. (5.54)
§ 2. Альтернионы и спинорные представления движений
неевклидовых пространств
Непосредственным обобщением алгебр комплексных и двойных
чисел, кватернионов и антикватернионов являются алгебры аль-
тернионов, определяющиеся следующим образом.
Алгеброй альтернионов п-го порядка индекса I гкп называется
вещественная алгебра ранга 2П“1, базис которой состоит из еди-
ницы 1, элементов е±, е2, ..., еп_х и всевозможных произведений
этих элементов е^... — е^е^ . .. е^. При этом здесь имеют
29 Зак. 177. Б. А. Розенфельд
450 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
место правила умножения
eiej = — (5.55)
и
= (5.56)
где числа ^ = ±1, причём среди этих чисел —1 повторяется
I раз.
Легко понять, что в каждом элементе все индексы
разные: если в произведении . ei имеются одинаковые
сомножители, мы можем переставить эти множители, пользуясь
правилом (5.55) так, чтобы эти множители оказались рядом,
а затем воспользоваться правилом (5.56) и свести этот элемент
к другому. Два произведения и е21^,,,2к равны, если числа
Л> • • •> Jk получены из чисел i19 Z2, • • •> с помощью чётной
подстановки, и отличаются знаком, если числа j2, . .., jk
получены из чисел Z1? Z2, . . ., ik с помощью нечётной подстановки.
Поэтому каждый базисный элемент можно заменить рав-
ным ему с точностью до знака базисным элементом в нор-
мальной форме, где j\ < j2 < . . . < jk. Это правило перемены
знака и даёт основание для названия элементов этой алгебры альтер-
нионами (от того же латинского слова alternus—попеременный,
что и термин «альтернирование» в § 4 главы III).
Алгебру °АП мы будем обозначать через Ап.
Произвольный альтернион может быть записан в виде
а = ^+2 + 2 2 • • • + 2 • • • 2 ...
i i j ii
...+^ (5.57)
где все базисные элементы предполагаются взятыми в нор-
мальной форме, или сокращённо в виде
а = S (5.58)
Алгебры Ап и 1Кп изоморфны алгебрам, состоящим из линей-
ных комбинаций всех базисных элементов алгебр соответственно
An+i и гАп+1, имеющих чётное число индексов. Для установления
этого изоморфизма достаточно поставить в соответствие всякому
базисному элементу е^,,.гк алгебры кп или ZAW при чётном k тот
же базисный элемент алгебры Ап+1 или гАте+1, а при нечётном
k—базисный элемент ... алгебры Ап+1 или гАте+1, где гп = 4-1.
АЛЬТЕРНИОНЫ
451
§ 2]
В алгебрах Aw и гАп/определена инволюция а—>а, при кото-
рой альтернион (5.58) переходит в альтернион
—
« = S(— 1) 2 (5.59)
к К
При этой инволюции имеют место соотношения
а -|~ Р = а 4- р; а = а и ар=ра.
В самом деле, соотношения a-|-p = a + ^ и a —а очевидны,
а соотношение op = pa следует из того, что
к (к4-1)
( О " «•••<• (5.60)
гъ гъ ft, — L
Будем называть координату а альтерниона а при 1 следом {а)
этого альтерниона. След выражения ар для двух альтернионов ос
и р с координатами аг1*”г/с и равен
= 2ч ••• згУ‘-^‘(5.61)
к 16
Этому же выражению равен след выражения {pa}.
Абсолютное значение квадратного корня следа произведения aa
будем называть модулем | а | альтерниона. Из предыдущей фор-
мулы следует:
| a |2= {aa} = 2ч • • • stk(a^ • (5.62)
к к
Формула (5.62) показывает, что если считать за расстояние
между двумя альтернионами аир модуль их разности |р — а|,
то алгебры Ап и гАп становятся изометричными соответственно
евклидовым пространствам R n_i и LR .
2 2
В силу (5.61) скалярное произведение (а, р) альтернионов аир,
рассматриваемых как векторы этого пространства, равно
(а, р) = {ар} = {ар). (5.63)
Алгебра At имеет один базисный элемент 1, вследствие чего
эта алгебра изоморфна по лю вещественных чис ел. Алгебра А2
имеет два базисных элемента 1 и ev причём ei = —1, вследствие
чего эта алгебра изоморфна полю комплексных чисел.
Алгебра ХА2 имеет два базисных элемента 1 и elt причём е± =+
вследствие чего эта алгебра изоморфна алгебре двойных
чисел. Алгебра А3 имеет четыре базисных элемента 1, ег, е2 и
29*
452 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
е±е2 = — £2e1} причём е{ = el = — 1 и, следовательно, = —1,
вследствие чего эта алгебра изоморфна телу, кватернионов.
Алгебры ХА3 и 2А3 имеют четыре базисных элемента 1, е19 е2 и
ete2 = — е2е1, причём в случае JA3 е? = —f— 1, — 1 и, следо-
вательно, (tf^)2 — 1, а в случае 2А3 и, следова-
тельно, — —1, вследствие чего эти алгебры изоморфны
алгебре антикватернионов. Определённая нами инволюция
в алгебрах А2, 1А2, As, 1А3, 2А3 совпадает с переходом к сопря-
жённому элементу соответственно в алгебрах комплексных и двой-
ных чисел, кватернионов и антикватернионов, а модули элементов
этих алгебр совпадают соответственно с модулями комплексных
и двойных чисел, кватернионов и антикватернионов.
Строение алгебр альтернионов определяется следующей тео-
ремой1).
Алгебры Ап изоморфны следующим алгебрам'.
А8?п+1 — алгебре вещественных матриц 24т-го порядка',
А8?п+2— алгебре комплексных матриц 24™-го порядка',
А8т+3— алгебре кватернионных матриц 24т-го порядка',
А8т+4— алгебре двойных кватернионных матриц 24т-го по-
рядка',
А8?п+б— алгебре кватернионных матриц 24т+4-го порядка',
А8?п+6 — алгебре комплексных матриц 24т+2-го порядка',
A8w+7— алгебре вещественных матриц 24т+ъ-го порядка',
A8w+8 — алгебре двойных матриц 24ш+3-го порядка.
Алгебры альтернионов 1Ап изоморфны следующим алгебрам:
4йА8т+1 и 4/f+1A8m+1—алгебре вещественных матриц
24т-го порядка',
4А:+2А8?п+1 и u+3A8w+1 — алгебре кватернионных матриц
24w“1-?o порядка',
4JfcA8m+2 и 47"+2A8w+2 — алгебре комплексных матриц 24т-го
порядка',
+2 — алгебре двойных матриц 24т-го порядка',
4k+^ksm+2— алгебре двойных кватернионных матриц 24w"1-ao
порядка',
4A'A8w+3 и 4А:+3А8?п+3 — алгебре кватернионных матриц
24т-го порядка',
и 4*+2A8w+3—алгебре вещественных матриц
24ш+1-го порядка',
— алгебре двойных кватернионных матриц 24т-го
порядка',
4A:+1A8w+4 и 4a‘+3A8w+4 — алгебре комплексных матриц 24w+1-ao
порядка',
1) См. работу автора [7]. Здесь исправлена ошибка, вкравшаяся
в указанную работу.
§ 21
АЛЬТЕРНИОНЫ
453
4Л+2А8?п+4— алгебре двойных матриц 24ш+1-го порядка}
4*A8w+6 и 4ft+1A8w+6— алгебре кватернионных матриц 24т+1-го
порядка;
4*+2А8?п+б и 4A:+3A8w+6— алгебре вещественных матриц 24т+2-го
порядка;
4*A8w+6 и 4й+2А8ш+б— алгебре комплексных матриц 24т+2-го
порядка;
4^+1Agm+6— алгебре двойных кватернионных матриц 24т+1-го
порядка;
— алгебре двойных матриц 24т+2-го порядка;
4fcA8w+7 и 4й+3А8ш+7— алгебре вещественных матриц 24т+3-го
порядка;
и 4A:+2A8w+7— алгебре кватернионных матриц
24ш+2-го порядка;
4ЛА8?п+8— алгебре двойных матриц 24ш+3-го порядка;
4*+1А8?п+8 и 4А:+3А8?п+8— алгебре комплексных матриц 24т+3-го
порядка;
4й+2А8?п+8— алгебре двойных кватернионных матриц 24ш + 2-го
порядка.
Отметим, что, в частности, алгебры и т+1А2м+1 изо
морфны алгебрам*.
— алгебре вещественных матриц 2т-го порядка;
т+1А-%т+2 — алгебре двойных матриц 2т-го порядка.
Для доказательства заметим, что центр алгебр Ап и 1А.п, т. е.
совокупность элементов этих алгебр, перестановочных со всеми
элементами этих алгебр, не может содержать базисных элементов,
кроме 1 и элемента В самом деле, при 0 < h < п—1
так как
^12 • • • h,ehh+l— ehh+lel% ... Л’
^12 ... hPhh+l = г?/12 ... 7г-1 Ml’
(5.64)
(5.65)
^ЛЛ+1^12 ... Л — ( 1 )Ч+1 hehl2 ... 7i-l —
= (< 1)Й' + 127г^/г+1 12 ... h-1 “ zhe12 ... h-1 h+Г (5.66)
Но элемент £12-«-n-i принадлежит к центру алгебры только
при чётном /г, так как
^12 ... п —1^г —— ( О™ г 1 ег^12... г-1 г + 1...п-1> (5.67)
2^12...п-1 — ( I/ *гг^12 ... г —1 г + 1. •. ?г —1 (5.68)
и условием принадлежности элемента ^i2...n-i к центру является
одновременная чётность или нечётность п — i— 1 и i— 1, т. е. чёт-
ность п. При нечётном п элемент £i2...n-i перестановочен только
с элементами с чётным числом индексов, а произведение е12^..п-\
454
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
на элементы с нечётным числом индексов при перестановке сомно-
жителей меняет знак.
Переход от алгебры Ап к алгебрам Ап+1 и 1Ап+1 и от ал-
гебры 1кп к алгебрам ZA^+1 и Z+1A^+1 можно представить себе
как переход от вещественных координат элементов алгебр кп и zAn
к координатам вида где — добавляемый базисный эле-
мент ei2... п- При этом элементы будут представлять
собой новые базисные элементы, имеющие индекс п. В силу (5.55)
и (5.56) в случае перехода от алгебры кп соответственно к алгеб-
рам А„Ч1 и 1Ага+1
n(n+D п(пуи t
4г. 1) 2 и 4. 1) 2 ; (5.69)
в случае перехода от алгебры zAn соответственно к алгебрам
^п+1 и Z+1-A-n+l
п(п+1) г . п(п-Ы) ? t
4. ..» = (—!) 2 и 4...» = (—!) 2 • (5.70)
Поэтому в случае перехода от алгебры кп к алгебре Ап+1
( —1, если /г = 4лп —1 или 4m + 2,
(D^ 2222 \
I 4-1, если п — 4m или 4m 4-3,
а в случае перехода от алгебры Ап к алгебре 1Ап+1
( —1, если /г = 4m или 4m 4-3,
22= \
( 4~ 1 > если п = 4т 4~ 1 или 4т 4~ 2.
Точно так же в случае перехода от алгебры zAn к алгебре zAn+1
— 1, если п = 4m 4~ 1 или 4m 4~ 2 и I чётно и
п ~ 4т или 4m + 3 и I нечётно,
। 1 л л । q / .. (5.73)
4-1, если п 2=2 4m или 4m 4-3 и I четно и
п =2 4m4-1 или 4m4~2 и Z нечётно,
а в случае перехода от алгебры zAn к алгебре г+1А?г+1
’—1, если п 22=2 4m или 4m4-3 и Z чётно и
п = 4т-\-\ или 4m 4-2 и Z нечётно,
4~ 1, если п 2= 4m4~1 или 4т-\-2 и Z чётно и (574)
п = 4m или 4m4-3 и Z нечётно.
Отсюда следует, что переход от алгебры Ап к алгебре Ап+1
при чётном п, когда элемент является элементом центра,
мы можем рассматривать как переход от вещественных координат
к комплексным координатам при п — 4т-{- 1 и как переход от
§ 2]
АЛЬТЕРНИОНЫ
455
вещественных координат к двойным координатам при п = 4т—1,
что мы будем записывать в виде
(0> -А-4?7г — A4w_i (#). (5.75)
Аналогично переход от алгебры кп к алгебре гАп+1 при чёт-
ном п мы можем рассматривать как переход от вещественных
координат к двойным координатам при п = 4т-{- 1 и как переход
от вещественных координат к комплексным координатам при
п = 4т—1, что мы будем записывать в виде
(^)’ — ^-4m-l (0* (5.76)
Точно так же мы найдём, что при чётном I
^4?п+2 ~ (О» ^47П (^)> I
г + 1Аш+2 = ZA4m+1 (е)> 1 + (О, /
а при нечётном I
^А4тц_2 • гА4ш+1 (#), ^A4w • ^А4Ш_4 (Z), 1
^+1А4ш+2 — гА4?и+1 (Z), г+1А4ш — гА47П_-£ (#). /
Таким образом, для определения строения алгебр Ап и 1кп
нам остаётся определить строение алгебр кп и 1кп при нечёт-
ном п.
Так как при i 2т
^12...2m 2т+к ~ + l . i— 1 i-H ... 2m 2m-pA:> (5.79)
£^12 ... 2т 2т + к (1)г . i — 1 г-pl... 2т 2т ±к> , (5.80)
а числа 2/п—1—I и I—1 одновременно чётны или нечётны,
базисные элементы е12... 2m2m+i и ei2...2m2m+2 перестановочны со
всеми базисными элементами, индексы которых не превышают 2т.
Поэтому переход от алгебры А.2т+1 к алгебрам A2w+3, 1A2w+3 и
2Д2т+з и от алгебры zA2w+1 к алгебрам zA2m+3, г+1А2т+3 и г+ “А.2игЧ-‘3
можно представить себе как переход от вещественных координат
элементов алгебр A2w+1 и гА2>п+1 к координатам вида
+ сф-|-б/а)д, гдеа), ф — добавляемые базисные элементы 0i2...2m2m+i
и е12...2т2т-\-2- Тогда Элементы <O^V8... г’д. будут представлять собой
новые базисные элементы, имеющие индекс 2/п-|-1 и не имеющие
индекса 2/п-|-2, элементы ф^2...4А будут представлять собой
новые базисные элементы, имеющие индекс 2т-\-2 и не имеющие
индекса 2zn-|-l, а элементы будут представлять собой
новые базисные элементы, имеющие индекс 2/п-|-1 и индекс
2^ + 2.
Так как в случае алгебр кп квадраты элементов
е* а п — — (____п(шч-1) (2m+i) (5.81)
12... 2т 2ш + 1 ^12... 2т 2т±2 ' ' '
456
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
равны + 1 при нечётном т и равны — 1 при чётном т, переход
от алгебры A.2W+1 к алгебре A2w+3 можно рассматривать как
переход от вещественных координат к кватернионным координа-
там при чётном т и как переход от вещественных координат
к антикватернионным координатам при нечётном т, что мы будем
записывать в виде
О’» 7)> = А4^_1 (/, е). (5.82)
Если мы переходим от алгебры к алгебре 1А2лг, мы
можем считать, что
^2 — — — (—1уш+1)(2т+1) (5.83)
т. е. один из этих квадратов равен-]-1, а другой—1 как при
чётном, так и при нечётном т, и переход от алгебры А2т+1 к ал-
гебре xA2?n+3 можно рассматривать как переход к антикватернион-
ным координатам, что мы будем записывать в виде
1-^-2т4-3 = ^‘2т+1 О» е)* (5.84)
Если мы переходим от алгебры A2w+1 к алгебре то
квадраты элементов
#2 — ^2 ——( + (2m4-1) ок\
с12...2ш2ш + 1 12...2т2т + 2 ' (О.ОО/
равны 4- 1 при чётном т и равны —1 при нечётном т, и пере-
ход от алгебры А2?п+1 к алгебре 2А2от+3 можно рассматривать как
переход от вещественных координат к кватернионным координа-
там при нечётном т и к антикватернионным координатам при чёт-
ном т, что мы будем записывать в виде
2-^-4jt>+3 — A4j,+1 G> й)> 2-А-4р+1 —• A-tp-1 (/> J)- (5.86)
Точно так же доказывается, что
27cA4/j+3 = 27cA4jj+1(/, А
2/c+1 А2ет+3 = 2fcA2m+1 (i> б),
2ft+2AtfJ+;s = 2fcA4M1(^ е),
~к^-ьр+1 A-tp—i А
*к+1^р+1 = *к^Р-1(1, J)
(5.87)
2л+1А^+3 = 2л+1А4р+1(/, е),
2fc+3A^+3 = 2ft+1A4p+1(G Д
^^р^-^Кр-Л^ J).
'2k+^ip+i = 27г+1А^_1 G, е).
(5.88)
Так как алгебра антикватернионов изоморфна алгебре вещест-
венных матриц второго порядка, а прямое произведение двух
алгебр кватернионов изоморфно алгебре вещественных матриц
четвёртого порядка, при переходе в алгебре кватернионных матриц
n-го порядка к кватернионным координатам в кватернионах,
§ 21
АЛЬТЕРНИОНЫ
457
являющихся элементами этих матриц, мы получим алгебру веще-
ственных матриц 4п-го порядка, а при переходе в алгебре ква-
тернионных матриц п-го порядка к антикватернионным координа-
там в кватернионах, являющихся элементами этих матриц, мы
получим алгебру кватернионных матриц 2п-го порядка. Поэтому
формулы (5.82), (5.84), (5.86), (5.87) и (5.88) дают нам утвер-
ждение теоремы для алгебр Ап и гкп нечётных порядков.
При переходе от вещественных координат к двойным коорди-
натам алгебра вещественных матриц 2ш-го порядка перейдёт
в алгебру двойных матриц того же порядка. При этом же пере-
ходе алгебра кватернионов перейдёт в алгебру двойных кватер-
нионов и, следовательно, алгебра кватернионных матриц 2ш“1-го
порядка перейдёт в алгебру двойных кватернионных матриц того
же порядка. При переходе от вещественных координат к комплекс-
ным координатам алгебра вещественных матриц 2ш-го порядка
перейдёт в алгебру комплексных матриц того же порядка. При
этом же переходе алгебра кватернионов перейдёт в алгебру ком-
плексных кватернионов, изоморфную алгебре комплексных матриц
второго порядка и, следовательно, алгебра кватернионных матриц
2»n-i.r0 порядка перейдёт в алгебру комплексных матриц 2ш-го
порядка. Поэтому формулы (5.75), (5.76), (5.77) и (5.78) дают
нам утверждение теоремы для алгебр кп и 1кп чётных порядков.
Из доказанной нами теоремы следует, что при п <^8 алгебры
кп изоморфны алгебрам'.
Ах— полю вещественных чисел',
к2 — полю комплексных чисел',
А3— телу кватернионов',
А4— алгебре двойных кватернионов',
Аб — алгебре кватернионных матриц второго порядка',
А6 — алгебре комплексных матриц четвёртого порядка',
А7 — алгебре вещественных матриц восьмого порядка',
А8 — алгебре двойных матриц восьмого порядка.
Аналогично, алгебры lkn изоморфны алгебрам:
*А2 —алгебре двойных чисел',
2А3 и 2А3— алгебре антикватернионов',
гА4 и 3А4— алгебре комплексных кватернионов',
2А4— алгебре двойных антикватернионов',
гАб и 4Аб—алгебре кватернионных матриц второго порядка',
2Аб и 3Аб— алгебре вещественных матриц четвёртого по-
рядка;
гА6 и бА6 — алгебре двойных кватернионных матриц второго
порядка;
2А6 и 4Ае — алгебре комплексных матриц четвёртого по-
рядка;
458 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
3Аб— алгебре двойных матриц четвёртого
порядка]
3А7, 2А7, бА7 и 6А7 — алгебре кватернионных матриц чет-
вёртого порядка]
3А7 и 4А7— алгебре вещественных матриц вось-
мого порядка]
1А8, 3А8, бА8 и 7А8 — алгебре комплексных матриц восьмого
порядка]
2А8 и 6А8—алгебре двойных кватернионных ма-
триц четвёртого порядка]
4А8 — алгебре двойных матриц восьмого
порядка.
Алгебры Ап впервые рассматривались Клиффордом [2], вслед-
ствие чего элементы этих алгебр часто называют числами Клиф-
форда. Алгебра ХА5 впервые рассматривалась Комбебьяком [1],
алгебра 4Аб впервые рассматривалась Дираком в связи с теорией
спина электрона 1).
Рассмотрим теперь алгебру А№ или zAn, представленную аль-
тернионами алгебры Ап+1 или zAn+1, являющимися линейными
комбинациями базисных элементов с чётным числом индексов.
Тогда, если рассматривать алгебры Ап+1 и гАп+1 как простран-
ства R2n и L R9n, то плоскости этих пространств, порождённые
одноиндексными базисными элементами elt е2,..., еп, являются
соответственно пространствами Rn и lRn.
Покажем, что отражение этого пространства Rn или lRn от
гиперплоскости с единичным или мнимоединичным нормальным
вектором v имеет вид
— (5.89)
В самом деле, если вектор В коллинеарен вектору фор-
мула (5.89) даёт rj = — В. Так как произведение двух линейных
комбинаций элементов ei является линейной комбинацией элемен-
тов 1, и е^, след произведения двух таких элементов аир
равен
{«?} =1(ар + ^) = ^(ар + ра). (5.90)
Вследствие этого выражение {оф}, в силу (5.58) равное скаляр-
ному произведению элементов аир, рассматриваемых как век-
торы пространства Rn или lRni равно
(7, р)={ар} = {р^}=1(а? + ₽а)=±(ра + а?) (5.91)
и, так как для линейных комбинаций векторов ei а = — а,
(а, 0) = -1(ар + (За). (5.92)
1) См. Дирак [1], стр. 271.
§ 2]
АЛЬТЕРНИОНЫ
459
Поэтому если вектор $ ортогонален вектору v, они связаны
соотношением ч$ =— и в этом случае формула (5.89) даёт
= 5.
Как мы видели в § 12 главы I, каждое вращение пространств
Rn и lR-n является произведением отражений от гиперплоскостей,
причём вращение с определителем -|-1 является произведением
чётного числа отражений. Поэтому всякое вращение пространств
Rn и lRn с определителем -|- 1 изображается преобразованием
(5.93)
где а — произведение чётного числа элементов алгебры Ап+1 или
гАп+1, являющихся линейными комбинациями одноиндексных ба-
зисных элементов. Такие элементы а являются линейными комби-
нациями базисных элементов с чётным числом индексов, т. е. эти
элементы можно рассматривать как элементы алгебры Кп или гкп.
Мы получили представление вращений пространств Rn и lRn аль-
тернионами соответственно алгебр Ап и гАп.
Так как элементы м в (5.89) являются альтернионами единич-
ного или мнимоединичного модуля, т. е. в силу (5.91) (м, м) =
= w = то а в (5.93), являющиеся произведениями элемен-
тов удовлетворяют условию
о-а = чк .. . Ч = — 1. (5.94)
т. е. альтернионы а в (5.93) удовлетворяют условию
аа — ± 1, (5.95)
Отсюда следует, что все элементы а в формуле (5.93) яв-
ляются альтернионами единичного и мнимоединичного модуля.
Преобразование (5.93) является тождественным преобразова-
нием только в том случае, когда элемент а принадлежит к центру
алгебры Ап+1 или гАп+1. Так как центр алгебр А№ и 1кп при
нечётном п состоит из элементов, кратных 1, и при чётном п
состоит из линейных комбинаций элементов 1 и е12 . . . №_1, а
элемент а является линейной комбинацией базисных элементов
с чётным числом индексов, элемент а в том случае, когда пре-
образование (5.93) является тождественным преобразованием, есть
кратное 1. Так как, с другой стороны, все элементы а в (5.93)
являются альтернионами единичного или мнимоединичного модуля,
преобразование (5.93) является тождественным преобразова-
нием только в том случае, когда я =
Пусть теперь одно и то же вращение пространства Rn или
lRn изображается преобразованием (5.93) и преобразованием
т] = ^-4 (5.96)
Тогда преобразование
(5.97)
460 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [ГЛ. V
является тождественным преобразованием и по доказанному
т. е. Р— Поэтому каждому вращению про-
странств Rn и lRn с определителем +1 соответствуют два
и только два альтерниона', а и —а.
Альтернионы а из алгебр Ап и гА№, изображающие вращения
пространств Rn и lRn, образуют группы. Будем называть эти
группы спинорными группами альтернионов алгебр А№ и 1А.п.
Так как произведению вращений при этом соответствует произ-
ведение альтернионов, мы получаем, что группы вращений про-
странств Rn и lRn с определителем 1 изоморфны фактор-
группам спинорных групп соответственно алгебр Кп и 1А.п по
их подгруппам, состоящим из альтернионов 1 и —1, т. е.
группы вращений пространств Rn и lRn с определителем +1
двузначно изображаются спинорными группами альтернионов
алгебр Ап и Аги.
Эта теорема для пространства Rn была установлена Лип-
шицем [1]. Из условия (5.95) следует условие
{аос} = z±= 1, (5.98)
т. е.
= (5-99)
к 1 л
С другой стороны, из того, что альтернионы, принадлежащие
к спинорной группе, являются произведениями чётного числа эле-
ментов = 2 легко выводится, что координаты альтернио-
нов, принадлежащих к спинорной группе, число индексов которых
больше двух, связаны условиями *)
— (2й— 1)!!а[/Л aV4 . . . аг2/с-1г2/с’ (5.100)
(это выражение встречалось нам в формуле (3.120) в § 4
главы III).
Условия (5.100) могут быть переписаны также в виде
aaW3/4 = 3!!a[V2a¥4l,
= 5!, (5101)
ас№ • ’ ’ = (2k — 1)!! с№'’ ’ а№ .
Условия (5.99) и (5.100) выражают все координаты альтернио-
нов, принадлежащих к спинорной группе, через п ^п~ коорди-
нат а^. Тот факт, что число этих координат совпадает с числом
параметров группы вращений пространств Rn и lRn, показывает,
!) См. Липшиц [1], стр. 68.
АЛЬТЕРНИОНЫ
461
§ 2]
что условия (5.99) и (5.100) образуют полную систему условий,
выделяющих спинорную группу из алгебр Аге и 1Ап.
При установленном нами соответствии между альтер-
нионами алгебр Ап и 1кп, принадлежащими к спинорной
группе, и вращениями пространств Rn и lRn альтерниону
а = У а11"'1^е{ соответствует вращение, элементы ма-
k 1 2ft
трицы которого имеют вид
Ai = =t И + 2(5...Sipaijii"лра^"лр —
р
— ^^ чаи . a^i-ty], (5.102)
р *• р
причём знак ± перед скобкой совпадает со знаком выраже-
ния аа.
В самом деле, если мы применим преобразование (5.93) к ба-
зисному вектору е^ то получим вектор
= (5.103)
где матрица (AZ)— искомая матрица. В силу (5.95) имеем:
(a-i/i-= (±«/i - ** = ±( — l)Vi-"4 (5.104)
поэтому
a^a-i = У S±(— l)sa^'"t»a3i-"^sei { e^j j . (5.105)
1 АГ J- xuo
Член Atiei этой линейной формы может возникнуть только
тогда, когда индексы ir . . ,i.2r с точностью до порядка совпа-
дают с индексами j\ . . . j2s. При этом может быть два случая:
среди этих индексов может присутствовать и может отсутство-
вать индекс I. В первом случае перепишем индексы it . . . i2r и
Ji . . . j2s в виде . . . ip (р=2г— 1 = 2s— 1), во втором слу-
чае перепишем их в виде . . . ip (р =^2r = 2s). Тогда
р_
^iei ~ — [S ( О" Х 1~
Р -L Р А Р 1
+ 2 (- 1 '• • S)2 ...{ е#и... d . (5.106)
р 1 р р
Но
р_
= О8^. 1(5 107)
p-и Г ’ 7
ерЧ • • • ipeie^1 ••'ip=z гъе1е\ {р~ 1" e<i’ -
462
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[гл. V
откуда
= ± [58i S{ — 2 . Si (а"1-^)2] (5.108)
р L р р 1 р
или, так как I а |2 = 2 ег- . . . (aV” А)2 = zt 1 (в отличие от
р 1 р
первого слагаемого предыдущей строки, где среди индексов
. . . ip нет Z, здесь i среди этих индексов имеется),
Ai = ± [ 1 — 2 S е<е< .. . Si (a{ii • • • S)2]. (5.109)
р р
Член Aiej той же линейной формы может возникнуть только
тогда, когда индексы . Z2r содержат индекс Z, а индексы
А • • • As его не содержат, или наоборот. Здесь могут быть че-
тыре случая, в соответствии с чем мы перепишем индексы Zx. . .Z2r
и А • • • As соответственно в виде
1) Z* . . . Z2r — iji^ . . . ip, . As "li • • • lp>
2) Zt . . . Z2r — Hi . . Лр, Ji . . . J2s —Jh. • • • A* (5 110)
3) Z^ . . . Z2r = уZ-£ ... ip, . . . J2S ~ ZZj ... ip,
4) ii • • • Z2r = Zt . . . ip, ji . . . J2S — Zy’Zj . . . ip.
Тогда
A*ej = ± [S (— I)7 - Wi - ^etjt ... < ... { +
p p r
p+1.............
+ S(—О 2 a 1 Pa^1 P6iii••• г1)е^е^1 •••i
p
p+1
4“ (—1) 2 1 pa 1 Pe3\ ••• 4ре4е™1 ••• %
p
Рл.
+ S(—!)i+ (5.111)
Но легко видеть, что
V^'i-S= = s<s/i- 1)2
P+1
P . . . P :P '1 X - / -J - - ... ( 1 ) ^'1,
Ър“^3\ ••• гр г 3 Ч" р г^... гр\ /
р + 1
е3\ ••• iveiei\ ••• ip~ ~~ ip==~~eiS^-eip(—1) 2 eJ’
eh ••• ioe^eii,i Ч = ~ ~ ~ s‘Sii ••• % ^2 ej-
(5.112)
§ 2]
АЛЬТЕРНИОНЫ
463
Отсюда, так как первый член совпадает с четвёртым, а вто-
рой с третьим, получаем:
= =t2(S••• 8» агз^-1раг1-гр —
р р
— Se<8< ... 8,£уь-*ра311-*р). (5.113)
р р
Формулы (5.109) и (5.113) составляют формулу (5.102).
В алгебре шА2?те можно также определить преобразования
вида (5.93), изображающие антивращения пространства mR%m-
Можно показать, что если обозначать элемент через е,
алгебру шА2м можно рассматривать как алгебру w~1A2m_1 (е),
альтернион а в этом случае удовлетворяет условию
аа = ±е (5.114)
и (5.101). Будем называть группу альтернионов алгебры wA2w,
связанную условиями (5.99) или (5.114) и (5.100), расширенной
спинорной группой. Так же как для спинорной группы, показы-
вается, что группа вращений и антивращений пространства ш+1/?2т+2
с определителем -}-1 изоморфна фактор-группе расширенной спи-
норной группы по её подгруппе, состоящей из альтернионов +1
и —1.
Выше было показано, что группы движений пространств Sn
и 1Sn при чётном п изоморфны группам вращений пространств Rn+1
и lRn+1 с определителями +1, а группы движений пространств Sn
и lSn при нечётном п и пф21—1 и собственной области про-
странства lSn при п = 21—1 представляются вращениями про-
странств Rn+1 и lRn+r с определителями обоих знаков. Поэтому
спинорные группы альтернионов (п-\- \)~го порядка при чётном п
двузначно изображают группы движений пространств Sn и 1Sn>
а при нечётном п четырёхзначно изображают подгруппы групп
движений пространств Sn и lSn при п^21— 1 и собственной
области пространства lSn при п — 21—1, состоящие из дви-
жений с определителями -|-1. Точно так же расширенные спи-
норные группы альтернионов 21-го порядка четырёхзначно изо-
бражают подгруппы групп движений пространства
состоящие из движений с определителями +1. Эти предста-
вления движений пространств Sn и lSn альтернионами называются
спинорными представлениями движений этих пространств.
Так как по теореме о строении алгебр альтернионов алгебры Ап
и ]Кп изоморфны алгебрам матриц, спинорные представления
движений неевклидовых пространств можно рассматривать
как представления этих движений линейными преобразованиями
векторов в соответственных пространствах. Векторы этих
пространств называются спинорами пространств Sn и lSn. Понятие
спинора было введено Картаном [2] (см. также [11]).
464 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
Мы видели, что алгебры матриц, изоморфные алгебрам Ап+1 и
zAn+1, можно рассматривать, с одной стороны, как алгебры вещест-
п
венных, комплексных, двойных и двойных комплексных матриц 22 - го
n —1
и 2 2 -го порядка, а с другой стороны, как алгебры матриц
меньшего порядка, элементами которых служат матрицы различных
порядков. Поэтому в качестве спиноров пространств Sn и lSn
можно рассматривать как векторы вещественного, комплекс-
п П —1
ного, двойного и двойного комплексного пространств 22 и 2 2
измерений, так и векторы пространств меньшего числа измере-
ний, координатами которых служат матрицы различных
порядков или представляемые ими альтернионы.
Наиболее важны два вида спиноров неевклидовых пространств:
спиноры, являющиеся векторами вещественного, комплексного,
п п — 1
двойного и двойного комплексного пространств 22 и 2 2 изме-
рений, и спиноры, являющиеся векторами двумерных пространств,
координатами которых служат вещественные, комплексные, двой-
п 1 п—3
ные и двойные комплексные матрицы 22 -го и 2 2 -го порядка
или представленные ими альтернионы. Оба эти вида спиноров
допускают простое геометрическое истолкование, которое мы
изложим в §§ 6 и 7.
В том случае, когда координатами спиноров являются двойные
и двойные комплексные числа или двойные матрицы, эти коорди-
наты можно записать в виде х* ~ х* е+-}-х*_е_. Векторы с коор-
динатами х^ и х\ в этом случае называются полуспинорами.
Заметим, что преобразования (5.93), где а — элемент спинор-
ной группы, переводят элементы с, являющиеся линейными комби-
нациями элементов е$ .. с любым одним и тем же числом
1 к
индексов, в элементы того же вида. В самом деле, в силу того,
что ... — е{ ein ... е{, мы получим:
1 К 12 о-
ае< ... = a6i a~1aeia-1 ... a"1, (5.115)
1 12 К
причём если элемент а принадлежит к спинорной группе, каждый
из сомножителей последнего произведения является линейной ком-
бинацией одноиндексных элементов. Но преобразование (5.93),
когда $ — линейная комбинация одноиндексных элементов, является
вращением в плоскости этих элементов, изометричной простран-
ству Rn или lRn. Поэтому, так как базисные элементы в этой
метрике взаимно ортогональны, элементы ае^"1 также взаимно
ортогональны, а, как нетрудно проверить, произведение k таких
АЛЬТЕРНИОНЫ
465
§ 2]
элементов обязательно является линейной комбинацией ^-индексных
базисных элементов.
В то время как преобразование координат элемента $, являю-
щегося линейной комбинацией элементов eif при преобразова-
нии (5.93) совпадает с преобразованием координат точек про-
странств Sn и lSn, преобразование координат элемента $, являющегося
линейной комбинацией элементов при том же преобразо-
вании совпадает с преобразованием выражений
— klx^yh . . . , (5.116)
составленных из координат k-\- 1 точек xi, yi, . . ., zif порождаю-
щих ^-мерную плоскость пространства Sn или lSn. Нетрудно
проверить, что числа (5.116) при выборе других &-|-1 точек
на той же плоскости не изменяются или умножаются на одно
и то же вещественное число и могут служить координатами
^-мерной плоскости; эти координаты были впервые введены
Грассманом [1] и называются грассмановыми координатами пло-
скостей. Рассматривавшиеся нами в § 11 главы III плюккеровы
координаты прямых являются частным случаем грассмановых
координат при £= 1.
Так как в условия (5.100) входят координаты альтернионов
с четырьмя и более индексами, эти условия можно написать
только для альтернионов, начиная с четвёртого порядка. Поэтому
при п = 2 и п = 3 единственным условием принадлежности аль-
терниона к спинорной группе является условие (5.99), т. е. спи-
норная группа в случае комплексных и двойных чисел, кватер-
нионов и антикватернионов состоит из элементов этих алгебр
единичного и в случае двойных чисел и антикватернионов
мнимоединичного модуля.
В случае альтернионов четвертого порядка условие (5.100)
имеет вид
аа1234 = а14а23 — а24а13 4~ #34я12, (5.117)
а условия (5.99) принимают для алгебр А4, *А4 и 2А4 соответ-
ственно вид
e2-Ha12)2-j-(a13)2-|-(a14)24-(a23)2+(a24)2-j-(«S4)2+(^1234)9= 1, (5.118)
а2—(а12)2—(а13)2—(а14)2+(а23)2+(а24)2+(а34)2-(а1234)2= =t 1, (5.119)
а2-На12)2—(а13)2-(а14)2—(а23)2—(a24)2-|-(a34)2-j-(a1234)2=±l. (5.120)
Но элементы алгебры А4 можно записать в виде
а=(«+«1Ч1+«2^24+«12е12Н-^234(«1'234-«23«и+«1Ч4-«3^12)-
(5.121)
30 Зак. 177. Б. А. Розенфельд
466
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Отсюда
«=(«—«14*14—«24*24—a12*12)+*i234 (a12S4+a2Se14—aise24-|- <z84e12),
(5.122)
аа = [a2_|_(fl12)2 _|_ (a18)2 _|_(д14)2 (a23)2 _J_(a24)2_|_(a84)2_|_(a1234)2]_|_
+ 2*1234 (“1234 — al2flS4 + alSfl24 — «14«2S), (5.123)
и вследствие этих соотношений условия (5.117) и (5.118) равно-
сильны условию аа=1. Элементы алгебры ХД4 можно записать
в виде
а=(а-]~ а14е14 4-а24е24Н-а12е12)+е1284 (а1234+а23е14+а13е24+а34«’12)
(5.124.
Отсюда
« = («—О14*14—а24*24—al2*12)+*1234(a1234—a28*14—al3*24—fl84*12)>
(5.125)
аа = [а2 —(fl12)2 —(а13)2_(а14)24_(а28)2+(а24)2 + (а84)2_(д1234)2] +
+ 2*1234 (fll2S4 — а12«34 + «13«24 а14а23)- (5.126)
Вследствие этих соотношений условия (5.117) и (5.119) равно-
сильны условию аа=±1. Далее, элемент алгебры 2Д4 можно
записать в виде
“=:(а+а14*14+й24*24+а12*12)+*1234 (а^+а23*!!—а13*24—а34*12>-
(5.127)
Отсюда
« = (а—«14*14—а24*24—а12*12)+*1234 (а1234—«23*14 + а13*24-|-а34е12),
(5.128)
аа = [а2_|_(а12)2_(а13)2_(а14)2_(а23)2_(а24)2_)_(а34)2_|_(а1234)2]_|_
+ 2е1234 (аа1234 — а4'2а84 а1за24 _ fli4a23)> (5 л 29)
и вследствие этих соотношений условия (5.117) и (5.120) равно-
сильны условию аа = z±z 1.
Так как элементы (5.121), (5.124) и (5.127) можно рассматри-
вать как соответственно двойной кватернион, комплексный кватер-
нион и двойной антикватернион, где £1234 играет роль соответственно
мнимой или двойной единицы, выражения (5.123), (5.126) и (5.129)
представляют собой квадраты модулей этих двойных и комплекс-
ных кватернионов и двойных антикватернионов. Поэтому спинор-
ная группа в случае двойных кватернионов, комплексных кватер-
нионов и двойных антикватернионов состоит из элементов
этих алгебр единичного и в случае комплексных кватернионов
и двойных антикватернионов мнимоединичного модуля.
Представление групп движений пространств S3 и х53 группами
двойных и комплексных кватернионов единичного модуля рас-
сматривалось А. П. Котельниковым [2] (см. также [4]).
§ 2]
АЛЬТЕРНИОНЫ
467
двойных комплексных матриц второго порядка вида
В А / Д_ В \
— и+-4- - — ]е_, алгебра комплексных кватер-
Д+/ \—В_
изоморфна алгебре всех комплексных матриц второго
Выше мы видели, что алгебра кватернионов изоморфна
/ А В\
алгебре комплексных матриц второго порядка вида — — ),
\— В
алгебра антикватернионов изоморфна алгебре всех вещественных
матриц второго порядка, алгебра двойных кватернионов изоморфна
алгебре
/ А+
\-В+
пионов
порядка, алгебра двойных антикватернионов изоморфна алгебре
всех двойных матриц второго порядка, а определители матриц
всех этих алгебр равны квадратам модулей соответственных ква-
тернионов или антикватернионов (в случае двойных алгебр —
в силу формулы (5.54)). Поэтому мы получаем следующие группы
матриц, осуществляющие спинорное представление групп движений
неевклидовых пространств 2 и 3 измерений:
Плоскость S2 — группа комплексных матриц второго по-
/ А В\
рядка вида — - ) с определителем -|-1 (двузначное соответ-
\— В A J
ствие).
Плоскость 1S2— группа всех вещественных матриц второго
порядка с определителем ±1 (двузначное соответствие).
Пространство S3— группа двойных комплексных
/ Д. ВА , / Д_ В \
второго порядка вида I — - )е+-Н - ~ Iе-
\ В^. А j В _ A_J
делителем +1 (четырёхзначное соответствие).
Пространство 153— группа всех комплексных
второго порядка с определителем ztl (четырёхзначное соответ-
ствие) или группа всех комплексных матриц второго порядка
с определителем (двузначное соответствие).
Пространство 253— группа всех двойных матриц второго
порядка с определителем ±1 и±б (четырёхзначное соответствие).
Из доказанных нами теорем мы получаем также следующие
группы матриц, осуществляющие спинорное представление групп
движений неевклидовых пространств 4, 5, 6 и 7 измерений.
Пространства S4 и х54— группы кватернионных матриц
второго порядка, связанных шестью вещественными условиями
(двузначное соответствие).
Пространство 2В4 — группа вещественных матриц четвёр-
того порядка, связанных шестью условиями (двузначное соответ-
ствие).
Пространства S6 и 2S6— группы комплексных матриц чет-
вёртого порядка, связанных 17 вещественными условиями (четы-
рёхзначное соответствие).
матриц
с опре-
матриц
30*
468
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[гл. V
Пространство х35— группа двойных кватернионных мат-
риц второго порядка, связанных 17 вещественными условиями
(четырёхзначное соответствие).
Пространство 3Зб— группа двойных матриц четвёртого
порядка, связанных 17 вещественными условиями (четырёхзначное
соответствие).
Пространства 36 и 336— группы вещественных матриц
восьмого порядка, связанных 43 вещественными условиями (дву-
значное соответствие).
Пространства г36 и 236— группы кватернионных матриц
четвёртого порядка, связанных 43 вещественными условиями (дву-
значное соответствие).
Пространства S7 и 437 — группы двойных матриц восьмого
порядка, связанных 100 вещественными условиями (четырёхзначное
соответствие).
Пространства х37 и 3S7 — группы комплексных матриц вось-
мого порядка, связанных 100 вещественными условиями (четырёх-
значное соответствие).
Пространство 237 — группа двойных кватернионных матриц
четвёртого порядка, связанных 100 вещественными условиями
(четырёхзначное соответствие).
Ниже мы рассмотрим более подробно спинорные представле-
ния движений пространств 32, 132, З3, 153, 2&> (§ 3); 34, х34, 234,
^5, 35б (§ 5); (§ 6 главы VI) и 37 и *37 (§ 8).
Будем называть алгеброй комплексных альтернионов п-го
порядка Кп (I) алгебру ранга 2П-1 над полем комплексных чисел,
базис которой и правила умножения его элементов совпадают
с базисом алгебры Ап и правилами умножения его эле-
ментов.
Алгебра An(Z) может быть получена путём перехода от веще-
ственных координат к комплексным координатам как из алгебр Ап,
так и из алгебр гАп. Так как при таком переходе комплексные
и двойные числа переходят в двойные комплексные числа, а ква-
тернионы и антикватернионы — в комплексные кватернионы, алгебра
которых изоморфна алгебре комплексных матриц второго поряд-
ка, при этом переходе комплексные и двойные матрицы п-го
порядка переходят в двойные комплексные матрицы п-го
порядка, а кватернионные матрицы n-го порядка — в комплексные
матрицы 2п-го порядка. Поэтому теорема о строении
алгебр комплексных альтернионов имеет чрезвычайно
простой вид.
Алгебры комплексных альтернионов An(f) изоморфны сле-
дующим алгебрам',
A2w+1(0— алгебре комплексных матриц 2т-го порядка;
A2w+2(Z) — алгебре двойных комплексных матриц 2т-го порядка.
АЛЬТЕРНИОНЫ
469
§ 2]
В частности, при алгебры Ап(Г) изоморфны алгебрам:
дх(/) — полю комплексных чисел;
А2(0 — алгебре двойных комплексных чисел;
— алгебре комплексных матриц второго порядка;
А<(0— алгебре двойных комплексных матриц второго порядка;
A&(Z)— алгебре комплексных матриц четвёртого порядка;
A6(Z)— алгебре двойных комплексных матриц четвёртого
порядка;
А7(0 — алгебре комплексных матриц восьмого порядка;
A8(Z)— алгебре двойных комплексных матриц восьмого порядка.
Эта теорема была установлена Брауэром и Вейлем [1].
В алгебре AW(Z) также определяется спинорная группа, состоя-
щая из тех альтернионов а алгебры AW(Z), представленных эле-
ментами алгебры An+1 (Z), имеющих чётное число индексов, для
которых преобразования (5.93) определяют вращения простран-
ства /?n(Z), порождённого базисными элементами ех, е2, . .., еп
алгебры Ате+1 (Z). Так же как для алгебр кп и 1Ап, доказывается,
что группа вращений пространства Rn (Z) с определителем 4“ 1
изоморфна фактогруппе спинорной группы алгебры Ап(1) по её
подгруппе, состоящей из альтернионов 1 и —1, т. е. группа
вращений пространства Rn(t) двузначно изображается спинор-
ной группой альтернионов алгебры Aw+1(Z). Альтернионы этой
группы удовлетворяют условию
{аа} = 1 (5.130)
и (5.100), причём условия (5.130) и (5.100) составляют полную
систему условий, выделяющих спинорную группу из алгебры An(Z)
(они удовлетворяют также условию аа — 1). Эта последняя тео-
рема также была доказана Липшицем [1].
При установленном нами соответствии между теми альтер-
нионами алгебры An(Z), которые принадлежат к спинорной груп-
пе, и вращениями пространства Rn(i) комплексному альтерниону
а = 2 ... i2k соответствует вращение, элементы матрицы
к
которого имеют вид
А$ = -|- 2 (2 aiJii • • • • S — 2 aa“i - ‘ ‘ S>). (5.131)
р р
Из этой теоремы следует, что всякая группа комплексных
ортогональных матриц п-го порядка с определителем + 1 дву-
значно изображается спинорной группой комплексных альтер-
нионов п-го порядка. Так как связная группа движений про-
странства Sn(i) однозначно или двузначно изображается группой
комплексных ортогональных матриц (п-]-1)-го порядка, спинор-
ная группа комплексных альтернионов (п-\-\)-го порядка
470 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
двузначно или четырёхзначно изображают связную группу дви-
жений пространства Sn(l). Это представление движений про-
странства Sn(i) комплексными альтернионами называется спинор-
ным представлением движений пространства Sn(i).
Так как алгебры комплексных альтернионов п-го порядка
п-1
изоморфны алгебрам комплексных матриц 2 2 -го порядка или
™~1
алгебрам двойных комплексных матриц 22 -го порядка, спинор-
ные представления движений Sn(i) можно рассматривать как
п-1
представления этих движений векторами в 2 2 -мерных ком-
™-i
плексных или 22 -мерных двойных комплексных пространст-
вах. Векторы этих пространств называются спинорами неевклидовых
пространств Sn(i).
Спинорное представление групп движений пространств S2(Z) и
S,3(Z) осуществляют следующие группы матриц:
Плоскость S2 (Z) — группа всех комплексных матриц второго
порядка с определителем—(-1.
Пространство S3(Z)— группа всех двойных комплексных
матриц второго порядка с определителем -|- 1.
§ 3. Плоскости комплексного и двойного переменного и
геометрическое истолкование спинорных представлений дви-
жений неевклидовых пространств двух и трёх измерений
Рассмотрим более подробно алгебры комплексных чисел а-\-Ы,
Z2 =—1 и двойных чисел а-\-Ьеу £2=-|-1, которые мы будем
представлять себе геометрически в виде соответственно плоскости
комплексного переменного и аналогичной плоскости двойного
переменного. Если считать за расстояние между двумя комплекс-
ными или двойными числами а и (i модуль их разности |р — а |,
плоскость комплексного переменного изометрична плоскости R2,
а плоскость двойного переменного изометрична плоскости rR2.
Отметим, что комплексные числа единичного модуля имеют вид
= cos ©4“i’sin ©, а двойные числа единичного и мнимоеди-
ничного модуля имеют соответственно вид z+z(ch ©-|-£sh ©) =
= zt: -|- е~че~) и zztz (sh ©-|-^ch ©) — ±е(е^е^-\-е~^е_)х).
Если записывать двойные числа в виде х х+£+ + х_е,__, изо-
тропные прямые плоскости двойного переменного имеют вид
= const и х_ = const.
Э Здесь и ниже число е в основании степени обозначает основание
натуральных логарифмов, которое не следует смешивать с двойной еди-
ницей е, не возводящейся в степень.
§ 3]
ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО
471
Нетрудно проверить, что преобразование
у = х-\-а (5.132)
является на плоскостях комплексного и двойного переменного
переносом.
Преобразование
у = ах, (5.133)
где а — комплексное или двойное число единичного модуля, является
поворотом. Если а = cos <р-|- i'sin ср, то поворот совершается на
угол ср, если а = ch <p-f-e sh ср,—на угол /ср, если а = — ch ср —
— sh ср, — на угол тс-|-/ср. Если а — двойное число мнимоединич-
ного модуля, преобразование (5.133) является антивращением,
причём если а = sh ср-|-е ch ср, — на угол у-j-/ср.
Если же а — положительное вещественное число, то преобразо-
вание (5.133) является гомотетией с коэффициентом а.
Преобразование
у=х (5.134)
является отражением от вещественной оси; преобразование
у = ах, (5.135)
где а — комплексное или двойное число единичного модуля, является
отражением от прямой, причём если а = cos ср -|- / sin ср, эта пря-
мая составляет с вещественной осью угол , если же а = ch ср—j—
-j-^shcp или а —— ch ср — sh ср, эта прямая составляет с веще-
ственной осью соответственно угол / или у + Преобра-
зования
у = ахД-b и у = ах-\-Ь, (5.136)
где а — комплексное или двойное число единичного модуля, являются
движениями общего вида и всякое движение плоскости /?2 или lR2
может быть представлено в таком виде. Преобразования (5.136),
где а — произвольное комплексное число, отличное от нуля, или
двойное число, не являющееся нулём или делителем нуля, называются
линейными преобразованиями соответственно первого или второго
рода и в случае плоскости комплексного переменного состоят из
движений и гомотетий, а в случае плоскости двойного переменного
состоят из движений, гомотетий и антидвижений.
На плоскости двойного переменного, так же как на плоскости
комплексного переменного, можно ввести аналитические функции,
которые мы определим как функции двойного переменного, пред-
ставляемые в виде степенных рядов
Л + О>2 = f (*1 + ех2) = S (flk + ebk) (хх + ех^к. (5.137)
к
472
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Подобно тому как аналитические функции комплексного пере-
менного л + ^2 = /(х1 + ^2)=/г(х1> *2) + ^(х1> х2> УДОвле-
творяют условиям Даламбера— Эйлера (называемыми также усло-
виями Коши — Римана)
^У1 —^2. дУ1__дУ2 (5.138)
ох± дх2 * дх2 dx-L
аналитические функции двойного переменного у± -\-1у2 =
=f (х± -(- ех,2) = (xt, х,2) + ef2 (х19 х2) удовлетворяют аналогичным
условиям
^1 = ^, ^1 = ^-. (5.139)
dxt дх2 ’ дх2 дх1 v
В самом деле, если мы запишем функцию f(x1-\-ex2) в виде
у+е+-+-у_е_ —/(х+^+ + х_е_) =
= /+(х+> x_)e+-\-f_{x+, х_)е_, (5.140)
ряд (5.137) может быть представлен в виде
y+e+-\-y_e_ =/(x+e+H-x_e_) = '^i{ake+-\-bke_)(x+e+-\-x_e_)k г
к
(5.141)
т. е. в силу (5.40)
У+е++у_е_ =f (х+е+-]-х_е_) = '^1акхк+е+~{-'^1Ькх-е_. (5.142)
к к
Здесь функции = 2 акх^ и У - = 2 &кх- представляют со-
к к
бой аналитические функции вещественного переменного. Поэтому
аналитические функции двойного переменного выражаются через
две функции вещественного переменного с помощью соотношения
У+е+ +у_е_ = f (х+е+ + х_е_) = f+ (х+) е++/_ (х_) е_. (5.143)
Сравнивая (5.140) и (5.143), мы находим, что для аналитиче-
ской функции двойного переменного функции у+ (х+, х_) и
j/_z=/_(x+, х_), входящие в формулы (5.140), связаны условием
Для того чтобы вывести из условия (5.144) условие (5.139),
заметим, что
х1 — х+-\-х_, х2 — х+ — х_ И х+= i(xt4-x2), х_=у (хг—х2);
(5.145)
У1 =У+Ч~У-. У2=У+—У- и у+ = 1 (Ji+J2), у2)-
(5.146)
§ 3]
ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО
473
Из общей формулы дифференциального исчисления =
dxi д । dx2 д д д , д
= следует, что -5-7-- ,—- = ±, поэтому
dt дх1 at ох2 J д (х± ± х2) dxt дх2 J
д_У± _ (У1 + У2) _ <?(У1 + у2) _ д(У1 + У2) __ 1
дх- д (хг — х2) дхх дх2
= ^У1\^У2_^У1_ду2=^
dx1'~1r дхх дх2 дх2 '
fy- _ д (yt —у2) _ д (yt —у2) . д (yt + y2) _ (5.147)
дх+ д (xt + х2) dx-L '**' дх2
дх± дх1'дх2 дх2 * ,
Из этих соотношений непосредственно следует формула (5.139).
Точно так же можно вывести из формулы (5.139) формулу (5.144).
Формулу (5.139) можно вывести и таким образом, как выводится
формула (5.138) в теории функций комплексного переменного.
Частными случаями аналитических функций двойного перемен*
ного являются функции, представляющиеся степенными рядами
с вещественными коэффициентами; для этих функций ак = Ьк,
вследствие чего эти функции можно записать в виде
f(x+e+-[-x_e_)=f(x+)e+-[-f(x_)e_. (5.148)
В частности,
е*+е++*-е- =ех+е+-+-еа,~е_, (5.149)
sin (х+е+ -\~x_e_) = е+ sin х+ -\-е_ sinх_, 1
> (0.1 О U)
cos (х+е+ -|- х_е_) — е+ cos х+ е_ cos х_. J
Из (5.149) следует:
вер —<Р -<Р
е т = е —ee+-fe e_f (5.151)
т. е. двойные числа единичного и мнимоединичного модуля можно
записать соответственно в виде ±eeff> и zt^e<p.
Аналитические функции двойного переменного можно дифферен*
цировать, причём производная функции (5.143) равна
dx dx± ^'dx-
(5.152)
Преобразования плоскости двойного переменного, определён-
ные аналитической функцией у — f(x) и функцией у = /(х),
сопряжённой с ней, являются конформными преобразованиями,
В самом деле, преобразования
dy=^-dx и dy = ^-dx (5.153)
их их
474
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
состоит из вращения или антивращения и гомотетии, а как при
вращении, так и при антивращении и гомотетии углы между кри-
выми, выходящими из центра вращения, антивращения или гомо-
тетии, не изменяются. Можно показать, что, так же как на пло-
скости комплексного переменного, всякое конформное преобразо-
вание плоскости двойного переменного определяется аналитической
функцией или функцией, сопряжённой с аналитической; первые из
этих преобразований называются конформными преобразованиями
первого рода, а вторые — конформными преобразованиями вто-
рого рода. Формула (5.143) показывает, что при всяком конформ-
ном преобразовании плоскости двойного переменного изотропные
прямые х+ = const и х_ = const этой плоскости переходят в изо-
тропые прямые (при конформном преобразовании первого рода
каждое из семейств изотропных прямых х+ = const и х_ = const
переходит в себя, а при конформном преобразовании второго рода
эти семейства переходят друг в друга).
Частным случаем конформных преобразований плоскостей ком-
плексного и двойного переменного являются дробно-линейные
преобразования соответственно первого и второго рода
ах 4- b ах-\-Ь
у =-----1— и у = —
cx-^d cx-±d
(5.154)
с определителем
= ad — be, не являющимся нулём и дели-
телем нуля.
При a = d — 0,b = c~l преобразования (5.154) принимают вид
и у = (5.155)
X X 1 X [2
второе из которых является инверсией относительно окружности
хх = 1, а первое — произведением этой инверсии на отражение
от вещественной оси, т. е. инверсией относительно пары точек
1, — 1.
При а = d = е+, b ~с = е_ и при a = d = e_, b = с = е+
первое из преобразований (5.154) принимает соответственно вид
е±х 4- в- । 1 е_хА-е+ 1 ,
+ <5Л56)
Определители этих преобразований соответственно равны е+—е_ = е
и е_ —е+ — — е.
Преобразования (5.156) являются инволюционными преобразо-
ваниями, неподвижными точками которых являются соответственно
точки параллельных изотропных прямых х_ = z±z 1 и —i±zl,
вследствие чего мы будем называть их инверсиями относительно
пар изотропных прямых.
ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО
475
§ 3] ------------
Всякое дробно-линейное преобразование плоскости комплекс-
ного или двойного переменного, не являющееся линейным пре-
образованием (с^О), если в случае двойного переменного коэффи-
циент с не делитель нуля, является произведением двух
линейных преобразований и инверсии относительно окружности.
В самом деле, первое преобразование (5.154) можно предста-
вить в виде
__ ах + b __ асх -\-bc ad — ad __ а . be — ad - 1
У cx-\-d с (сх + d) с* с (ex -\-d) ’ ' ’ '
т. е. в виде произведения линейного преобразования у = с (cx-\-d),
преобразования у = у и линейного преобразования у—~-\-
+ — ad)x, причём последние два из этих преобразований
можно заменить линейным преобразованием у = у~Р(#с— ad)x
и инверсией у = 4г. Второе из преобразований (5.154) точно
х
так же можно представить в виде произведения линейного пре-
образования у — c(cx-\-d), инверсии у = и линейного преобра-
х
зования у = у Ц- (Ьс — ad) х.
Всякое дробно-линейное преобразование плоскости двойного
переменного в случае, когда коэффициент с есть делитель
нуля, является произведением двух линейных преобразований
и инверсии относительно пары изотропных прямых. В самом
деле, первое преобразование (5.154) при с = 0 можно представить
в виде
У =
d_ е- —
^+с+ — 1 „ । <
-----е_, (5.158)
т. е. в виде произведения линейного преобразования у =. с+ (с+х+ +
+ ^+)^+ + (^_х_ + #_)с_, преобразования у = ^-е+-[-х_е _ и
линейного преобразования у = |jp + (&+c+ — tf+d+) х+~]е+е_.
Второе из преобразований (5.154) при с = 0 отличается от этого
преобразования заменой одного из линейных преобразований его
произведением на преобразование у = х, также являющимся ли-
нейным преобразованием.
Уравнение окружности на плоскости комплексного или двойного
переменного в том случае, когда центр окружности—точка а,
а радиус равен /?, имеет вид
| х — а |2 = хх — ах — ха аа = R?,
(5.159)
476 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
что может быть переписано в виде
Ахх + Вх + хВ + С = 0, (5.160)
где Д, С—вещественные числа, а В — комплексное или двойное
число. Сравнивая формулы (5.159) и (5.160), мы найдём, что
числа Д, В, С связаны с числами a, R соотношениями а = —д-
и аа— R? = BB— = т. е< ру — t откуда видно,
У1" -/1
что при ВВ>ДС радиус окружности веществен, а при ВВ < АС—
чисто мним.
Нетрудно проверить, что инверсия относительно окружности
(5.160) имеет вид
Вх -4- С /с 1 г? 1 \
у__-----_ (5.161)
л — Ах-В v
Определитель АС—ВВ этого преобразования отрицателен
в случае вещественного радиуса окружности и положителен в слу-
чае чисто мнимого радиуса окружности.
Дробно-линейные преобразования плоскостей комплексного
и двойного переменного являются круговыми преобразованиями.
Действительно, в силу того, что движения, антидвижения и гомо-
тетии переводят окружности в окружности и прямые в прямые,
линейные преобразования являются круговыми преобразованиями.
Инверсии относительно окружностей, как мы видели в § 1 главы IV,
также являются круговыми преобразованиями. Первое из преобра-
зований (5.153) также является круговым преобразованием. В са-
мом деле, при этом преобразовании уравнение окружности (5.160),
которое можно переписать в виде
Ах+х_ —В+х_ —J— В _х+ —j— С 0, (5.162)
перейдёт в уравнение
А + + + (5-163)
которое, если умножить его на х_ и заменить х+х_ на хх, можно
переписать в виде
В-хх + (Д^+ + С^_)х4-(а+ + Д^_)х + В+ = 0. (5.164)
Это уравнение является уравнением окружности или неизотроп-
ной прямой, для которой
Д' = В_, В' = Се+-±-Ае_, С' = В_. (5.165)
§ 3] ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО 477
Точно так же показывается, что при втором из преобразова-
ний (5.158) уравнение (5.160) переходит в уравнение окружности
или неизотропной прямой, для которой
А' = В^ В' = Ае+-\-Се_, С' = В^ (5.166)
Из того, что при ВВ > ВС радиус окружности вещественен,
а при ВВ АС — чисто мним, видно, что, так как при преобра-
зованиях (5.156) В'В' — АС и ВВ — А'С', эти преобразования
переводят окружности вещественного радиуса в окружности чисто
мнимого радиуса, и наоборот.
Так как всякое круговое преобразование является произведе-
нием инверсий относительно окружностей и, может быть, антивра-
щения, а как инверсии относительно окружностей, так и антивра-
щения на плоскостях комплексного и двойного переменного являются
дробно-линейными преобразованиями, всякое круговое преобразо-
вание плоскости комплексного или двойного переменного
является дробно-линейным преобразованием.
Так как дробно-линейные преобразования плоскости комплекс-
ного и двойного переменного являются круговыми преобразова-
ниями, для того чтобы сделать эти преобразования взаимно
однозначными, следует дополнить эти плоскости новыми точками
до конформных плоскостей С2 и ХС2. Этими новыми точками
является бесконечно удалённая точка оо, которой плоскость
комплексного переменного дополняется до расширенной пло-
скости комплексного переменного, и бесконечно удалённая и
идеальные точки, которыми плоскость двойного переменного до-
полняется до расширенной плоскости двойного переменного. Будем
обозначать бесконечно удалённую точку этой плоскости также со,
а идеальные точки этой плоскости через Ае+-±-оо е _ и сюе+~\~Ве_.
Идеальные точки Ае+-\-&э е_ и идеальные точки оо е+-\-Ве_ при
всех значениях А и В составляют две идеальные прямые. Учиты-
вая, что если при дробно-линейном преобразовании точка а пере-
ходит в точку оо, изотропные прямые, проходящие через точку а,
переходят в идеальные прямые, будем считать идеальные прямые
частными случаями изотропных прямых.
Определим двойное отношение W(x, у\ z, w) четырёх ком-
плексных или двойных чисел х, у, z, w той же формулой
W(x, у, z, w) = (5.167)
что и двойное отношение четырёх вещественных чисел (см. § 3
главы III).
Двойные отношения четырёх комплексных или двойных чи-
сел не изменяются при дробно-линейных преобразованиях пер-
вого рода и заменяются сопряжёнными числами при дробно-
478
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
линейных преобразованиях второго рода. В самом деле, под-
вергнем точки х, у, z, w
вим разности
'х = (ad~bc) (z — x)
(cz + d) (ex 4- d) ’
__'х._- (ad — bc) (w —
(cw + d) (ex + d) ’
J л . ах 4- b
преобразованию х =
_ , __ (ad —be) (z — y)
z У ~ (Cz + d)(ey + dY
, r ______(ad — be) (w — y)
W У (cw + d) (cy + d) *
и соста-
(5.168)
Деля почленно второе из этих равенств на первое, а третье —
на четвёртое, а затем второе из полученных равенств на первое,
мы получим:
: 'w-'У = (5.169)
'z — rxrw — *х Z — X W — X V 7
Если же
_ ах -j- b
ex d
мы подвергнем точки х, у, z, w преобразованию
то таким же образом получим:
rz — ry /w — 'у Z — y , w —у
'z — fX * fW — rX Z — X ' w — X*
(ЬЛ1^)
Формулы (5.169) и (5.170) показывают, что дробно-линейное
преобразование определяется заданием трёх пар соответствен-
ных точен и тем, является ли это преобразование преобразо-
ванием первого или второго рода.
Так как двойное отношение четырёх вещественных чисел ве-
щественно, а дробно-линейным преобразованием любую окруж-
ность или неизотропную прямую можно перевести в вещественную
ось, двойное отношение любых четырёх точен плосности двой-
ного или номпленсного переменного, лежащих на одной окруж-
ности или неизотропной прямой, вещественно. Это двойное
отношение совпадает с определённым нами в § 3 главы IV двой-
ным отношением четырёх концикличных точек плоскостей С2 и 1С2.
Можно определить также мнимые геометрические образы пло-
скостей комплексного и двойного переменного. Для этого следует
рассмотреть алгебру двойных комплексных чисел, которую можно
геометрически представить в виде плоскости двойного комплекс-
ного переменного, определить на ней комплексное расстояние между
точками, при котором она изометрична плоскости R2(i), допол-
нить её бесконечно удалённой точкой оо и идеальными точками
оое_ и оое+-\-Ве_ до расширенной плоскости двойного
комплексного переменного, которую можно рассматривать как
плоскость C2(i). Тогда, если считать расширенные плоскости ком-
плексного и двойного переменного погружёнными в расширенную
плоскость двойного комплексного переменного, как плоскости С2
и 1С2 в плоскость С2(/)> геометрические образы плоскости двой-
ного комплексного переменного, не лежащие на плоскостях ком-
§ 3] плоскости комплексного и двойного переменного 479
плексного и двойного переменного, следует считать мнимыми гео-
метрическими образами этих плоскостей. К таким мнимым образам
относятся изотропные прямые плоскости комплексного переменного,
мнимая окружность |х — a\ = iR этой плоскости, мнимые изо-
тропные прямые обеих плоскостей и т. д.
Как мы видели в § 2 главы IV, в силу интерпретации Дарбу
плоскости С2 и гС2 изображают абсолюты соответственно про-
странств 153и 2S3, а группы круговых преобразований этих плоско-
стей изоморфны группам движений этих пространств. Поэтому
расширенные плоскости комплексного и двойного переменного
изображают абсолюты соответственно пространств х53 и 2S3,
причём группы дробно-линейных преобразований этих плоско-
стей изоморфно изображают группы движений этих про-
странств.
Заметим, что группы дробно-линейных преобразований пло-
скостей комплексного и двойного переменного состоят соответст-
венно из двух и восьми связных компонент (в первом случае связ-
ные компоненты составляют дробно-линейные преобразования пер-
вого и второго рода с определителями -|-1, во втором случае
связные компоненты составляют дробно-линейные преобразования
первого и второго рода с определителями ± 1 и ±е), что со-
впадает с числом связных компонент групп движений пространств
и 2£3.
Так как каждому дробно-линейному преобразованию первого
ах 4- b Iа Ь\
рода у/ — - ф--- соответствует матрица | причем произ-
ведению дробно-линейных преобразований соответствует произ-
ведение матриц, из указанного изоморфизма вытекает гомоморф-
ное соответствие между группами движений пространств 153 и 253,
соответствующих дробно-линейным преобразованиям первого рода,
и группами соответственно комплексных и двойных матриц вто-
рого порядка. Определители этих матриц мы в первом случае
можем считать равными 1, так как если определитель А ма-
(а Ь\ ,
трицы | I не равен 1, мы всегда можем разделить числитель
и знаменатель дроби • на ]/Д, а во втором
считать равными ± 1 или
случае можем
так
как если
(а Ь\
d I не равен
определитель
или ±е, мы
ли йХ —I— Ь
всегда можем разделить числитель и знаменатель дроби —на
ex —а
V| | е+ + У| Д- | е_. Ядром гомоморфизма здесь в первом слу-
х /1 0\ /—1 0\
чае будет группа, состоящая из двух матриц К 1/1 о 1 /
а во втором случае — группа, состоящая из четырёх матриц
480 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
1 °\
О 1/’
/—1 0\ (е 0\ /— е 0\
I q 1/’\1е/И \ 0 е/ Полученное нами дву-
значное изображение группы движений пространства XS3 с опре-
делителем +1 группой комплексных матриц второго порядка
с определителем 1 и четырёхзначное изображение группы дви-
жений пространства 2S3 с определителем 4~ 1 группой двойных
матриц второго порядка с определителями ±1и±^ являются
спинорными представлениями этих групп движений.
Отсюда вытекает следующее геометрическое истолкование спи-
норов пространств г53 и ’^g1): если мы запишем линейное пре-
образование комплексных или двойных спиноров этих пространств
zx° = axO-l-bx1, |
/1 о ! л i (5.171)
х1 = ex0 dx1 )
и рассмотрим преобразование отношения х — координат этих
спиноров, мы получим дробно-линейное преобразование комплекс-
ного или двойного переменного х. Но, с другой стороны, мы
видели, что каждой точке расширенной плоскости комплексного
или двойного переменного отвечает точка абсолюта соответственно
пространства х53 или 2S3, причём при движениях этих пространств
происходят дробно-линейные преобразования этих плоскостей.
Поэтому координаты комплексных или двойных спиноров про-
странств и 253 можно рассматривать как координаты
точек абсолютов этих пространств, определённые с точностью
соответственно до комплексного или двойного множителя,
а спинорные представления движений этих пространств со-
впадают с преобразованиями спиноров, соответствующими пре-
образованиям абсолютов при движениях.
В случае пространства 253, спиноры которого являются двой-
ными векторами, можно также определить полуспиноры', если ко-
ординаты спинора имеют вид хг = x\e+-\-xLe_, то координаты
полуспиноров имеют вид х\ и xt, и если отношение координат
спинора является двойным числом х = х+е+-\- х_е_, отношения
X?
координат полуспиноров являются вещественными числами х+ =
х°_
и х_ — —. Так как прямые х+ = const и х_ = const на пло-
т-
скости являются изотропными прямыми этой плоскости, эти
прямые изображают прямолинейные образующие абсолюта про-
!) См. работу автора [18].
§ 3] ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО 481
странства 253. Поэтому координаты полуспиноров простран-
ства 253 можно рассматривать как координаты прямолинейных
образующих абсолюта этого пространства, определённые с точ-
ностью до вещественного множителя, а преобразования полу-
спиноров, происходящие при спинорных преобразованиях дви-
жений пространства 253, совпадают с преобразованиями полу-
спиноров, соответствующими преобразованиям абсолюта при
движениях.
Приведём сравнительную таблицу инволюционных дробно-ли-
нейных преобразований плоскостей комплексного и двойного пере-
менного (плоскостей С2 и 1С/) и соответствующих им инволюцион-
ных движений пространств 1S3, 253, первое из которых будем
считать пространством отрицательной кривизны, а второе — про-
странством положительной кривизны:
С2
инверсия относительно окру-
жности;
инверсия относительно мни-
мой окружности;
инверсия относительно пары
точек и сопряжённой с ними пары
мнимо сопряжённых точек;
10
инверсия относительно окру-
жности;
инверсия относительно двух
сопряжённых пар точек;
инверсия относительно двух
сопряжённых пар мнимых точек,
где мнимо сопряжены точки каж-
дой пары;
инверсия относительно двух
сопряжённых пар мнимых точек,
где мнимо сопряжены точки раз-
ных пар;
инверсия относительно пары
изотропных прямых;
инверсия относительно пары
мнимо сопряжённых изотропных
прямых;
отражение от собственной
плоскости и её идеального по-
люса;
отражение от собственной
точки и её идеальной полярной
плоскости;
отражения от собственной
прямой и её идеальной поляры;
отражение от точки и её по-
лярной плоскости;
отражение от двух взаимно
полярных гиперболических пря-
мых;
отражение от двух взаимно
полярных эллиптических прямых;
отражение от двух взаимно
полярных мнимо сопряжённых
прямых;
гиперболический паратакти-
ческий сдвиг на полупрямую;
эллиптический паратактиче-
ский сдвиг на полупрямую.
31 Зак. 177. Б. А. Розенфельд
482
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Определённое таким обра’зом изображение прямых пространств
и 2S3 парами точек плоскости комплексного и двойного пере-
менного оказывается полезным в целом ряде задач геометрии этих
пространств1).
Заметим, что если а = а+е+-]-а_е_ и b = b+e+-\-b_e_— пара
точек плоскости двойного переменного, то сопряжённая с ними пара
точек имеет вид а' = а^е+~\~ Ь_е_ и Ь' = Ь±е+-]-а_е__ (черт. 89).
Легко найти инволюционное дробно-линейное преобразование пер-
вого рода, имеющее своими неподвижными точками а и Ь, если
потребовать, чтобы при этом преобразовании точки а и b были
неподвижными, а точки х и у
переходили друг в друга, т. е.
в силу (5.169)
а — х ' b — х _
а — у * Ь — у
_ а — У . — У
~ а — х * b — х
(5.172)
Отсюда находим:
= ±1. (5.173)
а — х .Ь — х
а — у * b — у
Случай 1 соответствует тождественному преобразованию,
а случай —-1, т. е. случай, когда точки х, у гармонически
делят данную пару точек а, Ь, даёт нам искомое инволюционное
преобразование в виде
У = Ч+ • (5.174)
2х — (а-\- b) v 7
Неподвижные точки этого преобразования являются корнями
квадратного уравнения
х2— (a-]-b)x-]-ab = 0. (5.175)
Квадратный корень из двойного числа имеет не два, как в слу-
чае вещественных и комплексных чисел, а четыре значения: если а2
равно Л, то не только (—а)2, но и (еа2) и (—еа)2 также равны Л.
Поэтому квадратное уравнение (5.175) имеет четыре решения:
(а + Ь) ± (а — Ь) _\а
2 “V’
(а + &)±г(я—6) ( ае+ + Ье- = а+е+ + ь-е-
2 I Ье+-\-ае_ = Ь+е+ '
(5.176)
!) Это изображение применялось к дифференциальной геометрии про-
странства Штуди [3] и Беком [1], а к дифференциальной геоме-
трии обоих пространств и 2S3 Н. А. Габададзе (Кутаиси) [1].
§ 3]
ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО 483
Первые два решения — данная пара точек, а вторые два реше-
ния-—пара точек, сопряжённая с ними. Нетрудно проверить, что
точки аг и Ь' мы получим, если в середине отрезка, соединяющего
точки а и Ь, мы восставим перпендикуляр и по обе стороны от
его основания отложим точки на расстоянии ||Z|a —
Инверсия относительно пары точек а, b на плоскости ком-
плексного переменного имеет тот же вид (5.174). Если мы будем
представлять себе плоскость комплексного переменного погружён-
ной в плоскость двойного комплексного переменного, то наряду
с неподвижными точками а, b этого преобразования, так же как
в случае плоскости двойного переменного, найдём мнимо сопря-
жённые неподвижные точки этого преобразования а' ~ ае+-\-be_
и Ь' = Ье+-\-ае_. Эти точки можно получить теми же построе-
ниями, что и в случае плоскости двойного переменного.
Найдём связь между стационарными расстояниями двух
прямых пространств и 2S3 и двойным отношением соот-
ветственных пар точен плоскости ком-
плексного или двойного переменного.
Рассмотрим две пары точек плоскости
комплексного переменного, изображающие
две гиперболические прямые простран-
ства Дробно-линейным преобразова-
нием можно перевести пару точек, одно-
временно гармонически делящих эти две
пары точек, в точки 0 и сю, а одну из
данных пар точек — в пару точек 1, —1.
Тогда другая пара точек перейдёт в пару
точек а,—а, причём, очевидно, a = w(^,
Черт. 90
сю; 1, а). Если модуль
комплексного числа а равен е^ , а аргумент этого числа равен
COo + lcOj
т. е. а = е Q , то стационарные расстояния наших прямых
равны о)0 и /а)г Пары точек 1, —1 на, —а являются пересече-
ниями двух концентричных окружностей | х | = 1 и | х | = | а | и
двух прямых — вещественной оси и прямой, пересекающей её под
углом (черт. 90). Эти две окружности и две прямые изобра-
Q
жают концы общих перпендикуляров наших прямых, так как они
проходят через пары точек и каждая окружность ортогональна
каждой из прямых. Поэтому длины общих перпендикуляров равны
абсолютным значениям произведения qi на угол между прямыми
и на угол между окружностями. Но угол между прямыми равен
7 9
а угол между концентричными окружностями в силу (4.54) равен
Zln|a| = Z —, вследствие чего стационарные расстояния наших
31*
484
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
прямых действительно равны о>0 и С другой стороны, двой-
ное отношение чисел 1, —1, а, —а равно
№(1, а, —1, a) —=
— 1 — 1 — а — 1
= (а +1)2 (е i +1)2 = (е Ч +е~ 2« )2 (5 д
4е q
т. е. окончательно
UZ = ch2o-i"±^. (5.178)
Аналогично доказывается, что двойные отношения двух пар
точек плоскости двойного переменного, изображающих две гипер-
болические прямые пространства 253 с радиусом кривизны г,
имеющие стационарные расстояния со0 и шх, и двух пар мнимых
точек той же плоскости, изображающих две эллиптические прямые
того же пространства, имеющие стационарные расстояния /а)0 и /шг,
равны соответственно
W = соз5'^-^1, I+ = ch2<0(> + g<fll. (5.179)
Как мы видели в § 4 главы IV, в силу интерпретации Пуан-
каре многообразия пар точек плоскости С2, взаимно обратных
относительно мнимой и вещественной окружностей, изображают
соответственно плоскость S2 и плоскость 15.2 отрицательной кри-
визны, а группы круговых преобразований плоскости комплекс-
ного переменного, переводящих в себя соответственные окруж-
ности, изоморфны группам движений плоскостей S.2 и г5.2. Поэтому
пары точек расширенной плоскости комплексного переменного,
взаимно обратных относительно окружности хх =—1 и сим-
метричных относительно вещественной прямой, изображают
соответственно плоскость S2 и плоскость 15.2 отрицательной
кривизны, причём группы дробно-линейных преобразований пло-
скости комплексного переменного, переводящих в себя эту мни-
мую окружность и прямую, изоморфно изображают группы
движений плоскостей S2 и 15.2.
Покажем, что матрица дробно-линейного преобразования пер-
вого рода плоскости комплексного переменного, переводящего
- / а Ь\
в себя окружность хх =— 1, имеет вид - — . В самом
\ —b а)
деле, это линейное преобразование переводит точки х и — — ,
х
взаимно обратные относительно этой окружности, в точки у
и —-X-, обладающие тем же свойством. Поэтому дробно-линей-
У
§ 3]
ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО
485
ное преобразование у —
удовлетворяет условию
ах 4- b
сх d
переводящее в себя окружность,
у
(5.180)
или
— сх — d а — Ьх
ах-^Ь с — dx
(5.181)
откуда
а = —kd, b = kc, c^kb, d =—ka. (5.182)
На нарушая общности, мы можем считать, что определитель
ad — be нашей матрицы — положительное вещественное число.
Тогда из (5.182) следует, что
ad — be = k?(ad —be) = k-(ad — be), (5.183)
откуда № = 1. Если k = 1, то из (5.182) получаем a = —d, b = c
и определитель матрицы равен —аа — bb, т. е. отрицателен.
Если k = — 1, из (5.182) получаем a~d, b = —с и определи-
тель матрицы равен aa-\-bb, т. е. положителен.
С другой стороны, матрица дробно-линейного преобразования
плоскости комплексного переменного, переводящего в себя веще-
ственную ось, вещественна.
Так как каждому дробно-линейному преобразованию первого
рода соответствует матрица, причём произведению дробно-линей-
ных преобразований соответствует произведение матриц, из ука-
занного изоморфизма вытекает гомоморфное соответствие между
группами движений плоскостей S2 и 1S2 и группами соответственно
/ а Ь\
комплексных матриц второго порядка вида - — и веществен-
\—b а)
них матриц второго порядка.
Определители этих матриц мы в первом случае можем счи-
тать равными 4-1, во втором случае z±z 1. В самом деле,
/ а Ь\
определитель матрицы - -) веществен и положителен, а
\— aJ
определитель вещественной матрицы веществен и отличен
от нуля; если определитель Д этих матриц не равен 1
или ±1, мы всегда можем разделить числитель и знаменатель
486
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
/1
состоящие из двух матриц I
нами двузначные изображения
группой комплексных матриц
дроби на /|Д|. Ядром гомоморфизма здесь являются группы,
0\ /—1 0\ п
I и I Q j I . Полученные
группы движений плоскости S2
/ а Ь\
второго порядка вида ( - — )
с определителем -|- 1 и группы движений плоскости 1S2 группой
вещественных матриц второго порядка с определителями 1
являются спинорными представлениями этих групп дви-
жений.
Отсюда вытекает следующее геометрическое истолкование спи-
норов плоскостей S2 и 1S2: если мы запишем линейное преобра-
зование комплексных или вещественных спиноров этих про-
странств (5.171) и рассмотрим преобразование отношения х~-—^
координат этих спиноров, мы получим дробно-линейное преобра-
зование комплексного или вещественного переменного х, в первом
/ а Ь\
случае с матрицей _ — . Но, с другой стороны, каждой точке
\—b а)
расширенной вещественной оси отвечает точка абсолюта плоско-
сти 1S2, а каждой паре точек расширенной плоскости комплексного
переменного, взаимно обратных относительно Мнимой окружности
хх = —1, изображающей мнимый абсолют плоскости S2, соот-
ветствует пара точек этой мнимой окружности, гармонически
делящая данную пару точек. Вследствие этого каждой точке рас-
ширенной плоскости комплексного переменного соответствует
точка мнимого абсолюта плоскости S2, причём при движениях
плоскостей *$2 и происходят дробно-линейные преобразования
( а Ь\
плоскости комплексного переменного с матрицами — - и
\— b а)
дробно-линейные преобразования вещественной оси. Поэтому коор-
динаты спиноров плоскостей S2 и 152 можно рассматривать
как координаты точек абсолютов этих плоскостей, определён-
ные с точностью соответственно до комплексного или веще-
ственного множителя, а спинорные представления движений
этих плоскостей совпадают с преобразованиями спиноров,
соответствующими преобразованиям абсолютов при движе-
ниях.
Отображение абсолюта плоскости 152 на расширенную веще-
ственную числовую прямую, которую можно рассматривать как
прямую Ct, можно получить непосредственно в силу интерпрета-
ции Дарбу при п = 1. Отображение абсолюта плоскости S2 на
расширенную плоскость комплексного переменного также можно
получить и с помощью стереографической проекции окружности
§ 3] ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО 487
плоскости (Z) на прямую этого пространства, которую можно
рассматривать как плоскость комплексного переменного.
Интерпретация Пуанкаре плоскости 152 на плоскости ком-
плексного переменного играет важную роль в теории функций
комплексного переменного х).
Заметим, что в силу интерпретации Пуанкаре многообразие
пар точек плоскости 1С2, взаимно обратных относительно окруж-
ности, изображает плоскость х52 положительной кривизны, а группа
круговых преобразований плоскости двойного переменного, пере-
водящих в себя эту окружность, изоморфна группе движений
плоскости 1S2. Поэтому пары точек расширенной плоскости
двойного переменного, взаимно обратных относительно окруж-
ности хх = — 1, изображают плоскость 1S2 положительной
кривизны, причём группа дробно-линейных преобразований пло-
скости двойного переменного, переводящая в себя эту окруж-
ность, изоморфно изображает группу движений плоскости 1S2.
Матрица дробно-линейного преобразования первого рода плоскости
двойного переменного, переводящего в себя окружность хх = — 1,
/ а Ь\
также имеет вид _ _ . Так как каждая точка плоскости 162
\— b а)
положительной кривизны взаимно однозначно соответствует прямой
плоскости 152 отрицательной кривизны, пары точек плоскости
двойного переменного, взаимно обратных относительно окруж-
ности хх =—1, изображают прямые плоскости 1S2 отрицатель-
ной кривизны. Полученная таким образом интерпретация многооб-
разия прямых плоскости 152 на плоскости двойного переменного
была предложена И. М. Ягломом [1].
Отметим ещё один способ установления указанной интерпре-
тации спиноров плоскости 1S2, предложенный П. К. Рашевским [2].
Всякой точке абсолюта плоскости г52 соответствует прямолиней-
ная образующая изотропного конуса пространства рассмотрим
произвольный изотропный вектор, направленный по этой обра-
зующей, и спроектируем его ортогонально на плоскость /?2, про-
ходящую через вершину конуса; будем рассматривать эту пло-
скость как плоскость комплексного переменного и извлечём
квадратный корень из комплексного числа, изображаемого полу-
ченным нами вектором. Вещественная и мнимая части каждого
из комплексных чисел, полученных в результате извлечения корня,
являются координатами одного из спиноров, соответствующих
данной точке абсолюта. Тот же метод применим для спиноров
плоскости S2: всякой точке абсолюта плоскости S2 соответствует
прямолинейная образующая изотропного конуса пространства /?.>(/).
Рассмотрим произвольный изотропный вектор, направленный по
9 См. Ада мар [2] и Фукс [1, 2].
488 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
этой образующей, и спроектируем его ортогонально на пло-
скость /?2 (Z), проходящую через вершину конуса; будем рассма-
тривать эту плоскость как плоскость двойного комплексного пере-
менного и извлечём квадратный корень из двойного комплексного
числа, изображаемого полученным нами вектором. Если представить
каждое из двойных комплексных чисел, полученных в результате
извлечения корня, в виде а-\-Ы', то комплексные числа а, b
являются координатами одного из спиноров, соответствующих
данной точке абсолюта.
Так как расширенную вещественную числовую прямую можно
также рассматривать как проективную прямую f\, группу
дробно-линейных преобразований по этой прямой можно рассма-
тривать как группу проективных преобразований,
а угол со между двумя парами точек на вещественной числовой
прямой связан с двойным отношением этих пар точек соотноше-
нием W = cos2 —, в силу интерпретации Дарбу при п = 1 мы
получаем, что проективная прямая Рх изображает абсолют
плоскости 1S^. Многообразие пар точек прямой Plt если счи-
тать за расстояние между двумя парами точек инвариант сп,
связанный с их двойным отношением W соотношением
W = cos2 у , изометрично плоскости 152 кривизны 4- 1, а группа
проективных преобразований прямой Р± изоморфно изображает
группу движений плоскости 15.2. Мы получили интерпретацию
плоскости на прямой Рх, известную под названием интер-
претации Гессе [1]. Заметим, что при интерпретации Гессе соб-
ственные точки плоскости 152 отрицательной кривизны изобра-
жаются мнимо сопряжёнными парами точек; если мы изобразим
эти пары точек на плоскости комплексного переменного, мы снова
получим интерпретацию Пуанкаре плоскости 152.
Заметим, что в силу интерпретации Кели — Клейна при п = 2
кривая второго порядка на плоскости Р2 изображает абсолют
плоскости 152, многообразие пар точек этой кривой, если счи-
тать за расстояние между двумя парами точек угол между
прямыми, высекающими из кривой эти пары точек, изометрично
плоскости 182кривизны 4- 1, а группа коллинеаций плоскости Р2,
переводящих в себя кривую, изоморфно изображает группу
движений плоскости 1S2. При этом собственные точки плоскости 152
отрицательной кривизны изображаются мнимо сопряжёнными парами
точек кривой. Если мы определим двойное отношение точек кри-
вой как двойное отношение четырёх точек прямой, полученных
из точек кривой проектированием из некоторой точки кривой,
то двойное отношение W четырёх точек кривой связано с углом со,
определяемым этими парами точек, соотношением IF— cos2у.
§ 3] ПЛОСКОСТИ КОМПЛЕКСНОГО И ДВОЙНОГО ПЕРЕМЕННОГО 489
И интерпретация Гессе и интерпретация Кели — Клейна пло-
скости 1S.2 являются частными случаями следующей интерпретации
этой плоскости: рассмотрим в пространстве Рп пространственную
кривую п-го порядка («норм-кривую»), каждая точка которой
задаётся вещественным параметром t по формулам
х° = 1, х1 = t, х2 = t2, . . ., хп = tn. (5.184)
Нетрудно проверить, что при дробно-линейных преобразова-
ниях этого параметра происходят коллинеации пространства Рп и
всякой коллинеации пространства Рп, переводящей эту кривую
в себя, соответствует дробно-линейное преобразование этого пара-
метра. Поэтому группа коллинеаций пространства Рп, переводя-
щих эту кривую в себя, изоморфна группе проективных преобра-
зований прямой РГ Если мы определим двойное отношение четырёх
точек этой кривой как двойное отношение соответствующих этим
точкам значений параметра, мы находим, пространственная кри-
вая п-го порядка в пространстве Рп изображает абсолют пло-
скости 1S2, многообразие пар точек этой кривой, если считать
за расстояние между двумя парами точек инзариант со, свя-
занный с их двойным отношением W соотношением W ~ cos2 у,
изометрично плоскости 152 кривизны 4-1, а группа колли-
неаций пространства Рп, переводящих в себя кривую, изоморфно
изображает группу движений плоскости 152. Вместо пар точек
кривой можно говорить об определяемых ими прямых — бисекан-
тах; собственные точки плоскости 1S.2 отрицательной кривизны
изображаются мнимо сопряжёнными парами точек кривой и опре-
деляемыми ими вещественными прямыми — несобственными бисе-
кантами.
