









































































































































































































Author: Гуревич О.С.
Tags: этнография жизнь народа обычаи образ жизни фольклор теория управления аваиция аваиционное двигателестроение регуляторы издательство торус пресс
ISBN: 978-5-94588-096-2
Year: 2011




a
3"
Системы
автоматического
управления
авиационными
гтд
Энциклопедический справочник
Под редакцией д.т.н., проф. О. С. Гуревича
80-летию ЦИАМ
посвящается
Системы
автоматического управления
авиационными ГТД
Энциклопедический справочник
Под редакцией
д. т. н., проф. О. С. Гуревича
Москва
ТОРУС О ПРЕСС
2011
ББК
УДК
39.55
629.7.03-52:681.51
С 40
С 40 Системы автоматического управления авиационными
ГТД: Энциклопедический справочник / Под ред. д.т.н., проф.
О. С. Гуревича. — М.: ТОРУС ПРЕСС, 2011. — 208 с: ил.
ISBN 978-5-94588-096-2
Справочник содержит базовую информацию о принципах
управления авиационными газотурбинными двигателями (ГТД),
некоторых современных аспектах теории управления ГТД,
аппаратурных решениях, применяемых при разработке регуляторов.
Рассмотрены вопросы построения систем автоматического управления
(САУ) двигателями различных типов и их основные
характеристики, а также методы исследования САУ ГТД, включая
особенности математического моделирования и стендовых испытаний.
Приведенный список литературы позволит заинтересованному
читателю при необходимости углубить познания в данной области
техники.
Для инженеров, научных работников, аспирантов и студентов,
специализирующихся в области авиационного двигателестроения и
смежных направлениях.
ББК 39.55
ISBN 978-5-94588-096-2 © ФГУП «ЦИАМ им. П. И. Баранова», 2011
© ТОРУС ПРЕСС, 2011
Содержание
Условные обозначения 6
Введение: Системы автоматического управления
газотурбинными двигателями — очерк развития
О. С. Гуревин 9
ГЛАВА 1: Некоторые вопросы теории автоматического
управления авиационными ГТД 18
1.1 Принципы выбора программ управления газотурбинным
двигателем
О. С. Гуревич 18
1.2 Влияние эксплуатационных факторов на выбор
параметров регулирования
Л. И. Швец 40
1.3 Формирование требований к точности регулирования
Ф. Д. Голъберг, О. С. Гуревич 47
1.4 Влияние взаимодействия регуляторов на характеристики
САУ
О. С. Гуревич, Ф. Д. Голъберг 50
1.5 Адаптивное управление газотурбинным двигателем
Ф. Д. Голъберг, О. С. Гуревич 57
1.6 Интегрированное управление силовой установкой
с ТРДДФ
О. С. Гуревич, Ф.Д. Голъберг 61
1.7 Регулирование температуры газа в ГТД
О. С. Гуревич, Ф. Д. Голъберг 72
ГЛАВА 2: Аппаратурные решения в системах управления 76
2.1 Электронные цифровые системы управления
А. С. Трофимов 76
2.2 Гидромеханические регуляторы
А. А. Добрынин, В. И. Зазулов 85
2.3 Системы управления на элементах струйной техники
Г. П. Степанов 93
3
Содержание
2.4 Системы топливопитания
A. И. Гулиенко, О. С. Гуревич 101
2.5 Системы ГТД для «электрического» самолета
Ю. С. Белкин, А. И. Гулиенко, О. С. Гуревич 109
ГЛАВА 3: Построение систем автоматического
управления ГТД 118
3.1 Системы управления ТРДД
О. С. Гуревич 118
3.2 Системы управления ТРДДФ
О. С. Гуревич, Ф.Д. Гольберг 122
3.3 Системы управления турбовинтовыми
(турбовинтовентиляторными) и вертолетными
двигателями
B. В. Дятлов 128
3.4 Системы управления ВГТД
Г. В. Карягин, Э. Н. Обрубова 136
3.5 Системы управления сверхзвуковыми
воздухозаборниками
Ю. С. Белкин 140
3.6 Системы защиты двигателя от помпажа
Л. Г. Близнюков 147
ГЛАВА 4: Математическое моделирование САУ ГТД 153
4.1 Математическое моделирование газотурбинного
двигателя для решения задач управления
О. С. Гуревич, Ф. Д. Гольберг 153
4.2 Математическое моделирование систем управления ГТД
Ф. Д. Гольберг, О. С. Гуревич 160
4.3 Особенности моделирования электронных цифровых
САУ
А. С. Трофимов, В. И. Чернышов 168
4.4 Математическое моделирование сверхзвуковых
воздухозаборников
Ю. С. Белкин 173
4
Содержание
ГЛАВА 5: Экспериментальные исследования
и испытания 177
5.1 Экспериментальные исследования систем управления
на безмоторных стендах
А. И. Гулиенко, В. В. Карпушин 177
5.2 Испытания САУ на двигательных стендах
О. С. Гуревич, Л. Г. Близнюков 184
5.3 Испытания электронных регуляторов САУ ГТД
А. С. Трофимов 190
5.4 Информационно-измерительные системы стендов
для испытаний САУ
М. Г. Кесселъман 199
Список литературы 205
5
Условные обозначения
Ср — удельная теплоемкость;
Суд — удельный расход топлива;
F — площадь проходного сечения, поверхности;
G — массовый расход;
N — мощность;
Н — высота полета;
LK — положение клина СВЗ;
М — число Маха;
т — масса;
Мвр — вращающий момент;
Р — тяга двигателя;
р — давление;
Ар — перепад давлений:
Q, q — объемный расход; тепловой поток; прокачка масла;
R — газовая постоянная;
Т — абсолютная температура; постоянная времени;
t — температура в °С; время;
S — оператор преобразования Лапласа;
V — скорость полета; объем;
а — угол атаки; коэффициент избытка воздуха; угол установки
регулируемого элемента;
(3 — угол скольжения;
АХУ — запас газодинамической устойчивости;
А — интенсивность отказов; приведенная скорость потока;
г] — коэффициент полезного действия; полнота сгорания;
т — постоянная времени;
7г — степень сжатия, расширения;
а — коэффициент восстановления полного давления;
р — плотность;
v — кинематическая вязкость;
ip — угол установки лопаток НА, лопастей винта; коэффициент
расхода СВЗ.
Индексы
в — воздух; вентилятор; сечение за вентилятором;
вн — сечение на выходе внутреннего контура;
вх — вход; сечение на входе в двигатель;
6
Условные обозначения
вых — выход;
г — газ; горло СВЗ;
Гг — газогенератор;
к — клин; камера сгорания; компрессор; сечение за компрессором;
кр — критический;
н — наружный контур; невозмущенный поток;
на — направляющий аппарат;
нв — несущий винт;
нд, вд — ротор низкого давления, высокого давления;
ном — номинальный;
охл — охлаждающий;
пер — переходный;
пр — приемистость; приведенный к стандартным условиям;
программа регулирования;
рев — реверс;
с — сопло; срез сопла;
см — смеситель; сечение за смесителем ТРДД;
ст — свободная турбина;
ств — створка перепуска в ВЗ;
т — топливо; турбина; сечение за турбиной;
уд — удельный;
уст — установившийся;
ф — форсажный; сечение на выходе ФКС;
эф — эффективный;
* — параметр заторможенного потока.
Сокращения
АЦП — аналого-цифровой преобразователь;
БИТ — быстрое изменение тяги;
БСКД — бортовая система контроля и диагностики двигателя;
БЦУМ — бортовая цифровая управляющая машина;
ВГТД — вспомогательный ГТД;
ВЗ — воздухозаборник;
ВНА — входной направляющий аппарат;
ГДУ — газодинамическая устойчивость;
ГДФ — глубокое дросселирование форсажа;
ГТД — газотурбинный двигатель;
ИВ — измеряемая величина;
7
Условные обозначения
ИИС — информационно-измерительная система;
ИК — измерительный канал;
ИМ — исполнительный механизм;
ИСАУ — интегрированная САУ;
КВД, КНД — компрессор высокого давления, низкого давления;
КПА — коробка приводов агрегатов;
КПД — коэффициент полезного действия;
Л А — летательный аппарат;
ЛРР — линия установившихся рабочих режимов двигателя;
ЛТХ — летно-технические характеристики;
МГ, ЗМГ, ПМГ, НОМ, КР, МАХ, МФ, ЧФ, ПФ, ЧР — режимы работы
двигателя: малый газ, земной малый газ, полетный малый газ,
номинальный, крейсерский, максимальный, минимальный
форсированный, частичный форсированный, полный форсаж,
чрезвычайный режим;
МКИО — мультиплексный канал информационного обмена;
НА — направляющий аппарат;
ОВТ — устройство отклонения вектора тяги;
ОКС — основная камера сгорания;
РУ — реверсивное устройство;
РУД — рычаг управления двигателем;
С А — сопловой аппарат;
САУ — система автоматического управления;
СВЗ — сверхзвуковой ВЗ;
СВР — система восстановления исходного режима;
СПО — специализированное программное обеспечение;
СТП — система топливопитания;
СУ — силовая установка;
ТВВД — турбовинтовентиляторный двигатель;
ТВГТД — турбовальный ГТД;
ТВД, ТНД — турбина высокого давления, низкого давления;
ТРД — турбореактивный двигатель;
ТРДД — ТРД двухконтурный;
ТРДФ (ТРДДФ) — ТРД (ТРДДФ) с ФКС;
УЭЦИ — ускоренные эквивалентно-циклические испытания;
ФКС — форсажная камера сгорания;
ШИМ — широтно-импульсная модуляция;
ЭГТД — «электрический» ГТД.
8
Введение
Системы автоматического управления
газотурбинными двигателями — очерк развития
Возможность получения требуемых характеристик авиационного
газотурбинного двигателя (ГТД) на установившихся и переходных
режимах работы в значительной степени зависит от выбранных
способов управления рабочим процессом в нем и их реализации в системе
автоматического управления (САУ).
Система автоматического управления авиационного ГТД— это
комплекс устройств, обеспечивающих запуск и работу двигателя с
необходимыми для полета самолета характеристиками по тяге
(мощности), экономичности и безопасности. Качество САУ определяется
такими ее свойствами, как функциональность, статическая и
динамическая точность регулирования, надежность, ресурс, масса и
габаритные размеры, эксплуатационная технологичность и др.
Задачами автоматического управления авиационными ГТД
являются:
- получение оптимальных характеристик силовой установки (СУ);
— обеспечение устойчивости рабочего процесса в двигателе на
установившихся и переходных режимах работы;
— обеспечение прочности конструкции двигателя путем
предупреждения недопустимых механических и тепловых нагрузок
на ее узлы на установившихся и переходных режимах работы;
- возможность поддержания устойчивой работы двигателя на
заданном режиме и изменения режима работы при выполнении
требований к качеству и длительности переходных процессов.
9
Введение
Их конкретное содержание зависит от типа двигателя, выбранных
входов управления им и принципов построения САУ.
Для решения этих задач в САУ должны осуществляться:
- измерение необходимых параметров, характеризующих рабочий
процесс в двигателе и внешние условия (режим полета);
- формирование программ (законов) и алгоритмов управления,
позволяющих обеспечить управляемость двигателя, устойчивость
и заданное качество процессов управления;
- управляющие воздействия на регулирующие факторы
двигателя;
- подача топлива с требуемыми давлением и расходом в камеры
сгорания;
- подача топлива, другого рабочего тела или вида энергии с
заданными характеристиками в силовые исполнительные устройства;
- контроль и диагностирование САУ и двигателя и выполнение
необходимых операций по обеспечению требуемых показателей
безотказности.
Соответственно в САУ ГТД могут быть выделены несколько
осНовных подсистем, отличающихся определенной спецификой и
требующих специализации при проектировании и эксплуатации. К ним
отНосятся подсистемы сбора и обработки информации (датчики,
преобразователи), формирования программ и алгоритмов управления и
контроля (электронные, гидромеханические, пневматические и др.),
исполнительных устройств (преобразователи сигналов, силовые
исполнительные механизмы), подачи топлива (насосы, распределители
т°Плива и др.).
В науке и практике создания САУ СУ следует выделить два
основных направления работ, тесно связанных между собой и существенно
влияющих на результат разработки:
U) работы по методам управления двигателем и СУ в целом,
направленные на формирование способов воздействия на рабочий
процесс. Они должны позволить с учетом имеющихся
возможностей и ограничений выполнить комплекс многочисленных и
противоречивых требований к функциональным характеристикам
двигателя и самолета (тяги, экономичности, динамическим
свойствам, газодинамической устойчивости (ГДУ) и др.) при
изменении внешних условий (скорости и высоты полета, температуры
10
САУ ГТД — очерк развития
и влажности воздуха и т. п.) во всех условиях эксплуатации
самолета, обеспечив, вместе с тем, ресурс и надежность двигателя
и выполнение требований по эксплуатационной технологичности
(стоимости эксплуатации). Результатом работ по этому
направлению являются программы и алгоритмы управления,
составляющие алгоритмическую базу САУ, в частности основу
функционального программного обеспечения электронных регуляторов;
(2) работы по созданию аппаратуры систем управления и топливо-
питания. Осуществляется выбор характеристик и разработка
электронных, гидромеханических и другого типа регуляторов,
насосов и других элементов топливных систем, датчиков,
исполнительных механизмов, т. е. всего комплекса необходимых
агрегатов. При этом должны быть обеспечены работоспособность,
необходимая надежность и эксплуатационная технологичность с
учетом условий эксплуатации и внешних воздействий
(температуры, давления, вибраций, перегрузок и т.д.) и условий
применения летательных аппаратов (ЛА). Возможности аппаратурной
реализации САУ влияют на выбор методов управления.
Методы автоматического управления ГТД развиваются со времени
появления в авиации двигателей такого типа по мере
совершенствования общей теории управления и теории управления ГТД, методов
исследования систем (от приближенных аналитических методов к
численным исследованиям с помощью вычислительных машин, сначала
аналоговых, потом цифровых), самих двигателей (что предъявляет
все более высокие требования к системам управления) и, наконец,
технологических возможностей промышленности. Это позволяло все
полнее учитывать особенности двигателя, к которым относятся высокая
динамичность, зависимость статических и динамических
характеристик от режима работы двигателя и условий полета, в течение
которого они изменяются в соответствии со значительным изменением
температуры и давления воздуха и газа.
Сначала (в 1950-60-е гг.) использовались достаточно простые
алгоритмы управления, в соответствии с которыми в гидравлических и
механических устройствах выполнялось регулирование частоты
вращения ротора двигателя с введением необходимых воздействий по
производной и переменных коэффициентов усиления как элементов
адаптации к режиму работы (изодромные регуляторы).
11
Введение
Разработка ГТД более сложных схем с регулируемыми
элементами проточной части (направляющим аппаратом (НА) компрессора,
соплом), форсажной камерой сгорания (ФКС), регулируемым винтом,
повышение уровня параметров рабочего процесса (температуры и
давления газа) привели к усложнению задач управления, вызванному
взаимодействием контуров управления, появлением областей
совместной работы регуляторов. Возможности решения возникающих
проблем были связаны с разработкой методов снижения влияния
взаимодействия каналов управления, в частности, построением автономных
САУ, применением и развитием теории инвариантности с учетом
особенностей управления ГТД.
Дальнейшее расширение объема задач, решаемых в полете,
повышение требований к двигателям по уровню основных характеристик
(удельных параметров, надежности, ресурсу) потребовало более
точного учета изменяющихся в полете условий эксплуатации, повышения
точности управления на установившихся и переходных режимах
работы для обеспечения возможности реализации характеристик
двигателя, заложенных при его проектировании, и повышения
эффективности применения самолета.
Решение этих задач стало возможным с разработкой методов
адаптивного и интегрированного управления СУ, позволяющего
средствами автоматического управления получить характеристики
двигателя и СУ, в целом наилучшие для конкретных условий полета,
например наилучшую экономичность двигателя в крейсерском полете,
высокую маневренность самолета-истребителя, необходимые запасы
ГДУ при действии сильных возмущений (внешних и внутренних) и
при полете на больших высотах и т. п.
Аппаратурные решения. Возможности применения методов
управления тесно связаны с аппаратурными решениями, используемыми
при создании регуляторов ГТД, определяемыми, в свою очередь,
технологическими достижениями в области материалов, электроники,
оптики и т. д. На начальном этапе развития ГТД и их САУ эти
возможности ограничивались отсутствием работоспособных в условиях
размещения на двигателе и самолете электронных устройств, и
регуляторы выполнялись гидромеханическими или пневматическими, а
позднее — на элементах пневмоники. Сначала это были достаточно
простые гидромеханические регуляторы двух-трех параметров, но
12
САУ ГТД — очерк развития
уже в 1970-е гг. появились весьма сложные конструкции с
использованием пространственных кулачковых пар, воздушных редукторов,
мембранных устройств и др., обеспечивающих регулирование и
ограничение десятков параметров. В 1960-х гг. начались разработка и
эксплуатация электронных регуляторов аналогового типа, а к началу
1970-х гг. — первых цифровых электронных регуляторов.
Развитие электронных технологий в последующий период (1980-
90-е гг.), приведшее к созданию достаточно надежных термо- и
вибростойких электронных компонентов, позволило создать цифровые
электронные системы управления, практически не имеющие ограничений
по объему и сложности обрабатываемой информации для задач
управления ГТД. На первом этапе их внедрения были разработаны
системы супервизорного типа, в которых электронный регулятор
осуществлял управление, воздействуя на уставку гидромеханического
регулятора в ограниченном диапазоне ее изменения, а также системы
с электронными ограничителями предельных значений параметров
двигателя (температуры газа, частоты вращения). В дальнейшем,
по мере совершенствования электронной элементной базы (повышения
степени интеграции, термостойкости и, как следствие, надежности)
и подтверждения надежности электронных систем в эксплуатации,
были созданы и в настоящее время заняли доминирующее положение
цифровые электронные системы управления с полной
ответственностью типа FADEC (Full Authority Digital Electronic Control). В
таких системах электронный регулятор осуществляет прямое
управление регулирующими органами (факторами) двигателя и выполняет
все функции управления в полном диапазоне эксплуатационных
режимов.
Такими выполняются современные САУ для всех типов ГТД
(турбореактивных двухконтурных двигателей (ТРДЦ) для пассажирских
и транспортных самолетов, ТРДЦ с ФКС (ТРДЦФ), турбовинтовых
двигателей, турбовальных ГТД (ТВГТД) и др.). Архитектура
систем, как правило, соответствует централизованной схеме. При
таком построении для обработки информации и формирования сигналов
управления двигателем используется специальная бортовая
цифровая управляющая машина (БЦУМ). Датчики и исполнительные
механизмы (ИМ) соединяются с БЦУМ в основном аналоговыми линиями
связи (рис. 1, а). Система автоматического управления двигателя ап-
паратно и алгоритмически интегрирована с другими системами ЛА.
13
Введение
11
-,Л
Х\Х X L*
S
/V У~« I У^
1с
(б)
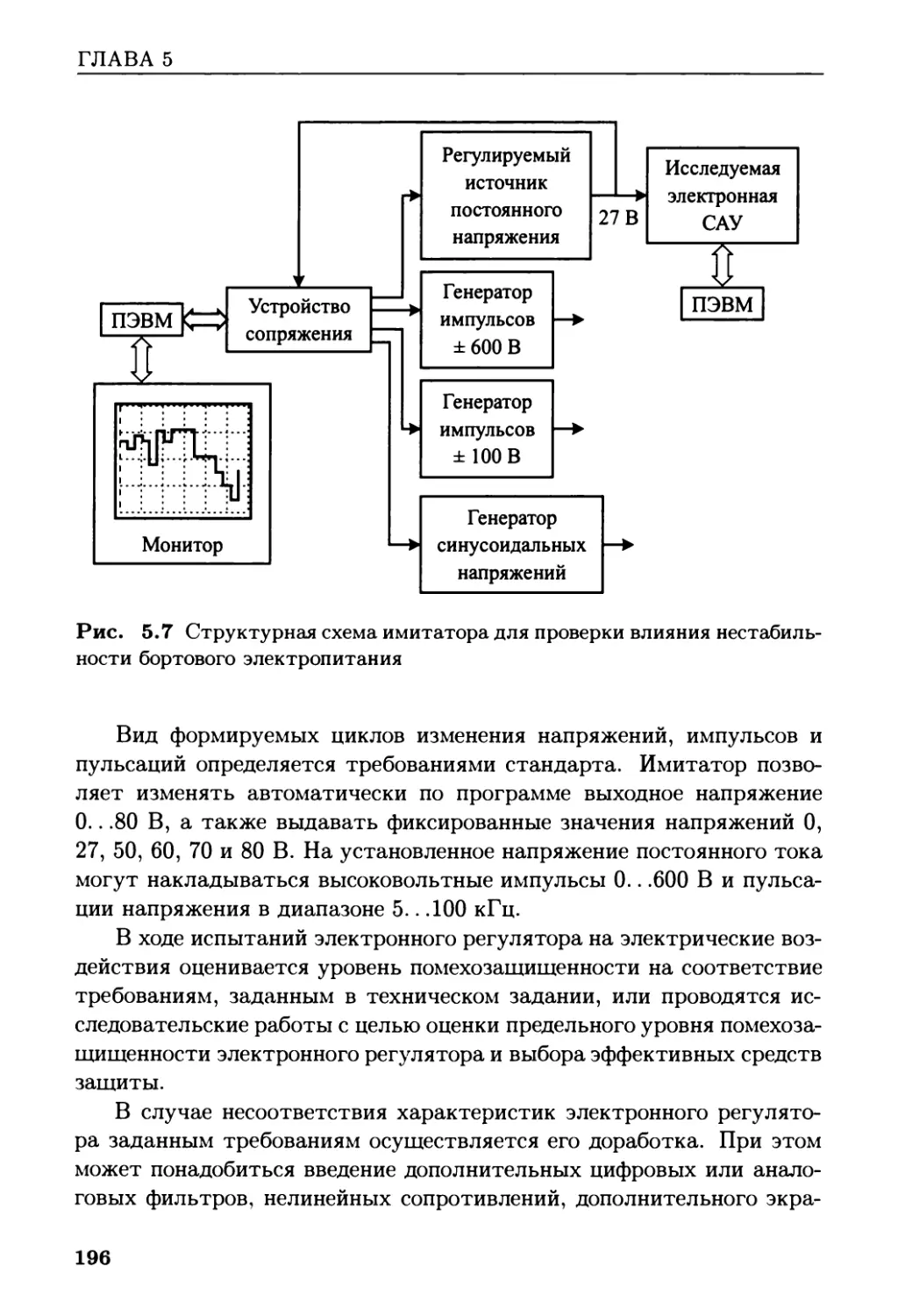
Рис. 1 Структурное построение централизованной (а) и
распределенной (б) САУ ГТД: 1 — электронный регулятор FADEC; 2 — топливная
система, гидромеханический регулятор; 3 — датчики; 4 —
исполнительные механизмы; 5 — аналоговые линии связи; 6 — самолетные системы;
7 — МКИО самолета; 8 — центральный процессор САУ ГТД; 9 —
интеллектуальные датчики; 10 — интеллектуальные ИМ; 11 — МКИО ГТД
Связь с ними осуществляется с помощью проводных мультиплексных
каналов информационного обмена (МКИО). Положение рычага
управления двигателем (РУД) вводится в систему управления в виде
электрического сигнала, а не с помощью механических тяг, как это было
при использовании гидромеханических регуляторов.
Надежность САУ обеспечивается комплексом средств. К ним
относятся:
— использование электронной элементной базы с высокой степенью
интеграции, обладающей высокой надежностью (интенсивность
отказов 10~6...10~8 1/ч) в реальных условиях эксплуатации
(температура окружающей среды — 60 ... + 125 °С, повышенные
вибрации, специфические воздействия для двигателей военной
авиации), а также надежных комплектующих изделий
(датчиков, исполнительных устройств и др.);
— применение аппаратного резервирования как в электронной
части САУ, так и с помощью регуляторов гидромеханического или
иного типа, а также программного резервирования;
— введение в электронный регулятор встроенной системы
контроля и диагностики САУ;
— резервирование электропитания путем использования бортовых
источников постоянного и переменного тока, а также с помощью
автономного электрогенератора;
14
САУ ГТД — очерк развития
— создание в эксплуатации насколько возможно комфортных
условий для работы аппаратуры САУ по температуре окружающей
среды, воздействию вибраций (размещение, охлаждение, проти-
вовибрационные опоры и т.п.);
— специальные технологические мероприятия в процессе
производства (входной контроль, термотренировка и т.д.).
Как правило, электронный регулятор выполняется двухканаль-
ным с полностью или частично отдельными для каждого канала
датчиками и исполнительными механизмами. Необходимые
функциональные возможности регулятора обеспечиваются использованием
высокопроизводительного (быстродействие до 20млнкор.оп/с)
процессора, достаточной по объему оперативной (ОЗУ) и постоянной
(ПЗУ) памяти и др.
Электронные регуляторы устанавливаются на двигателе (для
двигателей большой и средней размерности), а также в двигательном
отсеке или на борту (для двигателей малой размерности). В ряде
случаев, определяемых условиями эксплуатации и аппаратным
исполнением, применяется принудительное охлаждение регуляторов воздухом
или топливом.
Для повышения безопасности эксплуатации могут использоваться
резервные регуляторы гидромеханического или иного типа, или
ручное управление. Достигнутый уровень надежности электронных САУ
позволяет не использовать такие резервные регуляторы для
двигателей, устанавливаемых на самолетах гражданского и военного
назначения, имеющих два и более двигателей.
Системы топливопитания современных двигателей выполняются
двухступенчатыми с подкачивающим центробежным насосом низкого
давления в первой ступени и насосами высокого давления во второй
ступени. Все насосы, как правило, приводятся во вращение от
коробки приводов двигателя.
В качестве насосов высокого давления в основном используются
насосы, производительность которых специально не регулируется и
определяется частотой вращения ротора двигателя на данном режиме
работы (шестеренные и центробежные насосы). Исключение
составляют плунжерные насосы, позволяющие изменять
производительность независимо от частоты вращения. Однако область их
применения ограничена в связи с более низким ресурсом и высокой
стоимостью.
15
Введение
Методы управления ГТД, применяемые в настоящее время в
электронных САУ, в значительной степени аналогичны тем, которыми
пользовались в заключительный период разработки и эксплуатации
систем гидромеханического типа (в 1970-80-е гг.). Они
усовершенствовались в направлении большей адаптации управления к
условиям эксплуатации, интеграции с системами управления полетом.
Новые решения в области адаптивного и интегрированного управления,
управления при отказах и повреждениях двигателя и САУ и другие
интенсивно разрабатываются и, очевидно, в более полном объеме
будут все более широко использоваться уже в ближайшем будущем.
Важными и учитываемыми при разработке САУ ГТД являются
вопросы обеспечения их эксплуатации с минимальными затратами
на обслуживание. Возможность эксплуатации по техническому
состоянию характерна для лучших современных систем управления.
Перспективы развития САУ ГТД связаны с переходом на
построение цифровых электронных систем распределенной структуры,
базирующихся на использовании отказоустойчивых SMART-подсистем
(интеллектуальных датчиков и исполнительных устройств),
координации работы подсистем центральным резервированным процессором,
встроенном контроле, высокопроизводительной связи с другими
бортовыми системами.
Структура распределенной САУ показана на рис. 1, б. Такое
построение систем управления позволит существенно увеличить
надежность (в перспективе на порядок), снизить массу аппаратуры (на
30%.. .40%), повысить качество управления и, в результате,
улучшить характеристики двигателя, уменьшить расходы на
производство и эксплуатацию (до 50%.. .60%). Основой для создания
интеллектуальных распределенных систем управления является применение
передовых электронных технологий (высокотемпературной
электронной элементной базы, оптоэлектроники и др.).
Другим важным направлением совершенствования САУ ГТД
является создание систем топливопитания с насосами регулируемой
производительности. Это даст возможность снизить подогрев
топлива в системе, увеличить ее надежность и ресурс, уменьшить массу.
Наиболее перспективным в этой области выглядит введение
управления частотой вращения насосов с помощью регулируемого
электропривода, хотя известны и другие решения, такие как использова-
16
САУ ГТД — очерк развития
ние турбопривода или управление элементами насоса, изменяющими
форму его проточной части.
Применение на ГТД электропривода с высокой удельной
мощностью открывает и целый ряд других возможностей для улучшения
его характеристик путем создания высокоэлектрифицированного
двигателя для «электрического» самолета, т. е. такого, на котором
электрическая энергия станет базовой для его функционирования. В этом
случае электропривод может быть использован (помимо топливной
системы) для перемещения органов механизации проточной части
двигателя, для привода насосов в системе смазки.
Совмещение функций электрического стартера и генератора в
одном агрегате (стартере-генераторе), приводимом во вращение
непосредственно от вала двигателя, позволит отказаться от использования
на двигателе коробки приводов. Это уменьшит габаритные размеры
и массу двигателя и даст ряд других преимуществ (снижение отбора
мощности, повышение пожаробезопасности и др.).
Вопросам, рассмотренным в настоящей очерке, посвящены
работы [1-3].
17
Глава 1
Некоторые вопросы теории автоматического
управления авиационными ГТД
1.1 Принципы выбора программ управления газотурбинным
двигателем
Выбор программ и алгоритмов управления и аппаратурного
исполнения системы автоматического управления определяет
возможность реализации в двигателе предусмотренных при
проектировании термодинамических и прочностных характеристик, обеспечения
ГДУ рабочих процессов. Зависимость свойств двигателя от метода
управления им распространяется затем на характеристики самолета,
влияя на такие его качества, как экономичность, безопасность полета,
маневренность и др. В связи с этим важным условием использования
располагаемых возможностей двигателя является выбор и учет
способов его регулирования с начала проектирования, когда происходит
формирование характеристик двигателя и его отдельных узлов.
Система автоматического управления должна обеспечить возможность
работы двигателя на всех режимах его эксплуатации.
Номенклатура установившихся режимов работы для двигателей
разных типов включает в себя максимальный (МАХ), номинальный
(НОМ) и крейсерский (КР) режимы, режим земного (ЗМГ) и
полетного (ПМГ) малого газа, полного (ПФ), частичного (ЧФ) и
минимального (МФ) форсирования, а также чрезвычайный режим (ЧР) [4-8].
К переходным режимам работы двигателя относятся режимы запуска,
приемистости, сброса газа (мощности), включения и выключения
форсажа. Показатели качества переходных режимов определяют ди-
18
Некоторые вопросы теории управления ГТД
намические свойства двигателя, характеризующие его возможности
по времени изменения тяги в заданном диапазоне.
Выбор методов и программ управления должен позволять решать
весь комплекс задач управления, обеспечивая как оптимальность и
устойчивость режима работы двигателя, так и прочность его
конструкции. Это может быть достигнуто лишь при учете
эксплуатационных ограничений, характерных для авиационных ГТД.
Ограничения могут быть разделены на две группы: по условиям ГДУ рабочих
процессов в узлах СУ и по прочности. Первая группа ограничений
относится к таким узлам, как компрессор, камеры сгорания и
сверхзвуковой воздухозаборник (СВЗ), вторая связана с прочностью
конструкции двигателя, необходимый запас которой должен сохраняться
во всех условиях эксплуатации. Для установившихся режимов работы
двигателя ограничиваются предельные значения частоты вращения
роторов щ тах и температуры газа Тг*тах, наиболее существенно
влияющие на запас прочности лопаток турбины, а также давление
воздуха за компрессором Рг*тах, характеризующее вращающий момент
на валу ротора.
Прочностные ограничения на переходных режимах работы
двигателя выполняются путем ограничения величины и длительности
превышений параметрами щ и Тг* их максимальных допустимых
значений на установившихся режимах работы.
Параметры регулирования ГТД должны быть выбраны так,
чтобы они характеризовали как оптимальность и устойчивость
режима работы двигателя, так и уровень нагрузок на его
конструкцию [4-8].
Из теории авиационных ГТД известно, что при неизменных
внешних условиях тяга и экономичность двигателя определяются
величинами повышения давления 7Г*В = Рсм/Рвх и подогрева рабочего тела
То = Тг*/Тв*х, которые вполне характеризуются двумя параметрами:
степенью повышения давления в компрессоре 7Г* и температурой
газа перед турбиной Тг*. Для двигателя с ФКС добавляется подогрев
ГФ — ^ф/^в*х и температура газа X£ в ФКС. Эти параметры позволяют
также судить о механических и тепловых нагрузках, действующих на
конструкцию двигателя.
На практике (с учетом возможностей измерения параметров
рабочего процесса) регулирование ГТД осуществляется по параметрам,
косвенно характеризующим 7Г*, Тг* и X£: частоте вращения роторов
19
ГЛАВА 1
Пг, температуре газа за турбиной Т* или в ее тракте, иногда —
температуре лопаток турбины Т* (вместо температуры Тг*), комплексу
параметров GT/p*, &г.ф/р* и др.
При неизменных внешних условиях (Я, М, Тн) поддержание
заданных постоянных значений параметров регулирования позволяет
обеспечить эффективную и устойчивую работу двигателя. При
изменении внешних условий работы двигателя изменяются и оптимальные
значения регулируемых параметров. Влияние внешних условий
связано, в первую очередь, с изменением давления р*х и температуры Т*х
воздуха на входе в двигатель. Изменение давления р*х при Т*х = const
проявляется в пропорциональном изменении расхода воздуха,
давлений в тракте двигателя. Однако приведенные параметры (ппр, 7Г*,
7Г* и др.), определяющие характеристики узлов двигателя, а
следовательно, и режимы работы этих узлов, в значительной части области
эксплуатационных режимов при этом не изменяются. При изменении
величины Т*х изменяются и приведенные параметры, а также
положение рабочих точек на характеристиках узлов и, следовательно,
нарушается условие подобия режимов работы двигателя. Поэтому
влияние изменения режима полета может быть для большинства режимов
учтено применением программ управления, зависящих от
температуры Т*х. На ряде режимов полета, например на больших высотах,
необходимо учитывать изменение давления р*х и некоторых других
факторов.
Число регулирующих факторов ГТД зависит от его схемы и
степени механизации проточной части и включает расходы топлива в
основной GT и форсажной &г.ф камерах сгорания, площадь
критического сечения реактивного сопла FKp, углы установки лопаток НА
компрессора и др. Существенной особенностью ГТД как объекта
регулирования является то, что число его регулируемых параметров
заметно превышает число регулирующих факторов, что в значительной
степени определяет специфику построения САУ ГТД.
Выбор сочетания регулируемых параметров и регулирующих
факторов двигателя зависит от назначения двигателя, требований к его
характеристикам, схемы построения, количества регулируемых
элементов и др. Эти сочетания задаются в виде программ управления,
представляющих собой зависимости параметров регулирования (или
регулирующих факторов) от внешних условий (Т*х), регулирующих
факторов, а иногда и других параметров регулирования.
20
Некоторые вопросы теории управления ГТД
регулирование на максимальном режиме работы двигателя
Задачей регулирования на этом режиме является получение
максимальной тяги во всех условиях эксплуатации. В качестве
регулирующих факторов могут быть использованы расход топлива GT,
площадь сопла FKp, регулируемые элементы компрессора: поворотные
лопатки НА (ipHa.) и перепуск воздуха из компрессора (Gnep)- Для
пояснения основных закономерностей ниже сначала рассматриваются
свойства и регулирование одновального одноконтурного
турбореактивного двигателя (ТРД), а затем двигатели двухвальной схемы
ТРДД и ТРДДФ.
Регулирование расхода топлива GT. В связи с тем, что на основных
режимах работы двигателя перепады давлений в сопловом аппарате
(СА) первой ступени турбины и в выходном сопле близки к
критическим, величина 7Г* = const при FKp = const и не зависит от режима
работы двигателя. Воздействием на расход топлива можно
регулировать параметры п, Тг*, ппр и др., программы регулирования которых
задаются в виде:
Птах = / ЦВх) '•> -Mnax = / (-*вх) > Ппр max = / (-* вх) *
При управлении двигателем в соответствии с такими программами
определяющее влияние на его характеристики и построение САУ
оказывает напорность компрессора. В нерегулируемом компрессоре чем
выше напорность, характеризуемая расчетным значением 7г* = 7г* р,
тем меньше наклон линии установившихся рабочих режимов (ЛРР) и
больше наклон границы помпажа в координатах Св.Пр, тГк- Последнее
объясняется увеличением рассогласования ступеней компрессора при
отклонении режима его работы от расчетного, которое усиливается с
ростом 7г* р. В регулируемом компрессоре эта величина влияет
слабее. В результате изменение внешних условий, сопровождающееся,
например, увеличением температуры Т*х (уменьшением ггпр),
приводит к уменьшению запасов ГДУ (величины АКУ) в высоконапорном
компрессоре (7Г* > 8) и увеличению в низконапорном (7Г* р < 5).
В компрессоре средней напорности (7г* = 5... 8) величина АКУ
изменяется меньше. Напорность компрессора определяет и зависимость
параметров режима работы двигателя от внешних условий.
В двигателе с компрессором средней напорности при программе
управления nmax = const приближенно выполняется также условие
21
ГЛАВА 1
т:
"max = CO"St
^"* ^Ь^<^—
Гг max = const
t:
ч^ г
\ ^
\
4s%
T*
T*
увх1
T*
увх2
T*
Рис. 1.1 Комбинированная программа регулирования
^г* max = const, и применение любой из программ nmax = const или
^г* max — co^is^ дает близкие результаты. Если напорность
компрессора отличается от средней, то поддержание постоянного значения
одного из параметров при изменении Т*х приведет к отклонению другого
параметра. В результате, при выполнении программы nmax = const
нужно ограничивать Т* тах при росте Т*х для высоконапорного
компрессора. При Т* max = const в двигателе с низконапорным
компрессором нужно ограничивать величину nmax.
При любой напорности компрессора в области низких значений Т*х
(высоких ппр) происходит снижение ДА^У, и для защиты от помпажа
компрессора необходимо вводить ограничение максимального
значения параметра ппр программой ппр max = const. При управлении в
соответствии с этой программой в случае изменения Т*х сохраняется
подобие режимов работы двигателя, все приведенные параметры, в
том числе ДА'у, остаются неизменными, а температура Т* и
физическая частота вращения ггф увеличиваются при росте Т*х.
Необходимость учета комплекса регулируемых и ограничиваемых
параметров путем воздействия на один регулирующий фактор GT
приводит к использованию комбинированных программ
регулирования. В этом случае соответствующим выбором программы
регулирования (ограничения) одного из параметров (например, частоты
вращения) при его регулировании по замкнутому циклу косвенно
ограничиваются остальные параметры (ггпр max, T*max).
Вид комбинированной программы nmax = f (T*x) применительно
к двигателю с компрессором высокой напорности показан на рис. 1.1
(сплошная линия). Здесь основной диапазон режимов, находящийся в
22
Некоторые вопросы теории управления ГТД
интервале значений Т*х1 < Т*х < Т*х2, обеспечивается ограничением
частоты вращения ггтах = const. При росте Т*х увеличивается ТГ*,
достигая максимума при Т*х = Т*х2, после чего необходимо
выполнять условие Т* = const путем снижения частоты вращения. При
Т£х < Т*х1 нужно ограничивать параметр ппр max = const, чтобы
сохранить необходимый запас ГДУ компрессора.
Более точное регулирование достигается применением отдельных
каналов регулирования для каждого из параметров с последующим
селектированием сигналов управления по определенному принципу.
В двигателе с регулируемым соплом (при нерегулируемых
компрессоре и турбине) этот орган дает еще одну степень свободы и
может быть использован для регулирования температуры Тг*, что
позволяет независимо управлять параметрами п и Т* по программам
ftmax — const, Т* тах = const. При одновременном выполнении этих
программ величина 7Г* не является постоянной и ее изменение вдоль
ЛРР определяет необходимое изменение площади сопла, зависящее от
напорности компрессора.
Регулирование температуры газа с помощью площади FKp может
быть осуществлено также по замкнутой или разомкнутой схеме по
программам FKp = f (Тв*х), тг* = f {T*x) и обеспечивает работу
двигателя везде, где нет ограничения величины АКУ. Для независимого
регулирования параметра АКУ нужны дополнительные регулирующие
факторы, например, регулируемые СА турбины, что является делом
будущего, или регулирование компрессора, широко используемое на
практике.
Регулирование компрессора. Снижение запасов ГДУ
нерегулируемого многоступенчатого высоконапорного компрессора при
уменьшении ппр связано с увеличением рассогласования ступеней,
приводящего к уменьшению осевой скорости потока на входе в первые
ступени. В результате на оптимальном режиме работы компрессора
углы атаки в его первых ступенях увеличиваются, приближаясь к
критическим, а запасы устойчивости этих ступеней и всего
компрессора уменьшаются. Режимы работы средних и последних ступеней
при этом могут соответствовать достаточным запасам устойчивости.
Поэтому все методы регулирования многоступенчатого компрессора
с Целью увеличения его запасов устойчивости при снижении ппр
направлены на уменьшение углов атаки в первых ступенях для прибли-
23
ГЛАВА 1
жения их к расчетным значениям. Регулирование компрессора может
преследовать и ряд других целей, например, повышение
коэффициента полезного действия (КПД) и снижение уровня вибронапряжений
в лопатках, увеличение расхода воздуха.
Изменение углов атаки в ступенях компрессора может быть
осуществлено путем изменения углов установки лопаток НА как
входного (ВНА), так и нескольких первых ступеней. Уменьшение углов
установки (прикрытие) НА приводит к уменьшению углов атаки
рабочих лопаток и увеличению запаса ГДУ компрессора. Одновременное
управление лопатками НА нескольких первых ступеней более
эффективно, чем управление только ВНА. При уменьшении углов установки
напорные ветви на характеристике компрессора смещаются в
направлении меньшего расхода воздуха и большего КПД компрессора.
Программы регулирования НА задаются по отклонению угла
установки лопаток рна от его расчетного значения. В случае
движения лопаток НА в сторону «прикрытия» угол (/?на имеет
отрицательные значения. Используемые обычно программы регулирования
НА компрессора в виде рна = /(^пР) позволяют осуществить
регулирование параметра АКУ по разомкнутой схеме.
Другим методом повышения запасов устойчивости компрессора
является перепуск воздуха из его тракта через окна, открываемые с
помощью клапанов или специальной ленты. Наиболее эффективным
является перепуск из средних ступеней, так как способствует
приближению к расчетным режимам работы как первых, так и последних
ступеней компрессора. В результате увеличиваются запасы
устойчивости компрессора в области пониженных значений ппр. При
перепуске напорные характеристики смещаются в направлении больших
значений GB.np и 7Г*, а КПД обычно снижается. Управление
перепуском часто осуществляют дискретно, например, путем полного
открытия окон при достижении определенного значения ппр.
Для двигателей типа ТРДД характерно снижение АКу обоих
каскадов компрессора (вентилятора и компрессора) при увеличении ггпр,
что связано с применением регулирования НА. Ограничение АКУ т1П
наступает обычно при ггпр > 100%. Для защиты от нарушения ГДУ
компрессора вводится программа ограничения параметра ггв>пр max
или Як.пртах- На максимальных режимах работы действует весь
комплекс рассмотренных выше ограничений параметров двигателя.
Один из регулирующих факторов — площадь сопла FKp — может
24
Некоторые вопросы теории управления ГТД
быть использован для задания положения ЛРР на характеристике
вентилятора в ТРДДФ. Вариант управления выбирается исходя из
требований к характеристикам двигателя. Расположение ЛРР на
характеристике вентилятора определяет не только его запасы ГДУ,
но и интенсивность нарастания тяги при увеличении скорости
полета. Таким образом, выбором программы управления площадью
сопла можно формировать необходимую тяговую характеристику
двигателя.
Регулирование на дроссельных режимах
Дроссельные режимы задаются с помощью РУД и
осуществляются, в основном, при уменьшении расхода топлива. Главное
требование к этим режимам состоит в получении наибольшей
экономичности, в первую очередь на крейсерских режимах.