Интерпретация плоскости 152 на пространственной кривой
п-го порядка была предложена советским геометром Е. Д. Губой
(Сталинград) [1].
По аналогии с отображением абсолютов пространств 1S3 и 253
на расширенные плоскости комплексного и двойного переменного
можно определить отображение абсолюта пространства S3 на
расширенную плоскость двойного комплексного переменного.
Для этого следует построить стереографическую проекцию сферы
пространства /<3(0 на плоскость этого пространства и представить
эту плоскость как плоскость двойного комплексного переменного,
поставив в соответствие каждой точке этой плоскости с ком-
плексными координатами хх, х2 двойное комплексное число 4~
При этом отображении группа движений пространства S3 изо-
морфно изображается группой дробно-линейных преобразований
плоскости двойного комплексного переменного с матрицей
(а, Ь+\ / а_ Ь\
- ' - + - — U_. Таким образом мы получаем
— a+J \— Ь__ а_1
490 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
гомоморфное соответствие между двойными комплексными матри-
цами указанного вида и движениями пространства S3 с опреде-
лителем Определители двойных комплексных матриц мы
можем считать равными -|-1, так как они имеют вид Д = -1~
-|-Д__£__, где Д+, Д_ вещественны и положительны, и мы всегда
можем_разделить числитель и знаменатель дроби на ]/Д+£+ +
4-У*Д_^_. Ядром гомоморфизма здесь будет группа, состоящая
/1 0\ /—1 0\ 1е 0\ /— е 0\
из четырех матриц J, [ 0 (0 J и ( Q
Полученное нами четырёхзначное изображение группы движений
пространства 53 с определителем +1 группой двойных ком-
плексных матриц указанного вида с определителем 1 является
спинорным представлением этой группы движений.
Отсюда вытекает следующее геометрическое истолкование
спиноров пространства 53 *•): если мы запишем линейное преобра-
зование двойных комплексных спиноров этого пространства (5.171)
и рассмотрим преобразование отношения х = — координат этих
спиноров, мы получим дробно-линейное преобразование двойного
комплексного переменного х. Поэтому, так как каждой точке
расширенной плоскости двойного комплексного переменного соот-
ветствует точка абсолюта пространства 5.3, причём при движениях
этого пространства происходят указанные дробно-линейные пре-
образования этой плоскости, координаты спиноров простран-
ства S3 можно рассматривать как координаты точек абсолюта
этого пространства, определённые с точностью до двойного
комплексного множителя, а спинорные представления движе-
ний этого пространства совпадают с преобразованиями спи-
норов, соответствующими преобразованиям абсолютов при дви-
жениях.
В случае пространства S3 можно определить также полуспи-
норы: если координаты спинора имеют вид х1 = х\е н ,
то координаты полуспиноров имеют вид и х[_, и если отно-
шение координат спинора является двойным комплексным числом
х = х+е+-\-х_е_, отношения координат полуспиноров являются
Л Л
комплексными числами х+ = —j— и х_ = —. Так как прямые
X ,| X __
х+ = const и х_ = const на плоскости C2(f) являются изотроп-
ными прямыми этой плоскости, эти прямые изображают прямо-
линейные образующие абсолюта пространства S3. Поэтому коор-
динаты полуспиноров пространства можно рассматривать
как координаты прямолинейных образующих абсолюта этого
пространства, определённые с точностью до комплексного мно-
*) См. работу автора [18].
§ 4] ЗНАЧЕНИЕ СПИНОРОВ ДЛЯ ФИЗИКИ 491
жителя, а преобразования полуспиноров, происходящие при
спинорных представлениях движений пространства 53, совпа-
дают с преобразованиями полуспиноров, соответствующих пре-
образованиям абсолюта при движениях.
§ 4. Значение спиноров для физики
и геометрические свойства волновых полей
Название спинорных представлений объясняется тем значением,
которое имеет спинорное представление группы движений про-
странства х53 для теории спина электрона.
Связь группы движений пространства г53 с физикой ясна из
того, что связная группа движений пространства 153 изоморфна
связной группе вращений пространства 1/?4, совпадающей с груп-
пой преобразований Лоренца специальной теории относитель-
ности. Поэтому спинорное представление связной группы дви-
жений пространства х53 комплексными матрицами второго
порядка с определителем 1 является в то же время спинор-
ным представлением группы преобразований Лоренца.
Как показал эксперимент, с каждым электроном, кроме его
пространственных координат, связана ещё одна степень свободы,
могущая принимать два значения — «положительное» и «отрица-
тельное», которая первоначально связывалась с направлением вра-
щения электрона и поэтому получила название «спин» от англий-
ского слова «spin» — «вращение». В квантовой механике состояние
каждой частицы описывается с помощью одной или нескольких
функций пространственных координат и времени, причём эти
функции принимают комплексные значения, а интеграл от суммы
квадратов модулей значений этих функций по данной простран-
ственно-временной области равен вероятности того, что частица
находится в этой области. Эти же функции позволяют определить
и вероятности значений других физических величин для данной
частицы. Так как функции, определяющие частицы, являются реше-
ниями волновых дифференциальных уравнений, эти функции назы-
ваются волновыми функциями частицы, а пространственно-вре-
менная область, в которой они заданы, — волновым полем частицы.
Наличие спина электрона выражается в том, что волновые функ-
ции электрона делятся на две такие группы, что интеграл от
суммы квадратов модулей значений функций одной из этих групп
по данной области равен вероятности того, что частица находится
в этой области и её спин положителен, а интеграл от суммы
квадратов модулей значений функций другой из этих групп по
той же области равен вероятности того, что частица находится
в этой области и её спин отрицателен.
Как установил Дирак [1], волновое поле электрона задаётся
в каждой точке пространственно-временной области с помощью
492 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
четырёх комплексных чисел, составляющих две пары чисел,
одна из которых при преобразованиях Лоренца преобразуется
как пара координат спинора преобразований Лоренца, а вторая—
как пара чисел, сопряжённых с координатами спинора пре-
образований Лоренца. Этим и объясняется то обстоятельство, что
величины такого рода, впервые встретившиеся физикам, были
названы спинорами; впоследствии это название было распространено
на все спинорные представления. Указанный нами геометрический
смысл спинорных представлений движений пространства XS3 позво-
ляет дать следующее геометрическое истолкование этим спинорам х).
Мы видели, что каждому спинору пространства 153 с координа-
тами х°, х1, определённому с точностью до комплексного множи-
ло
теля, соответствует комплексное число х — — м. некоторая точка
абсолюта пространства 153; каждой точке абсолюта пространства 153
соответствует изотропная прямая пространства 1/?1, проходящая
через некоторую точку этого пространства.
Покажем, что изотропные векторы, соответствующие спинорам,
определённым волновым полем электрона, не могут быть колли-
неарными. Для этого прежде всего найдём координаты этих век-
торов. Заметим, что в силу формулы (4.42) точке плоскости ком-
плексного переменного с координатами а1 = х ~j~ х и а2 =
соответствует точка абсолюта пространства rS3 с координатами
Х° = хх-\-1, Х1 = х-{-х, Х'2 — ^(х — х), Xs = xx—1 (5.185)
х^ —
или, если положить х = — и умножить все координаты на хЪс1,
Х° — х°х° х1х1, X1 = x1xQ -к хОх1, |
_ } (5.186)
X2 — I (ххх0— хохг), Х3 = х°х0 — х1хА. J
Числа (5.186) можно рассматривать как координаты изотроп-
ного вектора X, соответствующего спинору х\ Отсюда следует,
что спинору у* соответствует изотропный вектор Y с координатами
-- у Оу О -|- у1 у1,
Y2 = I (у^у1 —УгУ°\
Y1 = уОу1 -J-yiyO,
Y6 = у°у° —у1 у1-
(ЬАЪ7)
Как известно, волновое поле электрона определяет в каждой
своей точке вектор плотности тока А, координата Д° которого
1) См. работу автора [22].
(5.188)
(5.187),
(5.189)
§ 4] ЗНАЧЕНИЕ СПИНОРОВ ДЛЯ ФИЗИКИ 493
равна плотности зарядов, а координаты А1, А2, А3— простран-
ственному вектору ^плотности тока. Эти координаты выражаются
через спиноры х\ у, определённые полем, по формуле1)
А0 = х°х° -|~ х1*1 + yQyQ + уАу},
Д1 = х°хх 4~ х1^0 + у°уг + y1yQ)
А2 = i (— xQxr 4- х1х°4-«У°.У1 — У^У0)*
Д3 — Х°Х° — х1х14- yQyQ —у1у1>
Сравнивая формулу (5.188) с формулами (5.186) и
мы замечаем, что
А X 4- г,
т. е. вектор А является суммой векторов X и Y.
Отсюда видно, что если бы изотропные векторы X, Y, опре-
делённые волновым полем электрона, были коллинеарными, век-
тор (5.189) плотности тока был бы изотропным, но этот вектор
обязательно имеет чисто мнимую длину, так как в системе коор-
динат, неподвижной относительно зарядов, координаты Д1, Д2, Д3
этого вектора равны нулю.
Поэтому волновое поле электрона определяет в каждой точке
пространственно-временной области, в которой оно определено,
две различные прямолинейные образующие изотропного конуса
с вершиной в этой точке. Но всякие две такие прямолинейные
образующие определяют двумерную евклидову плоскость индекса 1,
в которой они лежат, и двумерную евклидову плоскость индекса О,
вполне ортогональную этой плоскости индекса 1. Таким образом,
волновое поле электрона определяет в каждой точке некоторой
пространственно-временной области две вполне ортогональные
двумерные евклидовы плоскости, одна из которых является пло-
скостью индекса 1, а другая — индекса 0.
Теми же свойствами обладает волновое поле позитрона — ча-
стицы, отличающейся от электрона только знаком электрического
заряда.
Как известно, электрон и позитрон при определённых условиях
могут превращаться в два фотона — частицы света. Роль волно-
вого поля для фотона играет электромагнитное поле, в каждой
точке которого заданы два вещественных вектора — вектор Е
напряжённости электрического поля и вектор Н напряжён-
ности магнитного поля. В случае электромагнитного поля плоской
волны, к которому относится случай поля фотона, векторы Е и Н
в каждой точке перпендикулярны друг другу, т. е. (Е, Н) = 0,
Э См. Рашевский [8], стр. 322—323.
494 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
а их длины связаны соотношением | Н\-- с | Е |, где с-—скорость
света.
Электрическое и магнитное поля, составляющие электромаг-
нитное поле, представляют собой две формы единого процесса и
при переходе от одной системы координат к другой системе, дви-
жущейся относительно первой равномерно и прямолинейно, коорди-
наты каждого из векторов Е, Нв новой системе выражаются через
координаты обоих этих векторов в старой системе. Например,
если электромагнитное поле плоской волны вызывается двумя заря-
дами, равными по величине и противоположнъши по знаку, непо-
движными друг относительно друга, движущимися равномерно и
прямолинейно, то для систем координат, движущихся относительно
этих зарядов, движение этих зарядов определяет электрический
ток и, следовательно, магнитное поле, а для системы координат,
связанной с этими зарядами, имеет место только электрическое
поле, определяемое этими зарядами.
Закон преобразования координат векторов Е и Н при пре-
образованиях Лоренца таков же, как закон преобразования коэф-
фициентов — — FJi кососимметрической формы, причём мат-
рица (FV) составлена из координат векторов сЕ и Н по следую-
щему закону:
poo /701 роя Fos\ / 0 сЕ1 сЕ* сЕ\
рЮ F11 рю F13 | 1 — сЕ1 0 — Н‘* ЕР |
р-20 /721 р21 р23 । — сЕ'~ Н3 0 — ЕР г (5.190)
\/730 /731 р32 рЗЗ/ \—сЕй — № И1 0 /
Выражая условия (Е, Н) = 0 и |Я| = с|Е| через элементы
матрицы (F#), мы видим, что эти условия имеют вид
/701 р23 _j_ р02р%1 розрю — Q
(5.191)
и
— (FQ1f — (F02)2 — (Е03)2 + (F^y + (F61)2 + (F12)2 = 0. (5.192)
Так как условие (5.191) совпадает с условием (3.184), числа Fw
можно рассматривать как плюккеровы координаты некоторой пря-
мой пространства Р3 и, следовательно, если рассматривать связку
прямых пространства 1/?4, проходящих через некоторую точку
этого пространства, как модель пространства Р3, числа FW опре-
деляют некоторую двумерную плоскость пространства про-
ходящую через эту точку. При этом, если двумерная плоскость
определяется векторами х, у, числа Fv, определяющие эту пло-
скость, связаны с координатами х\ у4 этих векторов соотноше-
ниями FW ~ х1уз—yixK
§ 5] ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ 495
При этом условие (5.192) означает, что эта двумерная
плоскость полуевклидова, В самом деле, если полуевклидова
плоскость определяется изотропным вектором х и неизотропным
вектором у, в силу того, что всякий неизотропный вектор этой
плоскости ортогонален изотропному вектору, мы получаем:
__(pWyi (/702)2 (/703)2 _j_ (/723)2 (/731)2 (/712)2 __
= [- ОТ+(х'у+от+ОТ] I— W+ОТ]—
--(--Х°у° + х^у1 4- -|~ •^Ъ'3)2 =
= (х, х)(у, у) — (х, у)2=0. (5.193)
Если бы данная плоскость была евклидовой, на ней можно
было бы выбрать базис, состоящий из двух взаимно ортогональ-
ных неизотропных векторов, и левая часть (5.193) не была бы
равна нулю.
Двумерная полуевклидова плоскость пространства одно-
значно определяет и другую такую же плоскость, вполне орто-
гональную первой и касающуюся изотропного конуса вдоль той же
прямолинейной образующей.
Таким образом, волновое поле фотона, так же как волновое
поле электрона, определяет в каждой точке некоторой про-
странственно-временной области две вполне ортогональные дву-
мерные плоскости, но если в случае волнового поля электрона
эти плоскости являются евклидовыми, в случае волнового поля
фотона эти плоскости являются полу евклидовыми.
§ 5. Пространства кватернионов и антикватернионов и гео-
метрическое истолкование спинорных представлений движений
неевклидовых пространств четырёх и пяти измерений
Рассмотрим более подробно алгебры кватернионов a-\-bi-\-
~\-cJ-y-dk, i2=p =—1, ij = —ji = k и антикватернионов
ap-bi-\-ce-\- df, i'2 = — 1, e2 = 1, ie = —ei = f, которые мы бу-
дем представлять геометрически в виде пространств кватернионов и
антикватернионов. Если считать за расстояние между двумя ква-
тернионами или антикватернионами аир модуль их разности
|Р — а |, пространства кватернионов и антикватернионов изо-
метричны соответственно пространствам R± и 2/?4.
Преобразование у ~ х-\-а является в пространствах кватернио-
нов и антикватернионов переносом. Преобразования^ = ах и у/ = ха,
где а—кватернион или антикватернион единичного модуля, явля-
ются паратактическими поворотами. В самом деле, для кватернионов
и антикватернионов имеет место формула (5.91). Поэтому коси-
нусы углов между векторами х и ах и между векторами х и ха
496
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
соответственно равны
(х ах) (хахахх) — (хха -j- ахх)
1 /
(а + а) хх
ыз = у (а + а)>
(х, ха) 4 ^ХХа + хах>> 4 ахх}
1 / !-ч-
— (а + а) хх 1
Г*!1 = -§ (а + а)-
(5.194)
(5.195)
Следовательно, если а имеет вид cos ср-|-^0 sin ср, где — эле-
мент единичного модуля, являющийся линейной комбинацией ква-
тернионных или антикватернионных единиц, выражения (5.194) и
(5.195) равны cos ф, т. е. угол паратактического поворота равен ф.
Преобразования у = ах и у = ха, где а — антикватернион мнимо-
единичного модуля, являются антипаратактическими поворотами.
Преобразование у = ах, где а — положительное вещественное
число, является гомотетией с коэффициентом а.
Преобразование у = х является отражением от вещественной
оси. Поэтому преобразования
у = axb и у— axb, (5.196)
где а, b — кватернионы единичного модуля или антикватернионы
одновременно единичного или мнимоединичного модуля, являются
вращениями. Покажем, что всякое вращение пространств и 2/?4
может быть представлено в виде (5.196). В самом деле, как мы
видели в § 12 главы I, каждое вращение является произведением
отражений от гиперплоскостей. Но отражение пространства /?4
или 2/?4 от гиперплоскости с единичным или мнимоединичным
нормальным вектором п имеет соответственно вид
у= — пхп и у — пхп, (5.197)
так как если вектор х коллинеарен вектору п, пх = хп и фор-
мулы (5.197) дают у =—х, а если вектор х ортогонален век-
тору п, пх — — хп и формулы (5.197) дают у = х. Но произве-
дение чётного или нечётного числа преобразований вида (5.197) яв-
ляется соответственно первым или вторым преобразованием (5.196).
Точно так же показывается, что преобразования (5.196), где а,
b — антикватернионы, один из которых — единичного, а другой
мнимоединичного модуля, являются антивращениями и всякое анти-
вращение пространства 2/?4 может быть представлено в таком виде.
§ 51
ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ
497
Отсюда следует, что преобразования
y=axb-\-c и у = axb-{-c, (5.198)
где fl, b— кватернионы единичного модуля или антикватернионы
единичного или мнимоединичного модуля, являются движениями
общего вида и всякое движение пространств и 27?4 может быть
представлено в таком виде. Если a, b — произвольные кватернионы
или антикватернионы, не являющиеся нулём или делителями нуля,
преобразования (5.198) называются полулинейными преобразова-
ниями, при а=\ или b = 1—линейными преобразованиями
соответственно первого или второго рода и в случае пространства
кватернионов состоят из движений и гомотетий, а в случае про-
странства антикватернионов состоят из движений, гомотетий и
анти движений.
Заметим, что из того, что всякое вращение пространств /?4
и 2/?4 с определителем +1 может быть представлено в виде
y = axb, т. е. является произведением двух паратактических пово-
ротов, следует, что всякое движение пространств S3 и 2S3
с определителем + 1 является произведением двух паратакти-
ческих сдвигов1)»
В пространствах кватернионов и антикватернионов, так же как
на плоскостях комплексного и двойного переменного, можно опре-
делить дробно-линейные преобразования соответственно первого
и второго рода
у = (ax-\~b)(cx-\-d)~r и у = (ax-}-b)(cx~\- J)"1. (5.199)
, причём произведению дробно-ли-
кватернионная матрица
Каждому дробно-линейному преобразованию первого рода
у — (ах + b) (сх + d)-1 соответствует кватернионная или анти-
fl b
с d
нейных преобразований соответствует произведение матриц. Для
кватернионных и антикватернионных матриц в силу некоммута-
тивное™ кватернионов и антикватернионов нельзя ввести опреде-
лители. Роль определителей для этих матриц играют веществен-
ные числа
а Ь\ — ----------------------------------
} = aadd — aedb — bdca -4- bbcc,
cd)
(5.200)
которые мы будем называть полу определителями. Заметим, что
если заменить в выражении (5.200) кватернионы или антикватер-
нионы а, b, с, d комплексными или двойными числами, полуопре-
(а #1
I становится равным квадрату модуля определителя
с d)
1) Ср. формулы (2.170), (2.191), (2.192) и (2.195).
32 Зак. 177. Б. А. Розенфельд
498
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
а b
с d
тернионной или
. Нетрудно проверить, что полуопределитель ] У ква-
d)
(а Ь\
тернионной или антикватернионной матрицы ) равен опреде-
V
лителю соответственно комплексной или вещественной матрицы
четвёртого порядка, получающейся при замене каждого кватер-
ниона или антикватерниона a, b, с, d соответственно комплексной
/ А В\
матрицей второго порядка вида — — I или вещественной ма-
\— &
трицей второго порядка, представляющей этот кватернион или
антикватернион (см. § 1). Отсюда следует, что полуопределитель
произведения матриц равен произведению полуопределителей этих
матриц, в чём нетрудно убедиться и непосредственно. Поэтому мы
{а
1 преобразова-
с d]
ний (5.199) отличен от нуля.
Непосредственно проверяется, что обратная
/а
антикватернионной матрицы
V
матрица для ква-
Ь\
1 имеет вид
d/
'р q\ 1 / dda — cdb bbc — abd
r sj ta \ccb — dca aad — bac
V d)
(5.201)
Всякое дробно-линейное преобразование у = (ax~\-b) (cx-\-d) 1
может быть также записано в виде
у~(хг— р) \—xs-\~q\ (5.202)
где кватернионы или антикватернионы р, q, г, s определяются
с помощью соотношения (5.201). В самом деле, преобразование
x = (j)y-\-q)(ry + обратное данному преобразованию у =.
= (ax-\-b) (сх~}~ d)~\ может быть переписано в виде х (гу -|-5) =
= py-{-q или (хг—Р)У =—xs-\-q, т. е. в виде (5.202); но это
преобразование совпадает с данным преобразованием. Отсюда сле-
дует, что всякое дробно-линейное преобразование второго рода
может быть записано в виде
у = (ax-\-b)(cx-\- d) 1 = (xa-{-b)(xc--\-d) 1 =
= (х?+ d)"1 (ха-\- b). (5.203)
Таким образом, всякое дробно-линейное преобразование вто-
рого рода может быть представлено как в виде произведения не-
которого преобразования первого рода на преобразование у = х>
§ 51
ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ
499
так и в виде произведения преобразования у = х на некоторое
преобразование первого рода.
При a = d = 0, b = c=\ преобразования (5.199) принимают
вид
у^х-х и у = х-1=-±- (5.204)
I I
второе из которых является инверсией относительно гиперсферы
хх = 1, а первое — произведением этой инверсии на отражение от
вещественной оси, т. е. инверсией относительно пары точек 1, —1.
Всякое дробно-линейное преобразование пространства ква-
тернионов или антикватернионов, не являющееся полулиней-
ным преобразованием (с =# 0), если в случае антикватернионов
коэффициент с — не делитель нуля, является произведением
двух линейных преобразований и инверсии относительно гипер-
сферы. В самом деле, первое преобразование (5.199) можно пред-
ставить в виде
у — (ах-\-Ь) (сх-Д-ду1 = (a-^-bc^cx-^-bc^d—bc^d) (cx-^d)"1 =
= be"1 (ex4- d) (ex + rf)-1 + (a — bc~rd) (cx-^d)'1 =
= bc~1 + (a — bc~1d)(cx + d)~1, (5.205)
т. e. в виде произведения линейного преобразования у = сх +
преобразования у = х-1 и линейного преобразования у = Ьс~г-\-
(а — bc~1d)x, причём последние два из этих преобразований
можно заменить линейным преобразованием^ = bc~i~}~(a—bc^d)x
и инверсией у= х~*. Точно так же второе из преобразований
(5.199) можно представить в виде произведения линейного пре-
образования у = cx-\-d, инверсии у — х-1 и линейного преобра-
зования у^Ьс~х-^{а — brld)x.
Уравнение гиперсферы в пространстве кватернионов или анти-
кватернионов в том случае, когда центр гиперсферы—точка а,
а радиус равен R, имеет вид (5.159), что может быть переписано
в виде (5.160), где А, С—вещественные числа, а В — кватернион
или антикватернион. Сравнивая формулы (5.159) и (5.160), мы
находим, что элементы А, В, С связаны с элементами a, R
В ВВ — АС
соотношениями а =-----j-, R- =----2, откуда видно, что
при ВВ АС радиус гиперсферы веществен, а при ВВ < АС —
чисто мним.
Нетрудно проверить, что инверсия относительно гиперсферы
(5.160) в пространстве кватернионов или антикватернионов имеет
ВИД _ _ _
у = (— хА — В)-1(хВ+С). (5.206)
32*
500
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Дробно-линейные преобразования пространств кватернионов
и антикватернионов являются конформными преобразованиями.
В самом деле, в силу того, что движения, антидвижения и гомо-
тетии являются конформными преобразованиями, линейные и полу-
линейные преобразования являются конформными преобразованиями.
Инверсии относительно гиперсфер, как мы видели в § 1 главы IV,
также являются конформными преобразованиями. Поэтому дробно-
линейные преобразования кватернионов и дробно-линейные преоб-
разования антикватернионов, у которых с — не делитель нуля,
являются конформными преобразованиями. Так как дробно-линей-
ные преобразования антикватернионов, у которых с — делитель
нуля, могут быть получены предельным переходом из дробно-
линейных преобразований, у которых с — не делитель нуля, а пре-
делом преобразований, сохраняющих углы между кривыми, является
преобразование, также сохраняющее углы между кривыми, дробно-
линейные преобразования антикватернионов, у которых с — дели-
тель нуля, также являются конформными преобразованиями.
Обратно, так как всякое конформное преобразование является
произведением инверсий относительно гиперсфер и, может быть,
антипаратактического поворота, а как инверсии относительно гипер-
сфер, так и антипаратактический поворот в пространстве кватер-
нионов и антикватернионов являются дробно-линейными преобра-
зованиями, то всякое конформное преобразование пространств
кватернионов и антикватернионов является дробно-линейным
преобразованием.
Так как дробно-линейные преобразования пространств кватер-
нионов и антикватернионрв являются конформными преобразова-
ниями, для того чтобы сделать эти преобразования взаимно одно-
значными, следует дополнить пространства новыми точками до
конформных пространств С4 и 2С4. Этими новыми точками являются
бесконечно удалённая точка оо, которой пространство кватернио-
нов дополняется до расширенного пространства кватернионов,
и бесконечно удалённая точка оо и идеальные точки, составляю-
щие идеальный конус, которыми пространство антикватернионов
дополняется до расширенного пространства антикватернионов.
Интерпретация пространства С4 в виде расширенного простран-
ства кватернионов была предложена Картаном [1] и разработана
Штуди [6]. Штуди ввёл понятие полуопределителя кватер-
(а Ь\ ~ .
нионной матрицы | J , который он называл «набла-функцией»
кватернионов a, b, с, d.
В отличие от комплексного и двойного переменных, для кото-
рых класс аналитических функций весьма широк, единственными
кватернионными или антикватернионными функциями, для ко-
§ 5] ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ 501
торых можно определить производную, являются линейные
функции у = ах-\-Ь и у = ха-\~Ь. В самом деле, под производ-
ной функции y=.f(x) естественно понимать такую функцию <?(х),
что дифференциалы dx и dy связаны соотношениями dy = v(x)dx
или dy =zdx<? (х). В первом случае производная ф (х) = dy (dx)-1
называется правой производной, а во втором случае производная
ф(х) = (dx)-1dy называется левой. В силу геометрического смысла
умножения на кватернион или антикватернион преобразования
rfy = ?(x)rfx и dy=idxy(x) состоят из вращений, гомотетий и
антивращений, т. е. функция у = f(x) определяет конформное
преобразование. Но в силу теоремы Лиувилля (см. § 1 главы IV)
такое преобразование является дробно-линейным преобразованием
кватернионов или антикватернионов. Однако ни полулинейное пре-
образование, в которое дробно-линейное преобразование превра-
щается при с = 0, ни преобразование у = х-1 не дифференци-
руемы, так как для функций у = axb~\-c иу = х-1 соответственно
dy~a(dx)b и dy = — x~1(dx)x, в то же время для функций
у = ах-]-Ь и у = ха -\-Ь соответственно dy = а (dx) и у = (dx) а,
т. е. в первом случае имеется правая, а во втором случае левая
производная *).
Определим двойное отношение lF(x, у, z, и) четырёх кватер-
нионов х, у, z, и формулой
W(x, у; z, и) —(и—у)~г(и — x)(z — х)-1 (z—у), (5.207)
которая, если заменить кватернионы или антикватернионы комплекс-
ными или двойными числами, может быть переписана в виде (5.167).
Двойное отношение четырёх кватернионов или антикватернио-
нов при дробно-линейных преобразованиях первого рода подвер-
гается преобразованию
'W = pWp-\ (5.208)
где р — произвольный кватернион или антикватернион, не
являющийся нулём или делителем нуля.
Для доказательства достаточно проверить наше утверждение
для элементарных преобразований гх = х 4- а, 'х = ах, гх — ха
И 'х = X"1.
Так как при преобразовании 'х = х-\-а разности и—у, и~х,
z — х, z—у остаются без изменения, двойное отношение W при
этом преобразовании также остаётся без изменения.
Так как при преобразовании 'х = ах разности и—у, и — х,
z — х, z—у переходят соответственно в разности а (и—у),
а (и — х), a(z — х), a(z—у), двойное отношение W при этом
!) См. заметки Н. М. Крылова [1] и А. С. Мейлихзона
(Бельцы) [1].
502
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
преобразовании переходит в двойное отношение
'W—(u —у)"1а~1а (и — х) (z — х)'1а~1а (z —у) =
= (и—у)-1 (и — x)(z— х)-1(г—у) — W, (5.209)
т. е. остаётся без изменения.
Так как при преобразовании гх = ха разности и—у, и — х,
z — х, z—у переходят соответственно в разности (и—у) а,
(и — х)а, (z — х)а, (z—у) а, двойное отношение при этом
преобразовании переходит в двойное отношение
= а~\и—у)~г(и — х) асГ1 (z — х)-1(г—у) а =
= а-1 (и —у) (и — х)"1 (z — х) (z —у) а = a^Wa, (5.210)
т. е. в этом случае роль р играет а-1.
Так как при преобразовании гх = х~1 разности и—у, и—х,
z — х, z—у переходят соответственно в разности и~г—у-1,
w1— х"1, z~x — х-1, z-1—у~\ двойное отношение W при этом
преобразовании переходит в двойное отношение
'W = (и-1 —у/"1)-1 (и~х — х-1) (z-1 — х-1)-1 (z-1 —у-1) =
= (у-1 ZZ-1)~~1 (и-1 X-1) (X"1 Z-1)-1 (z-1 у-1) =
= у (и--y)~l UU"1 (х — и) х~1х (z — х) ZZ-1 (у-z)Z"1 =
= у(и —у)'1 (и — х) (z — х)"1 (у — и) у-1, (5.211)
т. е. в этом случае роль р играет у.
Этим наше утверждение, доказано для всех дробно-линейных
преобразований первого рода кватернионов и для тех дробно-ли-
нейных преобразований первого рода антикватернионов, у которых
с — не делитель нуля.
Так как двойное отношение четырёх вещественных чисел ве-
щественно, а дробно-линейным преобразованием любую окружность
или неизотропную прямую можно перевести в вещественную ось,
двойное отношение четырёх точек пространства кватернионов
или антикватернионов, лежащих на одной окружности или не-
изотропной прямой, вещественно. Но вещественные числа пере-
становочны со всеми кватернионами и антикватернионами, поэтому
преобразование (5.208) не изменяет этих чисел, т. е. если двойное
отношение четырёх кватернионов или антикватернионов вещественно,
это двойное отношение не изменяется при дробно-линейных пре-
образованиях и совпадает с определённым нами в § 3 главы IV
двойным отношением четырёх концикличных точек пространств
и
Так как кватернионы представляются комплексными матрицами
/ А В\
второго порядка вида — — ) (см. § 1), то можно сказать, что
\—В А )
§ 5] ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ 503
двойное отношение четырёх кватернионов представляется такой ма-
трицей, определённой с точностью до преобразования (5.208). Этим
преобразованием всегда можно привести матрицу к диагональной
/а 0\ -
форме ( — 1, где а, а — комплексно сопряжённые числа, являю-
щиеся собственными числами этой матрицы. Поэтому числа а, а не
изменяются при дробно-линейных преобразованиях. Эти числа до-
пускают следующую геометрическую интерпретацию: через четыре
неконцикличные точки пространства кватернионов можно провести
двумерную сферу или плоскость. Эту сферу или плоскость можно
перевести дробно-линейным преобразованием в плоскость кватер-
нионов вида aкоторую можно рассматривать как плос-
кость комплексного переменного. Число а или а сов-
падает с двойным отношением тех четырёх точек этой плоскости,
в которые перейдут данные четыре точки.
Так как антикватернионы представляются вещественными мат-
рицами второго порядка (см. § 1), то можно сказать, что двойное
отношение четырёх антикватернионов представляется такой матри-
цей, определённой с точностью до преобразования (5.208). Этим
преобразованием всегда можно привести матрицу к одной из трёх
/А 0 \ /а 0\ (А 1 \
нормальных форм ( ( - ) или ( где А, В — ве-
щественные числа, а, а — комплексно сопряжённые числа, являю-
щиеся собственными числами этой матрицы. Поэтому числа А, В
или а, а не изменяются при дробно-линейных преобразованиях
указанного вида. Эти числа допускают аналогичную геометрическую
интерпретацию: через четыре неконцикличные точки пространства
антикватернионов можно провести либо двумерную сферу или ев-
клидову плоскость, либо изотропный конус или полуевклидову
плоскость. Если сфера овальная или плоскость индекса 0 или 2,
её можно перевести дробно-линейным преобразованием в плоскость
антикватернионов вида а + которую можно рассматривать как
плоскость комплексного переменного. Число а или
а совпадает с двойным отношением тех четырёх точек этой плос-
кости, в которые перейдут данные четыре точки. Если сфера ли-
нейчатая или плоскость индекса 1, её можно перевести дробно-
линейным преобразованием в плоскость антикватернионов вида
а-\-Ье, которую можно рассматривать как плоскость двой-
ного переменного, и число а = Ае+~{-Ве_ или а = Ве+-\-Ае_
совпадает с двойным отношением тех четырёх точек этой плоско-
сти, в которые перейдут данные четыре точки. Если же точки
лежат на изотропном конусе или полуевклидовой плоскости, их
можно перевести дробно-линейным преобразованием в плоскость
антикватернионов вида я + ^О’ + е), которую можно рассматривать
504 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
как плоскость дуального переменного а-\-Ьг, е2 = 0,
и число А совпадает с вещественной частью двойного отношения
четырёх точек этой плоскости, в которые перейдут данные че-
тыре точки.
Заметим, что дробно-линейные преобразования антикватернио-
нов, у которых с — делитель нуля, могут быть получены предель-
ным преобразованием из дробно-линейных преобразований, у ко-
торых с — не делитель нуля, причём пределом преобразований, не
изменяющих чисел А, В или а, а, является преобразование, также
не изменяющее этих чисел. Поэтому при дробно-линейных преобра-
зованиях первого рода антикватернионов, у которых с — делитель
нуля, двойное отношение также подвергается преобразованию
(5.208).
Можно определить также мнимые геометрические образы про-
странств кватернионов и антикватернионов, для чего следует рас-
смотреть алгебру комплексных кватернионов, которую можно
геометрически представить в виде пространства комплексных ква-
тернионов. Далее, можно определить в нём комплексное расстояние
между точками, при котором оно изометрично пространству Т?4(0,
и дополнить его бесконечно удалённой и идеальными точками до
расширенного пространства комплексных кватернионов, которое
можно рассматривать как пространство C4(Z). Тогда, если считать
расширенные пространства кватернионов и антикватернионов по-
гружёнными в это пространство, как пространства С4 и 2С4 в про-
странство C4(Z), геометрические образы пространства комплексных
кватернионов, не лежащие в пространствах кватернионов и анти-
кватернионов, следует считать мнимыми геометрическими образами
этих пространств. К таким мнимым образам относятся изотропные
прямые, двумерные плоскости и мнимые гиперсферы |х — a\ = iR
пространства кватернионов.
Как мы видели в § 2 главы IV, в силу интерпретации Дарбу
пространства С4 и 2С4 изображают абсолюты соответственно про-
странств 15б и 3S6, а группы конформных преобразований первых
пространств изоморфны группам движений вторых пространств.
Поэтому расширенные пространства кватернионов и антиква-
тернионов изображают абсолюты соответственно пространств
1S6 и 3S6, причём группы дробно-линейных преобразований пер-
вых пространств изоморфно изображают группы движений
вторых пространств.
Так как группы движений пространств 1S6 и 3S6 состоят соот-
ветственно из двух и четырёх связных компонент, группы дробно-
линейных преобразований кватернионов и антикватернионов также
состоят соответственно из двух и четырёх связных компонент, и сле-
довательно, группа дробно-линейных преобразований первого рода
кватернионов связна, а группа дробно-линейных преобразований
первого рода антикватернионов состоит из двух связных компонент.
§ 5] ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ 505
Отсюда следует, что полу определитель кватернионной матрицы
неотрицателен, так как, если бы полуопределители кватернион-
ных матриц принимали бы и положительные и отрицательные зна-
чения, группа дробно-линейных преобразований первого рода ква-
тернионов, полуопределители которых отличны от нуля, состояла
бы из двух связных компонент.
Так как каждому дробно-линейному преобразованию у =
= (ах-\-соответствует матрица , причём про-
изведению дробно-линейных преобразований соответствует произ-
ведение матриц, из указанного изоморфизма вытекает гомоморфное
соответствие между группами движений пространств XS3 и 3S6, со-
ответствующих дробно-линейным преобразованиям первого рода, и
группами соответственно кватернионных и антикватернионных ма-
триц второго порядка. Полуопределители этих матриц мы можем
считать в первом случае равными -|-1, а во втором случае рав-
(а Ь\
с d} Не
равен zt 1, мы всегда можем разделить числитель и знаменатель
дроби (ax-\-b)(cx-\-d')~1 на Д|. Ядром гомоморфизма здесь
х /1 0\ /—1 0\
будет группа, состоящая из двух матриц I 1 ) и I о 1 /
Полученное нами двузначное изображение группы движений про-
странства 1S6 с определителем -j-1 группой кватернионных матриц
второго порядка с полуопределителем 4-1 и группы движений про-
странства 3S6 с определителем -|-1 группой антикватернионных
матриц второго порядка с полуопределителями ztl можно рассма-
тривать как спинорные представления этих групп движений. В по-
следнем случае группу антикватернионных матриц второго порядка
с полуопределителем z*zl можно заменить изоморфной ей группой
вещественных матриц четвёртого порядка с определителями z*zl.
Можно показать, что полученные нами из общей теории спинор-
ные представления групп движений пространств 1S6 и 3S6 соответ-
ственно двойными кватернионными матрицами второго порядка и
двойными матрицами четвёртого порядка могут быть получены из
этих спинорных представлений, если мы поставим в соответствие
каждой кватернионной матрице второго порядка или вещественной,
матрице четвёртого порядка А соответственно двойную кватернион-
ную матрицу второго порядка или двойную матрицу четвёртого
порядка Ае+АгА~1е_, где А — матрица, полученная из матрицы А
транспонированием и в случае кватернионных матриц умножением
каждого элемента матрицы слева на Z, а справа на Z-1 (см. § 6
главы VI).
Отсюда вытекает следующее геометрическое истолкование
спиноров пространств 1S6 и 3S6: если мы запишем линейное
506
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
преобразование кватернионных или антикватернионных спиноров
этих пространств
'х* |
гхх = сх°-|--^х1 /
(5.212)
и рассмотрим преобразование отношения х^х0^1)”1 координат
этих спиноров, мы получим дробно-линейное преобразование ква-
тернионного или антикватернионного переменного х. Но, с другой
стороны, мы видели, что каждой точке расширенного пространства
кватернионов или антикватернионов отвечает точка абсолюта соот-
ветственно пространств 1S6 и 3S6, причём при движениях последних
пространств происходят дробно-линейные преобразования первых
пространств. Поэтому координаты кватернионных спиноров про-
странства 1S5 и антикватернионных спиноров пространства 3S6
можно рассматривать как координаты точек абсолютов этих
пространств, определённые с точностью соответственно до
кватернионного или антикватернионного множителя, а спинор-
ные представления движений этих пространств совпадают
с преобразованиями спиноров, соответствующими преобразова-
ниям абсолютов при движениях.
Так как фактор-группа группы вещественных матриц четвёртого
порядка с определителями z*z 1 по её подгруппе, состоящей из
матриц (3}) и (—8}), изоморфна группе коллинеаций простран-
ства Р3, мы снова получаем изоморфизм группы проективных пре-
образований пространства Р3 и группы движений пространства 3S6,
лежащих в основе интерпретации Плюккера (см. § 11 главы III).
Таким образом, в основе интерпретации Плюккера лежит спи-
норное представление группы движений пространства 33б. В § 3
главы IV мы видели, что прямые пространства Р3 изображаются
точками пространства 2С4, причём группа проективных преобразо-
ваний пространства Р3 изоморфно изображается группой конформ-
ных преобразований пространства 2С4. Отсюда следует, что прямые
пространства Р3 изображаются точками расширенного пространства
антикватернионов, причём проективные преобразования первого
пространства изоморфно изображаются группой дробно-линейных
преобразований второго пространства. Это изображение может быть
установлено и непосредственно, если мы поставим в соответствие
прямой пространства Р3, проходящей через точки xi и у*, вещест-
венную матрицу второго порядка
[А В\ /х° у°\ [х2 у2\~1
\с D) = U Л1) U у*) <5'213)
или соответствующий этой матрице антикватернион. Нетрудно про-
верить, что этот антикватернион не зависит от выбора точек хг и
j/* и при коллинеациях и корреляциях пространства Р.3 он подвер-
§ 5] ПРОСТРАНСТВА КВАТЕРНИОНОВ И АНТИКВАТЕРНИОНОВ 507
гается дробно-линейным преобразованиям соответственно первого
или второго рода. Нетрудно также проверить, что если мы соста-
вим двойное отношение (5.207) четырёх антикватернионов, изобра-
жающих четыре прямые пространства Р3, то собственные числа
матрицы, представляющей это двойное отношение, которые, как
мы видели, инвариантны при дробно-линейных преобразованиях, со-
впадают с двойными отношениями точек пересечения этих прямых
с их директрисами (см. § 4 главы III). Определённые таким обра-
зом «матричные координаты» прямых оказываются полезными
в целом ряде задач проективной геометрии1).
Как мы видели в § 4 главы IV, в силу интерпретации Пуанкаре
многообразия пар точек пространств С4 и 2С4, взаимно обратных
относительно мнимой и вещественной гиперсфер первого простран-
ства и гиперсферы второго пространства, изображают соответ-
ственно пространство 54, пространство х54 отрицательной кри-
визны и пространство 2S4 любой кривизны, а группы конформ-
ных преобразований пространств С4 и 2С4, переводящих в себя
соответственные гиперсферы, изоморфны группам движений про-
странств S4, XS4 и 2S4. Поэтому пары точек расширенного про-
странства кватернионов, взаимно обратные относительно
мнимой гиперсферы и симметричные относительно гиперпло-
скости, и пары точек расширенного пространства антиква-
тернионов, симметричных относительно гиперплоскости, изо-
бражают соответственно пространство S4, пространство 154
отрицательной кривизны и пространство 2S4 любой кривизны.
При этом группы дробно-линейных преобразований пространств
кватернионов и антикватернионов, переводящих в себя эту
мнимую гиперсферу и гиперплоскости, изоморфно изображают
группы движений пространств S4, 1S4 и 234.
Так как каждому дробно-линейному преобразованию первого
рода соответствует матрица, причём произведению дробно-линейных
преобразований соответствует произведение матриц, из указанного
изоморфизма вытекает гомоморфное соответствие между группами
движений пространств S4, XS4 и 2S4 и группами в первых двух
случаях кватернионных, а во втором случае антикватернионных
матриц второго порядка. Полуопределители этих матриц мы можем
в первых двух случаях считать равными -|-1, а в третьем слу-
чае zt: 1. Ядром гомоморфизма здесь являются группы, состоящие
°\ Z1
из двух матриц К Ч и I I. Полученные нами двузнач-
ные изображения групп движений пространств S4, XS4 и 2S груп-
пами кватернионных и антикватернионных матриц второго порядка,
связанных условиями, соответствующими тому, что дробно-линейные
*) Матричные координаты прямых применялись к проективно-диффе-
ренциальной геометрии Н. А. Габададзе [1].
508 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [ГЛ. V
преобразования с этими матрицами переводят с себя мнимую
гиперсферу или гиперплоскость, являются спинорными предста-
влениями этих групп движений; в последнем случае группу анти-
кватернионных матриц второго порядка можно заменить изоморф-
ной ей группой вещественных матриц четвёртого порядка. Так как
при изоморфизме группы конформных преобразований простран-
ства 2С4 и группы проективных преобразований пространства Р3
инверсии относительно гиперсферы первого пространства соответ-
ствует нуль-система второго пространства, условия, накладываемые
на вещественные матрицы четвёртого порядка, соответствующие
тому, что дробно-линейные преобразования пространства анти-
кватернионов, переводящие в себя гиперплоскость (которую можно
рассматривать как гиперсферу пространства 2С4), совпадают с усло-
виями, накладываемыми на матрицы коллинеаций пространства Р3,
переводящие в себя линейный комплекс прямых, т. е. перестано-
вочные с нуль-системой. Поэтому группа вещественных матриц
четвёртого порядка, двузначно изображающих группу движений
пространства 2S4, является группой симплектических матриц.
Отсюда вытекает следующее геометрическое истолкование спи-
норов пространств 54, 1S4 и 2S4: если мы запишем линейные
преобразования кватернионных или антикватернионных спиноров
этих пространств (5.211) и рассмотрим преобразование отношения
х = х°(х1)^1 координат этих спиноров, мы получим дробно-линейное
преобразование кватернионного или антикватернионного перемен-
ного х, переводящее в себя мнимую гиперсферу или гиперплоскость.
Но, с другой стороны, каждой точке указанной мнимой гиперсферы
или гиперплоскости отвечает точка абсолюта соответственно про-
странств S4, XS4 и 2S4, причём при движениях последних про-
странств происходят дробно-линейные преобразования пространств
кватернионов и антикватернионов, переводящие в себя указанные
мнимую гиперсферу и гиперплоскости. Поэтому мы можем рас-
смотреть комплексные кватернионные спиноры, отношения коор-
динат которых изображаются точками мнимой гиперсферы про-
странства кватернионов, и кватернионные и антикватернионные
спиноры, отношения координат которых изображаются точками
гиперплоскости пространств кватернионов и антикватернионов. При
этом координаты комплексных кватернионных спиноров про-
странства 54, кватернионных спиноров пространства XS4 и
антикватернионных спиноров пространства 2S4 указанного вида
можно рассматривать как координаты точек абсолютов этих
пространств, определённые с точностью соответственно до
комплексного кватернионного, кватернионного и антикватер-
нионного множителя, а спинорные представления движений
этих пространств совпадают с преобразованиями спиноров,
соответствующими преобразованиям абсолютов при движе-
ниях.
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 509
Так как фактор-группа группы симплектических матриц четвёр-
того порядка по её подгруппе, состоящей из матриц (3}) и (— 3}), изо-
морфна группе симплектических преобразований пространства Sp3,
мы снова получаем изоморфизм этой группы и группы движений
пространства 254, лежащий в основе интерпретации пространства 2S4
в пространстве Sp.3 (см. § 12 главы III). Таким образом, в основе
интерпретации пространства 254 в пространстве Sp3 лежит
спинорное представление группы движений пространства 2S4.
§ 6. Геометрическое истолкование спинорных представлений
движений неевклидовых пространств любого числа измерений
(координаты спиноров как координаты плоских
образующих максимальной размерности абсолюта)
Найдём геометрическое истолкование спинорных представлений
групп движений пространств Sn, lSn и Sn(i) в вещественных ком-
п
ллексных двойных и двойных комплексных пространствах 22
п—1
или 2 2 измерений.
Рассмотрим сначала пространство nS2n с абсолютом:
(х0)2 —(х1)2 + (х2)2 —(х3)2 + . я. — (х'^-1)2 + (х2«)2 = 0. (5.214)
Спинорные представления движений этого пространства осуще-
ствляются альтернионами алгебры wA2n+1, одноиндексные элементы
которой удовлетворяют условиям
^ = 4-1, 4 = —1, ^=+1,..., ^ = +1,4 = -!.(5.215)
Представим эти альтернионы элементами алгебры wA2n+2,
являющимися линейными комбинациями базисных элементов с чёт-
ным числом индексов. Всякий такой элемент можно записать
в виде
а “И а 12 ... 2п —2 2n —1 +«ч 12 ... 2п —2 2п + а12#2п-1 2П, (5.216)
где а, а1, а2, а12 — альтернионы алгебры w"1A2n_1, предста-
вленные элементами алгебры w"1A2n.
Так КаК ЭЛеМеНТЫ 1, #012 ... 2n—2 2n—1, #012 ... 2n—2 2п, ^2n —1 2п
составляют базис алгебры, изоморфной алгебре антикватернионов,
причём ^012 ... 2п-2 2п-1 ^012 ... 2п-2 2п ^2п-2 2п
= €q 12 ... 2п—2 2п-1 ^0 12 ... 2п—2 2п » аЛЬТерНИОНЫ ЗЛГебрЫ ПА2п+-£
510
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
могут быть представлены в виде матриц второго порядка
'А В\
С d)
/а — а12
V1 —а2
а14“ а2\
а_^а12у-
(5.217)
Представляя таким же образом элементы а, а1, а2, а12 алгебры
w-1A2n_1 в виде матриц второго порядка, элементы которых
являются элементами алгебры и продолжая этот процесс
до тех пор, пока мы не дойдём до вещественной матрицы, мы
получим вещественную матрицу 2п-го порядка, представляющую
произвольный элемент алгебры wA2n+1.
Движения пространства nS.2n могут быть представлены пре-
образованием
H^ASA-1, (5.218)
где А — элемент спинорной группы, a S и Н — линейные комби-
нации базисных элементов с 2п индексами:
Е — 2 ***01 ... 1-1 г + 1 ... 2п>
i
н= 2 ...<-!<+!...an (i — о, 1........2rt).
i
В силу того, что
*01 ... г-1 г + 1 ... 2п ~ ( I)1’
*01 ... 4-1 г + 1 ... 2п*01 ... j-1 J+1 ... 2п =
=-----*01 ... J-l J + 1 ... 2п*01 ... 4-1 г + 1 2п
(5.219)
(5.220)
квадрат элемента Е равен
Е2 = (X0)2 — (х1)2 +- (х2)2 — ... — (Х2”-1)2 +- (х2й)2. (5.221)
Альтернион (5.217) может иметь вид (5.219) только в том случае,
когда а — 0, а1 и а2 являются вещественными числами, а а12 может
быть записан в виде
е = 2*41.гп-2 (1 = 0, 1, . .., 2и —2). (5.222)
г
Поэтому матрица (5.217), представляющая этот альтернион, которую
мы будем обозначать также буквой Е, имеет вид
---5
t-1 I t
(5.223)
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 511
Представляя таким же образом альтернион $ в виде аналогич-
ных матриц второго порядка и продолжая этот процесс до тех пор,
пока не дойдём до вещественной матрицы, мы получим веществен-
ную матрицу второго порядка, представляющую альтернион Е,
которую также будем обозначать той же буквой S. Для п = 1, 2, 3
матрица Е имеет соответственно вид
(5.224)
х° — X1 X2 х3 + X4 0 \
X1 X2 — х° 0 X3 4-х41
Е — I — X3 4-х4 0 — х° X1 4-х2 ’ (5.225)
0 — X3+ X4 — - X1 4- X2 х° /
• -х? х24-х2 -х3-х4 0 Х5 + Х6 0 0 0
-хЧ-х3 х° 0 -х'-х' 0 х5+хв 0 0
х3—х4 0 X3 -х*-ха 0 0 х34“Хв 0
Е — 0 х3-х4 Х3-Ха -х° 0 0 0 Х54-х® . (5.226)
0 0 0 X3 — X1 —Ха х34-х4 0
0 -Xs -f- X9 0 0 х1-х2 —х° 0 х34-х4
0 0 -х54-хв 0 -х3+х* 0 —х3 хЦх2
» 0 0 0 -хк4-х6 0 -х3-х4 -х‘+л •2 хО
Каждой матрице S соответствует точка пространства nS2n
с координатами х*. Рассмотрим матрицы Е, соответствующие
точкам абсолюта nS2n. Так как координаты такой точки удовле-
творяют условию (5.214), соответственная матрица Е удовлетво-
ряет условию Е2 = 0, откуда следует, что её определитель также
равен 0. Поэтому существуют ненулевые вещественные спиноры
пространства nS2n, переходящие при линейном преобразовании,
соответствующем этой матрице, в нуль, т. е. векторы а, для ко-
торых
b = Ей = 0.
(5.227)
Если обозначить координаты векторов а и b через соответ-
ственно
й, а1, я2, я12, я3, а13, а23, я123, ...» I
Ь, Ь1, Ь2, Ь1'2, F, V», b™, b™,..., b12-n, J <5-228>
условие (5.227) можно записать в координатах в виде 2п линей-
512 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
ных уравнений, которые при п=1, 2, 3 соответственно имеют
вид
Ь = — х°а4-(х14~х2)а1 = 0, |
Ь1 — — (х1 — х2) а 4- х0#1 = О, J
b — х°я — (х14~ х2) а1 + (х3 + *4)а2 = 0, 1
— х2)а — хОа14_(хз_рх4)й12 = о> I
д2 = — (х3 — х4) а — xQa2 + (х14- х2) я12 _ 0, |
Z>12 = — (х3 — х4) а1 — (х1 — х2) а14- х°я12 = О, J
b = — х°^4-(х44-х2) а1—(х34~х4) <224~(^б4~х6) а8 — О,
Ь1 = — (х1—х2) (24-х°а1—(x3-j-x4) я124~(х64~х6) я13 = О,
Ь2 = (х3 — х4) #4“ х°а'2—(х1-|-х2) я124-(х54~х6) я23 = О,
612 = (х3—х4) ^14"(х1—х2) а2—х°я124-(хб4-х3)я123 = О,
& = —(Хб—х3)я4-х°я3—(х14-х2)^134~(х34~х4)а23 = О,
М3 = —(хб—х6)^1+(х1—х2)#3—х°я134-(х34-х4) я123 = О,
Ь23 = —(хб—xQ)a2—(х3—х4)^3—х°а23+(х1-|-х2)^1'?3 = О,
М23 _(Х5— xQ^a12—(х3—х4)а12—(х1—X2)tf13+x°fl123 = 0.
(5.229)
(5.230)
(5.231)
Найдём условия, при которых эти системы уравнений содер-
жат минимальное число независимых уравнений. Система урав-
нений (5.229) состоит из двух независимых уравнений, число
которых не может быть уменьшено; эти уравнения определяют
точку на абсолюте плоскости 1S2, являющемся вещественной
кривой.
Система уравнений (5.230) содержит три независимых урав-
нения, так как уравнение £12 = 0 удовлетворяется в силу трёх
предыдущих вследствие тождественно выполняющегося соотноше-
ния
ab12 = аЧ)2 — аРЬ1 4- a12Z>.
(5.232)
Уравнения b = Q, £Л = 0, &2 = 0 определяют прямую, состоя-
щую из точек абсолюта пространства 2S4, на котором плоскими
образующими максимальной размерности являются прямые.
Система уравнений (5.231) может быть сведена к четырём не-
зависимым уравнениям, так как уравнения Ь12 = О, Z?13 —О, Ь2^ — О
удовлетворяются в силу уравнений b = О, = О, Z?2 = 0, й3 = 0
вследствие тождественно выполняющихся соотношения (5.232) и
соотношений, получающихся из него заменой индексов 12 на ин-
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 513
дексы 13 и 23. Кроме того, уравнение 6123 = О удовлетворяется
в силу семи предыдущих вследствие соотношения
ab1^ = а^ — а^^а^Ь1, (5.233)
которое выполняется тождественно при выполнении условия
ЯП123 — 0*023--0-2013 03^12. (5.234)
Уравнения b — О, Ь1 = О, № = 0, № = 0 определяют двумер-
ную плоскость, состоящую из точек абсолюта пространства 3S6,
на котором плоскими образующими максимальной размерности
являются двумерные плоскости.
Заметим, что если мы обозначим координаты 01, 02, 03, 0123
через соответственно я14, я24, 034, 01234, условие (5.234) совпадёт
с условием (5.117), являющимся частным случаем условий (5.100)
при п = 4.
Точно так же мы найдём, что при любом п система уравне-
ний (5.234) может быть сведена к п+1 независимым уравнениям
Ь = {— 1)»[ах° + 5(— = 0, (5.235)
Ь* = (— 1)« [(— 1 ){а (x2i -1 — x2i) + а<х°
+ S (— = 0, (5.236)
где 0^* = —дЛ В самом деле, остальные уравнения удовлетво-
ряются в силу этих уравнений при выполнении условий, которые,
если обозначить координаты 0г1”‘г/с с нечётным числом индексов
через 0г1,,,глп+\ совпадают с условиями (5.100).
Уравнения й = 0, Ь1 = 0, . . ., bn = Q определяют (п—1)-мер-
ную плоскость, состоящую из точек абсолюта пространства nS.2n,
на котором плоскими образующими максимальной размерности
являются (п—1)-мерные плоскости, составляющие одно связное
семейство.
Если мы нормируем координаты 011’,,г/с условием
2 (а*!’**)2 = 1, (5.237)
•••*/?
то в силу того, что для этих координат, если при нечётном числе
индексов обозначить их через 01f'1/cw+1, выполняются условия
(5.100), эти координаты можно рассматривать как координаты
элементов спинорной группы алгебры альтернионов Ап+1, при-
чём каждому вещественному спинору пространства nS.2n) коорди-
наты 0г1которого равны координатам элементов спинорной
группы алгебры Ап+1, соответствует плоская образующая макси-
мальной размерности абсолюта пространства nS.2n.
33 Зак. 177. Б. А. Розенфельд
514
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
С другой стороны, каждой такой образующей плоскости
можно поставить в соответствие вещественный спинор простран-
ства nS2n указанного вида. В самом деле, если мы проведём че-
рез нашу плоскость гиперплоскость (5.235), то, умножая уравне-
ние абсолюта (5.214), которое можно переписать в виде
(%0)2—2 «л2*-1)2—(х292] =
i
= (х0)2 — 2 (х^-1 — х2<) (х2^1 + х2*) = О, (5.238)
<
на а, а уравнение (5.235) — на (—1)пх° и складывая одно с дру-
гим, мы получим соотношение
2(x2«-1 + x29(«(x2i-1 —х2<) + (— 1)^х°] = 0. (5.239)
г
Это соотношение будет удовлетворено, если мы представим
его левую часть в виде квадратичной формы с кососимметриче-
ской матрицей, т. е. положим:
а (х2*-1 — х2<) + (— l)Wx° = 2 (— 1)<+1оу (х2’-1 — х2^). (5.240)
3
Перенося оба члена уравнения (5.240) в левую часть, мы видим,
что эти уравнения совпадают с уравнениями (5.236). Поэтому
уравнения (5.235) и (5.236) образуют полную систему уравнений
нашей плоской образующей. Обозначая координаты ai через ain+1„
мы можем с помощью формул (5.99) и (5.100) определить по
координатам а, а1 и все остальные координаты аг^'"гк аль-
терниона алгебры Ап+1, принадлежащего к спинорной группе, и
составить остальные уравнения (5.227) нашей образующей пло-
скости, являющиеся следствиями уравнений (5.235) и (5.236). По-
лученный альтернион определён с точностью до умножения на
— 1. Это рассуждение неприменимо только в том случае, когда
плоская образующая лежит в гиперплоскости х° = 0, но всякая
такая плоскость может быть получена предельным переходом из
плоских образующих, не лежащих в гиперплоскости х° = 0, и
такой плоскости можно поставить в соответствие элемент спинор-
ной группы алгебры Ап+1, полученный предельным переходом из
элементов, соответствующих плоскостям, не лежащим в гипер-
плоскости х° = 0.
Таким образом, мы получили, что спинорная группа алгебры
кп+1 двузначно изображает семейство плоских образующих
максимальной размерности абсолюта пространства nS$n, при-
чем из непрерывности всех встречающихся здесь функций следует,
что это соответствие непрерывно. То же двузначное изображение
следует и из сопоставления результатов § 8 главы III, где мы
показали, что семейство плоских образующих максимальной раз-
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 515
мерности абсолюта nS2n изображает связную группу движений про-
странства Sn, причём это изображение однозначно при чётном п
и двузначно при нечётном п и непрерывно, и результатов § 2
настоящей главы, где мы показали, что спинорная группа алгебры
Ап+1 изображает связную группу движений Sn, причём это изо-
бражение двузначно при чётном п и четырёхзначно при нечётном п
и также непрерывно.
Таким образом, в пространстве вещественных спиноров про-
странства nS2n имеется поверхность (уравнения которой, если
обозначать координаты с нечётным числом индексов через
а\••• имеют вид (5.100) и (5.237)), двузначно изображаю-
щая семейство плоских образующих максимальной размерности
абсолюта пространства nS2n. При движениях пространства nS2n,
когда матрицы S подвергаются преобразованию (5.218), веще-
ственные спиноры подвергаются преобразованию
fa = Xa. (5.241)
Так как при движениях пространства nS2n семейства плоских
образующих абсолюта переходят в себя, поверхность в простран-
стве спиноров, изображающая это семейство, также переходит
в себя. Координаты спиноров, являющихся радиусами-
векторами точек этой поверхности, можно рассматривать как коор-
динаты соответственных плоских образующих абсолюта; мы видим,
что при движениях пространства nS2n эти координаты подвер-
гаются преобразованию (5.241), т. е. преобразуются линейно; эти
линейные преобразования и образуют спинорное представление
группы движений пространства nS2n.
Все изложенные результаты непосредственно переносятся на
случай пространства S.2n(0, уравнение абсолюта которого также
может быть записано в виде (5.213) с той разницей, что здесь
следует считать все координаты точек и альтернионов комплекс-
ными числами. В этом случае все координаты спиноров являются
комплексными числами.
Для рассмотрения пространств S2n и lS2n при I Ф /г, уравне-
ния абсолютов которых можно записать в виде
(х0)2 ± (х1)2 + (х2)2 ± (х3)2 + ... ± (х2п-1)2 + (х2”)2 = 0, (5.242)
достаточно считать координаты точек пространства S.2n(l) веще-
ственными или чисто мнимыми, причём первыми следует считать
те координаты, перед которыми знаки в уравнениях (5.213) и
(5.242) совпадают, а вторыми следует считать те координаты,
перед которыми указанные знаки различны. В случае простран-
ства S2n абсолют мним и совпадает с абсолютом пространства
S2n(i), а в случае пространств lS2n при 1фп абсолюты веще-
ственны, но их плоские образующие максимальной размерности
33*
516
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
также мнимы. В этом последнем случае можно ограничиться рас-
смотрением тех из этих плоских образующих, которые содержат
вещественные точки абсолюта. Поэтому в случае пространств S2n
и lS.2n при 1фп все координаты спиноров также являются ком-
плексными числами.
Таким образом, спинорные представления групп движений
пространств S.2n(l), S2n и lS.2n допускают следующее геометри-
ческое истолкование: при движениях пространств S2n(Z), S2n и
lS2n абсолюты этих пространств преобразуются таким об-
разом, что 2п вещественных или комплексных координат аг^"Лк
плоских образующих максимальной размерности абсолюта ис-
пытывают линейные преобразования, матрицы которых пред-
ставляют альтернионы, образующие спинорное представление
движений пространств S2n(i), S.2n и lS.2n.
Теперь рассмотрим пространство n+1S2n¥1 с абсолютом
(X0)’2 _ (Х1)2 -р (Х2)2 _ (Х3)2 + . . . — (%2п-1)2
_р(х2п)2_ (Х2п+1)2 0. (5.243)
Спинорные представления движений этого пространства осу-
ществляются альтернионами алгебры одноиндексные эле-
менты которой удовлетворяют условиям
^ = + 1, 4=-1, = ...С-г = +1.
= eU = +1-
(5.244)
Движения этого пространства могут быть представлены пре-
образованиями (5.218), где А — элементы спинорной группы алге-
бры п+1А2п+2. Эти элементы представлены элементами алгебры
п+1А2?г+3, являющимися линейными комбинациями базисных эле-
ментов с чётным числом индексов, а S и Н — линейные комбина-
ции базисных элементов алгебры те+1А2п+3 с 2п-|-1 индексами:
S = 2 Хг£01 ... г-1 г + 1 ... 2п + 1,
* . (5.245)
Н — ... г-1 г+1 ... 2п + 1 (^— 0» 1, •••, 2п—|— 1).
г
Если мы в свою очередь представим элементы алгебры
п+1А2^+3 элементами алгебры п+1А4п+4, являющимися линейными
комбинациями базисных элементов с чётным числом индексов, то
S и Н будут представлять собой линейные комбинации первых
2п-|-2 базисных элементов алгебры п+1А.2п+4 с 2п-\-Ъ индексами:
й — S *%1 ... ?-1 г + 1 2п+1 2?i + 2,
' . (5.246)
Н — ,У%1 ... г-1 г + 1 2?г + 1 2п+2 0* — 0, 1, 2п—[- 1).
г
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 517
Альтернионы алгебры П+1А.2^4.2 можно рассматривать как аль-
тернионы алгебры пА2п+1, у которых вещественные координаты
заменены двойными координатами ”* ^4~^1’** X где
за двойную единицу е можно принять элемент 0012... 2п2п+ь квад-
рат которого равен + 1. С другой стороны, элементы £012 ...2п2п+ь
#012... 2п 2/Z+2, е2п+1'2п+ъ составляют базис алгебры, изоморфной
алгебре антикватернионов, причём
2 |.2 .
е012 ... 2n2n + l — ^012 ... 2п 2/Z + 2 = 1,
б2п+1 2п+2 ~ е 12 ... 2п 2и + 1 ^012 ... 2п 2n + 2i
(5.247)
что даёт нам право наряду с обозначением элемента #oi...2n2n+i
через е обозначить элемент £Oi... 2п2п+2 через г, а элемент в2п+12^+2
через — /. Поэтому элемент Е можно записать в виде
*%1 ... г’ —1 г + 1 ... 2nf ~F" Х“п+^1 =
i
— (S *^01 ... г-1 г + 1 ... 2/г “Н Х2п + 1в) (-/). (5.248)
г’
В силу (5.220) квадрат элемента Е имеет вид
Е2 = (X0)2 — (х1)2 + (х2)2 — (Xs)2 + • • • + С^-1)2 +
4- (х2")2 — (х2м+1)2. (5.249)
Так как элемент S-xXn... j_i ^4-1 ... 2п (i = 0, 1.2/г) имеет вид
(5.223), элемент Е может быть представлен в виде произведения
„ (—b-\-ex2n+1 х2п“1 + %2п\ . г-. ... пклч
й “ (__х2™-14- х2п $ 4- ех2п+г Г ~ f (5.250)
и аналогично элемент Н может быть представлен в виде произ-
ведения — Н*/. Поэтому мы можем переписать преобразование
(5.218) в виде
Н7=А( — Е7)А-А (5.251)
Но альтернион А может быть представлен в виде двойной
матрицы 2п-го порядка, которую можно записать в виде
А = А14“еА2, где At, А2 — вещественные матрицы 2п-го порядка.
Поэтому если мы обозначим альтернион А"1 через В14_^В2, то,
так как элемент f = — e2n+i2n+2 перестановочен с альтернионами
Bt и В2, а с элементом е = eOi... 2/12/1+1 связан соотношением
ef = —fe, мы получаем:
/(В1 + еВа) = (В1 — еВ2)/. (5.252)
518
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
Но если мы обозначим матрицу At— ek2 через А, матрица
— еВ2 является матрицей А-1 и формулу (5.261) можно пере-
писать в виде
— Н*/= — АЕ* А-1/ (5.253)
или
Н* = А£*А-1.
(5.254)
Формула (5.254) показывает, что линейное преобразование
в пространстве спиноров, являющихся здесь двойными векторами,
с матрицей Е*:
b = Е*а, (5.255)
переводит вектор а, преобразующийся при движении пространства
w+1S2n+1 по формуле
'а = Ка, (5.256)
в вектор Ь, преобразующийся при этом движении по формуле
(5.241). Вследствие этого, если мы запишем векторы а и b и
матрицу Е* в виде ал.е+-\-а_е__, b+e+-\-b_e_, Е+е+-|-Е_£__, пре-
образование (5.255) может быть записано в виде двух линейных
преобразований в пространствах полуспиноров, являющихся здесь
вещественными векторами
Ь_ = Е>+, = Е*_а_. (5.257)
Представляя альтернионы % в виде вещественных матриц 2п~1-го
порядка, мы можем переписать элемент S* в виде двойной мат-
рицы 2п-го порядка. Для п= 1, 2, 3 эта матрица имеет соответ-
ственно вид
н* / Х°Ц-£Х3 X4 —X2 \ \ Х14~Х2 Х°-4“£Х3/ (5.258)
/ х° ехь X1 X2 X3 X4 ° \
х1 — X2 — х° + ех5 0 х3
X3 + X4 0 —х°-|-£хб х1 + х2 , (5.259)
\ ° — х3Д-х4 —х1—х2 х° 4-ех5 /
-ХЭ + £А5 х1+х* -х3-х4 0 xs+xs 0 0 '
-х1-х* х'1 + ix* 0 -ха-х* 0 Х5-ЬХв 0 0
х3-х4 0 х°+ех3 — Х*-Х2 0 0 Х5_|_Х6 0
0 х'!-х4 х1 —х3 —х'+ех5 0 0 0 Хб-1-Х6
— - х5+ х6 0 0 0 х°4-£х5 -х2-х3 х3-ьх4 0
-хб+х3 0 Хх-Х3 х"+ех3 о Х;‘ + Х*
0 0 -хб+-х6 0 -ха+х* 0 — х' +- ех$ Х» + Х3
< 0 0 0 -хб4-хв -х3+х* -х^х3 хч^х5.
(5.260)
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 519
Каждой матрице Е* соответствует точка пространства n+1S2n+1
с координатами хЛ Рассмотрим матрицы Е*, соответствующие точ-
кам абсолюта n+1S2n+1. Так как координаты такой точки удовле-
творяют условию (5.243), соответственный элемент S удовлетворяет
условию Е2 = 0, откуда следует, что квадрат матрицы Е* также
равен 0 и, следовательно, её определитель также равен 0. Поэтому
существуют ненулевые спиноры пространства w+1S2n+1, переходя-
щие при линейном преобразовании, соответствующем этой матрице,
в нуль, т. е. векторы, для которых
Ь = Ъ*а = 0. (5.261)
Если обозначить координаты векторов а и b через (5.228), то
условие (5.261) можно записать в координатах в виде 2П двойных
линейных уравнений, которые при 1, 2, 3 отличаются от урав-
нений (5.229), (5.230), (5.231) только прибавлением к среднему
члену каждого уравнения = 0 выражения ех2п+1а^ .
Если мы обозначим двойные координаты векторов а и b через
соответственно а1^ и ЬЧ ± *''гке_ ,
эти уравнения можно переписать в виде 2ПЬ1 вещественных урав-
нений, причём в силу (5.257) первая половина из этих уравнений
при п=1, 2, 3 получается из уравнений (5.229), (5.230), (5.231)
заменой всех координат и Ьг^"'гк соответственно на
и и прибавлением к среднему члену каждого
уравнения Ьг± — 0 выражения г/с- Вторая же половина
из этих уравнений при /г = 1, 2, 3 получается из уравнений заме-
ной всех координат и соответственно на
и и прибавлением к среднему члену каждого уравнения
выражения —х2п+\А **’X
Находя условия, при которых система первых 2п из этих урав-
нений и система вторых 2п из этих уравнений содержат минималь-
ное число независимых уравнений, мы, так же как в случае урав-
нений (5.227), найдём, что каждая из этих систем может быть
сведена к «-[-1 независимым уравнениям. Первая система сво-
дится к уравнениям
Ь_=(—1)п [й+ (х° + (—1/ х2”*1) 4-
+ 2 (—1)< а\ (х*-1 + х20] = 0,
i
Ь^_ = (—1)п+* [(—iy (х2*-1 — х2*) —|-
+ а*+ (х° — (-1/ x2n+1) — S (~ 1 Ya'i(х2'-1 + x2J)] = 0,
i
(5.262)
520 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
а вторая — к уравнениям
Ь+ = (— 1)” [а _ (х° (— 1У x2^+i) 4-
+ 2 (— 1)VI (X21'"1 + X2i)] = О,
Ь\ =(— 1)ге+Ч(— 1)<а_(х2<-1 — х^)+ ' (5,263)
+ «i (х° + (-1Ух2й+1) — 2 (-l/ai'Cx^ + x^)] - О,
3
где #+ = —#+, = — а¥. В самом деле, все остальные урав-
нения удовлетворяются в силу этих уравнений при выполнении
условий, которые, если обозначить координаты и a±"'^k
с нечётным числом индексов соответственно через и
совпадают с условиями (5.100).
Уравнения Ь- — 0, = 0, . . ., tfL — 0 и Ь+ = 0, b\ = 0, ...
= 0 определяют n-мерные плоскости, состоящие из точек абсо-
люта пространства n+1<S2n+1, на котором плоскими образующими
максимальной размерности являются /г-мерные плоскости, соста-
вляющие два связных семейства.
Если мы нормируем координаты и условиями
5(аУ"**)2= Ь i, (5.264)
к + к
то в силу того, что для этих координат, если при нечётном числе
индексов обозначить их соответственно через и
выполняются условия (5.100), эти координаты можно
рассматривать как координаты элементов спинорной группы алгебры
альтернионов Ап+1. При этом каждому двойному спинору простран-
ства n+1S2n+1, координаты *“ г/се+ -J- а*}"' гке_ которого та-
ковы, что числа и равны координатам элементов
спинорной группы алгебры Ап+1, соответствуют две плоские обра-
зующие максимальной размерности абсолюта пространства п+152п+1.
С другой стороны, каждой такой паре образующих плоскостей
можно поставить в соответствие двойной спинор пространства n+1S2n+1
указанного вида; пространство n+1S2n+1 с абсолютом (5.243) можно
рассматривать как гиперплоскость х° = 0 в пространстве п+152п+2
с абсолютом вида (5.214). Плоские образующие максимальной раз-
мерности абсолюта пространства w+1S.2n+1 также /г-мерны, и мы
можем рассматривать плоские образующие максимальной размер-
ности абсолюта пространства w+1S2n_1 как частные случаи таких
же плоских образующих абсолюта пространства w+152n+2. Считая,
что уравнение (5.235) имеет вид х° = 0, мы находим, что для
такой плоскости все коэффициенты а* равны нулю, а следовательно,
§ 6] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ I 521
в силу уравнений (5.100) все остальные коэффициенты
с нечётным числом индексов равны нулю. Считая, что одно из
уравнений (5.236) имеет вид х° = 0, мы находим, что для такой
плоскости коэффициент а и все коэффициенты равны нулю,
а следовательно, в силу уравнений (5.100) все остальные коэффи-
циенты #г1‘”г2/с с чётным числом индексов равны нулю. Если мы
пронормируем коэффициенты аг^ *” и а^'"^ условиями
2(fl<1’"<2fc-i)3= 1, S(«<1’”<2k)3= 1 (5.265)
к к
и обозначим коэффициенты а^'"г^к через а^ '" , коэффициенты
не содержащие индекса /г-|-1, через г2/с-1п+1 >
а коэффициенты ah “* 7'2fc-2n+1 через аЛ ^-2, то в силу того,
что координаты a'i'"'lzk и являются координатами эле-
ментов спинорной группы алгебры Ап+2, координаты аг1"'г2к
и являются координатами элементов, спинорной группы
алгебры Ап+1. Тем самым мы поставили каждой плоской образую-
щей максимальной размерности абсолюта пространства n+1S2n+1
альтернион алгебры Ап+1, принадлежащий к спинорной группе,
определённый с точностью до умножения на —1, причём коорди-
наты этого альтерниона могут иметь вид или
и наше утверждение доказано.
Таким образом, мы получили, что спинорная группа алгебры
Ап+1 двузначно изображает каждое из двух семейств плоских
образующих максимальной размерности абсолюта простран-
ства w+1S2n+1, причём из непрерывности всех рассматриваемых
нами функций следует, что это соответствие непрерывно. То же
двузначное соответствие следует и из сопоставления результатов
§ 9 главы III и результатов § 2> настоящей главы: в § 9 главы III
мы показали, что каждое из двух семейств плоских образующих
максимальной размерности абсолюта пространства w+1S.2w+1 изобра-
жает связную группу движений пространства Sn, причём это соот-
ветствие однозначно при чётном п и двузначно при нечётном п и
непрерывно; в § 2 настоящей главы мы показали, что спинорные
группы алгебры Дп+1 изображают связную группу движений Sni
причём это изображение двузначно при чётном п и четырёхзначно
при нечётном п и также непрерывно.
Таким образом, в каждом из двух пространств вещественных
полуспиноров пространства n+1S2n+1 имеется поверхность, уравне-
ния которой имеют вид (5.100) и (5.237), двузначно изображаю-
щая одно из семейств плоских образующих максимальной размер-
ности абсолюта пространства n+1S.2w+1. При движениях собственной
области пространства n41S2w+1 с определителем +1, когда
522 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
матрицы S* подвергаются преобразованиям (5.254), двойные спи-
норы подвергаются преобразованиям (5.241), т. е. соответственные
полуспиноры подвергаются преобразованиям
'а+ = А+й+, = А_я_. (5.266)
Всякое движение собственной области пространства n+1S2n+1
с определителем — 1 может быть представлено в виде произведе-
ния движения собственной области этого пространства с определи-
телем —|— 1 на отражение от гиперплоскости х2п+1 = 0. Как видно
из формулы (5.250), при таком отражении матрица Е* переходит
в матрицу Е*, получающуюся от матрицы Е* изменением знака
перед е. Поэтому при движениях собственной области простран-
ства n+1S2n+1 с определителем — 1 двойные спиноры Картана под-
вергаются преобразованиям (5.256), т. е. соответственные полу-
спиноры подвергаются преобразованиям
= А_&_, 'а_ = А+д+. (5.267)
Так как при движениях пространства n+1S2n+1 каждое семей-
ство плоских образующих абсолюта переходит в себя или в дру-
гое из этих семейств, поверхности в пространствах полуспиноров,
изображающие эти семейства, также переходят в себя или друг
в друга. Координаты и полуспиноров, являю-
щихся радиусами-векторами точек этих поверхностей, можно рас-
сматривать как координаты соответственных плоских образующих
абсолюта. Мы видим, что при движениях собственной области про-
странства n+1S2n+1 эти координаты подвергаются преобразованиям
(5.266) и (5.267), т. е. преобразуются линейно; эти линейные пре-
образования и образуют спинорное представление группы движе-
ний пространства п+152п+1.
Все изложенные результаты непосредственно переносятся на
случай пространства S2w+1(0, абсолют которого также может быть
записан в виде (5.243), с той разницей, что здесь следует считать
все координаты точек и альтернионов комплексными числами. В этом
случае все координаты спиноров являются двойными комплексными
числами, а координаты полуспиноров—комплексными числами.
Для рассмотрения пространств S2n+1 и zS2n+1 при
абсолюты которых можно записать в виде
(X0)2±(х1)2 + . .. ± (х2^-1)2 + (х2^)2± (х2'^1)2 = 0, (5.268)
достаточно считать координаты точек пространства S2/i+1 веще-
ственными или чисто мнимыми, причём первыми следует считать те
координаты, перед которыми знаки в уравнениях (2.243) и (2.268)
совпадают, а вторыми следует считать те координаты, перед кото-
рыми указанные знаки различны. В случае пространства S2n+1
абсолют мним и совпадает с абсолютом пространства S2n+1 (Z),
а в случае пространств z52w+1(Z) при 14= п-1 абсолюты веще-
§ 7] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ п 523
ственны, но их плоские образующие максимальной размерности
также мнимы. В этом последнем случае можно ограничиться рас-
смотрением тех из плоских образующих, которые содержат веще-
ственные точки абсолюта. Поэтому в случае пространств S2n+1 и
z^2n+i ПРИ 1фп-\~\ все координаты спиноров также являются
двойными комплексными числами, а координаты полуспиноров —
комплексными числами. В том случае, когда координаты спиноров
имеют вид a~\-bie, их можно рассматривать как комплексные
числа, причём в этом случае координаты полуспиноров являются
сопряжёнными комплексными числами.
Таким образом, спинорные представления групп движений про-
странств 52n+1(0, S2w+1 и г52п+1 допускают следующее геометри-
ческое истолкование: при движениях пространств 52n+1(Z), S2n+1
и l$2n+i абсолюты этих пространств преобразуются таким
образом, что 2п вещественных или комплексных координат
аг^"'гк и аг_у”гк плоских образующих максимальной размер-
ности абсолюта испытывают линейные преобразования. Матри-
цы этих линейных преобразований являются коэффициентами
при е+ и е_ двойных и двойных комплексных матриц, предста-
вляющих альтернионы, образующие спинорные представления
движений пространств S2rl+1(i), и zS.2n+1.
Мы видим, что как в случае чётного, так и в случае нечётного
числа измерений геометрический смысл спинорных представле-
ний движений пространств Sn(t), Sn и lSn с помощью веще-
ственных, комплексных, двойных и двойных комплексных спиноров
состоит в том, что координаты этих спиноров можно рас-
сматривать как координаты плоских образующих максималь-
ной размерности абсолютов этих пространств, а спинорные
представления движения этих пространств совпадают с теми
преобразованиями спиноров, которые соответствуют преобра-
зованиям абсолютов при движениях.
Изложенное геометрическое истолкование спинорных представле-
ний в формулировке, несущественно отличающейся от приведённой
здесь, было предложено Картаном [И].
Приведённое нами в § 3 геометрическое истолкование спинор-
ных представлений неевклидовых пространств 2 и 3 измерений
можно рассматривать как частный случай истолкования Картана.
§ 7. Геометрическое истолкование спинорных представлений
движений неевклидовых пространств любого числа измерений
(координаты спиноров как координаты точек абсолюта)
Найдём геометрическое истолкование спинорных представле-
ний групп движений неевклидовых пространств Sn, lSn и Sn(i)
в двумерных пространствах, координатами которых служат
вещественные, комплексные, двойные и двойные комплексные
524
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
п п+1
матрицы 22-го и 2 2 -го порядка или представляемые ими
альтернионы.
Рассмотрим сначала пространство nS2n с абсолютом (5.214).
Спинорные представления движений этого пространства осуще-
ствляются альтернионами алгебры иА2п+1, которые можно пред-
ставить в виде (5.216) и в виде матриц второго порядка (5.217).
Элементами этих матриц являются альтернионы алгебры п~1А2п-1-
В силу перестановочности элементов eOi... 2п-2 2n-i> toi...2n-2 2n
и ^2п-12п с альтернионами алгебры w-1A2n_t альтернион, сопря-
жённый с альтернионом (5.216), имеет вид
а -f- ^1€q1 ,^2п-2 2п—1 “F а2^01 • 2n-2 2п “F а1"^2п-1 2n* (5.269)
В силу того, что
^01 •• • 2п-2 2п-1 ” ( О ^01 ••• 2п-2 2п-1» ^01 ••• 2п-2 2п “
“( 1) ^01 •••2п—2 2п’ е2п—1 2п— ^2п-1 2п» (5.270)
выражение (5.269) можно переписать в виде
а + ( О •• • 2п—2 2п-1 + ( 0 аЧ1 • • • 2п-2 2п (Х,^^2п-12п
(5.271)
и, следовательно, этот альтернион представляется матрицей
/ «_ (_ i)n(«1 + Й2Д / d _ (_£)п
V— l)w(oA — а2) а —а12 ) \(— l)w С A J
Мы видели, что движения пространства nS2n могут быть пред-
ставлены преобразованиями (5.218), где альтернионы S иН пред-
ставляются матрицами второго порядка вида (5.223). Заметим,
что квадрат альтерниона £, являющегося одним из элементов
матрицы S, в силу (5.220) равен
$2 = (%0)2_^_ . . . _^_(х2п-2)2е (5.273)
С другой стороны, в силу (5.59)
?=(— 1)”_Ч (5.274)
откуда следует:
Й = (— I)’1-1 [(х0)2 —(х1)2-^ .. . +(х2п-2)2]. (5.275)
Выберем альтернион Х° из алгебры п~1А2п_1, для которого
ХО^О х2п-1_х2п (5.276)
и альтернион
X1 = IX0-1, (5.277)
§ 7] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ п 525
тогда
— $ = — = (— 1)п1 = (— 1)П хо J1. (5.278)
Рассмотрим теперь альтернион Е, для которого координаты
удовлетворяют уравнению абсолюта (5.214). Для такого альтер-
ниона
х2п-1
— (^П-Р) (х2п)2 _ _ (ЛО)2 + (Х1)2—
^2П-1 Х2П д;2П-1 _|_ х2п
(д;2П-2)2
(—l)w^ _ (— ipxixoxoxi
(— IfW. (5.279)
Следовательно, в этом случае матрицу (5.223) можно пере-
писать в виде
/(—, 1)^ xW
\(— 1)п Х'Х1
Х°Х°\
XVC0/
(5.280)
Альтернион Н можно представить
_/(—!)” У°Р
\(—1)” У1?1
Поэтому в случае, когда А~* = А,
можем переписать в виде
/А
КС
аналогичной матрицей
у°уо\
yi ро J *
(5.281)
преобразование (5.218) мы
В\ /(—V)n X°Xl Х°Х°\ / D (— 1)”В\_
d) \(—irAvn a/ao/’v—i)nc a J
(_ 1 yi yi yi yiyo /
левой части (5.282), мы запи-
производя умножение матриц в
это преобразование в виде
Но,
шем
/(— 1)ге (АХ° 4-ВХ1) (А°С+ Х1^)
((_ 1)»(СА« 4- DX1) (АОС 4- ХЮ)
((_1)ПК°У^ У°У°\
(— 1)«РР руо/’
что
У° = АА°4-ВА1, I
У^СА^ОА1. /
утверждение имеет место и в случае, когда
(ДХ° + ВХ1) (Х°Д +
(СХ° + DX1) (Х°А +
откуда найдём,
(5.283)
(5.284)
Аналогичное
А-1 = —А.
526 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
Таким образом, всякому элементу спинорной группы ал-
гебры wA2n+1 соответствует линейное преобразование (5.284) в дву-
мерном пространстве, в котором роль координат играют альтер-
нионы алгебры w—1A2^_j_1. Поэтому векторы, координаты которых
являются альтернионами АГ°, X1, служат спинорами простран-
ства wS2n.
Если мы рассмотрим альтернионы АГ= А^Х1”4 и Y = У0У1-1,
то всякому элементу спинорной группы алгебры wA2n+1 соответ-
ствует дробно-линейное преобразование
Г = (4А'+В)(СХ+£))~1 (5.285)
в алгебре п-1А2п_1, причём, так как двум альтернионам ал-
гебры wA2n+1, отличающимся знаками, соответствует одно и то же
преобразование (5.285), группа дробно-линейных преобразова-
ний (5.285) в алгебре изоморфна группе движений
пространства nS2n.
При преобразованиях (5.285) переходит в себя совокупность
альтернионов
* = = с*2”-1 - (5-286>
являющихся альтернионами вида (5.222). Всякому альтерниону (5.286)
взаимно однозначно соответствует точка абсолюта простран-
ства wS2n+1, не являющаяся точкой пересечения с касательной
к нему гиперплоскостью х2п~1-\-х2п = 0. Если мы дополним про-
странство альтернионов (5.286) идеальными элементами, соответ-
ствующими точкам пересечения абсолюта с гиперплоскостью
Х2п~1-\-Х2п — о, мы получим взаимно однозначное соответствие
точек абсолюта пространства nS2n и альтернионов указанного
вида. В силу (5.276) эти идеальные элементы соответствуют парам
альтернионов А0, X1, для которых XQ является нулём или делите-
лем нуля; те же идеальные элементы следует добавить для того,
чтобы дробно-линейное преобразование (5.285) было взаимно одно-
значным. Очевидно, что при этом соответствии альтернионов (5.286)
и точек абсолюта преобразования (5.285) соответствуют преоб-
разованиям абсолюта, происходящим при движениях простран-
ства nS.2n.
Все изложенные результаты непосредственно переносятся на
случай пространства S2n(Z), уравнения абсолюта которого можно
записать в виде (5.213), с той разницей, что здесь следует счи-
тать все координаты точек и альтернионов комплексными числами.
В этом случае координаты спиноров являются комплексными аль-
тернионами, представляющимися комплексными матрицами.
Для рассмотрения пространств lS2n при I =/= п, уравнения абсо-
лютов которых можно записать в виде (5.242), достаточно счи-
тать координаты точек пространства S2n(i) вещественными или
§ 7] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ п 527
чисто мнимыми, как это указано в § 6. В случае пространства S.2n
абсолют мним и совпадает с абсолютом пространства S.2n(i),
вследствие чего в этом случае координаты спиноров являются
комплексными альтернионами, представляющимися комплексными
матрицами, получаемыми из координат спиноров пространства nS2n
заменой всех координат х* комплексными числами. В случае про-
странства lS2n при I #= п абсолюты вещественны и координаты
спиноров являются комплексными альтернионами, представляющи-
мися комплексными матрицами, полученными из координат спи-
норов пространства nS2n умножением тех координат, перед кото-
рыми знаки в уравнениях (5.214) и (5.242) различны, на Z.
Таким образом, спинорные представления движений пространств
S2w(z), S2n и lS2n допускают следующее геометрическое истолко-
вание: при движениях пространств S2n(i), S2n и lS2n абсолюты
этих пространств преобразуются таким образом, что коор-
динаты Х°, X1 точек абсолюта, являющиеся альтернионами
(2п—1)-го порядка, испытывают линейные преобразования,
матрицы которых представляют альтернионы (2/г-|- 1)-го по-
рядка, образующие спинорное представление движений про-
странств S2n(t), S2n и lS.2n, а отношения X координат Х°, X1
испытывают дробно-линейные преобразования с теми же ма-
трицами.
Рассмотрим теперь пространство ™+1S2w+1 с абсолютом (5.243).
Спинорные представления движений этого пространства осуще-
ствляются альтернионами алгебры п+1А2п+2, которые можно рас-
сматривать как альтернионы алгебры пА2п+1, у которых веще-
ственные координаты аг1"'гк заменены двойными координатами
где р0ЛЬ двойной единицы е играет элемент
е012...2П2П+1- Поэтому альтернионы алгебры п+1А2п+2 можно пред-
ставить в виде матриц второго порядка (5.217), элементы которых
являются альтернионами алгебры пА.2п, и в виде альтернионов
алгебры п“1А2п_1, у которых вещественные координаты заменены
/А В\ (А. ВЛ .