Наилучшая экономичность двигателя на крейсерских режимах
может быть достигнута, если уменьшение тяги сопровождается
значительным снижением температуры газа Тг* при минимальном
изменении расхода воздуха GB и степени повышения давления 7Г*. На
характеристиках компрессора может быть выделена область
расположения линий дроссельных режимов при разных программах
управления. Границами этой области являются линии дроссельных
режимов, соответствующие программам nmax = const, T*max = const.
Осуществление таких программ требует управления площадью
критического сечения сопла FKp.
При наличии минимума на кривой Суп(п) целесообразно
применение комбинированных программ для оптимизации двигателя по
экономичности, например таких, в которых начальный этап
дросселирования осуществляется по программе nmax = const до достижения
режима, соответствующего Суп т1П для этой программы, а затем —
при уменьшении п. Следует иметь в виду необходимость получения
достаточно большой частоты вращения на режиме малого газа (МГ),
что позволяет уменьшить время приемистости. В двигателе с
регулируемым соплом его раскрытие на этом режиме позволяет, понизив Тг*,
получить требуемую тягу при повышенных значениях частоты пмг и
удельном расходе Суд. Ухудшение экономичности на режиме ЗМГ не
имеет большого значения. Вместе с тем уменьшение диапазона
изменения п в интервале пмг ... птах и возможность более существенного
25
ГЛАВА 1
увеличения Т* от Т*мг до Т* тах в процессе приемистости двигателя
приводит к уменьшению времени приемистости. Наибольшее
распространение для управления на дроссельных режимах получила
программа регулирования расхода топлива со снижением частоты
вращения п = f (аруд,Т*вХ). Такое дросселирование, как отмечалось,
происходит при уменьшении Суд на крейсерских режимах.
Применяется и ряд дополнительных программ управления для
улучшения экономичности на крейсерских режимах, например
программа управления специальной заслонкой, изменяющей расход
воздуха, отбираемый от компрессора для охлаждения турбины
высокотемпературных двигателей. Уменьшение отбора воздуха при частоте
вращения, соответствующей диапазону крейсерских режимов,
способствует снижению Суд.
Программы регулирования на режиме малого газа
Особенности регулирования ГТД на режиме МГ вытекают из
требований, предъявляемых к этому режиму. Основным из них считается
требование получения минимальной тяги при параметрах режима
работы двигателя, обеспечивающих требуемое время приемистости и
необходимые запасы устойчивости компрессора и камеры сгорания,
когда имеется ограничение области устойчивой работы последней по
«бедному» срыву.
При выборе программ регулирования на режиме МГ необходимо
учитывать задачи интеграции двигателя и самолета.
На режиме ЗМГ целесообразно сохранение постоянной тяги при
изменении внешних условий. Потребная тяга на режимах ПМГ
обусловлена типом и характеристиками самолета, так как зависит от
допустимого угла наклона глиссады, аэродинамического качества
самолета, его взлетной тяговооруженности. Так, для дозвукового
пассажирского самолета потребная для безопасного снижения тяга
существенно больше, чем для маневренного сверхзвукового самолета,
траектории снижения которого более крутые. В отдельных случаях,
например при наличии длительных режимов торможения,
определенное значение имеет экономичность режима ПМГ. При полете с
высокими сверхзвуковыми скоростями из-за ограничения хода
регулирующих органов ВЗ может потребоваться ограничить диапазон
дросселирования двигателя. В этом случае увеличение скорости полета
26
Некоторые вопросы теории управления ГТД
должно сопровождаться ростом частоты вращения пмг на режиме
ПМГ.
Наиболее полно требования к режиму МГ могут быть
удовлетворены применением программ регулирования типа пмг = / (^х'Рвх)-
Однако часто применяются более простые для аппаратурной
реализации программы пмг = f {T^x), ^мгпр = const, GTMr = const,
С?тМГпр = const, пмг = const, а также их комбинации. Для
защиты от срыва пламени в основной камере сгорания на этом режиме
служат программы ограничения минимального расхода топлива,
например программа GT mjn = const.
Управление на режимах приемистости и сброса газа
Учет ограничений при выборе программ регулирования. Время
приемистости двигателя зависит от ряда факторов: инерционности
вращающихся масс двигателя (пропорционально моменту инерции
ротора относительно оси вращения), запасов ГДУ компрессора,
допустимого увеличения температуры газа, внешних условий и др., которые
должны учитываться при выборе программ управления этими
режимами. При заданных конструктивных параметрах и характеристиках
узлов двигателя время приемистости определяется программами
регулирования режимами МГ и приемистости, в соответствии с
особенностями которых проявляется и влияние внешних условий, а также
динамическими характеристиками регулятора приемистости и
ограничителей предельных значений параметров.
Возможности получения требуемого времени приемистости при
выборе программ регулирования лимитируются устойчивостью
рабочего процесса и прочностью конструкции, которые ограничивают
допустимое увеличение расхода топлива. Ограничения по ГДУ обычно
действуют в начале и в средней части процесса приемистости, а по
прочности — в его конце.
Увеличение Т* в процессе приемистости сопровождается ростом
отношения 7T*/GB.nP и уменьшением запасов ГДУ компрессора, т.е.
ЛРР при приемистости располагается выше линии установившихся
режимов. Это ограничивает возможность увеличения расхода
топлива при приемистости условием сохранения необходимого значения
^-^у min- Допустимое расходование запаса ДА"У компрессора при
приемистости обычно не превышает 8%.. .10%.
27
ГЛАВА 1
Из условия прочности лопаток турбины должна быть ограничена
температура Т*. В связи с тем, что на режимах с пониженной
частотой вращения (п < ггтах) окружные скорости и напряжения от
центробежных сил в лопатках меньше, а также вследствие инерционности
процесса прогрева лопаток турбины, при приемистости допускаются
небольшие кратковременные превышения температурой газа
значения Т* тах. Величина и время допустимого заброса
(перерегулирования) температуры зависят от термопрочности материала лопаток и
эффективности системы охлаждения, однако во всех случаях следует
иметь в виду отрицательное влияние заброса на ресурс двигателя. По
условию сохранения механической прочности ограничены и
допустимые забросы частоты вращения при приемистости.
Еще одно ограничение допустимого увеличения GT связано с
возможностью «богатого» срыва процесса горения в камере сгорания,
который возможен на режимах полета при минимальных давлениях в
тракте двигателя.
Программа управления на режиме приемистости позволит
осуществить этот процесс за минимальное возможное время, если в
диапазоне частот от пмг ДО птах обеспечит максимальные избытки
топлива, допустимые из условия сохранения необходимых запасов
устойчивости и прочности в соответствии с перечисленными
ограничениями. Характер такого процесса в плоскости характеристик
Рис. 1.2 Процессы приемистости и сброса в плоскости характеристик
компрессора: 1 — линия установившихся режимов работы; 2 — процесс
приемистости; 3 — процесс сброса
28
Некоторые вопросы теории управления ГТД
компрессора показан на рис. 1.2. Практически получаемое время
приемистости обычно больше минимального возможного вследствие как
неоптимальности программ управления при изменении внешних
условий, так и погрешностей их реализации, к которым относятся
статические и динамические погрешности регуляторов. К увеличению
времени приемистости приводит и отвод тепла в конструкцию
двигателя.
Если в комплексе программ регулирования двигателя имеется
программа Т*тах = const, то программа управления приемистостью
в первую очередь должна обеспечивать сохранение в этом процессе
необходимых запасов устойчивости компрессора. Так как прямое
измерение запасов устойчивости компрессора невозможно, применяют
программы управления приемистостью, учитывающие их косвенно.
Требования к процессу приемистости при изменении внешних
условий наиболее полно удается выполнить при дозировании топлива в
соответствии с программами, позволяющими обеспечить подобие
переходных режимов в двигателе. Этому условию удовлетворяет
поддержание заданных значений комплексов параметров, содержащих
отношение GT/p*, которое характеризует коэффициент избытка воздуха
и температуру газа. По величине этого отношения можно
определить положение границ помпажа компрессора и области устойчивой
работы камеры сгорания. Программы управления приемистостью,
построенные на базе комплексов параметров такого типа, могут иметь
вид:
-7 = /М*х); ~?-=const- -2L=/(nnp); -f =/«) и др.
Недостаток этих программ заключается в невозможности при их
выборе достаточно точно учесть такие факторы, как изменение
коэффициента полноты сгорания топлива, отвод тепла в конструкцию
двигателя и т. п., что в результате не позволяет выполнить требования ко
времени приемистости при изменении условий эксплуатации. Это
позволяют сделать программы регулирования, использующие комплекс
параметров, который включает ускорение ротора dn/dt:
dn 1 dn 1
-dtpK=const; ^ = /(Ппр) идр-
29
ГЛАВА 1
Однако в этом случае менее точно учитываются ограничения по
запасам ГДУ. Поэтому в современных САУ используют одновременно
оба типа программ, причем на программы первого типа возлагается
задача защиты от нарушения ГДУ.
На процесс приемистости двигателя существенно влияют
программы управления элементами его проточной части. Повышение
АКУ компрессора в области пониженных частот вращения и на
режиме МГ путем регулирования компрессора и раскрытия сопла
позволяет увеличить здесь допустимые избытки топлива и сократить
время приемистости.
Регулирование компрессора и сопла в процессе приемистости с
целью уменьшения ее длительности направлено на увеличение
мощности турбины, приводящее к возрастанию ускорения ротора. Для
этого НА компрессора необходимо регулировать на увеличение
расхода воздуха GB, т.е. на раскрытие, при повышении частоты
вращения. Целесообразно опережающее раскрытие по сравнению с
необходимым для установившихся режимов работы двигателя, что может
быть осуществлено использованием в алгоритмах управления
сигналов по производным dn/dt, dp^/dt.
Сохранение сопла при приемистости раскрытым позволяет иметь
повышенное значение 7Г*. Однако для получения минимального
времени приемистости по тяге целесообразным оказывается уменьшать
площадь сопла в этом процессе так, чтобы достигнуть требуемого
прикрытого положения при приближении частоты вращения к
значению ггтах. Выбор программ управления элементами проточной части
двигателя и дозированием топлива при приемистости взаимосвязан.
При сбросе частоты вращения уменьшением GT снижаются Т* и
отношение 7r*/GB. В результате ЛРР проходит ниже линии
установившихся режимов. Поэтому ограничение по устойчивости
компрессора в этом процессе не происходит. В этом случае оно может быть
обусловлено неустойчивостью работы камеры сгорания при
обеднении смеси (бедный срыв), наиболее вероятной на режимах
пониженных давлений в тракте двигателя. Защитой от такого срыва служит
ограничение минимального расхода топлива GT. Другими факторами,
ограничивающими скорость сброса, являются опасность
возникновения недопустимых напряжений в нагретых элементах конструкции
при быстром охлаждении, а на сверхзвуковых режимах полета —
возможность помпажа воздухозаборника.
30
Некоторые вопросы теории управления ГТД
Управление при сбросе частоты вращения, позволяющее учесть
существующие ограничения, может быть выполнено путем
применения программ уменьшения расхода топлива, аналогичных
программам управления приемистостью, например, использующих комплексы
параметров GT/p*, (dn/dt)(l/pl).
Влияние отвода тепла и прогрева конструкции. На процессы
приемистости двигателя, особенно при малом времени приемистости,
заметно влияет изменение теплового состояния его конструкции,
которое имеет место при запуске и приемистости холодного двигателя,
а также при переводе его с одного режима работы на другой. При
этом происходит отвод части тепла от воздуха и газа в материалы
конструкции, что вызывает понижение температуры газа, а процессы
в непрогретом двигателе протекают при пониженных КПД
лопаточных машин (компрессора, турбины) вследствие увеличенных зазоров
в последних.
Влияние прогрева таково, что если, например, для двигателя с
расчетным временем приемистости около 4 с через 0,5.. .1,5 мин
после начала запуска перевести РУД в положение максимального
режима работы двигателя, то через 10.. .15 с сила тяги может составить
лишь 90% необходимой РтаХ5 а значения 95% Ртах сила тяги
достигнет лишь через несколько минут. Наиболее сильное влияние
оказывает изменение радиальных зазоров в турбине и компрессоре, которые
в непрогретом двигателе больше расчетных. Это более длительный
процесс (занимает несколько минут), чем отвод тепла в конструкцию,
который длится несколько десятков секунд. Количественные
характеристики влияния прогрева зависят от конкретной конструкции и
материалов, из которых изготовлен двигатель, а также от способов
управления им.
Повышенные зазоры в компрессоре на режиме МГ снижают АКУ,
что приходится учитывать при выборе программ управления
приемистостью, уменьшая избытки дозируемого топлива. Иногда вводятся
ограничения в порядок управления двигателем, в соответствии с
которыми требуется предварительный прогрев двигателя после запуска
на режиме МГ до перевода РУД на более высокий режим. Для
маневренного самолета переходные режимы составляют значительную
Долю времени его работы и, таким образом, двигатель длительно
работает в режиме тепловой нестационарности.
31
ГЛАВА 1
Существенно, что в процессе приемистости непрогретого
двигателя при замедленном росте частоты вращения и температуры газа
регулятор-ограничитель параметра Т* вступает в работу, когда
частоты вращения еще малы, что также замедляет процесс. Это
замедление может быть частично скомпенсировано лишь в двигателе,
имеющем запасы по Т* в данных условиях эксплуатации.
Перспективным является управление зазорами в лопаточных
машинах как конструктивными методами, путем организации
направленных тепловых потоков и выбора сочетания материалов статора
двигателя, так и с помощью САУ.
Управление на режиме запуска
Возможность быстрого и надежного запуска является одной из
важнейших характеристик двигателя. Управление на режиме запуска
должно обеспечивать выход двигателя на режим МГ за заданное
время при выполнении ограничений по ГДУ и прочности. Время запуска
£зап нормируется в зависимости от назначения самолета, на котором
устанавливается двигатель. Как правило, величина £зап примерно на
порядок больше времени приемистости.
В стартовых условиях для запуска ГТД осуществляется раскрутка
одного из роторов с помощью стартера, так как автономная работа
двигателя возможна лишь при частоте вращения, при которой
вращающий момент, развиваемый турбиной, становится больше момента
сопротивления. Время запуска £зап зависит от ряда факторов,
главными среди которых являются момент инерции ротора (уменьшение
момента инерции — сокращение £3ап), мощность стартера
(увеличение мощности — снижение £зап)5 время отключения стартера, частота
вращения на режиме МГ (пкмг)5 запасы ГДУ компрессора и камеры
сгорания, допустимое повышение Тг*.
Процесс запуска ГТД можно представить тремя этапами [10]:
(1) раскрутка ротора стартером без подачи топлива в двигатель
(холодная прокрутка) до частоты nKi, при которой в камеру
сгорания подается и воспламеняется топливо;
(2) одновременная работа стартера и турбины до частоты пК2, когда
стартер отключается;
(3) работа двигателя без стартера, раскрутка ротора турбиной с
увеличением частоты вращения до величины пкмг-
32
Некоторые вопросы теории управления ГТД
Характерные значения частот вращения на границах этапов:
nKi = (0,1.. .0,2)nK max,
пК2 = (0,3...0,45)пктах,
пкмг = (0,65.. .0,7)пк тах.
Длительность первого и второго этапов составляет 70%.. .90%
времени запуска.
При выборе программы управления на запуске учитывается, что
основное ограничение расхода топлива определяется запасами ГДУ
компрессора, снижение которых начинается после достижения
частоты пК1, когда воспламеняется топливо и возрастает Т*. В конце
третьего этапа подача топлива уменьшается при переходе к режиму
МГ. На этом этапе, а иногда и на втором, может быть достигнуто
предельное допустимое значение Тг*тах и расход топлива GT должен
быть уменьшен.
Исходным для запуска в полете является режим авторотации, при
котором запуск может быть осуществлен без включения стартера
путем подачи топлива и включения зажигания. Для расширения
области надежного запуска может использоваться включение стартера.
Основное ограничение запуска в полете связано с устойчивой работой
камеры сгорания, причем отрицательное влияние на условия
воспламенения и устойчивого горения оказывают снижение уровней
давления и температуры, увеличение скорости потока на входе в камеру
сгорания. В результате область режимов полета, в которой возможен
запуск, ограничивается по скорости и высоте. Время запуска с ростом
высоты увеличивается вследствие уменьшения избыточной мощности
турбины и возрастания частоты вращения на режиме МГ.
С учетом рассмотренных закономерностей программа управления
двигателем на режиме запуска при пк < пк\ до воспламенения
топлива может быть представлена функциональной зависимостью вида
^т = / (Рвх> ^в*х' *т), где ^т — температура топлива.
Для управления после воспламенения топлива подход к выбору
программ управления аналогичен рассмотренному для режима
приемистости. Применяются программы типа GT/p*x = f {пк,Т*у.) или
пк/р1х = f (nK, Т*х) с использованием первой программы для защиты
от нарушения ГДУ. Функции защиты от помпажа компрессора
могут, кроме того, выполняться системой противопомпажной защиты, а
Для ограничения Т* может быть дополнительно применена программа
ттах = /(^в*х)-
33
ГЛАВА 1
Защита двигателя от помпажа компрессора
Надежная работа СУ самолета при действии на нее сильных
возмущений или при значительном отклонении условий работы от
расчетных обеспечивается применением специальных программ
управления, предназначенных для защиты двигателя от помпажа
компрессора. Для повышения запасов устойчивости компрессора
такие программы предусматривают управление органами механизации
проточной части двигателя (прикрытие НА компрессора, раскрытие
сопла) и/или уменьшение расхода топлива для перевода двигателя на
пониженный режим работы по сигналам, характеризующим
появление опасных возмущений, возникновение помпажа компрессора или
явлений, предшествующих ему. После устранения опасного режима
происходит восстановление исходного режима двигателя. При этом
управление двигателем в процессе изменения режима его работы
осуществляется в соответствии с программами регулирования на
переходных режимах.
Программы управления ГТД с ФКС на форсированных режимах работы
Управление на режиме полного форсирования. Максимальная тяга
на форсированном режиме при наилучшей экономичности может быть
получена при максимальных значениях параметров турбокомпрессора
(Гг*тах, птах) и температуры газа в ФКС (T<£ тах). В связи с этим
на форсированных режимах целесообразно сохранять максимальный
режим работы турбокомпрессора. Это может быть достигнуто
сохранением при работе форсажной камеры такого же значения 7Г*Е, как
и на нефорсированном режиме. При этом газогенератор
регулируется в соответствии с рассмотренными выше программами
регулирования.
Условие равенства расходов газа через турбину и сопло в
турбореактивном двигателе с ФКС (ТРДФ), записанное в предположении
сверхкритических перепадов давлений на них и при пренебрежении
величиной Ст.ф, приводит к приближенному соотношению
* ^кр.ф V ^г* _ .
34
Некоторые вопросы теории управления ГТД
йз которого следует, что при площади соплового аппарата Fca =
= const и 7г* = const переход на форсированный режим должен
сопровождаться раскрытием сопла.
Двигатели с большой регулируемой степенью форсирования
имеют регулируемое сопло. Если регулирование частоты п в ТРДФ
производится воздействием на расход топлива в основной камере
сгорания, то неизменность режима работы газогенератора обеспечивается
сохранением на форсированных режимах зависимости 7г* (Тв*х),
имеющей место для режимов без форсажа, путем регулирования площади
сопла по замкнутой или разомкнутой схемам в соответствии с
программами 7г* = / (Т*х), FKp = f (Т*х) и др. При дозировании топлива
в ФКС в соответствии с условием Т<£ = const суммарный
коэффициент избытка воздуха а^ возрастает при увеличении температуры
Т*х. Для получения максимальной степени форсирования двигателя в
изменяющихся условиях полета целесообразно регулировать Ст.ф при
аЕ = const, что может быть приближенно выполнено применением
программ типа Ст.ф/р* = const.
Для ТРЛЛФ со смешением потоков увеличение скорости полета
сопровождается ростом степени двухконтурности га, в связи с чем
увеличение GB опережает рост давления р*. Для сохранения при
изменении внешних условий а^ = const при формировании программы
дозирования форсажного топлива должна быть введена коррекция по
величине га. Но, так как Т* и га являются функциями температуры
Т*х, на режиме ПФ программа для Ст.ф может быть сформирована в
виде:
Рк
Такая программа, обеспечивающая выполнение условия а^ =
= const для ТРДДФ, показана на рис. 1.3 во взаимосвязи с
программами регулирования газогенератора и изменением параметров а^
и га. На участке 1, где ограничена величина пв.пр тах, сохраняется
wi = const, a T* растет при увеличении Т*х, что определяет
необходимость снижения Ст.ф/р*. На других участках программы, где
ограничиваются величины nB max и Т* тах, увеличивается степень
Двухконтурности га и отношение Ст.ф/р*. С ростом Т* на участке 2
Уменьшается скорость возрастания Ст.ф/р*. Температура газа Т£
постоянно повышается при увеличении Т*х.
35
ГЛАВА 1
УвхО Увх1 Увх2 Увх
Рис. 1.3 Программа дозирования топлива в ФКС: 1 — пв.Пр max = const]
2 Пв max = COnst\ 3 Tr*max = Const
Для регулирования сопла на форсированных режимах работы
ТРДДФ используются программы типа 7г* = / (Тв*х), 7г* = /(nB.np),
*£в = / К.пр), где тг*пъ = р*см/р*ъх.
Получению максимальной тяги на форсированных режимах
способствует управление площадью не только критического сечения FKp,
но и среза сопла Fc из условия обеспечения полного расширения в
нем, например в соответствии с программой регулирования Fc =
= Гс (7ГС, -^Kpj*
Регулирование на дроссельных форсированных режимах. К
дроссельным форсированным режимам относятся режимы частичного и
минимального форсирования. Одно из важных требований к
последнему, направленное на облегчение пилотирования самолета, состоит
в получении тяги, минимально отличающейся от тяги на
максимальном режиме. Возможности выполнения этого требования ограничены
условием надежного запуска и устойчивой работы ФКС. Принципы
регулирования на дроссельных форсированных режимах аналогичны
рассмотренным для режима ПФ с той лишь разницей, что оно
осуществляется при пониженной степени форсирования. Способ
дросселирования, позволяющий получить наилучшую экономичность, состоит
в уменьшении степени форсирования (величины 7ф), например в
соответствии с программой Ст.ф/р* = /(аруд^вх) ПРИ сохранении неиз-
36
Некоторые вопросы теории управления ГТД
менным максимального режима работы газогенератора путем
выполнения программы nmax = / (Т*х) воздействием на GT, и 7г* = /(Т*х)
или других, перечисленных выше, воздействием на FKp.
Уменьшить или устранить разрыв в величине тяги,
соответствующей режимам МФ и МАХ, позволяет управление по методу
глубокого дросселирования форсажа (ГДФ), рассмотренного впервые в
работах Ю.П. Тихомирова. Сущность метода состоит в том, что
дросселирование двигателя по тяге на форсированном режиме
осуществляется при некотором снижении режима работы
турбокомпрессора, в результате чего при работающей ФКС может быть получена
тяга двигателя, соответствующая максимальному нефорсированному
режиму и даже меньше. При определении допустимого снижения
частоты пк при работе форсажной камеры следует учитывать
ограничения на ее устойчивую работу.
Программы управления для этого способа целесообразно
выбирать так, чтобы от режима МГ до режима, соответствующего частоте
тгкр < Пк max, регулирование осуществлялось по рассмотренным
выше программам. При пк = пкр включается форсажная камера и
дальнейшее увеличение тяги происходит при одновременном
повышении частоты вращения пк (до значения пк тах) и степени
форсирования. Такое управление обеспечивается соответствующим выбором
программ пк = /(аРуд,Тв*х) и Ст.ф/р* = /(аРУД,Тв*х). При
управлении по программам ГДФ скачок тяги, соответствующий
включению ФКС, уменьшается и смещается в область более низких значений
тяги. Топливная экономичность двигателя на режимах ГДФ
ухудшается.
Регулирование на переходных режимах при изменении степени
форсирования. Условие сохранения неизменным режима работы
турбокомпрессора при работающей ФКС на переходных режимах,
вызванных изменением степени форсирования (при включении и выключении
форсажа, форсажной приемистости и сбросе), может быть выполнено
при согласованном изменении Ст.ф и площади FKp. Особенностью
Двигателей типа ТРДДФ является возможность непосредственного
газодинамического влияния процессов в форсажной камере и сопле
на режим работы вентилятора через наружный контур.
Точное согласование изменения Ст.ф и FKp при требовании
минимального времени получения форсажной тяги не всегда может быть
37
ГЛАВА 1
выполнено из-за ограничений по быстродействию регулятора
площади сопла, которое оказывается недостаточным при быстром (близком
к скачкообразному) изменении Ст.ф и параметров в ФКС в моменты
воспламенения смеси при включении форсажа, поступлении топлива
в форсажную камеру при заполнении топливных коллекторов, срыве
горения в форсажной камере.
В результате при изменении степени форсирования появляются
отклонения параметров потока газа на выходе из турбокомпрессора,
а в ТРДДФ — и из вентилятора, и возникают переходные режимы в
турбокомпрессоре двигателя. При этом характер переходных
процессов в системе зависит от программ управления двигателем на
установившихся и переходных режимах и характеристик регуляторов.
С целью получения требуемого качества переходных процессов
рассмотренные выше программы управления на установившихся
режимах корректируются так, чтобы повысить точность согласования
Ст.ф и FKp на переходных режимах. Если этого достичь невозможно,
в первую очередь стремятся обеспечить сохранение устойчивости
рабочего процесса. Эти цели достигаются ограничением скорости
изменения сигнала от РУД, поступающего на управление Ст.ф и FKp;
коррекцией подачи топлива в переходном процессе по фактической
величине площади сопла или величине 7Г*, например в соответствии
с программами вида Ст.ф/р* = /(аруд,^кр), Ст.ф/р* = /(аруд,7г*);
введением программ управления, позволяющих осуществить при
включении форсажа и форсажной приемистости раскрытие сопла,
опережающее подачу и воспламенение топлива, и др. Для сокращения
времени форсажной приемистости используются программы
предварительного заполнения топливных коллекторов. Уменьшить время
процессов форсажной приемистости и сброса тяги позволяет
управление по методу ГДФ.
Важное значение для обеспечения требуемых характеристик
процессов управления в основном и форсажном контурах двигателя на
форсированных режимах работы имеют вопросы согласования
регуляторов, определяющих расход топлива в форсажную камеру и
площадь критического сечения реактивного сопла. Такое согласование
достигается соответствующим выбором программ управления и
построением реализующих эти программы регуляторов.
На рис. 1.4 показано одно из возможных сочетаний программ
управления двигателем типа ТРДДФ, обеспечивающих управление на
38
"к-/(аРУД' О
яктах=/(0
в max J v вх
АО
Т* =f(T*)
л ттах J Ул вх'
"в.пртах = СО™'
Ркпшк = const
ЛкМГ -/(Тв*х>Рвх)
°Ж =А"к> О
GTmn = COnst
Plx
Г
^-\К*
ТРДЦФ
птт
^в "кТтРЖР^
в регуляторы
ФвНА
ФкНА
= А<*РУД> О^кр.0
Защита от
вибрационного горения
вФКС
кр
Г«
^
^кр =/(«РУД- О
К =/Ю |
^ =л^кр. >д
ФвНА=/К.пр^Лв/Л)
ФкНА^К.пр'^к^')
Рис. 1.4 Программы управления ТРДДФ
ГЛАВА 1
установившихся и переходных режимах работы во всех условиях
эксплуатации.
1.2 Влияние эксплуатационных факторов на выбор
параметров регулирования
Одним из важнейших требований, предъявляемых к САУ
авиационных ГТД, является возможность поддержания тяги двигателя
на заданном режиме его работы независимо от состояния двигателя
(степени износа в эксплуатации, прогрева перед стартом) в пределах
запаса по температуре Тг*, условий окружающей среды (например,
влажности). На ее значение не должны оказывать заметного влияния
включение или отключение дополнительных потребителей мощности
и воздуха, а также различные регулирующие воздействия на
двигатель со стороны САУ (включение-выключение перепуска в
компрессоре и обдува корпусов, частичное ограничение подачи охлаждающего
воздуха, изменение положения регулируемых НА). Выполнение этого
требования важно для обеспечения надежности и безопасности
работы СУ и удобства управления самолетом.
Для снижения эксплуатационных расходов необходимо, чтобы в
процессе эксплуатации требовалось минимальное количество
дополнительных настроек САУ.
Для обеспечения указанных требований параметр регулирования
должен быть близко связан с тягой двигателя. Это позволяет
снизить загрузку экипажа операциями по управлению СУ. Упрощается
возможность выполнения взлета самолета на пониженных режимах
путем задания величины тяги в соответствии с конкретными
условиями (длиной ВПП, загрузкой самолета, параметрами внешней среды),
что способствует экономии ресурса двигателя и снижению
эксплуатационных расходов.
Для сохранения заданной величины тяги двигателя в течение
всего периода его эксплуатации необходимо иметь достаточный запас по
параметру Т* (он может достигать нескольких десятков градусов),
что должно учитываться на стадии выбора проектных параметров
двигателя.
В программах управления установившимися режимами работы
ТРДД используются различные параметры регулирования. Широко
40
Некоторые вопросы теории управления ГТД
применялось регулирование частоты вращения ротора высокого
давления пвд. На многих двигателях используется частота
вращения ротора низкого давления пнд (двигатели фирмы Дженерал
Электрик, CFM, PW6000, некоторые отечественные ТРПД). В двигателе
RB211-22B фирмы Роллс-Ройс и ряде двигателей ГП «Ивченко-
Прогресс» используется регулирование по величине 7Г* Е.
На ряде современных двухконтурных двигателей для
магистральных самолетов в качестве параметра регулирования используется
степень повышения давления в двигателе 7г*в, или EPR (Engine Pressure
Ratio), которая отвечает перечисленным требованиям для двигателей
как с раздельными контурами (JT9D-7R4, PW2000, PW4000), так и с
общим соплом (RB211-524G/H, RB211-535, V2500, BR700).
Далее сопоставляются различные параметры регулирования при
воздействии некоторых факторов на примере ТРПД с то «4,5.
Износ и загрязнение элементов протонной части в процессе
эксплуатации приводят к изменению характеристик двигателя, в частности,
из-за уменьшения КПД и пропускной способности узлов и
соответствующего отклонения параметров двигателя в целом, которое
зависит от принятого параметра регулирования. Износу в той или иной
степени подвержены все элементы проточной части, но в наибольшей
степени снижение КПД имеет место для узлов газогенератора.
На рис. 1.5 показано влияние снижения на 1% КПД компрессора
Дг/^Вд и турбины Д77твд высокого давления на тягу SP и
температуру газа перед турбиной AT* на максимальном крейсерском режиме
(Н — 11 км, М = 0,8). При использовании в качества параметра
регулирования величины пвд наблюдается прирост Тг* на 23 и 21,5 К
соответственно при снижении на 1% /7квд и ^твд- Этот прирост
сопровождается увеличением тяги на 3,2% и 3,85%. На взлетном
режиме (Н = 0, М = 0) в аналогичных условиях прирост составляет
23 и 22 К. Если бы при этом двигатель работал вблизи предельных
режимов (например, при взлете в жаркую погоду), то в работу
вступил бы один из ограничителей, например температуры газа Тг*,
вызывая снижение тяги. В остальных случаях прирост температуры
Т*, приводящий к увеличению тяги, снижает ресурс горячей части
Двигателя.
Использование параметра регулирования 7г*в обеспечивает
стабильность поддержания тяги в процессе эксплуатации двигателя:
41
ГЛАВА 1
-0,01 ДЛтед
-0,01 АЛтед
Рис. 1.5 Влияние снижения КПД КВД и ТВД на основные параметры
двигателя: 1 — 7г*в = const] 2 — 71-*^ = const; 3 — пвд = const] 4 —
Пня = const
температура Тг* повышается на величину, необходимую для
поддержания тяги Р = const. В данном случае при снижении на 1% г/^вд
и г/твд соответственно AT* = 9 и 5 К на максимальном крейсерском
режиме (SP = +0,15% и +0,16%) и ДГГ* = 11,5 и 8 К на взлетном
режиме (SP « 0).
При использовании параметров пнд и 7Г*Е отклонения тяги
несколько больше, чем при регулировании по 7Г*В, но значительно
меньше, чем при использовании пвд.
Таким образом, программы регулирования, основанные на
использовании параметров 7г*в, пнд и 7г*в1;, позволяют поддержать
неизменной тягу при минимально необходимом повышении Тг*, т.е. являются
ресурсосберегающими по сравнению с программой, в которой
применяется параметр пвд.
42
Некоторые вопросы теории управления ГТД
Отклонения удельного расхода топлива Суд при использовании
всех рассмотренных параметров регулирования практически
одинаковые.
В процессе эксплуатации может возникнуть ситуация, когда,
например, на двухдвигательном самолете один из двигателей новый,
а другой близок к исчерпанию ресурса. При поддержании заданной
суммарной тяги обоих двигателей различие в значении Тг* у них
может составить примерно 20 К при регулировании по 7Г*В и до 40 К при
регулировании по пвд (при заметном различии тяг), причем
температура выше у изношенного двигателя. Это может оказать влияние на
ресурс двигателя. Применение параметра 7Г*В практически исключает
«разнотяговость» двигателей.
Снижение г/^вд и г/^вд может быть связано с увеличением зазоров
в проточной части из-за непрогрева двигателя, что наиболее
существенно для высокотемпературных ТРДД с газогенераторами малой
размерности.
Изменение величин зазоров и, соответственно, КПД компрессора
и турбины происходит также вследствие изменения режима обдува
корпусов. Так, для одного из двигателей в условиях крейсерского
полета при поддержании неизменным параметра пвд включение или
выключение принудительного обдува корпуса компрессора высокого
давления (КВД) приводит к изменению тяги на 1,1%. ..1,3%, тогда
как при поддержании 7г*в заметного отклонения тяги не
наблюдается.
Аналогично влияет частичное (на 50%) отключение подачи
воздуха, охлаждающего рабочие лопатки первой ступени турбины
высокого давления (ТВД): отклонение тяги SP « 4,2% при использовании
параметра регулирования пвд и SP ~ 0 при использовании 7г*в.
Отбор воздуха и мощности для нужд бортовых систем, как правило,
сопровождается ростом температуры Тг*, величина которого зависит
от выбора параметра регулирования. Так, при поддержании пвд
прирост Т* при увеличении отбора воздуха от компрессора минимален,
но при этом снижается тяга: на максимальном крейсерском режиме
(Я = И км, М = 0,8) SGkbr = 2% соответствует ДТГ* = +19 К,
8Р = —1,7%. Самый большой прирост температуры имеет место
при поддержании 7г*Е: ДГГ* = +31,5 К, SP = +0,85%. При
использовании параметра регулирования 7г*в прирост температуры газа
43
ГЛАВА 1
ДТГ* = 27,5 К, что практически соответствует сохранению
неизменной тяги. Близкий результат наблюдается при поддержании
параметра пнд.
При отборе мощности от ротора высокого давления в случае
пвд = const наблюдается рост Тг* и, соответственно, тяги двигателя:
например, при ДЛГВД « 150 кВт (200 л.с.) ДГГ* = +17 К, SP = +2,5%.
Использование параметра регулирования 7г*в обеспечивает
поддержание тяги на практически постоянном уровне, а прирост Тг* при этом
наименьший (+6,5 К).
Перепуск воздуха из компрессора при использовании параметра
регулирования пвд приводит к значительному снижению тяги (при
взлете на 5%.. .9% при перепуске 5% и на 12%.. .18% при перепуске
10% воздуха; большие значения соответствуют повышенным
режимам). В случае применения параметра 7г*в изменение тяги при
включении или отключении перепуска незначительно (не превышает 2,2%
при перепуске 10% воздуха, причем при включении перепуска тяга
возрастает); при использовании параметра регулирования пнд
влияние перепуска примерно в 2 раза больше, чем в случае применения
Отсутствие значительных «скачков» тяги при включении или
отключении перепуска в компрессоре, а также обдува корпусов,
частичного отключения подачи охлаждающего воздуха в турбину и в
других случаях важно с точки зрения удобства управления двигателем.
Таким образом, параметр 7г*в наиболее удобен для интеграции
управления самолетом и двигателем.
Увеличение влажности атмосферного воздуха на взлетном режиме
(Я = 0, М = 0, tH = +30 °С) на 50% при поддержании параметра
пвд приводит к наиболее существенному падению Тг* (ДТГ* = -15 К,
ДСВЕ = -1,3%), в результате чего тяга снижается на 1,8%. В
случае применения параметра 7г*в снижение Тг* заметно меньше (—5,2 К),
пВд несколько увеличивается (на 0,33%), в результате SP « 0.
Параметр пНд в данном случае занимает промежуточное положение, при
его применении SP = —0,7%; при использовании параметра тг*^ тяга
несколько возрастает (на 0,8%).
Выбор способа определения параметра 7г*в. Степень повышения
давления в двигателе 7г*в, понимаемая буквально, должна
представлять собой отношение среднего полного давления перед соплом р*
44
Некоторые вопросы теории управления ГТД
к давлению на входе в двигатель рвх: 7Г*В = р*/Рвх- Осреднение
поля полных давлений за смесителем ТРЛЛ со смешением потоков
при ограниченном числе приемников давления затруднено вследствие
большой его неравномерности. Поле давлений в канале наружного
контура также может иметь значительную неравномерность из-за
наличия силовых элементов, коммуникаций и т. д.
В различных двигателях сигнал 7Г*В формируется по-разному.
В двигателях фирмы Пратт-Уитни в качестве 7г*в используется
отношение давлений Рт/Рвх- В двигателе RB211-535C использовался
интегральный параметр (IEPR) тг*в = (pBlIFcn + p;Fci)/(pBX(Fcii +Fci)),
в более поздней модификации RB211-535E4 — упрощенный параметр
7г*в = Рви/Рвх- Здесь индексы I и II относятся к внутреннему и
наружному контурам двигателя соответственно, Fci, Fcn — площади среза
сопла внутреннего и наружного контура.
Сравнение различных способов формирования параметра 7г*в
(Рс/Рвх) Рт/Рюо Рвн/Рвх и ДР-) показывает, что, несмотря на
некоторые количественные различия, отклонения тяги во всех
рассмотренных случаях (из-за уменьшения КПД узлов, отбора воздуха и
мощности и т.д.) весьма невелики, и с этой точки зрения все параметры
практически равноценны.
Компрессоры современных и перспективных ТРДД с высокими
значениями 7г£Вд имеют несколько рядов поворотных НА,
управляемых по заданной программе с целью оптимизации режимов и
обеспечения достаточных запасов ГДУ во всем диапазоне режимов работы.
Неточность установки поворотных НА приводит к отклонениям
параметров двигателя, которые зависят как от погрешностей установки,
так и от принятого параметра регулирования, определяющего расход
топлива. Так, для рассматриваемого двигателя погрешность в угле
установки аппаратов компрессора, равная 1°, в случае применения
параметра регулирования пвд вызывает отклонение тяги более чем на
3% (AT* « +15 К), а при использовании параметров пнд, 7г*Е и 7г*в
изменение тяги не превышает 0,1% (ДТГ* < +1,5 К).
Для ТРДД увеличение расчетного значения степени двухкон-
турности то, обычно сопровождаемое снижением 7г*в, приводит к
росту влияния полных давлений перед соплами наружного и
внутреннего контуров на тягу двигателя, особенно в наземных условиях с
существенно докритическим режимом истечения из обоих сопел
(рис. 1.6). Поэтому с ростом то погрешности параметров регули-
45
ГЛАВА 1
PluK
1,005
1,000
0,995
0,990 0,995 1,000 1,005
0,990 0,995 1,000 1,005
Рис. 1.6 Зависимости коэффициентов влияния полных давлений перед
соплами на относительную тягу Р от степени двухконтурности гао
(Я = 0, М = 0, взлетный режим): 1 — гао = 4; 2 — 6; 3 — 8; 4 — 10;
5 — то = 12
рования, основанных на использовании р* или р*п, приводят ко все
большим отклонениям тяги. Это показано на рис. 1.7 в виде
влияния увеличения на 1% различных параметров регулирования на тягу
и Тг* применительно к ТРДД с mo ~ 11. Наименьшая точность
поддержания выходных данных обеспечивается при отклонении
параметров р*/р*х и Рви/Рвх (наряду с пвд): изменение тяги достигает
4,2%.. .4,7%.
Поскольку в двигателе с большой степенью двухконтурности тяга
в основном создается наружным контуром, коэффициент влияния на
тягу интегрального параметра тг*в = (рв11^с11 +PtFci)/(pZx(fc11 + ^i))
практически совпадает с коэффициентом влияния параметра 7Г*В =
= Рвн/Рвх- На выбор параметра регулирования влияют погрешности
аппаратуры САУ.
Для ТРДД с высокой степенью двухконтурности наиболее
высокую точность регулирования можно получить при использовании
параметра пнд. Несколько меньшую точность поддержания тяги
обеспечивают параметры 7г*Е и Ртвд/Рвх- Использование параметра
регулирования 7Г*В при любом способе его формирования для ТРДД с
высокой степенью двухконтурности может оказаться
нецелесообразным, учитывая практически достижимую точность датчиков,
необходимость осреднения полей давлений и небольшое изменение 7г*в во
всем диапазоне рабочих режимов.
46
Некоторые вопросы теории управления ГТД
5Л %
6
5
4
3
2
1
О
ArrU
30
25
20
15
10
5
0
т
Г|нд
*нд
^7
2
1
■вд
1к1
Рм
Р'П
Р±
Р'П
Ртвд
М,
кр
ш
Г|вд
ukZ
РвИ _Рт. />ТВД до
«* и* и*
Рвх />вх Рвх
кр
Рис. 1.7 Влияние отклонения на -1-1% параметров регулирования на тягу
SP и температуру АТГ*: 1 — Н = 0 км, М = 0; 2 — Я = 11 км, М = 0,8
1.3 Формирование требований к точности регулирования
Требования к точности регулирования и измерения регулируемых
параметров двигателя зависят от типа двигателя, его характеристик
и особенностей применения, программ управления.
Выбор точности регулирования на установившихся режимах
работы может быть выполнен исходя из условия получения с заданной
Погрешностью основных параметров или характеристик двигателя в
47
ГЛАВА 1
соответствии с задачами управления: тяги (мощности) на режимах,
на которых двигатель должен развивать наибольшую тягу,
экономичности, запасов ГДУ.
Например, для ТРДЦФ, имеющего регулирующие факторы GT,
Ст.ф, FKp, (рв, <Ло на режимах максимальной тяги связь между
погрешностью поддержания тяги SP и погрешностями регулирования
каждого из регулирующих факторов в предположении, что все
погрешности регулирования являются независимыми случайными
величинами, определится соотношением
5Р = ±
« +
(КСтф6Ст.ф)2 + (K%6Xi) + (КуМ*
л 0,5
где Xi — параметр двигателя, регулируемый воздействием на расход
топлива GT; Yi — параметр двигателя, регулируемый воздействием
С F
на FKp; Кстф, Кхт> К^ъ, К^к и Кукр — коэффициенты влияния на
тягу Р параметров Ст.ф, Xi, <pB, ipK и У$; 5Р, <5Ст.ф, SXi и SYi —
погрешности регулирования, отнесенные к значениям параметров и
регулирующих факторов на расчетном режиме Ро, Ст.фо, Хц> и Y^o;
5ipB и 5ipK — погрешности, отнесенные к диапазону изменения углов
поворота НА вентилятора ipB и компрессора ipK.
Коэффициенты влияния определяются из соотношений:
*х:
Кч>,
*ст.ф =
АР Xi0
AXi Po '
_ АР увта),
А^в Р0
АР G-г.фо
AGT.$ Ро
kf«p АР Yi0 .
* " AYi Ро '
АР Уктах
"; Kv""A^ Po
Коэффициенты влияния могут быть определены путем
математического моделирования или по данным эксперимента. Индексом Д
отмечены малые отклонения параметров от установившегося режима.
С помощью соотношения для расчета SP могут быть получены
количественные зависимости, характеризующие взаимосвязь
допустимых погрешностей регулирования различных параметров двигателя,
48
Некоторые вопросы теории управления ГТД
найденных из условия сохранения постоянной погрешности
поддержания тяги.
Выполнив однотипные расчеты для критичных с точки зрения
величины тяги режимов полета и комплекса рассматриваемых
программ управления, можно определить область значений
погрешностей, допустимых для всех условий полета. По результатам такого
расчета формируются требования к точности регулирования,
являющиеся базовыми для формирования требований к погрешностям
измерения параметров, входящих в программы и алгоритмы
управления [6].