двойными координатами, или в виде матриц I ) = I п +
/А \с \С1
~\~е К,2 2), где Ар Blt Clt Dlf А2, В2, С2, D3—альтернионы
алгебры п“1А2п_1. В силу перестановочности элемента ^oi2---2n2n+t
с альтернионами алгебры п~1А2п_1 альтернион, сопряжённый
с альтернионом, представляемым указанной матрицей, предста-
вляется матрицей
(-iTBxX , / d.2 _
А / \(— 1)пс2 а2 )
(5.287)
причём здесь
е &01 ... 2п 2п + 1 -- ( 1)
(5.288)
528 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
Мы видели, что движения пространства w+1S2n+1 могут быть
представлены преобразованиями (5.218), где альтернионы Е и Н
представляются произведениями —Е*/ и —Н*/ вида (5.250).
Здесь роль f играет элемент —^n+isn+s*
Выберем альтернион Х° из алгебры w“1A2n_1, определяющийся
условием (5.276), и альтернион
X^ft + x^+tyx0'1. (5.289)
Элементы матрицы Е* можно рассматривать как альтернионы
алгебры пА.2п; в этом случае элемент е следует рассматривать не
как элемент ^0i..-2»+i> а как элемент e0i...2n^i и считать, что
е — aoi ••• 2?i-i = ( 1)” в. (5.290)
Поэтому
и
(5.291)
W1 = $ + = (—1 )”(—$ + х^Ч). (5.292)
Рассмотрим теперь альтернион Е*, для которого координаты xi
удовлетворяют уравнению абсолюта (5.243). Для такого альтер-
ниона
— (х2»-1)2 + (Х2«)2
х2П-1 Х1П
— (л*>)2 + (Х1)3 — ... — (х2П-2)2 | (л2»+1)2
X2»-1 х2»
(; -|- Х2п+1е) (— $ -Р xza+ig) _ (—1)”Х1Х0Х<>Х1
л2п-1_|_х2» ~ д-охо
(—(5.293)
В этом случае альтернион Е представляется в виде произведения
/(— Y)n Xй Xх
V— \)п X'Xi
X<W\
XlXo)f’
(5.294)
где Х°, X1 — альтернионы алгебры ИА2П. Совершенно так же мы
найдём, что альтернион Н можно представить в виде
'(—1)” yoyi
(—1)” yiyi
yoyo
yiyo
(5.295)
§ 7] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ п 529
Поэтому в случае, когда А 1 = А, мы можем переписать равенство
(5.218) в виде
ГМ1 вЛдМ2 ВД !/(-!)»
LWi dJ ]^(—lyx^xi
¥°А0'
ххх°
(—1)”В2\
А-2 /
уоуо\
yiyo Д’
.(—1)” G
(-1)”вл / d2 _
А / \(-1)ис2
___/(—1 )п У0?1
~ \(—1)” к1/1
(5.296)
где е = е01,..2П2п+1 = (—1)п+1е. Но так как fe = — ef, то по-
лучим:
А( - (_ТЧ‘' =
IXt-irQ At ,/ Ч(-1)ЙС2 А2 J .
= 7 51 _ (-£)пм_/ _ н)Чу
A(-i)reG а, ) \(—1)пс2 а2 )
/•
(5.297)
Если мы будем считать е не за eoi...2»2n+i, а за eoi ...2n-2 2«-i>
мы должны будем считать е = eOi ...2n-22n-i =(—1)” е и элемент,
который мы раньше записывали в виде е, мы должны будем
записывать в виде — е. Следовательно, отбрасывая множитель f
в обеих частях равенства (5.296), мы можем переписать это
эавенство в виде
/Ах ВД /А2
ДС1 dJ \с2
D
.(-1)” А
ВД ] /(— lyx^x* А°Х°\
D2je\\(—^nXlX1- xlxy
(-1ГВЛ f d2 _
) V-i)nc2
A2 /
/(—l)n
l)n YW1
yoyo'
yiyo
(5.298)
т. e. в виде (5.282), где все элементы А, В, С, D — альтернионы
алгебры ”А2п. Но, производя умножение матриц левой части этого
равенства, мы перепишем его в виде (5.283), откуда найдём, что
альтернионы Х°, X1, Y°, Y1 связаны соотношением (5.284).
Аналогичное утверждение имеет место и в случае, когда А-1 = — А.
Таким образом, всякому элементу спинорной группы алгебры
”+1А2п+2 соответствует линейное преобразование (5.284) в двумер-
ном пространстве, в котором роль координат играют альтернионы
алгебры пК^п. Поэтому векторы, координатами которых являются
альтернионы Х°, X1, служат спинорами пространства га+1В2га+1.
34 Зак. 177. Б. А. Розенфельд
530
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[гл. V
Если мы рассмотрим альтернионы X=XQX1~1 и
то всякому спинорному альтерниону алгебры w+1A2n+2 соответ-
ствует дробно-линейное преобразование (5.285) в алгебре лА2п,
причём, так как двум альтернионам алгебры w+1A2n+2, отличаю-
щимся множителями ±1 или соответствует одно и то же
преобразование (5.285), группа дробно-линейных преобразова-
ний (5.285) в алгебре wA2n изоморфна группе движений собственной
области пространства w+152n+1 с определителем 4-1.
При преобразованиях (5.285) переходит в себя совокупность
альтернионов
* = = (- х2п-1+%2п) <-$ + *2я+1*Г (5.299)
Всякому альтерниону (5.299) взаимно однозначно соответствует
точка абсолюта пространства n+1*S2w+1, не являющаяся точкой
пересечения с касательной к нему гиперплоскостью х2п~1-}-х2п = 0.
Если мы дополним пространство альтернионов (5.285) идеальными
элементами, соответствующими точкам пересечения абсолюта с ги-
перплоскостью х2п-14-х2п = 0, то получим взаимно однозначное
соответствие точек абсолюта пространства n+1S2w+1 и альтернионов
указанного вида. В силу (5.276) эти идеальные элементы, так же
как в случае пространства wS2w, соответствуют парам альтернио-
нов Х°, Л1, для которых XQXQ = 0, т. е. Х° является нулём
или делителем нуля. Те же идеальные элементы следует добавить для
того, чтобы дробно-линейное преобразование (5.285) было взаимно
однозначным. Очевидно, что при этом соответствии альтернио-
нов (5.299) и точек абсолюта преобразования (5.285) соответ-
ствуют преобразованиям абсолюта, происходящим при движениях
собственной области пространства w+152w+1 с определителем 4~1-
Всякое движение собственной области пространства n+1*S2n+1
с определителем —1 может быть представлено в виде произведе-
ния движения этой области с определителем 4~1 на отражение
от гиперплоскости х2п+1 = 0. Как видно из формулы (5.299), при
таком отражении альтернион (5.299), который можно записать
в виде Х = Л14“А2^, переходит в альтернион^ — Х2е, который
мы будем обозначать X. Поэтому всякому движению собственной
области пространства п+152п+1 с определителем —1 соответствует
произведение преобразования (5.285) на преобразование Y=X
в алгебре ПА2Л. Полученное преобразование является дробно-
линейным преобразованием
Y = (ДХ+ В) (СХ+ D)-1 (5.300)
в алгебре wA2n и группа дробно-линейных преобразований (5.285)
и (5.300) в алгебре пА2п изоморфна полной группе движений
собственной области пространства п+152л+1. Точно так же мы
§ 7] ИСТОЛКОВАНИЕ СПИНОРНЫХ ПРЕДСТАВЛЕНИЙ и 531
найдём, что альтернионы и X1 при движениях собственной
области пространства w+1S2n+1 с определителем —1 испытывают
преобразование
= АХ^ВХ', П = CX^-j-DX1. (5.301)
Все изложенные результаты непосредственно переносятся на
случай пространства S2n+1 (/), уравнение абсолюта которого также
можно записать в виде (5.243), причём здесь следует считать все
координаты точек и альтернионов комплексными числами. В этом
случае координаты спиноров являются комплексными альтернио-
нами, представляющимися двойными комплексными матрицами.
Для рассмотрения пространств S2w+1 и zS2n+1 при Z^n-f-l,
уравнения абсолютов которых можно записать в виде (5.268),
достаточно считать координаты точек пространства S2n+1 веще-
ственными или чисто мнимыми, как это указано в § 6. В случае
пространства S2w+1 абсолют мним и совпадает с абсолютом про-
странства S2n+i(0- Поэтому в этом случае координаты спиноров
являются комплексными альтернионами, представляющимися двой-
ными комплексными матрицами, которые получаются из координат
спиноров пространства n+152w+1 заменой всех координат xi ком-
плексными числами. В случае пространства г52п+1 при 1
абсолюты вещественны и координаты спиноров являются альтер-
нионами, представляющимися двойными комплексными матрицами.
Они получаются из координат спиноров пространства n+1S2w+1
умножением тех координат, перед которыми знаки в уравнениях
(5.243) и (5.268) различны, на /.
Таким образом, спинорные представления движений пространств
S2w+i(0, S2n+i и *S2n+i допускают следующее геометрическое
истолкование: при движениях пространств S2w+1 (Z), S2n+1 и *S2n+t
абсолюты этих пространств преобразуются таким образом,
что координаты Х°, X1 точек абсолюта, являющиеся альтер-
нионами второго порядка, испытывают линейные преобразова-
ния. Матрицы этих линейных преобразований представляют
альтернионы (2я-|-2)-го порядка, образующие спинорное пред-
ставление движений пространств S2n+1(i), 32п+1 и lS2n+1,
а отношения X координат Х°, X1 испытывают дробно-линей-
ные преобразования с теми же матрицами.
Мы видим, что как в случае чётного, так и в случае нечётного
числа измерений геометрический смысл спинорных представлений
движений пространств Sn(i), Sn и lSn с помощью спиноров,
координаты которых являются альтернионами (п— 2)-го по-
рядка, состоит в том, что координаты этих спиноров можно
рассматривать как координаты точек абсолютов этих
пространств, а спинорные представления движений этих
пространств совпадают с теми преобразованиями спиноров, кото-
рые соответствуют преобразованиям абсолютов при движениях.
34*
532 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
Изложенное геометрическое истолкование спинорных предста-
влений было предложено советским геометром М. А. Джавадо-
вым (Баку) [2].
Приведённые нами в §§ 3 и 5 геометрические истолкования
спинорных представлений неевклидовых пространств 2, 3, 4 и 5
измерений можно рассматривать как частные случаи изложенного
истолкования.
Пространства альтернионов (5.286) и (5.299), дополненные
идеальными элементами, можно рассматривать как конформные
пространства. Так как эти конформные пространства изображают
абсолюты неевклидовых пространств, преобразования этих конформ-
ных пространств, изображающие движения неевклидовых про-
странств, являются конформными преобразованиями. Поэтому
формулы (5.285) и (5.300) дают нам представление конформных
преобразований конформных пространств с любым числом изме-
рений 3 в виде дробно-линейных преобразований. Это пред-
ставление является аналогом представления круговых преобразова-
ний плоскостей С2 и ХС2 в виде дробно-линейных преобразований
плоскостей комплексного переменного (см. § 3). Частными слу-
чаями этого представления являются представление конформных
преобразований пространств С4 и 2С4 дробно-линейными преобразо-
ваниями пространств кватернионов и антикватернионов и предста-
вление конформных преобразований пространств С3 и 1С3 дробно-
линейными преобразованиями пространств кватернионов и анти-
кватернионов, переводящими в себя гиперплоскости или гиперсферы
этих пространств (см. § 5).
Заметим, что из двух изложенных нами истолкований более
наглядным является истолкование, связанное с точками абсолюта,
вещественными у всех пространств lSn, в то время как первое
истолкование связано с плоскими образующими максимальной раз-
21 п+1
мерности, мнимыми у всех пространств lSn, кроме 2 Sn или 2 Sn.
Заметим ещё, что спинорные альтернионы м-го порядка, которые
в изложенной интерпретации представляются дробно-линейными
преобразованиями альтернионов (п — 2)-го порядка, могут быть
также представлены дробно-линейными преобразованиями альтер-
нионов (п—1)-го порядка. Такое представление было предложено
Фаленом [1].
§ 8. Принцип тройственности в семимерных неевклидовых
пространствах. Октавы и антиоктавы
В § 2 мы видели, что спинорные представления движений
n-мерных неевклидовых пространств осуществляются веществен-
ными, комплексными, двойными или двойными комплексными ма-
га п-1
трицами22-го или 2 2 -го порядка. Поэтому при малых значе-
§ 8]
ОКТАВЫ И АНТИОКТАВЫ
533
ниях п порядок матриц спинорных представлений меньше порядка
n-f-l ортогональных матриц, представляющих те же движения,
а при больших значениях п порядок матриц спинорных пред-
ставлений больше порядка ортогональных матриц. Равенство
п-1
этих порядков имеет место при п = 7, когда и zz —|— 1 и 2 2
равны 8, чем и объясняются особенности семимерных неевклидовых
пространств.
Как мы видели в § 8 главы III, плоские образующие макси-
мальной размерности абсолютов пространств и 4S7 являются
трёхмерными плоскостями и составляют два связных семейства;
две плоские образующие одного семейства не пересекаются
или пересекаются по прямой, а две плоские образующие раз-
ных семейств пересекаются в точке или по двумерной пло-
скости.
Покажем, что каждое аз двух семейств трёхмерных плоских
образующих абсолюта пространств S7 и 4S7 гомеоморфно самому
этому абсолюту. В самом деле, в § 8 главы III мы видели, что
фактор-пространство каждого из этих двух семейств по парам
плоских образующих гомеоморфно связной группе движений про-
странства S3. В § 2 настоящей главы мы видели, что спинорная
группа альтернионов алгебры А4, четырёхзначно изображающая
эту группу движений, выделяется из алгебры А4 уравнениями (5.117)
и (5.118). Если рассматривать алгебру А4 как пространство /?8,
уравнение (5.118) является уравнением гиперсферы единичного радиу-
са в этом пространстве. Отождествляя каждый из альтернионов а этой
группы с альтернионом —а, мы получим группу, изоморфную связ-
ной группе вращений пространства Т?4. Поверхность с уравнениями
(5.117) и (5.118) после этого отождествления можно рассматривать
как поверхность с уравнением (5.117) в пространстве S7; эта по-
верхность является эквидистантой трёхмерной плоскости, т. е.
квадрикой индекса 4, и может рассматриваться как абсолют про-
странства 4S7. Переходу от связной группы вращений простран-
ства Т?4 к связной группе движений пространства S7 соответствует
отождествление пар точек этой квадрики. Нетрудно проверить,
что отождествляющиеся точки квадрики — точки, симметричные
относительно баз этой эквидистанты. Отсюда вытекает гомеомор-
физм абсолюта и каждого из семейств его трёхмерных плоских
образующих в случае пространства 4S7. Доказательство для случая
пространства S7 совершенно аналогично, только при этом доказа-
тельстве следует заменить пространства S3, S7, /?4, /?8 и алгебру А4
соответственно пространствами S3(0> S7(Z), /?4(Z), Rs(i) и алгеб-
рой A4(Z).
Из этой теоремы следует, что в качестве координат трёхмер-
ной плоской образующей абсолюта пространств S7 и 457 можно
взять координаты соответствующей ей точки абсолюта; тогда
534 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
движению пространства S7 или 4S7 будет соответствовать линейное
преобразование этих координат с ортогональной матрицей. В силу
результатов § 6 это линейное преобразование является спинор-
ным представлением движения. Этим и объясняется тот факт,
что матрицы спинорных представлений в этом случае имеют тот же
порядок, что ортогональные матрицы.
Из установленного нами гомеоморфизма следует также, что
всякому предложению геометрии пространств S7 и 4S7, сформули-
рованному с помощью точек абсолюта, соответствуют ещё два
предложения геометрии этих пространств, сформулированных с по-
мощью трёхмерных плоских образующих абсолюта, принадлежа-
щих к первому или второму семейству. Этот принцип, напоминаю-
щий принцип двойственности проективной и неевклидовой геомет-
рии, называется принципом тройственности пространств S4
и 4S7; предложения, соответствующие друг другу по этому прин-
ципу, называются тройственными.
Принцип тройственности в пространствах S7 и 4S7 допускает
весьма изящную трактовку с помощью алгебр октав и антиоктав.
Если в определении алгебры отказаться от ассоциативности
умножения (5.2), мы получим неассоциативную алгебру. Будем
называть неассоциативную алгебру, в которой ассоциативность
заменена более слабым свойством — тем, что каждые два её эле-
мента порождают ассоциативную алгебру,—альтернативной алгеб-
рой. В альтернативных алгебрах для любых элементов а, р имеют
место соотношения
а(ар) = (аа)р, (ра)а=Р(аа). (5.302)
Если мы будем искать альтернативную алгебру, удовлетворяю-
щую тем же требованиям 1°—4°, что и алгебра комплексных и
двойных чисел, кватернионов и антикватернионов, мы получим,
кроме указанных алгебр, ещё две алгебры, элементы которых
можно записывать в виде
A = a + pZ, Р = — 1 и Д = а + рг, г2 = + 1, (5.303)
где а, р — кватернионы, причём произведение этих элементов опре-
деляется соотношениями
(« + ^)(Т+М = «7 — + +
_ (5.304)
(« + ^)(т + 3/’) = «т + 3? + (3« + Ь)/’- .
Формула (5.304) показывает, что произведение элемента е или г
на каждую из кватернионных единиц Z, у, k при перестановке
сомножителей меняет знак. Неассоциативность этих алгебр видна
из того, что в этих алгебрах в силу (5.304) i (jI) = (ji) I = — (ij)l
и = Эти алгебры являются вещественными
алгебрами ранга 8, вследствие чего элементы первой из этих
ОКТАВЫ И АНТИОКТАВЫ
535
§ 8]
алгебр называются октавами (от латинского octavus — восьмой),
а элементы второй из них называются антиоктавами. Элементы
Л jy ky I алгебры октав и их произведения и элементы Z, /, k, г
алгебры антиоктав и их произведения называются соответственно
октавными и антиоктавными единицами. Октавы впервые рас-
сматривались Кели [1], вследствие чего их часто называют чис-
лами Кели. [Заметим, что алгебры Л4 и ХА4, являющиеся ассоциа-
тивными алгебрами ранга 8, элементы которых также записываются
в виде (5.303), где а, (3— кватернионы, обладают тем свойством,
что элементы I и г в этом случае перестановочны с кватернион-
ными единицами, вследствие чего эти алгебры являются алгебрами
комплексных и двойных кватернионов.]
Инволюция а —> а в алгебрах октав и антиоктав имеет соот-
ветственно вид
Д = а— $е, А = а — (Зг, (5.305)
причём элемент а здесь также называется сопряжённым с эле-
ментом а, а квадратичная форма А А имеет соответственно вид
= АА = аа — (3(3. (5.306)
Если мы назовём модулем | А | октавы или антиоктавы А абсо-
лютное значение квадратного корня из произведения АА, то в этих
алгебрах, так же как в рассмотренных нами четырёх алгебрах,
имеет место соотношение
\А |2|В|2 = |АВ|2. (5.307)
Формула (5.306) показывает, что квадратичная форма АА
является положительно определённой для октав и знаконеопреде-
лённой для антиоктав. Если октава или антиоктава А обладает
обратным элементом А"1, этот элемент, так же как в рассмотрен-
ных нами четырёх алгебрах, имеет вид
(5.308)
Отсюда следует, что в алгебре октав все элементы, кроме 0,
обладают обратными элементами, т. е. октавы образуют
альтернативное тело. В алгебре антиоктав имеются элементы,
удовлетворяющие условию АА = 0, не обладающие обратными
элементами и являющиеся делителями нуля.
Формула (5.307) в случае октав даёт выражение произведения
двух сумм восьми квадратов в виде суммы восьми квадратов.
Алгебры октав и антиоктав можно представлять себе геометри-
чески в виде пространств октав и антиоктав. Если считать за
расстояние между двумя октавами или антиоктавами А и В модуль
их разности |В — А|, пространства октав и антиоктав изометричны
536
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ, V
соответственно пространствам /?8 и 4/?8. Скалярное произведение
двух октав или антиоктав, рассматриваемых как векторы этих
пространств, так же как в рассмотренных нами четырёх алгебрах,
имеет вид
(Д, В) = 1(ДВ+ВД) = 1(ДВ + ВД). (5.309)
Если в определении октав и антиоктав считать кватернионы а,
р комплексными кватернионами, мы получим одну и ту же алгебру,
которую мы будем называть алгеброй комплексных октав.
В отличие от алгебры октав алгебра комплексных октав обладает
делителями нуля. Алгебру комплексных октав можно представлять
себе геометрически в виде пространства комплексных октав,
в котором можно определить расстояние между точками так, что
оно изометрично пространству /?8(/).
Так как октавы и антиоктавы единичного модуля изображают
гиперсферы единичного радиуса в пространствах Л8 и 4/?8, точки
пространств S7 и 4S7 могут быть представлены соответ-
ственно октавами или антиоктавами единичного модуля, оп-
ределёнными с точностью до знака, а точки абсолютов про-
странств S7 и 4S7 могут быть представлены соответственно
комплексными октавами или вещественными антиоктавами
нулевого модуля, определёнными соответственно с точностью
до комплексного или вещественного множителя.
Покажем, что преобразования
Y=AX и Y = XA, (5.310)
где А — октава или антиоктава единичного модуля, изображают
паратактические повороты в пространстве Rs или 4/?8. В самом
деле, в силу (5.309) косинусы углов между векторами X и АХ
и между векторами X и ХА соответственно равны
(5.311)
(5.312)
(X, АХ) 4{х (Ж) +(ЛХ) х) 4(Х (х1) +(ЛХ) Х)
1 Аг’1 |ДХ|~ |ХТ ~ |XJ2 ’
(X, ХА) _ 1 (X (ХА) + (ХА) X) _ 1 (X (ХА) + (АХ) X)
| X11 ХА I — 2 | X |2 2 I X |3
Но в силу (5.302) эти выражения можно переписать в виде
(х АХ\ 4((XX) А + д (XX)) . (Л, АЛ) — — Z Л I Л\ |Х||ДХ| |Х|2 2 | X 11 XА 1 |Х|2 — 2 + (5.313) (5.314)
§ 8]
ОКТАВЫ И АНТИОКТАВЫ
537
Поэтому если октава А имеет вид cos ф-|- До sin ср, а анти-
октава А имеет вид сЬф —|-Xoshcp, где — соответственно октава
единичного модуля или октава мнимоединичного модуля, являю-
щаяся линейной комбинацией октавных или антиоктавных единиц,
выражения (5.313) и (5.314) равны cos ф или ch ср = cos /ф. Таким
образом, угол паратактического поворота соответственно равен <р
или /ср. Преобразования (5.310), где А — антиоктава мнимоеди-
ничного модуля, изображают антипаратактические повороты в про-
странстве 4R8.
Следовательно, преобразования (5.310), где А—октава или
антиоктава единичного или мнимоединичного модуля, изображают
паратактические сдвиги в пространстве S7.
Геометрическим местом точек, остающихся неподвижными при
паратактическом сдвиге, является пара непересекающихся плоских
образующих максимальной размерности абсолюта. Как мы видели,
эти плоские образующие являются трёхмерными плоскостями и
принадлежат к одному семейству плоских образующих. Неподвиж-
ные точки паратактических сдвигов (5.310) удовлетворяют урав-
нениям
АХ='кХ и ХА = \Х. (5.315)
Числа X являются собственными числами ортогональных ма-
триц, представляющих преобразования (5.310). Так как эти преоб-
разования являются паратактическими или антипаратактическими
поворотами, то число К принимает значения и где
ф — угол паратактического или антипаратактического поворота,
причём каждое из этих значений является четырёхкратным. Октавы
и антиоктавы X, удовлетворяющие уравнениям (5.315) при одном
из двух значений числа X, изображают точки одной из неподвиж-
ных плоских образующих абсолюта. Рассмотрим октаву А =
= cos ф + sin ф и антиоктаву А — ch <p-j-.40sh ф и построим
комплексную октаву и вещественную антиоктаву U = A — X,
которые соответственно имеют вид
U~А—ei<p=(cos ф-)-Д0 sin ф)—(cos ?+/ sin ф)=(Д0—Z) sin ф, 1
С?=А — е? — (ch ф-|-До sh ф) — (ch Ф-f-sh ф) — (Ло— 1) sh ф. J
(5.316)
В первом случае октава Ао — единичного модуля, вследствие
чего комплексная октава До— z, а следовательно, и комплексная
октава U — нулевого модуля. Во втором случае антиоктава До —
мнимоединичного модуля, вследствие чего антиоктава До—1,
а следовательно, и антиоктава U — также нулевого модуля. В силу
построения комплексной октавы или вещественной антиоктавы U
точки трёхмерной плоской образующей абсолюта, отвечающей
данному значению X, удовлетворяют соответственно уравнениям
ШГ=0 и XU = Q. (5.317)
538 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
Таким образом, мнимые трёхмерные плоские образующие аб-
солюта пространства S7 и вещественные трёхмерные плоские об-
разующие абсолюта пространства 4S7 удовлетворяют уравнениям
(5.317), где (7 — соответственно комплексная октава или веществен-
ная антиоктава нулевого модуля. Формулы (5.316) показывают,
что при замене октавы или антиоктавы А другой октавой или
антиоктавой, определяющей паратактический сдвиг вдоль прямых
той же паратактической конгруэнции с другим значением ср, эле-
мент (7 умножается на вещественный множитель. Заметим, что
в уравнениях (5.317) комплексную октаву или вещественную ок-
таву U можно умножить на любое соответственно комплексное
или вещественное число, отличное от нуля.
Мы получили представление каждого из семейств трёхмерных
плоских образующих абсолютов пространств S7 и 4S7 соответ-
ственно комплексными октавами или вещественными антиоктавами
нулевого модуля, определёнными с точностью соответственно до
комплексного или вещественного множителя, т. е. совершенно
таким же образом, что и точки абсолютов этих пространств.
Поэтому тройственными предложениями являются те предло-
жения, которые относятся к точкам и трёхмерным плоским обра-
зующим абсолютов пространств S7 и 4S7 и записываются с по-
мощью октав или антиоктав, представляющих эти точки или пло-
ские образующие, одинаковыми формулами.
Координаты октав и антиоктав, изображающих плоские обра-
зующие абсолютов пространств S7 и 4S7, можно рассматривать
как координаты полуспиноров этих пространств.
Приведём простейшие тройственные предложения.
1) Предложение
АВ = 0, (5.318)
где А, В — октавы или антиоктавы, представляющие два образа
разного рода. Из формул (5.317) следует, что если А представ-
ляет плоскую образующую первого семейства, а В — точку абсо-
люта, это предложение означает, что точка лежат на плоской
образующей первого семейства, а если А представляет точку
абсолюта, а В — плоскую образующую второго семейства, это
предложение означает, что точка лежат на плоской образующей
второго семейства. Если А представляет плоскую образующую
первого семейства, а В — плоскую образующую второго семей-
ства, это предложение означает, что плоскае образующие первого
а второго семейств пересекаются по двумерной плоскости.
2) Предложение
АВ^С, (5.319)
где А, В, С—октавы или антиоктавы, представляющие образы
трёх разных родов, причём С =£ 0. Если А и В представляют
§ 8]
ОКТАВЫ И АНТИОКТАВЫ
539
плоские образующие разных семейств, то, так как С ¥= О, эти пло-
ские образующие не пересекаются по двумерной плоскости и,
следовательно, пересекаются в точке. Эта точка представляется
октавой или антиоктавой С, так как
ВС = В (АВ) = В (ВД) = (ВВ) А = О,
СА (АВ) А = (ВА) А = В(АА) = О
(5.320)
(здесь мы воспользовались соотношениями (5.302) и тем, что ок-
тавы или антиоктавы А и В — нулевого модуля). Поэтому если А и В
представляют плоские образующие первого и второго семейств,
это предложение означает, что плоские образующие первого
и второго семейств пересекаются в точке. Если А представ-
ляет плоскую образующую первого семейства, В — точку абсолюта,
а С—плоскую образующую второго семейства, это предложение
означает, что плоская образующая второго семейства проходит
через точку и пересекается с плоской образующей первого се-
мейства по двумерной плоскости. Если А представляет точку
абсолюта, В — плоскую образующую второго семейства, а С—
плоскую образующую первого семейства, это предложение озна-
чает, что плоская образующая первого семейства проходит
через точку и пересекается с плоской образующей второго
семейства по двумерной плоскости.
3) Предложение
AB + BA = Qt (5.321)
где А, В — октавы или антиоктавы, представляющие два образа
одного рода. В силу (5.309) это предложение можно записать
в виде (Д, В) = 0. Поэтому если Д, В представляют точки абсо-
люта, это предложение означает, что две точки абсолюта лежат
на одной прямолинейной образующей. Если Д, В представляют
плоские образующие одного семейства, это предложение означает,
что две плоские образующие одного семейства пересекаются по
прямой.
Принцип тройственности в пространстве S7 был открыт Карта-
ном в связи с изучением спиноров этого пространства [4] (см.
также [11]). В частности, Картан рассматривал соотношение между
двумя полуспинорами разных родов и вектором, представляющим
точку абсолюта, выражаемое формулой (5.319)х). Применение
октав для изучения принципа тройственности в пространстве S7
было предложено Вейсом [1].
9 См. Картан [11], стр. 179.
540
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
§ 9. Полуальтернионы и спинорные представления движении
евклидовых пространств
Так как евклидовы пространства могут быть получены пре-
дельным переходом из неевклидовых пространств и при этом пе-
реходе группы движений неевклидовых пространств переходят в
группы движений евклидовых пространств, то спинорные представ-
ления групп движений неевклидовых пространств при этом пере-
ходе перейдут в некоторые представления групп движений евкли-
довых пространств, которые естественно называть спинорными
представлениями этих движений. Для определения этих пред-
ставлений следует определить алгебры, получаемые соответствен-
ным предельным переходом из алгебр альтернионов.
В § 11 главы II мы видели, что для предельного перехода
от пространств Sn и lSn к пространствам Rn и lRn следует напи-
сать уравнения абсолюта первых пространств в тангенциальных
координатах в виде 2 = 0, затем умножить одно из чисел
например е0, на t и устремить t к нулю. В пределе получится
(п— 2)-мерная квадрика, уравнение которой не содержит коор*
динаты п0, являющаяся абсолютом пространства Rn или lRn.
В алгебрах кп и 1кп этому предельному переходу соответ-
ствует переход, состоящий в том, что в соотношении
следует умножить одно из чисел е^, например в0, на t и устремить t
к нулю. Пока t ф 0, мы будем получать ту же алгебру кп или 1кп,
но с другим базисом, а при Z = 0 мы получим новую алгебру.
Так, например, если мы применим этот предельный переход
к алгебрам комплексных и двойных чисел, при t Ф 0 мы получим
те же алгебры с базисом 1, и 1, , а при t = § полу-
чим алгебру дуальных чисел с базисом 1, е. Если мы приме-
ним этот предельный переход к алгебрам кватернионов и анти-
кватернионов, при / ^=0 мы получим те же алгебры с базисом 1,
Z, jYt, ijYt и 1, Z, eYY a при ^ = 0 мы получим алгебру
полукватернионов с базисом 1, Z, е, тр Будем называть алгеброй
полу альтернионов п-го порядка индекса I вещественную алгебру
ранга 2W, базис которой состоит из таких же элементов 1, е0,
е19 . . ., еп_1 и их произведений, что и у алгебры zAw+1, но правила
умножения базисных элементов отличаются от правил умножения
e^j = — ejeine2i = — для алгебры lkn+1 тем, что в фор-
муле е2 = — ei следует заменить числа такими числами что
vo = O, а числа при / =/= 0 равны ztl, причём среди этих чисел
— 1 повторяется I раз. Алгебру полуальтернионов п-го порядка
индекса I будем обозначать через гВп, алгебру °ВП мы будем обо-
значать Вп. Произвольный полуальтернион может быть записан
в том же виде (5.57) или (5.58), что и альтернионы. Алгебры Вп
§ 9]
ПОЛУАЛЬТЕРНИОНЫ
541
и ZBW, подобно алгебрам Ап и 1Ап, изоморфны алгебрам, состоящим
из линейных комбинаций базисных элементов алгебр соответственно
Bw+i и zBn+1, имеющих чётное число индексов. В алгебрах Вп
и 1Вп определена инволюция а —> а, определяющаяся той же фор-
мулой (5.59), что и в алгебрах и 1кп. Будем называть коорди-
нату полуальтерниона а при 1 следом {а} этого полу альтерниона',
абсолютное значение квадратного корня следа произведения аа будем
называть модулем | а | полу альтерниона. В алгебрах Вп и 1Вп
верны формулы, получающиеся из формул (5.61) и (5.62) заменой
чисел на числа а также формулы (5.63). Поэтому если счи-
тать за расстояние между двумя полуальтернионами аир модуль
их разности, алгебры Вп и 1Вп становятся изометричными 2п-мер-
ным полуевклидовым пространствам.
Алгебра Вх имеет два базисных элемента 1 и е0, причём el ~ О,
вследствие чего эта алгебра изоморфна алгебре дуальных чисел.
Алгебра В2 имеет четыре базисных элемента 1, е$, ех и е<угх =
= — еге^ причём el = 0, е[ =— 1 и, следовательно, (е0^)2 = О,
вследствие чего эта алгебра изоморфна алгебре полукватернионов.
Алгебра ХВ2 имеет четыре базисных элемента 1, eQ, ех и eQe1 =
= — e1eQs причём el = 0, е[ = 1 и, следовательно, (е^)2 = О,
вследствие чего алгебра ХВ2 изоморфна алгебре полуантикватер-
нионов.
Алгебры полу альтернионов нечётного порядка индекса I можно
рассматривать как алгебры альтернионов того же порядка и
индекса с дуальными координатами, что мы будем записывать
в виде
Ф2т+1 = ’А2гй+1(е). (5.322)
Точно так же алгебры полуальтернионов чётного порядка
индекса I можно рассматривать как алгебры альтернионов на
единицу меньшего порядка того же или на единицу меньшего
индекса соответственно с полукватернионными или полу-
антикватернионными координатами, что мы будем записывать
в виде
^2т+2 ~ ^2ж+1 (б s)> гВ2ш+2 = (5.323)
Доказательство этих теорем совершенно аналогично доказательству
теорем о строении алгебр альтернионов (см. § 2).
Из этой теоремы следует, что алгебра В4 изоморфна алгебре
дуальных кватернионов, а алгебры ХВ4 и 2В4 изоморфны алгебре
дуальных антикватернионов.
В алгебрах Вп и гВп определяется спинорная группа по тем же
формулам (5.98) и (5.100). Формулу (5.98) можно переписать
в виде, отличающемся от (5.99) заменой чисел на v^. При пред-
ставлении алгебр Вп и гВп полуальтернионами алгебр Вп+1 и гВте+1,
542 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
являющихся линейными комбинациями базисных элементов с чётным
числом индексов, в силу этих условий все координаты полуальтер-
нионов, принадлежащих к спинорной группе с числом индексов
больше двух, выражаются через безиндексную и двуиндексные
координаты. Отсюда следует, что спинорные группы полуальтер-
нионов алгебр Вте и 1Вп зависят от вещественных пара-
метров, т. е. от того же числа параметров, что и группы дви-
жений пространств Rn и lRn.
Группа движений пространства Rn или lRn с определителем
+ 1 изоморфна фактор-группе спинорной группы полу альтернио-
нов соответственно алгебры Вп или 1Вп по её подгруппе,
состоящей из полуальтернионов 1 и — 1. При этом всякому
полу альтерниону а = 2 . i отвечает движение соот-
к 1 2Л
ветственно пространства Rn или lRn, состоящее из вращения,
определяемого матрицей с элементами
р 1
+ S "" ML (5.324)
и переноса
Л»' = zt 2(S v4vA ... V» •" hPa\•"bP —
p 1 p
— ... иЛ-*яваГ"Ч (5.325)
p 1 p
В самом деле, при преобразовании т] •=. afca-1 всякому полу-
альтерниону а соответствует преобразование в (п-{- 1)-мерной
плоскости в алгебре Bw+1 или zBw+1, состоящей из линейных ком-
бинаций одноиндексных базисных элементов е0, , еп этой
алгебры. Так как квадрат модуля элемента £ —2-^i равен
эта (и 4-1)-мерная плоскость изометрична полуевкли-
довой плоскости дефекта 1 и соответственно индекса 0 или /,
а лежащая в ней n-мерная плоскость, порождённая элементами
elf . . ., еп, изометрична соответственно пространству Rn или lRn.
Если а = где р и у — два альтерниона п-го порядка,
то а-1 = р“14-е08, где 8 — также альтернион п-го порядка. Если
полуальтернион а принадлежит к спинорной группе алгебры Вп
или zBn, то все координаты альтерниона р удовлетворяют условиям
принадлежности к спинорной группе алгебры Ап или zAn. Так как
альтернион р является линейной комбинацией базисных элементов
Вл+1 или гВп+1 с чётным числом индексов, не содержащих индекса О»
§ 9] ПОЛУАЛЬТЕРНИОНЫ 543
то он перестановочен с базисным элементом е0. Поэтому
аеоа-1 = (p-Rtf) е0(р-1 4-е08) = peJT1 * = е0, (5.326)
а^а"1 = (Р + еоТ)е1(Г1 + ео8) = (5.327)
Ввиду того, что Ре4р-1 является линейной комбинацией одноиндекс-
них элементов, сумма двух последних членов также является
линейной комбинацией одноиндексных элементов. Но этот элемент
содержит индекс 0, поэтому он может иметь только вид AieQ.
Произведение как мы видели в § 2, имеет вид J^Ajej,
где (А/) — ортогональная матрица я-го порядка с определите-
лем + 1. Таким образом,
аеоа-1 = е0, )
аМ-1=2Л^ + лЧ f <5’328>
J J
или в координатах
'XQ = Х°, |
= + f (5.329)
3 -I
Линейное преобразование (5.329) представляет движение про-
странства Rn или lRni состоящее из вращения, определяемого
матрицей (А}), и переноса, определяемого вектором Ai в проек-
тивных координатах х°, х1, ..., х№, связанных с декартовыми
координатами Хг соотношениями Х% = . Поэтому всякому эле-
менту спинорной группы алгебр Вп и zBn соответствует движение
пространств Rn и lRn. Формулы (5.324) и (5.325) доказываются
выкладкой, совершенно аналогичной выкладке при доказательстве
формулы (5.102). При установленном нами соответствии между
полуальтернионами и движениями пространств Rn и lRn вместе
с полуальтернионом а каждому движению соответствует полуаль-
тернион — а.
Легко показать, что таким образом можно получить любое дви-
жение пространства Rn или lRn с определителем +1. В самом
деле, как мы видели в § 2, всякому вращению этих пространств
с определителем 1 можно поставить в соответствие альтернион
алгебры Ап или гКп. С другой стороны, всякому переносу, опре-
деляемому вектором А*, соответствует полуальтернион
1— 2е^о«4’> (5.330)
i
544 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
так как
4)_,=
i г
~ 2 Bie0i ~~2~) 1 + Jj Мог “гр) — ej~\~eQ^^ (5.331)
г г
а произведению вращения на перенос соответствует полуальтернион,
являющийся произведением указанного альтерниона на полуальтер-
нион (5.330).
Полученные нами двузначные представления групп движений
пространств Rn и lRn с определителем -|-1 полуальтернионами
будем называть спинорными представлениями движений про-
странств Rn и lRn.
Так как алгебры Вп и zBn изоморфны алгебрам дуальных
альтернионов или альтернионов, в которых роль координат играют
полукватернионы или полуантикватернионы, алгебра которых в свою
очередь изоморфна алгебре дуальных матриц второго порядка вида
/ А В\ (А В\
( 2? Д 7 ИЛИ А/ ВСе ЭТИ алгебРы изоморфны алгебрам
дуальных, дуальных комплексных, дуальных двойных и дуальных
двойных комплексных матриц. Поэтому спинорные представления
движений пространств Rn и lRn можно рассматривать как предста-
вления этих движений линейными преобразованиями векторов в соот-
ветственных пространствах. Векторы этих пространств будем назы-
вать спинорами пространств Rn и lRn.
При п = 1 и 2 единственным условием принадлежности полуаль-
тернионов к спинорной группе является условие (5.99). Таким
образом, спинорная группа в случае дуальных чисел, полукватер-
нионов и полуантикватернионов состоит из элементов этих алгебр
единичного и, в случае алгебры полуантикватернионов, мнимоеди-
ничного модуля. Для дуальных кватернионов и антикватернионов,
так же как для алгебр А4, ХА4 и 2А4, показывается, что условия
(5.99) и (5.100) также равносильны условию единичности и, в случае
дуальных антикватернионов, мнимоединичности модуля.
Спинорное представление групп движений пространств Rn рас-
сматривалось Фаленом [1]. Представление группы движений про-
странства 7?3 группой дуальных кватернионов единичного модуля
рассматривалось А. П. Котельниковым [2] (см. также [4]).
Так как алгебры полукватернионов и полуантикватернионов
изоморфны алгебре дуальных матриц второго порядка соответст-
(А В\ f А В\
- _j и J , алгебра дуальных кватернионов изо-
морфна алгебре дуальных комплексных матриц второго порядка
ПОЛУАЛЬТЕРНИОНЫ
545
§ 9]
( "^1 I ( ^2 -^2 \
вида \_В2 А2/ Я алге^Ра Дуальных антикватернио-
нов изоморфна алгебре всех дуальных матриц второго порядка,
мы получаем следующие группы матриц, осуществляющие спинор-
ное представление групп движений евклидовых пространств 2 и 3
измерений.
Плоскость /^2 группа дуальных матриц второго порядка
/ -/4. В\ I 1
вида ( _ с определителем + I.
Плоскость 1/?3 — группа дуальных матриц второго порядка
/А В\ , ,
вида (__) с определителем z±zl.
\В А)
Пространство /?3 — группа дуальных комплексных матриц
/ At Bi\ . / Л2 52\ .
второго порядка вида _ _ + е _ _г с определителем 1.
\— Bi Ар \— В2 Л2/
Пространство 1/?3 — группа всех дуальных матриц второго
порядка с определителем ±1.
Определив алгебры комплексных полу альтернионов
мы аналогично можем определить спинорные представления дви-
жений пространств Rn(i).
Спинорные представления групп движений плоскостей R2f 1R2
и пространства лежат в основе интерпретаций этих пространств
на аналогичной плоскостям комплексного и двойного переменного
плоскости дуального переменного.
Если считать за расстояние между двумя дуальными числами а
и р модуль их разности — а|, плоскость дуального перемен-
ного изометрична полу евклидовой плоскости.
Отметим, что дуальные числа единичного модуля имеют вид
Изотропные прямые плоскости дуального переменного
являются прямыми, параллельными дуальной оси.
На плоскости дуального переменного можно определить ана-
литические функции, которые мы определим как функции дуаль-
ного переменного, представляемые в виде степенных рядов
У1 + гУ% = f Cxi + — 2 (ak + ~bk) (xi + еХ2) • (5.332)
к
В частности, так как (х± -|- гх2)к = хк -|- степенные
ряды дуального переменного с вещественными коэффициентами
(Ьк = 0) имеют вид
2 ак (*i + ех2)Й = 2 акхк + гх, 2 kakxk~\ (5.333)
к к ~ к
т. е., если мы обозначим функцию 2 акхк чеРез /(*)>
к
f (Xi + гх2) = f (X1) + sx2f' O1)> (5.334)
35 Зак. 177. Б. А. Розенфельд
546
СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ
[ГЛ. V
где f (х) — производная функции /(х). В частности,
еХ1+кс* _ + (5.335)
sin (хл + 8Х«) = sin хл + ех9 cos хл, 1
, , . (5.336)
COS (хх 4- ех2) = COS X-L — ех2 sin xv J
Из (5.335) следует, что
е6<р=14-£?, (5.337)
т. е. дуальные числа единичного модуля можно записать в ви-
де ±ее<р.
В § 7 главы I мы видели, что косинус угла между неизотроп-
ными векторами на полуевклидовой плоскости равен ± 1; если
считать угол вещественным, из этого следует, что угол между
этими векторами равен 0 или е. Вторая формула (5.336) показы-
вает, что то же значение косинуса будет, если считать угол
между двумя неизотропными векторами на полуевклидовой пло-
скости дуальным числом гу или е-]-£?-
Определим дуальный угол Ф между двумя векторами плоскости
дуального переменного, изображаемыми дуальными числами а и р,
по формуле
5|"ф = ткпи- <5-338>
Выражение (5.329) является чисто дуальным числом еср или
— еср. В первом случае в силу первой формулы (5.336) еср = sin еср
и Ф = еср, а во втором случае в силу той же формулы
— scp = sin (-е + еср) и Ф = Е-|-с(р. Косинусы этих углов равны
соответственно 1 и — 1.
Умножение на дуальное число единичного модуля
= z±z (1 £?) можно рассматривать как поворот соответственно
на угол еср или -E-j-acp. Отсюда следует, что преобразования
дуального переменного, определяемые аналитической функцией
y=zf(x) и функцией y=f(x), сопряжённой с аналитической,
не изменяют дуальных углов, т. е. эти преобразования можно
считать конформными преобразованиями.
Частным случаем конформных преобразований плоскости дуаль-
ного переменного являются дробно-линейные преобразования со-
ответственно первого или второго рода
ax±JL и у = ^+Ь
cx-\-d cx + d
(5.339)
с определителем ^=ad — be, не являющимся нулём или дели-
телем нуля. Для того чтобы сделать эти преобразования взаимно
однозначными, следует дополнить плоскость дуального перемен-
ПОЛУАЛЬТЕРНИОНЫ
547
§ 9]
ного бесконечно удалённой точкой и идеальной прямой, соот-
ветствующими при преобразовании у = У- нулю и делителям нуля.
Отметим, что дробно-линейные преобразования на плоскостях
комплексного, двойного и дуального переменного, рассматривае-
мые на проективной плоскости, и их комбинации с коллинеациями
исчерпывают все квадратичные кремоновы преобразования на
проективной плоскости х).
На плоскости дуального переменного можно определить ори-
циклы— кривые, определяемые уравнениями
Azxx —Вх — Вх —Cz О, (5.340)
где А, С—вещественные числа, а В — дуальное число. Эти кри-
вые имеют вид парабол с осью, параллельной дуальной оси.
Если представить себе плоскость дуального переменного погру-
жённой в пространство в виде полуевклидовой плоскости, то
орициклы являются линиями пересечения этой плоскости со сфе-
рами; эти линии пересечения являются параболическими окружно-
стями рассматриваемых сфер и при отождествлении диаметрально
противоположных точек этих сфер превращаются в орициклы
плоскости Лобачевского. В § 3 мы видели, что дробно-линей-
ные преобразования плоскости комплексного и двойного перемен-
ного являются круговыми преобразованиями. Аналогично можно
доказать, что дробно-линейные преобразования плоскости дуаль-
ного переменного переводят орициклы в орициклы или неизо-
тропные прямые.
Нетрудно показать, что многообразие орициклов и неизо-
тропных прямых плоскости дуального переменного, если счи-
тать за расстояние между орициклами и прямыми, пересекаю-
щимися под дуальным углом scp, число <р, которое в случае
мнимого пересечения является чисто мнимым числом, изомет-
рично пространству 1/?3, а группа дробно-линейных преобразо-
ваний этой плоскости при этом изоморфно изображает группу
движений пространства 1/^3 2). Для доказательства следует
погрузить плоскость дуального переменного в пространстве
в виде полуевклидовой плоскости и спроектировать эту плоскость
на изотропный конус из любой точки прямолинейной образующей
конуса, параллельной этой плоскости. При этом орициклы и не-
изотропные прямые плоскости спроектируются на плоские сечения
конуса и каждому орициклу или прямой можно будет поставить
в соответствие плоскость пространства 1/?3, высекающую из конуса
это сечение, и точку этого пространства, проективные координаты
которой совпадают с тангенциальными координатами этой
!) См. работу автора и 3. А. Скопец [1].
2) См. работу автора и И. Г. Белкина [1].
35*
548 СПИНОРНЫЕ ПРЕДСТАВЛЕНИЯ [гл. V
плоскости. Тогда расстояние между точками пространства 1/?3, со-
ответствующими двум орициклам, пересекающимся под дуальным
числом so, равно ср.
Представление движений пространства х/?3 матрицами дробно-
линейных преобразований плоскости дуального переменного и есть
спинорное представление этой группы движений. Если
мы рассмотрим подгруппы группы этих дробно-линейных преоб-
разований, соответствующие подгруппам группы движений про-
странства 1/?3, переводящим в себя евклидову плоскость индекса О
или 1, мы получим спинорное представление групп движений со-
ответственно плоскостей и 1/?2.
Спинорным представлениям плоскостей и х/?2 можно дать
и другую геометрическую интерпретацию, ставя в соответствие
всякой прямой плоскости R.2, если перпендикуляр, опущенный на
неё из начала координат, составляет с осью е± угол а и имеет
а -4- гр 1 а — гр
длину р, дуальные числа х = tg —и----------- = —ctg —и
аналогично всякой прямой плоскости — дуальные числа х
и -X. Тогда движения плоскостей R2 и 1/?2 изображаются на
плоскости дуального переменного дробно-линейными преобразова-
/ А В\ /А В. о
ниями с матрицами ( _ и _ j . Заметим, что группа всех
дробно-линейных преобразований на плоскости дуального пере-
менного изображается на плоскостях R2 и 1R2 группой преобра-
зований Лагерра (см. § 7 главы I). Так как эта последняя группа
в пространстве Rn и lRn изоморфна группе движений соответ-
ственно пространств Rn+1 и l+iRn+1, мы снова получаем изо-
морфизм группы дробно-линейных преобразований плоскости
дуального переменного и группы движений пространства 27?3 (изо-
морфной группе движений пространства х/?3). Интерпретация мно-
гообразия прямых плоскости /?,2 на плоскости дуального перемен-
ного была предложена Клейном х).
!) См. Клейн [3], стр. 253—254, а также работу И. М. Я г л о м а [1].
ГЛАВА ШЕСТАЯ
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА НАД АЛГЕБРАМИ
§ 1. Аффинные пространства над алгебрами комплексных
и двойных чисел, кватернионов и антикватернионов
В § 1 главы III мы определили вещественное и комплексное
аффинные пространства Ап и An(Z) как множества элементов двух
родов — точек и векторов, удовлетворяющих аксиомам I, II и Ш(п),
причём в случае пространства Ап аксиомами II определялось умно-
жение вектора на вещественное число, а в случае простран-
ства An(t) аксиомами II определялось умножение вектора на ком-
плексное число.
Аналогичные аффинные пространства могут быть построены и
при замене полей вещественных и комплексных чисел определён-
ными нами в § 1 главы V алгебрами двойных чисел, кватернионов
и антикватернионов. Будем называть п-мерным аффинным про-
странством An(e)t An(i, J) и AW(Z, е) множество элементов двух
родов — точек и векторов, удовлетворяющих аксиомам I, II иШ(п',
причём аксиомами II определяется умножение вектора на соответ-
ственно двойное число, кватернион или антикватернион. При этом
в силу некоммутативности кватернионов и антикватернионов в слу-
чае пространств Ап (I, j) и Ап(1, е) следует записывать скаляр-
ные множители только с одной стороны от векторов. Условимся
записывать эти множители всегда справа от векторов.
В пространствах Ап(е), An(i, j) и An(i, е) определяются кол-
линеарность и отношение векторов, т-мерные плоскости и, в ча-
стности, прямые и гиперплоскостй и их параллельность, а также
аффинные координаты совершенно так же, как в пространствах
Ап и Ап(Г).
Уравнение гиперплоскости в пространствах Ап(е), An(i, j) и
AW(Z, е), так же как в пространствах Ап и An(t), имеет вид
S«i-^+«0 = °- (6-0
i
Заметим, что уравнения параллельных гиперплоскостей, т. е.
гиперплоскостей, совмещаемых друг с другом с помощью
переноса 'х = х-\-а, могут быть представлены уравнениями вида
(6.1), отличающимися только слагаемым zz0.
550 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Рассмотрим взаимное расположение двух прямых на плоскости
Л2(е), X2(z, у) и A2(z, е).
Если уравнения двух данных прямых имеют вид
и-ус1 + и2х2 Uq = 0 (6.2)
и
vyc14~ и2х2 4- -у0 = о, (6.3)
то для нахождения общих точек этих прямых достаточно исклю-
чить координату х'2 из уравнений (6.2) и (6.3) и найти значение
координаты х1, удовлетворяющее обоим этим уравнениям. Из (6.2)
находим:
х2 = — и~1и1х1 — и~ 1uQ. (6.4)
Подставляя (6.4) в (6.3), получаем:
(^----V2a21U^X1 — V2U21UQ^~ (6-5)
Для пространства An(i, у), так же как для пространств Ап
и An(t), могут быть три случая:
1) Элемент — v2u~1u1 отличен от нуля. Тогда этот элемент
обладает обратным, и мы получаем единственное значение
координаты х1, удовлетворяющее обоим уравнениям:
= (^— v^u-^u^)-1 (v^u-1^ — г/0). (6.6)
Подставляя это значение в (6.4), мы получаем и единственное
значение координаты х2, удовлетворяющее обоим уравнениям.
В этом случае две прямые пересекаются в одной точке.
2) Оба элемента — ю2и~1и1 и ю2и~1и() — vQ равны нулю.
Уравнение (6.5) удовлетворяется любым значением х1, поэтому
любая точка прямой (6.2) является точкой прямой (6.3) и обратно,
т, е. две прямые совпадают.
3) Элемент — v2u~1u1 равен нулю, а элемент ъ^и-^и^— vQ от-
личен от нуля. Уравнение (6.5) не удовлетворяется ни одним
значением х1, поэтому две прямые не имеют общих точек. Так
как, производя перенос второй прямой, при котором элемент vQ
заменится элементом мы превратим эту прямую в прямую,
совпадающую с первой прямой; эти две прямые параллельны.
Для пространствАп(е) ъАп(1,е) могут быть пять случаев:
1) Элемент — v2u~1u1 не является нулём и делителем нуля.
Так же как выше, показывается, что уравнения (6.2) и (6.3) имеют
единственное решение (6.6) и прямые пересекаются в одной точке.
2) Оба элемента — v2u~1u1 и равны нулю.
Так же как выше, показывается, что прямые совпадают.
3) Элемент —v,2 и~1и1 равен нулю, а элемент ю.2и~1и()—vQ
отличен от нуля. Так же как выше, показывается, что прямые
параллельны.
§ 1] АФФИННЫЕ ПРОСТРАНСТВА 551
4) Элемент является делителем нуля, а элемент
— нулём или таким делителем нуля, что уравнение (6.5)
удовлетворяется некоторым множеством значений х1, но
не всякое значение х1 удовлетворяет этому уравнению. Так как
каждому значению х1, удовлетворяющему уравнению (6.5), соот-
ветствует общая точка прямых, в этом случае прямые пересекаются
более чем в одной точке. Будем называть такие две прямые на
плоскостях Л2(г) и Л2(/, ё) соприкасающимися прямыми.
5) Элемент — v2u^1u1 является делителем нуля, а элемент
v2u^1uQ— vo не является нулём или является таким делителем нуля,
что уравнение (6.5) не удовлетворяется ни одним значением х1.
Поэтому две прямые в этом случае не имеют общих точек. Так
как, производя перенос второй прямой, при котором элемент v0
заменится элементом мы превратим эту прямую в прямую,
не совпадающую с первой прямой, а соприкасающуюся с ней, эти
две прямые непараллельны. Будем называть такие две прямые на
плоскостях А2(е) и А2(1, е) расходящимися прямыми.
Наличие соприкасающихся и расходящихся прямых предста-
вляет собой особенность пространств Ап(ё) и Ап(1, е), происхо-
дящую от наличия делителей нуля в алгебрах двойных чи-
сел и антикватернионов.
Это же обстоятельство определяет наличие в пространствах
Ап(ё) и An(i, е) таких векторов, которые отличны от вектора-нуля,
но произведение которых на некоторый делитель нуля является
вектором-нулём. Будем называть такие векторы особенными век-
торами, а векторы, не являющиеся вектором-нулём и особен-
ными векторами,—неособенными векторами. Примером особен-
ного вектора является произведение неособенного вектора на
делитель нуля: если а — неособенный вектор, a Zx, 12 — делители
нуля, для которых 1±12 =. 0, то вектор b = alx обладает тем свой-
ством, что bl2 = alxl2 = 0.
Примером, когда оба элемента -у— и ‘V^u-^u^ — vQ яв-
ляются делителями нуля, а прямые принадлежат к 4-му и 5-му
случаям, являются случаи, когда один из них — двойное число Ае+,
а другой соответственно — двойное число Ве+ или Ве_. В пер-
вом случае уравнение (6.5) удовлетворяется двойными числами
вида х1 = е+-\-Се_ при любом С, во втором случае уравне-
ние (6.5) не удовлетворяется ни одним значением х1.
Если в пространствах Ап и Ап(1) всякая система векторов,
содержащая вектор-нуль, линейно зависима, так как сумма произ-
ведений всех этих векторов, кроме вектора-нуля, на нули с произ-
ведением вектора-нуля на произвольный ненулевой элемент алгебры
равна нулю, то в пространствах Ап(ё) и Ап(1, ё), кроме того,
всякая система векторов, содержащая особенный вектор,
552
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
линейно зависима, так как сумма произведений всех векторов,
кроме особенного, на нули с произведением особенного вектора на
элемент алгебры, превращающий его в вектор-нуль, равна нулю.
Очевидно, все координаты особенного вектора являются дели-
телями нуля.
Особенный вектор может быть получен умножением на дели-
тель нуля из неколлинеарных между собой неособенных векторов,
так что два вектора, коллинеарных третьему, коллинеарны между
собой только в том случае, когда все эти три вектора—неособенные.
Для того чтобы две прямые были соприкасающимися, доста-
точно, чтобы эти прямые имели общую точку и чтобы их напра-
вляющие векторы после умножения на некоторые делители нуля
превращались бы в один и тот же особенный вектор. Если мы
построим такой вектор с началом в общей точке прямых, то ко-
нец этого вектора является второй общей точкой этих прямых.
В пространствах Ап(е) и An(i, е) в силу наличия делите-
лей нуля в алгебрах двойных чисел и антикватернионов не имеют
места аффинные теоремы Паппа и Дезарга (см. § 5 главы III).
В самом деле, покажем это сначала для пространства Ап(е). Если
в случае теоремы Паппа (черт. 63) элемент а является делителем
нуля, вектор yab — xa = (yb — х)а является особенным вектором
и через точки ха и yab можно, кроме прямой, параллельной сто-
роне, соединяющей точки х и yb, провести другую прямую, рас-
ходящуюся с этой стороной. Если провести через точки ха иуаЬ
такую прямую, а через точки ха, уа и xb, yab прямые, парал-
лельные соответственно прямым, соединяющим точки xb, yb и х, уа,
мы получим шестиугольник, удовлетворяющий условию теоремы
Паппа, но для этого шестиугольника теорема Паппа неверна. Точно
так же, если в случае теоремы Дезарга (черт. 64) элемент а яв-
ляется делителем нуля, вектор za—ya-=-(z—у) а является осо-
бенным вектором и через точки уа, za можно, кроме прямой,
параллельной стороне yz, провести другую прямую, расходящуюся
с этой стороной. Если провести через точки х, z такую прямую,
а через точки ха, уа и ха, za прямые, параллельные соответ-
ственно сторонам ху и xz, мы получим треугольник, который
вместе с треугольником xyz удовлетворяет условию теоремы Де-
зарга, но для них теорема Дезарга неверна. Для пространства
Ап(1, е) невыполнение теорем Дезарга и Паппа при ab = ba до-
казывается таким же образом.
В пространствах An(t, J) и Ап(1, е) в силу некоммутатив-
ности алгебр кватернионов и антикватернионов также не
имеет места аффинная теорема Паппа. В самом деле, если
ab =/= Ьа в шестиугольнике, изображённом на черт. 63, стороны,
соединяющие вершины ха, уа и xb, yb, параллельны в силу кол-
линеарности векторов у а — ха = (у — х) а и yb — xb = (у — х)Ь.
Точно так же стороны, соединяющие вершины х, уа и xb, yab,
§ И
АФФИННЫЕ ПРОСТРАНСТВА
553
параллельны в силу коллинеарности векторов^— х и yab — xb =
= (уа—х)Ь, а стороны, соединяющие вершины х, yb и ха, yab,
непараллельны в силу неколлинеарности векторов yb — хи yab— ха
(сторона, соединяющая вершины х, yb, в силу коллинеарности
векторов yb — х и yba — xa = (yb — х)а параллельна прямой,
соединяющей точки ха, yba, но точка yba здесь не совпадает
с точкой yab). Поэтому шестиугольник с вершинами х, уа, ха,
yab, xb, yb удовлетворяет условию теоремы Паппа, но для него
теорема Паппа неверна.
Мы видим, что теорема Паппа выполняется только в том
случае, когда алгебра скаляров не
является коммутативной.
Покажем, что теорема Дезарга
выполняется только в том слу-
чае, когда алгебра скаляров не
имеет делителей нуля и является
ассоциативной. Мы уже видели, что
наличие делителей нуля приводит
к невыполнению этой теоремы. Пока-
жем теперь, что в том случае, когда
система скаляров не имеет делителей
нуля, но неассоциативна, эта тео-
рема также не имеет места. В самом
имеет делителей нуля и
деле, построим три коллинеарных вектора х, xb, хс и три колли-
неарных вектора у, ya, yb и, так же как при доказательстве тео-
ремы Паппа, построим векторы yab, xbc, ybc и y(ab)c (черт. 91).
В силу коллинеарности векторов yb — х и ybc— х, yb — xb и
ybc— xbc, yab — х и y(ab)c— хс прямые, направленные вдоль
этих векторов, соответственно параллельны. Так как векторы xbc
и ybc получены из векторов xb и yb умножением на с, а при от-
сутствии делителей нуля через две точки можно провести только
одну прямую, радиус-вектор каждой точки прямой, соединяющей
точки xbc и ybc, получен из радиуса-вектора некоторой точки
прямой, соединяющей точки xb и yb, умножением на с. Точно
так же радиус-вектор каждой точки прямой, соединяющей точки
хс и y(ab)c, получен умножением на с из радиуса-вектора неко-
торой точки прямой, соединяющей точки х и yab. Поэтому если
мы обозначим радиус-вектор точки пересечения второй и четвёр-
той из этих прямых через z, радиус-вектор точки пересечения
первой и третьей из этих прямых является вектором zc. Треуголь-
ники с вершинами xb, yab, z и xbc, y(ab)c и zc удовлетворяют
условию теоремы Дезарга, и если эта теорема имеет место, пря-
мые, соединяющие вершины xb, yab и xbc и y(ab)c, параллельны и,
следовательно, векторы yab — xb и y(ab)c— xbc коллинеарны.
Первый из этих векторов, а следовательно, и второй, коллинеа-
рен вектору уа — х, но коллинеарность векторов y(ab)c— xbc
554 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
и уа — х может иметь место только в том случае, когда (ab) с =
= а(Ьс). Поэтому в случае неассоциативности алгебры скаляров
теорема Дезарга для двух указанных треугольников не может
иметь места.
Связь между коммутативностью умножения в алгебре скаляров
и выполнением теоремы Паппа и связь между ассоциативностью
умножения в этой алгебре и выполнением теоремы Дезарга в слу-
чае отсутствия делителей нуля были установлены Гильбертом [1].
Тот факт, что в тех пространствах, в которых верна теорема
Паппа, верна и теорема Дезарга (пространства Ап и Лп(/)), ноне
наоборот (пространство An(i, j)), связан с тем, что теорема Де-
зарга является следствием теоремы Паппа (см. § 5 главы III).
Будем называть аффинными преобразованиями пространства
An(i, 7), так же как в случае пространства Ап, взаимно однознач-
ные преобразования этого пространства, переводящие прямые
в прямые. Так же как в случае пространства Ani доказывается,
что при аффинных преобразованиях пространства An(it j) парал-
лельные прямые переходят в параллельные прямые. В случае про-
странств Ап(е) и Дп(/, е), в которых две прямые, лежащие в одной
двумерной плоскости, могут не пересекаться и не быть параллель-
ными, указанное доказательство не имеет места, вследствие чего
будем называть аффинными преобразованиями пространств Ап (е)
и Ап(1, е) взаимно однозначные преобразования этих пространств,
переводящие прямые в прямые, а параллельные прямые в парал-
лельные прямые, причём в случае пространства Ап(е), так же как
в случае пространства Ап(Г), следует дополнительно потребовать
непрерывность этих преобразований. Так же как в случае про-
странств Ап и An(t), показывается, что при аффинных преобра-
зованиях пространств Ап(е), An(i, j) и An(i, е) векторы переходят
в векторы, сумма векторов переходит в сумму соответственных
векторов, а произведение вектора на скаляр I переходит в произ-
ведение соответственного вектора на скаляр у (Z), где функция с? (х)
удовлетворяет условиям
'?(*+.)') = ?(•*) + '? О'), (6.7)
?(ху) = <?(*)<? (.у), (6.8)
т. е. является автоморфизмом соответственной алгебры.
Так же как для пространства Ап, показывается, что для лю-
бого рационального х
ср(х) = х. (6.9)
Отсюда в случае пространства Ап(е), так же как в случае
пространства Ап(Г), в силу непрерывности аффинного преобразо-
вания, из которой следует непрерывность функции <?(х), соотно-
шение (6.9) имеет место для любого вещественного х. В случае
пространств An(it j) и An(i, е) соотношение (6.9) также имеет
место для любого вещественного х, однако здесь для доказатель-
§ 1] АФФИННЫЕ ПРОСТРАНСТВА 555
ства этого соотношения не нужно требовать непрерывности аффин-
ного преобразования. Здесь это соотношение следует из того, что
при всяком автоморфизме некоммутативной алгебры её центр пе-
реходит в себя (если элемент а перестановочен с произвольным
элементом х, то элемент ср (а) перестановочен с элементом (х),
также являющимся произвольным элементом), а центр алгебр ква-
тернионов и антикватернионов состоит из вещественных чисел,
и поэтому при всяком автоморфизме алгебр кватернионов и анти-
кватернионов подалгебра этих алгебр, состоящая из вещественных
чисел, изоморфная полю вещественных чисел, переходит в себя.
Так как при всяком автоморфизме алгебр кватернионов и антиква-
тернионов в подалгебре, состоящей из вещественных чисел, также
должен иметь место автоморфизм, а единственным автоморфизмом
поля вещественных чисел является тождественное преобразование,
мы находим, что при любом автоморфизме алгебр кватернионов
и антикватернионов все вещественные числа остаются неизменён-
ными, т. е. в этих алгебрах для любого вещественного х также
имеет место соотношение (6.9).
Из соотношения (6.9) в случае пространства Ап(е) в силу
того, что £2 = -]--1, мы получаем:
[?(^)р^+1. (6.10)
Так как в силу (6.9) 1 = <р(1) и —1 <?(—1), мы получаем:
<?(е) = е или —е. (6.11)
В силу (6.7), (6.8) и (6.11) мы получаем, что для двойного
числа z = х -ф- еу
ф (z) = у (хеу) = <? (х) + <? (е) у (у) — х± еу. (6.12)
Из (6.9) в случае пространства An(i, J) в силу того, что
/2 = р = k'1 = —1, ij = — jt = k, jk — — kj = i, ki = — ik=j,
мы получаем:
[? (ОГ2 = [? С/)]2 = [? Ж2 = — 1,
® (0 ® (7) = — ® (7) ® (0 = ® (*), б 3
® (7) ® (&) = — ® (*) ? (7) = ® (0.
? (Л) ? (0 = — ? (0 ?(&) = ? (/)•
В случае пространства j) в силу того, что = — 1,
^г=/2=1, 1е = — ei=ft ef =—fe = — i, fi =— lf = e, мы
получаем:
[® (Z)]2 = — 1, [? (e)]2 = [? (/)]3 = 1, '
®(0®GO = — <?(«) ®(0 = <?(/),
=— © (/) © (e) = — © (z),
® (/) ? (0 = — ® (0 ? (/) = ? (e)-
556
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
Кватернионы ср (Z), <р(у), ср(&) являются линейными комбина-
циями элементов Z, у, k, так как в силу (6.9) они не являются
вещественными числами, а квадрат кватерниона a-\-bi-\-cj dk,
не являющегося вещественным числом, может быть вещественным
числом только при а = 0. Точно так же антикватернионы <р (Z),
<?(#), ?(/) являются линейными комбинациями элементов Z, е, f.
Поэтому если ввести в алгебры кватернионов и антикватернионов
метрики пространств /?4 и 2/?4, элементы ср (Z), ср (у), ср(&) являются
векторами пространства /?3, а элементы ср (Z), ?(#), <?(/) являются
векторами пространства 2/?3. Эти векторы составляют ортонорми-
рованные базисы указанных пространств; длины векторов <p(Z),
ср (у), ?(&) равны 1, а длины векторов ср(е) и ф(/) равны —1,
так как, например,
I ? (О Р = ? (О ? (О = — I? (012 — 1>
| ф (е) |2 = ср(е) ф (е) = — [ср (е)]2 = — 1,
(6.15)
а углы между ними равны так как, например, косинус угла 6
между векторами <?(1) и ср (у) равен
cos о = <Т(О.Т»)> = +
1?(0| l?(/)l I f (О I I ? О) I
= — у (<? (О ? (/) + <? (7) ? (О) = 0.
(6.16)
При этом в силу (6.13) и (6.14), если базисы Z, у, k и Z, е, f
были правыми базисами, базисы ср (Z), ср (у), <?(k) и ср (Z), ср (е), <р(/)
также являются правыми базисами. Поэтому в силу свойств групп
движений пространств Rn и lRn имеется единственное вращение
пространства 7?3 с определителем + 1, переводящее базис Z, у, k
в базис ср (Z), ср (у), ср(&), и единственное такое же вращение про-
странства 2/?3, переводящее базис Z, е, / в базис cp(Z), ср (е), <р(/).
Но в § 5 главы V мы видели, что всякое такое вращение имеет вид
ф (х) = аха~1, (6.17)
где а — кватернион или антикватернион единичного или мнимоеди-
ничного модуля. Поэтому в алгебрах кватернионов и антикватер-
нионов функция /(х), удовлетворяющая условиям (6.7) и (6.8),
имеет вид (6.17); этот результат часто выражают, говоря, что
всякий автоморфизм алгебр кватернионов и антикватернионов
является внутренним.
Поэтому при аффинных преобразованиях векторы пространства
Лп(<?) испытывают преобразования 'х = Ах, где
A (x-j-j/) = Ах-]- Ay, A(kx) = k(Ax) или k(Ax), (6.18)
АФФИННЫЕ ПРОСТРАНСТВА
557
§ И
а векторы пространств An(i, J) испытывают преобразования
'х = Ах, где
А(х-]~у) = Ах-+-Ау, A(xk) = (Ax)(aka~^. (6.19)
Преобразования (6.18), так же как в случае пространства
Дп(0, называются соответственно линейными преобразованиями
первого и второго рода, преобразования (6.19) при а±\ назы-
ваются линейными преобразованиями, а при аФ± 1 называются
полулинейными преобразованиями.
Если при аффинном преобразовании базисные векторы пе-
реходят в векторы аь а их начало переходит в точку с радиу-
сом-вектором Ь, то при этом преобразовании в случае простран-
ства Ап(е) точка с радиусом-вектором я = 2х^ переходит
в точку с радиусом-вектором
= или = 2 (6.20)
i i
а в случае пространств An(i, j) и An(i, е) точка с радиусом-
вектором х = S eixi переходит в точку с радиусом-вектором
i
'х = S U'tax^-1 + b. (6.21)
i
Поэтому если ai — 2 ejab закон преобразования координат точек
У
пространства Ап(е) при аффинном преобразовании имеет вид
'xi “ 2 а}х^ + или fxi = ^a'jX^Arbi, (6.22)
i i
а закон преобразования координат точек пространств An(i, j) и
Ап(1, ё) при аффинном преобразовании имеет вид
'х* = 2 а}ах^а~х . (6.23)
Преобразования (6.22), так же как в случае пространства
An(t), называются соответственно аффинными преобразованиями
первого или второго рода.
В силу взаимной однозначности аффинных преобразований
пространств Ап{ё), An(i, J) и Ап(1, е) матрицы этих преобразо-
ваний обладают обратными матрицами.
Более общая теорема для аффинных пространств над произ-
вольными телами и, в частности, для пространств над телом ква-
тернионов была доказана Рейдемейстером х) (см. ниже, § 8).
В силу непрерывности функций (6.23) аффинные преобразо-
вания пространств An(i, j) и An(i, ё), в определении которых
!) См. Рейдемейстер [1], стр. 121.
558
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
мы не требовали непрерывности, так же как аффинные преобра-
зования пространств Ап, An(t) и An(e)t являются непрерывными
преобразованиями.
Частные случаи аффинных преобразований при Ь1 = 0 и при
ai = 8*, так же как в случае пространств Ап и 4п(г), называются
соответственно центроаффинным преобразованием и переносом.
Как видно из формул (6.20), для однозначного задания аффин-
ного преобразования пространства Ап(е) достаточно указать,
в какие точки переходят общее начало и концы векторов неко-
торого базиса, а также является ли это преобразование преобра-
зованием первого или второго рода. Как видно из формулы (6.21),
для однозначного задания аффинного преобразования про-
странств An(i, j) и Ап(1, е) достаточно указать, в какие точки
переходят общее начало и концы векторов некоторого базиса и
вектора, являющегося линейной комбинацией этих векторов,
у которого хотя бы одна координата является кватернионом или
антикватернионом, отличным от вещественного числа (остальные
координаты могут быть равны нулю).
Как видно из формул (6.22), аффинные преобразования про-
странства Ап(е) зависят от 2n(n-f-i) вещественных параметров
(двойные числа а\ и № зависят соответственно от 2/г2 и 2п ве-
щественных параметров) и, в частности, центроаффинные преоб-
разования и переносы зависят соответственно от 2/г2 и 2п веще-
ственных параметров. Как видно из формулы (6.23), аффинные
преобразования пространств X^(Z, У) и Ап (I, е) зависят от
Ап (п+ 1) + 3 вещественных параметров (кватернионы и антиква-
тернионы а* и Ь* зависят соответственно от 4/г2 и 4/г веществен-
ных параметров, кватернион или антикватернион единичного модуля а
зависит от трёх вещественных параметров) и, в частности, центро-
аффинные преобразования и переносы зависят соответственно от
4/г2-|-3 и 4/г вещественных параметров.
Аффинными преобразованиями прямых A1(e)i A1(ii j) и
А± (it е} будем называть те преобразования, которые происходят
при аффинных преобразованиях пространств Ап(е), An(i, j) и
Ап(1, е), переводящих в себя прямую. Эти преобразования на
прямой А±(е) имеют вид
'х = ах-^-Ь и 'х = ах-\-Ь, (6.24)
а на прямых A1(ti j) и Л1(г, е) имеют вид
'х = axb-\-c. (6.25)
Если рассматривать прямую Л?г(г) как плоскость двойного пере-
менного, аффинные преобразования первого и второго рода этой
прямой являются линейными преобразованиями первого и второго
рода этой плоскости, а если рассматривать прямые Ar(i, j)
§ 1] АФФИННЫЕ ПРОСТРАНСТВА 559
и (Z, в) как пространства кватернионов и антикватернионов,
аффинные преобразования этих прямых являются линейными пре-
образованиями (при вещественном Ь) и полулинейными преобра-
зованиями (если b не является вещественным числом) этих про-
странств.
Точно так же, как для аффинных преобразований пространств
Ап и Лп(0, доказывается, что аффинные преобразования про-
странств А Де), АД1, У) и АД1, е) образуют группы, что
центроаффинные преобразования этих пространств образуют
группы, изоморфные группам неособенных матриц п-го порядна
над соответственными алгебрами, а переносы этих пространств
образуют группы, изоморфные группам векторов этих про-
странств. Далее доказывается, что группы аффинных пре-
образований пространств А Де), АД1, j) и АД1, е) являются
группами Ли, что эти группы транзитивны и при п > 1 импри-
митивны.
Пространства АД1) и А Де) допускают простые интерпретации
в пространствах Ап и А^п, а пространства АД1, У) и АД1, е) до-
пускают простые интерпретации в пространствах Л2п(0 и
Для получения интерпретации пространств А Де) в простран-
стве Ап достаточно поставить в соответствие каждой точке про-
странства АДе) пару точек {А, В} пространства Ап, а каждому
вектору пространства АДе)— пару векторов {а, Ь} простран-
ства Ап. Тогда вектор пространства АДе) с началом, изображае-
мым парой точек {Д, В}, и концом, изображаемым парой то-
' > —>•
чек {С, D}, изображается парой векторов [AC, BD}; сумма век-
торов, изображаемых парами векторов {а, Ь] и {с, d}, изобра-
жается парой векторов (a-j-c, произведение вектора,
изображаемого парой векторов {а, Ь}, на число ke+-\-le~ изо-
бражается парой векторов {ak, bl\. Выполнение аксиом про-
странства АДе) является непосредственным следствием выполне-
ния аксиом пространства Ап.
При нашей интерпретации особенные векторы про-
странства АДе) изображаются парами векторов {а, 0} и {0, Ь}\
для превращения пар векторов {а, 0} и {0, Ь] в нулевые пары
нужно умножить их на соответственно делители нуля Ае_ и Ае±.
Коллинеарные векторы пространства АДе) изобра-
жаются в пространстве Ап парами векторов, состоящими из по-
парно коллинеарных векторов. Отсюда следует, что особенный
вектор пространства АДе), изображаемый парой векторов {а, 0},
коллинеарен двум неколлинеарным между собой векторам изо-
бражаемым парами векторов {а, #} и {а, с}, где b и с — два
вектора пространства Ап, неколлинеарных между собой.
Заметим, что линейно независимые системы пар векторов {а, Ь},
{с, d}, . . ., (е, f] состоят из таких векторов, что как т векторов
560 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
а, с, . . . , е, . так и т векторов b, d, . . . , f образуют ли-
нейно независимые системы. Отсюда и из предыдущего утверж-
дения следует, что точки прямых, m-мерных плоско-
стей и гиперплоскостей пространства Ап (е) изображаются
в пространстве Ап парами точек, лежащими соответственно на
парах прямых, m-мерных плоскостей и гиперплоскостей, а
точки параллельных прямых, m-мерных плоско-
стей и гиперплоскостей пространства Ап(е) изображаются
в пространстве Ап парами точек, лежащими соответственно на
попарно параллельных прямых, m-мерных плоскостях и гипер-
плоскостях.
Если нам даны две точки пространства Ап(е), изображае-
мые парами точек {А, В} и {С, £)), то точки прямой пространст-
ва Ап(е), проходящей через эти точки, изображаются в про-
странстве Ап парами точек, лежащими на прямых АС и BD,
которые, в частности, могут совпадать. Совпадение точек А, С
или точек В, D соответствует случаю неоднозначности проведения
прямой пространства Ап (е) через две точки. Соприкасающие-
ся прямые пространства Ап(е) изображаются в пространст-
ве Ап такими двумя парами прямых, что первые прямые совпада-
ют, а вторые — не совпадают или наоборот, а расходящие-
ся прямые изображаются двумя парами прямых, у которых
первые прямые параллельны, а вторые — непараллельны или
наоборот.
Если et, е2, ..., еп — векторы некоторого базиса простран-
ства Ап, то всякую пару векторов этого пространства можно
представить в виде линейной комбинации
{а, Ь} = =
i i i
= 2 {а^+ + ^е_} [е{, е{]. (6.26)
i
Следовательно, пары векторов {eif изображают векторы
некоторого базиса пространства Ап(е), а координатами точек про-
странства Ап(е), изображаемых в пространстве Ап парами точек
с координатами Xi и Р, при таком выборе базиса являются числа
Х^е+АгУ^е_.
Линейные преобразования первого рода векторов пространства
Ап(е) могут быть записаны в виде
'Х‘е+ + (Л>+ + ) (Х>е+ + Ре_) =
= (2лХ)е+ + (25>'3)е_, (6.27)
j J
т. е. эти преобразования изображаются в пространстве Ап неза-
висимыми линейными преобразованиями каждого из двух векторов
§ 1] АФФИННЫЕ ПРОСТРАНСТВА 561
рассматриваемых пар. Отсюда видно, что линейные преобразова-
ния первого рода векторов пространства Ап(е) образуют группу,
являющуюся прямым произведением двух групп линейных преоб-
разований векторов пространства Ап.
Линейные преобразования второго рода векторов пространства
Ап(е) могут быть записаны в виде
'Х*е+ + = 2 И>+ + В$е_) (Yie+ + Хе_) =
= (S^^)«+ + (2^)e_, (6.28)
3 J
т. е. эти преобразования изображаются в пространстве Ап пре-
образованием, состоящим из независимых линейных преобразова-
ний каждого из двух векторов рассматриваемых пар и изменения
порядка преобразованных векторов. В частности, преобразование
fxi = х\ представляющее собой переход от каждого вектора про-
странства Ап(е) к вектору с сопряжёнными координатами, изо-
бражается в пространстве Ап изменением порядка векторов во
всех парах векторов.
Этой интерпретации можно придать другую форму, изображая
точки пространства Ап(е) не парами точек одного пространства
Ап, а парами точек в двух пространствах Ап.
Так как группа линейных преобразований векторов простран-
ства Ап состоит из двух связных компонент, группа линейных
преобразований первого рода векторов пространства Ап(е) состоит
из четырёх связных компонент и группа всех линейных преобра-
зований векторов пространства Ап(е) состоит из восьми связных
компонент. Поэтому в силу связности группы переносов группа
аффинных преобразований пространства Ап(е) также состоит из
восьми связных компонент.
Для получения интерпретации пространств An(i) и Ап(е)
в пространстве Л2п достаточно поставить в соответствие каждой
точке и вектору пространства Ап(1) с координатами xi = X-^-^-^-lX2*
и каждой точке и вектору пространства Ап(е) с координата-
ми xi — Х2*-1 eX2i точку или вектор пространства А2г1 с ко-
ординатами X1. Производя операции сопоставления вектора паре
точек, сложения векторов и умножения вектора на комп-
лексное или двойное число и находя координаты полученного
вектора, мы найдём, как изображаются эти операции в прост-
ранстве А2п.
Так как все координаты особенного вектора являются делите-
лями нуля, координаты X1 векторов пространства А.2п, изобра-
жающих особенные векторы пространства Ап(е), удовлетворяют
условию (АГ27""1)2— (X27)2 — О для всех Z.
36 Зак. 177. Б. А. Розенфельд
562 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Прямые x = at~\~b пространства An(i) изображаются в про-
странстве Д.2п множествами точек, координаты которых удовле-
творяют условиям
4- IX* = (Д^-1 + 1А^ (Г+iU) + В2*-1 + /Я2* =
— (А-г^Т— + + + (6.29)
т. е.
=Д2^17'—ДЗ^+В^"1, = Д^-^ + Д^Г+В2*, (6.30)
и точно так же прямые x = at-\-b пространства Ап(е) изобра-
жаются в пространстве Д2п множествами точек, координаты кото-
рых удовлетворяют условиям
= Д^-^+ДЗ^ + В’2^1, X2i = Д3^1^ + Д3^+В3\ (6.31)
Формулы (6.30) и (6.31) показывают, что прямые пространств
Дп(0 и Ап(е) изображаются в пространстве А2п двумерными
плоскостями специального вида. Точно так же пока-
зывается, что m-мерные плоскости пространств Дп(0 и Ап(е)
изображаются в пространстве А2п 2т-мерными плоскостями спе-
циального вида.
Линейные преобразования первого рода 'х* = ^а$х3 векторов
пространства Дп(/) могут быть записаны в виде
pX2i = 2 (Д^| + /Д2^) (Л21’"1 + =
- S [(Л^и^'-1 — + (6.32)
i
что можно переписать в виде fXI—'^AjXJ, если положить:
Д^1 = а%, а^ = - д^-1. (6.33)
Точно так же линейные преобразования первого рода 'х{
векторов пространства Ап(е) изображаются преобразованиями
'X1 = 5 AjXJ пространства А.2п, если положить:
Д^-i = Д^, ДЙ-i = Д^"1. (6.34)
Нетрудно проверить, что группа неособенных комплексных
матриц п-го порядка изоморфна группе неособенных веществен-
ных матриц 2п-го порядка, элементы которых связаны соот-
ношениями (6.33), а группа неособенных двойных матриц п-го
порядка изоморфна группе неособенных вещественных ма-
триц 2п-го порядка, элементы которых связаны соотношения-
ми (6.34).
§ 11
АФФИННЫЕ ПРОСТРАНСТВА
563
Интерпретация плоскости Д2(/) в пространстве Д4 применялась
д. П. Норденом [4].
Из интерпретации пространства Ап(ё) в пространстве А2п не-
трудно получить рассмотренную нами выше интерпретацию этого
пространства в пространстве Ап: для этого достаточно поставить
в соответствие каждой точке пространства Ап(е), изображаемой
в пространстве А.2п точкой с координатами X1, пару точек про-
странства Ап с координатами ^(X2i + X2i+X) u^(X2i— X2i+V).
Для получения интерпретации пространства An(i, е) в про-
странстве А2п достаточно поставить в соответствие каждой точке
пространства An(i, ё) пару точек {Д, В) пространства Д2п, а
каждому вектору пространства Ап(1, е) пару векторов {а, ft} про-
странства А2п. Тогда вектор пространства An(i, е) с началом,
изображаемым парой точек {Д, В}, и концом, изображаемым парой
точек {С, £)}, изображается парой векторов {AC, BD}; сумма
векторов, изображаемых парой векторов {а, ft} и {с, d}, изобра-
жается паров векторов + b-\-d}, а произведение вектора,
изображаемого парой векторов {a, ft}, на антикватернион, пред-
k т\
t , изо-
I nJ
бражается парой векторов {ka-J-lb, ma-\-nb}. Выполнение аксиом
ставляемый вещественной матрицей второго порядка
пространства An(i, е) является непосредственным следствием вы-
полнения аксиом пространства Д2л.
При нашей интерпретации особенные векторы простран-
ства An(i, ё) изображаются парами коллинеарных векторов: для
превращения пары векторов (ka, Id) в нулевую пару нужно умно-
( I 1\
представляемый матрицей ( L
\ rv /v J
жить её на антикватернион,
являющейся делителем нуля.
Коллинеарные векторы пространства Ап(1, ё) изобра-
жаются в пространстве Д2п парами векторов, лежащих в одной
двумерной плоскости. Поэтому вырожденный вектор простран-
ства Ап(1, е), изображаемый парой векторов {ka, la}, коллинеа-
рен двум неколлинеарным между собой векторам пространства
Ап(1, ё), изображаемым парами векторов {a, ft} и {а, с), где ft
и с — два вектора пространства А2п, неколлинеарных между собой
и вектору а.
Заметим, что линейно независимые системы m-пар векторов
{a, ft}, {с, d}, . . ., {е, /} состоят из 2m векторов a, ft, с, d, . . .
образующих линейно независимую систему. Отсюда и
из предыдущего утверждения следует, что точки прямых,
m-мерных плоскостей и гиперплоскостей про-
странства Ап(1, е) изображаются в пространстве А2п парами
точек, лежащими соответственно на парах параллельных или
36*
564
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
совпадающих двумерных, 2/п-мерных и (2м — 2)-мерных плоскостей,
а точки параллельных прямых, m-мерных пло-
скостей и гиперплоскостей пространства An(i, е) изо-
бражаются в А2п парами точек, лежащими, соответственно на
попарно параллельных двумерных, 2/п-мерных и (2п— 2)-мерных
плоскостях.
Если нам даны две точки пространства Лп(/, е), изображаемые
парами точек {А, В} и {С, D] в пространстве Д2п, то точки пря-
мой, проходящей через эти точки, изображаются в пространстве
А2п парами точек, лежащими на двух двумерных плоскостях,
параллельных векторам BD и АС, одна из которых проходит
через точки В и D, а другая — через точки А и С. Случай кол-
линеарности векторов АС и BD соответствует случаю неодно-
значности проведения прямой An(i, е) через две точки. Сопри-
касающиеся прямые пространства An(i, е) изображаются
в пространстве А2п такими двумя парами параллельных или со-
впадающих между собой двумерных плоскостей, что плоскости
первой пары пересекаются по прямым с плоскостями второй пары,
а расходящиеся прямые изображаются такими двумя парами
двумерных плоскостей, что плоскости первой пары не пересе-
каются с плоскостями второй пары, но имеют с ними одно общее
одномерное направление.
Если elf е2, ..., е2п— векторы некоторого базиса простран-
ства А2п, то всякую пару векторов {а, Ь] этого пространства
можно представить в виде линейной комбинации
{a, b} = S
II i
/ а21’"1 ^-1\
— S {e2i -1» e2i} ( 2i h'2i )’ (6.35)
•?, \ u U J
Следовательно, пары векторов (e2i_t, e2i} изображают век-
торы некоторого базиса пространства An(i, е), а координатами
точек пространства An(i, е), изображаемых в пространстве А2п
парами точек с координатами Л7 и Y1, при таком выборе базиса яв-
ляются антикватернионы, представляемые матрицами ( ).
Линейные преобразования векторов пространства An(i, ё) при
замене антикватернионов представляющими их
быть записаны в виде
V*2' 'г* CtUh д’й /
матрицами могут
K2J-1
(6.36)
Y4
АФФИННЫЕ ПРОСТРАНСТВА
565
§ И
т. е.
'Х2*"1 = 2-(Л1’С11Лг2-;“1 + Д^-1Хм),
3
'X-1 = 2 (
'^-1 =2(дЙ:11у2г-1+4//1^), (6,37)
3
'Y^^A^Y^ + A^)
3
или
'X^'Za^X'7, 'Y1 = ^AIjYJ. (6.38)
J J
Таким образом, линейные преобразования векторов простран-
ства Ап(1, е) изображаются в пространстве А.2п преобразованиями,
при которых два вектора пространства А.2п, изображающих вектор
пространства Ап(1, е), подвергаются одному и тому же линей-
ному преобразованию.