Формирование требований к погрешностям датчиков
Формула для расчета погрешности измерения 5ХИЗМ параметра X
в предположении, что все погрешности регулирования, измерения и
преобразования сигналов являются независимыми случайными
величинами, имеет вид:
6Хи
где SX:
(6Хрег)2 - (6Хпр)2 - (6Х™У - W") - (SX„Y
0,5
per
допустимая погрешность регулирования параметра X;
<5^пр — погрешность формирования программы регулирования
параметра X; 5Х*Х и 5Х*ЫХ — погрешности преобразования сигнала
измерения параметра X и выходного сигнала канала регулирования
этого параметра; SX^ — алгоритмическая погрешность,
определяемая ограничениями используемых в БЦУМ функциональных методов
и технических средств реализации алгоритмов управления.
Для погрешности 5Хпр, когда Хпр = f(X\,X2,..., Xk), имеем
соотношение:
&ХПХ> = ±
11
дХ
Xl° XY \ j.( 9f X™ XY \ _i_
df Хко
дХк /о
6Хк
-|0.5
где Х\, Х2, ..., Хк — измеряемые параметры, используемые для
формирования программы управления; 5Х? = 5Х?ИЗМ + 5Х?П; 6Xin3M —
49
ГЛАВА 1
погрешность измерения параметра Х{; SXi п — погрешность
преобразования сигнала измерения Xi\ г = 1,2,..., fc.
Выполнив расчеты для всех параметров регулирования и
сочетаний программ управления можно определить требования к САУ
по точности измерения параметров регулирования и сформировать
обоснованные требования к величинам допустимых погрешностей
аппаратуры САУ [6].
Возможность достижения требуемой точности с учетом
необходимых затрат на разработку и дальнейшую эксплуатацию САУ может
являться одним из критериев при выборе метода управления
двигателем. Поэтому уже при выборе программ управления необходимо
оценить возможности их последующей реализации в САУ по этому
критерию.
Для современных систем управления погрешности регулирования
и ограничения основных параметров на установившихся режимах
работы двигателя составляют:
5тц = ±0,15% ... 0,2% ; 5Т* = ±1%; 5рк = ±1% ;
<5тг; = ±1%...1,5%; 5<fi = ±l%; SGT = ±2% .. .3% ;
погрешности измерения
±0,1%; <Jpiimi = ±0,5%...l%;
±0,5% ... 1%; ЯГ;Х.НЗМ = ±0,5% ... 1% ;
±1,5%... 2%;
перемещения
SLK3M = ±0,5% ... 1% .
Допустимые погрешности регулирования на переходных режимах
работы двигателя определяются по критериям сохранения ГДУ,
прочности и ресурса узлов двигателя.
1.4 Влияние взаимодействия регуляторов
на характеристики САУ
Степень взаимодействия регуляторов зависит от используемых
программ регулирования, структуры и характеристик регуляторов,
OTli Изм —
°-*т.изм
^^т.изм =
50
Некоторые вопросы теории управления ГТД
схемы и характеристик двигателя [11, 12]. Связь между каналами
регулирования обусловлена рядом причин. Поскольку взаимосвязаны
все параметры, характеризующие рабочий процесс в двигателе,
даже при независимом регулировании, когда число регулирующих
факторов и регулируемых параметров одинаковое и в регуляторах не
содержится специально вводимых связей между каналами управления,
в процессе регулирования наблюдается взаимодействие регуляторов.
Другой возможной причиной взаимодействия является наличие
связей между каналами управления внутри регулятора. Они
появляются, когда один регулирующий фактор используется для управления
несколькими регулируемыми параметрами. И, наконец, в регулятор
могут вводится дополнительные каналы взаимосвязи с целью
получения требуемых характеристик управления, например, на переходных
режимах работы двигателя.
Возникающее взаимодействие может оказывать влияние на такие
показатели работы системы, как точность регулирования на
установившихся и переходных режимах, устойчивость и качество процессов
управления.
Взаимодействие каналов регулирования различных параметров в
системах с одним регулирующим фактором определяется способами
согласования отдельных регуляторов, а также принципами их
построения.
Построение систем управления ГТД, при котором регулирование
ряда параметров осуществляется путем воздействия на один
регулирующий фактор, характерно для управления расходом топлива GT.
В системах гидромеханического типа для согласования регуляторов
используется ряд специальных устройств, обеспечивающих при
изменении условий полета и режима работы двигателя необходимую
последовательность выполнения программ управления. При этом обычно
изменением GT регулируется частота вращения ротора (основной
канал регулирования), а программы ограничения предельных значений
Других параметров выполняются путем воздействия через
согласующие устройства на основной регулятор.
Возможны различные схемы устройств для согласования, напри-
Мер такие, в которых два регулятора параллельно или
последовательно воздействуют на астатический исполнительный механизм,
Управляющий GT, или регулятор одного параметра действует на
настройку регулятора другого параметра и др.
51
ГЛАВА 1
Соответствующим выбором нелинейных характеристик
согласующих устройств и регуляторов ограничиваемых параметров
обеспечиваются определенный диапазон и последовательность работы
каждого регулятора, если предельные значения регулируемых
параметров, заданные программами ограничения, не достигаются
одновременно.
Однако изменение внешних условий и режима работы двигателя
могут приводить к такому изменению параметров, когда
одновременно несколько из них достигают максимальных допустимых
значений. В таком случае становится возможной совместная работа
регуляторов этих параметров в определенном интервале их
изменения — зоне совместной работы. Происходящее при этом
взаимодействие регуляторов, воздействующих на один регулирующий фактор,
оказывает влияние на основные показатели регулирования
(статическую точность, устойчивость, переходные процессы) и должно
учитываться при выборе структуры и характеристик САУ.
Одна из причин появления погрешностей регулирования на
установившихся режимах работы в системах с одним регулирующим
фактором, в которых для согласования работы регуляторов используется
устройство с астатическим исполнительным механизмом, исследована
И. Л. Письменным. В зоне совместной работы регуляторы,
астатические при автономной работе, становятся статическими, и изменение
внешних условий и режима работы двигателя приводит к появлению
статической ошибки регулирования. Характерно снижение значений
регулируемых параметров по отношению к заданным уставкой
регуляторов, которое может достигать 0,5%.. .1%. Такое снижение
сопровождается потерями тяги и экономичности двигателя, и в ряде
случаев может быть недопустимым.
Совместная работа регуляторов, воздействующих на один
регулирующий фактор, изменяя характеристики устойчивости системы,
может приводить к уменьшению запасов устойчивости регулирования,
снижению допустимых коэффициентов усиления в каналах
управления и, в результате, к ухудшению динамической точности
регулирования.
Для устранения отрицательного влияния взаимодействия
регуляторов на характеристики системы управления с одним регулирующим
фактором в современных САУ ГТД применяется селектирование
сигналов управления. Оно выполняется алгоритмически (в современных
52
Некоторые вопросы теории управления ГТД
цифровых САУ) или с помощью специальных устройств — селекторов
сигналов.
Селектирование позволяет исключить зону совместной работы
каналов управления и обеспечить во всех условиях работы системы
воздействие на регулирующий фактор только одного регулятора,
включаемого в работу в зависимости от режима работы двигателя.
Таким образом, каждый из каналов управления работает автономно.
В этом случае параметры регуляторов, определяющие запасы
устойчивости автономных контуров, могут, как правило, выбираться без
учета их взаимодействия с другими регуляторами.
Применяется принцип селектирования, согласно которому
регулируется тот параметр двигателя, величина которого наиболее
близка к уставке его регулятора или ограничителя (программе
управления).
Например, при управлении ГТД путем изменения расхода топлива
в основной камере сгорания на максимальных режимах работы
двигателя, для того чтобы все регулируемые параметры не превысили
максимальных допустимых значений (ограничение сверху), селектор
должен пропустить на управление дозирующим устройством сигнал,
соответствующий получению минимальной величины GT.
Классифицируя по требуемой величине регулирующего фактора, такое
селектирование называют селектированием по минимуму (селектор min).
С его помощью определяются очередность выполнения программ
Тттах = /(Гвх)> Рк max = C07lst, ™max = /(Г^), Ппр тах = C07lSt,
программы регулирования при приемистости и ряд других.
Если ограничивают минимальные значения параметров
(ограничение снизу), то предпочтение отдается регулятору параметра, для
поддержания которого требуется наибольший расход топлива, т.е.
осуществляется селектирование по максимуму (селектор max). Такой
принцип применяется для согласования с регуляторами сброса
частоты вращения, ограничения минимального расхода топлива.
Применяя последовательное селектирование по минимуму и максимуму,
Можно обеспечить необходимое ограничение значений регулируемых
параметров сверху и снизу.
Применение селекторов, устраняющих зону совместной работы,
Позволяет сохранить статическую точность и запасы устойчивости
Регулирования, свойственные автономным регуляторам параметров.
Взаимодействие каналов управления при этом сохраняется на пере-
53
ГЛАВА 1
ходных режимах. Его характер зависит от программ управления,
способов селектирования сигналов управления и динамических свойств
регуляторов.
Взаимодействие регуляторов при приемистости двигателя
Рассмотрим процесс приемистости от режима МГ до
максимального режима двухвального ТРДД с системой регулирования,
содержащей регуляторы приемистости РП, частот вращения пк, пв
(регуляторы Рп) и температуры газа за турбиной Т* (регулятор РТ).
Регуляторы согласуются с помощью селектора min.
На начальном участке процесс определяется регулятором частоты
вращения пк, который с максимальной скоростью увеличивает расход
топлива GT из-за наличия в нем большого сигнала рассогласования,
появившегося при быстром переводе РУД в направлении увеличения
уставки регулятора. Когда величина GT достигает значений,
определяемых программой регулирования приемистости, расход топлива
ограничивается регулятором приемистости, который работает до тех
пор, пока (как в этом примере) температура газа Т* не достигает
допустимого значения Т* тах (при этом пв < пвтах) или вступает в
работу регулятор частоты вращения.
В результате селектирования сигналов происходит передача
управления каналу регулирования температуры газа. Такое
взаимодействие регуляторов, действующих на один регулирующий фактор,
обеспечиваемое применением согласующих устройств, позволяет
получить требуемое протекание процессов.
Для оценки влияния изменения программы регулирования
двигателя при приемистости на время работы регуляторов будем выбирать
эту программу так, чтобы в процессе приемистости во время работы
регулятора приемистости расходовать одинаковую часть
располагаемого запаса устойчивости КВД, т. е. из условия АКу.к.рлсх = const,
где Д/^у.к.расх — расходуемый запас ГДУ.
По мере увеличения Д/^у.к.расх и уменьшения времени
приемистости tnp время работы регулятора приемистости в переходном
процессе сокращается в связи с увеличением времени работы регулятора
частоты пк и более быстрым ростом температуры газа, приводящим
к более раннему вступлению в работу регулятора температуры.
Минимальное значение tnp достигается в переходном процессе, в котором
54
Некоторые вопросы теории управления ГТД
О Ю 20 ЛКу,.расх>%
Рис. 1.8 Распределение времени работы регуляторов при приемистости
ограничение по температуре газа наступает раньше, чем по величине
Д/fy, и регулятор приемистости не вступает в работу.
Распределение времени работы регуляторов, воздействующих на
GT, в процессе приемистости в зависимости от величины ДАу.к.расх
иллюстрирует рис. 1.8. Область работы регулятора приемистости
РП, ограниченная кривыми, которые характеризуют изменение
относительного времени t/tnp начала работы регулятора приемистости и
регулятора температуры РТ, заштрихована.
Влияние динамических характеристик регуляторов на их
взаимодействие в переходном процессе можно проследить на примере
изменения инерционности измерителя температуры газа (постоянная
времени Тит) в канале регулирования параметра Т*.
Увеличение Тит приводит к более позднему вступлению
регулятора температуры в работу и снижению динамической точности
регулирования: при приемистости возрастают величины превышений
(забросов) температурой ее значений, соответствующих программе
регулирования. При больших значениях Тит приемистость может
закончиться еще до начала работы регулятора температуры.
Штриховые линии на рис. 1.8 относятся к другим значениям постоянной
времени ТИт-
При неизменной программе регулирования приемистости
увеличение инерционности регулятора температуры газа сопровождается
55
ГЛАВА 1
уменьшением tnp. Учитывая, что определенные величины забросов
Т* могут оказаться допустимыми, в соответствии с реальными
динамическими характеристиками канала регулирования температуры
может быть скорректирована программа регулирования, реализуемая
взаимодействующим с ним регулятором приемистости. Целью такой
коррекции будет уменьшение расходуемых запасов устойчивости КВД
при сохранении времени приемистости.
Влияние управления площадью сопла
Некоторые особенности взаимодействия регуляторов,
управляющих расходом топлива GT и площадью критического сечения
реактивного сопла FKp, могут быть рассмотрены на примере процесса
приемистости двухвального ТРДДФ с регулируемым соплом.
Программа изменения площади FKp выбрана так, чтобы сопло было
полностью раскрыто на режиме МГ и далее в процессе приемистости при
частоте вращения пк < пкр, после чего закрывалось с постоянной
скоростью до положения, соответствующего максимальному режиму
работы двигателя.
Оценим влияние взаимодействия регуляторов на время
приемистости двигателя. Чем больше значение nKF, т.е. чем дольше в
процессе приемистости сопло остается раскрытым, тем быстрее
увеличивается частота вращения пв. Оптимальным является такое значение
пкр = п^, при котором процесс характеризуется наибольшими
скоростями увеличения обеих частот вращения, однако до окончания
приемистости не вступает в работу регулятор-ограничитель частоты
вращения пв, уменьшающий расход топлива в случае пв > пв тах-
Закрытие сопла до величины, соответствующей максимальному
режиму, происходит к моменту t ~ tnp. При этом уже близки к
максимальным значениям частоты вращения обоих роторов двигателя и
температура газа.
При nKF < n^p снижаются скорости увеличения частот вращения
обоих роторов и увеличивается время tnp. В случае пкр > ^f Увс"
личение 7Г*НД приводит к опережающему возрастанию частоты
вращения 7? в, которая достигает максимального значения пв тах еще до
получения необходимой величины тяги. Регулятор-ограничитель
параметра пв снижает расход топлива, в результате чего происходит
уменьшение Т* и частоты вращения пк и резко увеличивается время
56
Некоторые вопросы теории управления ГТД
приемистости. Более позднее закрытие сопла приводит к
перераспределению времени работы регуляторов: происходит сокращение
времени действия регулятора приемистости, сначала из-за более раннего
вступления в работу регулятора Тг*, а при nKF > п°пр —
регулятора пв.
Более полное использование возможностей двигателя при
приемистости может быть достигнуто, если одновременно с изменением
характеристик регулятора сопла корректировать и программу
регулирования приемистости.
1.5 Адаптивное управление газотурбинным двигателем
Характеристики двигателя в эксплуатации могут значительно
отклоняться от оптимальных под воздействием различных внешних и
внутренних факторов: изменения давления и температуры воздуха
(газа) в полете; ухудшения характеристик узлов двигателя при
износе или при изменении теплового состояния конструкции на
переходных режимах работы; изменения мощности, отбираемой от вала
двигателя, и количества воздуха из тракта; неравномерности потока
на входе; возникновения повреждений и отказов в двигателе и его
системах и т. п. При этом необходимо обеспечить возможность
получения его наилучших в данных условиях характеристик, сохранить
ГДУ, предотвратить разрушение двигателя, обеспечить устойчивость
и качество процессов управления, т. е. адаптировать к условиям
эксплуатации. Эта возможность в значительной степени определяется
САУ, которая для решения таких задач должна строиться как
адаптивная.
Элементы адаптации имелись уже в первых САУ ГТД.
Современные цифровые электронные САУ, обрабатывающие большое
количество информации и реализующие сложные алгоритмы управления,
позволяют осуществлять более глубокую адаптацию характеристик
Двигателя методами и средствами управления. Для этого
адаптивная САУ, помимо традиционных, должна выполнять следующие
Функции:
— распознавание состояния двигателя (ухудшение характеристик
узлов, работу на установившемся или переходном режимах,
возникновение отказов и т. п.);
57
ГЛАВА 1
— формирование цели управления в соответствии с результатами
распознавания состояния двигателя;
— выбор способа управления двигателем, обеспечивающего
достижение заданной цели (выбор комплекса программ управления,
оптимальных для данных условий работы двигателя);
— формирование и выбор параметров алгоритмов управления,
позволяющих обеспечить заданное качество управления при
использовании выбранных программ управления.
Система автоматического управления выполняется
двухуровневой. На верхнем уровне формируется цель управления и
осуществляется коррекция программ управления, на нижнем — формируются
адаптивные алгоритмы управления, позволяющие для всех условий
эксплуатации двигателя реализовать с требуемым качеством
сформированные на верхнем уровне программы управления.
Распознавание состояния двигателя является базовой задачей и
необходимо для формирования цели управления и выбора
соответствующего комплекса программ и алгоритмов. Здесь могут быть
выделены несколько направлений.
Распознавание ухудшения характеристик узлов. На установившихся
режимах работы снижение тяги двигателя при действии различных
по физической природе факторов, приводящих к ухудшению
характеристик узлов газогенератора (износа, непрогретости элементов
конструкции и др.), может быть однозначно идентифицировано на основе
анализа изменения зависимости 7Г*В (Т* пр), где 7Г*В — степень
повышения давления в двигателе; Т* пр — приведенная температура газа
за турбиной. Снижению тяги на одну и ту же величину
соответствует одинаковое смещение этой зависимости. Для распознавания
в САУ может быть введена зависимость 7Г*В (Т* пр) ,
соответствующая двигателю с номинальными характеристиками. Разность
между номинальным и фактическим значениями параметра 7Г*В может
быть использована в качестве меры ухудшения характеристик
двигателя и сигнала управления в системе.
Распознавание установившегося и переходного режимов работы
двигателя необходимо для ввода в работу адаптивных программ и
алгоритмов регулирования, различающихся для установившихся и
переходных режимов работы двигателя. В соответствии с алгоритмом,
позволяющим это сделать, установившимся считается такой режим
58
Некоторые вопросы теории управления ГТД
работы двигателя, на котором модули отклонений регулируемых
параметров двигателя от заданных значений и абсолютные величины
их производных одновременно не превышают заданных значений.
При этом допускается инерционное вычисление производных с целью
фильтрации помех.
Распознавание отказавшего канала управления органами механизации
протонной части в ГТД с регулируемыми НА компрессоров и
регулируемым соплом может быть выполнено при использовании
зависимости S = /(7Г*), где S — скольжение роторов; 7Г* — суммарная
степень расширения газа на турбине.
Перемещение рабочей точки в плоскости координат 5, 7Г* при
уменьшении тяги двигателя в случае отказа одного из каналов
управления этими регулирующими органами и при нормальном
дросселировании происходит в существенно разных направлениях независимо
от режима полета. Если при снижении тяги, фиксируемом,
например, по уменьшению параметра 7Г*В, происходит рост величины 7г*
при малом изменении скольжения 5, то отказ произошел в канале
управления соплом. Если при этом величина S резко уменьшается, а
величина 7г* изменяется мало, то отказ произошел в контуре
управления НА вентилятора. И, наконец, если увеличение S сопровождается
малым изменением 7Г*, то отказ произошел в контуре управления НА
компрессора.
По результатам идентификации в САУ может быть выполнена
реконфигурация управления, направленная на минимизацию влияния
отказа на характеристики двигателя.
Расширение возможностей адаптации двигателя связано с
применением способов управления, приспособленных для этих целей.
В качестве одного из таких методов может быть использован
альтернативный способ дросселирования ГТД при малом
изменении частоты вращения роторов, разработанный О. С. Гуревичем и
Ф. Д. Гольбергом. Он может быть применен на двигателе, имеющем
регулируемые в широком диапазоне компрессор и сопло. Для его
реализации программы управления углами установки <рк НА компрессора
и площадью критического сечения сопла FKp корректируются по
положению РУД, а расход топлива в камеру сгорания определяется из
условия обеспечения малого изменения частоты вращения
компрессора при дросселировании:
59
ГЛАВА 1
пк min — (0?9 . . . 0,95j7lK тах ,
где пк min — частота вращения на режиме минимальной тяги.
При традиционных методах управления дросселирование
двигателя по тяге от ее максимальной величины Р = Ртах ДО величины
Р = ^мг5 соответствующей режиму МГ, осуществляется путем
значительного снижения частоты вращения роторов.
Для получения максимального диапазона изменения тяги при
дросселировании по альтернативному методу при приближении к
режиму Р = Ртш полностью раскрывается сопло и прикрываются НА
компрессора. Имеется возможность так сформировать программы
управления, чтобы получить Ртш = Рмг и сохранить экономичность
двигателя на крейсерских режимах такой же, как при обычном
управлении.
Применение такого способа дросселирования может быть
использовано для адаптации характеристик двигателя к режимам
эксплуатации путем уменьшения длительности процессов приемистости и
сброса тяги, повышения запасов ГДУ компрессора на этих режимах,
для снижения термоциклической повреждаемости лопаток турбины и
увеличения ресурса двигателя многорежимного самолета.
Если целью управления является увеличение ресурса двигателя
многорежимного самолета, где существенное влияние на ресурс
оказывает малоцикловая усталость, программа дозирования топлива при
приемистости выбирается из условия сохранения времени
приемистости таким же, как при обычном управлении. Однако в этом случае
максимальная скорость изменения температуры лопатки в переходном
процессе снижается более чем в 2 раза по сравнению с аналогичным
процессом при обычном управлении, существенно уменьшается
размах деформаций в цикле приемистость-сброс в интервале режимов
МГ-МАХ. Циклическая долговечность лопаток ТВД в критических
точках лопатки увеличивается в 1,5-2 раза. При этом выполняются
все другие требования к характеристикам двигателя на переходных
режимах работы.
Еще одну возможность для адаптации на переходных режимах
работы ГТД предоставляет использование перепуска воздуха за КВД
при взаимосвязанном управлении его величиной и расходом топлива в
камере сгорания. В этом случае может быть осуществлено адаптивное
управление запасами ГДУ КВД.
60
Некоторые вопросы теории управления ГТД
Если целью управления на конкретном этапе полета является
уменьшение времени приемистости двигателя (например, для
выполнения маневра), то увеличив в процессе приемистости отбор воздуха
за КВД и повысив, таким образом, запасы его ГДУ, можно увеличить
избытки топлива, подаваемого в камеру сгорания. Процесс будет
протекать при увеличенном ускорении роторов и, следовательно, время
приемистости уменьшится. Ограничением в этом случае будет
допустимая температура газа.
При необходимости повышения запасов ГДУ КВД в процессе
приемистости двигателя увеличение отбора воздуха может не
сопровождаться повышением расхода топлива. Возможность уменьшения
запасов ГДУ, расходуемых в переходных режимах, позволяет также
улучшить характеристики двигателя и на установившихся режимах
путем использования части запасов, резервируемых на переходные
режимы.
Поскольку при рассматриваемом методе управления программы
управления различны для переходных и установившихся режимов
работы двигателя, в системе должно быть предусмотрено распознавание
режима работы.
1.6 Интегрированное управление силовой установкой
сТРДДФ
Возможности улучшения характеристик СУ с ГТД связаны не
только с совершенствованием рабочего процесса, схем, конструкции,
материалов, но и с управлением СУ. Один из путей —
интегрированное управление СУ, при котором управление рабочим процессом
в отдельных ее элементах (двигателе, воздухозаборнике,
многофункциональном сопле и т. д.) и СУ в целом ставится в зависимость от
режима или этапа полета, управления самолетом или использования
Установленного на нем оборудования. В этом случае СУ вместо
заранее определенных и неизменных свойств будет иметь гибкие
характеристики, видоизменяемые в полете методами и средствами
управления.
Такой подход может стать особенно эффективным при управлении
СУ с ТРДДФ современного многорежимного самолета, к
характеристикам которой на отдельных этапах полета предъявляются разные,
61
ГЛАВА 1
часто несовместимые требования. Так, на взлете или в полете с
максимальной скоростью главным является получение наибольшей тяги;
при крейсерском полете на дозвуковых и сверхзвуковых скоростях
необходимо иметь высокую экономичность; при маневрировании, уходе
на второй круг, палубном базировании — высокую динамичность по
тяге и т. п. Однако, как правило, нет необходимости в получении всех
предельных характеристик одновременно.
Принципы интегрированного управления дают возможность
реализовать такие характеристики дифференцированно, в соответствии
с решаемыми в полете задачами, наиболее полно использовать
потенциальные возможности двигателя и, тем самым, в некоторых
случаях обеспечить выполнение предъявляемых требований без
повышения уровня параметров рабочего процесса.
Другая сторона интегрированного управления СУ состоит в
осуществлении оптимального взаимодействия ее элементов (двигателя,
сверхзвукового воздухозаборника, многофункционального сопла)
между собой и с системами самолета, направленного на улучшение
эффективных характеристик СУ и снижение уровня ограничений на
режимы эксплуатации самолета.
Ряд специальных требований к СУ предъявляется при
использовании в полете сопел с устройствами отклонения вектора тяги (ОВТ)
и реверса (РУ), в частности для обеспечения устойчивой работы и
согласования изменения режимов работы двигателя и сопла.
Анализ возможностей совершенствования управления СУ
показывает, что заметное улучшение в этом направлении не может быть
достигнуто традиционными методами, основанными на автономной
оптимизации управления отдельными ее элементами, выполняемой
независимо от управления самолетом и задач полета, а также на
представлении о независимости систем управления самолетом и СУ. Это
приводит к увеличению запасов по отношению к предельным
значениям параметров рабочего процесса, отказу от некоторых
эффективных решений, неполному использованию возможностей СУ.
Цель интегрированного управления состоит в более глубоком
использовании возможностей СУ на самолете методами и средствами
автоматического управления для лучшей адаптации ее характеристик
к задачам, решаемым в полете.
Осуществление интегрированного управления связано, в первую
очередь, с созданием методов такого управления, являющихся алго-
62
Некоторые вопросы теории управления ГТД
ритмической базой для построения интегрированных САУ (ИСАУ) и
лх аппаратурной реализации.
В проблеме интегрированного управления СУ могут быть
выделены два аспекта: алгоритмический, содержанием которого являются
методы интегрированного управления и реализующие их алгоритмы,
учитывающие взаимосвязь СУ с другими подсистемами на борту и
задачами полета; аппаратурный, состоящий в объединении систем и
устройств, обеспечивающих функционирование всего бортового
комплекса (вычислительных средств, энергетических систем,
информационных систем и т.д.).
В алгоритмическом аспекте проблемы могут быть выделены
четыре направления:
(1) задачи, связанные с разработкой способов управления
собственно двигателем, его рабочим процессом в ИСАУ, позволяющие
выполнить требования к СУ, предъявляемые на различных
этапах полета, и осуществить адаптацию характеристик двигателя
к задачам полета;
(2) работы по формированию методов интегрированного управления
элементами СУ (двигателем и воздухозаборником). Их
основными целями являются улучшение эффективных характеристик
СУ в составе самолета и снижение уровня ограничений на
изменение режимов работы СУ и расширение безопасного диапазона
внешних воздействий (по углам атаки, скольжения, тепловым
возмущениям);
(3) вопросы согласованного управления режимами работы
двигателя и устройствами, обеспечивающими изменение направления
вектора тяги в полете, в том числе и реверсирование тяги;
(4) задачи, решаемые при автоматическом управлении режимом
работы СУ через автомат тяги в интегрированной системе
управления самолетом по сигналам из систем управления полетом,
вооружением и других систем. Целями управления в этом случае
являются: повышение качества траекторного управления
самолетом на режимах, на которых необходимо выдерживание
заданных скорости полета и дистанции между самолетами,
геометрической высоты (полет со следованием рельефу местности);
разгрузка летчика; экономия ресурса СУ и т. д.
63
ГЛАВА 1
Содержание рассмотренных направлений составляет
совокупность конкретных задач управления, определяемых назначением и
характеристиками самолета, особенностями конкретных этапов и
режимов полета.
Рассматривая аппаратурный аспект интегрированного
управления, следует иметь в виду, что функционально и конструктивно
отдельные подсистемы самолета становятся все более связанными.
Представляется целесообразным выделить четыре основных
направления интеграции:
(1) средств измерения и передачи информации;
(2) вычислительных средств;
(3) энергетических систем;
(4) систем отображения информации.
Структурное построение интегрированной системы управления
должно позволить реализовать принципы интегрированного
управления в соответствии с методами и алгоритмами управления,
оптимальными для решения задач полета: формирование комплексов программ
и алгоритмов управления СУ для типовых режимов эксплуатации
самолета; обеспечение изменения способов управления СУ в полете
в соответствии с требованиями его конкретного этапа; обмен
информацией о режиме работы СУ и ее САУ с другими системами самолета
и др.
Для выполнения этих функций в САУ должно содержаться
устройство для формирования разных комплексов программ
управления, предназначенных для использования в различных условиях
эксплуатации самолета. Выбор наилучшей для данного этапа полета
программы управления осуществляется специальным селектором
программ, который может действовать либо по сигналам из самолетных
систем, формируемым и используемым в них для осуществления
взаимодействия подсистем управления полетом, вооружением и др., либо
автоматически по командам в САУ СУ или самолета в соответствии
с комплексом специальных критериев.
Автоматическое управление режимом работы СУ в
интегрированной системе управления может быть осуществлено воздействием
на РУД через автомат тяги или путем введения сигналов из систем
управления полетом непосредственно в САУ СУ. Структурное
построение ИСАУ в соответствии с изложенной концепцией представлено
структурной схемой на рис. 1.9.
64
Летчик
Пульт
режимов
САУ самолета
Самолет
—л— -~Л
|СУ
вз
Двигатель
= F
Сопло
Датчики
ВЗ
ИМВЗ
—7Ь—
Датчики двигателя
Управление ВЗ
Программы
и алгоритмы
интегрированного
управления ВЗ
Интегрированная САУ СУ
2Z
ИМ двигателя
7Ъ
Датчики
сопла
ИМ
сопла
~~7%—
Управление двигателя
1 1 I В
i Ё 8 I
Я о. о *
£5 eg
Е s 2 ч
X ed
s a.
а.
е
УЧ
Управление
соплом
Программы
и алгоритмы
интегрированного
управления
многофункциональным
соплом
7Z
73
Автомат
тяги
^=ЙРУД
Из САУ
самолета
Сигналы
на управление
ОВТ и РУ
Рис. 1.9 Структурная схема ИСАУ
ГЛАВА 1
Метод управления, обеспечивающий быстрое изменение тяги
Метод дросселирования двигателя при малом изменении частоты
вращения может быть использован в интегрированной САУ
многорежимного самолета для уменьшения времени изменения тяги в
процессах приемистости и сброса. Его модификация для решения этой
задачи названа методом быстрого изменения тяги (БИТ).
Вид процессов приемистости для одного из двигателей при
управлении по методу БИТ, протекающих при быстром переводе РУД из
положения МГ в положение ПФ, показан на рис. 1.10 (режим Н = 0,
М = 0). Режим минимальной тяги получен при пк = 0,9, <рк = tpK min,
FKp = FKp max- Для сравнения приведены процессы для обычного
Р = Р/Рп<
0,95РПФ
0,00 0,25 0,50 0,75 1,00 } = t/t
пр. ном
пк~ "кЧтах
0,9
0,7
2^
—
~~1
0,00 0,25 0,50 0,75 1,00 "/ = ///
пр.ном
пъ~пъ/пъ max
0,7
0,3
>
*
^Г
0,00 0,25 0,50 0,75 1,00 / = t/t
Т = Т*IT*
т л т л т max
пр.ном
0,00 0,25 0,50 0,75 1,00 } = t/t
пр.ном
Рис. 1.10 Процессы изменения параметров при приемистости:
1—обычное управление; 2 — управление по методу БИТ
Некоторые вопросы теории управления ГТД
управления (сплошные кривые). Время достижения заданного уровня
тяги Р = 0,95Рпф при управлении по методу БИТ меньше почти в
2 раза без снижения запасов ГДУ двигателя и повышения
температуры газа в переходном процессе по сравнению с аналогичным
процессом при обычном управлении.
Применение такого метода управления двигателем на режимах
полета, где необходимо улучшение маневренных характеристик
самолета, дает возможность уменьшить на 10%.. .15% габариты типовых
маневров, совершаемых в ближнем воздушном бою.
Существенные преимущества может дать использование метода
БИТ для самолета палубного базирования на режиме экстренного
взлета после неудачной посадки: на 20%.. .25% уменьшить
посадочную скорость, в результате чего в 1,5-2 раза снижается перегрузка,
действующая на летчика при торможении. Повышается и
безопасность этого маневра.
Интегрированное управление двигателем и сверхзвуковым
воздухозаборником
Интегрированное управление дает возможность повысить
точность согласования режимов работы ВЗ и двигателя.
Управление на установившихся режимах работы силовой установки
Регулирование максимального значения приведенного расхода
воздуха через двигатель. Необходимость регулирования
приведенного расхода воздуха через двигатель связана с тем, что область
устойчивой работы ВЗ может существенно уменьшаться при углах
поворота потока меньше оптимальных для данного числа М и
увеличенной площади горла Fr, необходимых для пропускания в двигатель
требуемого количества воздуха.
Решение проблемы возможно при интегрированном управлении
путем воздействия на двигатель и ограничения максимального
расхода воздуха через него. Для этого при достижении приведенным
расходом воздуха GB.np максимального допустимого значения,
которое зависит от характеристик ВЗ и двигателя, уменьшается расход
топлива в основную камеру сгорания. Расход GB.np, не поддающийся
непосредственному измерению, в системе управления можно оценить
По косвенным параметрам (приведенной частоте вращения вентиля-
67
ГЛАВА 1
тора пв.пр, аэродинамическому параметру е замкнутого
регулирования ВЗ, положению регулируемых панелей его клина).
Управление ВЗ по критерию РЭф max wa режиме разгона
самолета. При работе двигателя на неизменном режиме, например в
процессе разгона самолета, эффективная тяга СУ в сверхзвуковом полете
существенно зависит от того, насколько оптимально регулируется ВЗ.
Одним из вариантов управления регулирующими органами ВЗ в этом
случае может быть экстремальное регулирование по критерию Рэф —►
"~¥ Рт&х с использованием косвенного параметра пх = (l/g)(dv/dt) —
перегрузки самолета вдоль продольной оси.
Управление на переходных режимах работы силовой установки
Инвариантность режима согласования воздухозаборника и
двигателя в интегрированной САУ. Получение высокой точности
согласования режимов работы ВЗ и двигателя по расходу воздуха на
переходных режимах работы СУ является одной из сложных проблем
разработки САУ. Это объясняется тем, что область устойчивой
работы сверхзвукового ВЗ, определяемая границами помпажа и
допустимого уровня неравномерности и пульсаций потока перед двигателем
(помпаж двигателя, «зуд» ВЗ), сравнительно узка, а действующие на
ВЗ в полете возмущения различной природы велики и имеют большие
скорости изменения.
Цель управления согласованием режимов работы ВЗ и двигателя
в процессе отработки действующих возмущений можно определить
как задачу сохранения режима их совместной работы, заданного
программой управления для установившихся режимов, т.е. достижения
инвариантности режима согласования к возмущению.
Физическая причина погрешностей согласования двигателя и ВЗ
на переходных режимах работы СУ состоит в несоответствии
скоростей изменения возмущающих факторов и быстродействия контура
регулирования ВЗ. Возможны два способа разрешения этого
противоречия: ограничение возмущений (диапазона и скоростей изменения
режима работы двигателя, углов атаки и скольжения) и повышение
быстродействия САУ СУ до значений, обеспечивающих парирование
действующих возмущений.
При интегрированном управлении ограничивается скорость
изменения расхода воздуха через двигатель на режимах сброса газа
и приемистости по условию сохранения заданных запасов ГДУ ВЗ и
68
Некоторые вопросы теории управления ГТД
СУ путем воздействия на расход топлива в основной камере сгорания
гтд.
В качестве характеристики запаса ГДУ ВЗ в системе
используется отклонение ALK клина от положения, заданного программой
регулирования, или отклонение аэродинамического параметра
замкнутого регулирования Ае от заданного значения. В интегрированной
САУ соответствующее изменение расхода топлива может быть
осуществлено как путем непосредственного управления дозирующим
краном по сигналу ALK(Ae), так и посредством коррекции по этому
сигналу программ управления, используемых для дозирования топлива
на режимах приемистости и сброса.
При таком управлении неизбежны нежелательные ограничения
по скорости изменения тяги двигателя. Предпочтительнее способы
управления, которые позволяют обеспечить сохранение ГДУ СУ без
введения ограничений на возмущения. Естественным ограничением в
данном случае остается достижимое быстродействие приводов
регулирующих органов СУ.
Инвариантная система управления
Условием физической осуществимости инвариантной системы
регулирования является выполнение принципа двухканальности. В
качестве основного способа реализации этого принципа можно
рассматривать введение в систему компенсирующей связи по возмущению.
Для внутренних возмущений в СУ такой связью по отношению к
контуру управления ВЗ в САУ СУ будут, например, каналы управления
по параметрам двигателя, косвенно характеризующим изменение
расхода воздуха через него на переходных режимах работы.
Такое построение системы представляет собой одну из
возможных форм интеграции управления ВЗ и двигателем [12]. При этом
структура и параметры объединяющего системы канала управления
(канала интеграции) выбираются из условий инвариантности режима
совместной работы ВЗ и двигателя к внутренним возмущениям.
В случае, когда характеристики всех элементов САУ линейны, из
условия абсолютной инвариантности может быть получена и
передаточная функция необходимого компенсирующего устройства.
Существенной нелинейностью, практически определяющей
динамические свойства системы управления, является характеристика
69
Область
инвариантности
Х^^КУ^АУИ 1
/////X
с///////////////
^^^^^
^АУИ> С
Рис. 1.11 Связь между параметрами канала интеграции: Кку —
коэффициент усиления компенсирующего устройства; Кауи — коэффициент
усиления агрегата управления в цепи компенсации; Ккру — минимальное
значение Кку при котором достижима инвариантность)
исполнительного механизма САУ ВЗ, имеющая зоны насыщения и
нечувствительности по скорости. Эта нелинейность входит в канал
интеграции и должна быть учтена при выборе его характеристик.
Получено условие абсолютной инвариантности для системы, имеющей в
цепи управления нелинейность типа «насыщение», справедливое для
детерминированных возмущений с произвольным законом и конечной
скоростью изменения частоты вращения. Для случая, когда
характеристика исполнительного механизма имеет существенную зону
нечувствительности, найдено условие для определения максимально
допустимой величины этой зоны, при которой достижима инвариантность
до е.
Связь между параметрами канала интеграции, задаваемую
условиями инвариантности, определяет гипербола ^ку^ауи = 1
(рис. 1.11). Выбор параметров САУ в соответствии с изложенными
принципами дает возможность получить инвариантное управление в
ИСАУ без ограничения уровня возмущений при регулировании ВЗ по
замкнутому циклу.
Возможности управления без ограничения возмущений в ИСАУ с
регуляторами ВЗ программного типа рассмотрим применительно к
САУ, в которой перемещение клина (конуса) LK выполняется в
функции параметра 7гк. Такие системы могут иметь большие динамиче-
70
Некоторые вопросы теории управления ГТД
LK1%
90
80
70
60
70 75 80 85 лВДпр,%
Рис. 1.12 Процессы управления в САУ ВЗ программного типа: 1 —
программа регулирования ВЗ; 2 — граница помпажа; 3 — автономный
регулятор ВЗ; 4 — ИСАУ (ККу = #£ут); 5 — ИСАУ (ККу < #кпу); 6 —
ИСАУ (ККу > *Гкпу)
ские погрешности, складывающиеся из двух составляющих. Одна
обусловлена принципом регулирования (структурная динамическая
погрешность) и приводит к опережению регулирующим органом его
необходимого положения, а другая — запаздываниями в аппаратуре
регулирования (аппаратурная динамическая погрешность) и
вызывает отставание регулирующего органа.
Принцип выбора характеристик канала интегрированного
управления в такой системе состоит в получении равных структурной и
аппаратурной погрешностей, что позволит достигнуть инвариантности
в принятом смысле.
Представление о характере процессов управления с помощью
рассматриваемой системы дает рис. 1.12, где для одного из режимов
сверхзвукового полета в координатах пндПр, LK (пндПр —
приведенная частота вращения ротора низкого давления) показаны программа
Регулирования ВЗ и движение относительно нее регулирующего
органа в переходных процессах, вызванных резким дросселированием
Двигателя от режима ПФ до режима МГ. Время г^к, составляющее
около 0,25 с при автономном управлении ВЗ, уменьшилось в ИСАУ
До 0,08 с.
71
ГЛАВА 1
Интегрированное управление двигателем и многофункциональным
соплом
Использование многофункционального сопла с устройствами
реверса и отклонения вектора тяги является одной из возможностей
улучшения летно-технических характеристик (ЛТХ) перспективных
самолетов-истребителей и повышения их боевой эффективности.
Реализация возможностей СУ, содержащей сопло с РУ и ОВТ,
непосредственно связана с интеграцией управления этими устройствами
и двигателем, а также СУ и самолетом.
Управление СУ с реверсивным устройством. Применение РУ в
полете связывается, в первую очередь, с решением задач, в которых
для успешного маневрирования необходимо осуществлять резкое
торможение самолета. Интеграция управления двигателем и РУ может
позволить сократить длину пробега при посадке.
Управление СУ с отклоняемым вектором тяги. Отклонение
вектора тяги может быть использовано как средство улучшения ЛТХ,
маневренных и пилотажных характеристик перспективного
самолета-истребителя, позволяющее обеспечить управляемость на режимах
полета с малыми скоростями, когда недостаточна эффективность
аэродинамических органов управления, улучшить характеристики
боковой устойчивости и поперечной управляемости на больших углах
атаки, улучшить взлетно-посадочные характеристики.
Важное значение имеет управление ОВТ для маневренных
самолетов с большой степенью продольной неустойчивости, для которых
управление направлением вектора тяги необходимо для балансировки
самолета. Возможности интегрированного управления СУ с ОВТ
зависят от концепции построения самолета. Максимальная
эффективность при применении сопла с ОВТ может быть достигнута при
согласованном управлении соплом и режимом работы двигателя.
1.7 Регулирование температуры газа в ГТД
Одним из важных требований к характеристикам управления ГТД
является высокая точность поддержания (ограничения) заданной
температуры газа на установившихся и переходных режимах его работы,
так как качество регулирования на режимах, предельных по темпера-
72
Некоторые вопросы теории управления ГТД
туре газа, является важным для получения требуемых характеристик
и сохранения ресурса двигателя [11, 12]. Погрешности регулирования
температуры газа на установившихся режимах не должны превышать
5.. .10 К, а на переходных режимах допустимая величина «заброса»
температуры составляет 30.. .50 К на время не более 0,5.. .1 с. При
этом скорость изменения температуры газа на переходных режимах
может достигать 500 К/с.
В качестве измерителей температуры газа в САУ используются
термопары, которые для защиты от повреждений помещают в
корпус (чехол). В таком конструктивном исполнении измеритель имеет
достаточно большую инерционность, препятствующую получению
требуемой динамической точности регулирования (ограничения)
температуры газа при быстропротекающих переходных процессах в
двигателе, например, таких как приемистость. Для улучшения
динамических свойств регулятора температуры газа применяют
алгоритмическую компенсацию инерционности измерителя, вводя в сигнал
управления воздействие по производной от сигнала измерения.
Повышение качества компенсации достигается путем коррекции
параметров алгоритма по давлению воздуха за компрессором р* или
комплексу параметров (пк, Тв*х, р*х).
Устойчивость регулирования температуры газа зависит от
характеристик измерителя температуры, алгоритмов управления и
способов согласования канала регулирования Тг* с другими каналами
управления в САУ. Однако общей закономерностью является
уменьшение области устойчивости регулирования при снижении
инерционности канала регулирования различными способами
(применением малоинерционных измерителей, введением компенсирующих
устройств). Такая тенденция имеет место для двигателей различных
типов во всех условиях полета.
Отмеченную закономерность иллюстрируют границы областей
устойчивости регулятора температуры для одного из двигателей,
показанные на рис. 1.13. На графиках используются следующие
обозначения: Кт — суммарный коэффициент усиления регулятора
температуры Т*; Тр — коэффициент, характеризующий величину сигнала
по производной в пропорционально-интегрально-дифференциальном
(ПИД) регуляторе температуры газа; Тит — постоянная времени,
характеризующая инерционность измерителя температуры газа.
Штриховка направлена внутрь области устойчивости.