Отсюда видно, что группа линейных преобразований векторов
пространства Ап(1, е) изоморфна группе линейных преобразо-
ваний векторов пространства А2п или, что равносильно этому,
группа неособенных антикватернионных матриц п-го порядка
изоморфна группе неособенных вещественных матриц 2п-го по-
рядка, что является также следствием изоморфизма алгебр этих
матриц (см. § 1 главы V).
Всякой антикватернионной матрице (а*.) можно поставить в соот-
ветствие вещественное число, которое мы будем называть полу-
определителем антикватернионной матрицы и которое равно опре-
делителю соответственной вещественной матрицы (Xj), причём в силу
нашего изоморфизма при умножении антикватернионных матриц
их полуопределители перемножаются. Нетрудно проверить, что
если заменить все элементы антикватернионной матрицы переста-
новочными между собой комплексными или двойными числами,
полуопределитель антикватернионной матрицы равен произведению
определителя этой матрицы на комплексное или двойное число,
сопряжённое со значением этого определителя. Определённый нами
в § 5 главы V полуопределитель (5.200) антикватернионной ма-
трицы второго порядка является частным случаем определённо-
го здесь полуопределителя антикватернионной матрицы любого
порядка.
Так как группа линейных преобразований векторов простран-
ства А2г1 состоит из двух связных компонент, группа антикватер-
нионов единичного и мнимоединичного модуля также состоит из
двух связных компонент. Так как, с другой стороны, группа пе-
реносов пространства А2п связна, группа аффинных преобразований
пространства Ап {I, е) состоит из четырёх связных компонент.
566 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Для получения интерпретации пространства An(i, J) в про-
странстве A.2n(i) достаточно поставить в соответствие каждой точке
и вектору пространства An(l, j) с кватернионными координатами х\
/Х^-1 —X* \
представляемыми комплексными матрицами _
\X2i X2i^J
точку или вектор пространства А.2п(Г) с комплексными коорди-
натами X1, Для получения интерпретации пространства Дп(/, е)
в пространстве А.2п(1) достаточно поставить в соответствие каждой
точке и вектору пространства An(i, е) с антикватернионными
координатами xi3 представляемыми комплексными матрицами
/Х2г-1 \ л
/ ), точку или вектор пространства A2n(i) с ком-
плексными координатами X1. Для получения же интерпретации
пространства Ап(1, е) в пространстве А.2п(1) достаточно поставить
в соответствие каждой точке и вектору пространства Ап (Z, е)
с антикватернионными координатами х\ представляемыми двой-
/%^-1 _ X* \
ными матрицами ( _ , точку или вектор простран-
\Х^ х2*-1/
ства А2п(е) с двойными координатами X1.
Производя операции сопоставления вектора паре точек, сложе-
ния векторов и умножения вектора на кватернион и антикватернион
и находя координаты полученного вектора, мы найдём, как изо-
бражаются эти операции в пространствах А2п(1) и Д2/г(^).
Так как все координаты особенного вектора являются делите-
лями нуля, координаты X1 векторов пространств А2п(1) и А2п(е)3
изображающих особенные векторы пространства Ап(1, е), удовле-
творяют в первом случае условию x2i~1X2i~1— X2iX2i = 0, а во
втором случае условию X'2i^1X'2i~1X'2iX'2i = (для всех Z).
Прямые х~ at-\-b пространств An(i3 J) и Ап(1, е) изобра-
жаются соответственно в пространствах А2п(1) и А2п(е) множеством
точек, координаты которых удовлетворяют условиям
/^-i _ x2i AM2*"1 —— ТА —B~2i \
Х'^^/уА^ АЫ-ууи
/ А^^Т—~A2iUB2i~x — A*~4J— А* 7- В2* \
— ( __ _____________________ ____ I, (о.о9)
УА* Т-[-A2iU B2i — A2i U-\-A(2i~1T-\-~B2i~1J
т. е.
Д^ + В2*"1, X'2i =А^-ГиА^Т~\-В2\ (6.40)
и точно так же прямые x = at-[-b пространства Ап(1, е) изобра-
жаются в пространстве A21l(i) множествами точек, координаты ко-
§ 11
АФФИННЫЕ ПРОСТРАНСТВА
567
торых удовлетворяют условиям
= (6.41)
Формулы (6.40) и (6.41) показывают, что прямые пространств
АО’ Л и A(z, е) изображаются в пространствах АЛО и А2п(е)
двумерными плоскостями специального вида. Точно
так же показывается, что m-мерные плоскости пространств An(i, j)
и An(i, е) изображаются в пространствах A2n(i) и А2п(е) 2т-мер-
ными плоскостями специального вида.
Представляя линейные преобразования векторов пространств
АО’, /) и АО, е) линейными преобразованиями векторов про-
странств А2п(Г) и А2п(е), мы найдём, что группа неособенных
кватернионных матриц п-го порядка изоморфна группе неосо-'
бенных комплексных матриц 2п-го порядка, элементы которых
связаны соотношениями
= А%, А% - — А%~\ (6.42)
а группа неособенных антикватернионных матриц п-го порядка
изоморфна группе неособенных комплексных матриц 2п-го по-
рядка, элементы которых связаны соотношениями
= (6.43)
и группе неособенных двойных матриц 2п-го порядка, элемен-
ты которых связаны соотношениями (6.42). Эти изоморфизмы
также являются следствиями изоморфизмов алгебр матриц ука-
занного вида.
Всякой кватернионной матрице (aj) можно поставить в соот-
ветствие неотрицательное вещественное число, которое мы будем
называть полу определителем кватернионной матрицы и которое
равно определителю соответственной комплексной матрицы (4j),
являющемуся неотрицательным вещественным числом в силу соот-
ношений (6.42), причём в силу нашего изоморфизма при умноже-
нии кватернионных матриц их полуопределители перемножаются.
Нетрудно проверить, что если заменить все элементы кватернион-
ной матрицы перестановочными между собой комплексными числами,
полуопределитель кватернионной матрицы равен произведению
определителя этой матрицы на комплексное число, сопряжённое
со значением этого определителя. Определённый нами в § 5
главы V полуопределитель (5.200) кватернионной матрицы второго
порядка является частным случаем определённого здесь полуопре-
делителя кватернионной матрицы любого порядка.
Так как группа линейных преобразований векторов простран-
ства АЛО и её подгруппа, определяемая условиями (6.42), связны,
то группа кватернионов единичного модуля также связна. Точно
568 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
так же группа переносов пространства An(i, j) связна и группа
аффинных преобразований пространства Лл(/, у) также связна.
Полуопределитель антикватернионной матрицы (ар, введённый
нами выше, можно определить так же как определитель соответ-
ствующей этой матрице комплексной или двойной матрицы (Aj),
являющийся вещественным числом в силу соответственно соотно-
шений (6.43) и (6.42). Нетрудно проверить, что полуопределители,
определяемые всеми тремя указанными нами способами, совпадают.
§ 2. Евклидовы пространства над алгебрами комплексных
и двойных чисел кватернионов и антикватернионов
Подобно тому, как, определив в пространстве Ап скалярное
произведение векторов с помощью аксиом IV, мы превращаем это
пространство в евклидовы пространства Rn или lRn, мы можем
определить и в пространствах An(t), Ап(е), An(iy j) и Ап(1, е)
скалярное произведение векторов и превратить эти пространства
в пространства, которые мы также будем называть евклидовыми
пространствами.
Аксиомы IV в случае пространств над комплексными и двой-
ными числами, кватернионами и антикватернионами могут иметь вид
IV, 1°. Каждым двум векторам а, b поставлен в соответ-
ствие скаляр (соответственно комплексное и двойное число, ква-
тернион или антикватернион)
k(a, b), (6.44)
называемый скалярным произведением векторов.
IV, 2°. Скалярное произведение симметрично-.
(а, b) = (b, а), (6.45)
или IV, 2'. Скалярное произведение эрмитово-симметрично:
(а, Ь) — (Ь> а).
(6.46)
IV, 3°. Скалярное умножение дистрибутивно относительно
сложения векторов:
(а, Ь-±-с) = (а, &) + (я, О* (6.47)
IV, 4°. Скалярный множитель можно вынести за знак ска-
лярного произведения:
(a, bk) = (ay b)k. (6.48)
Для формулировки пятой аксиомы заметим, что если в про-
странстве Ап(е), An(i), Ап(1, j) или Ап(1, е) выбран базис
^ , . . ., еп и векторы х, у имеют вид х = 2 У = 2
4 4
§ 2] ЕВКЛИДОВЫ ПРОСТРАНСТВА 569
скалярное произведение (х, у) в случае аксиомы IV, 2° имеет вид
(х, У) = (5 ^х<, S е}уЗ) = s (S eye*, е^уЗ = S S е^уЗ —
i j j ъ j i
= е^х*уЗ = 25(^, е^х*уЗ (6.49)
i j i j
или, если обозначить (ei9 е^) через а^,
(х, у) = 2 2 ацХ*уЗ. (6.50)
* J
Точно так же в случае аксиомы IV, 2° предыдущее скалярное
произведение имеет вид
(X, у) = (2 eixi, 2 еууЗ) = 2(2 eix\ е^уЗ = 2 бз< 2 еус*)уЗ =
i 3 3 $ 3 i
= 2 2(^-, ег)Х*уЗ = 2 2*4^. е^уЗ (6.51)
* J i 3
или, если обозначить (eif ej) через а^>
(х, у) = 2 2 Х*а^у3. (6.52)
i 3
Будем называть выражение (6.50) билинейной формой, а выра-
жение (6.52) эрмитовой билинейной формой. Выражения вида (6.52)
названы по имени французского математика Эрмита, введшего эти
выражения. В силу аксиом IV, 2° и IV, 2' коэффициенты
в первом случае удовлетворяют условию симметрии а^ = а^,
а во втором случае — условию эрмитовой симметрии aij — a3-i.
Соответственные скалярные квадраты имеют вид
(х, х) = ^^aijXix3 (6.53)
* з
и
(х, х) = 2S^«yxi. (6.54)
* з
Будем называть выражение (6.53) квадратичной формой,
а выражение (6.54) эрмитовой квадратичной формой.
Во втором случае в силу эрмитовой симметрии коэффициенты аи
и, следовательно, члены х1аах1 вещественны, а для каждого члена
xiaijX3 при I =/= j имеется сопряжённый с ним член х«?о^х\ вследст-
вие чего в случае аксиомы IV, 2' скалярный квадрат веществен*
Билинейные формы остаются инвариантными при преобра-
зованиях координат в случае коммутативных алгебр. В самом
деле, при преобразовании базиса
ev = 2 e^Ai, = 2 et'A* > (6.55)
570 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
координаты вектора преобразуются по закону
х{' = ^А^х\ / = 2^.?’, (6.56)
i i'
так как
X = 2 еГ = 2 ^'Х1' = ei'^i (6.57)
i ir i i'
Если мы зададим закон преобразования коэффициентов били-
нейных форм в виде
= 2 l&ijAvA^, = Aj , (6.58)
г з i' j'
то в силу коммутативности алгебры
5 2 aijxiyj =2222 ai'fAiAj'хгу3 = 22 а^^х^у3’. (6.59)
i 3 i J V 3' i1 3'
Поэтому билинейные формы можно определить для комплексных
и двойных чисел. Так как в нашем доказательстве коммутативность
существенно использовалась, в случае некоммутативных алгебр и,
в частности, в случае кватернионов и антикватернионов, инва-
риантных билинейных форм определить нельзя.
Эрмитовы билинейные формы остаются инвариантными при
преобразованиях координат в случае как комплексных и двойных
чисел, так и кватернионов и антикватернионов. В самом деле,
если при преобразовании базиса (6.55) мы зададим закон преобра-
зования коэффициентов ау эрмитовых билинейных форм в виде
ai'3' = 22 AvatjAfy, ay = 22 Al'a^^Aj , (6.60)
i 3 i’ j'
TO
2 2 х^агзУ^ — 2 S 2 S x^Airai'^Aj /=22 xt а^з'У^ • (6-61)
i 3 i 3 i' 3' V 3'
Как мы уже упоминали, всякая комплексная квадратичная форма
может быть приведена линейным преобразованием к сумме квад-
ратов координат. Но для них не справедлив закон инерции ква-
дратичных форм. Для комплексных чисел и кватернионов имеет
место закон инерции эрмитовых квадратичных форм, т. е. если
эрмитова квадратичная форма выбором базиса приводится к виду
— х^х1 — х2х2— . . . —х1х1 xl+1xl+1 -|- • • • ~[~хпхп, (6.62)
то число минусов в этой форме, также называемое индексом
формы, не зависит от выбора базиса, при котором форма приве-
дена к этому виду. Этот закон инерции является следствием
закона инерции для вещественных квадратичных форм и положи-
тельной определённости форм аа = иаа = а2-]-Ь2 с2 Аг d2•
§ 2] ЕВКЛИДОВЫ ПРОСТРАНСТВА 571
в самом деле, если заменить в форме (6.54) элементы xi их
выражениями через вещественные координаты элементов
форма (6.62) станет квадратичной формой индекса 21 от 2п пере-
менных в случае комплексных чисел и квадратичной формой
индекса 4Z от 4п переменных в случае кватернионов. Поэтому
в случае комплексных чисел и кватернионов существуют положи-
тельно определённые эрмитовы квадратичные формы (6.62) ин-
декса 0, принимающие неотрицательные значения и равные нулю
лишь в том случае, когда вектор х1 является вектором-нулём.
Квадратичные формы в случае двойных чисел в силу (5.41)
и (5.42) могут быть представлены в виде <p+e+4-где
<р+, <?_— две вещественные квадратичные формы. В том случае, если
обе формы ф+, являются невырожденными формами индекса I,
будем называть двойную квадратичную форму невырожденной
формой индекса 1\ такая форма может быть выбором базиса
приведена к виду
— (л:1)2 —(х2)2 — . . . — (хг)2 + (хг+1)2+ . . . +(х^)2, (6.63)
и индекс этой формы не зависит от выбора базиса, при котором
эта форма приведена к этому виду. В то же время для двойных
чисел и антикватернионов не имеет места закон инерции квадра-
тичных эрмитовых форм, так как в этих случаях формы
— аа = — а2-|-&2 и яя = я2-|-£2 — е2— бГ2, —аа = —а2 — ^2 +
-\-c2-\-d2 имеют одинаковый индекс и, если заменить в форме (6.62)
элементы х1 их выражениями через вещественные координаты эле-
ментов х\ форма (6.62) станет квадратичной формой индекса п
от 2п переменных в случае двойных чисел и квадратичной формой
индекса 2п от 4я переменных в случае антикватернионов.
Заметим, что вещественные квадратичные формы 2п и 4п
переменных, определённые формой (6.62), как в случае комплекс-
ных чисел и кватернионов, так и в случае двойных чисел и
антикватернионов являются невырожденными формами. Те свой-
ства Г—4°, которые, как мы показали в § 1 главы V, выделяют
алгебры комплексных и двойных чисел кватернионов и антиква-
тернионов из всех остальных алгебр, по существу заключаются
в том, что в случае этих алгебр можно построить такие
эрмитовы квадратичные формы, которые являются невыро-
жденными квадратичными формами от вещественных координат
элементов, входящих в эту форму. Будем называть такие
эрмитовы квадратичные формы невырожденными формами.
Поэтому пятая аксиома в случае пространств над ком-
плексными и двойными числами, кватернионами и антикватернионами
может иметь вид:
IV, 5°. Скалярный квадрат вектора неотрицателен, причём
знак равенства имеет место только для вектора-нуля — для
Ъ72
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
эрмитово-симметричного скалярного произведения в случае ком-
плексных чисел и кватернионов.
IV, 5'. Скалярный квадрат вектора является невырожденной
квадратичной формой индекса I—для симметричного скалярного
произведения в случае двойных чисел, или, если вставить перед
словом «квадратичной» слово «эрмитовой», для эрмитово-симме-
тричного скалярного произведения в случае комплексных чисел
и кватернионов.
IV, 5". Скалярный квадрат вектора является невырожден-
ной квадратичной формой — для симметричного скалярного про-
изведения в случае комплексных чисел или, если вставить перед
словом «квадратичной» слово «эрмитовой», для эрмитово-симме-
тричного скалярного произведения в случае двойных чисел и
антикватернионов.
Заметим, что в случае некоммутативных алгебр нельзя опреде-
лить инвариантных при преобразовании координат не только били-
нейных, но и любых полилинейных форм Х1уЗ . . .zk
I з к
и, в частности, определителей, являющихся кососимметрическими
полилинейными формами. В § 1 мы видели, что роль определи-
телей в случае кватернионных и антикватернионных матриц играют
вещественные числа — полуопределители.
Будем называть пространство, определяемое аксиомами про-
странства Ап(е) и аксиомами IV; 1°, 2°, 3°, 4°, 5', п-мерным
двойным евклидовым пространством индекса Z. Это пространство
обозначим так: 1Rn(ey пространство °/?л(е) обозначается Rn(e).
Будем называть пространство, определяемое аксиомами про-
странства Ап(1) и аксиомами IV, 1°, Т, 3°, 4°, 5°, п-мерным
комплексным унитарным евклидовым пространством индекса О
Un(i\ а при замене аксиомы IV, 5° аксиомой IV, 5' — п-мер-
ным комплексным унитарным евклидовым пространством ин-
декса
Будем называть пространство, определяемое аксиомами про-
странства Ап(е) и аксиомами IV, Г, 2', 3°, 4°, 5", п-мерным
двойным унитарным евклидовым пространством Un(e).
Будем называть пространство, определяемое аксиомами про-
странства Лте(/, J) и аксиомами IV, Г, 2', 3°, 4°, 5°, п-мерным
кватернионным унитарным евклидовым пространством индекса О
Un(l, у), а при замене аксиомы IV, 5° аксиомой IV, 5' — п-мер-
ным кватернионным унитарным евклидовым пространством
индекса I lUn(i, j).
Будем называть пространство, определяемое аксиомами про-
странства Ап(1, е) и аксиомами IV, Г, 2', 3°, 4°, 5", п-мерным
антикватернионным унитарным евклидовым пространством.
Так как скалярное произведение векторов в пространствах
Rn(e) и lR}l(e) является двойным числом, то для однозначного
§ 2] ЕВКЛИДОВЫ ПРОСТРАНСТВА 573
определения расстояния в этом пространстве условимся называть
абсолютным значением ||а|| двойного числа а+е+-]- а__е~ двой-
ное число | а+ | | | е_, а абсолютным значением [|а|| двой-
ного комплексного числа ^+еЛ_~\га_е_ двойное комплексное число
||а+|к+Ч“ На-Н^-’ где На+Н> На-П—абсолютные значения ком-
плексных чисел а+, а_. Будем считать длиной вектора а про-
странства Rn(e) и lRn(e) определённое таким образом абсолютное
значение квадратного корня из скалярного квадрата (а, а) этого
вектора, а расстоянием между точками А, В этих пространств —
длину вектора АВ.
Интерпретация пространства Ап(е) в пространстве Ап даёт
нам интерпретацию пространств Rn(e) и lRn(e) в пространствах
Rn и lRn. Для получения этих интерпретаций достаточно поста-
вить в соответствие каждой точке пространств Rn(e) и lRn(e)
с координатами xt = х^е +х[_е_ точки пространств Rn и lRn
с координатами х^ и х*_. Тогда в силу (5.41) и (5.42) скалярное
произведение (х, у) двух векторов пространств Rn(e) и lRn(e),
являющееся аналитической функцией координат этих векторов,
связано со скалярными произведениями (х+, j/+) и (х_, у_) соот-
ветственных векторов пространств Rn и lRn соотношением (х, у) =
= (х+, У+)е+ ~}-(х_, у_)е_. Поэтому расстояние ш между двумя
точками пространств Rn(e) и lRn(e) связано с расстояниями ю+
и соответственных точек пространств Rn и lRn соотношением
w = ы+е+-\-<п_е_, а угол ф между двумя векторами пространств
Rn(e) и 1^п(е) связан с углами ф+ и ф_ соответственных векторов
пространств Rn и lRn соотношением ф = ®+е+ Ц-ф_£_.
В пространствах Rn(e) и lRn(e) можно определить движения
как взаимно однозначные непрерывные преобразования этих про-
странств, сохраняющие расстояния между точками. Так же как
для пространств Rn(T) (см. § 10 главы I), показывается, что дви-
жения пространств Rn(e) и lRn(e) являются аффинными преобра-
зованиями первого рода. Так как группа всех аффинных преоб-
разований первого рода пространства Ап(е) изоморфна прямому
произведению двух групп аффинных преобразований простран-
ства Ап, группа движений пространств Rn(e) и lRn(e) изо-
морфна прямому произведению двух групп движений соответ-
ственно пространств Rn и lRn.
Рассмотрим более подробно унитарные евклидовы простран-
ства ип{е), Un(it у) и Un(i, е). Пространство Un(l) часто
рассматривается в линейной алгебре1). Пространство рас-
сматривалось Шевалле 2).
*) См. Мальцев [1], стр. 336 и Гельфанд [1], стр. 78.
2) См. Шевалле [1], стр. 33.
574
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
Определим длину |а| вектора а пространств Un(i), Un(e),
Un(i, j) и Un(i, e) как абсолютное значение квадратного корня
из скалярного квадрата (а, а) этого вектора, т. е.
|а| = ||/(^7)||, (6.64)
а расстояние между точками А и В как длину вектора АВ.
Формула (6.64) показывает, что расстояние между двумя различ-
ными точками пространств Un(i) и Un(i, j) всегда вещественно и
положительно, а расстояние между точками пространств Un(e)
и Un(l, е) может быть вещественно, чисто мнимо и равно нулю.
Будем называть углом между векторами а и b элемент данной
алгебры ф, определяемый соотношением
cos ф — м , (6.65)
И IN 7
причём косинус в случае любой из рассматриваемых нами алгебр
может быть определён как сумма ряда
m2 ©4 фб
cos<?= 1 —+ —. . . (6.66)
В пространствах Un(i) и Un(i, у), так же как в простран-
ствах Rn, выполняется неравенство Коши
(х, у) (у, х)<(х, х)(у, у). (6.67)
Оно непосредственно следует из того, что скалярный квадрат
вектора х—yt неотрицателен при любом соответственно ком-
плексном или кватернионном t\
(х—yt, х—yty^O,
т. е. при любом t
(у, У)М— ИУ> х)— (*, y)t~{-(x, х)^0.
(6.68)
(6.69)
В самом деле, если у = 0, неравенство (6.67) тривиально.
Если у Ф 0, подставляя в (6.69) в качестве t число , полу-
чаем
(*, у) (у, х) — (х, у) (у, х) — (х, у) (у, х) 4~ (х, х) (у, у) 0, (6.70)
т. е. неравенство (6.67).
Векторы а, Ь, для которых (а, Ь) = 0, называются взаимно
унитарными. В пространствах Un(i), Un(e), Un(l, J) и e),
так же как в пространстве Rn, уравнение гиперплоскости может
быть записано в виде
(а, х) — р, (6.71)
где вектор а, взаимно унитарный со всеми векторами, лежащими
в гиперплоскости, называется нормальным вектором гиперпло-
ЕВКЛИДОВЫ ПРОСТРАНСТВА
575
§ 2]
скости. Для всякой m-мерной плоскости пространств Un(i), Un(e),
Un(i, J) и e) можно указать вектор, взаимно унитарный
с этой плоскостью: таким вектором является нормальный вектор
любой гиперплоскости, проходящей через /n-мерную плоскость.
Отсюда следует, что в пространствах Un(i), Un(e), Un(i, J) и
Un(l> e) всегда можно выбрать базис, состоящий из взаимно уни-
тарных векторов. Если все векторы такого базиса являются еди-
ничными, базис называется унитарно-нормированным,
В случае пространств Un(i) и Un(t, j) длина каждого вектора,
отличного от нуля, положительна, и, умножив вектор а длины | а |
на вещественное число q—г, мы получим единичный вектор. В слу-
1 а I
чае пространств Un(e) и Un(i, ё) длина неизотропного вектора
положительна или является чисто мнимым числом из верхней по-
ловины мнимой оси. Умножив вектор а длины |а| в первом слу-
чае на вещественное число yi-, а во втором случае на двойное
I а I
е
число или антикватернион -рщ-, мы также получим единичный
вектор. Поэтому унитарно-нормированные базисы имеются во
всех четырёх пространствах Un(i), Un(l9 7), ЦДе) и е)-
Скалярное произведение (6.51) векторов х и у пространств
Un(i), Un(e), Un(i, у) и Un(i, е) в случае унитарно-нормирован-
ного базиса, когда (ei} ej) = 8^-, имеет вид
(х, у) = 2
г
(6.72)
и, в частности,
(х, х) —2^^-
г
Углом между двумя прямыми с направляющими векторами
а, b а углом между двумя гиперплоскостями с нормальными
векторами а, b будем называть тот из углов между векторами
al и Ьт, где I и т — произвольные элементы данной алгебры,
который в случае пространств Un(i) и Un(i, j) веществен и
«Су, а в случае пространств
нус которого веществен или
векторами al и Ьт равен
(al, Ьт)
(6.73)
Un(e) и Un(i, ё)— тот угол, коси-
чисто мним. Косинус угла между
/ {а, Ь) т
(6-74)
| al | | Ьт | 111 | а 11 b | т | ’
откуда видно, что элементы / и т всегда можно подобрать таким
образом, чтобы выражение (6.74) было равно
I (Щ Ь) |
cos 9 == т2—:-г ,
Т | Л I М
(6.75)
576 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
т. е. было вещественно или чисто мнимо. При этом в простран-
ствах Un(t) и Un(i, j) в силу неравенства Коши (6.67) coscp<^l
и определённый таким образом угол ср веществен и заключён
в пределах от 0 до тс; в пространствах Un(e) и Un(i, е) опре-
делённый таким образом угол <р может быть вещественным, мнимым
и равным нулю.
Прямые линии пространств Un(e) и Un(i, е), направляющие
векторы которых изотропны, называются изотропными прямыми.
Концы всех изотропных векторов пространств Un(e) и Un(i, е}
с началом в точке а образуют изотропный конус этой точки.
На всякой m-мерной плоскости пространств Un(i) и Un(i, у)
можно выбрать унитарно-нормированный базис из т векторов;
m-мерные плоскости пространств Un(t) и Un(i, j) и те т-мерные
плоскости пространств Un(e) и Un(i, е), на которых можно
выбрать такой базис, являются соответственно пространствами
Z7m(f), Ц»(^)> ^w(f, 7) и ^w(z, Будем называть такие m-мер-
ные плоскости евклидовыми плоскостями-, m-мерные плоскости
пространств Un(e) и Un(l, е), все векторы которых изотропны,
будем называть изотропными плоскостями-, m-мерные плоскости
этих пространств, не являющиеся ни евклидовыми, ни изотропными,
будем называть полу евклидовыми плоскостями.
Из формулы (6.73) видно, что пространство Un(i) изометрично
пространству R2n, пространство Оп(е) изометрично простран-
ству nR2n, пространство Un(i, у) изометрично пространству R±n,
а пространство е) изометрично пространству '2nR4n'
Таким образом, пространства R2n, nR2n, R4n и 2nR±n образуют
вещественные интерпретации пространств Un(i), Un(e),
Un(i, j) и Un(h e). Эти же интерпретации могут быть
получены с помощью рассмотренных нами в § 1 интерпретаций
пространств An(i) и Ап(е) в А2п и интерпретаций пространства
Ап{1, j) в Л2„(/) и пространства An(i, е) в Л2п(г) и А.2п(е). При
этих интерпретациях взаимно унитарные векторы пространств
Un(t), Un(e), Un(i, у) и Un(t, е) изображаются ортогональными
векторами пространств R2n, nR2n, R4n, 2nR4n-
Из изометричности пространств Un(i) и Un(i, j) простран-
ствам R.2n и R4n следует выполнение в Un(i) и Un(i, j) аксиом
1°—3° метрического- пространства (см. § 3 главы I).
Если базисы и е^ пространств Un(i), Un(e), Un(i, у) и
Un(i, е) — унитарно-нормированные, то, умножая скалярно левую
и правую части первой формулы (6.55) на et, а левую и правую
части второй формулы (6.55) на ер и используя соотношения
е^ = Ъ^ мы найдём:
Ai^(ei, xf ={е,, е<), (6.76)
откуда мы находим, что
Дг=дГ (6.77)
§ 2] ЕВКЛИДОВЫ ПРОСТРАНСТВА 577
Так как элементы и А\ являются координатами векторов,
составляющих унитарно-нормированный базис, при другом уни-
тарно-нормированном базисе, то из соотношений (^, е]) = Ъц для
каждого из этих базисов мы находим, что матрица (а\) удовле-
творяет условию
= (6.78)
i
Матрица (Д|'), обладающая такими свойствами, называется
унитарной матрицей индекса 0. Нетрудно проверить, что те же
условия мы получим, если потребуем, чтобы матрица преобразо-
вания (6.56) удовлетворяла условию
s х*х{ = S Х{'х*'. (6.79)
Если мы определим движения пространств Un(i), Un(e), Un(i, j)
и Un(i, e) как взаимно однозначные отображения этих пространств
на себя, не изменяющие расстояния между точками, то в отличие
от пространств Rn и lRn движения пространств Un(e),
Un(l, J) u Un(h e) не являются аффинными преобразованиями
этих пространств. В самом деле, в силу изометричности этих
пространств соответственно пространствам R2ni nR2ni и
движения первых пространств изображаются движениями соответ-
ственных вторых пространств. Но прямые пространств Un(e)>
Un(i, j) и Un(t, е) изображаются в R2n, nR2ni Rin и ^R4n двумер-
ными и четырёхмерными плоскостями специального вида.
Вследствие этого движение первых пространств, изображающееся
в соответственном втором пространстве движением, переводящим
плоскость, изображающую прямую, в плоскость, не изображаю-
щую прямую, не переводит прямые в прямые, т. е. не является
аффинным преобразованием. Заметим, что формула (3.156) имеет
место в пространствах Rn и lRn, а также, если считать параметры
многообразия плоскостей соответственно комплексными, двойными,
кватернионными и антикватернионными, в пространствах Un(i),
Un(e), Un(i, j) и Un(lt e). В силу этой формулы многообразия
всех двумерных плоскостей пространств R2n и nR2n и всех четы-
рёхмерных плоскостей пространств R±n и зависят соответ-
ственно от 3(2п — 2) = 6 (п—1) и 5(4п — 4) = 20 (п—1) веще-
ственных параметров, а многообразия всех прямых пространств
t/w(Z), У) и Un(i, е) зависят от 2(п—1) соответ-
ственно комплексных, двойных, кватернионных и антикватернион-
ных параметров, т. е. в первых двух случаях от 4 (п—1), а в по-
следних двух случаях от 8(п—1) вещественных параметров.
Теория пространств lUn(i) и lUn(i, j) строится совершенно
аналогично. Отличие этих пространств от пространств Un(l) и
£4 (/, у) состоит в том, что в пространствах lUn(i) и lUn(i, f) рас-
стояние между точками может быть вещественно, чисто мнимо и
37 Зак. 177. Б. А. Розенфельд
578 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
равно нулю. Кроме того, в этих пространствах можно выбрать
базис, состоящий из попарно взаимно унитарных векторов, п— I
из которых имеют единичную длину, а/—мнимоединичную длину,
т. е. скалярные произведения (^, векторов таких базисов, также
называемых унитарно-нормированными, равны не 8^-, а е^8^, вслед-
ствие чего скалярное произведение векторов и скалярный квадрат
вектора в этом базисе соответственно равны
(х, у) = 2 (6-80)
ъ
И
(х, х) = 2 £i**x< (6.81)
г
В этих пространствах не имеет места неравенство Коши. Про-
странства ]Un(i) и lUn(i, j) изометричны соответственно простран-
ствам 2lR±n и Матрица (А#) перехода (6.55) от одного уни-
тарно-нормированного базиса к другому в этих пространствах
удовлетворяет условию
(6.82)
i
Матрица А\>, обладающая такими свойствами, называется уни-
тарной матрицей индекса I. Нетрудно проверить, что те же
условия мы получим, если потребуем, чтобы матрица преобразо-
вания (6.56) удовлетворяла условию
S == S ^х1' xir. (6.83)
< г
§ 3. Проективные пространства над алгебрами комплексных
и двойных чисел, кватернионов и антикватернионов
Будем называть п-мерным двойным проективным простран-
ством Рп(е), п-мерным кватернионным проективным простран-
ством Pn(i, j) и п-мерным антикватернионным проективным
пространством Pn(i, ё) множества элементов, называемых точ-
ками, находящихся во взаимно однозначном и взаимно непрерывном
соответствии с прямыми связки соответственно в пространствах
^»+1И»4+10>Л и Будем называть т-мерными пло-
скостями пространств Рп(е), Pn(i, J) и Рп(1, ё), при т = 1 —
прямыми, при т = п—1—гиперплоскостями, множества точек
этих пространств, которые при этом соответствии отвечают пря-
мым связки, лежащим в (m-|-1)-мерных плоскостях; будем назы-
вать коллинеациями пространств Рп(ё), Pn(i, j) и Pn(i, е)
взаимно однозначные отображения этих пространств на себя, при
которых прямые переходят в прямые.
Пространство Pn(i, j) рассматривалось А. Н. Колмогоровым [1]
и вместе с проективными пространствами над любыми телами Рей-
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 579
демейстером [1], Бэром [1] и др.; пространство 7^(7, /) специально
изучалось Било [1]. Пространство Р± (Z, е) впервые рассматрива-
лось Хуа Ло-гэном [1, 2] (см. ниже, § 9). Пространства Рп(е) и
Pn(if ё) впервые рассматривались автором [17] (общее определение
проективного пространства над произвольным кольцом с единицей
имеется у Биркгофа 9 и др.).
Точки пространств Рп(ё), Pn(i, j) и Pn(i, е\ отвечающие пря-
мым связки, пересекающимся с гиперплоскостью соответственно
пространств Ап+1 (е), Ап+1 (i, j) и Ап+1 (I, е), не проходящей через
центр связки, находятся во взаимно однозначном и взаимно непре-
рывном соответствии с точками соответственно пространств Ап(е),
An(i, J) и Ап(1, ё). При этом соответствии m-мерные плоскости
пространств An(e)f An(i, j) и An(i, ё) отвечают m-мерным пло-
скостям пространств Рп(ё), Pn(i, J) и Рп(1, е), а аффинные преобра-
зования первых пространств являются частными случаями колли-
неаций вторых пространств. Это даёт возможность рассматривать
пространства Рп(е), Pn(i, /) и Рп(1, ё) как результат дополнения
соответственных пространств Ап(е), Ап(1, у) и Ап(1, ё) новыми
точками, отвечающими прямым связки, не пересекающимся с гипер-
плоскостью.
Так как при приближении одной из прямых связки пространств
Ап+1(^), Лп+1(/, у) и Лп+1(/, ё), пересекающейся с гиперплоскостью,
к прямой той же связки, параллельной этой гиперплоскости, точка
пересечения прямой с гиперплоскостью удаляется в бесконечность,
новые точки, соответствующие прямым связки, параллельным ги-
перплоскости, будем называть бесконечно удалёнными точками
пространств Ап(ё), An(i, J) и Ап(1, ё) при их дополнении до
Рп(е), Pn(it У) и Pn(it ё). Эти бесконечно удалённые точки соста-
вляют гиперплоскость пространств Рп(ё), Рп(1, j) и Рп(1, е), на-
зываемую бесконечно удалённой гиперплоскостью пространств
Ап(е), Ап(Р J) и ПРИ их дополнении до Рп(е), Pn(i, j)
и Pn(i, ё), В случае пространств Ап+1(е) и Лп+1(/, е) имеются пря-
мые связки, расходящиеся с гиперплоскостью. Будем называть но-
вые точки, соответствующие этим прямым связки, идеальными
точками пространств Ап(е) и Ап(1, е) при их дополнении до
Рй(е) и Рп(1, е).
Связки прямых в пространстве Ап+1(е), An+1(i, j) и An+1(i, е)
можно считать интерпретацией или моделью пространств Рп(ё),
Pn(i, J) и Pn(i, е).
Так как связки прямых в аффинных пространствах компактны,
проективные пространства Рп(ё), Pn(i, j) и Pn(i, е) также ком-
пактны.
Будем определять точки пространств Рп(е), Pn(i, j) и Pn(t, ё)
векторами аффинного пространства, принадлежащими прямой связки
Э См. Биркгоф [1], стр. 151.
37*
580 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
этого пространства, соответствующей данной точке, причём в слу-
чае пространств Рп(е) и Pn(i, е) этот вектор должен быть неосо-
бенным, так как в противном случае он неоднозначно опреде-
ляет прямую связки, а значит, и точку пространства Рп(ё) и Рп(1, ё).
Координаты вектора пространства Ап+1 (е), Ап+1 (i, j) и Ап+1 (Z, е),
определяющего точку пространства Рп(е), Pn(t, j) и Pn(i, ё),
будем называть проективными координатами этой точки. Таким
образом, каждая точка пространств Рп(ё), Pn(h J) и Рп(1> е)
характеризуется координатами х°, х1, . .., хп, являющимися-
элементами соответственной алгебры и определёнными с точностью
до умножения на общий множитель (в случае пространств Рп(1, j)
и Рп(1> е) умножение производится справа). Таким образом,
координаты хЧ при любом I, не являющемся нулём и делителем
нуля, определяют ту же точку пространств Рп(ё), Pn(i, j) и
Pn(i, е), что и координаты xi.
В случае проективных прямых Р± (е), Р± (I, j) и Р± (I, е) вместо
двух координат х°, х1, определённых с точностью до множителя,
не являющегося нулём и делителем нуля, часто пользуются их отно-
шением х = х° (х1)-1. Тогда все тачки прямой P^h /), за исклю-
чением точки х1 = 0, и все точки прямых Рх (ё) и Р± (I, ё), за
исключением точек, для которых х1 является нулём или делителем
нуля, находятся во взаимно однозначном соответствии соответ-
ственно с двойными числами, кватернионами и антикватернионами
и прямые Pt (ё), Рх (I, j) и Р1(1)е) можно рассматривать как со-
ответственно расширенную плоскость двойного переменного, рас-
ширенное пространство кватернионов и расширенное простран-
ство антикватернионов. Точка х1 = 0 в этом случае является
бесконечно удалённой точкой этой расширенной плоскости и рас-
ширенных пространств и обозначается знаком сю. Точки пря-
мых Р±(е) и Pt(Z, е), для которых х1 — делитель нуля, являются
идеальными точками этой расширенной плоскости и расширенного
пространства.
Точки пространств Рп(е), Pn(i, J) и Pn(i, е) являются линей-
ными комбинациями п-|-1 базисных точек, что записывается в виде
х=^е^хЧ (6.84)
г
Точки /^-мерной плоскости этих пространств являются линей-
ными комбинациями т-\- 1 базисных точек, что записывается в виде
x = (6.85)
а
Всякую тп-мерную плоскость пространств Рп(ё), Pn(tf У) и
Pn(t, е) можно рассматривать как соответственно пространство
Рт(ё), 7) и ^)> причём числа ta в формуле (6.85)
играют роль координат точек этих пространств.
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 581
Две плоскости пространств Рп(е), Pn(i, j) и Pn(i, е), так же
как плоскости пространств Рп и Pn(i), определяют плоскость,
являющуюся пересечением этих плоскостей, и плоскость, поро-
ждённую этими плоскостями.
Так как уравнения гиперплоскостей пространств Ап+1 (е),
An+i(t> У), ^n+i(^ проходящих через центр связки, имеют вид
2 ирс* = 0, координаты, точек гиперплоскости пространства
i
Рп(е), Pn(l, J) и Рп(1, е) удовлетворяют уравнению 2 uix<i = О*
i
Элементы uif так же как координаты точек, определены с точ-
ностью до умножения на общий множитель, не являющийся нулём
и делителем нуля, который здесь следует писать слева, так как
элементы lUj при любом /, для которого |/|^=0, определяют ту
же гиперплоскость пространства Рп(е), Pn(t, /) и Рп(1,е), что и
элементы uit а в пространствах Pn(i> j) и Pn(i, ё) элементы иг
определяют в общем случае другую гиперплоскость. Поэтому эле-
менты и^ можно считать координатами гиперплоскостей; будем
называть эти координаты тангенциальными координатами гипер-
плоскостей.
Если базисные векторы пространств Ап+1 (е), Ап+1 (i, j) и An(i, ej
выбраны таким образом, что векторы elf е2, •••> еп параллельны
гиперплоскости, в виде которой пространство Ап(е), An(i, j) и
Ап(1, е) погружено в пространство Ап+1(ё), An+1(i, j) и An+1(i, е),
причём эта гиперплоскость имеет уравнение х°=1, и мы примем
за базис пространств Ап(ё), An(l, j) и An(i, е) векторы, равные
этим векторам е19 е2, . . ., еп, то аффинные координаты х1, . . ., хп
точек пространств Ап(е), An(i, J) и Ап(1, ё) связаны с их проек-
тивными координатами х°, х1, .. ., хп соотношениями X* = х* (х0)-1.
Бесконечно удалённые точки этих пространств удовлетворяют усло-
вию х° = 0, а в случае пространств Ап(ё) и An(i, ё) идеальные
точки этих пространств обладают тем свойством, что координаты х°
этих точек являются делителями нуля.
В пространствах Рп(ё), Pn(i, j) и Рп(1, е), так же как в про-
странствах Рп и Pn(t), имеет место принцип двойственности.
Такая особенность пространств Ап(ё) и Л№(/, ё)> как наличие
расходящихся прямых, после дополнения этих пространств беско-
нечно удалёнными и идеальными точками исчезает: две такие пря-
мые пространств Ап(ё) и Ап(1, ё) пересекаются в идеальной точке
и все прямые пространств Рп(ё) и Pn(i, eY лежащие в одной дву-
мерной плоскости, пересекаются, так же как в пространствах Рп,
P„(f) и Pn(i, J).
С другой стороны, такая особенность пространств Ап(е) и
Ап(1, е), как наличие соприкасающихся прямых, после дополнения
этих пространств до пространств Рп(ё) и Рп(1, е) не может исчез-
нуть. Поэтому две прямые пространств Рп(е) и Рп(1, ё) могут
582 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VJ
пересекаться более чем в одной точке, через две точки этих про-
странств может проходить более одной прямой.
Отсюда видно, что в пространствах Рп(е) и Рп(1, е) не имеет
места тот факт, что две плоскости, числа измерений которых равны
I и т, порождающие s-мерную плоскость, пересекаются по един-
ственной плоскости размерности d, связанной с числами Z, т и s
соотношением (3.15), и что те же две плоскости, пересекающиеся
по d-мерной плоскости, порождают единственную плоскость раз-
мерности s, связанной с числами Z, т и d тем же соотношением.
Поэтому пространства Рп(е) и Рп(1, ё) не подходят под часто
применяющееся определение «проективного пространства» как мно-
жества элементов п родов — тп-мерных плоскостей, такого, что
две плоскости измерений Z и т определяют единственное d-мерное
пересечение и единственную s-мерную плоскость, порождённую
ими, причём размерности Z, т, d, s связаны соотношением (3.15).
Отметим, что в то же время число измерений Z и т двух пло-
скостей пространств Рп(е), Pn(i, j) и Pn(i, е) и числа измерений
d и s их пересечения и плоскости, порождённой ими,—в случае
пространств Рп(ё) и Pn(i, ё) в том случае, когда они являются
единственными,—связаны тем же соотношением (3.15), что и в слу-
чае пространств Рп и /\(0- Это доказывается совершенно так же,
как в пространствах Рп и Рп(0-
В пространствах Рп(ё) и Рп(Д ё) не имеют места проек-
тивные теоремы Паппа и Дезарга (см. § 5 главы III), так как
в соответственных аффинных пространствах не имеют места аффин-
ные теоремы Паппа и Дезарга (см. § 1) и при дополнении аффин-
ных пространств до проективных параллельные прямые пересе-
каются в бесконечно удалённых точках.
Точно так же в пространствах Pn(i, j) и Pn(i, е) не имеет
места проективная теорема Паппа, так как в соответствен-
ных аффинных пространствах не имеет места аффинная теорема
Паппа.
Как показал А. Н. Колмогоров [1], множество элементов, удов-
летворяющее его аксиомам 1° и 2° (см. § 5 главы III) и аксиоме
полноты, при /г^>3 является пространством Pn(i, j). При /г == 2
для получения плоскости РД1, j) к этим аксиомам следует доба-
вить требование выполнения теоремы Дезарга («аксиома Де-
за р г а»).
В точности так же как для пространства Рп, доказывается,
что всякая коллинеация пространства Рп(ё), Pn(i, J) и Pn(i,e)
изображается центроаффинным преобразованием связки прямых
соответственных пространств Лп+1(е), Дл+1(/, J) и Ап+1(1, ё).
Поэтому коллинеации пространства Рп(ё) в координатах имеют
вид
l' хг = 2 и хг = 2 (6.86)
J 3
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 583
а коллинеации пространств Pn(i, j) и Pn(i, е) в координатах
имеют вид
'х7 —(6.87)
э
Но, умножая обе части этого равенства справа на а и обозна-
чая 1а через I, а а^а через аг., мы перепишем это равенство в виде
' хЧ—^^. (6.88)
3
Как в формулах (6.86), так и в формуле (6.88) матрица (ар
обладает обратной матрицей.
Более общая теорема для проективных пространств над произ-
вольными телами и, в частности, над телом кватернионов, непо-
средственно следующая из указанной теоремы Рейдемейстера для
аффинных пространств, была изложена Бэром1) (см. ниже, § 8).
Коллинеации (6.86) пространства Рп(е), так же как в случае
пространства Рп(1), называются соответственно коллинеациями
первого и второго рода.
Коллинеациями прямых Р± (е), Р± (i, j) и Р± (i, е) будем назы-
вать те преобразования этих прямых, которые происходят при
коллинеациях пространств Рп(е), Pn(l, j) и Рп(1, е), переводящих
в себя эти прямые. Рассматриваемые преобразования имеют тот же
вид (6.86) и (6.88), где индексы I, j пробегают значения 0, 1.
Как видно из формул (6.86) и (6.88), для однозначного зада-
ния коллинеации пространства Рп{е) достаточно указать, в какие
точки переходят п-\-2 точек, не лежащих по п-\-\ в одной ги-
перплоскости, а также, является ли эта коллинеация коллинеацией
первого или второго рода, а для однозначного задания коллинеа-
ции пространств Pn(i, j) достаточно указать, в какие точки пере-
ходят ^4-3 точек, не лежащих по п-|-1 водной гиперплоскости.
Формулы (6.86) и (6.88) показывают, что коллинеации про-
странств Рп(ё), Pn(i, j) и Рп(1, е) составляют группы, гомо-
морфные группам линейных преобразований векторов соответ-
ственно пространств Ап+1(е), Ап+1(1, j) и An+1(i, е). При этом
тождественному преобразованию соответствуют все центроаффин-
ные преобразования, переводящие в себя каждую прямую связки,
т. е. преобразования 'х* = 1х\ где в случае пространства Рп(е)
I—произвольные двойные числа, а в случае пространств Pn(l, j)
и Рп(1, ё) I — вещественные числа. Это следует из того, что
в преобразовании 'х* = /х\ переводящем в себя прямые связки,
элемент Z должен быть перестановочным со всеми х*.
Преобразования 'х1 = lx'1 указанного вида составляют ядро
этого гомоморфизма. Поэтому группа коллинеаций пространств
9 См. Бэр [1], стр. 83.
584
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
У) и е) изоморфна фактор-группе группы ли-
нейных преобразований векторов соответственно пространств
Ап+1(е), An+i(t, J) и Лп+1(7, е) по её подгруппе, состоящей из
преобразований 'xi = 1х\ где в случае пространства Рп(ё) I—ПР°“
извольные двойные числа, а в случае пространств Рп(1, /) и Pn(i, ё)
I—произвольные вещественные числа.
В случае пространства Рп(е) ту же фактор-группу мы получим,
если будем рассматривать линейные преобразования векторов про-
странства Ап+1(е) с определителями ±1 и ±е и преобразования
rxi = lx* с теми же определителями. Но такие преобразования
сводятся к тождественному преобразованию 'х* = хг и преобразо-
ваниям 'х{ = — х\ rxi = exi и 'х* =— ex'1. Поэтому группа кол*
линеаций пространства Рп(ё) изоморфна фактор-группе группы
двойных матриц (п+1)-го порядка с определителями ±1 и ±е
по её подгруппе, состоящей из матриц преобразований 'х1 = х\
'xi = — х* и гхг = ex'1, 'х* = — ex'1.
В случае пространств Pn(i, j) и Рп(1, ё) те же фактор-группы
мы получим, если будем рассматривать линейные преобразования
векторов пространства Лм+1(г, j) с полуопределителем +1 и ли-
нейные преобразования векторов пространства Ап+1(1, ё) с полу-
определителем ±1 и преобразования 'х* = lx1 с вещественным I
с тем же полуопределителем. Но такие преобразования сводятся
к тождественному преобразованию /xi = х* и преобразованию
/xi = —xi. Поэтому группы коллинеаций пространств Pn(i, j) и
Рп(1, ё) изоморфны факторгруппам групп соответственно кватер-
нионных и антикватернионных матриц (п-|-1)-го порядка с полу-
определителем 1 в первом случае и ±1 во втором случае по
их подгруппам, состоящим из матриц преобразований /xi — х*
и 'х1 = — xi.
Так как двойные, кватернионные и антикватернионные матрицы
(zz—1)-го порядка, представляющие коллинеации пространств Рп(ё),
Pn(i, у) и Рп(1, ё), представляются вещественными матрицами
2(п+0‘го и 4(п-Р 1)-го порядка и так как равенство опреде-
лителя двойной матрицы ±1 и ~±ze и равенство полуопределителя
кватернионной и антикватернионной матрицы z±zl является алгеб-
раическим условием, накладывающимся на вещественные матрицы
(2п+1)-го и 4 (тг —1)-го порядка, группы матриц (п-|- 1)-го по-
рядка, представляющих коллинеации пространств Рп(ё), Pn(h j)
и Рп(1> в), являются группами Ли. Поэтому группы коллинеаций
пространств Рп(ё), Pn(i, j) и Pn(i, е) являются группами Ли.
Преобразования ' х1 = — х* и ' хг — ± ех1 пространства Ап+1 (е)
при нечётном п имеют определитель -|~ 1 и, следовательно, при-
надлежат к той же связной компоненте группы линейных преоб-
разований, что и преобразование 'х* = х\ а при чётном п имеют
определитель соответственно —1 и ±е и, следовательно, принад-
лежат к другим связным компонентам. Поэтому отождествление
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 585
элементов этой группы, которое имеет место при переходе к фак-
тор-грУппе> ПРИ чётном п происходит таким образом, что каждый
элемент каждой связной компоненты отождествляется с некоторым
элементом каждой из трёх других связных компонент, а при не-
чётном п происходит таким образом, что каждый элемент каждой
связной компоненты отождествляется с тремя другими элементами
той же связной компоненты. Таким образом, учитывая, что группа
линейных преобразований векторов пространства Ап+1(е) состоит
из восьми связных компонент, мы приходим к выводу, что груп-
па коллинеаций пространства Рп(ё) при чётном п состоит
из двух, а при нечётном п состоит из восьми связных ком-
понент.
В случае пространств Pn(i, j) и Pn(i, е) группа линейных
преобразований векторов пространства Лп+1(/, У) с полуопредели-
телем 4-1 связна, группа линейных преобразований векторов
пространства Ап+1(1, ё) с полуопределителем ±1 состоит из двух
связных компонент, а преобразование /xi = —xi всегда имеет
полуопределитель +1 и, следовательно, принадлежит к той же
связной компоненте группы линейных преобразований, что и пре-
образование 'х3 = х3. Отсюда следует, что группа коллинеаций
пространства Pn{i, j) связна, а группа коллинеаций простран-
ства Рп(1, е) состоит из двух связных компонент.
Коллинеации пространства Рп(ё) зависят от того же числа
параметров, что и двойные матрицы (/г-4О"го порядка с опре-
делителями ±1 или ±е, т. е. от (я-|-1)2—\ — п(п-\-2) двой-
ных параметров или от 2п(п-(-2) вещественных параметров.
Коллинеации пространств Pn(i, У) и Pn(i, ё) зависят от веще-
ственных параметров, число которых на единицу меньше числа
вещественных параметров, от которых зависят кватернионные и
антикватернионные матрицы (/г-|~1)“го порядка, т. е. коллинеа-
ции пространств Pn(i, j) и Pn(i, е) зависят от 4(п-|-1)2—1 =
= 4лг (лг —|—2) —3 вещественных параметров.
Группы центроаффинных преобразований пространств Ап+1(е),
ЛЛ+1(/, j) и Ап+1(1, е) с общим центром, если исключить из про-
странства центр этих преобразований, транзитивны, но имприми-
тивны: классами импримитивности здесь являются прямые, про-
ходящие через этот центр. Так как точки пространств Рп(е\
Рп (I, у) и Рп (I, е) находятся во взаимно однозначном соответствии
с этими классами импримитивности, а группа, порождаемая на
множестве этих классов импримитивности центроаффинными пре-
образованиями пространств Ап+1 (е), Ап+1 (i, j) и Ап+1 (I, е), изо-
морфна группе коллинеаций пространств Рп(е), Pn(h У) и Pn(i, е),
группы коллинеаций пространств Рп(е), Pn(i, j) и Pn(i, е)
транзитивны и примитивны.
Будем называть двойным отношением четырёх точек х, у,
z, w на прямой пространств Рп(е), Pn(i, j) и Pn(i, ё) с коорди-
586 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
натами yi, zi = xi-\-yik и = jc* —f—соответственно двой-
ное число, кватернион и антикватернион:
Г(х, у\ z, w) = lk~4 (6.89)
Двойное отношение четырёх точек пространства Pn(i, j)
и Pn(i, е) определено с точностью до преобразования
'W = pWp-\ (6.90)
где р — произвольный кватернион или антикватернион, не
являющийся нулём или делителем нуля. В самом деле, если
первые две из наших точек представлены не векторами х и у,
а векторами 'х = ха и 'y=yb, то третья и четвёртая из этих
точек представляются векторами
'xa-1-\-'yb~1k и 'ха^-^-'уЬ-Ч, (6.91)
а значит, и векторами
rz = 'х-^-'уЬ-Чга и 'w = 'x-\-'yb~4a. (6.92)
Но
W('x, 'у; 'z, 'w) = (b-1la)(b-1ka)-1 =
= Ь-Чаа-Чг-Ч) = b~' (Ik-1) b, (6.93)
откуда следует наше утверждение.
Коллинеации первого рода пространства Рп(е) оставляют
двойное отношение четырёх точек на прямых инвариантным,
а коллинеации второго рода заменяют двойное отношение на
сопряжённое число. Это предложение доказывается так же, как
для двойного отношения в пространстве Pn(i).
При коллинеациях пространств Pn(i, j) и Pn(i, ё) двойное
отношение подвергается преобразованию (6.90). В самом де-
ле, при коллинеациях пространств Pn(i, j) и Pn(i, ё) векторы
пространств An+1(i, j) и An+1(i, ё), представляющие точки
пространств Pn(i, j) и Pn(i, е), подвергаются линейным пре-
образованиям и умножаются справа на кватернион или анти-
кватернион. Мы уже видели, что при умножении векторов, пред-
ставляющих точки, на кватернионы или антикватернионы двойное
отношение подвергается преобразованию (6.90). Если при колли-
неации векторы х и у подвергаются линейному преобразованию
гх = Ах и переходят в векторы Ах и Az, то в силу линейного
преобразования векторы z = x-\-yk и w = x-\-yl переходят
в векторы Az = A (x-\-yk) = Ах-[-(Ау) k и Aw = А (х + у[) =
= Ах-\-(Ау)1 и двойное отношение последних четырёх точек
равно тому же элементу Ik-1, что и отношение первых четы-
рёх точек.
Если мы будем рассматривать проективные прямые P1(i)f
Р1(е), Pt(i, j) и Рг(1, е) как соответственно расширенные пло-
(6.95)
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 587
скости комплексного и двойного переменного и расширенные
пространства кватернионов и антикватернионов, это двойное
отношение в последних двух случаях с точностью до преобра-
зования (6.90) совпадает с двойными отношениями, определён-
ными нами в §§ 3 и 5 главы V. В самом деле, определим точки х,
у проективных прямых их координатами х°, х1 и у0, у1, а точки z,
— их тангенциальными координатами z§, zr и w0, Тогда
«o(^4^y0*)+-M*1+.y1fc) = o, |
w0(x04-j/0/) + ®’i(-v1+.y1/) — 0, J
т. е.
2г0х°+^х1 = — (г0^° 4- ^.у1) А,
wox° 4~ WjX1 = — C-w0-V0 4~ ^1Уг) I-
Отсюда
& = — (^°4-^1j1)-1(z0x°4-z1x1), 1
/ =— (woj/0J ’
и
W(X, у\ Z, + X
X (^xO + ^xi)-1 (^O?o4-^13/1)-1- (6-97)
Если бесконечно удалённой точкой наших прямых является точка
х1 = 0, двойные числа, кватернионы или антикватернионы, пред-
ставляющие наши четыре точки, связаны с их обычными или танген-
циальными координатами соотношениями х = х^х1'1, у — у^у1'1,
z = z~1z1,
Поэтому
'W zzzy^Wy^1 = у1 (^0^°+ W0'Wq1 (wox°+ tW1X1)x1~1X1 X
X (z^-j-z^-^^-^z^-f-z^y1-1 =
= [w'1 (woy° + ^y1) j/1-1] O'1 (‘Wox° ^1x1) X1-1] X
XIV C^+V1^1 xl“1F1 l^1(^oy°-i-z1y1)y1'' X1 =
— —yy1 — x) (z — x)"1 (z —y), (6.98)
что совпадает с выражением (5.207) и в случае комплексных и
двойных чисел с выражением (5.167).
Более общая теорема для проективных пространств над произ-
вольными телами, и, в частности, эта теорема для пространств над
телом кватернионов, была доказана Рейдемейстером г) (см. ниже, § 8).
Точно так же коллинеации пространства Рп(е) оставляют
инвариантным, а коллинеации пространств Pn(i, j) и Рп(1, е)
9 См. Рейдемейстер [1], стр. 137 и Бэр [1], стр. 100.
588 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
подвергают преобразованию (6.90) двойное отношение двух
точек и двух гиперплоскостей, имеющее вид
W(x, у, z, Х(2^у). (6.99)
i i i i
Здесь хг и у1 — координаты точек, а и — тангенциальные
координаты гиперплоскостей; это двойное отношение равно двой-
ному отношению точек х, у и точек пересечения гиперплоскостей z
и с прямой, определяемой точками х, у.
В пространствах Pn(i)f Рп(е), Pn(l, j) и Рп(1, е) существуют
однопараметрические семейства точек прямых линий, обладающих
тем свойством, что двойное отношение любых четырёх точек такого
семейства вещественно. Такие семейства, следуя Штаудту, назы-
вают цепями, Цепи могут быть получены коллинеациями из
точек прямых линий пространств Pn(i), Рп(е), Pn(i, j) и Рп(1> е)
с вещественными координатами.
На расширенных плоскостях комплексного и двойного перемен-
ного и в расширенных пространствах кватернионов и антикватер-
нионов, рассматриваемых как соответственно пространства С2, 1С2,
С4 и 2С4, цепи прямых Р4(/), Р^е), P^i, j) и Px(i, е) изобра-
жаются окружностями.
Кроме коллинеаций в пространствах Рп(е), Pn(i, j) и Pn(i, е)
можно определить корреляции — отображения точек этих про-
странств на их гиперплоскости, при которых (п — 2)-мерная пло-
скость пересечения двух гиперплоскостей переходит в прямую,
проходящую через соответственные точки. Покажем, что корреля-
ции пространства Рп(е) имеют вид
и Iйi ~ 2(6• 100)
J з
а корреляции пространств Рп(1> j) и Pn(i, е) имеют вид
1иг = 2 х^ац, (6.101)
з
где матрицы (аф обладают обратными матрицами. В самом деле,
выше мы видели, что коллинеации пространств Рп(е), Pn(i, /)
и Рп(1, е) изображаются центроаффинными преобразованиями
связки прямых в пространствах (е), Ап+1 (i, j) и Ап+1 (i, е),
т. е. при коллинеациях координаты преобразованных точек ли-
нейно выражаются через координаты преобразуемых точек. Совер-
шенно так же показывается, что при отображении одного простран-
ства Рп(е), PW(Z, у)или Pn(h е) на Другое, в последних двух слу-
чаях обладающее тем свойством, что координаты точек определены
с точностью до множителя справа, если при этом отображении пря-
мые одного пространства переходят в прямые другого пространства,
координаты точек второго пространства линейно выражаются через
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 589
координаты точек первого пространства. В силу принципа двойствен-
ности многообразия гиперплоскостей пространств Рп(е), Pn(i, j)
и Pnty> являются моделями тех же пространств, причём прямые
этих пространств изображаются пучками гиперплоскостей, пере-
секающихся по (п— 2)-мерной плоскости, т. е. (п— 2)-мерными
плоскостями. Поэтому если тангенциальные координаты гиперпло-
скостей определены с точностью до множителя, как это имеет место
в пространствах Рп(г) и Рп(е), корреляции выражаются формулами
вида (6.86), т. е. имеют вид (6.100). Но в случае пространств
Pn(i, J) и Pn(i, е), где тангенциальные координаты гиперплоско-
стей определены с точностью до умножения на матрицу слева, для
получения координат гиперплоскости, в которую переходит точка х\
мы должны подвергнуть выражение вида ^a}xJ антиавтомор-
з
физму алгебры кватернионов или антикватернионов. Покажем,
что всякий антиавтоморфизм алгебр кватернионов и антикватер-
нионов имеет вид
ср(х) — аха~г. (6.102)
В самом деле, если преобразование у = ?(х) является антиавто-
морфизмом, преобразование у = ср (х) является автоморфизмом и,
следовательно, имеет вид ср (х) = bxb~\ откуда следует, что
y(x) = bxb~t = b~xxb. Применяя антиавтоморфизм (6.102) к выра-
жениям вида ^а}х3, мы получаем формулу (6.101).
з
Корреляции (6.101) пространства Рп(е), так же как в случае
пространства Рп(ь), называются соответственно корреляциями пер-
вого и второго рода.
Из формул (6.101) и (6.102) видно, что если координаты
точки х являются линейными комбинациями координат т-^-1 точек,
то тангенциальные координаты соответственной гиперплоскости
являются линейными комбинациями координат /тг —1 соответствен-
ных гиперплоскостей с теми же коэффициентами или с коэффи-
циентами, сопряжёнными с ними. Поэтому если точка х пробегает
m-мерную плоскость, соответственная гиперплоскость пробегает
совокупность гиперплоскостей, пересекающихся по (п— т—^-мер-
ной плоскости, т. е. при корреляции пространств Рп(е), Pn(l, j)
и Рп(1, е) т-мерная плоскость переходит в (п — т—^-мер-
ную плоскость.
Произведение двух корреляций является коллинеацией, поэтому
совокупность всех коллинеаций и корреляций образует группу.
Группа всех коллинеаций и корреляций пространств Рп(е), Pn(l, J)
и Рп(1, е) называется группой проективных преобразований этого
пространства. Число связных компонент этих групп равно удвоен-
ному числу связных компонент групп коллинеаций, т. е. группа
590 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
проективных преобразований пространства Рп(е) при чётном п
состоит из четырёх связных компонент, а при нечётном п
состоит из 16 связных компонент, а группы проективных пре-
образований пространств Pn(i, J) и Рп(1, е) состоят соответ-
ственно из двух и четырёх связных компонент.
Корреляциями прямых Р±{е), Px(i, j) и PX(Z, е) будем называть
преобразования этих прямых, имеющие тот же вид (6.100) и (6.101),
где индексы I, j пробегают значения 0, 1. Для прямой Рг{е) кор-
реляции совпадают с коллинеациями, вследствие чего группа проек-
тивных преобразований прямой Р-^е) состоит из восьми связных
компонент. Корреляции прямых Рх0‘, /) и Pr(i, е) не являются
коллинеациями. При переходе от проективных координат х°, х1
к координате х = хох1-1 коллинеации первого и второго рода
прямой Pr(e) изображаются соответственно дробно-линейными пре-
образованиями первого и второго рода плоскости двойного пере-
менного, а коллинеации и корреляции прямых Pt(lf J) и P1(ii е)
изображаются соответственно дробно-линейными преобразованиями
первого и второго рода пространств кватернионов и антикватер-
нионов.
Заметим, что всякая корреляция пространства Рп(е) может быть
представлена как произведение некоторой коллинеации на простей-
шую корреляцию ui = хг или ui = xi, а всякая коллинеация или
корреляция второго рода этого пространства может быть предста-
влена как произведение соответственно некоторой коллинеации или
корреляции первого рода на простейшую коллинеацию второго
рода 'х* = х*. Всякая корреляция пространств Pn(t, J) и Рп(1, е)
может быть представлена как произведение некоторой коллинеации
на простейшую корреляцию и^х*.
Найдём все инволюционные проективные преобразования про-
странств Рп(1) и Pn(l, J).
Определение инволюционных коллинеаций и корреляций пер-
вого рода пространства Рп(1) ничем не отличается от определения
инволюционных коллинеаций и корреляций пространства Рп (см. § 4
главы III). Поэтому, так же как в случае пространства^, найдём,
что инволюционные коллинеации первого рода пространства Рп(1)
приводятся к виду
'х* = xi (i < т), 'хз = — хз (у > т\ (6.103)
Эти коллинеации, так же как в случае пространства Рп, являются
симметрией относительно конфигурации — /n-мерная плоскость 4~
+ (п — т—1)-мерная плоскость, которую мы здесь также будем
называть т-парой. ^Заметим, что в случае пространства Pn(i)
коллинеация с матрицей (3.56) совпадает с коллинеацией с мат-
рицей (3.55) при m-|— 1 —
§31
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
591
Так же как в случае пространства Рп, мы найдём, что инволю-
ционные корреляции первого рода пространства Pn(t) являются
корреляциями первого рода, матрицы которых связаны соотно-
шениями
aij = aji (6.104)
или
(6.105)
т. е. являются симметрическими или кососимметрическими. В пер-
вом случае корреляция является полярным преобразованием
относительно квадрики и может быть приведена к виду
и.1 — х\ (6.106)
а во втором случае корреляция называется нуль-системой и, так
же как в случае пространства Рп, определяет линейный комплекс
п — 1
инвариантных ——мерных плоскостей.
Для определения всех инволюционных коллинеаций второго
рода заметим, что матрицы этих коллинеаций должны удовлетво-
рять условию
= (6.107)
з
Не нарушая общности, мы можем предположить, что опреде-
лители матриц наших коллинеаций равны 1. Поэтому число k
равно одному из корней (/г4~1)-й степени из единицы 1, sn+1,
Sn+i> •••> £n+i- Из формулы (6.107) следует, что
4 = 5 (а-1)Ж = k (о-1)*, (6.108)
откуда
244 = fc4- (6.Ю9)
3
Но, заменяя в равенстве (6.107) все комплексные числа на
сопряжённые, мы получим
544=14, (6-110)
3
откуда следует, что k вещественно. Таким образом, & =
или —1.
Рассмотрим инволюционную коллинеацию второго рода при
k= -|- 1. Если точка х при этой коллинеации переходит в точку у,
то произвольная точка z = x-\-ly переходит в точку той
же прямой 'z—y-\-lx, т. е. эта прямая переходит в себя при
коллинеации. Поэтому число I можно считать за координату
592 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ« VI
точки z на этой прямой, и при нашей коллинеации эта координата
преобразуется по закону
7 = 4. (6.111)
Преобразование (6.111) обладает бесконечным множеством непо-
движных точек, удовлетворяющих условию И — 1. Повторяя то же
рассуждение для точки и, не лежащей на прямой ху, мы найдём,
что, если при нашей коллинеации точка и переходит в точку v,
прямая uv также переходит в себя при коллинеации и поэтому,
так же как прямая ху, обладает бесконечным множеством непо-
движных точек. Поэтому в пространстве Рп(£) можно выбрать
базис из неподвижных точек коллинеации. Если мы выберем эти
точки за базисные, наша коллинеация примет вид
'& = &, (6.112)
где в силу (6.111) при &=-|-1 числа являются комплексными
числами единичного модуля, т. е. равны Умножая коорди-
наты хъ на е 2, мы приведём наши коллинеации к виду
x* = Z (6.НЗ)
Рассмотрим теперь инволюционную коллинеацию первого рода
при £ = —1, которая может быть только при чётном п. Если
точка х при этой коллинеации переходит в точку у, то точка
z=^x-\-ly при той же коллинеации переходит в точку той же
прямой fz=y— ~1х9 т. е. эта прямая переходит в себя при кол-
линеации. Поэтому число I можно считать за координату точки
z на этой прямой, и при нашей коллинеации эта координата пре-
образуется по закону
7 = -4. (6.114)
Но так как произведение И не может быть равно — 1, наша
коллинеация не имеет неподвижных точек и, следовательно, её
нельзя привести к виду (6.112). Если мы возьмём за базисные
точки лг —1 точек, попарно переходящих друг в друга, наша
коллинеация примет вид
'х* = ^+1x2<+1, 'x2i+1 = ^+1xai, (6.115)
где в силу равенства определителя нашей коллинеации -|-1 числа
а-й+i и a}i+1 связаны соотношением = —1, а в силу
(6.107) при k——1 эти числа связаны соотношением 0**+*= —1 •
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 593
Поэтому а значит, и аЦ+1— вещественные числа. Умножая
координату x2i на =----------, мы приведём преобразование
Л2г + 1
(6.Н5) к виду
'х21' — — x2i‘\ 'x2i+1 = x2i. (6.116)
Коллинеация (6.113) оставляет неподвижными точки простран-
ства Pn(i) с вещественными координатами. Будем называть сово-
купность точек пространства Pn(t) с вещественными координатами
и всякое многообразие точек пространства Pn(i\ получающееся
из этого многообразия коллинеациями, п-цепью этого простран-
ства; будем называть преобразование (6.113) и преобразования,
приводимые к этому виду, отражениями от п-цепей. При п~ 1
я-цепи являются определёнными нами выше цепями.
Если коллинеация (6.116) переводит точку х пространства
Pn(i) в точку 'х; то точка у прямой fхх переходит в некоторую
точку 'у той же прямой, так как если точки х, 'х, у, лежащие
на одной прямой, переходят соответственно в точки 'х, х, 'у,
также лежащие на одной прямой, то эта прямая совпадает с пря-
мой 'хх. Поэтому каждая точка пространства принадлежит только
к одной из построенных таким образом прямых, т. е. эти прямые
составляют конгруэнцию. Будем называть эту конгруэнцию пря-
мых эрмитовой линейной конгруэнцией. Коллинеация (6.116) пе-
реводит в себя все прямые эрмитовой линейной конгруэнции,
вследствие чего эту коллинеацию можно рассматривать как сим-
метрию относительно эрмитовой линейной конгруэнции.
Определение всех инволюционных корреляций второго рода
пространства Pn(i) производится аналогично определению кор-
реляций пространства Рп. Найдём закон преобразования гипер-
плоскостей с тангенциальными координатами ui в точки с коор-
динатами 'х* при корреляции:
= (6.117)
3
Для этого заметим, что в этом случае соотношение 2 uixi = О
г
также влечёт за собой соотношение 2 '^/х^ =: О, которое здесь
можно переписать в виде
22*4/^==0‘ (6.118)
* 3
Но это соотношение может быть записано в виде 2 хиг — 0 в том
_ г
случае, если ut = 2 ajtxi или ut = S 'x°aji' Поэтому квадрат
j з
преобразования (6.117) переводит точку с координатами хг’
38 Зак. 177. Б. А. Розенфельд
594 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
в точку с координатами "х*, связанную с координатами первой
точки соотношением
2 xja^ = 2 "х*ац. (6.119)
i 3 j 3
Квадрат преобразования (6.111) является тождественным пре-
образованием в том случае, когда ” х* = 1х\ т. е. при тождест-
венном выполнении условий
5 х3 (а у — laj{) = 0, (6.120)
сводящихся к условиям
ач = 1а^ (6.121)
Отсюда следует, что /7=1. Но из этих же условий видно, что
при умножении матрицы (а^) корреляции на произвольное ком-
плексное число k число 7 умножается на , являющееся числом
единичного модуля. Поэтому всегда можно выбрать число k таким
образом, что I является вещественным положительным числом.
Поэтому I = 1 и _
ai} = a}i, (6.122)
т. е. матрицы инволюционных корреляций второго рода про-
странства Pn(i) являются эрмитово-симметричными.
Корреляция с эрмитово-симметричной матрицей называется по-
лярным преобразованием относительно эрмитовой квадрики
= (6.123)
4 э
Уравнение (6.123) при надлежащем выборе базиса может быть
приведено к виду
2xV = 0 (6.124)
ИЛИ
Se^V = 0, (6.125)
i
где ei = ±1. Эрмитова квадрика (6.124) является мнимой, эрми-
това квадрика (6.125) вещественна. В том случае, когда среди
чисел встречается т раз —1 ип — /п-|-1 раз 4“ 1 и — мень-
шее из чисел т и п — т 4-1, эрмитова квадрика называется
эрмитовой квадрикой индекса I, Полярное преобразование отно-
сительно эрмитовых квадрик (6.124) и (6.125) имеет соответст-
венно вид ui = хг и — spA
Плоскости, переходящие друг в друга при полярных преоб-
разованиях относительно эрмитовых квадрик, называются взаимно
полярными плоскостями. Симплекс, каждая вершина которого
является полюсом противоположной грани, называется автополяр-
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 595
ным симплексом данной эрмитовой квадрики. В случае эрмито-
вых квадрик (6.124) и (6.125) базисные точки являются вершинами
автополярного симплекса.
Определение инволюционных коллинеаций пространства Pn(i, j)
производится так же, как определение инволюционных коллинеа-
ций пространства Рп и инволюционных коллинеаций первого рода
пространства Pn(i)- Здесь мы также получаем коллинеации (6.103),
являющиеся симметриями относительно m-пар, коллинеацию
'х* = 1х*, (6.126)
которую можно также привести к виду
'хг = 1хЧ-\ (6.127)
и произведения коллинеаций (6.103) на коллинеацию (6.126),
В случае коллинеации (6.127) координаты rxi отличаются от ко-
ординат xi изменением знаков у коэффициентов при кватернион-
ных единицах j и k, вследствие чего коллинеация (6.127) оста-
вляет неподвижными точки, координаты которых имеют вид
а-\~Ы. Будем называть совокупность точек пространства Pn(i, j)
с такими координатами и всякое многообразие точек простран-
ства Pn(it j), получающееся из этого многообразия коллинеа-
циями, комплексной п-цепью этого пространства; будем называть
преобразование (6.127) и преобразования, приводимые к этому
виду, отражениями от комплексных п-цепей.
Определение инволюционных корреляций пространства Pn(i> j)
производится так же, как определение инволюционных корреляций
второгорода пространства Pn(i). Также как в случае простран-
ства Pn(j), мы получаем здесь при ”хэ = хН соотношение (6.120),
из которого следует:
2 (*•?%♦ — I • (6.128)
з
Так как кватернионы х7 произвольны, мы находим, что кватер-
нион I должен быть перестановочен с любым кватернионом, т. е.
является вещественным числом, причём, так же как выше, показы-
вается, что это число должно удовлетворять условию Р = 1, т. е.
Z = ztl. Ввиду того, что кватернионную матрицу можно умножить
только на вещественное число, случай I = — 1 не сводится к
случаю Z = —J— 1. Поэтому в случае инволюционной корреляции
пространства Pn(lt j) мы получаем (6.122) и
ai}—— ajit (6.129)
Т. е. матрицы инволюционных корреляций пространства Pn(i, j)
являются эрмитово-симметрическими или эрмитово-кососим-
метрическими.
38*
596 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Будем называть корреляцию пространства Pn(i, J) с эрмитово-
симметрической матрицей полярным преобразованием относи-
тельно эрмитовой квадрики с уравнением (6.123), а корреляцию
с эрмитово-кососимметрической матрицей — эрмитовой нуль-
системой. Уравнения эрмитовых квадрик пространства Pn(i, j),
так же как пространства Рп(1), могут быть приведены к виду
(6.124) и (6.125), причём эрмитова квадрика (6.124) является мнимой.
Поэтому образами симметрии пространства Pn(i) являются',
т-пары, при т=: 0—0-пара, п-цепь, совокупности 0-пар,
автополярных относительно квадрики и эрмитовых квадрик, и
п — 1
при нечетном п линейный комплекс ——мерных плоскостей
и эрмитова линейная конгруэнция прямых. Образами сим-
метрии пространства Pn(i, ]) являются', т-пары, при т=^0 — 0-
пара, комплексная п-цепь, совокупности 0-пар, автополярных
относительно эрмитовых квадрик, и совокупность 0-пар, инва-
риантных при эрмитовой нуль-системе^).
Заметим, что коллинеации и корреляции первого рода про-
странства Рп(е) имеют соответственно вид
' хг =. (а]е+ bjeх^, (6.130)
з
'«-i = 5 («г/+ + Ь^е_) хз, (6.131)
3
где (uj), (bj) — матрицы произвольных вещественных инволюцион-
ных коллинеаций, одна из которых может быть заменена матри-
цей (8$) тождественного преобразования, а (аф, (Ьц)— матрицы
произвольных вещественных инволюционных корреляций. Инволю-
ционные коллинеации и корреляции второго рода пространства Рп (е)
определяются так же, как в пространстве Рп(1)- Инволюционные
коллинеации и корреляции пространства Рп(1, е) определяются
так же, как в пространствеPn(i, j). Здесь наряду с преобразова-
ниями (6.127) имеются аналогичные преобразования
fxi = exie, (6.132)
при которых координаты fxi отличаются от координат xi изме-
нением знаков у коэффициентов при антикватернионных единицах
v и /. Вследствие этого коллинеация (6.132) оставляет неподвиж-
ными точки, координаты которых имеют вид а-\-Ье. Будем назы-
вать совокупность точек пространства Pn(i, е) с такими коорди-
натами и всякое многообразие точек пространства Pn(i, /),
х) Классификация инволюционных корреляций пространства Рп (i, j)
является частным случаем такой же классификации для проективных про-
странств над телами, приведённой Бэром [1], стр. 143. В классификации
Бэра пропущена эрмитова нуль-система.
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 597
получающееся из этого многообразия коллинеациями, двойной
п-цепью этого пространства; будем называть преобразование (6.132)
и преобразования, приводимые к этому виду, отражениями от
двойных п-цепей.
Далее, будем называть п-полу цепью пространства Рп(е) гео-
метрическое место точек этого пространства, с координатами
х* = + х*_е_, где х^_ или х[_ — фиксированное вещественное
число, а х\ и х* принимают все возможные значения.
В пространствах Рп(е) и Pn(i, е) также можно определить
эрмитовы квадрики (6.123) и полярные преобразования (6.117)
относительно них.
Покажем, что полярное преобразование относительно эрми-
товой квадрики пространств Рп(ц), Рп(е)> Pn(h J) или
может быть определено как преобразование, ставящее в соот-
ветствие каждой точке х0 пространства гиперплоскость, со-
стоящую из таких точек на каждой из прямых, проходящих
через точку х0, которые, если рассматривать эту прямую как
плоскость комплексного или двойного переменного или про-
странство кватернионов или антикватернионов, взаимно об-
ратны точке xQ относительно окружности или гиперсферы,
по которой прямая пересекается с квадрикой. В самом деле,
выбирая некоторую точку у на каждой из прямых, проходящих
через точку х0, мы можем записать произвольную точку этой
прямой в виде х0+^. Представим себе переменное k пробегаю-
щим плоскость комплексного или двойного переменного или про-
странство кватернионов или антикватернионов. Тогда окружность
или гиперсфера, по которой прямая пересекается с квадрикой,
состоит из точек, удовлетворяющих уравнению
S (х^ + ky J) а^ (х*+Уk) = kk (2 2 у^уу*) +
i j i j
Ч* (S 5 4“ (S 2 xOaijyl>) 4~ 5 2 xQaij Xo = 0. (6.1 33)
i 3 i 3 i 3
В силу (5.161) и (5.206) инверсия относительно окружности
или гиперсферы (6.133) имеет вид
'k = [ — k (2 ^1У3аууг) — 2 2 xJai:jy]-1 X
i j i 3
x \k (2 2/M)+22 • (6.i 34)
i 3 * J
Так как точка x0 соответствует значению k = 0, а точка у —
значению k = со, то в том случае, когда точки х0, у взаимно
обратны относительно окружности или гиперсферы (6.133), ин-
версия (6.134) должна переводить точку 0 в точку со. Так как
преобразования (5.161) и (5.206) переводят точку 0 в точку со
598 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
только в том случае, когда в этих формулах В = 0, наше усло-
вие равносильно условию S 2 Таким образом, точки д/,
i 3
удовлетворяющие указанному условию, являются точками гипер-
плоскости, тангенциальными координатами которой являются выра-
жения ui = 2
3
Выше мы видели, что прямые Рл (I), Pt (е), Pt (t, j) и Pt (i, е)
можно рассматривать как соответственно расширенные плоскости
двойного переменного и расширенное пространство кватернио-
нов и антикватернионов. С другой стороны, как мы видели в §§ 3
и 5 главы V, расширенные плоскости комплексного и двойного пе-
ременного и расширенные пространства кватернионов и антиква-
тернионов являются моделями соответственно конформных про-
странств С.2, 1С.3, С4 и 2С4, причём группы дробно-линейных пре-
образований первых пространств изоморфны группам конформных
преобразований вторых пространств. Поэтому группы проектив-
ных преобразований пространств прямых Рх (Г), Pt (е), Pt (7, /)
и Pr(i, е) изоморфны группам конформных преобразований
соответственно пространств С2, 1С.2, С4 и 2С4 и первые из этих
пространств можно рассматривать как модели вторых и на-
оборот.
Группы проективных преобразований прямых Pt (Z) и Pt(e)
состоят соответственно из двух и восьми связных компонент,
а группы проективных преобразований прямых Pt (i, j) и Pr (I, е)
состоят соответственно из двух и четырёх связных компонент, что
совпадает с числом связных компонент групп конформных пре-
образований пространств С2, 1С2, С4 и 2С4.
Приведём сравнительную таблицу соответствующих друг другу
геометрических образов прямых Рх(/,/) и P1(ii е) и пространств
С4 и 2С4:
pi(h J) и р1(1' е)
точка;
цепь;
комплексная цепь;
двойная цепь;
эрмитова квадрика;
С4 и 2С4
точка;
окружность;
овальная двумерная сфера;
линейчатая двумерная сфера;
гиперсфера.
В случае прямых РДг) и Pr(e) и плоскостей С2 и точки
и цепи первых также отвечают соответственно точкам и окружно-
стям последних. Заметим, что цепи прямых P^i, j) и ^,(7, е)
являются совокупностями точек этих прямых, инвариантных при
эрмитовой нуль-системе.
§3]
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
599
Интерпретация пространства (е) в пространстве даёт
нам интерпретацию пространства Рп(е) в пространстве Рп. Для
получения этой интерпретации достаточно поставить в соответствие
каждой точке пространства Рп(е) с координатами х{ = Xie+-\-Ye_
две точки пространства Рп с координатами Xi и УЛ При умно-
жении координат на двойное число k = Ke+-\-Le__ коор-
динаты X1 и У* умножаются соответственно на вещественные
числа К и L.
Точно так же каждой гиперплоскости пространства Рп(е) с тан-
генциальными координатами иг = U,be+-\-Vie_ мы поставим в соот-
ветствие две гиперплоскости пространства Рп с тангенциальными
координатами Uit V}.
Коллинеации и корреляции первого рода пространства Рп(е)
могут быть записаны соответственно в виде
'Х*Ке+ +' YiLe_ = 2 И>+ + (Хуе+ + У^_) =
= 2 ^Хе+ + 2 В} Yje_, (6.135)
3 3
KUie+ 4- LV.^ = 2 (Л/+ + + Yje_) =
3
= 2 Ai}Xie++ 2 BifYJe_, (6.136)
3 3
т. e. эти преобразования изображаются в пространстве Рп преобра-
зованиями, состоящими из независимых коллинеаций или корреляций
каждой из двух точек рассматриваемых пар. Отсюда видно, что
коллинеации первого рода пространства Рп(е) и совокупность
коллинеаций и корреляций первого рода пространства Рп(е)
образуют группы, являющиеся прямыми произведениями соот-
ветственно двух групп коллинеаций и двух групп проективных
преобразований пространства Рп-
Коллинеации и корреляции второго рода пространства Рп(е)
могут быть записаны в виде
/XiXe+-i-'YiLe_=^i(A^e+-\-Bje_)(Yje+-[-XjeJ^
= 2 AjYje+ + 2 ВрСе_, (6.137)
3 3
Киге+ 4- = 2 (^+ + Хзе_) =
з
= + (6.138)
з J
т. е. эти преобразования изображаются в пространстве Рп пре-
образованиями, состоящими из независимых коллинеаций или кор-
реляций каждой из двух точек рассматриваемых пар и изменения
600 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
порядка точек или гиперплоскостей, полученных при этих преобра-
зованиях. В частности, преобразование 'хг = х пространства Рп(е)
изображается в пространстве Рп изменением порядка точек всех
пар точек. Таким образом, совокупность пар точек простран-
ства Рп является моделью пространства Рп{е).
Заметим, что в силу (5.54) двойные матрицы (aj) с определи-
телем 1, —1, е, —е соответствуют парам вещественных матриц
(Ду), (В}), определители которых соответственно равны 1 и 1, —I
и —1, 1 и —1, —1 и 1.
Обозначим двойное отношение четырёх точек пространства Рп(е)
с координатами х* = х\е± у* = yie+-\-yie_i = zie+~\~
-\-гге_, 'll)1 = ^\е^ -|- через W, двойное отношение четы-
рёх точек пространства Рп с координатами х\, у\, z\, че-
рез W+, а двойное отношение четырёх точек с координатами
xt, j/t, zl_, (d)L через W_. Тогда в силу того, что двойное отно-
шение четырёх точек является рациональной функцией от коорди-
нат этих точек, мы имеем:
W = W+e+-[-W_e_. (6.139)
Поэтому цепи пространства Рп(е) изображаются в простран-
стве Рп парами точек, пробегающих две прямые линии и опреде-
ляющих проективное соответствие между этими прямыми линиями:
в случае цепи двойное отношение W является вещественным числом,
откуда следует, что т. е. двойные отношения соответ-
ственных четвёрок точек на этих прямых равны.
Две прямые пространства Рп(е), которые пересекаются более
чем в одной точке, изображаются в пространстве Рп такими парами
прямых, вторые прямые которых совпадают; общие точки двух
данных прямых пространства Рп(е) изображаются парами точек,
первые точки которых совпадают с точкой пересечения первых
прямых наших пар прямых, а вторые точки пробегают всю общую
вторую прямую этих пар прямых.
Точно так же две точки пространства Рп(е), через которые
проходит более одной прямой, изображаются в пространстве Рп
такими парами точек, вторые точки которых совпадают; прямые
пространства Рп(е), проходящие через эти точки, изображаются
парами прямых, первые прямые которых совпадают с прямой,
определяемой первыми точками наших пар точек, а вторыми пря-
мыми являются все прямые, проходящие через общую вторую точку
этих пар точек.
Интерпретация пространств An+1(t) и Ап+1(е) в пространстве
А2п+2 Даёт нам интерпретации пространств Pn(i) и Рп(е) в про-
странстве Р2п+1- Для получения этой интерпретации достаточно
поставить в соответствие каждой точке пространства Рп(р) с коор-
§ 3]
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
601
динатами х® = №*’ + iX2i+1 и каждой точке пространства Рп(е)
с координатами х® — X2l-\-eX2i+1 точку пространства P2n+i
с координатами X1. Так как точка пространства Pn(i) с коорди-
натами X1 определяется также координатами Ах®, где k = K-]-iL,
ЭТОЙ точке соответствуют точки пространства с координа-
тами, удовлетворяющими условиям
'X2i + i'X2i+i — (X2i + ZA^+i) (ЛГ-4- iL) =
= (X2iK— X^Ey-i-i(X2iL + Х'^К), (6.140)
t. e.
'Х^ = Х^К—Х^+1Ь,
'X2i+1 = X2*L + X2i+1X.
(6.141)
Точно так же точке пространства Рп(е) с координатами х® соот-
ветствуют точки пространства Р2п+1 с координатами
'*“ = ***+^«1. (6.142)
'л'-'-------Л-'*
Формулы (6.141) и (6.142) показывают, что точки пространств
Pn(i) и Рп(е) изображаются в пространстве P%n+i прямыми
специального вида. Первая из этих формул показывает,
что прямая (6.141) соединяет точку X с точкой У, связанной
с ней соотношениями
y2i — X2i+1, Y'2i+1 = X'2i,
(6.143)
т. e. полученной из точки X эллиптической инволюцией, а вторая
из этих формул показывает, что прямая (6.142) соединяет точку X
с точкой У, связанной с ней соотношениями
Y2i = X'2i+1 У’2^+1 — X'2i
(6.144)
т. е. полученной из точки X гиперболической инволюцией.
Поэтому прямые пространства Р2п+1, изображающие точки
пространств Pn(i) и Рп(е), переходят в себя при эллиптиче-
ской или гиперболической инволюции, т. е. составляют соот-
ветственно эллиптическую или гиперболическую линейную кон-
груэнцию.
Это же соответствие между пространствами Pn(t) и Рп(е) и
линейными конгруэнциями можно получить и другим способом:
прямые эллиптической линейной конгруэнции соединяют точки
двух мнимо сопряженных n-мерных плоскостей пространства Р2п+1,
каждая из которых является пространством Pn(i). Так как через
каждую точку n-мерной плоскости проходит единственная прямая
конгруэнции, тем самым установлено взаимно однозначное
соответствие между эллиптической линейной конгруэнцией и
602 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
пространством Рп(1). Прямые гиперболической линейной конгруэн-
ции соединяют точки двух вещественных zz-мерных плоскостей про-
странства Р2п+1, каждая из которых является пространством Рп.