73
ГЛАВА 1
Рис. 1.13 Границы областей устойчивости регулятора температуры газа
Эта особенность характеристик устойчивости регулирования
определяет противоречия в требованиях к параметрам регулятора
температуры газа, которые должны обеспечивать высокое качество
регулирования на переходных режимах работы двигателя и
необходимую точность на установившихся: необходимо иметь малую
инерционность канала регулирования, что не позволяет реализовать
достаточно высокий коэффициент усиления Кт в нем для получения
требуемой точности поддержания заданного значения Т* на
установившихся режимах.
Требования по устойчивости и динамической точности могут
быть согласованы при построении быстродействующего регулятора
температуры газа в классе адаптивных систем.
Один из вариантов адаптивного регулятора температуры газа,
разработанный О. С. Гуревичем и Ф.Д. Гольбергом, содержит кроме
основного контура управления замкнутый и разомкнутый контуры
адаптации [12]. Замкнутый контур адаптации изменяет параметры
основного алгоритма в зависимости от режима работы системы.
74
Некоторые вопросы теории управления ГТД
При наличии в системе переходного режима для получения
максимальной динамической точности реализуется структура, в
которой достигается минимальная инерционность в канале регулирования.
Вблизи установившихся режимов работы двигателя для получения
требуемой статической точности коэффициент Кт в канале
увеличивается одновременно с ростом инерционности канала регулирования.
При этом в регуляторе автоматически устанавливается коэффициент
усиления, при котором обеспечивается необходимый запас
устойчивости регулирования.
Изменение параметров алгоритма регулирования осуществляется
по сигналу, характеризующему степень приближения к
установившемуся режиму.
75
Глава 2
Аппаратурные решения в системах управления
2.1 Электронные цифровые системы управления
Развитие архитектуры электронной части систем управления
ГТД связано с прогрессом в области электронных технологий,
увеличением объема выполняемых системой функций, усилением
интеграции с бортовым комплексом Л А.
На начальном этапе использования электронных регуляторов
двигатель имел полноразмерный гидромеханический регулятор,
обеспечивающий работу двигателя на всех режимах, и электронный
регулятор аналогового или цифрового типа, выполнявший ограниченное
число функций путем прямого управления или по супервизорной
схеме. Связь с бортовым комплексом осуществлялась, как правило, с
помощью аналоговых линий связи (рис. 2.1, а).
Появление микропроцессоров и микроЭВМ, работоспособных в
условиях эксплуатации, характерных для САУ ГТД, позволило
создать цифровые системы, которые стали осуществлять прямое
управление регулирующими органами двигателя на всех режимах его
работы и выполнять функции его оперативной диагностики (рис. 2.1, б).
Системы построены по централизованной схеме. Связь с бортом
осуществляется с помощью цифрового канала в виде последовательного
кода с частотой до 100 кГц. В такой системе может оставаться
гидромеханический регулятор, выполняющий функции резервного при
отказе электронной части системы.
Создание сверхбольших интегральных схем, повышение их
безотказности на один-два порядка и быстродействия в 10.. .20 раз, увелн-
76
ы
X
яг
н
Электронный
| [—►[ регулятор
ж
Бортовой
комплекс
Полноразмерный
гидромеханический
регулятор
Исполнительные
устройства
S
S
яг
н
|—| J Электронный
регулятор
Исполнительные
|—И I устройства
ГМ резерв
(а)
Цифровой
канал
(б)
Бортовой
комплекс
scd-h
Исполнительные
Электронный L—| |
регулятор I —
устройства
Бортовой
комплекс
Бортовой
комплекс
ж
ж
МКИО самолета
Центральный
процессор САУ
двигателя
ЗЕ
МКИО двигателя
Интеллектуальные
МКИО
устройства
(в)
Интеллектуальные Интеллектуальные
датчики исполнительные устройства
(г)
н
н
Рис. 2.1 Архитектура электронной части САУ ГТД: (а) гидромеханический регулятор с супервизорной
электронной частью; (б) централизованная электронная САУ с гидромеханическим резервным регулятором;
(в) централизованная электронная САУ с отдельными интеллектуальными устройствами; (г)
распределенная электронная САУ
ГЛАВА 2
чение объема памяти привело к созданию нового поколения
высоконадежных цифровых систем (также построенных по централизованному
принципу), в которых достигнутый уровень надежности позволил в
ряде случаев отказаться от использования резервного
гидромеханического регулятора (рис. 2.1, в).
Дальнейшее повышение надежности и функциональных
возможностей, снижение стоимости разработки и эксплуатации систем
управления и контроля ГТД связано с созданием систем, построенных по
распределенному принципу. В этом случае система выполняется на
базе интеллектуальных датчиков и исполнительных устройств,
высокоскоростного МКИО двигателя (рис. 2.1, г). Верхний уровень
системы реализуется в центральном процессоре САУ двигателя, который
связан с бортовым комплексом по быстродействующему МКИО
самолета со скоростью передачи информации 10.. .100 МГц. Для
практической реализации таких систем необходима высокотемпературная
элементная база, работоспособная при температуре до 200 °С и выше.
Современные электронные системы управления ГТД выполнены,
как правило, по централизованному принципу [11, 13-15].
Структурная схема такой системы показана на рис. 2.2. Вычислительное ядро
системы может иметь одну или несколько микроЭВМ, объединенных
с помощью локальных шин. Быстродействие систем управления ГТД
составляет до 20.. .40 млнкор.оп/с, объемы оперативной памяти —
24.. .32 К слов, объемы постоянной памяти — 64.. .128 К слов.
Системы, как правило, имеют существенный запас по быстродействию и
объему памяти для развития и модернизации.
В настоящее время в цифровых системах управления ГТД
используются 16-разрядные вычислители, позволяющие обеспечить
требуемую точность. При необходимости можно осуществлять вычисления
с удвоенной точностью или применять 32-разрядные вычислители.
Устройства управления входными и выходными
преобразователями, как правило, имеют специализированные контроллеры.
Датчики с идентичным видом выходных сигналов объединены в группы.
Эти сигналы путем последовательного подключения вводятся на вход
соответствующего преобразователя. В случае недостаточной частоты
измерения входных сигналов число однотипных преобразователей
может быть увеличено. Как правило, система имеет преобразователи
сигналов от датчиков частоты вращения, давления, термопар, угло-
78
Преобразователи
датчиков частоты
вращения
терморезисторов
термопар
датчиков угловых
перемещений
дискретных
команд
1_.
Связь с другими
системами
~1
hra
датчиков давления
Д
Ml
<=я
Вычислительное
ядро системы
7%
Устройство
управления
входными
преобразователями
7$
к=э
Канал для подключение
КПА
К=>кКПА
Устройство
управления
выходными
преобразователями
Усилители-
преобразователи
с ШИМ-выходом
Усилители-
преобразователи
с пропорциональным
выходом
Вторичное питание
t т t
Усилители
дискретных сигналов
Канал для
последовательного
кода
Встроенный
источник
питания
1 Г
27 В Автономный
генератор
Рис. 2.2 Структурная схема одного канала электронной САУ
ГЛАВА 2
вых перемещений, термосопротивлений и датчиков дискретных
команд.
Преобразователи сигналов частоты вращения строятся по
принципу преобразования временного интервала в числоимпульсныи код, а
затем — в параллельный код. Преобразователи сигналов от
терморезисторов, термопар и некоторых типов датчиков давления формируют
из постоянного напряжения параллельный код. Преобразователи
сигналов углового перемещения, поступающих от синусно-косинусных
трансформаторов и некоторых типов датчиков давления,
осуществляют преобразование переменного напряжения в параллельный код.
В настоящее время в цифровых системах управления ГТД
используются в основном 10-12-разрядные преобразователи.
Для связи с другими системами САУ двигателя имеет канал
передачи информации в последовательном коде в соответствии с
выбранным протоколом.
Преобразователи дискретных команд, поступающих от
выключателей, реле, кнопок и др., формируют единичный код.
Кроме того, предусматривается специальный канал для
подключения контрольно-проверочной аппаратуры КПА, который позволяет
осуществлять проверку и поиск неисправностей и, в случае
необходимости, проводить изменение параметров алгоритмов управления и
заменять программы регулирования до установки электронного
регулятора на борт и в период эксплуатации.
Для формирования управляющих сигналов используются
усилители-преобразователи с пропорциональными и широтно-импульсными
(ШИМ) выходными сигналами. Управляющие сигналы подаются на
исполнительные механизмы: пропорциональные — на
электромагнитные преобразователи, а ШИМ-сигналы — на электромагнитные
клапаны.
Прием сигнала от датчика и выдача управляющего сигнала на
исполнительные устройства происходит в течение рабочего цикла
системы, составляющего 10.. .60 мс и выбираемого в зависимости от
динамических характеристик ГТД и каналов управления. За время
рабочего цикла кроме реализации алгоритмов управления двигателем
в системе осуществляются:
— предварительная обработка первичной информации (цифровая
фильтрация сигналов, линеаризация характеристик,
алгоритмическое повышение точности, вычисление производных и др.);
80
Аппаратурные решения в системах управления
— управление потоками информации и диспетчеризация
вычислений;
— программный контроль аппаратных средств, системных связей,
математического обеспечения, состояния информации и
процесса передачи информации;
— алгоритмический контроль реализуемых программ
регулирования, диагностирование состояния элементов системы и
управление реконфигурацией в случае отказов;
— передача информации к устройствам отображения и накопления,
задачи бортовой операционной системы.
Перечисленные задачи занимают до 60% рабочего цикла системы.
В перспективных системах предполагается использование
бортовых математических моделей двигателя и алгоритмов идентификации
их параметров для адаптивного управления, контроля и
восстановления информации в случае отказов информационных каналов, т. е.
создание систем с искусственным интеллектом.
Бортовое программное обеспечение построено по модульному
принципу с выделением модулей, соответствующих алгоритмическим
задачам, решаемым системой. Оно разрабатывается на языке
Ассемблер или языках высокого уровня, а затем с помощью программы
транслятора переводится в машинный язык, используемой ЭВМ.
Встроенный источник питания преобразует электропитание,
поступающее от бортовой сети постоянного тока 27 В или автономного
генератора, в напряжение требуемого уровня и качества.
Конструктивно блоки электронных регуляторов, как правило,
содержат ряд плат, объединенных коммутационной платой. В
зависимости от места установки регулятора корпус блока может быть литым
или штампованным.
Повышение степени интеграции электронной элементной базы,
внедрение многослойных печатных плат, технологии поверхностного
монтажа позволили существенно уменьшить массу и габаритные
размеры электронных регуляторов. За период с середины 1980-х гг. до
настоящего времени произошло снижение этих показателей в 4-6 раз.
Надежность электронных систем управления ГТД
обеспечивается комплексом мер, реализуемых на этапах конструирования,
производства и эксплуатации систем.
81
ГЛАВА 2
На этапе конструирования определяющим надежность
разрабатываемого электронного регулятора является использование
высоконадежных элементов электронной техники с высокой степенью
интеграции. Повышение уровня интеграции элементной базы приводит к
сокращению количества используемых элементов, паяных и сварных
соединений, плат и разъемов в электронном регуляторе, а
следовательно, к повышению его надежности.
Переход от дискретных элементов и универсальных
интегральных схем сначала к микросборкам, а затем — к заказным большим
интегральным схемам существенно повысил надежность электронных
систем управления. Заказные сверхбольшие интегральные схемы
позволяют создавать одноканальные электронные регуляторы с
наработкой на отказ 40.. .60 тыс. ч.
Выбор места установки электронного регулятора с комфортными
условиями эксплуатации по температуре, вибрациям, влажности
и т.д. позволяет существенно увеличить его надежность.
Например, снижение температуры от 100 до 50 °С повышает надежность
аналоговых микросхем в 15-20 раз, цифровых — на порядок.
Для повышения надежности электронного регулятора
применяется резервирование. В электронных системах управления
двигателями используют как полное резервирование целого канала, так и
частичное — отдельных недостаточно надежных узлов.
В настоящее время наибольшее распространение получили двух-
канальные электронные системы с перекрестными связями между
каналами (рис. 2.3). Такая система строится с использованием двух-
гчики
Устройство
ввода
Устройство
ввода
Н эвмН
Устройство
вывода
Н ЭВМН
Устройство
вывода
r-J иу *
ИУ2
Рис. 2.3 Двухканальная электронная САУ с перекрестными связями
82
Аппаратурные решения в системах управления
обмоточных исполнительных устройств ИУ. Датчики могут
резервироваться полностью или только их чувствительные элементы.
Для реализации структурной избыточности, позволяющей
подключать резервные устройства в случае отказа основных, система
содержит аппаратно-программные средства встроенного контроля,
осуществляющие контроль по методу последовательного расширения и
охвата всех частей системы на основе проконтролированных и
работоспособных элементов. При этом контроль системы начинается с
проверки электропитания и кварцевого генератора вычислителя,
выполняемой с помощью специальных электрических схем. Затем
осуществляется самопроверка вычислительного ядра и внутренних
линий связи системы с помощью тестов различной сложности и
эффективности. В случае их нормальной работы система переходит к
проверке периферийных элементов и устройств. При обнаружении
отказов и сбоев в ходе контроля проводится ряд повторных проверок,
а затем принимается решение о достоверности отказа.
Для контроля функционального программного обеспечения
осуществляется анализ выполнения всех программных модулей в
полном объеме. Факт успешного выполнения каждого модуля программы
фиксируется специальным счетчиком, а по состоянию контрольной
суммы определяется факт реализации всех подпрограмм управления
и контроля.
Для защиты от зацикливания программ в конце каждого цикла
формируется прерывание программы по таймеру. Для контроля
обновляемости информации в начале цикла вся информация,
поступающая из предыдущего цикла, получает признак «старая».
Информация в текущем цикле получает признак «новая». Информация перед
выдачей на исполнительные устройства или другие каналы
проверяется на наличие признака «новая». Этот и ряд других методов
позволяют организовать эффективный контроль одного канала системы.
При двухканальном построении цифровых систем управления
имеется дополнительная возможность использования для контроля
идентичной информации, имеющейся в каждом канале. Идентичная
информация для межканального перекрестного сравнения передается
между каналами в виде контрольных сумм. Совпадение
соответствующих контрольных сумм в обоих каналах позволяет выдавать
управляющие сигналы на соответствующие исполнительные устройства.
Если такого совпадения не происходит, то в каждом канале произ-
83
ГЛАВА 2
водится возврат к началу цикла и повторение цикла с теми же
исходными данными. Затем осуществляется повторное сопоставление
контрольных сумм. Положительный результат сравнения позволяет
продолжить работу системы в штатном режиме.
Входная и выходная информация в системе контролируется на
принадлежность физически допустимому значению параметра и по
максимуму приращения параметра за определенный цикл времени с
учетом взаимной связи параметров, последовательности ряда
событий, ожидания определенного значения параметра, как реакции на
выполнение определенного действия, фиксации времени после
фиксированного события и т. д.
Такие подходы в организации аппаратно-программных средств
встроенного контроля нашли применение практически во всех
современных цифровых системах управления ГТД.
Этап производства является очень важным в реализации
надежности, заложенной в конструкции электронного регулятора.
Существенную роль играет эффективная система технического контроля.
Применение отбраковки, термо-, вибро- и электротренировок на
стадиях входного контроля элементов и создания плат, модулей и блоков
позволяет значительно повысить надежность электронных
регуляторов, но приводит к росту стоимости аппаратуры. Контроль и
отбраковка используемых микросхем может повысить их надежность на
порядок.
На этапе эксплуатации снижение надежности электронного
регулятора возможно по объективным и субъективным причинам. Первые
связаны в основном с недостаточным уровнем технических средств
наземного контроля, действием климатических факторов, попаданием
агрессивных веществ и др. Вторые зависят от квалификации
обслуживающего персонала, соблюдения правил эксплуатации и качества
технической эксплуатационной документации (описаний, инструкций
и др.). Снизить неблагоприятное воздействие указанных факторов
позволяют периодическая аттестация обслуживающего персонала и
совершенствование средств наземного контроля.
В табл. 2.1 приведены примерные соотношения причин отказов
современных электронных регуляторов для разных воздействий и мест
их проявления.
84
Аппаратурные решения в системах управления
Таблица 2.1 Соотношение причин отказов регуляторов
Вид воздействия
Температура
Влажность
Вибрации
Прочее
50%
20%
20%
10%
Место проявления
Разъемы
Изделия электронной техники
Паяные и сварные соединения
Прочее
40%
30%
20%
10%
2.2 Гидромеханические регуляторы
Гидромеханические регуляторы были основными в системах
автоматического управления ГТД до появления цифровых электронных
САУ с полной ответственностью (типа FADEC) и обеспечивали
выполнение всех функций управления на двигателях различного
назначения [16, 17]. Полнофункциональные гидромеханические регуляторы
работают в настоящее время на многих ГТД, находящихся в
эксплуатации. Гидромеханические устройства применяются и в составе
современных электронных САУ для выполнения отдельных функций и
в качестве резервных регуляторов, управляющих двигателем при
отказе электронного регулятора.
Ко времени создания цифровых электронных систем управления
для ГТД гидромеханические регуляторы, содержащие комплекс
механических (рычажных, кулачковых), гидравлических и
пневматических счетно-решающих устройств, необходимых для реализации
многопараметрических программ и алгоритмов управления, стали весьма
сложными. Например, для выполнения порядка 100 функций
управления такой регулятор должен содержать до 6500 деталей, в том
числе около 100 прецизионных пар. Сложность таких систем
иллюстрирует принципиальная схема насоса-регулятора (разработка ОАО
НПП «Темп» им. Ф. Короткова»), объединяющего функции
регулирования и подачи топлива и обеспечивающего выполнение функций
Управления газогенератором ГТД (рис. 2.4). Такие сложные
конструкции дорогостоящи в разработке, производстве и эксплуатации, что
явилось важным стимулом для перехода к электронным системам
Управления.
Ниже приведены примеры построения некоторых
гидромеханических устройств, выполняющих отдельные функции управления
двигателем.
85
00
5 1
Рис. 2.4 Схема насоса-регулятора: 1 — электромагнитный клапан; 2 — дроссельный пакет; 3 —
пространственный кулачок; 4 — плоский кулачок; 5 — сильфон; 6 — центробежный датчик частоты вращения;
7 — дозирующий кран; 8 — насос высокого давления; 9 — клапан предельного давления; 10 — клапан
постоянного перепада
Аппаратурные решения в системах управления
На форсунки
Команды управления
насоса
На вход в насос
Рис. 2.5 Принципиальная схема регулятора расхода топлива: 1 —
запорный клапан; 2 — дозирующий кран; 3 — клапан постоянного перепада
Регулятор расхода топлива обеспечивает дозирование топлива,
поступающего от насоса высокого давления в камеру сгорания, в
соответствии с командами управления. Схема простейшего регулятора
расхода топлива, устанавливаемого за шестеренным насосом,
показана на рис. 2.5.
Функцию формирования расхода топлива выполняет дозирующий
кран 2 с профилированным проходным сечением, к которому топливо
подается от насоса. Для обеспечения необходимой точности
дозирования с помощью клапана 3 поддерживается постоянный перепад
давлений путем изменения расхода перепускаемого топлива. Запорный
клапан 1 предназначен для предотвращения утечек топлива на
неработающем двигателе.
Регулятор частоты вращения (рис. 2.6) работает следующим
образом. При увеличении частоты вращения возрастает
центробежная сила на грузиках 1 датчика, при этом они расходятся, преодолевая
87
ГЛАВА 2
9
10
8^\ итТТП
Ipti I I I Г
1рИ III I jl J
ife^M
От насоса
В камеру сгорания
Рис. 2.6 Схема регулятора частоты вращения: 1 — грузики
центробежного регулятора; 2, 3 — пружины центробежного регулятора; 4 — пакет
биметаллических пластин; 5 — рычаг; 6 — кулачок; 7 — маятник; 8-10 —
дроссельные пакеты; 11 — поршень статической приставки; 12 —
дозирующая игла; 13 — управляющая полость; 14 — регулировочный винт; 15 —
рычаг для связи с РУД
затяжку пружин 2 и 3 центробежного регулятора и открывая
проходное сечение маятника 7. Происходит уменьшение давления в
управляющей полости 13 и дозирующая игла 12 перемещается в сторону
закрытия проходного сечения, снижая расход топлива и восстанавливая
заданную частоту вращения. Статическая приставка с дроссельным
пакетом 8 служит для создания изодромного эффекта. При резких
88
Аппаратурные решения в системах управления
возмущениях поршень 11 статической приставки перемещается,
вытесняя рабочую жидкость в бесштоковую полость дозирующей иглы и
тем самым увеличивая ее скорость. По мере приближения к
равновесному режиму поршень статической приставки под действием пружин
смещается в нейтральное положение, снижая скорость дозирующей
иглы. Дроссельные пакеты 9 и 10 служат для увеличения скорости
дозирующей иглы при больших возмущениях, например на режимах
приемистости и сброса.
Заданная частота вращения определяется положением РУД
(рычаг 15), который через кулачок 6 и рычаг 5 обеспечивает требуемое
усилие на пружине 3 регулятора. Для настройки используется также
регулировочный винт 14. Пакет биметаллических пластин 4
компенсирует влияние температуры топлива на изменение частоты
вращения. Здесь и далее рпит — давление питания регуляторов.
Распределитель топлива. Функции распределения топлива по
коллекторам или секторам форсунок в камерах сгорания выполняют
распределители топлива или распределительные клапаны. На рис. 2.7
показана схема простейшего распределителя топлива.
К нижнему торцу золотника 1 распределителя подводится
топливо от дозирующего крана, а пружинная полость соединена со
сливом. При увеличении давления на входе в распределитель топлива
золотник, преодолевая силу затяжки пружины, перемещается вверх,
открывая во втулке профилированные окна подвода топлива к коллек-
Топливо В 1 коллектор
Рис. 2.7 Схема распределителя топлива: 1 — золотник; 2, 3 — запорные
клапаны
89
ГЛАВА 2
торам. Запорные клапаны 2 и 3 предназначены для предотвращения
утечек топлива на неработающем двигателе.
Автомат приемистости. На рис. 2.8 представлена схема
автомата приемистости, который осуществляет подачу топлива GT в
зависимости от давления воздуха за компрессором р*, частоты
вращения ротора компрессора пк и температуры воздуха на входе в
двигатель Т*х в соответствии с заданной программой GT/p* = / (пк, Т*х).
Центральным узлом автомата является счетно-решающий
механизм, обрабатывающий преобразованные сигналы от трех датчиков.
Сигнал температуры воздуха на входе в двигатель Т*х в виде
давления топлива поступает под ползушку 4 следящей системы. При
увеличении Т*х возрастает давление топлива рт под ползушкой 4 и она
перемещается, открывая слив из бесштоковой полости сервопоршня 3,
который смещается вверх и через рычаг 6 и золотник 5 закрывает
слив топлива. Таким образом сигнал температуры преобразуется в
осевое перемещение сервопоршня 3 и через рейку 8 — в угловое
положение объемного кулачка 7.
Осевое перемещение кулачка осуществляется по сигналу с
датчика частоты вращения. При увеличении частоты вращения грузики 1
центробежного регулятора расходятся, маятниковый механизм 2
прикрывает слив топлива из бесштоковой полости сервопоршня 9,
который перемещается, восстанавливая равновесие на центробежном
регуляторе.
Давление воздуха за компрессором р* измеряется с помощью силь-
фона 12 и преобразуется через рычаг 13 и управляющий клапан 11 в
осевое перемещение сервопоршня 10 и угловое положение кулачка 14.
С профиля объемного кулачка 7 снимается сигнал lg(f(nKiT*x)),
суммируемый с сигналом lgp*, сформированным на плоском кулачке 14 в
зависимости от давления за компрессором. Результат этой операции
преобразуется в перемещение управляющего золотника 17
сервопоршня дозирующего крана 18. Сигнал обратной связи lgGT поступает с
плоского кулачка 15, связанного через рычаг 16 с дозирующим
краном 18. Таким образом, формула работы представленного автомата
приемистости имеет следующий вид:
igGT = igP; + ig(/(nK.rB*x)),
или GT=p*/(nK,TB*x).
90
Аппаратурные решения в системах управления
of оо
.^ X
«~ * S3
s о а
я 5 *
Я | 5
g-s
3
а
s
CO
s
а *
i ^
s
и
о
h ^
£ со
i-H CO
5 l
О
s
и
8- <
ао
>i «в
G *
3
is §
x се
a а
и
CQ
CU ^ а
91
ГЛАВА 2
Регулятор параметра 7г*. В регуляторах таких параметров, как
отношение давлений, используются воздушные редукторы и
мембранные механизмы.
В регуляторе сопла, поддерживающем степень расширения газа
на турбине 7г* = const (рис. 2.9), равновесное состояние системы
обеспечивается при р* = Кр^, где р* — давление газа за турбиной; К —
коэффициент редукции; р* — давление воздуха за компрессором.
Требуемое значение давления в пружинной полости мембраны 2
обеспечивается выбором коэффициента редукции воздушного
редуктора i, выполненного в виде сопла Л аваля. При отклонении давления
р* от заданного значения мембрана перемещается, изменяя через
рычаг 3 положение плоского клапана 4, что приводит к перемещению
распределительного золотника 5, который через пружину обратной
Рис. 2.9 Схема регулятора параметра п*: 1 — воздушный редуктор; 2 —
мембрана; 3 — рычаг; 4 — плоский клапан; 5 — золотник; 6 — жиклер:
7 — пружина обратной связи; 8 — гидроцилиндр сопла; 9 — сопло
92
Аппаратурные решения в системах управления
связи 7 восстанавливает равновесное положение плоского клапана при
новом положении золотника.
Окна золотника связаны с полостями гидроцилиндров 8 сопла,
обеспечивая изменение площади сечения сопла 9, необходимое для
парирования возмущения по давлению р*. При достижении заданного
значения р* распределительный золотник возвращается в исходное
положение, а весь контур управления соплом — в равновесное
состояние.
Современные гидромеханические регуляторы позволяют
реализовать весьма сложные программы и алгоритмы управления. Точность
регулирования основных параметров двигателя при применении
таких регуляторов составляет ±0,5% ... 1,5% для установившихся
режимов работы двигателя и 2%.. .5% для переходных.
В настоящее время в связи с внедрением в практику управления
ГТД электронных систем управления гидромеханическая часть
системы значительно упрощается. Основными функциями становятся
питание топливом двигателя и его силовых исполнительных
механизмов, исполнение команд электронного регулятора, который
осуществляет наиболее сложные функции управления, а также управление
двигателем при отказе электронного регулятора.
2.3 Системы управления на элементах струйной техники
Применение пневматических струйных регуляторов в ГТД
связано, главным образом, с необходимостью обеспечения надежности
в эксплуатации при высокой температуре рабочей среды, действии
на систему управления вибраций, электромагнитных и радиационных
излучений и других сильных внешних воздействий. Высокая
надежность таких систем объясняется их нечувствительностью к таким воз-
Действиям, а также отсутствием подвижных элементов [18].
Работа струйных элементов основана на взаимодействии потоков
Жидкости (газа). Струйные элементы позволяют выполнять многие
Функции и логические операции. Их быстродействие определяется
скоростью распространения звука в газе и, хотя оно ниже, чем в
электронных устройствах, но является достаточным для управления в
отдельных контурах ГТД. Быстродействие струйного элемента при
размерах каналов питания и управления 0,8 х 0,3 мм составляет несколько
Миллисекунд.
93
ГЛАВА 2
Дроссели. Первичным элементом в пневматических регуляторах
является дроссель, определяющий расход и давление газа в элементах
схемы и режим ее работы. В регуляторах применяются дроссели,
показанные на рис. 2.10 [19, 20].
Дроссели типов «сопло-заслонка» и «заслонка-сопло» содержат
два последовательных гидравлических сопротивления, сопло 2 и
канал между торцом сопла и заслонкой 1. Работа такого устройства
зависит от режима течения газа в этих элементах. Возможны
сочетания режимов, когда в обоих элементах одинаковые докритические
или надкритические режимы течения или в одном элементе докрити-
ческий режим, а в другом — надкритический.
При определении расхода газа через дроссели следует учитывать,
что критическое отношение давлений /Зкр = р/ро = (2/fc + l)*/^*1)
может изменяться в зависимости от профиля дросселя и числа Re [20].
Для дросселей типа «сопло-заслонка» значение /Зкр меньше, чем
для цилиндрических (1,5 < l/d < 3), у которых при давлении на
входе дросселя ро меньше атмосферного для воздуха /Зкр < 0,528, а
для дросселей типа сопло Лаваля /Зкр = 0,8.. .0,9. При уменьшении
давления ро ниже атмосферного величина /Зкр снижается и зависит от
диаметра торца сопла и размера щели под заслонкой. При перемычке
<4-
Рис. 2.10 Схемы дросселей: (о) цилиндрического; (б) с острой кромкой:
(б) типа сопла Лаваля; (г) типа «сопло-заслонка»; (д) типа «заслонка-
сопло»
94
Аппаратурные решения в системах управления
на торце сопла 0,225 мм и щели h = 0,05 мм критический режим
приближается к критическому режиму дросселя с острой кромкой,
когда /?кр = 0,037.
Струйные функциональные и логические элементы. В ГТД в
качестве параметра регулирования широко используется отношение
давлений воздуха (газа), например в регуляторах расхода топлива,
реактивного сопла, компрессора, воздухозаборника. Для
формирования сигнала, характеризующего отношение давлений, в
пневматических регуляторах применяют устройства, состоящие из двух
последовательно установленных турбулентных дросселей и промежуточной
камеры между ними (рис. 2.11, а). Это устройство при
надкритическом режиме течения в выходном дросселе обеспечивает
пропорциональное редуцирование абсолютного давления на входе в камеру.
Для этих же целей применяется однодроссельное устройство типа
сопла Лаваля с отбором давления от центрального тела,
расположенного внутри сопла (рис. 2.11, б).
Более простое устройство делителя может быть выполнено на
плоском струйном элементе с косым срезом на выходной части сопла
питания (рис. 2.11, в). Командный сигнал в виде отношения рг/pi
формируется при изменении знака перепада давлений воздуха в
выходных каналах В и С.
В зависимости от конфигурации и сочетания каналов в струйном
элементе осуществляется непрерывное или дискретное изменение
сигнала управления с выполнением различных функциональных и
логических операций. Схемы струйных элементов различного назначения
показаны в табл. 2.2 (функциональные устройства) и 2.3 (логические
PoJ
/
/ Р\ 1
2
1 Рг
(а) (б) (в)
Рис. 2.11 Схема устройства пропорционального редуцирования
абсолютных давлений: (а) проточная камера с двумя турбулентными дросселями;
(б) дроссель типа сопла Лаваля с отбором давления на центральном теле;
(б) плоский струйный элемент с косым срезом сопла питания
95
со
Таблица 2.2 Схемы функциональных устройств
Элемент
Условное обозначение
Схема элемента
Типовая характеристика
Сравнения
\Рп
РВГРВ2^^
Ру\ РУ2 й
РВ2
Ры
\Рп
/A^K\AN РВ\<РВ2
В2 В1
Усилитель
-й
\Ри
Рв
Рв
Ру
Дифференцирующее
звено
I—s—l—S~~P\
В2 ЛГЛВ1
У..
Bl/^l^NB2
[^
Интегри-
рующе
звено
В1
\^£^hi
В2
w
Ру\
Рп
РУ2
Рв\
/>В2
АРВ
[/jVy
Вихревой
усилитель
Рп© /7у = 0 Рп© Ру*°
Pb(Qb)
РВь*Рп>0 QB.^Pn>0
*Ру
^1*
Таблица 2.3 Схемы логических элементов
Элемент
Условия работы
Алгоритм действия
Схема элемента
У1
OSL
Сравнения
4
В2
ГТ
У2
В1
Ру\ <РУ2
Л~В1 В27>
РУ\>РУ2
«И»
(пассивный)
У1
А<1>А
*В
У2
У1
гП
«и»
(активный)
«Не»
мз
У2 "^А
О'
♦в
У1
У2
У1Ч./У2
У1 /У2
У1
У2
У
0
1
в
1
0
У1 = 1 _W_y2=l У1=0Л\£-У2=1
В
В
п
В^А
п
l^A
У1, У1?
«Или»
«Памяти»
У2
В
У1
У2
У1 ^;^У2 У1 (S$?T У2
Еж ЕЖ
ВГ^А В2 bTRA" B2
ГЛАВА 2
элементы). В табл. 2.2 и 2.3 использованы следующие обозначения:
А — канал связи с атмосферой; В — выходной канал; П — питание-
У — канал управления; рц — давление питания; ру — давление в
канале управления; рв — давление в выходном канале.
Струйная система управления воздухозаборником. Одна из
первых струйных САУ — система замкнутого типа для регулирования
положения панелей клина сверхзвукового ВЗ — была разработана в
ЦИАМе. Эта система обеспечивает изменение расхода воздуха
через ВЗ в зависимости от режима работы двигателя и режима полета.
Схема такой системы управления показана на рис. 2.12 в трех
вариантах.
В двух из них в качестве параметра регулирования используется
отношение статического давления на внутренней стенке канала
воздухозаборника к полному давлению в набегающем потоке е = рСт/р„
(рис. 2.12, а и б). Это системы релейного типа с зоной
нечувствительности е\ < £р < £2> где ер — расчетная величина отношения давлений.
В третьем варианте параметром регулирования является местная
скорость потока Мм в канале (рис. 2.12, в).
В системе предусмотрена коррекция управления в зависимости от
режима полета по сигналам датчиков углов атаки (ДУА) и
скольжения (ДУС).
Во всех схемах при выходе регулируемого параметра за пределы
зоны нечувствительности струйный блок логики выдает команды на
выпуск или уборку панелей клина в зависимости от знака отклонения.
Для питания системы используется воздух, отбираемый от
компрессора двигателя или из набегающего потока. Точность работы
САУ по ходу клина составляет ±2,5% по ходу клина.
Струйный регулятор компрессора. Струйные регуляторы
успешно применяются для управления положением лопаток НА и клапанов
перепуска воздуха из компрессора ГТД. Схемы таких регуляторов
показаны на рис. 2.13 и 2.14 (разработка ОАО «ОМКБ»). Параметром
регулирования является степень повышения давления воздуха в
компрессоре < = P*Jp*BX.
В качестве датчика отношения давлений в регуляторе
используется плоский струйный датчик 1 с косым срезом. При движении
штока сервомотора 2 с помощью механической обратной связи 3
происходит перенастройка выходного дросселя 4 пневматического редук-
98
^пд <fl> _*
ис
(б)
s\wj
Г"
I
5^i.f^
I
И
^d.l.ks\\\4.l.f^
(«)
БУС^
РВ1
РВ2
ДУА
г—i
ДУС
L.
7--^r_-tpr-_-r-Jt7l
I Г
U=.
I Ц v ■.._! lib
l-J VI t- U lJ
i !
iU-sz.
U-.i
==ft
y2 H--J-J
Т-обр.
БК
Г"
Г
I^gl—JJ
9—9-
M
I
*К^
T
.J
к
БПД
N «или» «или» И
L _^ ^Х-
Уборка Выпуск
.J
СО
СО
Рис. 2.12 Схемы системы управления панелями клина СВЗ с тремя способами формирования параметров
регулирования: ПД — приемник давления; ИС — измеритель скорости; Т-обр. — Т-образный насадок;
БУС — блок управления струйный; БК — блок коррекции; ДУА — датчик угла атаки; ДУС — датчик
угла скольжения; БПД — блок параметров давления; РВ — воздушный редуктор; У — усилитель
ГЛАВА 2
Рис. 2.13 Схема струйного регулятора ВНА компрессора: 1 — датчик
отношения давлений; 2 — шток сервомотора; 3 — механическая обратная
связь; 4 — выходной дроссель; 5 — пневматический редуктор
<^
Рис. 2.14 Схема струйного регулятора клапанов перепуска воздуха in
компрессора: 1 — газодинамический делитель; 2 — пневматический
редуктор; 3 — элемент сравнения; 4 — струйный усилитель; 5 — клапан
перепуска
100
Аппаратурные решения в системах управления
хора 5 до тех пор, пока давление питания воздухом плоского
струйного делителя не достигнет величины, при которой перепад давлений
в выходных каналах струйного элемента станет равным нулю. При
этом движение штока прекращается.
В результате каждому значению 7Г* будет соответствовать
определенное положение штока сервомотора и лопаток ВНА.
В струйном регуляторе положения клапанов 5 перепуска воздуха
из компрессора (см. рис. 2.14) применен струйный датчик отношения
давлений, в состав которого входят пневматические делитель 1 и
редуктор 2, а также элемент сравнения 3 со струйным усилителем 4.
Погрешность такого регулятора составляет не более ±3%.
В течение многих лет струйные регуляторы находятся в серийной
эксплуатации на ГТД, подтверждая высокие надежность и ресурс: их
наработка на отказ превышает 1 млн ч.
2.4 Системы топливопитания
Система топливопитания (СТП) ГТД должна обеспечить подачу
топлива в камеру сгорания с требуемыми характеристиками по
расходу, давлению, температуре и чистоте, необходимыми для работы
двигателя и его систем во всех условиях эксплуатации.
Для решения этой задачи СТП должна выполнять следующие
функции:
— создание необходимого расхода и давления топлива на входе
насосов и перед форсунками для питания камер сгорания ГТД;
— фильтрацию топлива, поступающего из самолетных баков;
— питание топливом агрегатов САУ и ее исполнительных органов;
— распределение топлива по коллекторам камер сгорания;
— прекращение подачи топлива в двигатель по сигналу из системы
управления или по команде летчика (включение стоп-крана);
— охлаждение топливом масла в системе смазки опор роторов
двигателя и в установленных на нем агрегатах (центральный
редуктор, ППО и др.);
— обеспечение требуемого теплового состояния топливной
системы;
— слив топлива из коллекторов в дренажную систему при останове
двигателя;
101
ГЛАВА 2
— аварийный слив топлива из самолетных баков;
— охлаждение топливом агрегатов САУ (при необходимости) и ряд
других.
При этом СТП должна обеспечивать:
— диапазон изменения расхода топлива 1:20 для двигателей без
ФКС и 1:100 для двигателей с ФКС;
— максимальное давление топлива перед форсунками 9.. .13 МПа;
— минимальное давление топлива на входе в двигатель
0,03.. .0,05 МПа;
— работоспособность при температуре топлива от —60 ° С на входе
в двигатель до + ПО... + 130 °С перед форсунками;
— возможность работы при наличии в топливе воды в количестве
0,005... 0,02 %(масс);
— тонкость фильтрации топлива 16.. .25 мкм с возможностью
кратковременной эксплуатации при перепуске загрязненного
топлива мимо фильтра;
— надежность (наработка на отказ в полете 3 • 107 ч);
— ресурс агрегатов до 30.. .50 тыс. ч (для двигателей
магистральных самолетов);
— возможность диагностирования агрегатов и степени их износа,
эксплуатация по техническому состоянию;
— минимальные масса, энергопотребление агрегатов, стоимость
производства и эксплуатации.
Необходимая степень выполнения перечисленных требований
зависит от двигателя, на котором устанавливается система, типа ее
агрегатов и привода насосов, возможности получения требуемых
характеристик, в том числе связанных с тепловым состоянием системы
и качеством топлива, которые влияют на его смазывающую
способность. Максимальная допустимая температура топлива на входе в
форсунки камер сгорания определяется уровнем, при котором топливо
сохраняет свои физико-химические свойства.
В топливных системах авиационных двигателей используются
шестеренные, плунжерные и центробежные насосы [17, 21, 22].
Плунжерные насосы широко применяются для подачи топлива в
основную камеру сгорания и в качестве насоса для управления соплом.
102
Аппаратурные решения в системах управления
Они позволяют регулировать расход независимо от частоты
вращения изменением положения наклонной шайбы. Такие насосы имеют
относительно большую массу (особенно насосы для получения
больших расходов), сложны и чувствительны к загрязнению топлива, что
снижает их надежность и ресурс, увеличивает стоимость, ухудшает
эксплуатационную технологичность.
Шестеренные насосы достаточно просты, надежны. При
одинаковых габаритах с плунжерным насосом они имеют в 1,5.. .2 раза
большую производительность, которая, однако, жестко связана с частотой
вращения. Чтобы регулировать подаваемый ими расход, на выходе
насоса устанавливаются перепускные устройства, и избыток топлива
перепускается с выхода насоса на его вход. С увеличением высоты
полета величина перепуска становится больше и может достигать 75%
максимальной производительности насоса. Это приводит к
повышению температуры топлива, что снижает ресурс аппаратуры
регулирования, ухудшает возможности использования топлива для
охлаждения в системе смазки двигателя. Такие насосы используются для
подачи топлива в основную камеру сгорания.
Центробежные насосы обладают большой производительностью
при малой массе, нечувствительны к загрязнению топлива. Основной
их недостаток — низкий КПД на режимах с малой величиной расхода
топлива и недостаточный напор при малой частоте вращения, так как
давление топлива на выходе такого насоса пропорционально квадрату
частоты вращения. Это затрудняет их применение на режимах
запуска и вблизи режима МГ, и такие насосы не используют для подачи
топлива в ОКС. Область применения центробежного насоса —
предварительное увеличение давления топлива на входе в топливную
систему (подкачивающий насос) и подача топлива в форсажную камеру
сгорания. Управляющий орган этого насоса — дроссельный кран на
выходе.
На рис. 2.15 показаны типичные схемы систем топливопитания
ГТД без ФКС и с ФКС.
В современных СТП осуществляется двухступенчатое повышение
Давления топлива. В системах топливопитания двигателя без ФКС,
например ТРДД, топливо из расходного бака самолета центробежным
Насосом с электроприводом ЭЦН подается к двигательному
центробежному подкачивающему насосу ДЦН и далее через топливомасля-
103
ГЛАВА 2
КПА
Расходный
бак самолета
►кОКС
эцн
~+ -| КПТ |- ' <
(а)
КСТ
К приводу сопла А
КПА
НС
"С
Расходный
бак самолета
от двиг.
н
"4F
ЭЦН
ДЦН
<|
а
ФННДУаНТМТМРТ,
ШН
Ннвд
ДУ UTMTUPT
► к ФКС
►кОКС
; Чпк1
- -| КПТ | L <
(б)
магистрали
подачи топлива
магистрали
перепуска
механические
валы
Рис. 2.15 Схемы систем топливопитания ГТД без ФКС (а) и с ФКС (б)
ДУ — дозирующее устройство; ДЦН — двигательный центробежный насос
КПА — коробка приводов агрегатов; КПТ — клапан перепуска топлива
КСТ — клапан слива топлива; НВД — насос высокого давления; НС —
насос сопла; ТМТ — топливомасляный теплообменник; ПК — перепускной
клапан; РТ — распределитель топлива; Ф — фильтр; ФН — форсажный
насос; ЭЦН — электроприводной центробежный насос
104
Аппаратурные решения в системах управления
яый теплообменник ТМТМС, предназначенный для охлаждения масла
в системе смазки, к топливному фильтру Ф. Фильтр имеет
перепускной клапан ПК для временного перепуска топлива на вход насоса
высокого давления НВД при засорении фильтра механическими
примесями или льдом. Фильтр оборудован сигнализатором максимального
допустимого перепада давлений.
Из НВД топливо поступает к дозирующему устройству ДУ и далее
в распределитель топлива РТ по коллекторам камеры сгорания и к ее
форсункам. Возможны схемы СТП с отдельным дозатором топлива
для каждого коллектора (без РТ). Топливо из ДЦН поступает также
в топливомасляный теплообменник ТМТппо для охлаждения масла в
приводе постоянных оборотов (ППО) электрогенератора.
При использовании в качестве НВД шестеренного насоса
избыточная для двигателя на высотных режимах полета часть топлива
со входа в дозирующее устройство перепускается на выход ДЦН (на
рис. 2.15 магистрали перепуска показаны штрихами). Для снижения
температуры топлива оно может перепускаться после ДЦН в
самолетный бак через клапан перепуска топлива КПТ.
Аварийный слив топлива из самолетных баков проводится в СТП
такой схемы подкачивающим насосом через клапан слива топлива
КСТ. Все насосы приводятся во вращение от валов коробки
приводов агрегатов КПА, входной вал которой вращается ротором высокого
давления двигателя.
Шестеренный насос высокого давления конструктивно часто
объединен в один агрегат HP (насос-регулятор) с гидромеханическим
регулятором и дозирующим устройством. В электронной системе
управления типа FADEC такой агрегат является ее исполнительным
механизмом.