Так как прямые конгруэнции соединяют произвольные точки zz-мер-
ных плоскостей, мы получили взаимно однозначное соответствие
между гиперболической линейной конгруэнцией и совокупностью
пар точек пространства Рп, которая, как мы видели выше, является
моделью пространства Рп(е).
Точно так же каждой гиперплоскости пространства Рп(1)
с тангенциальными координатами иг = U2i-^tU2i+1 и каждой
гиперплоскости пространства Рп(е) с тангенциальными координа-
тами zz^ = + e^2i+i ставится в соответствие гиперплоскость
пространства Р2п+1 с тангенциальными координатами Ui. Так же
как для точек, показывается, что гиперплоскости пространства
Р2л+1, соответствующие одной гиперплоскости пространства Pn(i)
или Рп(е), проходят через одну (2rz—1)-мерную плоскость спе-
циального вида; эта плоскость состоит из прямых эллиптической
или гиперболической линейной конгруэнции, изображающих точки
пространства Рп(Г) или Рп(е). Также показывается, что /п-мер-
ные плоскости пространств Pn(t) и Рп(ё) изображаются (2zn-]-l)-
мерными плоскостями, состоящими из прямых линейной кон-
груэнции.
Матрицы коллинеаций пространства Р2п+1, переводящие в себя
указанные линейные конгруэнции или, что равносильно этому,
перестановочные с коллинеациями (6.143) и (6.144), связаны усло-
виями соответственно (6.33) и (6.34). При этих коллинеациях
в пространствах Pn(i) и Рп(е) происходят преобразования, при
которых прямые переходят в прямые, т. е. снова коллинеации.
Коллинеации пространства Р.2л+1, переводящие в себя указанные
линейные конгруэнции, образуют группы. Так как каждая колли-
неация этой группы изображает коллинеацию пространства Рп(1)
или Рп(е), группа указанных коллинеаций пространства Р2п+1
гомоморфна группе коллинеаций пространства Рп(ь) или Рп(е).
Ядром гомоморфизма при этом является группа коллинеаций про-
странства Р2п+1> переводящих в себя каждую прямую конгруэнции.
Таким образом, эллиптическая и гиперболическая линейные кон-
груэнции прямых пространства Р2п+1 являются моделями со-
ответственно пространств Рп(1) и Рп(е).
Интерпретация прямой P1(i) в виде эллиптической линейной
конгруэнции прямых пространства Р% применялась А. П. Норде-
ном [2].
Заметим, что аналогично определению пространств Pn(i) и
Рп(е) можно определить проективное пространство Pn<S) над
алгеброй дуальных чисел. Совершенно аналогично моделям про-
странств Pn(i) и Рп(е) в виде эллиптической и гиперболической
линейных конгруэнций пространства Р2п+1 может быть построена
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
603
вещественными матрицами второго порядка
KXI-\-LYI и MX1 NY1 антикватернионы xi
§ 3] -----------
модель пространства Рп(ё) в виде параболической линейной
конгруэнции пространства P2n+i- При этом группа движений
пространства Рп(ё) также гомоморфна группе коллинеаций про-
странства Р2п+1, переводящих в себя конгруэнцию, а ядром гомо-
морфизма является подгруппа этой группы, состоящая из колли-
неаций, переводящих в себя каждую прямую конгруэнции х).
Интерпретация пространства Ап+1(1У е) в пространстве А2п+2
даёт нам интерпретацию пространства Рп(1, е) в пространстве
Р2п+1. Для получения этой интерпретации достаточно поставить
в соответствие всякой прямой пространства Л2?г+1, проходящей
через точки с координатами X1 и Y1, точку пространства Pn(i, е)у
координатами которой служат (п-|-1) антикватернионов
представляемых
(X2i Y'2i \
I 1 xzo-.fl • При замене этих точек точками той же прямой
1 v at + 1у^г + 11х *
с координатами j ‘ ‘
умножаются справа на один и тот же антикватернион /, предста-
(К
вляемый матрицей <£ дИ- Совершенно так же мы поставим
в соответствие каждой (2п—1)-мерной плоскости пространства
P2n+1, являющейся пересечением двух гиперплоскостей с танген-
циальными координатами Ui и Vi, гиперплоскость пространства
Рп(1у е)у тангенциальными координатами которой служат п-|~1
антикватернионов uiy представляемых матрицами (* При
замене этих гиперплоскостей гиперплоскостями того же пучка
с тангенциальными координатами LVi и MUf-\-NVi анти-
кватернионы ut умножаются слева на один и тот же антикватер-
нион Z, представляемый матрицей
прямая пространства Р2п+1 лежит в (2п—1)-мерной плоскости,
то соответственная точка пространства Рп(1, ё) лежит в соответ-
ственной гиперплоскости, так как из того, что 2 UiX^^UjYi =
I I
~ 2 УтХ1 = 2 = 0, следует 2 uixi = О-
I I
Коллинеации (6.88) пространства
в виде
что если
i
Pn(it e) могут быть записаны
>3< 'Y2i
?^дл2г4"1 'уг2г
ы_ V/X-
,ЛЛГ/~2Дд22}+1
з 3
A2i \ / У2Э V23 \
A2j+i\JA . ) (6.145)
х) См. С е м я н и с т ы й [1].
604
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
К'хЧи1 =S(4^ + ^+i^+1) '
^x2i+14- b'x2^1 = 2 (Лу+1ХУ+ A^X2j+1),
M,Xi-^N,Yi ==^(A%Y-j+A$+tY2j^), (6Л46)
M'x2i+1 + N'Y2i+1 = 2 ИУ+1^ + л1Й^+1)>
3
или
к'х1-i-L'Y1 = ^AjXJ, м’х1 + Z.V —^AjYJ. (6.147)
J J
Эти формулы показывают, что коллинеации пространства Pn(i, е)
изображаются коллинеациями пространства Р%п+1> т. е. группа
коллинеаций пространства Pn(i, е) изоморфна группе коллинеаций
пространства Р2п+1- Это же следует и из изоморфизма группы
неособенных антикватернионных матриц (я-|-1)-го порядка и
группы неособенных вещественных матриц (2я-|-2)-го порядка.
В самом деле, группы коллинеаций пространств Рп(1, е) и Р2„+1
изоморфны фактор-группам этих групп по их изоморфным между
собой подгруппам, состоящим из матриц преобразований 'х* = 1х1
и где I—вещественные числа.
Корреляции (6.101) пространства Рп(1, е) могут быть записаны
в виде
(К L \ ( Щъ U%i+i \__
N) ' V2MJ ~
— VI ( У2Л * / A2if 2J+1 ^2i+l, 2J+1\ цо\
Z\-X'^ Х'2з) \—A2i2j -A2i+lt2j p }
t. e.
KU2i + LV2i = 2 (42i, 2>y^+A2i, 2j+1Y-y^),
3
“F ^^2<+1 = 2 (Л2»+1, '“F Л2»+1, 2J+1^2,? + 1)>
3 (6.149)
M U2i H- NV2 = - S (X2i, 2jX-y + A2i> 2J+1X^),
3
MU2i+1 + NV2i+1 = -S(A2i+1> 2^Н-Л2Ш>2ЖХ2/+1),
ИЛИ
KUi-\-LVi = '£iAijYj, NVi —— '^1AijXj. (6.150)
J J
Эти формулы показывают, что корреляции пространства Pn(i, е)
изображаются корреляциями пространства P2n+V Отсюда следует
ПРОЕКТИВНЫЕ ПРОСТРАНСТВА
605
§3]
что группа всех проективных преобразований пространства
pn(i, е) изоморфна группе всех проективных преобразований
пространства P2n+V Таким образом, многообразие прямых про-
странства Р2п+1 является моделью пространства Рп(1, е).
Так как расширенное пространство антикватернионов является
моделью проективной прямой P1(ii е), построенную нами в § 5
главы V интерпретацию многообразия прямых пространства Р3
в пространстве антикватернионов можно рассматривать как интер-
претацию прямой P1(i) е) в многообразии прямых пространства Л>,
являющуюся частным случаем построенной нами сейчас интерпрета-
ции пространства Рп (I, е) в многообразии прямых пространства Р2п+1.
Четыре точки пространства Рп(1, е), лежащие на одной прямой,
изображаются в пространстве Р2п+1 четырьмя прямыми, лежащими
в одной трёхмерной плоскости. Как мы видели в § 5 главы V,
двойное отношение четырёх антикватернионов, соответствующих
четырём прямым, определяется двойным отношением четвёрок
точек пересечения этих прямых с их директрисами. Отсюда сле-
дует, что цепи пространства Рп(1,е) изображаются в простран-
стве Р2п+1 семействами прямолинейных образующих квадрик,
лежащих в трёхмерных плоскостях.
Две соприкасающиеся прямые пространства Рп(1, е) изобра-
жаются в пространстве Р2п+1 трёхмерными плоскостями, лежащими
в четырёхмерной плоскости и, следовательно, пересекающимися
по двумерной плоскости. Общие точки данных прямых простран-
ства Рп(1, е) изображаются всеми прямыми, лежащими в этой
двумерной плоскости. Точно так же две точки пространства Рп(1, е),
через которые проходит более одной прямой, изображаются в про-
странстве Р2п+1 пересекающимися прямыми. Прямые простран-
ства Рп(1, е), проходящие через эти точки, изображаются всеми
трёхмерными плоскостями, проходящими через двумерную пло-
скость, порождённую этими прямыми.
Приведём сравнительную таблицу тех инволюционных проек-
тивных преобразований пространств Рп(1, е), которые имеют
аналоги в пространстве Pn(i, у)> и соответствующих им инволю-
ционных проективных преобразований пространства Р2п+1'>
Рпе, е)
р
симметрия относительно
лг-пары;
отражение от комплексной
л-цепи;
отражение от двойной л-цепи;
полярное преобразование от-
носительно эрмитовой квадрики;
эрмитова нуль-система;
симметрия относительно
(2т-]- 1)-пары;
эллиптическая инволюция;
гиперболическая инволюция;
нуль-система;
полярное преобразование
относительно квадрики.
606
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
Коллинеация пространства Рп(1, е), соответствующая симметрии
относительно 2/п-пары пространства Р^п+i^ не име^т аналога
в пространстве Р2п+1. Заметим, что в то время как в простран-
стве Pn{i, j) в силу закона инерции эрмитовых форм имеется
несколько различных видов эрмитовых квадрик, в простран-
стве Pn(i, е), где этот закон отсутствует, имеется только один
вид эрмитовых квадрик, что соответствует одному виду нуль-
систем в пространстве Р2п+1- Напротив, в пространстве Pn(i, е)
имеется несколько видов эрмитовых нуль-систем, что соответствует
нескольким видам квадрик в пространстве P2n+i-
Интерпретации пространств Дп+1(/, у) и 4п+1(г, е) в про-
странствах Л2п+2(/) и А2п+2(е) дают нам интерпретации пространств
Pn(i, j) и Pn(i, е) в пространствах P2w+1(Z) и Р2п+1(е). Для
получения интерпретации пространства Pn(i, j) в пространстве
^2n+i(0 достаточно поставить в соответствие каждой точке про-
странства Pn(i, j) с кватернионными координатами х1, представ-
(Xм — А^+Л
ленными комплексными матрицами ( ^2. х ^2. Ь точку про-
странства Р2п+1 (I) с комплексными координатами X1. Для получения
интерпретации пространства Рп(1, е) в пространстве ^2П+1(О
достаточно поставить в соответствие каждой точке простран-
ства Рп(1> ё) с координатами представленными комплексными
/А2* А^А
матрицами г точку пространства Р2л+1(0 с коор-
динатами X1- Для получения интерпретации пространства Pn(it е)
в пространстве ^2n+i(e) достаточно поставить в соответствие
каждой точке пространства Рп(1, е) с координатами х\ предста-
[Xм ______А2*+г\
вленными двойными матрицами l^2. х точку про-
странства P2n+1 (е) с координатами X1.
Рассмотрим более подробно первую и третью из этих интер-
претаций. Так как точка пространства Pn(j, j) и Рп(1, ё)
с координатами х* определяется также координатами х1к, этой
точке соответствуют также точки пространств Р.2п+1(0 и P2n+2(j)
с координатами, удовлетворяющими условиям
/'Xм — 'А2*+х\ (Xм — Хм+Л /х — Г\
уА2*+х 'Xм J \А2*+Х Xм J\L KJ
/Xм K—XM+1L — Xм L — XM+4C\
= _ _ _ I, (6.151)
^А2*+ХА+ Xм L — XM^L 4- Xм KJ
т. e.
'A2* = XMK— XM+xL, 'A2*+x = A^+1A+ XML. (6.152)
§ 3] ПРОЕКТИВНЫЕ ПРОСТРАНСТВА 607
Формулы (6.152) показывают, что точки пространств Рп(1, у)
и РпУ. е) изображаются в пространствах P.2n+1(i) и Pan+iO)
прямыми специального вида. Эти формулы показывают, что пря-
мая (6.152) соединяет точку X с точкой У, связанной с ней
соотношениями
Р = — Хп+\ Y^^ = X\ (6.153)
т. е. полученной из точки X эрмитовой инволюцией.
Отсюда следует, что прямые пространств P^x(i) и P2w+1(0,
изображающие точки Рп(ь) и Рп(е), переходят в себя при эрми-
товой инволюции, т. е. составляют эрмитову линейную кон-
груэнцию.
Точно так же каждой гиперплоскости пространств Pn(i, j)
и Pn(h е) с тангенциальными координатами и^ представляемыми
комплексными матрицами ( 2г отвечают гиперпло-
\^2i+l J
скости пространств и Р2п+1(е) с тангенциальными коор-
динатами Ui. Так же как для точек, показывается, что гипер-
плоскости пространств Р2п+1 (0 и Л2п+1 (е), соответствующие одной
гиперплоскости пространства Рп(1, j) или Рп(1, е), проходят
через одну (/г — 2)-мерную плоскость специального вида; эта
плоскость состоит из прямых эрмитовой линейной конгруэнции,
изображающих точки пространств Pn(i, j) и Pn(i, е). Также
показывается, что /n-мерные плоскости пространств Pn(i, j)
и Рп(1, е) изображаются (2zn-|- 1)-мерными плоскостями, состоя-
щими из прямых эрмитовой линейной конгруэнции.
Матрицы коллинеаций пространств P2n+1(t) и Р2п+1(е), пере-
водящие в себя эрмитовы линейные конгруэнции, или, что равно-
сильно этому, перестановочные с коллинеациеи (6.153), связаны
условиями (6.42). При этих коллинеациях в пространствах Pn(i, j)
и Pn(i, е) происходят преобразования, при которых прямые
переходят в прямые, т. е. также коллинеации. Коллинеации про-
странств Р2п+1 (0 и ^2n+i (*), переводящие в себя эрмитовы
линейные конгруэнции, образуют группы. Так как каждая колли-
неация этой группы изображает коллинеацию пространства Pn(l, j)
или Рп(1, е), группы указанных коллинеаций пространств P2n+1(i)
и Р2п+1(е) гомоморфны группе коллинеаций соответственно про-
странства Pn(i, j) и Рп(1, ё). Ядром гомоморфизма при этом
являются группы коллинеаций пространств Р2?г+1(0 и Р%п+1(е)
переводящие в себя каждую прямую конгруэнции. Эта группа
состоит из двух преобразований — тождественного преобразо-
вания и коллинеации (6.153). Таким образом, эрмитовы линей-
ные конгруэнции прямых пространств Р2п+1 (0 w Р2п+1 (е),
являются моделями соответственно пространств Pn(i, j)
tt Pn(l, е).
608
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
§ 4. Неевклидовы пространства над алгебрами комплексных
и двойных чисел. Трёхмерные неевклидовы пространства
как комплексные и двойные неевклидовы плоскости
(интерпретации Котельникова)
В § 2 главы II мы определили комплексное неевклидово про-
странство Sn(i). Совершенно аналогично мы определим двойное
неевклидово пространство индекса I lSn(e) как множество эле-
ментов, называемых точками, находящихся во взаимно однозначном
и изометричном соответствии с системами точек пересечения гипер-
сферы пространства lRn+1 (е) с прямыми, проходящими через её
центр. Пространство QSn(e) будем обозначать Sn(e). Будем назы-
вать т-мерными плоскостями пространств Sn(e) и ]Sn(e), при
т = 1 —прямыми, при т = п— 1 —гиперплоскостями множе-
ства точек этих пространств, соответствующих m-мерным большим
сферам гиперсферы пространства Rn+1 (е) или lRn+1(e). В отличие
от гиперсфер пространств Rn+li lRn^t и &n+i (0> которые пере-
секаются с прямыми, проходящими через их центр, в парах
диаметрально противоположных точек, гиперсферы пространств
Rn+i(e) и lRn+i (е) пересекаются с прямыми, проходящими через
их центр, в четвёрках точек, так как определение этих точек
сводится к решению квадратного уравнения, которое, как мы
видели в § 3 главы V, в области двойных чисел имеет не два,
а четыре решения. Радиус гиперсферы г мы будем называть
радиусом кривизны пространства Sn(e) или LSn(e), а величину
д —— — кривизной этого пространства.
Так же как для пространств Sn(i), показывается, что про-
странства Sn(e) и lSn(e) можно рассматривать как метри-
зованное пространство Рп(е).
Интерпретации пространств Rn(e) и lRn(e) в пространствах Rn
и lRn дают нам интерпретации пространств Sn(e) и lSn(e) в про-
странствах Sn и lSn. Для получения этих интерпретаций достаточно
поставить в соответствие каждой точке пространств Sn(e) и lSn(e)
положительной или отрицательной кривизны с координатами x^e+~j-
~i~xLe_ точки пространств Sn и lSn той же кривизны с коорди-
натами их\ Тогда из свойств интерпретации пространств Rn(e)
и lRn(e) в пространствах Rn и lRn следует, что расстояние
между двумя точками пространств Sn(e) и lSn(e) связано с рас-
стояниями <о+ и о)__ соответственных точек пространств Sn и 1Sn
соотношением = со+^+-|-&_е_.
В пространствах Sn(e) и lSn(e) можно определить движения
как взаимно однозначные непрерывные преобразования этих про-
странств, сохраняющие расстояние между точками. Так же как
для пространств Sn(l), показывается, что движения пространств
Sn(e) и lSn(e) являются коллинеациями первого рода. Так как
§4]
ИНТЕРПРЕТАЦИИ КОТЕЛЬНИКОВА
609
группа всех коллинеаций первого рода пространства Рп{е) изо-
морфна прямому произведению двух групп коллинеаций простран-
ства Рп, группа движений пространств Sn(e) и lSn(e) изоморфна
прямому произведению двух групп движений соответственно
пространств Sn и lSn.
Будем называть нормальной п-цепъю пространства Sn(Z),
Sn(e) и lSn(e) n-цепь этого пространства, полученную движением
этого пространства из /г-цепи с вещественными координатами
точек. В пространстве Sn(l) имеются /г-цепи с вещественными
координатами точек, изометричные пространствам Sn и lSn при
всех возможных значениях /, поэтому будем называть нормальную
n-цепь пространства Sn (/), изометричную пространству Sn или lSn,
соответственно нормальной п-цепью индекса 0 или I. Все нор-
мальные n-цепи пространств Sn(e) и lSn(e) изометричны соответ-
ственно пространству Sn или 1Sn, где I—индекс пространства lSn(e).
Комплексные и двойные плоскости 52(г), S2(Z) и XS2(^) по-
зволяют дать изящные интерпретации вещественных пространств 53,
XS3 и 2S3, предложенные для пространств S3 и А. П. Ко-
тельниковым [2] (см. также [4]) и несколько позже Штуди [3]. Будем
называть эти интерпретации интерпретациями Котельникова.
Для определения этих интерпретаций следует рассмотреть
плюккеровы координаты прямых (см. § 11 главы III) в простран-
ствах S3, XS3 и 2S3. В неевклидовых пространствах будем опре-
делять плюккеровы координаты только с помощью полярно со-
пряжённых точек ((х, у) — 0), координаты которых удовлетворяют
условию (х, X) = 1.
Если координаты точек пространства S3 удовлетворяют усло-
вию (х, х) = (х0)2 -|- (х1)2 (*2)2 + (Л6)2 = 1, плюккеровы коорди-
наты прямых этого пространства удовлетворяют условию
(р01)2+(р02)2 + (Р03)2 + (Р23)2 + (Р31)2 + (Р12)2 =1.(6.154)
В самом деле,
(Р01)2+(Р02)2+(Р03)2+(Р23)2+(Р31)2+(Р12)2=
- ЮТ+С*1)2 + ЮТ + ЮТ1 (ЮТ+Су1)2+ЮТ+ЮТ] —
— (xQyQх1у1-]-х2у^— (ху х)(у, у) — (х, у)2. (6.155)
Так как (х, x) = (j/, у) = 1 и (х, у) = 0, выражение (6.155)
равно 1.
Условие (6.154) показывает, что определённые таким образом
плюккеровы координаты прямых пространства S3 определены
с точностью до умножения на — 1.
Если прямой пространства S3 соответствуют плюккеровы
координаты, рч, поляре этой прямой соответствуют плюкке-
ровы координаты
901 __ р23} ^02 = ^оз = pi2, q™ = р01, ф* = р<&, q™ — р^. (6.156)
39 Зак. 177. Б. А. Розенфельд
610 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
В самом деле, полярное преобразование пространства S3 в нашей
системе координат имеет вид
uQ = х°, и± = х1, и2 = х2, и3 — х3. (6.157)
Отсюда следует, что лучевые плюккеровы координаты qw прямой
в равны соответственным осевым плюккеровым координатам и
её поляры pip откуда в силу (3.196) получаем (6.156).
Каждой прямой пространства S3 можно поставить в соот-
ветствие вектор пространства R3(e) с координатами
pi = poi.±ep^ р2 = р02^ер&19 = (6.158)
Длина этого вектора равна 1, так как
(Р1)2 + (р2)2 + (Р3)2 = [(р01)2 + 0,03)2 + 0,03)2 +
4- 0^3)2 4- (р»1)2 + (р12)2] + 2^ (Р01Р23 + Р°'2Р31 + Р03Р12), (6 • 159)
но первая скобка в силу (6.154) равна 1, а вторая в силу (3.184)
равна 0. В силу того, что плюккеровы координаты определены
с точностью до умножения на — 1, каждой прямой пространства Ss
вместе с вектором Pi соответствует вектор —Р*.
Если прямой пространства S3 соответствует вектор Рг
поляре этой прямой соответствует вектор еР*: в силу (6.156)
этой поляре соответствует вектор с координатами
Ql==p23 4_^p01j 32^314-^02, = (6.160)
что совпадает с координатами еР\ еР2, еР\ Поэтому пары
взаимно полярных прямых пространства S3 взаимно однозначно
изображаются четвёрками точек сферы единичного радиуса в про-
странстве R3(e), причём каждой паре взаимных поляр соответ-
ствуют четыре точки сферы с радиусами-векторами Pi, —Р\ еР1
и —еР*. Но именно таковы радиусы-векторы точек пересечения
сферы пространства R3(e) с прямой этого пространства, прохо-
дящей через её центр. Если мы отождествим такую четвёрку точек,
мы получим плоскость S.2 (а) с радиусом кривизны 1. Поэтому мы
можем сказать, что многообразие пар взаимно полярных прямых
пространства S3 взаимно однозначно изображается плоскостью S.2(tf)
с радиусом кривизны 1.
Из непрерывности функций (6.158) видно, что полученное нами
соответствие между парами взаимно полярных прямых простран-
ства Ss и точками плоскости S.2(^) является также взаимно непре-
рывным.
Расстояние между двумя точками плоскости S2(tf), изобра-
жающими две прямые пространства S3 с радиусом кривизны г,
§ 41
ИНТЕРПРЕТАЦИИ КОТЕЛЬНИКОВА
611
имеющие экстремальные расстояния ш0 и <и1, равно двойному
числу
S = |2^£^|. (6.161-
В самом деле, расположим базисные точки пространства S3
на общих перпендикулярах наших прямых, причём точки eQ и е± —
в точках пересечения этих перпендикуляров с первой прямой.
Тогда первая прямая является базисной прямой eoet, и единствен-
ной плюккеровой координатой этой прямой, отличной от нуля,
является р01=1, а вторая прямая проходит через точку
<D0 «0 cos у " p e^ sin у , et cos у 4- e3 sin у, (6.162)
и плюккеровы координаты этой = COS у COS у , #02 = 0, = sin — sin — , q^1 = 0, v r r ч прямой имеют вид дгОЗ cos sln ч г г 1 qr* = — sin — cos —. г г j • (6.163;
Поэтому двойные векторы, соответствующие этим прямым, имеют
соответственно координаты
pi=l, =
Q1 — cos — cos — + е sin — sin —, Q2 — О,
г г 1 г г '
(Da . . (Da (D<
Q3 — cos sln __L — e sln _2. cos e
r r r r
Ho
Wn ttb . (Da . (D-.
Q1 = cos — cos —L + e sin — sin — =
r r J r r
(<Oa (D< . (Oa . \
cos — COS — + sin — sin —1 +
r r 1 r r J + 1
I / <0a (D-j , (Da . (D1 \ (Da (Dj .
+ cos — cos — — sin — sin — ) e = cos ——1 e, 4-
1 \ r r r r } ~ r + 1
i ^оЧ"0^! / wo—Ш1 • ^оЧ-03! \ wo—e<&i
4-cos ——-e =cos ———-e ]=cos —-----------------------------1
1 r \ r + 1 r ~) r
Q3 = cos — sin — — e sin — cos — =
r r r r
(6.164)
(6.165
(<Da . (Di . (Da (D-. \ ,
cos — sin — — sin — cos — }e, +
r r r r / + '
-f- ^cos sin + sin у cos у e_ = sin e^
+sin Sin (“5%+4- ^4^ ^-sln^-1.
39*
612 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Отсюда следует, что косинус угла 2 между векторами Р и Q
равен
cos g _____________PXQY + P2Q2 + P3Q3___________
У(Р1)2 + (Р2)2 + (Р3)2 /(Ql)2 + (Q2)2 + (Q3)2
= cos , (6.166)
откуда непосредственно следует (6.161).
Заметим, что при перемене местами экстремальных расстояний
<о0 и абсолютное значение Q не изменяется.
Формулу (6.161) можно переписать в виде
a = + (6.167)
Формула (6.167) показывает, что двойное расстояние 2 яв-
ляется вещественным числом тогда и только тогда, когда
соответственные прямые пересекаются (а>0 или ojj равно 0), и
что двойное расстояние является делителем нуля тогда и
только тогда, когда соответственные прямые паратактичны
(<*>i = — %)•
Из установленной нами изометрии следует, что группа дви-
жений пространства S3 изоморфна группе, состоящей из движений
плоскости S.2(e) и произведений этих движений на переход к точ-
кам с сопряжёнными координатами (при которых расстояние между
точками переходит в сопряжённое число). Поэтому связная группа
движений пространства З3 изоморфна группе движений пло-
скости S2(e). Так как группа движений плоскости S2(^) изо-
морфна прямому произведению двух групп движений плоскости S.2,
связная группа движений пространства S3 изоморфна прямому
произведению двух групп движений плоскости S2. С изображе-
нием движений пространства S3 движениями двух плоскостей S2
мы уже встречались в § 11 главы III, где мы видели, что движе-
ния пространства изображаются движениями пространства 3S6,
переводящими в себя пару взаимно полярных двумерных плоско-
стей, являющихся плоскостями 5.2. Подгруппами связной группы
движений пространства S3, изоморфными группе движений пло-
скости S2, являются группы правых и левых паратактических
сдвигов. Указанный изоморфизм вытекает также из того, что
связная группа движений пространства S3 четырёхзначно изобра-
жается группой кватернионных преобразований у = axh~x, где
а, b — кватернионы единичного модуля (тождественному преобра-
зованию соответствуют кватернионы а = ± 1, b = ± 1), а группа
движений плоскости S.2 двузначно изображается группой кватер-
нионных преобразований у = аха"1, где а — кватернион единич-
ного модуля (тождественному преобразованию соответствует ква-
тернион а = ± 1).
§ 4] ИНТЕРПРЕТАЦИИ КОТЕЛЬНИКОВА 613
Таким образом, геометрию пространства S3, если за основ-
ной образ пространства принять пару взаимно полярных пря-
мых, можно рассматривать как геометрию плоскости S.2(^).
Приведём сравнительную таблицу геометрических образов пло-
скости S.2O) и пространства S3,
указанной интерпретации:
ЗД
точка;
прямая;
нормальная 2-цепь;
2-полуцепь;
соответствующих друг другу при
$8
пара взаимно полярных пря-
мых;
конгруэнция перпендикуля-
ров к прямой;
связка прямых и. плоское
поле прямых, полярных прямым
связки;
паратактическая конгруэнция
прямых.
Если координаты точек пространства 1S3 удовлетворяют усло-
вию (х, х) — — (х0)2 + (х1)2 -|- (х2)2 -|~ (х3)2 = ± 1, плюккеровы
координаты прямых этого пространства удовлетворяют условию
— (Р01)2 — (р02)2 — (р03)2 + (р23)2 + (Р31)2 + (Р12)2 = ± 1, (6.168)
причём знак -|- имеет место для эллиптических прямых, а знак —
для гиперболических прямых. В самом деле,
- (Р01)2 — (Р02)2 — (р03)2 + (Р23)2 + (Р31)2 + (р12)2 -
- I- (X0)2 + (х*)2 + (X2)2 + (Х3)2] [— (/)2 + (у )2 ^,2)2 (у)2] _
--(— Х°у° + Х1^1 + Х2у2 + х3у3)2 = (х, х) (у, у)-(X, у)2. (6.169)
Так как (х, у) = 0, и для эллиптических прямых (х, х) =
= (у, у) = ±1, а для гиперболических прямых (х, х) =
= — (у, у) = ±1, выражение (6.169) равно 1 для эллиптиче-
ских прямых и — 1 для гиперболических прямых.
Условие (6.168) показывает, что определённые таким образом
плюккеровы координаты прямых пространства х53 определены
с точностью до умножения на — 1.
Если прямой пространства 1S3 соответствуют плюккеровы коор-
динаты рч, поляре этой прямой соответствуют плюккеровы коор-
динаты
^01 _p^t q02 = _p81, ^03 _р12>
q-Ъ = /?01, ^31 — р02, ^12 — рОЗ.
В самом деле, полярное преобразование пространства 1S3
в нашей системе координат имеет вид
йо — — х°’ ^^х1, w2 = x2, zz3 —х3. (6.171)
(6.170)
614 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Поэтому лучевые плюккеровы координаты ## прямой связаны
с осевыми плюккеровыми координатами pti её поляры соотно-
шениями
901 = — Poi, ^02 = —Р02> ?08 = —Роз, | 17.ч
„23 „31 „12 (6Л72)
Я —Р'2Ъ> Я —Я —7'12’ J
откуда в силу (3.196) получаем (6.170).
Каждой прямой пространства 1S3 можно поставить в соот-
ветствие вектор пространства с координатами
pi P^ = p^-\-ip^9 (6.173)
Длина этого вектора равна i для эллиптических прямых и 1 для
гиперболических прямых. В самом деле,
(pi)2 + (Р2)2 + (Р3)2 = [(РО1)2 + (р02)2 + (р03)2 __ (р23)2 _
— (р31)2 — (р12)2] + 2/ (р01р23 + р02р31 + р03р12), (6.174)
но первая скобка в силу (6.168) равна —1 для эллиптических
прямых и -f-1 для гиперболических прямых, а вторая скобка
в силу (3.184) равна нулю. Так как плюккеровы координаты
определены с точностью до умножения на—1, каждой прямой 1S3
вместе с вектором Pi соответствует вектор —Р*.
Если прямой пространства 153 соответствует вектор Р1, её
поляре соответствует вектор iPl\ в силу (6.170) этой поляре
соответствует вектор с координатами
Qi=_p23_|_Zpoit Q2^— р31Ц_/р13э ^З^—рГЗ^.^ (6.175)
что совпадает с координатами ZP1, /Р2, /Р3. Мы видим, что из
двух взаимных поляр пространства х53 одна изображается векто-
ром единичной длины, а другая — вектором мнимоединичной
длины. Поэтому гиперболические и эллиптические прямые про-
странства х53 взаимно однозначно изображаются парами диаме-
трально противоположных точек сфер соответственно единичного
и мнимоединичного радиуса в пространстве /?3(z). Если мы отожде-
ствим диаметрально противоположные точки этих сфер, то полу-
чим плоскость S2(0 с радиусом кривизны 1 или L Так как каждой
точке одной из этих сфер взаимно однозначно соответствует точка
другой из этих сфер, изображающая поляру прямой, изображаемой
этой точкой, мы можем ограничиться рассмотрением одной из этих
сфер, а вместо прямых говорить о парах взаимно полярных прямых.
Следовательно, мы можем сказать, что многообразие пар взаимно
полярных прямых пространства XS3 взаимно однозначно изобра-
жается плоскостью S.2(i) с радиусом кривизны 1 или i.
Из непрерывности функций (6.173) видно, что полученное нами
соответствие между парами взаимно полярных прямых простран-
ства 1S3 и точками плоскости S2 (0 является также взаимно непре-
рывным.
§ 41
ИНТЕРПРЕТАЦИИ КОТЕЛЬНИКОВА
615
Можно показать, что изотропные прямые пространства XS3
изображаются точками абсолюта плоскости S2(i).
расстояние между двумя точками S.2(i), изображающими
две прямые XS3 с радиусом кривизны qi, имеющие стационарные
расстояния <о0 и равно комплексному числу
й=|^о^Ао1|< (б17б)
В самом деле, расположим базисные точки пространства
на общих перпендикулярах наших прямых, причём точки е0 и
е±— в точках пересечения этих перпендикуляров с первой пря-
мой; тогда первая прямая является базисной прямой eQe1 и един-
ственной плюккеровой координатой этой прямой, отличной от нуля,
является р01=1, а вторая прямая проходит через точки
£och^ + ^shy: и er cos у у, (6.177)
и плюккеровы координаты
этой прямой имеют вид
g01 — ch —cos —, qVz=0, ~ ch — sin —,
V Q Q ч q q
^23 — sh — sin —, = 0, qvl = sh — sin —.
* q q 4 4 q q
(SATS}
Поэтому комплексные векторы, соответствующие этим прямым,
имеют соответственно координаты
pi=l, =
Q1 — ch — cos sh — sin —, Q2 = 0,
q q q q
Q3 = ch — sin — — i sh — cos —.
q q q q
Ho
Qi — ch — cos — + i sh — sin — = cos — cos — +
q q 1 q q q q 1
. . /фч . Фа Фа--- /фч
4- Sin —1 Sin — — COS —------i,
1 q q q
Q2 = ch — sin — — I sh — cos — = cos sin — —
q q q q q q
. /Ф1 . Фа -
— sin — COS — — sin —--------1.
q q q
(6.180)
Поэтому косинус угла 2 между векторами Р и Q равен
COS 2 = P1Q1 + P2Q2 + P3Q3 = ~ ,
•/(pi)2 + (p2)2 + (p3)2yr(Ql)2 + (Q2)2 + (Q8)2 q
(6.181)
откуда непосредственно следует (6.176).
616
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
Из установленной нами изометрии следует, что группа движе-
ний пространства 15.3 изоморфна группе, состоящей из движений
плоскости S2(Z) и произведений этих движений на переход к точ-
кам с сопряжёнными координатами. Поэтому связная группа дви-
жений пространства 1S3 изоморфна группе движений пло-
скости P2(i). С изображением движений пространства х53 движе-
ниями плоскости S2(Z) мы уже встречались в § 11 главы III, где
мы видели, что движения пространства 153 изображаются дви-
жениями пространства SS6, переводящими в себя пару взаимно
полярных мнимо сопряжённых плоскостей, являющихся плоско-
стями S2(Z).
Таким образом, геометрию пространства 1S3, если за основ-
ной образ принять пару взаимно полярных прямых (или пря-
мую собственной области), можно рассматривать как геоме-
трию плоскости S2(i).
Приведём сравнительную таблицу геометрических образов
плоскости S2(i) и собственной области пространства 1S3 отрица-
тельной кривизны, соответствующих друг другу при указанной
интерпретации:
ЗД
точка;
прямая;
нормальная 2-цепь индекса 0;
нормальная 2-цепь индекса 1;
^3
прямая;
конгруэнция перпендикуля-
ров к прямой;
связка прямых;
плоское поле прямых.
Аналогично показывается, что многообразия пар взаимно по-
лярных гиперболических и эллиптических прямых простран-
ства 2S3 взаимно однозначно и взаимно непрерывно изобра-
жаются плоскостями rS2(e) с радиусами кривизны соответ-
ственно 1 и i. При этом расстояние между двумя точками
плоскости 1S2 (ё), изображающими две прямые пространства 2S3
с радиусом кривизны г, имеющими экстремальные расстояния о>0,
ojj и Zco-p равно соответственно двойному и двойному ком-
плексному числам
2 = |^±^|, (6.182)
Из этой изометрии следует, что группа движений простран-
ства 2S3 изоморфна группе, состоящей из движений плоскости 1S2 (е)
и произведений этих движений на переход к точкам с сопряжён-
ными координатами. Поэтому группа движений пространства 2S3
с определителем -f-1 (состоящая из четырёх связных компонент)
изоморфна группе движений плоскости 1S2(e), Так как группа
движений плоскости 152(^) изоморфна прямому произведению двух
групп движений плоскости 1S2, группа движений пространства
§ 4] ИНТЕРПРЕТАЦИИ КОТЕЛЬНИКОВА 617
25 с определителем -|-1 изоморфна прямому произведению двух
групп движений плоскости 1S2. С изображением движений про-
странства 2S3 движениями двух плоскостей 1S2 мы уже встреча-
лись в § 11 главы III, где мы видели, что движения простран-
ства 2S3 изображаются движениями пространства 355, переводящими
в себя пару взаимно полярных двумерных плоскостей, являющихся
плоскостями 1S2. Подгруппами группы движений пространства 2S3
с определителем -|-1, изоморфными группе движений плоскости 1S2,
являются группы правых и левых паратактических сдвигов. Ука-
занный изоморфизм вытекает также из того, что группа движений
пространства 2S3 с определителем -j-1 четырёхзначно изображается
группой антикватернионных преобразований у = axb~\ где а,
Ъ — антикватернионы единичного или мнимоединичного модуля,
а группа движений плоскости 152 двузначно изображается груп-
пой антикватернионных преобразований у —аха~\ где а—анти-
кватернион единичного или мнимоединичного модуля.
Изображая плоскости S2(e) и 1S2(e) парами точек плоскостей S2
и 1S2, мы получим интерпретации пространств S3 и 2S3 соответ-
ственно на парах плоскостей S2 и 1S2, с которыми мы встречались
в § И главы III. Такая интерпретация для пространства S3 была
предложена Фубини [1] и несколько позже Штуди [3]. Будем на-
зывать эти интерпретации интерпретациями Фубини.
Вместо неевклидовых плоскостей S2(^), S2(Z) и 1S2(^) можно
рассматривать сферы в пространствах /?3(Х), /?3(/) и 1/?3(^)- Точки
этих сфер взаимно однозначно изображают не пары взаимно по-
лярных прямых, а прямые, причём каждую прямую следует рас-
сматривать в двух экземплярах, приписывая каждому из них опре-
делённое направление. Точно так же вместо пар плоскостей S2
и 1S2 можно рассматривать пары сфер в пространствах /?3 и х/?3;
пары точек этих сфер также взаимно однозначно изображают пря-
мые с заданным на них направлением. Именно в этом виде интер-
претации Котельникова пространств S3 и 1S3 и интерпретация
Фубини пространства S3 были предложены их авторами.
Совершенно аналогично определению евклидовых пространств
Z?W(Z), Rn(e) и lRn(e) и неевклидовых пространств Sn(t), Sn(e) и
18п(е) над алгебрами комплексных и двойных чисел можно опре-
делить евклидовы пространства Rn(s) и lRn(?) и неевклидовы
пространства Sn(s) и lSn(s) над алгеброй дуальных чисел.
Дуальные плоскости 52(з) и 152(е) позволяют дать аналогичные
интерпретациям Котельникова пространств S3, 1S3 и 2S3 интерпре-
тации пространств /?3 и 1/?3. Эти интерпретации для пространства
также были предложены А. П. Котельниковым [1] (см. также [4])
и несколько позже Штуди [1] (см. также [3]). Мы также будем
называть их интерпретациями Котельникова.
Для определения этих интерпретаций следует рассмотреть плюк-
керовы координаты прямых в пространствах /?3 и 1/?3. В евклидовых
(6.183)
618 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
пространствах будем определять плюккеровы координаты с по-
мощью таких пар точек, одна из которых является бесконечно
удалённой. Если прямая проходит через точку х с координатами х1,
х2, х3 в направлении единичного вектора а с координатами а1,
а2, а3, то будем определять плюккеровы координаты точкой х
с проективными координатами 1, х1, х2, х3 и бесконечно удалён-
ной точкой с проективными координатами 0, а1, а2, а3. Тогда
плюккеровы координаты (3.180) этой прямой имеют вид
р01 = а1, р02 = а2, р03 — а3,
р& — х2а3 — х3а2, р31 — х3^1 — х1^3, р12 = х1#2 — х2ах.
Первые три из этих координат являются координатами вектора а,
а последние три — координатами векторного произведения хХ#-
Если отказаться от задания направления прямой, вектор а, а сле-
довательно, и координаты (6.183) будут определены с точностью
до умножения на — 1.
В случае, когда основная метрическая форма пространства /?3
имеет вид (х, х) = (х1)2 + (х2)2 + (^3)2, плюккеровы координаты
прямых этого пространства удовлетворяют условию
(p°i)2 + (р02)2 + (р03)2 = 1. (6.184)
Каждой прямой пространства /?3 можно поставить в соответ-
ствие вектор пространства /?3(з) с координатами
pi = р<>1 + гр2*, Р2 = р*2 + ер31} р>з = роз + (6.185)
Длина этого вектора равна 1, так как
(Р1)2 + (р2)2 + (Р3)2 = [(р01)2 + (/?02)2 (p03)2j +
+ 2s (p°ip23 + Р^Р*1 + р03р12), (6.1 86)
но первая скобка в силу (6.184) равна 1, а вторая скобка в силу
(3.184) равна нулю. Так как плюккеровы координаты определены
с точностью до умножения на — 1, каждой прямой пространства /?3
вместе с вектором Р* соответствует вектор —Р\
Таким образом, прямые пространства Р3 изображаются парами
диаметрально противоположных точек сферы единичного радиуса
в пространстве /?3(з). Поэтому многообразие прямых простран-
ства Р3 взаимно однозначно изображается плоскостью S2(e)
с радиусом кривизны 1.
Из непрерывности функций (6.185) видно, что полученное нами
соответствие между прямыми пространства Р3 и точками плоско-
сти S2(s) является также взаимно непрерывным.
Расстояние между двумя точками плоскости S2(s), изображаю-
щими две прямые пространства Р3, угол между направлениями
§4]
ИНТЕРПРЕТАЦИИ КОТЕЛЬНИКОВА
619
которых равен о>, а минимальное расстояние которых равно р,
равно дуальному числу
F 2 = (6.187)
В самом деле, расположим начало координат пространства
в точке пересечения первой прямой с общим перпендикуляром пря-
мых и направим базисный вектор ех по первой прямой, а е%— по
общему перпендикуляру прямых. Тогда первая прямая определяется
точкой О и вектором ev Единственной плюккеровой координатой
первой прямой, отличной от нуля, является р01~1. Вторая пря-
мая определяется точкой ре,2 и вектором е± cos со—-£3sin<D. Плюк-
керовы координаты этой прямой имеют вид
о01 = cos а), я20 = 0, q^ =— sin а), 1
оч • 41 л ю (6.188)
q^> =—psin<D, q61 — 0, q12 =—pcosw. J
Поэтому дуальные векторы, соответствующие этим прямым,
имеют соответственно координаты
pi=l, Р2 = 0, Р3=0, 1
Q1 = cos а) — spsina), Q2 = 0, Q3 ——sinw — гр cos a). J (6.189)
Но в силу (5.334) координаты Q1 и Q3 можно переписать в виде
Q1 = cos а) — гр sin а) = cos (со + SP)> 1
‘ • / । \ I (6.190)
= — sin а) — гр cos а) — — sin (ш + гр), )
и косинус угла 2 между векторами Р и Q равен
~ P1Q1-|-P2Q2 + P3Q3
cos 2 — —~ ----------- = cos (<о -f- еР)>
V (Р1)2 + (Р2)2 + (J*)2 V (Q1)2 + (Q2)2 + (QV)2
(6.191)
откуда непосредственно следует (6.187).
Из установленной нами изометрии следует, что группа движений
пространства /?3 изоморфна группе, состоящей из движений плоско-
сти S2(e) и произведений этих движений на переход к точкам с со-
пряжёнными координатами. Поэтому связная группа движений
пространства /?3 изоморфна группе движений плоскости S2(e).
Таким образом, геометрию пространства /?3, если за основ-
ной образ пространства принять прямую, можно рассматривать
как геометрию плоскости S2(e).
Если мы будем называть нормальными 2-цепями плоско-
сти S2(e) совокупности точек, полученные движениями из сово-
купности точек с вещественными координатами, и антинормаль-
ними 2-цепями плоскости S2(e) совокупности точек, полученные
движениями из совокупности точек с чисто дуальными коор-
динатами, мы можем привести следующую сравнительную таб-
лицу геометрических образов плоскости S2(e) и пространства /?,3,
620
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
соответствующих друг другу при указанной интерпретации:
точка;
прямая;
нормальная 2-цепь;
антинормальная 2-цепь;
*3
прямая;
конгруэнция перпендикуля-
ров к прямой;
связка прямых;
плоское поле прямых.
Аналогично показывается, что многообразия прямых вещест-
венной и чисто мнимой длины пространства 1/?3 взаимно одно-
значно и взаимно непрерывно изображаются плоскостями 152 (г)
с радиусами кривизны соответственно 1 и I, причём расстоя-
ние между двумя точками плоскости 152(е), изображающими
две прямые пространства 1/?3, угол между направлениями ко-
торых равен а), а стационарное расстояние которых равно р,
равно дуальному или комплексному дуальному числу (6.187).
Отсюда следует, что группа движений пространства с опреде-
лителем +1 изоморфна группе движений плоскости 1S2(e).
Вместо неевклидовых плоскостей 52(е) и 1S2(e) здесь также
можно рассматривать сферы в пространствах /?3(е) и 1Z?3(s), точки
которых взаимно однозначно изображают прямые с заданными на-
правлениями. Именно в этом виде интерпретация Котельникова про-
странства /?3 была предложена её автором.
Интерпретации Котельникова пространств /?3 и S3 были приме-
нены к дифференциальной геометрии семейств прямых этих про-
странств Бляшке [1], Д. Н. Зейлигером (Новочеркасск) [1] (про-
странство /?3) и М. С. Бродским (Одесса) [1] (пространство 5.3).
§ 5. Унитарные неевклидовы пространства над алгебрами
комплексных и двойных чисел кватернионов
и антикватернионов
В определённых нами в § 2 унитарных евклидовых простран-
ствах, так же как в евклидовых пространствах Rn и lRn, можно
определить гиперсферы — геометрические места точек, отстоящих
от одной точки на одном и том же расстоянии. Так как простран-
ства Un(i), lUn(i), Un(e), Un(i, j), 4Jn(i, j) и Un(i, e) соответ-
ственно изометричны пространствам /?2п, 2г/?2п, nR%n, Rin, aR±n и
2n/?4n, гиперсферы первых пространств изометричны гиперсферам
соответственных вторых пространств. Гиперсферы унитарных евкли-
довых пространств переводятся в себя группами вращений этих
пространств. Очевидно, эти гиперсферы переводятся в себя и всеми
подгруппами групп вращений, в частности группами тех вращений
унитарных пространств, которые являются аффинными преобразо-
ваниями этих пространств. Покажем, что последние группы, рас-
сматриваемые как группы преобразований гиперсфер в этих про-
§5]
УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
621
странствах, являются транзитивными группами. В самом деле,
покажем, что базисный вектор е0 унитарных евклидовых пространств
всегда можно перевести преобразованием указанной группы в про-
извольный вектор х0 этого пространства той же длины. Если
базис пространства унитарно-нормированный, вектор х0 связан
условием (Хр, х0)=1. Будем искать это преобразование в виде
Оно должно удовлетворять условию
3 i i j i
* = Z^e» =aQ, (6.192)
т. e. элементы крайнего левого столбца матрицы этого преобра-
зования должны совпадать с координатами вектора х0. Так как
базис пространства унитарно-нормированный, матрица нашего пре-
образования должна переводить в себя форму 2 хгх\ т. е. является
унитарной. Поэтому элементы других столбцов этой матрицы
являются координатами векторов, взаимно унитарных между собой
и с вектором х0. Но каждый единичный вектор унитарного евкли-
дова пространства можно включить в такую систему векторов, от-
куда следует существование искомого преобразования.
В то же время указанные группы вращений унитарных евкли-
довых пространств, рассматриваемые как группы преобразований
гиперсфер в этих пространствах, являются импримитивными
группами. В самом деле, эти вращения переводят точки, высекае-
мые из гиперсферы одной и той же прямой, проходящей через
центр гиперсферы, в точки, высекаемые из той же сферы некоторой
другой прямой, также проходящей через центр гиперсферы. Таким
образом, совокупности точек гиперсферы, высекаемые из неё одной
и той же прямой, проходящей через центр гиперсферы, являются
классами импримитивности. Так как при изометрическом соответ-
ствии пространств ип(Г), и Un(e), с одной стороны, и про-
странств R.2n, 2lR2n и с другой стороны, гиперсферы изобра-
жаются гиперсферами, а прямые, проходящие через центры гиперсфер,
изображаются двумерными плоскостями, проходящими через центры
гиперсфер, классы импримитивности гиперсфер пространств
Un(i), и Un(e) изображаются большими окружностями
на гиперсферах пространств R.2n, 2lR2n и nR2rb. Точно так же как
при изометрическом соответствии пространств Un(i, у), j)
и Un(i, e), с одной стороны, и пространств ±lR±n и 2nR±n,
с другой стороны, гиперсферы изображаются гиперсферами, а пря-
мые, проходящие через центры гиперсфер, изображаются четырёх-
мерными плоскостями, проходящими через центры гиперсфер,
классы импримитивности гиперсфер пространств Un(it у),
У) и Untt* е) изображаются большими трёхмерными сфе-
рами на гиперсферах пространств Rin, ilR±n и 2nRin-
Подобно тому как, считая классы импримитивности гиперсфер
в евклидовых пространствах Rn+1 и lRn+1 точками новых
622
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
пространств, мы получаем неевклидовы пространства Sn и lSn, классы
импримитивности мы можем в случае унитарных евклидовых про-
странств считать точками новых пространств, которые в этом
случае также естественно называть неевклидовыми пространствами.
Вместо классов импримитивности можно рассмотреть прямые связки
с центром в центре гиперсферы, высекающие из неё эти классы
импримитивности; за расстояние между двумя точками первого
пространства естественно принять угол между двумя прямыми
связки, умноженный на радиус гиперсферы. Поэтому будем назы-
вать п-мерным унитарным неевклидовым пространством мно-
жества элементов, называемых точками, находящихся во взаимно
однозначном соответствии с прямыми связки в (п-|~ 1)-мерном уни-
тарном евклидовом пространстве, пересекающимися с гиперсферой
радиуса г, причём за расстояние между двумя точками неевклидова
пространства будем считать угол между соответственными прямыми
связки, умноженный на радиус гиперсферы. Будем называть /п-мер-
ными плоскостями неевклидова пространства, при т=\—пря-
мыми, при т = п—1—гиперплоскостями множества точек этого
пространства, которые при этом соответствии отвечают прямым
связки, лежащим в (т-}~ 1)-мерных плоскостях.
Будем называть унитарные неевклидовы пространства, полу-
ченные с помощью связки прямых в унитарных евклидовых про-
странствах t/n+1(i), lUn+1(i), Un+1(e), Un+1(i, j), lUn+1(i, J),
Un+1(i, соответственно пространствами Kn(i), lKn(i), Kn(e),
Kn(l, j), j) и Kn(i, e), радиус гиперсферы г будем назы-
вать радиусом кривизны унитарного неевклидова пространства,
1
а число — кривизной этого пространства.
Гиперсферы в унитарных евклидовых пространствах, классы
импримитивности которых изображают точки унитарных неевкли-
довых пространств, а также связки прямых в унитарных евклидо-
вых пространствах можно считать интерпретациями или моделями
унитарных неевклидовых пространств. Способ получения моделей
унитарных неевклидовых пространств из гиперсфер в унитарных
евклидовых пространствах показывает, что унитарные неевкли-
довы пространства гомеоморфны фактор-пространствам гипер-
сфер в соответственных унитарных евклидовых пространствах
по классам импримитивности их групп вращений, являющихся
аффинными преобразованиями.
Идея построения неевклидова пространства с комплексными
координатами с помощью эрмитовой формы принадлежит Сегре [2].
Пространство /С3(7) впервые систематически изучалось Фубини [2],
Штуди [4] и подробно изучается в монографиях Кулиджа [3] п
Картана [10]. Там же рассматривается пространство ХК3(0. Про-
странство Кп(1) с более общей точки зрения изучается в книге
Схоутена и Стройка [1] (см. также работу автора [13]). Простран-
§ g] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 623
ства Кп(ё), Kn(l, f) и Kn(i, ё) впервые рассматривались автором
(см. 15], [11], [16], [19], а также статью автора и И. М. Яглома [1]).
Пространство Kn(i, j) рассматривалось также Ван Сянь-чжуном [1 ].
Отметим также, что гиперсферы пространств /?2п+2 и /?4п+4 (изо-
метричных соответственно пространствам Un+1(i) и £/n+1(Z, /))
являются тем, что в топологии называют косыми произведениями
(расслоёнными пучками) классов импримитивности этих гиперсфер
и соответственно пространств Кп(Г) и Kn(i, у)1).
В пространствах и Un(i, j) каждая прямая связки
пересекается со всеми гиперсферами с центром в центре связки*,
в пространствах 11п(ё) и Un(i, ё) каждая неизотропная пря-
мая связки пересекается с гиперсферами как вещественного,
так и чисто мнимого радиуса*, в пространствах lUn(i) и ]Un(i, j)
изотропные прямые делят прямые связки на два класса*, одни
пересекаются с гиперсферами вещественного радиуса, а другие —
с гиперсферами чисто мнимого радиуса. В самом деле, в про-
странствах R2n и Rin плоскости, изображающие прямые связки,
пересекаются со всеми гиперсферами с центром в центре связки.
В пространствах nR2n и 2Л^4п плоскости, изображающие неизо-
тропные прямые связки, являются пространствами 1/?2 и 2/?4, а такие
плоскости пересекаются с гиперсферами как вещественного, так и
чистого мнимого радиуса, а в пространствах 2lR%n и пло“
скости, изображающие неизотропные прямые связки, являются пло-
скостями R2 и R± или 2R2 и 4/?4, причём первые плоскости пере-
секаются только с гиперсферами вещественного радиуса, а вторые —
только с гиперсферами чисто мнимого радиуса.
Интерпретации унитарных неевклидовых пространств в связках
прямых позволяют расширить эти пространства и считать прямые
связки, не пересекающиеся с гиперсферой, представляющими новые
точки этих пространств. Так как угол между произвольной прямой
унитарного евклидова пространства и изотропной прямой равен
бесконечности, будем считать новые точки унитарных неевклидовых
пространств, соответствующие изотропным прямым связки, бес-
конечно удалёнными точками этих пространств, а совокупность
этих точек будем называть абсолютом этих пространств. В про-
странствах Кп(ё), lKn(i, У), Кп(1, ё) абсолюты вещественны,
а в пространствах Кп(1) и Kn(i, j)— мнимы. Будем называть
новые точки унитарных неевклидовых пространств, соответствую-
щие неизотропным прямым, не пересекающимся с гиперсферой,
идеальными точками этих пространств, а совокупность этих
точек — идеальной областью. Идеальные точки можно определить
только для пространств lKn(i) и гКп(1, ])•
Далее, /n-мерную и (п — т—1)-мерную плоскости унитарного
неевклидова пространства будем называть взаимно полярными
!) См. Стинрод [1], стр. 131.
624 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
плоскостями, при т — 0 — полюсом и полярной гиперплоскостью,
если каждой точке одной из этих плоскостей соответствует прямая
связки, все векторы которой взаимно унитарны всем векторам
прямых, соответствующих точкам второй плоскости. Так как взаимно
унитарные векторы пространств Un(t), Un(e), Un(i, /),
4Jn(i, J) и в) изображаются ортогональными векторами про-
странств R.2n, 2lR2n, nR.2n, Rln, aRin и плоскости первых
пространств, все векторы одной из которых взаимно унитарны
всем векторам второй, изображаются вполне ортогональными пло-
скостями. Поэтому всякая т-мерная плоскость унитарного не-
евклидова пространства обладает (п — т—1)-мерной полярной
плоскостью.
Будем называть две /n-мерные плоскости, при т = § — точки
унитарных неевклидовых пространств полярно сопряжёнными,
если каждой точке этих плоскостей соответствует прямая связки,
все векторы которой взаимно унитарны всем векторам прямых,
соответствующих точкам второй плоскости. Одна из двух по-
лярно сопряжённых m-мерных плоскостей при т < п — т—1
целиком лежит в (п — т—1)-мерной плоскости, полярной
другой.
В унитарных неевклидовых пространствах, так же как в не-
евклидовых пространствах Sn и lSn, имеет место принцип двой-
ственности.
Будем определять точки унитарных неевклидовых пространств
с радиусом кривизны г радиусами-векторами произвольных точек
классов импримитивности гиперсфер, соответствующих данным
точкам. Эти векторы связаны уравнением гиперсферы (х, х) = г2.
Если одним из векторов, определяющих точку унитарного не-
евклидова пространства, является вектор х0, то произвольный век-
тор, определяющий эту точку, имеет вид х — x0Z, где I—произ-
вольный элемент единичного модуля соответственной алгебры.
Расстояние а) между точками х, у унитарных неевклидовых
пространств в силу (6.75) определяется по формуле
в которой можно | х | и [ ] заменить на г.
Эти же точки, а также точки абсолютов унитарных неевкли-
довых пространств можно характеризовать также любым не-
особенным вектором унитарного евклидова пространства, напра-
вленным по прямой связки, соответствующей этой точке. В этом
случае расстояние между двумя точками унитарного неевклидова
пространства определяется по той же формуле (6.193), где модули
векторов х и у не связаны никаким условием.
Найдём линейный элемент du унитарных неевклидовых про-
странств, т. е. расстояние между бесконечно близкими точками х
§5]
УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
625
и у этих пространств. Полагая у = x-{-dx-\- у d2x-|- ••• > мы
можем переписать формулу (6.187) в виде
(х, х dx -ф -Q- d2x ... Wx dx -jy d'2x , x'j
cos2-2---------------Ц---------------------Ц-----------1 (6.194)
(x, x)\x + dx + X + dx 4- d2x + ... j
t. e.
Л rf<02 \2 d<& | _
V 2r2“b • • J — 1 r2 l~ • • • —
£(x, x) + (x, dx) +|(x, d*x)+ |\x, x) + (dx, x) + ~ (d*x, x)+ ...J
(x, x) ^(x, x)+(x, dx)+(dx9 x)+(dx, dx)+~(x, ^x, x)+... j
(6.195)
Раскрывая скобки в числителе и знаменателе и прибавляя и
отнимая от числителя выражение (х, х) (dx, dx), мы можем пере-
писать (6.195) в виде
1 ^ю2_1_ __ 1 x)^dx, dx) — (x, dx)(dx, х)
1 Г* -j- . . . — 1 x)2-j- .. . ’ (0.1У0)
откуда окончательно находим:
du? — г2
(х, х) (dx, dx) — (х, dx) (dx, х)
(х, х)2
(6.197)
В этой формуле векторы, представляющие точки унитарных
неевклидовых пространств, не предполагаются связанными ника-
кими условиями. В окрестности точки можно выбрать для каждой
точки единственный представляющий её вектор следующим спосо-
бом: выберем для данной точки некоторый представляющий её
вектор, удовлетворяющий условию (х, х) = г2. Проведём через
конец этого вектора гиперплоскость, для которой этот вектор
служит нормальным вектором, и поставим в соответствие каждой
точке окрестности данной точки радиус-вектор точки пересечения
прямой связки, представляющей эту точку, с этой гиперплоскостью.
Тогда для векторов, представляющих точки этой гиперплоскости,
будут иметь место соотношения (х, х) = г2, (х, dx) = (dx, х) — О
и формулу (6.197) можно будет переписать в виде
du?=z(dx, dx). (6.198)
Формула (6.198) показывает, что геометрия унитарных неев-
клидовых пространств в малых окрестностях точек близка к гео-
метрии построенной нами гиперплоскости.
Так как в случае пространств Un+1 (0> Uп+1 (^), ^n+i (i* J) и
&n+i (I, е) указанная гиперплоскость является соответственно
40 Зак. 177. Б. А. Розенфельд
626
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
пространством Un(i), Un(e), Un(i, j), Un(l, e), мы находим, что
геометрия пространств Kn(i), Кп(е), Kn(l, j)nKn(i, е) в малых
окрестностях точек близка к геометрии соответственно про-
странств Un(i), Un(e), Un(i, у), /7w(z, е). С другой стороны,
так как в случае пространств lUn+1(i) и lUn+1(t, J) указанная
гиперплоскость является соответственно пространствами lUn(i) и
у), если перпендикуляры к этим гиперплоскостям имеют
вещественную длину, и пространствами и у),
если перпендикуляры к ним имеют чисто мнимую длину, геомет-
рия пространств lKn(i) и lKn(i, j) положительной кривизны
в малых окрестностях точек близка к геометрии соответст-
венно пространств lUn(i) и lUn(i, j), а геометрия пространств
и lKn(i, j) отрицательной кривизны в малых окрестно-
стях точек близка к геометрии соответственно пространств
и у), при 1=\—пространств Un(t) и Un(i, ])•
Поэтому в силу того, что пространства Un(i) и Un(i, j) удо-
влетворяют аксиомам метрического пространства, пространства
Kn(i) и Kn(i, j) и пространства 1Kn(i) u^Knii, j) отрицатель-
ной кривизны также удовлетворяют аксиомам 1°—3° метри-
ческого пространства (см. § 3 главы I).
Будем называть точки унитарного неевклидова пространства,
соответствующие базисным векторам е0, . . ., еп унитарного евкли-
дова пространства, базисными точками. В случае унитарных
неевклидовых пространств с радиусом кривизны г мы будем поль-
зоваться унитарно-нормированным базисом в унитарном евклидо-
вом пространстве, который состоит из взаимно унитарных векто-
ров длины г.
Гиперплоскости унитарных неевклидовых пространств можно
определять координатами их полюсов, которые мы будем назы-
вать тангенциальными координатами соответственной гиперпло-
скости.
Так как связки прямых в аффинных пространствах An+1(i\
Ап+1 (е)> ^п+1 J) и ^п+1 (!> е) образуют интерпретации проек-
тивных пространств Рп(1\ Рп(е)> Pn(h J) и Pn(h е)> изложен-
ные нами интерпретации унитарных неевклидовых пространств
приводят нас к новым интерпретациям этих пространств, в кото-
рых точки пространств Kn(i), Кп(е), Kn(it j), lKn(i, j)
и Kn(i, е) представляются точками соответственно проек-
тивных пространств Pn(i), Рп(е)> Рп(/> J) и Pnd* е)*
Мы видели, что при интерпретациях как унитарных неевкли-
довых, так и проективных пространств в связках прямых точки
/n-мерных плоскостей этих пространств изображаются прямыми
связки, лежащими в (т-\- 1)-мерных плоскостях. Поэтому при
интерпретации унитарных неевклидовых пространств в проек-
тивных пространствах т-мерные плоскости, при т= 1—пря-
мые унитарных неевклидовых пространств изображаются
§5]
УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
627
т-мерными плоскостями, при т = 1 —прямыми соответствен-
ного проективного пространства.
Уравнение изотропного конуса в унитарном евклидовом про-
странстве
(х, х) — О (6.199)
является в проективном пространстве уравнением эрмитовой квад-
рики, поэтому при интерпретации унитарных неевклидовых
пространств в проективных пространствах абсолют унитар-
ного неевклидова пространства изображается эрмитовой квад-
рикой в соответственном проективном пространстве. Так как
точки и /n-мерные плоскости унитарных неевклидовых пространств
изображаются точками и /n-мерными плоскостями проективных
пространств, то будем отождествлять и эрмитовы квадрики, изо-
бражающие абсолюты, с этими абсолютами.
Таким образом, унитарные неевклидовы пространства
1Кп(Г), Кп(е), Кп(1, /), lKn(i, j) и Кп(1, е) можно рассматри-
вать как метризованные проективные пространства Pn(i),
Рп<е)’ pn(i’ J) « pn(i> е).
Так как абсолюты пространств Un(i) и Un(i, j) мнимы, эти
пространства гомеоморфны соответственно пространствам Pn(i) и
Рп(1, 7), откуда видно, что пространства и Kn(i, /) ком-
пактны. Пространства Кп{е), lKn(j, j) и Кп(1> е), полу-
чающиеся от соответственных проективных пространств удалением
бесконечно удалённых и идеальных точек, некомпактны.
Две полярно сопряжённые точки х и у унитарных неевклидо-
вых пространств связаны условием
(х, _у) = О, (6.200)
совпадающим с условием того, что каждая из этих точек лежит
на гиперплоскости, полярной другой точке относительно эрмито-
вой квадрики (6.199). Поэтому взаимно полярные плоскости
изображаются в проективных пространствах взаимно поляр-
ными плоскостями относительно абсолюта.
Расстояние а) между двумя точками унитарного неевклидова
пространства с радиусом кривизны г, изображаемого двумя точ-
ками х, у проективного пространства, выражается через эти точки
по формуле (6.193), где (х, у) — эрмитова билинейная форма,
соответствующая эрмитовой квадратичной форме (х, х), являю-
щейся левой частью уравнения (6.193) абсолюта, а |х| и |j/| —
абсолютные значения квадратных корней из эрмитовых квадра-
тичных форм (х, х) и (у, у). В самом деле, векторы аффинного
пространства, представляющие точки х и у, можно рассматривать
как направляющие векторы двух прямых связки в унитарном евкли-
довом пространстве, представляющих данные точки унитарного не-
евклидова пространства, а уравнение (6.193) является в то же
40*
628
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
время уравнением изотропного конуса в унитарном евклидовом про-
странстве.
Формулу (6.193) можно преобразовать так, чтобы получить
чисто проективное определение расстояния между двумя точками
проективного пространства при интерпретации в нём унитарного
неевклидова пространства.
Для того чтобы показать это, возведём обе части формулы
(6.193) в квадрат и запишем полученное равенство в виде
те? Л — У) (У, *)
г (х, х)(у, у)
(6.201)
Заметим, что скалярное произведение векторов унитарного
евклидова пространства
(х, у) = 22 х1а^уз (6.202)
* з
можно представить в виде
(X, у) = 2 (6.203)
3
где _
«9 = 2*4/ (6.204)
i
— тангенциальные координаты гиперплоскости, полярной точке х.
Поэтому, если мы обозначим тангенциальные координаты гипер-
плоскости, полярной точке у, через vit мы можем переписать
равенство (6.201) в виде
cos2 -^=(2 (2 Uiyi)' (6-205)
i i i i
Но правая часть этого выражения является двойным отноше-
нием W(x, у\ и, v) двух точек х, у и двух гиперплоскостей zz,
v, соответственно полярных этим точкам. Поэтому мы можем пе-
реписать (6.205) в виде
cos2 у = W(х, у\ и, v). (6.206)
С другой стороны, двойное отношение IF(x, у; и, v) равно
cos2 у = IF(x, у\ и/, У), (6.207)
где ur, v' являются точками пересечения гиперплоскостей zz, v
с прямой, определяемой точками х, у. Так же как в § 5 главы III,
показывается, что формула (6.207) может быть заменена фор-
мулой
ш =|^1n W(J, k; X, _у)|, (6.208)
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 629
где у, &— точки, одновременно гармонически делящие пары точек
X, я' и у, v'. В случае пространств Кп(Р) и /Q(Z, 7), где точки
k мнимы, а радиус кривизны г веществен, формула (6.208)
может быть переписана в виде
<0 = ^ln W(J, k; X, у). (6.209)
Формула (6.209) для пространства Un(i) была впервые пред-
ложена Схоутеном и ван Данцигом [I]1). Они, однако, опреде-
ляли точки у, k как точки пересечения прямой, определяемой
точками х, у, с абсолютом, что не является однозначным опреде-
лением, так как прямая пространства Un(i) пересекается с абсо-
лютом по однопараметрическому семейству мнимых точек.
Формулу (6.201) в случае пространств Кп(1\ Кп(е)> Kn(i, j}
и Kn(i, е) при унитарно-нормированном базисе можно переписать
в виде
2 Xiyi yixi
<*> i i
r 2 xixi 2 yiyi1
i i
(6.210)
а в случае пространств lKn(i) и lKn(i, j) при унитарно-нормиро-
ванном базисе можно переписать в виде
о оз
cos2 —
г
2 S wixi
i i
i i
(6.211)
Так как проективные прямые P1(i), Р1(е), Р±(Ь j) и P^l, e)
можно рассматривать как соответственно расширенные плоскости
комплексного и двойного переменного и расширенные пространства
кватернионов и антикватернионов, унитарные неевклидовы прямые
^i(0, 1Ar1(Z), К^е), /^(Z, у), 1Kt(Z, у) и /^(Z, е) можно рассма-
тривать как соответственно метризованные плоскости комплексного
и двойного переменного и пространства кватернионов и антиква-
тернионов или, что равносильно этому, как метризованные кон-
формные пространства С2, 1С.2, С4 и 2С4.
Абсолюты прямых (Z) и изображаются на плоскости
комплексного переменного соответственно мнимой и веществен-
ной окружностью, абсолют прямой К±(е) изображается на пло-
скости двойного переменного окружностью, абсолюты пря-
мых 7Q (Z, у) и j) изображаются в пространстве кватер-
нионов соответственно мнимой и вещественной гиперсферой, абсолют
прямой (Z, е) изображается в пространстве антикватернионов
I) См. Схоутен и Стройк [1], стр. 259.
630 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
гиперсферой, а полярно сопряжённые точки унитарных неевклидовых
прямых изображаются точками, взаимно обратными относительно
этих окружностей и гиперсфер. Поэтому та метрика, которую надо
ввести в пространства С2, ХС2, С4 и 2С4, чтобы они стали изоме-
тричны унитарным неевклидовым прямым, может быть определена по
формуле (6.208), где у, k— точки, одновременно гармонически
делящие пары точек х, х' и у, у', а х', у' — точки, взаимно об-
ратные точкам х, у при указанных инверсиях. Сравнивая фор-
мулу (6.208) с формулой (4.83), где /, k— точки, одновременно
гармонически делящие пары точек именно такого вида, мы, заме-
чая, что в формуле (6.208) перед знаком логарифма стоит число
а в формуле (4.83) — число у, находим, что плоскость С2 с уста-
новленной таким образом метрикой в случае мнимой окружности
изометрична сфере радиуса у в пространстве /?3, а в случае веще-
ственной окружности и г ~qi изометрична сфере радиуса ~-
в пространстве Точно так же плоскость 1С2 с установленной
г
таким образом метрикой изометрична сфере радиуса у в про-
странстве 1/?3, пространство С4 с установленной таким образом
метрикой в случае мнимой гиперсферы изометрично гиперсфере
радиуса у в пространстве /?б, а в случае вещественной ги-
персферы и r — qt изометрично гиперсфере радиуса у в про-
странстве и, наконец, пространство 2С4 с указанной метрикой
изометрично гиперсфере радиуса у в пространстве 2/?б. Поэтому
прямая (0 с радиусом кривизны г изометрична сфере
радиуса ~ в пространстве /?3, прямая 1K1(i) с радиусом кри-
визны qi изометрична гиперсфере радиуса ~~ в простран-
стве 1/?3, прямая Кх (е) с радиусом кривизны г изометрична сфере
радиуса у в пространстве х/?3, прямая ^(/, /) с радиусом кри-
визны г изометрична гиперсфере радиуса у в пространстве R-,
прямая 1K1(ii j) с радиусом кривизны qi изометрична гипер-
сфере радиуса в пространстве а прямая Kr(i, е) с ра-
диусом кривизны г изометрична гиперсфере радиуса у в про-
странстве 2/?б.
При этих изометриях между унитарными неевклидовыми прямыми
и сферами полярно сопряжённые точки прямых соответствуют
§5]
УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
631
диаметрально противоположным точкам сфер (так как и те
и другие соответствуют парам точек пространств С2, ХС2, С4
и 2С4, взаимно обратных относительно окружностей и гипер-
сфер, изображающих абсолюты унитарных неевклидовых прямых),
а цепи прямых соответствуют окружностям сфер (так как и те и
другие соответствуют окружностям пространств С2, 1С.2, С4 и 2С4).
Будем называть движениями унитарных неевклидовых про-
странств взаимно однозначные отображения этих пространств на
себя, не изменяющие расстояний между точками. Движения уни-
тарных неевклидовых пространств переводят гиперплоскости
в гиперплоскости. В самом деле, гиперплоскость в унитарном
неевклидовом пространстве является геометрическим местом точек,
полярно сопряжённых её полюсу, т. е. отстоящих от полюса на
постоянном расстоянии г. Так как /n-мерные плоскости являются
пересечениями гиперплоскостей, движения унитарных неевклидо-
вых пространств переводят т-мерные плоскости в т-мерные
плоскости и, в частности, прямые в прямые. Поэтому, если рас-
сматривать унитарные неевклидовы пространства как метризован-
ные проективные пространства, движения унитарных неевклидовых
пространств являются коллинеациями и, следовательно, имеют вид
(6.86) в случае пространств Kn(i), lKn(t) и Кп(е) и вид (6.88)
в случае пространств КД1, /), lKn(h J) и e)>
Движения унитарных неевклидовых пространств являются
коллинеациями, переводящими в себя абсолют, так как абсолют
является геометрическим местом бесконечно удалённых точек.
Обратно, всякая коллинеация, переводящая в себя абсолют уни-
тарного неевклидова пространства, является движением ввиду
того, что расстояние двух точек этого пространства является функ-
цией двойного отношения этих точек и гиперплоскостей, полярных
им относительно абсолюта. Так как всякая коллинеация, пере-
водящая в себя абсолют, перестановочна с полярным преобразо-
ванием относительно него, движения унитарных неевклидовых
пространств совпадают с коллинеациями, перестановочными
с полярным преобразованием относительно абсолюта.
Если мы выберем такой базис, что эрмитова квадратичная форма
в левой части уравнения абсолюта примет вид ^£х*хг в случае
i
пространств КпЦ), Кп(е), Kn(i, J), Кп(1, е) и в случае
i
пространств 1Кп(1) и гКДК 7), движения унитарных неевклидовых
пространств представляются линейными преобразованиями, пере-
водящими в себя эти формы. Как мы видели в § 2, матрицы таких
линейных преобразований являются унитарными матрицами соот-
ветственно индекса 0 и I и удовлетворяют соответственно условиям
(6.78) и (6.82). Как видно из условия унитарности (6.78),
632
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
комплексные и двойные унитарные линейные преобразования зависят
от п2 вещественных параметров, так как п2 комплексных или
двойных, т. е. 2п2 вещественных, параметров линейного преобразо-
п п (п — 1) , о
вания связаны 2 ———- -]-п = п2 вещественными условиями
(6.78). Кватернионные и антикватернионные унитарные линейные
преобразования зависят от п (2п-1- 1) вещественных параметров,
так как п2 кватернионных или антикватернионных, т. е. 4п2 веще-
ственных, параметров линейного преобразования связаны 4п^п —-Ц-
-\-п = п(2п—1) вещественными условиями (6.78).
Рассмотрим унитарные линейные преобразования векторов про-
странств Ап(Г), Ап(е), An(i, j) и Ап(1, е), которые, если рас-
сматривать эрмитову квадратичную форму (х, х), переводящуюся
в себя этими линейными преобразованиями, как скалярный
квадрат вектора, можно считать унитарными евклидовыми про-
странствами.
Заметим, что, накладывая условие унитарности индекса 0 и Z
на комплексные матрицы /г-го порядка с элементами =
и условие унитарности индекса 0 на двойные матрицы
п-го порядка с элементами а} = мы найдём, что
вещественные матрицы 2п-го порядка (Aj), связанные условиями
(6.33) и (6.34), представляющие эти комплексные и двойные матрицы,
удовлетворяют условию ортогональности в первым случае индекса О
и 2Z, а во втором случае индекса п. Точно так же, накладывая
условие унитарности индекса 0 и Z на кватернионные матрицы п-го
порядка с элементами п}, представляемыми комплексными матри-
(
I ^3 ^3
цами „ . . _.
А-
кватернионные матрицы п-го порядка с элементами предста-
вляемыми двойными матрицами такого же вида, мы найдём, что
комплексные и двойные матрицы 2п-го порядка (Aj), связанные
условиями (6.42), представляющие эти кватернионные и антиква-
тернионные матрицы, удовлетворяют условию унитарности в первом
случае индекса 0 и 2Z, а во втором случае индекса 0.
Всякое комплексное унитарное линейное преобразование пер-
вого рода индекса 0 может быть приведено к виду
'х* = е^х\ (6.212)
В самом деле, мы видели, что комплексное унитарное линейное
преобразование первого рода индекса 0 в пространстве Un(i) может
быть представлено вещественным ортогональным линейным пре-
образованием индекса 0 в пространстве /?2п, матрица которого
, и условие унитарности индекса 0 на анти-
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 633
удовлетворяет условию (6.33). Приводя последнее преобразование
к нормальному виду
'X2i = COS + 1 s|n fx2*4-1 — X2i Sin X2W COS %,
(6.213)
мы видим, что здесь отличны от нуля только элементы = Д?4+1 =
= cos ср, A^+1 =—A2I+1 = sin Таким образом, условие (6.33)
удовлетворено. Поэтому отличными от нуля элементами комплекс-
ной матрицы здесь являются только элементы а* — । =
= cos + i sin = eb(?i.
Отсюда следует, что всякое комплексное унитарное линейное
преобразование второго рода индекса 0 может быть приведено
к виду _
'х* = е^х\ (6.214)
Всякое кватернионное унитарное линейное преобразование
индекса 0 может быть приведено к виду
'х* = (cos —|— k sin <p^) (6.215)
В самом деле, мы видели, что кватернионное унитарное линей-
ное преобразование индекса 0 в пространстве Un(l, j) может быть
представлено комплексным унитарным линейным преобразованием
первого рода индекса 0 в пространстве £Л3п(0, матрица которого
удовлетворяет условию (6.42). Приводя последнее преобразование
к виду (6.212) и накладывая на его матрицу условия (6.42), мы
найдём, что это преобразование приводится к виду
'Х^ = е^Хг\ 'x2i+1 —e~i<fiX2i+1. (6.216)
Здесь отличны от нуля только диагональные элементы, поэтому
отличными от нуля элементами кватернионной матрицы являются
0 \
только элементы at, представляемые матрицами I I, т. е-
имеющие вид а\ = cos <?$ + k sin с^.
Всякое двойное унитарное линейное преобразование первого
рода или приводится к виду
' xi — zie&fixi (6.217)
где = 1, а вещественны или мнимы, или получается
предельным переходом из преобразований, приводимых к этому
х) В формуле (6.217) и в следующих формулах е в основании степени —
основание натуральных логарифмов, а е в показателе степени — двойная
единица.
634
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
виду. В самом деле, мы видели, что двойное унитарное линейное
преобразование первого рода в пространстве Un(e) может быть
представлено вещественным ортогональным линейным преобразо-
ванием индекса п в пространстве п/?2п, матрица которого удовле-
творяет условию (6.34). Последнее преобразование или приводится
к нормальному виду
'X2i = (Xм ch X2i+1 sh
/^ч-i s. (;^sh ?х2^1 ch
(6.218)
или получается предельным переходом из преобразований, приво-
димых к этому виду. В (6.218) отличны от нуля только элементы
“ ch и Таким образом, усло-
вие (6.34) удовлетворено. Поэтому отличными от нуля элементами
двойной матрицы здесь являются только элементы а} = ДЙ +
4- eA%+1 = (ch ©*+«! sh %) = е/'Ч
Отсюда следует, что всякое двойное унитарное линейное пре-
образование второго рода или приводится к виду
'х^г^х*, (6.219)
или получается предельным переходом из преобразований, при-
водимых к этому виду.
Всякое антикватернионное унитарное линейное преобразова-
ние или приводится к виду
’ хг — ег(сЬ^+/$Ь®г)х\ (6.220)
где е^= ±1, а вещественны или мнимы, или получается
предельным переходом из преобразований, приводимых к этому
виду.
В самом деле, мы видели, что антикватернионное унитарное
линейное преобразование в пространстве Un(i, е) может быть
представлено двойным унитарным линейным преобразованием пер-
вого рода в пространстве U.2n(e), матрица которого удовлетворяет
условию (6.42). Последнее преобразование или приводится к нор-
мальному виду (6.217), или получается предельным переходом из
преобразований, приводимых к этому виду. Накладывая на пре-
образование, приведённое к виду (6.217), условие (6.42), мы найдём,
что это преобразование приводится к виду
'Х* - е{ее(р<№\ 'x2i+1 = 8^~е<р<№г+1. (6.221)
Здесь отличны от нуля только диагональные элементы, поэтому
отличными от нуля элементами антикватернионной матрицы являются
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 635
i I 0 \
только элементы а^, представляемые матрицами I _ I, т. е.
\ 0 /
имеющие вид а* = еДсЬ %+/sh %).
Поэтому всякое движение пространства Кп(1) может быть
приведено к виду (6.212) или (6.214); требование равенства еди-
нице определителя матрицы этого движения равносильно требо-
ванию равенства = Всякое движение пространства Кп(е)
г
приводится к виду (6.217) и (6.219) или получается пре-
дельным переходом из движений, приводимых к этому виду»
Требование равенства z±z 1 определителя матрицы движения, при-
водимого к указанному виду, также равносильно требованию ра-
венства S Ф,- = О»
i
Всякое движение пространства Kn(i, J) может быть приве-
дено к виду (6.214). Всякое движение пространства Кп(1, е) при-
водится к виду (6.220) или получается предельным переходом
из движений, приводимых к этому виду»
Так как группа коллинеаций пространства Рп (I) изоморфна фак-
тор-группе группы линейных преобразований пространства Ап+1(0
с определителем -|-1 по её подгруппе, состоящей из преобразований
/ i i 1 i i f i n i n
x — x , x — > • • • > % —• , где &n+l> • • • > ®n+-l
корни (п-|-1)-й степени из единицы, группа движений простран-
ства Kn(t) изоморфна фактор-группе группы унитарных линейных
преобразований пространства Un+1 (Z) с определителем +1 по её
подгруппе, состоящей из преобразований хг = х\ хг = sn+ix\ • • •
' Л_________™ Л
. . . , Л, -- .
С другой стороны, группа коллинеаций пространства Рп (е)
изоморфна фактор-группе группы линейных преобразований про-
странства Ап+1 (е) с определителем z±z 1 и zt е по её подгруппе,
состоящей из преобразований rx{ = xi, fxi = — х\ 'х* = ех1 и Гх1 =
= — exi. Поэтому группа движений пространства Кп(е) изоморфна
фактор-группе группы унитарных линейных преобразований про-
странства /7п+1(^) с определителями ±1 по её подгруппе, состоя-
щей из преобразований fxi = xl, rxi — —х1.
Точно так же группы коллинеаций пространств Pn(l, J)
и Рп(1, е) изоморфны фактор-группам групп линейных преобра-
зований пространств Ап+1 (I, /) и Ап+1 (I, е) в первом случае с
полуопределителем 1, во втором случае с полуопределите-
лем z±z 1 по её подгруппе, состоящей из преобразований rх1 = xi
и гхг — — хг» Поэтому группы движений пространств Kn(i, j)
и Kn(i, е) изоморфны фактор-группам групп унитарных ли-
нейных преобразований соответственно пространств Un+1(i, j)
и 47w+1(f, ё) по их подгруппам, состоящим из преобразова-
ний 'Х1 — X1 И ' X1 = — xi»
636
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
Будем называть движения пространств Kn(i), lKn(i) и Кп(е),
являющиеся коллинеациями первого и второго рода, соответственно
движениями первого и второго рода.
Так как группы коллинеаций пространств /\(/), Рп(е), Pn(i, J)
и Pn(i, е) являются группами Ли, а условия унитарности являются
алгебраическими условиями, накладываемыми на вещественные
координаты элементов матриц коллинеаций, группы движе-
ний унитарных неевклидовых пространств являются груп-
пами Ли.
Выше мы видели, что движения первого рода пространства Кп(1)
представляются комплексными унитарными матрицами (п-|-1)-го
порядка индекса 0 с определителем 1, а эти матрицы предста-
вляются вещественными ортогональными матрицами (2я-)-2)-го
порядка индекса 0, элементы которых связаны алгебраическими
соотношениями. Принимая во внимание, что группа ортогональ-
ных матриц индекса 0 компактна, мы получаем, что группа дви-
жений первого рода пространства Kn(t) компактна, а следо-
вательно, и группа всех движений пространства Kn(i) компак-
тна. Точно так же движения пространства представляются
кватернионными унитарными матрицами (zz-j-l)-ro порядка ин-
декса 0, а эти матрицы представляются комплексными унитарными
матрицами (2п-|-2)-го порядка индекса 0 и, следовательно, веще-
ственными ортогональными матрицами (4п-)~4)-го порядка ин-
декса 0, причём элементы последних матриц связаны алгебраи-
ческими соотношениями. Поэтому группа движений пространст-
ва Kn(i, j) также компактна. Группы движений остальных
унитарных неевклидовых пространств представляются веществен-
ными ортогональными матрицами индекса Z > 0 и, следовательно,
некомпактны.
Так как всякое движение первого рода пространства Кп(1),
имеющее вид (6.212), и всякое движение пространства Kn(i, J),
имеющее вид (6.215), могут быть непрерывно переведены в тож-
дественное преобразование = х* при стремлении всех чисел
к нулю, а всякое движение первого рода пространства Kn(i) и всякое
движение пространства Kn(i, j) приводятся к указанному виду,
группа движений первого рода пространства Kn{t) и группа
движений пространства Kn(i, J) связны, поэтому группа всех
движений пространства Кп (Z) состоит из двух связных компо-
нент. С другой стороны, всякое движение первого рода простран-
ства Кп(е), имеющее вид (6.217), и всякое движение пространства
Kn(i, в), имеющее вид (6.220), могут быть непрерывно переведены
в преобразование 'х1 — при стремлении всех чисел к нулю.
Но преобразование гх1 = если среди чисел чётное число
отрицательных или положительных может быть непрерывно переве-
дено в тождественное преобразование 'х1 = х или в преобразование
fxi = — xi, а если среди чисел нечётное число отрицательных
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 637
и нечётное число положительных, что имеет место только при
нечётном п, может быть непрерывно переведено в преобразова-
ние zx° =— х°, rxi = xi (/>0). Учитывая, что всякое движение
первого рода пространства Кп(е) и всякое движение пространства
Kn(h е) приводится к указанному виду или получается предельным
переходом из движений, приводимых к этому виду, группа движе-
ний первого рода пространства Кп(е) и группа движений про-
странства Кп(1, е) при чётном п связны, а при нечётном п
состоят из двух связных компонент. Поэтому группа всех
движений пространства Кп(е) состоит при чётном п из двух,
а при нечётном п из четырёх связных компонент.
Так как движения пространств Kn(i) и Кп(е) представляются
унитарными линейными преобразованиями пространств Un+1(t)
и Un+1 (е) с определителем 1, а определители произвольных
унитарных линейных преобразований этих пространств в силу
формул (6.212) и (6.217) являются комплексными или двойными
числами единичного модуля, так что условие равенства определи-
теля -|- 1 представляет собой одно вещественное условие, группы
движений пространств Kn(i) и Кп(е) зависят от числа пара-
метров, на единицу меньшего, чем число (п-|-1)2 параметров
группы унитарных линейных преобразований пространств Un+1 (Z)
и Un+i(e)> т- е- 01П я (я+ 2) вещественных параметров. Точно
так же движения пространств Kn(i, j) и Kn(i, е) представляются
унитарными линейными преобразованиями пространств Un+1(i, j)
и ZJn+1(z, е) с полуопределителем ±1, а полуопределители произ-
вольных унитарных линейных преобразований этих пространств,
равные определителям представляющих их линейных преобразова-
ний (6.214) и (6.220) пространств и ^2п+2(е^ Равны +1-
Поэтому группы движений пространств Kn(i, j) и Кп(1, е) зави-
сят от того же числа (n-|-1) (2п-|-3) вещественных параме-
тров, что и группы унитарных линейных преобразований про-
странств Un+1(i, j) и Un+1(i, ё).
Группы унитарных линейных преобразований в унитарных
евклидовых пространствах являются транзитивными группами пре-
образований на гиперсферах этих пространств. При этом в связках
прямых с центром в центре гиперсферы эти группы индуцируют
преобразования, которые, если рассматривать эти связки прямых
как модели унитарных неевклидовых пространств, изображают
движения этих пространств. Поэтому группы движений унитар-
ных неевклидовых пространств транзитивны. Так как при этом
соответствии точки унитарных неевклидовых пространств соответ-
ствуют классам импримитивности гиперсфер, группы движений
унитарных неевклидовых пространств при п > 1 примитивны.
Унитарные неевклидовы прямые импримитивны, так как их клас-
сами импримитивности являются пары полярно сопряжённых точек
этих прямых.
638
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
Так как движения унитарных неевклидовых пространств являются
коллинеациями, инволюционные движения этих пространств являются
инволюционными коллинеациями.