В системе топливопитания двигателя с ФКС, например ТРДДФ
(рис. 2.15,5), дополнительно к схеме рис. 2.15, а имеется
центробежный форсажный насос высокого давления ФН для подачи топлива в
ФКС и плунжерный насос сопла НС для питания топливом высокого
Давления силовых гидроцилиндров системы управления положением
створок реактивного сопла. На вход этих насосов топливо подается
с выхода подкачивающего насоса ДЦН, а их вращение
осуществляется от КПА. Дозирование топлива в ФКС выполняет устройство
Дроссельного типа ДУф, установленное после насоса ФН. Далее для
Распределения топлива по коллекторам форсажной камеры сгорания
105
ГЛАВА 2
используется распределитель топлива РТф. Система топливопита-
ния может быть построена с применением отдельных дозаторов
топлива дозирующих устройств в каждый коллектор СТП. Тогда в ней
не требуется распределитель топлива РТф. На входе в ФН имеется
клапан отключения форсажного насоса, который перекрывает доступ
топлива от ДЦН на нефорсированных режимах работы двигателя и
при превышении температурой топлива допустимого значения. Для
охлаждения масла в системе смазки двигателя после дозаторов ДУ
и ДУф устанавливаются топливомасляные теплообменники ТМТМС.
Аварийный слив топлива из самолетных баков осуществляется в этой
СТП с помощью форсажного насоса через клапан слива топлива КСТ.
Насос высокого давления сопла НС подает топливо в агрегат
управления гидроцилиндрами для перемещения створок, изменяющих
площадь критического сечения сопла. В гидроцилиндрах привода
сопла вводится циркуляция топлива для обеспечения необходимого
теплового режима привода. Режим работы НС определяется
специальным агрегатом управления, питание которого осуществляется
топливом от НВД.
Слив топлива из всех агрегатов системы топливопитания
(дозирующих устройств, распределителей топлива, гидроцилиндров) обычно
осуществляется на вход ДЦН.
Подкачивающий насос в СТП часто выполняется как шнекоцент-
робежный. Напор ДЦН выбирается так, чтобы обеспечить работу
насосов высокого давления без кавитации и составляет 0,3.. .0,6 МПа
при частоте вращения 6000.. .9000 мин-1. Максимальная
производительность ДЦН определяется как сумма максимальных расходов
топлива в основную и форсажную камеры сгорания (для двигателя с
ФКС), а также расхода топлива, необходимого для работы агрегатов
САУ, и возможных утечек.
Максимальное давление топлива на выходе насоса высокого
давления объемного типа (шестеренного, плунжерного) для подачи топлива
в ОКС на максимальном режиме работы двигателя при максимальном
давлении газа в ней составляет 9.. .13 МПа при частотах вращения
5000.. .8000 мин"1 и расходах до 10000 кг/ч.
Производительность НВД должна обеспечить необходимый
расход топлива как на режиме запуске двигателя при низкой частоте
вращения, так и при максимально возможной частоте вращения
насоса с учетом отбора топлива для работы агрегатов системы.
106
Аппаратурные решения в системах управления
Центробежные насосы высокого давления, подающие топливо в
фКС, работают на высоких частотах вращения: 25 000.. .30 000 мин-1.
Лх максимальная производительность определяется необходимым
максимальным расходом топлива в ФКС и составляет до 60 000 кг/ч.
Максимальное давление топлива на выходе ФН определяется на
максимальном режиме работы двигателя по расходу топлива при
максимальной его температуре. Его величина должна превышать
давление в ФКС на величину перепада давлений на форсунках для
качественного распыла топлива и потерь давления в трубопроводах и
агрегатах, расположенных между ФН и форсунками ФКС.
Плунжерные насосы высокого давления для привода створок
сопла обеспечивают подачу топлива с давлением до 21 МПа при
частоте вращения 3000.. .3800 мин-1 и расходе топлива, позволяющем
получить необходимую скорость перемещения створок.
Одной из наиболее важных при проектировании СТП является
проблема достижения допустимого теплового режима работы системы
топливопитания Необходимость специальных мероприятий
обусловлена:
— применением топливомасляных теплообменников для
охлаждения масла в системе смазки двигателя и охлаждения привода
постоянных оборотов электрогенератора;
— наличием перепусков топлива с выходов на входы качающих
узлов;
— значительным подогревом топлива в баках самолета (для
двигателей с ФКС);
— использованием топлива для охлаждения силовых
гидроцилиндров сопла (для двигателей с ФКС).
В связи с этим в системе топливопитания для снижения
температуры топлива может вводиться его перепуск из-за ДЦН в самолетный
бак при работе двигателя на теплонапряженном режиме.
Включение клапана перепуска осуществляется при достижении температурой
топлива на выходе насоса ДЦН определенной величины. Количество
Перепускаемого топлива зависит от максимальной температуры топ-
Лива на входе в топливную систему двигателя и на этапе
проектирования может быть определено путем проведения теплового расчета
режимов работы топливной системы двигателя совместно с
топливной системой самолета. При этом необходимо учитывать темпера-
107
ГЛАВА 2
туру топлива при заправке, температуру топлива в баках при взлете
самолета и теплообмен между топливными баками и окружающим
воздухом.
Для двигателей с ФКС предусматривается отключение
форсажного насоса ФН на нефорсированных режимах работы двигателя, а
также на форсированных режимах при малых расходах топлива при
полете на больших высотах, где из-за сильного снижения КПД насоса
ФН происходит большой подогрев топлива.
Снижению подогрева топлива в СТП способствует повышение
КПД насосов, уменьшение потерь давления на регуляторах и
перепада давлений на форсунках.
Качество топлива в СТП определяется не только степенью его
загрязненности, но и наличием в нем воды и свободного воздуха. В
эксплуатации под действием вибраций может происходить захват
свободного воздуха с поверхности раздела фаз в топливных баках и движение
его в трубопроводах в количестве до 1,5% объема. Наличие воздуха
и воды также ухудшает смазывающую способность топлива и
приводит к повышенному износу трущихся деталей. Кроме того, это может
приводить к возникновению колебательных процессов в системе. Для
уменьшения влияния воздуха на работоспособность агрегатов в
трубопроводах СТП не должно быть участков, в которых может
скапливаться воздух.
Одним из важных направлений совершенствования СТП является
применение в них насосов регулируемой производительности.
Возможности регулирования производительности насосов связаны с
управлением частотой вращения качающего узла насосов, изменением
геометрии проточной части (в центробежных насосах) и др. Способы
управления частотой вращения могут быть различными, например с*
помощью газовой турбины (турбонасосный агрегат), регулируемого
гидропреобразователя, электроприводов. Регулируемые по
производительности лопастной насос с изменяемым эксцентриситетом и
центробежный насос с паровым ядром не получили распространения из-за
недостаточного ресурса.
Перспективным является применение для привода насосов
электродвигателей с регулируемой частотой вращения. Регулирование
производительности насосов путем управления частотой вращения их
привода позволяет получить ряд существенных преимуществ:
уменьшить подогрев топлива вследствие исключения перепуска топлива с
108
Аппаратурные решения в системах управления
выхода на вход насоса; увеличить ресурс насосов за счет того, что до
90% времени полетного цикла насосы регулируемой
производительности работают при меньших давлениях и на пониженных частотах
вращения по отношению к их максимальным значениям. Облегчается
также запуск ГТД, так как производительность топливного насоса не
связана с частотой вращения вала двигателя.
Контроль за работой СТП осуществляется путем измерения
давления топлива и температуры на входе в двигатель, на входах в насос
высокого давления и в дозатор топлива, в коллекторах камеры
сгорания, максимального перепада давлений на фильтрах, расхода
топлива, времени работы топливной системы (суммарного и поэтапного).
Для диагностирования технического состояния насосов в
эксплуатации могут использоваться сигналы о степени загрязнения топливного
фильтра, а также информация, получаемая с помощью датчиков
вибраций корпусов насосов и пульсаций давления топлива на их выходе с
применением вероятностно-статистических методов прогнозирования
остаточного ресурса [23].
2.5 Системы ГТД для «электрического» самолета
На современных самолетах для работы его различных систем
используются три источника энергии — гидравлическая,
пневматическая и электрическая. Наличие многочисленных гидравлических и
пневматических коммуникаций приводит к снижению надежности
систем, увеличению габаритов и массы агрегатов, усложнению и
удорожанию обслуживания.
Улучшение этих показателей становится возможным при замене
на самолете гидравлических и пневматических систем на
электрические. Такой подход реализуется в перспективных разработках путем
создания «полностью электрического» самолета и «электрического»
ГТД (ЭГТД) для него. При этом предъявляются новые требования
к построению электрической системы самолета: увеличивается
потребление электроэнергии, для снижения массы электрических
агрегатов и коммуникаций повышается напряжение бортовой сети до
270.. .540 В, на двигателе необходимо разместить электрогенератор
Повышенной мощности, обеспечить работу при изменяющейся частоте
вращения генератора и др.
109
ГЛАВА 2
Концепция «электрического» самолета предполагает применение
электрической энергии во всех системах самолета и двигателя. К ним
относятся система кондиционирования воздуха и противообледени-
тельная система, электрическими заменяются гидравлические
приводы органов управления полетом, в тормозной системе и управлении
выпуском шасси, в устройствах реверса тяги и др. Основными
источниками энергии на «электрическом» самолете являются встроенные в
ГТД стартер-генератор и, при необходимости, дополнительный
генератор, которые целесообразно устанавливать непосредственно на
валах роторов двигателя, а в качестве силовых исполнительных
устройств в системах используются электроприводы на базе
бесконтактных электрических двигателей.
«Электрическая» вспомогательная СУ вырабатывает только
электрическую энергию. Воздух для самолетных нужд от нее не
отбирается, что также способствует улучшению характеристик
вспомогательной СУ.
«Электрический» ГТД может быть выполнен без отбора воздуха
из компрессора и без механической коробки приводов агрегатов
двигателя и самолета: гидравлических насосов, генераторов и др. В его
системах используются электрические устройства для привода
насосов топливной системы и органов механизации газового тракта
двигателя. Для подвеса роторов двигателя рассматриваются два варианта:
с обычными подшипниками качения и системой смазки, в которой
применяются электроприводные насосы, и с магнитными подшипниками,
для которых смазка не нужна. Второй вариант относится к более
отдаленной перспективе в связи трудностями получения приемлемой
массы магнитных подшипников при современных технологиях.
Использование регулируемого электропривода в топливной
системе позволяет дозировать топливо в камеру сгорания без
специального дозатора: расход топлива в этом случае определяется частотой
вращения насоса [24]. Меняется и система подачи топлива, в связи с
тем, что пропадает необходимость в устройствах перепуска и
дросселирования для согласования расхода топлива на выходе насоса с
потребностями двигателя в связи с отсутствием жесткой связи между
частотой вращения вала двигателя и ротора насоса.
При применении электропривода для перемещения направляющи*
аппаратов компрессора уменьшается число прецизионных
золотниковых пар в агрегатах САУ, соединений в топливных магистралях, снп-
110
Аппаратурные решения в системах управления
ясается пожароопасность, так как не используется керосин в силовых
гидроцилиндрах, и исключается влияние работы привода на систему
топливопитания.
Возможность более свободного размещения электроприводных
агрегатов, кабелей и трубопроводов, помещение высокооборотных
стартера-генератора и генератора внутри двигателя и исключение
коробки приводов позволяет уменьшить габариты и мидель двигателя.
Таким образом, «электрический» ГТД для «электрического»
самолета это двигатель, у которого:
— нет отбора воздуха на самолетные нужды,
— нет коробки приводов самолетных и двигательных агрегатов,
— встроенные в роторы стартер-генератор и дополнительный
генератор,
— система управления и топливопитания с электроприводными
исполнительными устройствами,
— система смазки с электроприводными насосами или магнитные
подшипники для подвеса роторов,
— электрическая ПОС воздухозаборника двигателя,
— электрический привод реверсивного устройства.
Экспертные оценки показывают, что «электрический» двигатель
имеет ряд преимуществ по сравнению с двигателями традиционных
схем: на 10%.. .20% уменьшаются масса и мидель двигателя, на
2%.. .5% повышается топливная экономичность, повышается
надежность в связи с возможностью организации более качественного
контроля и диагностики двигателя и его систем, уменьшаются вредные
выбросы в атмосферу, на 10%.. .15% снижается трудоемкость
изготовления, уменьшаются затраты на эксплуатацию двигателя.
Особенности «электрического» ГТД определяют направления
работ по его электрификации, которая может быть осуществлена
поэтапно путем построения на 1-м этапе «более электрического» ГТД
с электрификацией отдельных узлов при сохранении коробки
приводов части агрегатов, с переходом в дальнейшем к «полностью
электрическому» ГТД без коробки приводов. В варианте «более
электрического» ГТД вращение стартера-генератора может осуществляться
через коробку приводов, в системах подачи топлива и смазки, а также
управления органами механизации компрессора применяются
управляемые электроприводы.
111
ГЛАВА 2
Функции САУ ЭГТД существенно расширяются для обеспечения
управления его электрическими устройствами: встроенным
стартером-генератором, электрическими приводами насосов в системах топ-
ливопитания и смазки, а также органов механизации проточной части
двигателя.
В качестве электрического привода устройств системы
управления целесообразно применение регулируемого по частоте вращения
вентильного электродвигателя постоянного тока с возбуждением
от высокоэнергетических постоянных магнитов. Он обладает рядом
технико-эксплуатационных преимуществ по сравнению с другими
типами электрических машин, к числу которых можно отнести
отсутствие щеточных узлов, требующих обслуживания, большая
перегрузочная способность по моменту, высокое быстродействие, широкий
диапазон регулирования частоты вращения, минимальные масса и
габариты, значительный срок службы.
Блок управления электродвигателем должен обеспечивать
регулирование частоты вращения электродвигателя по сигналам САУ ГТД.
ограничение тока в обмотках якоря, максимальной и минимальной
частоты вращения ротора электродвигателя, управление силовыми
ключами, контроль технического состояния электродвигателя. На
вход блока управления через мультиплексный канал связи поступают
управляющие сигналы от электронного цифрового регулятора,
задающие требуемую частоту вращения ротора электродвигателя или
величину тока. Из блока управления в электронный цифровой регулятор
через МКИО выдается информация о частоте вращения вала
электродвигателя, токе в обмотках управления, а также сигналы системы
контроля работоспособности электропривода.
Для перемещения лопаток направляющего аппарата компрессора
используется электропривод на основе вентильного электродвигателя
с электромеханизмом поступательного движения, преобразующим
вращение его вала в поступательное перемещение выходного штока,
и блоком управления.
Структурная схема электроприводной САУ ЭГТД [25] приведена на
рис. 2.16. На схеме показан электронный цифровой регулятор типа
FADEC с датчиками частоты вращения компрессора и вентилятора
ггк, ггв, давления воздуха за компрессором рк, расхода топлива GT-
температуры газа за турбиной Т*, давление и температура воздуха
на входе в двигатель р*х, Тв*х и др. В состав системы входят блоки
112
Аппаратурные решения в системах управления
от
и..
1
Г '
Ьга[
т
|~7
г 1
г
т
1
р
гп
Tl
к
г
1 САУ
(FADEC)
1
1
ъ
^
М
[К
ио
/
к.
i
аНА
Электроприводы
НА и КПВ
\
i
j
Блок
управления
i
т^ п ^ДД|
Л
Насос
высокого
давления
А
Электродвигатель
А
Блок
управления
i
\
<=
^
Ч| |
Из бака
Насос
низкого
давления
i
Электродвигатель
i
f
Блок
управления
i
<7
Насосы
системы
смазки
A
Электродвигатели
i
k
'
Блок
управления
A
Рис. 2.16 Структурная схема электроприводной САУ ЭГТД
управления электроприводами органов механизации
газовоздушного тракта двигателя: направляющих аппаратов компрессора ана и
клапанов перепуска воздуха /гк.п, а также электроприводы
(электродвигатель с блоком управления) насосов топливной системы,
обеспечивающих требуемый расход топлива GT. Здесь же показан канал
управления насосами в системе смазки опор роторов двигателя,
выходными параметрами которого являются прокачка масла GM и его
давление на выходе нагнетающего насоса рм.
В традиционных двухступенчатых системах топливопитания
с насосами низкого и высокого давления их вращение осуществляется
от коробки приводов. Применение электроприводных насосов
позволит осуществить регулирование производительности насоса в
соответствии с потребностями двигателя на всех режимах его работы и,
в результате, снизить подогрев топлива, увеличить ресурс насосов и
получить ряд других преимуществ.
Методы обеспечения надежности электроприводной СТП
отличаются от используемых в традиционных системах в связи с возмож-
113
ГЛАВА 2
ностью появления отказов иного типа. В таких системах можно
выделить три группы отказов: в механической части привода насосов
(обрыв рессоры, соединяющей электродвигатель с валом насоса,
заклинивание вала), механические повреждения в самих насосах
(разрушение подшипников опор вала, повреждения в проточном тракте
насосов), отказ электропривода (электродвигателя или его блока
управления).
При возникновении любого из этих отказов насос становится
дополнительным дросселем в магистрали подачи топлива и при
неподвижном роторе насоса (заклинивание вала), и когда он продолжает
вращаться в режиме авторотации. Применение шунтирующего
перепуска топлива со входа на выход электроприводных насосов,
автоматически включающегося при отказе, позволяет в двухступенчатой
системе путем соответствующего выбора характеристик обеспечить
взаимозаменяемость насосов и, таким образом, резервирование в
определенном диапазоне режимов (например, крейсерский полет и
посадка).
В современных системах смазки, где насосы приводятся во
вращение от коробки приводов двигателя, давление подачи масла в
двигатель составляет 0,3.. .0,6 МПа, максимальная температура масла
на входе в двигатель — до 150 °С, частота вращения валов
нагнетающего и откачивающих насосов зависит от частоты вращения
роторов двигателя и не регулируется.
Отличия и преимущества электроприводной системы смазки
ГТД иллюстрирует табл. 2.4.
Применение электроприводной системы смазки позволит
улучшить ряд эксплуатационных характеристик двигателей: повысить
надежность запуска при отрицательной температуре воздуха и после
останова двигателя, снизить потери масла, уменьшить содержание
воздуха в откачиваемом масле и др.
В состав агрегатов электроприводных систем смазки, по
сравнению с традиционными, добавляются электродвигатели и блоки
управления ими (при необходимости управления частотой вращения
насосов). Отдельный электропривод вращает нагнетающий насос, а число
электроприводов для откачивающих насосов и суфлеров может быть
разным: откачивающий электроприводной насос для каждой опоры
роторов и электроприводной суфлер, или же один электропривод для
всех откачивающих насосов.
114
Аппаратурные решения в системах управления
Таблица 2.4 Сравнение характеристик систем смазки
| Современные
[Привод маслонасосов от вала КВД:
- неоптимальные значения р и Т
масла;
- переразмеренные насосы;
- выброс масла;
- повышенный подогрев топлива
[Привод суфлера от вала КВД:
- плохое отделение воздуха на
низких частотах вращения КВД
[Системы разогрева масла при
запуске:
- увеличение массы
Электроприводные
Независимый электропривод
нагнетающего и откачивающих насосов:
- гибкое управление режимами;
- улучшение температурного
состояния подшипников;
- уменьшение подогрева топлива
Электропривод для суфлера:
- гарантированное удаление
воздуха на всех режимах;
- уменьшение выброса масла
- Опорожнение полостей опор путем
включения откачивающих насосов;
- Надежный запуск (не нужен
разогрев) |
Включение подачи масла осуществляется с задержкой
относительно момента начала раскрутки роторов, выключение — с задержкой
относительно момента останова роторов.
Возможная схема системы смазки ЭГТД, содержащая
нагнетающий и откачивающие насосы и суфлер с регулируемыми
электроприводами, показана на рис. 2.17.
В этой системе масло из маслобака поступает на вход
нагнетающего шестеренного насоса НН, подающего масло ко всем опорам
роторов двигателя. Откачивающие шестеренные насосы ОН откачивают
масло из опор роторов двигателя и картера КР коробки приводов.
Высокооборотный центробежный ОН-С выполняет функции откачки
масловоздушной смеси и отделения воздуха от масла (сепарацию),
после чего масло поступает в топливомасляный теплообменник ТМТ для
охлаждения и далее в маслобак. Воздух из насоса-сепаратора вместе с
воздухомаслянои смесью из опор роторов двигателя подается на вход
высокооборотного центробежного насоса-суфлера ЦС. С выходов
суфлера воздух сбрасывается на срез сопла, а остатки масла поступают
в маслобак.
Режим работы электродвигателей ЭД задается САУ ГТД через
блоки управления БУ.
115
ГЛАВА 2
ф | ¥ ^Д^НБУН-ИЗСАУ J
^flj ^^ЬизСлТТопл|
из САУ I пн-г "^ — Гш
изСАУ-JBy
Рис. 2.17 Схема системы смазки с электроприводными агрегатами
Управление режимом работы агрегатов системы смазки
становится дополнительной задачей САУ двигателя, а его эффективность
определяется взаимодействием систем смазки, топливопитания и
САУ.
Способы управления режимом работы нагнетающего насоса (НН)
могут быть разными:
- НН работает на постоянной частоте вращения (пнн = const.
привод постоянной частоты вращения);
- частота вращения НН регулируется из условия поддержания
постоянным давления масла на входе в полости опор р™ = const
(привод с регулируемой частотой вращения);
- частота вращения НН пропорциональна частоте вращения
ротора двигателя (как при приводе насосов от КПА).
116
Аппаратурные решения в системах управления
Во всех случаях частота вращения откачивающих насосов
пропорциональна частоте вращения нагнетающего насоса.
В системе с электроприводом при программах управления ггнн =
= const и Рдз = const; температурный режим маслосистемы
отличается незначительно. По сравнению с приводом насосов от КПА
максимальная температура масла и топлива несколько снижается.
Выполнение закона управления рд* = const требует применения
электропривода с регулируемой частотой вращения или клапана
постоянного давления.
При использовании программы ггнн = const давление масла на
входе системы смазки с подъемом на высоту может незначительно
уменьшиться, однако при этом требуемый диапазон изменения
давления рДв на всех режимах работы двигателя выдерживается.
Преимуществом такой системы является меньшая масса агрегатов системы
смазки, так как для привода с постоянной частотой вращения не
требуется регулятор частоты вращения привода.
Откачивающие насосы выключаются уже после останова
двигателя для осушения масляных полостей. Суммарная
производительность этих насосов должна быть в 2.. .3 раза больше, чем
производительность нагнетающего насоса, поскольку они откачивают из
масляной полости смесь масла с воздухом.
Необходимые для разработки «электрического» ГТД технологии
должны обеспечить возможность создания:
— электроприводов с удельной массой < 0,5 ... 0,8 кг/кВт;
— высокооборотных электрогенераторов (с частотой вращения до
30000 об/мин, напряжением 270.. .540 В, мощностью до
300 кВт),
— высокоинтегрированной термостойкой (£раб > 125 °С)
элементной базы, в том числе силовой, с интенсивностью отказов Л =
= 10-8...Ю-10 1/ч;
— магнитных подшипников;
— Smart-датчиков и Smart-исполнительных механизмов.
Состояние развития этих технологий позволяет рассчитывать на
возможность реализации рассмотренных систем в ближайшей
перспективе.
117
Главаз
Построение систем автоматического
управления ГТД
3.1 Системы управления ТРДД
Системы автоматического управления современных ТРДД
выполняются цифровыми электронными типа FADEC без
гидромеханического резервного регулятора или с простым регулятором такого типа,
часто только для управления вручную. Система осуществляет в
полном диапазоне условий полета функции управления и ограничения
предельных значений параметров на всех установившихся и
переходных режимах работы двигателя, защиты двигателя от помпажа,
самоконтроль и диагностику САУ, контроль и диагностику состояния
двигателя [9, 25-28].
Система воздействует на имеющиеся на двигателе регулирующие
органы (факторы): расход топлива в камере сгорания; углы установки
лопаток ВНА компрессора; клапаны перепуска воздуха из
компрессора; заслонки для управления отбором воздуха на охлаждение
турбины и для управления зазорами в компрессоре и турбине, а также на
ряд других вспомогательных органов.
Электронный регулятор имеет централизованную структуру,
устанавливается обычно на двигателе (для больших двигателей) или
на борту (для малоразмерных ТРДД). В нем применяется
электронная элементная база с высокой степенью интеграции, высокой
надежностью (Л < 10~8 1/ч) и термостойкостью (до +125 °С).
Современные методы управления и контроля обеспечивают
решение задач адаптивного управления, интеграцию по каналам ин-
118
Построение систем автоматического управления ГТД
формационного обмена с системами самолета, компенсацию отказов.
Система топливопитания, как правило, построена на базе
подкачивающего центробежного насоса для предварительного повышения
давления и шестеренного насоса высокого давления, приводимых от
двигательной коробки приводов.
Один из вариантов комплекса программ, реализуемых в системе
управления ТРДД, может быть представлен в следующем виде.
1. Управление расходом топлива на запуске:
— регулирование подачи топлива в камеру сгорания до
воспламенения топлива,
Gt = /(рвх>гвх>*т) ;
— регулирование подачи топлива в камеру сгорания после его
воспламенения
I^L - ft \.
Рвх
— ограничение температуры газа за турбиной
Т* = f(T* ) .
2. Управление расходом топлива на режимах МГ—МАХ:
— малый газ, пкмг = /(РвХ»^вх) с ограничением GT min = const;
— максимальные режимы
Т1в max = J v-^вх/ ' ^в.пр max = / \-*вх/ 5
Пк max = / (-*вх) 5 Рк max = cons* \ -*т max = / (-*вх) '
— дроссельные режимы, включая режимы номинальный и
крейсерский,
Ив = /(<*руд,Рвх,Тв*х).
Если двигатель имеет запас по температуре газа по отношению к
ее допустимому максимальному значению, для управления им могут
быть использованы параметры, позволяющие улучшить эксплутаци-
онные характеристики двигателя и повысить эксплутационную
технологичность, такие как степень повышения давления в двигателе
^дв = Р*/Рвх и его модификации. Это дает возможность за счет
119
ГЛАВА 3
увеличения температуры газа сохранить заданные характеристики
двигателя по тяге в процессе эксплуатации при износе его узлов и
ухудшении их характеристик, изменении теплового состояния
конструкции, отборе воздуха из тракта двигателя и мощности от вала
ротора, замене отдельных узлов и агрегатов, не прибегая к
регулировке аппаратуры САУ, а также снизить затраты на обслуживание.
Несмотря на известные проблемы с измерением величины 7г*в
(выбор места измерения давлений, влияние неравномерности поля
давлений), такой параметр применяется для регулирования ряда
современных ТРДД.
Программа управления для этого случая:
Кв = /(аруд»/£х»гвх);
- режимы приемистости и сброса тяги:
-■jf = /(як.пр); -f = /К, т;х).
Рк Рк
3. Управление НА КВДи клапанами перепуска воздуха:
<А< = /(ГСк.пр) ; £кп = /(ГСк.пр) •
Надежность САУ должна быть такой, чтобы наработка на отказ,
приводящий к выключению двигателя в полете, составляла до 106 ч.
Высокие показатели требуются и по другим видам отказов.
Получение заданных показателей надежности обеспечивается в
системе комплексом мероприятий: использованием элементной базы
и других комплектующих, обладающих высокой надежностью;
аппаратурным резервированием в электронном регуляторе и его элементах
(двухканальная схема построения с отдельным комплектом
датчиков и исполнительных механизмов для каждого канала);
резервированием электрического питания (включая автономный генератор);
программными средствами (встроенная система контроля и диагностики
САУ, помехозащищенные алгоритмы управления); резервированием
программ управления двигателем; реконфигурацией структуры при
отказах и др.
Требования к точности регулирования зависят от выбранного
комплекса программ управления. В процессе разработки системы
управления определяются оптимальные сочетания требований к отдельным
120
Построение систем автоматического управления ГТД
параметрам и датчикам, позволяющие реализовать необходимую
точность поддержания тяги двигателя, экономичности, запасов ГДУ.
Характерные допустимые погрешности регулирования и
ограничения основных параметров двигателя на установившихся режимах
работы составляют:
6пвд = 6пнд = ±0,2%; 6тгдв = ±0,5%... 1%;
6р*к = ±0,5%... 1%; 6Т* = ±1%; 6аВнА = ±1%... 1,5% .
Погрешность дозирования топлива на режимах приемистости и
сброса:
6GT = ±2%...3%.
Для получения такой точности регулирования погрешности
измерения основных параметров, используемых при формировании
программ и алгоритмов управления, не должны превышать для
давления воздуха и газа ±0,5% от измеряемой величины (ИВ),
температуры воздуха на входе в двигатель ±0,5... 1% ИВ, температуры
газа 6.. .10 К, частоты вращения 0,1% ИВ, положения лопаток ВНА
±0,5%.
На переходных режимах работы двигателя САУ должна
обеспечивать регулирование (ограничение) с точностью, необходимой для
выполнения требований по устойчивости рабочего процесса, ресурсу
двигателя и длительности процессов управления.
В перспективе системы управления будут выполняться по схеме
с распределенной структурой на базе Smart (интеллектуальных)
датчиков и ИМ. Smart-датчики и Smart-ИМ, содержащие
микропроцессорные устройства (МП) для преобразования и предварительной
обработки сигналов измерения и управления, соединяются с вычислителем
САУ двигателя, установленным на двигателе или на борту самолета,
с помощью цифровых линий связи. Возможная схема такой системы
показана на рис. 3.1.
Другим направлением в совершенствовании систем управления
ГТД является применение «электрических» технологий, в рамках
которых привод насосов и органов механизации проточной части
двигателя осуществляется с помощью электродвигателей. Это позволит
упростить системы и удешевить их обслуживание, снизить стоимость
разработки, уменьшить массу и улучшить ряд других характеристик.
121
ГЛАВА 3
Smart-
датчики
Топливо
из бака
Мультиплексный канал информационного обмена
МП
Топливные
насосы
75
Питание
от бортовых систем
Л
МП
Автономный
генератор
L
Электронный цифровой
регулятор
Канал А
Канал В |
Топливно-дозирующий
узел
МП
Smart-ИМ
Топливо
в двигатель
Рис. 3.1 Схема распределенной САУ ТРДД
В частности, наиболее просто в этом случае решается проблема
регулирования производительности топливных насосов путем управления
их частотой вращения.
3.2 Системы управления ТРДДФ
Турбореактивные двухконтурные двигатели с ФКС
устанавливаются, в основном, на сверхзвуковых самолетах военного назначения
(истребителях, бомбардировщиках). Среди требований к двигателям
этих самолетов есть целый ряд таких, которые оказывают
существенное влияние на принципы управления и построение САУ. К ним
могут быть отнесены требования получения максимальной тяги на
нефорсированных и форсированных режимах работы и высокой
динамичности (для обеспечения заданного времени выполнения задания,
маневренности); сохранения ГДУ при действии ряда специфических
возмущений (попадании возмущенного потока воздуха на вход
двигателя с неравномерными полями давления и температуры, горячих
газов при применении оружия и др.); быстрой боеготовности
(необходимо малое время запуска, получение максимальной тяги на непро-
гретом двигателе); сохранения ресурса горячей части двигателя при
большом количестве циклов; приемистость (сброс и др.)- При этом
сохраняются и основные требования к системе управления по обеспс-
122
Построение систем автоматического управления ГТД
чению управляемости двигателя, устойчивости и качества процессов
управления, точности регулирования на установившихся и
переходных режимах работы.
Современная САУ ТРДДФ осуществляет [5, 6, 12, 28]:
— управление на режимах запуска двигателя (на земле и в полете);
— управление расходом топлива GT в основную камеру сгорания
на установившихся и переходных режимах работы двигателя в
диапазоне режимов работы от МГ до ПФ;
— управление углами установки НА компрессоров <^к на
установившихся и переходных режимах работы двигателя;
— управление положением регулируемых створок критического и
выходного сечений реактивного сопла;
— управление отбором воздуха на охлаждение турбины;
— дозирование и распределение топлива по коллекторам ФКС;
— повышение запасов ГДУ двигателя и вывод двигателя из пом-
пажа;
— управление двигателем при отказе электронного регулятора;
— связь с бортовой системой контроля и диагностики двигателя
(БСКД), системами СУ и самолета по МКИО;
— самоконтроль и диагностику САУ.
Типовые программы управления ТРДДФ приведены ниже.
Запуск двигателя:
— дозирование топлива до его воспламенения
Gt = f (pIx^bx^t) ;
— дозирование топлива после воспламенения
% = /К,т;х);
Рвх
— ограничение температуры газа за турбиной
т; = /(т;х);
— защита от помпажа без прекращения режима запуска.
123
ГЛАВА 3
Управление расходом топлива в основной камере сгорания:
— на режимах МГ на земле и в полете воздействием на расход
топлива в ОКС выполняется программа пкмг = /(Рвх'^вх) с
ограничением GT mm = const;
— режим работы двигателя задается и регулируется по программе
пк = /(аруд^вх) •
На максимальных и форсированных режимах работы двигателя
путем селектирования по критерию GT —► min выбирается для
выполнения одна из следующих программ ограничения предельных
значений параметров:
^в max = / \J-bx) » Пк max — / (J- Bx/ »
Рк max = COnst ; Тт max = / (Тв*х) 5 Тп max = / (Рк) •
На переходных режимах приемистости и сброса тяги в диапазоне
режимов МГ-МАХ дозирование топлива осуществляется в
соответствии с программами пк/р*к = / (пк, Гв*х); GT/p* = / (пк, Гв*х).
Программа управления положением НА компрессора (вентилято-
ра) у>к = /«.„„), где <.пр = < (288Д6/Т;Х)-0'5.
Воздействием на площадь FKp критического сечения сопла на
максимальных и форсированных режимах работы двигателя выполняется
программа 7г^ = /(Твх), или 7г*в = /(пв.пр), где 7г^ = p*Jp*T
характеризует степень расширения газа на турбине; 7гдв = Р^м/Рвх — степень
повышения давления в двигателе.
Минимальная площадь сопла может ограничиваться в
соответствии с программой FKp min = / (аруд. Гвх) .
При включении форсажа после перевода РУД в положение,
соответствующее форсированным режимам, до появления сигнала
воспламенения топлива в ФКС может понадобиться увеличение площади FKP
путем коррекции программ регулирования параметра 7г* (7ГдВ).
На режиме ЗМГ сопло максимально раскрывается при снижении
частоты вращения п'к пр ниже заданного значения.
Расход топлива GT.$ в ФКС дозируется по программе GT.$/p*K =
= /(аРуд.Гв*х).
124
Построение систем автоматического управления ГТД
Для ускорения процесса заполнения топливом коллекторов ФКС
осуществляется подача в них на начальном этапе недозированного
топлива.
При включении форсажа увеличение расхода топлива GT.(j> >
> С^ф не допускается до появления сигнала о воспламенении
топлива в ФКС. Здесь б^ф — расход топлива на режиме минимального
форсирования.
Современные системы управления ТРДДФ строятся, в основном,
по централизованному принципу. Программы и алгоритмы
управления реализуются в функциональном программном обеспечении
электронного регулятора (ЭР).
Сигналы измерения с датчиков после преобразования и
фильтрации поступают в блоки формирования программ управления и для
формирования алгоритмов управления. Помимо сигналов с датчиков в
электронный регулятор поступает ряд дискретных сигналов (запуска
двигателя, розжига форсажной камеры, из системы помпажной
защиты и др.).
Каналы регулирования и ограничения параметров двигателя пв,
nK, T*, Тл, р* выполняются астатическими. Алгоритмы управления
в этих каналах выбираются в классе адаптивных, помехозащищен-
ных алгоритмов, обеспечивающих необходимые запасы устойчивости
и качество процессов управления во всех условиях эксплуатации
двигателя. В контуре регулирования температуры газа Т*
предусматривается адаптивная компенсация инерционности термопары.
Согласование с каналами управления на режимах запуска,
приемистости, сброса и других осуществляется путем последовательного
селектирования сигналов управления по минимальному и
максимальному уровням.
Составной частью электронного регулятора являются
встроенные средства контроля (ВСК), предназначенные для обеспечения его
надежности, повышения эффективности технического обслуживания
Двигателя и самолета в процессе эксплуатации.
Программное обеспечение ВСК реализует алгоритмы системного
и алгоритмического контроля аппаратной части (функциональных
узлов ввода-вывода, микроЭВМ, блока питания и др.), диагностики
отказов, реконфигурации для их компенсации.
Структурная схема САУ ТРДДФ показана на рис. 3.2.
125
ГЛАВА 3
Из ЭР
ИМЭ
Исполнительная
часть САУ
Резервный
ГМ-регулятор
HP
НВД
ИМ
Из расходного
бака самолета
1
ннд
Фильтр
I
НС
ФН
РУД
А->
В ^ ^ ^К
тф|
Двигатель
~%[
Датчики САУ
Самолетные ^—N
системы i
к=31
МКИО
Электронный
регулятор
FADEC
....1....
| Автономный генератор '
ИМЭ
Агрегат
управления
соплом
ИМЭ
Агрегат
управления подачей
топлива в ФКС
На ИМЭ
Рис. 3.2 Структурная схема САУ ТРДДФ
Сигналы управления с выходов электронного регулятора
поступают на регулирующие органы двигателя через исполнительные
механизмы электронной части (ИМЭ) САУ.
Система топливопитания должна обеспечить требуемые значения
и диапазон изменения расхода топлива в ОКС и ФКС, а также
работу органов механизации проточной части двигателя (поворотных
НА, сопел и др.) и получение комплекса характеристик (массы,
потребляемой мощности, подогрева топлива и др.).
В настоящее время одной из наиболее распространенных является
СТП, построенная с использованием шестеренного насоса для
питания топливом ОКС, центробежного насоса для питания ФКС и от-
126
Построение систем автоматического управления ГТД
дельного плунжерного насоса высокого давления для привода створок
реактивного сопла.
Топливо из расходного бака самолета подается с помощью
центробежного насоса низкого давления ННД через топливный фильтр
на входы шестеренного насоса высокого давления НВД,
центробежного насоса высокого давления ФН и плунжерного насоса высокого
давления НС (см. рис. 3.2).
Шестеренный насос НВД подает топливо в ОКС, в
гидромеханические элементы системы управления и гидроцилиндры привода
НА вентилятора и компрессора. Кроме того, с помощью НВД может
обеспечиваться подача топлива в пусковые форсунки ФКС, в агрегат
управления насосом сопла НС, а также в форсунки ФКС при малых
расходах топлива для обеспечения требуемого теплового режима
топливной системы. Насос ФН помимо подачи топлива в ФКС служит
также для аварийного слива топлива из баков самолета.
Плунжерный насос высокого давления НС обеспечивает работу
гидроцилиндров привода сопла.
Шестеренный насос НВД обычно конструктивно объединен в один
агрегат HP (насос-регулятор) с исполнительной частью электронного
регулятора по каналам управления расходом топлива в ОКС и НА
вентилятора и компрессора, а также с резервным гидромеханическим
(ГМ) регулятором. При работающей электронной системе агрегат HP
является ее исполнительным механизмом.
В системе топливопитания для уменьшения подогрева топлива
предусматривается отключение форсажного насоса ФН на
нефорсированных режимах работы двигателя, а также на форсированных
режимах при малом расходе топлива (полет на больших высотах), так как
в этом случае из-за значительного снижения КПД насоса ФН топливо
сильно нагревается. Прекращение подачи топлива на вход насоса ФН
может осуществляться с помощью специального клапана по сигналу
превышения температурой топлива заданного значения или снижения
требуемого расхода ниже определенного значения.
Снизить температуру топлива можно его перепуском после ННД
в самолетный бак через клапан рециркуляции. Необходимость в
таком перепуске может возникать при планировании самолета после
полета на теплонапряженном режиме и работе двигателя на режиме
ПМГ. Теплонапряженный режим обычно соответствует полету со
скоростью, близкой к максимальной, на большой высоте.
127
ГЛАВА 3
3.3 Системы управления турбовинтовыми
(турбовинтовентиляторными) и вертолетными
двигателями
Системы управления турбовинтовыми (турбовинтовентиляторными)
двигателелями
Свойства самолетных турбовинтовых и турбовинтовентилятор-
ных (ТВВД) двигателей как объектов регулирования близки.
Поэтому аналогичны и требования к САУ этих двигателей, а также
построение систем управления ими [7, 26, 29]. В дальнейшем под
турбовинтовыми двигателями понимаются как собственно
турбовинтовые двигатели, так и ТВВД.
Основными задачами управления турбовинтовыми двигателями
являются:
— управление тягой воздушного винта (винтовентилятора) путем
изменения мощности газогенератора, углов установки лопастей
и частоты вращения винтов при наилучшей экономичности;
— обеспечение наилучшей экономичности СУ путем согласования
режимов работы газогенератора и воздушного винта в
соответствии с условиями полета самолета;
— снижение уровня шума, создаваемого воздушными винтами,
путем синхрофазирования винтов и изменения их частоты
вращения;
— обеспечение безопасной работы двигателя при повреждении его
узлов и отказах в САУ;
— управление реверсом тяги воздушных винтов при посадке
самолета и рулении на аэродроме;
— защита двигателя при помпаже и автоматическая ликвидация
помпажа компрессора;
— автоматическое восстановление режима работы двигателя при
погасании камеры сгорания.
Системы автоматического управления турбовинтовыми
двигателями выполняют следующие основные функции:
— управление запуском двигателя на земле и в полете;
128
Построение систем автоматического управления ГТД
— управление мощностью двигателя или тягой воздушных винтов
в полете и на земле; управление двигателем на переходных
режимах работы при изменении его мощности, реверсе тяги и
парировании возмущений;
— ограничение предельных значений параметров двигателя
(мощности, вращающего момента, частоты вращения роторов
газогенератора и винта, температуры газа) с целью его защиты от
перегрева или разрушения;
— управление органами механизации компрессора, охлаждением
турбин;
— оптимизацию частоты вращения винтов по условиям полета;
— синхрофазацию винтов;
— самоконтроль системы и компенсацию отказов ее элементов.
Во многих современных САУ в одном электронном устройстве
объединены функции автоматического управления и оперативного
контроля технического состояния двигателя.
Программы управления, реализуемые в САУ турбовинтовых
двигателей, должны позволять решать весь комплекс задач управления.
Основные программы управления турбовинтовыми двигателями
приведены ниже.
Запуск двигателя. Дозирование топлива до его воспламенения
осуществляется по программе: GT = f {plx,T*x,tT).
После воспламенения до выхода на режим МГ при управлении
расходом топлива ограничивается ускорение ротора газогенератора
по программе: пГГ/р*вх = /(пггпр).
Для сохранения необходимых запасов ГДУ расход топлива
дополнительно ограничивается по программе: GT/p*K = /(пггпр).
Ограничение температуры газов за турбиной газогенератора:
т.зап max = / \пгг пр? РВх> "*вх/*
При превышении заданного максимального значения температуры
газов в процессе запуска на земле двигатель выключается.
Работа турбовинтового двигателя на земле. Управление прямой
тягой винта (воздействием на GT): (рв = /(аруд); пв\т.лх = const.
Управление реверсом тяги винта: <ръ — /(аруд); nB2max = const.
"еверс включается при выполнении ряда дополнительных условий.
129
ГЛАВА 3
Работа турбовинтового двигателя в воздухе. Управление
мощностью (тягой) двигателя: NaB = / (&руп,р1х,Т*х,у) воздействием на
Сгт.
Управление частотой вращения винтов: пв = /(аруд) или nB.np =
= /(А^дв.пр, М) воздействием на углы установки лопастей винтов.
Управление фазой вращения винтов обеспечивает поддержание
заданного сдвига фаз относительно опорной частоты.
Ограничение предельных значений параметров:
- воздействием на расход топлива
^\дв тах = / (Рвх, -LBX) ', ^вр max = /(^в) 5
ПГГ max = / (Рвх' ^в*х) J ™в1 max = COUSt ;
-*т max / V^rr» Ръкч -*вх/ '
GT min = / (Рвх) 5 Gt max = / (Рвх) 5
- воздействием на углы установки лопастей (фиксация, затяжеле-
ние)
Пв2тах = COUSt (фиксация) ; Мвр min = / (с*руд,рвх, у) .
Защита свободной турбины от раскрутки воздействием на стоп-
кран:
^ст max -^ ^ст зад 5 ^ст зад = /(Лет) •
Время отсечки топлива 0,08.. .0,1 с.
Защита от отрицательной тяги винтов обеспечивается:
- введением съемного промежуточного упора положения лопастей:
- фиксацией лопастей винта при превышении заданного значения
частоты вращения винта;
- «затяжелением винта» при Мвр < Мвр.3ад по программам
Мвр = / (аруд,Рвх>v) J ^в min = / (аруд) ;
- автоматическим флюгированием винта при выключении
двигателя;
- ручным флюгированием винта.