Найдём все инволюционные движения пространств Кп (Z) и Кп (I, J).
Требуя, чтобы инволюционные коллинеации пространств Pn(Z)
и Pn(i, J), найденные нами в § 3, переводили в себя абсолюты
пространств Kn(j) и Kn(i, j) с уравнением ^ixixi = 0, мы полу-
i
чим, что все инволюционные коллинеации пространства Kn(i)
приводятся к одному из видов
fxi = xi (i^.m), 'хэ~ — хэ U>m)' (6.222)
х* = х\ (6.223)
и при п — 2т— 1
— —xw+S 'хт+* = х{. (6.224)
Аналогично все инволюционные коллинеации пространства
Kn(i, ]) приводятся к одному из видов (6.222) и
'хг = Zx*Z-1. (6.225)
Движение (6.222) является отражением от /n-мерной плоскости
• • • ет пространств Кп(1) и Kn(i, j) и в то же время отраже-
нием от полярной ей (п—т—1)-мерной плоскости, при т=0—от-
ражением от точки и полярной ей гиперплоскости, при т = 1 —отра-
жением от прямой и полярной ей (п— 2)-мерной плоскости.
Движение (6.223) переводит в себя п-цепь пространства,
состоящую из точек с вещественными координатами. Будем назы-
вать n-цепи, полученные из этой n-цепи движениями простран-
ства Kn(i), нормальными п-цепями, а движения, приводимые
к виду (6.223), отражениями от нормальных п-цепей.
Движение (6.225) переводит в себя комплексную п-цепь про-
странства Kn(i, J), состоящую из точек с координатами вида a-}-bi.
Будем называть комплексные n-цепи, полученные из этой ком-
плексной n-цепи движениями пространства Kn(i, У), нормальными
комплексными п-цепями, а движения, приводимые к виду (6.225),
отражениями от нормальных комплексных п-цепей.
Отметим инволюционные движения пространств Кп(е) и Kn(i, е),
аналогичные инволюционным движениям пространств Kn(t)n
В пространстве Кп(е), кроме инволюционных движений (6.222),
(6.223) и (6.224), отметим инволюционные движения
'xi = xi (Z т), 'х$ = — хэ (j > т) (6.226)
и при п = 2т— 1
(6.227)
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 639
В пространстве Kn(i> е), кроме инволюционных движений (6.216)
и (6.225), отметим инволюционные движения (6.227),
' хг = ix'T1 (i < m), 'х? = — ix^C1 (J > tn) (6.228)
и
/xi — exie, (6.229)
Движения (6.227) в пространствах Kn(i) и Kn(i, j) приводятся
к виду (6.222), движение (6.226) в пространстве Кп(1) приводится
к виду (6.228), а движение (6.228) в пространстве 7C(Z, /) при-
водится к виду (6.225).
Движение (6.226) переводит в себя n-цепь пространства Кп(е),
состоящую из точек, у которых координаты х{ (I т) вещественны,
а координаты xi(j > m)— чисто двойные. Будем называть п-цепи,
полученные из этой п-цепи движениями пространства Кп(е), нор-
мильными п-цепями индекса т-|-1, п-цепи, полученные движе-
ниями из п-цепи, состоящей из точек с вещественными координа-
тами, нормальными п-цепями индекса 0, а движения, приводимые
к виду (6.223) и (6.226), отражениями от нормальных п-цепей.
Движение (6.228) переводит в себя комплексную n-цепь про-
странства Kn(i, е), состоящую из точек, у которых координаты
xl(i^.m) имеют вид а-\-Ы, а координаты x^(j^>m) имеют вид
ce-\-df. Будем называть комплексные п-цепи, полученные из этой
п-цепи движениями пространства Kn(i, е), нормальными комплекс-
ными п-цепями индекса m-f-l, комплексные п-цепи, полученные
движениями из комплексной п-цепи, состоящей из точек с коор-
динатами вида а-\-Ы, нормальными комплексными п-цепями
индекса 0, а движения, приводимые к виду (6.225) и (6.228),
отражениями от нормальных комплексных п-цепей.
Движение (6.229) переводит в себя двойную n-цепь простран-
ства Kn(i, е), состоящую из точек с координатами вида а-\-Ье.
Будем называть двойные п-цепи, полученные из этой двойной
п-цепи движениями пространства Kn(i, е), нормальными двойными
п-цепями, а движения, приводимые к виду (6.229), отражениями
от нормальных двойных п-цепей.
Мы видим, что m-мерные плоскости, при т = 0—точки, при
т=\—прямые пространств Kn(i), Кп(е), Kn(i, j) и Kn(i, е),
а также нормальные п-цепи пространств Кп(1) и Кп(е) и нормаль-
ные комплексные и двойные п-цепи пространств Kn(i, J) И Kn(i9 е)
являются образами симметрии этих пространств.
Налагая в формуле (6.210) на комплексные или двойные коор-
динаты точек условие х* = xi или условие х* — х* при i < I и
х* = — х1 при Z^Z, мы найдём, что нормальные п-цепи про-
странства Kn(i) и нормальные п-цепи индекса 0 пространства
Кп(е) изометричны пространству Sn, а нормальные п-цепи
индекса I пространства Кп(е) изометричны пространству lSn,
640 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. Vi
Налагая в формуле (6.204) на кватернионные и антикватернионные
координаты точек условия = и xi = exie, мы найдем,
что нормальные комплексные п-цепи пространства J) и
нормальные комплексные п-цепи индекса 0 пространства Кп(1, е)
изометричны пространству Kn(f), нормальные комплексные
п-цепи индекса I пространства е) изометричны простран-
ству lKn(i), анормальные двойные п-цепи пространства е)
изометричны пространству Кп(е).
Теперь мы можем найти геодезические семейства точек уни-
тарных неевклидовых пространств. Прежде всего покажем, что
геодезические семейства точек унитарных неевклидовых про-
странств являются геодезическими семействами точек прямых
этих пространств, т. е. прямые являются вполне геодезиче-
скими многообразиями точек. В самом деле, если нам даны две
точки унитарного неевклидова пространства, через них можно
провести прямую и на этой прямой рассмотреть геодезическое
семейство точек. Пусть это семейство точек не является геодези-
ческим семейством точек всего пространства; тогда геодезиче-
ское семейство точек пространства, соединяющее две данные
точки, не лежит на проведённой нами прямой. Произведём отра-
жение от этой прямой. При этом отражении наше геодезическое
семейство точек перейдёт в другое семейство точек той же длины,
т. е. в другое геодезическое семейство точек, соединяющее те же
точки. Но геодезические семейства точек являются решениями
вариационной задачи и, следовательно, интегральными кривыми
системы дифференциальных уравнений, вследствие чего существуют
такие окрестности точек, через каждые две точки которых можно
провести единственное геодезическое семейство точек. Поэтому
наше предположение неверно и геодезическими семействами точек
наших пространств являются геодезические семейства точек прямых.
Точно так же доказывается, что /n-мерные плоскости унитар-
ных неевклидовых пространств, а также нормальные n-цепи про-
странств Kn(i) и Кп(е) и нормальные комплексные и двойные
n-цепи пространств Kn(i, j) и Kn(i, ё), являющиеся образами
симметрии этих пространств, также представляют собой вполне
геодезические многообразия точек этих пространств.
Так как прямые унитарных неевклидовых пространств изоме-
тричны двумерным и четырёхмерным сферам в евклидовых простран-
ствах, геодезические семейства точек этих прямых соответствуют
большим окружностям сфер. Но мы видели, что любым окружно-
стям этих сфер соответствуют цепи унитарных неевклидовых про-
странств, поэтому геодезические семейства точек унитарных неев-
клидовых пространств являются цепями этих пространств.
При метрике прямой Kt(Z) на плоскости комплексного пере-
менного и при метрике прямой j) в пространстве кватернио-
нов геодезические семейства точек этих прямых изображаются
§5]
УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
641
окружностями, ортогональными к окружности или гиперсфере,
изображающей абсолют прямой K^i) или K^i, У). Так как всякая
такая окружность может быть получена движением из веществен-
ной оси плоскости комплексного переменного или пространства
кватернионов, изображающей геометрическое место точек прямой
с вещественными координатами, то, если мы будем называть цепи
пространств Kn(i) и Кп(1, /), получаемые движениями этих про-
странств из цепи с вещественными координатами точек, нормаль-
ными цепями, мы находим, что геодезическими семействами
точек пространств Кп(1) и Kn(i, у) являются нормальные
цепи. При метрике прямой K±(e) на плоскости двойного переменного
и при метрике прямой КА\1, е) в пространстве антикватернионов
неизотропные геодезические семейства точек этих прямых изобра-
жаются окружностями, ортогональными к окружности или гипер-
сфере, изображающей абсолют прямых KL(e) и ё). Но всякая
такая окружность может быть получена движением из веществен-
ной оси плоскости двойного переменного или пространства анти-
кватернионов или из двойной оси плоскости двойного переменного
или оси единицы е пространства антикватернионов, причём веще-
ственная ось изображает геометрическое место точек прямой
с вещественными коэффициентами, а двойная ось и ось единицы е
удовлетворяют соответственно условиям х = — х и х — —ехе.
Поэтому, если мы будем называть цепи пространств Кп(е) и
Кп(1, е), получаемые движениями этих пространств из цепи
с вещественными координатами точек и из цепи, координаты точек
которой удовлетворяют указанным условиям, соответственно
эллиптическими и гиперболическими нормальными цепями, мы
находим, что неизотропными геодезическими семействами точек
пространств Kn(t) и Kn(i> J) являются эллиптические и гипер-
болические нормальные цепи.
Будем называть изотропные геодезические семейства точек
пространства Кп(е) и Кп(1, е) изотропными цепями.
Для треугольников, образованных отрезками нормальных цепей
унитарных неевклидовых пространств, могут быть выведены фор-
мулы тригонометрии. Эти формулы для пространства Kn(i) были
выведены советским геометром П. А. Широковым (Казань) в ра-
боте [4], подготовленной к печати после его смерти его сыном
А. П. Широковым.
При определении пространств Кп(1) и Кп(е) мы видели, что
их точки можно взаимно однозначно представить системой не-
пересекающихся больших окружностей гиперсферы соответственно
в пространствах R2n+2 и n+1R2n+v- Отождествляя диаметрально
противоположные точки этих гиперсфер, мы превратим их в про-
странства S.2n+1 и n+1S2n+1 той же кривизны, а большие окруж-
ности гиперсфер—в прямые этих пространств. Таким образом,
точки пространств Kn(t) и Кп(е) можно взаимно однозначно
41 Зйк. 177. Б. А. Розенфельд
642
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
представить системой непересекающихся прямых соответ-
ственно в пространствах S2w+1 и n+1S2n+i т°й же кривизны.
Рассмотрим эти системы прямых более подробно.
Если точки пространств Kn(i) и Кп(е) определяются соответ-
ственно вектором пространства Un+1(l) с координатами х1 = Х^-\~.
+ и вектором пространства t/w+i(£) с координатами
х* = X2i-j-eX2i+1, эти точки определяются в то же время соот-
ветственно вектором пространства 6гп+1(/) с координатами
xieit = (X2i + iX2i+1) (cos 14- i sin t) =
= (X2i cost— X2i+1 sin 0-|"4 sin t-\-X2i+1 cos t) (6.230)
и вектором пространства Un+1(e) с координатами
— xi (ete+ _|_e-te_) = + eA'2*+i)re+1 (ch /+ e sh t) —
— (X2i ch t + X2i^ sh f) + e {X2i sh t + A2*+x ch t)x). (6.231)
Поставим в соответствие каждому вектору пространств Un+1(i)
и Un+1(e) с координатами х* вектор соответственно пространств
/?2п+2 и w+1^2n+2 с координатами X1. В том случае, когда вектор
пространств Un+1(i) и Un+1(e) является радиусом-вектором точки
гиперсферы радиуса г, соответственные векторы пространств
/?2п+2 и w+1^2n+2 также являются радиусами-векторами точек
гиперсферы того же радиуса. Поэтому координаты X1 можно
рассматривать также как координаты точек пространств S2n+1 и
w+1S2w+1. Формулы (6.230) и (6.231) показывают, что точке про-
странств Kn(i) и Кп(е) с координатами х* соответствуют прямые
пространств S2n+1 и w+1S2n+1, точки которых имеют соответ-
ственно координаты
'X2i — X2i cost— X2i+1 sin t, X2i+1 = X'2i sin t~\- X2i+1 cos t
(6.232)
и
fX2i = X2* ch t-\-X2i+1 sh t, X'2^1 = X2i sh Z^ + X2^1 ch t. (6.233)
Совпадение формул (6.232) и (6.233) с формулами (3.143) и
(3.145) показывает, что полученные нами прямые пространства S2n^i
образуют паратактическую конгруэнцию, а полученные нами пря-
мые пространства nS2n_1 образуют гиперболическую паратактиче-
скую конгруэнцию.
Представление точек пространств Kn(i) и Кп(е) прямыми пара-
тактических конгруэнций пространств S2n+1 (Z) и S2w+1 (е) является
частным случаем рассмотренного нами в § 3 представления точек
пространств Pn(i) и Рп(е) прямыми линейных конгруэнций про-
странства Р2„+1.
9 В формуле (6.231) е в основании степени — основание натуральных
логарифмов, а в остальных случаях—двойная единица.
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 643
Расстояние <о между двумя точками х и у пространств Кп(1)
и с радиусом кривизны г при унитарно-нормированном
базисе в силу (6.193) определяется соотношением
cos7 = (6,234)
Подставляя в (6.234) значения xi = X2i-\-lX2i+1 и ву*’=У2*-|-
мы получаем:
F2<+i)4-Z ( 2 Х'М Y'2i+1_X2i+1 Y'2i\ |2=
i г
Здесь X и Y — произвольные точки двух прямых паратакти-
ческой конгруэнции пространства S2n+1, соответствующих точкам х
и у пространства Kn(i). Так как левая часть (6.235) не зависит
от положения точек X и Y на этих прямых, то и правая часть
(6.235) не зависит от положения этих точек. Входящее в (6.235)
выражение -^-1 (Х2?Т^Ц-Х2*+1У'2?'+1)| равно косинусу делённого
г
на г расстояния между точками X и Y пространства S2n+1. Таким
образом, если точки X и Y выбраны так, что выражение Л^у^-и—
—Х2г’+1У2г‘обращается в нуль, выражение — (X2iY2^X2i+1Y2i+1')
г
является максимальным и, следовательно, расстояние между точ-
ками X и Y является м и н и м а л ь н ы м, т. е. точки X и Y рас-
положены на концах общего перпендикуляра двух прямых пара-
тактической конгруэнции пространства S2w+1 и расстояние между
этими точками равно расстоянию между проходящими через них
прямыми конгруэнции. Следовательно, расстояние между двумя
точками пространства Kn(i) равно расстоянию между двумя соот-
ветственными прямыми паратактической конгруэнции пространства
52п+1, т. е. пространство Кп(1) изометрично паратактической
конгруэнции прямых пространства S2w+1.
Точно так же, подставляя в (6.234) значения xi = X'2i-}~ еХ'2^1
к yi =Y'2i-\-eY2i+\ мы получаем:
соз2у=д (X*Y*—Х2«+1У2’:+1) + е 2 (Х^У2^1—Х2г’+1У2<)|2—
г г
= 1 (| 2 (**Y* — Х2г’+!Г2^1))2 — | 2 (x’2i Y'2i+1 — Л’2<+1Уа<) |а) .
(6.236)
41*
644 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Здесь X и Y—произвольные точки двух прямых паратакти-
ческой конгруэнции пространства w+1S2w+1, соответствующих точ-
кам х и у пространства Кп(е), Так как левая часть (6.236) не
зависит от положения точек X и Y на этих прямых, то и правая
часть (6.236) не зависит от положения этих точек. Входящее
в (6.236) выражение | (X2iY2i— x2i+1Y2i+1) j равно косинусу
i
делённого на г расстояния между точками X и Y пространства
w+1S2n+1. Поэтому, если точки X и Y выбраны так, что выражение
обращается в нуль, выражение ~ (X'2iY2i—
i
— | является минимальным и, следовательно, расстояние
между точками X и Y является максимальным, т. е. точки X и Y
расположены на концах общего перпендикуляра двух прямых
гиперболической паратактической конгруэнции пространства п+1 S2n+t
и расстояние между этими точками равно расстоянию между про-
ходящими через них прямыми. Таким образом, расстояние между
двумя точками пространства Кп(е) равно расстоянию между двумя
соответственными прямыми гиперболической паратактической кон-
груэнции пространства w+1S2n+1. т. е. пространство Кп(е) изо-
метрично гиперболической паратактической конгруэнции пря-
мых пространства n+1S2n+r
Матрицы движений пространств S2n+1 и wHS2n+1, переводящие
в себя указанные паратактические конгруэнции или, что равно-
сильно этому, перестановочные с паратактическими сдвигами на
полупрямую вдоль прямых этих конгруэнций, связаны условиями
соответственно (6.33) и (6.34). Как мы видели в § 7 главы ГН, эти
движения могут быть определены также тем условием, что они
перестановочны с нуль-системой U2i = X2i+1, = — X2i,
т. е. переводят в себя кососимметрическую билинейную форму
2 (Х2*У'2*+1—X2i+1Y‘2i). В силу изометричности паратактических
i
конгруэнций пространствам Kn(i) и Кп(е) при движениях про-
странств S2n+1 и переводящих в себя паратактические
конгруэнции, происходят движения пространств Кп(1) и Кп(е)>
Указанные движения пространств S2n+1 и n+1S2n+1 образуют группы.
Так как каждое движение этой группы изображает движение про-
странства Kn(i) или Кп{е), группа указанных движений пространств
S2n+1 и n+1*^2n+i гомоморфна группе движений пространства Kn(j)
или Кп(е). Ядром гомоморфизма при этом является группа движе-
ний пространства S2n+1 или n'rlS-in+i’ переводящая в себя каждую
прямую конгруэнции, т. е. группа паратактических сдвигов вдоль
прямых этой конгруэнции. Таким образом, паратактическая
конгруэнция прямых пространства S2n+1 и гиперболическая
§5]
УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА
645
паратактическая конгруэнция прямых пространства n^1S2Yl+1
являются моделями соответственно пространств Кп(1) к Кп(е).
При п = 1 в силу того, что пространства Кг (0 и (е) с радиу-
сом кривизны г изометричны сферам радиуса у соответственно
в пространствах R3 и 1/?3, мы снова получаем, что паратакти-
ческая конгруэнция прямых S3 изометрична сфере простран-
ства R%, а гиперболическая паратактическая конгруэнция пря-
мых 2S3 изометрична сфере вещественного радиуса простран-
ства XR^ т. е. мы снова получили теоремы о сферическом
изображении паратактических конгруэнций пря-
мых пространств S3 и 2S3 (см. § 11 главы III). При этом изо-
бражении окружности сфер пространств /?3 и 1/?3 и, следовательно,
семейства прямолинейных образующих поверхностей Клиффорда
пространств S3 и 2S3, входящих в паратактические конгруэнции
прямых, изображают цепи пространств (Z) и (е). Далее,
большие окружности сферы пространства /?3 и эллиптические
и гиперболические окружности сферы пространства 1/?3 и, следо-
вательно, семейства прямолинейных образующих прямоугольных
поверхностей Клиффорда пространств S3 и 2S3, входящих в пара-
тактические конгруэнции прямых, изображают нормальные цепи
пространства (/) и эллиптические и гиперболические нормальные
цепи пространства Кх (ё). Наконец, прямолинейные образующие
сферы пространства х/?3 и, следовательно, плоские пучки прямых
пространства 2S3, состоящие из прямых паратактической конгру-
энции, изображают изотропные цепи пространства
Так как всякое геодезическое семейство точек пространств Кп{1)
и Кп(ё) лежит на некоторой прямой, всякое такое семейство точек
изображается в паратактической конгруэнции прямых семейством
прямолинейных образующих прямоугольной поверхности Клиф-
форда, лежащей в некоторой трёхмерной плоскости, или (в случае
пространства Кп(е)) пучком паратактичных прямых, лежащим
в некоторой двумерной плоскости.
Если точки пространств Kn(i) и Кп(ё) пробегают /п-мерную
плоскость, то прямые соответственных паратактических конгуэнций
пробегают (2/п-|-1)-мерные плоскости пространств S2W;bl и w+1S2w+1,
так как, полагая равными нулю координаты х1 = (X2i + iX'2l+1) е 1
и х* = {X'2i-\-eX2i+r) eGt при I > m, мы получим Х'2т+2 = . ..
... = ^Y2n+i — о, т. е. уравнения (2/п-|- 1)-мерной плоскости.
Если точки пространств Kn(t) и Кп(е) пробегают нормальную
л-цепь, то прямые соответственных паратактических конгруэнций
пробегают n-параметрические семейства, состоящие из прямых,
пересекающихся с n-мерными плоскостями под прямым углом.
В самом деле, полагая, что координаты х* = (X2i + iX'2i+1) е z
и х* = (X* + eX'2i+х) eet удовлетворяют условию xi = х*, мы
получаем при t — 0 = X'2i, а полагая, что эти координаты
646 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
удовлетворяют условию х* = —х1, мы получаем при
х* = iX2i+1 и х* = eX2i+1. Таким образом, в случае нормальных
n-цепей индекса 0 соответственные прямые пересекаются под пря-
мым углом с n-мерной плоскостью X1 = Х2п+х = 0 и с плоско-
стями, полученными из неё с помощью паратактических сдвигов,
а в случае нормальных n-цепей индекса I—с n-мерной пло-
скостью Х° = . .. = Х21~2 = Х2г+1 = .. . = Х2п+1 = 0 и с пло-
скостями, полученными из неё с помощью паратактических сдвигов
(отсюда же следует, что если точки пространств Kn(i) и Кп(е)
пробегают n-цепь общего типа, то прямые соответственных пара-
тактических конгруэнций пробегают n-мерные семейства, состоящие
из прямых, пересекающихся с /г-мерными плоскостями под
произвольными углами).
Совершенно аналогично можно показать, что пространства
lKn (I) изометричны эллиптическим паратактическим конгру-
энциям прямых пространства
Заметим, что аналогично определению пространств Кп(1) и Кп(ё)
можно определить неевклидово пространство К^п+1 (s), в котором
форма (х, х) определяется соотношением
е (х, х) = 2 (x2ix2i+1 — x2i+1x2i). (6.237)
i
Аналогично моделям пространств Kn(l), гКп(1) и Кп(е) в виде
паратактических конгруэнций прямых пространств S.2n+1, 2Z5.2n+1
и w+1S.2w+1 может быть построена модель пространства 7C2n+i(£)
в виде параболической паратактической конгруэнции простран-
ства 2п+254и+31).
Применим интерпретации пространств Kn(i) и Кп(е) в виде
паратактических конгруэнций прямых пространств S.2n+1 и n+1S2?l+1
для определения числовых инвариантов и геометрических кова-
риантов /га-мерных плоскостей и нормальных n-цепей пространств
Kn(i) и Кп(е).
Две (2/п+1)-мерные плоскости пространств S.2n+1 и n+1S.2n+1,
состоящие из прямых паратактических конгруэнций и, следова-
тельно, изображающие /n-мерные плоскости пространств Kn(i)
и Кп(ё), обладают следующими особенностями: их стационарные
расстояния (длины общих перпендикуляров) попарно равны: со0 = <о15
= о>3, . . ., (o.2w = a)2m+1, а общие перпендикуляры, соответствую-
щие каждому из этих стационарных расстояний, составляют одно-
параметрические семейства, являющиеся семействами прямолинейных
образующих прямоугольных поверхностей Клиффорда, лежащих
в трёхмерных плоскостях. Рассматриваемые семейства прямых изо-
бражают цепи пространства Kn(t) или Кп(е), являющиеся геоде-
зическими семействами точек. Эти цепи переходят в себя при
9 См. Семянистый [1].
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 647
отражении от каждой из данных m-мерных плоскостей пространств
КпО) или Кп(е)> т* е- пересекают каждую из этих т-мерных
плоскостей под прямым углом, вследствие чего мы будем называть
их общими ортогональными цепями данных т-мерных плоско-
стей пространств Кп(1) и Кп(е). Прямые, в которых лежат эти
цепи, изображаются двуггараметрическими семействами прямых пара-
тактических конгруэнций, высекаемыми из них определёнными
нами трёхмерными плоскостями. Они также переходят в себя при
отражении от каждой из данных m-мерных плоскостей, т. е. пере-
секают каждую из этих m-мерных плоскостей под прямым углом,
вследствие чего мы будем называть их общими перпендикулярами
данных т-мерных плоскостей пространств Kn(i) и Кп(е). Инва-
рианты <о0~ о)г, <о.2 = а>3, ...» ~ w-2m+i m-мерных плоскостей
являются стационарными расстояниями т-мерных плоскостей
пространств Kn(i) и Кп(е), т. е. длинами отрезков соответствен-
ных общих ортогональных цепей, заключённых между т-мерными
плоскостями.
Две m-мерные плоскости пространств Kn(i) и Кп(е) в общем
случае обладают т-±-1 общими ортогональными цепями, которым
соответствуют различные стационарные расстояния. Если два ста-
ционарных расстояния равны между собой, эти расстояния соот-
ветствуют не двум, а двупараметрическому семейству общих
ортогональных цепей, лежащих в одной трёхмерной плоскости.
Если все стационарные расстояния двух m-мерных плоскостей
равны между собой, эти расстояния соответствуют не m-f-l»
a 2m-параметрическому семейству общих ортогональных цепей,
соединяющих каждую точку на одной плоскости с определённой
точкой другой плоскости. Такие m-мерные плоскости будем назы-
вать паратактичными т-мерными плоскостями. Если все рас-
стояния между двумя m-мерными плоскостями равны г, каждая
прямая, пересекающаяся с обеими этими плоскостями, является их
общим перпендикуляром, m-мерные плоскости в этом случае
полярно сопряжены.
Две n-мерные плоскости пространств S.2zl+i и n+1S.2n+1, орто-
гональные к прямым паратактических конгруэнций и, следовательно,
с точностью до паратактического сдвига изображающие нормаль-
ные п-цепи пространств Кп(1) и Кп(е), обладают в общем случае
п —1 общими перпендикулярами и п+1 стационарными рас-
стояниями, причём паратактическим сдвигом одной из этих плоско-
стей всегда можно достичь того, что стационарные расстояния
этих плоскостей удовлетворяют условию Эти /г —1
г
прямых паратактических конгруэнций изображают п-1 попарно
полярно сопряжённых точек пространств Кп(1) или Кп(е\ поэтому
всякие две нормальные п-цепи пространств Кп($ и Кп(е) в общем
648
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
случае пересекаются по /г —1 попарно полярно сопряжённым
точкам. Эти точки будем называть направляющими точками пары
нормальных /г-цепей. Они определяют n-f-l инвариантов
связанных условием = 0.
Общие ортогональные цепи, перпендикуляры m-мерных пло-
скостей и направляющие точки нормальных /г-цепей простран-
ства Кп(1) всегда вещественны. При положительной кривизне
пространства Kn(i) стационарные расстояния m-мерных плоскостей
и инварианты нормальных /г-цепей являются вещественными чис-
лами. Общие ортогональные цепи, перпендикуляры т-мерных
плоскостей и направляющие точки нормальных /г-цепей про-
странства Кп(е) могут быть вещественными и мнимо сопряжён-
ными, причём стационарные расстояния m-мерных плоскостей и
инварианты нормальных /г-цепей в первом случае вещественны
или чисто мнимы, а во втором случае комплексно сопряжены.
Найденные нами числовые инварианты и геометрические кова-
рианты плоскостей и нормальных n-цепей пространств Kn(i)
и Кп(е) можно определить и непосредственно с помощью отраже-
ний от этих плоскостей и n-цепей. Произведение отражений
от двух m-мерных плоскостей общего вида пространств Kn(t)
и Кп(е) при т</г — т—1 является движением, неподвижными
точками которого являются точки пересечения плоскостей, полярных
этим плоскостям, и точки пересечения общих ортогональных цепей
этих плоскостей с абсолютом. Последние точки пересечения вполне
определяют общие ортогональные цепи m-мерных плоскостей.
Если стационарные расстояния двух m-мерных плоскостей про-
странств Kn(i) и Кп(е) равны а>0, <о1, ..., <ow, не равные 1
собственные числа матрицы произведения отражений от этих пло-
скостей равны е г , . . . , е~ г , е “ г , . . е ~ г в случае про-
2ег- _зе^ _2ег-
странства Kn\i) и е г , . . е r , е г , . . е г в слу-
чае пространства Кп(е). Точно так же произведение отражений
от двух нормальных /г-цепей общего вида пространств Kn(i)
и Кп(е) является движением, неподвижными точками которого
являются точки пересечения этих /г-цепей. Если инварианты двух
нормальных /г-цепей пространств Kn(i) и Кп(е) равны о>0, .. .,
собственные числа матрицы произведения отражений от этих
ХЪ - ------------
/г-цепей равны е r t ...} е г .
В пространствах К%п+1 (0 и /С2№+1(^), так же как в простран-
стве S2n+1, имеются конгруэнции прямых, паратактичных друг
другу. Всегда можно выбрать такой базис пространства AT2M-i(O
или К2п+1 (е), чтобы точки прямой, принадлежащей к такой кон-
груэнции и* проходящей через точку с координатами х1, имели бы
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 649
координаты
'%2* ах2г __ ^ + 1, 'Х2г + 1 ^ + 1 > ~а = j . (6.238)
Будем называть такие конгруэнции прямых паратактическими
конгруэнциями прямых пространств AT2n+1(Z) и К2п+1(е). Сравне-
ние формулы (6.238) с формулой (6.152) показывает, что пара-
тактические конгруэнции Прямых Пространств К2п+1 (Z) И (^)
являются частными случаями эрмитовых линейных конгруэнций
прямых пространств P2w+1(Z) и Р2п+1(е).
Все прямые паратактической конгруэнции прямых пространств
/С2п+1 (О и ^2n+i (^) переводятся в себя только двумя движениями
этих пространств: тождественным преобразованием и инволюцион-
ным преобразованием
'х2г — _ хМ + 1, /х2г + 1 — . (6.239)
При движении (6.239) каждая точка переходит в полярно
сопряжённую ей точку проходящей через эту точку прямой пара-
тактической конгруэнции, вследствие чего будем называть это
преобразование паратактическим сдвигом на полупрямую вдоль
прямых данной паратактической конгруэнции. Так как этот сдвиг
вполне определяет паратактическую конгруэнцию, то паратакти-
ческие конгруэнции прямых пространств К2п+1 (Z) и ЛГ2п+1(О
являются образами симметрии, роль симметрий относительно кото-
рых играют паратактические сдвиги на полупрямую1 вдоль прямых
этих конгруэнций.
Движения пространств К2п+1 (Z) и К2п+1 (#), переводящие в себя
паратактические конгруэнции прямых, могут быть определены
как движения этих пространств, перестановочные с паратакти-
ческим сдвигом на полупрямую вдоль прямых этих конгруэнций.
Эти же движения могут быть определены как движения этих про-
странств, перестановочные с некоторой нуль-системой. В самом
деле, произведение паратактического сдвига на полупрямую
(6.239) на полярное преобразование относительно абсолюта про-
странства Uj. = х1 представляет собой нуль-систему
u* = -x*+\ (6.240)
Так как всякое движение унитарного неевклидова простран-
ства перестановочно с полярным преобразованием относительно
абсолюта этого пространства, то перестановочность движения
с паратактическим сдвигом на полупрямую влечёт за собой пере-
становочность этого движения с нуль-системой и обратно, что
доказывает наше утверждение.
Точки пересечения прямых паратактической конгруэнции про-
странства К2п+1 (е) с абсолютом удовлетворяют условию x2i =
= — x2i+1, x2i+1 = х21, откуда видно, что эти точки составляют
(2п-|- 1)-цепь.
650 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. V)
При определении пространств Kn(i, J) и Кп(1, е) мы видели,
что точки этих пространств можно взаимно однозначно предста-
вить системой непересекающихся больших трёхмерных сфер ги-
персферы соответственно в пространствах /?4п+4 и 2n+27?4w+4. Но
пространства /?4п+4 и 2w+2/?4w+4 изометричны соответственно про-
странствам U2n+2(l) и <7.2п+2(е), причём гиперсферы первых про-
странств соответствуют гиперсферам вторых пространств того же
радиуса. Покажем, что при этом большие трёхмерные сферы
гиперсфер пространств /?4п+4 и 2п+2/?4п+4, соответствующие точкам
пространств Kn(it j) и Кп(1, ё), изображаются сечениями гипер-
сфер пространств t/.2n+2(0 и U2n+2(e) двумерными плоскостями
этих пространств, проходящими через центры гиперсфер. Если
мы отождествим точки областей импримитивности гиперсфер
пространств U2n+2(i) и U2n+2{e) относительно групп унитарных
линейных преобразований в этих пространствах и тем самым пре-
вратим эти гиперсферы соответственно в пространства К2п+1 (0 и
/C2w+1(tf), а сечения этих гиперсфер двумерными плоскостями про-
странств U2n+2(i) и U2n+2(e)f проходящими через центры гипер-
сфер, в прямые пространств /С2п+1(0 и К2п+1(ё), это утвер-
ждение равносильно тому, что точки пространств Kn(i, j) и
Xn(h ё) можно взаимно однозначно представить системой
непересекающихся прямых соответственно в пространствах
^2n+i(0 и К2п+1(ё) же кривизны.
Для доказательства заметим, что если точки пространств
Kn(i, j) и Kn(i, ё) определяются векторами пространств
и Un+1(it е) с координатами х\ представленными соответственно
(X* — Х'2^\
комплексными или двойными матрицами _ , эти
XX2i+1 /
точки определяются в то же время векторами пространств
(7w+1(f, /) и Un+1(i, в) с координатами хЧ, где I—кватернион
или антикватернион единичного модуля, представляемыми матри-
цами
(X2i — /а —
Ш+1 X2i J а/
/аХ2* — рХ2^1 — Jx2i —аХ^+Л
Ха^^ + рХ2*, —JX^^aX'2i /
+ 1. (6.241)
Поставим в соответствие каждому вектору пространств
Z7n+1(Z, /) и Un+1(i, е) с координатами х* вектор соответственно
пространств U2n+2(i) и U2n+2(e) с координатами X1. В том слу-
чае, когда векторы пространств Un+1(it J) и Un(i, е) являются
радиусами-векторами точек гиперсфер радиуса г, соответственные
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 651
векторы пространств (72n+2(f) и U2n+2(e) также являются радиу-
сами-векторами точек гиперсфер того же радиуса. Поэтому коор-
динаты X1 можно рассматривать также как координаты точек
пространств /С2п+1(0 и ^зп+iW- Формула (6.241) показывает, что
точки пространств Kn(i, j) и Кп(1, е) с координатами хг действи-
тельно соответствуют прямым пространств (0 и
причём точки этих прямых имеют координаты
'X2i = aX2i — рХ2^1, 'A^+i = аХ2г+1
aa-J-fFp=l. (6.242)
Наше утверждение, таким образом, доказано.
Совпадение формул (6.242) с формулами (6.238) показывает,
что полученные нами прямые пространств /С2л+1(0 и ^an+iW
образуют паратактические конгруэнции этих про-
странств.
Представление точек пространств Kn(l, j) и Кп(1, е) прямыми
паратактических конгруэнций пространств /С2п+1 (Z) и К2п+1 (е)
является частным случаем рассмотренного нами в § 3 представле-
ния точек пространств Pn(i, j) и Pn(i, е) прямыми эрмитовых
линейных конгруэнций пространств Р2л+1(0 и ^2п+1(е)*
Расстояние между двумя точками х и у пространств Kn(i,j}
и Kn(i, е) кривизны с абсолютом х*х* = 0 в силу (6.193)
i
определяется соотношением (6.234). Подставляя в (6.234) значения
/ x2i ____________X2i+1\ / Y2i ____p2<+i\
матриц __ и __ , представляющих
x'li J yYZi+i Y2i J
кватернионные и антикватернионные координаты точек х и у, и
замечая, что модуль кватерниона и антикватерниона равен опре-
делителю представляющей его комплексной или двойной матрицы,
мы получаем:
cos2 —
_i_iyf х™ x'2i+1
i 4
Y
Y'M+i
______ Y 2г+ 1
~Y%i
i
’ x2iY2i -j-X2i+1Y2i+1 x2iY 2i+1 X2i+1Y2
X^Y2i+1 x2i+1Y2i x2i~Y2i + x2i+1Y2i+1
i
(6.243)
652 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. Vi
Здесь X и Y — произвольные точки двух прямых паратакти-
ческой конгруэнции пространств K2n+1(i) или соответ-
ствующих точкам х и у пространства Kn(i, J) или *)• Так
как левая часть (6.243) не зависит от положения точек X и Y на
этих прямых, то и правая часть не зависит от положения этих
точек и выражение I (X2iY2i4- Х2г’+1 Y2i+1) | равно косинусу
i
делённого на г расстояния между точками X и Y пространств
K2n+i (О или ^2n+i (Ю- Поэтому, если точки X и Y выбраны так,
что выражение X2iY2i+r — x2i+1Y2i обращается в нуль, выраже-
ние -j- | (X2iX2i — x2i^X2i+1) | является экстремальным и,
i
следовательно, расстояние между точками ,х и у также является
экстремальным.
Таким образом, точки х и у расположены на концах общего
перпендикуляра двух прямых паратактической конгруэнции про-
странства К2п+1 (Z) или ^2n+1(^) и расстояние между этими точ-
ками равно расстоянию между проходящими через них прямыми
конгруэнции.
Следовательно, расстояние между точками Кп(ё J) и Kn(i, е)
равно расстоянию между двумя соответственными прямыми па-
ратактической конгруэнции пространств К2п+1 (0 или К2п+1(ё),
т. е. пространство Kn(i, j) изометрично паратактиче-
ской конгруэнции пространства К2п+1 (/), а пространство
Кп(1, ё) изометрично паратактической конгруэнции простран-
ства К2п+Х(е).
Матрицы движений пространств К2п+1(1) и К2п+1(е), перево-
дящие в себя указанные паратактические конгруэнции или, что
равносильно этому, перестановочные с паратактическими сдвигами
на полупрямую вдоль прямых этих конгруэнций, связаны усло-
виями (6.42). Как мы видели, эти движения могут быть опре-
делены также тем условием, что они перестановочны с нуль-си-
стемой U2i = X^+1, U2i+1 =—-X2i, т. е. переводят в себя косо-
симметрическую билинейную форму ^(X2iY2i+r — x2MY2i). В силу
г
изометричности паратактических конгруэнций пространствам
и Кп(1, ё) при движениях пространств A^+iG) и ^2n+iW> пере-
водящих в себя паратактические конгруэнции, происходят движе-
ния пространств ^2n+l(^) и которые образуют группы.
Так как каждое движение этой группы изображает движение про-
странства Кп(1, ]) или ё), группа указанных движений
пространств Л?2л+1(0 и ^2?г+1(^) гомоморфна группе движений
пространства Kn(i, j) или Kn(i, ё). Ядром гомоморфизма
при этом является группа движений пространства /С2п-и(0
или /C2?i+i (<), переводящая в себя каждую прямую конгруэнции,
§ 5] УНИТАРНЫЕ НЕЕВКЛИДОВЫ ПРОСТРАНСТВА 653
которая состоит из двух движений — тождественного преобразо-
вания и паратактического сдвига на полупрямую вдоль прямых
конгруэнции.
Таким образом, паратактические конгруэнции прямых про-
странств K2n+i (О и ^2n+i (е) являются моделями соответ-
ственно пространств Kn(i, j) и Кп(1, е).
В частности, при п = 1 в силу того, что пространства Xt(Z, /)
и Kr (i, е) изометричны гиперсферам соответственно пространств
/?б и 2/?5, мы получаем, что паратактические конгруэнции про-
странств X3(Z) и К^(е) изометричны гиперсферам соответственно
пространств R& и 2/?б.
Если точки пространств Kn(i, /) и Кп(1, е) пробегают т-мер-
ную плоскость, то прямые соответственных паратактических кон-
груэнций пробегают (2m1)-мерные плоскости пространств
X2n+i(Z) и ^2n+i(^)- Полагая равными нулю координаты х\ пред-
(Х^ — Х2*+Л /а —
ставляемые матрицами • _ при Z > т, мы
УХ2^1 X2* ) а/
получим X?w+2 — . . . = X'2n+1 — 0, т. е. уравнения (2т + ^-мер-
ной плоскости.
Нетрудно также проверить, что если точки пространства
Kn(i, j) или Кп(1, е) пробегают нормальную комплексную или
двойную n-цепь, то прямые соответственных паратактических кон-
груэнций пробегают 2п-параметрические семейства, состоящие из
прямых, ортогонально пересекающихся с нормальной (2/z-j- 1)-цепью
соответственно пространств X2n+1(Z) и
С помощью интерпретации пространств Kn(i) и Кп(ё) в виде
паратактических конгруэнций прямых пространств X2n+1 (Z) и
Х21г+1(е) можно определить числовые инварианты и геометриче-
ские коварианты m-мерных плоскостей, комплексных и двойных
нормальных n-цепей пространств Kn(i, j) и Kn(i, е), анало-
гичные числовым инвариантам и геометрическим ковариантам
/n-мерных плоскостей и нормальных n-цепей пространств Kn(i)
и Кп(е).
Интерпретации пространств Kn(i) и Кп(1, j) в виде паратакти-
ческих конгруэнций прямых соответственно пространств S2n+1 и
X2n+1(Z) позволяют весьма просто вычислить объёмы пространств
Кп(Г) и Kn(i, j), которые, так же как у пространства Sn, ко-
нечны.
Так как пространство Kn(i) изометрична паратактической кон-
груэнции прямых S2n+1 с тем же радиусом кривизны, то объём
пространства Kn(i) равен объёму пространства S.2n+1 с тем же
радиусом кривизны, делённому на длину прямой этого про-
странства. Аналогично, так как пространство Kn(i, j) изоме-
трично паратактической конгруэнции прямых X2w+1(Z) с тем же
радиусом кривизны, то объём пространства K^(i, j) равен объёму
654
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
пространства K^n+1(fy с тем же радиусом кривизны, делённому
на площадь прямой этого пространства.
В § 5 главы II мы видели, что объём пространства S2n+1
с радиусом кривизны г равен
(6.244)
(2лг)П п\ 7
Поэтому, так как длина прямой этого
объём пространства Кп(1) с радиусом
V— ^пг2п
V “ л! *
пространства равна ттг, то
кривизны г равен
(6.245)
При и—1 мы находим, что площадь прямой (Г) с радиусом
кривизны г равна тгг2, т. е. площади поверхности сферы радиуса
~ в /?3, которой изометрична прямая К± (0.
Из (6.244) следует, что объём пространства ^2n^-l(0 с радиу-
сом кривизны г равен
(2лг 4- 1)! •
(6.246)
Поэтому, так как площадь прямой этого пространства равна тгг2,
объём пространства Кп(1, /) с радиусом кривизны г равен
V ___
V “ (2л + 1)! *
(6.247)
При п = 1 мы находим, что объём прямой /^(i, j) с радиу-
сом кривизны г равен —у-, что равно удвоенному объему про-
странства с радиусом кривизны у, т. е. объёму гиперповерх-
ности гиперсферы радиуса ~ в /?б, которой изометрична прямая
А
§ 6. Проективная геометрия любого числа измерений
как неевклидова геометрия
В § 11 главы III мы видели, что группа проективных преоб-
разований пространства изоморфна группе движений простран-
ства 3S6, что позволяет рассматривать трёхмерную проективную
геометрию как пятимерную неевклидову геометрию. Покажем, что
проективную геометрию любого числа измерений также можно
рассматривать как неевклидову геометрию.
В § 3 главы III мы определили 0-пары пространства Рп, т. е.
конфигурации точка -|-гиперплоскость этого пространства. Как
мы видели, две 0-пары пространства Рп обладают проективным
инвариантом — двойным отношением точек и гиперплоскостей этих
ПРОЕКТИВНАЯ ГЕОМЕТРИЯ КАК НЕЕВКЛИДОВА
655
§ 6]
двух 0-пар, причем двойное отношение двух О-пар с координа-
тами точек X’ и У» и тангенциальными координатами гиперпло-
скостей Ui и Vi равно F
2 V{Xi^U{Yi
w = 2 u<xi S w ' (6,248)
i i
Многообразие Q-nap пространства Pn> если считать за рас-
стояние между двумя 0-парами их проективный инвариант со
связанный с двойным отношением (6.248) соотношением
tfZ=cos2co, изометрично пространству Кп(е) с радиусом кри-
визны 1, а группа проективных преобразований пространства Рп
изоморфна группе движений пространства /Q(tf)1).
Для доказательства первого утверждения достаточно поставить
в соответствие всякой 0-паре пространства Рп с координатами
точки X* и тангенциальными координатами прямой иг точку про-
странства Кп(е) с координатами х'1 = Xie+-{-
Так как при умножении координат X* на двойное число
k = Ke+-\~Le_ координаты X* умножаются на число К, а коорди-
наты Ui — на число L, это соответствие является взаимно одно-
значным. Составляя для двух точек пространства Кп(е) с коорди-
натами х* = Х*е+ + и yi = Yie+-\-Uie_ инвариант
о
COSJ 0) = — 2--
2j XW •
i
мы находим, что этот инвариант совпадает с двойным отноше-
нием (6.248), что доказывает изометричность многообразия 0-пар
пространства Рп с введённой нами метрикой пространству Кп(е)
с радиусом кривизны 1.
Для доказательства второго утверждения покажем, что группа
движений первого рода пространства Кп(^) изоморфна группе
коллинеаций пространства Рп. В самом деле, со всякой двойной
матрицей я-го порядка с элементами а] = Aje+-\-Bje_ связаны
две вещественные матрицы: А = (Д}) и B = (Bj). Будем обозна-
чать такую двойную матрицу а = Ае+-\-Ве_. Рассмотрим такую
матрицу, для которой матрица В = (Bfy, полученная из матрицы В
транспонированием, является обратной матрицей для матрицы А.
Так как для обратных матриц имеет место соотношение
(ДВ)-1 = В-1Д-1, а для транспонированных матриц имеет место
i) Метрика в многообразии 0-пар плоскости Р2, совпадающая с опре-
делённой нами метрикой, впервые рассматривалась М. А. Д ж а в а д о-
в ы м [1].
2 у*у*
г
656 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
аналогичное соотношение АВ ВА, всякая группа матриц А изо-
морфна группе матриц А-1. Таким образом, группа матриц А
изоморфна группе матриц В, а следовательно, и группе двойных
матриц указанного вида.
Покажем, что двойные матрицы указанного вида являются
унитарными. В самом деле, элементы взаимно обратных матриц А
и В связаны соотношениями
= (6.250)
i
Если же мы подставим в условия унитарности
= (6-251)
i
двойной матрицы а = Ае+ -{-Be- выражение элементов этой ма-
трицы через элементы вещественных матриц А и В, мы найдём, что,
если эти последние элементы связаны условием (6.250), элементы
двойной матрицы связаны условием унитарности (6.251).
Как мы видели в § 1 главы V, определитель двойной матрицы
А = А+е+ -|-А_е_ связан с определителями матриц А+ и А_ соот-
ношением (5.54). Поэтому группа двойных унитарных матриц
п-го порядка с определителем ±1 изоморфна группе веществен-
ных матриц того же порядка с тем же определителем.
Но группа движений первого рода пространства Кп(е) изо-
морфна фактор-группе двойных унитарных матриц (n-l-l)-ro по-
рядка с определителем ±1 по её фактор-группе, состоящей из
матриц преобразований fxi = xi и 'х1 — — х\ а группа коллинеа-
ций пространства Рп изоморфна фактор-группе группы веществен-
ных матриц (п-|-1)-го порядка по её подгруппе, состоящей из
матриц преобразований fxi = х1 и 'xi =— хк Поэтому группа
движений первого рода пространства Кп(е) изоморфна группе
коллинеаций пространства Рп. С другой стороны, полная группа
проективных преобразований пространства Рп состоит из колли-
неаций и корреляций, причём всякая корреляция может быть пред-
ставлена как произведение некоторой коллинеации на корреляцию
= X1, являющуюся полярным преобразованием относительно
мнимой квадрики — 0- Производя над точками с коорди-
i
натами х* = Х{е+-{-и^_ преобразование fxi = мы находим,
что это преобразование совпадает с преобразованием Ui = Xi.
Отсюда следует, что полная группа проективных преобразований
пространства Рп изоморфна полной группе движений простран-
ства Кп{е). Этим наша теорема полностью доказана.
Таким образом, геометрию проективного пространства Рп,
если за основной образ пространства принять 0-пару, можно
§ 6] ПРОЕКТИВНАЯ ГЕОМЕТРИЯ КАК НЕЕВКЛИДОВА 657
рассматривать как геометрию унитарного неевклидова про-
странства Кп(е).
Эта интерпретация оказывается полезной в ряде задач проек-
тивно-дифференциальной геометрии пространства Р *).
При найденном нами соответствии между точками простран-
ства Кп(е) и 0-парами пространства Рп точки абсолюта про-
странства Кп(е) изображаются такими 0-парами, точки ко-
торых лежат в их гиперплоскостях. В самом деле, подставляя
координаты х* = Х^^Ще _ точки пространства Кп(е), соот-
ветствующей 0-паре с координатами точки X1 и тангенциальными
координатами гиперплоскости Щ, в уравнение абсолюта ^pcixi — О,
мы получим:
= (6.252)
т. е. условие того, что точка 0-пары лежит в её гиперплоскости.
Полярно сопряжённым точкам пространства Кп (е) соот-
ветствуют такие 0~пары пространства Рп, точка каждой из
которых лежит в гиперплоскости другой 0-пары. В самом
деле, подставляя координаты х* = Х*е+ -j- U^e_ иу* = Yie+-\- 'Vie_
двух точек пространства Кп(е), соответствующих 0-парам с коор-
динатами точек X1 и У* и тангенциальными координатами гипер-
плоскостей Ui и Vit в условие полярной сопряжённости ^xiyi = О,
г
мы получим:
2 VtX* = St/^ = O, (6.253)
i i
т. e. условие того, что точка первой 0-пары лежит в гиперпло-
скости второй 0-пары, а точка второй 0-пары лежит в гиперпло-
скости первой 0-пары.
Из формулы (6.248) можно сделать ряд выводов. Во-пер-
вых, во введённой нами метрике в многообразии 0-пар про-
странства Рп расстояние между 0-парой общего типа и 0-парой,
точка которой лежит в её гиперплоскости (удовлетворяющей
условию (6.252)), равно бесконечности] во-вторых, расстояние
между двумя 0-парами, точка каждой из которых лежит
в гиперплоскости другой (эти 0-пары удовлетворяют усло-
вию (6.253)) равно В-третьих, расстояние между двумя
0-парами, у которых точки или гиперплоскости совпадают,
равно нулю.
В § 4 главы III мы определили /n-пары пространства Рп, т. е.
конфигурации /n-мерная плоскость 4- (п — т—1)-мерная пло-
скость. Будем говорить, что 0-пара инцидентна с т-парой, если
1) См. работы автора [11, 16].
42 Зак. 177. Б. А. Розенфельд
658 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
точка 0-пары лежит в одной из плоскостей m-пары, а гиперпло-
скость 0-пары проходит через вторую плоскость т-пары.
При установленном нами соответствии между точками простран-
ства Кп(е) и 0-парами пространства Рп точкам т-мерной пло-
скости пространства Кп(е) соответствуют 0-пары, инцидент-
ные с т-парой. Для доказательства достаточно рассмотреть
m-мерную плоскость пространства Кп(е), проходящую через пер-
вые т-\- 1 базисных точек. Налагая условие . = хп = О
на точки с координатами хг — Xie+-\-Uie_, где X* — координаты
точки, а —тангенциальные координаты гиперплоскости 0-пары Рп,
мы находим, что координаты точки 0-пары связаны условием
Хт+1 = . .. = Хп = 0, т. е. точки 0-пары лежат в т-мерной
плоскости, а тангенциальные координаты гиперплоскости 0-пары
связаны условием Um+1 = . . . = Un = 0, т. е. гиперплоскости
0-пары проходят через (п— т—1)-мерную плоскость.
В силу того, что m-мерные плоскости пространства Кп(е) изо-
метричны пространству Кт(е), многообразие 0-пар, инцидентных
с т-парой, изометрично многообразию 0-пар пространства Р„г,
что видно и непосредственно, если рассматривать m-мерную пло-
скость m-пары как пространство Рт и каждой 0-паре нашего много-
образия поставить в соответствие 0-пару этого пространства Рт,
точка которой совпадает с точкой 0-пары пространства Рп, а гипер-
плоскость— с (т—1)-мерной плоскостью пересечения гиперпло-
скости 0-пары с рассматриваемой m-мерной плоскостью.
Прямые пространства Рп, описываемые точками семейств 0-пар,
соответствующих точкам общих перпендикуляров двух т-мерных
плоскостей пространства Кп(е), совпадают с определёнными нами
в § 4 главы III директрисами соответственных m-пар, т. е. с пря-
мыми, пересекающимися со всеми четырьмя плоскостями двух
m-пар. Точки пространства Рп, являющиеся точками 0-пар, соот-
ветствующих точкам пересечения общей ортогональной цепи двух
m-мерных плоскостей с абсолютом, совпадают с определёнными
нами в § 4 главы III направляющими точками соответствующих
m-пар, т. е. точками директрисы, одновременно гармонически де-
лящими обе пары точек пересечения этой директрисы с плоско-
стями m-пар. Стационарные расстояния двух m-мерных плоскостей
совпадают с проективными инвариантами двух соответственных
m-пар, определяющихся двойными отношениями Wi четвёрок точек
пересечения плоскостей m-пары с её директрисами.
Точно так же мы найдём, что точкам двух мнимо сопряжён-
ных взаимно полярных m-мерных плоскостей пространства K2m+1(e)
и соединяющим мнимо сопряжённые точки этих m-мерных пло-
скостей прямым соответствуют мнимые 0-пары, инцидентные
с двумя мнимо сопряжёнными m-мерными плоскостями простран-
ства Р2м+1, и соединяющие мнимо сопряжённые точки этих т-мер-
ных плоскостей прямые эллиптической линейной конгруэнции. При
§ 6] ПРОЕКТИВНАЯ ГЕОМЕТРИЯ КАК НЕЕВКЛИДОВА 659
этом каждой прямой, соединяющей мнимо сопряжённые точки
zn-мерных плоскостей соответствует 1-пара, состоящая из прямой
эллиптической линейной конгруэнции и (2zn—1)-мерной плоскости,
образованной из прямых этой конгруэнции.
При установленном нами соответствии между точками простран-
ства Кп(е) и 0-парами пространства Рп точкам п-цепи простран-
ства Кп(е) соответствуют такие Q-пары, точки и гиперпло-
скости которых связаны коррелятивным соответствием. В са-
мом деле, так как zz-цепь получена из геометрического места точек
пространства Кп(е) с вещественными, координатами с помощью
проективного преобразования, координаты точек zz-цепи имеют
вид
= + (6.254)
3
где Хо — вещественные числа. Если мы положим хг = Хге+
то из (6.254) следует X* = ^А}х^ и Ui = "^B}x?Q или
Ui = S C^X3. При этом, если мы обозначим матрицы (Л}), (Bj)
3
и (С^«) соответственно через А, В и С, матрица С связана с ма-
трицами А и В соотношением
В частности, точкам нормальной zz-цепи индекса 0 соответ-
ствуют 0-пары, автополярные относительно мнимой квадрики,
а точкам нормальной zz-цепи индекса Z соответствуют 0-пары,
автополярные относительно вещественной квадрики индекса Z.
В самом деле, всякая нормальная zz-цепь индекса 0 получена
с помощью движения пространства Кп(е) из геометрического места
точек с координатами, удовлетворяющими условию xi = хЛ Таким
образом, соответственная совокупность 0-пар получена с помощью
проективного преобразования пространства Рп из совокупности
0-пар, координаты точек и тангенциальные координаты гиперпло-
скостей которых удовлетворяют условию X* = Uif т. е. из 0-пар,
автополярных относительно мнимой квадрики 2(х9’2 = 0. Точно
i
так же всякая нормальная zz-цепь индекса Z получена с помощью
движения из геометрического места точек с координатами, удо-
влетворяющими условию х* = х*(1<1), хз = — xjfj^rp Другими
словами, соответственная совокупность 0-пар получена с помощью
проективного преобразования из совокупности 0-пар, коорди-
наты точек и тангенциальные координаты гиперплоскостей кото-
рых удовлетворяют условию = X* (/ < Z), Uj — —* Хз (J Z),
т. е. из 0-пар, автополярных относительно вещественной квад-
рики 28*(^г)2 — О-
i
В силу того, что нормальные п-цепи индекса 0 пространства
Кп(е) изометричны пространству Sn, а нормальные п-цепи индекса Z
42*
660 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
этого пространства изометричны пространству lSn, многообразия
0-пар, автополярных относительно мнимой квадрики или веще-
ственной квадрики индекса Z, изометричны соответственно про-
странствам Sn и lSn, что видно и непосредственно. В самом деле,
если ввести в пространство Рп метрику пространств Sn и lSn,
определяемую рассматриваемой квадрикой как абсолютом, и счи-
тать в формуле (6.248) гиперплоскости и и v полярными гипер-
плоскостями точек х и у относительно соответственных квадрик,
эта формула совпадает с формулой (3.133).
Точки пересечения двух нормальных zz-цепей пространства Кп(ё)
изображают 0-пары пространства Рп, автополярные одновременно
относительно обеих квадрик, соответствующих рассматриваемым
zz-цепям, т. е. являются вершинами и гранями общего автополяр-
ного симплекса этих квадрик, а числовые инварианты zz-цепей
совпадают с числовыми инвариантами двух соответственных квадрик.
В частности, при zz — 1 мы получаем, что цепям прямой (е)
соответствуют пары точек прямой Plf связанные проектив-
ным соответствием, а нормальным цепям прямой Кг{е) соот-
ветствуют пары точек прямой Pv гармонически делящие пару
мнимо сопряжённых или вещественных точек, т. е. пары точек,
находящиеся соответственно в эллиптической и гиперболиче-
ской инволюции.
Так как прямая К-^ё) изометрична совокупности 0-пар, инци-
дентных с 1-парой, то цепям пространства К^ё) соответствуют
семейства 0-пар, инцидентных с 1-парой, и определяющие на пря-
мой этой 0-пары пары точек, связанные проективным соответствием,
а нормальным цепям пространства К± (е) соответствуют такие семей-
ства 0-пар, у которых проективное соответствие является эллипти-
ческой или гиперболической инволюцией.
Так как нормальные цепи играют роль геодезических линий
пространства Кп(ё), соответствующие им семейства 0-пар играют
роль геодезических линий в многообразии 0-пар. Нетрудно про-
верить, что эллиптическим и гиперболическим нормальным цепям
соответствуют семейства 0-пар, определяющие соответственно элли-
птическую или гиперболическую инволюцию.
Нетрудно также проверить, что изотропным цепям простран-
ства Кп(с) соответствуют семейства 0-пар, инцидентных с 1-парой
и обладающих общей точкой или общей гиперплоскостью.
Приведём сравнительную таблицу инволюционных движений про-
странства Кп(е) и соответствующих им инволюционных проектив-
ных преобразований пространства Рп:
Кп(е) Рп
отражение от zn-мерной пло- симметрия относительно zn-
скостии полярной ей (п—т— 1)- пары;
мерной плоскости;
§ 6]
ПРОЕКТИВНАЯ ГЕОМЕТРИЯ КАК НЕЕВКЛИДОВА
661
отражение от пары мнимо со-
пряжённых взаимно полярных
п — 1
—2—мерных плоскостей;
отражение от нормальной
п-цепи;
паратактический сдвиг на по-
лупрямую;
эллиптическая инволюция;
полярное преобразование от-
носительно квадрики;
нуль-система.
Сопоставляя установленный нами изоморфизм группы движений
пространства Кп(е) и группы проективных преобразований про-
странства Рп с лежащим в основе интерпретации Плюккера (§ 11
главы III) изоморфизмом группы проективных преобразований про-
странства Р3 и группы движений пространства 3S5, мы находим,
что группа движений пространства К3(е) изоморфна группе дви-
жений пространства Это позволяет построить интерпрета-
цию одного из этих пространств в другом. Приведём сравнитель-
ную таблицу соответствующих друг другу образов симметрии
пространств К$(е) и 3S5:
точками её полярная плос-
кость;
пара взаимно полярных пря-
мых;
пара мнимо сопряжённых
взаимно полярных прямых;
нормальная 3-цепь индекса 0;
нормальная 3-цепь индекса 1;
нормальная 3-цепь индекса 2;
паратактическая конгруэн-
ция;
856
гиперболическая паратакти-
ческая конгруэнция;
гиперболическая прямая и её
полярная трёхмерная плоскость;
эллиптическая прямая и её
полярная трёхмерная плоскость;
пара взаимно полярных дву-
мерных плоскостей, не пересе-
кающих абсолюта;
пара мнимо сопряжённых
взаимно полярных двумерных
плоскостей;
пара взаимно полярных дву-
мерных плоскостей, пересекаю-
щих абсолют;
точка и её полярная гипер-
плоскость.
Заметим, что представление группы движений пространства К$(е)
группой двойных унитарных матриц четвёртого порядка совпадает
с тем представлением, которое получено нами из общей теории
спинорных представлений (см. § 2 главы V).
В общей теории спинорных представлений мы установили также,
что группа движений пространства 5б четырёхзначно изображается
группой комплексных матриц четвёртого порядка, связанных 17 ве-
щественными соотношениями (см. там же). Нетрудно проверить, что
662
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
16 из этих условий, так же как в случае группы двойных матриц
четвёртого порядка, представляющих группу движений простран-
ства 35б, являются условиями унитарности, а 17-е усло-
вие является условием равенства определителя единице. Фактор-
группа этой группы по группе, состоящей из четырёх матриц
(±2 &}) и (zt ZSJ), изоморфна группе движений пространства K3(Z)
(zt 1 и ±i — корни 4-й степени из единицы). Поэтому группа
движений пространства изоморфна группе движений
пространства S6. Этот изоморфизм, в основе которого, как
мы видим, лежит спинорное представление группы движений про-
странства S6, позволяет построить интерпретации пространств 7<3 (Z)
и S6 друг в друге. Приведём сравнительную таблицу соответствую-
щих друг другу образов симметрии пространств ^з(Z) и S5:
&
точка и её полярная плос-
кость;
пара взаимно полярных пря-
мых;
нормальная 3-цепь;
паратактическая конгруэн-
ция:
паратактическая конгруэн-
ция;
прямая и её полярная трёх-
мерная плоскость;
пара взаимно полярных дву-
мерных плоскостей;
точка и её полярная гипер-
плоскость.
§ 7. Симплектическая геометрия любого числа измерений
как неевклидова геометрия
В § 12 главы III мы видели, что группа симплектических пре-
образований пространства Sp% изоморфна группе движений про-
странства 2S4, что позволяет рассматривать трёхмерную симплек-
тическую геометрию как четырёхмерную геометрию. Покажем,
что симплектическую геометрию любого числа измерений также
можно рассматривать как неевклидову геометрию.
В § 12 главы III мы определили симплектический инвариант
двух прямых пространства Sp2w+1: если первая прямая проходит
через точки с координатами X1, Y1, а вторая прямая проходит
через точки с координатами Z1, W1, то этот инвариант имеет вид
2 . 2 (Z2«T2*+1 — Z2i^Y2i)
—------------------------------------------------
2 (Z2* W+1 — Z2*+i W)
i i
2(^2г^2г+1 — X2i+iZ2i) • W2i^1Y2i)
______i_____________________i ____________________
2 (X^Y21^1 — x2i^Y2i) • 2 {Z2iW2i^— Z2i+lW2i)
. (6.255)
§ 7]
СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ КАК НЕЕВКЛИДОВА
663
Многообразие прямых пространства 5р2л+1, если считать
за расстояние между двумя прямыми их симплектический ин-
вариант ш, связанный с их инвариантом (6.255) соотношением
UZ~cos2<o, изометрично пространству Кп(1, е) с радиусом кри-
визны -j—1, а группа симплектических преобразований прост-
ранства Sp2n+1 изоморфна группе движений пространства
ад
Для доказательства первого утверждения заметим, что в § 3
мы показали, что многообразие прямых пространства Р2п+1 обра-
зует вещественную интерпретацию пространства Pn(it ё). При этом
прямой пространства Р2п+1, проходящей через точки с координа-
тами X1 и Y1, соответствует точка пространства Pn(i, е), анти-
кватернионные координаты которой представляются матрицами
(X2* y2i \
^2г+1 у2<+1)‘ Составляя для двух точек пространства Кп(1, е)
с антикватернионными координатами х* и у\ представляемыми со-
ответственно матрицами W2i+i)> инва“
риант (6.249), мы находим, что этот инвариант в точности равен
инварианту (6.255), что доказывает изометричность многообразия
прямых пространства Р2п+1 с введённой нами метрикой простран-
ству Кп(1, ё) с радиусом кривизны +1.
Для доказательства второго утверждения заметим, что, как
мы видели в § 1, группа неособенных антикватернионных матриц
л-го порядка изоморфна группе неособенных вещественных матриц
2л-го порядка. При этом изоморфизме вещественной матрице
2л-го порядка (Aj) соответствует антикватернионная матрица
п-го порядка (а*.), где антикватернионы а1, представляются веще-
" аИ д
ственными матрицами второго порядка ( 2^1 )•
A2J4-I/
Если мы подставим в условия унитарности (6.251) антиква-
тернионной матрицы (aty вместо антикватернионов а* представляю-
3 /A2i- A2i A
щие их вещественные матрицы второго порядка I 2^+1 2*4-1)’
\А^з ^2J4-1/
мы найдём, что элементы Aj связаны условием
2(AjA^+1— Aj ^Ак) = к-^i — (6.256)
г
совпадающим с условием симплектичности вещественной матрицы
второго порядка (3.170), и обратно, если элементы Aj связаны
условием симплектичности (6.256), элементы а* соответственной
антикватернионной матрицы связаны условием унитарности (6.251).
664 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Заметим, что как полуопределители антикватернионных уни-
тарных матриц п-го порядка, так и равные им определители
соответствующих им вещественных симплектических матриц 2п-го
порядка равны -|-1.
Но группа движений пространства ё) изоморфна фактор-
группе группы антикватернионных унитарных матриц (п-^1)-го
порядка по её фактор-группе, состоящей из матриц преобразова-
ний 'xi = xi и 'х1 =—х\ а группа симплектических преобразо-
ваний пространства Sp2n+1 изоморфна фактор-группе группы
вещественных симплектических матриц (2п-|-2)-го порядка по её
фактор-группе, состоящей из матриц преобразований 'X1 = X1
и X =—X1. Поэтому группа движений пространства ё)
действительно изоморфна группе симплектических преобразо-
ваний пространства Sp.2n+1. Этим наша теорема полностью
доказана.
Таким образом, геометрию симплектического простран-
ства Sp2n+1, если за основной образ пространства принять
прямую, можно рассматривать хак геометрию унитарного
неевклидова пространства Кп(1, е).
При найденном нами соответствии между точками простран-
ства Кп(1, ё) и прямыми пространства Sp2n+1 точки абсолюта
пространства Кп(1, е) изображаются прямыми пространства Sp2n+1,
целиком лежащими в (2п—1)-мерных плоскостях, в которые они
переходят при абсолютной нуль-системе. В самом деле, подставляя
антикватернионные координаты х\ представляемые матрицами
(Х*м Y2i
X^i+i y2i+1
прямой пространства Sp2n+1, проходящей через точки с координа-
тами X1 и Y1, в уравнение абсолюта 2 ~ 0, мы получим:
i
2 (X2i Г2‘+’ — X«+iy2«') = о, (6.257)
i
, точки пространства Kn(i, е), соответствующей
что доказывает наше утверждение.
Полярно сопряжённые точки пространства Kn(i, е) изобра-
жаются такими прямыми пространства Sp2n+1, каждая из которых
целиком лежит в (2п—1)-мерной плоскости, в которую при
абсолютной нуль-системе переходит другая из этих прямых.
В самом деле, подставляя антикватернионные координаты хг и у*9
fX'2i Y2i \ (Z2i VF2* \
представляемые матрицами ^+1 и ^2/+t
двух точек пространства Кп(ё е)> соответствующих прямым
пространства Sp2n+1, проходящим через точки с координа-
§ 7] СИМПЛЕКТИЧЕСКАЯ ГЕОМЕТРИЯ КАК НЕЕВКЛИДОВА 665
тами X1, Y1 и ZJ, W1, в условие полярной сопряжённости 5
мы получим: *
2 (XW2**1 — X2i^W2^ = 2 — =
i t 7
= 2 (X2iZ2i+1 — X2i+*) — 2 (W2i Y2i+1 — W2i+1 Y2i) — 0, (6.258)
что доказывает наше утверждение.
Из формулы (6.255) можно сделать ряд выводов. Во-первых,
во введённой нами метрике в многообразии прямых простран-
ства расстояние между прямой общего вида и прямой,
целиком лежащей в (2п—1)-мерной плоскости, в которую она
переходит при абсолютной нуль-системе (эта прямая удовле-
творяет условию (6.257)), равно бесконечлости. Во-вторых, рас-
стояние между двумя прямыми, каждая из которых целиком
лежит в (2п—\)-мерной плоскости, в которую при абсолют-
ной нуль-системе переходит другая из этих прямых (эти
прямые удовлетворяют условию (6.258)), равно В-третьих,
расстояние между двумя пересекающимися прямыми равно
нулю.
Так как геодезическими семействами точек пространства Кп(1> ё)
являются геодезические семейства точек прямых этого простран-
ства, геодезическими семействами прямых пространства Sp2n+1
являются геодезические семейства трёхмерных плоскостей этого
пространства.
В § 12 главы III мы видели, что геодезическое семейство
прямых пространства Sp%, проходящее через две непересекаю-
щиеся прямые, является семейством прямолинейных образующих
линейчатой квадрики, проходящей через данные прямые и прямые,
в которые они переходят при абсолютной нуль-системе, а геоде-
зическое семейство прямых пространства Spz, проходящее черев
две пересекающиеся прямые, является пучком прямых, лежащих
в двумерной плоскости, определяемой этими прямыми, и проходя-
щих через их точку пересечения. Поэтому геодезическое семейство
прямых пространства Sp2n+1, проходящее через две непересе-
кающиеся прямые, является семейством прямолинейных обра-
зующих линейчатой квадрики, лежащей в трёхмерной плоскости,
определяемой этими прямыми и проходящей через них и две
прямые пересечения указанной трёхмерной плоскости с (п — 2)-
мерными плоскостями, в которые две данные прямые переходят
при абсолютной нуль-системе. Геодезическое семейство прямых
пространства Sp2n+%, проходящее через две пересекающиеся
прямые, является пучком прямых, лежащих в двумерной пло-
скости, определяемой этими прямыми, и проходящих через их
точку пересечения. В первом случае геодезические семейства
666 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
прямых изображают нормальные цепи пространства Кп(1, е\
а во втором случае — изотропные цепи этого пространства.
Приведём сравнительную таблицу инволюционных движений
пространства Кп(1, е) и соответствующих им инволюционных
симплектических преобразований пространства 5р.2п+1:
*5р2п+1
отражение от /п-мерной
плоскости и полярной ей
(п— nt— 1)-мерной плоскости;
отражение от пары мнимо
сопряжённых взаимно полярных
п — 1
—2—мерных плоскостей;
отражение от нормальной
комплексной п-цепи;
отражение от нормальной
двойной п-цепи;
симметрия относительно
(2/п+1)-пары, плоскости кото-
рой переходят друг в друга при
абсолютной нуль-системе;
эллиптическая инволюция,
мнимые неподвижные плоскости
которой переходят друг в друга
при абсолютной нуль-системе;
эллиптическая инволюция,
мнимые неподвижные плоскости
которой являются нуль-плоско-
стями;
гиперболическая инволюция,
неподвижные плоскости которой
являются нуль-плоскостями.
§ 8. Проективные и неевклидовы пространства
над алгебрами матриц и альтернионов
Определённые нами в § 3 и § 5 проективные и неевклидовы про-
странства над алгебрами комплексных и двойных чисел, кватер-
нионов и антикватернионов являются частными случаями проектив-
ных и неевклидовых пространств над произвольными ассоциативными
алгебрами.
Будем называть п-мерным аффинным пространством над ассо-
циативной алгеброй А и обозначать Ап (А) множество элементов
двух родов — точек и векторов, удовлетворяющих аксиомам I, II
и причём аксиомами II определяется умножение вектора на
элемент алгебры А. В пространстве Ап (А) определяются особенные
векторы, коллинеарность и отношение векторов, /n-мерные плоскости
и, в частности, прямые и гиперплоскости и их паралелльность, ко-
ординаты и аффинные преобразования совершенно так же, как в рас-
смотренных нами выше аффинных пространствах. Будем записы-
вать скалярные множители справа от векторов.
Так же как в рассмотренных нами выше аффинных пространствах,
показывается, что аффинные преобразования пространств Ап (А)
имеют вид
fxi = 2 aj ? О’) + Ь*, (6.259)
j
где <р(х) — непрерывный автоморфизм алгебры А.
§ 8] ПРОСТРАНСТВА НАД АЛГЕБРАМИ МАТРИЦ И АЛЬТЕРНИОНОВ 667
Эта теорема для аффинных пространств над произвольными
телами была доказана Рейдемейстером х).
Будем называть п-мерным проективным пространством
над ассоциативной алгеброй А и обозначать Рп (А) множество
элементов, называемых точками, находящихся во взаимно однознач-
ном и взаимно непрерывном соответствии с прямыми связки в про-
странстве АП+1(А). В пространстве РП(А) определяются /п-мерные
плоскости и, в частности, прямые и гиперплоскости, координаты
точек и тангенциальные координаты гиперплоскостей, коллинеации,
корреляции и двойное отношение совершенно так же, как в рас-
смотренных нами выше проективных пространствах. Координаты
точек пространства Рп (А), так же как в пространствах Рп (I, J)
и Рп (I, е), определены с точностью до умножения на скаляр справа,
а тангенциальные координаты гиперплоскостей пространств РП(А),
так же как в пространствах Рп (I, J) и Рп (Z, е), определены с точ-
ностью до умножения на скаляр слева. Так же как в рассмотрен-
ных нами выше пространствах, доказывается, что всякая коллинеа-
ция пространства Рп(А.) изображается центроаффинным преобра-
зованием связки прямых соответственного пространства Ап+1 (А),
откуда следует, что коллинеации пространства Рп(&) имеют вид
гхЧ — 2 я} (х^), (6.260)
a
где ф(х)— непрерывный автоморфизм алгебры А.
Аналогично тому как выводилось то, что корреляции про-
странств Pn(i, j) и Рп(1, е) имеют вид (6.101), доказывается,
что корреляции пространства Рп(А.) имеют вид
lUi = 2 ? (*б aij, (6.261)
где ф(х)— непрерывный антиавтоморфизм алгебры А.
Эти последние теоремы для проективных пространств над про-
извольными телами, непосредственно следующие из указанной тео-
ремы Рейдемейстера, были изложены Бэром* 2).
Коллинеации и корреляции пространства Рп (А) составляют
группу, называемую группой проективных преобразований этого
пространства.
Так же как в пространствах Рп (I, J) и Рп (/, е), показывается,
что двойное отношение четырёх точек пространства Рп (А)
определено с точностью до преобразования
'W^pWp-i, (6.262)
где р — произвольный скаляр, не являющийся нулём или дели-
телем нуля.
*) См. Рейдемейстер [1], стр. 121.
2) См. Бэр [1], стр. 83 и 131.
668 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Нетрудно проверить, что при коллинеациях (6.260) пространств
Рп (А) двойное отношение четырёх точек подвергается преобразо-
ванию
'Г =©(№), (6.263)
где ф(Х)— непрерывный автоморфизм алгебры А. Эта последняя
теорема для проективных пространств над произвольными телами
была доказана Рейдемейстеромх) (в силу того, что всякий непре-
рывный автоморфизм алгебр кватернионов и антикватернионов
является внутренним, для пространств Рп (I, J) и Рп (I, е) фор-
мула (6.263) принимает вид (6.90)).
Наиболее интересны аффинные и проективные пространства над
алгеброй Фп вещественных матриц, алгеброй Фп(0 комплексных
матриц, алгеброй Фп (е) двойных матриц и алгебрами Ап и 1Ап
альтернионов (индекс п в обозначении алгебр Фп, Фп(0 и Фп(£)
означает порядок матриц).
Для того чтобы выяснить, какой вид имеют аффинные и проек-
тивные преобразования в аффинных и проективных пространствах
над алгебрами Фп, Фп(0, ФП(О, Ап и zAn, выясним, какой вид
имеют непрерывные автоморфизмы и антиавтоморфизмы в этих
алгебрах.
Прежде всего покажем, что всякий автоморфизм алгебры Фп
является внутренним, т. е. имеет вид
<з(Х) = АХА~\ (6.264)
где А — неособенная матрица. В самом деле, так как при всяком
автоморфизме алгебры её центр переходите себя, а центр алгебры Фп
состоит из матриц вида xi, где х — вещественное число, а I —
единичная матрица, при всяком автоморфизме алгебры Фп мно-
жество матриц вида х! переходит в себя. Это множество, очевидно,
является подалгеброй, изоморфной полю Ф вещественных чисел.
Так как при всяком автоморфизме алгебры Фп в подалгебре матриц
вида xi также должен иметь место автоморфизм, а единственным
автоморфизмом поля Ф является тождественное преобразование,
мы находим, что при любом автоморфизме алгебры Фп все ма-
трицы вида xi остаются неизменными, т. е.
у(хГ) = х1. (6.265)
Уравнение
АХ—аХ (6.266)
имеет отличное от нуля решение X только в том случае, когда
число а является собственным числом матрицы А, так как урав-
нение (6.266) в координатах имеет вид
= (6.267)
Э См. Рейдемейстер [1], стр. 137 и Бэр [1], стр. 100.
§ 8] ПРОСТРАНСТВА НАД АЛГЕБРАМИ МАТРИЦ И АЛЬТЕРНИОНОВ 669
Отсюда видно, что элементы столбцов матрицы X, т. е. числа
при фиксированном k можно рассматривать как координаты соб-
ственных векторов матрицы Л, соответствующих собственному
числу а. Применяя к соотношению (6.266) автоморфизм (JV), мы
получим в силу (6.266)
? (Д) ср {X) = аср (АГ). (6.268)
Так как уравнение (6.268) имеет отличное от нуля решение ср (20
только в том случае, когда число а является собственным числом
матрицы <р(Д), мы находим, что матрица <р(Д) имеет те же соб-
ственные числа, что и матрица А.
Если мы выберем п различных чисел alt а2, . . ., ап и обра-
зуем матрицу
Mi \
то, так как матрица <р(Д) имеет те же собственные числа, что и А,
существует неособенная матрица Т, такая, что
<р(А)= TAT-'. (6.270)
Определим автоморфизм
ф(Х)= Т~Ч(Х) Т; (6.271)
очевидно,
ф(А) = А. (6.272)
Рассмотрим теперь матрицы Е^, у которых элемент, находя-
щийся на пересечении t-й строки и &-го столбца, равен 1, а все
остальные элементы равны нулю. Тогда получим:
АЕк = а(Ек, ЕкА — а^к. (6.273)
Применяя автоморфизм ^(Д) к соотношениям (6.273), мы полу-
чим:
(д4) = Ж4) = М(4), = ф(4) А=а^(4), (6.274)
откуда следует, что
ф(4) = 4Я (6.275)
Но из соотношения {Е^ = Е} находим, что (tfj)a=^ и, сле-
довательно, = 1. Полагая = vki из соотноше-
ния E^ = E\Eu находим, что иЪ = Далее из того, что и\ = Ь
670 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
получаем ~ и, следовательно, и^ = Поэтому если мат-
ui ик
рица X имеет элементы xj, т. е. Х = 22 xffl, то
* з
= (6,276)
i 3 i 3
или
ф(Х) = ихи-\ (6.277)
где
/"х \
t/ = . I, (6.278)
' ’ «»/
т. е.
<Р(Л) = 7'<L(A)7'-1 ^(тиух^тиу1. (6.279)
Отсюда получается формула (6.264), если положить А = TIE
Мы встречались с частным случаем этой теоремы для п = 2в§1.
Покажем, что всякий непрерывный автоморфизм алгебры Фп(0
имеет вид (6.264) или
<d(X) = AXA~\ (6.280)
где А—неособенная матрица, вХ—матрица, элементы кото-
рой комплексно сопряжены с элементами матрицы X,
В самом деле, так как центр алгебры Фп(0 состоит из матриц
вида xi, где х — комплексные числа, а /—единичная матрица,
при всяком автоморфизме алгебры Фп(/) множество матриц вида х!
переходит в себя. Это множество, очевидно, является подалгеброй,
изоморфной полю Ф(0 комплексных чисел. Так как при всяком
автоморфизме алгебры Фп(0 в подалгебре матриц вида х! также
должен иметь место автоморфизм, а непрерывными автоморфизмами
поля Ф (Z) являются только тождественное преобразование и переход
к сопряжённому комплексному числу, мы находим, что при любом
непрерывном автоморфизме алгебры Фп(0 для любого комплекс-
ного х имеет место соотношение (6.265) или
v(xI) = xL (6.281)
В первом случае ср (IX), где /—комплексное число, равно /ср (X),
а во втором случае —/ср(Х)- Поэтому, применяя то же доказа-
тельство, что и для алгебры Фп, мы находим, что в первом случае
автоморфизм ср (АГ) имеет вид (6.265). Во втором случае автоморфизм
ф(Х) = ^) (6.282)
§ 8} ПРОСТРАНСТВА НАД АЛГЕБРАМИ МАТРИЦ И АЛЬТЕРНИОНОВ 671
обладает тем_свойством, что ty(lX) — ty(X) и в силу доказан-
ного (X) = АХА . Отсюда видно, что в этом случае автомор-
физм <р(АГ) имеет вид (6.280).
Точно так же показывается, что всякий непрерывный автомор-
физм алгебры Фп(е) имеет вид (6.264) или (6.280).
Покажем, что всякий автоморфизм алгебры Фп(1, j) кватер-
нионных матриц является внутренним, т. е. имеет вид (6.264).
В самом деле, так как центр алгебры Фп(/, j) состоит из матриц
вида х/, где х— вещественное число, а У—единичная мат-
рица, мы находим, что при любом автоморфизме алгебры Фп(1, J)
все матрицы вида xi, где х — вещественное число, остаются неиз-
менными. Поэтому, представляя кватернионные матрицы п-го порядка
вещественными матрицами 4/г-го порядка, мы в силу доказанной
нами теоремы об алгебре Фп получаем, что любой автоморфизм
алгебры Фп(/, /) имеет вид (6.264), где X и ср (А)— матрицы
алгебры Ф4п, представляющие матрицы алгебры Фп(1, у), а А —
некоторая матрица алгебры Ф4П. Нетрудно проверить, что в том
случае, когда матрицы X и <?(Х) алгебры Ф4П представляют матрицы
алгебры Фп(/, у), матрица А также всегда может быть выбрана
из множества матриц, представляющих матрицы алгебры Фп(/, у),
и в формуле (6.264) все матрицы можно считать матрицами алге-
бры Ф„((, /).
Аналогично показывается, что всякий непрерывный автомор-
физм алгебры j> е) двойных кватернионных матриц имеет
вид (6.264) или (6.280).
Заметим, что алгебры альтернионов нечётного порядка А2т+1
и 1А2т+1 изоморфны алгебрам Ф2т или Ф2Ш-1 (i, у), а алгебры
альтернионов чётного порядка А2ш и lk2m изоморфны алгеб-
рам Ф/*”1 (0, Ф2т-1(^) или Ф2т"20’, у; е), где роль мнимой и
двойной единиц i и е играет элемент Поэтому если
мы обозначим альтернион алгебры А2ш или гА2ш, получаемый
из альтерниона а этой алгебры изменением знаков всех коорди-
нат, содержащих индекс 2т—1, через а (альтернион, сопряжён-
ный с альтернионом а, будем обозначать через а), то приходим
к выводу, что всякий автоморфизм алгебр к2т+1 и lk2m+1
является внутренним, т. е. имеет вид (6.264), а всякий непрерыв-
ный автоморфизм алгебр к2т и lk2m имеет вид (6.264) или (6.280).
Покажем что всякий антиавтоморфизм алгебр Фп, А2т+1
и lk2m+1 имеет вид
ф(Х) = АХА~\ (6.283)
где А — неособенный элемент алгебры, а X—матрица, полу-
ченная транспонированием матрицы X, или альтернион, со-
пряжённый с альтернионом X. В самом деле, преобразование
^(А)=^А) (6.284)
672
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
является автоморфизмом алгебры и в силу доказанного =
= А'1ХА, откуда непосредственно вытекает формула (6.283).
Всякий непрерывный антиавтоморфизм алгебр Фп(г),
Д2?п и 1А^т имеет вид (6.283) или
ф(Х) = АХА~1, (6.285)
где А — неособенный элемент алгебры. В самом деле, преобра-
зование (6.284) является непрерывным антиавтоморфизмом алгебры
и в силу доказанного Ъ(Х) = А~ГХА или откуда непо-
средственно вытекают формулы (6.283) и (6.285).
В силу доказанных теорем для пространств ДП(ФШ), Ai(A2w+1)
и А„(гА2?п+1) формула (6.259) может быть переписана в виде
'х* = 2 ai ахэа-1-^, (6.286)
3
а для пространств Ап(Фт(1)), Ап(Фт(е)), Ап(А2т) и Ап(1А2т)
та же формула может быть переписана в виде (6.286) или
'х* = 2 ataxia-1 -f- Ы. (6.287)
3
Так же как для пространств Pn(i, j) и Pn(i, е), показывается,
что в силу доказанных теорем для пространств ^П(ФШ), ^п(А2ш+1)
и Pw(zA2w+1) формула (6.260) может быть переписана в виде
^/=2^, (6.288)
а формула (6.261) — в виде
lai = (6.289)
3
Точно так же для пространств Рп(Фт(1)), Рп(Фт(е)), Рп(А2т)
и Pn(lAim) формула (6.260) может быть переписана в виде (6.288)
ИЛИ
'х(1 = ^а^, (6.290)
3
а формула (6.261)—в виде (6.289) или
/и< = 2*«о- (6.291)
3
Преобразования векторов пространств Ап (Фш), Ая(Фт(/)),
Ап(Фт(е)), Ап(Хт) и Дп(гАш), происходящие при аффинных прео-
бразованиях, имеют вид (6.286) и (6.287) при Ь* = 0. Эти преобразо-
вания при а = 1 называются линейными преобразованиями, а в том
случае, когда а не является скалярной матрицей, называются
полулинейными преобразованиями. Аффинные, линейные и полу-
линейные преобразования пространств Дп(Фш(0), АП(Ф^(^))>
§ 8] ПРОСТРАНСТВА НАД АЛГЕБРАМИ МАТРИЦ И АЛЬТЕРНИОНОВ 673
An(A2w) И Дп(гА2ш), представляемые формулами (6.286) и (6.287),
называются соответственно преобразованиями первого и вто-
рого рода.
Из свойств автоморфизмов алгебр Фте, А2т+1 и гА2т+1 следует,
что в определении аффинных преобразований аффинных пространств
над этими алгебрами и в определении коллинеаций и корреляций
проективных пространств над этими алгебрами мы можем не тре-
бовать непрерывности этих преобразований, так как для этих
пространств непрерывность является следствием остальных свойств
рассматриваемых преобразований.
Пространство АП(ФШ) допускает простую интерпретацию в про-
странстве Атп. Для получения этой интерпретации достаточно
поставить в соответствие каждой точке пространства АП(ФШ) си-
стему т точек {Xit . . ., Хт} пространства Атп, а каждому вектору
пространства АП(ФШ) — систему т векторов {хх, ..., про-
странства Атп. Тогда вектор пространства Ап(Фт) с началом,
изображаемым системой точек {А^}, и концом, изображаемым
системой точек {FJ, изображается системой векторов {XaFa}.
Сумма векторов, изображаемых системами векторов {ха} и fyj,
изображается системой векторов {ха-j-, а произведение вектора,
изображаемого системой векторов {ха) на матрицу (&&), изобра-
жается системой При этой интерпретации особенные
ь
векторы пространства Ап (Фш) изображаются системами линейно
зависимых векторов. Коллинеарные векторы пространства Ап(Фт)
изображаются системами векторов, лежащих в одной /п-мерной
плоскости. Если еГ1, е12, ..., етп — векторы некоторого базиса
пространства Атп,’ то всякую систему т векторов {ха} этого
пространства можно представить в виде
{ха} = {S S = S kJ (*«’*)• (6-292)
bi i
Следовательно, системы векторов {е&^} изображают векторы неко-
торого базиса пространства Ап(Фт), а координатами точек про-
странства ДП(ФШ), изображаемых в пространстве Атп системами
точек с координатами {ха}, при таком выборе базиса являются
/ b, i\
матрицы (ха ).
Линейные преобразования векторов пространства Ап(Фт) могут
быть записаны в виде
= (6.293)
т. е. линейные преобразования векторов пространства АП(ФШ)
изображаются в пространстве Атп преобразованиями, при кото-
рых все векторы ха, изображающие вектор пространства Ап(Фт),
подвергаются одному и тому же линейному преобразованию.
43 Зак. 177. Б. А. Розенфельд
674 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Поэтому группа линейных преобразований векторов простран-
ства ЛП(ФШ) изоморфна группе линейных преобразований векто-
ров пространства Атп, что является также следствием изоморфизма
алгебр этих матриц.
Пространства Ап(Фт(1)) и Ап(Фт(е)) допускают аналогичные
интерпретации соответственно в пространствах Amn(i) и Атп(е).
Коллинеации и корреляции пространств Рп(Фт(1)), Рп(Фт(еУ)>
Рп(к2т) и вида (6-288), (6.289), (6.290) и (6.291) назы-
ваются коллинеациями и корреляциями соответственно первого
и второго рода.