130
Построение систем автоматического управления ГТД
Допустимые погрешности регулирования в САУ турбовинтовых
двигателей составляют:
— поддержание (ограничение) мощности или вращающего
момента ±2%;
— поддержание (ограничение) частоты вращения газогенератора
±0,15%;
— ограничение приведенной частоты газогенератора ±0,3%;
— поддержание (ограничение) частоты вращения воздушного
винта ±0,5%;
— ограничение температуры газов ±6 ... 10 °С;
— ограничение расхода топлива ±5%.
Допустимые отклонения параметров двигателя в переходных
режимах имеют следующие значения:
— заброс частоты вращения газогенератора Дпгг < 1%;
— заброс температуры газов < 15 °С;
— заброс мощности, вращающего момента < 4%;
— заброс частоты вращения винта < 4%.
Современные системы управления турбовинтовыми двигателями
являются цифровыми электронными, выполняющими все функции
управления путем непосредственного воздействия на регулирующие
органы двигателя. Электронный регулятор выполняет функции
управления и контроля газогенератора и воздушного винта.
Возможны разные варианты построения САУ:
— одноканальная аналоговая или цифровая электронная система с
развитой гидромеханической частью;
— двухканальная электронная цифровая система с упрощенным
гидромеханическим резервным регулятором;
— двухканальная электронная цифровая система без
гидромеханического резерва.
В САУ может быть применен гидромеханический надсистемный
регулятор для защиты от превышения частотой вращения свободной
турбины предельных допустимых значений (защита от раскрутки).
Структурная схема САУ ТВД в последнем из названных
вариантов показана на рис. 3.3.
Система имеет два идентичных канала управления А и В, каждый
из которых выполняет функции автоматического управления
газогенератором (ГГ), воздушным винтом (ВВ) и контроля технического
131
ГЛАВА 3
аРУД аРУВ
А L
Из систем объекта
I i i
Блок управления
и комплексирования
От
датчиков-^
ГГиВВ
Канал А
Управление
контроль
диагностика
СВК
В системы объекта
Канал В
Управление
контроль
диагностика
СВК
ЭСУ
ГМ часть САУ ГГ
ш—
Управление НАК
Указатели,
табло
■"гг
•явв
•т:
ХНАК
ГМ часть САУ ВВ
1фв
Масляный
насос
zzi—
Основной
насос
Фильтр
—Е—
Подкачивающий
насос
1
Флюгерный
насос i
из бака
Рис. 3.3 Структурная схема САУ турбовинтового двигателя: ГМ —
гидромеханическая часть системы; НАК — НА компрессора; ГГ —
газогенератор; РУВ — рычаг управления винтом; ЭСУ — электронная система
управления
состояния ГГ и ВВ. В каждом из каналов имеется автономная система
защиты от раскрутки свободной турбины (Огр. пст) и газогенератора
(Огр. пгг) и система встроенного контроля (СВК), обеспечивающая
при отказах реконфигурацию системы и компенсацию отказов.
Связь системы управления двигателя с системами управления
самолета осуществляется через самолетный электронный блок
управления и комплексирования с помощью цифровых линий связи.
С целью повышения безотказности САУ датчики и
электрогидравлические преобразователи выполняются двухканальными (двух-
обмоточными).
Система подачи топлива содержит подкачивающий
центробежный насос, фильтр с клапаном перепуска, шестеренный или
плунжерный насос высокого давления.
132
Построение систем автоматического управления ГТД
В качестве рабочего тела в системе управления поворотом
лопастей воздушного винта используется масло, подаваемое насосом,
расположенным в регуляторе винта, или флюгерным насосом. В насос
регулятора масло подается из системы смазки двигателя, а во
флюгерный насос — из отдельного маслобака.
В современных системах управления турбовинтовыми (турбовин-
товентиляторными) двигателями электронный регулятор имеет
быстродействие > 5 • 106 кор. оп/с; объем оперативной памяти 8.. .12 кБ;
объем постоянной памяти 32 кБ. Он может длительно работать при
температуре окружающей среды от -55 до +85... 125 °С. Масса
регулятора составляет 6.. .10 кг. Наработка регулятора на отказ,
приводящий к выключению двигателя в полете > 300 тыс. ч, на отказ
системы защиты ротора от раскрутки > 106 ч, на отказ и
повреждение, выявленные на земле и в полете > 6 тыс. ч. Ресурс до первого
капитального ремонта и межремонтный ресурс > 6 тыс. ч,
назначенный ресурс > 24 тыс. ч, срок службы > 20 лет.
Системы управления вертолетными двигателями
Основной задачей системы управления ТВГТД является
стабилизация частоты вращения несущего винта вертолета (свободной
турбины) при изменении загрузки трансмиссии, обусловленной
изменением общего шага несущего винта, шага хвостового винта и
маневрами вертолета [30].
Наличие сложной трансмиссии и муфт свободного хода
существенно увеличивает вероятность потери связи между турбиной и
винтом и раскрутки свободной турбины с ее последующим разрушением.
Вследствие этого чрезвычайно важной задачей САУ является
надежная защита силовой турбины от раскрутки.
Существенное влияние на требования к САУ ТВГТД оказывают
условия эксплуатации вертолета. На режимах висения или при
полетах вблизи земли возможно попадание в двигатель воды или снега
и заглохание двигателя. Обязательной для ТВГТД является система
восстановления режима работы двигателя.
Полет и висение вертолета вблизи земли в песчаной местности
приводит к пылевой эрозии лопаток компрессора, при полетах над
морем — к засолению проточной части компрессора. Это вызывает
существенное снижение запасов ГДУ двигателя и увеличение вероят-
133
ГЛАВА 3
ности помпажа компрессора. Одним из основных требований к САУ
ТВГТД является обеспечение защиты двигателя от помпажа и его
ликвидация.
Введение в конструкцию двигателя упругого торсиона для
электронного измерителя вращающего (крутящего) момента существенно
снижает частоту крутильных колебаний системы «силовая турбина -
несущий винт». Частота крутильных колебаний близка к собственной
частоте системы стабилизации частоты вращения несущего винта.
Необходимо исключить возможность влияния крутильных колебаний
на работу системы стабилизации частоты пнв-
Одним из важных требований к САУ ТВГТД является
синхронизация режимов работы двигателей в двухдвигательном вертолете с
целью повышения ресурса главного редуктора и одновременной
выработки ресурса двигателей.
Изменение частоты вращения несущего винта для получения
требуемой тяги в зависимости от режима полета дает существенную
экономию топлива. Системы автоматического управления ТВГТД
должны обеспечивать необходимую коррекцию частоты вращения
несущего винта (свободной турбины).
С учетом перечисленных требований определяются функции
современных САУ ТВГТД, основными из которых являются:
— стабилизация частоты вращения свободной турбины при
изменении мощности, потребляемой несущим и хвостовым винтами с
ограничением забросов и провалов частоты вращения несущего
винта в заданных пределах (программа nCT = const);
— синхронизация режимов работы двух двигателей (MBpi = Л/вр2<
или пгг\ = пГГ2);
— прямое ограничение предельных значений параметров рабочего
процесса двигателя;
— защита свободной турбины от раскрутки, ликвидация помпажа
и восстановление режима работы двигателя при заглохании;
— фиксация отказа одного из двигателей и перестройки
ограничителей предельного значения параметров другого двигателя на
чрезвычайный режим работы;
— оптимизация частоты вращения несущего винта по условиям
полета и загрузке вертолета пнв = f (р*х, Т*х, v, тпверт);
— обнаружение и компенсация отказов в системе управления.
134
Построение систем автоматического управления ГТД
Программы управления вертолетным ГТД и характеристики САУ
аналогичны программам управления газогенератором турбовинтового
двигателя.
Вычислительные мощности современных электронных цифровых
САУ позволяют реализовать необходимый набор алгоритмов
управления, контроля технического состояния и диагностики двигателя.
Основное внимание при разработке электронных цифровых САУ типа
FADEC уделяется обеспечению безотказности системы и, в первую
очередь, безопасной работы двигателя.
В настоящее время применяются следующие варианты
построения САУ ТВГТД:
— одноканальные электронные цифровые системы с развитой
гидромеханической частью, которая при отказе электронного
регулятора обеспечивает сохранение максимальной мощности
двигателя;
— двухканальные электронные цифровые системы с упрощенной
гидромеханической резервной системой, при работе которой в
случае отказа электронного регулятора возможно снижение
мощности двигателя на 15%.. .20%. Система защиты свободной
турбины от раскрутки аппаратурно выполняется автономной.
Основными особенностями перспективных САУ ТВГТД типа
FADEC являются:
— применение вместо гидромеханического резервного регулятора
третьего упрощенного электронного канала;
— применение автономных систем защиты от раскрутки роторов
двигателя;
— применение в качестве исполнительных механизмов шаговых
моторов, обеспечивающих фиксацию режима работы двигателя
при отказе электронного регулятора;
— аппаратная интеграция систем управления и контроля
технического состояния двигателя;
— использование электронных измерителей вращающего
(крутящего) момента, торсион которых встроен в двигатель;
— использование автономных электрогенераторов для питания
электронных блоков САУ;
— дублирование датчиков основных параметров двигателя и
исполнительных механизмов электронной системы.
135
ГЛАВА 3
Из системы
объекта
Блок управления
силовой установкой
От датчиков
двигателя
и ?г
В систему
объекта
Канал А
s:
&
О
Канал В
s:
&
О
Резервный
канал
Насос
высокого
давления
Топливный
фильтр
FADEC
Дозатор
топлива
I
>5
3
S я
Р *
Обмен с САУ
второго двигателя
Управление
НАК
Подкачивающий насос
ХНАК
из бака
Рис. 3.4 Структурная схема САУ ТВГТД
На рис. 3.4 показана структурная схема САУ ТВГТД.
Электронный блок САУ имеет три автономных канала управления и
автономный канал защиты свободной турбины от раскрутки (Огр. пст). Два
идентичных канала А и В выполняют все функции управления,
контроля и защиты двигателя. Резервный канал обеспечивает
управление двигателем по упрощенным программам и наиболее важные
функции защиты двигателя: стабилизацию и ограничение частоты
вращения свободной турбины, ограничение частоты вращения
газогенератора, синхронизацию режимов работы двигателя. При отказе
всех трех каналов происходит фиксация режима работы двигателя.
3.4 Системы управления ВГТД
Вспомогательный ГТД (ВГТД) является источником энергии на
борту самолета (или вертолета) при неработающих основных
маршевых двигателях. В полете ВГТД используется в качестве аварийного
136
Построение систем автоматического управления ГТД
источника энергии. ВГТД осуществляет генерацию сжатого воздуха
для запуска маршевых двигателей, обогрев кабины и
кондиционирование салона Л А, а также привод генератора постоянного или
переменного тока [31, 32].
Стационарный режим работы при п = 100% является основным
для ВГТД. К установившимся режимам работы относятся также
непродолжительные режимы с максимальным отбором мощности
(воздуха) для запуска маршевых двигателей, режимы с отбором
механической мощности для привода электрогенератора и отдельных
гидромеханических агрегатов, а также режимы длительной работы
с отбором механической мощности и воздуха на кондиционирование.
Переходными режимами работы ВГТД являются режим запуска-
разгона до выхода на режим п = 100%, а также режимы, протекающие
при изменении нагрузки (отбора воздуха, включения/выключения
генератора и др.) [33].
Задачи управления ВГТД зависят от его схемы и назначения.
Можно выделить четыре типовые схемы вспомогательного двигателя:
(1) одновальный с отбором воздуха за общим компрессором;
(2) двухвальный с отбором воздуха за компрессором низкого
давления;
(3) двухвальный с приводом дополнительного (служебного)
компрессора от свободной турбины;
(4) одновальный с отбором сжатого воздуха от дополнительного
компрессора, приводимого непосредственно от вала газогенератора.
При отборе воздуха за общим компрессором и приводе
генератора переменного тока от вала газогенератора кроме запуска
двигателя система управления должна поддерживать постоянной
физическую частоту вращения ротора, обеспечивать достаточные запасы
ГДУ компрессора, управлять расходом отбираемого и перепускаемого
воздуха из компрессора.
В системе управления двухвального ВГТД с приводом генератора
переменного тока от вала ротора низкого давления необходимо
управлять расходом воздуха, перепускаемого из компрессора низкого
давления, а также поддерживать постоянной частоту вращения каскада
низкого давления.
Двухвальный ВГТД с приводом дополнительного компрессора от
свободной турбины управляется путем поддержания постоянной
частоты вращения свободной турбины, от которой отбирается мощность
137
ГЛАВА 3
на привод генератора переменного тока. Мощность дополнительного
компрессора обычно регулируется изменением угла установки
лопаток ВНА и перепуском части сжатого воздуха из этого компрессора в
сопло. Известны схемы двигателей и без регулируемого ВНА.
Наиболее широкое применение для средне- и дальнемагистральых
самолетов нашли ВГТД одновальной схемы с регулируемым ВНА
дополнительного компрессора и клапаном перепуска сжатого воздуха из
него, управляемым в зависимости от расхода воздуха через
компрессор. На его примере рассмотрим основные характеристики системы
управления ВГТД.
Для управления запуском и разгоном ВГТД используются
программы управления вида:
1)GT =/(#);
2) dn/A = /(n, Гн);
3) п = /(*).
Первая программа регулирования запуска и разгона достаточно
проста для реализации. Однако при широком диапазоне изменения
внешних условий она не позволяет точно выдержать заданное время
запуска. Этого недостатка нет у второй программы регулирования.
В связи с отсутствием жестких требований к ВГТД по времени
запуска широко используется более простая третья программа.
При некоторых внешних условиях, например при повышенной
температуре наружного воздуха, отборе воздуха из компрессора, в
процессе запуска может происходить увеличение температуры газов
перед турбиной. Для защиты от превышения заданных предельных
значений Т* используется программа ограничения Tr*max = const.
Особенностью ВГТД является ограничение температуры газа путем
ограничения расхода отбираемого воздуха воздействием на ВНА или
заслонку в тракте отбора.
Регулирование на режимах загрузки двигателя при отборе
электроэнергии осуществляется поддержанием физической частоты
вращения ротора силовой турбины п = const.
Управление ВНА служебного компрессора обеспечивается в
зависимости от расхода сжатого воздуха на нужды Л А. Во время запуска
ВГТД лопатки ВНА находятся в прикрытом положении. При этом
мощность, отбираемая от турбокомпрессора, минимальна.
138
Построение систем автоматического управления ГТД
Работа ВГТД на режимах холостого хода и отбора электрической
мощности происходит при полностью прикрытом ВНА. Режимы
запуска маршевого двигателя и обогрева салона самолета
обеспечиваются при полностью отрытом положении ВНА, а работа на наиболее
длительных режимах кондиционирования салона может выполняться
при различных положениях ВНА, задаваемых клапаном
регулирования расхода воздуха GBK в системе кондиционирования
воздушного судна. При изменении пропускной способности этого клапана
в САУ ВГТД поступает сигнал о степени его открытия и с
коррекцией по температуре наружного воздуха изменяется положение
лопаток ВНА. При этом в пределах допустимых запасов устойчивой
работы компрессора уровень давления отбираемого воздуха сохраняется
постоянным.
Расход воздуха, отбираемого из служебного компрессора на
установившихся режимах работы, соответствует пропускной способности
воздушной сети, подключенной к компрессору, тогда как давление
отбираемого воздуха регулируется с помощью поворотных лопаток ВНА
на входе в служебный компрессор. Пропускная способность
воздушной сети изменяется в соответствии с потребностями системы
кондиционирования воздуха.
Вспомогательный ГТД с отбором воздуха из служебного
компрессора, кроме системы защиты от превышения предельных значений
параметров рабочего процесса, обычно оборудуется системой защиты
служебного компрессора от помпажа. Когда отбор воздуха на
самолетные нужды меньше, чем минимальная производительность
компрессора при данном давлении, избыток воздуха перепускается за
пределы сети.
Расположение рабочих точек для типовых установившихся
режимов работы служебного компрессора при разном отборе воздуха на
нужды потребителя показано на рис. 3.5. Схема и основные
регуляторы ВГТД со служебным компрессором показаны на рис. 3.6.
В настоящее время для управления ВГТД используются системы
Управления, содержащие регуляторы различных типов:
гидромеханические, пневматические, электронные.
В гидромеханических и пневмомеханических регуляторах в
качестве датчиков абсолютного давления воздуха за компрессором обычно
используется сильфонный узел, связанный с золотником, дозирующим
топливо.
139
ГЛАВА 3
К*
Рис. 3.5 Расположение
рабочих точек для типовых режимов
работы ВГТД на характеристике
служебного компрессора: 1 —
запуск маршевого двигателя; 2 —
обогрев салона; 3 — прикрытие
ВНА
Рис. 3.6 Схема и регуляторы ВГТД
со служебным компрессором: 1 —
турбокомпрессор; 2 — служебный
компрессор; 3 — электрогенератор;
4 — система защиты от помпажа; 5 —
ограничитель температуры газа; 6 —
воздушный стартер; 7 — регулятор
ВНА; 8 — регулятор частоты
вращения
Измерение частоты вращения осуществляется
гидромеханическим тахометром в виде центробежного механизма, воздействующего
непосредственно на дозирующий золотник, либо на устройство
измерения давления в пневматической камере и, далее, через мембранный
или сильфонный узел, связанный с дозирующим золотником.
Регулирование отбора воздуха из основного компрессора, если он
переразмерен для этих целей, или от служебного компрессора
часто выполняется пневматическим регулятором прямого действия или
струйным регулятором на элементах пневмоники.
Современные САУ ВГТД выполняются цифровыми электронными
(типа FADEC) и реализуют все функции управления, а также
контроля и диагностики двигателя.
3.5 Системы управления сверхзвуковыми
воздухозаборниками
Задачей САУ СВЗ является управление процессом торможен и я
сверхзвукового потока на входе в СУ для обеспечения поступления
необходимого для двигателя количества воздуха при минимальных по-
140
Построение систем автоматического управления ГТД
ok ;пР3 GbSlv2 01
/ 4/4 "/в.пр!
^в.пр! ^в.пр2 ^в.прЗ
(£) Св.пр1
рис. 3.7 Дроссельные (а) и регулировочные (б) характеристики СВЗ и
программа управления (б)
терях давления (максимальном коэффициенте восстановления полного
давления) и внешнем сопротивлении СУ, а также необходимых
характеристиках потока по уровню неравномерности и пульсаций давления
на входе в двигатель. При этом должны сохраняться необходимые
запасы ГДУ как СВЗ, так и компрессора двигателя.
Регулируемый СВЗ имеет устройства для изменения геометрии
поверхностей сжатия сверхзвукового потока (углов наклона панелей
клина в для плоского СВЗ, формы или положения центрального тела
для осесимметричного СВЗ), площади входа FBX и/или площади горла
Fri формы дозвукового канала, площади створок выпуска воздуха FCTB
из дозвуковой части.
По способу торможения сверхзвукового потока различают СВЗ
внешнего сжатия (торможение до плоскости входа), смешанного
сжатия (торможение как до плоскости входа, так и внутри канала) и
внутреннего сжатия (торможение внутри канала). Сверхзвуковые ВЗ
смешанного и внутреннего сжатия могут быть с пусковым
регулированием или автозапускаемые. Под запуском СВЗ понимается
образование сверхзвукового течения внутри канала на участке от
плоскости входа до горла. Способ торможения потока в СВЗ влияет на
Характеристики его системы управления и взаимодействие контуров
Управления СВЗ и ГТД.
На рис. 3.7, аи б приведены для постоянного режима полета
дроссельные характеристики плоского СВЗ в координатах (<£, а) и
^в.прЕ, 0)> гДе Св.прЕ = Св.пр-f Св.пр.ств; GB.np и Св.пр.ств — приведен-
141
ГЛАВА 3
ный расход воздуха соответственно через двигатель и перепускные
створки ВЗ. В координатах (GB.npE, 0) показаны: линия 1 угловых
точек дроссельных характеристик (программа управления), границы
помпажа СВЗ (линия 2) и двигателя (линия 3). Здесь могут быть
также нанесены линии РЭф max и линии постоянного уровня возму.
щений потока перед двигателем. Эти зависимости позволяют
выбрать программы управления СВЗ в виде в = /(GB.np) и FCTB =
= /(GB.np), обеспечивающие нужное согласование характеристик СВЗ
и двигателя для данного режима полета. Выбор программы
управления FCTB = /(GB.np) обычно производится для режимов
дросселирования двигателя при неподвижном клине из условия
^в.прЕ ~~ ^в.пр г ^в.пр.ств ~~ COTlSt .
Анализ рассмотренных характеристик для разных значений числа
М, а, /3 позволяет построить программу управления для заданной
области режимов полета:
0 = /'(GB.np,M,a,/?); /(GB.„p,M,a,/J).
Связь между изменением углов наклона скачков уплотнения и
площади горла при изменении углов установки панелей клина для СВЗ
внешнего сжатия выбирается так, чтобы весь воздух, прошедший
через косые скачки уплотнения, не мог пройти через горло СВЗ. Тогда
перед плоскостью входа СВЗ располагается ударная волна, а в горле
СВЗ устанавливается скорость потока, соответствующая Аг = 1.
На оптимальном режиме работы СВЗ площадь Fr должна
выбираться так, чтобы коэффициент восстановления давления сгдз в
дозвуковой части СВЗ имел максимальное значение, а ударная волна
перед плоскостью входа располагалась на минимальном расстоянии от
кромки обечайки. При большей площади Fr в нем установится
дозвуковое течение, и ударная волна отойдет дальше от плоскости входа,
что приведет к увеличению внешнего сопротивления СВЗ. Если
площадь Fr будет выбрана меньше оптимальной, то за горлом появится
дополнительный замыкающий скачок уплотнения.
Обычно точка согласования для СВЗ внешнего сжатия выбираете*
на пологой ветви вблизи угловой точки дроссельной характеристики
при Аг несколько меньше 1. Делается это для того, чтобы избежать
перехода на закритический режим работы при неточном выполнении
142
Построение систем автоматического управления ГТД
оптимального закона управления, в частности из-за статических и
динамических погрешностей системы управления. Переход на закри-
тический режим работы для таких СВЗ обычно не желателен ввиду
резкого возрастания возмущений в потоке перед двигателем.
Иногда для уменьшения хода панелей клина, необходимого для
обеспечения нормальной работы СВЗ при дросселировании двигателя
и для увеличения быстродействия системы, дополнительно к
управлению площадью горла используется управление створками выпуска
воздуха.
Сверхзвуковые ВЗ смешанного сжатия с пусковым
регулированием имеют два существенно различающихся режима работы:
Режим «незапуска», когда выбитая ударная волна при Лг = 1
располагается перед плоскостью входа, за горлом устанавливается
сверхзвуковое течение и переход к дозвуковому течению перед
компрессором происходит через замыкающий скачок уплотнения.
Режим «запуска», при котором сверхзвуковое течение
осуществляется внутри канала СВЗ от плоскости входа до замыкающего
скачка, расположенного за горлом, Лг > 1; при этом а на режиме «запуска»
существенно больше, чем на режиме «незапуска».
Переход с первого режима на второй обеспечивается выполнением
определенной последовательности действий — процедуры «запуска».
Для этого нужно увеличить Fr и открыть створки выпуска воздуха
до тех пор, пока не произойдет «проглатывание» ударной волны
перед плоскостью входа. При этом возрастает Лг и уменьшается а.
После «проглатывания» головной волны необходимо уменьшить Fr
и сечение створок так, чтобы замыкающий скачок уплотнения в
канале располагался на заданном расстоянии от горла при Лг несколько
больше 1. При этом с ростом числа М расчетная величина Лг
увеличивается.
При действии возмущений (порывов ветра, маневров J1A) может
произойти почти мгновенный (за время порядка 0,01 с) переход на ре-
Жим «незапуска», сопровождающийся падением давления перед
двигателем на 30%.. .50%, значительным ростом внешнего сопротивления
СВЗ и, как правило, помпажом двигателя.
Для управления СВЗ смешанного сжатия вблизи расчетных
значений чисел М полета, когда необходимо обеспечить определенную
геометрию поверхностей сжатия и внутреннего канала, определяемую
143
ГЛАВА 3
числом М и углами вектора скорости набегающего потока, программа
управления СВЗ должна иметь вид:
0 = /(М,а,/3).
Если створки полностью закрылись, то согласование двигателя
и СВЗ по расходу воздуха обеспечивается уменьшением расхода
воздуха через двигатель GB.np путем снижения частоты вращения
компрессора.
На режимах полета при числах М меньше расчетных программы
управления СВЗ смешанного сжатия строятся в основном так же, как
и программы для СВЗ внешнего сжатия. Конструкция этих СВЗ
такова, что при изменении положения панелей и Fr весь воздух,
прошедший через скачки уплотнения, может пройти через горло. Поэтому
нужна коррекция программ управления клином (конусом) по числу М
полета для выполнения двух условий, следующих из уравнений
равенства расходов через систему скачков, горло и двигатель при сгвг = сгк с
и максимальной величине сггд = сг3.ссгг д:
firFrq(Xr) = <т3.с<7д.з(^кд(^к) + FCTB).
Здесь сгвг, сгкс, сг3.с, (тг.д — коэффициенты восстановления давления
соответственно на участке до горла СВЗ, в косых скачках уплотнения,
в замыкающем скачке и на участке между горлом и плоскостью входа
в двигатель.
Сигналы измерения параметров М, а, /?, необходимые для
формирования программ управления СВЗ, поступают от специальных
датчиков или из навигационной системы самолета.
Так как непосредственное измерение параметра GB.np в полете
практически невозможно, используются косвенные методы его
определения, основанные на связи GB.np с параметрами, характеризующими
режим работы двигателя. В качестве таких параметров обычно
выбирают ппр, 7ГК, 7ГВ. Связь между параметрами ппр и GB.np или тгк
должна корректироваться по режимам работы двигателя
(форсированный, нефорсированный), при изменении программ управления
органами механизации компрессора и др.
Для двухконтурных двигателей точность выдерживания
зависимостей GB.nP = /(гсв.пр) или GB.np = /(тгк) связана с точностью работы
144
Построение систем автоматического управления ГТД
£ДУ двигателя, поддерживающей положение рабочей линии
вентилятора. Разброс характеристик отдельных экземпляров двигателей и
jjx изменение по мере выработки ресурса приводят к значительным
(рр 3%. • .5%) погрешностям в определении GB.np, что эквивалентно
погрешности в установке панелей клина до 10%.
Для формирования программ в системах управления вместо
параметров ппр или 7гк можно использовать положение поверхностей
сжатия СВЗ и какой-либо комплекс давлений (чаще всего
отношение давлений), измеренный вне и/или внутри СВЗ. При этом одно из
давлений (обычно в зоне расположения замыкающего скачка
уплотнения) должно отражать характер течения воздуха внутри канала, а
другое — условия полета.
На рис. 3.7, в для постоянных условий полета показано изменение
параметра е замкнутого регулирования СВЗ в зависимости от угла в
при разных величинах расхода Св.Пр- Здесь е — отношение давлений
в тракте отсоса пограничного слоя через щель в горле СВЗ к полному
давлению в набегающем потоке.
Используя данные рис. 3.7, б, можно на зависимости е =
= /(0, GB.np) нанести линии оптимальных режимов, границы помпажа
СВЗ и компрессора и получить зависимости ен = f{6); en = /(#);
£з = f{@), T-e. значения параметра е в оптимальных точках
(настоечные значения) на границе помпажа и на границе «зуда» СВЗ. Если
с помощью системы управления поддерживать е = ен, то на
рассматриваемом режиме полета будет обеспечено оптимальное управление
СВЗ, а по разности (е - ен) и (е - е3) можно оценить запасы
устойчивости СУ и правильность работы системы.
По дроссельным и регулировочным характеристикам СВЗ для
Других условий полета могут быть построены зависимости Si =
= /(0, М, а, /3), используя которые можно обеспечить управление СВЗ
во всех условиях полета. При этом легкоизмеряемые параметры е и в
используются вместо параметра GB.np-
Структурная схема комбинированной системы управления,
которая реализует такой закон управления, показана на рис. 3.8. На
Рисунке обозначено: в — положение клина ВЗ; 0о.с — сигнал ДОС,
Пропорциональный 0; ппр — приведенная частота вращения; 6пр —
Положение клина, задаваемое в программном регуляторе; иаоа — сиг-
н&л, пропорциональный измеренной величине е; ин — сигнал,
пропорциональный настроечному отношению давлений.
145
ГЛАВА 3
М,а,|
0,
3 %
*| ПР
III Ре. "ДОД
ВЗ
1 W
1 fcl
дод у
р:
М и-
n w
1»г
"н
- 9
-1 ипр
w
W
и
"Т
БН
р *
—^
УП
9
1 ^^ 1
°ос Г
ч.
ДОС
ГЦ
Рис. 3.8 Структурная схема системы управления СВЗ: АУ — агрегат
управления; БН — блок настройки уставки по параметру е\ ВЗ —
воздухозаборник; ГЦ — гидроцилиндр; ДОД — датчик отношения давлений;
ДОС — датчик обратной связи; И — интегратор; ПР — программный
регулятор; УП — усилитель-преобразователь
Система имеет грубый программный регулятор ПР и точный
замкнутый контур регулирования с блоком БН формирования
настройки £н, осуществляющий через интегратор И сдвиг программы до тех
пор, пока не будет достигнуто равенство е = ен. Перемещение клина
СВЗ осуществляется с помощью электрогидравлической силовой
следящей системы, включающей в себя усилитель-преобразователь УП,
агрегат управления АУ, силовой гидроцилиндр ГЦ и датчик
обратной связи ДОС. Такое построение системы позволяет получить
малые динамические ошибки при парировании возмущений, связанных
с изменением режима работы двигателя, и обеспечивает точное
поддержание оптимального режима работы СВЗ в широком диапазоне
изменения GB.npi М, а, /3.
В замкнутой системе без контура программного регулирования
весьма трудно обеспечить малые динамические ошибки при
парировании возмущений, вызванных изменением режима работы двигателя,
в связи с ограничением ее быстродействия условием устойчивости
регулирования. Для парирования этих возмущений и используется
грубый программный контур регулирования по параметру ппр.
Применение двухконтурной САУ позволяет также увеличить
надежность системы, так как, например, при отказе замкнутого контура
продолжает работать менее точная программная система. Для
диагностирования отказов и безопасного перехода на программный
контур зона действия замкнутого контура (диапазон сдвига программы)
146
Построение систем автоматического управления ГТД
ограничивается. Этот диапазон должен обеспечить возможность
получения оптимального режима работы и, вместе с тем, избежать пом-
пажа СВЗ или двигателя при максимальном отклонении от
оптимальной программы. Диапазон работы замкнутого контура составляет
примерно ±10% полного хода панелей клина.
При таком соединении программного и замкнутого контуров
регулирования последний может иметь относительно малое
быстродействие, а первый — большие статические погрешности. Управление в
замкнутом контуре через следящую систему кроме удобства
сопряжения с программным контуром и ограничения зоны действия
замкнутого контура позволяет уменьшить неблагоприятное влияние на
работу системы изменения нагрузок на шток гидроцилиндра панелей
клина.
Системы управления, поддерживающие значение е = const,
удается создать для СВЗ внешнего сжатия, работающих в сравнительно
узком диапазоне изменения условий полета и режимов работы
двигателя. Перенастройка регулируемой величины е в зависимости от
положения поверхностей торможения существенно облегчает выбор
параметра е.
3.6 Системы защиты двигателя от помпажа
Назначение систем защиты двигателя от помпажа — не допустить
нарушения ГДУ компрессора и работы двигателя при потере ГДУ.
Системы защиты подразделяются на два типа [9, 16, 34]:
(1) системы кратковременного повышения запасов устойчивости
(СКПЗУ) СУ;
(2) системы вывода двигателя из режима потери ГДУ (помпажа,
вращающегося срыва) и восстановления исходного режима
(СВР).
Системы защиты должны быть работоспособны во всех условиях
эксплуатации Л А: при различных высотах и скоростях полета,
изменении состояния атмосферы, вибрационных нагрузках, эволюциях Л А
и др.
Они имеют световую и/или звуковую сигнализацию в кабине
экипажа о потере ГДУ и сигнализацию об их неисправности.
147
ГЛАВА 3
Системы кратковременного повышения запасов устойчивости
предназначены для предотвращения нарушения ГДУ двигателя при
воздействии временных, прогнозируемых, эпизодически возникающих
факторов. К таким факторам относятся кратковременное увеличение
неравномерности и пульсаций потока при эволюциях Л А, воздействие
тепловых возмущений, ударных волн и др.
Системы этого типа разделяют на две группы:
(1) включаемые в ситуациях, предшествующих появлению
прогнозируемых возмущений;
(2) срабатывающие лишь в тех случаях, когда интенсивность
возмущений превышает заданный критический уровень.
Системы первой группы приводятся в действие по команде
экипажа Л А, а второй — по сигналу, вырабатываемому специальными
датчиками. В системах второй группы могут быть использованы
сигнализаторы, предназначенные для распознавания определенной
ситуации, например: превышения заданного уровня пульсаций давления
на входе в двигатель, достижения критических углов атаки,
превышения заданного отклонения рулей самолета и др.
В качестве управляющих факторов для кратковременного
повышения запасов устойчивости СУ используются быстродействующие
органы управления воздухозаборником, поворот лопаток НА
компрессора, перепуск воздуха из проточного тракта компрессора,
кратковременное уменьшение расхода топлива в основной камере
сгорания, уменьшение расхода топлива в ФКС, изменение площади
реактивного сопла.
Скорость и время срабатывания СКПЗУ синхронизируются с
длительностью действия возмущения. Характерная длительность
основных операций составляет:
- время между приведением системы в состояние готовности и
началом воздействия возмущений на двигатель (< 0,25 с);
- время восстановления исходного режима после достижения
режима с максимальным запасом ГДУ не должно превышать более
чем на 1.. .2 с время приемистости с этого пониженного режима
до исходного режима;
- время срабатывания органов управления составляет не более
0,2 с (для створок реактивного сопла 0,8 с) с момента включения
экипажем (для систем первой группы) или с момента
поступления команды от сигнализатора (для систем второй группы).
148
Построение систем автоматического управления ГТД
В СКПЗУ могут использоваться как все перечисленные выше
управляющие воздействия, так и часть из них.
Системы восстановления исходного режима должны
автоматически срабатывать при потере ГДУ независимо от причин ее
возникновения. Они обеспечивают автоматическую ликвидацию
неустойчивой работы и восстановление исходного режима в соответствии с
положением рычага управления двигателем.
Для регистрации неустойчивой работы в СВР используются
параметры, характеризующие появление помпажа и вращающегося срыва,
такие как пульсации полного или статического давления или
скоростного напора в потоке на выходе из компрессора. Частота пульсаций
составляет 8.. .150 Гц.
Исполнительными органами в СВР являются те же устройства,
что и в СКПЗУ. В дополнение к ним может применяться устройство,
обеспечивающее полное прекращение подачи топлива.
Исполнительные механизмы включаются на время существования
сигнала о неустойчивой работе и отключаются через 0,1.. .0,2 с после
ее ликвидации.
По окончании процесса ликвидации неустойчивости
автоматическое восстановление исходного режима происходит как по обычному
циклу приемистости, так и с использованием специальных программ
управления, обеспечивающих минимальное время восстановления
режима.
Критериями эффективности СКПЗУ являются:
— относительное увеличение запаса ГДУ компрессора
гг, А^у СКПЗУ - А^у.исх
оКу скпзу = -гт} ;
^^у.исх
— потеря импульса тяги в процессе повышения запаса ГДУ
*исх
/СКПЗУ = J [^исх (Я, М, аруд) - P(t)] dt ,
где Рисх — значение тяги до включения системы защиты; P(i) —
изменение тяги по времени; tcp — момент срабатывания системы
защиты;
— время восстановления исходного режима tB.
149
ГЛАВА 3
Рис. 3.9 Изменение параметров двигателя при работе СКПЗУ
Значения /скпзу ПРИ достижении требуемого значения <Жускпзу
должны быть минимальны.
Для контроля работы и оценки эффективности СКПЗУ
используются доступные для измерения параметры: снижение частоты
вращения роторов Ап\ и Дггг; время достижения минимальных значении
частот вращения tn\mm и f7l2min; ^в- Чем меньше их значения (при
требуемом увеличении располагаемого запаса устойчивости), тем
эффективнее система. Изменение параметров двигателя при работе
СКПЗУ показано на рис. 3.9.
Для оценки эффективности СВР используются следующие
критерии:
150
Построение систем автоматического управления ГТД
Рис. 3.10 Изменение параметров двигателя при работе СВР
потеря импульса тяги при ликвидации неустойчивого процесса
ten
/лик = [ [Рисх (Я. М, аруд) - P(t)} dt ,
*ср
где tcn — момент выхода из срывного режима;
потеря импульса тяги при восстановлении исходного режима
<исх
/в = J [Рисх (Я. М. аруд) - P(t)] dt;
*сп
151
ГЛАВА 3
— время ликвидации неустойчивого процесса (наличия сигнала от
сигнализатора неустойчивости)
*лик = *сп ~~ *ср >
— время восстановления исходного режима tB\
— величина заброса температуры газов перед турбиной (или за
ней) ДТГ*;
— продолжительность заброса температуры газов £3аб-
Чем меньше значения перечисленных параметров, тем
эффективнее система.
Характер изменения параметров двигателя при работе СВР
показан на рис. 3.10. Характерное время ликвидации помпажа £лик =
= 0,2 ... 0,5 с, а время восстановления режима tв = 3... 8 с. Эти
значения зависят от типа, характеристик и размерности двигателя.
Перспективы развития систем защиты двигателя от помпажа
связаны с построением систем селективного типа, в которых при
нарушении ГДУ регулирующие факторы двигателя используются
выборочно в зависимости от режима работы двигателя, вида потери
газодинамической устойчивости, типа входного возмущения [3]. Это
позволит уменьшить потери импульса тяги при срабатывании
системы защиты, повысить безопасность полета, сделать более удобным
пилотирование.
152
Глава 4
Математическое моделирование САУ ГТД
4.1 Математическое моделирование газотурбинного
двигателя для решения задач управления
На всех этапах разработки САУ ГТД значительное место
отводится математическому моделированию и параметрической
оптимизации САУ на ЭВМ. Это позволяет значительно уменьшить затраты
времени на подготовку и решение задач, повысить эффективность
исследований, решить проблемы, возникающие в процессе создания и
эксплуатации двигателя.
Цикл работ в области управления может быть обеспечен
использованием комплекса из нескольких типов моделей ГТД разного уровня
сложности. Комплекс в целом должен отвечать ряду требований,
основными из которых являются:
— возможность моделирования установившихся и переходных
режимов работы при изменяющихся условиях полета в широком
диапазоне изменения режима работы двигателя;
— получение точности моделирования на установившихся и
переходных режимах, достаточной для решения задач управления;
— приемлемое время расчета на ЭВМ при использовании моделей
высокого уровня;
— возможность выполнения расчетов в реальном и ускоренном
времени при использовании математических моделей на
полунатурных стендах.
Комплекс математических моделей двигателя для решения задач
управления включает в себя модели трех типов: динамическую поуз-
ловую, многорежимную упрощенную и линейную [11, 12, 14, 26, 35, 36].
153
ГЛАВА 4
Динамическая поузловая модель — это модель наиболее высокого
уровня, достаточно полно описывающая свойства двигателя,
предназначенная для расчетов на ЭВМ установившихся и переходных
режимов его работы в полном диапазоне их изменения для всех условий
эксплуатации. Она позволяет осуществлять выбор и оценку
эффективности программ и алгоритмов управления, в том числе и при
совместном рассмотрении с самолетом и его САУ.
Многорежимная упрощенная модель может быть использована,
как и поузловая, для выполнения расчетных исследований САУ при
известных программах и алгоритмах управления двигателем, при
полунатурных испытаниях систем управления на безмоторных
стендах, в том числе пилотажных. Диапазоны воспроизводимых с
помощью упрощенной модели режимов работы двигателя и условий
полета являются более узкими, чем для предыдущей модели, а
точность расчетов — ниже.
Линейная модель применяется, как правило, для предварительных
приближенных оценок и характеристик устойчивости регулирования
и динамических свойств системы «в малом» как при расчетах, так и
при полунатурном моделировании. В совокупности с аналогичными
моделями остальных элементов исследуемых систем она позволяет
использовать известные аналитические методы анализа и синтеза САУ.
Динамическая поузловая математическая модель двигателя
Эта модель обычно строится при ряде следующих допущений:
— описание газодинамических процессов в тракте двигателя
выполняется в одномерной постановке в сосредоточенных
параметрах;
— при расчете переходных режимов используются стационарные
характеристики лопаточных машин (компрессоров, турбин);
— уравнения газовой динамики записываются без учета массовых
сил и вязкости;
— процессы в смесителе и сопле полагаются изоэнтропическими
и других, менее существенных допущениях.
Такие допущения не препятствуют выполнению достаточно
точной идентификации модели в широком диапазоне изменения режимов
работы двигателя и условий полета.
154
Математическое моделирование САУ ГТД
В моделях рассматриваемого типа учитываются инерционность
вращающихся масс, нестационарность газодинамических процессов,
зависимость показателя адиабаты от температуры и состава газа,
отбор мощности от роторов на привод различных агрегатов, отбор
воздуха из компрессоров и наружного контура на охлаждение двигателя
и самолетные нужды, изменение коэффициента полноты сгорания в
основной и форсажной камерах сгорания в зависимости от состава и
давления газа и ряд других факторов.
При необходимости для решения конкретных задач модель
позволяет учесть процессы нестационарного теплообмена газового потока и
элементов конструкции двигателя путем соответствующей коррекции
используемых характеристик.
В поузловой математической модели используются статические
характеристики узлов, что позволяет широко использовать
экспериментальные данные и повысить точность идентификации.
Применение основных уравнений газовой динамики в нестационарной форме
дает возможность учесть динамические свойства газовых трактов в
двигателе и расширить частотный диапазон применимости модели,
что бывает важно для некоторых задач динамики управления
(например, при расчете процессов в ФКС и сопле).
Вместе с тем это позволяет разрешить основные уравнения модели
относительно рассчитываемых координат и осуществить
последовательное решение уравнений в процессе расчетов на ЭВМ без
использования итерационных методов, что значительно сокращает время
расчета переходных процессов в двигателе. Установившиеся режимы в
такой модели считаются «методом установления».
Математически поузловая модель ГТД представляется системой
алгебраических и нелинейных обыкновенных дифференциальных
уравнений 8-10-го порядка. Используемые в ней базовые
соотношения для описания процессов в типовых элементах и узлах двигателя, в
сочетании со статическими зависимостями, представляющими
характеристики узлов, и уравнениями для расчета термогазодинамических
параметров в тракте, образуют полную систему уравнений модели.
Независимыми координатами в модели являются внешние условия (Я,
М, Тв*х) и регулирующие факторы (GT, Ст.ф, <рв, <рк, FKp, Fc и др.).
В результате расчета определяются параметры потока в выбранных
сечениях по тракту двигателя (давление, температура, расход,
скорость), частота вращения роторов, эксплуатационные характеристи-
155
ГЛАВА 4
ки (тяга, удельный расход топлива и др.). Характеристики
компрессоров и турбин вводятся в модель в виде
GB.np = Св.пр(пКПр,7Г*,</?на) '•> ^к = ^к (Пк пр, 7Г*, </?На) i
^т.пр = ^т.пр (^тпр? 7TTJ i Vt = ^?т ч^тпр? ^т) •
Нестационарные процессы в элементах газового тракта двигателя
описываются с помощью уравнений, полученных из записанных в
нестационарной форме основных уравнений газовой динамики для
сжимаемой сплошной среды: уравнений неразрывности, движения и
энергии.
Для пояснения методики построения модели ниже приведен один
из способов получения уравнений, описывающих
термогазодинамические процессы в основной камере сгорания. Уравнения для расчета
протекающих в ней процессов используются и для моделирования
процессов в других газовых объемах с подводом (отводом) тепла и без него
(наружный контур, ФКС и др.).
Будем полагать, что при сгорании топлива тепло подводится на
входе в камеру. Тогда уравнение энергии для камеры может быть
записано в следующем виде:
|(рсП + |(^-) = о.