Интерпретация пространства Лп+1(Ф?п+1) в простран-
стве Д(??г+1)(п+1) даёт нам интерпретацию пространства Рп(Фш+1)
в пространстве Ртп+т+п- Для получения этой интерпретации до-
статочно поставить в соответствие всякой /n-мерной плоскости
пространства Ртп+т+п> проходящей через точки х0, xlt . . . xmt
точку х пространства координатами которой слу-
жат 1 матриц х* = (х*’*), причём при замене точек ха их линей-
ными комбинациями ^аьха матрицы (Ха'г) умножаются справа
ъ
на одну и ту же матрицу (ag). Совершенно так же мы поставим
в соответствие каждой (тп-\-п—1)-мерно,й плоскости простран-
ства Ртп+т+п> являющейся пересечением т-\-\ гиперплоско-
стей Uq, ult . .., ит, гиперплоскость и пространства Рп(Фт+1),
тангенциальными координатами которой служат п-|-1 матриц и{ =
причём при замене гиперплоскостей иа их линейными
комбинациями матрицы (uabfi) умножаются слева на одну
ь
и ту же матрицу (а%). Заметим, что если /и-мерная плоскость
пространства Рпт+п+т лежит в (тп-^-п—1)-мерной плоскости,
то соответственная точка пространства Рп(Фт+1) лежит в соот-
ветственной гиперплоскости. Таким образом, из соотноше-
НИЯ 5 2 = ° следует, ЧТО 2(иаьл)(хе’г) = 0, т. е.
i b i
2 и^ — о.
Коллинеации пространства Рп(Фт+1) могут быть записаны
в виде
(Ж Ь (^) = 3 (4:1) (6.294)
т. е.
2 х*' = 0. (6.295)
с j Ь
Эта формула показывает, что коллинеации пространства Рп(ФпМ)
изображаются коллинеациями пространства Ртп+т+п, т. е. группы
коллинеаций пространств Рп(Фт+^) и Ртп+т+п изоморфны, что
следует и из изоморфизма соответственных групп матриц.
§ 8] ПРОСТРАНСТВА НАД АЛГЕБРАМИ МАТРИЦ И АЛЬТЕРНИОНОВ 675
Корреляции пространства Рп (Фто+1) могут быть записаны в виде
(*&) («ьс, <) = S (хъ (abe, {J), (6.296)
т. е.
S г = S 2 *Ъ ij‘ (6.297)
b j ъ
Последняя формула показывает, что корреляции простран-
ства Рп(Фт+1) изображаются корреляциями пространства Ртп+т+п-
Поэтому группа всех проективных преобразований простран-
ства Рп(Фт+^) изоморфна группе всех проективных преобра-
зований пространства Ртп+т+п- Таким образом, многообразие
т-мерных плоскостей пространства Ртп+т+п является моделью
пространства Рп(Фпь+\)*
В частности, моделью прямой Рх(Фт+^) является многооб-
разие т-мерных плоскостей пространства P%m+i- В этом слу-
чае вместо проективных координат х°, х1 можно пользоваться
одной матричной координатой х = Л1”1. Если мы будем назы-
вать коллинеациями и корреляциями прямой Pt (Фт+1) преобразо-
вания этой прямой, имеющие вид (6.288) и (6.290), где Z, j = 0, 1,
то при переходе к координате х коллинеации и корреляции прямой
изображаются соответственно дробно-линейными преобразованиями
rx — (ax-\-b) (сх-\- d)"1 и fx= (ax-\-b)(cx-{-d)”1. (6.298)
Нетрудно проверить, что если мы составим двойное отноше-
ние четырёх точек прямой Р± (Фт+1), равное двойному отноше-
нию их матричных координат
W(x, у\ zt -w) = (-w—у)~г (уи— x)(z— х)"1^—у), (6.299)
то собственные числа полученной матрицы, которые остаются
инвариантными при преобразованиях (6.262) этого двойного отно-
шения, совпадают с двойными отношениями точек пересечения
четырех m-мерных плоскостей пространства Р2ш+1, изображаемых
этими точками с их т-\-\ директрисами (см. § 4 главы III).
Заметим, что преобразования (2.263) в этом случае совпадают
с преобразованиями (2.262).
Аналогично показывается, что многообразия т-мерных пло-
скостей пространств Pmn+m+n(i) и Ртп+т+п являются моде-
лями соответственно пространств Pn<&m+iW)) и (*))•
Покажем теперь, что пространства Рп (1Ат+1) допускают модели
в виде конгруэнций прямых в пространствах Р%п+1 (1Ат). Для этого
поставим в соответствие каждой точке пространства
с координатами X1 точку пространства Pn(l^m+i) с координатами
(6.300)
43*
676 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Той же точке пространства Рп(1А.т+1) соответствуют, очевидно,
все точки пространства Р2а+1 (1Ат) с координатами у1, связанными
с координатами соотношениями
yi=xik=Y^-\-e12...mYii+\ (6.301)
где & = ...WL— произвольный элемент алгебры zAm+1,
не являющийся нулём или делителем нуля.
Заметим, что
(т + 1)
e?2...w=(—1) 2 , (6.302)
т. е. при нечётных т el2...m = (—1) 2 , а при чёт-
, 111,
9 Z 4
ных т ^12...9в = (—1) 2- Заметим также, что при нечётных т
элемент ,,.ш перестановочен со всеми элементами алгебры zAw+t
и, в частности, со всеми элементами алгебры zAm, рассматриваемой
как подалгебра алгебры zAm+1, состоящая из линейных комбина-
ций базисных элементов, не содержащих индекса т, т. е. для
всех элементов X этой подалгебры
(6.303)
а при нечётных т для элементов X той же подалгебры имеет
место соотношение
— Xei2... w (6.304)
Поэтому формула (6.301) при нечётных т может быть пере-
писана в виде
+ е12... т Г*+1 = (X* + е,2... ,,Л2т) (К+ ... mL) =
1 .
= (ЛГ2^+( — 1) т 3 X2i+1L')-\-ei2...m{X2i+xK-\-XiiL), (6.305)
а при чётном т — в виде
Y* + ех •>.,. т У2’+i = (X* + е12... шХ2г+1) (АГ+ ... ,aL) =
= Х*К+(— 1) 2 X^+1L + e12...,lt(X2^K+XiiL). (6.306)
Формулы (6.305) и (6.306) могут быть записаны в виде
Y1 = XrK-{- 'XTL, (6.307)
где при нечётном т
'X* = (— 1),т-т~X2ihl, '^+1 = X2i, (6.308)
а при чётном т
, ш-i___
'X2i =( — 1) + 2 X2I+1, 'X-^+i =Xii. (6.309)
§ 8] ПРОСТРАНСТВА НАД АЛГЕБРАМИ МАТРИЦ И АЛЬТЕРНИОНОВ 677
Преобразования (6.308) и (6.309) являются инволюционными
коллинеациями, а точки с координатами (6.309) образуют прямые,
являющиеся инвариантными прямыми этих коллинеаций. Множества
этих прямых являются конгруэнциями. Будем называть кон-
груэнции прямых, инвариантных при коллинеациях (6.308), линей-
ными конгруэнциями пространств P2n+1 (ZAW), а конгруэнции пря-
мых, инвариантных при коллинеациях (6.309), эрмитовыми
линейными конгруэнциями пространств P2n+1 (ZAW).
Точно так же каждой точке пространства Pn(z+1 Aw+1) может
быть поставлена в соответствие прямая линейной или эрмитовой
линейной конгруэнции прямых в пространстве P2n+1 (ZAW); при
этом в формуле (6.302) и, следовательно, в формулах (6.308) и
(6.309) следует заменить Z на
Доказанные нами в § 3 теоремы о линейных конгруэнциях
пространств P2n+1, Р2п+1(0 И^2»+1Й являются частными случаями
следующих теорем:
Прямые линейных или эрмитовых линейных конгруэнций
пространства P2n+1 (zAm) образуют модель соответственного про-
странства Рп(1Ат+1) и Рп (z+1 Aw+1), а группы коллинеаций
пространств Рп(1Ат+1) и Рп(1+1Ат+1) изоморфны фактор-группе
групп коллинеаций пространства P2n+i переводящих
в себя соответственную линейную или эрмитову линейную
конгруэнцию, по подгруппе коллинеаций, переводящих в себя
каждую прямую этой конгруэнции.
Прямые Рх (Aw) и Рг (ZAW), по существу, рассматривались
нами в § 7 главы V, где мы применяли дробно-линейные преоб-
разования альтернионов.
Определив инволюционные корреляции в проективных прост-
ранствах над алгебрами матриц и альтернионов, мы можем опре-
делить неевклидовы пространства над этими алгебрами. Будем
называть корреляцию, определяющую неевклидово пространство,
абсолютной корреляцией этого пространства; роль движений
этого пространства будут играть коллинеации, перестановочные
с абсолютной корреляцией, а роль точек абсолюта — точки, лежа-
щие в гиперплоскостях, в которые они переходят при абсолютной
корреляции. Две точки такого неевклидова пространства обладают
инвариантами относительно группы движений, однако в отличие
от рассмотренных нами раньше неевклидовых пространств число
таких инвариантов в общем случае больше единицы; этими инва-
риантами являются собственные числа матрицы, представляющей
двойное отношение двух данных точек и двух гиперплоскостей,
в которые они переходят при абсолютной корреляции.
В том случае, когда коллинеации (6.308) и (6.309) являются
движениями неевклидовых пространств, определяемые ими линейные
конгруэнции прямых можно рассматривать как паратактические
конгруэнции прямых неевклидовых пространств. Можно доказать,
678 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
что прямые паратактических конгруэнций (2/z~pi)-мерных неевкли-
довых пространств над алгебрами 1Ат образуют модели
/z-мерных неевклидовых пространств над алгебрами zAm+1 и 1+1Ат+1
Частными случаями определённых таким образом неевклидовых
пространств являются пространства Kn(i), Кп(е), Kn(i,j) и
Кп(1, е), в которых роль абсолютной корреляции играет полярное
преобразование относительно абсолюта, являющееся корреляцией
с матрицей, удовлетворяющей условию эрмитовой симметрии. По-
следнее пространство можно также рассматривать как простран-
ство над вещественными матрицами второго порядка, в котором
роль абсолютной корреляции играет корреляция с матрицей, удо-
влетворяющей условию (при изоморфизме групп про-
ективных преобразований пространств РП(Ф2) и Р%п+1 эта корре-
ляция соответствует нуль-системе пространства P^n-vi)-
Другим частным случаем определённого таким образом неевк-
лидова пространства является прямая над алгеброй вещественных
матриц (/п-|-1)-го порядка, на которой роль абсолютной корре-
ляции играет корреляция с матрицей, удовлетворяющей тому же
условию = — а^. Если мы возьмём в качестве такой матрицы
/О — П л
матрицу I j I , абсолютная корреляция примет вид zz0=—х1
и = л°. Если мы будем характеризовать точки этой прямой
матрицами х=:хох1-1, то точка с тангенциальными координатами
й0, характеризуется матрицей у где матрицы у*\ у1
связаны с матрицами uQi соотношением woj/°+ i^y1 = 0, т. е.
у =y°yi~1 = — uo1uv Поэтому наша абсолютная корреляция
может быть записана в виде у = — = х1 х° = х^1^1 ,
т. е. у = х, а точки абсолюта характеризуются матрицами, удо-
влетворяющими условию х = х, т. е. симметрическими матрицами.
Это пространство рассматривалось китайским математиком Хуа
Ло-гэном [1,2] (по существу он ограничился рассмотрением
только геометрии на абсолюте этого пространства, т. е. «геомет-
рии симметрических матриц»).
Проективные и неевклидовы пространства над алгебрами веще-
ственных матриц любого порядка рассматривались в работе
автора [21]. Основные результаты проективной и неевклидовой
геометрии над алгебрами матриц были получены М. А. Джавадо-
вым [3]; основные результаты проективной и неевклидовой гео-
метрии под алгебрами альтернионов были получены М. А. Джа-
Еадовым и его учениками Н. Т. Аббасовым, Ф. М. Алиевой,
А. П. Исмаиловым и С. С. Касимовой1).
х) См. Джавадов, Аббасов и Алиева [1] и Джавадов,
Исмаилов и Касимова [1].
§ 91 ПЛОСКОСТИ НАД АЛГЕБРОЙ ОКТАВ 679
§ 9. Проективная и неевклидова плоскости
над алгеброй октав
Заменяя в определении аффинных пространств 4n(Z, j) кватер-
нионы на октавы (см. § 8 главы V) и заменяя аксиому 11,5°,
предполагающую ассоциативность алгебры скаляров, аксиомой
II, 5'. Умножение вектора на скаляр альтернативно, т. е.
(яр)р-1^ а, (6.310)
мы определим аффинное пространство над алгеброй октав
An(i, J> h- Однако в этом пространстве нельзя определить пря-
мые линии как геометрические места концов коллинеарных друг
другу векторов с общим, началом. В самом деле, это определение
предполагает транзитивность коллинеарности векторов, а вектор
(ap)q в силу неассоциативности алгебры октав в общем случае
не может быть представлен в виде произведения аг, т. е., не-
смотря на коллинеарность векторов а, ар и векторов ар, (ар) q,
векторы а и (ap)q неколлинеарны.
Однако на аффинной плоскости Д2(/, j, /) можно определить
прямые уравнениями
х1 = а0 (6.311)
или
х2 = а^-^а^. (6.312)
Прямые (6.311) будем называть прямыми бесконечного наклона,
а прямые (6.312) — прямыми с наклоном at. При таком, определе-
нии прямых:
1) две различные точки у и z находятся на одной и только
одной прямой', если у1 = zx = aQ, это — прямая xx^aQ, если же
у1 z1, это — прямая
х2 —у2 = [(.у2 — z2) (у' — z1)"1! (х1 —.у1). (6.313)
2) Для заданной прямой и точки вне её существует одна
и только одна прямая, проходящая через точку и не имеющая
общих точек с прямой. Для прямой (6.311) и точки у искомая
прямая имеет вид х1^^1, а для прямой (6.312) и точки искомая
прямая имеет вид
х2 —у2 = ах (х1 —.у1). (6.314)
Поэтому, дополняя плоскость A.2(i, j, I) «бесконечно удалён-
ной прямой», содержащей по одной «бесконечно удалённой точке»
для каждого семейства прямых равного наклона, мы получим
проективную плоскость над алгеброй октав Р2(1> j, t), обла-
дающую следующими свойствами:
1) две различные точки находятся на одной и только
одной прямой.
680 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
2) Две различные прямые обладают одной общей точкой1).
Мы не можем определить плоскость Р.2(/, У, Z) с помощью
связки прямых в пространстве Л3(/, у, /), так как в этом про-
странстве не определены прямые.
Но, с другой стороны, если мы будем называть прямую пло-
скости РсД1, j, Z) прямой Pr(t, j, I), то из указанных свойств
плоскости Л2(/, j, Z) видно, что прямая Pr(i, j, I) находится во
взаимно однозначном и взаимно непрерывном соответствии с пуч-
ком прямых плоскости Л2(/, У, Z).
Из этих определений видно, что прямая Pr(i, j, Z) и плоскость
Р%0 ком п актн ы.
Называя длиной вектора плоскости Д.2(/, У, Z) абсолютную
величину квадратного корня из эрмитовой формы
(х, х) = х1х1 х2х2, (6.315)
мы введём на этой плоскости метрику унитарной евклидовой
плоскости U2(i, j, Z), изометричной пространству /?16. Прямая
1Д (Z, У, Z) плоскости j, Z) изометрична пространству /?8.
Так как прямая Рх(1, J, I) получена дополнением прямой
ДД/, 7» 0 или J, Z) одной «бесконечно удалённой точкой»»
прямую Рг(1, j, Z) можно рассматривать как пространство С8,
т. е. эта прямая гомеоморфна гиперсфере пространства /?9.
Если мы будем называть эрмитовой окружностью плоскости
C/.2(Z, У> 0 геометрическое место точек, равноотстоящих от одной
точки, то эта эрмитова окружность изометрична гиперсфере про-
странства /?16. Так как каждая прямая пучка с центром в центре
эрмитовой окружности плоскости U2 (i, j, I) пересекается с этой
эрмитовой окружностью по геометрическому месту точек, изомет-
ричному гиперсфере пространства /?8, прямая Р± (I, j, Г) гомео-
морфна фактор-пространству гиперсферы пространства по
гиперсферам пространства Р8. Отметим, что гиперсфера про-
странства /?16 (изометричного плоскости £7.2(/, У, Z)) является
косым произведением указанных семимерных сфер и прямой
P^i, J. I)2)-
Из найденных нами свойств плоскости P.2(Z, у, Z) видно, что
на этой плоскости выполняются аксиомы 1° и 2° А. Н. Колмого-
рова (см. § 5 главы III). В то же время, как нетрудно проверить,
в силу неассоциативности октав на этой плоскости не выполняется
теорема Дезарга, откуда видно, что плоскость Р2(/, У, Z) не может
иметь трёхмерного и многомерного аналогов, так как при п^>3
из аксиомы 2° Колмогорова вытекает теорема Дезарга. Как видно
из работ Рут Моуфанг [1] и Холла [1], рассматривавших проек-
тивные плоскости над произвольными альтернативными телами,
на плоскости P%(i, j, I) выполняются теорема о полном
i) См. например, Биркгоф [1], стр. 161—163.
2) См., например, С тин род [1], стр. 132—134.
§ §1 ПЛОСКОСТИ НАД АЛГЕБРОЙ ОКТАВ 681
четырёхстороннике и малая теорема Дезарга (см.
также § 5 главы III). Если мы добавим к координатам х°, х1
координату х°=1и будем записывать уравнения (6.311) и (6.312)
в виде
2^ = 0 (6.316)
i
(т. е. в первом случае = —1, а2 —0, во втором случае
=— 1), то точки и прямые плоскости Р2(/, у, /) можно харак-
теризовать октавными матрицами третьего порядка с элементами
xv = х№, (6.317)
Эти матрицы удовлетворяют условию эрмитовой симметрии
xv = хл, (6.318)
и условию
хЧхзк = xikxM, а^а^к = ai4a^. (6.319)
Обратно, всякая октавная матрица третьего порядка (xv) или (а^-),
удовлетворяющая условияхМ (6.318) и (6.319) и определённая с точ-
ностью до вещественного множителя, определяет соответственно
точку или прямую плоскости j, I), причём матрица (xv),
у которой х00 =/= 0, определяет точку с координатами
х^х^Г1 (1=1, 2, j = 0, 1,2), (6.320)
а матрица (а^«), у которой а1± и а22 не равны нулю одновре-
менно, при а22 = 0 определяет прямую (6.311) с коэффициентом
«о = —а71Чо С/ = °> ь 2)> (6.321)
а при а22 =/= 0 определяет прямую (6.308) с коэффициентами
аг = — (I = 0, 1; j = 0, 1, 2). (6.322)
Условия (6.318) и (6.319) обладают тем свойством, что вместе со
всякими двумя октавными матрицами х и у, удовлетворяющими
этим условиям, им удовлетворяет также матрица ху-^-ух. Если
мы поставим в соответствие всяким двум октавным матрицам х, у>
удовлетворяющим условиям (6.317) и (6.318), вещественное число
((х, у))—^{ху-+-ух}, (6.323)
где {х}—след матрицы х, то в координатах xv уравнение пря-
мой, определяемой матрицей а = (а^), может быть записано в виде
((а, х)) = 0. (6.324)
Всяким двум точкам плоскости Р2(/, J> 0 с координатами х*, у*
и двум прямым «этой плоскости с коэффициентами ait bi можно
682
ПРОСТРАНСТВА НАД АЛГЕБРАМИ
[ГЛ. VI
поставить в соответствие октаву
-- 1(2 (2 [(5 а^)-1 (2 ЪУ% (6.325)
i i i i
которую мы будем называть двойным отношением этих двух
точен и двух прямых. Эту же октаву мы будем называть двой-
ным отношением двух данных точек и двух точек пересечения
определяемой ими прямой и двумя данными прямыми или двойным
отношением двух 0-пар (конфигураций точка-р прямая). Нетрудно
проверить, что квадрат модуля этой октавы может быть записан
в виде
I UZI2 = WW=^b' ((а>.УУ)
11 ((*, X)) ((*, у))
(6.326)
На плоскости Р2(/, /, Z) можно определить проективные преобра-
зования и, в частности, коллинеации и корреляции, так же как
на плоскости P2(Z, /). При коллинеациях плоскости P2(Z, /, Z)
двойное отношение (6.325) подвергается преобразованию
'W = pWp-\ (6.327)
где р — произвольная октава, отличная от нуля (октава pWp"1
определена, так как она лежит в подалгебре, порождённой двумя
октавами W и р и поэтому ассоциативной). Так как преобразова-
нием (6.326) всякая октава может быть приведена к виду а-\-Ы,
четыре точки, лежащие на одной прямой плоскости P2(Z, /, Z), и
две 0-пары этой плоскости определяют комплексный инвариант ср,
связанный с их двойным отношением соотношением
2 Г+ W . . I W—W\ Q0Q4
cos2<p = —------Н —§— * (6.328)
Гармонические четвёрки точек плоскости P2(Z, у, Z), т. е. такие
четвёрки точек этой плоскости, лежащих на одной прямой, двой-
ное отношение которых равно —1, могут быть также определены
с помощью теоремы о полном четырёхстороннике.
Если рассматривать прямую Pt(Z, /, Z) как модель простран-
ства С8, то коллинеации этой прямой, т. е. преобразования этой
прямой, индуцируемые на ней коллинеациями плоскости P2(Z, /, Z),
переводящими прямую в себя, изображаются конформными пре-
образованиями пространства С8 и группы этих преобразований
изоморфны. Вещественная и мнимая части комплексного инварианта
двух пар точек прямой Pt(Z, /, Z), определяемого двойным отно-
шением этих точек по формуле (6.328), совпадают со стацио-
нарными углами этих двух пар точек, рассматриваемых как
пары точек пространства С8.
Рассмотрим на плоскости P.2(Z, У, Z) корреляцию, ставящую
в соответствие каждой точке х0 с координатами х$ прямую
х2 = — (Хо)-1 (xjx1) — (х?)"1. (6.329)
§ 91
ПЛОСКОСТИ НАД АЛГЕБРОЙ ОКТАВ
683
Будем называть точку х0 и прямую (6.329) полюсом и полярой.
Тогда двойное отношение точек х, у и их поляр может быть пере-
писано в виде
г=[(Syy)-1 (Sy^)i I(S (2х*У)1> (б.ззо)
г i i i
откуда видно, что двойное отношение является вещественным чис-
лом. В этом случае двойное отношение может быть определено и
в координатах с помощью соотношения
Ц7 _ «Х> У))
/((х> х)) ((У. У)) '
(6.331)
Если определить расстояние между двумя точками плоскости
Р2(/, /» 0 с помощью соотношения
cos2 у = W, (6.332)
где W—двойное отношение этих точек и их поляр, а г — произ-
вольное положительное число, то мы определим на плоскости
P2(it I) метрику октавной унитарной неевклидовой плоскости
^2 О’» У» 0- Число г называется радиусом кривизны этой плоско-
сти. Совершенно аналогично определяется октавная унитарная
неевклидова прямая j, /).
Можно доказать, что прямая (I, j, I) с радиусом кривизны г
изометрична гиперсфере радиуса у в пространстве
Можно также доказать, что движения плоскости /C2(Z. /, /)>
определяемые так же, как в пространстве Kn(l, j), являются кол-
линеациями этой плоскости, переводящими в себя мнимую кривую
х'х1 + х2х2 4-1=0 (6.333)
— абсолют плоскости J, !)•
Прямые (Z, /, Z) и K1(i, j, /) и плоскости Р2(/, /, /) и
/С2(/, /> 0 рассматривались Фрейденталем [1, 2], А. Борелем [1,2]
и Шевалле и Шафером [1].
Аналогичные пространства могут быть построены и с помощью
алгебры антиоктав.
Заменяя в определении плоскости j, I) координаты октав
комплексными или двойными числами, мы получим проективную
плоскость над алгеброй комплексных октав Рj» I) и
проективную плоскости над алгеброй двойных октав P2(i, j, я),
геометрия которых аналогична геометрии плоскости Р2(г> У» 0*
Плоскость P.2(l, j, l\ i') компактна, но так как алгебра комплекс-
ных октав обладает делителями нуля, эта плоскость не удовлетво-
ряет аксиоме 2° А. Н. Колмогорова (см. § 5 главы III).
684 ПРОСТРАНСТВА НАД АЛГЕБРАМИ [ГЛ. VI
Рассмотрим на плоскостях j, i') и P%(i, J, 1\ е) кор-
реляцию, ставящую в соответствие каждой точке х0 с координа-
тами xl прямую
х2 = — Оо)-1 (xjx1)— (Хо)”1, (6.334)
где для комплексной или двойной октавы = Cq = или е),
а~а-\-т{Ь, а=а — ч\Ь. Будем называть точку х0 и прямую
(6.334) полюсом и полярой. Тогда двойное отношение точек х, у
и их поляр может быть переписано в виде
w = [(2УУ) 1 (2У*0][(2^0 (6.335)
i i i ъ
откуда видно, что это двойное отношение в случае плоскостей
P2(i, I' и Л е) выражается через некоторую веще-
ственную октаву w соответственно по формулам
W==w±^+.fw-±t w = (6.336)
ис помощью преобразования (6.323), где р — вещественная октава,
может быть приведено к виду, получающемуся из (6.336) заменой
—2— на I —2— • Если обозначить произведение rz, обладаю-
щее свойствами двойной единицы е, через е, а произведение ei,
обладающее свойствами мнимой единицы z, через z, то две точки х, у
плоскостей P%(1, j> I', ir) и P2(i, j, I', ё), на которых задана ука-
занная корреляция, определяют соответственно двойное или ком-
плексное число ф, связанное с вещественной октавой w, опреде-
ляемой двойным отношением этих точек и их поляр, соответственным
соотношением
n w-\-w , — wl „ w-i-w . .|w—W I oo_4
cos2<p = —I- 2—|> cosa? = —J |_z _—I (6.337)
Если положить в (6.333) <p = y, где г — произвольное положи-
тельное число, и считать получающееся таким образом двойное или
комплексное число со расстоянием между точками х, у плоскостей
P%(i, J* к и *)> мы опРеДелим на этих плоскостях
метрику соответственно комплексной или двойной октавной уни-
тарной неевклидовой плоскости, обозначающейся соответственно
/f2(z, /> *>') и ^2^» еУ Число г называется радиусом кри-
визны этих плоскостей.
Если мы поставим в соответствие всяким двум комплексным
или двойным октавным матрицам х, у, удовлетворяющим условиям
§ 9]
ПЛОСКОСТИ НАД АЛГЕБРОЙ ОКТАВ
685
(6.317) и (6.318) соответственно комплексное или двойное число
((х, j)) — {ху + ух}, (6.338)
то в координатах хч уравнение прямой, определяемой матрицей (аф,
может быть записано в виде (6.324), а модуль | cos2 ~ | двойного
или комплексного числа cos2 у может быть определён в коорди-
натах хч с помощью соотношения
гоч2 ю I2 — <(•*> У» «У- •*))
г I “ ((X, х))((у, у))*
(6.339)
На плоскостях /С2(/, у, Z; zv) и /С2(/, у, Z; в) может быть опре-
делена и вещественная метрика, если считать за расстояние между
точками с двойным или комплексным расстоянием ш вещественное
число |ш|. Преобразования этих плоскостей, сохраняющие это
вещественное расстояние, совпадают с движениями этих плоскостей,
сохраняющими двойное или комплексное расстояние со.
Аналогично приведённому нами в § 6 главы VI доказательству
того, что многообразие 0-пар пространства Рп является моделью
пространства Кп(е\ можно доказать, что многообразие Ъ-пар
плоскости P2(i, j, I), если считать за расстояние между двумя
парами их комплексный инвариант ср, связанный с их двойным
отношением соотношением (6.328), изометрично плоскости
K%(i, j, 1\ е) с радиусом кривизны 1, если считать за расстоя-
ние между двумя точками этой плоскости их комплексное
расстояние, и группа проективных преобразований плоскости
P.2(l, J* О изоморфна группе движений плоскости /С2(/, у, Z; е)х).
Для доказательства следует поставить в соответствие всякой 0-паре
плоскости Р2(/, у, Z) с координатами точки х* и коэффициентами
уравнения прямой а* точку плоскости /C2(Z, у, Z; е) с координа-
тами х*е+-]- а^а#-. Тогда двойное отношение W двух точек пло-
скости K2(i, J, 1\ е) выражается через двойное отношение w двух
соответственных 0-пар плоскости P2(Z, у, Z) правой формулой
(6.336), вследствие чего комплексный инвариант ср двух 0-пар
плоскости Р2(/, у, Z) совпадает с комплексным расстоянием двух
соответственных точек плоскости /С2(/, у, Z; е), откуда следует и
изоморфизм групп.
Заметим, что как показал Ван Сянь-чжун [1], всякое связное
компактное метрическое пространство, обладающее тем свой-
ством, что для всяких двух пар точек, находящихся на оди-
наковом расстоянии, имеется изометрическое преобразование
1) См. работу автора [23].
686 ПРОСТРАНСТВА НАД АЛГЕБРАМИ |ГЛ. VI
пространства, переводящее одну пару точек в другую, изомет-
рично одному из следующих пространств: гиперсфере простран-
ства Rn, пространству Sn, пространству Kn(i), пространству
Kn(i, j) и плоскости K.2(i, J, /)•
Плоскость K2(l, J, l> I'), хотя и является связным компактным
метрическим пространством, не входит в число указанных про-
странств, так как для того, чтобы существовало движение этой
плоскости, переводящее одну её пару точек в другую, необходимо
совпадение не только вещественных расстояний | со | этих пар точек,
но и двойных расстояний w.
ГЛАВА СЕДЬМАЯ
НЕЕВКЛИДОВЫ ПРОСТРАНСТВА КАК РИМАНОВЫ
ПРОСТРАНСТВА ПОСТОЯННОЙ КРИВИЗНЫ. ГЕОМЕТРИЯ
ПРОСТЫХ ГРУПП ЛИ КАК НЕЕВКЛИДОВА ГЕОМЕТРИЯ
§ 1. Римановы пространства и пространства аффинной
связности
Неевклидовы пространства являются частными случаями так
называемых римановых пространств. Для определения этих про-
странств нам необходимо определить несколько понятий многомерной
дифференциальной геометрии.
Если топологическое пространство обладает окрестностью одной
из своих точек, гомеоморфной пространству Rn, то, ставя в соот-
ветствие каждой точке этой окрестности координаты соответствен-
ной точки пространства Rn, мы тем самым определим систему
координат в этой окрестности, являющейся областью определения
этой системы. Будем называть п-мерным дифференциально-гео-
метрическим пространством Хп такое топологическое простран-
ство, что: 1° каждая точка этого пространства обладает окрест-
ностью, гомеоморфной пространству Rn\ 2° в этом пространстве
задано некоторое множество систем координат, причём области
определения этих систем покрывают всё пространство; если точка
находится в пересечении областей определения двух систем и имеет
в этих системах координаты х* и xv, то функции х1' =fir(xJ)
имеют непрерывные производные до некоторого порядка и якобиан,
т. е. определитель матрицы
дх*'\
.дхЧ
отличен от нуля.всюду в рас-
сматриваемом пересечении областей. Это последнее ограничение
позволяет свободно переходить от одной системы координат, опре-
делённой в некоторой области, к любой другой из рассматриваемых
нами систем координат, определённых в той же области.
1) Более подробно с геометрией римановых пространств и пространств
аффинной связности читатель может познакомиться по книгам П. К. Р а-
шевского [8] и А. П. Нордена [3], а также статье автора и
А. А. Абрамова [1].
688 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [ГЛ. VII
Если мы рассмотрим все кривые х*(0, проходящие через неко-
торую точку пространства Хп, то производные координат X* =
! dx^ \
= 1-77-) в этой точке можно рассматривать как координаты векто-
\ at /0
ров, причём при преобразовании координат эти векторы преобра-
зуются по линейному закону X*’ = 2 А-i где Ai = Будем
дх^
называть определённый таким образом вектор касательным векто-
ром к данной кривой в данной точке. Совокупность всех касательных
векторов в некоторой точке х пространства Хп можно рассматри-
вать как совокупность всех векторов некоторого пространства Ап,
которое называется касательным пространством пространства Хп
в точке х и обозначается Ап(х). При этом малая окрестность
точки х пространства Хп находится во взаимно однозначном и
взаимно непрерывном соответствии с малой окрестностью начала
координат пространства Ап(х).
Частным случаем пространства Хп является n-мерная поверх-
ность в TV-мерном пространстве в этом случае касательные
пространства Ап(х) можно представлять себе как касательные пло-
скости к этой поверхности, а касательные векторы — как векторы
в этих плоскостях. Но в общем случае пространство Хп не пред-
полагается погружённым в другое пространство.
Будем называть п-мерным римановым пространством lVn
пространство Хп, в котором задано расстояние между точками
таким образом, что квадрат расстояния между бесконечно близкими
точками с координатами xi и xi-\~dxi равен
= i^dxidxK (j д)
г 3
Здесь величины — функции точки, преобразующиеся при пре-
образовании координат х1* по такому закону, чтобы выражение
осталось неизменным, причём квадратичная форма (7.1) является
формой индекса /. Пространство °Vn будем обозначать Vn.
В случаях пространств Vn и lVn пространства Ап(х) можно
считать соответственно пространствами Rn или lRn.
Зная расстояние между бесконечно близкими точками про-
странств Vn и lVn, мы можем определить длину дуги кривой как
интеграл j* d<s> вдоль этой дуги. Кривые пространств Vn и lVn,
дающие стационарное значение интегралу j* du>, называются гео-
дезическими линиями. Составляя уравнения Эйлера этой вариа-
ционной задачи, мы найдём, что эта система дифференциальных
уравнений, интегральными кривыми которой являются геодезические
РИМАНОВЫ ПРОСТРАНСТВА
689
§ 1]
линии, имеет вид
d-x1 ! у! к dx1 dxi
-rfF^0’ (7-2)
г j
где t параметр, пропорциональный длине дуги кривой, и
Г» — 1 у, th (dahk , dajh dajk\
+ <7'3)
h
где (a#) — матрица, обратная матрице (аи), т. е. У - Й.
h
В окрестности каждой точки мы можем определить отражение
по геодезическим линиям: при отражении от точки а каждая
точка х окрестности точки а переходит в точку 'х, лежащую на
геодезической линии, соединяющей точки х и а, по другую сторону
от точки а, причём точка а является серединой отрезка геодезиче-
ской линии, соединяющей точки х и 'х.
Если z — середина отрезка геодезической линии, соединяющей
достаточно близкие точки х и у, то произведение отражений от
точек х и z переводит точку х в точку у, а окрестность точки
х в окрестность точки у и тем самым пространство Ап(х) в
пространство Ап(у). Получаемое таким образом отображение
векторов пространства Ап(х) на векторы пространства Ап(у) назы-
вается параллельным переносом векторов из точки х в точку у.
Умея параллельно переносить векторы в бесконечно близкую
точку, мы можем определить параллельный перенос вектора вдоль
кривой. Для этого следует интегрировать вдоль данной кривой
систему дифференциальных уравнений
<7-4>
3 к
Если мы произведём параллельный перенос вектора вдоль
замкнутого контура, то в общем случае после возвращения в ис-
ходную точку мы получим вектор той же длины, но с другим
направлением. Если мы будем стягивать этот контур, то угол
между первоначальным вектором и вектором, полученным после
параллельного переноса, будет бесконечно малой того же по-
рядка, что и площадь двумерной поверхности, натянутой на рас-
сматриваемый контур. Поэтому при стягивании контура в точку
отношение этого угла к площади поверхности будет стремиться
к некоторому числу, называемому кривизной пространства Vn
или lVn в данной точке в двумерном направлении, определяемом
поверхностью, натянутой на контур. В общем случае в каждой
точке пространства Vn и lVn разным двумерным направлениям
соответствуют разные значения кривизны. Если пространства Vn
44 Зак. 177. Б. А. Розенфельд
690 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [гл. VII
и lVn обладают тем свойством, что значения кривизны во всех
двумерных направлениях и во всех точках одинаковы, эти про-
странства называются пространствами постоянной кривизны.
Из приведённого нами определения параллельного переноса
вектора видно, что при перенесении вектора вдоль геодезической
линии угол между вектором и геодезической линией не меняется.
В частности, касательный вектор к геодезической линии при пе-
ренесении вдоль неё остаётся касательным вектором, что видно
также из того, что формула (7.2) может быть получена из фор-
мулы (7.4) подстановкой вместо координат вектора X* координат
dx^
касательного вектора к кривой . Поэтому если нам дан геоде-
зический треугольник, т. е. треугольник, образованный из трёх
отрезков геодезических линий, то при перенесении вектора вдоль
контура этого треугольника вектор будет поворачиваться относи-
тельно касательных к сторонам треугольника только в угловых
точках. В каждой угловой точке вектор будет поворачиваться на угол,
равный углу между касательными в этой точке, т. е. если внут-
ренние углы геодезического треугольника равны А, В, С, то
в вершинах треугольника вектор повернётся соответственно на
углы А — тг, В — к, С—к, а при возвращении в исходную
точку-—на угол —Зтг. Поэтому кривизну в двумер-
ном направлении пространств Vn и lVn можно вычислить
как предел отношения углового избытка A -j- В -j- С — к геоде-
зического треугольника к его площади при стягивании этого
треугольника в точку.
Кривизна положительна, если угловой избыток Д~|-В-РС—к>0,
отрицательна, если Д + —п < 0, и равна нулю, если
— о.
Простейшими частными случаями пространств Vn и lVn
являются соответственно пространства Rn и lRn. Геодезическими
линиями этих пространств являются прямые линии и отраже-
ние по геодезическим линиям является обычным отражением от
точки. Так как произведение двух таких отражений, как мы
видели, является переносом, то в случае пространств Rn и lRn
параллельный перенос векторов совпадает с их обычным пере-
носом. Так как при параллельных переносах вдоль замкнуто-
го контура вектор пространств Rn и lRn совпадает со своим
первоначальным положением, то пространства Rn и lRn
являются соответственно пространствами Vn и lVn нулевой
кривизны.
Другим частным случаем пространств Vn и lVn являются
/z-мерные поверхности в пространствах R$ и LR$ с евклидовыми
касательными плоскостями. В этом случае
Jo)2 _ (dx, dx).
(7-5)
§ 1] РИМАНОВЫ ПРОСТРАНСТВА 691
Если поверхность отнесена к координатам и1, .. ., ип, то
dx=^4^idui (7.6)
i
и формулу (7.5) можно переписать в виде
d<»2=2 S (ft» ft)dai da3- (7-7>
t з
Можно показать, что параллельный перенос касательного век-
тора по поверхности в бесконечно близкую точку можно полу-
чить переносом этого вектора в пространстве Rn или lRn и про-
ектированием полученного вектора на касательную плоскость.
Для поверхностей пространства 7?3 определённая нами кри-
визна совпадает с обычной полной кривизной поверхности.
Пусть в каждой точке пространства Хп заданы функции,
точки Vjki преобразующиеся при преобразовании координат х* по
такому же закону, как и функции (7.7), но такие, что для них
не существует функций а^9 определяющих Г/л по формулам (7.3)
(это означает, что система дифференциальных уравнений (7.3)
относительно неизвестных а^ не интегрируема). Тогда в нашем
пространстве, так же как в Vn и lVn, можно определить парал-
лельный перенос векторов по формулам (7.4), т. е. отображение
пространств Ап(х) друг на друга вдоль кривых. Пространство
Хп с установленной таким образом связью касательных аффинных
пространств называется п-мерным пространством аффинной
связности Ln. Пространства Vn и lVn являются частными слу-
чаями пространств Ln,
В пространствах Ln можно определить геодезические линии
как линии, касательные векторы к которым при перенесении вдоль
них остаются касательными векторами. Эти линии определяются
теми же уравнениями (7.2), что и в пространствах Vn и lVni где
t—некоторый параметр, определённый с точностью до преобра-
зования 't = at Ь> называемый аффинным параметром геоде-
зической линии. Таким образом, хотя в пространстве не опреде-
лены расстояния между точками и нельзя сравнивать произвольные
отрезки геодезических линий, в этих пространствах благодаря
заданию на каждой геодезической линии аффинного параметра
можно сравнивать отрезки одной и той же геодезической линии:
если концам этих отрезков соответствуют значения аффинного
j j j j td. —
параметра q, t2, t3 и /4, то выражение не изменяется при
преобразовании аффинного параметра 't = at~}-b. В частности,
задание аффинного параметра позволяет определить середину
каждого отрезка геодезической линии, а следовательно, и отра-
жение по геодезическим линиям. В случае, когда Г^- = Vji, про-
44*
692 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [гл. VII
странство аффинной связности называется пространством без
кручения. Для таких пространств параллельный перенос вектора
может быть определён с помощью отражения по геодезическим
линиям, так же как в пространствах Vn и в этом случае
пространство аффинной связности вполне определяется заданием
геодезических линий и аффинного параметра на них. Пространства
Vn и lVn являются частными случаями пространств Ln без кручения.
Важным классом римановых пространств и пространств аффин-
ной связности являются симметрические пространства. Симмет-
рическими пространствами аффинной связности называются
такие пространства аффинной связности без кручения, в которых
отражение по геодезическим линиям от каждой точки переводит
геодезические линии в геодезические линии с сохранением их
аффинных параметров, т. е. не изменяет параллельного переноса
векторов или, как говорят, сохраняет аффинную связность. Сим-
метрическим римановым пространством называется такое рима-
ново пространство, в котором отражение по геодезическим
линиям является изометрическим преобразованием. Римановы про-
странства постоянной кривизны являются частными случаями
симметрических пространств. В симметрических римановых про-
странствах, не являющихся пространствами постоянной кривизны,
кривизны по различным двумерным направлениям в каждой точке
не совпадают, но окрестности различных точек могут быть ото-
бражены друг на друга таким образом, что кривизны по соот-
ветственным двумерным направлениям в соответственных точках
совпадают. Поэтому симметрические римановы пространства можно
рассматривать как непосредственное обобщение пространств по-
стоянной кривизны.
Геометрия пространств Vn впервые рассматривалась Риманом
в той же работе [1], где он определил пространства Sn. Простран-
ство lVn впервые рассматривалось Эйнштейном в связи с его теорией
тяготения (см. ниже, § 3). Пространства аффинной связности
впервые рассматривались Вейлем в связи с дальнейшими задачами
физики в той же книге [1], где он ввёл свои аксиомы простран-
ства Rn (см. § 1 главы I). Первые результаты теории симметриче-
ских римановых пространств были получены П. А. Широковым [1].
Общая теория симметрических римановых пространств и про-
странств аффинной связности была построена Картаном [5, 6].
§ 2. Неевклидовы пространства
как римановы пространства постоянной кривизны
Так как гиперсферы пространств Rn+1 и lRn+1 как частный
случай поверхностей этих пространств являются м-мерными рима-
новыми пространствами, неевклидовы пространства Sn и lSn, ко-
торые можно рассматривать как гиперсферы, также являются
§ 2] ПРОСТРАНСТВА постоянной КРИВИЗНЫ 693
n-мерными римановыми пространствами. Так как при этом ка-
сательные гиперплоскости к гиперсферам пространства Rn+1
и гиперсферам чисто мнимого радиуса пространства 17?п+1 яв-
ляются пространствами Rn, пространство Sn и пространство
1Sn отрицательной кривизны являются частными случаями
пространства Vn. Так как касательные гиперплоскости к гипер-
сфере вещественного радиуса пространства lRn+1 и к гиперсфере
чисто мнимого радиуса пространства l+1Rn+1 являются простран-
ствами lRn, пространство lSn положительной кривизны и про-
странство l+1Sn отрицательной кривизны являются частными
случаями пространства lVn.
Роль геодезических линий в неевклидовых пространствах Sn
и lSn, как мы показали в § 2 главы II, играют прямые
линии.
Вычислим кривизну пространств Sn и отрицательной кри-
визны, рассматриваемых как пространства Vn, Для этого восполь-
зуемся тем, что кривизну в двумерном направлении пространства
Vn можно вычислить как предел отношения углового избытка
Д-4-В-|-£—11 геодезического треугольника к его площади при
стягивании этого треугольника в точку. Роль геодезических
треугольников в неевклидовых пространствах играют обычные
треугольники. Так как площадь треугольника в пространстве Sn
с радиусом кривизны г, как мы видели в § 3 главы II, равна
5 = г2(д_|_В + С — к), (7.8)
то кривизна в любом двумерном направлении этого пространства
равна
, Л -j- 3 -j- С — тс __«. 1 _ 1 . Q
k ~11т г2 (л + в + с — тс) “ 1т 7? ~ 7* •
С другой стороны, так как площадь треугольника в простран-
стве с радиусом кривизны qi, как мы видели в § 4 главы II,
равна
5 = —Л—В —С), (7.10)
то кривизна в любом двумерном направлении этого пространства
равна
* 11111 —В —С) =11т(— — 7?' (7Л1)
Тем же способом, которым мы вывели формулу (7.10) в § 4
главы II, можно показать, что площадь треугольника в любом
пространстве lSn с радиусом кривизны г или qi вычисляется соот-
ветственно по формуле (7.8) или (7.10), откуда следует, что кри-
визна в двумерных направлениях этих пространств имеет соответ-
ственно вид (7.9) и (7.11).
694
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ
[гл. VII
Мы видим, что кривизна всех пространств Sn и lSn во всех
двумерных направлениях и во всех точках равна одному и тому же
1 1
числу и
т. е. тому числу, которое мы называли кри-
визной этих пространств.
Таким образом, неевклидовы пространства Sn и lSn являются
римановыми пространствами постоянной кривизны, причём кри-
визна неевклидовых пространств равна кривизне в двумерных
направлениях этих пространств, рассматриваемых как рима-
новы пространства.
Отсюда следует, что всякая поверхность постоянной отри-
цательной полной кривизны в пространстве 7?3 изометрична
части или нескольким частям плоскости 152 той же кривизны.
Теория поверхностей постоянной отрицательной полной кривизны
была разработана русским учёным Миндингом (Дерпт) [1, 2].
В этих работах Миндинг установил три типа поверхностей вра-
щения постоянной отрицательной полной кривизны, нашёл тригоно-
метрические соотношения в геодезических треугольниках на этих
поверхностях и обнаружил, что эти соотношения могут быть полу-
чены из таких же соотношений для сферы умножением радиуса
сферы на I, т. е. что эти соотношения совпадают с тригонометри-
ческими соотношениями Лобачевского. Однако, несмотря на то, что
работы Миндинга были опубликованы в 19-м и 20-м томах того же
журнала Крелля, в котором была напечатана «Врображаемая гео-
метрия» Лобачевского, связь исследований Миндинга с геометрией
Лобачевского была установлена только Бельтрами [1]. Как показал
Миндинг *), все поверхности вращения постоянной отрицательной
« 1
полной кривизны —2 имеют уравнения меридианов
Z =
с& — х* ,
—о-----9 dx,
х% 4- q2 — а2
(М2)
где а — параметр. При a = q выражение (7.12) легко интегри-
руется и меридиан определяется параметрическим уравнением
z = qs\x\t, х = ± <?(1п tgy + cos . (7.13)
Эта последняя кривая называется трактриссой и определяется
тем свойством, что отрезок её касательной между точкой касания
и осью z постоянен. Поверхность, образуемая вращением этой
кривой вокруг оси z, называется псевдосферой (черт. 92). Поверх-
ности вращения, соответствующие случаям а <4 q и а^> q, изобра-
жены на черт. 93 и 94. Как показал Бельтрами, верхняя и нижняя
половины псевдосферы изометричны части плоскости 15.2 отрица-
1) См. Каган [2], стр. 105—107.
§ 2] ПРОСТРАНСТВА ПОСТОЯННОЙ КРИВИЗНЫ 695
тельной кривизны, ограниченной дугой орицикла и двумя орто-
гональными ей параллельными прямыми. Верхняя и нижняя поло-
вины поверхностей, соответствующих
случаям a <Zq и а > q, изометричны
частям той же плоскости, ограниченным
соответственно дугой окружности и
двумя её радиусами и дугой экви-
дистанты, соответствующим ей отрез-
ком базы и двумя перпендикуляра-
ми к базе.
Тот факт, что пространства Sn
и lSn являются симметрическими
пространствами, очевиден из того, что
отражение от точки в этих простран-
ствах является движением.
Унитарные неевклидовы простран-
ства Kn(t), Кп(е), Кп(1, /),
^re(i, j) и Kn(i, ё) также изоме-
тричны римановым пространствам.
В самом деле, как мы видели в § 5
главы VI, квадрат линейного элемента
этих пространств при специальном вы-
боре координат точек можно записать
в форме (7.5), т. е. если отнести эти
пространства к вещественным коорди-
натам и1, ..., и2п в случае пространств 1Кп(Г) и Кп(е)
и к вещественным координатам и1, . . ., и±п в случае пространств
Kn(t, Л> Л и Kn(i, е), то dx можно записать в виде (7.6)
и формулу (7.5) в виде (7.7).
696 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [ГЛ. VII
Поэтому пространства Kn(t), lKn(i) и Кп(е) изометричны
2п-мерным римановым пространствам, а пространства Kn(i, j),
lKn(i, /) и Кп(1, е)— 4п-мерным римановым пространствам.
Выберем за вещественные координаты точек n-мерных унитар-
ных неевклидовых пространств вещественные координаты комплекс-
ных, двойных, кватернионных и антикватернионных координат
точек гиперплоскостей (п-]~ 1)-мерных унитарных евклидовых про-
странств, радиусы-векторы которых представляют точки унитарных
неевклидовых пространств. Тогда квадратичная форма является
положительно определённой в случае пространств Kn(i) и Kn(i, j)
и формой индекса 2Z, n, 4Z, 2п в случае соответственно пространств
^n(Z), l«n(h У) и Кп(1, ё). Поэтому пространства Kn(i)
и j) изометричны соответственно римановым простран-
ствам V2n и У4п, а пространства lKn(i), Кп(ё), lKn(i, j) и Kn(i, ё)
изометричны соответственно римановым пространствам 2lV2n,
nV2n, Романовы пространства, изометричные уни-
тарным неевклидовым пространствам, являются симметри-
ческими пространствами, так как отражение от точки в этих
пространствах является движением.
В то же время эти римановы пространства не являются
пространствами постоянной кривизны. В самом деле, через
каждую точку пространства Кп(1) и Кп(е) с радиусом кривизны г
можно провести нормальную n-цепь и прямую, причём нормальная
n-цепь пространств Kn(i) и Кп(е) изометрична пространству Sn
с тем же радиусом кривизны, а прямая этих пространств изомет-
рична сфере радиуса ~ соответственно в пространствах /?3 и 1/?3.
Поэтому кривизна во всяком двумерном направлении в п-цепи равна
1 4
— , а кривизна во всяком двумерном направлении на прямой равна .
Можно показать, что в произвольном двумерном направлении
кривизна нашего пространства равна -^-(1-[-ЗХ2) (Х2< ^^.Совер-
шенно аналогично это утверждение доказывается и для остальных
неевклидовых пространств.
Заметим, что пространство V2n, изометричное пространству
/Сп(7), является частным случаем А-пространства П. А. Широ-
кова [I]2), а пространство nV2n, изометричное пространству Кп(е),
является частным случаем расслоённого пространства П. К. Ра-
шевского [5]3). Л-пространства, теория которых была опублико-
вана П. А. Широковым в 1925 г., часто называют келеровыми
*) См. Штуди [4], стр. 343, а также Яно и Моги [1] и Широ-
ков [4].
2) См. также работу А. П. Широкова [1].
в) См. также работу автора [13].
§ 3] НЕЕВКЛИДОВА ГЕОМЕТРИЯ И ФИЗИКА 697
пространствами по имени немецкого математика Э. Келера [1],
рассматривавшего их в 1932 г. Эти пространства в связи с тео-
рией аналитических функций многих комплексных переменных
рассматривались также австрийским математиком С. Бергма-
ном [1] и советским математиком Б. А. Фуксом [1].
§ 3. Неевклидова геометрия и физика
В § 4 главы V мы познакомились с применением спинорных
представлений группы движений неевклидова пространства
к некоторым вопросам физики. Рассмотрим теперь значение гео-
метрии неевклидовых пространств для изучения реального про-
странства. В § 7 главы I мы видели, что пространство и время
реального мира согласно специальной теории относительности
можно рассматривать как пространство 1/?4. Но это описание
пространства и времени является одним из первых приближений,
хотя и более точным, чем описание механики Галилея — Ньютона,
считающей пространство и время независимыми друг от друга.
Следующее приближение было сделано самим Эйнштейном в его
теории тяготения («общей теории относительности»). Как показал
Эйнштейн, пространство и время реального мира с большей точ-
ностью можно рассматривать как риманово пространство 1V4,
кривизна в двумерных направлениях которого больше в тех об-
ластях, где больше плотность материи. Таким образом, про-
странство и время оказываются не только зависимыми друг от
друга, но их свойства оказываются зависящими и от материи,
формой существования которой они являются. Так как материя
распределена в мире неравномерно, это пространство 1V4 является
пространством переменной кривизны1).
Поэтому если в первом приближении пространство ХУ4 можно
считать пространством нулевой кривизны, в следующем прибли-
жении это пространство можно считать пространством
постоянной кривизны, кривизна которого равна среднему
значению кривизны пространства 1V4. Так как неевклидовыми
пространствами, геометрия которых в малых областях близка
к геометрии пространства 1/?4, являются пространство 1S4 положи-
тельной кривизны и пространство 2S4 отрицательной кривизны,
указанное пространство постоянной кривизны является простран-
ством X*S4, если среднее значение кривизны положительно, и про-
странством 2S4, если это среднее значение отрицательно. Заметим,
что и пространство 1S4 и пространство 2S4 простираются в беско-
нечность, однако гиперповерхность /= const, т. е. собственно
пространство, если рассматривать её как вполне геодезическую
поверхность этого пространства, в силу того, что геометрия этой
1) См. Фок [1].
698
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ
[гл. VII
гиперповерхности в малых областях близка к геометрии простран-
ства /?3, в первом случае является пространством Римана S3 и,
следовательно, имеет конечный объём, а во втором случае является
пространством Лобачевского х53 отрицательной кривизны и, сле-
довательно, простирается в бесконечность.
Для того чтобы составить себе приблизительное представление
о кривизне пространства, вычислим среднее значение кривизны
гиперповерхности t = const по современным астрономическим дан-
ным. Следует при этом иметь в виду, что данные астрономических
наблюдений всегда характеризуют положение только в некоторой,
ограниченной части мира, которая с прогрессом астрономии
постоянно расширяется, но всегда остаётся ограниченной. Ясно,
что данные, относящиеся к ограниченной части мира, нельзя рас-
пространять на всю бесконечную вселенную, в которой за преде-
лами обследованной нами части мира всегда могут найтись области,
обладающие свойствами, резко отличающимися от свойств знакомой
нам части мира. Однако средние астрономические данные по изу-
ченной нами части мира можно всё же рассматривать как весьма
вероятное приближение к истинным средним данным.
Вычисляя среднее значение кривизны гиперповерхности t = const
по значению средней плотности космической материи и отношению
средней скорости внегалактических туманностей к их расстоя-
нию от наблюдателя, которые согласно астрономическим данным
1941 г.
найдём,
соответственно равны 10 3 г!см и 1,8-10 17 сек \
что эта средняя кривизна равна отрицательному числу —
мы
1
причём q = 1,7 • 1027 см = 1,8 • 109 световых лет1). Поэтому в ука-
занном приближении наше пространство является простран-
ством Лобачевского XS3 отрицательной кривизны, т. е. прости-
рается в бесконечность', если считать указанную гиперповерхность
вполне геодезической, пространство и время составляют про-
странство 254 отрицательной кривизны.
С ещё большим приближением можно считать пространствами
постоянной кривизны отдельные участки пространства или про-
странства и времени.
Таким образом, возможно непосредственное применение к про-
странству и времени реального мира геометрий трёхмерных
и четырёхмерных неевклидовых пространств. Это применение
возможно, конечно, только в узких участках и при различных
упрощающих предположениях. Действительность гораздо богаче
и разнообразнее тех схем, которые даёт неевклидова геометрия, но
эти схемы могут служить ступенями в познании действительности.
Однако было бы неправильным считать, что значение неевкли-
довой геометрии для физики состоит только в этом возможном,
1) См. Ландау и Лифшиц [1], стр. 277.
ГЕОМЕТРИЯ ГРУПП ЛИ
699
§ 4]
весьма ограниченном её применении к геометрии реального про-
странства и времени и в ряде частных применений неевклидовой
геометрии к различным вопросам физики. На самом деле значение
неевклидовой геометрии для физики неизмеримо больше. Это
значение состоит прежде всего в том, что неевклидова геометрия
была необходимым этапом в развитии наших представлений о про-
странстве, показавшим, что геометрия Евклида не является един-
ственной возможной непротиворечивой геометрией, и давшим первый,
простейший пример пространства, обладающего кривизной. Без
открытия Лобачевским неевклидовой геометрии было бы невозможно
открытие Риманом геометрии римановых пространств, а без откры-
тия Римана были бы невозможны открытия современной физики.
§ 4. Инвариантная аффинная связность
и риманова метрика в группах Ли
Из изложенного выше видно, что в геометрии всех рассмот-
ренных нами пространств важную роль играют группы Ли — фунда-
ментальные группы всех этих пространств являются группами Ли.
Укажем на связи теории групп Ли с геометрией пространств аф-
финной связности и римановых пространств.
Из определения группы Ли видно, что всякая группа Ли
размерности п является частным случаем пространства Хп. Для
задания координат в окрестности каждой точки достаточно задать
координаты в какой-нибудь окрестности единицы группы. В ка-
честве кривых x(f), проходящих через единицу группы, можно
рассматривать однопараметрические подгруппы, т. е. подгруппы
элементов, зависящие от одного вещественного параметра /, причём
= x(^)x(Q. (7.14)
Параметр t, обладающий этим свойством, называется канони-
ческим параметром и определён с точностью до преобразова-
ния 't = at. В качестве кривых x(t), проходящих через произволь-
ный элемент группы, можно рассматривать смежные классы
однопараметрических подгрупп, проходящих через этот элемент.
Если — такой смежный класс, проходящий через элемент х(/0),
то канонический параметр подгруппы х-1(^0)х(^) или х(Сх-1(^о)
называется каноническим параметром смежного класса и опре-
делён с точностью до преобразования 't = at-\-b. Если элемент х
можно соединить с единицей группы однопараметрической под-
группой, причём х соответствует значению параметра ^—1, то
в силу (7.14) при целых т х(т)~хт и, следовательно, при
целых п х\-Л= хп и хп . Поэтому, рассматривая
700
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ
[ГЛ. VII
вещественное число t как предел последовательности рациональных
чисел, мы приходим к выводу, что все элементы однопараметри-
ческой подгруппы могут быть записаны в виде х(£) = х*. Если
элемент х нельзя соединить с единицей группы однопараметри-
ческой подгруппой, его всегда можно получить предельным пере-
ходом из элементов, соединимых с единицей однопараметрическими
подгруппами.
Векторы касательного пространства Лп (1) в единице группы Ли
можно рассматривать как касательные векторы к однопараметри-
ческим подгруппам, причём если векторы $ и 7] соответствуют
подгруппам x(t) и y(t), линии x(f)y(f) с параметром t соответ-
ствует вектор $ + В пространстве Ап(\) можно также опреде-
лить операцию коммутирования векторов: если векторы $ и т)
соответствуют подгруппам х (/) и у (/), линии z (f2)~x (/)у (/) x~\t) X
Х^-1(0 с параметром f2 соответствует вектор Этот вектор
называется коммутатором векторов £ и т] и обозначается так:
£ = [$т]]. Пространство Лм(1), если рассматривать операцию С = [Ь]]
как умножение векторов, является неассоциативной алге-
брой. Операция С=[^] удовлетворяет условиям
IN= — HJ, (7.15)
[[&)] с] + [i«i + [мч в] = о. (7.16)
Неассоциативная алгебра, умножение которой удовлетворяет
условиям (7.15) и (7.16), называется алгеброй Ли. Алгеброй Ли
является алгебра векторов пространства /?3 с обычным векторным
умножением, а также алгебра, полученная из любой ассоциативной
алгебры, если заменить в ней операцию умножения оф операцией
[оф] = — ра.
Всякая группа Ли однозначно определяет алгебру Ли, причём
одну и ту же алгебру Ли определяют различные группы Ли,
обладающие окрестностями единицы, допускающими гомеоморфное
отображение, при котором элементам х, у и z = ху одной окрест-
ности соответствуют элементы zx, 'у и rz = 'х'у другой окрест-
ности. Такие группы Ли называются локально изоморфными.
Среди всех групп Ли, локально изоморфных между собой, имеется
одна такая группа, что все остальные локально изоморфные группы
изоморфны фактор-группе этой группы по её дискретным коммута-
тивным нормальным делителям. Обратно, всякая алгебра Ли
определяет группу Ли с точностью до локального изоморфизма.
Всякий раз, где мы встречались с фактор-группой группы Ли
по дискретным нормальным делителям (переход от спинорной
группы к группе ортогональных матриц, переход от группы вра-
щений пространств /?п+1 и к группе движений пространств Sn
и 18п), мы имели дело с локально изоморфными группами Ли.
ГЕОМЕТРИЯ ГРУПП ЛИ
701
§ 4]
В каждую группу Ли можно единственным образом ввести
аффинную связность без кручения, инвариантную при преобра-
зованиях х > ха, х > ах и х > х для этого достаточно счи~
тать геодезическими линиями в группе её однопараметрические
подгруппы и их смежные классы, а за аффинный параметр на
этих геодезических линиях считать канонический параметр под-
группы или её смежного класса. При этом отражение по геодезии
ческим линиям от элемента группы а будет иметь вид
х ах~у а, (7.17)
откуда видно, что это отражение переводит геодезические линии
в геодезические линии с сохранением их аффинного параметра.
Поэтому определённая нами инвариантная аффинная связность
является аффинной связностью симметрического пространства.
Очевидно, что всякая вполне геодезическая поверхность
в группе Ли с определённой нами аффинной связностью также
является симметрическим пространством аффинной связности.
Верно и обратное: произведение отражений относительно двух
точек симметрического пространства также сохраняет аффинную
связность. Поэтому все произведения отражений и преобразования,
полученные предельным переходом из этих произведений, образуют
топологическую группу или, по крайней мере, окрестность единицы
такой группы (произведения отражений от бесконечно близких
точек представляют собой преобразования, бесконечно близкие
к единице этой группы). Эта группа, порождённая отражениями
от точек симметрического пространства, называется фундаменталь-
ной группой симметрического пространства. Фундаментальная
группа симметрического пространства всегда является группой Ли.
В силу своего определения аффинная связность симметрического
пространства инвариантна при преобразованиях фундамен-
тальной группы. В фундаментальной группе имеются элементы,
являющиеся произведениями отражений s от точки нашего
симметрического пространства на отражение s0 от некоторой
фиксированной точки этого пространства, находящиеся, во всяком
случае в некоторой окрестности каждой точки, во взаимно одно-
значном соответствии с точками этого пространства (в общем
случае отражение от точки может быть в то же время отражением
от некоторой другой точки, как, например, отражение от точки
на сфере). Эти произведения отражений составляют поверхность в
фундаментальной группе, проходящую через её единицу (при s = s0)
и изображающую, во всяком случае в некоторой окрестности
единицы, наше симметрическое пространство. Покажем, что эта
поверхность является вполне геодезической поверхностью в фунда-
ментальной группе, т. е. каждая геодезическая линия фундамен-
тальной группы, соединяющая две точки этой поверхности, лежит
на ней целиком. В самом деле, элементы группы, принадлежащие
702 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ли [гл. VII
к этой поверхности, удовлетворяют условию
х* = sqxSq = х-1 (7.18)
(так как s0(ss0) s0 = sos = (s,s0)'-1). С другой стороны, при пре-
образовании а нашей группы отражение s преобразуется в отра-
жение asa~1, вследствие чего элемент ss0 нашей поверхности
подвергается преобразованию
ss0 —> (asa^1) s0 = a (ss0) = a (ss0) (a*)"1. (7.19)
Геодезическая линия группы, соединяющая её единицу с эле-
ментом х, удовлетворяющим условию х* = х-1, имеет вид х*
и целиком состоит из элементов, удовлетворяющих этому условию,
так как (xz)* = (х*/ = (х-1/ = (х*)-1. Произвольная геодезическая
линия, соединяющая два элемента нашей поверхности, может быть
получена из этой геодезической линии преобразованием (7.19).
Отсюда следует, что произвольная геодезическая линия, соединяю-
щая две точки нашей поверхности, лежит на ней целиком. Таким
образом, всякое симметрическое пространство аффинной связ-
ности может быть представлено вполне геодезической поверх-
ностью его фундаментальной группы.
Поэтому геодезические линии симметрического простран-
ства состоят из точек, удовлетворяющих тому условию, что
произведения отражений от этих точек на отражение от неко-
торой фиксированной точки этой геодезической линии соста-
вляют однопараметрическую подгруппу фундаментальной
группы симметрического пространства.
Важнейшим классом групп Ли являются простые группы Ли,
т. е. такие группы Ли, которые не содержат недискретных Нор-
мальных делителей меньшей размерности и не локально изоморфны
группам, содержащим такие нормальные делители. Особенность
этих групп состоит в том, что в случае простых групп Ли и
групп, являющихся их прямыми произведениями, их инвариантная
аффинная связность порождается римановой метрикой, также инва-
риантной при преобразованиях хха, хах и х->х-1. При
этом в случае самих простых групп Ли эта метрика — единствен-
ная с точностью до изменения масштаба; она является метрикой
пространства Vn в случае компактных групп и метрикой про-
странства lVn в случае некомпактных групп.
Подгруппы простых групп, состоящие из элементов, переста-
новочных с одним элементом, и имеющие наименьшую размерность
среди всех таких подгрупп, называются ранговыми подгруппами
простых групп, а их размерность называется рангом простой
группы. Будем называть элемент простой группы регулярным
элементом, если элементы, перестановочные с ним, образуют ран-
говую подгруппу. Особенность ранговых подгрупп состоит в том,
ГЕОМЕТРИЯ ПРОСТЫХ ГРУПП ЛИ
703
§ 5]
что при инвариантной метрике в простой группе в ранговых
подгруппах господствует евклидова геометрия.
Если фундаментальная группа симметрического пространства
аффинной связности является простой, то благодаря тому, что
это пространство может быть представлено вполне геодезической
поверхностью фундаментальной группы, аффинная связность этого
пространства порождается инвариантной римановой метрикой.
Очевидно, что всякая вполне геодезическая поверхность в
группе Ли с определённой нами метрикой является симметриче-
ским римановым пространством. В том случае, если фундаменталь-
ная группа симметрического риманова пространства проста, верно
и обратное: всякое такое пространство изометрично вполне
геодезической поверхности его фундаментальной группы.
В симметрических пространствах, фундаментальные группы
которых просты, имеются поверхности, которые при изображении
пространства поверхностью в фундаментальной группе изобра-
жаются пересечением этой поверхности с ранговой подгруппой
группы. Эти поверхности могут быть поэтому определены как
поверхности симметрического пространства, состоящие из таких
точек, что произведения отражений от этих точек на отражение
от некоторой фиксированной точки этой поверхности перестано-
вочны с регулярным элементом группы. Размерность такой по-
верхности будем называть рангом симметрического пространства,
а сами эти поверхности ранговыми поверхностями^ Так как эти
поверхности являются пересечениями вполне геодезической поверх-
ности в группе, изображающей симметрическое пространство, и
подгруппы, также являющейся вполне геодезической поверхностью,
ранговые поверхности симметрических пространств являются
вполне геодезическими поверхностями ранговых пространств.
Особенность ранговых подпространств симметрических римановых
пространств, фундаментальные группы которых просты, состоит
в том, что в ранговых подпространствах господствует евкли-
дова геометрия.
Теория аффинной связности и римановой метрики в группах Ли
была построена Картаном [5, 6, 7, 8, 9].
§ 5. Геометрия простых групп Ли
как неевклидова геометрия
Все простые группы Ли были найдены Киллингом и Карта-
ном х). Как показали Киллинг и Картан, все компактные простые
группы Ли изоморфны или локально изоморфны следующим
группам'.
1) См. Чеботарёв [1], стр. 500 и Понтрягин [1], стр. 501,
где изложен наиболее изящный вывод этой классификации, принадлежа-
щий Е. Б. Дынкину [1].
704 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [гл. VII
Ап— группам комплексных унитарных матриц (п+1)-го
порядка с определителем -|- 1;
Вп—группам вещественных ортогональных матриц (2лг~4~ 1) - го
порядка с определителем + 1 j
Сп—группам комплексных унитарных симплектических
матриц 2п-го порядка;
Dn — группам вещественных ортогональных матриц 2п-го
порядка с определителем -|- 1
и пяти изолированным группам G,2, Fv EQ, Еп и Е3. При
этом в случае групп Ап, Вп, Сп, Dn п пробегает все натураль-
ные значения за исключением п = 2 в случае групп Dn, Заме-
тим, что, как мы видели в § 5 главы VI, группа комплексных
унитарных симплектических матриц 2п-го порядка изоморфна
группе кватернионных унитарных матриц п-го порядка.
Индекс в обозначении этих групп указывает ранг группы. Все
элементы групп Ап, Вп, Сп и Dn являются матрицами линейных
преобразований соответственно в пространствах Лп+1(7), Д2п+1,
An(i, j) и А2п, причём эти преобразования, как мы видели в § 11
главы I и в § 5 главы VI, приводятся соответственно к виду
'х* = Лд 5 = 0; (7’20)
— х2*-1 cos ср,- — x2i sin Ф;, 1
(7.21)
'x2i = x2*-1 sin x2i cos 'x2n+1 = x2n+1; J
'x* (cos^-J-^5*11?*)-*^ (7.22)
'x2*-1 — x^“1cos<9i—x2*sinvi/x2i = x2i^1sin^iArx2icos^>i. (7.23)
Регулярными элементами этих групп являются матрицы указан-
ного вида, у которых все числа различны, вследствие чего
матрицы, перестановочные с этими регулярными элементами,
являются матрицами того же вида. Координатами определённых
таким образом ранговых подгрупп являются числа Их число
в первом случае равно /г —j— 1, но в этом случае они связаны со-
отношением —0, а в трёх остальных случаях равно п,
г
вследствие чего размерность ранговых подгрупп указанных групп
во всех случях равна п.
Как показал Картан [7], всякой некомпактной простой группе
Ли соответствует такая компактная простая группа Ли, что при
переходе от вещественных координат этих групп к комплексным
они дают одну и ту же комплексную группу или, как говорят,
имеют одну и ту же комплексную форму; при этом одной ком-
пактной группе соответствуют несколько некомпактных групп.
ГЕОМЕТРИЯ ПРОСТЫХ ГРУПП ЛИ
705
§ 5J
Некомпактные простые группы Ли считаются принадлежащими
к тому же классу Ап, Вп, Сп, Dn, G2, Fit f6> Е Е что и со_
ответственная компактная группа. Следует отметить, что класс D
не содержит компактной простой группы (группа ортогональных
матриц четвёртого порядка индекса 0 локально изоморфна пря-
мому произведению двух групп ортогональных матриц третьего
порядка того же индекса, так как эта группа локально изоморфна
связной группе движений пространства S3, а эта последняя группа
изоморфна прямому произведению двух паратактических сдвигов,
каждый из которых изоморфен группе движений плоскости &>)’
но этот класс содержит некомпактную простую группу (группу
ортогональных матриц четвёртого порядка индекса 1, локально
изоморфную связной группе движений пространства xSa).
Из изложенной классификации мы видим, что каждый из клас-
сов Ап, Вп, Сп, Dn простых групп содержит группы движений
неевклидовых пространств. В самом деле, группа движений
пространства локально изоморфная группе комплексных
унитарных матриц (тг-Р0’го порядка с определителем +1, и
группа движений пространства Кп(е), имеющая одну и ту же
комплексную форму, являются простыми группами класса Ап.
Группа движений пространства S.?n, изоморфная группе
вещественных ортогональных матриц (2п+1)-го порядка с опре-
делителем + 1, и группы движений пространств lS%ni имеющие
одну и ту же комплексную форму, являются простыми группами
класса Вп.
Группа движений пространства локально изоморф-
ная группе кватернионных унитарных матриц я-го порядка, и
группы движений пространства е), имеющие одну и ту
же комплексную форму, являются простыми группами класса Сп.
Группа движений пространства S2n_v локально изоморфная
группе вещественных ортогональных матриц 2п-го порядка с опре-
делителем + 1, и группы движений пространств за исклю-
чением групп движений пространств S3 и 2S3, являются простыми
группами класса Dn.
Стационарными подгруппами пространств Кп(1) и Кп(е) являются
группы вращений этих пространств, изоморфные прямым произ-
ведениям групп движений пространств ^_1(Z) и соответ-
ственно на группы комплексных и двойных чисел единичного
модуля. Первые из этих групп являются соответственно компакт-
ной и некомпактной простыми группами класса An_lt а вторые —
соответственно компактной и некомпактной простыми группами
класса Dv Так как размерность группы Ап равна n(n-j-2),
а размерность прямого произведения групп Ап_± и Dt равна п2
(размерности групп Ап_1 и £)х соответственно равны (п— 1) (п -}- 1)
и 1), разность этих размерностей равна вещественной размерности
пространств Kn(i) и Кп(е), т. е. 2п.
45 Зак. 177. Б. А. Розенфельд
706
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ
[гл. VI
Стационарными подгруппами пространств S2n и lS.2n являются
группы вращений этих пространств, изоморфные группам движе-
ний пространств S2n-1 и kS.2n_lf являющимся соответственно ком-
пактными и некомпактными простыми группами класса Dn. Так
как размерность группы Вп равна n(2n-f“l)» а размерность
группы Dn равна п(2п—1), разность этих размерностей равна
размерности пространства S.2ni т. е. 2п.
Стационарными подгруппами пространств 7Cn_1(Z, /) и е)
являются группы вращений этих пространств, изоморфные прямым
произведениям групп движений пространств J) и /Q_2(Z, е)
соответственно на группы кватернионов и антикватернионов еди-
ничного модуля. Первые из этих групп являются соответственно
компактными и некомпактными простыми группами класса Cn~lt
а вторые — соответственно компактными или некомпактными
простыми группами класса Cv Так как размерность группы Сп
равна п (2п -f- 1), а размерность прямого произведения групп Сп_г
и Сх равна 2тг2— Зя-|-4 (размерности групп Сп_г и Сх соот-
ветственно равны (п—1)(2лг—1) и 3), разность этих размерно-
стей равна вещественной размерности пространств J) и
е), т. е. 4(п—1).
Стационарными подгруппами пространств и lS.2n_1
являются группы вращений этих пространств, изоморфные груп-
пам движений пространств S2n_2 и kS.2n_2, являющимся соответ-
ственно компактными и некомпактными простыми группами класса
Вп_1. Так как размерность группы Dn равна п(2п—1), а раз-
мерность группы Вп_± равна (п—1)(2п—1), разность этих
размерностей равна размерности пространства S.2n_lf т. е. 2п—1.
Заметим, что группа проективных преобразований простран-
ства Рп, изоморфная группе движений пространства Кп(е) (см.
§ 6 главы VI), является простой группой класса Ап.
Группы конформных преобразований пространств C.2n_v
zC2n_t, £^-2’ 1^2п-2» изоморфные группам движений пространств
x52n, 1» г+1^2п-1 (см- § главы IV), за исключением
группы конформных преобразований плоскости *С2, являются
простыми группами классов Вп и Dn.
Группа симплектических преобразований пространстваSp.2n_lt
изоморфная группе движений пространства е) (см. § 7 главы VI),
является простой группой класса Сп,
Заметим также, что группы движений евклидовых пространств
и группа аффинных преобразований аффинных пространств не
являются простыми группами, так как они содержат нормальный
делитель — группу переносов.
Приведём геометрические интерпретации трёх из пяти изоли-
рованных простых групп.
Компактной группой класса О2 является группа непрерывных
автоморфизмов алгебры октав (см. § 8 главы V). Если ввести
§5]
ГЕОМЕТРИЯ ПРОСТЫХ ГРУПП ЛИ
707
в алгебру октав метрику пространства /?8, то эту группу можно
рассматривать как группу преобразований этого пространства. Так
же как при рассмотрении группы автоморфизмов алгебры кватер-
нионов (см. § 1 главы VI), показывается, что непрерывные авто-
морфизмы алгебры октав изображаются в пространстве /?8 враще-
ниями гиперплоскости, проходящей через точку, изображающую
нуль алгебры, перпендикулярно к вещественной оси. Если мы пере-
множим две октавы, изображающиеся векторами в этой гиперпло-
скости, то проекцию вектора, изображающего произведение этих
октав, на гиперплоскость можно рассматривать как «векторное
произведение» данных векторов. Поэтому указанную группу можно
определить как группу линейных преобразований векторов про-
странства сохраняющую скалярное и определённое нами вектор-
ное произведение векторов.
Как показал Борель [1], группа движений октавной унитар-
ной неевклидовой прямой K^i, J, I) (см. § 9 главы VI) также
является компактной простой группой класса С2. При этом
стационарная подгруппа этой прямой является прямым произведе-
нием двух групп Лх (так как размерность группы О2 равна 14,
а размерность прямого произведения двух групп Лх равна 6 (раз-
мерность группы Лх равна 3), разность этих размерностей равна
вещественной размерности прямой j, Z), т- е- 8).
Как показал Фрейденталь [1], группа движений октавной уни-
тарной неевклидовой плоскости K2(J,, J, Z) (см. там же) является
компактной простой группой класса F4. При этом стационарная
подгруппа этой плоскости является группой В4 (так как размер-
ность группы F4 равна 52, а размерность группы В4 равна 36,
разность этих размерностей равна вещественной размерности пло-
скости /С2(/, у, Z), т. е. 16).
Фрейденталь же [1] показал, что группа проективных прео-
бразований плоскости P2(l> j, Z) является некомпактной про-
стой группой класса Е$. Из изоморфизма этой группы и группы
движений плоскости /С2(/, у, Z; е) (см. там же) следует, что группа
движений плоскости К2(1, j\ 1\ е) является некомпактной про-
стой группой класса F6. Стационарная подгруппа плоскости
K2(it jе) изоморфна группе проективных преобразований плоскости
Р2(Z, у, Z), переводящих в себя 0-пару; эта последняя группа
изоморфна прямому произведению группы коллинеаций прямой
P1(ii j, Z) на группу вещественных чисел по умножению; первая
из этих групп изоморфна группе конформных преобразований про-
странства С8, т. е. группе движений пространства 1S9, и, значит,
является некомпактной простой группой класса вторая из этих
групп является некомпактной простой группой класса £>х.
Так как группы движений плоскостей /С2(/, у, Z; е) и /С2(/, у, Z; Z')
(см. там же) имеют одну и ту же комплексную форму, а последняя
группа вследствие компактности плоскости K2(i, J, 1\ Г) компактна,
45*
708 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [гл. VII
мы получаем, что группа движений комплексной октавной уни-
тарной неевклидовой плоскости К.2 j, l*9 I') является компакт-
ной простой группой класса EQ, а стационарная подгруппа пло-
скости ZC2(Z,/, Z; /') изоморфна прямому произведению групп и
(так как размерность группы EQ равна 78, а размерность пря-
мого произведения групп £>б и Dt равна 46 (размерность групп Db
и соответственно равна 45 и 1), разность этих размерностей
равна вещественной размерности плоскости /С2(/, /, Z; /')> т- е- 32)х).
Мы видим, что простые группы Ли почти всех классов могут
быть интерпретированы как группы движений различных неевкли-
довых пространств, т. е. геометрии пространств, фундаментальными
группами которых являются простые группы Ли, почти во всех
случаях можно рассматривать как неевклидовы геометрии.
По этому поводу заметим, что неевклидова геометрия в той
форме, в которой её открыл Лобачевский, бывшая исторически
первой непротиворечивой геометрией, отличной от евклидовой,
положила начало появлению целого ряда таких геометрий. Расши-
рившееся в результате открытия Лобачевского понятие о простран-
стве привело к построению целого ряда новых геометрий, опре-
деляемых различными группами преобразований: учение о проектив-
ных свойствах фигур в евклидовом пространстве превратилось
в геометрию проективного пространства; учение о сферах и ок-
ружностях в евклидовом пространстве превратилось в геометрию
конформного пространства; учение о нуль-системах в евклидовом
пространстве превратилось в геометрию симплектического простран-
ства. В ряду этих геометрий сама неевклидова геометрия заняла
место важного, но частного случая.
В предыдущей и этой главах мы показали, что классическое
понятие неевклидовой геометрии может быть расширено таким
образом, что неевклидовы геометрии представляют собой об-
щую схему геометрической интерпретации почти всех классов
простых групп Ли,
§ 6. Общая теория образов симметрии
в неевклидовых пространствах
В § 2 мы видели, что неевклидовы пространства являются сим-
метрическими римановыми пространствами.
Этот факт представляет собой частный случай следующего,
более общего факта: все симметрические пространства, фунда-
ментальные группы которых являются группами движений не-
евклидовых пространств или группами, состоящими из части
связных компонент этих групп, изометричны многообразиям
некоторых геометрических образов в этих неевклидовых про-
странствах с метриками, инвариантными при движениях этих
1) См. работу автора [23].
§ б] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 709
пространств. Такими геометрическими образами являются образы,
симметрии неевклидовых пространств.
В сямом деле, если фундаментальная группа симметрического
пространства является группой движений неевклидова пространства
или группой, состоящей из части связных компонент этой группы,
то отражение от точки симметрического пространства является
инволюционным движением этого неевклидова пространства и вся-
кой точке симметрического пространства соответствует некоторый
образ симметрии в неевклидовом пространстве, относительно ко-
торого данное инволюционное преобразование является симметрией.
Если отражения от точки симметрического пространства оставляют
неподвижными более одной точки этого пространства, все эти точки
изображаются одним образом симметрии неевклидова пространства.
Поэтому в общем случае полученные таким путём образы симмет-
рии взаимно однозначно изображают симметрическое пространство
только в некоторой окрестности точки, не содержащей двух точек,
определяющих одно и то же отражение. Но в том случае, когда
отражение от точки симметрического пространства оставляет не-
подвижной только одну точку, построенное многообразие образов
симметрии взаимно однозначно изображает симметрическое про-
странство в целом. Построенное многообразие образов симметрии
можно рассматривать как модель данного симметрического про-
странства.
Покажем, что всякое многообразие образов симметрии неев-
клидова пространства, на котором группа движений транзи-
тивна, является моделью симметрического пространства, фун-
даментальная группа которого изоморфна группе движений
неевклидова пространства или группе, состоящей из части связ-
ных компонент этой группы. В самом деле, всякому образу сим-
метрии нашего многообразия мы можем поставить в соответствие
движение, являющееся произведением симметрий относительно этого
образа и относительно некоторого фиксированного образа из этого
многообразия. Эти произведения симметрий составляют поверхность
в группе движений, взаимно однозначно изображающую наше много-
образие образов симметрии. Так же как при аналогичном отобра-
жении симметрического пространства на поверхность в группе,
доказывается, что полученная поверхность является вполне геоде-
зической поверхностью в группе движений с её инвариантной ме-
трикой. Но эта поверхность является симметрическим римановым
пространством.
Рассмотрим теперь произвольное произведение симметрий отно-
сительно наших образов симметрии
$i$2 • * • (7.24)
и построим преобразование
e(sxs2 ... s,n)a-1, (7.25)
46 Зак. 177. Б. А. Розенфельд
710 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [гл. VII
где а — произвольное движение. Преобразование (7.25) можно пе-
реписать в виде
as^^as^a-1 . . . asma~\ (7.26)
т. е. в виде произведения преобразований as fl"1. Однако преобра-
зование asp-1 само является симметрией относительно того образа
симметрии, который получен из образа симметрии, определяющего
симметрию с помощью движения а. Поэтому произведения сим-
метрий образуют нормальный делитель группы движений; дополнив
эти произведения симметрий преобразованиями, получаемыми из
них предельным переходом, мы получим нормальный делитель
группы движений. Этот нормальный делитель представляет собой
фундаментальную группу нашего симметрического пространства,
т. е. является группой Ли. Но группы движений неевклидовых про-
странств, за исключением пространств <$3 и 2С3, являются простыми
группами Ли и не могут иметь недискретного нормального дели-
теля меньшей размерности. Поэтому фундаментальная группа со-
впадает с группой движений или с частью её связных компонент.
Очевидно, что фундаментальная группа всегда совпадает с груп-
пой движений, если эта последняя группа связна.
Примером того случая, когда фундаментальная группа симме-
трического пространства совпадает не со всей группой движений,
а с частью связных компонент этой группы, является простран-
ство Кп(р), отражения от точек которого порождают группу дви-
жений первого рода, являющуюся только одной связной компонен-
той группы движений.
Из свойств симметрических римановых пространств непосред-
ственно следует, что метрика симметрического пространства
в многообразии образов симметрии неевклидова пространства
является инвариантной при преобразованиях фундаментальной
группы этого симметрического пространства, т. е. при дви-
жениях неевклидова пространства.
Поэтому многообразия образов симметрии в неевклидовых
пространствах можно рассматривать как модели симметри-
ческих пространств и применять к их изучению теорию сим-
метрических пространств.
Картаном [7] была проведена классификация всех симметрических
римановых пространств, фундаментальными группами которых
являются компактные простые группы Ли. Он назвал симметриче-
ские пространства, фундаментальные группы которых являются
группами класса А, соответственно пространствами типов А I, ЛИ,
А III и А IV; симметрические пространства, фундаментальные группы
которых являются группами класса В, соответственно простран-
ствами типов BI и В II; симметрические пространства, фундамен-
тальные группы которых являются группами класса С, соответ-
ственно пространствами типов CI и СП и симметрические простран-
§ 6] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 71 1
ства, фундаментальные группы которых являются группами класса/?,
соответственно пространствами типов DI, 7)11 и DIII. Укажем
многообразия образов симметрии пространств Sn, Kn(i) и Kn(i, /),
являющиеся моделями этих симметрических римановых пространств 1).
Моделями симметрических римановых пространств типов АI,
А II, А III и А IV являются соответственно: многообразие нормаль-
ных /г-цепей пространства Кп(1)> многообразие паратактических
конгруэнций этого пространства (при нечётном п), многообразия
m-мерных плоскостей этого пространства и само пространство
Моделями симметрических римановых пространств типов В I и
ВII являются соответственно многообразия m-мерных плоскостей
пространства S2n и само пространство S2n.
Моделями симметрических римановых пространств типов CI и
СП являются соответственно многообразие нормальных комплекс-
ных n-цепей пространства Kn{i, j) и многообразия m-мерных пло-
скостей этого пространства (случай самого пространства Kn(i, J)
Картан рассматривает как частный случай пространства типа СП
при m = 0).
Моделями симметрических римановых пространств типов DI,
DII и D III являются соответственно: многообразия m-мерных пло-
скостей пространства S2n+1, само пространство S2n+1 и многообра-
зие паратактических конгруэнций этого пространства.
Образы симметрии проективного пространства Рп, конформных
пространств Сп и 1Сп и симплектического пространства
группы преобразований которых являются простыми группами Ли,
изоморфными группам движений неевклидовых пространств, изо-
бражаются образами симметрии этих неевклидовых пространств,
и поэтому многообразия этих образов симметрии также можно
рассматривать как модели симметрических римановых пространств.
Картан показал также, что имеется только один вид симметри-
ческого пространства, фундаментальной группой которого является
компактная простая группа G2, два вида симметрических про-
странств, фундаментальной группой которых является компактная
простая группа F^ и четыре вида симметрических пространств,
фундаментальной группой которых является компактная простая
группа £6. Нетрудно проверить, что моделью единственного сим-
метрического пространства, фундаментальная группа которого есть
группа О2, является прямая Kt(Z, /, /), моделью одного из сим-
метрических пространств, фундаментальная группа которых есть
группа F4, является плоскость j, Z)> а моделью одного из
симметрических пространств, фундаментальная группа которых
есть группа £6, является плоскость K2(i9 j, l*> 1')> если за рас-
стояние между двумя точками этой плоскости принять модуль | ш |
комплексного расстояния а) между точками этой плоскости.
1) См. работу автора ]15].
46*
712
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ
[гл. VII
Многообразия образов симметрии пространств, группы пре-
образований которых не являются простыми группами Ли или
прямыми произведениями таких групп, также можно рассматривать
как модели симметрических пространств, так как эти многообра-
зия можно изобразить вполне геодезическими поверхностями в соот-
ветственных группах. Однако, так как в эти группы нельзя ввести
инвариантной метрики, а можно ввести только инвариантную аф-
финную связность, симметрические пространства, моделями кото-
рых служат образы симметрии этих пространств, в общем случае
являются симметрическими пространствами аффинной связности.
Примером такого пространства являются пространства Rn и lRn.
Многообразия точек этих пространств, т. е. сами пространства Rn
и lRn, являются частными случаями симметрических римановых
пространств, но многообразия m-мерных плоскостей этих про-
странств в общем случае являются моделями симметрических про-
странств аффинной связности, в которые нельзя ввести инвариант-
ной метрики. Заметим, что фундаментальными группами пространств
Rn и *Rn, рассматриваемых как симметрические пространства,
являются не группы движений, а группы переносов, являющиеся
нормальными делителями групп движений.
Рассмотренные нами симметрические пространства являются
частными случаями симметрических пространств аффинной связности
с кручением, введённых П. К. Рашевским [6, 7]. Симметрические
пространства в смысле Рашевского, не являющиеся симметриче-
скими пространствами в смысле Картана, также допускают модели
в виде многообразий геометрических образов в пространствах
с различными группами преобразований, однако здесь эти геоде-
зические образы уже не являются образами симметрии.
Как мы видели, всякая пара образов симметрии неевклидова
пространства определяет числовые инварианты — собственные числа
матрицы движения, являющегося произведением симметрий относи-
тельно этих образов, или функции от этих собственных чисел, и
геометрические коварианты — неподвижные точки этого движения
или определяемые этими точками инвариантные прямые, плоскости
и т. д.
Для пар образов симметрии в неевклидовых пространствах,
обладающих тем свойством, что матрицы движений, являющихся
произведениями симметрий относительно этих образов, приводятся
к диагональному виду, можно доказать следующую теорему.
Задание числовых инвариантов двух образов симметрии
в неевклидовом пространстве, обладающих тем свойством, что
матрицы движений, являющихся произведением симметрий от-
носительно этих образов, приводятся к диагональному виду,
определяют эти два образа симметрии с точностью до движения.
Рассмотрим две пары образов симметрии xv х2 и xlt х,2, сим-
метрии относительно которых мы будем соответственно обозначать
§ 6] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 713
через s2 и s.2. Эти две пары образов симметрии обладают
тем свойством, что произведения симметрий и имеют одни
и те же собственные числа. Требуется доказать, что существует
такое движение а, которое одновременно переводит образ х±
в образ xlt а образ х2 в образ х2. Так как при движении а сим-
метрия s переходит в симметрию asa~\ то искомый элемент а
должен удовлетворять условиям
as^1 = sv as^a,-1 = s2. (7.27)
Из совпадения собственных чисел произведений симметрий сле-
дует, что существует движение р, удовлетворяющее условию
Р^зР-1 = sj2. (7.28)
Перемножая левые и правые части условий (7.27), мы находим
что движение, удовлетворяющее условиям (7.27), всегда удовле-
творяет условию (7.28), однако обратное в общем случае не имеет
места. Рассмотрим движение р, удовлетворяющее условию (7.28)
и не удовлетворяющее условиям (7.27).
Это движение р переводит образы симметрии х± и х2 в неко-
торые образы симметрии х± и х2, причём симметрии относительно
этих образов имеют соответственно вид psj)-1 и ps^p-1. Покажем,
что
st(ps1p-1) = s2(ps2p-1). (7.29)
В самом деле, умножая обе части (7.28) справа на ps2p-1, мы
получим:
(ps^p-1) (ps-зр-1) = pSip-1 — (sps.^ps^p-1. (7.30)
Умножая вторую и третью части (7.30) слева на мы получим
(7.29).
Покажем, далее, что преобразование перестановочно
с преобразованием s±s2. В самом деле, в силу (7.28) и (7.29)
(SiPSiP-1) (?Л) = (^«^-^(pSi^ap-1) = stps2p-1 =
= (^2Р-1) (P^tp-1) (pSjp-1) = (SiP^lP-1)^!^"1) =
= SiCP^s.ap-1)-1^^-1) = s1(s1s2)-‘ps1p-1 = (sts2) (SiPSip-1).
(7.31)
Так как движение ^(p^p-1) является произведением симметрий
относительно двух образов симметрий, принадлежащих к связному
пространству образов симметрии, то симметрии s1 и р^р"1 можно
соединить однопараметрическим семейством симметрий, а умножая
все симметрии этого семейства слева на мы получим однопа-
раметрическое семейство преобразований, соединяющих движение
714 РИМАНОВЫ ПРОСТРАНСТВА# ГРУППЫ ли [гл, VII
s1(ps1p~1') с единицей группы движений. Так как это движение,
как мы только что показали, перестановочно с произведением сим-
метрий ^$2, матрица которого по нашему условию приводится
к диагональному виду, матрица движения s1(ps1p~1) также приво-
дится к диагональному виду и, следовательно, движение s1(ps1p~1)
может быть соединено с единицей группы движений однопараме-
трической подгруппой. Умножив все движения этой подгруппы
слева на мы получим смежный класс по этой подгруппе. Все
элементы этого смежного класса в силу § 4 являются симметриями
относительно образов симметрии, составляющих геодезическое се-
мейство образов симметрии, соединяющее образы симметрии
и хк. Точно так же, умножая все преобразования этой подгруппы
слева на мы получим другой смежный класс по этой подгруппе,
все элементы которого являются симметриями относительно обра-
зов симметрии, составляющих геодезическое семейство образов
симметрии, соединяющее образы симметрии х2 и х2. На отрезках
этих геодезических семейств образов симметрии, соединяющих
образы симметрии xv хх и х2, х2, существуют середины — образы
симметрии 'х± и 'х2, при этом симметрии относительно последних
имеют соответственно вид
_ £
и (7-32)
Образы симметрии 'х± и zx2 обладают тем свойством, что при
симметрии относительно образа 'xt образ хх переходит в образ хх
и обратно, а при симметрии относительно образа ' х2 образ х2
переходит в образ х2 и обратно.
В силу (7.32) мы можем записать:
1
= 's-jjsjj-1 = $2'$2 = 's^p-1 = 3 = q. (7.33)
Поэтому
q-^q — ('s£i) $1 CSiPs^-1) = psj}-1, (7.34)
q-^q — ('s2s.2) s2 ('s.ips2p-i') = ps2p-\ (7.35)
t. e.
«1 = (<7P) $1 (<7P)-1> «I = (W) (7P)-1 (7.36)
и искомым движением нашего пространства, переводящим пару
образов симметрии xv х2 в пару образов симметрии хх, х2,
является движение s^ps^.
§ 6]
ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ
715
Условие этой теоремы выполнено для любых пар образов сим-
метрии пространств Sn, Kn(i) и Kn(i, /), матрицы всех движений
которых приводятся к диагональному виду.
Эта теорема непосредственно переносится на образы симмет-
рии пространств РП) Сп, и Spin+i, фундаментальные группы
которых изоморфны группам движений неевклидовых пространств.
Из этой теоремы можно сделать ряд выводов. Во-первых, ста-
ционарные расстояния m-мерных плоскостей пространств S , ,
Kn(i, J), j) и Kn(i, e) и инварианты
нормальных ft-цепей пространств и определяют пары
образов симметрии с точностью до движения этих пространств.
Во-вторых, инварианты m-пар, квадрик и линейных комплексов
п — 1 „ п
—2—мерных плоскостей пространства Рп определяют пары обра-
зов симметрии с точностью до проективного преобразования.
В-третьих, стационарные углы m-мерных сфер пространств Сп
и 1Сп определяют пары образов симметрии с точностью до проек-
тивного преобразования. В-четвёртых, инварианты (2m-|- ^-мер-
ных плоскостей пространства Sp.2n+1 определяют пары этих обра-
зов симметрии с точностью до симплектического преобразования.
Частный случай этой теоремы — о том, что стационарные углы
m-мерных плоскостей, проходящих через одну точку простран-
ства, определяют пару этих плоскостей с точностью до вращения
(эквивалентный тому, что стационарные расстояния т-мерных
плоскостей пространства Sn определяют пару этих плоскостей
с точностью до движения), был доказан Д. И. Перепёлкиным [1].
Заметим, что задача определения числовых инвариантов двух
„ ft — 1
квадрик или двух линейных комплексов ——мерных плоскостей
пространств Рп совпадает с известной задачей линейной алгебры
об определении совокупных инвариантов двух квадратичных или
двух кососимметрических билинейных форм.
При несколько усложнённых условиях эта теорема верна и
для более широкого класса пространств и групп преобразований,
в частности для пространств Rn и lRn. В этом случае, так как
движения пространств Rn и lRn. при нечётном п могут быть пред-
ставлены матрицами (ft—1)-го порядка
' 1 о
а 1
(7.37)
R
где R — матрица вращения в гиперплоскости пространства Rn
или lRn, эти движения в общем случае нельзя представить в диа-
716 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ли [гл. VII
гональной форме, и мы должны заменить это требование требова-
нием приводимости матрицы к диагональной форме (это требо-
вание всегда выполнено в пространстве Rn). С другой стороны,
здесь числовыми инвариантами образов симметрии будут уже не
только собственные числа матриц (7.37) или функции от них, но
и число а этих матриц, равное длине вектора переноса, на кото-
рый смещается гиперплоскость, в которой происходит вращение
с матрицей R (заметим, что число а не является инвариантом при
преобразовании матрицы (7.37) с помощью проективных и аффин-
ных преобразований и преобразований подобия, но является инва-
риантом при преобразовании этой матрицы с помощью движений
пространства Rn или lRn). Поэтому стационарное расстояние и
стационарные углы m-мерных плоскостей пространств Rn и lRn
также определяют эти плоскости с точностью до движения.
Ранг симметрических пространств, моделями которых являются
многообразия образов симметрии неевклидовых пространств, можно
определить как число независимых числовых инвариантов пары
образов симметрии этого многообразия. В частности, ранг мно-
гообразий m-мерных и (п— т—1)-мерных плоскостей про-
странств Sn, lSn, Kn(i), Kn(e), Kn(i, j), lKn(i, j) и Kn(i, e),
m-пар пространства Pn, (m—1)-мерных и (п — m—1)-мерных
сфер пространств Cn_1 и 1Cn_1 и (2m-|- 1)-мерных и (2п—2т—1)-
мерных плоскостей пространства Sp% равен т-\-1, а ранг
многообразий нормальных n-цепей пространств Kn(i) и Кп(е) и
квадрик пространства Рп равен п.
Заметим, что ранг 1 имеют многообразия точек и гиперпло-
скостей пространств Sn, lSn, Kn(i), Kn(e), Kn(i, j),
lKn(i, j) и Kn(i, e\ 0-пар пространства Рп, гиперсфер про-
странств Cn и lCn, прямых и (2n—1)-мерных плоскостей про-
странства *?Р2п+1 и> кроме того, многообразия паратактических
конгруэнций пространств S3, 2S3, S5, 2S6, SS6, /C3(Z), z/C3(0 и
/С3(е) и линейных комплексов прямых пространства Р3.
Для определения инвариантной метрики в многообразиях обра-
зов симметрии заметим, что метрика в группах движений неев-
клидовых пространств, инвариантная при преобразованиях х-+ха,
х—уахи х—у х—1, может быть определена следующим образом.
Представим движения этих пространств вещественными матрицами,
и если х и у — матрицы, представляющие два произвольных
движения, обладающих тем свойством, что матрица ух-1 приво-
дится к диагональному виду, обозначим собственные числа этой
матрицы через егш°, ...» егш^. Тогда за расстояние между дви-
жениями, представляемыми матрицами х и у, можно принять число оо,
определяемое соотношением
2 2 I I 2
ш = о>1 . . . +
(7.38)
§ 6] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 717
Так как матрицы, не приводимые к диагональному виду,
можно получить предельным переходом из матриц, приводимых
к диагональному виду, мы можем с помощью предельного пере-
хода определить расстояние между любыми движениями группы.
Полученная метрика инвариантна, так как числа матриц
(уа)(ха)-1=ух~1, (ау)(ах)~1 = а (ух-1) а-1 и =
^у-1х=у~1(ху-1)у—у-1(ух-1)-1у с точностью до умноже-
ния на —1 совпадают с числами матрицы ух-1. Как мы уже
говорили, в группах движений всех неевклидовых пространств,
кроме S3 и 2S3, эта метрика — единственная с точностью до из-
менения масштаба.
Поэтому для определения метрики симметрического простран-
ства в многообразии образов симметрии в неевклидовом простран-
стве, являющейся инвариантной метрикой при движениях этого
пространства, достаточно произвести отображение этого многооб-
разия на поверхность в группе и положить расстояние между
двумя образами симметрии равным расстоянию между движениями,
изображающими эти образы. Если мы каждому образу симметрии
поставим в соответствие движение, являющееся произведением ss0
симметрии s относительно этого образа на симметрию s0 отно-
сительно некоторого фиксированного образа, то за расстояние
между этими образами можно принять число а>, определяемое соот-
ношением (7.38), определённым для матриц движений и s2s0,
где и s2 — симметрии относительно наших образов. Но
(Vo) (Vo)-1 = (Vo) (Vi) = Vi> (7-39)
т. e. расстояние между двумя образами симметрии в инвари-
антной метрике в многообразии этих образов в том случае,
когда матрица произведения симметрий относительно этих
образов приводится к диагональному виду, равно абсолютному
значению квадратного корня из суммы квадратов делённых
на i логарифмов собственных чисел этой матрицы.
В силу того, что инвариантная метрика в группах движений
всех неевклидовых пространств, кроме S.3 и 253, является един-
ственной с точностью до изменения масштаба, определённая нами
инвариантная метрика в многообразии образов симметрии всех
неевклидовых пространств, кроме 53 и 2S3, также является един-
ственной с точностью до изменения масштаба. Поэтому, так как
те числовые инварианты, которые мы определяли для пар обра-
зов симметрии, только множителем отличаются от делённых на i
логарифмов собственных чисел матрицы произведения симметрий
относительно этих образов, расстояние между двумя образами
симметрии в инвариантной метрике в многообразии этих обра-
зов равно абсолютному значению квадратного корня из суммы
квадратов определённых нами числовых инвариантов этих
образов.
718 РИМАНОВЫ ПРОСТРАНСТВА» ГРУППЫ ЛИ [гл. VII
Это определение непосредственно переносится на образы сим-
метрии пространств Рп, Сп, 1Сп и Sp.2n+1, фундаментальные группы
которых изоморфны группам движений неевклидовых пространств.
В частности, расстояние между двумя /n-мерными плоскостями
пространств Sni lSn, Kn(i), Kn(e), Kn(i, j), lKn(i, J) и
Kn(i, e) в инвариантной метрике в многообразии /n-мерных пло-
скостей равно абсолютному значению квадратного корня из суммы
их стационарных расстояний. Расстояние между двумя /п-мерными
сферами пространств Сп и гСп в инвариантной метрике в много-
образии /n-мерных сфер равно абсолютному значению квадратного
корня из суммы квадратов их стационарных углов. Расстояния
между двумя /n-парами, между двумя квадриками пространств Рп
и между двумя нормальными п-цепями пространств Кп{е),
Kn(i, J) и Кп(/> е) в инвариантной метрике в многообразиях этих
образов равны абсолютным значениям квадратных корней из сумм
квадратов их числовых инвариантов.
В том случае, когда ранг многообразия образов симметрии
равен 1, расстояние между двумя образами симметрии в инвари-
антной метрике в этом многообразии равно абсолютному значению
единственного числового инварианта этих образов.
Как мы видели в § 4, геодезические линии симметрического
пространства состоят из таких точек, что произведения отражений
от этих точек на отражение от некоторой фиксированной точки
этой геодезической линии составляют однопараметрическую под-
группу фундаментальной группы симметрического пространства.
Поэтому геодезические семейства точек многообразия образов
симметрии неевклидова пространства в инвариантной метрике
в этом многообразии состоят из таких образов симметрии,
что произведения симметрий относительно этих образов сим-
метрии на симметрию относительно некоторого фиксирован-
ного образа симметрии этого семейства составляют однопара-
метрическую подгруппу группы движений.
Так как движения однопараметрической группы имеют вид х*,
все движения, составляющие такую группу, в том случае, когда
их матрицы приводятся к диагональному виду, приводятся к этому
виду одновременно, т. е. все эти движения имеют одни и те же
неподвижные точки, а собственные числа этих матриц всех этих
движений имеют вид е^, ..., е^п*. Таким образом, геодезиче-
ские семейства образов симметрий неевклидовых пространств
состоят из таких образов симметрии, которые определяют
с фиксированным образом симметрии этого семейства одни и
те же геометрические коварианты, а числовые инварианты
которых имеют вид = kjt.
Это определение непосредственно переносится на образы сим-
метрии пространств Рп, Сп, 1Сп и &Р фундаментальные группы
§ 6] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 719
которых изоморфны группам движений неевклидовых про-
странств.
Определение геодезических семейств образов симметрии при-
менимо к многообразию симметрий, фундаментальные группы
которых не являются простыми группами Ли, например, к обра-
зам симметрии пространств Rn и lRn, с той разницей, что здесь
числовыми инвариантами образов симметрии будут уже не только
собственные числа матриц (7.37), представляющих движения этих
пространств, или функции от них, но и число а этой матрицы.
Так, например, роль геодезических линий в многообразиях
м-мерных плоскостей пространств Sn и lSn играют т-геликоиды—
семейства /n-мерных плоскостей с общей системой общих перпен-
дикуляров, причём плоскости семейства высекают на общих пер-
пендикулярах пропорциональные отрезки. В частности, в много-
образиях прямых пространств и ZS3 роль геодезических линий
играют линейчатые геликоиды1).
Роль геодезических линий в многообразиях /n-мерных плоско-
стей пространств A^(Z), и Кп(е) играют т-геликоиды—
семейства /n-мерных плоскостей с общей системой общих ортого-
нальных цепей, причём плоскости семейства высекают на общих
ортогональных цепях пропорциональные отрезки.
Роль геодезических линий в многообразиях /n-мерных плоско-
стей пространств Rn и lRn играют /п-геликоиды — семейства пло-
скостей с общим перпендикуляром и с общей системой направляю-
щих листов, причём плоскости семейства высекают на направляющих
листах пропорциональные углы, а на общем перпендикуляре —
отрезки, пропорциональные этим углам. В частности, в многооб-
разиях гиперплоскостей пространств Rn и lRn роль геодезических
линий играют пучки гиперплоскостей2), а в многообразиях про-
странств /?3 и lR^ — обычные линейчатые геликоиды3).
Роль геодезических линий в многообразиях /n-мерных сфер
пространств Сп и 1Сп играют /п-спирали — семейства сфер с общей
системой направляющих пучков гиперсфер, причём сферы семей-
ства составляют с одной из них пропорциональные стационарные
углы. В частности, в многообразиях гиперсфер пространств Сп и
1Сп роль геодезических линий играют пучки гиперсфер, а в мно-
гообразии пар точек плоскости С2— такие семейства пар точек,
что на плоскости С2 можно ввести метрику плоскости /?2, в кото-
рой эти семейства составляют две логарифмические спирали, сим-
метричные относительно их общей асимптотической точки.
Роль геодезических линий в многообразии /n-пар простран-
ства Рп играют т-инволюции — семейства /n-пар с общей системой
1) О случае S3 см. Штуди [5], в случае Sn см. работу автора [1].
2) См. Норден [1].
3) См. Бортолотти [1].
720 РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [гл. VII
директрис и направляющих точек, причём /n-пары семейства
высекают на каждой из директрис пары точек, находящихся
в инволюции. В частности, в многообразии пар точек прямой Pt
роль геодезических линий играют семейства пар точек, находя-
щихся в инволюции, а в пространстве 0-пар пространства Рп—
семейства 0-пар, точки и гиперплоскости которых составляют
прямолинейный ряд точек и пучок гиперплоскостей, находящихся
в инволюционном проективном соответствии.
Роль геодезических линий в многообразии нормальных /г-цепей
пространства /Сп(г), 1Кп(1), Кп(е) играют семейства /г-цепей
с общей системой направляющих точек, причём п-цепи семейства
составляют с одной из них пропорциональные метрические Инва-
рианты.
Роль геодезических линий в многообразиях квадрик простран-
ства Рп играют такие семейства квадрик с общим автополярным
симплексом, что уравнения этих квадрик можно привести к виду
2е/?(?)2. (7.40)
i
Как мы видели в § 4, ранговые поверхности симметрического
пространства, на которых господствует евклидова геометрия, со-
стоят из таких точек, что произведение отражений от этих точек
на отражение от некоторой фиксированной точки этой поверхности
перестановочно с таким произведением отражений, являющимся
регулярным элементом. В многообразиях образов симметрии ран-
говым поверхностям симметрических пространств соответствуют
многообразия образов симметрии, которые мы будем называть
ранговыми подмногообразиями многообразий образов симметрии.
В силу свойств ранговых поверхностей симметрических пространств
ранговые подмногообразия многообразий образов симметрии
состоят из таких образов симметрии, что произведения симмет-
рий относительно этих образов на симметрию относительно
некоторого фиксированного образа симметрии этого подмного-
образия перестановочны с таким произведением симметрий^
являющимся регулярным элементом.
Так как в том случае, когда матрицы, приводимые к диаго-
нальному виду, перестановочны между собой, они одновременно
приводятся к диагональному виду, перестановочные между собой
движения имеют одни и те же неподвижные точки. Поэтому
ранговые подмногообразия многообразий образов симметрии
неевклидовых пространств состоят из всех таких образов
симметрии, которые определяют с фиксированным образом
симметрии этого подмногообразия одни и те же геометриче-
ские коварианты. При этом числовые инварианты образов сим-
метрии рангового подмногообразия могут служить координатами
этого подмногообразия.
§ 6] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 721
В силу свойств ранговых поверхностей симметрических про-
странств ранговые подмногообразия многообразия образов сим-
метрии неевклидовых пространств являются вполне геодези-
ческими подмногообразиями этих многообразий и в ранговых
подмногообразиях многообразий образов симметрии неев-
клидовых пространств господствует евклидова геометрия.
Рассмотрим примеры ранговых подмногообразий многообразий
образов симметрии пространств Sn и Кп(1). Так как группы дви-
жений этих пространств компактны, в этих подмногообразиях
господствует евклидова геометрия пространства индекса 0.
Эти подмногообразия безграничны, но обладают конечным объё-
мом, т. е. эти подмногообразия обладают тем же свойством, что и
поверхности Клиффорда в 53 и их обобщения в Sn (см. § 10 главы И).
Ранговые подмногообразия многообразий т-мерных плоско-
стей пространств Sn и состоят из всех плоскостей,
имеющих одну и ту же систему общих перпендикуляров
и, в случае пространства Кп (0, одну и ту же систему
общих ортогональных цепей в этих перпендикулярах. Произ-
вольная плоскость такого семейства порождается т 1 точками —
по одной на каждом общем перпендикуляре в случае пространства Sn
и по одной на каждой общей ортогональной цепи в случае про-
странства Kn(i)- Поэтому, так как прямые пространства Sn и нор-
мальные цепи пространства Kn{t) изометричны окружностям,
ранговые подмногообразия многообразий т-мерных плоскостей
пространств Sn и Kn(i) изометричны {т-\-\)-мерному кубу
с отождествлёнными противоположными гранями. В частности,
ранговое подмногообразие многообразия прямых пространства S3
является конгруэнцией перпендикуляров к прямой и изометрично
квадрату с отождествлёнными противоположными сторонами или
прямоугольной поверхности Клиффордах).
Ранговые подмногообразия многообразий нормальных п-цепей
пространства Кп(1) состоят из всех п-цепей, имеющих одну
и ту же систему направляющих точек. Если принять эти на-
правляющие точки за базисные, то произведение отражений от двух
п-цепей такого семейства представляется диагональной комплексной
матрицей с определителем, равным единице. Поэтому п-цепи таких
семейств можно взаимно однозначно отобразить на диагональные
комплексные матрицы (п-|- 1)-го порядка с определителем 1, причём
в силу определения инвариантной метрики в пространствах
образов симметрии квадраты расстояний между двумя п-цепями
пространства Kn(i), соответствующими преобразованиям 'х* =
i - * г IV
— е г хъ и 'хг — е гх\ равны Так как числа о\-,
i
1) О случае Sn см. работу автора [1].
722
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ [ГЛ. VII
кроме того условия, что преобразования, у которых числа о);
отличаются на ттг, совпадают, связаны также условием 2
i
то ранговое подмногообразие многообразия нормальных и-цепей
пространства Kn(i) изометрично проекции (я-j-^-мерного куба
на n-мерную плоскость, перпендикулярную к одной из его диаго-
налей, причём противоположные грани полученной фигуры отожде-
ствлены. Полученная фигура обладает 2 (2П—1) вершинами и
еп(/г-|-1) гранями, в частности при п = 2 эта
фигура является правильным шестиугольни-
ком, а при zz = 3—ромбододекаэдром или
гранатоэдром (фигурой с 14 вершинами и
12 гранями в виде ромбов; форму этой фигуры
имеют кристаллы граната (черт. 95)).
На основе изложенной общей теории обра-
зов симметрии может быть построена диф-
ференциальная геометрия семейств образов
симметрии. Хорошо известными частными
Черт. 95. случаями этой геометрии являются дифферен-
циальная геометрия семейств прямых в
пространствах /?3, З3 и 1S3, конформно-дифференциальная гео-
метрия семейств сфер и окружностей в пространстве С3 и
проективно-дифференциальная геометрия семейств пар прямых
в пространстве Р,^ развивавшиеся совершенно независимо друг
от друга. Приведём общие принципы построения дифференциаль-
ной геометрии семейств образов симметрии, применимые для семейств
всех рассмотренных нами образов симметрии в неевклидовых про-
странствах и в пространствах, геометрии которых можно предста-
вить как неевклидовы геометрии.
Основным объектом дифференциальной геометрии семейств
образов симметрии являются локальные числовые инварианты
и геометрические коварианты, т. е. числовые инварианты и
геометрические коварианты двух бесконечно близких образов дан-
ного семейства, и закон изменения этих параметров в окрестности
одного образа семейств. Например, для конгруэнций прямых
пространства /?3 такими локальными инвариантом и ковариантом
являются параметр распределения и центр луча в данном на-
правлении— параметр линейчатого геликоида, проходящего через
две бесконечно близкие прямые, и точка пересечения оси этого
геликоида с данной прямой, а закон изменения этого инварианта
и этого коварианта в окрестности прямой конгруэнции даётся
известными формулами Гамильтона и Мангейма1),
В общем случае локальные числовые инварианты определяются
нормальным видом матриц элементов однопараметрической под-
1) См. Бляшке [1], стр. 304.
§ 6] ОБЩАЯ ТЕОРИЯ ОБРАЗОВ СИММЕТРИИ 723
группы фундаментальной группы многообразия образов симметрии,
проходящей через произведение симметрий относительно рассматри-
ваемых бесконечно близких образов симметрии (это произведение
симметрий находится достаточно близко от единицы группы),
а локальные геометрические коварианты определяются матрицей
перехода к тому базису, в котором матрицы элементов этой одно-
параметрической подгруппы имеют нормальный вид. Если g (t)__
матрицы элементов однопараметрической подгруппы в первоначаль-
ном базисе, go(0 — матрицы этой подгруппы в нормальном виде,
а — матрица перехода от первоначального базиса к новому, то за
касательные векторы симметрического пространства, изображающего
наше многообразие образов симметрии, соответствующего рассма-
триваемому линейному элементу, можно принять производные
/ = ^(0 = 1 «g-оСОй-1. (7.41)
Выражая элементы матриц а и g0(Z) через элементы матрицы I
и требуя, чтобы матрица I пробегала значения, соответствующие
линейным элементам, принадлежащим данному семейству, мы полу-
чим закон распределения локальных параметров для любого
семейства образов симметрии, обобщающий формулы Гамиль-
тона и Мангейма.
Среди всех семейств образов симметрии особую роль играют
семейства, зависящие от числа параметров, равного числу незави-
симых строк или столбцов матрицы /. В этом случае строки или
столбцы матрицы I линейно зависят друг от друга и эти линейные
преобразования строк или столбцов определяют локальные аффи-
норы (линейные операторы) указанных семейств. Эти локальные
аффиноры определяют локальную структуру семейства и при опре-
делённых условиях определяют всё семейство с точностью до преобра-
зования фундаментальной группы многообразия образов симметрии.
В частности, в случае /n-мерных плоскостей пространств Rn,
lRn, Sn и lSn матрицы I имеют zn-j-1 независимых строк и п — т
независимых столбцов. Поэтому локальные аффиноры указанного
типа можно построить для (п — т)-параметрических семейств пло-
скостей, называемых конгруэнциями, и (/п + 1)"параметрических
семейств, называемых антиконгруэнциями. Аналогично можно
определить конгруэнции и антиконгруэнции сфер пространств Сп
и ьСп, /n-пар пространства Рп и т. д. Для прямых пространств
Я3, и ^з и окружностей пространства С3 эти семейства совпа-
дают с обычными прямолинейными конгруэнциями и конгруэнциями
окружностей. Определённые нами локальные аффиноры семейств
образов симметрии для конгруэнций прямых пространства /?3 со-
впадают с аффинором Куммера1), для конгруэнций прямых
1) См. Дубнов [1], стр. 237.
724
РИМАНОВЫ ПРОСТРАНСТВА. ГРУППЫ ЛИ
[гл. VII
пространств S3 и XS3— с аффинором Фибби-Кулиджа х), для кон-
груэнций прямых пространства Rn— с аффинором П, К. Рашев-
ского 2), для конгруэнций /n-мерных плоскостей пространств Rn
и Sn — с аффинором В. В. Вагнера 3), для одного вида конгруэн-
ций окружностей пространства С3— с аффинором Кулиджа4).
Тождественное обращение в нуль некоторых локальных аффиноров,
а также симметричность и кососимметричность матриц этих аффи-
норов соответствуют специальным типам семейств образов симмет-
рии, в частности обращение в нуль некоторых локальных аффиноров
характеризует фокальные антиконгруэнции прямых в простран-
ствах Rn, lRn, Sn, lSn, фокальные конгруэнции окружностей
Кулиджа в пространстве С3 5) и их обобщения в пространствах Сп
и 1Сп, пары конгруэнций С. П. Финикова в пространстве Р3
(«преобразования 7») 6). Симметричность матриц локальных аффи-
норов характеризует нормальные конгруэнции прямых в простран-
стве /?3 7) и их обобщения в пространствах Rn, lRn, Sn, lSn',
циклические системы окружностей Рибокура в пространстве С3 8)
и их обобщения в пространствах Сп и 1Сп\ пары конгруэнций
Бианки в пространстве 9). Кососимметричность матриц локальных
аффиноров характеризует изотропные конгруэнции прямых в про-
странстве /?3 10) и их обобщения в пространствах Rni lRn, Sn, lSn.
Систематическому изложению дифференциальной геометрии
семейств /n-мерных плоскостей в пространствах Rn и Sn, проективно-
дифференциальной геометрии семейств пар прямых в пространстве Р3,
конформно-дифференциальной геометрии семейств /n-мерных сфер
в пространстве Сп, унитарно-дифференциальной геометрии семейств
/n-мерных плоскостей и нормальных п-цепей в пространствах Kn(i)
и Кп(е) и проективно-дифференциальной геометрии /n-пар и ква-
дрик в пространстве Рп посвящены статьи автора [4, 8, 9, 10, И]
(см. также заметки [5? 6]).
2)
3)
4)
5)
6)
7)
8)
9)
10)
См.
См.
См.
См.
См.
, стр. 572.
, стр. 550.
1], стр. 177.
, стр. 273.
Кулидж [1], стр. 215.
Рашевский [1].
Вагнер [1]
Кулидж [2
Кулидж [2
См. Фиников
См. Д у б н о в [1 ,
См. Кулидж [1], 286.
См. Фиников [1], стр. 144.
См. Дубнов [1], стр. 286.
БИБЛИОГРАФИЯ
Адамар Ж. (Hadamard J.)
(1] Аналлагматические свойства окружностей. Прибавление М к его Эле-
ментарной геометрии, т. IL М., 1938, 543—604.
[2] Неевклидова геометрия в теории автоморфных функций. М.— Л., 1951.
Алберт A. A. (Albert А. А.)
fl] Quadratic forms permitting composition. Ann. of Math. 43, 1942, 161—177.
Аргунов Б. И.
[1] Конфигурационные постулаты и их алгебраические эквиваленты.
Матем. сб., 26 (68), 1950, 425—456.
Аристотель (Aristoteles)
[1] Аналитики первая и вторая. М., 1952.
Бек Г. (В ес k Н.)
[1] Kummers Theorie der geradlinigen Strahlensysteme im Nicht-Euklidische
Raume. Sitzungsberichte der Berlin. Math. Oes. 9, 1910, 59—70.
Бельтрами Э. (Beltrami E.)
(1] Опыт объяснения неевклидовой геометрии. Сборник «Об основаниях
геометрии», Казань, 1893, 1—37.
Бергман С. (Bergmann S.)
[1] Ueber eine in der Theorie der Funktionen von zwei komplexen Veran-
derlichen auftretende unit^rc Geometric. Proc. Konink. Nederl. Akad. v.
Wetensch. 36, 1933, 307—313.
Бертини Э. (Bertini E.)
[1] Einfiihrung in die projektive Geometrie mehrdimensionaler Raume, Вена,
1924.
Бертран Л. (Bertrand L.)
{1] Elements de geometrie. Париж, 1812.
Б и л о Ж. (В i 1 о J.)
fl] Onderzoekingen betreffende de meetkundige grodslagen van de projectieve
quaternionenmeetkunde. Брюссель, 1949.
Биркгоф Г. (В irk h off G.)
fl] Теория структур. M., 1952.
Бляшке В. (Blaschke W.)
fl] Дифференциальная геометрия, т. 1, iM., 1935.
f2] Vorlesungen ueber Differentialgeometrie, t. III. Берлин, 1929.
Богомолов С. A.
[11 Вывод правильных систем по методу Фёдорова, ч. 1. Л., 1932.
f2j Введение в неевклидову геометрию Римана. Л.—М., 1934.
726
БИБЛИОГРАФИЯ
Бойяи Ф. (Bolyai F.)
[1] Tentamen juventutem studiosam in elementa matheseos puros. Марош
Вашархей (Тыргу Муреш), 1832.
Бойяи Я. (Bolyai J.)
[1] Приложение, содержащее науку о пространстве абсолютно истинную,
не зависящую от истинности или ложности XI аксиомы Евклида, что
a priori никогда не может быть решено. М.— Л., 1950.
БомбеллиР. (Bom belli R.)
[1] L’algebra parte maggiore deiraritmetica divisa in tre libri. Болонья, 1572.
Б о p e л ь A. (Borel A.)
(1] Some remarks about Lie groups transitive on spheres and tori. Bull. Amer.
Math. Soc. 55 (1949), 580—587.
[2] Le plan projectif des octaves et les spheres comme espaces homogenes.
Comptes rendus Acad. Sci. Paris, 230, 1950, 1378—1380.
Бортолотти Э. (Bortolotti E.)
[1] Geometria dlfferenziale metrica nello spazio rigate. Atti del congresso
internaz. d. matem. Bologna 4, 1928, 305—316.
Брауэр P., Вейль Г. (В га u er R., W e у I H.)
[1] Spinors in n dimensions. Amer Journ. of Math., 57, 1935, 425—449.
Бродский M. C.
[1] Конгруэнции прямых эллиптического пространства. М., 1941.
Бэр Р. (В а е г R.)
[1] Линейная алгебра и проективная геометрия. М. 1955.
Бюшгенс С. С.
[1] Аналитическая геометрия, ч. 1. 4-е изд., М.— Л., 1946.
Вагнер В. В.
[1] Differential geometry of the family of R^s in Rn and of the family of
totally geodesic S/c-i’s in Sn^ of positive curvature. Матем. сб., 10 (52,)
1942, 165—209.
Валлис Дж. (Wallis J.)
[1] Demonstratio postulati quinti Euclidis. В книге Энгель и Штеккель
[1], 21—30.
Ван Сянь-чжун (W a n g Hsien-Chung)
[1] Two-point homogenous spaces. Ann. of Math. 55, 1952, 177—191.
Вебер Г., Вельштейн И. (Weber Н., Wellstein J.)
[1] Энциклопедия элементарной математики, т. II. 2-е изд., Одесса, 1913.
Вейль Г. (W е у 1 Н.)
[1] Raum — Zeit — Materie. 5-е изд., Берлин, 1923.
Вейс Э. (W е i s s Е.)
[1] Oktaven, Engelscher Komplex, Trialitatsprinzip. Math. Zeitschrift, 44
1933, 580—611.
В e с с e л ь К. (Wessel C.)
fl] Essai sur la representation de la direction. Копенгаген, 1897.
Габададзе H. A.
[1] О применении комплексных и гиперкомплексных чисел к теории
прямолинейных конгруэнций. Сообщения Акад, наук Груз. ССР, 15:10,
1954, 641—645.
БИБЛИОГРАФИЯ
727
Г а м и л ь т о н В. Р. (Н a m i 1 t о n W. R.)
fl] Lectures on quaternions. Дублин, 1853.
Г а у с с К. Ф. (Gauss С. F.)
[1] Mutationen des Raumes. Werke, т. 8, Лейпциг, 1908, 357_362.
Гельфанд И. М.
[1] Лекции по линейной алгебре. 2-е изд., М.— Л., 1951.
Гессе О. (Hesse О.)
[1] Ueber ein Uebertragungsprinzip. Journ. f. reine u. angew Math 66
1866, 15—21.
Гильберт Д. (Hilbert D.)
[1] Основания геометрии. Перевод с 7-го изд., М.— Л., 1948.
Глаголев Н. А.
[1] Проективная геометрия. М.—Л., 1936.
Гордевский Д. 3.
[1] Интерпретация проективной геометрии с помощью окружностей.
Харьков, 1953.
Грассман Г. (Grassmann Н.)
[1] Die Ausdehnungslehre. 2-е изд., Берлин, 1862.
Губа Е. Д.
[1] Геометрическое истолкование теории бинарной квадратичной формы»
Учёные записки Сталинградского пед. ин-та, 3, 1953, 62—70.
Гурвиц A. (Hurwitz А.)
[1] Ueber die Komposition der quadratischen Formen mit beliebig vielen
Variabeln. GOttinger Nachrichten. 1898, 309—316.
Д a p б у Г. (D a r b о u x G.)
[1] Принципы аналитической геометрии. Л.— М., 1938.
Дезарг Ж. (Desargues G.)
[1] Brouillon project d’une atteinte aux evenements des rencontres d’un
cone avec un plan. В книге L’Oeuvre mathematique, Париж, 1951,
99—180.
Делоне Б. H.
[1] Краткое изложение доказательства непротиворечивости планиметрии
Лобачевского. М. 1953.
Делоне Б. Н., Райков Д. А.
[1] Аналитическая геометрия, т. I, М.— Л., 1948, т. II, М.— Л., 1949.
Джавадов М. А.
[1] Об одной реализации расслоенного пространства. Труды сем. по вект.
и тенз. анализу при МГУ, 8, 1950, 314—327.
[2] Конформные преобразования в евклидовых и псевдоевклидовых про-
странствах любого числа измерений как дробно-линейные преобра-
зования. Доклады Акад, наук СССР, 86:4, 1952, 653—656.
13] Проективные и неевклидовы геометрии над матрицами. Доклады
Акад, наук СССР, 67:5 (1954), 769—772.
Джавадов М. А., Аббасов Н. Т., А л и е в а Ф. М.
И] Линейные конгруэнции в пространствах над алгебрами альтернионов.
Доклады Акад, наук Азерб. ССР, 11:2, 1955, 75—78.
728
БИБЛИОГРАФИЯ
Джавадов М. А., Исмаилов А. П., Касимова С. С.
[1] Пространства над алгебрами альтернионов. Доклады Акад, наук
Азерб. ССР, 11:1, 1955, 3—8.
Дирак П. А. М. (Dirac Р. А. М.)
[1] Основы квантовой механики. 2-е изд., Л.— М., 1937.
Домшлак Ю. И., Левинов А. М., Семянистый В. И.
[1] Числовые инварианты и геометрические характеристики линейных
комплексов и паратактических конгруэнций. Доклады Акад, наук
Азерб. ССР, 9:2, 1953, 71—74.
Дубнов Я. С.
[1J Die Differentialgeometrie der Strahlenkongruenzen in tensorieller Darstel-
lung. Труды сем. по вект. и тенз. анализу при МГУ, 1, 1953, 223—303.
[2] О моделях гиперболической геометрии. Труды сем. по вект. и тенз.
анализу при МГУ, 7, 1949, 5.
[3] Основы векторного исчисления, ч. I, 4-е изд., М.—Л., 1950.
Д ы н к и н Е. Б.
[1] Структура полупростых алгебр Ли. Успехи матем. наук, 2:4 (20),
1947, 59—127.
Евклид (Eukleides)
[1] Начала. Книги I—VI, М.— Л., 1948. Книги VII—X, М.—Л., 1949.
Книги XI—XIII, М,— Л., 1950.
Ефимов Н. В.
[1] Высшая геометрия. 3-е изд., М., 1953.
Зейлигер Д. Н.
[1] Комплексная линейчатая геометрия. Л., 1934.
Каган В. Ф.
[1] Основания геометрии, т. I. Опыт обоснования евклидовой геометрии.
Одесса, 1905.
’2]
[3
4
[5
[6]
[7]
Основы теории поверхностей, т, L, М.—Л., 1947, т. II., М.—Л., 1948.
Основания геометрии, т. I. М.— Л., 1949.
Лобачевский. 2-е изд., М.— Л., 1948.
Строение неевклидовой геометрии у Лобачевского, Гаусса и Больяи.
В книге Широков П. А., К а г а н В. Ф. Строение неевклидовой
геометрии. М.—Л., 1950, 79—180.
Развитие интерпретаций неевклидовой геометрии. Труды сем. по вект.
и тенз. анализу при МГУ, 7, 1949, 187—204.
Вводные соображения и первое развитие интерпретаций геометрии
Лобачевского. Учёные записки МГУ, математика, 148 (4), 1951, 3—6.
К а р т а н Э. (С а г t a n Е.)
[1] Nombres complexes. Encycl. d. Sci. Math., т. 1, кн. 1, вып. 3, 1908,
329—468.
[21 Les groupes projectifs qui ne laissent invariante aucune multiplicity plane.
Bull. Soc. math. France, 41, 1913, 53—96.
[3] Sur le probleme general de la deformation. Comptes rendus du congrfcs
math. Strassbourg, 1920, 397—406.
[4] Le principe de dualite et la theorie des groupes simples et semi-simples.
Bull. d. Sci. math., 49, 1925, 361—374.
[5] Геометрия групп преобразований. В книге Картан Э. Геометрия
групп Ли и симметрические пространства. М., 1949, 7—111.
£6] Об одном замечательном классе римановых пространств. Там же,
112—149.
БИБЛИОГРАФИЯ
729
I71 Компактные и некомпактные группы и риманова геометрия. Там же
150—182. ’
’8
Геометрия простых групп. Там же, 183—239.
Теория конечных непрерывных групп и топология. Там же 240______282
Lecons sur la geometrie projective complexe. Париж, 1931.
Теория спиноров. M., 1947.
Кваде В. (Quade W.)
[1] Wirk-, Blind- und Scheinleistung bei WechselstrOmen mit beliebigen
Kurvenform. Archiv fur Elektrotechnik, 18, 1934, 130—138.
Келер Э. (Kahler E.)
[1] Ueber eine bemerkenwerte Hermitesche Metrik. Abhandl. Math Sem.
Hamburg, 9, 1933, 173—186.
Кели A. (Cayley A.)
[1] On Jacobi’s elliptic functions and on quaternions. London-Edinburgh-
Dublin Phil. Magaz. (3) 26, 1845, 208—211.
[2] A sixth memoir upon the quantics. Phil. Trans, of the Roy. Soc. London,
149:1, 1859, 61—90.
Кеплер И. (К e p 1 e r J.)
[1] Ad Vitellionen Paralipomena quibus astronomiae pars optica traditur.
Opera, т. II, Франкфурт — Эрланген, 1859, 119—398.
Клавий X. (Clavius Ch.)
[1 ] Euclidis elementorum libri XV. Рим. 1574.
Клейн Ф. (Klein F.)
(11 Ueber die sogenannte Nicht-Euklidische Geometrie. Math. Annalen, 4,
1871, 573—625; 6, 1872, 112—145.
2] Неевклидова геометрия. M.— Л., 1936.
3] Высшая геометрия. М.— Л., 1939.
4] Лекции о развитии математики в XIX столетии. М.—Л., 1937.
Клиффорд В. К. (Clifford W. К.)
[1] Предварительный очерк бикватернионов. Приложение к его книге
Здравый смысл точных наук, П., 1922, 203—221.
[2} Applications of Grassmann’s extensive algebra. Amer. Journ. of Math.,
1, 1878, 350—358.
К о к л ь Дж. (Cockle J).
[11 On certain functions resembling quaternions and on a new imaginary
in algebra. London-Edinburg-Dublin Phil. Mag. (3) 33, 1848, 435—439.
Колмогоров A. H.
[11 Zur Begriindung der projektiven Geometrie. Ann. of Math., 33, 1932
175—176.
Комбебьяк Ж. (Combebiac G.)
[1] Sur un systeme numerique complexe representant le groupe des trans-
formations conformes de 1’espace. Bull, de la Soc. Math., 30,1902, 1 12.
Котельников А. П.
[1] Винтовое счисление и некоторые приложения его к геометрии и
механике. Казань, 1895.
[2] Проективная теория векторов. Казань, 1899. т
[3] Принцип относительности и геометрия Лобачевского. Сборник «in
memoriam Lobatschevskii», т. 2, Казань, 1927, 37 66.
47 Зак. 177. Б. А. Розенфельд
730
БИБЛИОГРАФИЯ
[4] Теория векторов и комплексные числа. В книге Котельни-
ков А. П., Фок В. А. Некоторые применения идей Лобачевского
в механике и физике, М —Л., 1950, 7—47.
Круг К. А.
[1] Основы электротехники, т. II. 6-е изд., М.— Л., 1946.
Крылов Н. М.
[1] О кватернионах Роана Гамильтона и о понятии моногенности. Доклады
Акад, наук СССР, 55, 1947, 799—800.
Кулидж Дж. Л. (Coolidge J. L.)
1] The elements of non-euclidian geometry. Оксфорд, 1909.
2 A treatise of the circle and the sphere. Оксфорд, 1915.
3] The geometry of the complex domain. Оксфорд, 1924.
К у p о ш А. Г.
[1] Теория групп. 2-е изд., М.—Л., 1953.
[2] Курс высшей алгебры. 4-е изд., М.— Л., 1955.
Кутузов Б. В.
[1] Геометрия Лобачевского и элементы оснований геометрии. 2-е изд.
М., 1955.
Лагерр Э. (Laguerre Е.)
[1] Note sur la theorie des foyers. Nouv. Ann de math., 12, 1853, 57—66.
[2] Sur la geometrie de direction. Bull, de la Soc. Math., 7, 1880, 196—208.
Ламберт И. Г. (Lambert J. H.)
[1] Theorie der Parallellinien. В книге Энгель и Штеккель [1],
152—207.
Ландау Л. Д. и Лифшиц Е. М.
[1] Теория поля. М.— Л., 1941.
Лежандр А. М. (Legendre А. М.)
[1] Elements de geometrie. 3-е изд., Париж, 1800.
[2] Elements de geometrie. 12-е изд., Париж, 1823.
Либман Г. (Liebmann Н.)
[1] Nichteuklidische Geometrie. 2-е изд., Берлин—Лейпциг, 1912.
Линник Ю. В.
[1] Кватернионы и числа Кели; некоторые приложения арифметики ква-
тернионов. Успехи матем. наук, 4:5 (33), 1949, 49—98.
Липшиц Р. (L i р s с h i t z R.)
[1] Untersuchungen fiber die Summen von Quadraten. Бонн, 1886.
Лиувилль Ж. (L io u ville J.)
[1] Extension au cas de trois dimensions de la question du trace geogra-
phique. 6-е приложение к книге Monge G. Application de 1’analyse
a la geometrie. 5-е изд., Париж, 1850, 609—616.
Лобачевский H. И.
1] О началах геометрии. Сочинения, т. I. М.— Л., 1946, 185 261.
2 Воображаемая геометрия. Сочинения, т. III. М.— Л., 1951, 16—70.
3 Применение воображаемой геометрии к некоторым интегралам. Сочи-
нения, т. III. М.— Л., 1951, 181—294.
БИБЛИОГРАФИЯ
731
[4 ] Новые начала геометрии с полной теорией параллельных. Сочинения
т. II. М —Л., 1949, 147—454.
[5 ] Геометрические исследования по теории параллельных линий Сочи-
нения, т. I. М.— Л., 1946, 79—127.
[6 ] Пангеометрия. Сочинения, т. III. М.—Л., 1951, 435—524.
Мальцев А. И.
[1] Основы линейной алгебры. М.— Л., 1948.
Мёбиус А. Ф. (Мб bins A. F.)
[1] Barycentrische Calciil, ein neues Hilfsmittel znr analytischen Behandlnng
der Geometfie. Werke, т. I, Лейпциг, 1885, 1—38.
[2] Theorie der Kreisverwandschaften in rein geometrischer Darstellung.
Werke, т. II, Лейпциг, 1886, 243—314.
Мейлихзон A. C.
[1] По поводу моногенности кватернионов. Доклады Акад, наук СССР,
69, 1948, 431—434.
Меллер И. А.
[1J Построение системы моделей эллиптической плоскости на евклидовой.
Учёные записки МГУ, математика, 148 (4), 1951, 21—29.
Миндинг Ф. (Minding F.)
[1] Wie sich entscheiden lasst, ob zwei gegebene krumme Flachen auf
einander abwickelbar sind, nebst Bemerkungen uber die Flachen von
unveranderlichen Kriimmungsmasse. Journ. f. reine it. angew. Math., 19,
1839, 370—387.
[2] Beitrage zur Theorie der kiirzesten Linien auf krummen Flachen, Journ»
f. reine u. angew. Math., 20, 1840, 325—327.
Минковский Г.
[1] Время и пространство. В книге Лоренц Г. А., Пуанкаре А.,
Эйнштейн А., Минковский Г. Принцип относительности.
М.—Л., 1935, 181—203.
Монж Г. (М о n g е G.)
[1] Начертательная геометрия. М., 1947.
Моуфанг Р. (Moufang R.)
[1] Alternativkorper und der Satz vom vollstandigen Vierselt. Abhandl. Math.
Sem. Hamburg, 9, 1933, 207—222.
Насирэддин Tycn(Nasfr-ad-dfn at-Tusi)
[1] Euclidis elementorum geometricorum libri tredecim. Ex traditione doctis-
simi Nasridini Tusini nunc primum arabice impressi. Рим, 1594.
[2] Tahrir Uqlfdas fi’ilmi-l-handasati. Тегеран, 1880.
[3] Трактат о полном четырёхстороннике. Баку, 1952.
Н о р д е н А. П.
[1] Об истолковании пространства аффинной связности с вырождающейся
метрикой. Доклады Акад, наук СССР, 50, 1946, 57—60.
[2] Пространство линейной конгруэнции. Матем. сб. 24 (66). 1949,
429—455.
[3] Пространства аффинной связности. М.— Л., 1950.
[4] Об одной интерпретации комплексной аффинной плоскости. Сборник
«125 лет неевклидовой геометрии Лобачевского». М.— Л., 1952,
187—194.
[5] Элементарное введение в геометрию Лобачевского. М., 1953.
47*
732
БИБЛИОГРАФИЯ
Перепёлкин Д. И.
[1] Об угловых инвариантах пространств п измерений. Изв. физ.-матем.
о-ва, Казань (3), 1, 1934—1935, 55—63.
(2] Курс элементарной геометрии, т. I, М.— Л., 1948; т. II, М.—Л., 1949.
Плюккер Ю. (Р I и с к е г J.)
[1] Nene Geometrie des Raumes gegriindet auf die Betrachtung der geraden
Linien als Raumelement. Лейпциг, 1868.
Полозков Д. П.
[1] Изучение обобщённых интерпретаций плоской геометрии Лобачевского
и их геодезических линий. Учёные записки МГУ, математика, 148 (4),
1951, 9—14.
Понсе ле Ж. В. (Poncelet J. V.)
[1] Traite des proprietes projectives des figures. 2-е изд., Париж, 1865.
Понтрягин Л. С.
[2] Непрерывные группы. 2-е изд., М.—Л., 1954.
Прокл (Proclos)
[1] Im primum Euclidis elementorum librum commentarii. Лейпциг, 1873.
Пуанкаре (Poincare H.)
fl] Theorie des groupes fuchsiens. Acta mathematica 1, 1882, 1—62.
[2] Les geometries non-euclidiennes. Revue generale d. Sc., 2:23, 1891,
769—774.
(3] Об основных гипотезах геометрии. Сборник «Об основаниях геоме-
трии». Казань, 1893, 109—121.
Рашевский П. К.
[1] Congruence rectiligne dans Tespace euclidien a n dimensions. Труды
сем. по вект. и тенз. анализу при МГУ, 2—3, 1935, 212—228.
[2] Геометрия конуса нулевых направлений. Учёные записки МГПИ
им. К. Либкнехта, 1, 1937, 73—93.
[3] Sur 1’unicite de la geometrie projective dans le plan. Матем. сб., 8 (50),
1940, 107—120.
[41 Sur une geometrie projective avec des nouveaux axiomes de configura-
tion. Матем. сб., 8 (50), 1940, 183—204.
[5] Скалярное поле в расслоённом пространстве. Труды сем. по вект. и
тенз. анализу при МГУ, 7, 1949, 225—248.
[6] Симметрические пространства аффинной связности с кручением. Труды
сем. по вект. и тенз. анализу при МГУ, 8, 1950, 82—92.
[71 О геометрии однородных пространств. Труды сем. по вект. и тенз.
анализу при МГУ, 9, 1952, 49—74.
[8] Риманова геометрия и тензорный анализ. М., 1953.
Рейдемейстер К. (Reidemeister К.)
[1] Vcrlesungen uber Grundlagen der Geometrie. Берлин, 1930.
Риман Б. (Riemann В.)
[1] О гипотезах, лежащих в основании геометрии. Сочинения, М.— Л.,
1948, 279—293.
Розенфельд Б. А.
[1] Внутренняя геометрия множества /n-мерных плоскостей п-мерного
эллиптического пространства. Известия Акад, наук, серия матем.,
5, 1941, 353—368.
БИБЛИОГРАФИЯ
733
[2] Метрические геометрии пространства шаров. Учёные записки МГУ
математика, 73:5, 1944, 59—82.
[3] Многомерное обобщение поверхности Клиффорда. Учёные записки
МГУ, математика, 100:1, 1946, 150—154.
[4] Дифференциальная геометрия семейств многомерных плоскостей. Изве-
стия Акад, наук СССР, серия матем., И, 1947, 283—308.
[5] Метрика и аффинная связность в пространствах плоскостей, сфер
и квадрик. Доклады Акад, наук СССР, 57:6, 1947, 543—546.
[6] Дифференциальная геометрия образов симметрии. Доклады Акад,
наук СССР, 59:6, 1948, 1057—1060.
[7] Спинорные представления действительных вращений. Труды сем. по
вект. и тенз. анализу при МГУ, 6, 1948, 506—512.
[8] Метрический метод в проективно-дифференциальной геометрии и её
конформных и контактных аналогах. Матем. сб., 22 (62), 1948, 457—492.
[9] Конформно-дифференциальная геометрия семейств Ст в CL. Матем. сб.,
23 (65), 1948, 297—313.
[10] Унитарно-дифференциальная геометрия семейств Кт в Кп- Матем. сб.,
24 (66), 1949, 53—74.
[11] Проективно-дифференциальная геометрия семейств пар Рт 4- Pn-m-i
в Рп. Матем. сб., 24 (66), 1949, 405—428.
[12] Геометрия простейших алгебр. Доклады Акад, наук СССР, 64:5, 1949,
629—633.
[13] Об унитарных и расслоённых пространствах. Труды сем. по вект.
и тенз. анализу при МГУ, 7, 1949, 260—275.
[14] Символический метод и векторные диаграммы для несинусоидальных
токов. Труды сем. по вект. и тенз. анализу при МГУ, 7, 1949, 381—387.
[15] Симметрические пространства и их геометрические приложения.
В книге Картан Э. Геометрия групп Ли и симметрические про-
странства. М., 1949, 331—368.
[16] Проективная геометрия как метрическая геометрия. Труды сем. по*
вект. и тенз. анализу при МГУ, 8, 1950, 328—354.
[17] Проективные геометрии над кватернионами и псевдокватернионами.
Доклады Акад, наук СССР, 74:3, 1950, 421—424.
[18] Геометрическая теория спинорных представлений групп движений
2-мерных и 3-мерных неевклидовых геометрий. Труды Азерб. гос. уни-
верситета, 1, 1951, 33—68.
[19] Неевклидовы геометрии над комплексными и гиперкомплексными
числами и их применение к вещественным геометриям. Сборник
«125 лет неевклидовой геометрии Лобачевского». М.— Л., 1952, 151—166.
[20] По поводу классификации коллинеаций. Успехи матем. наук, 7:1 (47)
1952, 195—198.
[21] Геометрия многообразия плоскостей проективного пространства как
точечная проективная геометрия. Труды сем. по вект. и тенз. анализу
при МГУ, 9, 1952, 213—222.
[22] Некоторые геометрические свойства волновых полей. Доклады Акад,
наук Азерб. ССР, 10: 8, 1954, 533—536.
[23] Компактная простая группа как группа движений комплексной
октавной неевклидовой плоскости. Доклады Акад, наук Азерб. ССР,
10:12, 1954, 829—833.
Розенфельд Б. А., Абрамов А. А.
[1] Пространства аффинной связности и симметрические пространства.
Успехи матем. наук, 5:2 (36), 1950, 72—147.
Розенфельд Б. А., Белкин И. Г.
[1] Геометрия плоскости дуального переменного. Доклады Акад, наук
Азерб. ССР, 8:11, 1952, 579—582.
734
БИБЛИОГРАФИЯ
Розенфельд Б. А., Левинов А. М.
[1] Применение неевклидовой геометрии к некоторым задачам проективной
геометрии. Труды сем. по вект. и тенз. анализу при МГУ, 10, 1955,
225—234.
Розенфельд Б. А., Скопец 3. А.
fl] Квадратичные кремоновы преобразования на плоскости и комплексные
числа. Доклады Акад, наук СССР, 83:6, 1952, 801—804.
Розенфельд Б. А., Я г лом И. М.
[1] О геометриях простейших алгебр. Матем. сб., 28 (70), 1951, 205—216.
Саккери Дж. (Saccheri G.)
[1] Euclides ab omni naevo vindicatus. В книге Энгель и Штеккель
[1], 45—135.
Саммервилль Д. М. Ю. (S о m tn е г v i 11 е D. М. Y.)
[1] Classification on geometries with projective metric. Proc. Edinburgh
Math. Soc., 28, 1910, 25—41.
Сегре K. (Segre C.)
[1] Sulla teoria e stilla classificazioni delle omografie in uno spazio lineare
ad un numero qualunque di dimensioni. Mem. Acc. Lincei (fis.-mat.) (3),
19, 1884, 127—148.
(2] Un nuovo campo di ricerche geometriche. Atti di Accad, d. Sc. Torino,
25, 1889, 276—301, 430—457, 592—612; 26, 1890, 40—56.
Семянистый В. И.
[1] Параболические конгруэнции прямых. Труды сем. по вект. и тенз.
анализу при МГУ, 10, 1955, 235—246.
Синцов Д. М.
[1] Теория коннексов в пространстве в связи с теорией дифференциаль-
ных уравнений в частных производных первого порядка. Казань. 1894.
Скопец 3. А.
[1] Циклографическое отображение пространства Лобачевского. Сборник
«125 лет неевклидовой геометрии Лобачевского». М.— Л., 1952,
129—150.
Скорняков А. А.
[1] Проективные плоскости. Успехи матем. наук, 6:6 (46), 1951, 112—154.
Степанов Н. Н.
[1] Сферическая тригонометрия. 2-е изд., М.— Л., 1948.
Стинрод Н. (S teenrod N.)
[1] Топология косых произведений. М., 1953.
Схоутен Я. А., Данциг Д. ван (S с h о u t е n J. A., D а и t z i g D.
van)
[1] Ueber unitare Geometrie konstanter Kriimmung. Proc. Konink. Nederl.
Akad. v. Wetensch. 34, 1931, 1293—1314.
C x о у т e н Я. А., С т p о й к Д. Я. (S с h о u t е n J. A., S t г и i k D. J.)
[1] Введение в новые методы дифференциальной геометрии, т. II. М., 1948.
Фален К. Т. (Vahlen К. Th.)
(1] Ueber Bewegungen und komplexe Zahlen. Math. Annalen. 55, 1902,
585—593.
БИБЛИОГРАФИЯ
735
Фёдоров Е. С.
[1] Точное изображение точек пространства на плоскости. Записки Гоо-
ного ин-та, 1, 1907, 52—79. н
Фиников С. П.
[1] Проективно-дифференциальная геометрия. М.— Л., 1937.
Фок В. А.
[1] Некоторые применения идей неевклидовой геометрии Лобачевского
к физике. В книге Котельников А. П., Фок В. А. Некоторые
применения идей Лобачевского в механике и физике, М.—Л. 1950
48—87.
Фрейденталь Г. (Freudenthal Н.)
[1] Oktaven, Ausnahmegruppen und. Oktavengeometrie. Утрехт, 1951.
[2J Zur ebenen Oktavengeometrie. Proc. Konink. Nederl. Akad. v. Wetensch.
56, 1953, 195—200.
Фробениус Г. (Frobenius G.)
[1] Ueber lineare Substitutionen und bilineare Formen. Journ. f. reine u. angew.
Math., 84, 1878, 59—63.
ФубиниГ. (Fubini G.)
[1] Il parallelismo di Clifford negli spazii ellitici. Annali d. Scuola. Norm.
Super. Pisa, 9. 1900, 1—74.
[2] Sulle metriche definite da una forma Hermitiana. Atti d’Istit. Veneto, 63,
1903, 502—513.
Фукс Б.- A.
[1] Теория аналитических функций многих комплексных переменных.
М.—Л., 1948.
[2] Неевклидова геометрия в теории конформных и псевдоконформных
отображений. М.— Л., 1952.
Хазанов М. Б.
[1] О площадях на плоскости Лобачевского. Доклады Акад, наук СССР
66:4, 1949, 571—574.
[2] О развитии теории площадей на плоскости Лобачевского. Учёные
записки Кабардинского пед. ин-та, 6, 1955, 3—23.
Хайям О. (А 1-К h а у у a m i ’U.)
[1] Комментарии к трудным постулатам книги Евклида. Историко-мате-
матические исследования, 6, 1953, 67—107.
Ходж В., Пид о Д. (Hodge W., Р е d о е D.)
[1] Методы алгебраической геометрии, т. II. М., 1954.
Холл М. (Hall М.)
[1] Projective planes. Trans. Amer. Math. Soc., 54, 1943, 229—277.
Хуа Л о - г э н (H u a Loo -k eng)
[1] Geometries of matrices I. Generalisations of von Staudt’s theorem. Trans.
Amer. Math. Soc., 57, 1945, 441—481.
[2] Геометрия симметрических матриц над полем действительных чисел, 1.
Доклады Акад, наук СССР, 53, 1946, 99—102.
Чеботарёв Н. Г.
[1] Теория групп Ли. М., 1940.
Четверухин Н. Ф.
[1] Проективная геометрия. 6-е изд., М., 1953.
736
БИБЛИОГРАФИЯ
Ш в а н В. (Schwann W.)
[1] Элементарная геометрия, т. I, М., 1937.
Шевалле К. (Chevalley С.)
[1] Теория групп Ли. т. 1, М., 1948.
Шевалле К., Ш а ф е р Р. Д. (Chevalley С., Shafer R. D.)
[1] The exceptional simple Lie algebras Fa and Er. Proc, of Nat. Ac. Sci.,
36, 1950, 137—141.
Широков А. П.
[1] К вопросу об /-пространствах. Сборник «125 лет неевклидовой гео-
метрии Лобачевского». М.—Л., 1952, 195—200.
Широков П. А.
[1] Постоянные поля векторов и тензоров в Riemann’oBbix пространствах.
Известия физ.-матем. о-ва. Казань (2), 25, 1925, 86—114.
[2] Тензорное исчисление. М.— Л., 1934.
[3] Краткий очерк основ геометрии Лобачевского. В книге Широ-
ков П. А., Каган В. Ф. Строение неевклидовой геометрии. М.—Л.,
1950, 9—76.
[4] К теории симметрических пространств. Учёные записки Казанского
ун-та, 115, 1955, 3—20.
Штуди Э. (Study Е.)
[1] Eine neue Darstellung der Krafte der Mechanik durch geometrische Fi-
guren. Berichte der math.-phys. Classe d. Konigl. Sachs. Ges. d. Wiss.,
51, 1899, 29-67.
[2] Geometrie der Dynamen. 2-е изд., Лейпциг, 1903
[3] Ueber Nicht-Euklidische und Linien-Geometrie. Jahresbericht d. Deut.
Math. Vereinigung, 11, 1902, 313—342; 15, 1906, 476—527.
4] Kiirzeste Wege im komplexen Gebiete. Math. Annalen, 60, 1905, 321—377.
5 Schraubenflache als Extreme. Amer. Journ. of Math., 29, 1906, 160—169.
6] Ein Seitenstiick zur Theorie der linearen Transformationen einer komp-
lexen Veranderlichen. Math. Zeitschrift, 18, 1923, I, 55—86, II, 201—229;
21, 1924, III, 45—71, IV, 174—194.
Эйлер Л. (E u 1 e r L.)
[1] Demonstratio theorematis Fermatiani omnem numerum esse summam
quatuor quadratorum, Opera, (1) t. 2, Лейпциг—Берлин, 1911, 338—372.
Энгель Ф„ Штеккель П. (Engel F„ Stackel Р.)
[1] Die Theorie der Parallellinien von Euklid bis auf Gauss, eine Urkunden-
summlung zur Vorgeschichte der Nicht-Euklidischen Geometrie. Лейпциг,
1895.
Энгельс Ф. (Engels F.)
[1] Диалектика природы, M., 1948.
Яблоновский А. В., Ямпольский В. Г.
[1] Некоторые специальные вопросы, относящиеся к интерпретации пло-
ской геометрии Лобачевского. Учёные записки МГУ, математика,
148 (4), 1951, 15—20.
Я г л о м И. М.
[1] Проективные мероопределения на плоскости и комплексные числа.
Труды сем. по вект. и тенз. анализу при МГУ, 7, 1^48, 276—318.
Я н о К., М о г и И. (J а п о К., М о g i I.).
[1] Sur les variet£s pseudokahleriennes a courbure holomorphique constante.
Comptes rendus Acad. Sci. Paris, 237, 1953, 962—964.
ИМЕННОЙ УКАЗАТЕЛЬ
Аббасов Н. Т. 678
Абрамов А. А. 687
Адамар Ж. (Hadamard J.) 415, 487
Алберт A. A. (Albert А. А.) 442
Алиева Ф. М. 678
Аргунов Б. И. 318
Аристотель (Aristoteles) 31, 246
Архимед (Archimedes) 11, 36
Бек Г. (Beck Н.) 482
Белкин И. Г. 547
Бельтрами Э. (Beltrami Е.) 322, 694
Бергман С. (Bergmann S.) 697
Бертини Э. (Bertini Е.) 280, 344,
345, 346
Бертран Л. (Bertrand L.) 256
Бианки Л. (Bianchi L.) 724
Било Ж. (Bilo J.) 579
Биркгоф Г. (Birkhoff G.) 579, 680
Бируни А. Р. (Birunf A. R.) 149
Блок A. (Bloch А.) 415
Бляшке В. (Blaschke W.) 403, 404,
620, 722
Богомолов С. А. 111, 150
Бойяи Ф, (Bolyai F.) 260
Бойяи Я. (Bolyai J.) 262
Больцано Б. (Bolzano В.) 30
Бомбелли Р. (Bombelli R.) 443
Борель A. (Borel А.) 683, 707
Бортолотти Э. (Bortolotti Е.) 719
Брауэр Р. (Brauer R.) 469
Бродский М. С. 620
Буняковский В. Я. 22
Бэр Р. (Baer R.) 579, 583, 596, 667
Бюшгенс С. С. 280
Вагнер В. В. 724
Валлис Дж. (Wallis J.) 253
Ван Сянь-чжун (Wang Hsien-chung)
623, 685
Вебер Г. (Weber Н.) 428
Вейерштрасс К. (Weierstrass К.) 30
Вейль Г. (Weyl Н.) 12, 469, 692
Вейс Э. (Weiss Е.) 539
Вельштейн И. (Wellstein J.) 428
Вессель К. (Wessel С.) 443
Вольман А. Я. 242
Габададзе Н. А. 482, 507
Галилей Г. (Galilei G.) 44, 697
Гамильтон В. Р. (Hamilton W. R.)
443, 448, 722
Гаусс К. Ф. (Gauss С. F.) 263, 443
Гельфанд И. М. 79, 81, 573
Гессе О. (Hesse О.) 488
Гессенберг Г. (Hessenberg G.) 315,
Гильберт Д. (Hilbert D.) 12, 35, 171,
315 554
Глаголев Н. А. 269, 280
Глизон Э. (Gleason А.) 61
Гордевский Д. 3. 404
Грассман Г. (Grassmann Н.) 37
Губа Е. Д. 489
Гурвиц A. (Hurwitz А.) 442
Даламбер Ж. (D’Alembert J.) 472
Данциг Д. ван (Dantzig D. van) 629
Дарбу Г. (Darboux G.) 394, 397
Дедекинд Р. (Dedekind R.) 27, 31
Дезарг Ж. (Desargues G.) 271, 312
Декарт Р. (Descartes R.) 31
Делоне Б. Н. 72, 111, 150, 264, 269
Демокрит (Demokrites) 31
Джавадов М. А. 532, 655, 678
Дирак П. А. М. (Dirac Р. А. М.)
458, 491
Домшлак Ю. И. 307, 330
Дубнов Я. С. 143, 431, 723, 724
Дынкин Е. Б. 703
Евклид (Eukleides) 11, 35, 171, 253
Ефимов Н. В. 150, 269
Жордан К. (Jordan С.) 81
Зейлигер Д. Н. 620
738
ИМЕННОЙ УКАЗАТЕЛЬ
Ибн ал-Хайсам A. A. (Ibn al-Hai-
tham А. ‘А.) 248
Ивон-Вилларсо A. (Yvon-Villarceau
А.) 415
Исмаилов А. П. 678
Каган В. Ф. 7, 10, 12, 150, 247, 254,
255,256, 258, 260, 263, 380, 429, 431,
694
Кантор Г. (Kantor G.) 31
Картан Э. (Kartan Е.) 72, 113, 275,
280, 350, 371, 415, 463, 500, 523,
539, 622, 692, 703, 704, 710
Касимова С. С. 678
Кваде В. (Quade W.) 44
Келер Э. (Kahler Е.) 697
Кели A. (Cayley А.) 151, 152, 322,
352, 442, 535
Кеплер И. (Kepler J.) 271
Киллинг В. (Killing W.) 703
Клавий X. (Clavius Ch.) 253
Клейн Ф. (Klein F.) 42, 124, 150, 151,
152, 323, 334, 337, 371. 397, 426, 548
Клиффорд В. К. (Clifford W. К.) 226,
237, 443, 448, 458
Кокль Дж. (Cockle J.) 447
Колмогоров А. Н. 316, 443, 578, 582,
680, 683
Комбебьяк Ж. (Combebiac G.) 458
Котельников А. П. 49, 289, 299, 369,
443, 466, 544, 608, 617, 620
Коши О. (Cauchy А.) 22, 443, 472
Кронекер Л. (Kronecker L.) 40, 41
Круг К. А. 33
Крылов Н. М. 501
Кулидж Дж. Л. (Coolidge J. L.) 334,
337, 403, 622, 724
Куммер Э. (Kummer Е.) 723
Курош А. Г. 16, 24
Кутузов Б. В. 150, 260
Лагерр Э. (Laguerre Е.) 48, 352
Ламберт И. Г. (Lambert J. Н.) 255, 256
Ландау Л. Д. 698
Левинов А. М. 307, 330, 339
Лежандр А. М. (Legendre А. М.) 257
Лейбниц Г. В. (Leibnitz G.W.)31,443
Ли С. (Lie S.) 60
Либман Г. (Liebmann Н.) 334, 337
Линник Ю. В. 442
Липшиц Р. (Lipschitz R.) 447, 460,
469
Лиувилль Ж. (Liouville J.) 381, 501
Лифшиц Е. М. 698
Лобачевский Н. И. И, 151, 170, 260,
261, 694, 699
Лоренц Г. A. (Lorentz Н. А.) 46, 491
Мальцев А. И. 79, 81, 117, 448, 573
Мангейм A. (Mannheim А.) 722
Мёбиус A. (Mobius А.) 153, 265, 381
Мейлихзон А. С. 501
Меллер Н. А. 431
Миндинг Ф. (Minding F.) 694
Минковский Г. (Minkowski Н.) 46
Моги И. (Mogi I.) 696
Монж Г. (Monge G.) 271
Монтгомери Д. (Montgomery D.) 61
Моуфанг Р. (Moufang R.) 680
Насирэддин Туси (Nasir-ad-din at-
Tusf) 31, 149, 250
Нейман Дж. фон (Neumann J. von)
61
Норден А. П. 150, 563, 602, 687, 719
Ньютон И. (Newton I.) 31, 44, 697
Папп (Pappos) 312
Перепёлкин Д. И. 10, 72, 111, 715
Пидо Д. (Pedoe D.) 344, 345, 346
Пифагор (Pythagoras) 25
Плюккер И. (Pliicker J.) 356
Полозков Д. Н. 431
Понселе Ж. В. (Poncelet J. V.) 271
Понтрягин Л. С. 25, 59, 61, 442, 703
Посидоний (Poseidonios) 246
Прокл (Proklos) 247
Птолемей К. (Ptolemaios К,) 247
Пуанкаре A. (Poincare Н.) 152,416,426
Райков Д. А. 72, 111, 264, 269
Рашевский П. К. 12, 152, 318, 487,
493, 687, 697, 712, 724
Рейдемейстер К. (Reidemeister К.)
557, 579, 583, 587, 667, 668
Рибокур A. (Ribaucour А.) 724
Риман Б. (Riemann В.) 151, 160, 263,
472 692, 699
Розенфельд Б. А. 44, 239, 280, 339,
365, 404, 452, 480, 490, 492, 547,
622, 623, 657, 678, 685, 687, 697,
708, 711, 719, 721, 724
Саккери Дж. (Saccheri G.) 253, 254,
255
Саммервилль Д. М. Ю. (Sommerville
D. М. Y.) 48, 49, 352
Сегре К. (Segre С.) 280, 622
Семянистый В. И. 300, 307, 330 331,
603, 646
Синцов Д. М. 289
Скопец 3. А. 427, 547
Скорняков Л. А, 318
Степанов Н. Н. 143
Стинрод Н. (Steenrod N.) 623, 680
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
739
Стройк Д я. (Struik D. J.) 381, 403,
622, 629
Схоутен Я. A. (Schouten J. А.) 381,
403, 622, 629
Тауринус A. (Taurinus А.) 263
Фален К. Т. (Vahlen К. Th.) 532, 544
Фёдоров Е. С. 48
Фибби Ч. (Fibbi С.) 724
Фиников С. П. 724
Фок В. А. 697
Фрейденталь Г. (Freudenthal Н.) 683,
707
Фробениус Г. (Frobenius G.) 442
Фубини Г. Г. (Fubini G. G.) 369,
617, 622
Фукс Б. А. 487, 697
Хазанов М. Б. 194
Хайям О. (Al-Khayyamf ‘U.) 31, 166,
181, 246, 248
Ходж В. (Hodge W.) 344, 345, 346
Холл М. (Hall М.) 680
Хуа Ло-гэн (Hua Loo-keng) 579, 678
Циппин Л. (Zippin L.) 61
Чеботарёв Н. Г. 59, 703
Четверухин Н. Ф. 269
Шафер Р. Д. (Shafer R. D.) 683
Шван В. (Schwann W.) 447
Шварц Г. A. (Schwarz Н. А.) 22
Швейкарт Ф. К. (Schweikart F. К.)
263 7
Шевалле К. (Chevalley С.) 573, 683
Широков А. П. 641, 697
Широков П. А. 150, 308, 641, 692,
696, 697
Штаудт Г. К. (Staudt G. К.) 588
Штеккель П. (Stackel Р.) 263
Штуди Э. (Study Е.) 369, 482, 500
617, 622, 696, 719
Эйлер Л. (Euler L.) 443, 472, 688
Эйнштейн A. (Einstein А.) 45, 692, 697
Энгель Ф. (Engel F.) 263
Энгельс Ф. (Engels F.) 42
Эрмит Ш. (Hermite Ch.) 569
Яблоновский А. В. 431
Яглом И. М. 426, 487, 548, 623
Ямпольский В. Г. 431
Яно К. (Yano К.) 696
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолют пространства евклидова Антивращение 111
315 Антидвижение 111
-----неевклидова 189 Антикватернион 441
Абсолютное значение числа двой- Антиколлинеация 290
ного 573
—-------комплексного 189
Автоморфизм группы 18
— кольца 435
Аксиома Архимеда 36
— параллелограмма 12
— размерности 14
— треугольника 21
Аксиоматика Вейля — Рашевского
— Гильберта 35
— Евклида 35
— Колмогорова 316, 582, 680
Алгебра вещественная 434
— комплексная 434
— Ли 700
Альтернативность 679
Альтернион 449
Антиавтоморфизм 436
Антиконгруэнция 723
— фокальная 724
Антикорреляция 290
Антиоктава 534
Асимптоты гиперсферы 136
Ассоциативность 16
Аффинор Вагнера 724
— Кулиджа 724
12 — Куммера 724
— локальный 723
— Рашевского 724
— Фибби — Кулиджа 724
База эквидистанты 176, 230
Базис ортонормированный 27
— унитарно-нормированный
575
Бикватернионы 448
740
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Вектор 12
— изотропный 50
— направляющий 19
— нормальный 23, 574
— особенный 551
— собственный 79
Вектор-нуль 13
Векторы базисные 20
— взаимно унитарные 574
— коллинеарные 19
— компланарные 19
— линейно независимые 14
— ортогональные 22
Вид матрицы диагональный 80
Волновое поле 491
Вращение 72
Гармоническая четвёрка 286
Геликоид линейчатый 719
Геометрия симметрических матриц
678
Гипербола вогнутая 337
— выпуклая 337
Гиперплоскость 37
— бесконечно удалённая 271
Гиперсфера 135, 230
— линейчатая 139
— овальная 139
Гомеоморфизм 28
Гомология 270
— инволюционная 293
Гомоморфизм 18
Гранатоэдр 722
Группа 16
— импримитивная 124
— интранзитивная 124
— Ли 60
— примитивная 125
— простая 702
— спинорная 460
— топологическая 59
— транзитивная 124
— фундаментальная однородного
пространства 124
— — симметрического пространства
701
Движение 66, 194, 631
— винтовое НО, 202
Двойное отношение 284
Делитель нуля 435
Дефект пространства полуевклидова
49
---полунеевклидова 152
— угловой 181
Диаграмма векторая 33, 44
Директриса 304
Дискретность 27
Дистрибутивность 14, 434
Длина вектора 22
Додекаэдр 169
Замыкание 26
Избыток угловой 165
Изображение сферическое паратак-
тической конгруэнции 371
Изоморфизм группы 18
— колец 435
— локальный 700
Икосаэдр 169
Инварианты квадрик 309
— линейных комплексов 308
— т-пар 305
— и-цепей 648
— числовые образов симметрии 133
Инверсия относительно гиперсферы
382
---пары изотропных прямых 474
------- точек 482
---сферы 405
Инволюция в алгебре 439
— гиперболическая 293
— эллиптическая 293
Индекс квадратичной формы 48
-------эрмитовой 571
— квадрики 297
— матрицы ортогональной 56
— — унитарной 577
— пространства евклидова 48, 572
--- неевклидова 151
Интерпретация Вельштейна 428
— Гессе 488
— Губы 489
— Дарбу 403
— Кагана 431
— Кели — Клейна 323
— Котельникова 369, 609, 617
— Минковского 46
— Плюккера 365
— Пуанкаре 365
— Фубини 369, 617
— Яглома 426, 487
Квадрика 297
— линейчатая 299
— овальная 299
— эрмитова 594, 597
Кватернион 441
Классы импримитивности 125
— смежные 17
— транзитивности 124
Коварианты геометрические образов
симметрии 133
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
741
Коллинеация 269
Кольцо 135
Комбинация линейная векторов 14
Коммутативность 17
Коммутатор 700
Компактность 29
Комплекс линейный 301
Компонента связная 27
Конгруэнция изотропная 724
— линейная гиперболическая 283.
300
--- параболическая 283, 300
--- эллиптическая 283, 300
— - — эрмитова 593
— нормальная 724
— паратактическая 203, 219, 649
— плоскостей 723
— прямых 203
— фокальная 724
Координаты аффинные 21
— вектора 20
— грассмановы 465
— декартовы 24, 164, 177, 184
— пентасферические 397
— плюккеровы 365
— полисферические 397
— проективные 272
— тангенциальные 191, 274
— тетрациклические 397
Корреляция 287
Кривизна пространства неевклидова
151
--- риманова 689
Круг шаровой 351
Кручение 692
Линия геодезическая 140, 688
Лист Мёбиуса 153
Листы направляющие 130
Матрица 40
— клеточная 448
— особенная 63
— ортогональная 41, 56
— симплектическая 353
— унитарная 577
/«-геликоид 719
Механика Галилея — Ньютона 44
/«-инволюция 719
Многогранники правильные 168
Множество замкнутое 25
— открытое 26
Модуль 441
Мотор 299
/«-пара 299
/«-спирали 719
Мутовка 289
Набла-функция 500
Независимость аксиом 33
Непрерывность 27
Непротиворечивость аксиом 32
Неравенство Коши 22
Норм-кривая 489
Нормальный делитель 17
п-полуцепь 597
Нуль-пара (0-пара) 289
Нуль-плоскость 301
Нуль-система 299
л-цепь 593
Область идеальная 189
— собственная 189
Образы геометрические мнимые 59
---симметрии 127
Образующие плоские гиперсферы
137
--- квадрики 299
Объём параллелепипеда 128
— пространства 184, 654
Окрестность 26
Окружность 140, 175
— большая 140
— гиперболическая 142
— параболическая 142
— эллиптическая 142
— эрмитова 680
Октава 535
Октаэдр 169
Орисфера 235
Орицикл 175
Отношение векторов 19
Отображение непрерывное 28
Отражение винтовое ПО
— от «-цепи 593, 638
— от плоскости 89, 201
— от прямой 89, 201
— от точки 89, 201
— скользящее 110, 211
Пара конгруэнций Бианки 724
---Фиников а 724
Пара точек 412
Парабола гиперболическая вогнутая
337
---выпуклая двухветвевая 337
------- одноветвевая 337
— соприкасающаяся 337
— эллиптическая 337
Параллели Клиффорда 226
Параллельность 19, 170
Параметр аффинный 265, 691
— канонический 699
— распределения 722
— эквидистанты 176, 230
742
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Перенос 19
— параллельный векторов 689
Перпендикуляры общие 130, 151,
223, 647
Перспектива 269
Плоскость 19, 151, 270
— двойного переменного 470
— расширенная 477
— дуального переменного 545
— изотропная 51, 576
— инвариантная 80
— комплексного переменного 470
--------расширенная 477
— неевклидова двойная октавная 684
---комплексная октавная 684
--- октавная 683
— полуевклидова 51
— полунеевклидова 156
— проективная двойная октавная 683
---комплексная октавная 683
--- октавная 679
Плоскости взаимно полярные 191,
297, 594
— паратактичные 224, 647
— полярные 191, 297, 594
Площадь треугольника 164, 179
— Хазанова 194
Поверхность Клиффорда 226
— односторонняя 153
Поворот 90
— антипаратактический 112
— орициклический 211, 214
— паратактический 91
— — гиперболический 103
------- эллиптический 103
Подгруппа однопараметрическая 699
— ранговая 702
— стационарная 124
Подмногообразие ранговое 720
Подпространство ранговое 703
Поле 435
Полнота системы аксиом 34
Полуальтернион 540
Полуантикватернион 443
Полукватернион 443
Полуопределитель 497, 565, 567
Полуспинор 464
Полюс 191, 297
Представление спинорное 463
Преобразование аналлагматическое
381
— аффинное 66
--- первого и второго рода 77
— дробно-линейное 474, 497
— инволюционное 126
— конформное 376
— кремоново 547
Преобразование круговое 381
— Лагерра 48
— линейное 61
---- первого и второго рода 65
— Лоренца 46
— Мёбиуса 381
— полулинейное 497, 557
— полярное 297, 594, 596
— проективное 288
— симплектическое 352
— центроаффинное 71
Принцип Больцано—Вейерштрасса 30
— двойственности 193, 275
— Дедекинда 27
— тройственности 534
Проблема V Гильберта 61
Проекция стереографическая 387
Произведение косое 623
— прямое алгебр 447
-групп 18
— скалярное 15
— топологическое 30
Пространство антикватернионов 495
— аффинное 264
— — антикватернионное 548
«-----двойное 548
---- кватернионное 548
------- комплексное 268
---- над алгеброй 666
---- октавное 679
— аффинной связности 691
— гиперболическое 152
— евклидово 12
---- двойное 572
---- дуальное 617
---- комплексное 56
---- многомерное 37
---- со знаконеопределённой мет-
рической формой 48
— — унитарное 272
— касательное 688
— кватернионов 495
— Клейна 124
— конформное 391
------комплексное 394
— метрическое 21
— неевклидово 151
---- двойное 608
---- дуальное 617
----комплексное 159
----Лобачевского 151
---- Римана 151
---- над алгеброй 677
---- унитарное 622
— однородное 124
— одностороннее 198
— полуевклидово 49
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
743
Пространство полунеевклидово 152
— проективное 270
--- антикватернионное 578
•--двойное 578
--- дуальное 602
---кватернионное 578
---комплексное 275
--- над алгеброй 667
— псевдоевклидово 48
— расслоённое 697
— риманово 688
— симметрическое 692
— симплектическое 352
— топологическое 25
— - — регулярное 28
— эллиптическое 152
Прямая 19
— гиперболическая 156
— изотропная 51, 576
— параболическая 156
— эллиптическая 156
Прямые конквадричные 311
— паратактичные 226
— расходящиеся 170
— характеристические линейных
комплексов 309
Псевдокватернион 441
Псевдосфера 694
Пучок гиперсфер 406
— расслоённый 623
Радиус гиперсферы 135, 230
— кривизны 151, 622
Ранг алгебры 434
— простой группы 702
— симметрического пространства
Расстояние 21, 22
— касательное 47
--- мнимое 47
Расстояния минимальные плоскостей
128
— стационарные движения 200
— •— плоскостей 223
Ромбододекаэдр 722
Ряды кругов Ивона-Вилларсо 415
Связность 27
— аффинная 691
Сдвиг вдоль прямой 202
— паратактический 202
------- гиперболический 208
----на полупрямую 203, 209
--- эллиптический 208
Семейство геодезическое 640, 718
Символ Кронекера 40, 41
Симметрия 127
Симплекс 73, 157, 275
— автополярный 191, 297, 595
Система окружностей Рибокура 724
— триортогональная 380
Соответствие изометрическое 21
Спин 491
Спинор 463
Спирали логарифмические 719
Сумма прямая групп 18
------ колец 436
Сфера 135
— большая 139
Сферы встречающиеся 411
— зацепленные 411
— косферичные 411
— паратактичные 411
— расцепленные 411
— сопряжённые 405
Тело 435
Теорема Алберта 442
— Гурвица 442
— Дезарга 312
------ малая 314
— косинусов 25, 143
------- двойственная 148
— Лиувилля 381
— Паппа 312
— синусов 147
— тангенсов 148, 149
— Фробениуса 442
Теория относительности общая 697
-специальная 45
— тяготения 697
Точка 12
— бесконечно удалённая 392
— предельная 26
Точки базисные 158, 272
— взаимно обратные 382
— взаимно полярные 191, 297,
594
— идеальные 189
— конциклические 412
— направляющие и-пар 304
------/г-цепей 648
— циклические 351
Трактрисса 694
Треугольник вырожденный 173
— сферический 143
Тригонометрия сферическая 143
Углы стационарные вращения 91
------ плоскостей 130
------сфер 410
Угол 24
— мнимый 54
— параллельности 171
744
УКАЗАТЕЛЬ ОБОЗНАЧЕНИЙ
Уравнение характеристическое 79
Условия Даламбера — Эйлера 472
Фактор-группа 18
Фактор-пространство 29
Форма квадратичная эрмитова 569
— метрическая 39
— нормальная Жордана 81
Формула Гамильтона 722
— Мангейма 722
Функции аналитические двойного
переменного 471
-----дуального переменного 545
-----комплексного переменного 471
-----многих комплексных перемен-
ных 697
Центр гиперсферы 135, 230
— луча 722
Центр группы 17
— кольца 435
Цепи общие ортогональные 647
Цепь 588
— нормальная 638
Черырёхсторонник полный 295, 314
Четырёхугольник Хайяма 166, 181,
284
Числа бикомплексные 448
— двойные 441
— дуальные 443
— Кели 535
— Клиффорда 458
— сопряжённые 441
Число собственное 79
Элемент антиинвариантный 438
— регулярный 702
Элементы сопряжённые 441
Эллипс 336, 337
Ядро гомоморфизма 18
УКАЗАТЕЛЬ ОБОЗНАЧЕНИЙ
Ап 264 Ап (/) 268 Ап (е), Ап (1, j), Ап (1, е) 548 An(l, j, 1) 679 Аге (х) 688 АИ(А) 666 Сй) 1СП 391 С„(0 394 Кп<Р)г Кп(е), К„{1, е) 622 J, 1), Kz(l, j, I) 683 АГ2(А J, l> l'\ j, I; e) 684 K„(e) 646 Ln 691 Pn 270 Pn (0 275 Pn(e), Pn(l, J), Pn(l, e) 578 Pi(.l, j, Pi(l, j, I) 680 P2 (i, j, l\ i'\ Рч. (J, J, e) 683 P„(e) 602 Pn<A) 667 7?3 12 Rn 37 lRn 48 wRn, l+'d'Rn 49 Rn(l) 56 (d}Rn(i) 57 Pn(e), lPn(e) 572 RnW, lRn& 617 Sn, 151 ^Sn, l+(d>Sn 159 Sn(l) 159 wSn(l) 159 Sn(e), iSn(e) 608 Sn(e), lSre(e) 617 SPn 352 Un(i), Un(e), Un(l, j), lUn(l, j), Un(l, e) 572 Vn, Wn 688 Xn 686 Ara, iAn 449 Bn, iBn 540 40 8} 41 e4 50 y{ 540 Фп, Ф» (0. Ф»(в) 668 ФпО.А Фп(1. J-, e) 671