С учетом соотношения G = puF при F = const имеем
Переходя к сосредоточенным параметрам, получаем
jt {pcPcvcpT*p) = - [GBXi (Гв*х) - Свыхг (Гв*ых)] ;
Свхг (Г;х) = ^ (VkHu + гс) + Сксгв (Гв*х) ;
Свых? (Гв*ых) = Grir (Гвых, авых) ,
где гс = in(T0) + гт{Т*х) - гт(То)\ Скс — расход воздуха на входе в
ОКС; Gr — расход газа на выходе из ОКС; гв — энтальпия воздуха:
гп — энтальпия чистых продуктов сгорания; гт — энтальпия жиД-
156
Математическое моделирование САУ ГТД
кого топлива; То — стандартная температура определения теплоты
сгорания топлива; г/к — коэффициент полноты сгорания для ОКС;
ffu — теплотворная способность топлива; а — коэффициент избытка
воздуха; V — объем ОКС.
После ряда преобразований для расчета температуры и давления
газа в ОКС имеем:
dr; = дг(аг)т; г ст
dt VkcP*Dt 13600
"Сг^Л^^Гг( г' г)Г
где
dP; _ дг(аг)г; / gt \ Рг dr;
~dT~ Vkc rKC + 36oo"Grj + 7^^r-
При расчете давления в газовых емкостях, в которых нет подвода
тепла от внешнего источника, полагается dT*/dt = 0.
Уравнение импульсов при расчете процесса смешения потоков,
вытекающих из внутреннего и наружного контуров, используемое для
определения давления за турбиной низкого давления, записывается в
следующем виде:
* Р*смРсм/(Ьсм)/сгсм -p;MFBH/(ABH)
Рт FT/(AT)
Иногда приемлемая точность расчетов может быть получена при
применении более простой формулы, полученной при допущении
/(АсМ) = ДАвн) = /(Ат).
В модели могут быть учтены отборы воздуха за компрессором на
охлаждение узлов двигателя (турбины, сопла) и самолетные нужды, а
также его утечки и возврат части этого воздуха в тракт. Расчет
температуры газа на участках тракта, где происходит смешение потоков
газа и воздуха (например, в турбинах), выполняется по формулам:
г}КНи +гс
гГ(ГГ*,аГ)
кг(Тг*,аг)
+ Gkc
.(гл-
гг(Тг\аг)
кг{Т*аг)\
157
ГЛАВА 4
• ,гр* л ч гГ1 (ГД, Qri) Gri + гв (Г0*хл) GB
Gr2
Гг*2 =Гг2(^2>аг2) •
Индекс 1 относится к температуре газа до смешения потоков, а инде*
2 — после смешения.
При определении частоты вращения роторов учитывается отбоп
мощности на привод двигательных и самолетных агрегатов, который
в общем случае, задается в зависимости от режимов полета и работы
двигателя.
Логическая схема расчета параметров в сверхзвуковом сопле
строится в зависимости от соотношения располагаемого и критического
перепадов на нем, величин qKp и </ид и обеспечивает расчет всех
параметров, необходимых для определения внутренней тяги двигателя.
Погрешности расчета с помощью поузловой модели определяются
в основном достоверностью используемых характеристик узлов
двигателя.
Рассмотренная модель позволяет для широкого диапазона условий
эксплуатации осуществлять расчет установившихся режимов работы
двигателя с погрешностью не более 1%.. .3%, а переходных — не более
3%.. .5%, что достаточно для решения задач управления.
Многорежимная упрощенная модель двигателя
Модель такого типа может быть представлена в виде системы
линейных дифференциальных и алгебраических уравнений с
переменными коэффициентами. Методы построения таких моделей
базируются на допущении о выполнении критериев подобия режимов
работы двигателя в определенном диапазоне изменения внешних условии.
Кроме того, используются допущения о том, что динамические
свойства двигателя определяются только инерционностью врашаюших-
ся масс, выполняются условия эквивалентности влияния расхода
топлива в ФКС и площади FKp сопла на режим работы турбокомпрессор
(для ТРДДФ) и ряд других.
Система уравнений многорежимной упрощенной математическ
модели, например, для двухвального ТРДД, может быть представле
в виде:
158
Математическое моделирование САУ ГТД
dt
^Х1К.пр)ДС^р + ^2(Пк.пр)Дпв.пр + ^з(Пк.пр)Д^к + ^4(пк.пр)Д^в;
Xjnp = Х}пр(пк.Пр) + ^5(Пк.пр)Дпв.пр + ^б(Пк.пр)Д^к+^7(Пк.пр)Д^в;
где
Д^т.пр = ^т.пр — ^гт.пр(Пк.пр) ;
^^в.пр = ^в.пр — ^B.npv^K.npj 5
Д^к = <л< - rfCT(nK.nP); Д<л» = v^b - ^вст(пк.пР);
индексы: «уст» — значение параметра на установившемся режиме
работы в соответствии с ЛРР двигателя; «пр» — приведенное значение
параметра; щ = пк,пв; Xj = P*,P*,T*,T* и др.
Для согласования такой модели двигателя с моделями САУ и
другими элементами СУ система уравнений упрощенной модели должна
быть дополнена формулами перехода от физических параметров к
приведенным и обратно.
Стандартные формулы приведения при необходимости
корректируются по параметрам Т*х, Re и другим на основе данных
эксперимента и расчетов с помощью моделей более высокого уровня с целью
учета нарушений условий подобия. Для определения входящих в
модель функциональных зависимостей и идентификации модели может
использоваться поузловая модель двигателя или данные
эксперимента. Погрешности расчета установившихся режимов работы
двигателя при применении рассматриваемой модели составляют 3%.. .5%,
а переходных режимов — 5%.. .10%.
Линейная модель двигателя
Методы получения линейных моделей двигателя хорошо
разработаны. Базой для получения таких моделей служат модели более
высокого уровня.
Система уравнений линейной модели двигателя получается путем
линеаризации системы нелинейных уравнений, например, поузловой
^тематической модели. В частности, линейная математическая
модель Двухвального ТРДДФ выглядит следующим образом [14]:
159
ГЛАВА 4
(a0S2 + ayS + a2) ХПв =
= {l0S + h) XGt + {b0S + h) XFkp - (c0S + а) ХСтф ;
(a0S2 + aiS + a2) ХПк =
= (l2S + /3) XGt + (b2S + 63) XFkp - (c2S + c3) ХСт.ф ;
(a0S2 + a\S + a2) Хт; =
= (l4S2 + kS + l6) XGt - (b4S + 65) XFkp + (c4S + c5) ХСтф ;
[aoS -\- a\S -\- a2) Xt* =
= (l7S2 + l8S + /9) XGt - (b6S + b7) XFkp + (c6S + c7) XGt ф .
где S — оператор Лапласа; Х\ — AXi/Xio — относительные
отклонения параметров GT, Ст.ф, nB, nK, Tr*, T*, FKp; a;, &;, с» и ^ —
постоянные коэффициенты.
Для каждого исследуемого режима работы двигателя и режима
полета необходимо иметь отдельные математические модели такого
типа, которые в общем случае могут отличаться как
коэффициентами, так и структурой уравнений.
4.2 Математическое моделирование систем
управления ГТД
Необходимый уровень описания различных элементов САУ
определяется степенью влияния тех или иных факторов на процессы
регулирования и целью решаемой задачи. В задачах управления ГТД
используются математические модели трех типов:
(1) поэлементные, предназначенные для проведения расчетов с
помощью ЭВМ. В таких моделях в качестве параметров
непосредственно рассматриваются конструктивные и схемотехнические
параметры регуляторов. В этом случае могут быть корректно
учтены различные факторы, такие как трение в элементах
конструкции, силы на исполнительных устройствах, изменение
формы проходных сечений отверстий в гидромеханических
устройствах, квантование по времени и уровню сигналов, задержка
выдачи решений, влияние помех и сбоев в электронной части
и др.;
160
Математическое моделирование САУ ГТД
(2) приближенные нелинейные, полностью воспроизводящие
программы управления двигателем во всем диапазоне режимов
работы и упрощенно описывающие динамические свойства и
статические характеристики регуляторов. Модели предназначены для
исследований «в большом» и могут использоваться при оценке
эффективности методов управления на полунатурных стендах;
(3) линейные модели с типовыми эквивалентными нелинейными
статическими характеристиками (зонами нечувствительности,
областями насыщения, гистерезисом и др.), применяемые для
исследования характеристик устойчивости и качества
регулирования при малых отклонениях от установившегося режима. Такие
модели получают путем линеаризации нелинейных моделей или
аппроксимации данных динамического эксперимента (частотных
характеристик, переходных процессов).
Рассмотрим в качестве примера поэлементную математическую
модель гидромеханического регулятора, воздействующего на расход
топлива, основные элементы которого показаны на рис. 4.1. Модель
включает в себя следующие уравнения.
Уравнение для движения поршня статической приставки 5,
осуществляющей воздействие на расход топлива по производной от
регулируемого параметра
~Ж = Т ГсV [Sign^M ~Ри)/с(хс)\/Ьм-Ри| +
+ sign(pM3 - Ри)/мэ(яи)>/|Рмэ-Ри|] - sign(pH - py)Qx0 J-^—- > ;
%и min "^ %vl "^ %и max?
где хИ — перемещение поршня статической приставки 5 относительно
положения равновесия; FK — площадь поршня статической
приставки; /2С — коэффициент расхода; р — плотность жидкости; хс —
перемещение золотника селектора; р — давление жидкости; /мэ —
площадь проходного сечения окна; Qxo — расход жидкости через
Дроссельный пакет при перепаде давлений на нем, равном Дро
(остальные обозначения показаны на рис. 4.1).
Уравнение золотника 9 селектора, обеспечивающего передачу
Управления расходом топлива от электронного к
гидромеханическому регулятору и обратно,
161
ГЛАВА 4
Рис. 4.1 Схема гидромеханического регулятора: 1 — гидравлический
усилитель; 2 — гидравлический селектор; 3 — тахометр с маятником: 4
маятниковая полость; 5 — статическая приставка; 6 — дроссельный пакет:
7 — сервопоршень; 8 — дозирующий кран; 9 — золотник селектора; 10
электронный регулятор; 11 — ИМ с широтно-импульсной модуляцией
162
Математическое моделирование САУ ГТД
Рмэ — Рм г-, %с
Fc
5 U •< Хс •< Хс тах ч
Fc
где Сс, Rc — соответственно жесткость и предварительная затяжка
пружины золотника селектора.
Уравнение справедливо, когда золотник селектора не находится на
упорах. В противном случае давление рмэ определяется из уравнения
неразрывности, в котором производная dxc/dt полагается равной 0.
Уравнение для определения расхода Сим через электромагнитный
клапан, управляемый от электронного регулятора сигналом с ШИМ,
Сим = /им/^им
/им = \
\j-y/P4-Pcn\
п n + q
/ИМ max При —гт <t<
0
при
n + q
<t <
п + 1
; п = 0,1,2,...,
где /им — площадь проходного сечения электромагнитного клапана;
Мим — коэффициент расхода; q — коэффициент заполнения
импульсов; v(q) — зависимость частоты v сигнала ШИМ от величины q; n —
число периодов сигнала ШИМ.
Для ускорения расчетов на компьютере с помощью моделей этого
типа используются алгоритмы прямого счета, не требующие
применения итераций. Для этого разработаны специальные методы
решения уравнений, описывающих типовые элементы гидромеханического
регулятора: проточные камеры со многими дросселями, золотники
(поршни) при учете действующих на них сил «сухого» трения и др.
Рп
С
/п
Р\ Pi Pn
w
Реп
т
Рис. 4.2 Расчетная схема проточной части камеры переменного объема
163
ГЛАВА 4
Примером такого подхода является метод определения давления
жидкости в проточной камере с несколькими дросселями.
На рис. 4.2 показана расчетная схема проточной камеры
переменного объема с дросселем питания (перед которым давление рп
является максимальным из рассматриваемых), дросселем слива (за
которым давление рсл является минимальным из рассматриваемых) и п
дросселями (перед которыми давление жидкости pi, p2> • • •, Р/> • • •,
Рп)-
Уравнение неразрывности для такой камеры имеет вид:
~ У\ Signfe - p)fAifi y/sigll(pi ~р)(Рг -Р) +
/2 [2 dx
-VnfnVPn -P- J - VcnfcWP ~ Pen + F— =0, (4.1)
где рел < Pi < Pn) i = 1, • • •, Щ f — площадь дросселя; F — площадь
поршня; х — перемещение поршня.
Для нахождения решения уравнения необходимо предварительно
определить знак разности (pi — р). Для n-го дросселя это можно
сделать, если известно решение уравнения для камеры с (п—1) дросселем.
Левая часть уравнения (4.1) может быть записана в виде:
Fn{p) = Fn-i(p) + W-/in/nSign(pn - p)y/sign(pn - p)(pn - p).
Если p — решение уравнения Fn_i(p) = 0, то можно показать, что
при р> рп всегда р > рп, а при р < рп всегда р < рп.
Тогда критерий нахождения знака разности (рп —р) и выбора
уравнения для определения давления в камере можно сформулировать
следующим образом: если решение р уравнения неразрывности для
камеры с (п — 1) дросселем меньше давления рп перед тг-м дросселем,
то давление р в камере с п дросселями меньше давления рп, а для
нахождения давления р необходимо использовать уравнение:
Fnl(p) = Fn-i(p) + \l - IJLnfnVPn ~P = 0.
164
Математическое моделирование САУ ГТД
В противном случае (когда р > рп и, следовательно, р > рп) для
определения давления рп необходимо использовать уравнение:
Fn2(p) = Fn_i(p)- J - VnfnVP ~ Рп = 0.
Выбранное уравнение точно может быть решено для камеры
постоянного объема при п = 1 и для камеры переменного объема при
п = 0. Для больших значений в обоих случаях возможно лишь
приближенное решение.
Правило для определения давления жидкости в камере с тремя
дросселями выглядит следующим образом:
(1) вычисляется параметр
Рп + а2Рсп
Р =
1+а2
(2) если р > pi, то
В-у/В2- 4АС
Р= 2А
(3) если р < pi, то
где
Bi-y/Bf-AAiCi
Р= 2АХ
А=(1 + а2 + Ь2)2-4а2Ъ2;
В = 2(1 + а2 + Ъ2) (рп + а2рсл + b2Pl) - 4a2b2 (pi + рсл) ;
С = (рп + а2Рсл + b2pi)2 - 4a2b2pipCJl;
Л1 = (1 + а2-Ь2)2+4а2Ь2;
Вг = 2 (1 + а2 - Ь2) (рп + а2рсл - b2Pl) + 4а2Ь2 (pi + рсл) ;
Ci = (рп + а2Рсл - b2Pi) + 4a262pipcn ;
Мел/ел , Ml/l
а = т- 5 °= —7" •
А^п/п Мп/п
165
ГЛАВА 4
Для камеры переменного объема при п = О уравнение (4.1) имеет
вид:
J- VnfnVPn -Р - J- Мсл/сл\/Р-Рсл + F— = 0 .
Можно показать, что давление жидкости в проточной камере для
этого случая определяется из соотношений:
Р = \
(В2-у/В*-4А2С2 d* п
—^Л при -г > о ;
2А2 dt ~
В2 + yjB\ - 4А2С2 dx
2А2 ПРИ А*0'
где
А2 = а\ + 1;
В2 = 2
(а? + 1)(Рп+а?Рсл) + (а?-1)6?(^)
С2 = (рп - а\рсл) + 4а?рпрсл + Ь\ ( — 1 Ь? ( — 1 - 2 (р„ - а?рсл)
Мел/ел
Мп/п
bi
finfn\/Vp
Для большего числа дросселей, когда необходимо использовать
приближенные методы решения уравнений, полученное выше правило
выбора уравнения (определение знака разности (р — рп)) позволяет
определить более узкий (по сравнению с интервалом (рСл,Рп))
интервал (р,рп), в котором находится решение р.
Ниже в качестве примера приведены линейные математические
модели с типичными нелинейностями (ограничениями диапазона
изменения параметров) гидромеханического регулятора частоты
вращения пк, реализующего программу управления пк = /(аруд,Тв*х). и
электронного ограничителя температуры газа Т* (программа
^т max = const), воздействующих на расход топлива GT через
исполнительный механизм регулятора параметра пк.
Все уравнения записаны в относительных отклонениях
параметров от их значений на установившемся режиме.
166
Математическое моделирование САУ ГТД
Математическая модель гидромеханического регулятора частоты
вращения пк (см. рис. 4.1) представляется обобщенным уравнением,
описывающим в линейном приближении измеритель частоты
вращения, статическую приставку, обеспечивающую введение сигнала
управления по производной, и астатический исполнительный
механизм, связанный с дозирующим краном:
S(T»S + 1)AGT = knK(TpS + 1)(Дпк - Дпк.зад); ]
\Апк - Дпк.зад| < ДГСк max , J
где 5 — оператор преобразования Лапласа; Дпк тах — диапазон
пропорциональности характеристики измерителя; Дпкзад — уставка
регулятора; к — коэффициент усиления; Т — постоянная времени.
Второе из уравнений (4.2) учитывает ограничение диапазона
пропорционального измерения частоты вращения пК в системе.
Ограничение скорости изменения расхода топлива (скорости
дозатора):
(dOA (dOA (dGT\
\ dt )min-\ dt )-\dt J,
Формирование уставки регулятора осуществляется в
соответствии с уравнением:
£±ПК max =
А;аДаруд + А;т1ДТвх
.изм *
Измеритель температуры Тв*х:
(Tls + i)ArBX.U3U = AT;x.
Электронный регулятор температуры газа Т*:
- измеритель температуры Т* (термопара)
т »
(ТИТ5 + 1)ДТТ.ИЗМ = ДТ:
д!7т = дт;.ИзМ-дт;зад;
ДГт.зад = ^тгДТ'вх.изм '
— устройство для компенсации инерционности измерителя
температуры т;
(Тф.ку5 + 1)Д£7У = KKy(TKyS + 1)Д£7Т.
167
ГЛАВА 4
Гидромеханическая часть регулятора температуры описывается
уравнениями (4.2), в которых вместо Апк — Дпк.зад необходимо
подставить координату Д£/у, а коэффициент кПк заменить
коэффициентом усиления регулятора температуры fcT2-
Расчеты с помощью таких моделей проводятся с использованием
линейных моделей двигателя.
4.3 Особенности моделирования электронных
цифровых САУ
Создание и широкое внедрение электронных цифровых систем
управления авиационными ГТД потребовало разработки специальных
средств математического моделирования их работы с учетом действия
на них электромагнитных и других помех, нестабильности бортового
электропитания, возникновения отказов и других возмущений.
Математическая модель цифровой САУ, обобщенная структурная
схема которой показана на рис. 4.3, содержит модели
информационно-измерительных каналов (датчиков, аналого-цифровых
преобразователей и шумов), исполнительных устройств (цифроаналоговых
преобразователей, исполнительных механизмов и помех), счетно-ре-
Шумы
в информационных
каналах
1БЦУМ
Входные
преобразовательные
устройства (АЦП)
I
Датчики
Сбои
в информационно-
вычислительном процессе
Счетно-решающее
устройство
ДВИГАТЕЛЬ
Помехи в каналах
управления
Выходные
преобразовательные
устройства (ЦАП)
Исполнительные
устройства
Рис. 4.3 Обобщенная структурная схема математической модели
цифровой САУ
168
Математическое моделирование САУ ГТД
шающей части БЦУМ, а также модель сбоев в
информационно-вычислительном процессе.
В моделях информационно-измерительных каналов учитываются
динамические характеристики датчиков, квантование сигналов
измерения по уровню, дискретность по времени и эффекты, связанные с
процессом аналого-цифрового преобразования.
Динамическая и статическая характеристики датчиков задаются
уравнениями:
та^ + Хл = Х; V = f(Xa)+Z,
где X — входная величина; Хл — измеряемая величина; V —
измеренная величина; тд — постоянная времени, характеризующая
динамические свойства датчика; f(Xn) — статическая характеристика
датчика; £ — погрешность.
Модель информационного канала содержит также модель помех.
Фоновая составляющая случайных помех в каналах, вызываемая
погрешностями измерений, преобразований и наводками имитируется
дискретным гауссовским шумом во входных цепях цифровой части
БЦУМ и формирователем для каждого канала [15].
Математическая модель аналого-цифрового преобразователя
(АЦП), осуществляющего преобразование непрерывных сигналов в
цифровые, имеет вид:
V»=qE(^-+0,5sign(V")\ ,
где V£ — цифровое значение преобразованной переменной; VH —
измеренное значение непрерывной переменной; q — погрешность
квантования по уровню; Е — операция взятия целой части числа,
заключенного в скобки.
С учетом шума входной сигнал Vй определяется уравнением:
V* = V* + 8СК0ПШ ,
где 5ско — среднее квадратическое отклонение переменной величины;
пш — случайная величина с нормальным распределением, нулевым
математическим ожиданием и дисперсией, равной 1.
169
ГЛАВА 4
В моделях цифроаналоговых преобразователей принято, что
преобразователь обеспечивает поддержание выходного сигнала на
постоянном уровне в течение такта решения в БЦУМ и формирует
управляющий электрический сигнал (например, для сигнала ШИМ).
Учитывается также, что процесс преобразования сопровождается
квантованием сигнала по уровню в соответствии с разрядностью
преобразователя и временным запаздыванием [13].
Помехи, вызванные собственными шумами и наводками от
внешних электромагнитных воздействий, добавляются к сигналу на выходе
преобразователя. Математическая модель цифроаналогового
преобразователя реализуется следующим образом:
UB = qE(— + 0,5sign(Un)\ ;
Uy = KyUBe~TS + z0 + sn ,
где UB — промежуточная величина; Uy — выходной сигнал
цифроаналогового сигнала; Un — цифровой сигнал; Ку — коэффициент
усиления; г — время запаздывания; 5 — оператор Лапласа; zq — смещение
нуля; 5П — шум выходного сигнала.
В модели преобразователя цифрового кода в управляющий сигнал
имеется возможность изменения коэффициента усиления и величины
смещения его нуля.
В моделях исполнительных механизмов учитываются их
динамические характеристики и ограничение по быстродействию.
Математическая модель счетно-решающей части БЦУМ строится
в виде разностных уравнений, которые позволяют учитывать такт
решения в БЦУМ и моделировать ячейки оперативной памяти.
Например, математическая модель счетно-решающей части БЦУМ для
управления по частоте вращения ротора высокого давления может
содержать следующие разностные уравнения:
- уравнения формирования и ограничения рассогласования
параметра регулирования:
Ve[k ■ Го] = K(Vnp[k • Го] - V„[k • Го]);
min
<v£[k-T0}<ve
max i
где Ve — величина рассогласования параметра регулирования:
Ктр — заданное значение; Уиз — измеренное значение этого па-
170
Математическое моделирование САУ ГТД
раметра; Ve mm — нижняя допустимая граница изменения Ve;
Ve max — верхняя допустимая граница изменения Ve\ К —
постоянный коэффициент; к = О,1,2...; То — такт решения в БЦУМ;
— уравнения фильтрации, формирования дифференциальной и
пропорциональной составляющих регулирования:
Vi[k ■ Т0] = (VI[(Л - 1) • Го] - Ve[(k - 1) • T0])d + Ve[(k - 1) • Г0];
Vc[k ■ Го] = Vi[k ■ Го] + ^-(Ve[k • Го] - V[k • Го]),
J ф
где Vc — дифференциальная и пропорциональная составляющие
регулирования; V\ — промежуточная переменная величина;
Kd — коэффициент усиления по производной; d = ехр(—7о/7ф);
Тф — постоянная времени фильтра;
— уравнения формирования и ограничения интегральной
составляющей регулирования:
Уяи[к • Го] = Уян[(к - 1) • Го] + KKHVc[k ■ Го]Г0 ;
^ин min S Уин|д J-0\ S ^ин max ч
где VKH — интегральная составляющая регулирования; VKH тш и
V^h max — нижняя и верхняя границы изменения интегральной
составляющей регулирования; Кин — коэффициент усиления
интегральной составляющей регулирования;
— уравнения формирования и ограничения управляющего сигнала:
Vynp[k • То] = VHH[k • То] + Vc[k • Го];
Уупр min S Уупр[^ ' -*0j S Уупр max 1
где V^np — сигнал управления для исполнительного механизма;
V'ynp min и Vynp max — нижняя и верхняя границы изменения
управляющего сигнала.
Для модели имитации сбоев в информационно-вычислительном
процессе предусмотрена возможность изменения коэффициентов
разностных уравнений и содержимого ячеек памяти, например ячейки
памяти интегральной составляющей регулирования VKH [(k — 1) • То].
Рассмотренная модель цифровой САУ может работать вместе с
математическими моделями ГТД разного уровня сложности.
171
ГЛАВА 4
л в.об/мин
Рк, кг/сц2
104
900
800
700-
600
Гтиэм
К
-у^ф/^ЛЬ/^Ч*^
4><W^
tn \
г ■ ■■■- 1
■ i
■| У ' "' ч > ■
Ш.с
я к, об/мин
12 000
11000
10 0004
J>T. кг/сц2
Рис. 4.4 Пример моделирования цифровой САУ
Ее использование позволяет выбирать параметры цифровых
алгоритмов управления и фильтрации, алгоритмов восстановления
информации по косвенным параметрам, алгоритмов оценки по
критериям правдоподобия и других алгоритмов защиты системы,
исследовать работу цифровой системы управления при различных
уровнях и времени действия помех в информационно-измерительных
каналах.
В качестве примера на рис. 4.4 показаны результаты
моделирования процесса приемистости двигателя с цифровой системой
управления, модель которой построена в соответствии с изложенными
принципами. В модели имитируются шумы в измерительных каналах. На
8-й секунде процесса в системе вводится сбой в ячейку памяти
цифрового интегратора, который приводит к изменению основных
параметров рабочего процесса в двигателе.
Пакет программ, реализующий математическую модель
электронной цифровой САУ, строится по модульному принципу. Модули для
каждого из элементов САУ имеют интерфейс в виде графических окон,
позволяющий в интерактивном режиме изменять их параметры.
172
Математическое моделирование САУ ГТД
4.4 Математическое моделирование сверхзвуковых
воздухозаборников
Математические модели СВЗ используются для выбора
характеристик САУ СВЗ, исследования их взаимодействия с ГТД, а также
выбора характеристик САУ СУ. Для решения этих вопросов
математическая модель СВЗ как объекта управления должна позволять
рассчитывать на установившихся и переходных режимах работы полное
давление перед двигателем р*х и давления внутри и вне тракта СВЗ
Pi, используемые в замкнутых системах регулирования СВЗ, в
зависимости от условий полета (i/, M, а, /?), положения регулирующих
органов (0, FCTB) и расхода воздуха GB.np через ГТД.
Анализ динамических характеристик САУ ГТД и СВЗ, а также
скоростей действующих на него возмущений, показал, что
математическая модель СВЗ для решения задач управления должна
воспроизводить его динамические свойства в полосе частот до 5.. .10 Гц.
Простейшая математическая модель СВЗ внешнего сжатия
обычно разрабатывается при следующих допущениях:
— течение внутри канала одномерное;
— дозвуковая часть канала рассматривается как ряд
последовательных объемов со средним давлением, равным давлению на
их выходе;
— время распространения возмущения по потоку т+ = L/(acp(l +
+ Мср)), против потока т_ = L/(acp(l — Мср)), где L —
расстояние от точки приложения возмущения до точки измерения; аср и
Мср — средние значения скорости звука и числа Маха в потоке;
— зона взаимодействия замыкающего скачка с пограничным слоем
равна высоте горла, а давление в этой зоне изменяется по
линейному закону;
— скорость изменения статической температуры внутри канала
пренебрежимо мала.
Среднее давление в канале между плоскостью горла и входом в
компрессор ГТД отличается от давления на входе в компрессор на
5%.. .7%.
Полученное в этих предложениях уравнение для давления на входе
в двигатель для СВЗ внешнего сжатия имеет вид:
173
ГЛАВА 4
dpB = Утт(Хк) dpB =
Тв dt " 0,04RVT^FnpT(\K) dt
= gt (pi, т;х, m, a, /?, 0КЛ) - gk (p:x, r;x, FflP),
где Fnp = FKq(XK) + FCTB.
Для учета времени распространения возмущений в канале от
точки приложения до точки наблюдения используется уравнение
Pi = Pi(t - п),
где Ti = Li/(acp(l — Mcp)); Li — расстояние от точки приложения
возмущения до точки наблюдения. Инерционность процессов в СВЗ
характеризуется переходным и транспортным запаздываниями
величиной 0,03. ..0,1 с.
Более точное описание динамических свойств СВЗ в
сосредоточенных параметрах дает учет перемещения замыкающего прямого
скачка уплотнения в канале [11]. Расчетная схема СВЗ показана на
рис. 4.5. Здесь и в приведенных ниже уравнениях приняты следующие
обозначения. Индексами а и Ь отмечены значения параметров потока
непосредственно перед замыкающим скачком и за ним в системе
координат, связанной со стенкой канала. Индексами Ха и Хь обозначены
параметры перед и за скачком в координатах, связанных со скачком.
Положение скачка X измеряется от кромки обечайки, т. е. с
приближением скачка к компрессору величина X возрастает. Накопление
массы воздуха на нестационарных режимах рассматривается в
объеме V, ограниченном с одной стороны фронтом I прямого скачка, с
другой — сечением II перед створкой.
Скорость перемещения прямого скачка в канале под действием
возмущений со стороны набегающего потока и двигателя
определяется системой уравнений:
Рис. 4.5 Расчетная схема СВЗ
174
Математическое моделирование САУ ГТД
— = (Мб-Мхь)а6;
at
1 dx (к- l)Mi - 2
аа Л ' ь у 2кМ2Ха - {к - 1) '
кят: / кят:
аа — \/ , , „, , ч ,п\-1,о > аЬ =
1 + ((/с-1)/2)МГ у 1 + ((fe - l)/2)Mg *
Из этих уравнений следует, что при прочих равных условиях
скорость перемещения скачка dX/dt явялется функцией чисел Ма и М&
перед скачком и за ним.
Число Ма определяется из соотношения:
д(Аа) = ^§^(Ак)-Ддш(Х),
где анс — коэффициент восстановления полного давления на участке
до прямого скачка; F\ — площадь сечения, в котором расположен
скачок, зависящая от X и 0; </?н = </>h(#, Мн,с*,/?); Aqm(X) — член,
учитывающий изменение расхода воздуха через тракт слива
пограничного слоя (щель) из области горла СВЗ.
Число Мь за скачком определяется из условий протекания
процессов в дозвуковой части ВЗ по следующей схеме. Процесс накопления
массы в объеме между сечениями I и II с осредненными параметрами
р*р, Гс*р, рср, Мср описывается уравнением:
d(Vpcp) _
GXa(t)-Gii(t-T*)-Gm(X).
dt
Параметры р*р, Т*р, рср и Мср связаны следующим соотношением:
Рср RTcp~ RTc*p\l+ 2 Мср
i/(i-fc)
где
лт ,/*, ъл\ Mb(t) + Mu(t-T2)
Мср = / (Мь, Мк) и ^ - .
Объем V зависит от положения скачка X и геометрии канала
(величины в):
V = V(X,0).
175
ГЛАВА 4
Передаточное запаздывание т^ введено для того, чтобы учесть
конечную скорость распространения возмущений от сечения II вверх по
потоку. Для упрощения примем, что Тс*р = Т* и р*р = р£. Полное
давление за движущимся скачком р£ связано с давлением перед ним
р* зависимостью:
(fc + l)M^ 2 + (fc-l)M*
2 +(к- 1Щ2Х 2 +{к- 1)Ы?Х
2 + (к-1)М2ь
2 + (к-1)МХь_
Г к + 1
[2кМХа -(к-
1
Ш
к/(к-1)
1/(к-1)
Расход воздуха, втекающий в движущийся скачок:
где Ga = 0№p»FBX<pHq(\H)<THC/y/T*.
Число Ми зависит от пропускной способности компрессора и
перепускных створок и может быть определено из соотношения:
Суммарный расход воздуха через компрессор, створки перепуска
и щель слива (Сщ):
Gu « 0,04-
+ Gm(X); рШ = Pl(t ~ тг)<тд
Здесь сгдз — коэффициент восстановления полного давления в
дозвуковой части канала; т\ — передаточное запаздывание распространения
возмущений от сечения I к сечению П.
Положение прямого скачка уплотнения X в канале, которое
является одним из выходных параметров в этой математической модели,
позволяет судить о нарушении согласования характеристик ВЗ и ГТД
на неустановившихся режимах работы и, в частности, о запасах ГД^
ВЗ и двигателя, а также определить давление на стенке канала.
На начальных этапах проектирования системы управления, когда
еще не выбраны регулируемые параметры, положение замыкающего
скачка можно использовать в качестве входного параметра системы
управления для предварительной оценки динамики управления.
176
Глава 5
Экспериментальные исследования и испытания
5.1 Экспериментальные исследования систем управления
на безмоторных стендах
Экспериментальное исследование агрегатов САУ и систем в
целом является одним из важнейших этапов их разработки,
подтверждающим правильность выбранных конструктивных решений для
получения требуемых характеристик систем в ожидаемых условиях
эксплуатации. Такие исследования обычно проводятся на специальных
стендах, в составе двигателя и на Л А [37, 38].
Основной объем экспериментальных исследований выполняется до
установки системы на двигатель на проливочных, климатических,
электромагнитных, вибрационных и других стендах, позволяющих
подтвердить работоспособность системы и провести ее
сертификацию. Эти испытания сокращают объем и сроки дорогостоящих
испытаний на двигателе и Л А.
На двигателе проводятся отдельные виды сертификационных
испытаний САУ или сертифицируется система в целом, уточняется
настройка агрегатов для получения требуемых характеристик,
проверяется работоспособность в условиях реального нагрева агрегатов, а
также акустических воздействий, вибрационных нагружений и др.
На ЛА исследуется взаимодействие агрегатов САУ с самолетными
системами и проводятся специальные исследования, например,
проверка электромагнитной совместимости агрегатов систем, испытания
с имитацией отказных ситуаций типа отключения бакового насоса
и др.
177
ГЛАВА 5
Одной из основных задач при испытаниях на стендах является
максимально точное воспроизведение условий эксплуатации по
температуре, давлению и расходу рабочей среды, внешним условиям
(температуре, давлению, влажности) и внешних вибрационных и
электромагнитных возмущающих воздействий. Наибольшая достоверность
достигается при комплексном воздействии перечисленных факторов.
Важное место при отработке САУ занимают испытания на
подтверждение заданных показателей надежности и ресурса.
Назначенный ресурс агрегатов исчисляется десятками тысяч часов, и для его
подтверждения до начала эксплуатации используют методы
ускоренных испытаний. Ускорение достигается за счет того, что при
испытаниях изменение параметров агрегатов (частот вращения, расходов,
давлений, температуры топлива и др.) осуществляется циклически от
минимальных до максимально возможных значений при повышенных
частоте циклов и уровне нагрузки. Скорости изменения параметров
выбираются несколько большими, чем те, которые реализуются при
работе на двигателе. Для определения коэффициентов ускорения
проводятся контрольные испытания со специальным
освидетельствованием узлов и деталей в процессе наработки и в конце испытаний. Для
гидромеханических агрегатов достигнутые коэффициенты ускорения
составляют до 5.. .10.
При проведении стендовых испытаний решаются следующие
основные задачи:
— проверка и получение характеристик САУ в соответствии с
техническим заданием;
— проверка работоспособности и живучести в специальных и
экстремальных условиях работы (при имитации возможных
отказов и аварийных ситуаций, в том числе при воздействиях,
превосходящих по параметрам условия эксплуатации);
— проверка работоспособности и надежности при неблагоприятном
сочетании конструктивных допусков и условий эксплуатации;
— настройка агрегатов для проведения дальнейших работ на
двигателе;
— подтверждение надежности и ресурса;
— сертификация систем и агрегатов.
В соответствии с этими задачами стенды по назначению условно
можно разделить на исследовательские (доводочные) и контрольно-
178
Экспериментальные исследования и испытания
сдаточные. Контрольно-сдаточные стенды предназначены для
контроля качества при серийном изготовлении агрегатов и проведения
их настройки на соответствие заявленным параметрам и
характеристикам. Стенды для исследований в свою очередь разделяются на
стенды для автономных исследований агрегатов САУ, в том числе
стенды с комплексным воздействием возмущающих факторов, и
многофункциональные стенды с обратной связью для испытаний систем
управления в замкнутой схеме.
Стенды для автономных исследований агрегатов САУ
предназначены для проведения работ, связанных с проверкой параметров
(характеристик) и подтверждения надежности отдельных узлов и
агрегатов на установившихся и переходных режимах их работы в
разомкнутой схеме. По видам испытаний стенды можно условно
разделить на следующие:
— проливочные — для испытания гидравлических агрегатов
(насосов, дозаторов);
- климатические и «высотные» — для испытания агрегатов в
условиях положительных и отрицательных температур
внешней среды, повышенной влажности, «морского» тумана,
пониженного давления (высотные условия);
— вибрационные — для испытания агрегатов в процессе
функционирования при воздействии вибраций;
- комплексного воздействия — для проверки надежности
агрегатов и систем в целом при одновременном воздействии
температуры, давления, вибраций.
Стенды для автономных исследований позволяют проводить
испытания как в рабочем диапазоне изменения параметров
(электрических, гидравлических и др.), так и при значениях параметров,
превышающих этот диапазон. Они содержат регулируемый по частоте
вращения электропривод, топливную и масляную системы, а также
ряд технологических систем, обеспечивающих работу стенда
(вентиляционную, водоснабжения, пожаротушения).
Укрупненная схема типового стенда для испытаний агрегатов
систем топливопитания ГТД и его основных устройств приведена на
рис. 5.1. Один из возможных вариантов характеристик такого стенда:
179
ГЛАВА 5
11 12
Рис. 5.1 Стенд для испытаний агрегатов СТП ГТД: 1 — топливная
система; 2 — топливный бак; 3 — датчик расхода; 4 — подкачивающий
топливный насос; 5 — теплообменник; 6 — кран с дистанционным управлением
слива/заправки топлива; 7 — ручной кран; 8 — фильтр; 9 — испытуемый
агрегат; 10 — вибростенд; 11 — коробка приводов; 12 — электропривод;
13 — трубопровод с водой; 14 — масляная система; 15 — масляный бак;
16 — маслонасос; 17 — подвод масла
Диапазон изменения расхода топлива, тыс. л/ч 50
Давление топлива на выходе из подкачивающих
насосов, МПа 0,15.. .0,45
Температура топлива, °С 10.. .100
Производительность откачивающей топливной
системы, тыс. л/ч, не более 100
Давление на выходе масляного насоса, МПа 0,7
Подача масла, л/ч, менее 2000
Топливная и масляная системы оборудованы теплообменниками 5
для охлаждения водой топлива и масла на сливе в расходные баки при
длительных испытаниях.
Форсунки камеры сгорания имитируются установкой на выходе
системы топливопитания эквивалентных дросселей.
180
Экспериментальные исследования и испытания
При испытаниях определяются характеристики топливной
системы и подтверждается работоспособность ее агрегатов в течение
заданного времени, в том числе при отсутствии очистки топлива в
топливном фильтре. Для этого в топливо добавляется определенное
количество загрязняющих веществ. Проверяется также
работоспособность агрегатов на топливе, насыщенном водой, во всем рабочем
диапазоне расходов и давлений.
Для проверки возможности кавитационной эрозии деталей при
испытаниях должны быть воспроизведены условия, способствующие ее
возникновению, в частности производится насыщение топлива
воздухом в соответствии с ожидаемыми условиями эксплуатации.
Определение кавитационных характеристик агрегатов должно проводиться
на «свежем» топливе, подаваемом из отдельного бака, чтобы
газонасыщенность топлива не уменьшалась в процессе испытаний.
Весьма эффективными для выявления дефектов являются
вибрационные испытания функционирующих агрегатов САУ (испытания
на виброустойчивость). Воздействие синусоидальных вибраций
выявляет до 30% дефектов, а случайных вибраций за небольшое
время — более 80% дефектов. При испытании с воздействием
вибраций по одной оси выявляется примерно 60%.. .70% дефектов, по двум
осям — 70%.. .90%, а по трем — до 95%.
Полунатурные стенды с обратной связью позволяют проводить
исследования характеристик САУ и отдельных ее агрегатов при
работе в замкнутой схеме. Это обеспечивается сопряжением
аппаратуры САУ с математической моделью ГТД, работающей в реальном
времени. Схема такого стенда и его основные системы показаны на
рис. 5.2.
Основой стенда являются регулируемый по частоте вращения
электропривод постоянного тока для насосов, регуляторов, датчиков
и других приводных устройств и вычислительный комплекс с
математической моделью двигателя, позволяющей воспроизводить его
характеристики по всем регулируемым параметрам и управляющим
органам. Работа стенда обеспечивается рядом технологических систем:
топливной, воздушной (для высокого давления и вакуумной),
масляной, водоснабжения, вентиляции, пожаротушения.
Сигналы, характеризующие изменение измеряемых в САУ
параметров для регулирования и контроля, поступают из модели двига-
181
00
to
Пульт управления
Блок управления
электроприводами
Преобразователи-имитаторы
датчиков
Электроприводы
Вычислительный
комплекс
Модель ГТД
реального времени
Программа
обеспечения
динамики стенда
САУ
Электронная часть
Гидромеханическая часть Fn
Насос ФКС
Насос ОКС
Насос сопла
Источники | I
питания
Баковый насос
Топливный бак
<Я,С?Т
О
О
<
ас
9-
Г1
>
03
>
Преобразователи для
регулирующих факторов
ФНА
Привод НА
Привод Fc
Силовая загрузка
Силовая загрузка
Гидросистема
загрузки
Вибростенд
Термобарокамера
5| Автоматизированная
система сбора
и обработки
информации
□
Рис. 5.2 Схема полу натурного стенда с обратной связью
Экспериментальные исследования и испытания
теля на преобразователи-имитаторы датчиков, на выходе которых
характеристики сигналов соответствуют получаемым с датчиков САУ.
Эти сигналы подаются на входы агрегатов системы управления
(электронных, гидромеханических, пневматических) и на блок управления
электроприводами, служащими для имитации вращения валов
двигателя. От вала одного из электродвигателей вращение передается в
двигательную коробку приводов, а через нее — на приводные
агрегаты САУ и топливной системы, установленные на стенде.
Регуляторы двигателя на стенде, как и при работе на двигателе,
взаимодействуют со всеми устройствами, входящими в САУ
(преобразователями, насосами, приводами органов механизации
проточной части двигателя), формируя управляющие воздействия на
двигатель (GT, Ст.ф, v?Ha5 Fc и ДР-)- Для ввода в математическую модель
двигателя сигналов, характеризующих эти воздействия, на стенде
имеются преобразователи, осуществляющие необходимое
преобразование и нормирование регулирующих факторов.
Нагрузки на регулирующие органы двигателя имитируются с
помощью системы силовой загрузки. Компенсацию динамических
погрешностей стендовых преобразователей осуществляет заложенная
в компьютер стенда программа обеспечения динамики стенда.
В комплекс стендового оборудования входят устройства для задания
внешних воздействий на аппаратуру САУ (вибростенд,
термобарокамера). Анализ результатов испытаний, в том числе экспресс-анализ,
обеспечивает автоматизированная система сбора и обработки
информации.
Мощность силовых электроприводов стенда составляет
20.. .600 кВт, точность поддержания частоты вращения на
установившихся режимах 0,1%.. .0,2%, диапазон устойчивого поддержания
частоты вращения 10%. ..110%, время изменения частоты вращения
от 5% до 100% — 0,5.. .0,8 с. Физическая частота вращения выходных
валов приводов соответствует частоте вращения роторов двигателя,
система управления которого испытывается на стенде.
В гидросистеме загрузки силовых органов управления
используются плунжерные насосы регулируемой производительности (по
числу загружаемых приводов), которые могут работать каждый
отдельно и параллельно на одного потребителя. Рабочая жидкость в этой
системе — самолетная гидросмесь с давлением ртах = 21 МПа и
объемным расходом жидкости Q = 1... 8 л/с.
183
ГЛАВА 5
Необходимая точность воспроизведения характеристик двигателя
с помощью стендовой математической модели составляет 1%.. .3% на
установившихся режимах работы и 5%.. .7% — на переходных.
На стенде агрегаты САУ могут устанавливаться в двух
вариантах: путем полного воспроизведения компоновки агрегатов на
двигателе (для этого может использоваться двигатель-имитатор, привод
валов которого осуществляется через редуктор от электроприводов
стенда) или на отдельно установленной штатной коробке приводов.
Подобные стенды позволяют определять характеристики систем и
агрегатов на установившихся и переходных режимах работы в
замкнутой и разомкнутой схемах, проводить анализ располагаемых
запасов устойчивости регулирования, выполнять отработку
взаимодействия отдельных контуров и агрегатов, исследовать влияние
возмущений и внешних факторов, работоспособность САУ при отказах.
5.2 Испытания САУ на двигательных стендах
Стендовые испытания САУ на двигателе проводятся как в
исследовательских целях, так и в процессе разработки, доводки и
предъявления двигателя заказчику.
Исследовательские испытания проводят для экспериментальной
проверки в реальных условиях эксплуатации новых методов
управления и аппаратурных решений и, в отличие от испытаний систем,
разработанных для конкретных двигателей, могут проводиться на
специально подготовленном двигателе-демонстраторе, а не на двигателе,
для которого предназначена система.
Экспериментальные исследования САУ ГТД в замкнутой схеме
чаще проводят не на двигателях, а на полунатурных безмоторных
стендах с обратной связью, на которых реальная аппаратура САУ
работает с математической моделью двигателя. Это связано с тем, что
испытания системы управления на двигателе дорогостоящи и обычно
сводятся к проверке ее работоспособности в штатном исполнении или
близком к нему. При этом возможности для исследовательских
испытаний бывают весьма ограниченны.
Вместе с тем, испытания САУ на двигателе дают возможность
повысить достоверность исследований, так как точность
результатов испытаний на полунатурных стендах с обратной связью невы-
184
Экспериментальные исследования и испытания
сока вследствие действия ряда трудно устранимых факторов. К ним,
например, относится влияние характеристик стендовых систем
(топливной, пневматической, электрической, систем загрузки).
Обеспечить их взаимодействие таким же, как это происходит на двигателе,
весьма сложно при моделировании изменения условий эксплуатации и
режима работы двигателя.
Заметные статические и динамические погрешности вносят
управляемые приводы, имитирующие двигатель, преобразователи
электрических сигналов в физические величины параметров рабочего
процесса в двигателе (частоты вращения, давления и температуры
воздуха и газа), формируемых в его математической модели. Точная
их компенсация практически невозможна.
Не могут быть воспроизведены особенности измерения
параметров регулирования, связанные, например, с влиянием неравномерно-
стей, пульсаций.
Модель двигателя, используемая на полунатурном стенде, также
не в вполне адекватно отражает его характеристики.
Проведение исследовательских работ в области автоматического
управления на двигателе становится более эффективным при
использовании специального двигательного стенда, обладающего
возможностями для гибкого изменения состава подключаемой к двигателю
аппаратуры САУ, имеющего постоянно действующий расширенный
комплект датчиков и возможность нестандартного препарирования
двигателя, информационно-измерительную систему, позволяющую
проводить специфические измерения для нестационарных задач
управления, специальную систему с моделью двигателя,
позволяющую производить проверку и отладку аппаратуры до начала
испытаний на двигателе, комплекс систем защиты двигателя и т. д.
Важно иметь на таком стенде возможность оперативного
изменения состава подключаемой к двигателю аппаратуры САУ и
комплекта датчиков. При этом стендовые системы управления
испытаниями должны позволять проводить реконфигурацию состава САУ
в процессе ее испытаний без останова двигателя. Для обеспечения
безопасности испытаний во время реконфигурации двигатель может
переводиться на работу с его штатной САУ. Структурная схема
системы управления испытаниями показана на рис. 5.3.
Блок переключения систем управления двигателем коммутирует
прохождение команд управления на исполнительные механизмы от
185
ГЛАВА 5
Датчики
опытной САУ
Опытная
САУ
гтд
♦
Исполнительные
механизмы САУ
♦
Блок
j переключения [
| систем |
П
Датчики
штатной системы
J Штатная
1 САУ I
Управляющий
компьютер
стенда и ИИС
Системы
аварийной
защиты
Датчики
стендовые
Рис. 5.3 Структурная схема системы управления испытаниями
штатной или опытной САУ. При переключении систем управления
на работающем двигателе важно, при необходимости, без заметного
изменения расхода осуществить перевод подачи топлива в камеру
сгорания от штатного насоса к насосу высокого давления (НВД) опытной
САУ. Для безопасной работы на стенде полезно иметь возможность
запуска двигателя при работе штатной САУ, а затем переходить на
работу от опытной системы управления.
В методике проведения экспериментальных исследований на
двигателе-демонстраторе целесообразно предусмотреть два этапа:
подготовительный (технологический) (рис. 5.4, а) и основной этап работы
с опытной САУ (рис. 5.4, б).
Основная задача подготовительного этапа — проверка перед
испытаниями на двигателе работоспособности всех опытных агрегатов.
Такая проверка производится путем перевода электронного цифрового
регулятора опытной САУ в режим работы с математической
моделью двигателя. Моделируемый режим работы двигателя может
изменяться путем подачи сигнала управления от РУД на вход регулятора
опытной САУ. Сигнал о фактическом расходе топлива поступает в
математическую модель двигателя. При этом насос высокого давления
НВД работает на эквивалент форсунок. Путем имитации изменения
режима работы двигателя проверяется управление перемещением на-
186
Экспериментальные исследования и испытания
РУД
Математическая
модель
ГТД
КПВ_
ФнАзад
Из бака
Привод НВД
НВД
В бак
I
Блок
переключения
Оператор-
Штатная
САУ
■П
Опытная
САУ
Штатная
САУ
Блок
переключения
(а)
Электронный
" ~ —\ регулятор
опытной САУ
1/V Tvnvn*
f КПВ
±±
ГТД
Из бака
Привод НВД
НВД
Штатная
САУ
Блок
переключения
Z~J
В бак
(б)
ГТД
Рис. 5.4 Схема испытаний опытной САУ на двигателе: (а)
подготовительный этап; (б) работа с опытной САУ
правляющих аппаратов и срабатывание клапанов перепуска воздуха.
Тумблер Тп служит для передачи управления двигателем от одной
САУ к другой.
Целью стендовых испытаний САУ при доводке или предъявлении
двигателя заказнику являются проверка и подтверждение ее
работоспособности, функциональных характеристик и управляемости
двигателя в требуемом диапазоне условий эксплуатации и режимов
работы двигателя. Испытания проводятся на наземных, высотных и
климатических стендах.
Испытаниям подвергаются системы автоматического управления,
изготовленные согласно основной конструкторской и технологической
документации. Как правило, испытания САУ совмещаются с
испытаниями двигателя для определения его основных характеристик и не
предполагают специальных работ по системе управления.
187
ГЛАВА 5
Система автоматического управления считается работоспособной,
если выполняет заданные в ТЗ функции с требуемыми показателями
(по точности, длительности переходных режимов, диапазону
изменения параметров и др.) на всех режимах работы двигателя во всех
условиях эксплуатации.
Под управляемостью понимается обеспечиваемая системой
управления способность двигателя сохранять и изменять режим работы,
задаваемый с помощью РУД или при подаче внешнего сигнала в
заданных условиях эксплуатации при требуемых характеристиках
двигателя на установившихся и переходных режимах его работы.
При установке электронных устройств вне двигателя оценка их
работоспособности в условиях высотного стенда не производится.
При испытаниях на высотном стенде работоспособность САУ и
управляемость двигателя определяются в эксплуатационном
диапазоне изменения высоты и скорости полета на установившихся
режимах работы двигателя от режима МГ до максимального (взлетного)
или чрезвычайного режима, и от режима минимального до режима
полного форсирования (для двигателя с ФКС), на режимах
авторотации, а также на переходных режимах при запуске, приемистости,
дросселировании, включении и выключении ФКС, срабатывании
системы помпажной защиты, реверсивного устройства и других
элементов, входящих в состав двигателя.
Достоверная проверка работы двигателя и его САУ на
переходных режимах возможна только на высотных стендах, имеющих
специальные системы управления, позволяющие поддерживать на этих
режимах неизменными параметры потока воздуха на входе в
двигатель (р*х, Тв*х) и на его выходе.
Программа работ по проверке работоспособности САУ и
управляемости двигателя на высотных и климатических стендах согласуется
с программой испытаний двигателя на летательном аппарате.
В испытаниях оценивается качество выполнения САУ всех
функций, заданных в ТЗ:
- величина отклонений от заданных значений регулируемых
параметров на установившихся и переходных режимах работы;
- время переходных процессов;
- стабильность значений регулируемых параметров двигателя
при изменении условий эксплуатации.
188
Экспериментальные исследования и испытания
Оценка погрешностей регулирования производится в
соответствии с нормативными документами, ТЗ и руководством по
эксплуатации.
Двигатель и САУ перед началом испытаний должны быть
укомплектованы необходимыми системами, обеспечивающими измерение
контролируемых параметров. Для каждого двигателя перечень
контролируемых параметров САУ определяется в соответствии с
инструкцией по эксплуатации двигателя.
В процессе испытаний параметры, характеризующие работу САУ,
регистрируются:
— стендовой системой контроля, использующей основные и
дополнительные датчики в соответствии с инструкцией по
эксплуатации;
— встроенной системой контроля САУ;
— БСКД.
Метрологический класс измерительных систем, а также
регистрирующих приборов должен быть определен с учетом требований к
точности, сформулированных в нормативно-технической документации
на САУ.
Проверка выполнения функций САУ и точности ее работы в
полном объеме проводится во время испытаний двигателя на
предприятии-разработчике в условиях М = О, Н = 0. Во время испытаний
двигателя на высотных и климатических стендах, а также на ЛА
проводится выборочная проверка работы САУ на ряде режимов,
определяемых программой испытаний двигателя.
Для определения статической и динамической точности частота
опроса измеряемых величин для большинства параметров должна
быть не меньше 20 Гц, а при оценке эффективности работы
автоматических систем помпажной защиты параметры, характеризующие ее
работу (давление за компрессором, перепад на Т-образном насадке,
выходные команды системы защиты), должны регистрироваться с
частотой не ниже 15 кГц.
Оценка точности САУ на установившихся режимах проводится по
результатам измерений регулируемых параметров, полученных
после окончания переходных процессов через время, не меньшее
трехкратной длительности переходного процесса. При этом используются
189
ГЛАВА 5
результаты измерений регулируемых параметров в контрольных
точках, на которых оцениваются характеристики двигателя.
Для оценки качества переходных процессов на каждом
проверяемом режиме выполняется не менее трех переходных процессов с
выдержкой на исходном режиме в соответствии с руководством по
эксплуатации. Время окончания переходного процесса фиксируется по
моменту, когда регулируемая переменная находится в пределах
допуска.
При оценке отклонений регулируемых параметров двигателя от
заданных программой значений целесообразно использовать сигналы
ошибок регулирования в электронных регуляторах, обеспечив их
передачу и регистрацию в информационно-измерительном комплексе.
Система автоматического управления считается выдержавшей
испытания по оценке ее работоспособности и управляемости двигателя
в случае, когда отклонения регулируемых параметров на
установившихся режимах, а также параметры переходных процессов,
полученные в результате испытаний, не выходят за пределы допусков,
указанных в нормативно-технической документации (ТЗ на САУ и ТТЗ
на двигатель), и не появляются отказы, приводящие к потере ее
работоспособности .
5.3 Испытания электронных регуляторов САУ ГТД
Проверка и подтверждение заданных характеристик электронных
регуляторов САУ ГТД (функциональных, надежностных,
прочностных и др.) обеспечивается путем проведения комплекса испытаний
на автономных стендах, а также в составе САУ на полунатурных
стендах и на двигателе.
Стендовые испытания электронных регуляторов включают
помимо тех, которым подвергаются регуляторы всех типов
(климатические, механические, в замкнутом контуре), ряд специальных
испытаний по оценке влияния электрических воздействий.
Исследование электронных систем управления на полунатурном стенде
с обратной связью
До проведения механических и климатических испытаний на
полунатурном стенде в замкнутом контуре проводятся испытания элек-
190
Экспериментальные исследования и испытания
тронной части системы управления на функционирование в полном
объеме. Проверка программного обеспечения совместно с реальными
аппаратными средствами на правильность функционирования
выполняется при имитации помех, сбоев, отказов различного типа и
деградации параметров системы.
Испытания в замкнутом контуре позволяют выявить и устранить
многие дефекты системы на ранних стадиях проектирования до
выхода на дорогостоящие испытания на двигательных стендах и летные
испытания.
Полунатурный стенд для отработки электронных систем
управления в замкнутом контуре содержит имитаторы сигналов датчиков
и исполнительных устройств [39], персональную ЭВМ со
вспомогательными программными средствами, обеспечивающими работу
комплекса на различных режимах, и персональную ЭВМ, в которой
реализуется математическая модель двигателя и его гидромеханических
агрегатов, работающих в реальном масштабе времени. Исследуемая
электронная система подключается к имитаторам датчиков и
исполнительных устройств.
Имитаторы сигналов датчиков преобразуют цифровые входные
сигналы, поступающие от персональной ЭВМ с математической
моделью двигателя, в выходные сигналы, идентичные по электрическим
параметрам сигналам от реальных датчиков. Набор имитаторов
соответствует количеству и типам датчиков, установленных на
двигателе. Например, имитатор терморезистора формирует эквивалентное
сопротивление цепи (60.. .240 Ом) выходного сигнала при включении
в эту цепь управляемого источника тока с уровнем,
пропорциональным входному коду. Имитатор состоит из регистра, цифроаналого-
вого преобразователя, генератора тока, формирователя напряжения,
пропорционального силе тока, суммирующего усилителя и омического
делителя.
Имитаторы исполнительных устройств создают электрическую
нагрузку для выходных цепей системы, эквивалентную по
электрическим параметрам реальной нагрузке, и формируют цифровой
сигнал, пропорциональный управляющему сигналу, который поступает
на вход персональной ЭВМ с математической моделью двигателя.
Имитаторы каждого датчика и исполнительного механизма
выполняются в виде отдельных плат.
Программные средства стенда содержат:
191
ГЛАВА 5
— модели реального времени ГТД и его гидромеханических
агрегатов;
— программные модули, обеспечивающие работу устройств ввода-
вывода, преобразование и кодирование сигналов;
— модули связи с системным таймером для организации режима
реального времени;
— модули отображения информации в виде графиков и таблиц в
режиме реального времени;
— модули, обеспечивающие задание на выдачу и прием тестовых
сигналов в режиме пошагового выполнения программы;
— программы контроля устройств полу натурного стенда и др.
В ходе испытаний на полунатурных стендах исследуется
совместная работа аппаратных средств и программного обеспечения на
переходных и установившихся режимах работы. С целью обеспечения
устойчивости и требуемого качества регулирования во всем
диапазоне полетных условий уточняются основные настройки цифровых
регуляторов, отрабатываются алгоритмы работы системы встроенного
контроля и проверяется логика парирования отказов. Кроме того,
проводится интегральное тестирование аппаратных и программных
средств.
Исследование влияния электрических воздействий
На электронные регуляторы ГТД оказывают воздействие
имеющиеся на борту различные электронные устройства, разветвленные
линии связи, мощные источники электроэнергии, а также внешние
источники электромагнитных помех (радиолокационные станции,
высоковольтные линии электропередачи, разряды молнии и др.). В связи
с этим необходимо всесторонне исследовать помехозащищенность
систем в лабораторных условиях до испытаний на двигательных
стендах и летающих лабораториях.
Для этого системы подвергаются испытаниям на отдельные виды
воздействий: электромагнитную совместимость; вторичные
воздействия разрядов молнии; нестабильность бортовой электросети и т. д.
Критические ситуации в ходе полета могут возникать при
комплексном воздействии ряда факторов. Например, разряд молнии кроме
непосредственного воздействия на электронный блок и линии связи
192
Экспериментальные исследования и испытания
может приводить к существенным отклонениям в работе бортовой
сети и, тем самым, дополнительно влиять на работу электронного
регулятора.
При проведении таких испытаний электронных систем
управления двигателей эффективным является использование
автоматизированного комплекса, состоящего из имитаторов вторичного
воздействия разряда молнии, нестабильности работы бортовой электросети,
средств имитации помех и сбоев и аппаратно-программных средств,
позволяющих имитировать работу электронных систем управления в
замкнутом контуре.
Исследование электромагнитной совместимости электронных
систем управления двигателей. Испытания на электромагнитную
совместимость электронных систем управления включают
исследование электромагнитных помех, генерируемых самой системой, и
восприимчивости к электромагнитным помехам от других бортовых
систем. Требования по электромагнитной совместимости электронных
систем устанавливаются в зависимости от последствий, вызываемых
нарушениями в их функционировании.
При испытаниях электронных систем на генерацию
электромагнитных помех необходимо оценить уровни напряженности
электрического поля, создаваемого системой, в диапазоне частот
0,15.. .1215 МГц, а также электромагнитных помех в цепях питания
и соединительных кабелях систем в диапазоне частот 0,15.. .30 МГц.
Исследования напряженности электрического поля, создаваемого
системой, проводятся в экранированных помещениях, размеры
которых должны позволять устанавливать измерительные антенны на
расстоянии не менее 2 м от стен помещения и 1 м от исследуемой
аппаратуры. Исследуемую систему располагают на заземленном столе.
Для перекрытия всего диапазона частот используются штыревые, би-
конические, логарифмические и другие типы антенн, подключаемые
в ходе испытаний последовательно через экранированный кабель к
измерителю электромагнитных помех. Схема размещения оборудования
показана на рис. 5.5.
При испытаниях на восприимчивость электромагнитных помех
необходимо имитировать воздействие магнитного и электрического
полей. Магнитное поле создается на расстоянии 0,15 м от блока с
помощью переменного тока с эффективным значением в прово-
193
ГЛАВА 5
иш /
Рис. 5.5 Схема размещения измерительной антенны и исследуемой
системы: 1 — испытательный стол; 2 — испытуемая аппаратура; 3 — источник
питания; 4 — антенна; 5 — экранированный кабель; 6 — измеритель
де-индукторе 20 А на частоте 400 Гц. Кроме того, необходимо
имитировать магнитное поле в диапазоне звуковых частот вокруг
соединительных кабелей испытуемой аппаратуры. Воздействия
электрического поля на блоки, цепи питания и соединительные кабели
создаются в радиочастотном диапазоне электромагнитных помех:
для цепей питания 0,09.. .30 МГц, для блоков и соединительных
кабелей 0,15.. .1215 МГц.
Исследование влияния электромагнитных помех от разрядов
молнии. Молния, развиваясь вблизи Л А или при непосредственном
поражении его, создает наведенные напряжения в электрических
цепях внутри блоков аппаратуры и в линиях связи между ними.
Импульсы напряжения, наведенные в электрических цепях, имеют
сложную форму. Объясняется это тем, что возникающие при разрядах
молнии импульсы являются результатом наложения ряда процессов
взаимодействия электромагнитного поля с металлическими
элементами конструкции ЛА и электрическими цепями межблочных и внут-
риблочных соединений.
Бортовое электронное оборудование, на которое в условиях
эксплуатации возможно воздействие разрядов молнии, должно проходить
испытания в лабораторных условиях на стойкость к воздействиям
импульсов напряжений трех видов: «длинной», «короткой» и
«колебательной» волн. Каждая форма импульса определяется конкретными
физическими факторами, возникающими при разряде молнии.
В зависимости от места установки электронного регулятора на
самолете задается требуемая категория жесткости. По отечествен-
194
Экспериментальные исследования и испытания
Пульт ручного
управления
77
Блок
сопряжения
ПЭВМ
Генератор
длинной волны
Генератор
короткой волны
Генератор
колебательной
волны
fclyl Монитор
КПА
Исследуемая
электронная САУ
L
Цифровой
осциллограф
Рис. 5.6 Структурная схема комплекса для проведения испытаний на
вторичные воздействия от разрядов молнии
ному стандарту предусмотрены четыре категории, отличающиеся
амплитудой импульсов. Например, для наиболее незащищенных зон на
самолете устанавливается четвертая категория, имеющая амплитуду
3200 В по колебательной волне.
Испытательный комплекс позволяет в автоматическом режиме
осуществить выбор вида генерируемой волны, формирование пачки
испытательных импульсов требуемой полярности и их регистрацию.
Структурная схема автоматизированного комплекса показана на
рис. 5.6.
В процессе испытания электронного регулятора фиксируются
моменты возникновения сбойной работы, восстанавливаемых и невос-
станавливаемых отказов, которые, как правило, связаны с
электрическими повреждениями элементов микроэлектроники.
Исследование влияния нестабильности бортового
электропитания. Для исследования влияния установившихся и переходных
режимов работы бортовой электросети постоянного тока с
номинальным напряжением 27 В на функционирование электронных систем
управления ГТД используется автоматизированный имитатор
бортовой электросети (рис. 5.7). Имитатор содержит регулируемый
источник постоянного напряжения, генераторы импульсов величиной ±100
и ±600 В и синусоидальных напряжений.
195
ГЛАВА 5
Регулируемый
источник
постоянного
напряжения
Генератор
импульсов
±600 В
Генератор
импульсов
±100 В
27 В
Генератор
синусоидальных
напряжений
Исследуемая
электронная
САУ
ж
ПЭВМ
Рис. 5.7 Структурная схема имитатора для проверки влияния
нестабильности бортового электропитания
Вид формируемых циклов изменения напряжений, импульсов и
пульсаций определяется требованиями стандарта. Имитатор
позволяет изменять автоматически по программе выходное напряжение
0.. .80 В, а также выдавать фиксированные значения напряжений 0,
27, 50, 60, 70 и 80 В. На установленное напряжение постоянного тока
могут накладываться высоковольтные импульсы 0.. .600 В и
пульсации напряжения в диапазоне 5.. .100 кГц.
В ходе испытаний электронного регулятора на электрические
воздействия оценивается уровень помехозащищенности на соответствие
требованиям, заданным в техническом задании, или проводятся
исследовательские работы с целью оценки предельного уровня
помехозащищенности электронного регулятора и выбора эффективных средств
защиты.
В случае несоответствия характеристик электронного
регулятора заданным требованиям осуществляется его доработка. При этом
может понадобиться введение дополнительных цифровых или
аналоговых фильтров, нелинейных сопротивлений, дополнительного экра-
196
Экспериментальные исследования и испытания
нирования кабелей и блоков, изменение схемы заземления, переноса
электронного регулятора в более помехозащищенные зоны самолета
и др.
Исследование влияния климатических, механических и других видов
воздействий
Климатические воздействия. Испытания на воздействие
температуры проводятся для определения рабочих характеристик
электронных регуляторов при изменении температуры в заданном
интервале (в настоящее время от —60 или —40 до +125 °С). Важной
особенностью испытаний электронного регулятора на воздействие
повышенных температур является оценка путем термометрирования
теплового режима работы наиболее термонапряженных элементов
внутри электронного регулятора.
Испытание электронных регуляторов на воздействие пониженного
давления проводится при различных температурах. Изделие
считается выдержавшим испытание, если во время пребывания его в
условиях пониженного атмосферного давления обеспечивается надежная
коммутация электрических цепей, не наблюдаются явления «короны»
и перекрытия между токоведущими элементами, а параметры
электронных регуляторов находятся в пределах норм.
Воздействие влажности окружающей среды проявляется в виде
воды, дождя, водяных паров, капель, брызг и др. Под влиянием влаги
металлы корродируют, а диэлектрики снижают свое поверхностное
сопротивление. При испытаниях электронного регулятора на влаго-
устойчивость испытуемый регулятор помещают в камеру влажности,
в которой устанавливают температуру согласно техническим
условиям, после чего повышают влажность до 95%.. .98%. Регулятор
выдерживают в этих условиях в течение 2-10 суток. Водопроницаемость
электронного регулятора определяется с помощью падающей на него
воды (льющейся или в виде брызг).
Механические воздействия. Воздействие вибрации,
представляющей собой периодические механические колебания, особенно опасны,
когда их частота совпадает с частотой собственных вибраций
элементов электронного регулятора. При определенных условиях может
возникать механический резонанс, который обычно приводит к разру-
197
ГЛАВА 5
шению аппаратуры. Момент возникновения резонанса определяется с
помощью тензометрических датчиков, установленных в наиболее
критичных точках конструкции. Электронный регулятор,
расположенный на двигателе, должен выдерживать синусоидальные вибрации с
амплитудой ускорения 20g в диапазоне частот 5.. .2000 Гц.
Воздействия в виде механических ударов возникают при резком
изменении ускорения и характеризуются ускорением и
длительностью. Удары имеют место при нормальных условиях эксплуатации
Л А во время приземления, руления или когда Л А неожиданно
сталкивается с порывами ветра в полете. Целью испытаний является
определение устойчивости аппаратуры к ударам, возникающим при
вынужденной посадке. При расположении электронного регулятора на
двигателе возможны механические одиночные и многократные
ударные нагрузки. Пиковое ускорение одиночной ударной нагрузки может
достигать 15g (длительностью 15 мс). При ударных нагрузках
многократного действия пиковое ускорение достигает 8g (длительностью
20 мс).
Акустические воздействия представляют собой вид
механических воздействий, возникающих на ЛА в основном из-за шума,
создаваемого двигателями. Количественно акустический уровень шума
характеризуется давлением звука и диапазоном частот звуковых
колебаний. Акустический шум в зоне установки электронного
регулятора на двигателе может достигать уровня звукового давления 150 дБ
(в диапазоне частот 0,1.. .10 кГц).
Кроме климатических и механических испытаний электронный
регулятор подвергают испытаниям на воздействия песка и пыли,
грибковых образований, соляных брызг, вредных жидкостей и др.
Требования к устойчивости аппаратуры при воздействии внешних
факторов определяются в соответствии со специальными
стандартами.
Уменьшить количество дефектов, связанных с климатическими,
механическими и другими видами воздействий на электронный
регулятор, позволяет всесторонняя и тщательная проработка его
конструкции, использование специальной элементной базы, эффективный
входной контроль покупных изделий микроэлектроники и
электротехники, использование различных видов тренировок (температурных,
механических и электрических) элементов, плат, устройств и блоков
198
Экспериментальные исследования и испытания
и обеспечение комфортных условий эксплуатации электронного
регулятора.
Испытания на подтверждение надежности
Причинами отказов являются воздействие температуры,
вибраций и влажности, а по месту проявления отказов — разъемы,
электронные комплектующие элементы и паяные соединения.
В ходе конструирования, изготовления и испытаний электронного
блока не удается избежать конструкторских и технологических
ошибок и брака в производстве. В результате реальная средняя наработка
на отказ опытного образца электронного устройства существенно
отличается от расчетной. Это отличие косвенно характеризует
конструкторский, технологический и производственный уровень
предприятия. Испытания направлены на упреждающее определение
конструктивных и технологических дефектов электронного регулятора.
До начала эксплуатации требуется подтверждение наработки на
отказ реальными испытаниями на полунатурных и двигательных
стендах двух и более образцов.
Допускается использование ускоренных
эквивалентно-циклических испытаний (УЭЦИ). Современные методики УЭЦИ строятся на
основе применения форсированных режимов, которые ускоряют
физико-химические процессы в материалах и конструктивных элементах
испытуемых электронных регуляторов, что способствует более
быстрому развитию в них отказов. Создать такие условия можно,
изменив штатные условия работы электронного блока на более жесткие по
температуре, вибрации, влажности, напряжению питания,
реализовав комбинированные воздействия, а также циклическим изменением
внешних воздействий с повышенной частотой. Применение УЭЦИ
позволяет ускорить ход испытаний в несколько раз.
5.4 Информационно-измерительные системы стендов
для испытаний САУ
Информацию в процессе стендовых испытаний САУ получают с
помощью информационно-измерительной системы (ИИС).
Необходимость выполнения этих функций на переходных режимах работы —
199
ГЛАВА 5
одна из главных особенностей ИИС при экспериментальных
исследованиях САУ. В зависимости от задач испытаний агрегатов и систем
ГТД можно выделить три частотных диапазона измерения
параметров:
(1) до нескольких герц — для установившихся режимов;
(2) до десятков-сотен герц — для переходных процессов;
(3) десятки килогерц — для быстроизменяющихся процессов.
Так, при определении напорных и кавитационных характеристик
качающих топливных узлов измерения выполняются в первом
частотном диапазоне, при контроле параметров при приемистости и
проверке точности регулирования — во втором, а измерения пульсации
давления и вибрации корпусов при диагностике — в третьем.
При выборе средств измерений учитывается физическая природа
измеряемых параметров, диапазон их изменения, требуемая точность
в «статике» и «динамике». При испытаниях САУ измеряют частоту
вращения п, давление рв и температуру tB воздуха, расход GT,
давление рт и температуру tT топлива, перемещение а органов
управления и др. Требования к средствам измерений зависят также от
типа испытательного стенда, вида испытаний, характеристики
испытуемого устройства. Погрешность измерения может оцениваться
по отношению к ИВ параметра. Например, диапазон изменения
частоты вращения п составляет 0%.. .110% при допустимой погрешности
±0,1%...0,15% ИВ.
При испытаниях агрегатов и систем на безмоторных
(лабораторных, полунатурных) стендах выбор средств измерений по критерию
точности осуществляется в зависимости от допуска D на отклонение
измеряемого параметра х согласно соотношению:
6Х <0,33£>.
где 5Х — предел погрешности измерения х при прямых измерениях.
Если контроль характеристики у = f (х\, Х2,..., хр) агрегата
производится по результатам косвенных измерений нескольких
параметров Xi, то выбор средств для их измерения осуществляется, исходя из
условия
Sv =
£(1г'*) ^°да-
у~\\^\оХг
200
Экспериментальные исследования и испытания
д Н-Нлск-Нвп
ycoL
i~r_
| Принтер |
l 1
А3 tt
А
w
Графо-
построитель
t
I
ЭВМ
^|нмд|
Йнод|
1
Дисплей
Рис. 5.8 Структурная схема ИИС стенда
где 6У — предел погрешности определения характеристики агрегата;
dy/dxi — коэффициент чувствительности характеристики агрегата к
режиму работы по Х{.
Информационно-измерительная система представляет собой
комплекс аппаратно-программных средств, который может быть
выполнен по сосредоточенной или распределенной схеме. В испытательных
комплексах стендовая ИИС является одной из подсистем
многоуровневой АСУ ТП испытаний.
Информационно-измерительная система сосредоточенного типа
имеет централизованный вычислитель и измерительные каналы (ИК)
физических величин, которые с помощью устройства связи с
объектом УСО подключаются к стендовой ЭВМ, оснащенной устройствами
визуализации и хранения данных (рис. 5.8). Измерительный канал
содержит датчики Д соответствующих физических величин с
выходным электрическим сигналом, вторичные преобразующие ВП и
формирующие устройства и линии связи Л С. Для градуировки датчиков
используются специальные устройства автоматического задания A3
эталонных физических сигналов. Могут применяться автоматические
переключатели, обеспечивающие работу многодиапазонных
измерителей и др.
Маломощный сигнал с выхода датчиков усиливается в ВП и
приводится к нормализованному виду: напряжению постоянного тока,
например, ±5 В, частоте 5.. .500 Гц, силе тока 4.. .20 мА или
преобразуется в дискретный сигнал.
Нормализованный сигнал с выхода ВП с помощью ЛС передается
в УСО. Для приема измерительных сигналов УСО имеет входы со-
201
ГЛАВА 5
ответствующеи номенклатуры, которые с помощью мультиплексора
подсоединяются к измерительному устройству. Аналоговые сигналы
преобразуются в цифровую форму с помощью АЦП, частотные — с
помощью счетчиков числа импульсов.
Основными характеристиками АЦП являются время
преобразования, число эффективных разрядов преобразования, отношение
сигнал/шум, дифференциальная и интегральная нелинейности и др.
Для измерения сигналов в первом частотном диапазоне используются,
как правило, 14-24-разрядные, во втором — 12-14-разрядные, в
третьем — 10-12-разрядные АЦП. У последних частота
преобразования достигает 0,5.. .1 МГц.
Частотные входы УСО характеризуются диапазоном измеряемых
частот входного сигнала, диапазоном его амплитуд, величиной
гистерезиса нуль-органа, частотой сигнала заполнения и др., а дискретные
входы УСО — числом цифровых линий, значениями напряжения и
силы тока высокого и низкого уровня.
Сигналы в дискретной форме передаются в стендовую ЭВМ для
дальнейшей обработки. Результатом первичной обработки является
оценка параметра агрегата, полученная с требуемым уровнем
достоверности. При этом определяются вероятностные характеристики:
математическое ожидание, дисперсия и доверительный интервал
результата измерения. На основе априорной информации о
статистических характеристиках сигналов в ИК осуществляется обработка
импульсных помех и сбоев измерений, что повышает устойчивость
оценок.
Вторичная обработка данных реализует косвенные и совокупные
измерения и направлена на получение характеристик агрегатов
САУ.
Измерительная информация в табличном и графическом виде
отображается на экране электронного дисплея, регистрируется и
выводится на печать и графопостроители в виде машинных протоколов.
Архивация результатов испытаний в базах данных осуществляется
с помощью накопителей на магнитных (НМД) и оптических (НОД)
дисках с использованием соответствующего программного
обеспечения.
С развитием микропроцессорной техники на стендах стали
применяться распределенные измерительные системы, в которых ряд
функций интегрируется в одном устройстве — интеллектуальном датчике.
202
Экспериментальные исследования и испытания
Он имеет на выходе цифровой код — результат измерений,
передаваемый в главный вычислитель с помощью одного из стандартных
интерфейсов: RS-485, CAN и др. Такая архитектура ИИС обладает
рядом преимуществ: повышаются точность и надежность, улучшается
помехозащищенность.
Метрологические характеристики ИК стендовых систем во
многом определяются выбором датчиков, который зависит от требуемой
точности, температуры окружающей среды, внешних механических
воздействий. Так, для преобразования давления р в электрический
сигнал используются пьезо- и тензорезисторные датчики с
погрешностью преобразования 0,25%.. .0,5%, для измерения давления
горячего топлива с температурой более 80 ° С — металлопленочные
датчики. Более высокую точность (0,1%) и временную стабильность
характеристики преобразования (1-3 года) позволяют получить
емкостные датчики со специальной схемой измерения малых емкостей.
Для измерения частоты вращения используется частотный датчик
с индуктором, позволяющий обеспечить погрешность измерений до
0,1%.
Эффективность стендовой ИИС во многом определяется уровнем
сервиса: степенью адаптации ИИС к задаче испытаний, выбором и
конфигурацией ИК, возможностью автоматической градуировки,
настройкой режимов работы, проверкой работоспособности ИК и
элементов. Это требует развитого специализированного программного
обеспечения (СПО). Входящее в СПО метрологическое обеспечение
позволяет помимо оперативного контроля точности измерений
проводить в соответствии со стандартами метрологическую аттестацию
ИК и вычислительных компонент СПО, являющихся составной
частью компьютерного измерителя. Это дает возможность получить
оценки дополнительных составляющих погрешности прямых и
косвенных измерений, обусловленных обработкой случайной компоненты
измерительного сигнала, порождаемой шумами в средствах
измерений, помехами в линиях связи, наводками от источников
электропитания ИИС, а также флуктуациями параметров в испытуемых
агрегатах САУ.
Повысить эффективность автоматизированного эксперимента при
контроле характеристик САУ позволяют специальные программы,
реализующие методы алгоритмического повышения точности
измерений. При этом контролируемая характеристика представляется
203
ГЛАВА 5
математической моделью, а идентификация ее параметров проводится
по совокупности всех экспериментальных точек с использованием
методов математической статистики. Например, программы
регулирования у = / (xi, £2,..., хр) представляются линиями регрессии
(полиномиальной, множественной, кусочно-гладкой)
Y = XB.
Здесь X — матрица плана эксперимента размера р х га, где р —
число независимых переменных (или известных функций от них) в
программе регулирования, га — число экспериментальных точек;
В = (ХТХ) XTY — оценка коэффициентов по методу наименьших
квадратов; Y — вектор результатов измерений yi в га точках.
Погрешность выполнения программы регулятором
представляется полосой предсказания РР, верхний и нижний пределы которой в
каждой j-й точке диапазона определяются из соотношения:
PPj = Yj±t1_a/2S^ ,
Г 3
где t\-Q/2 — табличное значение критерия Стьюдента при уровне
значимости a; S- — дисперсия предсказания в j-й точке, значения
которой находятся на диагонали матрицы
G^-!=X(XTX)_1XT.
Y v '
При решении задач диагностики агрегатов САУ для выделения
составляющих колебаний быстропеременных параметров используется
алгоритм быстрого преобразования Фурье. Повысить точность оценок
амплитуды и частоты составляющих спектра позволяют специальные
методы синхронного анализа, использующие в качестве опорного
сигнала результаты измерения мгновенных значений частоты вращения
роторов.
204
Список литературы
1. Гуревич О. С, Близнюков Л. Г., Трофимов А. С. Системы
автоматического управления авиационными силовыми установками //
Конверсия в машиностроении, 2000. №5. С. 50-61.
2. ЦИАМ 2001-2005. Основные результаты научно-технической
деятельности: в 2 т. Т. II / Под общ. ред. В. А. Скибина, В. И.
Солонина, М.Я. Иванова. — М.: ЦИАМ, 2005. 496 с.
3. Системы автоматического управления авиационными
газотурбинными двигателями / Под ред. О. С. Гуревича. — М.: ТОРУС
ПРЕСС, 2010. 264 с.
4. Теория и расчет воздушно-реактивных двигателей / Под ред.
СМ. Шляхтенко. — М.: Машиностроение, 1987. 568 с.
5. Нечаев Ю. Н. Законы управления и характеристики авиационных
силовых установок. — М.: Машиностроение, 1995. 200 с.
6. Гуревич О. С. Управление авиационными газотурбинными
двигателями: Учеб. пособие. — М.: Изд-во МАИ, 2000. 100 с.
7. Кулагин И. И. Основы теории двигателей. — М.: Оборонгиз, 1957.
327 с.
8. Литвинов Ю. А., Боровик В. О. Характеристики и
эксплуатационные свойства авиационных турбореактивных двигателей. — М.:
Машиностроение, 1979. 288 с.
9. Научный вклад в создание авиационных двигателей: В 2 кн. / Под
общ. ред. В. А. Скибина, В. И. Солонина. — М.: Машиностроение,
2000. Кн. 1, 725 с; Кн. 2, 616 с.
10. Сосунов В. А., Литвинов Ю.А. Неустановившиеся режимы
работы авиационных газотурбинных двигателей. — М.:
Машиностроение, 1975. 216 с.
11. Интегральные системы автоматического управления силовыми
установками самолетов / Ю.С. Белкин, Б. В. Боев, О. С.
Гуревич и др.; под ред. А. А. Шевякова. — М.: Машиностроение, 1983.
283 с.
12. Интегрированное управление силовой установкой
многорежимного самолета / О. С. Гуревич, Ф. Д. Гольберг, О. Д. Селиванов;
под общ. ред. О. С. Гуревича. — М.: Машиностроение, 1994. 304 с.
13. Изерман Р. И. Цифровые системы управления. — М.: Мир, 1984.
541 с.
205
Список литературы
14. Шевяков А. А. Системы автоматического управления
авиационными воздушно-реактивными силовыми установками. — М.:
Машиностроение, 1992. 432 с.
15. Олсон Г., Пиани Д. Цифровые системы автоматизации и
управления. — СПб.: Невский Диалект, 2001. 557 с.
16. Автоматика авиационных газотурбинных силовых установок /
С. А. Гаевский, Ф. Н. Морозов, Ю.П. Тихомиров; под ред.
А. В. Штоды. — М.: Воениздат, 1980. 247 с.
17. Черкасов Б. А. Автоматика и регулирование воздушно-
реактивных двигателей. — М.: Машиностроение, 1988. 402 с.
18. Залманзон Л. А. Теория аэрогидродинамических систем
автоматического управления. — М.: Наука, 1977. 416 с.
19. Степанов Г. П., Куликов Ю.Н., Христовский Р.Е. Исследование
расходных характеристик цилиндрических пневматических
дросселей // Автоматическое регулирование двигателей летательных
аппаратов. Тр. ЦИАМ №761, 1977. Вып. 17. С. 119-128.
20. Куликов Ю.Н., Степанов Г. П. Определение коэффициентов
расхода пневматических дросселей типа «Сопла Лаваля» // Тр.
ЦИАМ, 1980. №895. С. 250-256.
21. Гидравлика, гидромашины и гидроприводы: Учебник для
машиностроительных вузов / Т. М. Башта, С. С. Руднев, Б. Б. Некрасов
и др. — 2-е изд. — М.: Машиностроение, 1982. С. 423.
22. Авиационные центробежные насосные агрегаты / Л. С. Аринуш-
кин, Р. Б. Абрамович, А.Ю. Полиновский и др. — М.:
Машиностроение, 1967. 255 с.
23. Черноморский B.C., Кессельман М.Г., Чернышов В.И.
Прогнозирование остаточного ресурса топливных насосов в
эксплуатации // ЦИАМ 2001-2005. Основные результаты научно-
технической деятельности: в 2 т. Т. II / Под общ. ред. В. А. Ски-
бина, В. И. Солонина, М.Я. Иванова. — М.: ЦИАМ, 2005. С. 347-
352.
24. Гуревич О. С, Белкин Ю. С, Гулиенко А. И. Особенности
построения системы топливопитания ГТД с электроприводными
насосами // Конверсия в машиностроении, 2005. №4-5. С. 70-74.
25. Гуревич О. С, Белкин Ю.С., Гулиенко А. И. Системы
автоматического управления ТРДД для магистральных самолётов //
Техника воздушного флота, 2005. Т. LXXIX. №3-4 (674-675). С. 73-78.
206
Список литературы
26. Теория автоматического управления силовыми установками
летательных аппаратов / Под ред. А. А. Шевякова. — М.:
Машиностроение, 1976. 344 с.
27. Авиационный двигатель ПС-90А / А. А. Иноземцев, Е. А. Коняев,
В. В. Медведев, А. В. Нерадько, А. Е. Ряссов; под ред. А. А.
Иноземцева. — М.: Либра-К, 2007. 320 с.
28. Автоматика и регулирование авиационных двигателей и
энергетических установок: Учебник / А. А. Иноземцев, М. А. Нихамкин,
В. Л. Сандрацкий. — М.: Машиностроение, 2008. Т. 5. 187 с. (Сер.
газотурбинные двигатели)
29. Александров В. А. Воздушные винты. — М.: Оборонгиз, 1951.
475 с.
30. Дмитриев И. С, Есаулов СЮ. Системы управления
одновинтовых вертолетов. — М.: Машиностроение, 1969. 219 с.
31. Авиационные газотурбинные вспомогательные силовые
установки / A.M. Поляков, Ю.И. Шальман, В. И. Кричакин и др. —
М.: Машиностроение, 1978. 200 с.
32. Лужин А. А., Петровский В. С. Авиационные газотурбинные
вспомогательные силовые установки. — М.: Машиностроение, 1978.
200 с.
33. Павловский Н. И. Вспомогательные силовые установки
самолетов. — М.: Транспорт, 1977. 240 с.
34. Письменный И. Л. Многочастотные нелинейные колебания в
газотурбинном двигателе. — М.: Машиностроение, 1987. 128 с.
35. Любомудров Ю. В. Применение теории подобия при
проектировании систем управления газотурбинных двигателей. — М.:
Машиностроение, 1971. 200 с.
36. Добрянский Г. В., Мартьянова Т. С. Динамика авиационных
ГТД. — М.: Машиностроение, 1989. 240 с.
37. Леонтьев В.Н., Сиротин С. А., Теверовский A.M. Испытания
авиационных двигателей. — М.: Машиностроение, 1976. 216 с.
38. Автоматизация испытаний и контроля авиационных ГТД. — М.:
Машиностроение, 1977. 280 с.
39. Трофимов А. С. Формирователи сигналов датчиков: Краткое
техническое описание. — М.: ЦИАМ, 1989. 10 с.
207
Научное издание
Системы автоматического управления
авиационными ГТД
Энциклопедический справочник
Под редакцией д.т.н., проф. О. С. Гуревича
Титульный редактор Т. Торжкова
Технический редактор Л. Кокушкина
Художественный редактор М. Седакова
Дизайн обложки К. Сейфуль-Мулюкова
Издательство «ТОРУС ПРЕСС»
119991, г. Москва, ул. Косыгина, д. 4
e-mail: torus@torus-press.ru
http://www.torus-press.ru
Сдано в набор 23.11.2010. Подписано в печать 23.03.2011.
Формат 60 х 90/16. Бумага офсетная. Печать офсетная.
Усл.-печ.л. 13,0. Уч.-изд. л. 14,0. Тираж 400 экз.
Заказ №3036.
Отпечатано в ППП Типография «Наука»
Москва 121099, Шубинский пер., д. 6